/








































































































































































































































































































































































































































































































































































Текст
КУРС
ВЫСШЕЙ МАТЕМАТИКИ
И МАТЕМАТИЧЕСКОЙ
ФИЗИКИ
Под редакцией
А. Н. ТИХОНОВА. В. А. ИЛЬИНА, А. Г. СВЕШНИКОВА
ВЫПУСК 2
КРАТНЫЕ ИНТЕГРАЛЫ
И РЯДЫ
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1967
Б. М. БУДАК, С. В. ФОМИН
КРАТНЫЕ
ИНТЕГРАЛЫ
И РЯДЫ
ИЗДАНИЕ ВТОРОЕ,
СТЕРЕОТИПНОЕ
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебника
для физических и физико-математических
факультетов университетов
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1967
ОГЛАВЛЕНИЕ
От редакторов серии............................................. 14
Предисловие..................................................... 14
Глава 1. Двойные интегралы...................................... 15
§ 1. Некоторые вспомогательные понятия. Площадь плоской фигуры 16
1. Граничные и внутренние точки. Область (16). 2. Расстояние
между множествами (18). 3. Площадь плоской фигуры (19).
4. Основные свойства площади (22). 5. О понятии меры мно-
жества (23).
§ 2. Определение и основные свойства двойного интеграла....... 24
1. Определение двойного интеграла (24). 2. Условия существо-
вания двойного интеграла. Верхние и нижние суммы (26).
3. Важнейшие классы интегрируемых функций (32). 4. Свой-
ства двойного интеграла (33).
§ 3. Аддитивные функции области. Производная по площади .... 35
1. Функции точки и функции области (35). 2. Двойной инте-
грал как аддитивная функция области (36). 3. Производная
функции области по площади (36). 4. Производная по пло-
щади от двойного интеграла (37). 5. Восстановление аддитив-
ной функции области по ее производной (38). 6. Определен-
ный интеграл как функция области (40). 7. Продолжение
функций области по аддитивности (41).
§ 4. Некоторые физические и геометрические применения двойных
интегралов................................................... 41
1. Вычисление объемов (41). 2. Вычисление площадей (42).
3. Масса пластинки (42). 4. Координаты центра масс пла-
стинки (43). 5. Моменты инерции пластинки (44). 6. Свето-
вой поток, падающий на пластинку (45). 7. Поток жидкости
через поперечное сечение канала (45).
§ 5. Сведение двойного интеграла к повторному................ 46
1. Наводящие соображения (46). 2. Случай прямоугольной обла-
сти (48). 3. Случай криволинейной области (50).
§ 6. Замена переменных в двойном интеграле................... 54
1. Отображение областей (54). 2. Криволинейные коорди-
наты (56). 3. Полярные координаты (57). 4. Постановка за-
дачи о замене переменных в двойном интеграле (58). 5. Пло-
6
ОГЛАВЛЕНИЕ
щадь в криволинейных координатах (59). 6. Замена перемен-
ных в двойном интеграле (66). 7. Сравнение с одномерным
случаем. Интеграл по ориентированной области (69).
Г л а в а 2. Тройные и многократные интегралы................ 71
§ 1. Определение и основные свойства тройного интеграла.... 71
1. Предварительные замечания. Объем пространственной фи-
гуры (71). 2. Определение тройного интеграла (73). 3. Усло-
вия существования тройного интеграла. Интегрируемость непре-
рывных функций (74). 4. Свойства тройных интегралов (75).
5. Тройной интеграл как аддитивная функция области (76).
§ 2. Некоторые применения тройных интегралов в физике и геомет-
рии .................... '.................................... 77
1. Вычисление объемов (77). 2. Нахождение массы тела по
плотности (77). 3. Момент инерции (78). 4. Вычисление коор-
динат центра масс (78). 5. Притяжение материальной точки
телом (79).
§ 3. Вычисление тройного интеграла............................. 80
1. Сведение тройного интеграла по параллелепипеду к повтор-
ному (80). 2. Сведение тройного интеграла по криволинейной
области к повторному (82).
§ 4. Замена переменных в тройном интеграле..................... 85
1. Отображение пространственных областей (85). 2. Криволи-
нейные координаты в пространстве (86). 3. Цилиндрические и
сферические координаты (86). 4. Элемент объема в криволи-
нейных координатах (88). 5. Замена переменных в тройном
интеграле. Геометрический смысл якобиана (89).
§ 5. Понятие о многомерных интегралах...................... 93
1. Общие сведения (93). 2. Примеры (94).
Глава 3. Элементы дифференциальной геометрии.................. 97
§ 1. Вектор-функции скалярного аргумента................... 97
1. Определение вектор-функции. Предел. Непрерывность (97).
2. Дифференцирование вектор-функции (98). 3. Годограф. Осо-
бые точки (100). 4. Формула Тейлора (101). 5. Интеграл
от векторной функции по скалярному аргументу (101). 6. Вектор-
ные функции нескольких скалярных аргументов (102).
§ 2. Пространственные кривые..................................102
1. Векторное уравнение кривой (102). 2. Основной трехгран-
ник (105). 3. Формулы Френе (106). 4. Вычисление кривизны
и кручения (107). 5. Система координат, связанная с основным
трехгранником (109). 6. Вид кривой вблизи произвольной ее
точки (ПО). 7. Ориентированная кривизна плоской кривой (113).
8. Понятие о натуральных уравнениях кривой (113). 9. Неко-
торые приложения к механике (115).
§ 3. Параметрическое уравнение поверхности................... 117
1. Понятие поверхности (117). 2. Параметризация поверхно-
сти (118). 3. Параметрическое уравнение поверхности (119).
ОГЛАВЛЕНИЕ
7
4. Кривые на поверхности (120). 5. Касательная плоскость (121).
6. Нормаль к поверхности (122). 7. Системы координат в каса-
тельных плоскостях (123).
§ 4. Измерение на кривой поверхности длин, углов и площадей.
Первая квадратичная форма поверхности ........................ 124
1. Аффинная система координат на плоскости (125). 2. Длина
дуги на поверхности. Первая квадратичная форма (126). 3. Угол
между двумя кривыми (128). 4. Определение площади поверх-,
ности. Пример Шварца (129). 5. Вычисление площади гладкой
поверхности (131).
§ 5. Кривизна линий на поверхности. Вторая квадратичная форма 135
1. Нормальные сечения поверхности и их кривизна (136).
2. Вторая квадратичная форма поверхности (138). 3. Индикат-
риса кривизны (139). 4. Главные направления и главные кри-
визны поверхности. Формула Эйлера (140). 5. Вычисление
главных кривизн (142). 6. Полная кривизна и средняя кри-
визна (143). 7. Классификация точек на поверхности (143).
8. Первая и вторая квадратичные формы как полная система
инвариантов поверхности (145).
§ 6. Понятие о внутренней геометрии поверхности...............146
1. Наложимость поверхностей. Необходимое и достаточное усло-
вие наложимости (146). 2. Внутренняя геометрия поверхно-
сти (147). 3. Поверхности постоянной кривизны (148).
Глава 4. Криволинейные интегралы.................................150
§ 1. Криволинейные интегралы первого рода.....................150
1. Определение криволинейного интеграла первого рода (150'.
2. Свойства криволинейных интегралов (154). 3. Некоторые
применения криволинейных интегралов первого рода (155).
4. Криволинейные интегралы первого рода в пространстве (157).
§ 2. Криволинейные интегралы второго рода.....................158
1. Постановка задачи. Работа силового поля (158). 2. Опреде-
ление криволинейного интеграла второго рода (159). 3. Связь
между криволинейными интегралами первого и второго
рода (160). 4. Вычисление криволинейного интеграла второго
рода (162). 5. Зависимость криволинейного интеграла второго
рода от ориентации кривой (165). 6. Криволинейные интегралы
вдоль самопересекающихся и замкнутых путей (165). 7. Криво-
линейные интегралы второго рода вдоль пространственных кри-
вых (166).
§ 3. Формула Грина............................................168
1. Вывод формулы Грина (168). 2. Вычисление площади с по-
мощью формулы Грина (173).
§ 4. Условия независимости криволинейного интеграла от пути.
Интегрирование полных дифференциалов...........................174
1. Постановка вопроса (174). 2. Случай односвязной обла-
сти (174). 3. Нахождение функции по ее полному дифферен-
циалу (178). 4. Криволинейные интегралы в многосвязной
области (179).
8 ОГЛАВЛЕНИЕ
Глава 5. Поверхностные интегралы............................183
§ 1. Поверхностные интегралы первого рода................183
1. Определение поверхностного интеграла от скалярной функ-
ции (183). 2. Сведение поверхностного интеграла к двой-
ному (184). 3. Некоторые применения поверхностных интегра-
лов к механике (188). 4. Поверхностные интегралы от вектор-
ных функций. Общее понятие поверхностного интеграла пер-
вого рода (189).
§ 2. Поверхностные интегралы второго рода......................191
1. Сторона поверхности (191). 2. Определение поверхностного
интеграла второгорода (195). 3. Сведение поверхностного инте-
грала второго рода к двойному интегралу (199).
§ 3. Формула Остроградского....................................201
1. Вывод формулы Остроградского (201). 2. Вычисление поверх-
ностных интегралов с помощью формулы Остроградского. Пред-
ставление объема пространственной области в виде поверхно-
стного интеграла (205).
§ 4. Формула Стокса............................................207
1. Вывод формулы Стокса (207). 2. Применение формулы
Стокса к исследованию пространственных криволинейных инте-
гралов (210).
Глава 6. Теория поля...........................................213
§ 1. Скалярные поля........................................ 213
1. Определение и примеры скалярных полей (213). 2. Поверх-
ности и линии уровня (214). 3. Различные типы симметрии
полей (215). 4. Производная по направлению (216). 5. Градиент
скалярного поля (217).
§ 2. Векторные поля...........................................219
1. Определение и примеры векторных полей (219). 2. Векторные
линии и векторные трубки (220). 3. Различные виды симметрии
векторных полей (220). 4. Поле градиента. Потенциальное
поле (221).
§ 3. Поток векторного поля. Дивергенция.......................223
1. Поток векторного поля через поверхность (223). 2. Дивер-
генция (224). 3. Физический смысл дивергенции для различных
полей. Примеры (226). 4. Соленоидальное поле (229). 5. Урав-
нение неразрывности (230). 6. Плоское течение жидкости. Фор-
мула Остроградского на плоскости (231).
§ 4. Циркуляция. Ротор........................................233
1. Циркуляция векторного поля (233). 2. Ротор векторного
поля. Запись формулы Стокса в векторных обозначениях (233).
3. Символическая запись ротора (235). 4. Физический смысл
ротора (235). 5. Еще раз о потенциальных и соленоидальных
полях (238).
§ 5. Оператор Гамильтона......................................239
1. Символический вектор V (239). 2. Действия с векто-
ром V (240).
ОГЛАВЛЕНИЕ
9
§ 6. Дифференциальные операции второго порядка. Оператор Лап-
ласа ........................................................243
1. Дифференциальные операции второго порядка (243). 2. Урав-
нение теплопроводности (245). 3. Стационарное распределение
температур. Гармонические поля (246).
§ 7. Запись основных дифференциальных операций теории поля
в ортогональных криволинейных координатах....................248
1. Постановка задачи (248). 2. Криволинейные ортогональные
координаты в пространстве (249). 3. Цилиндрические и сфери-
ческие координаты (251). 4. Градиент (252). 5. Диверген-
ция (252). 6. Ротор (253). 7. Оператор Лапласа (254). 8. Запись
основных формул в цилиндрических и сферических координа-
тах (255).
§ 8. Переменные поля в сплошных средах.......................256
1. Локальная и материальная производные (256). 2. Уравнение
Эйлера (258). 3. Производная по времени от интеграла по жид-
кому объему (259). 4. Другой вывод уравнения неразрывно-
сти (262).
Глава 7. Тензоры............................................- . 263
§ 1. Понятие аффинного ортогонального тензора................264
1. Преобразования ортогональных нормированных базисов
(264). 2. Определение аффинного ортогонального тензора (266).
§ 2. Связь между тензорами второго ранга и линейными операто-
рами ........................................................268
1. Линейный оператор как тензор второго ранга (268). 2. Тен-
зор второго ранга как линейный оператор (269).
§ 3. Связь между тензорами и инвариантными полилинейными фор-
мами ........................................................271
1. Тензоры первого ранга и инвариантные линейные формы
(271). 2. Тензоры второго ранга и инвариантные билинейные
формы (272). 3. Тензоры произвольного ранга р и инвариант-
ные полилинейные формы (274).
§ 4. Тензор деформаций.......................................275
§ 5. Тензор напряжений.......................................Z76
1. Определение тензора напряжений (276). 2. Тензор напряже-
ний как линейный оператор (278).
§ 6. Алгебраические операции над тензорами...................279
1. Сложение, вычитание и умножение тензоров (279). 2. Умно-
жение тензора на вектор (280). 3. Свертка (281). 4. Переста-
новка индексов (281). 5. Разложение тензора второго ранга на
симметричный и антисимметричный (281).
§ 7. Тензор относительных смещений...........................282
§ 8. Поле тензора............................................284
1. Поле тензора. Дивергенция тензора (284). 2. Формула Остро-
градского для поля тензора (286). 3. Уравнения движения
сплошной среды (287).
10
ОГЛАВЛЕНИЕ
§ 9. Приведение симметричного тензора второго ранга к главным
осям........................................................288
§ 10. Общее определение тензора..................................289
1. Взаимные базисы векторов (289). 2. Ковариантные и контра-
вариантные координаты векторов (290). 3. Операция суммиро-
вания в тензорной символике (290). 4. Преобразование базис-
ных векторов (291). 5. Преобразование ковариантных и коп-
травариантных координат вектора (291). 6. Общее определение
тензора (292). 7. Операции над тензорами (294). 8. Дальней-
шие обобщения (294).
Дополнение к гл. 7. Об умножении матриц.....................294
Глава 8. Функциональные последовательности и ряды..............297
§ 1. Понятие равномерной сходимости; признаки равномерной схо-
димости.....................................................297
1. Сходимость и равномерная сходимость (297). 2. Признаки
равномерной сходимости (303).
§ 2. Свойства равномерно сходящихся функциональных последова-
тельностей и рядов............................................308
1. Непрерывность и равномерная сходимость (308). 2. Пре-
дельный переход под знаком интеграла и почленное интегри-
рование ряда (311). 3. Предельный переход под знаком про-
изводной и почленное дифференцирование ряда (314). 4. По-
членный предельный переход в функциональных последова-
тельностях и рядах (316).
§ 3. Степенные ряды..........................................318
1. Интервал сходимости степенного ряда; радиус сходимости
(318). 2. О равномерной сходимости степенного ряда и непре-
рывности его суммы (324). 3. Дифференцирование и интегри-
рование степенных рядов (327). 4. Арифметические операции
над степенными рядами (329).
§ 4. Разложение функций в степенные ряды.....................330
1. Основные теоремы о разложениях функций в степенные
ряды; разложения элементарных функций (330). 2. Некоторые
применения степенных рядов (336).
§ 5. Степенные ряды в комплексной области.................... 338
§ 6. Сходимость в среднем.....................................342
1. Квадратичное уклонение и сходимость в среднем (342).
2. Неравенство Коши — Буняковского (343). 3. Интегрирова-
ние сходящихся в среднем последовательностей и рядов (344).
4. О связи между сходимостью в среднем и возможностью по-
членного дифференцирования последовательностей и рядов
(347). 5. Связь между сходимостью в среднем и другими ви-
дами сходимости (348).
Дополнение 1 к гл. 8. Критерий компактности семейства функций . . 350
Дополнение 2 к гл. 8. Слабая сходимость и дельта-функция........353
ОГЛАВЛЕНИЕ
11
Глава 9. Несобственные интегралы •...............................
§ I. Интегралы с бесконечными пределами интегрирования........
1. Определения; примеры (358). 2. Сведение несобственного
+ со
интеграла J* f(x)dx к числовой последовательности и число-
а
вому ряду (362). 3. Критерий Коши для несобственных инте-
гралов (364). 4. Абсолютная сходимость. Признаки абсолютной
сходимости (366). 5. Условная сходимость (372). 6. Распро-
странение методов вычисления интегралов на случай несоб-
ственных интегралов (374).
§ 2. Интегралы от неограниченных функций с конечными и беско-
нечными пределами интегрирования .............................
§ 3. Главное значение расходящегося интеграла.................
§ 4. Несобственные кратные интегралы..........................
1. Интеграл от неограниченной функции по ограниченной об-
ласти (387). 2. Интегралы от неотрицательных функций (389).
3. Абсолютная сходимость (393). 4. Признаки абсолютной схо-
димости (394). 5. Эквивалентность сходимости и абсолютной
сходимости (397). 6. Несобственные интегралы с неограничен-
ной областью интегрирования (399). 7. Методы вычисления не-
собственных кратных интегралов (400).
Глава 10. Интегралы, зависящие от параметра......................
§ 1. Собственные и простейшие несобственные интегралы, зависящие
от параметра .................................................
1. Собственные интегралы, зависящие от параметра (402).
2. Простейшие несобственные интегралы, зависящие от пара-
метра (407).
§ 2. Несобственные интегралы, зависящие от параметра..........
1. Понятие равномерной сходимости (411). 2. Сведение несоб-
ственного интеграла, зависящего от параметра, к последователь-
ности функций (413). 3. Свойства равномерно сходящихся
интегралов, зависящих от параметра (416). 4. Признаки равно-
мерной сходимости несобственных интегралов, зависящих от
параметра (423). 5. Примеры вычисления несобственных инте-
гралов с помощью дифференцирования и интегрирования по
параметру (428).
§ 3. Эйлеровы интегралы.......................................
1. Свойства гамма-функции (435). 2. Свойства бета-функции
(438).
§ 4. Кратные собственные и несобственные интегралы, зависящие
от параметров ................................................
Глава 11. Ряды Фурье и интеграл Фурье............................
§ 1. Предварительные сведения о периодических функциях и поста-
новке основной задачи .........................................
1. Периоды периодической функции (449). 2. Периодическое
продолжение непериодической функции (450). 3. Интеграл от
358
358
375
383
387
402
402
410
434
442
449
449
12
ОГЛАВЛЕНИЕ
периодической функции (451). 4. Арифметические действия над
периодическими функциями (451). 5. Суперпозиция гармоник
с кратными частотами (452) 6. Постановка основной задачи
(453). 7. Ортогональность тригонометрической системы; коэф-
фициенты Фурье и ряд Фурье (453). 8. Разложение в ряд Фурье
четных и нечетных функций (456). 9. Разложение функции на
отрезке [—л, л] (458).
§ 2. Основная теорема о сходимости тригонометрического ряда
Фурье...........................................................459
1. Класс кусочно-гладких функций (459). 2. Формулировка
основной теоремы о сходимости тригонометрического ряда
Фурье (461). 3. Основная лемма (461). 4. Доказательство
основной теоремы сходимости (463). 5. Примеры (467). 6. Раз-
ложение функций, заданных на отрезке [0, /], только по синусам
или только по косинусам (472).
§ 3. Ряды Фурье по ортогональным системам. Неравенство Бесселя 474
1. Ортогональные системы функций (474). 2. Коэффициенты
Фурье и ряд Фурье функции f (х) по ортогональной системе
(476). 3. Задача о наименьшем квадратичном уклонении. То-
ждество Бесселя. Неравенство Бесселя (477).
§ 4. Связь между степенью гладкости функции и скоростью сходи-
мости ее тригонометрического ряда Фурье. Понятие улучшения
сходимости .....................................................481
1. Условия равномерной сходимости тригонометрического ряда
Фурье (481). 2. Связь между степенью гладкости функции и
скоростью сходимости ее тригонометрического ряда Фурье (484).
3. Понятие улучшения сходимости тригонометрического ряда
Фурье (489).
§ 5. Равномерная аппроксимация непрерывной функции тригономе-
трическими и алгебраическими многочленами; теоремы Вейер-
штрасса . .............................................. 491
§ 6. О полноте и замкнутости ортогональных систем..............495
1. Понятие полноты ортогональной системы (496). 2. Критерий
полноты — равенство Парсеваля (496). 3. Свойства полных си-
стем (497). 4. Полнота основной тригонометрической системы
(499). 5. Полнота других классических ортогональных систем
(502).
§ 7. Ряды Фурье по ортогональным системам комплексных функций
и комплексная запись тригонометрического ряда Фурье .... 503
§ 8. Тригонометрические ряды Фурье для функций нескольких неза-
висимых переменных..............................................507
§ 9. Интеграл Фурье.............................................510
1. Неограниченное растяжение интервала разложения функции
в ряд Фурье и интегральная формула Фурье (510). 2. Обосно-
вание интегральной формулы Фурье (511). 3. Интеграл Фурье
как разложение в сумму гармоник (516). 4. Комплексная форма
интеграла Фурье (517). 5. Преобразование Фурье (518).
6. Интеграл Фурье для функций нескольких независимых пере-
менных (521).
ОГЛАВЛЕНИЕ
13
Дополнение 1 к гл. II. О полиномах Лежандра..................527
Дополнение 2 к гл. 11. Ортогональность с весом и ортогонализация . 529
Дополнение 3 к гл. 11. Функциональное пространство и геометриче-
ские аналогии............................................535
Дополнение 4 к гл. 11. О некоторых применениях преобразования
Фурье....................................................539
Дополнение 5 к гл. 11. Разложение б-функции в ряд Фурье и инте-
грал Фурье.............................................. 544
Дополнение 6 к гл. 11. Равномерная аппроксимация функций много-
членами ................................................. ... 546
Дополнение 7 к гл. 11. Об устойчивом суммировании рядов Фурье
с возмущенными коэффициентами............................551
Добавление 1. Об асимптотических разложениях....................556
§ 1. Примеры асимптотических разложений......................556
1. Асимптотические разложения в окрестности нуля (556).
2. Асимптотические разложения в окрестности бесконечности
(557).
§ 2. Некоторые общие определения и теоремы...................560
1. Соотношения порядка. Асимптотическая эквивалентность
(560). 2. Асимптотические разложения функций (562).
§ 3. Метод Лапласа для асимптотического разложения некоторых
интегралов.................................................. 568
Добавление 2. Некоторые сведения об универсальных вычисли-
тельных машинах.................................................573
§ 1. Общие сведения о вычислительных машинах ................573
1. Введение (573). 2. Основные типы вычислительных машин (574).
3. Основные узлы УЦВМ и их назначение (575). Системы счи-
сления, используемые в УЦВМ (578). 5. Представление чисел
в вычислительной машине (579).
§ 2. Основные операции, выполняемые УЦВМ. Команды............580
1. Типы операций (580). 2. Основные арифметические опера-
ции (581). 3. Дополнительные операции вычислительного назна-
чения (582). 4. Поразрядные (логические) операции (582).
5. Операции обращения к внешним устройствам (583). 6. Опе-
рации передачи управления (584). 7. Осуществление операций
в машине (585).
§ 3. Элементы программирования.....................•.........586
1. Общие сведения (586). 2. Программирование по форму-
лам (587). 3. Циклические процессы (589). 4. Блок-схемное про-
граммирование. Подпрограммы (592). 5. Коды команд. Операции
над командами (593). 6. Об автоматизации программирова-
ния (595).
§ 4. Некоторые вопросы организации работы на УЦВМ............596
1. Условия, определяющие эффективность применения на
УЦВМ (596). 2. Основные этапы решения задачи с применением
УЦВМ (596). 3. Методы предупреждения и обнаружения ошибок
счета (597).
Литература..................................................... 599
Предметный указатель............................................600
ОТ РЕДАКТОРОВ СЕРИИ
Кратные, криволинейные и несобственные интегралы, теория поля,
степенные и тригонометрические ряды — это те разделы математики,
с которыми каждому физику приходится встречаться достаточно
часто. Им и посвящена эта книга. Такие важные для читателя-физика
вопросы, как, например, теория поля, ряды и интегралы Фурье, из-
ложены здесь несколько шире, чем это делается обычно в общих
курсах анализа. Кроме того, в книге излагаются элементы дифферен-
циальной геометрии, а также сведения о тензорах, об асимптотических
разложениях и о вычислительных машинах, что обычно не входит
в традиционные руководства по анализу.
Эта книга представляет собой второй выпуск серии «Курс высшей
математики и математической физики». Вместе с первым выпуском
она соответствует программе курса анализа для физических и физико-
математических факультетов.
ПРЕДИСЛОВИЕ
Этот выпуск, как и остальные выпуски, входящие в серию, на-
писан на основе опыта чтения лекций на физическом факультете МГУ.
В нашем изложении мы старались показать связи между различными
математическими понятиями, их применения и, если это возможно,
их физический смысл, уделяя также должное внимание алгоритмиче-
ской, вычислительной стороне дела. Главы 1—6 и добавление о вы-
числительных машинах написаны С. В. Фоминым, главы 7—11 и до-
бавление об асимптотических разложениях — Б. М. Будаком, однако
общий план и детали изложения неоднократно обсуждались совместно.
При работе над книгой нам оказали помощь своими советами наши
товарищи по кафедре В. А. Ильин, Э. Г. Позняк, А. Г. Свешников
и др. Особенно большую и ценную помощь мы получили от А. Н. Ти-
хонова. Ряд важных замечаний сделали Н. В. Ефимов и Л. Д. Куд-
рявцев, прочитавшие книгу в рукописи. Всем этим лицам авторы вы-
ражают глубокую благодарность.
Авторы
ГЛАВА 1
ДВОЙНЫЕ ИНТЕГРАЛЫ
Понятие определенного интеграла
*
f f(x) dx
а
х, скажем двух, незави-
связано с такими задачами, как вычисление пройденного пути по
заданной скорости, нахождение площади криволинейной трапеции и
т. д. Существует много задач, аналогичных названным, но относящих-
ся к функциям не одной, а нескольк
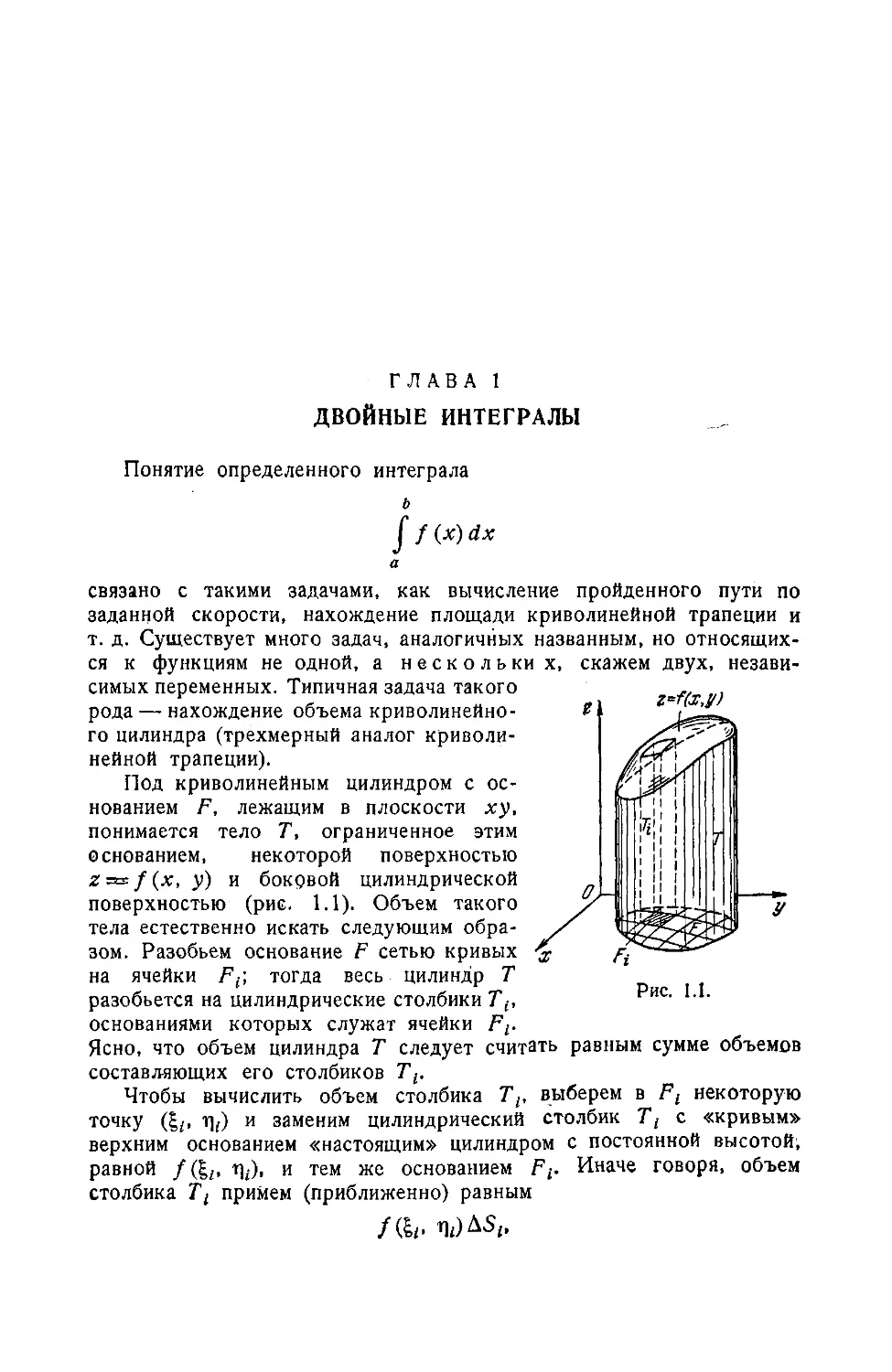
симых переменных. Типичная задача такого
рода — нахождение объема криволинейно-
го цилиндра (трехмерный аналог криволи-
нейной трапеции).
Под криволинейным цилиндром с ос-
нованием F, лежащим в плоскости ху,
понимается тело Т, ограниченное этим
основанием, некоторой поверхностью
2!=гх/(х, у) И боковой ЦИЛИНДрИЧеСКОЙ
поверхностью (рис. 1.1). Объем такого
тела естественно искать следующим обра-
зом. Разобьем основание F сетью кривых
на ячейки тогда весь цилиндр Т
разобьется на цилиндрические столбики Т
основаниями которых служат ячейки Ft.
Ясно, что объем цилиндра Т следует счи'
составляющих его столбиков Т
Чтобы вычислить объем столбика Твыберем в Ft некоторую
точку (£z, T]f) и заменим цилиндрический столбик Тz с «кривым»
верхним основанием «настоящим» цилиндром с постоянной высотой;
равной /(!;, и тем же основанием Ft. Иначе говоря, объем
столбика Т( примем (приближенно) равным
Рис. 1.1.
равным сумме объемов
16
двойные интегралы
1ГЛ. 1
где ASZ — площадь ячейки Ft. За приближенное значение объема
всего цилиндра Т примем сумму
п
2/(^, T|Z)A5Z, (1.1)
взятую по всем ячейкам, на которые разбито основание F. Интуи-
тивно ясно, что сумма (1.1) будет представлять объем цилиндра Т
с точностью тем большей, чем меньше размеры ячеек Ft. Для полу-
чения точного значения этого объема нужно в выражении (1.1)
перейти к пределу, неограниченно уменьшая размеры ячеек Ft.
Этот предельный переход и приведет нас к понятию интеграла
от функции /(х, у) двух независимых переменных — так называемому
двойному интегралу. Изучение двойных интегралов составит содер-
жание настоящей главы.
Очевидна аналогия между изложенными (пока лишь наводящими)
рассуждениями и построением определенного интеграла на отрезке.
Отличие их состоит лишь в том, что здесь рассматриваются функции
не одной, а двух переменных, а вместо длин отрезков Axz берутся
площади тех ячеек Ft, на которые разбивается фигура F, служащая
основанием цилиндра.
Помимо задачи о вычислении объема криволинейного цилиндра,
существует много других задач, также связанных с понятием двойного
интеграла. Некоторые из них будут рассмотрены в § 4 этой главы.
Ряд физических и геометрических задач приводит к понятию
интеграла от функций трех и большего числа переменных. Изучению
таких интегралов будет посвящена следующая глава.
Уже рассмотренная выше задача о вычислении объема криволи-
нейного цилиндра показывает, что понятие двойного интеграла суще-
ственно опирается на понятие площади криволинейной плоской фигуры,
поскольку в выражение (1.1) входят площади ASZ криволинейных
ячеек Ft, на которые мы разбили основание цилиндра. Поэтому, хотя
с понятием площади читателю приходилось встречаться и раньше *),
мы начнем эту главу с краткого изложения основных сведений
о площадях.
§ 1. Некоторые вспомогательные понятия.
Площадь плоской фигуры
1. Граничные и внутренние точки. Область. Напомним не-
которые необходимые для дальнейшего понятия. Пусть а — не-
которая точка на плоскости. Открытый круг радиуса е с центром
*) См. вып. 1, гл. 11, § 2.
§ I]
ПЛОЩАДЬ ПЛОСКОЙ ФИГУРЫ
17
в точке а*) называется ^.-окрестностью или просто окрестностью
этой точки. Точка а, принадлежащая данному множеству А, называ-
ется его внутренней точкой, если некоторая «достаточно малая»
е-окрестность точки а целиком состоит из точек множества А. Мно-
жество, все точки которого внутренние, называется открытым множе-
ством, Говорят, что открытое множество G связно, если любые две его
точки можно соединить не-
прерывной кривой, целиком
принадлежащей О. Связное
открытое множество короче
называется областью.
Например, совокупность
точек, координаты которых
удовлетворяют условию
х2 у2 < 1, есть область
(рис. 1.2, а). Множество,
состоящее из двух кругов
х2—у2<1 и (х— 2)2-f-y2<l, не область: оно открыто, но не
связно (рис. 1.2, (Г).
Точка а называется граничной для множества А, если любая ее
окрестность содержит точки, как принадлежащие, так и не принад-
лежащие А. Сама граничная точка при этом может принадлежать А,
а может ему и не принадлежать. В частности, открытое множество не
содержит ни одной своей граничной точки. Совокупность всех гра-
ничных точек множества называется его границей. Множество,
содержащее все свои граничные точки, называется замкнутым.
Каждое множество может быть превращено в замкнутое присоедине-
нием к нему всех его граничных точек. В частности, присоединив к
некоторой области О все ее граничные точки, мы получим множество,
называемое замкнутой областью.
Точка а называется предельной для множества А, если в А
существует последовательность попарно различных точек av а2.....
ап..... сходящаяся к а. Предельная точка множества А может
принадлежать, а может и не принадлежать А. Замкнутые множества,
и только они, содержат все свои предельные точки. (Докажите это!)
Множество называется ограниченным, если его можно поместить
внутрь некоторого достаточно большого круга. Пусть А — ограни-
ченное множество. Обозначим р(ар а2) расстояние между двумя его
произвольными точками. Пусть теперь aj и а2 пробегают (независимо
друг от друга) все множество А. Ясно, что множество чисел р(ар а2)
ограничено сверху (р(ар а2) не может превысить диаметр круга,
*) То есть совокупность всех точек плоскости, расстояние которых
от а строго меньше е.
18 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. I
в котором помещается Л). Точная верхняя грань чисел р (аг, а2)
называется диаметром d(A) множества А (рис. 1.3).
Если множество А есть часть множества В (или совпадает с ним),
то мы будем обозначать это, как обычно, символом АсВ. Принад-
_________________ лежность точки а множеству А записывается
/у так: я £ Л.
/ $ Объединение двух множеств А и В, т. е.
совокупность точек, принадлежащих хотя бы
-X С—одному из них, мы обозначим А-\-В, а об-
щую часть множеств А и В, т. е. сово-
Рис. 1.3. купность точек, принадлежащих и Л и В од-
новременно, обозначим АВ.
2. Расстояние между множествами. Введем еще одно понятие,
которое нам понадобится при доказательстве теоремы существования
двойного интеграла.
Пусть Л и В — два произвольных множества на плоскости. Назо-
вем расстоянием между множествами А и В число
р(Л, B) = infp(<z, Z>), (1.2)
где точная нижняя грань берется по всем парам а£А, Ь£В. Ясно,
что если Л и В имеют хотя бы одну общую точку, то р(Л, В) = 0.
Обратное, вообще говоря, не верно; например, расстояние между
гиперболой У=~ и осью х равно нулю, хотя эти две линии не
имеют общих точек. Справедлива, однако, следующая теорема, кото-
рая нам понадобится в § 2.
Теорема 1.1 (отделимость замкнутых множеств). Если
Р и Q — ограниченные замкнутые множества без общих точек,
то р(Р, Q) > 0.
Доказательство. Предположим противное, т. е. пусть
р(Р, Q) — 0. Тогда, по определению расстояния между множествами,
для каждого и—1, 2, ... найдутся такие точки рп £ Р и qn £ Q, что
Р(дп. Qn)<^- (1-3)
Так как {/>„} — ограниченная бесконечная последовательность, то по
теореме Больцано — Вейерштрасса (см. вып. 1, гл. 14, § -2) из нее
можно выбрать подпоследовательность
Рп; Рп2.....Рпк......
сходящуюся к некоторой точке рй. Но тогда соответствующие точки
^п2...................................• • •
из последовательности {<7Л} образуют подпоследовательность, сходя-
щуюся, в силу (1.3), к той же самой точке р0.
же подпоследо-
точки, начиная
они совпадают
§ и ПЛОЩАДЬ плоской ФИГУРЫ 19
Точка р0 обязательно принадлежит множеству Р. В самом деле,
здесь возможны два случая. Либо подпоследовательность [рп } со-
держит бесконечно много различных точек, тогда р0 будет предель-
ной для Р и, в силу замкнутости Р, ра£Р', либо
вательность [рп } стабилизируется, т. е. все ее
с некоторого места, совпадают. Тогда, очевидно,
с р0 и р0£Р. По тем же причинам р0 £ Q. Но
тогда Р и Q имеют общую точку, что противо-
речит условию теоремы.
Упражнение. Убедиться, что теорема вер-
на, когда из двух замкнутых множеств Р и Q ог-
раничено хотя бы одно.
3. Площадь плоской фигуры. Из элементарной 4
геометрии известно понятие площади многоуголь-
ной фигуры. (Под многоугольной фигурой мы по-
нимаем множество, составленное из конечного
числа ограниченных многоугольников (рис. 1.4.)
Площадь многоугольной фигуры — это число,
обязательно неотрицательное*), обладающе
свойствами:
1 (монотонность). Если Р и Q—две многоугольные фигуры
и Р целиком лежит внутри Q, то
плР
2 (аддитивность). Если Рх и Р2—две многоугольные фигуры
без общих внутренних точек и P\-\-Pi означает объединение
этих фигур, то
пл (Pj Р2) = пл Pi + пл Р2 **).
3 (инвариантность.) Если многоугольные фигуры Рг и Р2
конгруэнтны между собой, то
пл (Pi) — пл (Р2).
Рис. 14.
следующими
Распространим теперь понятие площади, сохранив все три свойства,
с многоугольных фигур на некоторый более широкий класс фигур.
Эта задача решается следующим способом.
*) Нулем оно будет, разумеется, лишь тогда, когда многоугольная фигура
вырождается в конечное число точек или отрезков.
**) Легко убедиться в том, что требования 1 и 2 не независимы: моно-
тонность площади вытекает из ее. неотрицательности и условия аддитивности.
Действительно, если многоугольная фигура Р лежит внутри многоугольной
фигуры Q, то Q можно представить как объединение Р и многоугольной
Вигуры, которую естественно назвать разностью между Q и Р и обозначить
— Р. Тогда (по аддитивности) пл Q = пл Р-f- пл (Q — Р), но так как
пл (Q — Р)^ 0, то пл Q > пл Р.
20-
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. 1
Пусть F—некоторая плоская фигура*). Будем рассматри-
вать всевозможные многоугольные фигуры Р, целиком лежащие вну-
три F, и многоугольные фигуры Q, целиком содержащие F. Фигуры Р
будем называть вложенными, а фигуры Q — объемлющими. Площади
вложенных фигур ограничены в совокупности сверху (например,
площадью любой объемлющей фигуры), а площади объемлющих фигур
ограничены снизу (например, нулем). Поэтому существуют точная
верхняя грань **)
<S, = S,(F)= sup (плР)
площадей всех многоугольных фигур, вложенных в фигуру F, и точ-
ная нижняя грань
S* = S*(F)= inf (пл Q)
площадей всех многоугольных фигур, объемлющих F.
Величина S, называется внутренней площадью фигуры F,
a S* — ее внешней площадью. Из того, что площадь любой вложен-
ной фигуры не больше, чем площадь любой объемлющей, следует:
5, <S\
Если S* = S*, то их общее значение S называется просто пло-
щадью фигуры F. Сама фигура F при этом называется имеющей
площадь или квадрируемой.
Итак, мы распространили понятие площади с многоугольников
на некоторый, более широкий класс фигур ***). Сохранение основных
свойств площади (аддитивность, монотонность и инвариантность)
будет доказано в п. 4.
Установим следующее, полезное для дальнейшего условие квадри-
руемости фигуры.
Теорема 1.2. Фигура F квадрируема в том и только
том случае, если для любого е > 0 найдутся две такие много-
угольные фигуры PcF и Qz>F, что
iuiQ — плР<е. (1.4)
Доказательство. Действительно, если такие фигуры суще-
ствуют, то из
пл Р 5* пл Q
*) То есть некоторое ограниченное множество точек на плоскости.
**) Если в фигуру F нельзя вписать ни одного многоугольника, то мы
полагаем по определению, что S„ = 0.
***) Ясно, что всякая многоугольная фигура представляет собой квадри-
руемую (в указанном выше смысле) фигуру и для нее новое определение
площади (с помощью S„ и $*) дает исходную величину этой площади.
§ 1] ПЛОЩАДЬ ПЛОСКОЙ ФИГУРЫ 21
получаем, что
О — St<e,
а так как е>0 произвольно, то «$* = £,.
Обратно, если S* = S*, то, по определению точных граней, для
заданного е > 0 найдутся вложенная фигура Р и объемлющая фи-
гура Q такие, что
\ — у<плР<5ф> 5*<пл(?<5* + -|,
откуда
пл Q —плР < е.
Совокупность точек, принадлежащих Q, но не принадлежащих Р,
представляет собой многоугольную фигуру площади пл Q — плР,
содержащую границу фигуры F. Поэтому ус-
ловие теоремы 1.2 означает, что фигура F
квадрируема в том и только том случае,
если ее граница может быть погружена в М
многоугольную фигуру сколь угодно малой V&
площади (рис. 1.5).
С помощью этой теоремы легко устано-
вить квадрируемость ряда фигур, отличных
от многоугольных, например квадрируемость Рис. 1.5.
круга. В качестве Р и Q для круга можно
взять правильный вписанный и правильный
описанный многоугольники с достаточно большим числом сторон.
Собственно говоря, тот вывод формулы площади круга, который
обычно приводится в школьном курсе геометрии, основан на тех же
самых рассуждениях, которые здесь излагаются в общем виде.
Введем следующую терминологию. Будем говорить, что некоторое
множество, в частности кривая, имеет площадь нуль, если его можно
заключить в многоугольную фигуру сколь угодно малой площади.
Мы можем теперь сформулировать теорему 1.2 иначе.
Теорема 1.2'. Для того чтобы фигура F была квадрируе-
мой, необходимо и достаточно, чтобы ее граница имела пло-
щадь нуль.
Опираясь на эту теорему, мы опишем сейчас некоторый класс
заведомо квадрируемых фигур, достаточно широкий для того, чтобы
ограничиться им во всех дальнейших рассмотрениях.
Лемма. Всякая спрямляемая *) кривая имеет площадь нуль.
*) Спрямляемой называется кривая, имеющая конечную длину. Как
известно (см. вып. 1, гл. 11, § 1), если кривая задана уравнениями
х = ф (/), у — ф (i), а < i < р,
где ф(<) и ф (<)— непрерывные функции, имеющие непрерывные (или кусочно-
непрерывные) производные, то она спрямляема.
22
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. I
Доказательство. Пусть L — спрямляемая-кривая и I—ее длина.
Разобьем эту кривую с помощью «+1 точек на части, длина каж-
дой из которых меньше уем (это, разумеется, всегда возможно),
„ 2/
и примем каждую из этих точек за центр квадрата со стороной —
(рис. 1.6). Сумма этих квадратов представляет собой многоугольную
—। фугуру, объемлющую кривую L, а площадь
этой многоугольной фигуры не превосходит
суммы площадей составляющих ее квадра-
JytLJ 4/2
Д/р-1 тов, т. е. -^г(п~Ь !)• Так как I фиксиро-
,-j/T вано, а п можно взять произвольно боль-
шим, то кривую L действительно можно по-
грузить внутрь фигуры сколь угодно малой
площади. Лемма доказана.
Рис. 1.6. Из этой леммы и теоремы 1.2' полу-
чаем:
Всякая плоская фигура (т. е. ограниченное плоское множе-
ство), граница которой состоит из одной или нескольких
спрямляемых кривых, квадрируема.
Именно этот класс фигур мы и будем, как правило, рассматри-
вать в дальнейшем.
Замечание. Укажем еще один класс плоских квадрируемых
фигур. Всякая кривая, определяемая уравнением
у = f(x), а^х^д,
где f (х)—непрерывная функция, или уравнением х = g(у), c^y^d,
где g(y) тоже непрерывна, имеет площадь нуль. (Доказательство
этого было дано в гл. 11 вып. 1.) Отсюда, в силу теоремы 1.2',
следует, что всякая фигура, граница которой представима в виде
конечного числа непрерывных кривых, задаваемых уравнениями вида
у = / (х) или х — g (у), квадрируема.
4. Основные свойства площади. Покажем теперь, что введенное
нами определение площади плоской фигуры действительно обладает
свойствами монотонности, аддитивности и инвариантности.
Монотонность почти непосредственно вытекает из определения
площади, и ее проверка может быть предоставлена читателю. Уста-
новим аддитивность, т. е. докажем следующее предложение:
1) Пусть Рх и F2—две квадрируемые фигуры без общих
внутренних точек и F— их объединение (рис. 1.7); тогда F
тоже квадрируема и
пл F = пл -|- пл f2.
(1-5)
§ 1] ПЛОЩАДЬ ПЛОСКОЙ ФИГУРЫ 23
Квадрируемость фигуры F следует из теоремы 1.2' и того, что
ее граница составлена из множеств площади нуль, ограничивающих
фигуры Fr и F2 (она является частью объединения границ фигур Fy
и F2) *) Остается доказать равенство (1.5).
Для этого рассмотрим многоугольные фигу-
ры Ру и Р2, вложенные в Fy и F2 соответствен-
но, и многоугольные фигуры Q} и Q2, объем-
лющие соответственно Fy и F2. Фигуры Ру и
Р2 не пересекаются, поэтому площадь много-
угольной фигуры, составленной из Ру и Р2,
равна пл Ру -|- пл Р2. Фигуры и Q2 (возмож-
но, пересекающиеся) составляют в сумме фи-
гуру Q, площадь которой не превосходит пл Qj-I-пл Q2. Таким обра-
зом, имеем
пл Р ~ пл Ру + пл Р2 пл F пл Q пл Qj -J- пл Q2
и
пл Ру пл Р2 пл Fy -j- пл F2 пл Qj + пл Q2.
Так как разности naQj — пл/3! и плф2 — плР2 могут быть сделаны
сколь угодно малыми, то отсюда следует равенство (1.5). Аддитив-
ность доказана.
Наконец, свойство инвариантности площади непосредственно выте-
кает из инвариантности площади для многоугольных фигур и самого
способа определения площади квадрируемых
фигур через площади многоугольников. Укажем
еще одно свойство квадрируемых фигур.
2) Общая часть двух квадрируемых
фигур есть квадрируемая фигура.
Действительно, если Fy и F2— какие-либо
две фигуры и F — их общая часть (рис. 1.8),
то каждая точка, граничная для F, является
Fy, либо для F2. Поэтому наше утверждение
1.2' и того факта, что объединение множеств
площади нуль само имеет площадь нуль.
5. О понятии меры множества. Введенное в этом параграфе понятие
площади называют понятием площади по Жордану **), или мерой /Кардана.
Это понятие имеет, однако, некоторые недостатки. Действительно, выше
было показано, что объединение двух квадрируемых фигур есть квадрируе-
мая фигура. Отсюда, конечно, немедленно следует, что и объединение любого
конечного числа квадрируемых фигур есть квадрируемая фигура. Однако
если мы рассмотрим некоторую последовательность квадрируемых фигур
Л, Р2....Рп.....
Рис. 1.8.
граничной либо для
следует из теоремы
*) Очевидно, что всякая часть множества площади нуль сама является
множеством площади нуль.
*♦) Камилл Жордан (1838—1922) — французский математик.
24 двойные интегралы [гл. 1
то их объединение может быть уже и не квадрируемой фигурой. Вот про-
стой пример. Рассмотрим на плоскости квадрат
0<х< 1, 0<у<1,
и отметим в нем точки с рациональными координатами. Нетрудно показать,
что все эти точки образуют счетное множество, т. е. что их можно располо-
жить в виде последовательности
Р1 = (*1. У1). Р2 = (х2, у2)..........рп = (х„, у„), ...
g
Возьмем теперь некоторое число е > 0 и построим круг радиуса Г] < -g-
с центром в точке Далее, возьмем первую из точек р2, Рь . не попав-
шую в этот круг, и построим с центром в этой точке круг радиуса г2 < ,
не пересекающийся с первым кругом. После этого возьмем первую из остав-
шихся точек, не попавшую в построенные круги, и примем ее за центр круга
е
радиуса г3 < , не пересекающегося с двумя уже построенными кругами.
Будем продолжать такое построение до бесконечности. Мы получили последо-
вательность помещенных внутри квадрата кругов (без общих точек),
расположенных в этом квадрате «всюду плотно*)». Нетрудно показать (сде-
лайте это), что объединение этих кругов представляет собой фигуру F,
не квадрируемую в смысле Жордана. Вместе с тем этой фигуре естественно
приписать площадь, равную сумме площадей составляющих ее кругов. Эта
сумма, очевидно, равна
00 оо
i=l i = l
Подобные затруднения отпадают, если вместо понятия меры Жордана
пользоваться более гибким и совершенным понятием меры Лебега **), кото-
рое мы, к сожалению, не можем здесь излагать.
§ 2. Определение и основные свойства
двойного интеграла
1. Определение двойного интеграла. Перейдем к основной теме
этой главы—понятию двойного интеграла. Пусть G— некоторая
квадрируемая фигура, и пусть в G определена ограниченная функция
/(х, у). Разобъем G на конечное число непересекающихся квадри-
руемых частей Gt и составим сумму
п
(1-6)
z=i
где ASf — площадь 0{, а (|г, ify) — произвольная точка, принадлежа-
щая Gt. Суммы вида (1.6) будем называть интегральными суммами
*) Это означает, что объединение этих кругов представляет собой
множество, замыкание которого есть весь квадрат.
**) Анри Лебег (1875—1941) — французский математик, один из созда-
телей современной теории функций.
свойства двойного интеграла
25
§ 2]
(отвечающими функции /(х, у) и фигуре О). Введем понятие пре-
дела интегральных сумм (1.6) следующим образом.
Определение 1. Пусть D — наибольший из диаметров d (Оj)
фигур О[. Мы скажем, что число J есть предел инте-
г р а ль ны х сумм (1.6) при D-±Q, если для любого с > 0 най-
дется такое 6 > 0, что
|a-J|<e (1.7)
как только
D<t>. (1.8)
Иными словами, неравенство (1.7) должно выполняться для всех
интегральных сумм о, соответствующих разбиениям O=G1-|-G2-)-
4- . .. -j- Оп, которые удовлетворяют условию (1.8) независимо от
вида разбиения фигуры G на части Ot и независимо от выбора точки
(&£’ Л/) в каждом из элементов разбиения.
Определение 2. Если предел
п
lim 2
D->0 i = l
интегральных сумм (1.6) существует, то он называется двой-
ным интегралом от функции f (х, у) по области О и обо-
значается символом
f f f(x, у) ds
а
или
f Jf(x, y)dxdy.
о
Сама
функция f(x, у) при этом называется интегрируемой по фигуре О.
Иногда понятие двойного интеграла вводят несколько иначе. Фигуру G,
взятую из того или иного класса фигур, разбивают прямыми, параллельными
осям координат на прямоугольные ячей-
ки (рис. 1.9). В каждой из ячеек Gt вы-
бирают по точке (5/, Л/) и составляют
сумму а = 2/ (lb П/) AS,. Сумму берут,
скажем, по всем ячейкам, лежащим вну-
три G, игнорируя ячейки, прилегающие
к границе G (их суммарная площадь ма-
ла). Затем переходят к пределу, когда
максимальный диаметр ячейки стремит-
ся к нулю. Неудобство этого определе-
ния состоит в том, что оно по форме
привязано к определенной системе
координат на плоскости, в то вре-
мя как интуитивно ясно, что интеграл
f f f(x, у) ds, т. е.
* о
объем цилиндрического тела, не должен зависеть
от выбора системы декартовых координат на плоскости. Определение
с прямоугольными ячейками потребовало бы специального доказательства
этого факта. При нашем определении это получается автоматически. Изло-
женное выше определение обладает и другими преимуществами. Пусть, ска-
жем, функция f (х, у) принимает на G только два значения: и а2 (рис. 1.10).
26
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. I
Если части Gt и G2, на которых f(x, у) равна at и а2 соответственно, квадри-
руемы, то наше определение
позволяет получить интеграл f J* f(x, у) ds,
а
по существу, без предельного перехода. Ин-
туитивно очевидно, что
J* J” f (х, у) ds = пл G| • а1 4- пл О2 • а2
а
(доказать!). Определение с прямоугольными
ячейками потребовало бы даже в этом очевид-
ном случае кропотливого предельного пере-
хода.
Вместе с тем следует подчеркнуть, что
оба указанных пути приводят к одному и
тому же понятию двойного интеграла.
Рис. 1.10. 2. Условия существования двойно-
го интеграла. Верхние и нижние сум-
мы. Выясним, какие условия нужно наложить на функцию /(х, у),
определенную на некоторой квадрируемой фигуре О, для того,
чтобы можно было гарантировать существование двойного интеграла
f f у) ds.
а
Вводя определение двойного интеграла, мы предполагали, что
соответствующая функция /(х, у) ограничена*). Однако, как
легко показать на примерах, не всякая ограниченная функция инте-
грируема **).
*) В гл. 10 вып. 1 применительно к функциям одной переменной на от-
резке было доказано, что всякая интегрируемая функция ограничена. Однако
проведенные там рассуждения мы не можем полностью перенести на случай
двух переменных. Действительно, рассматривая различные разбиения квадри-
руемой фигуры G на квадрируемой части О;, мы, вообще говоря, не сможем
избежать случая, когда некоторые из этих элементов разбиения имеют пло-
щадь нуль. Но тогда из неограниченности функции не следует неограничен-
ность ее интегральных сумм / (х;, yi)&Si при каждом разбиении (по-
скольку функция может оказаться неограниченной только на том элементе
разбиения, который имеет площадь нуль). В случае одной переменной при
разбиении промежутка интегрирования на непересекающиеся полусегменты
такое положение не возникает. В случае двух (или нескольких) переменных
мы могли бы исключить появление элементов нулевой площади, сузив как
класс рассматриваемых фигур, так и класс рассматриваемых разбиений. Дру-
гой возможный путь (который мы здесь и выбрали) состоит в том, чтобы
заранее исключить из рассмотрения неограниченные функции.
**) Примером ограниченной, но не интегрируемой функции двух пере-
менных может служить функция, определенная на квадрате 0 < х <11, 0 < у С 1
следующим образом: f(x, у) = 1, если х и у рациональны, и f (х, у)— 0
в противном случае. Доказательство неинтегрируемости такой функции предо-
ставляется читателю.
§ 2] СВОЙСТВА ДВОЙНОГО ИНТЕГРАЛА 27
Для нахождения условий интегрируемости удобно, как и в слу-
чае одной переменной, воспользоваться так называемыми нижними
и верхними суммами Дарбу*).
Пусть /(х, у)— ограниченная функция, определенная на квадри-
руемой фигуре О, и (GJ—некоторое разбиение этой фигуры. Обо-
значим Afz и mt соответственно точную верхнюю и точную нижнюю
грани значений /(х, у) на элементе Gt. Суммы
Q=2-MZASZ и ®== 2 mi ^$1
z=i z=i
назовем соответственно верхней и нижней суммами Дарбу функ-
ции /(х, у) (отвечающими данному разбиению {GZJ фигуры G). Оче-
видно, что Q^-co для любого разбиения {Gz}.
Укажем основные свойства верхних и нижних сумм.
1) Для данного разбиения {GJ фигуры О верхняя и ниж-
няя суммы представляют собой соответственно точную верх-
нюю и точную нижнюю грани интегральных сумм
п
отвечающих данному разбиению {Gz} (и всевозможным выборам
точек (£z, т];)). В частности, всегда
п п п
q = 3 mz < 2 / П/) ASZ < 2 М{ AS, = Q.
t=i i=i 1=1
Неравенство
Ж ni)AS/<SAIzASz = Q
i=l 1 = 1
очевидно при любом выборе точки (£z, r]z) на Gz.
С другой стороны, по определению точной верхней грани, для
каждого е > 0 можно в каждом из элементов данного разбиения {Gz}
выбрать точку (£z, t]z) так, что Mt—/ (£z, T]z) < (•$ — площадь
области G). Но тогда
п п п
Q - S f =2 - f < 12 asz=е.
/ — 1 Z =1 I и 1
Для нижней суммы рассуждения аналогичны.
*) Гастон Дарбу — французский математик (1842—1917).
28
ДВОЙНЫЕ ИНТЕГРАЛЫ
(ГЛ. I
Назовем разбиение {<?>} измельчением разбиения {Gz}, если каж-
дый элемент Ql второго разбиения либо служит элементом первого
разбиения, либо представляет собой объединение нескольких элемен-
тов этого первого разбиения. Справедливо следующее утверждение:
2) Если Q и <о— верхняя и нижняя суммы, отвечающие раз-
биению {GJ, а СУ ион' — верхняя и нижняя суммы, отвечающие
некоторому его измельчению {Gy}, то
<о в/ СУ СУ
т. е. при измельчении разбиения верхняя интегральная сумма
не увеличивается, а нижняя не уменьшается.
Действительно, пусть {GJ—некоторое разбиение фигуры О и
{Оу} — его измельчение. Это означает, что каждый элемент Gt раз-
биения (Ог) представляет собой сумму элементов Gifl, а — 1, 2.kt,
второго разбиения. При этом
kt
Д5£=2Д5;а, (1.9)
а=1
а=1, 2.......kt. (1.10)
и каждый элемент Gy входит в состав одного из Gz. Отсюда следует
2 Mla \S'ia = Q'.
i=1 i=i а=1
Аналогично доказывается неравенство
3) Пусть {О/} и {Gy} — два произвольных разбиения фи-
гуры О, а СУ, о' и СУ', <£>" — отвечающие им верхние и нижние
суммы. Тогда
СУ>с>", СУ'>в>',
т. е. любая верхняя сумма (отвечающая данной функции /(х, у))
не меньше, чем любая нижняя сумма (отвечающая той же функ-
ции). Для доказательства этого утверждения заметим прежде всего,
что для любых двух разбиений {в}} и {Gy} фигуры G найдется их
«.общее продолжение», т. е. такое разбиение, которое служит из-
мельчением каждого из двух данных. В качестве элементов этого
«общего продолжения» можно взять, например, пересечения произ-
вольного элемента G/ одного разбиения с произвольным элементом Оу
второго разбиения (нужно брать, конечно, только такие Gt и Gy,
которые имеют общие точки).
Рассмотрим теперь верхние и нижние суммы, отвечающие разбие-
ниям и их общему продолжению {О*}. Обозначим эти
§ 2] СВОЙСТВА ДВОЙНОГО ИНТЕГРАЛА 29
суммы соответственно й', о/; О!', ft)"; Q, ft>- Тогда по свойству 2)
й'>й,
и
ft)' <1 0), <i>" ft).
Кроме того, очевидно, имеет место неравенство
Таким образом,
S' Q со о"
и аналогично
й" й со (o'.
Утверждение доказано.
Совокупность всех верхних сумм, отвечающих данной функции
/(х, у), ограничена снизу (например, любой нижней суммой), а сово-
купность всех нижних сумм ограничена сверху (например, любой
верхней суммой). Обозначим J точную нижнюю грань верхних сумм,
a J—точную верхнюю грань нижних сумм. Числа J и J называются
верхним и нижним интегралами функции f(x, у) (по области G).
Имеет место неравенство
j<J.
Действительно, если бы имело место обратное неравенство, то на-
шлось бы число е такое, что
J—7>е>0. (1.11)
Далее, по определению точных граней, нашлись бы верхняя сумма
и нижняя сумма (о2 такие, что
fij —J<^- И J — й2<|,
т. е.
^1 — ®2 4~ < е»
откуда, в силу (1.11).
йг — ft»2 < 0,
что противоречит свойству 3).
Свойства 1) — 3) верхних и нижних сумм позволяют установить
следующее необходимое и достаточное условие интегрируемости функ-
ции f(x, у), вполне аналогичное необходимому и достаточному усло-
вию существования определенного интеграла (см. вып. 1, гл. 10,
теорема 10.1).
Теорема 1.3. Ограниченная на квадрируемой фигуре О
функция f (х, у) интегрируема на G в том и только том случае.
30
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. I
если для любого е>0 найдется такое разбиение фигуры G,
что отвечающие этому разбиению суммы Дарбу удовлетво-
ряют условию Й— со < е.
Доказательство этой теоремы опирается на следующую лемму Дарбу.
Лемма Дарбу. Верхний и нижний интегралы J и J служат соответ-
ственно пределами верхних и нижних интегральных сумм Дарбу при
D -> 0. (D — максимум диаметров d (G() элементов разбиения {GJ фигуры G.)
Для удобства введем понятие границы разбиения. Если дано разбие-
ние {G,} фигуры G на квадрируемые элементы G;, то под границей L раз-
биения {G;} мы будем понимать объединение границ Lt всех элементов Gy.
Z. = Z-i-(-^2+ + Ln.
Для всякого разбиения фигуры G на квадрируемые G, границы Li имеют
площадь нуль, поэтому граница L разбиения {G;} также имеет площадь
нуль.
Граница L как объединение конечного числа замкнутых множеств L[
является замкнутым множеством. (Это общее утверждение о замкнутых мно-
жествах читателю предлагается доказать!)
Перейдем теперь к доказательству леммы Дарбу.
Доказательство леммы Дарбу. По определению верхнего инте-
грала J для всякого е > 0 найдется такое разбиение ^GZJ фигуры G, что
отвечающая ему верхняя сумма й* удовлетворяет условию
0<й* —7<у.
Заключим границу L* этого разбиения строго внутрь некоторой многоуголь-
ной фигуры Q, площадь которой меньше чем тгп~> где Al — sup I f (х, у) |.
(х,у)(.а
Граница L* и граница многоугольной области Q — это два ограниченных
замкнутых множества без общих точек (рис. 1.11). Следовательно, по тео-
реме 1.1 расстояние между ними есть некоторая положительная величина а.
Рассмотрим теперь произвольное разбиение
{Gft} фигуры G, для которого D< а. Элемен-
ты G* этого разбиения обладают, очевидно,
ДДгР&тмД Ж УИ следующим свойством: если Gs имеет хотя бы
Шх Ш т ОДНУ °6|ЦУЮ точку с А*, то G* целиком лежит
Mr Дг внутри области Q. Такие элементы Gs мы на-
Ж зовем граничными, а все остальные — внут-
ренними. Покажем теперь, что всякому раз-
Ж .лиаД биению {Gfe}, для которого D < а, _отвечает
верхняя сумма й, отличающаяся от J меньше
ы чем а разобьем сумму й на два слагаемых:
п
рис. i.i 1. й = 2 Mk =SX as;+2'Х as;,
Й = 1
где первая сумма 2' берется по всем внутренним, а вторая 2" по всем
граничным элементам разбиения {G^}. Оценим каждую из этих сумм в отдель-
ности. Каждый внутренний элемент разбиения {G^} целиком лежит внутри
некоторого элемента разбиения {Gf}. При этом соответствующая точная
верхняя грань М.'к не превосходит, очевидно, точной верхней грани значений
§ 2] СВОЙСТВА двойного ИНТЕГРАЛА 31
функции f(x, у) на этом элементе разбиения [О*]. Отсюда следует, что
£Xas'<q*.
Далее, очевидны неравенства
|тИЯ<Л1= sup !/(-*, У) I при всех k
1 1 (х, у)$О
и
Д5а < пл Q < 2^-.
Следовательно,
и, значит,
а = j; м; as;+2Х < а*+у < ^+
что и требовалось доказать. Для нижних сумм доказательство аналогИно.
Перейдем теперь к доказательству теоремы 1.3.
Необходимость. Пусть /(х, у) интегрируема и пусть задано £ > 0.
Обозначим интеграл от f(x, у) символом /. По определению предела инте-
гральных сумм, для данного е найдется такое 6 > 0, что для всякого разбие-
ния (О/}, для которого D < б, выполняется, независимо от выбора точек
(^- ПД условие
(1-12)
Далее, верхняя и нижняя суммы, отвечающие разбиению {(?/), представляют
собой соответственно точную верхнюю и точную нижнюю грани интеграль-
ных сумм, отвечающих этому разбиению. Поэтому, зафиксировав разбиение,
можно выбрать точки (g-, тр) и r]z) в элементах Gz этого разбиения так,
чтобы выполнялись неравенства
п п
й-^/(ия;)Д5, <4; 2/(^г1')д^-й)<Т <113)
ial 1 = 1
Так как каждая из этих двух интегральных сумм удовлетворяет неравен-
ству (1.12), то из (1.13) следует:
£2 — <э < ,е.
Достаточность. Если для любого е > 0 существует такое разбие-
ние, что
Q — <о < е,
то, очевидно, _
/= 7.
Обозначим общее значение этих величин через J и покажем, что J предста-
вляет собой предел интегральных сумм, т. е. двойной интеграл от функ-
ции f (х, у) по G. В силу леммы Дарбу, J есть общий предел верхних и
нижних сумм при £>->0. Но так как любая интегральная сумма, отвечающая
32 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
некоторому разбиению, заключена между соответствующими суммами Quo,
то J есть предел интегральных сумм при £>->0. Теорема доказана.
3. Важнейшие классы интегрируемых функций. С помощью
теоремы 1.3 мы установим сейчас интегрируемость некоторых важ-
ных классов функций, в первую очередь непрерывных функций. Ниже
мы будем считать, что каждая из рассматриваемых функций задана
в некоторой замкнутой ограниченной квадрируемой области.
Теорема 1.4. Всякая функция f(x, у), непрерывная в замк-
нутой ограниченной*) области G, интегрируема на G.
Доказательство. Поскольку /(х, у) непрерывна на замкну-
том ограниченном множестве, она ограничена и равномерно непре-
рывна на этом множестве**). В силу равномерной непрерывности
функции / (х, у), для каждого е > 0 найдется такое 6 > 0, что как
только фигура О разбита на части G(, диаметр каждой из которых
мен'1>ше 6, колебание функции /(х, у) в каждой из этих частей,
т. е. разность — mt, будет меньше чем е. Но тогда
Q — (0—2 — 2 mt < е 2
i=i i=i i=i
следовательно, функция /(х, у) интегрируема.
Требование непрерывности подынтегральной функции слишком
стеснительно. Поэтому для
приложений важна следующая теорема,
гарантирующая существование двойно-
го интеграла для некоторого класса
разрывных функций.
Теорема 1.4'. Если функция
f(x, у) ограничена в замкнутой
ограниченной области Q и непре-
рывна на G всюду, кроме некото-
рого множества площади нуль,
то f(x, у) интегрируема в G.
Доказательство. Возьмем про-
извольное е > 0. По условию /(х, у)
ограничена, т. е. существует такое
К, что |/(х, у) | < К. Заключим множество, на котором функ-
ция /(х, у) может быть разрывной, внутрь многоугольной фигу-
ры Q, площадь которой меньше чем (рис. 1.12). Часть области
G, не входящую в Q, обозначим G. Граничные точки много-
*) И, конечно, квадрируемой; в дальнейшем мы всегда будем пред-
полагать выполненным условие квадрируемости, не оговаривая этого особо.
♦*) См. вып. 1, гл. 14, теоремы 14.6 и 14.8.
§ 2] СВОЙСТВА ДВОЙНОГО ИНТЕГРАЛА 33
угольной фигуры Q, принадлежащие G, мы причисляем к G, поэто-
му G замкнута. На замкнутом множестве О функция /(х, у) непре-
рывна, а следовательно, и равномерно непрерывна. Выберем 6 > О
так, чтобы в любой части фигуры G, имеющей диаметр меньше
чем 6, колебание функции /(х, у) было бы меньше чем (где
5 — площадь G). Рассмотрим теперь такое разбиение области G:
первым его элементом Gl служит Q, а все остальные имеют диа-
метр, меньший чем 6. Оценим разность й— ® для этого разбиения.
Имеем
Й — со — Мj AS! — /Hj ASj -|- (М; — mz) AS; <
Z = 2
п
<(Ml-m1) + £ 2TASz.
/ = 2
n
Ho Afj — mt 2/C a 2 < •$, следовательно,
1 = 2
Й-со<2К^ + -^-£ = е.
Так как е>0 произвольно, то, в силу теоремы 1.3, функция /(х, у)
интегрируема.
4. Свойства двойного интеграла. Основные свойства двойного
интеграла вполне аналогичны соответствующим свойствам определен-
ного интеграла для функции одной переменной, поэтому мы только
перечислим эти свойства, не останавливаясь на доказательствах.
1. Если функции fi(x, у) и /2(х, у) интегрируемы в обла-
сти G, то их сумма (разность) тоже интегрируема в G и
J J 1/1 (X, у)±/2(х, y)]ds = J J/!(х, y)ds ± f J/2(х, y)ds.
о а о
2. Если k — постоянное число и функция f(x, у) интегри-
руема в G, то функция kf(x, у) тоже интегрируема в G и
J f kf(x, y)ds = k f f f(x‘ >)ds-
о о
Совокупность этих двух свойств называется линейностью ин-
теграла.
3. Если область О представляет собой объединение двух
областей Ог и 02, в каждой из которых функция f(x, у) инте-
грируема, то в О эта функция также интегрируема. Если,
34 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
кроме того, Gx и С2 не имеют общих внутренних точек, то
У / f(x> y)ds = у у f(x, y)ds-]- у у f(x, y)ds.
a Gi <?:
Это свойство называется аддитивностью интеграла.
4. Если j\(x, у) и f2(x, у) интегрируемы в G и j\(x, у)
У)- т0
f f fl <х< У)ds <• У У /г(х> У) ds.
о а
Это свойство называется монотонностью интеграла; из него вы-
текают свойства 5 и 6.
5 (оценка интеграла по модулю). Если f(x, у) инте-
грируема в G, то функция |/(х, у)| также интегрируема в G а
У У f(.x- У) ds < У У | / (х, у) | ds.
о о
6 (теорема о среднем). Если функция f(x, у) интегри-
руема в G и удовлетворяет неравенствам
m^f(x, у)<Л1.
то
mS^ у у f(x, y)ds MS, (1.14)
а
где S — площадь фигуры G.
Это утверждение непосредственно вытекает из свойства 4 и того
очевидного факта, что
У у с ds = cS, с = const.
а
Если функция /(х, у) непрерывна, то теорема о среднем может
быть сформулирована в таком виде:
6'. В области G найдется такая точка (£, т|). что
У У f(x> y)ds = fQ„ ri)S. (1.15)
а
Действительно, примем за т и М соответственно точную нижнюю
и точную верхнюю грани значений функции f(x, у) в G. Тогда, со-
гласно (1.14),
f f (х> У) ds < М.
§ 3] АДДИТИВНЫЕ ФУНКЦИИ ОБЛАСТИ 35
Но (см. вып. 1, гл. 14, § 3) функция, непрерывная в замкнутой
области, принимает значения т, М. Предположим для простоты,
что функция f(x, у) принимает значения М и т в точках (хр yj
и (х2, у2), лежащих внутри области О. (Рассуждение несколько
усложняется, если какая-либо из этих точек, или обе они, попадают
на границу области G.) Любые две точки области мы можем соеди-
нить ломаной, лежащей в области. Соединим ломаной точки (хр yt)
и (х2, у2), в которых функция равна соответственно М и т. Вдоль
такой ломаной функция /(х, у) непрерывна и, следовательно, вместе
со значениями М и т принимает и все промежуточные. В частности,
найдется точка, обозначим ее (£, т}), в которой
f(& т1) = -5- f f f(.x, y)ds,
a
тем самым формула (1.15) доказана.
§ 3. Аддитивные функции области.
Производная по площади
1. Функции точки и функции области. Одно из самых основ-
ных понятий анализа — понятие функции. Мы встречались с функ-
циями, зависящими от одной, двух или нескольких независимых
переменных. Пользуясь геометрической терминологией, можно ска-
зать, что эти функции представляют собой переменные величины,
зависящие от точки на прямой (в случае одной переменной), от
точки на плоскости (при двух переменных) или от точки в про-
странстве некоторого числа измерений. Однако в анализе и его фи-
зических применениях часто встречаются функции другого рода,
в которых роль значений аргумента играют уже не отдельные точки,
а множества — например плоские или пространственные фигуры;
такие функции называются функциями множества или функциями
области *).
Примером функции области может служить площадь S (G) об-
ласти G, определенная для всех квадрируемых плоских областей
так, как это было описано в § 1. Рассмотрим еще один пример.
Пусть по плоскости ху распределена некоторая масса. Тогда каждой
области G, лежащей в этой плоскости, отвечает определенное число —
масса ji(G), сосредоточенная на G. Здесь опять-таки мы имеем дело
*) Термин «область» употребляется здесь просто как синоним термина
«множество», а не как термин, означающий открытое связное множество.
Запас областей (т. е. запас множеств), на которых определена данная функ-
ция области (т. е. множества), различен в различных ситуациях. У нас таким
запасом будет, как правило, совокупность всех квадрируемых фигур.
36 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
с переменной величиной, зависящей от области, т. е. с некоторой
функцией области.
Введем следующее важное определение.
Определение. Функция области F (G) называется аддитив-
ной, если выполнены следующие условия'.
1) если F(G) определена для областей Ог и О2, то она
определена и для их объединения G1-|-G2;
2) если Gj и G2 не имеют общих внутренних точек, то
/=’(Oi + O2) = /7(O1) + /;’(G2) *).
Обе указанные выше функции — площадь и масса — обладают этим
свойством аддитивности. Можно привести и много других примеров
аддитивных функций области: поверхностный заряд, количество све-
товой энергии, падающей на освещенную поверхность, давление
жидкости на дно сосуда и т. п.
Можно, конечно, указать примеры и не аддитивных функций
области. Например, если каждой квадрируемой области поставить
в соответствие квадрат ее площади, то мы получим функцию об-
ласти, но не аддитивную.
С аддитивными функциями, в которых роль аргумента играет не
плоская, а пространственная область, мы встретимся в следующей
главе, посвященной тройным интегралам.
2. Двойной интеграл как аддитивная функция области. Рас-
смотрим двойной интеграл
J f f (*, y)ds.
а
считая в нем подынтегральную функцию f(x, у) фиксированной,
а область интегрирования G переменной. Тогда этот интеграл будет
представлять собой некоторую функцию Ф (G) области G. В силу
свойства 2 двойных интегралов, сформулированного в предыдущем
параграфе, эта функция области аддитивна. Запас областей, на ко-
торых она определена, составляют все квадрируемые фигуры, содер-
жащиеся в квадрируемой фигуре Go, на которой задана f (х, у).
3. Производная функции области по площади. Рассмотрим
снова функцию р (G), т. е. некоторое распределение масс по пло-
скости. Если О — квадрируемая область и 5 (G) — ее площадь, то
отношение
Ц(О)
5(G)
*) Отсюда, в частности, следует, что если G имеет площадь нуль, то
F(G) —0. Это означает, что мы рассматриваем лишь массы, распределенные
с некоторой двумерной плотностью (а не сосредоточенные в отдельных точ-
ках или на отдельных линиях).
§ 3] АДДИТИВНЫЕ ФУНКЦИИ ОБЛАСТИ 37
представляет собой среднюю плотность распределения массы в данной
области О. Будем теперь уменьшать размеры области О, стягивая
ее к некоторой фиксированной точке р0. Если при этом отноше-
ние (1-16) стремится к некоторому пределу р(р0), то этот предел
называется плотностью распределения масс в данной точке рй.
Таким образом, распределение масс по плоскости можно задавать
непосредственно с помощью аддитивной функции области р. (G),
а можно его характеризовать и соответствующей плотностью.
Перейдем теперь от нашего конкретного примера (распределения
масс) к произвольной функции области. В отличие от рассмотрен-
ного выше примера — массы, произвольная функция области может
принимать, как положительные, так и отрицательные значения.
Пусть F (О') — некоторая аддитивная функция области, определен-
ная для всех квадрируемых областей *). Мы скажем, что число А
есть предел отношения
F(G)
S (О)
(S (G) — как обычно, площадь области G) при стягивании области G
к точке рй, если для любого е > 0 найдется такое б > 0, что
для всякой области G, целиком помещающейся в круге радиуса б
с центром в точке р0.
Этот предел мы будем обозначать символом
F(G) dF
11Ш или —т-
S (G) ds
и называть производной аддитивной функции Г (О) по площади.
Эта производная представляет собой, очевидно, уже функцию в обыч-
ном смысле, т. е. переменную величину, зависящую от точки.
Возвращаясь к нашему примеру, можно сказать, что плотность
р(р0) распределения масс по плоскости есть производная по пло-
щади от массы.
4. Производная по площади от двойного интеграла. Из тео-
ремы о среднем для двойных интегралов (см. § 2, п. 4, свойство 6)
вытекает следующий результат. Пусть
/?(G) = / f f{x, y)ds,
Q
(1.17)
*) Или для всех квадрируемых областей, содержащихся в некоторой
фиксированной области.
38 ДВОЙНЫЕ ИНТЕГРАЛЫ !ГЛ. 1
где /(х, у) — некоторая фиксированная функция, которую мы пред-
положим непрерывной во всей рассматриваемой части плоскости.
Покажем, что аддитивная функция области F (О), определенная ра-
венством (1.17), имеет производную по площади и эта производная
совпадает с подынтегральной функцией f(x, у).
Действительно, пусть р0 — некоторая фиксированная точка,
О — область, лежащая в некотором круге с центром в р0, и т,
М — соответственно точная нижняя и точная верхняя грани значений
функции /(х, у) в области G. По теореме о среднем
sTG)/J f(x'
о
При стягивании области G к точке р0, т. е. при стремлении радиуса
круга к нулю, числа т и М стремятся (в силу непрерывности /(х, у)
в точке р0) к одной и той же величине, а именно к значению
функции /(х, у) в этой точке. Следовательно, к этому пределу
стремится и заключенное между ними отношение. Итак, действи-
тельно,
~di = ^x- уУ
5. Восстановление аддитивной функции области по ее произ-
водной. Выше мы говорили о нахождении производной от функции
области. Сейчас мы рассмотрим обратную задачу: дана функция
точки /(х, у); найти такую функцию области F(G), производная
которой совпадала бы с f (х, у). Считая / (х, у) непрерывной, мы
сразу можем указать одну такую функцию области, а именно двой-
ной интеграл
fff(x,y)ds (1.18)
о
(рассматриваемый как функция от О). Естественно поставить вопрос:
существуют ли какие-либо другие аддитивные функции области,
имеющие ту же самую производную. Покажем, что если /(х, у)
непрерывна, то существует лишь одна аддитивная функция области,
имеющая /(х, у) своей производной (и представимая, следовательно,
двойным интегралом (1.18)).
Если F1(G) и F2(G) — две аддитивные функции области, имею-
щие одну и ту же производную по площади, то
4<Л-г,)=о.
Поэтому нам достаточно показать следующее:
§ 3]
АДДИТИВНЫЕ ФУНКЦИИ ОБЛАСТИ
39
dF
Если то F=Q. Это в свою очередь вытекает из сле-
дующей леммы:
Лемма. Если в ограниченной замкнутой области D про-
dF
изводная аддитивной функции области F(D) суще-
ствует и неотрицательна, то F(D)^-Q.
Доказательство. Предположим противное, т.
F(Z9)<0. Тогда найдется такое Z < 0, что
S (D) и’
е. пусть
т. е.
(1-19)
Далее, выберем последовательность положительных
е2, .... сходящуюся к нулю, и разобьем область D на
число частей Dt, диаметр каждой из которых меньше еР
ней мере для одной из этих частей, обозначим ее О(1),
подняться условие
F(D{iy)^lS(Dw),
так как если бы для всех выполнялось противоположное нера-
венство
F(Di)>lS(Di),
чисел ер
конечное
По край-
должно вы-
то, просуммировав эти неравенства по всем Dt, мы пришли бы
к противоречию с неравенством (1.19).
Далее, разобьем D*1' на части, диаметр каждой из которых
меньше чем е2. Среди них найдется хотя бы одна, обозначим ее О(2),
для которой выполнено неравенство
F < IS (D(2)).
Продолжив этот процесс, мы получим последовательность {£)(л)}
вложенных друг в друга замкнутых ограниченных областей, диаметры
которых стремятся к нулю Q5W означает замыкание £)(л), при этом
F(DW)=zF(D(n))). Но тогда существует точка, обозначим ее pQ,
принадлежащая всем £>(л) *). Так как, по предположению, производ-
dF
ная существует всюду, в частности и в точке р0, то ее значе-
ние в этой точке может быть представлено как
lim
П“>0О
F(DW)
S (Р(л)) ’
(1-20)
*) Это — двумерный аналог леммы о вложенных сегментах, см. вып. 1,
гл. 3, § 3.
40
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. I
(л) F
Но по построению последовательности D[ 1 отношение $ (р(л))" ПРИ
всех п не превосходит фиксированного отрицательного числа I, по-
этому предел (1.20) не может быть неотрицателен. Лемма доказана.
Заменив F (О) на — F (G) и воспользовавшись доказанной лем-
мой, получим, что если
F(£))<;0. Наконец, если
dF
— существует и неположительна, то
ds
т. е. если одновременно
dF
ds
О и
ds
то F (£)) = 0 для всякой замкнутой ограниченной области.
6. Определенный интеграл как функция области. Сравним изложен-
ные сейчас факты с тем положением, которое существует для функций
одного независимого переменного. Определенный интеграл
ь
//(5)^
а
можно рассматривать (при фиксированной функции /) как функцию от сег-
мента [а, 6], т. е. как функцию области на прямой, причем, в силу известных
свойств определенного интеграла, это будет аддитивная функция. Но сегмент
определяется двумя точками — своими концами. Если же один его конец,
скажем левый, считать фиксированным, то функция сегмента сводится
к обычной функции точки. Именно так и поступают, рассматривая интеграл
f/(i)d£ (1.21)
а
(при фиксированном а) как функцию верхнего предела. При этом, выбрав
вместо нижнего предела а какую-либо иную точку а', мы изменим функ-
цию (1.21) на постоянное (т. е. не зависящее от х) слагаемое, а именно на
величину
а'
f f (£)<*.
а
Таким образом, интеграл от функции одного переменного представляет собой
однозначно определенную функцию области на прямой. Эту функцию, рас-
сматриваемую на сегментах, можно свести к функции одной переменной,
определенной с точностью до произвольного постоянного слагаемого. Изло-
женные в этом параграфе теоремы о производной двойного интеграла по
площади и о восстановлении функции области по ее производной предста-
вляют собой двумерные аналоги теорем о производной определенного инте-
грала от непрерывной функции по верхнему пределу и о том, что первооб-
разная определяется по функции однозначно, с точностью до постоянного
слагаемого.
§ 4] ПРИМЕНЕНИЯ ДВОЙНЫХ ИНТЕГРАЛОВ 41
7. Продолжение функций области по аддитивности. Если некоторая
функция задана не всюду, где она может быть определена, то ее обычно
можно продолжить, если известны те или иные ее свойства. Например, если
известно, что функция f(x) линейна, т. е. имеет вид
f (х) = ах 4-й,
то достаточно знать ее значения в двух точках для того, чтобы определить
ее значение всюду. Если же функция f{x) периодическая, т. е. обладает
тем свойством, что при некотором Т
f (хТ) = f (х)
для всех х, то достаточно знать значения этой функции на отрезке [О, Г] для
того, чтобы определить ее значения всюду (например, зная sin х для всех х
от 0 до 2л, мы можем найти синус любого угла). Аналогично обстоит дело
и с функциями области. Если известно, что функция области F(G) аддитивна,
то, зная ее значения на некотором классе областей, мы можем во многих
случаях однозначно продолжить ее (с сохранением свойства аддитивности)
на некоторый более широкий класс областей. Например, пусть F (G) — адди-
тивная функция области, определенная на всех треугольниках. Тогда ее можно
продолжить «по аддитивности» на все многоугольники (а затем и на более
широкий класс областей).
Фактически именно с такой задачей о продолжении функции области
по аддитивности мы имели дело в § 1, где рассматривалось понятие площади.
Площадь представляет собой аддитивную функцию области, которую мы
считали определенной на многоугольниках (или на многоугольных фигурах)
и затем продолжали, с сохранением аддитивности, на более широкий класс
фигур, которые мы назвали квадрируемыми. Общая задача о продолжении
аддитивных функций «по аддитивности», о нахождении того возможно более
широкого класса фигур, на который такое продолжение возможно, и т. д.
играет важную роль во многих вопросах математики.
К сожалению, мы не имеем возможности излагать здесь эти вопросы:
это потребовало бы от нас введения и систематического использования идей
и понятий общей теории меры.
§ 4. Некоторые физические и геометрические применения
двойных интегралов
1. Вычисление объемов. В самом начале этой главы мы уже
рассматривали одну геометрическую задачу, лежащую в основе поня-
тия двойного интеграла, а именно задачу о вычислении объема
криволинейного цилиндра. Мы видели, что для цилиндра, ограничен-
ного снизу замкнутой областью G, а сверху поверхностью z — f (х, у),
где /(х, у) — неотрицательная непрерывная функция, приближенное
значение объема дается интегральной суммой
п
(1.22)
i = i
(Сумма берется по всем элементам Ot разбиения фигуры О на ква-
дрируемые части; AS;—площадь элемента Ог; (E,z, T]Z)(;GZ.) Как уже
говорилось во введении к этой главе, точное значение объема — это
42 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
предел, к которому стремятся интегральные суммы (1.22) при неогра-
ниченном измельчении разбиения фигуры О. Но предел сумм (1.22)—
это двойной интеграл от функции f (х, у) по О. Его существование
(при указанных выше предположениях об f (х, у) и G) было доказано
(теорема 1.3). Итак, объем V криволинейного цилиндра, ограничен-
ного снизу замкнутой областью G, а сверху поверхностью z = / (х, у)
(/ непрерывна), представляется двойным интегралом
J f f (X, У) ds.
G
На самом деле объем криволинейного цилиндра следует определить
как значение этого интеграла. Ведь само понятие объема, хотя и ясное
геометрически, заранее не определено. Строго говоря, приведенные рас-
суждения показывают лишь, что такое определение естественно и хорошо
согласуется с нашей геометрической интуицией.
Рассмотрим еще некоторые задачи, в которых находит применение
понятие двойного интеграла.
2. Вычисление площадей. Полагая в двойном интеграле подын-
тегральную функцию /(х, у) тождественно равной 1, мы получим
интеграл
f f ds. (1.23)
а
равный, очевидно, площади фигуры G (поскольку этой площади будет
равна каждая из интегральных сумм, отвечающих интегралу (1.23)).
Формула
S = f f ds (1.24)
о
для вычисления площади часто бывает удобнее, чем формула
ь
S = J / (х) dx,
а
выражающая площадь криволинейной трапеции, поскольку фор-
мула (1.24) применима не только к криволинейным трапециям, но
и к любым квадрируемым фигурам, расположенным произвольным
образом по отношению к координатным осям.
3. Масса пластинки. Рассмотрим на плоскости ху материальную
пластинку, т. е. некоторую область О, по которой распределена масса
с плотностью р(х, у). Вычислим по заданной плотности р(х, у) массу
этой пластинки, считая, что р(х, у) — непрерывная функция от х
и у. Разобьем G каким-либо образом на части Gf и в каждой из
этих частей выберем некоторую точку (|г, t]z). Массу каждого такого
§ 4) ПРИМЕНЕНИЯ ДВОЙНЫХ ИНТЕГРАЛОВ 43
элемента Ot можно считать равной приближенно p(|z, t]z) Д8( (где
— площадь Gz), а масса всей пластинки приближенно равна сумме
2р(^. Л/)Д5р (1.25)
i=i
взятой по всем элементам разбиения. Для получения точного значения
массы пластинки нужно перейти в этой сумме к пределу, неогра-
ниченно измельчая разбиение (Gz) области Q. При этом сумма (1.25)
переходит в двойной интеграл
fff(x,y)ds, (1.26)
о
который и представляет собой массу пластинки.
Ясно, что нахождение массы пластинки по плотности есть частный
случай задачи о восстановлении функции области по ее производной
по площади, которую мы рассматривали в предыдущем параграфе.
4. Координаты центра масс пластинки. Найдем координаты
центра масс пластинки, занимающей в плоскости ху некоторую
область G. Пусть р (х, у) — плотность этой пластинки в точке (х, у).
Разбив область О на части Gz, выберем в каждой из этих частей
некоторую точку (£z, T]z) и будем приближенно считать массу каждой
из частей пластинки равной p(£z, ,qz)ASz, где ASZ— площадь частичной
области Gz. Если считать, что каждая из этих масс сосредоточена
в одной точке, а именно в точке (£z, T|z), то для координат хс и ус
центра масс такой системы материальных точек получаются сле-
дующие выражения:
п п
2 &/Р&- nz)A$z 2 V nz)
= —п--------------: Ус = . (1-27)
xLi Р Р ’h)
1=1 1=1
которые представляют собой приближенные значения координат центра
масс пластинки. Чтобы получить точные значения этих координат,
нужно в формулах (1.27) перейти к пределу, неограниченно измельчая
разбиение области О. При этом стоящие в формулах (1.27) суммы
перейдут в соответствующие интегралы и мы получим, что коорди-
наты центра масс пластинки определяются формулами:
f f хр (х, у) ds J* J ур (х, у) ds
хс=-Vr-------------•- Ус=-т~т-------------• <1<28>
J J Р и у) ds j J р (х, у) ds
О О
44 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
Если пластинка однородна, т. е. р —const, то формулы для коор-
динат центра масс имеют более простой вид:
J* £ х d s J" J* у d s
xc = Srr-----; Ус = Л-г-------> (1.29)
JJds Sfds
Q О
б. Моменты инерции пластинки. Как известно, момент инерции
материальной точки относительно некоторой оси равен произведению
массы точки на квадрат ее расстояния от этой оси, а момент инерции
системы материальных точек (относительно одной и той же оси)
равен сумме моментов инерций, составляющих эту систему масс.
Пусть область О плоскости ху занята пластинкой, имеющей плот-
ность р(х, у). Разбив область G на части Gz, площади которых
равны и выбрав в каждой из этих частей некоторую точку (£z, т|(),
заменим нашу пластинку системой масс p(£z, T]Z)ASZ, лежащих в
точках Qp т];). Момент инерции такой системы точечных масс
относительно оси у равен
п
ч,)А5,.
Это выражение мы принимаем за приближенное значение момента
инерции пластинки, тем более точное, чем мельче взятое разбиение.
Переходя здесь к пределу при неограниченном измельчении разбиения
области О, получим для момента инерции пластинки относительно
оси у следующую формулу:
/у = J" J х2р(х, у) ds. (1.30)
а
Аналогично момент инерции пластинки относительно оси х равен
= У2Р(х, у) ds. (1.31)
о t
Найдем еще момент инерции /0 пластинки относительно начала коор-
динат. Приняв во внимание, что момент инерции материальной точки
с массой т относительно начала координат равен
m(x24~y2)
и воспользовавшись рассуждениями, аналогичными проведенным выше,
получим, что
4 = J f (*2 + y2)p(*- y)<is>
Q
т. е.
/0=л+/г
§ 41 ПРИМЕНЕНИЯ ДВОЙНЫХ ИНТЕГРАЛОВ 45
6. Световой поток, падающий на пластинку. Пусть пластинка,
лежащая в плоскости ху, освещена точечным источником света,
находящимся в точке с координатами (0, 0, z0). Его силу света
(одинаковую по всем направлениям) обозначим /. Вычислим световой
поток, падающий на пластинку. Световой поток dF, падающий на
элементарную площадку ds, равен / da, где da— телесный угол,
под которым видна площадка ds из точки (0, 0, д0). В свою
очередь da равняется площади площадки ds, деленной на квадрат
расстояния до источника и умноженной на косинус угла между нор-
малью к площадке и направлением на источник. Освещенностью А (х, у)
пластинки в точке (х, у) называется величина Из сказанного
выше следует, что
А (х, у) = — =1^- =----------.
ds ds (х2 + у2+г2)/а
Полный световой поток, падающий на пластинку, равен двойному
интегралу от А (х, у) по области О, занимаемой пластинкой, т. е.
равен
(х2 ф-у2 4-г2)’/г ’
7. Поток жидкости через поперечное сечение канала. Рас-
смотрим канал, по которому течет жидкость, и выделим некоторое
сечение этого канала, перпендикулярное направлению течения. Приняв
плоскость этого сечения за плоскость ху, мы можем сказать, что
скорость У жидкости в каждой Точке рассматриваемого сечения есть
функция от х и у, т. е. У = V (х, у). Вычислим количество жидкости,
протекающее через это сечение в единицу времени. Рассмотрим бес-
конечно малый элемент площади ds этого сечения. Количество жидко-
сти, протекающей через этот элемент в единицу времени, равно, оче-
видно, массе столбика с основанием ds и высотой У (х, у), т. е. равно
рУ (х, у) ds, (1.32)
где р—плотность жидкости. Для получения количества жидкости, про-
текающего через все сечения, надо просуммировать бесконечно малые
элементы (1.32), т. е. взять двойной интеграл
У / Р^(х, у) ds
а
по рассматриваемому сечению.
Замечание. Выше, в частности при рассмотрении последней
задачи, мы пользовались такими выражениями, как «бесконечно малый
элемент площади», «элемент массы» и т. п. Такой язык широко
46 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
применяется, особенно в физической литературе. Например, обычно
говорят, что для пластинки с плотностью р(х, у) величина
р(х, у) ds
есть «элемент массы» (сосредоточенный на «элементе площади ds»),
а масса этой пластинки, т. е. интеграл
J f Р<х> У)аз’
а
есть «сумма этих элементов массы».
Смысл подобных выражений состоит в том, что в них каждый
раз подразумевается тот процесс предельного перехода (от конечных
сумм к интегралам), который нам встречался в каждой из рассмо-
тренных выше задач. В дальнейшем мы тоже будем пользоваться
иногда этим «физическим» языком (отдавая, однако, себе ясный отчет
в точном смысле того предельного перехода, который за ним
скрывается).
§ 5. Сведёние двойного интеграла к повторному
Мы познакомились уже с определением и основными свойствами
двойного интеграла, условиями его существования и некоторыми
физическими и геометрическими задачами, связанными с этим понятием.
Но мы еще совсем не затраги-
вали вопроса о способах фак-
тического вычисления двойных
интегралов. В решении этой за-
дачи основную роль играет
теорема о том, что вычисление
двойного интеграла сводится,
при достаточно широких усло-
виях, к последовательному ин-
тегрированию по каждой из
переменных в отдельности.
Доказательство этой теоремы
и составляет содержание на-
стоящего параграфа.
1. Наводящие соображения. Основная идея излагаемых ниже
теорем состоит в следующем. Будем рассматривать двойной интеграл
/ / f(x, y)dxdy
о
как объем криволинейного цилиндра Т, ограниченного снизу обла-
стью О, сверху поверхностью z=f(x, у), и сбоку цилиндрической
§ 5] СВЕДЕНИЕ ДВОЙНОГО ИНТЕГРАЛА К ПОВТОРНОМУ 47
поверхностью, проходящей через границу области О (рис. 1.13).
Тело Т можно представлять себе как составленное из бесконечно
тонких слоев, параллельных плоскости yz. Объем каждого такого
слоя равен
J(x) dx,
т. е. произведению площади J(x) соответствующего сечения тела Т
на толщину слоя dx. Объем всего тела Т при этом равен
ь
fd(x)dx. (1.33)
а
В свою очередь величина J(x) (площадь криволинейной трапеции)
представляется интегралом
y2W
f f(x,y)dy, (1.34)
У1 W
где х рассматривается как фиксированная величина, a yj (х)
и у2(х)— концы того отрезка, который служит проекцией рассматри-
ваемого сечения на плоскость ху (рис. 1.13). Комбинируя (1.33)
и (1.34), получаем, что объем тела Т может быть представлен в виде
ь у2И
f dx J f (x, у) dy,
a yt(x)
т. e. что имеет место равенство
ь У2<*)
J f f(x, y)ds = fdx jf /(x, y)dy. (1.35)
О а У[(х)
Эта формула означает, что, представляя себе двойной интеграл как
сумму элементов / (х, у) dx dy, мы можем при вычислении этой суммы
сначала произвести суммирование по слоям, параллельным одной ко-
ординатной оси, а потом просуммировать результаты, относящиеся к
каждому слою. Алгебраическим аналогом равенства (1.35) служит
формула
2 aik — S (ZEj atk\'
i,k i \ k /
Ясно, что, если бы мы, снова взяв некоторый криволинейный цилиндр,
стали бы рассматривать его сечения, параллельные не плоскости yz.
[ГЛ. 1
48 ДВОЙНЫЕ ИНТЕГРАЛЫ
а плоскости xz, это привело бы к равенству
d
f(x, y)ds = J dy J" f(x, y)dx
О c xt (y)
(рис. 1.14). Перейдем теперь от картинок к точному изложению.
2. Случай прямоугольной области. Рассмотрим сначала двойной
интеграл по некоторому прямоугольнику со сторонами, параллель-
ными осям координат.
Теорема 1.5. Если для
функции f (х, у), опреде-
ленной в прямоугольнике
Р = \а ^_ х ^b, c^.y^.d\,
(1.36)
существует двойной инте-
грал
J* J / (х, y)dxdy, (1.37)
р
а при каждом фиксирован-
ном значении х, а^х^Ь, существует однократный инте-
грал
J(x) = ff(x, y)dy, (1.38)
с
то существует повторный интеграл
b d ъ
J dx J* f(x, y)dy— J J(x)dx (1.39)
ас a
и выполняется равенство
ь d
f(x, y)dx dy — j dx
P a c
Доказательство. Разобьем прямоугольник P на частичные
прямоугольники Р^, подразделив его стороны точками а = х0 <
< xz < х2 < ... < хй = Ъ и соответственно с = у0 < yz < У2 < • • •
... <yz = d; таким образом, PLj = {xz_j х xz, У,-! У у7 }
(рис. 1.15). Пусть тц — точная нижняя грань, a Mtj~ точная верхняя
грань значений функции /(х, у) в прямоугольнике Р^. Выберем
f /(х, y)dy. (1.40)
§ 5] СВЕДЕНИЕ ДВОЙНОГО ИНТЕГРАЛА К ПОВТОРНОМУ 49
в каждом из промежутков [xz_P xz] произвольную точку |z. Так
как m;y</(?z, y)<Afzy при yy_i <у <у? то
у7
mzyAyy< f y)dy^MijXyj — (1.41)
У/-1
причем стоящий здесь интеграл существует, так как по предполо-
жению существует интеграл (1.38), взятый по всему отрезку [с, d\
при произвольном х. Суммируя неравенства (1.41) по j от 1 до /,
получим
г d _z
^mz/Ayy<J(^z) = J/(|z, y)dy ^^Ми\у).
7 = 1 c j=l
Умножив каждое из этих неравенств на Axz — xt — х^ и просум-
образом,
*
о) 2 (&/) ^xi
i = i
Если теперь все Axz и Ayft устремить к нулю, то, поскольку мы
предположили существование двойного интеграла (1.37) *), как
*) Так как двойной интеграл (1.37) по предположению существует, то
при любом способе разбиения прямоугольника Р на части, таком, что ма-
ксимум диаметров элементов разбиения стремится к нулю, верхняя и нижняя
суммы Дарбу стремятся к общему пределу, а именно, к соответствующему
двойному интегралу. Мы выбрали тот способ разбиения, который для нас
наиболее удобен, а именно, с помощью систем вертикальных и горизон-
тальных прямых.
50
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. I
нижние, так и верхние интегральные суммы будут стремиться к этому
k
двойному интегралу. Следовательно, и интегральные суммы 2
1=1
стремятся к тому же самому пределу. Таким образом,
ь b d
J J" f (х, y)dxdy = J J(x)dx — J dx J f(x, y)dy.
P a a c
Меняя роли переменных x и у |и предполагая существование инте-
д х
грала Jx (у) = J* f (х, у) dx 1 , получаем аналогичное равенство
а '
d Ь
J dy J f (х, у) dx ~ J J /(х, yjdxdy.
р
интегралом (1.37) существуют оба
ь
c a
Наконец, если наряду с двойным
d
интеграла, J(x) = J" f(x, y)dy и = J f(x, y)dx, to
c
b d
J* J/(x, y)dx dy — J" dx f f(x, y) dy — J" dy J* /(x, y) dx.
P a с c a
a
d b
8. Случай криволинейной области. Рассмотрим теперь вопрос
о сведении двойного интеграла к повторному для случая криволиней-
ной области. Пусть область О ограничена двумя непрерывными кри-
выми у = у1(х) и у = у2(х) и вертикальными отрезками х = а и
х = Ь (рис. 1.16). Тогда справедлива следующая теорема:
Теорема 1.6. Если для функции /(х, у), определенной
в области G, существует двойной интеграл
J j~ /(х, у) dx dy,
а
а при каждом фиксированном значении х из [а, существует
интеграл
J(x)= J
У1(-г)
то существует повторный интеграл
ь Уг(л)
J dx f f (х, у) dy
а УМ
§ 5] сведение двойного интеграла к повторному 51
и выполняется равенство
ь Уа(Х)
f f/(x, y)dxdy = fdx J f(x,y)dy. (1.42)
О а У1(лг)
Доказательство. Положив с — min уг (х), d = max у2 (х),
заключим область G в прямоугольник Р, определяемый неравенствами
я х с < у < </ (рис. 1.16), и рас-
смотрим в этом прямоугольнике вспомога-
тельную функцию
ч I f(x' Я ВНУТРИ °-
/ (xt у) —• {
7 v ' I 0 в остальных точках.
Функция f*(x, у) удовлетворяет ус-
ловиям предыдущей теоремы. Действи-
тельно, она интегрируема в области G
(так как совпадает в ней с / (х, у)) и Рис j 16
интегрируема в остальной части прямо-
угольника Р, которую мы обозначим
Р — Q (там она равна нулю). Следовательно (по свойству аддитив-
ности интеграла, см. стр. 33—34), она интегрируема и по всему
прямоугольнику Р. При этом
и
/ J /* (х, у) dx dy — f f f(x, y)dxdy
о a
f f fix, y)dxdy — 0,
p-o
откуда
J y)dxdy = j‘ J f(x, y)dxdy. (1.43)
p о
Далее, при каждом значении х, лежащем между а и Ь, существует
интеграл
Jf*(x,y)dy = j f*(x,y)dy+f f*(x. y)dy+ f f(x, y)dy,
c c yt(X) y2(JT)
(1.44)
так как существует каждый из трех интегралов, стоящих справа.
Действительно, отрезки [с, yj(x)] и [у2(х)> лежат вне области О
УМ
и на них /*(х, у) равна нулю, а интеграл J* f*(x, у) dy совпадает
уМ
52
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ, 1
с интегралом
Уг(-Г)
У f(x, y)dy,
УМ
существующим по условию. Первый и третий интегралы в правой
части равенства (1.44) равны нулю, поэтому окончательно получаем
d уг(х)
ff*(x,y)dy = f /(х, y)dy. (1.45)
с УМ
Мы видим, что функция /*(х, у), определенная в прямоугольнике Р,
удовлетворяет условиям теоремы 1.5 и, следовательно, двойной
интеграл от этой функции по Р может быть сведен к повторному:
b d
----\ J f f*(x, y)dxdy = J dx J f (x, у) dy.
____\ P a c
Отсюда и из равенств (1.43) и (1.45) полу-
ют ^1 чаем
/ Ь у2(х')
/ f f f(x, y)dxdy=J'dx J f(x,y)dy,
о a y^x)
что и требовалось доказать.
Рис. 1.17. В теореме 1.6 мы рассматривали такую
область G, что каждая вертикальная прямая
х = const пересекает ее границу не больше чем в двух точках
у^х) и у2(х), и предполагали существование интеграла
Уг(л-)
J(x) — J / (х, У) dy (а <. х < 6).
ум
Предположив, что каждая прямая у = const пересекает границу
области G не более чем в двух точках xt(y) и х2(у) (рис. 1.17),
х-АУ)
и потребовав существования интеграла $ f(x, y)dx при каждом
*|(У)
фиксированном у, мы можем доказать существование повторного
интеграла
d х2(у)
У dy У /(х, y)dx
с Х1(у)
и его совпадение с двойным интегралом.
§ 5) СВЕДЕНИЕ ДВОЙНОГО ИНТЕГРАЛА к ПОВТОРНОМУ 53
Как мы уже видели в самом начале этого параграфа, геометри-
ческий смысл формул, сводящих двойной интеграл к повторному,
состоит в том, что объем тела равен интегралу от площади его
поперечного сечения (представляющей собой функцию той перемен-
ной, которая определяет положение секущей плоскости).
Замечание 1. Если область G такова, что некоторые прямые
(вертикальные или горизонтальные) пересекают ее границу более
чем в двух точках, то для представления двойного интеграла,
взятого по этой области, в виде повторного область Q следует
разбить на части, каждая из которых удовлетворяет условиям тео-
ремы 1.6, и сводить к повторному каждый из соответствующих
двойных интегралов отдельно (рис. 1.18).
Например, пусть область интегрирования G— единичный круг
х2_|_у2^1, из которого вырезан эллипс х2-]-2у2<^1 (рис. 1.19).
Тогда двойной интеграл по G можно представить, например, так:
1
J f /(х> y)dx dy — J
a -i
/(x, y)rfy 4-
]/ 1-л*
1 V 2
+ J dx J* f(x, y)dy.
-1
т. e. в виде суммы двух повторных интегралов.
Замечание 2. Если двойной интеграл может быть сведен как
ft у2(х)
к повторному интегралу вида J* dx § f(x, y)dy, так и к инте-
а У> (л)
54
ДВОЙНЫЕ ИНТЕГРАЛЫ
(ГЛ. 1
d *2<У)
гралу вида f dy § f (х, у) dx, то для вычисления двойного инте-
с .ту)
грала можно воспользоваться любым из этих представлений. Однако
Рис. 1.20.
может оказаться, что одно из них значи-
тельно удобнее, чем другое, поэтому в кон-
кретных задачах выбор того или иного по-
рядка интегрирования (т. е. сначала по х,
а потом по у, или наоборот) может быть
не безразличен.
Пример. Записать двойной интеграл
f f f(x> y)dx dy,
о
где G— область, ограниченная кривыми у = ]/2ах— х2 и у — У Чах
и прямой х — Ча (рис. 1.20), в виде повторного (двумя способами).
2а Уйх
Ответ. 1) J dx J" /(х, y)dy,
0 У2ах-х2
2а 2а а а-Уа’-у2
2) f dy f f(x, y)dx + j"dy J /(x, y)dx +
a 0 y2}2a
a 2a
-i-f dy f f(x' y^dx-
° а+У a2-y3
Во втором случае нам пришлось разбить интеграл на три слагаемых,
а в первом мы обошлись одним.
§ 6. Замена переменных в двойном интеграле
К замене переменных часто приходится прибегать при интегри-
ровании функций одной переменной. Не менее важную роль играет
замена переменных и при вычислении двойных интегралов. Прежде
чем заняться вопросом о замене переменных в двойном интеграле,
мы должны будем изложить некоторые сведения об отображении
областей.
1. Отображение областей. Рассмотрим две плоскости с декар-
товыми координатами х, у и £, т] соответственно и предположим,
что в плоскости ху выделена некоторая замкнутая ограниченная
область О с границей L, а в плоскости |г]— замкнутая ограниченная
§ 6] ЗАМЕНА ПЕРЕМЕННЫХ В ДВОЙНОМ ИНТЕГРАЛЕ 55
область *) Г (рис. 1.21, а и б). Предположим, что в области Г
определены функции
х = х(& т]). У = У(£. П) (1-46)
такие, что, когда точка (£, г]) пробегает область Г, соответствующая
точка (х, у) пробегает всю область О. Таким образом, функции
(1.46) определяют отображение области Г на область G.
Рис. 1.21.
Мы предположим, что это отображение удовлетворяет следующим
условиям:
1) Отображение взаимно однозначно, т. е. различным точкам
области Г отвечают обязательно различные точки области О. Иными
словами, мы предположим, что существуют решения
1 = £>(х, у), т] = У) О-4?)
уравнений (1.46) относительно £ и т], однозначные во всей области G.
2) Функции (1.46) и (1.47) непрерывны и имеют непрерыв-
ные частные производные первого порядка.
3) Функциональный определитель (якобиан)
D (х, у)
D (£, п)
дх дх
Tfdn
ду ду
’drf
(1-48)
всюду в области Г отличен от нуля, а следовательно, поскольку
входящие в этот якобиан производные предполагаются непрерывными,
сохраняет в Г постоянный знак.
Якобиан
обратного отображения (1.47) связан с якобиа-
ном (1.48) .соотношением
D (х, у) D (|, п) _ ,
D (g. Я) D (х, у)
*) Области G и Г предполагаются, конечно, квадрируемыми.
56 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
непосредственно вытекающим из определения произведения опреде-
лителей и правила дифференцирования сложной функции, поэтому
D (£. Л) к
™ у' также нигде не обращается в нуль.
Если в области Г дана некоторая гладкая или кусочно-гладкая
кривая
1 = Л = Л(О> а</<₽,
то отображение (1.46) переводит ее в кривую
х = х&(Г), я(0)> У = У(£(О. Л(0).
опять-таки гладкую или кусочно-гладкую, так как если производные
йЕ йп
~dt и ~dt сУществУют и непрерывны, то существуют и непрерывные
производные
dx __ дх di, . дх dr] dy ________ ду di, ду йт|
dt di, dt ' <Эт) dt И dt dt dt От) dt '
причем они не обращаются в нуль одновременно, если хотя бы одна
di, dr\ (
из производных и отлична от нуля (последнее вытекает
D(x, у)
из того, что D ф 0J.
В частности, граница Л области Г переводится в границу L
области О.
Это вытекает из теоремы о неявных функциях (см. вып. 1, гл. 15, § 2).
Если бы точке (х0, у0), принадлежащей L, отвечала какая-то внутренняя
точка (U т]0) области Г, то из равенств
X = X (g, л), у = у (g, •»!)
величины £ и т| определялись бы в некоторой окрестности точки (х0, у0)
как функции от х и у. Но всякая окрестность граничной точки (л0, у0) со-
держит точки, не принадлежащие G, следовательно, у точки (Sj0, т]0) (внутрен-
ней для Г) нашлась бы окрестность, содержащаяся в Г и не отображаю-
щаяся в область О, что противоречит условию.
2. Криволинейные координаты. Рассмотрим в области Г прямую
| = (см. рис. 1.21). В области G ей отвечает гладкая линия, опре-
деляемая параметрическими уравнениями
х = х(10, 11), у = уа0. л) (1-49)
(параметром служит г]). Аналогично каждой прямой Л — Ла отвечает
в области G линия, определяемая уравнениями
* = х(|. т]0), у = у(& Ло)- (1.50)
Линии (1.49) и (1.50) области G, в которые отображение (1.46) пере-
водит прямые из Г, параллельные координатным осям, называются
координатными линиями т] и | в области О.
§ 6]
ЗАМЕНА переменных в двойном интеграле
57
Из взаимной однозначности отображения
х = хЦ, л). У = У(&- *1)
следует, что через каждую точку (х, у) области О проходит един-
ственная линия вида (1.49), отвечающая постоянному значению %, и
единственная линия вида (1.50), отвечающая постоянному значению т].
Следовательно, величины | и г) можно рассматривать как координаты
(отличные, конечно, от декартовых) точек области О. Так как коор-
динатные линии (1.49) и (1.50), отвечающие этим координатам, будут,
вообще говоря, кривыми (а не прямыми, как в,случае декартовой
координатной сетки), то величины £ и т] называются криволиней-
ными координатами точек области G.
Таким образом, переменные g и т) имеют двоякий геометрический смысл:
во-первых, это—декартовы координаты точек области Г, а во-вторых, это—
криволинейные координаты точек области G. В соответствии с этим каждое
соотношение вида Ф (£, т]) = 0 можно рассматривать как уравнение (в де-
картовых координатах) некоторой кривой Л, лежащей в области Г, и как
уравнение (в криволинейных координатах) кривой I, лежащей в О и являю-
щейся образом кривой Л при отображении (1.46).
употребительная система
это полярные коорди-
3. Полярные координаты. Наиболее
криволинейных координат на плоскости —
наты. Они связаны с декартовыми ко-
ординатами х и у соотношениями
х - г cos <р, y = rsin<p
(г>0; С-<лр<2л). (Е51)
Координатными линиями для поляр-
ных координат служат концентрические —
окружности с центром в начале коор-
динат (г = const) и лучи, выходящие из
этого центра (<р = const). Отображение
(1.51) переводит полуполосу г^>0,
0^Сф<2л в целую плоскость ху. Оно
взаимно однозначно всюду, кроме точки
х = 0, у —0, которой на плоскости Гф Рис. 1.22.
отвечает полусегмент г — 0, 0 ф < 2л.
Исключив точку х = 0, у = 0, мы можем рассмотреть отображение
плоскости ху на полуполосу г > 0, обратное (1.51). Это обратное
отображение непрерывно всюду, кроме положительной полуоси х, так
как, хотя лежащим на ней точкам отвечает значение ф, равное нулю, но
если точка М приближается к этой полуоси снизу, то соответствую-
щее значение ф стремится не к нулю, а к 2л. Таким образом, фор-
мулы (1.51) устанавливают отображение полуполосы 0
<(ф<2л на плоскость ху, взаимно однозначное и в обе стороны
непрерывное всюду, кроме тех точек, в которых г =0 или <р == 0.
58
ДВОЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. I
Наглядно можно представлять себе переход от полуполосы на
плоскости гср к плоскости ху как «раскрывание веера». Мы берем
полуполосу 0<г<оо, 0<^<р<2л и как веер развертываем ее
на плоскость ху (рис. 1.23). Рис. а
— первый кадр фильма, рис. б—вто-
рой кадр, рис. в — уже почти конец
фильма, рис. г — это последний кадр.
Рис. 1.23.
Например, пусть на плоскости гср
0<а ^Ь, < 2л.
Рис. 1.24,
задана прямоугольная область
Наше «раскрывание веера» пре-
вращает ее в сектор кругового
кольца на плоскости ху (рис. 1.24).
Вычислим якобиан перехода
от декартовых координат к по-
лярным, т. е. якобиан преобра-
зования (1.51). Получим
D (х, у) _ | cos q> — г sin ф |
D т1) I sin ф г cos ф | ’
Он отличен от нуля всюду, кро-
ме точки х = 0, у = 0.
4. Постановка задачи о замене переменных в двойном инте-
грале. Сформулируем теперь задачу о замене переменных в двойном
интеграле, о которой уже говорилось выше. Пусть О — замкнутая
область, ограниченная кусочно-гладкой кривой L, и /(х, у) — задан-
ная в О функция, непрерывная или имеющая разрывы, лежащие
§ 6] ЗАМЕНА ПЕРЕМЕННЫХ В ДВОЙНОМ ИНТЕГРАЛЕ 59
на множестве площади нуль, и ограниченная. Пусть, далее
функции
х = х(&, Т1), у = у(£, П)
определяют отображение на область G некоторой области Г, удо-
влетворяющее условиям 1) — 3), перечисленным в п. 1. Задача со-
стоит в том, чтобы интеграл
f f f(x- У) dx dy,
а
взятый по области О, представить, преобразовав в нем подынтеграль-
ное выражение к новым переменным £ и -rj, в виде интеграла по об-
ласти Г.
5. Площадь в криволинейных координатах. При выводе фор-
мулы замены переменных в двойном интеграле основной шаг состоит
в том, чтобы выразить через криволинейные координаты площадь
области. Здесь имеет место следующая теорема:
Теорема 1.7. Пусть х — х(1, г]), у = у(^, г)) — взаимно одно-
значное, непрерывное и непрерывно дифференцируемое отобра-
жение области Г на область О, якобиан которого отличен
от нуля. Тогда
пл G = f f dxdy = f J" | (1-52)
'o' ' г
Доказательству этой теоремы мы предпошлем наглядные рассу-
ждения, проводимые «на физическом уровне строгости». (При жела-
нии читатель может ими и ограни-
читься.)
Рассмотрим в области О две па-
ры бесконечно близких координатных
линий. Пусть первая из этих пар от-
вечает значениям
£о и +
координаты а вторая пара — значе-
ниям
По и По + ^П
Рис. 1.25.
координаты rj. Эти координатные линии вырезают в области G бес-
конечно малый элемент площади А0А1А3А2, который с точностью до
малых выше первого порядка можно считать параллелограммом
(рис. 1.26). Сторонами этого параллелограмма служат, очевидно,
60
двойные интегралы
[ГЛ. 1
векторы
Площадь ds параллелограмма Л0Л1Л3Л2 равна абсолютной величине
детерминанта, составленного из компонент векторов Л0А] и Д0Д2,
т. е.
ds = a6c. вел.
дх л
дх ,
-г— dx\
^-“1
di, ь
ду я
"1»^-
(1.53)
А площадь S всей области Q получается суммированием всех
таких элементов, т. е. действительно представляется в виде двойного
интеграла
г
где х0, у0> «> b, at к bi — постоянные и
взятого по области Г изменения переменных £ и т].
Оформим теперь эти наглядные рассуждения в виде доказательства. При
этом мы позволим себе опускать некоторые детали, которые читатель при
желании легко восстановит. Кроме того, для упрощения рассуждений мы
будем предполагать, что рассматриваемое отображение определено и удо-
влетворяет указанным в теореме условиям не только в области Г, но и
в некоторой большей области, содержащей внутри себя область Г (вместе
с границей).
Доказательство теоремы 1.7. Рассмотрим сперва тот элемен-
тарный, но, по существу, основной случай, когда рассматриваемая в пло-
скости §т) область представляет собой прямоугольник П со -сторонами, па-
раллельными осям координат, а ее отображение на плоскость ху есть ли-
нейное отображение, определяемое формулами
+ + Н ]>5
У — Уо + в1?>+
а Ь
ai ^1
литической геометрии, образ прямоугольника П при таком отображении будет
параллелограммом (обозначим его Р), площадь которого связана с площадью
прямоугольника П соотношением
пл Р=абс. вел. | пл П (1.55)
(докажите это!). Отсюда следует, что любая квадрируемая фигура Ф,
лежащая в плоскости gq, переводится линейным отображением (1.54) в
0. Как известно из ана-
§ 6] ЗАМЕНА ПЕРЕМЕННЫХ В ДВОЙНОМ ИНТЕГРАЛЕ 61
квадрируемую фигуру /•', площадь которой выражается так:
пл F — абс. вел. Н I пл Ф. (1.56)
Впрочем, для дальнейшего нам понадобится лишь равенство (1.55).
Рассмотрим теперь некоторое произвольное (нелинейное) отображение
х — x(g, т]), у = у (g, п), удовлетворяющее условиям теоремы. Возьмем
в области Г, где это отображение определено, некоторую точку (g0. По) и
рассмотрим прямоугольник
ёо < ё< ёо + hl, По<Н<По + *2.
который мы снова обозначим П (рис. 1.26).
С помощью формулы конечных при-
ращений запишем отображение этого пря-
моугольника на плоскость ху в виде
Х = х° + 7Г + 77
a a (L57)
У = Уо+-^+-^п+а2.
где х0 = х (g0, По), У а = У (ёо, По), значения производных берутся в точке
(So, Из) “
а1 = (х^(ё*, п*) — 4 Go- Ho))^ + (4G*- Ю-ЧОо- Ио))^,
а2 = (у IG**, И *) - у i (£о« По)) + (Уд (Г, В*) - Уд Go, По)) rfn-
(Здесь ёо < V < ё: ёо < ё** < ё1 Ио < Н* < И! По < И** < П-)
Первые производные от х и у по g и п по условию непрерывны, а зна-
чит, и равномерно непрерывны в замкнутой ограниченной области Г. Следо-
вательно, для любого £ > 0 можно выбрать число h настолько малым, что,
как только hi + h2 < h, для всех точек (g, п), принадлежащих прямоуголь-
нику П, выполняются неравенства
| х\(g, п) — 4 Go- Ио) | < е> 14 (ё, и) — Go. По) | < е
и аналогично для у& и у^, причем е не зависит от выбора точки (g0, По)-
С помощью этих оценок получаем, что
| Я[ | < ей, | а21 < ek. (1.58)
Сравним теперь нелинейное отображение (1.57) с линейным отображением
, дх .. . дх . - , ду , ду ,
•v=*°+-^-rfs+-^-rfn. У = Уо +<*И, (1-59)
которое получается, если в формулах (1.57) отбросить cq и а2. Как мы
уже знаем, такое линейное отображение переводит прямоугольник П в
62
двойные интегралы
[ГЛ. 1
параллелограмм, который мы снова обозначим Р, причем, 'согласно (1.55),
дх дх
д1 ОТ]
пл Р = абс. вел. пл П.
ду 5у
К ch)
(1.60)
Нелинейное отображение (1.57) переводит П в некоторую криволиней-
ную фигуру Посмотрим, насколько ее площадь отличается от площади
параллелограмма Р.
В силу (1.58), для любой точки (g, л)СП
| х — х | = | И| | < ей, | у — у | = | а21 < ей,
т. е.
/(л —л)2 + (у —у)2 < /2 th.
Иначе говоря, расстояние между образами одной и той же точки (g, л)СП
при линейном (1.59) и нелинейном (1.57) отображениях не превышает 1^2* th.
Поэтому если мы заключим границу параллелограмма Р в полоску ширины
/2 th, то граница криволинейной фигуры & будет целиком лежать внутри
Рис. 1.27.
этой полоски (рис. 1.27). Ясно, что пл
отличается от пл Р не больше чем на
площадь этой полоски. Элементарный
подсчет показывает, что площадь
такой полоски не превосходит ее ши-
рины, умноженной на периметр парал-
лелограмма Р. Этот периметр лег-
ко оценить. Пусть М выбрано так, что
во всей рассматриваемой области Г
дх дх ду
каждая из производных--^, ~,
0g Од д£
дУ ,, /
не превосходит по модулю М (эти
производные непрерывны, а значит,
и ограничены в замкнутой ограниченной области Г). Тогда из (1.59) сразу
следует, что стороны параллелограмма Р не превосходят Mh. Таким обра-
зом, периметр Р не больше, чем 4Afh, а площадь полоски, в которую мы
заключили границу Р, не превосходит 4^2 tMh2, т. е. не превосходит
Следовательно,
или, в силу (1.60),
У2 tM пл П.
пл = пл Р-|-у,
пл сЯ = абс. вел.
дх
ду
К
пл П + у,
(1-61)
где
| у | < |^2 tM пл П.
(1-62)
§ б] ЗАМЕНА ПЕРЕМЕННЫХ В ДВОЙНОМ ИНТЕГРАЛЕ 63
Пусть теперь Ф — многоугольная фигура, лежащая внутри Г и соста-
вленная из прямоугольников со сторонами, параллельными осям координат,
а У — фигура, в которую она переводится отображением х = х (£, т]),
у = у (g, г|). Разобьем Ф на прямоугольники Пр полупериметр каждого из
которых меньше h. Образы этих прямоугольников в сумме составляют
фигуру ^г, а площадь каждого можно представить в виде
"МЯШ.Е,“п‘+т'' (1И)
11=11/
где точка (£/, т)() принадлежит прямоугольнику П/ и
j | < / 2 еЛ4 пл П/.
Просуммировав равенства (1.63) по всем прямоугольникам получаем
п п п
= = плП/ + ^уг (1-64)
Z = 1 Г = 1 6 ч 1 = 1
Т1=Л/
Первое слагаемое в правой части этого равенства представляет собой,
очевидно, интегральную сумму, отвечающую интегралу
f (16S)
ф
а второе не превосходит
У 2 Me У, пл П/ = У 2 Me пл Ф,
1=1
где е может быть сделано (за счет выбора достаточно мелкого разбиения
фигуры Ф) сколь угодно малым. Интеграл (1.65) заведомо существует, так как
подынтегральная функция непрерывна. Следовательно, мы можем в ра-
венстве (1.64) перейти к пределу, неограниченно измельчая разбиение фигуры Ф.
Получим
ф
Для завершения доказательства теоремы остается сделать переход от много-
угольной фигуры Ф, погруженной в область Г, к самой области Г. Этот
переход уже не составляет труда. Так как Г квадрируема, то можно найти
две такие фигуры Ф1 и Ф2, составленные из прямоугольников *), первая из
которых вложена в Г, а вторая объемлет Г, что разность их площадей
меньше заданного положительного числа б. Отображение х = х (g, q), У (5, Л)
переводит их в две квадрируемые фигуры и г, одна из которых вло-
жена в G, а другая объемлет О. Нетрудно показать, что
| пл — пл <Г21 < (2тИ2 4- /2 Me) б
*) При этом объемлющая фигура Ф2 должна лежать в той области,
большей чем Г, в которой, как мы условились, рассматриваемое отображе-
ние определено и удовлетворяет условиям теоремы.
64
двойные интегралы
[ГЛ. 1
(проделайте это, воспользовавшись равенством (1.64) и тем, что
max I < 2Af2^. Тогда тем более
I D д) | }
| пл О — пл <7*, I < (2М2 + К 2 Me) 6. (1.66)
Но <7"] —образ многоугольной фигуры Ф„ следовательно, по доказанному
ранее
Ф1
. Кроме того, по теореме о среднем
Г Ф,
- f <1е8>
Г-Ф,
Из (1.66) и (1.68), учитывая (1.67), получаем
InaG-y* J | Dd{^ g рИП | < (4М2 + К 2 Me) б.
Так как б произвольно мало, то отсюда вытекает утверждение теоремы.
Замечание 1. Основная идея, на которую опирались как
изложенное доказательство, так и приведенные выше наглядные рас-
Рис. 1.28.
сторонами dr и rod<p
суждения, состоит в том, что нелинейное
отображение х = х(£,, т]), у = у(ь, 1)) в ма-
лой области можно аппроксимировать ли-
нейным, притом тем точнее, чем меньше
область. Собственно говоря, рассмотрение
нелинейного функционального соотношения
как линейного в бесконечно малом — это
основа всего анализа.
Пример. Рассмотрим снова полярные
координаты. Линии r — rC), г — r0-{-dr,
ф = ф0, <р = ф0-|--4?ф вырезают на плоско-
сти ху бесконечно малый прямоугольник со
(рис. 1.28). Поэтому элемент площади в
полярных координатах равен rQdqdr. (Этот же результат вытекает,
конечно, и из общей формулы (1.52), поскольку Сле-
довательно, площадь в полярных координатах выражается формулой
5 = J J г dr dtp,
(1.69)
§ 6]
ЗАМЕНА ПЕРЕМЕННЫХ В ДВОЙНОМ ИНТЕГРАЛЕ
65
где Г — область изменения переменных г и
область G ограничена двумя лучами ф — <рх
г — г (<р), т. е. имеет вид, изображенный на
эту область на плоскости Гф), то, преобразо-
вав двойной интеграл (1.69) в повторный, по-
лучим
Ч>2 rW
S — J d<p J г dr.
Ti о
Выполнив здесь интегрирование по г, на-
ходим
Фг
5 = У f Г2 (ф) £?ф.
ф. В частности, если
и ф = ф2 и кривой
рис. 1.29 (изобразите
Ч>1
Это — известная формула площади в полярных координатах (см. вып. 1,
гл. 11, § 2).
Замечание 2. Из формулы (1.53) ясен геометрический смысл
абсолютной величины якобиана RS*' R . Обозначим этот якобиан,
л)
для сокращения записи, ./(£, т]) и рассмотрим отображение области Г
на область О, определяемое формулами
х = х(£, Т]). У = У(.1< П)-
Это отображение переводит лежащий в Г бесконечно малый прямо-
угольник (рис. 1.30), ограниченный прямыми
и имеющий площадь dt, г/г], в параллелограмм, площадь которого
равна
|У(^, n)| d^.
66
двойные интегралы
[ГЛ. I
Следовательно, |J(|, я)| представляет собой коэффициент растяжения
площади (в точке (£, я)) ПРИ отображении области Г на О.
Замечание 3. В теореме 1.7 мы предполагали, что отображение
х = х (%, я). У = У (£ П)
области Г на область G взаимно однозначно. Однако выражение (1.52)
для площади в криволинейных координатах сохраняет силу и в том
случае, если это условие нарушается в отдельных точках или вдоль
отдельных линий. Рассмотрим
Рис. 1.31.
в качестве типичного примера ото-
бражение прямоугольника 0 г а,
О ф 2л на круг, отвечающее
введению полярных координат по
формулам
x = rcos<p, у = г sin <р. (1.70)
Это отображение
ловиям теоремы
точек, лежащих
0 С х а. Возьмем
удовлетворяет ус-
1.7 всюду, кроме
на отрезке у = 0,
в плоско-
СТИ Гф прямоугольник
0<^ф<^2л — е, а в плоскости ху—
область, отвечающую этому прямоугольнику при отображении (1.70)
(рис. 1.31). Для этих областей формула (1.52) верна (так как там
условия 1) — 3) выполнены). Если теперь перейти к пределу при р->0
и е—>0, то получим, что формула (1.52) остается справедливой и
для всего рассматриваемого круга г а.
Аналогичные рассуждения могут быть проведены и в общем слу-
чае произвольного отображения, взаимно однозначного всюду, кроме
отдельных точек или линий.
6. Замена переменных в двойном интеграле. Полученное нами
выражение (1.52) площади в криволинейных координатах позволяет
легко найти и общую формулу замены переменных в двойном инте-
грале. Рассмотрим интеграл
J f f(x, y)dxdy,
Q
(1.71)
где область G ограничена кусочно-гладким контуром L, а функ-
ция /(х, у) или непрерывна в этой области (включая границу) всюду,
или же ограничена в ней и непрерывна всюду, кроме некоторого
множества площади нуль.
Пусть функции х — х (S,, я) и у — у (%, я) определяют соответ-
ствие между точками области G и точками некоторой области Г,
удовлетворяющее всем тем предположениям, при которых была уста-
новлена формула (1.52), выражающая площадь области G в криво-
S 6]
ЗАМЕНА ПЕРЕМЕННЫХ В ДВОЙНОМ ИНТЕГРАЛЕ
67
линейных координатах. Разобьем область Г на части Г; некоторой
системой кусочно-гладких кривых. Соответствующие им кусочно-
гладкие кривые разобьют область О на части Oz площади ASZ.
Выбрав в каждой из этих частей QL произвольную точку (xz, yz),
составим интегральную сумму
2 f(xi’
i=l
(1-72)
отвечающую интегралу (1.71).
Применив к каждой из частичных областей Gz формулу (1.52),
получим
Г,
Обозначив якобиан символом J(^, т]) вместо
вавшись теоремой о среднем, будем иметь
D (х, у)
D& п)
и воспользо-
= <)| д«„
где Aoz— площадь области Г). Заменив в интегральной сумме (1.72)
каждую из величин ASZ найденным выражением, получим
01^(0 OIA<v
Точка (с*, г]*) получается в результате применения теоремы о сред-
нем, и выбор ее в каждой из частичных областей Г\ от нас не
зависит. Напротив, точка (xz, yz) выбирается в каждой из частичных
областей Gz совершенно произвольно. Поэтому мы можем положить
т. е. выбрать ту точку области Gz, которая соответствует точке
(?*’ Л*) области Г,. Тогда рассматриваемая интегральная сумма при-
мет вид
п
ч!). у(«. <))|J(i;. oi4’.-
а это не что иное, как интегральная сумма для интеграла
f f 7(x(l. n). У& n))P(l. (1.73)
г
Этот интеграл существует, так как подынтегральная функция в об-
ласти Г либо непрерывна, либо ограничена и непрерывна в Г всюду,
68 ДВОЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 1
кроме точек некоторого множества, имеющего площадь нуль. Если
теперь неограниченно измельчать разбиение области Г на части Г(-,
то, в силу непрерывности соответствия, диаметры областей также
будут стремиться к нулю. При этом рассматриваемая интегральная
сумма должна стремиться, с одной стороны, к двойному интегралу
(1.71), а с другой — к интегралу (1.73). Следовательно, эти инте-
гралы равны
f ff (х, у) dxdy = f f л), У (I, П))1Ж (1-74)
о г
Это и есть формула замены переменных в двойном интеграле.
Итак, если Q — замкнутая ограниченная область с кусочно-
гладкой границей и f(x, у) — заданная в этой области функ-
ция, непрерывная всюду или же ограниченная и непрерывная
всюду, кроме некоторого множества площади нуль, и если
фо рмулы
х = х (I, п). У = У (В. Л)
устанавливают соответствие между точками области G и
точками некоторой области Г в плоскости £т|, удовлетво-
ряющее условиям 1) — 3) п. 1, то имеет место формула замены
переменных (1.74).
Равенство (1.74) справедливо и в тех случаях, когда условия
взаимной однозначности, непрерывности и непрерывной дифференци-
руемости соответствия между областями G и Г нарушаются в отдель-
ных точках или вдоль конечного числа кривых площади нуль.
В двойном интеграле, как и в однократном, замена перемен-
ных — важнейший способ приведения интеграла к виду, более удоб-
ному для его вычисления. Необходимо, однако, подчеркнуть, что
в случае двух переменных возникает одно новое обстоятельство.
В то время как для однократного интеграла замена переменных
делается лишь с целью упрощения подынтегрального выражения, при
вычислении двойных интегралов стремятся упростить не только инте-
грируемую функцию, но и ту область, по которой берется интеграл.
Последнее обстоятельство, настолько важно, что иногда имеет смысл
пойти даже на некоторое усложнение подынтегральной функции, но
зато получить простую область интегрирования.
Пример. Вычислить j'j'dxdy, где G — область, ограниченная
о
эллипсом = 1- Здесь подынтегральная функция тождественно
равна 1, т. е. является простейшей из всех возможных. Однако для
вычисления этого интеграла зсе же имеет смысл сделать замену
§ 6] ЗАМЕНА ПЕРЕМЕННЫХ В ДВОЙНОМ ИНТЕГРАЛЕ 69
переменных, положив
x = apcos<p, y = Z?psin(p. (1.75)
Якобиан такого преобразования равен abp. Область интегрирова-
ния при этом переходит в прямоугольник
О <р < 2л, О С р 1.
Переходя к новым переменным и записывая двойной интеграл в виде
повторного, получаем
2л 1
J J dx dy — ab J dtp J p dp = nab.
a oo
Упражнения. 1. Вычислить площадь области, ограниченной
кривыми ху = 1, ху — 2, у = х2, у = 2х2.
Указание. Принять за новые переменные
1 = ху, (1-76)
2. Нарисовать сети координатных линий, отвечающие заменам (1.75)
и (1.76).
7. Сравнение с одномерным случаем. Интеграл по ориентированной
области. Формула (1.74) аналогична формуле замены переменной в опреде-
ленном интеграле
ь 6
(1-77)
J f(x)dx = J f(x (0) х' (/) dt
а а
с той только разницей, что в случае одной переменной
производной х' (f) (играющей здесь роль якобиана),
водная. Причина этого различия состоит в том, что
ь
грал I / (х) dx берется по орквитированному
берется не модуль
а сама эта произ-
определенный инте-
отрезку [а, 6] и при
а
перестановке пределов меняет знак, а двойной интеграл берется по не-
oi p и е н т и р о в а н н о й области. Если бы мы условились в определенном
интеграле пределы интегрирования всегда ставить так, чтобы нижний предел
был не больше верхнего, то формула (1.77) (где х = х (t)— монотонная
функция) приняла бы вид
ь ₽
J f (х) dx =
а а
(Проверьте это!)
С другой стороны, можно было бы в случае двойных интегралов ввести
понятие ориентации области и приписывать площади такой области знак
плюс или минус.
За ориентацию области принимается выбор определенной ориентации
(направления обхода) ее границы. Именно, область называется ориентиро-
jf(*(t)) l*'(i)idt. (1.78)
70
двойные интегралы
[ГЛ. I
ванной положительно, если при движении по ее границе область остается
слева от наблюдателя (рис. 1.32).
представляющая в криволинейных
области G, имеет вид
В противоположном случае область назы-
вается ориентированной отрицательно.
Если площадь области G (неориенти-
рованной) равна S, то площадь этой
области, взятой с положительной ориен-
тацией, положим равной опять-таки S,
а площадь отрицательно ориентирован-
ной области Сбудем считать равной—S.
Можно показать, что отображение
х = х (£, т])> У = У (5- Л) области Г на G
сохраняет ориентацию, если его якобиан
положителен, и меняет ориентацию,
£) (х, у) „ _ ж
если < 0, Поэтому формула,
координатах площадь ориентированной
S-f
г
(без знака модуля);
аналогично меняется и формула (1.74).
ГЛАВА 2
ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
В предыдущей главе мы ввели понятие двойного интеграла. Сей-
час мы определим интеграл от функции трех переменных, так назы-
ваемый тройной интеграл. Тройные интегралы, подобно двойным,
находят широкое применение в различных физических и геометриче-
ских задачах. Некоторые из этих задач будут рассмотрены в § 3.
Между тройными интегралами и двойными существует почти полная
аналогия. Те доказательства, которые не отличаются сколь-нибудь
существенно от доказательств соответствующих утверждений для двой-
ных интегралов, мы будем, как правило, опускать.
В § 5 этой главы будет дано понятие о многократных интегралах,
т. е. об интегрировании функций произвольного числа независимых
переменных.
§ 1. Определение и основные свойства
тройного интеграла
1. Предварительные замечания. Объем пространственной фи-
гуры. Понятия внутренней точки области, границы, замкнутой обла-
сти, диаметра и т. д., определенные в § 1 гл. 1 для плоскости, пе-
реносятся без всяких изменений на случай трехмерного пространства.
Вводя двойной интеграл, мы пользовались понятием площади.
Аналогично определение тройного интеграла опирается на понятие
объема пространственной фигуры.
Определение объема многогранника мы считаем известным из эле-
ментарной геометрии. Распространить это понятие на более широкий
класс фигур можно так же, как в § 1 гл. 1 мы распространили по-
нятие площади с многоугольных фигур на криволинейные квадрируе-
мые фигуры. Изложим вкратце соответствующие рассуждения.
Объем V (Р) многогранного тела (т. е. тела, составленного из
конечного числа многогранников) представляет собой неотрица-*
тельную величину, обладающую следующими свойствами:
72
ТРОЙНЫЕ и многократные интегралы
[ГЛ. 2
1 (монотонность). Если Р и Q — два многогранных тела
и Р содержится в Q, то
V(P)<V(Q).
2 (аддитивность). Если Р и Q — два многогранных тела
без общих внутренних точек, то
V(P-bQ) = V(P) + V(Q).
3 (инвариантность). Если многогранные тела Р и Q кон-
груэнтны между собой, то их объемы равны.
Эти три свойства должны быть сохранены при распространении
понятия объема с многогранных тел на более общий класс куби-
руемых тел.
Возьмем произвольное пространственное тело*) Фи рас-
смотрим всевозможные вложенные в него многогранные тела; точную
верхнюю грань их объемов назовем внутренним объемом тела Ф
(если тело Ф таково, что внутрь него вообще нельзя поместить ни
одного невырожденного многогранного тела, то его внутренний
объем мы положим по определению равным нулю). Точную нижнюю
грань объемов многогранных тел, объемлющих тело Ф, мы назовем
его внешним объемом. Если внешний объем тела Ф равен его
внутреннему объему, то это общее их значение называется просто
объемом тела Ф, а само это тело называется кубируемым. Ана-
логично теореме 1.2 доказывается следующая теорема:
Теорема 2.1. Тело Ф кубируемо в том и только том
случае, если для любого & > 0 найдутся два таких много-
гранных тела РсгФ и <2^>Ф, что
V(Q)~V(P)<e.
Мы скажем, что некоторое множество имеет объем нуль, если
его можно поместить внутрь многогранного тела сколь угодно малого
объема. Пользуясь этим понятием, мы можем теорему 2.1 сформу-
лировать так:
Чтобы тело Ф было кубируемо, необходимо и доста-
точно, чтобы его граница имела объем нуль.
Этот критерий позволяет установить кубируемость достаточно
широких классов тел. Например, кубируемо всякое тело, составлен-
ное из конечного числа криволинейных цилиндров, каждый из кото-
рых имеет квадрируемое основание, а сверху ограничен поверхностью,
задаваемой уравнением z—f(x, у), где / (х, у) — непрерывная функ-
*) То есть некоторое ограниченное множество точек в пространстве.
§ 1] СВОЙСТВА ТРОЙНОГО ИНТЕГРАЛА 73
ция. Объем каждого такого цилиндра представляется двойным инте-
гралом
f f f(x> y)dxdy,
а
взятым по основанию этого цилиндра.
Другой важный класс кубируемых тел — это пространственные
области, ограниченные конечным числом гладких *) поверхностей.
Доказательство того, что область, ограниченная гладкими поверхно-
стями, кубируема, по существу, аналогично доказательству того, что
гладкая кривая имеет площадь нуль, но несколько более громоздко.
Мы не будем приводить его.
Повторив рассуждения, проведенные в п. 4 § 1, можно устано-
вить справедливость следующих утверждений:
1) Если Oj и Ф2 — два кубируемых тела, то их объедине-
ние Ф — кубируемое тело, и если тела Ф] и Ф2 не имеют общих
внутренних точек, то объем Ф равен сумме объемов Ф! и Ф2,
2) Пересечение (общая часть) двух кубируемых тел есть ку-
бируемое тело.
Замечание. Обратим внимание на то, что к понятию объема
у нас имеются два различных по форме подхода.
С одной стороны, мы определили объем криволинейного цилиндра
с квадрируемым основанием G, ограниченного сверху поверхностью
z — f lx, у), как двойной интеграл
f ff(x, у) dx dy.
о
С другой стороны, мы ввели понятие объема кубируемого тела с по-
мощью аппроксимации такого тела (изнутри и снаружи) многогран-
ными телами. Можно, однако, показать, что для достаточно широкого
класса тел (во всяком случае, для тел, ограниченных кусочно-глад-
кими поверхностями) оба эти подхода равносильны.
2. Определение тройного интеграла. Пусть на кубируемом теле V
задана ограниченная функция f(x, у, z). Разобьем V на части Vt
и, произвольно выбрав в каждой из Vt некоторую точку (£Р т];, Сг),
составим сумму
п
Г = Л/. (2-1)
i = l
где Д©г — объем элемента V t, а сумма берется по всем элементам
разбиения. Введем следующие определения.
*) Поверхность называется гладкой, если в каждой ее точке существует
касательная плоскость и при переходе от точки к точке положение этой ка-
сательной плоскости меняется непрерывно.
74 ТРОПНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ [ГЛ. 2
Определение 1. Пусть D — наибольший из диаметров d(Vt)
элементов Vt, на которые разбито тело V. Число J называется
пределом интегральных сумм (2.1) при D—>0, если
для любого е > 0 найдется такое & > 0, что
|Г — J| < е,
как только D <6.
Иначе говоря, неравенство |Т — <е должно выполняться для
каждой интегральной суммы Т, отвечающей любому разбие-
нию {У,}, для которого D <6, и любому выбору точек (^, т]г, £;)
в каждом из У(-.
Определение 2, Если предел интегральных сумм (2.1) при
D->G существует, то он называется тройным интегра-
лом от функции f(x, у, z) по V и обозначается символом
J J* J* f(x, у, z)dv или J* J* j" f(x, у, z)dxdydz.
Функция /(х, у, z) при этом называется интегрируемой по V.
3. Условия существования тройного интеграла. Интегрируе-
мость непрерывных функций. Как и в случае одной или двух пе-
ременных, не всякая ограниченная функция /(х, у, z) интегрируема.
Для нахождения достаточных условий существования тройного инте-
грала используют обычно, как и в случае двойных или однократных
интегралов, верхние и нижние суммы Дарбу.
Пусть /(х, у, ^ — ограниченная функция, заданная на кубируемом
теле V, (VJ—некоторое разбиение этого тела и Afz, т{ — соответ-
ственно точная верхняя и точная нижняя грани значений функции
/(х, у, z) на У/. Тогда
п п
и ^m-i&Vt
i = l i = l
(здесь Дт>/ — объем элемента Vz) называются соответственно верхней
и нижней суммами Дарбу для функции /(х, у, z) и данного раз-
биения {тела У. Свойства верхних и нижних сумм Дарбу, сфор-
мулированные в § 2 гл. 1, дословно переносятся на случай трех
переменных.
С помощью рассуждений, в точности повторяющих доказатель-
ство теоремы 1.3, доказывается следующее необходимое и достаточ-
ное условие существования тройного интеграла:
Теорема 2.2. Ограниченная на кубируемом теле V функция
f (х, у, z) интегрируема по У в том и только том случае,
если для любого ё > 0 найдется такое разбиение тела У, что
разность между верхней и нижней суммами Дарбу для функ-
ции /(х, у, z), отвечающими этому разбиению, меньше е.
§ 1] свойства тройного ИНТЕГРАЛА 75
С помощью этого критерия устанавливаются следующие теоремы,
аналогичные теоремам 1.4 и 1.4' для двойных интегралов.
Теорема 2.3. Всякая функция f (х, у, z), непрерывная в зам-
кнутой ограниченной*) области V, интегрируема в этой
области.
Теорема 2.4. Если функция f(x, у, г) ограничена в замкну-
той ограниченной*) области и непрерывна в этой области
всюду, кроме, быть может, точек, принадлежащих некото-
рому множеству объема нуль, то f (х, у, г) интегрируема
по этой области.
4. Свойства тройных интегралов. Основные свойства тройных
интегралов вполне аналогичны свойствам двойных интегралов. Пере-
числим их.
1—2 (линейность). Если fi(x, у, z) и /2(х, У> 2) интегри-
руемы по области V, a и k2 — постоянные, то
интегрируема по V и
f f f ^1/1 У' Я + Ьъ/Лх, у, z)]dv —
V
— f f У’ z^>dv+^ f f f /г(х, У> z)dv.
V V
3 (аддитивность). Если V — объединение двух тел и У2
без общих внутренних точек и f(x, у, z) интегрируема по V\
и по V2, то f (х, у, z) интегрируема по V и
f f f f (х, у, z)dv =
f f f f (x, y, z)dv -J- f f f f(x, y, z)dv.
v v,
4 (монотонность). Если f\(x, у, z)^-f2(x, у, z) и обе
эти функции интегрируемы по V, то
J f f У> z)dv>f f f A О- У- z) dv-
V V
5 (оценка интеграла по модулю). Если f (х, у, г) инте-
грируема по V, то |/(х, у, z)l также интегрируема и
f f f f (х, у, z) dv^ C f f f lf(x, У. z)ldv.
V I V
*) И кубируемой. Условие кубируемости мы в дальнейшем всегда будем
предполагать, не оговаривая этого каждый раз особо.
76
ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 2
6 (теорема о среднем). Если функция f(x, у, z) интегри-
руема по V и удовлетворяет неравенствам m^f(x,y,z)^M,
то
mv
</ f f f(x, у, z)dv
Mv,
V
где v — объем тела V.
Для непрерывных функций теорема о среднем может быть сфор-
мулирована так:
6'. Если функция f{x, у, z) непрерывна, а V — связная зам-
кнутая ограниченная область, то в области V найдется
такая точка (£, q, С), что
f f f f(x- У- z)av = f(l< Д О®-
v
5. Тройной интеграл как аддитивная функция области.. Ана-
логично функциям области на плоскости можно ввести понятие функ-
ции пространственной области*). Примером такой функции (опре-
деляемой на всех кубируемых телах) может служить объем области.
Далее, если пространство (или некоторая его часть) заполнено мате-
рией, то, ставя в соответствие каждой области ту массу, которая
находится внутри этой области, мы опять-таки получим некоторую
функцию области в пространстве. Объем и масса обладают уже зна-
комым нам свойством аддитивности, которое формулируется здесь
точно так же, как и для плоского случая: функция области E(V)
называется аддитивной, если для любых двух областей и У2>
для которых F(V') определена и которые не имеют общих внутрен-
них точек, F(Vj + y2) определена и
Если /(х, у, z) — интегрируемая функция, то тройной интеграл
f f f ^Х’ У’ Z)dV’
V
рассматриваемый как функция области интегрирования, представляет
собой аддитивную функцию области (свойство 3 и. 4).
Аналогично двумерному случаю вводится понятие производной
аддитивной функции области в пространстве по объему, а именно:
число А мы назовем пределом отношения
Е(У)
v
*) Термин «область» мы здесь употребляем как синоним термина «куби-
руемое тело».
ПРИМЕНЕНИЯ ТРОЙНЫХ ИНТЕГРАЛОВ
77
§ 21
(где v — объем области V) при стягивании V к точке /Ио, если для
любого е > 0 найдется такое б > 0, что
для всякой области V, целиком помещающейся в шаре радиуса б,
с центром в точке тИ0. Этот предел называется производной функ-
ции F (V) по объему в точке Мо и обозначается
Если F(V)— масса, содержащаяся в области V, то ее производ-
ная по объему (если она существует) представляет собой плотность
р(х, у, z) пространственного распределения масс.
Из теоремы о среднем для тройного интеграла и из непрерыв-
ности подынтегральной функции сразу вытекает, что производная
интеграла от непрерывной функции по объему существует и совпа-
дает с подынтегральной функцией
^.1 f J ^Х' У’ ^dv = f(x' У- *)•
V
причем этот интеграл представляет собой единственную аддитивную
функцию области в пространстве, производная которой по объему
есть заданная непрерывная функция /(х, у, z).
§ 2. Некоторые применения тройных интегралов
в физике и геометрии
Рассмотрим некоторые типичные задачи, связанные с вычислением
тройных интегралов.
1. Вычисление объемов. Если V — кубируемое тело, то тройной
интеграл
J J* J dxdydz (2.2)
v
равен объему этого тела. Действительно, этому объему равна каждая
из интегральных сумм, отвечающих интегралу (2.2). Тройные инте-
гралы в некоторых случаях бывают удобнее для вычисления объемов,
чем двойные, так как с их помощью можно записать сразу объем
не только криволинейного цилиндра, но и любого кубируемого тела.
2. Нахождение массы тела по плотности. Если дано некото-
рое тело с объемной плотностью р(х, у, г), представляющей собой
непрерывную функцию, то тройной интеграл
I I I р(х, У> z) dx dy dz.
78 ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ [ГЛ. 2
взятый по всему объему, занимаемому этим телом, представляет собой
массу данного тела. Вывод здесь вполне аналогичен выводу формулы
для нахождения массы пластинки по ее плотности.
3. Момент инерции. Проводя обычный предельный переход от
системы материальных точек к непрерывно распределенной массе,
легко получить следующие выражения для моментов инерции отно-
сительно координатных осей тела с объемной плотностью р(х, у, г):
Jz—f f J(*2 + y2)P(*- у. z^dxdydz,
V
/y = ff J (x2 + z2) p (x, y, z)dxdydz,
J J (y24-z2)p(x, y, z)dxdydz.
Момент инерции относительно начала координат выражается фор-
мулой
/0 = f f f (x2-j-y2-hz2)p(x, у, z)dxdydz.
v
4. Вычисление координат центра масс. Координаты центра
масс некоторого тела, имеющего объемную плотность р(х, у, z),
выражаются формулами:
J f J" ХР (х, у, z) dx dy dz f f f УР ^x’ dz
%_______v___________________. у _____ v_____________________.
J* J" J* p (x, y, z) dx dy dz f f f p (x’ y’ dx dy
V V
f f f zp (x, y, z) dx dy dz
V___________________
J* f f P(x, y, z) dx dy dz
V
Z.
которые получаются с помощью тех же рассуждений, что и в слу-
чае двух измерений. В частности, если рассматриваемое тело одно-
родно, т. е. р(х, у, z)~ const, то выражения для координат центра
масс принимают более простой вид:
fffydv
х dv
ff fsdv
§ 2]
ПРИМЕНЕНИЯ ТРОЙНЫХ ИНТЕГРАЛОВ
79
5. Притяжение материальной точки телом. Пусть даны тело,
заполняющее область V и имеющее плотность р(х, у, z), и мате-
риальная точка (лежащая вне V) с координатами (х0, у0, z0) и мас-
сой т. Найдем силу, с которой материальная точка притягивается
телом. Рассмотрим элемент объема тела dv. Масса этого элемента
равна р(х, у, z)dv, а сила, с которой он притягивает материальную
точку, равна по величине
7 тр (х, у, z) dv ,
где y — постоянная тяготения (зависящая от выбора единиц) и
г = /(* — х0)2 + (у — у о)2 + (^ — ^о)2,
а направление ее совпадает с направлением вектора г, соединяющего
точки (х0, у0> z0) и (х, у, г). Рассмотрим компоненту этой силы вдоль
оси х. Эта компонента равна
(х — х0) тр (х, у, z) dv
(2.3)
(поскольку косинус угла между осью х и вектором г равен —-—.
Для того чтобы получить проекцию Fx на ось х силы, с которой
притягивает материальную точку все тело, нужно просуммировать
элементы (2.3), т. е. взять тройной интеграл.
Итак,
Г'-///
утр (х, у, z) (х — х0)
р ~~
dv.
Аналогично получаются и две другие компоненты:
Fy = f f J V.^(^ У^(У-Уо) dv.
V
Fz = f f f YWP (•*• У'_£) (г ~ го) dv.
Замечание. Следует подчеркнуть, что в рассматриваемых здесь за-
дачах о нахождении координат центра масс, моментов инерции и т. д., равно
как и в аналогичных задачах, о которых шла речь в § 4 предыдущей главы,
полученные нами формулы представляют собой, собственно говоря, опреде-
ления соответствующих понятий (центра масс, моментов инерции и пр.) для
случая непрерывного распределения масс. Оправданием этих определений
служат, в конечном счете, не логические рассуждения, а совпадение резуль-
татов экспериментов с расчетами, основанными на этих определениях.
80
ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 2
§ 3. Вычисление тройного интеграла
Как и в случае двойных интегралов, основной прием, на кото-
ром базируется вычисление тройных интегралов, состоит в сведении
интеграла к повторному, т. е. к замене интегрирования по объему
интегрированием по каждой из переменных в отдельности *).
Задачу о сведении тройного интеграла к повторному мы рассмо-
трим сначала для случая, когда интеграл берется по некоторому
параллелепипеду со сторонами, парал-
лельными осям координат.
1. Сведение тройного интеграла
по параллелепипеду к повторному.
Рассмотрим тройной интеграл
f f f f(x> У- z) dxdydz,
Q
в котором область интегрирования Q
представляет собой прямоугольный па-
раллелепипед:
а-^х-^Ь, c^y^d, k^z^l
(рис. 2.1), проектирующийся на плоскость ху в прямоугольник Р,
определяемый неравенствами
a^x^b, c<^y^.d.
Имеет место следующая
Теорема 2.5. Если для функции f(x, у, z) существует,
тройной интеграл
У / У У’
Q
и если для каждой фиксированной точки (х, у) из Р суще-
ствует интеграл
i
/(х, У) = J f(x> у, z)dz,
k
то повторный интеграл
i
J fdxdy J f(x, у, z)dz
р k
*) Здесь мы имеем в виду точное вычисление интеграла. Для прибли-
женного вычисления кратных интегралов сведение их к повторным, как пра-
вило, не применяется.
§ 3]
ВЫЧИСЛЕНИЕ ТРОЙНОГО ИНТЕГРАЛА
81
существует и имеет место равенство
i
ff у' = f fdxdy f f(x, у, z)dz. (2.4)
Q P k
Доказательство этой теоремы аналогично доказательству
теоремы о сведении двойного интеграла к повторному (см. тео-
рему 1.5). Оно сводится к установлению того факта, что любая
интегральная сумма, отвечающая при некотором разбиении интегралу
J* J*/(x, y)dxdy, заключена между нижней и верхней суммами Дарбу,
р
отвечающими тройному интегралу
Предположив, что интеграл
f f f ^Х' У’ Z’>dV'
Q
d
= J / (X, y)dy
c
(при любом фиксированном x, a^x^.b) также существует, мы
можем в формуле (2.4) интегрирование по прямоугольнику Р заме-
нить повторным интегрированием, сначала по у, а потом по х. Сде-
лав это, мы можем переписать равенство (2.4) в следующем виде:
ь d I
J J* J* f(x, у, z) dv = J dx f dy f f(x, y, z)dz. (2.5)
Q ack
Это и есть формула, сводящая вычисление тройного интеграла по
параллелепипеду Q к последовательному интегрированию по каждой
из трех переменных в отдельности. В формуле (2.5) интеграл справа
берется сначала по z, потом по у и, наконец, по х. Мы могли бы,
предположив существование интегралов
ь d
Л(у. *) = f f(x, у, z)dx и Л(д) = /Л(У-
а с
получить аналогичную формулу
/ а ь
J* J У /(х, yt ^dv — j' dz I dy j* f(x, у, z)dx,
Q k c a
а также (опять-таки при условии существования соответствующих
однократных и двойных интегралов) и другие аналогичные формулы,
сводящие тройной интеграл к повторному, взятому по х, у и z
в той или иной последовательности. В частности, если /(х, у, г)
непрерывна, то как тройной, так и все возможные двойные и одно-
кратные интегралы от этой функции существуют, поэтому при
82
ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 2
вычислении тройного интеграла от непрерывной функции можно инте-
грировать по переменным х, у и z в любой последовательности.
2. Сведение тройного интеграла по криволинейной области
к повторному. Рассмотрим теперь криволинейную область V, кото-
рая снизу и сверху ограничена поверхностями
z^z^x, у) и г = г2(х, у),
а сбоку — некоторой
G — проекция области И на
Рис. 2.2.
цилиндрической поверхностью, и пусть
плоскость ху (рис. 2.2). Будем такую
область кратко называть «цилиндри-
ческой по г». Пусть в области V за-
дана функция f (x, у, Z), интегрируе-
мая в этой области и такая, что для
любой фиксированной точки (х, у) ив
О существует однократный интеграл
*2 (X, У)
J f(x> У> z)dz.
*1 (х, у)
Заключим область V в некоторый па-
раллелепипед Q:
a^x^b, c<^.y^.d, k^.z^l,
и определим на Q вспомогательную
функцию /*(х, у, z), положив
Г(х,
( /(х, у, z) в V,
У- о вне V.
Ясно, что /*(х, у, z) интегрируема по Q и что
J / f У' z')dv^ / / f f(x’ у’ z^dv' <2-6>
Q v
Применив к /*(х, у, z) формулу (2.4), получим
i
f f f Г(х< У> z)dv = j’ fdxdy J y, z)dz, (2.7)
Q P k
где P — проекция Q на плоскость ху.
В силу того, что /*(х, у, z) равна нулю вне V, имеем
I z2(x, у)
J f*{x’ У< z)dz= J /(х, у, z)dz. (2.8)
А у)
Этот интеграл представляет собой функцию от х и у, равную, оче-
видно, нулю вне области О. Поэтому двойной интеграл от нее, взя-
§ 3]
ВЫЧИСЛЕНИЕ ТРОЙНОГО ИНТЕГРАЛА
83
тый по Р— проекции параллелепипеда Q на плоскость ху,— сов-
падает с интегралом от нее же, взятым по О. Таким образом, учи-
тывая (2.6) и (2.8), равенство (2.7) можно переписать в следующем
виде:
z2(x, у)
J J* f f(x, у, z)dx dy dz = J J dxdy J f(x, y, z)dz. (2.9)
v a zdx, y)
Итак, мы получили следующий результат:
Теорема 2.6. Если для функции f(x, у, z), заданной
в области V, цилиндрической по z, существует тройной ин-
теграл
f f f У> z>dv>
v
а для каждой фиксированной точки (х, у), принадлежащей
проекции G области V на плоскость ху, существует инте-
грал
х,{х, у)
I (х, у)= J f(x, у, z)dz,
zl (х, у)
то повторный интеграл
Zj(X, у)
dxdy J* f(x, у, z}dz
а г,(Х, у)
существует и имеет место равенство (2.9).
Выражение
Zj (х, у)
/ (х, у)= J f(x, у, z)dz
Z1 (X, У)
представляет собой функцию двух переменных. Если для этой функ-
ции и той области G, по которой она интегрируется, выполнены
условия теоремы 1.6, то двойной интеграл
J / (х, у) dx dy
а
можно в свою очередь представить в виде повторного, взятого, ска-
жем, сначала по у, а потом по х. В результате получаем равенство
ь у2 (х) га (х, у)
J J J /(х, у, z)dv = J dx J dy J /(х, у, z)dz. (2.10)
V а У1(х) Z((x,y)
Это и есть окончательная формула, сводящая тройной интеграл к по-
вторному. Ясно, что мы могли бы поменять ролями переменные х,
84
ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 2
у и z и свести тройной интеграл к повторному, взятому в каком-
нибудь ином порядке, например, сначала по х, потом по у и, нако-
нец, по z. При этом всегда пределы интегрирования по какому-либо
переменному зависят от тех координат, по которым мы еще не ин-
тегрировали.
При выводе формулы (2.9) мы пользовались тем, что каждая
прямая, параллельная оси z, встречает границу области V не более:
чем в двух точках. Если область имеет более сложный вид, то для
сведения взятого по ней тройного интеграла к повторному нужно
эту область предварительно разбить на такие части, к каждой иа
которых формула (2.9) применима. С аналогичным положением дел
мы уже встречались в случае двойных интегралов.
Подводя итог сказанному выше, сформулируем кратко «рецепт»
сведения тройного интеграла к повторному (для определенности бу-
дем считать, что повторный интеграл берется сначала по z, а по-
том по остальным переменным).
1. Область, по которой берется тройной интеграл, следует раз-
бить на такие части, чтобы граница каждой из этих частей пересе-
калась любой вертикальной прямой не более чем дважды. Ниже бу-
дем рассматривать только одну такую часть.
2. Зафиксируем х и у, т. е. рассмотрим некоторую прямую, па-
раллельную оси г. Пусть zr(x, у) и z2(x, у) — точки пересечения
этой прямой с границей области интегрирования; гг(х, у) и z2(x, у)
являются пределами для интегрирования по z.
3. После интегрирования по z мы получаем функцию двух пере-
менных х и у; ее область определения — это проекция простран-
ственной области V на плоскость ху. Двойной интеграл от этой
функции двух переменных заменяется повторным так, как это было,
описано в § 5 гл. 1.
По существу, формула сведения тройного интеграла к повторному осно-
вана на той же самой «группировке слагаемых», с которой мы уже имели
дело. Вместо того чтобы суммировать элементы f (х, у, z) dx dy dz в ка-
ком-то произвольном порядке / т. е. брать J" J £ f (х, у, z)dxdy dz\, мы
\ V /
сначала собираем все слагаемые, отвечающие одному столбику над точкой
(«2 (X, У) \
т. е. берем J" / (х, у, z) dx I, затем собираем вместе все стол-
21 (X, У) /
бики, лежащие в сечении области V плоскостью х = const т. е. вычисляем
у2(х) г2(х,у)
j dy f f{x,y,z)dz
У1(х) ?!(-*, У)
и, наконец, собираем вместе все такие сечения
§ 4]
ЗАМЕНА ПЕРЕМЕННЫХ В ТРОЙНОМ ИНТЕГРАЛЕ
85
т. е. получаем формулу
* Уа(ж)
f f ff(x.y.z)dv=fdx f
У a y,(x)
z,(x, у)
z, (X, y)
Пример. Тройной интеграл, взятый по
х2-4— у2 + z2 а2,
шару
записать в виде повторного.
Ответ.
f f f f(.x, у, z~)dv —
x!+y:+z2<aJ
Уа2-х2
-а
-Уа2-хг
Уа2-х2-у2
У f(x’ У- z)dz.
-У а2-х2-у''
§ 4. Замена переменных в тройном интеграле
Мы уже встречались с заменой переменных в двойном интеграле
(§ 6 гл. 1) и в однократном (вып. 1, гл. 6, § 2). Здесь мы рассмотрим
вопрос о замене переменных
параграфа во многом ана-
логично §6 гл. 1.
1. Отображение про-
странственных областей.
Рассмотрим два экземпляра
трехмерного пространства.
Пусть в одном из них вве-
дены координаты х, у, z, а
в другом — координаты
к], £. Пусть, далее, V и
Q— две области в этих про-
странствах, ограниченные
кусочно-гладкими поверхностями S и S соответственно (рис. 2;3).
Предположим, что между точками этих областей установлено взаимно
однозначное и в обе стороны непрерывное соответствие. Это соот-
ветствие может быть записано с помощью
х = х (I, г]. Z), У = У (ё. П. 0.
или с помощью обратных функций
| = £(х, у, г), Т]== п(х, у, z),
Предположим, что функции (2.11) и (2.12) не только непрерывны,
но и имеют непрерывные частные производные первого порядка.
Тогда якобианы
в тройном интеграле. Содержание этого
Рис. 2.3.
трех функций
z = z (|, я. С)
£ = £(х. У. Z).
D U у. г) D & Т]. О
D (5, n. □ D (x, y, z)
(2.U)
(2.12)
86 ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ [ГЛ. 2
существуют и непрерывны. Мы будем предполагать, что каждый
из этих якобианов отличен от нуля. При этих условиях выполняется
соотношение
D (х, у, z) D (|, Ц. □ _ . ,9 , о,.
D& я, О ‘ D (х, у, г) — ь
Как и в двумерном случае, можно показать, что соответствие, опре-
деляемое формулами (2.11) и (2.12), переводит внутренние точки
одной области во внутренние точки другой, а граничные точки —
опять-таки в граничные.
2. Криволинейные координаты в пространстве. Отображе-
ние (2.11) переводит область Q в V. Следовательно, задание точки
(£, Л- ?) из вполне определяет соответствующую точку (х, у, z)
из V. Иначе говоря, величины £, т]> £ можно рассматривать как
координаты (отличные, конечно, от декартовых) точек области V.
Они называются криволинейными координатами.
Рассмотрим в Q плоскость, определенную условием £ = |0, т. е.
параллельную координатной плоскости г£>. Отображение (2.11) пере-
водит ее в некоторую поверхность. Декартовы координаты точек
этой поверхности суть *)
х = х(£0, т], £), y = y(lQ, т]. £). z = т]. О- (2.14)
Придавая различные значения, мы получим некоторое семейство
поверхностей, зависящее от £ как от параметра. Плоскости г) —const
и = const переходят при отображении (2.11) в два аналогичных
семейства поверхностей в области V. Эти три семейства поверхно-
стей называются координатными. Через каждую точку области V
проходит по одной поверхности каждого из трех семейств (при усло-
вии взаимной однозначности отображения (2.11)).
3. Цилиндрические и сферические координаты. Рассмотрим
две наиболее употребительные системы криволинейных координат
в пространстве — цилиндрические и сферические координаты.
а) Цилиндрические координаты. Определим положение точки М
в пространстве ее декартовой координатой z и полярными коорди-
натами г, <р ее проекции на плоскость ху (рис. 2.4). Величины
г, ф, z называются цилиндрическими координатами точки М.
Непосредственно из чертежа видно, что они связаны с декартовыми
координатами точки М следующими соотношениями:
Х = ГС03ф, у = Г51Пф, z — z. (2.15)
*) Выражения (2.14) представляют собой так называемые параметрические
уравнения поверхности. Подробнее о параметрических уравнениях поверх-
ности будет сказано в гл. 3.
ЗАМЕНА ПЕРЕМЕННЫХ В ТРОЙНОМ ИНТЕГРАЛЕ
87
§ 4J
Цилиндрическим координатам отвечают следующие три семейства
координатных поверхностей:
а) цилиндры г — const (0 г < оо),
0) вертикальные полуплоскости ф = const (0 ф
у) горизонтальные плоскости z — const (— оо <
Якобиан, соответствующий
к цилиндрическим, равен
переходу от
< 2 л),
Z < со),
декартовых координат
D [х, у, г) _
D (г, <р, г)
СОЗф
— г sin ф
О
0
0 = г.
1
(2.16)
устанавливающие
sin ф
г cos ф
О
(2.15),
декартовыми и цилиндри-
Формулы
связь между
ческими координатами, определяют отоб-
ражение области
0 % г < оо, 0 ф
Рис. 2.4.
2л, — оо < z < оо
(2-17)
пространства переменных (г, ф, z) на все пространство (х, у, z).
При этом каждой точке (0, 0, z0) отвечает в области, определенной
неравенствами (2.17), целый полусегмент
г = 0, 0<ф<2л,
Таким образом, в точках, лежащих на оси z, наше отображение не
является взаимно однозначным. Во всех остальных точках простран-
z = z0.
ства (х, у, z) рассматриваемое соответствие бу-
дет, очевидно, взаимно однозначным.
б) Сферические координаты. Определим
положение точки М в
тремя величинами:
а) расстояние р
до М,
0) угол 9 между
тельным направлением оси z,
у) угол ф между проекцией ОМг отрезка
ОМ на плоскость ху и положительным на-
правлением оси х (рис. 2.5). Величины р, 9
и ф называются сферическими координата-
ми точки М. Из чертежа видно, что декар-
точки М связаны с ее сферическими координа-
соотношениями:
х = р81п9созф, у »рsin 9 sinф, z = pcos9. (2.18)
Сферическим координатам отвечают следующие три семейства коор-
динатных поверхностей:
пространстве следующими
от начала координат О
отрезком ОМ и положи-
товы
тами
координаты
следующими
88
ТРОПНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 2
а) сферы р= const (0<^р<оо),
Р) полуконусы 0 = const (0 0 л),
у) вертикальные полуплоскости ф = const (0 <р < 2л).
Якобиан, соответствующий переходу от декартовых координат
к сферическим, равен
sin 0 cos ф
pcos 0 cos ф
-psin 0 sin ф
sin 0 sin ф
pcos 0 з!пф
p sin 0 cos ф
cos 0
— psin 0
0
= p2 sin 0.
(2.19)
Формулы (2.18) определяют отображение области (полубесконеч-
ный брус)
0<^р'<со, О<0< л, 0<^ф<2л
(р, 0, ф) на все пространство (х, у, z). Это отобра-
отображение, отвечающее цилиндрическим координатам,
пространства
жение, как и
взаимно однозначно во всех точках пространства (х, у, х), кроме
точек, лежащих на оси z. Каждой точке (О, О, z0) отвечает полу-
сегмент р = z0, 0 = 0 (или 0 = л, если z0 < 0), 0 ф < 2л, а
точке (0, 0, 0) отвечает прямоугольник р = 0, О-^0<(л, 0<^ф< 2л.
4. Элемент объема в криволинейных координатах. Найдем
теперь выражение элемента объема в криволинейных координатах.
Рассмотрим снова некоторую пространственную область V, в кото-
рой введены криволинейные координаты g,
тр £, связанные с декартовыми координата-
ми х, у, z формулами
X = X (|, Т]. £). У = У (£. п. 2). 9 9П.
Z = Z&. Т), £). ( }
Функции х(|, Т], С), у(£, т], 5) и г(£, т], £)
мы предполагаем непрерывными и имеющи-
ми непрерывные производные, а якобиан
D (х, у, г)
считаем отличным от нуля.
D (g, т]. С) ?
пары бесконечно близких между собой коорди-
Рассмотрим три
натных поверхностей. Пусть первая из этих пар задается фиксиро-
ванными значениями первой координаты, равными соответственно |
и вторая — значениями т] и второй координаты и
третья — значениями С и третьей координаты. Эти три пары
поверхностей вырезают в пространстве бесконечно малый криволи-
нейный параллелепипед. Найдем его объем dv, пренебрегая вели-
чинами выше первого порядка малости по сравнению с этим объе-
мом. С точностью до бесконечно малых высшего порядка этот па-
раллелепипед совпадает с прямолинейным параллелепипедом, ребрами
которого служат векторы PPV РР2 и РР-Л (рис. 2.6). Легко про-
§ 4]
ЗАМЕНА ПЕРЕМЕННЫХ В ТРОЙНОМ ИНТЕГРАЛЕ
89
верить, что эти векторы имеют следующие координаты (мы опять
здесь ограничиваемся главными членами)
".=(£«•
dg 5
ду ,
-4-ЙТ1,
di] 1
dg
<4
5W-
<4
Как известно, объем параллелепипеда, построенного на трех векто-
рах, равен абсолютной величине детерминанта, составленного иа
координат этих векторов. Следовательно,
дх dz „ -dF^ "df^ дх , ду . дг , -d?^ -d? = ± dx dg dx dt] dy dz ~d£ dy dz dt] dt] dt, dr\dZ,
^-dZ — d£ dx dy dz
dt, * dg s dg s dg
где знак плюс или минус берется так, чтобы все выражение было,
положительно. Итак, мы получим, что
dv = \J& г], Q\dldi]d£, (2.21)
где J(£, Т|, £) = У' &------якобиан преобразования (2.20).
5. Замена переменных в тройном интеграле. Геометрический
смысл якобиана. Мы показали, что объем бесконечно малого эле-
мента выражается в криволинейных координатах формулой (2.21).
Из нее сразу следует, что объем конечной области V записывается
в виде тройного интеграла *)
JJ/m n. (2.22>.
<2
взятого по той области Q изменения переменных £, т], £, которая,
переводится в область V отображением (2.20).
Из этого выражения для объема формула замены переменных
получается с помощью следующих рассуждений, аналогичных изло-
женным в п. 6 § 6 гл. 1.
*) Мы опустили здесь те оценки, которые в § 6 гл. 1 были проведены
для двух переменных.
Читатель, разобравший доказательство теоремы 1.7, легко воспроизведет
аналогичное доказательство и для данного случая. Здесь, как и в случае
двух переменных, основная идея состоит в аппроксимации нелинейного
отображения малой области подходящим ее линейным отображением.
SO ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ [ГЛ. 2
Пусть f (х, у, г) — непрерывная функция, заданная в замкнутой
ограниченной области V. При этих предположениях интеграл
f f f f(x< У- z)dxdydz (2.23)
v
существует. Он представляет собой предел интегральных сумм вида
п
yz, (2.24)
z=i
Пусть формулы (2.20) устанавливают соответствие между об-
ластью V и некоторой областью £2 изменения переменных £, т), £,
причем это соответствие удовлетворяет условиям, указанным в п. 1.
В силу этого соответствия, каждому разбиению {V)} области V на
части отвечает определенное разбиение (£2Z) области £2, и обратно.
Согласно (2.22) можно объем Avz области Vt представить в виде
д^=f f JVa. n-
Применив к этому интегралу теорему о среднем, получим
= № «)1А^
где Acoz— объем частичной области £2;, а (£*, т]*, £*)— некоторая
точка, принадлежащая £2Z.
В сумме (2.24) каждая из точек (xz, yz, zz) выбирается внутри
соответствующей области VL произвольно. В частности, можно в ка-
честве (xz, yz, zt) взять ту точку, которая имеет криволинейные
координаты £*, т]*, £*. Следовательно, интегральную сумму (2.24)
можно переписать в виде
ч;. Q. У(& 4 Q. <. <. c;jp»,.
(2.25)
т. е. в виде интегральной суммы, отвечающей интегралу
f f f/(x& n. £). У& n- 0. n. ?))!•/(£. n. (2.26)
ц
Этот интеграл заведомо существует, уак как подынтегральная функ-
ция в нем непрерывна. Рассмотрим некоторую последовательность
неограниченно измельчающихся разбиений области V. Ей отве-
чает, в силу отображения (2.20), определенная последовательность
разбиений области £2, причем если максимум диаметров областей Vt
стремится к нулю, то максимум диаметров областей £2Z тоже стре-
§ 4] ЗАМЕНА ПЕРЕМЕННЫХ В ТРОЙНОМ ИНТЕГРАЛЕ 91
мится к нулю. Этой последовательности разбиений отвечает последо-
вательность интегральных сумм, каждую из которых можно записать
в виде (2.24) или в виде (2.25). Предел этой последовательности
интегральных сумм (2.24) равен интегралу (2.23), а предел сумм (2.25)
есть интеграл (2.26). Таким образом, интегралы (2.23) и (2.26) пред-
ставляют собой пределы одних и тех же интегральных сумм. Следо-
вательно, они равны, т. е.
Iff ^х' у' z^dv =
v
:)> у(^ т>- z(& т’’ (2-27)
о
Итак, если задано взаимно однозначное отображение зам-
кнутой ограниченной области V на область Q, непрерывное,
непрерывно дифференцируемое и имеющее отличный от нуля
якобиан, и если f(x, у, z)— непрерывная функция, опреде-
ленная в этой области V, то имеет место формула (2.27)—
формула замены переменных в тройном интеграле.
Нетрудно показать, что она справедлива не только для непре-
рывной функции /, но и для ограниченной функции, непрерывной
в V всюду, кроме точек, образующих множество объема нуль.
Вернемся снова к формулам (2.20), устанавливающим соответ-
ствие между областью V изменения переменных х, у, z и областью Q
изменения переменных £, т], £. Это соответствие переводит лежащий
в Q бесконечно малый параллелепипед
£о<£<£о + ^. ПоС'ЛС'ПоЧ-^'П. +
объем которого равен do = d\ dt» в криволинейный параллелепи-
пед, определяемый теми же неравенствами, с объемом
dv — ]У(£, л. (2.28)
Следовательно, модуль якобиана |J(£, т], £)|—это отношение бес-
конечно малых объемов, отвечающих друг другу при отображении
(2.20) (рис. 2.7).
В простейших случаях якобиан, отвечающий той или иной замене
переменных, можно найти, пользуясь выражением (2.28) для элемента
объема, из чисто геометрических соображений, не проводя вычисле-
ний. Покажем это на примерах цилиндрических и сферических коор-
динат.
Цилиндрические коо рдинаты. Рассмотрим элемент объема,
заключенный между тремя парами бесконечно близких координатных
поверхностей, а именно, двумя цилиндрами радиусов г и r-\-dr,
двумя горизонтальными плоскостями, лежащими на уровнях z nz-\-dz.
92
ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 2
и двумя полуплоскостями, проходящими через ось z и составляющими
с осью х углы ф и ф-f-Ap. Ограниченный ими элемент объема
представляет собой, с точностью до малых высшего порядка, прямо-
угольный параллелепипед с ребрами dr, dz и rdq (рис. 2.8). Его
объем равен
г dr d(f dz,
откуда видно, что якобиан перехода от декартовых координат к ци-
линдрическим равен г.
Сферические координаты. Рассмотрим область, ограниченную
двумя сферами радиусов г и r~г/г, двумя полуконусами, опреде-
ляемыми углами 0 и 0-|-d0 (отсчитываемыми от оси д), и двумя
полуплоскостями, составляющими углы ф и ф + dtp с плоскостью xz.
$ 5]
ПОНЯТИЕ О МНОГОМЕРНЫХ ИНТЕГРАЛАХ
93
Эту область можно считать прямоугольным параллелепипедом с реб-
рами г </0, dr и г sinQrfcp (рис. 2.9). Следовательно, объем этого
параллелепипеда равен
г2sin О dr d0 dtp,
откуда видно, что соответствующий якобиан равен
г2sin 0.
§ 5. Понятие о многомерных интегралах
1. Общие сведения. Те определения и факты, которые в первой
главе были изложены для двух переменных, а в этой —для трех,
могут быть перенесены на случай любого числа переменных. Именно,
прежде всего определяется объем «-мерного параллелепипеда.
В соответствии с известными из аналитической геометрии фор-
мулами, представляющими площадь параллелограмма и объем парал-
лелепипеда в виде детерминантов, за объем «-мерного параллелепи-
педа принимается абсолютная величина детерминанта, элементами строк
(или столбцов) которого служат координаты векторов, образующих
ребра этого параллелепипеда. Далее, отправляясь от объема парал-
лелепипеда, нетрудно ввести объем для многогранных «-мерных тел,
а затем определить объем и для некоторого класса областей в «-мер-
ном пространстве. После этого интеграл от функции « перемен-
ных /(хр х2.......хл) вводится как предел соответствующих инте-
гральных сумм; «-кратный интеграл от /(хР х2.......х„), взятый по
некоторой «-мерной области Q, обозначается символом
J f f f (Х1’ Х2.........Хп) dXl dX2 dxn-
о
При соответствующих условиях, налагаемых на область G и на
подынтегральную функцию, «-кратный интеграл может быть записан
с помощью « последовательных интегрирований по каждому перемен-
ному в отдельности, т. е. в виде
J J ’ ’' J ?(хр Х2......Хя) dXi dXi ’ ’ ‘ dXn =
О
b Л2)(х1) хп\х1...хл-1)
= fdxi f dx2 ... j' f(xlt x2...................... xn)dx„.
a IX X Д1) IX X X
X2 (1) xn (X1..xn-l)
Формула замены переменных в «-кратном интеграле аналогична
соответствующим формулам для двойных и тройных интегралов,
а именно, если xi = xi(y1, у2.......... уп), /=1, 2........... п,
94 ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ [ГЛ. 2
ТО
f • f f<xi...x„)dx1 ... dxn =
О
•=// .....л).......*.Oi.......у»))Х
где Г — область изменения переменных у1( уп.
2. Примеры. Для «.-кратных интегралов остаются в силе все
основные факты, изложенные выше для двойных и тройных инте-
гралов. Не останавливаясь на общих вопросах теории п-кратных
интегралов, рассмотрим некоторые простейшие примеры.
1) Взаимное притяжение двух материальных тел. Хотя
реальное физическое пространство, в котором мы живем, имеет
только три измерения, существуют разнообразные конкретные задачи,
в которых приходится рассматривать интегралы кратности большей
трех. В качестве простейшего примера такого рода укажем формулу
для силы взаимного притяжения двух материальных тел конечных
размеров. Пусть одно из этих тел занимает некоторую область О и
имеет объемную плотность р(х, у, z), а другое занимает область G'
и имеет объемную плотность р'(х', у', z') (нам удобно обозначить
декартовы координаты точек одного и другого тела разными симво-
лами). По закону Ньютона направленная по оси х компонента dFx
силы притяжения, действующей между двумя бесконечно малыми
элементами
do — dx dy dz и dv' = dx' dy' dz'
объемов этих двух тел, равна
у.Р (•*!.?’ У’ г1(х — х') dx dy dz dx' dy' dz', (2.29)
где у — постоянная и
Г = V(x — x')2 Ч- (У — У')2 + О ~ -И2 •
Для того чтобы получить полную величину компоненты Рх силы
взаимодействия между рассматриваемыми телами, нужно просуммиро-
вать выражения (2.29) по всем элементам объема обоих тел. Иначе
говоря, компонента Рх силы взаимного притяжения тел, заполняющих
области G и G', равна
yj J" I У* j* Р(х’ У- г)р^х ’ У ’ г"> (х—х') dx dy dz dx' dy' dz'.
GxG'
(2.30)
§ 5] ПОНЯТИЕ О МНОГОМЕРНЫХ ИНТЕГРАЛАХ 95
Аналогично записываются и две остальные компоненты. При этом
точка (х, у, z) пробегает всю область О, а точка (х', у', z') неза-
висимо пробегает всю область G'. Таким образом, интеграл (2.30)
берется по области в шестимерном пространстве, которую естественно
обозначить О X О' и назвать «произведением» областей G и G'.
2) Рассмотрим интеграл
In — f f .. . J dXi dx2 ... dxn, (2.31)
a
взятый по области G, определяемой неравенствами
Xj^-0, x2>0, .. ., xn>0,
xi + X2~l~ •••
Сводя интеграл (2.31) к повторному, получаем
1П = J f ... J dxldx2 ... dxn =
а
1 1-xl l-X]-.r2- ... -Xn_j
~ ! dxif dx2 ... J dxn.
0 0 0
Выполнив интегрирование по хя и подставив пределы, получим
1 1-ж1 ••• ~ХП-3
!n = fdXlj dx2... f (1—хх—... —xn_i)dxn_!.
0 0 0
Далее, проинтегрировав no x„_t и подставив пределы, будем иметь
1 1-xi ••• _лгл-з
In = fdx.f dx2... f ~-Хя-2)2 dxn_2.
0 0 о
Продолжая последовательно интегрирование, окончательно получим
_ с (1-х.Г-1 __1_
—J (п-1)! п! ’
о
3) Объем n-мерного шара, «-мерный шар радиуса а с центром
в начале координат — это совокупность тех точек «-мерного про-
странства, координаты которых удовлетворяют условию
+ ••• + *«О2-
Объем Vn такого шара — это интеграл
J" f ... f dxx dx2 ... dxn.
Xj+Xj+ ... +x2<a2
96
ТРОЙНЫЕ И МНОГОКРАТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 2
Вычислить этот интеграл можно следующим образом. Положив
х( — ау, получим
Vn^anUn.
где Un — объем шара радиуса 1. Далее, так как
Un= f f ... f dxxdx2 ... dxn =
то, положив xrt = cosO, получим
Л
2
U„ = 2U„_l J sin" 0 de. (2.32)
о
Приняв во внимание, что Ul — 2 (одномерный шар радиуса 1 — это
отрезок [—1, 1], а одномерный объем — это длина), мы можем по-
следовательно найти U2, U3 и т. д. *).
*) С помощью эйлеровых интегралов (см. гл. 10, § 3, в частности при-
мер 3) можно дать явное выражение для Un.
ГЛАВА 3
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
В этой главе мы применим дифференциальное и интегральное
исчисления к изучению геометрических объектов — кривых и
поверхностей. Исследование геометрических образов средствами
анализа составляет содержание дифференциальной геометрии.
Рамки этого курса позволяют нам изложить лишь основы дифферен-
циальной геометрии, которая представляет собой обширную науку,
тесно связанную с механикой, теорией дифференциальных уравнений
и другими дисциплинами.
§ 1. Вектор-функции скалярного аргумента
1. Определение вектор-функции. Предел. Непрерывность. Кри-
вые и поверхности удобно задавать функциями, принимающими
векторные значения (короче, в е к т о р-фу н к ци я м и). Поэтому
мы начнем главу с того, что кратко сформулируем основные понятия
анализа применительно к вектор-функциям. Мы можем при этом не
входить в подробности, так как нового (по сравнению со случаем
скалярных функций) здесь будет немного.
Определение. Пусть каждому значению переменной t,
принадлежащему отрезку [а, &],
поставлен в соответствие вектор \
r(/) = x(/)i + y(Oj + ^(Ok- (3-1) \ ( )
Такой вектор называется век- х
то р-фу нкци е й скалярного ар-
гумента t. рТ
С вектор-функцией г (0 связыва-
ются следующие наглядные представ- ис‘ ’ ’
ления. Если откладывать от начала
координат векторы г(/), отвечающие различным значениям аргумента t,
то концы этих векторов составят некоторую кривую — график вектор-
функции г (/), обычно называемую годографом функции г(/)(рис. 3.1).
98
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ геометрии
[ГЛ. 3
Если рассматривать аргумент t как время, то годограф функции г (0 —
это траектория движения некоторой точки.
Постоянный вектор
R = а! bj 4~ ск
называется пределом г(0 при /—>0, если
lim | г (/) — RI = 0,
(3.2)
где | г (0 — R | — длина вектора г (t) — R. Это условие равносильно
трем скалярным условиям:
limx(0 = a, lim у (t) — b, lim z (f) — c. (3.2')
t-¥t$
Вектор-функция r(0 называется непрерывной в точке t0, если
lim r(0 = r(0).
Вектор-функция r(t) непрерывна в точке t0 тогда и только тогда,
когда все т р и ее компоненты — скалярные функции х (t), у (t), z (t) —
непрерывны в точке t0. (Докажите это!) Сумма, разность, ска-
лярное и векторное произведения непрерывных вектор-функций не-
прерывны. (Проверьте это!)
2. Дифференцирование вектор-функции. Вектор-функция г (0
называется дифференцируемой в точке t, если существует предел
lim
дг-»о
АГ (О
д/
lim
г (/ + Д0 — г (t)
Ы
Этот предел называется производной вектор-функции г (0 и обозна-
чается символами , г'(0 или г(0. Легко проверить, что суще-
ствование г' (0 равносильно существованию трех производных х' (0,
у' (0 и z'(f), причем
г' (0 = х' (0 i 4- у' (0 j 4- z' (t) k.
Вектор направлен по секущей годографа функции г(0
(рис. 3.2), а направление вектора ~ — это направление предельной
прямой, к которой стремится эта секущая, когда точка Л41 прибли-
жается к М, т. е. направление касательной к годографу в точке М.
Кинематически г' (0 — это скорость точки, движущейся по за-
кону г(0.
Для вектор-функции имеют Место следующие правила дифферен-
цирования:
1) если г (0 = const, то т' (t) = 0;
2) (Ar (t))' = kr' (t), A = const;
§ 1] ВЕКТОР-ФУНКЦИИ СКАЛЯРНОГО АРГУМЕНТА 99
3) (и (/) г (/))' = и' (/) г (/) -|- и (t) г' (/), и (/) — скалярная функция;
4) (г1(0±г2(0)' = т;(0±Г2(0;
5) (Г, (/), Г2 (0)' = (Г; (0. г'(0);
6) [гт(/), г2(/)]' = [г'(/), r2(O]~Hrj(O> ^(0) (здесь необходимо
сохранять порядок сомножителей);
7) если г = г(О и t = t(x), то
dt dr dt
dt dt dr
— правило дифференцирования сложной вектор-функции.
Доказательство этих правил мы предоставим читателю.
Отметим следующие частные случаи дифференцирования вектор-
функции:
а) Производная вектора постоянного направления. Пусть
вектор г(t) имеет постоянное направление (т. е. от t зависит
лишь его длина). Тогда векторы
г (0 и г' (0 коллинеарны. Дей-
ствительно, в этом случае г (0 мож-
но записать в виде';
г(О = «(Ое,
где «(/)— скаляр, а е — постоянный
вектор, например единичный. Тогда
г'(0=и' (0 е, т. е. г' (0= г (О-
б) Производная вектора постоянной длины. Если |г(£)|==
= const, то векторы г (t) и г' (t) взаимно ортогональны. Действи-
тельно, в этом случае (г (0, г' (f)) = const; дифференцируя это равен-
ство, получаем
2(г(0, г'(0) = О, т. е. (г(0, г'(0) = О,
что и требовалось.
Геометрический смысл этого соотношения очень прост. Если
|г(01 = Я. то годограф функции г (t) лежит целиком на сфере ра-
диуса R с центром в начале координат. Касательная к такой кривой
лежит в плоскости, касательной к сфере, и, следовательно, перпенди-
кулярна радиусу-вектору г(0, идущему в точку касания.
Дифференциалом вектор-функции г (t) называется
вектор
dr = dx- i dy - j + dz k.
Иначе говоря,
dr = x' (t) dt • i + y' (0 dt • j z' (0 dt • k = r' (t) dt.
100 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
т. е. дифференциал вектор-функции равен произведению ее произ-
водной на дифференциал (т. е. приращение) независимой переменной.
Как и в случае скалярной функции, дифференциал dr вектор-функции
отличается от ее приращения Дг на величину выше первого порядка
малости относительно Д/.
3. Годограф. Особые точки. Мы назвали годографом вектор-
функции г(/) ту кривую, которую описывает конец вектора г(/) при
изменении t, если его начало все время находится в некоторой фикси-
рованной точке.
Если r(Z)— дифференцируемая вектор-функция, то вектор г'(0
там, где он не равен нулю, направлен, как мы видели, по касатель-
ной к годографу. Точки, в которых производная т' (t) не существует
или существует и равна
могут иметь различный
0, называются особыми. Эти особые точки
характер. Приведем несколько примеров
г)
Рис. 3.3.
(рис. 3.3). При движении точки по закону г (t) путь может пред-
ставлять собой «гладкую» кривую, однако скорость v (t) = г' (/) при
t^-ty может стремиться к нулю. Материальная точка испытывает
остановку в момент t — t0. Это — особенность самого движе-
ния, но не той геометрической кривой, по которой движется точка
(рис. 3.3, а). В других случаях такая остановка может сопрово-
ждаться изменением направления пути (излом; см. рис. 3.3, б). Это —
особенность как самого движения, так и соответствующей геометри-
ческой кривой. Может оказаться, что на кривой имеется излом, но
скорость г' (/) при приближении к этой точке не стремится к нулю
(рис. 3.3, б). Здесь точка испытывает толчок, меняющий ее скорость
скачком. Далее, кривая, по которой происходит движение, может
иметь точку возврата (рис. 3.3, в), причем скорость материальной точки
вблизи этой точки также может либо стремиться к нулю, либо меняться
§ 1] ВЕКТОР-ФУНКЦИИ СКАЛЯРНОГО АРГУМЕНТА 101
скачком. Наконец, при t—>t0 движение г (Z) может просто «замирать»
и не возобновляться при t > t0. Это—«покой» в конце пути (рис. 3.3, г).
Эти и различные другие особенности движения представляют интерес
при изучении конкретных случаев; вместе с тем они затрудняют при-
менение общих методов. Мы будем в дальнейшем такие особенности
исключать и рассматривать движения, для которых r'(f) всюду суще-
ствует и не обращается в нуль.
4. Формула Тейлора. Для вектор-функции имеет место формула
Тейлора
г (t + At) = г (0г' (0 At +1 г" (О А/2 + ... +1 (г(«> (/) 4-«) АГ.
(3.3)
где а — вектор, стремящийся к нулю при At -> 0. Действительно,
применив формулу Тейлора к каждой из трех компонент *) x(t),
y(t) и z (t) вектора г (/), получим
= + +• • •
(0+at) А/"
и еще два аналогичных равенства для у и г. Умножив эти равенства
соответственно на i, j и к и сложив, получим формулу (3.3).
Мы видим, таким образом, что основные понятия и правила диф-
ференциального исчисления легко и без существенных изменений пере-
носятся со скалярных функций на векторные. Следует, однако, иметь
в виду, что такой перенос все же нельзя делать совершенно
автоматически. Например, известная формула конечных прираще-
ний (вып. 1, гл. 8, § 9) для вектор-функций несправедлива. (Постройте
пример!)
б. Интеграл от векторной функции по скалярному аргументу.
Для вектор-функции г(/), заданной на отрезке как и для
обычных скалярных функций, можно составить интегральные суммы
и рассмотреть их предел при стремлении к нулю максимальной длины
отрезков, на которые разбит отрезок [а, Ь\. Этот предел называется
интегралом от г(£) по отрезку [а, 6] и обозначается символом
ь
J* г (Z) dt.
а
*) Мы, разумеется, предполагаем, что компоненты х(£), у (0> хг(ОвектоР'
функции г(^) удовлетворяют тем условиям, при которых формула Тейлора
для каждой из них имеет место.
f x(t)dt-\-j • J y(f)^4-k-J z(t)dt.
j и (C r' (t) dt
c, J* r (0 dt
a
102 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
Как и для скалярных функций, можно установить, что если r(t)
непрерывна на [а, 6], то этот предел существует.
Легко видеть, что существование предела одной векторной инте-
гральной суммы
п
/=1
(здесь д = ^0</1< ... — t^^Xf^t?) равносильно суще-
ствованию пределов трех скалярных интегральных сумм для трех
компонент х(/), у(0> 2 (О функции г(/). При этом
b b ь ъ
J r(0^ = i •
а а а а
На интегралы от вектор-функций распространяются обычные свойства
интегралов от скалярных функций. Например,
ь ь
J и' (t) г (0 dt — u (t>) r(b) — и (а) г (а) —
а а
— формула интегрирования по частям; и (/) — скалярная функция.
Легко выводятся также формулы, связывающие интегрирование
с основными операциями векторной алгебры. Например,
ь
f [С, r(t))dt =
а
где с — постоянный вектор.
6. Векторные функции нескольких скалярных аргументов.
Можно рассматривать векторные функции не одного, а нескольких
скалярных аргументов (в частности, с вектор-функциями двух ска-
лярных аргументов мы встретимся в этой главе при изучении поверх-
ностей). На такие функции легко переносятся понятие частной произ-
водной и другие понятия анализа.
§ 2. Пространственные кривые
1. Векторное уравнение кривой. Вектор-функции скалярного
аргумента представляют собой удобный способ задания кривых в про-
странстве. Действительно, если нам задана некоторая непрерывная
вектор-функция г (t) (a t b), то, построив ее годограф, мы полу-
чим некоторую кривую у в пространстве.
$ 21
Пространственные кривые
103
Обратно, если задана тем или иным способом некоторая кри-
вая *) у, то можно попытаться задать ее с помощью вектор-функции.
Для этого поступим следующим образом:
Мы скажем, что кривая у параметризована, если каждой ее
точке поставлено в соответствие определенное значение некоторого
параметра t, пробегающего какой-то отрезок [а, £>], причем это соот-
ветствие взаимно однозначно**) и непрерывно в каждой
точке отрезка [а, Ь\ (последнее условие означает, что-если t—>/0, то
и расстояние между точками г (tQ) и г (f) кривой тоже стремится
к нулю). Если кривая у параметризована, то радиус-вектор каждой
точки этой кривой определяется соответ-
ствующим этой точке значением парамет- /
pa t, т. е. ------
г = r(Z) (г = xi + yj + zk). (3.4) С
Это соотношение называют параметра- j
ческим (векторным) уравнением кри- п /
вой у. Ясно, что векторное уравнение (3.4) У *у
можно заменить тремя скалярными урав- ( /
нениями:
Х — Х (f), у = у (f), z = z (t).
Пользуясь термином, введенным в Рис-
предыдущем параграфе, можно сказать,
что, параметризуя кривую, мы представляем ее как годограф некото-
рой вектор-функции г (/).
В дальнейшем мы будем рассматривать только такие кривые и
такие их параметризации, для которых соответствующая вектор-функ-
ция г (t) трижды непрерывно дифференцируема.
Пример. Положим
r(0 = iacos/-]-ja:sinZ-|-kM. (3.5)
Это параметрическое уравнение определяет кривую, называемую вин-
товой линией (рис. 3.4).
Рассматривая ту или иную кривую, мы можем выбрать для нее
различные параметризации. Например, если кривая у задана уравне-
нием г = г (t), a-^t ^b, то, положив
t = t (т), а т р,
где t(x)— монотонная функция такая, что t' (т) > 0, t(<3.) — a,
t($) — b, мы можем принять т за новый параметр и писать уравнение
*) Мы не уточняем здесь самого понятия кривой. Некоторые сведения
по этому поводу содержатся в вып. 1, гл. 11, § 1.
**) Это условие означает, что мы рассматриваем кривые, не имеющие
точек самопересечения.
104 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
кривой y в виде г = г(/(т)).
Во многих случаях удобна так называемая натуральная пара-
метризация кривой, когда за параметр принимается длина дуги
этой кривой, отсчитываемая от фиксированной точки. Переход
от какого-либо параметра на кривой к натуральному параметру
может быть осуществлен следующим образом: пусть у — некоторая
кривая и t — какой-либо параметр на ней. Выберем на у некоторую
точку Af0, отвечающую значению параметра t — и назовем ее
начальной точкой. Возьмем на у произвольную точку М. Длина I
дуги Л40Л4 выражается, как известно, формулой
t ________________ i
1= J* Vх'2 у'2 -|- z'2 dt *), т. е. I — J | г' (t) | dt,
h to
где t — значение параметра, отвечающее точке М. Эта формула
определяет I как однозначную и непрерывную функцию от t-. 1 = 1 (Z).
Если функция r(Z) такова, что г' (/) нигде не обращается в нуль,
то всюду /'(/)=# 0 и, следовательно (см. вып. 1, гл. 11, § 1), t можно
представить как однозначную и непрерывную функцию от I: t = t (I).
Положив r = r(Z(Z)), мы представим г как функцию дуги I, т. е.
получим натуральную параметризацию кривой.
Пример. Рассмотрим снова винтовую линию (3.5). Для нее
dl = ya2 sin21 -j- a2 cos21 -|- b2 dt = a2 + b2 dt,
т. e. I = У a2 -f- b21. Переходя к параметру Z, мы можем переписать
уравнение винтовой линии в виде
г (Z) = 1 a cos 1 -I- ja sin ______- -f- kb 1 . "
Уа2 + Ь2 J /a2-)-Z>2 /a24-Z>2
Замечание. Если в уравнении
г = г (Z)
*) По существу, эта формула означает следующее: кривая (x (Z), у (/),
z (t)) рассматривается как «ломаная» с бесконечным числом бесконечно
малых звеньев (dx, dy, dz). Длина отдельного звена дается теоремой Пифа-
гора и равняется К(dx)2 -f- (dy)2 + (dz)2 = У(х' (t) )2 + (у' (t) )2 + (*’ (t) )2 dt.
t
«Сумма» длин этих «звеньев», т. е. интеграл § ^х'2 у'2 -j- z'2 dt, и равна
6
длине кривой.
ПРОСТРАНСТВЕННЫЕ КРИВЫЕ
105
§ 21
параметр t представлять себе как время, то кривую, определяемую
этим уравнением, можно рассматривать как траекторию точки, дви-
жущейся из начального положения со скоростью r'(Z). Но по одной
и той же кривой точка может двигаться разными способами: зада-
нием кривой определяется лишь направление скорости в каждый
момент, но не ее величина. Можно, в частности, рассмотреть случай,
когда скорость движения г' по модулю тождественно равна единице.
Именно это и будет иметь место в случае натуральной параметри-
зации кривой. Действительно, dr = idx jdy-[-kdz, следовательно,
I dt_ I _ K(rfx)24-(dy)2 + (d^)2 = dl_ _ j 3 6
I dl I dl dl ' \ • f
Таким образом, различные параметрические уравнения одной и той же
кривой можно кинематически представлять себе как законы движения
частиц, описывающих одну и ту же траекторию с разными скоро-
стями. При этом уравнение
r==r(Z).
где I — длина дуги описывает движение частицы со скоростью,
по модулю равной единице.
2. Основной трехгранник. Рассмотрим кривую, заданную урав-
нением
г = г(/). (3.7)
В каждой ее точке М (отвечающей значению /) единичный вектор *)
т = г (Z)
определяет направление касательной к этой кривой. Вектор
г — т
ортогонален т, как производная вектора постоянной длины (см. п. 2
§ 1). Разделив его на | г |, мы получим единичный вектор **)
, = ти. (3.8)
ортогональный т. Присоединим еще к т и v вектор
₽ = [т, V]. (3.9)
*) Здесь и дальше мы будем обозначать производные от г по натураль-
ному параметру символами г, гит. д., сохранив обозначения г', г" и т. д.
для производных по произвольному параметру.
**) В тех точках, где г = 0, вектор v не определен. Такие точки (они
называются точками спрямления) мы в дальнейшем будем исключать
из рассмотрения.
106 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
Векторы 1, v и Р образуют тройку взаимно ортогональных единич-
ных векторов, которая называется основным репером или основным
трехгранником кривой (3.7) в данной точке (рис. 3.5). Этот
трехгранник жестко связан в каждой точке с рассматриваемой кри-
вой, поэтому вид самой кривой можно пол-
л ностью охарактеризовать, описав движение ос-
Р новного трехгранника при перемещении его
вершины по кривой.
Отметим, что векторы т, v и f удовлетво-
—• ряют, кроме соотношения (3.9), еще двум ана-
рис 3 5 логичным соотношениям:
[V, р] = т, $, t] = v.
Векторы т, у, р называются соответственно единичными векторами
касательной, нормали и бинормали.
3. Формулы Френе, Движение основного трехгранника задается
скоростями изменения векторов т, у и £, т. е, их производными по I.
Вычислим эти производные.
Производную вектора ф, т. е, вектор г, мы уже рассматривали.
Введя обозначение
k — | г |,
мы запишем эту производную в виде
т = Ау,
где k — неотрицательное число.
Рассмотрим теперь вектор £. Его производная р, как и произ-
водная всякого единичного вектора, перпендикулярна ему. Кроме
того, она перпендикулярна т. В-самом деле, = У] и, значит,
Р = [т, у]-}-[т, у] = [/гу, у]-}-[-с, v] = [т, у], а этот вектор перпен-
дикулярен т. Вектор р перпендикулярен р и т, следовательно, он
коллинеарен у. Поэтому можно положить
Р = — ху,
где х — числовой коэффициент *).
Наконец, вычислим у. Имеем
* = <Г = [fL 's] + l₽. т] = [—ху, т]-HP* £v] = — Ax-j-xp.
*) Этот коэффициент может быть как положительным, так и отрица-
тельным. Обозначение —х (а не х) удобно для дальнейшего.
§ 2] ПРОСТРАНСТВЕННЫЕ КРИВЫЕ 107
Итак, мы получили для производных х, v и р следующие формулы:
т= Av, (3.10)
v = — kx Ч-хР, (3.11)
Р = — zv. (3.12)
Они называются формулами Френе*). Эти формулы содержат
две скалярные величины: А и и. Величина А называется кривизной
кривой, а х — кручением. Геометрический смысл кривизны и кру-
чения мы рассмотрим несколько позже.
4. Вычисление кривизны и кручения. По определению
А = |г|. (3.13)
Таким образом, для вычисления кривизны кривой г = г (/) достаточно
найти вектор г(/) и вычислить его длину.
Для вычисления кручения х возьмем равенства
г = х, г — Av
и продифференцируем последнее из них еще раз по I. Воспользо-
вавшись формулой (3.11) для V, получим
г = Av — А2т 4- А%р.
Из трех последних равенств следует, что
(г. г, ?) = АЧ (3.14)
(г, г, г)
откуда х = ^2 ' т- е-
(3.15)
№
Формулы (3.13) и (3.15) позволяют вычислить кривизну А и кру-
чение х при натуральной параметризации кривой. Если же кривая
задана уравнением
Г = Г (/),
где г (f) — трижды дифференцируемая функция какого-то произволь-
ного параметра t, то, рассматривая t как функцию длины дуги I,
получим
dr _ dr dt d2r _ d2r IdtV . dr d2t
dl ~~ dt ' dl ’ dl1 ~ dt2 \dl) dt dl2 ’
d3r _ rf3r i \3 d2r dt d2t . dr d3t (3.16)
dl3 — dt3 \~dl I + d dt2 dl dl2 "I- dt dl3 ‘
) Жан Ф p e и e — французский математик (1801—1880).
108
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ геометрии
[ГЛ. 3
Первое из этих равенств можно переписать так:
, dt
Т —Г 777 .
dl
откуда (поскольку |т|=1)
^мы считаем, что t и I возрастают в одном и том же направлении,
т. е. что > о) • Далее, взяв векторное произведение первых двух
равенств (3.16), будем иметь
г dt d2t 1 Г dr d2t 1 (<# \3
L dl ’ dl2 J — L dt ’ dt2 J ( dl J ’
Г dt d?r ] , e
ИЛИ, поскольку =«P>
*P = [r'(O. r"(01(^)3. (3.18)
Так как |p| = l, то из (3.17) и (3.18) получаем
<3.19)
Наконец, подставляя выражения (3.16) в равенство (3.14), получим
(г' (/). Г" (0, х"' (0) (3.20)
Из двух последних равенств получаем окончательную формулу для
кручения:
_ (г'(О. г"(0, (0)
~ |[г'(0.г"(0П2
(3.21)
Упражнение. Вычислить кривизну и кручение винтовой линии
г = i a cos t j a sin t k bt.
Замечание. Вернемся еще раз к формулам (3.16). Они пока-
зывают, что векторы г' и х" выражаются линейно через векторы г
и г. Иначе говоря, векторы х' и х" определяют ту же самую пло-
скость, что и векторы г, г, а именно, соприкасающуюся плоскость.
Таким образом, соприкасающаяся плоскость кривой (в данной точке)
может быть определена как плоскость, в которой лежат векторы х' (t)
и г" (/) (какой бы ни была параметризация кривой). Если предста-
влять себе t как время, а уравнение
г=г(7)
§ 2]
ПРОСТРАНСТВЕННЫЕ КРИВЫЕ
109
как закон движения точки, то можно сказать, что соприкасающаяся
плоскость — это та плоскость, в которой лежат векторы
скорости и ускорения движущейся точки.
5. Система координат, связанная с основным трехгранником.
Три вектора т, v и £ определяют в каждой точке кривой г(/) свою
систему координат, в которой координатными осями служат:
1) касательная (ее направление определяется вектором t),
2) главная нормаль; ее направление определяется вектором v) и
3) бинормаль (ее направление определяется вектором ^).
Координатными плоскостями в этой системе служат:
1) плоскость, проходящая через точку М и перпендикулярная t
(т. е. плоскость, в которой лежат главная нормаль и бинор-
маль); она называется нормальной плоскостью кривой г —г(/)в
точке М;
2) плоскость, проходящая через точку М и перпендикулярная v;
она называется спрямляющей плоскостью;
3) плоскость, проходящая через точку М и перпендикулярная fl
(т. е. плоскость, в которой лежат г и г); она называется1] сопри-
касающейся плоскостью.
Эта система координат называется сопровождающей системой
координат.
Ра сположение этих прямых и плоскостей показано на рис. 3.6.
Задача. Для кривой г = г (Z) написать уравнения касательной,
главной нормали и бинормали, а также нормальной, спрямляющей
и соприкасающейся плоскостей в точке г0 — г (Zo).
Решение. Векторное уравнение прямой, проходящей через точку
с радиусом-вектором г0 в направлении вектора а, имеет вид
р — г0 + Ха, — оо < X < со,
а уравнение плоскости, проходящей через точку с радиусом-векто-
ром г0 и ортогональной вектору п, пишется так:
(р — г0, п) = 0.
Отсюда сразу получаем следующие уравнения:
р = г04~Хг0 (касательная),
р = г0-j~Xr0 (главная нормаль),
р — r0-f- X (г0, г0] (б и н о р м а л ь),
(р — г0, г0) = 0 (нормальнаяплоск
(р — г0, г0) = 0 (с п р я м л я ю щ а я п л о с
(касательная),
(главная нормаль),
(бинормаль),
(нормальная плоскость),
(спрямляющая плоскость),
(р — г0, (г0, г01) = 0 (соприкасающаяся плоскость)
(здесь г0= r(Z0), г0=г(/0), r0=r(Z0)).
110 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИЙ (ГЛ. 3
Упражнения. 1. Написать уравнения касательной, главной
нормали и бинормали для кривой
г = г (/).
Указание. Заметим, что вектор [г', г"] направлен по бинор-
мали, а вектор [г', [rz, г"]] — по главной нормали.
2. Написать уравнения нормальной, спрямляющей и соприкасаю-
щейся плоскостей для кривой г=г(О-
3. Написать уравнения касательной, главной нормали и бинор-
мали, а также уравнения нормальной, соприкасающейся и спрямляю-
щей плоскостей для винтовой линии
x = acost, у —a sint, z = bt
в точке t = 0.
6. Вид кривой вблизи произвольной ее точки. Воспользуемся
сопровождающей системой координат для выяснения вида кривой
в окрестности какой-либо ее точки.
Предположим, что в точке r0 = г (10) производные
г0 = г (W- Го = г <zo)> *о = г %)
отличны от нуля, и разложим функцию г(/) в окрестности точки 10
§ 2] ПРОСТРАНСТВЕННЫЕ КРИВЫЕ Ш
по формуле Тейлора *):
г (0 = г0 + г0 А/ + j г0 А/2 + 4 го АР + О (А/4); (3.22)
AZ —Z —10.
Воспользуемся теперь сопровождающей системой координат, т. е.
примем точку г0 за начало координат, касательную за ось х, глав-
ную нормаль за ось у и бинормаль за ось z. Применив для вычи-
скости.
Возьмем равенства (3.23а) и (3.236) и ограничимся в них глав-
ными членами; эти равенства примут вид
х — А/, у = k АР.
Исключив отсюда AZ, получим уравнение параболы (рис. 3.7)
У = у kx2'
которая представляет собой, с точностью до величин порядка А/3,
проекцию кривой г = г (Z) на соприкасающуюся плоскость. Так как
по определению k > 0, то ветви этой параболы отходят от касатель-
ной в ту же сторону, куда направлен и единичный вектор V, причем
тем быстрее, чем больше k.
Рассмотрим теперь проекцию кривой на спрямляющую плоскость.
Из формул (3.23а) и (3.23в), ограничиваясь в них главными членами,
получаем
х = А/, z — 4 №.
о
Исключив отсюда А/, получим уравнение кубической параболы
z = -&kxx3. (3.24)
*) О (AZ4) означает в соответствии с общепринятой символикой вели-
чину порядка AZ4,
112 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
Здесь знак коэффициента при х3 совпадает со знаком кручения (так
как кривизна всегда положительна). Соответствующие параболы изо-
бражены на рис. 3.8, а и б. Так как при малых А/ знаки коорди-
нат х и у определяются знаками их главных членов, то из фор-
мулы 3.24 вытекает:
1. Вблизи точки, в которой кручение отлично от нуля, кривая
расположена по обе стороны от соприкасающейся плоскости.
2. Кривая отходит от соприкасающейся плоскости тем быстрее,
чем больше абсолютная величина кручения. При этом, если х > О,
то при возрастании I кривая отходит от соприкасающейся плоскости
в ту сторону, куда указывает вектор J3, а при х<0 — в противо-
положную.
Задачи. 1. Показать, что кривая, кривизна которой тождественно
равна нулю, есть прямая линия.
2. Показать, что кривая, кручение которой тождественно равно
нулю, — плоская (т. е. она целиком лежит в некоторой фиксирован-
ной плоскости).
Ре шение. 1. Если /г = 0, то г = 0, т. е. r = e = const, откуда
г= r0—|—Ze0, а это — уравнение прямой.
2. Если х^О, то, в силу третьей формулы Френе, [5 = 0, т. е.
Р = Р0 = const. Так как векторы г и [30 ортогональны, то
(0. г) —0,
т. е., в силу постоянства ^ = ро,
4<р»- г>=«-
Отсюда ф0, г) — const, а это есть уравнение плоскости.
§ 2]
ПРОСТРАНСТВЕННЫЕ КРИВЫЕ
113
7. Ориентированная кривизна плоской кривой. Рассмотрим кри-
вую, лежащую в некоторой фиксированной плоскости. Приняв эту
плоскость за плоскость ху, напишем уравнения нашей кривой в виде
х = х (f), y = y(f), z = Q. (3.25)
Вычислив кривизну этой кривой по формуле (3.19), получим
__ | х'у" — х"у’ |
'2 + /2)'2
(3.26)
Однако обычно (см., например, вып. 1, гл. 16, § 3) кривизной плоской
кривой называют само выражение
х'у" — х"у’
U'2 + y'2)3/2 ’
(3.27)
а не его модуль. Дело в том, что на плоскости (в отличие от трех-
мерного пространства) можно определить не только абсолютную вели-
чину скорости вращения касательной, но и направление этого вра-
щения (против или по часовой стрелке). Именно это направление
вращения и указывается знаком величины (3.27). Если это выражение
положительно, то кривая называется выпуклой (рис. 3.9, а), а если
оно отрицательно, то кривая называется вогнутой (рис. 3.9, б). Вели-
чину (3.27) называют иногда ориентированной кривизной кривой (3.25).
8. Понятие о натуральных уравнениях кривой. Формулы (3.13)
и (3.15) позволяют найти кривизну и кручение кривой, заданной
уравнением г = г (/), в виде
функций от /:
A = A(Z), z = x(Z). (3.28)
Эти соотношения, связывающие
кривизну и кручение кривой с
длиной дуги, называются нату-
ральными уравнениями данной
кривой. Естественно поставить
вопрос: в какой мере нату-
ральные уравнения (3.28) опре-
деляют саму кривую. Нетрудно
показать, что каждая кривая определяется своими натуральными
уравнениями однозначно с точностью до ее положения в прост-
ранстве.
Действительно, пусть даны две кривые у и уи Если на этих кривых
можно ввести натуральные параметры I и Ц так, чтобы в точках, отвечаю-
щих одинаковым значениям этих параметров, совпадали их кривизны k и kt
и их кручения х и хь т. е. чтобы при I = 1\ выполнялись равенства
МО=МЛ). х(0 = и1(^1).
114 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
то мы скажем, что кривые у и у! имеют совпадающие натуральные уравне-
ния. Покажем, что в этом случае можно, передвигая одну из кривых как
твердое тело, полностью эти кривые совместить. Действительно, совместим
некоторую точку А кривой у, отвечающую фиксированному значению 1° пара-
метра I, с точкой кривой у,, отвечающей тому же значению параметра
Далее, повернем кривую у так, чтобы единичные векторы т, v, 3 основного
трехгранника, отвечающего этой кривой в точке А, совпали бы соответ-
ственно с единичными векторами ть V], Pi основного трехгранника, отвечаю-
щего точке Л| кривой уь Этого, очевидно, всегда можно добиться. Мы
имеем, таким образом,
= v°=v?, р°=р?, (3.29)
где индекс «нуль» означает, что векторы берутся в точке, отвечающей зна-
чению параметра /° = I®. Ставя в соответствие друг другу те точки М и Mj
кривых у и У1, в которых I = ZP мы можем считать, что на у и у, введен
один и тот же параметр, и рассматривать т(, V] и Pj как функции от I. Рас-
смотрим, далее, скалярную функцию
а (Z) = (т, -сО + (V, >0 + (?, pi)
и вычислим ее производную по I. Пользуясь при этом формулами Френе,
получаем
= k (V, т() + k (v„ т) + (- кг + хр, v,) +
+ (v, — kzx + xPO — x (v, 31) — x (v„ 3) = 0,
т. e. на самом деле а от l не зависит. Из равенств (3,29) вытекает, что при
I = 10 значение а равняется трем; таким образом,
а (0 = 3.
Каждое из трех входящих в o(Z) слагаемых представляет собой скалярное
произведение двух единичных векторов и, следовательно, не может быть
больше единицы. А так как вся сумма равна трем, то каждое из этих сла-
гаемых должно быть в точности равно единице. Но скалярное произведение
двух единичных векторов равно единице только тогда, когда эти векторы
совпадают. Таким образом,
TS’l. V = V1, 3 = 31
при всех I, т. е. основные трехгранники кривых у и yt совпадают не только
в начальной точке Zo, но и при всех значениях параметра. Отсюда вытекает,
что совпадают и сами кривые, потому что кривую всегда можно восстано-
вить по вектору т = г (Z), именно
r(Z)=r(Z0)+ J T(X)rfX.
i,
Счевидно, верно и обратное: если две кривые отличаются друг от
друга только положением в пространстве, то они имеют одинаковые
натуральные уравнения.
Естественно поставить следующий вопрос: возьмем произвольно
две непрерывные функции
k (I) и х (/), Zj Z Z2,
Пространственные кривые
115
§ 4)
причем k (Г) > 0. Существует ли кривая, для которой эти функции
представляют собой соответственно кривизну и кручение? Ответ на
этот вопрос положительный. Однако приводить здесь соответствую-
щее доказательство мы не будем, так как оно потребовало бы ряда
сведений из теории дифференциальных уравнений, которых мы здесь
не приводим.
9. Некоторые приложения к механике. Рассмотрим материаль-
ную точку, движущуюся по некоторой траектории. Если г (7)— ра-
диус-вектор точки в момент времени t, то уравнение ее траектории
запишется в виде
Г — г (О-
Производная
представляет собой скорость движения точки по траектории. Вводя
натуральный параметр I, мы можем написать
___dr ___dr dl ___ dl
V~~dF'~~di~di~’Z'di'
Так как т — единичный вектор, то
। । dl
т. е. производная представляет собой абсолютную величину ско-
рости.
Вторая производная
W = ^
радиус-вектора по t — ускорение. Его можно записать в виде
d2r ( dl \2 d2l
w ~ dl2\dt) “г т dt2 •
С помощью формул Френе получаем
d2l . , (dl \2
Таким образом, ускорение раскладывается в сумму двух составляю-
rf2Z
щих, одна из которых т направлена по касательной и называется
. I dl V
тангенциальным ускорением, а другая vs (I —по главной нор-
мали и называется нормальным ускорением. Тангенциальное уско-
d2l dv dl
рение wt = т можно записать в виде wT = т -л- , где v — —гт —
Г dt2 dt dt
абсолютная величина скорости, т. е. тангенциальное ускорение —
116
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
[ГЛ. 3
это скорость изменения абсолютной величины скорости V.
С формулой для нормального ускорения wv = v« 1-^-1 читатель зна-
ком из элементарного курса физики. Именно, известно, что при дви-
жении точки по окружности радиуса R с постоянной скоростью v
ускорение направлено к центру окружности и
равно -r но — это как раз кривизна k
окружности. Таким образом, разложение
. d.4 . , / dl \2
w = wT -j- wv == т -f- vk I —ry-) можно на-
глядно представить себе так: движение в данный
момент времени как бы разлагается на уско-
ренное движение по касательной (что дает в
ускорении член wT) и на движение по ок-
ружности радиуса с постоянной ско-
ростью (что дает в ускорении член wv). Точка
участвует одновременно в двух этих движениях
(рис. 3.10).
Задача. Материальная точка движется под действием некоторой
центральной силы, т. е. силы, которая в каждый момент времени
направлена по прямой, соединяющей эту материальную точку с неко-
торым неподвижным центром. Доказать, что траектория плоская.
Решение. Примем притягивающий центр за начало координат.
Пусть
г = г (О
— уравнение траектории движения. Сила, действующая на движу-
щуюся точку, направлена к притягивающему центру. Следовательно,
согласно второму закону Ньютона, такое же направление имеет и
ускорение, т. е. вектор г" (I); таким образом, векторы г и г" колли-
неарны. Но тогда в каждой точке траектории выполнено соотношение
(г, г', г"') = 0.
Дифференцируя это смешанное произведение по t, получаем
-^-(г, г', г") = (г', г', г")-1-(г, г", г")-|-(г, г', г'") = 0.
Первые два слагаемых в средней части равенства равны нулю, сле-
довательно, равно нулю и третье. Но если
(г, г', г"') = 0
и векторы г и г" коллинеарны, то
(г', г", г'") = 0
при всех t, но тогда х = 0, а это и есть условие того, что наша
кривая плоская (п. 6 § 2).
§ 3]
ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПОВЕРХНОСТИ
117
§ 3. Параметрическое уравнение поверхности
1. Понятие поверхности. В этом и следующих параграфах мы
применим аппарат анализа к изучению поверхностей.
Понятие поверхности, интуитивно достаточно ясное, можно опре-
делять с различной степенью общности. В анализе чаще всего при-
ходится рассматривать поверхности, задаваемые уравнениями вида
2 = /(х, у),
где /(х, у) — непрерывная функция, определенная в некоторой
области G. Несколько более широкий класс поверхностей мы полу-
чим, рассматривая уравнения вида
F(x, у, z) = 0.
Чтобы такое уравнение действительно определяло поверхность
(в смысле, соответствующем нашим наглядным представлениям), необ-
ходимо на функцию /7(х, у, z) наложить некоторые дополнительные
условия.
Определение поверхности как совокупности точек, координаты кото-
рых удовлетворяют уравнениям вида z = f(x, у) или F(x, у, z) = 0,
не очень удобно, так как оно привязывает понятие поверхности
к выбору той или иной системы координат. Сформулируем понятие
поверхности, не прибегая к координатной системе. Введем прежде
всего важное понятие односвязной области.
Пусть G—некоторая область на плоскости. Назовем область О
о д н освязной, если она удовлетворяет следующему условию:
каков бы ни был замкнутый контур L, лежащий
внутри этой области, ограниченная этим конту-
ром (конечная) часть плоскости целиком лежит в О.
Иными словами, односвязность области озна-
чает отсутствие в ней «дырок». Любой замкнутый r/мт У/Ль'
контур, лежащий внутри такой области, можно r J//A///
стянуть в точку, не выходя за пределы этой об- Y/WX&foZrf/ffwW
ласти.
Если область не односвязна, то она называется
многосвязной. Сг
Примерами односвязных областей служат
круг, треугольник, квадрат и т. д. Кольцо, т. е. ис‘ ' ’
часть плоскости, ограниченная двумя концентри-
ческими окружностями, представляет собой простейший пример много-
связной области: действительно, область, ограниченная контуром L
(рис. 3.11), вовсе не составляет части кольца, заключенного между
окружностями Сх и С2.
Назовем теперь простой поверхностью множество то-
чек в трехмерном пространстве, представляющее собой взаимно
118 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ (ГЛ. 3
однозначный и в обе стороны непрерывный образ какой-либо замкну-
той ограниченной односвязной области. Далее, просто поверхно-
стью мы будем называть соединение любого конечного числа простых
поверхностей. При этом мы, вообще говоря, допускаем и наличие
у поверхности самопересечений, т. е. рассматриваем и такие гео-
хштппгтг^ ^гттгтгх метрические образы, как, скажем, изо-
ll ТГГТТ^экППИТПТГ Ж браженный на рис. 3.12. .
HLUijI pljJJI 1Ш1 Если f(x, у)— непрерывная функ-
I И ния, определенная в замкнутой одно-
связной ограниченной области G, то
И уравнение
z^=f(X’ У)
|М определяет простую поверхность. Дей-
ствительно, отображение
Рис'3’12, (X, у)*->(х, у, /(х, у))
устанавливает взаимно однозначное и в обе стороны непрерывное
соответствие (проверьте это!) между точками области О и точками,
координаты которых удовлетворяют уравнению z — f(x, у).
Практически наши дальнейшие рассмотрения будут ограничи-
ваться поверхностями, представленными как соединение конечного числа
простых поверхностей, определяемых уравнениями вида z = f (х, у).
При этом от соответствующих функций / нам придется обычно,
кроме непрерывности, требовать еще и некоторой гладкости (суще-
ствования и непрерывности первых или вторых производных). Эти
условия будут оговорены там, где они нам понадобятся.
2. Параметризация поверхности. Хотя задание поверхности
с помощью уравнения вида z — f(x, у) или Р(х, у, д) = 0 в ана-
лизе встречается очень часто, во многих случаях удобнее задавать
поверхность с помощью параметрических уравнений. Для того чтобы
написать уравнение поверхности в параметрической форме, введем
прежде всего понятие координат на поверхности.
Пусть на некоторой поверхности 2 задано однопараметрическое
семейство линий *). Назовем это семейство правильным, если через
каждую точку поверхности проходит одна и только одна линия из
данного семейства. Если на поверхности даны два правильных семей-
ства, такие, что каждая из линий первого семейства пересекается
(без касания!) с каждой линией второго семейства не более чем
в одной точке, то говорят, что на поверхности задана координат-
ная сеть. Пусть линии первого из семейств, образующих коорди-
натную сеть, определяются значениями некоторого параметра и.
*) Таким образом, каждая линия этого семейства характеризуется опре-
деленным значением некоторого параметра.
§ 3]
ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПОВЕРХНОСТИ
119
а линии второго семейства — значениями некоторого параметра v.
Так как по условию через каждую точку поверхности проходит
единственная кривая из первого семейства и единственная кривая
второго семейства, то положение точки на поверхности однозначно
определяется соответствующими этим линиям значениями м0 и т/0
параметров и и v. Параметры и и v, значениями которых опреде-
ляются линии, составляющие коор-
динатную сеть, называются ко-
ординатами на данной поверх-
ности.
Замечание. В §6 гл. 1 мы
вводили криволинейные координаты в
плоской области. Здесь мы, собствен-
но говоря, повторили то же самое по-
строение, но только применительно к
кривой поверхности. Введение коорди-
нат на поверхности можно, очевидно,
рассматривать как задание взаимно од-
нозначного и взаимно непрерывного рис здз
отображения поверхности на некоторую
часть плоскости, в которой введены
декартовы координаты и и v. При этом линии, образующие координат-
ную сеть, — это образы лежащих в плоскости uv прямых, параллельных
координатным осям.
Примеры. 1. Тором называется поверхность, образованная
вращением окружности вокруг не пересекающей ее прямой, лежащей
в плоскости этой окружности. Положение точки на окружности
можно задавать углом ф(0<^ф<2л),
отсчитываемым от некоторой начальной точ-
ки. Положение самой окружности мож-
/ "'"у л но задавать углом поворота ф, который
Ik )} отсчитывается от начального положения.
Таким образом, положение точки на торе
определяется двумя углами ф и ф, каж-
„ „ ,, дый из которых меняется от 0 до 2л.
Рис. 3.14. п л 1 п
Линии ф = 0 и ф = 0 соответствующей ко-
ординатной сети изображены на рис. 3.14.
2. Пусть поверхность задана уравнением z — / (х, у); иначе
говоря, она проектируется взаимно однозначно на некоторую часть
плоскости ху. Линии, которые при этом проектируются в прямые
х = const и у = const, образуют на поверхности z=f(x, у) коор-
динатную сеть (рис. 3.15).
Ясно, конечно, что на одной и той же поверхности можно зада-
вать различные координатные сети.
3. Параметрическое уравнение поверхности. Если на поверх-
ности S введены каким-либо образом координаты и, v, то говорят,
что эта поверхность параметризована параметрами и и V. Каждая
120
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
(ГЛ. 3
точка такой поверхности может быть задана значениями параметров и
и V. Но эта же точка может быть задана и своими декартовыми
координатами. Следовательно, декартовы координаты точек пара-
метризованной поверхности
г представляют собой функции
Рис. 3.15.
координат на поверхности:
х — х(и, v), у = у(и, V),
z = z(u, v). (3.30)
Эти три скалярных урав-
нения можно заменить одним
векторным:
г —г (а, т»), (3.30')
где г — xi + yj zk. Урав-
нения вида (3.30) или (3.30')
мы будем называть параметри-
ческими уравнениями поверх-
ности.
Замечание 1. В параметрическом уравнении кривой коорди-
динаты х, у, z являются функциями одного параметра. В уравне-
нии поверхности г = г(и, v), представляющей собой геометрический
образ двух измерений, естественно должны участвовать два неза-
висимых параметра.
Замечание 2. Уравнение z = f(x, у) можно рассматривать
как частный случай параметрического уравнения, если принять х и у
за параметры и положить
г = xi4-yj4-/(x, y)k.
Упражнение. Написать параметрическое уравнение тора в коор-
динатах <р и ф (см. пример 1 п. 2).
В дальнейшем мы будем рассматривать поверхности, заданные
именно параметрическими уравнениями, причем функцию г («, г») будем
предполагать непрерывной и имеющей непрерывные частные производ-
ные по и и v. Начиная с § 8, нам придется потребовать также сущест-
вования и непрерывности ее частных производных второго порядка.
4. Кривые на поверхности. Рассмотрим на поверхности, задан-
ной уравнением (3.30'), какую-нибудь кривую. Если на этой кривой
введен некоторый параметр t, то каждому значению t будет отвечать
некоторая точка поверхности, т. е. некоторые значения и и V.
Таким образом, вдоль кривой координаты и n v являются функциями
параметра t:
и = и (t), v — v (t).
S 3]
ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПОВЕРХНОСТИ
121
Эти уравнения называются уравнениями кривой на поверхности. Под-
ставив их в уравнение поверхности, получаем параметрическое урав-
нение кривой на поверхности:
г = г(«(О. v (t)).
(3.31)
И обратно, подставив в уравнение поверхности (3.30') вместо
независимых переменных и и v какие-либо функции одного пере-
менного t, мы получим уравнение не-
которой кривой, лежащей на этой по-
верхности.
Рассмотрим касательную к кривой
(3.31). Ее направление определяется
вектором
dt dr du . dt dv
dt du dt' dv dt ’
который представляет собой линей-
, dr dr
ную комбинацию векторов
называемых координатными векторами и представляющих собой
векторы, касательные к координатным линиям, проходящим через
рассматриваемую точку. Для краткости обозначим их гв = -^-,
_ dr
1"г' dv
5. Касательная плоскость. Рассмотрим всевозможные кривые на
поверхности, проходящие через данную точку М, и касательные
векторы к ним в этой точке (рис. 3.16). Каждый из этих векторов
представляет собой линейную комбинацию векторов гц и rv, т. е.
лежит в определяемой этими векторами плоскости. Эта плоскость
называется касательной плоскостью к данной поверхности в точке М.
Напишем уравнение касательной плоскости. Поскольку векторы г0
и rv лежат в касательной плоскости, вектор N — [гв, нормален
к ней и уравнение этой плоскости имеет вид *)
(р —г, N) = 0
(3.32)
(здесь г — радиус-вектор точки касания, р — радиус-вектор текущей
точки касательной плоскости).
Пусть поверхность задана уравнением z = f(x, у), т. е. в век-
торной форме
г = ixH-jy + k/(x, у).
Напишем уравнение касательной плоскости для такой поверхности.
*) Точки, в которых [Гц. гД = 0, мы исключаем из рассмотрения.
122 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЁОМЕТРИИ [ГЛ. 3
Имеем
и, следовательно,
N==[*> гУн-j/;+k- (з-33)
Подставив в уравнение касательной плоскости (3.32) вместо р — г
вектор i(x — х0) -|- j (у — y0) + k(z — z0), а вместо нормального
вектора N его выражение (3.33), получим уравнение плоскости,
касающейся поверхности z=f(x, у) в точке (х0, у0, g0):
<3-34)
где значения четных производных f'x и /' берутся в точке касания
(х0. Уо)-
Если поверхность задана неявным уравнением F(x, у, д) = 0,
которое определяет z как дифференцируемую функцию от х и у, то
dF dF
дг дх дг __ ду
дх dF ’ ду dF '
дг дг
Подставив эти выражения вместо fxn f' в уравнение (3.33), полу-
чаем уравнение плоскости, касательной к поверхности F(x, y,z) — 0,
+(у - +1* - *o)=°-
Здесь значения F'x, F' и F'z также берутся в точке касания (х0, у0, z0).
6. Нормаль к поверхности. Вычислим направляющие косинусы
вектора
N —[гв, rj,
нормального к поверхности г = г(«, о). Так как
____________/ дх ду дг\ _____________/ дх ду дг \
Г“ \ ди ’ ди " ди) И Г° \ dv ’ dv ’ dv / ’
то вектор [rB, Tj,] имеет компоненты
ду дг дг дх дх ду
ди ди ди ди ди ди
ду дг , в= дг дх , с== дх ду , (3,35)
dv dv dv dv dv dv
а его направляющие косинусы соответственно равны
cos(N, х) = ~7= , cos(N, у) = —-----
/л24-в24-С2 /л2 + в2 4-с2
cos(N, z) = —== .
К Л2 4- В2 4- С2
ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПОВЕРХНОСТИ
123
§ 3) ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ПОВЕРХНОСТИ
В частности, если поверхность задана явным уравнением
*=/(*. у),
или в векторной форме уравнением
r = xi + yjH-/(x, y)k,
А =
в=
о
1
1
о
с =
т. е. в этом случае
cos(N, х') —— ......., cos(N, у) —
1 / . . ./2 . ./2
К1+/;2+<
(3.36)
7. Системы координат в касательных плоскостях. Рассмотрим
поверхность 2, в каждой точке М которой можно построить каса-
тельную плоскость. Полезно представлять себе поверхность, покры-
тую «чешуей» касательных плоскостей. Поверхность — это кривое
многообразие-носитель, ее касательные плоскости — это плоские
несомые многообразия. Этот наглядный образ будет полезен при
изучении дальнейшего материала
этой главы.
Выберем в каждой касательной
плоскости пару неколлинеарных У,'"
векторов (репер) и е2, кото-
рые определят в ней систему коор- /''''-^<5
динат. Этот репер, разумеется, '>^u=c(msT,
можно выбирать в каждой точке г/=сопэт\. /
произвольным образом. Однако за-
дание параметризации и, v, есте-
ственно, порождает в каждой из ка- Рис- 3-17-
сательных плоскостей некоторый
„ <5г дг „ „
специальный репер, именно репер 6] = -^-, е2 = Действи-
тельно, фиксируем значение параметра v = г»0 и будем менять пара-
метр и; тогда радиус-вектор г (и, v0) опишет на поверхности коор-
динатную кривую v — v0~ const (рис. 3.17). Касательный вектор
к этой кривой, т. е. т>0), будет лежать в касательной пло-
dr
скости к поверхности (см. п. 4). Аналогично вектор также лежит
в касательной плоскости к поверхности. Мы предполагаем, что через
124
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
[ГЛ. 3
каждую точку поверхности проходит одна и только одна линия
каждого из семейств « — const и v — const. Поэтому в каждой каса-
тельной плоскости возникает один и только один репер (ru, гс); если
эти векторы отличны от нуля, то они не коллинеарны, поскольку
по условию кривые и. = const и v = const ни в одной точке не
касаются друг друга. Опасно лишь обращение какого-либо из этих
векторов в нуль. Мы будем в дальнейшем считать, что параметриза-
ция на рассматриваемом куске поверхности такова, что гя #= 0 и го #= 0.
Итак, задание параметризации и, v на поверхности по-
рождает в каждой касательной плоскости невырожденный
репер е1 —ru, е2~ Tv т- е- некоторую аффинную систему ко-
ординат.
Выбор другой параметризации и, о порождает в несомых каса-
тельных плоскостях другой набор систем координат в! = г~, е2 = г~,
а в каждой из касательных плоскостей переход от одной параметри-
зации к другой порождает аффинное преобразование системы
координат.
Действительно, пусть
и —и (и, v), v = v(u, и)
— выражение старых параметров и, v через новые и, v. По правилу
дифференцирования сложной вектор-функции имеем
Таким образом, новый репер еР е2 выражается через старый еР е2
по формулам
Аналогично выражается старый репер еР е2 через новый ер е2.
§ 4. Измерение на кривой поверхности длин, углов и площадей*.
Первая квадратичная форма поверхности
Для решения многих физических, технических и геометрических
задач нужно уметь вычислять длины дуг, лежащих на поверхности,
углы между такими дугами, площади тех или иных частей поверх-
ности. Этот круг вопросов мы и рассмотрим сейчас. Основная идея
§ 4] ИЗМЕРЕНИЯ НА КРИВОЙ ПОВЕРХНОСТИ 125
всех излагаемых в этом параграфе рассуждений состоит, по существу,
в замене бесконечно малого элемента гладкой поверхности соответ-
ствующим элементом касательной плоскости. Поэтому нам полезно
начать с некоторых формул и понятий, относящихся к вычислению
длин, углов и площадей на плоскости.
1. Аффинная система координат на плоскости. Рассмотрим
плоскость и некоторый невырожденный репер еР е2 на ней. Любой
вектор г, лежащий в плоскости, можно представить в виде
Г = ^1 + ^2-
Запишем квадрат длины вектора г. Имеем
г2 = (г, r) = ^(e1( е1)4-2^(е1, е2) + £22(е2- е2).
Введя обозначения *)
£п = (еР ej), ^12 = (е1. е2), £22 = (е2, е2),
перепишем это равенство в виде
'2 = ^1^ + 2^iS2 + ^. (3-38)
Величины gu, gl2 и g22 определяются выбором репера еР е2. Легко
видеть, что через эти' величины (и, конечно, координаты соответ-
ствующих векторов) выражаются длины векторов, углы между век-
торами и площади параллелограммов, натянутых на два вектора.
Действительно, выражение для длины г вектора г получается из
(3.38). Далее, если
Г = 1А + ^е2, р = ЛА 4-ДА,
то
(Г. р) = gl 161Л1 4- £1261112 + £12ЬП1 4- £2262Д1-
Воспользовавшись формулой
мы можем выразить угол между векторами г и р через их коорди-
наты и коэффициенты gik.
*) Иногда также пользуются обозначениями
E = (elt е,), Л=(е1, е2), О=(е2, е2).
Полагая еще £2i= £12’ совокупность величины g.k (г, k = 1, 2) часто запи-
сывают в виде матрицы
126 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
Наконец, найдем площадь S параллелограмма, построенного на
векторах г и р. Как известно
5 = | [г, р]|.
поэтому
5 = I [&iei + £2е2, тцв1 + Tn2e2] I = I — 12П11 I [еР е2] |.
Но _______________
ЦеР e2]| = |e1||e2|sin(e1, е2) = |е1||е2|/1— cos2(elt е2) =
= е2)2 = V>u£22 —£?2-
Следовательно,
5 = — I М2 — £2П11-
Итак, знание величин gn, g12, g22 действительно позволяет вычи-
слять на плоскости длины, углы и площади, т. е. все метрические
величины.
2. Длина дуги на поверхности. Первая квадратичная форма.
Пусть задана поверхность
г = г («, <0-
Вычислим длину линии, расположенной на этой поверхности. Вы-
брав на этой линии за параметр длину дуги, ее уравнение можно
записать в виде
г = г(и(Г), v(l)).
_ dr
Так как вектор — имеет длину единица, то
dl2 = dr2.
Но
d г = ги du + ro dv,
следовательно,
dZ2 = r2 d«24-2(ru, r J du dv -|- r2 dv2.
Воспользуемся обозначениями
= £12 = (r„, гр), g^r2,
тогда
Ш2 = gu du2 + 2g12du dv + g22 dv2. (3.39)
Это выражение представляет собой квадратичную форму (относи-
тельно переменных du и dv), при этом, очевидно, положительно
определенную *). Она называется первой квадратичной формой
п
*) Квадратичная форма atk%fik называется положительно опре-
п
деленной, если У, aikl£k > 0 для любых g ,..., £я, кроме ...
§ 4) ИЗМЕРЕНИЯ НА КРИВОЙ ПОВЕРХНОСТИ 127
поверхности r = r(«, v). Коэффициенты £1Р £12 и g22 квадратичной
формы (3.39) — это, очевидно, те самые коэффициенты £п, £12, £22,
которые отвечают реперу ru, rv, в плоскости, касательной к нашей
поверхности в рассматриваемой точке. Эти коэффициенты зависят
от точки поверхности. Кроме того, они зависят, конечно, и от вы-
бора параметризации поверхности.
Первая квадратичная форма поверхности дает выражение, для
длины бесконечно малого элемента дуги. Длина некоторой конечной
кривой, лежащей на поверхности, получается отсюда интегрирова-
нием. Точнее, если кривая на поверхности задана уравнениями
и = и (t), V — V (/), t t2,
то ее длина равна
h ___________________________________
, Г _ Г / du\2 . о du dv . / dv \2 ,,
l— J у + 2^ ~dF~di'^^\~dF) dt
h
(вдоль этой кривой gw gi2 и g22 представляют собой, очевидно,
функции параметра /).
Примеры. 1. На плоскости задана декартова система коорди-
нат, определенная взаимно ортогональными единичными векторами
ej и е2. Если г0 — радиус-вектор начала этой системы координат,
то радиус-вектор произвольной точки плоскости равен
г = г0 + е,и 4- е2и
Мы получили уравнение плоскости, параметризованной декартовыми
координатами и и v на ней. Для этой параметризации
ra = eP ro = e2, £п=1. gi2 = 0, g22=l,
следовательно, для плоскости, параметризованной декартовыми коор-
динатами, первая квадратичная форма записывается так:
dP^dut + dv2.
Здесь несомое многообразие — касательная плоскость — совпадает
в каждой точке с несущим многообразием (тоже плоскостью), а по-
рождаемый в каждой из касательных плоскостей координатный репер
совпадает (с точностью до параллельного переноса) с координатным
репером еР е2 рассматриваемой плоскости.
2. Пусть на плоскости введены полярные координаты риф.
Тогда радиус-вектор произвольной точки плоскости можно записать
так:
г = г0 р («1 cos ф + е2 sin ф)
128 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
(в! и е2 — опять-таки единичные взаимно ортогональные векторы).
Это — уравнение плоскости, параметризованной полярными коорди-
натами. Здесь
гр = в! cos <р + е2 sin <р, fq> = р (— в! sin Ф + е2 cos ф)
и, следовательно,
£п = (гР’ гр)= Ь ^12 = (Гр. гФ) = 0, §-22 = (гф, Гф) = р2,
dl2 — dp2 -f- р2 t/ф2.
3. Рассмотрим сферу радиуса а, приняв на ней за параметры
долготу ф и широту 0*) (рис. 3.18). Ее урав-
/V нение в координатах ф и 0 имеет вид (про-
/^7 верьте это!)
If>=d \ г = r0-f- a [(i cosф4“j з!пф) cos 0 -f-k sin 0}.
в=0 этого УРавнения получаем
/ ге = — a (i созф 4~ j зшф) sin 04~ як cos 0,
Ч \ У г<р = а(—1 sin ф 4~ j cos ф) cos 0
S и, следовательно, здесь
Рис' 318’ dP = а2 (с/02 4- cos2 0 t/ф2).
4. Если поверхность задана явным уравнением
z — f(x, у),
т. е.
r = xi4-yj4-/(x, у)к,
то для нее
гх=*+кЛ. ry=j4-k/;
и, следовательно,
dp = (1 4- Л2) dx2 + 2/;/; dx dy 4- (1 4- /у ) dy2.
Упражнение. Написать первую квадратичную форму тора
в координатах ф и ф (см. уПр. в п. 3 § 3).
3. Угол между двумя кривыми. Углом между двумя пересе-
кающимися кривыми называется угол между их касательными
в точке пересечения. Пусть через точку на поверхности проходят
две кривые и пусть смещению по одной кривой соответствуют диф-
ференциалы координат du и dv, а смещению по другой — диффе-
ренциалы Ъи, bv. Векторы смещений можно записать так:
dr = radu~\-rvdv, 6r = ru6w 4~ г»в®.
♦) Отсчитываемую от экватора.
129
§ 4] ИЗМЕРЕНИЯ НА КРИВОЙ ПОВЕРХНОСТИ
Угол ф между ними определяется формулой
(dr, 6г)
v I dr II dr I
В частности, угол со между координатными линиями, т. е. между
векторами ги и г^, определяется формулой
cos со = .
V gl\g22
Если g-12 —0, то координатные линии на поверхности пересе-
каются под прямым углом. Такая координатная сеть называется
о ртогональной. В ортогональных координатах первая квадратичная
форма имеет вид
dP = gndui-\-g72dv2.
4. Определение площади поверхности. Пример Шварца. Пе-
рейдем теперь к рассмотрению площади кривой поверхности.
Прежде чем говорить о ее вычислении, нужно определить само по-
нятие площади поверхности. Введем это понятие следующим образом.
Пусть 2 — некоторая гладкая поверхность, ограниченная кусочно-
гладким контуром L. Разобьем эту поверхность с помощью некото-
рого числа кусочно-гладких кривых на части — «элементы» 2^
Z = 1, .. ., N, — и выберем в каждой из этих частей произвольную
точку Mt. Проведем через точку Mt касательную плоскость к по-
верхности 2 и спроектируем элемент 2г на эту касательную пло-
скость; мы получим на этой ка-
сательной плоскости некоторую /--jr—~7
квадрируемую плоскую фигуру S, / /
(рис. 3.19). //
Определение. Площадью / 1 /
поверхности 2 мы назовем /___________________________-/
предел (если он существует) сумм 3 1д
площадей этих проекций, взя-
тых по всем элементам разбие-
ния, при условии, что максимум диаметров этих элементов
стремится к нулю. Поверхность, для которой этот предел суще-
ствует, называется квадрируемой.
На первый взгляд кажется, что естественнее всего было бы определить
площадь поверхности S как предел, к которому стремятся площади поверх-
ностей вписанных в S многогранников, при условии, что максимум диаметров
их граней стремится к нулю (так же как длина кривой есть предел длин
вписанных в эту кривую ломаных). Однако еще в прошлом веке была обна-
ружена несостоятельность такого определения. Рассмотрим следующий при-
мер, принадлежащий Шварцу.
В цилиндр радиуса R и высоты Н впишем многогранник следующим
образом: разделив цилиндр i оризонтальными плоскостями на т равных
130
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
[ГЛ. 3
цилиндров высоты — каждый, разобьем каждую из возникающих «4-1
окружностей (включая сюда верхнее и нижнее основания исходного цилиндра)
на равные части п точками так, чтобы точки деления на каждой окружности
находились над серединами дуг соседних окружностей. Возьмем теперь две
соседние точки, лежащие на какой-либо окружности, и точку, лежащую не-
посредственно над или под серединой дуги, соединяющей эти две точки,
и построим на этих трех точках треугольник (рис. 3.20). Совокупность всех
таких треугольников образует много-
гранную поверхность, вписанную в ис-
ходный цилиндр. На вид этот многогран-
ник похож на голенище сапога, собран-
ное в гармошку. Его называют поэтому
сапогом Шварца (рис. 3.21).
Если теперь и п и т неограни-
ченно растут, то размеры каждого из
треугольников, составляющих вписан-
ный в цилиндр многогранник, стремятся
к нулю. При этом, однако, суммарная площадь этих треугольников вовсе не
обязана стремиться к 2nRH (боковой поверхности цилиндра); в зависимости
от того, как меняются пит, она может неограниченно расти, стремиться
к пределу, отличному от 2л/?//, или же вообще не иметь предела.
Действительно, элементарный подсчет показывает, что площадь одного
треугольника (при заданных т и п) равна
Число таких треугольников равно, очевидно, 2пт, поэтому сумма их
площадей есть _________________________
ап, т — sin ~ j/"Н2 + ^2/га2 — cos ’ (3.40)
Если теперь п и т стремятся к бесконечности, причем так, что т растет
быстрее, чем л2, то выражение (3.40) неограниченно растет. Если же п и т
т
меняются так, что отношение стремится к некоторому конечному пре-
делу q, то
lim mil — cos — = lim m2 sin2 q,
л, m->oo \ Л/ *
§ 4] ИЗМЕРЕНИЯ НА КРИВОЙ ПОВЕРХНОСТИ 131
и, следовательно,
lim +
п, пг->оо г *
Подбирая q, мы можем получить в пределе любое число, большее или
равное 2nRH, т. е. любое число, большее «истинной» площади цилиндра.
Истинное значение площади боковой поверхности цилиндра мы получим
лишь при q — 0, т. е. если т растет медленнее, чем п2.
Итак, попытка определить площадь кривой поверхности с помощью
вписанных многогранников оказалась неудачной даже для обыкновенного
круглого цилиндра. Легко понять причину, по которой способ, пригодный
для определения длины кривой, не годится для определения площади поверх-
ности. При достаточно мелком разбиении кривой (будем считать кривую
гладкой) направление хорды, соединяющей соседние точки деления, близко
к направлению касательной, проведенной в любой точке соответствующей
дуги. В случае поверхности это не так: многоугольная площадка сколь
угодно малых размеров может опираться всеми своими вершинами на
гладкую поверхность так, что угол между нормалью к площадке и поверх-
ности будет большим. При этом, очевидно, такой плоский элемент не может
служить хорошей аппроксимацией соответствующего элемента поверхности.
Это как раз и наблюдается в приведенном выше примере Шварца: если
т ,
q sj велико, то треугольники, образующие вписанную поверхность, почти
перпендикулярны боковой поверхности цилиндра. Образованный ими много-
гранник весь состоит из мелких складок. Это и служит причиной того, что
площадь поверхности такого многогранника может быть много больше
площади боковой поверхности цилиндра.
5. Вычисление площади гладкой поверхности. В предыдущем
пункте мы ввели определение площади кривой поверхности. Уста-
новим теперь для гладкой поверхности существование площади и
формулу, с помощью которой эта площадь может быть фактически
вычислена.
Теорема 3.1. Пусть параметрическое уравнение
г = Г (и, V)
определяет гладкую поверхность, ограниченную кусочно-глад-
ким контуром. Тогда эта поверхность квадрируема и ее
площадь равна
G=ff V ^12—^12 audv> (3-41)
D
где Sii’ Sa и S22— коэффициенты первой квадратичной формы
этой поверхности, a D — область изменения переменных и и v.
Доказательство. Разобьем поверхность S на части Вы-
брав в каждой из этих частей некоторую точку Mt, проведем в ней
касательную плоскость. Введем местную систему декартовых коорди-
нат, выбрав за начало точку Mt, нормаль в этой точке за направление
оси z, а касательную плоскость за плоскость ху. Координаты х, у
132
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ геометрии
[ГЛ. 3
и z произвольной точки поверхности Sz можно записать как функции
от и и и:
x — x(u,v), y~y(u,v), z — Z (и, V)*).
Проекция поверхности Sz на
определяется уравнениями
х = х(и, v),
касательную плоскость в точке
у = у(и, v), z = 0.
Пользуясь выражением для
линейных координатах (§ 6
этой проекции в виде
площади плоской фигуры в криво-
гл. 1), мы можем записать площадь
Dl
где Dt — та область, которую пробегают переменные и, v, когда
точка (х, у, z) пробегает элемент 2Z, а знак берется так, чтобы
все выражение было положительным.
Выражение
+
xtt xv
Уч Уч
можно переписать в виде, не
нат, а именно:
связанном с
выбором системы коорди-
V
ла
Уи
Уч
Если области Sz (а следовательно, и Z)z) достаточно малы, то
J / I rj I du dv = (| [ги, rj |
Di 1
+ ez [df,
где rfz — площадь области Dlt ut, vt — координаты точки Mt и
maxez—>0 при измельчении разбиения поверхности S. Таким образом,
сумма площадей проекций всех частичных поверхностей Sz на соот-
ветствующие касательные плоскости равна
2 |[гя. rj|
t=i I
(3.42)
*) Правильнее было бы писать х = xt (и, v), у = у; (и, v), z = zt (и, о),
потому что эти уравнения соответствуют г-й системе координат, связанной
с касательной плоскостью и нормалью в точке М(.
§ 4] ИЗМЕРЕНИЯ НА КРИВОЙ ПОВЕРХНОСТИ 133
Предел этого выражения при неограниченном измельчении разбиения
поверхности мы и назвали площадью поверхности. Этот предел
существует и равен интегралу
/ / Нг«> гД1du dv
D
(поскольку в (3.42) первое слагаемое есть интегральная сумма для
этого интеграла, а предел второго равен нулю). Для завершения
доказательства остается установить, что
|[Г«’ ГЛ =/^22-^2- <3-43)
Пусть <в— угол между векторами ги и го. Тогда
I [га. rjl=|rj |rw| sina> = | ги || 1—cos2o> =
= VrlTl — Т1Л cos2 ® /^1^22 — ^12-
Теорема доказана.
Замечание 1. С вектором [r„, rv] мы уже встречались выше
(п. 5 § 3). Там мы установили, что этот вектор имеет следующие
компоненты:
ду dz
ди ди
ду дг
dv dv
dz дх
ди ди
дг дх
dv dv
дх ду
ди ди
дх ду
dv dv
следовательно, длина его равна
У Л2 4-В2 4-С2.
поверхности можно пере-
Рис. 3.22.
Таким образом, формулу (3.41) площади
писать так:
о = f f У Л24-В24-С2du dv. (3.41')
D
Замечание2. Геометрический смысл
полученной нами формулы (3.41) состоит
в том, что подынтегральное выражение
У— ^12du dv (с точностью до бес-
конечно малых высших порядков) —
площадь «бесконечно малого параллело-
грамма», вырезаемого из поверхности S
двумя парами бесконечно близких координатных линий и —и0,
u = u0~ydu, v = v0 и v — v0-\-dv (рис. 3.22). Действительно, вер-
шины Ро, Ру Р% этого параллелограмма имеют криволинейные
координаты (я0, f0), (zz04-rf«, vQ) и («g, v9-ydv) соответственно,
134 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
Поэтому с точностью до малых выше первого порядка имеем
PoP\ = radu, P0P2=rvdv.
Площадь da параллелограмма, построенного на векторах Р^ и PqP2,
равна модулю их векторного произведения
da = | [ru, ro]|dudv.
В силу (3.43) это выражение можно переписать так:
do = /^11^22 — ^2du dv-
Рассмотрим важнейшие частные случаи формулы (3.41). Если
поверхность S задана явным уравнением
z=/(x, у),
то, как мы уже видели выше (см. п. 2, пример 4), в этом случае
£ц = 1 + fx £12 = f'xf'y- £22 = 1 + /у2’
откуда ____________
К£п£22 - £?2 = К1 + /ж -+-<•
Следовательно, площадь поверхности z = f (х, у) выражается фор-
мулой
0 = f <3-44)
D
причем в данном случае D — проекция поверхности S на плоскость ху.
Замечание 1. Так как
1/"1 4- f2 4- f'2 —--J----
" т J X г J у cos (N, г)
(см. п. 5 § 3), то формулу (3.44) можно переписать так:
ndx dy
cos (N, z) '
D
Смысл ее состоит в том, что элемент площади поверхности равен
его проекции на плоскость ху, деленной на косинус угла между
нормалями к этому элементу поверхности и к плоскости ху.
Замечание 2. Если поверхность S состоит из конечного числа
кусков, каждый из которых представим уравнением вида z=f(x, у),
то ее площадь можно вычислить, применив формулу (3.44) к каж-
дому такому куску в отдельности.
Пример. Найти площадь части параболоида z — x2-j-y2, лежа-
щей внутри цилиндра х2-|-у2=а2.
§ 5] КРИВИЗНА ЛИНИЙ НА ПОВЕРХНОСТИ 135
Решение. Искомая площадь равна
о= J* J ]/ 1 -|-4х2-|- 4y2dx dy.
x2+y!<as
Переходя к полярным координатам, получаем
2л а 2л
о=J* dtp J /4r2 + lrdr у [(4г24-=
об б
2л
=т?/ [(4а2 +1)5/2 -
о
Предположим теперь, что поверхность задана неявным уравне-
нием F(x, у, z) = 0. Если поверхность такова, что это уравнение
можно однозначно разрешить относительно z (это равносильно
тому, что наша поверхность пересекается любой вертикальной пря-
мой не более чем в одной точке), то, воспользовавшись правилами
дифференцирования неявных функций, получаем
dF . dF
dz dx dz _ dy
dx ' dF ’ dy dF '
dz ~dz
Подставляя эти выражения вместо f'x и f в формулу (3.44), получаем
d (3 451
о= -—>----——--------------— dx dy. (3.45)
о | d? |
Здесь опять-таки, как и в формуле (3.44), подынтегральная функ-
ция представляет собой не что иное, как обратную величину косинуса
угла между нормалью к поверхности и осью z.
Упражнение. Найти площадь части поверхности конуса
х2-(-у2 — z = О, лежащей внутри цилиндра x2-j-y2—a2.
Ответ. о = 2 ]/2на2.
§ 5. Кривизна линий на поверхности.
Вторая квадратичная форма
В предыдущих параграфах мы получили формулы для вычисления
длин кривых на поверхности, углов между кривыми и площади
поверхности. Однако эти величины еще не определяют форму поверх-
ности. Например, цилиндр и плоскость — это разные поверхности,
136
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
[ГЛ. 3
хотя цилиндр можно развернуть на плоскость так, что при этом
все углы, длины и площади сохраняются. Для изучения формы
поверхности мы примем следующий метод: взяв в рассматриваемой
точке нормаль к поверхности, будем проводить через эту нормаль
всевозможные плоскости (нормальные плоскости) и изучать форму
получаемых при этом сечений поверхности (нормальных сечений).
1. Нормальные сечения поверхности и их кривизна. Рассмо-
трим поверхность S, заданную уравнением
г = г (и, v).
Вектор-функцию г (и, v) мы будем считать здесь и далее дважды
непрерывно дифференцируемой. Возьмем на поверхности S некото-
Рис. 3.23.
рую точку Мо и выберем на норма-
ли к S, проведенной в этой точке,
определенное направление, т. е. опре-
деленный единичный вектор п. Пусть
у — одно из проходящих через Мо
нормальных сечений. Таким образом,
кривая у лежит в плоскости, проходя-
щей через единичный вектор и, нор-
мальный к 5 в точке Мо (рис. 3.23).
у представляет собой плоскую кривую,
и форма этой кривой в окрестности
точки Л40 вполне определяется ее кри-
визной k в этой точке и направлением
вогнутости (по отношению к выбранному направлению нормали в
точке Л40). Для вычисления кривизны кривой у запишем уравнение
этой кривой в виде
т = г(и(1), v(l))
(3.46)
(I — натуральный параметр) и воспользуемся 1 -й формулой Френе
dt d2r
откуда
(3.47)
Единичный вектор V направлен, очевидно, по нормали К поверх-
ности S в точке Л40, и следовательно, он или совпадает с и (если
направление вогнутости сечения у совпадает с выбранным направле-
нием нормали к S), или отличается от п знаком (если эти напра-
вления противоположны). Для того чтобы учесть одновременно и
величину кривизны и направление вогнутости сечения, введем ве-
личину
г (d2r \
k ~ \ dl2 ’ П) ’
(3.48)
§ 5]
КРИВИЗНА ЛИНИИ НА ПОВЕРХНОСТИ
137
которую мы назовем но рмальной кривизной поверхности 2
н точке Мо в направлении сечения у. Из сказанного ясно, что
/г— |А|. При вращении вокруг п плоскости, в которой лежит
сечение у, будет меняться и нормальная кривизна k — k (у); она будет
теперь «следить» не только за формой нормального сечения, но и
за его направлением вогнутости. Так, например, если поверхность
в точке 7140 имеет форму седла, как
на рис. 3.24, то для сечения уг нор-
мальная кривизна %! будет положи-
тельна, поскольку вектор V] главной
нормали к Yj совпадает с п, а для
сечения у2 нормальная кривизна k2 бу-
дет отрицательна, поскольку v2 = — п.
В дальнейшем, говоря о нормаль-
ных сечениях поверхности, мы будем
рассматривать только соответствую-
щую нормальную кривизну (3.48), а
не кривизну, определяемую форму-
лой (3.47). Эту нормальную кривизну мы будем дальше обозначать
просто буквой k, опуская значок—над ней.
Величину
мы будем называть радиусом нормальной кривизны поверхности 2
(в данной точке и в данном направлении). Неотрицательная вели-
чина |/?| есть, очевидно, радиус кривизны соответствующего нор-
мального сечения. Поскольку k может обращаться в нуль, для R
мы должны допускать и бесконечные значения.
Выведем теперь формулу для вычисления нормальной кривизны k.
Для этого воспользуемся уравнением (3.46) кривой у и вычислим
Введем для сокращения записи обозначения
_ д2г д2г _ о2г
г““ — Tzt2" ’ — ди di ' — dv2 ‘
Из уравнения (3.46) кривой у получим, что
d2r d / du . dv\
~dP ~~dl \а~дТ'Х,и~ЗЛ } ~
{du\2 . n du dv , (dv\2 . d2u , d2v .n,
Г““\5Г) + r"ja \^г) “I- Г“ Hd2"^ Гу~сПг' С3-49)
Векторы гц и rv лежат в касательной плоскости. Следовательно,
они ортогональны и, т. е.
(г„, п) = (гр, п) = 0.
138 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
d2t
Поэтому, подставив в формулу (3.48) выражение (3.49) для •
получим
= <Г., п>«У + 2(г„. п)(^у. (3.50)
2. Вторая квадратичная форма поверхности. Запишем полу-
ченную нами формулу (3.50) нормальной кривизны поверхности
в более удобном виде. Введя обозначения
= П), b12 = (ruv, и), 022 = (rTO, п), (3.51)
перепишем равенство (3.50) следующим образом:
. __ 1 __ bu du2 -]- 2Z>12 du dv-т- b22 dv2
r — ~r~~ dP
(3.52)
В знаменателе здесь стоит dP, т, е. первая квадратичная форма
поверхности. Числитель тоже представляет собой квадратичную форму
(относительно du и dv). Она называется второй квадратичной
формой поверхности и играет в теории поверхностей (наряду
с первой квадратичной формой) фундаментальную роль. Вторую ква-
дратичную форму поверхности мы будем в дальнейшем обозначать
символом <р2. Таким образом,
<р2 = budu2 + 2£12 du dv + b22 dv2,
где blx, b]2 и b22 определены равенствами (3.51).
Пример. Рассмотрим поверхность, заданную уравнением
z=f{x, у),
т. е. в векторной форме
r = xi+yj-|-/(x, y)k.
Здесь
TXX = f"XX^ 'xy = fx^ ryy=fyyk-
Следовательно,
= /LC0S(n- bVi^f"XyC0S(n- Z)' b22 = /yyCOS(n’ *)•
t. e.
(P2 = (fxx(ix2-i-2fXydxdy + fyydy)C0S(n’ (3.53)
Таким образом, в этом случае вторая квадратичная форма предста-
вляет собой, с точностью до множителя cos(n, z), совокупность
членов второго порядка в разложении функции z = у) по фор-
муле Тейлора.
§ 5]
КРИВИЗНА ЛуНИЙ НА ПОВЕРХНОСТИ
139
Замечание. Мы уже видели, что первая квадратичная форма
определяет «метрику» поверхности: с ее помощью на поверхности
измеряются длины, углы и площади. Вычисление этих величин опи-
ралось, по существу, на возможность заменять в первом приближе-
нии бесконечно малый элемент поверхности соответствующим эле-
ментом касательной плоскости. Вторая квадратичная форма — это
мера того, насколько поверхность
уклоняется в окрестности данной ,_____________>
точки от касательной плоскости, /, м р
проведенной через эту точку. ° 1 s'
Чтобы убедиться в этом, вы- /dl
числим расстояние между близкой / /_________________/
к Мо точкой М поверхности S и Д /
касательной плоскостью, проведен- 1
ной в точке Мд (рис. 3.25). Рас- рис 325
смотрим проходящее через точки Мо
и М нормальное сечение. Искомое
расстояние равно, очевидно, расстоянию МР от М до касательной
к кривой у. Но это расстояние с точностью до малых высшего по-
рядка (см. п. 6 § 2) равно
~ k dl2 = у (Z>n du2 -ф- 2£12 du dv -|- b22 dv2),
причем знак этого выражения указывает направление, в котором по-
верхность отходит от касательной плоскости.
Можно было бы само понятие второй квадратичной формы ввести,
исходя из задачи о вычислении расстояния от точки поверхности до
касательной плоскости, проведенной через близкую точку.
Упражнения. 1. Показать, что для плоскости (при любой ее
параметризации) вторая квадратичная форма тождественно равна нулю.
2. Вычислить вторую квадратичную форму для тора в коорди-
натах <р и ф (см. пример 1 п. 1 § 3).
3. Индикатриса кривизны. Радиус кривизны = нормаль-
ного сечения у в точке 7И0 зависит от направления, в котором про-
ведено сечение у. Чтобы изобразить эту зависимость наглядно, вос-
пользуемся следующим приемом. Отложим от точки /Ио на касательной
плоскости в каждом направлении вектор р, длина которого равна
]Л|7?|, где R — радиус нормальной кривизны поверхности в этом
направлении. Этот вектор можно, очевидно, записать в виде
где т — единичный вектор, касательный к соответствующему нор-
мальному сечению.
140 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
Геометрическое место концов этих векторов представляет собой
некоторую кривую, лежащую в плоскости, касательной к S в точке Л40
(рис. 3.26). Эта кривая называется индикатрисой кривизны по-
верхности S в данной точке.
у-------------------Найдем уравнение индикатрисы
''X / кривизны.
/ г*— / Примем за координатные век-
/ торы в касательной плоскости гй
' х. и го. Так как
/'---- __________________________dr___ du . dv
--------------------------2 Х — dl — Г“ dl Г® dl ’
ТО
Рис. 3.26. г___ da г________ dv
т. е. каждая точка индикатрисы кривизны имеет, в выбранном базисе,
координаты
Воспользуемся равенством
1 , I du\2 , п, du dv t . / dv\
~R—b^\di) + 2612 W’dr + M’^T
Умножив его на |/?|, получаем, что
»п (пж •&)'+(иж -^) (иж 49+
+»и(ИЖ-£)'=±|.
т. е. что £ и г) удовлетворяют уравнению
Ы24-2Ып+М2=±1- (3-54)
Это — уравнение некоторой центральной кривой второго порядка
с центром в начале координат *).
Таким образом, индикатриса кривизны представляет собой цен-
тральную кривую второго порядка **) с центром, находящимся в рас-
сматриваемой точке поверхности.
4. Главные направления и главные кривизны поверхности.
Формула Эйлера. Уравнение индикатрисы кривизны, как и уравне-
ние всякой центральной кривой второго порядка, можно привести
*) Последнее видно из того, что в уравнении отсутствуют члены первой
степени.
**) Точнее, здесь имеются две такие кривые: Ь^2 + 2/>12Ц &22П2 — 1
и Лп£2 26]2gt) -)- Ьгг’П2 — —1, уравнения которых отличаются лишь свобод-
ным членом. Подробнее о виде индикатрисы кривизны см. п. 7.
§ 51 КРИВИЗНА ЛИНИИ НА ПОВЕРХНОСТИ 141
к главным осям, т. е. вместо базисных векторов ги и го можно
выбрать в касательной плоскости два других базисных вектора так,
чтобы они были взаимно ортогональными и единичными и чтобы
в уравнении индикатрисы кривизны отсутствовал член с произведе-
нием координат. Для этого нужно, чтобы новые базисные векторы
были направлены по главным осям индикатрисы кривизны. Эти два
направления мы назовем главными направлениями нашей поверх-
ности (в данной точке).
При таком выборе системы координат в касательной плоскости
уравнение индикатрисы принимает вид
px2-f- qy2 = ± 1. (3.55)
Пусть <р — угол между главным направлением, принятым за напра-
вление оси х, и произвольным нормальным сечением. Тогда, очевидно,
х = | cos ф, у = У\ R | sin ф,
где R — радиус кривизны данного нормального сечения. Подставив
эти выражения х и у в уравнение (3.55) и вспомнив, что правая
часть этого уравнения представляет собой отношение | R | к R,
получим
рсо82ф + <7 3И12ф = -^- = &. (3.56)
,Т ,1,1
Назовем главными кривизнами пх = -^~ и л2 = -^- поверхности
в данной точке нормальные кривизны, отвечающие главным напра-
влениям индикатрисы кривизны в этой точке. В выбранной нами
л П
системе координат это — направления ф = 0 и ф-^-, поэтому
Aj = р, k2 = </•
Таким образом, равенство (3.60) принимает вид
k — kx cos2 ф-J- k2 sin2 ф, (3.57)
или
4г = 4~СО82ф + -1^-51П2ф. (3.57')
A Al А 2
Это — так называемая формула Эйлера. Она дает выражение
нормальной кривизны поверхности по любому направлению через
главные кривизны.
' Из формулы Эйлера сразу видно, что главные кривизны — это
экстремальные значения нормальной кривизны. Действительно, если
kx = k2, то k не зависит от ф и здесь любое направление будет
142 ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ [ГЛ. 3
экстремальным *). Пусть kx #= k2, например kx > k2. Тогда kx—k2 > О
и, переписывая формулу Эйлера в виде
k — (kx — /г2) cos2 ф Н- k2 (cos2 ф -j- sin2 ф) = (ftj — fe2) c°s2 Ф + fe2>
получаем, что kx~^- k2 при каждом ф.
Эти экстремальные свойства главных кривизн дают удобный способ
для их фактического вычисления.
5. Вычисление главных кривизн. Из формулы Эйлера (3.57)
легко усмотреть, как нормальная кривизна А(ф) зависит от напра-
вления ф. График зависимо-
на
что
&о»
че-
при
как
л,
сти k ОТ ф
рис. 3.27. Из
при каждом
> ^2’
ф.
Так
на
же нор-
изображен
него видно,
заданном
существуют
тыре значения угла
У7 которых k (ф) = Ло.
углы, отличающиеся
определяют одно и то
мальное сечение, то каждому k0
отвечают два нормальных се-
кривизна равна k0. Но если k0 — kx
чения, для которых нормальная
или k0 = k2, то эти два нормальных сечения сливаются в одно.
Иными словами, главные кривизны — это те значения нор-
мальной кривизны, каждому из которых отвечает одно и
только одно нормальное сечение нашей поверхности. Форму-
лу (3.52) для определения нормальной кривизны как функции на-
правления можно переписать так:
(5ц — Agu) du2 + 2 (&12 — *gi2) du dv + (b22 — kg22) dv2 = 0,
или, деля на dv2 и полагая -т- — t (где t определяет сечение),
(£ц — kgn) t2 + 2 (£12 — kgn) t + (р22 — kg^ = 0. (3.58)
В соответствии с изложенным выше это квадратное уравнение для t,
отвечающих главным направлениям и только для них, имеет не два,
а лишь один корень. Для этого в свою очередь необходимо и доста-
точно, чтобы дискриминант уравнения (3.58) обращался в нуль.
*) Точка, в которой kx — k2, называется точкой округления или омби-
лической точкой. Можно показать, что единственная поверхность, целиком
состоящая из точек округления, — это сфера.
§ 5] КРИВИЗНА ЛИНИЙ НА ПОВЕРХНОСТИ 143
Итак, для нахождения главных кривизн мы получаем уравнение
(*12 kg12)2 (Ьц ^н) (*22 kg22) — 0’ (3.59)
или
^2~ kg„ =0_ (35д/)
*12 kgl2 *22 ^g22
6. Полная кривизна и средняя кривизна. Во многих случаях
вместо главных кривизн kx и k2 удобнее рассматривать их про-
изведение
K = kxk2 (3.60)
и полусумму
+ = |(*l + *2). (3-61)
К называется полной или гауссовой кривизной поверхности, а Н—ее
средней кривизной.
Из квадратного уравнения (3.59') сразу получаем формулы
bub22 — ^11*22“ 2g12*12 +^22*11 ,Q
А =----------2~ . л =-------Т7---------2“\--• (3 • о2)
£1^22 ~ #12 2 (^1^22-^2)
Пример. Вычислить полную и среднюю кривизны для гипербо-
лического параболоида z — х2 — у2.
Решение. = 1 + 4х2, g12 = —4ху, g22=l + 4y2; *п = 2,
Z>12 = 0, b22 = — 2. Значит,
К — ~4 н — 4<-*2—+)
Л 1+4х24-4у2 ’ 14-4х24-4у2 ’
В частности, - в начале координат К — — 4, Н = 0.
7. Классификация точек на поверхности. Каждой точке Мо
дважды непрерывно дифференцируемой поверхности S мы сопоставили
определенную кривую — индикатрису кривизны в этой точке. Урав-
нение индикатрисы можно, как мы знаем, привести к виду
ZjjX2 + k2y2 = ± 1, (3.63)
где и k2 — главные кривизны нашей поверхности в точке Л40.
Тип кривой (3.63) зависит от знака произведения ktk2. Рассмотрим
возможные здесь три случая.
1) Ajftj > 0. Можно считать, что kx >0, k2 > 0, так как, изменив
направление нормального вектора п, мы можем изменить знаки у kx
и k2 на противоположные. При > 0 и k2 > 0 уравнение (3.63)
определяет эллипс, если в нем справа стоит 4-1, а уравнение, в ко-
тором справа стоит —1, никакой кривой не соответствует.
Точки, в которых kxk2 > 0 (т. е. индикатриса кривизны — эллипс),
называются эллиптическими точками.
144
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
[ГЛ. 3
2) kxk2 < 0. В этом случае уравнение (3.63) определяет гиперболу
или, точнее говоря, две гиперболы с общими асимптотами. Одна из
них отвечает правой части -|-1, а другая — правой части —1. Точки,
в которых kYk2 < 0 (индикатриса кривизны — пара гипербол), назы-
ваются гиперболическими.
3) kxk2 = 0. Если при этом одна из главных кривизн отлична
от нуля, то уравнение (3.63) определяет пару параллельных прямых.
а) б)
6}
Рис. 3.28.
Точки, в которых kxk2 = 0 (но одна из главных кривизн отлична
от нуля), называются параболическими.
Если в данной точке kx = k2 = 0, то в ней понятие индикатрисы
кривизны теряет смысл. Точки, где й1 = й2 = 0, называются точками
уплощения поверхности.
Итак, тип точки определяется знаком полной кривизны /( = klk2
в этой точке. Поскольку
,, ^11^22— ^12
А о ’
gllg22~gl2
а величина gng12— g2i2 всегда положительна, то тип точки опреде-
ляется знаком дискриминанта bub22— Ь^2 второй квадратичной формы.
Легко представить себе строение поверхности в окрестности
точки каждого из трех типов. Пусть точка Л10 — эллиптическая.
Тогда Aj и k2 имеют одинаковые знаки, а следовательно, в силу
формулы Эйлера, все нормальные кривизны в данной точке имеют
одинаковые знаки. Геометрически это означает, что в рассматриваемой
точке все нормальные сечения имеют одно и то же направление во-
гнутости. В окрестности эллиптической точки поверхность похожа
на эллипсоид и имеет вид, изображенный на рис 3.28, а.
Рассмотрим теперь гиперболическую точку. В ней главные кри-
визны имеют разные знаки. Поэтому здесь существуют нормальные
сечения с различными направлениями вогнутости. Поверхность в окре-
стности такой точки имеет седлообразный вид (см. рис. 3.28, б).
Несколько сложнее строение поверхности в окрестности парабо-
лической точки. Здесь имеется одно направление, по которому нор-
мальная кривизна равна нулю. По всем остальным направлениям нор-
мальная кривизна имеет один и тот же знак. Типичным примером
§ 5j КРИВИЗНА ЛИНИЙ НА ПОВЕРХНОСТИ 145
параболической точки является любая точка обыкновенно круглого
цилиндра (см. рис. 3.28, в), однако возможны и другие случаи, на
которых мы не будем останавливаться.
Рассмотрим следующий пример. Пусть поверхность задана урав-
нением
z = f(x, у)
и пусть в точке (х0, у0) выполнены необходимые условия экстре-
мума, т. е. -^- — 0, -^- = 0. Тогда нормаль к поверхности в этой
точке совпадает с направлением оси z и, как показывает простое вы-
числение, коэффициенты второй квадратичной формы поверхности
в этой точке равны
ЬП=ГХХ’ bU = b21=fXV‘
и, следовательно,
(з-64)
Мы видим, что тип рассматриваемой точки определяется знаком вы-
ражения (3.64). Но, как известно, знаком этого же выражения опре-
деляется наличие или отсутствие экстремума в данной точке. Таким
образом, мы получаем следующие связи между типом точки и нали-
чием или отсутствием в этой точке экстремума:
эллиптическая точка — экстремум есть (j"xxfyy — f'xy > 0),
гиперболическая точка—экстремума нет (jxxfyy—/"у<0),
параболическая точка — неопределенный случай
(f f =
V xxJ уу J ху /
Упражнение. Каков тип точек, лежащих на: 1) эллипсоиде,
2) двуполостном гиперболоиде, 3) однополостном гиперболоиде,
4) эллиптическом параболоиде, 5) гиперболическом цилиндре.
8. Первая и вторая квадратичные формы как полная система
инвариантов поверхности. Мы ввели для поверхностей первую
квадратичную форму и показали, что эта форма определяет на по-
верхности длины, углы и площади. Далее, мы показали, что вторая
квадратичная форма определяет нормальные кривизны поверхности,
т. е. вид поверхности в окрестности каждой точки. Естественно
поставить следующий вопрос: в какой мере поверхность определяется
своими двумя квадратичными формами. Ответ на него дает следую-
щая теорема.
Теорема 3.2. Если на поверхностях S « S* можно ввести
координаты и и v и, соответственно, и* и о* так, чтобы в тех
точках, в которых и = и*, v = v*, совпадали бы и соответ-
146
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
[ГЛ. 3
стелющие квадратичные формы, т. е. чтобы в этих точках
выполнялись равенства
— &12~ё12’ ^22~ ^22’
^П = ^1Г ^12 ^12’ ^22 ~^22'
то такие две поверхности конгруэнтны, т. е. могут отли-
чаться друг от друга только положением в пространстве.
Таким образом, первая и вторая квадратичные формы играют для
поверхностей ту же роль, что и натуральные уравнения для кривой:
они образуют полную систему инвариантов, определяющую по-
верхность с точностью до ее положения в пространстве.
Мы не будем проводить здесь доказательство сформулированной
теоремы. Его можно найти почти во всех учебниках дифференциаль-
ной геометрии*).
§ 6. Понятие о внутренней геометрии поверхности
1. Наложимость поверхностей. Необходимое и достаточное условие
наложимости. Выше мы рассматривали поверхности как твердые тела,
считая, что они могут перемещаться в пространстве, но не меняют свою
форму. В некоторых случаях естественнее, однако, другая точка зрения,
состоящая в том, что поверхности рассматриваются как нерастяжимые,
но абсолютно гибкие пленки. При этом изучаются те свойства поверхности,
которые не меняются при ее изгибании, т. е. при деформациях, не связанных
с растяжением.
Если одна поверхность может быть совмещена с другой при помощи
изгибания, то эти поверхности, называются наложимыми друг на друга.
Иначе говоря, две поверхности называются наложимыми друг на друга, если
между их точками можно установить взаимно однозначное соответствие так,
чтобы линии, переходящие друг в друга при этом соответствии, имели одну
и ту же длину.
Естественно возникает вопрос: каковы условия, необходимые и доста-
точные для того, чтобы две поверхности были наложимы друг на друга.
Ответ на него дает следующая теорема.
Теорема 3.3. Для того чтобы две поверхности 2 и 2* были нало-
жимы друг на друга, необходимо и достаточно, чтобы эти поверх-
ности допускали такую параметризацию и, v, при которой в точках
и 44* £2*, имеющих одинаковые координаты и, v, соответствую-
щие коэффициенты их первых квадратичных форм были бы равны.
Доказательство. Достаточность этого условия очевидна: если та-
кая параметризация возможна, то, поставив в соответствие друг другу те
точки поверхностей 2 и 2*, которые имеют одинаковые координаты и, v,
мы получим в соответствующих точках одинаковые коэффициенты первых
квадратичных форм
£ц = £11> Sl2 = Sl2’ S22 — S22-
Но тогда, параметризовав две соответствующие друг другу линии на этих
поверхностях с помощью одного и того же параметра t (т, е. так, чтобы
*) См„ например, А. П. Н о р д е и, Дифференциальная геометрия,
Учпедгиз, 1948, стр. 188.
§ 61 ПОНЯТИЕ О ВНУТРЕННЕЙ ГЕОМЕТРИИ ПОВЕРХНОСТИ 147
в соответствующих друг другу точках этих линий значение параметра было
одно и то же), мы получим, что
_______ . . .
С, Г / du У , n_ du dv „ ( dv\2
J V g 11 \dt) +2Si24F~dT + g22\dF)
h
a65>
т. e. что длины этих дуг равны.
Обратно, если две поверхности 2 и 2* наложимы друг на друга, то на
этих поверхностях можно ввести общую параметризацию, введя каким-либо
образом координаты и, v на поверхности 2 и считая, что точка Л1*£2* имеет
те же внутренние координаты и, v, что и отвечающая ей точка М. Рас-
смотрим теперь на поверхностях 2 и 2* две отвечающие друг другу линии
и параметризуем их так, чтобы их точки, совпадающие при наложении,
отвечали одному и тому же значению параметра t. Тогда равенство длин
дуг этих кривых запишется в виде (3.65). Так как это равенство будет иметь
место при всех и t2, то из него получим
du2 -j- 2£12 du dv 4- g22 dv2 = du2 4- 2^*2 du dv 4- g22 du2.
Но это последнее равенство должно выполняться тождественно по du
и dv, так как оно справедливо для любых соответствующих друг другу кри-
вых, проходящих через любые точки и в любых направлениях. Тождествен-
ное равенство двух квадратичных форм влечет совпадение их коэффициентов.
Таким образом,
£ц = #11> Д12 = Д12> Sil= Sl1<
что и требовалось доказать.
2. Внутренняя геометрия поверхности. Совокупность тех свойств по-
верхности, которые не меняются при ее изгибании, называется внутренней
геометрией поверхности. Мы сейчас показали, что две поверхности изгибаемы
друг в друга в том и только том случае, если на них можно ввести одну
и ту же первую квадратичную форму. Следовательно, к внутренней геомет-
рии поверхности относятся те и только те ее свойства *), которые могут
быть выражены через первую квадратичную форму. Таким образом, внут-
ренняя^ геометрия поверхности определяется ее первой квадратичной
формой. К внутренней геометрии поверхности относятся, следовательно,
длины линий, лежащих на поверхности. Далее, поскольку угол между лини-
ями на поверхности и площадь поверхности выражаются через коэффициенты
первой квадратичной формы (см. п. 2 и 4 § 4), то эти величины также отно-
сятся к внутренней геометрии.
Замечательно то обстоятельство, что внутренним свойством поверхности
является и ее полная кривизна К. Именно, Гауссом была получена для пол-
ной кривизны в ортогональных координатах следующая формула:
________1 J д / 1 । д / 1 dgn\ 1
^Vgugzi \ди \ У gltg22 ди dv \ Vgng22 dv / J’
в которую входят только коэффициенты первой квадратичной формы. В то же
время ни средняя кривизна, ни главные кривизны при изгибании не сохра-
няются.
*) Речь идет, конечно, о тех свойствах, которые относятся к самой по-
верхности и не зависят от выбора ее параметризации.
148
ЭЛЕМЕНТЫ ДИФФЕРЕНЦИАЛЬНОЙ ГЕОМЕТРИИ
[ГЛ. 3
Сам термин «внутренняя геометрия» применительно к свойствам, сохра-
няющимся при изгибании поверхности, означает, что они присущи именно самой
поверхности и не связаны с ее вложением в пространство. Поясним это сле-
дующим «мысленным экспериментом». Представим себе, что поверхность
населена некими двумерными существами, достаточно разумными, но не имею-
щими никаких выходов в окружающее эту поверхность пространство. Такие
существа могли бы построить геометрию своего «мира», назвав «прямой»,
проходящей через две точки, кратчайшую из всех линий (лежащих целиком
на поверхности), проходящих через эти точки (например, на сфере такой
«прямой» будет дуга большого круга), и, далее,
определить «треугольники», «многоугольники» и
I । I т. д. и изучать свойства этих фигур (не выходя
/II в окружающее поверхность пространство). Та
/ | \ геометрия, которая при этом получилась бы, и
/ j \ является внутренней геометрией нашей поверх-
/ • \ ности. При этом наши гипотетические существа
/ । \ никоим образом не смогли бы отличить одну по-
/ | \ верхность от любой другой, на нее наложи-
У' । мой *). Например, внутренняя геометрия плоско-
| сти — это обычная планиметрия, которую все
1 изучают в школе. Однако все теоремы плани-
_ I метрии останутся верны, если вместо плоскости
рассматривать любую наложимую на нее по-
\ верхность, скажем параболический цилиндр. А
\ | / вот внутренняя геометрия сферы существенно
\ j / отличается от геометрии плоскости: например, на
\ । / сфере сумма углов треугольника всегда больше,
| ! / чем л.
V~i 3. Поверхности постоянной кривизны. Рас-
' смотрим поверхность, полная кривизна К кото-
Рис. 3.29. рой в каждой точке имеет одно и то же зна-
чение. Такие поверхности называются поверх-
ностями постоянной кривизны!' Из инвариантности полной кривизны при
изгибаниях следует, что две поверхности постоянной кривизны наложимы
друг на друга только тогда, когда их кривизны равны. Можно показать,
что верно и обратное: две поверхности одной и той же постоянной кри-
визны наложимы друг на друга. Таким образом, каждая из этих поверхностей
полностью (с точки зрения внутренней геометрии) характеризуется одним
числом — своей полной кривизной К,-
Геометрические свойства поверхности постоянной кривизны существенно
зависят от знака кривизны, поэтому следует отдельно рассматривать поверх-
ности положительной, нулевой и отрицательной кривизны.
Поверхностью нулевой кривизны является плоскость. Ее внутренняя
геометрия — это обычная планиметрия. Ту же самую внутреннюю геометрию
имеет и любая другая поверхность нулевой кривизны.
«Канонической моделью» поверхности положительной кривизны К может
служить сфера радиуса У?= -2—-. Внутренняя геометрия этой поверхности
*) Соображения о том, когда возможно, а когда невозможно «внутренним
Образом» отличить прямое от кривого, имеют смысл не только примени-
тельно к двумерным объектам — поверхностям, но и для объектов большей
размерности, в частности и для трехмерного пространства. Эти вопросы
очень важны с точки зрения общих представлений о вселенной. К сожале-
нию, мы не имеем возможности здесь их рассматривать.
§ б] ПОНЯТИЕ О ВНУТРЕННЕЙ ГЕОМЕТРИИ ПОВЕРХНОСТИ 149
отлична от привычной нам планиметрии: если под «прямыми» понимать
кратчайшие линии (т. е. в случае сферы дуги больших кругов), то верны
следующие утверждения: любые две «прямые» при неограниченном их про-
должении пересекаются, сумма углов треугольника больше двух пря-
мых и т. д.
Поверхностью постоянной отрицательной кривизны К < 0 является так
называемая псевдосфера, которая изображена на рис. 3.29. Она представляет
собой поверхность, образованную вращением трактрисы, т. е. кривой, опре-
деляемой уравнениями
х~ a (cos /-f-In tg-|j, у = sin Д
Изображенная на рис. 3.29 поверхность не гладкая: она имеет ребро.
Это обстоятельство не случайно: можно показать, что в трехмерном про-
странстве не существует неограниченно продолжимой гладкой поверхности,
имеющей постоянную отрицательную кривизну. Внутренняя геометрия псевдо-
сферы отлична и от обычной планиметрии и от геометрии на сфере. Она
совпадает с так называемой геометрией Лобачевского, в которой сумма
углов треугольника меньше двух прямых, через данную точку проходит
бесконечно много прямых, не пересекающих данную, и т. п. Не имея воз-
можности останавливаться здесь на всех этих вопросах (имеющих, между
прочим, глубокие связи с современными физическими представлениями,
в частности с теорией относительности), мы отсылаем интересующегося ими
чатателя к соответствующей специальной литературе *).
*) См., например, Н. В. Ефимов, Высшая геометрия, Физматгиз, 1961.
ГЛАВА 4
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
Нахождение массы материальной кривой по ее плотности, вычисле-
ние работы силового поля вдоль некоторого пути и ряд других
задач требуют введения так называемых криволинейных интегралов,
т. е. интегралов от функций, заданных вдоль кривых. Этому поня-
тию, важному как для самого анализа, так и для его физических
приложений, посвящена настоящая глава.
Рассмотрение различных физических задач, связанных с интегри-
рованием функций вдоль линий, приводит к необходимости введения
двух типов криволинейных интегралов, называемых обычно криво-
линейными интегралами первого и второго рода. Впрочем, как мы
увидим, эти два типа криволинейных интегралов легко преобразуются
друг в друга.
§ 1. Криволинейные интегралы первого рода
1. Определение криволинейного интеграла первого рода.
Пусть АВ — некоторая кривая, гладкая или кусочно-гладкая*), и
пусть /(А1) — функция, заданная на этой кривой. Рассмотрим не-
которое разбиение этой кривой на части А1_1А1 точками
А — Ай, А,.....Ап — В, (4.1)
выберем на каждой из дуг произвольную точку и соста-
вим сумму
п
(4.2)
z=i
*) Напомним, что кривая, заданная уравнениями х = ср (/), у = ф (/),
называется гладкой, если функции cp(Z) и ф(<) непрерывны и имеют не-
прерывные первые производные, не обращающиеся в нуль одновременно
(иными словами, если кривая в каждой точке имеет касательную и напра-
вление этой касательной непрерывно зависит от точки касания). Непрерыв-
ная кривая, составленная из конечного числа гладких кусков, называется
кусочно-гладкой.
§ 1] криволинейные интегралы первого рода 151
где A/z— длина дуги (рис. 4.1). Мы будем называть такие
суммы интегральными суммами. Введем следующее определение:
Определение. Если при стремлении maxA/z к нулю инте-
гральные суммы (4.2) стремятся к некоторому конечному
пределу*) J, то этот предел называется криволинейным
интегралом первого рода от функции f (М) по кри-
вой АВ и обозначается
J f{M)dl.
АВ
Поскольку точки кривой АВ определяются своими координа-
тами (х, у), функцию f (Л4), заданную на АВ, мы будем обычно
писать в виде /(х, у), а сам интег-
рал J* / (/И) dl — в виде
АВ
f f(x, y)dl.
АВ
При этом, однако, следует иметь в
виду, что переменные х и у здесь не
независимы, а связаны условием: точ-
ка (х, у) лежит на кривой АВ.
Нетрудно убедиться в том, что по-
(4-3)
нятие криволинейного интеграла пер-
вого рода на самом деле почти не отличается от обычного понятия
определенного интеграла функции одной переменной и легко к
нему сводится. Действительно, приняв на кривой АВ за параметр
длину дуги I, отсчитываемую от начальной точки А, запишем эту
кривую с помощью уравнений вида
х - х (/), у = у (/) (О L).
(4-4)
При этом функция /(х, у), заданная на АВ, сведется к функции
f(x{l), у(1)) переменной I. Обозначив I* значение параметра /, отве-
чающее точке Mit перепишем интегральную сумму (4.2) в виде
п
1=1
(4-5)
*) Как и в случае определенных интегралов (см. вып. 1, гл. 10, § 1),
число J называется пределом интегральных сумм, если для любого е > 0 выпол-
п
i = l
нено неравенство
< е, как только max Д// достаточно мал.
152 КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 4
Это — интегральная сумма, отвечающая определенному интегралу
L
f y(T))dl.
о
Раз интегральные суммы (4.2) и (4.5) равны между собой, то
равны и отвечающие им интегралы; таким образом,
L
f/(M)dl = f/(х (I), у (I)) dl, (4.6)
AB 0
причем оба эти интеграла существуют или не существуют одно-
временно. Следовательно, если функция f (Л4) непрерывна *) (или же
кусочно-непрерывна и ограничена) вдоль кусочно-гладкой кривой АВ,
то криволинейный интеграл (4.3) заведомо существует, поскольку
при этих условиях существует определенный интеграл, стоящий
в равенстве (4.6) справа.
Замечание. Хотя, как это ясно из сказанного, криволинейный
интеграл первого рода непосредственно сводится к определенному
интегралу от функции одной переменной, между этими понятиями
имеется следующее различие. В интегральных суммах (4.2) величины
(длины дуг ^Z-1XZ)—обязательно положительные, независимо
от того, какую точку кривой АВ мы считаем начальной, а какую —
конечной. Таким образом, выбор на кривой АВ того или иного
направления (ориентация этой кривой) на величину интеграла (4.3)
никак не влияет, т. е.
f/(M)dl= f f(M)dl, (4.7)
АВ BA
b
в то время как определенный интеграл J* f (х) dx при перестановке
а
пределов меняет знак.
Для сведения криволинейного интеграла первого рода к обыкно-
венному определенному интегралу нет необходимости пользоваться
натуральным параметром (длиной дуги). Пусть кривая АВ задана
параметрическими уравнениями
х = <р(О, У = Ф(О (4) < (4-8)
причем ф(0 и ф(/) непрерывны, а <р' (t) и ф'(0 кусочно-непрерывны
и ограничены и ф'2(О+'ф,2(О > О- Тогда на АВ можно ввести
*) Мы говорим, что функция f (М), определенная на спрямляемой
кривой, непрерывна на этой кривой, если она непрерывна на ней как
функция параметра /.
§ 1] КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ ПЕРВОГО РОДА 153
в качестве параметра длину дуги I, отсчитываемую от некоторой
фиксированной точки. Выберем при этом направление отсчета для I
так, чтобы возрастанию параметра t отвечало возрастание длины
дуги I. Тогда I будет монотонно возрастающей функцией t и
dl=V<f'\t)+y\t)dt. (4.9)
Воспользовавшись равенством (4.6) и формулой замены переменной
в определенном интеграле, получим
i t, _____________
f f(M)dl = f/(x(l), y(l))dl — р(ф(0, W)) VV(0 + T'2(0^.
AB 0 t,
причем здесь to < /1. Итак, справедлива следующая
Теорема 4.1. Пусть АВ — гладкая кривая, заданная урав-
нениями
x = tp(t), y = $(t) (t£[t0, /J),
и f(x, у)— функция, заданная на этой кривой. Тогда имеет
место равенство
6 ______________
f f(x, y)dl = ff(y(t), ф(0)У<р'2(0 + ф'2(/Ж (4.10)
AB
причем стоящий слева криволинейный интеграл существует
в том и только том случае, когда существует определенный
интеграл, стоящий справа.
В частности, если кривая АВ задана явным уравнением
у = у(х) (а<^х<;^),
то формула (4.10) сведения криволинейного интеграла к определен-
ному пр'ншает вид
ь _______
f f(M)dl= f f(x, y(x))Vi-j-y'2dx. (4.11)
AB a
Упражнение. Записать криволинейный интеграл от функции
f(x, у) по дуге АВ, заданной полярным уравнением
г = г (ф) (ф1 < ф < ф2)
в виде определенного интеграла по ф.
Ч>2 _______
Ответ. J / (х, у) dl~ J / (г cos ф, г sin ф) Vг2 г'2 dq.
АВ q>i
154 КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ (ГЛ. 4
Замечание. Определенный интеграл
f f(x) dx
а
от неотрицательной функции можно трактовать как площадь криво-
линейной трапеции (рис. 4.2, а). Подобным же образом криво-
линейный интеграл
f f(M) dl
АВ
можно при / (Л4) 0 представлять себе как площадь куска цилин-
дрической поверхности, составленной из перпендикуляров к пло-
скости ху, восставленных в точках М кривой АВ и имеющих
переменную длину f(M) (рис. 4.2, б).
2. Свойства криволинейных интегралов. Свойства криволиней-
ных интегралов вполне аналогичны свойствам определенных интегра-
лов и сразу вытекают из формулы (4.6), сводящей криволинейный
интеграл к определенному. Перечислим основные из них.
1 (линейность). Если 6 = const, a f (М) интегрируема
на АВ, то
f kf(M)dl = k f f(M)dl
AB AB
и интеграл слева заведомо существует.
2 (линейность). Если f (М) и g(M) интегрируемы на АВ,
то f(M') + g(M) интегрируема и
f (/(M)±g(M))dl = $f(M)dl± fg(M)dl.
AB AB AB
§ 1] КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ ПЕРВОГО РОДА 155
3 (монотонность). Если f (М)— неотрицательная инте-
грируемая функция, то всегда
f f(M)dl^0.
АВ
4 (аддитивность). Если дуга АВ составлена из двух
дуг АС и СВ, то
f f(M)dl = f f(M)dl+ f f(M)dl,
AB AC CB
причем интеграл слева существует тогда и только тогда,
если существуют оба интеграла справа.
5 (оценка по модулю). Если f (М) интегрируема на АВ,
то | / (AI) | тоже интегрируема и
| f /(М)Л|< f\f(M)\dl.
АВ АВ
6 (теорема о среднем). Если f (М) непрерывна на АВ,
то на этой дуге найдется такая точка М*, что
f f(M) dl — f (М*) L
AB
(L — длина дуги AB).
7 . Подчеркнем, наконец, еще раз, что
f f(M)dl = f f(M)dl,
AB BA
m. e. что выбор направления на дуге АВ не влияет на вели-
чину интеграла от скалярной функции f (Л1) по этой дуге.
3. Некоторые применения криволинейных интегралов первого
рода. Укажем некоторые типичные задачи, в которых удобно поль-
зоваться криволинейными интегралами первого рода.
1) Нахождение массы материальной кривой по ее плот-
ности. Материальной кривой будем называть кусочно-гладкую кри-
вую, вдоль которой распределена некоторая масса. Линейной плот-
ностью р (М) материальной кривой в точке М называется предел,
к которому стремится отношение массы Др, находящейся на дуге ММ'
этой кривой, к длине дуги ММ', при условии, что длина этой
дуги стремится к нулю. Иначе говоря, если I — длина дуги AM и
ц(Л4) — масса этой дуги, то р (М) = Отсюда ясно, что
156
криволинейные интегралы
[ГЛ. 4
I
масса дуги АВ выражается интегралом | pdZ, т. е. криволиней-
о
ным интегралом
J р (Л4) dl
АВ
от плотности, взятым по кривой АВ.
2) Вычисление координат центра масс материальной кривой.
Пусть масса распределена вдоль кривой АВ с плотностью р(х, у)*).
Разбив эту кривую на части длины A/z и выбрав на каждой из этих
частей некоторую точку (xz, yz), можно материальную кривую при-
ближенно рассматривать как систему масс p(xz, yz)A/z, расположен-
ных в точках (xz, yz). Центр масс такой системы материальных
точек имеет координаты
п п
у.)д/г y^k
, у_ = ------------
П ’ 'С п
5р(хгУг)Ч 2S Р (хг У[)
Эти выражения можно считать приближенными значениями координат
хс и ус центра масс материальной кривой АВ. Для получения точных
значений этих координат следует перейти к пределу при maxA/z->0.
В результате такого предельного перехода получаем
J хр {х, у) dl
X =AS._____________'
хс — (• ’
J р (х, у) dl
АВ
У УР {х, у) dl
уе=—------------•
✓ 4? л •
J р (х, у) dl
АВ
(4.12)
В частности, в случае однородной
кривой р = const имеем
АВ
bdl
АВ
(4-13)
3) Вычисление моментов инерции материальной кривой.
Момент инерции системы точечных масс mt относительно некоторой
*) Здесь и в последующих задачах нам естественно задавать точки
кривой их декартовыми координатами х, у (см. п. 1).
§ I] криволинейные интегралы первого РОДА 157
прямой равен
п
S
1=1
где rt— расстояние от /-й массы до этой прямой. В частности,
моменты инерции такой системы масс, лежащих в плоскости ху,
относительно осей х и у равны соответственно
п п
/=2^ и / 2%2„г/
1=1 1 = 1
(где (xz, уг)— координаты точечной массы znz). Для получения
моментов инерции относительно координатных осей материальной
кривой АВ, вдоль которой распределена масса с плотностью р(х, у),
нужно сделать такой же предельный переход, как и в предыдущей
задаче. Тогда для моментов инерции кривой АВ относительно коор-
динатных осей мы получим выражения
Ix= J у2р(х, у)dl, /у= J х2р’(х, y)dl. (4.14)
АВ АВ
4) Притяжение точечной массы, материальной кривой.
Пусть снова АВ — материальная кривая с плотностью р(х, у) и
т0 — точечная масса, имеющая координаты (х0, у0). Рассуждения,
аналогичные проведенным выше, показывают, что кривая АВ при-
тягивает массу гпц с силой, проекции которой на координатные оси
равны соответственно
Г.-v«<. fл г,dl.
АВ АВ
Здесь у — постоянная тяготения и г = ]/(х — х0)2 (у — у0)2.
Если считать, что интегрирование вектора по некоторому пара-
метру означает интегрирование каждой из его компонент (см. § 1 гл. 3),
то эти две скалярные формулы можно заменить одной векторной:
сила F, с которой материальная точка т0 притягивается материальной
кривой АВ, равна
F=y/n0 f^^-rdl, (4.15)
АВ
где г — вектор с компонентами (х — х0) и (у — у0).
4. Криволинейные интегралы первого рода в пространстве.
Определение криволинейного интеграла первого рода, сформулиро-
ванное выше для плоской кривой, дословно переносится на случай
функции f (Al), заданной вдоль некоторой пространственной кривой.
158 КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 4
Если эта кривая АВ задана параметрическими уравнениями
х = <р(О, У = Ф(О. * = X(0
то криволинейный интеграл первого рода, взятый вдоль этой кривой,
сводится к определенному интегралу по формуле
_____________________
f f (/И) di = ff (ср (О, Ф (0. х (0)/<р'2 (04-Ф'2 (0+X'2 (0 dt.
АВ 6
Условия существования и основные свойства пространственных
криволинейных интегралов вполне аналогичны тем, которые были
сформулированы выше для плоского случая. Криволинейные инте-
гралы первого рода в пространстве естественно возникают при рас-
смотрении таких задач, как вычисление массы пространственной кри-
вой по заданной плотности, нахождение координат центра масс ма-
териальной пространственной кривой, ее моментов инерции и т. п.
Соответствующие формулы читатель легко может получить с помощью
рассуждений, аналогичных проведенным выше для плоского случая.
§ 2. Криволинейные интегралы второго рода
1. Постановка задачи. Работа силового поля. Введем теперь
криволинейные интегралы другого типа — так называемые криволи-
нейные интегралы второго рода.
Для того чтобы подойти к этому понятию, начнем с конкретной
физической задачи. Рассмотрим плоское силовое поле, т. е. некоторую
плоскую область, в каждой точке А1 которой задана сила F(M).
Компоненты F (Л4) по осям х и у обозначим Р (Л4) и Q (Л4).
Определим работу этого силового поля при перемещении точки
вдоль некоторой кривой АВ.
Если сила F постоянна (и по величине и по направлению), а путь АВ
прямолинеен, то соответствующая работа равна произведению вели-
чины этой силы на длину пути и на косинус угла между силой и
перемещением, т. е. работа равна скалярному произведению
(F, АВ).
Найдем теперь выражение для работы в общем случае, т. е. когда
сила F переменна, а путь криволинеен. Пусть АВ — гладкая кривая,
лежащая в той области, где задано силовое поле. Разобьем кривую АВ
на части точками
Д = Л40, ....Мп = В
и рассмотрим ломаную, вершинами которой служат точки (рис. 4.3).
Считая, что вдоль каждого звена ломаной сила F сохраняет
постоянное значение, скажем, равное Д(Л4г), вычислим работу,
отвечающую перемещению вдоль этой ломаной. Если (хг, yz) —
§ 2] КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА 159
координаты точки Alz и
Axz=xz —xz_p Ayz = yz —yz_p
то работа, отвечающая перемещению вдоль отрезка Afz_p Mit равна
(F(MZ), M^z) = P(Mz)Axz + Q(Mz)Ayz,
а работа, отвечающая перемещению вдоль всей ломаной, равна
п
2 (Р (2И z) Axz + Q (МЦ Ayz). (4.16)
/=i
Эту сумму можно принять за приближенное значение работы, совер-
шаемой силовым полем F (М) вдоль кривой АВ. Для получения точ-
ного выражения этой работы нужно в
сумме (4.16) перейти к пределу, устре-
мив максимум длин дуг М[_1М1 к ну-
лю. Рассмотрим этот предельный пере-
ход в общем виде.
2. Определение криволинейного
интеграла второго рода. Пусть АВ —
гладкая кривая и F (Л4) — (Р (Л4), Q (/И))
— вектор-функция, определенная на
кривой АВ. Разобьем эту кривую на
части точками
Д = Л40. /И,....Мпг=В.
координаты которых обозначим соответственно (х0, у0), (хр yz), ...
..., (хя, уя). Рассмотрим сумму
п
+ (4.17)
1 = 1
где Axz=xz— xz_P Ayz = yz — yz_p Если при стремлении макси-
мума длин дуг 2WZ_1A1Z к нулю эти суммы стремятся к некоторому
конечному пределу, то этот предел называется криволинейным инте-
гралом второго рода от вектор-функции F = (/э. Q) и обозна-
чается *) символом
J P(M)dx + QOM)dy. (4.18)
АВ
*) Вместо Р (М) и Q (М) мы будем иногда писать Р(х, у) и Q (х, у),
понимая под х и у декартовы координаты переменной точки м\ в тех слу-
чаях, когда это не может вызвать недоразумений, мы будем функции Р (М)
и Q (М) обозначать просто Р и Q, а криволинейный интеграл (4.18) писать
в виде J Р dx + Q dy.
АВ
160
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. 4
Этот интеграл представляет собой, очевидно, сумму д ух интегралов
§P(M)dx и J Q(M)dy,
АВ АВ
.0
отвечающих векторам (Р, 0) и (0, Q), на которые разлагается век-
тор (Р, Q).
Замечание. Понятие криволинейного интеграла второго рода
не следует смешивать с тем «покомпонентным» интегрированием
векторной величины по скалярному аргументу, с которым мы встре-
чались выше (см. п. 5 § 1 гл. 3 и конец п. 5 § 1 этой главы),
например при вычислении силы притяжения материальной точки мате-
риальной кривой.
3. Связь между криволинейными интегралами первого и вто-
рого рода. Криволинейный интеграл второго рода легко сводится
к интегралу первого рода, рассмотренному в § 1. Действительно,
справедлива следующая теорема.
Теорема 4.2. Пусть АВ — гладкая кривая, заданная урав-
нениями
х — х(1), у = у(Г), (4.19)
и F — (Р, Q)— векторная функция, определенная и ограничен-
ная*) на этой кривой. Тогда имеет место равенство
J Р dx-]-Q dy = J (Р cosa-)-Q sin a) dl, (4.20)
AB AB
где a — а(Л4) — угол между касательной к кривой АВ в точке М
и положительным направлением оси х. При этом стоящий
слева интеграл существует, если существует криволинейный
интеграл первого рода, стоящий в равенстве (4.20) справа.
Доказательство. Докажем равенство
f Pdx— Г Р cos a dl.
АВ АВ
Равенство
J" Qdx— J* Qsinadl
АВ АВ
доказывается так же. Интеграл
yPdx
АВ
*) Вектор-функция (Р, Q) называется ограниченной, если Р и Q — огра-
ниченные функции.
§ 21 КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА 161
представляет собой по определению предел сумм вида
Т — ^^Р {М \х t.
Сравним эту сумму с интегральной суммой
п Г = 2 P(Ml)cosa(Ml)Mi, / = 1
отвечающей (при том же самом разбиении кривой АВ) интегралу
J Р cos a dl. АВ
Если х = х (/), то в каждой точке М кривой АВ
= cos а (/И) (4.21)
и, следовательно, \xt— J cosarfZ.
Воспользовавшись теоремой о среднем, получаем
Дх, = cos(/VIi) AZ;,
где М* — некоторая точка дуги Следовательно,
|Т— 7’*] = 2 Р(Л1/)[соза(М1-) — cos Д/е-
n <; 2 |^(^/)| • |cosa(Mz)— cosa(M*)| i=i
Вдоль гладкой кривой функция cos а (Ж) непрерывна, а значит (по-
скольку эта кривая представляет собой замкнутое ограниченное мно-
жество), и равномерно непрерывна. Следовательно, каково бы ни было
е > 0, для каждого достаточно мелкого разбиения кривой АВ имеет
место неравенство i cos a (Mz) — cosa(Alz)| < e.
Тогда |Г — Г | < Ce 2 = ceZ,,
где C = sup |Р|, a L — длина кривой АВ. Отсюда следует, что если
162 КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 4
интегральные суммы Г* имеют предел, то суммы Т стремятся к этому же
пределу. Тем самым теорема доказана.
Замечание. Выражение Pcosa4~Qs>na представляет собой
скалярное произведение (F, т) вектора F = (P, Q) на единичный век-
тор T = (cosa, sin а), касательный к кривой АВ, т. е. проекцию
вектора F = (P, Q) на касательную к АВ. Обозначив эту проекцию
символом Fx и воспользовавшись равенством (4.20), мы можем за-
писать криволинейный интеграл (4.18) в виде
J* Fx dl. (4.22)
АВ
Этой краткой записью мы будем часто пользоваться ниже, особенно
в гл. 6. Иногда также, особенно в физической литературе, этот ин-
теграл пишут в виде
f (F, dl), (4.23)
АВ
понимая под dl бесконечно малый вектор с компонентами
dx = dlcosa и dy — dlsin a.
4. Вычисление криволинейного интеграла второго рода. Из
сопоставления теорем 4.1 и 4.2 сразу вытекает следующая
Теорема 4.3. Пусть АВ — гладкая кривая, заданная
уравнениями
х = ф(0> У = Ф(О> (4.24)
и пусть F = (P, Q)— вектор-функция, заданная на этой кри-
вой. Тогда
Л
J Р dx -y Q dy — J [Р(ф(0. Ф(О)ф,(О + <?(ф(О» Ф(О)Ф'(*)1^.
АВ
(4.25)
и интеграл слева существует, если существует определенный
интеграл, стоящий справа-, при этом ta — значение парамет-
ра t, отвечающее точке A, a —значение, отвечающее точке В.
Теоремы 4.1—4.3 очевидным образом остаются справедливы,
если кривая АВ не гладкая, а лишь кусочно-гладкая.
Рассмотрим важнейшие частные случаи формулы (4.25).
Если кривая АВ задана явным уравнением
У = У <х),
(4.26)
§ 2] КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА 163
где х пробегает отрезок [а, £], то формула (4.25), сводящая криво-
линейный интеграл второго рода к определенному, принимает вид
ь
J Р dx-\-Qdy = J [Р(х, у (х)) + Q (х, у (х)) у' (х)] dx (4.27)
АВ а
(где х — а отвечает начальной точке А кривой, а х = Ь — ее конеч-
ной точке В). Если, в частности, кривая АВ — отрезок горизонталь-
ной прямой у = у0, то вдоль него /=0 и интеграл
J* Р dx -|- Q dy
АВ
вдоль такого отрезка сводится просто к интегралу
ь
J y0)dx.
а
Аналогично для кривой, заданной уравнением
х = х(у), (4.28)
где у пробегает некоторый отрезок [с, d], имеем
d
J Pdx-j-Q dy = j' (Р(х(у), y)x'4-Q(x(y), у)] dy (4.29)
АВ с
В частности, если АВ — отрезок вертикальной прямой х = х0, то
х' = 0 и интеграл (4.29) сводится к
f Q(x0, y)dy. (4.30)
АВ
Примеры. 1. Вычислить интеграл
J* x2dx-j-xydy (4.31)
АВ
а) вдоль прямолинейного отрезка, идущего из точки (1, 0) в точку
(°. О-
б) вдоль четверти окружности х = cos t, у = sin t ^0 t j ,
соединяющей те же точки (рис. 4.4).
164
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. 4
Решение.
о
а) х2 dx -|- ху dy -- (х2— х(1—x)')dx —
ав i
о
— У (2х2— x~)dx = —
1
Л
2
б) J х2 dxху dy = J" (— cos2/sin t-j- cos21 sin t) dt = O.
ав о
2. Вычислить интеграл
У 3x2ydx + (x3 + V)dy (4.32)
AB
а) вдоль прямолинейного отрезка, идущего из точки (0, 0)
в точку (1, 1),
б) вдоль дуги параболы у — х2, соединяющей те же точки,
в) вдоль ломаной, проходящей через точки (0, 0), (1, 0), (1, 1)
(рис. 4.5).
Решение.
1
а) У Зх2у dx + (х3 -j- l)dy = У (4х3 + 1) dx =2;
ав о
1
б) У Зх2у t/x + (x3+ 1) dy = У (5х4+ 2х) dx — 2;
ав о
в) у Зх2у dx + (*8+ 1)</у =
АВ
(1,0) (1,1) 1
— У 3x2y<Zx + у (x3-|-l)t/y = j’2dy — 2.
(0, 0) (1, 0) о
§ 2] КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА 165
Замечание. Читатель, видимо, обратил внимание на то, что
во втором примере мы, взяв три различных пути (соединяющих одни
и те же точки), получили три одинаковых результата. Это обстоя-
тельство не случайно. Причину его мы разъясним в § 4.
5. Зависимость криволинейного интеграла второго рода от
ориентации кривой. Из определения криволинейного интеграла
J Pdx + Qdy (4.33)
АВ
непосредственно следует, что в нем постоянный множитель можно
выносить за знак интеграла, что интеграл от суммы двух векторных
функций равен сумме интегралов от слагаемых и т. д. Подчеркнем
следующее важное свойство интеграла (4.33): криволинейный интеграл
второго рода в отличие от интеграла первого рода, определенного
в § 1, зависит от ориентации кривой АВ, по которой этот интеграл
берется, а именно, при изменении ориентации этой кривой интег-
рал (4.33) меняет знак:
J' Р dx -[-Q dy =— £ Р dx Q dy.
BA BA
(4-34)
Действительно, изменив направление обхода кривой АВ, мы заменим
тем самым Дх; и Ду; в сумме (4.17) на —Дх( и —Ду£ соответ-
ственно. При этом изменят знак интегральные суммы (4.17), а сле-
довательно, и их предел.
Это свойство криволинейного интеграла второго рода вполне соот-
ветствует физической интерпретации такого интеграла, как работа
силового поля вдоль некоторого пути: при изменении направления
движения по кривой работа силового поля вдоль этой кривой меняет
знак на противоположный.
6. Криволинейные интегралы вдоль самопересекающихся и
замкнутых путей. С точки зрения возможных приложений теории
криволинейных интегралов целесообразно не исключать из рассмо-
трения пути интегрирования, которые имеют самопересечения. Иначе
говоря, если кривая задана уравнениями
х = х (р, y — y(t) («<;/<: b),
то мы не исключаем того, что существуют два различных значения £j
и t2 параметра t, для которых
х (Л) = х (72) и у (/j) = у (tj.
При этом, однако, когда речь идет об интегралах второго рода,
нужно учитывать, что задать путь интегрирования это значит не просто
задать множество точек, но и определенное направление обхода. Для
кривых с самопересечениями направление обхода не определяется
166
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. 4
заданием начальной и конечной точек. Например, кривые, изображен-
ные на рис. 4.6, а и б, нужно рассматривать как две различные кри-
вые. Сказанное относится не только к плоским, но и к простран-
ственным кривым.
Часто приходится рассматривать криволинейные интегралы, взятые
по тому или иному замкнутому контуру. При этом под замкнутым
контуром (на плоскости) мы понимаем
такую кривую
х = х (f), y — y(t) (а t b),
что
х (а) = х (Ь) и у (а) — у (б).
Не исключается, что этот контур имеет
еще и точки самопересечения, т. е.
что, кроме t — a и t — b, есть и дру-
гие различные между собой значения
параметра, которым отвечают одина-
ковые значения х и у.
не имеет точек самопересечения, то для
олько два направления обхода (ориента-
ции): против часовой стрелки (положительная ориентация) и по часо-
вой стрелке (отрицательная ориентация). Если рассматривается инте-
грал второго рода
J Р dx-\~Qdy
с
а) б)
Рис. 4.6.
Если замкнутый контур
него можно указать два и
вдоль такого контура, то его значения, отвечающие двум различным
ориентациям контура С, равны между собой по абсолютной вели-
чине и противоположны по знаку. Мы будем, как правило, рассмат-
ривая замкнутый контур, считать его ориентированным положительно,
а криволинейный интеграл второго рода по отрицательно ориентиро-
ванному контуру заменять интегралом, взятым в положительном
направлении, но со знаком минус перед интегралом.
Криволинейный интеграл по замкнутому контуру С часто обо-
значают символом
Р dx-\-Qdy.
с
7. Криволинейные интегралы второго рода вдоль простран-
ственных кривых. Выше мы рассматривали криволинейные инте-
гралы от векторных функций вдоль плоских кривых. Все сказанное
о них более или менее автоматически переносится на пространствен-
ный случай. Пусть АВ — гладкая пространственная кривая и
F = (Р, Q, Р) — непрерывная вектор-функция, заданная вдоль этой
§ 2) КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА 167
кривой. Разбив АВ на части точками
А = М0, .....Мп=В
с координатами (х{. yit z^, Z= 1, 2, п, рассмотрим сумму
п
2 J/3 (М<) bxt + Q (Mz) Ayz + R (/Mz) ЬгД.
1=1
где
\xl = x[ — xl_1, \zl^zi — zi_1.
Предел этих сумм мы назовем криволинейным интегралом
второго рода от вектор-функции F — (Р, Q, R) вдоль про-
странственной кривой АВ и обозначим
f P(M)dx + Q(M)dy + R(M)dz. (4.35)
АВ
ИЛИ *)
f Р(х, у, z) dx 4-Q (х, у, z) dy 4- R(x, у, z)dz.
АВ
С помощью рассуждений, дословно повторяющих те, которые были
проведены для плоского случая, устанавливается формула, сводящая
интеграл (4.35) к криволинейному интегралу первого рода
J Р dx -j- Q dy + R dz — J [P cos a 4- Q cos ₽ 4- R cos Y1 dl
AB AB
(здесь a, 0, у — углы между касательной к АВ и осями координат
х, у и д).
Если гладкая кривая АВ задана уравнениями
х = ф(О. у = ф(О. z =
причем точке А отвечает t = t0, а точке В отвечает t — tx, то имеет
место равенство
f Р dx 4- Q dy 4- R dz = f [P((p(t), ф(0. х(О)ф'(О +
AB tn
4-Q (Ф(0. Ф(0. x(0)Ф' (0 + R (Ф(0. Ф(0- x(0) x'(01 dt. (4.36)
сводящее криволинейный интеграл второго рода к определенному
интегралу.
Так как выражение Pcosa4-Qcos04~^cosY— это проекция
вектора F = (Р, Q, R) на направление касательной к АВ, то,
*) Часто для краткости мы будем писать его просто в виде
J" Р dx -j- Q dy 4" R dz.
AB
168 КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ [ГЛ. 4
обозначив эту проекцию Fx, мы можем, как и в плоском случае, запи-
сать криволинейный интеграл (4.35) в виде
f Fxdl.
АВ
Все свойства плоских криволинейных интегралов, изложенные выше,
автоматически переносятся на пространственный случай. В частности,
криволинейный интеграл (4.35) меняет знак при изменении ориента-
ции кривой, т. е.
J Р dx 4- Q dy 4~ R dz = — J P dx -|-Q dy 4- R dz.
AB BA
В соответствии с этим в определенном интеграле, стоящем в фор-
муле (4.36) справа, нижний предел t0 — это значение параметра,
отвечающее начальной точке А кривой АВ, а верхний предел tx — зна-
чение параметра, отвечающее конечной точке В. (Независимо от того,
какое из чисел tQ, больше, а какое меньше.)
§ 3. Формула Грина
В этом параграфе мы выведем так называемую формулу Грина*),
связывающую криволинейный интеграл
Р dx-\-Qdy,
с
взятый по границе некоторой области, с двойным интегралом по са-
мой этой области. Эта формула широко применяется как в самом
анализе, так и в его приложениях. Неко-
торые из этих применений будут рассмот-
рены ниже.
1. Вывод формулы Грина. Рассмот-
рим сначала область О, имеющую простой
вид: снизу и сверху она ограничена ку-
сочно-гладкими кривыми
У = (X), у = у2 М, (4.37)
а слева и справа — вертикальными отрез-
ками
х = а, х — Ь (4.38)
(рис. 4.7). Границу ABCDA области мы будем считать ориентиро-
ванной положительно, т. е. будем считать принятым на ней то
направление обхода, при котором сама область О остается все время
*) Джордж Грин (1793—1841) — английский математик, автор ряда
исследований по математической физике.
§ 3]
ФОРМУЛА ГРИНА
169
слева. Пусть функция
вместе со своей частной
Р(х, у) определена и непрерывна
дР
производной во всей области О, вклю-
чая ее границу.
Рассмотрим двойной
интеграл f f
о
dx dy и постараемся пре-
образовать его в криволинейный. Для этого сведем его к повторному
интегралу и выполним интегрирование по у. Получим
» ya to
= / -^dy =
Q а Ух (х)
Ъ
— f[P(x, у2(х)) — Р(х, yt (х))] dx=
а
ь ь
= у Р(х, y2(x))dx — J Р(х, y1(x))dx. (4.39)
а а
Каждый из этих двух определенных интегралов можно рассматривать
как криволинейный интеграл, взятый по соответствующей дуге (см.
(4.27)), а именно:
ь
J Р(х, у2(х))б/х= J Р(х, y)dx =— J Р(х, y)dx
a DC CD
И
b
— J Р(х, y1(x))dx = —J Р(х, y)dx.
а АВ
Добавив к правой части равенства (4.39) еще два криволинейных
интеграла:
— J Р(х, y)dx и — J Р(х, у) dx,
ВС DA
каждый из которых равен нулю (как интеграл по dx вдоль верти-
кального отрезка), получим равенство
Jf-~-dxdy = —j’Pdx— JPdx—f P dx—JPdx,
О AB BC CD DA
t. e.
^dxdy = — J P dx. (4.40)
a ABCDA
Мы доказали это равенство для области, ограниченной линиями
(4.37) и (4.38). Но формулу (4.40) можно распространить и на
170
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. 4
любую область, которую можно разбить на конечное число частей
такого вида. Действительно, пусть область G с границей L разбита
на части Gz, i— 1, 2, .... п, для каждой из которых имеет место
равенство
О Lt
(Lc — граница области Gz). Просуммировав эти равенства по I от 1
до п, мы слева- получим двойной интеграл, взятый по всей области G,
а справа получится сумма кри-
волинейных интегралов, взятых по
контурам £г. Каждый из этих кон-
туров состоит из линий, ограни-
чивающих область G, и из вспо-
могательных линий, с помощью ко-
торых область G разбивается на
части. Но каждая из этих вспомо-
гательных линий входит в состав
ровно двух контуров Lt, следова-
тельно, по каждой из них криволи-
нейный интеграл будет взят дважды,
причем в двух противоположных направлениях (рис. 4.8). Поэтому
при суммировании интегралов вида
§ Pdx
Li
интегралы по всем вспомогательным линиям взаимно уничтожатся и
останется лишь интеграл по границе области G, т. е. мы получим
равенство
f f ^dxdy = ~J Pdx' <4-4l>
G L
где L — положительно ориентированная *) граница области О.
Поменяем теперь х и у ролями и рассмотрим область, ограни-
ченную горизонтальными отрезками
у = с, у = d (4.42)
и линиями
х = Х1(у), х = х2(у) (4.43)
(рис. 4.9). Пусть функция Q(x, у) и ее производная опреде-
*) То есть на L выбрано то направление обхода, при котором область G
остается слева.
§ 31 ФОРМУЛА ГРИНА 171
лены и непрерывны в области G (включая границу). Записав двойной
интеграл
f f^dxdy
о
в виде
<2 х2 (у)
Jdy J ^dx
с X, (у)
и проделав те же выкладки, что и при выводе формулы (4.40), по-
лучим равенство
ff^dxdy= J ®аУ'
О ABCDA
аналогичное (4.40) (с той лишь разницей, что справа нет знака ми-
нус). Рассуждения, ничем не отличающиеся от изложенных выше,
показывают, что равенство
f J 7^dxdy^f Qdy <4-44)
a l
верно не только для областей, ограниченных
линиями (4.42) и (4.43), но и для конечных
объединений таких областей.
Будем, для краткости, называть область О
простой, если она допускает разбиение как
на части с границами вида (4.37), (4.38),
так и на части с границами вида (4.42), (4.43).
Для простой области справедливы, в силу до-
казанного, как равенство (4.41), так и равенство (4.44). Вычтя (4.41)
из (4.44), получим формулу
fpdx + Qdy = JJ (g —^)dxdy. (4.45)
l а
где криволинейный интеграл берется по границе L области G в по-
ложительном направлении. Это и есть формула Грина, которую
мы хотели установить. Итак, мы получили следующий результат:
Теорема 4.4. Пусть G — простая область и пусть функ-
ции Р(х, у) и Q(x, у) непрерывны вместе со своими частными
производными и -g в замкнутой области G. Тогда имеет
место формула Грина (4.45).
172
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
{ГЛ. 4
Замечание 1. Если граница L области G состоит из несколь-
ких отдельных контуров, то J*Р dx-\-Qdy означает сумму интегра-
L
лов, взятых по составляющим L контурам, причем по каждому из
них берется то направление обхода, при
котором сама область
(рис. 4.10).
Замечание 2. При
на мы предполагали, что
дР dQ
производные и непрерывны не
внутри области, но и на ее границе. Однако от-
дР dQ
носительно производных и
предположить, что они непрерывны и огра-
ничены внутри области Q. Действительно, pac-
о. ограниченную кривыми у = yj (х) и у = у2 (х)
Рис. 4.10.
О остается слева
выводе формулы Гри-
Р и Q и их частные
только
достаточно
смотрим снова область
и вертикальными отрезками х = а, х= b (рис. 4.7). Пусть 6 > 0 и пусть
G6— область, ограниченная сверху и снизу кривыми у=у2(х)—6 и
у=У1(х)4-6 соответственно, а слева и справа вертикальными отрезками
х — а + 6 и х = b — б. Область G6 при всяком б > 0 лежит вместе с гра-
ницей внутри G, следовательно, для G6 выполнены те условия, при которых
равенство (4.41) было доказано. Таким образом,
fj^-dxdy^
(4.46)
(Z,6 — граница области Gs). Так как площадь области Gft отличается от пло-
щади области G не больше чем на /5, где I — длина границы L области G,
то интеграл, стоящий в равенстве (4.46) слева, отличается от
J f^-dxdy
G
не более чем на Z6A1, где М — верхняя грань j J внутри G. Далее, функ-
ция Р(х, у) непрерывна, а следовательно, и равномерно непрерывна и огра-
ничена в замкнутой области G. Отсюда сразу следует, что
J Р dx при б -> 0.
L
Таким образом, в равенстве (4.46) можно сделать предельный переход при
6 -> 0, и мы получаем, что равенство
dP
ду
О
L
§ 3)
ФОРМУЛА ГРИНА
173
верно для области, изображенной на рис. 4.7, а следовательно, и для любой
простой области. Аналогично устанавливается и равенство
f f ^dxdy=fQdy-
О L
Воспользовавшись понятием несобственного двойного интеграла *), можно
, А , dPdQ
было бы требование ограниченности производных и в области G
й С С (dQ дР\ .
заменить требованием существования интеграла J у —-^-jdxdy
о’
(хотя бы как несобственного интеграла).
Замечание 3. Мы доказали формулу Грина для областей,
которые мы условились называть простыми. К ним заведомо от-
носятся все многоугольные фигуры. С помощью аппроксимации кри-
волинейных областей многоугольными нетрудно получить, что фор-
мула Грина верна и для любой области, ограниченной конечным
числом кусочно-гладких линий.
2. Вычисление площади с помощью формулы Грина. Из фор-
мулы Грина вытекают некоторые полезные формулы для вычисления
площади области.
Пусть G — некоторая простая область с границей L и S — пло-
щадь этой области. Рассмотрим криволинейный интеграл
J х dy.
L
Применив к нему формулу Грина, получим
J х dy — У У dxdy—S.
L о
Аналогично получается формула
S — — у у dx,
L
а также следующая, более симметричная, формула **) для
*) О несобственных интегралах см. гл. 9.
**) Можно, конечно, получить бесконечно много различных формул вида
8= у Pdx+Qdy.
L
Для этого достаточно в качестве Р и Q брать любые функции, удовлетво-
dQ дР .
ряющие условию ---------— 1.
174
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
(ГЛ. 4
площади:
S = у х dy — ydx. (4.47)
i.
Пример. Вычислить площадь области, ограниченной астроидой
№ a cos3Л y = csin3L
Решение. Применяя формулу (4.47), получаем
2я
S = i xdy— у dx = -|-а2 J* sin21 cos21 [cos21-\- sin2/] dt =
i о
2л
~i-a2 /* sin2 2t dt — ^- ла2.
o J о
0
§ 4. Условия независимости криволинейного интеграла
от пути. Интегрирование полных дифференциалов
1. Постановка вопроса. В § 2, рассматривая примеры криво-
линейных интегралов, мы обратили внимание на то, что в некоторых
случаях криволинейный интеграл
J Р dx-\-Qdy
АВ
зависит не от самой кривой АВ, а только от начальной и конечной
точек, т. е. принимает одинаковые значения для всех кривых, соеди-
няющих фиксированные точки А и В. Сейчас мы установим условия,
при которых такая независимость интеграла от выбора пути имеет
место. С этим вопросом связана другая важная задача, которую мы
здесь также рассмотрим: нахождение функции двух переменных по ее
полному дифференциалу.
2. Случай односвязной области. Напомним (см. гл. 3), что
плоская область G называется односвязной, если, каков бы
ни был замкнутый контур L, лежащий внутри этой области, огра-
ниченная этим контуром (конечная) часть плоскости целиком при-
надлежит Q.
Теорема 4.5. Пусть функции Р(х, у) и Q(x, у) определены
дР
и непрерывны вместе со своими частными производными
§ 4) НЕЗАВИСИМОСТЬ КРИВОЛИНЕЙНОГО ИНТЕГРАЛА ОТ ПУТИ 175
и в замкнутой ограниченной односвязной области О.
Тогда следующие четыре условия равносильны между собой
(т. е. выполнение любого одного из них влечет за собой выполнение
остальных трех):
1. Интеграл
§ Рdx-\-Qdy,
взятый по любому замкнутому пути, лежащему в О, равен
нулю.
2. Интеграл
J Р dx-\-Qdy
АВ
не зависит от выбора пути интегрирования.
3. Выражение Pdx-^-Qdy представляет собой полный диф-
ференциал некоторой однозначной функции, определенной
в области G.
4. В области Q всюду
дР _ dQ
ду дх
(4.48)
Доказательство этой теоремы мы
проведем по следующей логической схеме:
1->2->3->4-> 1,
т. е. покажем, что из первого условия следует второе, из вто-
рого— третье, из третьего — четвертое, а из четвертого — снова
первое. Тем самым будет доказана равносильность всех четырех
условий.
а) 1—>2. Рассмотрим в области G два произвольных пути,
соединяющих точки А и В, скажем, АСВ и ADB (рис. 4.11).
В сумме они составляют замкнутый путь ACBDA. По условию
интеграл, взятый по любому замкнутому пути, равен нулю, т. е.
Но
J* Рdx-}-Qdy = 0.
ACBDA
J Р dx + Q dy — f Pdx-^-Qdy + J Pdx-j-Qdy^=
ACBDA ACB BDA
= j P dx -j- Q dy — J P dx Qdy.
ACB ADB
176
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. 4
Следовательно,
J Р dx Q dy — J Pdx-\-Qdy.
АСВ ADB
Утверждение «1—>2» доказано*).
б) 2->3. Пусть интеграл § Р dx-\-Qdy не зависит от пути
АВ
интегрирования; тогда, если точку А зафиксировать, то
этот интеграл будет однозначной функцией координат х и у
точки В:
J Р dx -|- Q dy = U (х, у).
АВ
Покажем, что эта функция U (х, у) дифференцируема и что
dU = Р dx -у Qdy.
Для этого достаточно показать, что производные и суще-
ствуют и равны Р(х, у) и Q(х, у) соответственно**).
Вычислим
W _ Ит U (х + Дх, у) —U (х, у)
дх txx
Величина At/ = U (х Ах, у) — U (х, у) представляет собой
интеграл от Р dx-{-Qdy, взятый по пути, соединяющему точки
(х, у) и (х4~Ах, у). Так как, по условию, этот интеграл не
зависит от вида кривой, то можно считать, что путь совпадает с
*) Если кривые АСВ и ADB имеют общие точки, отличные от Л и В
(рис. 4.12), то небольшое усложнение проведенных рассуждений приводит
к тому же самому результату.
**) Как известно, функция, имеющая непрерывные частные производ-
ные, дифференцируема.
§ 4]' НЕЗАВИСИМОСТЬ КРИВОЛИНЕЙНОГО ИНТЕГРАЛА ОТ ПУТИ 177
горизонтальным отрезком ВВХ (рис. 4.13). Таким образом,
~ = f Pdx + Qdy = ^~ f Р(х, y)dx = P(x + Q&x. у).
l\a La л ал tj
ВВ, x, у
(В последнем равенстве мы использовали теорему о среднем для
интегралов.) Следовательно,
lim Р(х + ЭЛх, у) =
ах Дх->0
= Р(х, у),
В^-У) g^z+ДХ'у)
У
поскольку Р(х, у) непрерывна,
л ди
Аналогично доказывается, что-?— =
ду
~Q(x, у).
в) 3 —> 4. Если
Р dx-}-Q dy
А^о’Уо)
О
Рис. 4.13.
— полный дифференциал некоторой функции
= Л Ж
дх ду
Но тогда по теореме о смешанных производных
dQ _ дЧ7 _ дги _ дР
дх дхду ду дх ду '
х л 1 п dQ dP
г) 4—>1. Пусть равенство —~ = -г— выполнено
произвольный контур, лежащий в облас-ти О.
область по условию односвязна, то ограниченная контуром L
часть плоскости принадлежит области О, в которой определены
функции Р, Q и их производные. Поэтому криволинейный интеграл
У Pdx-\-Q dy
U (х, у), то
и пусть L —
Так как эта
по формуле Грина можно преобразовать в двойной:
f Р dx + Q dy = f f (-g- - dx dy,
L D
где D — область, ограниченная контуром L. В силу (4.48), интеграл
справа равен нулю. Следовательно,
J Р dx -ф- Q dy — О
L
для всякого замкнутого контура L, лежащего внутри О. Доказатель-
ство теоремы закончено.
178
КРИВОЛИНЕЙНЫЕ ИНТЕГРАЛЫ
[ГЛ. 4
3. Нахождение функции по ее полному дифференциалу.
В процессе доказательства теоремы 4.5 мы получили решение сле-
дующей задачи, с которой нам еще придется встречаться (см. п. 4
§ 2 гл. 6); найти функцию, полный дифференциал которой есть
заданное выражение
Рdx-\~Q dy.
про-
Ограничившись случаем, когда функции Р и Q и их частные
изводные -ду- и непрерывны в некоторой односвязной области О,
мы доказали (теорема 4.5), что Р dx-]-Q dy служит полным диф-
ференциалом некоторой функции в том и только том случае, когда
дР _ dQ
ду дх
О
Далее, мы показали (там же), что если это равенство выполнено,
то условию
dU = Pdx-\-Qdy (4.49)
удовлетворяет функция
(х, у)
U(x,y) = J* Pdx-{-Qdy.
(Хо, Уо)
Наконец, из формулы конечных приращений (см. вып. 1, гл. 8, § 9)
следует, что две функции, имеющие одинаковые полные дифферен-
циалы, отличаются друг от друга лишь на
постоянное слагаемое. Следовательно, формула
(X, у)
U (х, у) — J Pdx-^-Q dy^-C (4.50)
(Хо, Уо)
(где (х0, у0)— фиксированная точка, а С —
произвольная постоянная) содержит все функ-
ции, удовлетворяющие условию (4.49). Так
как в равенстве (4.50) интеграл не зависит
от пути, то мы можем выбрать линию, сое-
диняющую точки (х0, у0) и (х, у), по своему
усмотрению. Удобно, например, за путь интегрирования взять лома-
ную, составленную из горизонтального и вертикального отрезков *)
(рис. 4.14). При этом выборе пути равенство (4.50) принимает вид
(X, Уо) (X, у)
£/(х, у) = J* Pdx-\- J Qdy-\-C.
(Х„, Уо) (X, Уо)
(х,у)
Рис. 4.14.
*) Если эти отрезки принадлежат G,
§ 4) НЕЗАВИСИМОСТЬ КРИВОЛИНЕЙНОГО ИНТЕГРАЛА ОТ ПУТИ 179
Начальную точку (х0, у0) можно выбрать произвольно (в пределах
той области, в которой определены функции Р и Q). Изменение
этой точки равносильно, очевидно, изменению аддитивной по-
стоянной С.
Практически при нахождении функции по ее полному дифферен-
циалу удобно поступить следующим образом. Если
= Л = (4.51)
дх оу '
то, интегрируя первое из этих равенств по х и рассматривая в нем у
как параметр, получим
L/(x, у) = + (4.52)
где /1 не зависит от х (но, вообще говоря, зависит от у, т. е.
f1 — f1(y)). Далее, интегрируя второе из равенств (4.51) по у и
рассматривая в нем х как параметр, получим
U{x, y)^=fQdy + f2, (4.53)
где — если мы сможем подобрать функции /Ду) и /2(х)
так, чтобы правые части равенств (4.52) и (4.53) совпали, то полу-
ченная таким образом функция переменных х и у и будет той функ-
цией, полный дифференциал которой совпадает с Р dx-\-Qdy.
Пример. Пусть
dU = (2ху-|- l)dx-|-(x24- Зу2) tZy.
Интегрируя коэффициент при dx по х, имеем
J (2%У + 1) dx = х2у 4- х + /j (у), (4.54)
а интегрирование коэффициента при dy по у дает
f (х2 + 3у2)с?у = х2у + у3 + /2(х). (4.55)
Правые части равенств (4.54) и (4.55) совпадут, если мы положим
/1(У) = У3+С, /2(х)=х + С.
Таким образом, получаем, что
U — х2у-(-х4-у3-|-С.
4. Криволинейные интегралы в многосвязной области. На по-
следнем шаге доказательства теоремы 4.5, т. е. там, где мы из условия
дР __ dQ
ду дх
(4.56)
180
Криволинейные Интегралы
[ГЛ. 4
вывели справедливость равенства
j) Р dx -j- Q dy = 0
L
(4-57)
для любого замкнутого контура, была существенно использована
односвязность области G.
Рассмотрим простой пример, показывающий, что в много-
связной области из условия (4.56) равенство (4.57), вообще
говоря, не следует. Пусть
+ (4-58)
С
Подынтегральное выражение не имеет смысла в точке (0, 0), поэтому
мы исключим из рассмотрения некоторую окрестность начала коор-
динат. В оставшейся части плоскости (это будет уже многосвязная
область) коэффициенты при dx и dy непрерывны, имеют непрерывные
частные производные и
d ( —У ) _ д ( х \
ду \ х2 + у2 / дх ( х2 У2 / '
Однако интеграл (4.58), взятый по некоторому замкнутому пути,
не равен, вообще говоря, нулю: например, если С — окружность,
заданная уравнениями
x = cos/, y==sin£,
то
2Я
f=f^fdx+-^ydy = fdt = 2n. (4.59)
с 6
Выясним, какими свойствами обладает интеграл
УPdx-\-Qdy,
если функции Р и Q удовлетворяют условию * *)
дР _ dQ
ду дх '
но область G, в которой они заданы, многосвязна. Рассмотрим
для определенности область G, изображенную на рис. 4.15, т. е.
ж. п дР dQ
*) Мы по-прежнему предполагаем, что Р, Q, и
в замкнутой ограниченной области G.
непрерывны
§ 4] НЕЗАВИСИМОСТЬ КРИВОЛИНЕЙНОГО ИНТЕГРАЛА ОТ ПУТИ 181
имеющую три «лакуны». Рассмотрим сначала некоторый замкнутый
контур L, который не охватывает ни одной из этих лакун. Тогда
к интегралу, взятому по такому контуру, можно применить формулу
Грина, и мы получим, что этот интеграл равен нулю.
Пусть теперь Lv — контур, охватывающий одну из лакун.
Здесь формула Грина уже неприменима и интеграл по такому кон-
туру, вообще говоря, нулю не ра-
вен (см. приведенный выше при-
мер). Покажем, что величина
этого интеграла не зависит
от выбора контура, охваты-
вающего данную лакуну. Пусть
и Li—два таких контура. Соеди-
нив их вспомогательной линией (ab),
получим контур
(zz^ + ^ + ^a) — L\ (4.60) °
! Рис. 4.15.
(знак минус перед Ц означает, что
этот контур обходится в отрица-
тельном направлении). Этот контур не охватывает ни одной из лакун,
следовательно, интеграл по нему равен нулю. Но интегралы по (ab)
и (Ьа) равны по величине и противоположны по знаку. Таким обра-
зом, получаем
Р dx Q dy j* Р dx -|- Q dy = 0,
Li ~Li
t. e.
J* P dx-\-Qdy = JP dx-\-Qdy.
£i
Таким образом, каждой из лакун в области О отвечает неко-
торое определенное число — значение криволинейного интеграла
(j) Р dx + Q dy, взятого по любому из замкнутых контуров, охваты-
вающих эту лакуну. Оно называется циклической постоянной этой
лакуны. Отсюда легко получается, что значение интеграла
§ Р dx~\-Qdy по произвольному замкнутому контуру записывается
так. Пусть <о2, и3— циклические постоянные лакун, имеющихся
в области О, и пусть контур обходит первую лакуну kx раз,
вторую /г2 раз, а третью k3 раз (при этом под каждым из k{
понимается алгебраическая сумма ориентированных обходов, т. е.
182
КРИВОЛИНЕЙНЫЕ интегралы
[ГЛ. 4
число обходов против часовой стрелки минус число обходов по часо-
вой стрелке), тогда
Р dx 4- Q dy = AjWj 4- k2<s>2 4- ^з®з-
Если в многосвязной области О провести разрезы /, II, III, как это
показано на рис. 4.16, то мы получим односвязную область, и в ней
у. можно построить однозначную функ-
-----\ цию
/-------- (х’у>
( ('-S j U(x, у) — J Рdx~\-Qdy,
У (4-61)
--------------------------— . -—.-------------------» однако, в силу сказанного выше,
У--------------------------ее значения на противоположных
Рис. 4.16. краях разреза I будут отличаться
на (др на краях разреза II—на со2
и на краях разреза III — на сд3. Если же разрезов не делать,
то выражение (4.61) будет опять-таки функцией, полный дифферен-
циал которой равен Pdx-j-Qdy, но уже функцией многозначной.
Ее значения в фиксированной точке (отвечающие путям, делающим
различное число обходов вокруг лакун) отличаются друг от друга
слагаемым вида
4" ^2М2 + ^3®3>
где йр k2 и k3 могут принимать любые целые значения *).
Ясно, что все сказанное здесь автоматически переносится на случай
любого числа лакун.
*) Конечно, может оказаться случайно, что все циклические постоян-
(х, у)
ные (0/ равны нулю. Тогда функция U (х, у) = J Pdx-]-Q dy окажется
(-Vo, Уо)
однозначной и при отсутствии разрезов. В этом случае будут иметь место
все утверждения теоремы 4.5 (независимо от связности области).
ГЛАВА 5
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
В разных физических вопросах часто встречаются функции,
заданные на той или иной поверхности. Примерами таких функций
могут служить плотность распределения зарядов на поверхности
проводника, освещенность поверхности, скорость жидкости, проте-
кающей через некоторую поверхность, и т. д. Эта глава посвящена
изучению интегралов от функций на поверхности, так называемых
поверхностных интегралов, и некоторым их применениям.
Теория поверхностных интегралов во многом аналогична теории
криволинейных интегралов, изложенной в предыдущей главе. В част-
ности, мы и здесь будем различать интегралы первого и второго рода.
Вводя определение поверхностного интеграла, мы будем опи-
раться на некоторые сведения о поверхностях, изложенные в §§ 3 и 4
гл. 3, и в первую очередь на понятие площади кривой поверхности.
§ I. Поверхностные интегралы первого рода
1. Определение поверхностного интеграла от скалярной функ-
ции. Пусть в точках кусочно-гладкой поверхности S с кусочно-глад-
кой границей *) L определена некоторая ограниченная функция
/(Л4). Разобьем поверхность S кусочно-гладкими кривыми на
части Sp S2, .... (рис. 5.1). Площадь каждой из них обозначим
<TZ (Z = 1, 2, .... я). Выбрав в каждой из этих частей произвольную
точку составим сумму
(5.1)
«=1
которую мы будем называть интегральной суммой, отвечающей
функции f(M) (при данном разбиении поверхности S и данном
выборе точек Л4;).
*) Поверхность S может быть, в частности, замкнутой.
184
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 5
Введем следующее
Определение. Если при стремлении наибольшего из диа-
метров частей 2/ поверхности 2 к нулю интегральные суммы Т
стремятся к некоторому конечному пределу, то этот предел
ы м интегралом первого
рода от функции f (А1) по по-
верхности 2 и обозначается
символом
fff(M)da. (5.2)
s
Точку М поверхности 2 можно
задать декартовыми координатами
х, у, z. Поэтому функцию f (/И),
определенную на 2, мы будем обо-
значать также f(x, у, z), а соот-
ветствующий поверхностный инте-
грал — символом J J f(x, у, z)d<5.
S
называется поверхност
При этом, однако, необходимо помнить, что переменные х, у и z
не независимы, а связаны условием: точка (х, у, z) лежит на поверх-
ности 2.
2. Сведение поверхностного интеграла к двойному. Мы сформу-
лировали определение поверхностного интеграла первого рода,
теперь возникает вопрос об условиях его существования и о спо-
собах его фактического вычисления.
Оба эти вопроса решаются легко, путем сведения поверхностного
интеграла к двойному.
Рассмотрим сначала простейший случай, когда поверхность задана
уравнением в декартовых координатах.
Теорема 5.1. Пусть 2 — гладкая поверхность, заданная
уравнением z — z(x,y), (x,y)£D, где D — замкнутая огра-
ниченная область, a f(x, у, z) — некоторая ограниченная
функция, определенная на поверхности 2. Тогда справедливо
равенство
/ J /(х, у, z)do — У У f{x, у, z(x,y)) К\-\-z'2-\-z'2 dxdy. (5.3)
S D
При этом поверхностный интеграл, стоящий слева, суще-
ствует, если существует двойной интеграл, стоящий в правой
части равенства (5.3).
Доказательство. Разобьем поверхность 2 кусочно-гладкими
кривыми на п частей 2(, Спроектировав это разбиение на пло-
§ Н
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ПЕРВОГО РОДА
185
скость ху, мы получим разбиение области D на квадрируемые
части Dt (рис. 5.2). При этом диаметр каждого из элементов Dt
будет не больше, чем диаметр соответствующего элемента S( по-
верхности S.
Рассмотрим теперь интеграль-
ную сумму
п
T’=2/(-vo У/- Фг (5-4)
Z=1
отвечающую поверхностному ин-
тетраду J J* f(x, у, z) do. Пло-
s
щадь о(- элемента можно пред-
ставить в виде
Рис. 5.2.
= f f V * l~hZx+Zy dx
Di
где z = z(x, у), и затем, воспользовавшись теоремой о среднем для
двойного интеграла от непрерывной функции *), в виде
где (х*, у*)—некоторая точка, принадлежащая области Dit a Sz—пло-
щадь этой области. Следовательно, интегральную сумму (5.4) можно
переписать так:
п ________________________________
т= 2 f(xit у,., z(xz, у,.))|/ 1 + z’x2(x*. У*) + <2«. y*)Sz. (5.4')
Сравним ее с интегральной суммой
П -- - -
г=2/(х<- у,- z{xi' у())и 1 + <2(л-> у») + *у2(Л’ yt)si- (5-5)
отвечающей двойному интегралу, стоящему в равенстве (5.3) справа
(при том разбиении области D, которое отвечает данному разбиению
поверхности S).
Суммы (5.4') и (5.5) отличаются друг от друга только тем, что
в (5.5) значения как функции /, так и выражения '! + < + <
берутся в одной и той же точке (х;, у,), произвольно выбираемой
внутри элемента Dt, а в (5.4') значения У 1 -ф- сф2 -ф z’2 берутся
*) Поверхность z — z(x, у) мы считаем гладкой, следовательно,
К, 2 ,2
1 ф- zx (х, у) ф г (х, у) — непрерывная функция.
186 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ [ГЛ. S
в точке (х*, yz), диктуемой нам теоремой о среднем и, хотя и при-
надлежащей тому же элементу £>z, но, вообще говоря, не совпадаю-
щей с точкой (xz, yz)._____
Функция pl + z'* -|- z'J непрерывна, а следовательно, и равно-
мерно непрерывна в замкнутой ограниченной области D, поэтому
для каждого е > 0 найдется такое бх > 0, что
+ + У,)-
- 1 + <(х*. у*) + г/(xj, у;) | < е, (5.6)
как только максимум диаметров областей Dt станет меньше, чем бР
Функция /(х, у, г) по условию ограничена, т. е.
|/(х, у, z)| = const,
поэтому из (5.6) следует оценка:
И - f| = |i /(xz, У, z(xt, у,))[И + <(4
-K1 + <(*Z- ^)+<(хн У/)] I <Кг 2 s‘ = KeS-
где S — площадь области D.
Теперь мы уже легко закончим доказательство теоремы. Если
интеграл, стоящий в (5.3) справа, существует, то для всякого е > О
найдется такое б2 > О, что для всякой суммы Т, отвечающей такому
разбиению {Z)z} области D, диаметры элементов которого меньше б2,
выполнено неравенство
/ f Дх, у, z(x, у)) V 1 + (х, у) + г'у (х, у) dxdy — T
D
< е.
(5.8)
Пусть теперь б = min (бР б2), a {2ZJ—такое разбиение поверх-
ности 2, что диаметры всех Sz меньше, чем б, и пусть —отве-
чающее ему разбиение области D. Тогда диаметр каждого из Dt
меньше, чем б, и, следовательно, выполнены неравенства (5.7) и
(5.8). Из этих неравенств получаем, что
J J/(X, y.z
D
(X, у)) 1 + z'* (х, у) -Н z'y (х, у) dx dy — Т
<£(1-4- KS)
для всякого достаточно мелкого разбиения поверхности S. Но это и
означает, что предел интегральных сумм Т существует и равен инте-
гралу, стоящему в (5.3) справа. Теорема доказана.
§ 1] ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ПЕРВОГО РОДА 187
Следствие. Если поверхность S — гладкая, а функция
f(x, у, z) непрерывна на ней, то интеграл
f f f(x, у, z)do
х
существует.
Действительно, в этом случае в равенстве (5.3) справа стоит
интеграл от непрерывной функции. Он существует, а следовательно,
существует и стоящий слева поверхностный интеграл.
Замечание 1. Так как (см. п. 6 § 3 гл. 3)
г 1 + zx + zy cos (п >
то равенство (5.3) можно переписать так:
f ff(x, у, z)da = J f f(x, у, z(x, у)) co-f.^yg) . (5.9)
X D
Переменив роли координат x, у и z, можно в случае поверхности,
заданной уравнением
х — х (у, z\,
получить равенство
f f f(x, у. z)da=f f f(x (у, z). у, z) coyx)- (5.90
X D,
(где — проекция поверхности S на плоскость yz), а в случае
поверхности
y = y(z, х)
— равенство
f ff(x, у. z)do=f ff(x, y(z, x), z) (5.92)
X d2
(где D2 — проекция S на плоскость zx).
Замечание 2. Если поверхность S состоит из нескольких
частей, каждая из которых может быть представлена уравнением
вида
х = х(у, z), y~y(z, х) или z~z(x, у),
то для сведения поверхностного интеграла, взятого по такой поверх-
ности, к двойному можно воспользоваться тем, что поверхностный
интеграл по 2 равен сумме интегралов, взятых по составляющим
эту поверхность частям, и затем применить формулы (5.9) к каждому
из этих частичных интегралов в отдельности.
188 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ [ГЛ. 6
Если поверхность задана параметрическим уравнением, то рас-
суждения, не отличающиеся сколько-нибудь существенно от приве-
денных выше, приводят к следующей теореме.
Теорема S.f . Пусть 2 — гладкая поверхность, заданная
уравнением
г —г (и, V),
и f(x’ У< — ограниченная функция, определенная на этой
поверхности. Тогда справедливо равенство
f j f(x> z)da =
х
— f f f(x(U, V), у (и, V), Z(U, Т>)) — ^12 dU dV' <5’10)
D
причем поверхностный интеграл, стоящий слева, существует,
если только существует двойной интеграл в правой части
равенства.
Здесь D- - область изменения параметров и и v, a gn, g12 и
g22 —коэффициенты первой квадратичной формы поверхностном, п. 1
§ 4 гл. 3). Выражение У gng22— g\2dudv представляет собой эле-
мент площади поверхности, записанный в криволинейных коорди-
натах. Таким образом, формула (5.10) означает следующее: для того
чтобы записать поверхностный интеграл f f f(x- У> z^do
х
в виде двойного, нужно подставить в него вместо декартовых
координат х, у, z точек поверхности их выражения через
криволинейные координаты uav, а элемент площади da тоже
заменить его выражением через криволинейные коо-рдинаты.
Формула (5.3) и формулы (5.9), (5.90 и (5.92) являются, оче-
видно, частными случаями общей формулы (5.10). Легко проверить,
что все эти формулы остаются в силе, когда поверхность не гладкая,
а кусочно-гладкая.
3. Некоторые применения поверхностных интегралов к меха-
нике. Поверхностные интегралы первого рода часто встречаются
в физических задачах. С такими интегралами приходится иметь дело
при изучении распределения масс по поверхности, например при
нахождении координат центра масс, моментов инерции материальных
поверхностей и т. п. Вывод соответствующих формул, по существу,
ничем не отличается от вывода формул, относящихся к распреде-
лению масс в плоской области или вдоль кривой (см. пп. 3—5 § 4
гл. 1 и п. 3 § 1 гл. 4), поэтому мы приведем лишь окончательные
результаты, предоставив все выкладки читателю.
Пусть по поверхности S (гладкой или кусочно-гладкой) распре-
делена некоторая масса с поверхностной плотностью р(х, у, z).
§ 1] ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ПЕРВОГО РОДА
189
представляющей собой непрерывную функцию на 2. Такую поверх-
ность 2 будем кратко называть материальной поверхностью.
Тогда имеют место следующие формулы:
1) Масса у. материальной поверхности 2 равна
Р-
= ff PC*’ У’ z)
do.
2
2) Координаты центра масс материальной поверхности опреде-
ляются формулами:
f f хр (X, у, z) da J J ур {х, у, z) da
- - 2' Ус==~~-----------------'
f Р У’ da
f f zp (x, у, z) da
У j P (X, y, z) da
2
z.
f f p(x, y, z) da
2
В частности, для однородной поверхности (р = const)
х da
у da
z da
2
2
2
3) Момент инерции поверхности 2 относительно оси z равен
У У (*2 + У2)Р (х< у. z) do.
2
Аналогично выражаются моменты инерции относительно других
осей.
4. Поверхностные интегралы от векторных функций. Общее
понятие поверхностного интеграла первого рода. Выше мы рас-
сматривали поверхностные интегралы от скалярных функций. Это
понятие легко переносится на векторные функции. Пусть
F(/W) = Pi + Qj + #k
— некоторая векторная функция, заданная на поверхности 2. Опре-
делим интеграл от этой функции по поверхности 2, положив
У у F(Al)«to = i у у Р(М)do + j у у Q(M)do+kf f R(M)do.
2 2 2 2
(5.11)
190
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 5
Мы назовем его поверхностным интегралом первого
рода от векторной функции F. Значение такого инте-
грала представляет собой вектор. Вопросы об условиях существова-
ния поверхностного интеграла первого
рода от векторной функции, о сведе-
нии его к двойному, о его свойствах
и т. д. непосредственно сводятся к со-
ответствующим вопросам для интегра-
лов от скалярных функций Р, Q и
R — компонент вектора F.
Для иллюстрации этого понятия вы-
числим силу, с которой материальная
поверхность притягивает материальную
* точку.
Пусть р(х, у, г) — плотность рас-
пределения масс на поверхности S и
т—масса, сосредоточенная в некото-
рой точке (х0, у0, z0), не лежащей на
этой поверхности. Элемент поверхно-
сти da несет на себе элемент массы р(х, у, z)da, а сила dF, с кото-
рой этот элемент притягивает точечную массу т0, равна по закону
Ньютона
dF = ymop(x, у, z)-^da,
(5.12)
где у — постоянная, зависящая от выбора единиц, а г — вектор, сое-
диняющий точки (х0, у0, Zq) и (х, у, z) (рис. 5.3). Полная сила F,
с которой вся поверхность S притягивает массу т0, равна сумме
элементарных сил (5.12), т. е. поверхностному интегралу
y/n0 J j р(х, у, z)±-da.
2
Таким образом (поскольку г — (х — х0)i-j-(у — Уо)}-}~(г — z0)k),
F = ym0 I / У* р(х, у, z\* r^~da-\-
+j J f p(*. у, z) y do-j-k f f p(x, y, z) — da
Этот интеграл обязательно существует, если поверхность S гладкая
или кусочно-гладкая, а поверхностная плотность р(х, у, z) непре-
рывна на 2.
§ 2] ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА 191
В том понятии поверхностного интеграла, которое мы рассмо-
трели, было существенно, что каждый «интегральный элемент»
/ (/И) do
зависел от величины элемента площади do и значения функции f(M)
(скалярной или векторной) в данной точке, но не зависел от ориен-
тации поверхностного элемента do в пространстве. Именно
так обстоит дело в тех физических задачах, которые мы рассматри-
вали здесь: масса элемента материальной поверхности или сила,
с которой этот элемент притягивает материальную точку, не будут
меняться, если этот элемент поверхности мы каким-либо образом
повернем.
Однако существуют задачи другого типа, в которых ориентация
элемента do играет существенную роль. К ним относится, например,
задача (которую мы рассмотрим ниже) о вычислении количества жидко-
сти, протекающей через поверхность за единицу времени, а также и
ряд других. Этот второй круг задач приводит нас к другому понятию
поверхностного интеграла, так называемому поверхностному инте-
гралу второго рода. Ему будет посвящен следующий параграф.
Как мы увидим ниже, поверхностные интегралы первого и второго
рода связаны между собой простыми формулами.
§ 2. Поверхностные интегралы второго рода
1. Сторона поверхности. Для того чтобы определить поверхно-
стный интеграл второго рода, нам нужно ввести сначала понятие сто-
роны поверхности, аналогичное понятию ориентации кривой.
Пусть 2—гладкая поверхность. Возьмем на 2 некоторую внутрен-
нюю точку УИ0, проведем через нее нормаль к 2 и выберем на этой
нормали одно из двух возможных направлений. Это можно сделать,
фиксировав определенный единичный вектор п, нормальный к 2 в точ-
ке 440. Проведем теперь на поверхности 2 через, точку /Ио какой-либо
замкнутый контур С, не имеющий общих точек с границей поверхно-
сти, и будем передвигать единичный вектор п из точки Л40 вдоль С
так, чтобы этот вектор все время оставался нормальным к 2 и чтобы
его направление менялось при этом передвижении непрерывно. По-
скольку вектор п все время остается нормальным к 2, то имеются две
возможности: 1) при возвращении в точку Мо вектор п возвращается
в первоначальное положение; 2) в результате обхода по контуру С
вектор п меняет свое направление на противоположное.
Введем следующее
Определение. Гладкая поверхность 2 называется д в у -
сторонней, если обход по любому замкнутому контуру,
лежащему на поверхности 2 и не имеющему общих точек с ее
границей, не меняет направления нормали к поверхности.
192
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 5
Если же на поверхности существует замкнутый, контур,
при обходе по которому направление нормали меняется
на противоположное, то поверхность называется односто-
ронней.
Если поверхность 2 двусторонняя, то в каждой ее точке М
можно выбрать единичный вектор нормали n (Л4) так, чтобы вектор
п(УН) зависел от точки М непрерывно. Для построения такой вектор-
функции п(Л1) возьмем на 2 некоторую начальную точку Мо и вы-
берем в этой точке один из двух возможных единичных нормальных
векторов п(Л10). После этого возьмем на 2 произвольную точку М,
соединим ее с Л40 какой-либо кривой L, лежащей на 2, и перенесем
вдоль L вектор п из Мо в М так, чтобы он все время оставался
нормальным к поверхности и чтобы его направление при этом пере-
носе менялось непрерывно. Вектор n(А1), полученный таким образом
в точке М, не зависит от выбора кривой L, соединяющей точки А10
и Ж. Если бы две разные кривые Ц и Л2 приводили к разным резуль-
татам, то, соединив эти кривые в одну, мы получили бы на 2 замкну-
тый путь С, при обходе по которому направление нормального
вектора меняется на противоположное, т. е. эта поверхность не
была бы двусторонней.
Из сказанного ясно, что на двусторонней поверхности существуют
две и только две такие функции n (М), непрерывные на всей поверх-
ности 2. Действительно, каждая такая функция полностью опреде-
ляется выбором одного из двух воз-
Z можных направлений нормали в одной
точке. Мы будем называть каждую
из этих двух функций «непрерывным
полем нормалей» на 2. Ясно, что на
/ односторонней поверхности нельзя по-
строить ни одного непрерывного по-
п___________________ля нормалей.
Zy Выбор на 2 определенного непре-
рывного поля нормалей мы будем на-
зывать выбором стороны этой поверх-
Рис 5 4 ности.
Примеры. 1. Простейший при-
мер двусторонней поверхности—
плоскость. Двусторонней поверхностью будет и любая часть пло-
скости, например круг.
2. Любая гладкая поверхность, определенная уравнением
z = f(x, у), — двусторонняя. Действительно, мы получим одну
ее сторону (верхнюю), выбрав в каждой ее точке нормальный вектор
так, чтобы он составлял с положительным направлением оси z ост-
рый угол, а другую (нижнюю) сторону — при противоположной ориен-
тации нормали (рис. 5.4).
5 2]
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА
193
3. Всякая замкнутая поверхность, не имеющая самопе-
ресечений, — например сфера, эллипсоид ит. п., — двусторон-
п я я. Направив в каждой точке замкнутой поверхности нормаль внутрь
объема, ограниченного поверхностью, мы получим внутреннюю сто-
рону поверхности, а направив нормаль наружу,
получим внешнюю сторону. xf’mT| | | ПТГПТи
4. Простейшим примером односторонней |
поверхности может служить так называемый лист Ill
Мёбиуса, изображенный на рис. 5.5. Его можно д с
получить, взяв полоску бумаги ABCD (рис. 5.6,а)
и склеив ее так, чтобы точка А совпала с точ- Рис- 5-5-
кой С, а точка В — с точкой D, т. е. повернув
перед склеиванием один ее край на 180° (рис. 5.6, б). Легко видеть,
что при обходе листа Мёбиуса по его средней линии направление
нормали к нему меняется на противоположное, т. е. эта поверхность
действительно является односторонней.
Замечание 1. Двустороннюю поверхность называют также
о риентируемой, а выбор определенной ее стороны — ориентацией.
Рис. 5.6.
поверхности. Односторонние поверх-
ности называют неориентируе-
мыми.
Читатель должен различать тер-
мины «ориентируемая» (сторону
можно выбрать) и «ориентирован-
ная» (сторона уже выбрана).
Замечание 2. В отличие от
таких свойств, как, например, глад-
кость поверхности, которые могут
иметь или не иметь места в отдельных точках (локальные свой-
ства), ориентируемость (или неориентируемость) — это свойство,
характеризующее всю поверхность в целом (глобальное свой-
ство). Действительно, на листе Мёбиуса или любой другой поверх-
ности малая окрестность любой точки ориентируема. В каждой та-
кой окрестности можно построить непрерывное поле нормалей,
хотя на всем листе Мёбиуса такое поле построить нельзя.
С понятием стороны поверхности тесно связано понятие ориен-
тации ее границы, которое нам понадобится ниже*).
Пусть S — ориентированная поверхность, ограниченная
одним или несколькими контурами. Определим ориентацию каж-
дого контура L, входящего в состав границы поверхности S,
согласованную с ориентацией поверхности S, по следующему
*) Эта связь существенно зависит от того, к какой координатной си-
стеме, правой или левой, отнесено все трехмерное пространство. Мы будем
иметь в виду правую систему.
194
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 5
правилу: направление обхода контура L мы считаем положи-
тельным (согласованным с ориентацией 2), если наблюдатель,
расположенный на поверхности так, что направление вектора
нормали совпадает с направлени-
Рис. 5.7.
ем от ног к голове, ооходит кон-
тур L, оставляя поверхность 2 все
время слева от себя (рис. 5.7).
Противоположное направление мы
считаем отрицательным. Если
L — произвольный замкнутый' кон-
тур, ограничивающий какую-либо
часть ориентированной поверхности
2, то направлением обхода этого
контура, согласованным с ориен-
тацией поверхности 2, мы считаем
опять-таки то, при котором ограни-
ченная этим контуром часть поверх-
ности 2 (на рис. 5.8 она заштрихо-
вана) остается слева *).
Если в качестве поверхности 2
взята ориентированная плоскость,
то это определение согласованности ориентации контура и по-
верхности сводится к уже хорошо знакомому читателю правилу, по
которому контур считается ориентированным положительно, если его
обход совершается против часовой стрелки, и ориентированным
отрицательно в противоположном случае.
Замечание 3. Правило согласования ориентации поверхности
2 и ограничивающего ее контура L можно сформулировать еще
следующим образом: пусть п — единичный вектор нормали к по-
верхности 2 в некоторой точке М, принадлежащей L, и пусть
*) Если в пространстве взята левая система координат, то согласова-
ние противоположное, т. е. положительно то направление обхода кон-
тура L, при котором поверхность 2 остается справа.
§ 2]
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА
195
v — вектор, нормальный к L и к п и направленный в ту сторону,
с которой расположена поверхность S. Тогда положительное на-
правление обхода контура L указывается вектором [у, п] *)(рис. 5.9).
2. Определение поверхностного интеграла второго рода. Рас-
смотрим сначала одну из задач, приводящих к понятию поверхно-
стного интеграла второго рода, а именно, задачу о вычислении потока
жидкости через некоторую по-
верхность.
Пусть пространство заполне-
но движущейся жидкостью, ско-
рость которой в точке (х, у, z)
задается вектором V (х, у, z) с
компонентами Р — Р(х, у, z),
Q = Q(x, у, z), R = R(x, у, z).
Рис. 5.10.
Вычислим количество П жидко-
сти, протекающей за единицу
времени через некоторую ориен-
тированную поверхность S.
Рассмотрим бесконечно малый
элемент do поверхности S. Количество жидкости, протекающее через
do за единицу времени, равно, очевидно, dH = Vndo, где Vn —
проекция скорости V на направление нормали п к do (рис. 5.10),
Записав Vп как скалярное произведение вектора V на единичный
вектор нормали п к do, имеем
dII = [Pcos(n, x)4~Qcos(n, y) + Pcos(n, z)\do. (5.13)
Это — элемент потока жидкости. Чтобы получить количество жидко-
сти, протекающее через всю поверхность S, нужно просуммировать
выражения (5.13) по всем элементам do, т. е. взять интеграл
П = У J* [Pcos(n, x)-|-Qcos(n, у)cos (n, z)] do.
2
Этот интеграл представляет собой не что иное, как поверхно-
стный интеграл первого рода (в том смысле, как мы определили его
в § 1) от выражения
Pcos(и, x) + Qcos(n, y)-|-Pcos(n, z).
Важно, однако, то, что само это выражение зависит не только от
вектор-функции (Р, Q, R), заданной на поверхности S, но и от на-
правления нормали в каждой точке этой поверхности.
*) Это правило остается справедливым, независимо от того, к какой
системе координат, правой или левой, отнесено все пространство. Направле-
ние вектора п не зависит от системы координат, направление v также не
зависит. При смене правой системы на левую векторное произведение [v, п]
меняет свое направление на противоположное.
196 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ [ГЛ. 5
Перейдем теперь к общему определению. Пусть 2 —гладкая дву-
сторонняя поверхность. Фиксируем какую-либо определенную
сторону этой поверхности (поле нормалей п(7И)) и рассмотрим не-
которую векторную функцию А — (Р, Q, R), заданную на S. Обо-
значим Ап проекцию вектора А на направление нормали к 2 в дан-
ной точке. Эту проекцию можно записать в виде
Xn = ftcos(n, x) + Qcos(n, y)4-ftcos(n, z),
где cos(n, x), cos(n, у) и cos(n, z) — косинусы углов между напра-
влением нормали к поверхности и направлениями координатных осей,
т. е. компоненты единичного вектора нормали п.
Интеграл
J J [Pcos(n, x) + Qcos(n, у)4~ R cos(n, z)] do (5.14)
s
мы назовем поверхностным интегралом второго
рода от вектор-функции R = (P, Q, R) по поверхности S
(точнее говоря, по выбранной стороне поверхности S) и будем
обозначать
J У Р dy dz -j- Q dz dx 4- R dx dy.
Z
Таким образом, по определению
У У Р dy dz -\-Qdz dx-\- R dx dy =
z
= У У [ftcos(n, x)4-Qcos(n, y)4-#cos(n, z)}do. (5.15)
z
При переходе к другой стороне поверхности компоненты единич-.
ного вектора нормали, а следовательно, и сам интеграл (5.14), меняют
свой знак на противоположный. Для односторонней поверх-
ности понятие поверхностного интеграла второго рода не
вводится.
Для того чтобы понятие поверхностного интеграла приобрело общ-
ность, необходимую для приложений, приходится рассматривать инте-
гралы и по таким поверхностям, которые имеют самопересечения
(с аналогичной ситуацией мы уже встречались в теории криволинейных
интегралов).
Замечание 1. Если do — бесконечно малый элемент площади
поверхности, то выражения
cos(n, x)do, cos(n, у) do, cos(n, z)do
§ 2]
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА
197
представляют собой проекции элемента da на плоскости yz, zx и ху
(рис. 5.11), поэтому мы и обозначаем их dydz, dz dx и dxdy соот-
ветственно.
Замечание.2. Мы определили поверхностный интеграл второго
рода, опираясь на понятие поверхностного интеграла первого рода.
Рис. 5.11.
Однако интеграл второго рода можно определить и непосред-
ственно, с помощью соответствующих интегральных сумм, а именно,
следующим образом:
Будем для сокращения записи рассматривать только одну компо-
ненту вектора (Р, Q, R), скажем R. Возьмем некоторую гладкую
ориентированную поверхность S и рассмотрим разбиение этой поверх-
ности на части 2г. Взяв в каждой их этих частей произвольную
точку (х(, yt, Zi), составим интегральную сумму
п
У-,. Z^S;, (5.16)
i s=l
где St— проекция . на плоскость ху. При этом величину мы
будем считать положительной, если в точках, принадлежа-
щих нормаль к поверхности образует с положительным направле-
нием оси z острый угол, и отрицательной, если в каждой
точке элемента S(- этот угол тупой*). Нетрудно проверить, что
*) В разбиение поверхности S могут входить еще и «неправильные»
элементы, т. е. такие, что в некоторых их точках угол (n, z) острый, а в не-
которых — тупой (рис. 5.12). Можно или избегать разбиений, содержащих
такие элементы, или приписывать таким элементам произвольный знак. Это
не влияет на результат, поскольку сумма площадей проекций таких элемен-
тов мала.
198 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ [ГЛ. 5
для непрерывной функции R(x, у, z) и гладкой поверхности S пре-
дел интегральных сумм (5.16) при неограниченном измельчении раз-
биения поверхности существует и равен
J у /?(х, у, z)dxdy
х
(ср. с определением криволинейного интеграла второго рода в п. 2
§ 2 гл. 4).
Аналогичным образом можно определить через интегральные
суммы и интегралы
Р(х. у, z)dydz и f f Q(x> У' z)dzdx,
2 X
а следовательно, и интеграл общего вида
У у Р dy dz + Q dz dx R dx dy
2
— сумму интегралов этих трех типов.
Замечание 3. Отличие поверхностного интеграла второго рода
от интеграла первого рода состоит, по существу, в том, что в инте-
грале второго рода элемент площади da рассматривается не как
скалярная величина, а как вектор da, направленный по нормали
к поверхности и имеющий компоненты:
da cos (n, х), da cos (n, у), do cos (n, z).
В соответствии с этим поверхностный интеграл второго рода от
векторной функции А = (Р, Q, Л) часто записывают в виде
У У (A, da), (5.17)
х
что равносильно записи
У У (A, n)do. (5.18)
2
Замечание 4. Наряду с интегралами вида (5.18) в некоторых
задачах приходится рассматривать интегралы вида
f f !*• "1 da. (5.19)
2
Значение такого интеграла представляет собой уже не скаляр,
а вектор. Его вычисление сводится, очевидно, к покомпонентному
интегрированию вектора [А, п]. Так как здесь подынтегральное вы-
ражение зависит и от нормали п к поверхности 2, то интеграл (5.19)
§ 21
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ ВТОРОГО РОДА
199
естественно рассматривать как поверхностный интеграл второго рода
(но только «в е к т о р н ы й», в отличие от «с к а л я р н о г о» инте-
грала (5.18)).
3. Сведение поверхностного интеграла второго рода к двой-
ному интегралу. Из определения поверхностного интеграла второго
рода и теоремы 5.1 сразу вытекает следующий результат:
Пусть гладкая {или кусочно-гладкая) поверхность 2 за*
дана уравнением
z = z(x, у)
(причем берется верхняя сторона этой поверхности) и R (х, у, z) —
некоторая ограниченная функция на 2. Тогда
J* J" R(x, у, z)dxdy = J* у R(x, у, z(x, y))dxdy, (5.20)
s D
где D — проекция поверхности 2 на плоскость ху; входящий в это
равенство поверхностный интеграл существует, если суще-
ствует стоящий
Действительно,
переписать в виде
справа двойной интеграл.
рассматриваемый поверхностный интеграл можно
J J R(x, у, 2)cos(n, z) da.
z
Применив к нему
равенство. Таким образом, для того чтобы поверхностный инте-
грал у у R(x, у, z)da, взятый по верхней стороне поверх-
ности 2, определенной уравнением z = z(x,y), преобразовать
в двойной, следует в подынтегральную функцию вместо z
подставить соответствующую функцию z(x, у), а интегриро-
вание по поверхности 2 заменить интегрированием по ее проек-
ции D на плоскость ху.
Если же интеграл берется по нижней стороне поверхности 2, то
f f R(x, У> z)dxdy — — у у R{x, у, z{x,
Z D
Аналогично получаются формулы
У у Р {х, у, z) dy dz = ± У у Р (х (у, z), у,
Z
и
f f Q(x> У> z)dz dx — ± у у Q(x, у (z, х),
z d2
формулу (5.9), немедленно получаем требуемое
у)) dx dy.
z)dydz (5.21)
z) dz dx, (5.22)
200 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ [ГЛ. 5
где в первом случае под S понимается поверхность, заданная урав-
нением х = х(у, г), а во втором — поверхность, заданная уравне-
нием y — y(z, х). Знак плюс берется в том случае, когда нормаль
к поверхности образует с осью х (соответственно с осью у) о с т р ы й
угол, а знак минус, когда этот угол тупой. Dt и D2 — проекции
поверхности S на плоскости yz и гх соответственно.
Формулой типа (5.20) можно воспользоваться для сведения по-
верхностного интеграла к двойному и в том случае, когда ориенти-
рованная поверхность S состоит из нескольких кусков, каждый из
которых определяется уравнением вида z = z(x, у). В этом случае
рассматриваемый интеграл следует представить как сумму интегра-
лов, отвечающих этим кускам, и затем к каждому из этих слагаемых
применить формулу (5.20).
Упражнение. Интеграл
J= J J R(x, у, z)dxdy,
s
взятый по внешней стороне сферы
х2 у2 z2 = а2,
записать в виде суммы двойных интегралов.
Ответ.
J— J J R\x, у, У а2 — х2 — у2) dx dy —
х2+у2<а2
— f J* /?(x, y, — j/a2 — x2 — y2) dxdy.
x,+y2<a1
(Первое слагаемое равно интегралу, взятому по верхней стороне
верхней полусферы, а второе, вместе со знаком минус, равно инте-
гралу, взятому по нижней стороне нижней полусферы. Две таким
образом ориентированные полусферы составляют вместе внешнюю
сторону полной сферы.)
Мы показали, как сводится к двойному интегралу поверхностный
интеграл второго рода, взятый по поверхности, заданной уравнени-
ем в декартовых координатах. Для поверхности, заданной парамет-
рическим уравнением, применение теоремы 5.1' сразу дает следующий
результат: если гладкая (или кусочно-гладкая) поверхность S
задана параметрическим уравнением
г — г (и, V)
§ 3]
ФОРМУЛА ОСТРОГРАДСКОГО
201
и (Р, Q, /?) — ограниченная вектор-функция, определенная
на 2, то
Р dy dz-\-Qdz dx 4- Rdx dy —
s
= f f |/’cos(n, x)4-Qcos(n, у) -b R cos (n. z)J V gugm—gl2du dv,
D (5.23)
где D — область изменения параметров и и v, a gxi, gX2 « g22—
коэффициенты первой квадратичной формы поверхности 2;
входящий в это равенство поверхностный интеграл сущест-
вует, если существует стоящий справа двойной интеграл.
Формулу (5.23) можно записать несколько иначе. Известно, что
(см. п. 5 § 3 гл. 3)
. . А , . В
cos(n, X) — —7= — , COS(n, у) — —F— --------,
У А2 4- В2 + С2 УА2 + В2+С2
COS(n, Z) ——7=^. =
/л2 + В2 4- С2
(5.24)
где
ду
ди
ду
dv
dz
du
dz
dv
dz
du
dz
dv
dx
du
dx
dv
Ox
du
dx
dv
dy
du
dy
dv
и что
V^22-^2" =
Поэтому формулу (5.23) можно записать так:
ff
s
Р dy dz -\-Qdz dx-\- R dx dy = J* J [РЛ 4~ dudv,
D (5.25)
где
P — P{x(u, v), y(u, v), z(u, v))
и аналогично для Q и R.
Ясно, что равенства (5.20) — (5.22) представляют собой частные
случаи общей формулы (5.23).
§ 3. Формула Остроградского
1. Вывод формулы Остроградского. В предыдущей главе мы
вывели формулу, связывающую двойной интеграл по некоторой
плоской области, с криволинейным интегралом, взятым по ее границе
{формула Грина). Сейчас мы установим аналогичную формулу,
202
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 5
связывающую тройной интеграл по пространственной области с по-
верхностным интегралом, взятым по внешней стороне поверхности,
ограничивающей эту область. Эта формула называется формулой
Остроградского *).
Введем для удобства следующие термины. Пространственную
область V, ограниченную двумя кусочно-гладкими поверхностями
и 2г, заданными уравнениями
z = z1(x, у) и z — z2(x, у), (5.26)
и боковой цилиндрической поверхностью 23 с образующими, парал-
лельными оси г, мы назовем областью, цилиндрической вдоль
оси z или, короче, «z-цилиндрической». Поверхности z — z1 (х, у)
и z = z2(x, у) назовем ее криволинейными основаниями, ниж-
ним и верхним**) (рис. 5.13). Ана-
логично область, ограниченную ку-
сочно-гладкими поверхностями
x = x1(y, z) и х = х2(у, z)
и цилиндрической поверхностью с
образующими, параллельными оси х,
назовем «х-цилиндрической». Так
же определяются и «у-цилиндриче-
ские» области.
Назовем, наконец, область V
простой, если ее можно разбить
как на конечное число г-цилиндри-
ческих областей, так и на конеч-
ное число областей каждого из двух
остальных типов.
Пусть V — некоторая z-цилинд-
рическая область с основаниями 2Р
22, заданными уравнениями (5.26)
и боковой поверхностью 23. Сое-
динение этих трех поверхностей, т. е. всю границу области V, обо-
значим 2. При этом мы будем рассматривать внешнюю сторону
поверхности 2. Возьмем функцию R(x, у, z), определенную и непре-
*) М. В. Остроградский опубликовал эту формулу в 1828 г. в ра-
боте «Заметка о теории тепла». Часто ее называют также формулой Гаусса,
однако Гауссом эта формула была получена значительно поЗже, в 1841 г.
**) Боковая поверхность 2 может отсутствовать. Например, шар
мы считаем z-цилиндрической областью, основания которой суть 2j —
нижняя полусфера и 22 — верхняя полусфера, а боковая поверхность 23 вы-
родилась в экватор (шар является также и областью, цилиндрической вдоль
осей х и у).
ФОРМУЛА ОСТРОГРАДСКОГО
203
§ з)
dR
рывную вместе со своей частной производной в области V (вклю-
чая ее границу), и рассмотрим очевидное равенство
Хг(Х, у)
J ^-dz — R(x, у, z2(x, y)) — R(x, у, zx(x, у)).
(X У)
Проинтегрируем это равенство по области D, представляющей собой
проекцию V на плоскость (х, у), заменяя повторный интеграл
тройным:
dxdydz = J’ R(x, у, z2(x, y))dxdy —
V J " D
— j* J* R(x, у. zr(x, y))dxdy. (5.27)
D
Первый из стоящих справа интегралов можно записать (см. фор-
мулу (5.20)) в виде поверхностного интеграла от функции R(x, у, г),
взятого по верхней стороне поверхности
z = z2 (х, у).
Аналогично второй из этих интегралов можно рассматривать как
поверхностный интеграл от той же функции R(x, у, z), взятый
по верхней стороне поверхности z — zx (х, у), или как интеграл
по нижней стороне той же поверхности z — (х, у), взятый с обрат-
ным знаком. Таким образом, мы получим
J' f f dx dy dz = У* j* R dx dy-]- j* j* Rdxdy, (5.28)
V S, 2,
где первый из стоящих справа интегралов берется по верхней сто-
роне поверхности S2, а второй — по нижней стороне поверхности Sx.
Прибавив к правой части формулы (5.28) интеграл
J* J Rdxdy
(равный, очевидно, нулю), взятый по внешней стороне боковой
поверхности S3, мы получим справа поверхностный интеграл, взятый
по внешней стороне всей поверхности S, ограничивающей область V.
Таким образом, мы получаем следующее равенство:
J J f dx dy dz = l' У* Rdx dy — J J' /?cos(n, z)do. (5.29)
v 's'7 s
204
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
{ГЛ. Б
Равенство (5.29) справедливо и для любой области V, которую
можно разбить на конечное число ^-цилиндрических частей. Дей-
ствительно, разобьем V на такие части Vz, напишем для каждой
из них равенство вида (5.29) и просуммируем эти равенства. Слева
мы получим тройной интеграл, взятый по всей области V, а справа —
сумму поверхностных интегралов, взятых по частям поверхности S,
ограничивающей V, и по тем поверхностям, с помощью которых V
разбивается на части Vпричем по каждой из этих последних инте-
грал берется дважды, один раз по одной ее стороне, а второй
раз — по другой. Поэтому в результате суммирования все интегралы,
взятые по разделяющим поверхностям, взаимно уничтожа-
ются, и мы получаем
f f f "^dxdydz — У* Rdxdy. (5.30)
V 2
Пусть теперь V — область, цилиндрическая вдоль оси х, т. е.
ограниченная кусочно-гладкими поверхностями-основаниями
X—Х1(У1, z), х = х2(у, г)
и боковой цилиндрической поверхностью, а Р(х, у, z)— функция,
дР
непрерывная вместе со своей производной в области V (включая
ее границу). Рассуждения, аналогичные проведенным выше, приводят
к равенству
f f f ‘^7’dx dy dz— Г j* Pdydz, (5.31)
v J %
которое остается в силе и тогда, когда V состоит из конечного числа
х-цилиндрических частей.
Аналогично получается и равенство
dz — У* Qdzdx, (5.32)
v J х
справедливое для всякой области V, которую можно разбить на ко-
нечное число у-цилиндрических областей.
Пусть, наконец, V — некоторая простая область и пусть функ-
ции Р, Q, R вместе со своими производными -4^-, непре-
рывны в этой области всюду, включая ее границу (т. е. непрерывны
в замкнутой области). Тогда .справедливы все три равенства: (5.30),
ФОРМУЛА ОСТРОГРАДСКОГО
205
dx dy dz —
§ 3)
(5.31) и (5.32). Сложив их, получаем
= У* У Р dy dz Q dz dx-\- R dx dy
(5.33)
(5.33')
считали,
dx dy dz —
или, в других обозначениях,
V
~ f f f IP cos (n, x)+Qcos(n, y) + /?cos(n, z)]dv.
2
Это и есть формула Остроградского.
Замечание. При выводе формулы Остроградского мы
, n n п - дР dQ dR
что функции Р, Q, R и их частные производные-—-, непрерыв-
ны (а следовательно, и ограничены) в замкнутой простой области.
Применив те же рассуждения, что и для формулы Грина (см. замечание 1
§ 3 гл. 4), можно доказать справедливость формулы Остроградского при
следующих более общих условиях:
1/ V — ограниченная область, граница которой состоит из конечного
числа кусочно-гладких поверхностей.
2. Функции Р (х, у, z), Q (х, у, г) и R (х, у, г) непрерывны, а следова-
тельно, и ограничены в замкнутой области V.
D п дР dQ dR
3. Производные существуют и непрерывны внутри
, I/ ,х ч Г С Г (дР , dQ . dR\ , , .
области V (без границы) и интеграл J J J 4" х “У “г
V
существует (быть может, как несобственный интеграл*)).
2. Вычисление поверхностных интегралов с помощью фор-
мулы Остроградского. Представление объема пространственной
области в виде поверхностного интеграла. Выше мы показали
(формула (5.10)), как поверхностный интеграл второго рода свести
к двойному. Однако для фактического вычисления поверхностного
интеграла этот путь не всегда самый удобный. В частности, инте-
грал по замкнутой поверхности иногда удобнее сводить к тройному
по формуле Остроградского.
Примеры. 1. Вычислить интеграл
J х2 dy dz 4- у3 dz dx-\-z2dxdy,
2
взятый по сфере х'
a1.
*) О несобственных кратных интегралах см. гл. 9.
206
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
[ГЛ. 5
Решение. Воспользовавшись формулой Остроградского, будем
иметь
J= 3 f f f (x2-j-у2-}-z2)dx dy dz,
r2+y2+z2<o2
откуда, введя сферические координаты, получаем
2л л а
dtp У* dQ l' r4 sin Qdr = -|- ла5.
ООО
2. Вычислить интеграл
J= f fzdy dz-\-xdz dx-\-ydxdy,
взятый по некоторой замкнутой поверхности 2.
Решение. По формуле Остроградского рассматриваемый инте-
грал сводится к тройному, под знаком которого стоит тождествен-
ный нуль. Следовательно, J—Q, какова бы ни была замкнутая по-
верхность 2.
В предыдущей главе мы видели, что формула Грина дает,
в частности, выражение для площади области через криволинейный
интеграл по ее границе (см. (4.47)). Точно так же и из формулы
Остроградского легко получить выражение для объема области в виде
поверхностного интеграла по замкнутой поверхности 2 — границе этой
области. Действительно, подберем функции Р, Q и R так, чтобы
dP dQ .
дх ду ‘ dz
Тогда получим
J* fPdy dz-^-Qdz dx-}- Rdxdy = J* J J dx dydz — V,
S V
где V — объем, ограниченный поверхностью 2. Интеграл здесь бе-
рется по внешней стороне 2. В частности, положив
P = -jX, Q=-^y, R = ~z,
мы получим для вычисления объема удобную формулу
И = f xdy dz + у dz dx-}-z dxdy. (5.34)
§ 4]
ФОРМУЛА СТОКСА
207
§ 4. Формула Стокса
1. Вывод формулы Стокса. В этом параграфе мы выведем так
называемую формулу Стокса, связывающую поверхностные интегралы
с криволинейными. Формула Стокса обобщает формулу Грина и пере-
ходит в нее, если рассматриваемая поверхность сводится к плоской
области, лежащей в плоскости ху. Подобно формулам Грина и
Остроградского, формула Стокса широко применяется как в самом
анализе, так и в его приложениях.
Пусть дана гладкая ориентированная поверхность S, ограниченная
ориентированным контуром Л (ориентации S и Л согласованы,
см. п. 1 § 2), и пусть в некоторой трехмерной области, содержащей
внутри себя поверхность 2, определена векторная функция (Р, Q, R),
такая, что Р, Q и R непрерывны в этой области вместе со своими
частными производными первого порядка.
Постараемся преобразовать криволиней-
ный интеграл
J* Р dx Q dy + R dz, (5.35)
л
взятый по контуру Л, в интеграл по по-
верхности S.
Рассмотрим сначала случай, когда
поверхность S задана уравнением
z = z{x, у)
в декартовых координатах. Обозначим D проекцию поверхности S
на плоскость ху, и пусть L — граница области D, т. е. проекция
контура Л (рис. 5.14). Преобразование криволинейного инте-
грала (5.35) в поверхностный мы проведем по следующей схеме:
f -f -Jf-ff'
Л L D 2
т. е. криволинейный интеграл по пространственному контуру Л пре-
образуем сперва в криволинейный интеграл по плоскому контуру L,
затем (с помощью формулы Грина) переведем его в двойной инте-
грал по области D и, наконец, этот последний преобразуем в поверх-
ностный интеграл по S.
Проведем теперь соответствующие выкладки. Рассмотрим сначала
интеграл вида
Ji = J Р dx.
л
208 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ [ГЛ. 5
Заметим прежде всего, что
Ji= J"P(x, у, z) dx = J Р (х, у, z(x, y))dx,
л L
поскольку контур Л лежит на поверхности S, заданной уравнением
z = z(x, у). Далее, применив формулу Грина, получаем
Jp= f Р(х, у, z(x, y))dx~ — J f (^--]-^-^dxdy (5.36)
L "о
(здесь P — сложная функция от x и у, и мы учли это при вычи-
слении производной от Р по у).
Воспользовавшись выражениями для направляющих косинусов
нормали (см. (3.36)), получаем, что
dz cos (п, у)
ду cos (п, г) '
Поэтому
л=- Г /7^-^-cos>
1 ,/ J \ду dz cos (n, z) / *
D
Теперь, воспользовавшись формулой (5.20), мы можем этот двойной
интеграл преобразовать в поверхностный. Получаем
, С С (дР дР cos (п, у) \ , ч ,
Ji=— / / -s-------3-----т—cos(n, z)da =
J J \ dy dz cos (n, z)) v
2
= — f f COS (n, z) — ~ cos (n, y)j da.
Итак,
f nj C C(dP . . dP , Q_4
у Pdx — J J ^-cos(n, y)— -^-cos(n, z)j da. (5.37)
A 2
Мы предполагали, что поверхность 2 задана уравнением
z — z(x, у). Тот же результат можно было получить, предположив,
что 2 задана уравнением у —y(z, х). Для этого нужно было бы
рассмотреть проекцию 2 на плоскость zx (вместо ху) и провести
рассуждения, аналогичные изложенным выше. Далее, если 2 — часть
плоскости, перпендикулярной оси х (тогда 2 нельзя однозначно
спроектировать ни на плоскость ху, ни на плоскость zx), то равен-
ство (5.37) верно тривиальным образом: и правая и левая его части
будут равны нулю (проверьте это!). Наконец, стандартные рассужде-
ния, которыми мы уже пользовались при выводе формул Грина
и Остроградского, показывают, что если поверхность 2 состоит из
конечного числа частей, для каждой из которых верно равенство (5.37),
ФОРМУЛА СТОКСА
209
§ 4]
то оно верно и для всей поверхности 2. Таким образом, равен-
ство (5.37) установлено для поверхности, состоящей из конечного
числа кусков перечисленных выше типов. В точности так же полу-
чаются два аналогичных равенства:
I' Qdy — У* J* ^cos(n, z) — cos(n, x)po, (5.38)
A X
f Rdz = J У* cos(n, x) — cos (n, y)jdo. (5.39)
A
Складывая все эти три равенства, получаем
J Pdx-\-Qdy-\-Rdz = f J cos(n, z) +
A X
, / dR dQ\ , , . / dP dR\ , /1 .
+W ~ )cos (n> x)+hr - cos <n’ da- <5 -4°)
Это и есть формула Стокса. Ее можно переписать в следующем
виде:
[ Pdx + Qdy^Rdz^ f
A s’
77)^^ +
dQ\ . , . I dP
-5— I dy dz —I— I -3—
dz ) s 1 \dz
^)dzdx. (5.41)
Формулу Стокса легко запомнить, заметив, что первое слагаемое
в правой ее части — это то же самое выражение, которое стоит под
знаком двойного интеграла в формуле Грина, а второе и третье по-
лучаются из него циклической перестановкой координат х, у, z и
функций Р, Q, R.
Если поверхность 2 сводится к плоской области, лежащей в пло-
скости ху, то интегралы по dz dx и dy dz обращаются в нуль и
формула Стокса переходит в формулу Грина.
Замечание 1. При выводе формулы Стокса мы пользовались
декартовой системой координат. Но ни криволинейный, ни поверх-
ностный интегралы, входящие в эту формулу, не зависят от способа
задания поверхности 2 и ее границы А. Поэтому формула Стокса
остается в силе и при любом другом способе задания поверхности,
например с помощью параметрического уравнения
г = г (и, V).
ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ
210 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ [ГЛ. 5
Замечание 2. Формула Стокса остается в силе и в том случае,
когда граница Л поверхности 2 состоит из нескольких отдельных
контуров. В этом случае под J Р dx -ф- Q dy -ф- R dz следует пони-
Рис. 5.15.
мать сумму интегралов, взятых по этим контурам, причем ориентация
каждого из этих контуров опять-таки должна быть согласована с вы-
бором стороны поверхности S. Например, если S представляет со-
бой боковую поверхность цилиндра с вырезан-
ным в ней отверстием (рис. 5.15) и мы рас-
сматриваем внешнюю сторону этой поверхно-
сти, то формула Стокса связывает интеграл
по 2 с криволинейным интегралом, взятым по
трем контурам, образующим ее границу и ори-
ентированным так, как это показано стрелка-
ми на рис. 5.15.
2. Применение формулы Стокса к ис-
следованию пространственных криволиней-
ных интегралов. Формула Стокса имеет много-
численные применения, и мы еще вернемся к
ней в следующей главе. Сейчас мы воспользу-
емся этой формулой для того, чтобы перенести
на пространственные криволинейные интегралы
те результаты об условиях независимости кри-
волинейного интеграла от пути, которые в § 4
гл. 4 были получены (с помощью формулы Грина) для плоского случая.
Введем следующее
Определение. Трехмерная область V называется поверх-
ностно односвязной*), если на любой замкнутый контур,
лежащий в V, можно натянуть по-
верхность, также целиком лежащую в V
(т. е. если внутри V найдется поверхность,
имеющая этот контур своей границей).
Примерами поверхностно односвязных
областей являются: шар, все пространство,
область, заключенная между двумя концен-
трическими сферами, и т. п. Примером не-
односвязной области может служить шар,
сквозь который проходит цилиндрический
туннель (рис. 5.16).
Установим теперь следующий результат,
аналогичный теореме 4.5.
Теорема 5.2. Если функции Р(х, у, г),
Q(x, у, z), R(x, у, г) непрерывны вместе со своими частными
*) Или, короче, просто «о д н о с в я з н о й».
$ 4] ФОРМУЛА СТОКСА 211
производными первого порядка в некоторой замкнутой огра-
ниченной поверхностно односвязной области V, то следующие
четыре утверждения равносильны между собой’.
1. Интеграл Р dx-\-Q dy R dz, взятый по любому зам-
кнутому контуру, лежащему внутри V, равен нулю.
2. Р dx-\-Qdy-\-Rdz не зависит от выбора пути, со-
АВ
единяющего точки А и В.
3. Р dx Q dy + R dz — полный дифференциал некоторой
однозначной функции, определенной в V.
4. Выполняются равенства 1
dQ _ дР dR _ dQ dP _ dR „ „
dx dy ’ dy dz ’ dz dx ' ( • )
Доказательство этой теоремы, по существу, не отличается
от доказательства теоремы 4.5 и проводится по той же схеме 1 —>
-> 2->3->4-> 1. Мы предоставим его читателю, ограничившись
лишь следующим указанием: для того чтобы из условия 4) получить
условие 1), рассмотрим некоторый замкнутый контур Л, лежащий в V;
так как область V по условию односвязна, то на Л можно натя-
нуть поверхность S, целиком лежащую внутри V. Применив к кри-
волинейному интегралу, взятому по Л, формулу Стокса, получаем,
что из условия (5.42) следует равенство
J* Р dx -j- Q dy 4- R dz = 0.
д
Если выражение Р dx + Q dy + R dz представляет собой полный
дифференциал некоторой функции U (х, у, z), то нетрудно написать
явное выражение этой функции:
(л-, у, г)
U (х, у, z) = J* Pdx-j-Qdy-i-Rdz-^-C, (5.43)
(л0, Уя, г„)
аналогичное формуле (4.50), установленной в § 4 гл. 4 для двух
переменных.
/ (х, у, г)
I Здесь J* означает интеграл, взятый по произвольному пути,
\ (Хя, Уя, 2я)
целиком лежащему в области V и соединяющему точку (х0, у0, z0)
с (х, у, г). 1
212 ПОВЕРХНОСТНЫЕ ИНТЕГРАЛЫ (ГЛ, 5
Если функции Р, Q и R удовлетворяют условиям (5.42), но об-
ласть, в которой они определены, не односвязна, то свойства инте-
грала
J* Р dxQ dyRdz
АВ
аналогичны свойствам криволинейного интеграла J* Р dx -|- Q dy
АВ
в плоской многосвязной области. В частности, выражение (5.43) при
выполнении равенств (5.42) и в случае многосвязной области пред-
ставляет собой функцию, полный дифференциал которой равен
Pdx-\-Qdy-\-Rdz, но в многосвязной области эта функция, во-
обще говоря, многозначна.
ГЛАВА 6
ТЕОРИЯ ПОЛЯ
Понятие поля лежит в основе многих представлений современной
физики. В этой главе мы изложим элементы того математического
аппарата, которым приходится пользоваться при изучении физических
полей.
В физических задачах чаще всего встречаются величины двух
типов: скаляры и векторы*). В соответствии с этим мы будем
рассматривать два типа полей — скалярные и векторные.
§ 1. Скалярные поля
1. Определение и примеры скалярных полей. Пусть й— неко-
торая область в пространстве. Мы говорим, что в этой области
задано скалярное поле, если каждой точке М этой области
поставлено в соответствие некоторое число U(Л1).
Примерами скалярных полей могут служить поле температур
внутри некоторого нагретого тела (в каждой точке М этого тела
задана соответствующая температура U (УИ)), поле освещенности, со-
здаваемое каким-либо источником света, и т. д.
Важным примером скалярного поля служит поле плотности массы,
с которым мы уже встречались. Напомним это понятие. Пусть неко-
торая пространственная область й заполнена непрерывно распреде-
ленной массой. Сопоставив каждой области V, содержащейся в й,
ту массу, которая находится в области V, мы получим аддитивную
функцию области р (V). Если в каждой точке существует производ-
ная от р(У) по объему, то эта производная называется плотностью
*) Это, собственно говоря, верно лишь применительно к более элемен-
тарным вопросам физики. В ряде разделов теоретической физики — электро-
динамике, теории относительности, теории элементарных частиц и т. д. суще-
ственную роль играют величины более сложной природы, чем скаляры и
векторы. Об одном важном типе таких величин — так называемых тензо-
рах — будет идти речь в следующей главе.
214 ТЕОРИЯ ПОЛЯ [ГЛ. 6
массы, а значения этой производной образуют скалярное поле, назы-
ваемое полем плотности массы. Аналогично, рассматривая некоторое
непрерывное распределение зарядов по пространственной области Q,
мы приходим к скалярному полю плотности электрического заряда.
Число подобных примеров можно было бы увеличить.
Наряду с полями, заданными в пространственных областях, часто
приходится рассматривать и плоские скалярные поля. Примером
такого поля может служить освещенность части плоскости, создавае-
мая каким-либо источником света.
2. Поверхности и линии уровня. Если U (Л1) — некоторое ска-
лярное поле, то, введя в области, где задано поле, декартовы коор-
динаты, можно представить это поле в виде функции U (х, у, z)
координат точки М *). Эту функцию мы всегда будем в дальнейшем
предполагать непрерывной и имеющей в рассматриваемой области
непрерывные частные производные первого порядка по х, у и z.
Задание скалярного поля с помощью фиксированной системы ко-
ординат и соответствующей функции U (х, у, z) не всегда дает
достаточно ясное представление о поведении этого поля. Для полу-
чения более наглядной картины удобно пользоваться так называемыми
поверхностями уровня. Поверхностью уровня скалярного
поля U (/И) называется геометрическое место точек, в кото-
рых поле U (Л4) имеет данное фиксированное значение С.
Уравнение поверхности уровня имеет вид **)
U (х, у, г) = С.
(6-1)
Ясно, что поверхности уровня (отвечающие различным С) запол-
няют всю область, в которой определено поле, и никакие две поверх-
ности
U(х, у, z) — Cx и U (х, у, z) = C2
не имеют общих точек. Задание всех поверхностей уровня с отмет-
*) Вид этой функции зависит, конечно, не только от рассматриваемого
поля, но и от выбора системы координат. Но если система координат счи-
тается фиксированной, то понятие скалярного поля просто совпадает
с понятием функции трех переменных. Мы, однако, будем все время поль-
зоваться термином «поле», подчеркивая этим, что речь идет здесь, как пра-
вило, о величинах, имеющих непосредственный физический смысл, не свя-
занный с выбором той или иной системы координат.
**) При сделанных выше предположениях относительно функции
U (х, у, z) такое уравнение действительно определяет некоторую гладкую
поверхность, если только точки, удовлетворяющие равенству (6.1) (при дан-
ном С), вообще существуют и если в этих точках производные
не обращаются в нуль одновременно (см. вып. 1, гл. 14, § 4).
§ 1]
СКАЛЯРНЫЕ ПОЛЯ
215
кой на них соответствующих значений С равносильно заданию
самого поля U(Л1). Взаимное расположение поверхностей уровня
в пространстве дает наглядное представление о соответствующем ска-
лярном поле.
Указанный способ изображения поля особенно удобен тогда, когда
речь идет о поле, заданном не в пространственной, а в плоской
области. Такое поле описывается
функцией двух переменных U (х, у).
Равенство вида U (х, у) —С опре-
деляет, вообще говоря, некоторую
кривую. Такие кривые называют-
ся линиями уровня плоского ска-
лярного поля U (уИ). С помощью
линий уровня обычно изображается
рельеф местности на топографиче-
Рис. 6.1.
ских картах, а именно, на них про-
водятся линии, состоящие из то-
чек, имеющих одну и ту же высоту
над уровнем моря; эти линии называются горизонталями (рис. 6.1).
Распределение температур, давлений, количества осадков и т. п.
обычно также изображается на специальных картах с помощью соот-
ветствующих линий уровня (называемых
изотермами в случае температур, изобара-
ми, когда речь идет о давлениях, и т. д.).
3. Различные типы симметрии полей.
Во многих физических задачах приходится
иметь дело с полями, обладающими теми
или иными специальными свойствами сим-
метрии, облегчающими изучение таких
полей. Укажем некоторые частные случаи.
а) Плоскопараллельное поле. Если
скалярное поле U(уИ) в какой-либо декар-
товой системе координат можно описать
функцией, зависящей не от трех, а только от двух координат, ска-
жем, функцией вида U(х, у), то такое поле называется плоскопа-^
раллельным (или двумерным). Иначе говоря, поле U (уИ) назы-
вается плоскопараллельным, если в пространстве существует
направление, при сдвигах вдоль которого поле U (Л1) переходит
само в себя. Поверхности уровня такого поля — это семейство ци-
линдрических поверхностей (рис. 6.2); в соответствующим обра-
зом выбранной системе координат они задаются уравнениями ви-
да U (х, у) —С.
б) Осесимметрическое поле. Если для поля U (7И) можно
подобрать такую цилиндрическую систему координат, в которой
оно изображается функцией, зависящей только от переменных
216
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
г = Ух14- у2 и z (но не от угла <р), то это поле называется
осесимметрическим. Иначе говоря, поле U (/И) осесимметрическое,
если оно переходит само в себя при повороте пространства (на
произвольный угол) вокруг некоторой фиксированной прямой — оси
симметрии этого поля. Поверхности уровня такого поля предста-
вляют собой, очевидно, поверхности вращения (рис. 6.3). Если эти
поверхности вращения — круглые цилиндры (рис. 6.4), т. е. если
поле U(М) в соответствующей цилиндрической системе координат изо-
бражается функцией, зависящей лишь от одной координаты г (рассто-
яния точки от оси симметрии поля), то U (Л4)
называется цилинд рическим полем.
в) Сферическое поле. Если значе-
ния U (Л4) зависят лишь от расстояния точ-
ки М от некоторой фиксированной точки Мо,
то такое поле называется сферическим.
Поверхности уровня сферического поля —
семейство концентрических сфер (рис. 6.5).
4. Производная по направлению. При
изучении скалярного поля методами анализа
мы должны в первую очередь описать его
локальные свойства, т. е. изменение вели-
чины U (Л4) при переходе от данной точки М
к близким точкам. Для этого мы используем производную поля по
направлению. Напомним это понятие.
Пусть U (Л4) — скалярное поле. Рассмотрим две близкие точки М
и М' и составим отношение
h
(6-2)
где h—длина отрезка ММ'. Пусть точка М' приближается к М,
причем направление отрезка ММ' все время совпадает с направле-
§ t] СКАЛЯРНЫЕ ПОЛЯ 217
нием фиксированного единичного вектора X. Если при Этом отноше-
ние (6.2) стремится к некоторому пределу, то этот предел называется
производной скалярного поля U(М) в точке М по направле-
нию X и обозначается
дЩМ)
дК ’
Производная характеризует скоросте изменения величины U(M)
в направлении X.
тт ди *
для вычисления выберем некоторую систему координат и
представим U (Л4) в виде U (х, у, г).
Пусть направление X образует с осями координат углы а, р и у.
Тогда
ММ' = h(i cos аД-jcosp-j-kcos у)
и
U (М') — U (х -J- h cos a, y-|-Acosp, ^-j-Acosy). (6.3)
а производная 4^- совпадает с производной по h от сложной функ-
ции (6.3) при h — О. Дифференцируя, получаем
dU(M) dU(M') I dU . dU o . dU
———- =-5—cos а+ -Д—cos 6-{--г—cosy. (6.4)
d>. dh |л=0 dx 1 dy ' 1 dz 1 4 ’
5. Градиент скалярного поля. Выражение (6.4) можно рассма-
тривать как скалярное произведение двух векторов: единичного
вектора
X = (cos a, cos р, cos у),
a dU
определяющего направление, по которому берется производная
и вектора, имеющего компоненты
dU dU dU
dx ’ dy ’ dz ’
Этот вектор называется градиентом скалярного поля U и обозна-
чается символом
grad U.
Таким образом,
.,, (dU dU dU\
grad , -г, (6.5)
и, следовательно,
— = (grad U, X).
(6-6)
218 ТЕОРИЯ ПОЛЯ [ГЛ. 6
Рис. 6.6 дает наглядную интерпретацию выражения производной по
направлению как проекции grad U на это направление.
Из формулы (6.6), которую можно переписать в виде
= | grad U | cos <р
(где ф — угол между grad U и единичным вектором X), видно, что
в каждой точке, в которой grad U =£= 0, существует единственное
dU
направление, по которому имеет наибольшее значение, т. е. един-
ственное направление наибыстрейшего возрастания функции U. Это
направление совпадает с направлением вектора grad U. Действительно,
__________________ для этого направления ф = 0 и, следова-
тельно,
/----Х( ara3!L-A dU . ....
/ -^7 = I grad U |•
• /X—jx в то Время как для всех других направле-
у/ НИЙ
Рис. 6.6. = | grad U | cos ф < | grad U |.
Итак, мы получили, что направление вектора grad U — это на-
правление наибыстрейшего возрастания величины U, а длина вектора
grad U равна скорости возрастания величины U в этом направлении.
Однако ни направление наибыстрейшего возрастания функции,
ни величина ее производной в этом направлении не зависят, очевидно,
от выбора системы координат. Мы установили, таким образом, что
градиент скалярного поля зависит лишь от самого поля, но
не от выбора системы координат (хотя из равенства (6.5), при-
нятого нами за определение градиента, это сразу и не видно).
„ dU dU dU „
Производные в данной точке м — это компоненты
вектора, нормального к поверхности U (х, у, z) — const, проходящей
через эту точку *). Таким образом, в каждой точке поля U градиент
поля направлен по нормали к поверхности уровня, проходящей через
эту точку.
*) Действительно, если направление Л лежит в плоскости, касательной
к поверхности U (х, у, z) = const, то производная по этому направлению
равна нулю:
-^- = (gradf7, Х) = 0,
т. е. grad U ортогонален любому вектору, лежащему в касательной плоскости.
5 2] ВЕКТОРНЫЕ ПОЛЯ 219
Назовем линией градиента *) скалярного поля U всякую кривую,
касательная к которой в каждой ее точке направлена по grad U
в этой же точке. Таким образом, линии градиента поля — это те
линии, вдоль которых поле U меняется быстрее всего.
Можно показать, что если функция U (х, у, z) имеет непрерыв-
ные частные производные до 2-го порядка включительно, то через
каждую точку области, в которой задано поле U, проходит одна
и только одна линия градиента. В каждой точке линия градиента
ортогональна той поверхности уровня, на которой эта точка лежит.
§ 2. Векторные поля
I. Определение и примеры векторных полей. Мы говорим, что
в некоторой области й определено векторное поле, если каждой
точке М этой области поставлен в соответствие определен-
ный вектор А (Ж).
Один из важных примеров векторных полей, к которому мы
будем неоднократно возвращаться, — это поле скоростей стацио-
нарного потока жидкости. Оно определяется так: пусть область Й
заполнена жидкостью, текущей в каждой точке с некоторой ско-
ростью V, не зависящей от времени (но различной, вообще говоря,
в разных точках); поставив в соответствие каждой точке М из Й
вектор v = v (7И), мы получим векторное поле, называемое полем
скоростей.
Другой важный пример векторного поля — это поле тяготения.
Пусть в пространстве распределена некоторая масса. Тогда на мате-
риальную точку с массой 1, помещенную в данную точку М, дей-
ствует некоторая гравитационная сила. Эти силы, определенные
в каждой точке, образуют векторное поле, называемое полем
тяготения (отвечающим данному распределению масс) или гра-
витационным полем.
Если в пространстве распределены каким-либо образом электри-
ческие заряды, то на единичный электрический заряд, помещенный
в точку уИ, эти заряды действуют с определенной силой ^(Af).
Образуемое этими силами векторное поле называется электро-
статическим полем.
И поле тяготения, и электрическое поле представляют собой
примеры силовых полей.
Если А (7И) — некоторое векторное поле в пространстве, то, взяв
в этом пространстве какую-либо декартову систему координат, мы
можем представить А (Л1) как совокупность трех скалярных функций—
компонент этого вектора. Эти компоненты мы будем обозначать, как
правило, Р(х, у, z), Q(x, у, z) и R(x, у, z). В дальнейшем мы
*) Ср. с общим определением векторной линии в следующем параграфе.
220 ТЕОРИЯ ПОЛЯ [ГЛ. 6
будем рассматривать векторные поля, компоненты которых непре-
рывны и имеют непрерывные частные производные первого порядка *).
2. Векторные линии и векторные трубки. Пусть в области Q
задано векторное поле А (/Л). Кривая L, лежащая в Q, называется
векторной линией, если в каждой точке этой кривой направление
касательной к ней совпадает с направлением вектора А в этой же
точке. В частности, если поле А есть поле скоростей стационарного
потока жидкости, то его векторные линии — это траектории частиц
жидкости.
В вопросах, связанных с изучением полей, важную роль играет
задача о нахождении векторной линии поля А, проходящей через
данную точку Мо.
Аналитически эта задача формулируется, очевидно, так: требуется
найти вектор-функцию г (/), удовлетворяющую условиям
т' (t) — ХА,
г (to) = Го»
где г0 — радиус-вектор начальной точки Л10, t0 — начальный момент
времени, а X — произвольная числовая величина. Можно показать,
что если компоненты Р, Q, R вектора А — непрерывно дифферен-
цируемые функции координат, ни в одной точке не обращающиеся
в нуль одновременно, то условия (6.7) действительно определяют
в той области, в которой задано поле А, одну и только одну век-
торную линию **).
Ограниченная некоторой поверхностью 2 часть пространства,
в котором задано векторное поле А, называется векторной труб-
кой, если в каждой точки поверхности 2 нормаль к 2 орто-
гональна вектору А в этой же точке. Иначе говоря, векторная
трубка — это часть пространства, состоящая из целых век-
торных линий; каждая векторная линия или целиком лежит внутри
данной векторной трубки, или находится целиком вне ее. Можно
сказать, что поверхность 2, ограничивающая векторную трубку,
соткана из векторных линий.
Если снова представить себе векторное поле А как поле скоро-
стей движущейся жидкости, то векторная трубка — это та часть
пространства, которую «заметает» при своем перемещении некоторый
фиксированный объем жидкости.
3. Различные виды симметрии векторных полей. Изучение
векторного поля (как и скалярного) существенно облегчается, если
это поле обладает теми или иными свойствами симметрии. Перечислим
некоторые важнейшие частные случаи.
*) Ясно, что если это условие выполнено в какой-либо одной декарто-
вой системе координат, то оно выполнено и в любой другой системе.
**) Это следует из теоремы существования и единственности решения
для систем дифференциальных уравнений (см. вып. 3, гл. 1, § 6).
§ 2]
ВЕКТОРНЫЕ ПОЛЯ
221
а) Плоскопараллельное поле. Если для данного векторного
поля А можно подобрать декартову систему координат, в которой
компоненты поля А имеют вид Р(х, у), Q(x, у), R(x, у) (т. е. не
зависят от г), то поле А называется плоскопараллельным. Если
при этом R(x, у)—0, то поле А называется плоским. Примером
такого поля может служить поле скоростей жидкости, скорости
частиц которой параллельны некоторой фиксированной плоскости и
не зависят от расстояния частицы до данной плоскости (плоский
поток). Векторные линии такого поля — плоские кривые (одни и те же
в каждой параллельной плоскости).
б) Осесимметрическое поле. Векторное поле А называется
осесимметрическим, если существует такая цилиндрическая система
координат г, ф, z, что в каждой точке М вектор А(А4) зависит
лишь от г и z, но не от ф. Иными словами, такое поле переходит
само в себя при повороте вокруг оси z. Если вектор А (Л1) зависит
только от г, то поле называется цилиндрическим.
в) Одномерное поле. Векторное поле называется одномерным,
если существует такая декартова система координат, в которой ком-
поненты этого поля имеют вид Р(х), 0, 0. Векторные линии такого
поля представляют собой, очевидно, совокупность всех прямых,
параллельных оси х.
4. Поле градиента. Потенциальное поле. Рассмотрим снова
некоторое скалярное поле U (Л1). Построив в каждой точке М
вектор grad £7, мы получим векторное поле — поле градиента скаляр-
ной величины U. Введем следующее
Определение. Векторное поле А(Л1) называется потен-
циальным, если его можно представить как градиент
некоторого скалярного поля U (Му.
А = grad U.
Само скалярное поле U называется при этом потенциалом вектор-
ного поля А.
Рассмотрим следующий пример. Пусть U = f (г), где г =
= j/x2 + у2-J- z2 (т. е. U — сферическое поле). Найдем grad £7.
Имеем
dU „ dr j-r, х
Му-
Аналогично
ду j \ > r ()z j v j г
Таким образом,
grad £7 = /'(г) X, (6.8)
г — xi -j- yj -ф- zk.
222
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
Если векторное поле А имеет потенциал, то этот потенциал
определяется полем А однозначно, с точностью до произвольного
постоянного слагаемого. Действительно, если скалярные поля U и V
имеют один и тот же градиент, то
grad ((7 — У) = 0.
Но тогда и производная от U — V по любому направлению
равна нулю в любой точке, откуда сразу следует, что
U — V = const.
Векторные линии потенциального поля А представляют собой, разу-
меется, линии градиента его потенциала U, т. е. линии наибыстрей-
шего изменения этого потенциала.
Естественно возникает вопрос об условиях, при которых данное
векторное поле А потенциально. Фактически этот вопрос мы уже
рассмотрели в гл. 5. Действительно, там было показано (теорема 5.2),
что выражение
Р dx -|- Q dy + R dz
(где Р, Q, R — непрерывные функции, имеющие непрерывные част-
ные производные 1-го порядка) служит полным дифференциалом не-
которой однозначной функции U (х, у, z) в том и только том слу-
чае, если Р, Q, R удовлетворяют условиям *):
дР_ _ dQ_ dQ__dR dR___dP_
ду дх ’ дг ду ’ дх дг ' ' ’ '
Но если
Р dx -\-Qdy~\- R dz = dU,
то
дх ду дг
т. е. условие (6.9) как раз и означает, что поле (Р, Q, R) потен-
циально.
Итак, для того чтобы векторное поле R = (P, Q, R), имею-
щее непрерывные и непрерывно дифференцируемые компоненты,
было потенциальным, необходимо и достаточно, чтобы
выполнялись равенства (6.9).
Если А — потенциальное векторное поле, то фактическое нахо-
ждение его потенциала сводится к нахождению функции по ее пол-
ному дифференциалу — задаче, которую мы рассматривали в § 4
гл. 5 (формула (5.43)), а для двух переменных — в § 4 гл. 4 (фор-
мула (4.50)).
*) Мы считаем, что область, в которой определено векторное поле А,
односвязна.
§ 3] ПОТОК ВЕКТОРНОГО ПОЛЯ. ДИВЕРГЕНЦИЯ 223
К понятию потенциального поля мы еще вернемся в п. 5 § 4.
Пример. Пусть в начало координат О помещена масса т. Если
теперь в некоторую точку М(х, у, z) поместить единичную массу,
то на нее будет действовать сила притяжения, равная
F = (r = xi + yJ + zk).
Эти силы, определяемые в каждой точке пространства, образуют
векторное поле — поле тяготения точечной массы т. Его можно
представить как градиент скалярной величины
ут
г ’
называемой ньютоновским потенциалом точечной массы т. В самом
деле, воспользовавшись формулой (6.8), получаем
, ут т
grad—= —у-р-г.
§ 3. Поток векторного поля. Дивергенция
1. Поток векторного поля через поверхность. В предыдущей
главе (§ 2) мы показали, что количество жидкости, протекающей за
единицу времени через данную (ориентированную) поверхность 2,
равно интегралу
J* f A„do,
х
где Ап — нормальная составляющая вектора скорости А = (Р, Q, R).
Эту величину мы назвали потоком жидкости через поверхность 2.
Пусть теперь А — произвольное векторное поле и 2 — ориентиро-
ванная поверхность. Поверхностный интеграл
ffA^°
х
мы назовем потоком векторного поля А через поверхность 2.
Таким образом, если А — скорость движения жидкости, то поток
вектора А через некоторую поверхность равен количеству жидкости,
протекающей через эту поверхность за единицу времени. Для век-
торного поля иной природы поток имеет, конечно, другой физиче-
ский смысл.
Пример. Пусть U = U(х, у, г) — поле температур внутри не-
которого тела, k — коэффициент теплопроводности и А = grad U.
Согласно закону Фурье, количество тепла dQ, протекающее за
224 теория поля [гл. 6
единицу времени через элемент da некоторой поверхности 2, вы-
ражается формулой
dQ — — k-^da, (6.10)
dU
где ------производная поля температур в направлении нормали
к do. (Знак минус в правой части равенства (6.10) отвечает тому
известному факту, что тепло течет от более нагретых частей тела
к менее нагретым, т. е. в направлении убывания U.) Так как
-^- = (gradt/)„,
то равенство (6.10) можно переписать в виде
dQ = — k (grad U)n do,
из которого следует, что количество тепла Q, протекающего за еди-
ницу времени через всю поверхность 2, равно
Q = ~ff k(gradU)„do. (6.11)
s
Введя вектор
q = — k grad U,
называемый вектором потока тепла, получаем
Q = / J Чпda-
Е
Таким образом, количество тепла, протекающее через 2 за еди-
ницу времени, равно потоку вектора q через поверхность 2 (отсюда
и название «вектор потока тепла»).
2. Дивергенция. Пусть А — некоторое векторное поле, которое
мы снова будем представлять себе как поле скоростей несжимаемой
жидкости. Поскольку жидкость несжимаема, поток
H = ff Anda
Е
вектора А через какую-либо замкнутую поверхность 2 *) равен,
очевидно, количеству жидкости, которое за единицу времени возни-
кает или уничтожается в пределах той пространственной области Q,
границей которой служит 2. Назовем это количество суммарной
мощностью источников (если П > 0) или стоков (если II < 0),
*) Мы условимся рассматривать внешнюю сторону этой поверхности.
§ 3] ПОТОК ВЕКТОРНОГО ПОЛЯ. ДИВЕРГЕНЦИЯ 225
расположенных в области 2. Рассмотрим отношение
ffA"da
ТО-
потока жидкости через поверхность 2 к объему области Q, ограни-
ченной этой поверхностью. Оно представляет собой среднюю плот-
ность источников (или стоков), т. е. количество жидкости, возни-
кающей (исчезающей) за единицу времени в единице объема области Q.
Рассмотрим, наконец, предел
J f А" da
этого отношения, где знак iim означает предел при условии, что
Й->7И
область £2 стягивается к некоторой фиксированной точке М. Этот
предел можно назвать плотностью источников (стоков) в точке М.
Он представляет собой скалярную величину и служит важной харак-
теристикой исходного поля.
Рассмотрев этот пример, перейдем к общим определениям.
Пусть А — некоторое векторное поле. Поставим в соответствие
каждой пространственной области й, ограниченной гладкой или
кусочно-гладкой поверхностью S, величину
2
— поток вектора А через внешнюю сторону поверхности S.
Мы получим некоторую функцию области Ф(Й). Легко проверить,
что эта функция аддитивна.
Определение. Производная функции Ф(й) по объему, т. е.
предел
f f Anda
lim (6’12>
Q->Af V W
называется дивергенцией векторного поля А и обозна-
чается
div А.
Таким образом, введенная нами для поля скоростей несжимаемой
жидкости плотность источников представляет собой дивергенцию
этого поля скоростей.
226
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
Теорема 6.1. Если h = (P, Q, R)— векторное поле, опреде-
ленное в области Q и такое, что функции Р, Q, R непре-
рывны в Q вместе со всеми своими первыми производными, то
div А существует во всех точках этой области и в любой де-
картовой системе координат выражается формулой
.. . dP.dQ.dR /с
div А — -5-(6.13)
dx 1 ду 1 dz ' ’
Доказательство. Воспользуемся формулой Остроградского
2 Q
В силу теоремы о производной тройного интеграла по объему
(п. 5 § 1 гл. 2), производная по объему от правой части этого ра-
dP.dQ.dR п
венства существует и равна i'gy'+'ду. Следовательно, тому же
самому выражению равна и производная по объему от левой его
части. Но эта последняя и есть по определению div А.
Замечание. Часто равенство
.. . dP . dQ . OR
div A = -г—1- -г—
dx 1 dy 1 dz
принимают за определение дивергенции. Однако это определение
менее удобно, чем принятое нами, так как оно опирается на выбор
той или иной системы координат, и мы должны еще доказывать,
что сумма уу i уу । уу от выбора системы координат не зависит.
А независимость от выбора системы координат выражения (6.12)
очевидна.
Итак, каждому векторному полю А, компоненты которого непре-
рывны и имеют непрерывные частные производные, мы поставили
в соответствие скалярную функцию div А. Пользуясь этим понятием,
мы можем теперь формулу Остроградского записать так:
2
J Р J div A dv,
й
(6.14)
т. е. поток вектора А через внешнюю сторону замкнутой по-
верхности S равен интегралу от дивергенции поля А, взя-
тому по области, ограниченной поверхностью S.
3. Физический смысл дивергенции для различных полей.
Примеры.
а) Мы уже выяснили, что для поля скоростей А несжимаемой
жидкости, движущейся в некоторой пространственной области,
§ 3]
ПОТОК ВЕКТОРНОГО ПОЛЯ. ДИВЕРГЕНЦИЯ
227
выражение
iff
Q
div A dv
представляет собой суммарную мощность источников, расположенных
в области Q, a div А — это плотность источников (т. е. их мощ-
ность, приходящуюся на единицу объема). В частности, если А —
поле скоростей несжимаемой жидкости, у которой нет ни стоков,
ни источников, то
div А — 0.
б) Рассмотрим теперь поле тяготения, создаваемое некоторым
распределением масс. Выясним, что представляет собой дивергенция
такого поля. Рассмотрим сначала поле, создаваемое массой тй, со-
средоточенной в точке (х0, у0, Zq). В этом случае единичная масса,
помещенная в точку (х, у, z), притягивается с силой
„ / X — Хо у — у о Z—Zn\
F = (Y^o —73— • Y^o • Ymo -ft - )
(6.15)
(г = У (х — хо)2 + (у — у0)2 + (Z — Zq)2).
Здесь у — постоянная тяготения, зависящая от выбора единиц.
Ниже мы у писать не будем, считая, что система единиц выбрана
так, что у—1. Вычислим дивергенцию силового поля (6.15). В ка-
ждой точке, отличной от точки (х0, у0, z0), имеем
д / х — хв\ ft —3(х— х0)2 г г2 — 3 (х — х0)2
7Z (™о —--------------те---— = «о--------ft----•
аналогично
д (т у~Уо\ -<п r2-3(Y-Yo)2
77 |^о ft—J — то -5
д
дг
т0
z — z<>\________г2 — 3(г — z0)2.
ftft- j — то ft
Складывая, получаем
divр_т 3ft—3(х —xQ)2 —3(у —у0)2 —3(z —z0)2 _0
^5
Однако в точке (х0, у0, z0) приведенные выкладки теряют смысл,
и в этой точке значение divF вообще не определено. Поэтому и
значение интеграла
fffdivFdv
а
не может быть получено непосредственным вычислением, если об-
ласть £2 содержит точку (х0, у0, z0). Таким образом, выражение,
228 ТЕОРИЯ ПОЛЯ [ГЛ. 6
стоящее в формуле Остроградского (6.14) справа, в нашем случае
не определено. Однако мы легко можем найти величину, стоящую
в этой формуле слева, т. е. поток вектора F через поверхность 2,
ограничивающую объем й. Сделаем это. Пусть сначала 2—сфера
некоторого радиуса а с центром в точке (х0, у0, с0). В каждой
точке такой сферы направление вектора (6.15) совпадает с напра-
влением нормали к этой сфере. Поэтому проекция вектора (6.15) на
нормаль в данном случае равна длине этого вектора, т. е. постоян-
ной величине Следовательно,
а2
/ / рп da = ^T 4л«2 = 4лт0.
Заменив сферу 2 любой другой замкнутой поверхностью 2Р охва-
тывающей точку (х0, у0, г0), мы получим тот же самый результат.
Действительно, выберем сферу 2 настолько малой, чтобы она цели-
ком содержалась внутри 2Р Тогда
2! 2
так как левая часть этого равенства представляет собой поток век-
тора F через границу пространственной области, в которой
divF = 0.
Следовательно,
f f рп do = f f Fn do.
X, X
Рассмотрим теперь поле тяготения, создаваемое несколькими то-
чечными массами. Это поле равно сумме полей, создаваемых каждой
массой в отдельности. Поток суммы полей через некоторую поверх-
ность 2 равен, очевидно, сумме потоков слагаемых; отсюда выте-
кает, что поток через некоторую замкнутую поверхность поля тяго-
тения, создаваемого системой материальных точек, равен сумме на-
ходящихся внутри этой поверхности масс, умноженной на 4л.
С помощью предельного перехода от системы материальных точек
к массе, непрерывно распределенной по пространству с объемной
плотностью р(х, у, 2), можно показать *), что при непрерывном
распределении масс поток гравитационного поля через замкнутую
поверхность 2 равен заключенной внутри этой поверхности массе,
умноженной на 4л. Но эта же масса может быть представлена как
*) Строгое обоснование этого предельного перехода относится к так
называемой теории потенциала; оно опирается на теорию интегралов, зави-
сящих от параметра, основы которой излагаются в гл. 10,
§ 3]
ПОТОК ВЕКТОРНОГО ПОЛЯ. ДИВЕРГЕНЦИЯ
229
интеграл от плотности р(х, у, z), взятый по объему Q, ограничен-
ному поверхностью S. Таким образом, обозначая по-прежнему сим-
волом F (х, у, г) значение гравитационного поля в точке (х, у, г),
имеем
J J* Fn(x, у, z) da = 4л J* J р(х, у, z)dv,
S 2
откуда
Г f F„ da
4лр(х, у, z) = lim -J —
2->(x,y, z) v \ы)
стоящий здесь справа предел представляет собой дивергенцию век-
торного поля F. Итак, окончательно получаем: дивергенция грави-
тационного поля, создаваемого некоторым распределением
масс, равна объемной плотности р(х, у, z) этого распределе-
ния, умноженной на 4л.
в) Те же самые рассуждения, которые мы провели для поля
тяготения, можно повторить и для электростатического поля и по-
казать, что дивергенция такого поля равна плотности ’зарядов, умно-
женной на 4л. (Это утверждение, известное в электростатике
под названием теоремы Гаусса, широко используется в различ-
ных задачах, связанных с электростатическими полями, например
при вычислении напряженности поля в конденсаторах различной
формы.)
4. Соленоидальное поле. Векторное поле, дивергенция которого
тождественно равна нулю, называется соленоидальным *) или труб-
чатым. Примером соленоидального поля может служить, как мы
видели выше, поле скоростей несжимаемой жидкости при отсутствии
стоков и источников, т. е.
при условии, что ни в одной
точке жидкость не исчезает и
не возникает.
Для сОленоидальных полей
имеет место так называемый
закон сохранения интен-
сивности векторной труб-
ки, состоящий в следующем.
Пусть А — соленоидальное по-
ле. Рассмотрим некоторую векторную трубку и возьмем ее отре-
зок, заключенный между двумя ее сечениями Sj и S2 (рис. 6.7). Эти
сечения вместе с боковой поверхностью S3 трубки образуют замкну-
тую поверхность S. Так как поле соленоидально, т. е. divA^O, то,
*) От греческого слова оиХтр» (солен) — трубка,
230 ТЕОРИЯ ПОЛЯ [ГЛ. 6
в силу формулы Остроградского,
/р.^=о.
2
Но
J J Л„6?О = J J And<s+ J J* Ля(/о + у J Andv, (6.16)
2 Sj 2j
причем в каждом из слагаемых имеется в виду внешняя сторона по-
верхности. Третье из стоящих справа слагаемых равно нулю, так как
по определению векторной трубки на поверхности 23 направление
векторного поля А перпендикулярно направлению нормали к этой
поверхности, т. е. на 23
Л„ = 0.
Если мы теперь на сечении Sj направление нормали изменим на
противоположное, то равенство (6.16) перепишется в виде
f f A„da=f f A„do, (6.17)
т. e. поток вектора А через любое сечение векторной трубки имеет
одно и то же значение. Если поле вектора А представлять себе как
поле скоростей несжимаемой жидкости при отсутствии источников
и стоков, то равенство (6.17) означает: количество жидкости,
протекающей за единицу времени через сечение векторной
трубки, одно и то же для всех сечений этой трубки.
5. Уравнение неразрывности. В качестве применения изложен-
ных выше понятий дадим вывод одного из основных уравнений дви-
жения жидкости, так называемого уравнения неразрывности. Пусть
А — поле скоростей движущейся жидкости. Мы будем предполагать,
что в рассматриваемой области жидкость не исчезает и не возникает.
Однако в отличие от наших предыдущих рассмотрений мы будем
предполагать эту жидкость сжимаемой, т. е. считать плотность р
некоторой функцией координат х, у, z и времени t. Выясним, как
связана скорость движения такой жидкости с изменением ее плот-
ности. Для этой цели рассмотрим некоторый замкнутый объем й и
подсчитаем двумя способами изменение AQ количества жидкости внутри
этого объема за время А/. Пусть р(х, у, z, t) — плотность жидкости
в момент t в точке х, у, z. Тогда, очевидно,
й
С другой стороны, изменение количества жидкости внутри объема й
равно умноженному на Ai потоку жидкости через поверхность 2,
§ 3]
ПОТОК ВЕКТОРНОГО ПОЛЯ. ДИВЕРГЕНЦИЯ
231
ограничивающую этот объем, т. е. равно — Д/ j J (pA)„ da, где
s
п — наружная нормаль (знак минус берется потому, что если ско-
рость направлена наружу, то количество жидкости в объеме умень-
шается). Преобразовав этот поверхностный интеграл с помощью фор-
мулы Остроградского в объемный, получим
div (рА) dv.
а
Приравняв друг другу два выражения для AQ и сократив на А/,
будем иметь
й 2
так как это равенство должно иметь место для любой области й, то
равны между собой и подынтегральные выражения, т. е.
-J = -div(pA). (6.18)
Мы получили уравнение, связывающее между собой скорость и плот-
ность движущейся жидкости при отсутствии источников и стоков.
Оно называется уравнением неразрывности.
Если ввести вектор J = pA — плотность потока жидкости,
то уравнение неразрывности можно переписать так:
+ div J = 0. (6.18')
6. Плоское течение жидкости. Формула Остроградского на
плоскости. Рассмотрим плоское векторное поле, т. е. поле, компо-
ненты которого в некоторой декартовой системе координат имеют вид
Р = Р(х. у), Q = Q(x, у), Я = 0 (6.19)
(см. п. 3 § 2). Его можно представлять себе как поле скоростей
жидкости, каждая частица которой движется параллельно фиксиро-
ванной плоскости со скоростью, не зависящей от ее расстояния до
этой плоскости (такое движение жидкости называется плоским тече-
нием). Дивергенция такого поля равна
dP . dQ
дх ду ‘
Пусть й— цилиндр высоты единица, с основанием О, лежащим в пло-
скости ху, и боковой поверхностью 2 (рис. 6.8). Напишем для
области й формулу Остроградского, предварительно заметив, что трой-
ной интеграл от по численно равен двойному интегралу
232
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
от этого выражения по плоской области G, поток вектора (6.19)
через поверхность 2 равен криволинейному интегралу
J* [Pcos(n, х) 4- Q cos (n, y)]dl,
L
теперь
где п — нормаль к контуру L, а поток через верхнее и нижнее осно-
вания цилиндра Q равен нулю (последнее вытекает из того, что век-
тор (6.19) перпендикулярен оси z). В силу сказанного, формула
Остроградского для плоскопараллельного поля А и цилиндрической
области Q имеет вид
J* [Pcos(n, x)4-Qcos(n, y)]dl = ^ + -^-рхс/у. (6.20)
l 'а
) третью координату z, будем рассма-
тривать (6.19) как векторное по-
ле, заданное в плоскости ху.
Назовем криволинейный интеграл
J* [Z3 cos (п, x)+Qcos(n, y)]dl
L (6.21)
потоком этого векторного поля
через контур L. Тогда форму-
ла (6.20), называемая фо рмулой
Остроградского для плоскос-
ти, означает, что двойной инте-
поля А по некоторой области О равен
потоку вектора А через границу этой области.
Легко убедиться в том, что формула (6.20) — просто эквивалент
формулы Грина (4.45). Действительно, если мы, как обычно, обозна-
чим через а угол между касательной к кривой и положительным на-
правлением оси х, то
cos(n, х) —— sin a, cos(n, у) — cos а,
поэтому интеграл (6.21) можно записать так:
J(Qcosa — Psina)dl,
L
или
J Qdx — Pdy.
L
Преобразовав этот криволинейный интеграл в двойной с помощью
формулы Грина, мы и получим равенство (6.20). Это рассуждение
грал от дивергенции плоского
§ 4] ЦИРКУЛЯЦИЯ. РОТОР 233
можно обратить, т. е. если равенство (6.20) установлено, то из него
можно вывести формулу Грина.
Таким образом, как формула Стокса, так и формула Остроград-
ского в плоском случае превращаются в формулу Грина.
§ 4. Циркуляция. Ротор
1. Циркуляция векторного поля. Пусть снова А = (Р, Q, R)—
некоторое векторное поле и L — гладкая или кусочно-гладкая кривая.
Криволинейный интеграл
Pdx-\-Qdy + Rdz,
L
или, короче,
f Axdl,
L
где Ах — тангенциальная составляющая поля А на контуре L, мы
назовем циркуляцией векторного поля А вдоль кривой L. Если
А = (Р, Q, R)— силовое поле, то его циркуляция вдоль кривой L
представляет собой, как мы уже знаем (см. § 2 гл. 4), работу этого
силового поля вдоль пути L. Для полей иной природы циркуляция
имеет, конечно, другой физический символ.
2. Ротор векторного поля. Запись формулы Стокса в вектор-
ных обозначениях. Если L — замкнутый контур, то криволинейный
интеграл
J Р dx-\-Q dy R dz
L
по этому контуру можно преобразовать в поверхностный, восполь-
зовавшись формулой Стокса (5.41):
Р dx + Q dy 4- R dz —
L
С Г (dQ dP\ , , . (dR dQ\ . , . (dP dR\ . .
— / / -5х — -T~\dxdy-\- ----------4-\dydz-\~ -5-----^—Xdzdx,
J j \dx dy [ \dy dz J z 1 \dz dx /
2
(6.22)
взятый по некоторой поверхности 2, натянутой на контур L. Правая
часть равенства (6.22) представляет собой поток через поверхность 2
вектора
[dR dQ\. . [dP dR\ . . (dQ OP\. ,R
^7 ~ W + Ur ~ аг)j + Ьг ~ k‘ <6’23>
Назовем этот вектор ротором (или вихрем) векторного поля А
и обозначим rot А. Таким образом, по определению
, . [ dR dQ\. . (dP dR\ , . [ dQ dP\,
234
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
Пользуясь понятием ротора, мы можем переписать формулу Стокса
в следующем компактном виде:
Axdl — ^ J (rot А)„
s
da,
(6.25)
т. е. циркуляция векторного поля А вдоль некоторого зам-
кнутого контура L равна потоку ротора этого векторного
поля через поверхность, натянутую на этот контур.
В нашем определении ротора участвует не только само векторное
поле А, но и некоторая определенная система координат (х, у, z).
Однако на самом деле вектор rot А не зависит от выбора координат-
ной системы, а определяется лишь исходным векторным полем А.
Чтобы убедиться в этом, воспользуемся формулой Стокса (6.25), счи-
тая, что поверхность S — это некоторая плоская площадка, a L—огра-
ничивающий ее контур. Применив к стоящему в равенстве (6.25)
справа поверхностному интегралу теорему о среднем, получим *)
Ах dl
(rotA(AT))n = -L—---,
где М* — некоторая точка, принадлежащая площадке S, а а— пло-
щадь этой площадки. Будем теперь стягивать площадку S к некото-
рой фиксированной точке М так, чтобы направление нормали п к этой
площадке оставалось все время одним и тем же. В пределе полу-
чим
(rotAGM))„= lira -------. (6.26)
Циркуляция вектора А вдоль контура не зависит от выбора коорди-
натной системы, поэтому из равенства (6.26) вытекает, что проекция
rot А на направление нормали п не зависит от выбора системы коор-
динат. Но направление нормали п мы могли выбрать произвольно,
поэтому проекция вектора rot А на любое направление, а следова-
тельно, и сам вектор rot А не зависят от выбора системы коор-
динат **).
*) Как обычно, мы считаем, что компоненты Р, Q, R векторного поля А
имеют непрерывные частные производные первого порядка по х, у и г.
**) Предполагается, что мы рассматриваем только правые системы коор-
динат. При цереходе к левой системе координат (где положительным напра-
влением вращения считается направление по часовой стрелке) вектор rot А
изменит направление на противоположное.
§ 41
ЦИРКУЛЯЦИЯ. РОТОР
235
3. Символическая запись ротора. Ротор векторного поля
А —(Р, Q, R) удобно записывать в виде символического детерми-
нанта
i j к
д дх д ду д дг , (6.27)
Р Q R
где i, j, k — единичные векторы, направленные по осям координат,
д д д
а под умножением символа или на некоторую функцию
понимается выполнение соответствующей операции дифференцирова-
/ д r dQ\
ния например, означает .
Действительно, разложив детерминант (6.27) по элементам первой
строки, получим, что
i j к
д д д
дх ду дг
Р Q R
; i i I PQ dP\tr
\ dy dz I ""T” \ dz dx J ' \ dx dy /
4. Физический смысл ротора. Физический смысл ротора можно
пояснить следующим образом. Будем снова рассматривать вектор-
ное поле А как поле скоростей движу-
щейся жидкости. Поместим в таком А? « ,,
потоке, в определенной его точке, беско- \
нечно малое колесико с лопастями, рас- ъ/'х 'Urv
положенными по окружности L этого х ‘
колесика (рис. 6.9). Под воздействием по- t г
тока жидкости такое колесико будет вра- Vv ' '
щаться с некоторой скоростью, завися-
щей, вообще говоря, от направления оси v \
колесика.
Естественно считать, что линейная Рис-
скорость каждой точки окружности L по
величине будет равна среднему произведений проекций вектора А
на направление касательной к Z, т. е. будет выражаться формулой
v = -^£ Atdl. (6.28)
ZjCa J
L
По формуле Стокса (6.25) криволинейный интеграл (6.28) можно пре-
образовать в поверхностный интеграл
2ЙЯ f f (rotAM°. <6-29>
z
236
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
взятый по площади S рассматриваемого колесика. Считая это колесико
бесконечно малым, мы можем записать интеграл J" J" (rot A)„ da в виде
2
произведения площади колесика на значение (rotA)„ в его центре,
т. е. в виде
л/?2 (rot А)я.
В результате равенство (6.28) принимает вид
ф = у (rot А)я.
Максимально возможное значение проекции вектора на какое-либо
направление есть модуль этого вектора. Поэтому, если направление
оси колесика выбрать так, чтобы его скорость v была максимальной
(это направление, очевидно, совпадает с направлением rot А), то мы
получим
®max == I^0^ А |
ИЛИ
| rot А | = .
Но — это величина угловой скорости о) колесика. Итак, мы полу-
чили следующий результат: если колесико с лопастями ориентировано
так, что скорость его вращения максимальна, то его угловая ско-
. рость равна половине ] rot А [, а направление
1 оси совпадает с направлением вектора rot А.
> Таким образом, rot А характеризует «вра-
rotA=?/wk щательную компоненту» поля скоростей; он
~~_____равен удвоенной угловой скорости вращения
бесконечно малой частицы жидкости.
0__________ Примеры. 1. Рассмотрим векторное по-
/у ле с компонентами
Р — — уа>, Q = хо), R — 0.
Рис. 6.10. Это поле можно рассматривать как поле ско-
ростей, отвечающее вращению всего простран-
ства вокруг оси z с угловой скоростью о). Ротор этого вектор-
ного поля равен, как легко проверить, 2<ок, т. е. он направлен по
оси вращения, а по величине равен удвоенной угловой скорости
(рис. 6.10).
Физический смысл этого результата заключается в следующем.
Всякая частица жидкости при вращении вокруг оси z участвует в двух
движениях: в мгновенном переносном движении со скоростью
v = (—уо), хш, 0) и в мгновенном вращательном движении. Легко
ЦИРКУЛЯЦИЯ. РОТОР
237
видеть, что мгновенная угловая скорость вращения любой частицы со-
впадает с угловой скоростью <0 всего макроскопического движения
жидкости. Поэтому поле мгновенных угловых скоростей частиц ока-
зывается постоянным и равным о>. Значит, и поле ротора также по-
стоянно и равно 2w. Вся жид-
кость как бы заполнена беско- г,,
нечно малыми вихрями.
2. Рассмотрим жидкость, те-
кущую в постоянном направле-
нии с постоянной скоростью, т. е.
предположим, что Р, Q и R посто-
янны. В этом случае rotA^O.
3. Пусть Р = у, Q = О,
R = 0. В этом случае
rot А = — к.
rotA=-k’'
В последнем примере ротор
в каждой точке отличен от нуля, Рис- 6.11.
хотя все векторные линии — пря-
мые, параллельные плоскости yz. Это может показаться противоре-
чащим утверждению, что rot А характеризует «вращательную ком-
поненту» поля А. Но на самом деле это не так. Здесь «вращатель-
ная компонента» обусловлена не искривлением векторных линий, а
изменением скорости движения при изменении расстояния от плос-
кости yz. Легко сообразить, что колесико с лопастями, поставлен-
ное в поток жидкости, движущейся в каждой точке (х, у, z) со ско-
ростью (у, 0, 0), не будет находиться в покое, если только его ось
вращения не перпендикулярна оси г.
4. Пусть векторное поле А имеет компоненты
Р =Q = . у. ^-, Р = 0. (6.30)
/х2 4- у2 Y х2 4- у2
Это поле можно рассматривать как поле скоростей жидкости, дви-
жущейся в плоскости ху по гиперболам ху = С (рис. 6.12) так, что
величина скорости в каждой точке равна 1. Найдем дивергенцию и
ротор этого поля. Имеем
div А =
дх \ V х2 + у2 / ду \ Y х2 + у2 / (х2 -|- у2)’/’
Г д / -У _ д I х k = — 2ху k
[длД/х24-у2/ ду \/x24-y2/J (x24-y2)s/
Здесь дивергенция положительна, когда | у | > | х |, и отрицательна
при | у | < | х |. Физически это означает, что движение несжимаемой
жидкости, описываемое полем (6.30), возможно лишь тогда, когда
238
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
в тех областях, где | у | > | х имеются источники, а там, где
| у | < | х |, имеют место стоки. Ротор поля (6.30), как и всякого
плоскопараллельного поля, направлен в каждой точке по оси z, именно,
Л
Рис. 6.12.
его направление совпадает с положи-
тельным направлением оси z во вто-
рой и четвертой четвертях и с отри-
цательным направлением оси z в пер-
вой и третьей. И дивергенция, и ротор
поля (6.30) стремятся к нулю, когда
х2-|-у2—>оо, т. е. по мере удаления
от начала координат.
5. Еще раз о потенциальных и
соленоидальных полях. Понятие ро-
тора, рассмотренное в этом парагра-
фе, непосредственно связано с опре-
делениями потенциального и солено-
идального полей, введенными выше.
Мы назвали потенциальным вектор-
ное поле, представимое в виде гра-
диента некоторого скалярного поля, и показали *), что векторное
поле А — (Р, Q, R) потенциально в том и только том случае, если
его компоненты удовлетворяют условиям
дР __ dQ dQ _ dR dR _ dP
dy dx ’ dz dy * dx dz '
Но эти три условия означают не что иное, как равенство нулю всех
трех компонент ротора поля А. Таким образом:
Для того чтобы векторное поле А было потенциальным,
необходимо и достаточно, чтобы выполнялось условие**)
rot А = 0.
Понятие соленоидального поля, введенное в § 2, тоже связано
с понятием ротора. Действительно, непосредственное вычисление
показывает, что для любого векторного поля А
d I dR
div (rot А) — — -3—
v - dx \ dy
dz)
d IdP
dy \ dz
dR \ , d IdQ____dP\___„
dx ) dz \ dx dy /
T. e. векторное поле, представимое в виде ротора какого-либо дру-
гого векторного поля, соленоидально. Можно показать (мы не будем
этого делать), что верно и обратное, т. е. что всякое соленоидаль-
ное поле можно представить в виде ротора некоторого век-
*) Считая функции Р, Q, R непрерывно дифференцируемыми, а область,
в которой задано поле (Р, Q, R), односвязной.
**) Мы считаем, что поле А задано в односвязной области и его компо-
ненты дважды непрерывно дифференцируемы.
ОПЕРАТОР ГАМИЛЬТОНА
239
§ 51
торного поля. Иными словами, для всякого поля А, удовлетворяю-
щего условию div А = 0, можно подобрать поле В так, что А = rot В.
Это векторное поле В определяется не однозначно, а с точностью
до произвольного слагаемого вида grad U.
Если А = rot В. то поле В называется вектор-потенциалом
поля А.
Хотя потенциальные и соленоидальные поля не исчерпывают всех
векторных полей, любое векторное поле сводится к комбинации
полей этих двух типов. Точнее говоря, можно доказать, что всякое
векторное поле А представимо в виде
А — В-h С.
где В потенциально, а С соленоидально.
§ 5. Оператор Гамильтона
1. Символический вектор V. В § 1 мы ввели понятие градиента
скалярного поля. Переход от скалярного поля U к grad U можно
рассматривать как некоторую операцию, во многом аналогичную
по своим свойствам операции дифференцирования, с той, однако,
разницей, что дифференцирование переводит скаляр в скаляр,
в то время как здесь мы имеем переход от скаляра к вектору.
Операцию перехода от U к grad U часто обозначают, следуя Гамиль-
тону *), символом V (читается «набла» **)) и называют оператором
«набла», или оператором Гамильтона. Таким образом, по опре-
делению (
\U = grad U.
Оператор V удобно трактовать как символический вектор с компо-
д д д .
центами и —.
V = -£- i + 4- j
дх ' ду * ' дг
а применение его к скалярной функции — как умножение скаляра на
этот вектор ***).
*) У. Р. Гамильтон (1805—1865) — английский математик и ме-
ханик.
**) Само название «набла» было также введено Гамильтоном. Наблой
назывался старинный музыкальный инструмент, имевший треугольную форму.
***) Выше, например, при записи ротора как символического детерминанта
мы уже видели, что операцию дифференцирования удобно представлять себе
как «умножение» символа дифференцирования на ту функцию, производная
которой вычисляется.
240
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
С помощью вектора V удобно записывать и остальные операции
векторного анализа, а именно, если А = (Р, Q, /?), то
div А =-/-Р 4-Q + -A/? = (V, А),
дх 1 ду 1 дг 4 '
т. е. дивергенция векторного поля А есть скалярное произведение
символического вектора V и вектора А. Аналогично
'°'А = «• « -4 С) 1 + (4 Р-ТЕГ «) J +
т. е. ротор векторного поля А есть векторное произведение век-
тора V на вектор А.
2. Действия с вектором V. Целесообразность введения символи-
ческого вектора V состоит в том, что с его помощью удобно полу-
чать и записывать различные формулы векторного анализа. Кроме
того, сами эти формулы приобретают в такой записи большую
наглядность и выразительность. Вот простейшие примеры.
Выше мы с помощью непосредственных вычислений получили
следующие два равенства:
rot grad U — 0
и
div rot А = 0.
Переписав их с помощью вектора V, получим
[V, VI/] = 0
и
(V, V, А) —0.
Левая часть первого из этих равенств представляет собой «векторное
произведение» (символическое) двух «векторов», отличающихся друг
от друга лишь скалярным множителем, а во втором равенстве слева
стоит «смешанное произведение» трех векторов, два из которых
одинаковы. Следовательно, равенство нулю этих выражений нахо-
дится в полном соответствии с основными законами векторной
алгебры.
С помощью непосредственной проверки можно убедиться в том,
что на вектор V можно перенести многие из основных действий,
известных для обычных векторов. Именно это обстоятельство и дает
возможность получать с помощью вектора V ряд формул векторного
анализа, применяя аппарат векторной алгебры.
Следует, однако, иметь в виду, что аналогия между символи-
ческим вектором V и «настоящими» векторами — не полная. Именно,
формулы, содержащие символический вектор V, аналогичны обычным
§ 5] ОПЕРАТОР ГАМИЛЬТОНА 241
формулам векторной алгебры в том случае, если они не содержат
произведений переменных величин (скалярных или векторных), т. е.
до тех пор, пока нам не приходится применять входящие в V опера-
ции дифференцирования к произведению переменных величин. Если же
некоторое выражение содержит произведение двух или нескольких
переменных сомножителей, то, применяя к этому выражению вектор V,
нельзя руководствоваться обычными правилами векторной алгебры.
Для установления соответствующих правил действия рассмотрим
некоторые примеры.
1. Пусть U — U(x, у, z) — скалярное поле и А = А(х, у, г) —
векторное поле. Вычислим div(£7A), т. е. (V, £7А). Применение
вектора V сводится к применению входящих в него операций диф-
ференцирования. Но, как известно, правило дифференцирования
произведения состоит в том, что мы дифференцируем сначала первый
сомножитель, а остальные рассматриваем как постоянные, затем
дифференцируем второй сомножитель, считая остальные постоянными,
и т. д. и берем сумму полученных таким образом выражений.
Условимся каждый раз отмечать в формулах знаком «|» тот
сомножитель, к которому оператор V должен применяться. Тогда,
как легко проверить, выражение для div (£7 А) можно записать так:
(V, £/A) = (V, t/A) + (V, UА).
Множители, на которые V не действует, можно «высвободить»
из-под оператора V. Таким образом, получаем
(V, £7A) = (V, £7A) + (V, £7A) = (V£7, A) + £7(V, A),
т. e. в обычных обозначениях
div (UA) — (A, grad U) + U div A.
2. Рассмотрим выражение
grad (£7V),
которое в символической записи имеет вид
V£7V.
Руководствуясь сказанным выше, имеем
VUV = VUV + V£7V = VVU -j- UW,
т. е. в обычных обозначениях
grad (UV) — V grad U -|- U grad V.
Из рассмотренных примеров ясны правила, которые надо приме-
нять, пользуясь оператором V: в выражениях, содержащих одну
242 ТЕОРИЯ ПОЛЯ [ГЛ. 6
переменную, с ним можно поступать, как с обычным вектором,
а к выражениям, содержащим произведения нескольких переменных,
оператор V применяется в соответствии с правилом дифференциро-
вания произведения. Наконец, применение V к сумме любых слагае-
мых всегда сводится к применению V к каждому из слагаемых
в отдельности.
Дадим в заключение этого параграфа сводку формул, связываю-
щих операции взятия градиента, ротора и дивергенции с основными
операциями векторной алгебры:
1. div (t/А) = (A, grad U) -J- U div A;
2. grad (UV) — V grad U -ф- U grad V;
3. rot (t/A) = U rot А-ф- [grad U, A];
4. div [А, В] — (B, rot A) — (A, rotB);
5. rot [A, B] = (B, V) A — (A, V) ВA div В — В div A;
6. grad (A. B) = (B, V)A + (A, V)B + [B, rot A] + [A, rotB];
в частности, положив в последней формуле А = В, получим
grad= (A, V)A+[A, rot А].
Первые две из этих формул были получены выше. Остальные могут
быть получены аналогичным образом с применением оператора V
(и соблюдением указанных выше правил действия с V) и обычных
формул векторной алгебры. В частнрсти, для вычисления выраже-
ния rot [А, В], которое в символической форме пишется как
[V. [А, В]],
следует применить известную формулу *)’ двойного векторного произ-
ведения:
[а, [Ь, с] ] = b (а, с) — с (а, Ь).
Выражение вида (А, V) В, встречающееся в последних двух форму-
лах, означает векторную величину
/ дВх дВх дВх дВч
\Ar—^-A-Av—^—-l-Az—^--—, Ах-—^
\ х дх 1 У ду 1 г дг х дх
х дх
dBv dBv
+ Ау -ф- Аг -W,
1 У dy 1 г дг )
*) Эту формулу удобно запомнить так: произведение [а, [Ь, с] ] равно
среднему вектору Ь, умноженному на скалярное произведение крайних
(т. е. на (а, с)), минус внутренний крайний вектор (т. е. с), умноженный на
скалярное произведение двух остальных (т. е. на (а, Ь)). Это правило, как
легко проверить, остается в силе и для двойного векторного произведения,
имеющего вид [ [а, Ь], с].
§ 6] ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ ВТОРОГО ПОРЯДКА 243
которую можно рассматривать как результат применения «скаляр-
ной» операции
(А, V) = Ах —— + Ау + Az
к каждой из компонент вектора В *).
§ 6. Дифференциальные операции второго порядка.
Оператор Лапласа
1. Дифференциальные операции второго порядка. В преды-
дущих параграфах мы ввели понятия градиента, дивергенции и
ротора. В приложениях векторного анализа приходится встречаться
не только с выполнением этих основных операций, но и с различ-
ными их комбинациями. Особенно часто встречаются так называемые
операции второго порядка, т. е. попарные комбинации трех указан-
ных выше основных операций.
Комбинируя символы grad, rot, div попарно, мы можем соста-
вить из них девять пар. Однако не все эти пары имеют смысл;
например, операция
rot div
(т. е. взятие ротора от дивергенции) не имеет смысла ни для ска-
лярного поля, ни для векторного. Все имеющиеся здесь возмож-
ности изображаются следующей таблицей:
ч, J Скалярное поле U Векторное поле A
grad div rot
grad grad div A
div div grad U div rot A = D
rot rot grad U ex 0 rot rot A
в которой заштрихованы клетки, отвечающие не имеющим смысла
сочетаниям основных операций. Мы видим, что применительно
*) Для большей симметрии формул мы здесь обозначили компоненты
векторов А и В теми же буквами, что сами векторы, добавив соответствую-
щие индексы. Такой системой обозначений мы будем пользоваться и дальше.
244 ТЕОРИЯ ПОЛЯ (ГЛ. 6
к скалярному полю имеют смысл две операции, а именно:
rot grad U,
div grad U. -
Первое из этих выражений представляет собой ротор потенциаль-
ного поля grad U и, как мы видели, тождественно равно нулю.
Выражение div grad U, вообще говоря, не обязано быть нулем.
Оно называется оператором Лапласа *) и обозначается АП. Вос-
пользовавшись известными выражениями градиента и дивергенции
в декартовых координатах, получаем
лг; а- ( < dU . , dU , \ д!и . d2U , d2U
MJ — div (grad U) = div i + -т— j -4- -5— k = —k тгт + tt
' \ dx ' dy J 1 dz / dx2 1 dy2 1 dz2
Так как и дивергенция, и градиент не зависят, как мы знаем,
от выбора координатной системы, то и А(7 зависит лишь от самого
поля U, но не от системы координат. К оператору Лапласа мы еще
вернемся ниже.
Оператор Лапласа А естественно рассматривать как скалярный
квадрат вектора V. Действительно,
т. е,
(v, V)t/=S+-S+S=^
4 ' дх2 1 ду2 1 дг2
Иногда приходится оператор А применять не к скалярной величине,
а к вектору. При этом если
А = ДЛ-Лу] + Я2к,
то под АА понимается вектор
AAJH-AAyJ + AA2k.
Как мы увидим немного ниже, это выражение на самом деле зависит
только от самого вектора А, но не от выбора системы координат.
Рассмотрим теперь операции второго порядка для векторного
поля. Применительно к векторному полю имеют смысл три операции
второго порядка, а именно:
grad div А,
rot rot А,
div rot A.
*) Точнее, оператором Лапласа называется сам символ А = div grad,
применение которого к скалярному полю U дает величину (опять-таки ска-
лярную) ДС7.
§ 6) ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ ВТОРОГО ПОРЯДКА 245
С выражением вида div rot А мы уже встречались в § 4 при нахо-
ждении условий соленоидальности поля и выяснили, что всегда
div rot А = 0.
Напротив, выражения grad div А и rot rot А не обязаны обра-
щаться в нуль. Они часто встречаются в различных вопросах меха-
ники и электродинамики.
Выведем формулу, связывающую эти величины. Рассмотрим для
этого выражение
rot rot А,
которое в символической форме записывается так:
[V, [V, А]].
Воспользовавшись- снова! формулой для двойного векторного произ-
ведения, получим, что
[V, [V, A]] = V(V, А) —(V, V)A,
т. е.
rot rot А = grad div А— ДА. (6.31)
Из этой формулы видно, в частности, что выражение ДА, опре-
деленное выше, действительно не зависит от выбора системы коор-
динат, поскольку величины rot rot А и grad div А с выбором системы
координат не связаны.
Так как в выражении (6.31) участвует только одна переменная
величина, то мы, оперируя с V, могли воспользоваться обычными
формулами векторной алгебры. Читателю рекомендуется проверить
равенство (6.31) непосредственно, не прибегая к символическому
методу (и сравнить выкладки в том и другом случае).
2. Уравнение теплопроводности. В качестве применения введен-
ных выше понятий рассмотрим вывод уравнения для поля темпера-
тур внутри некоторого нагретого тела. Пусть U (х, у, z, t) — темпе-
ратура тела в точке (х, у, z) в момент t. Выделим в этом теле
некоторый объем Q, ограниченный замкнутой поверхностью 2, и вы-
числим двумя способами изменение количества тепла внутри этого
объема за малый промежуток времени dt. В каждом элементе объема
температура за время dt меняется на величину ^j-dt, а масса этого
элемента равна pdv (где р — плотность). Следовательно, изменение
количества тепла в элементе объема есть
dU .. .
с dtp dv
246
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
(здесь с — удельная теплоемкость; величины сир предполагаются
постоянными), а изменение количества тепла за время dt во всем
объеме Q равно
dQ=dt f f f ^-cpdv.
a
С другой стороны, ту же самую величину dQ можно подсчитать как
количество тепла, протекающего за время dt через поверхность S,
ограничивающую объем Й. Количество тепла, протекающего за время dt
через элементарную площадку do, равно (см. п. 1 § 2)
— dtk (grad U)ndo,
а количество тепла, протекающего за это время через всю поверх-
ность S, выразится интегралом
f J k (grad U)a do.
z
Преобразовав этот интеграл по формуле Остроградского в объем-
ный, получим
dt f f k (grad U)n do = dt J J j" fe div (grad U)dv = dt J f f & №dti.
S Q Й
Приравняв друг другу полученные выражения для AQ и сократив
на dt, будем иметь
jf f = f f fkWdv.
2 2
Так как это равенство должно иметь место для любой пространст-
венной области й, то отсюда следует
(“’=£)• <632)
Мы получили уравнение, которому должна удовлетворять функция U,
представляющая собой температуру некоторого тела, т. е. так назы-
ваемое уравнение теплопроводности.
3. Стационарное распределение температур. Гармонические
поля. Мы показали, что распределение температур внутри тела
должно удовлетворять уравнению (6.32). Может, в частности, ока-
заться, что рассматриваемое нами тело находится в состоянии тепло-
вого равновесия, т. е. что ни на границе его, ни во внутрен-
_ dU п
них точках температура не меняется со временем. Тогда= О и
§ 6] ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ ВТОРОГО ПОРЯДКА 247
уравнение (6.32) принимает вид
Д£7 = 0,
т. е. в декартовых координатах
д2Ц , д2Ц . d2U __ _
дх2 ду2 "Г dz2
Состояние теплового равновесия можно представить себе следующим
образом. Предположим, что на границе тела в каждой точке под-,
держивается некоторая фиксированная температура, не зависящая от
времени (но разная, вообще говоря, в разных точках). Тогда то
распределение температур, которое установится внутри тела через
достаточно большой (строго говоря, бесконечно большой) промежу-
ток времени, и будет тем равновесным распределением температур,
которое соответствует заданному тепловому режиму на поверх-
ности тела.
Уравнение
Д(7 = 0
называется уравнением Лапласа. С его помощью описывается не
только стационарное распределение тепла. Уравнение Лапласа играет
первостепенную роль при описании и других установившихся про-
цессов, например равновесного распределения зарядов по поверх-
ности проводника, установившегося движения несжимаемой жидкости
в замкнутом сосуде и т. д. Скалярное поле U (х, у, z), удовлетво-
ряющее условию Д(7 = 0, называется лапласовым или гармониче-
ским полем. Стационарное распределение температур внутри неко-
торого тела представляет собой, согласно сказанному выше, гармони-
ческое поле.
Один из важных примеров гармонического поля — это функция
у (г — х2 + у2+ г2, k — const).
Эту функцию можно представлять себе как потенциал поля тяготе-
ния (или электростатического поля), создаваемого точечной массой
(точечным зарядом), помещенной в начале координат. Проверим, что
эта функция — гармоническая (кроме начала координат, где она не
определена). Действительно,
д k kx d2k .г2 — 3x2r , Зх2 — г2
~дх~~ ~дх27~~П 7* ~5 >
и аналогично
d2 k _ , Зу2 — г2 д2 k 3z2 — г2
ду2 г гъ ’ дг2 г г5 ’
248
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
откуда
Гармонической будет и функция
ном г0, а следовательно, и любая
k & .
|f 2_г । при любом фиксирован-
линейная комбинация вида
Ski
I Г —rz I ’
1-1
представляющая собой потенциал, создаваемый системой точечных
масс. Предельный переход от точечного распределения масс к непре-
рывному с плотностью ц(х, у, z), естественный здесь с точки зре-
ния физики, потребовал бы для своего математического обоснования
применения теории интегралов, зависящих от параметра, которые
будут рассмотрены в гл. 10. Систематическое изложение всего круга
вопросов, связанных с понятием потенциала, имеется в учебниках по
математической физике.
Упражнения. 1. .Напишите потенциал поля тяготения,-созда-
ваемого массой, непрерывно распределенной по пространству с плот-
ностью ц(х, у, г).
2. Каков потенциал электростатического поля, создаваемого беско-
нечной, равномерно заряженной нитью. Будет ли этот потенциал
гармонической функцией?
§ 7. Запись основных дифференциальных операций
теории поля в ортогональных криволинейных координатах
1. Постановка задачи. Такие величины, как градиент, диверген-
ция, ротор и другие, часто встречаются в различных задачах теоре-
тической и математической физики. Во многих случаях полезно уметь
записывать эти величины не только в декартовых координатах, как это
было сделано выше, но и в тех или иных криволинейных системах
координат. Предположим, например, что рассматривается поле, обла-
дающее сферической симметрией, т. е. в каждой точке рассматри-
вается величина, скалярная или векторная, зависящая только от рас-
стояния этой точки до начала координат. Ясно, что все формулы,
связанные с таким полем, должны значительно упроститься, если
записывать их в сферических координатах, а не в декартовых.
В других случаях могут оказаться удобными какие-либо иные си-
стемы координат.
В этом параграфе мы запишем в криволинейных координатах
выражения для градиента, дивергенций, ротора и оператора Лапласа,
§ 7] ОСНОВНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ 249
2. Криволинейные ортогональные координаты в пространстве.
Предположим, что в трехмерном пространстве введена некоторая
система криволинейных координат qx, q2, q3*) и пусть
x = x(qx, q2, q3), у = у (^, q2, q3), z = z (^, q2, q3) (6.33)
— формулы, связывающие декартовы координаты х, у, z с криволи-
нейными координатами qv q2, q3.
Мы ограничимся простейшим и в то же время практически наи-
более важным случаем ортогональных координат (система криволи-
нейных координат называется ортогональной, если в любой точке
три координатные линии, проходящие через эту точку, ортогональны
между собой). Свойством ортогональности обладают, в частности,
такие употребительные в пространстве системы координат, как сфе-
рическая и цилиндрическая.
Найдем прежде всего выражения для
и объема в ортогональных координатах.
Для этой цели рассмотрим бесконечно ма-
лый криволинейный параллелепипед, вы-
резаемый тремя парами координатных по-
верхностей, отвечающих соответственно
значениям параметров qx, q2, q3, равным q{
И 91 + ^Р <?2 и ?г + ^2- ?з и ?з + ^з
(рис. 6.13).
Рассмотрим сначала ребро MMt. Точ-
ка М имеет криволинейные координаты
(91, q2, 93), а точка Мг—криволинейные
координаты (9i -f- dqlt q2, q3). Обозначив
декартовы координаты точки М через
х, у, z, а декартовы координаты точки Му— через x-]-dx, y -\-dy,
z-}-dz, мы можем написать, что длина dl{ вектора MMt равна
yrdx2-j-dy2~i-dz2.
Вдоль ребра MAfj координаты х, у, z суть функции переменной qx
(92 и 93 постоянны вдоль MMJ. Следовательно, в данном случае
, дх , . ду . . дг ,
dx = -^—dqi, dy =-^-~dqv dz = ^—dqy
dq, 71 J dqx dqt 71
элементов длины, площади
Рис. 6.13.
*) С понятием криволинейных координат в пространстве мы уже встре-
чались в гл. 2. Мы будем предполагать, что функции, связывающие криво-
линейные координаты с декартовыми, удовлетворяют тем условиям, которые
формулировались в гл. 2 § 4. Для большей симметрии формул мы будем
здесь обозначать криволинейные координаты несколько иначе, чем в гл. 2,
а именно, одной буквой с индексами 1, 2, 3. Аналогично компоненты вектор-
ного поля А (в той системе координат, которая будет рассматриваться)
мы обозначим Ар А2, А3.
250
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
и
"=/«)+«У+«У"’-
Аналогично для длин dl2 и d/3 ребер Л4/И2 и МЛ43 получаем сле-
дующие выражения:
W «У+Ш+(£У*
Введя обозначения
«-=/«У+ОУ+ОУ- <6-м>
"з=/Ш+Ш+Ш’
перепишем формулы для dZp dl2 и dl3 так:
dlx = Hxdqx, dl2 = H2dq2, dl3 = H3dq3. (6.35)
Множители Hx, Н2, Н3 называются параметрами Ламэ, отвечаю-
щими криволинейным координатам qx, q2, q3; их называют также
масштабными множителями. Координатные линии, вдоль каждой
из которых меняется только один параметр, следует представлять
себе как кривые, на которые нанесены шкалы значений этих пара-
метров. Множители Нх, Н2, Н3 на этих кривых преобразуют «неесте-
ственные» параметры qx, q2, q3 в «естественные»—длины дуг соот-
ветствующих линий.
Наша система координат ортогональная, поэтому площадь dox
грани равна произведению dl2 на dl3, т. е.
dox—H2H3dq2dq3,
аналогично для площадей da2 и do3 двух других граней ММХЫ2М3
и /И/И^3/И2 имеем
do2 — Н3НХ dq3 dqx и do3 = НХН2 dqx dq2. (6.36)
Наконец, объем всего рассматриваемого бесконечно малого парал-
лелепипеда равен
dv = dlx dl2 dl3 = HXH2H3 dqx dq2 dq3. (6.37)
Введем в точке M ортогональный и нормированный базис, состоящий
из трех единичных векторов еР е2, е3, касательных к координатным
$ 7] ОСНОВНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ 251
линиям, проходящим через точку М. Заметим, что в отличие от
декартовой системы координат, определяемой тремя постоянными
единичными векторами i, j, к, этот базис еР е2, е3 будет меняться
от точки к точке, т. е. сами векторы ер е2, е3 представляют собой
функции параметров qx, q2, q3. Это не мешает нам, однако, любой
вектор, заданный в произвольной точке М (т. е. любое векторное
поле), записать в виде линейной комбинации векторов еР е2, е3.
3. Цилиндрические и сферические координаты. Вычислим пара-
метры Ламэ для важнейших частных типов ортогональных криволи-
нейных координат: цилиндрической и сферической систем. Цилиндри-
ческие координаты г, <р, z связаны с декартовыми координатами
формулами
x = rcosq>, y = rsin<p, z — z.
Отсюда по формулам (6.34) получаем
Благодаря тому что параметры Ламэ имеют непосредственный геоме-
трический смысл, эти результаты нетрудно усмотреть геометрически
без всяких вычислений. Рассмотрим бесконечно малый параллелепи-
пед, ограниченный тремя парами координатных поверхностей, отве-
чающих значениям цилиндрических координат, со-
ответственно равным г и r-\-dr, <р и <р-1-- d<p, z
и z-\-dz (рис. 6.14). Длины d/p dl2 и dl3 ребер
АВ, АС и AD этого параллелепипеда соответст-
венно равны dr, г и dz, откуда сразу следуют
формулы (6.38).
Аналогично для сферических координат, за-
даваемых равенствами
х — pcostpsinO, у = р sin ф sin 9, д==фсоз9,
вычисление дает
Рис. 6.14.
Hl—1, Н2 = р, /73 = psin0. (6.39)
Этот результат тоже виден непосредственно из чертежа (рис. 6.15),
так как длины dlv dl2 и dl3 ребер АВ, АС и AD параллелепипеда,
ограниченного координатными поверхностями, отвечающими значе-
ниям сферических координат р и p4~dp, ф и фД-йф, В и 9-|-rf8,
252
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
соответственно равны
rfp, pd9 и psinOrfcp,
откуда сразу получаем (6.39).
4. Градиент. Найдем выражение градиента в ортогональных криво-
линейных координатах. Проекция градиента функции U — U (qx, q2, qa)
на некоторое направление совпадает, как известно, с производной
от U по этому направлению. Следовательно, для того чтобы вычи-
слить компоненты вектора grad U в базисе ер
е2, е3, нужно вычислить производные от U по
направлениям, определяемым этими векторами.
Пусть А (У — разность значений функции U в
точках Л4г и /И. Тогда
(grad U, ej) = lim -ц- =
dl,+0 all
— Г — 1 dU
~di+o Hdqi - Нх dq, •
Аналогично две другие компоненты градиента равны
J_dU_ 1 dU
Н2 dq2 И Н3 WT'
Таким образом, окончательно,
grad U
1 dU , 1 dU , 1 dU
~ Н, dqt ' Н2 dq2 e2-t“ Н2 dq3
(6.40)
5. Дивергенция. Вычислим теперь дивергенцию некоторого век-
торного поля А в координатах дг, q2, q3- В § 2 мы определили div А
в точке М формулой
,. . ,. 1
div А — lim —
f /
Следовательно, мы можем вычислить div А в точке М как отно-
шение потока вектора А через поверхность бесконечно малого парал-
лелепипеда, изображенного на рис. 6.13, к объему dv этого парал-
лелепипеда. Обозначим Ар А2, А3 компоненты вектора А в базисе еР
е2, ез (т- е- положим А — А2е2 +А3е3) и вычислим сначала
поток этого вектора через две грани, перпендикулярные ребру A4MV
Внешняя нормаль к грани уИЛ12^Л13 совпадает с вектором —ej
(вектор ej направлен в сторону возрастания q„ а внешняя нормаль
к рассматриваемой грани имеет противоположное направление). Следо-
§ 7] ОСНОВНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ 253
вательно, поток вектора А через эту грань равен (с точностью до
бесконечно малых выше первого порядка относительно dv)
(А, —— AxH2H3dq2dq3, (6.41)
где величины Н2, Н3 берутся в точке (qlt q2, q3).
Противоположная грань М^3!\Ш2 отличается от рассмотренной
тем, что на ней первая криволинейная координата равна ql-\-dq1
(а не 90; следовательно, значение величины А1Н2Н3 на этой грани
отличается от ее значения на грани MM2N1M3 приращением
(А^2^з) dqx •
Кроме того, направление нормали к грани M-lN3NN2 совпадает
с направлением вектора еР Поэтому поток вектора А через грань
M^3NN2 равен
рад +-^- (Л^Яз) Й91] dq2 dq3. (6.42)
Сложив выражения (6.41) и (6.42), получим, что поток вектора А
через две параллельные между собой грани и MXN3NN2
равен
-^-(Л^Яз)^! dq2dq3.
Аналогично, рассматривая две другие пары параллельных между
собой граней, получим следующие два выражения для потока век-
тора через эти пары граней:
d(A2H3Hi) , . . А j j
~~dq2 dqxdq2dq3 и dq^dq2dq3.
Складывая все эти три величины и деля на dv, получим
divA= 1- ^(А^ WWy
Н^Н2Н2 L dqi 1 dq2 1 <ty3 J '
6. Ротор. В § 4 мы показали, что проекция (rot А)„ ротора век-
торного поля А в некоторой точке М на направление некоторого
фиксированного вектора п представляется формулой
(rotA)„ = lim — f Axdl,
х->/и J
где S—площадка, перпендикулярная вектору п, о — ее площадь и
L — ее граница. Следовательно, мы можем получить проекцию rot А
на направление вектора е1( вычислив циркуляцию А вдоль контура
(рис. 6.13) и разделив ее на rfOp Представим эту
циркуляцию в виде суммы четырех слагаемых, отвечающих отрезкам
254 теория поля (гл. 6
Л1М2, Afg/Vp AfjAfg и М3М, и вычислим каждое слагаемое отдельно.
Начнем с первого из них. Проекция вектора А на направление Л4А42
равна А2, следовательно, циркуляция вектора А вдоль Л4АГ2 равна
(с точностью до бесконечно малых выше первого порядка относи-
тельно dOj)
A2dl2— A2H2dq2, (6.44)
где величины А2 и Н2 берутся в точке (qlt q2, q3). Циркуляция
вдоль отличается от только что полученного выражения тем,
что на третья координата равна ^з + ^з’ а не 'Уз- как на AfAf2,
и, кроме того, направление отрезка противоположно направ-
лению е2. Поэтому циркуляция вдоль равна
[ ^2^2 +"^7 (^2^г) *7з] ^2-
Аналогично получаем для циркуляций вдоль Л42^ и
жения
(6.45)
выра-
д
dq2
(6.46)
и
— А3Н3 dq3.
(6.47)
Сложив величины (6.44), (6.45), (6.46) и (6.47), получим, что цир-
куляция вектора А вдоль контура А1Л42А\М3/И равна
д(А2Н2) . . . д(А3НА . ,
~ d~q~ -d<h + d<h dq3~
Деля полученное выражение на H2H3dq2dq3, т. е. на площадь гра-
ни MM2NxM3, получаем, что компонента (rotA)x вектора rot А в на-
правлении базисного вектора ei равна
1 fd(A3/73) <ЦА2Я2) )
I dq2 dq3 J
Аналогично вычисляются две другие компоненты:
(6.480
(6.482)
д(А,Нх)
(6.483)
dqi
7. Оператор Лапласа. Исходя из найденных выражений для
grad U и div А, мы можем написать выражение оператора Лапласа
в координатах qx. q2, q3. Получаем
*,, ... 1 ( д (Н2Н3 dU \ .
ДЦ — div grad U— | dqi ( dqi ) +
, ди_\ , d (hyh2 6 49)
/Z3 / f
Н2 dq2
§ 7] ОСНОВНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ ОПЕРАЦИИ 255
Эту формулу очень легко запомнить, если знать ее «происхожде-
ние». Множители Ламэ Нх, Н.2, Н3 в знаменателях при dqv dq2, dq3
возникли из-за градиента. Множители Н2Н3, H3Hlt НХН2 в числите-
лях возникли из площадей тех площадок, через которые вычисляется
1
поток, множитель возник из-за того, что поток через грани
параллелепипеда делится на объем параллелепипеда.
8. Запись основных формул в цилиндрических и сфериче-
ских координатах. Выше, в п. 3, мы уже нашли параметры Ламэ
для цилиндрических и сферических координат. Чтобы написать в этих
системах координат формулы для градиента, дивергенции, ротора
и оператора Лапласа, нужно лишь подставить эти параметры в по-
лученные выше общие формулы. Таким образом, находим:
а) для цилиндрических координат.:
,,,, dU . 1 dU . dU
gr-ad U — -т— е. Ч-ч— еф -+- -т— е,,
ь dr г 1 г dtp ф 1 dz г
1 д(гАг\ 1 dArr ад
dlvA=7~V + 7-^r+4r-
1 дА2 дА^ \ / дАг _ Мг\
г dtp dz Гг'\ dz dr / Ф
/1 d(rAv) .1 dA
\ r dr r dq
1 d2U , d2U .
r2 dq2 dz2 ’
ег.
bU =
б) для сферических координат:
rot А
, dU . 1 dU . 1 dU
dp ep p d9 e° p sin 9 dtp e<p’
divA— 1 i_________1 d(sinOAe) ,____1
p2 dp ' p sin 9 d9 ' p sin 9 dtp ’
1 / d(Apsin9) _ a A \ ,
p sin 0 \ d9 dq / Cp '
, / 1 dAp 1 d(pAq,)y_ , /1 d(pA9) 1 dAp\
\ p sin 9 d<p p dp /e® \ p dp p d9 /et(”
д „ _ 1 d ( 2 dU\ , 1 d / . dU\ , 1 d2U
p2 dp у dp / p2 Sjn 0 д9 \Sln dO / p2 sin2 9 d<p2
В задачах, связанных с рассмотрением оператора Лапласа в сфе-
рических координатах, часто наряду с полным оператором Лапласа АС/
встречается выражение
1 и I I О ии \ I
р2 sin 0 d9 Is1" ° "din А
1 d2U
р2 sin2 Н dq2 *
называемое «угловой частью» оператора Лапласа.
256
ТЕОРИЯ ПОЛЯ
[ГЛ. 6
Замечание. В этом параграфе мы систематически пользова-
лись такими понятиями, как «бесконечно малый параллелепипед»,
«элемент объема» и т. д. Ясно, что здесь, как и в других подоб-
ных случаях, смысл этих выражений состоит в том, что мы рассмат-
риваем сначала объекты конечных размеров, а затем совершаем
предельный переход, стремя эти размеры к пулю. Мы полагаем, что
при желании читатель может проделать самостоятельно все те пре-
дельные переходы, которые здесь лишь подразумевались, но не изла-
гались.
§ 8. Переменные поля в сплошных средах
До сих пор мы, изучая те или иные поля, интересовались в ос-
новном зависимостью соответствующих величин (скалярных или век-
торных) от пространственных координат. Сейчас мы рассмотрим не-
которые вопросы, связанные с зависимостью поля от времени.
1. Локальная и материальная производные. Рассмотрим дви-
жущуюся жидкость, скорость которой в каждой точке зависит не
только от координат этой точки, но и от времени. Пусть, далее,
с этой жидкостью связана некоторая переменная величина <р, напри-
мер температура, давление и т. п. Изучая изменение этой величины ср
с течением времени, мы можем поступать двояким образом: или сле-
дить за ее изменением в данной точке, т. е. при фиксированных
значениях х, у и z, или же рассматривать значение этой величины
для данной частицы (координаты которой меняются с течением вре-
мени). Например, если речь идет о температуре потока жидкости,
то ее можно измерять термометром, укрепленным неподвижно, или
же термометром, который плывет в этом потоке. Изменение с те-
чением времени некоторой величины <р(Л, t) в данной точке М ха-
рактеризуется так называемой частной или локальной производной
<Эф _ и™ ф(ЛМ + ДО—Ф(А1,0
~ЗГ — 11т ----------д7--------’
т At->0
при вычислении которой точка М рассматривается как фиксиро-
ванная.
Изменение с течением времени величины <р(Л4, t) для данной
частицы характеризуется полной или материальной производной
ф(Ж, t) по t, которая определяется следующим образом.
Пусть М — положение данной частицы в момент t, а М' — по-
ложение этой же частицы в момент £ —|—Д/. Полной производной ср
по t называется
йчг |im ср (АГ, Г-|-Д/) — ср (Af, /) (6 51)
л д/_>0 д<
§ 8]
ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНЫХ СРЕДАХ
257
Чтобы установить связь между локальной и материальной производ-
ными, заметим, что, вычисляя материальную производную, мы должны
считать координаты х, у и z точки М функциями от t, причем их
производные по t — это компоненты скорости потока в точке М:
dx dy dz
~dt~Vx' ~dt~Vy' ~dt~~Vi'
Поэтому, дифференцируя <p = <p(x, у, z, t) как сложную функцию
от t, получаем
dtp _ dtp । dtp
dt ~~~dF'~dx
т. е.
ду У 1 дг г
£rad<^
(6.52)
Аналогичным образом можно ввести понятия частной и полной про-
изводной по времени и для какой-либо векторной величины А (Ж, t),
связанной с движущейся средой. Эти производные определяются фор-
мулами
дК = ljm A(34J + A^-.A(MQ , (6.53)
vt Af->0
dK = lim A(M/+ao-aL<o , (6 54)
Д/->0
аналогичными формулам (6.50) и (6.51). Связь между этими произ-
водными дается формулой
dA dA , dA . dA . dA .
—= 0, + t- -4- (6.55)
dt dt 1 dx x 1 ду У 1 dz 2 4 '
которая получится дифференцированием A(x, у, z, t) как сложной
функции от t. Равенства (6.52) и (6.55) удобно записать в виде
dtp
~dt
dtp
dt
b(V, V)q>
(6.56)
и
^.= -+(v> V)A. (6.57)
понимая под (v, V) оператор
d . d . d
Vx dx + ду dz ’
т. e. «скалярное произведение» вектора скорости v и символиче-
ского вектора V.
Слагаемые (v, V) <р и (v, V) А, входящие в формулы (6.56) и
(6.57), называются конвективными членами; они связаны с переносом
258 теория поля [гл. 6
(конвекцией) частиц и возникают только при рассмотрении движу-
щейся среды.
Рассмотрим в качестве примера ускорение частицы движущейся
жидкости. Оно представляет собой полную (т. е. относящуюся к
фиксированной частице) производную скорости. Воспользовавшись
формулой (6.56). получаем
^=-S-+(v’ V>v- (6-58>
т. е. в координатной записи
dvx dvx dvx dVy dvz -
dt ~ dt + ^“37
и аналогично для двух других компонент.
2. Уравнение Эйлера. Воспользуемся понятиями материальной и
локальной производных для вывода одного из основных уравнений
гидродинамики — так называемого уравнения Эйлера.
Рассмотрим внутри движущейся жидкости некоторый объем Q,
ограниченный поверхностью S. На элемент с/о этой поверхности
действует сила — давление, равное — pn do, направленное по нор-
мали *) к do (здесь п — единичный вектор внешней нормали, а
р — скалярная величина). Сила F, действующая на всю поверхность S,
запишется в виде
где, как всегда, под интегралом от вектора
pn=/?cos(n, x)i4~Pc°s(n, у) j 4- р cos(n, z)k
понимается вектор с компонентами
J J* pcos(n, x)do. J* J pcos(n, y)do
2 X
и f f Р cos(n> z) do.
(6.60)
Интеграл (6.59) можно преобразовать в тройной интеграл по объему,
применив формулу Остроградского к каждой из компонент (6.60)
*) Мы считаем, что рассматриваемая жидкость идеальная, т. е. имеет
нулевую вязкость. В этом случае давление на любую бесконечно малую пло-
щадку внутри жидкости направлено по нормали к этой площадке.
§ 8] ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНЫХ СРЕДАХ
этого вектора. Получим
259
S Q Q
й О
следовательно, на каждый элемент da объема жидкости действует
сила
— grad р da.
С другой стороны, если р(Д4, t)— плотность жидкости в данной
точке М в момент t, a w — ускорение частицы, находящейся в этой
точке, то wp(AJ, f)da представляет собой произведение массы, со-
держащейся в объеме da, на ускорение, и, следовательно, по за-
кону Ньютона имеет место равенство
w р da — — grad р da,
т. е.
wp = — grad р.
(6.61)
Это и есть основное уравнение свободного движения идеальной
жидкости, называемое обычно уравнением Эйлера*). Здесь под w
понимается ускорение частицы жидкости, т. е. полная производная
скорости по времени w — . Воспользовавшись выражениями для
компонент ускорения, найденными в конце п. 1, мы можем перепи-
сать уравнение Эйлера в координатной форме:
dv, , dv, , dv,
x dx 1 > dy 1 2 dz
dvv dvv dvv
x dx 1 У dy 1 2 dz
dv, . dv,
- v r 1 -4- v v
x dx 1 y dy
__ dp
dx ’
dP
- dy ’
______dp_
dz ’
2 dz
8. Производная по времени от интеграла по жидкому объему.
Рассмотрим в движущейся среде некоторый объем Q. Мы будем
называть этот объем жидким, если он во все моменты времени
состоит из одних и тех же частиц жидкости. Следовательно, жидкий
*) Знак минус в правой части уравнения (6.61) имеет ясный физиче-
ский смысл: понятно, что ускорение каждой частицы жидкости направлено
в сторону уменьшения давления, т. е. против градиента р.
260 ТЕОРИЯ ПОЛЯ [ГЛ. 6
объем с течением времени перемещается и деформируется. Рассмотрим
интеграл
J= J J J(6.62)
£2
от некоторой скалярной функции <р (М, t) по такому жидкому объему
и вычислим производную этого интеграла по времени.
При вычислении этой производной мы должны учесть, что инте-
грал (6.62) зависит от времени двояким образом: во-первых, от t
зависит подынтегральная функция, а во-вторых, при изменении t
меняется и та пространственная область, по которой интеграл берется *).
Если бы изменения объема й не происходило, то за время dt
функция %> получила бы приращение -~dt, а интеграл (6.62) полу-
чил бы при этом приращение
о
Рассмотрим теперь изменение интеграла (6.62), вызванное изменением
объема й. Обозначим 2 поверхность, ограничивающую объем й
в момент t. Изменение объема й за время dt происходит, очевидно,
за счет того, что некоторые частицы жидкости за это время втекают
или вытекают через поверхность 2. Через элемент do поверхности 2
за время dt вытекает объем жидкости, равный vndtdo, где vn—проек-
ция скорости жидкости на внешнюю нормаль к do. Это изменение
объема даст интегралу (6.62) приращение
<pv„ dt do,
а все изменение интеграла (6.62), вызванное изменением объема й
за время dt, равно
Таким образом, полное изменение интеграла (6.62) за время dt равно
dJ—dt [ j* j* f f qvndo
*) Интеграл (6.62) представляет собой так называемый интеграл, зави-
сящий от параметра, причем от параметра t зависят и подынтегральная
функция и область интегрирования. Основы теории интегралов, зависящих
от параметра, будут изложены в гл. 10. Здесь мы, не опираясь на общую
теорию, рассмотрим лишь вопрос о вычислении производной интеграла (6.62)
по времени, важный с точки зрения физических приложений,
§ 8] ПЕРЕМЕННЫЕ ПОЛЯ В СПЛОШНЫХ СРЕДАХ 261
и, следовательно,
< = <6-63>
Q 2
Преобразовав второе слагаемое в правой части этого равенства по
формуле Остроградского, получим
(6,64)
Наконец, воспользовавшись равенством
div (<pv) = <р div v -|- (v, grad ф)
(см. (6.29)) и выражением (6.52) для полной производной, получаем
окончательно
4 f f fф da=f f f (4г+div v)da- <6- 65>
Q Q
В частности, если div v = 0 (т. e. рассматривается движение
несжимаемой жидкости, без стоков и источников), то формула (6.65)
принимает более простой вид:
Q Q
Замечание. Рассмотренная нами задача о дифференцировании
интеграла, взятого по жидкому объему, аналогична следующей одно-
мерной задаче (с которой мы еще встретимся в гл. 10): вычислить
производную по t от интеграла
i>(t}
J(t) = J* ф (х, t) dx.
а (С
Рассматривая J(t) как сложную функцию от a (t), b (0 и t, легко
получаем, что
J' (О = f -J" + Ф {Ь (О, О Ь' (/) - ф (а (0, 0 а' (/)•
а (О
Здесь опять-таки J'(t) представляет собой сумму двух слагаемых,
первое из которых определяется изменением подынтегральной функ-
ции, а второе — изменением области интегрирования.
Мы рассмотрели выше интеграл по жидкому объему от скалярной
функции. Аналогичным образом можно рассмотреть интеграл пр
262 ТЕОРИЯ ПОЛЯ (ГЛ. 6
жидкому объему от векторной функции А(Л4, t). Для производной
этого интеграла по t получается с помощью тех же рассуждений
формула
4-///**-///[4й-+А d,vv]rf“- <«'66>
Q £2
Выше речь шла об интегрировании по жидким объемам. В гидро-
динамике и других разделах физики приходится рассматривать, наряду
с жидкими объемами, жидкие поверхности и линии. Они определяются
как поверхности и линии, состоящие из фиксированных частиц
жидкости и, следовательно, меняющие с течением времени форму и
положение в пространстве в соответствии с движением жидкости.
Поверхностные или криволинейные интегралы по таким жидким поверх-
ностям или линиям от тех или иных функций опять-таки предста-
вляют собой выражения, зависящие от времени двояким образом
(от времени зависят и область интегрирования и подынтегральная
функция). Применяя те же рассуждения, что и в случае жидких
объемов, нетрудно получить формулы для дифференцирования таких
поверхностных и криволинейных интегралов по времени.
4. Другой вывод уравнения неразрывности. Из формулы (6.63)
сразу вытекает уравнение неразрывности, полученное нами в п. 5 § 3.
Пусть р(Л4, ^—плотность движущейся (сжимаемой) жидкости. Масса Т
этой жидкости, заключенной в некотором объеме й, равна
о
Если объем й жидкий, то масса внутри этого объема остается
постоянной. Следовательно (см. (6.64)),
~3tf f f = f f/[-!- +div (pv)]d«> = 0.
O Q
Так как объем й произволен, то отсюда получаем
-J-4-div(pv) = O,
т. е. уравнение неразрывности.
ГЛАВА 7
ТЕНЗОРЫ
В естествознании и технике приходится иметь дело с физическими
величинами различной математической природы. Это различие про-
является, в частности, в характере их аналитического выражения
и в законах преобразования их аналитического выражения при пере-
ходе от одной системы координат в пространстве к другой.
Простейшими, с точки зрения математической природы, физиче-
скими величинами являются скалярные величины, например масса
тела, объем тела, длина вектора и т. п., инвариантные относительно
преобразований координат. Каждая такая скалярная величина в лю-
бой системе координат выражается одним числом, причем это число
не зависит от выбора системы координат.
Следующими по сложности математической природы являются
величины векторные, например скорость, ускорение, сила и т. п.
Векторная величина в трехмерном пространстве в каждом базисе
определяется тройкой чисел — тройкой проекций вектора на оси
координат, или, как говорят, «тройкой координат вектора в данном
базисе», причем эти «координаты вектора» при переходе от одного
базиса к другому преобразуются по определенному закону.
Следующими после векторов по сложности математической при-
роды являются физические величины, называемые тензорами, играю-
щие роль линейных операторов над векторами (по поводу понятия
линейного оператора см. п. I § 2). Такого рода величиной описы-
ваются, например, проводимость в анизотропном теле.
А именно, в изотропном теле вектор плотности тока j и вектор
напряженности электрического поля Е коллинеарны, т. е. связаны
соотношением
j = оЕ,
(7.1)
где б — скалярный множитель (о > 0), называемый проводимостью.
В анизотропном теле j и Е уже, вообще говоря, не коллинеарны и
множитель о является линейным оператором, преобразующим вектор Е
в вектор j; этот оператор называется «тензором» проводимости.
264 ТЕНЗОРЫ [ГЛ. 7
Если выбрать в пространстве какой-либо определенный базис
еР е2, е3 и разложить по этому базису j и Е
j — Ле1 + Ле2 + Ле3’ g.
Е — £[6] £'2е2£3е3,
то равенство (7.1) можно заменить эквивалентной системой трех
скалярных равенств
/л =5 о* A. k =1,2,3. (7.1')
i « 1
Таким образом, тензор проводимости о в каждом базисе опреде-
ляется девятью числами aki, k, 1 = 1, 2, 3, которые называются
координатами, тензора о в данном базисе.
В определение тензора входит описание преобразования его коор-
динат при переходе от одного базиса к другому.
В §§ 1—9 мы ограничимся переходами лишь в множестве всех
ортогональных нормированных базисов и изучением соответствую-
щих им аффинных ортогональных тензоров. В § 10 мы остановимся
кратко на обобщениях.
§ 1. Понятие аффинного ортогонального тензора
1. Преобразования ортогональных нормированных базисов.
Рассмотрим два каких-либо ортогональных нормированных базиса еР
е2, е3 и в;, е'2, е'3 в трехмерном евклидовом пространстве. Из орто-
гональности и нормированности базисов вытекают следующие соотно-
шения для скалярных произведений:
( 0 при I #= k,
(ez- = (ez> ей) = бГй* fiZ» = ( 1 при i==k. (7’3)
Базисы вр e2, e3 и e', e2, e3 будем условно называть «старым» и
«новым». Разложив векторы нового базиса по старому, получим
е^аие^а^ + а^з.
е2 ~ а21в 1 “Ь а22е2 Н- a23e3’
е3 ~ а31е1 a32e2 аззе3*
или, короче,
3
е,' = 2 azzez- 1. 2, 3.
(7Л)
(7.4')
ПОНЯТИЕ АФФИННОГО ОРТОГОНАЛЬНОГО ТЕНЗОРА
265
§ п ,
Матрица
«11 а12 «13
<4/11 = «21 «22 «23
а31 «32 «33
(7.5)
называется матрицей перехода от старого базиса еР е2, е3 к новому
базису е', е2, е3.
Изучим свойства этой матрицы. Умножая вектор е(' = a.^j -|-
+ а/2е2_Ьа/зез скалярно на вектор = a^ej + а^2е2 +“/Зе3, по-
лучим
( 0 при / #= /,
а/1а/1 + а/2а;2 + а<за/з = ^ij — j 1 п_ f___, (7-6)
т. e. сумма квадратов элементов любой строки матрицы равна еди-
нице, а сумма произведений соответствующих элементов любых двух
различных строк матрицы равна нулю *). Умножая скалярно (7.4')
на eft, находим **)
(er (^.7)
Найдем аналогичные выражения для элементов матрицы, обратной
матрице (7.5). Разлагая векторы старого базиса ер е2, е3 по новому,
будем иметь
®1 = Р11®1 Р12®2 ~Ь Р13е з|>
®2 = 021®1 Н- 022®2 023® з> (7.8)
®3 = ₽31®1 + 032®2 “I- Рззе 3’
или, короче, з
4 = (7.8')
Матрица
011 Р12 013
11М1 = 021 022 023 (7.9)
031 032 033
является, очевидно, обратной матрице (7.5). Умножая (7.8') скалярно
*) Матрица ||ау||, для которой выполнены соотношения (7.6), называется
ортогональной. Таким образом, матрица нерзхода от одного ортогонального
нормированного базиса к другому является ортогональной.
** ) Очевидно, а(к => (е', е*) = cos(ez, еА).
266 ТЕНЗОРЫ [ГЛ. 7
на е^, получим
(<ЛНг (7.10)
Сравнивая (7.10) и (7.7), найдем следующую связь между эле-
ментами матриц (7.5) и (7.9):
а« = Рм. (7.11)
Таким образом, матрица (7.9), обратная матрице (7.5), получается
транспонированием матрицы (7.5).
2. Определение аффинного ортогонального тензора. При по-
строении формальной теории тензоров инвариантные скалярные ве-
личины и векторы оказывается целесообразным включить в число
тензоров. Так, скалярная величина L, инвариантная относительно пе-
реходов от-одного ортогонального нормированного базиса к другому,
называется аффинным ортогональным тензором
нулевого ранга.
Температура, масса, длина вектора являются аффинными орто-
гональными тензорами нулевого ранга. Проекция вектора на первую
координатную ось (т. е. на ось, определяемую первым базисным
вектором ei) в каждом базисе е1( е2, е3 является скалярной вели-
чиной, не инвариантной относительно переходов от одного базиса
к другому, и поэтому не является тензором нулевого ранга.
Включение векторов в число тензоров обеспечивает
Определение I. Пусть величина L определяется в каждом
ортогональном нормированном базисе тройкой чисел-, в ба-
зисе ер е2, е3 числами Llt L$, Lz, в базисе е', е2. — числами
L\, Li, L3 и т. д- Если при переходе от любого базиса elt е2, е3
к любому другому базису е^, е2, эти числа преобразуются
по формулам
з
= (7.12)
где —матрица перехода от базиса ер е2, е3 к базису
ег е2’ ез* т0 величину L называют аффинным ортого-
нальным тензором первого ранга и обозначают
символом т. е, L^(L().
Числа 4р ?»=1| 2, 3, называют координатами тензора L в базисе
ер е2, е3, а числа Li, /=®1, 2, 3, соответственно координатами
этого тензора в базисе вр е2, е3.
Докажем, что любой вектор является аффинным ортогональ-
ным тензором первого ранга. Во-первых, в каждом ортогональ-
ном нормированном базисе вр е2, е3 вектор х определяется трой-
кой чисел — тройкой своих координат. Во-вторых, при переходе
§ П ПОНЯТИЕ АФФИННОГО ОРТОГОНАЛЬНОГО ТЕНЗОРА 267
от одного базиса к другому координаты вектора х преобразуются
по формулам вида (7.12). Действительно, разложив х по базисам
еР е2, е3 и ё', е2, е', получим
X -*4®] ~Ь Х2^2 Н- )|'3®3 = Л'2®2 ^З^З' 13)
Умножим равенство (7.13) скалярно на ер В силу (7.3) и (7.7),
это дает
з
<=w+v2+v3=2wt> z=1*2-з, <7-14)
s=i
причем формулы (7.14) имеют тот же вид, что и формулы (7.12),
а это и означает, что вектор х является аффинным ортогональным
тензором первого ранга.
Замечание 1. Очевидно, каждый аффинный ортогональный
тензор первого ранга можно рассматривать как вектор.
Замечание 2. Так как обратная матрица для матрицы ||а^||
получается транспонированием ||ai?||, то из равенства (7.14) находим
з
7=1, 2, 3. (7.14')
Сформулируем теперь определение тензора второго ранга.
Определение 2. Пусть величина L определяется в каждом
ортогональном нормированном базисе девяткой чисел: в ба-
зисе е,, е„ е3 числами Llh i, i=\, 2, 3, в базисе е.', el, el
числами Lij, I, J—1, 2, 3, и т. д. Если при переходе от лю-
бого базиса ер е2, е3 к любому другому базису е', е2, е3 эти
числа преобразуются по формулам
з з
L'lJ = 2 2 z- 2- 3, (7.15)
т=1 л=1
где ||aZy||—матрица перехода от базиса еР е2, е3 к базису
е', е2, е3, то величину L называют аффинным ортого-
нальным тензором второго ранга и обозначают
символом (Ljj), т. е. L = (AZy-).
Числа Lij, I, /=1, 2, 3, называют координатами тензора L
в базисе ер е2, е3, а числа Ltj, I, j=\, 2, 3, — его координатами
в базисе е', е2, е'.
В §§ 2—9 мы остановимся подробно на примерах и свойствах
аффинных ортогональных тензоров второго ранга, а сейчас сформу-
лируем определение аффинного ортогонального тензора произволь-
ного ранга /?)>1.
Определение 3. Пусть величина L определяется в каж-
дом ортогональном нормированном базисе еР е2, е3
268 ТЕНЗОРЫ [ГЛ. 7
совокупностью Зр чисел ts— 1. 2, 3; s=l, 2.....р.
Если при переходе к любому другому о ртогональному норми-
рованному базису е', е2, е3 эти числа преобразуются по закону
з
А. у = 2 «у у ®у < • • Я, j L. . . , (7.16)
12" Р 1/1 22 1Р>Р >1'2 }Р
где [(“*/11—матрицы перехода от базиса ер е2. е3 к базису
е', е2, то величину L называют аффинным ортого-
нальным тензором р-г о р анга и обозначают символом
(Llil2--1рУ т' е- ЬМЧгг ••'/>)•
Числа называются координатами этого тензора в базисе
е,, е9, е,, а числа L'. , , —его координатами в базисе е.', еЛ е~
1 Z О '1*2 *** 1 2 <5
Замечание 1. Иногда определение тензора р-ro ранга, р^-1,
формулируют в следующей эквивалентной форме.
Говорят, что задан аффинный ортогональный тензор ранга
р 1 ... <р)’ есла 6 каждом ортогональном нормирован-
ном базисе еР е2, е3 задано Зр чисел 1, 2, 3,
s=l, ..., р и если при переходе к любому другому ортого-
нальному нормированному базису е', е2, е3 эти числа преоб-
разуются по закону
з
L' . . — У а, .а. . ... а,. L. . . . (7.17)
1^-‘Р J^Jp^ ^2 1р>р1^2-1р ’
Иногда мы будем пользоваться этой формой определения тензора
при р— 1, а также при р — 2.
Замечание 2. Определения 1,2 и 3 сформулированы для
трехмерного пространства. Совершенно аналогично они могут быть
сформулированы и для М-мерного пространства, где ортогональ-
ные нормированные базисы содержат по N единичных векторов
ер е2, .... eN; ej, е2, .... е^, а матрица перехода от базиса
ер е2.....вдг к базису ej, е2.....имеет порядок N, так как
N
е' = У а/уе7-, /=1, 2......N.
j=i
§ 2. Связь между тензорами второго ранга
и линейными операторами
1. Линейный оператор как тензор второго ранга. Напомним
прежде всего, что линейным оператором или линейной вектор-
функцией называется такая функция
У = Ь(х),
ТЕНЗОРЫ И ЛИНЕЙНЫЕ ОПЕРАТОРЫ
269
§ 21
которая каждому вектору х ставит в соответствие вектор у и для
которой выполняется равенство
L (CjXi-j-С2х2) = CjL (х^ + C2L (х2) (7.18)
при любых х1 и х2 и любых константах Сг и С2.
Координатами линейного оператора L в базисе еР е2, е3 назы-
ваются коэффициенты разложения образов L (е^, L (е2), L (е3)
базисных векторов по базису ер е2, е3:
L (е/ = 4- i2ie2 4~ £3ie3,
L (ег) — ^i2ei + T-22e2 A32e3, (7.19)
L (e3) — ^i3^i + T,23e2 4~ A33e3,
или, короче, разложения
з
L(e,)=2 Lk)ek, /=1,2,3. (7.20)
*=i
Умножим скалярно обе части равенства (7.20) на ez. В силу
соотношений (7.3), это дает
Azy = (ez,L(e7)), /. /=1,2,3. (7.21)
Аналогично для координат оператора L в базисе е', е2, е3 получаем
z.;y = (e;,L(e;)), /,/=1,2,3. (7.22)
Подставляя в (7.22) выражения
3 3
е; = 2 а(Л- е' = 2 %„е„. (7.23) '
т=1 л=1
найдем
3 3 3 3
= 2 3 М;Я(ея. Ь(ел))= 2 2 vlmajnLma, Z. / == 1. 2, 3. (7.24)
т=1 л=1 т=1 л=1
Формулы (7.24) совпадают с формулами (7.15), а следовательно,
доказано, что линейный оператор L является аффинным орто-
гональным тензором второго ранга.
2. Тензор второго ранга как линейный оператор. Аффинный
ортогональный тензор (Ltj) второго ранга можно рассматривать как
линейный оператор над векторами евклидова пространства. Пусть
задан аффинный ортогональный тензор второго ранга (AZ;). Определим
соответствующий линейный оператор у = L (х) сначала на базисных
векторах каждого ортогонального нормированного базиса elt е2, е3
270 ТЕНЗОРЫ (ГЛ. 7
соотношениями (7.19), а затем определим этот оператор для каждого
з
вектора х — 2 xfii соотношением
1-1
з
Ь(х)=2хЛ(е<). (7-25)
i=i
Докажем, что определенный таким образом оператор действительно
является линейным, -т. е. что для него выполняется соотноше-
з з
ние (7.18). Пусть х—2-v<ei и y=2jW тогда
7=1 7=1
з
(>1Х+С2у = 2 ((-l^l + ^yi) е7-
7 = 1
Следовательно, в силу определения (7.25) (заменяя в (7.25) х
на CjX—|~б?2у), получим соотношение
з
L (CjX + С2у) = 2 (^ix7 + СгУ7) L (е<)=
7 = 1
з з
= С1 2 (eZ) + С2 2 У1Ь (ez) = CtL (х) + C2L (у),
7=1 7=1
совпадающее с (7.18). Линейность оператора доказана.
Нетрудно доказать, что определение линейного оператора L
с помощью тензора (L[j) не зависит от выбора базиса. Иными сло-
вами, если вместо координат LZ;- тензора в базисе ev е2, е3 взять
координаты L'(j этого тензора в базисе ez, е2, е3 и определить линей-
ный оператор L' соотношениями
L' (ei)~ ^nei + ^2ie2 + 7-31ез-
L (ег) ~ T.jrjCj£22е2-j-Т.32е3, (7.19')
L (®з) ~ ^тзе1 Н~ 7-2зе2 7-ззез
для базисных векторов ez, е2, е3 и соотношением
з
L'(x)=2 x’yPi) (7.25')
з
для каждого вектора х = 2 *-e', то
7 = 1
L'(x) = L(x) (7.26)
для каждого вектора х.
§ 3] ТЕНЗОРЫ И ИНВАРИАНТНЫЕ ПОЛИЛИНЕЙНЫЕ ФОРМЫ 271
Действительно, воспользовавшись соотношениями
3 3 3 3
=22 а/ьа/Л/,,-. х! = 2 а,-,х'., еь = 2
1} « у"] It J h
(7.19), (7.25), (7.19') и (7.25'), получим
3 3 3 3 3/33 \
L (x)= Д xt^ (e/)= 2 xi 2Aze*= 2 xj 2 ( 2 2 ^ik^ji^ki ) ez
/ = 1 1 = 1 S = 1 / = 1 ‘ Z=1 \ft=l 1 = 1 ' /
3 3 3
= 2 x'j 2 W = 2 ХУ (e)) = L' (x), (7.27)
что и требовалось доказать.
Мы доказали совпадение операторов L' и L и тем самым доказали,
что с помощью соотношений (7.19) и (7.25) каждому аффинному
ортогональному тензору второго ранга (£(у) однозначно ставится
в соответствие линейный оператор L. Этот линейный оператор L
можно отождествить с тензором (А/?-), которому он соответствует,
иными словами, рассматривать аффинный ортогональный тензор вто-
рого ранга как линейный оператор. Такая интерпретация аффинного
ортогонального тензора второго ранга широко используется в физике;
именно таким образом интерпретируются тензор проводимости и тензор
инерции, упомянутые в начале этой главы, а также тензор напряже-
ний, с которым мы познакомимся в § 5 *). Но возможна и другая
весьма полезная интерпретация тензора второго ранга, на которой
мы остановимся в следующем параграфе.
§ 3. Связь между тензорами и инвариантными
полилинейными формами
1. Тензоры первого ранга и инвариантные линейные формы.
Пусть в каждой системе координат задана система трех чисел аи
а2, а3, причем эти числа при переходе от одной системы координат к
другой преобразуются так, что линейная форма alxl-l~a2x2-j-а3х3,
где Хр х2, х3 — координаты произвольного вектора х, остается
инвариантной; тогда величины at (/=1, 2, 3) образуют тензор пер-
вого ранга. Действительно, пусть в базисе еР е2, е3 вектор х пред-
ставляется в виде х = XjCj + х2е? + х3е3 и коэффициенты линейной
формы равны av а2, а3, а в базисе ej, е2, е3 тот же вектор х
•) Если вместо соотношений (7.20) и (7.25) для определения линейного
оператора, соответствующего тензору (А;/), воспользоваться соотношениями
3 3
А*(еу) = 2 !• 2, 3, и L* (х) = 2 xiL* (в/), то получится линей-
fc=i t=i
ЧЫЙ оператор А*. который называется сопряженным с Ц.
ТЕНЗОРЫ
[ГЛ. 7
представляется в виде х = х'е{4~ x2e2-j- х^е^ и коэффициенты линей-
ной формы равны a'v а'2, а'г и пусть линейная форма инвариантна,
т. е. для любого вектора х выполняется равенство
а[х' + а’2х'2 + а'ах'г = агхх + а2х2 + аах3. (7.28)
Подставив в правую часть равенства (7.28) выражение хк через x’t:
з
хк — 2 atkx't' будем иметь
з з з з / з \
2 <х;= 2 ак 2 = 2 2 а, А х'.
1=1 * = 1 t=l 1=1 \ Й=1 /
В силу произвольности х', х', х', получим
3
< = ^aikak, (7.29)
«= 1
что и требовалось доказать.
2. Тензоры второго ранга и инвариантные билинейные формы.
Совершенно аналогично коэффициенты инвариантной билинейной
формы
з
2 a^x^j (7.30)
i, j=l
(где xt и yz— соответственно координаты текущих векторов х и у)
составляют тензор второго ранга. Действительно, пусть в базисе
еР е2, е3 билинейная форма имеет вид (7.30), а в базисе е', е'2, е' —
вид
з
^2^-ф) (7-31)
и пусть
3 3
2 2 <7-32)
Z, J = 1 т, я=1
для любых двух векторов х, у. Подставив в правую часть равенства
(7.32) выражение старых координат векторов х, у через новые.
3 3
х„ = 2 а,тх’ —2а,„У<> (7.33)
т im * п ' 7
получим
3 3 / 3 \ f 3 \
2, a'ijX'iy'j = 2 атп 2 V't 2 а}пУ'} =
I,/=1 J J tn, n = l \i = l / \; = 1 /
3 / 3 \
= 22 aimai„an,n x'.y’.. (7.34)
lj=l\m^=l im J" mnJ 1 J 4 7
5 3]
ТЕНЗОРЫ И ИНВАРИАНТНЫЕ ПОЛИЛИНЕЙНЫЕ ФОРМЫ
273
В силу произвольности х\ и у^.
3
аиж (7.35)
т, л=1
что и требовалось доказать.
Замечание 1. Равенство (7.35) можно доказать, используя
лишь векторы единичной длины. Действительно, полагая, например,
[ 1 при 1 = 10, | 1 при j' = j!0,
= ! Z=l,2, 3, y'=j /=1,2,3,
I 0 при I =# l0, ' 0 при J =# Jo,
(7.36)
получим из равенства (7.34) равенство
з
а' . = 2 aimai„an,n< (7.35')
Wo mn-l *°т mn
причем векторы
3 3
имеют, в силу соотношений (7.36), единичную длину, так как базис
вр вр ортогонален и нормирован (мы условились рассматривать
только такие базисы). Следовательно, если билинейная форма инва-
риантна на единичной сфере, т. е. при условии, что ее значения
рассматриваются лишь на векторах единичной длины, то совокуп-
ность ее коэффициентов atj образует аффинный ортогональный тен-
зор второго ранга.
Билинейная форма называется симметричной, если матрица ее
коэффициентов симметрична, т. е. ац — а^. (В силу (7.35), это
равенство имеет место в любом базисе, если оно выполняется хоть
в одном базисе.) Полагая в симметричной билинейной форме у = х,
мы получим по определению квадратичную форму
з
(7.37)
Симметричная билинейная форма однозначно определяется поро-
ждаемой ею квадратич'ной формой. Действительно, подстазим в (7.37)
вместо координат вектора х координаты вектора х-|-у. Поскольку
274
ТЕНЗОРЫ
[ГЛ. 7
а,и = ац, мы получим
з зз
ац(х/Ч-Уг) (xj ~1~ У/)= ; 2 J aijxix j~\~ {2 ( +
з з
+ 2 а1)х1У]-\~ 2 aijyixj —
i,j=i i,j=i
з з з
= . 21 atjx^j +1 2 j ацУ1У) + 2 ; 2 x ai}xty}.
Следовательно,
з
E аих(У}~
i,j=i
( 3 3 3
— 2"j \ a/;(x/ + >’z)(x;+y7)— 2 a4xixi— а1)У1У]
17.7 = 1 7,7=1 7,7 = 1
(7.38)
(7.39)
что и требовалось доказать. Отсюда следует, что коэффициенты
инвариантной квадратичной формы составляют аффинный
ортогональный тензор второго ранга, так как Они являются
коэффициентами соответствующей симметричной инвариантной били-
нейной формы, а ранее было доказано, что коэффициенты инвариант-
ной билинейной формы образуют аффинный ортогональный тензор
второго ранга.
Замечание 2. На основании замечания 1 мы можем сказать
теперь, чтб система коэффициентов atj квадратичной формы
з
2 ацхIхинвариантной на единичной сфере, образует аффинный
7,7 = 1
ортогональный тензор второго ранга.
3. Тензоры произвольного ранга р и инвариантные поли-
линейные формы. Пусть векторы |2, .... %р разложены по ба-
зису еР е2. е3:
§7 — В/1е1 “Н S?2e2 ~Н ^7зез« /=Ь 2.............Р>
и пусть в этом базисе задана система коэффициентов ai i t , где
Z5=l, 2, 3, $= 1, ..., р. Тогда функция
з
••• ч
называется полилинейной формой. Как и в случае инвариантной
билинейной формы, нетрудно доказать, что совокупность коэффициен-
тов инвариантной полилинейной формы произвольного ранга р 1
образует аффинный ортогональный тензор р-го ранга-
§ 41
275
ТЁНЗОР деформаций
§ 4. Тензор деформаций
Рассмотрим некоторое деформируемое тело, любую точку кото-
рого в системе координат Охгх2хз будем характеризовать ее радиусом-
вектором г = Хдв, х2е2 4- х3е3; если радиус-вектор точки М
равен г, т. е. ОМ = г, то будем
писать М (г).
Пусть тело подверглось де-
формации, причем точка М (г)
сместилась на вектор ц, т. е.
заняла положение М' (г 4- и)
(рис. 7.1). Эта деформация описы-
вается полем смещений и — о
4- и2е2 + изез- Рассмотрим точку х**1
Mj (г 4- dr), близкую к М (г); при
деформации она перейдет в точку 'г рис 7j
Л1^(г4-^г, u4-du). Деформа-
цию тела в окрестности данной точки М (г) можно характеризовать
изменением длин всевозможных отрезков ММи ММ2, .... выходя-
щих из точки М (г) в достаточно малой ее окрестности.
Рассмотрим изменение длины отрезка MMt при деформации тела.
Длина отрезка ММг равна | dr |. Он перейдет в отрезок M'm'i,
длина которого равна |dr4~du|. За меру изменения длины от-
резка MMt примем
1 [м'М? — ММ?} = 1 {(dr + du)2 — dr) = 1 {2 du dr 4- du2} =
= Тад dxi + Тзд dxl + Тзд dxl 4- 2ухл dx1 dx2 +
+ 2Тад, dXl dX3 + dX2 dX3-
Мы получили квадратичную форму относительно переменных dxp
dx2, dx3, которая по самому своему определению является инва-
риантной. Следовательно, ее коэффициенты образуют тензор второго
ранга. Матрицей этого тензора будет
Тад, ТГЛ TX1Xj
^ХгХ, ^Х2Хз •
Тад Улл Тад
(7.40)
Этот тензор называется тензором деформаций.
Если деформация столь мала, что квадратами и произведениями
величин «р «2, «з и их производных по хр х2, х3 можно пренебречь
276
ТЕНЗОРЫ
[ГЛ. 7
по сравнению с их первыми степенями, то матрица этого тензора
представится в виде
<5и1
dxt
1 (ди2 . дщ
2 \ dxt ‘ 0х2/
1 / ди3 . dui \
2 \ dxt дх3 /
1 {dut . ди2 \
2 \ дх2 ' дх, /
ди2
дхг
1 (ди3 , ди2\
2 \ дх2 ' дх3)
1 / ди} . ди3\
2 \ дх3 "i- dxt )
1 / ди2 , ди3 \
2 \дх3 ‘ дх2/
ди3
дх3
(7.41)
§ 5. Тензор напряжений
1. Определение тензора напряжений. Пусть упругое тело
деформировано. Проведем мысленно через точку М этого тела эле-
ментарную плоскую площадку о и восставим к какой-нибудь из двух
сторон этой площадки нормальный единичный вектор п (рис. 7.2).
Если равнодействующую Fna всех упругих сил, приложенных к вы-
бранной стороне площадки, разделить на площадь о этой площадки-,
F
то по определению получится среднее напряжение (рл)ср = на
тора р„ в одной и той же точке
площадке о, проходящей через
точку М с нормалью п. Пере-
ходя к пределу при стягивании а
к М, получим истинное напря-
жение в точке М на элементар-
ной площадке с нормалью п:
p„=lim-^l. (7.42)
Меняя направление нормали п,
т. е. поворачивая площадку о,
проходящую через точку Л4, мы
получим различные значения век-
М. Таким образом, напряженное
состояние упругого тела в данной его точке М не может быть
описано одним вектором. Но оказывается, что достаточно знать на-
пряжение на трех взаимно перпендикулярных площадках, проходящих
через точку М, и тогда может быть вычислено напряжение в точке М
на площадке любой ориентации, проходящей через /И.
Докажем это. Обозначим через рх, рл и рг напряжения в точке М
на элементарных площадках, нормали к которым совпадают по на-
правлению с осями координат Охх, Ох2, Ох3. Иными словами,
xi
означает напряжение на площадке с единичной нормалью ег,
Р
§ 51
ТЕНЗОР НАПРЯЖЕНИЙ
277
где ez—единичный вектор вдоль оси Oxt (рис. 7.3). Рассмотрим
тетраэдр с вершиной в точке М и ребрами МА, МВ, МС, парал-
лельными осями Охг, Ох2, Ох3. Внешняя нормаль п2 к грани МАС
направлена противоположно
вектору е2. Значит, напряжение
на этой площадке будет равно
— pXj. Аналогично напряжение
на грани ВМС соответствую-
щей внешней нормали п* —
= — ер будет равно — рх ,
а напряжение на площадке
МАВ, соответствующей внеш-
ней нормали п3 — — е3, будет
равно —pXj. Обозначим че-
рез рл напряжение на пло-
щадке АВС, соответствующей
внешней нормали и, и составим уравнение, выражающее второй за-
кон Ньютона для тетраэдра МАВС:
P-5-oA-g- = op„-CTC°s(n, ^i)P^,-ocos(n, х2)рЛ2 —
— ocos(n, х3)рЛ, + у oApf- (7-43)
(Здесь ст — площадь грани ABC, h — высота тетраэдра, если за осно-
вание принята грань АВС, р — объемная плотность массы, f — объем-
ная сила, приходящаяся на единицу массы (например, сила тяжести).)
Тогда -уо/г — объем тетраэдра МАВС, ocos(n, х^), ст cos (п, х2),
о cos (п, х3)— площади граней МВС, МАС, МАВ. Если разделить
равенство (7.43) на о, а затем перейти к пределу при Л—>0 при
dv , -
условии, что ускорение и объемная сила f остаются ограничен-
ными, то получится равенство
0 = Р„ —PA.,cos(n, Xj) — PAcos(n, х2) — Pxscos(n, х3).
Следовательно,
Рл = Рх,cos (п- Xi) + Px2cos(n' X2) + Pxscos(n’ хз)- <7-44)
Так определяется напряжение р„ на площадке с нормалью п через
напряжения на площадках, нормали к которым совпадают по напра-
влению с осями координат.
278
ТЕНЗОРЫ
[ГЛ. 7
Разложим векторы рх, рл., по базисным векторам ег е2, е3:
Если матрица
Рх,= Л1е1 “Ь Т’12е2-Ь Р1зез>
Рх2 = ^21®! “Ь /,22в2 /,23е3’
Рх3 = ^31е1 “Ь Рз2^2 “Ь ^33е3’
Рн Р12 Ра
Pij 11 = Р21 Р22 Р23
Р31 Р32 Рзз
(7-45)
(7-46)
для данной точки М известна, то в точке М можно определить
напряжение на любой площадке о, проходящей через точку М, как
только будет задано направление нормали п к этой площадке; это
обеспечивается соотношениями (7.44) и (7.45). Таким образом, на-
пряженное состояние тела в точке характеризуется матрицей (7.46).
Рассмотрим проекцию вектора напряжения р„ на площадке с нор-
малью п на направление этой нормали. По самому своему смыслу
эта величина не зависит от выбора системы координат. Умножая
обе части равенства (7.44) скалярно на п и используя (7.45), полу-
чим, что эта величина выражается квадратичной формой
и
(р„. п)== 2 pocos(n, х,)соз(п, xj).
(7.47)
определенной на единичной сфере.
Таким образом, квадратичная форма (7.47) инвариантна на еди-
ничной сфере. Следовательно, совокупность ее коэффициентов pi}
образует аффинный ортогональный тензор второго ранга П = (р/;)
(см. замечание 2 § 3).
Этот тензор называется тензором напряжений.
2. Тензор напряжений как линейный оператор. Тензор напря-
жений удобно рассматривать как линейный оператор, преобразующий
единичную нормаль п к площадке в вектор напряжения р„ на этой
площадке.
Подставим в левую часть равенства (7.44) разложение вектора
напряжения по базису е1( е2, е3:
Р„ = /’п,е1 + рп^+ Рп*Г
а в правую часть — разложения р*, pz , р^ по этому же базису (см.
соотношения (7.45)). Получим, в силу единственности разложения
§ 6] АЛГЕБРАИЧЕСКИЕ ОПЕРАЦИИ НАД ТЕНЗОРАМИ 279
р„ по базису еР е2, е3, систему трех скалярных уравнений:
Рт = Ри cos (n- -*1) + P2icos(n, х2) + Pai cos (п, х3),
Рп2 = Р12cos (n. Xi)H-p22cos(n, х2) —р32 cos (п> х3),
Аз = Аз cos (n, x^ + p^cosCn, x2) + p33cos (п, х3),
(7.48)
выражающих упомянутый линейный оператор в базисе ер е2, е3.
Если единичный вектор нормали к площадке
n = eicos(n, x1) + e2cos(n, x2)-|-e3cos(n, х3)
представить в виде горизонтальной матрицы-строки
n=||cos(n, X!), cos(n, х2), cos (и, х3)||,
то можно написать (см. Дополнение к гл. 7)
Рл = п II A./II. (7.49)
где ||А/II—матрица тензора П = (р/;-), представляющая тензор на-
пряжений в данной точке. Вместо того чтобы говорить об умно-
жении матрицы ||р^|| тензора II = (pZy) на вектор, говорят об умно-
жении тензора (pZy) на вектор*). Таким образом, чтобы • получить
в данной точке М напряжение на площадке с единичной нормалью п,
нужно умножить тензор напряжений П = (р^) в данной точке на
единичный вектор нормали п слева:
р„ = п(р/7) = пП.
(7.49/-
§ 6. Алгебраические операции над тензорами
1. Сложение, вычитание и умножение тензоров. Тензоры
одинакового ранга можно суммировать и вычитать; например, сум-
мой (разностью) тензоров второго ранга и btj называется тен-
зор, координаты которого равны
cij~ kcij — aij — 2. 3.
Нетрудно убедиться, что величины ctj при изменении системы коор-
динат преобразуются по тензорному закону. Аналогично определяется
сумма двух тензоров любого (одинакового) ранга. Перемножать
можно тензоры любых рангов. Например, произведением тензора
второго ранга atj на тензор третьего ранга Ьтпр называется тензор
пятого ранга, координаты которого равны
Ситпр = аиЬтпр-, I, J, т. п, р=1, 2, 3.
Нетрудно доказать, что величины с1}тпр при переходе от одной
*) Или, точнее, об операторном умножении тензора на вектор.
280
ТЕНЗОРЫ
[ГЛ. 7
системы координат к другой преобразуются по тензорному закону.
Аналогично определяется произведение двух тензоров любых рангов.
Умножение тензора на число можно рассматривать как частный
случай произведения двух тензоров; оно определяется так: произ-
ведением тензора atjk на число С называется тензор с координа-
тами Ь1}Ь = Са1}к. Нетрудно проверить, что величины соста-
вляют тензор.
2, Умножение тензора на вектор. Остановимся теперь на так
называемом операторном умножении тензора второго ранга на вектор.
Мы уже встречались с частным случаем такого умножения тензора
второго ранга на вектор при рассмотрении тензора напряжений (см.
соотношение (7.49) предыдущего параграфа). Различают операторное
умножение тензора (AZy) на вектор х слева, x(AZy), и справа,
(Azy) х. В .обоих случаях под произведением тензора на вектор
понимают некоторый вектор. Пусть матрица тензора (AZ;) в базисе
еР е2. е3 равна
7-31
II Ln
7*12 ^13
7-22 ^23
7-32 ^-33
(7.50)
з
и пусть в этом базисе х = 2 Xfit-
i=i
Тогда координаты вектора-произ-
ведения
У* = х(Агу) (7.51)
определяются в этом базисе уравнением (см. Дополнение к гл. 7)
7-п А12 А]3
к ^11= ХГ Х2’ Хз|| ^21 7-22 ^23 • (7.52)
731 Т-32 ^-33
а координаты вектора-произведения
y==(Az;)x (7.53)
определяются в этом же базисе уравнением
У! 7-11 ^12 ^13 Х1
У2 = 7-21 1*22 ^-23 ’ Х2 • (7-54)
Уз 7-31 Т-32 ^"33 *3
Соотношения (7.52) и (7.54) можно записать соответственно в более
компактной форме
У* = *11М (7.52')
У = |1МХ' (7-5П
§ 6] АЛГЕБРАИЧЕСКИЕ ОПЕРАЦИИ НАД ТЕНЗОРАМИ 281
интерпретируя в первом случае векторы х и у* как матрицы-строки,
а во втором случае — векторы х и у как матрицы-столбцы *).
3. Свертка. Следующей операцией, специфической для тензоров,
является операция свертывания или свертки по какой-либо паре
индексов. Так, например, сверткой тензора четвертого ранга с^т„
называется тензор второго ранга, координаты которого определяются
равенствами 3
^тп Cilmn’
i-\
Нетрудно доказать, что величины атп образуют тензор второго ранга.
Если тензор четного ранга подвергнуть операции свертки максимально
возможное число раз, то получится число, т. е. инвариант.
Так, например, если произведение двух тензоров первого ранга afij
подвергнуть свертке, то получится скалярное произведение векто-
ров а и Ь:
з
(a. b) = ^laibl.
1=1
4. Перестановка индексов. Рассмотрим перестановку индексов
для весьма важного случая — аффинного ортогонального тензора вто-
рого ранга Положим в каждом базисе еР е2, е3
Lij = Lji,
где — координаты тензора в этом базисе. Совокупость ве-
личин Lij, как нетрудно доказать, также образует аффинный орто-
гональный тензор второго ранга. Этот тензор называется сопряжен-
ным с тензором (L^) и обозначается символом (£;;) Аналогично
в тензоре любого ранга можно делать перестановку любых двух
индексов, при этом снова получится тензор того же ранга.
5. Разложение тензора второго ранга на симметричный и анти-
симметричный. Тензор второго ранга (£Z;) называется симметрич-
ным, если его матрица
^21
^31
Z,]2 А13
^22 ^-23
^32 ^33
в каждом базисе симметрична, т. е. если в каждом базисе выполнены
соотношения Ьц — Ьц, I, J—1, 2, 3.
Тензор второго ранга (Ltj) называется антисимметричным,
если для элементов его матрицы ||£Zy|| в каждом базисе выполнены
*) Соотношениями (7.51) и (7.53) (или, что то же самое, соотношениями
(7.52') и (7.54')) определяются два взаимно сопряженных линейных оператора.
Ср. со сноской на стр. 271.
ТЕНЗОРЫ
(ГЛ. 7.
282
соотношения
LiJ ~ ~ LJl‘
Из этих соотношений следует, что для антисимметричного тензора
1-и — — ^ii' т- е- 2£,./ = О и £(/ = 0. Таким образом, симметричный
тензор второго ранга определяется шестью своими координатами,
а антисимметричный — только тремя недиагональными координатами.
Простейшим примером антисимметричного тензора второго ранга
является векторное произведение двух векторов а и Ь. Действительно,
пусть в базисе еР е2, е3
а = + а2е2 + «3е3, b = + Ь2е2 + Ь3е3.
Тогда векторное произведение [а, Ь] можно записать так:
в:
[а, Ь] =
е2 е3
6Z 2
^2 ^3
= (a2ft3 — азь2> е1 + («3^1 — а1Ьз) е2 + (а А — а2Ьх) е3. (7.55)
Учитывая, что векторы а и b являются тензорами первого ранга,
получим, что система девяти величин Lij = albj — образует
тензор второго ранга. Очевидно, этот тензор антисимметричен.
Действительно, Lji = ajbl — = — (ар] — —Lij- Сле-
довательно, этот тензор определяется тремя своими координатами
(a2Z>3 — а3Ь2), («3^1 — 1Л3), (0^2 — a2£>i), входящими в равенство (7.55).
Нетрудно показать, что если матрица тензора второго ранга (£гу)
симметрична (антисимметрична) в каком-либо одном ортогональном
нормированном базисе, то она также симметрична (антисимметрична)
в любом другом таком базисе.
Заметим теперь, что каждый тензор второго ранга (LZ/-) может
быть представлен в виде суммы симметричного и антисимметричного
тензоров, что вытекает из равенства
— Т (7.56)
В следующем параграфе мы рассмотрим важный пример разло-
жения аффинного ортогонального тензора второго ранга на симме-
тричный и антисимметричный тензоры, а именно, тензор относительных
смещений разложим на тензор деформаций и тензор относительного
поворота.
§ 7. Тензор относительных смещений
Рассмотрим, как и в § 4, деформированное состояние тела. Пусть
U = U (г) = e^j (хр х2, х3)+е2«2 (хр х2, х3)+е3и3 (хр х2, х3) — вектор
смещения точки, определяемой радиусом-вектором r=x1ei+x2e24~x3e3.
§ 7] ТЕНЗОР ОТНОСИТЕЛЬНЫХ СМЕЩЕНИИ 283
Предполагая функции uv и2' «3 дифференцируемыми, получим
dut дХ! dxY-\ du. , . h -a-*- dx2 Я dx2 21 - -г—— dx3, дх3 Л
du2 = ди2 dxi dx-i dth j 1 dx2dXi । би2 , - dx3 dx*’ (J.b7)
du3 = _ ди3 dxi dxi~\ dx2 * 1 du3 - dx>-
Переходя от координат х2, х3 к координатам Xi, х3> Хз.
3 д
Х[ = X atkxk’ нетрудно проверить, что величины , I, J — 1, 2, 3,
feTi "XJ
образуют аффинный ортогональный тензор второго ранга. Этот тен-
зор называется тензором относительных смещений. Обозначая
его через можно переписать систему (7.57) в виде равенства
dU = dr. (7.58)
т, /<Ш(г)\
Разложим теперь тензор I rfr 1 на симметричный и антисимметрич-
ный тензоры. На языке матриц это разложение примет вид
OU1
ЗхГ
ди2
дх}
ди3
dXi
Out dut
дх2 дх3
ди2 ди2
дх2 дх3
ди3 ди3
дх2 дх3
где вектор to == -|-со2е2 Ч-®зез равен ytotU. Первая матрица
в правой части равенства (7.59) есть матрица симметричного тензора
деформаций Д, а вторая — матрица антисимметричного тензора отно-
сительного поворота U. Теперь равенство (7.58) можно переписать
284
ТЕНЗОРЫ
[ГЛ. 7
в виде
dU — Дг/r-j-Qdr.
Непосредственным вычислением можно проверить, что
QtZr = [у rot U, Jrj ,
а следовательно,
rfU = Д dr -Ц- pg- rot U, rfr J.
(7.60)
(7.61)
Рассматривая относительные смещения dU точек в окрестности
точки г, получившей в результате деформации смещение U (г), заме-
чаем, что: 1) если rotU = 0, то, в силу (7.61), относительные сме-
щения происходят за счет чистой деформации; 2) если же Д — 0
(т. е. все элементы матрицы тензора Д равны нулю), то относитель-
ные смещения dU происходят за счет чистого поворота.
§ 8. Поле тензора
1. Поле тензора. Дивергенция тензора. Если каждой точке М
некоторой области О пространства поставлен в соответ-
ствие тензор (Ljj), то говорят, что в области О задано поле
тензора (Д;-) *), при этом предполагается, что координаты Ьц тен-
зора являются определенными функциями координат точки М (хр х2, Х3).
Характерными примерами тензорных полей являются поле тензора
деформаций и поле тензора напряжений в упругом теле, подверг-
шемся деформации, так как напряженное и деформированное состоя-
ния такого тела в различных его точках (хР х2, х3), вообще говоря,
различны.
Пусть координаты Ltj тензора (Ьц) имеют непрерывные частные
производные первого порядка по х2, х3.
Составим с помощью матрицы тензора
7-п Т,12 7,13
II 7-21 7^2 7-23 (7.62)
7-31 7-32 7,33
L1 — ^11е1 + ^12^2 + Лзе3'
L2 = ^-2161 + 7-22^2 Н- Т.23е3,
I-з == Т-з^ ~I- 7,32е2 -Ь 7^363.
векторы
(7.63)
*) Для определенности мы имеем в виду поле тензора второго ранга,
§ 8]
ПОЛЕ ТЕНЗОРА
285
Дивергенцией тензора (Ltj) называется вектор
— (div (£/у) )i в! 4- (div (Агу) )2 е2 + (div (£zy) )3 е3. (7.64)
Это определение дивергенции тензора (/.,;) является формальным.
Нужно проверить, имеет ли оно инвариантный характер, т. е.
является ли определенная таким образом дивергенция вектором или,
что то же самое, тензором первого ранга. Итак, нужно про-
верить, что величины
(dl,(L,y)),= «lL + ^- + ^-. /=1.2.3, (7.65)
образуют тензор первого ранга. Имеем
з
(div W-’ *=1.2,3.
fe=l
Перейдем к новой системе координат Ox'x'x'. В
3 / 3 3/
(d,v(r„»;=s^=S
m=l т т = 1 л=1 «
новой системе
• (7-66)
tn
Но, как известно, матрица, обратная матрице ||а^ ||, получается про-
стым транспонированием поэтому
з
=== (7*67)
т = 1
В силу определения тензора второго ранга имеем
з з
2 ат»аР^И' (7.68)
*=1 1 = 1
Подставляя выражения (7.67) и (7.68) в (7.66), получим
3 3 3 3
(div(Z.iy))( = 2 2 L =
m = l л=1 *=1 1 = 1 ”
3 3 Г 3 / 3 \
-
fc=l 1=1 ьл=1 \m = l /
33 /3 \ 3 / 3 \ 3
=2 2-^-)==i;a//(div(^)v
£=1 (=1 '«=1 ' i=l Z Г=1
286
ТЕНЗОРЫ
[ГЛ, 7
поскольку
® | 1 при n — k,
= ^nk = | л пп„ „ J. к
т~1 I и При П =f= к,
что и требовалось доказать.
2. Формула Остроградского для поля тензора. Пусть коорди-
наты Ltj, 1=1, 2, 3, /==1, 2, 3, тензора (L^) имеют непрерывные
производные первого порядка в замкнутой ограниченной области
Й+ <*£>> границей которой является кусочно-гладкая поверхность оа,
удовлетворяющая условиям, при которых устанавливается справедли-
вость обычной формулы Остроградского. Пусть, далее, п — единич-
ный вектор внешней нормали к поверхности, а произведение и (4/)
образуется так же, как в соотношении (7.49f) образовывалось п(рф.
Тогда имеет место формула
J J n(4y)da = У f f div (Li}) da, (7.69)
oq а
которая читается так:
Поток тензора (Ltj) через замкнутую поверхность о2 равен
тройному интегралу от дивергенции тензора по объему Q,
ограниченному этой поверхностью.
Потоком тензора (Ltj) через поверхность Oq называется инте-
грал, стоящий в левой части (7.69).
Формула (7.69) называется тензорной формулой Остроград-
ского.
Доказательство формулы (7.69) сводится к применению обыч-
ной формулы Остроградского к каждой составляющей вектора п(£у):
У J n(.L4)do =
па
— в! J J[Z,ncos(n, Х1) + 4i cos (п, х2) + Z,31 cos (п, x3)J do +
аЯ
+ e2J J [42 cos (n, Xj) + L22 cos (n, x2) + 42cos(n, x3)] do +
«a
+ ез У У [L13cos(n, Xj)-1- 4з cos (n, x2) 4~ 4з cos (n, x3)]do =
= <?1 У У y(div(4;))id<B-+-e2 У У У (div(4y))2d® +
а а
+ езУ У У (div(LM))3 dw= у f у (div(£,j)) d®.
й й
§ 8]
ПОЛЕ ТЕНЗОРА
287
3. Уравнения движения сплошной среды. Применим тензорную
формулу Остроградского к выводу уравнения движения сплошной
среды. Выделим мысленно элементарную область в движущейся сплош-
ной среде (рис. 7.4) и напишем для нее второй закон Ньютона, рас-
сматривая область Q, заполненную массой, как материальную точку,
pQ-g_==pQf + y’ fpndo. (7.70)
'®а
(Здесь р — объемная плотность массы, Q — объем области (Q),
f — объемная сила, приходящаяся на единицу массы, ря— напряжение
на элементарной площадке do с единичным нормальным вектором п.)
Поверхностный интеграл в пра-
вой части равенства (7.70) равен
J* Jряdo = J* J undo —
aQ °а
= f ffdivndco =
a
= eifff (div n)i dw4~
a
+ e2J f f (div П)2Жо +
+ e3 J J J (div n)3dco, (7.71) Рис. 7.4.
a
где П — тензор напряжений. Применяя к каждому из интегралов
в правой части равенства (7.71) теорему о среднем, получим
f f ря do = ejQ (div П)*4-e2Q (div П)* 4-e3Q (div П)*. (7.72)
°a
Подставляя этот результат в (7.70), деля на Q и переходя к пределу
при Q—>тИ (при стягивании Q к точке Л4), получим уравнение дви-
жения сплошной среды в векторной форме:
p4r=pf+divn- (7.73)
В проекциях на оси координат векторное уравнение (7.73) рас-
падается на три скалярных уравнения:
dvt af I дР" i dp2i ।
р dt p'1 1 dx. ‘ 0x2 ' dx3 ’
dv, Р dt “ 1 dp22 t dx2 1 (7.74)
dv3 of 1 dpi3 1 dp23 | дРзз
p~dt~~ P'3 ' dx, 1 dx2 1 dx2
288
ТЕНЗОРЫ
[ГЛ. 7
§ 9. Приведение симметричного тензора второго ранга
к главным осям
Будем интерпретировать аффинный ортогональный тензор второго
ранга (£Zy) как линейный оператор
У = Ь(х) (7.75)
(см. п. 2 § 2). Собственными векторами и собственными зна-
чениями тензора называют собственные векторы и собствен-
ные значения линейного оператора L(x). Напомним, что всякий от-
личный от нулевого вектор х, удовлетворяющий равенству
L(x) = Xx, (7.76)
где X — некоторое число, называется собственным вектором опера-
тора L; при этом число X называется собственным значением опера-
тора L, отвечающим собственному вектору х.
Переходя к координатам вектора х в базисе еР е2, е3, уравнение
(7.76) можно заменить системой скалярных уравнений:
(Хц — X) Xj -|- 712^2 -f- L13x3 — О,
(7.77)
Чтобы эта линейная однородная система имела нетривиальный век-
тор — решение, необходимо и достаточно, чтобы ее определитель
был равен нулю, т. е.
Ьц — X х12 Хп
^21 £22 X Хгз = 0.
Х-31 Хз2 Х33 х
(7.78)
Если тензор симметричен, т. е. если его матрица в каждом ба-
зисе еР е2, е3 симметрична, то, как известно, все корни Хр Х2 и Х3
уравнения (7.78) вещественны. Известно, что можно так выбрать
нормированные собственные векторы еР е2, е3, отвечающие собствен-
ным значениям Хр Х2, Х3, чтобы они образовали ортогональный нор-
мированный базис, причем в этом базисе матрица оператора L будет
иметь диагональную форму
О О
О L2 О
О О L3
(7.79)
Выбор базиса еР е2, е3, в
тональную форму, называется
котором матрица тензора имеет диа-
приведением тензора к главным
ОБЩЕЕ ОПРЕДЕЛЕНИЕ ТЕНЗОРА
289
§ 101
осям. Укажем в качестве примера, что для тензора проводимости
в анизотропном теле — «монокристалле» — главными осями являются
кристаллографические оси. По поводу главных осей тензора инер-
ции, тензора деформации и тензора напряжений мы отсылаем к кур-
сам механики и механики сплошных сред.
§ 10. Общее определение тензора
Понятие аффинного ортогонального тензора, рассматривавшееся
в предыдущих параграфах, связано с преобразованием ортогональ-
ных декартовых систем координат и соответствующих им ортогональ-
ных нормированных базисов.
В настоящем параграфе, рассматривая всевозможные косоуголь-
ные декартовы системы координат и соответственно произвольные
базисы, мы дадим общее определение тензора.
1. Взаимные базисы векторов. Пусть векторы
еР е2, е3 или, короче, ez (7.80)
образуют базис. Обозначим через
У = (в1, е2, е3) (7.81)
объем параллелепипеда, построенного на этих векторах, как на реб-
рах. Векторы е*
е1 = [*-2уез], <г?= [^е11 , ез = 1£1ьД (7.82)
образуют так называемый «взаимный» базис для базиса е£.
Легко проверить, что и, обратно, базис е( является взаимным
для базиса е*. Действительно, объем параллелепипеда, построенного
на векторах eft, как на ребрах, равен
у' —(е1, е2, с3) — (^ег’ ^ез’ е‘] tei’ е21 —
= Тэ-(1е2, е3], I [е3, ej, [ev е2] ]) =
1 V2 1
==: уз (®з! (®1 (®з®1®г) ®2(®1®1®з)))== уз == ~у ’ (7.83)
Таким образом,
VV' = 1.
Поэтому
[е2, е3] _ v [ [е3, е,], [е„ е2] ] _ У2е, _ .
у ----- v уз ' уз с1’
(7.84)
(7.85)
[ГЛ. ?
(7.86)
290 ТЕНЗОРЫ
аналогично получаем
[е3, е1] [е1, е2]
yi —с2* J/1 —с3‘
Из соотношений (7.85) и (7.86) вытекает, что
ь ( 0
е*) = 6*= [
при I #= k,
при i — k.
(7.87)
Следует заметить, что если базис ер е2, е3 ортонормирован, то
взаимный базис с ним совпадает.
2. Ковариантные и контравариантные координаты векторов.
Рассмотрим разложение вектора х по взаимным базисам:
3 3
х — 2 xie‘ = S x‘^i- (7.88)
1=1 z=i
Контравариантными координатами вектора х в данном ба-
зисе называются коэффициенты разложения этого вектора по данному
базису; так, числа х‘ и xt являются контравариантными координа-
тами вектора х в базисах ер е2, е3 и е1. е2, е3, соответственно.
Ковариантными координатами вектора х в данном базисе назы-
ваются скалярные произведения этого вектора на векторы взаимного
базиса. Умножая скалярно (7.88) на eft или на eft и используя (7.87),
получим, что ковариантные координаты вектора х в базисах е1, е2,
е3 и ер е2, е3 равны, соответственно,
з з
(х, eft) = (ez, efc) = 2 xfik = xk, (7.89)
/=] /=1
3 3
(x, eft) = 2 x‘ (e,-. e*) = 2 x‘tf = x'- (7.90)
z=i i-i
Таким образом, ковариантными координатами вектора в данном
базисе являются его контравариантные координаты во взаимном
базисе.
3. Операция суммирования в тензорной символике. В тензор-
ном исчислении для записи операции суммирования принято следую-
щее правило: если в некотором выражении встречаются одинаковые
индексы, из которых один верхний, а другой нижний, то это озна-
чает, что по данному индексу проведено суммирование от 1 до 3.
Например, суммы (7.87) и (7.88) в соответствии с этим правилом
записываются в виде
х = х^‘, х = х'е(; (7.91)
§ tol ОБЩЕЕ ОПРЕДЕЛЕНИЕ ТЕНЗОРА 291
3
билинейная форма У, а1кх1хк записывается в виде
I, ь=1
aikxlxk (7.92)
и т. п.
4. Преобразование базисных векторов. Рассмотрим преоб-
разование старого базиса ez в новый базис е^. Применяя тензорную
запись суммирования, будем иметь
ez, = a‘,ez, 1'=\, 2, 3. (7.93)
Коэффициенты а1., образуют матрицу перехода от старого базиса е.
к новому базису ег, т. е. а}, а^, а®,
И4|| = а’, а|, а|, ai, af, а|, (7.94)
вектора eft по оазисным векто-
при I =# k,
(7.98)
Если мы рассмотрим обратное преобразование нового базиса ег
в старый базис е;:
е(. — afez,, (7.95)
то матрица ||а‘’Д, очевидно, будет обратной для матрицы ||az,||. Дей-
ствительно, подставляя в равенство
= (7.96)
выражение ez,=a',ez, получим
et = az'a',er (7.97)
В силу единственности разложения
рам еР е2, е3> из (7.97) получаем
( О
= 1
но это и означает, что матрицы ||aj'[| и ||a-z, || взаимно обратны.
5. Преобразование ковариантных и контравариантных коор-
динат вектора. Рассмотрим сначала, как преобразуются контрава-
риантные координаты вектора:
х = х‘е(-= хге/'. (7.99)
Подставляя ez = az'ez, в (7.99), получим, что
x = xza('ez, = xz'ez,.
В силу единственности разложения х по базису ер, е-2', ез-, находим
aj'xz. (7.100)
292
ТЕНЗОРЫ
[ГЛ. 7
Таким образом, «новые» контравариантные координаты х1' выра-
жаются через «старые» контравариантные координаты х1 с помощью
матрицы ||ct|'|j обратного перехода от нового базиса ег к старому
базису е,- *). Отсюда и происходит название «контравариантные коор-
динаты» (т. е. противопреобразующиеся).
Аналогично (7.100) получаем, что
xi=a/z,xi'. (7.101)
Рассмотрим теперь, как преобразуются ковариантные коорди-
наты хх вектора х- Так как
то
xz = (x, ez), Х;- = (х, er). (7.102)
х., = (х, е,,) —(xaC, e,) = aCx.. (7.103)
Таким образом, прямое преобразование ковариантных координат
выполняется с помощью той же матрицы, что и прямое преобразо-
вание базисных векторов (е/ в е/'); отсюда и название «ковариантные
координаты» (т. е. сопреобразующиеся). Аналогично (7.103) получаем
х1 = о.1/х1,. (7.104)
6. Общее определение тензора. Будем по-прежнему обозначать
через матрицу перехода от старого базиса ez к новому ег.
а через ||а‘'[|— матрицу обратного перехода от нового базиса в;'
к старому ez.
Определение 1. Величина А, определяемая в каждом базисе
ez(z = l, 2, 3) Зр+9 числами ... iр < где индексы ls, s = l,
2.....р, и jt, t~ 1, 2.....q, независимо друг от друга про-
бегают значения 1, 2, 3, называется тензором (p-\-q)-zo ранга,
р раз ковариантным и q раз контравариантным, если при
переходе от любого базиса к любому другому базису ее
эти числа преобразуются по закону
где ||az,|| — матрица перехода от базиса ер е2, е3 к базису
ei” е2" ез” а матрица ||а('||— об ратная ей.
Числа Ai'i?... ip называются координатами тензора А в базисе ez.
Верхние индексы j\....jq называются контравариантными индек-
сами тензора, а нижние 1Х...1р — ковариантными.
*) Точнее, с помощью матрицы, получающейся транспонированием этой
обратной матрицы.
§ 10]
ОБЩЕЕ ОПРЕДЕЛЕНИЕ ТЕНЗОРА
293
Иногда пользуются следующей эквивалентной формой определения
тензора.
Пусть в каждом базисе е,, е2, еч задана система Ър+<1
j j ... j
чисел -Ai'iz ‘р’ г&е ин^ексы s~ Ь .р,и jt, t = 1,2, . . .,q,
независимо друг от друга пробегают значения 1, 2, 3.
Если при переходе к любому другому базису ег. е2,, е3, эти
числа преобразуются по закону
= ... а>aV ... (7.105)
'l»2- 'Zp '1 г2 б) * * * lp h >2 ]q lll2" lp
где ||a?, ||—матрица перехода от базиса elt е2, е3 к базису
ег, е2,, е3,, а матрица ||af || — обратная ей, то говорят, что
задан тензор (р-\-д)-го ранга, р раз ковариантный и q раз
контрава риантный.
Примеры. 1. а) Система коэффициентов ai^ инвариантной
билинейной формы
/(х, у) = ац2х^у^ = а > .'Xllyl2 (7.106)
‘1г2
является ковариантным тензором второго ранга.
Действительно, подставляя в (7.106) выражения
G 11 * 1 19 9
х =a -х и у —а 'у “, (7.107)
‘1 ‘2
получим, в силу произвольности векторов х и у, что
б) В частности, если / (х, у) = (х, у)—скалярное произведение
двух векторов х, у, то совокупность коэффициентов gi^2 билиней-
ной формы
(X- У) = ё1,1.х1'У^
называется метрическим тензором или, точнее, ковариантным
метрическим тензором. Если в каждом базисе в/ элементы обрат-
ной матрицы для HgjjJI обозначить через g1'11, то они образуют
так называемый контравариантный метрический тензор.
В силу симметрии скалярного произведения, (х, у) = (у, х), тен-
зоры gtj и g4 симметричны, т. е. в каждом базисе
gij = gjt< gll = g’1-
2. Совокупность координат Ц линейного оператора L
L(e/) = ^e/, /=1,2,3, (7.109)
294
ТЕНЗОРЫ
[ГЛ. 7
образует тензор второго ранга, один раз ковариантный и один раз
контравариантный. Действительно, взяв новый базис ен, имеем
L(ez-) = £/-'e7'. (7.110)
С другой стороны,
L(e/') = L(a/-, ei) = ail'L(ei) = aii'L{aij е,-. (7.111)
Сравнивая (7.110) с (7.111), в силу единственности разложения век-
тора Ь(ег) по базису е/, получаем
(7.112)
3. Совокупность ковариантных координат xt вектора х образует
ковариантный тензор первого ранга; совокупность контравариантных
координат вектора х образует контравариантный тензор первого
ранга.
7. Операции над тензорами. Операции над тензорами в общем
случае определяются так же, как в случае аффинных ортогональных
тензоров, с той лишь разницей, что операции сложения и вычитания
определяются для тензоров одинакового ранга, имеющих одинаковое,
строение, т. е. таких, у которых число р нижних индексов
одинаково и число q верхних индексов также одинаково, а свертка
делается только по верхнему и нижнему индексам.
Добавляются некоторые новые~операции, например операции опу-
скания и поднятия индексов, осуществляемые соответственно путем
свертки с ковариантным или контравариантным метрическим тен-
зором.
8. Дальнейшие обобщения. Дальнейшие обобщения связаны
с введением криволинейных координат. Возникают понятия парал-
лельного перенесения, ковариантного дифференцирования, объекта
связности. По поводу общей теории тензоров мы отсылаем к спе-
циальным руководствам [1], [2], [3].
ДОПОЛНЕНИЕ К ГЛ. 7
ОБ УМНОЖЕНИИ МАТРИЦ
Напомним, что произведением Р • Q двух прямоугольных матриц
(где число столбцов в первом множителе должно равняться числу
строк во втором)
Ри
Р— Ры
Рп\
Р12 • • Pin
Р22 • • • Р2п
Ргц2 • ' • Ртп
Я и
<721
<712 • • • Ян
Я22 Я 2s
И
Яп1 Яп2 ’ ' ' Я ns
ДОПОЛНЕНИЕ к ГЛ. 7
295
называется матрица
/? =
’11 г12 • г1п
21 Г 22 г2п
т\ гт2 • Гтп
элемент которой г^, /=1, 2, ir, /—1, 2, п, стоящий на
пересечении Z-й строки и /-го столбца, равен скалярному произве-
дению /-й строки первого множителя (матрицы Р) на /-й столбец
второго множителя (матрицы Q):
п
Гн = Piv4v:‘
V=1
Представим векторы У и х как вертикальные матрицы-столбцы
У1 Xj
У = Уг • х2 •
Уз хз
Тогда равенство
У1 Ll2 ^-13 *1
Уг = ^21 1*22 ^-23 ' Х2 (О
Уз ^-31 ^32 ^33 Х3
после умножения матриц в правой его части принимает вид
У1
Уг
Уз
з
L\kxk
k = l
3
2L ^2kXk '
k-l
3
2L ^3kXк
k=i
что равносильно
системе трех скалярных равенств
У1 — Х1 4” ^-12х2 4~ ^13Х3’
Уг — ^2lx 1 4” ^22Х2 4- ^23Х3'
Уз — ^~31Х1 4* ^'Зг-'-дН- ^33Х3'
(2)
(3)
Аналогично представим векторы х и у* в виде горизонтальных
матриц-строк
х=|| ХГ Х2' -М- У* = ||у1- Уз ||-
296 тензоры [ГЛ. 7
Тогда равенство к- У2. у; после умножения матриц НК Х2- М в правой части 7-п Т,]2 £13 7-21 Т,22 £23 7-31 Т-32 Т-зз принимает вид (4)
||У1’ Уа- у:н 3 3 12Х1 3 ’ 2 ^i3xt 1 = 1 >
трех скалярных равенств:
что равносильно системе
У1 ~ ^11Х1 ^21Х2 ^31Х3’
у2 = “Ь ^22X2 Н~ ^32Х3'
Уз ~ ^13Х1 Ч- ^23Х2 “Ч ^33Х3‘
Обычно равенство (1) записывают еще короче в виде
у = Lx,
а равенство (4) соответственно в виде
y* = xL.
(5)
(6)
(7)
ГЛАВА 8
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
В этой главе мы рассмотрим последовательности и ряды, членами
которых являются функции. Такие последовательности и ряды
называются функциональными.
Разложение функций в ряды, члены которых, вообще говоря,
проще, чем разлагаемые функции, используется при вычислении и
исследовании функций, при интегрировании функций, при решении
дифференциальных уравнений и играет важную роль в математике и
ее приложениях. При этом существенно используются понятия равно-
мерной сходимости и сходимости в среднем, характер-
ные для функциональных последовательностей и рядов.
§ 1. Понятие равномерной сходимости; признаки
равномерной сходимости
1. Сходимость и равномерная сходимость. Рассмотрим последо-
вательность функций
AW. /2(Х), .... /„(X), .... (8.1)
определенных на сегменте а х <1 b *). Если вместо текущего х
подставить какое-нибудь фиксированное значение х0£[а, Ь], то
функциональная последовательность превратится в числовую:
Л(*о)- •••• /я(*о)> ••• (8-2)
Функциональная последовательность (8.1) называется сходящейся
в точке х0, если числовая последовательность (8.2) сходится; функцио-
нальная последовательность (8.1) называется расходящейся в точке х0,
если числовая последовательность (8.2) расходится. В первом слу-
чае х0 называют точкой сходимости последовательности (8.1),
*) Вместо сегмента можно взять какое-либо другое множе-
ство X значений х, например: а < х < b или а х < Ь, или а < х <1 Ь, или
а < х < -j- со, или а х < -|- со, или — со</<-|-иит. п. В тех слу-
чаях, когда такая замена замкнутого отрезка [а, 6] произвольным множе-
ством X недопустима, это будет оговариваться особо.
298 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
во втором случае — точкой расходимости этой последователь-
ности *).
Если последовательность функций сходится в каждой точке
х£[а, ft], то говорят, что она сходится, на сегменте [а, ft], При
этом в каждой точке х сегмента [а, 6] существует определенный
предел lim fn (х), который будет, вообще говоря, зависеть от х,
П->+СО
т. е. будет некоторой функцией /(х), определенной на [а, ft], Эту
функцию называют пределом последовательности функций (8.1)
и пишут
AW-*/W при п^ + оо,
или
lim /„(х) = /(х) на [а, Л]. (8.3)
П->+со
Теперь мы можем сформулировать следующее
Определение 1. Последовательность функций {/„(х)} назы-
вается сходящейся к функции /(х) на сегменте [a, ft],
если при каждом фиксированном значении х£[а, ft] последо-
вательность чисел fn(x) сходится к числу f (х), т. е. если для
каждого е > 0 и каждого х £ [a, ft] найдется такое N—N(e, х)**),
зависящее от в и, вообще говоря, от х, что будет
|/я(х)—/(х)|<е при каждом n~>N(e, х). (8.4)
Среди всех сходящихся функциональных последовательностей осо-
бого внимания заслуживают равномерно сходящиеся последова-
тельности.
Определение 2. Последовательность функций {fn (х)} назы-
вается равномерно сходящейся к функции f (х) на
сегменте [a, ft], если для каждого е > 0 найдется такое
N = Л7(е) ***), зависящее от е и не зависящее от х, что откло-
нение fn(x) от /(х) удовлетворяет неравенству
|/п(х)—/(х)| <е при каждом п~> Af(e) (8.6)
сразу для всех х £ [о, ft].
*) Множество всех точек сходимости функциональной последовательно-
сти (8.1) называют областью сходимости этой последовательности. Область
сходимости функциональной последовательности может иметь сколь угодно
сложную структуру; она может совпадать со всей осью х, как в случае
последовательности /n(x)s= —, —со < х < -|-оо, п= 1, 2. сходящейся
на всей оси х к функции /(х)==0, или не содержать ни одной точки, как
в случае последовательности /„(x)=s(—1)л, —оо<х<-]-со, n= 1, 2.
расходящейся при каждом значении х, — со < х < -|- со.
**) 7V(e, х) не предполагается обязательно целым.
***) N (е) не предполагается обязательно целым.
§ 1) ПОНЯТИЕ РАВНОМЕРНОЙ СХОДИМОСТИ 299
Этому определению, очевидно, эквивалентно следующее
Определение 2'. Последовательность функций {/„ (х)) назы-
вается равномерно сходящейся к ф у н к ц и и f (х) на
сегменте [a, Z>], если
sup IЛ (*) — / (•*) I 0 при п->-|-оо, (8.5')
т. е. если верхняя грань отклонения функции fn(yc) от функ-
ции /(х) на сегменте [а, Ь] стремится к нулю при я->-|-о©.
Действительно, если выполняется (8.5'), то для всякого е > О
найдется такое W (е), что при любом п > N (е) будет
sup |Л(*) — / О)| < е.
Но, в силу определения верхней грани,
I/.W-/WK sup |/„(х) — /(х)|
а
сразу для всех х£[а, (>]. Следовательно, будут выполнены соот-
ношения (8.5).
Обратно, если выполнены соотношения (8.5), то
sup |/„(х) — /(х)| <е
при каждом я > П (е), а это означает, в силу произвольности е > О,’
что выполнено (8.5').
Равномерную сходимость последовательности {/„ (х)} к функции
/ (х) на [а, д] обозначают символом
ЛМ^/W на [я, Д]. (8.6)
Равномерная сходимость имеет простой геометрический смысл.
Соотношение (8.5') означает, что верхняя грань отклонения графи-
ка функции у — fn(x) от графика функции у — f (х) на отрезке [а, Д]
стремится к нулю при п—>4-оо. Иными словами, если окружить
график функции y — f(x) «е-полоской», определяемой соотношениями
/(х)—е < у </(x)-j-e, (8.7)
то графики всех функций у = /„(х), начиная с достаточно боль-
шого п, целиком лежат в этой «е-полоске», окружающей график
предельной функции у = /(х) (рис. 8.1).
Примеры. 1. Последовательность /л(х) = -^- sin пх -> f (х) = 0
при я—>-|-оо на всей оси х, —оо<х<-|-оо; эта сходимость
является равномерной, так как |/л(х)— /(х)| — 1sin пх |
<е сразу при всех х, —со<х<-|-оо, если только
п > N (е) = у.
300 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
2. Последовательность /п (х) = хп сходится к функции
( 0 при 0 С х < 1
f (х) = { , , на сегменте 0 х С 1 при я —> 4- оо.
(1 при х — 1
Однако эта сходимость будет неравномерной. Действительно,
пусть 0<е< 1, 0 < х < 1. Тогда неравенство |/„(х)— /(х)| =
= хп < е выполняется только при я > М (е, х) = , Но N (е, х) ==
Рис. 8.1.
и 0<е<1. Следовательно, при
О < е < 1 не найдется такого конечного N (е), не зависящего от х,
чтобы неравенство | fn (х) — f (х) | — хп < е выполнялось при каж-
дом п > N (е) сразу для всех х из полусегмента 0 х < 1. Если
сегмент 0 х 1 заменить меньшим сегментом 0 х 1 — д,
где 0<6< 1, причем 6 может быть сколь угодно малым положи-
тельным числом, то на этом меньшем сегменте последовательность
fn(x)~x" сходится к своему пределу /(х) = 0 равномерно.
Действительно, N (в, х) = N (е) = при 0 х 1 —6,
поэтому | fn (х) — / (х) | = х" < е при n > N (е) — [д сРазУ для
всех х £ [0, 1 —6].
К анализу этого примера можно подойти и с геометрической точки
зрения. На рис. 8.2 изображены графики функций последователь-
ности и жирной линией график предельной функции f (х); он состоит
из отрезка 0 х < 1 (без правого конца) оси х и изолированной
точки с координатами (1, 1). Окружим график предельной функции/(х)
«е-полоской» при 0<е< 1. График каждой функции /я(х) = х",
выйдя из начала координат, обязательно при некотором х, 0 < х < 1,
§ 11
ПОНЯТИЕ РАВНОМЕРНОЙ СХОДИМОСТИ
301
покидает эту «е-полоску», так как его правый конец должен попасть
в точку (1,1). Значит, последовательность fn(x) = xn, п=1, 2......
сходится на сегменте 0 < х < 1 неравномерно.
2
3. Последовательность функций fn (х) = — arctg пх, —оо < х <
< + °°’ л—1. 2, 3........ сходится к функции
/ (х) ~ sign х —
— 1 при — сю < х < О,
О при х = О,
4-1 при 0<х<-|-оо,
однако эта сходимость не является равномерной, что легко
устанавливается с помощью геометрического анализа, аналогично тому,
как это сделано в предыдущем
примере.
4. Последовательность функ-
ций fа(х)= сходите”
к функции f (х) = 0 на полу-
прямой 0 < х < 4- °о. Чтобы
установить, сходится ли эта по-
следовательность равномерно к
своему пределу на полупрямой
О <Сх <-|-оо, проверим, выпол-
няется ли соотношение типа (8.5'),
т. е. будет ли sup | fn (х) —
— /(*)!-* О при я—>-|~оо. Для
этого найдем максимум «отклонения» ср„ (х) = | fn (х) — f (х) | =
2пх
14-я2х2
на полупрямой 0 < х < 4* оо. Мы имеем
, . . (1 + п2х2)2п — 2пх-2л2х п 1 — п2х2
% =-------(Т+й2х2)2--------=2й ода •
что фд (х) — 0 при 1 — я2х2 = 0, т. е.
ПРИ Хп = ^
Очевидно,
Следовательно,
2п- —
—^=1740 при
п2
Значит, сходимость не является равномерной. Здесь неравно-
мерная сходимость характеризуется наличием бегущего горбика, вы-
сота которого (рис. 8.3), равная единице, является максимумом откло-
нения графика /я (х) от графика f (х) при 0 < х < 4~ °о.
302
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
(ГЛ. #
Все сказанное до сих пор о функциональных последовательностях
легко переносится на функциональные ряды, т. е. на ряды вида
СО
2 (х) — и1 (•*) + и2 (х)+ ••• +м*(х)+ •••> (8-8)
где функции ик (х) заданы, например, на сегменте [а, Ь].
Определение /Р Функциональный ряд (8.8) называется схо-
дящимся, если сходится последовательность его частичных
сумм
п
<$„(*)= 2 uk(x), ге=1, 2, ... (8.9)
Л = 1
Предел последовательности частичных сумм
S(x) — lim 5„(х) (8.10)
л-> 4-00
называют суммой ряда (8.8). Если ряд (8.8) сходится и
его сумма равна S(x), то пишут
оо
S(x) = ^uk(x). (8.11)
k=i
Определение 2г. Функциональный ряд (8.11) называется
равномерно сходящимся к своей сумме S (х) на сег-
менте [а, />], если последовательность его частичных сумм
{«!>„ (х)) сходится равномерно на [а, к его сумме S(x), т. е.
если для всякого е>0 найдется такое N = ;V(e), что откло-
нение Sn(x) от 5(х) будет удовлетворять неравенству
|S(x)-S„(x)| =
2
= л +1
(8.12)
е
для каждого п~> N (е) сразу
при всех х£[а, д], иными сло-
вами, если
sup |S(x)— S„(x)|= sup
CO
2
Л=и +1
zzft(x) ->0
при
co.
(8.12')
Примеры равномерно (неравномерно) сходящихся рядов легко по-
строить, отправляясь от примеров равномерно (неравномерно) сходя-
щихся последовательностей. Действительно, по произвольной последо-
вательности функций
......AW-.- (8-13)
§ 1) ПОНЯТИЕ РАВНОМЕРНОЙ сходимости 303
легко построить ряд
/1 (*) + [/2 (х) - /1 (X)] + [/з (X) - Л (X)] + . . .
•••+1/и(х)— /л-i (х)] + • • • . (8.14)
для которого она является последовательностью частичных сумм.
Поэтому, если последовательность (8.13) сходится равномерно (не-
равномерно), то и ряд (8.14) сходится равномерно (неравномерно),
в силу определения 2Р
Заметим, что в силу определения 2Х справедливо и обратное утвер-
ждение: из равномерной (неравномерной) сходимости ряда (8.14) сле-
дует равномерная (неравномерная) сходимость последовательности
(8.13).
Непосредственно из определения равномерной сходимости вытекает
справедливость следующих двух утверждений:
1) Сумма конечного числа равномерно сходящихся последо-
вательностей (рядов) является равномерно сходящейся последо-
вательностью (рядом).
2) Умножение всех членов равномерно сходящейся после-
довательности (ряда) на одну и ту же ограниченную функ-
цию <р(х) (в частности, константу) не нарушает равномерной
сходимости.
Докажем, например, второе утверждение. Пусть /л(х)=£/(х)
на [а, Ь] и пусть существует такая константа С, 0<C<-f-oo, что
|ср(х)| < С при всех х£[а, />). Пусть, наконец, дано какое угодно
е > 0. В силу равномерной сходимости /„ (х) к f (х), найдется такое
/V(e), что |/л(х) — /(х)|<-^- сразу при всех х £[«,/>] для ка-
ждого п> N (е), но тогда
|ф(х)/„(х) —ф(х)/(х)| = |ср(х)| |/„(х) — /(Х)|< С • -|г = е
для каждого ra>/V(e) сразу при всех х£[а, £>], т. е. <f(x)fn(x)^£
г£ср(х)/(х) на [а, />] при п->-|-оо. Считая fn(x) частичной сум-
мой, a f (х) — суммой равномерно сходящегося функционального
ряда, заключаем, что это утверждение справедливо и для равномерно
сходящегося ряда.
2. Признаки равномерной сходимости. Если предел f (х) после-
довательности функций (8.13) известен, то ее исследование на равно-
мерную сходимость часто может быть выполнено непосредственно,
на основе определений 2 и 2j или их геометрической интерпретации,
аналогично тому, как это было сделано в примерах 1—4.
Однако иногда целесообразнее исследование вопроса о равномер-
ной сходимости последовательности функций (8.13) свести к иссле-
дованию вопроса о равномерной сходимости соответствующего функ-
ционального ряда (8.14), для которого она является последователь-
ностью частичных сумм. Такое сведение может быть полезным
304
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
потому, что для функциональных рядов существуют различные прак-
тически удобные признаки равномерной сходимости.
Наиболее простым и широко используемым из таких признаков
является мажорантный признак Вейерштрасса, основанный на сравне-
нии функционального ряда с числовым рядом, члены которого неот-
рицательны.
Числовой ряд с неотрицательными членами
4-оо
2 ак — «14-а24- ••• 4-^4- ••• (8.15)
k = 1
называется ма ж о р и р у ю щи м, или м а ж о рентным, для
функционального ряда
+оо
2 ик (х) = «1 (х) 4- и2(х) 4- ... 4-«ft(x)4- ... (8.16)
Й = 1
на отрезке а^.х^Ь, если
(8.17)
при всех k—\, 2, ... сразу для всех х£[а, Ь\.
Мажорантный признак Вейерштрасса. Если для функ-
ционального ряда (8.16) существует сходящийся мажо рирую-
щий на [а, Ь} числовой ряд (8.15), то ряд (8.16) сходится
равномерно на [а, £>].
Доказательство. Пусть дано какое угодно е > 0. В силу
сходимости мажорантного ряда (8.15), при всех достаточно
больших значениях п имеет место неравенство
4-со
2 ak<e.
k=sn+1
Тогда при всех таких п, в силу соотношений (8.17), будут выпол-
няться неравенства
4-оо 4-оо 4-оо
3 «*(*)< 2 |«И*)|< 2 «А<е (8-18)
k = Tl + 1 k = n + l ft = n4-l
сразу для всех х£[а, д], что и означает равномерную
сходимость ряда (8.16). Признак доказан.
' Ч-оо
п . VI sin пх „ „ „
Примеры. 1. Ряд 2л —^2— сходится равномерно на всей
П=1
оси х, —оо<х<4~со> так как для него существует мажори-
рующий сходящийся числовой ряд
4-со
V"i 1 /1 sin пх I 1 , . . \
при -°°<-*<+00 ’
П=1
§ И
ПОНЯТИЕ РАВНОМЕРНОЙ СХОДИМОСТИ
305
+со
2. Рассмотрим ряд V 7-3—4—г на полуоси 0 х < оо. Поль-
л = 1
зуясь обычными приемами дифференциального исчисления, находим
max х- . „ Следовательно, I х I -q-v при
0<Х<+ео 1+«Х2 2л2 | 14-Л4.Г2 | - 2п2 г
+оо
0 х < 4* Но ряд сходится. Следовательно, по при-
знаку Вейерштрасса, ряд 2j 1 пьхг
п-\
всей полуоси 0<^х<4_°°-
S+°° (—В" А -
-* , 0 х <
П=1
руклцего сходящегося числового ряда,
4-оо
а ряд — расходится. Однако, в
вып. 1,гл. 13, § 5, неравенство (13.80));
сходится равномерно на
Z
со, не существует мажори-
I (—1)" I 1
так как max -—,
0<Х<+оо1 х + " I «
силу признака Лейбница (см.
при любом х £ [0 < х < -ф-оо)
имеет место оценка
1
х-\- п
при 0 х < -|-оо,
а следовательно, в силу определения равномерной сходимости функ-
+оо
(_iyi
ционального ряда (см. соотношение (8.12)), ряд У —, — сходится
ля X -|- П
72= I
равномерно на полуоси 0<^х<-|-оо. Этот пример показывает, что
признак Вейерштрасса является лишь достаточным для равно-
мерной сходимости и не является необходимым.
Приведем теперь основной критерий равномерной сходимости,
имеющий важное теоретическое значение и позволяющий установить
более тонкие достаточные признаки равномерной сходимости, чем
признак Вейерштрасса.
Критерий Коши (для равномерно сходящихся последова-
тельностей). Для равномерной сходимости последователь-
ности функций (/„ (х)} к функции /(х) на отрезке [а, 6] необхо-
димо и достаточно, чтобы для всякого е > 0 существовало такое
N=^N($), что при каждом n>N(&) и всех р > 0 неравенство
|/п+р(х) —(х)| < е (8.19)
выполнялось бы сразу для всех х£[а, Ь].
306 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
Доказательство. Необходимость. Пусть /„ (х) =£/(х)
на [а, £]; тогда при любом е>0 существует такое N(е), что при
всех п > N (е) и всех р > 0 будет
IAW—7(*)| <4 и —/WI <7
сразу для всех х£\а, Ь]. Поэтому
I/«+₽(*) — /»W|<
<|/п+р(*)-/(*)! + |/(х)-/Я(Х)| < у + у = е
при всех n>/V(e) и всех р > 0 сразу для всех х £ [а, £»].
Достаточность. Из выполнения неравенства (8.19) при всех
х£[а, Ь] вытекает, что при каждом фиксированном х£[д,
последовательность чисел fn(x), п=1, 2...... сходится, так как
она является фундаментальной, т. е. последовательность функций
fn(x), п—\, 2, ..., сходится на всем отрезке [а, 6]. Обозначим
предельную функцию через /(х). Переходя к пределу в (8.19) при
оо, получим, что
|/л(х) — f (*)| <е
при всех п>Л/(е) сразу для всех х£[а, &]. Но это и означает,
что fn (х) / (х) на отрезке [а, 6]. Критерий доказан.
Применяя критерий Коши для равномерно сходящихся последова-
тельностей к последовательности частичных сумм
Sj (х) = и, (х),
S2(x) = «i(x) + «2(x)....S„(x) = «i(x)+ ... +«„(x), ...
+°°
функционального ряда ]£uk(x), получим
Л=1
Критерий Коши (для равномерно сходящихся рядов). Для
равномерной сходимости ряда
-г со
2 ^И = «1И + «2М+ ••• +«tW+ (8.20)
А = 1
на отрезке [а, Ь\ необходимо и достаточно, чтобы для вся-
кого е>0 существовало такое /V = /V(e), что при каждом
n>N(e) и всех р > 0 неравенство
\Sn+p{x) — Sn(x)\ =
выполнялось бы сразу для всех х £ [а, #].
С помощью критерия Коши можно доказать
§ Ij ПОНЯТИЕ РАВНОМЕРНОЙ СХОДИМОСТИ 307
Признак Абеля. Если частичные суммы ряда
4-со
2 йл (х)= Mi (х)_Ь иг(х)+ ••• 4-иа(х)+ ••• (8.22)
Й = 1
равномерно ограничены на [а, Ь], т. е. существует
такая константа С, 0<С<-]-оо, что
п
|s„(x)|= 2«*(*)
ft — 1
С при «=1, 2, .... (8.23)
сразу для всех х£[а, £], а последовательность функций
Ш <х2(х)....................aft(x)4.... (8.24)
монотонно не возрастая, равномерно стремится
к нулю на этом отрезке, то ряд
4-оо
2 «л (*) «й (*)
*=1
(8.25)
сходится равномерно на [а, Л].
Прежде чем доказать признак Абеля, приведем пример его при-
менения.
+ ОО '
. „ vr sin kx
4. Ряд 2j —£— можно рассматривать как результат умножения
Й = 1
членов ряда
+ оо
S sin£x = sinx4-sin2x+ ••• + sin kx 4~ ... (8.26)
Й = 1
на члены последовательности
1. 1. 1..... 1 ... (S.27)
Для частичных сумм ряда (8.26) имеет место оценка
11 7Т
|sinT|
(ср. с вып. 1, гл. 13, § 5), а следовательно, сразу при всех х,
удовлетворяющих неравенствам
2/илa х (2m + 1)л-]-а, где 0 < а < л,
т = 0, ±1, ±2, .... (8.28)
выполняются неравенства
| Sn (х) | <4—-— = const < со при п=1, 2, ...
SinJ
308 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
Так как последовательность (8.27), монотонно убывая, стремится
к нулю и, будучи числовой, стремится к своему пределу равно-
+ СО
„ V sin kx
мерно на всей оси х, то ряд V —— удовлетворяет всем усло-
k=i
виям признака Абеля на каждом интервале (8.28) и поэтому схо-
дится равномерно на каждом таком интервале.
Доказательство признака Абеля. Докажем, что при
сформулированных выше условиях для ряда (8.25) выполнен критерий
Коши (для равномерно сходящихся рядов). Мы имеем
ал+1мл + 1~1_ал+2мл+2+ ••• Ч~ал+рмл+р =
= ал + 1 [5„+1 — 5ц] + “л+2^л+! — ^л+ЧЧ" ' • •
... Ч-®л + ДН-(ал+1 ал + 2)‘^л+1 Ч~ •••
I (®л+р—1 &п+р) §п+р—1 “F ^п + р^п+р' (8.29)
Учитывая, что (х) а2 (х) ... ^>а„(х)^>ая+1(х) ... и что
|5я(х)|<:С при всех п — 1, 2, ... и всех х£[а,/>], из равенства
(8.29) получим, что
1ал+1ил + 1+ ••• Ч- ^п+р^п + р I С (®л + 1 Ч- (®лт 1 ®л+2)Ч“
Ч~(ал+2 ал+з)Ч~ • • • Ч~(ал+р-1 — ал+р)Ч-ал+р} = 2<^ал + 1 <2Сел + ]
при всех р>0 и сразу для всех х£[а, &], где еп+1 =
= sup ал+1(х)—>0 при л—>Ч-оо, что и требовалось доказать.
§ 2. Свойства равномерно сходящихся функциональных
последовательностей и рядов
1. Непрерывность и равномерная сходимость.
Теорема 8.1. А) Если последовательность непрерывных
функций j\ (х), /2 (х), .... /л (х), ... сходится равномерно
на [а, Ь] к функции f(x), то /(х) также непрерывна на [а, 5].
Б) Если все члены ряда
Ч-оо
S (х) = У (х) (8.30)
А = 1
непрерывны на [а, Ь] и ряд сходится равномерно на [a, 5],
то его сумма S(x) также непрерывна на [а, д].
Доказательство. А) Возьмем произвольную точку х£(д, Z>],
и пусть (хЧ~А)^[«, 5]. Установим непрерывность /(х) в
точке х. Для этого оценим разность f (х -|- /г) — / (х). Пусть дано
произвольное е > 0. Покажем, что при достаточно малых по
§ 2] СВОЙСТВА РАВНОМЕРНО СХОДЯЩИХСЯ Рядов 309
модулю значениях h модуль этой разности будет меньше е. Имеем
|/(х+Л)-/(х)|<|/(х + А)-/л(х + А)| +
+ IЛ (* + ft) — fn (х) | +1 fn (х) - f (х) |. (8.31)
Взяв п достаточно большим, мы, в силу равномерной сходимости
fn(x) к /(х) на [а, А], будем иметь
|/(х4~й)— fn (х + Л) | < при всех (х-|-Л)£ [а, А], (8.32)
I / (х) —/л (*) I < 4 при всех х£[аг, Ь]. (8.33)
Фиксировав п, выбранное указанным образом, рассмотрим сред-
ний член в правой части неравенства (8.31). Так как fn(x)— функ-
ция непрерывная, то найдется такое 6 = б(е)>0, что при всех А,
удовлетворяющих неравенству ]ft| < д(е), будет
|/я(х + А)-/л(х)|<|. (8.34)
Но тогда из (8.31), в силу (8.32), (8.33) и (8.34), получаем, что
|/(х-|-й)— / (х) | < е при всех А, удовлетворяющих неравенству
IА | <6(е), а это и означает, что /(х) непрерывна в точке х£[а, А].
Но точка х£[а, Ь] была выбрана произвольно, следовательно,
f(х) непрерывна в каждой точке х£[а, А], т. е. непре-
р ы в н а на [а, А].
Заметим, что если х является одним из концов сегмента [а, А],
то приращению А можно придавать значения лишь какого-нибудь
одного знака, что приводит к доказательству непрерывности справа
в точке а и непрерывности слева в точке Ь.
п
Б) Частичная сумма ряда Sn(x)=^ и^(х), как сумма конечного
числа непрерывных функций, непрерывна при любом л=1, 2, 3, ...
Так как, в силу равномерной сходимости ряда, 5„(х)Д>5(х) на
[а, Ь], то, по доказанному в А), сумма ряда также непрерывна.
Теорема доказана.
Равномерная сходимость является лишь достаточным усло-
вием для того, чтобы предел последовательности непрерывных функ-
ций был непрерывной функцией. Это подтверждает хотя бы пример 4
из п. 1 § 1, в котором рассматривается последовательность непре-
рывных функций fa(х) = ’ «=1, 2, .... неравномерно
сходящаяся на полупрямой 0 х < 4- оо к непрерывной функ-
ции / (х)==0.
Однако для некоторого узкого класса последовательностей и
рядов справедливы и обратные утверждения, доказанные Дини *).
*) Улисс Дини (1845—1918) — итальянский математик.
3tO ФУНКЦЙОНАЛЬНЫЁ ПОСЛеДоВАтЁЛЬНОСТЙ и РЯДЫ (ГЛ. 8
Теорема 8.1' (теорема Дина). А) Если последовательность
непрерывных функций, заданных на [а, Ь] *), не убывает,
т. е. fi(x)^f2(x)^ ••• (*)<:.. • на [а, />], и сходится
к непрерывной функции f (х), то эта сходимость является
равномерной на [а, й].
+оо
Б) Если сумма ряда 8(х)—^ uk(x) с неотрицательными
s=i
непрерывными на [а, Ь] членами непрерывна на [a, Z>], то
этот ряд сходится равномерно на [а, Ь].
Доказательство. А) Докажем, что при любом е>0 най-
дется такое п, при котором будет
О Rn (х) = / (х)—/л(х)<е сразу при всех х£[а, fr]. (8.35)
Тогда, в силу очевидной монотонности последовательности
Я1(х)>/?2(х)> (8.36)
соотношение (8.35) будет выполняться и при всех больших значе-
ниях п, т. е. будет иметь место равномерная сходимость.
Доказательство будем вести от противного. Пусть для некото-
рого е0 > 0 такого п не существует. Тогда при каждом п—1,
2, ... найдется такое х„£[а, £>], что будет
Я„(хл)>е0. (8.37)
Из последовательности точек хг, х2, .... хп, ... на отрезке [а, Ь\
выберем по теореме Больцано — Вейерштрасса подпоследовательность
хЯ1> х„2...хПь, .... сходящуюся к некоторому х0 £ [a, Z>j. Функ-
ция Rn (х) = f (х) — fn (х), как разность двух непрерывных функ-
ций, является непрерывной; поэтому при любом т будет
lim Rm (хп ) = Rm (хо)-
nk~* +°°
Но при любом т и достаточно большом k будет пк > т, и, сле-
довательно, в силу (8.36) и (8.37),
%т (Хпь) Rnb (Хпь) е°'
Переходя в этом неравенстве к пределу при nk—>-|-оо, получим,
что Rm (х0) е0 при любом т. Но это противоречит соотношению
lim Rm(xo) — O, вытекающему из сходимости fm(x) к f(х)
гп->+оо
в точке xQ.
*) В этой теореме существенно используется замкнутость и ограничен-
ность отрезка [а, 6]; однако теорема сохраняет силу и при замене отрезка
[а, Ь] произвольным замкнутым ограниченным множеством X.
§ 21
СВОЙСТВА равномерно сходящихся РЯДОВ
311
п
Б) Частичные суммы ряда Sn(x)= 2 uk(x)> я = 1> 2, ..., с не-
*=i
отрицательными непрерывными членами образуют неубывающую по-
следовательность непрерывных функций, сходящуюся по условию
к непрерывной функции 5 (х). Следовательно, в силу пункта А)
данной теоремы, эта сходимость равномерна, а это и означает,
что ряд сходится равномерно.
2. Предельный переход под знаком интеграла и почленное
интегрирование ряда. Если
или
X X
lim f Г lim '/„(£)! Д
->+оо J J [л->+со J
•Vq Хо
(8.38i)
то говорят, что можно переходить к пределу под знаком
X +00
интеграла J /„(£)</£ или соответственно что ряд uk (х)
Хо Л = 1
можно интегрировать почленно в пределах от х0 до х.
Соотношение (8.382) является обобщением теоремы об интеграле
суммы на случай бесконечного числа слагаемых.
Заменяя функциональную последовательность {/„ (х)} рядом, для
которого она является последовательностью частичных сумм, или,
+ оо
наоборот, заменяя ряд 2+(•*•) последовательностью его частичных
Й=1
сумм, мы можем соответственно соотношение (8.38j) преобразовать
к виду (8.382) и соотношение (8.382) преобразовать к виду (8.38j).
Таким образом, решая вопрос об условиях справедливости одного
из них, мы тем самым решаем вопрос об условиях справедливости
и другого. Заметим, что для справедливости соотношений (8.38j) и
(8.382) не достаточно существования интегралов и сходимости соот-
ветствующих последовательностей и рядов (см. примеры в конце
этого пункта). Требуется еще выполнение некоторых дополнительных
условий. Такого рода достаточными условиями являются:
1) равномерная сходимость и, как это будет показано в § 6 настоя-
щей главы, 2) сходимость в среднем.
Теорема 8.2. А) Если последовательность непрерывных
функций {/„(х)} сходится равномерно на [а, к функ-
ции f(x), т. е.
(8.39)
312
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
то последовательность интегралов
f fn(z)dz
Xt
X
равномерно по х на [а, Л] к интегралу J" f(z)dz
Ха
X X
f fn. (z)dz^f f(z)dz
-Го Ха
при любом х0^[а, #].
Б) Если ряд
S(x)= ^иЛ(х),
л = 1
сходится
(8.40)
(8.41)
члены которого непрерывны на отрезке [a, Z>], сходится равно-
мерно на этом отрезке, то имеет место равенство
X +со х
J S(z)dz = '£ J uk(z)dz,
Ха Л=1 Ха
(8.42)
т. е. ряд (8.41) можно интегрировать почленно в пределах
от х0 до х при любых х0 и х из [а, £>], причем ряд (8.42)
сходится равномерно по х на [а, Ь\ при любом х0^[д, 6].
Доказательство. А) Пусть дано е > 0. Выберем такое N(е),
чтобы, в силу (8.34), выполнялось неравенство
\fn
(8.43)
при каждом n>N(e) сразу при всех х£[а, д]. Так как по тео-
реме 8.1 функция f (х), будучи пределом равномерно сходящейся
последовательности непрерывных функций, непрерывна, то инте-
грал j"f(z)dz существует при любых х0 и х из [а, 6]. Оценим
Ха
X X
разность J* fn(z)dz — § f(z)dz. При каждом «>Д7(е), в силу (8.43),
Ха Ха
мы имеем
f — f(z~)]dz
Xq
X X
f f„ (z)dz-j' f(z) dz
Xq Xq
X
<f!/»(«) — f(z)\dz <|x — *olyzr7<e, (8.44)
§ 2] СВОЙСТВА РАВНОМЕРНО СХОДЯЩИХСЯ РЯДОВ 313
а это и означает, что имеет место (8.40). Из соотношения (8.40)
вытекает равенство
X X
lim f /„(z)dz = f f(z)dz при x, x0Q[a, b]. (8.45)
+CO J J
x0 хй
Таким образом, если последовательность непрерывных функ-
ций (/п(х)} сходится равномерно на [a, Z>], то можно пере-
X
ходить к пределу под знаком интеграла fn(z)dz при любых
X,
х0 и х из [а, £].
п
Б) При любом п = 1, 2, 3, .. . частичная сумма S„ (х) = 2 ut(x)>
fe=i
как сумма конечного числа непрерывных функций, непрерывна.
По условию
S„(x)^XS (х) на [а, &].
Но тогда, в силу пункта А),
j" Sn(z)dz^$ j S(z)dz на [а, £].
Хо Хо
Заметим, что
X х п П X
f S„(z)dz — J '^iuk(z')dz = '^i f uk(z)dz. (8.46)
Xo Xo ft=l ft=l X,
Поэтому соотношение (8.45) можно переписать так:
§ uk(z)dz j"S(z)dz на [а, Ь\, (8.47)
х0 х0
причем выражение, стоящее в фигурной скобке, является частичной
суммой ряда (8.42). Следовательно, равенство (8.42) имеет место
и ряд (8.42) сходится равномерно на [а, Ь], что и требовалось
доказать.
Замечание. Теорема сохраняет силу и в том случае, когда
fn(x), п—1, 2, .... могут иметь разрывы, но являются интегри-
руемыми функциями. Тогда при условии равномерной сходимости /(х)
также интегрируема и выполняется соотношение (8.40).
Равномерная сходимость является лишь достаточным условием
для того, чтобы можно было переходить к пределу под знаком инте-
грала и интегрировать ряд почленно. Например, последовательность
fn(x)—xn сходится неравномерно на отрезке 0 х 1 к своему
314 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
пределу /(х) = 0 при 0<^х<1, /(1)=1. Однако
Г С п xn+1 —х”+1
J fnWz=;J z“dz = —----------------->0 =
Хо Xq
X
= f(z)dz при л—>4~00
•*0
и любых ха и х из отрезка [а, #]. Но если последовательность инте-
грируемых функций /я(х) сходится к своему пределу /(х) неравно-
X X
мерно, то может случиться, что lim f f„(z)dz=£ f f(z}dz. Ha-
re->+oo J J
Xo x„
пример,
f„ (%)-- 4nx3e~nx' —> f (x)= 0, — oo < x < —|— oo,
HO
i i
J" 4nx3e~nx' dx — 1—e~n -/> £ 0 • dx = 0 при n-> + oo.
о о
3. Предельный переход под знаком производной и почленное
дифференцирование ряда. Если
lim /;(х)=1 lim /л(х)1' (8.48)
л~> +со ( +со J
или.
( 4-со V 4-со
| 2 «* (*) | (*)> (8.49)
то говорят, что можно переходить к пределу под знаком
+ оо
производной или соответственно что ряд У, иА(х) можно диф-
ференцировать почленно.
Соотношения (8.48) и (8.49) эквивалентны в таком же смысле,
как и соотношения (8.38j) и (8.382).
Соотношение (8.49) является обобщением правила дифференциро-
вания суммы на случай бесконечного числа слагаемых.
Для справедливости соотношений (8.48) и (8.49) не достаточно
существования производных и сходимости соответствующих после-
довательностей и рядов, требуется еще выполнение некоторых допол-
нительных условий. Достаточные условия такого рода содержит
Теорема 8.3. А) Если последовательность непрерывно диф-
ференцируемых функций*} {/„(х)} сходится к f (х) на [а, Ь],
Л (*)->/О) на [а, д], (8.50)
*) Функция f (х) называется непрерывно дифференцируемой, если она
имеет непрерывную производную.
§ 21 СВОЙСТВА РАВНОМЕРНО СХОДЯЩИХСЯ РЯДОВ 315
а последовательность их производных {/„(х)) сходится равно-
мерно к ф(х) на [а, Ь],
f'2{x)...f'n (х), ... Ф (х) на [а, 6], (8.51)
то / (х) также дифференцируема на [а, д] и
/'(х) = ф(х) = lim f'n(x), (8.52)
л-> +со
т. е. допустим предельный переход под знаком производной.
Б) Если ряд с непрерывно дифференцируемыми членами
4-оо
S(x)=2«,(x)' (8.53)
Л = 1
сходится на [а, #], а ряд производных
о(х)=£и*(х) (8.54)
k=i
сходится равномерно на [a, Z>], то сумма S(х) ряда диффе-
ренцируема на этом отрезке и всюду на нем выполняется
равенство
4-со
S'(x) — o(x) — 2 и'Лх)< (8.55)
*=i
т. е. ряд (8.53) можно почленно дифференцировать.
Доказательство. А) Так как по условию доказываемой тео-
ремы, производные f'n(x) являются непрерывными функциями и имеет
место равномерная сходимость /п(х)=£ф(х) на [а, Ь\, то по тео-
реме 8.2
X X
lim f f'n(z)dz= fq>(z)dz, (8.56)
M->+O0 J J
Xq Xq
t. e.
X
Hm [/„(*) — /„(x0)l= f q»(z)dz. (8.57)
n->4-co J
•V°
Переходя к пределу в левой части равенства (8.57), получим
X
f(.X) — f(X0)= J ф(2) dz,
Хо
т. е.
/(х) = /(х0)4- f(p(z)dz. (8.58)
Хо
316 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
Следовательно, f (х) как сумма двух дифференцируемых функций —
X
константы f (х0) и интеграла J* (р (z) dz — является функцией д и ф-
Хо
ференцируемой. Дифференцируя обе части равенства (8.58) по х,
получим
/'(х) = ф(х) = lim f'n(x).
п-^+со
п
Б) Полагая 5л(х)= 2 имеем 5л(х)->5(х) на [а, £>],
Л = 1
п
S„(x)^$o(x) на [а, 6], причем S'n(x)= Т «*(х) непрерывна на [а, £>]
Й=1
при п=1, 2, ... Следовательно, в силу пункта A), S(x) является
функцией, дифференцируемой на этом отрезке, и всюду на
этом отрезке выполняется равенство
4-оо
S' (х) = О (х) = 2 и'ь (х)>
что и требовалось доказать.
Если последовательность производных сходится неравномерно, то
может случиться, что равенство (8.52) не выполняется. Например,
fn (х) == In (пх + ]/п2х2-^- 1)->/(х) = 0 при п ->-1-00,
— оо < х < —оо,
но
lim /;(0)= lim )=1=^Г(0) = 0.
Л-»+оо и-> 4-со \ У ПгХ* 1 |х-0/
4. Почленный предельный переход в функциональных после-
довательностях и рядах. Теорема о пределе суммы, вообще говоря,
неверна в случае бесконечного числа слагаемых. Так, например, и
сумма, и каждый член ряда в равенстве
х — — —£----sin—т— , —/ < х < Z, 1=£0,
Л мя k I
Ы
справедливость которого доказывается в п. 5 § 2 гл. 11, стремятся
к определенным конечным пределам при х—>/ — 0. Если же при-
менить к этому равенству теорему о пределе суммы при х—>/ — О,
то мы получим абсурдное равенство I — 0.
Однако при определенных дополнительных ограничениях теорема
о пределе суммы распространяется и на случай бесконечного числа
слагаемых. Справедлива следующая
$ 2] СВОЙСТВА РАВНОМЕРНО СХОДЯЩИХСЯ РЯДОВ 317
Теорема 8.4. А) Если функциональный ряд
+оо
5W=2«»W = »1W+«2W+ ••• +«*(*)+ ••• (8-59)
*=1
сходится равномерно в некоторой окрестности точки х0 и
если
Ишйа(х) = сй при k = \, 2............... (8.60)
+ оо
то числовой ряд S ck сходится. причем
а=1
+оо 4-со
lim У, «А(х)= 2 (8.61)
х-Ь-ха k = l А=1
т. е. в равномерно сходящемся ряде можно переходить к пре-
делу почленно.
Б) Если последовательность функций fx(x), /2(х),
..., fn(x), ... равномерно сходится в окрестности точки х0
и при каждом п существует определенный конечный предел
lim fn{x) = An,
Х-^Хо
то последовательность чисел Др Л2, .... Ап, ... также схо-
дится и
Hm lim fn{x')— lim lim fn(x).
Х-ЬХь л-> +со л->+со х->х0
Доказательство. Пусть дано произвольное е > 0. Так как
ряд (8.59) сходится равномерно в окрестности х0, то существует
такое N(е), что при всех n>Af(e) и всех р>0 будет
1«л+1(*)-|- + “п+рМ | < е (8.62)
сразу для всех х из этой окрестности хи. Переходя к пределу
при х х0 в неравенстве (8.62), получим неравенство
1сл+1 + ••• +сл+р1<^е- (8.63)
справедливое при всех п > N (е) и всех р > 0. Следовательно, ряд
4-оо
У ск сходится. Устремляя в (8.62) и (8.63) индекс р к беско-
й=1
нечности, получим
2
Л = л+1
е,
ОО
2
«»w
е
(8.64)
при всех n^N (е) и сразу для всех х из окрестности х0.
Фиксируем теперь «>А/(е) и выберем 6 = 6(e) так, чтобы
318
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
выполнялось неравенство
n n
2 «*(*)—2 ck
S=1 *=1
Тогда при О
S «* w—S q
*=1
е при
< б (e) будем
n n
*=1
6(e).
иметь, в силу (8.64) и
Cft
ft=l
Л=л + 1
(8.65)
(8.65),
Lk
k = n+l
(8.66)
Доказательство Б) следует из
/1W+I/2M-Л(*)1+ ... +I/„(x)-/„-i(x)]+ •••.
для которого последовательность ^(х), /2(х).fn(x) является
последовательностью частичных сумм и который удовлетворяет всем
условиям пункта А).
А), если рассмотреть ряд
§ 3. Степенные ряды
Степенным рядом называется функциональный ряд вида
Ч-оо
CkXk = Cq 4~ clx + c2J1'2_t_ ••• 4-Cnx"4_ ••• (8.67)
* = 0
или вида
+оо
2 г* (х — х0)* = с04- сг (х — х0) + . . . + сп (х — х0)" 4- ..., (8.68)
*=0
где коэффициенты с0, с}.......сп, ...—постоянные числа. Ряд
вида (8.68) простой заменой х' —х —х0 сводится к ряду вида (8.67).
Поэтому в дальнейшем мы ограничимся рассмотрением рядов вида (8.67).
Представление функции в виде суммы степенного ряда или, иными
словами, разложение функции в степенной ряд при-
меняется как в теоретических исследованиях, так и в приближенных
вычислениях. Подробнее мы остановимся на этом в § 5, а сейчас
займемся изучением основных свойств степенных рядов.
1. Интервал сходимости степенного ряда; радиус сходимости.
Выясним прежде всего, какой может быть область сходимости сте-
пенного ряда. В отличие от области сходимости произвольного функ-
ционального ряда, которая может оказаться множеством точек сколь
угодно сложной структуры, область сходимости степенного ряда
2 скхк всегда является отрезком оси х, который может быть
fe = O
СТЕПЕННЫЕ РЯДЫ
319
§ 3)
сегментом, полусегментом или интервалом, может вырождаться в одну-
точку х = 0 или совпадать со всей осью х. Всякий степенной ряд
+со
2 скхк сходится в точке х — 0, поскольку в этой точке он превра-
*=о
щается в числовой ряд
со -"Ь ci 1 0 + с2 • 0 + • • • + сп 0 + ... = Co-
Существуют степенные ряды, сходящиеся только в точке х = 0,
4-со
например ряд 2 п । *)• Действительно, при любом х #= О
п = 0
(«4-1)! | х|я+1 .. . . ... , .
lim — Tiiхр------= 11т (»+1)|^| = +
Я->4-оо rii I л I «->4-00
4-оо
следовательно, по признаку Даламбера ряд 2 п 1х" расходится.
л = 0
Существуют степенные ряды, сходящиеся на всей оси х, например
4-со
SXn
; его сходимость при любом х легко устанавливается также
л = 0
с помощью признака Даламбера. Рассмотрим теперь какой-нибудь
степенной ряд, область сходимости которого не совпадает со всей
осью х и не вырождается в точку х — 0, например ряд 14-х4~
4-х2 4- ... ..., представляющий собой геометрическую про-
грессию со знаменателем х. Как известно, он сходится при | х | < 1
и расходится при | х | 1. Таким образом, областью сходимости этого
ряда является конечный интервал — 1 < х < 1 с центром в точке
х = 0. Оказывается, что вообще справедлива следующая
Теорема 8.5. Если область сходимости степенного ряда
4-со
2 ckxk не вырождается в точку х = 0 и не совпадает со всей
ft = O
осью х, то существует такой конечный интервал (—R, R),
называемый интервалом сходимости степенного ряда
+ 0О
2 скхк, в каждой внутренней точке которого этот ряд схо-
ь=о
дится абсолютно, а в каждой точке, лежащей вне сегмента
[— R, /?], расходится**).
*) Напомним, что по определению 0! = 1.
**) При этом, если интервал (—R, R) является интервалом сходимости
4-оо
степенного ряда 2 ckxk> то> как выяснится из дальнейшего, областью схо-
л=о
димости этого ряда может оказаться либо интервал (— R, R), либо сегмент
[— R, /?), либо один из полусегментов (— R, Я] или [— R, R).
320
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
Для доказательства этой теоремы нам потребуется
+ со
Лемма. Если степенной ряд 2 ckxk сходится при
k = 0
х = а#=0, то он сходится абсолютно при каждом х, для
которого |х| < |а|.
+СО
Доказательство леммы. Из сходимости ряда ^ckak
s=o
следует, что >0 при k—>-{-оо; поэтому существует такое
А = const <+ со, что | ckfLk | А при всех £ = 0, 1, 2, ...
Пусть 1 1 |х| < |а|. Положим очевидно, что 0С<?<1.
Тогда мы будем иметь | ckxk | = | скак | • — Aqk при всех + оо
А = 0, 1, 2, ... Но ряд 2 Aqk> как геометрическая прогрессия й = 0
+ СО
со знаменателем, меньшим единицы, сходится, значит, ряд 2 Icax*I
*=о
также сходится по признаку сравнения (см. вып. 1, гл. 13, § 2),
+оо
т. е. ряд 2 ckx>! ПРИ данном значении х сходится абсо-
ь=о .
лютно. Лемма доказана.
+ со
Из доказанной леммы вытекает, что если степенной ряд 2 ckxk
А = 0
сходится при некотором значении х = а =#0, то он сходится абсо-
лютно на интервале —|а| < х<|а|. В частности, если ряд
-Ьоо
2 ckxk сходится на всей оси х, то он сходится на всей оси
л=о
х абсолютно.
Доказательство теоремы 8.5. Положим /? = sup|x'|, где
х' пробегает множество всех точек сходимости ряда. Совершенно
очевидно, что /?<-|-оо, так как если бы существовали точки
сходимости х' со сколь угодно большим модулем | х’ |, то, в силу
леммы, ряд сходился бы абсолютно на всей оси х, а это противо-
речит условию теоремы. В силу определения числа R, при |х| > R
ряд расходится. Докажем, что при |х| < R он сходится абсолютно.
Пусть |х| </?. В силу определения точной верхней грани, найдется
такая точка сходимости х', что |х| < |х'| < R; но тогда по лемме
при таком значении х ряд будет сходиться абсолютно. Теорема
доказана.
5 3] СТЕПЕННЫЕ РЯДЫ 321
В концах интервала сходимости степенные ряды могут вести себя
различным образом. Например, ряды
1+х + х2+...4-х'’+ .... (а)
‘ 1*2 уЗ уЛ
1-*+^--^-+ ••• +(-i)"v+ •••• <б>
у2 уЗ уП
1+x+^+^+---+v+ 00
у2 уЗ у/1
1 + Л + '22- + ’Зг+ +7^+ • • • (г)
имеют интервал сходимости —1 <х< 1. Для рядов (б), (в), (г) это
устанавливается с помощью признака Даламбера, а ряд (а) — извест-
ная геометрическая прогрессия. Ряд (а) в концах интервала сходи-
мости расходится. Ряды (б) и (в) сходятся в одном из концов интер-
вала (по признаку Лейбница) и расходятся в другом, превращаясь
в гармонический ряд. Ряд (г) сходится абсолютно в обоих концах
интервала сходимости (в силу интегрального признака).
Таким образом, если область сходимости степенного ряда 2 ckx>t
= 0
отлична от одной-единственной точки х — 0 и не совпадает со всей
осью х, то существует такое число R, 0 < R < 4- со, что областью
сходимости данного степенного ряда является какой-либо из отрез-
ков: (—R, R) или (—R, /?], или [—R, R), или [—R, /?]; это
число R называют радиусом сходимости степенного ряда.
Если степенной ряд сходится только при х = 0, то полагают, что
радиус сходимости R = 0; если же степенной ряд сходится на всей оси х,
то полагают R = -|- оо. Это позволяет пользоваться понятием радиуса
сходимости в случае любого степенного ряда. Степенной ряд, а сле-
довательно, и его радиус сходимости однозначно определяются после-
довательностью коэффициентов с0, сг.с„, ... Укажем некоторые
способы вычисления радиуса сходимости по коэффициентам ряда.
Теорема 8.6У. Если существует предел
lim -I J- = 1, 0 i < 4-°°>
Л-»+со 1с«1
+“ 1
то радиус сходимости ряда ^ckxk равен R = -j-, при этом
л=о 1
полагают R — 0 при I — -|-оо и R = -\-oo при 1 = 0.
Доказательство. Применив к ряду признак Даламбера.
получим, что
*) Если члены ряда неположительны, то для применения признака
Даламбера нужно брать их абсолютные величины. Аналогично обстоит дело
с применением признака Коши.
322 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
Если Z = О, то |х| • 1 = 0 и ряд сходится абсолютно при любых
значениях х, т. е. R = -|- оо. Если 1 = со и х 0, то |х| • / = -f~ оо
и ряд расходится при любых х #= 0, т. е. R = 0. Если 0 < I < со,
то при 11 х | < 1 ряд сходится абсолютно, а при 11 х | > 1 ряд
расходится; иными словами, при |x| < у ряд сходится абсолютно,
а при х > -у он расходится; следовательно, R = -j-. Теорема
доказана.
Аналогично доказывается (с применением признака Коши) сле-
дующая
Теорема 8.62. Если существует предел
lim /, 0</<-+-оо,
п->+оо
+ 0°
то радиус сходимости ряда У, ckxk равен R-— при этом
л=о
полагают R = 0 при / —-|-оо и /? = -]-со при 1 = 0.
Теоремы 8.6* и 8.62 применимы лишь в тех случаях, когда
существуют соответственно пределы lim 45."+'1 и lim У | сп |.
К любому степенному ряду применима следующая более сильная
Теорема 8.63 {Коши — Адамара). Радиус сходимости произ-
4-оо
вольного степенного ряда У ckxk равен
к = 0
1 ___ "_____
л = у, где 1= lim Vic,,]. (8.69)
+со
причем считается, что R = 0 при Z = -f-co и R = -\-co при 1 = 0.
__ п______
Замечание. Символом lim У | | обозначен верхний предел
п->+от 3 ___
последовательности неотрицательных чисел | с} I, У | с21, у |с3| . ...
п____
.... у | сп | ,... Если эта последовательность не ограничена, то по опре-
л _________________
делению lim V]c„] = -]~оо. Если же она ограничена, то
4-со
V- Л
Пт j/]ся|является абсциссой самой правой предельной точки
/1-4 4-
последовательности.
Доказательство теоремы 8.63. Возможны лишь следующие три
случая: 1) 0 < / <+со> 2)Z = 0, 3)Z = 4-co- Рассмотрим каждый случай
отдельно.
§ 3) СТЕПЕННЫЕ РЯДЫ 323
1) Пусть 0 < 7 < 4-°о. Докажем, что R = у, т. е. что: а) при любом
I +СО
для которого | | < -г-, ряд V ckxk сходится; б) при любом х2, для кото-
1 к=0
, , 1
рого I х21 > у, этот ряд расходится.
а) Пусть | х} | < у, т. е. 71 х, | < 1. Тогда при достаточно малом е > О
______________________________________ п______
будет (/ + е) | Л] | = ^ < 1. Так как I = lim р41 сп | является самой правой
П -> -1-00
предельной точкой последовательности {к, с« I L то р^|с„| <Z4"e- начиная
с достаточно большого п, а следовательно, при всех таких значениях п
п______
KR7TI*1|<('-H)I*iI==‘7<1. т. е. [ся||.к1|л<<7л
+со
Поэтому, в силу признака сравнения и в силу сходимости прогрессии 2 q",
п=0
-1-00 +ОО
ряд 2 I сп t I Х1 Iя сходится, т. е. ряд 2 спх1 сходится абсолютно.
72=0 72 = 0
б) Пусть |л2| > у, т. е. 11 х21 > 1. Тогда при достаточно малом е,
____________________________________________________ п______
О < е < Z, будет (Z — е) ] х21 > 1. Но так как I = lim сп | является
/2->4-оо
П ___
предельной точкой последовательности {)/|сп | J, то найдется такая беско-
нечная последовательность индексов < п2 < ... < л* < .... что
пк_____ пк____
>z-e- т- е- /|\| Н2|> (/-е)|^2|> 1 и | с„к (| х21 * > 1.
Таким образом, для ряда 2 необходимый признак сходимости не вы-
*=о
полнен, а следовательно, этот ряд расходится.
+со
2) Пусть 7=0. Докажем, что R = 4~ °о> т. е. что ряд 2 с^х11 сходится
к=0
___ п______
при всех х, — со < х < 4* со. Пусть хй =)= 0. Так как Z = 0= lim Kl ся I •
л-»+оо
то, начиная с достаточно большого п, будет Kl c« I < тут—г> т- е- ПРИ
I хо I
п______ 1 1
всех таких п будет К | | | х01 < у и | сп ] | х0 |л < Поэтому, в силу
+ оо
признака сравнения, ряд 2 I cn 11 хй I” сходится, а следовательно, ряд
л = 0
4-со
2 сходится абсолютно.
72 = 0
324 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
п_____
3) Пусть Z = 4-o°- т. е. последовательность чисел } не ограни-
+оо
чена. Докажем, что Z? = 0, т. е. что при любом ха у= 0 ряд 2 спХд рас-
л=0
+со
ходится. Допустим, что ряд 2 с„х", где х0 #= О, сходится, тогда спх£->0
п=0
при п (в силу необходимого признака сходимости), а следовательно,
найдется такое число А, 1 < А < -|- со, что | спХд | < А при всех
п __________________________________________________ п
п = О, 1,2,...; поэтому при всех п == О, 1, 2, ... будет У\с„ | | х0 ] < У А < А,
п_____
т. е. будет у|сп| < т-г, а это противоречит условию, что последова-
I -*01
п____
тельность (К|сп|) не ограничена. Теорема полностью доказана.
Замечание. Теорема Коши — Адамара позволяет иначе, чем это
сделано в п. 3, доказать возможность почленного дифференцирования и
почленного интегрирования степенного ряда, так как легко проверить, что
формулы (8.69) для проинтегрированного и продифференцированного степен-
ного ряда дают ту же величину радиуса сходимости, что и для исходного
степенного ряда.
2. О равномерной сходимости степенного ряда и непрерыв-
ности его суммы. Было установлено, что во внутренних точках
интервала сходимости степенной ряд сходится абсолютно.
Выясним теперь, как обстоит дело с равномерной сходимостью.
Справедлива
+оо
Теорема 8.7. Сепенной ряд 2 скх>г сходится равномерно
л=о
на каждом замкнутом интервале, лежащем строго внутри
интервала сходимости.
Доказательство. Пусть —/? < а х 0 < R, где
(— R, /?) — интервал сходимости. Докажем, что на отрезке [а, 0]
ряд сходится равномерно. Возьмем х0 > max (1а|, |0|), х0£(—R, R).
Тогда для всех х£[а, 0] будет выполняться неравенство |х| < |х0|,
а следовательно, и неравенство | спхп | спх£ |. Но числовой ряд
4-оо
2 сходится. Следовательно, по признаку Вейерштрасса ряды
№0
4-00 4-со
2 спхп и 2 1слх”1 сходятся на отрезке [а, 0] равномерно.
л=0 л=0
Теорема доказана.
4-со
Замечание 1. Если ряд У |zzft(x)| сходится равномерно, то
4-оо
называется регулярно сходящимся. Следовательно,
fc=O
СТЕПЕННЫЕ РЯДЫ
325
§ 3)
степенной ряд 2 сьхк сходится регулярно на каждом замкнутом
б=о
интервале, лежащем строго внутри интервала сходимости.
Замечание 2. На всем интервале сходимости степенной ряд
может сходиться неравномерно. Например, ряд
1 + хЧ-х* + ••• +х"4-
на своем интервале сходимости —1<х<1 сходится неравно-
мерно, так как модуль разности между его суммой и частичной
суммой при любом фиксированном п неограниченно возрастает при
х —> 1 и, следовательно, не может оставаться меньше конечного е > О
сразу при всех х из интервала —1 < х< 1. Однако справедлива
+оо
Теорема 8ЛХ. Если степенной ряд 2 сьхк сходится в конце
6 = 0
x = R интервала сходимости (—R, R), то он сходится равно-
мерно на замкнутом интервале [0, /?].
Доказательство. Докажем, что на замкнутом интервале
[0, /?] будет выполнен критерий Коши равномерной сходимости
функционального ряда. Отсюда будет следовать равномерная сходи-
мость ряда на [0, /?]. Введем обозначение
= +cn+pRn^p, р=1. 2, ...
Очевидно, что
ся+1Яп+1 = 5я>1,
.....cn+pRn+p = Sn,p-Sn,p_r
Н-оо
Пусть дано е > 0. Так как числовой ряд 2 ct^k п0 условию схо-
6 = 0
дится, то, в силу критерия Коши для числового ряда, существует
такое N (е), что при всех п > N (е) будет
1^/1, 61 < е для всех & = 0, 1, 2, 3, ... (0)
v !х\п+!‘( х\п+р~х .
Учитывая, что II <; 1-^-1 -<•••<. 1 ПРИ 0 ^х ^,R<
и используя (а) и (0), получим
1<;я+1*л+14-ся+2*п+24- 4-c„+p*n+/,l =
326
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
при всех n>Af(e), всех р=1, 2, ... и сразу для всех х из от-
резка 0 х R, что и требовалось доказать.
Замечание 1. Аналогично обстоит дело, если ряд 2
fc = 0
сходится в левом конце интервала сходимости (— /?, R) или
в обоих концах, тогда он сходится равномерно на 1— R, 0] или
соответственно на (— R, /?].
Замечание 2. Если в конце x = R интервала сходимости
(— R, R) степенной ряд расходится, то он не может сходиться равно-
мерно на интервале 0 <1 х R, иначе по теореме о почленном пере-
ходе к пределу в равномерно сходящемся ряде мы получили бы, что
он будет сходиться и в конце х = R.
Из теорем о равноменной сходимости степенного ряда и непре-
рывности членов степенного ряда вытекает следующая
Теорема 8.8. Сумма степенного ряда
+ оо
S(x)= 2 сьх1>
S = 0
(8.70)
непрерывна в каждой внутренней точке интервала сходи-
мости *).
Доказательство. Если точка х лежит внутри интервала
сходимости (— R, R) ряда (8.70), то ее можно заключить в замкну-
тый интервал [а, ЭД, лежащий строго внутри интервала сходимости
(рис. 8.4). На интервале [а, ЭД ряд (8.70) сходится равномерно и его
члены непрерывны. Следовательно, его сумма будет непрерывной
на интервале [a, ЭД, а значит, и в точке х этого интервала. Теорема
доказана.
*) Здесь и в дальнейшем мы будем предполагать, что интервал сходи-
мости ряда (8.70) не вырождается в точку.
СТЕПЕННЫЕ РЯДЫ
327
« 3]
Замечание. Если ряд (8.70) сходится в каком-либо из концов
интервала сходимости (— /?, R), то его сумма будет непрерывной
и в этом конце. Это вытекает из равномерной сходимости ряда (8.70)
на соответствующем замкнутом интервале вида (—R, 0] или [0,
(см. теорему 8.7,).
3. Дифференцирование и интегрирование степенных рядов.
Теорема 8.9. Степенной ряд (8.70) можно дифференциро-
вать почленно во внутренних точках интервала сходимости,
т. е. в них его сумма S (х)
дифференцируема и выпол- -R а О х J3 R х
няется равенство —J——------1--1---1—1----1---
4-со
S'(x) = 2 kckxk~x, (8.71) Рис. 8.4.
4 = 1
причем производный ряд (8.71) имеет тот же интервал схо-
димости, что и ряд (8.70).
Доказательство. Обозначим соответственно через R и R'
радиусы сходимости рядов (8.70) и (8.71). Докажем сначала, что
4-со
Если х£(—R', R'), то ряд 2^|с*||х1 1 сходится, по-
k = 1
4-со 4-со
этому сходится ряд 2 lc*l I х|*- а значит, и ряд У |cj|x|\следо-
4=1 4=о
вательно, х£(—R, R). Поэтому Еслих£(—R, R), то можно
выбрать такое х0£(—R, R), чтобы выполнялось неравенство |х0| > |х|
4-со
(х0 4= 0). Так как ряд У, qx* сходится, то cftXo->O при А-^-4-00;
4 = 0
значит, найдется такая константа А > 0, что будет | cfcxk | < А при всех
k — 0, 1, 2, ... Поэтому имеет место следующая оценка для членов
ряда (8.71):
।=4л * । । 14 Г < i4t k 14Г <8 72)
При |Х|<|ХО|, т. е. при |^|<1, ряд схо-
4 = 1
дится, что легко устанавливается с помощью признака Даламбера.
Действительно, при k—>-\-co будет
т4г<‘+|’14Г:-гаЧ4Г=(' +ЖН41< *
Но тогда по признаку сравнения, в силу соотношений (8.72), ряд
(8.71) при данном х также сходится, т. е. х£(—R', R')- Следова-
тельно, R R'. Сопоставляя это с полученным ранее неравенством
R' R, заключаем, что R' — R.
328 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
Теперь мы можем воспользоваться тем, что на каждом замкнутом
интервале, лежащем строго внутри интервала сходимости (—/?, R),
ряды (8.70) и (8.71) сходятся равномерно, а члены их непрерывны.
Это означает, что заведомо выполнены условия теоремы 8.3 о по-
членном дифференцировании функционального ряда, откуда и следует
справедливость доказываемой теоремы.
Следствие. Сумма степенного ряда S (х) = У1. ckxk имеет
А = 0
производные всех порядков, причем
Sw(x)=2 k(k — 1) ... (k — «+»=1, 2, ... (8.73)
= n
Радиус сходимости ряда (8.73) совпадает с радиусом сходи-
мости ряда S (х) = 2 с kxk.
k = 0
Доказательство этого следствия получается повторным при-
менением теоремы 8.9 к производному ряду (8.71), затем к полу-
ченному из него таким же образом производному ряду второго по-
рядка и т. д.
Теорема 8.10. Степенной ряд
S(x)='^lct!xk (8.70)
»=о
можно интегрировать почленно в интервале сходимости',
в частности, имеет место равенство
С x*+1 '
j S(z)dz = ^ck^—r, (8.74)
0 k = 0
причем радиусы сходимости рядов (8.70) и (8.74) совпадают.
Доказательство. Ряд (8.70) состоит из непрерывных функ-
ций, поэтому его можно интегрировать почленно на интервалах равно-
мерной сходимости. Какова бы ни была точка х £ (— R, R), ее всегда
можно заключить в замкнутый интервал [a, ₽], лежащий строго внутри
интервала (— R, R) и содержащий начало координат. Интегрируя
в этом интервале от 0 до х ряд (8.70) почленно, получим равенство
(8.74), что и требовалось доказать.
Замечание. Если ряд (8.70) сходится в каком-либо из концов
интервала сходимости (—R, R), то х в равенстве (8.74) может со-
впадать с этим концом, так как тогда ряд (8.70) сходится равно-
мерно на соответствующем замкнутом интервале [— 7?, 0] или [0, /?).
§ 3] СТЕПЕННЫЕ РЯДЫ 329
4. Арифметические операции над степенными рядами. Оста-
новимся сначала на сложении, вычитании и умножении. Пусть
+ оо
f(x) = а04~ Й1Х 4~ °2х24~ ... 4-а„х"4- ... = 2 апхп, (а)
л=0
4-со
g(x)=tft04-/>1x-(-*2x2+ ... Ч~М" + ... =2^ (Р)
я=0
причем радиусы сходимости рядов (а) и (0) равны соответственно
Ra > 0 и Rb > 0. Тогда
4-со
/(х) ±g(x) = 2 («„ ± Ьп)хп при I х| < min(/?a, Rb), (у)
п= О
4-со
/(x)g(x) = 2 («А + «А-1-Ь ••• Л-апЬ^хп
п= О
при | х I < min (Ra, Rb). (6)
Справедливость соотношения (у) очевидна (см. вып. 1, гл. 13,
§ 4); соотношение (б) получается по теореме об умножении абсо-
лютно сходящихся рядов (см. вып. 1, гл. 13, § 4), так как при
| х | < min (Ra, Rb) оба ряда (у) и (б) сходятся абсолютно.
Рассмотрим, наконец, деление. Если Ra > 0, Rb > 0 и bQ =# О,
то при достаточно малых значениях | х | имеет место следующее раз-
ложение в степенной ряд частного:
4~ Д1Л~ 4~ 4~ ... 4~gnXn4~ ...
4* bi х 4- Ь2х2 4~ ••• Ьпхп...
— соЧ~ С1Х 4" с2х2Ч~ • • • 4“ спх'1 4~ •••’
коэффициенты ct которого могут быть найдены по рекуррентным
формулам, получающимся в результате умножения степенных рядов
в правой части равенства
а0 4- ахх 4- я2х24- . . . s
— (^o4~^l-v4~^2x24~ • • • ) (с0 4~ е1х 4“ С2Л'2 4~ • • )
и сравнения коэффициентов при одинаковых степенях х в правой и
левой частях результирующего равенства. Ряд с„х" может быть
о
также получен делением ряда а0 4~ aix + а2х? 4~ • • • на Ряд
/?0 + ^iX4-^2x24~ ••• по тем же правилам, по которым делятся
многочлены, расположенные по возрастающим степеням х. На дока-
зательстве этих утверждений мы останавливаться не будем.
330 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. в
§ 4. Разложение функций в степенные ряды
Говорят, что функция /(х) разлагается в степенной ряд
+оо
У, ckxk на интервале (—г, г), если на этом интервале дан-
ft=0
ный степенной ряд сходится и его сумма равна f (х), т. е.
Ч-оо
/(х)= 2qx» (8.75)
л=о
на интервале (— г, г), при этом предполагается, что интервал
(— г, г) не вырождается в точку *). О роли, которую играют раз-
ложения функций в степенные (и другие функциональные) ряды, мы
уже говорили в начале главы. В конце этого параграфа мы дадим
характерные примеры применения разложений в степенные ряды при
вещественных значениях х. Степенным рядам в комплексной области
посвящен § 5 этой главы.
1. Основные теоремы о разложениях функций в- степенные
ряды; разложения элементарных функций. Докажем прежде всего,
что одна и та же функция /(х) не может иметь двух различ-
ных разложений вида (8.75), так как справедлива
Теорема 8.11. Степенной ряд
+ 'И
/W=W. (8.76)
л = о
сходящийся на интервале (— R, R) (не вырождающемся в точку),
является рядом Тейлора для своей суммы f (х), т. е. его коэф-
фициенты находятся по формулам Тейлора
*=0,1,2................ (8.77)
а следовательно, коэффициенты степенного ряда (8.76) опре-
деляются по его сумме однозначно.
Доказательство. Для доказательства достаточно воспользо-
ваться следствием из теоремы о почленном дифференцировании сте-
пенного ряда. В силу этого следствия, сумма f (х) ряда (8.75)
бесконечно дифференцируема и имеет место равенство
+ оо
/<п)(х) = 2 k(k— 1) . . ; (k — п +- i)ckxk-”, п=1,2,... (8.78)
ft ж П
*) Если f (x) может быть разложена на интервале (—г, г) в степенной
ряд, то она называется аналитической функцией переменной х на этом
интервале.
РАЗЛОЖЕНИЕ ФУНКЦИЙ В СТЕПЕННЫЕ РЯДЫ
331
§ 41
Полагая в (8.78) х = 0, получим
/я)(0) = и!Ся,
а следовательно,
_ /">(0)
« — п! ’
что и требовалось доказать. Итак, если функцию f (х) можно раз-
ложить в сходящийся к ней степенной ряд, то он является для этой
функции рядом Тейлора.
Возникает вопрос, справедливо ли обратное утверждение? Если
функция / (х) бесконечно дифференцируема на интервале
(— R, R), где R #= 0, и для нее формально построен ряд Тейлора
/(0) + /'(0)х + ^-х2+ ... + + .... (8.79)
то будет ли он сходиться на интервале (—R, R), и если да, то
будет ли его сумма равна функции /(х)? В общем случае ответ
на этот вопрос является отрицательным, как показывает при-
мер функции
1
/(х) = Ь" ПРИ (8.80)
0 при х — 0.
Эта функция бесконечно дифференцируема на всей оси х, причем
в начале координат
/(0) = /(0) = ... =/п’(0) = /',+1'(0)= ... =0. (8.81)
Следовательно, все коэффициенты ряда Тейлора для этой функции
равны нулю; ряд Тейлора сходится на всей оси х, и его сумма
тождественно равна нулю, в то время как данная функция равна
нулю только в начале координат-
Теорема 8.12. Для того чтобы функцию f (х) можно было
Ч-оо
разложить в степенной ряд 2 ckxk на интервале (—R, R),
k =о
R 0, необходимо и достаточно, чтобы f (х) имела на этом
интервале производные всех порядков и чтобы остаточный
член в формуле Тейлора
/(х) =/(0) Ч-(0) х-{- ... +/^хл + /?я (8.82)
стремился к нулю при всех х£(—R, R), когда п—>4~оо.
Доказательство. Если f (х) может быть разложена в сте-
пенной ряд У, скхп на интервале (—R, R), то, в силу следствия
k =о
332 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ (ГЛ. 8
теоремы 8.9, она имеет производные всех порядков, и по тео-
+ оо
реме 8.11 равенство /(х) = 2 ckxk может быть переписано в виде
А=0
/м = /(0)+4г1х+•••<8'83>
Равенство (8.83) означает, что разность между суммой и частич-
ной суммой ряда (8.83), равная, согласно (8.82), остаточному
члену в формуле Тейлора, должна стремиться к нулю при
п -> -{- со для всех х £ (— R, R).
Обратно, если /(х) имеет производные всех порядков на ин-
тервале (—R, R) и в формуле Тейлора (8.82) Rn—>0 при п —>-|-оо
для каждого х£(—R, R), то
| / w - [/ (0)+4г1 х + ••• +4^*”]
->0
при п—>-\-оо для каждого х£(—R, R), а следовательно, ряд (8.83)
сходится и его сумма равна f(x) на интервале (—R, R), что и.
требовалось доказать.
Удобные достаточные условия разложимости функции в степенной
ряд содержит следующая
Теорема 8.13. Для того чтобы функцию f (х) можно было
4-оо
разложить в степенной ряд ^chxk на интервале (—R, R),
Й = 0
достаточно, чтобы /(х) имела на (—R, R) производные всех
порядков и чтобы существовала такая константа М, что
|/<л) (х) | 7И при п — 0, 1, 2, ... и всех х£(—R, R), (8.84)
т. е. чтобы производные всех порядков были равномерно огра-
ничены в совокупности на интервале (—R, R).
Доказательство. Так как функция /(х) имеет производные
всех порядков на (—R, R), то для нее можно формально по-
строить ряд Тейлора. Докажем, что он сходится к /(х). Для этого,
согласно теореме 8.12, достаточно доказать, что остаточный член
в формуле Тейлора (8.82) стремится к нулю при п—► -f-00 и всех
х £ (— R, R). Воспользовавшись формой Лагранжа *) для Rn, полу-
чим, в силу (8.84), следующую оценку:
. D , I /,!+,)(0х) , I MRn+l п
.... х£(— R, R), О<0<1. (8.85)
) См. вып. 1, гл. 8, § 9-
§ 4] РАЗЛОЖЕНИЕ ФУНКЦИЙ В СТЕПЕННЫЕ РЯДЫ 333
Нетрудно проверить с помощью признака Даламбера, что ряд
24 (п + 1)1
л= О
сходится; поэтому, в силу необходимого признака схо-
, MRn+x
димости, будет
> 0 при и—>—j~co. Значит, в силу оценки
(8.85), будет /?л—>0 при n->-j-co и всех х£(—R, R). что и
требовалось доказать.
Рассмотрим некоторые важные примеры разложения функций
в степенной ряд, т. е. в ряд Тейлора.
1. Для функций /(x) = sinx и /(х) — cos х имеем | (х) | 1
при всех /г = 0, 1, 2 и всех х, —оо < х < -|- оо, поэтому каждая
из них разлагается в степенной ряд, сходящийся на всей число-
вой оси.
yW(0)
Вычисляя коэффициенты Тейлора | - , получим
уЗ у5 _ xZn+l
sin х — х — ••• -И—1) (2п4-1)! + "
. х2 . х4 а:2'1 .
cos х=1— —-j-—— ... +(— 1) -ТадгЧ- •••
2. Для функции /(х) — ех производные всех порядков на от-
резке (—/?, /?) удовлетворяют условию | (х) | = ех eR. Следо-
вательно, показательная функция f (х) — ех разлагается в сте-
пенной ряд на любом интервале (—R, R) оси х, т. е. на всей
оси х.
Вычисляя коэффициенты Тейлора, получим
е'=1+х + -£+ ... +£+ ...
3. К функции /(х) = 1п(1-|-х) целесообразно применить следую-
щий прием. Дифференцируя ее по х и разлагая полученную произ-
водную по формуле геометрической прогрессии, получим
//(Х) = ТТТ== 1 ~* + —х3+ •••
при ---1 < X < 1.
Интегрируя это равенство почленно, на основании теоремы 8.3 будем
иметь
|п(14-х) = х ——... при—1<х<1. (8.86)
Разложение (8.86) остается справедливым и при х— 1. Действительно,
так как ряд (8.86) сходится при х = 1 (по признаку Лейбница), то
334 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
его сумма
<л2 у*3 у* 4
= + ...
будет непрерывной (в силу замечания к теореме 8.3) на отрезке [0, 1].
Следовательно. lim S(x) = S(l) = 1--^ + -5--т+ ••• Функ-
л->1-0 2 О Д
ция /(х) = In (1 -|- х) также непрерывна на этом отрезке, поэтому
In 2 = In (1 Ц- х)| j_0. Но при 0<х < 1 выполняется, согласно (8.86),
равенство In (1х) = S(x). Следовательно,
In 2 = lim ln(l-]-x)= lim S(x) = •$(!) =
—0 X->1-0
=1_1+2_1+.
2 ‘ 3 4
4. Функцию /(x) = arctgx можно разложить в степенной ряд
аналогичным образом. Дифференцируя и применяя для производной
разложение по формуле геометрической прогрессии, находим
Г (x)==T4~j2’== 1 ~ х2 + х4 —х6+ . .. при — 1<х<1.
Интегрируя почленно, получим
arctgx = x—Л----------ПРИ —1<х<1.
Что это разложение остается справедливым и в точке х=1, можно
показать так же, как была доказана в предыдущем примере спра-
ведливость разложения
1п2=1-4 + 4-1+...
5. Напишем формально ряд Тейлора для функции /(х) = (1 х)а,
где а — произвольное отличное от нуля действительное число:
1+ох+«(^12).х2 + .«(«-1з)(«-2) хз+ ... =
4-со
. = 1 + 2 а(а-1).„(а-*+1) (8 87)
Л = 1
При целом положительном а — п все члены ряда (8.87), начиная
с («+ 1)-го, обращаются в нуль, и мы приходим к обычной фор-
муле бинома Ньютона. Применяя признак Даламбера (при а #= п,
п = 0, 1, 2, ...) легко установить, что радиус сходимости ряда (8.87)
равен 1. Следовательно, вне отрезка [—1, 1] функция (1 —|-х)а
§ 4]
РАЗЛОЖЕНИЕ ФУНКЦИЙ В СТЕПЕННЫЕ РЯДЫ 335
при а, не являющемся целым положительным числом, заведомо не
4-00
может быть разложена в степенной ряд вида У) скхк, т. е. по це-
л=о
лым неотрицательным степеням х. Покажем, что внутри этого от-
резка будет справедливо разложение
(1 +х)“ = + • =
+оо
= 1 + а(а-1) (а-МП (8 88)
*= 1
Для этого достаточно доказать, согласно теореме 8.12, что остаточ-
ный член в формуле Тейлора для функции (1 +х)“ будет стремиться
к нулю при п—> + °° для всех х из интервала (—1, 1).
Остаточный член в формуле Тейлора возьмем в форме Коши:
= (1-6)" хя+1 ^„+1) 0 о < 6 < 1.
" л! J
Для функции (1-4-х)“ он примет вид
/?„ = е>?П+1 a (a -- 1) ... (a - л) (1 + 0x)““n -
= [(tt 1)(a П) x”] • • Ь(1 + 0*)°L (8-89)
Так как x >
/ 1 — 6 \"
<U + 6xj <
, „ . 1 — 6 . , n
— 1, то 0 < t < 1. а следовательно, 0<
1 при всех л=1, 2, 3, ... Далее, при всех х£
£(—1, 1), в силу неравенства 0 < 0 < 1, |ах|(1-|-0х)“ будет за-
ключено между | ах |(1—|х|)“ и | ах | (11 х |)а, а последние вели-
(а—1)(а— 2)... (а — п) в
чины не зависят от п. Наконец, множитель --------—-----/----1-----х
•*. п
является л-м членом ряда Тейлора для функции (l-j-x)”-1, сходи-
мость которого при — 1 < х < 1 легко доказывается с помощью
признака Даламбера. Поэтому при —1 <х< 1, в силу необходи-
мого признака сходимости, будем иметь
«(«—!) ••• (а —») хп } о
п!
при л —► —оо. Таким образом, при —1 < х < 1 две из квадратных
скобок в (8.89) остаются ограниченными, а третья стремится к нулю
при л->4-оо; следовательно, R„->0 при л-*-|-оо для каждого
х£(—1, 1). Этим доказательство справедливости разложения (8.88)
на интервале — 1 < х < 1 завершено.
336 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
2. Некоторые применения степенных рядов.
а) Степенные ряды могут применяться для приближен-
ных вычислений значений функций. Ряды
у 2 уЛ
^=1 + х + ^-+ +тг+ (8.90)
уЗ уб у 7 . „2£ + 1
sinx = x_JL + JL _±.+ ... +(._1)*_S_—_+ (8.91)
у2 у4 ув у2А
CosX=l_A- + ^r-^r+ ... +(-1)"-^+ (8.92)
можно использовать для вычисления значений ех, sin х и cos х при
любых значениях х с любой степенью точности, поскольку ра-
венства (8.90) — (8.92) выполняются на всей оси х.
Если в качестве приближенных значений этих функций брать
частичные суммы рядов (8.90) — (8.92) соответственно, то допускаемые
при этом погрешности особенно просто оцениваются в случае рядов
(8.91) и (8.92), в силу признака Лейбица погрешность не превос-
ходит первого из отброшенных членов *).
Ряд для логарифма
1п(1+х) = х-4 + 4- ••• .... (8.93)
— 1 <х<1,
хотя и знакопеременный, но сходится медленно, а при х > 1 рас-
ходится. Чтобы ускорить сходимость ряда и сделать возможным
вычисление логарифмов чисел, больших единицы, из разложения (8.93)
вычитают разложение
* 1п(1— х) = — х — — ~~ ... (8.93')
Это дает
1п(4Й)-М1+т + т+ •••)• <8'94>
Полагая в (8.94) х — > получают
In —у— = 1 п (те —{— 1) — In п —
= 2« + 1 0 + 3(2и-Ь 1)« + 5(2п+1)4 + • ‘ •) • (8,95)
Отправляясь от In 1 = 0, можно с помощью ряда (8.95), сходящегося
достаточно быстро, найти логарифмы всех натуральных чисел-
') Ср. с вып. 1, гл. 13, § 5.
5 4] РАЗЛОЖЕНИЕ ФУНКЦИИ В СТЕПЕННЫЕ РЯДЫ 337
Ряд для арктангенса
arctgx=x —4 + 4-4+ ••• (8-96)
о и /
можно использовать для вычисления числа л с любой степенью точ-
ности. Именно, полагая в (8.96) х— 1, получим
т=1++++ <8'97'
В силу знакопеременности этого ряда, легко оценивается
погрешность, допускаемая при замене его суммы частичной суммой.
Ряд
+ оо
(1 + х)« = 1 + 2 +tt.-1++-A+-1.)- х»
s=i
Можно использовать для извлечения корней. Например,
1/10=2]/ 1+± = 2(1+±)3 =
Г 112/1X2 1
= 2[1+44-4(т) + •]• <8-98>
Выписанные члены дают значение этого корня с четырьмя верными
знаками. Ряд (8.98) — знакопеременный, поэтому погрешность
оценивается легко.
б) Разложение в степенные ряды можно использовать
для вычисления интегралов, не берущихся в элементарных
функциях. Например, используя ряд (8.91) для sin х, получим
с. Г sin Е, х3 . xs х7 . ,а
Sxx — J i — x 3.3! + 5.51 7-7! (8-99)
0
Заметим, что деление ряда (8.91) на х при х =# 0 законно, так что
sin х
при х =# 0. При х = 0 полагаем -= 1; тогда равенство (*) сохра-
нится и при х = 0. Ряд (8.99) — знакопеременный, так что
погрешность при замене его суммы частичной суммой оценивается
очень просто.
в) Степенные ряды (не только по целым положительным сте-
пеням х) находят широкое применение при интегрировании
дифференциальных уравнений, причем это приводит, вообще
говоря, к построению новых функций, о чем подробно будет идти
338 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
речь в вып. 3 и 4 настоящего курса. Мы же ограничимся здесь одним
элементарным примером. Пусть требуется разложить в степенной ряд
X
функцию F (х) = е~х2 J" е$2 dl,. Легко проверить, что F (х) удовле-
о
творяет дифференциальному уравнению
F' (x)-4-2xF(x) = 1 (8.100)
и начальному условию F(0) = 0. Будем искать решение уравне-
ния (8.100) в виде степенного ряда
F(x) = У спхп = с0-\-с1х-\-с2х2--\- ... +с„хл+ ... (8.101)
п=0
Подставляя этот ряд в уравнение (8.100) и сравнивая коэффициенты
при одинаковых степенях х в левой и правой частях равенства,
получим
С1 = 1, (я + 2)ся+2 + 2с„ = 0, п—1, 2, ... (8.102)
Из начального условия F(0) = 0 находим
со = О. (8.103)
С помощью (8.102) и (8.103) из (8.101) получаем
-f-oo
/» О'2**2'14 1
F (х) = е~х‘ J г? dl = 2 b'.U+l) ’ (8’ 104>
0 л = 0
Сначала ряд (8.101) мы дифференцировали почленно формально,
теперь, когда коэффициенты его уже известны, мы видим, что
ряд (8.104) сходится при всех х, —оо<х<-}-оо, и, следова-
тельно, почленное дифференцирование законно при всех значе-
ниях х (см. теорему 8.9).
§ 5. Степенные ряды в комплексной области
Последовательность комплексных чисел
г1==Х1-р/У1, z2=x2 + Zy2......zn = хп + iy„, . .. (А)
называется сходящейся к комплексному числу zQ — х0 -ф- Zy0 при
гс—>-ф-сю, если
\zn — *o I = —хо)2 + (>'п —Уо)2 -* 0 ПРИ п -* + сю.
Поэтому для сходимости последовательности (А) к числу z0 — х0 -ф- 1уа
необходимо и достаточно, чтобы
п
о и У«-*Уо ПРИ w-> + oo.
§ Б] СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 339
Ряд с комплексными членами
4-со
2 «А.
*=1
где ak — ай-ф- А=1, 2.......... называется сходящимся, если
сходится последовательность его частичных сумм.
На ряды с комплексными членами легко распространяются поня-
тия абсолютной и условной сходимости, а также основной критерий
сходимости, признак Даламбера и признак Коши * **)).
Областью сходимости степенного ряда
+ ••• •••• (Б)
где коэффициенты с0, сг.сп,...— комплексные числа, a z — x-\-iy —
комплексное переменное, является круг с центром в точке z = 0. Этот
круг может вырождаться в точку z = 0 или занимать всю плоскость
переменного z — x-\-iy. Внутри круга сходимости ряд (Б) сходится
абсолютно. Справедливость этих утверждений вытекает из следую-
щей леммы.
Лемма. Если степенной ряд (Б) сходится при z — а =£ О,
то он сходится абсолютно при любом z, для которого |z| < |<х|,
т- е. в круге |г| < |а| с центром в точке z = 0 и радиусом,
равным
В каждом круге, концентрическом с кругом сходимости и лежащем
строго внутри него, степенной ряд сходится равномерно, и его
сумма будет не только непрерывной, но и бесконечное число
раз дифференцируемой функцией.
Отправляясь от разложений в степенные ряды элементарных
функций действительного переменного:
+ ... Ч-тгЧ- .... (8-105)
sinx = x_A.+ ... .... (8.io6)
2 2k
cosx= 1~4гЧ- ••• +(-!)*да-Ч- (8-107)
мы можем дать определение элементарных функций комплексного
переменного z — хly: ez, cos г, sin z, которые при z = х совпа-
дают соответственно с ех, cosx и sin х. Напомним, что ряды (8.105) —
*) Если члены ряда не являются положительными вещественными
числами, то для применения признаков Даламбера и Коши нужно брать
их модули.
**) Эта лемма была доказана для степенных рядов в действительной
области (см. доказательство теоремы 8.5), но таким же образом она доказы-
вается и для степенных рядов в комплексной области.
340
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. »
(8.107) сходятся при всех действительных значениях х, но тогда,
в силу сформулированной выше леммы, они будут сходиться
и при всех комплексных значениях z, если в них вместо х подста-
вить z. Поэтому, полагая
-у2 у>П
^=1+2 + 4!+...+^-+..., (8-108>
-3 -2А + 1
siaz=z—^ + ... +(-1)* (2* + 1), + ••• (8.109)
C0S2=l-~+ ... +(-!)* .... (8.110)
мы получим функции комплексного переменного z, определенные
при всех значениях z. Умножая абсолютно сходящиеся (в силу леммы)
ряды, можно проверить, что для определенных таким образом функ-
ций комплексного переменного ez, cosz, sin z выполняются соот-
ношения
Сг' . — ezt+z2 (8.111)
И
cos2 z -f- sin2 z = 1. (8.112)
Заменяя в (8.108) z на iz и группируя отдельно в полученном ряде
члены, явно содержащие и явно не содержащие I, получим, исполь-
зуя (8.109) и (8.110), замечательную формулу Эйлера
е‘г = cos z -f- Zsin z, (8.113)
справедливую при любом комплексном z. Действительно,
• 1^2$ 1^2^ 2% 2$ 2*
^=1+^+^ + -+-+... = 1+/2_±г_/Дг+£_ + .„.
f г2 >4 \ / z3 zb \
• • • ==(1 “+ + • • •) = cos г + Zsin г.
Так как из соотношений (8.109) и (8.110) следует, что cos(—Д) —
= cos z, sin(—z) =— sin 2", то, заменяя в формуле Эйлера z на — z,
получим
е-j* —cos.z — Zsin г. (8.114)
Из уравнений (8.113) и (8.114) находим
etz e-iz е1г — е-'г
cos г —------vs---, sin z —------------
2 2z
(8.115)
Эти формулы также обычно называют формулами Эйлера.
*) Равенство (8.111) получается путем умножения степенных рядов
для ez' и по правилам, которые были доказаны в действительной области
и сохраняют силу в комплексной области.
§ 5] СТЕПЕННЫЕ РЯДЫ В КОМПЛЕКСНОЙ ОБЛАСТИ 341
Из формул (8.115) следует, что cos г и sin z в комплексной
области могут принимать сколь угодно большие значения.
Полагая, например, z~ — In, где п— натуральное число, получим
- —I— в п
cos(—in) —-------------ПРИ п-> + оо.
При этом формула (8.112) остается справедливой.
С помощью степенных рядов в комплексной области можно опре-
делить и другие функции комплексного переменного, такие, как
1п(1-|-г), arctg z и другие.
Теория функций комплексного переменного является одним из важ-
нейших разделов современной математики и находит широкие при-
менения в математической физике.
С точки зрения теории функций комплексного переменного находят
более полное объяснение некоторые факты из анализа функций
действительного переменного. Например, в равенстве
= 1 —х24-х4 —х6 + ... (*)
левая часть непрерывна и ограничена на всей числовой оси, однако
стоящий справа ряд при |х| 1 расходится. Если рассматривать
равенство (*) при комплексных значениях х, то причина этого явления
становится ясной, так как при x = Z левая часть равенства обра-
щается в бесконечность и, следовательно, окружность круга сходи-
мости (с центром в начале координат) должна проходить через точку
х = 1. (Если бы эта точка лежала внутри круга сходимости, то в ней
функция , 2 была бы непрерывной, а она при х — I обращается
4 ~г х
в бесконечность.)
В § 4 была рассмотрена функция
<р(х) =
е х2 при
О при
х =£ О,
х = 0.
Эта функция имеет в начале координат производные по х всех по-
рядков, но не разложима в степенной ряд по целым неотрицательным
степеням х. Причина этого становится ясной, если рассмотреть
функцию
_________________________________
Ф (?) — е * (z 0),
считая, что z принимает комплексные значения. Беря z — iy, получим
___i_ i ___i_
е г2 —еУ2 при у—>0, в то время как е *2 —>0 при х—>0.
Следовательно, эту функцию нельзя доопределить в начале координат
таким образом, чтобы она стала непрерывной. Если бы существовал
342
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
степенной ряд, сходящийся к <р(х) па некотором отрезке —R< х< R,
то при замене х на z получился бы степенной ряд, сходящийся
к ф(х) в круге |z| < R, и функция <p(z) была бы в точке z — О
непрерывной и даже дифференцируемой по z, а она разрывна.
Исчерпывающий анализ этого примера также может быть выполнен
лишь в теории функций комплексного переменного.
§ 6. Сходимость' в среднем
В ряде разделов математики и ее приложений используется бли-
зость функций f (х) и g (х) в некотором интегральном смысле,
допускающем в отдельных точках большие значения модуля разности
/ (х) — g (х). Обычно в качестве меры интегральной близости берут
«квадратичное уклонение»
и рассматривают тесно связанную
с ним «сходимость в сред-
н е м».
1. Квадратичное уклонение
и сходимость в среднем.
Определение 1. Ква-
дратичным уклонением
функции / (х) от g(x) на
[а, д] называется неотрица-
тельное число
ь
Р2(/. g) = J|/(x)-g(x)|2rfX*).
(8.116)
Очевидно, что
Р2(/. £) = P2te. /)•
Графики двух функций / (х) и g{x), близких в смысле малости
квадратичного уклонения, могут сильно отклоняться друг от друга
в отдельных точках (рис. 8.5).
Определение 2. Последовательность функций
fi (х), (х), .... fn (х), ... (8.117)
называют сходящейся в среднем к функции f (х) на
[а, Ь], если
ь
р2(/„. /) = J 1/»(х) — /(x)|2dx—>0 при п-> + со. (8.118)
а
*) Все функции в настоящем параграфе будут предполагаться инте-
грируемыми в обычном смысле, хотя большая часть понятий и утверж-
дений этого параграфа сохраняет силу и для функций, интегрируемых с
квадратом в смысле несобственного интеграла.
§ 6] СХОДИМОСТЬ В СРЕДНЕМ 343
При этом пишут'.
lim /я(х) = /(х) на [а, д]. (8.119)
п-++оо
Определение 3. Функциональный ряд
+ОО
2«й(х) (8.120)
ft = l
называется сходящимся в с реднем к S(x) на отрезке [а, д],
если последовательность его частичных сумм
п
S„(x) = 2 «*W- ге=1, 2................... (8.121)
ft=l
сходится в среднем к S(x) на \а, 6], т. е. если
ь
p2(S(x). S„(x)) = f S(x) — 2"л(х) rfx->0
a
n • 12
ft=i
При этом пишут'.
Ч-оо
5 (х) = 5 “ft (*)
ft=i
на [а, &].
при «-> Ч-оо.
(8.122)
(8.123)
2. Неравенство Коши — Буняковского. Если f (х) и g(x)
удовлетворяют на [а, д] описанным выше требованиям, то
ь
f f(x)g(x)dx
а
(8.124)
Доказательство. Положим
ь ь ь
A—j'f2(x)dx, В= f f(x)g(x)dx, C=fg2(x')dx (8.125)
а а а
и рассмотрим два возможных случая: 1) А = С = 0 и 2) по крайней
мере одно из чисел А и С отлично от нуля.
1) Если А = С = 0, т. е.
ь ь
J f2(x)dx = J g2(x) rfx = 0,
а а
то из очевидного неравенства
1/2(х) + ^2(х)]
344
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
следует, что
ъ * ь
f I/(x)g(x)\dx У*/2(x)dx + У"g2(x)dx
a L а а
Но
b ь
J f{x)g{x)dx \f(x)g(x)\dx,
а а
= 0.
ъ
следовательно, В— J f (х) g (х) dx = 0, и неравенство (8.124) выпол-
а
няется, так как в левой и правой его частях стоит нуль.
2) Пусть, например, А > 0. Тогда поступим следующим образом.
Заметим, что при всех действительных значениях параметра А
IV(-0+£(*)12>0.
, A2/2(x) + 2A/(x)g(x) + ^2(x)>0.
Интегрируя это неравенство по х от а до b и учитывая обозначе-
ния (8.125), получим, что при всех действительных А,
ЛА24-2ВА4-С>0, (8.126)
причем А >0. Но тогда квадратный трехчлен Ак2 2В\С не может
иметь двух различных действительных корней Aq < А2, иначе его можно
было бы представить в виде Л (А — Aj) (А — А2) и он принимал бы
отрицательные значения при Aj < А < А2, что противоречит нера-
венству (8.126). Необходимым и достаточным условием отсутствия
различных действительных корней является, как известно, неположи-
тельность дискриминанта трехчлена
В2 —ЛС<0. (8.127)
Перенося произведение АС в правую часть неравенства и извлекая
из обеих частей арифметический квадратный корень, получим
< /и • а это, если учесть обозначения (8.125), и есть
неравенство Коши — Буняковского.
8. Интегрирование сходящихся в среднем последовательностей
и рядов.
Теорема 8.14х. Если последовательность функций /] (х),
/2(х), .... fn(x\ ... сходится в среднем на отрезке [a, b]
к функции f (х), то при любых х0 и х на I<z, b] будет
lim
+со
f fn GO dz = f f{z)dz\
Xo
(8.128)
§ 6) СХОДИМОСТЬ В СРЕДНЕМ 345
более того, при любом х0£[а, />] имеет место равномерная
по х сходимость
Jfn(z)dzz$- J/(z)dz на (а, b}*). (8.129)
Доказательство. По условию
ь
Р2(/- /„) = f [f(z)-fn(ztfdz-±O при п-^ + оо. (8.130)
а
Чтобы доказать (8.129) (а следовательно, и (8.128)), оценим инте-
грал j'ff(z)— f„(z)\dz- Для этого, представив подынтегральную
Л'о
функцию в виде произведения
[/ (Z) - /„ (Z)] = 1 . If (Z) - fn (z)J,
применим неравенство Коши — Буняковского
J [/(*) — fn(z)\dz
Хъ
J lf(z) — fn(z)[2dz
Л
|/(д)-/л(г)|2^ = ]/7^у,р2(/. /„). (8.131)
Так как правая часть неравенства (8.131) от х не зависит и, в силу
(8.130), стремится к нулю при п—>-|~о°, то это и означает, что
J If (z) — f„ (z)] dz =5 0 на [a, d],
X,
т. e. соотношение (8.129) выполняется. Этим доказательство теоремы
завершено.
Если разность f(x) — f „ (х) заменить ее модулем, то вместо (8.131)
при х0 — а и х ~ b получим неравенство
ь
f \f(z)~f„ (z) I dz < . /р2 (/, Л). (8.132)
а
Интеграл в левой части (8.132) выражает площадь, заключенную
*) Напомним, что все функции в данном параграфе, в том числе fn (х)
и f (х), предполагаются интегрируемыми на [а, £>] в обычном смысле;
см., однако, сноску на стр. 342.
346 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
между графиками fn(x) и /(х) и ординатами х = а и х = Ь- Таким
образом, в случае сходимости в среднем fn(x) к f (х) на (а, &] эта
площадь стремится к нулю, так как квадратичное уклонение р2 (/, /„)
стремится к нулю. При этом максимум обычного отклонения f п (х)
от / (х) на [а, £>] может даже неограниченно возрастать. Например,
_± __________________________________ _1„х>
последовательность fn(x) — n 8 у 2пхе 2 сходится в среднем
к /(х) = 0 на отрезке 0<(х<^1, но ,
/ 1 \ V"2 —
шах |/,г(х) — /(х)| =fn -7= = 1/ — п8->4-со при п-> + со.
\У 2л/ г е
С помощью теоремы 8.14р доказанной для последовательностей,
легко доказывается для рядов
+ СО
Теорема 8.142. Если функциональный ряд 2 uk (х) с инте-
k=i
грируемыми членами сходится в среднем к интегрируемой
функции S (х) на отрезке [а, 6], то
J S(z)dz — J iz1(z)c?2r+ .. . + f u„(z)dz-[- ... (8.133)
Ло *0 Ху
при любых х0 и х £ [а, Ь], причем ряд (8.133) сходится к своей
сумме равномерно на [a, £].
Доказательство. Так как по условию Sn (х) сходится в сред-
п
нем к S(x) на [д, />], где S„(х) = 2 иk (х)’ то по теореме 8.14
Л=1
JSn(z)dzzt JS(z)dz на [«,(>], (8.134)
Х-, Хц
НО
X п X
f S„(z)dz = ^ fuk(z)dz,
Ха ft=l х„
следовательно,
п X X
• 2 f Uk(z)dz IS (z) dz,
*=1 Xa Xi
т. e. частичная сумма ряда (8.133) сходится равномерно к функции
j'S(z)dz, что и требовалось доказать.
§ 6]
СХОДИМОСТЬ В СРЕДНЕМ
347
4. О связи между сходимостью в среднем и возможностью
почленного дифференцирования последовательностей и рядов.
Теорема 8.15^. Если последовательность непрерывно диф-
ференцируемых функций {/„(*)] сходится на [а, 6] к функ-
ции f(x), а последовательность их производных {/„(х)} схо-
дится в среднем на [а, />] к непрерывной функции ф(х), то f (х)
дифференцируема на [а, 6] и
/'(х) = ф(х) = lim f'n(x) на [а, £]. (8.135)
л->+оо
Доказательство. Мы имеем при х, х0£[а, ft],
<Vb-a- /р2(/;,. ф)->0
(8.136)
при п—>-|-оо. Следовательно, переходя к пределу и учитывая, что
/л(х)->/(х) и fn (х0) -> f (х0) при п->--\-<х>, получим
/(х) —/(х0) = J q(z)dz, т. е. /(х) = /(х0)+ J tp(z)dz. (8.137)
АГ-э Xq
Из равенства (8.137) вытекает, что /(х) дифференцируема и
что имеет место равенство (8.135). Теорема доказана.
Аналогичным образом доказывается
Теорема 8.15%. Если функциональный ряд
+ оо
S(x) = 2M*(x) (8.138)
с непрерывно дифференцируемыми членами сходится на [а, Ь],
а ряд
+ 00
0 (х) = 2 (*) (8.139)
И=1
сходится,в среднем к непрерывной функции о(х), то сумма S(x)
ряда (138) дифференцируема на [а, Ь\ и
S' (х) — о(х) = У. и' (х). (8.140)
Доказательство теоремы 8.152 предоставляем выполнить
читателям.
348 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ (ГЛ. 8
5. Связь между сходимостью в среднем и другими видами
сходимости. Из обычной сходимости последовательности функ-
ций ^(х), /2(х)......... fn(x\ •••в каждой точке отрезка [а, Ь]
Рис. 8.6.
сходимость в среднем не вытекает. Например,
у---------------------пх2
fn(x)—y2nxe 1 ->/(х) = 0 на отрезке [0, 1],
но
1 1
fl/n(x)— f(x)]2dx — j" Чпхе~пхг dx = (1—е-и)-> 1 при я->~|-оо.
О G
Из равномерной сходимости вытекает сходимость в сред-
нем. Действительно, если для всякого е>0 найдется такое М(е),
что при всех n>A7(e) неравенство |/я(х)— У(л;)| < 1/ —
5 6] СХОДИМОСТЬ В СРЕДНЕМ 349
выполняется сразу для всех х£[а, Ь\, то, возводя в квадрат обе
части этого неравенства и интегрируя, получим, что
ь
Р2СЛ Л)= f \fnW — — а) = г
а
при всех n>N(e), т. е. что р2(/, /я)->0 при + а эт0
и означает сходимость в среднем fn(x) к /(х) на [a, ft].
Из сходимости в среднем равномерная сходимость не вытекает;
более того, не вытекает даже обычная сходимость в каждой точке.
Рассмотрим пример последовательности функций (х), /2(х)..........
fn(x), ..., сходящейся в среднем к f (x)sO на отрезке [0, 1) и не
сходящейся на этом отрезке ни в одной точке. Построение этой после-
довательности будем вести шаг за шагом, подвергая отрезок [0, 1]
разбиению сначала на 2 равные части, затем на 22 равных частей и
т. д., на 2Л равных частей и т. д. Разбив отрезок [0, 1] на две
равные части, определим /1(х) и /2(х), как указано на рис. 8.6, а
и 6. График функции изображен жирной линией, а маленькая дужка
означает, что точка, через которую она проходит, к примыкающему
куску графика не причисляется.
Разбив отрезок [0, 1] на 22 равных частей, определим /3(х),
/4(х), /5(х) и /6(х), как указано на рис. 8.6, в, г, д, е. Продолжая
этот процесс неограниченно, получим последовательность функ-
ций /i(x), /2(х), .... fn{x\ .... каждая из которых принимает на
отрезке [0, 1] только два значения: 0 и 1, поэтому /2(х)ее^/л(х)
на отрезке [0, 1] при всех я=1, 2, 3, ...
Докажем, что fn(x) сходится в среднем к /(x)sO на [0, 1].
Мы имеем
1 1 1
Р2(/. /«) = /!/«(*) — /(x)|2dx — J /2(x)dx = J/„(x)c?x->0
О 0 0
1
при /г-*-)-00- Действительно, J*fn(x)dx равен площади заштрихо-
о
ванного прямоугольника, которая, очевидно, стремится к нулю при
п-» + оо. (Сходимость в среднем доказана.
Однако последовательность fx (х), /2 (х), ..., fn (х), ... не схо-
дится ни в бдной точке отрезка [0, 1], так как в каждой точке х
этого отрезка при сколь угодно большом /V > О найдутся функ-
ции с номером п' > N, имеющие в этой точке значение 0, и най-
дутся функции с номером п" > JV, имеющие в этой же точке зна-
чение 1.
350
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
(ГЛ. 8
ДОПОЛНЕНИЕ 1 К ГЛ. 8
КРИТЕРИЙ КОМПАКТНОСТИ СЕМЕЙСТВА ФУНКЦИЙ
Вопрос о компактности семейства функций в математической
физике возникает при доказательстве существования решений диф-
ференциальных и интегральных уравнений и при доказательстве схо-
димости различных приближенных методов решения таких уравнений,
но для его рассмотрения не требуется привлечения понятий теории
дифференциальных или интегральных уравнений; по своему характеру
он естественным образом примыкает к вопросам, рассмотренным
в настоящей главе.
Определение 1. Семейство функций {/(х)}, заданных на
некотором множестве X точек х, мы будем называть ком-
пактным (в смысле равномерной сходимости), если из любой
бесконечной последовательности функций f\ (х), f2(x), ....
fn(x), ... данного семейства можно выделить подпоследова-
тельность fn{(x), fп2(х)... fnk(x), .... равномерно сходя-
щуюся на множестве X *).
Определение 2. Семейство функций {/(*)}, заданных на
некотором множестве X, мы будем называть равномерно
о г р а н и ч е'н ныл на этом множестве, если существует такая
константа С, 0 < С < -f-оо, что неравенство |/(х)|<^С выпол-
няется сразу для всех х£Х и для всех функций f (х) из дан-
ного семейства.
Определение 3. Семейство функций [f (х)}, заданных на мно-
жестве X, называется равностепенно непрерывным
на этом множестве, если для каждого в > 0 существует такое
б = 6(е)>0, не зависящее от выбора функции /(х)£{/(х)} и
выбора х’ и х”^Х, что для каждой функции f(x)£{f(x)} и
любых х' и х" ^Х, удовлетворяющих неравенству |х'—х"|<д(е),
выполняется неравенство
|/(х')-/(х")| <8. (1)
Теорема 1 (Арце ла). Если семейство функций {/(х)}, задан-
ных ни отрезке а^х-^b, равномерно ограничено и равно-
степенно непрерывно, то оно компактно в смысле равномер-
ной сходимости.
Доказательство. Рассмотрим какое-либо счетное всюду
плотное на отрезке а х b множество Л1 точек хр х2........
х„, .... например множество всех рациональных точек этого отрезка
или множество всех точек деления при последовательном делении
*) Аналогичным образом определяется компактность в смысле
сходимости в среднем. Однако по этому поводу мы отсылаем к руко-
водствам по функциональному анализу.
ДОПОЛНЕНИЕ 1 К ГЛ. 8
351
этого отрезка на 2, 4, 8......2", .. . равных частей. Возьмем какую-
либо последовательность функций {/л(х)| из данного семейства.
В силу равномерной ограниченности семейства, | fn (х) | С =
= const < -]- оо при всех » == 1, 2, 3, ... и сразу для всех х £ М.
В частности, последовательность чисел /n(Xj), п= 1, 2, .... будет
ограниченной, так что по теореме Больцано — Вейерштрасса найдется
сходящаяся подпоследовательность /ц(х1)« /12(х1)> •••- f\n (xi)- •••
В результате из последовательности функций fn(x) оказалась выде-
ленной подпоследовательность
/п (•'-)• /12(х)...../1л W’ •••• (21)
сходящаяся в точке Xj £ М.
Аналогично из последовательности (2j) выделим подпоследова-
тельность
/21 (х)’ /22 (х)....fin (х), ••• (^г)
сходящуюся в точке х2£Л4; последовательность (22) сходится также
и в точке X)£ М, ибо она является подпоследовательностью последо-
вательности (2j), которая в точке хг сходится. Итак, последователь-
ность (22) сходится в точках Xj и х2 множества М.
Продолжая неограниченно этот процесс выделения подпоследова-
тельностей, получим бесконечную таблицу:
/и (*)• /12 (*)....../1л СО. • • •
/21 (х), fn (х). .... f2n (х), ... (3)
fndx). f„2(x).......f
пп (X), . . .
в n-й строке которой (га=1, 2, 3, ...) стоит подпоследователь-
ность, сходящаяся в точках хР х2, .... хп. Поэтому диагональная
последовательность
/nW- /22U)........fM ... (4)
будет сходиться в каждой точке хл£/И. Докажем, что она схо-
дится равномерно на [a, />]. Для этого достаточно доказать, что
данная последовательность (4) удовлетворяет критерию Коши для
равномерно сходящихся функциональных последовательностей.
Пусть дано какое угодно е > 0. Сначала выберем из всюду плот-
ного множества М такое конечное подмножество /И [хр х2.....хр],
чтобы его'точки делили отрезок [а, Ь] на частичные отрезки длины
<б(е), где' ,А(е)>0 выбирается из условия равностепенной непре-
рывности семейства, т. е.
|/(х') — / (х")| < е при |х' — х"|<д(е) и х', х" £\а, Ь\.
Тогда для каждого х£[а, 6] найдется такое значение хг£М, что
|х— xz|<d(e). Найдем, далее, по заданному е>0 такое Л7(е), не
352 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ . [ГЛ. 8
зависящее от xt, Z= 1, 2....р, что
< е при всех т и n >/V (е) (5)
и всех i — 1, 2.... р. Тогда будет \fm.n (х) — fn„ (х)| < Зе при
всех т и п > N(е) и сразу для всех х£[а, Z>]. Действительно,
пусть т и п > V (е), а х£[а, />]. Найдется такое значение xt £ /И,
что | х — хz | < б (е). Но тогда, в силу равностепенной непрерывности
1/mmW — fmm(xi)\ < е, |/„„ (х) — fn„ (xz)| < 8, а следовательно,
в силу (5), будет выполняться неравенство
f тт (х) — f тт (*) ~ f тт (xi) 1 + I f тт (*/) — f nn (Xz)l +
+ 1/лл(^) —/яя(х)| < еЦ-е-|-е = Зе.
Критерий Коши равномерной сходимости для последовательности (4)
выполнен. Теорема доказана.
Теорема Ариела находит, например, применение при доказатель-
стве существования решения дифференциальных уравнений.
Докажем еще одну теорему, существенно используемую в теории
интегральных уравнений.
Теорема 2. Если последовательность функций [/„(х)} равно-
степенно непрерывна на [а, Ь] и удовлетво ряет условию
ь
Р2(/л- f [fm(x)~ fn(x^dx~>G при n, m--> + oo, (6)
a
то она сходится равномерно на этом отрезке к некоторой
непрерывной функции f (х).
Доказательство. Докажем, что для этой последовательности
выполнен критерий Коши равномерной сходимости, т. е. докажем,
что
Фл.ш (•*) = !/»(•«) — frn (*)]=£0 на fa, д] при п, т-+ + оъ.
Допустим противное. Тогда найдется такое е0 > 0, что при как угод-
но больших k существуют такие nh > k и хк£[а, б], для которых
| % Ы | > 4е0- <7>
В силу равностепенной непрерывности последовательности, найдется
6 = б(е0), для которого
I/п(*)—/«(•*»)I < со ПРИ I* — *J<6(eo)- (8)
Следовательно, при nfe > fe > N (е0) и |х — хй| <&(е0) будет
| w - (*л) | < | Л (*) ~ Л (**) I +
Н-|/л/*)-ЛДхА)]< 280. (9)
ДОПОЛНЕНИЕ 2 К ГЛ. 8
353
Но тогда, в силу (7) и (9), будем иметь
I WI I |~1 ‘’Ч (Х) ~ % (**) I > 4ео^2ео = 2ео- (10)
Если взять д(е0)<£ — а, то по крайней мере половина интервала
xk — d<x<xft+d лежит на отрезке [а, д]. Следовательно,
в силу (10), при nk"> k > N (е0)
ь
Р2 (\’ А) = f О)dx > 4ео| = 2еоб = const > °- О
а
что противоречит условию (б), так как число k можно взять сколь
угодно большим. Поэтому фтя (х) = [/т (х)— fn (х)] -> 0 на [а, Ь\
при п и Следовательно, в силу критерия Коши для равно-
мерно сходящихся последовательностей, последовательность {/„ (х)}
сходится равномерно на [а, Л] к некоторой функции /(х), при-
чем /(х) непрерывна, как предел равномерно сходящейся после-
довательности непрерывных функций. Теорема доказана.
ДОПОЛНЕНИЕ 2 К ГЛ. 8
СЛАБАЯ СХОДИМОСТЬ И ДЕЛЬТА-ФУНКЦИЯ
Наряду с равномерной сходимостью и сходимостью в среднем
важную роль в математике и математической физике играет так назы-
ваемая слабая сходимость.
Определение 1. ^Последовательность функций
<Р!(Х), ф2(х)...ф„(х).................. (1)
определенных и интегрируемых на {а, Ь), называется слабо
сходящейся «в себе» на (а, Ь), если для всякой непре-
рывной и ограниченной на (а, Ь) функции f(x) существует
конечный предел
ь
lim Г/(х) фя (х) dx. (2)
+оо *
а
Определение 2. Функция ф(х) называется слабым пре-
делом последовательности функций (1) на {а, Ь),
если
ь ь
lim [ /(х)фя(х)йх— f f(x)<p(x)dx, (3)
/?->+оо J J
। а а
для любой непрерывной и ограниченной на (а, Ь) функции /(х) *).
*) Точнее, в этом случае говорят, что последовательность (1) сходится
к <р(х) слабо в классе функций, непрерывных на (а, Ь)\ можно определить
слабую сходимость и в других классах функций.
354 ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ [ГЛ. 8
Если последовательность(1) сходится равномерно или в сред-
нем к интегрируемой функции ф (х), то, в силу теорем о предельном
переходе под знаком интеграла, равенство (3) будет выполняться для
каждой непрерывной и ограниченной функции / (х); таким образом,
из равномерной сходимости, а также из сходимости в среднем [ф„ (х)}
к ф(х) вытекает слабая сходимость (<рл (x)j к <р(х).
Если для любой непрерывной и ограниченной на {а, Ь) функ-
ции /(х)
ь
lim f f (х) ф„ (х) dx = 0, (4)
Д-» +со
а
то, очевидно, последовательность {ф„ (х)} сходится слабо к нулю
на (а, Ь), так как равенство (4) можно переписать в виде
ь ь
lim f f (х)ф„(х) dx = f /(x)-O-rfx. (4')
-i-оо
а а
Применяя критерий Коши к последовательности чисел
С 1
J / (х) фл (х) dx j, получим следующий критерий слабой сходи-
мости «в себе».
Критерий Коши (для слабо сходящихся последовательно-
стей). Для того чтобы последовательность (1) была слабо схо-
дящейся «в себе» на (а, Ь), необходимо и достаточно, чтобы
она была слабо фундаментальной, т. е. чтобы для каждой
непрерывной функции /(х) и для каждого е>0 существовало
такое число N (е, /), что
ъ
f f (*) [фл (*) — фт (х)1 dx
а
(5)
при всех п и т>АГ(е, /).
Напомним, что не всякая фундаментальная последовательность
рациональных чисел сходится к рациональному числу, и это при-
водит к необходимости расширения запаса чисел и введению ирра-
циональных чисел. Аналогично не всякая слабо фундаментальная
последовательность интегрируемых функций сходится слабо к инте-
грируемой функции, и это приводит к необходимости расшире-
ния запаса функций и введению так называемых обобщенных
функций.
ДОПОЛНЕНИЕ 2 К ГЛ. 8
355
Рассмотрим, например, последовательность функций {6л(х0, х)),
определяемых соотношениями
| п при х0--±<х<х0 + ^-,
(Хо, X) — } J J
[О при —оо < X < х0—2^-, х0 + ^ <х<Ч-оо.
(6)
Эта последовательность сходится слабо «в себе» на любом интер-
вале {а, Ь).
Действительно, пусть f (х) непрерывна на (а, Ь) и пусть х0£(а, Ь).
Тогда, начиная с достаточно большого п, интервал (х0—
х0 содержится в (д, Ь), и, применяя теорему о среднем к инте-
гралу, получим
Ь Х»+2Т
У* /(аг)&я(лг0« x)dx = n j f (x)dx = /(£),
а 1
Переходя в последнем равенстве к пределу при п—>-)-оо, в силу
непрерывности /(х), получим
ъ
lim f/(х)дя(х0, x)dx = /(x0). (7)
Л->+оо
а
Если же х0 лежит вне сегмента [а, Ь], найдем
ь
lim f f (х~)Ьп(хй, x)dx = 0. (8)
л->+со
Однако не существует никакой обычной интегрируемой функ-
ции, которая являлась бы слабым пределом последовательности
{6„ (х0, х)). В качестве слабого предела этой последовательности
вводят обобщенную функцию 6(х0, х), называемую 6-функ-
цией (дельта-функцией) с центром в точке х0.
В силу определения слабого предела (см. равенство (3)) и в силу
(7) и (8), для любой непрерывной на (а, Ь') функции /(х) будем иметь
ь
J* f(x~)t>(x0, x)dx —
а
/(х0) при х0£(я, Ъ),
О при х0(£[д, £].
(9)
356
ФУНКЦИОНАЛЬНЫЕ ПОСЛЕДОВАТЕЛЬНОСТИ И РЯДЫ
[ГЛ. 8
Иногда 6-функцию определяют формально соотношением (9).
Замечание. Вместо ограниченной и непрерывной на (а, д')
функции f (х) в соотношениях (7) и (8) можно, очевидно, брать
кусочно-непрерывную ограниченную на (а, Ь) функцию f (х), если
в каждой точке разрыва х* она доопределена равенством /(х*) =
f ix*____01-4- f (х* -4- 0)
-- --------Тогда равенство (9) естественно считать
выполненным и для таких функций *).
Аналогично тому, как одно и то же иррациональное число можно
определять с помощью различных эквивалентных фундаментальных
последовательностей рациональных чисел, так и одну и ту же
обобщенную функцию можно определять с помощью различных
эквивалентных слабо сходящихся последовательностей. При этом
имеет место следующее
Определение 3. Две слабо сходящиеся на (а. Ь) последова-
тельности функций (фп(х)}, и (фп(х)} называются эквива-
лентными, если для любой непрерывной и ограниченной
на (а, 6) функции f (х) выполняется равенство
ь
lim f/(x)[<pn(x) — ф„(х)] tfx = 0.
П->+ОО •>
а
При практическом применении 6-функции часто вместо рассмотрен-
ной нами последовательности [6„ (х0, х)} берут другие эквива-
лентные ей слабо сходящиеся последовательности, определяющие
6-функцию (см. Дополнение 5 к гл. И). Характеризуя соотноше-
ние (9), которым формально определяется 6-функция, иногда говорят,
что 6-функция обладает «выхватывающим» или «фильтрую-
щим» свойством: умножая любую непрерывную функцию f (х) на
6(х0, х) и интегрируя их произведение по интервалу, в котором
*) Если х0 — точка разрыва кусочно-непрерывной функции / (х), причем
t I \ f ------9) “|~ f (Xg -|- 0)
/ (х0) = - -- ' ' —- , то для доказательства равенства (7) при
&
. * Х°+27
х0 £ (а, Ь) нужно интеграл J* / (х) dx в соотношении (6') разбить на два:
1
Х’-2^
х, Х°+^
j f (х) dx и J" / (х) dx и применять теорему о среднем к каждому
„ 1 X,
9 "5л
ИЗ них.
ДОПОЛНЕНИЕ 2 К ГЛ. 8
357
определена f (х) и в котором лежит х0, мы «выхватываем» или
«отфильтровываем» значение f(x) в точке х0.
Если каждой функции f(x) из некоторого класса функций,
определенных на (а, Ь), ставится однозначно в соответствие
некоторое число, то говорят, что на этом классе функций
определен функционал.
Например, пусть {/(х)}— класс всех интегрируемых на (о, Ь)
»
функций; тогда интеграл I f(x)dx является функционалом,
определенным на этом классе.
С помощью интеграла (9) при любом фиксированном х0£(а, б)
также определяется функционал на классе всех функций, непре-
рывных на (a, by. Действительно, с помощью интеграла (9) каждой
непрерывной на (а, Ь) функции /(х) ставится однозначно в соот-
ветствие число /(х0), равное значению этой функции в точке х0 £ (а, Ь).
Иногда б-функцию отождествляют с функционалом, который опре-
делялся соотношением (9). Такова одна из интерпретаций обобщенных
функций, которая может быть положена в основу построения теории
обобщенных функций.
ГЛАВА 9
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
Определение интеграла как предела интегральной суммы
ь п
f f(x)dx= lim У/(Ь)А^ (9-1)
a max 0 ~
не охватывает случаев, когда подынтегральная функция не ограни-
чена или интервал интегрирования бесконечен. Однако в мате-
матике и математической физике широко используются интегралы
от неограниченных функций и интегралы с неограниченными обла-
стями интегрирования. Такие интегралы называются несобственными-
Для их определения не достаточно одного предельного перехода
вида (9.1), требуется еще дополнительный переход по области инте-
грирования. Именно, первоначальную область интегрирования, где
определение (9.1) не годится, заменяют такой подобластью, где оно
пригодно; предел интеграла, взятого по этой подобласти, когда она,
расширяясь, стремится совпасть с первоначальной областью, назы-
вают несобственным интегралом по первоначальной области. Такова
общая идея определения несобственного интеграла. Более точные
формулировки будут приведены ниже.
§ 1. Интегралы с бесконечными пределами интегрирования
1. Определения; примеры. Пусть функция / (х) определена на
полупрямой а х < оо и пусть для каждого В > а существует
в
интеграл J"/(x)rfx (определяемый соотношением вида (9.1)).
а
Определение /. Несобственным интегралом
+ со
У f(x)dx называется предел
а
со В
f f(x)dx— lim f f(x)dx. (9-2)
* B-¥-\-co J
a a
§Ц ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ 359
/
Если этот предел существует и конечен, то говорят, что
4-00
несобственный интеграл J"f(x)dx сходится', в противном
а
случае говорят, что он расходится.
Замечание. Пусть ах > а. Тогда из равенства
в а, в
J / (х) dx = J f (х) dx -j- J f (x) dx
a a a.
следует, что интегралы J* f(x)dx и J f{x}dx сходятся или рас-
a at
ходится одновременно. Таким образом, исследование на сходимость
4- со
интеграла J f(x)dx можно заменить исследованием на схо-
а
4-оо
димость интеграла § f(x)dxnpu любом
ах > а, если только
функция / (x) удовлетворяет
требованиям определения (1).
Несобственный интеграл (9.2)
имеет простой геометрический
смысл. Пусть f (х) — непрерыв-
ная неотрицательная функция при
х а. Область Q, примыкающая
сверху к оси х, ограничена гра-
фиком этой функции, отрезком
а х < -|- 00 оси х и отрезком
ординаты х = а, О^у <^/(а). Определения квадрируемости и площади
области, сформулированные ранее (п. 3 § 1 гл. 1), к этой области непри-
менимы *). Проведя произвольную ординату х — В > а, 0 у (В),
мы отсечем квадрируемую криволинейную трапецию АВВ'А' (рис. 9.1),
в
площадь которой выражается интегралом J f(x)dx. Естественно на-
а
звать область Q квадрируемой, если площадь трапеции АВВ'А’
стремится к конечному пределу, когда В—и этот предел
площади трапеции АВВ'А' назвать площадью области Q. Но
тогда площадь области Q будет выражаться несобственным
интегралом (9.2).
*) В силу ее неограниченности.
360
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
Аналогично интегралу (9.2) определяется несобственный интеграл
а а
f f(x)dx = lim f f(x)dx.
A->-oo f
co A
(9-3)
Если оба предела интегрирования бесконечны, то пола-
гают по определению, что
+со а +со
J f(x)dx= J f (х) dx J" f(x)dx, (9.4)
—co —co a
где a — произвольное конечное число, причем
интеграл
J" /(х)dx называется сходящимся тогда и только тогда,
— ОО
когда оба интеграла в правой части (9.4) сходятся.
+оо
Легко показать, что сходимость интеграла $ f(x)dx и его вели-
— ОО
чина в случае, если он сходится, не зависят от выбора точки а *).
+ оо +оо
Итак, интеграл j* f(x~)dx сводится к интегралам вида J f(x)dx
-оо а
4-со
*) Можно определить интеграл f (х) dx соотношением
— 00
4-оо В
f f (х) dx = lim f f (x) dx, (9.4')
J A->-co J
-oo B->+oo A
где А и В стремятся к своим пределам независимо друг от друга. Действи-
тельно, в силу (9.4), (9.3) и (9.2), имеем
Н-оо а +оо
/ (х) dx = J f (х) dx 4- J* / (х) dx =*
— оо —оо а
а В В
= lim If (х) dx lim f f (x) dx = lim f f (x) dx,
A->—oo J B->4-oo J A->—oo J
A a B->+ooA
причем для существования последнего предела при независимом стремлении
Л->— оо, В ->4- со необходимо и достаточно существование пределов
а в
lim f / (х) dx, lim f f (x) dx.
— co J В->4-co J
Д a
§ n
ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ
361
а а
и J" f(x)dx. Но интеграл вида J* f(x)dx простой заменой х на
сводится к интегралу вида J* f{x)dx, поэтому мы ограничимся
а
в основном изучением интегралов вида
f f(x)dx.
не стремится ни к какому
Рассмотрим некоторые примеры.
+ оо В
1. Интеграл j sinxdx— lim I sinxdx— lim (1—cosB) pac-
o £->+00 о
ходится, так как cos В при В->4-оо
пределу, колеблясь между —1 и -|-1.
+ аэ
_ „ Г dX
2. Интеграл J 2 сходится,
деленный
конечный предел;
так как существует опре-
lim Г i = lim [arctgB — arctgX] = 4 — (—=
В-Ц-оэ у 1 1 х В->4-оо z \ z/
Д->— оо ” —оо
3. Особенно важным примером служит интеграл
где С > 0 и а > 0;
он сходится при а> 1 и расходится при а<11. Действительно,
С In —
а
В1~а-а'~а
С 1 —а
при а = 1,
при а #= 1,
поэтому
в
г Г С ,
lim / —— dx —
Д->+оо •' X
а
при а > 1,
при а<1.
Используя этот интеграл для сравнения, можно установить сходи-
мость или расходимость многих других несобственных интегралов.
(Подробнее об этом см. теорему 9.3, п. 4.)
с—г
а— 1
362
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
(ГЛ. 9
2. Сведение несобственного интеграла Jf{x) dx к числовой
а
последовательности и числовому ряду. Исследование сходимости
+ оо
несобственного интеграла J f(x)dx может быть сведено к исследо-
а
ванию сходимости числовых последовательностей или числовых рядов.
+ со
Согласно определению 1, несобственный интеграл J* f(x)dx
а
В
является пределом функции F(B) = j' f(x)dx при £->-]-со. Если
а
применить к F (В) определение предела функции через последова-
тельности (см. вып. 1, гл. 4, § 2), мы придем к следующему
критерию:
+ со
Для сходимости интеграла J* f(x)dx необходимо и доста-
а
точно, чтобы при любом выборе последовательности точек
Вп~у> а, п=\, 2, Вп—> Ц-оо при п—>оо (9-5)
последовательность чисел
J f(x)dx, /1=1, 2, 3............... (9.6)
сходилась к одному и тому же конечному пределу. В случае
+ оо
сходимости интеграла J f(x)dx предел последовательности
а
(9.6) равен этому интегралу.
Заметим, что последовательность (9.6) является последователь-
ностью частичных сумм ряда
ВХ В2 ВП
J f{x)dx-\- J /(x)dx+ ... 4- У f(x)dx-\- ... (9.7)
й Вп-х
В связи с этим высказанный выше критерий можно сформулировать
иначе:
+оо
Для сходимости интеграла § f(x)dx необходимо и до-
а
статочно, чтобы при любом выборе последовательности точек
§ 1] ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ 363
(9.5) числовой ряд (9.7) был сходящимся и его сумма не зави-
села от выбора последовательности точек (9.5). В случае
+ со
сходимости интеграла § f(x)dx сумма ряда (9.7) равна
а
этому интегралу.
Замечание 1. Если функция f (х) знакопеременна на по-
лупрямой а <1 х < со, то из сходимости ряда (9.7) при каком-либо
одном выборе последовательности точек (9.5) еще не вытекает,
+ со
вообще говоря, сходимость интеграла J* f(x}dx. Например, инте-
а
+со
грал J" sinxrfx расходится (см. пример 1 п. 1), хотя ряд
о
4-со 2л (п+1)
J* sinxrfx сходится, так как все его члены равны нулю.
п=0 2пп
Если функция f (х) сохраняет знак при всех х~^-а, напри-
мер /(х)^>0 при всех х О, то для сходимости интеграла
+ оо
J* f(x)dx необходимо и достаточно, чтобы ряд (9.7) схо-
а
дился хотя бы при каком-либо одном выборе монотонно
возрастающей последовательности (9.5) *).
Необходимость этого критерия вытекает из сказанного выше.
Докажем его достаточность. Пусть /(х)^0 при всех х а
и пусть ряд (9.7) сходится для некоторой монотонно возра-
стающей последовательности (9.5). Тогда последовательность
частных сумм (9.6) этого ряда, в силу неотрицательности /(х),
будет монотонно возрастающей (неубывающей) и стремящейся к опре-
деленному конечному пределу J. Докажем, что при любом другом
выборе последовательности
Вт > а, т=\, 2, ...; Вт—>4~°° при т->-|-оо (9.5х)
соответствующий ряд
В1 В2 Вт + 1
J /(х)й?х-+ J /(x)dx-j- ... -j- J f(x)dx-}-... (9.7х)
а В\ В'т
также сходится и его сумма равна J.
*) Ср. с интегральным признаком сходимости числового ряда (вып. 1,
гл. 13, § 2, п. 4).
364 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 1ГЛ. 9
При доказательстве мы будем оперировать с частными суммами
рядов (9.7) и (9.7'). Пусть дано е > 0; тогда найдется такое Вп„,
что будет выполняться неравенство
J — г<_ J f(x)dx<J.
а
Возьмем такое тп, чтобы при всех т тп было В' >- В . Так как
и * и т л0
для любого Вт найдется В„т > Вт, то при всех т т0, в силу
неотрицательности /(х), будет выполняться неравенство
В„ в в„
па т пт
J—е< J f(x)dx~^j" /(x)dx<lj f(x)dx~^J.
а а а
f (х) dx = J, что и требовалось доказать.
а
Пример. Пусть
2" при
/(х) =
О при
। n= 1, 2, ...
^ + 22n<x</i-j-l.
4-со 4-со
Тогда интеграл / /(x)dx = ^ / /(x)dx = ^^=l сходится.
1 л=1 п Л=1
Замечание 2. Этот пример показывает, что из сходимости инте-
4-оо
грала J* f(x)dx даже в случае неотрицательной функции /(х) не
а
следует, что /(х)->0 при х->4~оо.
3. Критерий Коши для несобственных интегралов. Сходимость
несобственного интеграла
4-оо В
f f(x)dx— lim f f(x)dx (9.2)
J B->4-co J
a a
означает существование определенного конечного предела у функ-
в
ции F (В) = J f (х) dx при В -> оо.
а
Согласно общему критерию Коши (см. вып. 1, гл. 8, § 1, п. 2),
F(B) стремится к определенному конечному пределу при В-*-)-00
§ 1]
ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ
365
в том и только том случае, если для каждого е > 0 существует
такое 8(e), что |F(B")— F(B')|<e при всех В' и В">В(е).
в
Подставляя сюда выражение F(B) — f f(x)dx, получим следующий
а
Критерий Коши (для интеграла). Для сходимости инте-
4-оо
грала J* f(x)dx необходимо и достаточно, чтобы для всякого
а
е>0 существовало такое В(е), что при всех В' и В">В(е)
выполнялось бы неравенство
в"
/ f(x)dx
В'
(9.8)
т. е. чтобы интеграл
В’
J f(x)dx
В'
(9.8')
стремился к нулю при В' и В"
В некоторых случаях критерий Коши (9.8) можно применять не-
посредственно при исследовании на сходимость конкретных интегралов.
+оо
Пример. Рассмотрим интеграл j* s1”— dx (полагая его подын-
о
тегральную функцию, для непрерывности, равной 1 при х = 0).
Интегрируя по частям, будем иметь
В’
Г sin х , cos В'
/ -------dx —--------о7~
.! X В'
В'
Поэтому
9 9
С-дт + в»-*0 ПРИ 5 И В"-> 4-оо.
Следовательно, интеграл
dx
сходится.
Важнее, однако, применение критерия Коши не к исследованию
отдельных конкретных интегралов, а к выводу практически более
366
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
удобных общих достаточных признаков сходимости интегралов.
Переходя к рассмотрению таких признаков, введем сначала понятие
абсолютной сходимости интеграла, аналогичное понятию абсолют-
ной сходимости числового ряда.
4. Абсолютная сходимость. Признаки абсолютной сходимости.
Определение 2. Пусть функция f (х) интегрируема в обыч-
ном смысле на каждом конечном отрезке*) а^.х^В,
а<В< + оо. Несобственный интеграл (9.2) называется
абсолютно сходящимся, если сходится интеграл
+со
У |/(x)|dx.
а
(9.9)
Теорема 9.1. Если интеграл (9.2) сходится абсолютно,
то он сходится.
Доказательство. Действительно, из сходимости интеграла
(9.10) вытекает, что для всякого е>0 найдется такое 5(e), что
<е при всех В' и В" > 5(e). Но всегда
В"
f\f(x)\dx
В'
J/(х)dx
В'
В"
У ( / (х) | </х
В'
(9.10)
Поэтому будет
В’
У / (х) dx
В'
В"
У | /(x)l dx
В'
< е при всех В' и В’' > В (е),
т. е. для интеграла (9.2) выполняется критерий Коши. Следовательно,
интеграл (9.2) сходится. Теорема доказана.
Замечание 1. Из сходимости интеграла (9.2) его абсо-
+ 0О
лютная сходимость не вытекает. Например, интеграл
6
+ОО
сходится (см. п. 3), а интеграл dx расходится. Чтобы до-
6
казать его расходимость, достаточно, согласно п. 2, доказать рас-
Г sin х ,
/ ---------dx
/ х
*) Из интегрируемости /(х) в обычном смысле на конечном отрезке
следует, как известно, интегрируемость | / (х) | в обычном смысле на этом
отрезке.
§ 1]
ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ
367
ходимость числового ряда
п=0 ЯП
| sin х |
X
dx,
которая
навливается с помощью признака сравнения числовых
легко уста-
рядов. Мы
имеем
л(л+1)
f \^Ldx> 1_
J X ' (п + 1) л
ЯП
л(л+1)
f sin х dx
ЯП
при n > 1,
_ 2
(n + 1) я
4-оо +со
S2 2 V 1
— = — 2j ~ расходится, так как он отличается лишь по-
П=1 /1=1
2
стоянным множителем — от гармонического ряда *).
Замечание 2. Пусть /(х) определена при д«^х<-|-оо и
интегрируема на каждом конечном интервале а^х^В. Тогда
+ оо
при любом й] > а из абсолютной сходимости интеграла f{x)dx
Ol
4-со
следует абсолютная сходимость интеграла J* f(x)dx, так как для
а
4-оо 4-оо
сходимости любого из интегралов § |/(x)|dx и J |/(x)|dx не-
а а(
обходимо и достаточно, чтобы
В"
J" |/(x)|dx—>0 при В' и В"->4-оо.
В'
При исследовании абсолютной сходимости несобственных интегралов
обычно применяют признаки сравнения для интегралов.
Теорема 9.2. {общий признак сравнения). Если при всех
достаточно больших х
|/(*)| <£(*)
(9.И)
4-оо 4-оо
*) Если интеграл J” f(x)dx сходится, а интеграл J* | f (х) | dx рас-
а а
4-оо
ходится, то интеграл J* f (х) dx называется условно сходящимся,
в
Таким интегралам посвящен п. 5.
368 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ [ГЛ. 9
то из сходимости ин теграла
+оо
f g(x)dx (9.12)
а
следует абсолютная сходимость интеграла *)
+ оо
J f(x)dx.
а
(9.13)
Доказательство. В силу выполнения критерия Коши для
сходящегося интеграла (9.1) и в силу неравенства (9.11), для вся-
кого е > 0 найдется такое В (е), что
В"
В'
В"
J g(x)dx
В'
<е при всех В', В">В(е),
т. е. критерий Коши будет выполнен также и для интеграла
+ оо 4-со
J | f (х) | dx. Следовательно, интеграл J | / (х) | dx сходится, а это
а ’а
и означает абсолютную сходимость интеграла (9.13). Признак доказан.
В примере 3 п. 1 мы установили, что при а > 0 и С > О
+°° ® ( в1-а
Г lim ПР« а>1-
Х“ Вч.+со^ Х“ [ +оо при a^j
Отсюда и из общего признака сравнения следует
Теорема 9.3 (частный признак сравнения). Пусть дан
+ оо
несобственный интеграл j* f(x)dx*).
а
1. Если при всех достаточно больших значениях х,
Q
|/(л)|< —, г&е м а>1, то данный интеграл сходится
абсолютно.
2. Если же при всех достаточно больших значениях х
С
функция f(x)^— или если при всех достаточно больших х
ха
Q
функция /(х)<------, где С>0 и а<^1, то этот интеграл
х
расходится.
*) В теоремах 9.2, 9.3, 9.3', 9.3" и 9.3да мы предполагаем, что функ-
ция f (х) интегрируема в обычном смысле на каждом конечном интервале
а < х < В, а < В < -}- со.
§ 1] ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ 369
Доказательство. 1) Полагая в общем признаке сравнения
+ 00
g(x) — -^~ и учитывая, что при а>1 интеграл / g(x)dx =
х
а
+00
/dx а1"0
— = с---------- (при а > 0) *) сходится, получим, что инте-
а
+со
грал J* f (х) dx сходится абсолютно.
а
с
2) Пусть / (х) ——, где С > 0 и а 1 при всех х >- а. > а.
х“
В
Интегрируя в пределах от аг до В, получим, что j* f(x)dx^>>
в ai
d dx
/ —- -> -оо при В-> + оо, так как а<С1, а следовательно,
J х“
о>
+СО
интеграл J f(x")dx расходится. Но тогда расходится и интеграл
4Jj
+ ОО
J f(x)dx.
а
(J
Если же f (х) ---— при всех х «1 > а > О, С > 0 и а<3,
С
то, полагая /*(х) =— /(х), получим /*(х) —-при всех х aj>
ха
+ со
> а > 0, а следовательно, интеграл J f*(x)dx расходится; вместе
а
с ним расходится и интеграл
+ оо В В
f f(x)dx— lim f f(x)dx =— lim f f*(x)dx.
J B-++OO d Я-++СО
a a a
♦) Мы предполагаем, что a > 0, так как в противном случае можно
заменить а через at > 0, потому что из абсолютной сходимости интеграла
+со +оо
J* f(x)dx следует абсолютная сходимость J* f(x)dxt а из расходимости
а
+оо +оо
J" f (х) dx — расходимость J” f (х) dx.
Ci а
370
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
Замечание 1. Пункт 2 теоремы 9.3 можно сформулировать
в следующей эквивалентной форме: если при всех доста-
точно больших значениях х(х'^-а') функция f (х) сохраняет
Ч-оо
С с
знак и | f (х) | , где С > 0, а<^1, то интеграл I f(x)dx
xu J
расходится. °
Q
Замечание 2. Выполнение условия I/ (х) I ——-, С>0, а<^1,
ха
при всех достаточно больших х а является недостаточным
+ °о
для расходимости интеграла I f(x)dx. Интеграл может оказаться
а
сходящимся за счет знакопеременности функции. Напри-
+оо
мер, нетрудно показать, что интеграл J* f(x)dx от функции, опре-
1
деляемой соотношением / (х) = (—— , п х < п + 1,
х“
п—1,2, 3, .... где 0<а<^1, сходится, хотя |/(х)| = —•, где
0<а<1. х
Q
Очевидно, признак сравнения с функцией —— можно сформули-
х“
ровать иначе:
Теорема 9.3' (модифицированный частный признак
сравнения). Пусть подынтегральная функция в интеграле
+ оо
J* f(x)dx при всех достаточно больших х представима в ви-
а я (х)
де /(х) = 7е • Тогда-. 1) если g(x) по модулю ограничена,
а а>1, то этот интеграл сходится абсолютно, 2) если
g(x) сохраняет знак и | g(x) | const > 0, а а< 1, то этот
интеграл расходится.
Иногда оказывается удобной следующая форма признака сравне-
ния с функцией —— :
Теорема 9.3" (частный признак сравнения в предельной
форме). Пусть существует предел lim |/(х)|ха = С. Тог-
Х->+оо
+ со
да\ 1) если 0 С < + оо, а > 1, то интеграл J f(x)dx сходится
а
абсолютно, 2)еслиже 0 <С <С-|-со,а<3, а f (х) сохраняет
знак при всех достаточно больших х, то этот интеграл
расходится.
§ 1] ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ 371
Доказательство. 1) Если 0^С<-]-оо, то при всех
достаточно больших х
| / (х) | ха < 2С, т. е. I/WK— ПРИ С > О,
И
I f (х) I ха < 1, т. е. |/О)|<-^- при С = 0,
4-00
поэтому, в силу теоремы 9.3, интеграл J" f(x)dx сходится
а
абсолютно.
2) Если 0 < С <^-|-со, а<3, то при всех достаточно больших х
|/О)0“- > с_ 2 ’ т. е. |/О)| > • с 2х“ при с< 4~ со
1/0)0“ - > 1, т. е. 1/0)1 > 1 при 4“ ОО,
+ОО
поэтому, в силу замечания 1 к теореме 9.3', интеграл J* f(x)dx
а
расходится. Теорема доказана.
Замечание 3. Теорема 9.3" (частный признак сравнения в пре-
дельной форме) охватывает несколько более узкий класс функций,
чем теорема 9.3' (частный признак сравнения), поскольку, в отличие
от теоремы 9.3' теорема 9.3" предполагает существование конечного
или бесконечного предела у |/(х)|х“ при х—>4~со-
Из теоремы 9.3" очевидным образом следует
Теорема 9.3"' {частный признак сравнения в терминах
порядков величин). Пусть \f (х)| является бесконечно малой вели-
чиной порядка Д- при х—> Ц-оо, тогда-. \)если а > 1, то интеграл
ха
+ ОО
J1 f{x)dx сходится абсолютно, 2), если же а^1, a f (х) со-
а
храняет знак при всех достаточно больших х, то интеграл
+ оо
J* f{x)dx расходится,
а
Напомним, что /(х) называется величиной такого же порядка
малости, как и —!-(а>0) при х—если
х“
lim |/ (х) | : = lim |/(х) | хп = С, где 0 < С < со.
х->+со X х->+со
372
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
Замечание 4. Теорема 9.3"', очевидно, охватывает еще более
узкий класс функций, чем теорема 9.3", так как предполагает суще-
ствование предела | f (х) | ха при х —> 4~ °°> отличного от нуля и
бесконечности.
' убывает быстрее
и, следовательно,
Примеры. 1. Интеграл Пуассона J* e~x'dx сходится, в силу
о
теоремы 9.3, так как показательная функция е~
любой отрицательной степени х при х—
при всех достаточно больших х будет
. С
где С = const > 0 (здесь мы взяли а = 2, хотя могли бы взять а
равным и любому другому числу > 1). Этот интеграл сходится
также и в силу теоремы 9.3', так как
lim х2е~хг — 0 (а = 2).
Х>+оо
+ оо
2. Интеграл J* e~xxp~ldx сходится при всех вещественных
1
значениях р, например, в силу теоремы 9.3", поскольку при любых
таких р
lim х2е~ххР~1 = 0.
Х-> + оо
+ оо
/Хт
1 dx при я 0. Мы имеем
хт ____хт 1 __ g (х)
14-хя —’ хя 14-х-" ““ хп~т ’
где g (*)< 1 при х>1. Следовательно, в силу теоремы 9.3',
интеграл сходится при п—т > 1 и расходится при п — т 1.
б. Условная сходимость.
Определение 3. Интеграл
+оо
J f(x}dx
а
(9-14)
называется условно сходящимся, если он сходится, в то
время как интеграл
+ 0О
J |/(х)Их (9.15)
а
расходится.
§ 1] ИНТЕГРАЛЫ С БЕСКОНЕЧНЫМИ ПРЕДЕЛАМИ 373
Сходимость некоторых условно сходящихся интегралов позволяет
установить признак Абеля.
Теорема 9.4 (признак Абеля). Пусть ф(х) непрерывна,
a g (х) непрерывно дифференцируема на полупрямой
а<^х<-|-со. Интеграл
+оо
J 4(x)g(x)dx (9.16)
а
В
заведомо сходится, если первооб разная Ф(В) = J\(x)dx ог-
а
раничена на полупрямой а^В <4-оо, a g(x), монотонно
убывая, стремится к нулю при х—>-|-оо.
Доказательство. Покажем, что при выполнении условий
теоремы для интеграла (9.16) выполнен критерий Коши. Интегри-
руя по частям, получаем
В" В"
f ^(х)ё(х)с1х=Ф(В")ё(В") — Ф{В')ё(В')— f Ф(х)ё'(х)(1х.
В’ В’
В силу монотонного убывания g(x) при х—>4-оэ, g' (х)^0, по-
этому к последнему интегралу можно применить обобщенную тео-
рему о среднем; это дает
В" В’
f Ф (х) g' (х) dx = Ф (В) / g' (X) dx = Ф (В) [g (В") - g (В')},
В’ В’
где В заключено между В' и В”. Следовательно,
В’
f ф (х) g (х) dx = Ф (В") g (В") - Ф (В') g (В')-Ф (В) [g (B")-g (В')],
в’
откуда, в силу ограниченности Ф(В) и стремления к нулю g(B)
при В-> + оо, получаем
В"
J* Ф (х) g (х) dx-> О при В' и В" ->-|-оо.
В'
Теорема доказана.
374
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
(ГЛ. 9
;sin X
dx, где а>0, сходится,
л
так как, положив <p(x) = sinx и g(x) — —— будем иметь
^.и >
|Ф(Х)| =
<р(х) dx
X
У sin х dx
Л
= | cos л — cos X К 2
при л<^х<^-|-со, a g'(x)
->0, монотонно убывая, при
х—> 4~ 00 и а > 0.
Замечание. Сходимость этого интеграла можно доказать и
не прибегая к признаку Абеля, а применяя критерий Коши и ин-
тегрирование по частям, как в конце п. 4.
2. Полагая в интеграле
+со
/’ (Inx)sinx , . . . . . Inx
/ -----------dx, <p(x) = sinx, £(*) = — ,
e
замечаем, что он сходится по признаку Абеля.
+ ОО
3. Рассмотрим интеграл Френеля J* sin(x2)dx, находящий при-
о
менение в оптике. Полагая x1 = t, получим
4-со +оо
/ sin(x2)dx —
6 0 '
Последний интеграл сходится в силу признака Абеля.
6. Распространение методов вычисления интегралов на слу-
чай несобственных интегралов. При вычислении несобственных ин-
тегралов можно использовать замену переменных, интегрирование
по частям, представление интеграла от суммы нескольких слагаемых
в виде суммы интегралов от этих слагаемых, т. е. поступать так,
как это делалось в случае собственных интегралов; соответствую-
щие формулы будут иметь силу, если все входящие в них интег-
ралы сходятся.
Поясним на примере смысл последней оговорки. Интеграл
сходится (например, в силу частного признака сравне-
§ 2] ИНТЕГРАЛЫ ОТ НЕОГРАНИЧЕННЫХ ФУНКЦИЙ 375
ния). Разлагая дробь на простейшие (см. вып. 1, гл. 7, § 7),
имеем
1 . . 1 . । 1_______ ,,
х2 + х — 2 “ 3(х4-2) ' 3(х — 1) •
Однако интегралы
4-оо
Г dx
и / х______1 очевидным
3
образом
рас-
ходится. Поэтому нельзя написать равенство
+ оо 4- со 4-со
Г dx ________ 1 dx . 1 /* dx
J x2 + x — 2 ~ ~ ~3J x + 2 + T J *
3 3 3
Чтобы воспользоваться разложением (*) для вычисления рассматри-
ваемого интеграла, проинтегрируем (*) от 0 до Л и преобразуем
после этого правую часть равенства:
А А А
С dx _________ 1 Г dx . 1 С dx _______ 1 . Г 5 А — 1 П
J х2 + х — 2 ~ — Т,/ x + 2 J ТЛ-’3 П[2 ^4-2] •
3 3 3
Переходя к пределу в последнем равенстве при А—>4-0°> получим
+оо
f dx _ 1 . 5
J х2 + х — 2 ~ 3 П 2 *
§ 2. Интегралы от неограниченных функций с конечными
и бесконечными пределами интегрирования
Остановимся сначала на интегралах с конечными пределами ин-
тегрирования. Пусть f(x) определена на отрезке [a, Z>] всюду, кроме,
быть может, конечного числа точек. Точку х0£[а, />] мы будем на-
зывать особой для /(х), если /(х) не ограничена на [а, Ь] в л го-
бой окрестности точки х0. Например, для функции
/(х) =
1 А ,
— при 0 < х 1,
х точка х = 0 является особой (рис. 9.2).
О при х = 0
Для функции
(1.1 п /1
I—sin— при 0<Х<3,
/(*)= *
{ . О при х = О
376 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ [ГЛ. 9
точка х — 0 также является особой (рис. 9.3). Заметим, что
в этом примере /(х) не стремится к бесконечности при х—>0, так
как в сколь угодно малой окрестности точки х — 0 эта функция
бесконечное число раз обращается в нуль.
Определение. Пусть f(x') определена на отрезке [а, д]
всюду, кроме, может быть, конечного числа точек. Если х = Ь
д-ц
является для f(x) особой точкой и если интеграл J f(x)dx
а
существует при каждом ц, 0 < ц < 6— а, то несобствен-
ъ
ним интегралом J"f(x)dx называется предел
а
b Ь-ц.
ff(x')dx= lim f f(x)dx. (9.17)
J u->4-0
a a
Если этот предел существует и конечен, то интеграл
(9.17) называется сходящимся, в противном случае — расхо-
дящимся.
Аналогично определяется несобственный интеграл в случаях,
когда особой точкой для /(х) является:
левый конец х — а интервала интегрирования [а, ЭД:
ь ь
J f(x)dx = а или оба конца х = а и х ь J* f(x)dx = а Him | f(x)dx, (9.18) *->+о 9 о+л = ь-. i-H : lim f f(x)dx, (9.19) X->+0 J |l->+0 a+K
§ 21
ИНТЕГРАЛЫ ОТ НЕОГРАНИЧЕННЫХ ФУНКЦИИ
ИЛИ
внутренняя точка х — с, а<с<Ь:
ь
f f (х) dx — lim
J ?.->+о
° Ц->+0
е-ц b
J* f(x)dx-\- ^f(x)dx
-а с+к
377
(9.20)
Остановимся теперь на условиях сходимости несобственных ин-
тегралов от неограниченных функций. Применяя критерий
Коши к функции
Ь-ц
F(p) = f f(x)dx (9.21)
а
при Ц—>4-0, получим
Критерий Коши (для несобственного интеграла (9.17)).
Для сходимости интеграла (9.17) необходимо и достаточно,
чтобы для всякого е>0 существовало такое д = б(е)>0, что
Ь-ц"
f f (х) dx
b-\l'
<e при всех 0 < ji', р"<б(е).
Аналогично может быть сформулирован критерий Коши для ин-
тегралов (9.18) — (9.20). Можно доказать, что для сходимости ин-
тегралов (9.19) и (9.20) необходимо и достаточно, чтобы сходились
с 6
интегралы J f (х) dx и J* f(x}dx, причем в случае (9.19) точку
а с
х = с, а < с < #, можно выбирать произвольно. В случае схо-
димости для интегралов (9.19) и (9.20) имеет место равенство
ь с ь
J f(x)dx — j" f(x)dx-^- J* f (x)dx. (9.22)
a a c
Аналогично можно поступить в случае любого конечного
числа особых точек на интервале интегрирования [а, £]; интервал
[а, 6] следует так разбить на конечное число интервалов, чтобы на
каждом частичном интервале функция f(x) имела особую точку
лишь в одном из его концов.
Таким образом, общий случай сводится к интегралам вида (9.17)
и (9.18); но интеграл вида (9.18) простой заменой X на —х сво-
дится к интегралу вида (9.17). Поэтому мы ограничимся в основ-
ном рассмотрением интегралов вида (9.17).
Абсолютная и условная сходимости определяются, как
и в случае интегралов с бесконечными пределами интегрирования.
С помощью критерия Коши можно доказать, что из абсолютной
сходимости следует сходимость, а также установить следующий
378
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
(ГЛ. 9
Общий признак сравнения. Если Ь — единственная особая
точка f (х) на [а, Ь] и |/(х)| g (х) при всех х£[а, Ь), до-
ь
статочно близких к Ь, то из сходимости интеграла J g(x)dx
а
b
вытекает абсолютная сходимость интеграла J" f(x)dx.
а
Остановимся теперь на частном признаке сравнения с функ-
Q
цией ------, аналогичном теореме 9.3.
Частный признак сравнения. Пусть функция f(x), задан-
ная на [а, Ь], имеет особую точку в конце х — b и интеграл
J* f(x)dx существует при каждом р, 0 < р < — а. Тогда',
а
1) если при всех £), достаточно близких я Ь,
г
|/(х)К ^_^а , где 0<С<4-оо, а<1, (9.23)
ъ
то интеграл j’f(x)dx сходится абсолютно',
а
2) если же при всех х(£[а, Ь), достаточно близких к Ь,
/(х)> - С ча , где С>0, а>1, (9.24)
(Ь — х)а
либо при всех х£[а, Ъ), достаточно близких к Ь,
/(х)<------——где С > 0, а>^1, (9.24')
(Ь — х)а
то этот интеграл расходится.
Доказательство. 1)В этом случае имеем
b-ii."
f f(x)dx
Ь-ц'
l/(x)ldx <С
b—р
при а < 1 и р', р" -> 0.
Ъ
Следовательно, интегралы J* f(x)dx и
ь
f |/(x)|dx сходятся.
а
§ 2]
ИНТЕГРАЛЫ ОТ НЕОГРАНИЧЕННЫХ ФУНКЦИЙ
379
2) Предполагая f(х) неотрицательной*), будем иметь
С
f > 7Z-----7Т ПРИ а <ai<-x <Ь,
(Ь — х)а
Ь-ц Ь-ц
У" f (х) dx > У - dx -> 4- оо при ц->0 + 0 и а)>1,
а, а,
так как
а > 1,
ь ь
Следовательно, интеграл J" f(x)dx, а с ним и интеграл J* f (x')dx,
а, а
расходится.
Замечание. Пункт 2) доказанного признака можно сформули-
ровать в следующей эквивалентной форме: если при всех х,
(j
достаточно близких к Ь, |/ (х)| , где С > 0, а 1, причем
ь
f (х) при указанных х сохраняет знак, то интеграл J f(x)dx
а
расходится.
Простой перефразировкой из доказанного частного признака
сравнения получается
Модифицированный частный признак сравнения. Пусть
функция /(х), интегрируемая в обычном смысле на каждом
отрезке а^х^Ь — Z, где 0 < X < b — а, может быть пред-
ставлена в окрестности b (т. е. при b — в виде
fix) — —. Тогда:
(b-x)a
1) если g(x) ограничена по модулю, а то интеграл
ь
J f(x)dx сходится абсолютно',
а
*) Если / (х) неположительна, то делаем замену /* (х) = — f (х), где
/* (х) уже неотрицательна; из расходимости I /* (х) dx вытекает расходи-
ь
мость интеграла f f (х) dx —
а
а
Ь
J /* (х) dx.
а
380
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
2) если g(x) сохраняет знак в окрестности b, |g(x)|^.
ь
const > 0, а а^> 1, то этот интеграл J* f(x)dx расходится,
а
Аналогично формулируется модифицированный частный признак
сравнения в случае, когда единственной особой точкой /(х) на [а, Ь]
является конец х = а.
Нетрудно также сформулировать и доказать частный признак
сравнения в предельной форме, что мы предоставляем сделать
читателю.
Напомним, что |/(х)| называется величиной такого же порядка,
что и -------- при х -> Ъ — 0, если
(Ь— х)а
lim |/(х)|: 1 -= lim (b — х)“|/(х)| = С, где 0 < С< + оо,
х+ь-о (Ь—х)а х->г>-о
и сформулируем
Частный признак сравнения в терминах порядков вели-
чин. Пусть |/(х)| при х->-Ь — 0*) является бесконечно боль-
1
(6-х)“
шой величиной порядка
(а > 0); тогда:
ь
1) если а< 1, то интеграл J f(x)dx сходится абсолютно',
а
2) если же а^-1, a f (х) сохраняет знак в окрестности
х = Ь (т. е. при Ъ — rk<^x<^b, 0 < Z < — а), то этот ин-
теграл расходится.
Аналогично формулируется этот признак, когда / (х) имеет осо-
бую точку не в конце х — Ь, а в конце х — а отрезка [а, £]•
1
dx
• , ,сходится, так как
/1 —х3
Примеры. 1. Интеграл J
о
/1 —х3 (1—х),/г (14-х + х2)'/» (1— х)‘/« 8('Х^’
где g (х) =------J----г,---ограниченная функция. Здесь а = 0,
(1 Ч-х + х2)"
£=1, а = 1.
*) Мы предполагаем функцию f (х) интегрируемой в обычном смысле
на каждом отрезке а^х^й — К, 0 <К < b — а.
§ 2] ИНТЕГРАЛЫ ОТ НЕОГРАНИЧЕННЫХ ФУНКЦИЙ 381
1
2. Рассмотрим интеграл J sl^px dx. Мы имеем
о
,, . Sin АС 1 Sin АС 1 . . . . Sin АС .
/«=—где g(x)==~;—функ’
Л Л Л Л Л
ция, ограниченная по модулю, причем sin х g'(x) 1. Здесь а = 0,
£=1, а —р— 1. Поэтому при а = р—1<1 интеграл сходится,
а при а — р —1^-1 он расходится. Таким образом, интеграл
1
/sin X , п „
хр dx сходится при р<2 и расходится при р>2.
о
Признак Абедя для несобственных интегралов с конечными пре-
делами интегрирования мы предоставляем сформулировать и доказать
читателю по аналогии с признаком Абеля для несобственных инте-
гралов с бесконечными пределами интегрирования (см. п. 5 § 1).
Наконец, по поводу замены переменных, интегрирования по ча-
стям и разложения на слагаемые несобственных интегралов с конеч-
ными пределами интегрирования можно сказать то же самое, что
говорилось об этих операциях для несобственных интегралов с бес-
конечными пределами интегрирования (см. п. 6 § 1).
Остановимся теперь вкратце на интегралах с бесконечными пре-
делами интегрирования от неограниченных функций с конечным чис-
лом особых точек. Если несобственный интеграл берется по полу-
прямой а^х<4~оо (—оо < х<(а) или по всей оси —оо<х<4-°о.
то, разбивая область интегрирования одной или двумя точками деления
на один конечный интервал, содержащий все особые точки
подынтегральной функции /(х), и на один или два полубесконечных
интервала без особых точек /(х), сводят общий несобственный
интеграл к рассмотренным выше частным случаям. При этом исход-
ный интеграл полагают равным по определению сумме интегралов
по частичным интервалам, на которые разбита первоначальная область
интегрирования.
Исходный интеграл называют сходящимся тогда и только
тогда, когда все интегралы по упомянутым частичным интервалам
сходятся, и расходящимся, если хоть один из них расходится.
Можно показать, что это определение сходимости исходного
интеграла и численная величина интеграла в случае его сходимости
не зависят от выбора точек деления.
+ оо
Примеры. 3. J” e~xxP_1dx. Если р — 1 < 0, то подынте-
о
тральная функция имеет особую точку х — 0. Поэтому разбиваем
интервал интегрирования точкой х = 1 на два: [0, 1] и (1, -f-oo);
382 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ [ГЛ. 9
мы имеем
+ оо 1 Ч-оо
J е~ххр~' dx — у е~ххР~1 dxJ e~xxp~xdx.
О 0 1
1 1
Интеграл е~ххр~х dx — j" —x_-p-dx сходится при 1 — р < 1, т. е.
о о х
+ 00
при р > 0, и расходится при р 0. Интеграл J e~xxp~ydx, как
1
было установлено ранее (п. 4 § 1), сходится при всех значениях р,
— оо<р<+оо, следовательно, интеграл *) J e~xxp~xdx схо-
о
дит с я при всех р>0 и расходится при всех р <^0.
1
4. У хр In7 -±- dx. Сделаем замену переменных: In = t. ~ = е*,
6
х — е~‘, dx =— е~‘dt. Тогда
1 0 +оо
f xpW±dx==_ У’ e~ptt4e~ldt — f t<e-{p+'}t dt.
О +oo О
При q < 0 подынтегральная функция имеет особую точку х — 0.
Поэтому разбиваем интеграл на два:
+оо 1 +со
f fe~(p+1)tdt^ f e~(p+1)^dt + f e~(p+,)it9dt.
0 0 1
Интеграл j* e~tp+r>ttl,dt = —dt сходится только при —q<_ 1,
о о
т. е. только при <? >— 1, независимо от значений, принимаемых р.
+ со
Интеграл J e~tp+r>ttq dt при q > — 1 сходится только при р +1 >О,
1
*) Этот интеграл называется гамма-функцией Эйлера и обозна-
чав
чается символом Г (/?), т. е. Г(р)= J е~ххр~} dx.
о
§ 31 ГЛАВНОЕ ЗНАЧЕНИЕ РАСХОДЯЩЕГОСЯ ИНТЕГРАЛА 383
1
т. е. только при р > — L Следовательно» интеграл § л/ln^-^-dx
о
сходится только при р > — 1 и q > — 1.
+ оо
5. У ХР(|ПХ)?^П|ПХ)Г • Делаем замену lnlnx = t Получаем,
е
что при р > 1 интеграл сходится только при г < 1 и любых q-,
при />=1 он сходится только при г < 1 и q > 0; если р<1,
то он расходится при любых г и q.
§ 3. Главное значение расходящегося интеграла
Пусть f (х) интегрируема в обычном смысле на каждом конечном
в
отрезке оси х. Если не существует lim I f(x)dx при не зав и-
А->-оо J
4-со А
+оо
симом стремлении Л и В к их пределам, т. е. интеграл J" f(x)dx
— СО
А
расходится, но существует lim Г f(x)dx, то этот предел назы-
А->4-оо J
— А
4-оо
вают главным значением расходящегося интеграла J* f(x)dx
— 00
и пишут
4-оо А
V.p. f f(x)dx= lim f f(x)dx (9.25)
-L — A
(V.p. — начальные буквы французских слов «Valeur principal», озна-
чающих «главное значение»).
Пусть теперь /(х) имеет единственную особую точку с, а < с < Ь,
на отрезке [а, й] и пусть интеграл
ь
f f(x)dx= lim
J Л->0+0
a H-*0+0
c-k b
J f(x)dx-\- f/(x)dx
a c+n
расходится, т. e. предел фигурной скобки при независимом стре-
млении % и цк 0 —0 не существует. Тогда, если предел этой
скобки существует при X = р-> 0-j-0, то его называют главным
384 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ [ГЛ. 9
b
значением расходящегося интеграла J* f(x)dx и пишут
а
b
V.p. f f(x)dx— 1
J Л->0+0
a
‘ c-l b
lim f /(x)rfx-|- f f(x)dx
-*°+° ? „Л
(9.26)
Примеры. 1. Если f(x) — нечетная функция*), то всегда
существует
4-оо А
V.p. f f(x)dx — lim f f (x)dx = O.
Л->+оо 4
— co — A
2. Если /(x)— четная функция*), то
л а о
J f (х) dx — 2 J / (x)dx — 2 J f (x) dx.
-а о -л
+ 00
Поэтому, если интеграл J* f{x)dx от четной функции расходится,
— оо
О +оо
т. е. хоть один из интегралов J f(x)dx и J f(x)dx расходится,
— оо О
4-со
то и главное значение V.p. J f(x}dx также не существует,
— 00
3. Применяя главные значения расходящихся интегралов, вычислим
интеграл
4-со
/Х2т
X2" ^х’ где т и п — целые> 0 < т < п, (2.27)
— ОО
играющий важную роль в теории эйлеровых интегралов (см. § 3
гл. 10). Так как
I х2т I С
I 1 х2П I ПРИ 001 где С = const,
г (2fe + l) я
и так как все корни уравнения 1 -4~х2а — 0, xk — e 2п —
= ак-\- 1ЬЬ, 4 = 0, 1, ...» 2я—1, не являются вещественными,
то подынтегральная функция не имеет особых точек на оси х
’) См. 11. 8 § 1 гл. 11.
§ 3]
ГЛАВНОЕ ЗНАЧЕНИЕ РАСХОДЯЩЕГОСЯ ИНТЕГРАЛА
385
и интеграл сходится. Разлагая дробь
х2т
1 + х!П
на простейшие и инте-
грируя в пределах от —I до I, получим*)
л2т ]
где Аь —--5—— =----х2т+\ так как х2п ——1. Переходя
к 2nx2k * 2п k k г
к пределу при Z—находим
+°° 2л—1
f T^iT dx = 2 ±
— оо й = 0
где знак плюс соответствует bk > 0, а минус соответствует 6А<0.
Интегралы
л f dx _ л | Г (x — ak) dx , . Г bkdx
k-l х~х*~ k\-l (— J,
являются, очевидно, расходящимися, а числа +п1Ак — lim / ------------
Z-> +оэ _•/ х хь
являются их главными значениями.
Заметив, что bk > 0 при k = 0, 1, .... п—1 и 6А<0 при
k = n, n—j— 1» .... 2«—1, можно написать
л-1 2л—1
(А)
♦) Интеграл от комплексной функции и (х) -J- iv (х) вещественной пере-
менной х, где и (х) и v (х) вещественны, по определению равен
J [« U) + w(x)J dx = и (х) dx -f- i J" v (x) dx.
386
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
где
л-1 л-1
k=0 ft=0
2m-1
k
(2m + l)(2ft + l)
(2m+ 1) (2m + l)(2n + l)
Л -----Гп-----
1-е 2п
" /2^±1я
1 — е 2п
так как ei(2m+I>1' ——1. Далее, полагая k — k'п, получим
(2т + 1)(2» + 1)
2л
"-1 (2m+l)(2fe'+n "-1 . (2m + l)(2t'+l)
=-i S * 2л *г(2т+1>я= i L * 2" • (В)
fe'=0 Л'=0
а эта сумма лишь знаком отличается от суммы (Б).
Из (А) с помощью (Б) и (В) получаем
сю i Д? + 1 л
О / С х2т 2л‘ * _ л 1
Z/— J 1+х™ах~ п 2т+1 — „ 2m+1
-«> 1 „ ^Гп sin — J л
В силу четности подынтегральной функции (см. сноску на стр. 384),
отсюда находим, что
-boo
/* Х^^1 5Т 1 ,
, 7-^ dx = £-------о—. (2.27х)
14- х2П 2л , 2m 4-1 ' '
0 81ПТ^Я
4. Интеграл
lim
0+0
ц->0+0
)- lim In — ,
А.->0+0
ц->0+0
где а < с < Ь, расходится. Однако если при переходе к пределу
что X — [1, то мы получим, что данный интеграл имеет
считать,
главное значение:
ь
f
а
dx . b — с
------= In-------.
х — с с — а
§ 4]
НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ
387
§ 4. Несобственные кратные интегралы
Сначала мы рассмотрим случай, когда подынтегральная функция
не ограничена, а область интегрирования ограничена, а затем случай,
когда область интегрирования не ограничена. Все рассуждения мы
будем вести для двойных интегралов; тройные и ?/-кратные инте-
гралы рассматриваются аналогично.
1. Интеграл от неограниченной функции по ограниченной
области. Пусть в ограниченной области Q на плоскости ху задана
функция /(Л4) = /(х, у), неограниченная в окрестности точки
Ж0(х0, у0)£й, и пусть, какова бы ни была область сое, содержа-
щая внутри себя точку ?И0, в области £2 — coj (заштрихованной на
Рис. 9.4.
рис. 9.4, а и б) функция f(M) — f(x, у) ограничена и интегри-
руема в обычном смысле, т. е. интеграл
f f f GW) da> существует как
предел интегральной суммы (см. определение 1, § 2, гл. 1)*). Индек-
сом б обозначен диаметр области При б—>0 область coj стяги-
вается к точке Л40.
Определение 1. Несобственным интегралом от
функции f (М) = f (х, у) по областей называется предел
lim f j f(M)da>== ff f(M)da. (9.28)
Й — £2
*) Области Й и и6, как и все другие, рассматриваемые в этом параграфе,
предполагаем квадрируемыми; символом Й обозначается замкнутая область,
т. е. область й с присоединенной к ней границей. Точка Мо может лежать
внутри Й или на границе, но она обязана лежать внутри ®4; под Й — по-
нимается множество всех точек, принадлежащих й и не принадлежащих
если £2 и <о6 квадрируемы, то Й — ®6 квадрируема.
388 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ [ГЛ. 9
Если этот предел существует, конечен и не зависит от
способа стягивания <oj к точке Жо, то несобственный инте-
грал (9.28) называется сходящимся; в противном случае
он называется расходящимся.
Мы говорим, что при 6->0 интеграл J* J" /(M)rfa стремится
к определенному конечному пределу J, не зависящему от способа
стягивания области ©6 к точке /Ио, если, какова бы ни была после-
довательность областей
®д,. ®б2......................... (9-29)
каждая из которых содержит точку Мо внутри себя и диаметры
которых удовлетворяют условию
6„->0 при я-*-|-оо*)> (9.30)
соответствующая последовательность чисел
.... f f/(M)d(o, ... (9.31)
о-»йл
сходится к одному и тому же пределу J, не зависящему
от выбора последовательности (9.29).
Замечание 1. В то время как для однократного интеграла (т. е.
при N — 1) в качестве й— брались интервалы [а, b—X] (см.
определение и формулу (9.17)), т. е. обязательно связные области,
при N^>2 области й— со^ и ®бя непредполагаются связ-
ными.
Определение 2. Пусть точка Л1о лежит внутри й. Если
интеграл (9.28) расходится, но последовательность (9.31)
стремится к одному и тому же пределу каждый раз, когда
в качестве (9.29) берется стягивающаяся последовательность
кругов с центром в Мо, то этот предел называется глав-
ным значением расходящегося интеграла (9.28)**).
Главное значение расходящегося двойного (и тройного) интеграла
находит применение в математической физике.
Замечание 2. Если точка Мо лежит внутри й, то исследо-
вание на сходимость интеграла j* J" f(M)da можно заменить иссле-
а
*) Здесь не предполагается, что последовательность (9.29) стягивается
монотонно, т. е. что дэ до ... ЕЭ сой ю ...; предполагается только
выполнение условие (9.30).
**) При определении главного значения расходящегося 7У-кратного инте-
грала вместо стягивающихся последовательностей кругов берутся стягиваю-
щиеся последовательности JV-мерных шаров.
5 4]
НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ
389
дованием на сходимость интеграла J* J /(Af)rf(o по любой под-
o'
области й'сй, содержащей внутри себя точку Мо (ср. с замеча-
нием на стр. 359, § 1). В том случае, когда особая точка Мо при-
надлежит границе Й, в качестве й' можно взять подобласть,
являющуюся пересечением с областью й какой угодно области Й*.
содержащей Мо внутри себя.
Замечание 3. Случай, когда /(Ж) имеет произвольное ко-
нечное число особых точек, принадлежащих области й или ее гра-
нице, сводится к случаю, рассмотренному в определении 1, с по-
мощью надлежащего разбиения области й на части, аналогично тому,
как это делалось для однократных несобственных интегралов. _
2. Интегралы от неотрицательных функций. Интегралы от не-
отрицательных функций мы рассмотрим в первую очередь,
поскольку их исследование проще и сами они могут быть использо-
ваны при исследовании интегралов от знакопеременных функций.
Теорема 9.5. Пусть подынтегральная функция f(M) =
~f(x, У) в интеграле (9.28) является неотрицательной
и пусть в качестве стягивающейся последовательности (9.29)
взята какая-либо монотонно стягивающаяся последователь-
ность кругов с центрами в точке Л40, т. е. такая, что
о . .., б„-*0 при п->-|- оо. (9.29')
1 2 vn
Тогда для сходимости интеграла (9.28) необходимо и доста-
точно, чтобы соответствующая последовательность чисел
f f f (/И) da, ff/(M)da>..... f f f (M) da, ... (9.31')
а-к, q-k. Q-K,
61 eJ 6n
была ограниченной.
Доказательство. Необходимость условия вытекает
непосредственно из определения сходимости интеграла (9.28): если
интеграл- (9.28) сходится, то последовательность (9.31') сходится
и, следовательно, она ограничена.
Достаточность. Пусть последовательность (9.31') огра-
ничена. Так как последовательность (9.29') является монотонно
стягивающейся, то последовательность областей интегрирова-
ния у интегралов (9.31') является монотонно расширяю-
щейся, т. е. имеют место включения
Й— К. /ей — К.г а ... ей — К.г<=. ...
61 б2 6п
Тогда, в силу неотрицательности подынтегральной функции /(7И) =
= /(х, У)* последовательность чисел (9.31') будет неубывающей.
390 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ (ГЛ. 9
Но, в силу ограниченности, она будет сходиться к определен-
ному конечному пределу J:
lim f f f(M)da = J, (9.32)
6n
причем f f f (-M) dco <1 J. Для завершения доказательства теоремы
q-k •
bn
нужно установить, что и при любом другом выборе стягивающейся
последовательности областей (9.29) соответствующая последователь-
ность чисел (9.31) будет сходиться к тому же пределу J. Чтобы
это установить, заметим, что при любом достаточно большом п для
области (Ол можно найти такие круги К • и К • из последователь-
ности (9.29 ), чтобы имело место включение
К'ТЗ(а.-=>К' (9.33)
6р
и чтобы радиусы 6'р и 6^ этих кругов стремились к нулю при -> 0.
Из включения (9.33) вытекает включение
й— К ' ей — <0 ей — К.', (9.34)
бр 6q
из которого, в силу неотрицательности функции, вытекает неравен-
ство
f f/(М)Ло< f f f(M)da^ J J/(Af)dw; (9.35)
Q-K > Q-ou Q-K '
&P " bp
HO
lim f f f(Af)dca = lim f f /(44)rfw = J,
6„->0 Q — K - Q-Ar ’
P &P 4
следовательно, из (9.35) вытекает, что
lim
/г~> +оо
J J/(Л4)йа = Л
£2-<0.
Ь„
что и требовалось доказать.
Из теоремы 9.5 непосредственно следует более общая
Теорема 9.6. Пусть подынтегральная функция f(M) =
— fix, у) в интеграле (9.28) является неотрицательной и
пусть в качестве (9.29) взята произвольная стягивающаяся
последовательность областей (см. сноску на стр. 388). Тогда для
НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ
391
§ 4]
сходимости интеграла (9.28) необходимо и достаточно, чтобы
соответствующая последовательность чисел (9.31) была огра-
ниченной.
Доказательство. Необходимость устанавливается так же,
как в доказательстве предыдущей теоремы. Для доказательства до-
статочности возьмем какую-либо монотонно стягиваю-
щуюся последовательность кругов (9.29') и докажем, что соответ-
ствующая последовательность чисел (9.31') будет ограниченной,
если ограничена последовательность (9.31). А тогда по теореме 9.5
интеграл (9.28) будет сходящимся. Ограниченность последова-
тельности чисел (9.3 И) устанавливается следующим образом: пусть
J* J" / (/И) бы О С — const < + оо (9.36)
й-о,
6т
при всех m—1. 2, 3, ... Так как д,„->0 при т->-\-оо, то,
каково бы ни было п, найдется такое т, что будет- иметь место
включение
К ’=>(0. , (9.37)
6« 6т
из которого следует включение
й — К.’<=Й — <йй . (9.38)
°п т
Поэтому, в силу неотрицательности f(M) = f(x, у), будет выпол-
няться неравенство
J ff(M) da < f ff(M)da. (9.39)
Cl-K ! й-й.
6«
Сопоставляя его с (9.36), получаем, что при всех п выполняется
неравенство
J* J f (/И) da С — const < -f- оо, (9.40)
* а-к <
йп
что и требовалось доказать.
Пример. Докажем, что интеграл
J J" -^dxdy, где С — const, г = У(х— х0)2Ч~(у— Уо)2’ (9-41)
о г
по ограниченной области Й, содержащей внутри себя точку
7И0==(х0, у0), сходится при а<2 и расходится при а ^>2.
392 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ [ГЛ. 9
В соответствии с замечанием 1 в конце п. 1 интеграл (9.41) по
области Q можно заменить интегралом по какой-либо подобласти Q',
содержащей внутри себя точку Мо. В качестве такой подобласти
возьмем круг с центром в точке Мо и достаточно малым радиу-
сом /? и исследуем интеграл
У* dx dy, С > 0, г = У(х — х0)2-\-(у— у0)2, а = const.
«R
(9.42)
Для этого возьмем какую-либо монотонно стягивающуюся последо-
вательность кругов
=> ••• 9 Мй, где бя —> 0 при я-*4-оо, (9.43)
и рассмотрим интеграл
KR-4n
dx dy.
(9.44)
Переходя к полярным координатам, получаем
2л л
f f ^rdrd^fd^f ±rdr =
Kr-1% KR-Kbn 0 ln
r 2—a “|r—Я
£ 2яС V-77 при a 2,
= 2nC j r'~adr = L2~aJ-*n
6n 2nC [In ПРИ a = 2.
(9.45)
Если в (9.45) перейти к пределу при 6„—>0, то мы получим, что
интеграл (9.40) при a < 2 остается ограниченным, а при а^-2 он
становится неограниченным. Следовательно, интеграл (9.42), а вместе
с ним и интеграл (9.41), сходится при а<2 и расходится
при а 2.
Аналогично в случае любого числа N независимых переменных
х2, .... xN /V-кратный интеграл
••• dXN' С>°‘
J__________________________ (9.46)
... +(х„-Ч)2
сходится при a </V и расходится при ai>/V, если точка
Л40 = (х“ х%) лежит внутри N-мерной области Q. Таким обра-
$ 4] НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ 393
зом, значение а —А7, равное размерности пространства, является
критическим, оно отделяет значения а(а<Л7), при которых
интеграл (9.46) сходится, от значений а (а ^>77), при которых этот
интеграл расходится, причем значение a~N приводит к расходи-
мости интеграла.
3. Абсолютная сходимость. Пусть функция /(Af), заданная
в области Q, имеет единственную особую точку Мо, принадлежащую
области Q или ее границе, и, какова бы ни была область <о, содер-
жащая внутри себя Л40, / (А!) интегрируема в обычном смысле
в области Q — со.
Определение 3. Интеграл J* J*/(Af)dco называется аб co-
st
лютно сходящимся, если сходится интеграл J* J|f (Al)|day.
о
Теорема 9.7. Если интеграл J* J* /(Af)dco сходится абсо-
о
лютно, то он сходится.
Прежде чем перейти к доказательству теоремы 9.7,
которые общие свойства сходящихся несобственных
В силу теоремы о пределе суммы и теоремы о выносе
множителя за знак предела, имеем:
1) если интегралы J J /i и J* J* f2(M)da сходятся,
- а о
то сходятся и интегралы J J* [/1(/И)±/2(Л1)]<7«), причем имеет
а
отметим не-
интегралов.
постоянного
место равенство
J f [Л(М) ± /2(Ж)]^ = f f /1(M)dQ + f f /2(M)dQ;
ft ft ft
2) если интеграл J J* f(M)d& сходится, то при C = const
ft
интеграл J* J* Cf(M)d& также сходится и
ft
J Cf{M)d(n — C j f f(M)da.
ft ft
Перейдем теперь к доказательству теоремы 9.7. Представим
подынтегральную функцию /(А!) в виде разности двух неотрица-
тельных функций
/(Ж)= |/(М)| -[|/(М)| -/(/И)]=/1(Л4)-/г(М). (9.47)
394
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
где
Интеграл
л (/И) = I f (М) I и /2(/И) = |/(М)|-/(М).
J" J1 /j (Л4) da = у у | f {М) | da сходится по условию.
й>
Так как
/2(М) = |/(М)| - f{M) <2|/(А1)|,
а интеграл
Я
f f 2|/(Л4)| rf(0= 2 f f
Я й
сходится по условию доказываемой теоремы, то, в силу теоремы 9.6,
какова бы ни была стягивающаяся последовательность (9.29), соот-
ветствующая ей последовательность интегралов § f 2 | f (Al) (da
Я-и.
6л
ограничена. Поэтому, в силу очевидного неравенства
УУ/2(Л4)^< У у 2 |/ (М)| dco,
Q-й). Й-СО.
0„ О»
п п
последовательность f f f2 (Al) rf to также ограничена. Следова-
й-со.
йл
тельно, по теореме 9.6 интеграл § § f2{M)da сходится. Но тогда,
я
в силу (9.47), будет сходиться и интеграл § § f{M)da, причем
я
будет выполняться равенство
У у/(А1)Ао = у у /^Mjda-f у /2(M)da, (9.48)
я я я
что и требовалось доказать.
Замечание. Для TV-кратного несобственного интеграла при
AQ2 справедлива и обратная теорема (см. п. 5), т. е. сходимость
и абсолютная сходимость эквивалентны.
4. Признаки абсолютной сходимости.
Теорема 9.8 {общий признак сравнения). Пусть всюду
в области Й выполняется неравенство
V<\f{M)\^g{M), (9.49)
§ 4] НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ 395
причем /(А1) и g(M) имеют единственную особую точку А10,
принадлежащую области Й или ее границе. Тогда:
1) если у У g(M)da
а
абсолютно-,
2) если у у f (Al) da
й
ходится.
Доказательство.
довательность областей (9.29). В силу неравенства (9.49), будем иметь
У УI / (А1) | rfw < У fg(M)da. (9.50)
Й-а.
6п
сходится, то а f J /(Af)ako сходится
й
расходится, то и J* J g(M)da рас-
й
Возьмем какую-либо стягивающуюся после-
сходится, то последовательность
также ограничена,
й-а.
бл
1) Если J J g (Al) da
о
J* У g4Al)tfol остается ограниченной, но тогда, в силу неравен-
й-w, I
6п )
ства (9.50), последовательность iff l/W[da
I Q—co.
I бЛ
а следовательно, по теореме 9.6 интеграл УУ |/(A4)| da сходится.
2) Если интеграл f f f (Al) da расходится, то расходится также
а
и интеграл f f | / (Al) | da\ действительно, если бы последний инте-
Й
грал сходился, то сходился бы по теореме 9.7 также и интеграл
У у f (Al) da. Из расходимости интеграла f f \f (Af) | da вытекает,
Й О
в силу теоремы 9.6, что при любом выборе стягивающейся после-
довательности (9.29) последовательность f f | / (Al) | da не ограни-
2—со.
чена; но тогда, в силу неравенства (9.50), не ограничена также после-
довательность у у g(M)da, а следовательно, интеграл У У g (Al) da
й-о, Si
bn
расходится, что и требовалось доказать.
Теорема 9.9 (частный признак сравнения'). Если для функ-
ции, заданной в Q. и имеющей единственную особую точку
396
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
7И0(х0, у0)> принадлежащую области О или ее границе, выпол-
няется неравенство
|/(M)J = |/(x, у)| <где —const > О,
г (9.61)
Г == У(Х — Хо)2 — (у — уо)^
при а < 2, то интеграл J J f{M)da сходится и притом
абсолютно.
Доказательство. В силу (9.51) и в силу сходимости инте-
грала (9.41), при а<2 интеграл J* J | / (Л4) | da будет сходящимся
Q
по теореме 9.8, что и требовалось доказать.
Замечание. В случае несобственного интеграла по ЛА-мерноЙ
области Q
Я раз
f f f №...........XN)dx\ ••• dxN
2
от функции f(M) = f(xlt ..., xN), имеющей единственную особую
точку Mo = (xO, ..., х^) в области Q или на ее границе, в частном
признаке абсолютной сходимости (теорема 9.9) следует брать
г = /(X! —х0)2+ ... +(xw — х^)2 и а < N.
Пример. Найдем силу притяжения материальной точки
M0=(x0, у0, z0) с единичной массой материальным телом, зани-
мающим объем й в пространстве (х, у, z), если объемная плотность
массы тела равна р(Л1) = р(х, у, г).
Найдем проекции силы притяжения на оси х, у, z (см. п. 5
§ 2 гл. 2):
= f f f РОЮ Х г3Хл dxdydz,
Fy=:ff f P(.M) У~з- dxdydz,
/% = f f f P(M)^± dxdydz,
Q
(9.52)
где
Г = У(Х — X0)2 + (y — y0)2-|_(Z — z0)2, Ж = (х, у, Z~).
В гл. 2 мы ограничились случаем, когда точка /И0 = (х0, у0, z0)
лежит вне тела £2; если же Ма лежит внутри тела Q, то инте-
J 4] НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ 397
грады (9,52) становятся, вообще говоря, несобственными. Пусть плот-
ность р(А4) = р(х, у, z) ограничена в О, т. е. р (М) р0 == const
при всех значениях М £ Й. Тогда
I г хлх X — Хо | ~ 11 X — Ха I Ол , I х — х0 I ,
|р(Л4)- fr- |<Ро|тг—ибо j—^|<1.
Так как a = 2</V=3, то, в силу частного признака сравнения,
первый из интегралов (9.52) сходится абсолютно. Аналогично уста-
навливается абсолютная сходимость двух других интегралов (9.52).
Для А/-к ратных несобственных интегралов при NJ>2, в отличие
от однократных, имеет место тот замечательный факт, что из обыч-
ной сходимости интеграла вытекает его абсолютная сходимость, т. е.
справедлива теорема, обратная теореме 9.7.
5. Эквивалентность сходимости и абсолютной сходимости. При
А/;>2 несобственный интеграл от f (М) сходится тогда и только тогда,
когда сходится интеграл от | f (А4) |. Это вытекает из теоремы 9.7 и сле-
дующей теоремы.
N раз
Теорема 9.10. Если интеграл
N
... dxN сходится
также сходится.
и N^-2, то интеграл J" J" J 1/(М) | dxx ... dxN
Доказательство. Для упрощения записи доказательство будем вести
для случая N = 2. Пусть особая точка Мо функции / (А1) == f (х, у) лежит
внутри области й на плоскости *). Пусть интеграл J* J" / (Al) rfa сходится;
й
предположим, что интеграл $ J” | f (Al) | da> расходится. Тогда, взяв какую
й
угодно стягивающуюся последовательность концентрических кругов {/<л}
Й => Кг ДЭ ... => Кп => • • • В мй *) (9.53)
с центром в точке А1о, в силу неотрицательности | f (Al) |, получим
lim f f I / (М) | da — -f- co. (9.54)
л-> +uo J J
' 0-АГЛ
Но тогда последовательность (9.53) можно выбрать так, чтобы выполнялись
неравенства
|/(Af)| Ао>2 J J | /(Al) | rfe>-{-2n, n= 1, 2, ... (9.55)
1 a~Kn
*) Если Al0 лежит на границе Й, то вместо кругов Кп нужно взять их
пересечения с й, т. е. их части, лежащие в й.
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
[ГЛ. 9
(9.59)
398
Введем функции
/+ (М)=|[17(М)1 + /(Ш /_(Л1) = 1[|/(Л1)|-/(Л1)]. (9.56)
Очевидно, что /+(Л4)>0, /_(Л1)>0 и
/ W = /+ (М) - /_ (М), | f (М) | = /+ (Л!) + /_ (Л4). (9.57)
В силу (9.57), имеем
J У |/(M)|rfa = J* J* /+(М)<й>+ J f (9.58)
кп~ кп+\ кп~ ^п+1 Кп~ ^п+1
Последовательность (9.53) можно считать выбранной так, что
f f f+(M)d«>> ff f_(M)d<i>.
Kn-Kn+1 Kn-Kn+1
(В противном случае можно перейти к подпоследовательности последова-
тельности (9.53) и, если потребуется, к замене f (М) на —/(Л4).) Тогда из
(9.58) и (9.55) вытекает, что
J J /+(Л1) da>> J J|/(Af)|rf» + rt, п= 1, 2, ... (9.60)
Если разбить кольцо Кп— Кп+\ на достаточно малые квадрируемые ячейки,
то нижняя интегральная сумма т{+ Да; *) для j' j" f+ (/И) d®
Кп-Кп+1 кп-*п+
на этом кольце будет, в силу (9.60), удовлетворять неравенству
J* J" |/(jM)| Ло + л, л= 1, 2, ...
а~кп
(9.61)
На всех этих ячейках т^+>0, так-как /+>0 всюду. Не нарушая неравен-
ства (9.61), отбросим из суммы т{+ Да,- все слагаемые, для кото-
Кп'Кп+1
рых mL + = 0. Если обозначить через Gn область, составленную из ячеек,
соответствующих оставшимся слагаемым, то, очевидно, на этой области
/(М)=/+(Л4) и
У J1 /(/И) d<j> = J* j~ f+ (М) afa> Да, >
°п °п °п
> J J I f (М) I d<s> + щ п = 1, 2, ... (9.62)
Q~Kn
) Здесь zn{+ означает точную нижнюю грань / (Л1) на ячейке Да;.
НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ
399
§ 41
Далее имеем
У J* da
а-Кп
J* J" | / (Л4) | da, л = 1, 2, ...
(9.63)
Складывая (9.62) и (9.63), получим
J У f (М) da> п, п — 1, 2, ..
нп
(9.64)
где Нп = (Й — Кп) + Gn, причем если обозначить через ап разность Й — Нп,
то, очевидно, диаметр при п->-\-са. Следовательно, из (9.64) вытекает
расходимость интеграла
У У /(A4)d®,
а
что противоречит условию. Итак,
предположение, что
интеграл
У у |/(Л4) | da расходится, приводит к проти-
Q
воречию; следовательно, он сходится. Теорема доказана.
Замечание. Если в определении jV-кратного несобственного интеграла
при N >2 области й— со. считать связными, то теорема 9.10 сохранит
п
свою силу. Действительно, область Нп = (й — Кп) + Gn в доказательстве
теоремы 9.10 можно сделать связной, сохранив неравенство (9.64); для этого
достаточно соединить связные куски, составляющие Нп, квадрируемыми
полосками с достаточно малой суммарной площадью. Возможность построе-
ния таких полосок становится очевидной, если разбиение кольца Кп— Кп+1
на квадрируемые ячейки для образования интегральной суммы
V Дсо;- осуществлять с помощью лучей, выходящих из центра А10
этого кольца, и концентрических окружностей с центром в Л40.
В про ивоположность этому, если в случае однократного несобственного
интеграла J f (х) dx вместо последовательностей интервалов [а, Ь — X], вхо-
а
дящих в определение (см. § 2, соотношение (9.17)), брать исчерпывающие
последовательности произвольных «разрывных» областей, то класс функций,
интегрируемых в несобственном смысле, сузится; интегрируемыми в несоб-
ственном смысле функциями окажутся лишь абсолютно интегрируемые в не-
собственном смысле функции. (Абсолютно интегрируемые в несобственном
смысле функции в обоих определениях, очевидно, одинаковы.)
6. Несобственные интегралы с неограниченной областью
интегрирования, подынтегральные функции которых ограничены
в любой ограниченной подобласти, исследуются совершенно анало-
гично. Сформулируем для примера определение несобственного инте-
грала и достаточный признак сходимости.
Определение 4. Пусть дана неограниченная область Q.
Расширяющаяся последовательность ограниченных подобла-
стей
(9.65)
^2.....Цр • •
J J/W*. f J/
Q. Я,
400 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ (ГЛ. 9
называется исчерпывающей, если, каково бы ни было R > 0,
все точки области Й, принадлежащие кругу радиуса R с цент-
ром в начале координат, будут принадлежать всем Qn, начи-
ная с достаточно большого п.
Определение 5. Пусть в неограниченной области Q задана
функция f (М), интегрируемая в обычном смысле по любой
ограниченной подобласти. Если при любом выборе исчерпываю-
щей последовательности (9.65) соответствующая последова-
тельность чисел
(A'l)d(o..J J f(M)da, ...
Qn
сходится к одному и тому же конечному пределу J, то инте-
грал J J / (TVf) cfa> называется сходящимся', в противном
я
случае интеграл называется расходящимся.
Достаточный признак сходимости. Если f (Л1) = f (х, у)
удовлетворяет требованиям, сформулированным в предыдущем
определении, и неравенству
| / (Ж) | < , где С = const > 0,
г
а = const >2, г = ~]/(х — х0)2 (у — у0)2.
причем М0 = (х0, у0)— какая-нибудь фиксированная точка, то
интеграл J" J* сходится.
в.
Заметим, что общие теоремы, аналогичные 9.5, 9.6, 9.7, 9.8,
9.10, верны и для несобственных интегралов с неограниченными
областями интегрирования.
7. Методы вычисления несобственных кратных интегралов.
Сведение сходящегося несобственного двойного интеграла к повтор-
ному осуществляется так же, как и в случае собственного двойного
интеграла: 1) для неотрицательной (неположительной)
подынтегральной функции — при условии сходимости повторного инте-
грала от этой функции, 2) для знакопеременной подынтеграль-
ной функции — при условии сходимости повторного интеграла от ее
модуля *).
Замена переменных в сходящемся несобственном Af-кратном инте-
грале осуществляется по тем же правилам, что и в случае собствен-
ного N-кратного интеграла.
*) Аналогично обстоит дело в случае ?7-кратного несобственного инте-
грала при N>3.
§ 4] НЕСОБСТВЕННЫЕ КРАТНЫЕ ИНТЕГРАЛЫ 401
Оставляя в стороне доказательства общих утверждений, ограни-
чимся примером, в котором используются сведение несобственного
двойного интеграла к повторному и замена переменных в несобствен-
ном двойном интеграле.
4-оо
Пусть требуется вычислить интеграл J= f e~x2dx. Его сходи-
о
мость устанавливается обычным образом. Так как при изменении
обозначения переменного интегрирования величина определенного
4-со 4-со
интеграла не меняется, то J= J* e_-v2dx = J* е~У2 dy. Поэтому
о о
Ч-оо 4-со 4-оо / 4-оо \
= f e~x2dx^ e~yidy = j' I е~х2f е~у2 dyj dx =
о о о \ о /
4-оо 4-оо
= J dx f e-x2-v2dy,
о о
причем повторный интеграл сходится. Двойной интеграл
4-оо 4*оо
f dx £ е~х2-У2 dy,
о о
очевидно, также сходится, в силу достаточного признака сходимости.
Следовательно,
4-оо 4-со
f e~x2~y2dxdy.
о о
Переходя к полярным координатам, получаем
Л/2 4-сю 4-оо
= dq> l' e~r2r dr = — I* rflrdr = ~,
об 0
Следовательно,
* +o° _
. f К rt
/— / e~x dx — -1-^-.
о
Этот прием вычисления данного интеграла предложен Пуассоном.
ГЛАВА 10
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
В математике и математической физике весьма эффективным ана-
литическим аппаратом являются интегралы, зависящие от пара-
метра; таковы, например, эйлеровы интегралы (см. § 3), интегралы
типа потенциала (см. вып. 4) и т. п.
Эта глава посвящена изучению свойств интегралов, зависящих от
параметра.
§ 1. Собственные и простейшие несобственные интегралы,
зависящие от параметра
1. Собственные интегралы, зависящие от параметра. Пусть
функция u=f(x, у), заданная в прямоугольнике П: а-^х^Ь,
c^.y^d, интегрируема по г на отрезке при ка-
ждом значении у из отрезка Тогда интеграл
z>
J(y) = f f(x, y)dx (10.1)
a
является функцией параметра у, определенной на отрезке
Займемся изучением свойств интегралов вида (10.1).
Теорема 10.1 (о непрерывной зависимости интеграла от
параметра). Если функция f(x, у) непрерывна в замкну-
том прямоугольнике П: а-Сх-сУ.Ь, c-^y^d, то интеграл
ь
J(y) = J f{x, y)dx является непрерывной функцией парамет-
а
ра у на отрезке c^.y^_d.
Доказательство. Из непрерывности функции /(х, у) в зам-
кнутом прямоугольнике П следует ее равномерная непрерыв-
ность. Это значит, что для всякого е > 0 найдется такое 6 = б(е) > 0,
не зависящее от расположения точек (х', у') и (х", у") в прямо-
угольнике П, что при выполнении неравенств
\х'— х"|<6(е) и |у'— у"|<д(е) (10.2)
§ 1]
СОБСТВЕННЫЕ ИНТЕГРАЛЫ
403
выполняется также неравенство
|Ж. /)-/(•*". У") |<
(10.3)
В частности, полагая х' — х" = х, получим, что для любых у' и у"
из отрезка с У у d, удовлетворяющих неравенству
|у'~у"| < 6(e), (10.2')
и всех х из отрезка а х b будет выполняться неравенство
у") (10.3')
Поэтому при любых у' и у" из отрезка c^y^d, удовлетворяю-
щих неравенству (10.2'), будет выполняться неравенство
ь
IJ(У) — J(У') I = f (/ (х, yr) — f (х, у")] dx
а
b
f \f(x, y')—f(x, y")|dx < j^-(b — a) = e,
a
а это означает равномерную непрерывность J(у) на отрезке
c^y<^.d. Теорема доказана.
Следствие. При условиях теоремы 10.1 функция F(u, v, у)—
V
= J*/(х, y)dx непрерывна в замкнутом параллелепипеде П*:
и
a-^u^.b, а-^у^Ь, c-^.y^.d.
Доказательство. В силу непрерывности функции /(х, у)
в замкнутом прямоугольнике П, найдется такая константа С,
0<С<-\-оо, что | f (х, у) | < С всюду в П. Поэтому при любых
(«', у', у') и (и", у", у") из П* выполняется неравенство
| F (и', у', у') — F (и", у", у") | —
v’
J I/(-v, y') — /(x, y")l dx
u'
f f(x, y')dx— J /(x, y")dx
и’ un
y') — f{x, y")] dx 4-
J f{x, y")dx
4-Cju" — zz'|-j-C|v" — v'(10.4)
404 ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА [ГЛ. 10
Пусть точка («', v', у') фиксирована, а точка (u", v", у") -*
-*(«'. v', у'). Тогда первое слагаемое в правой части (10.4) стре-
мится к нулю по теореме 10.1, а второе и третье — очевидным об-
разом, что и требовалось доказать.
Теорема 10.2 (о дифференцировании интеграла по пара-
метру). Если f (х, у) и f'v(x, у) непрерывны в прямоугольнике П:
ъ
a^x^.b, c<J,y<Ld, то интеграл J(y) = j' f(x, y)dx является
а
дифференцируемой функцией параметра у на отрезке c^y^.d,
причем всюду на этом отрезке
ь ъ
^=4у f /(*• = f f'^x> y)dx- (10-5)
a a
Замечание. Формула (10.5) называется формулой дифферен-
цирования интеграла по параметру по правилу Лейбница: производ-
ная интеграла по параметру равна интегралу от производ-
ной подынтегральной функции по этому параметру.
Доказательство. Мы должны доказать, что
.. J (у + Ду)— J (у) Г {, , ..
lim -----—= / fAx, y)dx.
Ду->0 у
Для этого докажем, что разность между переменной величиной
ь
J (у + Ду) — J (у) г ,, , . .
— ----— и ее предполагаемым пределом J /у(х, y)dx
а
стремится к нулю при Ду -> 0. В силу формулы конечных при-
ращений, имеем
ь
J(у + Ду)—-/(У) _ Г f(x, у + Ду)— /(х, у) _
Ду J &у
а
Ь
= //,(*> у + 0Ду)</х.
а
где 0^0 < 1. Поэтому упомянутая разность равна
ь
J (у 4- Ду) — J (у) [А. ..
~ J fy (* У)dx =
а
ь
= f [/'U, у + ОДу) — fy(.x> (10-6)
S И
СОБСТВЕННЫЕ ИНТЕГРАЛЫ
405
Оценим ее при достаточно малых значениях | Ду |. Пусть дано е > 0.
Так как /'(х, у) непрерывна в замкнутом прямоугольнике П,
то она равномерно непрерывна в нем. Следовательно, найдется
такое 6(e) > 0, что при | Ду| <6(е) будет
|/;(х, у + Ду) —/у(х, У)| < —-
при всех х£[а, 6] и любых у и y-j-Ду из отрезка [с, d].
Так как 0 < 0 < 1, то и подавно при всех указанных х, у и у Ду
будет
|/;(х. у-Н-0Ду)—/'(х,
Следовательно, в силу (10.6),
/;(х, уих
а
b
< f у + 0Ду) —/'(X, у)рх<т^-(^ —а) = е
а
при всех ] Ду | < 6(e). Теорема доказана.
Теорема 10.3 (о дифференцировании по параметру инте-
грала с пределами интегрирования, зависящими от пара-
метра). Пусть f (х, у) и f'y(x, у) непрерывны в прямоуголь-
нике П: a^x^b, c^y-^d, a x = Xj(y) и х = х2(у) диффе-
ренцируемы и удовлетворяют условию а<^х1(у)<^Ь (1=1, 2)
при c^y-^d. Тогда производная интеграла
^2 (У)
J(y) — J f(x, y)dx (10.7)
по параметру у существует и равна
J'W= / f'y(x, y)rfx + /(x2(y), у)^-/(Х1(у), у)^-. (10.8)
ж>(У)
Доказательство. Мы имеем
ЛУ) = Р(Х1(У). х2(у), у), J0.9)
406
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
причем функция F (ц, V, у) = J f (х, у) dx при a<^.v^.b,
и
c^.y^.d имеет непрерывные частные производные:
V
Fa = ~f(u,y), Fv — f(v,y), Fy = ff'(x, y)dx. (10.10)
и
Непрерывность частной производной Fy, существующей по тео-
реме 10.3, имеет место в силу следствия теоремы (10.1). Поскольку
функции х = х1 (у) и х = х2 (у) дифференцируемы, то к инте-
гралу (10.7) можно применить правило дифференцирования слож-
ной функции, которое и приведет к равенству (10.8). Теорема до-
казана.
Теорема 10.4 (об интегрировании, интеграла по пара-
метру). Если функция f (х, у) непрерывна в прямоугольнике П:
c<^y<^d, то
d d b b d
J J(y)dy — f dy f f(x, y)dx — f dx f f(x, y)dy, (10.11)
с с a a c
m. e. для того, чтобы проинтегрировать интеграл
ь
J(y) = J” f(x,y)dx по параметру у, нужно подынтегральную
а
функцию f(x, у) проинтегрировать по этому параметру у.
Доказательство. Равенство (10.11) является следствием тео-
ремы о сведении двойного интеграла к повторному (см. § 5 гл. 1).
Приведем еще одно доказательство, легко распространяющееся
на TV-мерный случай (см. § 4). Вместо равенства (10.11) докажем
более общее равенство
d t t d
J dy J /(x, y)dx — J” dx J" f(x, y)dy при (10.12)
c a a c
Если ввести обозначения
d t t d
<p (t) = J dy J* f (x, y)dx, ф(7) — у dx f(x, y) dy, (10.13)
c a a c
то достаточно доказать, что q/(i) = ф'(t) при и что
q>(a) = ф(а), так как тогда, очевидно, будет <р(£) = ф(/) на [а, Т>].
Равенство ср (а) — ф(а) очевидно, так как <р(а)=0 и ф(а) —0.
t d
Полагая F(t, y) = j' f(x, y)dx, получим ф(0 — У F(t> У)йу> гДе
а с
СОБСТВЕННЫЕ ИНТЕГРАЛЫ
407
§ 1]
F(t, у) непрерывна в прямоугольнике П *: с у d.
в силу следствия теоремы 10.1, a Ft (t, у) = f (t, у) непрерывна
по условию доказываемой теоремы. Следовательно, по теореме 10.2
d d
ф'(0 = /Ft^' = У^аУ- (10.14)
С с
d t
Полагая £(%) = J / (х, у)с?у, получим = l(x)dx. Так как
с а
по теореме 10.1 £(х) является непрерывной функцией х на отрезке
а х ^.Ь, то по теореме о дифференцировании определенного инте-
грала по верхнему пределу
t d
4'(t) = -^ f Kx)dx = l(t) = f f(t, y)dy. (10.15)
a c
Сопоставляя (10.14) и (10.15), получаем, что <р' (t) == ф' (t) при
Следовательно, в силу равенства q> (а) — ф (а), также
ф(/)=’ф(^) при В частности, <р(6) = ф(£), т. е. равенство
(10.11) выполняется. Что и требовалось доказать.
2. Простейшие несобственные интегралы, зависящие от па-
раметра. Теоремы 10.1, 10.2, 10.4 легко распространяются на не-
собственные интегралы следующего специального вида:
ь
J(y) = J f У) g(x)dx, (10.16)
а
где f(x, у) непрерывна, a g(x)—вообще говоря, разрывная
ь
функция, но такая, что интеграл J" |^(х)| dx сходится, причем
а
один или оба предела интегрирования могут быть бесконечными.
Перейдем к точным формулировкам соответствующих обобщен-
ных теорем *).
Теорема 10.1' (обобщенная теорема о непрерывной зависи-
мости интеграла от параметра). Если f(x, у) непрерывна и
+ СО
ограничена при а х <-j~ce, с С У -С d, а интеграл J |g (х)| dx
а
*) Теоремы 10.1', 10.2', 10.4' находят применение в математической фи-
зике и в теории интеграла Фурье.
408 ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА [ГЛ. 10
сходится, то
-l-оо
4(у) = J f(x, y)g(x)dx (10.17)
а
является непрерывной функцией у на отрезке c^.y^.d.
Теорема 10.2' (обобщенная теорема о дифференцировании
интеграла по параметру). Если f (х, у) и f'y(x, у) непрерывны и
4-со
ограничены при а х <-|-оо, с ^у ^d, а интеграл J |g(х)| dx
а
сходится, то интеграл (10.17) является дифференцируемой
функцией параметра у на отрезке c^y^d, причем всюду
на этом отрезке выполняется равенство
4-со
J'(y) = / f'y(x, y)g(x)dx. (10.18)
а
Теорема 10.4' (обобщенная теорема об интегрировании
интеграла по параметру). При условиях теоремы 10.1 инте-
грал (9.17) является интегрируемой функцией параметра у
на отрезке c^y^.d, причем
d d 4-оо 4-оо / d \
f J(y) dy = j'dyj’ f (x, у)g(x) dx = j" lg(x)Jf(x, y)dyjdx.
с с a a \ c . J
(10.19)
Докажем для примера теорему 10.1'. Пусть |/(х, у)| <С = const
4-оо
при а<:х<4-со, c^y^.d.aj' |g(x)| dx < 4- со и пусть
а
4-со
дано е>0. В силу сходимости интеграла f|g(x)|dx, можно взять />а-
. а
4-со
столь большим, что будет 2С \g(x)\dx Фиксировав такое/
i
и взяв у' и у" на отрезке с у d, представим разность J(y')—J(у")
в виде i
J(y') — J(y") = J [/(*. /) — f(x, y"))g(x)dx-{-
а 4-со
4~/ [/(-V. y') — f(x, y")\g(x)dx. (10.20)
/
В прямоугольнике c^.y^.d функция f(x,y), будучи
непрерывной, равномерно непрерывна- Поэтому найдется такое
5 1] СОБСТВЕННЫЕ ИНТЕГРАЛЫ 409
д = 6(е)>0, что для любых у' и у" из отрезка c^.y^.d, удовле-
творяющих неравенству |ух— у"| <б(е), при всех х из отрезка
а х I будет выполняться неравенство
|/(*. — у") |
Но тогда из равенства (10.20) получаем неравенство
i
|Л/) —Лу")| < f |/(-v, /) — f(x, y")||g(x)| dx-\-
a
+ oo
-+/ {|/(x, y')| — |/(x, y")D |£(x)| dx^
I
I +oo
<2^/\e(x)\dx-{-2C f |g(x)|rfx<-^-tf+-|- = e
a I
при |yx —y"| <6(e),
а это .означает, что интеграл J(у) является непрерывной функ-
цией на отрезке с у d.
Мы предоставляем читателю доказать теоремы 10.2' и 10.4' для
интегралов вида (10.17), а также переформулировать и доказать тео-
ремы 10.Г, 10.2х и 10.4х для интегралов вида (10.16). Заметим
только, что в случае интегралов вида (10.16): 1) ограниченность
/(х, у), /' (х, у) вытекает из непрерывности /(х, у), /^(х, у) в рас-
сматриваемой области а х -^.Ь, с у d, 2) отпадает необходи-
мость разбиения интервала интегрирования по х, на части,
в отличие от того, как это делалось при доказательстве теоремы 10.1х
для интегралов вида (10.17).
Дифференцирование и интегрирование интегралов по параметру
широко применяются для вычисления интегралов, зависящих от пара-
метра, а также для вычисления интегралов, не зависящих от пара-
метра, после надлежащего введения параметра.
Пример. Вычислим интеграл
+ оо
J(y) — I е~а* ~П^У- dx, где а = const > 0, —Д<:у<^Д. (10.21)
о
Полагая /(х, у) — 5.1П*ХУ, g^xy~e-axt получим, что /(х, у) и /'(х, у)
непрерывны и ограничены в полуполосе 0 х < + оо,
+ оо +оо
— а интеграл J \£(x)\dx=j*
о о
410
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
сходится. Поэтому можно применить обобщенную теорему 10.2'
для интеграла вида (10.17). Дифференцируя по параметру под
знаком интеграла, получим
+ 00
J' (у) = J1 е~ах cos ху dx.
о
Выполняя дважды в последнем интеграле интегрирование по частям
(по х), найдем
(10.22)
Так как, согласно (10.21), 7(0) = О, то, интегрируя (10.22) в пре-
делах от 0 до у, получим
у
J(y) = f <ty = arcts V •
6
Можно поступать и несколько иначе. Интегрируя (10.22) по у,
будем иметь
J(y)= arctg-£-+ С.
Так как, в силу (10.21), 7(0) = 0, то, полагая в равенстве, содер-
жащем константу С, у = 0, получим, что С = 0. При обоих под-
ходах требуется, чтобы было известно значение вычисляемого инте-
грала при некотором частном значении параметра у.
§ 2. Несобственные интегралы, зависящие от параметра
Пусть функция u=f(x, у) определена при 0 х < + оо,
c^y^.d и пусть при каждом значении у, c^y^d, интеграл
+ со
— f f(x, y)dx
a
(10.23)
сходится; тогда 7(у) является функцией у, определенной на
отрезке [с, d). В силу определения несобственного интеграла, имеем
+со I
J(у) = f / (х, y)dx = lim f/(x, у) dx. (10.24)
a a
Аналогично обстоит дело
функций. Пусть, например,
при а^х<6, c^y<^d,
с интегралами от неограниченных
функция и = /(х, у) определена
не ограничена при х->b — 0 и
§ 2]
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
411
при каждом значении у £ [с, d] интеграл
ь ь-к
J*(y) = f f(x, y)dx~ lim f f(x, y)dx (10.25)
J >.->0 + 0 J
a a
сходится. Тогда J*(у) является функцией у, определенной на
отрезке [с, d].
1. Понятие равномерной сходимости. В теории несобствен-
ных интегралов, зависящих от параметра, важную роль играет
понятие равномерной сходимости. При наличии равномерной
сходимости с несобственными интегралами, зависящими от параметра,
можно обращаться, вообще говоря, как с собственными (см. п. 3
настоящего параграфа). Остановимся сначала на определении равно-
мерной сходимости для интеграла с бесконечным интервалом инте-
грирования.
Определение 1. Интеграл (10.23) называется равно-
мерно сходящимся по параметру у (относительно
параметра у) на отрезке c<(y<(d, если для всякого е>0
найдется такое L — L(e), что неравенство
I 4-оо
j(у) — f f(x, y)dx = J f (x, у) dx
a I
<e (10.26)
будет выполняться при всех L(e) сразу для всех у £ [с, d\.
Аналогично определяется равномерная сходимость и для интеграла
от неограниченной функции.
Определение 2. Интеграл (10.25) называется равно-
мерно сходящимся по параметру у на отрезке [с, d],
если для всякого е>0 найдется такое д = д(е)>0, что не-
равенство
b-k ь
— f f(x’ y)dx = f f(x> y)dx
a b-k
e (10.27)
будет выполняться при всех X, удовлетворяющих неравенству
0<Х<д(е), сразу для всех у £ [с, d\.
+ со
Примеры. 1. Интеграл J(y) = j* уе~ху dx сходится при каж-
о
дом у на отрезке 0<^у<^1, но эта сходимость не является равно-
мерной. Действительно,
4-со 4-со
j* ye-^dx^j' e~‘dt=e~ly
i iy
412
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
при сколь угодно большом фиксированном I > 0 будет > -i- при
всех значениях у, достаточно близких к нулю, и, следовательно,
при е = у не найдется такого Z,(e), чтобы при />А(е) неравенство
+ 00
уе~хуdx
i
1
е = 7
выполнялось сразу для всех у из отрезка О у 3 1.
Если же отрезок 0 <3 <3 заменить отрезком 0 < 6 <3 <3
+ОО
то на нем интеграл J(y) = J уе~хуdx сходится уже равно-
ст*
+оо -f-oo
мерно. Действительно, J* ye~xydx~j' е~‘dt — е~1у е~1Ъ при
1 1У 1
In —
О < б <3 <3; поэтому при 0 < е < 1 и I > —неравенство
+ оо
J уе~хуdx
< е
будет выполнено сразу при всех у из отрезка 0<б<<у^1.
1
2. Интеграл /(у) = J" уху 1 dx сходится при каждом у из отрезка
о
O'Cy^l, но эта сходимость не является равномерной.
Заметив, что подынтегральная функция становится неограниченной
А. х
при х->0-|-0, оценим интеграл j* yxy_1 dx — ху |0 = V. Как бы
о
ни было мало фиксированное % > 0, при у—>0-]-0 этот интеграл
стремится к единице.
б = б (е), чтобы при О
п 1
Поэтому при е = -у
А, < б (е) неравенство
не найдется такого
выполнялось сразу для всех у из отрезка 0 <3 <3.
Если же отрезок 0 <3 33 заменить отрезком 0<б0<333>
1
то на нем интеграл J(y) = j" уху~1 dx сходится уже равно-
b
§ 2]
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
413
мерно.
£>о<у <
Действительно. J*
о
1. Так что, если О
уху~1 dx — V <1 А6” при 0 < А <
1
е6», то
к
J* yxy~ldx
о
при всех у из отрезка
2. Сведение несобственного интеграла, зависящего от пара-
метра, к последовательности функций позволяет доказательство
основных теорем о таких интегралах свести к простой ссылке на
соответствующие теоремы о последовательностях функций.
Если интеграл
+ со
Лу) = f f(x, y)dx
(10.28)
< е < 1 и А <
а
1 и
< е
сходится при каждом у из отрезка [с, d], то, какова бы ни была
последовательность значений Л, /г.....• ->-|-оо при
где 1к^а при Л=1, 2...........последовательность функций
lk
F/t(y) = j’ f(x> y)dx, k = l, 2...........
будет, очевидно, сходиться к J(y) на отрезке [с, d].
Пусть интеграл (10.28) сходится при каждом у из отрезка [с, </];
тогда справедлива
Теорема 10.5. Для равномерной сходимости интеграла
+оо
J(y) = J f(x, y)dy по параметру у на отрезке [с, d] необхо-
а
димо и достаточно, чтобы при любом выборе последователь-
ности значений 1г, 12.....lk, ...->4“°° при А->4-оо после-
довательность функций
,1ь
Fk(y) = f/(x, y)dx, Л=1, 2............. (10.29)
а
сходилась к J(y) равномерно на отрезке c^.y^d.
Доказательство. Необходимость. Пусть интеграл (10.28)
сходится равномерно на отрезке с у d и пусть дано е > 0.
Тогда найдется такое L (е), что при всех I > L (е) неравенство
i
Ay) — J fix, y)dx
а
е
будет выполняться сразу для всех у £ (с, d}.
414
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
Пусть lk—> —[— со при k—>4-00 (причем lk а при k = 1, 2, . ..).
Тогда найдется такое N(е), что при всех /г^>/У(е) будет /й>А(е),
а следовательно, при всех таких /г, в силу выбора Z,(e), будет
выполняться неравенство
lk
1Лу)-^(у)| = f(x> y)dx
а
< В
сразу для всех у £ [с, d], что и означает равномерную на
отрезке сходимость последовательности (10-29) к интегралу (10.28).
Достаточность. Если всякая последовательность функций
вида (10.29), где 1к —>-f-оо при k—>-|-оо, сходится равномер-
но к J(y) на отрезке c^y^d, то интеграл (10.28) будет равно-
мерно сходящимся по параметру у на этом отрезке. Действи-
тельно, если бы интеграл (10.28), сходящийся по условию при
каждом у £ [с, d], сходился неравномерно относительно у на этом
отрезке, то существовало бы такое е0 > 0, что при сколь угодно боль-
шом L нашлись бы такие Z > L и у £ [с, d], для которых выполня-
лось бы неравенство
i
Лу) — J f(x< у) dx
а
е0-
Тогда, придавая L значения £ = 1, 2, 3....k, . .., мы получили бы
последовательности соответствующих значений lk > k и yk £ [с, d],
для которых было бы
1ь
d(yk) — ff(x, yk)dx = |У(у*) — Г*(УА)|
a
eo>
lk
e. построенная последовательность функций Fk (у) = J / (x, у) dx,
a
k— 1, 2...... оказалась бы неравномерно сходящейся на отрезке
с у d, что противоречит условию. Теорема доказана.
Замечание 1. Если функция /(х, у) сохраняет знак, например
неотрицательна, то для равномерной сходимости интеграла
+ оо
/(у) = J /(х, y)dx по у на отрезке c<^y<^d достаточно, чтобы
а
при каком-либо одном выборе последовательности /2......1к, . . .
соответствующая последовательность функций (10.29) сходилась к J(y)
равномерно на отрезке с у d.
§ 2]
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
415
Действительно, если f (х, у) неотрицательна, то J f (х, y)dx~^>
а
lk
J /(х, y)dx при всех I 1к. Поэтому
а
I
•Цу) — f f(x, y)dx
а
lk
J (у) — J f(x. y)dx
a
e
при всех / > 1к
сразу для всех у £ [с, d], если только 1к достаточно велико.
Замечание 2. Если функция f (х, у) непрерывна при
О х < Ч- оо, c<^y<^d и сохраняет знак, например неотрица-
+ ОО
т е л ь н а, а интеграл J(y) = J* f (х, у) dx является непрерывной функ-
о
цией параметра у на отрезке [с, d], то этот интеграл сходится
равномерно на отрезке [с, d].
Действительно, взяв какую-либо возрастающую последовательность
/х, Z2, .... 1к, . . . —> -(-оо (1к a, k—\, 2,...), получим после-
довательность непрерывных, в силу теоремы (10.1), функций
lk
— J* / (х> y)dx, k— 1, 2, 3............. (A)
a
монотонно возрастающую, в силу неотрицательности /(х, у), и схо-
дящуюся к непрерывной функции
J(y) = f f(x, y)dx (Б)
а
на отрезке c<(y^d. Но тогда по теореме Дини (см. п. 1 § 2 гл. 8)
последовательность (А) будет равномерно сходиться на отрезке [с, d]
к своему пределу (Б), а следовательно, в силу замечания 1, инте-
4-со
грал У(у) = у /(х, y)dx будет равномерно сходящимся на этом
а
отрезке.
Замечание 3. Несобственный интеграл
* ь-к
J*(y) = f f(x, y)dx— lim f /(x, y)dx
а Х-Ю+о/
416 ИНТЕГРАЛЫ. ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА [ГЛ. 10
можно аналогичным образом свести к последовательности функций
Дй (У) = J f У) dx, где ^й -> 0 4 0 при k -» 4 оо. Подробности
а
мы опускаем.
3. Свойства равномерно сходящихся интегралов, зависящих
от параметра.
Теорема 10.6. Если функция f(x, у) непрерывна в полу-
4 СО
полосе а < 4 е0- с ^У ^d, а интеграл J (у) = J* f (х, y)dx
а
сходится равномерно по параметру у на отрезке c<^y<^d,
то на этом отрезке J(y) является непрерывной функцией.
Доказательство. Возьмем произвольную последовательность
чисел /р /2....1к, оо при k —> 4 00 а) и рассмо-
трим последовательность функций
'й
Рк(у) = ^ f(x, y)dx, k—\, 2..........
a
По теореме 10.1 о непрерывной зависимости собственного интеграла
от параметра, все они непрерывны на отрезке По тео-
реме 10.5 эта последовательность сходится равномерно на от-
+оо
резке c-^y^d к интегралу J(y) = J*/(х, y)dx, а следовательно J(y),
а
как предел равномерно сходящейся последовательности непрерывных
функций, будет непрерывной функцией. Теорема доказана.
Теорема 10.7 (о дифференцировании несобственного
интеграла по параметру). Пусть /(х, у) и f'y{x, у) непре-
рывны при c^y^d, а<(х<4со « интеграл
4оо
J(y) = J f(x, y)dx (10.28)
а
сходится на отрезке c^y^d, а интеграл
4 со
f f'(x, y)dx (10.30)
а
сходится равномерно на этом отрезке. Тогда J(y) является
дифференцируемой функцией у на [с, d], причем
4 со 4 со
= y^dx = f f'Ax' y>dx- (10-31)
а а
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
417
§ 21
Доказательство. Возьмем произвольную последовательность
чисел /,......lk, при k~►-J-00 и рассмотрим
последовательность функций
1ь
Р>г(У)~ f f(.x> У)^х> k=l, 2.........c^y^d,
a
+ oo
сходящуюся на отрезке [с, d] к интегралу = /(%, y)dx.
а
По теореме 10.3 р дифференцировании собственного интеграла по
параметру имеем
lk lk
= УН* = /fytx-y'ldx, £=1,2,..., с<у<й.
а а
причем все непрерывны на [с, d}\ а в силу равномерной схо-
димости интеграла (10.30), последовательность функций F*(y) схо-
дится равномерно на отрезке [с, d] к интегралу (10.30). Итак,
4-оо
F*(y)->/(y) на [с. d], Fk(y)=t f fy(x, y)dx на [c, d],
a
причем F*(y) непрерывны на [c, d]. Поэтому, в силу теоремы
о дифференцировании функциональной последовательности (см. п. 3
§ 2 гл. 8) J(y) будет дифференцируемой функцией на [с, d\,
и всюду на этом отрезке будет
+оо
J'(y) = f fykx< y)dx, (10.31)
a
что и требовалось доказать.
Теорема 10.8 (об интегрировании несобственного инте-
грала по параметру). Если f (х, у) непрерывна при а^,х<_-\-со,
c^y^.d, а интеграл
4-со
J(y) = f /(X. y)dx (10.28)
а
сходится равномерно на отрезке c-^y^d, то
d d 4-оо -l-oo d
J J(y)dy — J" dy J* f(x, y)dx — J" dx J" f(x, y)dy. (10.32)
с с a a c
Доказательство. Какова бы ни была последователь-
ность чисел 12.........1к, ... при £->4-°о (/* «)>
418 ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА [ГЛ. 10
соответствующая последовательность функций
lk
= y)dx, fc=l, 2.................
a
по теореме 10.5 о сведении равномерно сходящегося интеграла к по-
следовательности функций сходится к J(y) равномерно на [с, d].
По теореме 10.1 о непрерывности собственного интеграла, как функ-
ции параметра, все Fk(y), k = 1, 2...непрерывны на отрезке [с, d].
Следовательно, по теореме об интегрировании функциональных после-
d d
довательностей (см. п. 2 § 2 гл. 8) lim f Fft(y)dy= f J(y)dy.
Л->4-00
с с
Но по теореме об интегрировании собственного интеграла по пара-
метру
d d ik ik d
j FkWdy= f dy f /(x, y)dx = f dx f /(x, y)dy.
с с a a c
Следовательно, при любом выборе последовательности /2, ...
.... lk> ... —►-J-00 ПРИ > + оо будет
d d
lim С dx j f(x, y)dy — f J(y)dy.
Л->4-оо J J J
a c c
4-co d
А это означает, что интеграл J dx J* /(x, y)dy сходится и имеет
а с
место равенство
+оо d d 4-оо
f dx J/(x, y)dy = Jdy J* /(x, y)dx.
a c c a
Теорема доказана.
Следствие, Если f(x, у) непрерывна и сохраняет знак при
а -Сх <+©о, c^y^d, например неотрицательна, то из не-
прерывности интеграла
+со
Ду) = / f(x, y)dx
а
на отрезке [с, d] следует справедливость равенства (10.32).
Доказательство. Действительно, в силу замечания 2 к тео-
4-оо
реме 10.5, интеграл J(y)= J f(x, y)dx сходится равномерно на
§ 2j НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 419
отрезке с у d, а следовательно, в силу теоремы 10.8, справед-
ливо равенство (10.32).
Для знакопостоянной функции /(х, у) справедлива сле-
дующая
Теорема 10.9 (о перестановке двух несобственных инте-
грирований). Пусть функция f (х, у) непрерывна и сохраняет
знак при с<СУ<4“°о. а^х < + со, а интегралы
4-со d
J(y) — ff{x,y)dx, J*(x) = j*/(x, y)dy
a c
как функции параметров непрерывны соответственно при
с у < 4- оо и а х < 4-оо. Тогда, если хотя бы один из по-
вторных интегралов
4-со 4-со 4-со 4-со
f dy f f(x, y)dx, f dx f f(x, y)dy
c a a c
сходится, то сходится и другой, и они равны между собой,
т. е.
4-со 4-оо 4-оо 4-оо
f dy f f(x, y)dx = f dx j f(x, y)dy.
c a a c
Доказательство. Будем вести доказательство для случая,
когда /(х, у) неотрицательна при с<^у<4-о0> #<Сх<4-со.
Допустим, что сходится повторный интеграл
4-со 4-со
J— J* dy
с а
\ f(x, y)dx. (10.33)
Тогда нужно доказать, что
I 4-оо 4-со 4-оо
lim f dx f f(x, y)dy — J= f dy f f(x, y)dx. (10.34)
Z->4-co J J J J
a c c a
Пусть дано e > 0. Докажем, что при всех достаточно больших I
I 4-оо
разность между переменной величиной J dx J /(х, y)dy и ее пред-
а с
4-оо оо
dy J* f(x, y)dx будет по абсолютной ве-
а с
полагаемым пределом \
личине меньше е.
420
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
Прежде чем оценивать эту разность, заметим, что, в силу след-
ствия теоремы 10.8,
I 4-со 4-оо I
f dx J f(x, y)dy—j' dy J /(x, y)dx.
a c c a
Учитывая, что f(x, у) неотрицательна, можно записать
О J" dy J* /(х, y)dx— у dx у /(х, y)dy = £ dy j" f(x, y)dx =
с а ас cl
(10.35)
Оценим сначала второе слагаемое в правой части неравенства (10.35).
Поскольку повторный интеграл (10.33) сходится, то найдется такое ср
ЧТО 4-оо 4-со
f аУ f /(х, y)dx < у. (10.36)
Ci а
Фиксировав сг так, чтобы выполнялось неравенство (10.36), перей-
дем к оценке первого слагаемого в правой части неравенства (10.35).
+оо
По условию интеграл у /(х, y)dx является непрерывной на отрезке
а
с <СУ < 4-оэ функцией и, следовательно, поскольку / (х, у) неот-
рицательна, сходится равномерно на отрезке c^y^Cj (по за-
мечанию 2 к теореме 10.5). Поэтому можно найти такое £(е), что
+оо
при всех I > L (е) неравенство
i
подняться сразу для всех у £(с, с^. Но тогда при всех I > А(е) будет
/(х, y)dx < Yici-c) будет вы'
fdy f f(x, y)dx<
c I
Сопоставляя (10.35), (10.36) и (10.37) заключаем, что
4-со 4-оо I 4-оо
О у dy у f(x, у) dx — у dx у f (х, у) dy < е
с а ас
при всех />£(е), что и требовалось доказать.
(10.37)
§ 2] НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 421
Если на знак функции не наложено никаких ограничений, то имеет
место следующая
Теорема 10.9' (о перестановке двух несобственных
интегрирований). Пусть функция f(x, у) непрерывна при
а <^х <-|-оо, с у < + оо, а интегралы
f(x, y)dy и J" f(x, y)dx (10.38)
с а
сходятся равномерно', первый — на каждом конечном отрезке
а х Л, а второй — на каждом конечном отрезке с у С С.
Тогда если хотя бы один из повторных интегралов
Ч-оо 4-со 4-со 4-со
У dx у |/(х, у)| dy, у dy у |/(х, y)|dx (10.39)
а с с а
сходится, то сходятся и равны между собой повторные инте-
гралы
4-оо со 4-со 4-со
dy У f(x, y)dx, (10.
а с с а
Доказательство. Пусть сходится, например, второй из инте-
гралов (10.39). Тогда, в силу двукратно примененного признака срав-
нения— один раз для функций f (х, у) и | f (х, у) |, а другой раз для
4-со ,, 4-оо
функций у f(x, y)dx и у |/(х, y)[dx—. второй из интегра-
а а
лов (10.40) также сходится.
Поэтому нужно доказать только, что
lim у dx у /(х, у) dy = j dy f /(x, y)dx. (10.41)
с c
f dx f f(x, y)dyt
a
4-co
У f (x> У) dy, при любом
С
В силу равномерной сходимости интеграла
конечном / > а будет
У dx У / (х, у) dy — у dy у /(х, y)dx. (10.42)
а с с а
I
422
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
Оценим разность между переменной величиной J dx J* / (х, у) dy
а с
4-оо 4-со
и предполагаемым пределом J* dy J” /(х, y)dx в соотношении (10.41).
с а
Воспользовавшись равенством (10.42), мы получим при любом
сг > с, что
4-со 4-оо I 4-оо
f dy j f(x,y)dx — f dx J /(x, y)dy =
c a a c
4-co 4-go
= J dy J f (x, y) dx
c a
4-oo 4-oo
— f dy J /(x. y)dx
c I
— J dy J f(x, У) dx =
с а
Ci +оо
= f dyf f(x, y)dx-\-
с I
4-J dy $ I / (*. y) | dx < fdyf f^x' y^dx 4-
O l cl
4-oo Ч-oo
4-f dy f lf(x, y)]dx. (10.43)
t'i a
4-oo 4-oo
Так как повторный интеграл J* dy J* |/(x, y)\dx по условию exo-
c a
дится, то при любом e > 0 найдется такое сг > с, что будет
(10.44)
а
Фиксировав
пользуясь
сг > с, выбираем, как в доказательстве теоремы 10.9
+со \
равномерной сходимостью j'f(x,y)dxl, такое А (е),
a J
чтобы при
всех
I > L (е) неравенство
+со
/ / (х, у) dx
t
е
2 (С] — с)
§ 2)
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
выполнялось сразу для всех у £ [с, cj. Тогда
Ci +со
f dy [ f (х, у) dx
С I
£ (Ci — с) _____ е
2(с’1 — с) ~"2
423
(10.45)
при всех / > Z. (е), а следовательно, в силу (10.43), (10.44) и (10.45)
при всех таких / будет
что и требовалось доказать.
Отметим, что аналогичные теоремы имеют место также и для
зависящих от параметра несобственных интегралов от неограничен-
ных функций.
4. Признаки равномерной сходимости несобственных интегра-
лов, зависящих от параметра.
Критерий Коши. Для равномерной сходимости интеграла
4-со
J f(x> y)dx на отрезке [с, d] необходимо и достаточно,
а
чтобы для всякого е>0 существовало такое L — L(£), что
при всех I' и 1">Л(е) неравенство
г
f f(x, y)dx
r
< е
(10.46)
выполнялось бы сразу для всех у £ [с, d\.
Доказательство. Это условие является необходимым. Дей-
ствительно, в случае равномерной сходимости при любом е > 0 можно
найти такое L — L(p), что при всех I' >L(e) и всех I" > Z.(e) нера-
венства
+ СО
/ y)dx
i"
будут выполняться сразу для всех у g [с, d]. Поэтому при всех I' и
I" > А(е) и сразу для всех у £ [с, d] будет выполняться неравенство
/*
//(V. y)dx
Г
424
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
Это условие является достаточным. Действительно, если при
всех I' и I" > L(e) неравенство (10.46) выполняется сразу для всех
+со
у £ [с, d\, то интеграл J/(х, y)dx сходится при каждом у £ [с, d)
а
(см. п. 3 § 1 гл. 9), и, переходя к пределу в (10.46) при /"->-]-оо,
получим, что при всех I' > L(e) неравенство
+ со
J /(*. y)dx
I'
е
выполняется сразу для всех у £ [с, d]. Теорема доказана.
Мажорантный достаточный признак разномерной схо-
димости (признак Вейерштрасса). Если |/(х, у)|<£(х) при
СО
с причем интеграл J* g(x)dx сходится,
а
+ оо +оо
то интегралы J* f(x, y)dx и J* |/(х, y)|dx сходятся равно-
а а
мерно на отрезке c^y^d.
Доказательство. Пусть дано произвольное е > 0. В силу
+°°
сходимости интеграла J* g(x)dx, найдется такое L — А(е), что при
а
всех I' и /" > L (е) будет выполняться неравенство
I”.
J g (х) dx < е (I" > /');
v
но тогда при всех I' и /" > £(е) будут также выполняться и нера-
венства
г
/ f(x, y)dx
V
(I" > I')
сразу для всех у £ [с, d}. Следовательно, в силу критерия Коши,
+со +оо
интегралы J / (х, у) dx и J* | / (х, у) | dx сходятся равномерно
а а
на отрезке с у d. что и требовалось доказать.
Для несобственных интегралов от неограниченных функций
с конечными пределами интегрирования признаки равномерной сходи-
5 .2]
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
425
мости формулируются и доказываются аналогичным образом. Сформу-
лируем для примера
Критерий Коши (для равномерно сходящегося инте-
грала). Для равномерной сходимости интеграла
ь Ь-к
J*(y) = f f(x, y)dx — lim f f(x, y)dx, c<^y^d, (10.47)
J x->o+o J .
a a
no параметру у на отрезке c^.y^.d необходимо и доста-
точно, чтобы для каждого е>0 существовало такое 6 = д(е),
что при всех К' и к" из интервала 0<1<6(е) неравенство
b-k"
J f(x, y)dx
b-k'
(10.48)
< 8
выполнялось сразу для всех у £ [с, d].
<, 1
Примеры. 1. Ясно что интеграл J(p) = J" х₽~’ dx схо-
о
дится при р>0 и расходится при Пусть р0 > 0;
при 0<х<1 неравенство хр~1 будет выполняться при
всех р р0. Поэтому в мажорантном признаке можно взять
/(х, р) = х₽-1, g(x) = xPy~l, и, в силу сходимости интеграла
1 1
g(x)dx = хр<>~}dx — ——
о о
о Ро '
о
р на отрезке 0 < pQ С р
интеграл J(p) —f(x, p)dx = J* хр~х dx будет сходиться равно-
о
мерно относительно параметра
сколь бы мало ни было р0 > 0.
Посмотрим, будет ли этот
отрезке 0 < р < -
к
J хр~х dx при р
о
интеграл сходиться равномерно на
Для этого изучим поведение интеграла
к
/\р
хр~х dx = — —> —j—с*э при
о
р —> 0 0 и любом сколь угодно малом фиксированном К > 0. Следо-
вательно, при любом е > 0 неравенство
к
J хр~х dx
о
< е
426
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
не может быть выполнено сразу для всех р из интервала 0 < р <-|-оо,
как бы мало ни было Z > 0, т. е. на интервале 0 < р < -f- оо инте-
1
грал J(p)— J* х?-1 dx сходится неравномерно.
о
+со
2. Интеграл J(a) — j' е~ах2 dx сходится равномерно при
о
0 < a <как бы мало ни было а0 > 0, в силу мажорант-
ного признака, если положить / (х, а) — е~ах\ g(x) — e~<p>x\ так
как |/(х, a)|=e-(l*2<:g(x)==e_a»x! при 0<a0<ia< + oo,
4-со 4-со
0^х<4-со. причем интеграл J" g(x)dx — J" е~а<>х2 dx сходится,
о о
Докажем, что если устранить число а0 > 0, не допускающее
стремления а к нулю, и рассмотреть полный интервал значений а,
+ оо
при которых интеграл J(a) = J* е~ах~ dx сходится, т. е. интервал
о
0<a<-j-c>o1 то на нем этот интеграл не будет сходиться равно-
4-со
мерно. Для этого прежде всего заметим, что J* e~t2 dt есть некото-
о
рая положительная константа, как интеграл от неотрицательной
непрерывной функции, не равной тождественно нулю.
+оо
Оценим теперь остаток интеграла J* е~аХ> dx при как угодно
i
большом фиксированном I и 0<а<4-оо. Полагая £=х'|Ла,
dt adx, получим
4-со 4-со
I e~ax2dx = —^= e~t2dt->4~00 ПРИ <х—>0—|—0,
1 IVa
так как
+ со + со
lim f e-pdt— f e~l2dt = const > 0.
a->0+0 J
iVa °
Следовательно,
венство
при любом I > 0 и малом фиксированном е нера-
] е~ах"' dx
i
< е
§ 21 НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 427
не может выполняться сразу для всех а из интервала 0 < а < -ф- оо,
+со
т. е. интеграл J(a) —J e~ax2dx на всем интервале 0<а<-|-оо
о
сходится неравномерно.
+ со
3. Докажем, что интеграл J(a) —J е~ах dx при 0<^а < -j-cc
о
и фиксированном р#=0 сходится равномерно относительно па-
+оо
„ У1 sin Вх ,
раметра а. Оценим для этого остаток интеграла / е-ал——ах,
i
полагая « = -L, dv — e-axsinp х dx и интегрируя по частям, полу-
чим
С g-ax sln dx = — е aXsln (Рх + (р)
' * х /а2 + р2
е ах sin (Р-Г -ф ф) dx
х2 /а2 + р2
где <р — вспомогательный угол,
а . р
cos ср = , , sin ф = .
/а2 + р2 Ка2 + р2
при р=£0 у всех х^-Ои всех а
определяемый соотношениями
Так
О, то,
как
следовательно.
е “sinpx
dx
2
<е при />ш-е
сразу для всех а, 0<^а<4~оо, что и означает равномерную схо-
димость интеграла.
Если интеграл, зависящий от параметра у на отрезке [с, d],
является несобственным по нескольким причинам, то интервал ин-
тегрирования разбиваем на конечное число интервалов таким обра-
зом, чтобы (если это возможно) каждый из отвечающих им интег-
ралов был несобственным по какой-либо одной причине: либо из-за
наличия особенности у подынтегральной функции, либо из-за беско-
нечности интервала интегрирования. Первоначальный интеграл на-
зывается равномерно сходящимся относительно параметра у на от-
резке с у d тогда и только тогда, когда каждый из частичных
интегралов, полученных при таком разбиении, сходится равномерно
на этом отрезке.
428
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. Ю
Б. Примеры вычисления несобственных интегралов с помощью
дифференцирования и интегрирования по параметру. Интегралы
в этих примерах служат не только для демонстрации методов, но
почти все представляют также самостоятельный интерес и находят
применения в различных разделах математики и физики.
1. Зная, что
1
Г Xм , _______ я 1
J l + x2ft ах , 2m+ 1
о sin ' л '— я
при т < п, где т и п — натуральные числа (см. пример 3 § 3 гл. 9),
докажем, пользуясь теоремой 10.6 о. непрерывной зависимости ин-
теграла от параметра, что
4-со
? ip_1 ,, я .
J l + tdt~ sin рл
О
при 0<р<1. Сделав замену переменного интегрирования, получим
4-со I -j
С t 2п __
J 14-f а , 2т'+1 '
0 Sin —2n~Я
(Б)
Заметим, что функция f(t, р) является непрерывной при 0 < t < -ф-оо,
f tp-i
0<р<1, и что интеграл J dt сходится равномерно отно-
о
сительно р на любом отрезке вида 0 < рг р р2 < 1. Послед-
нее легко установить, разбив интеграл J*
о
на два: j и J , и при-
0 1
менив к ним мажорантный признак с мажорирующими функциями
/р.-i
Т+7
и
^2-1 \ Г
1 соответственно I. Следовательно, интеграл J dt
/ о
является непрерывной функцией параметра р при 0<р<1. Так
как любое значение р из этого интервала может быть получено как
2m +1
предел последовательности чисел вида —, где т < п, то, пере-
ходя к пределу в (Б), получим требуемое равенство (А)- Равенство (А)
используется в теории эйлеровых интегралов (см. § 4 настоящей
главы).
§ 2J НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ ' 429
+ со
2. Вычислим интеграл ~$х. dx. Непосредственно его нельзя
о
дифференцировать по параметру р, но мы знаем (см. п.2 § 1), что
более общий интеграл J е~ах ^^-dx, отличающийся от данного
о
«множителем сходимости» е~ах, а > 0, можно вычислить, применяя
дифференцирование по параметру и это дает (см. там же),
+ 0О
/* sin рх р
/ е~аХ—х = arctg- •
о
Было доказано (пример 3 п. 4), что последний интеграл схо-
дится равномерно по а при фиксированном р и 0<ia<-|-oo, сле-
довательно, он является непрерывной функцией параметра а при
О a < 4-со. Поэтому
4-со +оо
dx— lim j
a->0+0 g
e~ax
dx —
л
"2
0
г t Р
= lim arctg —
a->0+0 a
Л
~~2
В частности,
о
sinx , л
----dx —-?r.
x---2
при р > О,
при Р —0, (10.49)
при р < 0.
(10.50)
о
Последний интеграл используется в теории рядов и интегралов Фурье.
3. Вычислим интеграл Пуассона (см. также конец гл. 9)
+ СО
J— J* е~х‘dx. (10.51)
о
Его сходимость была установлена ранее (см. п. 4 § 1 гл. 9). По-
лагая x = ut, dx = u dt, получим
4-со
J = f e~uVudt.
о
430
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
Умножая обе части последнего равенства на е~и\ найдем
+СО
Je~u2 = f e-^+^udt. (10.52)
о
Интегрирование последнего равенства по и дает
P = e-u'du=f duf e-^+^udt. (10.53)
о о в
Подынтегральная функция f(t, и) — е-^+^^и неотрицательна и не-
прерывна при 0 <7 0-<«<4-оо. Внутренний интеграл
в (10.53) является, согласно (10.52), непрерывной функцией и при
О <«<4-оо. Изменив формально порядок интегрирования, получим
повторный интеграл
J" dt e~^+t2}u2u du, (10.54)
о о
внутренний интеграл которого
Г°° 1 1“=+°° 1 .
J е-(1+^и^ = _^±__ (10.55)
о
является непрерывной, функцией t при 0 </ < 4-001 Следовательно,
по теореме 10.9 о перестановке двух несобственных интегрирований
в случае знакопостоянной подынтегральной функции интеграл (10.54)
также будет сходящимся и будет равен интегралу (10.53). Таким
образом, в силу (10.55),
4-оо 4-со 4-со
/ «у л -44=|.
0 0 о
Следовательно,
+°о _
J= e-*’dX = ^. (10.56)
о
Этот интеграл имеет различные применения, в частности, в теории
теплопроводности, в теории вероятностей и статистической физике.
4. Вычислим интеграл
4-оо
J(p) = j* e~ajcl cos dx, где а = const > О, (10.57)
о
§ 2] НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ 431
имеющий применение в теории теплопроводности и в статистической
физике. Его сходимость следует, например, из сходимости интеграла
J* е~ах* dx- Дифференцируя формально по р, получим равенство
о
+со
l' е-ах2(—x)sinpxdx. (10.58)
6
Справедливость равенства (10-58) нетрудно обосновать. В самом деле:
1) e-ctx2 cosflx и e-ctx2 х sin рх непрерывны при —оо<р<-}-со,
0<Jx < -[-оо, и 2) интеграл (10.57) сходится при —оо < р < -j-оо,
а интеграл (10.58) сходится равномерно относительно р при —оо <
<Р< + оо, в силу мажорантного признака с мажорирующей функ-
цией g(х) — е~ах2; таким образом, равенство (10.58) действительно
имеет место по теореме о дифференцировании несобственного инте-
грала по параметру. Интегрируя в (10.58) по частям (по х), получим
4-со
dJ nxi sin ₽х 1Х=+О° р Г , Р
—7а—е~ —гг— —4~ / е- cospxrfx — —4—J(P).
dp 2а |х=0 2а ,/ 1 2а
Разделяя переменные в полученном дифференциальном уравнении
для 7(р), найдем
Интегрируя (10.59), получим
У
7(Р) = Се'4“. (10.60)
Найдем теперь константу С. Согласно (10.56) имеем
7(0)=/ e~ax2dx — —^=r /* e~zl dz (z = x /а). (10.61)
»/ У а 2 г а
о о
Следовательно, в силу (10.60) и (10.61),
Подставляя этот результат в (10.60), будем иметь
+°° __рз
7(Р) = У* е~ах2 cos рх dx — у 4“ . (10.62)
Q
432
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
. 5. Вычислим интегралы Френеля J sin(x2)dx и J" cos (х2) dx,
о о
находящие применение в оптике. Полагая x2 = t, получим
4-со 4-оо 4-со 4-оо
Г . 2 , 1 Г sin t ,, Г . 2 , 1 Г cos I ,,
I sinx2dx = — / -==-dt, / cos x1 dx = — / dt,
d 2 J /1 •/ 2 d /1
0 0 ’ 0 o'
+oo
1 2 /*
Вычислим, например, первый из них. Заметив, что / e~lu? da
yt У nd
О
(см. 10.61), получим
4-со 4-оо 4-со
f = d,f СЮ-63>
о ' ' о о
Если бы в интеграле (10.63) было легко обосновать изменение
порядка интегрирования, то вычисления было бы легко довести до
конца. Однако непосредственно это делается весьма громоздко, по-
этому, как в примере 1, мы введем множитель сходимости где
k — const > 0, т. е.
/ е~к1 dt — —^= Г dt j e~^k+u^ * sin a du =
J V t /л d
0 r 1 о 0
du
о
/ e~(k+u2}tsintdt = -^ I ------------—----. (10.64)
d Ул J 1 (ь4-м2)2 4
о о 1 х 1
В этом случае перестановка двух интегрирований легко рбосновы-
4- со
вается с помощью теоремы 10.9. Так как интеграл e~M^Ldt
о "
сходится равномерно при 0 k < -ф- и его подынтегральная функ-
ция непрерывна при 0 k <-1-со, 0^/<4-оо, то он является
непрерывной функцией k на отрезке 0 /г <4-со. Поэтому, пере-
ходя к пределу при k ->0 4-0, получим
du
14-«4 •
Разлагая дробь на простейшие и выполняя интегрирование, находим
+оо __
j sin х2 dx — у1/ у. (10.65)
О
§ 2]
НЕСОБСТВЕННЫЕ ИНТЕГРАЛЫ
433
Аналогичным путем доказывается, что
4-оо ___
У* cos х2 dx = -i- j/^ у • (10.66)
о
6, Рассмотрим, наконец, интеграл Фруллани
4-со
/* dXt где о < а < ^. (10.67)
о
Остановимся на двух основных случаях:
1) Если f (х) непрерывна и интегрируема на полупрямой 0-^х <
< 4~оо, а /(х) стремится к определенному конечному пределу /(4-со)
при х->4-оо, т. е.
то интеграл
+ оо
f f'(x)dx = f(+oo)-f(0),
О
+оо
J* f (ах) dx
о
(10.68)
сходится равномерно по параметру и на отрезке 0 < а и Ь.
Действительно, так как f (х) стремится к конечному пределу f (4~ со)
при х->4-со, то для /(х) выполнен критерий Коши, т. е. для вся-
кого е > 0 найдется такое W (е), что при всех х' и хг
’’ > N (е) будет
А"и
f f'<f)dt =
А'и
при всех
А"
| / (х') — f (х") | < е. Но тогда
f f' (ux)dx = -1
А’
И
I /(А"и) — f (Л'п) I 1 , . . , ..
= ~ < Т (Л й) ~ < е
I ** I и-
A"> — N(b) сразу для всех и из отрезка а^и^Ь- Поэтому инте-
грал (10.67) можно вычислить, интегрируя (10.68) по параметру
в пределах от а до Ь, т. е.
4-оо 4-со b b 4-со
/ (М—-/(ах) __ у* dx § f' (их) du = du I* f' (их) dx ==
0 0 a a 0
b
= f f.(+ °°H f (°) du (4- oo) _ / (0)] In |. (10.69)
2) Если не существует конечный предел /(х) при х->4“°°' но
4-со
сходится интеграл dx, А>0, и существует производная f (0),
А
f ^Ldt-f(O) J
434 ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА [ГЛ. 10
ТО
+ со
/ /<М-/(я-0 dx = — f(0)\n-. (10.70)
tJ X Q>
0
Действительно,
as s
f dt = f /.<“>-/№ Лх ((=dx}.
0 0
bs s
f (/=M.
0 0
Следовательно,
s bs bs
у f(bx}—f{ax)
0 as as
bs
= f
as
откуда, переходя к пределу при $->-(-оо, получим (10.70).
Равенства Фруллани (10.69) и (10.70) можно применять к вычи-
слению различных конкретных интегралов. Так, с помощью (10.69)
находим (всюду 0 < а < Ь)
4- со -}-со
а *
а с помощью (10.70) находим
+оо 4-оо
/sin bx — sin ах , _ [* cos bx — cos ах . , а
dx = 0, / -dx — In -г.
х-----------------------------J х----b
о о
Г rbX-e-aX dx = ln^, I _^t.g^-arctgax
J x b J x 2
0 - 0
§ 3. Эйлеровы интегралы
Эйлеровы интегралы
4-со
Г(/?) = У хр~хе~х dx— гамма-функция от р
о
1
В(р, ^) = J'x/?“1(l—dx — бепга-функция от р, q
о
§ 3]
ЭЙЛЕРОВЫ ИНТЕГРАЛЫ
435
играют важную роль в различных разделах математики и математи-
ческой физики. Поскольку бета-функция может быть выражена через
гамма-функции (см. соотношение (10.81)), то мы в первую очередь
остановимся на исследовании свойств гамма-функции.
1. Свойства гамма-функции.
+ 0О
1) Интеграл Г(/>) — J* хр~хе~х dx с х о д и т с я при 0< р < + со
о
и расходится при р (см. конец § 2 гл. 9). При р < 1 он
является несобственным не только потому, что интервал интегриро-
вания бесконечен, но и потому, что при р < 1 подынтегральная функ-
ция стремится к бесконечности при х-»0-]-0.
+ оо
Докажем, что интеграл Г(р) = J* хр~хе~хdx с ходится равно-
о
мерно по параметру р на любом конечном отрезке
<Р0< + оо. Как и в случае исследования этого интеграла на про-
стую сходимость, разобьем интервал интегрирования [0, -|-оо) на два:
0 х 1 и + со. и займемся исследованием на равномер-
1 4-со
ную сходимость интегралов J* хр~хе~х dx и J xp~x е~х dx. Интеграл
о 1
1
j'xp~1e~xdx сходится равномерно при 0 < р0 х <-]-оо в силу
о
мажорантного признака, так как е~ххр~х хр°~ при 0 < х < 1 и
1
р0, а интеграл J хр°~1 dx при р0 > 0 сходится. Остаток
о
ХА К
хр~х е~х dx I хр~'е~х dx — е~х j' хр~х dx = -> + оо
о о о
при р->04-0 и X = const >0. Следовательно, на интервале
1
0<р<-|-со интеграл fxp~xe~xdx сходится неравномерно,
о
+со
Интеграл J xp~xe~xdx сходится равномерно при —оо < р <
1
<Л)< + оо, где Ро — произвольное фиксированное число, в силу
мажорантного признака, так как
хр~}е~хх' '~ *е~х при 1 х < -f- оо, —оо < р < Ро,
436 ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА [ГЛ. 10
+ оо
а интеграл J хРа~1е~х dx сходится. На интервале —оо < р < оо
1
этот интеграл равномерно сходиться не будет. Чтобы это доказать,
+ СО
исследуем остаток J* хр~ге~х dx при р—>-|-оо и любом фиксиро-
i
ванном />1. Каково бы ни было натуральное AZ, при р—>4-со,
начиная с некоторого значения р, будет р — 1 > AZ, и мы будем
иметь неравенство
4-со +оо +оо
j хр~'е~х dx > J xNe~xdx —— е~хxN 1^ + N J* xN~le~xdx =
i i i
=[l" + NZAr-1 + N (AZ—1) lN~2 + ... + AZ!] -> + oo при AZ-^-j-oo.
Следовательно,
lim f xp~1e~xdx — -f-oo
p->+co J
при любом фиксированном I > 0.
Итак, интеграл J" e~xxp~l dx сходится равномерно на интервале
о
0<р0<р<4~с<,> где Ро— произвольное положительное число,
4-со
а интеграл J* хр~1е~х dx сходится равномерно на интервале —оо <
1
< р < Ро <-|-оо, где Ро—произвольное конечное число. Поэтому
оба они одновременно сходятся равномерно на любом отрезке
вида 0 < р0 .< р С Рй, а следовательно, и интеграл Г (/>) =
4-со
— J" xp~xe~x dx сходится равномерно относительно р на каждом
о
таком отрезке.
2) Так как подынтегральная функция /(х, р) = хр~1е~х непре-
рывна при 0 < х < 4-оо, 0 < р <-|-оо, а сходимость
I 4-оо
lim f хр~ге~х dx — f хр~1е~х dx
•> J
>.->0+0 * 0
является равномерной по р на каждом конечном отрезке 0 < р0 < р <
+со
<</^<4-00, то Г(р) = I xp~1e~xdx является непрерывной
S3] ЭЙЛЕРОВЫ ИНТЕГРАЛЫ 437
функцией на каждом таком отрезке, т. е. непрерывной функцией при
всех р, удовлетворяющих неравенству 0<р<-|-со.
+ QO
3) Дифференцируя Г(р) = J xp~le~xdx по р под знаком инте-
о
грала, получим
Г'(р) = £ хр~' (\nx~)e~xdx. (10.71)
о
Равенство (10.71) справедливо, так как интеграл (10.71) сходится
равномерно на каждом конечном отрезке 0 < р0 р ^.Ро < 4~ оо
и частная производная f'p(x, р) = хр~х (In х) е~х непрерывна при
0<х<4~оо, 0 < р < °0- Равномерная сходимость интеграла
(10.71) устанавливается применением мажорантного признака к инте-
гралам:
J* xp_1 (In х) е~х dx и J хр-1 (In х)е~х dx
о о
с мажорирующими функциями хр°~ 11 In х | и хр»-11 In х| е~х соответ-
ственно.
Аналогично устанавливаются существование производной любого
порядка k =1, 2, 3, ... и справедливость равенства
+ оо
rw(p) = J хр~х (\пх)* е~х dx, k= 1, 2, ... (10.72)
о
4) Интегрируя по частям, находим
pr(p)=pj хР~'е~х dx — xpe~x\^°Q-1t-£ хРе~х dx,
о о
т. е.
Г(р+1) = рГ(р)- (Ю.73)
Применяя повторно рекуррентную формулу (10.73), можно свести
вычисление Г (а п), где 0 < а 1, а п — произвольное натураль-
ное число, к вычислению Г (а):
Г(а4-л) = (а4-я— 1)(а + л — 2) ... (а + 1) а Г (а). (10.74)
Если положить а — 1 и учесть, что
Г(1)=у e~xdx—l, (10.75)
о
то формула (10.74) даст
Г(«+ 1) = п(п — 1) . .. 2 1 =п\ (10.76)
438
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
5) Вычислим
j х 2е dx,
о
полагая х = t2. Получим
е~‘2 dt = 2^ = y л.
6
(10.77)
6) График функции Г (р) имеет вид, изображенный на рис. 10.1,
причем Г(р) —>-|-оо при р —>04-0 и при р—>4* со. Значения Г (р)
при натуральных значениях р находятся по формулам (10.83) и (10.84).
Так как Г(1) = Г (2) = 1, то по
теореме Ролля Г' (р) обращается
в нуль по крайней мере в одной
точке интервала 1 < р < 2; пусть
это будет р0. Так как Г" (р) —
4-со
— С хр-1(1пх)2 e~xdx>0 при всех
о
р, 0 < р<4~СО, то Г' (/^монотон-
но возрастет при 0 < р < -|- со
и не может иметь при 0 < р < -j-oo
корней, отличных от р0; кроме
того, в силу монотонного возра-
стания, Г' (р) < 0 при р < р0 и
Г'(р)>0при р>р0. Значит, Г(р)
при р = р0 достигает минимума.
Приведем численные значения:
рояь 1,4616, т1пГ(р) =
= Г (р0) = 0,8856.
Так как при pi>2 гамма-функция возрастает, то при р > /г1,
где /г^>1, будет Г(р) > Г(«4- 1) = п\ Следовательно, Г(р)->4~оо
при р—> 4~ со. Далее,
г<„>—
при р > 0. Следовательно, Г(р) = г ^4~ И ПрИ р_>о, так
как Г(р4~ 1)—>Г(1) = 1 при р->04-0.
2. Свойства бета-функции,
1
1) Интеграл В(р, q) = f хр~} (1 — x)Q~l dx сходится при р>0
о
и q > 0.
§ 3]
ЭЙЛЕРОВЫ ИНТЕГРАЛЫ
439
2) С помощью замены переменной интегрирования х — 1 — t,
получаем, что
В {р. <?) = В(<7, р). (10.78)
Следовательно, бета-функция симметрична относительно р и q.
3) Если q > 1, то
1
В(р, ?) = /'(l-x)f-1d(^-) =
о
= Г’ + (1 - х)-2 dx =
Р 1г=0 Р 'J
1 1
= ——- хр~} (1—х)ч~2 dx—1 хР'1 (1 — x'f~1dx =
о Р о
= -^В(р,<7-1)--^-В(р, q).
Следовательно,
В(р, ?)=--^~11В(р. q— 1) при q > 1. (10-79)
Если р> 1, то, в силу симметрии бета-функции, используя (10.79),
можно записать
В(р, д)=--^~-^Ь(р-\. q) прир>1. (10.79')
1
4) Выполнив в интеграле В(р, d) — f хР~1 (1 —х)?-1 dx замену
о
переменной интегрирования х — -у-
новое аналитическое представление:
получим для бета-функции
4-со
в (р, ?) = f —z? dz.
‘ J (1-|_г)₽+«
(10.80)
5) Связь между функциями В и Г. Докажем, что при р > 0 и q > 0
+оо
Сделав в интеграле Г(р) = У xp~1e~xdx замену переменной х — tz,
о
t > 0, dx — tdz, получим
4-оо
у’ zP-^e-‘xdz. (10.82)
' Q
440 ИНТЕГРАЛЫ. ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА (ГЛ. 10
Заменив в (10.82) t на 1+/ и р на p-\-q, получим
+°° *
- Г~ —Лт = / гР+ч-^е-^ г dz. (10.83)
(1-М)₽+7 J v
Умножим обе части последнего равенства на tp~l и проинтегрируем
по t от 0 до -|-оо:
4-со 4-со 4-оо
Г'/> + !>/ n^»d‘=f “‘f
о ' ~ ' о о
В силу (10.80), последнее равенство перепишется так:
Г(р + <7)В(р.л)== J dt j zp+4~4p~le-{1+t)2dz. (10.84)
о о
В интеграле (10.84) при р> 1 и?>1 допустима перестановка двух
интегрирований, в силу теоремы 10.9 о перестановке двух несоб-
ственных интегрирований в случае знакопостоянной подынтегральной
функции. Действительно,
а) функция
f(z, ty^z^-h^e-^^O
и заведомо непрерывна при 0 .г < -|- со, 0 оо;
б) если р > 1 и 9>1, то интеграл (10.84) сходится;
в) интеграл
+ 00
f zdt=r(p + q) —
J W l (J ^_/)P + <7
является непрерывной функцией t при 0 t < -|- со, а интеграл
4-оо
f tp'1zp+l!-\-(1+()zdt = r(p)z,1-1e-z
о
является непрерывной функцией z при 0 г < -|- оо. Сле-
довательно, в силу упомянутой теоремы, повторный интеграл
4-со 4-оо
J* dz § zp+q~xtp~xe~^+^zdt также сходится и равен интегралу (10.84).
о о
ЭЙЛЕРОВЫ ИНТЕГРАЛЫ
441
s 3]
Таким образом,
+со +оо
Г(р4-4)В(/>, ?) = f dz f zp+4~xtp~'e~^+e>z dt —
О о
+-ОО
dz J*
о
+со
Г 2Р+?-’е-г Г (р)
J Z?
dz =
+ ОО
= г (р) I' z4~xe~* dz = Г (р)Г (д).
о
Следовательно, равенство (10.81) имеет место при р>1 и <?>1.
Чтобы доказать его справедливость при р > 0 и q > 0, приме-
ним к этому равенству, написанному для р > 1 и <7 > 1, рекуррент-
ные формулы (10.79), (10.80) к левой части и (10.73) к правой
части.
6) Имеет место равенство
В(р, 1_?) = _2L_ при 0<р<1. (10.85)
Действительно, подставляя в формулу (10.80) q = 1 — р, получим
В(р, l-q) = f ^^dz, 0<р<1. (10.86)
б
Но в п. 5 § 2 (пример 1) было доказано, что интеграл (10.86)
равен ihiWпри °<р<ь
откуда и следует справедливость соот-
ношения (10.85). Воспользовавшись формулой (10.81), из (10.85)
получим так называемую формулу дополнения:
Г(р)Г(1 - р)
л
sin ря
при 0 < р < 1.
(10.87)
Многие интегралы можно вычислять, сводя их к эйлеровым инте-
гралам.
Примеры.
4-со 4
1. Г-г^ЦГ4/х = в(А 3)
J (1 + х)2 \ 4 4 )
0
442 ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ От ПАРАМЕТРА [ГЛ. 10
Л
р 5 £
2. Вычислим интеграл J= I sin2 xcos2 xdx. Полагая sin2x = .z,
о
£ £
получим sinx = z2, cosx = (l— г)2, dz = 2 sin x cos x dx. Следо-
вательно, учитывая предыдущий пример, будем иметь
, о/7 5\ Зя/2
-4J 16~~•
3. Вычислим интеграл
Л
2
•7=J* sinp-1 х cos'7-1 х dx, р>0, q > 0.
о
Полагая sin2 х — z, получим
А'
2 1
/» 1 /* —_ 1 ।
I sinp-1 х cos’-1 х dx — у J z2 (1 — z)2 dz —
о 0
В частности, при q = 1 найдем
Л
§ 4. Кратные собственные и несобственные интегралы,
зависящие от параметров
Для краткости мы будем рассматривать только тройные инте-
гралы, зависящие от параметров; однако все рассуждения будут
иметь силу и для интегралов любой кратности, кроме тех случаев,
которые будут оговорены особо.
Пусть функция /(х, у, z, а, р, у) определена при (х, у, z)£Cl
и (а, р, у)£П*. где Q и Q* — области пространств (х, у, z) и
(а, р, у) соответственно, и пусть интеграл
Да, р, у)= f С С f(x, у, z, а, р, y)dxdydz (10.88)
§ 41
КРАТНЫЕ ИНТЕГРАЛЫ
443
существует в собственном или несобственном смысле при любых
(а, 0, у)£й*. Тогда он является функцией параметров (а, 0, у},
определенной в области й*.
Справедливы следующие предложения:
1) Если f(x, у, z, а, 0, у) непрерывна, как функция
(х, у, z, а, 0, у) в области й X й*, причем й и Й* — замкнутые
ограниченные области*}, то, как и в одномерном случае,
J(a, 0, у) будет непрерывной функцией параметров а, 0, у
в Й*.
2) Если, кроме того, f (х, у, z, а, 0, у) также непрерывна
в й X 2*1 то
dJ
да
у, z, а, р, у) dxdydz —
у, z, а, 0, у) dx dy dz.
(10.89,
а
Аналогично обстоит дело с дифференцированием по 0 и у.
3) Наконец, при условиях предложения 1) допустимо инте-
грирование интеграла по параметру.
Предложения 1) — 3) доказываются так же, как и в одномерном
случае. Они легко распространяются на интегралы вида
•/(а. 0. V) = f f f у,
Q
z, a, 0, y}g(x, y, z) dx dy dz.
(10.90)
где f(x, y, z, a, 0, у) удовлетворяют прежним требованиям, a
// J У’ z^dxdydz
Q
< К = const < oo,
причем интеграл
ным или несобственным.
J f f lg(x> У< z)\dxdydz
Q
может быть собствен-
Пример. Потенциал гравитационного поля, создаваемого телом Й
с плотностью массы р(Л4) = р(х, у, г) в точке Q(x0, yQ, г0}, лежа-
щей вне тела, равен
U(Q) — U(x0, у0, г0) = f f f dxdydz. (10.91)
*) Областью 2 X 2 * называется множество всех точек (х, у, г, а, 0, у)
шестимерного евклидова пространства, получающихся, когда точка (х, у, г)
пробегает Q и, независимо от нее, точка (а, 0, у) пробегает й*.
444
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
где гР() = }/ (х — х0)2 + (у — у0)2 -\-(г — z0~)2— расстояние между
точками Р(х, у, z) и Q(x0, у0, г0). Функция /(х, у, z, х0, у0, z0) =
1
—-----, если точка Q лежит на положительном расстоянии от
ГРО
X df df df
тела 12, непрерывна и имеет непрерывные производные
ОХ$ Оу$ OZq
Плотность р(х, у, z) можно считать абсолютно интегрируемой функ-
цией в й. Дифференцируя (10.91) по х0, у0 и z0 по правилу Лейб-
ница (см. соотношение (10.89)), получим проекции на оси координат
силы притяжения материальной точки Q(x0, у0, z0) единичной массы
телом й:
^x(Q) = -^- = f f [ (x — xQ) dx dy dz,
^xo * a ” rPQ
J £ J r3PQ
(y — y0) dx dy dz, (10.92)
= “ = / / f ^'(z — zjdxdydz.
дго J J rPQ
Если точка Q(x0, y0, zQ) лежит внутри тела й, то rPQ — 0 при
совпадении Р с Q. Следовательно, Q является особой точкой подын-
тегральной функции интегралов (10.91) и (10.92) и эти интегралы
становятся несобственными, даже если р(Р) = р(х, у, z) является
ограниченной интегрируемой функцией в й. Характерной чертой
этих несобственных интегралов, зависящих от параметров (х0, у0, z0),
является то, что координаты особой точки подынтегральной функции
зависят от этих параметров, а именно, равны им. Мы ограничимся
рассмотрением несобственных кратных интегралов, зависящих от
параметров, вида
J(Q) = f f f F(p> Q)f^)dxdydz, (10.93)
я
где
P(x, y, z)£Q, Q(x0, y0, ZO)£Q.
Функция F (P, Q) непрерывна при P #= Q и становится неограничен-
ной при P->Q, a f(P)— ограниченная интегрируемая в й функция.
(Интегралы (10.91) и (10.92) являются частными случаями интеграла
вида (10.93).)
Определение. Интеграл (10.93) называется равномерно
сходящимся в точке Q (х0, у0, z0), если для всякого е > 0
§ 4]
КРАТНЫЕ ИНТЕГРАЛЫ
445
существует такое 6 = 6(e), что неравенство
J J f F('P' Q,')f(p)dx(iy<iz
a6(e)
(10.94)
выполняется для любой области Qj(e) диаметра <6(е), содер-
жащей "ч себе точку Q, и для любой точки Q’, расстояние
которой от Q меньше 6(e).
Достаточный признак разномерной сходимости. Инте-
грал (10.93) сходится равномерно в точке Q(x0, у0, ,z0)£Q,
если существуют такая окрестность точки Q(x0, у0, z0) и
такие константы С и К, что при всех Р и Q' из этой
окрестности выполняется неравенство
| F (Р, Q') | , где Z = const<3, С = const <-|-оо. (10.95)
rPQ’
Доказательство. По условию | f (Р) | < К — const <
всюду в Q. Следовательно, если шар радиуса 6(e) с центром в Q,
ZZ/6(e)(Q), лежит в упомянутой окрест-
ности точки Q, то для любой об-
ласти 2j(e) диаметра <6(е), содержа-
щей в себе Q и для любой точки
Q'CZZ/fifej будет
f f f F (P, Q') f (P) dx dy dz
s6 (e)
fff7^Kdxis,dl<
«6(e) PQ
CK f f f dXC~dZ ’ (10-96)
Ш26(е)«3’) Гр*’
где ZZ/26(g)(Q') — шар радиуса 26(e) с центром в Q' (рис. 10.2).
Переходя к сферическим координатам с полюсом в точке Q',
получим
fff
ш2б(е)
2 л В 26 (е)
rPQ' о о о
г2 sin 0 ,
—— dr =
26(e)
= 4л f F-}-dr = (10.96z)
6
446
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
Из (10.96) и (10.96') следует, что
f f f F(P. Q')f(P) dxdydz
s6(e)
С ^Дг[26(е)]3-\ (10.97)
О — A
Так как 3 — X > 0, то при достаточно малом 6(e) правая часть
(10.97) будет меньше е, что и требовалось доказать.
Замечание. В случае /V-кратного интеграла (N Г) показа-
тель X в признаке должен удовлетворять неравенству X < N.
Если плотность массы р(Р) в интегралах (10.91) и (10.92)
является ограниченной интегрируемой функцией в Q, то, в силу
доказанного признака, эти интегралы будут равномерно сходящимися
в любой точке Q(x0, у0, г0)^С2.
Из равномерной сходимости вытекают следствия, такие же как
и в случае однократных интегралов. Рассмотрим для примера тео-
ремы о непрерывности интеграла, как функции параметров, и о диф-
ференцировании интеграла по параметру.
Теорема 1O.1O. Если интеграл (10.93) сходится равно-
мерно в точке Q£Q, то при сформулированных ранее огра-
ничениях на функции F(P, Q) и f (Р) интеграл (10.93) является
непрерывной функцией в точке Q£Q.
Доказательство. Докажем, что для всякого е>0 найдется
такое 6= 6(e), что из неравенства I rQQ’ | < 6(e) следует неравенство
Рис. 10.3.
|J(Q) — J(Q )| < е. Для этого возь-
мем шар Z7/6(e)(Q) радиуса 6(e)
с центром в Q, лежащий внутри Q
(рис. 10.3), и разобьем каждый из
интегралов J(Q) и J(Q') на два сла-
гаемых: Jj по области ZZ/f,(E)(Q) и У2
по области Q—ZZ/j(e)(Q). Тогда
| J(Q) - J(Q') | < | J2(Q) - J2 (Q') | +
+ |Л(<Э)1 + 1Л(<Э')|. (Ю.98)
При достаточно малом 6(e) >0 и
второе и третье слагаемые в правой
части (10.98) (каждое) будут <
О
в силу равномерной сходимости интеграла в точке Q. Если взять ка-
кое угодно положительное 6' (е) < у6(e), то при условии, что рас-
стояние от Q до Q' удовлетворяет неравенству
|QQ'|<6'(e), (10.99)
интегралы в первом слагаемом в правой части (10.98) будут соб-
ственными. Следовательно, если взять 6' (е) < у 6 (е) достаточно ма-
КРАТНЫЕ ИНТЕГРАЛЫ
447
§ 41
лым, то по теореме о непрерывной зависимости собственного крат-
ного интеграла от параметров первое слагаемое в правой части
(10.98) также будет <4- при условии (10.99). Сопоставляя эти
О
результаты, получаем, что, в силу (10.98), из выполнения неравен-
ства (10.99) будет следовать выполнение неравенства
| J(Q) — J(Q') | < е, (10.100)
что и требовалось доказать.
Исследование дифференцируемости по параметру несобственного
интеграла вида (10.93) в общем случае выходит за рамки данной
книги (см., напр., [12], Лекц. VII, § 2). Покажем, как решается этот
вопрос в случае, когда F(P, Q) = l/rPQ, /(/э)=р(Р), где р(Р) —
ограниченная (|р(Р)| < С — const <-|-со) в й интегрируемая функ-
ция, т. е. когда интеграл имеет вид (10.91). Этот случай является
весьма существенным для теории потенциала (см. вып. 4). Если точка
Q(x0, Уо> zo) лежит вне Й (Р(х, у, г) пробегает й), то интеграл
(10.91) является собственным и, как было доказано выше, выпол-
няются равенства (10.92). Докажем, что равенства (10.92) сохраняют
силу и в том случае, когда точка Q(x0, у0, г0) лежит внутри й.
Ограничимся рассмотрением первого из равенств (10.92). Для его
доказательства докажем, что разность
___Up + Ал0, у0, z0) — U (л„, у0, z0)
а~ Д^ '
— ff ^-dxdydz (10.101)
Q rPQ
стремится к нулю при Ах0->0 и фиксированной Q(x0, Уо- £0)£й.
Пусть дано какое-угодно е > 0. Опишем из точки Q(x0, у0, z0) шар
достаточно малого радиуса 6(e), ZZ/j(E)(Q), лежащий внутри й, и
обозначим через Ux(xQ, у0, z0) и U2(x0, у0, z0) интеграл (10.91),
взятый по области = Ш&(Q) и Й2 = Й — Й! = Й — ZZ/ft(e)(Q).
Очевидно, U — -|- U2, поэтому разность (10.101) можно перепи-
сать в виде
°=
I ^0 J I Й, rPQ J
Д^2__ Г Г Г Р(Р)(Х-ХО) dxdydz} (10.102)
( Дх0 J £ J rPQ )
Оценим первое слагаемое в правой части (10.102). Мы имеем:
= -----~\dxdydz —
йХд аХд •> J \rPQ’ ГPQ !
р (Р) Гр9 ~ Гр®'. dxdydz, (10.103)
rPQrPQ'
448
ИНТЕГРАЛЫ, ЗАВИСЯЩИЕ ОТ ПАРАМЕТРА
[ГЛ. 10
где Q' — точка с координатами (х0-|-Дх0, у0, z0), лежащая
в (eJ(Q). Стороны треугольника QPQ’ равны rPQ, гР(у
и |Дх0|; поэтому
IrpQ'-rpQKIAxol. (10.104)
Учитывая оценку (10.104) и очевидное неравенство
„1
ГPQrPQ' -rPQ rPQ''
получаем для (10.103) оценку
Д£ь f f fl 1
Дх0 2 J £ М rPQ
-х—Idxrfydz, так как |р(Р)| <С.
rPQ'l
(10.105)
Интеграл fff dx d? dz сходится равномерно в Q, = ZZ/j(e)(Q) (см.
J J rPQ
достаточный признак); поэтому правая часть неравенства (10.105)
будет < 4 при достаточно малом 6 = б (е) > 0. Второе слагаемое
в правой части (10.102) в силу неравенства |х — *о |/гр<? 1
и достаточного признака равномерной сходимости также является
равномерно сходящимся интегралом и поэтому будет по модулю
<4- при всех достаточно малых d = 6(e). Оценим, наконец, третье
О
слагаемое в правой части (10.102). Так как U2 (х0, у0, г0) =
~ f f f dy dz является интегралом вида (10.90) (точка
Q(x0, у0, z0) лежит вне й2)> то его можно дифференцировать по пара-
метру х0, а следовательно, при всех достаточно малых | Дх01 <
< 6 — 6 (е) будет
Г f Г р-(-)(4 Хо} dxdydz <|. (10.106)
Дх0 j j j pPq з
Таким образом вся разность (10.101) будет по модулю <е при
всех достаточно малых 6 = 6(е) и | Дх01, что и требовалось доказать.
Замечание. Результаты, полученные в этом параграфе для инте-
гралов по объему, без труда переносятся на интегралы по кривым и
поверхностям. Надлежащее видоизменение формулировок и дока-
зательств предоставляется сделать читателям.
ГЛАВА 11
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
В естествознании и технике часто приходится иметь дело
с периодическими процессами: колебательным и вращатель-
ным движением различных деталей машин и приборов, периодиче-
ским движением небесных тел и элементарных частиц, акустическими
и электромагнитными колебаниями и т. п.
Математически все такие процессы описываются периодическими
функциями. Функция f(f) одной переменной t называется
периодической, если существует такое число Т =£ О, на-
зываемое ее периодом, что
f (t-\-Т) —f (f) при всех значениях t, —оо</<-|-оо. (11.1)
Простейшими периодическими функциями являются, как известно,
тригонометрические функции sin/ и cos/ с периодом Т— 2л.
В физике простейшей периодической функцией обычно считают
«гармонику» (или «гармоническое колебание»)
£(/) — Л sin(<o/ +ф), —оэ < / < + оо. (Н-2)
Так как
^(/ + ^) = U0 при _oo</<+oo, (11.3)
то Т — есть период гармоники. Константы А, а и ф называются
соответственно амплитудой, частотой и начальной фазой
гармоники.
Одним из основных вопросов настоящей главы является вопрос
о представлении произвольной периодической функции в виде суммы
гармоник.
§ 1. Предварительные сведения о периодических функциях
и постановка основной задачи
1. Периоды периодической функции. Пусть /(/) — периоди-
ческая функция с периодом Т =/= 0, т. е.
f (/-j-jT) = f (/) при всех /, —оо</<-|-оо. (П-4)
450 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. 11
Тогда любое целочисленное кратное периода kT, k = ± 1, ±2......
также является периодом этой функции.
Действительно, если Т — период, то при любом целом k > 1
будет
f (t+kT) = / [Н- (fe - 1) T-j-T] = f u + (А— 1) Т] =... = f (0 (11.5)
при всех t, —co</<-j-oo, то есть kT является периодом f(t).
Далее,
f U—Т'] = f [(^—Т) -|- Т] = f(f) при всех t, — оо<7 < -j-оо, (11.6)
а следовательно, число —Т является периодом /(/). Но тогда
по только что доказанному число k (— Т) = — кТ при любом
целом k > 1 также является периодом f (t). Утверждение доказано.
Пусть теперь числа Т\ и Т2 являются периодами функции / (t)\
тогда легко проверить, что числа Тх ± Т2 также являются периодами
этой функции.
Очевидно, тождественную константу можно рассматривать как
периодическую функцию с каким угодно периодом, иными словами,
любое число будет ее периодом.
Если f (t)— непрерывная периодическая функция, отличная
от тождественной константы, то она имеет наименьший
положительный период*), который обычно и называют пе-
риодом этой функции.
2. Периодическое продолжение непериодической функции.
Отправляясь от непериодической функции /(х) **), заданной на от-
резке а х <1 а Т, можно построить периодическую функцию F (х)
с периодом Т, совпадающую с / (х) на отрезке а х а 4- Т.
Если рассуждать геометрически, то для этого нужно выполнить
переносы графика функции f (х) параллельно оси х вправо и влево
на расстояния Т, 2Т, ЗТ......пТ, ... (рис. 11.1). Этот процесс
мы назовем периодическим продолжением функции /(х) за пре-
делы отрезка а <^х ^а-\-Т с периодом Т. При этом F(х) не
получает, вообще говоря, однозначного определения в точках вида
х — а ± kT, k — 1, 2, 3, ..,
*) Если бы непрерывная периодическая функция / (/), отличная от то-
ждественной константы, не имела наименьшего положительного периода, то,
как нетрудно показать, нашлась бы последовательность ее положительных
периодов Г], Г2, ..., Тп.... сходящаяся к нулю. Их всевозможные цело-
численные кратные представляли бы всюду плотное множество точек на оси I,
— оо<£<4-со, а следовательно, значения /(f) на этом всюду плотном
множестве были бы равны значению / (f) в начале координат. Таким обра-
зом, f (t) была бы равна тождественной константе / (0) на этом всюду
плотном множестве и, в силу непрерывности, она была бы равна тождест-
венной константе на всей оси t, — со <<<-(- оо, что противоречит условию.
**) В дальнейшем независимую переменную мы всюду будем обозначать
через х.
§ 1] ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ 451
3. Интеграл от периодической функции. Если f (х) является
периодической интегрируемой функцией с периодом Т, то
а+Т Т
J* f (х) dx = j" f (х) dx при любом а, —оо<а<4-оо. Дей-
а О
ствительно,
а+Т Т а+Т
J" / (х) dx — J* f (х) dx + f f (х) dx =
а а Т
Т а Т
— J* /(x)dx-|- J f(x)dx = J' f(x)dx.
а О О
так как, в силу периодичности функции,
л+Г л+7* л
J f(x)dx— J /(х — T)dx = J / (х') dx', где х' = х— Т.
т т о
Таким образом, интеграл от периодической функции с периодом Т
по любому отрезку длины Т имеет одно и то же значение.
—।------ - 1 1 1
0 а+Т а+2Т а+ЗТ х
а~2Т а-Т а
Рис. 11.1.
4. Арифметические действия над периодическими функциями.
Очевидно, что сумма, разность, произведение и частное функций
с одним и тем же периодом Т являются периодическими функциями
с периодом Т.
Если периоды Tf и Tg двух периодических функций /(х) и g(x)
соответственно соизмеримы, т. е. Tf'.Tg—p:q, где р и q —
целые числа, то число T* — pTg = qTj будет периодом как функции
/(х), так и функции g(x). Следовательно, сумма, разность, произ-
ведение и частное этих функций также будут периодическими функ-
циями с периодом Т*.
Если же периоды Tf и Tg функций / (х) и g (х) несоизме-
римы, то сумма таких функций уже не является периодической
функцией, она будет так называемой почти периодической функцией.
Сформулируем определение почти периодической функции. Функция f (х),
непрерывная на всей вещественной оси —оо<х<-|-оо, называется
452 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. II
почти периодической, если для всякого е > 0 найдется такое
число L — L (е.) > О, что на любом интервале длины L, a<;x^a-|-L,
— со < а < + оо, найдется по крайней мере один «почти период» т = т (е),
соответствующий данному е, т. е. такое число т = t (е), что
|/(* + т(е)) — f (х)| <е
при всех х, —со < х < -)-со.
(Очевидно, что периодические функции являются частным случаем почти
периодических.) Можно доказать, что сумма, разность, произведение и част-
ное (если делитель 0) двух любых почти периодических функций является
почти периодической функцией, т. е. что множество всех почти периоди-
ческих функций (в отличие от множества всех периодических функций)
замкнуто относительно основных арифметических операций.
б. Суперпозиция гармоник с кратными частотами. Рассмотрим
последовательность гармоник
Ak sin ^-^Д-х -j- ф*) , k—\, 2. —оо<х<-}-оо. (11.7)
Т
Очевидно, число Tk—-^- является периодом &-й гармоники*). Сле-
довательно, число Т = kTk является общим периодом всех гармоник
последовательности (11-7). Частотой й-й гармоники является ~~f~’
k=\, 2, ... Таким образом, частоты гармоник последовательности
,,. 2л.
(11.7) являются целочисленными кратными одного и того же числа -у-.
Такие гармоники мы будем называть гармониками с кратными
частотами.
Сумма или, как говорят физики, суперпозиция конечного
числа таких гармоник
N
/„(x^^+^^sinf^x + q^ (11.8)
А = 1
является периодической функцией периода Т, так как число Т
является общим периодом всех этих гармоник **).
Аналогично суперпозиция бесконечного числа таких гармоник,
точнее, сумма сходящегося ряда
+оо
/(х)==Л0+^Аа81п^х + фл), (11.9)
1
также является периодической функцией о периодом Т\
п л • Г2яА ( । Г) । 1 , Г/Зяй \ 1
*) Действительно, sin I x-J-y I т" Ф* = sin I I + 2л =•
. /2лй \
= sin ^T"x + 4,fe)-
** ) Напомним, что константу Ло можно считать периодической функцией
с каким угодно периодом и, в частности, с периодом Т.
§ 1] ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ 453
Равенства (11-8) и (11.9) можно преобразовать так. Учитывая, что
. . (2лй 1 \ . 2лЬ . . . 2nk
Ак Sinl—^Х-|-фА1 = ЛА51Пфй cos—jr-x-|-Xftcos(pftsin-y-x,
положим
-у- = Л- «й = sin <Рй- ^ = ЛАсозфй, 2/ = Т;
тогда равенства (11.8) и (11.9) примут вид
/ArW = ^+S(^cos^+&ftsin-^), (11.10)
6=14
/(x) = ^+2(^cos^ + ^sin-^j. (11.11)
6=1 х
В правой и левой частях равенств (11.10) и (11.11) все функции
являются периодическими с периодом 2l.
Заметим, что функции fN (х) и f (х) имеют уже более сложную
kax
природу, чем составляющие их гармоники или функции cos—j—
и sin —, А==1, 2, 3, . .. (см., например, рис. 7,6).
Ряд (11.11) называют тригонометрическим, а равен-
ство (11.11), если оно имеет место, — разложением функ-
ции f(х) в тригонометрический ряд.
6. Постановка основной задачи. Основной задачей настоящей
главы является исследование вопросов:
1) Какую периодическую функцию с периодом 21 можно раз-
ложить в тригонометрический ряд вида (11.11), т. е. пред-
ставить в виде суммы, такого ряда?
2) Как найти коэффициенты разложения (11.11) ап, ak ubk,
если это разложение возможно?
3) Какова зависимость между характером сходимости
ряда (П-11) и свойствами функции /(х)?
7. Ортогональность тригонометрической системы; коэффи-
циенты Фурье и ряд Фурье. Разложение (11.11) — это разложение
функции f (х) в ряд по функциям системы:
1 ЛХ . ЛХ Алх . йлх
-g-, COS — , Sin-^-, ..., COS——, Sin ——... (11.12)
которую мы будем называть основной тригонометрической си-
стемой.
Основная тригонометрическая система является ортогональной
на отрезке [—I, /] в следующем смысле: интеграл по отрезку
454
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. II
[—I, I] от произведения любых двух различных функций этой си-
стемы равен нулю, а интеграл по отрезку [—I, I] от квадрата любой
функции этой системы отличен от нуля.
Действительно,
i
Г 1 knx , 11. knx |х=г п
J 2 I 2 kn I „ ,
-I 'X--1
I
Г 1 . knx , 11 knx 1х=г (ll.lSj)
/ -75- sin —Z- dx —-гут—cos—7— =
J 2 I 2 kn I L_ ,
—z
= —|jyl(-')*-(-l>,l = 0.
Далее,
i
Г knx nnx ,
/ cos—t—sin——dx—
-1
1
1 /“ г (Л-4-л)л i (k— ri) л 1 . n . ,
= y / cos '—x + cos -—j-2— xl dx — 0 при k ¥= n. (11.132)
Аналогично находим
i
Г . knx . nnx , n .
/ sin—— sin—— dx — Q при k =f= n,
-i
1
Г . knx nnx , _ . >
I sin cos—j—dx — 0 при k = n.
-1
(11.133)
Наконец,
1 i
[* <, knx . C
/ cos2—y-dx= /
-i -i
1 1
Г. n knx j /
sin2—— dx— /
-1 -i
, , , knx
1 4- cos2---
dx = l.
2
. , knx
1 — cos2 —-—
-----2------ dx Z’
(11.134>
Решим теперь вопрос об определении коэффициентов а0, ак, Ьк
разложения (11.11).
ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ
455
$ П
Если ряд (11.11) сходится равномерно или в среднем на
отрезке [—I, 1\ к функции f(x), то его можно интегрировать
почленно. Это утверждение сохраняет силу и после умножения равен-
ства (11.11) на любую интегрируемую функцию. Последнее обстоя-
тельство в сочетании с ортогональностью системы (11.12) позволяет
найти коэффициенты а0. ak и bk разложения (11.11). Интегрируя
равенство (11.11) почленно, получим
f f(x) dx —
—i
I +oo Г 2
an C , , X? Г knx . , . Г . knx .
= -£- I dx 4- 2j «л I cos—— z/x-j-6ft / sin——dx
-i ft=o L -i -i
откуда
(11.140)
Чтобы определить коэффициент an при cos ——, умножим равен-
ство (11.11) на cos и проинтегрируем по х от —I до I; это
даст (в силу (11.13,)—(11.134))
i I
/., . ппх . а0 Г ппх , .
/(x)cos-y— dx — -£ I cos —j—dx-\-
-i -i
+ oo 1 +СЙ
. (* knx ПЛХ , . V , / . knx nnx ,
y«ft / cos ——cos ——ax + ^jOft / sin—j—cos——dx—
ft=i -i ft=i -i
i
/ , nnx , ,
= an j cos2—j—dx — anl,
-i
откуда
i
an = Y f f(x)cos-^dx. (11.14,)
-z
Аналогично, чтобы определить коэффициент bn при sin ,
умножим равенство (11.11) на sin пя^х- и проинтегрируем по х от
456 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. П
— I до Ч-Z; это даст (в силу (11.130 — (11.130)
i
f f (х) sin ^-dx = bnl,
-i
откуда
i
b„ = ± f /(x)sin-^dx. (11.140
-i
Определение 1. Числа a0, an и bn, определяемые no фор-
мулам (11.140, (11.140 и (11.140, называются коэффициен-
тами Фурье функции f(х) по основной тригонометриче-
ской системе (11.12).
Определение 2. Тригонометрический ряд
+ 00
4=1 4
коэффициенты aQ, ak и bk которого определяются по фор-
мулам (11.140, (11.140 и (11.140 через функцию f (х), назы-
вается рядом Фурье функции f (х).
Заметим, что для существования интегралов (11.140, (11.140 и
(11.140 достаточно интегрируемости функции /(х) на отрезке
[—Z, ZJ. Поэтому каждой интегрируемой на отрезке [—Z, Z] функ-
ции /(х) можно поставить в соответствие ее ряд Фурье
+ОО
4=1 4
т. е. тригонометрический ряд, коэффициенты которого определяются
по формулам (11.140, (11.140 и (11.140. Однако, если от функ-
ции f (х) не требовать ничего, кроме интегрируемости на отрезке
[—Z, Z], то знак соответствия в соотношении (11.16), вообще говоря,
нельзя заменить знаком равенства. В следующем параграфе мы выясним
некоторые достаточные условия, при выполнении которых это
можно сделать.
8. Разложение в ряд Фурье четных и нечетных функций.
Функция /(х), заданная на отрезке [—Z, Z], называется четной, если
/(—х) = /(х) при всех х£ [—Z, ZJ. (П-17)
Функция /(х), заданная на отрезке [—Z, Z], называется нечет-
ной, если
/(—х) =— /(х) при всех х£[—Z, Z]. (11.18)
§ 1]
ПРЕДВАРИТЕЛЬНЫЕ СВЕДЕНИЯ
457
Из этих определений следует, что график четной функции сим-
метричен относительно оси ординат, а график нечетной функции
симметричен относительно начала координат.
Если f (х)— произвольная функция, заданная на отрезке [—I, /],'
то первая из функций
+ и /2(х) = /(Х)~2/(~Л) (11.19)
является четной, а вторая — нечетной, прячем
/(х) = /х(х) + /2(х) при всех xg[— I, Z], (11.20)
а следовательно, всякая функция / (х), заданная на отрезке [—I, Z],
может быть представлена в виде суммы четной и нечетной функций.
Если f (х) интегрируема на отрезке [—Z, Z], то
10 11
J f(x)dx~ j" /(x)dx-i-j' f(x)dx — J" [/(x)-j- f (—x)\dx (11.21)
-i -i о о
(так как при замене х на — х получаем
о о I
У f(x)dx — — J" / (— x)dx — J f (— х) dx).
-i i о
Из соотношения (11.21) следует, что
У /(х) dx =
-I
I
2 у f(x)dx,
о
0,
если функция / (х) четная,
если функция /(х) нечетная.
(11.22)
, 1 jvh. ajvh. «лл .
Функции , cos-j-, cos——, .... cos—j--------------четные, а функ-
. лх . 2лх . knx
ции sin—j—, sin—j—.........sin —-------нечетные.
Пусть /(x) интегрируема на отрезке [—Z, Z]; если функция /(х)
четная, то ее ряд Фурье имеет вид
Sknx
a*cos—;
fe=i
(11.23)
если же функция /(х) нечетная, то ее ряд Фурье имеет вид:
+ 00
V , knx
24Ь^П~Т~'
Й=1
(11.24)
458
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. П
Действительно, если функция / (х) четная, то / (х) cos
,, , . ksix
также четная, a /(x)sin—j— нечетная, поэтому
= j f
'-1 о
I
bk=± f /©sin-^-^ = 0,
-i
i i
ak = T J f^cos-i^ = Tj /©cos-y^-й©
— I 0
Если же функция /(x) нечетная, то /(х)cos-^х
,, . . kxx
a /(x)sin—— четная, поэтому
1 1
«о = т f /©Д = 0, = ± f/©cos-^-<©=0,
-i -i
i i
bk=T f /©sin-^-^ = |J’/©Sin-^M.
-I 0
(11.25)
нечетная,
(11.26)
9. Разложение функций на отрезке [— я, я]. Если требуется
разложить в тригонометрический ряд Фурье функцию /(х), заданную
на отрезке [—я, л], то, полагая в формулах (11.13) и (11.17) 1 = п,
получим для коэффициентов Фурье и ряда Фурье следующие выра-
жения:
Л л
«0 = 4- f = Т f /(^cos«^-
-л -л
я +со
bn = -^ f /(l)sinn£<© /(x)~-^- + 2(aftcos*x + &ftsin*x).
-Л Й = 1
Общий случай задания функции /(х) на отрезке [—I, /] сводят
к только что рассмотренному с помощью замены независимой пере-
менной х =—р- • Функция <р(х ) —/1-^-1 определена на отрез-
ке — ж^х'^л, если / (х) определена на отрезке [—I, /].
СХОДИМОСТЬ РЯДА ФУРЬЕ
459
§ 2]
Однако, имея в виду последующие применения рядов Фурье
в математической физике, мы для единообразия написания и выра-
ботки надлежащих навыков будем вести все рассмотрения непосред-
ственно для отрезка [—I, /].
§ 2. Основная теорема о сходимости
тригонометрического ряда Фурье
Целью настоящего параграфа является доказательство того, что
тригонометрический ряд Фурье (11.16) периодической кусочно-
гладкой функции f (х) с периодом 21 сходится к f (х) в каждой
точке непрерывности f (х).
Сначала мы опишем класс кусочно-гладких функций, играющих
важную роль в математической физике, а затем перейдем к изло-
жению основной теоремы.
1. Класс кусочно-гладких функций. Функция /(х) назы-
вается кусочно-непрерывной на [а, Л], если она непре-
рывна всюду на этом отрезке, исключая, быть может, конеч-
ное число точек разрыва первого рода.
Такая функция имеет в каждой точке х отрезка [а, Й] конечные
правое и левое предельные значения:
/(х + 0)= 11т/(х4-г), /(х — 0)— lim/(x — z), (11.27)
z-»0 z->0
z>0 z>0
а в концах отрезка [a, 6] — конечные предельные значения /(а4-0)
и f(b — 0).
Кусочно-непрерывную на [а, Ь], а<^Ь, функцию f (х) назы-
вают кусочно-гладкой на [а, />], если f'(x) существует
и непрерывна всюду на этом отрезке, кроме, быть может,
конечного числа точек, в которых, однако, существуют конеч-
ные правое и левое предельные значения
/'(х4-0)= lim/'(х 4~ 2), /'(х — 0)= lim/'(х — z). (11.28)
z->0 z->0
z>0 z>0
При этом предполагается также, что существуют конечные
предельные значения f'(a-{-0) и f'(b — 0) в концах отрез-
ка {а, 6].
Кусочно-гладкая функция /(х) имеет в каждой точке х отрезка
[а, д] конечные правую и левую производные:
/' (x)=limZ<-*+*)-^ + »>,
/дев(х)=;5^-^/и-о).
J лев' ' Л _z
2>0
460 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
Действительно, применяя формулу конечных приращений *) и используя
соотношения (11.28), получим
lim f(x± z}~f{X = lim f'(x ± Qz) — f'(x ± 0), (11.30)
z->0 * z z->0
z>0 z>0
а следовательно, производные Лрав(^) и /aeB(x) существуют и имеют
место равенства
/прав W == /' (^ + ОХ Лев (*) = /' (X - 0).
График кусочно-гладкой функции /(х) имеет определенную каса-
тельную в каждой точке, кроме, быть может, конечного числа точек,
в которых, однако, существуют определенные правая и левая каса-
тельные (рис. 11.2).
Если /(х) является кусочно-гладкой функцией на [a, #], то, оче-
видно, [а, 6] можно разбить на конечное число таких отрезков
[й0> °11< ®21> •••• lai> °i+ll.
где
а0 = а<а1< ••• < < й-1+i < ••• < — Ь,
что внутри каждого отрезка [az, функции /(х) и /7(х) не.
прерывны и стремятся к определенным конечным пределам
/(а; + 0), /'(«/ + 0) и /(а/+1 —0), f'(al+l — 0)
*) Нужную нам формулу конечных приращений / (х 4- г) — f (х 4- 0) =
= zf (x-\-Qz), где 0 < 0 < 1, можно получить так: возьмем 0 < 6 < z и
применим обычную формулу конечных приращений
f (X 4- 2) - f (X 4- б) = (Z - б) Г (X 4-1),
где 0 < б < | < г, а затем перейдем к пределу при 5 -» 0.
СХОДИМОСТЬ РЯДА ФУРЬЕ
461
§ 2]
при стремлении х к at справа и к ai+1 слева. Отсюда следует
ограниченность /(х) и /'(х) на каждом из отрезков [az,
а следовательно и на [а, 6] *).
2. Формулировка основной теоремы о сходимости тригоно-
метрического ряда Фурье.
Теоргма 11.1. Если функция /(х) является кусочно-гладкой
на отрезке —то ее тригонометрический ряд Фурье
сходится в каждой точке х этого отрезка, причем для
суммы
S(x) = -^ + £(aftc°S-^ + ^sin^) (11.31)
А = 1
этого ряда выполняются равенства'.
1) S (х) = f (х), если —1<х<1 и х является точкой не-
прерывности f (х),
ох С/ л /(х-+-0) + /(х —0)
2) S(x) — ——' 2 -----если —1<х<1 и х является
точкой разрыва f(x),
Замечание. Если —Z<x<Z и х является точкой непрерыв-
ности /(х), то / (х — 0) — / (х0) — / (х), а следовательно,
/(х + 0) + /(х-0) = 4f(x) =
Поэтому равенства 1) и 2) можно заменить одним равенством
S(x)^=-/(x + 0) + /(x~0) , (11.32)
выполняющимся в каждой внутренней точке х отрезка [—1,1].
3. Основная лемма. Для доказательства теоремы нам потре-
буется следующая
Основная лемма. Если f (х) является кусочно-гладкой
функцией на отрезке а^.х^.Ь, то
ъ
lim f /(х) sin ах dx = 0. (11.33)
а-»со J
*) Действительно, если f (х) и fl (х) доопределить по-новому в концах
отрезка [at. д/+11» полагая, что /(а2) = /(а/-|-0), /(а/+1) =/(а/+1—0),
f М = f (at Д- 0), f (ai+P) == f (ai+i — 0), to f (x) и f (x) станут непре-
рывными на замкнутом отрезке [а/, а/+1], а следовательно, и ограниченными
на нем. Так как при этом значения /(х) и f (х) могут измениться лишь
в концах отрезка [ai, ai+t], то и при первоначальном определении функции
/ (х) и f (х) ограничены на [а,, а/+1].
462 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ , [ГЛ. И
Доказательство. Разобьем [а, £] на такие частичные отрезки
[а0. Дц]. [#!• •••> ai+iL •••• aw+iL
где а = а0<о]< ... < а, < < ... < aN < aN+1 = b, что
функции /(х) и /'(х) внутри каждого отрезка \at, al+l] непрерывны
и стремятся к определенным конечным пределам
/(«/ + 0), Г(«/ + 0) и /(а(+1-0), f'(ai+1-0)
при х->дг справа и х—>а/+1 слева. Так как
b N ai+\
J/(x)sinax dx = J /(x)sinaxdx, (11.34)
a 1=0 a(-
to достаточно доказать, что
al+l
lim I / (x)sinax dx = 0
a->oo ->
ai
(11.35)
при Поскольку /(x) и /'(x) можно считать непрерыв-
ными на замкнутом отрезке [at, az+1] (см. сноску на стр. 461),
то можно воспользоваться интегрированием по частям. Это дает
a/+i а/+1
Г ,, . . , f (х) cos ах l-*--0 1 С
/ /(x)sinaxrfx=—------------ - +— / f (x)cosaxdx.
“l ai
(11.36)
Так как /(х) и /'(х) ограничены на [а, &], т. е. существуют такие
константы М и М', что |/(х)|<СЛ4 и |f (х)|<;М' всюду на [а, Ь],
то из равенства (11.36) следует неравенство
ai+i
J /(x)sinaxdx
ai
. Af'(at+1—
a ' a
(11.37)
Из неравенства (11.37) при a->oo следует соотношение (11.35).
Этим основная лемма доказана.
Замечание 1. Можно доказать, что лемма верна и для значи-
тельно более широкого класса функций. Например, если /(х) абсо-
лютно интегрируема на [а, Ь], т. е. несобственный интеграл
ь
J* |/(x)|dx < + оо, то лемма также сохраняет силу.
а
Замечание 2. Под знаком интеграла в лемме можно вместо
sin ах брать cosax.
§ 2]
СХОДИМОСТЬ РЯДА ФУРЬЕ
463
4. Доказательство основной теоремы сходимости. Пусть
f (х)— кусочно-непрерывная и кусочно-гладкая функция на отрезке —
Z<^x<^Z. Продолжим периодически функцию /(х) с периодом
2/ за пределы этого отрезка на всю ось х и докажем, что для
каждого х, —оо < х <-|-оо,
J с z \ f (-^ — 0) -j- f (х -f- 0)) г, I /11 о о \
<оп(х)— —------ 2 ——-|->0 при (11.38)
где ' ,
п
«W = -y- + 2j г* cos-z----b^sin—j—) (ll.39)
»=i
— частичная сумма тригонометрического ряда Фурье функции /(х),
отвечающего отрезку —Z<^x<^/*). Подставляя в (П.39) выражения
коэффициентов Фурье
I i
= | f ШЛЪ = т f /©cos-^-dS,
-I —z
I
(I l.40)
-I
получим
1 n /
5„(x) = 4- f + f /®[cos-^-cos-^ +
-l Л = 1 -I
1 Г n
+ sin±Elsin2±l]d^| f f<£> l + ^cos
-i L *=1
Г n
= T f + T + Scos-^r
— l—x A=1
dz, (11.41)
*) Так как f (x) после периодического продолжения стала периодической
, 1 лх . лх knx , knx
функцией с периодом 21, a -g-, cos-g—, sin-g—cos—-—, sin——
также являются периодическими функциями с периодом 21, то интегралы
при вычислении коэффициентов Фурье а0 = J_ J f (х) dx, а„ =
-I
I I
= j* f (х) cos гсгс* ьп __ _L j* f (х) sin п1^х dx можно после такого
-I -I
продолжения f (х) брать не только по отрезку —Z<x<;Z, но и по любому
другому отрезку длины 2Z; от этого значения коэффициентов не изменятся.
464 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. 11
где z = Z,— х. Найдем теперь замкнутое выражение для суммы
п.
on(^) = | + ^cos-^. (11.42)
Л = 1
Умножая обе части (11.42) на 2sin-£y, получим
п
2и„ (z) sin = sin 2j 2 sm"2— cos ——
4 = 1
. яг . \1Г , Z, . 1\ яг . /, 1\ лг~\ . ! . 1 \ яг '
^sin-^ + ^L5111 l* + -2)-Z Sln г - 2)~Г J = sln Iя + 2) - ’
4 = 1
откуда
Подставляя это в (11.41), получим для частичной суммы ряда Фурье
выражение
sin («+!') 211
ад =4 / /(x+z)—>—^~dz- (н-44>
-l-х 2sin-|£
Так как /(х) (периодически продолженная за пределы отрезка [—I, 1\
с периодом 2Z) является периодической функцией с периодом 21
, I , 1 \ яг
sin г+т Т
и так как, в силу (11.43), —------------- является периодической
2sin^T
sinfn + yj'T"
функцией z с периодом 21, то произведение f(x-\-z)---------------
2sinTT
также является периодической функцией z с периодом 21. Поэтому
интеграл по z от этого произведения по любому отрезку длины 21
имеет одно и то же значение. Следовательно, в интеграле (11.44),
берущемся по интервалу длины 2Z, пределы интегрирования —Z— х
и Z — х можно заменить пределами —Z и Z; в результате получим
равенство
i , ( , 1\ яг
. sin п+т —
sn (X) = У / / (х + z) dz. 11.45)
2sin^
§ 2] СХОДИМОСТЬ РЯДА ФУРЬЕ 465
Интегрируя (11.43) по z от —I до Z, получим
i . I . 1\ яг i
1 f Г + 2) Z 1 Г . ,
т J ~ —dz=^i J dz==1’ <lh46>
Л Ssin-^- JZ
l . f , 1\ яг
/ Sin n + у -J—
cos —5—dz = 0 при /г—1, 2, 3, ... Но--------------
Z o , яг
-l 2sn 2Z
является четной функцией z (см. п. 8 § 1); поэтому из (11.46)
вытекает, что
dz~ 2
(11-47)
Умножая первое из равенств (11.47) на f(x — 0), а второе на
/(х + 0) и складывая результаты, получим
о
/(Х О)+/(Л + О) _ ! у*
-I
sin
2sinlT
2
sin
о
----------dz.
о , яг
2sn 2Z
(11.48)
Вычитая (11.48) из (11.45), будем иметь
Sn (х) — /(^~0) + /(^ + 0) =
о . I . 1\ яг
1 [‘ sinb + y \-Г
= -т / !/(* + *>-/(х-0)]—+
2slnlT
I . I , 1\ яг
1 Г sinln + y)-7"
+т / [/(*+*)-/(*+о)1—<и-49)
‘° 2s,nir
Докажем, что оба интеграла в правой части равенства (11.49)
стремятся к нулю при п-»-{-оо. Покажем это, например, для
466 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
второго из интегралов (11.49). Представим оцениваемый интеграл в виде
6
, = J_ Г /(х + г)-/(х + 0)
п л J г
о
i
лг
21
, лг
Sin-2T
sin
(«+4)^-л+
/(х + г)-/(х + 0)
о , пг
2 sin 2/
sin (п ~j~dz — Jn-}-Jn>
(11.50)
6
взяв 0 < 6 < Z. Пусть дано е > 0. Докажем, что за счет выбора 6 > О
первый из интегралов (11.50) можно сделать по модулю < у
сразу при всех п—1, 2,... Так как ^^-i-^-y-^-^t22_>y'(x-|-O)
при z —> 0 0 *), то при достаточно малом 6 > 0 и всех z из интервала
О < z < 6 будет
|/(1+£)-/(^ + 0).|<|Г(х + 0)| + 1.
”27”
Так как--------->1 при z~>0, то при достаточно малом д>0
Sin'2T
и всех z из интервала 0 < z < 26
Наконец, при всех действительных z и всех п = 1, 2, ...
Следовательно, при всех и=1, 2, ...
ft
fn| <2у | /(-*+*)—/(*+°)
о
nz
~2Г
|Sin(„+j)^|^<
<vl^/(x+0)l + 1b
если только 6 > 0 достаточно мало. Взяв 6 > 0 столь малым, чтобы
1|/' (*4-0)| 4- 1] < получим, что
|Л|<у при всех п=1, 2, ... (11.51)
*) См. соотношения (11.30).
§ 21 СХОДИМОСТЬ РЯДА ФУРЬЕ 467
Фиксируем выбранное д>0 и рассмотрим второй интеграл из (11.50)
6 * sin
Функция является кусочно-непрерывной и ку-
2, 712
sn Ти-
сочно-гладкой на отрезке (при д > 0), так как таковым
является числитель, а знаменатель 2 sin представляет собой не-
прерывно дифференцируемую функцию, не обращающуюся в нуль
на этом отрезке. Тогда по основной лемме >0 при л->-|-оо
и, следовательно, при всех достаточно больших значениях п будет
|Х|<|. (И.52)
Сопоставляя (11.51) и (11.52), получим, в силу (11.50), что
|Л| <|Л|4-| Л| < '2~^"2==е (11.53)
при всех достаточно больших п, т. е. Уя->0 при п—>-|-оо.
Аналогично доказывается, что и первый из интегралов в правой
части (11.49) стремится к нулю при п—>-|-оо. Следовательно,
lim Sn(x)== /(z + 0) + /U-0) . (11.54)
л-> + со
Напомним, что f (х) периодически продолжена за пределы отрезка
(—I, Z] с периодом 2Z. Следовательно,
/(2 + 0) = /(-/ + 0) и /(-Z-O) = /(Z-O). (11.55)
Подставляя в (1L54) сначала х — — I, а затем x = Z и используя
соотношения (11.45), получим
lim S„(-Z) = lim Sn {Г) = Z-±0) + Z (/ ~0) . (11.56)
n->+co rt->+oo
Этим доказательство теоремы завершено.
б. Примеры. 1. Разложим f(x) — x в тригонометрический ряд
Фурье на отрезке [—Z, ZJ. В силу нечетности функции f (х)
i
д0 —0, дя = 0, Ьп = -^ I /(x)sin—j—</х.
6
468
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 11
Интегрируя по частям, будем иметь
Следовательно, по основной теореме сходимости
. knx
Sin——
/(х-о)+/(х+о)=х п₽и _1<х
7(-./ + О) + /(/-О).. = 2Ц+1 = о при х=±/
Графики f(x) = x и S(x) изображены на рис. 11.3.
Функция S (х) является периодической с периодом 2/, причем
S(x) = x только при —I < х < I. В точках вида х —(2А-|-1)/,
k = 0, +1, +2, ..., S(х) претерпевает разрывы, принимая значение,
равное нулю, так как полусумма правого и левого предельных зна-
чений 5(х) в каждой такой точке равна нулю. На рис. 11.4 при-
. „ с , , 21 V (—1)А + 1 • kax
веден график частичной суммы о5 (х) = — 2j -—-sin - при
*=1
— /<х</.
2. Пусть /(х) = х2 на отрезке [—I, /]. Так как /(х)=х2—
функция четная, то
i i
2 Г О J 2 [* 9 ЛЛХ , L П 1 П
а0—-^1 x2dx, ап = — I x2cos—— dx, bn = 0, п=1, 2, ...
о о
§ 2] СХОДИМОСТЬ РЯДА ФУРЬЕ 469
Вычислив коэффициенты а0 и ап, получим, в силу основной теоремы
сходимости, что
+СО
. Z2 . 4Z2 V knx Q ,,, соч
= cos ~T~==zX при —Z<x</. (11.58)
s=i
Графики функции f(x') = x2 и суммы ряда Фурье 5(х) изображены
на рис. 11.5.
Функция S(x) является непрерывной и в точках вида х=(2/г-|-1) л,
/г = 0, ±1, ±2......так как /(—Z-|-O) = /(Z— 0) = Р для функ-
ции / (х) = х2.
Если разложение ведется на интервале [— л, л], т. е. I — л,
то равенство (11.58) принимает вид
+ю >.
о Л2 . . V (—1)* , ,, . ГП,
х2 = -з~-4-4 2j ^,2 cosAx. (11.59)
*=i
470
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 1!
При х — 0 из (11.59) получаем полезное равенство
^=‘-4+4-п+ ••• +(-i)'-y+... (Н.60)
3. Пусть
( Ci при —I < х < 0,
f (х) — {
I с2 при 0 < х < I.
Тогда
i о I
ao—j-ff(x)dx = -jf Crdx-\-i-f c2dx = c1 + c2,
-I -I о
I О I
. 1 Г ,, . . ппх , 1 [* ппх , , 1 Г ппх ,
Ьп = у / /(x)sin —у dx = y I CjSin—yrfx + y / c2sin—— dx.
-i -i о
Следовательно, bn = 0 при п четном и bn — 2 c‘^ при n нечетном.
~Sl ~SZ -41 ~SZ ~2Z ~l dl Z 21 SZ 4Z SZ SZ £
Рис. 11.6.
Поэтому, в силу основной теоремы сходимости,
с . . с, 4- с, , 2 (с, — с.) ( . пх . 1 . Злх , 1 . 5лх . )
<j(x> = _22p.+ 4|sln_ + _sin__+ _sin__+...j =
f q при —I < x < О,
i' c2 при 0 < x < I,
c' — при x — ± I, 0.
График S(x) изображен на рис. 11.6.
На рис. 11.7 приведены графики частичных сумм полученного
ряда Фурье S^x), S2{x) и 53(х) при условии, что ct = — 1. с2 = + 1,
§ 2]
СХОДИМОСТЬ РЯДА ФУРЬЕ
471
472
ряды фурье и интеграл фурье
1ГЛ. и
когда ряд принимает вид
с, , 4 ( . лх , 1 . Злх , 1 . 5лх . )
5(х) = -{srn-r +з81п — + Tsin— + ••• Н
— 1 при —I < х < О,
= 1 при 0 < х < I,
О при х = 0, х—+1.
6. Разложение функций, заданных на отрезке [0, 1\, только
по синусам или только по косинусам. Пусть кусочно-непрерывная
и кусочно-гладкая функция / (х) задана на отрезке 0<^х<Д. Ее
можно продолжить различным образом на отрезок —Z<^x<^0,
в частности: 1) четно и 2) нечетно. В первом случае на отрезке [—I, Z]
получится четная функция. Для нее
i i
— /(£)cos^^, bk — 0, (11.61)
, о о
а ряд Фурье на отрезке [—I, Z] принимает вид
+ 0О
(11.62)
* = i
Во втором случае получается нечетная функция на отрезке [—I, Z].
Для нее (
д)==0, aft = 0, = j f /(Osin^^. (11.63)
О
а ряд Фурье на отрезке [—I, I] принимает вид
4-оо
/W~2^sin^r- (11-64)
fe = l
На отрезке 0<x<Z каждый из рядов (11.62) и (11.64) сходится
к /(х) (в точках непрерывности f (х)).
Следовательно, мы можем сказать, что каждую кусочно-гладкую
функцию /(х), заданную на отрезке 0 х можно, по желанию,
разложить в ряд по одним косинусам (11.62), коэффициенты
которого находятся по формулам (11.61), и в ряд по одним
синусам (11.64), коэффициенты которого находятся по форму-
лам (11.63).
Пусть, например, /(х) = х на отрезке 0 х <^Z; при нечетном
продолжении получаем /(х) = х на отрезке —Z х <3- но разло-
жение такой функции в ряд Фурье было рассмотрено выше (см.
пример 1 и рис. 11.3). При четном продолжении /(х) = х полу-
чаем /(х)=|х| на отрезке —Z^x<^Z. Разлагая /(х) в ряд
§2] . СХОДИМОСТЬ РЯДА ФУРЬЕ 473
по косинусам на отрезке 0-^х<^1 по формулам (11.61), (11.62),
получим
+оо
X — -у- Н- 2j ak COS ПРИ 0<X<Z,
' ft=l
где
i i
2 /* , , 2 /* knx 41 . ..n
0o = 7 / xdx — l, an^-j-J xcos —j-dx = ^r[(— 1) — 1] =
о 0
, 0 при n четном,
= 1 4/
---------------------------------------ПРИ n нечетном.
Следовательно,
I 41 I nx . 1 3nz . 1 5лх . )/ii дг-ч
x = J — -2 )cos-f—I-32 cos ——F 52 cos -7-+ • ••( (11.65)
при о
Справедливость равенства (11.65) при х = 0 и х = 1 легко уста-
новить, если рассматривать (11.65) как тригонометрический ряд
Фурье четной функции f (х) = | х |, заданной на отрезке [—Z, /].
Такое истолкование ряда (11.65) позволяет легко построить график
его суммы при любых значениях х (рис. 11.8).
Вообще, так как при четном продолжении любой кусочно-непре-
рывной и кусочно-гладкой функции /(х), заданной на отрезке [0, Z],
имеют место соотношения
/(-0) = /(+0) и /(—Z-f-O) = /(Z —0), (11.66)
то сумма ее тригонометрического ряда Фурье в точках х = 0
и х= +1 будет непрерывной и равной соответственно /(+0) — /(—0)
и f (— Z -f- 0) = / (Z — 0). Если f (х), кроме того, непрерывна в концах
отрезка [0, Z], т. е. f 1- 0) — f (0) и /(Z — 0) = / (Z), то отсюда
следует, что сумма ее ряда по косинусам равна /(х) и в концах
этого отрезка.
Напротив, при разложении /(х), 0<Jx<J, в ряд по синусам,
т. е. при нечетном продолжении f (х) на отрезок — Z х 0,
474
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. И
у сумм ряда Фурье могут появиться разрывы в точках х = 0 и х= ±/,
несмотря на непрерывность и гладкость f (х) на отрезке 0 х I.
На рис. 11.9 изображен график суммы ряда Фурье нечетно продол-
женной функции f(x) = x-j-1, заданной при О^.х^.1. Так как
при нечетном продолжении /(—0) =— /(4-0) и /(—=
= — /(/— 0), то равенства /(—0) = / (-1- 0) и /(—/-|-0) = /(/—0),
необходимые для непрерывности суммы ряда Фурье в точках х = 0
и х — ± I, будут иметь место только в случае, когда
/(+0) = 0 и /(/-0) = 0.
(11.67)
§ 3. Ряды Фурье по ортогональным системам.
Неравенство Бесселя
Разложение функции /(х) в тригонометрический ряд Фурье
является частным случаем разложения /(х) в ряд по ортогональной
системе функций.
1. Ортогональные системы функций. Функции ф(х) и ф(х),
интегрируемые*) на [а, Ь\, называются ортогональными
на [а, £>]. если
ь
<р(х)ф(х)</х = 0. (11.68)
а
Система функций
Ф1(х), ф2(х), ..., <рл (х)..................... (11.69)
интегрируемых на [а, &], называется ортогональной
на [a, Z>], если
С ( 0
Фг (*) <Р* (*) dx =
J I > и
а '
при I ф k,
при i = k.
(11.70)
*) Всюду, если не оговорено противное, интегрируемость понимается
в смысле собственного интеграла, а функции предполагаются вещественными.
§ 3]
РЯДЫ ФУРЬЕ ПО ОРТОГОНАЛЬНЫМ СИСТЕМАМ
475
система
knx . knx z i i
cos—j—, sin—i—, ... (11.71)
knx
., cos —— ,
(11.72)
Приведем примеры ортогональных систем.
1) Основная тригонометрическая
1 пх . пх
cos—sin — , ....
ортогональна на отрезке [— I, I].
2) Системы функций
. 1 пх 2лл
а) -у, cos -у-, cos —-j—
,ч . пх . 2пх . knx
б) sin -у- , sin —— , .... sin-— ,
ортогональны (каждая) на отрезке [0, /].
3) Система полиномов Лежандра
«=1.2.......P0(x)=l, (11.73)
ортогональна на отрезке [—1, 1] (см. Дополнение 1 к гл. И).
Если функция <р(х) интегрируема на [а, Ь], то ее нормой
на [а,
ft] назовем неотрицательное число
/ ь \у»
||ф|| = I J <P2(x)dx I .
/
всех функций ортогональной системы положительны,
соотношений (11.70), которыми определяется ортогональность
(11.74)
Нормы
в силу
системы.
Используя символ нормы, эти соотношения можно переписать так:
ъ
Г / ч / ч j ( 0 при I =/= k,
a I IIФа II2 при i = k.
Приведем нормы функций некоторых ортогональных систем.
1) Нормы функций основной тригонометрической системы (11.71)
на отрезке [—/, /] равны, в силу определения (11.74) и соотноше-
ний (11.132):
(11.75)
cos
sin-^p|=y/, (11.76)
Л=1, 2, ...
2) Нормы функций систем (11.72) на отрезке [0, /], как нетрудно
вычислить, равны
‘>141=4. h4l=/T
(11.77)
476 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. 11
3) Нормы полиномов Лежандра на отрезке [—1, 1] равны
/ +1 \‘/> ___________
РЯ(*)И= f P«(x)dx = у/'^т. (11.78)
\-1 /
(По поводу вычисления нормы ||Р„ (х)|| см. Дополнение 1 к гл. 11.)
2. Коэффициенты Фурье и ряд Фурье функции f(x) по орто-
гональной системе. Пусть функция /(х) интегрируема на [а, 6]
и пусть на [а, />] имеет место равенство
-Ьсо
/(х)= 2 (11.79)
ft = i
где ak — постоянные числа, a cpft (х) — функции ортогональной
на [а, £>] системы (11.69). Если ряды, получающиеся после умноже-
ния равенства (11.79) на любую функцию <р„ (х) системы (11.69),
можно интегрировать почленно *), то, в силу ортогональности си-
стемы (11.69), коэффициенты ак очень просто выражаются через f (х)
следующим образом. Умножим равенство (11.79), на <рл (х) и про-
интегрируем по х от а до Ь; мы получим
Ь +со b
f f (х) <p„(x)dx='^ak J ФЛ (х) <р„ (х) dx. (11.80)
а А = 1 а
Все интегралы в правой части равенства (11.80) при k =/= п обра-
щаются в нуль, в силу соотношений ортогональности (11.70). Сле-
довательно,
ь ь
f f W <₽„ (*) dx = ап J <р2 (х) dx = ап || (р„ ||2,
а а
откуда
b
Лп= (11.81)
а
Числа ап, определяемые по формулам (11.81), называются коэф-
фициентами Фурье функции f (х) по ортогональной системе
(11.69), а ряд (11.79), коэффициенты ак которого определяются
по формулам (11.81), называется рядом Фурье функции /(х) по
ортогональной системе (11.69).
Так как для образования чисел ак по формулам (11.81) от функ-
ции / (х) требуется лишь интегрируемость (напомним, что функ-
*) Возможность такого почленного интегрирования заведомо будет иметь
место, если ряд (11.79) сходится к своей сумме равномерно или в среднем
на отрезке [а, 6].
§ з] ряды фурье по ортогональным системам 477
ции фй (х) интегрируемы в силу определения ортогональной системы),
то каждой интегрируемой на [а, £] функции f (х) можно поставить
в соответствие ее ряд Фурье по системе (11.69), ортогональной на [а, Ь]:
+оо
/(х)~ 2 Wt(x),
k = \
(11.82)
т. е. ряд, коэффициенты ak которого находятся по формулам (11.81).
Условия, которым должна удовлетворять функция /(х) для того,
чтобы знак соответствия в соотношении (11.82) можно было заменить
знаком равенства, зависят от свойств ортогональной системы
{фА(х)}. Для случая, когда в качестве ортогональной системы, по
которой ведется разложение, взята основная тригонометрическая си-
стема, соответствующие достаточные условия содержатся в доказан-
ной выше основной теореме сходимости тригонометрического ряда
Фурье. Доказательство аналогичных теорем сходимости для других
ортогональных систем требует специального рассмотрения.
3. Задача о наименьшем квадратичном уклонении. Тождество
Бесселя. Неравенство Бесселя. Рассмотрим какой-либо фикси-
рованный отрезок
Ф!(х), ф2(х).....ф„(х) (11.83)
системы (11.69), ортогональной на [а, 6]; линейная комбинация
функций
п
(11.84)
fe=i
с произвольными числовыми коэффициентами ak, k—1, 2.........п,
называется многочленом п-го порядка по ортогональной си-
стеме (11.69).
Пусть функция /(х) интегрируема на [а, Ь] и пусть требуется
решить следующую задачу:
Найти, при каких значениях коэффициентов aft, k = 1, 2, .... /г,
многочлен n-го порядка по данной ортогональной системе имеет
наименьшее квадратичное уклонение (гл. 8, § 6, п. 1) от функции
/ (х) на отрезке [а, £»], т. е. при каких значениях коэффициен-
тов аг, а2, .... а„ величина
Р2
п \ Ъ Г п 12
/> У «Л = Г /(*) — У алф* (X)
й=1 / a L *=1
п 2
А = 1
dx —
(11.85)
достигает своего абсолютного минимума.
478
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
1ГЛ. II
Раскрывая квадратную скобку, получим
(л х
/• 2а^и==
/
Ъ п Ъ Ъ / п \2
= J/2(x)<Zx—2 2 «а J7(*)<Pa(*W + / ( 2“аФа (*)) dx =
а
А = 1 а
Ь
= f f2 (*) dx —
a
а Jfe = l /
п п
2 akak II Фа II2 + 2 а* II'Р* II2’ О1-86)
А=1 й=1
ь
так как § f (х) (х) dx = ak || фл ||2 (согласно (11.81))
а
Ь ь
и f <pz (х) ср* (х) dx — 0 при i #= k, a J* ф2 (х) dx —1| фй Ц2.
а а
Дополняя до полного квадрата, из (11.86) получим
(л \ b п л
/- 2 I = f f2 W dx - 2 a21| Ф, ||2 + 2 (aA - ай)21| Фл ||2.
k=l ! a £ = 1
(11.87)
Только последняя сумма в правой части (11.87) зависит от коэф-
фициентов ak. Так как эта сумма неотрицательна, то она достигает
точной нижней грани, обращаясь в нуль при dA — ak\ при этом
/ п \
квадратичное уклонение р2 ( /, 2 <^аФа I достигает, очевидно, своего
\ А = 1 /
абсолютного минимума, равного
(п.
/• 2 а*<р*
А = 1
' 2
л
b Г
= у / (*)—2 а*ф* dx==
А = 1
п
а
b
(11.88)
Многочлен
а
А = 1
n
2 «аФа W.
A = 1
ah которого являются коэффициентами Фурье функ-
данной ортогональной системе {<pfe(x)j, называется
Фурье функции f (х) по данной ортогональной
(11.89)
коэффициенты
ции f (х) по
многочленом
системе {фА(х))<
§ 3] РЯДЫ ФУРЬЕ ПО ОРТОГОНАЛЬНЫМ СИСТЕМАМ 479
Итак, среди всех многочленов ц-го порядка (п фиксировано)
по данной ортогональной на [а, Ь] системе (<pft (х)} наименьшее
квадратичное уклонение от функции f (х) на отрезке [а, 6] имеет
многочлен Фурье функции /(х) по этой ортогональной системе.
Равенство (11.88), выражающее квадратичное уклонение от / (х)
ее многочлена Фурье на отрезке [а, #], называется тождеством
Бесселя.
Замечая, что левая часть равенства (11.88) неотрицательна, полу-
чим неравенство
л Ь
(И.эо)
й = 1 а
справедливое при всех п^>1, поскольку правая его часть от п
не зависит. При возрастании п сумма, стоящая в левой части нера-
венства (11.90), не убывает; в силу ограниченности сверху, она
стремится к определенному конечному пределу при /г->-|-оо. Пере-
ходя к пределу в неравенстве (11.90) при п—получим так
называемое неравенство Бесселя
4-со Ь
< f f2(x)dx. (11.91)
fe = l a
В случае основной тригонометрической системы неравенство (11.91)
принимает, в силу соотношений (11.76), вид
2 +оо ।
+ + f f2^dx- (и-92)
»=1 -I
Неравенство Бесселя (11.91) мы установили для любой функции /(х),
интегрируемой в обычном смысле на отрезке [а, &].
Функция /(х) называется интегрируемой с квадратом на [а, Ь],
если интегралы
ь ь
J f(x)dx и J* /2(х)й?х (11.93)
а а
существуют как собственные или как несобственные.
Неравенство Бесселя (11.91) (а следовательно, и 11.92) сохра-
няет силу и для любой функции f (х), интегрируемой с квад-
ратом на [а, Ь].
Более того, неравенство Бесселя (11.91) сохраняет силу и в том
случае, когда функции <pft(x) ортогональной системы также’являются
функциями, интегрируемыми с квадратом. Действительно,
480
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. И
b ь
из сходимости интегралов /2 (х) dx, J* <р2 (х) dx и очевидных
а а
неравенств
/2 (х) 4-Фа (х) . . . . .. ??W+?tW *)
I / (х) ф4 (х) |<----g------- 1Ф/ О) <РА (*) I <---§-----
вытекает, в силу общего признака сравнения, абсолютная сходимость
интегралов
ь ь
ffM(pk(x)dx и J Ф/ (x)<pft (х) dx,
а а
а при написании и выводе неравенства Бесселя мы имеем дело лишь
с такими интегралами **).
Вводя понятие интегрируемости с квадратом и ортогональности
с весом можно вывести обобщенное неравенство Бесселя, справедли-
вое для более широкого класса функций (см. по этому поводу До-
полнение 2 к гл. 11).
Из неравенства Бесселя для случая основной тригонометриче-
ской системы (см. неравенство (11.9-2)) вытекает сходимость ряда
2 +°°
-у-+^(й|+^1) и- следовательно,
Й = 1
+ /
lim ak — ^- lim f f (x) cos dx = 0,
k->4-oo I &->4-oo J
+l (И-94)
lim ^=ylim Г /(x)sin kltx-dx = Q.
£->4-oo * £->oo
Соотношения (11.94) являются частным случаем более общих соот-
ношений
+( +i
lim С f (х) cos ах dx — 0, lim f/(x)sinax dx — 0, (11.95)
a->+co «->+co -j
справедливых, в сиду замечания 1 к основной лемме (см. § 2), для
абсолютно интегрируемых функций.
*) 0<(|/(х)|—|фА(х)])2=/2(х) —2|/(x)g>A(x)[ + q)£(x), откуда
| f (X) ф* (X) | < у [/2 (X) + 4>fe (х)].
’*) По поводу дальнейших обобщений см. Дополнение 2 к гл. 11.
§ 4] ПОНЯТИЕ УЛУЧШЕНИЯ СХОДИМОСТИ 481
§ 4. Связь между степенью гладкости функции
и скоростью сходимости ее тригонометрического ряда Фурье.
Понятие улучшения сходимости
Сначала мы изучим условия равномерной сходимости тригоно-
метрического ряда Фурье, а затем установим связь между степенью
гладкости функции f (х) и скоростью убывания коэффициентов ak и bk
ее тригонометрического ряда Фурье (при неограниченном возрастании
номера k), и оценить скорость сходимости этого ряда.
1. Условия равномерной сходимости тригонометрического
ряда Фурье. Равномерную сходимость тригонометрического ряда
Фурье мы докажем для непрерывной и кусочно-гладкой функции,
удовлетворяющей некоторому дополнительному необходимому усло-
вию, Напомним, что функция f (х) называется непрерывной и кусочно-
гладкой на отрезке [—/, /], если сама она непрерывна, а ее произ-
водная f'(x) кусочно-непрерывна на этом отрезке. Справедлива
следующая
Теорема 11.2. Если непрерывная и кусочно-гладкая на
отрезке [—/, /] функция / (х) имеет равные значения на кон-
цах этого отрезка —I) — f (/), то ее тригонометрический
ряд Фурье
+ СО
S(x) = -^4-2(aftcos^ + ^Sin^). (Н.96)
Л = 1
где
i i
«о=| f /(£Ж «п = т f /©cos^L^.
-i -i
i
bn=} (11.97)
-i
сходится равномерно на этом отрезке, причем S(x) = f(x)
в каждой точке отрезка [—I, /].
Доказательство. Чтобы доказать равномерную сходимость
ряда (11.96), достаточно доказать сходимость мажорирующего число-
вого ряда
+ от
^+21(1^1 + 1^1) (П-98)
Й = 1
или, что равносильно, сходимость ряда
+оо
2(Ы + 1М- (11-99)
fe = l
482 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ (ГЛ. И
Тогда по признаку Вейерштрасса (см. п. 2, § 1 гл. 8) ряд (11.96)
будет равномерно сходящимся на всей оси х, так как
р* cos-^|< |ал| и pftsin-^|
при всех х, — со < х < -|- оо. Обозначим через а'к и Ь'к коэффи-
циенты Фурье производной /' (х):
i i
a'k == у f f (х) cos dx, Ь'к = г f f W sin ^T~ dx'
-i -i
и выполним в формулах для коэффициентов Фурье функции /(х)
интегрирование по частям. Будем иметь
i
1 /* - , а Ллх .
ak = T J f (х) cos -j- dx =
i
1 I ,, x . knx\x=+l 1 I f , kitx I b'k
= Tta^Wsln-r[. ~T7^ J f '(x)sin-7-dx = --v,
x~ 1 -i
так как sin-^y^- обращается в нуль при х= +1;
i
, 1 Г £ I х • ^ЛХ .
J f (х) sin -у— dx =
~i
i
1 l . knxf-1 , 1 l C , x tout l аь ’
= -ТЪГ/<х)С08 —L {+-^- J f (x)cos-rrfx = y-A,
-i
поскольку
cos-^ / (x) = /(/)(-!/-/ (-/) (-1/ =
так как по условию теоремы /(() = / (— Z). Поэтому
I«*n-IM (11ЛОО>
Но f (х) по условию теоремы кусочно-непрерывна на отрезке
[—I, /]. Поэтому она интегрируема на этом отрезке и для нее
выполняется неравенство Бесселя
,2 +оо
Л = 1 -I
$ 4] ПОНЯТИЕ УЛУЧШЕНИЯ СХОДИМОСТИ
а следовательно, числовой ряд
483
,2 +со
т+2«+‘.') (11.101)
А = 1
сходится. Далее, из неравенств
/, , , 1 ? з 141 1
0<(laJ —у) ~ak ~2~k~
/1 ' । 1V '2 141 1
0<(l».|-T) -2^ + f
вытекают неравенства
la*l 1 L/2 I 1 ) l4| 1 / ,2 । 1 \
k 2 \ k2 Г k 2 \b* "r k21 ’
Следовательно,
|°Л I । I bk | 1 / ,2 , ,,2\ , 1 /1 1 mo
~k—I—k~ ^"2(a* +4) + ir- (11.102,
4-00
Но тогда из сходимости рядов (11.101) и JT (легко устанавли-
й = 1
ваемой с помощью интегрального признака) вытекает сходимость
+со
ряда 2’(aft2_l_ b'k) 4" gr}’ а следовательно, в силу признака
сравнения и неравенств (11.102) и (11.100), сходится ряд
Й = 1
мажорирующий для тригонометрического ряда Фурье функции /(х).
Отсюда следует равномерная сходимость тригонометрического ряда
Фурье функции /(х) к его сумме S(x) на всей оси х. Справедли-
вость равенства S(x)== f (х) на отрезке [—I, Z] вытекает из основной
теоремы сходимости, условия которой здесь выполнены. Этим дока-
зательство теоремы завершено.
Замечание. Равенство значений функции /(х) на концах
отрезка [— I, /] является необходимым условием того, чтобы
тригонометрический ряд Фурье (11.96) функции / (х) сходился к ней
на концах этого отрезка. Действительно, если для суммы этого
ряда S(x) выполнены равенства
S(—/) = /(—0, $(/) = /(/), (11.103)
484
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. И
то. в силу равенства
S(— l) = S(l), (11.104)
являющегося следствием периодичности суммы ряда (11.96) с перио-
дом 2/ (все члены ряда периодичны с периодом 21), будет выпол-
няться также равенство
/(-/) = /(/)• (И.105)
Поэтому равенство (11.105) и подавно является необходимым для
того, чтобы ряд Фурье (11.96) функции /(х) сходился к ней равно-
мерно на всем замкнутом отрезке [—I, /].
Если изменить в конечном числе точек значения непрерывной
кусочно-гладкой функции /(х), заданной на отрезке [—I, /] и имею-
щей равные значения на его концах, то получится разрывная
функция, имеющая на концах отрезка [—I, /], вообще говоря, раз-
личные значения. Коэффициенты Фурье такой измененной функции
останутся прежними (так как интегралы, выражающие коэффициенты
Фурье, при этом не изменятся). Следовательно, в силу оценок дока-
Ч-оо
зательства теоремы 11.2 ряд 2(1ал1 + Р*|) будет сходящимся; а
*=i
значит, тригонометрический ряд Фурье этой кусочно-непрерывной и
кусочно-гладкой функции будет сходиться равномерно на отрезке
[—I, /], но не к ней, а к исходной функции. Однако для равно-
мерной сходимости на отрезке [—I, Z] тригонометрического ряда
Фурье кусочно-непрерывной и кусочно-гладкой функции /(х) не-
обходимо, чтобы все ее разрывы были устранимыми и имело место
равенство ее предельных значений на концах отрезка /(—/ —0) =
= / (/ — 0). Это легко доказывается с помощью теорем о непрерыв-
ности суммы ряда и о почленном предельном переходе в равномерно
сходящемся ряде (§ 2 гл. 8).
Теорему 11.2 можно сформулировать несколько иначе. Заметим
прежде всего, что если функция f (х) непрерывна на отрезке [— /, /]
и имеет равные значения на его концах, то при ее периодическом
продолжении с периодом 21 получается функция, непрерывная на
всей оси х.
Назовем, далее, функцию /(х) кусочно-гладкой на всей оси х,
если она является кусочно-гладкой на каждом конечном отрезке оси х.
Теперь мы можем сформулировать теорему следующим образом:
Если периодическая функция f (х) с периодом 21 является
непрерывной и кусочно-гладкой на всей оси х, то ее тригоно-
метрический ряд Фурье (11.96) сходится к ней равномерно на
всей оси.
2. Связь между степенью гладкости функции и скоростью
сходимости ее тригонометрического ряда Фурье. Исследование
такой связи важно для выяснения возможности приближенной замены
§ 41 ПОНЯТИЕ УЛУЧШЕНИЯ сходимости 485
суммы тригонометрического ряда Фурье его частичной суммой,
а также для выяснения возможности почленного дифференцирования
такого ряда, что находит важные применения в математической физике.
Теорема 11,3. Если / (х), f (х). /(т'(х), где т^>0,
непрерывны на отрезке [—/, /] и имеют равные значения на
его концах, т. е.
/(-/) = /(/). /'(-/) = /'(0.(-/) = /№(/), (11.106)
а кусочно-непрерывна на отрезке [—I, Z], то для
коэффициентов Фурье функции /(х)
+ / +*/
«* = 4 //@СОЗ^^, = |
-I -I
выполняются соотношения
at = о = (11.107)
« l^/n+1 у’ « I £1тг+] у х '
и ряды
2Г(1айЦ-|^|), v=0, 1, 2, .... т, (11.108)
сходятся *).
Доказательство. Интегрируя по частям, как при доказа-
тельстве теоремы 11.1, получим
i
аА = 4 f f(l)coS^dl =
-I
I
=TTS-! ©sl" т i ® slnir di “
—ткЛ'©!|"т^=
-I
= f © cos £' ( - f f © COS *21 dl =
*) Соотношения (11.107) означают, что
lim I аъ : —= 0, lim IЬь : —= 0.
*->•+□4 *m+1 j л-»+оо\ k J
486
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
1ГЛ. и
I
ьГ-г f /"(£)COS^^ = ...
Л2л2 J J I e
-I
l
-и lm+1 1 f /m + 1)
“ Лт+1ят+1 / J J
I
Ang
~~T~
(11.109)
При этом мы пользуемся тем, что, в силу: 1) условия (11.10) тео-
ремы, 2) четности косинуса и 3) обращения в нуль синуса на концах
отрезка [—/, /], выполняются равенства
/^©cos^-l1 +‘ = 0, /«(|)sin-^r+I = 0 при 0<$<m.
1 lj=-Z 1 lj=-z
Фигурная скобка под знаком интеграла (11.109) означает, что в зави-
симости от того, сколько раз было выполнено интегрирование по
частям, в качестве множителя при /т+1\&) может оказаться либо
kn£ , . kni
COS-y-^-, либо Sln-y^.
Совершенно аналогично получаем, что
(11.110)
Переходя в равенствах (11.109) и (11.110) к модулям и складывая
результаты, будем иметь
+ (пли)
где а£”+1) и — коэффициенты Фурье (х).
Так как а*т+1) и 6^1+1) стремятся к нулю при k—то из
(11.111) следует, что
аА = о
(11.112)
Из (11.111) получаем, что
(П.ПЗ)
ПОНЯТИЕ УЛУЧШЕНИЯ сходимости
487
4 41
так как
Поэтому из (11.111), в силу неравенства Бесселя
|_(n» + l)|2 +“ ,
^4-L + S(| + J
fe=l -f
+ oo
и в силу сходимости ряда , вытекает сходимость ряда
Й = 1
+ СО
2 А” (| ак | + |), а из нее — сходимость всех рядов (11.108).
Теорема доказана.
Замечание 1. Если речь идет о разложении в ряд по sin-^y~,
Л=1, 2........функции /(х), заданной только на отрезке [0, Z], то
условия теоремы 11.3 должны быть выполнены для функции F(x),
определяемой на всем отрезке I—I, Z] путем нечетного продолже-
ния /(х). В частности, для непрерывности функции F(x) при х = 0
необходимо, чтобы выполнялось равенство /(0) —0, так как в про-
тивном случае при нечетном продолжении получится разрыв в точке
х = 0. Аналогично этому в точке х — 1 должно быть f (Z) = 0, ибо
для продолженной нечетной функции должно выполняться равенство
F(—Z) = F(Z). Поскольку производная нечетной функции четна, то
для производной функции F(x) автоматически выполняется соотно-
шение F' (— Z) = F' (Z).
Вообще для того чтобы производные функции F (х), непрерыв-
ные, на отрезке [—I, Z], имели равные значения на его концах,
нужно потребовать, чтобы выполнялись условия
/<v) (0) =/v) (Z) = О при v = 0, 2, 4, ...
Тогда для производных нечетного порядка от функции F(x) соот-
ветствующие условия теоремы 11.3 будут выполнены автоматически.
В частности, для сходимости рядов
4-со
2 kv | Ьк I, v = 0, 1, 2,
Л=1
i
где Ьк = т ^/(1) sin dg— коэффициенты Фурье функции /(х),
о
заданной на отрезке [0. Z], достаточно потребовать, чтобы /(х) удо-
влетворяла следующим условиям:
488 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
1) / (-*:), fr(x} и f" (х) должны быть непрерывны, a f" (х)—
кусочно-непрерывна на отрезке [0, /];
2) /(0) =/(/); Л(0) = Г(/) = 0.
Замечание 2. Если функцию /(х), удовлетворяющую усло-
виям теоремы 11.3, периодически продолжить за пределы отрезка
[—Z, /] с периодом 2/, то она станет непрерывной периодической
функцией с периодом 2/ на всей оси х, равно как и ее производные
до m-го порядка включительно. Поэтому теорему 11.3 можно пере-
фразировать следующим образом:
Если периодическая функция /(х) с периодом 21 является
непрерывной при —оо < х < оо вместе со своими производ-
ными до т-го порядка включительно (т^>0), а (т-\-1)-я произ-
водная /т+1>(х) кусочно-непрерывна, то для коэффициентов
Фурье ak и bk этой функции по основной тригонометрической
системе выполняются соотношения'.
1) °* = °(рги-)- = при £->+оо,
2) ряды &v(l а*|~НМ) при v = 0, 1, ... т
k=l
сходятся. Таким образом, эта теорема устанавливает связь между
степенью гладкости периодической функции и скоростью сходимости
ее тригонометрического ряда Фурье.
Замечание 3. Если выполнены условия теоремы 11,3 при
т > 0, то тригонометрический ряд Фурье функции f (х) можно диф-
ференцировать почленно не менее т раз, т. е. заведомо будут вы-
полняться равенства
+со
/(> (*) = 24Г*С03~+^81П~г) (или)
fe=l
при 1<Г 5 от, —l^x^l,
так как мажорирующие ряды
4-со
fe=l
сходятся вместе с рядами (11.109).
Замечание 4. Доказательство теоремы 11.3 позволяет оце-
нить скорость сходимости ряда Фурье, то есть дать оценку погреш-
ности, допускаемой при замене суммы тригонометрического ряда Фурье
его частичной суммой. При выполнении условий теоремы 11.3, исполь-
зуя соотношение (11.111), неравенство Коши—Буняковского для сумм,
неравенство Бесселя для коэффициентов Фурье функции /<т+1)(х)
§ 4]
ПОНЯТИЕ УЛУЧШЕНИЯ сходимости
489
и очевидную оценку ряда
у __L_
Li. ^т+2
k — +1
получим
knx . , . knx \
cos-j— -!-/>* sin-j-)
4-oo
< S (Ы + 1МХ
A = feo + 1
3. Понятие улучшения сходимости тригонометрического ряда
Фурье. Тригонометрический ряд Фурье, получающийся в результате
решения какой-либо конкретной задачи, может оказаться столь мед-
ленно сходящимся, что его практическое использование затруднено,
поскольку замкнутое выражение его суммы неизвестно.
В связи с этим возникает вопрос, нельзя ли из медленно сходя-
щегося тригонометрического ряда Фурье
4-со
/(х)-^4- 2(«*cos-^+^sin^), -/<%</, (А)
*=1 '
выделить такой медленно сходящийся тригонометрический ряд Фурье,
сумма которого <р(х) известна в замкнутой форме, чтобы оставшийся
ряд, связанный с /(х) и <р(х) соотношением
+со
/ (х) = <р (х) 4- («ft cos —J— 4- sin ——)
A = 1
(Б)
сходился уже достаточно быстро, т. е. чтобы его коэффициенты ай
и достаточно быстро стремились к нулю при >4~сс-
Такой переход от представления (А) для функции /(х) к пред-
ставлению (Б) называется улучшением сходимости ряда (А).
Если известны особенности функции /(х) (предельные значе-
ния / (х) и ее производных при х -> ± I и в точках разрыва), то
490 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
улучшение сходимости достигается вычитанием из f (х) достаточно
простой функции ф(х) с такими же особенностями, как и у f{x).
Пусть, например, известно, что f (х) непрерывно дифференци-
руема на отрезке [—I, /] и что lim /(х)=±/. Так как значе-
х->± I
ния f (х) на концах отрезка [—I, /] не равны, то ряд (А) сходится
неравномерно на этом отрезке. Положим <р(х) = х; эта функция
так же непрерывно дифференцируема на [— /, /] и имеет такие же
предельные значения на его концах, как и /(х). Поэтому функ-
ция /(х) — х непрерывно дифференцируема и имеет равные предель-
ные значения на концах отрезка [—I, /], а следовательно, ряд в пред-
ставлении (Б) для функции / (х) при <р (х) = х будет сходиться уже
равномерно на отрезке [—I, Z].
Ознакомимся теперь с другим подходом к улучшению сходимости
ряда (А), когда никакой дополнительной информации о его сумме не
имеется. А. Н. Крылов предложил в этом случае выделять из коэф-
фициентов ап и Ьп ряда (А) младшие степени величины — и пы-
таться суммировать ряд с коэффициентами, содержащими эти млад-
шие степени величины При этом нужно пользоваться таблицей
разложений различных функций в тригонометрические ряды Фурье
с достаточно медленно сходящимися разложениями.
Пусть, например, требуется улучшить сходимость ряда
+оо
/ (х) ~ (—1)" n4- 1 sinпх’ —л<х<л. (11.115)
п=2
Так как
П3 _ 1 . 1
п4 — 1 п ' п6 — п ’
то
+оо +со
,, . VT , , чп Sin ПХ , V1 г <чЛ sinnx
л=2 л=2
Но ранее было установлено (см. пример 1 п. 5 § 2, в котором для
нашего случая нужно положить I — л), что
+ со
nV/ ,чп+1 sinnx . '
х=2У(—1) —~—> —Л<Х<Л.
л=1
Поэтому
+оо
SZ 1хЛ Sinnx X . . -
(— 1) —-— = — j + sinx, — л<х<л,
п=2
§ 5] ТЕОРЕМЫ ВЕЙЕРШТРАССА 491
Следовательно,
+03
/(x) = -| + sinx + 2(-l)n-J^-, -л<х<л. (11.116)
п=2
Ряд (11.116) сходится уже значительно быстрее, чем ряд (11.115).
§ 5. Равномерная аппроксимация непрерывной функции
тригонометрическими и алгебраическими многочленами;
теоремы Вейерштрасса
Пусть е>0 — какое-нибудь фиксированное число. Если нера»
венство
|<р(х) — ф(х)| <е
выполняется сразудлявсехх£ [a, 6], то говорят, что ф(х) равно-
мерно г-а ппроксимирует функцию <р (х) на отрезке [а, 6].
Теорема 11.4. (первая теорема Вейерштрасса). Если функ-
ция f (х) непрерывна на отрезке —l^.x-^1 и имеет равные
значения на его концах, то при любом е>0 найдется три-
гонометрический многочлен
(или)
k=i
равномерно ^-аппроксимирующий функцию /(х) на отрезке
(-/, /].
Для доказательства этой теоремы нам потребуется
Лемма. Какова бы ни была непрерывная на отрезке
а-^х^,Ь функция f(х), при всяком е>0 существует такая
непрерывная и кусочно-гладкая на этом отрезке функция g& |х|,
что
|/(*) —£е(*)| <у при всех х£[а, Ь], (11.118)
причем
ge(a) = f(a), gR(b)=f(b). (11.119)
Доказательство леммы. Так как f(х) непрерывна на
замкнутом отрезке [а, #], то она равномерно непрерывна на нем,
т. е. при любом е>0 найдется такое 6 = 6(e), что для любых хг
и х" из отрезка [а, 6], удовлетворяющих неравенству |х' — х"| < 6(e),
будет выполняться неравенство
!/(*')-/(*")! <|-
(11.120)
492 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
Поэтому, если разбить отрезок [a, д] точками деления х0=а<
< хг < ... < xz < xz+z < . .. < хя+] = Ь на частичные отрезки
[xz, xz+11 длины меньше 6, то для любых двух точек х' и х", при-
надлежащих одному и тому же частичному отрезку [xz, xz + 1], будет
выполняться неравенство (11.120).
Определим на [а, Ъ] непрерывную кусочно-гладкую функцию
y = ge(x), положив gf.fXt) — f(Xi) при Z = 0, 1, .... fflJ-1 и счи-
тая g (х) линейной на каждом отрезке [xz, xz+i], I = 0, 1....т.
График функции y = gR(x) представляет собой ломаную, вписанную
в график функции y = f(x). В силу определения ge(x), имеем
g£ («) = /(«). gt (&) = /(*)•
Докажем, что
|/(^)-^(^)| <|
при любом х' £[а, £]. Пусть, например, x'£[xz, xz+1J. В силу линей-
ности gg(x) на отрезке [xz, xz+ij, значение ge(x') заключено между
значениями ge(xz) =/(^xz) и g’e(xz+1) = f (х<+1). Так как непрерыв-
ная функция / (х) принимает на отрезке [xz, xz+1] все значения, про-
межуточные между значениями /(xz) и' /(xz+1), то найдется такое
х" £ [xz, xz+1], что / (х") = ge (х7). Следовательно,
I/U')—/(*")| = 1/(0 —^(Ol <у,
так как х' и x"£[xz, xz+i], что и требовалось доказать.
Доказательство теоремы 11.4. По условию /(х) непре-
рывна на отрезке [—I, 1\ и имеет равные значения на его кон-
цах: /(—Z) = /(/). Пусть дано е > 0. Согласно лемме существует
такая непрерывная и кусочно-гладкая на [—I, 1\ функция £Е(х),
что
I/(*) — ё'е (О <-g- при всех х£[— I, /] (11.121)
и
(-*) = /(-/). £е(0 = /(0.
а следовательно,
ge(-O = ge(D. (11.122)
так как / (— Г) = f (Z).
По теореме 11.2 тригонометрический ряд Фурье функции ge(x)
сходится равномерно к ge (х) на отрезке [— Z, Z]. Следовательно,
при достаточно большом п для его частичной суммы Та (х) =
§ 5] ТЕОРЕМЫ ВЕЙЕРШТРАССА 493
п
аа , / knx , , . knx\
= -£ -]- 2j I a* cos —--|-/>ftsin—— 1 оудет выполняться неравенство
* = i
|geW — Тп (х)| <у при всех х£[—2, /]• (11.123)
Сопоставляя (11.121) и (11.123), получим
|/W — T'nWlCI/(х) — £е(х)| +
+ | ёг W - Тп W I < 4 + Т = е (И 124)
при всех х£[—2, 2]. Теорема доказана.
Замечание. Взяв последовательность ер е2, . .., eft, .... стре-
мящуюся к нулю, мы получим последовательность тригонометрических
многочленов ТП1 (х), ТПг (х), .... равномерно сходящуюся на от-
резке [—2, 2] к функции /(х). Однако эти тригонометрические
многочлены не являются, вообще говоря, частичными суммами одного
и того же тригонометрического ряда. Действительно, многочлен Тп (х),
отвечающий данному е > 0, т. е. входящий в неравенство (11.124),
является многочленом Фурье для вспомогательной непрерывной и
кусочно-гладкой функции й’Дх), которая с изменением е меняется,
что приводит к изменению коэффициентов многочлена Тп (х). Однако
тот факт, что непрерывная функция f (х) не является, вообще говоря,
пределом равномерно сходящейся последовательности частичных сумм
одного и того же тригонометрического ряда, не есть следствие лишь
способа построения многочленов Тп (х).
Если бы /(х) была пределом равномерно сходящейся последова-
тельности частичных сумм некоторого тригонометрического ряда
+оо
7г+ ^4 (ak cos —7~^ Рл sin на отрезке [—I, I], то он (этот
й = 1 4
ряд) неизбежно являлся бы тригонометрическим рядом Фурье для /(х).
Однако можно привести примеры непрерывных функций /(х) на
отрезке [—I, /], тригонометрические ряды Фурье которых расходятся
в конечном или даже в бесконечном числе точек этого отрезка.
Построение таких примеров довольно сложно *).
Теорема 11.5 (вторая теорема Вейерштрасса). Если f(x)
непрерывна на отрезке a^x^l, то для всякого е>0 най-
дется алгебраический многочлен
? т(х) = ^1Х + ^2л-2-Ь ••• Ч~-АтХт,
равномерно ъ-аппроксимирующий /(х) на отрезке а~^х~^.Ь,
*) См„ например, Н. К. Бари, Тригонометрические ряды.
494
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
(ГЛ. 11
т. е, такой, что всюду на атом отрезке выполняется нера-
венство
\f(x) — Pm(x)\ <е. (11.125)
Доказательство. Возьмем />0 столь большим, чтобы от-
резок [о, Ь] лежал строго внутри отрезка [—I, /]. Определим на
(— I, I] непрерывную функцию F(х),‘ положив F(x) = /(x) на [а, ЭД,
F (— /) = р (I) = 0 и считая Р (х) линейной на отрезках — I х а,
b-^x^l. По первой теореме Вейерштрасса при любом е > 0 най-
дется такой тригонометрический многочлен
п
7’nW = -r+S(fl‘cosJ? + ^sinJT£)’ <11Л26>
*=i'
что всюду на [— 1, /] будет выполняться неравенство
|F(x)-Гй(х)| <|. (11.127)
Разложим в ряд Тейлора синусы и косинусы, входящие knx . А2л2 9 . k*n* . cos t =1 21/2 х^^-^-х* .... в (11.127): (11.128)
sln‘=i=^.J_«x>+«x5_ ... (Ц.129)
Степенные ряды (11.128) и (11.129) сходятся (например, по признаку
Даламбера) при всех х, — оо < х < + оо. Подставляя (11.128) и
(11.129) в (11.126), получим степенной ряд
7,я(х) = Д0 + Д1х4-Л2х24- ... +Дтхт+ .... (11.130)
сходящийся при всех х, — оо < х < -|~ оо, и, следовательно,
равномерно сходящийся на любом конечном отрезке оси х,
в частности на отрезке [—I, Z]. Поэтому, беря т достаточно боль-
шим, получим такую частичную сумму ряда (11.131)
Рт^ = Ао+Ахх-\- ... -\-Атхт,
что
PmWI <у при всех (11.131)
Сопоставляя неравенства (11.131) и (11.127), получим
F (х) - Рт (х) | < | F (х) - Тп (х) | +
+ (7'л(х)-Рга(х)|<|4-| = е (11.132)
при всех х£[—I, /], в частности при всех х£[а, Ь]. Но при
всех х£[а, ЭД P(x) = f(x) и неравенство (11.132) превращается в
О ПОЛНОТЕ И ЗАМКНУТОСТИ
495
$ в]
неравенство
|/(х) —Pm(x)| <е, (11.133)
что и требовалось доказать.
Замечание. Взяв последовательность ер е2, ..., еА, .... схо-
дящуюся к нулю, получим последовательность алгебраических много-
членов Рт1(х), Рт2(х)....равномерно сходящуюся к /(х) на [а, />].
Эти многочлены не представляют собой, вообще говоря, частичных
сумм одного и того же степенного ряда по причинам, аналогичным
описанным в замечании после доказательства первой теоремы Вейер-
штрасса (теоремы 11.4).
Теоремы Вейерштрасса не дают эффективного способа построе-
ния многочленов, равномерно аппроксимирующих непрерывную функ-
цию с заданной точностью е > 0.
П. Л. Чебышев поставил и исследовал проблему построения много-
членов наилучшего приближения, играющую важную роль при эффектив-
ной равномерной аппроксимации непрерывных функций многочленами.
Обозначим через Нп множество всех алгебраических многочленов
степени Пусть Рп(х)£Нп, а функция f (х) непрерывна на [а, £»].
Число
E(f,P„)= max |/(х) —Рп (х)|
а<х<Ь
назовем отклонением Ря(х) от f (х) на [а, £]. Нижнюю грань
значений Е (f, Рп), когда Ра (х) пробегает все множество Нп, обо-
значим через Еп (/) и будем называть наименьшим отклоне-
нием. Чебышев доказал существование и единственность многочлена
наилучшего равномерного приближения, т. е. такого Рп (х) £ Нп, что
Е(/, Ря) = £„(/),
и исследовал методы построения таких многочленов. При этом им
были получены так называемые многочлены Чебышева, наименее
уклоняющиеся от нуля (см. по этому поводу [4], том И, гл. 4).
При построении многочлена, равномерно аппроксимирующего непре-
рывную функцию /(х) на отрезке [а, Ь] с заданной точностью е,
для практических применений важно, чтобы он имел наименьшую
возможную степень. Таким многочленом, очевидно, является много-
член наилучшего равномерного приближения к функции f (х) на [a, 6]
из совокупности Нп при п, для которого выполняется неравенство
§ 6. О полноте и замкнутости ортогональных систем
Всюду в этом параграфе под классом функций Q [а, />] мы будем
понимать множество всех кусочно-непрерывных на [а, 6] функций.
Понятия полноты и замкнутости будут определены для функций
из Q[a, ij; основные теоремы о полноте и замкнутости будут также
496 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. 11
доказаны для функций этого класса (теоремы 11.6—11.10 настоящего
параграфа).
Следует заметить, однако, что все это может быть сделано и для
значительно более широкого класса функций — для функций, инте-
грируемых с квадратом на [а, 6], или даже для функций, интегри-
руемых с квадратом с некоторым весом р(х) на [а, (см. Допол-
нение 2 к гл. 11).
1. Понятие полноты ортогональной системы. Ортогональная
на [а, Ь] система функций
<Pi(x). Ф2(х)....фя (*)>••• (11.134)
называется полной в Q [a, Z>], если для каждой функции /(х) из Q [a, />]
ее ряд Фурье по ортогональной системе (11.134)
(И.135)
s=i
где
ь / 6 уд
Ck =F7F//(xM(*w ИфйП = y f , (H.136)
сходится к /(x) в среднем на [a, Z>], т. е.
/ п \ Ь Г п ”12
/. У <ДФ* = f f (*) — У 'Л (х)
\ й=1 / a L й=1
dx —> 0
при п —>4~оо.
(11.137)
В этом случае говорят, что система (11.134) образует базис про-
странства- Q [a, £], так как для каждого «элемента» f(x)£Q[a, Z>]
в случае полноты системы (11.134) имеет место обобщенное равенство
+оо
f (*) = У СлФй (*)•
fe=l
ь
где c‘ = iiTii2 /*/ООФаС*)^- (11.138)
которое следует понимать в смысле сходимости в среднем на от-
резке [a, £>], т. е. в смысле выполнения соотношения (11.137).
2. Критерий полноты — равенство Парсеваля. Воспользуемся
тождеством Бесселя
Р2
Л \ Z>r II 12
/ 2 I = f f (*) — У Ck^k (х)
k = l 1 а Л = 1
dx =
b п
= fс2||фа||2 (11.139)
а л=1
lim р2
§6] О ПОЛНОТЕ И ЗАМКНУТОСТИ 497
(см. п. 3 § 3). Переходя в нем к пределу при п ->-(-00, получим
П \ Ь + оо
/> У = f f4x)dx — У с2||фа||2, (11.140)
* = 1 / a k=l
откуда следует, что равенство
(п \
/2<VpJ = ° (11.141)
&= 1 /
равносильно равенству
Ъ 4-со
//2(x)<Zx==2}C2|^J. (11.142)
a S = 1
Равенство (11.142) называется равенством Парсеваля. Таким обра-
зом, для того чтобы ортогональная система (11.134) была полна
в Q[a, Z>], необходимо и достаточно, чтобы для любой функции
/(x)£Q[«, />] выполнялось равенство Парсеваля (11.142).
3. Свойства полных систем. Ортогональная на [a, Z>] система
Ф1(х), ф2(х)...ф„(х), ... (11.143)
называется замкнутой в Q[a, £>]> если любая функция
/(x)^Q[a, i], ортогональная на [а, 6] всем функциям системы
(11.143), является нулем пространства Q[a, b], т. е. равна
нулю всюду в точках непрерывности f (х), и, следовательно,
может быть отлична от нуля лишь в конечном числе точек
на [а, £>].
Теорема 11.6. Если ортогональная на [а, 6] система (11.143)
полна в Qla, fr], то она и замкнута в Q[a, />]•
Доказательство. Пусть кусочно-непрерывная функция f (х)
ортогональна всем функциям системы (11.143) на [а, £], т. е.
ь
J* f (х) ф* (*) dx = 0 при А= 1, 2, ...
а
Тогда коэффициенты Фурье функции /(х) по системе (11.143)
равны нулю:
ь
ck = -^~^ Г f(x)(pk(x)dx = 0, А = 1, 2, ... (11.144)
В силу полноты системы (11.143) в Q [а, £], для любой функции
f (x)^Q[a, 6] будет выполняться равенство Парсеваля
Ь 4-со
f f> (X) dx = 2 с\ || фй ||2, (11.145)
а * = 1
[ГЛ. 11
498 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
но, в силу (11.144), из (11.145) следует, что
ь
f f2 (х) dx = 0.
а
(11.146)
Пусть / (хо)=АО, где х0£ [а, 6] является точкой непрерывности /(х).
Заключим х0 в отрезок [а', Ь'], на котором / (х) непрерывна и
который содержится в [а, £>]. Так как /2 (х) непрерывна и неотри-
Ъ'
цательна на [а', ft'], причем /2(х0)>0, то J /2 (x)dx > 0. Но тогда
а'
b
и подавно J*/2(x)dx>0, что противоречит равенству (11.146).
а
Следовательно, / (x)sO в точках непрерывности на [а, Л]. Тео-
рема доказана.
Теорема 11.7. Если две функции f(x) и g(x) из Q[a, ft]
имеют один и тот же ряд Фурье по полной ортогональной
системе на [a, ft], то они как элементы пространства Q[a, ft]
совпадают, т. е. могут отличаться лишь в конечном числе
точек на [a, ft].
Доказательство. Функция ф(х) = (/(х)— gr(x))^Q[a, ft]
ортогональна всем функциям системы (11.143) на [a, ft]. Действи-
тельно,
ь ь ь
J ф (х) <рА (х) dx = f f (x)<pk(x) dx ~ f g(x)<pk(x)dx =
a a a
2. 3... (11.147)
где eg — коэффициент Фурье функции f (x), a eg — коэффициент
Фурье функции g(x). Так как по условию ряды Фурье этих функ-
ций совпадают, т. е. eg = eg при Л=1, 2....то из (11.147) сле-
дует, что
ь
J” ф(х) (f>k (х) dx = 0 при k = 1, 2, 3, ... (11.148)
а
Но тогда по предыдущей теореме разность ф (х) — f (х) — g (х)
тождественно равна нулю на [a, ft] в точках непрерывности ф(х),
а следовательно, может быть отличной от нуля лишь в конечном
числе точек на [a, ft], что и требовалось доказать.
Теорема 11.8. Если ортогональная на [a, ft] система (11.143)
является полной в Q[a, ft], то для любых двух функций
f(x) и g(x) из Q[a, ft] имеет место обобщенное равенство
§6] О ПОЛНОТЕ И ЗАМКНУТОСТИ 499
Па рсеваля
Ь +оо
f f{x)g{x)dx = '^cftcl ||фл||2, (11.149)
а Л = 1
где с[ a cf— коэффициенты Фурье функций f(x~) и g(x) по
ортогональной системе (11.143).
Доказательство. Равенство (11.149) получается, если на-
писать равенство Парсеваля для функций f (х)-\- g (x) и f(x)—g(x),
а затем вычесть их и разделить результат пополам.
Теорема 11.9. Если f(x)^Q[a, £J, а ортогональная на [а, 6]
система {<pz (x)j полна в Q [а, й], то ряд Фурье функции /(х)
по системе {<р( (х)) можно интегрировать почленно т. е.
X +оо дг
f = Sc* f (11.150)
A = 1 Xi
при любых x0 и x из отрезка [а, b], причем ряд (11.150) схо-
дится равномерно по х на [а, 6].
Доказательство. Справедливость этой теоремы вытекает из
+ оо
сходимости в среднем ряда Фурье 2сА<рА(х) к f (х) на [а, Ь\ и
А = 1
теоремы о почленном интегрировании рядов, сходящихся в среднем
(см. п. 3 § 6 гл. 8).
4. Полнота основной тригонометрической системы.
Теорема 11.10. Основная тригонометрическая система
1
Т’
лх
cos —
пх
SIH -у-
knx , knx
., COS—J—, sin—J—,
(11.151)
полна в Q [—l, I].
Доказательство. Требуется доказать, что для любой кусочно-
непрерывной функции /(х) на [—I, I] будет
i
р2(/> 7’л)= /[/ (х} — Тп(х)Х dx->0 при /1-> + оо, (11.152)
где
п
„у/ , \ а0 . V / knx . , , kxx\
w=-у+г*cos ~—^bk sin ~r)
A=1 '
— многочлен Фурье функции f (x) по системе (11.151).
Пусть | f (x) | < M на [— I, l] и пусть e > 0. He нарушая общ-
ности рассуждений, можно предположить, что /(х) имеет единствен-
ную точку разрыва х0, лежащую внутри [—1,1]. Построим такую
непрерывную на отрезке [—I, I] функцию g(x), чтобы она имела
500
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 11
равные значения на его концах: g(—[) — g (/), и чтобы выполнялось
неравенство
i
Р2(/. g) = f lf(x)-g(xtfdx<^. (11.153)
-i
Для этого, взяв б>0 достаточно малым, положим g(x) = f(x)
при —I^x-^Xq—1> и при х0 -б <4 х I — б, а на отрезках
х0— б <1 х х06, I — Ъ^х^1 будем считать g(x) линейной
(см. рис. 11.10, на котором график / (х) изображен сплошной ли-
нией, а график функции g(x)— пунктиром с длинными штрихами).
В силу определения g(x), имеем g(—/) = g (/) = /(—/), причем
разность /(х) — g(x) может быть отличной от нуля только при
х0—б < х < х0 + б и при I — б < х < I. Поэтому будем иметь
I Хо+б
Р2 (f. £)= f If (*) — g (x)]2 dx = j [f (x) — g (x)]2 dx +
-z xo-d
l Xo+d
+ f[/(x) — g(x)]2dx< j {l/(x)| + |g(x)| }2Jx +
l-Ь x0-6
I
+ f {|/(x)| + |g(x)|)2dx<4Al226 + 4M26=12/W26<-|-,
t-6
если только взять б>0 достаточно малым. Так как g(x) непре-
рывна на отрезке [— I, 1\ и имеет равные значения на его концах:
g(—l) = g(l), то по первой теореме Вейерштрасса (теорема 11.4)
найдется такой тригонометрический многочлен
. п
'Г / \ Яо 1 W 1 о •
Тпй (X) = cos —j- 4- sin — J,
A = 1 V
§ 6]
О ПОЛНОТЕ И ЗАМКНУТОСТИ
501
что
/ £
Ig (х) — 7\(х) I < у при всех х£[— I, /]. (11.154)
Следовательно,
I I
Р2(£. f [g(x)-T„,(x)fdx<l[ f dx = ^. (11.155)
-i -i
Воспользуемся теперь элементарным неравенством
(а + ^)2<2а2Н-2Я
положив а = /(х) — g(x), b = g(x)— Тл„(х); это даст
{/ (х) - 7\ (х))2 < 2 {1/ (х) - g (х)]2 + [g (х) - ТПо (х)]2}
и, следовательно,
i i
Р2(/. По)= f [/(x)-7\(x)]2dx<2 f [/(x)-g(x)]2dx +
-i -i
i
+ 2 f [^(x)-7’„0(x)]2rfx<2|-|-2| = 8.
-z
Если в последнем неравенстве заменить тригонометрический много-
член 7\(х) тригонометрическим многочленом Фурье Tf„a(x) функ-
ции /(х), то и подавно будет
Р2(/. 7’0<е, (11.156)
так как при подстановке T„rj вместо ТПо квадратичное уклонение до-
стигает своего минимума.
Воспользовавшись тождеством Бесселя, перепишем неравенство
(11.156) так:
z 2 «о )
Р2(/. ^)= f f4x)dx-l ^ + V(a2+Z>2) <е. (ii.157)
-i k=i J
Следовательно, и подавно будет
z
Р2(/. Ю = f f\X)dx-l
di
(11.158)
при всех п п0. В силу произвольности е > 0, это означает, что
р2(/, при я->4-оо, что и требовалось доказать.
502 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. 11
Из доказанной полноты тригонометрической системы следует, со-
гласно предыдущему, ее замкнутость, а также однозначная определи-
мость кусочно-непрерывной функции /(х) ее тригонометрическим
рядом Фурье всюду на отрезке [—I, /], кроме, быть может, конеч-
ного числа точек (точек разрыва /(х)). Впервые полноту тригоно-
метрической системы доказал А. М. Ляпунов.
5. Полнота других классических ортогональных систем, исполь-
зуемых в математической физике, доказывается аналогично. Рассмотрим,
например, доказательство полноты системы полиномов Лежандра.
Пусть / (х) кусочно-непрерывна на отрезке [—1, 1] и пусть дано
произвольное е > 0. Заменим /(х) непрерывной на [—1, 1] функ-
цией gg(x), для которой
1
р2(/. [/(x)-^e(x)]2dx<|, (11.159)
-1
аналогично тому, как это делалось в доказательстве полноты тригоно-
метрической системы; только здесь уже незачем добиваться равенства
значений функции ge(x) на концах отрезка [—1, 1]. По второй тео-
реме Вейерштрасса (теорема 11.5) найдется такой алгебраический
многочлен
Qm (х) — 4) + А*2 + ••• ~Ь~Атхт<
что равномерно на отрезке [—1, 1] будет выполняться неравенство
а следовательно, и неравенство
+1
p2ke’Qm)= f [м*)-<м*)]2^<-Ь а1-1™)
-1
Так как 1, х, х2.... х"1*) являются линейными комбинациями
полиномов Лежандра, то
Qm (х) = Во + ВЛ (х) 4- ВЛ (х) -|- ... + ВтРт (х),
где Рг(х)...Рт(х) — полиномы Лежандра.
Из (11.159) и (11.160), в силу неравенства (а-^-ЬУ2 ^.2а2-{-21й,
следует, что
Р2(/. *е) + 2Р2Qm)<2| + 24 = e- С11-161)
♦) См. Дополнение 1 к гл. 11.
§ 7] РЯДЫ ФУРЬЕ ПО ОРТОГОНАЛЬНЫМ СИСТЕМАМ 503
Если в выражении р2 (/, Qm) коэффициенты Во.......Вт заменить
коэффициентами Фурье функции /(х) по системе полиномов Лежандра
+ 1
= f f(x)Pk(x)dx, k = 0, 1...............m, (11.162)
-i
то, в силу минимизирующего свойства коэффициентов Фурье, квадра-
тичное уклонение р2(/, (%) не увеличится. Поэтому, вводя обозна-
ЧСНИ6
<%(х) = с0 + сЛ(х)+ ... +стРт(х), (11.163)
получим, что
Р2(/. <%)<е- (11.164)
В силу тождества Бесселя
+1 п
р2(/. <?<)= J с11-165)
-1 А = 1
получим, что из выполнения неравенства (11.164) вытекает также
выполнение неравенства
Р2(/.<ЭД<е (11.166)
при всех п^т. В силу произвольности е > 0, это означает, что
р2(/, Qty —>0 при (11.167)
Этим полнота системы полиномов Лежандра в Q[—1, 1] доказана.
§ 7. Ряды Фурье по ортогональным системам
комплексных функций и комплексная запись
тригонометрического ряда Фурье
В данном параграфе наряду с вещественными функциями мы будем
рассматривать комплексные функции вещественной переменной х,
а именно, функции вида
ф(х) = ф*(х) + /ф**(х), (11.168)
где ф*(х) и ф**(х)— вещественные функции. Функцию, комплексно
сопряженную с ф(х), т. е. отличающуюся знаком мнимой части,
будем обозначать через ф (х); таким образом,
ф(х) = ф*(х) —/ф‘*(х). (11.168')
Заметим, что
ф (X) ф (х) = [ф* (X)]2 + (ф*’(х)]2 = I ф (х) |2 > 0. (11.169)
504 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. и
Функция tp (х) = ср* (х) -ф- /ф** (х) называется непрерывной (ку-
сочно-непрерывной) на [а, ft], если ее вещественная и мнимая части,
т. е. <р*(х) и ф**(х), непрерывны (кусочно-непрерывны) на [a, ft].
Производная и интеграл от функции ср (х) — ф* (х) + г’Ф** (х) опре-
деляются соответственно равенствами
d<f dcp* । dtp**
dx ' dx ' dx ’
ь ь b
J ф (x) dx = J ф* (x) dx Ц- i J ф** (x) dx,
a a a
(11.170)
(11.171)
причем ф (x) — ф* (x) -|- /ф** (x) называется дифференцируемой (инте-
грируемой), если ф*(х0) и ф**(х) дифференцируемы (интегрируемы).
Если ф (х) = ф* (х) /ф** (х) и ф (х) = ф* (х) 4~ г'ф** (х) интегри-
руемы на [а, ft], то, очевидно, функция ф(х)ф(х) также интегри-
руема на [а, ft]. В частности, если ф(х) интегрируема на [а, ft], то
ф(х)ф(х) также интегрируема на [a, ft], причем
ь ь ь
J" Ф WfW dx — J* | ф(х) |2cZx — J {[ф* (x)]2 + [ф**(х)]2} dx 0.
a a a
Функции ф(х) и ф(х), интегрируемые на [a, ft], называются орто-
гональными на этом отрезке, если
ь
J ф (х) ф (х) dx = 0. (11.172)
а
Система комплексных функций
Ф!<х), ф2(х)....ф„(х), .... (11.173)
интегрируемых на [a, ft], называется ортогональной на [a, ft], если
/ф;(х)Фй(*)^ = { ? ||2 „ "РИ (Н-174)
J ||Ш12>0 при J = k. )
причем нормой интегрируемой функции ф(х) называется неотрица-
тельное число
ь — ь —
||ф|| = f J ф(х)ф(х)<7х I = I J I ф (х) I2 dx j . (11.175)
§ 7] РЯДЫ ФУРЬЁ ПО ОРТОГОНАЛЬНЫМ СИСТЕМАМ 505
Одним из важнейших примеров ортогональных систем комплекс-
ных функций является система
е~, п = 0, ±1, ±2................... (11.176)
kax пах
ортогональная на отрезке [—Z, /]. Ортогональность е 1 и е 1
при k =# п устанавливается непосредственным интегрированием произ-
ведения
, kax j , пах\ ' , kax . пах , (k-n)ax
е ‘ U ‘ ) = е~е~‘~ = е 1 =
(k — п) я.х . . , (k — п) ях
= COS -i---р-----1-1 sin ---р----.
Для норм получаем значения
Коэффициенты Фурье для любой функции /(х). интегрируемой
на [а, Z>], по ортогональной системе (11.173) определяются по фор-
мулам
ь
с* = ^2//(х)фА(*И*. £ = 1.2,... (11.178)
Рядом Фурье функции f (х) по ортогональной системе (11.173)
называется ряд
+со
/(х)~2<УРИ*)., (11.179)
Й = 1
коэффициентами ск которого являются числа (11.178).
В частности, коэффициенты Фурье/(х)по системе (11.176) равны
= У*/(х)е“'~dx, £ = 0, ±1, ±2.......... (11.178х)
-i
а ряд Фурье (11.179) по этой системе принимает вид
2 спе
Л=-00
(11.179х)
506 РЯДЫ ФУРЬЁ И ИНТЕГРАЛ ФУРЬЁ (ГЛ. И
Докажем, что если функция f (х) вещественна на отрезке [— I, /],
то соотношения (11.178') и (11.179') эквивалентны соотношениям
i
ак — ~ Jf(x)cos^-dx, 6 = 0, 1, 2, ...;
(11.180)
= у f f(x)3in ~dx, 6=1,2,...
-i
и
+CO
/(x)~^-h2(a*cos^F + ^sinA7£)- (11Л81)
А = 1 '
т. е. что соотношения (11.178) и (11.179) являются комплексной
записью коэффициентов Фурье и ряда Фурье для функции f (х) по
основной тригонометрической системе.
Применяя формулу Эйлера
= cos <р -]-1 sin <р
к (11.178'), получим
i
c0 = ^i-f f(X)dx = -%-; (11.182)
-i
i i
1 /* ,, . ~{^7~ . 1 ЙЛХ . . ЙЛХ) .
с*— 2У J f(x)e 1 dx = -^- y/(x)[cos-----------Zsin-y-|dx =
~i -i
= , 6=1,2,...; (11.183)
i k 1
1 Г j: / \ 1 j I C X l x Г блх , . . k-ЛХ 1 .
с-л=-27 J f^e dx==n J /U)[cos—j- + /sin-y-px =
-I -I
= , 6=1,2,... (11.184)
Ряд (11.179') можно переписать в виде
+ 0° ппх +-со knx +оо . клх
2 сае ‘ +2 c_ke--T~. (11.185)
л= —оо Ла=1 А=1
Подставляя в (11.185) выражения (11.182), (11.183) и (11.184) коэф-
фициентов с0, ck и и используя формулы Эйлера
cos ф =--------------, sin ф =----------ж-----,
§ 8]
РЯДЫ ФУРЬЕ ДЛЯ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ
507
получим равенство
Л--00 ft=l
ftnx +со , ,, . Иях
—Г‘-т =
*=1
i kJtx f клх
1 I f
е — е *
21
СО
= T+£bcos^+^sin^F)- (11Л86>
что и требовалось доказать.
Если функция /(х) является не только интегрируемой, но и
кусочно-гладкой на [—I, Z], то, в силу основной теоремы о сходи-
мости тригонометрического ряда Фурье и в силу равенства (11.186),
можно написать
+ со ППХ
f(x) — 2 спе 1 ,
П — —СО
(11.187)
где коэффициенты Фурье определяются по формулам (11.178), при-
чем в левой части равенства (11.187) /(х) в точках разрыва нужно
/ (х 4- 0) 4- f (х — 0) , .
заменить через ——1 -------------, если — I < х < Z, а в точках
х _ + i чепез Г(/~0) + /(/ + 0)
Комплексная запись (11.178), (11.179) разложения функции / (х)
в тригонометрический ряд Фурье широко используется в математике
и ее приложениях. Она весьма удобна при выполнении различных
выкладок, в частности, где фигурируют произведения тригонометри-
ческих рядов Фурье, а также при рассмотрении тригонометрических
рядов Фурье для функций нескольких независимых переменных.
§ 8. Тригонометрические ряды Фурье
для функций нескольких независимых переменных
Пусть функция /(х, у) определена в прямоугольнике —Zj^x-^Zp
— ^2 У "С h и при каждом у £ [— Z2, Z2] удовлетворяет условиям,
при которых ее можно разложить в тригонометрический ряд Фурье,
как функцию х на отрезке [—ly Z2). Тогда, воспользовавшись ком-
плексным представлением для тригонометрического ряда Фурье,
получим
4-°о ППХ
f(x, у) = 2 с„(у)е Ь , (11.188)
Л= -OQ
508
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
(ГЛ. И
где
1 /»'
С«(^=2Г J 1'
' -А
д = 0, ±1, ±2, ... (11.189)
Пусть каждую из функций сп (у) в свою очередь можно разло-
жить на отрезке —в тригонометрический ряд Фурье, т. е.
4-оо тлу
сп(У) = 2 спте Ъ, n = 0, ±1, ±2,..., (11.190)
т«-со
где
/j
1 р imnri
спт= 2Ц- J сп(П)е~ 11 «. т = 0; ±1, ±2, ... (11.191)
— ^2
Тогда, подставляя (11.189) в (11.191) и (11.190) в (11.188), получим
/(*.у)==2 s спте (11.192)
л=—те гл «—те
где
z. 12
1 /» с njl^ mTtT|)
с™= 47]z7 J J ^e~ k ll la (11.193)
12 -A -la
Так мы получили разложение функции двух переменных в тригоно-
метрический ряд Фурье в комплексной форме.
Воспользовавшись формулой Эйлера е‘* = cos q>-J-isin q>. разло-
жение (11.192) можно переписать в следующей форме:
,, . / плх , , , плх\ I тлу . . . тлу\
— 2j спт\со^~г1-----H/sin“j^cos-7^--|-fsm-^-J =
nt m = -cx)
4-co
КЧ л Г nnx mny . , . nnx mny .
= Zj bmn —cos-^-H-^sin-y— cos-^-4
m, n- —co
. , nnx . mny » , . nnx . mnyl /t < 1Л4Ч
+cmn cos—sin ~ir+sin ~irsin irJ (11 194)
где
4
_£
2
1
^mn
при m—n = 0,
при /к = 0, n>0 или m > 0, n = Q,
при т > 0, п > О
(11.195)
§ 81 РЯДЫ ФУРЬЕ ДЛЯ ФУНКЦИЙ НЕСКОЛЬКИХ ПЕРЕМЕННЫХ 509
И
Л Ц
1 С Г х, ч плх тлу .
атп = ~[^ J J f(x> y)cos— cos—^dxay;
—ц
it i,
, 1 Г Г ,, . . плх тлу . ,
ьтп = -цц J J f(x, y) sin -Ц- cos—^dxdy;
—h —it
ii i,
, 1 Г Г ,, . плх . тлу , ,
стп = TJ7 J J f (х' у) cos “sin h dx dy’
— Z( — Za
Zl h
атп = -цц J f f(x- y)s'in^sinJ^-dxdy- (11-196)
-ii -h
Если f (x, у) является четной функцией по каждому из аргу-
ментов, т. е.
/(-х. у) = /(х, — у) = /(х, у), (11.197)
то, как легко усмотреть, bmn = с'тп = dmn — 0 и ряд Фурье для
такой функции принимает вид
+со
/(X, у) = 2 ^a^cos^Lcos^-. (11.198)
т, п=0
Если /(х, у) нечетна по х и по у, то для нее могут быть
отличными от нуля только dmn, так что ряд Фурье принимает вид
4-со
/(X, у) = 2 dmesinJ^-sinS. (11.199)
т, п=0
Если /(х, у) четна по у и нечетна по х, то она разлагается
, плх тлу
в ряд по sin — cos —; если же она нечетна по у и четна
Ч *2
плх . тлу
по х, то разлагается в ряд по cos—}—sin—.
Ч l2
Мы не будем исследовать условий разложимости функции /(х, у)
в двойной тригонометрический ряд Фурье, а сформулируем без дока-
„ ,, ч df df d2f
зательства, что если f (х, у), и <, являются непре-
J "ох оу ох оу
равными функциями, периодическими по х с периодом 2lt
и по у с периодом 212, то тригонометрический ряд Фурье
функции f(x, у) сходится к /(х, у) в каждой точке.
510
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. И
§ 9. Интеграл Фурье
1. Неограниченное растяжение интервала разложения функ-
ции в ряд Фурье и интегральная формула Фурье. Если интер-
вал [— I, /], на котором функция f (х) разлагается в тригонометри-
ческий ряд Фурье, неограниченно возрастает, ?. е. I—>-|-со, то ряд
Фурье превращается в интеграл Фурье. При переходе к пределу
происходит качественный скачок: функция, заданная на любом
конечном интервале [—I, /], разлагается в ряд «гармонических коле-
баний», частоты которых образуют дискретную последовательность;
функция /(х), заданая на всей оси х или на полуоси х, разлагается
в интеграл, который представляет собой сумму «гармонических коле-
баний», частоты которых непрерывно заполняют действительную
полуось 0^1 < 4- со. Рассмотрим этот предельный переход от ряда
Фурье к интегралу Фурье.
Пусть f(x) задана на всей оси х и на каждом конечном от-
резке [—I, /] является кусочно-гладкой. Тогда, в силу основ-
ной теоремы о сходимости тригонометрического ряда Фурье, при
любом I > 0
4-от
/ (х) = -%- 4- 2 (а*cos -^4- bk , (11.200)
где
= 7 f /©cos^<©
-i -i
i
f /©sin^^.
-i
(11.201)
Равенство (11.200) имеет место, если х — внутренняя точка
отрезка [—/, Z], в которой /(х) непрерывна; если же х — вну-
тренняя точка этого отрезка, в которой /(х) разрывна, то в левой
f (х 4- 0) 4- / (х__________________________________________0)
части равенства (11.200) /(х) нужно заменить через J v ~ ----•
Подставляя выражения (11.201) в (11.200), получим
л + °° п
f + ,//©cos-^(^-x)^. (11-202)
-i fe=i -i
Если /(x) еще и абсолютно интегрируема на всей оси х,
т. е.
+со
j" |/(х)| dx = Q < 4-00, (11.203)
S 9]
ИНТЕГРАЛ ФУРЬЕ
511
то при переходе к пределу при / —> оо первое слагаемое в пра-
вой части (11.202) в силу условия (11.203) стремится к нулю.
Следовательно,
4-оо 4
/(*) = lim IV [/Q)cos^(|-x)d£. (11.204)
/->+«> 1 Г?, У, 1
Положим -^у- = ХА, у — ДХА. Тогда (11.204) можно переписать
в виде
4-оо
/(*) = lim уУ^й [/Q)cosXa(^ — x)dl-
i^.+oa л J
AX.ft->0 ~l
(11.205)
Будем теперь рассуждать нестрого:
i
1) при больших значениях I интеграл J f (|) cos Xft (£—x)d^ можно
-i
+ оо
заменить интегралом J* f (£) cos Xft (| — x) d^,
— 00
4-oo 4-oo
2) У ДХЛ J f (I) cos (£ — x) d| является интегральной суммой
—oo
Ч-oo 4-co
для интеграла J dX J /(£)cosX(g— x)d^, поэтому из (11.205)
О —co
получаем
4-oo 4-со
/W=^/dK f /(l)cosX(l-x)^, (11.206)
О —oo
где в левой части равенства (11.206) вместо /(х) нужно писать
/(х-4-0)4-7(х — 0) „ , .
——!— если х является точкой разрыва функции /(х).
Равенство (11.206) называется интегральной формулой Фурье,
а интеграл, стоящий в ее правой части, — интегралом Фурье.
2. Обоснование интегральной формулы Фурье. Равенство
(11.206) было получено с помощью формальных предельных пере-
ходов, которые не были обоснованы. Вместо того чтобы их обосно-
вывать, удобнее непосредственно доказывать справедливость равен-
ства (11.206).
Теорема 11.11. Если функция f (х), кусочно-гладкая на
каждом конечном отрезке оси х, абсолютно интегрируема
512
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 11
+оо
ча всей оси х, т. е. интеграл § |/(х) | dx сходится, то
— ОО
I Ч-oo
lim | [d’K f f (£)cos - x)Zlf + Ф..+~. (11.207)
/->+co П " Z
0 —co
Доказательство. Заметим прежде всего, что интеграл
ЬСО
J* / (У cos X (£, — х) dl,, зависящий от параметра К, сходится равно-
— ОО
м е р н о по параметру К при < -|-оо, так как |/(£) cos К (£—х) |<^
+со
| f (£) |, а интеграл J* |/(£)|^£ по условию сходится. Следова-
— ОО
тельно, можно изменить порядок интегрирования (см. п. 3 § 2 гл. 10),
т. е. записать так:
I 4-со 4-со I
Lf dK f /a)cosXa-x)^ = l f dlf /©cosM£-x)<a =
0 —co —oo 0
+oo 4-oo
= | f Sin[-~XX) ^=4 f (1L208)
J Ъ л’ Jb «/ t
— CD —CD
где C=| — x, Нам остается доказать, что
о
lim 1 /‘/(x+^-g^-rfC^ (11.209)
f->4-co я •/ b
— оо
+со
lim /(х + С)-У-^=Х.<4 + °1. (11.210)
г-я-оо31^ &
При доказательстве мы воспользуемся известным соотношением
+со
iy Л=4 (11.211)
О
(см. п. 5 § 2 гл. 10).
Докажем, например, справедливость соотношения (11.210). В силу
равенства (11.211), можно записать, что
+оо
Д(х-Ьр) 1 Г+ (11.212)
w Л ,/ Iq
О
§ 9]
ИНТЕГРАЛ ФУРЬЕ
513
Поэтому разность между переменной величиной и предполагаемым
пределом в соотношении (11.210) будет равна
l-оо
О
4-со
= 4/ 1/(*+0-7(* + 0)1
о
(11.213)
Таким образом, нужно доказать, что этот интеграл стремится к нулю
при /->-)-°0- Разобьем интервал интегрирования 0<^£<-|-оо на
три: О А^С< + оо; тогда интеграл (11.213)
будет представлен в виде суммы трех интегралов
Jo, +со = Л), 6 + Л, Д Ч~ +со>
(11.214)
После этого будем действовать следующим образом. Сначала, за-
давшись произвольным е > 0, докажем, что при всех достаточно
малых д > 0 и всех достаточно больших Д > 6 будут выполняться
неравенства
|4б|<| и |/д,+00|<| (11.215)
сразу при всех /^-1. Затем, фиксировав биА так, чтобы выпол-
нялись неравенства (11.215), выберем / 1 столь большим, чтобы
в силу основной леммы (см. § 5) выполнялось неравенство |Л,д| <у.
Отсюда, в силу (11.214), будет следовать, что |-/0, +оо| <е при всех
достаточно больших 1^1. Итак, оценим сначала интеграл
б
4,=Д/51„ д &
О
При всех достаточно малых д > О
|/(а: + £)--/(х + О) | < |/^рав(х)|-|-1 при всех С 6(0, 6).
Следовательно,
л.к£(|/щ„<х>|+ч<| пр— *< 3||/>и”->|+Т)
(11.216)
и при всех значениях I.
514
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. И
Оценим, далее, интеграл
4~оо 4-со
А, +оо = ± />/(х + ^)-^-^-^+0) [
е/ Ъ W •/ ь
д д
Мы имеем
Ч-oo
|А,+00|<4/ 1/^ + С)|-|+^-(х+-^
д
4-оо
— CO
+ oo
Q I I/(*4-0) I Г sing*
~~ лД “Г л J g* '
1Л.
где £* = £. (11.217)
4-co
Напомним, что, согласно условию (11.203), Q = I \f(x)\dx < OO,
— oo
поэтому при всех достаточно больших А > 0 будет < -g- сразу
4-оо
sin g*
-dg сходится, то при
о
всех достаточно больших А > 0 и всех I 1
для всех I. Далее, так как интеграл j
1 /(* + 0) I
л
ZA
Следовательно, в силу (11.217)
|4,+»|<| (11.218)
при всех достаточно больших А>0 и всех /^>1.
Оценим, наконец, интеграл
Дд== 1 A(x4-O-/(x.+ 0)sinZg^ (Н219)
₽/ tj
6
Функция / / (* 4~ 0) п0 переменной С является кусочно-
гладкой на отрезке Поэтому, в силу основной леммы
(см. § 5), при всех достаточно больших значениях /^-1 будет
выполняться неравенство
14д|<|. (11.220)
§ 9]
ИНТЕГРАЛ ФУРЬЕ
515
Сопоставляя (11.216), (11.218) и (11.220), получим, что при всех
достаточно больших /^>1
Ро, +оо|<е, (11.221)
что и требовалось доказать.
Замечание. Основная теорема об интеграле Фурье справедлива
и при более слабых ограничениях, налагаемых на функцию /(х).
А именно, если абсолютно интегрируемая на всей оси х функ-
ция f (х) 1) кусочно-непрерывна на каждом конечном отрезке
оси х и -2) отношение |1 ограничено при лю-
бом фиксированном х для всех достаточно малых £, то основ-
ная теорема сохраняет силу.
Действительно, доказательство основной теоремы сводится к оценке
трех интегралов: +оо для Jo, +со*). Последний из этих
трех интегралов мал при достаточно большом А, в силу абсолют-
ной интегрируемости /(х). Интеграл Jo, в мал при всех достаточно
.. п I/(х-Н)— /(х-ЬО) I
малых о > 0, если отношение | । ограничено при
каждом фиксированном х для всех достаточно малых £ > 0. В ин-
теграле же
. ... /(х-Н)—/(х + 0)
функция <р(£) = —— ~ кусочно-непрерывна на отрезке
0<6^£^Д при любом фиксированном х. Пусть [а, 6] — какой-
либо сегмент, на котором ср (£) непрерывна, и пусть дано какое угодно
с > 0. Построим такую кусочно-гладкую функцию g (х) (как при
доказательстве первой теоремы Вейерштрасса), чтобы выполнялось
неравенство
|ф(0-gt(0 | < 2(6е_а) при 0<б<£<А.
Но тогда
ь ъ ь
f q>(£)sin£d£ С /l Ф(0 — ^е(0 pS-H f £e(C)sin/U£
а а а
♦) И соответствующих трех интегралов _6, J_в _д, /_д _оо для
Jo _„>, которые рассматриваются совершенно аналогично.
516 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
при всех достаточно больших I > 0, так как для кусочно-гладкой
функции £е(С) справедлива основная лемма. Разбивая интеграл J& д
на интегралы по сегментам непрерывности <р(£), получаем, что
д—>0 при Z—>4~оо, чем и завершается доказательство теоремы.
3. Интеграл Фурье как разложение в сумму гармоник. Инте-
гральную формулу Фурье (11.206) можно переписать следующим
образом:
+оо
/(%) — J* [А (X) cos Ах sin Ах] dk, (11.222)
о
где
+оо 4-со
Л(А) = -1-/ /©cosA^, В(К) = ± f /©Sin4^. (11.223)
— со — оо
Равенство (11.222) аналогично разложению функции в тригонометри-
ческий ряд Фурье, а выражения (11.223) аналогичны формулам для
коэффициентов Фурье. Выражение (11.222) можно несколько пре-
образовать. Мы имеем
А (X) cos Кх -|- В (A) sin Ах = N (A) sin (Ах 4“ фх). (11-224)
где
N(A) = yWj + W). cos ФХ = 4$Г sin^ = W (11-225>
Таким образом, соотношение (11.222) представляет собой разложе-
ние функции /(х), заданной на бесконечном интервале О^А <4-о°>
на гармонические колебания, частоты которых А непрерывно запол-
няют действительную полуось 0 А < 4~ а функции А (А) и В (А)
дают закон распределения амплитуд 0 <4 А < 4“ 00 и начальных фаз (р^
в зависимости от частоты А.
Если функция /(х) задана на конечном отрезке [—I, Z], то, как
было установлено выше, при надлежащих ограничениях она разла-
гается на «гармонические колебания»:
+оо
, . . а0 . VI ( krtx । l • кях\
• /(*)=+ cos~7—
£=1
4-оо
+ 2л^5[п(Чх+Фа), (11.226)
Й = 1
частоты которых Aft = -y~, А=1, 2........ образуют арифметиче-
скую прогрессию.
ИНТЕГРАЛ ФУРЬЕ
517
§ 9]
4. Комплексная форма интеграла Фурье имеет вид
4-оо 4-оо
= f (11.227)
— СО —оо
она эквивалентна действительной форме (11.206). В самом
+ со
деле, J* /(^)cosX(x — £)d£ является четной функцией X, а
— ОО
4-оо
J" f (£) sin X (х — £) — нечетной функцией X; поэтому
— со
4-оо 4-оо 4-оо 4-оо
dX f / (£) cos X (£ — х) d£ = —f dK f /(£) cos X (x—£) d£,
0 —oo —oo —co
4-oo 4-oo
f dK J /(S)sinX(x-£)^.
— OO —co
Следовательно, в силу формулы Эйлера
еи (*-£) = cos X (х — £)4~г sin X (х — £),
имеем
4-со 4-со 4-со 4-оо
^у\х f /©^Mx-5)^ = _L f d'K f /®cosX(x-|)d| +
— co —co —oo —co
4-co 4-oo
+ i f dK //®sinX(x-£)^ =
— CO —oo
4-oo 4-00
= (IK f /(£)cosX(x —|)d£,
0 —co
откуда вытекает эквивалентность (11.206) и (11.227). При этом
4-оо 4-оо
интеграл 0—j* dK /(|)sinX(x— |)d£ понимается, вообще
—оо —оо
говоря, в смысле главного значения (см § 3 гл. 9):
4-оо 4-оо
f dK J /a)sinX(x-£)^ =
— со —оо
Z 4-„®о
= lim i I* dK f / (£) sin X (x — £) d£.
Z->+co 1 J '
518
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
(ГЛ. П
5. Преобразование Фурье. Равенство (11.227) можно переписать
в виде
4-со / 4-со \
/(х) = -^ f e^dk l-A=- f f^e^dlj. (11.228)
—оо X —со /
Если ввести обозначение
+ оо
7(Х) = -^ f (11.229)
— ОО
то, согласно (11.228), получим
4-оо
f(x) = -^= f "f (к) eiKx dk. (11.230)
у 2Л J
— со
Функция /(X) называется образом Фурье или спектральной
характеристикой функции f (х), заданной на всей вещественной
оси х, — со < х < -|- оо, а переход от f (х) к / (Z) по фор-
муле (11.229) называется преобразованием Фурье. Восстановление
«оригинала» f (х) по образу /(X) с помощью формулы (11.230)
называется обратным преобразованием Фурье.
Перефразируя основную теорему об интеграле Фурье, мы можем
теперь утверждать, что справедлива
Теорема 11.12. Если f (х) абсолютно интегрируема на всей
оси х и является кусочно-гладкой на каждом ее конечном
отрезке, то-. 1) образ Фурье функции, определяемый соотно-
шением (11.229), существует и 2) справедлива формула обра-
щения (11.230), которую следует понимать как предельное
соотношение:
i
/(х)=-^=- lim f f(k)eiKxdk.
У 2л !->+со J
Замечание. В силу замечания к основной теореме об интеграле-
Фурье, теорема 11.12 сохраняет силу и для любой абсолютно инте-
грируемой на всей оси х функции /(х), кусочно-непрерывной на
I /(х4-0 — У(х4-0) I
каждом конечном ее отрезке, если отношение ———1
остается ограниченным при каждом фиксированном х для всех доста-
точно малых |С|, Преобразование Фурье для функций, заданных при
— оо < х < оо, находит широкое применение в математике и
математической физике (см. Дополнение 4 к гл. 11).
Наряду с преобразованием Фурье, которое применяется для
функций, заданных на всей бесконечной прямой — оо < х < оо„
9)
ИНТЕГРАЛ ФУРЬЕ
519
широко используются также синус- и косинус-преобразования Фурье
для функций, заданных на полупрямой 0 х < 4~ оо. Остановимся
на этих преобразованиях несколько подробнее. Раскрывая в формуле
(11.206) косинус разности, получим
4-оэ -f-oo
— f d\ У / Q) cos Ц cos Kx dl 4-
О —оо
4-oo 4-oo
+ -i- f dl. J f (£)sin X^sinZx dl, (11.231)
0 — co
причем оба интеграла сходятся, в силу абсолютной интегрируе-
мости /(х), на всей оси х. Если f (g) — четная функция, то
/ (|) sin нечетная, а / (£) cos четная, поэтому второе слагаемое
в правой части (11.231) обращается в нуль и мы получаем
4-со +оо
/(х) = -|'У> cosKxdkJ /(Dcos^ldl. (11.232)
О о
Если функция /(х) нечетная, то аналогично находим, что
4-оо 4-оо
/(х) = -|-У sinbxdkj' f(l)sinkldl. (11.233)
6 о
В случае, когда х является точкой разрыва, нужно в левых
частях равенств (11.231), (11.232) и (11.233) заменить /(х)
ня/(*4-0) + /(*-0)
на .
Если /(х) определена только на отрезке 0<^х<-|-оо, то ее
можно продолжить на отрезок — оо < х < 0 четно или нечетно,
и тогда для /(х) мы получим два различных представления:
4-со / 4-со \
/(х)=]/^-/cosXxdJj/4 f /(^cos^dgl, (11.234)
О \ о /
4-со / _ Ч-оо х
7(х)=|//' 4 f sinbxdJjA4 f Ш Sin4^ I • (11.235)
0'0 /
Если /(х), заданная на полуоси 0<1х<4-оо, непрерывна
в точке х == 0, то при четном продолжении она будет непрерывной
в точке х = 0 и как функция, определенная на всей оси, поэтому
равенство (11.234) будет выполняться также при х = 0. Напротив,
равенство (11.235) будет выполняться при х = 0 только в том
случае, если /(0) = 0, так как при нечетном продолжении функции
520 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
всегда - = 0 . Равенство (11.234) можно разложить на
два более простых равенства следующим образом. Положим по опре-
делению
______________________________ 4-оо
fc wf f ®cos о1 -2зб>
О
Тогда, согласно (11.234), будет
__ +оо
/(*)=]/f fc (*) cos lx dl. (11.237)
6
Функция fc(l) называется косинус-образом Фурье функции f (х)г
заданной на полуоси 0<^х<-|-оо, а переход от f (х) к fc(l) по-
формуле (11.236) называется косинус-преобразованием Фурье.
Восстановление «оригинала» f(х) по косинус-образу /С(Х) с по-
мощью формулы (11.237) называется обратным косинус-преобра-
зованием Фурье.
Мы видим, что преобразования (11.236) и (11.237) являются
взаимно обратными.
Аналогично вместо (11.235) можно написать
__ +оо
(11.238)
О
и
______________________________ +оо
/(х)=|Лу1 /s(X)sinXxd%, (11.239)
о
где Д(Х) называется синус-об разом Фурье функции fix'), задан-
ной на полуоси 0 х < + оо; переход от / (х) к fs (X) по фор-
муле (11.238) называется синус-преобразованием Фурье, а восста-
новление «оригинала» /(х) по формуле (11.239) называется обрат-
ным синус-преобразованием Фурье.
Примеры.
1. /(х) =
1 при 0 х < а,
1
у при х = а,
О при х > а.
____ а
О
§ 9]
ИНТЕГРАЛ ФУРЬЕ
521
sin Ка cos Хх _________
X
о
Применяя формулу (11.237), получаем
1 при 0 х < а,
1
у при х — а,
О при х > а.
2. f(x) = e~ax, а > 0, х^О. Интегрируя по частям, по фор-
мулам (11.236) и (11.238) находим, что
__ +°о __
W'=/’ if
о
__ +со __
4/ 4^..
о
Применяя к полученным равенствам соответственно формулы (11.237)
и (11.239), получим
+ СО
+со
2 /* AsinXx _ах _ _
— / —9 -| T9-dx = е , х > 0.
л J а2-\-№
о
Так, применяя косинус- и синус-преобразования Фурье, мы можем
получить таблицу значений несобственных интегралов, зависящих
от параметра. Однако основное назначение синус- и косинус-пре-
образований Фурье состоит в применениях к решению задач мате-
матической физики (см. Дополнение 3 к гл. 11).
6. Интеграл Фурье для функций нескольких независимых
переменных. Остановимся сначала на случае двух независимых пере-
менных. Пусть функция /(хр х2) определена при —со < хг <
— оо < х2 < -|- оо и абсолютно интегрируема от — оо до оо
по каждой из переменных хр х2 при каждом фиксированном зна-
чении другой из них. Если, кроме того, /(хР х2) является непре-
рывной и кусочно-гладкой по каждой из переменных хр х2 при
каждом фиксированном значении другой из них, то к функции
/(хР х2) по каждой из переменных хр х2 в отдельности при любом
фиксированном значении другой из них применима интегральная фор-
мула Фурье. Фиксировав х2 и применяя формулу Фурье (11.206)
по хР получим
+оо +оо
/(xPx2) = ^-J> rfXj У*/(£р x2)cosX1(x1 — h)dlv (11.240)
О —со
522
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 11
Фиксировав |t и применяя к f (gp х2) формулу Фурье (11.206}
по х2, получим
4-оо 4-со
/(ii. *2) = ^ f dk2 l2) cos Х2 (х2 —12) d£2. (11.241)
О —co
Подставляя (11.241) в (11.242), найдем
/(*Р х2) =
Ч-оо 4-со 4-со 4-оо
— f co^iCXi—UdZif d\2 /(|р |2)cosX2(x2—|2)d|2==
0 —co 0 —oo
4-oo 4-oo 4- co 4-oo
— dk1 У* d^J" dk2 J'/(|p fc2)cos%i(xi—|1)cosX2(x2—|2)d|2.
О —oo 0 —oo
(11.242)
Если /(xp x2) четна как по xp так и по х2, то фор-
мула (11.242) преобразуется к виду
J cosZqXjdZj £ cosX^J^ j“ cosX2x2(/Z2X
ООО
4-со
X I f (Ip l2)cos ^2I2 ^i2.
о
(11.243)
Если же /(Xp x2) нечетна как по xP так и по х2, то
4-оо 4-оо 4-со
/(ХрХ2) = -^ У* sinX1x1dk1J‘ sin Aqli ^lisinX2x2dZ2X
ООО
+co
х//(Ip l2)sinX2|2rf|2. (1 1.244)
о
Переходя к комплексной форме интеграла Фурье, фор-
мулу (11.242) можно преобразовать к виду
/ (Хр х2) =
4-со -f-оо 4-со 4-со
= f d^f J d^ f
— OO —co —co —oo
(11.245)
причем интегралы no и по Х2 следует понимать, вообще говоря,
в смысле главного значения (см. § 3 гл. 9, а также п. 4 § 9
9]
ИНТЕГРАЛ ФУРЬЕ
523
настоящей главы). Если возможно изменение порядка интегрирования
по и Х2, то формула (11.245) оказывается эквивалентной сово-
купности следующих двух формул:
4-оо 4-оо
7(^.4) = -^- f dtif (11.246)
f(Xl. x2) = ^- f f /(Xp (11.247)'
— OO —co
Первая из них называется прямым преобразованием Фурье функ-
ции f (хР х2), а вторая — обратным.
Аналогично обстоит дело и в случае функции трех и большего
числа независимых переменных. Приведем соответствующие формулы
для функции трех независимых переменных. Интегральная формула
Фурье имеет вид
4-оо 4-со 4-оо 4-со 4-со 4-со
/(XpX2,x3) = iy’ dbtf d^ f dl2 f d^ f d).3 f /(|pB2, |3)X
X COS Xi (Xj — £1) cos X2 (x2 — У cos X3 (x3 — £3) d%3, (11.248)
а в комплексной форме
/(Xp x2, x3) =
4-oo 4-oo 4-oo 4-oo 4-co 4-co
= w/ f f f d^ f d^ f £з)Х
О —со 0 — oo —co —oo
£1) + M(X2— — ЬЯ (11.249)
Если промежуточные интегрирования перестановочны, то фор-
мула (11.249) эквивалентна совокупности следующих двух формул:
f (^1> Х3) =
4-оо 4-оо 4-оо
= f f ^2 f /Qp & (11.250)
4-co 4-oo 4-oo
/ (Xp X2, X3) el dk3. (11.251)
Интегралы (11.247) и (11.251) понимаются, вообще говоря, в смысле
главного значения.
524 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. и
Остановимся вкратце на обосновании формул (11.246) и (11.247).
Аналогично обосновываются формулы (11.250) и (11.251). Спра-
ведлива следующая
Теорема 11,13. Пусть функция f (х2, х2) непрерывна на
всей плоскости ххх2 и выполнены следующие условия'. 1) инте-
гралы
4-со 4-оо
jf x2)]dxt и J | /(хр x2)|dx2 (11.252)
— ОО —со
сходятся равномерно по х2 и хг на каждом конечном от-
резке х2<^х2<^х2 и X] X; хр соответственно, 2) повтор-
ный интеграл
4-оо 4-со
У dx2 у |/(хр х2) | dxx (11.253)
— оо —оо
сходится; тогда если при всех достаточно малых |£|:
3) | -7 (Х| / (xi + 0, х2) j каждом фиксирован-
ном Xj и всех х2,
4) | ~t*1’ ~К91 | С2 (Xj) при каждом фикси-
+со
рованном х2 и всех хР причем § C2(x1)dx1 сходится, то суще-
— оо
ствует образ Фурье функции /(хр х2)
4-со 4-оо
= f f f(.h,^e-l^+^dl2 (11.254)
— 00 —00
и справедлива формула об ращения
4-оо 4-оо
/(Хр х2) = ^- / d^ f /(Хр (Ц.255)
— ОО —со
понимаемая в следующем смысле:
f х2) =пт У/(А,р l2)e'(^+^)dU (11.256)
h, г2-> + 00 •> J
—it —12
где предельный переход осуществляется сначала по 12,
а затем по lv
§ 9]
ИНТЕГРАЛ ФУРЬЕ
525
Доказательство. Образ Фурье функции /(Хр х2) по аргу-
менту хл
+оо
7(4 х2) = -^=- J f&> x2)e-^d^ (11.257)
— СО
существует, в силу сходимости первого интеграла (11.252), и
является непрерывной функцией х2, в силу равномерной сходимости,
вытекающей из равномерной сходимости первого интеграла (11.252).
Интеграл
4-сс 4-со
f |7(4 x2)\dx2 = У dx2
— СО —00
f /(4
1
/2л
(11.258)
сходится, в силу сходимости интеграла (11.253).
В силу условий 1) и 3) и непрерывности функции /(хР х2) по хг
и в силу замечания к основной теореме о преобразованиях Фурье
(см. теорему 11.10 п. 4 § 6), справедлива формула обращения
+со
/ (хР х2) = J f (Хр х2) е1^ d^ =
— ОО
А
= ^7==- Um /’/(Хр x2)ea>x>dXp (11.259)
V 2л I,->+со '
— h
В силу условия 4) и равенства (11.257), имеем
1/(4 х2 + £)~7(4 х2 + 0)|<
4-оо 4-со
< ] 1/(4 *2ч-о-/(4 ^2+о)|^<iq f c^d^,
—co —oo
t. e.
4-co
|/(Xi, x2 + g)-7(X1,x24-0) y’c2Q1)^1. (11.260)
В силу сходимости интеграла (11.258), существует двукратный
образ Фурье функции /(хР х2):
+ оо
7(4 М=у= f 7(4
— со
4-со 4-со
/ d^ f (11.261)
526
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. II
причем, в силу непрерывности /(Хр х2) по х2 и выполнения усло-
вия (11.260), справедлива формула обращения
+оо
7(М, х2) = -^=- f /(Хр k2)e‘^dk2 =
— ОО
= —!==• lim Г /(Хр Х2) eiK^ dx2. (11.262)
У 2л Z2->+oo J
~h
Подставляя (11.262) в (11.259), получим
A г2_
/(xp x2) = -J— lim Г e'^dXj lim Г f (Xp X2) e1^dX2 ,
2Jt />->+oo_«J Z2->+oo_«/
(11.263)
или иначе
h h_
/(xp x2) = -4— lim f' f f (Xp k2) eldk2, (11.264)
zn A, z2->+co 4 4
где предельный переход совершается сначала по 12, а затем по /р
Теорема доказана.
В случае функции трех переменных /(хр х2, х3) формулы пря-
мого и обратного преобразований Фурье запишутся следующим
образом:
+ 00 4-00 4-00
7(х,.ч.ад=^/ / //ы,.ух
— ОО —со —оо
X dl2 (11.265)
и
4-со 4-оо 4-оо
/(Хр Х2, х3) = )3 J f f /(^Р ^2- \з) X
— со —оо —оо
X е‘ (Ал+Хл+Мз) di2 rfx3. (11.266)
Если подставить (11.265) в (11.266), то получится равенство
4-со 4-оо 4-со 4-оо 4-оо 4-со
/ (Хр х2, х3) — f f f f f f f (&P h- £з) X
— 00 —oo —oo —oo —oo —oo
X еЧМ^-^ М^-М+М^з)] d^d^d^d^d^dly (11.267)
He составляет труда выписать соответствующие формулы и для
функции N переменных.
ДОПОЛНЕНИЕ 1 К ГЛ. И
527
Для обоснования системы равенства (11.265), (11.266), кроме
требований к сходимости интегралов, аналогичных рассмотренным
в случае функций двух переменных, достаточно потребовать, чтобы
при всех достаточно малых |£| выполнялись неравенства:
1 \ I f (xi + Ci> х2’ хз) — f (-*1 4~ 0, хг, хз) | п
1) | | Ч
при каждом фиксированном х1 и всех х2 и х3,
2) । f (Х1’ 4*^2’ Хз) -/ (Х1’ Х2 Ч~4 х3) | с (х )
при каждом фиксированном х2 и всех хх и х3,
| (%1’ Xi' Хз ~1~ Сз) f (х1> х2> х3 4~ 0) । <•- Q х )
при каждом фиксированном х3 и всех хг и х2, причем интегралы
4-оо 4-оо 4-оо
J C2(x^dxx и J dx2 J* C3(Xj, xj)dxx должны сходиться. Тогда
— со —со —оо
существует трехкратный образ Фурье (11.265) функции /(Хр х2, х3)
и имеет место равенство (11.265), понимаемое в следующем смысле:
А
3)
-Z,
dA,2
lim
gi [Х1ЛГ|+Х2Х2+Х.з.Гз] 4/Х-з
(И-268)
где -предельный переход осуществляется сначала по Z3, затем по 12
и, наконец, по lv
Случай М независимых переменных рассматривается аналогично.
ДОПОЛНЕНИЕ 1 К ГЛ. 11
О ПОЛИНОМАХ ЛЕЖАНДРА
Докажем, что полиномы Лежандра
1 яп
РоМЫ, Pn(x)==1A_^.[(x2_l)«], п=1, 2............ (1)
ортогональны на отрезке [—1, 1], т. е. что
+i
J Рп (х) Рт (х) dx = 0 при т + п. (2)
528 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. 11
Очевидно, достаточно доказать, что равенство (2) выполняется при
т < п (ввиду равноправия т и га), а для этого в свою очередь
достаточно доказать, что
+1
J* Рп (х) xmdx — 0 при т < п, (3)
-1
где т — целое и неотрицательное. Полагая
’ где =
получим, что
+ 1 +1
/* Pn(x)xmdx = ^-T f -“n<x) xmdx. (4)
J п ' 2лга! J dxn v '
-1 -1
Выполняя в последнем интеграле интегрирование по частям до исчез-
новения хт и учитывая, что
“п(±1) = <(±1)= ••• =и("-1)(±1) = 0,
получим равенство (3). Этим доказательство ортогональности поли-
номов Лежандра на отрезке [—1, 1] завершено.
Вычислим теперь норму га-го полинома Лежандра. Для этого
снова применим интегрирование по частям в интеграле
Р»(*)112 = 2^Г /
-1
(5)
Интегрируя по частям га раз и учитывая, что ип (х) имеет степень
2га и ил(± 1) = и'п (± 1) = ... =«<"-1>(±1) = 0, получим
4-1 +1
Г dnun(x) dnun (х) Г dn~xtin(x) dn+'un(x) _
J dxn dxn J dxn~1 dxn+l
-1 -1
4-1
_ /142 f dn+2un(x) _
’ J dxn~2 dxn+2
-1
+ 1 +1
... =(-!)« f Un{x)^^-dx = (2га)! f (1-х)л(1 +x)ndx. (6)
ДОПОЛНЕНИЕ 2 К ГЛ. 11
529
Но
1-1 +1
f + f (l-x)n-4i-\-xr+ldx=...
-I -1
+ 1
_ n{n — l)...l f M I — .______<n!)2 O2n + 1 (7\
-----(n+l)(n + 2)...(2n) J ax~ (2n)!(2n+l)
— 1
Подставляя (7) в (6) и (6) в (5), получим
\\PA*W= } [/\(х)]2^=2ЛТТ- <8>
-1
Следовательно, норма n-го полинома Лежандра равна
P«WII=/Ur- О)
Заметим, что степень n-го полинома Лежандра Рп (х) равна п при
п — 0, 1, 2, ... Так как полиномы Лежандра Р0(х), Рх(х), ...
.... Р„(х) ортогональны на отрезке [—1, 1], то они линейно не-
зависимы, а следовательно, образуют базис пространства всех алге-
браических многочленов степени <4 и; отсюда вытекает, что любой
многочлен степени <4 п. может быть представлен в виде линейной
комбинации многочленов Лежандра Р0(х), Р\(х).Рп(.х) и> в част-
ности,
= а0пР0 (х) + ащ/3! (х) + ... 4-аллРл (х)
(см. Дополнение 2 к гл. 11).
ДОПОЛНЕНИЕ 2 К ГЛ. II
ОРТОГОНАЛЬНОСТЬ С ВЕСОМ И ОРТОГОНАЛИЗАЦИЯ
Обобщением введенного ранее понятия ортогональности функций
является понятие ортогональности функций с весом.
Пусть р (х) — неотрицательная функция, не равная тождественно
нулю и непрерывная на открытом интервале (а, Ь), причем инте-
грал
6
f p(x)dx (1)
а
530 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ (ГЛ. II
существует (как собственный или как несобственный) и положителен *).
Будем называть функцию р (х) весом.
Пусть для функции /(х), заданной на [a, Z>], интегралы
ь ь
J p(x)f (х) dx и f р (х) [/ (х)]2 dx (2)
а а
(собственные или несобственные) существуют; тогда функция называ-
ется интегрируемой с квадратом с весом р(х) на [а, #]. В част-
ности, если р(х)=1, то мы приходим к сформулированному ранее
(стр. 479, соотношение (11.93)) определению интегрируемости с квад-
ратом.
Пусть функции системы
Ф1 (я). ф2 (•»)• • • •. Ф„ (X), .... (3)
заданной на [а, £], также интегрируемы с квадратом с весом р(х)
на [а, Ь], т. е. интегралы
ь ь
J р (х) <ря (х) dx и J* р(х) [<р„ (х)]2 dx, п—1,2, ... (4)
а а
(собственные или несобственные), существуют. Если интервал [а,
конечен, то из существования интегралов (2) и (4) и элементарных
неравенств
I f (х) ф„ (х) | < 1 [/2 (х) + ф2 (х)],
I <р„ w ф,я (*) I < т w+ф2« W] (5)
следует существование интегралов
& ь
J p(x)f(x)(pn(x)dx и J р (х) ф„ (х) фт (х) dx. (6)
а а
Если же интервал [a, 6] бесконечен, то существование интегра-
лов (6) будем предполагать дополнительно.
Мы будем предполагать, далее, что каждая из рассматриваемых
функций непрерывна на [a, Z>] всюду, кроме, может быть, конечного
числа точек, которые могут быть, в частности, особыми точками
функций.
*) Интеграл при сформулированных условиях может оказаться несоб-
ственным, если функция р (х) не ограничена при х -> а + 0 или х -> b — 0.
Такого типа особенности у р(х) встречаются в случае некоторых важных
классов специальных функций (см., например, полиномы Чебышева первого
рода в конце этого Дополнения).
ДОПОЛНЕНИЕ 2 К ГЛ. И
531
Функции <р„ (х) и <рт (х) называются о ртогональными с весом р (х)
на отрезке [а, ЭД, если
Di®
J p(x)<p„(x)<pm(x)rfx = O при m=hn. (7)
а
Система функций (2), интегрируемых с квадратом с весом
р (х) на fa, Z»J, называется ортогональной с весом р(х)
на [а, ЭД, если
и
ь
J р (х) <р„ (х) qpm (х) dx = О при пфгп (8)
а
b
j" p(x)q>2(x)dx > 0 при п=1, 2, ... (9)
а
Обычная ортогональность функций является частным случаем орто-
гональности с весом, когда вес р(х)=1.
Пусть функция /(х) интегрируема с квадратом с весом р(х)
на [а, ЭД, а система (3) ортогональна с весом р(х) на [а, ЭД.
Если коэффициенты ряда
f (,х) ~ ЭДФ1 (*) + с2ф2 (*)+••+ спср„ (х), ... (А)
определяются по формулам
ь
J р (х) / (х) <р„ (х) dx
Сп = ±—ь----------------- П = 1, 2.......... (Б)
J Р {X) <р2 (X) dX
а
то он называется рядом Фурье для функции /(х) по си-
стеме (3).
Мы скажем, что ряд (А) сходится к f (х) в среднем с ве-
сом р(х) на [а,
lim
если
fp(x) /(х) — 2 сАфА(х) dx = 0.
ЭД.
ь
-|2
т
(В)
Если ряд (А) сходится равномерно или в среднем с весом р (х)
к функции /(х) на [а, ЭД, то его коэффициенты однозначно опре-
деляются по формулам (Б). Действительно, при сформулированных
532
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 11
условиях, в силу неравенства Коши — Буняковского, имеем
Ь |- т
f Р (*) Ф« (х) f (х) — (х)
a k-1
dx
т -12
р (*) / w — 2
Л = 1
при т—>4--оо и любом фиксированном п. С другой стороны, в силу ор-
тогональности с весом р (х) функций <pz (х) на [а, />] при т^п, имеем
= f P(x)f (х) <рл (х) dx — сп J р (х) (х) dx = const
а а
при фиксированном п. Следовательно,
& &
f Р(х)/ (х) сря (х) dx — cnj’p (х) ср2 (х) dx = О,
а а
откуда и следует (Б).
Понятие полноты и замкнутости (см. § 6 гл. 11), а также основ-
ные связанные с ними теоремы (теоремы 11.4—11.7 § 5, 6 гл. И)
легко обобщаются на случай систем, ортогональных с весом.
Разложение функций в ряд по системам, ортогональным с весом,
находит широкое применение в математической физике. Из систем,
ортогональных с весом, назовем прежде всего различные системы
специальных полиномов, о которых речь будет идти ниже, а также
системы собственных функций круглой и кольцевой мембран, шара
и шарового слоя (см. вып. 4).
Разложение функций в ряд по системам, ортогональным с весом
(в частности, с весом /?(х)=1), весьма удобно в силу простоты
определения коэффициентов разложения. Ортогональные с весом си-
стемы можно строить, отправляясь от линейно независимых систем,
путем так называемой ортогонализации.
Функции*) ср!(х), <р2(%). <р„(х) называют линейно
зависимыми на [а, (»], если существуют такие константы
С{, С2....Сп, не все равные нулю, что линейная комбинация
£1Ф1 (х) + ^2Ф2 W + • • • + £ЛФи (*) = О
(10)
*) Напомним, что каждую из рассматриваемых функций мы считаем непре-
рывной всюду на [а, £>], кроме, быть может, конечного числа точек.
ДОПОЛНЕНИЕ 2 К ГЛ. 11 533
тождественно равна нулю на [а, Ь] всюду, кроме, быть может,
точек разрыва функций ф^х), ф2(х), .... ф„(х).
Если же из тождественного в указанном смысле равен-
ства (10) следует, что все коэффициенты Ct линейной комби-
нации равны нулю, то функции ф^х), ф2(х), .... ф„(х) назы-
ваются линейно независимыми на [а, й].
Если система функций фх(х), ф2(х).....фя(х) ортогональна
на 1а, й] с весом р(х), то функции системы линейно не-
зависимы на [а, &]. Действительно, пусть
С1Ф1 W + ^2<P2(^)++С„ф„(х) = 0 на {а, 6] (11)
всюду, кроме, быть может, конечного числа точек. Умножим равен-
ство (11) на р(х)фт(х) и проинтегрируем по х от а до Ъ, учитывая
ортогональность функций с весом р (х) на [а, />]. Получим, что
ь
ст f Р (*) 4>2т (х) dx = 0, (12)
а
а так как интеграл =Н=0, то Ст — 0. В силу произвольности т,
получаем, что = С2 — ... = Сп — 0.
Отправляясь от линейно независимой системы ф! (х), ф2 (х), . . .
. ... ф„(х), легко построить ортогональную систему (с весом р(х))
Ф1 (х), ф2 (х), .... Фя (х) такую, что
Ф1 W = ti (*)•
ф2 (х) = ф2 (х) + %21ф! (х),
Фз (х) = фз(х) + %з1ф1(х)4-Х32ф2(х), Г (13)
ф„(х) = ф„(х)Ч-Х„1Ф1 (х) + %л2ф2(х) + .••+V1V1W- J
Из соотношений (13) следует, что при каждом k— 1, 2, .. ., п функция
фл (х) является линейной комбинацией (х)....фА (х) с коэффициен-
том 1 при фй (х) и, следовательно, не может быть равной тожде-
ственно нулю всюду, кроме точек разрыва функций (х).......ф/; (х),
так как иначе функции (х), ..., фА (х) были бы линейно зависимыми
на [а, 6], что противоречит условию. Следовательно, каждая функция
ФА (х) отлична от нуля в некоторой точке своей непрерывности, поэтому
ь
J* р (х)ф2 (x)dx > 0, k—l, 2........п. (14)
а
(Из соотношений (13) следует также, чю фА(х) при каждом
k = 1, 2, ..., п является линейной комбинацией (х), Ф2(х), ..., q>k (х)
с коэффициентами 1 при фА (х).)
534
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. И
Числа входящие в (13), однозначно определяются из условий
ортогональности функций (х), <р2 (х), .... <р„ (х). Это можно до-
казать по индукции. Умножая обе части второго из равенств (13)
на р (х) ф! (х) и интегрируя по х от а до Ь, получим
*
J Р (X) Фт W Ф2 (x)dx =
а
b b
= J" р(х) фг (х) ф2 (х) dx + Х21 J р (х) ф2 (х) dx = 0.
а а
'Следовательно,
ъ
У Р W <Р1 (х) <р2 (х) dx
Л21 - b •
У P(x)q\(x)dx
а
Пусть при I <1 k — 1 уже вычислены и функции ф! (х), ,. ., фй-1 (х)
попарно ортогональны на [a, />] с весом р(х). Тогда из соотношений
•ортогональности
й-1
0 = (Ф*. ф/) = (Ф*. Ф;) + 2 Чг(Фг> Ф/) = (11’й- Ф/) + ^(Фр Ф;)
z = i
при J=l, 2, .... k—1 находим, что
, / — 12 k 1
(<Р/. 47) ’ /“1, 2.......k 11
где
ь ь
(Я5*. фу)= У Р (х) фА (х) фу (х) dx, (ф?„ ф7)= у р (х) ф2 (х) dx.
а а
После этого уже все функции фг (х), .... фА (х) определены и по-
парно ортогональны на [a, Z>] с весом /?(х). Этим доказательство
утверждения закончено.
Описанный процесс построения по системе линейно независимых
функций ф/х), .... ф„ (х) ортогональной системы ф[ (х)......фп (х),
связанной с ней соотношениями (13), называется ортогонализацией.
Ортогонализуя систему целых неотрицательных степеней х
1, х, х2, ..., х", ... (15)
на отрезке [—1, 1] с весом р(х)=1, мы получим систему ортого-
нальных на отрезке [—1, 1] многочленов, которые лишь постоян-
ДОПОЛНЕНИЕ 3 к гл. и 535
ними множителями отличаются от многочленов Лежандра, опреде-
ляемых по формуле Родрига
«=1.2,...; Р0(х)=1. (16)
Ортогонализуя ту же систему степеней (15) на отрезке [—1, 1}
/ ч 1
с весом р(х) = у==,
получим систему полиномов Чебышева пер-
вого рода; если же взять вес р(х)=у1—х2, то получаются по-
линомы Чебышева второго рода.
Ортогонализуя систему степеней (15) на полупрямой [0, -f-oo)
с весом р (х) — е~х, получим систему полиномов Чебышева — Ла-
герра. Если же взять р(х) — xse~x, где $ > — 1, то при ортого-
нализации системы (15) на той же полуоси [0, Ч-оо) получатся обоб-
щенные полиномы Чебышева — Лагерра.
Наконец, ортогонализуя систему степеней (15) на всей прямой
— оо < х < -|- оо с весом р (х) = е~х\ получим систему полиномов
Чебышева — Эрмита. Для всех специальных полиномов существуют
удобные общие формулы, подобные формуле Родрига (16) (см. вып. 4).
Перечисленные системы ортогональных полиномов находят важные,
применения в математической физике (см. вып. 4).
ДОПОЛНЕНИЕ 3 К ГЛ. 11
ФУНКЦИОНАЛЬНОЕ ПРОСТРАНСТВО
И ГЕОМЕТРИЧЕСКИЕ АНАЛОГИИ
Множество функций (?[а, Ь\, определенное в § 6, можно рас-
сматривать как функциональное пространство, считая, что две функ-
ции ср(х) и ф(х) из Q[a, ft] представляют один и тот же элемент
или «вектор» пространства, если они могут отличаться самое боль-
шее в конечном числе точек на [а, Ь]. Элементы пространства Q\a, b],
определяемые функциями ф(х), ф(х), ф(х), будем обозначать,
опуская аргумент х, через ф, ф, т], . ..
Определив сумму элементов ф-|-ф и произведение Хф элемента ф
на число X соответственно через сумму ф(х)-(-ф(х) и произведение
на число % функций ф(х), представляющих эти элементы, получим,
что Q [a, ft] относительно этих операций ведет себя так же, как
множество всех векторов трехмерного евклидова пространства отно-
сительно операций сложения векторов и умножения их на числа.
Нулевой элемент 0 пространства представляется любой функцией
из Q [a, ft], которая может отличаться от нуля самое большее в ко-
нечном числе точек на [a, ft].
536 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. II
Определим скалярное произведение любых двух элементов ф и ф
из Q[a, b} равенством
ь
(ф. t)= f <p(x)ii>(x)dx. (1)
а
Нетрудно проверить, что определенное таким образом скалярное
произведение удовлетворяет обычным требованиям, а именно:
(1) (ф. 'Ф) = (Ф. Ф).
(2) (А.<р, ф) = A (tp, ф), где А. — любое вещественное число,
(3) (ф. Ф1 + Ф2) = (ф, Ф1) + (ф. Ф2).
(4) (<р, ф) 0; если же (ф, ф) = 0, то ф — 0.
(Выполнение требования (4) уже было доказано в ходе доказательства
теоремы 11.6 п. 3 § 6.)
Таким образом, относительно скалярного произведения, опреде-
ляемого равенством (1), пространство Q[a, д] ведет себя так же, как
множество всех векторов трехмерного евклидова пространства отно-
сительно обычного скалярного произведения.
Два «вектора» ф и ф из Q[a, называются ортогональными,
если их скалярное произведение равно нулю, т. е. если
ь
(ф, ф) = J ф (х) ф (х) dx — 0. (2)
а
Норму или «длину» вектора ф£ Q [а, Ь] можно теперь опреде-
лить равенством
||ф||=]/(^). (3)
Если ]|ф||¥=0, то, полагая ф (х) = , получим, что
<4>
в силу определения (3). Косинус угла между /(х) и g(x) определим
соотношением
cos (f, g) = —У’ , (5)
Это определение закономерно, так как, в силу неравенства Коши —
Буняковского (ср. п. 2 § 6 гл. 8),
1(/. £)| <11/111И1- (6)
Проекцией / на g, где g #= 0, называют
11/11 cos (/^)=-^. (7)
ДОПОЛНЕНИЕ 3 К ГЛ. П
537
Определим теперь сходимость в пространстве Q[a, #]. Мы скажем,
что <р„->ср при И-*-)-00' если
/ » \‘/г
11<РЯ —<Р||==Н К W —<p(x)]2rfxj ->0 (8)
'•fl /
при n->-{-co, т. е. если последовательность {<рл(х)} сходится
в среднем к ср(х) на [а, Ь].
Мы скажем, что имеет место равенство
/ — /1 + Л+ ••• +/я+ •••• (9)
если
« "I2 \|/2
/ (*) — 2 dx] "* 0
й = 1 -I /
(Ю)
+ ОО
при п -> 4” оо, т. е. если ряд 2 fk (х) сходится в среднем к f (х)
k=i
на [а, />].
Установим аналогию между разложением вектора х трехмерного
евклидова пространства по ортогональному базису е2, е3 и раз-
ложением функции / (x)£Q[a, 5] в ряд Фурье по полной ортого-
нальной системе
<Pi (х), <р2(х), .,<р„ (х), ... (11)
В трехмерном евклидовом пространстве для каждого вектора х
в любом фиксированном базисе существует единственное разложение
х = Xjej 4- х2е2 -f- х3е3.
(12)
Коэффициенты этого разложения легко найти, если воспользоваться
скалярным произведением. Умножая равенство (12) скалярно на ez>
получим
(X, ez) = xz(ez, ez) = xz]|ez||2, (13)
в силу ортогональности базиса ер е2, е3 *). Из (13) находим, что
(х> ei)
Х‘~ 1|ег||2 ’ (14>
Величины
ММ = 1,2,3, (15)
II ck II
где символом || || обозначена длина вектора, являются проекциями
вектора х на направление векторов ek, k = 1, 2, 3.
*) Векторы ер е2, е3 мы не предполагаем, вообще говоря, единичными.
538 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. И
Возводя обе части равенства (12) в скалярный квадрат, получим
равенство
II * И 2 = Х11| е1 |Г + Х2 I е2 |Г + Х31| e3 Г- С16)
выражающее теорему Пифагора для трехмерного случая: квадрат
длины вектора равен сумме квадратов его проекций на три взаимно
перпендикулярных направления.
Совершенно аналогично в пространстве Q [а, 6] каждый «век-
тор» f может быть единственным образом разложен по «векторам»
полной ортогональной системы {<р}. т. е. представлен в виде (см. п. 1
§ 6 гл. 11)
/ С1Ф1 + С2<р2 + +слФл4~ ••• (17)
причем коэффициенты ск разложения (17) определяются по фор-
мулам
“=ЪГ ‘ = Ь2-- <18>
Таким образом, каждый «вектор» f из Q [a, 6] однозначно опреде-
ляется бесконечной последовательностью своих «координат» (сА)
в «базисе» {<рл}.
В силу полноты системы имеет место равенство Парсеваля
(см. п. 2 § 6)
11/112 = с2|Ы12+с2||чМ2 +- ••• +с2||фп||2+ ••• (19)
выражающее теорему Пифагора для функционального пространства
Q [а, Л>].
Если взять проекции вектора х не на все базисные векторы еР
е2, е3, а, например, только на ej и е2, то равенство (16) заменится
неравенством
IIх II2 > x2||ei||2 + ^||е2||2. (20)
Аналогично, если ортогональная система {<₽„} не полна в Q[a, b],
до равенство Парсеваля (19) заменится неравенством Бесселя
II/II2 ><>1||2 + ^|Ы|2+ +<Ж||2+ ••• (21)
Эти геометрические идеи используются в теории так называемых
гильбертовых пространств, находящей применения в квантовой меха-
нике и математической физике.
539
ДОПОЛНЕНИЕ 4 К ГЛ. И
О НЕКОТОРЫХ ПРИМЕНЕНИЯХ ПРЕОБРАЗОВАНИЯ ФУРЬЕ
Остановимся на некоторых применениях преобразования Фурье.
Многие физические приборы можно рассматривать как операторы
или преобразователи, на вход которых подаются функции fx (f),
f2 (Z)...а на выходе получаются соответственно функции хх (f).
х2 (t), ... Так, различные усилители можно рассматривать как опе-
раторы, преобразующие напряжение /(/) переменного тока, пода-
ваемого на вход, в напряжение x(f) переменного тока, получающе-
гося на выходе.
Преобразователь называется линейным, если он удовлетворяет
следующим требованиям:
1) если /(/) преобразуется в х (f), то cf (f), где с — произволь-
ная постоянная, преобразуется в сх (/),
2) если fx (t) и /2 (0 преобразуются соответственно в х{ (/) и
х2(0, то /1(0 +А (0 преобразуется в ^(О + ^гСО-
Если требования 1) и 2) выполнены, то говорят, что для пре-
образователя выполняется принцип суперпозиции.
Мы будем предполагать также, что установившиеся гармонические
колебания с частотой а преобразуются в установившиеся гармони-
ческие колебания с той же частотой а, т. е. что выполнено еще
одно требование:
3) функция elait преобразуется в функцию A (a) elat.
Зависимость коэффициента пропорциональности А (а) от частоты
означает, что гармонические колебания с различными частотами один
и тот же преобразователь преобразует по-разному. Функция А = А (а)
называется спектральной характеристикой преобра-
зователя. Эта функция принимает, вообще говоря, комплексные зна-
чения
Я (а) = А1 (а) где R (а) = |Я (а)|, <р (а) = arg А (а).
Следовательно, гармоническое колебание elat преобразуется в гармо-
ническое колебание A (a) ei<s>t — R (а) е1 (<0ч’
Модуль /?(а)= | А (а) | спектральной характеристики называется
частотной характеристикой преобразователя; он по-
казывает, во сколько раз изменяется амплитуда гармонического коле-
бания с данной частотой а. Аргумент <р (а) = arg А (а) спектральной
характеристики называется фазовой характеристикой
преобразователя; он показывает, насколько изменяется фаза гармо-
нического колебания с данной частотой а.
Зная спектральную характеристику А = А (а) линейного преобра-
зователя и применяя преобразование Фурье, можно решить следую-
щие две задачи.
540 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. 11
Прямая задача. По заданной функции f(f) на входе найти
преобразованную функцию x{f) на выходе.
Обратная задача. По преобразованной функции x(f), полу-
чающейся на выходе, найти функцию f (f), поданную на вход.
Покажем сначала, как решается прямая задача. Пусть на вход
подана функция f (f). Найдем ее образ Фурье
+оо
7(0) = -!=. У /(т)е-^Л (1)
— СО
и представим функцию f (t) в виде
+оо
f(t) = -±= f (2)
У 2Л J
— со
Интеграл в правой части равенства (2) можно рассматривать как
сумму бесконечно большого числа бесконечно малых гармонических
колебаний вида
J_ / (со) elat da. (3)
у 2л
Гармоническое колебание eiat преобразуется в гармоническое колебание
A(a)ei(i,t, следовательно, гармоническое колебание /(со) dcoj
преобразуется, в силу свойства 1) преобразователя, в гармоническое
колебание
( -2= / (со) dco) А (со) е™ = А ((й) J((о) (4)
2л / у 2л
Сумма колебаний (3) преобразуется, в силу свойства 2) преобразо-
вателя, в сумму колебаний (4), а следовательно, функция /(х),
определяемая соотношением (2), преобразуется в функцию х (f), опре-
деляемую соотношением
+со
х (t) = Д_ / А (со) / (со) eiat da. (5)
у 2л J
— оо
Соотношением (5) решается прямая задача.
Из соотношения (5) следует, что образом Фурье функции х (/)
является
х (со) = А (со) /(со), (6)
т. е. для получения образа Фурье х(со) преобразованной функции x(t)
нужно образ Фурье / (со) функции / (/), поданной на вход, умножить
на спектральную характеристику Л (со) преобразователя.
ДОПОЛНЕНИЕ 4 К ГЛ. 11
541
Чтобы решить обратную задачу, из соотношения (6) находим
т
и, применяя к этому равенству обратное преобразование Фурье,
получаем, что
+со _
= f 4rv ela,t da. (8)
J /2л J A (®) 47
— OO
Соотношение (8) представляет собой решение обратной задачи; оно
позволяет по функции x(f), получающейся на выходе, найти функ-
цию /(0. поданную на вход, при этом предварительно нужно, при-
менив преобразование Фурье, найти образ Фурье х(а) функции x(t),
получающейся на выходе.
Эти задачи часто приходится решать в радиофизике, радиотех-
нике, при исследовании систем автоматического регулирования и т. п.
Преобразование Фурье широко применяется также для решения
различных краевых задач математической фйзики. Образ Фурье
искомой функции часто удовлетворяет значительно более простому
уравнению, чем сама искомая функция. Поэтому для решения краевых
задач математической физики преобразование Фурье применяется по
следующей схеме: сначала подвергают преобразованию Фурье уравне-
ние, которому удовлетворяет искомая функция, и таким путем полу-
чают уравнение для ее образа Фурье, затем, найдя из этого уравне-
ния образ Фурье используемой функции, находят с помощью обратного
преобразования Фурье саму искомую функцию (см. вып. 4).
Рассмотрим один характерный пример. Пусть требуется найти
распределение температуры в неограниченном стержне в произволь-
ный момент времени t > 0, если ее распределение в начальный
момент времени t = 0 известно. Температура и в стержне (ось х
считается направленной по стержню) является функцией точки х
стержня и времени f. и = и(х, t), — оо < х < -ф-оо, 0 < t < + оо.
Известно, что температура в стержне удовлетворяет уравнению тепло-
проводности (см. вып. 4)
ди , д2и । п ,пч
~дГ==адх2' ~ оо<^< + °о. ^>0. (9)
Так как начальное распределение температуры известно, то
и(х, Q')-f(x), —оо<х<-|-оо, (10)
где f(x) — известная функция. Таким образом, чтобы найти распре-
деление температуры в неограниченном стержне в любой момент
времени t, нужно найти решение уравнения (9), принимающее задан-
ные начальные значения (10).
542
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
(ГЛ. И
Решим эту задачу, применяя преобразование Фурье по перемен-
ной х. Через и (A, t) обозначим образ Фурье функции и (х, /):
+00
и (А, 0 = /* а(х> t)e~iKxdx.
У 2л J
— 00
(11)
Умножим обе части уравнения (9) на e~iKx и проинтегрируем
по х от —оо до -|-оо, предполагая, что функция и и ее производ-
ные достаточно быстро стремятся к нулю при х -> ± оо.
Применив интегрирование по частям, получим
4-оо 4-оо
Г e~iKx dx — -^r—^=- f и(х, t)e~lKx dx~
V2л J dt dt y~2S J v
— OO —oo
, 4-00
= £tt(X, O. = fl2 I r d^e_tKxdx==a2 1 Лг4=+М +
dt /2л j dx2 /2л dx L_
— co «Л — co
4-oo
I ]X=4-co i /» _
+ a2 ——a2X2 r_____________________ I ue~iKxdx =—t)9
/2л L=_TO /2л J
так как внеинтегральные члены обращаются в нуль, в силу ограни-
ченности e~iKx*') и стремления к нулю и и при х—> + оо.
Следовательно, для образа Фурье искомой функции получается
уравнение
^4-^2Й=0, (12)
значительно более простое, чем уравнение (9). Из равенства (11)
при t — 0 находим начальное условие для и (X, t)
4-со
и (К, 0) = * /* w(x, tye~ilxdx~
у 2л J
— oo
-Foo
= f /(x)e-^dx = /(X). (13)
у 2л J
— co
Решим уравнение (12) при начальном условии (13); из (12) получаем
= — aWdt.
и
) | е iKx | = | cos \х 4- i sin Ax | = /cos2 Ax 4- sin2 Ax = 1.
ДОПОЛНЕНИЕ 4 К ГЛ. 11
543
Следовательно,
In и —’— a?№t + In С
и
и (к, t) = Ce-a2^.
Определим константу С с помощью начального условия (13):
й(х, о) = с= / (X).
Подставляя это значение С в предыдущее равенство, получим для
образа Фурье искомой функции выражение
и (X, (14)
Чтобы найти и(х, /), применим к равенству (14) обратное преобра-
зование Фурье, подставив вместо /(А) его явное выражение /(А) =
+оо
= У* f (£) d^. Это дает
— СО
+00
и(х, f) - ?_ Г и (А,, /)еахЛ —
у 2л J
— ОО
+ 00 +оо
= 4 f f e-^tea(x-i) dK=z
— OO —co
+oo +oo
=4 f f®d$f e-a2wcosM*-£)^
— co 0
1
2a)f nt
<x-
4a2t dl.
так как (см. п. 5 § 2 гл. 10)
+со
J d?-°vcospXdX = y]/ 4а.
о
Таким образом, решение уравнения (9) при начальном условии (10)
имеет вид
. ТГ (x-tf
U{X' = J 4а2‘ <*
Аналогичным образом применяются синус- и косинус-преобразова-
ния Фурье для решения краевых задач на полупрямой 0 х < + сю
(см. вып. 4).
544 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ [ГЛ. II
Применение кратных преобразований Фурье позволяет решать
краевые задачи для неограниченных областей на плоскости и в про-
странстве, таких, как вся плоскость, полуплоскость, квадрант, все
пространство, полупространство и т. п.
ДОПОЛНЕНИЕ 5 К ГЛ. 11
РАЗЛОЖЕНИЕ 8-ФУНКЦИИ В РЯД ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
Вычисляя коэффициенты Фурье для d-функции б(х0, х) по обыч-
ным формулам, получаем
i
ak = T J 6(*о- I) cos-f-d£ = T cos —
-i
i
= } f 6(x0, l)dl = ±,
-I
I
bk=~ f 6(x0, |)sin-^-^ = ±sin-^ (при x0C(-/. /)).
Jz
Следовательно, ряд Фурье для d-функции 6(х0, х) имеет вид
4-со
. . . 1 . 1 VI I knxa knx . . Аях0 . knx\
6(х0, x)^-Tl+-r24\ZO3~r~CO3~l-----bsm-7-5-Sin-T-) =
+оо
1 . 1 VI kn , .
= 27 + t2ucos“(x — Xo)
4=1
или в комплексной форме
б(х0, -ду- 2j е * (2)
Л = —со
Рассмотрим последовательность частичных сумм этого ряда
п
~ z . 1 । 1 Vi I knx0 knx , . knx* . ЛялтА /оч
6л(х0, 2T + y2j V0S~7^C0S"z—Hm-y-^sin-j-J, (3)
4=ix
n= 1, 2, ....
или в комплексной форме
п я
т . , 1 V 1к 1 о /,п
6я(х0, х)=^- X е • /1=1.2,... (4)
k = -n
ДОПОЛНЕНИЕ 5 К ГЛ. И
545
Если f(x) является кусочно-гладкой на интервале (—I, I), то, оче-
видно,
i
lim f/W\(% x)dx = /(x0). (5)
л->4 -со •;
если считать / (х) доопределенной в каждой точке разрыва х* равен-
/(х* —0)4-/(х* 4-0) _
ством f (х j — ——— 2 •—!—- • Поэтому (см. замечание после
соотношений (7), (8) и (9) в Дополнении 2 к гл. 8 и сноску на
стр. 356) последовательность {бя(х0, х)} будет слабо сходящейся
к б-функции б(х0, х) в классе кусочно-гладких функций на (—Z, Z);
иными словами, ряд (1) слабо сходится к б(х0, х) в классе кусочно-
гладких функций на (—Z, Z). Этот факт можно выразить символи-
ческим равенством
4* со
а / \1 г 1 [ kltXfr kltX г . kKXn , k'HX)
б(х0, х) = -^ +J 2,1 (cos—г2’008-^--Fsin-j-2-sin-T-l, (6)
Л-1
Умножив обе части равенства (6) на любую кусочно-гладкую функ-
цию f (х) и интегрируя почленно по х от — I до I, мы приходим
к доказанному выше равенству
+оо
/(x0)=-^ + £(«*cos^ + Min^). (7)
й = 1 4
где ак и bk определяются по обычным формулам для коэффициен-
тов тригонометрического ряда Фурье функции /(х) на интервале
(-/, Z).
Равенство (6), понимаемое в смысле слабой сходимости в классе
кусочно-гладких функций на (— I, Г), называется разложением
6-функции б(х0, х) в тригонометрический ряд
Фурье.
Аналогично обстоит дело с разложением б-функции б(х0, х)
в интеграл Фурье. Применяя к б (х0, х) формально интегральную фор-
мулу Фурье (см. § 9)
+ 00 +ОО
б(х0, х) = -^У d\ У* б(х0, £)cosX(| — x)dl,
О —оо
получим
+оо
б (х0, х) = J’ cos X (х0 — х) dX. (8)
о
546
РЯДЫ ФУРЬЕ И 'ИНТЕГРАЛ ФУРЬЕ
(ГЛ. II
Это равенство, называемое разложением Ъ -функции 6 (х0, х)
в интеграл Фурье, также следует понимать в смысле слабой
сходимости. Умножая обе его части на любую абсолютно интегри-
руемую на всей оси х функцию /(х), кусочно-гладкую на каждом
конечном интервале, и интегрируя по х от —оо до -(-со (с изме-
нением порядка интегрирования по х и А, в правой части), получим
известное равенство
4-оо -Ьоо
Л*о) = |/ Л f /®cosZ(x0-Drf|. (9)
О — оо
Итак, при разложении 6-функции 6(х0, х) в ряд Фурье (6) и
в интеграл Фурье (8) с 6-функцией можно обращаться так же, как
с обычной кусочно-гладкой функцией (абсолютно интегрируемой на
всей оси в случае интеграла Фурье), а с разложениями (6) и (8),
понимаемыми в смысле слабой сходимости, можно, в известном смысле,
обращаться, как с обычными равенствами.
По поводу дальнейших сведений о 6-функции мы отсылаем к вып. 4
настоящего курса, а также к [5] и [6].
ДОПОЛНЕНИЕ 6 К ГЛ. 11
РАВНОМЕРНАЯ АППРОКСИМАЦИЯ ФУНКЦИЙ МНОГОЧЛЕНАМИ
Приведем доказательство теоремы Вейерштрасса о равномерной
аппроксимации непрерывной функции f алгебраическими многочле-
нами, легко распространяющееся на функции многих независимых
переменных. Это доказательство в случае ДГ-кратно непрерывно диф-
ференцируемой функции f позволяет построить равномерно аппро-
ксимирующий функцию / алгебраический многочлен, производные
которого до N-ro порядка включительно равномерно аппроксимируют
соответствующие производные функции /.
Теорема 1 (Вейерштрасса), Любую функцию f(x), непре-
рывную на замкнутом ограниченном отрезке а-^х ^.Ь, можно
равномерно аппроксимировать алгебраическим многочленом
со сколь угодно высокой точностью.
Доказательство. Предположим, что 0 < а < b < 1 (в про-
тивном случае сделаем надлежащую замену независимой перемен-
ной х). Возьмем числа аир, удовлетворяющие неравенствам
0<а<я<£<Р<1. и продолжим / (х) непрерывно на весь отре-
зок 0<х<Д так, чтобы было /(х)^0 при 0-<х<:а и
Р<Х< 1.
ДОПОЛНЕНИЕ 6 К ГЛ. 11 547
Докажем, что алгебраический многочлен степени 2/г (относитель-
но х)
Р
J" / (u) [1 — (и — х)2]п du
рп (д) = °------------------- (1)
J” (1—и2)п du
-1
при достаточно большом п равномерно аппроксимирует функцию f (х)
на отрезке [а, £>] с любой наперед заданной степенью точности. Для
этого заметим, что
0 0
1
J* = f (1 —г»2)" dv < (1 —б2)" при любом 6, 0 < б < 1.
6
Следовательно,
j*
0<-72-<(1— б2)л(«+1)->0 при ц —>оо, (2)
J п
если б = const, 0 <б< 1. Сделав замену и — x = v, перепишем
интеграл (1) в виде
р-х
У /(V-+-X) (1 — v2)ndv
рпМ=-а~х +i----------------- (3)
У (1 — v2)n-dv
-1
и оценим на отрезке а<^.х-^.Ь разность
Р-х +1
У /(о + х)(1— v2)ndv— у /(х)(1— v2)ndv
Pn(x)-fW = —----------------------277“12---------------• (4)
Пусть дано е > 0. Выберем 6, 0<б< 1, так, чтобы выполнялось
неравенство
| / (х + f) — / (х) | <-|- при а<х<б и |t»|<6 (5)
и чтобы было 0<x-|-f< 1 при а^х^.Ь и |v|<Cd. Представим
548
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. II
числитель дроби (4) в виде
-б
f f (V + х) (1 — v2)n dv + j" f(v-)-x)(l—v2)ndv +
a-x 6
6
+ f [f(x-+v)-f(x)l(l-v2)ndv +
-6
-6 J
+ f f (x) (1 — v2)n dv-\- f f (X) (1 — v2)n dv.
-i б
В силу (5) имеем
б
/ 1/(х + г')-/(х)](1-®2)я^ <
-б
Полагая М— max |/(х)|, получаем оценки
-6
J /(-о—|-х)(1 — v^ndv <
a-x
3-х
J" /О + х)(1 — v2)ndv < MJ*n,
б
(6)
(7)
(8)
2|[л- Л].
Mfn,
так как — 1 < а — х<0 и 0 < 0 — х < 1 при а х Ь, и оценки
в
J f (х) (1 — 1»2)л dv
-1
1
J /(х)(1 — v2)ndv
а
ли*.
(9)
Поэтому числитель дроби (4)
не превосходит величины
Заметив это, получаем следующую оценку для (4):
2рл + 4Л1Гп е /
|Ря(х)-/(х)|< 27д---= т + 2М-^
для всех х£[а, £>].
(Ю)
(Н)
Но, в силу (2), второе слагаемое в правой части неравенства (11)
будет меньше е/2 при всех достаточно больших п. Следовательно,
при всех достаточно больших п
\Рп(х)— f (х) | < е для всех х^[а, £]. (12)
Теорема доказана.
Совершенно аналогично для функции многих переменных может
быть доказана
ДОПОЛНЕНИЕ-6 К ГЛ. И
549
Теорема 2 (Вейерштрасса). Пусть f (xv х2.............хт) непре-
рывна в области П: az-<xz<;z>z, 1=1, 2.............. т, причем
О < ai <.t>i < 1. Продолжим f непрерывно на весь единичный
т-мерный куб Ет: 0<xz<l, 1=1, 2..............т, так, чтобы f
была тождественно равна нулю вне параллелепипеда П*:
ai -С xi Рн где 0 < az < at < bt < pz < 1. Tогда алгебраический
многочлен степени пт относительно хх, х2, .... хт
Рп(хи х2.......х^ =
Pi Р™
J" ••• J* /(и1> • • •• Ии1)[1 (Mi *i)2]/1 • • • (1 — (Цт — хт)2]пdui... dum
°1 ат____________,___________________________________________
г- +1 тт
f (1 — a2)" (du)
.-1 J (13)
при достаточно большом п равномерно аппроксимирует функ-
цию f(xx.....хт) в П с любой наперед заданной точностью.
Замечание 1. Если функция f (х) (/(xz...хш)) имеет не-
прерывные производные до некоторого порядка АГ включительно, то
производные Рп(х) (Рп(х1, .... хт)) до N-vo порядка включительно
равномерно аппроксимируют соответствующие производные f (х)
(f(xx....хот)) со сколь угодно высокой точностью на отрезке [а,
(в параллелепипеде П) при всех достаточно больших значениях п.
Докажем справедливость этого утверждения в простейшем случае.
Пусть / (х) и f (х) непрерывны на отрезке а^х^Ь, 0 < а < /> < 1.
Продолжим / (х) на весь отрезок О х 1 так, чтобы / (х) и /' (х)
были непрерывны на всем этом отрезке и тождественно равны нулю
вне отрезка a х 0, гдеО<а<а<6<0<1. Дифференцируя
многочлен (1) по х и интегрируя по частям, получим
Р
/f(u)\l-(u-x)2\*du
Р'п(х) = -^------’-------------=
Р 3
//(и)Й’[1“(и-х)2]Л‘/и “ f /(“)^[1-(“-^)2]л^
a a
. “ 2Jn — 2Jn — .
P P-X
У f'(и) [1 — (и — x)2]n du j' f'(v-[-x)(l — v2)ndv
a a-x
~ 2T„ +i
/ (1 — v2)ndv
-1
550 РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
После этого разность
[ГЛ. 11
х +1
J* Г (x-|-t<)(l— v2)n dv— J* /'(х)(1— v2)n dv
P'n (x) - /' (x) = -------------------277^----------------------
оценивается так же, как разность (4) при доказательстве тео-
ремы 1.
Замечание 2. Простым следствием теоремы 2 является
Теорема 3 (Вейерштрасса). Если функция f (х) непрерывна
на отрезке —l^x^l и имеет равные значения на его кон-
цах, т. е. /(—I) — f (I), то она может быть с любой наперед
заданной степенью точности равномерно аппроксимирована
на этом отрезке тригонометрическим многочленом вида
ОО
а0 . VT / knx . , , knx\
у-+2j^cos—+^sin“rb
А = 1 '
(14)
Доказательство. Положим -j- — 0. Тогда функция Г(0) =
= f = f (х) будет непрерывной на отрезке — л 0 л, причем
F (— л) = F (л). Введем на плоскости с декартовыми прямоугольными
координатами Л полярные координаты 0, р: £ = pcos0, -q = psin0,
и рассмотрим функцию <р(с,> T[) = pF(0). Эта функция непрерывна
на всей плоскости ц и при р=1 совпадает с F(0), т. е.
<р(|, Л)=^(в) на окружности |2-|-т)2=1. По теореме 2 функцию
<р(£, т]) можно в квадрате ——1 т|1 равномерно
аппроксимировать со сколь угодно высокой точностью алгебраическим
многочленом Р„(|, т]). Полагая р — 1, получим равномерную аппро-
ксимацию F(0) с той же точностью на отрезке —л<^0<^ л тригоно-
метрическим многочленом Pn(cos0, sin 0) или, возвращаясь к х = ~,
равномерную аппроксимацию f (х) с той же точностью на отрезке
— I х I тригонометрическим многочленом Рп (cos , sinj.
Заменяя в последнем произведения и высшие степени cos-^- и
sin —j— линейными комбинациями синусов и косинусов кратных
дуг, этот многочлен можно привести к виду (14). Теорема до-
казана.
ДОПОЛНЕНИЕ 7 К ГЛ. 11
551
ОБ УСТОЙЧИВОМ СУММИРОВАНИИ РЯДОВ ФУРЬЕ
С ВОЗМУЩЕННЫМИ КОЭФФИЦИЕНТАМИ
Пусть известны точные значения ck коэффициентов Фурье функ-
ции f (х), интегрируемой с квадратом на [а, 6] по ортонормирован-
ной системе {<рА (х)}:
ck = J/OM (x)dx, £=1,2..................... (1)
а
и пусть при некотором х£[а, £] выполнено равенство
+ оо
/(*) = 2(2)
Лг = 1
Заменяя в нем сумму ряда частичной суммой, получим приближенное
равенство
п
fix') ~ 2 сксрк(х), (3)
*=1
которое при л —> —оо переходит в точное равенство (2). Таким
образом, увеличивая число членов п, приближенное равенство (3)
в рассматриваемой точке х можно сделать сколь угодно близким
к точному.
Однако на практике приходится пользоваться приближенными
или, как говорят, возмущенными значениями коэффициентов
Фурье:
ck = ск~\~ ^-ck< (4)
которые отличаются от точных значений ck добавками ДсА, называе-
мыми погрешностями или возмущениями.
Если в приближенном равенстве (3) точные значения коэффициен-
тов Фурье ск заменить их приближенными значениями ск, то полу-
чится приближенное равенство
п
/(x)«2^q>ft(x), (5)
А = 1
точность которого при неоправданном увеличении числа членов п
может, вообще говоря, не улучшиться, а ухудшиться. Если на воз-
мущения ДсА не наложено никаких ограничений, то это совершенно
очевидно. Обычно на Дсл накладывают следующее ограничение:
+оо
2 (Дс*)2 < ь2. (6)
*=i
552
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 11
где 62 — достаточно малое число. Из выполнения условия (6) при
каком угодно конечном б следует, во-первых, существование функ-
ции f (х), интегрируемой с квадратом на [а, б], для которой ряд
4-со
2 сйфь (х) является рядом Фурье * *), а также следует, во-вторых, что
А = 1
в силу равенства Парсеваля
& +со 4-оо
f [/(*) - / (X)]2 dx = 2 Cck ~ ctf = 2(Дс^2 < 62’ <7>
а й=1 й=1
т. e. что квадратичное уклонение /(x) от /(x) на [a, б] меньше 62.
Однако выполнение условия (6) при сколь угодно малом & не га-
рантирует сходимости ряда с возмущенными коэффициентами
+оо ~
5 (*)• (8)
k = l
Поэтому даже при выполнении условия (6) неоправданное увеличение
числа членов п в приближенном равенстве (5) может привести
не к его улучшению, а к ухудшению.
Рассмотрим, например, полную ортонормированную систему
1 Г 2
qpj(х) = -т=-, <рй+1 (х) = ]/ — coskx, k—\, 2.................. (9)
ул, V л
на отрезке 0 х л. Пусть функция f (х) является как угодно
гладкой на отрезке О х л, и пусть ее точный ряд Фурье
+ со
Й = 1
(10)
4*оо
*) Действительно, из неравенства 2 (б^)2 < -J- оо, неравенства Бесселя
Л = 1
4-оо Ъ
с| < J* /2 (х) dx и элементарного неравенства "сй < 2 [сй 4- (ЛсА)2],
Л=1 а
+со ~
k= 1, 2, ..., вытекает сходимость ряда 2 Но в теории функций дей-
Й=1
ствительного переменного доказывается ([7], теорема Рисса — Фишера), что
+ оо ~
сходимость ряда 2 является необходимым и достаточным условием су-
ществования функции f (х), интегрируемой с квадратом на [а, 6], для которой
+°о _
ряд 2 (х) является рядом Фурье.
Л = 1
ДОПОЛНЕНИЕ 7 К ГЛ. II
553
сходится к ней как угодно быстро в точке х = 0. Положим
ДС1 = 0, = при Jfesfcl, 2...........—— <б2, б'>0. (11)
Тогда
+со f2
£(Acft)2 = -2^-<d2, (12)
ft = l
т. е. условие (6) для возмущений ДсА выполнено. Однако ряд
2 (х) = £ (Cft + ^ft) <рА (х)
Й = 1 Й = 1
+ со
расходится при х — 0. Действительно, ряд У сА<рл (0) по условию
к = 1
сходится к /(0), а ряд
+ оо , 4-оо г 4-со
й=-1 Й = 1 Й = 1
расходится, отличаясь от гармонического лишь отличным от нуля
множителем 6 у/”(6 ф 0).
Тем не менее, если точный ряд Фурье функции f (х) сходится
к /(х) в некоторой точке х£[а, £], то выполнение условия (6) при
сколь угодно малом 6 > 0 позволяет с помощью надлежащего вы-
бора N (6) сделать в этой точке х модуль разности
ЛЦд)~
/(х) — 2
й = 1
сколь угодно малым, т. е. сделать в данной точке х приближенное
равенство
/(х)«2адл(х) (5')
й = 1
сколь угодно близким к точному. При этом не требуется никаких
дополнительных ограничений на степень гладкости функции f (х)
и скорость сходимости ее точного ряда Фурье в данной точке х.
Именно, справедлива следующая
Теорема. Пусть для членов ортонормированной на [а, Ь]
системы {<pft (х)} выполнены неравенства
|фй (х)| Д = const <-j-со при k=l, 2, ..., a^.x^..b (13)
554
РЯДЫ ФУРЬЕ И ИНТЕГРАЛ ФУРЬЕ
[ГЛ. 11
и пусть при каждом 62 в правой части неравенства (6) число
N (6) выбирается так, что выполнены условия:
Тогда
N (6)->4-оо
d27V(6)->0
при
при
д —> О,
д->0.
lim
б-»0
JV(6) ~
/ (х) — 2 Wk (х)
л = 1
= 0
(14,)
(142)
(15)
при любом х£[а, б], для которого выполнено равенство (2).
Доказательство. В силу соотношений (2), (4), (6), (14j)
и (142) и неравенства Коши —Буняковского для сумм, будем иметь
W) ~
/ (х) — 2 (X)
+оо N (д)
2 <4Фй (х) — 2 Wk (X)
fc=l fe = l
Wk (*)
7V(6)
— 2
fc = l
AT(d) +oo
2 ф! w + 2 Wk w
A = 1 fe = JV(6)+l
< Л y'6W(d) +
(16)
Член Д j/QWV (d) в правой части неравенства (16) стремится к нулю
при 6-> 0, в силу условия (142), а член
2 <4Фй (х) стремится
Й=ЛГ(6)Ц
4-со
к нулю при 6—>0, в силу условия (14,) и сходимости ряда 2 саФа (х)
Л = 1
в рассматриваемой точке х. Теорема доказана.
Из доказательства этой теоремы вытекают следующие выводы.
Пусть в точке х£[а, 6] выполнено равенство (2) и при некотором
б > 0 выполнено ограничение (6) на возмущения Дсй коэффициентов
Фурье. Чтобы модуль разности
k — 1, 2......сделать в данной
Л'0)~
/(X) — 2 QTftW
s=i
точке х £ [а, Ь]
нужно число членов N (6) частичной суммы
, где cft=cA4-Acs,
минимальным,
N(6) ~
2 Сйфй(х) взять
k = l
не слишком малым, чтобы член
неравенства (16) был достаточно
2 ^ф* (х) в правой части
* = ЛГ(в) + 1
мал, и не слишком большим,
чтобы член Д]/д2Л/\б) в правой части неравенства (16) также был
достаточно малым,
ДОПОЛНЕНИЕ 7 К ГЛ, П
555
Всякий метод восстановления функции f (х) с любой наперед за-
данной степенью точности по ее ряду Фурье с возмущенными коэф-
фициентами, если возмущения коэффициентов удовлетворяют усло-
вию (6) при сколь угодно малом б > 0, мы называем устойчивым,
методом суммирования ряда Фурье с возмущенными коэффи-
циентами.
Таким образом, из доказанной теоремы вытекает, что если б2
в правой части условия (6) может быть сделано сколь угодно малым,
то путем надлежащего выбора N (6) в приближенном равенстве (5')
может быть осуществлен устойчивый метод суммирования ряда
Фурье с возмущенными коэффициентами.
Устойчивые методы суммирования рядов Фурье с возмущенными
коэффициентами рассматривались А. Н. Тихоновым в работе [8].
В этой, работе были предложены методы восстановления по ряду
Фурье с возмущенными коэффициентами не только функции / (х),
но и ее производных. Однако рассмотрение этих более тонких во-
просов выходит за рамки данной книги.
ДОБАВЛЕНИЕ 1
ОБ АСИМПТОТИЧЕСКИХ РАЗЛОЖЕНИЯХ
При решении многих задач математики и математической физики
вычисление и исследование функции / (х) в окрестности некоторой
конечной точки х0 или в окрестности бесконечности *) связано
с большими трудностями. Эти трудности часто удается преодолеть
с помощью асимптотических разложений, приводящих к замене функ-
ции / (х) такими функциями, которые вычисляются и исследуются
проще, чем /(х), и которые при х, приближающемся к х0, или
соответственно при х, стремящемся к бесконечности, все более и
более точно аппроксимируют /(х).
Сначала, не формулируя общих определений, мы приведем при-
меры асимптотических разложений (§ 1), затем остановимся на неко-
торых общих определениях и теоремах (§ 2) и, наконец, покажем
на примере гамма-функции применение метода Лапласа для получения
асимптотических разложений некоторых интегралов (§ 3).
§ 1. Примеры асимптотических разложений
1. Асимптотические разложения в окрестности нуля рассма-
тривались уже в 1-м выпуске настоящего курса. Там в гл. 8 были
получены асимптотические разложения в окрестности нуля для сле-
дующих элементарных функций:
^=1 + х + £+ ... +^ + о(хя),
X2 х4 х"-1
cosx==l—2L_|_JL_ ... +(_!) 2
п нечетно, '
sinx = x_^ + ^._ ... +(-1)2
п четно,
*) То есть при х -> + со, или при х -> — со, или при | х | оо.
§ 1]
ПРИМЕРЫ АСИМПТОТИЧЕСКИХ РАЗЛОЖЕНИИ
557
1п(1 + х) = х-4 + 4~ ••• +<- 1)Л~1 -Т- + °^й)-
(l+x)a=l+-^-x+tt(a-1) ...
... +^—9 D хя + о(хП)
(I)
где о(хл)— величина более высокого порядка малости при х—>0,
чем хп. Разложения (I) использовались для вычисления некоторых
тонких пределов, когда более грубая информация о поведении эле-
ментарных функций в окрестности нуля была недостаточной.
2. Асимптотические разложения в окрестности бесконечности.
Рассмотрим теперь некоторые асимптотические разложения в окрест-
ности бесконечности. Часто в математической физике приходится
пользоваться функцией
4-00
Y(x) = -^ Г (1)
У Л е/
X
при больших значениях аргумента х > 0. Найдем асимптотическое
разложение функции W (х) в окрестности бесконечности, т. е. при
х-> + оо. Интегрируя по частям, находим
e~v2^
2&
i+“
% l6=x
е~л
2х
Поступая таким же образом
(га1)-кратного применения
ложение для W (х):
Г е~?
с интегралом / и т.-д., после
X
этого приема получим следующее раз-
п
й«=1
1-3...(26-1)
(2х2)*
+-£»(*) > (2)
+00 х
*)Ч(х)<=-^- e~v 1— Ф(х), где Ф (х) = -?=-/ rfg —
VЛ J V Л '
х О
«интеграл ошибок», играющий важную роль в теории вероятностей, теории
теплопроводности, статистической физике. Он не выражается через элемен-
тарные функции; существуют многочисленные таблицы его значений при раз-
личных значениях аргумента х.
558
ДОБАВЛЕНИЕ
[1
где
Rn М = (-1 )л+1 ьз.-СЧ+в е^х J (3)
г ®
Для остаточного члена Rn(x) справедлива следующая очевидная оценка:
+ со
X
Обозначим через О ) ПрИ х—>оо величину, для которой выпол-
няется «соотношение порядка»:
1^ / 1 \I „ , 1
О —I const-— при х->оо.
| \ЛА/| хк
Тогда разложение (2), в силу оценки (4), можно переписать в виде
ЧЧх)
, г «
1+£(-)*
х У л “ (2л2)«
L л = 1
(5)
Так как ol - 2*+2)-»0 при х-^-^-оэ, то, отбрасывая член о/
можно написать, что
Т(х)«
при X—>—j—оо.
(6)
Соотношения (5) и (6) называются асимптотическими
+ 0О
разложениями Ч;(х) = —~ / e-^dZ, при x->-f-oo или,
У л •’
X
иначе, «в окрестности бесконечности».
Если в правой части соотношения (6) суммирование продол-
жить неограниченно, то получится разложение Т (х) в асимптоти-
ческий ряд
Т(х)«
4-со
£=1
1 • 3 ... (2fe — 1)
(2х2)*
(7)
Этот ряд расходится при всех значениях х. При каждом достаточно
большом х модуль k-ro члена ряда с возрастанием номера k сначала
убывает, затем, достигнув некоторого минимального значения, возра-
стает неограниченно. Однако, в силу неравенства (4), для разности
§ 1] ' ПРИМЕРЫ АСИМПТОТИЧЕСКИХ РАЗЛОЖЕНИЙ 559
между 4е (х) и частичной суммой этого ряда имеет место оценка
, г п
т (%) —1 + У (— 1)*1 •3 • • - о <
4 х/л 2х J "
- е~* . 1-3...(2» + 1) ,8>
x}Gr 2л+1х2"+2 ’ >
Иными словами, погрешность, допускаемая при замене функции Т (х)
частичной суммой ряда (7), не превосходит первого из отброшен-
ных членов и быстро стремится к нулю при х—>4_°°-
Многократное интегрирование по частям является достаточно
общим методом получения асимптотических разложений. Таким путем
могут быть получены асимптотические разложения для интегральной
показательной функции
X
/*
Ei(x)= J —оо < х < 0 при х-> — оо,
— со
для интегрального косинуса
4-со
Ci(x)= У* -c°s - dl,, 0<х<4-°° при |х|—>-|-со,
X
для интегрального синуса
Si(x)= —оо < х < 4- оо при |х|—>оо.
о
Некоторые асимптотические разложения удается получить иными
элементарными приемами (см., например, [9] или [10]).
Рассмотрим один несложный пример. При исследовании распро-
странения электромагнитных волн у поверхности земли и в ряде
других задач используется функция
F(x) = e-*’fel’d£. (9)
о
Нетрудно получить разложение для F(x) в сходящийся степенной
ряд*), которым, однако, при больших значениях х пользоваться
неудобно. Найдем асимптотическое представление для F(x) при
х->4-оо. Умножая равенство (9) на 2х и применяя дважды
*) См. п. 2 § 4 гл. 8,
560 ДОБАВЛЕНИЕ
правило Лопиталя при х->-|-оо, получим
[I
lim 2xf(x)=l. (10)
Х-> + со
Следовательно, для F (х) имеет место асимптотическое представление
F (х) = 17 [1 +0(1)1 ПРИ СО
где о(1) при х —оо определяется как величина, стремящаяся
к нулю при х—►—|—оо. Вместо (И) можно написать также
при х-»4-оо. (12)
Можно было бы привести много других асимптотических разложений,
но мы пока ограничимся рассмотренными примерами.
§ 2. Некоторые общие определения и теоремы
Мы будем рассматривать функции /(х), g(x).......... заданные
на некотором множестве М точек х вещественной прямой, например
на конечном интервале, на полупрямой, на всей вещественной прямой.
1. Соотношения порядка. Асимптотическая эквивалентность.
Остановимся сначала на соотношениях порядка f (х) = о (g (х))
и /(х) = О (g(x)). Пусть х0 — какая-либо предельная точка мно-
жества Ж.
Определение 1. Если
lim Zl£l = o,
х-*ха ё(х)
х£М
(13)
то говорят, что /(х) есть «о малое» от g(x) при х->х0
на множестве М, и пишут
f (х) — о (g(х)) при х->х0 на М. (14)
Замечание. Выполнение соотношения (13)
всякого е > 0 найдется такое б = б (е) > 0, что
означает, что для
|/(х)| <е|^(х)| при всех х£М, для которых |х — х0| <6.
(13')
Определение 2. Если существует такая константа С,
0 < С < —оо, что при всех х £ М из достаточно малой окрест-
ности х0 выполняется неравенство
(15)
5 2]
НЕКОТОРЫЕ ОБЩИЕ ОПРЕДЕЛЕНИЯ И ТЕОРЕМЫ
561
то говорят, что f(x) есть «о большое» от g(x) при х —>х0
на множестве М, и пишут
f (х) — О (g (х)) при х->х0 на М. (16)
Определение 2t. Если неравенство (15) выполняется на
всем множестве /И, то говорят, что f (х) есть «о большое»
от g(x) на множестве М, и пишут
f(x) — O(g(x)) при х£М. (16')
Если / (х) — о (g (х)) при х—>х0 на М, то, как это следует
из определений 1 и 2, и подавно f (х) = О (g (х)) при х-*х0
на М.
Замечание. Если множество М не ограничено, то совершенно
аналогично определяются соотношения порядка f (х) = о (g (х))
и / (х) — О (g (х)) при х-*-^00 (или — °°* или |х|->оо),
иными словами, соотношения порядка «в окрестности бесконечности».
Если выбор множества М очевиден, то в соотношениях (13)—(16)
указание на М опускают.
Примеры. 1) ех — 1 = О (х) при X- ->0,
2) sin х = О (х) при х - >0,
3) cos х = О (1) при X- >0,
4) sin2 х — о (х) при X — >0,
5) х2 = о (х) при X- >0,
6) х2 — О (х) при X — >0,
7) е~х‘ — о (х-1) при X — > оо,
X
е? d^ = O
-н- при х->4-оо.
8) F(x) = e--*2 j
о
Сформулируем теперь определение асимптотической эквивалент-
ности функций.
Определение 3. Функции f(x) и g(x) называют асимпто-
тически эквивалентными при х—>х0 на множестве М
и пишут
f (х)—g(x) при х—>х0 на М, (17)
если
(/(*)/g (*))-> 1 при х->х0 на М. (18)
Вместо соотношения (17) можно написать, очевидно, соот-
ношение
/(*) = ^(х)1Ч-о(1)1 при х->х0 на М, (19)
называемое асимптотическим представлением /(х)
в окрестности х0 на множестве М.
562 ДОБАВЛЕНИЕ (1
Совершенно аналогично определяется асимптотическая эквива-
лентность функций на множестве М в окрестности бесконечности
(т. е. при х —*•—|—оо, или при х— оо, или при |х| —>оо).
Примеры. 9) sinx~x при х—>0,
10) F (х) = е~*2 J е% ПРИ х->-}-<х>.
о
2. Асимптотические разложения функций. Раскрывая скобки
в соотношении (19), получим равенство
/ (x) = g (x)-]-o(g(x)) при х->х0 на М, (19')
которое является простейшим асимптотическим разложением /(х)
в окрестности х0 на множестве М.
Сформулируем теперь общее определение асимптотического раз-
ложения, охватывающее также частные случаи, рассмотренные в § 1
настоящего добавления. Для этого нам прежде всего потребуется
ввести понятие асимптотической последовательности и асимптоти-
ческого ряда.
Определение 4. Конечная или бесконечная последователь-
ность функций (фя(х)}, заданных на множестве М, называется
асимптотической на М при х^~х0 (х—>оо), если при
каждом п выполнены соотношения порядка фй+1(х) = о(фя(х))
при х-*х0 (х->оо).
Например, последовательности
1) 1, х, х2....х'!, ... при х—>0,
2) 1, х\ х?“2....х\ ... (О < Xj < Х2 < ... < Хя < ...)
при х->0,
3) 1, (х — х0), (х — х0)2..(х — х0)", . . . При X х0,
4) 1, х“Ч х-х2.....х~\ ... (0 < Xj < Х2 < . .. < Х„ < .. .)
при х->4-оо,
5) ех, ехх~\ ехх~\ ..., Zx~\ ... (О < Xt < ... < Кп < .. .)
при х—>-|-со,
6) 1, х-1, х-2.....х-",... при х -> + оо
являются, очевидно, асимптотическими.
Последовательности 1), 3), 6) называются степенными; по-
следовательности 2), 4), 5), где Xz — некоторые вещественные числа, —
обобщенными степенными.
Определение 5. Если (фя(х))—бесконечная асимптоти-
ческая последовательность (на множестве (И) при х-+х9
НЕКОТОРЫЕ ОБЩИЕ ОПРЕДЕЛЕНИЯ И ТЕОРЕМЫ
563
§ 2]
+ СО
(х->4-оо), то ряд 2 спсРп (х) с любыми постоянными коэффи-
п = 1
циентами ср с2, ..., сп, . .. называется асимптотическим
рядом (на множестве Л1) при х—>х0 (х->оо).
Определение 6. Пусть {<р„ (х))—конечная или бесконечная
асимптотическая последовательность на множестве М при
х—>х0 (х->оо). Если для функции / (х), заданной на Л4, вы-
полняется соотношение
N
/(х)= 2 «йФа(х)+о(фуу(л:)) при х —> х0 (х —> оо), (20)
й = 1
где ах, а2....aN— некоторые константы, то его называют
асимптотическим разложением f(x) на М при
х->х0 (х->оо) по последовательности (фя(х)} до N-го члена
включительно.
Разложение (20) записывают также в виде
N
/(х) ~ 2 айФ*(х) при х —> х0 (х —> оо). (21)
й = 1
Если имеет место асимптотическое разложение (20), то, очевидно,
и подавно имеют место асимптотические разложения, получающиеся
из (20) заменой N на k, где А = 1, 2....N—1.
+ оо
Определение 7. Пусть У ak<fk (х) — асимптотический ряд
Й = 1
на множестве Л4 при х—»х0 (х—>оо) и пусть для функции f (х),
заданной на М, асимптотическое разложение (20) имеет
место при каждом N—\, 2, 3, ... Тогда этот ряд назы-
вают асимптотическим разложением функции f (х)
на Л1 при х —> х0 и пишут-
+ оо
/(x)«S ak(pk (х) при х —>х0 (х—>оо.) (22)
k = i
Асимптотические разложения, рассматривавшиеся в предыдущем
параграфе, очевидно, удовлетворяют определениям 6 и 7.
Заметим, что асимптотические разложения в окрестности х = 0,
или х = х0т^0 или в окрестности бесконечности сводятся друг
Q
к другу заменой вида z = —, или вида z — С (х — х0), или вида
С
Z—-------- соответственно, однако такое сведение при практических
X — Xq
применениях асимптотических разложений не всегда целесообразно.
Остановимся на различии между разложением функции f (х)
в сходящийся к ней функциональный ряд и ее разложением в
564 ДОБАВЛЕНИЕ tl
асимптотический ряд. В первом случае мы требуем, чтобы разность
между /(х) и частичной суммой ряда стремилась к нулю при любом
фиксированном х и А/->-|-оо; во втором случае требуем, чтобы
разность /(х)—У ал<рА(х) при каждом Af стремилась к нулю при
*=i
х —>• х0 (х —> оо), имея более высокий порядок малости, чем послед-
ний член в частичной сумме.
Асимптотический ряд для /(х) может быть сходящимся или рас-
ходящимся, как это показывают примеры асимптотических рядов, рас-
смотренных в § 1 настоящей главы. Однако из сходимости асимптоти-
ческого ряда данной функции f (х) не следует, что его сумма равна
/(х). Так, например, нетрудно убедиться, что для функции f(x) =
—е~х имеет место следующее тривиальное асимптотическое разложение:
е~х «О • 1 + 0 • х-1-|- ... +0 • х-л-|- ... (при х—>~4~оо), (23)
причем асимптотической ряд (12.23) сходится, однако его сумма
при всех х (х¥=0) не равна е~х.
Для практических применений асимптотических разложений важно
оценить погрешность, допускаемую при замене /(х) частичной
N
суммой У алфй(х) ее асимптотического разложения (22), т. е.
*=1
оценить остаточный член о(фдг(х)) в разложении (20) при
X —> х0 (х->оо).
Ввиду того, что аналитическая оценка остаточного члена часто
сопряжена с большими трудностями, на практике для выяснения
области применимости асимптотических разложений пользуются конт-
рольным расчетом, проведенным каким-либо другим методом. В ряде
случаев этого оказывается достаточно. Например, пусть известно,
что модуль остаточного члена |о(фЛг(х))| стремится к нулю при
х —> х0, монотонно убывая. Если при значении х, достаточно близ-
ком к х0, удалось каким-либо способом получить значение /(х)
N
и оно отличается от значения 2 ak(Pk (х) в этой же точке х меньше,
*=1
чем на е > 0 (по модулю), то при всех х, более близких к х0, мо-
N
дуль разности /(х) — 2 йаФй(-*) и подавно будет оставаться меньшее.
й = 1
Аналогичным образом обстоит дело, когда не |о(фЛГ(х))|, а неко-
торая мажоранта фдг (х) | о (фд, (х)) | стремится к нулю, монотонно
убывая, при х -> х0.
Асимптотическое разложение любой функции /(х) по заданной
асимптотической последовательности {фл(х)], если оно существует,
определяется однозначно. Именно, имеет место
§ 2]
НЕКОТОРЫЕ ОБЩИЕ ОПРЕДЕЛЕНИЯ И ТЕОРЕМЫ
565
Теорема 1. Пусть каждый член асимптотической после-
довательности {фп(х)) отличен от нуля при всех х в доста-
точно малой окрестности х0 (или при х—>оо) и пусть имеет
место асимптотическое разложение (20) для функции f (х).
Тогда его коэффициенты ak однозначно определяются по фор-
мулам
п-1
/(*)—2
ап = lim ----------------- при л=1, 2.........N. (24)
х->Ло wW
(ЛГ-»оо)
Доказательство. Заменив в соотношении (20) W на в и
переписав его в виде
л-1
/(х)=2 + + (*))-
*=i
находим
л-1
/(*)—2
________k=i_______
П ~ Фл (X)
о (Фл (*) )
Фл(*) '
1
откуда и следует справедливость равенства (24). Теорема доказана.
Обратная теорема неверна; именно, функция /(х) определяется
своим асимптотическим разложением неоднозначно; могут быть раз-
личные функции с одним и тем же асимптотическим разложением.
Так, например, функции /(х) = е~* и g(x) = 0 имеют одинаковое
асимптотическое разложение (23) по степеням 1, х-1, х-2, ...
.... х-я, ... при х —оо.
Определение 8. Две функции /(х) и g(x) называются
асимптотически эквивалентными относительно
данной асимптотической последовательности (срл (х)} при
х->х0 (х->оо), если при всех п выполняется соотношение
f (х) — g(х) = о (<рп(хУ) при х->х0 (х->оо). (25)
Две функции /(х) и g(x) с одинаковым асимптотическим раз-
ложением по некоторой асимптотической последовательности, оче-
видно, асимптотически эквивалентны относительно этой асимптоти-
ческой последовательности.
Нетрудно доказать, что для совпадения коэффициентов асимпто-
тических разложений функций /(х) и g(x) по одной и той же
асимптотической последовательности (<рл (х)} необходимо и доста-
точно, чтобы эти функции были асимптотически эквивалентны отно-
сительно последовательности (срл(х)).
Остановимся теперь на вопросе об операциях над асимптотиче-
скими разложениями.
566
ДОБАВЛЕНИЕ
[1
Если при х -> х0 (х —>оэ) имеют место асимптотические раз-
ложения
/(х)«2 «*Ф*(*) и g(x)»2M»W при х->х{) (х->оо),
к=1 k = l
(26)
то, очевидно, при любых постоянных аир имеет место также
асимптотическое разложение
4-оо
af (х) + р^ (х) « 5 (аа* + fU>k) <рк (х) при х -> х0 (х-+ оо). (27)
*=i
Перемножать асимптотические разложения двух функций f (х)
и g(x) по одной и той же асимптотической последовательности (фл(х)),
вообще говоря, нельзя, так как уже произведения фт (х) <рл (х)
не всегда можно расположить в асимптотическую последовательность.
Остановимся на вопросе о почленном интегрировании асимпто-
тических разложений. Справедлива следующая
Теорема 2. Пусть последовательность {<рл (х)) положи-
тельных функций вещественной переменной х, определенных
на интервале а < х < Z», является асимптотической при
х^-Ь — 0 и пусть имеет место асимптотическое разложение
+ оо
/ (х) « 2 (х) пРи х->Ь — 0*). (28)
Если интегралы
ь ь
//(№ и (29)
сходятся, то имеет место также асимптотическое разложение
Ъ 4-оо b
f (30)
а А = 1 л
Доказательство. Для положительных функций в неравен-
стве |фл+1 (х)| < е|<рл (х)|, выражающем соотношение порядка
<рл+1 (х)= о (фл(х)) **), знак модуля можно опустить. В результате
получим, что
Ф«+1(^)<еФл (*) при х->Ь — 0 (*)
*) Здесь b—конечное число или -(-оо.
**) См. замечание к определению 1.
§ 21
НЕКОТОРЫЕ ОБЩИЕ ОПРЕДЕЛЕНИЯ И ТЕОРЕМЫ
567
при любом е > 0. Интегрируя (*) от х до Ь, что возможно, в силу
сходимости интегралов, получим, что
ь ь
0<<рл(|)<П (31)
X X
при любом
вательность
0 и при х->Ь— 0, откуда вытекает, что последо-
ft
/<РЛ) dl
является асимптотической при х->Ь — 0.
Для доказательства соотношения (30) нужно доказать, что
ft N ft
f f(&dl~^Ckf при x->b — 0 (30')
X k = \ X
для каждого N = \, 2, 3, ... В силу положительности функций
Ф„(х), соотношение (20), имеющее место в силу (28), можно пере-
писать в виде
f(x) — (*)
»=i
<есрлг(х) при х—>Ь— 0
и любом е>0 для каждого W=l, 2, 3, ... Следовательно,
при х -+Ь — 0
и любом е>0 для каждого М—1, 2, 3, ... Но это и означает,
что для каждого N=l, 2, 3, ... справедливо асимптотическое раз-
ложение (30), что и требовалось доказать.
Из теоремы 2 вытекает очевидным образом справедливость
следующего утверждения:
Если имеет место степенное асимптотическое разложение
Ч- оо
/(х)« 2 akx~b пРи х~> + сО (32)
1г=0
4-со
и интеграл J [/(£) — а0 — сходится, то имеет место
X
также степенное асимптотическое разложение
4-оо Ч-оо
f [/© - «о - «1ГЧ dl ~ 2 Т7Д7Т х-^. (33)
Jf W
568 ДОБАВЛЕНИЕ [1
Почленное дифференцирование асимптотических разложений,
вообще говоря, недопустимо. Однако можно указать важные частные
виды асимптотических разложений, допускающих почленное диффе-
ренцирование. Пусть, например, f (х) допускает степенное асимпто-
тическое разложение вида (32), а ее производная f (х) допускает
также степенное асимптотическое разложение, в котором отсутствуют
члены с х° и х-1:
• г\ * *
f ••• ••• при х~> + о°- <34>
Интегрируя (34), в силу предыдущего предложения, получим
л, dn d„
(-ф- оо) -ф- — -ф- —$ -р ••• + ••• ПРИ х — °°- (35)
Но, в силу единственности разложения /(х) в асимптотической ряд
по степеням 1, х-1, х-2, х-3, .... x~k, .... разложение (35)
должно совпадать с разложением (32), т. е. будут выполняться
равенства /(4-оо) = а0, а*=а{.......afk = ak, ... Подставляя эти
значения в (34), получим
---••• ~ртт— ••• ПРИ + (34)
а это асимптотическое равенство получается почленным дифферен-
цированием асимптотического равенства (32).
На этом мы закончим краткое изложение некоторых общих све-
дений об асимптотических разложениях и в следующем параграфе
опишем один важный метод построения асимптотических разложений
для некоторых интегралов.
§ 3. Метод Лапласа для асимптотического разложения
некоторых интегралов
Пусть требуется получить асимптотическое представление интеграла
ь
J(t) — J / (х, t)dx при /->-]-оо (36)
а
в предположении, что при больших значениях t подынтегральная
функция имеет резкий пик в окрестности некоторого значения х — х0,
а вне этой окрестности значения подынтегральной функции по модулю
весьма малы. Очевидно, может случиться, что интеграл, взятый по
этой окрестности х0, будет при больших значениях t почти равен всему
интегралу (36). Если, кроме того, окажется возможным в этой
окрестности заменить функцию /(х, f) с достаточно высокой точ-
МЕТОД ЛАПЛАСА
569
§ з]
ностью такой простой функцией, интеграл от которой легко берется,
причем разность между этим интегралом и исходным интегралом (36)
стремится к нулю при /->-|-оо, то это приводит к асимптотиче-
скому представлению интеграла (36) при больших значениях t.
Такой метод получения асимптотических представлений для интегра-
лов описанного типа был предложен Лапласом.
Рассмотрим применение этого метода на примере гамма-функции
4* со
Г(/+ 1) = J е-“и1 du (37)
о
при t—Асимптотическое представление, которое мы таким
путем получим для Г (/-)-4 при больших значениях t в случае целых
t = n > 0, представляет собой так называемую формулу Стирлинга,
дающую асимптотическое представление для я! при больших значе-
ниях п.
Заменой я = /(1-4-4 приведем интеграл (37) к виду
Г(/+ = f [е~х+ х)]* dx = е~* tt+' f etlllx’dx. (38)
-i -i
Функция е~х(14~л:) == е-х+1п<1+х)== ей(А где h(x} — —x4-ln(14~^).
достигает максимума при х = 0 вместе с функцией h (х). Действи-
тельно, h' (х)~ — 1 -f- yJL положительна при — 1 < х < 0 и от-
рицательна при 0 < х < -j-оо. Так как в точке максимума h (х) имеем
h (0) = 0, то при всех остальных значениях х, — 1 < х < О,
0<х<4- оо, функция й(х) отрицательна. Поэтому при £—>4“00
функция е/й(л) —>0 при — 1 < х < 0 и при 0 < х < 4-оо. Следо-
вательно, можно попытаться применить метод Лапласа.
Взяв число б>0 достаточно малым (и во всяком случае <1),
представим интересующий нас интеграл в виде суммы
J e-'"Wx = J eih^dx^- J e^Wx + J eih^dx. (39)
-i -i -6 d
Чтобы оценить каждый из интегралов, стоящих в правой части ра-
венства (39), найдем оценки для й(х) на интервалах: —1<х<^—6,
— б<х<6и6<х<+со. Разлагая 1п(1-|-х) на отрезке
— б х б в степенной ряд, получим
у*2 4*3 4*4 4*5
Л у ч I I
W = --2- + '3-~^ + '5’“ •••
__ х2 Г . , 2х 2х2 . 2х8 ]
••• + 3 ~4 Н 5
570
ДОБАВЛЕНИЕ
[1
Ряд, стоящий в квадратных скобках, удовлетворяет признаку Лейб-
ница, так как |х| <б< 1- Поэтому отбрасывание всех членов, на-
2х2 2х2
чиная с---, дает погрешность, не превосходящую по модулю .
2 I х I
Но при достаточно малом б > 0 будет —для всех х из
отрезка — 6<ix<^6. Следовательно,
Г — 1 — < А Г— 1 +фб] при — б<х<б, 4 6 < 1.
z L и J L о j о
(40)
На интервале —1 х —6 функция й(х) возрастает, достигая
при х — — 6 наибольшего значения й(—6) < 0. На интервале
б<Сх<4-°° функция й(х) убывает, имея наибольшее значение при
х = 6, й(б)<0. Таким образом,
й(х)<й(—6)<0 при — 1<х<б, (41)
й (х) h (б) < 0 при б х < оо. (42)
Займемся теперь оценкой интегралов (39). В силу неравенства
(41), при £->-]-оо будем иметь
-6 -б
J etfl'x>dx^ J* е"г(-«)</х = е<л(-6>(1 —б) = О(е/л<-4))-^0. (43)
-1 -1
Далее, при f>l и 6<^х<4‘°°> в силу (42), выполняются не-
равенства th (х) th (6) и th (х) 4 й (х), складывая которые получим
th (х) 4 4 [th (6) й (я)! при f > 0 и 6<^х<-|-оо, (44)
Поэтому при /->4" со
+f 4 tfh (*)+А (х))
| е2 dx —
б
6
тА<б>+г°4ад.
= е | е2 dx —
6
Наконец, в силу неравенства (40),
X2 Г 4 1 X1 Г 4 *|
У е ‘ 2 11 + 3 2 dx < у e<h(x'> dx < ft2' 3 & dx.
-6 -6 -a
С помощью оценок типа (44) и (45) находим
6 ^2 г 4 1 х2 г 4 т
J е 2 I' * 3 6J dx = j* е 2 I-1 ± 3 2 dx 4- О
— 6 —со
(45)
(46)
(47)
§ 3]
МЕТОД ЛАПЛАСА
571
при со, где а (6) < 0 является константой, зависящей от б,
но не зависящей от t. Вычислим теперь интегралы
+ 0О 1-2 г 4 1
/ е-‘~
— •со
1
Сделав замену £ = х (" 1 ± у j2. получим
4-оо д-’ 4 II 1
l' е ‘ 2 [1 + з ^йх = (2л)2 t 2. (48)
— ОО
Из (47) и (48) при + следует, что
У* 6Ьх = (2л)2’Л’2 (1 ±уд)~'24-О(е-«(б)9. (49)
-6
Очевидно, что
1 _1
(14-4бр2=1-Е1(б), (i — 46)2=1+мб).
где ej (6) и е2(б) положительны и стремятся к нулю при б->0. Если
6 > О фиксировано, то, в силу отрицательности — а (б), п^и доста-
точно больших t > 0 будет
2 j_
|О(ега({’Н)| < min(e1(6), е2(б))(2л)2 t 2.
Поэтому из (46) и (49) получаем, что
± _1 6 — 1
(2л)2 t 2[1— 2б1(б)]< f е^(х>ах <(2л)2 Г 2 [1 4-2е1(б)] (50)
-6
при достаточно больших t > 0. Учитывая оценки (43) и (45) и
тот факт, что при достаточно больших t > 0 будут выполняться
неравенства
| О (eth<-6) | < (2л)2 t 2 min (б] (б), е2 (б)),
1 _1
|О(е^(д)| <- (2л)2 t 2 min (ej (д), е2 (д)),
найдем
1 _1 +°° 1
(2л)2 t 2 (1 — Зе^д)) < J et,l^dx < (2л)2 t 2(1 + Зе2(д)) (51)
-I
572 ДОБАВЛЕНИЕ [1
*
при всех достаточно больших t > 0. Следовательно, в силу произ-
вольной малости Cj (6) и е2 (б) и определения отношений порядка, будет
+°° _1_ __1_
J eth w dX — (2л)2 t 2 [1—f—°(1)1 ПРИ /~> + оо. (52)
-1
Подставив это в (38), получим окончательно асимптотическое пред-
ставление для Г(^+1) при /->4-оо:
Г(/+1) = е-'?+2(2л)2[1 + о(1)]. (53)
При t = п, где п — целое положительное число, соотношение (53)
превращается в формулу Стирлинга
п ! = е~пцп+ 2 (2л)2 [1 4- о (1)] при л—(54)
широко применяющуюся в математике и ее приложениях.
Методом Лапласа могут быть получены асимптотические разло-
жения и более общего вида; он может быть применен также к крат-
ным интегралам [10]. Обобщением метода Лапласа на случай инте-
гралов от функций комплексного переменного является метод перевала,
применяющийся, как и метод Лапласа, в различных разделах математики
и математической физики. По поводу метода перевала см. [10] и [11].
ДОБАВЛЕНИЕ 2
НЕКОТОРЫЕ СВЕДЕНИЯ ОБ УНИВЕРСАЛЬНЫХ
ВЫЧИСЛИТЕЛЬНЫХ МАШИНАХ
Цель этого добавления — дать самые общие сведения о совре-
менных вычислительных машинах, принципах их работы и их исполь-
зовании. Его нельзя, конечно, рассматривать как сколько-нибудь
систематическое изложение теории вычислительных машин и методов
программирования. Для более подробного ознакомления с этими во-
просами следует обратиться к специальной литературе.
§ 1. Общие сведения о вычислительных машинах
1. Введение. Многие задачи, возникающие в физике, технике
и других областях, требуют для получения окончательных, практи-
чески важных результатов проведения весьма громоздких и трудо-
емких вычислений. Часто объем этой вычислительной работы оказы-
вается столь большим, что выполнить ее вручную практически
невозможно, или же она требует так много времени, что при этом
сам результат счета успевает потерять всякую ценность. Например
бессмысленно для предсказания погоды на сутки вперед пользоваться
методом, который требует месяца вычислительной работы.
Количество задач, в которых требуются и проведение больших
вычислений и быстрое получение результата, особенно возросло
в последнее время в связи, например, с автоматизацией производ-
ства и другими потребностями техники.
Уже давно люди пользовались для облегчения и ускорения вычи-
слений различными техническими приспособлениями. Однако коренное
изменение положения здесь произошло за последние 10—20 лет,
когда появились быстродействующие вычислительные машины, осно-
ванные на применении радиоэлектронных элементов и схем.
Эта новая область техники за короткий срок достигла порази-
тельных успехов. Появились вычислительные машины, выполняющие
несколько десятков и даже сотен тысяч арифметических операций
574
ДОБАВЛЕНИЕ
[2
в секунду. Это позволяет успешно решать такие задачи, сама поста-
новка которых при ручном способе вычислений была бы безнадежной.
Появление электронных вычислительных машин не только рас-
ширило возможности применения математических методов в приклад-
ных вопросах, но и повлияло на развитие самой математики. В мате-
матической логике, приближенном анализе возникли новые задачи
и целые новые направления. Теория вычислительных машин, вопросы
программирования (см. об этом § 3) составляют сейчас один из важ-
ных разделов математики.
В наши дни вычислительная техника используется в самых раз-
личных областях. Поэтому знакомство с основными свойствами и
принципами действия вычислительных машин, их возможностями
и особенностями необходимо людям разных специальностей, в том
числе и каждому физику.
2. Основные типы вычислительных машин. Вычислительные
машины разделяются по принципу их действия на два больших класса:
машины дискретного действия, называемые также цифровыми вычи-
слительными машинами, и машины непрерывного действия, называемые
также аналоговыми устройствами. В цифровых машинах операции
выполняются над числами, представленными в той или иной системе
счисления. Величины, вводимые в машины непрерывного действия,
изображаются (моделируются) значениями каких-либо физических ве-
личин (сил тока, напряжений, механических смещений и т. п.), ко-
торые могут меняться непрерывно. При этом в цифровую форму
переводится лишь окончательный результат вычислений. Машины не-
прерывного действия находят применение в ряде задач (главным
образом там, где не требуется большой точности вычислений), однако
в современной вычислительной математике они играют значительно
меньшую роль, чем машины дискретного действия.
Ниже, говоря о вычислительных машинах, мы будем иметь в виду
только цифровые машины.
По своему назначению цифровые вычислительные машины делятся
обычно на специализированные, т. е. рассчитанные на решение задач
определенного, сравнительно узкого класса, и универсальные, т. е.
вычислительные машины, предназначенные для решения весьма разно-
образных задач, как вычислительных, так и логических (например,
перевод с одного языка на другой). Именно универсальные цифровые
вычислительные машины (короче УЦВМ) мы и будем здесь рассма-
тривать.
Возможность применения одной и той же УЦВМ для разнообраз-
ных задач представляет собой большое преимущество машин этого
типа. Следует, однако, иметь в виду, что непосредственно УЦВМ
может выполнять лишь некоторый, ограниченный набор основных
операций (о них будет сказано в § 2), поэтому для решения той или
иной конкретной задачи на УЦВМ необходимо свести решение этой
§ 1] ОБЩИЕ СВЕДЕНИЯ О ВЫЧИСЛИТЕЛЬНЫХ МАШИНАХ 575
задачи к определенной последовательности тех операций, которые
может выполнять машина, т. е., как обычно говорят, необходимо
составить для машины программу, соответствующую данной задаче.
Таким образом, каждая задача требует для своего решения на УЦВМ
определенной, подчас довольно сложной подготовки — программиро-
вания, т. е. составления программы, отвечающей этой задаче. Эле-
ментарные сведения о программировании и простейшие примеры про-
грамм приведены в § 3 этого добавления.
3. Основные узлы УЦВМ и их назначение. Как уже было
сказано выше, всякая УЦВМ может выполнять некоторые элемен-
тарные операции, арифметические и логические. Кроме того, при ре-
шении задач выполняется ряд других функций, а именно: ввод
в машину исходных данных и команд, хранение этих данных и про-
межуточных результатов, вывод окончательных результатов. В соот-
ветствии с этим каждая УЦВМ, независимо от ее конструктивных
особенностей, должна иметь следующие основные узлы:
1. Устройство ввода — (УВ).
2. Запоминающее устройство (или память) — (ЗУ).
3. Арифметическое устройство — (АУ).
4. Устройство управления — (УУ).
5. Устройство вывода — (УВыв.).
Принципиальную схему любой УЦВМ можно изобразить так:
Сплошные стрелки на этой схеме указывают направления передачи
информации, а пунктирные — направления, по которым идут упра-
вляющие сигналы.
Рассмотрим вкратце роль каждого узла.
1. Ввод — устройство, предназначенное для введения в машину
как исходных данных, так и тех правил (команд), по которым ма-
шина должна действовать при решении данной задачи. Исходные
данные и команды должны быть представлены в той форме, в ко-
торой машина их может воспринимать; обычно их записывают либо
на магнитную ленту, либо на перфоленту, либо на перфокарты.
576
ДОБАВЛЕНИЕ
[2
На магнитной ленте информация записывается с помощью чере-
дования намагниченных и ненамагниченных участков.
На перфоленте (представляющей собой обычную бумажную ленту)
запись делается с помощью отверстий, которые пробиваются в этой
ленте на определенных местах.
На перфокарте запись делается также путем пробивания определен-
ных отверстий. Стандартная перфокарта имеет вид, показанный на
стр. 577. Такие перфокарты широко применяются в вычислительных
машинах.
2. Память (запоминающее устройство) машины предназначена для
хранения и выдачи команд, хранения исходных данных и промежуточ-
ных результатов, необходимых для дальнейших вычислений. Запомина-
ющее устройство состоит из ряда занумерованных ячеек, -каждая из ко-
торых имеет определенное число разрядов. Любая из этих ячеек может
быть использована либо для хранения чисел, либо для хранения команд.
Как видно из приведенной выше схемы, запоминающее устройство ма-
шины непосредственно связано со всеми остальными блоками. Через
ввод сюда поступают исходные данные для решения задачи и соответ-
ствующий этой задаче набор команд (программа). Из запоминающего
устройства числа поступают в арифметическое устройство, где выпол-
няются арифметические операции, а результаты снова поступают в
запоминающее устройство.
Для решения сложных задач нужны машины с запоминающими
устройствами возможно большей емкости. Вместе с тем важно,
чтобы выбор необходимых данных из запоминающего устройства
происходил быстро. Для того чтобы совместить эти два требования,
запоминающее устройство обычно составляют из двух блоков:
быстродействующей оперативной (или внутренней) памяти ограничен-
ной емкости и внешней памяти, имеющей большой объем, но дей-
ствующей сравнительно медленно. Внешняя память с арифметическим
устройством непосредственно не связана: данные из нее поступают
по мере необходимости в оперативную память и только потом пере-
рабатываются арифметическим устройством.
3. Арифметическое устройство — та часть машины, в которой
выполняются арифметические операции. Какие именно операции
должны быть предусмотрены в машине, будет сказано ниже.
4. Устройство управления интерпретирует (т. е. переводит в
определенные электрические сигналы) команды, входящие в программу,
и посылает соответствующие сигналы в остальные узлы машины. Устрой-
ство управления определяет (в соответствии с заданной программой)
работу всех устройств, входящих в состав вычислительной машины.
Автоматическое (в соответствии с заданной программой) управле-
ние— один из важнейших принципов работы УЦВМ, поскольку
никакое ручное управление не могло бы обеспечить той скорости,
с какой работает электронная вычислительная машина.
§ 1]
ОБЩИЕ СВЕДЕНИЯ О ВЫЧИСЛИТЕЛЬНЫХ МАШИНАХ
577
Стандартная перфокарта,
578
ДОБАВЛЕНИЕ
12
5. Устройство вывода предназначается для записи в удобной
форме ответов задачи или каких-либо промежуточных данных, кото-
рые желательно сохранить. Вывод данных может осуществляться
в различной форме: на перфокартах или на перфоленте, в виде
цифр, отпечатанных на бумажной ленте, или же' в виде записи на
магнитной ленте.
4. Системы счисления, используемые в УЦВМ. Если мы про-
изводим с числами какие-либо операции, то, независимо от того,
выполняются ли эти операции вручную или на вычислительной ма-
шине, мы должны пользоваться каким-либо определенным способом
записи чисел, т. е. некоторой системой счисления. В настоящее
время повсеместно распространена десятичная система, в которой
каждое число изображается в виде комбинации степеней числа 10.
Так, например,
2548
есть сокращенная запись выражения
2 • 1034-5 • 1024-4 ГО14-8 • 10°.
В десятичной системе каждое число записывается с помощью цифр
0, 1......9, а операции над числами выполняются по общеизвест-
ным правилам.
Однако за основание системы счисления можно было бы взять
любое другое целое положительное число, отличное от единицы *).
Логически наиболее проста двоичная система, в которой каждое
число представляется как комбинация степеней двойки. Например,
13 = I • 234-1 • 224~0 • 214~ 1 • 2°. Для этой системы требуется
всего две цифры: 0 и 1, так как уже число 2 представляет собой
единицу следующего разряда.
Посмотрим теперь, какую систему счисления удобнее всего
использовать в цифровых вычислительных машинах. Заметим прежде
всего следующее. Если мы пользуемся системой счисления с неко-
торым основанием р, то у нас в каждом разряде будут участво-
вать р цифр (например, в десятичной системе используется 10 цифр,
в двоичной 2 цифры и т. д.). Для того чтобы иметь возможность
фиксировать в машине р различных цифр, нужно, чтобы в этой
машине были устройства, имеющие р устойчивых состояний, каждое
из которых изображало бы определенную цифру.
При тех скоростях, с которыми работают современные вычисли-
тельные машины (как правило, десятки и сотни тысяч операций в
*) Системы счисления, отличные от десятичной, действительно были
в употреблении у разных народов. С математической точки зрения десятич-
ная система не имеет никаких специальных преимуществ. Ее распространен-
ность исторически связана с тем, что десять пальцев на обеих руках были
той первой «вычислительной машиной», которой человек пользовался с не-
запамятных времен.
§ 1] ОБЩИЕ СВЕДЕНИЯ О ВЫЧИСЛИТЕЛЬНЫХ МАШИНАХ 579
секунду), было бы трудно пользоваться для фиксации чисел в машине
какими-либо механическими устройствами. Однако такие скорости
легко могут обеспечить радиоэлектронные устройства (радиолампы,
полупроводниковые элементы и т. п.), практически безынерционные.
Такие радиоэлектронные устройства имеют, как правило, два устой-
чивых состояния. Например, радиолампа может быть или «отперта»
(ток через нее идет), или «заперта» (тогда через нее ток не идет).
Эти свойства радиоэлектронной аппаратуры приводят к тому, что й
современной вычислительной технике именно двоичная система нашла
самое широкое применение.
Важное достоинство двоичной системы составляет также простота
тех правил, по которым в этой системе выполняются арифметиче-
ские операции. Например, вся «таблица умножения» для двоичной
системы исчерпывается следующими равенствами:
0-0 = 0, 1 . 0 = 0 • 1 = 0, 1-1 = 1.
Некоторое неудобство двоичной системы состоит в необходи-
мости перевода исходных данных из десятичной системы (которой
мы пользуемся обычно) в двоичную и обратного перевода резуль-
татов машинного счета из двоичной в десятичную. Впрочем, эта
операция перевода чисел из одной системы в другую несложна и
легко, может быть автоматизирована.
Помимо двоичной системы, в вычислительных машинах исполь-
зуются также восьмеричная система (т. е. система с основанием 8)
и смешанная двоично-десятичная система. Эта последняя состоит
в том, что каждое число сперва представляется в десятичной системе,
а затем каждая входящая в него цифра записывается по двоичной
системе. Например, число
5386
в двоично-десятичной системе имеет вид
0101; ООП; 1000; ОНО.
Очевидно, что для представления одного десятичного разряда (т. е<
всех цифр от 0 до 9) нужно отвести 4 двоичных разряда.
В некоторых вычислительных машинах *) применяются элементы,
имеющие не два, а три устойчивых состояния (скажем, ток идет,
ток идет в обратном направлении, ток не идет), Арифметика
этих машин основана не на двоичной, а на троичной системе счи-
сления.
б. Представление чисел в вычислительной машине, В вычи-
слительной машине оперируют С числами, имеющими определенное
♦) К ним относится, например, отечественная машина «Сетунь».
580
ДОБАВЛЕНИЕ
[2
(для данной машины) число разрядов. (В реально существующих
конструкциях обычно бывает 30—40 двоичных разрядов.) Если число
содержит меньше значащих цифр, то свободные разряды слева за-
полняются нулями. Если же некоторое число содержит больше цифр,
чем предусмотрено разрядов в машине, то это число при вводе
в машину округляется (т. е. отбрасываются его младшие разряды).
Ограниченность числа разрядов ограничивает, таким образом, и ту
точность, с которой мы можем вести вычисления на УЦВМ.
Так как в любой задаче приходится оперировать не только с по-
ложительными, но и с отрицательными числами, то нужно пред-
усмотреть способ, с помощью которого в машине фиксируется знак
числа. Обычно для этой цели выделяется один разряд (первый слева)
и в этом разряде ставят 0, если число положительно, и 1, если
отрицательно.
Далее, в вычислительных задачах нам приходится иметь дело,
вообще говоря, с дробными числами. Поэтому в машине должна быть
предусмотрена, как и в обычной записи чисел, «запятая», отделяющая
целую часть числа от дробной. Положение этой запятой может или
меняться в процессе вычислений (машины с «плавающей» запятой),
или же быть раз навсегда фиксированным (машины с фиксированной
запятой). В этом последнем случае число разрядов в целой части
числа строго фиксированное. Машины с фиксированной запятой
менее удобны: в них для каждой задачи приходится вводить опре-
деленные «масштабные факторы», приводящие все встречающиеся
в задаче числа к тому порядку величин, который предусмотрен
в машине. Однако с точки зрения логической и конструктивной
эти машины проще, чем машины с плавающей запятой.
§ 2. Основные операции, выполняемые УЦВМ. Команды
1. Типы операций. Мы уже говорили, что работа УЦВМ состоит
в выполнении некоторого, сравнительно небольшого числа основ-
ных операций. Теоретически можно было бы свести все действия,
выполняемые машиной, всего лишь к нескольким, действительно
элементарным, действиям. Однако это вызвало бы значительные
трудности при составлении программ и при использовании машин.
Поэтому в реально существующих машинах не стремятся свести
набор основных операций к минимальному. Увеличение количества
основных операций усложняет конструкцию, но зато существенно
облегчает использование машины. Набор основных операций в раз-
личных машинах бывает различным, однако в любой УЦВМ имеются
операции следующих типов:
1) основные арифметические операции;
2) дополнительные операции вычислительного назначения;
3) логические операции;
§ 2] ОСНОВНЫЕ ОПЕРАЦИИ, ВЫПОЛНЯЕМЫЕ УЦВМ. КОМАНДЫ 581
4) операции передачи управления (в частности, условный пере-
ход);
5) операции обращения к внешним устройствам.
Прежде чем описывать отдельные типы операций, обратим вни-
мание на следующее. Все числа, над которыми производятся опера-
ции, мы считаем записанными в ячейках памяти машины, а сами эти
ячейки — определенным образом пронумерованными. Если произво-
дится какая-либо операция над двумя числами, то мы должны ука-
зать 1) номера ячеек, в которых находятся эти числа; 2) действие,
которое следует с ними произвести (сложить, умножить и т. п.),
и 3) номер ячейки, в которую следует записать результат. Следова-
тельно, каждая «команда», т. е. сигнал, по которому выполняется
такая операция, должна содержать три номера ячеек, участвующих
в операции (они называются адресами), и указание о том, какая
именно операция производится. Иначе говоря, каждая такая команда
имеет вид *)
Название операции 1-й адрес 2-й адрес 3-й адрес
Здесь важно обратить внимание на следующее: в команде, по
которой выполняется та или иная операция, всегда указываются
только номера ячеек, содержащих те числа, над которыми произво-
дится операция, но не сами эти числа. Благодаря этому мы можем
составлять программу, т. е. последовательность команд, не зная еще
тех чисел, с которыми нам придется оперировать.
Перейдем тепер» к описанию конкретных операций.
2. Основные арифметические операции. В их число входят
следующие четыре операции.
1) Сложение: «к числу, записанному в ячейке а, прибавить
число, записанное в ячейке р, и результат записать в ячейку у».
Символически:
СЛОЖИТЬ а ₽ У
2) Умножение: «умножить число, стоящее в ячейке а, на число,
стоящее в ячейке р, и записать произведение в ячейку у». Симво-
лически:
умножить а р У
*) Для простоты изложения мы имеем в виду так называемые трех-
адресные машины. Существуют машины, у которых в каждой команде уча-
ствует иное количество адресов (одно-, двух- и четырехадресные машины),
но мы не будем о них говорить.
582
Добавление
[г
3) Вычитание', «вычесть из числа, стоящего в ячейке а, число,
стоящее в ячейке 0, и записать разность в ячейку у». Символические
вычесть а 0 У
4) Деление', «разделить число, записанное в ячейке а, на число,
записанное в ячейке 0, и записать результат в ячейку у». Символи-
чески:
разделить а 0 у
3. Дополнительные операции вычислительного назначения..
Число и набор таких операций могут быть различными в различных
машинах. Вот некоторые примеры таких операций:
1) Нахождение минимума двух чисел: «из двух чисел, стоя-
щих в ячейках а и 0, выбрать меньшее и записать его в ячейку у»,
т. е.
min а 0 У
2) Нахождение максимума двух чисел определяется анало-
гично.
3) Нахождение модуля числа: «найти модуль числа, находя-
щегося в ячейке а, и записать его в ячейку у», т. е.
mod
Здесь, как и в некоторых других операциях, участвуют не три
адреса, а только два.
Чем больше в машине предусмотрено различных дополнительных
операций, тем проще и короче составление программы. Во многих
современных машинах в число основных операций включают, на-
пример, операции извлечения корня, вычисления синуса и т. п.,
которые на самом деле представляют собой комбинации некоторого
числа основных арифметических операций (см. соответствующие про-
граммы в § 3).
4. Поразрядные (логические) операции. Эти операции характе-
ризуются тем, что в них действия выполняются без переноса цифр-
из одного разряда в другой. Приведем некоторые примеры таких
операций.
1) Поразрядное сложение. Операция состоит в том, что числа,
стоящие в ячейках а и 0, складываются поразрядно, т. е. каждый:
разряд из ячейки а складывается с тем же самым разрядом ячейки 0.
9 2]
ОСНОВНЫЕ ОПЕРАЦИИ, ВЫПОЛНЯЕМЫЕ УЦВМ. КОМАНДЫ
583
по правилу:
0 + 0 = 0, 0 + 1 = 1 +0 = 1, 1 + 1=0.
Результат заносится в ячейку у. Обозначим эту операцию так:
Слож. поразрядн. а ₽ У
2) Проверка совпадения. Операция состоит в том, что числа,
стоящие в ячейках аир, сравниваются поразрядно и в соответ-
ствующем разряде ячейки у пишется единица, если сравниваемые цифры
одинаковы, и нуль в противном случае *). Например, результат
-сравнения чисел
10 110 110 1
110 10 0 10 0
-есть число
10 0 110 110.
Обозначение этой операции:
Сравн. а ₽ У
3) Логическое отрицание. Операция состоит в следующем:
® ячейке а стоит некоторое число. В ячейку у в каждый разряд
пишется нуль, если в ячейке а в этом разряде записана единица,
и наоборот. Обозначение:
Отриц. логич. а 0 У
Набор поразрядных операций также варьируется в зависимости от типа
-машины.
5. Операции обращения к внешним устройствам. Сюда отно-
сятся: ввод, запись (передача числа из внутренней памяти во внешнюю),
считывание (передача числа из внешней памяти во внутреннюю),
печать и останов машины.
1) Команда ввода обозначается так:
Ввод п — 1 а +1
Она означает следующее: «ввести в п ячеек памяти, имеющих номера
« + 1, а + 2, .... а + «, числа (или команды) из вводного устройства
(например, с перфоленты или с перфокарт)».
*) В некоторых типах машин принята обратная система, т. е. совпадение
обозначается нулем, а различие — единицей.
ДОБАВЛЕНИЕ
(г
584
2) Печать. Команда
Печ.
а
и—1
означает: «отпечатать (в десятичной системе) числа, содержащиеся
в п ячейках, начиная с ячейки номер а».
3) Останов *). Команда
Ост.
представляет собой сигнал, по которому работа машины прекращается.
Внешними запоминающими устройствами, а следовательно, и
командами обращения к ним приходится пользоваться в громоздких
задачах с длинной программой и большим количеством исходных
данных. Мы на них останавливаться не будем.
6. Операции передачи управления. Мы уже отмечали, что
в команде указываются не сами числа, над которыми выполняются
операции, а только их адреса. Именно это и дает возможность спла-
нировать (запрограммировать) весь ход вычислений заранее, до начала
решения задачи. Однако при решении многих задач возникают ситуации,
в которых дальнейший ход вычислений зависит от того, какой ре-
зультат мы уже получили на данном этапе. Например, если решается
квадратное уравнение, то ход вычислений зависит от того, получится
дискриминант этого уравнения положительным или отрицательным.
В тех случаях, когда вопрос о дальнейшем ходе вычислений решается
в зависимости от результата, полученного на некотором шаге, при-
ходится прибегать к операциям условного перехода.
Приведем несколько примеров таких операций:
1) Передача управления в зависимости от сравнения двух
чисел с учетом знаков. Обозначение:
Пер. упр.
а
k
₽
Эта операция состоит в следующем: «сравнить число, стоящее
в ячейке а, с числом, стоящим в ячейке 0; если первое из них больше
второго, перейти к выполнению следующей команды, а если первое
меньше
в ячейке с номером k»
2) Передача управления в зависимости от сравнения мо-
дулей двух чисел. Обозначение:
или равно второму, то выполнять команду, записанную
Пер. упр. | < | а 0 k
*) В вычислительной технике сложилась почему-то традиция заменять,
этим термином равнозначащее слово «остановка».
§ 2] ОСНОВНЫЕ ОПЕРАЦИИ, ВЫПОЛНЯЕМЫЕ УЦВМ. КОМАНДЫ 585
Эта операция аналогична предыдущей, с той лишь разницей, что
сравниваются не сами числа, а их абсолютные величины.
3) Передача управления по знаку числа. Обозначение:
Пер. упр. по знаку a k2
Эта операция состоит в следующем: «если число, записанное в ячейке а,
положительно, то выполняется команда, записанная в ячейке
в противном случае выполняется команда, записанная в ячейке k2».
Эта последняя операция может быть использована как операция
безусловного (т. е. выполняемого обязательно) перехода к команде
с номером k. Для этого достаточно составить такую команду:
Пер. упр. по знаку
а
k k
Тогда, какое бы число ни было записано в ячейке а, будет совер-
шаться переход к команде, записанной в й-й ячейке.
Вычислительная машина выполняет любую из предусмотренных
в ней операций по получении соответствующей команды. Эти команды
изображаются двоичными числами и записываются, как и исходные
данные для решения задачи, в памяти машины. Устройство управле-
ния интерпретирует эти команды, т. е. переводит их в определенные
комбинации электрических сигналов, управляющие действиями осталь-
ных блоков машины.
7. Осуществление операций в машине. С инженерной точки
зрения вся работа вычислительной машины представляет собой ту или
иную переработку комбинаций электрических сигналов, осуществляе-
мую с помощью определенных радиотехнических схем. Мы не будем
здесь останавливаться на технической стороне дела, т. е. не будем
выяснять, какие именно устройства нужны для осуществления той
или иной конкретной операции. Рассмотрим в качестве примера
несколько подробнее лишь одну операцию — сложение двух положи-
тельных чисел.
В двоичной системе, как и в любой другой позиционной системе
счисления, сложение двух многозначных чисел сводится к их пораз-
рядному сложению и переносу в случае необходимости единицы
в ближайший старший разряд. Правила, которыми определяется сло-
жение цифр в каждом разряде, состоят в следующем: 0 + 0 = 0;
1 + 0 = 04-1 = 1; 1 —1 = 0 плюс единица следующего разряда.
Пусть а и b — цифры, которые мы должны сложить, выполняя
операцию сложения в некотором разряде, а с — число, которое пере-
носится из предыдущего разряда. Выполнить сложение в данном
разряде — это значит по данным а, Ь и с (каждое из которых может
быть нулем или единицей) найти цифру д, которая должна быть
записана в данном разряде в сумме, и цифру р, которая должна
586 ДОБАВЛЕНИЕ [2-
быть перенесена в следующий разряд. Легко проверить, что все воз-
можные здесь случаи исчерпываются следующей таблицей:
а 0 1 0 0 1 1 0 1
ь 0 0 1 0 1 0 1 1
с 0 0 0 1 0 1 1 1
S 0 1 1 1 0 0 0 1
р 0 0 0 0 1 1 1 1
Отсюда ясно, что для осуществления операции суммирования в пре-
делах одного разряда мы должны иметь в машине устройство с тремя;
входами (отвечающими цифрам а, b и с) и двумя выходами (отве-
чающими цифрам s и р), работающее в соответствии с таблицей (*),
т. е. так, что если ни на один из входов не подается напряжения,
то на выходах s и р напряжения тоже нет, если напряжение подается на
один из входов, то оно есть на выходе $ и отсутствует на выходе р,
и т. д. Устройство, действующее по этим правилам, называется
одноразрядным сумматором. Такое устройство нетрудно факти-
чески реализовать в виде некоторой радиотехнической схемы, соста-
вленной из радиоламп или из полупроводниковых элементов. Мы,,
однако, не будем приводить эти схемы.
§ 3. Элементы программирования
1. Общие сведения. Для решения задачи на УЦВМ весь ход
этого решения должен быть представлен как некоторая последова-
тельность тех элементарных операций, которые данная машина может
выполнять. Выполнение каждой операции определяется соответствую-
щей командой, а последовательность команд, отвечающая решению-
данной задачи, называется программой. Программирование, т. е.
составление программы, — один из основных этапов решения задачи
на УЦВМ. Ясно, конечно, что прежде, чем приступать к програм-
мированию, нужно выбрать определенный математический метод,
решения задачи и получить те конкретные формулы, по которым
должен происходить расчет.
Программа зависит от тех численных методов, которые мы выбрали
для решения задачи (например, для приближенного вычисления инте-
грала мы можем пользоваться формулой трапеций, формулой прямо-
угольников или каким-либо иным приемом), и от типа машины, т. е.
от набора тех операций, которые может выполнять данная машина.
Однако даже если метод счета и тип машины определены, то про-
грамма этим еще не определяется однозначно: мы можем разложить.
'§ 3] ЭЛЕМЕНТЫ ПРОГРАММИРОВАНИЯ 587
нашу вычислительную задачу в последовательность элементарных
операций различными способами. Выбор наиболее рациональной про-
граммы для той или иной задачи определяется в значительной мере
квалификацией лица, составляющего программу. Мы не можем здесь
останавливаться на вопросах программирования сколько-нибудь под-
робно и ограничимся лишь разбором простейших типичных примеров.
2. Программирование по формулам. Наиболее простой для
программирования тип задач — это вычисление по формулам, сводя-
щееся к последовательному выполнению ряда арифметических опера-
ций. В этих случаях программирование сводится к рациональному
разбиению всей формулы на отдельные операции, к размещению
соответствующих команд и исходных данных в памяти машины.
Рассмотрим элементарный пример.
Пример. По данному х вычислить значение
_ 2x4-3
V 5х 1 '
Все вычисление можно, очевидно, представить в виде такой после-
довательности элементарных операций:
1) А^Ъх, 2) /$2=^ + 3, 3) Вх = Ьх, (1)
В2 = Вг+\, 5)у = А.
Для того чтобы произвести эти операции на машине, расположим
в пяти ячейках памяти машины (скажем, в ячейках с номерами
п + 1 п -|- 5) исходные данные, Получим
№ ячейки Записанное число № ячейки Записанное число
3 5 3 +++ СОЬОн-. X 2 3 «4-4 л 4-5 5 1
В других пяти ячейках запишем команды, отвечающие тем действиям,
которые указаны в равенствах (I). Получим такую последователь-
ность команд:
№ ячейки Операция 1-й адрес 2-й а дрес З-й адрес Результат операции
т-\- 1 Умножить п 4- 1 п- Н2 «4-2 2х
лг--2 Сложить п 4-2 тг- нз «4-2 2x4-3
Л1--3 Умножить л 4-1 /г- 1-4 «4-1 5х
т 4 Сложить «4-1 п- 45 «4-1 5х-|- 1
«г 4-5 Разделить «4-2 «4-1 «4-2 2x4-3 5х-|- 1
588
ДОБАВЛЕНИЕ
[2-
В тот момент, когда тот или иной промежуточный результат
перестает быть нужен для дальнейших вычислений, мы можем соот-
ветствующую запись «стереть» и использовать содержавшую его-
ячейку для новой записи. Так мы поступили, например, при выпол-
нении первой команды, записав произведение чисел, хранившихся
в ячейках пЦ~1 и «-|-2, снова в (п-|-2)-ю ячейку. Это позволяет
рациональнее использовать объем памяти машины, не загружая ее
ненужными для дальнейшего данными.
Составленную нами программу нужно еще дополнить вначале
командой ввода, по которой начальные данные и коды программ
вводятся в память машины, и командой перевода исходных данных
из десятичной системы в двоичную, поскольку все операции в машине
выполняются в двоичной системе, а исходные данные записываются-
и вводятся в машину обычно в десятичной системе. Далее, после
команды «разделить», записанной в (тя-|-5)-й ячейке, необходимо
поместить еще три команды. По первой из них результат вычисления
переводится из двоичной системы в десятичную, по второй печатается
ответ, и, наконец, последняя команда — это прекращение работы
машины — останов.
Последний шаг в написании программы — это замена буквенных
обозначений адресов конкретными числами. Эти номера пишутся
четырехзначными числами в восьмеричной системе, начиная с 0000
и т. д. Обычно первые ячейки памяти используются как рабочие
ячейки для стандартных операций (ввод, перевод числа из одной
системы в другую и т. д.). Например, в машине «Стрела» для этой
цели отведены первые 11 ячеек (от 0001 до 0013 в восьмеричных
обозначениях) *). Начав заполнение ячеек памяти с 0014, запишем
окончательно нашу программу в таком виде:
№ ячейки Операция или число 1-й адрес 2-й адрес 3-й адрес
0014 Ввод (в ячейки 0015—0032) 0015 0015
0015 Перевод из десятичной системы 0026 0004 0026
0016 в Двоичную (ячейки 0026—0032) Умножение 0026 0027 0027
0017 Сложение 0027 0030 0027
0020 Умножение 0026 0031 0026
0021 Сложение 0026 0032 0026
0022 Деление 0027 0026 0027
0023 Перевод из двоичной системы 0027 0027
в десятичную 0027
0024 Печать
*) При этом ячейка с номером 0000 содержит число «0».
§ 3] ЭЛЕМЕНТЫ ПРОГРАММИРОВАНИЯ 589
Продолжение
№ ячейки Операция или число 1-й адрес 2-й адрес 3-й адрес
0025 0026 0027 0030 0031 0032 0033 Останов X 2 3 5 1
3. Циклические процессы. Ясно, конечно, что в случаях, по-
добных только что рассмотренному элементарному примеру, никакого
практического смысла применение УЦВМ не имеет. Мы рассмотрели
этот пример лишь для того, чтобы показать, как в самом простейшем
случае привычные нам формулы переводятся на язык, «понятный»
машине. Применение вычислительных машин с программным управле-
нием оказывается эффективным лишь в тех случаях, когда число
операций, выполняемых машиной, велико по сравнению с числом
команд, которые мы должны фактически ввести в память машины.
Во многих задачах такое многократное использование одних и тех же
команд достигается благодаря тому, что соответствующая вычисли-
тельная схема состоит из многократных повторений отдельных серий
операций. Эти повторяющиеся серии называются циклами, а соот-
ветствующие вычислительные схемы называются циклическими. Рас-
смотрим некоторые простейшие примеры циклических программ.
1) Вычисление квадратного корня. Предположим, что мы
должны вычислить с заданной точностью квадратный корень из некото-
рого положительного числа а. Для решения этой задачи можно
воспользоваться следующим фактом (см. вып. 1, гл. 3). Каково бы
ни было положительное число а, последовательность,
= х2 = | .
...; хя+1 = У(2)
сходится и ее предел равен ]/а . Вычисляя последовательно х2, .. .
и т. д., мы можем продолжить процесс до тех пор, пока не будет
достигнута некоторая заданная точность, например до тех пор, пока
разность между хп и предыдущим значением хл-1 не станет меньше
заданной величины. __
Следовательно, для вычисления )/а на машине мы должны ввести
в три ячейки памяти число а = х0, принятое нами за нулевое
590
ДОБАВЛЕНИЕ
Г2
приближение, число е, определяющее точность, и число . Далее
вычисление \~а осуществляется по следующей программе:
№ ячейки Название операции 1-й адрес 2-й адрес З-й адрес Результат операции
0014 Ввод 0016 0015 Ввод массива
0015 Перевод 10—>2 0030 0003 0030 Перевод исходных дан- ных в двоичную си- стему
0016 Сложение пораз- рядное 0031 0027 Засылка хп из ячейки «0031» (где хп остает- ся) в «0027»
0017 0020 Деление Сложение 0030 0031 0027 0027 0031 0031 а . а %п 1 . '
0021 Умножение 0031 0033 0031 Хл+' 2(^+3^)
0022 Вычитание 0031 0027 0027 хя+1 — хп
0023 Пер. управления 0032 0027 0016 Проверка того, дости- гнута ли заданная точность (сравнение х„_1 — хп и е), и окончание цикла, если точность достигнута
0024 0025 0026 0027 0030 0031 0032 0033 0034 Перевод 2 -> 10 Печать Останов а х0 е 1 2 0031 0031 0031 Перевод результата в десятичную систему Печать результата Рабочая ячейка
2) Составление таблиц функций. Другой типичный пример
циклического процесса счета — это вычисление значений различных
функций — показательной, тригонометрической, логарифмической при
различных значениях аргумента, т. е. составлениие таблиц элемен*
тарных функций.
Рассмотрим, например, функцию sin х. По формуле Тейлора *•
*•3 . у-2/14-I
sinx = x-A-+ +(-!)" (3)
ЭЛЕМЕНТЫ ПРОГРАММИРОВАНИЯ
591
§ 3]
причем остаточный член /?п+1 не превосходит
дДл+З
(2п4-3)! ’
Обозначив *-й член суммы, стоящей в (3) справа, через uk и положив
sft == «j-j-и24~ ••• получим, что
«й+1 = — х2~> где о* = 2* (2* 4-1), (4)
ия
И
^+i = s* + “s+i (*=1,2,...), s1==x. (5)
Наконец, легко проверить, что
а= ик 4- 8* 4“ б; = 6 (* = 1, 2, ...). (6)
Итак, мы приходим к следующей схеме вычислений: за первое при-
ближение для sin х принимается — х. Далее, после того как полу-
чено *-е приближение sk (* = 1, 2, ...), для нахождения следую-
щего приближения sk+x находятся сперва коэффициент ак+1 (по
формуле (6)), затем величина и^+1 (по формуле (4)) и, наконец,
sft+i (по формуле (5)). Если же величина ик+1 оказывается меньше,
чем заданное е, то як принимается за значение sin х, оно отпечаты-
вается и машина переходит к вычислению sin х при новом значении х.
Этот ход вычислений можно осуществить при помощи следующей
программы:
№ ячейки Операция 1-й адрес 2-й адрес 3-й адрес Результат операции
0014 Ввод 0043 0015 Ввод массива
0015 Перевод 10 —> 2 0044 0010 0044 Запись исходных данных к двоичной системе
0016 Сложение пораз- рядное 0050 0062 Перенос х в стандарт- ную ячейку для «ft
0017' Сложение пораз- рядное 0062 0062 0063 Перенос в стандарт- ную ячейку для 8
0020 Умножение 0062 0064 X2
0021 Вычитание 0064 0064 — X2
0022 Умножение 0045 0060 0065 8 (А —1)
0023 Сложение 0065 0046 0065 8 (k—1)4-6
0024 Сложение 0057 0065 0057 ak
0025 Сложение 0060 0044 0060 k
0026 Деление 0062 0057 0065 “k
0027 Умножение 0065 0064 0062 v2 ,, — X —— Uk + 1
0030 Сложение 0063 0062 0063 St+i — Sk 4- Uk+t
0031 Передача упра- вления 1 < 1 0047 0062 0022 Конец вычисл. sin_rz
592
ДОБАВЛЕНИЕ
[2
Продолжение
№ яче'йки Операция 1-й адрес 2-й адрес З-й адрес Результат операции
0032 0033 0034 0035 0036 0037 0040 0041 0042 0043 0044 0045 0046 0047 0050 0051 0052 0053 0054 0055 0056 0057 0060 0061 0062 0063 0064 0065 Сложение пораз- рядное Сложение пораз- рядное Сложение пораз- рядное Сложение адре- сов Сложение адре- сов Сложение Передача упра- вления Перевод 2—> 10 Печать Останов 1 8 6 е х2 х3 х4 4 1 III адр. 1 I адр. 0 (ац) 0 (k) Раб. ячейка для 1 Станд. ячейка ДЛЯ Uh Станд. ячейка для S Станд. ячейка ДЛЯ — X2 0063 0016 0032 0061 0061 0050 0050 0056 0055 0044 0054 0003 0003 0050 0060 0057 0016 0032 0061 0016 0050 Перенос sin Х[ -> Перенос 0->А Перенос 0 -> а0 Изменение 1-го адреса команды 0016 Изменение 3-го адреса команды 0032 i -> i ф-1 Конец табулирования
Аналогичные программы можно составить для вычисления других
элементарных функций (cos х, ех, In х и т. п.).
4. Блок-схемное программирование. Подпрограммы. При соста-
влении программ для более или менее сложных задач удобно разбивать
такие программы на отдельные части, так называемые блоки, отве-
чающие отдельным частным задачам. Это облегчает составление про-
граммы; кроме того, одни и те же блоки могут входить в качестве
составных частей (стандартных программ) в программы различных
задач. Рассмотрим такой элементарный пример. Требуется вычислить
§ 3J ЭЛЕМЕНТЫ ПРОГРАММИРОВАНИЯ 593
приближенное значение интеграла
6
J=$f(x)dx (7)
а
с помощью метода прямоугольников (см. вып. 1, гл. 12). Вычисле-
ния здесь естественно разбить на две части (два блока):
1) вычисление входящих в формулу прямоугольников значений
функции f (х) в точках xz;
2) вычисление суммы
п
5 = (8)
z=i
представляющей собой приближенное значение интеграла (7). Про-
грамма для вычисления f(xj) зависит от вида функции /(х). На-
против, программа для вычисления суммы (8) не связана с выбором
функции f (х).
Точность получающегося таким образом результата (т. е. абсо-
лютная величина разности J—S) зависит, очевидно, от двух факто-
ров: точности самой формулы прямоугольников *) и точности, с кото-
рой находятся значения функции f в точках xz.
5. Коды команд. Операции над командами. Выше при составле-
нии программ мы пользовались словесными обозначениями операций,
например «сложить», «умножить» и т. д. Но для ввода команд
в машину эти словесные обозначения необходимо заменить числен-
ными, записанными по двоичной системе, т. е. кодами этих команд.
Поэтому те ячейки памяти машины, в которые введены команды,
заполняются так же, как и при вводе числовых данных, некоторой
последовательностью нулей и единиц. Из общего числа имеющихся
в каждой ячейке разрядов несколько разрядов отводятся для записи
кода команды, а остальные — для записи адресов. Например, в машине
«Стрела» в каждой ячейке имеется 43 разряда. Из них по 12 разрядов
отводится на запись каждого из адресов, а шесть — на код команды
(один разряд отводится для контрольного знака). Таким образом,
команда «сложить числа, находящиеся в ячейках 7 и 12, и результат
записать в ячейку 13» в коде машины «Стрела» запишется так:
0000000001110000000011
*) Об оценке точности различных формул для приближенного вычисле-
ния интегралов см. вып. 1, гл. 2, § 2.
594 ДОБАВЛЕНИЕ [2
(«0000001» по коду «Стрелы» означает сложение). То обстоятельство,
что команды, введенные в машину, по виду ничем не отличаются
от числовых данных, не вызывает каких-либо неудобств. Напротив,
это дает возможность обращаться с командами, как с обычными
числами, например «складывая» их *), а это в свою очередь позво-
ляет сильно упростить программирование. Рассмотрим для иллюстра-
ции сказанного следующий простой пример. Предположим, что нам
нужно составить программу для суммирования тысячи чисел. Можно,
конечно, ввести их в память машины, например в ячейки с (п-[-1)-й
по (»+ 1000)-ю, а затем составить программу следующим образом:
1-я команда:
СЛОЖИТЬ п-\- 1 п + 2 п+ 2
2-я команда:
сложить п + 2 п + 3 п + 3
999-я команда:
сложить п + 999 п + 1000 п+1000
Можно, однако, решить эту задачу более экономно следующим
образом. Запишем снова те числа, которые нужно сложить, в ячейках
памяти от (п-|-1)-й до (л-|-1000)-й. После этого в ячейку, скажем,
с номером п-|-1001 запишем:
0001 0001 0001
Пусть теперь в ячейке с номером т -|-1 записана команда:
сложить п +1 п + 2 п + 2 »
дающая сложение двух первых чисел. Далее, в ячейку пг + 2 запишем такую команду: с номером
поадресно сложить т + 1 п + 1001 т + 1
В ячейку с номером т-\-3 поместим команду перехода к ячейке с номером пг-+1> которая теперь уже будет содержать команду:
сложить п + 2 п + 3 п + 3 »
*) Следует иметь в виду, что при операциях над командами применяются
специальные операции сложения: сложение кодов операций, поадресное и
поразрядное сложение.
§ 3] ЭЛЕМЕНТЫ ПРОГРАММИРОВАНИЯ 595
по которой к сумме двух первых чисел будет прибавлено третье
и результат будет записан в ячейку с номером « + 3. Ясно, что
цикл из таких трех команд обеспечит сложение всех чисел, записан-
ных в ячейках n-j-1........п +1000. Остается еще обеспечить
печать ответа и останов машины по окончании работы.
Таким образом, применение операции сложения команд позволило
нам заменить длинную цепь однотипных команд небольшим числом
операций.
6. Об автоматизации программирования. Несмотря на наличие
таких приемов, как использование стандартных подпрограмм, и
другие усовершенствования, облегчающие и упрощающие програм-
мирование, составление программы часто бывает весьма трудоемким
процессом, требующим во много раз больше времени, чем сам счет
на УЦВМ. В первую очередь это относится к большим современным
быстродействующим машинам. Поэтому сейчас все большее зна-
чение приобретают различные методы автоматизации програм-
мирования.
Не имея возможности останавливаться здесь на описании этих
методов сколько-нибудь подробно, укажем лишь их основную
идею. Она состоит в том, чтобы передать функции перевода
словесного описания тех или иных вычислений в последова-
тельность команд, записанных в коде машины, самой вычислительной
машине. Иначе говоря, математик пишет ход решения той или иной
задачи в виде словесного описания, пользуясь некоторым заранее
фиксированным набором понятий и терминов. Далее такое словесное
описание вводится в УЦВМ (при этом, конечно, каждая буква текста
изображается определенной комбинацией нулей и единиц, так же как
это делается, например, в телеграфии); после этого сама вычисли-
тельная машина с помощью некоторой универсальной программы-
транслятора переводит это словесное описание в программу, записан-
ную в коде данной машины. Для того чтобы такой переход от сло-
весного описания к программе мог быть автоматизирован, необходимо,
чтобы это описание было составлено с соблюдением определенных
формальных правил и с четко ограниченным запасом слов. Суще-
ствует несколько таких стандартизованных формальных «языков»,
используемых для автоматического программирования. Наиболее
распространенные из них — это алгоритмический язык АЛГОЛ и
язык ФОРТРАН *). Каждый такой язык может быть использован
независимо от того, на какой машине в дальнейшем будет про-
водиться счет. Напротив, программа-транслятор, преобразующая
словесную запись в машинные команды, зависит от выбора языка и
*) АЛГОЛ — сокращение английских слов «algoritmlc language» (алго-
ритмический язык), а ФОРТРАН — комбинация слогов слов «formula tran-
slating» (перевод на язык формул).
598 ДОБАВЛЕНИЕ [2
от типа машины (но не зависит от той конкретной задачи, которая
должна быть сосчитана).
Введение таких формальных языков и программ-трансляторов
позволяет значительно сократить трудоемкую и кропотливую работу
по программированию.
§ 4. Некоторые вопросы организации работы на УЦВМ
1. Условия, определяющие эффективность применения УЦВМ.
Как уже говорилось выше, для решения на УЦВМ той или иной
задачи должна быть составлена отвечающая этой задаче программа,
т. е. указана в соответствующем коде последовательность тех эле-
ментарных операций, к которой сводится задача. Если бы число
отдельных команд в программе было таким же, как и число тех
операций, которые необходимы для решения данной задачи, то при-
менение УЦВМ было бы лишено всякого смысла, так как при этом
составление программы занимало бы не меньше времени, чем выпол-
нение всех расчетов вручную. Однако при решении всякой задачи
отдельные циклы операций приходится повторять несколько, а иногда
и очень много раз (мы видели это уже на таких простых примерах,
как программа извлечения квадратного корня; в еще большей степени
это относится к более сложным задачам). Поэтому число команд
в программе (разумно составленной) во много раз меньше числа
операций, выполняемых по этой программе машиной. Особенно
эффективно применение УЦВМ в тех задачах, где приходится много-
кратно повторять вычисления с различными данными, но по одной
и той же схеме. С другой стороны, существуют и такие задачи,
в которых применение УЦВМ оказывается неэффективным из-за того,
что они при сравнительно небольшом объеме счета требуют
для решения их на УЦВМ составления длинной и громоздкой про-
граммы.
Умение правильно решить вопрос о целесообразности примене-
ния УЦВМ для той или иной конкретной задачи — первое условие
рационального использования вычислительной техники.
2. Основные этапы решения задачи с применением УЦВМ.
Решение той или иной прикладной задачи с помощью УЦВМ слагается
из следующих основных этапов.
1) Математическая формулировка задачи. Всякая задача,,
предназначенная для численного ее решения на УЦВМ, должна быть
прежде всего четко сформулирована именно как математическая
задача. Иначе говоря, та физическая, техническая или какая-либо
другая проблема, которая подлежит решению, должна быть пред-
ставлена как задача о решении каких-либо уравнений, вычислении
интегралов и т. п. Следует иметь в виду, что этот этап работы,
требующий обычно совместной работы физиков или инженеров,
§4)
НЕКОТОРЫЕ ВОПРОСЫ ОРГАНИЗАЦИИ РАБОТЫ НА УЦВМ
597
разрабатывающих данную проблему, и математиков-вычислителей,,
представляет собой часто значительные трудности. Для успешного-
преодоления их необходимо, с одной стороны, знакомство матема-
тиков с физическим или техническим существом тех задач, численным
решением которых они занимаются, а с другой — знание «заказ-
чиком», хотя бы в общих чертах, тех методов и возможностей,,
которыми располагает вычислительная математика.
2) Численный анализ задачи (выбор алгоритма). Вычислитель-
ная машина непосредственно не может оперировать такими понятиями,
как решение уравнения, интеграл, функция и т. д., с помощью-
которых мы обычно формулируем ту или иную задачу. Поэтому
для перевода уже сформулированной задачи на язык, доступный:
машине, мы должны для каждой операции (интегрирование, диффе-
ренцирование, решение уравнения и т. д.) подобрать соответствую-
щий численный метод. Например, вычисление производной заме-
няется нахождением соответствующего разностного отношения, инте-
гралы считаются с помощью тех или иных приближенных методов-
(формула трапеций, формула Симпсона и т. п.), в которых при-
ходится выполнять лишь некоторую последовательность арифмети-
ческих операций, и т. д. Ясно, что для решения одной и той же
математической задачи можно пользоваться различными численными,
приемами. Выбор наиболее рациональных методов счета во многом
определяет эффективность решения задачи с помощью УЦВМ.
3) Составление программы. После того как закончен числен-
ный анализ задачи, т. е. для каждого ее этапа подобран соответ-
ствующий алгоритм, сводящийся к некоторой последовательности
элементарных операций, приступают к составлению программы. Для
одной и той же задачи, даже при одном и том же выборе численных
методов ее решения, программа может быть составлена далеко не
единственным образом. Выбор наиболее рационального пути про-
граммирования, наилучшего использования объема памяти и других
возможностей машины требует от лица, составляющего программу,
опыта, знания типа той вычислительной машины, на которой будет
происходить счет, а также известной изобретательности.
4) Выполнение вычислений и анализ результатов. После
того как программа счета полностью подготовлена, выполнение вычи-
слений на правильно работающей машине представляет собой довольно
стандартную процедуру. Ее часто выполняет оператор, который
может и не быть знаком со всей задачей в целом.
3. Методы предупреждения и обнаружения ошибок счета.
Проведение сложных вычислительных работ на УЦВМ бывает связано
с выполнением миллионов элементарных операций. При этих усло-
виях обеспечение безошибочного счета представляет собой достаточно
сложную задачу. Причины ошибок могут быть различны. Прежде
всего необходимо обеспечить правильность самой программы, так как.
S98
ДОБАВЛЕНИЕ
Р
искажение или пропуск хотя бы одной команды в программе при-
водит, как правило, к тому, что весь счет оказывается или вовсе
невозможным, или приводит к совершенно неверным результатам.
Поэтому каждая программа должна быть до начала счета тщательно
проверена. Процесс проверки и исправления программы называется
ее отладкой. Иногда для отладки программы прибегают к следую-
щему приему: проделав какой-то этап вычислений вручную, сравни-
вают полученный результат с результатом такого же счета на машине.
Существуют и другие систематические методы обнаружения ошибок
в программе, но мы не будем на них останавливаться.
Далее, для правильности счета необходимо обеспечить правиль-
ность работы самой машины. Основной метод проверки работы
пашины — это решение на ней стандартных задач (тестов) с заранее
известными ответами и отлаженной программой. Следует, однако,
иметь в виду, что та или иная погрешность в работе машины (сбой)
может возникнуть уже в процессе самого счета. Для обнаружения
и устранения таких ошибок прибегают часто к двойному счету: тот
или иной промежуточный результат вычисляется и запоминается
машиной, после чего вычисления повторяются еще раз. Получив
таким образом два раза один и тот же результат, машина автомати-
чески переходит к следующему этапу вычислений.
Наконец, еще один возможный источник неправильностей в счете —
это накопление ошибок при округлениях. Наличие в машине опре-
деленного фиксированного числа разрядов ограничивает возможную
точность счета, поскольку все числа мы вынуждены округлять
с точностью до единицы последнего разряда. Эти ошибки округления
при выполнении большого количества операций могут накапливаться
и в результате, без всяких погрешностей в программе или в машине,
приводить к ошибкам, во много раз превышающим погрешности
исходных данных.
Существуют различные методы повышения точности счета на
УЦВМ. Например, можно в случае необходимости записывать все
числа с удвоенным количеством знаков, отводя для записи каждого
числа не одну ячейку памяти, а две.
ЛИТЕРАТУРА
1. К очин Н. Е., Векторное исчисление и начала тензорного исчисления
ГОНТИ, 1938.
2. Рашевский П. К., Риманова геометрия и тензорный анализ, Изд-во
«Наука», Москва, 1964.
3. Эддингтон А. С., Теория относительности, ГТТИ, 1934.
4. Березин И. С. и Жидков Н. П., Методы вычислений, т. II, гл. 4.
Физматгиз, 1962.
5. Иваненко Д. и Соколов А., Классическая теория поля, ГТТИ,.
1951.
6. Гельфанд И. М. и Шилов Г. Е., Обобщенные функции, вып. 1„
2, 3, Физматгиз, 1958.
7. Колмогоров А. Н. и Фомин С. В., Элементы теории функций й
функционального анализа, вып. 2, Изд-во МГУ, 1960.
8. Тихонов А. Н., Об устойчивых методах суммирования рядов Фурье.
ДАН СССР, т. 156, № 2, 1964, стр. 268—271.
9. Э р д е й А., Асимптотические разложения, Физматгиз, 1962.
10. Д е Б р ё й н, Асимптотические методы в анализе, ИЛ, 1962.
11. Лаврентьев М. А. и Шабат Б. В., Методы теории функций ком-
плексного переменного, Изд-во «Наука», 1965.
12. С о б о л е в С. Л., Уравнения математической физики, ГТТИ, 1954.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абеля признак 307, 373
Абсолютно интегрируемая функция
510
— сходящийся несобственный инте-
грал 366, 393
Автоматизация программирования
595
Адамара — Коши теорема 322
Аддитивная функция множества 36
---области 36, 76
Аддитивность двойного интеграла
34
— криволинейного интеграла 155
— тройного интеграла 75
Адрес 581
АЛГОЛ 595
Амплитуда колебания 449
Аналитическая функция 330
Антисимметричный тензор 281
Арифметические операции 581
Арифметическое устройство 576
Арцела теорема 350
Асимптотическая эквивалентность
561, 565
Асимптотический ряд 563
Асиптотическое представление 561
— разложение 556, 563
Аффинная система координат 125
Аффинный ортогональный тензор вто-
рого ранга 267
---------------- первого ранга 266
---------р-го ранга 268
Базисы векторов взаимные 289
Бесселя неравенство 479
— тождество 479
Бета-функция 434, 438—442
Бинормали вектор 106
Бинормали уравнение 109
Блок-схемное программирование 592
Буняковского — Коши неравенство
343
Ввода устройство 575
Вейерштрасса признак 424
----мажорантный 304
— теорема 491, 493, 546, 549
Вектор бинормали 106
— касательной 106
— нормали 106
Векторная линия 220
— трубка 220
Векторное поле 219
----, вихрь 233
----, дивергенция 225
----, потенциал 221
----, поток 223
— —, ротор 233
, циркуляция 233
— уравнение кривой 103
Вектор-потенциал 239
Вектор-функция 97
— —, дифференциал 99
----дифференцируемая 98
----, интеграл по скалярному аргу«
менту 101
---- линейная 268
----непрерывная 98
----, производная 98
---, формула Тейлора 101
Верхняя сумма Дарбу 27, 74
Вес 530
Взаимные базисы векторов 289
Винтовая линия 103
Вихрь 233, 235
Внешний объем тела 72
предметный указатель
601
Внешняя площадь фигуры 20
Внутренний объем тела 72
Внутренняя геометрия поверхности
146
— площадь фигуры 20
— точка 17
Восьмеричная система счисления
579
Вторая квадратичная форма 138
Вывода устройство 578
Вычислительного назначения допол-
нительные операции 582
Вычислительные машины дискретно-
го действия 574
----непрерывного действия 574
Вычитание тензоров 279
Гамильтона оператор 239
Гамма-функция 382, 434—438
Гармоника 449, 452
Гармоническое колебание 449
— поле 247
Гауссова кривизна 143
Геометрия Лобачевского 149
Гиперболическая точка 144
Главная кривизна 141
Главное значение расходящегося ин-
теграла 383, 388
Главной нормали уравнение 109
Главные направления поверхности
141
Гладкая поверхность 73
Годограф 97, 100
Гравитационное поле 219, 227—229
Градиент 217, 252, 255
Граница* множества 17
Граничная точка 17
Грина формула 171
Дарбу лемма 30
— сумма 27, 74
Двоичная система счисления 578
Двоично-десятичная система счисле-
ния 579
Двойной интеграл 16, 25
----, замена переменных 66—70
---- как аддитивная функция обла.
сти 36
----, оценка по модулю 34
----, производная по площади 37
— —, сведение к повторному 46—54
•— —, свойства 33, 34
— —, теорема о среднем 34
— —, физические и геометрические
применения 41—46
Двумерное поле 215
Двусторонняя поверхность 191
Деформаций тензор 275
Дельта-функция 355, 544—546
Диаметр множества 18
Дивергенция 225, 252, 255
— тензора 285
—, физический смысл 226—229
Дини теорема 310
Дифференциал вектор-функции 99
Жордана мера 23
Замена переменных в двойном инте-
грале 66—70
------- тройном интеграле 85—93
Замкнутая область 17
— система функций 497
Замкнутое множество 17
Запоминающее устройство 576
Индикатриса кривизны 140, 143
Интеграл двойной 16, 25
—, зависящий от параметра 402—
407
—,---------кратный 442
— криволинейный второго рода 159,
166
--- первого рода 151, 157
— многомерный 93—96
— несобственный 358, 360, 376, 387,
400
— от векторной функции 101
— поверхностный второго рода
196
---первого рода 184, 190
— повторный 48, 50, 80, 83
— Пуассона 372, 429
— тройной 71, 74
— Френеля 432
— Фруллани 433
— Фурье 510, 517, 521
— эйлеров 434
Интегральная сумма 24, 151,
183
Интегрируемая функция 25, 32, 33,
74
— с квадратом функция 479,
530
Интервал сходимости 319
Касательная плоскость 121
Касательной вектор 106
— уравнение 109
<502
предметный указатель
Квадратичная форма вторая 138
— — первая 126
----положительно определенная 126
Квадратичное уклонение 342
Квадрируемая фигура 20, 22
Квадратируемая фигура 20, 22
Ковариантные 292 индексы тензора
— координаты Ковариантный тензора 290 метрический тензор
293 Код 593 Команда 581 Компактное семейство функций
350 Контравариантные индексы тензора
292
— координаты тензора 290
Контравариантный метрический тен-
зор 293
Координатная сеть 118
---- ортогональная 129
Координатные линии 56
— поверхности 86
Координаты аффинные 125
— ковариантные тензора 290
— контравариантные тензора 290
— криволинейные 56, 86, 249
---- ортогональные 249
— на поверхности 118
— полярные 57, 64
— тензора 264, 292
— сферические 87, 92, 251
— цилиндрические 86, 91, 251
Коши критерий 305, 306, 354, 364,
365, 377, 423, 425
Коши — Адамара теорема 322
Коши — Буняковского неравенство
343
Косинус-преобразование Фурье
520
Коэффициенты Фурье 456, 476,
505
Кривая параметризованная 103
— кусочно-гладкая 150
•— спрямляемая 21
Криволинейные координаты 57, 86,
249
----ортогональные 249
Криволинейный интеграл второго ро-
да 159, 166
----------, вычисление 162
Криволинейный интеграл второго ро-
да независимость от пути 174—182
----------, связь с криволинейным
интегралом первого рода 160
Криволинейный интеграл первого ро-
да 151, 157
----------, оценка по модулю 155
----------, применения 155—157
----------, свойства 154, 155
—---------, связь с криволинейным
интегралом второго рода 160
----------, теорема о среднем 155
Кривизна 107
— гауссова 143
— главная 141
— нормальная 137
— полная 143
— средняя 143
Кривизны индикатриса 140, 143
Кручение 107
Кубируемое тело 72
Кусочно-гладкая кривая 150
Кусочно-гладкая функция 459
---непрерывная функция 459
Ламэ параметры 250
Лапласа метод 569
— оператор 244, 254, 255
— уравнение 247
Лапласово поле 247
Лебега мера 24
Лежандра полиномы 475, 527
Лейбница правило 404
Линейная вектор-функция 268
— зависимость функций 532
Линейность двойного интеграла 33
— криволинейного интеграла 154
— тройного интеграла 75
Линейный оператор 268
Линии координатные 56
Линия векторная 220
— винтовая 103
— уровня 215
Лист Мёбиуса 193
Лобачевского геометрия 149
Логические операции 582
Локальная производная 256
Магнитная лента 576
Мажорантный признак 424
— признак Вейерштрасса 304
— ряд 304
Мажорирующий ряд 304
Масштабные множители 250
Материальная производная 256
Матрица ортогональная 265
— перехода 265
Матрицы, умножение 294—296
Мёбиуса лист 193
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
60?
Мера Жордана 23
— Лебега 24
Метрический тензор 292
Многомерный интеграл 93—96
Многосвязная область 117
Множества, общая часть 18
—, объединение 18
— функция 35
Множество, граница 17
—, диаметр 18
— замкнутое 17
— ограниченное 17
— открытое 17
— связное 17
Монотонность двойного интеграла 34
— криволинейного интеграла 155
— тройного интеграла 75
Набла (V).оператор 239
Наименьшее отклонение 495
Направления поверхности главные
141
Напряжений тензор 276, 278
Натуральная параметризация кривой
104
Натуральные уравнения кривой 113
Начальная фаза 449
Неориентируемая поверхность 193
Неразрывности уравнение 231, 262
Несобственный интеграл 358, 360,
376, 400
•----абсолютно сходящийся 366, 393
-----, зависящий от параметра 402,
407—434
-----,-------кратный 442
•----кратный 387, 400
-----равномерно сходящийся 411,
444
-----расходящийся 359, 376
•----сходящийся 359, 366, 376
— — условно сходящийся 372
Нижняя сумма Дарбу 27, 74
Норма функции 475, 504
Нормали вектор 106
Нормаль 122
Нормальная кривизна 137
— плоскость 109
Нормальное сечение 136
— ускорение 115
Области функция 35, 76
•----аддитивная 36, 76
Область 17
— замкнутая 17
многосвязная 117
Область односвязная 117
— поверхностно односвязная 210
— сходимости 298
Обобщенная функция 355
Образ Фурье 518, 520
Обратное преобразование Фурье 51?
Обращение к внешним устройствам
583
Общая часть множеств 18
Объединение множеств 18
Объем многогранного тела 71
— тела 72
Ограниченное множество 17
Одномерное поле 221
Одноразрядный сумматор 586
Односвязная область 117
Односторонняя поверхность 192
Окрестность 17
Округления точка 142
Омбилическая точка 142
Оператор Гамильтона 239
— Лапласа 244, 254, 255
— линейный 268
— набла (V) 239
Определитель функциональный 55, 85
Ориентируемая поверхность 193
Ортогональная координатная сеть
129
— матрица 265
— система функций 453, 474, 504
-------(с весом): 529
------- замкнутая 497
------- полная 496
Ортогональные криволинейные коор-
динаты 249
Осесимметрическое поле 215, 221
Основной репер (трехгранник) кри-
вой 106
Остроградского формула 205
Отделимость замкнутых множеств 18
Отклонение 495
Открытое множество 17
Относительных смещений тензор
283
Отображение 55, 85
Память 576
Параболическая точка 144
Параметризованная кривая 103
— поверхность 119
Параметрическое уравнение кривой
103
Параметры Ламэ 250
Парсеваля равенство 497
Первая квадратичная форма 126
€04
предметный указатель
Передачи управления операции
584
Перестановка индексов тензора
281
Перехода матрица 265
Период функции 449
Периодическая функция 449
Перфокарта 576, 577
Перфолента 576
Плоская фигура 20
Плоское поле 221
Плоскопараллельное поле 215, 221
Плоскость касательная 121
— нормальная 109
— соприкасающаяся 108, 109
— спрямляющая 109
Плотность распределения масс 37
Площадь многоугольной фигуры 19
— ориентируемой фигуры 70
— плоской фигуры 20
-------, свойства 22, 23
— поверхности 129, 131
— фигуры в криволинейных коорди-
натах 59
Поверхности координатные 86
Поверхностно односвязная область
210
Поверхностный интеграл второго ро-
да 196
---, вычисление 205
---— —, сведение к двойному ин-
тегралу 199
---первого рода 184, 190
-----------, применения 188
— —---------, сведение к двойному ин-
тегралу 184
Поверхность 118
— гладкая 73
— двусторонняя 191
-т- неориентируемая 193
— односторонняя 192
— ориентируемая 193
— параметризованная 119
—, площадь 129, 131
— постоянной кривизны 148
— простая 117
— уровня 214
Повторный интеграл 48, 50, 80,
83
Подпрограмма 592
Поле векторное 219
----, вихрь 233
----, дивергенция 225
----, потенциал 223
----, поток 223
----, ротор 233
Поле векторное, циркуляция 233
— гармоническое 247
— гравитационное 219, 227—229
— двумерное 215
— лапласово 247
— одномерное 221
— осесимметрическое 215, 221
— плоское 221
— плоскопараллельное 215, 221
— потенциальное 221, 238
— скалярное 213
---, градиент 217
---, производная 217
— скоростей 219, 227
— соленоидальное 229, 238
— сферическое 216
— тензора 284
— трубчатое 229
— тяготения 219, 227—229
— цилиндрическое 216, 221
— электростатическое 219, 229
Полная кривизна 143
— ортогональная система функций
496
— производная 256
Положительно определенная квадра-
тичная форма 126
Полярные координаты 57, 64
Поразрядные операции 582
Последовательность функциональная
297
Постоянной кривизны поверхность
148
Потенциал векторного поля 221
Потенциальное поле 221, 238
Поток векторного поля 223
— тензора 286
Почти периодическая функция
451
Предельная точка 17
Проводимости тензор 264
Программа 581, 586
Программирование 586
— блок-схемное 592
Производная вектор-функции 98
— локальная 256
— материальная 256
— по площади от двойного интегра-
ла 37
Производная полная 256
— скалярного поля 217
— функция области по площади
36
— частная 256
Простая поверхность 117
Пространственное тело 72
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Пространство функциональное 535
Псевдосфера 149
Пуассона интеграл 372, 429
Равномерная сходимость последова-
тельности функций 298, 299
-----ряда 303—308, 348
-----Фурье 481
Равномерно ограниченное семейство
функций 350
— сходящийся несобственный инте-
грал 411, 444
— — функциональный ряд 302
Равностепенно непрерывное семейст-
во функций 350
Радиус нормальной кривизны 137
— сходимости 321
Разложение асимптотическое 556
Расстояние между множествами
18
Расходимость последовательности
функций 297
Расходящийся несобственный инте-
грал 359, 376
--------, главное значение 383,
388
Регулярно сходящийся ряд 324
Репер основной 106
Ротор 233, 253, 255
—, символическая запись 235
—, физический смысл 235
Ряд асимптотический 563
— степенной 318—329
— Тейлора 331, 333, 334
— тригонометрический 453
— функциональный 297
— Фурье 456, 474, 476, 505, 507, 531
Свертка тензоров 281
Связное множество 17
Сеть координатная 118
----- ортогональная 129
Сечение нормальное 136
Симметричный тензор 281
Синус-преобразование Фурье 520
Скалярное поле 213
-----, градиент 217
-----, производная 217
Скоростей поле 219, 227
Слабая сходимость 353
Сложение тензоров 279
Собственные векторы 288
— значения 288
Соленоидальное поле 229, 238
605
Соприкасающаяся плоскость 108, 109
Сопряженный тензор 281
Спектральная характеристика 539
---- функции 518
Специализированные цифровые вы-
числительные машины 574
Спрямляемая кривая 21
Спрямляющая плоскость 109
Сравнения признак 367, 368, 370, 371,
378, 379, 380, 394, 395
Средняя кривизна 143
Степенной ряд 318—329
----в комплексной области 338 —
342
----, применения 336—338
Стирлинга формула 569
Стокса формула 209
Сумма Дарбу 27, 74
— интегральная 24, 151, 183
— ряда 302
Сумматор одноразрядный 586
Суперпозиции принцип 539
Суперпозиция гармоник 452
Сферические координаты 87, 92, 251
----, градиент 255
----, дивергенция 255
----, Лапласа оператор 255
•---, ротор 255
Сферическое поле 216
Сходимости интервал 319
— область 298
— радиус 321
Сходимость «в себе» 353
— в среднем 342, 347, 348, 537
— последовательности функций 297—
299
— рядов 303—308
Сходящийся несобственный интеграл
359, 376
— функциональный ряд 302
Тангенциальное ускорение 115
Тейлора ряд 331, 333, 334
— формула для вектор-функции 101
Тело (пространственное) 72
— кубируемое 72
— объем 72
Тензор 264, 292
— антисимметричный 281
— аффинный ортогональный второго
ранга 267
------- первого ранга 266
-------р-го ранга 268
— деформаций 275
—, дивергенция 285
606
предметный указатель
Тензор, ковариантные индексы 292
—, контравариантные индексы
292
—, координаты 264, 292
— метрический 292
— напряжений 276, 278
—, общее определение 292
— относительных смещений 283
—, поле 284
—, поток 286
— проводимости 264
— симметричный 281
— сопряженный 281
Тензоры, алгебраические операции
279—282
Теплопроводности уравнение 246
Тор 119
Точка внутренняя 17
— гиперболическая 144
— граничная 17
— округления (омбилическая) 142
— параболическая 144
— предельная 17
— уплощения 144
— эллиптическая 143
Транспонирование матрицы 266
Трехгранник основной 106
Тригонометрическая система 453, 475,
499
Тригонометрический ряд 453
Тройной интеграл 71, 74
— —, замена переменных 85—93
— — как аддитивная функция об-
ласти 36
---, оценка по модулю 75
----, сведение к повторному 80—85
. --, свойства 75, 76
— —, теорема о среднем 76
----, физические и геометрические
применения 77—79
Трубка векторная 220
Трубчатое поле 229
Тяготения поле 219, 227—229
Угол между кривыми 128
Уклонение квадратичное 342
Умножение матриц 294—296
Умножение тензора на скаляр 280
— тензоров 279
Универсальные цифровые вычисли-
тельные машины 574
Уплощения точка 144
Управления устройство 576
Уровня линия 215
— поверхность 214
Ускорение нормальное 115
— тангенциальное 115
Условно сходящийся несобственный
интеграл 372
Устройство арифметическое 576
— ввода 575
— вывода 578
— запоминающее 576
— управления 576
УЦВМ 574
Фазовая характеристика 539
Фигура квадрируемая 20, 22
— плоская 20
Форма квадратичная вторая 138
---- первая 126
----положительно определенная
126
ФОРТРАН 595
Френе формулы 107
Френеля интегралы 432
—, геометрический смысл 65, 91
36
Фруллани интеграл 433
Функция абсолютно интегрируемая
510
— интегрируемая 25, 32, 33, 74
---- с квадратом 479
— кусочно-гладкая 459
— кусочно-непрерывная 459
— множества 35
— области 35, 76
----, производная по площади 36
— периодическая 449
— почти периодическая 451
Функционал 357
Функциональная последовательность
297'
Функциональное пространство 535
Функциональный определитель 55,
85
— ряд 297
----, сумма 302
----сходящийся 302
------- в среднем 343
------- равномерно 302
Фурье интеграл 510, 517, 521
Фурье косинус-преобразование 520
— коэффициенты 456, 476, 505
— образ 518
— обратное преобразование 518
— преобразование 518
— ряд 456, 474, 476, 505, 507,
531
— —, равномерная сходимость 481
----, скорость сходимости 485
ПРЕДМЕТНЫЙ указатель
W
Фурье ряд, улучшение сходимости
489
— синус-преобразование 520
Цилиндрические координаты 86, 91,
251
'----, градиент 255
-----, дивергенция 255
-----, Лапласа оператор 255
-----, ротор 255
Цилиндрическое поле 216, 221
Циркуляция 233
Цифровые вычислительные машины
574
Частная производная 256
Частота колебания 449
Частотная характеристика 539
Шварца пример 129
Эйлера уравнение 259
— формула 141, 340
Эйлеровы интегралы 434—442
Электростатическое поле 219, 229
Эллиптическая точка 143
Якобиан 55, 85
—, геометрический смысл 65, 91
Борис Михайлович Будак,
Сергей Васильевич Фомин
Кратные интегралы и ряды
(Серия «Курс высшей математики
и математическая физика»)
М., 1967 г.г 608 стр. с илл.
Редакторы И, А. Угарова» /О. Д. Горьков
Техн, редактор Я. Ф. Брудно
Корректор С. Н. Емельянова
Печать с матриц. Подписано к печати 9/1 1967 г.
Бумага бОхЭО’/м» Физ. печ. л. 38. Условн. печ. л» 38.
Уч.-изд. л. 37,93. Тираж 40 000 экз. Цена книги 1 р. 24 к.
Заказ № 537.
Издательство «Наука»
Главная редакция
физико-математической литературы
Москва. В-71, Ленинский проспект. 15.
Ленинградская типография № 2
имени Евгении Соколовой Главполиграфпрома
Комитета по печати
при Совете Министров СССР.
Измайловский проспект. 29.