/







Автор: Штарьков Ю.М.
Теги: электротехника кодирование эвм анализ изображений сборник научных трудов обработка видеоинформации
ISBN: 5-02-006556
Год: 1989



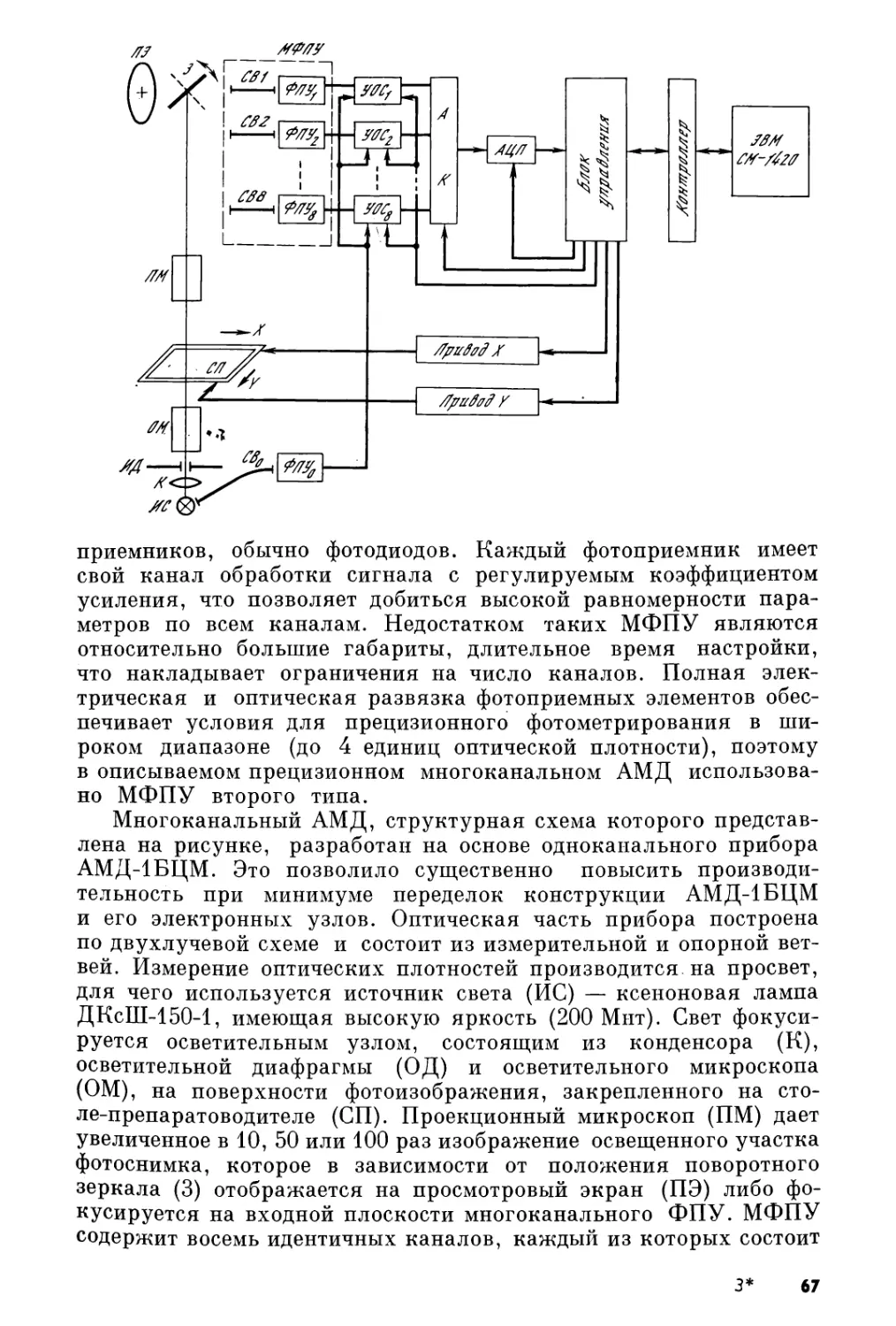
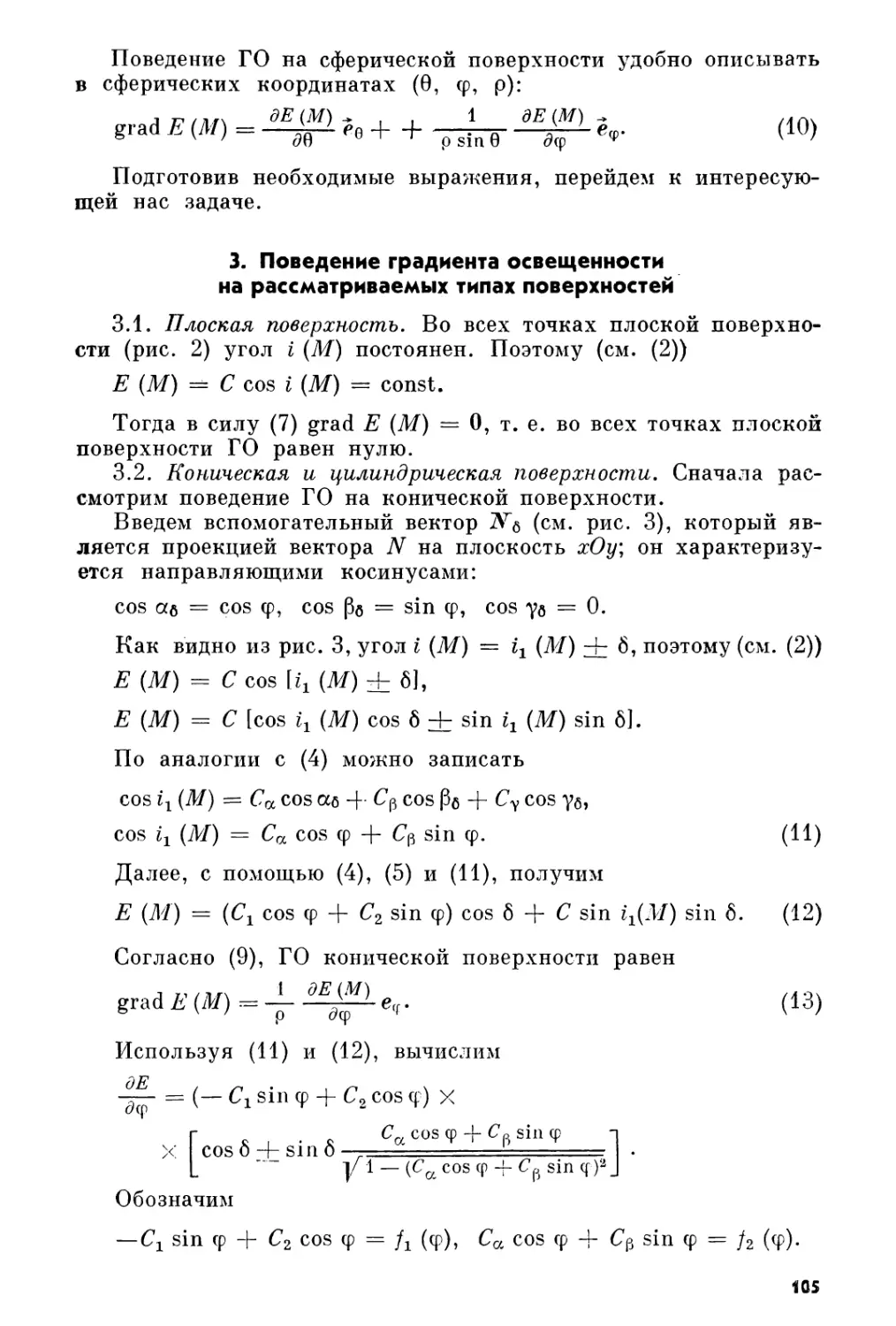
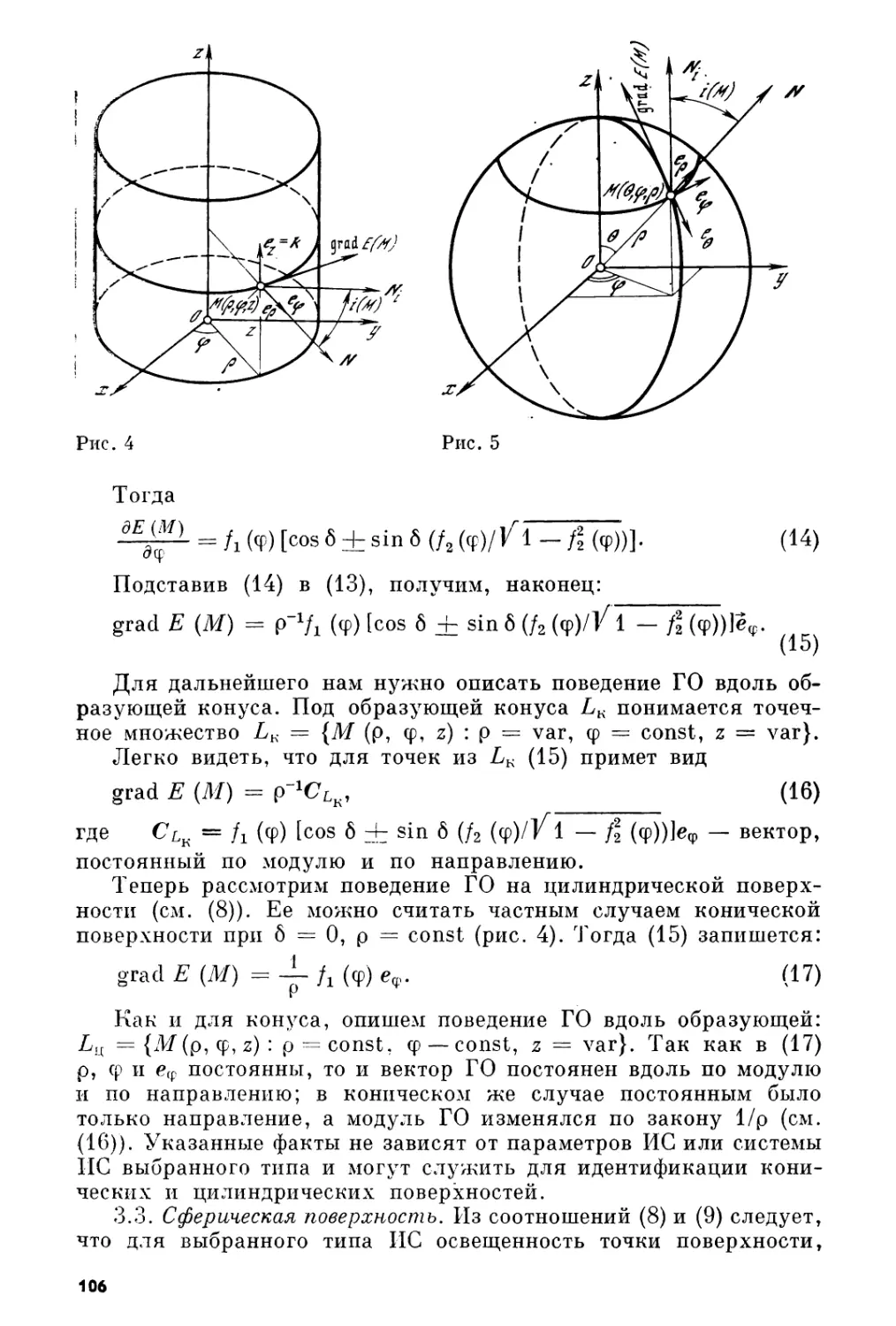
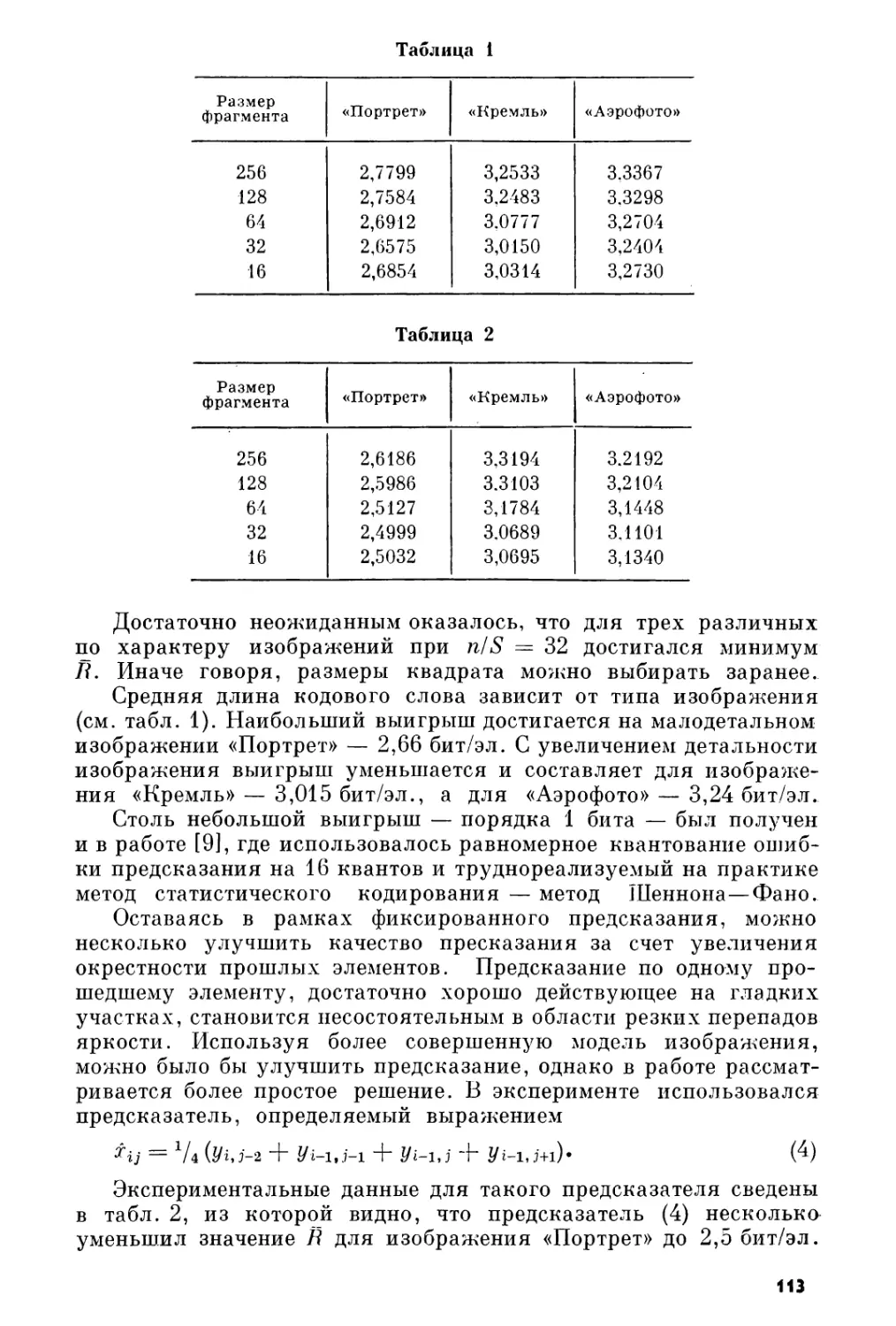
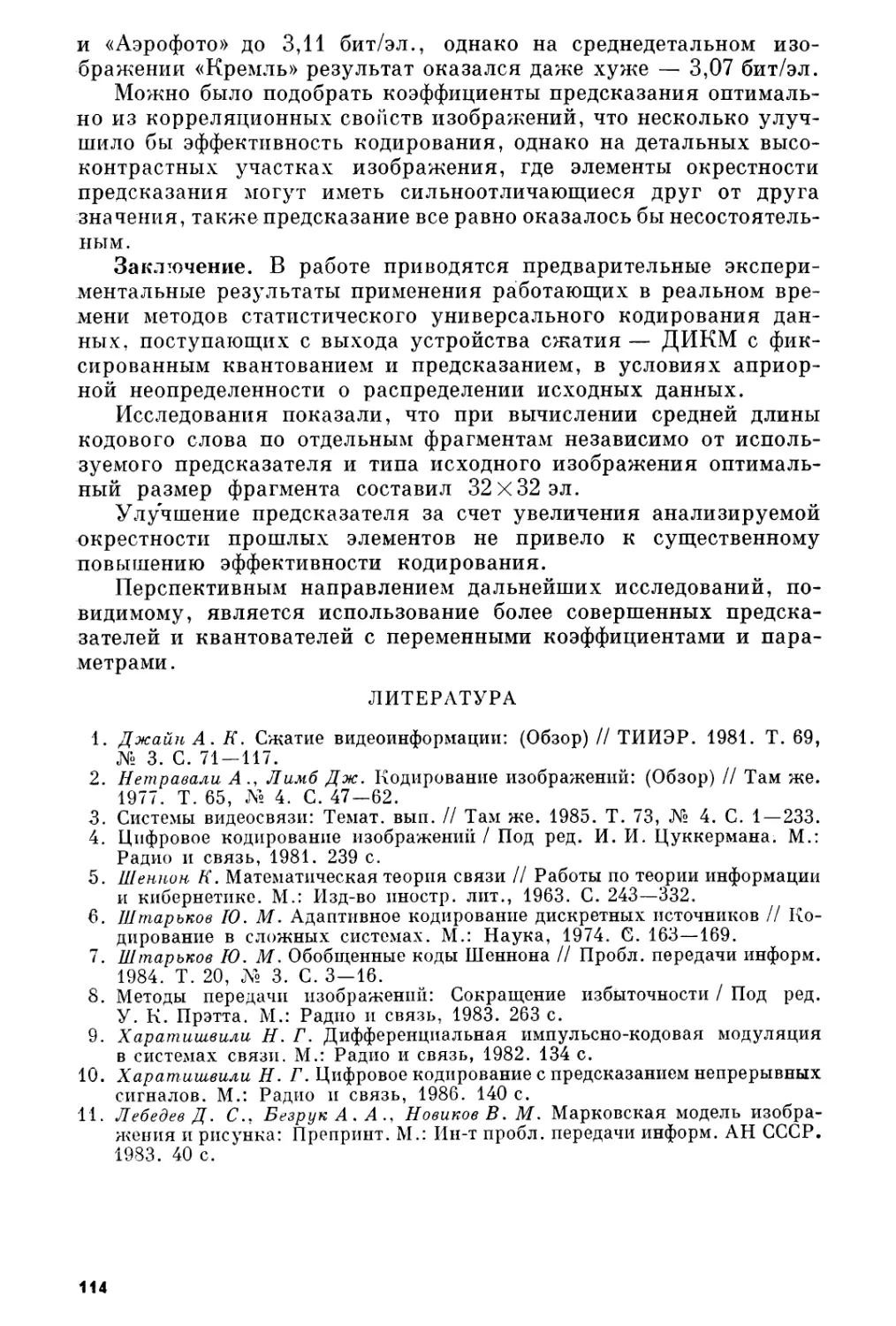
Текст
«НАУКА»
Исправление: на обороте титульного листа
ISBN 5-02-006556 должно быть ISBN 5-02-006556-0
вместо
АКАДЕМИЯ НАУК СССР
ИНСТИТУТ ПРОБЛЕМ ПЕРЕДАЧИ ИНФОРМАЦИИ
НКОНИКА
цифровая
обработка
видеоинформации
СБОРНИК НАУЧНЫХ ТРУДОВ
Ответственный редактор
доктор технических наук
Ю. М. ШТАРЬКОВ
МОСКВА
«НАУКА»
1989
УДК 621.391*26
Иконика. Цифровая обработка видеоинформации.— М.: Наука,
1989.— 128 с. ISBN 5—02—006556.
Сборник посвящен задачам обработки видеоинформации с помощью
ЭВМ. Рассмотрены методы улучшения, кодирования, анализа изобра¬
жений. Большое внимание уделено принципам построения, вопросам
программного и аппаратного обеспечения систем обработки изображе¬
ний. Разработанные методы, алгоритмы ориентированы на практическое
применение, их использование позволяет повысить точность и удобство
отображения видеоинформации, экономичность ее представления.
Для специалистов по цифровым методам обработки видеоинформа¬
ции, по построению информационных систем.
Рецензенты:
В. В. БУГРОВСКИЙ, В. В. ЗЯБЛОВ
Научное издание
Иконика
Цифровая обработка видеоинформации
Утверждено к печати Институтом проблем передачи информации
Редактор В. В. Передников. Редактор издательства О. М. Горина. Художник
Л. А. Григорян. Художественный редактор Н. Н. Михайлова. Технический
редактор Л. В. Каскова. Корректор Р. 3. Землянская
ИБ № 39992
Сдано в набор 19.12.88. Подписано к печати 21.02.89. Т-00067. Формат 60X90716.
Бумага типографская № 1. Гарнитура обыкновенная. Печать высокая.
Усл. печ. л. 8,0. Усл. кр. отт. 8,38. Уч.-изд. л. 8,4. Тираж 5500 экз.
Тип. зак. 2408. Цена 85 коп.
Ордена Трудового Красного Знамени издательство «Наука». 117864, ГСП-7,
Москва, В-485. Профсоюзная ул., 90
2-я типография издательства «Наука». 121099, Москва, Г-99, Шубииский пер., 6
И
1402030000-101
055(02)-89
19-89, кн. 2
ISBN 5-02-006556
© Издательство «Наука», 1989
ПРЕДИСЛОВИЕ
Видеоинформация является важным источником изучения ок¬
ружающего мира. В настоящее время актуальность этого вида
информации значительно возросла в связи с растущей потреб¬
ностью решения многих важных народнохозяйственных задач
в различных областях. Примерами таких областей могут служить
электронная микроскопия, рентгенология, радиолокация, ме¬
теорология, телевидение, машинное зрение роботов и др.
При решении этих задач большую роль играют технические
системы формирования и обработки изображений. Целью разра¬
боток таких систем является выделение из изображений полезной
с точки зрения той или иной задачи информации, представляя
ее в форме, удобной для получателя. Так, результаты проведения
аэрокосмической съемки часто бывает необходимо представить
в виде карты, из информации, полученной с помощью зрительной
системы роботов, необходимо получить описание изображаемых
предметов на естественном языке.
Извлечение полезной информации затруднено многими ме¬
шающими факторами. В качестве примеров можно привести иска¬
жения на изображениях, обусловленные несовершенством опти¬
ческих систем, устройств регистрации изображений, влиянием
помех каналов связи. В случае машинного зрения роботов воз¬
никающие трудности связаны часто с наличием теневых эффектов,
неравномерности освещения. Возможности устранения многих из
этих эффектов связаны с техническим совершенствованием систем
формирования изображений и их автоматической обработки с по¬
мощью ЭВМ.
Этим и другим проблемам обработки изображений с целью
повышения их качеств и анализа посвящен настоящий сборник.
В нем рассмотрены модели изображений, методы выделения кон¬
туров и повышения резкости изображений, представлены методы
машинного зрения и передачи информации, приведена методика
составления радиолокационной карты, а также результаты прак¬
тической реализации разработанных методов. Большое внимание
в сборнике уделено описанию изображений с помощью моделей и
применению этих моделей в задачах обработки видеоинформации.
Следует отметить особую актуальность задач анализа изображе¬
ний. Этому кругу задач посвящен раздел сборника, в котором
приведены работы по методам машинного зрения. В разделе ме¬
тодов передачи информации рассмотрены вопросы кодирования
3
изображений, методы расчета помех систем передачи информации,
исследованы свойства некоторых видов радиоканалов.
Сборник продолжает тематику работ, опубликованных в ра¬
нее изданных сборниках: Иконика. М.: Наука, 1968; Иконика:
Пространственная фильтрация изображений: Фотографические си¬
стемы. М.: Наука, 1970; Иконика: Цифровая голография: Обра¬
ботка изображений. М.: Наука, 1975; Иконика: Цифровая обра¬
ботка и фильтрация изображений // Вопр. кибернетики. Вып. 38.
М.: ВИНИТИ, 1978; Иконика: Теория и методы обработки изо¬
бражений. М.: Наука, 1984; Кодирование и обработка изображе¬
ний. М.: Наука, 1988.
Модели изображении
и их применение
УДК 621.391
ВЫДЕЛЕНИЕ КОНТУРОВ НА ОСНОВЕ
иерархической двухуровневой вероятностной
МОДЕЛИ АНСАМБЛЯ ИЗОБРАЖЕНИИ
А. А. Безрук, Д. С. Лебедев
Введение. Выделение контуров, т. е. линий, разделяющих уча¬
стки изображения с различными яркостями,— важнейшая задача
анализа сцен, поскольку с такими линиями, как правило, совпада¬
ют границы предметов, составляющих сцену.
Почти любой алгоритм выделения контуров включает в себя
операцию вычисления разности яркостей (или значений других
величин, связанных с яркостью) соседних элементов изображения
и сравнение значения этой разности с порогом. Порог необходим
для того, чтобы не принимать за признак контура разность ярко¬
стей, обусловленную флуктуациями интенсивности приходящего
излучения, шумами детекторов излучения и т. д.
Таким образом, выделение контуров есть типичная задача
теории статистических решений. Наиболее эффективные методы
этой теории связаны с байесовым оцениванием. Для того чтобы
сформулировать задачу выделения контуров в терминах оценива¬
ния, надо ввести вероятностную модель изображений.
Обычно, говоря о выделении контуров, представляют изобра¬
жения как совокупности областей (пятен) почти постоянной яр¬
кости с резкими границами, разделяющими соседние области.
Нужные свойства изображений обеспечивает сравнительно прос¬
тая двухуровневая вероятностная модель ансамбля. Ее верхний
уровень — марковская модель рисунка границ, разделяющих об¬
ласти почти постоянной яркости [1]. Нижний уровень — гаусс-
одномарковское случайное поле, потенциал парного взаимодей¬
ствия элементов которого управляется реализацией поля рисун¬
ков так, что пары соседних элементов, принадлежащие одной
области, взаимодействуют сильно, а элементы, разделенные гра¬
ницей областей, совсем не взаимодействуют.
Таким образом, согласно модели, конкретное наблюдаемое
изображение есть результат двухэтапного случайного выбора —
на первом этапе выбирается рисунок границ областей почти по¬
стоянной яркости, а на втором — конкретное распределение яр¬
костей, заполняющее эти области.
Двухуровневые вероятностные модели ансамблей изображений
уже применялись в задачах анализа изображений [2—4]. Особен¬
5
ность предлагаемой двухуровневой модели состоит в использо¬
вании марковской модели рисунка и гаусс-одномарковской модели
поля яркостей. Такое сочетание позволило сформулировать и
решить задачу выделения контуров (известные модели использо¬
вались только для решений задач сегментации текстурного поля
и обнаружения перепадов яркости для изображения с фиксиро¬
ванным дискретным (небольшим) набором возможных значений
яркости).
Наблюдаемой является совокупность яркостей элементов изо¬
бражения. а параметры, определяющие рисунок границ, ненаблю¬
даемы. Следовательно, задача выделения контуров может быть
сформулирована как задача статистического оценивания по на¬
блюдаемому изображению параметров, описывающих границы об¬
ластей почти постоянной яркости, т. е. линии разрыва взаимо¬
действия.
Используя разработанную модель, можно применить байесово
оценивание этих параметров. В работе применяется его разновид¬
ность — оценивание по максимуму апостериорной вероятности
(МАВ). Основная трудность в реализации МАВ оценивания —
необходимость минимизации функций большого числа перемен¬
ных, принимающих дискретные значения. Единственный способ
минимизации, который в данном случае гарантирует достижение
абсолютного минимума,— полный перебор комбинаций значений
аргументов. Этот способ, очевидно, нельзя осуществить.
В работе сравниваются различные методы приближения к ми¬
нимуму, в том числе заимствованные из арсенала статистической
физики. Вероятностная модель ансамбля изображений, основан¬
ная на марковских случайных полях, позволяет установить ана¬
логию между функцией, которую надо минимизировать, и потен¬
циальной энергией некоторой физической системы. Такая анало¬
гия широко используется в большинстве работ по статистическим
байесовым методам анализа изображений. Кроме того, рассмотре¬
ны адаптивные методы, когда наряду с оцениванием параметров,
описывающих границы, происходит уточнение параметров моде¬
ли, которые считаются неизвестными заранее.
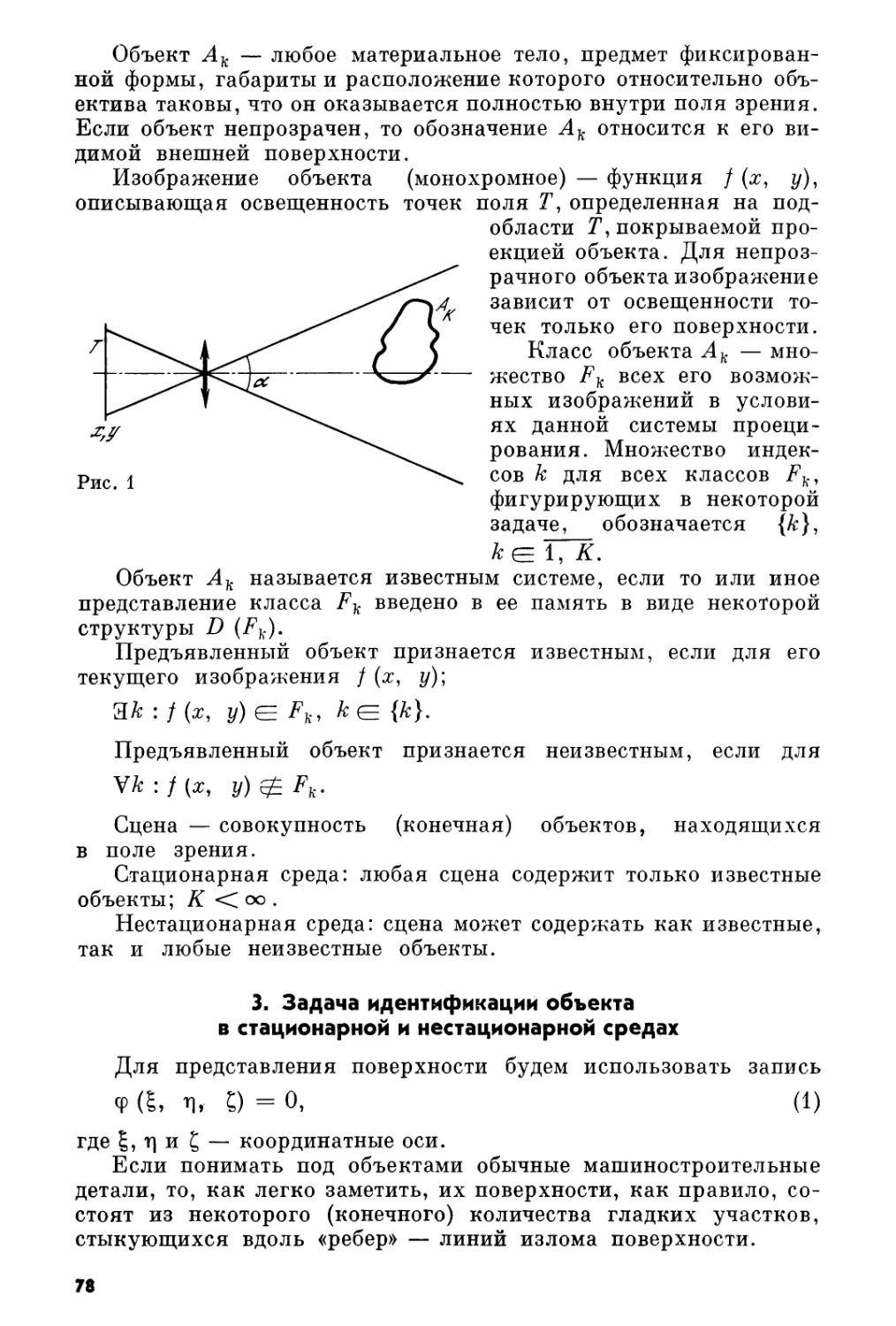
Иерархическая двухуровневая модель изображения. Непо¬
движное плоское одноцветное изображение описывается распреде¬
лением яркости
и (х, у), (x,y)<=s, (1)
где (х, у) — координаты точки плоскости изображения; S — часть
плоскости, называемая полем зрения.
Будем предполагать поле зрения прямоугольным:
S = {(z, у): 0 < х < X, 0 < у < У}
и разобьем его прямыми х = nh, п = О, 7V, N = \X/h], у = inh,
in = 0. М, М [Y/h] (Ы обозначает целую часть числа z) на
6
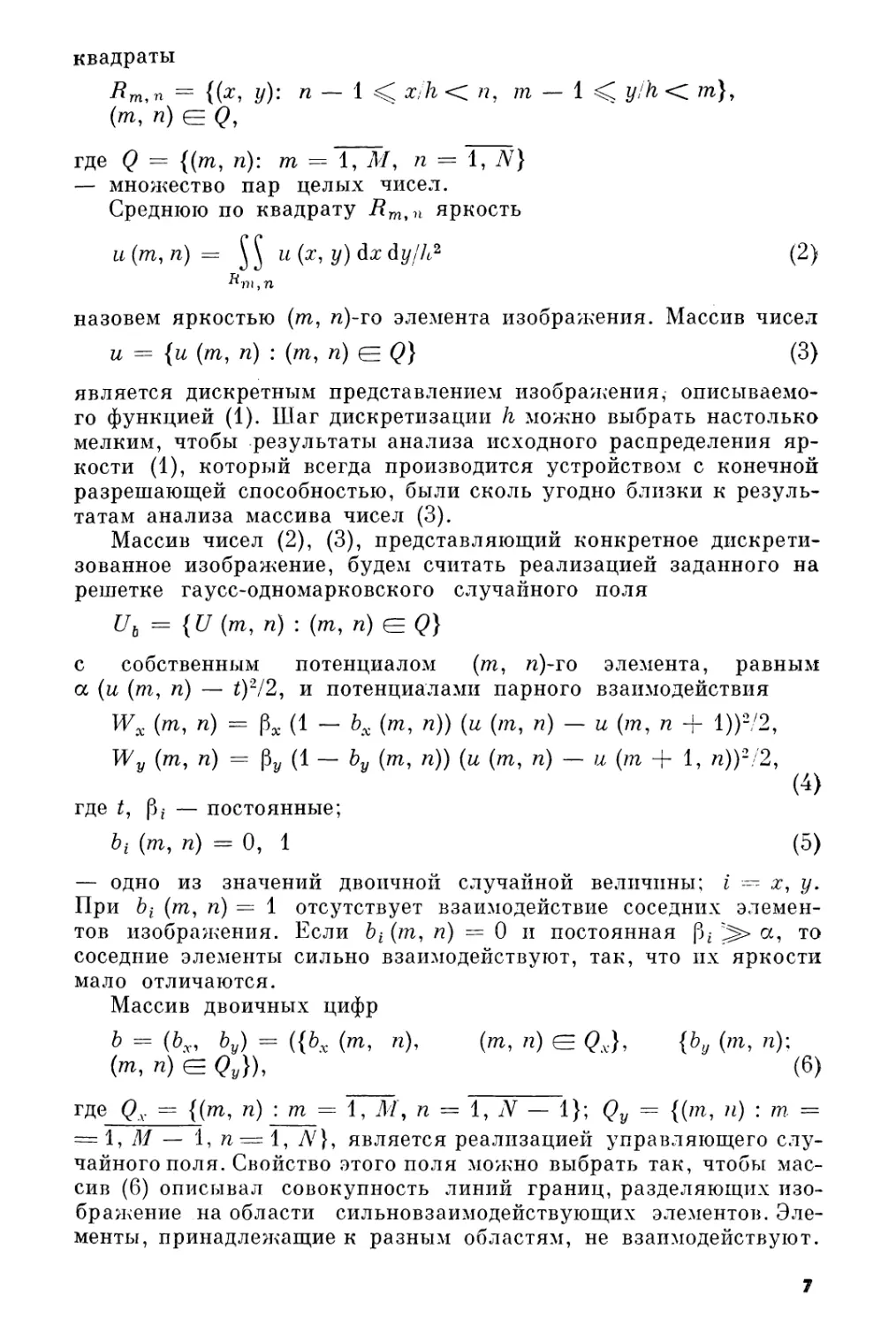
квадраты
Rm,n = {(х, у): п — 1 < xli<Z п, т — 1 < y!h < in},
(т, п) (= Q,
где Q = {(т, п): т = 1, М, п = 1, Л7}
— множество пар целых чисел.
Среднюю по квадрату Нт>п яркость
и (т, п) = и (х, z/) dx dy/k2 (2)
назовем яркостью (т, тг)-го элемента изображения. Массив чисел
и = {и (т, п) : (тп, п) ЕЕ (?}
(3)
является дискретным представлением изображения, описываемо¬
го функцией (1). Шаг дискретизации h можно выбрать настолько
мелким, чтобы результаты анализа исходного распределения яр¬
кости (1), который всегда производится устройством с конечной
разрешающей способностью, были сколь угодно близки к резуль¬
татам анализа массива чисел (3).
Массив чисел (2), (3), представляющий конкретное дискрети¬
зованное изображение, будем считать реализацией заданного на
решетке гаусс-одномарковского случайного поля
Ub = {U (тп, п) : (тп, п) (?)
с собственным потенциалом (тп, тг)-го элемента, равным
а (и (т, п) — t)2/2, и потенциалами парного взаимодействия
Wx (т, п) = рх (1 — Ьх (т, 7?)) (и (т, тг) — и (т, п + 1))2/2,
Wy (тп, тг) = (1 — Ъу (тп, /г)) (и (т, п) — и (in + 1, ?г))2/2,
где t, рг- — постоянные;
bt (т, п) = 0, 1
(5)
— одно из значений двоичной случайной величины; i = х, у.
При bt (ттг, п) = 1 отсутствует взаимодействие соседних элемен¬
тов изображения. Если bt (т, п) = 0 и постоянная р^ а, то
соседние элементы сильно взаимодействуют, так, что их яркости
мало отличаются.
Массив двоичных цифр
b = (Ьх, Ьу} = ({bx (т, п), (т, п) QJ, (by (in, ri)\
(т, п) ЕЕ <?г/}), (6)
где Qx = {(т, п) : in = 1, 717, п = 1, N — 1}; Qy = {(in, п) : т =
= 1, М — 1, тг = 1, Л7}, является реализацией управляющего слу¬
чайного поля. Свойство этого поля можно выбрать так, чтобы мас¬
сив (6) описывал совокупность линий границ, разделяющих изо¬
бражение на области сильновзаимодействующих элементов. Эле¬
менты, принадлежащие к разным областям, не взаимодействуют.
7
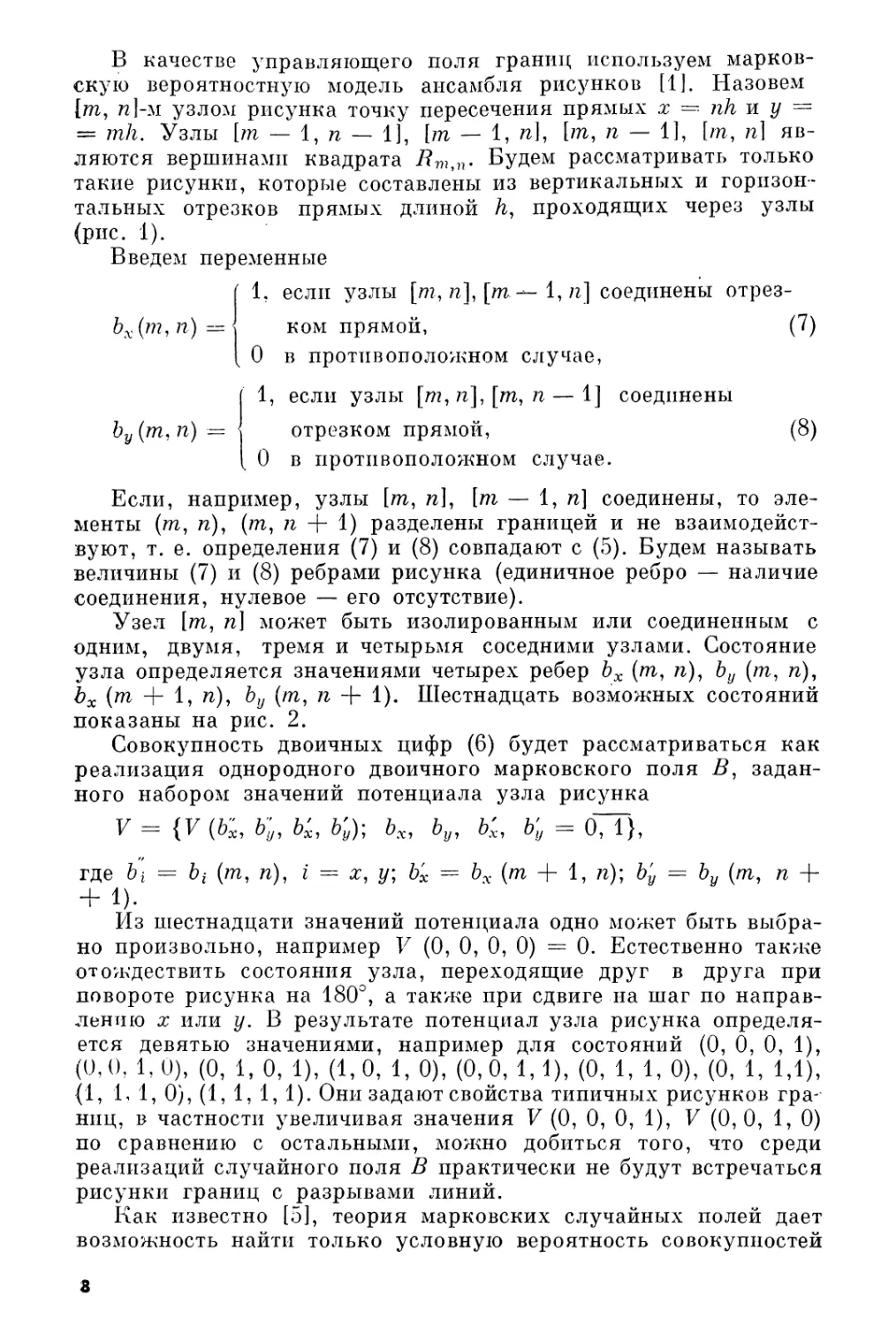
В качестве управляющего поля границ используем марков¬
скую вероятностную модель ансамбля рисунков [1]. НазовеАм
[т, п]-м узлом рисунка точку пересечения прямых х ~ nh и у —
= mh. Узлы [т — 1, п — 1], [in — 1, п}, [т, п — 1], [т, п] яв¬
ляются вершинами квадрата Вт,п- Будем рассматривать только
такие рисунки, которые составлены из вертикальных и горизон¬
тальных отрезков прямых длиной Д, проходящих через узлы
(рис. 1).
Введем переменные
Ьх (т, п) =
1, если узлы [т, /г], [т — 1, /г] соединены отрез¬
ком прямой, (7)
0 в противоположном случае,
Ъу (т, п) =
1, если узлы [zn, п\, [zn, п — Г] соединены
отрезком прямой, (8)
О в противоположном случае.
Если, например, узлы [тп, п\, [т — 1, п] соединены, то эле¬
менты (т, п), (тп, п + 1) разделены границей и не взаимодейст¬
вуют, т. е. определения (7) и (8) совпадают с (5). Будем называть
величины (7) и (8) ребрами рисунка (единичное ребро — наличие
соединения, нулевое — его отсутствие).
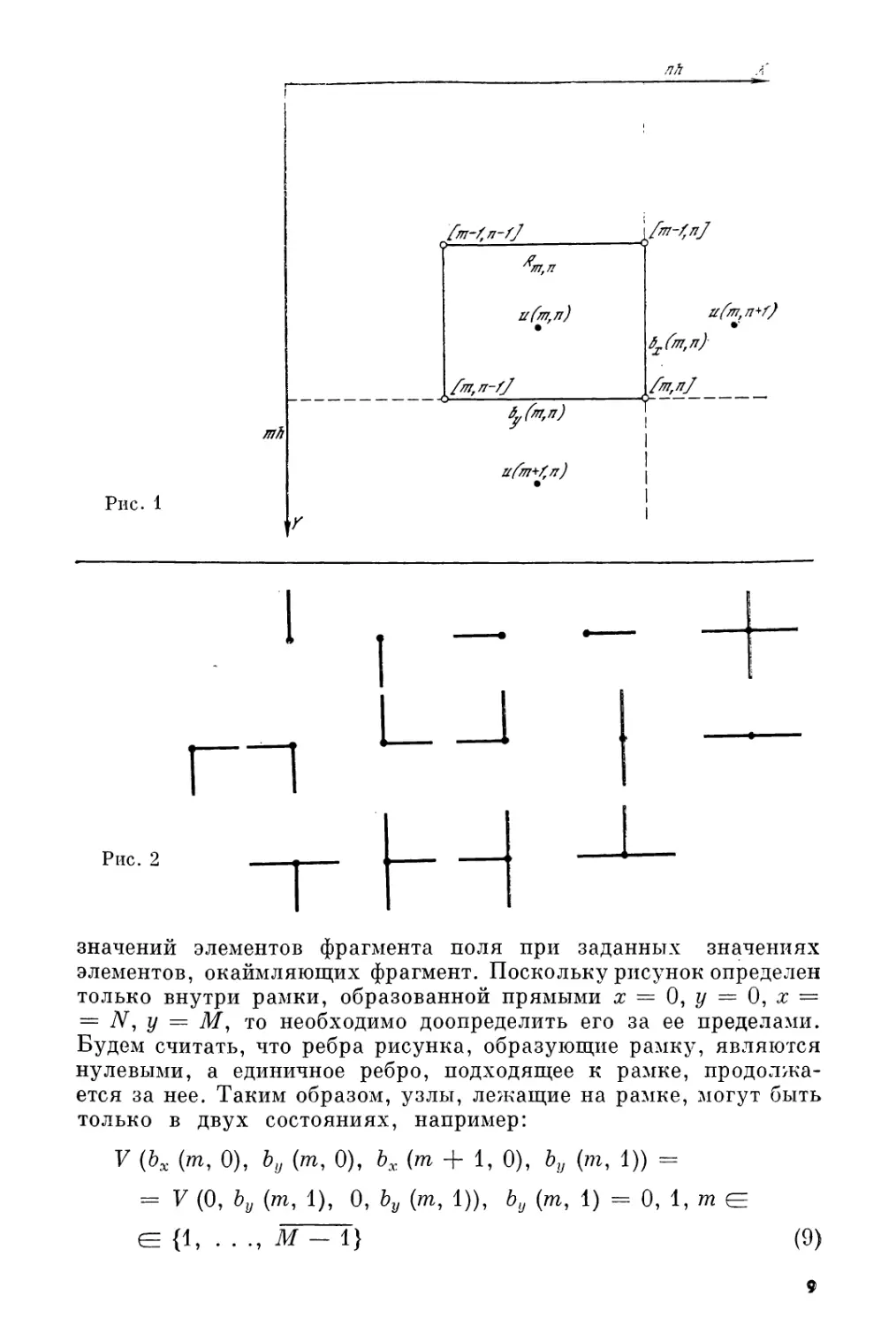
Узел [zn, п] может быть изолированным или соединенным с
одним, двумя, тремя и четырьмя соседними узлами. Состояние
узла определяется значениями четырех ребер Ьх (zn, п), Ъу (zn, га),
Ьх (т + 1, zz), Ъу (zn, п + 1). Шестнадцать возможных состояний
показаны на рис. 2.
Совокупность двоичных цифр (6) будет рассматриваться как
реализация однородного двоичного марковского поля В, задан¬
ного набором значений потенциала узла рисунка
V = {V (b'x, b’, b’, by)-, bx, by, bx, by = ОТТ},
где Ь, = bi (m, п), i = х, у; b'x = bx (т + 1, п); Ь'у = Ьу (т, п +
+ !)•
Из шестнадцати значений потенциала одно может быть выбра¬
но произвольно, например V (0, 0, 0, 0) = 0. Естественно также
отождествить состояния узла, переходящие друг в друга при
повороте рисунка на 180°, а также при сдвиге на шаг по направ¬
лению х или у. В результате потенциал узла рисунка определя¬
ется девятью значениями, например для состояний (0, 0, 0, 1),
(0,0. 1, 0), (0, 1, 0, 1), (1, 0, 1, 0), (0, О, 1J), (0,1, 1, 0), (0, 1, 1,1),
(1, 1, 1, 0), (1, 1, 1, 1). Они задают свойства типичных рисунков гра¬
ниц, в частности увеличивая значения V (0, 0, 0, 1), V (0,0, 1, 0)
по сравнению с остальными, можно добиться того, что среди
реализаций случайного поля В практически не будут встречаться
рисунки границ с разрывами линий.
Как известно [5], теория марковских случайных полей дает
возможность найти только условную вероятность совокупностей
8
nh
о
i
-^7, И
и(Уп,л)
•
^(т,л)-
/Ул,л-?/
fy,nj
и(т+?,л)
T
1
1
1
i
•
1
1
Рис. 1
значений элементов фрагмента поля при заданных значениях
элементов, окаймляющих фрагмент. Поскольку рисунок определен
только внутри рамки, образованной прямыми х = 0, у = 0, х —
= N, у = М, то необходимо доопределить его за ее пределами.
Будем считать, что ребра рисунка, образующие рамку, являются
нулевыми, а единичное ребро, подходящее к рамке, продолжа¬
ется за нее. Таким образом, узлы, лежащие на рамке, могут быть
только в двух состояниях, например:
V (Ьх (т, 0), Ъу (т, 0), bx (т + 1, 0), Ъу (in, 1)) =
= V (0, by (т, 1), 0, Ъу (т, 1)), by (т, 1) = 0,1,тЕ
е {1, . . (9)
9
или
V (bx (М, п), by (M, n), bx (M + 1, n), by (M, n + 1)) —
= V (bx (M, n), 0, bx (M, n), 0), bx (M, n) = 0, 1, n G
€= {1, . . ~N - 1}. (10)
Тогда условная вероятность рисунка
P(ft) = exp{-V у Vr„r,}/Zb, (11)
тн=0 л=0
где V„1fU = V (bx (m, n), by (m, n), bx (tn + 1, n), by (m, n + 1))
(потенциалы на рамке определяются в соответствии с краевыми
условиями (9) или (10) и аналогичных им) и
1 1 М—1 N-1
%ъ = У: • • • 3 ехр {— 3 S
Ъу(М-1,1Х)=0 \.(0,0)=0 Ш=1 п = 1
— статистическая сумма, которая берется по всем значениям ре¬
бер (7) и (8). Выражение (11) можно рассматривать как прибли¬
жение к совместной вероятности рисунка.
Обратимся теперь к случайному полю Ub, реализацией кото¬
рого является массив (3), описывающий конкретное дискретизо¬
ванное изображение. Зададим яркости элементов, окаймляющих
поле зрения, по правилу зеркального отражения от линии рамки:
и (т, 0) = и (т, 1), и(т, N + 1) = и (т, N), in = 1, М,
(12)
и (0, п) = и (1, п), и(М + 1, п) = и (М, п), п = 1, N.
В силу определений (4) потенциалы парного взаимодействия
элементов, разделенных рамкой, равны нулю.
Условная плотность вероятности совокупности яркостей (3)
при краевых условиях (12) и заданном рисунке границ Ь, которую
можно рассматривать как приближение к условной плотности
вероятности этой совокупности при заданном рисунке, равна
р (и | Ь) = ехр {— Vj (а у (it (т, и) —/)2 +
(nt,
+ рж 3 Wx(m, п) --н ру у n))}/Z(b), (13)
где t — среднее значение, одинаковое для всех элементов, и
Z (Ь) = \ ... \ ехр { . . . } du — статистический интеграл.
Таким образом, конкретное изображение, представленное мас¬
сивом (3), можно рассматривать как результат двухэтапного слу¬
чайного выбора: на первом этапе получают реализацию (6) управ¬
ляющего поля, которая определяет рисунок границ, разделяющих
невзаимодействующие области. На втором этапе «заполняют» эти
области реализацией (3) поля Ub.
Случайные поля В и Пъ в совокупности образуют иерархиче¬
скую двухуровневую вероятностную модель ансамбля изображе¬
ний кусочно почти постоянной яркости. Управляющее поле В —
10
верхний уровень модели, гаусс-одномарковское неоднородное (при
заданном рисунке) случайное поле; Ub — нижний уровень.
Имея конкретное дискретизованное изображение, мы знаем
только совокупность яркостей его элементов — массив чисел (3).
Величины (7) и (8), определяющие рисунок границ невзаимодей¬
ствующих областей, ненаблюдаемы. Сформулируем задачу выде¬
ления контуров как задачу обнаружения границ областей (линий
разрыва взаимодействия соседних элементов), т. е. статистиче¬
ского оценивания ребер (7) и (8) по совокупности наблюдаемых
яркостей.
Зная условные распределения вероятностей (И) и (13) естест¬
венно применить наиболее эффективное байесово оценивание. Апо¬
стериорная вероятность массива (6) при заданном изображении
Prs (Ъ | u) = Р (Ь) р (и I Ь)/р (и), (14)
где
Р (и) = %Р(Ъ) р(и\Ъ). (15)
ь
Используя принцип МАВ, найдем массив МАВ оценок:
b : Prs (b | и) -■ max Pps (b | и) = max Р (b) Р (и | 6), (16)
ь ь
которые описывают предполагаемый рисунок границ областей.
Чтобы выявить роль априорной информации о свойствах ри¬
сунка границ, которая содержится в распределении вероятно¬
стей (И), МАВ оценки (16) полезно сравнить с оценками макси¬
мального правдоподобия (МП):
b : Р (и \ b) = max Р (и | Ь). (17)
ь
Выделение кснтуров на основе модели. В общем случае задача
отыскания оценки Ъ состоит в переборе всевозможных комбина¬
ций ребер b = (bx, blf). Очевидно, что полный перебор неосуще¬
ствим. Поэтому надо искать способы приближения к минимуму
функции
U' (Ь | и) = -In Р (b) - In Р (и \ Ь)
при нахождении МАВ оценки, максимизирующей апостериорную
вероятность (14), или функции U" (и | Ь) = —In Р (и | Ь) при
нахождении оценки максимального правдоподобия (17) в отсут¬
ствии априорной информации о свойствах поля рисунка.
Простейший способ — поэлементный спуск — состоит в том,
что последовательно, независимо друг от друга находятся оценки
bt (т, п), считая остальные оценки ребер известными, затем эта
процедура повторяется для уточнения оценок и т. д. Пусть
найдены оценки Л-го приближения = (bx\ Оценка
Ь-'41 (m, п) на (к + 1)-м приближении должна минимизировать
U' (Ъ | й) или U" (и | Ь) при известных остальных оценках Ь^\ =
11
= \ b^ (ттг, тт). При минимизации U" (. . .) эта оценка
Ш+1),т п} ° ПР"
ui {"h п) = ']
( 1 в противоположном случае,
где
(т, п) = In (Р (и | (1, b£l))/P (и I (О, О)) =
(18)
— логарифм отношения правдоподобия альтернативных гипо¬
тез о ребре bi (ттг, п). Из определения р (и | Ь) следует, что
Р?} (т, п) = (и (т,п)_ и (т’, n')2))/2 + In (Z (0, b^)/Z (1, b(*l)),
(т/, п') = (т, п -г 1) при i = х, (mf, п') = (ттг + 1, п) при
Отношение статистических интегралов равно
D = Z (О, О / Z (1, b$) = (det В* (l)/det В1; (0))’Л,
(19)
где Вк (/) — матрица квадратичной формы (1) при bt (ттг, п) =
= В 7 = о, 1.
При минимизации U' (. . .):
г “р"е!"‘"’’Х“■
[ 1 в противоположном случае,
(20)
где
где V]v,n, VB\h' — потенциалы узлов при bt (ттг, п) = /, 7 =
= 0, 1; (ттг', п') = (т, п + 1) при i = х\ (т', п) = (ттг -j- 1,
при I = у.
Можно показать, что отношение D существенно зависит от
ребер, находящихся в небольшой окрестности оцениваемого
ребра.
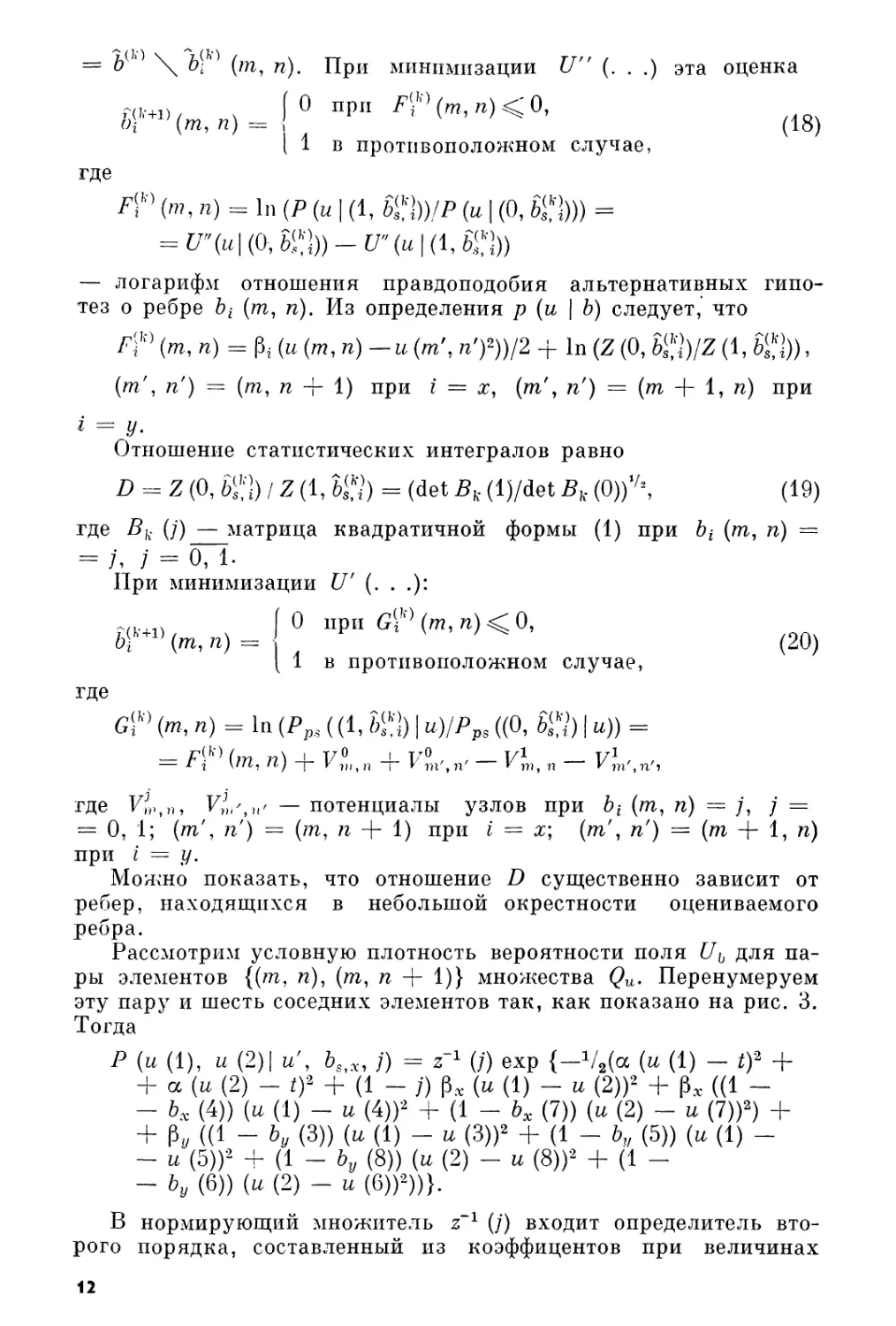
Рассмотрим условную плотность вероятности поля Ub для па¬
ры элементов {(т, ri), (/тг, тг + 1)} множества Qu. Перенумеруем
эту пару и шесть соседних элементов так, как показано на рис. 3.
Тогда
Р (и (1), и (2)1 и', bs,x, i) = z’1 (/) exp {—(и (1) — t)2 +
+ a(u (2) - t)2 + (1 - /) px (u (1) - и (2))2 + px ((1 -
- bx (4)) (u (1) - и (4))2 + (1 - bx (7)) (u (2) - и (7))2) +
+ |3y ((1 - by (3)) (u (1) - и (3))2 + (1 - by (5)) (u (1) -
- и (5))2 + (1 - by (8)) (u (2) - и (8))2 + (1 -
- by (6)) (u (2) - и (6))2))}.
В нормирующий множитель z~r (7) входит определитель вто¬
рого порядка, составленный из коэффицентов при величинах
12
Рис. 3
Wj)
i
i
I
u(4) 6xf4) \u(f) J
I
V
I
\ti(f)
\»/f)
I
f/?)
u2 (1), it2 (2), и (1) и (2), равных ax, a2 — (1 — /) px, где
<h = a + px (1 - bx (4)) + ₽y (1 - Ьу (3)) + ₽y (1 - bu (5));
a2 = a + px (1 - bx (7)) + py (1 - by (6)) +
+ |3y (1 - by (8)). (21)
Этот определитель
Det (/) = a±a2 + (1 — 7) Px («1 + a2)
и отношение статистических интегралов (19)
D = (1 + |3Х (14 + l/a2))-v2.
Если взять множество Qu, состоящим из восьми элементов
(в этом случае Qu состоит из десяти элементов), то отношение (19)
будет определяться определителями матриц восьмого порядка.
Для большинства комбинаций ребер это отношение при | Qu | =
= 8 оказалось близким к отношению при | Qu | = 2. Это же
остается справедливым и при дальнейшем расширении множества
Qu. На этом основании можно упростить выражение для (т, п),
представив его в виде
(m, п) = (и (1) — и №У2 — In (1 + ₽г- (lM4 +
+ i/4k’))),
где коэффициенты и а2‘} определяются выражениями (21) как
функции оценок ребер на Л-м приближении.
Применив правило (18) или (20) по всем ребрам, получаем
(к + 1)-е приближение Ь^+1\ Затем переходим к вычислению
оценок на (к + 2)-м шаге и т. д. до тех пор, пока при некотором
К оценки на двух соседних шагах будут отличаться на величину,
меньшую чем заданный порог. В качестве окончательной оцен¬
ки b выберем оценку Ь(К).
К сожалению, сравнительно просто реализуемая процедура
поэлементного спуска часто останавливается вдали от абсолютного
13
6Г+1) (in, п) = |
минимума, застревая в локальном минимуме. При этом ока¬
зывается зависимым от начального приближения 6<°).
Поэлементный спуск можно сделать более эффективным, если
вместо «жесткого» решения (18) или (20) ввести рандомизирован¬
ное правило оценивания ребра bt (m, н), допуская иногда «не¬
правильные» оценки, которые приводят к возрастанию миними¬
зируемой функции. В соответствии с рандомизированным реше¬
нием
0 при z, h<,
г й * (22).
1 в противоположном случае,
где zs — значение равномерно распределенной случайной величи¬
ны в диапазоне 0, 1; hs GE 10, 1] — порог. Очевидно, что вероят¬
ность решения b^+1) (т, п) = 0 равна hs; эту вероятность свяжем
с отношениями вероятностей Fi^ (т, п) и (т, п):
hs/(l — hs) = exp (m, n)},
ИЛИ
V(1 — hs) = exp {— fG^ (m, n)},
где / — положительная постоянная, управляющая выбором оцен¬
ки: при / = 1 вероятности решений равны апостериорным веро¬
ятностям значений оцениваемого ребра; при f эо правило (22)
переходит в «жесткое» правило (18) или (20); при / < (3 описан¬
ная процедура есть известный в статистической физике алгоритм
Метрополиса генерирования типичных реализаций. Как показано
в работе [6], итеративная процедура поэлементного спуска с ран¬
домизированным решающим правилом (22) приводит к минимуму
потенциальной функции гиббсовского случайного поля, если, на¬
чав со значения коэффициента /, близкого к нулю («высокая тем¬
пература»), увеличивать его от итерации к итерации, как бы
«охлаждая» физическую систему.
Разработанная теория этого метода не дает оптимальной стра¬
тегии управления коэффициентом /, неизвестно начальное значе¬
ние для / и число итераций для достижения минимума потенци¬
альной функции. При осуществлении этого метода, называемого
«annealing», была принята следующая зависимость для / (к) =
= /о (1 + ^’)-
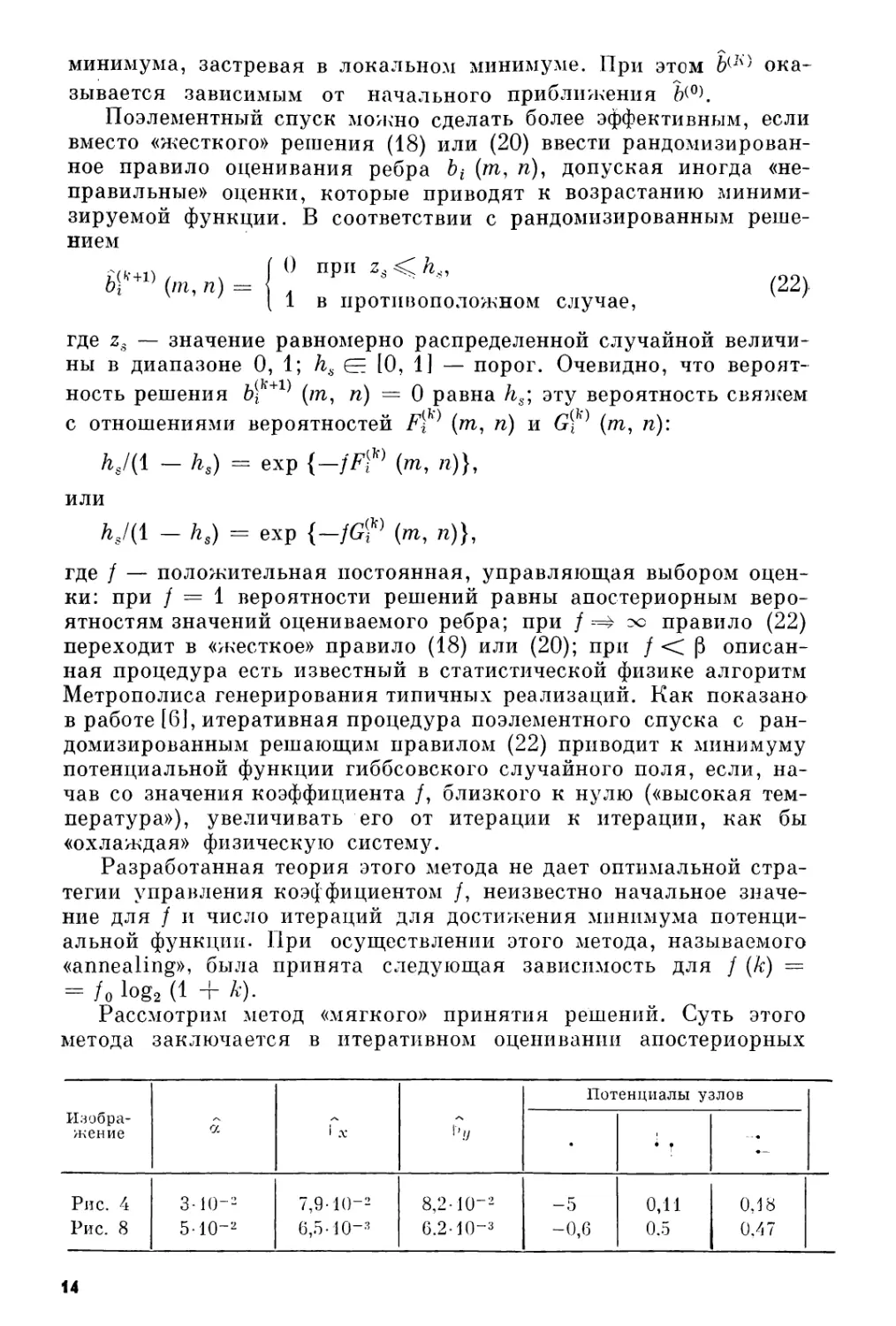
Рассмотрим метод «мягкого» принятия решений. Суть этого
метода заключается в итеративном оценивании апостериорных
Изобра¬
жение
а
1 X
1’7
Потенциалы узлов
•
* т
-
Рис. 4
Рис. 8
3-ю--
5-10-2
7,9 10-2
6,5-10-3
8,2-10-2
6.2-10-3
-5
-0,6
0,11
0.5
0,18
0,47
14
вероятностей Pps(bj (in, n) | и) ребра. Можно показать, что услов¬
ная вероятность Р (bt (т, п) = 1 | и, bSt = 1 — 1/(1 Ц-
+ exp (Gt (т, п))) определяется восемью ребрами множества bSti,
шесть из которых (см. рис. 3) отделяют пару яркостей и (1),
и (2) от шести соседних яркостей и (3), . . ., и (8), а два ух, у2
расположены между парами яркостей и (3), и (6); и (5), и (8).
При отсутствии априорной информации о поле рисунков
Р (bt (in, ri) = 1 | и, bSt t) = 1 — 1/(1 + exp (Ft (т, n)))
определяется шестью ребрами множества bSt отделяющих и (1)у
и (2) от и (3), . . ., и (8). Используя условную вероятность, по¬
лучим
Pps (bi (т, п) = 11 и) = 2j р (bi (т, п) = 11 и, bs,{) Р (bs>i | и).
bs, i
Однако для вычисления этой вероятности необходимо знать
совместное распределение вероятностей ребер множества b^ t, ко¬
торое, в свою очередь, определяется через совместное распреде¬
ление вероятностей ребер, окружающих ребра множества bSt
и т. д. Выход из этого положения состоит в принятии некоторого
предположения о совместной вероятности Р (bSt t | и). В частно¬
сти, простейшее из этих предположений состоит в принятии ги¬
потезы о независимости ребер множества bSi При таком пред¬
положении
Р' (bs, i\u) = P (ь) р (?2) р (Ьх (4)) Р (Ьх (7)) х
ХР(ЬУ (3)) Р (Ьу (5)) Р (Ьу (8)) Р (Ьу (6))
в случае МАВ оценки или
Р' (bs, i\u) = P(bx (4)) Р (bx (7)) Р (Ьу (3)) X
X Р (Ьу (5)) Р (Ьу (8)) Р (Ьу (6))
в случае МП оценки. При использовании такого предположения
получим систему уравнений
Pps Фх лг) = 1 | lz) = 2 Р (т, п) =
bs, X
■-= 11 и, bs,x) Р' (bs,x I и), (т, п) Qx, (23)
Pps (by (rn, п) = 11 и) = 3 Р (by (т, п) =
bst у
= 11 U, bs,y) Р' (bs, у I и), (т, п) е= Qy,
Потенциалы узлов
-Г т
Г
—
1 ;
--
-4
-4,8
-4,9
1,06
1,01
0.97
-9-10-3
-0.38
-0,35
3.9-Ю-2
3,5-Ю-2
3-Ю-2
15
связывающих квазивероятности всех горизонтальных и верти¬
кальных ребер. Указанное предположение приводит к грубой
оценке Р (bs, i | и) их приближением Р' (bs, i | и), но является до¬
пустимым, поскольку при расширении числа элементов множест¬
ва Qu распределение вероятностей соседних ребер по отношению
к ребрам, разделяющим элементы множества Qa, распадается
в большинстве случаев на статистически независимые группы
ребер. Решая систему уравнений (23) итеративным способом, по¬
лучим оценки квазивероятностей и определим оценки ребер в со¬
ответствии с правилом
£ I 1 при = l|u)>0,5,
bi (т, п) = (24)
( 0 в противоположном случае.
Выделение контуров при неполной информации о свойствах
ансамбля изображений. Распределение апостериорных вероят¬
ностей рисунков зависит от набора параметров, характеризующих
модель поля В и гаусс-одномарковское поле. Обычно на практике
они неизвестны заранее, в этом случае следует использовать
адаптивное байесово оценивание, когда наряду с рисунком сле¬
дует оценить неизвестные параметры U и as, где U — набор па¬
раметров модели рисунка и as = (а, [Зх, р^) — набор параметров
гауссова поля. В этом случае Р (Ъ, и | as, U) = Р (b \ U) р (и \ as, Ь)
и адаптивное байесово оценивание будет состоять в том, чтобы
одновременно с МАВ оценкой рисунка искать и МП оценки
параметров:
Ъ, U, ag: Р (b,u I as, U) = max Р (Ь, и I а,(7). (25)
Определение оценок (24) можно реализовать как итеративную
процедуру. Сначала задаются произвольные значения параметров
и а^0) и одним из рассмотренных методов находится МАВ
оценка:
й(1): Р (5(1) | и. U{0\ = max Pps (& | и. £7(0), с^0)).
ъ
Затем используют найденное приближение к рисунку для МП
оценивания параметров:
(7(1) : Р (fed) | (?(!)) = max Р | (7),
и
ccd) : Р (и \ Ь^\ бс<1}) = max Р (и | а5).
С найденными оценками параметров уточняется оценка ри¬
сунка и т. д.
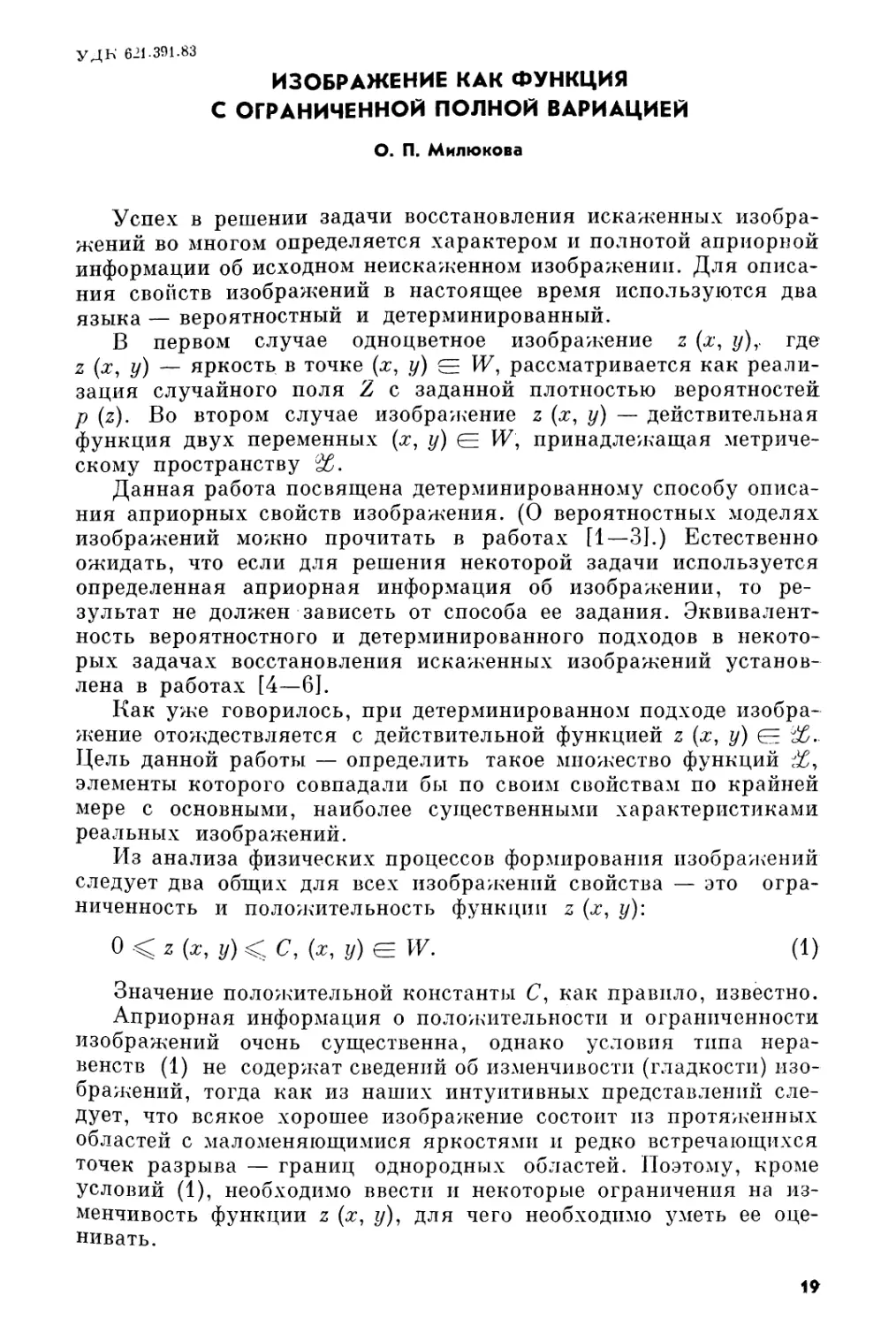
Реализация методов выделения контуров. Рассмотренные ите¬
ративные процедуры поиска оценок рисунка были осуществлены
посредством цифровой системы обработки изображений. На рис. 4
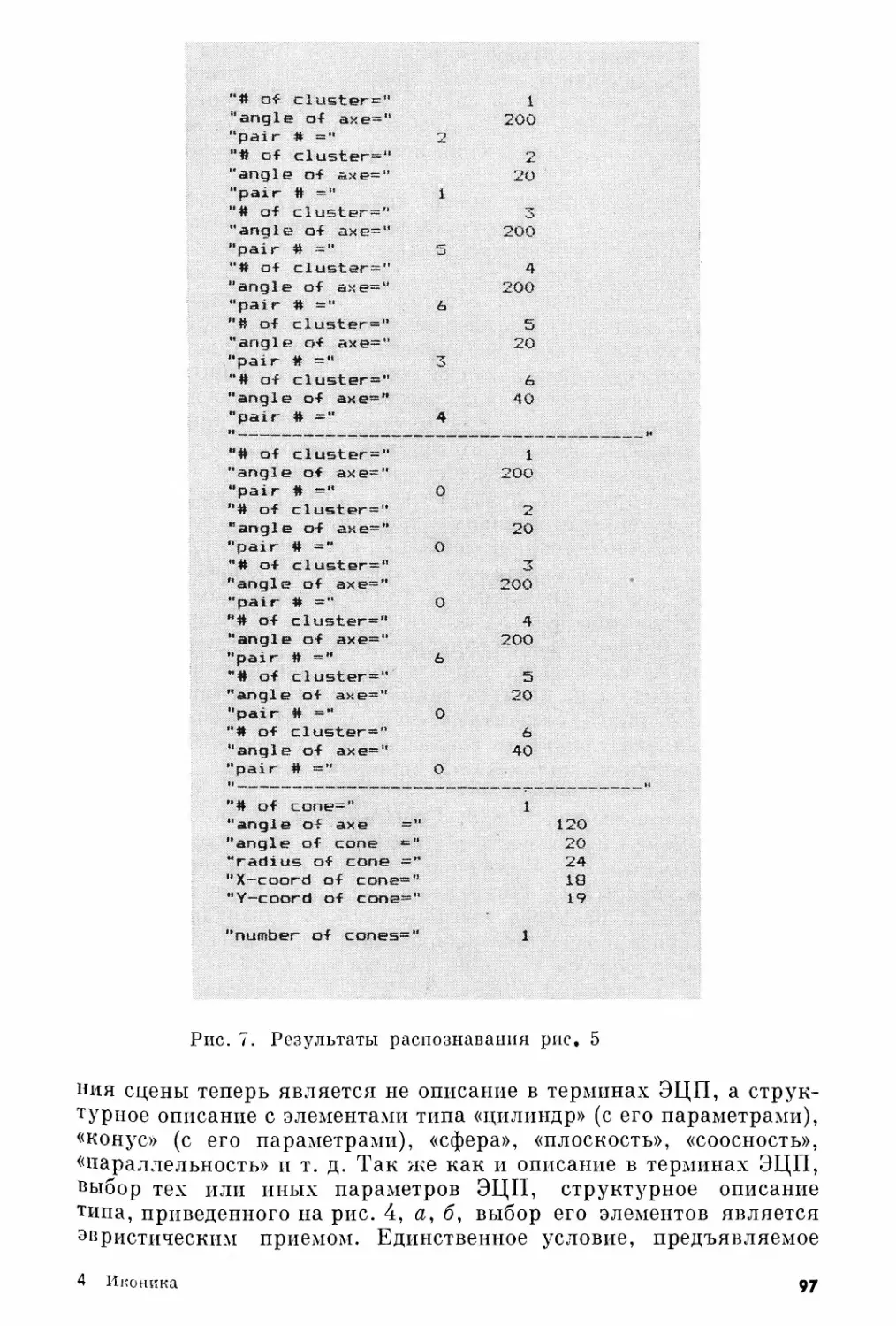
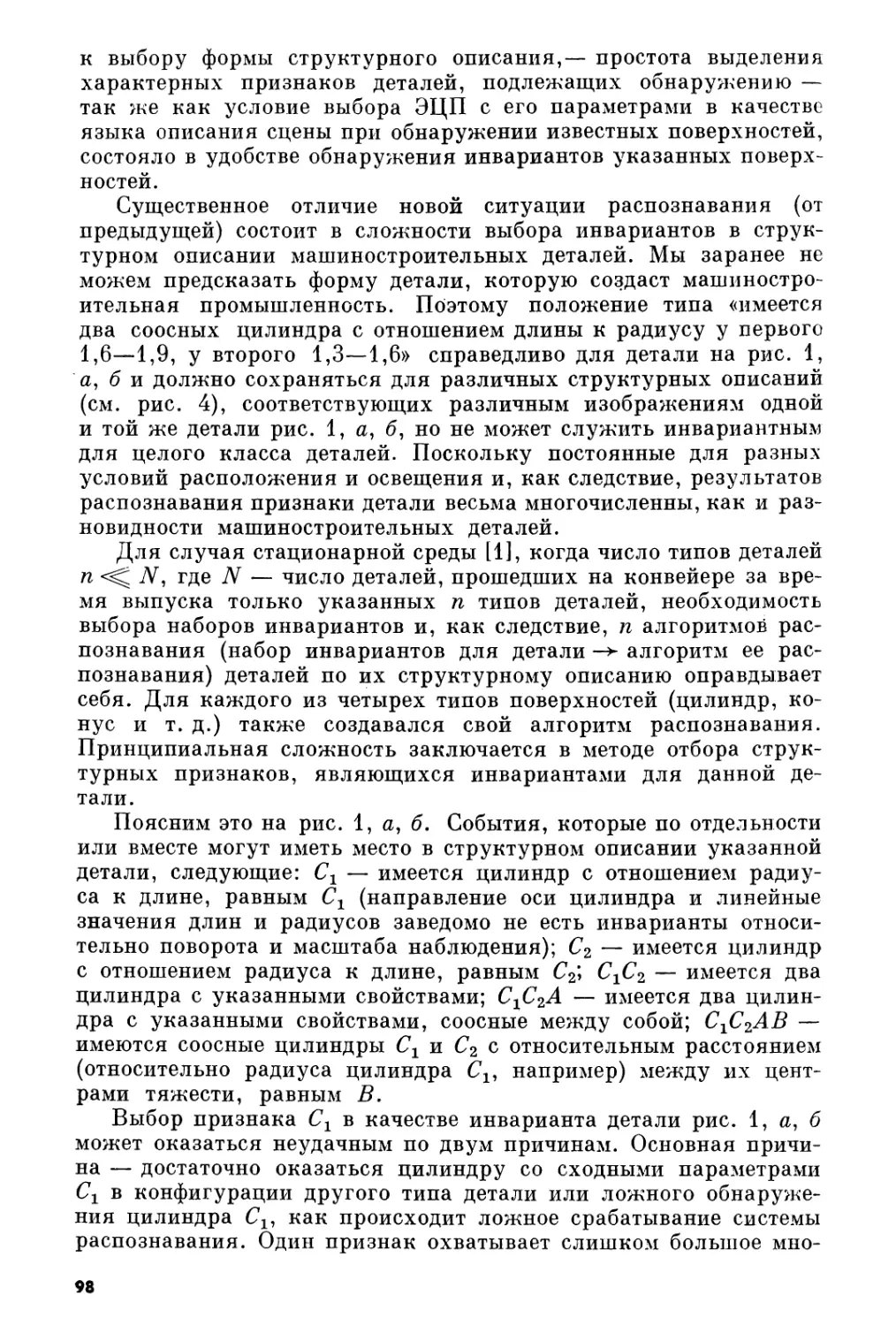
показано тестовое изображение, на рис. 5—7 приведены резуль-
16
Рис. 4
Рис. 5
Рис. 8
Рис. 6
Рис. 7
Рис. 9
Рис. 10
таты оценивания рисунка фрагмента тестового изображения с по¬
мощью процедуры «жесткого» решения (покоординатный спуск),
процедуры «annealing» и результат применения «мягкого» решения.
Оценки параметров используемых моделей были заранее неиз¬
вестны. Для оценивания U и as использовались процедуры, отли¬
чающиеся по своей простоте от (25), а именно: для оцени¬
вания U — метод у2-квадрат близости условиях вероятностей
Р (5?- (/п, /?) | i) и их оценок Р (bt (пг, п) \ а для оценива¬
ния параметров а5 — метод оценки, предложенный в работе [7].
На основе проведенных экспериментов можно сделать вывод
о том, что лучшим методом в отношении критерия вероятности
ошибки является метод «мягкого» решения с итеративным оцени¬
ванием вероятностей состояний ребер. Однако его реализация
требует больших затрат машинного времени. Возможные упро¬
щения алгоритма можно достичь, используя соображения моно¬
тонности Р (bt (пг, т?) = 1 | и, i) как функции состояний ребер
множества bSfi. Результат применения процедуры «мягкого» ре¬
шения для реального изображения рис. 8 приведен на рис. 9.
Оценки параметров приведены в таблице см. сгр. 14, 15.
На рис. 10 приведено контурное изображение, полученное
сравнением разности яркостей соседних элементов с постоянным
порогом, не зависящим от ребер множества bSii. В этом случае
не используется информация, заложенная в рассмотренных моде¬
лях. Сравнение вероятностей ошибок показывает, насколько вве¬
дение априорной информации позволяет улучшить качество оце¬
нивания. В работе проводилось моделирование методов выделения
контуров в соответствии с процедурой (18), т. е. без учета модели
рисунка. В этом случае эффективность выделения контурного
рисунка оказалась ниже по сравнению с результатами моделиро¬
вания при использовании этой модели.
ЛИТЕРАТУРА
1. Лебедев Д. С., Новиков В. М. Марковская вероятностная модель рисун¬
ка/7 Лебедев Д. С., Безрук А. А., Новиков В. М. Марковская вероят¬
ностная модель изображения и рисунка: Препринт. М.: Ин-т пробл.
передачи информ. АН СССР. 1983. С. 31—39.
2. Derin Н. Segmentation of textured images using Gibbs random fields //
Comput. Vision, Graph, and Image Process. 1986. Vol. 35, N 1. P. 72—98.
3. Лебедев Д. С. Иерархические вероятностные модели ансамбля сложных
изображений /■ Автоматизированные системы обработки изображений
(АСОИз-86): Тез. докл. II Всесоюз. конф. Львов, 1986. С. 29—30.
4. Террайи Ч. У., Куатьери Т. Ф., Даджон Д. Е. Алгоритмы анализа изо¬
бражений, основанные на статистических моделях // ТИИЭР. 1986.
Т. 74, № 4. С. 4-25.
5. Аверинцев А/. Б. Об одном способе описания случайных полей с дискрет¬
ным аргументом// Пробл. передачи информ. 1970. Т. 6, № 2. С. 100 —108.
6. Kirkpatrick S., Gellat С. D., Vechni М. Р. Optimization by simulated
annealing /7 Science. 1983. Vol. 220. P. 671—680.
7. Безрук А. А. Измерения параметров марковской модели изображения //
Лебедев Д. С., Безрук А. А., Новиков В. М. Марковская вероятностная
модель изображения и рисунка: Препринт. М.: Ин-т пробл. передачи
информ. АН СССР. 1983. С. 15—30.
18
УДК 621-391.83
ИЗОБРАЖЕНИЕ КАК ФУНКЦИЯ
С ОГРАНИЧЕННОЙ полной вариацией
О. П. Милюкова
Успех в решении задачи восстановления искаженных изобра¬
жений во многом определяется характером и полнотой априорной
информации об исходном неискаженном изображении. Для описа¬
ния свойств изображений в настоящее время используются два
языка — вероятностный и детерминированный.
В первом случае одноцветное изображение z (х, у)г где
z (х, у) — яркость в точке (х, у) ЕЕ W, рассматривается как реали¬
зация случайного поля Z с заданной плотностью вероятностей
р (z). Во втором случае изображение z (х, у) — действительная
функция двух переменных (х, у) ЕЕ W, принадлежащая метриче¬
скому пространству ££.
Данная работа посвящена детерминированному способу описа¬
ния априорных свойств изображения. (О вероятностных моделях
изображений можно прочитать в работах [1—3].) Естественно
ожидать, что если для решения некоторой задачи используется
определенная априорная информация об изображении, то ре¬
зультат не должен зависеть от способа ее задания. Эквивалент¬
ность вероятностного и детерминированного подходов в некото¬
рых задачах восстановления искаженных изображений установ¬
лена в работах [4—6].
Как уже говорилось, при детерминированном подходе изобра¬
жение отождествляется с действительной функцией z (х-, у) ЕЕ Й5.
Цель данной работы — определить такое множество функций
элементы которого совпадали бы по своим свойствам по крайней
мере с основными, наиболее существенными характеристиками
реальных изображений.
Из анализа физических процессов формирования изображений
следует два общих для всех изображений свойства — это огра¬
ниченность и положительность функции z (х, у):
О < z (х, у) < С, (х, у) е W. (1)
Значение положительной константы С, как правило, известно.
Априорная информация о положительности и ограниченности
изображений очень существенна, однако условия типа нера¬
венств (1) не содержат сведений об изменчивости (гладкости) изо¬
бражений, тогда как из наших интуитивных представлений сле¬
дует, что всякое хорошее изображение состоит из протяженных
областей с маломеняющимися яркостями и редко встречающихся
точек разрыва — границ однородных областей. Поэтому, кроме
условий (1), необходимо ввести и некоторые ограничения на из¬
менчивость функции z (х, ?/), для чего необходимо уметь ее оце¬
нивать.
19
Изменение (в частном случае — гладкость) изображения оце¬
нивается обычно с помощью функционала (обозначим его Q (2)),
который строится на основе различных предположений.
Рассмотрим сначала одномерный случай, когда изображение
z (х, у) зависит от одной из переменных, например от х, при про¬
извольном фиксированном у GE [с, d].
При этом упомянутые интуитивные представления о свойствах
реальных изображений совпадают с такими свойствами действи¬
тельной функции z (х), как ограниченность на [а, и существо¬
вание на [а, Ъ] конечного числа точек разрыва 1-го рода. Именно
этими свойствами — ограниченностью и наличием счетного числа
точек разрыва первого рода — обладают функции, определенные
на [а, £>] и принадлежащие классу функций V la, М, т. е. классу
ь
функций с ограниченной полной вариацией V (z),
а
Ъ п
где V (z) = sup 2 I 2 (*>.•) — 2 I’ (2)
a К —2
a = xr < x2 < . . . < xu = b — произвольная система точек из
la, Ь].
ь
Функции с ограниченной полной вариацией V (z) образуют
очень широкий класс функций. В то же время эти функции обла¬
дают разнообразными и важными для приложений свойствами,
такими, например, как существование конечной производной
z' (х) почти в каждой точке [а, 6], представимость таких функций
в виде разности двух неубывающих функций и т. д. Особенно¬
стью функции z (х) с ограниченной на [а, Ъ] вариацией является
также справедливость разложения
z И = ф И + (3)
где ф (х) — непрерывная на [a, функция; 5 (х) — функция скач¬
ков [7]. Это разложение единственно. Причем
1/(з) = У(ф) + П^-
а а а
Представление (3) полностью совпадает с широко используе¬
мым на практике модельным описанием изображения, при кото¬
ром последнее разлагается на непрерывную медленноменяющую-
ся составляющую и контур. Такое разложение позволяет строить
эффективные алгоритмы обработки изображений, в частности при
кодировании.
Норма элемента z в пространстве V [a, выражается через
полную вариацию (2):
II z llvta.b] I 2 (а) I + V (2) = z{a) + V (Ф) + V (s). (4)
а а а
20
Из предположения о принадлежности изображения z (.г)
к классу функций V [а, Ь] следует, что, например, при решении
задачи восстановления методом регуляризации [51 стабилизирую¬
щий функционал Q (z) естественно полагать равным норме (4):
Q (z) = || Z ||v £а, b]‘ (5)
Такой выбор функционала Q (z) приводит к весьма хорошим
результатам восстановления искаженных изображений [5, 61. Од¬
нако из этих же результатов видно, что существенный недостаток
представления (5) — его одномерность. Очевидно, что никакой
одномерный функционал не может достаточно полно описать свой¬
ства реального изображения, которое двумерно.
Поэтому естественно использовать обобщенное на двумерную
функцию z (х, у) понятие полной вариации (2). К сожалению,
все попытки ввести один функционал, ограниченность которого
обеспечивала бы наличие у функции z (х, у) свойств, аналогичных
всем свойствам одномерной функции z (х) с ограниченной вариа¬
цией, оказались неудачными. Ограниченность традиционных дву¬
мерных вариаций (вариаций Арцеля, Витали, Фреше, Харди и
т. д.) обеспечивает наличие довольно бедного списка свойств функ¬
ции z (х, у) [8] по сравнению с одномерной функцией ограничен¬
ной вариации.
Приведем два наиболее простых примера определения вариа¬
ции функции двух переменных z (х, у), заданной на прямоуголь¬
нике jb = [а, 5] X [с, d).
Вариация Витали
Пусть xt и z/7- (г = 1,2,. . ., Z; 7 = 1,2,. . ., т) — числа, такие,
что а = Zj < х2 < . . . < Xi = b; с = <С У-2 < У™ = d.
.Положим <Pj = z (z,+1, yj+1) 4- Z (xh yt) — Z (xh yJ+1) — z (xi+v yj).
Тогда вариацией Витали функции z (х, у) на SD называется точ-
ная верхняя грань
1—1 гп—1
V (z, ®) = sup S I <pj I
ц™, (хЦ, {Uj} i=l j=l
по всем Z, m и всевозможным наборам чисел xt и yj (i = 1, 2, .’. .
. . Z; 7 = 1, 2, . . ., m).
Вариация Тонелли
Полная вариация функции z (х, у) в смысле (2)] на отрезке
€ У d при фиксированном х обозначается
V == var z (х, у)
и на отрезке а х b при фпксированнохм у:
vz (у) = var z (х, у).
a
Пусть функция z (х, у) такова, что V\ (х) и V; (у) измеримы по
Лебегу на [а, 5] и [с, d] соответственно.
21
Тогда функционал
Ъ (1
т (z, 3)) = $ г ? (*)dx + J (у) АУ <6)'
а с
называется вариацией Тонелли [8]. Класс функций, имеющих
ограниченную вариацию Т (z, 3) оо на прямоугольнике Зг
обозначают через Т (3).
На примере функционала Т (z, 3) рассмотрим возможность
использования полной вариации двумерной функции z (х, у)
в задаче восстановления 15]. Предположим, что идеальное изо¬
бражение z (х, у) принадлежит классу функций Т (3). Обоснован¬
ность этого предположения вытекает из приведенных рассуждений
ь
об ограниченности одномерной полной вариации V (z) изобра-
а
жения z (х) при любом фиксированном у ЕЕ |с, d], а значит, огра¬
ниченности функций V- (х) и V\ (у) на [а, 6] и |с, d\ соответственно.
В качестве функционала Q (z), оценивающего изменчивость
функции z (х, у) ЕЕ Т (®) на прямоугольнике <39, так же как и
в одномерном случае, естественно положить
ЙТ (z) = Т (z, Ж). (7)=
Если предположить непрерывность изображения z (х, у), тЦ
смысл задания функционала (z) в виде (7) становится весьма
наглядным, так как из теоремы Тонелли следует, что для того,
чтобы непрерывная поверхность f = z (х, у), (х, у) ЕЕ 3 имела
конечную площадь, равную S (z, 3)), необходимо и достаточно,
чтобы функция z (х, у) имела конечную вариацию Тонелли Т (z,.
3) на 3) 18|. При этом
5(z,®) > jjjj + +(^) ] '' dxdy = L{z,X).
Для того чтобы S (z, ®)=7L(z, необходимо и достаточно,
чтобы функция z (х, у) была абсолютно непрерывной на 3.
Из сказанного следует, что дополнительное требование непре¬
рывности изображения z (х, #), ЕЕ Т (3) дает возможность выра¬
зить функционал качества Q (z) через площадь поверхности изо¬
бражения f = z (х, у), положив, например:
QT (z) = 5 (z, 3). (8)
Тогда оптимально восстановленное изображение z* [5] можно
интерпретировать как изображение с наименьшей площадью
поверхности /* = z* (х, у).
По-видимому, наиболее плодотворное определение многомер¬
ных вариаций — это определение, основанное на использовании
вариаций множества. Впервые такой подход был предложен
А. С. Кронродом [9]. Им же было обосновано следующее утвержде¬
ние: функция к переменных характеризуется к функционалами
22
(вариациями), которые в некотором смысле независимы и опи¬
сывают ^-мерные свойства функции.
Следовательно, функция двух переменных z (х, у) должна
характеризоваться двумя функционалами.
Для действительной функции двух переменных, заданной и
измеримой по Лебегу на прямоугольнике 2), вариацией (z)
порядка к (к = 1, 2) на 2) называется число
оо
(z)= J Vn^ejdt, (9)
— оо
где обозначает (к — 1)-ю вариацию множества et =
= {(<£, У) : у) ЕЕ 3D, z (х, у) = t}, а интеграл понимается
в смысле Лебега.
Функция z (х, у) называется функцией ограниченной вариа¬
ции, если вариации всех порядков у нее конечны.
Линейной вариацией функции z (х, у), заданной на 2), назы¬
вается функционал
оо
(10)
— оо
где нулевая вариация множества et — число компонент множест¬
ва et (уровня t функции z (х, у)).
Плоской вариацией функции z (х, у) на D называется функцио¬
нал
оо
V2 (2) = J V^dt, (11)
ОС
где вариация первого порядка Vx (et) множества et — длина (по
Хаусдорфу) множества et.
В работе [9] показано, что Vo (et) и V± (et) как функции t изме¬
римы по Лебегу.
Функции с конечными вариациями (10) и (11) обладают свой¬
ствами, аналогичными свойствам функции одной переменной
z (х) ЕЕ V [а, в], а именно: почти всюду у них есть полный диф¬
ференциал, почти всюду к ним сходится их ряд Фурье, они раскла¬
дываются в разность двух монотонных функций и т. д. [9].
Полагая изображение z (х, у) принадлежащим классу функций
К (S)) с ограниченными вариациями в смысле (9), функционал
Q (z), измеряющий изменчивость изображения, можно опреде¬
лить через полную вариацию функции z (х, у) ЕЕ К (3)) как
Й (z) = V, (z) + V2 (z). (12)
Однако применение функционала Q (z), заданного в общем
виде (12), в реальных задачах восстановления представляется
труднореализуемым.
Для оценки изменчивости изображений удобнее использовать
общие смысловые характеристики вариаций множества 18].
23
Так, например, линейная вариация множества есть формаль¬
ное выражение .интуитивного понимания длины множества: для
всякого отрезка его линейная вариация равна длине этого отрез¬
ка, для всякой гладкой дуги линейная вариация равна ее длине.
Аналогично для всякой достаточно гладкой поверхности плоская
вариация равна площади этой поверхности и т. д.
В частности, для непрерывно дифференцируемой на 55' функ¬
ции z (.г, z/):
6 а
= И I 8Tad 2 I dZ
а с
Нулевая вариация множества — его топологическая, а не мет¬
рическая характеристика, не изменяющаяся даже при гомеомор¬
физмах этого множества. Линейная вариация равномерно растя¬
нутого в к раз раз множества равна линейной вариации исходно¬
го множества, умноженной на к, а плоская вариация при таком
растяжении равна плоской вариации исходного множества, ум¬
ноженной на к2 [8].
Из сказанного следует, что, например, для контурного изо¬
бражения I ЕЕ 20 функционал Q (z) можно определить как длину
d (Z, 55) контура 1: Q (Z) = d (Z, 55), а для полутонового изобра¬
жения, так же как и при использовании вариации Тонелли (6)л
функционал Q (z) можно положить равным площади S (z, X)
поверхности / = z (х, у) (8).
Если предположить непрерывную дифференцируемость z (хг
у) на 5>, то
Ъ d
Q (2) = И Igrad 2 Idrdy’
а с
В случае, когда изображение z (х, у) представимо в виде суммы
контурной и гладкой составляющих, аналогично представлению
(3) функционал Q (z) можно записать как сумму
Q (z) = d + 5 (z,55),
по смыслу сопоставимую с (4).
Рассмотренные способы задания функционала Q (z), измеря¬
ющего гладкость изображения, через его вариации приводят
к нелинейным алгоритмам, что существенно усложняет задачу
обработки изображений.
В заключение отметим, что в настоящее время, несмотря на
огромное количество работ, не существует единого оптимального
метода восстановления искаженных изображений. Практика,
однако, убеждает, что успех в решении этой, как и всякой другой,
некорректно поставленной, задачи обеспечивается имеющейся
априорной информацией об идеальном изображении и шуме.
Важно поэтому отыскать простой адекватный способ описания
основных свойств изображения и шума на формальном языке.
24
При решении задачи приходится учитывать также и такие вто¬
ростепенные факторы, как объем обрабатываемых данных и реа¬
лизуемость алгоритмов восстановления современными вычисли¬
тельными средствами. Это, в частности, приводит к необходимости
создавать эффективные методы дискретной аппроксимации задачи,
которые позволяли бы использовать минимальный объем данных
для достижения требуемой точности решения.
ЛИТЕРАТУРА
1. Прэтт У. Цифровая обработка изображений. М.: Мир, 1982. Т. 1.3101 с.;
Т. 2. 480 с.
2. Лебедев Д. С. Упругая модель изображения И Кодирование и обработка
изображений. М.: Наука, 1988. С. 61—68.
3 Чочиа И. А. Двухмасштабная модель изображения//Там же. С. 69 —
86.
4. Лебедев Д. С., Милюкова О. П. Сравнение линейных методов восстанов¬
ления искаженных изображений И Цифровая обработка сигналов и ее
применение. М.: Наука, 1981. С. 78—86.
5. Милюкова О. Г1. Применение метода регуляризации в задачах восстанов¬
ления искаженных изображений // Иконика: Теория и методы обработ¬
ки изображений. М.: Наука, 1983. С. 12—20.
6. Лебедев Д. С.. Милюкова О. П. Восстановление изображения на основе
марковской вероятностной модели//Там же. С. 21—31.
7. Натансон- И. П. Теория функций вещественной переменной. М.: Наука,
1974. 480 с.
8. В итушкин- А. П. О многомерных вариациях. М.: Гостехтсорнздат, 1955.
138 с.
9. Кронрод А . С. О функциях двух переменных И Успехи мат. наук. 1950.
1. 5, № 1. С. 24 — 134.
'.УДК G21.39J.8 7:681.3.05
ВЕРОЯТНОСТНАЯ МОДЕЛЬ КОНТУРНОГО
ИЗОБРАЖЕНИЯ
П. А. Чочиа
Традиционный подход к описанию изображения, используе¬
мый в задачах сегментации, распознавания, анализа сцен и ряде
других задач, основывается на представлении изображения как
совокупности некоторого множества связных областей, каждая
из которых обладает какими-то свойствами, отличающими ее от
соседних областей; при этом контурами называются границы
между областями (см. 1.1— 31). В дальнейшем не будем касаться
свойств самих областей, а остановимся на рассмотрении контуров.
В связи с этим для упрощения терминологии везде под словом
«изображение» будем понимать контурное изображение, представ¬
ляющее собой двумерный бинарный сигнал х (и, и), принимаю¬
щий значения 1 в контурных и 0 в остальных точках.
Возможность описания произвольного контурного рисунка
(контурного препарата, полученного обработкой реального изо¬
25
бражения) отрезками прямых линий обсуждается в работе 14],.
где предлагается приблизить кривую линию последовательностью
линейных сегментов. Для этого на кривой следует отметить точки
высокой кривизны, которые затем соединить прямыми линиями.
Приемлемость такого подхода подтверждается работой 15], в ко¬
торой приводится пример построения рисунка, согласно данному
правилу.
В работах |6—8] рассмотрены модели, учитывающие контуры
лишь двух направлений — горизонтальные и вертикальные.
Хотя и говорится, что любой контур можно приблизить отрезками
горизонтальных и вертикальных линий, тем не менее ясно, что
статистические свойства протяженных вертикальных и горизон¬
тальных линий по сравнению с протяженными наклонными будут
совершенно различными.
Общая постановка модели. Вероятностная модель контурного
изображения описывает изображения со следующими свойствами:
изображение состоит из прямых линий, которые могут иметь
произвольные направления, но не могут иметь обрывов (т. е.
каждая линия должна начинаться и заканчиваться либо соеди¬
нением с какими-то другими линиями, либо на границах изобра¬
жения);
изображение является однородным и изотропным, т. е. его
статистические свойства не зависят от выбранной точки или на¬
правления;
статистические свойства изображения определяются конечным
числом параметров.
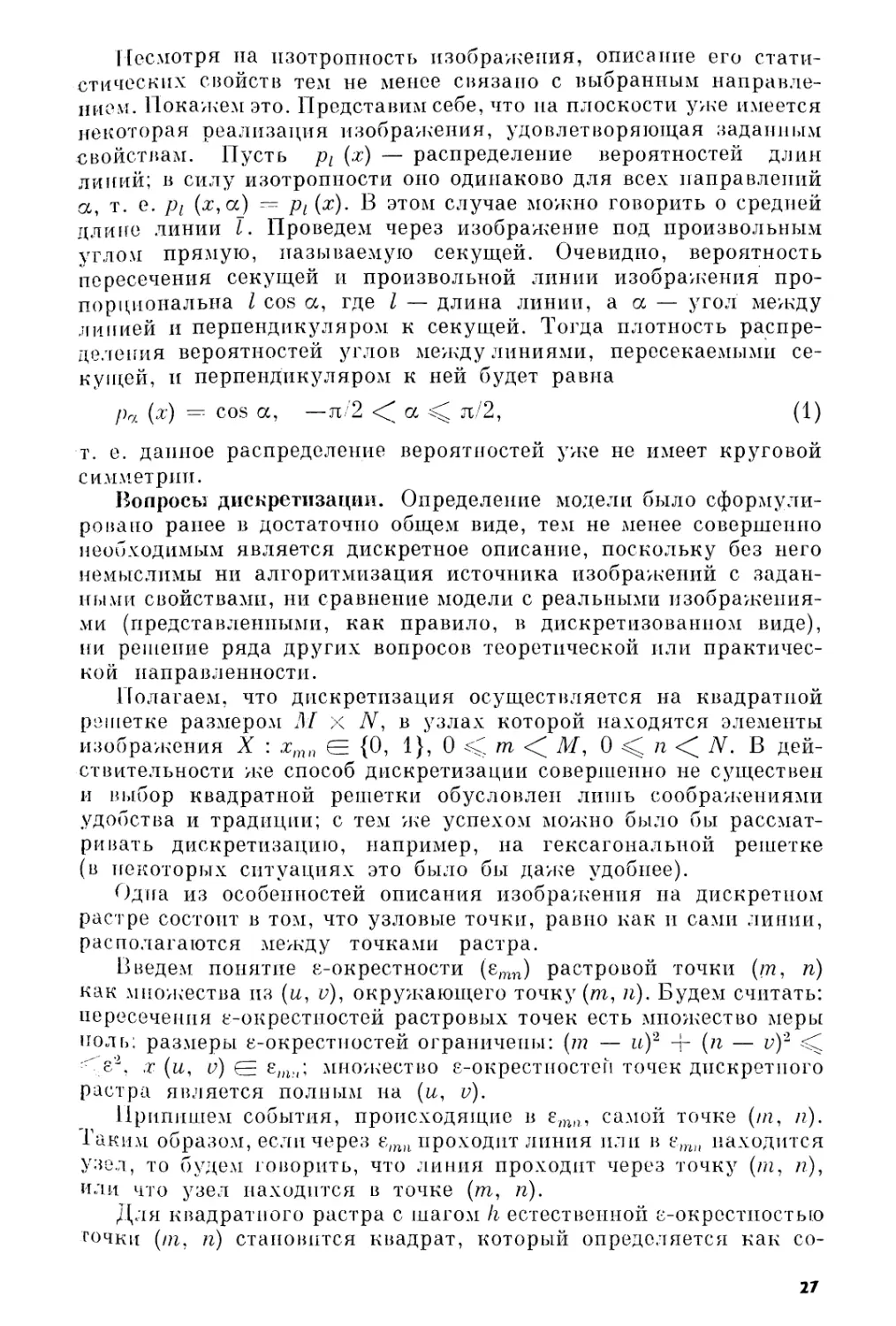
Рассматривая всевозможные соединения линий, становятся
очевидными следующие базовые конфигурации, показанные на
рис. 1. Будем называть точку изображения, в которой происходит
излом (2—5) или стык нескольких линий (6—9), узловой точкой
(узлом). Назовем узлы, в которых соединяются две, три или
четыре линии, узлами Z, Y и X соответственно. В принципе на
изображении можно допустить и более сложные узлы, в которых
сходятся пять или большее число линий, однако можно считать,
что вероятности таких узлов ничтожно малы (или что их можно
представить как объединения нескольких близко расположенных
узлов типа Y или X), а поэтому ограничимся представленными
конфигурациями.
Аналогичный набор возможных конфигураций узлов, несколь¬
ко расширенный за счет рассмотрения ряда частных случаев, на¬
пример узлов типа Г, А и некоторых других, приводится в работах
13, 9—11] для решения задачи анализа сцеп по контурным рисун¬
кам.
Используя другой подход, изображение можно рассматривать
как совокупность множества узловых точек па плоскости и соеди¬
няющих их прямых линий, возможные варианты проведения
которых определяются набором условных вероятностей узлов.
Прямую, проходящую от одного узла до другого, назовем линией
изображения (в дальнейшем просто «линия»).
26
Несмотря па изотропность изображения, описание его стати¬
стических свойств тем не менее связано с выбранным направле¬
нием. Покажем это. Представим себе, что па плоскости уже имеется
некоторая реализация изображения, удовлетворяющая заданным
свойствам. Пусть pt (.г) — распределение вероятностей длин
линий; в силу изотропности оно одинаково для всех направлений
а, т. е. pi (я, а) pi (х). В этом случае можно говорить о средней
длине линии I. Проведем через изображение под произвольным
углом прямую, называемую секущей. Очевидно, вероятность
пересечения секущей и произвольной линии изображения про¬
порциональна I cos а, где I — длина линии, а а — угол между
линией и перпендикуляром к секущей. Тогда плотность распре¬
деления вероятностей углов между линиями, пересекаемыми се¬
кущей, и перпендикуляром к ней будет равна
Ра (х) =-■ cos ос, —л/2 <Г а С л/2, (1)
т. е. данное распределение вероятностей уже не имеет круговой
симметрии.
Вопросы дискретизации. Определение модели было сформули¬
ровано ранее в достаточно общем виде, тем не менее совершенно
необходимым является дискретное описание, поскольку без него
немыслимы ни алгоритмизация источника изображений с задан¬
ными свойствами, ни сравнение модели с реальными изображения¬
ми (представленными, как правило, в дискретизованном виде),
ни решение ряда других вопросов теоретической или практичес¬
кой направленности.
Полагаем, что дискретизация осуществляется на квадратной
решетке размером М х 7V, в узлах которой находятся элементы
изображения X : хтп ЕЕ {0, 1}, 0 </ иг М, 0 п <Д N. В дей¬
ствительности же способ дискретизации совершенно не существен
и выбор квадратной решетки обусловлен лишь соображениями
удобства и традиции; с тем же успехом можно было бы рассмат¬
ривать дискретизацию, например, на гексагональной решетке
(в некоторых ситуациях это было бы даже удобнее).
Одна из особенностей описания изображения на дискретном
растре состоит в том, что узловые точки, равно как и сами линии,
располагаются между точками растра.
Введем, понятие е-окрестности (enm) растровой точки (щ, п)
как множества из (и, у), окружающего точку (т, п). Будем считать:
пересечения е-окрестностей растровых точек есть множество меры
ноль; размеры е-окрестностей ограничены: (т — и)2 + (п — и)2
е’2, х (и, (?) ЕЕ множество е-окрестностеп точек дискретного
растра является полным на (и, и).
Припишем события, происходящие в ewn, самой точке (/и, /г).
Таким образом, если через е/па проходит линия пли в находится
узел, то будем говорить, что линия проходит через точку (т, /?),
или что узел находится в точке (ш, п).
Для квадратного растра с шагом /ъ естественной с-окрестиостью
точки (//г, п) становится квадрат, который определяется как со-
27
Рис. 1. Конфигурация
узловых точек
J — линия без излома; 2—
5 — изломы; 2,3 — узел Z;
4 — узел V; 5 — узел Av
6 — узел У; 7 — узел X;
8 — узел Х\ 9 — узел 8,
в котором имеется стык ли¬
ний сверху, а ни/кние ли¬
нии не определены
i
I
'У
я
АЛ
z;
/Л
г/
7л
У
7
1
PC
1
к
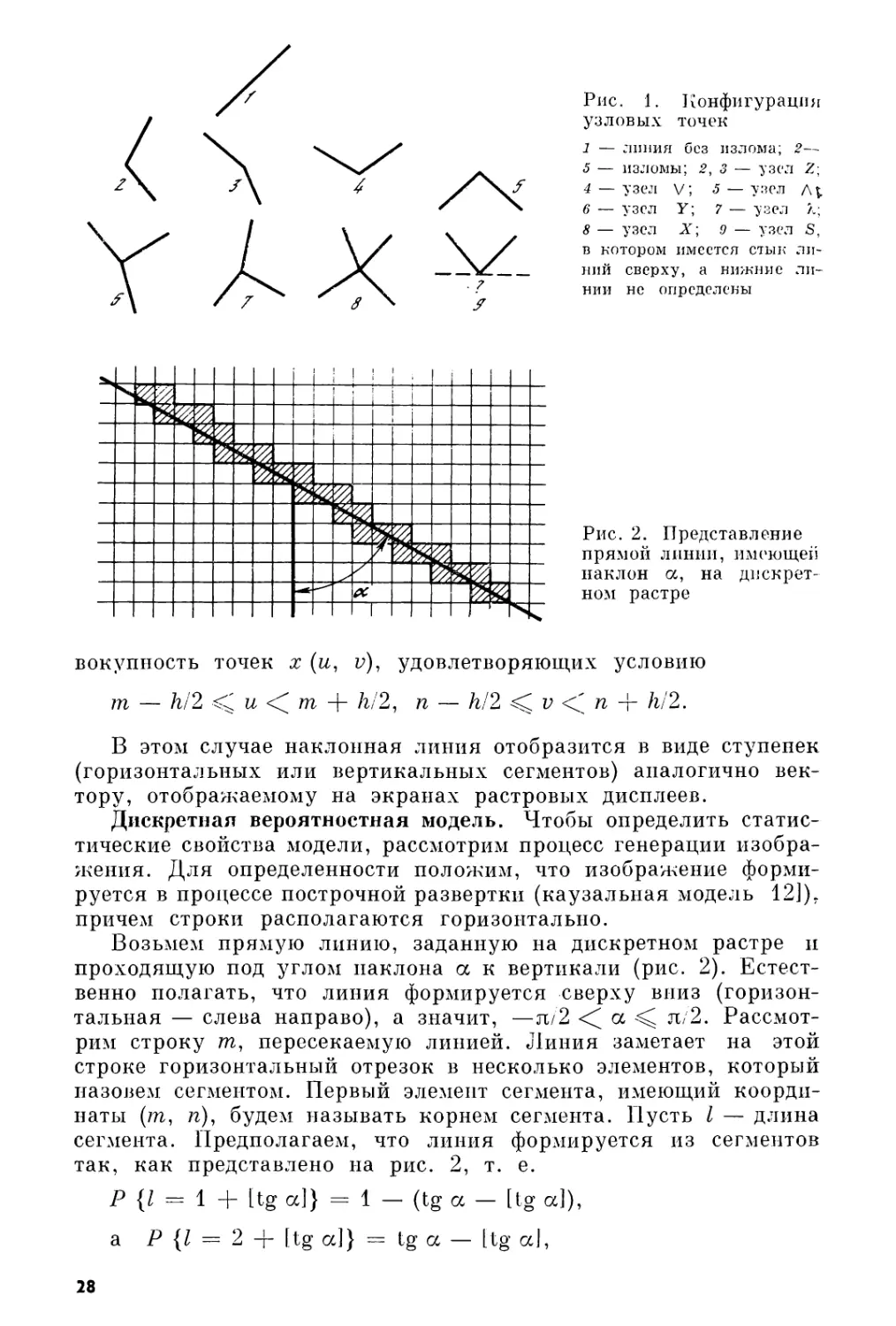
Рис. 2. Представление
прямой линии, имеющей
наклон а, на дискрет¬
ном растре
вокуппость точек х (и, и), удовлетворяющих условию
т — h/2 и тп + /г/2, п — h/2 и <' п + h/2.
В этом случае наклонная линия отобразится в виде ступенек
(горизонтальных или вертикальных сегментов) аналогично век¬
тору, отображаемому на экранах растровых дисплеев.
Дискретная вероятностная модель. Чтобы определить статис¬
тические свойства модели, рассмотрим процесс генерации изобра¬
жения. Для определенности положим, что изображение форми¬
руется в процессе построчной развертки (каузальная модель 12]).
причем строки располагаются горизонтально.
Возьмем прямую линию, заданную на дискретном растре и
проходящую под углом наклона а к вертикали (рис. 2). Естест¬
венно полагать, что линия формируется сверху вниз (горизон¬
тальная — слева направо), а значит, —л/2 а л/2. Рассмот¬
рим строку т, пересекаемую линией. Линия заметает на этой
строке горизонтальный отрезок в несколько элементов, который
назовем сегментом. Первый элемент сегмента, имеющий коорди¬
наты (/п, п), будем называть корнем сегмента. Пусть I — длина
сегмента. Предполагаем, что линия формируется из сегментов
так, как представлено на рис. 2, т. е.
Р {I = 1 + [tg а]} = 1 — (tg а — [tg а]),
a Р {I = 2 + Ltg ос]} = tg а — [tg а],
28
где [х] означает целую часть от х. Очевидно, математическое ожи¬
дание длины сегмента произвольной линии равно
Ml = 1 + tg а. (2)
Таким образом, точку (т, п), являющуюся корнем сегмента,
можно рассматривать как источник линии на строке т, причем
здесь перестает быть существенной вся предыстория па строках
от 0 до т — 1. На следующей строке корень сегмента данной
линии будет находиться в точке (т + 1, nJ, причем М (п± п) =
= tg а. Величину tg а назовем смещением. Заметим, что общее
число элементов, заметаемых линией из точки (пг, п) в точку
(тп', п'), равно
Ж = | in — т I + | п' — п |.
Отвлекаясь от стохастичности длин сегментов, можно сделать
вывод, что состояние элементов (0 или 1) любой строки изобра¬
жения полностью задано координатами корней всех проходящих
через нее линий . . ., и значениями углов наклона линий
С&1, . . ., OCfc.
С определенной степенью вероятности должно происходить
наложение сегментов, означающее пересечение линий на изобра¬
жении. Следовательно, в точке наложения должен оказаться
один из узлов вида Y, X или V (см. рис. 1). Перейдем к определе¬
нию вероятностей этих и некоторых других событий. Будем счи¬
тать, что вероятность появления корня в каждой точке изобра¬
жения одинакова и равна р (0 р 1), а значение угла ак рас¬
пределено равномерно на (—л/2, л/2). Обозначим q = 1 — р.
Вероятность того, что корень к + 1 отстоит от корня к на рассто¬
яние х, равна pqx. Среднее расстояние между соседними корнями
будет равно М (пк+1 — пк) = 1/р.
Определим среднюю длину сегмента L в предположении от¬
сутствия пересечения. Воспользовавшись (1) и (2), найдем
Л/2 Л/2
L — (1 + tg a) cos а dec / cos а с?а = 2. (3)
о ' о
Таким образом, средняя длина сегмента является величиной
постоянной и не зависит от параметров изображения.
Отсюда легко определяется средний размер свободного проме¬
жутка А между сегментами соседних линий на одной строке:
А = М (п^ — пк) — L = Ир — 2. (4)-
Найдем вероятность пересечения (стыка) пары линий р3 (узел
S на рис. 1). Чтобы сегменты пары линий не пересеклись ни в од¬
ной точке, корень второго сегмента, имеющего среднюю длину L,
должен попасть в промежуток средней длины А — L + 1. Таким
образом, вероятность пересечения р$ равна
Ps - 1 - (А - L + 1)/М (тгк+1 - = Зр. (5)
29
Событие S, как было сказано, является объединением следую¬
щих трех событий: узла У, узла X и узла V. Сумма их условных
вероятностей равна единице:
Р (Y | 5) + Р (X | .V) + Р (V | 5) = 1. (6)
Обозначим данные условные вероятности через ру, рх, ру.
Тогда вероятности того, что в произвольно взятом сегменте дол¬
жен оказаться соответствующий узел, будут равны
Р (Т) = PsPY, р (X) = pspx, Р (7) = PsPv- (7)
Рассмотрим узел X, т. е. ветвление линии на две. Поскольку
узел X является симметричным по отношению к узлу У, то, оче¬
видно, их вероятности должны быть взаимосвязаны. Рассмотрим
две соседние строки изображения (т и т + 1)- Пусть на строке
т имеется линий, причем с вероятностью р одна из линий сли¬
вается с другой (узел У), а с вероятностью у линия ветвится на
две (узел X). Тогда на строке т + 1 число линий N2 = N1(\ —
— р — у) + AriP/2 + 2Nry. Приравнивая в силу однородности
N± — получим у = р/2. Здесь р есть вероятность слияния ли¬
ний, и она равна pspy- Тогда вероятность ветвления линии равна
pspY!2. Считая ветвление равновероятностным в любой точке
сегмента, получим вероятность ветвления линии в точке: рк.~
= psPy/ZL = 'Р^ррх-
Перейдем к узлу Z и аналогичным ему. Очевидно, что излом
есть не что иное, как повернутый на 90° узел У; если же его по¬
вернуть еще на 90э, то получим узел Д. В силу изотропности
вероятности их появления на изображении должны быть одина¬
ковыми. Чтобы определить соотношения вероятностей, рассмот¬
рим следующую ситуацию. Пусть из некоторой точки исходят две
линии под произвольными углами осх и а2, 0 а1? а2 < 2л в обще¬
принятой ориентации. Очевидно, если 0 Д ах, а2 Д л, то это
будет узел У; если л Д ах, а2 Д 2л, то узел Д, иначе будет узел
Д — излом. Легко подсчитать распределение вероятностей между
.этими тремя событиями:
Р(У) = Р(А), Р«)-2Р(7). (8)
Вероятность Р (У) знаем из (7). В среднем на строке имеется
NpP (У) = Nppspv узлов У, а значит, и такое же число узлов Д.
Число незанятых элементов строки из (4) TVpMA = N (1 — Lp).
Значит, вероятность появления узла Д в свободной точке изо¬
бражения есть
Р (А) = NppsPv^N (1 - Lp)) = 379>/(1 - 2р). (9)
Вероятность излома pz найдем следующим образом. Исполь¬
зуя (7) и (8), очевидно, что вероятность наличия излома в сег¬
менте есть 2pspv- Нормируя на среднюю длину сегмента, получим
вероятность излома в произвольной точке линии: pz = 2pspv
!L = 3ppv-
30
Таким образом, свойства изображения полностью определены
тремя параметрами: р — вероятностью появления корня сегмента
в точке и любой парой из трех условных вероятностей в (6), на¬
пример pv — вероятностью слияния и рх — вероятностью пере¬
сечения пары линий.’
Некоторой особенностью является задание линий на границе.
В силу формирования изображения сверху вниз необходимо за¬
давать конфигурацию линий лишь на верхней и двух боковых
границах, причем на боковых границах генерироваться должна
лишь половина линий (так, на левой границе — в диапазоне углов
О а л/2), поскольку другая половина будет на границе за¬
канчиваться. Таким образом, вероятность генерации корня ли¬
нии в точке составляет величину р для верхней и р-2 для левой
и правой границ. Распределение вероятностей углов наклона
линий должно совпадать с (1) для верхней и должно быть повер¬
нутым на 90° для левой и правой границ.
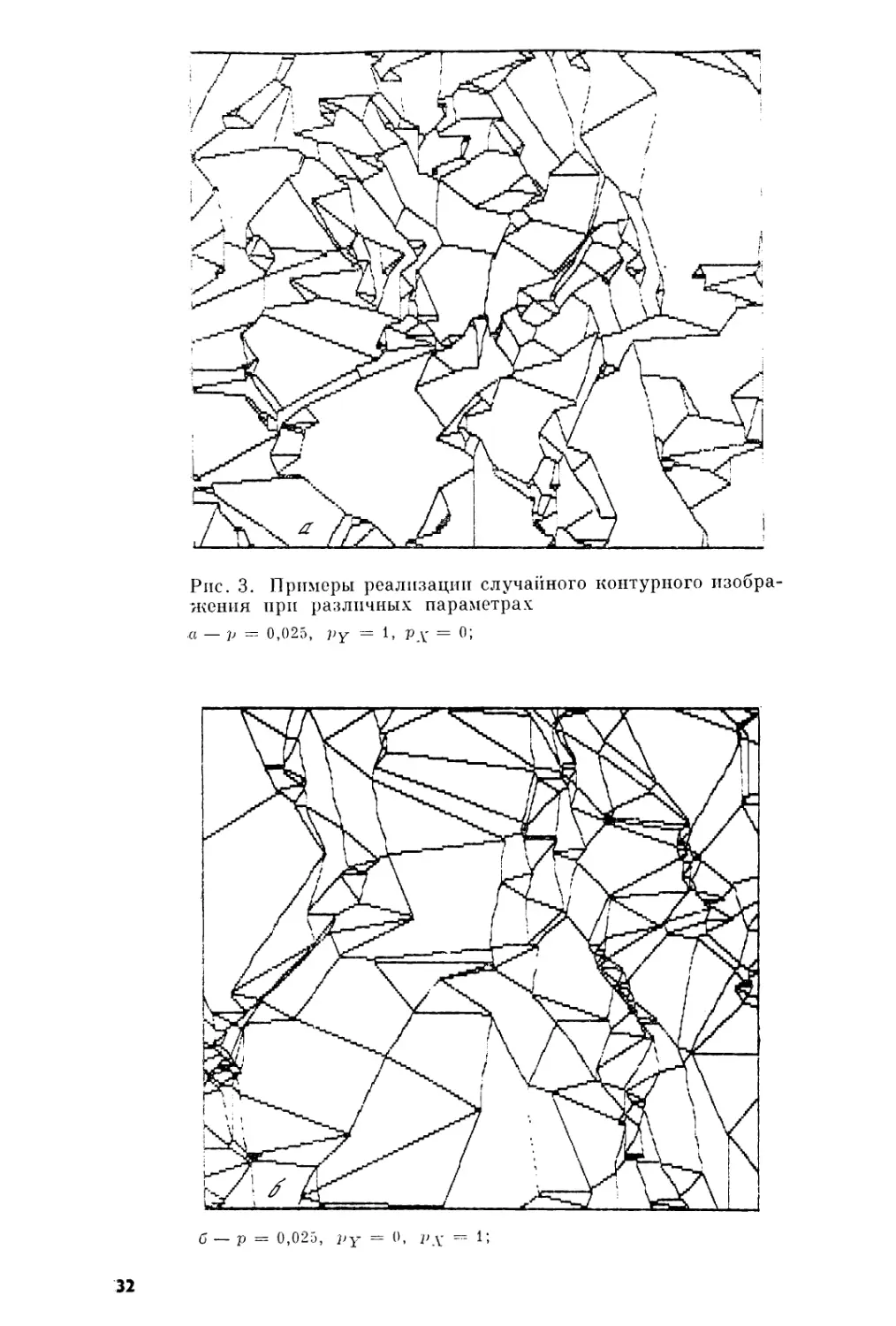
В соответствии с описанной моделью была реализована про¬
грамма-генератор случайных изображений. Некоторые примеры
сформированных случайных изображений с различными значе¬
ниями параметров р, pY и рх представлены на рис. 3.
Анализируя полученные соотношения для вероятностей р$,
pi, pz и Р (/\), отметим, что все они естественным образом зави¬
сят от вероятности появления корня р. Данный параметр может
рассматриваться поэтому в качестве масштабного коэффициента,
или, что то же самое, параметра точности дискретизации. Инте¬
ресно подметить, что L не зависит от р (3), т. е. независимо от дис¬
кретизации средняя длина сегмента составляет два элемента. Из
(5) или (9) легко видно, что имеются ограничения на вероятность
появления корня: р 1/3.
Заключение. Проведение экспериментов по генерации случай¬
ных контурных изображений показывает, что данная вероятност¬
ная модель описывает довольно широкий спектр контурных изо¬
бражений, некоторые из которых по своей структуре напоминают
контурные препараты, получаемые обработкой реальных изобра-
кений.
Наряду с полученными результатами остается открытым воп¬
рос, насколько хорошо данная модель описывает свойства реаль¬
ных изображений. Для ответа па него требуется проведение ана-
шза достаточно большого числа реальных изображений, разли-
шютцихся по своей структуре. Такой анализ должен включать
>тапы получения контурных препаратов, определения узловых
очек, прослеживания контурных линий, оценки значений пара-
гетров.
Дальнейшее развитие модели может идти по пути многоуров-
[евого представления, заключающегося в следующем. Случайное
[зображение, сформированное с некоторыми заданными парамет¬
рами, содержит целый ряд связных областей. Рассматривая даи-
[bie области как самостоятельные, внутри них может быть сфор-
31
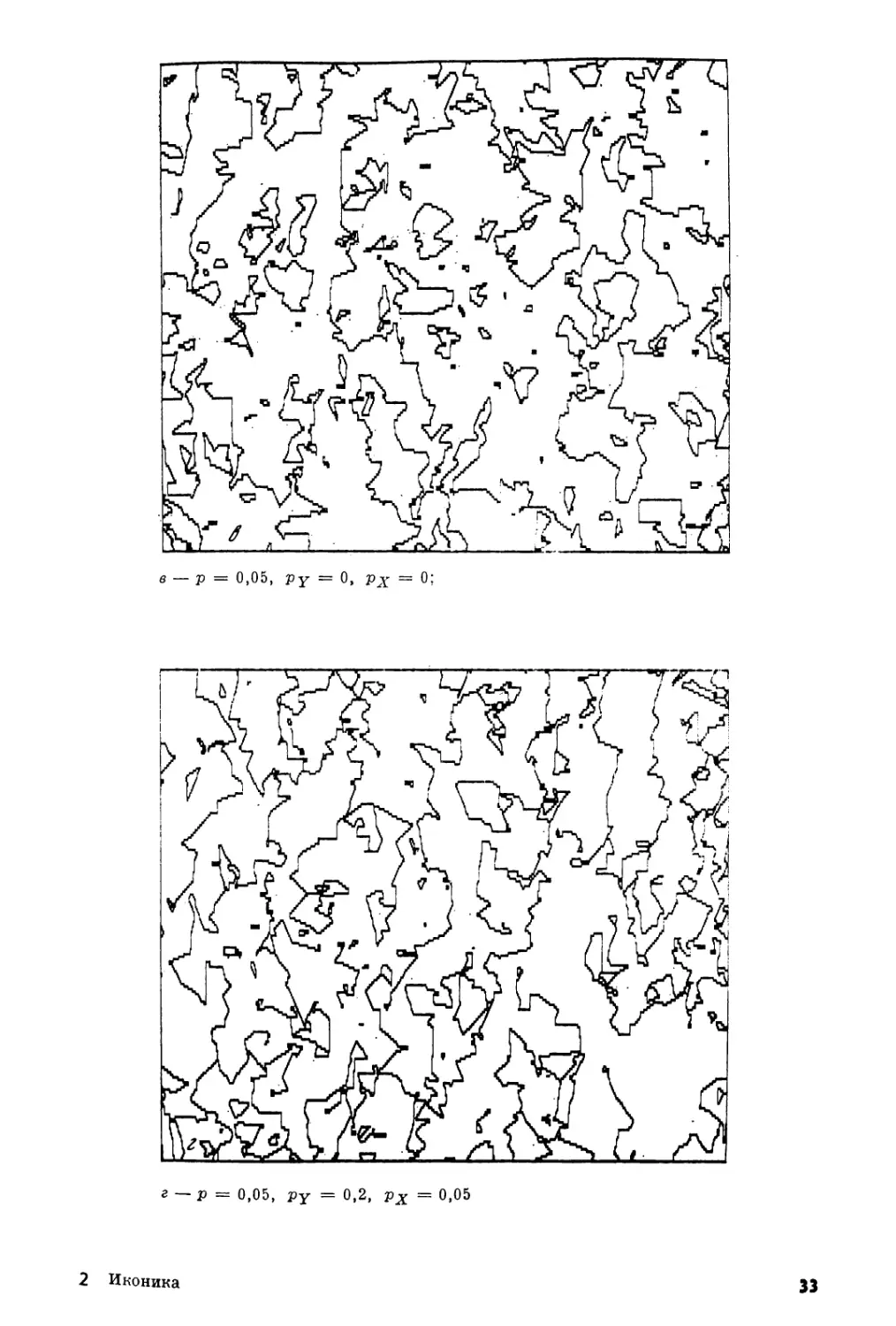
Рис. 3. Примеры реализации случайного контурного изобра¬
жения при различных параметрах
,а — р = 0,025, ру = t РД' = °1
б — р = 0,025, ру = 0, Ру — 1;
32
в — р = 0,05, ру = 0, Рх ~ О?
г — р — 0,05, ру = 0,2, р% = 0,05
2 Иконика
33
мировано изображение с другими статистическими свойствами
(значениями параметров). Этот процесс может быть повторен
многократно.
ЛИТЕРАТУРА
1. Розенфельд А., Дэйвис Л. С. Сегментация и модели изображений//
ТИИЭР. 1979. Т. 67, № 5. С. 71—81.
2. Прэтт У. Цифровая обработка изображений. М.: Мир, 1982. Т. 2.
480 с.
3. Джаин Р., Аггарвал Дж. К. Машинный анализ сцен, состоящих из
объектов криволинейных очертаний // ТИИЭР. 1979.' Т. 67, № 5.
С. 121 — 130.
4. Дуда Р., Харт П. Распознавание образов и анализ сцен. М.: Мир, 1976.
511 с.
5. Attneave F. Some informational aspects of visual perception П Psychol.
Rev. 1954. Vol. 61. P. 183-193.
6. Сергеев В. В., Сойфер В. А. Имитационная модель изображения и метод
сжатия данных И Автоматика и вычисл. техника. 1978. № 3. С. 76—78.
7. Lebedev D. S. Probabilistic characterization of images in filtration and
restorartion problems H Signal processing: Theories and applications / Ed.
M. Kunt, F. de Coulon. Amsterdam: North Holland: EURASIP, 1980.
P. 55-64.
8. Лебедев Д. С., Безрук А. А., Новиков В. M. Марковская вероятностная
модель изображения и рисунка: Препринт. М.: Ин-т пробл. передачи
информ. АН СССР. 1983. 40 с.
9. Mahabala Н. Preprocessor for programs which recognize scenes П MIT
Artificial Intelligence Lab. Mem. 177. 1969.
10. Уолц Д. Интерпретация контурных рисунков, изображающих сцены
с тенями И Психология машинного зрения. М.: Мир, 1978. С. 30—111.
11. Уинстон П. Г. Построение структурных описаний по примерам И Там
же. С. 185—248.
12. Джайн А. К. Успехи в области математических моделей для обработки
изображений//ТИИЭР. 1981. Т. 69, № 5. С. 9-39.
Методы и аппаратура
обработки изображений
УДК 681.3:523.164.8
МЕТОДИКА СОСТАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ
КАРТЫ ВЕНЕРЫ
ПО ДАННЫМ АВТОМАТИЧЕСКИХ МЕЖПЛАНЕТНЫХ
СТАНЦИИ «ВЕНЕРА-15» И «ВЕНЕРА-16»
И. М. Бокштейн, М. А. Кронрод, П. А. Чочиа
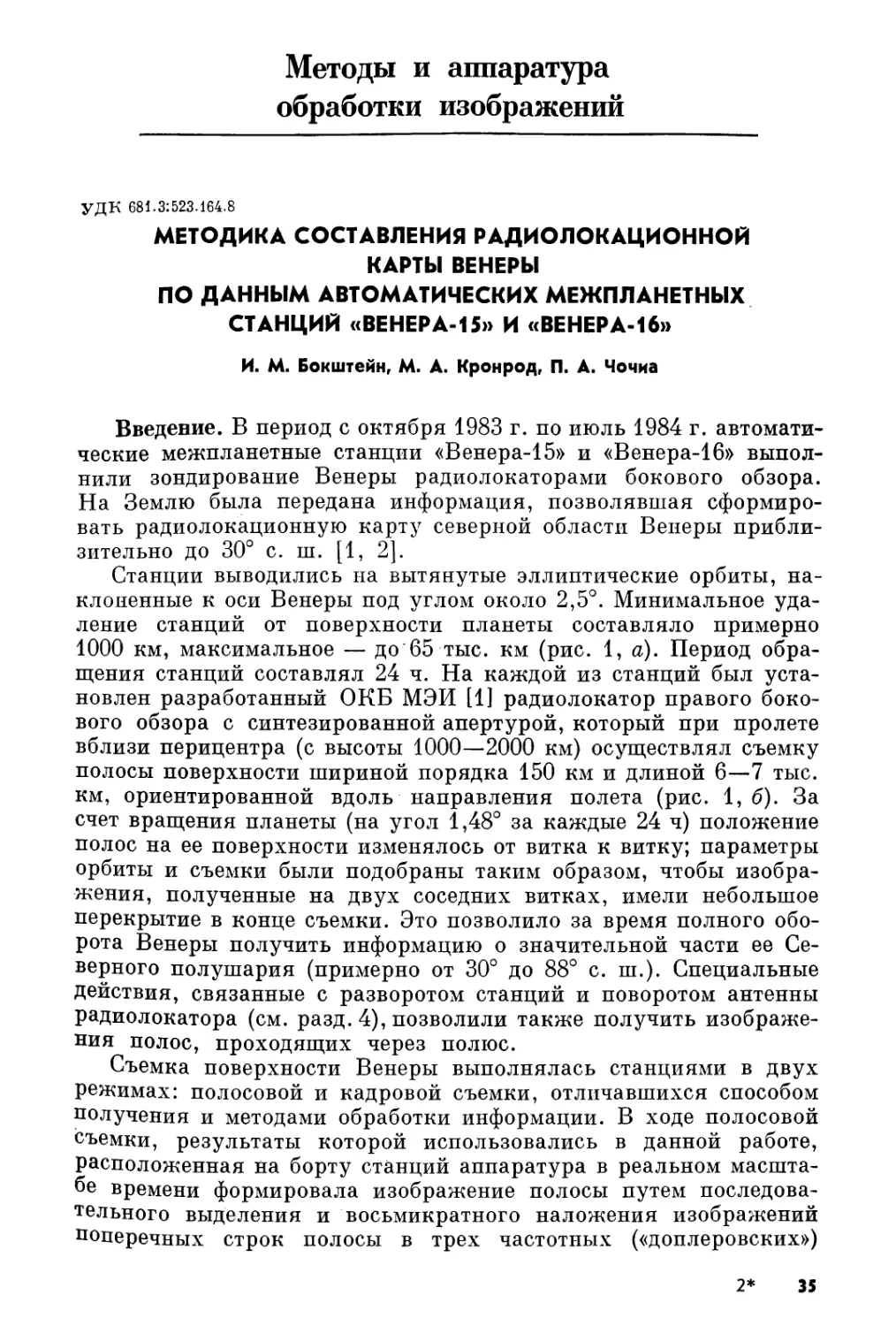
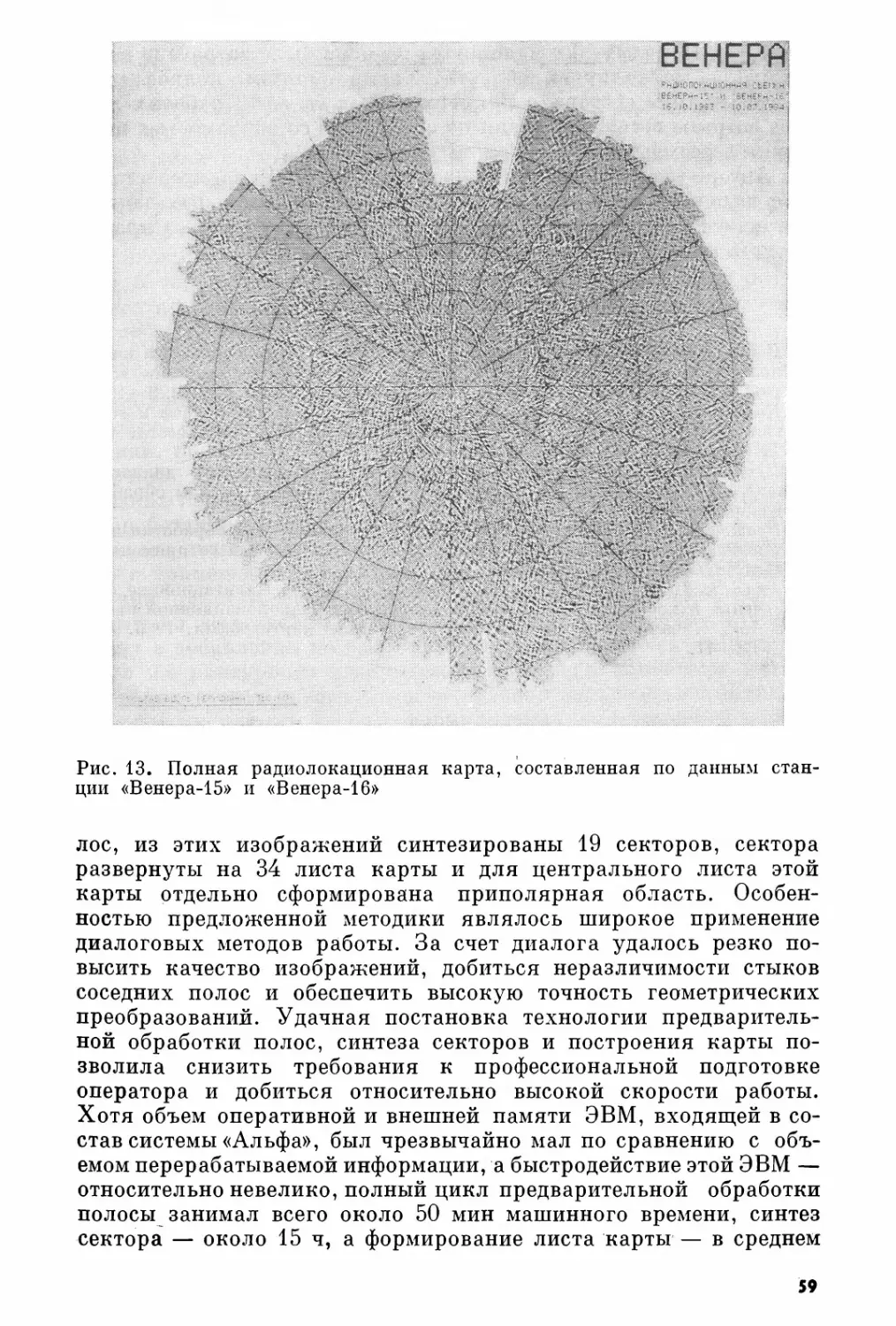
Введение. В период с октября 1983 г. по июль 1984 г. автомати¬
ческие межпланетные станции «Венера-15» и «Венера-16» выпол¬
нили зондирование Венеры радиолокаторами бокового обзора.
На Землю была передана информация, позволявшая сформиро¬
вать радиолокационную карту северной области Венеры прибли¬
зительно до 30° с. ш. [1, 2].
Станции выводились иа вытянутые эллиптические орбиты, на¬
клоненные к оси Венеры под углом около 2,5°. Минимальное уда¬
ление станций от поверхности планеты составляло примерно
1000 км, максимальное — до 65 тыс. км (рис. 1, а). Период обра¬
щения станций составлял 24 ч. На каждой из станций был уста¬
новлен разработанный ОКБ МЭИ [1] радиолокатор правого боко¬
вого обзора с синтезированной апертурой, который при пролете
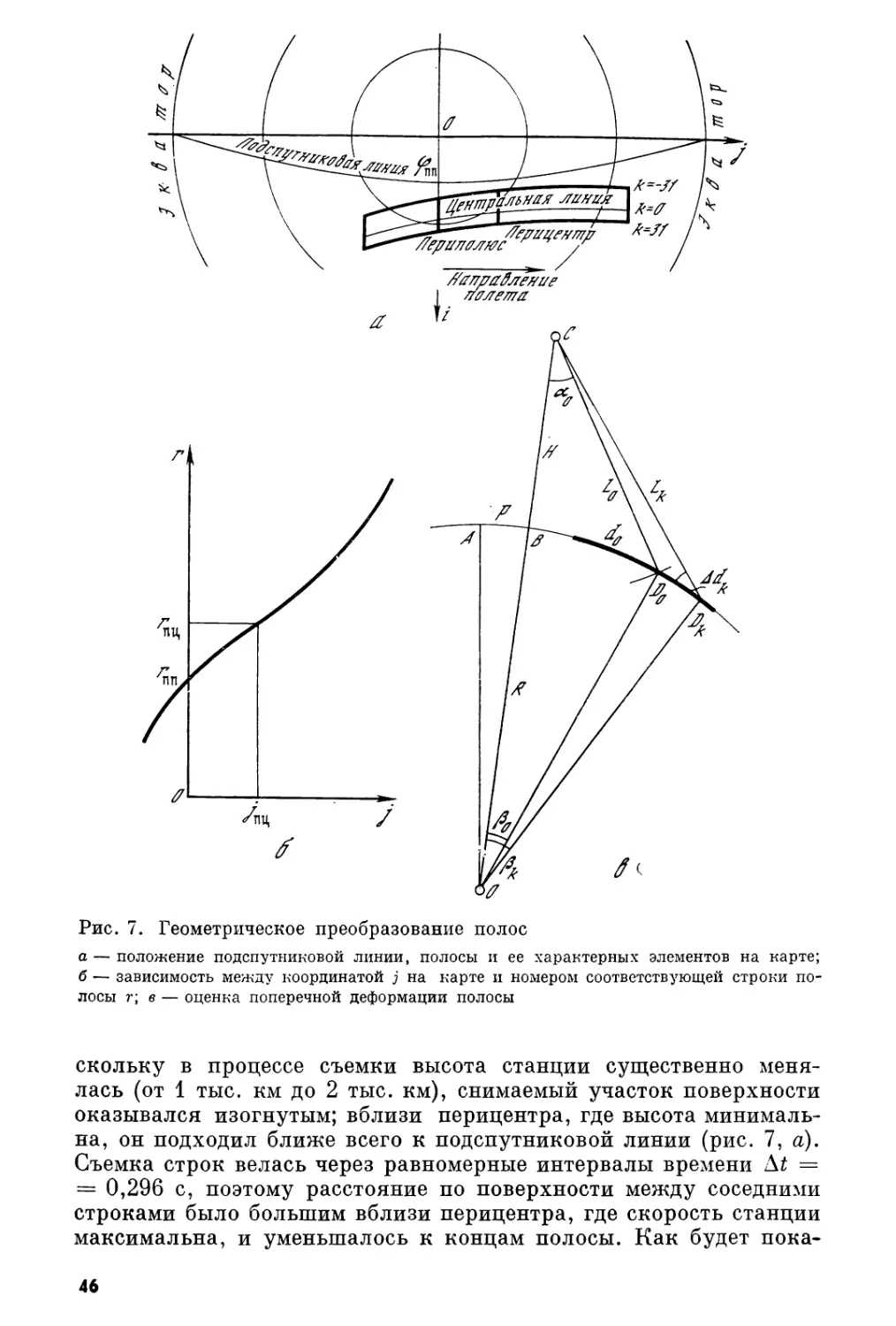
вблизи перицентра (с высоты 1000—2000 км) осуществлял съемку
полосы поверхности шириной порядка 150 км и длиной 6—7 тыс.
км, ориентированной вдоль направления полета (рис. 1, б). За
счет вращения планеты (на угол 1,48° за каждые 24 ч) положение
полос на ее поверхности изменялось от витка к витку; параметры
орбиты и съемки были подобраны таким образом, чтобы изобра¬
жения, полученные на двух соседних витках, имели небольшое
перекрытие в конце съемки. Это позволило за время полного обо¬
рота Венеры получить информацию о значительной части ее Се¬
верного полушария (примерно от 30° до 88° с. ш.). Специальные
действия, связанные с разворотом станций и поворотом антенны
радиолокатора (см. разд. 4), позволили также получить изображе¬
ния полос, проходящих через полюс.
Съемка поверхности Венеры выполнялась станциями в двух
режимах: полосовой и кадровой съемки, отличавшихся способом
получения и методами обработки информации. В ходе полосовой
съемки, результаты которой использовались в данной работе,
расположенная на борту станций аппаратура в реальном масшта¬
бе времени формировала изображение полосы путем последова¬
тельного выделения и восьмикратного наложения изображений
поперечных строк полосы в трех частотных («доплеровских»)
2*
35
каналах [1]. Разрешающая способность полосовой съемки состав¬
ляла в зависимости от высоты полета 2—3 км/эл.
Передававшиеся станциями па Землю изображения, получае¬
мые в ходе полосовой съемки, состояли из 2,5—3 тыс. строк, объ¬
единенных попарно и снабженных номером; строка содержала три
последовательно записанных блока по 63 элемента, соответствую¬
щих трем доплеровским каналам. Значение яркости, отвечающее
каждому элементу, было представлено 12-разрядным кодом и
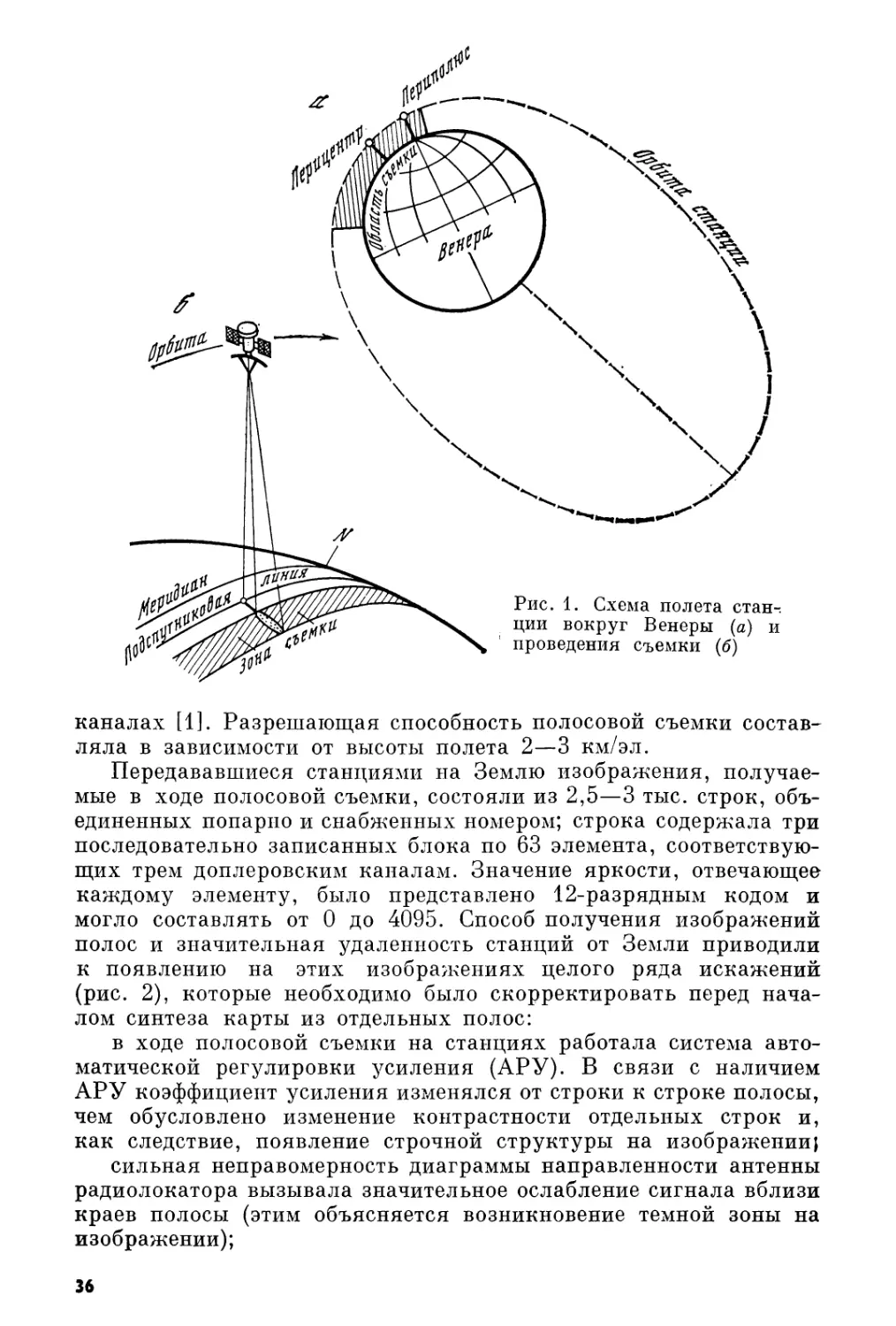
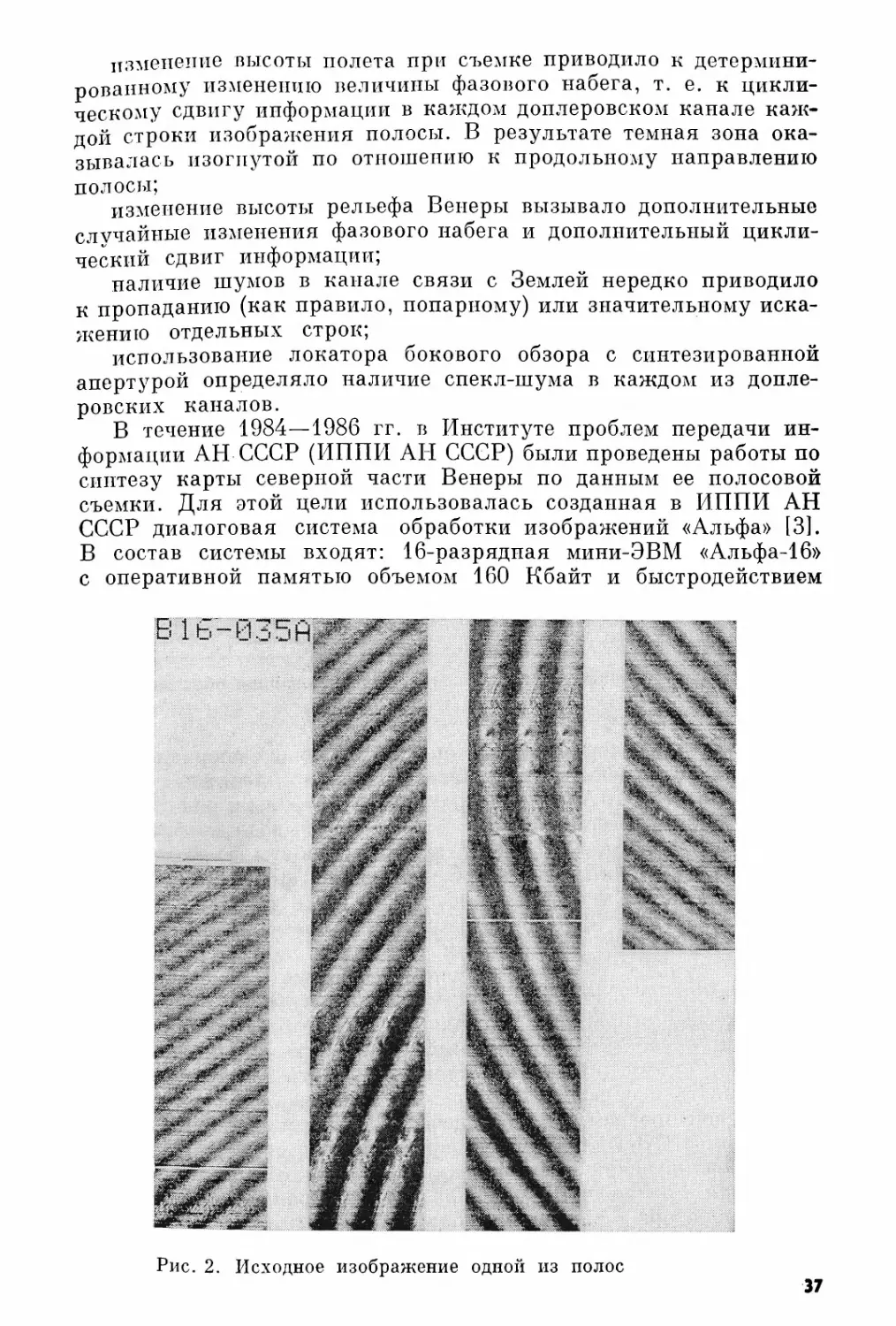
могло составлять от 0 до 4095. Способ получения изображений
полос и значительная удаленность станций от Земли приводили
к появлению на этих изображениях целого ряда искажений
(рис. 2), которые необходимо было скорректировать перед нача¬
лом синтеза карты из отдельных полос:
в ходе полосовой съемки на станциях работала система авто¬
матической регулировки усиления (АРУ). В связи с наличием
АРУ коэффициент усиления изменялся от строки к строке полосы,
чем обусловлено изменение контрастности отдельных строк и,
как следствие, появление строчной структуры на изображении!
сильная неправомерность диаграммы направленности антенны
радиолокатора вызывала значительное ослабление сигнала вблизи
краев полосы (этим объясняется возникновение темной зоны на
изображении);
36
изменение высоты полета при съемке приводило к детермини¬
рованному изменению величины фазового набега, т. е. к цикли¬
ческому сдвигу информации в каждом доплеровском канале каж¬
дой строки изображения полосы. В результате темная зона ока¬
зывалась изогнутой по отношению к продольному направлению
полосы;
изменение высоты рельефа Вейеры вызывало дополнительные
случайные изменения фазового набега и дополнительный цикли¬
ческий сдвиг информации;
наличие шумов в канале связи с Землей нередко приводило
к пропаданию (как правило, попарному) или значительному иска¬
жению отдельных строк;
использование локатора бокового обзора с синтезированной
апертурой определяло наличие спекл-шума в каждом из допле¬
ровских каналов.
В течение 1984—1986 гг. в Институте проблем передачи ин¬
формации АН СССР (ИППИ АН СССР) были проведены работы по
синтезу карты северной части Венеры по данным ее полосовой
съемки. Для этой цели использовалась созданная в ИППИ АН
СССР диалоговая система обработки изображений «Альфа» [3].
В состав системы входят: 16-разрядиая мини-ЭВМ «Альфа-16»
с оперативной памятью объемом 160 Кбайт и быстродействием
Рис. 2. Исходное изображение одной из полос
37
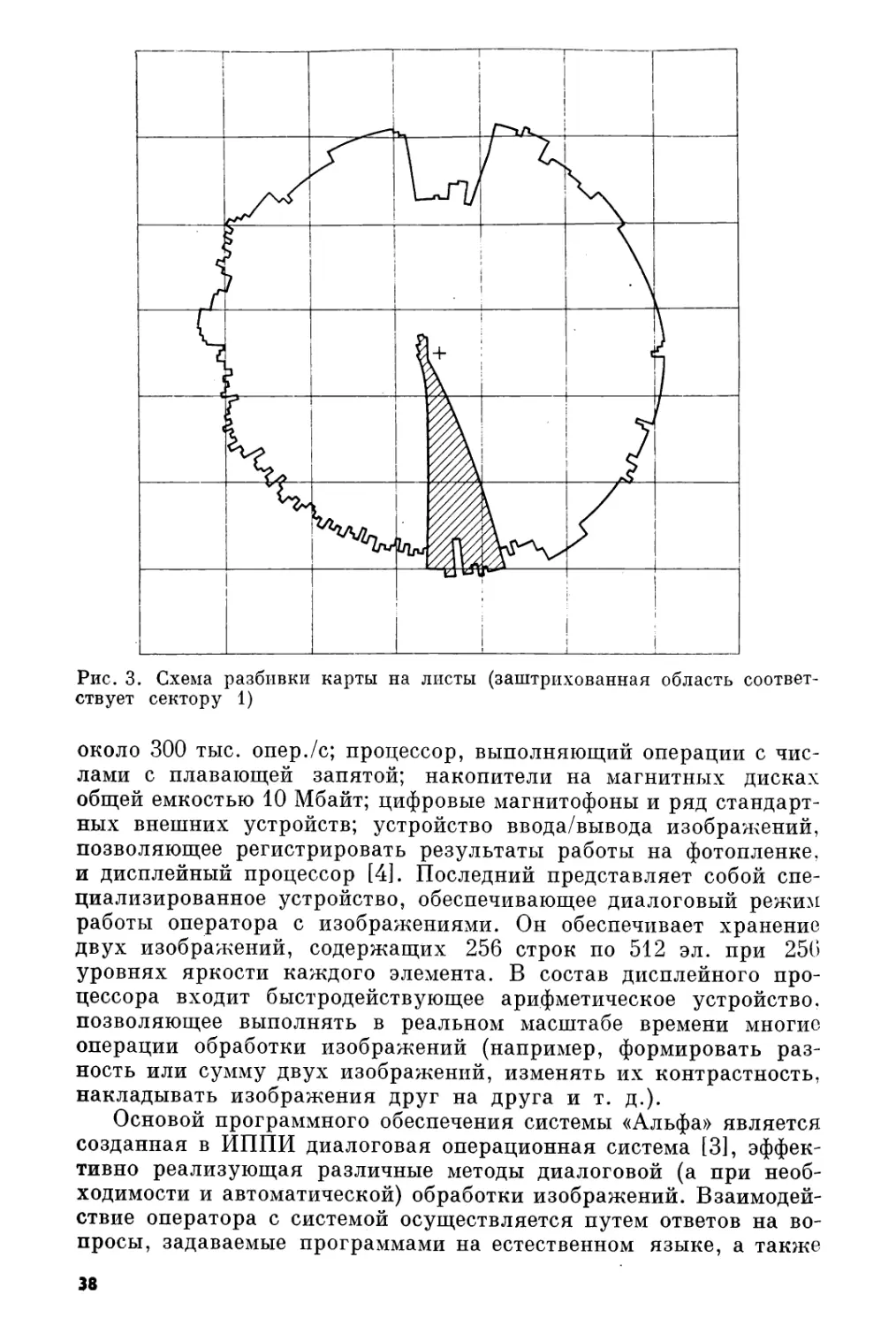
Рис. 3. Схема разбивки карты на листы (заштрихованная область соответ¬
ствует сектору 1)
около 300 тыс. опер./с; процессор, выполняющий операции с чис¬
лами с плавающей запятой; накопители на магнитных дисках
общей емкостью 10 Мбайт; цифровые магнитофоны и ряд стандарт¬
ных внешних устройств; устройство ввода/вывода изображений,
позволяющее регистрировать результаты работы на фотопленке,
и дисплейный процессор [4]. Последний представляет собой спе¬
циализированное устройство, обеспечивающее диалоговый режим
работы оператора с изображениями. Он обеспечивает хранение
двух изображений, содержащих 256 строк по 512 эл. при 256
уровнях яркости каждого элемента. В состав дисплейного про¬
цессора входит быстродействующее арифметическое устройство,
позволяющее выполнять в реальном масштабе времени многие
операции обработки изображений (например, формировать раз¬
ность или сумму двух изображений, изменять их контрастность,
накладывать изображения друг на друга и т. д.).
Основой программного обеспечения системы «Альфа» является
созданная в ИППИ диалоговая операционная система [3], эффек¬
тивно реализующая различные методы диалоговой (а при необ¬
ходимости и автоматической) обработки изображений. Взаимодей¬
ствие оператора с системой осуществляется путем ответов на во¬
просы, задаваемые программами на естественном языке, а также
38
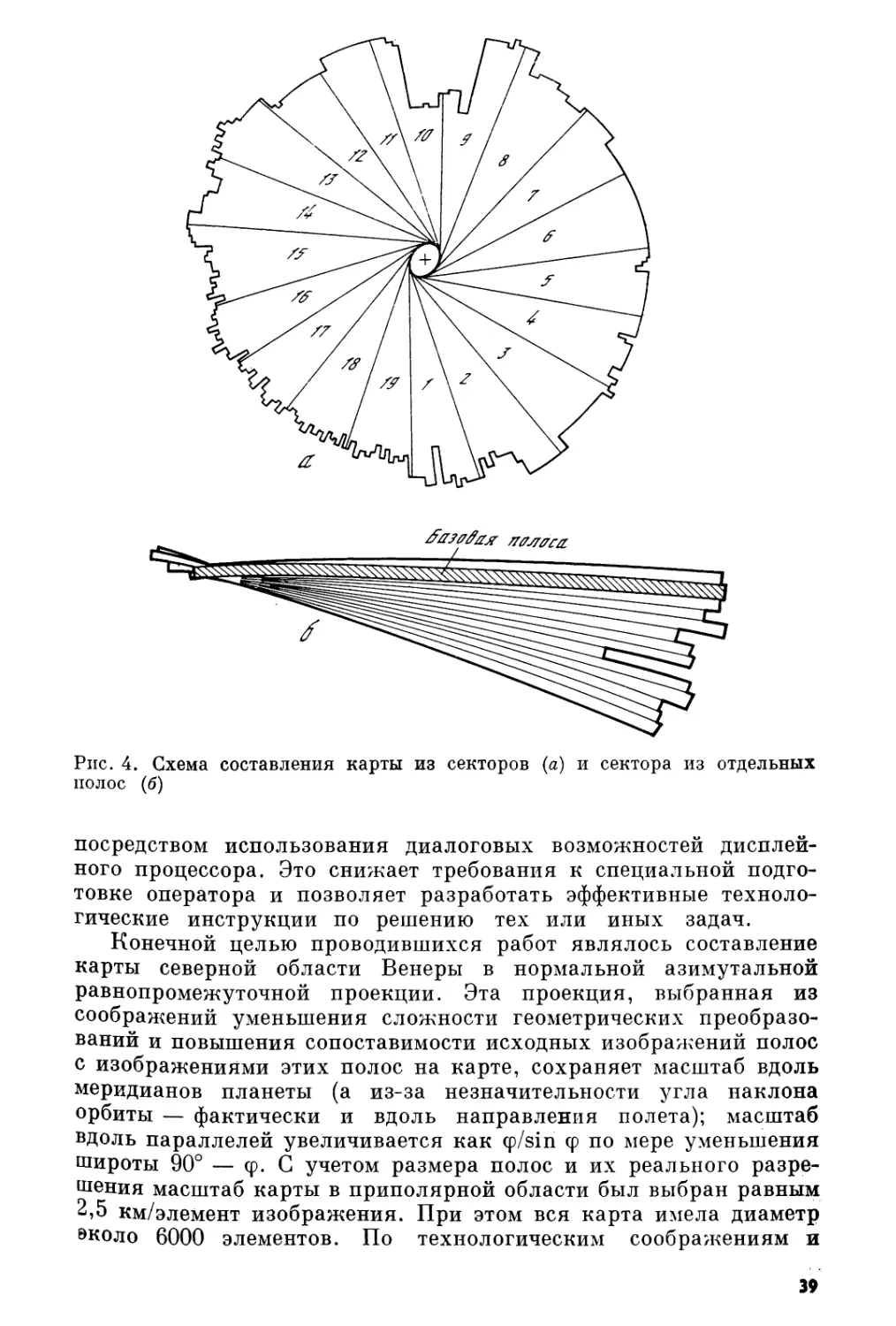
Рис. 4. Схема составления карты из секторов (а) и сектора из отдельных
полос (б)
посредством использования диалоговых возможностей дисплей¬
ного процессора. Это снижает требования к специальной подго¬
товке оператора и позволяет разработать эффективные техноло¬
гические инструкции по решению тех или иных задач.
Конечной целью проводившихся работ являлось составление
карты северной области Венеры в нормальной азимутальной
равнопромежуточной проекции. Эта проекция, выбранная из
соображений уменьшения сложности геометрических преобразо¬
ваний и повышения сопоставимости исходных изображений полос
с изображениями этих полос на карте, сохраняет масштаб вдоль
меридианов планеты (а из-за незначительности угла наклона
орбиты — фактически и вдоль направления полета); масштаб
вдоль параллелей увеличивается как cp/sin ср по мере уменьшения
широты 90° — ср. С учетом размера полос и их реального разре¬
шения масштаб карты в приполярной области был выбран равным
2,5 км/элемент изображения. При этом вся карта имела диаметр
вколо 6000 элементов. По технологическим соображениям и
39
с учетом ограниченного объема имевшихся магнитных дисков
(всего 2,5 Мбайт/диск) карта была разбита на 49 квадратных
листов размером 1024 X 1024 элемента, причем полюсу планеты
соответствовала середина центрального листа (рис. 3). Из этих
49 листов лишь 34 содержали информацию, полученную в ходе
полосовой съемки.
Обработка поступающих данных и синтез карты выполнялись
следующим образом. Вначале в систему вводилась исходная ин¬
формация о каждой из полос. Затем проводилась предваритель¬
ная обработка полос, направленная на устранение рассмотренных
искажений. После этого последовательно полученные полосы пре¬
образовывались в формат карты и объединялись в группы, содер¬
жащие до 16 полос (так называемые секторы). 19 синтезированных
таким образом секторов разворачивались на необходимые углы,
и из них формировались листы карты (рис. 4, а, б). Особая про¬
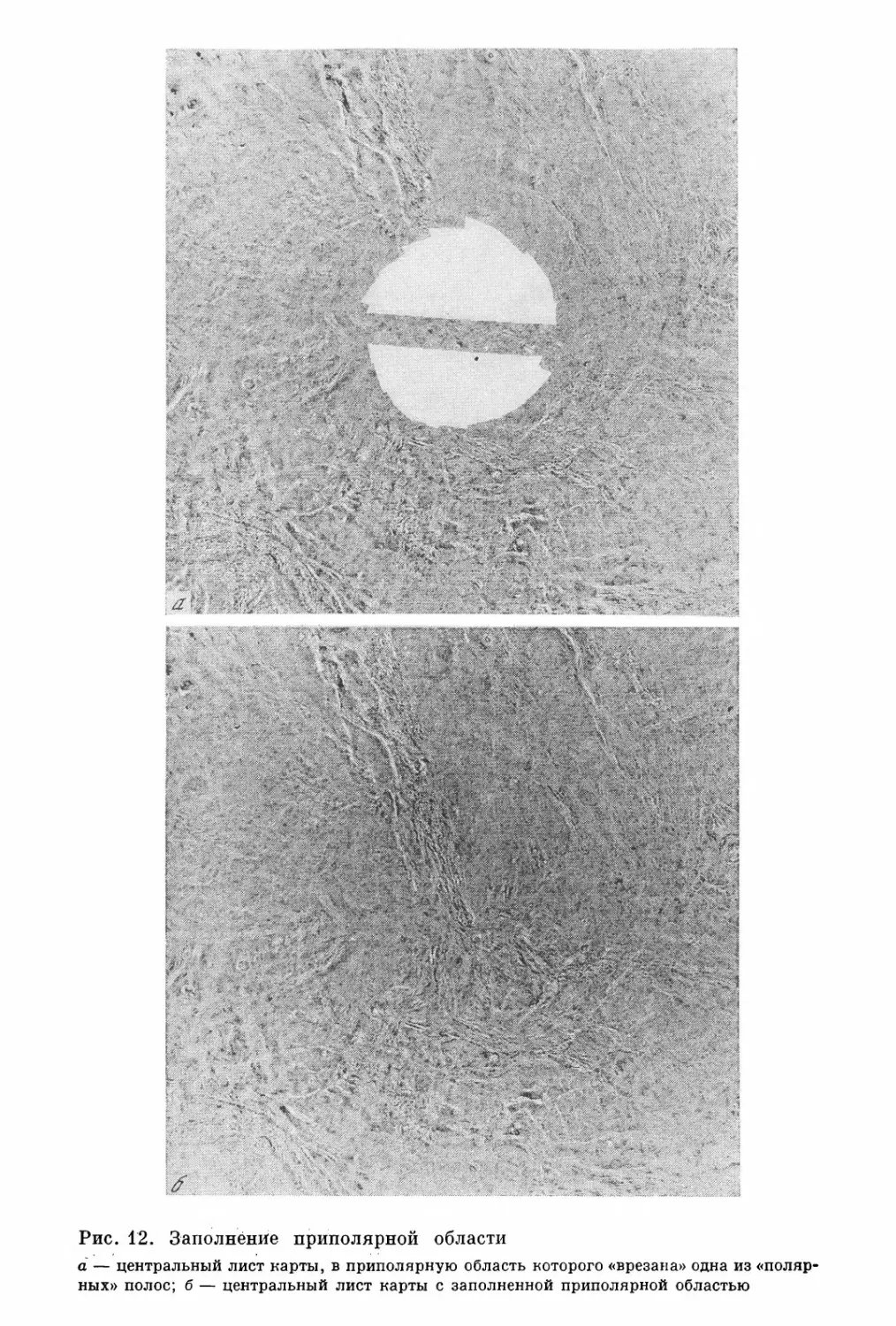
цедура использовалась для формирования приполярной части
карты (для этой области применялся особый режим зондирования
планеты, требующий специального вида преобразований полос).
Полосы, проходящие через полюс, стыковались с уже сформиро¬
ванным изображением центрального листа карты.
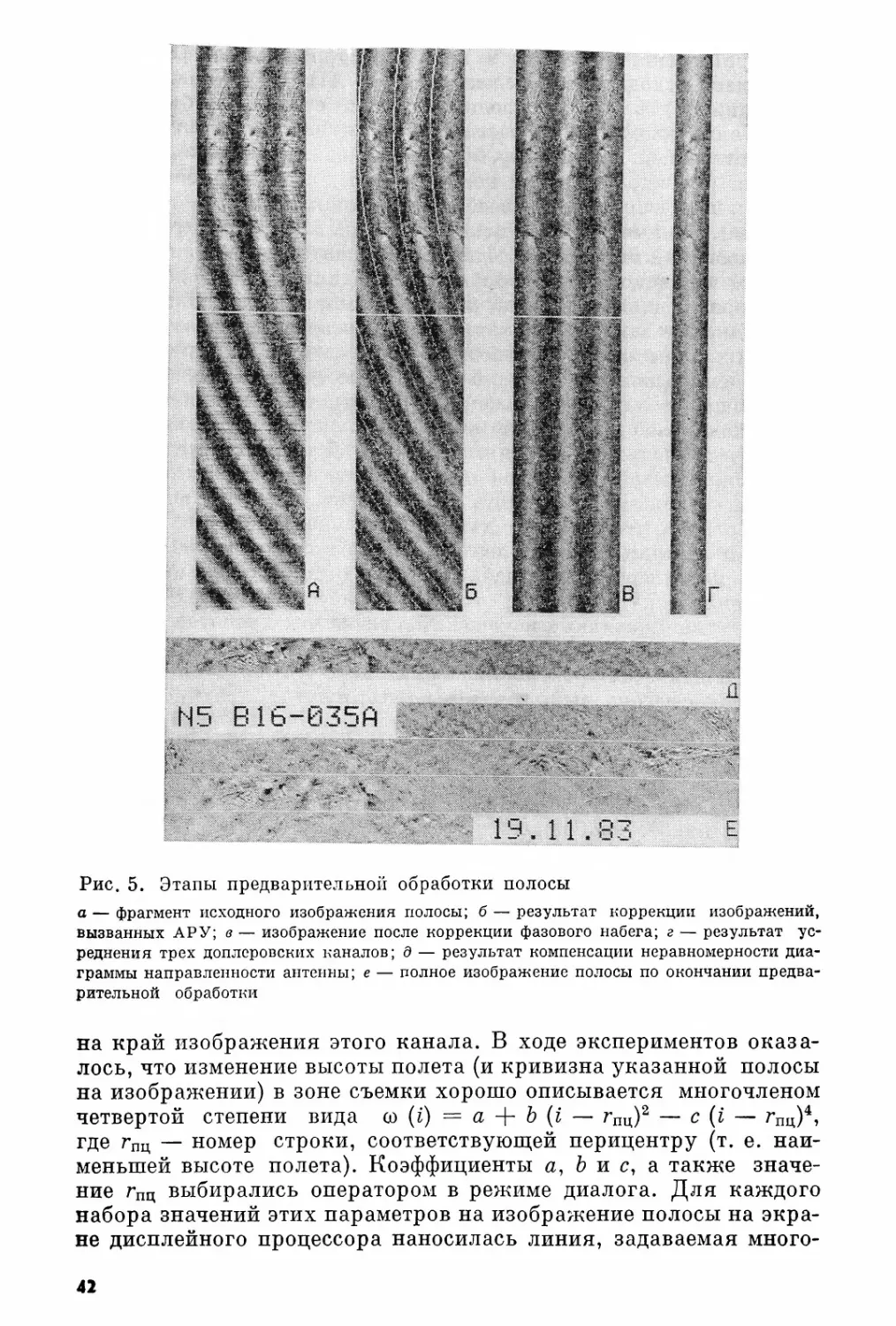
1. Предварительная обработка полос
Данные, полученные в ходе полосовой съемки поверхности
Венеры, поступали в ИППИ АН СССР в виде записей на магнит¬
ных лентах. Вначале одна лента содержала, как правило, резуль¬
таты одного дня съемки; в последующем был введен более плот¬
ный формат записи. При этом на каждой ленте стала умещаться
информация о нескольких днях съемки, причем данные о каждой
полосе образовывали отдельный файл, заголовок которого содер¬
жал сведения о дате и режиме формирования полосы. В связи
с большим объемом исходных данных (за время полета станций
было зафиксировано около 300 полос) с самого начала работ
в ИППИ АН СССР проводился их систематический учет. После
ввода каждой полосы в систему обработки изображений ей при¬
сваивался порядковый номер ввода и идентификационный номер
вида В — XX — YYY — Z, где XX = 15 или 16 — номер стан¬
ции; YYY = 1—269 — порядковый номер для съемки (У У У = 1
соответствует 16 октября 1983 г.); Z = А или В — полукомплект
станции, использовавшийся при измерениях.
В результате ввода полоса разбивалась на четыре части и за¬
писывалась на магнитный диск в виде квадратного изображения
объемом 1024 х 1024 х 12 бит (см. рис. 2).
Параллельно с вводом полос в систему вводилась информация
о параметрах орбиты станций во время проведения съемки. Соз¬
данный специально для этой цели каталог ввода включал для каж¬
дой полосы сведения о ее порядковом и идентификационном но¬
мерах, энергии станции на соответствующем витке орбиты Е,
высоте полета в точке перицентра 7/Пц, о наклоне орбиты фЦп
40
и номере строки, отвечающей периполюсу, гпп (эта информация
находилась исходя из проведенных ИПМ АН СССР траекторных
измерений [5]); в каталог вводились также сведения о биквадра-
тичной аппроксимации рабочего участка орбиты — номер строки,
соответствующей перицентру, гПц» начальная фаза а, квадратич¬
ный b и биквадратичный с коэффициенты, а также координаты
начала и конца полосы (о способе получения и смысле этих данных
см. далее). Данные каталога использовались в ходе геометрических
преобразований полос, необходимых для синтеза секторов. В свя¬
зи с тем что некоторые из орбитальных данных для ряда полос
отсутствовали или по тем или иным причинам были грубо не вер¬
ными, по мере заполнения каталог подвергался редактированию.
Редактирование обычно проводилось посредством интерполяции;
иногда использовались также более грубые эмпирические методы,
базирующиеся на предположениях о том, что энергия станции
в ходе полета меняется очень медленно, высота полета изменяется
плавно в пределах между днями коррекций траектории, а закон
изменения наклона орбиты близок к синусоидальному. Все из¬
менения содержимого каталога выполнялись, конечно, до начала
использования изменяемых данных.
По окончании ввода с ленты исходное изображение полосы
(рис. 5, а) подвергалось обработке с целью коррекции описанных
во введении искажений. Первый этап обработки включал коррек¬
цию мультипликативных искажений, связанных с работой системы
АРУ станций. Эта коррекция приводила к выравниванию (одно¬
временно для всех трех доплеровских каналов) средней яркости
строк полосы; она выполнялась по формуле
к
(1)
(здесь и далее и — значения яркости элементов исходного
и обработанного изображения соответственно; I — номер строки;
7 — номер элемента этой строки). Поскольку, как указано, каж¬
дому доплеровскому каналу соответствовали строки длиной 63
элемента, значение К принималось равным 3 X 63 = 189. Кон¬
станта 3 • 104 была выбрана экспериментально как обеспечиваю¬
щая достаточный динамический диапазон и отсутствие «зареза-
ния» сюжета. Результат преобразования (1) (рис. 5, б) представ¬
лялся в 8-разрядном формате; яркость каждого элемента откор¬
ректированной полосы могла принимать значения от 1 до 255.
Значение 0 было заранее отведено для указания на фоновую
часть изображений полос и секторов; это позволило заметно уп¬
ростить описанные в разд. 2—4 процедуры синтеза.
После выравнивания изображения полосы проводилась гео¬
метрическая коррекция фазового набега, возникающего в резуль¬
тате изменения высоты полета станции. Для этой цели строки
каждого из доплеровских каналов полосы циклически сдвигались
таким образом, чтобы минимум яркости, соответствующий спаду
чувствительности антенны (темная зона на рис. 5, а, б), попал
41
Рис. 5. Этапы предварительной обработки полосы
а — фрагмент исходного изображения полосы; б — результат коррекции изображений,
вызванных АРУ; в — изображение после коррекции фазового набега; г — результат ус¬
реднения трех доплеровских каналов; д — результат компенсации неравномерности диа¬
граммы направленности антенны; е — полное изображение полосы по окончании предва¬
рительной обработки
на край изображения этого канала. В ходе экспериментов оказа¬
лось, что изменение высоты полета (и кривизна указанной полосы
на изображении) в зоне съемки хорошо описывается многочленом
четвертой степени вида о (Z) = а + Ъ (I — гПц)2 — с (Z — гПц)\
где гПц — номер строки, соответствующей перицентру (т. е. наи¬
меньшей высоте полета). Коэффициенты а, Ъ и с, а также значе¬
ние гПц выбирались оператором в режиме диалога. Для каждого
набора значений этих параметров на изображение полосы на экра¬
не дисплейного процессора наносилась линия, задаваемая много¬
42
членом со (О (взятым по модулю 189 с учетом реальной ширины
полосы). Оператор методом последовательных приближений из¬
менял параметры а, Ъ, с и гпц до тех пор, пока эта линия не
совмещалась с серединой темной зоны по всей длине полосы (см.
рис. 5, б). По достижении этого результата найденные параметры
фиксировались и заносились в каталог, а изображение полосы
преобразовывалось по формуле
Уг] = ^(г-со(Ц)тос1бЗ’
для левого доплеровского канала и по аналогичным формулам
для остальных каналов. В результате коррекции фазового на¬
бега изображение полосы «выпрямлялось» и приобретало виду.
показанный на рис. 5, в.
Следующий этап предварительной обработки состоял в компен¬
сации сбоев, обусловленных низким отношением сигнал/шум при
приеме сигналов от весьма удаленных от Земли станций. Эти сбои
приводили, как правило, к полному пропаданию некоторых
строк полосы. В случае пропадания более четырех строк подряд
их приходилось заменять соседними строками (более короткие
промежутки заполнялись в ходе усреднения каналов).
По изображению трех доплеровских каналов, не содержащему
грубых сбоев, формировалось путем усреднения по формуле
Уч ~.(,ГО\Н_ •Х^-2,;+6з5+ ^1-4, J+126 )/3 (3):
единое изображение (рис. 5, г); результатом усреднения являлось
значительное снижение спекл-шума. Поскольку для рабочего
диапазона высот полета строки соседних каналов, номера которых
отличаются примерно на два (фактически — на 1,5—2,5), соот¬
ветствуют одним и тем же участкам поверхности Венеры, четкость
изображения в результате усреднения по формуле (4) не умень¬
шалась. В случае, когда строки одного или даже двух каналов
являлись сбойными, они не использовались при усреднении;
в связи с наличием сдвига между каналами такой режим работы
приводил к восстановлению изображения даже на тех участках,
где исходное изображение содержало не слишком протяженные
(до четырех строк) сбои (ср. рис. 5, в, г).
Дальнейшая предварительная обработка состояла в допол¬
нительной коррекции фазового набега, обусловленного локаль¬
ными изменениями высоты рельефа (описанная ранее коррекция
по формуле (2) предполагала наличие лишь медленных изменений
расстояния от станции до поверхности за счет эллиптичности
орбиты). Процедура коррекции, как и прежде, ставила своей
Целью перемещение минимума яркости, обусловленного спадом
чувствительности антенны, на край полосы. В самом деле, из
рис. 6 видно, что положение этого минимума при изменении
высоты рельефа h смещается на величину порядка h tg а. При
СС = 12° и максимальной высоте рельефа Венеры около 12 км эта
величина соответствует примерно 2 км, т. е. возникающая по¬
грешность не превышает одного элемента изображения полосы;
41
для реальных перепадов рельефа значение погрешности оказы¬
вается еще меньшим.
На ранних стадиях обработки полос дополнительная коррекция
фазового набега осуществлялась оператором в режиме диалога.
С этой целью он проводил на изображении полосы линию, при¬
ходящуюся на середину темной зоны; координаты точек этой линии
использовались для циклического сдвига усредненного изобра¬
жения. В связи с чрезвычайно высокой трудоемкостью этой про¬
цедуры в дальнейшем она выполнялась автоматически, а. ручная
коррекция использовалась лишь для тех мест, где автоматический
алгоритм терял работоспособность (это происходило в тех крайне
редких случаях, когда по каким-либо причинам параметры пред¬
варительной коррекции фазового набега подбирались недостаточ¬
но точно, что приводило к неполному выпрямлению полосы, или
когда значения минимума из-за нерасчетно большой высоты по¬
лета не сильно отличались от яркости центральных элементов
полосы).
Автоматическая коррекция фазового набега проводилась путем
определения максимума функции корреляции видеосигнала, ус¬
редненного по нескольким строкам, и эталонного сигнала, форма
которого определялась диаграммой направленности антенны. Ал¬
горитм коррекции сводился к следующему. Вначале подсчитыва-
Рис. 6. Смещение минимума диа¬
граммы направленности антенны при
изменении высоты рельефа
лось среднее значение видео¬
сигнала по 2к + 1 строкам по¬
лосы (реально к = 31):
= S zin/(2/c + 1).
n=j — li
Затем оценивалась функция
корреляции Xij и эталонного
сигнала f (j):
62
Fin = 3 / (/)
3=0
где [j + n] = (/ + n)mod63', no-
еле этого отыскивался макси¬
мум
F^m) = max (7^in).
Найденное значение m счи¬
талось началом строки, и все
элементы данной строки цикли¬
чески сдвигались влево на ш по¬
зиций. По окончании коррекции
фазового набега изображение
44
полосы упаковывалось и представлялось в виде вертикального фра¬
гмента размером 1024 строки по 252 элемента в каждой. Четыре
обработанные таким образом полосы образовывали одно изображе¬
ние размером 1024 X 1024 элемента (с узкими промежутками меж¬
ду полосами). Это изображение подвергалось транспонированию
(повороту вокруг главной диагонали); в результате каждая из
четырех полос оказывалась горизонтальной. По полученному
изображению в режиме диалога определялись координаты начала
и конца каждой полосы. Эти координаты записывались в каталог
ввода и наносились (вместе с номерами полосы) на свободные
участки ее изображения. Надписанное изображение фиксирова¬
лось на магнитной ленте в качестве промежуточного результата.
Последний этап предварительной обработки состоял в коррек¬
ции искажений, вызванных неравномерностью диаграммы на¬
правленности приемной антенны. Эти искажения, приводящие
к уменьшению яркости и контрастности при переходе от середи¬
ны к краям полосы, компенсировались путем деления текущего
значения яркости на ее скользящее среднее значение по продоль¬
ной окрестности шириной 63 отсчета:
31
Уц = СХц!( 2 ^i+R.j/63).
R=-31
Средняя яркость получаемого изображения (рис. 5, д) при
этом становилась равной С = 128 — середине диапазона 8-раз-
рядных значений яркости. В ходе коррекции при вычислении
скользящего среднего учитывались только реальные отсчеты
полосы, но не элементы окружающего ее поля; для этого исполь¬
зовались полученные на предыдущем этапе сведения о коорди¬
натах начала и конца полосы. На изображениях четверок полос,
подвергнутых коррекции, наносились текстовые комментарии
{порядковый и идентификационный номера и дата получения
каждой полосы); затем эти изображения (рис. 5, ё) записывались
на магнитную ленту. Хранение на лентах двух видов промежуточ¬
ных результатов (полученных до и после коррекции искажений,
вызванных неравномерностью диаграммы направленности) дало
возможность сохранить эти результаты в течение всего срока
работы, несмотря на низкое качество применявшихся магнитных
лент.
В результате проведения предварительной обработки были
получены качественные изображения примерно 300 полос, заре¬
гистрированных станциями «Венера-15» и «Венера-16» в течение
10 мес. работы.
2. Геометрическое преобразование полос
и синтез секторов
2.1. Геометрическое преобразование полос. Подвергнутые пред¬
варительной обработке изображения полос, описанные в разд. 1,
имели достаточно произвольную геометрию. В самом деле, по-
45
Рис. 7. Геометрическое преобразование полос
а — положение подспутниковой линии, полосы и ее характерных элементов на карте;
б — зависимость между координатой j на карте и номером соответствующей строки по¬
лосы г; в — оценка поперечной деформации полосы
скольку в процессе съемки высота станции существенно меня¬
лась (от 1 тыс. км до 2 тыс. км), снимаемый участок поверхности
оказывался изогнутым; вблизи перицентра, где высота минималь¬
на, он подходил ближе всего к подспутниковой линии (рис. 7, а).
Съемка строк велась через равномерные интервалы времени Ai =
= 0,296 с, поэтому расстояние по поверхности между соседними
строками было большим вблизи перицентра, где скорость станции
максимальна, и уменьшалось к концам полосы. Как будет пока¬
46
зано далее, расстояние по поверхности между соседними элемен¬
тами одной строки также было неодинаковым.
Для того чтобы получить правильное изображение полосы,
следовало провести соответствующую геометрическую коррек¬
цию. Естественно было сразу трансформировать полосу в масштаб
используемой картографической проекции; в этом случае при¬
ходилось учитывать неравномерность масштаба вдоль паралле¬
лей, появляющуюся при удалении от полюса, а также то, что
подспутниковая линия в данной проекции не является прямой.
Точные вычисления по формулам, учитывающим все эти фак¬
торы, требуют значительных затрат машинного времени. Однако
при обработке полос требования к точности невысоки (поскольку
ошибка должна лишь быть в пределах одного элемента изображе¬
ния); поэтому задачу геометрического преобразования полос
удается существенно упростить.
На рис. 7, а рассмотрено изображение, на котором формиру¬
ется полоса, преобразованная в проекцию карты: (Z, /) — коор¬
динаты элементов этого изображения; (0, 0) — элемент, соответст¬
вующий полюсу. Горизонтальная строка этого изображения (Z = 0)
принимается за меридиан, вдоль которого летит станция.
Строки преобразованной полосы должны быть перпендикуляр¬
ны подспутниковой линии. Однако для реальных параметров
орбиты отклонение точек этой линии от меридиана в выбранной
проекции настолько невелико, что можно считать строки перпен¬
дикулярными меридиану, т. е. использовать при вычислении вы¬
соты станции Н и при выполнении продольного растяжения только
координату /. Обозначив ;пц координату перицентра, введем обо¬
значения для двух углов: ср (/) = ([i/R)j иф (/) = ((х/7?)(/ — 7ПЦ),
где ц = 2,5 км/эл.— масштаб карты (размер одного элемента
вдоль меридиана); R = 6051 км — радиус Венеры. Здесь ср —
угловой размер дуги между полюсом и точкой на меридиане (ши¬
рота такой точки равна 90° — | ср ]); ф — угол, входящий в урав¬
нение эллиптической орбиты станции.
График на рис. 7, б иллюстрирует растяжение полосы, т. е.
зависимость между координатой j и номером соответствующей
строки полосы г. Отметим, что значения гПп и гПц (номера строк,
отвечающих периполюсу и перицентру) для преобразуемой по¬
лосы известны из каталога, а значение /Пц априори неизвестно.
Для компенсации продольного растяжения формировался мас¬
сив
s (п\ _ V ^япЦ с1 +g)2 .
V 7 Z-J ЯЕпцД* [1 + е cos (ЩЯ)]2 ’
li=i
Япц — выбиравшаяся из каталога высота станции в перицентре,
а 7пц и е — скорость станции в перицентре и эксцентриситет
орбиты станции на данном витке, вычислявшиеся по формулам
Рпц = У (D/Нпц) + Е, е = 1 + 2EH^/D, где D = 2утв (у — гра-
витационная постоянная; тпв — масса Венеры); Е < 0 — запи¬
47
санный в каталоге параметр — полная энергия элемента станции
массой 2 г.
Значение координаты /пц определялось из условия S (7’пц)~
~ гПц — Гап, после чего продольное растяжение выполнялось
по формуле г (7) = гпц + 5 (| j — 7ПЦ| )sign (7 — 7ПЦ).
Опишем теперь поперечную деформацию полосы (вдоль ее
строк), причем пока не будем учитывать изменение масштаба
на карте. Оценим все расстояния в километрах на поверхности
в направлении, перпендикулярном меридиану (рис. 7, в). Для
заданного значения координаты 7 отклонение подспутниковой
линии от меридиана равно р = Ясрпп cos ср (7) (значение фПп
содержится в каталоге). Высота станции над поверхностью пла¬
неты составляет
Н = (7? + Япц) -i-i + e , — R.
\ I нц/ 1 g cos -ф
Обозначим номер элемента строки, отвечающей координате 7,
через к (—31 к 31), соответствующую этому элементу точку
на поверхности — угол BODk (см. рис. 7, в) — через pfc,
расстояние от точки Dk до станции — Вк. Определив угол
Ро = arcsin (—4?~~ sin а0) — а0, (4)
где а0 = 10° — угол наклона локатора бокового обзора, можно
найти расстояние от рассматриваемой точки центральной линии
(соединяющей элементы с к = 0) до подспутниковой линии dQ =
= Яро и удаление этой точки от станции LQ = R sin po/sin cz0.
Расстояние от станции до произвольной точки Dk той же строки
составляет Lk = Lo k&L, где АЛ = 0,462 км. Применение
формулы
PR = 2 arcsin х
X {(]/ 81п2А + 2Л0ЛДЛ + (А:ДАУ-)/[47?(7? + Я)]} (5)
позволяет вычислить отклонение точки Dk от подспутниковой
точки dk = НРи-
Вычисления по формулам (4), (5) занимают много времени;
поэтому на практике значения dk определялись несколько иначе.
Можно показать, что отклонение точки от центральной линии
полосы Adk = dk — dQ = R (pft — po) медленно меняется с из¬
менением высоты И. Поэтому заранее были построены общие для
всех полос таблицы, содержащие для различных квантованных
значений Н, взятых с шагом 64 км, значения Adk; все эти таблицы
легко умещались в оперативной памяти. Значения d0 быстро
и с достаточной точностью находились путем аппроксимации
зависимости d0 (Я) многочленом второй степени.
Таким образом, отклонение элемента от меридиана, выражен¬
ное в километрах, вычислялось как сумма трех компонент: от¬
клонения подспутниковой точки от меридиана, отклонения цент-
48
Рис. 8. Синтез сектора
— стыкуемая полоса после геохмстрического преобразования; б — результат синтеза
сектора (контуры базовой и стыкуемой полос выделены)
ральной точки от подспутниковой линии и отклонения текущей
точки от центральной линии полосы.
Рассмотрим теперь, как именно формировалось изображение
преобразованной полосы. Для каждого ее столбца, т. е. для за¬
данного /, определялся номер г (/) соответствующей строки ис¬
ходной полосы, вычислялись значения ср, ф и Н и по квантован¬
ному значению Н находилась соответствующая ему таблица,
содержащая значения Adk. Вычислялись также отклонение под¬
спутниковой линии от меридиана р и отклонение центральной
линии от подспутниковой линии dQ. Затем для каждого элемента
(Z, /) определялось (уже с учетом неравномерности масштаба)
расстояние от этого элемента до меридиана, выраженное в кило¬
метрах, р = ipt sin ср/'ср, после чего из уравнения р = р + d0 +
+ AcZ]£ находилось значение AdR. По таблице определялся соот¬
ветствующий значению номер элемента к и яркость элемента ис¬
ходной полосы с координатами (г, к) придавалась элементу (£, /)
преобразованной полосы.
Результат описанного геометрического преобразования показан
на рис. 8, а. Заметим, что изгиб полосы, связанный с ее отклоне¬
нием от подспутниковой линии, в значительной мере компенси¬
ровался изгибом подспутниковой линии на данной проекции;
сужение полосы на концах компенсировалось растяжением из-за
изменения масштаба. Каждая строка полосы растягивалась не¬
равномерно, сильнее — в ее начале (ближе к подспутниковой
линии), причем особенно неравномерно — вблизи перицентра.
2.2. Синтез секторов. Процедура геометрического преобразо¬
вания полосы достаточно точно восстанавливает ее форму, но
не определяет ее точного положения, так как используются при¬
ближенные значения исходных данных. Так, небольшая ошибка
в координате периполюса гпп приводит к соответствующему сдви¬
гу всей полосы, хотя практически не изменяет ее формы. Поэтому
дальнейшая работа по составлению карты велась на основе при¬
вязки соседних полос по объектам на них.
49
В принципе можно было бы привязать к первой полосе вторую,
синтезировать общее изображение двух полос, привязать к нему
следующую полосу и т. д. Ясно, однако, что, когда круг замкнет¬
ся, самая последняя полоса не будет точно стыковаться с самой
первой, так как накопятся ошибки угла поворота и сдвига. Ясно
также, что любая ошибка в привязке потребует переделки резуль¬
татов всей последующей работы. Имеется еще ряд технологических
причин, заставляющих отказаться от этого способа, из них глав¬
ной для нас является ограниченность памяти на магнитных дис¬
ках.
Поэтому был введен промежуточный этап работы — синтез
секторов карты (рис. 8). Вся карта была разбита на 19 секторов
(см. рис. 4), каждый из которых содержал до 16 полос и охваты¬
вал 15—20° поверхности; при этом соседние сектора имели об¬
щую полосу, так что последняя полоса каждого сектора совпадала
с первой полосой следующего. Размеры сектора определялись
исходя из ограниченного объема памяти на магнитных дисках;
учитывалось, что при обнаружении ошибки нетрудно будет по¬
вторить синтез сектора. Предполагалось, что вопросы, связан¬
ные с составлением карты из секторов, будут решаться после
окончания синтеза всех секторов.
Формирование каждого сектора начиналось с геометрического
преобразования полосы, называемой базовой; после преобразо¬
вания она непосредственно (без поворота) становилась исходной
частью сектора. Затем полоса, соседняя с базовой, преобразо¬
вывалась и привязывалась к последней посредством поворота
и сдвига.
Определение параметров привязки проводилось в режиме
диалога. Для этого на изображениях обеих полос находились
по два соответствующих объекта: на участке, наиболее близком
к полюсу (т. е. в месте максимального перекрытия), и на участке,
достаточно удаленном от первого (отстоящем от периполюса на
3—4 тыс. км), где еще имеет место необходимое перекрытие по¬
лос. Вначале положение опорных объектов ориентировочно ука¬
зывалось путем наведения на эти объекты меток по полным изоб¬
ражениям полос на экране дисплейного процессора.
Для последующей точной привязки использовалась возмож¬
ность хранения в памяти дисплейного процессора одновременно
двух фрагментов изображений и мгновенного (при нажатии или
отпускании кнопки) перехода от воспроизведения одного фраг¬
мента к воспроизведению другого и обратно [4]. Эта возможность
позволяет очень эффективно выполнять привязку, если фрагменты
имеют один масштаб и одинаковую ориентацию. При выполнении
привязки изображения всех четырех используемых участков
полос вызывались в оперативную память; оттуда в память дис¬
плейного процессора передавались два участка, соответствующие
одному объекту,— участок базовой полосы и подвергнутый пово¬
роту и сдвигу в соответствии с текущими значениями параметров
участок стыкуемой полосы (рис. 9). Изображения каждого из
50
Рис. 9. Привязка базовой и стыкуемой полос
а — фрагмент сгыкусмэй полозы, подвергнутой сдвигу и повороту, б — фрагмент базо-^
вой полосы
участков можно было смещать, добиваясь совпадения их центров
с выбранным объектом и наилучшего соответствия этого и других
объектов на базовой и стыкуемой полосах.
В процессе работы на экране дисплейного процессора, помимо
изображений полос, воспроизводились параметры привязки, в част¬
ности коэффициент масштаба и угол поворота. Это позволяло
дополнительно контролировать правильность совмещения: угол
поворота полосы относительно соседней должен был составлять
около 1,48°, а масштаб — примерно 1.
После завершения привязки ее параметры автоматически за¬
писывались в соответствующий раздел каталога секторов (так
же как в начале работы с сектором — параметры базовой полосы)
и производилось геометрическое преобразование стыкуемой по¬
лосы. Независимо от параметров привязки геометрическое преоб¬
разование выполнялось с масштабом 1, т. е. изображения совме¬
щались по первой опорной точке (в районе полюса) и стыкуемая
полоса поворачивалась, а вторая опорная точка использовалась
только для определения угла поворота.
51
Рис. 10. Фотография с экрана дисплейного процессора, иллюстрирующая
проведение «врезки»
По окончании привязки и геометрического преобразования
из стыкуемой и базовой полос формировалось единое изображение.
Эта процедура (так называемая врезка полосы) выполнялась
в режиме диалога. Оператору предъявлялись друг под другом
на экране дисплейного процессора увеличенные соответствующие
участки базовой и стыкуемой полос. С помощью опрашиваемых
системой кнопок оператор мог проводить одновременно на соот¬
ветствующих местах изображений обоих этих участков ломаную
линию, фиксируя точки ее излома (рис. 10). При достижении
края поля экрана дисплейного процессора изображения авто¬
матически смещались в нужном направлении (на 1/8 поля вверх
или вниз, на 1/2 поля влево или вправо); при этом на изображении
сохранялись сегменты ломаной линии, попадающие в пределы
нового участка. По мере надобности при движении в горизонталь¬
ном направлении менялся номер диска, с которого считывалось
изображение базовой полосы. Ломаная линия играла роль гра¬
ницы раздела между полосами; оператор стремился проводить
ее таким образом, чтобы находящиеся по ее разные стороны облас¬
ти одной и другой полосы имели близкие значения яркости, явля¬
лись относительно однородными и близкими по текстуре (в част¬
ности, рекомендовалось по возможности проводить линию по
равнинным участкам и вдоль горных хребтов, обходя одиночные
кратеры). В случае неудачного проведения части линии оператор
мог последовательно отменить выбор произвольного числа зафик¬
сированных сегментов, а затем пойти, начиная с некоторого места,
по иному маршруту или уточнить ранее выбранный маршрут.
После того как разделяющая ломаная линия проводилась
вдоль всей области пересечения обоих полос, оператор обводил
52
ею конец стыкуемой полосы и соединял (нажатием дополнитель¬
ной кнопки) последнюю точку проведенной линии с ее начальной
точкой. Затем зона базовой полосы, обведенная линией, автома¬
тически заменялась изображением стыкуемой полосы. Если линия
проводилась оператором аккуратно, то граница раздела на полу¬
чаемом изображении оказывалась визуально неразличимой.
Выбор способа предварительной обработки полос, исключаю¬
щего появления на них нулевых значений яркости (см. разд. 1),
позволил организовать процедуру врезки таким образом, чтобы
нулевые значения не переписывались со стыкуемого на базовое
изображение. В результате отпала необходимость заботиться
об очень точном проведении линии через точки пересечения гра¬
ниц объединяемых полос; отбрасывание нулевых значений обес¬
печивало перезапись лишь содержательной части изображения
стыкуемой полосы.
После окончания врезки очередной полосы получаемое изоб¬
ражение делалось базовым и процедуры геометрического преоб¬
разования, привязки, поворота и «врезки» повторялись для сле¬
дующей по порядку полосы. Так продолжалось до тех пор, пока
из 10—16 полос не формировался полный сектор, в наиболее
широкой части содержащий около 1000 элементов в вертикальном
направлении; длина сектора (см. рис. 8, б) составляла до 3000
элементов.
3. Составление карты
Первый этап работ по составлению карты из секторов сводился
к определению положения секторов на карте по априорным дан¬
ным и результатам синтеза секторов. Для каждого сектора 5 в ка¬
талоге секторов содержались, в частности, углы и ц5 поворота
его верхней и нижней полос относительно меридиана. Поскольку
верхняя полоса сектора 5 одновременно являлась нижней полосой
сектора s + 1 (см. рис. 4, а), можно было прежде всего опреде¬
лить суммарный угол, охватываемый всеми 19 секторами:
То = 3 (ль — es)-
S=1
В связи с ограниченной точностью обработки полос и синтеза
секторов, а также с погрешностью дискретизации угол у0 состав¬
лял не 360, а всего 355,6°. Поэтому каждый сектор в ходе состав¬
ления карты следовало растянуть в М = 36О/уо раз, т. е. примерно
на 1% его углового размера.
Общая ориентация карты определялась по известным из не¬
зависимых источников координатам характерного объекта первого
сектора («патеры Клеопатры»). Долгота этого объекта задавала
угол поворота ух первого сектора, а широта — его сдвиг. Необ¬
ходимые углы поворота остальных секторов определялись по
53
формуле
s
Ys = Y1 + M 2 01k — 0R-1)*
к =2
Погрешности определения координат периполюса в ходе гео¬
метрических преобразований базовых полос секторов приводили
к сдвигу секторов. В ходе составления карты необходимо было
скомпенсировать этот сдвиг таким образом, чтобы поворот вокруг
полюса приводил к совмещению крайних полос .соседних сек¬
торов.
Для определения параметров сдвига были измерены координа¬
ты двух угловых точек правых концов верхней и нижней полос
каждого сектора (точек As, As, Bs и Bs соответственно). Коор¬
динаты точек Bs и Bs пересчитывались в систему координат
сектора 5 — 1 путем' поворота на угол М (ц3 — 03_г) против ча¬
совой стрелки; после этого среднее несовпадение полученных
координат с координатами точек Л8_1 и отвечало сдвигу
сектора 5 относительно сектора $ — 1.
Последовательное вычисление параметров сдвига и поворота
для секторов 2—19 позволило найти абсолютные параметры сдви¬
га каждого сектора на карте. Как и следовало ожидать, по окон¬
чании этой процедуры оказалось, что крайние полосы секторов
19 и 1 не совпадают, а сдвинуты друг относительно друга; вели¬
чина сдвига составила всего около 7 эл., что, как и незначитель¬
ность погрешности суммарного угла поворота, свидетельствует
о правильности выбранной методики составления карты. Указан¬
ный сдвиг удалось скомпенсировать путем коррекции на 1 эл.
относительных сдвигов некоторых секторов.
После определения параметров поворота и сдвига секторов
была выполнена работа по составлению собственно карты. В связи
с ограниченным объемом имеющихся магнитных дисков карта
формировалась из отдельных листов; всего в нее входило 49 листов
размером 1024 X 1024 эл., из которых 34 листа содержали ин¬
формацию (см. рис. 3). Каждый сектор, попадающий в формируе¬
мый лист, растягивался в М раз. На практике угловое растяжение-
сектора заменялось его линейным растяжением по формулам
I' = iQ + (г — i0)sin M60/sin 60,
j' = j — (i — i0)(cos 60 — cos M60)/sin 60,
где iQ — среднее расстояние от меридиана (i = 0) до конца верх¬
ней полосы сектора; 60 ~ 19° — средний раствор сектора. Возни¬
кавшая при этом погрешность составляла менее одного элемента,
и ею можно было пренебречь. После растяжения сектор подвер¬
гался сдвигу и повороту с учетом положения листа на карте.
Для объединения частей секторов, составляющих каждый
лист, использовалась процедура, аналогичная описанной в разд. 2
процедуре «врезки». Оператору предъявлялись друг под другом
увеличенные фрагменты изображений листа и сектора, и он про¬
54
водил на этих изображениях описанным ранее способом ломаную
линию раздела. После замыкания концов ломаной линии содер¬
жательная часть сектора, ограниченная этой линией, «врезалась»
в изображение формируемого листа. Растяжение, сдвиг, разво¬
рот и врезка секторов продолжались до тех пор, пока на лист
не наносилась информация со всех секторов, составляющих его
(рис. 11).
4. Синтез приполярной области
Центральный лист карты, полученной в результате объедине¬
ния секторов, содержал пробел в приполярной области. Наличие
этого пробела (см. рис. 11, а) было связано с геометрией полета
станций и способом проведения съемки (см. рис. 1). Для его за¬
полнения примерно раз в 1—2 недели одну из станций развора¬
чивали на 20° вокруг продольной оси; при этом полоса, снимае¬
мая локатором бокового обзора станции, проходила через полюс [1].
Геометрическое преобразование «полярных» полос в прин¬
ципе не отличалось от преобразования обычных полос. Оно про¬
водилось по тем же формулам и той же программой, но в особом
режиме работы: угол наклона локатора а0 = 10° заменялся на
ап = —Ю°. При этом, естественно, формируемое изображение
располагалось значительно выше, чем изображения обычных
полос, поэтому обеспечивался также сдвиг координат поля фор¬
мируемого изображения, чтобы преобразованная полоса попадала
в это поле.
Поскольку «полярные» полосы проходили выше подспутни¬
ковой линии, изгиб подспутниковой линии и отклонение централь¬
ной линии от подспутниковой уже не компенсировали, а допол¬
няли друг друга. В результате «полярные» полосы, преобразован¬
ные в проекцию карты, были значительно более изогнуты по срав¬
нению с обычными. Кроме того, как легко видеть, они зеркально
переворачивались в процессе преобразования.
Сведения о траектории полета станций в дни съемки «поляр¬
ных» полос оказывались, как правило, недостаточно точными,
а сведения об угле разворота — не вполне достоверными; поэтому
было принято решение о привязке этих полос к центральному
листу карты с контролем угла поворота (определяемого датой
съемки), но без сохранения единичного масштаба (т. е. с воз¬
можным увеличением или уменьшением полосы). Привязка про¬
водилась не для всей полосы, а лишь для ее центральной части
размером около 1000 элементов; северный полюс Венеры нахо¬
дился примерно в середине этого участка. Диалоговая процедура
привязки, аналогичная применявшейся для синтеза секторов,
сводилась к поиску на увеличенных изображениях фрагментов
центрального листа карты объектов, соответствующих объектам
начала и конца «полярной» полосы, повернутой на близкий к рас¬
четному угол. Смещая изображения фрагментов полосы, оператор
добивался совмещения выбранных объектов; правильность совме-
55
Рис. 11. Листы составной карты
а — центральный лист (с незаполненной приполярной областью); б — один из средних
листов; в — один из периферийных листов
щения проверялась по объектам, окружающим выбранные. Кри¬
терием правильности совмещения являлись также правдоподоб¬
ность угла поворота и близость масштаба к единице. По оконча¬
нии привязки полосы ее центральная часть разворачивалась таким
образом, чтобы выбранные объекты совпадали. Затем выполнялась
«врезка» полосы в центральный лист карты (рис. 12, а). Процесс
геометрического преобразования, привязки, разворота и «врезки»
«полярных» полос продолжался до заполнения приполярной об¬
ласти (рис. 12, б). Для каждой следующей полосы привязка,
как правило, оказывалась более простой и более точной, так как
ее можно было контролировать по совпадению объектов в районе
полюса. В ходе работ получаемые углы поворота оказались для
всех полос близкими к расчетным; масштаб всегда находился
в пределах 1 ± 0,005. Таким образом, выбранная методика, не¬
смотря на относительно грубые допущения, оказалась вполне
приемлемой.
Заключение
В результате применения описанной методики удалось успеш¬
но завершить работы по синтезу карты Венеры (рис. 13). В отно¬
сительно короткий срок обработаны изображения порядка 300 по-
57
Рис. 12. Заполнение приполярной области
а — центральный лист карты, в приполярную область которого «врезана» одна из «поляр¬
ных» полос; б — центральный лист карты с заполненной приполярной областью
Рис. 13. Полная радиолокационная карта, составленная по данным стан¬
ции «Венера-15» и «Венера-16»
лос, из этих изображений синтезированы 19 секторов, сектора
развернуты на 34 листа карты и для центрального листа этой
карты отдельно сформирована приполярная область. Особен¬
ностью предложенной методики являлось широкое применение
диалоговых методов работы. За счет диалога удалось резко по¬
высить качество изображений, добиться неразличимости стыков
соседних полос и обеспечить высокую точность геометрических
преобразований. Удачная постановка технологии предваритель¬
ной обработки полос, синтеза секторов и построения карты по¬
зволила снизить требования к профессиональной подготовке
оператора и добиться относительно высокой скорости работы.
Хотя объем оперативной и внешней памяти ЭВМ, входящей в со¬
став системы «Альфа», был чрезвычайно мал по сравнению с объ¬
емом перерабатываемой информации, а быстродействие этой ЭВМ —
относительно невелико, полный цикл предварительной обработки
полосы занимал всего около 50 мин машинного времени, синтез
сектора — около 15 ч, а формирование листа карты — в среднем
59
1—1,5 ч. Порядка 10 ч машинного времени было затрачено на за¬
полнение приполярной области. Таким образом, полное время
синтеза карты составило примерно 600 ч (т. е. 72 рабочих дня).
Эти затраты весьма невелики по сравнению со значимостью полу¬
ченных результатов.
Авторы выражают благодарность ОКБ МЭИ за предоставле¬
ние исходных данных полосовой съемки и орбитальных данных,
а также Н. И. Засоловой и Л. В. Кудрину за участие в практи¬
ческом проведении работ по составлению карты.
ЛИТЕРАТУРА
1. Богомолов А . Ф., Скрынник Г.И., Б ок штейн И. М. и др. Обработка данных
полосовой съемки поверхности Венеры, переданных станциями «Вене¬
ра-15» и «Венера-16» // Космич. исслед. 1985. Т. 23, № 2. С. 179—190.
2. Кузьмин Р. О., Бокштейн И. М., Кронрод М. А. и др. Рельеф и геоло¬
гия северной полярной области планеты Венера И Астрой, вести. 1986.
Т. 19, № 3. С. 177-195.
3. Кронрод М. А., ЧочиаП.А. Математическое обеспечение диалоговой
системы обработки изображений И Иконика: Теория и методы обработки
изображений. М.: Наука. 1983. С. 87—99.
4. Бокштейн И. М. Дисплейный процессор для диалоговой обработки полу¬
тоновых изображений // Цифровая обработка сигналов и ее применения.
М.: Наука, 1981. С. 187—206.
5. Аким Э. Л., Тюфлин Ю. С., Беленький Е. Г. и др. Навигационное обес¬
печение и координатная привязка материалов радиолокационной съемки
с АМС «Венера-15» и «Венера-16»// Геодезия и картография. 1986. № 1..
С. 38-41.
УДК 621.391.83:535.6
ВОЗМОЖНОСТИ ПОВЫШЕНИЯ
РЕЗКОСТИ ЦВЕТНЫХ ИЗОБРАЖЕНИИ
И. М. Бокштейн
Введение. Задача повышения резкости изображений имеет
весьма важное значение в случаях, когда исходное изображение,
подлежащее рассматриванию или визуальному анализу, оказы¬
вается сглаженным из-за несовершенства воспроизводящей си¬
стемы; такая ситуация может иметь место в полиграфии, медицин¬
ской диагностике, при работе с результатами дистанционного
зондирования и т. п.
Возможности повышения резкости многоградационных черно¬
белых изображений уже хорошо изучены; к настоящему моменту
разработано множество алгоритмов повышения резкости [1, 2].
Их применение, как правило, сводится к обработке изображения
каким-либо локальным оператором (например, оператором Лап¬
ласа, Собеля или Робертса), в результате чего выделяется высоко¬
частотная (контурная) составляющая этого изображения; затем
эта составляющая добавляется к изображению с некоторым весом.
60
Целью данной работы является исследование возможностей
применения методов, аналогичных описанному, для повышения
резкости цветных изображений без внесения значительного цве¬
тового шума.
Различные варианты повышения резкости цветных изображе¬
ний. Первая идея, естественно возникающая при попытках по¬
вышать резкость многоградационных цветных изображений (ко¬
торые обычно задаются своими цветовыми компонентами 7?, G
и 5), сводится к применению какого-либо из упомянутых опера¬
торов А для выделения контуров на каждой из компонент в от¬
дельности и к последующему добавлению контурного изображения
с весом с к исходному изображению:
R = R ctYR, G = G ct±G, В = R -р c^R. (1)
Попытки практического применения такого метода (метода U)
приводят, однако, к возникновению значительных цветовых ис¬
кажений, поскольку независимая обработка компонент вызывает
различные по величине и разнонаправленные изменения цвета
в близких точках изображения. Цветовые искажения проявляются
на обработанном цветном изображении в виде значительного им¬
пульсного шума (так, после обработки тестового изображения
«дом» с применением оператора Лапласа на имеющихся на изоб¬
ражении темно-зеленых кустах появляются красные «розы»).
Первый из естественных вариантов борьбы с цветовым шумом
состоит в добавлении ко всем трем цветовым компонентам одного
и того же контурного изображения; при этом изменения цвета
в соседних точках оказываются достаточно близкими и импульс¬
ный шум уменьшается. Для формирования контурного изобра¬
жения можно применять какие-либо операторы выделения кон¬
туров непосредственно к одной из цветовых компонент, например
к «зеленой» компоненте 6, которая для большинства изображе¬
ний реального мира является наиболее информативной. Будем
называть такой метод методом G. Однако более естественно и ра¬
зумно выделять контуры по яркостной компоненте Y = 0,32? +
+ 0,596 + 0,112?, несущей информацию о всех трех цветовых
компонентах (метод У). Формулы вычислений при реализации
метода G и метода У имеют вид
R = R + ckG, G = G + c\G; R = R + c&G
и
R = 2? 4- сАУ, G = G + сАУ, В = В + сАУ
соответственно.
Использование методов G и У все же не приводит к полному
устранению цветовых искажений, поскольку изменения различ¬
ных цветовых компонент при этом не согласованы друг с другом.
При желании полностью устранить искажения цвета эти измене¬
ния должны быть пропорциональны значениям компонент в каж¬
дой точке, так, чтобы выполнялись соотношения
R : G : В = 2? : G : В. (2)
61
Соотношения (2) означают, что векторы цвета на обработанном
и исходном изображениях совпадают по направлению и отлича¬
ются лишь своими модулями. Добиться выполнения соотношений
(2) естественнее всего за счет выполнения обработки по формулам
R = R + c-^AY, G^G-c-^AY, В = В + c-^AY-,
(3)
назовем этот метод методом Е. При применении метода Е (для кото¬
рого, как легко убедиться, R : G : В = R :• G : В) яркостная
компонента Y = 0,35 + 0,59G + 0,115 обработанного изображе¬
ния соответствует применению оператора А для непосредственного
повышения резкости яркостной компоненты Y исходного изо¬
бражения: Y = Y cYY. Элементы обработанного методом Е
изображения имеют тот же цвет, что и элементы исходного изо¬
бражения, и отличаются от них только по яркости.
Сравнение формул (1) и (3) позволяет убедиться в том, что для
любого одноцветного изображения вычисление по этим формулам
дает одинаковые результаты; это является дополнительным дово¬
дом в пользу применения в формулах (3) коэффициентов cRIY,
cGIY и cBIY, хотя в принципе добиться выполнения соотношений
(2) можно и с помощью других коэффициентов (например, cRIK,
cG/К и сВ/К, где К = aR + [3G + ?5, а, (3 и у — произвольные
неотрицательные числа).
Моделирование методов повышения резкости и сравнительная
оценка их возможностей. С целью практической проверки рабо¬
тоспособности и оценки искажений, характерных для описанных
методов повышения резкости, эти методы были применены для
обработки тестового цветного изображения «дом», содержащего
512x512 отсчетов, квантованных на 256 уровней, для каждой
из цветовых компонент. Это изображение (фотография средним
планом, содержащая дом, кусты и деревья, дорожку, небо с обла¬
ками и т. п.) является достаточно богатым в цветовом отношении,
но имеет явно недостаточную резкость (возможно, в связи с недос¬
таточной точностью фокусировки при съемке). Для повышения
его резкости были применены методы U, G, Y и Е\ в качестве опе¬
ратора А использовался оператор Лапласа для окрестности раз¬
мером 3x3 эл.:
AZi;- = Zij — Vs (Z^,^ -j- Zi-ltj + Zi_lrj+1 + Zi, Zi,j+i +
“F А+1Л-1 + Zi+l,j + Zi+l,j+l)i
где Z = R, G, В или Y — отсчет соответствующей компоненты
цветного избражения.
Обработка изображения «дом» была выполнена на ЭВМ
VAX — 11/750, входящей в состав системы обработки изображений
лаборатории методов полиграфии Технического университета
г. Хельсинки [3]; время работы написанной на языке Фортран-77
программы, реализующей одновременно все четыре метода обра-
62
ботки при заданном значении параметра с, составляло 3—5 мин
в зависимости от степени загрузки ЭВМ. Визуальное качество
получаемых изображений контролировалось на экране дисплей¬
ного процессора COMTAL VISION ONE/20. Для количественной
оценки возникших в процессе обработки цветовых погрешностей
были измерены усредненные цветовые расстояния между исход¬
ным и обработанными изображениями при различных значениях с.
Вычисление цветовых расстояний ЬЕ проводилось по стандартным
формулам Международной комиссии по освещенности (МКО) [4]:
8Е = 8Ё^ (4)
где /бе/?/ + + ; (5)
6С7* = - U%, 6V* = V% - 6IV* = W*} - W*, (6)
£7*, £7*, У*, V*, W* и W* —параметры, характеризующие цве¬
товые различия на изображениях:
( О, У<1
W ~ ( 25У’/з—17, 1<У <100,
£7* = 13Ж* (и — uQ),
V* = 13W*(y — vQ),
и и v — координаты цвета на так называемой равноконтрастной
диаграмме МКО (и, р); и0 и vQ — координаты эталонного источника
белого цвета. Черта в формуле (4) означает усреднение по всем
элементам изображения с координатами (Z, /). Программа, реали¬
зующая вычисления по формулам (4)—(7), написана на языке
Цветовые расстояния между изображением «дом»
и результатами применения различных методов повышения
его резкости
с
*
Метод обработки
и
G
У
Е
0,5
0,76
0,44
0,36
0.30
1
1,32
0.77
0,66
0,49
1,5
1,77
1,03
0.91
0,64
2
2,14
1,24
1,12
0,78
2,5
2,49
1,44
1,31
0,90
3
2,77
1,60
1,48
1,01
3,5
3,04
1,75
1,63
1,11
4
3,26
1,87
1,76
1,20
4,5
3,51
2,01
1,88
1,28
5
3,71
2,12
1,99 -
1,35
63
Фортран-77; время ее работы в связи со значительной сложностью
вычислений составляло 5—10 мин для каждой пары изображений.
Значения цветовых расстояний, измеренные для различных вели¬
чин параметра с (0,5^—5), приведены в таблице, а графики зависи¬
мостей цветового расстояния от с (т. е. от степени повышения рез¬
кости) показаны на рисунке.
С целью изучения возможностей применения рассмотренных
методов повышения резкости в полиграфии результаты обработки
изображения «дом» воспроизведены полиграфическим путем. Для
этой цели изображения были прежде всего представлены в виде
голубой, пурпурной, желтой и черной компонент, как это принято
в полиграфии. Затем эти компоненты подвергнуты растрированию
и представлены в двухградационной форме. С помощью устройства
Photowrite растрированные изображения компонент зафиксиро¬
ваны на пленке. Для формирования компонент, их растрирования
и вывода на фотопленку использованы стандартные программы
лаборатории методов полиграфии. После этого по изображениям
компонент с помощью имеющегося в лаборатории оборудования
синтезированы методом кромалиновых проб полиграфические
цветные изображения.
Анализ рис. 1 и данных, приведенных в таблице, показывает,
что цветовые расстояния, отвечающие применению методов £7, G,
У и £, относятся примерно, как 2,8 : 1,6 : 1,5 : 1; это означает,
что самым эффективным в смысле отсутствия цветовых искажений
является, как и предполагалось, метод Е (для него значения
SC7* и 6V* всегда равны нулю
и ненулевое цветовое расстоя¬
ние обусловливается только
изменениями яркости и вели-
л чины Ж*). Методы G и У по
степени цветовых искажений
также являются более удачны¬
ми, чем метод U; однако они
уступают несколько более
сложному в вычислительном от-
ношении методу Е. Цветовые
различия, связанные с приме¬
нением методов G и У, пример¬
но одинаковы (хотя, каки ожи¬
далось, метод G, выбирающий
информацию о контурах толь¬
ко из «зеленой» компоненты, дает
несколько худшие результаты).
Зависимость цветового расстояния от
степени повышения резкости мето¬
дами U, G, Y и Е для изображения
. «дом»
ff / z / 4 Zc
<64
Визуальное сравнение исходного изображения «дом» и резуль¬
татов повышения резкости при с = 3,5, полученных методом
кромалиновых проб, показывает, что предложенный метод Е обес¬
печивает гораздо лучшее визуальное качество при той же степени
повышения резкости, что и обычный метод U. На изображении,
обработанном методом Е, отсутствует цветовой шум; однако оно
выглядит столь же резким, как и изображение, обработанное ме¬
тодом U, и значительно более привлекательным, чем исходное
изображение.
Заключение. Описанные в работе эксперименты по применению
различных методов для повышения резкости цветных изображе¬
ний, проведенные измерения цветовых расстояний и визуальная
оценка полученных результатов позволяют сделать вывод о том,
что метод Е (использование которого не приводит к появлению
цветового шума) может с успехом служить средством повышения
резкости цветных изображений в полиграфии и других областях.
При необходимости максимально уменьшить объем вычислений
(например, в случае создания аппаратуры, повышающей резкость
в реальном масштабе времени) вместо метода Е можно применять
менее эффективные методы Y или G. Следует отметить, что сравни¬
тельные возможности рассмотренных методов не зависят от кон¬
кретного вида оператора Д; поэтому полученные качественные ре¬
зультаты справедливы не только для случая применения опера¬
тора Лапласа.
ЛИТЕРАТУРА
1. Прэтт У. Цифровая обработка изображений. М.: Мир, 1982. Т. 1. 310 с.;
Т. 2. 480 с.
2. Handbookoi' pattern recognition and image processing / Ed. T. Young,
K.-S. Fu. N. Y.: Acad, press, 1986. 817 c.
3. Activities о I the laboratory of graphic arts technology at Ilelsinski Uni¬
versity of Technology, 1985 // Graph. Arts Finl. 1986. Vol. 15, N 1. P. 11.
4. Wyszecki G. Proposal for a new color-difference formula // J. Opt. Soc. Amer.
1963. Vol. 53. N 11. C. 1318-1319.
УДК 535.8:535.242.2
МНОГОКАНАЛЬНЫЙ АВТОМАТИЧЕСКИЙ
МИКРОДЕНСИТОМЕТР
М. П. Гришин, Ш. М. Курбанов, Т. А. Святославская,
Н. Л. Святославский, Р. Р. Бикматов
При решении задач по обработке изображений, требующих
высокой фотометрической и координатной точности, для ввода
видеоинформации в ЭВМ используются оптико-механические авто¬
матические микроденситометры с барабанной и плоскостной раз¬
верткой. Особенностью этих устройств является постоянная
геометрия оптического узла, что обеспечивает постоянные усло¬
вия фотометрирования, т. е. измерения оптических характеристик
3 Иконика
65
элементов изображения: оптической плотности или коэффициента
пропускания. К автоматическим микроденситометрам (АМД) ба¬
рабанного типа относятся приборы Photomation (США), Scandig
(Великобритания), FEAG (ГДР). Наиболее распространенными
АМД плоскостного типа являются МД-6 (Великобритания),
PDS-1010A (США), АМД-1 (СССР) [1-3].
Преимуществом АМД барабанного типа является высокая
производительность при считывании изображений больших фор¬
матов. Недостатками таких приборов являются невозможность
считывания информации с фотопластинок, а также существенное
снижение их производительности при вводе в ЭВМ изображения
среднего и малого форматов.
Наиболее прецизионными АМД являются плоскостные при¬
боры, в которых сканирование изображения осуществляется
за счет его перемещения относительно оптического узла. Эти
приборы превосходят барабанные по фотометрической и коорди¬
натной точности и по диапазону фотометрирования. Производи¬
тельность их в широких пределах не зависит от формата вводимо¬
го изображения. Плоское расположение фотоизображения на
столе-препаратоводителе позволяет сравнительно простыми сред¬
ствами организовать предварительный просмотр и выбор информа¬
тивных участков изображения. Недостатком плоскостных АМД
является сравнительно невысокая производительность, ограничен¬
ная скоростью перемещения стола-препаратоводителя. Эта ско¬
рость сейчас лежит в пределах 5—50 мм/с и на сегодняшний день
в принципе может быть увеличена до 200 мм/с за счет применения
линейных шаговых двигателей (ЛШД). Однако отсутствие серий¬
ных ЛШД рамочного типа не позволяет реализовать это техничес¬
кое решение.
Эффективным путем повышения производительности плоскост¬
ных АМД является метод параллельного многоканального фото¬
метрирования изображений, при использовании которого за один
проход стола АМД считывается сразу несколько строк. Для реа¬
лизации этого технического решения необходимы многоканальные
фотоприемные устройства (МФПУ). Современные МФПУ можно
разделить на два типа: устройства с внутренними электрическими
связями и устройства с полной электрической развязкой отдель¬
ных фоточувствительных элементов. Среди МФПУ первого типа
на сегодняшний день лучшими характеристиками обладают фото-
чувствительные сверхбольшие интегральные схемы с переносом
заряда, которые позволяют реализовать до 2048 каналов при
своей сравнительно невысокой стоимости. К недостаткам этих
устройств относится наличие утечек, коммутационных помех,
взаимовлияние значительного разброса чувствительности эле¬
ментов. Все эти факторы ограничивают диапазон фотометрирова¬
ния, который для лучших устройств такого типа не превосходит
2 единиц оптической плотности, что явно мало для прецизионного
АМД.
МФПУ второго типа набираются из готовых одноэлементных
66
приемников, обычно фотодиодов. Каждый фотоприемник имеет
свой канал обработки сигнала с регулируемым коэффициентом
усиления, что позволяет добиться высокой равномерности пара¬
метров по всем каналам. Недостатком таких МФПУ являются
относительно большие габариты, длительное время настройки,
что накладывает ограничения на число каналов. Полная элек¬
трическая и оптическая развязка фотоприемных элементов обес¬
печивает условия для прецизионного фотометрирования в ши¬
роком диапазоне (до 4 единиц оптической плотности), поэтому
в описываемом прецизионном многоканальном АМД использова¬
но МФПУ второго типа.
Многоканальный АМД, структурная схема которого представ¬
лена на рисунке, разработан на основе одноканального прибора
АМД-1БЦМ. Это позволило существенно повысить производи¬
тельность при минимуме переделок конструкции АМД-1БЦМ
и его электронных узлов. Оптическая часть прибора построена
по двухлучевой схеме и состоит из измерительной и опорной вет¬
вей. Измерение оптических плотностей производится на просвет,
для чего используется источник света (ИС) — ксеноновая лампа
ДКсШ-150-1, имеющая высокую яркость (200 Мнт). Свет фокуси¬
руется осветительным узлом, состоящим из конденсора (К),
осветительной диафрагмы (ОД) и осветительного микроскопа
(ОМ), на поверхности фотоизображения, закрепленного на сто-
ле-препаратоводителе (СП). Проекционный микроскоп (ПМ) дает
увеличенное в 10, 50 или 100 раз изображение освещенного участка
фотоснимка, которое в зависимости от положения поворотного
зеркала (3) отображается на просмотровый экран (ПЭ) либо фо¬
кусируется на входной плоскости многоканального ФПУ. МФПУ
содержит восемь идентичных каналов, каждый из которых состоит
3*
67
из световода (СВ1—СВ8) и фотоприемника (ФПУ1—ФПУ 8).
Входные торцы световодов размерами 1X1 мм собраны в линейку
и образуют входную плоскость МФПУ. Каждый световод своим
торцом вырезает элемент квардратной формы, размеры которого
в зависимости от используемого увеличения ПМ равны 100 X
X 100 мкм, 20x20, 10x10 мкм. Свет, попавший в световод за
вычетом потерь, составляющих около 30%, передается в ФПУ,
состоящее из фотодиода и предварительного усилителя, аналогич¬
ных используемым в АМД-1БЦМ. Выходные сигналы ФПУ по¬
ступают в узлы обработки сигнала УОС1 — У0С8. Каждый узел
обработки сигнала включает в себя логарифмический усилитель
для получения сигнала, пропорционального оптической плот¬
ности, фильтр нижних частот для уменьшения уровня шумов
фотометрического тракта, устройство выборки и хранения УВХ.
Для устранения погрешности фотометрирования, обусловленной
нестабильностью ИС, на входы опорного тока логарифмических
усилителей подается сигнал опорного канала, состоящего из
световода и фотоприемного устройства ФПУО. Выходные сигналы
У ОС поступают на вход 8-канального аналогового коммутатора
(АК), выход которого, в свою очередь, подключен к входу аналого-
цифрового преобразователя (АЦП).
Сканирование фотоизображений производится с помощью двух¬
координатной механической управляемой развертки, состоящей
из стола-препаратоводителя с предметным стеклом и двух приво¬
дов (привод X и привод У). Максимальная скорость перемещения
стола равна 50 мм/с. Положение стола контролируется двумя
датчиками с дискретностью 1 мкм. Минимальное перемещение
(шаг развертки) равно 5 мкм. Основной режим развертки — по¬
строчное сканирование по прямоугольному растру, который ха¬
рактеризуется шагом перемещения по строке, шагом перемещения
по кадру и числом строк и столбцов. Формирование растра
осуществляется блоком управления по командам ЭВМ через кон¬
троллер. Каждый раз после прохождения столом расстояния,
равного шагу по строке, из блока управления в У ОС поступает
команда, переводящая УВХ в режим хранения, после чего выход¬
ные сигналы УОС1 — УОС8 последовательно подключаются к
входу АЦП, преобразующему их в 8-разрядный двоичный код
оптической плотности. Эти коды поступают в ЭВМ по каналу
прямого доступа.
Описанный многоканальный АМД практически не уступает
по своим фотометрическим характеристикам прибору АМД-1БЦМ,
превосходя его по производительности в 8 раз. Основные техни¬
ческие характеристики многоканального АМД: максимальные
размеры изображения 250 x250 мм; диапазон фотометрирования
0—4 ед. оптической плотности; погрешность фотометрирования
1,5 %; число фотометрических каналов 8; максимальная скорость
сканирования 50 мм/с; 256 уровней квантования оптической
плотности; максимальная производительность (при размере эле¬
мента изображения 10x10 мкм) 40 тыс. отсчетов/с.
68
Производительность
микроденситометра,
тыс. отсчетов/с
Формат изображе¬
ния, тыс. отсчетов
Размер
элемента
изображе¬
ния, мкм
Многоканальный
10
FEAG
2
0,5X0,5
10X10
20
4
1X1
40
8
2X2
40
16
4X4
40
32
8X8
10
4
0,5X0,5
-20X20
20
8
1X1
20
16
2X2
20
32
4X4
В таблице приведены сравнительные данные по реальной про¬
изводительности наиболее быстродействующего микроденсито¬
метра барабанного типа FEAG и описанного многоканального АМД.
Из этих данных видно, что при размерах элемента изображения
10x10 мкм многоканальный прибор превосходит FEAG по произ¬
водительности при вводе изображений квадратной формы разме¬
ром 512x512 эл. и более. При размере элемента изображения
20 х 20 мкм это превосходство имеет место для изображений раз¬
мером не более 2048X2048 эл.
Таким образом, использование метода многоканального счи¬
тывания изображений позволило создать микроденситометр, со¬
храняющий все достоинства приборов плоскостного типа и превос¬
ходящий барабанные микроденситометры по производительности
при считывании изображений больших форматов (до 8192 х
Х8192эл.), которые на сегодняшний день редко встречаются
на практике.
ЛИТЕРАТУРА
1. Обработка изображений // Зарубеж. радиоэлектрон. 1985. № 10. С. 85 —
2. Браилко Л. А., Гришин М.П., Иванов А. М. и др. Цифровой автома¬
тический микроденситометр с управлением от ЭВМ // Опт:-мех. пром-сть.
1976. № 4. С. 34—37.
3. Swing В. Е. Optics of microdensitometer//Opt. Eng. 1973. Nov. / Dec.
P. 185.
69
УДК 681.3
СИСТЕМА АВТОМАТИЧЕСКОЙ ОБРАБОТКИ
ЭКСПЕРИМЕНТАЛЬНОЙ ФОТОИНФОРМАЦИИ
В ВИДЕ ЧЕРНО-БЕЛЫХ И ЦВЕТНЫХ ПОЛУТОНОВЫХ
ИЗОБРАЖЕНИЙ
М. П. Гришин, Ш. М. Курбанов, Р. Р. Бикматов,
В. П. Маркелов, Н. Л. Святославский
В автоматизированных системах прецизиоинной обработки
изображений в настоящее время применяются плоскостные авто¬
матические микродеиситометры, такие, как МД-6 (Великобрита¬
ния), ПДС-1010 (США) [1,2]. В первой отечественной системе
такого рода использовался автоматический микроденситометр
AM Д-1 [3], ныне недостаточно производительный. Этот недостаток
преодолевается в описываемой далее системе.
Состав и назначение системы. Авторами разработана система,
состоящая из автоматического микроденситометра (АМД), блока
управления (Б'У) и ЭВМ СМ-1420. Структурная схема системы
представлена на рис. 1.
Система является универсальной и может быть использована
для решения двух самостоятельных задач:
автоматизации ввода-вывода в ЭВМ для дешифрирования
фотоинформации в виде черно-белых и цветных полутоновых
изображений при использовании как подсистемы ввода-вывода
АСОИз;
измерения структурометрических и сенситометрических ха¬
рактеристик черно-белых и цветных фотоматериалов — в этом
случае система используется в качестве автоматизированного
комплекса для исследования различных свойств фотоматериа¬
лов.
Использование АМД как подсистемы ввода-вывода АСОИз
рекомендуется для решения следующих задач: автоматической
обработки фотографических интерференционных картин при диаг¬
ностике пространственных неоднородностей; автоматического де¬
шифрирования оптических спектров, получаемых при поиске
полезных ископаемых в геологии, геохимии; автоматического
распознавания рентгеновских снимков в медицине, интероскопии
и др.; дешифрирования полутоновых черно-белых и цветных фото¬
изображений методом выделения эквиденсит в широком диапазоне
оптических плотностей и др.
При сенситометрических измерениях АМД может использо¬
ваться как прецизионное устройство для автоматического фото-
метрирования черно-белых и цветных фотоматериалов на про¬
зрачных и бумажных подложках с переменным пространствен¬
но
/ШГ
ным разрешением в широком диапазоне оптических плотностей,
для измерения фотографических шумов и гранулярности фото¬
материала, ЧКХ, для оценки зернистости фотослоя, информацион¬
ной чувствительности и других характеристик. Сопряжение АМД
с управляющей ЭВМ СМ-1420 позволяет значительно расширить
круг задач сенситометрии при использовании этой же ЭВМ для
расчетов.
Автоматический микроденситометр. В системе АМД может
работать как в режиме ввода изображений в ЭВМ, так и в режиме
вывода (синтезирования) обработанных на ЭВМ изображений
на фотопластинки, фото- и кинопленки, фотобумагу.
АМД имеет следующие характеристики режима ввода: диапа¬
зон измерения оптической плотности 0—4; размер измерительной
щели 0,5 X 0,5 — 8 X 8 мм при оптическом увеличении 50- и
100-кратном; максимальное быстродействие 12 тыс. отсчетов/с;
диапазон изменения скорости сканирования 0,5—60 мм/с; мак¬
симальный формат обрабатываемого снимка 250 X 250 мм; по¬
грешность фотометрирования D = 0,03 в диапазоне оптических
плотностей 0—2,5 и D = 0,07 в диапазоне 2,5—4; коорди¬
натная погрешность 15 мкм.
71
В режиме вывода светонепроницаемая кассета с фотоматериа¬
лом укрепляется на столе-препаратоводителе АМД, источником
света является светодиод, управляемый модулятором. В этом
режиме АМД имеет следующие характеристики: максимальное
быстродействие 2,5 тыс. отсчетов/с; максимальная скорость ска¬
нирования 60 мм/с; диапазон воспроизводимых оптических плот¬
ностей 0—3.
Система фотометрирования АМД. Система фотометрирования,
представленная на рис. 2, позволяет работать с черно-белыми
и цветными изображениями. Переключение режима работы осу¬
ществляется путем последовательного введения в оптический
тракт перед измерительной диафрагмой красного, синего или
зеленого светофильтра. В черно-белом режиме фильтры выводят¬
ся. Светооптический узел предназначен для освещения изображе¬
ния и выделения фотометрируемого элемента. Узел построен по
двухлучевой схеме с измерительным и опорным каналами, что
позволяет устранить погрешность фотометрирования, вызванную
изменением яркости источника света — ксеноновой лампы. В каж¬
дом канале установлено приемное устройство (ФП1—ПУ1 и
ФП2—ПУ2), состоящее из фотодиода и предварительного усили¬
теля. Предусмотрена возможность электронной регулировки чув¬
ствительности тракта при работе с различными диафрагмами и
светофильтрами. Переменный коэффициент усиления по току
предварительного усилителя позволяет эффективно использовать
свет и повысить точность фотометрирования при больших пло¬
щадях измерительных диафрагм. Такой способ компенсации
увеличения световых потоков применим только при использова¬
нии фотодиодов с большим динамическим диапазоном линейной
световой характеристики. Настройка коэффициента усиления ПУ1
контролируется индикатором.
Сигнал с выхода ПУ1 поступает на вход логарифмического
усилителя (ЛУ). Одновременно на вход опорного толка ЛУ через
регулятор нуля подается сигнал с опорного канала, состоящего
из опорного фотодиода ФП2 и предварительного усилителя ПУ2.
В опорный канал включен также индикатор состояния источника
света, сигнализирующий о том, что яркость источника света упала
ниже допустимой величины и источник необходимо заменить.
С выхода ЛУ снимается сигнал, соответствующий оптической плот¬
ности исследуемого элемента изображения.
С выхода ЛУ сигнал поступает на антилогарифмический уси¬
литель (АЛУ), сигнал на выходе которого пропорционален ве¬
личине оптического пропускания. Выбор измеряемого параметра
(оптической плотности или пропускания) осуществляется пере¬
ключателем режима измерения.
Далее сигнал поступает на фильтр низких частот (ФНЧ),
в котором предусмотрен переключатель полосы пропускания
А/ (20 кГц, 10 кГц, 5 кГц, 2,5 кГц). Величина А/ выбирается опе-
72
ратором в зависимости от скорости сканирования v и размера d
измерительной диафрагмы по приближенной формуле Д/ = vid.
Использование ФНЧ позволяет снизить шумовую погрешность
фотометрирования.
С выхода ФНЧ сигнал поступает на устройство выборки и хра¬
нения (УВХ). Управление работой УВХ осуществляется блоком
управления АМД следующим образом: как только координата
стола при сканировании сравняется с заданной, из БУ поступает
сигнал, переводящий УВХ в режим хранения на время преобра¬
зования АЦП. Выходной сигнал УВХ поступает на масштабный
усилитель (МУ), управляемый переключателем масштаба на пять
положений: 1Д, 2Д, ЗД, 4Д, 5Д. Коэффициент усиления МУ для
этих положений равен соответственно 4; 2; 4/3; 1; 1. Применение
МУ позволяет повысить дискретность квантования оптической
плотности при малых диапазонах фотометрирования. Например,
если максимальная оптическая плотность изображения не пре¬
вышает 1, то установка переключателя масштаба в положение 1Д
уменьшает в 4 раза цену единицы кода на выходе АЦП.
АЦП преобразует аналоговые значения оптической плотности
и оптического пропускания в 9-разрядный цифровой код. Для
визуального наблюдения результатов фотометрирования в ручном
режиме работы используется блок цифровой индикации.
Блок управления АМД. Сопряжение АМД с ЭВМ обеспечивает
БУ, его функциональная схема приведена на рис. 3. БУ реали¬
зует ручное и автоматическое управление АМД. В ручном режиме
73:
управление перемещением стола-препаратоводителя по двум коор¬
динатам осуществляется кнопками ручного управления, при этом
измеряются координаты стола относительно начальной точки и
величина оптической плотности, которые индуцируются на табло.
В режиме автоматического управления в БУ из ЭВМ по программ¬
ному каналу записываются параметры строки сканирования:
шаг перемещения — в регистр перемещения (РП); количество
шагов — в регистр количества перемещений (РКП); длина участка
строки до начала торможения стола — в регистр торможения
(РТ); величина скорости сканирования — в устройство управ¬
ления разгоном (УУР).
После записи в БУ параметров строки контроллер передает
АМД команду выполнения определенной функции. Код функции
поступает в устройство контроля выполнения команд (УКВК).
Предусмотрено выполнение следующих функций: общий сброс;
движение стола АМД без измерения оптической плотности; руч¬
ной режим; запись из ОЗУ ЭВМ в регистр данных (РД) блока по
каналу прямого доступа; чтение из РД в ОЗУ слова или байта
по каналу прямого доступа.
Из БУ в контроллер выдаются сигналы управления переда¬
чей данных в режиме прямого доступа СО, С1, которые опреде¬
ляют вид обращения к ОЗУ (чтение или запись байта или слова).
При обнулении РТ вырабатывается сигнал ОРТ, поступающий
в УУП и снимающий сигнал разгона (РАЗГ). УУР начинает сни¬
жение частоты импульсов управления приводом стола ПУПС.
Начинается торможение стола. Циклы обнуления и регенерации
РП повторяются до обнуления РКП, после чего УКВК подает
в контроллер сигнал готовности (ГОТ), означающий выполнение
заданной функции (конец строки сканирования). Для перехода
на следующую строку сканирования стол перемещается по другой
координате в режиме перегона.
Сканирование может осуществляться одновременно только
по одной координате. Признак ориентации строки сканирования
задается в регистре состояния прибора (РСП), который также
устанавливает: режим ввода или вывода (сигнал ВВ/ВЫВ); режим
фотометрирования (сигнал РФ); тип светофильтра при считыва¬
нии цветного изображения (сигнал ЦВ).
Эти сигналы поступают из узла ручного управления (УРУ).
Кроме перечисленных узлов в БУ входит регистр ошибок при¬
бора (РОП), который регистрирует ошибки и сбои АМД: по ис¬
точникам питания (сигнал ИП); по осветителю (сигнал ОСВ); вы¬
ход стола на один из концевых выключателей (сигнал КВ).
Содержимое всех регистров БУ может быть прочитано по про¬
граммному каналу в ЭВМ через линии Д00—Д15.
Контроллер АМД. В состав контроллера входят следующие
основные узлы: дешифратор адреса и кода операции (ДАК); уст¬
ройство управления прерыванием (УУП); устройство управления
прямым доступом (УУПД); регистр адреса (РА); регистр команд
74
и состояния (РКС); схемы управления вводом-выводом; коммута¬
тор данных (КД); передатчики общей шины (ОШ); приемники-
передатчики внешнего устройства.
ДАК вырабатывает сигналы чтения или записи регистров
контроллера или АМД. УУП осуществляет операцию «захват
шины» в процессе программного прерывания, а УУПД — в про¬
цессе прямого доступа. УУПД управляет чтением или записью
информации в ОЗУ ЭВМ. РА содержит текущий адрес памяти,
с которым идет обмен по каналу прямого доступа. РКС воспри¬
нимает команды (функции) со стороны ОШ, а также индуцирует
состояние контроллера и АМД. Схемы управления вводом-выводом
вырабатывают сигналы обмена информацией между регистрами
контроллера (прибора) и ОЗУ. КД коммутирует данные с выхо¬
дов регистров на вход передатчиков ОШ при чтении регистров.
Математическое обеспечение. Авторами разработано математи¬
ческое обеспечение (МО) системы. МО предназначено для управле¬
ния АМД, хранения, обработки и представления информации,
поступающей с АМД в виде полутоновых изображений. МО со¬
стоит из тестовых, метрологических и прикладных программ,
библиотеки подпрограмм обработки изображений и архива изо¬
бражений во внешней памяти ЭВМ. МО функционирует в среде
ОС РАФОС.
Архив изображений использует файловую систему и размеща¬
ется на дисках и лентах. Его основная функция — представление
изображений в терминах «строка изображения» и «отсчет строки»
независимо от типа отсчета вместо «файлов» и «записей». Отсчеты
изображения могут быть целого, вещественного или комплексно¬
го типа. Вторая функция архива — организация виртуальной
внешней памяти большого объема. В состав архива входят:
каталог изображений (один файл); комментарий пользователя
(один файл); данные (по одному файлу на устройство прямого
доступа).
Изображения размещаются максимально плотно. МО обеспе¬
чивает: сканирование фотоносителя заданным образом; хранение
полученных изображений в архиве; обработку изображений и
запись результатов в архив; вывод изображений на фотоноситель;
визуализацию профилей строк и эквиденсит изображений; провер¬
ку и настройку АМД.
Возможности оператора. Оператор запускает программу ко¬
мандой монитор ОС и далее работает в режиме диалога.
Тестовые программы проверяют работоспособность АМД во
всех режимах.
Метрологические программы позволяют: оценить скорость и
быстродействие АМД; оценить коэффициент передачи модуляции
АМД путем сканирования штриховых мир различной простран¬
ственной частоты; оценить погрешности при фотометрировании
75
и перемещении; настроить АМД при экспонировании фотоноси¬
теля для воспроизведения оптических плотностей на конкретном
фотоматериале.
Прикладные программы позволяют: сгенерировать архив
на дисках; ввести изображение с фотоносителя в архив; вывести
на терминал или на печать профили строк или эквиденситы изо¬
бражения; вывести изображение и текст комментария на фотоно¬
ситель; переписать изображение с диска на ленту и обратно.
Возможности программиста. Библиотека подпрограмм позво¬
ляет реализовать в программе на Фортране следующие функции:
управление АМД (перемещение, ввод, вывод и др.); обмен строка¬
ми изображений с архивом; вывод на терминал или на печать ин¬
формации в виде таблиц и графиков.
ЛИТЕРАТУРА
1. Swing R. Е. Optics of Microdensitometer//Optical Engineering. 1973.
Nov. I Dec. P. 185.
2. Обработка изображений И Зарубеж. радиоэлектрон. 1985. № 10.
С. 85-100.
3. Браилко Л. А., Гришин М.П., Иванов А. М. Цифровой автоматический
микроденситометр с управлением от ЭВМ // Опт.-мех. пром-сть. 1976.
№ 4. С. 34-37.
Методы
машинного зрения
УДК 621.391
ПОЛУТОНОВОЕ МАШИННОЕ ЗРЕНИЕ
В СТАЦИОНАРНОЙ среде
В. С. Файн
Введение
Распространенный способ преодоления мешающего влияния
изменчивости условий освещения в системах машинного зрения
(М3) состоит в переработке исходного полутонового изображения
в контурное. Однако связанная с этим потеря информации о глад¬
ких участках изображения часто бывает недопустима. Это застав¬
ляет разработчиков искать способы извлечения полезной информа¬
ции и из гладких участков, невзирая на интенсивную изменчивость
их вида при изменениях условий освещения. Нахождение такого
способа позволило бы создать систему комбинированного, двух¬
канального (контурно-полутонового) машинного зрения, в ко¬
торой выходы обоих каналов, взаимодействуя верифицировали
бы друг друга.
Существующие разработки в области полутонового М3 сво¬
дятся, как правило, к схеме «Shape from Shading» [1—2], т. е.
решают задачу восстановления формы поверхности по ее полу¬
тоновому изображению. Эта задача принадлежит к числу плохо
обусловленных (некорректных) и очень сложна.
В настоящей работе покажем, что если производственная или
иная среда, в которой работает система М3, обладает некоторым
свойством стационарности, то задача восстановления поверхно¬
сти по ее изображению может быть заменена существенно более
простой и притом корректной задачей распознавания образов
(РО). Дадим постановку этой задачи РО и рассмотрим возможный
подход к ее решению, а также сообщим о полученных практиче¬
ских результатах.
2. Некоторые определения и обозначения
После восприятия Т (рис. 1) — связная область плоскости
или неплоской (например, сферической) поверхности, в каждой
точке которой может быть произведено измерение ее освещенно¬
сти. На Т задана система координат (х, у),
Поле зрения — внутренность пространственного угла а,
соответствующего в данной системе проецирования полю восприя¬
тия.
17
Объект Ак — любое материальное тело, предмет фиксирован¬
ной формы, габариты и расположение которого относительно объ¬
ектива таковы, что он оказывается полностью внутри поля зрения.
Если объект непрозрачен, то обозначение Ак относится к его ви¬
димой внешней поверхности.
Изображение объекта (монохромное) — функция / (я, г/),
описывающая освещенность точек
поля 1 , определенная на под¬
области Т, покрываемой про¬
екцией объекта. Для непроз¬
рачного объекта изображение
зависит от освещенности то¬
чек только его поверхности.
Класс объекта Ак — мно¬
жество Fk всех его возмож¬
ных изображений в услови¬
ях данной системы проеци¬
рования. Множество индек¬
сов к для всех классов Fk,
фигурирующих в некоторой
задаче, обозначается {&},
1, К.
Объект Ак называется известным системе, если то или иное
представление класса Fk введено в ее память в виде некоторой
структуры D (Fk).
Предъявленный объект признается известным, если для его
текущего изображения / (х, у);
'З.к : / (я, у) ЕЕ Fk, к ее {к}.
Предъявленный объект признается неизвестным, если для
Vk:t(x, y)E£Fk.
Сцена — совокупность (конечная) объектов, находящихся
в поле зрения.
Стационарная среда: любая сцена содержит только известные
объекты; К < оо .
Нестационарная среда: сцена может содержать как известные,
так и любые неизвестные объекты.
3. Задача идентификации объекта
в стационарной и нестационарной средах
Для представления поверхности будем использовать запись
<р (L л, С) = о, (1)
где ц и £ — координатные оси.
Если понимать под объектами обычные машиностроительные
детали, то, как легко заметить, их поверхности, как правило, со¬
стоят из некоторого (конечного) количества гладких участков,
стыкующихся вдоль «ребер» — линий излома поверхности.
78
Не теряя общности, примем для удобства следующие упроще¬
ния: С1 — вся поверхность объекта представляет собой один всю¬
ду гладкий участок без ребер; С2 — гладкими считаются регуляр¬
ные (дважды непрерывно дифференцируемые) поверхности; СЗ —
для всех поверхностей функции (1) удовлетворяют условию Лип¬
шица с общим конечным значением модуля непрерывности.
Свойство С1 позволяет нам рассматривать в качестве объек¬
тов гладкие поверхности.
Рассмотрим задачу М3 с такими поверхностями как задачу
выбора из некоторого множества возможностей. Априорные ве¬
роятности предъявления каждой из поверхностей примем одина¬
ковыми.
Будем считать, что аналитические выражения (1) получены
с помощью интерполяции. Свойство СЗ позволяет констатировать,
что для представления любой из поверхностей достаточно неко¬
торого конечного количества п отсчетов (интерполяционных уз¬
лов) — одного и того же для всех поверхностей. Предположим
также, что существует некоторое конечное число т уровней кван¬
тования отсчета — одно и то же для всех отсчетов всех поверхнос¬
тей.
Посмотрим, чем отличается решение обсуждаемой задачи вы¬
бора для стационарной и нестационарной сред. Начнем с неста¬
ционарной среды. По определению (см. разд. 2) системе может
быть предъявлена любая поверхность, помещающаяся в поле зре¬
ния, что при принятой дискретности означает, очевидно, выбор
из К„с = nt11 возможностей. Следовательно, в нестационарной
среде для осуществления выбора нужно получить данные обо
всех п отсчетных точках с максимально возможной подробностью,
определяемой величиной т. Иными словами, в нестационарной
среде нужно восстановить поверхность, как это и делается в раз¬
работках типа «Shape from Shading».
Но все дело в том, что реальные производственные среды не
бывают нестационарными! В самом деле, невозможно предста¬
вить себе, чтобы в нормальном современном производстве среди
изделий, деталей, узлов обнаружился неизвестный объект, т. е.
предмет, одновременно и имеющий отношение к делу, и вместе
с тем абсолютно никогда не встречавшийся, с совершенно незна¬
комым внешним видом. Даже случайное появление постороннего
предмета влечет за собой не включение его в число выбираемых,
а выбрасывание его из производственного процесса после выясне¬
ния его непринадлежности к числу известных.
Следовательно, имея в виду системы М3 промышленного на¬
значения, надо исходить из стационарности среды. Посмотрим,
что представляет собой задача выбора в стационарной среде.
По определению в этой среде системе М3 могут предъявляться
только Кс заранее известных фиксированных поверхностей. Так¬
тика решения задачи в этом случае зависит от того, что представ¬
ляет собой по порядку величины Кс. Для выяснения этого нужно,
конечно, отталкиваться от практической ситуации, для работы
79
в которой предназначена система М3. Если продолжать рассмот¬
рение на примере машиностроительных деталей, то наиболее ти¬
пичным вариантом использования системы является зрительное
очувствление сборочного робота или робота выбора из кучи (си¬
стема «глаз—рука»). Современная технология сборки является
по преимуществу «узловой»: сначала из отдельных деталей соби¬
раются узлы, а потом уже из узлов — либо агрегаты, либо изде¬
лие в целом. Важно, что количество деталей в узле обычно не пре¬
восходит 20—30; такими же величинами ограничивается и число
узлов в агрегате (или в целом изделии), и число агрегатов в изде¬
лии.
Таким образом, в любом сборочном цикле робот сталкивается
не более чем с 20—30 фиксированными объектами, чем и определя¬
ется правдоподобный порядок величины Кс.
Сопоставим Кс с Кнс. Для типичных машиностроительных
деталей, в том числе и фигурировавших в наших экспериментах
(валы с шестернями, втулки, вкладыши подшипников), число от¬
счетов п составляет величину не менее 100; т имеет порядок не
ниже 26. Следовательно, Кнс 2600. Гигантская разница между
Кс и Кнс показывает, что при обнаружении у среды свойства ста¬
ционарности это свойство ни в коем случае не должно остаться
неиспользованным. Вопрос о том, как именно оно может быть ис¬
пользовано, рассматривается в следующем разделе.
4. Задача выбора в стационарной среде
как задача распознавания образов
Кс
Рассмотрим множество F = |J Fk всех возможных отличаю-
щихся изображений в данной системе проецирования для всех
Кс поверхностей. Мощность этого множества обозначим N. Раз¬
рабатывая систему М3, необходимо, с одной стороны, считать воз¬
можным появление любого изображения f (х, у) из F, с другой —
в силу стационарности среды / (х, у) обязательно принадлежит
к классу одного из Кс объектов и должно быть к этому классу от¬
несено.
Но отсюда следует, что система М3 должна осуществлять од¬
нозначное отображение множества F мощности N на множество
{&} мощности Кс. Учитывая очевидное соотношение N^> Кс, это
и означает, по определению, что в системе решается задача РО.
Это ставит перед нами два основных вопроса:
что должно представлять собой в данном случае описание по¬
верхности? (Раз уж оно не должно быть ее полным аналитическим
или цифровым представлением, как в задаче восстановления, то
чем же оно должно быть?)
если подходящая форма описания поверхности найдена, то как
извлекать это описание из изображения поверхности, по крайней
мере для ее видимой на изображении части?
80
5. Представление гладких поверхностей
в стационарной среде
Известен ряд способов представления гладких поверхностей;
эти способы имеют интерполяционную основу и реализуются чаще
всего в виде сплайнов того или иного вида [3—5]. Все такие спо¬
собы ориентированы на представление целиком всей гладкой по¬
верхности или по крайней мере достаточно больших ее участков,
т. е., иными словами, на восстановление поверхности.
Но из сказанного следует, что для наших целей нет необходи¬
мости в восстановлении поверхности: нам достаточно знать о каж¬
дой из Кс поверхностей только то, что позволит отличить ее от
Кс — 1 остальных. В простейшем случае это могут быть, напри¬
мер, какие-то небольшие характерные для данной поверхности
отдельные ее участки, быть может, с указанием их взаимного
расположения.
Это открывает некоторые новые возможности в вопросе пред¬
ставления ансамбля из Кс поверхностей. В самом деле, в упомя¬
нутых сплайн-функциях используются в любом месте поверхно¬
сти одни и те же базисные функции, что позволяет удовлетворить
естественному для универсальной аппроксимации требованию од¬
нородности процедуры на всей области определения. В нашем
случае требование однородности, очевидно, снимается, и это дает
возможность применять на каждом из отдельно аппроксимируе¬
мых участков поверхности наиболее близкие к форме этого участ¬
ка базисные функции.
Для того чтобы реализовать эту возможность, прежде всего
нужно образовать набор («магазин») базисных функций, которые
бы отвечали следующим требованиям:
составляли бы полный набор типовых форм, свойственных ма¬
лым участкам аппроксимируемых гладких поверхностей;
имели бы лаконичную, удобную и притом параметризованную
аналитическую форму задания (варьирование параметров позво¬
ляло бы добиваться наилучшего сближения между аппроксими¬
рующим и аппроксимируемым участками поверхностей).
Задача составления такого набора форм сама по себе совсем
не простая, к счастью, она уже ставилась и решалась в дифферен¬
циальной геометрии в связи с изучаемой в этой дисциплине теоре¬
тической проблемой локального поведения гладких поверхностей.
Результат дифференциальной геометрии, обеспечивающий ос¬
нову для решения этой задачи, дается следующей важной теоре¬
мой (см.: [6, 7]); об ее использовании в РО (см.: [8]).
Если в некоторой точке t поверхность регулярна (дважды
непрерывно диференцируема), то в этой точке существует (и при¬
том единственный) соприкасающийся параболлоид st одного из сле¬
дующих четырех типов: эллиптический параболлоид (рис. 2);
гиперболический параболлоид s2 (рис. 3); параболлоид s3, вырож¬
дающийся в параболлический цилиндр (рис. 4); параболлоид $4,
вырождающийся в (касательную) плоскость (рис. 5).
81
В силу свойства С2 данная теорема справедлива для рассмат¬
риваемых нами поверхностей. Далее, как легко видеть, свойство
СЗ позволяет усилить утверждение теоремы, приблизив его к ин¬
тересующей нас задаче локальной аппроксимации. А именно обо¬
значим через Si (а) поверхность параболлоида i-ro типа (2 = 1,4;
а — вектор параметров этого параболлоида).
Возьмем произвольную точку t ЕЕ Ак и восстановим нормаль
к Ак в этой точке (рис. 6). Рассмотрим круговой цилиндр z радиу¬
са е, имеющий осью эту нормаль. Область поверхности Ак, ока¬
82
завшуюся внутри цилиндра, обозначим о (t). Придадим парамет¬
рам некоторого параболлоида st (а) такие значения, чтобы он со¬
прикоснулся с Ак в точке t. Вырезаемую цилиндром z область по¬
верхности Si (а) обозначим (t) (рис. 7). Проведем через произ¬
вольную точку t', принадлежащую области о (t), прямую, парал¬
лельную оси цилиндра, до пересечения с областью о, (t). Точку
пересечения обозначим длину отрезка t ti d (£ , ti)-
Определим расстояние между о (t) и (t), например, следую¬
щим образом:
р (а су.) = min min max d (tr, ^)-
r • i a
(2)
Такое определение соответствует, очевидно, метрике равно¬
мерного приближения С (можно было бы использовать и другие
метрики, например L± или Л2). Из приведенной теоремы и свойства
СЗ поверхности Ак вытекает, как нетрудно видеть, справедливость
следующего е-б утверждения:
для V6 О Ле > 0: р (о, о^) б.
Это утверждение и устанавливает свойство (£) в (2) быть ап¬
проксимацией для области о при конечных размерах последней.
Зафиксируем величину допустимой погрешности аппроксима¬
ции б = б о и определим понятие «наибольшей окрестности точки
t в хорошо приближаемой параболлоидом (а)». Эту окрест¬
ность обозначим Sj (t); очевидно, Si (£) о (t). Практически
Si (t) можно получить разными способами, например присоеди¬
няя к области g (t) те из малых площадок поверхности Ак, примы¬
кающих к о (t) или к ранее присоединенным площадкам, для ко¬
торых вычисленная по (2) погрешность приближения соответст¬
вующей площадкой параболлоида st (а) не превосходит б0. Заме¬
тим, что этой возможностью проверять условие р б0 только
в пределах очередной присоединяемой площадки (т. е. без затра¬
гивания ранее накопленной области) мы обязаны, конечно, исполь¬
зованию в (2) метрики С. Разумеется, при описанном «выращива¬
нии» S i (t) из начального ядра о (t) значения i и а в (2) остаются
фиксированными — теми, которые были определены при аппрок¬
симации самой области о (t).
Определим на Ак обычным образом меру, имеющую смысл
площади, и обозначим эту меру ц. Рассмотрим функцию
И (2* (0) = Pt (t), определенную на поверхности Ак, и построим
такие функции для всех четырех значений I. Найдем для каждой
из рц (t) ее наибольшее на Ак значение; в силу свойства G2 такое
наибольшее значение существует. Обозначим его р,/ max. Введем
еще константы Р1 и р2: 0 < р± < 1; 0 < р2 1. Будем говорить,
что в точке t поверхность Ак «ведет себя как параболлоид г-го
типа», если
а) Hi (*) > Ц; (t), /<=1,4 & / У= г, причем
Hi (0 — Н; (0 > /»iHi (0; (3)
б) Hi (0 > p2Himax- (4)
S3
Область Sj (0, для которой выполняются условия (3) и (4),
будем называть параболлоидным участкохМ (или П-участком) г-го
типа поверхности Ак с точкой привязки t и вектором параметров а.
Соответственно описание П-участка представляет собой сле¬
дующий набор данных: а) индекс I типа параболлоида; б) коорди¬
наты точки t его привязки; в) аналитическое или координатное
представление границы участка; г) перечень значений парамет¬
ров параболлоида.
Здесь данные типов б, в и г представлены во внешней по отно¬
шению к объекту Ак системе координат. Более удобно предста¬
вить их в системе координат, связанной с объектом. Этого можно
достичь, например, вычислив по данным типа б первые и вторые
моменты системы точек t — точек привязки всех учитываемых
П-участков поверхности Ак и связав новую систему координат
с центром и осями моментов. Данные типов б, в и г могут быть те¬
перь пересчитаны в эту систему координат. Заметим, что данные
типов б и г в общем случае не независимы, однако их отдельное
эксплицитное представление практически удобно.
Перечень полученных таким образом описаний П-участков
поверхности Ак и образует ее представление для случая стацио¬
нарной среды. Исходя из сущности этого представления оно мо¬
жет быть названо «выборочно-параболлоидным», или ВП-пред-
ставлением. Нетрудно видеть, что при фиксированном алгоритме
«выращивания» Sj (t) из о (t), фиксированных значениях б0, рг
и и неизменной форме поверхности Ак ВП-представление явля¬
ется ее инвариантным описанием, как это и требовалось в разд. 4.
Вместе с тем в процессе настройки системы на новый набор
поверхностей можно в известных пределах регулировать объем
и состав ВП-представления: варьируя значения б0, и р2, можно
изменять количество и площади П-участков, тем самым приспо¬
сабливая ВП-представления каждой из поверхностей к их коли¬
честву Кс и большему или меньшему сходству между ними.
Особенно важный момент состоит в том, что варьирование б0
и р2 позволяет осуществлять своего рода обмен площадей П-участ¬
ков на их количество, а именно, уменьшая б0 и р2, можно добить¬
ся такого уменьшения площадей П-участков (при одновременном
увеличении их доступного количества), чтобы: чаша эллиптиче¬
ского параболлоида могла быть с допустимо малой погрешностью
заменена сферическим сегментом; прилегающая к Ак часть гипер¬
болического параболлоида — фрагментом пары соприкасающих¬
ся вершинами соосных (усеченных) конусов; прилегающая к Ак
часть параболического цилиндра — фрагментом кругового ци¬
линдра; прилегающая к Ак часть параболлоида, вырождающегося
в касательную плоскость,— фрагментом плоскости.
Если считать приближение участков поверхности Ак парабол-
лоидами аппроксимацией 1-го уровня, то приближение самих этих
параболлоидов перечисленными простыми поверхностями выгля¬
дит как «аппроксимация аппроксимации», или аппроксимация 2-го
уровня.
84
Использование аппроксимации 2-го уровня не только упроща¬
ет вычисления, но и создает простые возможности извлечения ин¬
вариантного описания видимой части поверхности Ак из ее полу¬
тонового изображения.
6. Построение ВП-представления поверхности
по ее полутоновому изображению
При использовании параболлоидной аппроксимации задача
построения ВП-представления видимой на изображении / (х, у)
части гладкой поверхности состоит, очевидно, из следующих эта¬
пов:
обнаружение фрагментов изображения / (х, у), являющихся
проекциями П-участков видимой части поверхности (эти фрагмен¬
ты назовем п-участками); определение для каждого п-участка
характеристик а — г (см. разд. 5) соответствующего П-участка;
определение по расположению п-участков в / (х, у) вычислимых
данных о взаимном положении П-участков поверхности.
Ясно, что ключевым для выполнимости всех этих действий яв¬
ляется первый этап — распознавание на изображении п-участ¬
ков. Тем самым мы снова сталкиваемся с задачей РО — в данном
случае подзадачей основной задачи идентификации поверхности.
Решение данной подзадачи РО следует, очевидно, искать на пути
построения инвариантных относительно освещения признаков
п-участков.
Если бы эти п-участки были проекциями параболлоидных
П-участков, то построение признаков для распознавания парабол-
лоидов было бы если и осуществимым, то, во всяком случае, да¬
леко не простым делом. Ситуация, однако, оказывается значи¬
тельно проще при использовании аппроксимации 2-го уровня.
В этом случае обсуждаемая подзадача РО состоит в распознании
таких областей поверхности Ак, в которых она ведет себя как ци¬
линдрическая, коническая, сферическая или плоская поверх¬
ность. Наблюдения и стимулированные ими экспериментальные
исследования поведения светотени на перечисленных поверхнос¬
тях выявили в этом поведении ярко выраженные и легко обнару¬
живаемые особенности, включая и ряд проявлений инвариантно¬
сти относительно условий освещения. Эти проявления инвариант¬
ности представлены в несколько огрубленном виде в таблице.
Примечание. 1Т — линия постоянной яркости (светлоты) на
области изображения / (х, у), занятой п-участком; lN — линия
нормалей к ZT, или линия направлений градиента яркости G (х,
уУу t (In) — функция, описывающая поведение яркости вдоль ли¬
нии lN; | G (1Т) | — функция, описывающая поведение | G (х, у) |
вдоль линии ZT; | G (lN) | — функция, описывающая поведение
I G (x, У) | вдоль линии Z2y; (хмум — точка наибольшей яркости
(или центр тяжести области наибольшей яркости) в пределах
п^Участка; var* — переменная величина, характер изменения ко¬
торой может быть предсказан в случае диффузного отражения света
85
'Гпп
п-уча¬
стка
Характеристики Zj
форма
положение
;g (/jj|
ц
Пр.
// образующей
const
к
»
»
var **
с
Эл. д.
~ коицентрично (х^Уы)
var *
п
-
-
G(x. y) =0
Тип
п-уча¬
стка
Характеристики Zjy
форма
положение
/ (^v)
|G (ZN)|
ц
Пр.
-L образующей
var *
var *
к
Эл. д.
»
»
»
с
»
±/т
»
»
п
-
-
i (z, у) = const
y) =0
поверхностью Ак; var** — переменная величина, характер из¬
менения которой может быть предсказан как при диффузном, так и
при зеркальном отражении света поверхностью Ак; Ц, К, С, Г1 —
соответственно цилиндрический, конический, сферический и плос¬
кий тип п-участка; Эл. д.— линия, близкая к эллиптической дуге;
Пр. — линия, близкая к прямой.
Описание в таблице свойств п-участков типа Ц, К, С и П, как
видим, не содержит никаких ссылок на условия освещения, что
и указывает на инвариантность этих свойств. В настоящее время
начаты исследования по теоретической (светотехнической) верифи¬
кации упомянутых свойств и лежащих в их основе наблюдений
(см.: [9]).
Инвариантные свойства п-участков и образуют основу, на ко¬
торой могут строиться признаки для распознавания по изображе¬
ниям типов этих участков и оценивания их характеристик б — г
(см. разд. 5), т. е. выполнения двух первых этапов из трех, пере¬
численных в начале разд. 6. Что касается третьего этапа, то для
его реализации необходимо, как указывалось в разд. 5, предвари¬
тельно представить взаимные положения П-участков для каждой
поверхности в системе координат, связанной с объектом Ак, пос¬
ле чего уже можно рассчитывать данные о расположении п-участ¬
ков на поле восприятия для всех возможных пространственных
положений поверхности. В общем случае произвольной глад¬
кой поверхности, когда априори считаются возможными все ее
пространственные положения, для просмотра всех этих положений
можно, в частности, рассмотреть «развертку по углам Эйлера»
[8]. Более реален, однако, случай, когда объект может занимать
в пространстве лишь конечное количество фиксированных поло¬
жений, дающих отличающиеся проекции. Это может быть, в част-
86
пости, несколько устойчивых положений объекта на горизонталь¬
ной плоскости, например шесть устойчивых положений для парал¬
лелепипеда с закругленными вершинами и ребрами. В подобных
случаях не представит труда ни определение состава и располо¬
жения совокупности видимых п-участков для каждого из устой¬
чивых положений объекта при настройке системы, ни распозна¬
ние по этой совокупности объекта и его положения при эксплуа¬
тации системы.
7. Некоторые практические разработки
Проведенное ранее теоретическое рассмотрение касалось про¬
извольных гладких поверхностей со свойствами Cl—СЗ (разд. 3).
Конкретные же наши разработки были связаны с определенным
видом объектов, представляющих практический, народнохозяй¬
ственный, интерес, а именно с деталями изделий машиностроения,
изготовляемыми главным образом на металлорежущих станках.
Ознакомление с такими деталями показывает, что их поверхности
состоят, как упоминалось в разд. 3, из гладких частей, стыкую¬
щихся вдоль некоторых ребер. Особенно важное наблюдение со¬
стоит при этом в том, что гладкие части поверхностей деталей
представляют собой, как правило, как раз те простые поверхности,
которые рассматривались при обсуждении аппроксимации 2-го
уровня, т.е. цилиндрические, конические, сферические и плоские,—
поверхности, получаемые при токарной, фрезерной, строгальной,
зуборезной и т. п. обработке. Понятно, что в этом случае в роли
П-участка выступает вся гладкая часть поверхности какого-либо
из четырех рассматриваемых простых типов. В программном па¬
кете, осуществляющем автоматическое распознавание соответст¬
вующих п-участков на изображениях сцен из машиностроительных
деталей и определение их параметров, использована часть инва¬
риантных свойств, представленных в приведенной ранее таблице.
Эксперименты показали высокую надежность распознавания и
определения параметров поверхностей при практически полной
независимости от характера и изменений условий освещения.
Более подробные данные об этой части работы можно найти в ра¬
боте [10].
ЛИТЕРАТУРА
1. Хорн Б. Определение формы по данным о полутонах И Психология ма¬
шинного зрения. М.: Мир, 1978. С. 137 — 184.
2. Horn В. К, Р., Brooks М. J. The variational approach to shape from sha¬
ding Ц Comput. Vision, Graph, and Image Process. 1986. Vol. 33, N 2.
P. 174—208.
3. Gordon W. J., Biesenfeld R. F. B-spline curves and surfaces//Computer
aided geometric design. N. Y.: Acad, press, 1974. P. 95 — 126.
4. Barsky B. A., Greenberg D. P. Determining a set of B-spline control ver¬
tices to generate an interpolating surface H Comput. Vision. Graph, and
Image Process. 1980. Vol. 14, N 3. P. 203—226.
5. Akima H. A method of bivariate interpolation and smooth surface fitting
based on local procedures // Gommun. ACM. 1974. Vol. 17, N 1. P. 18 — 20.
87
6. Погорелов А. В. Лекции по дифференциальной геометрии. Харьков:
Изд-во Харьк. ун-та, 1955. 106 с.
7. Погорелов А. В. Дифференциальная геометрия. М.: Наука, 1974. 176 с.
8. Файн В. С, Опознавание пространственных объектов // Пробл. переда¬
чи информ. 1961. № 10. С. 49—56.
9. Луценко М. М. Особенности поведения градиента освещенности на не¬
которых типах поверхностей / Наст. сб.
10. Файн В. С. Распознавание образов и машинное понимание естественно¬
го языка. М.: Наука, 1987. 174 с.
УДК 621.391
СУЩЕСТВЕННО ПОЛУТОНОВОЙ анализ сцен
В ЗАДАЧЕ РАСПОЗНАВАНИЯ
МАШИНОСТРОИТЕЛЬНЫХ ДЕТАЛЕЙ
Е. К. Вендровский
В работе [1] на основе анализа существующей постановки за¬
дачи распознавания на полутоновых изображениях и принципа
распознавания по инвариантам сформулирован подход, определен¬
ный как «существенно полутоновое машинное зрение», а также
приведены инварианты градиентной картины для четырех видов
поверхностей: цилиндра, конуса, сферы и плоскости —и дано под¬
робное решение задачи распознавания и оценки параметров ци¬
линдра по его полутоновому изображению при достаточно произ¬
вольных требованиях к условиям освещения. В настоящей работе
подробно описывается программная разработка, реализующая
процесс обнаружения и оценки параметров цилиндров, поскольку
структура указанного программного продукта одинакова для каж¬
дого из четырех типов основных поверхностей, что подтверждается
программой обнаружения и оценки параметров конической поверх¬
ности. Решение задачи обнаружения и оценки параметров конусов
является вторым важным условием распознавания деталей маши¬
ностроения (после решения задачи распознавания цилиндров),
и успех в этом вопросе резко расширяет возможности полутонового
подхода.
Имея структурное описание в виде перечня цилиндров, конусов
(в дальнейшем также плоскостей, сфер) с их параметрами, необ¬
ходимо решить задачу семантического плана: как по списку (струк¬
турному описанию) идентифицировать деталь, имеющую целый
набор списков в качестве своего допустимого описания.
1. Описание пакета программ,
реализующих экспериментальную проверку
рабочей гипотезы
Пакет программ можно разделить на две части:
программы предварительной обработки, реализующие переход
к сокращенному описанию изображения в терминах ЭЦП.
88
программа интеллектуальной обработки, реализующая процесс
распознавания цилиндров и оценку параметров цилиндров.
Программы предобработки включают:
программу GRAD с подпрограммой FRAGM33;
программу LABEL1 с подпрограммами TABS, ММ и RF;
программу LABEL2 с подпрограммами TAB, ММ и RF.
Программа GRAD в качестве входных данных получает имя
файла изображения и размер стороны изображения, считая послед¬
нее квадратным. Входное изображение имеет по-байтную упаков¬
ку. На выходе программа дает два файла изображения: массив
значений градиента входного изображения и массив значений мо¬
дулей градиента входного изображения. Значения градиента упа¬
кованы по-байтно. Значения модуля градиента хранятся в плаваю¬
щем виде. Градиент и модуль градиента вычисляются по окну 3 х
X 3 элементов изображения. Для фильтрации случайных флук¬
туаций яркости вертикальная и горизонтальная пара (аргументы
в функции градиента) значений яркости в окне 3x3 вычисляются
путем усреднения яркости по крайним (горизонтальным и верти¬
кальным) тройкам элементов изображения в окне 3x3.
Подпрограмма FRAGM33 осуществляет скользящее считыва¬
ние фрагмента 3x3 элементов изображения, передает фрагмент
в подпрограмму вычисления направления и модуля градиента и
записывает полученные значения на диск.
Программы LABEL1 и LABEL2 формируют сокращенное ЭЦП-
описание исходного изображения на основе файлов, сформирован¬
ных программой GRAD. Для создания ЭЦП-описания необходима,
как указывалось в [1], статистическая обработка значений гра¬
диента и фильтрация случайных значений ам в ЭЦП-описании.
Человеческий глаз, наиболее совершенный из известных детекто¬
ров изменений яркости, отбирает значимые перепады яркости от
незначительных, пользуясь механизмом, описываемым законом
Вебера—Фехпера, когда стимул (перепад, т. е. модуль градиента)
соотносится с яркостью фона. Пользуясь аналогией, в программах
LABEL1 и LABEL2 происходит сравнение среднего модуля гра¬
диента в окне X х X элементов изображения со средней яркостью
в том же окне. Если средний модуль градиента превосходит сред¬
нюю яркость, умноженную на некоторый коэффициент VT, то
главная мода рапределения направлений градиента в окне X X
X X элементов изображения дает значение ам. В противном слу¬
чае данному ЭЦП присваивается значение NIL, т. е. значение ам
в данном ЭЦП недостоверно.
При таком отборе происходит фильтрация случайных значений
оолее совершенная, чем первоначальный вариант фильтрации,
описанный в [1]. При варианте с порогом VT не встает вопроса о
пороге на число элементов поля, соседних к данному и имеющих
одинаковое с ним ам, для признания данного ам достоверным и,
кроме того, снимается проблема выбора числа итераций при филь¬
трации случайных значений ам. Таким образом, два параметра
89
а
Рис. 1. Сцена с деталями
а, б в разных масштабах зубчатая переда¬
ча с поворотом 45 и 180° соответственно
Рис. 2. Цилиндрическая деталь
управления (порог числа сосед¬
них ЭЦП с одинаковым значе¬
нием и число итераций) заме¬
няются на один параметр —
VT.
Для надежного обнаруже¬
ния поверхности и достоверной
оценки ее параметров необхо¬
димы достаточно представите¬
льные (в смысле числа входя¬
щих в них элементов) области
постоянного направления гра¬
диента. Размер области априор¬
но неизвестен и является слу¬
чайной величиной. При выбо¬
ре VT = 0 практически все
ЭЦП признаны достоверными в
смысле данных о ам и средний
размер области по полю изоб¬
ражения мал, так как большин¬
ство областей соответствуют
флуктуациям градиента на пло¬
скости вне объекта и имеют раз¬
мер в один элемент. При боль¬
шом значении VT средний раз¬
мер области также мал, так
как останутся только ЭЦП с
большим средним модулем гра¬
диента в ЭЦП, а при некото¬
ром VT вообще все ЭЦП при¬
знаны недостоверными в смыс¬
ле значения ам. Естественно
предположить, что распределе¬
ние среднего размера области
постоянного значения ам имеет
некоторый оптимум по аргумен¬
ту VT. Эксперименты подтвер¬
дили это предположение. Для
изображений рис. 1, 2 распре¬
деление среднего значения об¬
ласти монотонно имеет оптимум
в 2,9—3,2 элемента ЭЦП при
VT, равном 0,31; 0,33; 0,33 со¬
ответственно. Для рис. 3, суще¬
ственно отличного от перечис¬
ленных изображений в смысле
средней яркости изображения
(условия освещения или экс¬
позиции при съемке), монотон-
90
Рис. 3. Изображение с деталяхми
ность распределения сохраняется, но оптимум в 2,8 элемента дос¬
тигается при VT = 0,12.
Программа LABEL1 формирует ЭЦП-описание изображения
для набора VT от VT = АТ (АТ вводится пользователем) до VT =
= АТ—0,2 с шагом 0,02 и определяет VT, соответствующее опти¬
муму среднего размера области постоянного значения ам. Програм¬
ма LABEL1 определяет оптимальное значение VT для целого
класса изображений, формируемого по условиям съемки. Имея
значение VТ, можно применять программу LABEL2, которая фор¬
мирует ЭЦП-описание исходного изображения, используя опти¬
мальное значение VT, Пользуясь терминологией теории распозна¬
вания образов, можно классифицировать LABEL1 как программу
обучения, которая на основе выборки VТ настраивает систему рас¬
познавания на конкретный класс распознаваемых образов, в дан¬
ном случае класс изображений.
Программа LABEL2 во многом подобна программе LABEL1.
Она формирует ЭЦП-описание исходного изображения (файл, обо¬
значаемый «ИМЯ ИЗОБРАЖЕНИЯ. VEB») и его карту, т. е. раз-
метку областей (кластеров) с именем файла «ИМЯ ИЗОБРАЖЕ¬
НИЯ. МАР». В качестве входных данных программа требует имя
файла изображения, его линейный размер, размер ЭЦП и значе¬
ние коэффициента VT. Поскольку обучение с помощью програм¬
мы LABEL1 является единовременным актом, начальное значение
= АТ можно взять равным 0 и найти оптимальное значение
VT по 30—40 шагам, от VT = 0 до NT = 0,6; 0,8. Таким образом,
Для создания ЭЦП-описания изображения не нужно подби¬
рать параметры обработки, достаточно знать линейные размеры
обнаруживаемых поверхностей. Такая информация обычно из
вестна.
91
DESCRIPTION AFTER ANGLE MATCHING:
#1
ANGLE OF AXE =
150
LENGTH OF CYLINDER :
RADIUS OF CYLINDER =
42
ANGLE OF AXE =
145
LENGTH OF CYLINDER =
RADIUS OF CYLINDER =
43
ANGLE OF AXE :
150
LENGTH OF CYLINDER :
RADIUS OF CYLINDER --
44
ANGLE OF AXE -
145
LENGTH OF CYLINDER =
RADIUS OF CYLINDER =
45
ANGLE OF AXE --
145
LENGTH OF CYLINDER =
RADIUS OF CYLINDER =
46
ANGLE OF AXE =
145
LENGTH OF CYLINDER -
RADIUS OF CYLINDER =
NUMBER OF CYLINDERS-
5
5'
43
11
40
40
40
85
51
73
51
DESCRIPTION AFTER ANGLE AND DIRECTION MATCHING:
ANGLE OF AXE =
150
LENGTH OF CYLINDER :
57
RADIUS OF CYLINDER
43
X -COORD. OF CYLINDER:
6
Y-COORD. OF CYLINDER-
5
42
ANGLE OF AXE :
145
LENGTH OF CYLINDER --
40
RADIUS OF CYLINDER --
40
X-COORD. OF CYLINDER-
7
Y-COORD. OF CYLINDER-
14
43
ANGLE OF AXE =
145
LENGTH OF CYLINDER =
85
RADIUS OF CYLINDER -
51
X-COORD. OF CYLINDER;
19
V-COORD. OF CYLINDER--
1 6
NUMBER OF CYLINDERS--
3
DESCRIPTION AFTER ANGLE,
DIRECTION AND NEIGHBOURHOOD MATCHING
4!
ANGLE OF AXE =
150
LENGTH OF CYLINDER -
57
RADIUS OF CYLINDER -
43
X-COORD. OF CYLINDER-
6
Y-COORD. OF CYLINDER:
5
42
ANGLE OF AXE =
145
LENGTH OF CYLINDER --
40
RADIUS OF CYLINDER =
40
X-COORD. OF CYLINDER:
7
¥-COORD. OF CYLINDER:
14
43
ANGLE OF AXE =
145
LENGTH OF CYLINDER =
85
RADIUS OF CYLINDER :
51
X-COORD. OF CYLINDER:
19
Y-COORD. OF CYLINDER=
16
NUMBER OF CYLINDERS--
3
Рис. 4. Результаты распознавания цилиндрических поверхностей для дета¬
лей, изображенных на рис. 1, а, б
92
description after ANGLE HATCHING:
MnGTH^F^YLINDER =
RADIUS of cylinder --
LENGTH0OF^YLINDER =
RADIUS OF CYLINDER =
length°of?cylinder =
radius of cylinder --
B^°0FA^linder -
RADIUS OF CYLINDER =
LENGTHOOFACYLiNDER =
RADIUS OF CYLINDER
■
RADIUS OF CYLINDER =
NUMBER OF CYLINDERS:
185
180
180
185
180
180
6
40
39
17
22
25
37
71
39
35
22
50
37
DESCRIPTION AFTER ANGLE AND DIRECTION MATCHING;
#1
ANGLE OF AXE =
LENGTH OF CYLINDER =
RADIUS OF CYLINDER =
X-COORD. OF CYLINDER:
Y-COORD. OF CYLINDER:
#2
ANGLE OF AXE
LENGTH OF CYLINDER =
RADIUS OF CYLINDER =
X-COORD. OF CYLINDER:
Y-COORD. OF CYLINDER:
185
180
NUMBER OF CYLINDERS^
2
DESCRIPTION AFTER ANGLE,
DIRECTION
71
39
50
37
11
5
11
18
AND NEIGHBOURHOOD MATCHING:
#1
ANGLE OF AXE =
LENGTH OF CYLINDER =
RADIUS OF CYLINDER --
X-COORD. OF CYLINDER:
Y-COORD. OF CYLINDER:
#2
ANGLE OF AXE =
LENGTH OF CYLINDER -
RADIUS OF CYLINDER =
X-COORD. OF CYLINDER;
Y-COORD. OF CYLINDER;
NUMBER OF CYLINDERS-
185
ISO
2
71
39
60
37
11
6
11
18
93
Сформированное ЭЦП-описание годится для обнаружения (рас¬
познавания) всех видов цилиндрических поверхностей (цилиндр,
конус и т. д.), и конкретный вид поверхности, распознаваемой ин¬
теллектуальным блоком распознавания, определяется конкретным
видом указанного блока. Разработка интеллектуального блока
выполнена для распознавания цилиндров, и программная реали¬
зация этой разработки содержится в программе AIP.
Программа AIP в качестве входных данных запрашивает у поль¬
зователя линейный размер файла изображения (YLEN), размер
ЭЦП (WS), имя файла изображения (Imname), а также границы
обрабатываемого участка изображения в единицах ЭЦП — верх¬
нюю (XMI), нижнюю (ХМА), левую (YMI) и правую (YMA),
т. е. «кадрирует» поле изображения. Выходные данные (см. рис. 4,
а, б) содержат информацию о числе цилиндров на изображении и
по каждому цилиндру: направление оси, длину, радиус и коорди¬
наты центра тяжести в единицах ЭЦП.
Программа AIP содержит девять подпрограмм:
подпрограмма МАМ определяет число областей (кластеров)
постоянного или малойзменяющегося значения ам;
подпрограмма STIN инициализирует структуру данных об изоб¬
ражении и параметрах цилиндров на нем, которая на последующих
этапах работы программы будет наполняться конкретным содержа¬
нием;
подпрограмма CED определяет координаты границ прямоуголь¬
ников, описывающих все указанные кластеры ЭЦП;
подпрограмма CML определяет значение ам в каждом из клас¬
теров и для каждого кластера — протяженность оси прямоуголь¬
ника, описывающего кластер, считая эту величину оценкой протя¬
женности кластера;
подпрограмма CRS определяет пары кластеров, удовлетворяю¬
щих условиям А и В [1] (поворот градиента на 180° с точностью до
10° и максимальная (среди таких пар кластеров) геометрическая
близость двух кластеров, входящих в указанную пару), с одновре¬
менным вычислением радиусов потенциальных цилиндров.
подпрограмма GSD проверяет условие Б [1] — направление
векторов градиента пары областей, удовлетворяющих условию
А, навстречу друг другу — и определяет длину цилиндра как
протяженность большего из кластеров пары;
подпрограмма FSIN вычеркивает из структуры данных класте¬
ры, не входящие в «цилиндрические» пары хотя бы по одному из
признаков А, Б, В;
подпрограмма NEC проверяет оставшиеся в качестве «цилиндри¬
ческих» пары кластеров исходя из соотношения радиусов, длин и
расстояний между центрами тяжести цилиндров на соответствие
цилиндру или блику;
подпрограмма POUT формирует текстовой файл данных о про¬
цессе распознавания.
94
2. Обнаружение и оценка параметров
конических поверхностей
Поведение градиента яркости на конической поверхности ха¬
рактеризуется наличием двух мод, разнесенных на угол, не рав¬
ный 180° [1]. Рис. 5 иллюстрирует эту ситуацию, 180°. Су¬
щественным отличием интеллектуальной процедуры для конуса
в сравнении с цилиндром является проверка условия «встречности»
направлений градиента пары областей, определяющих наличие
конуса. Если для цилиндра проверка сводилась (подпрограмма
GSD) к сопоставлению квадрантов, в которых находились центры
тяжести парных областей и выходящие из них векторы направле¬
ний градиента, то для конусов, во-первых, в зависимости от рас¬
положения пары областей и векторов градиента число ситуаций
«навстречу» или «вовне» очень велико и, во-вторых, как видно из
рис. 4, векторы, выходящие из центров тяжести областей (в слу¬
чае конуса), могут и не пересекаться, особенно если одна из областей
полностью не выделена.
Для разрешения вопроса о направлении векторов градиента
пары областей следует определить конус как поверхность, имею¬
щую пару областей с постоянными направлениями градиента, при¬
чем полосы, ограниченные осями указанных областей и прямыми,
выходящими из крайних точек этих осей под углами, равными на¬
правлениям векторов градиента, имеют общие точки, т. е. пересе¬
каются.
При таком определении конуса большинство подпрограмм ин¬
теллектуальной процедуры распознавания конусов остаются без
изменений. Полностью сохраняются программы предварительной
обработки — программы получения ЭЦП-описания сцены. Су¬
щественно изменяется одна подпрограмма интеллекутальной про¬
цедуры — GSD. Для проверки наличия общих точек двух полос
необходимо проверить, пересекается ли хотя бы одна из границ
одной из полос с какой-либо границей другой полосы, т. е. зада¬
ча сводится к проверке наличия пересечений хотя бы пары из че¬
тырех полупрямых, каждая из которых выходит из своей вершины
одного из прямоугольников, ограничивающих пары кластеров
постоянного направления градиента на конусе.
На рис. 6 приведено изображение конической детали, а на
рис. 7 — распечатка результатов распознавания. Очевидно, что
при малых отличиях интеллектуальных процедур для распозна¬
вания и оценок параметров цилиндров и конусов эти процедуры
могут быть соединены в одном программном продукте.
3. Распознавание детали
по ее структурному описанию
Сделав переход от исходного, полутонового изображения к его
ЭЦП-описанию и далее через процесс распознавания к описанию
на языке «высокого уровня» в терминах «цилиндр», «конус», «сфе-
95
Рис. 5. Поведение градиента
на конической поверхности
Рис. 6. Изображение кониче¬
ской детали
ра», «плоскость» типа описаний, показанных на рис. 4, а, б, при¬
ходим к структурному описанию полутонового изображения. Это
структурное описание само является исходным материалом для
распознавания уже не типов поверхностей, а сложных, хотя и за¬
ранее известных, деталей из ограниченного набора, каждая из
которых описывается структурой. Элементы структуры составля¬
ют цилиндры, конусы, сферы и плоскости, соединенные отношения¬
ми типа «соосность», «параллельность» и т. д.
Задача распознавания детали по ее структурному описанию
во многом похожа на задачу распознавания априори известных
геометрических форм по полутоновому изображению. Роль
изменчивости условий освещения теперь играет изменчивость
структурного описания в зависимости от масштаба, поворота и
полноты распознавания составных частей детали. Языком описа-
96
**# of cluster-'1
1
“angle of axe="
200
“pair # =•*
2
"# Df cluster-1'
2
“angle of axe="
20
"pair #
1
“# of cluster="
3
“angle of axe=“
200
“pair #
5
"# of cluster-"
4
"angle of axe=“
200
“pair # = "
6
"# of cluster="
5
“angle of axe=“
20
"pair #
3
“# of cluster^"
6
"angle of axe="
40
“pair #
4
“# of clusters"
1
"angle of axe=”
200
“pair # —"
0
"# of cluster-"
2
“angle of axe=“
20
"pair # = “
0
“# of cluster=”
3
"angle of axe="
200
“pair #
0
"# of cluster-"
4
“angle of axe="
200
"pair # =“
6
“# of cluster^"
5
"angle of axe="
20
“pair # ="
0
"# of cluster==”
6
“angle of axe="
40
"pair # =“
0
“# of сопе=п 1
‘'angle <yf axe =" 120
"angle of cone *=“ 20
"radius of cone =" 24
"X-coord of cone=“ 18
"Y-coord of cone-" 19
"number of cones=" 1
Рис. 7. Результаты распознавания рис. 5
Ния сцены теперь является не описание в терминах ЭЦП, а струк¬
турное описание с элементами типа «цилиндр» (с его параметрами),
«конус» (с его параметрами), «сфера», «плоскость», «соосность»,
«параллельность» и т. д. Так же как и описание в терминах ЭЦП,
выбор тех или иных параметров ЭЦП, структурное описание
типа, приведенного на рис. 4, а, б, выбор его элементов является
эвристическим приемом. Единственное условие, предъявляемое
4 Иконика
97
к выбору формы структурного описания,— простота выделения
характерных признаков деталей, подлежащих обнаружению —
так же как условие выбора ЭЦП с его параметрами в качестве
языка описания сцены при обнаружении известных поверхностей,
состояло в удобстве обнаружения инвариантов указанных поверх¬
ностей.
Существенное отличие новой ситуации распознавания (от
предыдущей) состоит в сложности выбора инвариантов в струк¬
турном описании машиностроительных деталей. Мы заранее не
можем предсказать форму детали, которую создаст машиностро¬
ительная промышленность. Поэтому положение типа «имеется
два соосных цилиндра с отношением длины к радиусу у первого
1,6—1,9, у второго 1,3—1,6» справедливо для детали на рис. 1,
а, б и должно сохраняться для различных структурных описаний
(см. рис. 4), соответствующих различным изображениям одной
и той же детали рис. 1, а, б, но не может служить инвариантным
для целого класса деталей. Поскольку постоянные для разных
условий расположения и освещения и, как следствие, результатов
распознавания признаки детали весьма многочисленны, как и раз¬
новидности машиностроительных деталей.
Для случая стационарной среды [1], когда число типов деталей
п <<: 7V, где N — число деталей, прошедших на конвейере за вре¬
мя выпуска только указанных п типов деталей, необходимость
выбора наборов инвариантов и, как следствие, п алгоритмов рас¬
познавания (набор инвариантов для детали -> алгоритм ее рас¬
познавания) деталей по их структурному описанию оправдывает
себя. Для каждого из четырех типов поверхностей (цилиндр, ко¬
нус и т. д.) также создавался свой алгоритм распознавания.
Принципиальная сложность заключается в методе отбора струк¬
турных признаков, являющихся инвариантами для данной де¬
тали.
Поясним это на рис. 1, а, б. События, которые по отдельности
или вместе могут иметь место в структурном описании указанной
детали, следующие: Сг — имеется цилиндр с отношением радиу¬
са к длине, равным С± (направление оси цилиндра и линейные
значения длин и радиусов заведомо не есть инварианты относи¬
тельно поворота и масштаба наблюдения); С2 — имеется цилиндр
с отношением радиуса к длине, равным С2; С1С2 — имеется два
цилиндра с указанными свойствами; СХС2А — имеется два цилин¬
дра с указанными свойствами, соосные между собой; С^С^АВ —
имеются соосные цилиндры и С2 с относительным расстоянием
(относительно радиуса цилиндра Сх, например) между их цент¬
рами тяжести, равным В.
Выбор признака в качестве инварианта детали рис. 1, а, б
может оказаться неудачным по двум причинам. Основная причи¬
на — достаточно оказаться цилиндру со сходными параметрами
Сх в конфигурации другого типа детали или ложного обнаруже¬
ния цилиндра Сх, как происходит ложное срабатывание системы
распознавания. Один признак охватывает слишком большое мно¬
98
жество ситуаций на изображении, чтобы брать его в качестве ин¬
варианта. С другой стороны, если цилиндр Сг распознается не¬
достоверно или с большими погрешностями в оценке параметров,
то брать его в качестве инварианта нельзя. Достаточно пропустить
признак и происходит отказ от распознавания данной детали.
Возьмем другую крайность — в качестве инварианта берется
признак (\С2АВ. В этом случае множество возможных конфигу¬
раций поверхностей, имеющих указанный признак, резко сужа¬
ется. Нет другого типа детали с признаком С1С2АВ на рис. 1 (наш
набор п). Но сразу возникает сложность с обнаружением. Систе¬
ма распознавания обладает малой помехоустойчивостью. Доста¬
точно не распознать только один признак из набора, как происхо¬
дит сбой системы.
Возникает противоречие между полнотой описания объекта и
вероятностью получения структурного описания, необходимой
для распознавания полноты. Поскольку само описание (структу¬
ры типа рис. 4, а, б; 7) есть результат процесса обнаружения по¬
верхностей, т. е. апостериорная характеристика, то дать априор¬
ный ответ о достаточных и достоверных признаках (инвариантах)
детали нельзя. Эту проблему можно решить в рамках вероятно¬
стного подхода.
Пусть требуемая надежность распознавания задается уровнем
PQ — вероятности распознавания детали при ее появлении в поле
зрения системы распознавания. Обозначим событие, состоящее
в наблюдении детали рис. 1, Z. Набор признаков, который нам не¬
обходим для распознавания Z, обозначим X, например X =
= С}С2АВ или X = С1С2. Тогда X можно определить из условия
Р(Х, 2)>Рй. (1)
Следует брать совместную вероятность по следующим сооб¬
ражениям. Если переписать
Р (X, Z) = Р (X) Р (Z/X) (2)
и разобрать сомножители в правой части, то станет очевидно, что
даже близость к единице Р (Z/Х), например Р (Z/C^C^AB), т. е.
высокая достоверность наблюдения Z при условии структуры X,
может быть сведена на нет малой вероятностью получения описа¬
ния X.
Величины Р (X) и Р (Z/Х) получаются в процессе обучения.
Выбрав некоторое из эвристических соображений описание X,
настройщик системы прогоняет достаточно длинную серию дета¬
лей, где многократно встречается деталь Z, и измеряет указанные
вероятности, не переходя (что существенно!) к процессу распозна¬
вания. Если выполняется неравенство (1), то описание выбрано
Удачно, если нет, его следует поменять. Сократить, если X содер¬
жит много условий и Р (X) мало, или дополнить, если мало
Р (Z/Х). Таким образом, сомножители в правой части равенства
(2), тривиального самого по себе, служат регуляторами при по¬
4*
99
иске описания достаточной полноты — инварианты для детали
Z при распознавании Z по его структурному описанию.
Метод выбора описания X не указывает, в каких терминах за¬
писывается X. Марр в работе [2] считает представление трехмерной
модели сцены самым сложным и конечным этапом процесса вос¬
приятия (распознавания) сцены. Наше структурное описание яв¬
ляется основой трехмерной модели изображения. Для распозна¬
вания сложных сцен, какими являются машиностроительные
детали, выполняется [2] последовательность операций: «трехмер¬
ные модели иерархически упорядочиваются; основу каждой моде¬
ли образует некоторая пространственная конфигурация, состав¬
ленная из нескольких стержней или осей; к ней прикрепляются
объемные или поверхностные непроизводные элементы, характе¬
ризующие форму объекта». Объемными или поверхностными не¬
производными элементами в нашем случае (имеются эффективные
алгоритмы распознавания и оценки параметров поверхностей)
будут цилиндры, конусы, сферы и плоскости. Элементами взаимо¬
отношений указанных компонентов сцены служат [2] оси этих
компонентов и их взаимное расположение (соосность, параллель¬
ность и т. д.). В качестве языка описания модели более высокого
порядка может служить все множество понятий осей и поверх¬
ностей плюс индексы специфичности, присоединения и происхож¬
дения [3].
Описание сцены в терминах поверхностей, осей и индексов
удобно в силу наличия алгоритмов распознавания поверхностей,
с одной стороны, и с другой — удобством построения описаний
сложных объектов на основе понятий осей и индексов [3]. Тех¬
нологическое удобство — главная причина при выборе языка
описания величины X. Возможны и другие языки описания сце¬
ны [4, 5].
Заключение
В статье рассмотрен вопрос создания программного продукта
для распознавания типичной для деталей машиностроительной
промышленности поверхности — цилиндра, конуса. Рассмотрение
позволяет сделать вывод о подобии программных средств для рас¬
познавания, открывающем путь к созданию интегрированного
программного пакета для распознавания и оценки параметров
всех четырех типов поверхностей, характерных для машиностро¬
ительных деталей [1]. Указанное подобие является следствием
единого для всех видов распознаваемых поверхностей подхода
к распознаванию — обнаружение инвариантов (к условиям ос¬
вещения) в поведении градиента яркости на распознаваемой по¬
верхности.
Исследование вопроса распознавания на семантическом уров¬
не — не известной поверхности, а известной детали, состоящей
из набора (списка) поверхностей, сформировало вероятностный
подход к проблеме распознавания по структурному описанию.
100
При указанном подходе неизбежен этап обучения с участием че¬
ловека-оператора, выбирающего на основе измерений вероятно¬
стей распознавания элементов детали опорные признаки для рас¬
познавания детали в целом с требуемой достоверностью распозна¬
вания.
ЛИТЕРАТУРА
1. Вендровский Е. Я., Файн В. С. Существенно полутоновой анализ сцен//
Кодирование и обработка изображений. М.: Наука, 1988.
2. Марр Д. Зрение: Информационный подход к изучению представления
и обработки зрительных образов. М.: Радио и связь, 1978. 400 с.
3. MarrD., Nishihara II. К. Representation and recognition of the spatial
organization of three dimensional shapes // Proc. Roy. Soc. London B.
1978. Vol. 207. P. 269-294.
4. УолцД. Интерпретация контурных рисунков, изображающих сцены
с тенями //Психология машинного зрения. М.: Мир, 1987. С. 30—111.
5. Уинстон П. Г. Построение структурных описаний по примерам И Там же.
С. 185-247.
УДК 621.3'21.199
ОСОБЕННОСТИ ПОВЕДЕНИЯ
ГРАДИЕНТА ОСВЕЩЕННОСТИ
НА НЕКОТОРЫХ ТИПАХ ПОВЕРХНОСТЕЙ
М. М. Луценко
1. Введение
Системы машинного зрения (М3) обычно ориентированы на
специализированные условия освещения (УО) [1, 2], что не всег¬
да выполнимо в реальной производственной обстановке. Для до¬
стижения независимости работы систем М3 от изменчивости У О
исходные полутоновые изображения часто перерабатывают в кон¬
турные [3, 4]. При этом, однако, утрачивается большое количество
информации, содержащейся в изображении, что во многих случаях
недопустимо. В связи с этим возникает необходимость в разработ¬
ке систем М3, которые обеспечивали бы использование полуто¬
новой информации и были бы как можно менее чувствительны к из¬
менчивости УО. В известных разработках, ориентированных на
использование полутоновой информации [5, 6], задача М3 ста¬
вится как задача определения формы неизвестной поверхности
объектов по их полутоновому изображению. Такая задача некор¬
ректна L7] и не решается полностью автоматически.
В ИППИ АН СССР предложена другая интерпретация задачи
М3 с использованием полутоновой информации. Она заключает¬
ся в следующем. Ознакомление с многочисленными изделиями
Ряда производств, прежде всего машиностроения, показало, что
в большинстве случаев формы поверхностей укладываются в конеч¬
ное число типов. Это позволяет заменить задачу восстановления
101
поверхности по полутоновому изображению задачей идентифика¬
ции типа поверхности среди конечного набора типов. При решении
этой задачи была высказана гипотеза о том, что на однотипных
поверхностях распределение светотеней должно иметь в чем-то
сходный характер [7]. Экспериментальная проверка этой гипоте¬
зы связывалась с четырьмя наиболее распространенными в маши¬
ностроении типами поверхностей: плоскость, конус, цилиндр,
сфера. Поверхности считались ламбертовыми. В этом случае яр¬
кость поверхности связана с ее освещенностью через постоян¬
ный коэффициент и можно рассматривать картину освещенности,
а не яркости. Тогда гипотеза конкретизируется: существуют та¬
кие характеристики градиента скалярного поля освещенности
поверхности объекта (в дальнейшем — градиента освещенности
(ГО)), которые существенно определяются типом поверхности
и в значительно меньшей степени зависят от УО и направления
наблюдения.
Настоящая статья содержит первую попытку теоретического
исследования гипотезы и имеет целью выработку основ подхода
к светотехническому анализу обсуждаемых ситуаций. В связи
с этим на начальном этапе ограничимся лишь указанными типами
поверхностей и простейшими источниками света (ИС). Так как
поверхности считаются ламбертовыми, то этап их проецирования
на плоскость поля зрения не вносит ничего нового в картину ос¬
вещенности и поэтому может не рассматриваться.
2. Исходные данные и соотношения
2.1. Источники света и освещенность. В зависимости от со¬
отношения размеров ИС и расстояния от него до исследуемой точ¬
ки поверхности объекта ИС обычно делят на точечные, линейные
и ИС конечных размеров [8].
На практике часто встречаются точечные ИС — они достаточно
просты в формальном описании. Поэтому на обсуждаемом этапе
работы ограничимся этим типом ИС.
Освещенность точки М поверхности объекта (рис. 1) для то¬
чечного ИС дается соотношением [8]
Е (М) - I cos i (M)/R2
(1)
где I — сила света, которая считается постоянной; i (М) —
угол между единичной нормалью N к поверхности объекта в точке
М и единичным вектором N t в направлении ИС; R— расстояние
от ИС до точки М.
Обычно расстояние от ИС до поверхности объекта намного
больше размеров объекта. В этом случае I и R можно считать
постоянными. Нетрудно видеть, что тогда лучи, идущие от ИС
к объекту, параллельны. При этом соотношение (1) запишем в виде
Е (М) = С cos f (М),
где С = I/R2 — постоянный коэффициент.
(2)
102
(3)
Если имеется J ИС того же типа, то (2) примет вид
j j
Е(М) = X EjfM) = S Сj cos
3=1 3=1
где Ej (М) = Cj cos ij (M) — освещенность, создаваемая /-м ИС.
2.2. Представление освещенности через направляющие коси¬
нусы векторов. Для дальнейшего удобно связать выражения для
освещенности с координатной системой объекта. В этом случае
cos i (М) = cos a cos + cos [3 cos [Зг- + cos у cos yf,- где cos a,
cos p, cos у и cos a$, cos pf, cos yt — направляющие косинусы
векторов и соответственно.
Так как для параллельного ИС углы аг-, рг- и yf постоянны,
то
cos; (М) = Са cos a + Ср cos р + CY cos у, (4)
где Ca = cos Ср, = cos рг-, Cj = cos yt — постоянные коэф¬
фициенты.
Из соотношений (2) и (4) получаем
Е (М) = Сх cos а + С2 cos Р + С3 cos у, (5)
где Cj = CCa; С2 = ССр; С3 = CCY.
Таким образом, освещенность точки поверхности для выбран¬
ного типа ИС зависит только от направления нормали 2V.
Сходные рассуждения для J ИС (см. (3)) приводят к следующим
выражениям:
j
Е (М) 3 Cj (Caj cos a + Ср - cos P + CY. cos y) =
3=1
J J J
= cos a 2 C-tj + cos p 2 C2j + cos у 3 C3J-.
3=1 3=1 3=1
Обозначив
3 = ci, 3 c2j = cJ2, у c3j = ci,
3=1 3=1 3=1
получим
E (M) = Cf cos a + CJ2 cos p + C3 cos y. (6)
Сравнивая (6) c (5), замечаем, что в рамках данной модели
случай J ИС не отличается от случая с одним ИС. Это позволяет
без потери общности иметь дело дальше с одним ИС.
2.3. Представление градиента освещенности. Перейдем те¬
перь к ГО. Запишем его представление для рассматриваемых ти¬
пов поверхностей.
В декартовых координатах (х, у, z) поведение ГО в точке М
на плоской поверхности описывается выражением
где СПЛ — постоянный коэффициент.
103
Поведение ГО на цилиндрической и конической поверхностях
удобно описывать в цилиндрических координатах (р, ср, z). При
этом поведение ГО на цилиндрической поверхности описывается
выражением
grad Е (М) =
1 дЕ (М) + ,
е* +
дЕ (М) -
е*'
(8)
а на конической поверхности — выражением
grad Е (М) = СЬ()П
дЕ (М)
<5р
1 дЕ (М) ~ , дЕ (М) -л
р дер ?
где Скон — постоянный коэффициент.
(9)
104
Поведение ГО на сферической поверхности удобно описывать
в сферических координатах (0, ср, р):
grad Е (М)
дЕ (М) , 1 дЕ (М)
<90 "г ‘ р sin 0 <9ср е<р*
(10)
Подготовив необходимые выражения, перейдем к интересую¬
щей нас задаче.
3. Поведение градиента освещенности
на рассматриваемых типах поверхностей
3.1. Плоская поверхность. Во всех точках плоской поверхно¬
сти (рис. 2) угол i (М) постоянен. Поэтому (см. (2))
Е (М) = С cos i (М) = const.
Тогда в силу (7) grad Е (М) = 0, т. е. во всех точках плоской
поверхности ГО равен нулю.
3.2. Коническая и цилиндрическая поверхности. Сначала рас¬
смотрим поведение ГО на конической поверхности.
Введем вспомогательный вектор Лгб (см. рис. 3), который яв¬
ляется проекцией вектора N на плоскость хОу\ он характеризу¬
ется направляющими косинусами:
cos «б = cos ср, cos Рб = sin ср, cos уб = 0.
Как видно из рис. 3, угол t (М) = (М) + б, поэтому (см. (2))
Е (М) = С cos (М)±б],
Е (М) = С [cos Zj (М) cos 6 + sin h (^f) sin 6].
По аналогии с (4) можно записать
COS (М) = Са COS ct6 + Ср COS Рб + Су COS Уб»
cos (М) = Са cos ср + Ср sin ср. (И)
Далее, с помощью (4), (5) и (11), получим
Е (М) = (С1 cos ср + С2 sin ср) cos б + С sin sin б. (12)
Согласно (9), ГО конической поверхности равен
grad Е (М) = -А-
дЕ (М) л
Лр е‘(‘
(13)
Используя (11) и (12), вычислим
= (— G sin <р + С2 cos ф) X
Г я , • я С cos ф + sin ф
X cos б -I- sin б г - . ■ . -
L '■ ]/1 — cos ср 4-Ср sin <[)2
Обозначим
— Сх sin ср + С2 cos ср = Д (ср), Са cos ср 4- Ср sin ср = /2 (ср).
105
Рис. 5
Тогда
дЕ^~ = /1 (ф) lcos 5 + sin 6 (/2 (Ф)/^1 — /2 (Ф))]- (14)
Подставив (14) в (13), получим, наконец:
grad Е (М) = р_1/1 (ф) (cos 6 ± sin 6 (/2 (<р)/V1 — /г (ф))!^.
(15)
Для дальнейшего нам нужно описать поведение ГО вдоль об¬
разующей конуса. Под образующей конуса LK понимается точеч¬
ное множество = {М (р, ср, z) : р = var, ср = const, z = var}.
Легко видеть, что для точек из (15) примет вид
grad Е (М) - р"1^, (16)
где Clk = /i (ср) [cos б ± sin б (/2 (ср)//1 — /2 (ф)Жр — вектор,
постоянный по модулю и по направлению.
Теперь рассмотрим поведение ГО на цилиндрической поверх¬
ности (см. (8)). Ее можно считать частным случаем конической
поверхности при б = 0, р = const (рис. 4). Тогда (15) запишется:
grad Е (М) = Л (ф) е<г- (17)
Как и для конуса, опишем поведение ГО вдоль образующей:
LL[ = {М (р, ср, z) : р = const, ср — const, z = var}. Так как в (17)
р, ср и е(Р постоянны, то и вектор ГО постоянен вдоль по модулю
и по направлению; в коническом же случае постоянным было
только направление, а модуль ГО изменялся по закону 1/р (см.
(16)). Указанные факты не зависят от параметров ИС или системы
ИС выбранного типа и могут служить для идентификации кони¬
ческих и цилиндрических поверхностей.
3.3. Сферическая поверхность. Из соотношений (8) и (9) следует,
что для выбранного типа ИС освещенность точки поверхности,
106
а вслед за ней и направление ГО существенно зависят от направ¬
ления нормали в точке. Постоянство направления ГО вдоль об¬
разующих цилиндра и конуса вытекало как раз из этого обстоя¬
тельства. Что касается сферической поверхности, то на ней нет
линий постоянного направления N, а поэтому и векторы ГО вдоль
любой линии на сфере изменяют направление. В задаче М3, в
которой имеются только четыре рассматриваемых типа поверх¬
ностей, этот факт может быть использован для идентификации
сферы. Что касается модуля ГО, то в случае одиночного ИС на
его основе может быть построен простой признак для распознава¬
ния сферических поверхностей даже в случае, если, кроме пере¬
численных, имеются и другие произвольные гладкие поверхности
общего вида. Этот признак выводится из следующих рассуждений.
Если ось Oz системы координат, связанной с объектом, совпа¬
дает с направлением вектора 2У^, то (рис. 5) угол i (М) равен сфе¬
рической координате 6. Поэтому (см. (2)) Е (М) = С cos 0.
Согласно (10), ГО сферической поверхности равен
grad£(M)^-^ee = --^sin9ee. (18)
Опишем поведение ГО вдоль так называемых окружностей
равной освещенности (ОРО). Под ОРО Т понимается точечное
множество Т = {М (0, ф, р) : 0 = const, ф = var, р = const}.
Для точек из Т (18) запишется
grad Е (М) = — (С/р) sin 0е0 = — Сте0, (19)
где Ст = С/р sin 0 — постоянный коэффициент.
Из выражения (19) легко видеть, что признаком для распозна¬
вания сферических поверхностей в рассмотренном случае может
служить постоянство и неравенство нулю модуля ГО вдоль ОРО.
Этот результат с некоторым приближением может быть исполь¬
зован и в случае системы ИС того же типа, если один из них преоб¬
ладает по интенсивности. Если же ИС сравнимы по интенсивности,
такого простого признака получить не удается. В этом случае
также возможна идентификация сферической поверхности, однако
ее механизм достаточно сложен и выходит за рамки данной работы.
4. Заключение
Как видно, в рамках исследованной модели выявлены простые
закономерности распределения светотеней на некоторых поверх¬
ностях. Эти закономерности могут быть положены в основу эврис¬
тик, обеспечивающих идентификацию поверхностей при изменяю¬
щихся У О по их полутоновым изображениям.
107
ЛИТЕРАТУРА
1. Власов А, В., Шамис А. Л. Экспериментальные системы зрительного вос¬
приятия для роботов: (Обзор) И Интегральные работы. М.: Мир. 1975.
Вып. 2. С. 28—46.
2. Катыс Г. 11. Визуальная информация и зрение роботов. М.: Энергия,
1979. 176 с.
3. Джаин Р., Аггарвал Дж. К. Машинный анализ сцен, состоящих из объ¬
ектов криволинейных очертаний // ТИИЭР. 1979. Т. 67, № 5. С. 121 — 130.
4. Бэрроу X. Дж., Тененбаум Дж. М. Алгоритмическое зрение И Там же.
1981. Т. 69, № 5, С. 91—120.
5. Хорн Б. Определение формы ио данньш о полутонах // Психология ма¬
шинного зрения. М.: Мир, 1978. С. 137 — 184.
6. Хорн Б., Икеутпи К. Механическое манипулирование произвольно ори¬
ентированными объектами // В мире науки. 1984. № 10. С. 76—86.
7. Файн В. С. Распознавание образов и машинное понимание естественного
языка. М.: Наука, 1987. 176 с.
8. Щепина Н, С. Основы светотехники. М.: Энергоатомиздат, 1985. 344 с.
Методы
передачи информации
УДК 621.397.2
ОБ ИСПОЛЬЗОВАНИИ НЕРАВНОМЕРНОГО
КОДИРОВАНИЯ ПРИ СЖАТИИ ИЗОБРАЖЕНИЙ
МЕТОДОМ ДИФФЕРЕНЦИАЛЬНОЙ ИМПУЛЬСНО-КОДОВОЙ
МОДУЛЯЦИИ
Р. А. Прибылова, В. Б. Тхор,
Ю. М. Штарьков
Введение. Возможности сокращенного описания изображений
обуславливаются в основном двумя факторами. Первый связан
с ограничениями зрительного восприятия получателя, благодаря
которым исходное изображение можно без ущерба для субъектив¬
ного качества аппроксимировать другим, более простым, эконом¬
но описываемым изображением. Второй существенно опирается
на свойства источника изображений. Последовательность дискрет¬
ных величин, поступающих с выхода устройства сжатия изобра¬
жений, как правило, содержит остаточную избыточность, кото¬
рую можно уменьшить методами неравномерного (статистического)
кодирования источников.
В настоящее время накопилось большое количество работ,
посвященных как сжатию изображений [1—4], так и методам
статистического кодирования источников [4—7].
Па практике к методам кодирования изображений часто предъ¬
являются требования простоты, возможности реализации в реаль¬
ном времени и неотличимости декодированного изображения от
оригинала при небольших затратах цифр. Одним из популярных
методов сжатия, удовлетворяющих указанным требованиям, явля¬
ется дифференциальная импульсно-кодовая модуляция (ДИКМ)
(8—10], возможности которой в настоящее время хорошо изучены.
Высокого качества удается достичь при 15-уровневом квантовате¬
ле с фиксированными параметрами (4 бит/эл.)
Известны попытки использования статистического кодирования
последовательности данных на выходе системы ДИКМ с помощью
метода Шеннона—Фано [9].
В реальной ситуации применение кода Шеннона—Фано
сопряжено с трудностями, обусловленными отсутствием полного
вероятностного описания последовательности на выходе устройст¬
ва сжатия. В последнее время были разработаны достаточно
общие, простые в реализации и устойчивые к неизвестной статис¬
тике методы неравномерного кодирования [6, 7].
109
В настоящей работе описываются первые предварительные
результаты применения этих методов к последовательности дан-
ных на выходе квантователя ДИКМ с фиксированным предсказа¬
нием.
Используемая модель изображения. Чтобы оптимизировать
неравномерный код, необходимо знать распределение вероятнос¬
тей для последовательностей на выходе устройства сжатия или
для исходного массива данных. Во многих случаях, в частности
для изображений, сложная задача определения статистических
свойств источника далека от окончательного решения. Известно
много работ, в которых предлагается модель изображений, однако
для которых в настоящее время не удается построить достаточно
простого, работающего в реальном времени, метода кодирова¬
ния [И].
Отклонения свойств реального изображения от предполага¬
емых моделью приводят к потере эффективности метода кодирова¬
ния. В условиях сильной неопределенности находят применение
методы, использующие выборочное распределение. Если пред¬
положить, что изображение порождается случайным источником,
текущее значение реализации которого можно с хорошей точностью
предсказать по множеству предыдущих элементов, то выборочное
распределение естественно изхмерять по этому множеству. Здесь
возникает возможность по мере поступления новых реализаций
источника обновлять выборочное распределение и тем самым
отслеживать изменения статистических свойств изображения.
При использовании метода сжатия ДИКМ подобное измерение
статистики изображения можно производить на приемной сторо¬
не, что обеспечивает возможность работы алгоритма статистичес¬
кого кодирования в реальном времени.
Разумеется, такая простая модель источника не учитывает
многих реальных свойств изображения, например резкие перепады
яркости на контурных участках, однако на первом этапе ее можно
считать приемлемой, поскольку удается построить «хорошие»
неравномерные коды и простой алгоритм сжатия. В дальнейшем
можно постепенно усложнять модель при условии, что такое услож¬
нение позволит увеличить коэффициент сжатия, который явля¬
ется единственным критерием целесообразности в данной работе.
Неравномерное кодирование с фиксированным предсказанием.
Обозначим через х^ яркость j -го элемента в Z-й строке изображе¬
ния, ij = 1, п, а через ytj — его приближенное описание, полу¬
ченное в результате применения определенного алгоритма сжатия.
Для начала воспользуемся простым предсказанием по преды¬
дущему элементу, т. е. Ошибка предсказания —
= j = Xjj — квантуется некоторым фиксирован¬
ным квантователем Q, содержащим ц квантов, т. е. заменяется
целым числом ссо- = Q (егД, где 1 ц (предполагается,
что все кванты пронумерованы от 1 до ц). Наконец, для получения
ytj число a,ij заменяется представителем кванта e7 J- = д (ац),
обычно принадлежащим ос/7-му кванту, и в результате восстанав-
110
ливается величина у-^, согласно
выражению уц = + су =
= + 7 (а*,)-
Таким образом, в результате
сжатия получаем последователь¬
ность чисел а/7-, принадлежащих
конечному алфавиту А = 1, . ., Ц.
Поскольку флуктуации яркостей
вокруг предсказанного значения
независимы друг от друга, чи¬
сла ац также считаем независи¬
мыми. В этих условиях любая
последовательность из N букв
алфавита Л — рл — р1? . . ., |3;у
описывается кодовым словом ср
(pN) длины [7]
А(р-) = А7?< NI1(А,.
4)+tj.10gi(A.+±^i.) +
+ 4~log2 л ~ log2r(4r) ’
где В — среднее число бит, зат¬
рачиваемых на описание одной
буквы; i = i, ц — число вхож¬
дений буквы i в последователь¬
ность рА;
— частотная энтропия (квазиэнт¬
ропия); Г (•) — гамма-функция.
Подчеркнем, что в этом случае
кодируется не каждый элемент
последовательности Рд отдельно, а
Рдг в целом (блоковое кодирование).
Для формирования кодового сло¬
ва ф (рд) достаточно ввести произ¬
вольным образом условные веро¬
ятности
Тестовые изображения (а — в —
см. текст)
Ф.(Р I ₽г-2, • •
Неравенству (1) соответствует выбор условных вероятностей [7]
(2)
111
где ip(i-i) — число вхождений буквы р в первые i — 1 элемен¬
ты последовательности.
Результаты исследований для фиксированного предсказания.
В качестве тестовых изображений были выбраны изображения
размером 256x256 эл. с 256 градациями яркости, малой деталь¬
ности «Портрет», средней детальности «Кремль» и большой деталь¬
ности «Аэрофото» (см. рисунок а—в).
Использовался квантователь с р = 15 квантами, подобранными
так, чтобы удовлетворялись требования к качеству декодирован¬
ного изображения. Границы квантов были равны ±255, ±61,
±44, ±31, ±21, ±13, ±7, ±2, причем каждая из них принадле¬
жит кванту, находящемуся слева от нее (напомним, что кванту¬
ется ошибка предсказания, принимающая как положительные,
так и отрицательные значения). Этим квантам приписываются
значения ±71, ±51, ±37, ±25, ±16, ±9, ±4, 0 соответственно.
При равномерном кодировании на описание каждого
затрачивается 4^ бита, а при описанном ранее неравномерном
кодировании — /? = L ((3n)/jV, где |3Л' — последовательность
7V = лг2 = 2562. Таким образом, для оценки эффективности нерав¬
номерного кодирования достаточно построить гистограмму значе¬
ний i = 1, ц, произвести вычисления по формуле (1) и резуль¬
тат разделить на N = п2.
Существенная неоднородность большинства изображений поз¬
воляет предположить, что независимое кодирование отдельных
частей изображения позволит улучшить результат. Для исследо¬
вания этого вопроса каждое изображение разбивалось на S2
квадратов площадью n2/S2 (предполагается, что n/S — целое
число) и для любой точки &-го квадрата, к = 1, 52, использовались
распределения вида (2), являющиеся, по существу, текущими
гистограммами для уже просмотренных точек только этого квад¬
рата. Тогда средние затраты на описание одного равны
(3)
где {^R), I 1, ц} — гистограмма для &-го квадрата. Нетрудно
убедиться, что при 5 = 1 выражение (3) соответствует выражению
(1).
Из свойств энтропии следует, что с ростом S первое слагаемое
в выражении (3) уменьшается (локальная оптимизация эффек¬
тивнее глобальной), а второе увеличивается. Поэтому для любого
изображения существуют оптимальные размеры квадрата n/S.
Выбирая S = 1, 2, 4, 8, ... (n/S = 256, 128, 64, 32, ...), с помощью
формулы (3) можно вычислить Н. Результаты вычислений приве¬
дены в табл. 1.
112
Таблица 1
Размер
фрагмента
«Портрет»
«Кремль»
«Аэрофото»
256
2,7799
3,2533
3.3367
128
2,7584
3,2483
3.3298
64
2,6912
3.0777
3,2704
32
2,6575
3,0150
3,2404
16
2,6854
3,0314
3,2730
Таблица 2
Размер
фрагмента
«Портрет»
«Кремль»
«Аэрофото»
256
2,6186
3,3194
3.2192
128
2,5986
3.3103
3,2104
64
2,5127
3,1784
3,1448
32
2,4999
3.0689
3,1101
16
2,5032
3,0695
3,1340
Достаточно неожиданным оказалось, что для трех различных
по характеру изображений при n/S = 32 достигался минимум
В. Иначе говоря, размеры квадрата можно выбирать заранее.
Средняя длина кодового слова зависит от типа изображения
(см. табл. 1). Наибольший выигрыш достигается на малодетальном
изображении «Портрет» — 2,66 бит/эл. С увеличением детальности
изображения выигрыш уменьшается и составляет для изображе¬
ния «Кремль» — 3,015 бит/эл., а для «Аэрофото» — 3,24 бит/эл.
Столь небольшой выигрыш — порядка 1 бита — был получен
и в работе [9], где использовалось равномерное квантование ошиб¬
ки предсказания на 16 квантов и труднореализуемый на практике
метод статистического кодирования — метод Шеннона—Фано.
Оставаясь в рамках фиксированного предсказания, можно
несколько улучшить качество пресказания за счет увеличения
окрестности прошлых элементов. Предсказание по одному про¬
шедшему элементу, достаточно хорошо действующее на гладких
участках, становится несостоятельным в области резких перепадов
яркости. Используя более совершенную модель изображения,
можно было бы улучшить предсказание, однако в работе рассмат¬
ривается более простое решение. В эксперименте использовался
предсказатель, определяемый выражением
= Vi (нм + yi-ui-i + + г/i-u+i)- (4)
Экспериментальные данные для такого предсказателя сведены
в табл. 2, из которой видно, что предсказатель (4) несколько
уменьшил значение В для изображения «Портрет» до 2,5 бит/эл.
113
и «Аэрофото» до 3,11 бит/эл., однако на среднедетальном изо¬
бражении «Кремль» результат оказался даже хуже — 3,07 бит/эл.
Можно было подобрать коэффициенты предсказания оптималь¬
но из корреляционных свойств изображений, что несколько улуч¬
шило бы эффективность кодирования, однако на детальных высо-
контрастных участках изображения, где элементы окрестности
предсказания могут иметь сильноотличающиеся друг от друга
значения, также предсказание все равно оказалось бы несостоятель¬
ным.
Заключение. В работе приводятся предварительные экспери¬
ментальные результаты применения работающих в реальном вре¬
мени методов статистического универсального кодирования дан¬
ных, поступающих с выхода устройства сжатия — ДИКМ с фик¬
сированным квантованием и предсказанием, в условиях априор¬
ной неопределенности о распределении исходных данных.
Исследования показали, что при вычислении средней длины
кодового слова по отдельным фрагментам независимо от исполь¬
зуемого предсказателя и типа исходного изображения оптималь¬
ный размер фрагмента составил 32x32 эл.
Улучшение предсказателя за счет увеличения анализируемой
окрестности прошлых элементов не привело к существенному
повышению эффективности кодирования.
Перспективным направлением дальнейших исследований, по-
видимому, является использование более совершенных предска¬
зателей и квантователей с переменными коэффициентами и пара¬
метрами.
ЛИТЕРАТУРА
1. Джаин А. К. Сжатие видеоинформации: (Обзор) // ТИИЭР. 1981. Т. 69,
3. С. 71 — 117.
2. Нетравали А., Лимб Дж. Кодирование изображений: (Обзор) И Там же.
1977. Т. 65, № 4. С. 47-62.
3. Системы видеосвязи: Темат. вып. И Там же. 1985. Т. 73, № 4. С. 1—233.
4. Цифровое кодирование изображений / Под ред. И. И. Цуккермана. М.:
Радио и связь, 1981. 239 с.
5. Шеннон К. Математическая теория связи И Работы по теории информации
и кибернетике. М.: Изд-во иностр, лит., 1963. С. 243—332.
6. Штаръков IO. М. Адаптивное кодирование дискретных источников И Ко¬
дирование в сложных системах. М.: Наука, 1974. С. 163—169.
7. Штаръков Ю. М. Обобщенные коды Шеннона И Пробл. передачи информ.
1984. Т. 20, № 3. С. 3—16.
8. Методы передачи изображений: Сокращение избыточности / Под ред.
У. К. Прэтта. М.: Радио и связь, 1983. 263 с.
9. Харатишвили Н. Г. Дифференциальная импульсно-кодовая модуляция
в системах связи. М.: Радио и связь, 1982. 134 с.
10. Харатишвили Н. Г. Цифровое кодирование с предсказанием непрерывных
сигналов. М.: Радио и связь, 1986. 140 с.
11. Лебедев Д. С., Безрук А. А., Новиков В. М. Марковская модель изобра¬
жения и рисунка: Препринт. М.: Ин-т пробл. передачи информ. АН СССР.
1983. 40 с.
114
УДН 621.391.13:621.371.165
ПРОСТРАНСТВЕННО-УГЛОВЫЕ И ПОЛЯРИЗАЦИОННЫЕ
СВОЙСТВА РАДИОКАНАЛОВ, СОДЕРЖАЩИХ
СТАТИСТИЧЕСКИ НЕРОВНЫЕ ПОВЕРХНОСТИ
А. В. Просин
Введение. В работе применительно к системам передачи инфор¬
мации и системам дистанционного зондирования поверхностей
исследованы корреляционные характеристики радиосигналов,
рассеянных статистически неровной поверхностью. Исследование
базируется на результатах работ [1—4], где в приближении Кирх¬
гофа получены обобщенные выражения в виде кратных интегралов
для многомерной функции корреляции, справедливые для падения
радиоволны произвольной поляризации на статистически неров¬
ную поверхность с конечной проводимостью и их приема на направ¬
ленные антенны, которые могут распалагаться в зонах Френеля
и Фраунгофера. Статистически неровная поверхность задается
в виде нормального однородного и анизотропного случайного
поля, а вертикальные перемещения точек наблюдения — в виде
некоррелированных с перемещениями поверхности нормальных
однородных и однородно-связанных анизотропных случайных
полей. Такая модель поверхности позволяет описать широкий
класс реально существующих случайных поверхностей. Учиты¬
ваются затенения радиоволн случайной поверхностью. В работе
дано объяснение лишь тех величин, которые не встречаются в
[1-4].
Многомерная функция корреляции сигналов при одновремен¬
ном их разнесении по пространству, углу и поляризации. Пусть
на поверхность, уравнение которой в системе координат .г, у,
z (рис. 1) имеет вид / (л:, у), падает плоская радиоволна с комплек¬
сной амплитудой
= jEQ exp [ik (z sin 9 — z cos 9)] = £'0Ф0 = е02?0Ф0.
Рассмотрим случай, когда к месту приема приходят два рас¬
сеянных статистически неровной поверхностью сигнала. Пусть
первый сигнал на частоте / принимается на одну антенну с диа¬
граммой направленности по напряженности в точке Ai [О, О,
(0, 0)] на поляризацию 61? а второй Ё2 на той же частоте — на
другую антенну с F2 в точке А2 [5Х, Sy, h2 (Sx, Sy)] на поляриза¬
цию 62. Здесь 5Х, Sy — компоненты вектора разноса >9 (5V, Sy)
в системе координат х, у в плоскости xQy (рис. 2).
На основе разработанной корреляционно-спектральной теории
радиоканалов, содержащих статистически неровные поверхности
[1—4], для функции корреляции рассеянных сигналов при их раз¬
несении по пространственным, угловым и поляризационным коор-
115
динатам получим
оо
Ё (1, 2) = ЁгЁ* = 6Д | Ёо |2 $ л-1 du dr ехр(— и2 —
— оо
оо
— v2) (2л)-1 dur du4 exp (— 0,5^i — 0,5i4) X
— oo
116
X $$(2л) 1 dzz2 dtz.. exp (—0,5^2 — 0,5б/з) x
1g
X (ё18ю) «М exp (г/сФ), (1)
0 = 7?! — R2s — 2gu1H cos 9. (2)
Характеристики направленности приемных антенн по напря¬
женности в общем виде определяются следующим образом:
•^1,2 = ^1,2 ('Ф1,2> Фа1,2? На1,2^ фа1,2)»
COS фь2 = COS (ра1,2 cos ф + sin фаХ,2 Sin ф COS (ца1,2 — ц),
где фь2 — углы между осями приемных антенн и направлением
из точки А (рис. 1) на зеркально-отражающую точку поверхности;
2фа!,2 — угловая ширина диаграмм направленности антенн между
точками половинной мощности; ра1,2 и фаЬ2 — углы, определяю¬
щие в пространстве ориентацию осей диаграмм направленности
антенн. При использовании остронаправленных антенн их харак¬
теристики направленности в пределах первого лепестка можно
достаточно точно аппроксимировать гауссовыми кривыми
~ ехр (—0,35ф1,2/фи1,2). (3)
Выражение (1) справедливо при выполнении следующих нера¬
венств:
^1,2 >> 1, йь2 > Зсгоь2, Axrcos0>>l,
2фаЬ2 > COS 0/ЛЬ2, ^1,2 > 3 (Gal,2 + И2)0’5,
Sx'hy << 1, Sy'lr2 <<1, Д7г = I h2 — h1 I <<
I ^al ®a2 [ <^:
SXA/rA1<^i, SyA/rA2<^l. (4)
Для средней мощности сигнала из выражения (1) будем иметь
Ei Ё* = К (i, i) = | 6* |21 Eq |2 (2л)-1 du2 du3 exp (— — zz|) x
G
X f1 ifi (Ci6/o) == 1» 2. (5)
Формулы (1) и (5) справедливы как для зоны Френеля (ближ¬
ней зоны), так и для зоны Фраунгофера (дальней зоны). Из соот¬
ношений (1) и (5) видно, что для дальней зоны, где направление
на приемник при перемещении по поверхности остается постоян¬
ным и задается угловыми координатами ф = фд и ц = цд, выра¬
жение для К (1, 2) определяется четырехкратным интегралом,
а формула для Ё}Ё* выражается через элементарные функции.
В случае неподвижных антенн выражение (1) для зоны Френеля
сводится к четырехкратному интегралу, а для зоны Фраунгофе¬
ра — к двухкратному интегралу.
117
При анализе зависимости разнесенных сигналов от различных
параметров удобно использовать коэффициенты корреляции
В (1, 2) = | R (1, 2) \![К (1, 1) К (2,2)]0’5 (6)
и расстояния корреляции Ze, которые определяются из условия
R (I = 1е) = где I =- S, Sc, Sy, S-, Дсра, Дца — параметр
разноса; Дсра = | cpQ1 — <paJ; Др,а = | ца1 — pia2 |; е — основание
натуральных логарифмов.
Пространственно-угловь е и поляризационные функции кор¬
реляции сигналов при гауссовом коэффициенте корреляции по¬
верхности. Выражение (1) для многомерной функции корреляции
можно значительно упростить для любого коэффициента корреля¬
ции поверхности Bs, если учесть систему неравенств (4). Далее
для конкретности рассмотрим часто встречающийся в практичес¬
ких приложениях случай гауссова коэффициента корреляции,
когда
Bs = exp [—(Д^'2/2г£ + Д?/'2/2^)].
В силу неравенств (4) можно пренебречь величинами Sx7ri’
Sx'Sydr^^ \HyI2H <1 и ДЯ2/2Я <С 1- Тогда для фазово¬
го члена Ф (2) корреляционной функции (1) будем иметь
Ф X [— Д/г + Доа (1 + + (Оа1 + °Ъ2) (! — COS ср+
+ (У (u2SХ'/г± + w3S?//r2) (cos 9 + cos<p). (7)
Подставляя выражение (7) в формулу (1) и интегрируя по и?
V, ил, получим
/t (1,2) = бхб£ | Ёо |2 (2л)-1 dw2 dlto MW2 (М10) (M20)* X
G
X ехр (— 0,5гг2 — 0,5u|) exp {— 0,5/с2 cos2 <р х
X [ДОа + 2oaloa2 (1 — BAs)]} х
X exp (—ikkh cos ср) exp [ik (cos 9 + cos cp) +
+ u3a2Sy')]. (8}
В случае однородной и изотропной поверхности с двумерными
неровностями (случай а):
Г1 = Г2 — Г1 °>1 ~ ОДх' ~ а2 ~ ®1у' = ~ =
= Оц = V, Р = уи2, N = уи3.
Для однородной и анизотропной поверхности с одномерными
неровностями вдоль оси х (случай б)
a = 0, т\ = гх, г2 = оо, ах = а1л/ = о1х. = a1Z = gx, g2 =
= Gly' = Gly = 0, P = (SXU2, N = 0,
pi = 0 (x 0), л (x <0), tg pi = 0.
118
Интегрируя выражение (8) по переменной и3, получим
«23
(1, 2) = 6Х6* | Ё |2 § (2л)-о.о duJrfjFjFz (ёДо) (ёДо)*
«21
X ехр (— 0,5(4) ехр {— 0,5/с2 cos2 ср х
X [До„ + 2g01gq2 (1 — Д4.5)]} ехр (— ikSz cos ср) х
X ехр \ik(5x (cos 0 + cos ф) и25х],
u21 = —Ox3tg 0,5(3, и22 = g'1 ctg 0,5р.
В случае однородной и анизотропной поверхности с одномер¬
ными неровностями вдоль оси у (случай в).
а = л/2, г± = гу, г2 = оо, ах = о1л/ = о1у =
а2 = ^ly' = aix = 0, Р = О, N = Gyu2, gu = (5у | sin pt |.
Осуществив интегрирование выражения (8) по переменной zz3,
будем иметь
«24
(1, 2) = 6Х | Ёй |2 $ (2л)"1 Au2t1x\lF1F2 (ёг610) (ёЛо) X
«23
X ехр (— 0,5п2) ехр {— 0,5/с2 cos2 ср х
X [ДПа + 2оа1оа2 (1 — .6As)]} ехр (— ikS2 cos ср) х
X ехр [ikoy (cos 9 + cos ф) u25,y],
М-23 = Gy , u24 = Gy •
Для поверхностей морей и океанов, суши без растительности,
а также для поверхности Луны и планет обычно выполняются
условия Ох = а1х/ <С Д g2 = Gly' <С 1? т- е- наблюдаются очень
хгалые дисперсии наклонов мелкомасштабных составляющих по¬
верхности. Кроме того, во многих информационных и измеритель¬
ных радиосистемах облучение поверхностей производится под
сравнительно большими углами скольжения (3 = л/2 — 9. Поэто¬
му в последующих разделах корреляционные характеристики
сигналов анализируются лишь для практически важных случаев,
когда выполняются неравенства
аь2<С1, аь2 tg0<<l. (9)
Пространственный разнесенный прием сигналов при ненаправ¬
ленных антеннах. Функция пространственной корреляции при
использовании ненаправленных антенн определяется выражением
(8), где следует подставить F± = F2 = 1 и = 62 = 1. Коэффи¬
циент пространственной корреляции, согласно определению (6),
будет равен
-R (^х? ^уч $z) — (^1? Sz) 12 (сг2, Sy, Sz), (10)
Л = (1 + «1)-0-25 ехр [- 0,562/(1 + а2)],
119
Ц (1 4- 4)-0’25 exp [— 0,562/(1 + а?)],
= kkSzol cos 0, a2 = kkSzG22 cos 0,
br — 2ka± (Sz sin 0 cos a — Sx, cos 0),
b2 = 2ko2 (Sz sin 0 sin a -j- Sy< cos 0),
Ra = exp {— 0,5&2 cos2 0 [Aa« + 2aaloa2 (1 — БЛз)]}.
Для трех частных случаев поверхности получим:
а) R (Sx, Sy, Sz) = RaI± (у, Sx, Sz) I2 (y, Sy, S2) =
= Ra [1 + a2± (y)]-0,5 exp {— 2&2y2 x
X [(S2 sin 0 — Sx cos 0)2 4- S'y cos2 0] [1 4 al (y)]-1},
где у = ог= alxz = a2 = Gly, = Olx= <у1у-
б) R (5X, Sz) = flJi (av, Sx, Sy),
где ax = Qj — Ojx' — Ojr, cz = 0, S x, = 6xj
^) R //, ^z) = Ra^i (04 $y>
где Gy — Oj —- Hix' ~ ex — 0,5л, $Х' = Sy
В случае неподвижных точек наблюдения и пренебрежения
величинами порядка и ст* Для трех частных случаев а — в при
ко cos 0 1 расстояния пространственной корреляции разне¬
сенных сигналов Se, Sxe, Sye много меньше радиусов корреля¬
ции г, гх, гу статистически неровной поверхности. Случайное
перемещение приемных антенн приводит к дополнительной рас-
корреляции разнесенных сигналов.
Пространственная функция корреляции сигналов при направ¬
ленных антеннах. Коэффициент пространственной корреляции
при использовании остронаправленных антенн (3) и при = л
и R = 0 будет равен
Rh(S х, Syi Sz) — RAI±fi (O'lx, *^z) (^1!/’ $Ui *^z),
I1H (Sx, Sz, olx) = Iu (5X, 52, alx) Л41 (0, 0),
i'lH ^z, aiy) — Д2 (Sy> $z, Ql?/) 1'22 (6, 0)-
(11)
(12)
Для трех частных случаев поверхности он совпадает с коэф¬
фициентом (10) при фа = ОО.
Выражения для 1±1 и 122 весьма громоздки даже при = л
и R = 0. При дополнительном условии <ра = т- е- ПРИ направ¬
лении осей приемных антенн на зеркально-отражающую точку
на средней поверхности, будем иметь
zu = + аЦ)-°>25 ехр [-0,5<^н + я^)-‘], (13)
/22 = + агн)-0’25 ехр [— 0,5d.2b22H + ajU)-1], (И)
а1Н = ikS.c'lx cos 0, (15)
а2Н = ikSzoly cos 0, (16)
120
Fat = 2k(ylx (Sz sin 0 — Sx cos 0),
(17)
Fin = 2kolySy cos 0,
(18)
~ 1 + 5,6<у2хфи2,
(19)
d2 = 1 + 5,6о2^ф’2 cos2 0.
(20)
Из выражений (И) —(20) следует, что /пх (0, 0) = dj’5, Л>2 (0, 0)=
- d^\
Увеличение направленности антенн приводит к возрастанию
пространственной корреляции сигналов при всех видах разнесе¬
ния точек наблюдения. Интенсивность этого роста возрастает
с увеличением дисперсии наклонов поверхности.
Угловой разнесенный прием сигналов. В этом случае прием
сигналов осуществляется на два лепестка одной приемной антен¬
ны с диаграммами направленности
Fr ехр (—0,35ф1фа]), F2 = exp (—0,35ф21|^2).
Для расчета угловой функции корреляции можно использовать
выражение (8), где следует положить Sx = Sy = Sz = 0, ва1 =
= &а2 ~ °*а И — 62 = 6*
Коэффициент и расстояние угловой корреляции для случая
поверхности с одномерными неровностями вдоль оси х (случай а),
когда ца1 = ра2 = л и фа1 = фа2 = фа, будут равны
RH (Д<р0) = ехр [— о^Д<р^|?;4 (1 + 5,
Афое = Фо (5,6 + Ф«О.т2)0’5.
Расстояние корреляции зависит от угловой ширины диаграмм
направленности лепестков приемной антенны фя и дисперсии
наклонов поверхности ох. При ф2/<т2 <С 5,6 радиус угловой кор¬
реляции прямо пропорционален фа.
Поляризационный разнесенный прием сигналов. При разне¬
сении сигналов по поляризации в исходной формуле (8) следует
положить S х = Sy = S~ = 0 и оа1 ~ а„2 — сга.
С учетом неравенств (9) для случая ненаправленных антенн
были получены приближенные формулы для корреляционных
функций между ортогональными компонентами рассеянных сиг¬
налов в предположении, что = х0 = Z, 62 ~ //0 = Л 63 = £0 =
= к. Для трех частных случаев а — в идеально проводящей по¬
верхности будем иметь:
a) R (Z, /) = f 1 + 4у2 (tg2 0 + sin 20)]
R (j, к) = [1 + 2у2 (sc2 0 — 3)] Ц + 4у2 (sc2 0 4- sin2 0 -j-
+ 2 cig2 0)Г'Л
R (Z, к) = (1 — 4у2) 11 + 4y2 (tg2 0 + ctg2 0 + esc2 0)]_)’5;
121
Таблица 1
Вид 8
°п
0°
0
10
20
30
40
50
60
а
У
0,1
1
0,99877
0,99504
0,98853
0,97837
0,96212
0,93250
0,2
1
0,99513
0,98062
0,95636
0,92105
0,87001
0,79056
0,3
1
0,98915
0,95791
0,90909
0,84448
0,76192
0,65232.
б
0,1
1
0,99937
0,99736
0,99339
0,98620
0,97275
0,94491
0,2
1
0,99752
0,98956
0,97435
0,94802
0,90268
0,82199
0,3
1
0,99445
0,97697
0,94491
0,89318
0,81343
0,69337
в
%
0,1
1
0,99939
0,99766
0,99503
0,99183
0,98846
0,98532
0,2
1
0,99759
0,99077
0,98058
0,96849
0,95612
0,94491
0,3
1
0,99461
0.97958
0,95782
0,93301
0,90861
0.88735
Таблица 2
S
и
0°
0
10
20
30
40
50
60
а
У
0,1
0
0,50520
0,74854
0,84673
0,88983
0,91121
0,92472
0.2
0
0,24884
0,44734
0,58254
0,66933
0,73001
0.79047
0,3
0
0.13032
0,25300
0,36244
0,45946
0,55658
0,68702
б
ах
0,1
0
0,66895
0.88105
0,94780
0,97495
0,98845
1
0,2
0
0.43089
0,70560
0,85044
0,92783
0,97462
1
0,3
0
0,32945
0,59271
0,77500
0.89646
0,96490
1
в
0,1
0
0.62147
0,82234
0,88427
0,90731
0,91663
0,92027
0,2
0
0,30643
0.50933
0,61644
0,66827
0,69189
0,70162
0,3
0
0,12964
0,23723
0.31226
0,35702
0.38008
0,39016
Таблица 3
Вид S
°п
0°
0
10
20
39
40
50
60
а
У
0,1
0
0,50496
0,74754
0,84414
0,88308
0,89398
0,88126
0,2
0
0,24816
0,44291
0,56979
0,63916
0,66148
0,63558
0,3
0
0.12922
0,24466
0,33545
0,39418
0.41500
0,39094
б
0.1
0
0,63469
0,83963
0,90176
0,92164
0.92164
0,90176
0,2
0
0,33868
0,56263
0,67836
0,72567
0,72567
0.67836.
0,3
0
0,18037
0,82982
0,43148
0,48176
0.48176
0,43148
в
°и
0.1
0
0,65560
0,86324
0,92847
0,95484
0,96756
0,97435
0,2
0
0,39821
0,64987
0,78086
0,84903
0.88643
0,90784
0,3
0
0,27800
0,49522
0,64018
0,73101
0,78726
0,82199
122
6) R (i, j) = (1 + 4a* tg2 0)-0-5,
R (j, k) = (1 4- 2a; sc2 0) [1 + 4a* (sc2 0 + cig2 0)1~э’в,
R (i, к) = [1 - 4a*) 11 + 4a* (tg2 0 + ctg2 0)p,6;
e) R (z, /) = (1 + 4a* sin2 0)~°’5,
R (j, k) = (1 — 6a*) [1 + 4a* (sin2 0 + ctg2 0)]~0’5,
R (i, k) = (1 + 4a* esc2 0)-0’5.
Коэффициенты корреляции R (Z, j) для трех типов поверхнос¬
ти равны единице при 9 = 0° и уменьшаются с ростом 9. Иная
зависимость от угла 9 у коэффициентов R (j, к) и R (Z, к). При
любом виде поверхности они равны нулю при 9 = 0° и возрастают
с ростом 9, причем это возрастание монотонно у коэффициентов
R (j, к). Характер возрастания коэффициентов R (Z, к) зависит
от вида поверхности. В случае в) величина R (Z, к) монотонно
растет с увеличением 9. В случаях а) и б) коэффициенты дости¬
гают максимума в районе 9 45—50° и далее несколько умень¬
шаются с ростом 9, Для всех случаев неровной поверхности с рос¬
том дисперсии наклонов коэффициенты поляризационной корре¬
ляции R (Z, у), R (R к) и R (Z, к) убывают (см. табл. 1—3).
ЛИТЕРАТУРА
1. Просин А. В., Самознаев Л. Н. К теории разнесенного приема при рас¬
сеянии радиоволн на статистически неровной поверхности И Радиотех¬
ника. 1971. Т. 26, № И. С. 52—60.
2. Просин А. В. К теории каналов радиосвязи со статистически неровными
поверхностями // Тр. IV Междунар. коллоквиума по микроволновым
линиям связи. Будапешт, 1970. С. СТ-28/1—СТ-28/10.
3. Просин А. В. Элементы статистической теории многолучевых радиокана¬
лов, содержащих нерегулярные поверхности // II Междунар. симпоз.
по теории информ.: Тез. докл. М.; Ереван, 1971. С. 210—212.
4. Просин А. В. Пространственно-временные свойства радиоканалов, содер¬
жащих стохастические гауссовы поверхности // Тр. V Междунар. кол¬
локвиума по микроволновым линиям связи. Будапешт, 1974. С.СТ-233—
СТ-241.
123
УДК 621.391.13:621.391.17
МЕТОДЫ РАСЧЕТА МУЛЬТИПЛИКАТИВНЫХ ПОМЕХ
В СТОХАСТИЧЕСКИХ СИСТЕМАХ
ПЕРЕДАЧИ ИНФОРМАЦИИ
НА ОСНОВЕ КВАЗИСТАЦИОНАРНОГО ПРИБЛИЖЕНИЯ
А. В. Просин
За последние годы для передачи различных сообщений были
предложены новые перспективные системы передачи информации,
содержащие стохастические среды. К ним можно отнести системы
передачи с дальним тропосферным (ДТР), стратосферным (ДСР)
и ионосферным (ДИР) распространениями ультракоротких ра¬
диоволн (УКВ), работа которых базируется на использовании
физических явлений сверхдальнего распространения УКВ, наблю¬
давшихся вследствие рассеяния и отражения радиоволн объем¬
ными неоднородностями атмосферы. Разработаны системы пере¬
дачи, использующие отражение и рассеяние радиоволн поверхност¬
ными неоднородностями Земли, Луны и других планет солнечной
системы. Получили также широкое распространение системы на¬
земной космической связи с искусственными спутниками Земли
и системы, основанные на отражении радиоволн от следов метео¬
ров. Интенсивно развивается и сеть обычных радиорелейных
систем передачи, работающих в пределах видимости. Несмотря
на многообразие используемых физических явлений, перечислен¬
ные системы передачи объединяет наличие стохастических кана¬
лов связи со случайно изменяющимися параметрами. В системах
передачи с рассеянием и отражением за счет стохастического
канала создается основной информационный сигнал на входе
приемного устройства. В других системах стохастический канал
оказывает мешающее действие при передаче полезной информации.
Наличие стохастических каналов в перечисленных системах при¬
водит к возникновению интерференционных искажений переда¬
ваемых сигналов, которые существенно снижают помехоустой¬
чивость и эффективность систем передачи информации.
В силу малой мощности принимаемого сигнала и глубоких
замираний его амплитуды в системах радиосвязи, включающих
случайные среды, применяют частотную модуляцию (ЧМ), обес¬
печивающую в этих условиях наибольшие помехоустойчивость
и эффективность. В настоящей работе на основе предложенной
математической модели радиоканала со случайными неоднород¬
ностями анализируется помехоустойчивость одноканальных и
многоканальных систем передачи информации с ЧМ по отноше¬
нию к мультипликативным помехам. Задача решалась в квази-
стационарном приближении. Основной целью исследования явля¬
лось получение усредненных величин и законов распределения
среднеквадратичных ошибок и мощности помех. (Усредненные
среднеквадратичные ошибки и мощность переходных помех,.
124
Рис. 1
Рис. 2
обусловленные наличием стохастического канала, получены впер¬
вые.) Структурная схема одноканальной радиолинии с ЧМ (рис. 1)
используется в системах с отражением и рассеянием УКВ от Луны,
планет солнечной системы и ионизированных слоев атмосферы
(систем с ДИР УКВ). Структурная схема многоканальной радио¬
линии с ЧМ (рис. 2), несущей одной боковой полосой частот
(ОБП ЧМ) широко используется в спутниковых системах связи,
радиорелейных линиях (РРЛ), работающих в пределах прямой
видимости, РРЛ с ДТР УКВ и ДСР УКВ. Математические модели
передаваемых сообщений и стохастических радиоканалов, исполь¬
зуемые в настоящей работе, описаны в 1.1 ]. Здесь дано объяснение
лишь тех величин, которые не встречаются в |1—3]. Представляе¬
мое сообщение является, в сущности, кратким изложением ре¬
зультатов препринтов [2, 3].
Методы анализа сигналов, мгновенных и усредненных функций
корреляции и энергетических спектров мультипликативных помех
на выходе одноканальной и многоканальной радиолиний анало¬
гичны по форме. Поэтому при расчете этих характеристик будем
12S
рассматривать передачу некоторого обобщенного передаваемого
сообщения и (t). При использовании модели узкополосного ра¬
диоканала Ц] сигнал на его выходе определяется, как сигнал на
выходе обычного линейного четырехполосника с постоянными
параметрами, передаточная функция которого является одной из
реализаций случайной функции К (со). Мультипликативные по¬
мехи на выходе радиолинии при таком подходе являются нерегу¬
лярными функциями передаваемых сообщений и случайных
характеристик радиоканала. В силу малой скорости изменения
параметров канала процесс усреднения помех можно разделить
на два последовательных этапа. Вначале производится усредне¬
ние по множеству передаваемых сообщений для фиксированного
состояния канала, затем осуществляется дополнительное усред¬
нение по всем возможным состояниям случайного канала.
При квазистационарном методе решения на выходе идеального
частотного детектора приемника будем иметь
«вых (t) = U (t) + е (£), (1)
е (0 = Aflfpt К2 (/)] = 7?дс1<р [Q (£)]/d£,
где и (t) — исходное передаваемое сообщение; е (t) — продукты
искажений, возникающие в результате прохождения сигнала
через стохастический канал; ср [Q (Ц] — фазочастотная характе¬
ристика канала, взятая на мгновенной частоте й (t) = Кми(1\
Для исследования мультипликативных помех воспользуемся
методом спектрального анализа случайных процессов [1]. Цепочка
расчетов здесь такова. Сперва определяется функция корреляции
помех 5е (т). Затем находится энергетический спектр искажений
Fq (Q) о Ве (т). И наконец, определяются среднеквадратичная
ошибка и псофометрическая мощность переходных шумов, харак¬
теризующие помехоустойчивость системы передачи по отношению
к мультипликативным помехам.
Функция корреляции помех определяется восьмикратным
интегралом
оо оо оо оо
2?е (т) = Ви (О) (2л)'1 Jj d(/t J dy2 5 d^3 $ X
— oo —oo —oo —oo
ОО ОС oo oo
X (Д<0эУ1) (Дюэг/2) $ drx 5 dc2 § dp3 $ dt>4 x
— oo —oo —oo —oo
x exp (— jv1y1 — jv2y2 — jv3y3 — jv^ X
X exp {— 0,5 [(px 4* «2) + wi («3 + «4) + 2flu (r) v4«2 4~
+ 2Bw (r) v:iv. + 2BU (t) (i?xp4 — v2«3)]}. (2)
Интегрируя выражение (2) по переменным z/2, Уз->
<р4, получим
126
Бе (т) = Ви (0) $ J [Д„, (т) + R* (т) У1р2] х
X ехр {— 0,5 + v% + 27?„ (т) р^]} Ц (pj 72 (р2) d^ du,.
(3)
Выражение (3) является точным в квазистационарном при¬
ближении и может служить основой для получения различных
приближенных выражений для функций корреляции помех.
Осуществив разложение функции ехр (—в степен¬
ной ряд и используя соотношение
[/?„ (т)]" = п [(п - 1) 7?Г (т) 7?„2 (т) + ЯГ1 (т) Ru (т)],
после интегрирования (3) будем иметь
оо
5е (т) = - д2В1е/дт2 = [5„(0) У (-1)* (n!)-i R" (т) 72 (7V)],.
Н=1
(4) '
J (N) = | ехр (— 0,5i?2) vNI (у) dp |, N = (n — 1),
— oo
I (v) = (2л)'1 J (Дсоэр) exp (— jvy) dy.
— oo
Продукты когерентных искажений, которые необходимо ис¬
ключить из Ве (т), будут равны
(т)/5ц (0) = - Ru (т) /2 (0) = Ru, (т) У2 (0),
J (0) = | ехр (— 0,5г?2) I (t>) dv | .
— оо
Выделяя в сумме (4) продукты когерентных искажений, полу¬
чим
5Не(т) = -^Ше(т)/^2, (5)
где функция корреляции
В1Не(т) = Ви(0) 5(-1)л(п!Г1<(т)72(Л’). (6)
п—2
При использовании точного выражения (3)
ВЯе(т)-В£(т)-В^(т)/2(0). (7)
Структура выражений (5) и (6) такова, что, согласно теории
случайных процессов Ц], энергетический спектр продуктов иска¬
жений будет равен
Биг (&) = 4Й2 § В1Нг (у) cos (£2т) dr.
о
127
Следовательно, для оценки мгновенного и усредненного энер¬
гетических спектров продуктов мультипликативных помех, явля¬
ющихся базовыми для определения мгновенных и усредненных
среднеквадратичных ошибок и псофометрической мощности шу¬
мов, необходимо вычислить сумму интегралов такого вида
I.n = (т) cos (Qt) йт, п = 2,3, . . .
о
Вычисление таких интегралов для любого п приведено в [4].
В работах [2, 3] для нахождения интерференционных искаже¬
ний разработаны три приближенных метода расчета функции
корреляции помех. Первый метод основан на разложении частот¬
ной характеристики группового времени запаздывания канала
Тг (Q) = (Q) в ряд Фурье. Он дал возможность впервые полу¬
чить усредненные величины среднеквадратичных ошибок и мощ¬
ности помех. Второй метод базируется на разложении тр (^) в ряд
Тейлора. Этот метод позволил получить законы распределения
среднеквадратичных ошибок и мощности шумов. Третий метод
использует представление тг (£2) через ряды Тейлора ортогональ¬
ных компонент коэффициента передачи. На его основе впервые
проанализирована зависимость кривых распределения мульти¬
пликативных помех от отношения = \fJFeE, где А/э — эф¬
фективная девиация частоты; FeE — расстояние частотной корре¬
ляции огибающей случайного сигнала.
На основе этих методов в 12, 3] проанализирована помехоус¬
тойчивость одноканальных и многоканальных систем дальней
связи по отношению к мгновенным и усредненным мультиплика¬
тивным помехам. Исследуется зависимость среднеквадратичных
ошибок и мощности шумов от параметров радиолинии и стати¬
стических характеристик канала, причем канал в общем виде
представляется постоянной и случайной составляющими. Най¬
дены оптимальные параметры радиолиний, при которых имеют
место наибольшие помехоустойчивость и эффективность.
ЛИТЕРАТУРА
1. НросинА.В. Аналоговая связь по многолучевьш радиоканалам, содер¬
жащим статистически неоднородные среды И Передача информации по
радиоканалам, содержащим статистически неоднородные среды. М.:
Наука. 1976. С. 3-90.
2. НросинА.В. Помехоустойчивость и эффективность широкополосных
систем передачи информации, гключающих стохастические среды: Ме¬
тоды расчета мультипликативных помех: Препринт. М.: Ин-т пробл. пе¬
редачи информ. АН СССР. 1984. 70 с.
3. НросинА.В. Помехоустойчивость и эффективность широкополосных
систем передачи информации, включающих стохастические среды: Мето¬
ды расчета помехоустойчивости систем радиосвязи: Препринт. М.: Ин-т
пробл. передачи информ. АН СССР. 1984. 67 с.
4. Пр осин. А. В. К теории прохождения широкополосных сигналов в систе¬
мах наземной космической связи /7 РЭ. 1963. Т. 8, № 11. С. 1822 — 1833.
СОДЕРЖАНИЕ
Предисловие
Модели изображений
и их применение
А. А. Безрук, Д. С. Лебедев. Выделение контуров на основе иерархи¬
ческой двухуровнево]! вероятностной модели ансамбля изображений
О. П. Милюкова. Изображение как функция с ограниченной полной
вариацией 19
И. А. Чочпа. Вероятностная модель контурного изображения ... 25
Методы и аппаратура
обработки изображений
II. М. Бокилтейн, М. А. Кронрод, Л. А. Чочиа. Методика составле¬
ния радиолокационной карты Венеры по данным автоматических меж¬
планетных станций «Венера-15» и «Венера-16» .... .... 35
II. М. Бокштейн. Возможности повышения резкости цветных изоб¬
ражений 60
М. П. Гришин, III. М. Курбанов, Т. А . Святославская, II. Л. Свято-
славский, Р. Р. Бикматов. Многоканальный автоматический микро¬
денситометр 65
М. П. Гришин, Ш. М. Курбанов, Р. Р. Бикматов, В. П. Маркелов,
Н. Л. Святославский. Система автоматической обработки экспери¬
ментальной фотоинформации в виде черно-белых и цветных полуто¬
новых изображений 70
Методы
машинного зрения
В. С. Файн. Полутоновое машинное зрение в стационарной среде 77
Е. К. Вендровский. Существенно полутоновой анализ сцен в задаче
распознавания машиностроительных деталей 88
М. М. Луценко. Особенности поведения градиента освещенности на
некоторых типах поверхностей 101
Методы
передачи информации
Р. А. Прибылова, В. Б. Тхор, Ю. М. Штаръков. Об использовании
неравномерного кодирования при сжатии изображений методом диф¬
ференциальной импульсно-кодовой модуляции 109
А.В.Просин. Пространственно-угловые и поляризационные свойст¬
ва радиоканалов, содержащих статистически неровные поверхности 115
А.В.Просин. Методы расчета мультипликативных помех в стохас¬
тических системах передачи информации на основе квазистационар-
ного приближения 124
85 коп.