/



































































































































Текст
ББК 32.972
А67
УДК 681.32@75)
ПРЕДИСЛОВИЕ
Рецензенты — кафедра кибернетики Московского
института электронного машиностроении
и д-р техн. наук, проф. П. М. Чеголии
Анисимов Б. В., Курганов В. Д., Злобин В. К-
А67 Распознавание и цифровая обработка изображений: Учеб.
пособие для студентов вузов. — М.: Высш. шк., 1983. —
295 с. ил.
В пер.: 90 к.
В учебном пособии рассматриваются цифровая обработка и распознавание изо-
изображений; большое внимание уделяется идентификации точечных изображений,
распознаванию пространственных объектов по их плоским изображениям, геометри-
геометрическому преобразованию аэрокосмических снимков земной поверхности, проектиро-
проектированию устройств ввода — вывода видеоинформации для ЭВМ.
Предназначено для студентов вузов, обучающихся по специальностям «Элек-
«Электронные вычислительные машины» и «Автоматизированные системы управления».
Может быть полезно научным работникам и инженерам, специализирующимся
в области вычислительной техники и технической кибернетики.
Проблема распознавания образов и вопросы цифровой обработки
изображений в настоящее время привлекают внимание многих иссле-
исследователей, так как являются наиболее значительными областями при-
применения и развития теории самоорганизующихся систем, дают в рас-
распоряжение физиологов и психологов разнообразные методы и средства
для выяснения процессов восприятия формы, обучения и распознава-
' ния, происходящих в живых организмах.
Методы и алгоритмы теории распознавания широко используются
в медицине и геологии, при изучении природных ресурсов Земли, по-
построении читающих автоматов, в робототехнике, астрономии и т. д.
Не случайно успехи в области изучения земных ресурсов аэрокосми-
аэрокосмическими средствами, проектирования роботов-манипуляторов, авто-
автоматизации аэрокосмических наблюдений и других областях, связан-
связанных с обработкой больших массивов сложной пиктурной видеоинфор-
видеоинформации различной природы, вызвали потребность в подготовке соответ-
соответствующих специалистов. Однако учебники и учебные пособия, посвя-
посвященные вопросам распознавания и автоматизации обработки видеоин-
видеоинформации, практически отсутствуют.
В данном учебном пособии основное внимание уделяется идентифи-
идентификации точечных изображений, распознаванию пространственных объ-
объектов и цифровой обработке аэрокосмических снимков. Оно может
быть полезно студентам вузов и инженерам, специализирующимся в
области автоматической обработки информации, исследования природ-
природных ресурсов Земли, технической кибернетики.
Введение и гл. VII написаны д-ром техн. наук, проф. Б. В. Аниси-
мовым; гл. III и V— д-ром техн. наук, проф. В. Д. Кургановым;
гл. I и VI — д-ром техн. наук, проф. В. К. Злобиным, гл. II и IV —
- д-ром техн. наук, проф. В. Д. Кургановым и д-ром техн. наук, проф.
В.*К. Злобиным.
Авторы считают своим приятным долгом выразить благодарность
рецензентам — коллективу кафедры кибернетики Московского инсти-
института электронного машиностроения и д-ру техн. наук, проф. П. М.
Чеголину, критические замечания и полезные советы которых способ-
способствовали улучшению книги.
Авторы заранее признательны за все замечания по содержанию
книги, которые следует направлять по адресу: Москва, К-51, Неглин-
- ная ул., 29114, издательство «Высшая школа».
Авторы
1502000000—145
001@1)—83
33~83
ББК 32.972
6Ф7.3
© Издательство «Высшая школа», 1983
ВВЕДЕНИЕ
Цифровая обработка изображений приобретает в настоящее время
большое значение во многих областях деятельности человека. Дейст-
Действительно, изображение как форму наиболее полного представления
информации ничем нельзя заменить не только, например, в таком ис-
исключительном случае, как исследование поверхности той или иной
планеты, но и в обыденной жизни. Оно является объектом исследова-
исследования или его результатом в космонавтике, астрономии, биологии, ме-
медицине, физике, геологии, криминалистике и дефектоскопии.
Изображения получают не только в диапазоне частот электромаг-
электромагнитного излучения, отвечающего видимому свету, но и в диапазоне час-
частот акустическом, инфракрасном, ультразвуковом, ультрафиолетовом,
рентгеновских и гамма-лучей. Средства их формирования и регист-
регистрации отличаются большим разнообразием (фото-и киноаппаратура,
оптико-механические и оптико-электронные сканеры, радиолокацион-
радиолокационные и лазерные устройства). С их помощью можно, например, получить
на Венере изображение ее поверхности или представить в видимой
форме человеческую речь.
Техника передачи изображений достигла в настоящее время высо-
высокого уровня. Для передачи изображений используются оптическая,
проводная, радио и другие виды связи. Теоретически и эксперимен-
экспериментально доказана возможность высококачественной передачи видеоин-
видеоинформации на расстояния в несколько десятков и даже сотен миллионов
километров. Технически осуществимой представляется в настоящее вре-
время и задача создания глобальной системы связи для передачи изобра-
изображений.
Объем видеоинформации, перерабатываемой в различных областях
деятельности человека, очень вырос и продолжает увеличиваться.
Например, в США ежегодно получают около 25 млрд. снимков и не-
несколько сотен миллиардов единиц бумажной продукции, нуждающихся
в той или иной обработке. При обычном эксперименте по изучению эле-
элементарных частиц в ядерной физике обрабатывается несколько сотен
тысяч фотографий и т.д.
Громадные объемы видеоинформации вместе с естественным жела-
желанием извлечь из нее как можно больше сведений ведут к необходимос-
необходимости автоматизации процессов ее обработки. Для этого применяются
оптико-механические, оптико-электронные, телевизионные и анало-
аналоговые вычислительные системы. Особая роль в технике обработки изо-
изображений принадлежит ЭВМ, имеющим в своем составе устройства вво-
ввода, вывода и отображения зрительной информации и обладающим до-
достаточным быстродействием и объемом памяти.
Применение ЭВМ для обработки изображений позволяет в относи-
относительно короткие сроки и с меньшими затратами по сравнению с экс-
экспериментальным макетированием моделировать любые методы обра-
„л, включая идеальные или такие, которые при современном-состоя-
.ШИ техники реализованы быть не могут. При этом обеспечиваются точ-
«ость, надежность, практически абсолютная воспроизводимость ре-
' зультатов, возможность контроля процесса обработки на любой проме-
промежуточной стадии, гибкость в отношении типа и характера решаемых
зада4 и широкий фронт работ. Вот почему моделирование того или ино-
' гр метода обработки видеоинформации на ЭВМ, как правило, пред-
предшествует изготовлению экспериментального макета.
Примечание. Что же касается аналоговых вычислительных средств
(электронных, оптических, акустических и т. д.), то их сравнение с цифровыми
средствами по стоимости, быстродействию и точности с учетом не только совре-
современного состояния, но и тенденции развития этих средств показывает, что даже
в тех специфических областях обработки изображений, где они имеют пока что
преимущества перед цифровыми, эти преимущества в ближайшие годы будут
сведены на нет. Поэтому ниже под ЭВМ будут пониматься ЭЦВМ.
ЭВМ успешно применяются в настоящее время для решения многих
задач формирования, регистрации, передачи, обработки и распознава-
распознавания изображений. К ним можно отнести следующие задачи.
Эффективное кодирование изображений необходимо для уменьше-
уменьшения необходимой пропускной способности канала связи или объема
памяти, требуемой для хранения видеоинформации. Это кодирование с
. помощью выделения контуров или специальных преобразований изоб-
изображений, статистическое и психовизуальное кодирование, использую-
использующее, помимо всего прочего, и внутри кадровую или межкадровую избы-
избыточность, содержащуюся в изображениях.
Примечание. Психовизуальное кодирование — кодирование изобра-
изображения в процессе его пространственной и яркостной дискретизации, выполняе-
выполняемое с учетом свойств человеческого зрения.
Восстановление искаженных изображений, а также улучшение их
визуального качества заключается в его преобразовании, обратном пре-
преобразованию, вызвавшему искажение. Соответствующие алгоритмы
восстановления позволяют скомпенсировать искажения, обусловлен-
обусловленные рефракцией и турбулентностью атмосферы, аберрациями и дистор-
< сией оптики, нелинейными искажениями и остаточными изображения-
изображениями видиконных камер, конечным временем развертки и движением объ-
- ектов съемки, деформацией фотоматериала и помехами и т. д. При этом,
как правило, искажающие факторы заменяются их математическими
моделями или используются результаты специальных калибровок.
Улучшение же визуального качества изображений вызывает облегче-
облегчение их восприятия и анализа человеком. Этимцелям служат нанесение
иа изображение специальной графической нагрузки, подчеркивание
^ высших пространственных частот, использование псевдоцветов, нели-
нелинейные преобразования яркостной шкалы и т. п.
Моделирование систем передачи изображений проводится с целью
. исследования различных методов сокращения полосы телевизионного
сигнала или передачи видеосигнала по каналу с помехами. При этом
* ЭВМ выполняет роль кодирующей и декодирующей аппаратуры и кана-
канала связи, а наиболее употребительные операции — расфокусирование
предварительно дискретизованного исходного изображения, вычисле-
вычисление приращений яркости соседних его элементов, квантование, добав-
добавление шума с заданными свойствами, синтез выходного изображения и
его визуальное сравнение с исходным.
Автоматизация процесса подготовки производства в машинострое-
машиностроении, изготовление карт по аэрокосмическим снимкам, синтез учеб-
учебных фильмов и мультипликаций и т. д. связаны со значительным раз-
развитием в последние годы методов машинной графики, позволяющих
синтезировать машиностроительные чертежи, изучать поведение кон-
конструкций под нагрузкой и т. п. Получение снимков в заданных карто-
картографических проекциях сводится к геометрическим преобразованиям
изображений, в процессе которых полутоновое содержимое последних
не изменяется. При этом возникает необходимость в разработке эф-
эффективных методов оптимизации по затратам времени процессов пере-
переработки огромных массивов информации. Использование для синтеза
мультфильмов ЭВМ дает возможность существенно сократить объем
ручной работы по их рисованию, используя методы машинной интер-
интерполяции сюжетов.
Примечание. Машинная интерполяция сюжетов — генерирование ма-
машиной промежуточных положений движущихся объектов на основе сведений об
их начальных и конечных положениях.
Автоматическое чтение текста, дешифрование аэрокосмических
снимков, диагностика заболеваний и т.д. — это примеры задач, отно-
относящихся к проблеме распознавания образов. Особый интерес, проявля-
проявляемый к ее разработке в настоящее время, связан с открывающимися в
связи с этим возможностями лучшего понимания процессов обработки
информации в живых системах, создания более эффективных систем
«человек—машина», а также автоматических систем, позволяющих бы-
быстрее, точнее, надежнее или экономичнее человека решать различные
задачи обработки визуальной информации. Разделение последних
на задачи обработки и задачи распознавания носит условный характер.
В последние годы появились интересные работы, посвященные про-
процессам обучения и принятия решения при распознавании образов, а
также таким перспективным подходам к распознаванию, как детерми-
детерминированный, статистический, детерминированно-статистический, не-
непрерывно-групповой, структурно-лингвистический и др.
Примечание. Детерминированный подход к распознаванию предпо-
предполагает, что в любой точке пространства признаков, используемых для распозна-
распознавания, с ненулевой априорной вероятностью могут появляться реализации толь-
только одного класса.
Статистический подход к распознаванию предполагает, что в одной точке
пространства признаков с отличной от нуля априорной вероятностью могут ото-
отображаться реализации, относящиеся к различным классам.
Непрерывно-групповой подход к распознаванию опирается на детерминиро-
детерминированную модель последнего, согласно которой класс порождается в результате
априори неизвестных топологических преобразований иад некоторой эталонной
реализацией.
Структурно-лингвистический подход к распознаванию базируется иа опи-
описании геометрической структуры класса с помощью специального языка, алфа-
алфавит которого составляют так называемые непроизводственные элементы струк-
структуры и операции их композиции, задаваемые грамматикой этого языка.
Значительный вклад в теорию и практику обработки изображений
распознавания образов внесли В. М. Глушков, Н. Г. Загоруйко,
. А. Ковалевский, Ю. Е. Нестерихин, А. И. Петренко, А. А. Харке-
I, А. Гамба, Н. Нильсон, Ф. Розенблатт, А. Розенфельд, К. Фу.
«* Приведенные задачи обработки изображений не исчерпывают свя-
"^анной с ней проблематики. Она проникает почти во все области дея-
деятельности человека, где имеют дело с изображениями и есть возмож-
возможность применить ЭВМ. По мнению многих ученых, развитие методов и
средств обработки изображений привело к образованию новой отрасли
науки и техники, имеющей большую перспективу.
Примечание. В некоторых работах утверждается, что проблема рас»
¦•дознавания образов с методологической, научной и практической точек зрения
стала одной из важнейших в широкой области научных дисциплин, объединяе-
объединяемых обычно понятием «кибернетика». Вместе с тем, несмотря иа интенсивность ра-
работ в области обработки изображений и значительность полученных результатов,
следует признать, что найдено решение всего лишь нескольких проблем, да и то
частичное. Даже в такой, казалось бы, простой задаче распознавания, как авто-
автоматическое чтение текста, общих, исчерпывающих и экономичных решений ие най-
найдено до сих пор. Формальная процедура задания исходной системы признаков
» распознавании образов отсутствует. Несмотря на предпринятые попытки, не
Построена пока что и общая теория распознавания. Известны работы, в которых
-. возможность разработки такой теории считается по меньшей мере преждевре-
преждевременной. В связи с этим отмечается, что распознавание образов и а основе цифро-
цифровой техники прошло всего лишь путь «от рождения до отрочества, правда, все
еще неуклюжего».
Основная трудность в разработке обсуждаемой проблематики за-
заключается в том, что многие относящиеся к ней задачи с трудом подда-
поддаются формализации или пока что не формализованы вообще. До недав-
недавнего времени их решение было, как правило, исключительной преро-
прерогативой человека, .использовавшего для этого весь арсенал своих ум-
умственных и физических возможностей. Поэтому вопросы автоматиза-
автоматизации обработки изображений в ряде случаев оказываются далеко не-
нетривиальными и не могут быть легко и быстро разрешены на удовлет-
удовлетворительном уровне.
Следует указать и на исключительную специфичность и научную и
• техническую сложность любой сколько-нибудь серьезной задачи обра-
обработки и распознавания изображений. Например, техника, изображе-
изображения и методы их обработки, с которыми приходится сталкиваться при
распознавании треков в ядерных исследованиях, имеют многие осо-
особенности, не встречающиеся в других задачах. При этом используют,
как правило, ускоритель заряженных частиц, канал их транспорти-
транспортировки, мишень или поглотитель, регистрирующий детектор треков
На базе пузырьковой или оптической разрядной камеры, просмотро-
просмотровые столы и ЭВМ для автономной обработки информации с устройства-
устройствами ввода и отображения изображений. В детекторе обычно устанавлива-
устанавливается несколько объективов, что позволяет осуществить по полученным
.стереоизображениям пространственную реконструкцию событий. Ос-
Основная проблема здесь заключается в восстановлении непрерывности и
прослеживании треков, изобразившихся на снимках, поскольку
треки, как правило, представляют собой «рваные» линии, которые надо
Выявить в массе других треков, причем их оптическая контрастность
иногда низка и имеют место вариации фона, обусловленные «слепыми
пятнами» в оптике и примесями в камере. Все это пока что не позволяет
полностью автоматизировать процесс обработки снимков, тем более
что достоверность такой обработки должна быть исключительно высо-
высокой: новую частицу иногда удается обнаружить всего по одной фотогра-
фотографии. Выше указывалось и на огромное число снимков, получаемых в
каждом эксперименте. Поэтому на первый план при распознавании
треков выдвигаются такие технические характеристики процесса об-
обработки, как точность измерения параметров, достоверность резуль-
результатов, производительность и, следовательно, стоимость. Перечислен-
Перечисленные специфические особенности и трудности породили новое направ-
направление в теории и технике обработки и распознавания изображений.
В частности, благодаря этим и другим направлениям сформировался
упомянутый выше структурно-лингвистический подход к распознава-
распознаванию образов.
Без применения ЭВМ трудно представить себе решение любой за-
задачи обработки изображений. Важно иметь в виду и другое: рассмат-
рассматриваемый класс задач ставит серьезные проблемы и перед вычислитель-
вычислительной техникой, стимулируя ее дальнейшее развитие. Даже в случае ис-
использования ЭВМ общего назначения, как правило, возникает необ-
необходимость в разработке разнообразных устройств ввода — вывода и
отображения видеоинформации, а также специального математичес-
математического обеспечения, наиболее отвечающих той или иной задаче. Однако
насто для обработки изображений требуются вычислительные системы,
полностью ориентированные на такую обработку. Производительность
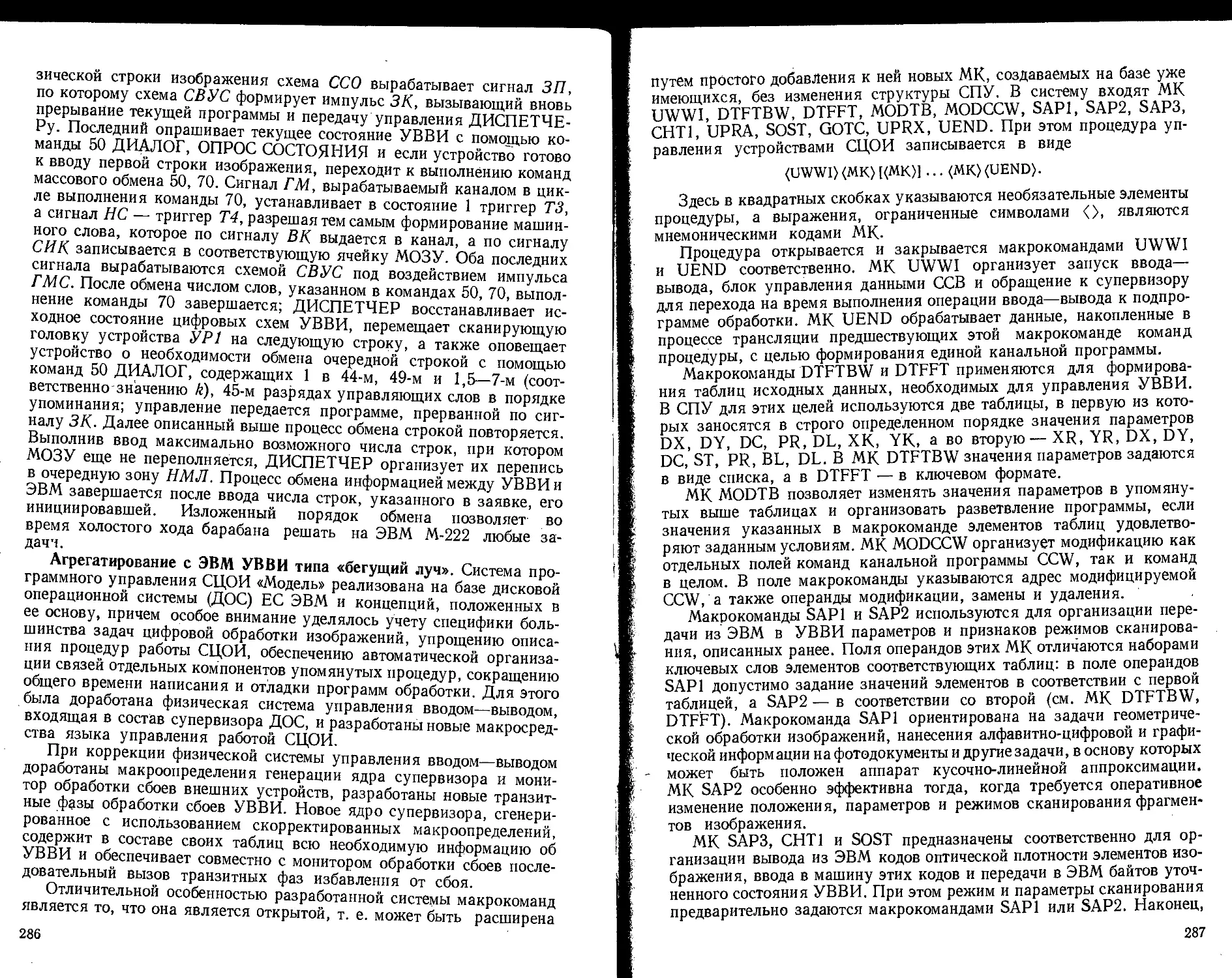
этих систем составляет 100—10 000 снимков/день, число элементов раз-
разложения изображений — 300 х 300 — 30 000 х 30 0000, полутоновая
шкала — до 256 градаций, длина слова с данными об одном элементе
— 8 бит, скорость обработки 105— 108 бит/с. Система, как правило,
включает в себя специализированную ЭВМ и устройства ввода — вы-
вывода (лазерный сканер, дисплей, накопитель на магнитных дисках
(НМД), плоттер). Затраты на ее разработку распределяются следующим
образом: ЭВМ—16, периферийное оборудование — 42, программное
обеспечение— 30, интеграция — 12%. Последние цифры свидетельст-
свидетельствуют о том внимании, которое должно быть уделено при проектирова-
проектировании таких систем разработке устройств ввода—вывода и математичес-
математического обеспечения.
Настоящее учебное пособие посвящено вопросам автоматизации об-
обработки и распознавания изображений с помощью ЭВМ. Очевидно,
однако, что рассмотреть эти вопросы для всех видов видеоинформа-
видеоинформации в рамках одной книги ограниченного объема не представляется
возможным. Поэтому ограничимся наиболее распространенными на
практике монохроматическими точечными изображениями объектов,
крупномасштабными проекциями трехмерных тел, наблюдаемых в слу-
случайных ракурсах на практически однородном фоне, и, наконец, такими
изображениями повышенной сложности, как аэрокосмические снимки
земной поверхности. С перечисленными изображениями приходится
иметь дело при обработке астрономических наблюдений, проектирова-
проектировании роботов-манипуляторов, изучении земных ресурсов и во многих
тих случаях, причем обработка более сложных изображений часто
ана с обработкой видеоинформации, сопутствующей им или вы-
яемой на их основе и относящейся к более простым классам.
Таким образом, исследование вопросов, определяющих проблема-
ку настоящего пособия, имеет важное значение для автоматизации
данообразных функций обработки и распознавания видеоинформа-
выполняемых в недалеком прошлом человеком в весьма важных
практических областях его деятельности.
Чтобы представить себе перечень и взаимосвязь основных этапов,
>рые надо выполнить при идентификации или распознавании про-
анственных объектов по одиночным или стереопарным снимкам, рас-
отрим схему распознавания пространственных объектов (рис. В.1).
Под идентификацией будем понимать классификацию объектов по
ах интегральным признакам, характеризующим данный объект в це-
' юм (площадь изображения объекта, максимальный или минимальный
размер изображения, отношение этих величин, периметр внешнего
.^Контура изображения и т.д.). Идентифицировать можно отдельные
объекты между собой.
V Под распознаванием будем понимать целевую классификацию объ-
ектов по набору у них некоторой совокупности целевых признаков,
характеризующих целевое назначение объекта и принадлежность его
X тому или иному классу.
Под классом будем понимать некоторое множество объектов, харак-
теризуемое определенным набором целевых признаков, наличие кото-
рых на объекте определяет его целевое назначение, например класс
объектов — телевизоры, целевые признаки — экран, различные руч-
.¦ки, рычаги и кнопки управления и др.
' Идентификация пространственных объектов. Одиночное изображе-
ние (блок 2) неизвестного объекта (блок /) (рис. В.I) фиксируется на
некотором носителе воспринимающего (чувствительного) элемента рас-
познающего комплекса, в качестве которого может быть, например,
фотооптическая или электронно-оптическая система. При вводе в ЭВМ
это изображение объекта дискретизируется, квантуется по яркости и
его элементы дискретизации кодируются (блок 3). Одновременно с
целью уплотнения полученной информации, дифференцирования по
' значимости для дальнейшего анализа ее минимизируют электронным
или алгоритмическим путем (блок 4).
В результате выполнения описанных этапов плоское изображение
объекта представляется в виде многосвязного контура. Так как при
"Идентификации используется только внешний контур изображения,
то его выделение происходит в блоке 5. Параллельно проводится ана-
анализ изображения с целью выявления на нем отдельных опорных эле-
ментов (блок 6), необходимых для проведения нелинейных преобразо-
преобразований внешнего контура изображения объекта (блок 7). Выполнение
этого этапа позволяет уменьшить перспективные искажения на изоб-
ражении, а также провести желательную переориентацию в простран-
стве и приведение, его к плоскостям проектирования, в которых инте-
интеральные признаки идентификации проявляются наиболее ярко.
9
Распознан-
Распознанный
объект
t
•Запрос-
1 новой
S
реализа
объект!
е<
С
г
я
ее
г
о
=
1
я
о
объекта
.-о
Я Л Я
S Dar
fsil
E©I3C
1
Распознава
i
i
,
контуров
Нормали
ция
контуров
i
репариро—
С
1
*
1
S
3 ПГ
Г Мин
заии
j
ание
ния
иров
оажс
о 9,
•S
X
О
я
о.
ю
9
^
3
я
S
о.
инф
f—-
Распознан-
Распознанный
объект
о
1
S
¦е
Запрос
Иденти
кация
объекта
Преобразо
ние
S
О пределе
опорных
элементо
1 изображе
1 ь
г*
с-
ИНИМИ—
ция
is f-1
1
11
1
и X
* 2
и
&|
вест-
№
контура
изображен
Выделен
нформации
S
НИИ
раж*
ктов
о,е
S О
и
fl
ю
о
новой
реализации
объекта
к
изображе
it
г
1 1
Формирова-
Формирование
целевых
признаков
с
г*
(
ГЛ
О 0J
С 5
U I
?S
s
S ' о „.
ч[5 о s«
К о я а ¦*
о о.S сю
1 U С о О О
?
—
09
Распозн
ный
г
! !¦
Ms!
я22й
j
' S
Препарир
вание
изображе
- 1
lit .
2 SsS-i
Запрос
новой
Ю и
Коли
изоб
1
«и
г,° а
2 CSS
t
объекта
1
объект
реализации
объекта
К
S
S
се
ш
се
X
tn
о
S
ю
о
в
се
се
S
<и
х
О
ю
о
X
о,
Далее объект идентифицируется (блок 8). При этом либо происхо-
Т классификация неизвестного объекта, либо, если машина не дает
тожительного ответа, делается запрос новой реализации объекта,
«той под другим ракурсом.
Распознавание по одиночным снимкам. Как и при идентификации,
Цсначала получают одиночное изображение (блок 2) неизвестного объ-
объекта (блок /) и далее проводятся этапы предварительной обработки
^изображения: кодирование (блок 9) и минимизация (блок 10). Затем
||многосвязный контур подвергается препарированию (блок //) на
^-систему односвязных контуров. Каждый такой контур нормализуется
¦ (блок 12), а затем распознается (блок 13). Так как целевые признаки,
§как правило, представляют собой связную систему из односвязных
{контуров (см. § 3.3), то для их формирования приходится проводить
' синтез односвязных контуров для получения изображений целевых
^признаков (блок 14), по найденному набору которых на изображении
-неизвестного объекта и производится его целевое распознавание
|'(блок 15). Исходом этого этапа может быть либо отнесение неизвест-
^'його объекта к одному из классов, либо запрос новой реализации объ-
объекта.
Распознавание по стереопарным снимкам. С помощью двух фотока-
фотокамер получают стереопарные изображения (блок 16) неизвестного объ-
екта (блок /). Затем каждый снимок стереопары дискретизируется,
кодируется (блок 17), минимизируется (блок 18) и препарируется на
систему односвязных контуров (блок 19). Проводится идентификация
соответственных точек стереопары (блок 20), что позволяет в дальней-
шем составить пространственное описание видимой части неизвестно-
го объекта (блок 21) и сформировать целевые признаки (блок 22), по
которым и проводится либо распознавание (блок 23), либо запрос но-
-вых стереопарных снимков неизвестного объекта.
Описанные выше этапы идентификации и распознавания являются,
как правило, основными, но не единственными.
10
ГЛАВА 1
МЕТОДЫ ОБРАБОТКИ ТОЧЕЧНЫХ ИЗОБРАЖЕНИЙ
§ 1.1. ОСОБЕННОСТИ ЦИФРОВОЙ ОБРАБОТКИ ТОЧЕЧНЫХ
ИЗОБРАЖЕНИЙ
В ряде областей деятельности человека возникает необходимость в
обработке точечных изображений, на которых можно лишь зафикси-
зафиксировать координаты «центров тяжести» соответствующих образований
(отметок) и нельзя выделить отдельные детали изобразившихся объ-
объектов (иногда еще можно получить информацию об «уровне блеска» на-
наблюдаемых объектов).
Типичная задача обработки точечных изображений— их идентифи-
идентификация, заключающаяся в распознавании на различных изображениях
(снимках) отметок, отвечающих одним и тем же по своей физической
сущности объектам. Об идентификации можно вести речь лишь в слу-
случае, когда идентифицируемые изображения «перекрываются», т. е. в
них заведомо содержатся одноименные отметки. Уровень «перекрытия»
зависит от целей обработки, а также от вида алгоритма идентификации.
Для упрощения алгоритма изображения регистрируются или форми-
формируются, как правило, таким образом, чтобы между их координатными
системами имело место только плоскопараллельное смещение. .
Типичные постановки задачи идентификации. Задача идентифика-
идентификации точечных изображений может иметь много различных постановок
в зависимости от конкретных технических приложений.
Один пример задачи идентификации — наблюдение объектов с по-
помощью кадровой системы, перемещающейся в пространстве по той или
иной траектории. Получаемые при этом в «соседние» моменты времени
частично перекрывающиеся точечные изображения, подлежащие иден-
идентификации, как правило, идентичны по плотностям отметок, уровням
помех, нелинейным искажениям и другим характеристикам.
Другой пример задачи идентификации — распознавание звезд
наблюдаемого участка неба. Автоматизация решения этой задачи воз-
возможна с помощью телевизионно-вычислительных средств. Идентифи-
Идентификации в каждом сеансе наблюдения подлежат машинный кадр, фор-
формируемый в памяти ЭВМ посредством обращения к машинному ката-
каталогу звезд в соответствии с имеющимися в распоряжении сведениями об
ориентации оптической оси оптико-телевизионного датчика и точности
этой ориентации, и телевизионный кадр, регистрируемый датчиком.
Условия идентификации в этой постановке имеют существенную
специфику: в машинном кадре в отличие от телевизионного кадра
практически отсутствуют нелинейные и геометрические искажения,
помехи и какие-либо другие отметки, кроме отметок от звезд, и значи-
значительно отличаются плотности отметок. Поэтому помимо идентифика-
идентификации необходимы предварительная обработка телевизионных кадров с
12
„_ ью компенсации в них нелинейных и геометрических искажений и
рациональная организация каталога звезд для оперативного формиро-
формирования на его основе машинных кадров.
Ниже основное внимание будет уделяться исследованию различных
алгоритмов идентификации точечных изображений, в ходе работы ко-
которых вначале реализуется совмещение точечных изображений. В ре-
результате этого одноименные отметки оказываются в непосредственной
близости друг от друга, а затем выполняется собственно идентифика-
идентификация отметок с использованием того или иного решающего правила.
Моделирование процесса идентификации точечных изображений на
ЭВМ. Во многих случаях работу алгоритмов идентификации можно ап-
апробировать посредством их моделирования на ЭВМ без использования
для этих целей натурной информации. Например, при астрономичес-
астрономических наблюдениях можно использовать гипотезу о распределении звезд
на небесной сфере по закону Пуассона. Тогда в памяти ЭВМ с помощью
'независимых программных датчиков псевдослучайных чисел, равно-
равномерно распределенных в диапазоне [0,1], возможно формирование пу-
ассоновских полей нужных размеров с заранее задаваемыми плотно-
плотностями отметок. Из этих полей несложно «вырезать» соответствующие
кадры, предусмотрев требуемые их размеры и взаимное положение,
дискретизацию координат их отметок, введение в кадры помех, нели-
нелинейных искажений и т. д. При желании математическая модель процес-
процесса наблюдения может быть усложнена, в частности для формирования
кадров возможно использование машинного каталога звезд. Очевидно,
что адекватность генерируемых ЭВМ кадров наблюдаемой картине от
такой замены только возрастет.
§ 1.2. ФОРМИРОВАНИЕ ЭТАЛОННЫХ И ПРЕДВАРИТЕЛЬНАЯ
ОБРАБОТКА РЕАЛЬНО НАБЛЮДАЕМЫХ ТОЧЕЧНЫХ ИЗОБРАЖЕНИЙ
Рассмотрим формирование машинного кадра, компенсацию нели-
нелинейных искажений в телевизионном кадре и согласование направле-
направлений осей координатных систем этих кадров на примере автоматизации
процесса распознавания звезд наблюдаемого участка неба.
Математическая модель машинного кадра. На небесной сфере про-
проведем плоскость Q, касающуюся небесной сферы в точке о, отвечаю-
отвечающей угловым геоцентрическим координатам а0, б0 ориентации опти-
оптической оси оптико-телевизионного датчика (рис. 1.1). Свяжем с ней
систему координат xyz, начало которой поместим в точку о, ось оу на-
направим по касательной к кругу склонений в сторону северного полюса
(Nord) мира, ось oz — в начало геоцентрической экваториальной сис-
системы координат XYZ — точку О, а ось ох — так, чтобы система xyz
была правой. Примем точку О за центр проектирования, а плоскость
Q — за плоскость центральных проекций звезд небесной сферы, све-
сведения о которых занесены в машинный каталог звезд. При этом рас-
рассмотрим лишь область плоскости Q, ограниченную квадратом ABCD с
центром в точке о и сторонами, параллельными осям ох, оу, полагая,
13
что для машинного кадра угол между произвольным боковым ребром
(например, ребром ОА) пирамиды OABCD и ее высотой Оо равен
Ьмр (угол между любой апофемой этой пирамиды и прямой Оо составит
соответственно LMa = arctg (V2~tg LMp/2)). Упомянутую область на-
назовем полем зрения машинного
кадра. Найдем связь между плос-
плоскими координатами х, у некото-
некоторой его отметки Т и угловыми
геоцентрическими координатами
а, б (соответственно прямым вос-
восхождением, склонением) отвеча-
отвечающей ей звезды S.
Выразим в системе XYZ ком-
компоненты ортов иъ и2, и3, со, со0,
отвечающих осям ox, oy, oz и
векторам 05 и Оо соответственно,
через величины а0, бп, а и б.
Рис. 1.1. Формирование эталонного изо-
изображения наблюдаемого участка небес-
небесной сферы:
I — небесная сфера; 2 —небесный экватор
Тогда
осей:
орты соответствующих
0,— cosao, 0),
>, Й32>)=(— cos ао sin б0, —sin а0 sin б0> cos c\,),
«з = («13>> "aS)> «33>)=(—cos aocos б0, —sinaocos б0, —sin 60),
<в=((в1> <в2, a>3)=(cos a cos б, sin a cos б, sin б),
Мо=(Ю1О)> wB0), co30>)=(cos а0 cos б0, sin а0 cos б0, sin б0).
Здесь нижние индексы упомянутых компонент отвечают номерам
осей системы координат XYZ, а верхние индексы — нижним индексам
ортов.
Представим связь между координатами х, у, z точки Т, ее коорди-
координатами X, Y, Z и координатами Хо, Yo, Zo точки о в той же системе в
виде следующего произведения матриц:
... в. ¦*'
= FG,
где
Е =
A.2)
X
2
. F =
Re-
" cos В
U[l> Up U3D
«i2) «22) «32>
"i3> «23> "з3)
; G =
У-уо
z-z0
гл -7 ^с ¦•
W2. *¦= —С
глс ft
»3; ао=
We a»i°>; Fo
; Х = -
cos
; Y =
14
7 ; Zo =
); cos p = cos (uC uH) = Wl й)<о) + йJ й)<о>+йK <»);
радиус небесной сферы; р - угол между ортами со и со0
4-
Jt
Подставляя A.1) в A.2), после преобразования найдем:
ж =-
У =
cos
Re
cos Р
• sin (a0—a) cos 6;
[cos 60 sin б—cos (a0—a) sin 60 cos 6J.
A.3)
Система уравнений A.3) представляет собой математическую мо-
модель машинного кадра. Она реализуется на множестве пар (а, б), вы-
выбираемых из машинного каталога звезд в каждом сеансе идентифика-
идентификации. При желании можно осуществить и дискретизацию координат
(х, у) каждой отметки машинного кадра в соответствии с параметрами
дискретизации поля зрения телевизионного кадра.
Система уравнений A.3) позволяет получить и выражения для об-
обратного преобразования (х, у) -*¦ (а, б), полагая G = F'E, где
С/
и[3>
«з3),
Находя отсюда ^координаты X, Y, Z точки Т, нетрудно рассчитать
с помощью величин а0, б0, arctg (Y/X) arctg (Z/J^X2 + Y2) и отвеча -
ющие ей координаты а и б.
Сравнительная характеристика машинного и телевизионного кад-
кадров. Машинный кадр строится по соотношениям A.3) в предположении,
что ориентация оптической оси оптико-телевизионного датчика абсо-
абсолютно точно соответствует величинам а0, б0. На самом деле она может
отклоняться от этого направления на угловую величину |Л(}| из-за
конечной точности ориентирования. Другими словами, если поле зре-
зрения датчика также представить в виде плоскости Q, касающейся небес-
небесной сферы в точке о, то эта точка находится от точки о на угловом рас-
расстоянии др.
^Ограничим мысленно упомянутое новое поле зрения квадратом в
плоскости Q с центром в точке о и размерами сторон, отвечающими
«углу зрения» телевизионного кадра размером 2 LTa X 2LTa. Свяжем
с плоскостью Q систему координат х у z с началом в точке о и осями,
ориентированными вдоль соответствующих сторон этого квадрата (об
ориентации последнего на плоскости Q пойдет речь ниже). При LTa<
< LMa область QM небесной сферы машинного кадра, отвечающая
квадрату ABCD, может находиться внутри ее области QT, отвечающей
телевизионному кадру, при любом значении Ар, а при LTa > LMa
может иметь место и обратная ситуация. При LMa = LTa ни того, ни
другого, как правило, не бывает, однако и в этом случае пересечение
упомянутых областей обычно значительно.
Рассмотрим звезды, наблюдаемые в «поле зрения» датчика. Часть
этих звезд, соответствующую его проницающей способности, спроеци-
спроецируем, как и при получении машинного кадра, на плоскость Q. Полу-
Полученная картина отметок существенно отличается от картины, наблюдае-
15
мой в машинном кадре, отвечающем рассматриваемым значениям па-
параметров а0, б0. И дело не только в том, что угол LMa может не совпа-
совпадать с углом Z.Ta, угловое расстояние Ар не равняться нулю, а система
координат xyz может быть повернута относительно системы координат
xyz; имеет место и большая разница в плотностях отметок в этих
квадратах. Действительно, проницающая способность оптико-телеви-
оптико-телевизионного датчика может быть выбрана такой, что далеко не все из на-
наблюдаемых с его помощью звезд занесены даже в самые мощные астро-
астрономические каталоги, на базе которых строится машинный каталог
звезд.
Другие отличия телевизионного и машинного кадра связаны с тем,
что в получаемом телевизионном изображении присутствуют помехи,
нелинейные и геометрические искажения и т. д.
Остановимся на общей характеристике различного рода помех.
Число флуктуационных помех, возникающих в ходе сложных процес-
процессов восприятия и считывания изображения в телевизионной трубке и
цепях видеоусиления, может быть существенно уменьшено посредст-
посредством выбора оптимального значения порога срабатывания регистрирую-
регистрирующей схемы оптико-телевизионного датчика и осреднения данных в ре-
режиме накопления сигнала. Что же касается отметок в телевизионном
кадре от звезд, не имеющих отметок в машинном кадре, то со значи-
значительным числом помех такого рода придется, видимо, смириться, да-
даже если QT c^. QM. Возможно и обратное явление, когда в машинном
кадре присутствуют отметки от звезд, не имеющих отметок в телеви-
телевизионном кадре, в том числе и при QT cr QM. Причинами этого могут
быть дефекты фотомишени телевизионной трубки, сбои в работе систе-
системы съема координатной информации, «мерцание» звезд и др.
Компенсация нелинейных искажений в телевизионном кадре. Не-
Нелинейные и геометрические искажения в телевизионном кадре возни-
возникают вследствие нелинейности отклоняющих токов и напряжений, а
также неоднородности магнитных и электрических полей в трубке.
Разработка точной математической модели этих искажений затруд-
затруднительна из-за наличия как регулярных, так и случайных компонент.
Типичные же способы борьбы с ними — это способы калибровки, ли-
линеаризации строчной и кадровой разверток с помощью компенсирую-
компенсирующих токов и напряжений и др.
Рассмотрим способ калибровки. На одну из боковых поверхностей
тонкой стеклянной пластинки наносится непрозрачное покрытие, ко-
которое затем в отдельных точках, образующих, например, треугольную
решетку, снимается. Упомянутая решетка наблюдается с помощью
датчика с периодичностью, зависящей от стабильности его характерис-
характеристик, определяющих нелинейные и геометрические искажения. В ре-
результате оказывается возможным измерить искаженные координаты
х*1> У*! (/ = 1,2,..., Мр, где Мр — число узлов решетки) отметок те-
телевизионного изображения наблюдаемой картины в системе координат
с началом в точке от, расположенной в верхнем левом углу телевизион-
телевизионного кадра, и осями от хт и от t/T, направленными вдоль верхней и ле-
левой его границ. Координаты xTJ-, уч1 (/ = 1,2, ..., Мр) этих отметок при
16
^утствии искажений можно вычислить в нужном масштабе по извест-
значениям шага /гр эталонного калибровочного растра и размера
¦X N телевизионного кадра. Коррекцию координат отметок произ-
иьного телевизионного кадра на основе этой информации можно
шолнить, например, следую-
образом (индекс «т» ниже
опущен),
Щ>; Пусть х*, у* — координаты
Щ^й звездной отметки Tt телеви-
телевизионного кадра (рис. 1.2); хи
Jhf — координаты той же отмет-
отметки после коррекции; х*, y*(j =
ifc» 1,2,3) — координаты трех бли-
ближайших к точке (х*, у*) отме-
отметок реального калибровочного тт
пяртпя- у и (i — 1 9 Ъ кппп Рис- 12- Исходные и скорректированные
растра, Х„у,Ц - l,/,ci) —КООр-. координаты отметок телевизионного
динаты соответствующих им от- кадра
меток эталонного калибровоч-
,його растра. Тогда координату xt можно найти из уравнения
'плоскости, проходящей через точки (х*, у), xj), /= 1, 2, 3:
х*-х[ у*-у{
х'-х*
_„• X,— X,
= о.
¦Отсюда, подставляя вместох*, у* их соответственнох*, у* их{, найдем
\у'-у\)
г У i Х2—xi
х1-*1 у\-у\
Аналогично определяется и координата уг (на рис. 1.2 эта коорди-
координата не показана).
к Кадр, полученный с помощью описанной процедуры преобразова-
преобразования отметок исходного телевизионного кадра, для которых ее можно
^реализовать, назовем интерполированным телевизионным кадром
г (ИТК). Характерная особенность последнего — низкий уровень иска-
лЗкений и отсутствие в нем отметок, соответствующих отметкам пери-
|ферийной части телевизионного кадра, не накрываемой калибровоч-
||Ным растром.
* Общая характеристика связи между координатными системами ма-
машинного и телевизионного кадров. Между координатами х, у и х, у
\ одноименных отметок плоскостей Q и Q имеет место перспективно-кол-
), линеарное соответствие вида
у+ев
eix-\-esy-\-\
17
где ех — е8 — константы, определяемые взаимным положением в про-
пространстве этих плоскостей.
Упомянутое соответствие можно упростить, если пренебречь пер-
перспективными искажениями, связанными с проецированием звезд на
пересекающиеся плоскости. Тогда
что отвечает совпадению плоскостей Q и $ в пространстве.
О правомерности такой замены говорят следующие ориентировоч-
ориентировочные расчеты. Предположим, что б0 = 0 и отклонение Оо от Оо на угол
"JS,wz в)буюг
10
/
у
/
,
/
/
у
.——¦¦
А
Л-
А
л
.—-—
уф.
4\
~%
30' 60' 90'М 0 30' 60' 90'М
Рис. 1.3. Определение перспективных Рис. 1.4. Графики зависимости относи-
искажений одноименных отметок: тельных ошибок координат х, у, связаи-
/ — небесный экватор иых с перспективными искажениями бд-
иоимеииых отметок
Ар имеет место в направлении небесного экватора (рис. 1.3).J Найдем
относительную ошибку 8Х, которая возникает, если в качестве абсциссы
х точки t взять отрезок ВС длиной Ах в плоскости Q:
x=Rc tg Да, Дх=/?е [tg (Да
?х cos Да
6*=-
cos (Да+ДР) cos
-tg APJ;
——1.
Соответственно относительная ошибка
A-5)
У—У
cos Да
cos (Да+Др)
-1.
A.6)
Графики зависимостей A.5) и A.6), приведенные соответственно на
рис. 1.4, а, б, показывают, что даже при очень больших значениях
Аа и Ар величины 8Х и 8У не превышают 0,1 %, а соответствующие аб«
солютные отклонения — десятых долей элемента разложения теле-
телевизионного кадра. Это позволяет с достаточной степенью точности
считать, что и при произвольном положении точки о относительно точ-
18
о перспективными искажениями координат проекций звезд, свя-
¦шыми с проецированием сферы на плоскость, можно пренебречь.
™. Конкретизируя выражения A.4), заметим, что если не принять ни-
Ткаких мер, то между координатами х, у и х, у одноименных отметок в
".Интерполированном телевизионном и машинном кадрах все еще будет
иметь место довольно сложная связь вида
/
[
у—ус) sin
5, y = —k \х— хе)
sin
[у— 2/ejcosi|),
A.7)
/
—7,
—
/XjX
(Mr
"Л
</r
Хм,
x,x
—
V
\\У,У
Гщ1\
\
) Y
рис
изменение ориентации коордниат-
иых осей машииного кадра:
/-небесный экватор
¦ xe, Ус — координаты начала системы координат ху в системе коор-
1 динат ху; ар — угол взаимного поворота этих систем, отсчитываемый
"против часовой стрелки; k— z
\ масштабный коэффициент. [Nord^
ч Обозначим символом kT =
'1W 2 LTa/iVT (где NT — размер
Стороны телевизионного кад-
кадра в элементах разложения
растра) угловые размеры эле-
элемента телевизионного кадра.
¦'Очевидно, что &т = (LT/iVT) x
XBLTa//.T), где LT—линейный
размер изображения кадра
' на фотокатоде, мм. Шаг Ар
эталонного калибровочного
растра, составляющий на фо-
фотокатоде hp, в элементах ра-
овен /ip/(LT/JVT). Полагая уг-
'ь',Яовые размеры элемента ма-
¦ Шинного кадра равными: ku = K, найдем значение парамет-
¦ • pa Rc в A.3), обеспечивающее это равенство. Очевидно, что Rc =
• '"" NJ[2 tg (kTNMl2)], где NM — размер стороны машинного кадра в
.^элементах разложения. Что же касается взаимного поворота кадров,
*t то следует отметить, что при ориентации датчика в геоцентрической
¦J экваториальной системе координат с точностью до Ар можно положить
ir^« 0. При этом а0 находится из соотношения а0 = s— t0, где s— мест-
,,'iitoe звездное время; t0 — часовой угол точки (а0, б0) небесной сферы.
^ Часто датчик ориентируется в топоцентрической азимутальной систе-
^"Ме координат, однако взаимный поворот кадров легко исключается,
ч"если угол гр предварительно рассчитать по значениям широты пункта
1 наблюдения, азимута и зенитного расстояния ориентации инструмента.
\ Иногда с'машинным кадром] будет связываться система J координат
•^Ом'Ям'Ум.^аналогичнаяд системе координат от хт ут. При этом следует
1§ иметь в виду, что при переходе оптическойтоси датчика через Северный
^ полюс ориентация'координатных осей:'упомянутых систем меняется на
\ 180°» (рис. 1.5).
•'"i Таким образом, если имеют место сглаживание результатов измере-
'; ния координат отметок телевизионного кадра, уменьшение нелинейных
•I. 19
и .геометрических искажений в нем с помощью, например, описанной
выше процедуры интерполяции, должное установление масштабного
соответствия между интерполированным телевизионным и машинным
кадрами, компенсация их взаимного поворота в случае необходимости
и согласование направлений координатных систем этих кадров, то
можно с приемлемой для практики точностью считать, что последние
не содержат явных неинвариантностей, а формулы A.7) приводятся
к простому виду х ж х — хе, 'у « у — ус, т. е. между системами ко-
координат ху и ху машинного и телевизионного кадров имеет место связь
типа плоскопараллельного переноса. В результате последующая иден-
идентификация этих кадров существенно упрощается.
§ 1.3. ИДЕНТИФИКАЦИЯ ТОЧЕЧНЫХ ИЗОБРАЖЕНИЙ ПО МЕТОДУ
ТРАСС
Рассмотрим идентификацию точечных изображений (кадров) по ме-
методу трасс, который заключается в том, что после совмещения границ
идентифицируемых кадров отметки одного из них не более чем попар-
попарно объединяются с отметками
другого кадра так, чтобы сумма
квадратов расстояний между
объединяемыми отметками была
минимальной.
Постановка задачи иденти-
идентификации кадров. Пусть имеется
последовательность кадров, по-
получаемых в моменты времени
t\i (и = 1.2, .... т). Рассмотрим
кадры К» и /Сц+ь Существен-
Существенно предположение, что боль-
большинство объектов, наблюдаемых
в кадре К&, наблюдается и в
кадре /Сц+i. т. е. оба кадра
включают в себя отметки от оди-
одинаковых по своей физической сущности объектов. Кроме того, в
каждом кадре наблюдаются помехи и объекты, не попавшие в сосед-
соседний кадр.
Под идентификацией кадров /С^ и К$+\ будем понимать выявление
в них отметок от совпадающих по своей физической сущности объектов
и установление между этими отметками взаимно-однозначного соответ-
соответствия. Другими словами, если отметки кадра К^ пронумеровать в не-
некоторой последовательности, то любой отметке кадра /Сц+ь обуслов-
обусловленной тем или иным объектом, следует присвоить тот же номер, что
и отметке кадра Кц, отвечающей упомянутому объекту.
Рассмотрим последовательность кадров Ki, K%, .... Кх, поступив-
поступивших в моменты времени tlt t2, ..., tx (рис. 1.6, а). Наложим эти кадры
друг на друга так, чтобы связанные с ними системы координат ху совпали
(рис. 1.6, б). Как видим, отметки (темный и светлый кружки, крестик)
объекта / на совмещенном кадре образуют трассу (траекторию) /,
20
Рис. 1.6. Идентификация точечных изо-
изображений:
а — взаимное расположение последователь-
последовательных кадров; б — образование трасс одно-
одноименными отметками в совмещенном кадре
(в — отметки в кадре ЛГр.. X — отметки в
кадре К„ , ,, О — отметки в
соответствующую трассе движения упомянутого объекта в «поле зре-
зрения» системы наблюдения. Предположим, что имеется алгоритм, позво-
позволяющий на основе кадров Klt /С2,..., Кх объединять отметки на сов-
совмещенном кадре в трассы такого типа. Тогда можно утверждать, что
отметки, образующие одну трассу, соответствуют одному и тому же
объекту. Решение задачи заключается в нахождении этого алгоритма.
Основное при объединении данных в трассы — нахождение опти-
оптимальных в некотором смысле правил присоединения отметок вновь по-
поступившего кадра к прослеживаемым трассам, принятие решения об
окончании или возникновении новых трасс, оценка минимальной час-
частоты следования кадров, при которой еще возможна устойчивая.иден-
устойчивая.идентификация отметок на соседних кадрах, и др. При этом необходимо учи-
учитывать случайный характер возникновения новых трасс, их сохране-
сохранения до конца интервала наблюдения и т. д.
Математическая модель метода трасс. Как следует из интуитивных
'представлений, а также анализа вышеперечисленных вопросов, в рас-
рассматриваемом случае максимальное правдоподобие обеспечивает такое
объединение отметок соседних кадров, которое сообщает минимум
функционалу вида
Ф( i)^L(R R)
где R, и Rj— соответственно радиус-векторы t-й и /-й отметок кадров
Кц и /Сц+1 в системе координат ху; L (Rt, Rj) = Ltj — функция стои-
стоимости объединения отметок i, / в пару (г, /), равная квадрату расстоя-
расстояния между объединяемыми отметками на совмещенном кадре.
При этом имеется в виду, что
min ф (г, /)= min У, L (Rt, Rj), A.8)
(i. Лея (j, /)=я {~!
где П — множество пар (i, /), удовлетворяющее условию не более чем
попарного объединения отметок, т. е. если -
(/, /)е Л, то (г, k), (I, j) $Л; i, / = 1,2 Mll;j,k =
= 1.2 М.. , ,: кФ!-1ф1. A.9)
Рассмотрим один из возможных алгоритмов поиска абсолютной ми-
нимали функционала A.8) при условии A.9), представляющий собой
модификацию традиционной формы алгоритма динамического про-
программирования с учетом специфики данной задачи [7].
Запишем A.8) с учетом его физического смысла в виде
min Ф (г, /)= min
/, /)ея
+min J min
l— min L,
min
— mm
У\
I Ma-I) ;=1
A.Ю)
21
где Мц+1 — множество номеров отметок кадра Кц+i', П(М* !> — мно-
множество пар (/, /), удовлетворяющее условию A.9) при /— 1,2,...,
Мц—1; /= 1,2, ..., Mp+i, M(J$f~1}— то же, что и М„,+1, при исклю-
исключении номеров отметок кадра /Сц+1, входящих в множество П(М»~Х) ;
IJfMp-i) — множество пар (/, k), аналогичное множеству пар Я, при
исключении отметок, входящих в пару (М ц, argmin Lm^i)-
Представив в виде равенства A.10) величины
min
('.Лея''
, min
(/¦/) ел1
i-ij.
2
min 2
(l, /)enB) 1=1
и подставив полученные соотношения в A.10) и последующие формулы,
окончательно получим
min ф (/,/) = ^ min Ly+ 2 min min
/+1, k
— min
min 2^ft~ min
1U)Enl'=! «. /»e
где Я^ — множество пар (/, /), удовлетворяющее условию A.9),
при 1= 1,2,..., i;j = 1,2, ...,Af|l+1; M(&\ = Мд+1\ЛКг), Af^ — мно-
множество номеров отметок Ку.+1, входящих в множество ПA>; Я,- —
множество пар (l,k), удовлетворяющее условию A.9), при /=1,2,..., i;
k € Мvi+i\arg min Lt+1, j.
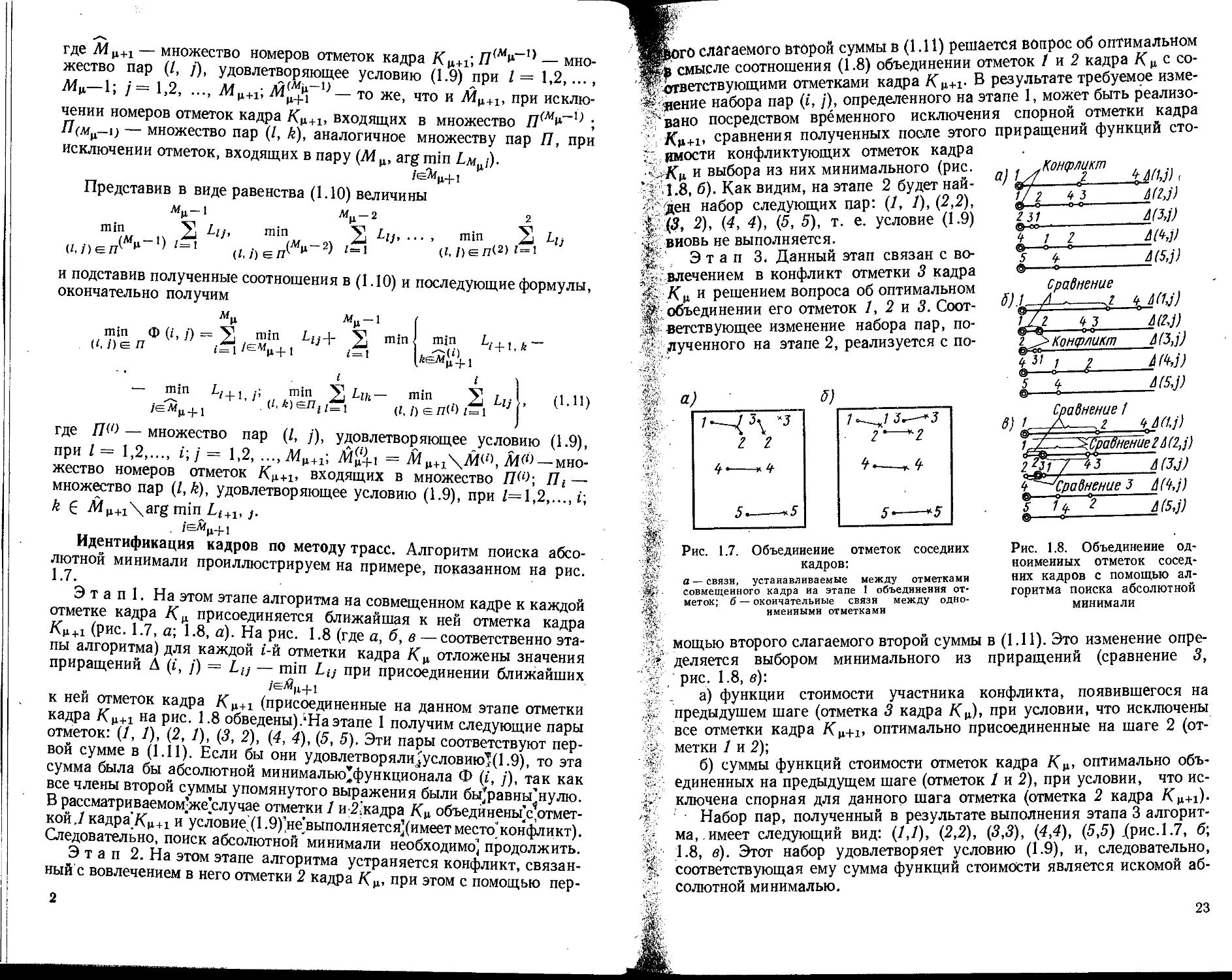
Идентификация кадров по методу трасс. Алгоритм поиска абсо-
абсолютной минимали проиллюстрируем на примере, показанном на рис.
1.7.
Э т а п 1. На этом этапе алгоритма на совмещенном кадре к каждой
отметке кадра /Ср. присоединяется ближайшая к ней отметка кадра
Кц+1 (рис. 1.7, а; 1.8, а). На рис. 1.8 (где а, б, в — соответственно эта-
этапы алгоритма) для каждой i-й отметки кадра К», отложены значения
приращений А (г, /) = Ltj — min L,-y- при присоединении ближайших
к ней отметок кадра /Сц+г (присоединенные на данном этапе отметки
кадра Кц+1 на рис. 1.8 обведены).'На этапе 1 получим следующие пары
отметок: (/, /), B, 1), C, 2), D, 4), E, 5). Эти пары соответствуют пер-
первой сумме в A.11). Если бы они удовлетворяли^условию1A.9), то эта
сумма была бы абсолютной минималью'функционала Ф (г, /), так как
все члены второй суммы упомянутого выражения были бьфавны'нулю.
В рассматриваемомрке'случае отметки / и^'кадра К» объедйнены]с,отмет-
кой./кадра]К"ц+1 и условиеA.9)'не'выполняется'(имеетместо"конфликт).
Следовательно, поиск абсолютной минимали необходимо] продолжить.
Этап 2. На этом этапе алгоритма устраняется конфликт, связан-
ный'с вовлечением в него отметки 2 кадра /Сц, при этом с помощью пер-
li1
Ш
>го слагаемого второй суммы в A.11) решается вопрос об оптимальном
р смысле соотношения A.8) объединении отметок / и 2 кадра Кц с со-
соответствующими отметками кадра К»+1- В результате требуемое изме-
изменение набора пар (?, /), определенного на этапе 1, может быть реализо-
реализовано посредством временного исключения спорной отметки кадра
/Ci»+i. сравнения полученных после этого приращений функций сто-
стоимости конфликтующих отметок кадра
/Сц и выбора из них минимального (рис.
1.8, б). Как видим, на этапе 2 будет най-
найден набор следующих пар: (/, /), B,2),
C, 2), D, 4), E, 5), т. е. условие A.9)
вновь не выполняется.
Этап 3. Данный этап связан с во-
вовлечением в конфликт отметки 3 кадра
/Си и решением вопроса об оптимальном
объединении его отметок 1, 2 и 3. Соот-
Соответствующее изменение набора пар, по-
полученного на этапе 2, реализуется с по-
4 3
АЩ)
/ 2
Сравнение
J— 1
j
AffJ)
Конфликт
5
@-
JfSJ)
Сравнение t
-AZ—.2
Уравнение 2 M2,j)
AfJJJ
'Сравнение з & Ct,j)
"? ~AE,j)
Рис. 1.7. Объединение отметок соседних
кадров:
а — связи, устанавливаемые между отметками
совмещенного кадра на этапе 1 объединения от-
б — окончательные связи между одно-
одноименными отметками
меток;
Рис. 1.8. Объединение од-
ноимеииых отметок сосед-
соседних кадров с помощью ал-
алгоритма поиска абсолютной
минимали
мощью второго слагаемого второй суммы в A.11). Это изменение опре-
определяется выбором минимального из приращений (сравнение 3,
рис. 1.8, в):
а) функции стоимости участника конфликта, появившегося на
предыдущем шаге (отметка 3 кадра Кц), при условии, что исключены
все отметки кадра Кц+х, оптимально присоединенные на шаге 2 (от-
(отметки / и 2);
б) суммы функций стоимости отметок кадра /Сц, оптимально объ-
объединенных на предыдущем шаге (отметок / и 2), при условии, что ис-
исключена спорная для данного шага отметка (отметка 2 кадра /Сц+i).
Набор пар, полученный в результате выполнения этапа 3 алгорит-
алгоритма,, имеет следующий вид: (/,/), B,2), C,3), D,4), E,5) .(рис. 1.7, б;
1.8, в). Этот набор удовлетворяет условию A.9), и, следовательно,
соответствующая ему сумма функций стоимости является искомой аб-
абсолютной минималью.
23
Таким образом, число операций сравнения после выполнения х-го
шага составит sOc = 0,5 и (к + I).
Рассмотренный пример, а также дальнейшие преобразования выра-
выражения A.П), связанные с представлением в основном его членов
i i
min 2 Lih и min 2 1*ц в виде, аналогичном этому выражению,
0,k)<=nt i=\ (t,i)<=n(i) i=i
позволяют сформулировать следующее правило.
Правило разрешения конфликта: временно исключаются из рассмот-
рассмотрения все спорные отметки кадра Кц+1 и сравниваются получаемые
после этого приращения A (i, /) всех участников конфликта. Тот участ-
участник, для которого упомянутое приращение максимально (например,
отметка с номером i = 1), получает высший приоритет; к нему, как
и ранее, присоединяется ближайшая спорная отметка с номером
j = arg min L1}. Для остальных участников конфликта (например,
отметок с номерами 2, 3..., i0) находятся соответствующие им новые
значения min Ltj, i = 2,3 i0 (где УИц+i = Mn+i\arg min LjJ), и
приращений А1 (/, /) = Ltj — min Ltj при условии, что все спор-
ные отметки по-прежнему считаются исключенными. Теперь дру-
другой участник конфликта (например, отметка с номером i = 2),
для которого приращение A1 (i, /) максимально, объединяется с от-
отметкой / = arg min L^. Участникам же 3,4,..., г0 вновь ставятся в со-
ответствие новые значения min Ьц (где Mjx%i = Afu,+1\{arg min Ltj,
arg min L2j}) и приращений A11 (i, j) = Ltl — min Ltj при условии, что
все спорные отметки исключены и т. д. i0 — 1 раз.
При вовлечении в конфликт новой отметки (например, отметки с
номером г'о + 1) процесс его разрешения повторяется вновь для отме-
отметок с номерами i = 1,2, ..., i0 -f 1, пока конфликт либо не получит
нового продолжения, либо его разрешение завершится.
Приведенное правило для ситуации, показанной на рис. 1.7, ил-
иллюстрирует рис. 1.9 (где а — г — соответственно этапы алгоритма,
символические обозначения соответствуют обозначениям на рис. 1.8).
Как следует из A.8),
min Ф (i, /)= min Ф (j, /)= min _
(e,/)e я (Ulefl (LI) ел
где Я — множество пар (/, г), удовлетворяющее условию не более чем
попарного объединения отметок, аналогичному условию A.9).
Другими словами, можно построить алгоритм поиска абсолютной
минимали функционала Ф, начинающийся с присоединения к каждой
отметке кадра K»+i ближайшей отметки кадра Ку,-
24
2
/=1
i & (I'D
'/- All,])
Таким образом, рассмотренный алго-
алгоритм поиска абсолютной минимали функ-
функционала Ф при условии не более чем по-
попарного объединения отметок заключается
в ее предварительной грубой оценке на
расширенном множестве пар (г, /) (снимает-
(снимается условие A.9)) с последующей деформа-
деформацией полученной величины посредством
разрешения конфликтов. При этом пары
(», /) переводятся в допустимое множество.
Следовательно, нахождение абсолютной ми-
минимали при снятии условия A.9) неслож-
несложно и быстро выполнимо. Определение же
минимальной деформации, переводящей
найденные пары (i, /) в допустимое мно-
множество, заключается в разрешении кон-
конфликтов, как правило, между отдельными
небольшими группами отметок, если Aif =
— tp+i — tfj, невелико. Однако проверка пока-
показывает, что в практически интересных слу-
случаях значения плотностей помех и пара-
параметров взаимного смещения кадров, как
правило, таковы, что идентификация не
обходится без разрешения многих кон-
конфликтов, с которыми связаны значитель-
значительные затраты времени и памяти. Последние
еще более увеличиваются при наличии в
кадрах нелинейных искажений. Все это за- Рис. 1.9. Объединение од-
' ставляет продолжать поиск более эффек- поименных отметок сосед-
-тивиых алгоритмов идентификации. них каДРов по правилу
r T разрешения конфликтов
Примечание. Как будет показано ниже, метод трасс наиболее целе-
целесообразно использовать для идентификации точечных изображений после их
предварительного грубого или точного совмещения.
§ 1.4. КВАЗИКОРРЕЛЯЦИОННЫЙ МЕТОД ИДЕНТИФИКАЦИИ
ТОЧЕЧНЫХ ИЗОБРАЖЕНИЙ
Сущность квазикорреляционного итерационного метода идентифи-
идентификации (совмещения) кадров заключается в том, что Взаимной корреля-
корреляционной функции двух соседних идентифицируемых кадров К» и Кц+i
(или телевизионного и машинного кадров соответственно) в окрест-
окрестности ее искомого максимума придается куполообразная форма путем
определенного функционального преобразования одного из кадров
(например, кадра /Сц+i). В результате Возникает возможность органи-
организовать направленный поиск упомянутого максимума, используя ту
или иную итерационную процедуру. При этом изложить этот алгоритм
удобно в следующем виде (см. [8]).
Математическая модель квазикорреляционного метода. Поставим
в соответствие j-й отметке кадра Кц+i некоторые функции fj (x, у)
25
(/ =. 1,2,..., М„,+1), которые будут определены позднее. Используя
совокупность этих функций, опишем кадр Кц+i в виДе функции
A.12)
—-I—-—Л ?v /—-—Л
F [х.У)= 2 fj [*'«)•
Пусть координаты х, у и х, у отметок произвольного объекта, наб-
наблюдаемого в кадрах /Сц-ц и К у, соответственно, имеют следующую
связь:
х=х[х,у),у=у[х,у). A.13)
Тогда
?{7,7)=FlxO?,7), у{Х*у)]=? (XT)- A.14)
Вычислим значение F (х, у) в точках (хи yi) (i = 1,2 М„)и со-
составим выражение для новой функции:
где Oi, a2, ..., аг—независимые параметры, характеризующие связь
A.13) между системами координат ху и ху.
Предположим, что Мц = Mu+i = ЛГ, т. е. количества отметок
в кадрах Кц и K^+i совпадают, и в этих кадрах присутствуют только
отметки от идентичных объектов. Обозначим символами а*, а!,..., а*
значения упомянутых параметров, при которых координатные описа-
описания объектов в идентифицируемых кадрах совпадают.
Существенным для дальнейшего изложения является вид функции
F (au a2,..., аг). Положим, что все определяющие ее компоненты та-
таковы, что допустимые значения ах, а2,..., аг образуют в пространстве
этих параметров ограниченную выпуклую замкнутую область G, при-
причем указанная функция непрерывна и дифференцируема на множестве
точек, соответствующем этой области, имеет единственный максимум
в точке (a*, at,..., a*) ? G и монотонно убывает с возрастанием рас-
расстояния между точками (аи аъ...,а^ и (а*, а\, ..., а*). Тогда необхо-
необходимыми и достаточными условиями совмещения^кадров Кц и Кц+
являются
dF dF
=0 »>
и Ч аг) = 0
и, следовательно, величины а*, а\, ..., а*, характеризующие взаимное
положение этих кадров, можно найти решением системы A.16),
Рассмотрим получение требуемой формы функции F (аъ а2,..., аг),
тесно связанное с выбором функций f} (х*у), для случая.^когда форму-
лы связи A.13) имеют вид х = х— х0, у =\у — Ус,гт- е. когда имеет ме-
место только взаимное плоскопараллельное|смещение кадров. Нетрудно
заметить, что надлежащий^вид функции F (av аг, ...,а{) можно обеспе-
26
¦ь, если в качестве упомянутых функций использовать, например,
зависимости вида
ч; где
1 при х > 0,
<г О-
—к0°РДинаты 1~И отметки каДРа
в системе координат ху; a, h — не-
некоторые действительные константы,
большие нуля.
Зависимости A.18) обеспечивают
меньшие вычислительные затраты и
большую скорость сходимости итера-
итерационного процесса, чем зависимости
A.17). Условимся, что каждая из
функций f, (х, 'у) A=1,..., М\ оп-
1 ределена на соответствующей ей об-
области G) плоскости х о у и исключает-
исключается из рассмотрения за ее пределами.
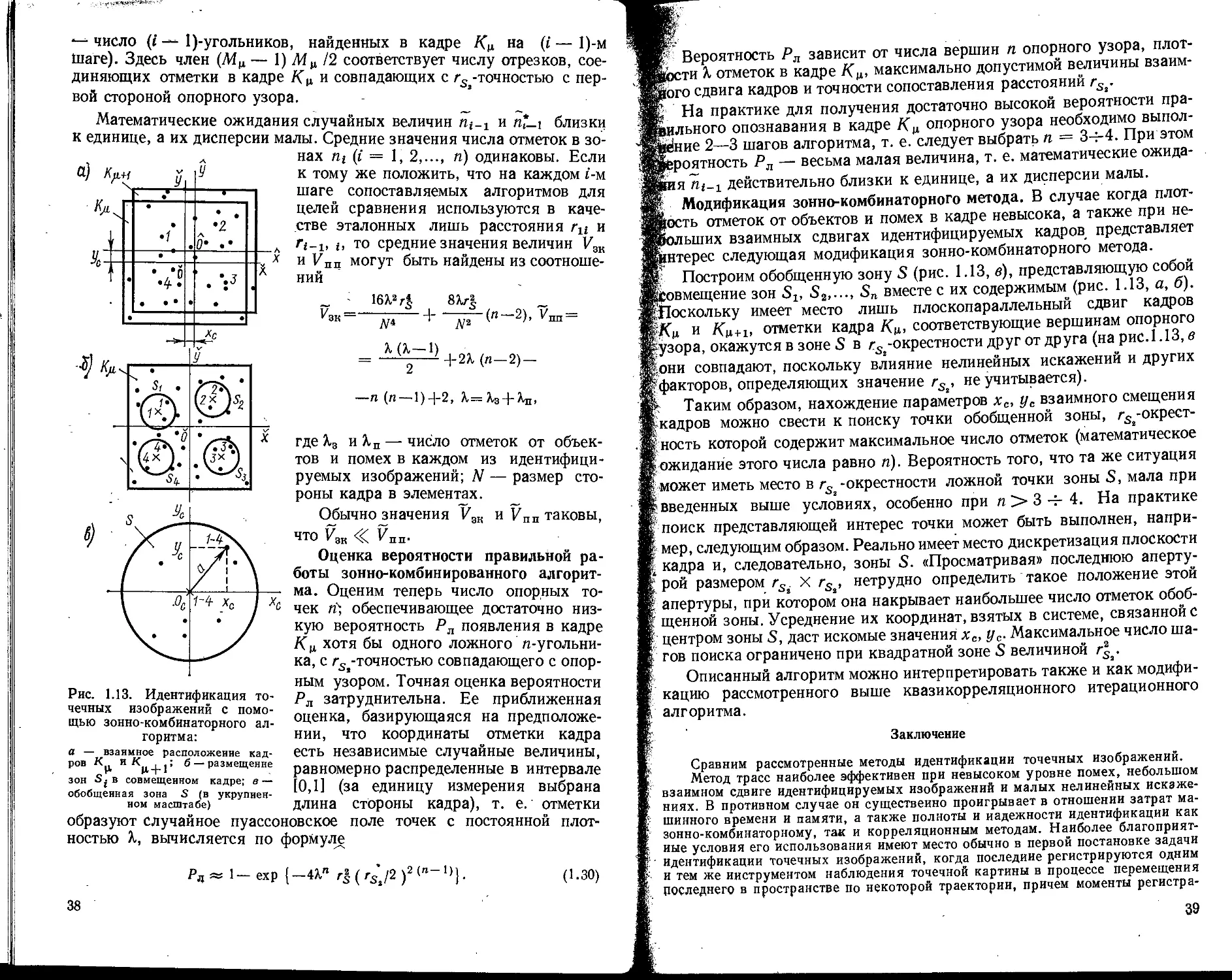
При распределении параметров хс,
ус взаимного смещения кадров по за-
закону равной плотности можно поло-
положить, что Gj — окружность с цент-
центром в точке (xj, у]) и радиусом, рав-
равным V2 amax («max — максимально
возможное значение параметров \хе\,
\ус\). Вид зависимостей A.12) и A.15)
г в этих условиях иллюстрирует рис.
1.10, б, в (ЛГ = 4). Рис. 1.10, а соот-
соответствует кадру Кц-
При выбранных таким образом
функциях fj (х, у) (/.= 1,2 ЛГ) со-
соотношение A.15) запишется в виде
/
Рис. 1.10. Совмещение точечных
изображений с помощью квази-
квазикорреляционного метода:
а — первое точечное изображение; б —
функционально преобразованное вто-
второе точечное изображение; в — вид
корреляционной функции изображений
F (ХС, Ус) =
М' М>
X
,•=1
A.19)
где (oif ="xi — Xj, wlf = yi — yj — абсцисса и ордината отметки
плоскости корреляции, соответствующей i-й отметке кадра /Сц и
Г ;-й отметке кадра /Сц+i; хг, г/г — координаты i-й отметки кадра^/Сц^
его системе координат ху (i = 1,2, ..., ЛГ); хс = л: — х; ус = У — #.
27
Это, в свою очередь, позволяет переписать A.16), дифференцируя
F (хс, Ус) по хс и ус следующим образом:
W M'
У У
j=i i = i
М' М-
v v
^_ ^_
с=1 i=i
(* -| ^f-Ус |) = 0;
A.20)
Использование итерационного процесса для решения системы A.20)
приводит к следующим выражениям:
(О
ЛГ ЛР
X X (Н «tf'-'c [*-1
М' М'
A.21)
—*с [< —1] 1) X (А—| «ojf»—Ус Р —Ч| ),
где t = 1,2,... — номер итерации; со — некоторая положительная по-
постоянная; Мо — число отметок, попадающих в апертуру размером 2/гХ
Х2Л на плоскости корреляции на (t — 1)-м шаге;
2 I
{Н-\*>1р-УсР-1]\). A-22)
В случае если в кадрах присутствуют помехи и в одном из них есть
отметки от объектов, не имеющих отметок в другом, то в A.19) ^- A.22)
верхние пределы суммирования по i и / должны быть заменены соот-
соответственно на М р и Жрц-i. Можно показать, что при отсутствии помех
и соответствующем выборе значения соШ0 итерационный процесс A.21)
за один шаг сходится к центру тяжести сигнальных отметок, попавших
в апертуру G размером- 2hx2h плоскости корреляции, т. е. к макси-
максимуму функции A.19). При попадании же в эту апертуру шумовых отме-
отметок определяется общий центр тяжести как шумовых, так и сигнальных
отметок. Итерационный процесс в этом случае продолжается до тех
пор, пока в апертуру размером 2h X 2 Л не перестанут попадать и вы-
выпадать из нее новые шумовые отметки. В результате получим общий
центр тяжести отметок, попавших в апертуру в окрестности максимума
корреляционной функции. Координаты полученного центра тяжести в
общем случае могут отличаться от истинных координат сдвига между
кадрами. В связи с этим возникает необходимость в оценке точностных
характеристик квазикорреляционного алгоритма совмещения изобра-
изображений в условиях помех. Проведем это исследование.
Оценка точностных характеристик квазикорреляциониого метода.
Проведем преобразование полученных ранее аналитических соотноше-
28
I. Разделив выражения под знаком двойной суммы в A.21) на сиг-
[ьную и шумовую составляющие, запишем первую формулу в виде
*сИ = -
2 ии
-Ч. A.23)
: — общее число отметок в апертуре плоскости корреляции на
шаге; МA) — число сигнальных отметок в апертуре; /72а — мно-
IfecTBO пар неодноименных отметок кадров, разности координат ко-
рых Uij определяют шумовые отметки в апертуре на ^-м шаге.
Полагая, что числа отметок, попадающих в апертуру на каждом
are t, являются независимыми случайными величинами, запишем
|;,23) так:
Хс И ='
\ + Хс
(L24)
1=1
Mi2) — число шумовых отметок плоскости корреляции, попадаю-
х в апертуру; хс\ — координата ?-й шумовой отметки этой аперту-
t Считая кадры Кц и /Сц+i фрагментами однородного пуассоновского
чечного поля, имеем следующие распределения случайных величин:
определение УИA) подчинено закону Пуассона с параметром КмA)',
>рдината xci распределена по закону равномерной плотности g (xci)=
l/Bh), — h < X& < h; распределение Mi%) подчинено закону Пу-
Пунсона со средней плотностью шумовых отметок в апертуре, определя-
Ц&гой выражением
w
'"м
¦м шаге
B),
среднее число помех в кадрах Кц и
N ^—
змер стороны кадра К» в элементах разложения.
При невысоких уровнях помех в кадрах можно считать, что слу-
случайные величины УИ'1) и Mi2) слабо коррелированы. Тогда случайная
ичина Mz2 = -^A) + -Ма2) подчинена закону Пуассона с парамет-
На основании A.24) при со = 1 погрешность в отработке сдвига на
(xcl+Axc[t-i])
Ахс [t]=xc [t]—xc=-
М,
/ = 1,2,...).
Пусть Алгс It— 1] слабо зависит от М(я2) и Mz2. Тогда при сделан-
х выше допущениях и с учетом того, что М {Л*с [0]} = — хс,
тематическое ожидание погрешности в отработке сдвига на ?-м шаге
азикорреляционного алгоритма определяется как
М
№=М {Ахс [t-l]) M {Af<*>/Afj.2}=«e
29
^2 1. Скорость сходимо-
сходимости зависит от соотношения между kM<D и^«). Выразив дисперсию
погрешности через второй начальный момент и проведя последователь-
последовательно все необходимые преобразования, получим
D {Ахс M}A{(e [])} {Л*с [t)}
ЯЛ?> \2(<-D
)
где Qx и
величин
М
1,5
1,0
0,5
— математические ожидания соответственно случайных
2)/ {M^Y и W)" /(М22J.
NX
3t
Рис. 1.11. Графики зависимо-
зависимости математического ожидания
ошибки в отработке смещения
между кадрами от шага сдви-
сдвига по квазикорреляциониому
методу (М{Ахс[0]}=Хс)
Рис. 1.12. Графики зависимо-
зависимости дисперсии ошибки в отра-
отработке смещения между кадра-
кадрами от шага сдвига по квази-
квазикорреляционному методу
(?>{Д[0]}0)
Так как D {Ахс [0]} = 0, то на ^-м шаге
D
При
oo lim
It]} = (/t»/3) Q
A,«u>)/[1 _ Q л
На рис. 1.11 и 1.12 приведены теоретические (сплошные линии)
и экспериментальные (пунктирные линии) зависимости М [Axclt]}
и D{Axc [t]} при различных значениях хс и h.
Выбор величины b = а> 1М0 обеспечивает довольно высокую ско-
скорость сходимости A.21), поскольку Мо в этих условиях равно числу
(/, /) отметок кадров Кц и Кц+i, для которых имеет смысл вычисле-
компонент (coW — хс U— 1]), (co(f> — ус It— 1]) (при малых зна-
знаниях апертуры величина Мо близка к величине Mw — числу от-
iK Км (Кц+i), имеющих соответственные отметки в кадрах /Сц+i
Число шаговк после которых движение апертуры на плоскости кор-
[яции прекращается, даже при сравнительно высоких уровнях по-
^ не превышает 3—4.
|i Полученные соотношения дают математическую модель квазикор-
-^.яционного алгоритма совмещения изображений и позволяют на
ручной основе подойти к выбору его основных параметров.
|р§ 1.5. КОРРЕЛЯЦИОННЫЕ МЕТОДЫ ИДЕНТИФИКАЦИИ ТОЧЕЧНЫХ
ИЗОБРАЖЕНИЙ
При простейшем корреляционном методе совмещения точечных изо-
1ажений осуществляется плоскопараллельное смещение одного из
Цбвмещаемых кадров относительно другого, характеризуемое некото-
значениями параметров хс, ус, после чего эти кадры накладывают-
ЖЯ друг на друга и подсчитывается число пар совпадающих отметок.
Жо взаимное положение кадров, для которого количество таких пар
•^Максимально, принимается соответствующим действительности.
i|§f При больших взаимных сдвигах кадров /Си и /Сц+1 возникает необ-
;Щ[рдимость в пропорциональном увеличении апертуры 2/г X 2k. След-
Ц^твие этого — резкое возрастание уровня помех и снижение точности
|||Этработки сдвига по A.21), если такая отработка вообще может иметь
|||iecTo. В связи с этим представляет интерес предварительное грубое
жовмещение кадров, базирующихся на использовании их корреляци-
ррйной свертки
м.
A.25)
б Ц*-*. Uf-y.) =
0 в остальных случаях.
30
-]ч Поиск максимума корреляционной свертки. Прямое использование
f 0.25) для оценки параметров взаимного сдвига кадров /Сц и /Сц+1
¦ ,На первый взгляд представляется невозможным, поскольку множества
'лЭначений хс, ус континуальны. Однако точечный характер идентифи-
идентифицируемых кадров позволяет преодолеть эту трудность. Действительно,
|лйредставляющие интерес значения К. (хс, ус), отличные от нуля, нахо-
Л Дятся без сколько-нибудь существенных операционных затрат, так как
j| Множества отметок кадров /("^ и /Сц+1 конечны. Для определения значе-
^ ний К (хс> Ус) достаточно найти по A.26) значения хс, ус для каждой па-
4 ры отметок (i, j), обращающие б (coW — хс, со(^) — ус в единицу,
ч Н положить значение свертки К (хс, ус) в каждой такой точке (хс, ус)
равным числу пар (i, j) отметок, соответствующих^упомянутой точке.
31
Затруднение вызывает также нахождение среди полученных значе-
значений К (хс, Ус) максимального (несмотря на конечность их числа), так
как из-за погрешностей дискретизации координат отметок кадров Кц и
Ки.+1> остаточных нелинейных искажений в кадре Кц, приближенности
формул х та х — хс, у та у — ус и других факторов максимум К(хс, ус)
«раздроблен» на конечное множество ненулевых значений этой сверт-
свертки, лежащих в плоскости корреляции осХсУс в г82-окрестности друг от
друга.
Одним из решений данной задачи является, например, дискретиза-
дискретизация плоскости ОсХсус с теми же параметрами, что и поля зрения датчи-
датчика, и ее просмотр апертурой размером rsi X rs2 (см. § 1.6), причем при
каждом положении последней значения свертки К (хс, Ус), отвечаю-
отвечающие ее элементам, суммируются (имеет место генерализация данных).
Координаты центра апертуры в ее положении, соответствующем мак-
максимуму формируемых сумм, характеризуют взаимный сдвиг кадров.
Метод «редкой сетки». Решение задачи определения максимального
значения К (хе, уе) по этому методу заключается в следующем. Область
плоскости осХсУс, ограниченная неравенствами \хе\ ^ атах» |#с|^атах
(где атах — максимально возможное значение \хс\, \ус\), разбивается
иа одинаковые квадраты со сторонами, параллельными осям_ осхс,
Осус. Далее определяются значения свертки кадров вида К (Хс,
Yс) = Б Б К (хс + 1ХС, ус+ IYC), где / > 1 — сторона каждого
из упомянутых
max
квадратов в элементах дискретизации; Хс, Yс =
^.—(«max^—1). •••> — !, 0,1, ..., amajl— 1—номера квадратов
В
m() , ,, , maj р др
разбиения. В соответствие квадратам ставятся счетчики, содержимое
каждого из которых в исходном положении равно нулю, и рассматри-
рассматриваются все возможные пары (г, /) отметок кадров Кц и Кц+i- Если неко-
некоторая пара (t, /) дает значения хс, ус, обращающивчфункцию б (с4р—
— Хс, coff-* — ус) в единицу и отвечающие некоторому квадрату, то
к содержимому соответствующего ему счетчика добавляется единица.
В результате счетчиками будут зарегистрированы значения свертки
К (Хс, Yc). Остается лишь выбрать среди них максимальное.
Такому решению задачи свойственны два недостатка: во-первых,
точность определения параметров взаимного сдвига кадров не превы-
превышает величины 1/2; во-вторых, г,2-окрестность плоскости осХсУс может
принадлежать частично двум (или более) квадратам и максимум К (Хс,
Yc) может быть выражен слабо или не выражен вообще. Для устране-
устранения первого недостатка целесообразна либо дальнейшая отработка
сдвига с помощью, например, квазикорреляционного итерационного
алгоритма, либо осреднение значений хс, ус, отвечающих выбранному
квадрату. Для устранения же второго недостатка можно рекомендо-
рекомендовать нанесение на плоскость осхсус не одной, а нескольких сеток квад-
квадратов со сдвигами друг относительно друга вдоль осей осхс и осус, при-
причем для повышения быстродействия алгоритма заполнение счетчиков,
соответствующих этим сеткам, целесообразно организовать параллель-
параллельно. Выбор же наиболее «тяжелого» квадрата следует произвести для
32
м^.. сетки индивидуально. Из отобранных квадратов далее надо вы-
JpaTb вновь самый «тяжелый» и по его местоположению на плоскости
корреляции оценить параметры сдвига кадров.
|: Оценка надежностных и точностных ха-
характеристик метода «редкой сетки». Рассмотрим
определение вероятности безошибочной работы и расчет точности кор-
корреляционного алгоритма совмещения точечных изображений. В соот-
соответствии с вышеизложенным одна из модификаций алгоритма может
быть построена с использованием свертки кадров вида К (Хс, У с) —
1
>= Б*" зГ'б [Ent Df//) l — Xc, Ent Df}/0 l — Yc], где символ Ent (x)
даначает вычисление целой части х.
; Из.этого выражения видно, что каждому значению К (Хс, Yс)
(где Хс — lxc, Y = 1ус — дискретные значения координат узлов ред-
редькой сетки, нанесенной на плоскость корреляции) ставится в соответ-
соответствие сумма значений свертки К (хс, Ус) A-25) в пределах соответст-
соответствующего квадрата размером 1x1.
Как отмечалось выше, для нахождения максимума К (Хс, Yc)
необходимо выявить наиболее «тяжелый» квадрат плоскости корреля-
корреляции. При этом приближенные значения хс, ус параметров сдвига хе,
уа сдвига кадров определяются по формулам
м
B)
щ
2
i=i
М
CD
2 Ус\
м1
A.27)
;где МA) — число одноименных пар отметок в кадрах К у. и K^+i,
|,Мк2>—число шумовых отметок плоскости корреляции, попавших в
| выделенный квадрат; хс%, ус\ — координаты шумовых отметок.
Случайная величина М^ распределена по закону Пуассона
IP (М<х> < т) = А,™<1) е-хмA)!т\ (кмш — плотность одноименных отме-
1'ток в кадрах; т—некоторое значение случайной величины МA>). Чис-
э шумовых отметок, попадающих в произвольный квадрат области
^плоскости корреляции, задаваемой условиями |лгс| ^ атах, \ус\ ^ «тах>
^определяется числом отметок в таких же по размерам квадратах изоб-
р ражений кадра Ky.+i, наложенных друг на друга. Здесь имеется в виду,
что структура К (хс, Ус) может быть получена наложением друг на дру-
друга Мц изображений кадра /Сц+1, повернутых на 180° (по часовой стрел-
ке) и сдвинутых относительно начала координат на величины xt, y}
(i = 1, 2,..., М^). Другими словами, с достаточной для практики точ-
точностью можно считать, что случайная величина М?2) распределена по
+
B>
X
)
К (X
среднее число помех в кадрах Кц и
^закону Пуассона с параметром
а,
),)/NftP, где A,MB>, ЯмB)
— размеры кадров Кц и Кц+i в элементах разложе-
разложе2 amax)-
33
ния
p+i
— N
2 Зак. 1053
Расчет вероятности Рпр правильной работы алгоритма сводится к
определению вероятности такого события, при котором число отметок
Mz-l — МA) + М**\ попавших в выделенный квадрат, превосходит
максимальное число шумовых отметок Мк*тах, попавших в любой
из оставшихся квадратов плоскости корреляции, т. е. Рир — Р Шы >
> Af^U), AfiM,,, = max {ЛГИ1, М&\ .... Afitf }, где п — число квад-
п
ратов области плоскости корреляции размером 2атах X 2ятах, ис-
исключая выбранный.
Пренебрегая корреляционной связью между случайными значения-
значениями числа сигнальных МAУ> и шумовых Mi2) отметок в выделенном квад-
квадрате, найдем, что величина Мы распределена по закону Пуассона
Xй
с параметром XSl = Im1d + А,мш, т. е. Р (MSl = и) = -^- е"*21.
Функция же распределения случайной величины УИкгтах будет равна
GK^% (v) = Р (Л^зх < v) = Р (М№ < v, Мй» < v, ..., М&} )
п
— П р (MCKV < v) = П GMB) (о) = G«^*> (v), где ми»- некоторые
значения случайных величин Мы и MkV-
Пусть случайная величина Л1& приняла значение, равное и =
= 1,2, .... Условная вероятность того, что Л4катах < -M2l, при этой ги-
гипотезе равна Р l(Msi > Mmax) I (M^\ — и)] = (fMw (и). Тогда по
формуле полной вероятности искомая вероятность Р (Мы >./Иктах) =
= и)]. Окончательно выра-
= 2 Р (Мы = и) Р
жение, оценивающее вероятность правильной работы алгоритма сов-
совмещения кадров, примет вид
и=1
и!
Полученная формула позволяет построить номограммы для выбора ве-
величины стороны квадрата / в зависимости от заданных значений Рпр,
V" и ^а>-
Расчет точности совмещения кадров с помощью рассматриваемого
алгоритма выполним лишь для одного параметра сдвига, например
хс. Для другого параметра этот расчет производится аналогично.
На основании A.27) погрешность определения параметра сдвига
л4г)
определяется как Ахс да хс — хс — B (х& — хЛ\1М-ц- Предположим,
5=1
что величины Л1A> и М^ независимы. Если считать поле шумовых
отметок в области размером 2ат&х х 2атах пуассоновским, то величи-
величина х& распределена в пределах любого квадрата этой области по зако-"
ну равной плотности, т. е. g (xci) =» III, —1/2 <хс% < 1/2.
При хе = const математическое ожидание погрешности в отработке
сдвига составит М {Ах(} = — хсКма)/Х^, т. е. при ^„(i)> Я,м(8> мате-
34
[ТИЧеСкбё бмЩание М {Ахс} « 0. Дисперсия же этой nbrpeniHOcf и
D (АхЛ =я
D
exP {-
; Рх= S
X
X
exp
математические ожидания случайных величин М^}1(М12) -f
M^L'(Mii")V(MlKt} + Мп)J соответственно.-
Ш • Другими словами, с ростом Хма> по отношению к XMai дисперсия
'Шр{Ахс} уменьшается, а при увеличении /, что желательно для ускоре-
Щ|?яия работы алгоритма, — возрастает.
Jf|X Полученные выше выражения могут быть положены в основу мате-
Щ|матической модели процесса корреляционного совмещения изо браже-
1.6. ЗОННО-КОМБИНАТОРНЫЙ МЕТОД ИДЕНТИФИКАЦИИ ТОЧЕЧНЫХ
ИЗОБРАЖЕНИЙ
, Зонно-комбинаторный метод идентификации кадров базируется
"на постоянстве геометрии точечных узоров. Для опознавания идентич-
Гных отметок в кадрах /Сц и /Сц+i возможно применение таких типов
^характеристик, как расстояние между отметками, периметры геомет-
геометрических фигур, построенных на их основе, углы между прямыми,
^проходящими через упомянутые отметки, и т. д. Ограничимся исполь-
использованием характеристик первого типа, так как их подсчет на основе
^координатных описаний кадров легко выполним; через них в конечном
J счете выражаются и все остальные инварианты, перечисленные выше;
^масштабные соотношения в кадрах Кц и Кц+i практически совпадают.
fv Зонно-комбинаторный метод идентификации точечных изображений
^.заключается в фиксации в одном из сопоставляемых кадров (например,
в кадре Kft+i) n-угольника, построенного на некоторых п отметках, и
поиске в другом кадре методом перебора фигуры, идентичной этому п-
к угольнику по геометрии, характеризуемой расстояниями между вер-
вершинами. Центральные вопросы, подлежащие здесь исследованию, —
вопросы, связанные с уменьшением числа вариантов перебора, поряд-
: ком выбора п опорных точек в кадре /Сц+i, определением .величины п,
обеспечивающей достаточно высокую вероятность того, что из отметок
2* 35
кадра Кц не может быть^образован более чем бДиИ искомый п-уголь*
ник, и др.
Зафиксируем в кадре Кц+1 некоторые опорные точки (xj, yj) (j =
= 1,2, ..., п). Поставим в соответствие каждой точке (Xj, yj) зону 5; кад-
ра Кц с центром (х} = Xj, у, = у}). Положим, что зона Sj имеет фор-
форму окружности с радиусом rs или форму квадрата со сторонами 2rs,
ориентированными вдоль границ кадра К», причем rs = 2 rs., где
rst — модуль максимально возможного смещения объекта в поле зре-
зрения системы наблюдения, вызываемого движением последней, в эле-
элементах разложения; rs, — модуль максимально возможного отклоне-
отклонения расстояния между отметками от двух произвольных объектов кад-
кадра К и от расстояния между отметками от тех же самых объектов в кад-
кадре Кц+i при всех допустимых положениях этих кадров друг относитель-
тельно друга в том же измерении (упомянутое отклонение вызывается
в основном непостоянством коэффициента нелинейных искажений теле-
телевизионного канала по кадру, погрешностями дискретизации координат
отметок и другими причинами).
Рассмотрим основные этапы зонно-комбинаторного алгоритма.
Этап 1. На этом этапе алгоритма анализируется содержимое зон
5Х и 52. Анализ сводится к вычислению величин
tfl2v! = l'?2-'hvs|-si2. A-28)
где r?2 = (#i — х2J + (Ух — г/2J — квадрат расстояния между
центрами зон Sj и 52; rJaV| = (*iv — x2lJ + (ylv — y2if — квадрат
расстояния между отметками v и | соответственно зон 5Х и 52; е12 =
= {Гц + rszJ — rh = rs, Br12 + rs,) — порог сравнения г?2 и
r?2v|; xiv, y\y—координаты v-й отметки зоны 5Х в системе коорди-
координат о х у (у = 1,2,..., пг); х2%, y2i—координаты g-й отметки зоны
S2 в той же системе (? = 1,2,..., п2); nlt п2 — число отметок в зонах
51( 52 соответственно.
Те пары отметок [(xlv, ylv), (x2i, г/2?)], для которых R12V\ <1 0, пре-
претендуют на отождествление со стороной опорного n-угольника, огра-
, ничейной точками (xlt уг), (х2, у2). Пусть число таких пар равно пг.
Отметки зон Sx и S2, не входящие ни в одну из этих пар, исключаются
из дальнейшего рассмотрения. Число переборов отрезков на этом этапе
равно пгпг.
Этап 2. На данном этапе алгоритма анализируется содержимое
зон Slt S2 и' S3. Для этого вычисляются величины
= l ^13 —
'23
= 1,2, ... , ni; |x = l,2, ... ,n3),
A.29)
где n3 — число отметок в зоне Ss; остальные обозначения имеют тот
же смысл, что и в A.28).
рПредположим, что число троек отметок [(Xiv.^iv). {x2^ у2ц),
г)], удовлетворяющих соотношениям A.29) одновременно, равно
Щ. Исключим из рассмотрения отметки зон Slt S2, S3, не входящие ни
|1ОДну из них. Оставшиеся отметки в зонах Slt S2 и S3 претендуют на
тветствие точкам (хъ уг), (х2, у2) и (х3, у3) в порядке упоминания.
1сло переборов треугольников на этом этапе равно пхп3.
:,; Аналогично выполняются и последующие этапы алгоритма. Описы-
|емая процедура продолжается до такого этапа /, на котором фикси-
уется tii — 1 (где tii — число (/+ 1)-угольников, построенных на
зе содержимого зон Slt S2,..., St+1 и совпадающих с rs -точностью с
гурой, образованной опорными точками (xj, yj) (/= 1, 2,..., / + 1))-
результате становятся известными координаты точек (х}, У}) (/ =
1, 2,..., I + 1) кадра Кц, отвечающие этим опорным точкам, что по-
вюляет рассчитать параметры взаимного сдвига кадров Кц и /Сц+i и
Йкончить их идентификацию. Общее число переборов многоугольни-
¦г-i _
Ьв при этом составит п1п2 + 2 Щ tit+2. После п — 1 этапов можно
Полностью опознать опорный узор.
Опорные точки в кадре /Сц+i не должны выбираться на его перифе-
[и, т. е. необходимо, чтобы \Zj\ < N12 — rs (где z = х, у; } = 1, 2,
, п). Желательно также попарное непересечение зон в кадре Кц,
[я чего расстояния между вершинами узора должны превышать 2rs.
В процессе опознавания узора возможно появление такой ситуации,
огда ни одна из точек некоторой зоны Sj не может быть поставлена в
„—(етствие вершине (Xj, yj), отвечающей ей (упомянутая вершина яв-
рется помехой или величина rs выбрана неудачно). Тогда следует ис-
очить из рассмотрения отметку (xj, yj) и, следовательно', зону S^
||ли скорректировать параметр rs. Наконец, по окончании (п — 1)-го
Stlara опорному узору может отвечать в кадре /Сц несколько п-уголь-
|иков. В этом случае целесообразно увеличить число опорных точек п
' ки заменить исходный узор частично или полностью.
Описанному алгоритму следует отдать предпочтение при его сопо-
тавлении с алгоритмами, базирующимися на прямом переборе, по
ребуемым для их реализации вычислительным затратам.
Сравнительная оценка операционных затрат. Действительно, в слу-
случае применения зонно-комбинаторного алгоритма число операций
' л—1
равнения видаA.28) составит V3K— пгп2 + 2 int-i "г+i. при прямом
J—2
._ переборе число VUn этих операций значительно больше, даже если
иеть в виду более экономичные алгоритмы, чем алгоритм, при кото-
ом n-угольник, идентичный опорному узору, отыскивается в кадре
i среди М ,j\!(M ц — п)! различных n-угольников. Один из таких ал-
л—1
|оритмов дает Упп = (М„,— 1)М^/2 + 2 »«?—i (M^ — i) (где п\
2
»=2
\ —
37
" число (i — 1)-угольников, найденных в кадре Кц на (i — 1)-м
Шаге). Здесь член (Мц — 1) Мп /2 соответствует числу отрезков, сое-
соединяющих отметки в кадре Кц и совпадающих с rs -точностью с пер-
первой стороной опорного узора.
Математические ожидания случайных величин щ-г и n(*-i близки
к единице, а их дисперсии малы. Средние значения числа отметок в зо-
зонах nt (i = 1, 2,..., п) одинаковы. Если
к тому же положить, что на каждом г-м
шаге сопоставляемых алгоритмов для
целей сравнения используются в каче-
качестве эталонных лишь расстояния rlt и
rt-lt t, то средние значения величин V3K
х и УПп могут быть найдены из соотноше-
соотношений
•1
\3
N*
,—')
+ 2А, (и—2) —
—п(и—
где Х3 и А,п — число отметок от объек-
объектов и помех в каждом из идентифици-
идентифицируемых изображений; N — размер сто-
стороны кадра в элементах.
Обычно значения V3K и Упп таковы,
что V3K < Vnn.
Оценка вероятности правильной ра-
работы зонно-комбинированного алгорит-
алгоритма. Оценим теперь число опорных то-
точек if; обеспечивающее достаточно низ-
низкую вероятность Рл появления в кадре
К и хотя бы одного ложного и-угольни-
ка, с rs -точностью совпадающего с опор-
опорным узором. Точная оценка вероятности
Рис. 1.13. Идентификация то- р затруднительна. Ее приближенная
чечных изображений с помо- ппрнкя бячи™ютттяягя ня ппрттпгшпжр-
щью зонно-комбинаторного ал- °Ценка> базирующаяся на предположе-
предположении, что координаты отметки кадра
есть независимые случайные величины,
равномерно распределенные в интервале
[0,1] (за единицу измерения выбрана
длина стороны кадра), т. е. отметки
образуют случайное пуассоновское поле точек с постоянной плот-
плотностью А,, вычисляется по формуле
горитма:
а — взаимное расположение кад-
кадров К и К , .; б — размещение
зон S. в совмещенном кадре; в —
обобщенная зона S (в укрупнен-
укрупненном масштабе)
1- ехр {-
rs\/2
(»-«
A.30)
38
Вероятность Рл зависит от числа вершин п опорного узора, плот-
рсти X отметок в кадре Кц, максимально допустимой величины взаим-
ого сдвига кадров и точности сопоставления расстояний г3г.
На практике для получения достаточно высокой вероятности пра-
[льного опознавания в кадре К» опорного узора необходимо выпол-
&ие 2—3 шагов алгоритма, т. е. следует выбрать п = З-г-4. При этом
фоятность Рл — весьма малая величина, т. е. математические ожида-
:я «i_i действительно близки к единице, а их дисперсии малы.
Модификация зонно-комбинаторного метода. В случае когда плот-
[ость отметок от объектов и помех в кадре невысока, а также при не-
льших взаимных сдвигах идентифицируемых кадров представляет
[терес следующая модификация зонно-комбинаторного метода.
Построим обобщенную зону S (рис. 1.13, в), представляющую собой
Совмещение зон Sv S2,..., Sn вместе с их содержимым (рис. 1.13, а, б).
^Поскольку имеет место лишь плоскопараллельный сдвиг кадров
Щи и Кц+ъ отметки кадра Кц, соответствующие вершинам опорного
?узора, окажутся в зоне S в rs -окрестности друг от друга (на рис.1.13, в
:Они совпадают, поскольку влияние нелинейных искажений и других
факторов, определяющих значение rs , не учитывается).
> Таким образом, нахождение параметров хс, ус взаимного смещения
кадров можно свести к поиску точки обобщенной зоны, г5г-окрест-
; ность которой содержит максимальное число отметок (математическое
ожидание этого числа равно п). Вероятность того, что та же ситуация
может иметь место в rs -окрестности ложной точки зоны S, мала при
введенных выше условиях, особенно при п > 3 -4- 4. На практике
поиск представляющей интерес точки может быть выполнен, напри-
например, следующим образом. Реально имеет место дискретизация плоскости
кадра и, следовательно, зоны S. «Просматривая» последнюю аперту-
апертурой размером rSi x rs, нетрудно определить такое положение этой
апертуры, при котором она накрывает наибольшее число отметок обоб-
обобщенной зоны. Усреднение их координат, взятых в системе, связанной с
центром зоны S, даст искомые значения хс, ус. Максимальное число ша-
шагов поиска ограничено при квадратной зоне S величиной г|2-
Описанный алгоритм можно интерпретировать также и как модифи-
модификацию рассмотренного выше квазикорреляционного итерационного
алгоритма.
Заключение
Сравним рассмотренные методы идентификации точечных изображений.
Метод трасс наиболее эффективен при невысоком уровне помех, небольшом
взаимном сдвиге идентифицируемых изображений и малых нелинейных искаже-
искажениях. В противном случае он существенно проигрывает в отношении затрат ма-
машинного времени и памяти, а также полноты и надежности идентификации как
зонно-комбинаторному, так и корреляционным методам. Наиболее благоприят-
благоприятные условия его использования имеют место обычно в первой постановке задачи
идентификации точечных изображений, когда последние регистрируются одним
и тем же инструментом наблюдения точечной картины в процессе перемещения
последнего в пространстве по некоторой траектории, причем моменты регистра-
39
ции «соседних» по времени изображений могут быть выбраны сколь угодно близ-
близкими.
Зонно-комбинаторный метод в отличие от метода трасс сохраняет высокую
эффективность и при значительных взаимных сдвигах кадров. Однако его по-
помехозащищенность также недостаточно высокая. Наличие среди отметок опорного
узора помех резко увеличивает операционные затраты, снижает надежность ме-
метода и ведет к потере точности совмещения изображений.
Наибольшую эффективность при значительных помехах и взаимных сдвигах
кадров обеспечивают корреляционные методы идентификации. Однако если упо-
упомянутые условия обеспечены, то эти методы проигрывают по быстродействию ме-
методу трасс и особенно зонно-комбинаторному методу.
Следует также отметить, что идентификация отметок при зонно-комбина-
торном4 методе выполняется лишь частично, а после использования корреляцио-
ных методов не имеет места вообще. Поэтому по окончании работы каждого из
алгоритмов, базирующихся на этих методах, реализуется совмещение идентифи-
идентифицируемых кадров, в результате чего одноименные отметки оказываются в непо-
непосредственной близости друг от друга, а затем осуществляется идентификация
упомянутых отметок. Последняя может быть выполнена практически на основе
метода трасс.
ГЛАВА i
МЕТОДЫ ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКИ
ПЛОСКИХ ИЗОБРАЖЕНИЙ ПРОСТРАНСТВЕННЫХ
ОБЪЕКТОВ
§ 2.1. ОСОБЕННОСТИ ЦИФРОВОЙ ОБРАБОТКИ ПРОЕКЦИЙ
ПРОСТРАНСТВЕННЫХ ОБЪЕКТОВ
Задача автоматического распознавания (отнесения к одному из за-
;ранее определенных классов) пространственного объекта по его одной
j'jm нескольким проекциям (изображениям), полученным с помощью
^некоторой системы наблюдения, может иметь место при изучении фау-
фаутны океанов на больших глубинах, функционировании роботов-манипу-
&{ляторов, дешифрировании аэрокосмических снимков и т. п. Следует
й" различать две ее постановки.
В первой постановке задачи автоматического распознавания под
|>,классом понимается то или иное множество различных объектов. В этом
Гслучае визуальной информацией об объектах не ограничиваются (да-
^ае если они имеют специфические геометрические формы), поскольку
i объединение в тот или иной класс различных объектов может иногда
fi носить весьма абстрактный характер. Все это позволяет отнести зада-
|'чу автоматической классификации пространственных объектов по их
^плоским изображениям к сложным задачам комплексного типа. Одна-
if'Ko будем предполагать, что упомянутая абстракция визуально реали-
реализуется в виде наличия или отсутствия у объектов, относящихся к од-
' ному и тому же классу, специфических деталей, что, безусловно, также
' часто встречается на практике. В связи с этим необходим анализ про-
екции объекта в процессе распознавания, т. е. выделение всех ее одно-
связных контуров, а также объединение последних или их частей с
-целью реконструкции (синтеза) проекций специфических деталей,
; идентификация которых предшествует классификации. Реализация
^подобного подхода к распознаванию пространственных объектов наи-
& более целесообразна при структурно-лингвистическом методе распоз-
иавания образов. Полезно здесь также и использование результатов
стереофотограмметрии.
Во второй постановке задачи автоматического распознавания под
классом понимается множество всех возможных проекций объекта,
соответствующего этому классу. В этом случае задача распознавания
: заключается в отождествлении наблюдаемого объекта с одним из за-
заранее известных. Если предположить, что объекты имеют различные
геометрические формы, то для решения поставленной задачи достаточно
только зрительной информации о них. Такая постановка имеет само-
самостоятельное практическое значение.
Будем называть задачу распознавания пространственных объектов
в первой постановке задачей классификации, а во второй постановке—
41
Рис. 2.1. Схема автомата
идентификации:
1 — наблюдаемый объект; 2 —
воспринимающее устройство;
3 — блок предварительной об-
обработки проекции; 4 — блок
измерения признаков; 5 — блок
принятия решения; 6 — ре-
результат идентификации; 7 —
правильная идентификация;
8 — обучающее устройство
Задачей идентификации. Ниже в основнбм рассматривается заДа«Ш
идентификации. Поэтому рассмотрим относящиеся к ней вопросы не-
несколько подробнее.
Вероятностный подход к решению задачи идентификации. Полнота
и точность восприятия объекта определяются способом наблюдения и
разрешающей способностью средств наблюдения. Однако высококаче-
высококачественное описание проекции объекта не всегда требуется для идентифи-
идентификации. Необходимо лишь выделение такого ограниченного числа неко-
некоторых ее признаков (параметров), при котором обеспечивается заданная
надежность распознавания. В геометрической интерпретации каждой
проекции соответствует точка n-мерного (п— число признаков) выбо-
выборочного пространства, вдоль осей которо-
которого отложены значения признаков, отвеча-
отвечающие этой проекции. Это пространство на-
назовем пространством признаков.
В представляющих практический инте-
интерес случаях классы по выбранным призна-
признакам пересекаются. В этой ситуации детер-
детерминированные алгоритмы идентификации
приводя? к необходимости частых «пере-
«переспросов» (повторных наблюдений), что не
всегда возможно и желательно. В то же
время многомерные распределения вероят-
вероятностей, соответствующие различным клас-
классам и определенным условиям наблюдения,
могут в значительной степени отличаться друг от друга. В этом случае
вероятностные методы распознавания дают больший эффект. Одновре-
Одновременно возникают возможности учета стоимостей ошибок разного рода,
априорных вероятностей классов и т. п. Поэтому основное внимание
уделим в основном вероятностным алгоритмам идентификации.
Схема автомата идентификации объектов приведена на рис. 2.1.
Обучение в случае вероятностной процедуры распознавания обычно
сводится к восстановлению плотностей распределения классов. Функ-
Функции блока 8 выполняет в основном человек. Ключ в режиме обучения
замкнут; в режиме нормальной эксплуатации — разомкнут.
Таким образом, исследование задачи идентификации объектов сво-
сводится к анализу вопросов, связанных с вводом проекции объекта в ав-
автомат идентификации, ее предварительной обработкой (фильтрация по-
помех, выделение контуров, нормализация проекции), выбором эффектив-
эффективной системы признаков, восстановлением плотностей распределения
классов, поиском оптимальных в некотором смысле алгоритмов при-
принятия решения и разработкой рекомендаций по выбору основных пара-
параметров распознающего автомата. При этом надо учитывать следующее:
а) необходимость идентификации трехмерных тел, наблюдаемых в
случайных ракурсах (методы распознавания таких объектов, за исклю-
исключением некоторых частных случаев, разработаны недостаточно);
б) многоальтернативность исходной ситуации, что приводит к не-
необходимости использования для идентификации большого числа при-
признаков, а также усложняет процедуру принятия решения;
42
в) сложность, а иногда и большая стоимость натурных эксперимен-
рв по распознаванию пространственных объектов, что требует выпол-
ения большого объема работ по изготовлению макетов и моделирова-
процесса их идентификации на ЭВМ.
-2.2. ФИЛЬТРАЦИЯ ПЛОСКИХ ИЗОБРАЖЕНИИ ПРОСТРАНСТВЕННЫХ
ОБЪЕКТОВ
Необходимость учета влияния помех связана с возможностью по-
поения в поле зрения системы наблюдения посторонних объектов (на-
(например, объектов точечного характера) и наличием шумов восприни-
[ающего устройства. Всякая методика учета помех должна быть адек-
[тна реальной ситуации, принятой концепции распознавания, исполь-
емым для этого признакам и т. п. Например, процедура оценки влия-
я помех посредством введения некоторого случайного разброса зна-
яий признаков* в ряде случаев ведет к появлению дополнительных по-
1ешностей, трудно поддающихся учету. Поэтому целесообразен учет
юмех уже на уровне абсолютного описания изображений. При этом
'процесс введения шумов при моделировании алгоритмов фильтрации
'(необходимость такого моделирования связана с трудностью постановки
ветствующих натурных экспериментов) может заключаться в сле-
щем: анализируется каждый элемент матрицы изображения и с
аранее задаваемой вероятностью рП его состояние изменяется на про-
противоположное. Такой метод введения помех удобен для реализации на
.ЭВМ и позволяет описать уровень шумов только одним параметром
'(величиной рп, выраженной в процентах). Примеры изображений, ис-
искаженных помехами, приведены на рис. 2.2. Качество же фильтрации
легко определяется коэффициентом р = МПШФ (где М п —число эле-
* ментов в кадре, искаженном помехами, не совпадающих с соответствую-
з ^щими элементами эталонного (исходного) изображения; М$ — число
•,элементов отфильтрованного изображения, не совпадающих с соответ-
соответствующими элементами эталонного).
Анизотропная фильтрация. Наибольшее применение для простран-
ственной фильтрации изображений получила анизотропная фильтра-
Дискретная интерпретация последнего приводит к соотношению
Г NJ2
аи=А 2
[_V=-AT?
/2 l=-Na/2
B.1)
;' где пц — элемент матрицы отфильтрованного изображения, находя-
' Щийся на пересечении г-й строки и /-го столбца; a/+v, /+i — элемент
Г Матрицы изображения, искаженного помехами, расположенный на
пересечении (i + v)-fl строки и (/ + |)-го столбца; w^ — элемент
^ апертуры, представляющей собой матрицу размером Na x Na (Ыа,
'¦' как правило, является нечетным числом), находящийся на пересече-
пересечении v-й строки и 1-го столбца; т] — порог фильтрации, являющийся
- .. ». , * / ч Г 0, если х < 0;
Константой; Л — пороговая функция, равная Л (х) = •! j ^ .
43
Для полной фильтрации матрицу изображения следует симметрично
дополнить элементами, равными нулю, так чтобы результирующий раз-
размер ее оказался равным (N + Na) X (N + Na) элементов (N — раз-
размер изображения в элементах). При wv$ = const имеет место алгоритм
усреднения (см. [2]). Кроме того, если фильтруется многоградационное
Рп=30% Р„ = 5% Эталоны
№
frrj
1
ш
It1
JWU
1
#
JhHAI 1П СИ ЩМ.
дУчМ/гу иТДГ
*" 1 МГЦ Hmww м И П 1
J т Д rffi- НдМ г tpfttW
" 11 * ЯВШЯ rU 1 'Пип
шшшж
in
¦ffl
j
Ш
F
<b ':¦¦
l::iSi
ШЛИ
i1-- Si
'i! S:
5"' та
~-\ Bs
" т~ягВг^внаг^ i
Ti ^? i ^ н1в Е »И "
4IH
ill!
h
11
jiff
:: Wl
•GBR
P
1
I
L
1
I
1
1
1
Щ
Й :
Ttj -i
Ш
ml
I
Ш
Ш
Рис. 2.2. Изображения, искаженные помехами
изображение, то следует ввести множество порогов (мощность множест-
множества равна числу градаций яркости) и присваивать элементу пц значение,
соответствующее максимальному порогу, который превышает сумма в
правой части уравнения B.1).
Анизотропная фильтрация ослабляет влияние отдельных пятен,
не относящихся к силуэту объекта, и пробелов в силуэте. Показано,
что она обеспечивает эффективную фильтрацию изображений, искажен-
искаженных аддитивным нормальным шумом. Обнаружена также похожая про-
процедура фильтрации в зрительной системе некоторых высших живот-
животных
44
Качество фильтрации возрастает с уве- Таблица 2.1
чением размера изображения Na. Однако '
этом пропорционально N1 растет и
||емя, затрачиваемое на нее. Обычно раз-
* "ер апертуры выбирается равным 5x5
лентов (табл. 2.1), что обеспечивает хо-
иее качество и завершение процесса
яльтрации изображений за приемлемое
ремя.
Элементы a>V| апертуры определяют-
определяются обычно исходя из нормального дву-
ерного некоррелированного кругового распределения, максимум
эрого*1 совпадает с ее центром. Такое распределение можно
Охарактеризовать только средним квадратичным отклонением ста.
^"распределение должным образом1 усекается и аппроксимирует-
Na/2 NJ2
2 2
Уз
w3
Ц
Wz
W2
W2
Ц
ws
w2
ц
v3
Ц
w2
w2
w3
w3
&я так, чтобы веса были нормированы, т. е.
wvg = 1. Чем
!йеньше ста, тем больший вес придается центральному элементу
|шертуры. Так, при ста ^ 0,3 вес центрального элемента wx = 1, веса
периферийных элементов w2 = wa = 0 и эффект фильтрации отсут-
|ггвует/При ста -*¦ оо и нормировании весов имеет место алгоритм ус-
даения, а при отсутствии нормирования — полное стирание изобра-
Цкения. Апертуры с ста < 1,0 называются узкими апертурами, а апер-
" ры с ста ^ 1,0 — широкими апертурами. Обычно используются набо-
||>ы Wt (i = 1, 2, ..., 6) весов, каждому из которых отвечают три раз-
различных значения wj (/=1, 2, 3) этих весов, данные в табл. 2.2. Сечения
Соответствующих упомянутым наборам распределений приведены на
:]РИС. 2.3.
Таблица 2.2
ffe.
ж
Wfr- 1
Wf'" W
fe W 2
it,' Wb
Шй- —•¦¦
°a
0,50
0,70
1,00
1,25
2,00
2,50
0,440
0,270
0,150
0,100
0,060
0,060
0,070
0,080
0,060
0,060
0,045
0,060
w,
0,000
0,005
0,020
0,020
0,030
0,025
Теоретический анализ анизотропной фильтрации для определения
оптимального значения порога фильтрации ц можно выполнить только
для изображений частного вида. Из общих соображений ясно, что при
аддитивном нормальном шуме значение г\ должно находиться вблизи.
45-
0,5, причем при увеличении ц наблюдается утоньшение проекции, а
при уменьшении ц — ее утолщение. Обычно используются следующие
значения: % = 0,3; ti2 = 0,4; г\3 = 0,5; т]4 = 0,6.
.Некоторые экспериментальные результа-
результаты анизотропной фильтрации. Ниже описываются
эксперименты, связанные с анизотропной фильтрацией плоских
изображений пространственных a) f о.е.
объектов, показанных на рис. 2.2.
Результаты однократной фильтра-
фильтрации изображений приведены на
рис. 2.4 и 2.5. Любая зависимость
коэффициента качества фильтрации
р = / (рп) на первом из них постро-
построена по результатам обработки 50
вариантов нанесения помех на соот-
соответствующее ей изображение объек-
>
о w
в)Р,о.е.
В
20
10 ЧОРп,%
Г
..и v п„ 0 10 20 30 МР„
Рис. 2.3. Сечения нормальных распреде- Рис. 2.4. Графики эксперименталь-
лений, соответствующих наборам весов ных результатов плнпт* *
..^шсышпыл распреде-
распределений, соответствующих наборам весов
Wi («=1, 2, ..., 6), приведенные в
табл. 2.1
ных результатов однократной филь-
фильтрации изображений объектов, пока-
показанных на рис. 2.2:
а — в — соответственно для объектов 7—3
тов 1,2 или 3 (см. рис. 2.2) для значения рп, для которого она оценива-
оценивалась. Штриховой линией на рис. 2.4, в показана та же зависимость
для алгоритма усреднения. Во всех случаях здесь и ниже предполагает-
предполагается, что г] = т]3, если это специально не оговаривается. Прирп « 10%
для фильтрации целесообразно использовать набор элементов с веса-
весами W2, а при рп т 25% — набор элементов с весами W? или набор
элементов с весами We.
Полученные результаты свидетельствуют о том, что хуже всего
сглаживаются изображения, имеющие узкие выступающие части. Для
оценки предельных размеров этих частей, при которых все еще будет
иметь место эффективное сглаживание, можно поставить следующий
эксперимент.
На «сетчатке» помещается прямоугольник с горизонтальной или
вертикальной ориентацией (по направлению большей стороны). Изоб-
46
кенйе искажается и сглаживается, Как обычно. При этом програм-
|но предусматривается уменьш^ие высоты (ширины) /п прямоуголь-
1ка при сохранении неизменной Ъсо ширины (высоты), равной 30 эле-
элементам. Для оценки качества фильтрации здесь целесообразно исполь-
г .1,'iJSw
у.-1': лун
; ' --ЙД
¦
¦
¦
S
¦
¦
S
¦
¦
S
в
¦
в
в
¦
¦
¦
S
•g
в
в
¦
¦
в
в
в
п
в
¦
¦
¦
в
¦
¦
8
¦
¦
в
¦
¦
в
¦
¦
8
¦
в
¦
¦
в
в
¦
¦
в
¦
в
в
в
¦
¦
в
я
1
¦
в
-
1
н
L
¦
в
'.l-i
¦¦
:.
¦
¦
¦
в
1
¦
Рп
- Э^ишнСа
- - пйпяЗбвзШвЗ]
.КПП
= 10%
P. jjj ПТиТп""
BiMliHIHlL Pul ~
итпии>мК:
1 1 1
¦---Ш
щ
"Я t
44
1
pi
i
L
SBffl
>r rr
Lit Г "'"
к_Щ Г" " ""¦
¦ШТ-ч
- -43ВВ|?ВД!ИЯ!№ЧьЦ
ff
\--
w
II"'
ее;;
тгг 'fflSi"
i
1
~t~ ~ ПЫШШШДДа
1 Г PttttmW
..аНУ'йЦйй"'
SlLHs йа: s ¦¦•:¦•¦
f ЦП1
tf
Li
1
I
ейЙЦЦ
SSSBSKr
11 IjjTT
Ж
ч- Рис. 2.5. Исходные и отфильтрованные изображения
1зовать другую меру, так как функция р = f (рп) слабо зависит от па-
Цраметра 1П. В качестве этой меры удобно выбрать р' = Мф1Ма (где
l-^Ma — количество единичных элементов эталонного изображения).
f 5 Графики зависимости р' = / (/п) при различных уровнях помех для
.прямоугольников с горизонтальной (сплошные линии) и вертикаль-
: Ной (пунктирные линии) ориентацией приведены на рис. 2.6. При /п ^
^'ц('п—пороговое значение /ш изменяющееся в диапазоне 4—8
элементов для различных апертур) фильтрация эффективна. Зная
47
/ш можно определить требуемое разрешение системы наблюдения, а
при фиксации последнего — максимальное расстояние до объекта иден-
идентификации.
Из рис. 2.5 и 2.6 видно, что анизотропная фильтрация обладает
избирательными свойствами, причем максимум р = / (ра) выражен
наиболее ярко при малых значениях
"' ' оя. При этом узкие апертуры более
эффективны при малом уровне шумов
(до 10—15%), а широкие — при боль-
большом B0—30%).
Процедуру фильтрации следует
предусмотреть и в процессе обучения
системы распознаванию, особенно в
случае применения широких апертур,
так как при сглаживании затрагивает-
затрагивается и сам силуэт изображения. Поэто-
Поэтому необходима автоматическая смена
апертуры в зависимости от интенсив-
интенсивности помех, если требования к разре-
разрешению системы, сформулированные
выше, выдержаны.
Мерой уровня шумов в присутст-
присутствии проекции объекта на «сетчатке»
может служить зависимость Ме1 =
= / (Рп)> представляющая собой коли-
количество единичных элементов «сетчат-
«сетчатки», с каждым из которых рядом по
горизонтали или вертикали находит-
находится только один единичный элемент.
Графические изображения зависимо-
зависимостей Mel = f фи) для объектов /, 2
и 3, усредненные аналогично зависи-
зависимостям, графически представленным
на рис. 2.4, приведены на рис. 2.7.
Величина Ме1 слабо зависит от кон-
конфигурации и размеров проекций (ко-
(коэффициент заполнения для проекций
объектов / и 2, показанных на рис.
2.2, колеблется от 0,25 до 0,43 соот-
соответственно). При ра = 14ч-19% мож-
можно установить пороговое значение
Мл = Ме1 = 60. Следовательно, ес-
Рис. 2.6. Графики зависимости
р'=/(/п) для прямоугольников с
горизонтальной (сплошные линии)
и вертикальной (пунктирные ли-
1Г;ля па-
филырацнн w2, тK и
Мл = Ме1 = 60. Следовательно, ес-
если Ме1 < 60, то целесообразно применять узкую апертуру (напри-
(например, W2), в противном же случае — широкую (например, We).
Оценка уровня ожидаемых помех возможна, конечно, по шумовым
характеристикам условий наблюдения и воспринимающего устройства,
а также в процессе пробного ввода изобразительной информации перед
наблюдением объекта идентификации.
48
|; Рекуррентная фильтрация, Эффективность сглаживания может
повышена и при использовании рекуррентного фильтра. В про-
: фильтрации здесь участвуют не только элементы исходного, но и
ке сглаженного изображения. Выражение B.1) в этом, случае имеет
ид
NJ2 NJ2
2 S
LV=-JVa/2 S iVa/2
flf+v, /+i> если [(v = l,2, ... , ЛГа/2; 1 =
= -ЛГа/2, ... , iVa/2), (v=0;?=0, I NJ2)];
~tf}\ если [(v=-l, -2 -NJ2;l = -NJ2,
... , NJ2), (v=0; \=—\, -2 -2Va/2)].
Г
уМц,0?.
'150
125
too
'¦ 75
SO
25
0
^=
sss?
05ье
Объект 2^
i
5 10 15 20 25 30Р„,%
P, o.e,
6,0
2,0
0
/
X
¦^2;^—
10
20
JO * <tOPn,%
Рис. 2.7. Графики зависимости
Mei=f(pu) для изображений объ-
объектов, показанных на рис. 2.2
Рис. 2.8. Графики эксперимен-
экспериментальных результатов рекуррент-
рекуррентной фильтрации для изображения
объекта 3, показанного на рис. 2.2
Графики экспериментальных результатов рекуррентной фильтра-
•:;дии для силуэта объекта 3 показаны на рис. 2.8. Видно, что рекуррент-
рекуррентный фильтр имеет преимущества только тогда, когда уровень шумов
'йе превышает 15—20%. Другим его достоинством является то, что для
ЦХранения элементов aff матрицы отфильтрованного изображения мо-
ргут использоваться те же ячейки памяти, что и для хранения элемен-
элементов ai+Vj j+^ Кроме того, рекуррентное сглаживание более чувстви-
чувствительно к порогу т).
|'; Иногда хорошие результаты дает двукратная фильтрация, когда
[изображение фильтруется дважды с разными апертурами и, возможно,
порогами.
Таким образом, при интенсивности помех, не превышающей 15—
20%, целесообразно использовать либо анизотропный фильтр с узкой
¦апертурой, либо рекуррентный фильтр с той же апертурой, в противном
а-случае следует применять анизотропный фильтр с широкой аперту-
Lpoft, если же на фильтрацию можно выделить некоторое дополнчтель-
г'ное время, то независимо от ожидаемого уровня шумов лучшее сглажи-
сглаживание обеспечивает фильтр с автоматической регулировкой апертуры.
Примечание. Все рассмотренные выше виды фильтрации, особенно
рекуррентную, можно легко реализовать на базе специализиров энных запоми-
запоминающих устройств.
49
§ 2.3. МИНИМИЗАЦИЯ ВИЗУАЛЬНОЙ ИНФОРМАЦИИ
Один из важных вопросов в проблеме автоматического распознава-
распознавания зрительных образов — вопрос об уменьшении объема вводимой в
ЭВМ исходной информации (числа элементов дискретизации изображе-
изображения объекта). Степень дискретизации пиктурного (многоградацион-
(многоградационного) изображения объектов для нормальной работы распознающих
алгоритмов может составлять сотни тысяч элементов дискретизации.
Такой объем данных даже после их сжатия при кодировании ввести в
оперативную память современных ЭВМ затруднительно. При исполь-
использовании же долговременной памяти машины резко увеличивается вре-
время решения задачи. Поэтому в память машины следует вводить не всю
информацию об объектах, а только ее наиболее информативную часть.
При распознавании зрительных образов чаще всего это координаты и
яркость точек контурных линий изображений объектов. Следователь-
Следовательно, из всех считываемых с изображения точек (например, при обра-
обработке телевизионного, фотографического или другого изображения)
необходимо исключить точки фона, а также точки, находящиеся внут-
внутри односвязных геометрических контуров и имеющие одинаковую яр-
яркость. Такую обработку изображения будем называть минимизацией
исходной информации. Минимизация исходной информации может
быть аппаратурной или алгоритмической.
Примечание. Такое разделение минимизации условно.
Устройства, осуществляющие аппаратурную и алгоритмическую
минимизацию, могут быть построены по различным принципам.
Аппаратурная минимизация. Устройство, реализующее этот спо-
способ минимизации, работает по принципу сравнения яркости точек изо-
изображения, полученного, например, на экране электроннолучевой труб-
трубки, с уровнем видеосигнала от фона изображения. При этом устрой-
устройство позволяет осуществлять ввод информации в ЭВМ в адресном и без-
безадресном режимах. При адресном режиме ввода г'-й элемент дискрети-
дискретизации изображения объекта представляется как точка с координатами
Xt, t/t, Bt; при безадресном режиме ввода г-му элементу дискретизации
присваивается только код яркости Вt (формирование координат точек
изображения при этом ведется программным путем). Покажем, что для
экономии объема памяти ЭВМ в системе считывания и ввода информа-
информации в машину целесообразно иметь оба режима работы.
Действительно, при безадресном режиме ввода число двоичных
разрядов памяти машины для размещения в ней поля наблюдения (на-
(например, телевизионного растра) составляет N6 = qNv, где q = EntX
X(log20+1 — число двоичных разрядов для кодирования яркости эле-
элемента дискретизации (t — число градаций яркости изображения объ-
объекта); Nv — число элементов дискретизации растра (поля наблюдения).
- Соответственно при адресном режиме ввода требуемое число
двоичных разрядов памяти Na = |Afp/ = |Afp (q + nx+ny),
где I = 5O/5P — коэффициент заполнения поля наблюдения;
So — площадь изображения объекта; Sp — площадь растра;
/ — число двоичных разрядов, необходимых для записи одного
50
цента дискретизации; пх — Ent (log2p) + 1 — число двоичных
урядов, необходимых для кодирования координаты х элемента
рбфетизации (р — число элементов разложения изображения по
роке); пу — Ent (log2d)+l—число двоичных разрядов, необходи-
tx для кодирования координаты у элемента дискретизации (d —
ело строк разложения изображения в растре).
При сравнении объемов памяти при адресном и безадресном режи-
uax ввода информации видно, что если Na = N6, то | = |„р = 0,15
|кр — критическое значение коэффициента заполнения); если | >
|„р, то выгоднее использовать безадресный режим^ввода информа-
Рис. 2.10. Дискрети- >
зированное изобра-
изображение объекта
Рис. 2.9. График за-
зависимости объема
памяти устройства
от коэффициента за-
заполнения N=f(l)
Ир
10
16
¦72
О . 0,05 0,1 0,15 0,2
А
1
1
1
1
V
Уп
а н
D 1 I
? 1 1
? i I
? 1 1
-1'
ч
м-ш-
f~*~
^ О
i 1 О
i ¦ О
' | О
| 1 О
1 1 О
ft-*
а ? *-
¦«. ? ?
•#>¦¦¦
О • |
•-в J-
< ¦ Ш 1 1
I» III!
< III!
¦*"f *
ул
1 1 < О
II <' О
о о
in О
<¦+ о
| О О
' ° Т
| 0 <
ч—-'
о о
о о
о о
0 О
О 1
О 1
1 —в
§
11 а
11 а
1 i D
О О
0 О
° Т
°л
г:
* а
? ?
ста
? ?
а а
? ?
-si
i а
ш а
? ?
? а
? ?
а а
а ?
? ?
а ?
i
i
i
!
1
1
1
12
16
20 X
и«ии; если | < |кр, то выгоден адресный режим ввода информации;
|если ? = |„р, оба режима ввода информации равноценны с точки зре-
ршя требуемого объема памяти (рис. 2.9). В этом случае, однако, сле-
рЙует предпочесть адресный режим ввода, так как при нем информация,
('введенная в машину, может сразу использоваться для последующих
преобразований координат точек изображения, в то время как при без-
безадресном режиме ввода их координаты еще дополнительно нужно
сформировать программным путем. Система ввода должна автомати-
автоматически выбирать тот или иной режим работы.
&* Алгоритмическая минимизация. Этот способ минимизации изобра-
изображения реализуется вычислительной машиной. При этом программным
;рутем исключаются все внутренние точки односвязных контуров, со-
,<ртавляющих изображение объекта. В результате остаются только точки
jjl(B данном случае пара контурных точек для каждого элемента дискре-
|Гтизации), которые относятся к контурным линиям.
4' Пусть в качестве исходной информации имеется пиктурное изо-
бражение, представляющее собой многосвязный контур, состоящий из
четырех односвязных геометрических контуров. Элементы дискрети-
дискретизации контуров представлены на рис. 2.10 (где светлые кружки и
квадратики — элементы дискретизированных контуров, темные круж-
кружки и квадратики — элементы контурных линий, выделяемые на этапе
препарирования или после этапа минимизации изображения). Поле
51
наблюдения условно разбито на строки и столбцы. На пересечении
/-й строки и г-го столбца находится элемент дискретизации с яркостью
Btj. Чтобы определить, принадлежит он к контурной линии или нет,
проводится сравнение его яркости с яркостями смежных элементов
дискретного растра. Условием принадлежности элемента растра к кон-
контурной линии является выполнение следующего неравенства:
О I Л +1 Bi.j-1 - Ви | +1 Bt ,}+i - Ви | +1 Bt+i. i—
-Bij\>0 прн В
О = I Л|-1. ; -
где Вф — код яркости фонового элемента.
Если G = 0, то это означает, что элемент Вц не лежит на границе
односвязной области (белые квадратики и кружки).
Для удобства последующей работы алгоритма распознавания час-
часто, как это сделано в рассматриваемом случае, каждой точке внутрен-
внутренней контурной линии ставятся в соответствие две смежные по строке
точки со своими яркостями. Координаты этих точек могут отличаться
друг от друга на один элемент дискретизации растра.
Результатом работы такого алгоритма минимизации являются'мас-
сивы точек контурных линий.
§ 2.4. ПРЕПАРИРОВАНИЕ СЛОЖНЫХ МНОГОСВЯЗНЫХ ПЛОСКИХ
ИЗОБРАЖЕНИЙ
Важным этапом предварительной обработки информации является
также препарирование многосвязного контура на односвязные. В ка-.
честве исходной информации здесь предполагается массив контурных
Рнс. 2.11. Изображение объек-
¦^ та после выполнения этапа
минимизации
Рис. 2.12. Структура памяти
устройства для этапа препари-
препарирования изображений:
А — ячейки памяти сформирован-
сформированных контуров; В — ячейки памяти
выделяемого контура; ТН — ячей-
ячейки памяти для записи начального
элемента выделяемого контура;
Т—ячейки памяти для записи те-
текущего опорного элемента; С —
свободные ячейки памяти
¦ 20 X
точек, полученных при минимизации информации (рис. 2.11). Наиболее
простыми и эффективными при реализации препарирования сложных
изображений являются принципы формирования односвязных конту-
контуров, основанные на сравнении по ряду критериев элементов дискрети-
дискретизации, описывающих исходную многосвязную геометрическую систе-
систему.
52
, Пусть имеется исходный массив контурных точек — поле поиска.
ри формировании в памяти машины любого односвязного контура
кно выделить ячейку памяти ТН для записи начального элемента
деляемого контура и ячейку памяти Т для записи текущей опорной
*чки, по отношению к которой в поле поиска имеется ближайшая точ-
9, принадлежащая этому контуру (рис. 2.12).
Примечание. В дальнейшем обозначения ТН и Т будут соответство-
ть начальной и текущей опорным точкам анализируемых контуров.
Процесс формирования односвязного контура состоит из трех эта-
в.
Этап 1. Выбор опорной точки Т.
Этап 2. Нахождение точки в поле поиска, ближайшей к опор-
опорой.
Э т а п 3. Пересылка найденного в поле поиска элемента контура
I массив точек формируемого односвязного контура.
Сначала из массива поля поиска выбирается произвольная точка,
вторая становится опорной. Условиями выбора ближайшей точки по
гношению к опорной являются следующие:
а) точки должны иметь одинаковую яркость:
BT = Bk, B.2)
|"де Вт и В ft — яркости соответственно опорной точки Г и выбранной
i массива поля поиска точки k;
б) точки должны располагаться близко друг к другу. Это условие
Цпроверяется по неравенству
(Xr-XftJ+(</r-</ftJ<2.
B.3)
щ
щ
Однако этих двух условий не всегда бывает достаточно для правиль-
правильного выбора точки k, ближайшей к опорной точке, Примером может
i служить следующая ситуация: .
^~ Здесь условиям B.2) и B.3) для опорной точ- I
,' ки 2 удовлетворяют сразу точки 1,3 я 4. Поэтому
¦ для правильного выбора точки k необходимо до-
дополнительное условие, характеризующее направ-
направление движения при формировании односвязных
'"Контуров. С этой целью вводится понятие элемен-
элементарного вектора — вектора Vb соединяющего два элемента дискре-
дискретизации изображения (точки выделяемых контуров — точки Т и k,
параметры которых удовлетворяют условиям B.2) и B.3)) и направлен-
направленного от точки Т к точке k. Всего таких векторов Vi (i = 1,2,..., 8) мо-
может быть восемь (рис. 2.13, где а — угол между векторами Vt на /-мд
(/ + 1)-м шагах препарирования контура; Т} и Т;_х — опорные точки
соответственно на /-м и (/ + 1)-м шагах препарирования; kj+1 — вы-
выбираемая точка контура на (/ + 1)-м шаге препарирования). Проекции
этих векторов Vx. и Vy. на оси'координат сведены в табл. 2.3.
На'рис. 2.13 один из восьми векторов Vt указывает «направление
входа» вектора V8 в &у+1-й элемент дискретизации и выходит из точки
Т], которая была опорной на предыдущем шаге препарирования. Угол
53
г,
а, характеризующий направление этого вектора, отсчитывается от на-
направления аналогичного вектора V;, имевшего место на предыдущем
шаге препарирования.
Если в качестве единицы угла поворота элементарного вектора
возьмем угол, равный 45°, то каждому из восьми векторов V* можно
поставить в соответствие некоторое число «г == Ent Dа/я).
Теперь потребуем, чтобы из всех точек, удовлетворяющих усло-
условиям B.2) и B.3), ближайшей считалась та, которой соответствует
число «г = u*mln=min[EntDa/n)].
Vi
Это условие и берется в качестве
дополнительного. Исходными Ждан-
Жданными для его реализации являют-
являются две опорные точки Т)-х — пре-
предыдущего я Tj — текущего шага
препарирования контуров и на-
направление вектора V* (по которо-
которому был осуществлен переход в опор-
опорную точку текущего шага выделе-
выделения односвязного контура) в виде
проекций \х. и \у. элементарного
Рис. 2.13. Возможные положения
элементарного вектора Vi
вектора на оси координат.
Процесс определения числа Ui состоит в последовательном повороте
через 45° вектора V; и вычислении всякий раз числа «г при выполнении
двух отмеченных ранее условий.
Таблица 2.3
Номер вектора
1
2
3
4
Проекция вектора V-
— 1
0
1
1
Номер
вектора
vi
1 | 5
1 | 6
• ' II 7
0 |
8
Проекция вектора
V*I
1
0
—1
—1
x«i
—1
—1
—1
0
Для реализации поворота элементарного вектора можно восполь-
воспользоваться на каждом шаге препарирования выражениями, позволяющи-
позволяющими найти проекции повернутого вектора V,-+1 через проекции исход-
исходного вектора Уг:
В табл. 2.4 приведены восемь преобразований элементарных векто-
векторов. На каждом шаге препарирования сравниваются параметры началь-
начальной ТН и текущей опорной Т точек. При совпадении параметров этих
ё>
Новое
положение
Проекции
вектора V^
Преобразование координаты
Таблица 2.4
Преобразование координаты
54
;точек выделение односвязного контура заканчивается. Затем из масси-
fBa поля поиска выбирается новая начальная точка и весь процесс повто-
повторяется до тех пор, пока не будет полностью использован исходный мас-
массив точек поля поиска.
Если на очередном /-м шаге поиска новой опорной точки ее не ока-
оказывается, то делается шаг «назад», т. е. за опорную принимается точка
Г;_2 предыдущего шага препарирования и т. д. В этом случае формиро-
формирование односвязного контура заканчивается тогда, когда нужно сделать
, шаг «назад» за начальную точку ТН.
Результат работы алгоритма препарирования — сформированные в
•памяти машины массивы точек (xi, у и В() односвязных контуров, над
которыми в дальнейшем проводится процедура их распознавания.
§ 2.5. МЕТОДЫ НОРМАЛИЗАЦИИ ПЛОСКИХ ИЗОБРАЖЕНИЙ
Из всего множества Aj проекций X, отвечающих некоторому классу
или объекту Aj, можно выделить подмножества R', R", R"\ ..., для
которых справедлива следующая закономерность: все разнообразие
проекций для каждого из этих подмножеств можно представить как
результат некоторых квазиизоморфных преобразований одной проек-
проекции. Назовем эту проекцию стандартной, а упомянутые преобразова-
преобразования, не выводящие проекции за пределы данного класса, — допустимы-
допустимыми. Числовые параметры, характеризующие допустимые преобразова-
преобразования, должны изменяться в ограниченных пределах.
Один из подходов, позволяющий отождествлять проекции того или
иного подмножества R', R", R'",... на уровне абсолютного описания,
связан с их нормализацией — приведением любой проекции Xi ? R' к
55
стандартной проекции Х'о ? #', т. е.
Н(Г)Х! = Х'О,
где Н — оператор нормализации; Г — множество групп допустимых
преобразований.
Взаимное положение объекта и системы наблюдения можно одноз-
однозначно охарактеризовать углами Эйлера ф, if> и Э системы координат,
расположенной на объекте, относительно системы координат, связанной
с системой наблюдения, а также расстоянием L от объекта до системы
наблюдения. Изменение углов <р и Э приводит к необратимым преобра-
преобразованиям проекции, которые нельзя считать допустимыми в смысле
приведенного выше определения. Изменения же величинif> и L, а также
отклонение оптической оси системы наблюдения от направления на
объект в определенных пределах ведут к допустимым преобразовани-
преобразованиям. Последние могут быть разделены на группы: Г± — трансляций, Г2—
вращений и Гв — гомотетий.
Следовательно, пространство допустимых преобразований — четы-
четырехмерное, а его независимые параметры — сдвиг хе по оси ох, сдвиг
г/с по оси оу, угол г|) поворота вокруг фиксированной точки и масштаб k
проекции (система координат ху по-прежнему предполагается связан-
связанной с изображением). При этом можно предложить следующую обоб-
обобщенную математическую модель процесса нормализации координат-
координатного описания проекции.
Математическая модель нормализации проекции объекта. Любое
монохроматическое изображение на плоскости хоу однозначно опреде-
определяется скалярной функцией яркости В (R) (R = (х, у) — вектор с
компонентами х и у). Тогда нормализация проекции, проводимая, на-
например, последовательно по группам преобразований Гх — Г3, экви-
эквивалентна следующим операциям над каждым вектором R:
№R Hi* II. «.="*•
"Ус
cosif1—sirr
sini|) cosi);
Mb =
ft 0
0 ft
где Ro — нормализованное значение вектора R; Rc, Мф и Mft — век-
вектор и матрицы преобразования на этапах 1—3 нормализации соответ-
соответственно.
Таким образом, на этапе 1 нормализации проекции имеет место ее
плоскопараллельное смещение на величины хе и уе вдоль соответствую-
соответствующих осей; на этапе 2 — ориентирование, т. е. поворот на угол ty; на
этапе 3 — масштабирование в k раз.
Рассмотрим порядок выбора упомянутых выше параметров.
Из изложенного ясно, что величины хс, уе характеризуют степень
плоскопараллельного смешения исходной проекции относительно
стандартной. Однако множество стандартных проекций бесконечно и
опознать стандартную проекцию, соответствующую исходной, нельзя.
Выход заключается в отыскании такого элемента (точки), который, во-
первых, есть у каждой проекции и, во-вторых, имеется у нее в единст-
единственном числе. Кроме того, алгоритм поиска этого элемента должен
56
_гь инвариантным относительно групп преобразований /\ — Га.
Условимся, что у стандартного изображения упомянутый элемент обя-
г. льно совмещен с началом системы координат ху. Тогда его коорди-
аты для исходной проекции в той же системе могут быть использова-
в качестве параметров этапа 1 нормализации.
Элементом, удовлетворяющим перечисленным требованиям, явля-
являйся центр тяжести изображения. Следовательно, первый шаг норма-
нормализации сводится к его центрированию. При этом параметры вектора
tc определяются по формулам
лгс=/п1О//Яоо> (/c=/noi/moo>
т10 и т01 — моменты первого порядка исходного изображения;
-t00 — момент нулевого порядка (площадь изображения). Эти момен-
могут быть найдены из известного для моментов (а + Р)-го поряд-
соотношения
В(х,у)
B.4)
|где В (x, у)—функция яркости, определенная в некоторой зоне So «сет-
«сетчатки» и однозначно задающая изображение SH в этой зоне в системе
координат ху. Для случая двух градаций яркости и дискретной «сет-
рштки»
A, если
если
in B.4) перепишется в виде
Цгде Ме — количество единичных точек «сетчатки».
Тогда
B.5)
хс=-
МР
Ус =
I— 1
Мс
<¦= 1
В результате центрирования проекция будет уже описываться сме-
смененной функцией яркости В± (х, у) = В (х — хс, у — уе). Для изо-
|бражения> заданного такой функцией, координатная система ху —
|дентральная, а его моменты первого порядка в этой системе равны ну-
|>лю. Произвольный центральный момент порядка а + Р далее обозна-
обозначается ц.аР.
Для однозначного ориентирования целесообразно фиксировать на
^центрированном изображении некоторый вектор \$> с началом в точке о.
редположим, что направление этого вектора у стандартного изобра-
изображения совпадает, например, с направлением орта х. Тогда угол между
ф и К для центрированного исходного изображения можно выбрать в
{,'качестве параметра ориентирования. Очевидно, что вектор ч|з должен
|,быть единственным у каждого изображения, а алгоритм его поиска —
^инвариантным относительно групп преобразований Га и Г3.
57
Для определения вектора ч|з необходимо фиксировать на изображе-
изображении помимо точки о еще одну точку, удовлетворяющую тем же требо-
требованиям, что и точка (хс, ус). В частном случае в качестве такого эле-
элемента можно использовать максимально или минимально удаленную
точку внешнего контура изображения. Однако в общем случае проек-
проекция может иметь несколько таких точек. Не претендует на общность и
алгоритм ориентирования, основанный на отыскании оси симметрии
проекции (такая ось может отсутствовать вообще).
Для ориентирования возможно использование системы прямых ли-
линий, направление каждой из которых выбирается заранее. При предъ-
предъявлении изображения, подлежащего опознаванию, каждая прямая пе-
перемещается параллельно самой себе до тех пор, пока не коснется этого
изображения в одной или нескольких точках. В результате изображе-
изображение оказывается вписанным в многоугольник, образованный отрезками
упомянутых прямых между точками их пересечения, площадь или, на-
например, периметр которого далее минимизируется посредством после-
последовательных поворотов изображения или исходной системы прямых.
Основные недостатки такого ориентирования — слабая помехозащи-
помехозащищенность, ограниченная точность, сложность обеспечения однознач-
однозначности ориентирования, сравнительно низкое быстродействие, повыше-
повышение которого связано с усложнением алгоритма из-за возможности на-
наличия локальных экстремумов минимизируемой величины.
Для ориентирования возможно также использование таких инте-
интегральных характеристик изображения, как его моменты различных по-
порядков. ¦ у
Исследуем изменения центральных моментов второго порядка [г20,
Йог и \in при вращении центрированного изображения вокруг начала
координат — точки о. Нетрудно показать, что
М>)=|*20 sin2 4> + ^2
о —И^ог) sin
u cos2i|),
B.6)
B.7)
B.8)
где г|з — угол поворота изображения против часовой стрелки относи-
относительно начального положения; ^го, Цог, и и — значения соответствую-
соответствующих моментов при-ф = 0.
Зависимость B.8) знакопеременна, и можно определить такой угол
¦ф = ур0, при котором цп = 0. Очевидно, что
0 = 0,5 arctg
1*02 —1
B.9)
Центральные оси, относительно которых н-п = 0, называются глав-
главными центральными осями.
Если предположить, что главные центральные оси стандартного
изображения совпадают с осями системы координат ху, то, как видно
из B.9), выполнение условия ^и = 0 еще не обеспечивает однозначного
ориентирования. При повороте изображения на угол 2я имеется четыре
его положения, когда [гп = 0. Найдем дополнительные условия, реа-
реализация которых дает требуемую однозначность.
Как ёидно из B.6)
»№)_ = Фог МО
Ц„=0
и B.7), (д.2О (я|з) 4- Йог (Ф>) = const, a
= 0, т.'е. при Цц = 0 один из моментов
ид,20 или \i02) достигает своего максимального, а другой — минималь-
минимального значения. Следовательно, если дополнить условие \iix = 0, на-
Цдример, условием ц2о > Йог. то множество всех возможных ориентации
зображения при выполнении этих условий может быть сведено к двум,
|отличающимся друг от друга поворотом на угол я.
-к
А
\
Ч
-ко
s
Ч
-80
\
Ч,
\
ч
S
-<t0s
80
W
\
\0
ч,
в*
^ч
s
120
С
-у
Рис. 2.14. Изображение, подлежащее ориентированию (а), и графики за-
зависимостей Цп^), 1*20 МО, 1*02 МО, 1*30D) (б)
Для однозначного ориентирования теперь необходима такая харак-
характеристика проекции, значение которой резко изменяется при повороте
"изображения на угол я. В качестве этой характеристики можно выб-
выбрать любой момент \ia$ нечетного порядка (например, момент ]х30).
•Действительно,
Изо D)= Цзо cos3 4—2[i2i cos24sin4+2|i,i2 cos4 sin2 ф—|д,03 sin3 4. B.10)
где [Хзо, н-2ь Н-12, Иоз— значения соответствующих моментов при
г|з = 0.
Из приведенного соотношения видно, что [г30 (ф> + л) = — \i30 (ф|).
, Полагая, что стандартному изображению соответствует значение
| Изо > 0. получим следующие условия для однозначного ориентирова-
ориентирования проекции:
Hix = O, (Лго > 1*02. |*зо > 0. (^-'')
На рис. 2.14, б приведены графики зависимостей \in (ф>), Иго (Ф1).
;''Ио2 (Ф) и Изо №). рассчитанные по B.6) — B.8) и B.10) для центриро-
|..ванного тупоугольного треугольника (рис. 2.14, а). Ориентированное
^положение треугольника отмечено на рис. 2.14, б вертикальной линией
Для рассмотренного алгоритма ориентирования безразлично, что
именно ориентируется (силуэт, контур или просто некоторая совокуп-
совокупность точек). Алгоритм отыскивает единственные главные центральные
59
оси этой совокупности (цп = 0), соЁмещаег одну из них с осью ох
(Н-20 > Йог) и задает на ней положительное направление (цзо->О).
Рассмотрим практическую реализацию этого алгоритма.
Для идентификации сложных технических объектов могут быть эф-
эффективно использованы в качестве признаков центральные моменты
различных порядков или другие какие-либо характеристики, построен-
построенные на их основе. Существенное достоинство этих моментов — возмож-
возможность вычисления их независимо от того, в каком порядке рассматрива-
рассматриваются элементы проекции. При этом для ускорения опознавания и, в
частности, ориентирования необходимо начинать вычисление требуемых
моментов уже в процессе ввода данных.
После нахождения координат хс, ус для вычисления моментов можно
воспользоваться формулой
- 2
/= i
2 (-DV<W
o
J l.5=o
rf
-e
где xu t/t — координаты i-ro элемента изображения до центрирования
проекции.
Можно также показать, что
-22 (-1
г—v
sin i|>)v X
X
2 C| (Jti sin 4>)B~S ftri cos 4>)S J,
где Xi,t/i — координаты i-ro элемента изображения после центрирова-
центрирования.
Это выражение после соответствующих преобразований можно при-
привести к виду
Ис*№)=2 S (-i)vcSc|(cos*)«+ft-v-e(sin*)v+efe+p_v_6 v+e.
v=oi=o
Здесь берутся моменты неориентированного изображения, причем в
качестве угла г|) целесообразно использовать итоговый угол поворота,
равный 1|> ="г|)д + v (я/2) (v = 0,1,2,3), гдег^ — главное значение г|H
(см. B.9)); |г|>0|<45°;
0, если [i20 > ц02, Цзо > 0;
1, если щ0 < ц02) ц,3о> 0;
2, если що>[го2. Цзо < 0;
3, если що< [г02, ц30 < °-
Условия B.11) могут быть применены и для однозначного ориен-
ориентирования проекций, имеющих одну или две оси симметрии, хотя
при одной оси симметрии для этого может потребоваться не момент
Изо. а какой-то другой момент третьего порядка (например, момент ц21).
При наличии же у проекции центра симметрии порядка выше второго
60
V =
ррй условия применять нельзя, хотя такой случай легко исключается
рюбавлением любого единичного элемента вблизи внешнего контура.
Ориентирование проекций объекта, имеющих центр симметрии вы-
|ше второго порядка. Рассмотрим теперь некоторые вопросы ориентиро-
ания проекций, имеющих центр симметрии порядка выше второго.
Условия B.11) в этом случае использованы для однозначного ориенти-
ориентирования быть не могут.
Действительно, для особенных фигур первого порядка ц21 (г|)) г= 0,
0 (г|)) = ц02 (г|)) и неприменимы условия цп = 0, \i20 > ц02. В связи
этим приведем зависимость от угла поворота г|) моментов третьего по-
порядка:
ИзоО|>) =— [(Изо—3nB)c3+3(^ i) З
sin 3-ф—3
_1_
~ 4
:2-нзо)
=Т[(
•1—}*оз) sin3t|5—(
1_
4
—M'Sa) cos
cos-ф—
sin-
-+-Ц.5з) sin i|5];
COS
B.12)
<из них можно установить первое условие ориентирования таких фи-
= 0. B.13)
Для выполнения этого условия проекцию следует повернуть на угол
Из о + Hi 2 , .. л
B-14)
Поскольку \ty[| ^ я/4 (ty[ — главное значение ^1), то для одно-
однозначного ориентирования необходимо еще одно условие, которое, на-
пример, может иметь вид ц21 + ц03 > 0, поскольку (см. B.12)) при
выполнении условия B.13) сумма ц21 + [х03 всякий раз достигает экст-
экстремального значения. Выполнение условия ц21 + ц03 > 0 может no-
noтребовать дополнительного поворота проекции на угол я.
Угол гр!, определяемый выражением B.14), нельзя подсчитать, если
+ [Ai2=|i2i + Н-оз = 0. Из B.12) легко установить, что в этом
случае имеют место более сильные равенства:
W = 0- BЛ5)
Назовем проекции, для которых тождества B.15) имеют место, осо-
особенными проекциями второго порядка. Для нахождения условий их
ориентирования рассмотрим равенство
B.16)
=(И4о-Ио4) cos Jhp-2
61
Потребуем ё ориентированном положении фигуры ёыполнения ус-
условия ц40 = Им- Тогда из B.16) найдем угол
на который следует повернуть проекцию для выполнения этого усло-
условия. Введение дополнительного условия \i3l + ц13 > 0 сокращает
число возможных положений фигуры после ее ориентирования по усло-
условию ц40 ~ Ио4 Д° двух, отличающихся одно от другого на угол я. Дей-
Действительно, при ц40 = Над сумма
достигает экстремальных значений. Однозначного ориентирования
здесь можно добиться, если потребовать также выполнения, например,
условия ц80 > 0.
Аналогично можно было бы ввести понятия особенных проекций
третьего порядка, когда ц'4о — ц„4 =з 0, ц31 + Ни = 0, и рассмот-
рассмотреть соответствующую им методику ориентирования. Однако вероят-
вероятность появления таких фигур на «сетчатке» чрезвычайно мала.
Анализируя вышеизложенное, можно предложить схему ориентиро-
ориентирования плоских изображений (до особенных проекций второго порядка
включительно) (рис. 2.15).
Существует несколько способов нахождения масштабного коэффи-
коэффициента k. Один из них основан на вписывании каждой проекции в квад-
квадрат или прямоугольник с заранее выбранными сторонами. Этому спо-
способу свойственна низкая помехозащищенность, а также связанная с
ним потеря информации об относительных размерах объектов. Послед-
Последнее справедливо и для таких способов определения масштабного коэф-
коэффициента, при которых фиксируется либо число элементов внешнего
контура, либо площадь стандартного изображения. Кроме того, коли-
количество элементов дискретного контура не пропорционально коэффи-
коэффициенту k, как это имеет место для непрерывного случая. В этой связи
наилучшие результаты обеспечивает следующий способ нахождения
масштабного коэффициента.
Положим, что на этапе обучения определено такое стандартное рас-
расстояние Lo от объекта до системы наблюдения, при котором любая про-
проекция любого объекта не выходит за пределы кадра. Пусть также в
каждом сеансе идентификации известно фактическое значение расстоя-
расстояния L. Тогда параметр этапа 3 нормализации будет равен k = LILO.
Если же измерение величины L с достаточной точностью не представ-
представляется возможным, то наиболее предпочтительным является упомяну-
упомянутое выше масштабирование по площади. При этом обычно предполага-
предполагается, что стандартное изображение имеет площадь М* = ./V2, а про-
произвольное изображение, площадь которого равна Мс, приводится к не-
нему с помощью соотношения k = 1^МЦ/МС = NlV~M~c-
Таким образом, нормализация проекции существенно упрощает за-
задачу идентификации трехмерных объектов, позволяя исключить влия-
влияние величин ф (для тел вращения), г|), L и некоторых других факторов
на вид проекции. Особое значение она приобретает при выявлении при-
62
С 56од данных j
f Конец
Рис. 2.15. Схема ориентирования плоских изображений
63
знаков, в*качестве которых могут выступать различные детали объекта,
их координаты и взаимное положение; при использовании для целей
опознавания таких сведений, как наличие или отсутствие осей симмет-
симметрии, данных о положении центра тяжести проекции объекта, ее ком-
компактности, центральных моментах инерции и т. д.
§ 2.6. ПРИНЦИПЫ ПОСТРОЕНИЯ АЛГОРИТМА СИНТЕЗА КОНТУРОВ
В качестве признаков распознавания часто используют сложные
признаки в виде сочетания нескольких геометрических односвязных
контуров, составляющих целевые признаки, характеризующие назначе-
назначение . распознаваемого
объекта в целом. Алго-
Алгоритм синтеза односвяз-
односвязных контуров имеет
своей целью формирова-
формирование целевых признаков
распознавания. То или
, и ИГЛ. XV W "S^ _-«-
о
иное сочетание однос-
односвязных контуров фор-
формирует целевые призна-
признаки. В качестве примера
рассмотрим принципы
построения алгоритма
синтеза для получения
целевых признаков, при-
приведенных на рис. 2.16.
Необходимым усло-
условием наличия целевого
признака 6, состоящего
из стержня и парабо-
изображении объекта некоторой
(рис. 2.17) в зависимости от
За достаточное условие его
Рис. 2.16. Виды
целевых признаков (деталей
объектов)
лоида, является присутствие на
комбинации фигур 13, 1, 11, 2, 3
ракурса обзора целевого признака 6 _,
присутствия принимается совпадение в пределах определенной точно-
точности координат одной из точек ц, 0, т) или Я (рис. 2.18) фигуры 13 с ка-
какой-либо из аналогичных точек фигуры 1, 2 или 3 (рис. 2.17) (аналогич-
(аналогично компонуются фигуры И).
Примечание. Точки \i, 9, т) и К являются точками пересечения нор"
мализованной фигуры (контура) с осями, проходящими через центр тяжести кон"
тура.
Эти необходимые и достаточные условия справедливы и для форми-
формирования многих других целевых признаков. Для исключения повтор-
повторной выборки контура, который уже вошел в состав выделенного ранее
целевого признака, ему присваивается индекс.
Для синтеза целевого признака 5, состоящего из шара и стержня;
необходимо иметь контуры 13 и 10. Достаточным условием наличия при!
знака считается присутствие у контура 13 хотя бы одной точки ц, 0, г\
или Я, расстояние которой до центра окружности удовлетворяет уело.
64
& в, г), я ^ R + А, где R — радиус окружности контура 10;
г—порог, определяемый точностью съема координат точек контуров.
Целевой признак 4 (спиральная система) может быть представлен
|двух модификациях (см. рис. 2.16). При наличии на изображении рас-
знаваемого объекта контура 14 или не менее двух контуров 12
jc. 2.17) можно говорить о присутствии на объекте целевого призна-
[ 4 (см. § 3.3).
Целевой признак 7 (см. рис. 2.16) (наличие гирлянды шаров) ха-
1ктеризуется присутствием на изображении распознаваемого объек-
i та не менее трех фигур 9 или 10
. 2 3 (см рИС- 2.17), максимальные раз-
\~ч \ / \ I меры которых совпадают. При
\J \у \J этом шары должны располагаться
вплотную 'друг к другу, т. е. рас-
о
А
ъ
3\
О
12
13
Рис. 2.17. Фигуры, состав-
составляющие целевые признаки,
приведенные на рис. 2.16
01
А
Рис. 2.18. 6*-Параметры
контура произвольной
формы
стояние между центрами тяжести двух соседних фигур не должно пре-
превышать максимального размера 1^, е, q, я,-
Целевой признак / (см. рис. 2.16) в виде усеченного конуса опреде-
определяется обнаружением на изображении одной из фигур 4, 5 или 6 и 11
(см. рис. 2.17). При этом если на распознаваемом объекте имеются це-
целевые признаки одного вида (например, конусы различных размеров),
то в алгоритм синтеза при выделении таких признаков вводятся допол-
дополнительно ограничения на некоторые геометрические характеристики
этих признаков, место их взаимного расположения и т. д.
Целевой признак 2 (см. рис. 2.16) (распознавание цилиндра) харак-
характеризуется присутствием на изображении фигур 7 или 8 и 11 (см.
рис. 2.17), максимальные размеры которых совпадают в пределах не-
некоторого допуска.
Целевой признак 8 (см. рис. 2.16) (прорези на теле пространствен-
пространственных тел) характеризуется присутствием на изображении контуров
/3(см. рис. 2.17).
Целевые признаки 3 могут быть перепутаны со стержнями при фор-
формировании целевого признака 6, 5 или 8 (см. рис. 2.17). Поэтому для
выделения на объекте стержней, прутков или других аналогичных де-
деталей необходимо вводить р алгоритм дополнительные характеристики
3 Зав. 1053 §5
каждому из схожих целевых признаков (их количество, размеры, рас-
расположение и т.д.).
Многие целевые признаки, которые здесь не рассматривались, мо-
могут быть синтезированы (выделены) на изображениях объектов по опи-
описанным здесь и другим принципам.
Чтобы можно было точнее охарактеризовать распоанаваемые объ-
объекты по назначению, необходимо не только определить набор целевых
признаков для них, но и найти некоторые их геометрические размеры.
Например, для описанной системы целевых признаков характерными
будут размеры h и I (см. рис. 2.16).
Если для анализируемого контура имеет место неравенство
— б5| |б4 — бв| (Л = 62,
>то \ и неизвестный контур
и неизвестный
симмет-
^з + б5 б4 + S
ричен относительно оси, параллельной оси ох выбранной систе-
системы координат. Здесь бг — геометрические параметры, характеризую-
характеризующие односвязные контуры.
Г С ПИ WC1 ЛТТПОПЛПТТИПЛ TTl-1-f» ППЛТТЛтПЛ [3 5 1^14 6 1
же справедливо неравенство
то
и неизвестный контур симметричен относительно оси, па-
параллельной оси оу выбранной системы координат.
Например, для целевых признаков 3 и 8 h = б*, т. е. h определяется
как больший размер из 81 и б2.
Для целевого признака 5 h = б*з + 0,5 б*о, где б*3 и б*о — на-
наибольший размер параметров 81 и б2 соответственно для контуров 13
и 10 (рис. 2.17).
Описанный способ формирования целевых признаков позволяет
строить устойчиво работающие алгоритмы синтеза контуров только
в том случае, если анализируемые контуры не сильно искажены по
форме. Между тем значительные искажения формы возможны не толь-
только за счет невысокой точности съема координат точек контуров, но и за
счет наложения на них изображений других деталей объектов. В этом
случае при использовании детерминированного подхода формирова-
формирования целевых признаков может возникнуть необходимость в запросе не
одного, а нескольких изображений объектов. Кроме того, можно ис-
использовать вероятностный способ распознавания контуров и формиро-
формирования целевых признаков (см. § 4.3 и 4.4).
Алгоритм синтеза контуров, построенный по описанным принципам,
можно применять как на этапе принятия решения о наличии на неиз-
неизвестном объекте некоторого набора целевых признаков, так и на этапе
обучения машины классификации объектов.
Наибольшее применение получила в настоящее время анизотропная филь-
ация, ослабляющая влияние отдельных пятен, не относящихся к изображе-
Ью объекта, и пробелов в силуэте, обеспечивающая эффективную фильтрацию
эображений объектов, искаженных аддитивным нормальным шумом. Лучше все-
поддаются фильтрации изображения, ие имеющие узких выступающих ча-
тей Анизотропная фильтрация обладает избирательными свойствами: узкие
пер'туры более эффективны при малом уровне шумов (до 10—15%), широкие —
ри большом уровне шумов B0—30%). При интенсивности помех до 15—2О/о
елесообразно использовать рекуррентную фильтрацию.
' Для экономии памяти ЭВМ и ускорения решения задачи распознавания сле-
ует применять минимизацию информации, позволяющую проводить дифферен-
ирование исходных данных по степени их значимости для дальнейшего распоз-
распознавания.
Нормализация плоских изображений упрощает алгоритмы распознавания
-онтуров В качестве характеристик нормализации надо использовать геометри-
яеские моменты различных порядков, которые одновременно могут служить при-
признаками распознавания односвязных геометрических контуров.
Заключение
В задачах распознавания пространственных объектов при дешифровании
аэрокосмических снимков различают две постановки проблемы: классификацию
и идентификацию.
Поскольку в реальных системах распознавания возможно появление в поле
зрения воспринимающего устройства различного рода помех, целесообразно на
этапе предварительной обработки изображений проводить их фильтрацию.
66
ГЛАВА 3
СИСТЕМЫ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ ОБЪЕКТОВ
ПО ИХ КРУПНОМАСШТАБНЫМ ИЗОБРАЖЕНИЯМ
§ 3.1. КРИТЕРИИ ПОЛЕЗНОСТИ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ
ОБЪЕКТОВ
Выделение наиболее информативных (полезных) признаков при син-
синтезе распознающих систем — одна из важнейших задач теории и прак-
практики распознавания. Однако до настоящего времени отсутствует соот-
соответствующая формальная постановка этой задачи. В неформальных же
постановках задачи определение информативных признаков преследу-
преследует: 1) уменьшение до минимума количества необходимых для описания
классов признаков без существенного увеличения вероятности ошибки
распознавания; 2) возможность использования относительно простых
алгоритмов распознавания; 3) уменьшение вероятности ошибки рас-
распознавания.
С решением этой задачи обычно связаны вопросы упрощения распо-
распознающей системы и повышения качества ее работы.
К построению эффективной системы признаков может быть два под-
подхода.
Первый подход заключается в том, что с самого начала берется ус-
установка на отыскание малого числа признаков большой информатив-
информативности. Однако все используемые при этом методы до сих пор основаны
на эвристике и эмпирике, т. е. выбор признаков определяется интуи-
интуицией, опытом и воображением разработчика. Как бы удачна ни была
сконструированная система признаков, нельзя доказать, что она луч-
лучше некоторой другой.
Второй подход заключается в том, что из большого числа исходных
признаков согласно некоторому критерию эффективности признаков от-
отбирается как можно меньшее число наиболее полезных для распознава-
распознавания признаков.
К настоящему времени разработаны разнообразные критерии эф-
эффективности признаков, основанные на методах математической ста-
статистики и теории информации (см. [3,4]). Наибольшее признание полу-
получили критерии, отражающие расстояния между распределениями клас-
классов, в частности дивергенция, использующая информационную меру
Кульбака (см. [5]).
Второй подход к построению эффективной системы признаков бо-
более конструктивный, чем первый, хотя и обладает существенным не-
недостатком: при обязательном наличии связи между критериями эффек-
эффективности признаков и вероятностью ошибки распознавания функцио-
функциональной зависимости между этими величинами нет. Это не позволяет
надежно оценить изменение вероятности ошибки распознавания после
минимизации описания, оставляя тем самым сомнения в его эффектив-
68
|ости. Усугубляющим фактором здесь является и то, что вероятность
цибки определяется не только системой признаков, но и принятым
решающим правилом, а также зависит от погрешностей, возникающих
i реальной распознающей системе. Этим объясняется отсутствие при-
призеров использования критериев эффективности признаков при практи-
практической реализации распознающих систем. На основе второго подхода
|к выбору полезных признаков можно функционально связать критерий
|эффективности признаков с вероятностью ошибки распознавания.
Полезность некоторого признака в исходной совокупности п при-
признаков определим по приращению полной вероятности ошибки ЛР0Ш
|при исключении этого признака из исходной совокупности:
|где Рош — полная вероятность ошибки распознавания классов Ах
1и Л 2 для исходной совокупности п признаков; Рош — полная вероят-
Цность ошибки распознавания классов Ах и Л2 при исключении k-vo
[-признака из исходной совокупности.
В зависимости от знака приращения АР0Ш могут иметь место сле-
следующие случаи:
РОш < 0 — k -й признак полезен, так как его исключение из ис-
i ходного описания приводит к увеличению вероятности ошибки;
рош = о — k-й признак бесполезен, так как его исключение из
'исходного описания не изменяет вероятности ошибки;
Рош > 0 — ?-й признак вреден, так как без него вероятность
Цошибки распознавания уменьшается.
Такой подход к определению критерия полезности признаков пред-
предполагает использование конкретного решающего правила, поскольку
^только в его рамках имеет смысл ошибка распознавания.
Если существование полезных или бесполезных признаков не вызы-
|вает никаких сомнений, так как подтверждается большим количеством
I легко контруируемых примеров, то концепция «вредности» признаков
| на первый взгляд кажется спорной. Однако она не противоречит ут-
' верждению, что вредной информации не существует. Информация о
^вредности признака есть полезная информация; весь вопрос о том,
правильно ли она используется.
: Трудность восприятия и осознания концепции вредности признака
I заключается в том, что она возникает в чистом виде только при разли-
Цчении двух классов. В случае большего числа классов «абсолютной»
| вредности признака, как правило, не бывает: вредности признака при
'". различении одних пар классов противостоит его полезность при раз-
| личении других пар.
Примечание. Только указанными трудностями можно объяснить
; столь немногочисленные работы, в которых интуитивно вводится понятие вред-
с ного признака (см. [6, 7]).
«Исчезновение» вредных признаков при различении более чем двух
! классов только кажущееся. Оно происходит за счет усреднения эф-
^фективности признаков по всем парам классов в условиях преобладаю-
преобладающи Щего числа полезных признаков. Отрицательное же влияние призна-
j|i ков, вредных для различения тех или иных классов, не исчезает и вы-
ражаетсй в увеличении вероятности ошибки распознавания Этих клас-
классов, а следовательно, и суммарной ошибки распознавания.
При распознавании более чем двух классов может возникнуть
«порочный» круг: включение некоторого признака в описание классов
окажется полезным для различения одних пар классов, но вредным
для различения других; исключение этого признака из описаний клас-
классов, наоборот, окажется вредным для различения первых классов и по-
полезным для различения вторых. Следствие такого противоречия —
обязательное возрастание количества ошибок распознавания с увели-
увеличением размера алфавита классов при любых решающих правилах, ис-
использующих один эталон на класс.
Только на основе анализа полезности, бесполезности или вредности
некоторого признака при разделении каждой из пар классов заданного
алфавита можно решить альтернативу включения или исключения
этого признака из исходного описания с точки зрения минимизации
ошибки распознавания.
§ 3.2. НЕКОТОРЫЕ СИСТЕМЫ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ
ОБЪЕКТОВ
В настоящее время общепризнано, что опознавание сложных вход-
входных ситуаций наиболее целесообразно проводить на основе их относи-
относительного описания (описания в пространстве признаков). Выбор эф-
эффективной системы признаков — наиболее важная задача теории рас-
распознавания. Однако удовлетворительного решения, определяющего по-
порядок автоматического отыскания последних посредством переработки
информации, получаемой на уровне абсолютного описания изображе-
изображения, пока не найдено. Поэтому по-прежнему основным решением оста-
остается автоматизированный выбор наиболее информативных признаков
из некоторого исходного множества (ансамбля) свойств проекций, за-
задаваемого эвристически. При этом эвристика должна базироваться на
фундаментальной основе, а не на легковесных предположениях.
От успешного решения данной задачи зависят процент ошибок на
этапе экзамена и распознавания, быстродействие и объем памяти рас-
распознающего устройства. В настоящее время при решении этой задачи
в лучшем случае формализуется лишь процедура выбора наиболее
информативных признаков из заранее заданного ансамбля свойств.
Иногда, правда, формализуется и процедура наращивания этого ан-
ансамбля в случае необходимости. Однако при этом, как правило, реали-
реализуется лишь получение заранее предписанных свойств.
Рассмотрим наиболее часто используемые для относительного опи-
описания изображений свойства. Вначале приведем некоторые системы
детерминированных свойств — признаков, позволяющих определить
отвечающие им алгоритмы измерения без применения тех или иных
случайных механизмов, а затем вероятностных свойств, основанных на
случайных факторах.
Система детерминированных признаков. Приведем наиболее рас-
распространенные системы признаков, используемые при распознавании
крупномасштабных изображений.
70
, 1. Одним из первых было предложено использовать для узнавания
,опологическое описание изображений, когда последние можно считать
Плоскими графами, если интересоваться только их внешними и внут-
внутренними контурами. При этом в отдельных задачах (автоматическое
ение текста и др.) все возможные изображения, составляющие тот
^ли другой класс, можно представить при отсутствии помех как ре-
результат гомеоморфных преобразований некоторого эталонного изобра-
кения, соответствующего этому классу. Задача распознавания в этом
пучае может быть сведена к установлению гомеоморфности предъяв-
предъявленного изображения с одним из эталонных. Ее можно обнаружить с
ромощью топологических инвариантов — таких свойств изображения,
которые не изменяются при его гомеоморфных преобразованиях. Ин-
Инвариантом, позволяющим дать численное описание изображений, яв-
яяется, например, индекс точки, определяемый количеством сходя-
сходящихся в ней линий. Соответствующее описание получается обходом в
„определенном порядке контуров изображения с одновременной фикса-
фиксацией индексов точек. Установление гомеоморфности — собственно
^распознавания — сводится к сравнению описаний предъявленного
^изображения и эталонных изображений классов (см. [8]).
В Важное достоинство топологического описания — его нечувстви-
нечувствительность к сильным деформациям изображения, включающим все пре-
преобразования подобия, если связывать с каждым изображением некото-
Црую характерную точку, из которой начинается обход. Однако это опи-
рание обладает слабой помехозащищенностью и является, как правило,
рйедостаточным для надежного опознавания: имеется неоднозначность
^перехода от описания к изображению (например, топологически не-
неразличимы русские буквы Г, 3, Л, М, П, С или цифры 1,2, 3, 5, 7).
' Кроме того, в случае опознавания пространственных объектов гомео-
i морфность всех изображений класса не может быть гарантирована даже
и идентификации.
\ 2. В. С. Файн предложил использовать для описания формы изоб-
[ражения следующие инвариантные относительно преобразований по-
подобия соотношения, выбранные на основании сведений из интеграль-
интегральной геометрии и вычисляемые сравнительно легко: хг = bhIS, x2 =
i~ hlb, x3 = L/yS, xt = Llh, хь = Lib, где b, h — меньшая и боль-
большая стороны минимального по площади прямоугольника, описанного
^вокруг изображения; S, L — площадь и периметр изображения соот-
^Ветственно.
Для повышения надежности распознавания или упрощения и уде-
Цшевления зрительного аппарата, а также если проверка покажет не-
Шдостаточность выбранного числа признаков, может быть применена сле-
|Дующая процедура наращивания ансамбля свойств. Надо либо увели-
увеличить число сторон описанного вокруг изображения многоугольника
^минимальной площади с заданными углами при вершинах, либо ис-
кпользовать значения длин сторон описанного прямоугольника при раз-
различных фиксированных его положениях относительно минимального
[:'по площади описанного прямоугольника. Для каждой пары получаемых
последнем случае чисел могут быть вычислены соответствующие зна-
• чения х
71
Рассмотренная методика формализации изобразительной информа-
информации не свободна от недостатков, основные из которых заключаются в
следующем:
а) из пяти приведенных выше свойств функционально независимыми
являются только три. Действительно, х3 = xt У^х-^х^, хь = хг х4;
б) разделительные возможности этих свойств весьма ограничены.
Например, показанные на рис. 3.1 изображения имеют одинаковые
значения b, h, S и L, существенно отличаясь друг от друга по своей ге-
геометрической форме. Казалось бы, этот недостаток можно устранить,
используя описанную выше процедуру наращивания ансамбля свой-
свойств. Однако легко понять, что фигуры, имею-
имеющие одинаковые значения 5 и L, а также
одинаковую выпуклую оболочку в простран-
пространстве этих свойств, неразличимы;
в) процедура наращивания ансамбля
свойств сравнительно трудоемка, поскольку
вызывает необходимость перехода либо к дру-
другому типу описываемых вокруг изображения
геометрических фигур, либо к последователь-
последовательности новых положений этих фигур относи-
относительно исходного положения;
г) получаемое с помощью таких свойств
описание обладает слабой помехозащищен-
помехозащищенностью. Действительно, достаточно одной «шумовой» точки на «сет-
«сетчатке» вне изображения, как значения этих свойств будут резко от-
отличаться от их значений для «чистого» изображения.
3. Можно использовать для узнавания спектральное описание изоб-
изображений. Под многомерным спектром абсолютно интегрируемой функ-
функции / (W V2,..., Vi) понимают в общем случае комплексную функцию
вида
Рис. 3.1. Примеры изо-
изображений, не различи-
различимых по признакам Ь, h,
S и/,
= J-J"
i exp
i = 1
¦¦.Vt\dVlt
C-2)
Спектральное описание изображения обладает рядом свойств, по-
позволяющих обеспечить его нечувствительность к преобразованиям по-
подобия и хорошую помехозащищенность при применении многомерных
фильтров.
Плоское изображение полностью определяется двумерной функцией
В (х, у), спектр которой нетрудно рассчитать с помощью соотношения
C.2).
Существенный недостаток такого описания — длительная вычис-
вычислительная процедура для его получения с преобладанием тригоно-
тригонометрических операций.
4. В некоторых работах, посвященных узнаванию, используется
интегральное описание изображений, т. е. их описание с помощью мо-
П
ЙейтоЁ ц.а|з (а, р = ОД,2, ...). Возможность применения такого бписЗ-
я обоснована следующей теоремой: .
Теорема: последовательность {^ар} моментов изображения одно-
чно определяется его функцией яркости В (х, у) и, наоборот, В (х,у)
днозначно определяется последовательностью {н-ар}-
К достоинствам интегрального описания изображений относят срав-
штельную простоту его получения и легкость наращивания ансамбля
Двойств в случае необходимости, высокую помехозащищенность, в осо-
енности при использовании для этих целей моментов нечетных поряд-
порядков (в случае равномерных аддитивных помех «шумовые» точки в раз-
Вых квадрантах системы координат, связанной с центром «сетчатки»,
будут в той или иной мере компенсировать друг друга). Значения от-
цельных свойств изображения могут быть получены в процессе его нор-
яализации как ее побочный результат.
Примечание. Система этих признаков подробно рассмотрена в гл. 2
яа примере нормализации изображений.
5. При выборе других методов формализации зрительной информа-
ли в большей или меньшей степени проявляется интуитивный подход,
келание удовлетворить определенным требованиям, необходимым для
еоретических исследований (простота получения значений свойств,
Йих независимость и т. д.). В этом отношении характерны следующие
гава метода формализации, часто используемые для экспериментальной
|проверки теоретических положений.
Так, предлагается на квадратную «сетчатку» накладывать четыре
((или более) пересекающиеся линии (рис. 3.2). Значения свойств xt
Здесь представляют собой расстояния вдоль этих линий от краев «сет-
«сетчатки» до первых пересечений с контуром изображения. В систему, та-
таким образом, входит восемь (или более) свойств. Разновидность этого
Описания — использование в качестве значений свойств расстояний от
ЦЙекоторой окружности до контура изображения.
Иногда применяется «сетчатка» размером 12 X 30 элементов. Она
разбивается на 20 прямоугольников (рис. 3.3, а). Далее для каждого
эямоугольника определяется восемь двоичных свойств. Значение
аждого свойства является результатом несложных арифметических
|Или логических операций над частью изображения, попавшей в данный
Прямоугольник. Например, если в последнем имеется более 14 «нуле-
рВых» элементов, то весь прямоугольник считается «белым» и в соответ-
соответствующем разряде 160-разрядного двоичного слова, отвечающего пол-
Цйому изображению, фиксируется 1; если же прямоугольник содержит
нее 14 «единичных» элементов, то он считается «черным» и в соответ-
соответствующем разряде фиксируется 0.
К достоинствам этих методов формализации относят простоту по-
получения значений свойств и легкость автоматизации процедуры нара-
наращивания их количества в случае необходимости, к недостаткам — сла-
"бую помехозащищенность и очень малую информативность каждого
отдельного свойства системы.
73
Система вероятностных признаков. Рассмотрим большую группу ме-
методов формализации зрительной информации, которые можно назвать
вероятностными, поскольку типичным для этих методов при определе-
определении свойств является использование тех или иных случайных меха-
механизмов.
1. Впервые применение случайных свойств имело место в персеп-
троне Розенблатта. Каждое конкретное свойство здесь определяет ал-
алгоритм преобразования сигналов, по-
поступающих от некоторых 5 - элемен- а)
тов, образующих соответствующий
этому свойству фрагмент «сетчатки»,
а случайный механизм используется
при формировании связей между 5-
и Л-элементами. Хаотичность этих
связей является одновременно и дос-
достоинством и недостатком персептро-
на. Действительно, благодаря таким
связям обеспечивается возможность
использования персептрона для ре-
решения самых разнообразных задач
узнавания. Однако при этом нет ника-
никакой гарантии, что выбранные фраг-
фрагменты окажутся эффективными для
решения той или иной задачи. Как
показали эксперименты, для решения
даже сравнительно простых задач уз-
t
i
*
-
t
А
l-
1
!
1
i
к
i
1
1
<
*
1 I
М
ч
1
1
1
I
«
ггг
1 1
(
а
Рис. 3.2. Пример изо-
изображения, вписанного в
сетку, с наложенными
на него пересекающими-
пересекающимися линиями
Рис. 3.3. Примеры изо-
изображения, вписанного в
систему прямоугольни-
прямоугольников (а), и бросания от-
отрезка прямой на сетчат-
сетчатку (б)
навания с приемлемой надежностью нужно огромное число Л-эле-
Л-элементов, что на современном уровне развития техники реализовать до-
довольно затруднительно.
2. А. Гамба одним из первых обратил внимание на возможность
улучшения характеристик персептрона. Для этого он предложил, во-
74
ервых, изменять пороги неэффективных Л-элементов и, во-вторых,
армировать в процессе обучения для каждого Л-элемента не один, а
есколько весовых коэффициентов соответственно числу классов зада-
j. Эти предложения были реализованы им и его сотрудниками в раз-
различных узнающихустройствах, получивших название PAPA.
A. В PAPA № 1 свет от источника проходит последовательно через
1егатив с прозрачным изображением и непрозрачным фоном и маску
из случайных линий (всего таких масок 80). Если интенсивность све-
га, прошедшего через маску, превышает определенное пороговое зна-
гние, то срабатывает триггер, фиксируя в соответствующем этой мас-
маске канале «единичное» значение отвечающего ей свойства. В процессе
5учения накапливаются частоты «единиц» для каждой маски и каждо-
р-о класса, которые затем используются при принятии решения.
Б. PAPA №2 является улучшенным во многих отношениях узнаю-
дим устройством. Число его Л-элементов превышает 10 000. Предус-
Предусмотрена система оптимизации Л-элементов (система замены неэффек-
неэффективных Л-элементов). Функции случайных масок PAPA № 1 выполня-
эт здесь случайные линии на экране электроннолучевой трубки, на от-
отклоняющие пластины которой подаются случайные сигналы («белый
пум»), предварительно записанные на магнитной ленте. PAPA № 2 —
узнающее устройство последовательного типа. Случайные линии
эрмируются на экране трубки последовательно одна за другой и каж-
из них соответствует своему Л-элементу. Последний возбуждается
'или нет в зависимости от числа пересечений изображения случайной
* линией и заранее выбранного порогового значения. Проецирование этой
'линии на изображение, которое по-прежнему выполняется в виде не-
'тагива, производится с помощью оптической системы.
B. Для формализации изобразительной информации в PAPA № 3
"используется тот же принцип, что и в PAPA № 2, с той лишь разницей,
что формирование случайных отклоняющих сигналов производится
здесь с помощью специальных генераторов «шума».
3. Может быть использована другая, чем в PAPA, но аналогичная
: по своему характеру система свойств изображений. Это значение свой-
'ства Xi здесь определяется как число случайных линий, каждая из ко-
¦ торых пересекает контур изображения I раз. Формирование равномер-
равномерной сетки случайных линий, накладываемой на изображение, произво-
производится заранее. При этом предполагается, что вероятность проведения
линии через любые две точки из конечного множества точек ограничен-
ограниченной «сетчатки» одинакова. Изображению в этом случае соответствует
случайный вектор х (хъ х2,..., хп). Если использовать нормализован-
_ п
ные свойства xt = xt \ 2 хи то их математические ожидания не зави-
сят от преобразований подобия. Предполагают также, что получае-
получаемое таким образом описание слабо зависит от имеющих место на прак-
| тике искажений изображений.
\ Примечание. Пока что трудно говорить об эффективности рассмотрен-
рассмотренных выше способов описания изображений, так как они были использованы для
опознавания элементарных входных ситуаций. Ясно лишь, что для классифика-
классификации объектов сложной формы потребуется огромное число случайных линий.
75
4. Для получения численного описания изображения можно ис-
использовать случайное «бросание» отрезка прямой длиной lt на «сетчат-
«сетчатку». Начальная точка А отрезка определяется парой случайных чисел
(л:, у), а конечная В — случайным углом а0 (рис. 3.3, б).
Определим величину xt как условную вероятность того, что если
точка А попадает внутрь изображения 5, то и точка В попадает туда
же:
При таком определении xt очевидно, что при соответствующем вы-
выборе масштаба измерения lt полученная величина не зависит от разме-
размеров и положения изображения на «сетчатке».
Интегральный вид выражения C.3) можно получить с помощью со-
соотношений
Я
Я dxdv
х, yeS0
f[(x,y),li]dxdy,
х, у е S
где / [(х, у), lt] — относительная величина части окружности радиуса
It с центром в точке (х, у), попадающей внутрь изображения S; 50 —
площадь «сетчатки».
При п различных значений Xt можно получить систему свойств
(Xi, Х%, ..., Хп).
Такие свойства использовались для опознавания геометрических
фигур, имевших небольшие отличия по форме. Величины xt определя-
определяются методами численного интегрирования. Свойства подобного типа
можно считать перспективными лишь при условии, что будут предло-
предложены сравнительно простые способы их вычисления. Помехозащищен-
Помехозащищенность этих свойств не исследована.
Рассмотренные методы формализации изоинформации далеко не ис-
исчерпывают всех известных в литературе методов, однако показывают,
что подходы к решению связанных с этим вопросов могут быть различ-
различные. Очевидно, что для сравнения эффективности отдельных способов
описания необходимо в какой-то степени стандартизировать материал
обучения и экзамена. При этом тестовых задач должно быть несколько
и они должны иметь различную степень сложности. Вместе с тем опыт
показал, что получаемые на основе того или иного метода формализа-
формализации описания классов при решении конкретных практических задач
пока что существенно отличаются от их описаний человеком. Человек
использует для этих целей очень специализированные термины, обра-
образующие словарь терминов, а даваемые им описания классов весьма ко-
короткие и компактные.
К сожалению, пока неизвестно, по каким законам обрабатывается
зрительная информация в мозгу человека. Однако, проанализировав
описания, используемые человеком при решении аналогичных задач,
можно попытаться построить систему, которая будет автоматически
вырабатывать описания классов, близкие к описаниям человека. Для
этого система должна обладать необходимым минимумом абстрактных
76
понятий. Однако она не может выработать такие понятия сама, обу-
обучаясь на разумном числе примеров.
Начальная организация системы может, например, заключаться
в следующем. Для описания классов в терминах, используемых чело-
человеком, необходимо организовать в системе некоторые операторы (под-
(подпрограммы), каждый из которых соответствует вполне определенному
термину. Кроме того, необходимо задать правила соединения операто-
операторов между собой — «правила грамматики», чтобы система могла стро-
строить различные «фразы» для описания классов. С целью сокращения
времени обучения можно использовать некоторые критерии для опре-
определения перспективности «фраз» в процессе их построения. Словарь
терминов и «правила грамматики» должны выбираться конструктором
так, чтобы система могла отыскать достаточно простые и короткие опи-
описания классов, необходимые для разделения последних во всех зада-
задачах из выбранной совокупности.
При автоматическом распознавании сложных пространственных
объектов технического происхождения целесообразно и использова-
использование таких «человеческих» приемов, как выделение и классификация
отдельных деталей этих объектов. Для этого необходимо, чтобы систе-
система могла автоматически препарировать сложное контурное изобра-
изображение на односвязные контуры, опознавать последние и синтезировать
из них проекции различных деталей объекта, которому принадлежит
это изображение.
§ 3.3. СИСТЕМА ГЕОМЕТРИЧЕСКИХ б*-ПРИЗНАКОВ
ПРИ РАСПОЗНАВАНИИ ОБЪЕКТОВ
После реализации алгоритма препарирования контуров необходи-
необходимы распознавание видов выделенных односвязных геометрических кон-
контуров и определение некоторых их геометрических параметров (раз-
(размеров). Процедуру распозна-
распознавания контуров и определе-
Изофажет
ния их геометрических пара-
параметров от поступления на
вход системы пиктурного изо-
изображения до выдачи системой
типов односвязных контуров
и определения их геометри-
геометрических характеристик удоб-
удобно расчленить на три этапа.
Рассмотрим этапы алгорит-
алгоритма распознавания контуров.
Этап 1. На этом этапе проводится уже описанная предваритель-
предварительная подготовка изобразительной информации (блок /). На выходе бло-
блока / (рис. 3.4) формируются совокупности точек (xit yt, Bt)k (где k =
= 1,2,3,... — номер односвязного контура) отдельных односвязных
контуров, которые являются исходными данными для блока 2.
Этап 2. На этом этапе происходит распознавание форм геометри-
геометрических контуров (блок 2). Каждому распознанному контуру присваи-
присваивается порядковый номер,
77
Номер
целевого
признака.
Характерис-
Характеристика целевого
признака
Контрольный
результат
Рис. 3.4. Этапы распознавания контуров:
/ — предварительной подготовки изображений;
2 — распознавания контуров; 3 —распознавания
целевых признаков
Номер
контура
Рис. 3.5. Процедуры этапа распознавания кон-
контуров:
/ — нормализация; 2 — определение параметров 6^;
3 — анализ контуров; 4 — вывод точек контуров на
телетайп
Алгоритм распознавания работает по принципу совпадения или не-
несовпадения площади неизвестной фигуры, найденной двумя различны-
различными способами. Первый способ позволяет определить площадь фигуры
по имеющимся координатам ее точек, используя, например, формулы
треугольника или трапеции. Площадь фигуры, найденную таким обра-
образом, назовем интегральной и обозначим SH. Площадь той же фигуры
можно найти по второму способу через систему геометрических пара-
параметров фигуры, характеризующих ее размеры, вытянутость, компакт-
компактность и т. д. Площадь фи-
K-*-(k+D гуры, найденную этим спо-
способом, назовем геометри-
геометрической и обозначим Sr.
Этап 3. На этом эта-
этапе происходит формирова-
формирование признаков, характери-
характеризующих целевое назначе-
назначение классифицируемых объ-
объектов, и определяются чис-
числовые значения их гео-
геометрических параметров
(блок 3).
Методика распознава-
распознавания контуров, описыва-
описываемая ниже, обладает достаточно высокой помехоустойчивостью, ин-
инвариантностью к преобразованиям группы подобия, допускает опре-
определенные деформации анализируемых контуров, не требует высокой
точности съема координат точек контуров, проста и наглядна.
Ограничениями к ее применению служат заранее сформированный
перечень фигур, подлежащих распознаванию, и то, что контуры долж-
должны иметь форму простейших фигур (шар, прямоугольник, трапеция
и т. д.). Однако последнее ограничение не является слишком жестким,
так как окружающие нас трехмерные объекты, которые требуется опо-
опознавать машине, как правило, состоят из отдельных деталей правиль-
правильной геометрической формы, классифицируемых с помощью системы
бгпризнаков. Примеры таких деталей и разновидности их изображений
приведены на рис. 2.17, 2.16.
Внутреннюю структуру блока 2 (рис. 3.4.) можно детализировать,
например, в соответствии с рис. 3.5. Операции, связанные с распозна-
распознаванием контуров, носят циклический характер. Число циклов М рав-
равно числу контуров в исходном изображении. Признак k = М несет
информацию об этом числе контуров и поступает в блок 2 (см. рис. 3.4)
вместе с массивом точек (xh yh Bt). Этим сигналом запрещается поступ-
поступление на клапан И другого, очередного сигнала k-+ (k+ 1), обеспе-
обеспечивающего цикличность работы всего блока 2 (рис. 3.5). Сигнал &-»-
-»-(&+ 1) означает, что обработка &-го контура закончена и можно
через клапан И подать на вход блока последовательность точек очеред-
очередного (k + 1)-го контура.
Расшифруем содержание процедур, изображенных на рис. 3.5
в виде самостоятельных блоков.
78
«,: Процедура нормализации (блок /) здесь рассматривается как вспо-
I могательная и выполняется по алгоритмам, описанным, например, в
" гл. 2.
При определении параметров бг (блок 2) происходит вычисление
некоторых условно введенных геометрических параметров б; (см. рис.
2.18), через которые легко и однозначно определяются площади одно-
связных контуров и распознаются сами типы контуров.
Обратим внимание на геометрический смысл этих параметров для
нормализованных фигур: 8Х — максимальный горизонтальный раз-
размер фигуры; б2 — максимальный вертикальный размер фигуры;
б3 — минимальное расстояние от центра тяжести фигуры (точка о) до
линии контура в направлении оси ох; б4 — максимальное расстояние
от центра тяжести фигуры до линии контура в направлении оси оу;
б5 — максимальное расстояние от центра тяжести фигуры до линии
контура в направлении оси ох; бв — минимальное расстояние от цент-^
ра тяжести фигуры до линии контура в направлении оси оу.
Выбранные параметры б* легко определяются по следующим соот-
соотношениям:
'mln I
*Л (8) I
ГДе X*max' #'max- X'min'
, — соответственно наибольшие и наи-
' ' "НШЛ - шил mil*. ШШ
меньшие значения координат точек фигуры; л^е) — координаты то-
точек контура, удовлетворяющие условию укм = у0, при этом всегда
^5 ^ 63; г/х(ц) — координаты точек контура, удовлетворяющие усло-
условию Хщв) = х0, при этом всегда б4 ^ б6.
Процедура обработки контуров происходит после вычисления па
раметров 6г (блок 3). Поскольку распознавание сложных пространст
венных объектов можно проводить на основе системы целевых призна
ков, состоящих из многосвязных контуров на плоских изображениях
объектов, то результатом операций в блоке 3 будет не только присваи-
присваивание номеров распознавания односвязным контурам и определение их
геометрических размеров, но и выявление вспомогательных точек
т), [г, 0 и X, которые в дальнейшем используются при синтезе контуров
и формировании целевых признаков.
Последовательность действий при распознавании фигуры иллюст-
иллюстрирует иерархическое дерево (рис. 3.6), в углах которого реализуется
некоторая аналитическая или логическая функция. Вид дерева и реа-
реализуемых в узлах функций зависит от числа и разнообразия класси-
классифицируемых контуров.
Сам процесс распознавания фигур осуществляется последователь-
последовательным сужением числа классов, к которым может быть отнесен анализи-
анализируемый контур, посредством дихотомий. Процесс этот длится до тех
пор, пока фигура не получит однозначного наименования.
Иерархическая система распознавания контуров. В узле А разделя-
разделяются компактные и некомпактные фигуры. С этой целью проверяется
неравенство ¦-1 vc > рх или *~7* <¦ Рх, где рх = 0,35 — порог
79
классификации, подбираемый экспериментально в зависимости от ти-
типов анализируемых фигур.
Примечание. Здесь и далее значение порогов подобраны эксперимен-
экспериментально; они обеспечивают распознавание указанных фнгур в узлах дерева с наи-
наибольшей вероятностью.
Если \8г — ба| / FХ + б2) < ръ то распознаваемый контур счита-
считается компактным, в противном случае — некомпактным.
В узле В от прочих фигур отделяется контур 14 (спираль). Неизвест-
Неизвестная фигура относится к спирали, если выполняется неравенство SJ
/(б1б2) < р2, где р2 = 0,4 — порог классификации. В противном слу-
случае это не спираль.
В узле С от прочих отделяются фигуры 12 и 13 по критерию вытяну-
тости контура 61/62 > ра, где р3 — 4 — порог классификации; б? —
наибольший из параметров 6Х
и 62; 6г — наименьший из
параметров 6Х и 62.
В узлеО проверяется сте-
степень искривления фигуры по
критерию 82/83 < р^ где pt =
= 0,6 — порог классифика-
классификации;
з = 84 + 8в, если 62^83;
3 = 83 + 85, если 8j < 83.
Если параметры контура
удовлетворяют последнему не-
неравенству, то фигуре присва-
присваивается номер 12, а осталь-
остальным контурам, анализиру-
анализируемым в узле D — номер 13.
В узле Е исследуются прошедшие через узлы В и С фигуры, кото-
которым номер не был присвоен (фигуры / — //). Для каждой из этих фи-
фигур (рис. 3.7) геометрическую площадь 5Г можно найти через парамет-
параметры 8t, т. е. 5Г = / (б,) (/= 1,2,..., 6).
Покажем, как это делается, на примере некоторых фигур.
Фигура 1. 5г1 = 5j — S2 = 62 [B/3 — я/4) 81 + я/4 (б, +
+ 65)], где 5j — площадь, заключенная между параболой и штриховой
прямой; 52 — площадь полуэллипса.
Фигура 2. 5r2 = 5j + S2 = B/3) 828* + (я/4) 62 (81 — 6*).
Найдем значение величины 6* через параметры б*. Уравнение параболы
в системе координат хоу имеет вид у — ах2. Так как а = у (8Л/81 —
= 65/б?, то 6* = у F2/2) = а (б2/2J = 6165/D6?). Тогда 5г2 =
= (я/4) 6j62 + A/6 — п/16) б! 8J81
Ф и г у р а 3. 5ГЗ = B/3) 6j62.
Ф и г у р а 4. 5Г4 = A/2) 81 (б2 + а).
Для определения параметра а через 8г рассмотрим два подоб-
подобных треугольника. Из подобия их следует, что F2 — аIB81) =
80
Исходный HaSop /рцгс/р
Рнс. 3.6. Иерархическое дерево распознава-
распознавания фигур
|ь (б4 — a/2)/Fj — б3), откуда а = Bбхб4 + 62б3 — М2)/б3. Тогда
. = Fi/63) F26з + 818i — 0,5 6j62).
Ф и г у р а 5. 5Г5 = [F2 + с)/2] (бх — Ь) + (я/4) 8ф — (я/4) ас.
|3десь величины a, b и с легко определяются. Из рисунка видно, что
= 6j — 63 — 6S.
Фигура 5
Фигура 6
Фигура 7 Фигура 8
Г-
Фигура W
Фигура 11
Фигура 9
Рнс. 3.7. Набор распознаваемых фигур
При сечении конуса плоскостями, параллельными его основанию,
получаются подобные фигуры, поэтому
2 = а1Ь и с = (а/Ь) 63=
-8,-8,).
При рассмотрении двух выделенных на рисунке подобных треуголь-
треугольников видим, что F2 — 6)/[0,5 F, — с)] = (бх — б,)/(б4 — 0,5 с).
Подставляя в это равенство значение параметра с, получим квадрат-
квадратное уравнение относительно параметра Ъ, т. е. 2 64й2 + (8285 —
— 26А)й + 6263 Fj — 63 — 65) = 0. Определив отсюда значение Ъ,
находим 5Г5.
Фигура 6. 5гв = *s±±c+-j- ^ + x 52d- Из рисунка име-
ем d = бх — 63 — 65, й =
с 5бА-
6364+6465—6164-0,56363
81
Подставив найденные значения размеров d, b, с в исходное выражение,
найдем площадь 5гв.
Фигура 7. 5Г7 = бхб2 при Ьх Ф 82.
Ф и г у р а 8. 5Г8 = ба (б3 + б5) при условии, что 81 > (б3 + б5).
Ф и г у р а 9. Для этой фигуры из рисунка имеем 5Г9 =5 — 5Х —
—52, где 5 — площадь окружности; 5Х — площадь сектора (на рис. 3.7
заштрихована); 52— площадь треугольника ОАВ.
Для нахождения этих площадей решим уравнения двух пересекаю-
пересекающихся окружностей, приведенных на рисунке:
Отсюда у = 0,5 (б' — 0,5 б2) = 8j — 0,5 б2.
юда у 0,5 (б 0,5 б2) 8j 0,5 б2.
Для найденного значения у абсцисса б" = 1^@,5 б2J— (бх—05б2J
Тогда tg а — б"/(б' — бх)= 2б"/Bб1 — б2) и частные площади
я co2arctg[26"/B61-62)] 1 . 26"
Si=t61 ^ =T61t
= 0,5B6!—б2) б".
Окончательно имеем 5Г9=B бх — б2) б" + (-т—0,5 arctg 55—г) б!.
Фигура 10. 5г10 = (л/4) б^, если 81 = б2.
Фигура 11. 5Г11 = (я/4) 8^2, если бх # б2.
Исследуемые 11 фигур, получающиеся на выходе узла Е (см.
рис. 3.6), можно дополнительно разбить еще на три группы, введя
критерии, характеризующие их форму. В качестве таких критериев
можно принять следующие: 9j = [бх — (б3 + 8Ъ)МЬХ и Э2 = [б2 —
— F« + бв)]/б2.
Тогда к группе I (узел F) будут отнесены фигуры, для которых Q1 —
= 02 ^ Ръ (Ръ ~ 0,1 — порог классификации), к группе II (узел Н) —
фигуры, для которых
> Ръ, 62 < Ръ'
к группе III (узел G) — фигуры, для которых дг = Э2 > р5.
Очевидный состав групп по номерам объектов распознавания будет
следующим:
Группа I 7, 10, И
'» II 2, 3, 4, 8, 9
» III 1, 5, 6
Такое дополнительное разбиение распознаваемых фигур повышает
надежность их классификации.
Распознавание же фигур происходит внутри каждой группы в уз-
узлах F, G, Н по наибольшему совпадению интегральной площади иссле-
исследуемой фигуры с одним из значений геометрической площади каждой
из неизвестных фигур. В случае совпадения этих площадей у неизвест-
неизвестного контура ему присваивается соответствующий номер. Аналитичес-
82 ,
ж
ки вышеуказанный критерий распознавания выражается следующим
образом:
тем, если ат- : ' "i~
где т — порядковый номер анализируемого контура; М — классифи-
классификационный номер контура; i = 1,2, ... — число анализируемых кон-
контуров; (тпор — пороговое значение коэффициента а, зависящее от точно-
точности координат точек контуров и степени их искажений (см. гл. 7).
Примечание. Во избежание анализа контуров-помех в алгоритм рас-
распознавания можно ввести порог на минимальную площадь фигуры Srain. Если для
неизвестной фигуры оказывается SH < Smin, то этот контур рассматривается
как помеха и не анализируется.
В табл. 3.1. приведены вероятности правильного распознавания
14 типов приведенных ранее фигур при двух размерах матрицы эле-
элементов дискретизации контуров 10x10 и 20x20.
Таблица 3.1
Размер
растра
10X10
20X20
Вероятность распознавания, %, фнгур
1
83
95
«
85
96
3
отот
от от
4
73
92
5
88
94
6
94
99
69
93
8
ОООТ
от от
9
98
99
10
96
99
и
96
99
12
85
94
13
89
95
14
97
99
Для набора статистики каждая фигура вписывалась в матрицу.
Затем машинным путем с некоторым шагом изменялись ее параметры
и ориентация.
Таким образом анализировалось около 800—1000 фигур каждого
класса. Описанный алгоритм распознавания работает надежно, если
погрешность съема координат точек фигур не превышает 5—10%.
§ 3.4. ГЕОМЕТРИЧЕСКИЕ МОМЕНТЫ-ПРИЗНАКИ
ПРИ РАСПОЗНАВАНИИ ГЕОМЕТРИЧЕСКИХ ФИГУР
Удобной и надежной системой признаков для классификации гео-
геометрических фигур служат моменты различных порядков, вычислен-
вычисленные в прямоугольной или полярной системе координат.
Геометрические моменты в декартовой системе координат. Общее
выражение для вычисления моментов имеет вид
+ ¦»
map= Jj" B(x,y)xay&dxdy,
— 00
где В (х, у) ¦— функция яркости изображения в прямоугольной системе
координат; а, Р — порядок момента.
Использование моментов в качестве признаков базируется на сле-
следующей фундаментальной теореме (см. [9]).
Теорема: бесконечная последовательность моментов изображения
{отар} (а, р = 0,1,2,...) однозначно определяется его функцией ярко-
яркости В (х, у) и, наоборот, функция В (х, у) однозначно определяется по-
последовательностью {/Пар}.
83
Следовательно, подсчитав некоторые моменты предъявленной про-
проекции, можно опознать ее. Какие моменты при этом наиболее целесооб-
целесообразно использовать и с какой точностью необходимо их вычислять, как
правило, определяется экспериментально. Описание проекции с по-
помощью моментов хорошо согласуется с процедурой ее нормализации,
рассмотренной в гл. 2. Можно отметить и такие достоинства этого опи-
описания, как наличие у него фильтрующих свойств, связанных со сгла-
сглаживающими качествами моментов (особенно моментов нечетных поряд-
порядков); независимость обработки координат элементов изображения при
подсчете значений признаков; использование при этом в основном толь-
только операций умножения и сложения; возможность определения момен-
моментов больших порядков через моменты меньших порядков; легкость на-
наращивания ансамбля признаков и др.
Примечание. Ниже предполагается, что для опознавания исполь-
используются моменты цар нормализованного изображения. Это, разумеется, не про-
противоречит упомянутой выше теореме.
Для идентификации трехмерных тел иногда применяются не момен-
моменты цар непосредственно, а рассчитанные на их основе характеристики:
\l4j\ (<Х.Р=1,2, ...)
C.4)
В знаменателе этой формулы находится сумма модулей всех момен-
моментов порядка (а + Р)- Эти признаки, обладая достоинствами моментов
ц„р, имеют еще следующие особенности:
а) они в меньшей степени, чем собственно моменты ц.ар, подвержены
влиянию помех. Например, максимальное относительное изменение
величин vap для изображений, приведенных на рис. 2.2, составило
около 40% при уровне помех до 30%, в то время как сами моменты из-
изменялись в 1,5—2 раза;
б) лризнаки vap инвариантны к отображениям проекции относи-
относительно координатных осей Од: и Оу, а также к ее поворотам на угол п,
поскольку при этом меняются в худшем случае лишь знаки отдельных
моментов, а в C.4) участвуют лишь модули последних. Это позволяет
упростить изложенный ранее алгоритм ориентирования, а именно ис-
исключить из условий B.9) последнее условие;
в) величины vap инвариантны также к изменению масштаба проек-
проекции. Действительно, при изменении ее масштаба в k раз момент fiap
изменяется в #*+Р+2 раз (для силуэта) или в №+§+х раз (для контура),
но поскольку все моменты в соотношении C.4) имеют один и тот же по-
порядок, то величина v«p не изменяется;
г) в связи с нормированием моментов в C.4) все значения величин
vap изменяются в одном и том же диапазоне 0 ^ vap < 1. Как будет
показано выше, это позволяет существенно сократить потребность в
машинной памяти для хранения соответствующих распределений, а
также время поиска необходимых для принятия решения значений
этих распределений.
Важен также вопрос о погрешностях вычисления моментов, связан-
связанных с пространственной дискретизацией изображения. Аналитическая
84
оценка этих погрешностей может быть выполнена лишь для изображе-
изображений частного вида (например, квадрата).
На рис 3 8 показан квадрат со стороной, равной 1, и количеством
отсчетных точек по осям ох и оу, равным ЛГ.Теоретическое значение
момента /пар порядка (а + Р) Для него при двух градациях яркости
равно m«p = {{ *?У* dx dy = l/[(a + 1) (Р + 1I. Дискретный же
эквивалент этой величины составит
1,0',
2N-1
Если в разложении
_?!-
- — CJ2"-1
B3—
*-1 — — С»Х
2N
i
z/v
Ж
О
\-\-
Vv-UA
К-Н-
h-l
ILJL-UX-J-J
444+f
-H+4-+-
4-1-
bi-H-H
г-Н-Н
t*
-ш
•ZN 2Н 2Н
. gfcj 10 К
2N
Рис. 3.8. Пример изображения
для аналитической оценки пог-
погрешности вычисления момен-
моментов
(где последний член содержит JV или
JV2; Ва, В4 ,... — числа Бернулли; С?,
С!,... — числа сочетаний из а элементов по 1,3,...) ограничиться
только первыми двумя членами, что уже при N = 10 дает относитель-
относительную ошибку, не превышающую 0,006%, то
S B/-1)а«-
f= 1
Тогда с учетом C.6) формулу C.5) можно привести к виду
C.6)
т:
что дает следующую относительную погрешность вычисления момента
24ЛГ2
При (а + P)max = 6, бар = 1% найдем, что N = 14. Громоздкие,
но несложные расчеты, аналогичные приведенным, показывают, что
при выборе в качестве признаков величин
размерность «сетчатки», требуемая для их вычисления с наперед задан-
заданной относительной погрешностью, как правило, гораздо меньше, чем
в случае использования признаков тар.
85
Практические вопросы масштабирования проекций. Рассмотрим
некоторые вопросы практического выполнения масштабирования про-
проекции с помощью моментов. Можно предложить два способа учета мас-
масштаба по известной величине k.
Первый способ предполагает умножение координат изображения
после его ориентирования на величину k, а затем вычисление требуе-
требуемых признаков. При этом если не предпринять никаких специальных
мер, то при k > 1 будут определяться признаки изображения, имеюще-
имеющего разрывы между элементами, а при k <С 1 — наложения последних.
Поэтому после упомянутой коррекции координат требуется перефор-
переформирование описания силуэта или контура.
Второй способ основывается на приведении моментов цар ориенти-
ориентированной проекции к ее моментам fvP после масштабирования с по-
помощью соотношений
fe+P + 2aB Для силуэта;
ap ДЛЯ контура.
Эти выражения дают точный результат только для непрерывных
изображений. Пространственная же дискретизация вносит определен-
определенные погрешности, которые в случае простых проекций можно оценить
аналитически.
Рассмотрим на «сетчатке» квадрат со стороной N единичных эле-
элементов, расположенный относительно системы координат оху так же,
как и квадрат, показанный на рис. 3.8. Его момент будет равен
N
N
1=1
N
Если теперь в разложении 2 '"* ограничиться первыми двумя чле-
нами, т. е. положить
что при N = 10 и N = 50, к примеру, дает относительные ошибки, рав-
равные 3,5 и 0,14% соответственно, то
+ 2(a+l)(p + ») + 4
Аналогичный квадрат со стороной kN будет иметь момент
.-ни-,
/V«+P
4 '
а при применении соотношения C.8) — момент
86
Тогда относительная погрешность масштабирования, связанная с
дискретизацией, равна
-¦ C.10)
т"
Так, например, зависимость 620 (k, N),
ражению, показана на рис. 3.9 (кривая /).
ная от погрешностей усечения, связан-
связанных с применением формулы C.9), ил-
иллюстрируется здесь кривой 2. На этом
же рисунке показана для сравнения
функция б'го (k, N), соответствующая в
аналогичных условиях контуру квадра-
квадрата со стороной N и толщиной контура
в один элемент «сетчатки» (кривая 3).
Как видим, проекцию на «сетчатке» же-
желательно иметь как можно больше, а ве-
величину k — ближе к 1, причем лучше,
если k > 1.
Признаки, определяемые выражением
C.7), зависят от k при дискретизации
изображения очень слабо. Так, напри-
например, если при большом N выражение
C.10) для моментов второго порядка
дает грубую оценку б^р, равную 2 (k —
—1I (kN), то нетрудно показать, что со-
соответствующая оценка для признаков ви-
вида C.7) подчиняется соотношению 3 (k—
— 1)/B2 kN), т. е. оказывается примерно
в 15 раз меньше.
Геометрические моменты в полярной
системе координат. Общее выражение
для вычисления моментов имеет вид
рассчитанная по этому вы-
Та же зависимость, свобод-
16
12
4
0
-4
1
1
//
и
А-
>
/
/ •
/^
2
„J
^
г———
6
Т
—г
3
\10к,0?
1,6
и
0,8
u,t
0
/
I
\l
У
J_
яУ.
я
-у
/_
/
/
/>¦
*~ —
в
— —
—г
\KfiA
о о
Рис. 3.9. Графики зависимости
бГ'2О (k, N):
а, б — соответственно квадраты
дискретизации изображения со
стороной N=10 н Af=lOO
где В (р, ф) — функция яркости изображения в полярной системе ко-
координат (например, для внутренних точек фигуры В (p,jCp) = 1; для
точек вне фигуры В (р, ф) = 0); р — радиус-вектор точки контура, про-
проведенный из центра тяжести фигуры; р — показатель степени момента;
??тах— расстояние от центра тяжести фигуры до максимально уда-
удаленной точки контура.
Поскольку основная информация о конфигурации фигур для нас
содержится в ее контурной линии, то будем рассматривать изменение
радиус-вектора р от р = #mln до р = #гааХ (Rmin и #гаах — соответст-
соответственно расстояния от центра тяжести фигуры до наименее и наиболее
удаленных точек контура) (рис. 3.10).
87
Заменив интегрирование по р суммированием, получим
J 2Я
^=2 Ар Jpffife,, Ф)Лр,
/=1 О
где Ар — шаг дискретизации радиуса; J = (Rmax — i?mln)/Ap — об-
общее число шагов дискретизации радиуса; р; = Rmla + /Ар — дискрет-
дискретное значение /-го радиус-вектора.
В качестве признаков используем отдельные слагаемые этого мо-
момента .
Для нормирования изображения по масштабу введем нормирующий
множитель | = 1/E — 5min) (где 5 — площадь изображения (силуэ-
(силуэта); 5га1п — площадь круга радиуса
#min); PjO = P/Rmin — Нормированный
радиус-вектор р;. Тогда окончательно
для вычисления признаков распознава-
распознавания фигур получим следующее выра-
выражение:
2Я
о
Рис. ЗЛО. Радиус-векторы (фи-
(фигуры)
Основные достоинства моментной си-
системы признаков классификации следу-
следующие:
1. Признаки инвариантны к парал-
параллельному переносу, поскольку полюс
системы координат совмещается с цент-
центром тяжести фигуры.
2. Нормирующий множитель | и нормированное значение ру-0
обеспечивают инвариантность к изменениям масштаба изображения.
3. Интегрирование по углу ф обеспечивает инвариантность к пово-
повороту.
4. Число признаков легко наращивается без перестройки алгорит-
алгоритма вычисления путем увеличения J и р.
5. Моментные признаки, с одной стороны, в достаточной степени
интегральны, так как вычисляются по площадям кольцевых сечений
фигуры и нечувствительны к некоторым погрешностям в описании кон-
контура, они позволяют практически неограниченно наращивать ансамбль
параметров распознавания; с другой стороны, уменьшая шаг Ар (уве-
(увеличивая J), можно получить все более детальное описание контура.
Рассмотрим основные этапы алгоритма формирования моментных
признаков.
Этап 1. На этом этапе алгоритма вычисляется площадь фигуры
через координаты ее точек:
п
где п — число точек контура.
- Э т а п 2. На этом этапе алгоритма находятся статические моменты
|v инерции'контура в исходной системе координат по приближенным вы-
выражениям
1 "
'¦-т s <¦
Этап 3. На данном этапе алгоритма определяются координаты
центра тяжести фигуры и начало координат переносится в эту точку:
где xi, y'i — координаты t-й точки
контура относительно новых осей ко-
координат (х'о'у') (рис. 3.10).
Эта п 4. На этом этапе алгоритма
определяются величины
и по всем I точкам вычисляются рас-
I' стояния Rmia и Rmax. Кроме того,
Rmin ищется еще по всем прямым,
соединяющим две соседние точки, ес-
если линейные участки контура задают-
задаются только начальной и конечной точ-
точками.
Рис. 3.11. Аппроксимация конту-
контура кусочно-ломаной линией
Э т а п 5. Этот этап алгоритма необходим для определения шага дис-
дискретизации:
Д (Я— Rmln)/J-
Число шагов дискретизации J задается в зависимости от сложности
распознаваемых фигур (чем сложнее фигура, тем больше J).
Э т а п 6. На этом этапе алгоритма вычисляются значения интегра-
интегра2Я
j=\ B(pjt
лов:
Если кодируемый контур аппроксимирован кусочно-ломаной ли-
линией (рис. 3.11), то интеграл можно заменить соответствующей суммой:
1 п
&1 = Y ? (p/--p/_i)A-<Pf+(R|R|+islnAcpf-p/_1 A«Pi),
где Аф; — угол между векторами R2 и Ri+1.
Следует учитывать, что если p^i < Йг <1 р;, то первое слагаемое
берется равным нулю; если р;- ^ R;, то второе слагаемое не учитывает-
учитывается; если pj_x ^ Rs, то оба слагаемых равны нулю.
89
Последний наиболее общий вид формулы для 2^- справедлив для
случаев, когда отрез'ок [Tt, Ti+1] не пересекается радиусами р;- и pj+1.
В противном случае этот отрезок разбивается точками пересечения на
интервалы и значения t§j вычисляются по частям.
Э т а п 7. На этом этапе алгоритма находят площадь Smln и нор-
нормирующий множитель |:
Smia=Jt^in, a ? = 1/(S-Smln).
Э т а и 8. На данном этапе алгоритма определяются значения приз-
признаков:
Xin — Хъ — с
Rmln
где k — порядковый номер признака.
§ 3.5. ЭФФЕКТИВНОСТЬ ПРИЗНАКОВ ЯРИ РАСПОЗНАВАНИИ
ДВУХ КЛАССОВ ОБЪЕКТОВ
При статистической постановке и решении задач распознавания при-
приходится сталкиваться с огромными трудностями, связанными с оцен-
оценкой многомерных плотностей вероятностей исходных признаков рас-
распознавания. Эти трудности можно преодолеть, если вместо многомерных
распределений исходных признаков рассматривать некоторые функцио-
функционально связанные с ними одномерные распределения. В качестве таких
распределений могут быть использованы, например, распределения
скалярных дискриминантных функций dt (X, W), реализующих при-
принятое решающее правило и количественно определяющих меру при-
принадлежности распознаваемой реализации X = (хъ х2,..., *&,..., хп)
(где хк — k-k признак распознавания) к классу At (i = 1, т) по из-
известным параметрам дискриминантной функции W= (тъ w2,..., wn).
При этом в силу центральной предельной теоремы допущение нормаль-
нормальности распределения дискриминантной функции оправдывается в зна-
значительно большей степени, чем обычно делающееся допущение о нор-
нормальности распределения исходных признаков. Это допущение легко
проверяется экспериментально, так как распределение дискриминант-
дискриминантной функции одномерно.
Рассмотрим случай распознавания объектов, относящихся к клас-
классам Аг и А2. Поверхность, разделяющая в пространстве признаков
эти классы, полностью определяется одной дискриминантной функци-
функцией^ (X, W) (см. [10]):
dn(X, W)=d1(X, WJ—dziX, W2). (З.П)
В общем случае параметры W = (Wu W2 Wi) дискриминантной
функции неизвестны. Для оценки величины этих параметров исполь-
используют обучающее множество объектов, относительно которых предпо-
предполагается известной проводимая классификация (обучение с учителем).
Процедура определения дискриминантной функции может быть раз-
разбита на три этапа:
90
p(d,2/Az) pfda/A,)
Этап 1. Заданием решающего правила или метрики близости
^описаний к классу, устанавливается вид зависимости дискриминант-
дискриминантной функции от неизвестных параметров.
Этап 2. По обучающему множеству объектов оценивается вели-
;• чина этих параметров.
Э т а п 3. Полученные оценки подставляются в выражение дискри-
дискриминантной функции в предположении, что они являются истинными
значениями параметров.
Определение дискриминантной функции d12 (X, W) эквивалентно
разделению и-мерного пространства признаков на две непересекающие-
непересекающиеся области Gx и G2. Если данный кон-
конкретный объект попадает в область Glt ^/H)
то принимается решение о его принад-
принадлежности к классу А1г т. е. X = (xlt х2,
..., xk,..., xn)^Gy-> Ay и, аналогично,
X = (xlt x2 xk,..., xnNG2-> A2.
Обучающая выборка, использовавша-
использовавшаяся при определении параметров дис-
дискриминантной функции, может быть
вторично применена для нахождения ус-
условных распределений этой функции.
Обозначим через р {йУ21Ау) и р (d12IA2)
плотности распределения вероятностей
дискриминантной функции d12 (X, W)
при условии предъявления обучающего
множества объектов, принадлежащих классам Аг и А2 соответствен-
соответственно. Эти распределения могут быть аппроксимированы нормальными
законами.
На рис. 3.12 показаны возможные распределения р (d12Mj) и
Р (didА а) дискриминантной функции, полученные по обучающему мно-
множеству объектов соответственно для классов Лх и А 2.
При равенстве плат за ошибки первого и второго рода (рис. 3.12)
полная вероятность ошибки распознавания
О
Рис. 3.12. Графики распределе-
распределения p{di2jAi) и p(di2/A2) дис-
кримииаитиой функции для
классов А\ и Л2
/?ОШ=/?1
C.12)
где Pi и Р2 — априорные вероятности появления классов Аг и А2;
С — выбранный порог принятия решения.
В случае нормальных распределений р (di2/^i) и р (d12IA2) выра-
выражение C.12) может быть переписано в виде
где
г
F (z) = -i— Г e-l''2dt — функция Лапласа; т12, т21 —
Т/2я J
мате-
I. . матические ожидания и а12, а21 — среднеквадратичные отклонения
| дискриминантной функции соответственно для классов Ах и Л2.
91
Полезность некоторого признака неходкой соЁокупностй Л приз-
признаков в соответствии с C.1) будем определять по изменению полной
вероятности ошибки распознавания при его исключении из этой сово-
совокупности.
Исключение k-то признака из исходной совокупности признаков
приводит к изменению математических ожиданий и среднеквадратич-
среднеквадратичных отклонений дискриминантной функции на величины А*/л12 и
А*ст12 для класса Ах и величины Д*/п21 и А*ст21 Для класса А 2. При этом
полная вероятность ошибки распознавания становится равной
om=Pi \l-F\
C-(m12-A*
7
m12)-|l
2 Л
C-(m2l-A* m21)
Г
(ЗЛ4)
Г*
При равенстве ошибок первого и второго рода можно получить весь-
весьма простое выражение для оценки полезности признаков. Действитель-
Действительно при а = р значение порога принятия решения С просто выражает-
выражается через математические ожидания и среднеквадратичные отклонения
условных распределений дискриминантных функций:
C = (m12CT2l+m21ff12)/(CTla+CT21). C.15)
Вообще говоря, задаваемое этим выражением значение порога С
не оптимально с точки зрения минимума полной вероятности ошибки
распознавания. Оптимальная разделяющая граница между классами
Ах и Л 2 определится уравнением
pip(dl2/A1)-pip(d12/A2)=O. C.16
При равенстве ст12 = ст21 значение порога С совпадает с оптималь-
оптимальным значением порога, а при близких значениях ст12 и ст21 отклонение
значения порога С от оптимального незначительно.
При использовании нормированных эталонных описаний классов
условные распределения дискриминантной функции имеют практически
равные друг другу среднеквадратичные отклонения. В этих условиях,
фактически не отступая от выбора оптимального порога принятия ре-
решения, появляется возможность значительно упростить выражение
для полной вероятности ошибки распознавания.
При значении порога принятия решения С, найденному по C.15),
выражения C.13) и C.14) запишутся соответственно так:
L
[———— ;
\—piF
(m12 — m21)—(A* m12—A* m21)
—(A* (Tn + A* a21)
^
3.17)
Из C.17) и C.18) непосредственно следует, что k-й признак полезен,
если выполняется неравенство
(т12—т21)—(А* т12—А* т21)
ml2—
)рОе после ряда преобразований может быть записано в более уДоб-
виде:
-f- А ст2
C.19)
Назовем стоящую в левой части этого неравенства величину услов-
расстоянием между распределениями дискриминантной функции
k-му признаку. Из неравенства C.19) следует, что k-й признак по-
зен лишь в случае, если условное расстояние между распределения-
[ дискриминантной функции по этому признаку больше расстояния
лежду распределениями дискриминантной функции по совокупности
|всех признаков исходного описания.
Примечание. Этот вывод качественно согласуется с результатами, по-
Еяученными в работах, в которых рассматривалось асимптотическое поведение ве-
вероятности ошибки классификации двух нормальных совокупностей при увеличе-
1 »ии числа признаков.
Обозначая оценку полезности ?-го признака исходного описания
|при различении произвольной пары классов А% и Aj через e,V, в соот-
соответствии с C.19) можно записать:
е<*>=(Л*тг—Л*'«^г)-¦
;(A*стг^•+Л%г)•
C.20)
Если elf > 0, то k -й признак полезен; если е!у'<;0— он вреден;
если е\р = 0 — бесполезен.
В случае статистически независимых признаков величины, входя-
; щие в C.20), легко определяются аналитически:
C.21)
А = 1
f=V"?^ -=/1x7
C.22)
92
где muk и rrijih — математические ожидания дискриминантной функ-
I ции по k-щ признаку соответственно в классах A t и А у, оцк и ajik —
1 среднеквадратичные отклонения дискриминантной функции по ?-му
| признаку соответственно в классах At и А{,
Акти = тт, Актп=тпк; C.23)
bk°ii=°u-V°IF°JiZ Ak an=an-Vaii-°h- C-24>
При наличии статистической зависимости между признаками ана-
¦ литическое определение величин atj, a^, A*tr^, А* ст;-г чрезвычайно
затруднено (при большой размерности пространства признаков п
^практически невозможно установить корреляционные связи между
I всеми сочетаниями признаков). В этих условиях определение указан-
I ных величин может быть произведено только на основе эксперимента,
^заключающегося в построении по некоторой обучающей выборке клас-
*сов условных распределений дискриминантной функции для исходной
93
совокупности из п признаков и для совокупности из и — 1 признаков
(при исключении некоторого &-го признака).
Вычислив по результатам эксперимента величину среднеквадратич-
среднеквадратичного отклонения значений дискриминантной функции при всех приз-
признаках Оц для класса At, а затем такую же величину при исключении
?-го признака, можно определить величину изменения среднеквадра-
среднеквадратичного отклонения:
Lkou = oi}-at'h C.25)
Аналогично находится Ак а}1 при исключении ?-го признака из
описания класса Л;-:
АЬоп=оп-о;ъ C.26)
Описанная здесь методика оценки эффективности признаков спра-
справедлива для дихотомического разделения классов.
На практике чаще встречается ситуация, когда требуется классифи-
классифицировать число классов объектов т > 2.
§ 3.6. ОПРЕДЕЛЕНИЕ ОШИБКИ РАСПОЗНАВАНИЯ ОБЪЕКТОВ
МЕТОДОМ ДИХОТОМИЙ
Предлагаемая в дальнейшем методика (см. § 3.9) для оценки ин-
информативности признаков учитывает в первом приближении наличие
статистических связей между ними (парных связей) и легко реализует-
реализуется на практике.
На вероятность правильного распознавания влияют, в частности,
информативность признаков и соответствующий выбор классифициру-
классифицирующего правила.
Рассмотрим влияние информативности признаков на правильность
распознавания. Будем считать, что используются адекватные статисти-
статистические решающие функции (бейесовская стратегия). Таким образом,
при необходимости можно будет оценивать потенциальные возможно-
возможности классификатора при определенном наборе признаков распознава-
распознавания.
Составление минимального описания классов объектов (ми-
(минимального маршрута обследования признаков распознавания) —
разработка методики выбора признаков — ведется таким образом, что-
чтобы потенциальные возможности распознающего устройства не были
ниже определенного уровня.
Предположим, что имеется Лг (i = \,m) классов объектов. Вероят-
Вероятность наблюдения объектов класса Л; обозначим через р (Л;). Кроме
того, имеется некоторая совокупность из п признаков (хъ х2,...,
xh, ..., хп), характеризующая т классов. Признак х^ может быть
дискретной или непрерывной величиной. Следовательно, каждая реа-
реализация объекта Л; может быть представлена «-мерным вектором или
точкой в и-мерном евклидовом пространстве признаков х (хъ х2,...,
Xf,,..., Хп).
Пусть pi = р (х IAt) — функция плотности вероятности вектора х
при условии, что А = А г.
94
Ошибка распознавания при этом определяется как
р (Aj)PJdx+
Для минимизации вероятности ошибки распознавания можно вос-
юльзоваться бейесовскими решающими функциями [11]. В этом слу-
е неизвестный объект будет распознан как объект, принадлежащий к
laccy At, если измеренный вектор х находится в области G; векторов
(рис. 3.13), в которой выполняется условие р {Аг)рг = max [p(Aj)pj]
/; i, j = 1,2, ..., m), или, другими словами,
Gi = {x : р(At)Pi =max [p {A-) p3]}. C.27)
C.28)
На рис. 3.13 представлена геометрическая интерпретация выраже-
ия C.28), когда т = 2 (i = К / = 2), G; = G1 и Gj = G2,
одномерного вектора х.
При дихотомии бейесовская ре-
решающая функция, определяемая
Цвыражением C.27), относит неиз-
естный объект к классу Л,, если
t. В этом случае область Gj
Является дополнением к области
, так что G, + Gj = 1. Область
можно определить как
О
Рис. 3.13. Геометрическая интерпре-
интерпретация ошибки распознавания
Граница решения
Pj] C.29)
:для каждой пары объектов. Тогда
"(вероятность ошибки классифика-
классификации будет вычисляться так:
Рот
i - /) = | Р
j dx+ §p(At) pi dx.
На рис. 3.14 условно приводятся области интегрирования для вы-
выражения C.28), когда т = 2 и т > 2. Из него видно, что
Рош=2 Г §P(Aj)Pidx+ §P(Ai)Pidx]
i<i [О, О. J
(', /) =
i<l [а
2
«¦</¦
Н- [p(Ai)Pidx]
sj У
C.30)
т. е. вероятность ошибки при распознавании т классов с использова-
использованием выражения C.28) меньше или равна суммарной ошибке, состоя-
'щей из ошибок распознавания всех парных комбинаций т классов объ-
объектов с использованием C.29). Это положение важное, поскольку по-
позволяет заменить определение рот одновременно для т классов на-
нахождением рош (i, j) для соответствующих пар классов. При этом лю-
любое количество т классов может быть разделено парным сопоставле-
сопоставлением всех объектов. Это существенно упрощает нахождение вероятно-
вероятности ошибки распознавания,
95
Количество парных разде-
разделений при т классов может
быть равно 0,5 т (т — 1).
Соответствующим выбором
признаков суммарную веро-
вероятность ошибки при 0,5 т X
X (пг—1) разделениях классов
Рис. 3.14. Области интегрировання ' для бУдет обеспечивать ниже не-
т=2 и т>2 (т=з) которого заданного порога П.
При этом вероятность ошиб-
ошибки при распознавании т классов с использованием C.28) не будет
больше порога П.
Если при разделении двух классов объектов
\
l+sj
C.31)
Т0 Рош (*'» /) ^ A — Я)/2 и знаки равенства и неравенства соответ-
соответствуют друг другу.
Действительно, из рис. 3.13 видно, что условие C.31) можно запи-
записать непосредственно в виде
а также что
2 г
2 s)p(Ai)Ptdx+pom(i, /) = !.
C.32)
C.33)
Тогда подстановкой C.33) в C.32) получим 1—2 рош (г, /) ^ П и
окончательно pom (г, /) ^ A — /7)/2, или
Рош<0,5|—
\p{Ai)pi—p{Aj)pj\dx.
Таким образом, чтобы рош было ниже некоторого уровня Лрош>
необходимо выбрать такой многомерный вектор х, при котором соот-
соответствующая взвешенная разность между вероятностями р; и р, была
бы по крайней мере равной A—2 Лрош)-
В идеальном случае \р (Лг)рг — р (А}) р}\ = 1 и рош = 0.
Однако рассмотренный путь нахождения ошибки распознавания на
практике затруднителен из-за многомерности вектора х и сложности
вычисления в этом случае функций pt и pj. Поэтому ниже будет рас-
рассмотрена методика, позволяющая связать вероятность распознавания
рПр = 1 — Рош с информативностью признаков, которая на практике
реализуется значительно проще, чем нахождение рпр через плотности
вероятностей векторов х,
§ 3.7. ЭФФЕКТИВНОСТЬ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ ТРЕХ
(И БОЛЕЕ) КЛАССОВ ОБЪЕКТОВ
При распознавании белее чем двух классов задача оценки эффектив-
' ности признаков существенно усложняется из-за неодинаковой роли
¦ одних и тех же признаков. Решение этой задачи должно носить компро-
компромиссный характер в силу необходимости удовлетворения противоречи-
противоречивых требований.
Рассмотрим алфавит А, включающий в себя т классов объектов,
причем т > 2. В соответствии с C.20) для каждой пары классов A t и
Aj (i, / = 1, т; i Ф /) этого алфавита могут быть определены оценки
полезности произвольного ?-го признака исходного описания е/*',
которые удобно записать в виде квадратной матрицы Efe:
0 е<Д> е<*2
е21
0
р()
е2т
р<*>
eml
р<>
em2
C.34)
Матрица Efe симметричная, так как е|*' = ej-Л Совокупность эле-
элементов г-й строки (столбца) матрицы характеризует полезность ?-го
признака при парном различении г-го класса и каждого из остальных
классов заданного алфавита. Средняя же полезность &-го признака в
йи классе представит собой величину
C.35)
Величины ai\ так же как и величины е!;', могут принимать полог
жительные, нулевые и отрицательные значения. На основе величин
а"' введем неотрицательную характеристику afe — добротность
/г-го признака в заданном алфавите
l+signo4"
2
обращающуюся в нуль только в случае, если во всех классах заданного
алфавита средняя полезность &-го признака меньше или равна нулю.
Если матрица Е& является обобщенной характеристикой полезности
произвольного &-го признака, то сумма матриц Еь по всем признакам
исходного описания (k = I, n) дает матрицу
Е =
C.3.7)
представляющую собой обобщенную характеристику исходной системы
признаков при различении всех классов заданного алфавита. Каждый
4' Зак. 1053
97
элемент матрицы Е — это сумма оценок полезности признаков при
парном различении классов АгиА} (/, j = 1, т\ i Ф /):
- n
I] j?j ij * \O.OO)
Совокупность элементов /-й строки (столбца) матрицы Е характери»
зует полезность исходной системы признаков при различении t-го клас-
класса и каждого из остальных классов заданного алфавита.
Средняя полезность признака исходного описания в i-м классе бу-
будет выражаться величиной
1 т
at = -——y2j eU- C-39)
Средняя добротность признака исходного описания в заданном ал-
алфавите классов вычисляется по аналогии с выражением C.36):
l + signa<° ...
-•=¦2
C.40)
она является, по определению, неотрицательной величиной, характе-
характеризующей эффективность исходной системы признаков при распозна-
распознавании заданного алфавита классов А.
Полезность некоторого признака в исходном описании тем выше,
чем больше значение его добротности ak в заданном алфавите классов,
поскольку наибольшие значения добротности ?-го признака, как сле-
следует из C.35), будут только при высоких и положительных значениях
оценок полезности е\р этого признака при парном различении всех
классов. Признаки, имеющие высокие значения добротности ак в за-
заданном алфавите, должны получать преимущественные веса по сравне-
сравнению с признаками, имеющими низкие или нулевые значения доброт-
добротности. Вес уь k-то признака естественно определить как отношение доб-
добротности ah этого признака к средней добротности а признака в описа-
описании:
7fe = afc/a' C.41)
Полученная указанным образом система весов yk (k — 1, п) дает
характеристику эффективности каждого из п признаков исходного опи-
описания при заданном решающем правиле.
: Достоинство изложенной методики оценки эффективности призна-
признаков исходного описания в том, что она непосредственно учитывает кон-
конкретный, принятый в данной системе алгоритм распознавания и может
быть применима как при бинарных, так и непрерывных значениях при-
признаков; на ее основе может быть осуществлена дальнейшая, более тон-
тонкая (точная) оценка эффективности признаков.
Подавляющая доля ошибок при распознавании отдельных классов
объектов приходится на сравнительно небольшое число «трудных»
для классификации классов, т. е. классов, расстояния между которыми
в пространстве признаков относительно малы. Вместе с тем для дру-
98
^их классов («легких» классов) расстояния до ближайшего из классов
[;в пространстве признаков настолько велики, что ошибки при их рас-
-познавании практически могут отсутствовать. При этом целесообразны
пути на повышение эффективности описания «трудных» классов при
[снижении эффективности описания (в разумных пределах) «легких»
'¦ классов. Часто при этом приходится поступаться эффективностью опи-
¦ сания большего количества классов в угоду эффективности описания
меньшего числа классов. Поэтому средняя эффективность описания
всех классов снижается.
Переоценка эффективности признаков исходного описания находит
свое количественное выражение в изменении весов признаков, что мо-
может быть представлено следующим образом.
На базе матрицы Eft и вычисленных весов yk признаков определяют-
определяются взвешенные матрицы Е* (? = 1, п):
||E^|l=7ftl|Eft||; C.42)
рни характеризуют попарную различимость классов по ?-му признаку
с учетом его веса в описании.
Сумма матриц E'k по всем k признакам дает матрицу Е', характери-
характеризующую попарную различимость классов в рамках исходного описа-
описания с учетом эффективности каждого из признаков:
|Е'Ц=2
4=1
C.43)
Среди элементов матрицы Е' отыскивается наименьший по величи-
величине (поскольку матрица Е' симметричная, то рассматриваются только
элементы над главной диагональю или под ней). Если в матрице имеется
несколько элементов с равным и наименьшим значением, то выбирает-
выбирается один, любой их них. Выбранный элемент ег/ матрицы Е' указывает,
что наихудшей различимостью характеризуются классы A t и А], а его
«величина дает количественную меру расстояния между этими клас-
классами. Далее из матрицы Е* выбирается такая, для которой различи-
различимость классов Аг и А} минимальна. Этот факт легко устанавливается
по минимуму суммы средних полезностей в i-м и /-м классах, т. е.
min (ар + a{k}). Если таких матриц несколько, то выбирается одна,
любая из них.
Признак, характеризующийся выбранной матрицей, исключается
из исходного описания (т. е. ему присваивается вес, равный нулю).
Исключение этого бесполезного (вредного) при разделении классов A t и
А) признака может попутно улучшить различение некоторых других
классов, но в общем случае найдутся и классы, для которых будут
иметь место ухудшение классификации классов.
Исключение k-vo признака означает одновременно и исключение
матрицы Еа.
Следовательно, ее нужно вычесть из матрицы Е':
цЕ'||_||ЕА|| = ||Е||. C.44)
4« 99
Описанная выше процедура повторяется для матрицы Е", затем
для матрицы Е'" и т. д. Процесс может быть остановлен либо по до-
достижении наименьшим по величине элементом матрицы Е& некоторого
заранее выбранного порога, либо по достижении следующей конфликт-
конфликтной ситуации: попытка увеличить различие для некоторой наиболее
трудно классифицируемой пары классов приводит на некотором шаге
к появлению другой, до этого шага не наихудшей, пары трудно разде-
разделимых классов.
Таким образом, описанная методика оценки эффективности призна-
признаков распознавания позволяет из исходного описания классов исклю-
исключить наименее информативные признаки, оставив наиболее информатив-
информативные, и тем самым повысить вероятность распознавания классов объек-
объектов.
§ 3.8. ИНФОРМАТИВНОСТЬ СТАТИСТИЧЕСКИ НЕЗАВИСИМЫХ
ПРИЗНАКОВ И МЕРА НАДЕЖНОСТИ ПРИ РАСПОЗНАВАНИИ
ОБЪЕКТОВ. МИНИМИЗАЦИЯ ПРОСТРАНСТВА ПРИЗНАКОВ
• В настоящее время не существует единого мнения о способе форми-
формирования оптимальной системы признаков распознавания — такого
"их набора, который использует минимально необходимое число призна-
признаков и их частных значений (градаций), обеспечивающих заданную ве-
вероятность распознавания. Поэтому поступают следующим образом.
На основании предыдущего опыта и интуиции человека выбирается
система из большого числа признаков с большим числом возможных
значений каждого, после чего в процессе обучения машины эту систе-
систему минимизируют по тому или иному критерию (см. [12, 13]).
Наиболее широко в теории распознавания применяется понятие
информативности признаков по Шеннону (см. [14]). В соответствии с
этой мерой информативность некоторого &-го параметра относительно
множества классов объектов At (i = 1, т) можно оценить как разность
начальной энтропии системы и энтропии решения по этому параметру:
Ih^H0(A)-H(A/xk), C.45)
где #0 (А) — начальная энтропия системы; Н (A/xh) — энтропия ре-
решения по параметру xh.
Пусть параметр xh может принимать / дискретных значений (гра-
(градаций) xkj (/ = 1,2 V). Тогда энтропия решения (см. [13]) по /-му
значению параметра xk определится как
Н (Am/xhJ) = — 2 Р Wxh}) log p (At/xkJ),
C.46)
1 = 1
гдер (Ai/xhj) — условная вероятность отнесения объекта к классу А%
по /-й градации признака xh.
Условная вероятность по критерию Бейеса будет равна
л _ p(Ai)p(xhj/Ai) _ p (At) p (xkjlAj)
100
(;где р (Лг) — априорная вероятность класса Аь среди всех т классов;
Р (xhj) — вероятность появления /-Й градации &-го признака по всем
; классам объектов; р (xhjlAi)— условная вероятность появления /-го
значения k-ro признака в классе A t объектов.
После подстановки этого выражения в уравнение C.46) получим
формулу для расчета энтропии решения в следующем виде:
p(Ai)p(xkj/Ai)x
X log
C.47)
т т "I
X logp (Ai)p (xhj/Ai)- 2 Р (At) P (Xkj/At) log 2 P (At) p {xhjIAi): ¦
(=1 i=i J
Для получения энтропии решения следует найти сумму значений
величин Н (A m/xhj) по всем градациям / = / с весами, пропорциональ-
пропорциональными вероятности появления каждой градации, т. е. р (xhj). Тогда
J J т
H(Alxh) = - 2 p(xkj)H(Am/xkJ) = - 2 S
; = i /=w=i
J m m
X \ogp(At, Xhj)+ 2 2
C.48)
где p (Au xkJ) — p (At) p (xhj/Ai) — совместное распределение вероят-
вероятностей значений признака хи для класса At.
Так как начальная энтропия системы
то, подставив найденные слагаемые в C.45), получим окончательное
выражение для определения информативности &-го параметра:
/ft = -2 P {At) logp (At) +
i = i
s
1=1 i
2 P(At, xkj) log p(Ait xkj)—
l
- 2 2
та
.2
C.49)
Это выражение основное для вычисления информативности призна-
признаков. Из него следует, что чем точнее измеряется значение каждого пара-
параметра и чем больше используется количество градаций признаков /,
тем большую информацию можно извлечь при использовании этого при-
признака. Однако следует помнить, что этот путь ведет к увеличению за-
затрат памяти ЭВМ и расходу машинного времени при реализации этапов
обучения и классификации. Поэтому желательно найти наименьшее
101
Но (А)
число признаков и их градаций, обеспечивающих требуемую вероят-
вероятность распознавания.
Минимизация пространства признаков. Иногда этот процесс назы-
называют нахождением минимального описания классов объектов. Этот
путь минимизации системы признаков можно интерпретировать сле-
следующим образом [15]. Если по оси абсцисс отложить значения вероят-
вероятностей р (xhj) последовательно для всех градаций / какого-либо при-
признака хи, а по оси ординат — соответствующие им значения Я {Atl
Ixkj), то можно построить график, аналогичный графику, показанному
на рис. 3.15. Площадь, ограниченная осью абсцисс и кривой, пропор-
пропорциональна энтропии решения по параметру Xk, а площадь между уров-
HfA р ) нем Яо (А) и характеристикой — инфор-
информационному содержанию Ih парамет-
параметра xk.
Для сокращения общей системы приз-
признаков можно отбросить некоторые гра-
градации параметров. При этом величина
потери информативности признака Д//
при ликвидации границы между /-й и
(/ — 1) -й градациями связана корре-
корреляционной зависимостью (с коэффици-
коэффициентом взаимной корреляции, равным
0,95) с величиной \р (xhj) + p (Xh>j-i)] I
\Н, (Ai/xk) - Яу_! (А,/*»I (на рис. 3.15
этому произведению соответствует гус-
густо заштрихованная площадь). Процесс минимизации системы приз-
признаков и будет состоять в том, чтобы ликвидировать те границы,
для которых эта площадь минимальна. Следует иметь в виду, что
после отбрасывания очередной границы характер распределения
вероятностей признаков меняется, что заставляет всякий раз вновь
строить характеристику Я (At/xhj) = / [р (xhJ)] и по ней выбирать сле-
следующую для отбрасывания границу.
Поясним основные принципы работы алгоритма минимизации систе-
системы признаков (вычисление величины потерь информативности призна-
признака Д/j при отбрасывании очередной границы между смежными града-
градациями признака проводилось непосредственно прямым путем).
Рассмотрим смежные границы между градациями / — 1 и /. Соот-
Соответствующие им составляющие энтропии решения по Xk-Щ признаку
в соответствии с C.48) будут равны:
т т
H)-l= 2 Pi bg Pi-r P log P = ~ 2 Pi b&Pl/Pl
i = l
Рис. 3.15. График зависимости
H(Am/xkj)=f[P(xhj)]
2
1=1
m
m
= — 2
1=1
где
102
m
= p (At; xk, ,_x), P = S />i, qt = p (At, xkJ), Q = 2 <7«-
После удаления границы между этими градациями составляющую
Энтропии, соответствующую объединенным градациям, можно найти
— 2 (/>«+?») log
Pi+Qi
P+Q '
Результирующая потеря информативности признака равна разно-
I сти новой и старой энтропии: J \?ф<&& "^ "'¦¦*
дгг гг. . __^н 4-Я- ) C 50)
Всегда ДЯ; > 0.
Для доказательства неравенства ДЯ7- > 0 подставим значения всех членов,
^Составляющих выражение C.50). Тогда
м м
V \ 1 Рт~Т~Ят . у . Рт
L (Рт + Ят) log p+Q + Jj Рт log — +
М
m=l
+
1
Ят log
- .
(А)
т=\
При этом исходное неравенство приводится к виду
мм м
V Рт . Рт , г. V 1™ 1 I mini V
р Ь — log— + Q 1 —log.—-(P+Q) I -j^q-
m=l m= 1 n—1
„ ,, Рт , Ят . P n
Введем обозначения am= "n~; bm= ~q", A = p i q, в —
чнеравенство (В) запишется в виде
м м
м
Ьт log Ът ~
p~^Tq-
X
(В)
Тогда
(Q _
т=\
где 0 < ат < 1, 0 < А < 1; 0 < Ьт < 1, 0 < В < 1.
Г\ Если через Я (а) и Я (Ь) обозначить функции Н {а)— 2 ат log am,
* т= 1
^ то неравенство (С) примет вид
f . АН {а)+ ВН (Ь)~ Я (Аа+ 66) > 0. (D)
Последнее справедливо для функций Я (а), выпуклых вниз.
, ' Составим матрицу вторых производных функции Я (alt аг ам):
а2 Я (д)
>0, если i—i, так как 0<аг<1.
103
Тогда матрица
daf
1
Ч
0
им
и будет положительно определена.
Следовательно, функция Н (а) выпукла вниз, неравенство (D) справедливо,
а исходное неравенство (В) доказано.
Таким образом можно рассчитать потерю информативности призна-
признака при ликвидации любых границ между его градациями.
В качестве условия окончания цикла отбрасывания градаций слу-
служит величина порога потерь информативности по всем признакам
r BA/ft)rnax либо по конкретному признаку
(A/ft)max. Можно также задать максимальное
число градаций, которое необходимо оста-
оставить в процессе минимизации. .
На рис. 3.16 для признаков х2, х3, хъ при-
приведены характерные кривые изменения их ин-
информативностеи в зависимости от числа гра-
градаций признаков. Анализ этих кривых по всем
признакам позволяет провести минимизацию
числа градаций с точки зрения затрат памяти
распознающего устройства и суммарных по-
потерь информативности параметров распозна-
распознавания. Поэтому целесообразно выбрать / = 5
по точке перелома большинства кривых.
В табл. 3.2. приведены результаты минимизации системы признаков.
В эксперименте использовались три класса объектов, описываемые сис-
системой из 15 признаков и их градаций (/ = 30). Потеря информативно-
Таблица 3.2
1,ь
1,0
0,5
I
Л
,—
— "
Х1
0 2 6 Iff
/
Рис. 3.16. Графики зави-
зависимости /k=f(j) для
признаков Хг, Хз, Xs
Признак хк
номер
в мини-
минимальном
маршруте
1
2
3
4
5
6
7
8
порядко-
порядковый
номер
12
5
9
13
10
1
6
7
Информативность /^
начальная
(при
./=30)
1,2105
1,2545
1,1804
1,1749
1,1652
1,1640
1,1122
1,0629
конечная
(при
/=5)
1,1150
1,0750
1,0691
1,0599
1,0467
1,0431
1,0085
1,0029
Признак л:^
номер
в мини-
минимальном
маршруте
9
10
11
12
13
14
15
порядко-
порядковый
номер
2
4
14
8
11
15
3
Информативность /^
начальная
(при
J =30)
1,0380
1,0829
1,0704
1,0122
1,0129
0,9628
0,8283
конечная
(при
У = 5)
0,9939
0,9762
0,9488
0,9056
0,9055
0,8799
0,7226
104
JtH в результате минимизации по всем признакам и их градациям
|оставила в среднем 0,1126 бит на признак, а экономия памяти при
J^tom оказалась шестикратной. Признаки в таблице расположены в по-
Црядке убывания значений их информативностеи до н после минимиза-
минимизации.
|§ 3 9 ИНФОРМАТИВНОСТЬ СТАТИСТИЧЕСКИ СВЯЗАННЫХ ПРИЗНАКОВ
ПРИ РАСПОЗНАВАНИИ ОБЪЕКТОВ
Оценить информативность группы статистически связанных приз-
|яаков, использовав шенноновскую меру, затруднительно из-за слож-
сложности нахождения многомерных распределений вероятностей призна-
признаков. Между тем сравнительно легко определить индивидуальные ин-
Нюрмативности признаков Ih (k = 1,2 л). Информационное содер-
содержание группы п признаков / равно сумме информативностеи отдель-
отдельных признаков только в случае их статистической независимости, т.е.
Чтобы обойти сложности оценки многомерных распределений веро-
вероятностей признаков, а вместе с тем учесть статистические связи между
ними, можно использовать следующий полуэвристический прием.
Сначала определяются индивидуальные информативности признаков
/ft. После этого отдельно оцениваются статистические связи между
всеми парными комбинациями признаков. Затем вычисляется оконча-
окончательная оценка информативности группы признаков с учетом их ин-
индивидуальных информативностеи н статистических связей между ни-
ми:
где
-(з-5"
если [ ] > 0;
если [ ]<0,
/k и / р — индивидуальные информативности соответственно &-го и
Р-го признаков *; (/ р)тах — максимально возможная информатив-
информативность Р-го признака; ah p — коэффициент, характеризующий статисти-
статистическую связь между k-ш и Р-м признаками.
Важное достоинство этого критерия оценки информативности при-
признаков — возможность его связи с вероятностью правильного распоз-
распознавания. Это позволяет не только сравнивать признаки между собой,
но и формировать минимальные описания классов объектов, потенци-
потенциально обеспечивающие заданную вероятность их классификации (рис.
, 3.17 и 3.18). На рис. 3.17 представлен график зависимости информа-
> тивности признака xh от абсолютных значений разностн условных веро-
вероятностей его наличия в двух классах \[р (xJAi)} — [р {хк1А^)\\ и раз-
* Признаки могут иметь набор своих частных значений (градаций).
105
ности вероятностей наличия самих классов \р {Аг) — р (Аг) |. Инфор-
Информативность &-го признака для разделения классов Аг и А2
+Р D,) р ЫАг)]~{Р(А±) [1 —р ЫАг)] +р (А%) [1 -р (xk/A2) ]}X
X log {р (Аг) [1 -р (хк/Аг)]+р (Аа) [1 -р (%/Л2)]} +
+p(Ai) {p(xh/Ai) log/7 (xh/A1)+ll-p(xk/A1)] logfl -p (xh/A1)}} +
+p (Л2) {/7 (V4) + [1 -P (*ftM2)] log [1 -/7 (%/Л2)]}. C.52)
На рис. 3.17 сплошные линии соответствуют условию р (xJAj) +
+ р (Xft/Лг) = 1 и представляют собой нижние границы изменения
информативности признака (наихудший случай) при различных абсо-
абсолютных значениях разности
\Р (Ai) — p(Au) |. Верхняя пун-
пунктирная линия является верх-
верхней границей изменений ин-
информативности признака для
случая р (Лх) = р (Л2) == 0,5
и получается при фиксиро-
фиксированном значении f p (жцМО = 1
и [изменении р (xhIA2) от 1 до 0.
Такие же верхние границы бу-
будут и для других значений
\Р(А,)-Р(Аг)\
Ряс. 3.17. Графики зависимостей /*«=
=Fl[\p(xk7Al)-p(xh/Ai\] при |р(Л,)-
—p(y42)|=const и pap=Fa \\p{XhlA\)—
—p(xh/At)\] при p(Ai)—p(A2)\=const:
1—5 — кривые, построенные при P(«ftM,) +
+P(xk/A,)=l, p(*ft/4,)=l и изменении
р{хуА,) от 0 до 0,8 с шагом 0,2
\р(А1)-р(Л;)\.
Примечание. В дальней-
дальнейшем будем рассматривать только
нижнюю границу (наихудший слу-
случай) изменения информативности /ft.
Из рисунков видно, что за-
зависимости /ft = Л t|P (XhlAx) —
-p(xh!A2)\), pnv=F2l\p(xh!A1)-
и зависимость рпр = ^з Aь)
— р (xh/A2) \], а следовательно, ,. „„ _ „ ч. „,
при \р (Ai) — р (^4а) |^= const (построение графиков будет пояснено
в § 3.11) не являются однозначными, т. е. характеризуются [не кривы-
кривыми, а областями значений.
При постоянном значении информативности /ft значение вероятно-
вероятности рпр зависит от соотношения величин р (xhIA^) и р (xhfA2). При
выборе системы признаков интерес представляет нижняя граница об-
области изменения рпр = F3 (/ft), которая получается фиксированием
величины р (xh /Аг) = 1 и изменением величины р (хк1А2) от 0 до 1.
Статистические связи между признаками в C.51) учитываются во всех
их парных комбинациях, т. е. только в первом приближении. Связи
более высоких порядков не учитываются из-за сложности их опреде-
определения и несущественности для практических расчетов.
Для оценки статистических связей между признаками, характери-
характеризуемых коэффициентом aftp, можно было бы воспользоваться коэффи-
коэффициентом корреляции или корреляционным отношением, так как в
общем случае полагают, что связь между парами признаков нелиней-
106
*ая, однако более удобно р
|использовать критерии со-
>ответствия, основанные на
гвычислении степени рас-
• хождения замеренных ча-
частот совместного появле-
| ния дискретных значений
признаков с распределе-
распределением выравнивающих ча-
| стот, соответствующим ус-
Ь ловию независимости приз-
признаков.
Сначала полагаем, что
| признаки статистически не-
независимы. Гипотетическое
распределение выравнива-
выравнивающих частот, соответству-
соответствующее этому условию, не-
необходимо подвергнуть ста-
.„ \] ^-^=
0 0,1 0,2 0,3 0А 0,5 0,6 0,7 1К
Рис. 3.18. Графики зависимостей pnv=Fz(Ik)
при \р(А{)— р(Л2) |=const:
1 — 6 — вспомогательные кривые, построенные при
р(Л,)+р(Л2) = 1; (/-р(Л,) = 1, р(Л2) = 0; 2—р(Л,)=0,9,
р(Л2) = 0,1; 3—р(Л,) = 0,8, р(Лг) = 0,2; 4—р(Л,) = 0,7,
р(Л2)=0,3; 5-р(Л,)=0,6, р(Л2) = 0,4; «-р(Л,) = р(Л2)=,
=0,5)
д дру
тистической проверке. Такая проверка на равномерность обычно
осуществляется по известным критериям соответствия.
Примечание. В дальнейшем будем пользоваться критерием Пирсо-
Пирсона, или х2-
Таблица 3.3
Градации
признака
*и
хгр
S
Градации признака хг
Хц |
Nu
Nai
...
[^p°l]
Npi
*.. I
[NU] ' M
N22
...
[№p2]
Np2
NJbp)
... |
...
[N%]
...
x'4 |
\N\q]
N,q
[N%]
N2q
...
NPq
Nq(xlp)
s
N1 (Xle)
^2 (X2q)
Np(x2q)
W
Примечание. Ne(x ) — итоговые частоты соответствующих строк дискретных значений
q
градаций первого признака (Ме(х2п'1~ S ^EV пРи E==consO -Ny (*ip) — итоговые частоты
V=l
Р
соответствующих столбцов дискретных значений второго признака (Ny(x1 „)= 2 "ev пРи
е=1
Р Ч
V=const; №= 2 ^г(х2у)= ^j Ny(-»rie) — сумма всех замеренных частот совместного
г=1 7=1
|ч: появления дискретных значений признаков; [Ney] = [r*E (x2q)][Ny (xip)] /W—выравни-
/W—выравнивающие частоты.
107
Предположим, что необходимо определить количественно статисти-
статистическую связь между признаками ^ и ^, могущими иметь в общем слу-
случае ряд градаций (частных значений), т. е. х[е) и х^ (е = 1, 2, ...,
р; у = 1, 2,...,<7).
Вначале составим таблицу (табл. 3.3) распределений замеренных
частот Nev совместного появления е-го значения л^-го признака и у-го
значения х2-то признака.
Сформируем взвешенные суммы квадратов отклонений величин
Nev от их гипотетических частот [N?y]:
7=1
C.53)
Эта двойная сумма распределена приблизительно как %fp с числом
степеней свободы % = (р — 1) (q — 1). Поэтому будем считать, что
%h ~ У2- Чем больше величина %h p2 для частной пары признаков
Хи и х$, тем больше статистическая связь между ними (для статисти-
статистически независимой пары признаков lNev] = [JV|7] и %1р = 0).
Для использования критерия Пирсона в выражении C.51) величи-
величины %1р для частных пар признаков следует нормировать, разделив их
на (%Ip) max для этой пары признаков, т. е. надо найти
= W.
C.54)
§ 3.10. ПОСТРОЕНИЕ МИНИМАЛЬНЫХ ОПИСАНИИ КЛАССОВ ОБЪЕКТОВ,
ОБЕСПЕЧИВАЮЩИХ ТРЕБУЕМУЮ ВЕРОЯТНОСТЬ ИХ РАСПОЗНАВАНИЯ
Под минимальным описанием классов объектов будем понимать ту
наименьшую совокупность признаков распознавания и их градаций,
которые позволяют с наперед заданной вероятностью распознавать име-
имеющиеся классы объектов.
Для решения поставленной задачи должны быть известны следую-
следующие исходные данные: Aj (i = 1, tri) — число классов распознаваемых
объектов; р (At) — вероятность появления классов; xlt x2, ..., xh, ...
хп — совокупность признаков распознавания; р (xJAt)— условные
вероятности признаков Хи в каждом классе Аи р (Xkp/At) — условные
вероятности совместного появления пар признаков xhp в каждом клас-
классе At.
Примечание. Излагаемая методика построения минимальных описа-
описаний классов предусматривает учет только парных статистических связей между
признаками.
Условные вероятности р (xkIAt) сведены в табл. 3.4.
Для каждого класса распознаваемых объектов строятся таблицы ус-
условных вероятностей р (хк$1Аг) (табл. 3.5).
Если отбирать признаки таким образом, чтобы минимизировать
ошибку распознавания при парных разделениях классов, то на осно-
основании условия C.30) общая ошибка распознавания будет меньше сум-
суммарной ошибки при всех парных разделениях классов. Если для про-
108
1
У "¦
-
Условные вероятности
p(*iMi)
Р (*iM2)
Р (^/Лт)
p(Jta^i)
Р (Jca/^a)
Р (*а/Лт)
Таблица 3.4
р (Afjj/zlj) признаков xh
.... |
....
хп
Р (Xn/Ai)
Р(хп/А2)
...
р(.хп/Ат)
Таблица 3.5
Признаки Afjj
Xl
*2
...
Хп
Условные вероятности р (x^/Aj) признаков х^ в классе А-
xt \ хг |
—
Р (x21/Ai)
Р (хп1/Аь)
Р (Hi/At)
—
Р (xm/Ai)
... |
...
...
...
...
хп
Р (xin/Ai)
p(x2n/Ai)
...
—
ототы рассуждений считать все классы объектов равновероятностными,
т.е. р (Aj) = р (Аг) = ... = р (At) = ...= р (Ат), то при парных раз-
разделениях классов в C.52) следует считать р (Аг) == р (Аг) = 0,5. Поль-
Пользуясь этим соотношением, можно определить индивидуальные инфор-
информативности всех признаков при всех парных разделениях классов.
Результаты вычислений информативностей Д"'Х) (\х, Я,=» 1,2,...,/тг;
k = 1,2,..., п) могут быть сведены в таблицу. Таблица составляется
для каждого из хп признаков (например, табл. 3.6 составлена для при-
признака xh).
Совокупность признаков распознавания, составляющих минималь-
минимальное описание какого-либо класса, в соответствии с графиком рпр =¦
= ^з (^ft) должна обладать информативностью в 0,692 бит, чтобы обес-
обеспечить вероятность распознавания рпр^0,95.
В классической постановке нахождение минимального описания
классов распознаваемых объектов составляет задачу линейного про-
п
граммирования, т. е. определение min 2 xh при ограничении величины
I ^t 0,692. Эта задача решается следующим образом.
109
Таблица 3.6
Таблица 37
Классы А1
At
A2
...
Am
Индивидуальная
At
—
...
Am' «>
1
j
информативность признака х^ прн парном
разделении классов
А. | -.
4'-2>
—
...
(т. 2)
...
...
—
...
Am
Л1-
А2-
т)
т)
Из табл. 3.6 отбираются признаки, которые в единственном числе
обеспечивают вероятность распознавания пар классов не хуже 95%
(признаки с информативностью Л"'^^ 0,692). Однако эти признаки,
как правило, не позволяют разделять все возможные парные сочета-
сочетания классов. Поэтому из оставшихся признаков необходимо отобрать
наиболее информативные, для которых 11^' Х)] шах < 0,692. Однако
каждый один такой признак не сможет обеспечить вероятность распоз-
распознавания 0,95% любой оставшейся пары классов объектов. В этом слу-
случае для разделения какой-либо пары классов выбираются два призна-
признака с наибольшей информативностью i]?'X) и оценивается их суммарная
информативность и т. д. Число признаков, используемых при разделе-
разделении двух классов, наращивается до тех пор, пока их суммарная ин-
информативность, вычисленная по C.51), не достигнет уровня 0,692.
Чтобы найти суммарную информативность двух признаков 1$' *\
необходимо прежде оценить значение коэффициента ah p. С этой целью,
используя гистограммы распределения признаков xh и дгр для каждого
разделяемого класса объектов, строят таблицу частот появления раз-
различных значений сочетаний выбранных признаков для классов А A
и Лх (табл. 3.7).
По этой таблице рассчитывают критерий %!р по формуле C.53) и
коэффициент ahp по формуле C.54). Наконец, в соответствии с выра-
выражением C.51) находится суммарная информативность пары выбранных
признаков и сравнивается с порогом 0,692.
Пусть требуется провести распознавание классов трехмерных объектов с
Рпр > 0,95 по следующим исходным даииым: At (i = 1, 2, ..., 7); р (А,) =
= р (Лг) = ... = р (Л7) — классы равновероятны; хи (k = 1, 2, ..., 9). Каж-
Каждый класс объектов описывается своим набором признаков: Лг (хг, хя, хй),
Аг (*i. xs> «я. *в). Аз (хх, х2, х3, х4), Л4 (ли), Аь (*i, хг, лт3), Лв (лг,, х4, х-,), Л7 (жг,
х2, х-,, лтй). Числовые значения условных вероятностей р (xtjAj) сведены в
табл. 3.8, а условные вероятности р (л^.р/Л,-) — в табл. 3.9—3.15.
Известно, что по каждому классу объектов имеется статистика в виде
W = 126 изображений (снимков) объектов, снятых под различными ракурсами.
ПО
Признаки
хк
*к
ч
. . - \
Частоты наличия (отсутствие) сочетаний признаков х^, jrg в классах А^ и А^
ч 1 '
Ч
Примечание. Черта над буквенным индексом означает отсутствие соответствующего
признака; Af(W, N*&)—частоты совместного наблюдения признаков х^ и *g соответственно в
классах А„ н Ai; ГЛ^'ЦП0- ГЛ^(^I°—выравнивающие частоты совместного появления прнз-
^ Л I ftp J L ftp J
Ваков Ху н ха соответственно в классах А^ и А},.
Таблица 3.8
и
о
03
At
А2
А3
л4
А,
А,
Л,
Условные вероятности р (х^/А^ признаков х^
Xl
0,960
0,580
0,968
а, ооо
0,860
0,590
0,675
X,
0,000
0,000
0,310
0,000
0,825
0,000
0,570
х.
0,800
0,560
0,700
0,000
0,660
0,000
0,000
Xi
0,000
0,000
1,000
1,000
0,000
0,984
0,857
Хь
0,000
0,000
0,000
0,000
0,000
0,000
0,890
X,
1,000
0,000
0,000
0,000
0,000
0,000
0,780
X,
0,000
0,000
0,000
0,000
0,000
1,000
0,000
Хш
0,000
0,890
0,000
0,000
0,000
0,000"
0,000
*.
0,000
0,980
0,000
0,000
0,000
0,000
0,000
При этом угол по азимуту меняется в диапазоне 0—360° с шагом дискретизации
в 20°, а угол места — в диапазоне 0—90° с шагом в 15°.
1. Используя выражение C.52), определим индивидуальные ииформатив-
ности каждого признака и построим табл. 3.16—3.24.
2. Выберем:
а) признак х*, обеспечивающий разделение классов At и Л8, А% Н Л*, Aj
И Ль Л2 и А г, Л4 и Л2, Л4 и Лх с вероятностью рпр > 0,95;
ш
Признаки Ajj
*i
*з
*e
Таблица 3.9
Условные вероятности р (*^'р/Л») признаков х^ в классе At
—
0,76
0,96
1
0,76
—
0,8
1
0,96
0,8
—
p-
Признаки Afft
Xl
x2
x3
Условные вероятности
x,
—
0,750
0,580
P (xh$/At)
Xt
0,750
—
0,480
признаков
Таблица 3.13
х^ в классе At
x.
0,580
0,480
—
Таблица 3.10
Признаки *?
Х\
Хъ
х»
X»
Условные
—
0,220
0,480
0,570
вероятности р
1 -
0,220
—
0,470
0,540
('ftp/-4
1
а) признаков х.
х.
0,480
0,470
—
0,865
в классе А,
1
0,570
0,540
0,865
—
Таблица 3.14
Признаки лг^
Xl
X,
x3
xt
Условные
Xl
—
0,300
0,700
0,968
вероятности р
1
0,200
—
0,280
,0,310
<*fef)/A.
1
признаков Ху
x.
0,700
0,280
—
0,700
Таблица- 3.11
t в классе А,
1
0,968
0,310
0,700
—
Таблица 3.12
Признаки *д
" ' ' Xt
Условные
вероятности
Р (х
ftp/-4'
х.
—
) признаков
ХМ
в
классе
А,
Признака х^
Xi
xt
Х1
Условные вероятности
х,
—
0,590
0,590
Р (xh$/A,)
Xl
0,590
—
0,984
признаков Afj
в классе А%
х,
0,590
0,984
—
Таблица 3.15
Признаки хк
Xi
*2
Xl
Хъ
----- ха
0
0
0
0
Условные
—
,490
,610
,620
,510
вероятности р
'¦ 1
0,490
—
0,600
0,675
0,700
xk$/A,)
х.
0,610
0,600
—
,810
0,675
признаков Ху в
0,620
0,675
0,810
—„
0,750
классе А,
х.
0,510
0,700
0,675
0,750
—
,<' И Л
б) признак х«, разделяющий классы Аг и А%, Л4 и Ль АхяАа, AanAlt At
а;
)
а;
в) признак Xi, разделяющий классы А% и Л,, А3 и Лв, Л7 и Лв, Л4 и Лв, Лв
й Л2, Лг и Лв.
Однако эти три признака не позволяют разделить все возможные парные со- „
четания классов объектов.
113
Классы Aj
Л1
А2
А3
А,
А,
А*
л,
At
—
0,1160
0,0020
0,6200
0,0200
0,1090
0,0760
Информативность /A
л.
0,1160
—
0,1390
0,2750
0,0540
0,0058
0,0100
А.
0,0020
0,1390
—
0,6684
0,0220
0,1150
0,0850
Табл
1> *) признака xt в классах А^
At
0,6200
0,2750
0,6684
—
0,4610
0,2690
0,3240
А,
0,0200
0,0540
0,0220
0,4610
—
0,0500
0,0260
А.
0,1090
0,0053
0,1150
0,2690
0,0500
—
0,0060
ица 3.16
А,
0,0760
0,0100
0,0850
0,3240
0,0260
0,0060
—
Таблица 3.18
Классы А1
Аг
At
Аа
At
Л6
А<
л,
0
0
0
0
0
0
At
—
,0000
.1210
,0000
,3980
,0000
,2880
Информативность /<М
А.
0,0000
—
0,1210
0,0000
0,3980
0,0000
0,2880
0
0
0
0
0
0
А,
,1210
,1210
—
,1210
,1426
,1210
,0360
. к)
0,
0,
0
0,
0
0
признака
At |
0000
0000
1210
—
3980
0000
2880
0
0
0
0
0
0
Табл i
х, в классах А,
А. |
3980
3980
.1426
,3980
—
,3980
,0390
А,
0,0000
0,0000
0,1210
0,0000
0,3980
—
0,2880
1ца 3.17
А7
0,2880
0,2880
0,0360
0,2880
0,0390
0,2880
—
(|-
Классы А,
Аг
А2
As
At
А,
А,
Л,
0,
0
0
0
0
0
* 1
—
0330
0070
4210
,0140
,4210
,4210
Информат
0,
0
0
0
0
0
0330
—
оно
2515
,0070
,2515
,2515
IBHOCTb ИМ"
0
' 0
0
0
0
0
0070
оно
—
,3610
,0005
,3610
,3610
. X)
о,
0,
0
0
0
0
признака jr, в классах
* 1
4210
2515
3610
—
,3060
,0000
,0000
0,
0
0
0
0
0
А, |
0140
0070
0005
3060
—
,3065
,3060
0,
0
0
0
0
0
Ai
* 1
4210
2515
3610
0000
,3065
—
,0000
0,
0
0
0
0
0
А,
4210
2515
,3610
0000
,3060
,0000
—
Таблица 3.19
Классы /4.
Аг
А,
As
А,
А,
А,
А,
At
—
0,0000
0,6920
0,6920
0,0000
0,6220
0,4500
Информативность /Jr
Аг
0,0000
—
0,6920
0,6950
0,0000
0,6220
0,4500
А,
0,6920
0,6920
—
0,0000
0,6920
0,0005
0,0300
, X)
0
0
0
0
0
0
признака
А,
6920
6950
0000
—
6920
0005
,0300
0
0
0
0
0
0
xt в классах А-
А,
,0000
,0000
,6920
,6920
—
,6220
,4500
0
0
0
0
0
0
А.
6220
,6220
0005
,0005
,6220
—
,0070
0
0
0
0
0
0
А,
,4500
,4500
,0300
,0300
,4500
,0070
—
114
3. Из оставшихся признаков отберем наиболее информативные, которые бы
обеспечили разделение оставшихся пар объектов: Аь и А7, Аъ и Л2, А3 и Л7,
Л3 и Л4, Л7 и At, Л7 и Ах, Л7 и Л2.
Например, для разделения классов Л 3 и А7 из отобранных признаков^, х«
и ж7 можно использовать только признак хв. Однако для него /(в3>7) = 0,403 <
:< 0,692; следовательно, он обеспечит рпр < 0,95.
115
Таблица 3.20
Таблица 3.23
Классы
At
А2
As
At
Аь
А,
Л,
лассы
Ai
А,
Ай
Л4
An
А,
Л,
Классы
Ai
А2
А3
А,
Аъ
А,
Л7
Ai
Ai
Ai
1
1 о
0
1 °
1 °
0
0
0
о
0
0
0
о,
о,
0,
0,
0,
0,
о,
At
—
,0000
,0000
,0000
,0000
,000
,5150
At
—
6920
6920
6920
6920
6920
0800
At
—
0000
0000
0000
0000
6920
0000
Информативность I ?" ' признака
1 *
1 0,0000
1 —
| 0,0000
| 0,0000
| 0,0000
I 0,0000
| 0,5150
л.
0,0000
I 0,0000
1 —
| 0,0000
| 0,0000
| 0,0000
0,5150
А*
0,0000
| 0,0000
0,0000
1 —
0,0000
| 0,0000
| 0,5150
0
|о
0
0
1
1 о
о
Информативность /g признака
>..
0,6920
—
0,0000
0,0000
0,0000
0,0000
0,4030
А.
0,6920
0,0000
-
0,0000
0,0000
0,0000
0,4030 .
Информативность If
Аг
0,0000
—
0,0000
0,0000
0,0000
0,6920
0,0000
А,
0,0000
о,олоо
—
0,0000
0,0000
0,6920
0,0000
At
0,6920
0,0000
0,0000
1 -
0,0000
0,0000
0,4030
о
о
о
|о
0
0
' ' признака
At
0,0000
0,0000
0,0000
¦— 1
0,0000
0,6920
0,0000
о,
0
о,
о,
о,
0,
xs в классах А^
А,
,0000
,0000
,0000
,0000
.
,0000
,5150
А.
0,0000
| 0,0000
0,0000
0,0000
0,0000
1 -
0,5150
1 А,
| 0,5150
| 0,5150
1 0,5150
| 0,5150
0,5150
| 0,5150
1 _
Таблица 3.21
х, в классах Л;
л.
,6920
0000
,0000
,0000
_
0000
4030
А.
0,6920
0,0000
0.0000
0,0000
0,0000
-
0,4030
Табл
х, в классах At
* 1
0000
0000
0000
0000
- 1
6920 |
0000 |
А.
0,6920
0,6920
0,6920
0,6920
0,6920
, .
0,6920 |
А,
0,0800
0,4030
0,4030
0,4030
0,4030
0,4030
-
яца 3.22
А,
0,0000
0,0000
0,0000
0,0000
0.0000
0,6920
—
116
- Классы /4.
Классы
Информативность lg" признака х, в классах А.
f-
'¦ А,
А2
¦ А3
At
Аъ
• лв
0
0
о
о
о
|о
At
—
5150
,0000
,0000
,0000
,0000
,0000
0
0
0
0
1 о
1 о
А,
,5150
j
,5150
,5150
,5150
,5150
,5150
А.
0,0000
0,5150
—
0,0000
0,0000
0,0000
0,0000
0
0
о
1
|о
|о
1 о
А.
0000
5150
,0000
—
,0000
.оосо
,0000
А.
0,0000
0,5150
0,0000
0,0000
1 -
0,0000
0,0000
0
0
о
0
|о
1
о
А.
,0000
,5150
,0000
,0000
,0000
—
,0000
0
0
0
0
о
1 °
А,
,0000
,5150
,0000
,0000
,0000
,0000
—
Таблица 3.24
Ипфорцативность If
признака х, в классах А,
At
А,
А,
А,
1 Аг |
! А2
1 А3
! л,
j .
Аъ
i
Ае
' Л7
0
0
0
0
0
о
- 1
,6440
,0000
,0000
,0000
,0000
,0000
0
0
0
о
о
о
6400
—
,6440
,6440
,6440
,6440
,6440
0,
0
0
0
0
1 о
0000
6440
0000
,0000
,0000
,0000
0,
0
0
0
0
0
0000
6440
0000
—
,0000
,0000
,0000
0
0
0
0
0
о
0000
,6440
,0000
,0000
—
,0000
,0000
о,
о
о
о
о
|о
0000
6440
0000
0000
,0000
—
,0000
0
0
о
о
о
о
1
,0000
.6440
,0000
,0000
,0000
,0000
—
Таблица 3.25
Признаки
хв
н
Измеренные и выравнивающие частоты наличия (отсутствия)
признаков хв, хь в классах А» и А7
V.
Хъ
0+95=95
[63]
0+17=17
[63]
Хъ
0+3=3
[63]
126+11 = 137
[63]
117
4"
Поэтому из оставшихся шести признаков для этой пары классов выбираем
такой, у которого [/У'"]тах- Таким признаком будет признак xs, для которого
/<».7> = 0,515.
4. Определим критерий Пирсона [%?3>в7)]2. По аналогии с табл. 3.7 составим
табл. 3.25.
Пользуясь данными этой таблицы, по формуле C.53) найдем коэффициент
63
63
63
63
5. В соответствии с C.54) определим коэффициент, оценивающий уровень
статистических связей между признаками х8 и хя:
.') = .
194
=0,77.
"¦*"•'•' 2W 256
6. По C.51) найдем информативность пары признаков:
/?s.e'> =0,515 + 0,403 (l —0,77 -^^-) = 0,687< 0,692.
Таким образом, необходимо продолжить процесс наращивания числа при-
признаков для разделения классов Л3 и Л7.
7. Из табл. 3.16—3.24 выберем признак хъ и составим таблицы наличия и
отсутствия пар признаков *8iS и х3,в в классах Л 8 и Л 7 (табл. 3.26 и 3.27).
Таблица 3.26
Признаки
хь
Ч
Измеренные и выравннвающне частоты наличия (отсутствия)
признаков х„ х, в классах Л, и А,
х»
0+0=0
[63]
89+0=89
[63]
Ч
0+112=112
[63]
37+14=51
[63]
Таблица 3.27
Признаки
хв
Х1
Измеренные и выравнивающие частоты наличия (отсутствия)
признаков х,, х, в классах Аг и А?
Х3
0+0=0
[63]
89+0=89
[63]
ч
0+98=98
[63]
37+28=65
[63]
8. По данным этих таблиц определим значения коэффициентов:
ВДЬ7)]* = 114' а«зу>=0,452;
т 9. Информативность Сбставит /?3,'в'Л = 0,877 >0,692. Таким образом, ДЛЯ
разделения классов Л8 и At необходимо иметь набор признаков х8, *в. хъ.
10. Для разделения классов Л8 и Л7 возьмем признаки дс8 и xt и составим по
им табл. 3.28.
Таблица 3.28
i
Признаки
Xi
xi
Измеренные и выравнивающие частоты наличия (отсутствия]
признаков х,, xt в классах А, и А,
хь
102+0=102
[63]
10+0=10
[63]
XI
6+0=6
[63]
6+126=134
[63]
11. Определим параметры fe^i"]2 = 200, a55,i7) = 0,79.
s 12. Определим, что /|«J = 0,70'l > 0,692. Таким образом, классы Л5 и
'А? разделяются парой признаков хь и xt.
13. Для разделения классов Л5 и Ла составим табл. 3.29.
Таблица 3.29
Признаки
х$
Измеренные и выравнивающие частоты наличня (отсутствия)
признаков х,, I, s классах А, я Аг
X»
109+0=109
[63]
14+0=14
[63]
3+0=3
[63]
0+126=126
[63]
14. Найдем коэффициенты [%1^ »]2 = 194, <4»-4г> = 0,77.
15. Вычислим информативность пары признаков: /?5да) = 0,791 > 0,692,
т. е. классы Аь и Л2 разделяются с требуемой вероятностью. * %
16. Разделим классы Л2 и Л4 по признакам х^ и х2, для чего составим
табл. 3.30.
Таблица 3.30
Признаки
Xi
хг
Измеренные и выравнивающие частоты наличия (отсутствия)
признаков х„ xt в классах А, и А,
xt
91+0=91
[63]
31+0=31
[63]
Ч
2+0=2
[63]
2+126=128
[63]
118
119
17. Определим коэффициенты [x^b4)F = 154, ai8/,*» = 0,614.
18. Найдем информативность признаков хг и xs\ l[3,'ai) ~ 0,815 > 0,692,
т. е. выбранные признаки обеспечивают надежное разделение классов А „к А4.
Аналогичным образом^можно показать, что для разделения классов А7 и Л4
необходимо использовать признаки хъ, Н и *i> Для которых П','в4Л = 0,777>
> 0,692; для разделения классов Аг и Л7 требуется набор признаков хъ и х^ с
информативностью /sjj7' = 0,701 > 0,692; для разделения последней пары
классов А7 и Л2 достаточно воспользоваться признаками ха и х8, для которых ин-
формативноеть /&7ь*» = 0,793 > 0,692.
Таким образом, для разделения любых парных сочетаний классов объектов
необходимо иметь следующее их минимальное описание: хг, ха, х«, Хъ, хв, x7, xs
и xt.
Анализ системы признаков показал, что признак х2 можно исключить из рас-
рассмотрения при разделении рассмотренных классов объектов, как малоинформа-
малоинформативный.
Рассмотренная методика составления минимальных описаний клас-
классов проста при реализации на ЭВМ и позволяет наращивать ансамбль
признаков распознавания в классах до получения требуемой вероятно-
вероятности классификации объектов.
§ 3.11. СВЯЗЬ ВЕРОЯТНОСТИ РАСПОЗНАВАНИЯ ОБЪЕКТОВ
С ИНФОРМАТИВНОСТЬЮ ПРИЗНАКОВ
Распознавание классов объектов At (i = 1, т) можно вести путем
использования последовательных дихотомий. При этом оценку инфор-
мативностей признаков также следует проводить для каждой пары
Классов.
Будем считать, что признаки имеют только два частных значения:
наличие, обозначаемое ~ 1, и отсутствие, обозначаемое 0.
Поскольку далее будет рассматриваться только нижняя граница
изменения Ih (наихудший случай), протабулируем ее путем подстанов-
подстановки в C.52) соответствующих значений р {хк1Аг) и р (xh!A2). При этом
получим следующие результаты:
Р Ш
Р (xh/A2
IP(A*
—р
i)p(a)
АЛ .
h/A2) .
.0,5
.1,0
.0,0
0,5
1,0
0,1
0,5
1,0
0,2
0,5
1,0
0,4
0,5
1,0
0,5
0,5
1,0
0,6
0,5
1,0
0,8
0,5
1,0
1,0
•1.° 0,9 0,8 0,6 0,5
0,4 0,2 0,0
У^.г> 0,6920 0,5250 0,4120 0,2720 0,2170 0,1660 0,0752 0,0000
После построения вспомогательного графика (см. рис. 3.17) найдем
зависимость рпр == f\p {Аг), р (Л2), р {xhIAx), p (xk!A2)].
При наличии двух классов и использовании для решения критерия
максимального правдоподобия получаем, что
х ? А1г если р (A1/x)>p(Ai/x);
х ? i4ji, если p(AJx) <p(AJx),
где р (AJx) up (A2!x) — условные вероятности отнесения х-й реализа-
реализации объекта соответственно к классам А х и А 2.
Вероятность ошибки распознавания классов рош — min [р (AJx);
Р (AJx)\.
120
ЕКИ
Найдем ошибку распознавания. Допустим, что имеет место условие
p{A1lx)->p{AJx). C.55)
Тогда, учитывая, что р {AJx) + р (А2!х) = 1, вероятность ошиб-
м P(A1/x)p(Ai)p(x/Ai)
х)
рош-
р(А2)р(х/А2)-р
plAjplx/AJ '
"где р (х!Ах) и р (х/А2)— условные вероятности реализации х соот-
соответственно в классе Аг и А2. Отсюда
42/х)р(А2)р(х/А2) _ р(Аь)р(х/А2)
pMi)p(x/i*1) p(A1)p(x/A1)
нли
р (А2/х) [р (At) p (xlА$ +р (Л,) р (х1А%)\ =р (Ла) р (д:/Л2).
И, наконец,
.... Р(Аш)р(х/Ащ)
Рош=р(А2/х)=
Поскольку величины, входящие в C.55), иногда бывает затрудни-
затруднительно определить, перейдем от него к более удобной для практики фор-
форме.
Воспользовавшись формулой Бейеса, приведем неравенство C.55)
к форме р (At)p (xIAJ > р (А2)р (х!А2) или [р {АгIр (Л2)] >
> [р (х[А2Iр (х/Ах)]. Тогда окончательно будем иметь
Рош —"
1 +\Р(Ai)/p (Д,)][р (x/AJ/p(x/A,)] '
если
>
р (х/А2)
ИЛИ
Рош =
1
РШ . р(хЩ
^ + lP(A2)/p(A1)]lp(x/Ai)/p(x/A1)} " р(А2)^ p(x/AJ
Соответственно вероятность правильного распознавания
р(А1)р(х/А1)
,. или рПр =
р(Лш)р_(х/Лш)
C'56)
На основании полученных выражений C.56) можно построить гра-
график зависимости нижних границ вероятности правильного распознава-
распознавания рпр от разности значений условных вероятностей наличия соответ-
соответствующего признака для классов \р (x/Aj) — р (*/Л2)|при различных
121
значениях разности вероятностей классов ]р (Ах) — р (As) [, На
рис. 3.18 эти зависимости даны в виде пунктирных линий. Они получа-
получаются при фиксировании р (xhIA^) — 1 и изменении р (xh!A2) от 1 до 0.
Выбор нижней границы изменения вероятности правильного рас-
распознавания рпр будет гарантировать необходимую вероятность пра-
правильного распознавания.
Для построения зависимости рпр = F3 (Ih) сначала протабулируем
значение нижней границы, используя выражения C.56):
р (А1) = р (Л8) . .0,5 0,5 0,5 0,5 0,5 0,5 0,5
Р (хь/АД 1,0 1,0 1,0 1,0 1,0 1,0 1,0
р (xh/AJ 0,0 0,1 0,2 0,4 0,6 0,8 1,0
IР (xh/Aj)-p (д:д/Л8) | ...1,0 0,9 0,8 0,6 0,4 0,2 0,0
рпр . ., 1,000 0,910 0,834 0,715 0,625 0,556 0,500
После этого построим график функций рпр = ^t Ip (xJAJ —
— p(xh/A2)\] по приведенным выше данным; затем график зависимости
/й = Fj_ I\p (xh/Aj) — р (xh!A2)\] и, наконец, совмещением этих гра-
графиков получим график зависимости рпр = F3 (Ih) (все вспомогатель-
вспомогательные построения на рис. 3.18 показаны штрих-пунктирными линиями).
Полученная зависимость для одного признака справедлива и для
ансамбля признаков, если известно их информационное содержание.
Пользуясь этой зависимостью, можно составлять минимальные описа-
описания (минимальные маршруты) классов объектов распознавания. Дей-
Действительно, по заданной пороговой величине вероятности распознава-
распознавания из графика (рис. 3.18) находится необходимое количество инфор-
информации, которую должны содержать признаки, обеспечивающие эту
вероятность. Затем определяется группа признаков, общая информа-
информативность которых не меньше требуемой. Ранжирование выбранных
признаков для распознавания определит минимальный маршрут их об-
обследования.
§ 3.12. ВЫДЕЛЕНИЕ ОБЛАСТЕЙ ПОПАРНОГО РАЗДЕЛЕНИЯ КЛАССОВ
Для заданной системы признаков только при попарном разделении
классов возможно обеспечение предельно высокой надежности распоз-
распознавания (см. § 3.6). Однако при большом числе классов распознаваемых
объектов даже рационально организованная процедура попарного пере-
перебора классов требует больших временных и аппаратурных затрат на
техническую реализацию.
Известны попытки с целью экономии времени решения задачи и ап-
аппаратуры ограничить перебор, производя его только для самых близ-
близких классов через разностные эталоны (см. [16]).
Противоречие, возникающее между высокими требованиями к дос-
достоверности распознавания и необходимым для этого объемом оборудо-
оборудования, наиболее удачно разрешается в распознающих системах, ис-
использующих сочетание двух (и более) различных методов распознава-
распознавания.
Например, в практике построения читающих устройств можно счи-
считать апробированным сочетание таких методов распознавания, как ме-
122
роды матричного сопоставления и методы структурного анализа изоб-
изображений («Рута-701», «Север-3», ВИНИТИ-2). С помощью небольшого
числа структурных признаков заданный алфавит разбивается на части,
"в пределах которых распознавание ведется уже с применением методов
Матричного сопоставления. Только при расчленении алфавита возмож-
. ;но практически приемлемое осуществление процедуры попарного
сравнения классов, а последнее позволяет достичь высоких показате-
показателей достоверности распознавания. Издержки, связанные с процедурой
;попарного перебора классов, могут быть скомпенсированы за счет зна-
значительного упрощения эталонных описаний каждой пары сравнивае-
сравниваемых классов. Действительно, для некоторой пары классов Аг и Aj за-
|данного алфавита в пространстве исходных признаков существенными
|с точки зрения распознавания будут только области, заключающие в
|себе лишь дискриминантную информацию, как единственно полезную
р.для различения данных классов.
В n-мерном пространстве признаков в общем случае можно выде-
выделить области связные и области несвязные, содержащие в себе исчер-
исчерпывающую дискриминантную информацию о классах Ai и Aj. Любой
признак, участвующий в дискриминации рассматриваемых классов,
; может принадлежать только одной из этих областей. Если признак не
участвует в дискриминации классов Ai я Aj, он бесполезен и не при-
принимается во внимание (не принадлежит ни одной из выделяемых об-
Ц ластей).
Признак xk принадлежит области Du попарного различения клас-
классов A t та Aj (i < /), если частная производная дискриминантной функ-
функции dij (x, W) по этому признаку положительна, или области D}i
попарного различения, если частная производная дискриминантной
функции отрицательна, т. е.
Ч е Ви, если ^^ >0; C.57)
D
H>
если
ddu(x, W)
dxk
C.58)
где xh — &-й признак распознаваемого объекта x— (xx, x2,..., xn).
Таким образом, при возрастании значений k-ro признака в области
Dtj мера сходства распознаваемого объекта с классом A i увеличивается,
а с классом Aj — уменьшается; при возрастании же значений xh в об-
области Dji мера сходства распознаваемого объекта с классом A t умень-
уменьшается, а с классом Aj — увеличивается.
Область Dl} попарного разделения классов Ai и Aj является ут-
утверждающей для объектов класса A i и отвергающей для объектов клас-
класса А} (см. [17,18]), соответственно область Djt — утверждающей для
объектов класса Л; и отвергающей для объектов класса Аг.
» Установим соотношения, согласно которым производится разбие-
разбиение пространства признаков на области попарного разделения классов
At и Aj для случая, когда в качестве решающих используются линей-
линейные функции (например, функции в виде скалярных произведений).
Для непрерывных значений признаков меры сходства распознаваемо-
123
го объекта по k-щ признаку rki и rkj соответственно с классами A t и A j
равны (см. [8]):
*ki=—
XhiU хы~
г=1
Xh}i>
C.59)
C.60)
где xhi, xhj — средние значения &-го признака соответственно в клас-
классах Л; и Л/, хкц uxkji—значения &-го признака соответственно в 1-й ре-
реализации обучающей последовательности длиной L класса Л; и t-й
реализации обучающей последовательности длиной Т класса Aj.
Дискриминантная функция di} (x, W) классов Л г и Л j с учетом C.59)
может быть представлена в виде
*1
2
4=1
C.61)
Согласно выражениям C.57) и C.61), для области попарного разли-
различен ия классов Dij имеем
Г " - - 1 /
L*=i J /
Следовательно, в область D^ попадают признаки, средние значения
которых в классе Л; превышают соответствующие средние значения
признаков в классе Aj.
Аналогично можно показать, что область Dji составляет совокуп-
совокупность признаков, средние значения которых в классе Лг меньше соот-
соответствующих средних значений признаков в классеЛ;, т. е. xhi — xh]-<i
<0.
Если признаки принимают бинарные значения A или 0), то их сред-
средние значения заменяются оценками вероятностей появления единич-
единичного признака phi и pk] соответственно в классах Л г и Aj.
Область Dtj составляют признаки, для которых
Phi-Pkj>0, C.62)
а область D/j — признаки, для которых
Phi~ Pftj<0.
Эффективность признаков, составляющих области Dij и Dji попар-
попарного разделения классов, определяется в соответствии с методикой,
описанной в § 3.13.
, В исходном эталонном описании класса Л; выделяется область Dij,
для которой выполняется условие C.62). Эталонное значение каждого
признака, входящего в эту область и классифицирующегося полезным,
взвешивается в соответствии с величиной оценки полезности е/;-
этого признака при попарном сравнении классов Лг и Aj.
Признаки, оказавшиеся вредными или бесполезными, исключаются
из области Dtj. Сформированная область Dtj при необходимости мо-
может быть нормирована.
124
к. Область Dji попарного разделения классов определяется по исход-
Ному эталонному описанию класса Aj аналогично области Dtj.
i Сформированные таким образом области Dtj и Djt попарного разде-
разделения классов представляют собой компактные и эффективные эта-
эталонные описания классов Лг и Aj. имеющие в два раза меньший объ-
I ем, чем исходные эталонные описания.
§ 3.13. АЛГОРИТМ ОТБОРА ЭФФЕКТИВНЫХ ПРИЗНАКОВ.
СОСТАВЛЕНИЕ ЭТАЛОННЫХ ОПИСАНИЙ КЛАССОВ
Рассмотрим последовательность процедур отбора эффективных при
'знаков при построении эталонных описаний объектов любой природы,
составляющих некоторый алфавит At = (Л1( А2,.., Ат).
Э т а п 1. На этом этапе определяются параметры дискриминантных
|функций dt (x, W) (i = 1, т) на основе обучающей выборки распознава-
распознаваемых объектов при заданной размерности пространства признаков,
т. е. исходные эталонные описания классов. Если принятый алгоритм
распознавания предполагает нормирование эталонных описаний,
последние нормируются.
Э т а п 2. На данном этапе алгоритма для каждой пары классов Ai
и Aj (i, j = 1, т; i < /) алфавита на основе обучающей выборки объ-
объектов определяются параметры дискриминантной функции dtj (x, W),
получаемой как разность дискриминантных функций dt (x, W) и
dj (х, W):
dij(x,W) = di(x,W)-dj(x,W),
где х = (xlt x2,..., xh, ... хп) — распознаваемый объект; W = (wu
; w2, ..., wn) — параметры дискриминантной функции.
; Искомыми параметрами являются математическое ожидание зна-
значений дискриминантной функции dtj (x, W) для класса Лг ти и для
класса Aj тНу а также среднеквадратичные отклонения ai} и ait со-
соответственно для классов Л i и Л/.
г=1
^.где L — число реализаций класса Л г в обучающей выборке; / — номер
^реализации класса At в обучающей выборке; гц—мера сходства 1-й
tреализации с эталоном класса Лг; гц— мера сходства 1-й реализа-
реализации с эталоном класса Aj.
|, Аналогично определяются параметры
т2
<=i
|где Т — число реализаций класса Aj в обучающей выборке; t — но-
"мер реализации класса Aj в обучающей выборке; гп — мера сходства
у/-й реализации с эталоном класса Лг; щ — мера сходства t-й реали-
|зации с эталоном класса Aj.
125
Этап 3. На этом этапе алгоритма для каждой пары классов ал-
алфавита А на основе обучающей выборки определяются параметры рас-
распределений дискриминантной функции dtj (х, W) при исключении &-го
признака (k = 1, л) из исходной совокупности признаков:
где г и \ г\\ — меры сходства 1-й реализации класса At с эталонами
классов At и Aj после исключения k-го признака из исходной совокуп-
совокупности признаков.
Аналогично определяются параметры
*--т2
о
И
пи
Этап 4. На этом этапе алгоритма по найденным величинам mtj,
/п'/' и тц, т]г определяются значения приращений математических
ожиданий Д(*'/Пг; и Д(й>т,-г дискриминантной функции при исключе-
исключении &-го признака из исходного описания:
4i = mn—miv)- '
Аналогично по величинам а^-,
среднеквадратичных отклонений:
а,-/' и ст,-
находятся приращения
Этап 5. На этом этапе алгоритма вычисляются согласно C.20)
оценки полезности признаков исходного описания при попарном разде-
разделении классов, которые записываются в виде совокупности матриц
Ей C.34).
Э т а п 6. На этом этапе алгоритма вычисляются для каждой мат-
матрицы Ей в соответствии с C.35) и C.36) значения добротности k-то при-
признака otft в заданном алфавите А.
Э т а п 7. На данном этапе алгоритма составляется согласно C.37)
матрица Е и по соотношениям C.39) и C.40) определяется значение
средней добротности признака исходного описания а в алфавите А.
Этап 8. На этом этапе алгоритма вычисляется по C.41) первич-
первичная система весов yk (k = 1, л), дающая характеристику эффектив-
эффективности каждого из л признаков исходного описания.
Этап 9. На этом этапе алгоритма в соответствии с описанной в
§ 3.7. методикой переоцениваются веса yh с целью повышения различи-
различимости «трудных» классов.
Этап 10. На данном этапе алгоритма взвешиваются признаки ис-
исходных эталонных описаний классов объектов на базе полученной та-
таким образом системы весов умножением каждой компоненты эталона
на соответствующий вес.
126
Для алгоритмов, предполагающих нормировку эталонов, преобразо-
преобразованные в результате взвешивания признаков эталонные описания под-
подвергаются повторному нормированию.
Полученные таким образом окончательные эталонные описания
^классов являются наиболее эффективными с точки зрения принятого
'алгоритма распознавания при разделении объектов заданного алфави-
алфавита.
Заключение
Выделение наиболее информативных признаков при синтезе распознающих
систем — одна из важнейших задач теории и практики распознавания. К ее реше-
решению может быть два подхода: 1) отыскание с самого начала малого числа при-
признаков распознавания большой информативности; 2) формирование минималь-
минимального описания классов путем минимизации большого числа исходных призна-
признаков по некоторому критерию эффективности признаков.
!•- Большинство критериев эффективности признаков основано на методах ма-
1,тематической статистики и теории информации. Вычисление информативности
[системы признаков можно проводить либо без учета статистических связей меж-
•ду ними, либо с учетом последних, несмотря на то что второй путь нахождения
| информативности более сложный; он полнее, как правило, отражает действитель-
^иость.
ГЛАВА 4
ОБУЧЕНИЕ ЭВМ И ПРИНЯТИЕ РЕШЕНИЙ
ПРИ РАСПОЗНАВАНИИ ОБЪЕКТОВ
ПО ИХ КРУПНОМАСШТАБНЫМ ИЗОБРАЖЕНИЯМ
§ 4.1. АВТОМАТИЗАЦИЯ ПОЛУЧЕНИЯ СТАТИСТИЧЕСКИХ ДАННЫХ
В ПРОЦЕССЕ ОБУЧЕНИЯ ЭВМ
Задача вероятностного обучения ЭВМ распознаванию сводится к
восстановлению для каждого класса (в случае идентификации для объ-
объекта) кривых плотностей распределения вероятностей значений при-
признаков (см. § 4.3). Значение каждой такой кривой в некоторой точке
оси абсцисс равно частоте повторений значения признака, соответству-
соответствующего этой точке, при наблюдении различных объектов класса, харак-
характеризуемого упомянутой кривой. Полученные кривые используются на
этапе распознавания. Для системы порогового типа необходимо, кроме
того, назначить так называемые пороги по используемым для распоз-
распознавания признакам.
Схема построения плотностей распределения признаков. Рассмот-
Рассмотрим логическую схему получения плотности распределения вероятнос-
вероятностей значений признака (рис. 4.1), использующую в качестве исходных
данных (блок /) значения г-го признака xt (cp, QIAj) для объекта А} в
дискретных точках плоскости фо0 (рис. 4.2), где фи 8 — углы Эйлера
(углы чистого вращения и нутации — углы обзора) системы координат,
жестко связанной с объектом, относительно^системы координат, жест-
жестко связанной с системой наблюдения; ф и 0 — предельные значения
углов обзора ф и 0, для которых имеет смысл изучение зависимости
xt (ф, QIAj). Совокупность значений xt может быть получена, напри-
например, посредством обработки результатов натурных съемок объекта А},
помещенного на специальном поворотном стенде, с заранее определен-
определенных ракурсов. Эту совокупность удобно записать в виде матрицы:
|| xt (ф, е/Л,)ф,р 9, || (<р'=0, 1 ф/ДФ; 9'=0,1 §/де), D.1)
где Аф и А0 — шаги квантования по осям оф и 00.
Общий элемент xt (ф, B/Aj)^, в' матрицы представляет собой зави-
зависимость xt (ф, QIAj) при ф = ф' Аф и 0 = 0' А0. В случае нормализа-
нормализации плоских изображений угол ф при изучении зависимости Х{ (ф,0/
lAj) для осесимметричных объектов может быть исключен из рассмот-
рассмотрения. Однако в целях общности процедуры обучения матрица-строка
\\Xi (BIAj)Q'\\ @' = 0, 1,..~ 0/А0) для каждого j^M1 преобразуется
в матрицу вида D.1) с одинаковыми строками (см. рис. 4.1, блок 6).
Далее производится выборка исходных данных для / ? Мг (блок 5)
и для / ? М2 (блок 9). Здесь Мг иМ2 — соответственно множества осе-
осесимметричных и произвольных по форме объектов.
128
Г~ Ввод данных J
г.
Начало ним а
определения
i)uCjj(xi)i=!n
Начало цикла
вычисления
дц(хО и Cn(xi), i-t,-, n
для очередного j
17/
ИМ
Выборка матрицы^строки
\\х1ША])в<\\,В-0,...,В/Дв
Преобразование матрицы
\xi(e/Aj)ei в матрицу
Выборка значений
матрииы
Преобразоёа
\\Xi(9,e/Aj)v
i
Преобразование матрииы
iCPez/lli б матрицу
'll
r-9
Упорядочение элементов
преобразованной матрицы
\\x'i(fe/Aj);'\\
Начало пикт вычисления
С
19-
Выборка элементов матрицы
соответствиюших очеред-
очередному элементарному пря
моугольнику плоскости
Олределение типа разбие-
разбиения этого прямоугольника
на ава треугольника
Подсчет значений gijv
и gij,4)t1icoomSemcmey№-
щих этим треугольни-
треугольникам в точках
упорядоченной'
последовательности
[
К
1Ч-
Формирование gij(x'i)
15
Конец цикла Вычисления
Не ,
Поде чет G;j (xt) 6 точках
упорядоченной
последовательности
г-/7
Конец цикла вычисления
'О и C-ij(x'i),H->n
цО iji,H
для очередного j
Нв
Конец цикпа определения
9lj (А I и Gijtx'i), К«чП;
Конец
Рис. 4.1. Схема алгоритма определения плотностей распределения
признаков
5 Зак. Ю53
129
Далее матрица \\xt (ф, QIAj)^, 9-II трансформируется в матрицу
\\xi (ijj, б/Л^'.в-П (блок5). Последняя отличается от исходной мат-
матрицы только тем, что каждые четыре ее элемента, соответствующие ап-
аппликатам любого элементарного прямоугольника авсй плоскости фо0
(рис. 4.2), обязательно не равны между собой (смысл такого преобра-
преобразования поясняется ниже). Это осуществляется добавлением к значе-
значениям этих аппликат величин 6t = Ы0~8, б2 = 2-Ю""8, б3 = 3-10~8
илиб4 = 4-Ю-8.
Предположим, что сопоставляются аппликаты х% (ф, 0/Д/)ф'(9';
xt (ф, eM;V,9'+i; xt (ф, eMjV+i.e'+i; xt (ф, e/^v+i.e- для неко-
некоторых фиксированных ф' и Э', исключая ф' = ф/Аф или Э' = 0/Д0.
Вначале сравниваются первая и
четвертая аппликаты. При нх ра-
равенстве к четвертой аппликате при-
прибавляется величина 6t. Затем срав-
сравниваются первая и вторая, первая
и третья и, наконец, четвертая н
вторая аппликаты. Значения вто-
второй, третьей и снова второй аппли-
аппликат корректируются в случае не-
необходимости прибавлением соот-
соответственно величин б2, б3 и б4.
Рис.
4.2. Порядок
зависимости Х
аппроксимации
(<р, Q[Aj)
Сопоставление четвертой н вто-
второй аппликат связано с возмож-
возможностью появления такого случая,
когда первая аппликата отличается от трех остальных, а вторая н чет-
четвертая совпадают. Сравнение второй и третьей, четвертой и третьей
аппликат производится при анализе элементарных прямоугольников,
соседних с рассмотренным. Ошибкой, вносимой этой процедурой пре-
преобразования, можно пренебречь, так как точность представления приз-
признака х% не превышает трех-четырех значащих цифр после запятой нз-за
погрешностей фиксации углов ф и 0 при фотосъемке, погрешностей
подсчета признака х% при дискретной «сетчатке» и конечном числе гра-
градаций яркости и т. д. По той же причине совпадение каких-либо ап-
аппликат прямоугольника после их корректирования исключается. В про-
противном случае значения величин 6t — б4 должны быть уменьшены.
Элементы преобразованной матрицы ||*' (ф, B!Aj)V', 9-1| распола-
располагаются далее в порядке возрастания их значений (см. рис. 4.1, блок 9).
При этом Исключаются случаи повторного появления в упорядочен-
упорядоченной последовательности одного и того же по значению элемента, а так-
также подсчитывается число элементов такой упорядоченной последова-
последовательности.
Далее организуется цикл подсчета элементарных плотностей рас-
распределения gijv (дг/v) (v= 1,2 Nm) и плотности распределения gtl (xl)
1-го признака объекта А) (см. рис. 4.1, блоки 10, 15). Как будет по-
показано в § 4.3,
2
v=i
Мт = 2ф0/(АфАб) — число треугольников пЛоскбсти фоб, на
щ-орые разбиваются ее элементарные прямоугольники (каждый пря-
Оугольник разбивается на два треугольника, и каждый треугольник
меет свой номер):
„v- #j;v> Btfv, CijV — отрезки, отсекаемые плоскостью Q^v на осях
координат с учетом знака (рис. 4.2).
| Плоскость Quv соответствует треугольнику adc, имеющему номер v,
|( однозначно определяется тремя аппликатами, соответствующими
•о вершинам. При этом предполагается, что плоскость Q^v исключает-
I из рассмотрения вне области плоскости фо0, ограниченной треуголь-
треугольником adc, и, следовательно, признак */v определяется только на этом
реугольнике.
; Таким образом, зависимость-*/ (ф, QlAj) аппроксимируются кусоч-
»Во-линейной поверхностью. Требуемая-точность аппроксимации обес-
обесцвечивается надлежащим выбором шагов квантования по осям оф и 00.
рПомимо характера функции х\ (ф, QIAj) на выбор шагов Аф н А0 вли-
г также и точность фиксации этой функции в дискретных точках.
Затем реализуется выборка элементов матрицы \\х\ (ф, 8/Л;)ф',е-II»
^соответствующих очередному элементарному прямоугольнику
^плоскости фо0 (см. рис. 4.1, блок //). Элементы этой матрицы распола-
располагаются в результате выполнения операций, описанных в блоке 8, в
^специальных ячейках памяти в порядке их перечисления по строкам
|слева направо (последние перебираются последовательно сверху вниз).
I' Пусть произвольный прямоугольник abed плоскости фо0 для неко-
J торых фиксированных углов ф' и 0', исключая угол ф' = ф/Аф илн
Щугол 0' = 0/А0, имеет следующие координаты вершин:
[ф'Дф, в'Дв], [ф'Лф,(в'
э, е'Д9].
D.2)
130.;
а&:
Для определенности предположим, что первыми выбираются четыре
аппликаты, соответствующие прямоугольнику, координаты вершин
которого находятся из D.2) при ф' = 0, 0' = 0; вторыми—аппликаты
. при ф' == 1, 0 = 0; третьими — аппликаты при ф' = 2, 0' = 0;
последними — аппликаты при ф' = (ф/Аф) — 1, 0' = @/А0)—1.
В остальном алгоритм блока // в специальном пояснении не нуж-
нуждается.
Назначение блока 12 (см. рис. 4.1) заключается в установлении ти-
типа разбиения очередного элементарного прямоугольника на два тре-
треугольника. Порядок такого разбиения можно, например, определить
следующим образом.
Положим, что треугольникам, на которые должен быть разбит пря-
прямоугольник abed плоскости фо0, следует присвоить номера v и v + 1,
а координаты вершин этого прямоугольника определяются выражени-
выражением D. 2). Указанным вершинам соответствуют следующие элементы
преобразованной матрицы: х'% (ф, 0/Л/)Ф'в'; */ (ф. в!А])<у,в'+\',
*• 131
xl (ф, б/ЛДр' + i.e'+i; xl (ф, 0/Лу)ф' + 1,в'- Выберем из них три мень-
меньших, т. е. xl (ф, 0/Л;)ф',е-; xl (ф, 0/Л;)ф- + 1, е- + ь */ (ф, в/Лу)ф- + 1, в-.
Эти элементы однозначно определяют в пространстве некоторую пло-
плоскость Qifr. Оставшейся аппликате xl (ф, 9/Лу)ф', e- + i вместе с
двумя другими аппликатами xl (ф, 0/Л^)ф-, в' и xl (ф, 0/Л;)ф' + 1, в' + i
отвечает плоскость Q^.v+i- Проекция линии пересечения этих плоско-
плоскостей на плоскость фО0 проходит через вершины а и с, определяя тем
самым тип разбиения прямоугольника abed на два треугольника abd и
abc с номерами v и v + 1 в порядке упоминания.
' Далее вычисляются значения каждой из двух очередных элементар-
элементарных плотностей распределения вероятностейgtp ngu,v+1, соответствую-
соответствующих упомянутым тре-
треугольникам, в точках
упорядоченной последо-
последовательности (см. рис. 4.1,
блок 13), сформирован-
сформированной по командам, опи-
описанным в блоке 9. Обоз-
. .у'. начим символами 4/vmm,
т»*1*ш xhvcp и хЬтж MeHb'meej
Рис. 4.3. График плотности распределения среднее И большее зна-
gih (ty) чения x'ty (<p,Q/A}), со-
соответствующие верши-
вершинам v-ro треугольника. При [распределении независимых случай-
случайных величин ф, 0 и системы этихи случайных величин по закону рав-
равной плотности элементарная плотность распределения g^-v (x'iv) имеет
вид, показанный на рис. 4.3, rj\ehijv = АфА0/[ф0 (x'i}ym!lx— х'иут1п)].
Таким образом, gUy равно 0 при *'yVmax < xl, x't ^ ~'
р, gijv рано 0 при *yVmax<*/» xt < *Vmtn>
достигает максимального значения при х\ — х'цЧс)? и изменяется линей-
линейно на участках x'ijVmin<Zx[ < х'фср (с положительной производной) и
x'nvcp < xl <. х'цчтах (с отрицательной производной). Очевидно, что вы-
вычисление^^ в точках упорядоченной последовательности целесообразно
только для тех ее элементов, значения которых лежат в открытом ин-
интервале (x'fjvmlni *'iyvmax)- Как ВИДИМ ИЗ РИС. 4.3, ВЫЧИСЛвНИе gijv ДЛЯ
некоторого упорядоченного значения- х[ (ф, 0/Лу) из этого интервала,
обозначенного х]уп, может быть выполнено сравнительно легко:
xijv min
,)
при
ft/v (*/уп) =
(*f/v max"
Этими соотношениями можно пользоваться при любых i, / и v,
поскольку значения х'фтХа, *'Wvcp, л;'г^гаах никогда не равны друг
другу попарно вследствие преобразования исходных данных с помощью
блока 9 (см. рис. 4.1). Одновременно при этих вычислениях исключа-
исключается возможность появления б-функций.
132
Формирование^ (xl) (см. рис.4.1, блок 14) заключается в следую-
,ем. Каждой точке упорядоченной последовательности ставится в со-
соответствие некоторая ячейка памяти машины. После вычисления значе-
ния?г^ в этой точке оно прибавляется к содержимому упомянутой ячей-
ячейки. В результате по окончании цикла вычисления gijv (xiv) (v = 1, 2, ...,
Nm) в этих ячейках будут храниться значения gtj (xl) в точках упо-
упорядоченной последовательности. К сожалению, из-за неравномерно-
неравномерности шага квантования по оси абсцисс возникает необходимость в запо-
запоминании соответствующих им значений аргумента.
Для контроля правильности вычисления очередной плотности gu(xl)
распределения вероятностей признака можно подсчитывать однов-
одновременно и значения закона распределения Gtj (xl) случайной вели-
величины xl для объекта Л у в тех же точках упорядоченной последователь-
последовательности. Площадь под кривой распределения gi} (xl) и последнее значе-
значение соответствующей ее кривой распределения &ц (xl) должны быть
равны 1. Как следует из алгоритма вычисления плотности gtj (xl), по-
последняя на участках между подсчитанными значениями изменяется
линейно. Значит, для вычисления кривой распределения Gtj (xl)
можно воспользоваться интегрированием по правилу трапеций (см.
рис. 4.1, блок 6).
Таким образом, рассмотрена процедура определения плотности рас-
распределения г-го признака для /-го объекта. Для получения всех плот-
плотностей gu (xl) эту процедуру следует проделать для всех i = 1, 2,...,
п и / = 1,2,..., т. Соответствующие вычисления описаны в блоках 2,3,
17, и 18 (см. рис. 4.1). Полученные зависимости в случае необходимо-
необходимости могут быть скорректированы усреднением по несущественным па-
параметрам, дополнительно влияющим на случайность описания формы
проекции, а также представлены в аналитической форме с помощью
хорошо разработанных методов выравнивания статистических рядов.
Схема назначения порогов по признакам. Рассмотрим назначение
порогов при использовании минимаксного критерия. Как будет пока-
показано в § 4.4, для каждой пары объектов /, / (/, /?M1UM2) B этом
случае возможно назначение по тому или иному признаку Х{ только
одного порога ПгЯ) хотя связанный с этим критерием подход довольно
пессимистический.
Для отыскания порога П^г в такой постановке достаточно сравнить
соответствующие кривые распределений Gi;- (x't) и Git (x't). Удобно од-
одну из кривых, например кривую Gu (x't), представить в виде [1 —
— Gu (x'i)]. Тогда величина порога Ищ равна абсциссе пересечения
кривых Gtj (xl) и [1—Gu (xl)], т. е. соответствует уравнению
nUi »
J gtj (xi) dxl = J gu(xl)dx'i. При этом вероятности непревы-
nm
шения qtji и превышения рцг случайной величиной х{ значения
Пш для класса / при дихотомии объектов Ах и А, по параметру х[
могут быть найдены из соотношений
оп) D3
1!''гДе
D.3)
D.4)
133
Составление отвечающей этим соотношениям логической схемы не-
незатруднительно.
В системе узнавания порогового типа по окончании процесса обу-
обучения необходимо помнить пт (т — 1) чисел, одна половина которых
представляет собой значения порогов Пщ (i <= 1,2, ..., л; / = 1,2,...,
т; j < I), а другая — соответствующие им значения pin. Величины же
Янь Яш и Ptu нетрудно рассчитать с помощью соотношений D.3) и D.4).
После назначения порога по некоторому признаку в соответствии с тем
или иным критерием значение минимизируемой этим критерием вели-
величины (например, величины ptji) можно использовать для оценки раз-
разделительных возможностей данного признака. Однако следует пом-
помнить, что этот признак может быть-малоэффективным при разделении
одной пары объектов и довольно эффективным при разделении другой
пары объектов. Кроме того, величина рщ характеризует скорее степень
пересечения /-го и 1-го объектов по /-му признаку, чем степень совпаде-
совпадения соответствующих плотностей распределения. Поэтому низкая ин-
информативность того или иного признака при его применении в сис-
системе порогового типа не означает низкой информативности этого при-
признака в системе, использующей на этапе принятия решения кривые
плотностей распределения вероятностей значений признаков.
§ 4.2. ПРИНЦИПЫ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ ПРОЦЕССА
ПРОСТРАНСТВЕННОГО ОБЗОРА
Необходимость моделирования на ЭВМ процесса обзора простран-
пространственных объектов возникает при отсутствии реальной аппаратуры вво-
ввода изобразительной объектной информации в машину. При этом про-
простое запоминание значений, используемых для опознавания признаков
для всех возможных положений каждого объекта относительно зри-
зрительного аппарата, практически невозможно. Однако эти значения мо-
могут быть получены на основе сведений о конечном числе проекций объ-
объекта.
Схема алгоритма моделирования на ЭВМ процесса автоматического
обзора пространственных объектов приведена на рис. 4.4. Схема ис-
использует в качестве исходных (блок /) те же данные, что и схема, пока-
показанная на рис. 4.1.
Моделирование процесса обзора заключается в предъявлении того
или иного объекта A} (j ^М^М^) с заданной априорной вероятно-
вероятностью \j^ 0 B1/ = 1) Для распознавания; в получении углов обзора
Ф и 0 при условии, что вероятности их значений распределены по за-
заранее заданному закону; в определении соответствующих этим углам
значений признаков xt (ц>, QIA}) (i = 1,2,..., п) при заданном способе
аппроксимации их зависимостей от ф и 9. Общее число ракурсов и ап-
априорные вероятности предъявления объектов задаются в блоке 2.
Организация циклического повторения описанной процедуры об-
обзора заданное число раз происходит в блоках 3, 18. Далее с помощью
датчика псевдослучайных чисел, распределенных, например, по зако-
закону равной плотности в закрытом интервале [0, 1], получаются три
псевдослучайных числа: ¦%, т]е и ц} (блок 4).
134
С
Ввод данных
Установка Ki(hh2,-,m)\
и числа инспекций
L
—j _
Начало цикла обзоров
I—?
Получение
Преобразование;
в адреса
•омера инспектируемого
объекта
J€HZ
Начало цикла подсчета
значений Xi[(rjge/Ae)/Aj]\
i=L2,...,ri "
—5—
Выборка значений
для очередного i
у—
Вычисление значения
ff
iqgj
для очередного i
—10—
Конец цикла
определения значений
Х1[(т/9в/йв)/А]
С
-11 »
Начало цикла
вычисления значении
-12—
выборка значений
fi>B/A)
Ш/АО+к? .
для очередного ь
—/3—
Определение типа раз-
разбиения соответствую-
соответствующего аппликатам эле-
элементарного прямоуголь-
прямоугольника на два треуголь-
треугольника
г-П—
Определение
рабочей плоскости
г-15—
Подсчет значения
Xt[(rjv WP,n9e/Ae)/Aj
| для очередного i
-16—
Коней, цикла
вычиспения значений
С=!,2,...,/?
Г
¦17-
Опознавание
MS
Конец цикла обзоров
Конец
Рис. 4.4. Схема алгоритма моделирования иа ЭВМ процесса
обзора объектов
135
Числа т)ф и т]е используются для определения соответствующих
им значений q/ и 0'. Для этого сначала первое число умножается на ве-
величину ф/Аф, а второе — на величину 0/Д0. Затем выделяются целые
части этих произведений Ent [т]ф (ф/Аф)] = ф' и Ent [т]е @/А0) ] =
= 0'. Величины ф' и 0' преобразуются в соответствующие адреса
(блок 5), необходимые для отыскания элементов xt (Q/Aj)e-; x( (Q/Aj)e> + i
(i—l, 2 п), если ]^МЪ или элементов х% (ф, 0М;)Ф',е-;
Xt (ф, 0/Л;)ф',в' + 1;л;г(ф, 0/Л;)фЧ-1,в'+Г,^(ф,0/Л;)(р' + 1,в'(г = 1, 2, ...,
«), [если }?Мг, используемых в последующем. Однако для отыска-
отыскания этих элементов необходимы также сведения о значении / и
его принадлежности множеству Мг или Мг. Для этого интервал воз-
возможных значений ц} разбивается на т поддиапазонов, величина каждо-
каждого из которых устанавливается равной априорной вероятности предъ-
предъявления для узнавания соответствующего объекта (установка границ
этих поддиапазонов производится в блоке 2). При этом каждому подди-
поддиапазону ставится в соответствие свое значение /. Тогда попадание % в
тот или иной поддиапазон однозначно определяет значение / и его при-
принадлежность к множеству Мг или М 2 (блок 6).
Если /6 Afi, то цикл подсчета х% (Q/Aj) (i = 1,2, .... п) организу-
организуется в блоках 7 и 10. Угол ф здесь не принимается во внимание.
Значение xt (Q/Aj) для очередного i вычисляется (блок 9) в соответ-
соответствии с выражением х{ (Q/A}) = [щ @/А9) — 9'] 1х( @/Л;)в' + 1—
;) + г(/;)9.
Таким образом, значение xt подсчитывается при условии линейной
аппроксимации зависимости х% (Q/Aj).
Равномерность шагов квантования по осям оф и о0 позволяет легко
отыскать значения xt (Q/A])e> и х% (б/Л^в' + i без запоминания соответ-
соответствующих им величин 0' и 0' + 1.
Предположим, что для некоторого / в Мг в памяти машины начи-
начиная с некоторой ячейки с адресом а} размещаются последовательно
элементы матрицы \\хг (Q/Aje'\\ (Q' = 0, 1,..., /Д9) в порядке их
перечисления в строке слева направо; далее в аналогичном порядке раз-
размещаются элементы матрицы \\х2 (9/Л^е-П @' = 0,1,..., 0/А0) и т. д.
Тогда адреса ячеек памяти, хранящих значения хх (9/Л/)в' и
хх (Q/Aj)e' + i для некоторого фиксированного 0', получаются простым
добавлением к адресу aj соответственно 0' и 0' + 1 единиц. Для каж-
каждого очередного i эти адреса увеличиваются на @/А0 +1). Связанные
с выборкой значений xt (QIAfo- и xt (в/Л^)в- + 1 действия выполняются
в блоке 8.
Цикл определения значений xt (ф, %IA)){i — \, 2,..., п), если
}?М2, организуется в блоках] //, 16. Выборка необходимых в этом
случае величин
. + ,,в. D.5)
для очередного / также выполняется сравнительно легко (блок 12)
136
Предположим, что элементы матрицы \\xt (ф, 0М;)Ф'. в'П (где ф' —
= 0,1, 2,..., ф/Дф; 0' = 0,1, 2 0/А0) располагаются в ячейках памя-
памяти машины в порядке их перечисления по строкам слева направо (по-
(последние перебираются последовательно сверху вниз). Тогда адреса
!рчеек памяти, соответствующих упомянутым значениям xt для / =1,
;равны _ а, + ф' @7Д0 + 1) + 0'; а} +_ф' @/А0 + 1) + @' + 1);
^ + Ф'@/А0 + 1) + 0'+0/А0 + 2; а; + Ф'@/Д0 + 1) + 0' + е/Л0 + 1 в
орядке упоминания {щ — начальный адрес массива ячеек объекта А}).
|Каждый из этих адресов увеличивается для очередного /_на (ф/Дф+1) х
1 X @/0 + 1). Легко понять, что точка обзора (т1Фф/Дф; т]е 0/Д0)
Рплоскости фо0 принадлежит такому элементарному прямоугольнику
Mabcd этой плоскости (см. рис. 4.2), координаты вершин которого равны
, в' Дв];
|где ф' и 0' — целые части величин т]<р_(ф/Дф) и Tie @/Д0).
' Для отыскания значения xt [(т]фф/Дф, т]9 0/Д0)М;] для очередного
необходимо прежде всего определить порядок аппроксимации зави-
зависимости xt (ф, Q/Aj), поскольку последняя задана в дискретных точ-
точках ПЛОСКОСТИ фО0.
Положим, как и в § 4.1, что
N
С
"//у
е-с
//V
Порядок нумерации треугольников плоскости фо0 определяется в бло-
блоке 13 аналогично тому, как это имело место в блоке 12 (см. рис. 4.1).
Назначение блока 14 заключается в установлении принадлежности
точки обзора [т]ф ф /Дф, щ 0/Д0] одному из треугольников, на кото-
ii рые разбивается прямоугольник, определяемый соотношением D.6).
!];!Для этого можно, например, подставить эти координаты в уравнение
рпрямой, разбивающей упомянутый прямоугольник на треугольники.
к Обозначим координаты вершин треугольника, которому принад-
принадлежит точка обзора, символами (<plt 0г), (ф2, 02), (ф3, 03). Естественно,
что ф1( ф2, Фз, 01, 02, % 6 М3 (где М3 — множество целых_чисел ф',
К 0', ф' + 1 и 0' + 1). Тогда значение xt {[r\v (ф/Дф), tie @/Д0IМ;>
В1 может быть найдено (блок /5) из уравнения
—(r^ ф/Дф-
-Qi H (ф2, 0.,/Aj) - xt (ф1, QJ
Q - хг (ф1, QJAj)
фа—ф! ва—I
Фз—Ф1 0з—«
Ф2-Ф1 Ч (Фг. УЧ ~ Ч (фх, QJAj)
Фз—Ф1 Ч (Фз, вз/А]) — Ч (Ф1, Qi/Aj)
ф2—Ф! еа—e
Ф8—ф! е»—9
137
Блок 17 схемы к обзору отношения не имеет. Его назначение заклю-
заключается в отнесении предъявленной для узнавания проекции, характе-
характеризуемой набором признаков xt (ф, Q!A}) (i = 1,2,..., п), к одному из
объектов (при идентификации) или классов (при классификации).
Возможно использование единообразной методики определения зна-
значений признаков xt (i = 1, 2, ..., п) при однократном^обзоре как для
/ 6 Mlt так и для / ? М2. Для этого достаточно преобразовать матри-
цу-строку \\xt (Q/Aj)B' || @' = 0, 1,2 ё/А0)для каждого i, /?
бЛ^в матрицу вида D.1) с одинаковыми строками и использовать
процедуру обзора, описанную выше для произвольных по форме объ-
объектов. Однако при незначительном упрощении подпрограммы обзора
Это привело бы к резкому увеличению потребности в машинной памя-
памяти и среднего времени, необходимого для многократных предъявлений
объектов для узнавания.
Попадание точки [т]ф (ф/Аф), щ @/А0)] на границы элементарного
прямоугольника или на общую сторону соответствующих ему треу-
треугольников, а также различные соотношения между величинами выра-
выражения D.5) не влияют на описанную процедуру обзора. Последнее тем
более справедливо, что в реальной системе моделирования каждая
матрица D.1) подвергается предварительно некоторому преобразова-
преобразованию. Смысл этого преобразования заключается в том, что каждые че-
четыре элемента упомянутой матрицы, соответствующие вершинам неко-
некоторого элементарного прямоугольника плоскости <ро0, обязательно де-
делаются не равными друг другу попарно. Вносимая при этом погреш-
погрешность является незначительной. Необходимость такого преобразова-
преобразования не связана с описанной методикой обзора, а возникает при решении
задачи обучения автомата узнаванию пространственных объектов, ко-
которая использует те же исходные данные (см. § 4.1). Нетрудно преду-
предусмотреть возможность смены закона распределения вероятностей зна-
значений углов ф и 0 при обзоре, возможность автоматической перестрой-
перестройки схемы обзора при изменении числа признаков или объектов, а так-
также возможность обзора того или иного объекта заданное заранее число
раз при случайных ракурсах наблюдения и т. д.
§ 4.3. ВЕРОЯТНОСТНЫЕ МЕТОДЫ ОБУЧЕНИЯ ЭВМ РАСПОЗНАВАНИЮ
ОБЪЕКТОВ
Общие вопросы вероятностного распознавания изображений. Пред-
Предположим, что изучается некоторый ансамбль п" свойств xt (i =
= 1,2,..., п") проекций объектов, подлежащих идентификации.
В общем случае эти свойства — функции некоторого вектора ю =
= (со1( соа,..., ©(), параметры которого характеризуют ракурс наблюде-
наблюдения, освещенность и т. п. Будем говорить, что объекты заданы в сре-
среде Q", если известны все зависимости свойств х% (со/Л^) = хц (со)
(i = 1,2,..., п") для каждого из объектов А} (/ = 1, 2, ..., т). Обозна-
Обозначим через / множество целых чисел 1,2,..., т. Тогда ;-й и 1-й объекты
неразличимы в среде Q", если хх (со/Л/) = хх (со/Лг) (i = 1, 2, ...,
"jleJj?l)
138
Если некоторое свойство х% не зависит от условий наблюдения,
It. e.Xi((x)/Aj)=const для всех значений вектора с», то будем называть
|его инвариантным относительно со. Объекту А} соответствует единст-
fвенная точка в «"-мерном пространстве свойств только в случае, когда
^последнее условие имеет место для всех i = 1,..., п". При этом иден-
идентификация этого объекта становится тривиальной задачей. Поиск та-
' кой среды Q" представляет поэтому существенный интерес, хотя'и мо-
может быть выполнен далеко не всегда.
В общем случае детерминистская постановка задачи идентификации
^трехмерных тел нецелесообразна. Статистический подход к ней можно
¦сформулировать следующим образом. Будем считать объекты со стати-
статистически независимыми свойствами заданными в среде Q", если из-
известны все законы распределения G^ (xi) (i = 1,2,..., п"; j = 1,2,...,
т). Тогда /-й и 1-й объекты неразличимы в среде Q", если Gtj (xt) —
= Gu (xt) (i=\, 2, ..., n"; /, l б /; / Ф I).
Допустим, что последнее условие выполняется не для всех свойств,
а только при i = я' + 1, п' + 2, ..., п"(п' < п"). Тогда исходному
описанию /-го и 1-го объектов в среде Q" однозначно соответствует опи-
описание в среде Q', включающей набор свойств Xi (i = 1,2, ... , п'). Рас-
Расположим далее последние в порядке уменьшения их информационной
значимости и выберем первые п свойств в качестве признаков. Необхо-
димо, чтобы
Но (/г—количество информации, получаемое при
использовании г-го признака; Но — начальная неопределенность
т
идентификации, равная — 2 (h
lj)'> ?i — априорная вероятность
наблюдения объекта Л}.) Сформированное таким образом пространство
Q будем называть пространством признаков.
При подсчете количества информации /; необходимо учитывать ста-
статистическую зависимость свойств. Иногда, правда, этого не делают, по-
п
лагая 2 h ^ аНо (я — коэффициент, характеризующий степень зави-
зависимости свойств; It — та же мера информации, рассчитанная в предпо-
предположении их независимости).
Для оценки информационной эффективности свойств может быть
использован теоретико-информационный подход. Однако при боль-
больших т и, следовательно, я этот подход слишком громоздкий даже в
случае, когда зависимость свойств не учитывается. Поэтому практичес-
практически часто определение размерности пространства Q производится в про-
процессе эксперимента. При этом основным критерием является обеспече-
обеспечение заданной надежности распознавания. Одновременно несложно
оценить информативность того или иного свойства, степень зависимо-
?L сти свойств и т. п. Для приближенной же предварительной оценки
информативности г-го свойства можно ограничиться подсчетом коэффи-
коэффициента пересечения объектов по этому свойству:
1 т
т(т — 1)
1. г-=1; 1Ф1
"fit
139
гДе gt) (xi), gu (xt) — плотности распределения свойства xt для объек-
объектов А) и A i соответственно; А°гя— область определения плотности рас-
распределения gt] (xt), для которой gtl (xt) > gt} (xt).
Следовательно, пространство Q должно формироваться из свойств,
имеющих наибольшие значения коэффициентов /г.
В одних системах распознавания на этапе принятия решения ис-
используются плотности распределения признаков, в других — специ-
специально назначаемые пороги по признакам. Рассмотрим связанные с
этим вопросы несколько подробнее.
Определение плотностей распределения признаков при равнорас-
пределенных углах обзора. Плотности распределения признаков, ис-
используемых для распознавания, находятся обычно построением на ос-
основе материала обучения соответствующих гистограмм, которые ап-
аппроксимируются далее в случае необходимости аналитическими зави-
зависимостями. При распознавании трехмерных объектов реализация этой
методики затруднительна, поскольку необходимо многократное наблю-
наблюдение объектов в условиях, адекватных реальной ситуации. Один из
методов сокращения требуемого для построения упомянутых плотнос-
плотностей объема работ заключается в следующем.
В рассматриваемом случае можно ограничиться учетом влияния на
вид проекции объекта только углов ф и 0, т. е. можно положить, что
xt) (со) = хи (ф, 0) (i — 1, 2,..., п; } = 1, 2,...,т). Плотность распреде-
распределения gt] (xi) свойства xt (со/Лу) может быть найдена, если известны
зависимость х1} (ф, 9) и закон распределения G (ф, 0) вероятностей
значений углов обзора.
Зависимость xi} (ф, 0) носит периодический характер, поэтому ее
необходимо изучить лишь на части плоскости фо0 (см. рис. 4.2), где
О^ф^фиО^0<С0, а символами ф и 9 обозначены значения уг-
углов, соответствующие периоду изменения величины Х{].
При обучении зависимость х^ (ф, 9) восстанавливается следующим
образом. Значения хг] вычисляются в дискретных точках плоскости
фо0 с заданным шагом квантования по углам ф и 0. Далее поверхность
хи (ф.0) аппроксимируется кусочно-линейной поверхностью так, что
через^каждые три^соседние точки (например, точки х{] (а), хц (с),
xt) (d), см. рис. 4.2) проводится плоскость
Ф
9
7ifv
D.7)
— константы, определяемые значениями хц (ф,0)
где Hi]V, Bijv,
в этих точках.
Порядок выбора соседних точек может, например, заключаться в
следующем. Рассмотрим в плоскости фо9 некоторый элементарный пря-
прямоугольник abed, стороны которого ad = be nab — dc равны соответ-
соответственно шагам квантования по осям оф и 00. Будем говорить, что вер-
вершины а (с) и 6 (d) противолежат вершинам с (а) и d (b) в порядке упо-
упоминания. Все другие комбинации из двух вершин (точнее, сами вер-
вершины) прилежат друг к другу. Таким образом, каждая вершина имеет
одну противолежащую ей вершину и две прилежащие. Теперь из четы-
140
аппликат, соответствующих точкам а, Ъ, с и d, выберем три мень-
йие (xtj (а), хи (с) и xtj (d), см. рис. 4.2), однозначно определяющие в
ространстве некоторую плоскость Q/;-v. Оставшейся аппликате хц (Ь)
месте с аппликатами xi}- (а) и хц (с), соответствующими прилежащим
„ вершине Ь вершинам а и с, отвечает другая поскость Qi;-, v+i- Про-
|кция линии пересечения этих плоскостей на плоскость фо0 проходит
•ерез вершины а и с, определяя тем самым тип разбиения прямоуголь-
прямоугольника abed на два треугольника: acd и abc. Условимся, что полученные
аким образом плоскости Qiiv и Qu,v+i исключаются из рассмотрения
ля значений ф и 0, лежащих соответственно вне ограниченных упомя-
утыми треугольниками областей плоскости фо0. Рассмотренную про-
процедуру повторим для каждого элементарного прямоугольника этой
рлоскости. Полученную кусочно-линейную поверхность будем считать
аппроксимирующей зависимость xtj (ф, 0). Требуемая точность ап-
аппроксимации может быть обеспечена надлежащим выбором шагов
«квантования по осям Оф и 00. Помимо характера функции xt) (ф, 0)
![она определяется еще точностью фиксации последней в дискретных
|точках. Согласование этих показателей всегда может быть реализовано
разумными средствами.
Пронумеруем треугольники плоскости фо0. Положим, что тре-
Еугольник acd (см. рис. 4.2) имеет номер v. Введем в рассмотрение ап-
аппроксимирующие зависимость хг] (ф, 0) функции
¦ф
Nm),
Nm =
_Hi}v, BijV, Ci]v — коэффициенты уравнения D.7);
§*= 2ф0/(АфА0) — число треугольников плоскости фо0; Аф, А0 — шаги
вантования по осям оф и 00.
Будем считать каждую из этих функций определенной только на со-
ветствующем ей треугольнике плоскости фО0. Тогда
v=i
-//V
н,
ifr
в,
6—С,,
О < <р < ф,
0<6<е.
D.8)
Для определения коэффициентов #v, Bv, Cv (индексы i и / времен-
> опущены) обозначим три точки, через которые проходит плоскость
кортежами (<piv, 01V, ^iv), fa2V, 02v, x^), (фзг, 03v, *sv). Тогда урав-
||№ние этой плоскости можно записать в матричном виде:
6-6,
Отсюда
ф—Фlv
D..
J!v
Jlv
An,, ~ X
v
=0.
D.9)
D.,
D,,
62!v
V31v
Ф 1 e21v
Фз1у 931v
141
где
Яу=<Рь
631v *31у
+ °lv
<P3iv
Я>21у
*3lv
X2\v
4*2 lv
Я>31у
^21v
631v
Подставляя значения #v, Bv, Cv в D.8), получим выражение
v=l
+F-elv)
3\V
Я>21
4>21v 621v
Я>31у 631v
-—x
lv
D.10)
Рис. 4.5. Пример кусочно-
линейной аппроксимации
зависимости xtj (q>, в)
f f
Рис. 4.6. Проекция линии
Lk на плоскость фОв:
1—8 номера частей области Do
Порядок нумерации точек не имеет значения, поскольку через
три точки, не лежащие на одной прямой, проходит единственная плос-
плоскость. Найдем плотность gtj (xt) распределения г-го признака /-го объ-
объекта для случая, когда плотности распределения углов обзора ф, 0 и
системы этих случайных величин соответственно имеют вид g} (ф) =
= 1/ф, 8t (9) = 1/6. S) (ф. 9) = 1/(Ф в); @ < Ф < ф, 0 < 0 < в).
Получим вначале выражение для функции распределения t-ro призна-
признака:
0и(*1)=Р(Х'и<хи), . D.И)
где xtj — ..екйторое значение случайной величины X'Ц (признака xt
объекта Aj).
Для иллюстрации вывода положим.что аппроксимированная ку-
кусочно-линейной поверхностью зависимость xtj (ф, 0) имеет вид, пока-
показанный на рис. 4.5. Проведем плоскость Q, параллельную плоскости
фо0, на расстоянии хц от нее. Эта плоскость пересечет поверхность
хц (ф, 0) по некоторой пространственной ломаной линии Lk (на рисун-
рисунке она замкнута, но может быть и незамкнутой или может состоять из
нескольких ветвей). Спроецируем ее на плоскость фо0 (рис. 4.6), при
этом проекция разделит плоскость фо0 на две области: для одной —
142
jicoTa поверхности над плоскостью фоб будет меньше xt}, а для дру-
Ш — больше хц. Обозначим через Do первую область. Чтобы выпол-
выполнялось соотношение D.11), случайная точка (ф, 0) должна, очевидно:
Йопасть в область Do. Следовательно,
В данном случае
рДе /)v _ области элементарных треугольников плоскости
|мерами v = 1,2,..., 7, составляющие область Do.
| Дифференцируя Gi} по х„, получим плот-
«ность распределения случайной величины XivW,9/Aj)
с но-
т. е.
= E gW (xiv)'
dxtlv
Рис. 4.7. Пример графи
ческого представления
(
зависимости х,
Рассмотрим процедуру вычисления произ- 'v
й
(<р,
Рассмотр рцдуру р е^ v
вольной элементарной плотности распределе-
распределения gl}v (xt4) несколько подробнее. Предположим, что xtv (ф, QIA})
имеет вид, показанный на рис. 4.7 (ниже индексы /и/ для упрощения
записи опускаются). Здесь
< *3v
9lv==63v''
D.12)
Пусть далее уравнение плоскости 0V (рис. 4.7) в отрезках имеет вид
v/tfv+e/Bv+*v/cv=iv
Тогда, используя формулы D.8) и D.12), нетрудно показать, что
ly—h<fQlv(X3v~X2v)
A6(P
lv
143
АФ(*Зу-*2у) #
В..
- -У-- -Дф Bv
uv *3v~ xlv Cv
де
Легко понять, что Gv (^v) = 0, gv (xv) = 0 при *v
что при xlv < xv < x2v имеют место равенства
Я..
~Ф1у
. Покажем,
)
Действительно, прямая ed (рис. 4.8) представляет собой проекцию
линии пересечения плоскости Qv с плоскостью, параллельной плоско-
плоскости фоб и отстоящей от нее на расстоянии xlv <. xv <C x2v. Нетрудно
найти ординату 0О точки пересечения этой прямой с прямой cd:
рде Sbld — площадь треугольника btd. Тогда
Следовательно,
*v)-. — K-cv)+— 92v+elv =
Ф" v L v nv J
ф 6 (X3v — xiv) (*3y—
в
Ч
1
о <e
Рис. 4.8. Графическая ил-
иллюстрация определения
плотности распределения
gv(*v) ПРИ xlv<xv<x2v
ф? C(9>,vJ,p)
О f,
Рис. 4.9. Графическая иллю-
иллюстрация определения плотно-
плотности распределении gv (xv)
при *2v < xv < x3v
е„= —
в
°2v
~Ф1
Как отмечалось ранее,
Hv Л.
во Л1
2ф9
Ф2у~Ф1у
e2v-e
lv
что и требовалось показать. Здесь Sdv — площадь области Dv или тре-
треугольника ecd;
Легко понять также, что (рис. 4.9)
АфА9 1
G
144
Действительно,
Фо elv
где Фо=-
Тогда
^y
=--—(*v-Cv)—
Ф2у
»V TSv
-v L Cv
Наконец,
ДшД9
2ф о
v
—92v+elv
Таким образом, в случае распределения углов обзора ф и 0 по зако-
Ну равной плотности плотность распределения t-ro признака /-го
145
Объекта будет равна
¦««(*»)= 2 sijv(xtv),
l
где guv (*|V) — элементарная плотность, соответствующая плотности,
определяемой выражением D.9):
(индексы I, / в этом соотношении опущены).
Рис. 4.10. Плотность рас-
распределения gv (*v) на
всем диапазоне изменения
xv
Рис. 4.11. Пример плот-
плотности распределения
&U (Xi)
Вид распределения gv (xv) иллюстрирует рис. 4.10. Можно было
бы показать, что изменение x2V1 в диапазоне Ulv, дгзу] приводит лишь к
перемещению отрезка h4 в том же диапазоне. Если же xiv =* *av = x3v,
то gv (*v) есть б-функция, площадь под кривой которой равна \Шт =
=> АфА0/Bф9).
Найденные за аисимости gu (*f) в случае необходимости коррек-
корректируются усреднением по несущественным параметрам, дополнитель-
дополнительно влияющим на случайность описания формы проекции.
Типичный пример распределения gu (xt) показан на рис. 4.11.
Описанная процедура получения^ (xt) легко реализуется на ЭВМ.
Ее недостатки — ограниченность распределения углов обзора зако-
законом равномерной плотности; большой объем памяти, требуемый для
хранения каждого_распределения gl} (xi) и достигающий в худшем слу-
случае 2 (ф/Аф + 1) (9/А0 + 1) ячеек; сравнительно большое время,'не-
время,'необходимое для подсчета значений gu (xi) в промежуточных точках,
что связано с нерегулярностью разбиения оси абсцисс по диапазону,—
нетрудно устранить. Действительно, аппроксимируя произвольное рас-
распределение углов обзора ступенчатой функцией, при которой их рас-
распределение в пределах каждого элементарного прямоугольника плос-
ности фоб равновероятно, можно компенсировать первый недостаток.
145
Устранение же последних двух недостатков достигается ступенчатой
аппроксимацией плотностей gt} (х{) при равномерном разбиении диапа-
диапазона изменения xt на поддиапазоны. Однако^более простое решение да-
дает метод статистического моделирования.
Определение плотностей распределения признаков при произволь-
произвольных распределениях углов обзора по методу статистического модели-
моделирования. Введем в ЭВМ информацию для вычисления зависимости
D.10). Это в основном аппликаты, соответствующие вершинам элемен-
элементарных прямоугольников плоскости фоб. Пусть в машине имеется два
датчика псевдослучайных чисел а^, и ае, диапазоны изменения и зако-
законы выработки которых соответствуют диапазонам изменения и законам
распределения углов ф и 0 (упомянутые датчики легко реализуются
программно). Тогда каждой паре чисел (а,,, ае) отвечает единственная
точка на плоскости фоб. Находя ближайшие к ней аппликаты, нетруд-
нетрудно по формуле D.10) вычислить, величину хц (Оф, ае). Повторим эту
процедуру Qo раз (значение Qo определяется требуемой точностью на-
нахождения^^ {xi)). В результате будет получен одномерный массив зна-
значений хц, используя который несложно построить соответствующую
гистограмму gti (xi). Для этого диапазон изменения хц разбивается
на 10—20 интервалов, затем подсчитываются частоты попадания зна-
значений хи в каждый из интервалов и, наконец, находятся ординаты гис-
гистограммы g^ (xi) отнесением упомянутых частот к соответствующим им
интервалам.
Изложенная методика свободна от упомянутых выше недостатков.
Действительно, имея в ЭВМ библиотеку датчиков псевдослучайных чи-
чисел, можно получить любой закон распределения углов ф и 0. Для хра-
хранения одной гистограммы необходимо всего 12—;22 ячейки, поскольку
ось абсцисс разбита на интервалы равномерно и для характеристики
количества интервалов разбиения достаточно, например, указать ми-
минимальное значение признака и величину интервала. Определение
требуемой ординаты гистограммы в случае необходимости сводится к
выборке ее из соответствующей ячейки памяти.
Нетрудно обобщить эту методику и на случай зависимости xt от
многих параметров. Например, в отдельных случаях распознавания
вид проекции объекта существенно зависит от фазы его освещения.
Можно, конечно, ввести дискретные фазы освещения и для каждой
из них вычислить и запомнить распределения признаков gti (xt), с тем
чтобы при опознавании объекта измерить фазу освещения и обратиться
для принятия решения к соответствующим этой фазе распределениям.
Однако такой подход связан со значительными затратами объема памя-
памяти. Если же при построении плотностей распределения признаков
gij(xi) есть возможность привлечь законы распределения значений уг-
углов, характеризующих фазу освещения, то часто требуемый объем па-
памяти может быть уменьшен. Правда, при этом необходимо изучение
зависимости xt (со/Лу) от более чем двух параметров,
Теоретически оценить количество Qo случайных испытании, необ-
необходимое для формирования гистограмм с заданной точностью, в общем
случае затруднительно. Для приближенной оценки Qo был поставлен
следующий эксперимент.
147
Пусть, например, зависи-
зависимость х (ф, 0) имеет вид, по-
показанный на рис. 4.12, а, б, и
аспределение углов обзора
описывается двумя независи-
независимыми законами равномерной
плотности g (ф) = 1/ф, g @)=
= 1/0. Теоретические оценки
распределений величины х
для рис. 4.12, а, б соответ-
соответственно будут в этих условиях
Иметь ВИД g (х) = Ш
*max=1 (РИС- 4.13, а,'б).'
На этом рисунке приведе-
приведены и отвечающие им экспе-
экспериментальные гистограммы
2 (х), а на рис. 4.14 — зави-
зависимости относительных сред-
Рис. 4.12. Примеры зависимости х (ф, 9) неквадратичных отклонений а
гистограмм от количества Qo
случайных испытаний (вид этих гистограмм практически не зависит
от %ai). Как видим, целесообразно установить значение Qo = 3000,
поскольку при Qo > 3000 значение а изменяется очень медленно
(при Qo = 10 000 а ж 4%).
Определение плотностей распределения признаков в задаче клас-
классификации трехмерных объектов. Возможность пересечения классов
по используемым для опознавания
признакам в этом случае резко воз-
возрастает. Известно также, что если
априорные вероятности отдельных
объектов, составляющих тот или
иной класс, не заданы, то о плотно-
а) дЫ,д(л)
1,0
0,6
0А
0,2
о
д(х)
,дм
1/16 Мб 5/16 7Л6 9/16 11/1613/16 15/Щ0Х
д(х)
1/16 3/16 5/16 7/16 9/16 Ш 130 15Л6Ш
Рис. 4.13. Графики теоретических
g (х) и экспериментальных g (х)
плотностей распределения значений
х для признаков х (ф, в) (см.
рис. 4.12)
148
гооо
то wm>qo,ae.
Рис. 4.14. Графики зависимости
=f (Qo) для признаков х (ф, 9)
рис. 4.12)
а—
(см.
1К. распределения признаков для этого класса трудно говорить. Соот-
..гствующие плотности для каждого из объектов можно получить по
зложенным выше методикам. При этом, поскольку в рассматриваемом
лучае принимаемые решения должны относиться к номерам классов,
не объектов, и цены решений каждого типа зависят только от номера
ласса, подобная задача должна рассматриваться как известная в ма-
ематической статистике задача различения сложных гипотез. Эта по-
ледняя задача очень сложна и решена лишь для некоторых частных
учаев.
В этой связи целесообразно предположить, что априорные вероят-
носги объектов, составляющих класс, одинаковы. Подобное допущение
Часго довольно близко к реальной ситуации. Тогда плотность распре-
распределения г-го признака для /-го класса может быть получена суммиро-
суммированием плотностей распределения г'-го признака для всех m.j объектов,
предъявленных при обучении и относящихся к /-му классу, с последую-
иЩим уменьшением масштаба по оси ординат в т.; раз. При этом особое
|внимание должно уделяться требованию достаточности статистики.
J Вероятностный подход к задаче автоматического опознавания трех-
олерных объектов позволяет далее при разработке решающей части
алгоритмов опознавания эффективно использовать методы теории ста-
статистических решений.
§ 4.4. ВЕРОЯТНОСТНЫЕ МЕТОДЫ ПРИНЯТИЯ РЕШЕНИЯ
! Рассмотрим класс алгоритмов принятия решения, использующих
' в той или иной форме сведения о плотностях распределения признаков.
Примечание. Этот класс алгоритмов наиболее последовательно мо-
j; жет быть изложен с позиции теории статистических решений (см. [19]). Ниже бу-
I дут рассмотрены только основные положения этой теории и вопросы ее приме-
] нения для целей автоматического распознавания трехмерных тел.
щ\ \ Предположим, что совокупность возможных входных ситуаций си^
|«стемы опознавания подлежит разделению на классы Ах, Аг, ..., Ат и
для этого используется п подходящих признаков. При предъявлении
, Некоторой реализации X, подлежащей опознаванию и являющейся в
общем случае случайной, соответственно п признакам делается п из-
мерений xlt x2>---> хп, которые в последующем часто будут рассматри-
ваться как компоненты случайного вектора х = (хъ х2, ..., хп). Пусть
f>i распределение вероятностей х зависит от класса А известным образом,
т. е. если класс есть А}, то функция плотности вероятностей по отноше-
нию к некоторой мере ц в выборочном пространстве Q есть g (x!Aj)
щ нли?,- (х). Поскольку природа ц не уточнена, то непрерывные и диск-
^ ретные распределения вероятностей включаются в эту формулировку
как частный случай. Требуется по наблюденному значению х опознать
класс предъявленной реализации X.
Пусть а,- будет решение, что класс есть Aj (/ = 1,2,..., /п), а а0 —
решение не относить X ни к одному из классов А. Введем понятие ре-
решающей функции н (av/x) или просто к (v/x) как функции, определен-
. т
ной для каждого х ? Q и решения av (v = 0,1, ..., т), причем 2 х (v/
149
/x) = l,x (v/x) > 0 (v = О, 1 m). Класс Всех таких решающих функ-
функций х обозначим D.
Таким образом, если х есть наблюденное значение случайного век-
вектора, то х (v/x) есть вероятность выбора решения а„.Cадача заключает-
заключается в нахождении оптимальной в некотором смысле решающей функции.
Если в действительности реализация X относится к классу А), а ре-
решение есть av, то предположим, что имеют место потери (штраф)
С (A), av) ^ 0 или просто C,v. Риск (математическое ожидание штрафа)
использования данной к ? D в случае, когда реализация X 6 Aj,
определяется следующим образом:
T(Ah х) =
2
V = 0
D.13)
Теперь предположим, что априорная вероятность (или частота по-
т
явления) Aj есть gj (gj > 0, / = 1,2,..., т), 2 h — 1- Средний риск,
соответствующий g = (gx, g2, ..., Ъ,т), определяется как
Г F, х)=
. х)&,.
D.14)
Данная решающая функция Я, (v/x) в Q есть решающая функция
Бейеса, если
Г(|, Х)<7(|, х) D.15)
для всех функций х ? D. Величина 7 (?, К), являющаяся минимумом
всех Т (?, и), называется бейесовым риском и обозначается Т (?).
Решающие,функции Бейеса можно легко найти. Из D.13) и D.14)
следует, что
m Г m "I
Г(|. *) = Г 2 2 Cjv/>(x) x(v/x)d(x
flv=0L/=l J
)
где/И*) = gyg, (x).
Далее обозначим символом Jo множество целых чисел 0,1, ..., пг.
Для фиксированного значения вектора х ? Q положим, что Jo (x)
есть подмножество Jo такое, что I ? Jo (x), если и только если
_ t). D.16)
Пусть также х (v/x) есть решающая функция в классе D такая, что
x(v/x)=0 D.17)
для всех v ф Jo (x). Из D.15) следует, что функция х, определяемая по
D.17), является бейесовой. Величины х (v/x) для v ? Jo (х) не вполне
точно определены, но соответствующая величина Т (? , х) всегда та же,
т. е. Т (?). Другими словами, средний риск минимизируется, если при
распознавании каждый раз принимается решение аь при котором
m
2 C,v/,(x) (v=0
/l
m;
D.18)
150
Пусть теперь
=d и, i=i
D.19)
Тогда
(Б, х)=
m
m m
2 2
/ = 1v=l
2
Так как
2
! TO
T ft, х) =Сг Ре (X) +СЯ Ря (X), D-2°)
где Рх{х) = S 5х <0/х> ^ (Х) ^-веР°ЯТН0СТЬ 0TKa3a 0Т Распознава-
ния;
е(*)= ^ 1«(//х)Ь0
D.21)
— вероятность правильного распознавания; Ре (х) = 1 — Рх (х)—
— Ре (х) — вероятность ошибки распознавания.
Интегрирование выполняется по всему пространству Q.
Под {х : А, В,...} (где Л, В, ... — некоторые отношения) будем по-
понимать множество всех х ? Q, для которых эти соотношения верные.
Если Е kF — некоторые множества, то?и^и^П^ есть соответ-
соответственно объединение и пересечение Е и F. Ниже будут использованы
следующие обозначения: /(х) ~^fj (x); h (х) = max {ft (x), fa(x),---»
U (х)}; Ег = {х : A-е) • Дх) > А (х)}; ?а = {х : A- с) • f (х) =
U Е2 - {х :'A ~ с) : f (х) > а'(х)};' ?а§5 = ?а U ?3; ^ - (х :
: f, (х) = А (х)}, / = 1,2 т; У (х) = {/: 1< / < т, х 6 F}}
для фиксированного вектора х 6 Й (здесь с = CJCj).
Тогда из D.16), D.17) и D.19) найдем, что функция х в классе D
; является бейесовой решающей функцией, если для всех
1,к @/х) = 1, х (//х) =<(/= 1,2 т);
_... i
D.22)
Как видно из D.22), функция х не всегда однозначно определена.
Как видно,ш у*, j, ц>у * „ППРПЖИТ йольше чем одно /, можно оп-
151
к @/х) ?= 1/3, х (jo/x) = 0,5 Все эти функции х имеют тот же
самый бейесов риск, хотя вероятности Ре (к), Рс (у.) и Рх (х) для них
могут быть различны.
Теперь предположим, что исключили а0 как возможное решение.
Пусть© будет множеством всех решающих функций х(//х) таких, что
Ук (j/x) = 1 (х (/Ух) !> 0) для всех х 6 Й (у; = 1,2, ..., т). Поскольку
х может рассматриваться как решающая функция, для которой
х @/х) = 0, видим, что DsD. Тогда при прочих равных условиях
Т (?) < Т* (?) (где Т* (?) — минимальное значение f (?, к) для всех
х ? D). Это значит, что бейесов риск может быть уменьшен введением
а0 как возможного решения. При этом можно показать, что уменьше-
уменьшение Сх относительно Сг снижает бейесов риск. Если Cx^Ch то мно-
множество -Ei,2= {х:А (х) = 0}. Следовательно, Е1>2 является в извест-
известном смысле пустым; если Cx<LCh то Е1Л есть множество всех х, для
которых A — с) / (х) ^ /; (х) (/ = 1,2, ..., гп). Суммируя обе части
этого неравенства, получим A — с) ^ Mm. Следовательно, если
О \ — Mm, то введение а0 в качестве возможного решения нецеле-
нецелесообразно (это условие, однако, недостаточно).
Бейесовы решающие функции могут быть найдены только тогда, ког-
когда потери и априорные вероятности классов известны. Если потери не-
неизвестны, то поиск оптимальных решающих функций других типов мо-
может быть предпринят. Например, можно рассмотреть решающие функ-
функции х, минимизирующие вероятность ошибки Ре (х), из числа тех
функций, вероятность отклонения Рх (х) которых равна заранее пред-
предписанной величине р. В этом случае, когда ошибка влечет за собой бо-
более неприятные последствия, чем отклонение, более подходящими яв-
являются условие Ре (х) ^ р1 и минимизация вероятности Р х (х).
Однако наиболее часто в рассматриваемом случае при принятии ре-
решения используется критерий «идеального наблюдателя». Ему соот-
соответствует матрица Штрафов
Сц=0, Сп = \ (/,/ = 1,2 ш; }ф1). D.23)
При этом а0 как возможное решение исключается. Такая матрица
соответствует простой регистрации ошибочных распознаваний. Поэто-
Поэтому средний риск равен полной вероятности ошибки. Действительно,
поскольку х @/х) = 0, из D.18), D.21) и D.23) следует, что
T(h и)=Ре (и) а 1- J I x(/7x)/;-(xLi.
Для получения оптимального алгоритма опознавания при данной
матрице штрафов каждому х f Й должен отвечать такой класс А],
апостериорная вероятность которого
D.24)
в данной точке пространства максимальна.
152
При принятии решения в соответствии с D.24) часто вводится допол-
^ельное условие, заключающееся' в том, что устанавливается опре-
аеленная пороговая величина Ап. Решение считается принятым, если
§зность между максимальным и ближайшим к нему по величине значе-
ями апостериорных вероятностей некоторых классов превышает за-
нный порог дп. В противном случае либо принимается нулевое реше-
е (отказ), либо указывается на конкурирующие классы,
Во многих практических задачах априорные вероятности классов
6/ неизвестны, поскольку их либо слишком трудно получить из опыт-
|ных даннкх, либо они в данной задаче вообще не имеют смысла
Функция х* доминирует над функцией х ? D, если Т (Aj, х*) ^
„ Т (А}, х) (/= 1,..., т) и неравенство выполняется по крайней мере
|для одного /. Функция х* называется допустимой функцией, если
йад ней не доминирует ни одна х 6 D.
Класс D* решающих функций х* из D считают полным классом,
.если для любой х ? D* всегда найдется х* ? D* которая домини-
|!рует над х. Доказано, что класс решающих функций Бейеса, соот-
соответствующих различным значениям |, полный. При этом все допусти-
? мые у. ? D являются бейесовыми и почти всегда верно обратное ут-
утверждение.
Вычисление риска Т (А}, х) (см. соотношение D.13)) не требует
|, знания ?. Поэтому возможно использование в случае отсутствия сведе-
(ний об априорных вероятностях классов такой решающей функции
№. которая минимизирует max [Т (Л1( х), Т (Л2, х), ..., Т (Aj, x)].
'Такая функция реализует min и max [T (Aj, x)] и является оптималь-
!¦¦¦ • х /
!;| зяой в минимаксном смысле. Эта функция будет бейесовой для некото-
:рых значений glt |2, ..., ?т. При этом величины Т (Aj, х°) (/ = 1,
(¦¦2, ..., т), соответствующие ненулевым членам последовательности
?Si, 1г, •••. 1т , равны между собой.
Минимаксная решающая функция гарантирует минимум среднего
г; риска при наиболее неблагоприятном значении ?. Однако поиск х°
|при многоальтернативной ситуации довольно сложен. Кроме того,
^ориентация на наихудшую ситуацию в ряде задач — слишком песси-
*мистический подход. В этой связи даже в рассматриваемом случае
иногда имеет смысл пользоваться бейесовыми решающими функциями,
¦ поскольку класс всех бейесовых функций, соответствующих всем воз-
|!'можным значениям ?, содержит класс всех допустимых функций (бейе-
fcoBbi функции могут быть найдены сравнительно легко; если даже зна-
ЕЧение ? выбрано в значительной степени произвольно, бейесовой и
1инимаксной решающим функциям соответствуют очень близкие зна-
значения риска). При этом весьма желательно получение хотя бы ориен-
Ц'тировочных оценок априорных вероятностей классов.
Большой интерес в связи с вышесказанным представляет компаунд-
\цый подход при принятии решения, который может быть кратко опи-
!;сан следующим образом. Пусть ХA>, ХB>, ... — последовательность
(реализаций, подлежащих опознаванию, а х*1*, хB>, ... — соответст-
соответствующие им значения вектора параметров х = (хъ хг, ..., хп). Не
будем пытаться опознавать отдельные реализации окончательно, пока
\ 153
последовательность значений х не станет достаточно большой. Исполь-
Используем значения вектора х*1), хB>, ... для оценки априорных вероятно-
вероятностей классов, а затем попытаемся опознать всю последовательность ре-
реализаций сразу. Г. Роббинс, впервые предложивший этот метод, по-
показал, что компаундный подход асимптотически субминимаксный.
При отсутствии сведений о значении ? часто используется также
принцип максимума правдоподобия. Он соответствует принципу мак-
максимума апостериорной вероятности, если компоненты вектора ? счи-
считать равными друг другу. Соответствующее решающее правило легко
получается из D.24) или D.18) в случае произвольной матрицы штра-
штрафов.
Идентификация трехмерного объекта возможна по двум (и более)
проекциям. Многократное наблюдение объекта в различных ракурсах
эквивалентно увеличению размерности пространства признаков. В
процессе обучения и принятия решения в этом случае можно эффектив-
эффективно использовать методы последовательного статистического анализа.
§ 4.5. ОБУЧЕНИЕ ЭВМ И ПРИНЯТИЕ РЕШЕНИЯ В СИСТЕМАХ
РАСПОЗНАВАНИЯ ПОРОГОВОГО ТИПА
При построении систем автоматического распознавания в настоя-
настоящее время широко используются элементы, реализующие различные
пороговые функции. Введение порогов по признакам, используемым
для распознавания, позволяет также свести процесс принятия реше-
решения к ряду последовательных дихотомий и существенно упростить оты-
отыскание вероятностей отнесения ситуации, предъявленной для распоз-
распознавания, к тому или иному классу. Однако назначение порогов часто
выполняется произвольно и в лучшем случае обосновывается некото-
некоторыми соображениями довольно общего порядка.
Назначение порогов при двухальтернативной ситуации. Рассмот-
Рассмотрим случай независимых признаков н отсутствия сведений о плотно-
плотностях распределения их значений. Назначим по признаку xt (i = 1,
2, ..., п), например, с помощью случайного механизма с тем или иным
распределением вероятностей порог IIj внутри интервала значений
Х( (данные об этом интервале обычно могут быть получены сравнитель-
сравнительно легко). В упомянутой ситуации из-за отсутствия нужной информа-
информации трудно дать другие какие-либо аргументированные рекомендации.
Сопоставим каждой конкретной реализации по данному признаку
символ 1 бинарного алфавита, если для нее x^Wi (возбужденное
состояние признака), и символ 0 в противном случае. Аналогичное
кодирование произведем по всем остальным признакам. В результате
информация об изображении запишется некоторым словом а^а^ ... ап
(а, — буква алфавита {1, 0}).
В процессе обучения ЭВМ отдельные реализации и, следовательно,
соответствующие им слова объединяются согласно указанию обучаю-
обучающего в то или иное множество (класс) и являются эквивалентными.
Это позволяет при выполнении определенных требований к тренировоч-
тренировочной последовательности оценить вероятности возбуждения и невоз-
бужденияр^- и<7г; =1—Рц г-го признака для /-го класса (г = 1,2, ....
154
Ji п; / = 1, 2) посредством подсчета частот превышения и непревы-
гния порога П* соответствующими значениями xt. Полученные ве-
верности, как будет показано ниже, используются на этапе принятия
Если необходимые для восстановления плотностей распределения
Шачений признаков измерения производятся с помощью восприни-
|ающего устройства или имеются некоторые априорные данные оо этих
"дотностях и требуется оценить лишь отдельные моменты распределе-
ш, то упомянутые выше вероятности могут быть подсчитаны по фор-
D.25)
git (xt) — плотность распределения значений i-ro признака для
1-го класса.
Примечай и е. Для персептрона Розенблатта нетрудно восстановить на
тапе обучения распределения вероятностей значений разности сигналов, по-
тупающих на возбуждающие и запрещающие входы того или иного элемента,
ля каждого класса.
В случае зависимых признаков целесообразно назначить по г-му
физнаку 2'~' порогов П? (st) (st = 0, 1, ..., 2'—1— 1). Условимся,
щто номер st соответствует такому (г — 1)-разрядному слову а^ ... On
Ш алфавите {1, 0}, которое получится после записи st в виде целого
щ — 1)-разрядного двоичного числа. Выражение D.25) в этом случае
Цйерепишется в виде
i(si)
§где gi] (Xilsi) — плотность распределения вероятностей i-ro призна-
признака для /-го класса при условии, что 1, 2, ..., (г — 1) признаки прини-
шают такие значения, при которых первые/ — 1 разрядов слов агаг ... ап
Соответствуют данному значению xt.
| Таким образом, в рассмотренной выше постановке задача узнава-
|ния на этапе экзамена сводится к построению алгоритма для решения
^проблемы эквивалентности слов. Это может быть сделано, например,
|с помощью известных в математической статистике методов проверки
гипотез. Разработанные в рамках этой теории критерии по-разному
формализуют понятия эффективности принятия решения в зависимо-
зависимости от характера исследуемой задачи и имеющихся в распоряжении
Данных об априорных вероятностях классов ^ и ?2 = 1 — |1( ценах
решений каждого типа и т. д. (см. § 4.4). Например, согласно принци-
принципу максимума апостериорной вероятности, соответствующему крите-
критерию «идеального наблюдателя» и минимизирующему полную вероят-
вероятность ошибки опознавания, некоторая реализация X относится к та-
такому классу А), апостериорная вероятность Р (j/X) = (^P (Xlj)) /
0*
/ S hP (XI}) которого максимальна (Р (Х//)=П {lpl} (sf)]
155
¦— вероятность появления соответствующего реализации X вектора
х = alta2, ...,ап в классе А}). Для случая независимых признаков
1=1
Принцип максимума правдоподобия в рассматриваемом случае при-
приводит к следующему решающему правилу.
Решающее правило: реализация X относится к классу Аъ классу
А 2> и решение не принимается, если коэффициент правдоподобия
А (X) — Р {XII) I P (X/2) соответственно больше, меньше или
равен J.
Оценим полную вероятность Рв ошибки опознавания в этом слу-
случае. Очевидно, что при независимости признаков коэффициент правдо-
правдоподобия
Рассмотрим величину % (X)
= In At (X) = at In (Ра/Ра) +
= 1п A(X) = 2ki(X), где MX) =
i
A — at) In {qtjqii) — дискретная слу-
случайная величина, которая может при-
принимать только два значения. Плот-
Плотность распределения этой величины
для /-го класса можно записать в
виде
-in ^
Рн
Рис. 4.15. График плотности рас-
распределения вероятностей значений
\(х) для классов 1 и 2
Математическое ожидание и
найдены из соотношений
In
Ян
где б — символ дельта-функции,
дисперсия величины А,,- (X) могут быть
) =Pij Qtj
Распределение вероятностей случайной величины % (X) для каж-
каждого класса можно получить применением центральной предельной тео-
теоремы, если п достаточно велико. Учитывая независимость используе-
используемых для опознавания признаков, найдем, что величина X (X) для /-го
класса распределена нормально (рис. 4.15) с математическим ожида-
ожиданием Ш) (К) = 2тн (М и дисперсией d} (i) = 2^ (^0
} () 2«j @
i i
Соответственно используемому решающему правилу предъявлен-
предъявленная для узнавания реализация X относится к классу Аъ классу Л2
и решение не принимается, если % (X) соответственно больше, меньше
или равна 0. Таким образом, вероятность ошибки распознавания ле-
1
156
о * о
кит в пределах min [ J gt (к) dk J g2 (k)dk] < Pe < max [ j gt (к) x
— oo 0 —°°
oo
|x dk [ g2 (k)dk]. Для каждой из этих границ нетрудно установить
в явном виде связь с выбранными значениями порогов. Соответствую-
Соответствующая верхней границе функция должна далее минимизироваться для
Получения минимаксного значения Ре. При этом могут быть использо-
использованы обычные методы поиска экстремума функции многих переменных
(методы градиента, наискорейшего спуска и т. п.). Если на функцию
(xi) не накладывать никаких ограничений, то алгоритм поиска
Цдолжен предусматривать возможность появления локальных миниму-
минимумов, не являющихся экстремальными. Эту задачу можно решить, на-
|пример, многократным случайным изменением значений порогов, по-
порученных после достижения очередного минимума функции. Число
|этих изменений («бросков») должно соответствовать требуемой досто-
1 верности отыскания экстремума.
? При использовании принципа максимума апостериорной вероят-
вероятности вероятность ошибки распознавания может быть найдена из ус-
? О со
;ловия Ре = ^ Jg! (k)dk+ lijga (k)dk, причем т} (к) изменяется
V —со О
¦ на величину In (?i/?2)> a выражение для dt (к) остается прежним. Сле-
[гдует отметить имеющие место практические трудности реализации
;;предложенного подхода к отысканию оптимальных значений порогов,
^поскольку число используемых для узнавания признаков обычно ве-
велико, а выражение для минимизируемой функции довольно громозд-
громоздко. В этой связи рассмотренный подход можно использовать в слу-
?чаях, когда число признаков не превышает 5—8.
Назначение порогов при многоальтернативной ситуации. Как уже
(указывалось выше, назначение порогов по признакам позволяет св.е-
*Сти задачу многоклассовой идентификации к ряду последовательных
^дихотомий. Задача может быть решена, например, следующим обра-
1'ром. Для каждой пары (/, /) из т классов (/, I = I, 2, ..., m; l> j)
|в соответствии с той или иной методикой назначается порог Пщ по
fi-щ признаку. Общее число порогов по данному признаку составит
|0,5т (т—1), поскольку Пгл = Пш.
' При предъявлении реализации X, подлежащей опознаванию, для
jljHee фиксируется xt (i = 1, 2, ..., п) и в произвольном порядке осущест-
осуществляются последовательные дихотомии классов. На каждом этапе ре-
решающей схемой определяется принадлежность предъявленной реали-
реализации одному из классов, участвующих в дихотомии. При этом другой
lace из рассмотрения исключается. Таким образом, общее число эта-
Йов опознавания данной реализации составляет т— 1. Эта процеду-
процедура может быть использована в случае, если заранее известно, что не-
¦Который класс А г, к которому в конечном счете относится реализация
К|а, не может проиграть не только" классам, участвовавшим с ним в ди-
рртомиях, но и классам, исключенным из рассмотрения на предшест-
предшествующих этапах. В противном случае возможны недоразумения. Пред-
Предположим, что т = 3, реализация X при дихотомии классов Ах и А2
157
Этап! Этап 2 ЭтапЗ
относится к Л2, а при дихотомии Л2 и Аа — к классу Аа. Реализация
опознается как принадлежащая классу А3. Однако класс Аа может
проигрывать классу At, что фактически не проверяется. Более того,
если классы Аг и Л2 не пересекаются по отдельным признакам, то воз-
возможно отнесение к классу А3 реализации X, появление которой в
этом классе невозможно (она может в действительности принадлежать,
например, классу Ах). Это происходит потому, что пороги по призна-
признакам для каждой пары классов в
общем случае различны, несмотря
на то что при каждой дихотомии
используются одни и те же приз-
признаки. Описанная процедура может
быть дополнена следующим обра-
образом (рис. 4.16).
Э т а п 1. На этом этапе фик-
фиксируется вектор х = (xlt xz, ...,xn),
соответствующий предъявленной
реализации X.
Этап 2. На данном этапе
производятся дихотомии каждой
пары классов (/, /) и вычисляются
вероятности Рп (X//) и Рп (XII)
Р(т/х)
Рис. 4.16. Процедура принятия ре-
решения в пороговой системе при мно-
гоальтериативной ситуации
появления X в каждом из участ-
участвующих в дихотомии классов.
Этап 3. На этом этапе подсчитываются апостериорные вероят-
вероятности классов, соответствующие данной входной ситуации, по выра-
выражениям
Ь П Р,ЦХЦ)
ii 1
т
П
(/ = 1,2 т).
Реализация X относится к такому классу А], апостериорная вероят-
вероятность которого максимальна.
Назначение порогов исходя из минимизации Ре или другой какой-
либо величины при многоальтернативной ситуации крайне затрудни-
затруднительно. Иногда для этого можно использовать процедуру, применяе-
применяемую при построении оптимального статистического кода. Тогда число
порогов по каждому признаку и количество этапов опознавания могут
быть сведены к минимуму и равны соответственно т — 1 и Ent (\agtfri).
Найдем, например, такую граничную точку Па, слева и справа
от которой площади под кривой т'1 \gtl (xt) + gi2 (Xi)+...+glm(Xi)] =
m
РаВНЫ. При ЭТОМ ПОЛОЖИМ, ЧТО /Иц ^ /Л{2
= /Я~1Ё?|у(*{) . ._ .
<! ... ^ т<то (далее эти неравенства считаются справедливыми для
любого i). Тогда исходное множество функций gij (*;) (/ = 1, 2
т) и, следовательно, классов можно разделить на два подмножества,
включающих функции gitl (ех = 1, 2, ..., т') и gm (е2 = т' + 1,
158
¦' + 2, ..., т) соответственно. Очевидно, что для симметричных мо-
чьных распределений miei < Пг1, miS2 > П?1 и
т/2 при т четном;
т/2~±1 при т нечетном.
результате по i-uy признаку будет назначено т — 1 порогов Пц,
П А назначаются пороги по другим приз-
,-{
y ру у
Аналогично назначаются
11а, .... П|>то_!.
акам.
Этап 1. На этом этапе узнавания реализации X значение xt
ля нее сопоставляется с ГГц (i = 1, 2, ..., я) и в соответствии с вы-
выбранным критерием принимается решение о принадлежности этой
лизации к одному из подмножеств
пассов е, или е„, после чего из
рас-
или
1,
тц П
яи<*о
т. ти ч
Рис. 4.17. Назначение порога
при дихотомии классов /lj и /
признаку Xi
по
лотрения исключается т — т
классов соответственно.
Этап 2. На этом этапе данная
Рвходная ситуация относится к одно-
|му из подмножеств выбранного^ под-
I множества классовой т. д.
Таким образом, общее число эта-
этапов опознавания составит log2 m, если
эта величина есть целое число, и
[log2 m] -f- 1, если она имеет дроб-
дробную часть. Здесь [...] — выделение целой части. При распределе-
распределениях gtj (хг), не являющихся симметричными и модальными, разделе-
разделение классов на подмножества можно производить по значениям площа-
площадей под кривыми gu (xt) слева и справа от соответствующих порогов.
Из рассмотренных выше процедур назначения порогов при много-
многоальтернативной ситуации более предпочтительной на этапе узнавания
является вторая процедура, обеспечивающая при прочих равных усло-
условиях меньшее время опознавания и меньшее число данных, подлежа-
подлежащих запоминанию. Возможно также разделение исходной совокупно-
совокупности классов на группы по принципу: первый класс и все остальные,
второй класс и все остальные, исключая первый, и т. д. Число порогов
в этом случае равно п (т — 1), а число этапов опознавания может ко-
колебаться от 1 до т — 1. Иногда удобно выделить определенную груп-
группу классов, рассматривая ее на этапе 1 как один класс. Однако чаще
всего назначение порогов по признакам в пороговых системах произ-
производится в соответствии с первой процедурой, изложенной для случая
многоальтернативной ситуации. При этом используются развитые в
теории статистических решений методы назначения порога П;у/ по
признаку xt при дихотомии классов А] и A t только по этому признаку.
Примечание. Вопрос об оптимальности всей совокупности назначен-
назначенных таким образом порогов остается, конечно, открытым.
Типичные кривые gt] (х{) и gtl (хг) в случае пересечения классов
приведены на рис. 4.17.
Так, например, критерий Вейеса, для применения которого помимо
плотностей распределения gij (хг) и gn (x{) надо знать априорные ве-
159
роятностн |у, Zi и цены решений каждого типа, минимизирует бейесов
риск Т (?, х). Если условиться, что а0 как возможное решение исклю-
исключается, то, используя D.16), можно показать, что Т(%, х) минимизирует-
минимизируется в данном случае, например, при следующих нерандомизированных
решающих функциях:
[Ов остальных случаях;
если ljCjigu(
в остальных случаях.
. D.26)
Далее положим, что коэффициент правдоподобия Л (xt) = gtl x
X (XiVeu (xt) — монотонная функция своего аргумента. Тогда, как
видим из D.26), можно фиксировать такое единственное значение при-
признака хг = Ilyi, при котором
D.27)
Pi U =
кA/х ) = ( 1'
\ 0
где Яц1=\—Рш> Pui =
dx
значение EFyj находится из соотношения
= § gn (xt)
ij l(ju)
Для случая использования критерия «идеального наблюдателя»
= Сц — 0, Сц = Су = 1 и найденное из D.28) значение порога
л в этих условиях минимизирует полную вероятность ошибки:
J
п,
Минимаксный критерий соответствует критерию Бейеса при наи-
наиболее неблагоприятных значениях iy и ^.Дифференцируя D.27) по \,
найдем, что для минимаксного решения
cjjQifl + c}iPiji*=cuPii}+ cijQiij- D.29)
Искомое значение Пш удовлетворяет этому соотношению, каждая
часть которого дает величину минимаксного риска. Для приведенно-
приведенного выше выбора цен уравнение D.29) будет иметь вид -
J gil(Xi)dxt= f gu(Xi)dxt,
D.30)
где каждый из интегралов равен минимаксной полной вероятности
ошибки по данному признаку.
Если при этом распределения gtj (xt) и gn (xt) нормальные, то
П
Hi1
160
где mi], mih atJ, Ън — оценки математических ожиданий и средних
|квадратичных отклонений этих распределений.
Пример графического решения уравнения D.30) на основе опытных
Вданных приводится на рис. 4.18, где Gu (xt) и 1 — G*/ (xt) — ча-
частоты событий Xi <C xt и Xt > xt для классов At и А у, Ay, Aih Дуг—
^интервалы значений xt для А}-, Ах и общий интервал соответственно.
Величина Пгя определяется как абсцисса середины участка оси
^абсцисс, для которого |1 — G*/ (*,-) —Gh (**) I имеет минимальное
[значение. W
Иногда плотности распределения gtj (xt) и gu (xi) имеют такой вид,
|при котором коэффициент правдоподобия является немонотонной
| функцией своего аргумента. Тогда для
рслучая соотношения D.28) возникает не-
необходимость в назначении по признаку
нескольких порогов. Если же классы
\ не пересекаются по отдельным призна-
признакам, то выбор порогов по этим призна-
признакам не представляет затруднений.
После назначения порога Utji в со-
соответствии с некоторым критерием зна-
чение минимизируемого этим критерием рш, 4 lg г фическое
функционала можно использовать для ние'задачи назначения порога
оценки разделительных свойств или Пщ при дихотомии классов А)
'степени его информативности, а также и Аг по признаку xt
|^ для сопоставления признаков с этой точ-
|ки зрения с целью установления минимального маршрута измере-
измерения реализации х.
Ь. Пороговые системы в значительно меньшей степени реагируют на
|форму плотностей распределения признаков. Достоинством рассмо-
рассмотренных выше алгоритмов опознавания является также их сравнитель-
сравнительная простота, а изложенная методика назначения порогов по призна-
признакам пригодна для широкого круга алгоритмов (в том числе и алгорит-
алгоритмов Розенблатта и Гамба).
§ 4.6. ОБУЧЕНИЕ ЭВМ ПО ЭТАЛОННЫМ ОПИСАНИЯМ
Предпосылки к разработке алгоритма обучения ЭВМ по эталон-
I ным описаниям классов. Выскажем некоторые соображения, пояс-
'; няющие описанные ниже алгоритмы обучения и классификации, ис-
•'пользующие эталонные (наиболее представительные) описания
-классов объектов. Принятие решения о принадлежности неизвест-
неизвестной реализации к тому или иному классу в этом случае делается
ъ соответствии со значением ее функции принадлежности.
При выборе эталонных представителей каждого класса полностью
откажемся от статистического подхода и воспользуемся принципами
выделения эталонов, основанными на методах нахождения минималь-
минимальных покрытий (см. [20, 21]). Метод наложения минимальных покры-
покрытий по матрице функций принадлежности пригоден и для'случая много-
многосвязных и многомерных областей обучающих реализаций классов
6 Зак.1053 161
объектов. Единственное ограничение к использованию этого метода —
необходимость не иметь полного совпадения изображений (векторов
реализаций) двух классов объектов (в многомерном пространстве
признаков это ограничение не является жестким).
С целью приведения всей совокупности реализаций к матричной
форме, удобной для последующего выделения эталонов, воспользуемся
методикой вычисления функций принадлежности, полностью некритич-
некритичной к вероятностным характеристикам^ классов и обеспечивающей
практически стопроцентное распознавание при наличии представитель-
представительной обучающей выборки.
Задачу обучения машины по эталонным описаниям можно сформу-
сформулировать следующим образом.
Пусть в «-мерном пространстве признаков задано множество реали-
реализаций объектов х = (х1ъ х21, ..., x8t xkm) (i = 1, 2, ..., т; г = 1,
2, ..., k), которое разбито на ряд подмножеств вида хт = (х1у х2, •••>
xh), соответствующих множеству классов объектов At (i — 1, 2, ..., т).
Требуется выделить в пространстве реализаций х минимальное число
областей (эталонов), позволяющих классифицировать любую реали-
реализацию из этого множества со стопроцентной вероятностью.
Прежде чем перейти к непосредственному рассмотрению алгоритма
обучения, сделаем несколько предварительных замечаний.
При реализации параметрического пути распознавания основные
трудности заключаются в оптимальном выборе системы координат (при-
(признаков) и в отыскании метода минимизации описаний объектов в этой
системе признаков.
Непосредственное запоминание описаний классов Ат объектов,
представленных k% реализациями каждый, в я-мерном пространстве
признаков потребует ткгп ячеек памяти машины и время для распоз-
распознавания tmax — mkin&.tcv, где Atcp — время одного сравнения не-
неизвестной реализации xei с реализациями множества х.
Такой способ хранения информации об объектах в реальных зада-
задачах приводит к неоправданному увеличению объема памяти ЭВМ и
времени распознавания. Поэтому необходимо минимизировать объем
исходной информации, например, выделением минимального числа
наиболее представительных для каждого класса эталонов.
Формированию эталонов должны предшествовать, как правило, не-
некоторые преобразования пространства признаков, обеспечивающие
наилучшие условия дальнейшей процедуры минимизации.
Существуют следующие критерии, определяющие оптимальность
преобразования системы признаков (см. [8]): а) минимум среднеквадра-
среднеквадратичного расстояния между реализациями одного класса объектов;
б) минимум максимального расстояния между реализациями одного
класса объектов; в) минимум среднеквадратичного расстояния внутри
классов при максимуме его между классами.
Поскольку описанный ниже алгоритм распознавания по эталонам
классов работает на каждом шаге по дихотомическому принципу раз-
разделения (один класс — все остальные), целесообразно на каждом шаге
рассматривать лишь тот габарит (область пространства признаков, га-
габаритная область), в котором находятся все реализации минимизируе'
162
кого класса. Это предусматривает такое преобразование системы ко-
координат и выбор в ней габарита, которое осуществит минимизацию
[среднего расстояния между реализациями основного («своего») класса
|И числом реализаций остальных («чужих») классов, попавших в га-
} барит.
Из интегральной геометрии известно, что для произвольных зам-
замкнутых ограниченных множеств $ справедливо изопараметрическое
неравенство вида F {$) > Ы\1к v {$yk-Vlk, где F (W) — поверхность
множества $; v {i§) — объем множества &; <ок — объем ^-мерного еди-
единичного шара. Для шара это неравенство обращается в равенство, т. е.
шар имеет минимальную поверхность из всех тел равного объема. Так
н как минимум среднего расстояния между точками множества при его ли-
линейных преобразованиях с сохранением объема достигается для мини-
минимальной поверхности множества, т. е. для гиперсферы, то, приняв в ка-
качестве разделяющих классы поверхностей гиперсферы, целесообразно
решать задачу распознавания в классе евклидовых метрик, для кото-
которого
u хр)
=/1
где (Ok ¦— весовой коэффициент ?-го признака; хг, хр — 1-й и р-й век-
вектор-реализации; xlk, xph— координаты вектор-реализаций хг и хр по
?-му признаку.
Евклидова метрика наиболее удобна и наглядна в случае исполь-
использования непрерывных признаков.
Для систем дискретных признаков чаще применяют хэммингово рас-
расстояние вида
п
2
—xpk\.
В качестве разделяющих поверхностей здесь обычно используют-
используются гиперпараллелепипеды.
При использовании метрики d (xh xp) для описания одного эталона
потребуется п + 1 число, для второго — 2« чисел. Для сравнения
реализации с эталоном в первом случае необходимо произвести п -\- \
вычитание и п умножений, во втором — 2п вычитаний, так что про-
проигрыш во времени при евклидовой метрике будет незначительным.
При выборе в дальнейшем евклидовой метрики помимо указанных
. соображений следует принимать во внимание наглядность ее и удоб-
удобство представления результатов в процессе проверки работы сложной
программы. Описание габарита и алгоритм проверки реализаций на
Принадлежность к ней должны быть предельно просты, поскольку через
этот этап на каждом шаге алгоритма минимизации проходят все ре-
реализации распознаваемых классов.
' Всем перечисленным выше условиям удовлетворяет габаритный
эталон в виде гиперсферы. Поэтому задачей оптимального преобразо-
преобразования исходного пространства признаков в этом случае будет макси-
максимальное приближение к гиперсфере области реализаций каждого клас-
6* 163
са. С этой целью предлагается провести для каждого класса объектов
отдельно ортогональное преобразование координат (см. [20, 21]) с
помощью матрицы вращения а = | \akp 11; и последующего сжатия вдоль
осей с помощью диагональной матрицы р = ПРььП"-
В результате получается преобразование, максимально приближаю-
приближающее область реализаций, соответствующую «нашему» классу, к гипер-
гиперсфере с диаметром, равным 1, в классе линейных ортогональных
преобразований. Объединяя поворот и сжатие, получим матрицу С =
= 11сйр|1? суммарного преобразования:
С1п
С21 С22
Pll
0
0
0
Pr
0
... 0
... 0
•• • Pnn
«11
«21
«711
«12
«22
«П2
• • • «171
... a2ri
• • • «7171
m спг • • • спп
Вычисление коэффициентов матриц преобразований для каждого
класса требует значительных затрат машинного времени, так как каж-
каждый шаг вычислений — это перебор расстояний между всеми реали-
реализациями класса. Например, время, необходимое для расчета матрицы
||а||, можно оценить как ta = {[ki (kt — 1)/2] nAtcv} n (в фигурных
скобках выделено время одного шага работы алгоритма). И хотя на
этапе обучения часто нет жестких временных ограничений, хранение
матриц требует дополнительных затрат памяти (п х п ячеек на ма-
матрицу), что может оказаться нежелательным фактором.
Поэтому желательно производить вычисление матриц преобразо-
преобразования только в случае, если выделение эталонов в исходном простран-
пространстве признаков не приводит к желаемым результатам (например, чис-
число эталонов недопустимо велико). Матрицы преобразования не обяза-
обязательно рассчитывать для всех классов. Это можно делать только для
самых «неудовлетворительных», с точки зрения количества эталонов,
классов.
Оптимизацию решения задачи отыскания эталонов можно осущест-
осуществить также по способу ортогонального преобразования пространства
признаков путем нахождения одной матрицы ||а|| для всех классов
одновременно, а матриц ||Р|| — для каждого класса в отдельности.
Этот способ приводит к положительным результатам, когда направ-
направления диаметров подмножеств реализаций для каждого класса не ор-
ортогональны, а близки между собой или полностью совпадают.
Выбор способа вычисления матриц преобразования в значительной
степепи зависит от качественных и количественных характеристик
системы признаков.
Недостатки системы признаков можно скомпенсировать ее преоб-
преобразованием и, наоборот, сложную операцию преобразования можно
упростить, совершенствуя систему признаков. Поэтому для выбора
оптимальных соотношений между недостаточным совершенством си-
системы признаков и сложностью ее преобразований можно рекомендо-
рекомендовать моделирование пробных задач на реальном исходном материале.
Алгоритм обучения ЭВМ по эталонным описаниям классов. В слу-
случаях, когда законы распределения вероятностей признаков или клас-
164
ЭВ распознаваемых объектов слишком сложны или неизвестно, что
дает возможности использовать известные в теории статистических
_ ешений решающие функции, переходят к параметрической интерпре-
интерпретации задачи распознавания с использованием детерминированных
ягоритмов обучения машины и классификации образов. Алгоритм
• обучения, описываемый ниже, прост в реализации и дает практически
] стопроцентное распознавание объектов (при наличии представитель-
J ной выборки объектов на этапе обучения машины), не требует больших
^объемов памяти ЭВМ.
Суть этого алгоритма сводится к тому, что в я-мерном пространстве
признаков опознаваемых объектов строятся для каждого класса объек-
'тов один или несколько областей-эталонов, включающих в себя (по-
(покрывающих) все объекты этого класса. Поскольку эталоны строятся
непересекающиеся, достигается практически стопроцентная вероят-
вероятность распознавания. Пространство признаков предварительно под-
подвергается преобразованию. Задача оптимального преобразования ко-
координат — максимально приблизить к гиперсфере область, занимае-
занимаемую реализациями «своего» класса. С этой целью предлагается произ-
произвести ортогональное преобразование координат и сжатие вдоль осей ко-
координат.
Опишем основные математические и логические операции, выполняе-
выполняемые ЭВМ на каждом этапе реализации алгоритма обучения по эталон-
эталонным описаниям объектов в пространстве признаков.
Этап 1. На этом этапе вводятся исходные данные (таблицы
информации объектов и матрицы ортогонального преобразования
||а||). Массив реализаций объектов х описывается системой призна-
признаков распознавания.
Этап 2. На данном этапе проводится ортогональное преобра-
преобразование исходного пространства признаков с помощью матрицы [|а||
(рис. 4.19):
В координатах
УтП
ап а12 ... а1п
«31 «22 • • • «27»
«12
«пп
mi г
где xmi — m-ro класса i-й вектор — реализация в исходном простран-
пространстве признаков; ymi— соответствующий ему вектор в преобразованном
пространстве признаков.
Этап 3. На этом этапе алгоритма вычисляются коэффициенты
сжатия в преобразованном пространстве признаков и проводится сжа-
сжатие подмножеств реализаций каждого из т классов Rm по осям про-
пространства признаков в соответствии с выражениями
= 1. 2,..., я; « = 1,2 Тт),
к, i
k, i
165
где bmih — коэффициент сжатия по k-и оси т-го класса объекта,
г-й реализации; Тт — общее число реализаций объекта т-го класса;
y'mih — преобразованная k-я координата m-ro класса объекта t-й реа-
реализации; (ymih)max> (j/mih)min — экстремальные значения k-й коор-
координаты 1-й реализации т-го класса, для которого на данном шаге ра-
работы формируются эталоны «своего» класса.
Этап 4. На этом этапе алгоритма происходит отыскание габа-
габарита т-го класса (рис. 4.20). Габарит представляет собой гиперсферу,
А
2. Ч
J +
J
л
I/-
ч.„
3 j
о
Х-,
Рис. 4.19. Пример преобразования
исходного пространства признаков
с помощью матрицы ||а||:
1—3 — соответственно реализации
классов А\—Аз
Рис. 4.20. Отыскание габа-
габарита класса А\:
1—3 — соответственно реализа-
реализации классов А\—Аз
которой должны покрываться все реализации т-го класса. С этой це-
целью:
а) определяются координаты центральной точки эталона, т. е.
Ут0к=°>5[™™{У^к}+™}п.{УЬ{к}} (А = 1.2 п; «=1,2 Тт);
б) рассчитывается евклидово расстояние от центра эталона до са-
самой удаленной реализации m-ro, «своего», класса, т. е.
*« max™X [AS (й**-^*I J (< = 1' 2 ТтУ,
в) определяется расстояние от центра габарита до ближайшей
«чужой» точки (реализации), расположенной за пределами сферы с
радиусом i? т е
romai,
т. е.
.-.., Т),
гДе Т — общее число реализаций множества;
_ ^)В/ЫЧИСЛЯется РадиУс габаритного эталона, т. е. R'm0 =
— 0,5 (Rm max + " ч
166
Таким образом найдены центр и радиус габаритной области.
Если допустить, что точность определения координат (признаков)
1Я всех классов одинакова, то расстояние между наиболее удаленной
центра эталона «своей» реализации и ближайшей «чужой» за пре-
чами габарита будет делиться границей габарита пополам [см. п. г)].
Этап 5. На данном этапе алгоритма выделение «чужих» точек-
Греализаций, попавших в габарит т-го класса, проводится по правилу:
/~ 2, .... Т), то
л/~ ? (Угшн ~
УтокJ
< R
mo
= Tm+l,T
Г, если
• «чужая» точка попадает в габарит (рис. 4.21), где кружочками обозна-
обозначены «чужие» реализации, попавшие в габа-
}рит, а крестиками — «свои» реализации клас-
класса Ап.
Этап 6. На этом этапе алгоритма фор-
формируется столбцовая матрица минимальных
| расстояний от каждой точки класса m до бли-
ближайшей «чужой» точки, попавшей в габарит:
Я'.
mln
= min
где
УШк1т — координаты
Рис. 4.21. Выделение
«чужих» реализаций,
попавших в габарит
класса Ат:
1—5 — эталоны классов Am
«чужих» точек, по-
попавших в габарит; y'mik — координаты «своих»
точек класса т; /г — количество «чужих» то-
точек в габарите.
Из-за конечного числа реализаций "обу-
"обучающей последовательности и неточности из-
измерения признаков реализации, используемые в режиме распоз-
распознавания, могут несколько отличаться от реализаций, по которым
релось обучение. Поэтому целесообразно ввести для радиусов эта-
эталонов некоторый запас &R'mo, зависящий от точности измерения
значений признаков. Аналитическое определение этой зависимости
при многомерной системе признаков чрезвычайно затруднительно,
поэтому можно предложить выбор значений AR'm0 проводить так, что-
чтобы граница между ближайшими реализациями, «своей» и «чужой»,
проходила посередине расстояния между ними, т. е. Ai?mo = 0>5 X
х ^m/min.min = 0,5 min {i?mimln}. Тогда элемент столбцовой ма-
матрицы будет определяться как pmi = R'mimia— hRmo-
Этап 7. На данном этапе алгоритма вычисляется квадратная
симметричная матрица взаимных расстояний между реализациями
m-ro класса, т. е.
rmil= ]/ 2
' 4=1
(г,/ = 1.2,..., Тт),
где i — строка матрицы (г-я реализация); / — столбец матрицы A-я
реализация).
J67
Этап 8. Здесь вычисляется двоичная матрица функций принад-
принадлежности:
где?т»=
10,
если
если
pmi —гтП>0; Это функция
<0
принадлежности, показывающая, попала A) или не попала @) 1-я
реализация m-го класса в гиперсферу радиусом pmi с центром в /-й
точке.
' Таким образом получена компактная запись взаимного положения
«своих» и «чужих» точек в пределах габаритного эталона.
Этап 9. На этом этапе проводится выделение эталонов т-го
класса, т. е. наиболее представительных реализаций, гиперсферы ко-
которых покрывают всю область, занимаемую остальными реализациями
этого класса, и не включают «чужих» реализаций.
Для матриц, аналогичных матрице Gm = ||?п||Гт, методика вы-
выделения минимальных покрытий разработана (см. [20, 21]). Минимиза-
цИя полученной двоичной матрицы функций принадлежности прово-
проводится последовательным поглощением строк и столбцов по следую-
следующему правилу.
Правило: строка ||gj,(|| поглощает строку \\gi,i\\, если ||g,vll-*-
-*¦ \\§hi\\ ведет к функции, тождественно равной 1 (знак «-v» означает
операцию импликации); столбец ||gn,ll поглощает столбец \\giu\\, если
\\gih\\-*~ \\8ih\\ ведет к функции, тождественно равной 1.
Операцию минимизации двоичной матрицы функций принадлеж-
принадлежности можно свести только к операции поглощения строк. В этом слу-
случае поглощение столбцов заменено операцией поглощения строк, ко-
которая проводится над транспонированной и обращенной матрицей.
Операции поглощения строк и столбцов чередуются и проводятся
до тех пор, пока матрица Gm либо не приведется к диагональному ви-
виду, либо не образуется одна из ее тупиковых (циклических) форм.
Примечание. Возникновение сложных тупиковых форм характерно
для специального вида матриц, обладающих упорядоченной структурой и редко
встречающихся при решении практических задач. Прн наличии тупиковых форм
матриц можно воспользоваться разработанными методиками и алгоритмами в
[20, 21].
На рис. 4.22 в качестве примера одного варианта задачи разделения
трех классов объектов, имеющих сложные конфигурации размещения
их реализаций в двумерном пространстве признаков (координат) хх
и х2, приведена картина расположения сформированных машиной
эталонов. Здесь первый класс А1 объектов (обозначен кружочками)
был представлен выборкой из 285 реализаций, второй класс Аг объек-
объектов (обозначен точками) имел 132 реализации, третий класс Л8 объек-
объектов (обозначен крестиками)—242 реализации.
Преобразование исходного пространства признаков заключалось
в сжатии с различными значениями для каждого класса объектов т
коэффициентами рт по осям хх и хг. Поэтому при возврате к исходному
168
.ространству эталоны классов превратились в эллипсы с осями, про*
Юрциональными коэффициентам сжатия рх — р8. Габариты классов
на рисунке не показаны. В местах пересечения габаритных эталонов
разных классов использовалась линейная разделяющая плоскость.
\ результате работы алгоритма было выделено эталонов: для класса
1Х — 10; для класса Л2 — 4; для класса Л8 — 7. Кроме того, на каж-
лй класс объектов был сформирован габарит.
,, Описанный алгоритм помимо обеспечения компактной записи ис-
исходных данных задачи после этапа обучения машины, убыстрения про.
Рис. 4.22. Пример разделения реализаций трех классов в двумерном про-
пространстве признаков
цесса распознавания и высокой вероятности распознавания обладает
еще одним важным достоинством: появляется возможность в объеди-
объединении по различным критериям распознаваемых объектов в новые
классы без какого-либо изменения алгоритма обучения и распознава-
распознавания.
§ 4.7. РАСПОЗНАВАНИЕ ОБЪЕКТОВ ПО ЭТАЛОННЫМ ОПИСАНИЯМ
КЛАССОВ
Суть алгоритма классификации заключается в установлении фак-
факта принадлежности неизвестной реализации одного из распознаваемых
классов объектов к какому-либо габариту или габариту и эталону,
сформированным на этапе обучения ЭВМ.
Исходными данными для работы алгоритма являются: ||а|| —
матрица ортогональных преобразований размером п х п (п — число
169
признаков распознавания); ||C|| — матрица коэффициентов сжатий
по осям; общий объем массива п х т (т — число классов объектов);
массив описаний габаритных эталонов, каждый из которых включает
в себя п координат центра габаритного эталона и его радиус Rm0;
общий объем этих данных (п + 1) X т; массив описаний эталонов
т
классов общим объемом 2(ft + 1) Dt (Dt — число эталонов г-го клас-
класса).
Распознавание объектов ведется следующим образом.
После предъявления машине неизвестной реализации Xj объекта
ее признаки (координаты) подвергаются предусмотренному для каж-
каждого класса преобразованию в соответствии с п. 2 и 3 § 4.6, т. е. х,- -*-
Затем вычисляется расстояние от конца неизвестной вектор-реали-
вектор-реализации до центра каждого габарита в соответствии с выражением
2 {У'к1 -Ут
('=1.2
и если R'm ^ R'mo, то реализация считается отнесенной к m-му классу.
Классификация заканчивается, если класс, к которому отнесена
неизвестная реализация, характеризуется только габаритом. В про-
противном случае аналогичным образом проверяется принадлежность ре-
реализации к одному из эталонов. Окончательное решение об отнесе-
отнесении реализации х) к т-му классу принимается по правилу.
Правило: реализация х) относится к классу т, если она попала
в габарит т-го класса и в один из эталонов того же класса объектов,
т е х) 6 Л Л ) ? A U ) A U
т. е. х)
Л
Am, U x)
Am, U
x\ ? Am
mD
где
) , U ) ? m, U U x\ ? AmDm, где
Amo—множество вектор-реализаций т-го класса, попавших в габарит-
габаритный эталон; Amt, ..., AmD —множества вектор-реализаций, огра-
ограниченных эталонами т-го класса.
Поскольку пространственные объекты могут быть достаточно слож-
сложными, а ракурс их наблюдения — случайным и «малоинформативным»,
то для надежности выделения признаков на реализациях и распознава-
распознавания иногда приходится использовать несколько реализаций объектов.
§ 4.8. СПОСОБ ПОВЫШЕНИЯ ВЕРОЯТНОСТИ РАСПОЗНАВАНИЯ
ОБЪЕКТОВ
При распознавании пространственных объектов сформированное
признаковое описание классифицируемых объектов может не обеспе-
обеспечивать нужной вероятности распознавания по одной реализации.
В этом случае для получения заданной вероятности распознавания
в процессе классификации используют не одну, а несколько реализа-
реализаций каждого объекта, полученных под различными ракурсами. Много-
Многократное измерение признаков на ряде реализаций объекта должно по-
повысить вероятность распознавания по сравнению с той, которая будет
170
При обследовании одной реализации. Докажем это, отыскав связь меж-
межчислом реализаций объекта и ошибкой распознавания.
Обозначим вектор признаков объекта или его реализацию через
Ху, где / = 1, 2, ..., F — число используемых при распознавании
s реализаций объекта. Тогда х/ будет вектором признаков, полученных
при измерении /-й реализации. В этом случае решение вопроса о при-
принадлежности вектора х/ классам Ах или А2 (двухальтернативная
ситуация) на основании только /-го измерения вектора х будет проис-
происходить в соответствии с выражением
или
p(At)
p (Аг)
Lf>\, если х/ ? А1у
Lf< 1, если х/ ? Аг,
где ffiA = Lf — отношение правдоподобия для /-го измерения;
р (Ai) — априорная вероятность г-го класса объектов; р (x.flAli2) —
условная вероятность реализации х^ в классе Л1J.
Для простоты последующих рассуждений будем считать, что кор-
корреляция между последовательными реализациями объекта отсутству-
отсутствует. Это означает, что при наличии / = F статистически независимых
реализаций решение о принадлежности последовательности векторов
(х1( х2, ..., х^, ..., Xf) тому или иному классу можно принимать на
основании неравенств
р
П
f=i
F
П pi
Lt > 1, если (Xl х8,.. •, xF) ? А1г
или
p(Ai)
р(Аг)
П
если
xa,
Теперь можно определить уменьшение вероятности ошибки распоз-
распознавания в результате многократного измерения вектора признаков
(на разных реализациях), если известны отношения правдоподобия
Lf каждого измерения. Связь между вероятностью ошибки распозна-
распознавания и отношением правдоподобия для /-го измерения вектора призна-
признаков была получена в § 3.11. Запишем это выражение для случая, ког-
когда р (Л1/х/)> р (A2/xf):
1 если ?Ш > _L . {4.з1)
Отсюда
4 =
\-p(AJ\f)
[р (AJ/p (A
Р(А2)
l—p(At/xf)
р (Аг)
D.32)
171
Тогда вероятность ошибки распознавания при F независимых из-
измерениях вектора признаков
1
Рош=р(А2/х1,х2 xF)—
, если
P(A2
D.33)
Если теперь значение Lf из D.32) подставить в D.33) и провести
некоторые преобразования, то можно получить окончательное выра-
выражение, оценивающее вероятность ошибки распознавания при F реа-
реализациях объекта через ошибку распознавания при одноразовом изме-
измерении вектора признаков:
Рош=Р| '- "
j ,
П
P(A2) ^J, P(A{)
F
Р(Л)П
p(A2) П lP(A1)p(Ai/
P
П {p(A2)[\-p{A2/xf)]}
П P (A2/xf)
П
D.34)
Т П !i-/))
Если p (Лх) = p (A2), то D.34) упрощается и приводится к виду
РоШ=Р(^2/х1, Х2,.. ., XF)=-
ИЛИ
Рот'
p"(AJxf)
D.35)
D.36)
когдар W
ИЛИ
D.37)
D.38)
Проиллюстрируем нахождение вероятности ошибки распознавания
на примере разделения классов А3 и Л5, А3 и Л7, Ах и Л3, Л7 и Л4
172
^„ектов по одному только признаку распознавания хх. При этом
|ош*не, должна превышать 0,05.
Будем считать, что если для рассматриваемой пары классов
lf> Р (Ai)lp (Aj) = 1, то х/ ? А] и ошибки распознавания для од-
одой и нескольких реализаций объектов будут определяться в соот-
гствии с D.31) и D.36).
»• Найдем отношения правдоподобия для каждой из указанных пар
классов, воспользовавшись данными табл. 3.9, полученными при реше-
рши одной практической задачи. При этом будем считать, что вектор-
реализация одномерная и равна xf = х^
ч
Li* > =
= 1,434 > 1;
Затем определим ошибку распознавания
для каждой пары объектов по одной реали- рс
зации:
1
i+lp(A,)/p(At)]Li
1
я)
¦=0,47;
ош
0,5
ол
0,3
0,2
0,1
0,05
,Рг(А7Ш
V
/
/
44-
1
P3(AZ/Xt)
' f
(Рош), -
Рис. 4.23. График зави-
зависимости pOm=f(m) при
*= (*0
Таким образом, пары классов объектов Л7
И Л4 разделяются с нулевой вероятностью
ошибки уже по одной реализации. Теперь для
оставшихся трех пар классов в соответствии с D.36) можно найти ми-
минимальное число реализаций xf, обеспечивающих рош^0,05. По
найденным значениям вероятностей ошибок распознавания для различ-
различного числа реализаций построим зависимости рош = <р (/) (рис. 4.23).
Из рисунка видно, что пары классов Аь и А3, Аъ и Л7 распознаются
с ошибкой Рош = 0,05 по восьми реализациям.
Для распознавания классов Аг и Л2 с той же ошибкой достаточно
иметь не более шести реализаций объектов. В данном случае исполь-
использован одномерный вектор признаков.
Конечно, можно построить таблицы, подобные табл. 3.8, и для со-
сочетания двух, трех признаков и более (см. §3.10). Например, по табли-
таблицам, подобным табл. 3.9, можно получить исходные данные для опре-
определения ошибки распознавания при наличии двумерного вектора при-
признаков xf = {xfep}.
Однако этот путь хотя и возможен, но весьма трудоемок при прак-
практической реализации. Поэтому можно предложить другой, более про-
простой путь нахождения необходимого числа реализаций объектов для
уменьшения ошибки рош. состоящий в следующем. Сначала по C.51)
173
оценивается информативность группы признаков, по которым ве-
ведется распознавание. Информативность определяет /г-мерность векто-
вектора признаков. Затем по графикам, аналогичным графикам, приведен-
приведенным на рис. 3.18, находится вероятность распознавания pnv по одной
реализации. Тогда рот = 1 — рпр. Далее, используя D.35) —D.38),
можно найти число необходимых реализаций объектов. Использование
описанной методики может явиться существенным фактором повыше-
повышения вероятности распознавания объектов при ограниченных исходных
данных о них.
Заключение
При идентификации пространственных объектов по их плоским изображе-
изображениям, когда собственные области классов в пространстве признаков пересекают-
пересекаются, во многих случаях наиболее приемлем вероятностный метод распознавания.
Этот метод используют при принятии решения плотности распределения вероят-
вероятностей значений признаков, полученные на этапе обучения.
В некоторых задачах можно ограничиться учетом влияния на вид проекции
объекта только двух углов обзора. Тогда плотность распределения вероятностей
значений того или иного признака может быть легко найдена обычными методами
теории вероятностей, если известны зависимость этого признака от углов обзора
и законы распределения вероятностей значений последних. Для наиболее ин-
интересного на практике случая распределения углов обзора по закону равной
плотности методика определения плотностей распределения признаков объясне-
объяснена в настоящей главе подробно. Предложено также обобщение этой методики на
случай произвольных распределений углов обзора, позволяющее к тому же учесть
зависимость признаков от многих параметров, получить компактное описание
искомых распределений и сравнительно просто организовать поиск требуемых
значений последних в памяти ЭВМ. Это обобщение основано на статистическом
моделировании процесса обучения. *•*
При разработке решающей части алгоритмов вероятностного распознавания
можно широко использовать методы теории статистических решений. В связи
с этим в настоящей главе описаны два типа систем распознавания. В системах
одного типа при принятии решения используются плотности распределения ве-
вероятностей значений признаков, а сам этот процесс трактуется как процесс про-
проверки статистических гипотез. Пороговые системы позволяют более просто опи-
описать пространство признаков, если число объектов и, следовательно, число ис-
используемых для распознавания признаков велико, и в меньшей степени реаги-
реагируют на погрешности определения плотностей распределения последних. W
Рассмотренные алгоритмы обучения и распознавания объектов по эталон-
эталонным описаниям позволяют в некоторых случаях свести задачу вероятностного
распознавания к детерминированной, практически стопроцентной классифика-
классификации объектов. Щ
Использование нескольких реализаций объекта в процессе его распознава-
распознавания делает ошибку распознавания сколь угодно малой.
ГЛАВА S
ФОТО- И СТЕРЕОФОТОГРАММЕТРИЧЕСКИЕ АСПЕКТЫ
В ЗАДАЧЕ РАСПОЗНАВАНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ
§ 5.1. ОСНОВНАЯ ПРОБЛЕМАТИКА ФОТОГРАММЕТРИЧЕСКИХ
ПРЕОБРАЗОВАНИИ В ЗАДАЧЕ РАСПОЗНАВАНИЯ ОБЪЕКТОВ
Вероятность распознавания пространственных объектов по их
плоским изображениям в значительной мере зависит от сохранения
подобия контуров, составляющих изображение объекта, оригиналу.
Плоское изображение, полученное фотокамерами (или на экране
передающих телевизионных трубок), построенными по обычной схеме,
представляет собой центральную проекцию заснятого объекта. Пер-
Перспективные искажения, возникающие при центральном проектировании,
могут инргда приводить к значительным по величине деформациям изо-
изображений контуров объекта на снимке, их относительному смещению,
перекрытию одних деталей объекта другими и т. д. Связность контуров
изображения и оригинала при этом нарушается, изменяются также
относительные размеры отдельных деталей, затрудняется процесс рас-
распознавания. Величина и характер указанных различий между ориги-
оригиналом и его изображением зависят от отстояния объекта от съемочного
аппарата, положения деталей объекта относительно оптической оси
съемочной камеры, конфигурации снимаемого объекта.
Для сложных пространственных объектов общая картина распре-
распределения искажений по всей площади снимка (изображения) весьма
сложная. В результате усложняется решение конечной задачи распоз-
распознавания объектов. Очевидно, вероятность распознавания можно будет
повысить за счет использования фотограмметрических методов для
предварительного преобразования изображений объекта.
Фотограмметрические методы позволяют при определенных усло-
условиях съемки найти или абсолютное геометрическое описание объекта,
т. е. координаты хг, yit zt для любой точки, полученной на изображении
объекта в единой для него системе координат, или решить частные за-
задачи по определению координат отдельных деталей объекта, взаимного
их расположения и т. д.
Результаты фотограмметрических преобразований можно предста-
представить в виде координат отдельных точек объекта в выбранной системе
измерения координат, ортогональных проекций объекта на заданные
плоскости, проекций по заданным направлениям или проекций сече-
сечений объекта плоскостями, параллельными заданной, и т. д. Таким об-
образом, для последующего анализа объектов фотограмметрические ме-
методы позволяют:
1) получать ортогональную проекцию объекта на любую плоскость
(выбираются наиболее информативные плоскости проектирования).
175
Примечание. Имеется в виду получение данных только для той ча-
части объекта, для которой есть изображение на снимке;
2) определять размеры отдельных деталей объектов, расстояние меж-
между отдельными точками и деталями ^объекта, с точностями, обуслов-
обусловленными условиями съемки, получать относительные размерьмэтдель-
ных элементов объекта в любом измерении;
3) получать данные для вычисления истинных площадей и объемов
отдельных деталей объекта;
4) формировать ортогональные проекции или изображения, близ-
близкие к ортогональным проекциям, для отдельных деталей объекта.
Решение указанных задач различно по своей трудности, требует
различных условий съемки, методов измерений и обработки.
Фотограмметрические методы, используемые для решения многих
народнохозяйственных задач, без глубокой проработки и изменений
не могут быть перенесены на решение вопросов, возникающих при
классификации трехмерных объектов.
Основными трудностями при этом являются особые условия съем-
съемки, отсутствие оператора в процессе измерений по снимкам, жесткие
требования к времени решения задачи распознавания, использование
ЭВМ вместо наиболее широко применяемых в фотограмметрии прибо-
приборов оптико-механического типа, специальная форма исследуемых
объектов и др.
§ 5.2. СИСТЕМА КООРДИНАТ И ЭЛЕМЕНТЫ ОРИЕНТИРОВАНИЯ
ОДИНОЧНЫХ И СТЕРЕОПАРНЫХ СНИМКОВ
Для получения информации о размерах и форме исследуемых объек-
объектов необходимо, чтобы полученное изображение было приведено к слу-
случаю съемки, когда снимок и выбранная плоскость изображения парал-
параллельны. При этом изображения всех элементов объекта, лежащих в
этой плоскости, подобны. В общем случае изображение получается при
произвольных элементах ориентирования. Возникающие при этом ис-
искажения могут резко изменять конфигурацию деталей объектов,
даже лежащих в одной плоскости: прямоугольник может превратить-
превратиться в четырехугольник с попарно-пересекающимися сторонами, окруж-
окружность — в эллипс и т. д., т. е. происходит искажение площадей и уг-
углов между линиями, что существенно затрудняет решение задачи рас-
распознавания объектов.
Задача трансформирования изображения объекта заключается в
преобразовании произвольно ориентированного плоского изображения
к нормальному случаю съемки. Поэтому необходимо знать элементы
ориентирования съемочной аппаратуры относительно каждой из пло-
плоскостей, составляющих пространственные формы объекта.
Фотограмметрические съемочные камеры в отличие от обычных фо-
фотоаппаратов сохраняют неизменным расстояние между фокальной пло-
плоскостью и объективом (рис. 5.1). В корпусе 2 укреплены объектив /
и фокальная рамка 3, в которой имеется фоточувствительный слой.
Задняя узловая точка объектива S соответствует центру проекции.
Плоскость фокальной рамки выдерживается перпендикулярной глав-
176
ной оптической оси объектива. Основание перпендикуляра, опущен-
опущенного из центра проекции на фокальную плоскость, дает главную точ-
О.
Фокусное расстояние камеры SO постоянно. Положение главной
эчки фиксируется на снимках особыми координатными метками в
виде точек, рисок, крестов и т. д.
Пересечение линий, соединяющих
|координатные метки, должно совпадать
главной точкой о и задавать систему
плоских координат для измерения коор-
рнат точек изображения объекта.
Для обработки одиночных плоских
изображений и получения пространст-
гнных координат точек объекта по оди-
рючному снимку примем систему коор-
|динат, изображенную на рис. 5.2. За
'.начало координат возьмем точку про-
Ц'ецирования S. Координаты точек изо-
изображения на плоскости проецирования
измеряются в системе координат хог.
^Начало координат этой системы помеще-
помещено в главную точку снимка (точку о).
Для пространственных координат точек объекта (в случае стерео-
\ парных снимков) примем аналогичную систему координат с началом
'"в левом центре проецирования S, а ось х направим в правый центр
г' .у
Рис. 5.1. Схема фотометричес-
фотометрической съемочной камеры
м
V
Рис. 5.2. Системы координат при об- Рис. 5.3. Системы координат при об-
обработке одиночных плоских изобра- работке стереопарных снимков
хеиий и получение пространствен-
пространственных координат точек объектов
проецирования S' (рис. 5.3). Координаты левого изображения р и
правого р' изменяются соответственно в прямоугольных системах ко-
кокор динат xoz и х'о'г'.
Из общей схемы решения фотограмметрической задачи известно,
что измерение координат точек изображений связано с их ориентирова-
ориентированием относительно объектива (см. [22, 23]).
Для определения пространственного описания объекта необходимо
иметь элементы внутреннего и внешнего ориентирования. Под элемен-
элементами внутреннего ориентирования понимают координаты главной точ-
177
ки о (х0, г0) и фокусное расстояние системы /= о?>, которые определяют
положение центра проецирования 5 относительно изображения
(см. рис. 5.1). Элементы внешнего ориентирования определяют про-
пространственные координаты относительно некоторой системы коорди-
координат SXYZ (рис. 5.3).
В неподвижной системе координат OXYZ центр проецирования
будет иметь координаты 5 (Xs, Ys, Zs).
Если при решении задачи требуются только абсолютные или отно-
относительные размеры объекта, то достаточно воспользоваться системой
координат SXYZ. В этом случае Xs = Ys = Zs = 0. Для получения
пространственных описаний объектов надо провести промежуточные
преобразования исходной плос-
плоскости р снимка и воображаемой
р(,оси которой параллельны осям
системы SXYZ (рис. 5.4).
Направление SOt совпадает
с направлением главного луча
50, которое в этом случае оп-
определится углами: а — продоль-
продольный угол наклона плоскости
снимка, составленный осью У и
проекцией главного луча 50 на
плоскость XY (дирекционный
угол); со — поперечный угол
наклона плоскости снимка, об-
образованный главным лучом и
его проекцией на плоскость
XY; х — угол поворота в плос-
плоскости снимка.
Величины Xs, Ys, Zs, а, со, х однозначно определяют положе-
положение изображения относительно системы координат oxyz.
Для нахождения элементов внутреннего ориентирования изобра-
изображения принята подвижная система координат хог. Элементы внешнего
ориентирования определяют ее положение относительно неподвижной
системы координат oxyz.
Поворачивая плоскость р последовательно на углы а, со, х, мож-
можно оси системы координат хог ориентировать параллельно соответст-
соответствующим осям системы координат xtotzt воображаемой плоскости pt.
Таким свойством обладают углы Эйлера, служащие для ориентирова-
ориентирования одной системы координат относительно другой.
Для всех видов съемки элементы внешнего ориентирования обычно
неизвестны и подлежат определению.
Учитывая принятые обозначения элементов ориентирования для
одиночного снимка, пару стереоскопических изображений с центрами
в точках 5 и 5' можно охарактеризовать следующими величинами:
Xs, Ys, Zs, а, со, х, и Xs, Ys, Zs, а', со', х'.
Так как величины АХ = Xs — Xs, AY = Ys— Ys, AZ =
— Zs — Zs соответствуют проекциям базиса В съемки на соот-
соответствующие оси, а величины Да = а' — а, Дсо = со' — со, Дх = х'— х
178
М
Рис. 5.4. Системы координат исходной
плоскости снимка р и воображаемой pt:
а — продольный угол наклона плоскости
снимка; со — поперечный угол наклона плос-
плоскости снимка; У. — угол поворота в плоскости
снимка
Определяют ориентирование правого снимка р' относительно левого
з, то элементы внешнего ориентирования можно записать в виде
"к, By, Bz, Да, Дсо, Дх.
Положение базиса можно задать углами его ориентации в системе
|координат SXYZ (см. рис. 5.3), т. е. iBy = arctg (BYIBX) и iBz =
|= arctg (BzlBx).
Тогда окончательно элементы внешнего ориентирования можно
^охарактеризовать такой последовательностью параметров: Xs, Ys,
%Zs, а, ю. *> Вх, 1ву, 1вг Да, Дю, Дх. Первые шесть элементов
|являются элементами внешнего ориентирования левого изображения
^плоскости р). Первые два элемента из последних пяти определяют на-
Цправление базиса относительно системы координат SXYZ, а три по-
Вследние элемента — угловое ориентирование правого изображения
(плоскости р') относительно левого.
Все элементы конечной пятерки называют элементами взаимного
[ ориентирования двух изображений стереопары. Элементы внутренне-
внутреннего и внешнего ориентирования позволяют восстановить положение
объекта в пространстве, которое оно занимало в момент съемки. Сле-
Следовательно, с их помощью можно восстановить пространственное
описание объекта.
§ 5.3. ОСНОВЫ ТЕОРИИ ПРЕОБРАЗОВАНИЯ СТЕРЕОПАРНЫХ СНИМКОВ
В ЗАДАЧЕ РАСПОЗНАВАНИЯ ОБЪЕКТОВ
Стереофотограмметрия изучает способы, позволяющие получить
полное геометрическое описание заснятого объекта по фотоснимкам,
т. е. определить его пространственное положение, форму и размеры.
Задачи стереофотограмметрии как теоретической дисциплины сводятся
к установлению геометрических зависимостей, возникающих между
фотоизображениями и заснятыми объектами, с одной стороны, и иден-
идентичными изображениями, полученными на различных снимках, —
с другой. На базе установленных геометрических закономерностей
строится метод пространственных измерений заснятых объектов
(см. [24]).
В стереофотографировании различают два случая съемки: нор-
нормальный и общий (конвергентные оси).
Нормальный случай съемки. Нормальный случай съемки — наибо-
наиболее простой с геометрической точки зрения и характеризуется перпен-
перпендикулярностью оптических осей съемочных камер к базису (рис. 5.5).
Объекты и съемочные камеры в момент фотографирования не изменяют
взаимного расположения. На рисунке приведены два стереопарных
снимка некоторой точки М объекта в пространстве и ее изображения т
и т' на левом и правом снимках.
Получение пространственных координат точек объекта поясним на
примере нахождения трех координат точки М. Пусть начало коорди-
координат находится в левом центре проецирования 5, ось Y совпадает с на-
направлением оптической оси левой фотокамеры, ось X направлена вдоль
базиса В, а ось Z перпендикулярна плоскости рисунка.
179
Обозначим координаты точек т и т' в плоскости снимков соот-
соответственно черех (х, z) и (х', г'), а пространственные координаты точки
М — через (X, Y, Z).
Если из правого центра проецирования S' провести прямую, па-
параллельную MS, до пересечения в точке mlt лежащей в плоскости
снимка р', то получим подобные треугольники A^''ASMS'
Из подобия этих треугольников следует, что
Y/B=f'/(x-x')=[/(x-x'),
где р = х — х' — горизонтальный параллакс.
У Мг(х,у) У'
E.1)
Щ/)
tri
mz(x,zj
Рис. 5.5. Нормальный случай
' съемки
Из E.1) находим, что
Рис. 5.6. Общий
съемки
E.2)
При рассмотрении другой пары подобных треугольников (ASMМг со
со ASOm) получаем, что XIх = Ylf, откуда с учетом E.1) имеем
Х=хВ1р. E.3)
Из подобия третьей пары треугольников (ASMM2 со ASmm2) на-
находим последнюю пространственную координату Zlz = Ylf, откуда
Z=Yz/f=Bz/p. E.4)
Точки М1 (Y, Z) и М2 (X, Y) являются проекциями точки М (X, Y,
Z) соответственно на плоскости (Y, Z) и (X, Y), а точка т2 (х, г) —
проекцией точки М2 в плоскости (х, г) левого снимка.
Уравнения E.2)—E.4) позволяют для нормального случая съемки
найти пространственные координаты через координаты точек в пло-
плоскости изображений.
Практически реализовать нормальный случай съемки можно, на-
например, установив две фотокамеры с одинаковыми параметрами на
жестком базисе.
Общий случай съемки. При общем случае съемки не накладываются
какие-либо дополнительные условия к режиму съемки (рис. 5.6).
Стереоскопическая съемка в этом случае позволяет получить пару
180
ерекрывающихся снимков объекта. Основными трудностями этой
емки при вычислении пространственных координат являются:
1. Определение элементов взаимного ориентирования изображе-
изображений.
2. Отождествление одноименных точек на стереопарах.
Общее решение фотограмметрической задачи распадается на два
тапа:
; 1. Преобразование координат точек, измеренных на реальных
Ьнимках, и приведение их к воображаемому случаю нормальной съем-
съемки (взаимное ориентирование).
2. Переход к пространственной системе координат SXYZ.
Этап 1. Решение задачи на этом этапе проводится на основа-
основании имеющихся геометрических связей между точками стереопарных
Изображений и элементами ориентирования снимков относительно ба-
(риса съемки.
В пространственной фототриангуляции направляющие косинусы
используются для определения ориентации базиса фотографирования,
i также угловых элементов а, со, х внешнего ориентирования снимков.
{..¦ На рис. 5.6 представлена пара взаимно-ориентированных снимков
|р и р' с центрами проецирования 5 и S', а также проекции т и т'
Цточки М. Положение осей системы координат SXYZ выбрано так,
гкак было описано ранее. Тогда положения точек S', т и т' относитель-
относительно точки 5 определяются векторами Ro, R и R'. Так как соответст-
[ венные лучи взаимно-ориентированных векторов лежат в одной базис-
-ной плоскости, то они компланарны, т. е. Ro (R XR') = 0.
В общем случае условие взаимного ориентирования можно записать
|в координатной форме:
?х By Bz
^т 'т Zm =0,
С V 7'
vm 'т ^т
g где Вх, By, Bz—проекции базиса на соответствующие оси; Хт,
ft Fm, Zm — координаты точки т в системе координат SXYZ; X'm, Y'm,
Z'm—координаты точки т' в системе координат S'X'Y'Z', парал-
параллельной системе координат SXYZ.
Если ось X направлена вдоль базиса, то условие компланарности
векторов в координатной форме запишется как
в о
%т Ym
К' Y'
^т ' т
ОТКУДЭ
= 0,
=0
E-5)
m
Координаты, входящие в E.5), можно найти, используя зависимо-
ста между пространственными координатами и координатами плоских
снимков:
z, E.6)
181
где/ — фокусное расстояние фотокамеры; ait bt, ct — направляю-
направляющие косинусы плоской и пространственной систем координат, опре-
определяемые через угловые элементы внешнего ориентирования:
вх cos a cos х —sin a sin <a si n x; ftj = — sin a cos и—cos a sin ш sin x;
a2 = sin a sin со; b2 — cos a cos a»;
a3 — — cos a sin и —sin a sin со cos и; 63 =sin a sin x —cos a sin со cos x;
e^ = cos со sin x; e2=sinco; c3=coscocosx
и характеризующие ориентацию плоскости снимка в системе коорди-
координат SXYZ, оси X и Z которой параллельны соответствующим осям
х и 2 в плоскости изображения (табл. 5.1).
Координаты
X, У, Z ^^-^^^
X
Z
л;
h
Направляющие косинусы
плоской х, у, г и пространст-
пространственной X, Y, Z систем коор-
координат
У
<h
b2
с2
г
«3
ь3
с3
Из девяти направляющих косинусов только три независимые.
Параметры Ъъ Ь3 и с1( с2 для плановых снимков являются величи-
величинами первого порядка малости Ь1 = ос, 63 ^ — ю! ci = х! С2 = 0)-
При этом можно считать, что Ь% ж 1, с3 « 1. Поскольку для левого
снимка со = 0, то из E.6) получим значения пространственных коор-
координат точки М:
Если найденные значения координат подставить в E.5), то после
преобразований получим уравнение взаимного ориентирования пла-
плановых снимков:
xz'
—
x' z
(] x'c[-q = O, E.7)
где q = z — z' — поперечный параллакс.
Уравнение E.7) содержит пять неизвестных направляющих коси-
косинусов съ с[, c'i, bx и Ъ'\. Одна точка стереопарных снимков позволяет
составить только одно уравнение взаимного ориентирования. Следо-
182
№„.».. о, Для определения Ёсех Неизвестных величин необходимо иметь
[плоские координаты и поперечные параллаксы по крайней мере пяти
уточек.
I Составив и решив пять уравнений вида E.7), можно определить
?;пять неизвестных направляющих косинусов. Для нахождения осталь-
|ных неизвестных направляющих косинусов воспользуемся определи-
|телем преобразования координат
а± <ч «з
Д =
= 1.
обладающим следующими свойствами:
1) сумма квадратов элементов одной строки или столбца равна
I единице;
2) сумма произведений соответствующих элементов двух строк или
:Столбцов равна нулю;
3) каждый элемент определителя равен своей адъюнкте, умножен-
умноженной на ± 1.
На основании первых двух свойств определителя составим систе-
систему уравнений:
a2 h+Оз fci=0;
E.8)
а1с1+а2с2+а3с3=0.
Учитывая, что Ь3 = 0, из уравнений второго и пятого систе-
системы E.8) найдем, что Ь2 = У 1 — Ь\, с2 — — (bjb2) сх = —
-(V у\ - ь\) Cl.
Всегда Ь2 > 0.
Из третьего уравнения системы E.8) определим, что
с3 = Vl —cl — &
Аналогично, для правого снимка
С3 = У1-КJ-КJ •
Решая второе и пятое уравнения системы E.8) для правого сним-
снимка, можно определить Ь<ц, а затем Ь'ъ. В частности, Ь'ъ — — Ь'\с\1с'ъ —
— Ьчсчкъ.
Подставив значение Ь'ъ во второе уравнение системы E.8), получим
t1 +(с; /с; л (к J+2к кс; /(с'3 п к +п + (с; / с3 л (к J-1=°-
E.9)
Введем обозначения А = 1 + (сг/сзJ, В = 2Ь[с[с'21(с'ьУ, С =
= [1 + (с'МJ] (б!J— 1. Тогда E.9) примет вид
183
РешиЁ это уравнение, определим, что Ъ'ч — (— В ± У В2 — 4 А С) /
I BЛ).
По найденным значениям направляющих косинусов с учетом тре-
третьего свойства определителя А вычислим остальные параметры: ах =
= Ь2с3 — ЬзР2, а2 = bgC-L — bxcs, a3 = Ъхс2 — Ь2Сх.
Аналогичные уравнения можно написать и для правого снимка.
Таким образом будут найдены все направляющие косинусы, необ-
необходимые для определения элементов взаимного ориентирования сним-
снимков р и р'.
Последним шагом этапа 1 является приведение плоскости снимка
р (р1) к воображаемой плоскости pt. Тогда координаты преобразован-
преобразованного снимка могут быть определены как
Аналогично,
_
c','+C'3Z'
J 3
Значение остаточного поперечного параллакса q = zt — z/.
Направляющие косинусы связаны с элементами внешнего ориенти-
ориентирования следующим образом:
tg a=—a3/ci; tg a' = —e'g / c'g ; sin со ж 0; sin ш'= —Ь'з ;
tg x=b1/bt, tgx'=6;/6;.
Следовательно, определив углы а, ю, к, а', со' и %', легко найти
элементы взаимного ориентирования: Да = а — а; Асо = со' — со;
Ах = к' — %.
Этап 2. На данном этапе при общем случае съемки определяют-
определяются пространственные координаты точек объекта по трансформирован-
трансформированным координатам плоских изображений стереопары. Это выполняет-
выполняется по «звестным формулам нормального случая съемки X =Bxt/(xt —
— х\), Y = Bfl(xt - xi), Z = BztJ(xt-x't).
Точность вычисления пространственных координат точек объекта
определяется точностью измерения элементов взаимного ориентиро-
ориентирования снимков и точностью обработки изображений.
Таким образом, описанная методика позволяет получать про-
пространственное описание видимых частей объекта.
§ 5.4. ИССЛЕДОВАНИЕ ПРОЕКТИВНЫХ СВОЙСТВ ОТДЕЛЬНЫХ ГРУПП
ОБЪЕКТОВ
Пространственные объекты технического происхождения могут
иметь весьма сложные формы. Описанные ниже алгоритмы преобразо-
преобразования проекций трехмерных объектов можно использовать на этапе их
идентификации, когда признаками распознавания являются, например,
Ллощадь фигуры или ее части, периметр контуров, соотношения между
геометрическими размерами фигур и др.
184
Поскольку формы распознаваемых фигур, их местоположение на
бъекте могут быть достаточно разнообразными, целесообразно клас-
классифицируемые объекты разбить на отдельные группы по виду фигур
рконтуров) на них, используемых в качестве базовых при преобразо-
преобразованиях центральных проекций.
f В качестве примера рассмотрим три группы пространственных
•объектов и алгоритмы их преобразования.
Рис. 5.7. Объект первой груп-
группы
Рис. 5.8. Объект второй груп-
группы
К первой группе пространственных объектов отнесем такие объек-
объекты, на которых базовые фигуры имеют вид прямоугольников (рис. 5.7);
к второй — вид цилиндрических тел (рис. 5.8); к третьей — вид
«звездочка» (рис. 5.9, а).
Рис. 5.9. Анализ объекта третьей группы:
а — объект третьей группы; б — расстояния от опорной точки пересечения до всех
точек пересечения; в — определение линии схода
Рис. 5.10. Искаженный прямоугольник /, //, ///, IV
Теоретические предпосылки к алгоритму преобразования изобра-
изображений объектов первой группы. Предположим, что в процессе препа-
препарирования многосвязного плоского изображения распознаваемого
объекта выделена фигура — четырехугольник /, 2, 3, 4 (можно также
рассматривать прямоугольники /, 2, 6, 5 или 8, 7, 3, 4).
Из свойств центральной перспективы известно, что при произволь-
произвольном расположении картинной плоскости (плоскости снимка) относи-
185
тельно предметной плоскости (плоскости четырехугольника на ре-
реальном объекте) параллельные линии могут изображаться сходящи-
сходящимися в точках схода. В результате рассматриваемая фигура, если она
прямоугольник, изобразится в виде неправильного четырехуголь-
четырехугольника с вершинами в точках /, //, /// и IV (рис. 5.10). Попробуем най-
найти способ перспективного преобразования искаженной фигуры к ви-
виду, который был бы получен при параллельном расположении картин-
картинной и предметной плоскостей.
Для такого преобразования необходимо, чтобы были определены
координаты точек /, //, /// и IV в некоторой прямоугольной системе
координат с началом в главной точке снимка.
Пусть точки /, //, /// и IV имеют соответственно следующие коор-
координаты: (Xlt Zt), (X2, 22), (XS, 23) И (Xt, 24).
Составим уравнения прямых, проходящих через точки:
zj); E.Юа)
-г.); E.106)
¦Zi): E.10b)
r-z,)/(z,-z,). E. Юг)
Преобразования координат точек изображений с учетом поворота
§йа угол а можно проводить по соотношениям
III, IV (*-*,)/(*4-*J =
/, IV (*-*!)/(*«-*!)= (
//, /// (x—x2)/(x3—х2) = (
Решение парных уравнений E.10а)—E.106) и E.10в)—E.10г)
дает координаты точек /х и /2 пересечения прямых. Чтобы избежать
пересечения в точке /3 прямых, следует выполнить условие для точек
/х и /2, лежащих вне площади исследуемой фигуры: |fl?iv,i, — rfi.i, I =
= №v.i|. №v,i, — rfni.i, I = Kiv.ih I и т. д., где d — отрезки пря-
прямых, вычисленные через координаты соответствующих точек.
Вычислив координаты точек схода 1У и /2, составим уравнение
прямой I-Jv проходящей через эти точки, которая будет представ-
представлять собой условную линию схода:
Положение линии схода и главная точка О снимка позволяют вы-
выбрать новое направление координатной оси г', совпадающей с главной
вертикалью на снимке. С этой целью составим уравнение прямой,
проходящей через главную точку О @, 0), перпендикулярную линии
схода 1Х12.
Если уравнение E.11) привести в виде z = &/„/,* + с, то koi =
= — Ш/,/2 и уравнение оси г' (линии 01) примет вид z' = — х/
' ?/,/, == koix. Из теории фотограмметрии известно, что угол
а = arctg ifIOI) определяет наклон снимка, а для нахождения угла
х можно воспользоваться выражением tgx = (#/, — */,)/(?/» — 2/,).
Зная «их, можно путем последовательного преобразования опреде-
определить трансформированные координаты любых точек изображения
объекта.
Поворот системы координат xOz на угол х производится в соот-
соответствии с уравнениями
х'=х cos х—г sin х;
г'=х sjn x-J-г cos x.
X'
хо —
/ cos a—г' sin a
z'
(f cos a—г' sin a) cos a
E.13)
Рис. 5.11. Фотограмметрические
преобразования прямоугольника:
/, 2, 3, 4 — исходный прямоугольник;
/', 2', 3', 4' — изображение прямо-
прямоугольника, снятого под произвольным
ракурсом: 1", 2", 3", 4" — трансформи-
трансформированный прямоугольник
E.12)
Полученные координаты х0, г0 точек контуров деталей объек-
объектов позволяют определить необходимые их линейные размеры путем
ч умножения величины отрезков на снимке на масштабный коэффициент
|D/(/cosoc):
Lo=LcD/(M/cosa), E.14)
где D — расстояние объекта до цент-
центра фотографирования; Lo — действи-
действительный линейный размер детали на
объекте; Lc — линейный размер на
трансформированном снимке; М —
масштабный коэффициент, выбира-
выбираемый из условия размеров сетчатки
изображения.
Точность описанного способа по
определению параметров объектов за-
зависит главным образом от точности
съема координат точек изображений.
На основе изложенных теоретиче-
теоретических предпосылок можно предложить
конкретный алгоритм преобразова-
преобразования изображений объектов первой группы, снятых под произволь-
произвольным ракурсом, и приведения их к некоторому стандартному виду.
В качестве объекта исследования возьмем изображение четырех-
четырехугольника /, 2, 3, 4 (рис. 5.11), снятого под произвольным ракурсом
(это изображение обозначено /', 2', 3', 4'). За плоскость приведения
взята плоскость четырехугольника 1, 2, 3, 4 (в общем случае положе-
положение плоскости или плоскостей приведения может быть выбрано
произвольно).
Алгоритм преобразования одиночных цен-
центральных проекций для объектов первой
группы.
Этап 1. На этом этапе алгоритма осуществляется ввод в память
ЭВМ постоянного параметра / — фокусного расстояния оптической
воспринимающей системы.
Этап 2. На этом этапе алгоритма в память ЭВМ вводятся коор-
координаты четырех точек (угловых) прямоугольника /', 2', 3', 4' (относи-
(относительно произвольного начала координат), т. е. (х[, z{), (*2> z'j), (#з,
2з), (ХА, 24).
Э т а п 3. На данном этапе алгоритма осуществляется ввод в па-
память ЭВМ координат (х'о, z'o) главной точки О снимка.
187
Этап 4. На этом этапе алгоритма происходит перенос начала
координат в главную точку:
4= Ч -*о
i = \, 2, з, 4.
Э т а п 5. На этом этапе составляются уравнения прямых. Прямая,
проходящая через следующие точки:
1-2
3 — 4
1—4
2—3
1-3
2—4
хз—хг
х
х3—х.г
X
xt—х2
Ч—Ч х2—хг
—г— =__??__
Ч—Ч 'хг—х3
2 _ хх
Ч—Ч zi—xl
ч—ч
ч
г4—г3
Ч
Ч~х2 z3—z2
Х\ гг
Х3—Хг
х2
г3
ч—ч
Этап 6. На этом этапе алгоритма осуществляется раздельно
решение трех систем уравнений, приводящее к системам уравнений вид
хг
Ч—хх
х3
— — -а =0 и т. д.
г4—г3 / ^ Xi— х3 г4—г3 I
Эти же системы уравнений можно записать и так:
2+с12=0;
a3i
а13
a2i
г+с13=0; Г аи
{
Z+c23=0;
решение систем уравнений дает координаты точек пересечения пря-
Кг
а12 с12
g34
«84 Ь34 1 I «si ..,
Аналогичные решения для двух других систем уравнений позво-
позволяют определить координаты точек пересечения прямых /2 и /3, т. е.
Этап 7. Анализ точек /1( /2, /3 и отбор из них двух, лежащих
на линии схода.
188
Точка /х:
а) вычисление длин отрезков (см. рис. 5.Ю):
б) проверка местоположения точки /х (вне или внутри анализируе-
яого четырехугольника).
Примечание. Это и другие условия проверяются с учетом соответст-
соответствующих порогов.
Если |d/-/l — div,it | = \dijv, то точка /х лежит вне контура;
если Id/,/, — div,^ | ф \di,iv I, то точка 1Г лежит внутри кон-
^тура.
Точка /2:
а) вычисление длин отрезков (см. рис. 5.10): ¦
б) проверка местоположения точки /2 (вне или внутри анализируе-
анализируемого контура):
если \di,i, — duj, | ~ \dijj\, то точка /2 лежит вне контура;
если \djj, — du.i, \Ф \di.n\, то точка /2 лежит внутри
контура.
Точка /8:
а) вычисление длин отрезков (см. рис. 5.10):
di. и = |У(*1-*/.)8+(г*-г/,J1; duu и = \V{X*-Xif+(Z>-Zi,? I;
б) проверка местоположения точки /8 (вне или внутри анализируе-
анализируемого контура):
если \di,i, — dnij, | = \d,piu\, то точка /3 лежит вне контура;
если \dij3 — ^///,/,1 Ф \di,m\, то точка /3 лежит внутри кон-
контура.
В результате анализа местоположения точек будут выбраны в дан-
данном случае точки /х и /а, лежащие на линии схода.
Этап 8. На этом этапе алгоритма определяется угловой коэф-
коэффициент прямой:
k -
Этап 9. На данном этапе алгоритма определяется угловой ко-
коэффициент главной вертикали 01:
k0, =-l/ft/i/f = -(ж,,- */,)/( h,-'h)-
Этап 10. На этом этапе алгоритма для определения координат
точки / (xj, г/) пересечения прямых 1х1г и 01 решается система урав-
189
нений этих прямых:
X, — X,
'1 Л
Z, —Z,
г, =—х,
zT —г,
= 0:
X, — х
¦7,
г, —г,
Этап 11. На данном этапе алгоритма определяется длина отрез-
отрезка 01:
01 =\Ух}+г* |.
Этап 12. На этом этапе алгоритма определяется угол наклона
снимка:
a =arctg fJOI, О < а < -^-.
Этап 13. Результат выполнения этого этапа — определение уг-
угла к:
Х1~х,
х =arctg , 0 < х < 2я.
Этап 14. На данном этапе происходит преобразование коорди-
координат угловых точек четырехугольника с учетом угла к:
x'i =Xi cos к—Zi sjn к;
z'i=xt sin x+z,- cos x, «= 1, 2, 3, 4.
Этап 15. На этом этапе осуществляется преобразование коор-
координат угловых точек четырехугольника с учетом угла ос:
(*o)»=J5
cos a —z\ sin a
(/ cos a—г/ sin a] cos а
", «=1,2,3,4.
На этом трансформирование координат угловых точек анализируе-
анализируемого прямоугольника заканчивается. Чтобы провести аналогичное
преобразование координат для любой произвольной точки снимка,
необходимо выполнить этапы 4, 14 и 15 описанного алгоритма.
Теоретические предпосылки к алгоритму преобразования изобра-
изображений объектов второй группы. К этой группе объектов отнесем тела
вращения (цилиндрической формы), например такой объект, как по-
показанный на рис. 5.8. За плоскости приведения, на которые можно про-
проецировать изображение с целью получения в дальнейшем измеритель-
измерительной информации, можно принять например, торцовую xz или верти-
вертикальную плоскость ху (zy) (ориентировка осей в общем случае произ-
произвольная).
Для трансформирования на торцовую плоскость xz воспользуемся
свойством перспектив вертикальных линий. На этом основании изо-
190
ражения всех образующих цилиндра, в том числе крайних видимых,
удут представляться сходящимися прямыми, пересекающимися в
очке надира п (рис. 5.12).
'¦ Выделив произвольные прямолинейные участки на боковых обра-
образующих аЬ и ей цилиндра, получим в результате решения двух урав-
уравнений прямых z = k±x + С]/, z = k%x + c2 координаты точки надира
Через полученную точку п и главную точку О проведем новую
ккоординатную ось z', уравнение которой z' — konX (kon = xjzn —
|угловой коэффициент линии Oz').
Переход к новой системе координат опреде-
определяется углами
x=arctg/zOn;
a=arctg (On//)=arctg
| После этого решение задачи совпадает с пре-
йобразованием координат точек изображений объек-
Цтов первой группы. При решении используются
'уравнения E.12) и E.13). Полученная проекция
; близка к ортогональной.
Трансформирование изображения на вертикаль-
: ную плоскость, совпадающую с точками а, Ь, с, d
на образующих, можно выполнить по тем же зави-
1 симостям, подставляя вместо значения угла а зна-
значение угла а' — 90° — а.
ж1. Действительные размеры объекта и его деталей
I можно определить, воспользовавшись выражением
E.14).
Теоретические предпосылки для преобразования координат объек-
объектов реализуются в виде алгоритма. ,
Алгоритм преобразования одиночных цен-
центральных проекций для объектов второй
группы.
Этап 1. На этом этапе алгоритма происходит ввод в ЭВМ зна-
значения фокусного расстояния / оптической системы.
Этап 2. На данном этапе осуществляется ввод координат (х, z)
исследуемой группы точек (предполагаем начало координат в главной
точке О): (xa,za); (хь, zb); (хс, гс); (xd, zd); (xit zt) (i = 1, 2, 3, ... —
любые точки по полю объекта, которые требуется преобразовать).
Этап 3. На данном этапе алгоритма составляются и решаются
уравнения образующих цилиндра:
х—ха
Рис. 5.12. Иска-
Искаженный цилиндр
ь—ха
Решение уравнений дает координаты точки надира: п(хп, zn).
Этап 4. Здесь вычисляется длина отрезка:
т
Этап 5. На этом этапе алгоритма определяется угол наклона
снимка:
a==arctg On/f.
Этап 6. На данном этапе алгоритма вычисляется угловой коэф-
коэффициент k линии On:
0п
Этап 7. На этом этапе алгоритма определяется угол: х =
= arctg kOn.
Этап 8. На данном этапе проводится поворот системы коорди-
координат на угол х:
х\ = xt cos х -f zt sin x; z/ = — xt sin x + zt cos x.
Этап 9. На этом этапе алгоритма происходит трансформирова-
трансформирование координат точек на торцовую плоскость цилиндра: (х0)? = fxt /
Of cos a — zl sin a); (zo)T=fz'il(f cos а — z{ sin a) cos а.
Э т^а п 10. Ha данном этапе алгоритма осуществляется трансфор-
трансформирование координат точек на вертикальную (боковую) плоскость
объекта:
(*о)? —fx'i /(/ sina+z;'cos a);
(z0)? — —Hi /[(/ sina+г; cos a) sin a].
Преобразованное описание объекта в дальнейшем можно исполь-
использовать для распознавания его элементов, деталей и т. д.
Теоретические предпосылки к алгоритму преобразования изобра-
изображений объектов третьей группы. Для объектов этой группы в качестве
плоскостей приведения целесообразно выбрать плоскость лепестков
и перпендикулярную им плоскость.
Решать задачу преобразования изображений произвольно снятых
объектов можно, например, использовав одну из двух-описанных ниже
методик.
Цель методики 1 преобразования — нахождение в предметной пло-
плоскости лепестков двух пар параллельных прямых, которые в плоскости
снимка пересекаются на линии схода. Такими линиями являются пря-
прямые, проходящие через точки концов лепестков (рис. 5.9, а) /, /—//,
После нахождения линии схода задача преобразования снимков
решается по алгоритму преобразования для первой группы объектов.
Условно будем координаты внутренних точек лепестков обозначать
индексом i, а внешних точек лепестков — индексом /.
Например, координаты (xin, zin) принадлежат внутренней точке
п-го лепестка.
Рассмотрим алгоритм преобразования.
Алгоритм преобразования одиночных цен-
центральных проекций для объектов третьей
группы (методика 1).
Этап 1. Вначале формируются исходные данные: фокусное рас-
расстояние системы /; координаты концевых точек середин лепестков
(Xin, zin) и (xjn, Zjn) (i, j = 1, 2, 3, ...); координаты точек внешнего
192
I контура изображения; количество выделенных лепестков nmax = 6,
Э т а п 2. На этом этапе составляются уравнения прямых, прохо-
гдящих через концевые точки каждого лепестка: (х —х1пI(х}п — xin)=
I = (Z — Zin)/(Zjn — Zin) И Т. Д.
Эти уравнения можно привести к общей форме записи. Тогда для
I любой пары прямых получим систему уравнений
Аг д;+В12+//1 =
0;
где
= Zjn — Zin\ В1 — x^ — Xjn', C1 =
j
B2 ~
и т- Д-
Решение пар уравнений прямых дают координаты точки их пересе-
^о== Сх А,\ " ¦
чения, т. е. х° —
В2
\А, В,
А2 В,
А вг
Если
А2В2
= 0, то данные прямые параллельны. Если же
AJA2 = ВХ\В2 = CJC2, то прямые совпадают. Последнее может слу-
случиться, если пары лепестков расположены на одной прямой (см. рис>
5.9, а, лепестки /, 4; 2, 5 и 3, 6). Максимальное количество точек пе-
пересечения прямых при «шах = 6 равно 15.
Этап 3. На этом этапе относительно каждой точки пересечения
L (x°, z°) прямых (в этом случае назовем ее опорной точкой пересечения)
подсчитывается сумма расстояний до всех остальных точек пересече-
пересечения (см. рис. 5.9, б): S = 2 Sm, Sn = \V(x° — xlf + (z° -~zffi\,
№=I
где Sm — расстояние от опорной точки до m-й точки пересечения;
р — число точек пересечения без одной (опорной).
Этап 4. На этом этапе отбрасываются точка или точки с наиболь-
наибольшей суммой расстояний Smaxl, Smaxa> ••• Число отбрасываемых сумм
зависит от количества анализируемых лепестков п:
а) если п = 3, то отбрасывается одна сумма Sn,axi;
б) если п — 4, или 5, то отбрасываются две суммы: Smaxi и Smax2;
в) если п = 6, то отбрасываются три суммы: Smaxl, Smax2 и SmBX&.
Описанная процедура позволяет избавиться от возможных ошибок
в вычислении координат центра группирования точек пересечения
прямых, так как при этом отбрасываются именно те далеко отстоящие
от основной массы точек пересечения точки, которые получились от
пересечения прямых диаметрально расположенных лепестков.
Э т а п 5. На этом этапе находится центр группирования с для
оставшихся точек пересечения, являющийся одновременно и центром
окружностей в предметной плоскости, на которой лежат внутренние
и внешние точки лепестков:
-. гс=-
Я ' Я
где q — число точек, оставшихся после выполнения этапа 4.
7 Зак. I0S3
193
Этап 6. Здесь осуществляется выделение из оставшихся точек
пересечения двух, наиболее близко лежащих к центру группирования:
Sli2=min
ч
Этап 7. Здесь проводится отождествление с двумя оставшимися
точками пересечения двух соответствующих им лепестков.
Этап 8. На этом этапе ведется сортировка концевых точек двух
оставшихся лепестков на внутренние (хг, zt) и внешние (Xj, Zj) по кри-
критерию расстояния до них от соответствующих точек пересечения пря-
прямых.
Этап 9. На этапе проводятся прямые через две внутренние и
две внешние концевые точки, задающие линию схода.
Э т а п 10. Дальнейшие преобразования проводятся в соответст-
соответствии с алгоритмом для объектов первой группы.
Алгоритм преобразования одиночных цен-
центральных проекций для объектов третьей
группы (методика 2) .
Методика 2 преобразования плоского изображения имеет более
жесткое ограничение для применения (необходимость иметь не менее
пяти выделенных" лепестков звездочки).
Рассмотрим основные этапы этого алгоритма преобразования сним-
снимков.
Этапы 1—3. Операции, выполняемые на этих этапах, те же, что
и при методике 1.
Этап 4. На этом этапе происходит отбрасывание двух точек пе-
пересечения прямых с наибольшей суммой расстояний 5.
Этап 5. Происходит определение центра группирования остав-
оставшихся точек пересечения прямых: хс = (х\ + х\ + ... + х%IЪ, гс =
= И+4+ ... +г§)/8.
Этап 6. Происходит выделение пяти внешних точек (Xj, Zj) ле-
пестков по критерию \V(xc — XjJ + (гс — 2jJ| — \V^(xc — xj+1J +
+ (гс — Z]+iJ\ ^ fi, где fi — порог, определяемый точностью съема
координат точек изображения объекта.
Этап 7. На данном этапе решается система пяти уравнений эл-
эллипса по найденным в этапе 6 внешним точкам:
»з xf+2
аг х
+b2
+ b3
f+b
2?, 2
lZ?+2
+2c2 Xj
+ 2c3 x.
Cj xy z7-
f -4- ft / -1
+2dj xy -4
-2 +2d3x{
¦toi 'j+f
-l_i+2e2;
+2 + 2e3 5
=0;
-У+1
+/=o
xj+i+2eb
откуда определяются коэффициенты и строятся уравнения эллипса*
проходящего через оставшиеся внешние точки лепестков:
Начало
I1
Этап 8. Проведение через центр группирования двух взаимно
перпендикулярных прямых и определение точки их пересечения с эл-
эллипсом.
С этой целью совместно решаются уравнения эллипса и прямой
х — хс, а затем эллипса и прямой z = гс.
Этап 9. Проведение двух пар прямых, определяющих линию
схода (в предметной плоскости эти пары прямых параллельны), через
точки пересечения 1, 2, 3, 4 (см. рис. 5.9, в).
Этап 10. Переход к алгоритму преобразования изображений
объектов первой группы.
§ 5.5. ПРОСТРАНСТВЕННАЯ НОРМАЛИЗАЦИЯ ОБЪЕКТОВ
Наиболее общий случай съемки трехмерных объектов такой, когда
фотографируемое тело находится под случайным и произвольным ракур-
ракурсом по отношению к съемочной аппаратуре, что приводит к получению
бесчисленного множества изображений объекта. Однако операция про-
пространственной нормализации существенно упрощает процесс распоз-
распознавания объектов, увеличивая вероятность правильной классифи-
классификации. В этом случае нор-
нормализации могут быть под- ~~
вергнуты отдельные детали
трехмерного тела.
Большинство деталей рас-
распознаваемых объектов техни-
технического происхождения — те-
тела правильных геометриче-
геометрических форм (тела вращения,
прямоугольники, многогран-
многогранники и т. д.).
Рассмотрим алгоритм нор-
нормализации тел вращения. Ос-
Основные этапы возможного ал-
алгоритма распознавания пред-
представлены на рис. 5.13.
Этап 1. На этом этапе
происходит выбор точек кон-
контура детали из памяти ЭВМ
(блок /).
Э т а п 2. Здесь проводит-
проводится анализ контура по виду
«плоский — выпуклый» (блок
2).
С этой целью по трем ко-
координатам каждой точки кон-
контура последний препарирует-
Выбор точек
контура
детали
-2
Анализ контура
по условию
компланарности
ся на однородные участки,
прямолинейные и криволи-
криволинейные, а также определяют-
определяются точки перегиба контура.
7*
Выпуклый контур
Плоский контур
Мтгоуголь-
^ ник
надание кон-
контура
Пространст-
Пространственная
нормализация
Синтез
многоугольников
формирования
детали
Получение
проекций
детали
Распознавание
детали
Определение
характеристик
детали
Рис. 5.13. Схема алгоритма распознавания
195
194
Для прямолинейных участков контура в пределах допустимой точ-
точности должно выполняться условие
АХ; AYj AZj
AXi+i ~~ AYi+1 " AZi+1 f
E.15)
где AXt, AYt, AZt — приращения координат точек контура в исход-
исходной системе координат SXYZ на i-м шаге обхода контура; АХ1+Ъ
AYi+i, AZi+i — приращения координат на (i + 1)-м шаге обхода
контура.
По условию E.15) в контуре выделяются прямолинейные и криво-
криволинейные участки, а также точки перегиба (границы однородных уча-
участков). После этого проводится анализ контуров на выяснение их при-
принадлежности к плоскостям или
выпуклым поверхностям (блок 2).
Анализ проводится по условию
компланарности векторов г1( г2 и
г8 (рис. 5.14, а), проведенных из
любой точки контура до середины
его сторон:
,)=0. E.16)
.7 гг ' 2 Ха
Рис. 5.14. Определение типа контура
Если в контуре более четырех сторон, то необходимо условие
E.16) проверить по всем возможным тройкам векторов.
В координатной форме условие компланарности векторов примет
вид определителя:
Д*1 AYt AZ±
Х2 ДКа AZ% =0,
АХ3 AY, AZ3
где AXt, AYt, AZt — приращения координат вектора г{ относитель-
относительно общей точки А (рис. 5.14, а).
После раскрытия определителя получим уравнение
Д*! (ДКа AZa—AY3 Д22) + AYt (AZt ДХ3-ДХ, Д23) +
-\-AZi(AXiAY3—AX3Yi) = Q. E.17)
При проверке условия E.17) необходимо убедиться, что выбранные
векторы г{ не принадлежат попарно одной стороне фигуры (проверка на
неколлинеарность векторов проводится по условию гг X гг+1 Ф 0).
Если равенство E.17) выполняется, то анализируемый контур пло-
плоский, в противном случае — выпуклый.
Этап 3. На этом этапе проводится распознавание плоского кон-
контура (блок 3). Если анализируемый контур — окружность, то даль-
дальнейший анализ его прекращается, если же — многоугольник, то пере-
переходят к этапу 4.
Этап 4. Здесь происходит синтез многоугольников и формиро-
формирование пространственной детали (блок 4).
Этап 5. На этом этапе проводится пространственная нормали-
нормализация выпуклых контуров или отдельных деталей объектов, сформи-
сформированных на этапе 4 (блок 5).
196
Для выпуклого контура в качестве плоскости нормализации удоб-
яее выбрать такую, которая проходит через концы криволинейной ча-
чаги контура.
Одна из осей системы координат в плоскости нормализации прово-
ятся через крайние точки криволинейного участка (рис. 5.14, б).
^Третьей точкой, необходимой для последующих пространственных пре-
|образований, возьмем точку на середине криволинейного участка.
Нормализация предусматривает такую ориентацию детали в про-
пространстве, чтобы плоскость проектирования X0OY0 совпала с плос-
плоскостью, в которой лежат три выбранные точки (рис. 5.14, б).
Для выбора системы координат OX0Y^ZQ поместим ее начало
|\в точку /, а ось Хо направим через точки / и 2. Направления осей
|<Ж0 и OZO в этом случае выбираются однозначно.
Тогда составляющие вектора г2 в выбранной системе координат
определятся как
E.18)
где (Х1г Yv Zj) и (Х2, Y2, Z2) — координаты точек / и 2.
Направляющие косинусы для вектора г2 с осями исходной системы
координат будут равны
ДХ$ ДКа AZ2
fll2= ,: , . «22= ,_ , . «8!!="
где |г2| = VAXI + AY2 + AZ\ — длина вектора г2.
Поскольку ось 0Хо совпадает с направлением вектора г2, сразу
получаем направляющие косинусы между осями исходной и новой си-
систем координат а± = а12, а2 = а22, а„ = а82.
Проверка правильности полученных значений аъ а2, а3 проводит-
проводится по условию
Примечание. Из-за того, что решение задачи ведется с не абсолютной
точностью и зависит от погрешности измерений координат точек, условие E.19)
Выполняется приближенно.
Для нахождения направления оси 0Zo решается векторное произ-
произведение rZo = гх х г2, или
АХ7 ДК,
AZ%
AZ3
= 0.
Отсюда
XZg =AYt AZt—AY,
AYZi> = ДХ3 AZa—ДХ
Zi>
AZ7
3
ДХ,ДК3—
197
Теперь можно найти направляющие косинусы между осями исход-
исходной и новой систем координат:
ДХГ &У7 bz,
где |г*о| = УДХ1. + АУ1. + AZ1..
Как и раньше, проверка правильности определения направляющих
косинусов ведется по условию с\ + с\ + с\ = 1.
Для нахождения направления оси 0Yo решается векторное произ-
произведение Гуо = rZ(t X г2,
или
AZV
о о 'о
ДХ, ^Y7 AZ7
ДХ» ДУ„ AZ,
= 0.
Отсюда
y =ДХ,
0 0
2—ДХ
2 ДУ,
О
Как и в предыдущих случаях, определим направляющие косинусы:
ДХу' Ду\, Azv.
«"У
I«V
I "о I
где |Гу,| = УдХу, + ДУу, + Д2у..
Проверка правильности решения сводится к удовлетворению ра-
равенства Ъ\ + Ъ\ + *з = 1.
Окончательная проверка правильности вычислений направляющих
косинусов для систем координат SXYZ и XQY^,U проводится по условию
«1*1 ~\~ «2*2 ~\~ «3*3 = О) *1<а ~\~ *2^2 Ч~ *8С3 == О',
= 0.
После нахождения направляющих косинусов ait bit ct можно про-
проводить нормализацию деталей объекта (пересчет координат точек из
исходной системы координат SXYZ в новую X0Y0Z0) по уравнениям
(Х„)г = at ^Xi + а2 &Уг 4-«3 Д2г;
(Yв)i=ьi^xi+ь2AYi+ь3^zi¦,
где ДХг, AYit AZt — составляющие вектора гг, определяемые по
уравнениям E.18); i — 1, 2 п — текущая точка контура нормали-
нормализуемой детали.
Этап 6. На этом этапе проводится нахождение двух проекций
детали на плоскости: X0Z0 и X0Y0 (блок 6).
Первая проекция получается, если в трехмерном описании детали
принять (YQ)t = Q (i = 1, 2, ..., n).
Вторая проекция находится, если принять (Z0)t = 0.
198
Этап 7. Дальнейшая обработка полученных проекций нормали-
нормализованной детали ведется по общему алгоритму распознавания детали
(блок 7).
Этап 8. Проводится определение геометрических характеристик
| детали (блок 5).
§ 5.6. ФОРМИРОВАНИЕ ПРОСТРАНСТВЕННЫХ ОПИСАНИЙ ОБЪЕКТОВ
В УСЛОВИЯХ ПОМЕХ НАЛОЖЕНИЯ
При отображении пространственных объектов на плоскость появ-
появляются помехи, вызванные наложением одних деталей объекта на
другие. Эти помехи существенно затрудняют распознавание объектов,
поскольку в пространстве описа-
описаний деталей трехмерных тел нару-
нарушается непрерывность контуров,
составляющих эти детали. На
рис. 5.15 приведены примеры по-
помех наложения одних деталей объ-
объекта на другие.
Использование трехмерных опи-
описаний позволяет исключить неко-
некоторые виды помех наложения.
На рис. 5.16 приведены основ-
основные этапы алгоритма синтеза от-
отдельных частей контуров, «разор-
«разорванных» наложенными на них де-
деталями объекта.
Этап 1. На этом этапе вна-
вначале каждый контур на каждом
шаге его обхода проверяется на
замкнутость по условию Д/t2 =
= АХ! + AYf + AZ? < Аг (где
AXU AYи AZi — приращения со-
соответствующих координат (напри-
(например, AXt = Xi+i — Xt) для смеж-
смежных точек контура на t-м шаге об-
обхода; Дх — порог, зависящий от точности и равномерности съема
координат точек контура). Выполнение этого условия для всего кон-
контура свидетельствует о том, что контур не имеет разрывов и синтез
его не требуется проводить.
Этап 2. На данном этапе осуществляется определение величины
разрыва и числа точек перегиба в контуре. Если обнаружен разрыв
(невыполнение условия Д/г2 <! А{), то для нахождения недостающей
части контура проводится анализ точек контуров по яркости и близо-
близости в местах разрыва. После этого выясняются величина разрыва и
число однородных участков контура (количество точек перегиба).
Если величина разрыва Д/ не превышает некоторого порога Д2,
то разорванный участок соединяется прямой и дальше переходят к
нормализации. Наличие в разорванном контуре менее четырех точек
199
1
Рис. 5.15. Примеры помех наложения:
/ — деталь-помеха; 2 — искаженная де-
деталь
Проверка
контура
на замкну-
замкнутость
Определение
разрывов
и точек
перегиба
Синтез
разорван-
разорванных
контурод
Замкну-
Замкнутые ¦
Контур*
Разомкнутые
контура
Рис. 5.16. Этапы синтеза контуров
перегиба свидетельствует о
том, что деталь-помеха либо
полностью пересекла интере-
интересующий нас контур, либо его
частично закрыла.
Этап 3. Здесь произво-
производится синтез разорванных
контуров. Если оказывается
А/ <; А2, то контур восста-
восстанавливается соединением
(сшиванием) разорванных участков прямой линией. Если же А/ > А2,
то контур не восстанавливается, т. е. помеха не устраняется.
Описанный способ восстановления связности контуров, очевидно,
можно использовать тогда, когда восстановленные участки разорван-
разорванных контуров в виде отрезков прямых линий не искажают существен-
существенно характера синтезированного контура.
§ 5.7. АНАЛИЗ ТОЧНОСТИ ПОЛУЧЕНИЯ
ПРОСТРАНСТВЕННЫХ ОПИСАНИЙ ОБЪЕКТОВ
Точность определения пространственных координат объектов по
стереопарным снимкам зависит в основном от точности измерения эле-
элементов внешнего и внутреннего ориентирования, а также координат
плоских изображений.
Проанализируем возникающие погрешности при определении про-
пространственных координат.
Влияние ошибок измерения координат на плоских снимках.
Нормальный случай съемки. Пространственные ко-
координаты в этом случае определяются по выражениям X = Вх/р, Y =
= Bf/p,- Z = Bzlp, где В — базис съемки; р — горизонтальный па-
параллакс. Среднеквадратичные ошибки вычисления этих координат:
m\ =
«Ч\
dY \»
дВ
mt
dY \»
dp
E.20)
где mx, mz, mp, тв — среднеквадратичные ошибки в определении
соответствующих параметров.
Оценим некоторые величины, входящие в уравнения E.20):
^L=jL=_?_f. iL=__B-_L = __LF.
дВ р Bf ' dp /?2 Bf '
dX x x dZ г г
— — В = — У: =— = Y:
dp /?2 Bp dB p Bf
E.21)
200
dx p f ' dp
дВ ~ р ~ В ' дг
BP
После подстановки значений величин из E.21) в E.20) получим:
тв
E.22)
Из уравнений E.22) следует, что на точность измерения простран-
|'ственных координат влияют ошибки соответствующих параметров
[пропорционально расстоянию Y до объекта или квадрату этой вели-
гчины.
Существует приближенная зависимость между величинами тх,
• и ту:
х г~
тх=
mz
f
Отсюда следует, что при большом фокусном расстоянии / фотоопти-
фотооптической системы и малых значениях координат х и z среднеквадратич-
среднеквадратичные ошибки тх и mz будут значительно меньше, чем среднеквадра-
среднеквадратичная ошибка ту.
Поэтому наибольшую трудность представляет определение с необ-
необходимой точностью координаты Y.
В этой связи по второму уравнению системы E.22) можно постро-
построчить графики Y = F (В), при ту = const (рис. 5.17). По этим графи-
^, выбрав величину базиса В съемки, можно определить расстоя-
расстояние съемки при соответствующей точности его вычисления. И, наоборот,
задавшись расстоянием съемки и точностью его определения, можно
f выбрать необходимый базис В.
Влияние ошибок измерения элементов ориентирования. Ошибка
^измерения фокусного расстояния системы вызывает систематическую
'; погрешность в определении пространственных координат, так как
> х = / tg Я, z = / tg p/cos Я (Я и р — горизонтальный и вертикальный
> углы, определяющие направление от точки фотографирования на точ-
объекта).
Изменение фокусного расстояния на А/ приводит к погрешности
I1 измерения координат снимков Ахг = A/tg A, = (xlf) A/, Azx = A/
. tg p/cos Я = (zlf) А/ и горизонтального параллакса Арх = А# —
l— А*' = {plf) А/, где Ад; и Ах' — изменение координаты х для ле-
|вого и правого снимков стереопары.
Полученные ранее соотношения для определения пространствен-
?Ных координат соответствовали условию совмещения главной точки
мимка с началом координат (х0 — z0 = 0). В реальных условиях
0 0
Ф 0 и 20
0.
0
Допустим, что 20 Ф 0, а х0 = 0. Тогда координаты точек снимков
значение горизонтального параллакса будут отличаться от соот-
'' ветствующих значений при отсутствии погрешности на величины
201
Ax2 = 0, Az2 = 20, Ар2 = 0. Если 20 = 0, а х0 Ф 0, to появятся по-
погрешности (см. [80]) тех же величин соответственно на
х0, Аг» = -(хг/р)х0, АРз=Ьх3-Ах^[(х*-(х')ЧР] х0.
Учитывая суммарное влияние перечисленных факторов, получим:
х0;
Дг4 =
13 5 7
2000-'3000'1№0~'5000't
500СГ1
woo4
8000''
9000''
I0000'1
4000
800
?00
W
ZOO
1 3 5 7 9 В, И
Рис. 5.17. Графики зависимостей
Y=F(B) при mr=const:
a — f-1000 мм, ntp-0.01 mm; 6 — f-
-2000 мм. Шр-0.01 мм; в — f—5000 мм.
тр-0.01 мм
1
к
1
it
/л
/
/
/
А
%
1
/
/
/(
/
/
/
/
t
/
/
/
t
/
/
/
/
/
/
s
/
/
У
Эти погрешности оценивают
влияние элементов внутреннего
ориентирования на точность из-
измерения координат плоских изо-
изображений.
Чтобы определить влияние оши-
ошибок в элементах внешнего ориенти-
ориентирования, можно воспользоваться
полученными выражениями для
координат точек снимков в приве-
приведенной плоскости xt, х\, zu z't.
Для малых значений углов, счи-
считая, что а = Аа, © = А©, х = Ах,
после преобразований и учета чле-
членов только первого порядка мало-
малости можно получить xt = х + (/ + '
+ x2lf) a + (xzlf) со — zx; zt = г +
+ (xzlf) a + (/ + г2//) со + хх.
Элементы внутреннего ориен-
ориентирования могут замеряться с
очень высокой точностью; их вли-
влиянием в этом случае на определе-
определение пространственных координат
X, Y, Z можно пренебречь.
Погрешности в определении эле-
элементов внешнего ориентирования
могут внести заметные ошибки в
значения пространственных коор-
координат, поэтому их следует учиты-
учитывать. Поскольку наибольшие ошиб-
ошибки при вычислении пространствен-
пространственных координат связаны с точно-
точностью определения координаты Y,
следует обращать особое внимание
на точность ее измерения.
Заключение
Вероятность правильного распознавания пространственных объектов по
их плоским изображениям в значительной степени зависит от сохранения подо-
подобия контуров, составляющих изображение объекта, оригиналу. Между тем пер-
перспективные искажения, возникающие при центральном проецировании, могут
приводить к существенным деформациям контуров изображений объектов на
снимках.
Использование фотограмметрических преобразований объектов на этапе
предварительной обработки снимков может существенно повысить вероятность
распознавания объектов в целом и их отдельных деталей (целевых признаков).
Использование стереофотограмметрических принципов для получения про-
пространственных описаний трехмерных объектов, их пространственная нормализа-
нормализация—дополнительный резерв повышения вероятностей распознавания. На точ-
точность получения пространственных координат объектов основное влияние будет
оказывать точность вычисления элементов внешнего ориентирования, элементы
же внутреннего ориентирования могут измеряться с очень высокой точностью,
поэтому влиянием их погрешностей при определении пространственных коорди-
координат объектов можно пренебречь.
Наибольшие ошибки при нахождении пространственных координат объек-
объектов связаны с вычислением координаты Y, характеризующей расстояние от ме-
места съемки 'до объектива.
202
ГЛАВА 6
ОБРАБОТКА АЭРОКОСМИЧЕСКИХ ИЗОБРАЖЕНИЙ НА ЭВМ
§ 6.1. ОСОБЕННОСТИ ЦИФРОВОЙ ОБРАБОТКИ
АЭРОКОСМИЧЕСКИХ ИЗОБРАЖЕНИЙ
Аэрокосмические изображения (АКИ) поверхности Земли или дру-
других планет Солнечной системы относятся к сложнейшим изображени-
изображениям, с которыми сталкивается человек, по условиям их наблюдения,
параметрам регистрации, номенклатуре и сложности задач, связан-
связанных с их обработкой в различных отраслях народного хозяйства.
При более или менее полной обработке АКИ, как правило, возникает
необходимость и в обработке точечных и крупномасштабных изображе-
изображений, сопутствующих им или выделяемых на их основе.
Для исследования ресурсов Земли (ИРЗ) применяют специально
оборудованные самолеты, спутники, космические корабли ч орбиталь-
орбитальные станции. Средства получения, регистрации и передачи изображе-
изображений также отличаются большим разнообразием (изображения полу-
получают с помощью фото- и телевизионной аппаратуры, оптико-механиче-
оптико-механических сканеров, радиолокаторов бокового обзора, регистрируют на
фотопленке, фотобумаге, магнитной ленте, передают по цифровым,
телеметрическим или аналоговым каналам связи; при этом может ис-
использоваться практически весь диапазон электромагнитного излуче-
излучения). Следует указать и на значительные высоты и скорости полета
космических аппаратов, изменение элементов взаимного ориентирова-
ориентирования средств и предметов съемки в широких пределах, большие объемы
и скорости передачи видеоинформации, высокие требования к точно-
точности и оперативности ее обработки. Например, объем данных, отвечаю-
отвечающий одному монохроматическому аэрокосмическому снимку (АКС),
может достигать 135 Мбайт, скорость передачи видеоинформации по
телеметрическому каналу — 3 Мбайт/с, геометрическая точность обра-
обработки — 0,2 мм и выше, время обработки изображения — 10—15 мин.
Задачи обработки АКИ сложны и многообразны. Некоторые из
них связаны с улучшением визуального качества изображений, когда
изменяется лишь полутоновое содержание последних (задачи фильтра-
фильтрации помех, нелинейного преобразования яркостной шкалы, подчерки-
подчеркивания контуров, компенсации смазов, нанесения служебной информа-
информации и т. п.). Другие относятся к геометрическим преобразованиям
АКИ, в ходе которых меняется только координатное описание изобра-
изображений (задачи компенсации погрешностей, вызываемых кривизной
. Земли, атмосферной рефракцией, оптической дисторсией, деформацией
магнитной или фотопленки и т. п., а также задачи трансформирования
изображений, т. е. преобразование АКИ из наклонных в горизонталь-
горизонтальные или получения их картографических проекций). Все это задачи
предварительной обработки АКИ, хотя многие из них могут иметь и
204
большое самостоятельное значение. Окончательная же обработка изо-
изображений в полном объеме с целью извлечения нужной информации
пока что с трудом поддается автоматизации и выполняется, как правило,
с участием человека. Такая обработка предполагает в картографии вы-
выполнение стереоизмерений по перекрывающимся снимкам, сравнение
фотоизображений одной и той же местности, относящихся к различ-
различным периодам времени, с целью обновления карт, детальное распозна-
распознавание объектов искусственного и естественного происхождения, полу-
полученных на снимках (топографическое дешифрирование), и т. д.; в гео-
геоботанике и почвоведении — опознавание состава, фенологического
развития и состояния растительности, оценку состава и влажности
почв, определение структуры землепользования (тематическое дешифри-
дешифрирование) и т. п.; в гидрологии — картографирование речной и озерной
сети, а также снежного и ледового покрова, выявление характера тече-
течения и русловой деятельности рек в период между съемками, термаль-
термальную, минералогическую и промысловую характеристику вод, изуче-
изучение состава рек и озер во время половодий, обнаружение лавинной
или селевой опасности, тайфунов и т. п.
Для решения многих задач топографического и тематического де-
дешифрирования необходимо использование спектрометрических мето-
методов дистанционного зондирования Земли.
Примечание. К настоящему времени между уровнем развития ме-
методов и средств дистанционного зондирования и уровнем развития методов и
средств обработки получаемой при этом информации имеет место очень большой
разрыв. Причем общепризнано, что единственным классом систем обработки,
способным ответить на запросы сегодняшнего и завтрашнего дия, являются
цифровые вычислительные системы.
Одна из основных задач цифровой обработки АКИ связана с раз-
разработкой математических моделей их геометрических преобразований
цифровыми средствами. Важность ее заключается в том, что к геоме-
геометрическим преобразованиям изображений сводятся многие самостоя-
самостоятельные и практически значимые задачи обработки АКИ. Следует
также иметь в виду, что для ряда перспективных средств получения
и регистрации АКИ (конических оптико-механических сканеров, ра-
радиолокаторов бокового обзора и др.) такие модели пока что либо не
найдены вообще, либо известны в форме, мало пригодной для цифровой
обработки, базирующейся на использовании обратных соотношений.
Отсутствие же математического описания процессов переработки ин-
информации существенно затрудняет не только конкретное, но и общее
обоснование структур систем обработки и организации в них вычисли-
вычислительных процессов.
Большое значение имеют и задачи ускорения геометрических пре-
преобразований в системе «центральный процессор—оперативная память»,
а также рациональной организации обмена информацией между внеш-
внешней и оперативной памятью в системах цифровой обработки изобра-
изображений (СЦОИ). Действительно, при использовании традиционных ме-
методов и средств ввода—вывода изображений помимо больших объемов
исходных данных имеют место и крайне неудобные для обработки фор-
форматы размещения последних во внешних запоминающих устройствах.
205
В результате выполнение на базе ЭВМ средней производительности
даже такого простейшего преобразования фото-, сканерного или радио-
радиолокационного изображения, как его трансформирование, требует за-
затрат нескольких часов машинного времени. Такая организация долж-
должна быть не только на уровне операционной системы ЭВМ, но и на алго-
алгоритмическом уровне с учетом принципов построения и функциониро-
функционирования современных ЭВМ.
Что касается проблематики дешифрирования АКИ на базе ЭВМ,
то она имеет ограниченный интерес, если для этого используются лишь
монохроматические изображения. Учитывая, однако, ее исключитель-
исключительную важность для отдельных задач окончательной обработки изображе-
изображений, представляется целесообразным рассмотреть методику тематиче-
тематического дешифрирования монохроматических АКИ на базе СЦОИ.
§ 6.2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ГЕОМЕТРИЧЕСКИХ
ПРЕОБРАЗОВАНИЙ ИЗОБРАЖЕНИЙ
Основные факторы, влияющие на вид модели. Конкретный вид
математической модели геометрического преобразования АКИ опреде-
определяется многими факторами. Один из них связан со спецификой цифро-
цифровых средств обработки и заключается в следующем.
Положим, что исходное и преобразованное изображения размеща-
размещаются в памяти системы в виде построчно развернутых массивов плот-
плотности их элементов, причем размерности упомянутых массивов (раз-
(размеры изображений в элементах) составляют Л^ х N[ и N2 X N'2
соответственно. Свяжем с краями этих изображений целочисленные
машинные системы координат о1х1у1 и o2x2j/2 так> чтобы значения xv
и х2 совпадали с номерами отвечающих им столбцов матриц, а у1пу2 —
строк матриц. При геометрическом преобразовании изображения из-
изменяется лишь его координатное описание, а полутоновое содержимое
остается неизменным. Такое преобразование часто задается соотноше-
соотношениями
Xi = Ent lfx (Xl, yj + 0,5], у, = Ent [fy (Xl, Vl) + 0,5] F.1)
(квадратные скобки означают выделение целой части) и сводится к
пересылке в памяти СЦОИ кода оптической плотности элемента {хъ
Уг) из соответствующей ему ячейки в ячейку, соответствующую эле-
элементу (х2, у2). Однако такой вид законов преобразования неудобен для
обработки. Действительно, в ходе преобразования анализируемое изо-
изображение испытывает в общем случае разномасштабные растяжения или
сжатия вдоль различных направлений. При этом на синтезируемом
изображении образуются пустоты или наложения, поскольку соот-
соотношения F.1) реализуются для всех элементов (xlt уг) и не реализуются
для элементов (х2, у2). Устранение отмеченного недостатка фильтра-
фильтрацией выходного изображения связано с очень большими затратами вре-
времени. Поэтому более целесообразно применение метода обратного
преобразования, свободного от этого недостатка и реализуемого по
формулам
«!= Ent [/;!(*•.»!)+0.5], «/1 = Ent[/-i(xa, у2)] + 0,5]. F.2)
206
Однако такие формулы имеются далеко не для всех перспективных
средств получения и регистрации АКИ (см. § 6.1).
Важными факторами, от которых также зависит математическая
модель преобразования, являются способ получения изображения и
отвечающий ему закон связи координат точек местности и снимка.
В настоящее время в качестве основных способов можно выделить спо-
способы кадровый и сканирования. Характерная особенность первого
способа заключается в том, что все элементы изображения формируют-
формируются одновременно за короткое время экспозиции. Математическая тео-
теория этого способа на сегодня достигла высокого уровня развития как
для аэросъемки, так и для космической съемки. В процессе же скани-
сканирования изображение формируется поэлементно в течение сравнитель-
сравнительно длительного времени и имеет значительно более сложную геоме-
геометрическую структуру. Теория этого способа еще не разработана в не-
необходимой степени.
Математическая модель преобразования существенно зависит так-
также и от вида проекции, в которой представляется обработанный сни-
снимок. При выборе такой проекции учитываются масштаб изображения,
область его использования, требования к искажениям геометриче-
геометрических элементов и др. Для крупномасштабных изображений, применяе-
применяемых в топографии, обычно выбирается ортогональная проекция или
проекции, близкие к ней на небольших участках (например, проекция
Гаусса—Крюгера). Теория этих проекций хорошо разработана, для
них существуют оценки искажений геометрических элементов, форму-
формулы связи координат точек проекции с географическими координатами
соответствующих точек местности.
Для мелкомасштабных снимков, применяемых в геологии, метео-
метеорологии, при изучении земных ресурсов, используются цилиндриче-
цилиндрические, конические, произвольные проекции и др. Их теория требует в
настоящее время модификации в соответствии с новыми и перспектив-
перспективными средствами регистрации видеоинформации. Так, упомянутые
проекции были разработаны в основном для составления карт по аэро-
аэроснимкам и, как будет показано ниже, имеют ряд недостатков при пред-
представлении в них изображений, получаемых сканирующими системами.
Таким образом, нахождение математической модели геометриче-
геометрического преобразования АКИ, пригодной для их цифровой обработки,
сводится к отысканию обратных законов связи координат X, Y, Z
точки местности в некоторой фотограмметрической системе координат
CSXYZ, связанной с Землей, с координатами х', у' соответствующей
точки в выбранной проекции:
Х=Х(х',у'), Y = Y(x',y'),Z=Z(x',y'), F.3)
а также обратных формул соответствия координат X, Y, Z и отвечаю-
отвечающих им координат х, у изображения:
х = х(Х, Y,Z), y=y(X, Y.Z). F.4)
При этом искомая математическая модель запишется после подста-
подстановки F.3) в F.4) в виде
*°-Rx(x',y'), (/=fy(*'.</')• F-5)
207
Если использовать ортогональную проекцию и надлежащим обра-
образом выбрать систему CaXYZ, то при известной модели местности
Z (X, Y) выражения F.5) упрощаются и математической моделью
преобразования уже могут служить формулы F.4).
Обратные законы преобразования кадровых АКИ. Математиче-
Математическая теория кадровых систем достигла высокого уровня развития.
Поэтому ниже для этого способа получения снимков будет лишь крат-
кратко описана специфика преобразования АКИ в одну из наиболее распро-
распространенных картографических проекций — прямую цилиндрическую,
а также приводятся сведения, необходимые для решения часто встре-
встречающейся задачи трансформирования изображений в ортопроекцию.
Формулы связи геодезических координат В, L точки земного шара
с соответствующими координатами х', у' цилиндрической проекции
Меркатора имеют вид
B = 2arctg(exp{x7#8>)— я/2, L = y'/Ra, F.6)
где R3 — радиус Земли.
Выразим геоцентрические координаты X', У, Z' той же точки че-
через ее геодезические координаты:
' X'=RgcosBcosL, Y' = RacosBsinL, Z'=RasihB. F.7)
Теперь нетрудно записать обратные формулы связи координат х,
у с геоцентрическими координатами:
V-Vc—t
' -Y'c)+ai3{Z'-Z'c)
F.8)
где хс, уе, f — элементы так называемого внутреннего ориентирова-
ния изображения; ап—ааз — направляющие косинусы системы коор-
координат cxyz относительно геоцентрической системы OX'Y'Z' (эти систе-
системы жестко связаны со сканером и Землей соответственно); Х'с, Y'c, Z'c
— геоцентрические координаты точки с — центра съемки (грубо го-
говоря, совпадает с центром масс носителя).
Если F.6) подставить в F.7)ь а полученные соотношения — в F.8),
то определим искомые обратные законы преобразования изображе-
изображений, получаемых кадровыми системами.
Уравнениями трансформирования снимка в ортогональную проек-
проекцию могут служить зависимости F.8), если заменить в них геоцентри-
геоцентрические координаты на координаты системы CaXYZ, расположенной
так, что ее плоскость CaXY параллельна плоскости проецирования.
П р и мечание. В аэрофотограмметрии трансформирование изображе-
изображений в ортогональную проекцию по F.8) называется исправлением за углы наклона
и выполняется оптико-механическими приборами.
Связь координат точки сканерного снимка с ее фотограмметри-
фотограмметрическими координатами. Составной частью математической модели циф-
цифрового преобразования сканерного изображения являются формулы
F.4). Для их получения рассмотрим векторы R^). Rr и гг (О»
Определяющие для некоторого вре-
яени t соответственно положение но-
*теля в системе координат C3XYZ,
санируемой точки Т (X, Y, Z) в той
ке системе и сканирующего луча в
системе cxyz (рис. 6.1). Нетрудно ви-
еть, что
@ = Rr. F.9)
Координаты х, у точки сканерного
Изображения, отвечающей точке Т(Х,
Щ?, Z), однозначно определяются мо-
яентом времени t сканирования по-
поздней и для наиболее распростра-
распространенного на практике случа'я равно-
равномерной регистрации изображения за-
записываются в виде
x=kxt(modTCK), y=kyt, F.10)
Рис. 6.1. Геометрическая иллюст-
иллюстрации формулы F.9)
гДе Тск — период сканирования; kx, ky — некоторые постоянные.
Другими словами, нахождение одной из формул F.10) сводится
к решению векторного уравнения F.9) относительно времени. Связан-
р ный с этим подход может заключаться в следующем.
|; Запишем уравнение F.9) в матричной форме:
X
У
z
W
W
@
=
«2!
«31
@
@
@
«{*
«22
«32
@
W
@
«13
«2 3
«33
«
@
@
•
х-хс
Y-Yc
Z—Zc
@
@
@
F.11)
где а'ц — элементы матрицы вращения системы cxyz по отношению
к системе CaXYZ (i, j — 1, 2, 3).
Такая матрица полностью определяется используемыми в фото-
фотограмметрии углами а, ю, х, которые вместе с величинами Хс, Yc, Zc
(Называются элементами внешнего ориентирования изображения и в
рассматриваемом случае являются функциями времени и определяют-
• ся в процессе сканирования с помощью навигационной аппаратуры или
вычисляются по результатам измерения на снимке координат несколь-
нескольких опорных точек. Что же касается сканирующего луча, то он в дви-
^экущейся системе координат сканера описывает некоторую поверх-
поверхность, общее уравнение которой
F[x(t), y(t), z(t)]=O. F.12)
Тогда время t, необходимое для вычисления координаты у с точ-
cTbio до Тск/2 (V2 элемента изображений), можно определить как
L момент времени пересечения этой поверхностью точки Т (X, Y, Z).
||'Для этого надо решить относительно t уравнение F.12) после подста-
подстановки в него формул F.11). В общем случае эта задача не имеет анали-
аналитического решения и необходимо использовать те или иные численные
рметоды. Однако для широко распространенных сканеров с плоской
или конической сканирующей поверхностью в несложных, но важных
209
в практическом отношении законов движения носителя аналитическое
решение удается получить.
Пусть система координат cxyz плоского сканера выбрана так, что
ее начало лежит в плоскости сканирования, а ось сх перпендикулярна
этой плоскости. Тогда F.12) имеет вид х (t) = 0.
Положим также, что закон движения носителя определяется выра-
выражениями
+ &
где at, bit cir ei( ft, gt — некоторые постоянные (i = 0, 1, 2).
Если теперь выполнить описанные выше подстановки, то после
соответствующих преобразований получим следующее уравнение:
2 4 /
2 (ekX+fkY+gbQ + ^l 2 at4+ 2 *ifl+
ft=0 r= 0 \t, j; « + /=r i.lit+l—r
+ 2
i. /; i+i=
Это уравнение может быть разрешено относительно времени t в ра-
радикалах методом Декарта—Эйлера или методом Феррари. В важном
на практике частном случае, когда отличен от нуля только попереч-
поперечный угол наклона сканера (е0 = 1, а е; == ft — gt = 0), оно упрощает-
упрощается и искомое время может быть найдено по формуле
*t.t=(-«i ± Val~4a2(X + a0))/Ba2). F.14)
Для сканера с конической разверткой начало системы координат
cxyz следует совместить с вершиной конуса, а ось cz — с высотой по-
последнего. Тогда F.12) принимает вид х2 (t) + у2 (t) + tg2 yz2 (t) = 0
By — угол при вершине конуса).
Если вновь условиться, что закон движения носителя соответст-
соответствует формулам F.13) при ац — const, то время сканирования найдется
из уравнения /4/* -]- I^t3 + I2f + Ixt + /0 = 0, где /0 — /4 — кон-
константы, зависящие от ak, bh, ch, а/],у, X,Y,Z(k = 0,\, 2; i,j = 1,2,3).
В важном частном случае, когда сканер движется со скоростью Vc
параллельно плоскости C3XY вдоль оси С3Х и отличен от нуля только
поперечный угол наклона, т. е.
а=х=0, олфО, Xe = Vct+X0, ^=^0. ZC=ZO F.15)
(¦^о> Уо> %о — постоянные), искомое решенче запишется в виде
<i.2=U-X0 ± Vh (Y-К0)г+Л (Y-Yo) (Z-Zo) +V, (Z-Zo)* )/VCt F.16)
где Ji = sin2 со tg2 7 — cos2 со, J2 = sin 2©/cos2 y, Jz = cos2 со tg2 7 —
— sin2 со (знак «+» в последней формуле означает сканирование точ-
точки Т (X, Y, Z) задним полуконусом, а знак «—» — передним). Этой
формулой можно пользоваться для задания нулевого приближения
итерационного процесса при более сложных законах движения носи-
носителя.
210
Для определения координаты х сканерного снимка опишем прежде
,' всего движение сканирующего вектора Tr(t) в зависимости от этой коор-
; динаты. В связи с этим проведем перпендикулярно оси cz на расстоя-
; нии — /от начала системы координат cxyz некоторую плоскость и рас-
рассмотрим радиус-вектор rt(t) точки L пересечения вектора гг@ с упо-
^мянутой плоскостью (рис. 6.1). Параметрические уравнения движения
вектора rt@ в системе координат cxyz запишем в виде
xL=r(x), yL = s(x), zL=-f, F.17)
где xL, yL, zL — координаты вектора Vl (t) в системе координат cxyz;
г, s — некоторые функции.
Так как rr(t) = kjdf) (kc—некоторый скаляр), то F.11) с
учетом F.17) перепишется следующим образом:
откуда
или
г(х)
s(x)
е
x=r-4-f
all @
aii @
«81 @
«12 @
а'гг @
«3* @
а[г @
«2 3 @
«33 @
x-xe(t)
Y-Yc(t)
Z-Zc(t)
(Z-Zc)
, (Z-Zc)
x=s-i[-f
-Хс) + агг (Y-Yc)+a23 (Z-
F.18)
F.19)
' >
где r~\ s — функции, обратные функциям г (х), s (x).
Для нахождения координаты х можно использовать соотношения
F.19) или F.20).
Конкретный вид функций F.17) полностью определяется конструк-
конструктивными особенностями сканера. Например, для плоского сканера с
равномерным вращением луча при перпендикулярности оси сх плоскос-
плоскости вращения, симметричности вращения относительно оси cz и
/ = 1 имеет место г (х) = 0, s (х) = tg @* — q>0) @ = 2(f0IN1 —
угловая скорость сканирования; q>0 — начальная фаза; Nt — число
элементов в строке). Эти формулы позволяют записать уравнение F.20)
в виде
а'гх (X-Xc)+a^(Y-Yc)+a'3S(Z - Zc) \
2'33{Z-ZC) }'
X т*г * -
При законе движения носителя, отвечающем выражениям F.15),
это уравнение упрощается:
cos со (Y—Y.) + sin со (Z~ZC)
f ' F.21)
sin со (К—KJ—cos со (Z—Zc)
Для сканера с конической разверткой
r(x)=cos(9x— <p0), s(x) = sin(9A;—фо), /=ctgv
и F.19) принимает вид
Ki(X-Xc)+aiAY-Yc) +
eJl (X-Xc)+a32 <Y-Yc)+a33
i, (z - Zc) \
3S(z-zc) /"
211
В рассмотренном выше частном случае движения носителя и с уче-
учетом F.16) последняя формула видоизменяется так:
2ф0
arccos ctg у
± VQi (Y-
(Z-Zb)«
tgco(K-Ko)-(Z-Zo)
, F.22)
где Q1= I — tg2v tg2©, Q2 = tg ©/cos y, Q3 = tg2 © — tg2 y.
Соотношения F.14), F.21), а также F.16), F.22) относятся к выра-
выражениям с разделяющимися переменными, для которых возможно при-
применение методов ускорения геометрических преобразований АКИ,
изложенных в § 6.3. Их можно использовать для преобразования ска-
нерного снимка в ортоскопчческую проекцию.
В сканирующих системах бокового обзора положение вектора
rr(t) определяется моментом времени прихода электромагнитной
(ультразвуковой) волны, отраженной от сканируемой точки. Если не
учитывать рефракционных эффектов, то это время пропорционально
наклонной дальности между сканером и точкой, что позволяет вычис-
вычислить значение координаты х изображения:
Хс)з + (К- Кс)' + (Z - Ze)« ,
где km—-постоянный коэффициент, зависящий от параметров реги-
регистрирующего устройства.
Прямые законы преобразования сканерных изображений. В отдель-
отдельных задачах обработки изображений (определение элементов ориенти-
ориентирования по опорным точкам, нанесение условной графической на-
нагрузки и др.) важно знать также формулы прямых законов связи ко-
координат местности и снимка. Для получения этих формул обратим
F18)
матричное уравнение
X—Xc(t)
Y-Yc(t)
Z-Zc(t)
F.18):
«11 W
«{2 (О
«21
«a» i
@ «
31 (t)
i* (t)
«{3@ «23 @ «33@
т{х)
s(x)
-f
отсюда
x=xc+(z-zc) «j^W+«2^W-«3i
Y=Yc+(/, — /,c) ———
F.23)
Задаваясь далее конкретным видом функций F.17), можно найти
требуемые выражения для любого типа однолучевых сканирующих си-
систем. Например, для сканера с конической разверткой при законе дви-
движения носителя, записанном в виде F.15), такие выражения имеют вид
Vct+X0-ZB
sin со sin (Qx— <p0) —cos и ctg у
cos со sin (Qx—ф0) -[- sin со ctg у
sin со sin (Qx—<p0) —cos со ctg у
Для расчета параметров фотодокумента, оценки ошибок, связанных
с неточностью определения элементов ориентирования, и т. п. надо
знать дифференциальные формулы, позволяющие вычислить измене-
изменения координат X, Y, Z в зависимости от малых изменений переменных.
В рассматриваемом случае такие формулы находятся как полные диф-
ференциалы функций F.23). Для сканера с конической разверткой упо-
мянутые дифференциалы имеют такой вид:
dX
dY
Al "J „ VJ 1.
= —t; • -.„ —u> aw '»
R 1 dX
-a[x sin (9*-ф0) —Г [«23 cos (вх-Фп) - a{3 sin (Qx - фо)] , — =
_e,t A.\ cos (ех_фо) -(а{х-а'хз -j^j sin (9* - <p0)
Аналогично записываются дифференциальные формулы и для ска-
сканеров другого типа.
Гпреобразсвание сканерного изображения в картографическую про-
проекцию. Вопросы преобразования сканерного изображения в картогра-
картографическую проекцию рассмотрим применительно к крупномасштабной
212
213
съемке в условиях орбитального полета носителя. В этом случае при
продолжительных сеансах сканирования наиболее целесообразно ис-
использование косой эквивалентной цилиндрической времязависимой
проекции (КЭЦВП), для которой цилиндр проецирования охватывает
Землю, перпендикулярен плоскости орбиты носителя и связан с не-
неподвижной в пространстве системой координат, а отображение земной
поверхности перпендикулярными оси цилиндра лучами на боковую по-
поверхность последнего происходит последовательно во времени в соот-
соответствии с моментами анализа то-
точек Земли лучом сканирования.
1 Для нахождения формул пре-
преобразования АКИ в КЭЦВП вве-
введем систему координат C4X4Y4Z4,
начало которой совпадает с точкой
пересечения радиус-вектором носи-
носителя цилиндрической поверхности,
а ось СцХц касается последней,
лежит в плоскости орбиты носи-
носителя и направлена по ходу его дви-
движения (предполагается, что ци-
цилиндр охватывается орбитой; ра-
радиус-вектор мыслится в геоцентри-
геоцентрической системе) (рис. 6.2). Коорди-
Координаты носителя в этой системе
•^ ЦС = "> * ЦС == "» ^цС = Rc Ац|
Рис. 6.2. Образование КЭЦВП где Rc — расстояние носителя от
центра Земли, i?4 —радиус ци-
цилиндра. Координаты же произвольной точки Земли в цилиндри-
цилиндрической системе координат о'х'у' можно найти по формулам
У'=Уц.
F.24)
где Хц, Уц—координаты произвольной точки Земли в системе
C4XnF4Z4; т]с (t), т]н— истинные аномалии носителя и начального
меридиана N3NB1o' косой географической системы координат соот-
соответственно.
Как показывают расчеты, для сканерных изображений рассматри-
рассматриваемого класса погрешности вычисления х' по приведенной формуле на
порядок меньше типичных размеров сканирующей апертуры на мест-
местности и поэтому могут не учитываться. Сказанное позволяет записать
матричное уравнение F.18) в виде
г(х)
s(x)
-f
] азг о e;,"(o «;,;w
. [F.25)
где ац — коэффициенты матрицы, характеризующей положение си-
системы координат схуг относительно системы координат СпХцУnZn;
Zn — высота сканируемой местности в последней системе.
Другими словами, формулы F.25) могут быть положены в основу
преобразования сканерного АКИ в КЭЦВП..
Пусть орбита носителя — круговая, от нуля отличен только попе-
поперечный угол наклона w, а местность в районе сканирования аппрокси-
аппроксимируется сферой радиуса R3. Тогда
(<)=Псо t, Re=Rco, гц^-
F.26)
где 11 со, RCo — константы.
Полагая т]я = 0, получим для сканера с конической разверткой
формулы преобразования, аналогичные F.16), F.22):
',,2=4 (*' ± Уix
arccos X
2 ' 2Фо
± УЯ1 (y')'+Q« у' (УМ^пУ -Rco) + Q» {VRl -to'I -^cof'
у' tgco+^ro-
X ctgv
где Jo = 1/(^цт1«).
Подобным образом можно поступить и в более сложных случаях.
При записи прямых формул трансформирования АКИ в КЭЦВП по-
появляются трудности учета кривизны Земли и ее рельефа. Действи-
Действительно, из изложенного выше следует, что
a' r(x
.«(*)-"« f
У-Я* (П. ^3
F.27)
где z (х', у') = Z4 (Хц, Уц), т, е. искомые координаты х\ у' находятся
как в правых, так и в левых частях уравнений; их определение связа-
связано, как это следует из F.27), с решением при заданных tux системы
двух уравнений вида х' = шх + w2Px (x't у'), у' = ws+ wtPy (x', у'),
где хю1 — ш>4 — некоторые постоянные, зависящие от t, x.
Если земная поверхность аппроксимируется сферой радиуса Ra
и функция z (х', у') имеет вид последнего из соотношений F.26), то ана-
аналитическим решением этой системы будет
W3 — b
У'~
В других, более сложных случаях необходимо использовать ме-
методы численного решения системы уравнений.
Связь картографических координат точки сканерного АКИ с ее
геодезическими координатами. Многие задачи обработки АКИ требуют
Ш установления связи между координатами точки в выбранной проек-
проекции и ее геодезическими координатами В, L. Это необходимо, напри-
например, для привязки изображения к местности, нанесения на него сетки
215
214
параллелей и меридианов, стыковки изображений и т. д. Рассмотрение
подобных вопросов применительно к сканерным изображениям име-
имеет свою специфику, зависящую, помимо всего прочего, и от типа ис-
используемой проекции. Поэтому упомянутые вопросы рассматриваются
далее лишь для случая КЭЦВП.
Координаты х', у' некоторой точки Т Земли могут быть выражены
через ее косые географические координаты ц>и Xt (широта и долгота
точки Т) в виде х' — R4Klt y''= Rt(B, L) sin q>! (RT (В, L) — ра-
радиус-вектор точки Т; плоскость OX[Y[ косой системы координат
OX[Y\Z{ (рис. 6.2) совпадает с плоскостью орбиты, а начальный мери-
меридиан N3N3lo' проходит через Nn — точку пересечения земной поверх-
поверхности с осью цилиндра). Эти формулы можно упростить, если аппрок-
аппроксимировать геоид шаром, радиус R3 которого равен радиусу земного
сфероида в районе сканирования, а также заменить Т точкой на шаре
так, чтобы их географические координаты совпадали. Тогда х' = ^ЦЯХ,
у' = R3 sin фх. Следовательно,
<h=»arcsln(jr'/
3 = V a\ cos*
sin"
F.28)
где b). — bjVl — /3 cos2 K; a3, ba, e3 — большая и малая полуоси,
а также эксцентриситет эллипсоида Красовского; %с — угол накло-
наклона орбиты носителя; |с — угловое расстояние перигея носителя от
линии узлов.
Используя методы сферической тригонометрии, найдем, что
<P!=arcsin (sin ф sin ф^ + cos <p cos <р^ cos (XN _ щ;
N
X1=arctgj
cos ф sin (XN — %)
cos yN sin ф—cos ф sin ф^ cos
где ф, Я; Флаз1. ^з1 — географические координаты точек Т и Nai пря-
прямой геоцентрической системы OX'Y'Z'.
Если учесть, что
Флги = я/2-Я,с , %N =Я,(В - я/2, х = SQ - ш3 /, Sfl =
= %Q-s0-(u3(THC-ta), ц^ +я/2,
TO
(sin ф cos Яс—cos ф sin %c sin (co3 /—Sfl + Я,),
cos ф cos (©3/—Sa + Я,)
sin ф sin Я,с +cos ф cos %c sin (ш3 t—Sa + Л)
где ©3 — угловая скорость вращения Земли; Ка — долгота восходя-
восходящего узла орбиты в прямой системе; s0— звездное время в некоторую
гринвичскую полночь; Тие — время начала сканирования; tt — время
наступления гринвичской полуночи.
Чтобы воспользоваться последними формулами, необходимо знать
время t, когда сканирующий луч пересечет точку с заданными геогра-
216
|фическими координатами ф, К,- С этой целью, последовательно приме-
it няя выражения
X'=W1cosfl cos?, y=W1cosBsinL, Z' =Wt sin В A+е|),
X
Y
Z
=w3
X'
У
Z'
|, найдем координаты X, Y, Z точки Т в орбитальной системе координат
JOXYZ (рис. 6.2) в зависимости от геодезических координат В, L этой
¦точки, параметров Земли и орбиты носителя, траектория которого в
системе координат OXYZ определяется соотношениями
Xc = <*c (I—ec cos E) cos т^ (<), Yc=ac (I—ec cos E) sin tic (t), Zc=0,
где
cos vc cos lc—sin vc sin ?ccosX,c sin vc cos ?c+cos vc sin ?c cos Xc
X
—cos vcsin
vc cos
cos
sin vc sin %c
—sin vc sing,.—cos vc
—cos vc sin Xc
sin |c sin Я,с
cos \c sin Я,с
cos %c
Здесь vc, |c, ac, ec — элементы орбиты, Е — эксцентрическая ано-
аномалия носителя на момент времени сканирования t.
Применяя теперь формулы преобразования F.11) к системе коорди-
координат cxyz, после их подстановки в F.12) сканирующей поверхности по-
получим нелинейное уравнение относительно t. Решив его одним из из-
известных численных методов, найдем искомое время сканирования.
Описанная методика точного определения времени сканирования
t довольно громоздка. Более простая методика заключается в следую-
следующем. Подставим F.23) с учетом F.24) в F.28), в результате получим
cos ф cos (шз t—Sa-\-%)
= 0;
arccos
sin ф + cos %с cos ф sin (ш3 t—SQ
-7"+»lc @ +(z (*', y')~Rc+k4) X
-arcsin (sin ф cos %c—
x «;, r (*)+«;, •(*)-«;„ f
—cos ф sin Xcsin (cog/—Sfl+X))=0.
F.29)
Общий корень этой системы — искомое точное время сканирова-
сканирования. Однако допустимая погрешность вычисления может значительно
217
превышать период сканирования Тск. Так, точка, лежащая на широте
Ф = 60°, за время, равное та 0,1 с, перемещается за счет вращения
Земли всего лишь на 20 м. Практически же используемые значения пе-
периода Тск на два порядка меньше упомянутого времени (Тск » 2,5 X
X 10~* с). Другими словами, периодический член
(г (*', у')-
s (*)-«
можно считать не зависящим от времени t (в частности, равным 0).
Если к тому же известны приближенные значения координат х', у'
(например, в результате определения координат другой, близко распо-
расположенной точки местности), то точность вычислений можно значитель-
значительно улучшить, подставив в первую из формул F.29) значение х, найден-
найденное с помощью F.22).
Приближенное вычисление времени сканирования t можно выпол-
выполнить следующим образом. Найдем вначале географические координа-
координаты подспутниковой точки: q> = arcsin (sin (?с + tic) sin Xc); X = Xa —
— s0— (o3 (t—tt + Тяс) + arctg(tg(!c + Tic)cosA,c). Решение этих урав-
уравнений относительно времени t дает соответственно моменты t^ и 4 про-
пролета носителя над точками Ф и Л пересечения заданных линий широты
и долготы с трассой полета. Тогда, если углы а и © равны 0, то время
сканирования можно оценить по моменту tt> пролета носителя над точ-
точкой А пересечения трассы последнего с трассой, ортогональной ей
и проходящей через заданную точку (В, L). Полагая прямоугольный
сферический треугольник ФЛА плоским прямоугольным, найдем
^6 = t<p — (*<р — h) cos2 Xc.
Полученные в настоящем параграфе математические модели позво-
позволяют решать разнообразные задачи геометрических преобразований
АКИ при изучении земной поверхности.
§ 6.3. МЕТОДЫ УСКОРЕНИЯ ГЕОМЕТРИЧЕСКИХ
ПРЕОБРАЗОВАНИИ ИЗОБРАЖЕНИИ
Важным моментом общей методики геометрического преобразова-
преобразования АКИ на базе СЦОИ является то, что выполнить последнее для всех
элементов (х2, у2) по сложным высокоточным формулам F.2) за прием-
приемлемое время нельзя. Например, при количестве элементов изображения
NtN[ = 135-10е, числе операций, затрачиваемых на обработку од-
одного элемента, равном 40, и производительности СЦОИ, составляющей
100 000 операций/с, для преобразования необходимо 15 ч машинного
времени, даже если предположить, что исходные данные и результаты
обработки размещаются в оперативной памяти. Метод сжатия инфор-
информации, основанный на выделении контуров, в данном случае неэффек-
неэффективен, поскольку речь идет о высокоинформативных многоградацион-
многоградационных изображениях. Не дает должного эффекта и аппроксимация пре-
прецизионного преобразования более простыми интерполяционными фор-
формулами. В связи с этим возникает необходимость в разработке таких
методов организации вычислительных процессов, которые обеспечи-
обеспечивают действительно эффективное ускорение геометрических преобра-
218
!зований АКИ в системе «центральный процессор—оперативная па-
память» и позволяют практически реализовать последние на базе совре-
современных ЭВМ общего назначения средней производительности. Ниже
I рассматриваются некоторые из этих методов.
Пусть анализируемое и синтезируемое изображения хранятся в
памяти СЦОИ с виртуальной организацией. Тогда адреса кодов плот-
плотности соответствующих элементов (xlt уг) и (х2, у2) запишутся в виде
N2,
F.30)
где Л10, Л20 — начальные адреса массивов упомянутых изображений.
Разобьем выходное изображение горизонтальными и вертикальны-
! ми линиями на участки (фрагменты) одинаковых размеров A2 X /2
элементов). Предположим, что на каждом из таких участков выраже-
выражения F.2) с достаточной точностью аппроксимируются уравнениями
(xw,
. ft) +0.5]. Ух-
0>51'
F.31)
где х2 = х20 + х2, у2 = у20 + у2; х20, у20 — координаты централь-
центрального элемента рассматриваемого фрагмента, различные для разных
участков; зависимости /j1 (x2, y2), /71 (#2. J/г) предполагаются одина-
одинаковыми для всех фрагментов и могут быть найдены по результатам раз-
разложения /71 (x2> y2), fj1 (x2, у2) в двумерные ряды Тейлора в окрест-
окрестности центральных элементов.
Перепишем соотношения F.31) следующим образом:
*i=[ /Г1 (**>. Ы]+ [{ f7l (**>. yia)\ +F71 fa, й)+ 0,5,, .
_ } F.32)
У1 = [ /Г1 (*ю. »«.)]+[{ /7' (*«>• Ую))+}^1 («i.
где {....} — дробные части.
Положим, что
u=0, u_, u_2... u_[l, Дц=0, 00... 0 «_
o=0, v_lv_a...v_VL;&v=0, 00...0о
uit vt<B {0, 1}, i = —1, -2,... , —(Ц+2)
Тогда, принимая Аи = Ay = 0 (связанные с этим ошибки иссле-
исследуются ниже) и подставляя F.32) в F.30), найдем:
Al=Ail («го. Уго) + Аи(х1, j/j, и, v); A2^A2i (xi0, уг0)+А1г (хг, Уг), F.33)
где Ли (_х20, у20) = Л10 + [/J1 (хао. «/2оI + Ni Ш1 (^ао. J/2o)l;_
^12(^2. У2, и, v) = [и + /J1 (х2, у2) + 0,5] + Nt tuj-ly1 (Xj, ~J2) +
+ 0,5]; Л21 (x20> У20) = ^20 + *го + N2y20, A22=lc2+ N2l/2.
Соотношения F.33) позволяют организовать геометрическое пре-
i; образование изображения следующим образом. До начала синте-
I за изображения составим 22^ массивов команд пересылки вида
ПЕРЕСЛАТЬ Л12 (х2, у2, и, v) А22 {х2,~у2), каждый из которых отвеча-
219
ет одной из возможных пар значений и, v и содержит 1\ команд. Перед
синтезом фрагмента с координатами х20, yi0 центрального элемента
вычислим Л„ (х20, у20), А2Х (х20, у20), и, v, занесем Ап (х20, J/zo)>
^zx(zo, У20) на индексные регистры и передадим управление массиву
команд, соответствующему полученным и, v. В результате упомяну-
упомянутый фрагмент будет сформирован. Аналогично синтезируются и дру-
другие фрагменты.
Оценим основные технические характеристики рассматриваемого
метода.
Общее время преобразования Tnv — /|22|%и + N2N'2tnQ + N2 х
X NtiB0/l%, где /ф0, (п0, tB0 — время предварительного формирования
команды пересылки, ее выполнения в процессе синтеза изображения
и вычисления величин An (x20, #2о)> Л21 (*2о> #zo). u> v, соответствую-
соответствующих одному фрагменту, в порядке упоминания.
Размеры участка, минимизирующие время преобразования,
Время обработки участков Гпррт1п = N2N'2tn0 + 2^+yN2N^ot9O.
Относительная экономия времени при использовании описанного
метода по сравнению с обычной методикой преобразования изображе-
изображений по уравнениям F.2), F.30) составит
;
где 1Ф — время формирования команды пересылки по обычной мето-
методике.
Полагая ^ф0 = ^п0, ;во = \i2tm, t^ = \iatn0, получим ц = (р.3 +
•f 1)/A + 2^+lViilii2/(N2N2)). Обычно цх ttt ji, « цз « 40, ц = 0 —
— 2, N2 = N'2 = N2. Если к тому же N2 > 200, то л > Ю.
Вероятности появления ошибок в определении координат хг, ylt
связанные с усечением {/J1 (хм, у20)}, {/J1 (х20, у20)}, могут быть оп-
определены как вероятности превышения величинами z1= {и 4- /J1 х
X (х1г у2) + 0,5} + Ди и 22 = {v 4- fyl (?2, ft) + 0,5} + Af значе-
значения 1. Если условиться, что {и -f /71 (х2, у2) 4- 0,5} и Аи случайны,
независимы и равномерно распределены в диапазонах [0, 1) и [О.^1)
соответственно, то плотность распределения
f ZV2» при 0<21<2-»1; 1 при 2~'l<Zl< 1;
1 14211 —Zi 2* при 1 < zt < 1 +2-*1; 0 при других zt.
Отсюда вероятность появления ошибки в определении координат
хг равна рх — 2—№+1), а вероятность того, что она не имеет места, рав-
равна р0 = A — 2-<A+1>).
Аналогично находятся плотность распределения g (z2) и отвечаю-
отвечающие ей вероятности.
Таким образом, при {/Г1 (хм, Уго)} » и и {fc1 (хго, у20)} & v воз-
возможен случайный выбор одного из элементов (хи ух), (хг+ 1, yt),
220
h> У1 + 1). (*i 4- 1, #1 4- 1) с вероятностями pi, popx, popv p\ co-
ветственно, где {хх, ух) — элемент, определяемый по F.32), т. е.
|1ри р -> оо. Однако вероятность ошибочного выбора элемента, равная
— Ро, быстро уменьшается с увеличением \i (например, уже при
= 3 она составляет ~ 0,125). При ц = 0 имеют место те же вариан-
варианты ошибок, причем вероятность ошибочного выбора элемента здесь
равна 3/4. При центрировании Аи и Av упомянутая вероятность соста-
составит 2-с*+1) —2-2<И-2), т. е. дополнительно уменьшится.
Рассмотренный метод наиболее эффективен, когда массивы пересы-
пересылочных команд, о которых шла речь выше, формируются один раз для
всего снимка, т. е. зависимости /J1 (xs, y2), fc1 (x2, у2) могут быть вы-
выбраны с /2, равным /20, и достаточной точностью, общими для всех
фрагментов. Это, в частности, выполняется при преобразованиях вида
а-\ хг+а-1 </24a3-l+0,5], yx=[ a-» «,+ ag-i Уг+а-l +0,5], F.34)
iAt af1 — яё — постоянные. В противном случае приходится либо
.уменьшать значение /2, либо разбивать синтезируемое изображение на
^Подизображения, применяя к последним изложенную выше методи-
методику. Если l2 = 2s, aj\ tie1 — целые, а каждая из постоянных af1,
кФГ1! «Г1, aj1 имеет не более | двоичных цифр после запятой, то пре-
|образование F.34) может быть безошибочно реализовано в соответст-
соответствии с описанным методом при использовании лишь одного массива пере-
ллочных команд.
»,. Метод хорошо приспособлен для быстрого транспонирования изо-
изображений. Действительно, в этом случае хх = уг, ух = хг или хх =
н~ Уго + У2, Ух~ х20 4- хъ что представляет собой частный случай
^выражений F.31). При этом также не возникает никаких ошибок усе-
усечения в связи с целочисленностью хх, ух, х2, у2.
I: Повышения эффективности метода можно добиться, если в процес-
.; се преобразования изображение линейно или нелинейно поворачивать
"на относительно небольшой угол (до 15е). Это позволяет организовать
? «склеивание» заранее формируемых пересылочных команд и исполь-
использование команд пересылки полей переменной длины. Такие команды
I- есть в системе команд ЕС ЭВМ. В результате выполнения каждой из
;-них возможен синтез нескольких соседних элементов, отвечающих эле-
(. ментам исходного изображения, расположенным на одной строке.
г: Быстрое преобразование АКИ по изложенной методике особенно
эффективно, когда выражения F.2) могут быть представлены в виде
. x1 = [Ex(xi) + Ey(yi)+0,5},y1 = [Fx(x2)+Fv(y2)+0,5}. F.35)
Соответствующий этому случаю метод преобразования заключается
в следующем. Представим F.35) в форме
+Е*
W+0.5].
F.36)
Полагая далее {Еу (t/2)} ~ и, {Fy (y2)} t*iv(u,v — двоичные пред-
предоставления {Еу (у2)}, {Fy (y%)} с точностью до ц разрядов после запя-
221
той) и подставляя с учетом этого выражения F.36) в формулы F.30),
найдем:
Ai=An(x2, u,x>) + A12(ys), A2=A2i(x2)+A22(y2), F.37)
где An(x2,Z,l>) = [Z+Ex (*2)+0,5]+ NtlV+Fx (*2) + 0,5];.Л12 (у2) =
= А1О+[ЕУ (уг)]+^ [Fy (y2)]; Л21=д;2; A22=A20+N2 у2.
Составим теперь 22^ массивов команд пересылки вида ПЕРЕСЛАТЬ
Ап (х2, и, v) A2l (х2), каждый из которых отвечает одной из возмож-
возможных пар значений и, v и содержит N2 команд. Перед синтезом строки
с номером у2 вычислим v, A12 (у2), А22 (у2), и, занесем А12(у2), А22 (у2)
на индексные регистры и передадим управление массиву команд,
соответствующему полученным значениям и, v. В результате упомя-
упомянутая строка будет сформирована. Аналогично формируются и другие
строки.
Относительная экономия времени для данного метода составит
N2h
т) = —— —
где tfto, tB0, ц2, Цх определяются аналогично ti0, tB0, ц2, fxx (см. с. 220).
Другими словами, и здесь имеет место явный выигрыш во времени.
Заметим также, что какая-либо аппроксимация формул F.35) и свя-
связанные с нею погрешности при использовании рассматриваемого ме-
метода отсутствуют. Ошибки, возникающие при усечении {Еу (у2)},
{Fy (Уа)}. идентичны ошибкам усечения {/J1 (x20, у20)}, {fy1 (*2о> Уао)}.
рассмотренным выше.
Дальнейшее повышение эффективности формул F.37) связано с
уменьшением времени формирования массивов пересылочных команд
и объема памяти для их хранения. Для этого следует одновременно
готовить несколько таких команд, отвечающих одному и тому же зна-
значению х%, но разным значениям и, v. Затраты же памяти могут быть
уменьшены при записи А1 в виде
Ai =Лц (*2)+Л12 (g,) + G (в, v, г, а), F.38)
где Аи (х2) = [Ех (х2) + Nj, [Fx (x2)]; G (и, v,r,s) = [Z + r + 0,5] +
+ Nt [v + s -f 0,5]; Al2 (y2) определяется по формулам F.37); r, s —
двоичные представления {Ex (х2)}, {Fx(x2)} (с точностью до ц разрядов
после запятой).
В связи с этим преобразование изображений можно организовать
следующим образом.
Рассчитываются Ех (х2), Еу (у2), Fy (y2), Fx (x2) для всех хг = 0,
1, ..., N2 — 1; у2 = 0, 1, ..., N'2 — 1; образуется массив из #2 команд
пересылки ПЕРЕСЛАТЬ Лп (х2), А21 (х2), разбиваемый на 22^ групп,
каждая из которых определяется соответствующими ей значениями г.
s; формируется массив из N'z пар величин Л12 (у2), А22 (у2), содержащий
22^ групп, отвечающих значениями, v; перед каждой группой массива
команд резервируется ячейка, в которую перед обработкой очередной
группы строк записывается команда занесения на вспомогательный
222
гоегистр модификации адреса чтения величины G (и, v, r, s), отвечаю-
;й этим группам.
Синтез той или иной группы строк начинается с выборки значений
и, v, подсчета G (и, ~v, r, s) для всех возможных г, s, формирования и
Записи упомянутых команд занесения в зарезервированные ячейки.
Далее для очередной строки, входящей в группу, выбираются величи-
величины А12 (у2), А22 (у2), которые заносятся на основные регистры модифи-
модификации адресов чтения и записи команд пересылки, и управление пере-
переедается массиву этих команд.
Выражение F.38) требует большего количества операций, чем выра-
выражение F.37), но зато его использование дает существенную экономию
памяти (примерно в 2^N2I{N2 + N'2 + 22*+l) раза).
б Представляет интерес также реализация на базе выражения F.38)
| преобразований более общего вида, чем преобразования вида F.35).
Возможный подход при этом — использование метода многократных
преобразований, когда преобразование вида F.2) заменяется двумя
или несколькими последовательно проводимыми преобразованиями ви-
вида F.35).
Пусть
У1=Ь'0+Ь'1Х2+Ь'2у2+Ь'3х2у2+Ьлх%+Ььу1. )
Реализуем вначале преобразование хп = с'й -f с\хг -f с'гу2, уп =
s= do -f d[x2 -f й'ъуг, а затем преобразование хх = еб + e{xn +
+ eiyn + ее** + eiyl y1 = fi + f[xa + fiyn + fix\ + fiyl каждое
из которых отвечает выражениям F.35). Здесь а'й — а'5, bo — b5,
Со — с'2, do — d'2, eo — el, fo — f'i — постоянные; хп, уп — координа-
координаты точек в некоторой промежуточной системе координат оп хп уп
(преобразования ради простоты рассматриваются на континуальных
множествах точек).
Результат этих двух преобразований эквивалентен исходному, если
постоянные с'о — с'2, d'o — d'2, eo — е'4, /6 — f'i должным образом вы-
выбраны (четыре из этих констант могут быть выбраны произвольно,
например константы с'о, d'o, c\, d[).
Наиболее простой способ реализации двухэтапного преобразования
заключается в том, что на первом этапе в специальном массиве форми-
формируется промежуточное изображение, которое на втором этапе рассма-
рассматривается как исходное. Однако этот способ связан с существенными
затратами времени и памяти.
Более эффективный способ состоит в следующем. Будем преобразо-
преобразование исходного изображения в промежуточное осуществлять по обрат-
обратному методу, а промежуточного в выходное — по прямому. Полагая
по-прежнему, что для адресов соответствующих элементов в системах
координат o^th, onxnyn, о2х2у2 имеет место связь вида F.30), найдем:
Ах = Аи (хп) + А12 (уп), А2 = А21 (хп) + А22 (уп) (Л„ (*„), А12 (уп),
¦^ai (хп), А22 (уп) определяются по изложенной выше методике). Тог-
Тогда двухэтапное преобразование можно свести к одноэтапному, если
команды пересылки формировать в виде ПЕРЕСЛАТЬ Ли (хп),
¦^21 (хп)> а на регистры модификации соответствующих адресов зано-
223
Рис. 6.3. Аэро
сить А12 (уп), А22 (уп). При этом дополнительной памяти для форми-
формирования промежуточного изображения не потребуется.
Основной недостаток рассмотренного способа заключается в том,
что из-за использования прямого преобразования на выходном изо-
изображении могут иметь место пустоты, которые можно исключить, уве-
увеличивая число элементов промежуточного изображения, т. е. команд
пересылки.
Изложенные методы ускорения геометрических преобразований
АКИ были экспериментально опробированы на базе СЦОИ «Схема»
(см. гл. 7) с привлечением для этих целей реальной информации. На
рис. 6.3, А показан наклонный аэрофотоснимок с элементами ориенти-
ориентирования а = со = х = 6°, а на рис. 6.3, Б — результат его трансфор-
трансформирования в масштабе 1, 1. В последнем случае обработка производи-
производилась в соответствии с одной из модификаций выражения F.33) (зна-
(значение ц = 0, имела место упаковка кодов плотности элементов в ма-
224
фотоснимок
¦ шинные слова). Полное время преобразования составило 1,5 ч, причем
, работа процессора заняла 20 мин, остальное время было затрачено на
; обмен информацией между оперативной памятью (ОП), накопителем
на магнитном барабане (НМБ) и ленте (НМЛ) (какие-либо меры по
¦>оптимизации последнего не предпринимались).
§ 6.4. ВЫБОР СПОСОБОВ РАЦИОНАЛЬНОЙ ОРГАНИЗАЦИИ
ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ ОПЕРАТИВНОЙ И ВНЕШНЕЙ
ПАМЯТЬЮ ПРИ ГЕОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАНИЯХ ИЗОБРАЖЕНИЙ
ш Обмен информацией между оперативной и внешней памятью при
|1 обработке АКИ приводит к недопустимым временным затратам, если
|'"не принять никаких мер, направленных на его рациональную орга-
$¦', низацию. Так, в СЦОИ «Схема» (см. гл. 7), относящейся к числу луч-
"" ших отечественных систем подобного типа, при формате изображения
Зак. 1053 225
180 x 180 мм и шаге его дискретизации h = 0,06 мм число элементов
анализируемого АКИ составляет 9- 10е, а число машинных слов —
1,5-10е (в одном слове содержатся коды оптической плотности шести
элементов). Эти данные размещаются в процессе ввода в 375 зонах НМЛ,
каждая из которых содержит 4000 слов, что соответствует восьми стро-
строкам исходного изображения и емкости одного магнитного ОЗУ (МОЗУ).
В распоряжении пользователя СЦОИ «Схема» имеется два МОЗУ,
одно из которых можно использовать под исходное, а другое — под
преобразованное АКИ. Следовательно, обработать информацию можно
а)
1
/ '
2
формат Т
г 6К
{ oz
г ц
у
а
< Nz
Формат ж
S)
г),
Формат R ' 9орит±
Рис. 6.4. Форматы хранения изображений в ВЗУ
только по частям, т. е. обмен "информацией между МОЗУ и НМЛ будет
не редким явлением, а это приведет к значительным временным за-
затратам. Дополнительные неудобства связанв1 с форматами размещения
данных при вводе—выводе изображений (формат вывода аналогичен
описанному выше формату ввода): при повороте, например, исходного
АКИ на 45° для формирования всего лишь одной диагональной строки
преобразованного изображения требуется обращение ко всем 375 зо-
зонам НМЛ, упомянутым ранее. Из-за использования таких форматов
невозможна мгновенная остановка барабанов развертывающих узлов
устройства ввода—вывода информации. Однако это не означает, что
они должны'оставаться неизменными в процессе обработки. Скорее на-
наоборот. Быстрые методы геометрических преобразований АКИ в об-
общем случае базируются совсем на других форматах (см. § 6.3).
Рассмотрим некоторые способы рациональной организации обмена
информацией между ОП и ВЗУ при обработке АКИ на базе СЦОИ.
Пусть информация об исходном изображении (рис. 6.4, а) размеще-
размещена в построчном формате ввода—вывода (формат /) во внешнем запо-
226
бр
(ВП)
Йгнающем устройстве (ВЗУ) с произвольным доступом (например, в
|[МБ или НМД) и реализуется линейное преобразование, уравнения
" гор ого имеют вид
1. F.39)
„. Вначале рассмотрим двухэтапную организацию обмена, при кото-
которой на этапе 1 преобразованное изображение формируется в ВЗУ в
ормате ///, а на этапе 2 — в формате / (рис. 6.4, в, г). Формат ///
|1бразуется посредством запи- д х
во внешнюю память фраг- а) ¦
Центов 3 в порядке их следо-
ания слева направо, сверху
|>низ. Каждый из фрагментов,
свою очередь, записывается
внешней памяти в построч-
|ом фрагменте и имеет вид
йрямоугольника размером
X Ьф элементов и предва-
предварительно формируется в опе-
оперативной памяти (ОП). По-
юследнее обеспечивается вы-
р5оркой из внешней памяти
в оперативную инфор
отвечающей зоне 1
Црис. -6.4, а), и обработкой
Цэтой информации по уравне-
уравнениям F.39). Упомянутая зона
|полностью определяется фраг-
Цментом 2 исходного изображе-
изображения, соответствующим фраг-
риенту 3. Целесообразность
Информирования выходного изо-
изображения в формате /// вы-
вызывается удобствами обработ-
обработки, связанными, в частности, с использованием методов ускорения
^преобразований (см. § 6.3), а в формате / — характером визуализа-
визуализации результатов обработки в традиционных устройствах ввода—вы-
рвода информации.
Среднее время, затрачиваемое на обмен информацией между ОП
|и ВП на этапе 1, составит
.), F.40)
ES .. tBl = rVJVo + VJvn, 4з = т + афЬф1\п — время выборки и за-
Ц'писи данных, отвечающих зоне 1 и фрагменту 3 соответственно (где
' т — среднее время поиска информации в ВП; Vo — емкость блока ОП;
vn — скорость обмена информацией между ОП и ВП); Vx = Л^Яф =
= Nx {\а^\аф + \аъ1\Ьф) — объем данных, содержащихся в зоне 1
| (см. рис. 6.4, а и 6.5, а). Как правило, Ух » Vo.
227
Рис. 6.5. Графическая иллюстрация
формулы F.43)
Аналогично, среднее время обмена, затрачиваемое на обмен ин-
информацией между ОП и ВП на этапе 2, составит
т№ = 1Т 0 +^i/<4»)+2Vo/vB] Кг N\ /Vo. F.41)
Общее время обмена информацией
ГA)=ГО) + ГО). F.42)
Здесь предполагается, что пер.епаковка информации на этапе 2
осуществляется порциями информации объемом Vo-
В процессе обмена информацией возможно использование несколь-
нескольких блоков ОП, каждый из которых имеет, например, емкость Уо-
В одном из них можно разместить информацию о фрагменте 2, а в дру-
другом — о фрагменте 3. Естественно, что объем информации не должен
превосходить величины Уо. Однако на практике ресурсы ОП совре-
современных ЭВМ ограничены, что ведет к целесообразности динамического
совмещения данных об исходном и преобразованном изображениях в
одном блоке ОП. Как видно из рис. 6.5, а, б, связь между величинами
Сф, Ьф и Vo при таком совмещении дается формулой
ф Ьф +| а— 1|аф Ьф при | а—1 | Ьф Ьф < аф Ьф;
ф Нф при | а— 1 | Ьф Ьф > аф Ьф,
F.43)
/у
1
——
— —
——
откуда можно выразить, например, Ьф в зависимости от прочих пара-
параметров.
Используя теперь формулы F.40)—F.42) и соответствующие вы-
выражения для Ьф, можно получить соотношения, позволяющие оценить
значения аф и, следовательно, -значе-
-значения Ьф, минимизирующие Ttf\ при за-
заданных прочих параметрах.
, Количественные характеристики эф-
эффективности описанной организации об-
обмена информацией между ОП и ВП
удобно проиллюстрировать на примере
поворота изображения на угол Чр. Кри-
Кривые 2 и 2' на рис. 6.6 представляют со-
собой зависимости То1' от гр при оптими-
оптимизации с* и Ьф по изложенной выше ме-
методике (для кривой 2' йф = Ьф), а кри-
кривая 1 отвечает одноэтапной организации
обмена, когда преобразованное изобра-
изображение формируется в оперативной па-
памяти в формате / (см. рис. 6.4). Время, затрачиваемое на обмен ин-
информацией в последнем случае, можно оценить по формуле F.40) при
Сф = N2. В процессе расчетов предполагалось, что в качестве ВП
используется НМД ЕС-5056 (т = 0,03 с; vn = 150 кбайт/с; Vo = 36K),
а размеры исходного и преобразованного изображений составляют
2400 X 2400 элементов.
Как видно из рис. 6.6, двухэтапная организация обмена информа-
информацией между ВП и ОП эффективнее одноэтапной. Дальнейшего повыше-
повышения эффективности можно добиться, если ввести дополнительный этап
228
la, С
1200
900
600
300
0 0 20 40 60 4>,град
Рис. 6.6. Графики зависимости
TJ •s =/ (tj?)npH различной орга-
организации обмена
редставления исходных данных в формате // (см. рис. 6.4, б). Этот
^юрмат образуется построчной записью во внешнюю^память участков
исходного изображения размером s x N{ элементов каждый в поряд-
порядке их следования слева направо. Соответствующие затраты времени
ставят
Ц*} - Ml + Щa) +2V0/vn] Nt N'jVo. F.44)
Общие затраты времени при трехэтапной организации обмена ин-
|формацией между ОП и ВП
|тде
Ю
Рис. 6.7. Графическая иллюстрация формулы F.46)
Величина же TJiV в связи с изменением формата исходного изобра-
изображения уже не может быть подсчитана по формуле F.40). Поэтому най-
найдем формулу для ее определения в новых условиях. Фрагмент 2 ис-
исходного изображения, представленного в формате //, в более общем
виде приводится на рис. 6.7, а. Средний объем данных, извлекаемых
из ВП для формирования в оперативной памяти соответствующего
фрагмента 3 преобразованного изображения, составит
F.46)
Is Разбиение vt на v\ и v\ иллюстрирует рис. 6.7, б, из которого сле-
\. дует также, что Vz = яЯф, a VH = АСр^ф. где Аср — средняя высота
* фрагмента 2 в направлении оси " "
*' Действительно,
Г SB-/)
2 1 hi(x1)dx1-
1=1 s A—/)
s!B-r)
8В Заи. 1063
229
Здесь учтено, что y/=A,s, h]+l (х^^^ (xt—/s); /= 1, 2, ..., r
Для случая линейного преобразования (см. рис. 6.5)
1.
ф) m \^^ а^/а^\Ьф. F.47)
Как и ранее, будем считать, что выборка информации из ВП в ОП
осуществляется порциями информации объемом Vo. Тогда количество
обращений к ВП для извлечения из него данных, отвечающих V2,
составит
<7г= 2 П+"^о]= S {vi/V,-{vt/V,))+r+l,
/=0 '=0
где [...] и {...} — целая и дробная части х соответственно.
Так как {vilV0} лежит в диапазоне [0, 1) и распределена по зако-
закону равной плотности, то среднее число обращений qT = 0,5 (г — 1) +
+ V2IV0. При выборке из ВП информа-
информации о фрагменте длиной Ьф возможно об-
обращение как к г, так и к г + 1 его час-
частям с частотами рТ и рт+1 соответствен-
соответственно, причем г = 1 + [ЬфЫ], г + 1 = 2+
+ lLl]
800 3,э/1
После дополнительного осреднения полу-
получим следующее выражение для среднего
количества обращений к ВП для форми-
формирования в оперативной памяти фраг-
фрагмента 3:
Рис. 6.8. Графики зависимости <F=3?/>r + <7r+*/>r+*=0,5B-fI$/s)+V»/W
*VW(*) ' F.48)
Таким образом,
Т\$ ={и+^)Мгыу\афЬф), /и-ifa-^vn. F.49)
Теперь можно, используя F.44)—F.49) и некоторые из ранее по-
полученных соотношений, записать 7V} в зависимости от сф, Ьф, s, \аТг\,
\а*1\. ИГ1!, N!. Nlt Ni, N2, N'2, x, vn, Vo.
Далее, положим с$ = Ьф. Тогда с помощью F.43) найдем, что
1/|Г
ф1/1у|Г(
где (* = П + ИГ1! (ИГ1! + \aV\) при Не1! (ИГ11 + Hi!) < 1;
ИНГ1! + Иг1!) (ИГ1! + las1!) B противном случае.
Наконец, пусть значения всех аргументов 7V' фиксированы, ис-
исключая s. Нетрудно получить следующее выражение для этого аргу-
аргумента, минимизирующее временные затраты на трехэтапный обмен ин-
информацией между ОП и ВП:
s - У(т(| afi | + |as-i |)/2+таф Ы1Щ/{Ы&'Ш V0))/((\a^\ + \a^ |)(l/vn+T/V0)).
Кривая 3 на рис. 6.6 представляет собой зависимость То** oti|) при
оптимизации s по изложенной методике'при тех же значениях прочих
параметров, что и ранее. Следовательно, трехэтапной организации об-
обмена информацией между ОП и ВП отвечает высокая эффективность.
Рис. 6.8 иллюстрирует характер изменения Т10г) для различных зна-
значений s и i|), ,
230
Эффективность предложенных способов рациональной организации
обмена информацией между оперативной и внешней памятью СЦОИ
при геометрических преобразованиях была показана на примере пре-
преобразований вида F.39). Однако для этих преобразований оценить
| эффективность упомянутых способов в общем виде затруднительно.
Более того, на ограниченных участках изображений значительной
размерности преобразования F.39) с достаточной точностью аппрок-
| симируют любые нелинейные преобразования.
Изложенные способы можно с успехом использовать и для решения
| других задач обработки больших массивов данных, например транс-
'понирования суперматриц.
§ 6.5. МЕТОДИКА ЧАСТИЧНОГО ДЕШИФРИРОВАНИЯ ИЗОБРАЖЕНИЙ
И НАНЕСЕНИЯ УСЛОВНОЙ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ
НА ВЫХОДНОЙ ФОТОДОКУМЕНТ
Частичное дешифрирование АКИ на базе СЦОИ. Рассмотрим авто-
автоматизацию частичного тематического дешифрирования АКИ, т. е.
g распознавания не всех изобразившихся на них объектов естественно-
естественного или искусственного происхождения, а только части последних в
интересах изучения земных ресурсов. При этом ограничимся лишь из-
изложением методики частичного дешифрирования изображений на ба-
к зе СЦОИ и теории распознавания образов (лесных массивов, лугов,
водных поверхностей и т. п., характеризующихся более или менее од-
однородной внутренней структурой, что позволяет свести дешифриро-
вание объекта неопределенной формы к распознаванию отвечающего
jjf ему множества участков (фрагментов) снимка заранее фиксированных
" размеров).
Важным вопросом при частичном дешифрировании АКИ с позиций
теории распознавания образов является выбор эффективной системы
признаков. Несмотря на ограниченные цели дешифрирования, отме-
отмеченные выше, эти вопросы не простые. Действительно, изображения
на снимках лесных массивов, лугов, водных поверхностей и т. п.
существенно изменяются в зависимости от условий съемки и состоя-
состояния природной среды. Поэтому целесообразно зафиксировать, хотя
бы на первых порах, основные параметры, характеризующие эти ус-
условия, а также состояние природы. Кроме того, выбор признаков дол-
должен базироваться на эвристических или теоретических предпосылках,
|тарантирующих их потенциальную эффективность или, другими сло-
i вами, высокие разделительные свойства (см. гл. 3). Выбранные призна-
I' ки должны быть максимально просты в вычислительном отношении.
Рассмотрим произвольный участок снимка, имеющий размеры
X /{ элементов. Обозначим |-й уровень квантования оптической
| плотности изображения символом D j. Найдем распределение p(D |)
| элементов фрагмента по различным значениям D g, | = 0, 1 Ly — 1.
Очевидно, что р (D Е) = М |/(/i/{) (M Е — число элементов, имеющих
плотность D i) и не характеризует участок однозначно, поскольку не
| учитывает координатной информации. Однако представляющие ин-
'терес классы природных объектов таковы, что у отвечающих им фраг-
8В* 231
ментов нет регулярной структуры; следобательно, использование кд-
ординатной информации не имеет смысла. Текстура же каждого участ-
участка, характеризующая класс, находит в распределении р (J) g) практиче-
практически адекватное отображение. Конкурирующее в этой связи спектраль-
спектральное описание обладает существенно большей вычислительной слож-
сложностью.
Использование распределения р (D g) в явном виде для характе-
характеристики фрагмента нецелесообразно. Более предпочтительно приме-
применение для этих целей, например, различных моментов р (Dg). Рассмо-
Рассмотрим структурные признаки фрагментов:
6=0
Y)
*8ф = — 2
Очевидно, что х1ф характеризует среднее значение Dg в пределах
фрагмента, х2ф — среднеквадратичное отклонение D g от D, а х8ф —
общую форму распределения р (Dg). При практическом подсчете этих
величин Dg представляется соответствующим двоичным кодом.
Для нахождения гистограмм gi} (х1ф) распределения признаков
было обработано семь аэрофотоснимков масштаба 1 : 25 000, содер-
содержащих изображения леса, водной поверхности, луга и некоторых дру-
других природных объектов. Каждый снимок вводился в СЦОИ и на него
программными средствами наносилась регулярная сетка, разбивающая
его на отдельные фрагменты. Размеры сетки и, следовательно, участ-
участков выбирались в соответствии с рекомендациями, данными в [25].
По этим рекомендациям площадь фрагмента на снимке упомянутого
масштаба должна составлять около 16 мм2, что при максимальном раз-
разрешении устройства ввода—вывода информации отвечает размерам
участка 60 х 64 элементов. Затем снимок выводился для опознавания
его фрагментов оператором, одновременно печатались координаты каж-
каждого участка. Результаты отнесения фрагментов к классам Ах (лес),
А2 (водная поверхность), А3 (травяной покров) и Л4 (другие объекты)
сообщались системе. Далее участки автоматически группировались
по классам, для каждого из фрагментов рассчитывались распределе-
распределение р (Dg) и значения х1ф, х2ф, хзф (всего было получено 500, 120, 120
и 300 значений последних для классов Ах, А2, Аг и Ал соответствен-
соответственно). Гистограммы gl} (х1ф) находились обычным порядком.
Были изучены также вопросы сглаживания полученных распре-
распределений^; (х1ф) кривыми Пирсона. При этом выяснилось, что класс
Ах целесообразно разбить на подклассы А [ (лес крупный) и А [ (лес мел-
мелкий), поскольку статистические данные, отвечающие гистограммам
Ёи (#1ф), #2i (#2ф). t?3i (*зф)> оказались принадлежащими к различным
генеральным совокупностям.
232
Результаты Сглаживания сведены в табл. 6.1, в которой для каждой
гистограммы, относящейся к классам А[, А\, А2, Аа, указан соот-
соответствующий ей тип кривой Пирсона:
gi](*i<t>)=aij
CU
(тип1);
20?
V2"
:——е
(тип II),
а также параметры аи, Ьи, си, Ъ'ц, с'ц, di}, x"u или ~ih аи— послед-
последней.
Таблица 6.1
Плотность
распределения
g'll (*1ф)
§21 (*2ф)
§31 (*8ф)
§11 (xi1>)
§21 (*2ф)
§3i (Хзф)
§12 (*1Ф>
§24 (*2Ф>
§82 (*3ф)
§18 (*1ф)
§28 (*2ф)
§33 (*8ф)
а
0,
0,
0,
0
0
0
0
0
0
и
150
206
210
—
142
243
170
167
,152
,183
"и
—
9,72
13.78
4,25
—
—
4,35
3,32
4,57
9,30
12,70
9,25
ci
3,
5,
0,
2
0
1
3
5
2
i
75
04
93
35
93
70
72
37
,95
b'i
5
1
8
14
9
8
5
1
3
Параметр
•
80
63
,80
,17
,20
,78
,67
,25
,57
СЧ
2,
0,
3
4
3
4
2
0
1 1
03
60
53
,70
87
92
,62
,92
,25
V
xi
—
21,
4,
23,
49
3
2
103
18
3
7
30
01
20
,10
47
,17
,00
,40
,57
d
1,
0
1
2
0
0
1 5
1'
1 °
и
50
11
00
,00
,50
,10
,00
,00
,25
хи
39,60
19,50
3,95
24,10
14,45
3,60
52,30
3,72
2,38
96,00
16,30
3,23
о*
9,
3
0
|
и
50
10
29
—
—
к
11
II
I
I
I
II
II
I
I
I
I
I
I
Сглаживание проводилось по методу моментов, а проверка правдо-
правдоподобия гипотез — при использовании критерия %2 Пирсона. При
обработке же статистических данных по классу Л4 оказалось, что
х1ф, х2ф, хаф распределяются в широких диапазонах по законам,
233
имеющим сложный полимодальный характер. Для упрощения им были
поставлены в соответствие равномерные законы с диапазонами Изме-
Изменения 0 < х1ф < 127, 0 < х2ф < 30, — 5 < хзф < 0.
Простейший подход частичного дешифрирования, называемый иног-
иногда разбиением снимка с помощью квантования, может осуществляться
в случае, когда фрагмент включает в себя лишь один элемент изобра-
изображения и используется только признак х1ф. При этом обработка снимка
сводится к сравнению кода Ка оптической плотности каждого его эле-
элемента с некоторыми пороговыми значениями Кп1], Кпг) и, например.
замене Кп = 0, если Кп ф №, К^\.
Луг -1
Рещ-
Лес
Лес
(
крцпныйЛ.
мелкий^"
)
/
)
Рис. 6.9. Примеры, иллюстрирующие разделяющие
свойства соответственно признаков Х\ и Х2(а), Х\ и
х3 (б)
Для выбора К№\ /Сп2) находится распределение Кп, аналогичное
р (?)|), для участка некоторых размеров, существенную часть которо-
которого занимает выделяемая структура, и фиксируются значение Кп,
отвечающие минимумам полученного распределения, ближайшим к
моде последнего.
Недостатки этого алгоритма в следующем. Во-первых, условие
^Сп € \.К{п\ Кпг>] может иметь место не только для элементов выделяе-
выделяемой структуры, но и других структур. Отсеять последние элементы
можно, например, анализируя текстуру их окрестностей, но это в ал-
алгоритме отсутствует. Во-вторых, этому алгоритму в большей степени,
чем алгоритму, излагаемому ниже, свойственна-зависимость от усло-
условий съемки и состояния природы.
Таким образом, если говорить о сколько-нибудь эффективном ча-
частичном дешифрировании, то необходимо анализировать фрагменты
существенно больших размеров и использовать большее число соот-
соответствующих признаков.
Определенное представление о разделяющих свойствах признаков,
описанных выше, дают рисунки, где показаны проекции примерных
границ областей, образуемых в пространстве ох1фх2фхзф представляю-
представляющими интерес структурами, на плоскости ох1фх2ф (рис. 6.9, а) и
О-х^Ф-Кзф (Рис. 6.9, б). Эти признаки могут быть использованы для де-
дешифрирования. Соответствующая методика заключается в следующем.
234
Рис. 6.10. Результат выделении ЭВМ
лесного массива по одной из мето-
методик частичного дешифрирования
Предположим, что в памяти СЦОИ зафиксированы те или иные све-
сведения о распределениях gi} (х1ф) (i, j = 1, 2, 3, 4). Организуем про-
программными средствами просмотр снимка размером Л^ X N{ элемен-
элементов апертурой размером 1г X /[ элементов, перемещая ее в плоскости
снимка с шагами Ахъ Ауг вдоль координатных осей о^, огуг (для по-
повышения точности определения границ выделяемых структур возмож-
возможно Ахг < /1( Аг/i < /()• В каждом положении апертуры примем ре-
решение об отнесении соответствующего ей фрагмента снимка к одному
из классов, используя для этого, например, критерий «идеального на-
наблюдателя». При этом признаки будем считать независимыми, а ап-
априорные вероятности классов — равными (в некоторых случаях для
оценки упомянутых вероятностей
можно использовать сведения о рас-
распределении объектов представля-
представляющих интерес классов по исследу-
исследуемой территории).
Процессы обучения и принятия
решения можно организовать и на
детерминированной основе, распро-
распространив, например, методику, из-
изложенную в [17], на случай пересе-
пересечения классов. Обучение здесь за-
заключается в построении для каждого класса в пространстве признаков
минимального числа гиперэллипсоидов, включающих в себя все реали-
реализации учебной выборки, относящиеся к этому классу, но не содержа-
содержащих реализаций любого другого класса, исключая принадлежащие
области пересечения упомянутых классов (последняя определяется
как область, в которой расстояния между реализациями рассматривае-
рассматриваемых классов меньше некоторой заранее фиксированной величины).
Результатом обучения будет множество параметров, характеризую-
характеризующих эти гиперэллипсоиды, оси которых можно выбрать параллельными
соответствующим осям пространства признаков. Принятие реше-
решения в такой постановке сводится к определению гиперэллипсоидов,
которым предъявленная реализация принадлежит.
Результаты использования рассмотренных методик частичного де-
дешифрирования можно представить в виде условного изображения на
АЦПУ или в виде условного снимка, синтезированного в масштабе
исходного (рис. 6.10, где показано условное изображение некоторого
лесного массива, выделенного машиной в процессе дешифрирования
одного из снимков земной поверхности. Одновременно подсчитывались
площади и другие характеристики выделенных структур). Время
дешифрирования существенно зависит от значений Nlt N{, llt /{, Ахи
куъ и при Nx = N[ = 180 мм, /х = А*! = 60 элементов, 1\ ~ Ауг =
= 64 элемента оно составило около 2 ч; при Ахг — 30 элементов,
Ауг = 32 элемента — 4 ч. При этом примерно 40% времени затрачива-
затрачивалось на обмен информации между ОП и ВП, 10% — на принятие ре-
решения и формирование условного изображения, остальное — на вы-
вычисление значений признаков (в целях экономии времени при Ахг = 1г
Ау1 = 1[ распределение р (D0, отвечающее новому положению апер-
235
имеющим сложный полимодальный характер. Для упрощения им были
поставлены в соответствие равномерные законы с диапазонами изме-
изменения 0 < ххф^ < 127, 0 < х2ф < 30, — 5 < хзф <; 0.
Простейший подход частичного дешифрирования, называемый иног-
иногда разбиением снимка с помощью квантования, может осуществляться
в случае, когда фрагмент включает в себя лишь один элемент изобра-
изображения и используется только признак ххф. При этом обработка снимка
сводится к сравнению кода Кп оптической плотности каждого его эле-
элемента с некоторыми пороговыми значениями Кп\ К(п2) и, например,,
замене Ка = 0, если Ка Ф №, ОТ.
Ф
120
100
30
60
40
20
0
1
Река\
^ h
4—.
)
)
J0X,
Рис. 6.9. Примеры, иллюстрирующие разделяющие
свойства соответственно признаков хх и х2(а), х\ и
хз (б)
N
^ Для выбора К1п\ /Сп2) находится распределение Кп, аналогичное
р (D |), для участка некоторых размеров, существенную часть которо-
которого занимает выделяемая структура, и фиксируются значение /Сп,
отвечающие минимумам полученного распределения, ближайшим к
моде последнего.
Недостатки этого алгоритма в следующем. Во-первых, условие
KnE tKn1'. /Сп8)] может иметь место не только для элементов выделяе-
выделяемой структуры, но и других структур. Отсеять последние элементы
можно, например, анализируя текстуру их окрестностей, но это в ал-
алгоритме отсутствует. Во-вторых, этому алгоритму в большей степени,
чем алгоритму, излагаемому ниже, свойственна-зависимость от усло-
условий съемки и состояния природы.
Таким образом, если говорить о сколько-нибудь эффективном ча-
частичном дешифрировании, то необходимо анализировать фрагменты
существенно больших размеров и использовать большее число соот-
соответствующих признаков.
Определенное представление о разделяющих свойствах признаков,
описанных выше, дают рисунки, где показаны проекции примерных
границ областей, образуемых в пространстве оххфх2фхзф представляю-
представляющими интерес структурами, на плоскости ох1фх2ф (рис. 6.9, а) и
^хф-^зф (рис. 6.9, б). Эти признаки могут быть использованы для де-
дешифрирования. Соответствующая методика заключается в следующем.
234
*
"с
Рис. 6.10. Результат выделения ЭВМ
лесного массива по одной из мето-
методик частичного дешифрирования
Предположим, что в памяти СЦОИ зафиксированы те или иные све-
сведения о распределениях gu (х1ф) (i, j = 1, 2, 3, 4). Организуем про-
программными средствами просмотр снимка размером Nx X N[ элемен-
элементов апертурой размером 1Х X /{ элементов, перемещая ее в плоскости
снимка с шагами Ахъ Аух вдоль координатных осей oxxlt o^ (для по-
повышения точности определения границ выделяемых структур возмож-
возможно Ахг < /1( Ауг < /(). В каждом положении апертуры примем ре-
решение об отнесении соответствующего ей фрагмента снимка к одному
из классов, используя для этого, например, критерий «идеального на-
наблюдателя». При этом признаки будем считать независимыми, а ап-
априорные вероятности классов — равными (в некоторых случаях для
оценки упомянутых вероятностей
можно использовать сведения о рас-
распределении объектов представля-
представляющих интерес классов по исследу-
исследуемой территории).
Процессы обучения и принятия
решения можно организовать и на
детерминированной основе, распро-
распространив, например, Методику, из-
изложенную в [17], на случай пересе-
пересечения классов. Обучение здесь за-
заключается в построении для каждого класса в пространстве признаков
минимального числа гиперэллипсоидов, включающих в себя все реали-
реализации учебной выборки, относящиеся к этому классу, но не содержа-
содержащих реализаций любого другого класса, исключая принадлежащие
области пересечения упомянутых классов (последняя определяется
как область, в которой расстояния между реализациями рассматривае-
рассматриваемых классов меньше некоторой заранее фиксированной величины).
Результатом обучения будет множество параметров, характеризую-
характеризующих эти гиперэллипсоиды, оси которых можно выбрать параллельными
соответствующим осям пространства признаков. Принятие реше-
решения в такой постановке сводится к определению гиперэллипсоидов,
которым предъявленная реализация принадлежит.
Результаты использования рассмотренных методик частичного де-
дешифрирования можно представить в виде условного изображения на
АЦПУ или в виде условного снимка, синтезированного в масштабе
исходного (рис. 6.10, где показано условное изображение некоторого
лесного массива, выделенного машиной в процессе дешифрирования
одного из снимков земной поверхности. Одновременно подсчитывались
площади и другие характеристики выделенных структур). Время
дешифрирования существенно зависит от значений Л^, N[, lx, 1[, Ахг,
Ауи и при N± = N[ = 180 мм, lx = Ахх = 60 элементов, /( = Аух =
= 64 элемента оно составило около 2 ч; при Ахг = 30 элементов,
Аух — 32 элемента — 4 ч. При этом примерно 40% времени затрачива-
затрачивалось на обмен информации между ОП и ВП, 10% — на принятие ре-
решения и формирование условного изображения, остальное — на вы-
вычисление значений признаков (в целях экономии времени при Ахх = 1г
Аух= 1[ распределение р (О|), отвечающее новому положению апер-
235
туры, определялось с учетом расчетов, выполненных при нахождении
того же распределения для предыдущего ее положения). Какой-либо
оптимизации обмена информацией между оперативной и внешней па-
памятью СЦОИ в ходе описанных экспериментов не проводилось.
Частичное дешифрирование спектрозональных снимков во многом
аналогично частичному дешифрированию монохроматических АКС,
с той лишь разницей, что размерность пространства признаков здесь
возрастает в i раз (i — число спектрально независимых видеотрактов).
Нанесение графической нагрузки иа выходной фотодокумент. Си-
Системы рассматриваемого класса не накладывают никаких ограничений
на вид условной графической нагрузки, подлежащей нанесению на
АКИ.
Рассмотрим вопросы организации нанесения картографической
сетки на выходное изображение в СЦОИ «Схема». Географические ко-
координаты ф, Я (широта и долгота) точек синтезируемого изображения
определяются в процессе перехода от их геоцентрических координат
к гауссовым. При этом можно оценить диапазон изменения <р и % в пре-
пределах снимка и в зависимости от масштаба и цели получения послед-
последнего выбрать интервалы нанесения географических координатных ли-
линий. Предполагается, что для каждой такой линии в памяти ЭВМ
сформирован массив координат х2, у2 отдельных ее точек, образующих
узлы интерполяции с равномерным шагом, в процессе которой имеет
место кусочно-линейная аппроксимация этой линии. Шаг интерполя-
интерполяции выбирается исходя из требуемой точности измерения <р, А, и по-
погрешностей снимка.
Упомянутый массив может быть получен подстановкой в формулы
связи х2, у2 с у, % соответствующих значений последних. Кроме того,
массив дополняется координатами пересечения отвечающей ему линии
с другими линиями и границами изображения. Таким образом, можно
задавать сколь угодно сложные линии, в том числе и линии, аналитиче-
аналитическое описание которых отсутствует.
Рассматриваемая методика нанесения координатных линий на изо-
изображение ориентирована на представление последнего в НМЛ в виде
8-строчных зон, причем для уменьшения затрат времени нанесение всех
линий, пересекаемых каждой строкой, в пределах этой строки реали-
реализуется за одно обращение к ней, если линии имеют одноэлементную
толщину. Той же цели служит и предварительная обработка массивов,
заключающаяся в следующем. Массиву данных ставится в соответствие
один или несколько подмассивов. Каждый массив характеризует от-
отвечающий ему сегмент линии, на котором сохраняется знак изменения
координаты у2 при переходе от одного его интерполяционного узла к
другому.
Подмассив включает в себя значения y2lDin, у2тах граничных узлов
сегмента, адреса координат х2тЫ, у2т1п; х2тах, у2тях этих узлов
(по мере просмотра строк адрес координат x2min, y2m\n заменяется на
адрес координат х2т, у2т начального узла текущего участка интер-
интерполяции), упомянутый выше знак изменения координаты у2, целочис-
целочисленное значение тангенса угла, составляемого текущим интерполяцион-
интерполяционным отрезком сегмента с осью
336
При обращении к очередной строке производится просмотр всех
подмассивов, причем обработка данных, содержащихся в каждом под-
массиве, начинается с проверки условия t/2mJn ^ Угстр ^ Угтах
(#2стр — номер строки). Если это условие не выполняется, то пере-
переходят к следующему подмассиву. В противном случае по адресной
и знаковой информации подмассива выбираются координаты узлов
текущего отрезка аппроксимации и определяется точка пересечения
последнего со строкой. Далее остается заменить коды плотности эле-
элемента изображения, отвечающего этой точке, а также соседних с ним
элементов кодом плотности линии. При отыскании соседних элемен-
элементов учитываются спектр последней и ее толщина (спектр характери-
характеризуется совокупностью элементов строки при задании линии на дис-
дискретном поле и полностью определяется упомянутым выше целочис-
целочисленным значением тангенса угла, составляемого текущим интерпо-
интерполяционным отрезком сегмента с осью о2у2). Если толщина линии в эле-
элементах превышает 1, то в общем случае при формировании строки изо-
изображения может потребоваться обращение к соседним с ней строкам,
расположенным, в частности, в другой зоне НМЛ. При этом в качест-
качестве буферного накопителя целесообразно использовать НМБ.
После перебора всех подмассивов и выполнения аналогичных дей-
действий переходят к следующей строке и т. д. Процедура нанесения кар-
картографических линий на изображение прекращается при y2&Ip = y2V
(у2Г — нижняя граничная строка изображения). Эта процедура мо-
может быть совмещена с процессом вывода изображения по мере форми-
формирования 8-строчных зон НМЛ.
Благодаря описанной методике нанесение на изображение той
или иной координатной сетки реализуется в системе практически од-
одновременно со вводом—выводом данных.
Заключение
Рассмотренные в настоящей главе изображения встречаются не только при
изучении земных ресурсов, ио и при исследовании поверхности других планет
с помощью космических аппаратов. При этом важный класс задач обработки та-
таких изображений составляют задачи их геометрического преобразования.
Для геометрического преобразования аэрокосмического изображения на ЭВМ
необходимо разработать такую его модель, которая учитывала бы специфику
цифровой обработки, способ получения изображения и другие факторы. Для
традиционного кадрового способа основные компоненты упомянутой модели до-
достаточно полно освещены в существующей литературе. Описанная выше матема-
математическая модель процесса геометрической обработки АКИ ориентирована на наи-
наиболее перспективные в настоящее время сканерные видеоинформационные систе-
системы. Эта модель позволяет решать задачи ортотрансформирования изображе-
изображений, их преобразования в картографические проекции, привязки к местности
и т. д.
Использование традиционных приемов цифровой обработки АКИ ведет к
недопустимым затратам машинного времени из-за сложности законов обработки,
больших объемов видеоинформации и, как правило, крайне неудобных форма-
форматов размещения данных во внешней памяти в процессе ввода—вывода. Рассмо-
Рассмотренные методы ускорения геометрического преобразования АКИ в системе
«центральный процессор—оперативная память», базирующиеся на предваритель-
предварительном формировании в последней массивов пересылочных команд, и методы ра-
рациональной организации обмена информацией между внешней и оперативной
237
памятью, Основанные на двух- илн трехэтапном изменении форматов данных во
внешней памяти в процессе преобразования, позволяют примерно на порядок
сократить время обработки.
Тематическое дешифрирование АКИ на ЭВМ при изучении земных ресур-
ресурсов наиболее целесообразно на базе многоспектральной видеоинформации. Ис-
Использование для этих целей монохроматических изображений имеет в основ-
основном методический интерес. Соответствующая методика изложена выше. Она поз-
позволяет свести задачу дешифрирования АКИ к одной из постановок задачи рас-
распознавания образов.
Практически иа^любое аэрокосмическое изображение необходимо нанести
ту или иную условную графическую нагрузку для облегчения изучения этого
изображения человеком. Подобная операция должна выполняться оперативно.
Изложенная в данной главе процедура нанесения условной графической нагрузки
на выходной фотодокумент позволяет реализовать ее в темпе ввода — вывода дан-
данных.
ГЛАВА 7
ТЕХНИЧЕСКИЕ СРЕДСТВА РАСПОЗНАВАНИЯ
ПРОСТРАНСТВЕННЫХ ОБЪЕКТОВ И ЦИФРОВОЙ
ОБРАБОТКИ ИЗОБРАЖЕНИЙ
§ 7.1. СПОСОБЫ И СРЕДСТВА ВВОДА ВИДЕОИНФОРМАЦИИ В ЭВМ
Обработка изображений может вестись как аналоговыми, так и
цифровыми средствами. Однако громоздкость реализации сложных
вычислительных процедур, трудность запоминания сколько-нибудь
значительного количества данных, существенное влияние различных
дестабилизирующих факторов и недостаточная гибкость перестройки
структуры делают нецелесообразным глобальное применение аналого-
аналоговых средств в рассматриваемом случае. Использование же цифровой
техники предполагает в качестве первого этапа пространственную и
яркостную дискретизацию изображения, т. е. замену непрерывных
координат его элементов дискретными значениями и квантование яр-
яркости этих элементов на то или иное число уровней.
Пространственная дискретизация изображения в настоящее время
осуществляется, как правило, с помощью электротехнической или
электронной развертки. Оперативная идентификация объектов исклю-
исключает применение электромеханических устройств. Использование же
электронных средств для этих целей допускает параллельную или по-
последовательную обработку. В первом случае элементы изображения
воспринимаются «сетчаткой» практически одновременно, что может
быть реализовано, например, с помощью мозаики фотодиодов. При
этом возникает возможность параллельного считывания информации.
Однако такой ввод данных, несмотря на его высокое быстродействие,
часто затруднителен из-за сложности построения «сетчатки», имеющей
достаточные размеры, высокую чувствительность в режиме микросе-
микросекундных засветок и возможность хранения воспринятой информации
на время ее ввода в ЭВМ, а также значительных аппаратурных за-
затрат на дальнейшую параллельную обработку. Во втором случае
двумерная функция яркости В (х, у), описывающая плоское изображе-
изображение, преобразуется в одномерную В (t) = В [х (/), у (/)] с помощью
его развертки, осуществляемой соответствующей системой, последова-
последовательно анализирующей элементы (х, у) «поля зрения» с течением вре-
времени /. При этом траектория развертки либо автоматически определя-
определяется воспринимаемым изображением (следящая развертка), либо предо-
предопределена заранее (принудительная развертка).
Несмотря на сравнительно высокое быстродействие, простоту уче-
учета некоторых простейших преобразований изображения и экономич-
экономичность его описания при следящей развертке, применение последней
в ряде случаев нецелесообразно из-за существенного влияния помех
в «поле зрения», возможности срывов на тонких выступающих частях
239
прослеживаемого контура и зацикливания при обходе последнего
вследствие неоднозначности считывания, трудности анализа многогра-
многоградационных и неодносвязных изображений и т. п.
К принудительным относят радиально-круговую и строчно-кад-
ровую развертки. Однако подсчет значений тех или иных признаков,
используемых для распознавания изображения, на основе его описа-
описания, получаемого с помощью радиально-круговой развертки, затруд-
затруднителен. Кроме того, практическая реализация основных ее досто-
достоинств, связанных с инвариантностью упомянутого описания к парал-
параллельным переносам и поворотам изображения, если центр развертки
совмещен с геометрическим центром проекции и развертка начинается
от некоторого характерного для изображения направления, приводит
к большим аппаратурным затратам.
Перед непосредственной обработкой визуальных изображений не-
необходимо их ввести в ЭВМ.
Будем считать, что плоское изображение полностью описывается
двумерной функцией В (х, у), представляющей яркость (или коэффи-
коэффициент отражения света) отдельных его точек. Для цифрового представ-
представления изображения производятся пространственное квантование (не-
(непрерывные координаты х, у точек изображения квантуются на Nx
и N у элементов) и квантование яркости (непрерывный диапазон яр-
яркости от Bmin до Втах заменяется Ly дискретными отсчетами; Ly —
Число уровней квантования яркости).
Примечание. В дальнейшем положим, что «поле зрения» представ-
представляет собой квадратную «сетчатку» размером N X N элементов, а для кодирова-
кодирования яркости отдельных точек растра используется q = Ent (log2 Ly) + 1 дво-
двоичных разрядов
Предположим также, что анализ яркости отдельных элементов
изображения (сканирование поля зрения) производится в прямой
растровой последовательности слева направо и сверху вниз, напо-
напоминающей телевизионный растр. Начало координат расположено в
нижнем левом углу растра, ось х направлена вправо по краю сетчат-
сетчатки, а ось у направлена вверх.
Способы кодирования визуальной информации (ввода растровой
картины), позволяющие по записанной информации полностью восста-
восстановить исходное изображение, можно условно разделить на две группы.
Группу 1 составляют такие способы ввода, когда в память ЭВМ
записывается вся информация об изображении (конечно, в пределах
точности квантования координат и яркости) и не требуется никакой
априорной информации о характере изображения. Осуществить такой
ввод можно безадресным или адресным способом.
1. При безадресном способе ввода изображения вводится как
матрица ||Л|| размером N X N, каждый элемент ai} которой явля-
является ^-разрядным двоичным числом, представляющим яркость Вц
соответствующего элемента растра. Общее количество двоичных раз-
разрядов для записи растра составит
N6=qN* G.1)
и не зависит от характера изображения.
240
2. При адресном способе ввода для каждой точки изображения в
процессе ввода определяются ее координаты (xit yt) ч яркость Вц.
-Требуемая разрядность координат составит п — Ent (log2 N) + 1,
i .если Ent (log2 N) < log2 N, и n = Ent (log2 N), если Ent (log2 N) =
= log2 N. При этом общий объем памяти для хранения изображения
будет равен
N(q+2n)N* G.2)
Адресный способ ввода значительно уступает безадресному как по
требуемому объему памяти, так и по скорости ввода. Действительно,
количество двоичных разрядов при адресном способе ввода" в" т =
= (<7 + 2п)/<7 раз больше, чем при безадресном. Поэтому и требуемый
объем памяти, и число обращений к памяти в процессе ввода для ад-
адресного способа ввода примерно в т раз больше, чем для безадресного.
На практике, как правило, q<.n, поэтому т»1. Например, для
q = 3, п = 9 имеем т — 7.
Достоинство адресного способа ввода заключается в том, что вве-
введенную информацию можно сразу использовать для последующих пре-
преобразований, в которых участвуют координаты точек изображения
(например, для вычисления геометрических моментов, часто исполь-
используемых в качестве признаков распознавания). В этой связи значитель-
значительный интерес представляют локальные операции, позволяющие вы-
выполнять некоторые преобразования над матричными представлениями
изображений, полученными для безадресного ввода.
К группе 2 следует отнести способы ввода, для реализации которых
требуется некоторая априорная информация о характере изображе-
изображения. Такой информацией может быть, например, знание яркости фона,
на котором представлено изображение объекта. Если известна яр-
яркость фона Вф, а яркость точек изображения объекта отличается от
нее, то точки фона, не несущие полезной информации, в память ЭВМ
не вводятся.
Во всех способах ввода группы 2 требуемый объем памяти ЭВМ
зависит от площади, занимаемой изображением объекта на поле ра-
растра (количества элементов «сетчатки», занимаемых изображением
объекта), так как в этом случае вводу подлежат только точки изобра-
изображения объекта.
Для удобства сравнения различных способов формализации изо-
изображений вводится безразмерная величина |8 — коэффициент за-
заполнения растра: ?8 = NJN2 (Nw — число элементов дискретизации
растра, расположенных'на"гизображении объекта; N2 — полное число
элементов дискретизации растра).
Рассмотрим некоторые из способов формализации информации,
входящих в группу 2.
1. Для каждой точки изображения в процессе ввода определяются
ее координаты (xlt yt) и яркость Б{у. В этом случае требуемый объем
памяти ЭВМ (число разрядов) составит
Ni=(q+2n)tBN*. G.3)
Достоинства данного способа совпадают с достоинствами адресно-
адресного ввода.
241
2. При вводе изображений в памяти машины можно учесть то
обстоятельство, что для всех точек изображения, расположенных на
какой-либо, например /-й, строке растра, координата у} имеет одно
и то же значение. Поэтому для всех таких точек величину у} можно
указать только один раз (факт ввода у; для каждой строки может фик-
фиксироваться каким-либо признаком). Объем памяти ЭВМ, необходимый
для записи изображений (без учета затрат памяти на дополнительный
признак строки), в этом случае будет равен
N2=nN+(q+n)UN*. G.4)
Выражение G.4) справедливо в случае, если изображение занима-
занимает по вертикали все поле зрения, т. е. все N элементов. В противном
случае первый член последнего соотношения должен быть заменен на
величину nNB (JVB — размер изображения объекта по вертикали).
3. Суть этого способа ввода (полуадресного) состоит в том, что по
строке растра вводятся координаты (я,-, yt) только первой точки стро-
строки, яркость которой 5,7 ф Вф, а для последующих точек, для кото-
которых также Bt} Ф Вф, вводится только значение яркости. Требуе
мый объем памяти ЭВМ для такого способа ввода определить наибо-
наиболее трудно. Действительно, здесь необходимо учитывать, сколько
раз при движении луча по каждой строке пересекается линия внешне-
внешнего контура изображения (в известном смысле неоднозначность отсче-
отсчетов по координате х).
Для различных строк эта величина также может оказаться раз-
различной. Чтобы оценить максимальный объем памяти, положим, что
при движении луча по каждой строке внешний контур изображения
пересекается k раз (учитываются только вхождения в силуэт изобра-
изображения) и изображение занимает по вертикали N элементов.
При таких условиях необходимый объем памяти составит].
Nt=2knN+%a'qN*.
G.5)
Каждый из способов ввода группы 2 допускает некоторые модифи-
модификации, связанные в основном с кодированием координат и яркости
в приращениях. Например, для способа 2 ввода можно для каждой
вводимой точки указывать не абсолютное значение координаты xt,
а приращение ее относительно координаты ^,_х предыдущей записан-
записанной в память точки.
Если принять, что яркость для двух смежных точек изменяется
незначительно, то в способе 3 значения яркости точек можно указы-
указывать в приращениях.
Самым быстродействующим из способов ввода группы 2 оказывает-
оказывается способ 3 (при небольших значениях k), поскольку количество дво-
двоичных разрядов для записи одной точки изображения здесь наимень-
наименьшее.
Выражения G.1)—G.5) нетрудно обобщить и на случай прямоуголь-
прямоугольного растра, имеющего размер Nx x Nv элементов, по осям х и у.
Если обозначить через пх и пу разрядность координат по х и у
соответственно, то приведенные выше выражения принимают следую-
242
|щий ВИД!
Ni=2knvNy+UqNxNy.
На рис. 7.1 показаны графики зависимости ?„. От = f W) ПРИ
\q = var (цифры в скобках обозначают способ кодирования информа-
информации; сплошной линией обозначены графчки при q = 1, пунктирной —
;при q = 3).
За значение ?8. оит принято такое значение коэффициента \ъ, когда
объем памяти для безадресного ввода и каждого из способов ввода
группы 2 одинаков (k = 3).
Для практически значимых случаев п ^ 7, ?в > 8 полуадресный
ввод оказывается наиболее экономичным из способов ввода группы 2.
Сравним по быстродействию (в смыс-
смысле числа обращений к памяти ЭВМ в ^зт
процессе ввода) безадресный и полуад-
; ресный способы ввода. Выполнить та-
такое сравнение с высокой точностью за-
затруднительно, так как скорость ввода
будет зависеть от разрядности исполь-
используемого ЗУ. Однако если учесть, что в
первом приближении скорость ввода
пропорциональна объему вводимой ин-
информации, то TJT6 = 2kn/(qN) +
+ ?в (Тп — время при полуадресном
вводе; Тв — время при безадресном вво-
вводе). В данном случае не рассматривают-
, ся способы ввода, связанные со статисти-
1,0
0,8
0,6
ол
ол
/
V-
tz
S
/
У
mi
—
^^
О 31
128
IZ)
A1
B)
10A) П
Z56 511 1014 N
Рис. 7.1. Графики зависимости
1а.опт «=/(#) прн (?=var
ческим анализом вводимых изображений, в связи с трудностью его
реализации. Однако если такой анализ можно выполнить (определить
вероятности появления точек изображения с различной яркостью), то,
заменяя эффективное кодирование яркостей, можно даже для безад-
безадресного ввода получить значительную экономию памяти.
В ряде случаев для последующей обработки требуется иметь не
полное (силуэтное) описание изображения объекта, а только описа-
описание контурных линий, что существенно позволяет сократить необхо-
необходимый объем памяти ЭВМ.
Анализ способов ввода изобразительной информации в ЭВМ поз-
позволяет сделать следующие выводы.
Наиболее экономичными способами ввода являются безадресный
и полуадресный. Если яркость фона Вф известна, то следует применять
полуадресный ввод. Несмотря на то что полуадресный способ ввода
может в некоторых случаях дать значительный выигрыш в объеме
необходимой памяти и быстродействии ввода, следует учитывать, что
появление в поле растра помех в виде точек, не принадлежащих изо-
изображению и имеющих яркость, отличную от яркости фона, резко ухуд-
ухудшает его показатели. Действительно, даже на изолированную шумовую
точку при реализации этого способа потребуется q + 2п двоичных
разрядов, т. е. при наличии помех резко возрастает k.
243
Принцип реализации способов ввода группы 2 требует знания ап-
априорной информации, получение которой в ряде случаев затруднитель-
затруднительно. При этом приобретает первостепенное значение безадресный ввод,
для которого помехи и отсутствие априорной информации не имеют
значения. Поэтому алгоритмы обработки изображений, рассчитанные
на безадресный способ ввода информации, перспективны. Значение
безадресного способа ввода подчеркивается еще и тем, что размещение
информации в памяти ЭВМ стандартно и не зависит от структуры изо-
изображения, что дает возможность в ряде случаев (например, при выде-
выделении односвязных контуров из многосвязной системы контуров) ис-
использовать сравнительно простое и быстродействующее специализи-
специализированное оборудование.
§ 7.2. МАЛОКАДРОВЫЕ ТЕЛЕВИЗИОННЫЕ СРЕДСТВА ВВОДА
ВИДЕОИНФОРМАЦИИ В ЭВМ
Для обработки точечных и крупномасштабных изображений объек-
объектов широкое распространение получили малокадровые телевизионные
устройства ввода (см. §7.1). Функциональная схема одного из таких
Останов
Луск-
НУ
Рис. 7.2. Схема малокадрового устройства ввода
устройств приведена на рис. 7.2. Его сопряжение с различными ЭВМ
возможно при незначительных схемных изменениях. Устройство име-
имеет следующие основные технические характеристики: передающая теле-
телевизионная трубка—диссектор типа ЛИ-604; размер растра — 32 х 32,
64 х 64, 128 х 128 или 256 х 256 элементов; число градаций ярко-
яркости — 2, 4 или 8; время анализа одного элемента растра — 40 мкс,
время ввода одного кадра — 2,5 с вне зависимости от выбранных при
244
вводе размера растра и числа градаций яркости; разрядность выход-
выходного кода — 36 двоичных разрядов; способ ввода — безадресный;
режим ввода — кадровый или циклический (в первом случае автома-
автоматическая работа устройства прекращается после ввода одного кадра,
во втором же случае число кадров, вводимых за один сеанс автоматиче-
автоматической работы, может быть произвольным); управление—автономное.
Блок управления устройства, предназначенный для выработки
необходимых управляющих сигналов, включает в себя генератор G,
триггеры 77 и Т2, распределитель импульсов DI, элементы И50—И56,
ИЛИ5—ИЛИ8, элемент задержки Л31, переключатель растра ПР,
переключатель градаций ПГ и переключатель В режима ввода. На
панели управления, не показанной на рис. 7.2, помимо упомянутых
переключателей находятся также кнопки, с помощью которых выраба-
вырабатываются сигналы начальной установки НУ, Пуск и Останов, лампоч-
лампочки сигнализации и некоторые другие вспомогательные органы управ-
управления.
Начало работы устройства связано с появлением сигнала Пуск,
формируемого при нажатии соответствующей кнопки на панели управ-
управления или поступающего извне. Этот сигнал устанавливает триггеры
77 и Т2 в состояние 1, обеспечивая тем самым прохождение импульсов
генератора G, следующих с частотой 250 кГц, на вход распределителя'
импульсов DI. Каждый сигнал конца строки КС, вырабатываемый
счетчиком СТ2, вначале возвращает триггер Т2 в состояние 0, а затем
через промежуток времени, определяемый элементом задержки Л31,—
снова в состояние 1. Этим достигается учет того обстоятельства, чтб для
перехода от "предыдущей строки к последующей требуется определен-
определенное время. При включенном переключателе В работа устройства за-
заканчивается с появлением импульса конца кадра /С/С, формируемого
счетчиком СТ1.
Распределитель импульсов DI за время анализа одного элемента,
равное 40 мкс, вырабатывает пять распределенных во времени и про-
пространстве управляющих импульсов, нумерация которых на схеме соот-
соответствует очередности их появления на выходах распределителя. Каж-
Каждый из импульсов (/, 2 или 3) используется для организации сдвига
содержимого выходного регистра RG влево на один разряд. Действие
одного, двух или всех трех импульсов обеспечивает переключатель
ПГ. Сигнал 4 разрешает передачу кода яркости нужной разрядности
(в зависимости от положения того же переключателя) с выходов кван-
квантователя QV в младшие разряды регистра RG. Наконец, импульс 5
организует добавление 1 к содержимому счетчика СТ2. В схеме рас-
распределителя DI имеются четырехразрядный счетчик и дешифратор с
потенциальными выходами, что позволяет легко получить сигналы с
любым распределением во времени.
Блок разверток, основное назначение которого — формирование
сигналов, определяющих положение апертуры на фотокатоде диссек-
|, тора, состоит из счетчиков СТ1 и СТ2, цифро-аналоговых преобразо-
преобразователей DACX и ОАСУ, схемы выбора размера растра (элементы И4—
И9) и схемы выработки сигнала окончания анализируемой строки
(Я/-ЯЗ).
245
Счетчики СТ1 и Cf2 имеют по восемь двоичных разрядов и выпол-
выполнены по] обычной схеме. Преобразователи кодов этих счетчиков
в отклоняющие напряжения построены по схеме с декодирующей ма-
матрицей R—2R. Выходные каскады преобразователей DACX и ПАСУ
являются генераторами тока.
Элементы И1—И9 связаны с переключателем ПР. На рис. 7.2
его положение соответствует размеру растра 256 х 256 элементов.
В этой счтуации каждый импульс 4 распределителя импульсов DI
обеспечивает передачу кода яркости из квантователя QV в регистр
RG и каждый импульс КС является сигналом окончания анализируе-
анализируемой строки. Если же положение ПР соответствует растру 128x128,
то будут пропускаться все нечетные элементы на строке и все нечет-
нечетные строки. Точно так же при растре 64 х 64 C2 х 32) анализируют-
анализируются каждый четвертый (восьмой) элемент на строке и каждая четвертая
(восьмая) строка. При таком изменении размера растра скорость раз-
развертки всегда постоянна.
Блок диссектора BD включает в себя собственно диссектор, схему
выработки питающих напряжений, необходимых для его нормальной
работы, оптическую систему фокусировки изображения объекта на
фотокатод, а также электромагнитную фокусирующую и отклоняющую
систему. Выбор в качестве передающей трубки диссектора объясняется
легкостью организации дискретного управления положением аперту-
апертуры на фотокатоде, а также тем, что чувствительность и разрешающая
способность этой трубки вполне достаточны для построения устройст-
устройства ввода визуальной информации (УВВИ) с приведенными выше ха-
характеристиками, если объекты наблюдаются в нормальных условиях.
. Вырабатываемый диссектором видеосигнал поступает на видеоуси-
видеоусилитель, выполненный по обычной схеме.
Блок квантователя состоит из собственно квантователя QV и эле-
элементов И10—И12, ИЛИ1—ИЛИ2. Квантователь QV преобразует ви-
видеосигнал в цифровую форму. Он построен по принципу поразрядно-
поразрядного взвешивания с быстродействующими дифференциальными нуль-
органами в качестве сравнивающих схем. Необходимые помимо опор-
опорного напряжения ы0 напряжения ыо/2 и ыо/4 образуются с помощью
цепочки R—2R.
Элементы И10— И12, ИЛИ1—ИЛИ2 связаны, как видим, с пере-
переключателем ПГ, положение которого на рис. 7.2 соответствует числу
градаций, равному 2. При этом в соответствующем такте анализа того
или иного элемента изображения в младший разряд регистра RG
заносится значение старшего разряда кода яркости. При числе же
градаций, равном 4 или 8, в соответствующие разряды регистра запи-
записываются два старших или все три разряда этого кода.
Блок видеоконтроля VC реализован на основе осциллографа
С1-19, узел горизонтальной развертки которого представляет собой
усилитель, аналогичный усилителю вертикального отклонения. На
входы этих усилителей поступают напряжения строчной и кадровой
разверток, а на модулятор электроннолучевой трубки — аналоговый
эквивалент кода яркости элементов изображения.
246
I Блок выходного регистра включает в себя собственно выходной
^регистр RG, элементы И13—И49, ИЛИЗ—ИЛИ4 и элемент задержки
ЩЛ32. В исходном положении все разряды регистра RG, кроме младше-
младшего, находятся в состоянии 0. К моменту записи в него последнего кода
^яркости старший разряд оказывается в состоянии 1. Это позволяет с
гпомощью сигнала, вырабатываемого элементом И52 и обеспечивающего
^занесение кода яркости из квантователя QV в регистр RG, сформиро-
сформировать через посредство элементов И13, ИЛИ4 и элемента задержки
Л32 импульс выдачи машинного слова на кодовые шины КШО—КШ35.
f. При агрегатировании описанного устройства с ЭВМ «Минск-22»
^необходимо также обеспечить выдачу сигнала записи Зп, запускающе-
запускающего схему формирования импульсов записи в магнитном оперативном
'запоминающем устройстве (МОЗУ); сигнала регенерации Рг, по кото-
которому производится выработка в последнем токов запрета; сигнала до-
] бавления 1 в адресный регистр + IP A. Машинное слово выдается на
кодовые шины между первым и вторым из этих управляющих сигналов
и записывается в регистр числа запоминающего устройства. Адрес
первого машинного слова, подлежащего записи в МОЗУ, задается
оператором перед сеансом ввода с пульта управления.
В процессе эксплуатации разработанного устройства выявилась
существенная зависимость результатов ввода от направления и ско-
скорости перемещения объектов. Если положить, что за время fB полного
& ввода изображение объекта на фотокатоде смещалось не более чем на
|_ один элемент разложения, то tB ^ k0^l(v0N) (k0 — коэффициент, рав-
равный отношению действительных размеров объекта к размерам упомя-
упомянутого изображения; 1Ф — размер активной части фотокатода; v0 —
скорость перемещения объекта относительно устройства ввода;
N — размер «сетчатки»). При k0 = 100, /ф = 20 мм, v0 = 0,04 км/с
и N = 256 из последнего соотношения найдем, что tB да 1/5000 с.
Говорить о малокадровом режиме ввода в таких условиях не представ-
представляется возможным.
В связи с этим целесообразно помещение перед диссектором элек-
s тронно-оптического преобразователя (ЭОП) с электронным затвором,
\ обеспечивающим достаточно малые экспозиции, и люминофором, поз-
: воляющйм зафиксировать изображение на время, требуемое для мало-
• кадрового ввода. Отечественная промышленность освоила выпуск
: ЭОП с экспозицией 10~8—10~м с, временем переноса изображения
^ с фотокатода на люминофор порядка 10~7—10~8 с и временем спада
I яркости изображения на 5%, равным примерно 50 мс. Следует учесть
I также, что максимальная чувствительность этих преобразователей
V, в зависимости от материала фотокатода может приходиться на излуче-
I' ния с различной длиной волны; они могут выступать в роли усилителей
света и обладают хорошей пространственной разрешающей способ:
ностью.
Однако при применении ЭОП наиболее целесообразно использова-
использование в качестве передающей трубки видикона, поскольку он обладает
более высоким пространственным разрешением по сравнению с диссек-
диссектором, а также позволяет избавиться от люминофорного экрана в
247
ЭОП, тем более что в настоящее время разработаны видиконы с элек-
электростатической фокусировкой и отклонением луча.
В ряде задач предварительной обработки изображений, таких, как
фильтрация, выделение контура и др., возникает необходимость в об-
обращении к отдельным фрагментам изображения. Извлечение этих фраг-
фрагментов из памяти программными средствами приводит, как правило,
к резкому'снижению производительности. В связи с этим представляет
интерес разработка специализированного запоминающего устройства,
позволяющего формировать тот или иной фрагмент за одно обращение.
IIIУ
кшз-\
ш
г
3
щ
2
ВС
f
ел
L
[г
г
>
J_
г>
г
{F1
j
А,
в
В
'STRG-
-кшс
Рис 7.3. Схема специализированного ЗУ
Структурная схема такого устройства приведена на рис. 7.3, а схема
запоминающего блока — на рис. 7.4. Работу устройства поясним на
следующем примере.
Пусть исходное изображение представлено прямоугольной матри-
матрицей вида
«1,1 «1,2 ••• «1,18
«2,1 а2,2 «2,18
«8,1 «8.2 ••• «8,18
а выбираемые фрагменты соответствуют различным квадратным подмат-
подматрицам размера 3x3, например
«i,l «1.2 «1,8
«2,1 «2,2 «2.S
«S.l fl».S «3,8
«1,4 «1,5 «1,0
«2,4 «2,5 Ог.в
«8.4 «3,5 «8, в
а1,1в «1,17 «1,18
«2,1в «2,17 «2,18
«3,1в «8 ,17 «3,18
Пусть разрядность записываемых в запоминающий блок слов рав-
равна 6. Тогда исходная матрица с учетом перестановки разрядов в словах
в соответствии с рис. 7.4 может быть помещена в запоминающий блок
в виде следующей матрицы:
«1,1 «1,4 «1,2 «1,5 «1,8 «1,«
«1,7 «1,10 «1,8 «1,11 «1.» «1,12
«1,18 «1,18 «1,14 «1,17 «1.15 «1,1«
«2.1 «2,4 «2,2 «2,5 «2.8 «2,в
«8,18 «8,1в «3,14 «8,17 «8,15 «3,18
В режиме записи (режим работы устройства определяется специ-
льными сигналами, поступающими по шинам управления ШУ) уст-
юйство работает в следующем порядке. Адрес числа по кодовым шинам
дреса КША поступает для записи в регистр адреса RG1, код числа
ю кодовым шинам записи КШЗ — в регистр числа RG2. На выбранной
помощью дешифратора DC адресной шине А запоминающего блока
,JTRG усилителем / под воздействием_сигнала ^вырабатываемого бло-
(ком управления ВС, формирует-
I ' F --'*„!. „Г.Г-... В1 ВЧ В2 В5 ВЗ В6
|ся вначале импульс тока считы-
Евания для стирания ранее запи-
|санной информации по этому ад-
|ресу, а затем импульс полутока
записи. Одновременно с усили-
усилителей 2 на вертикальные шины
В, соответствующие тем разря-
разрядам регистра RG2, в которых за-
записаны единицы, также посту-
поступают импульсы полутока запи-
записей. Таким образом, режим за-
|писи совпадает с аналогичным
|; режимом в запоминающем уст-
Iройстве типа Z.
В реж име считывания дешиф-
дешифрированный адрес преобразует-
: ся на шифраторе CD под воз-
воздействием импульса / блока ВС
в сигналы возбуждения несколь-
нескольких адресных и нескольких раз-
разрядных усилителей. Так, напри-
например, если надо выбрать первую
подматрицу исходной матрицы,
то возбуждаются одновременно
адресные шины А1, А4, А7 и
А1-
AZ-
АЪ-
AS-
А6-
/
/
4
/
•
4
С1
/
/
/
/
с
/
/
/
/
4
/
/ /
/
/ /
/
н
' .'
/
} н
/
/
* 4
/
/
С1
/
/
/
с,
/
/
/
с
/
/
/
/
/
4
/
/
И
/
4
/
/
/
/
4
/
/
/
t /
а
/
/
/
ч
/
/
/
с
/
/
/
/
Г
/
/
/
/
/
/
H
А9-
Рис. 7.4. Схема запоминающего блока
специализированного ЗУ
248
адресные шины т, лт, п., «
разрядные шины Bl, B2, ВЗ. Девять сердечников, находящихся на
пересечении этих шин, принадлежат различным секциям С1—С9
шины считывания. С выходов этих секций снимается 9-разрядный код,
который записывается в выходной регистр RG3, поступая на кодовые
шины считывания КШС и усилитель 3, формирующий под воздейст-
воздействием импульса 3 блока ВС импульсы полутоков запрета для восста-
восстановления считанной информации. Одновременно на те же адресные и
разрядные шины поступают импульсы полутоков записи (шины запре-
запрета D на рис. 7.4 не показаны). В качестве этих шин можно использо-
использовать шины С1—С9 или специальные шины, проходящие через те же
сердечники.
Режим считывания сходен с аналогичным режимом в запоминаю-
запоминающем устройстве матричного типа. Их разница лишь в том, что одновре-
одновременно возбуждается несколько горизонтальных и вертикальных шин,
а считываемые слова не совпадают по своему расположению и разряд-
разрядности с записываемыми.
249
Меняя способ прокладки шин С1—С9 и закон формирования токов
считывания, можно получать различные варианты разбиения исходной
матрицы на подматрицы.
§ 7.3. ГРАДАЦИОННЫЕ, ДИНАМИЧЕСКИЕ И ТОЧНОСТНЫЕ
ХАРАКТЕРИСТИКИ ВЫСОКОКАЧЕСТВЕННЫХ УСТРОЙСТВ
ВВОДА—ВЫВОДА ВИДЕОИНФОРМАЦИИ
Визуальное качество синтезированного снимка во многом опреде-
определяется параметрами звеньев тракта, включающего в себя источник
видеоинформации, фотоэлектрический (ФЭП) и нелинейный пре-
преобразователи (НП), преобразователь напряжения в код (ПНК),
алгоритм обработки (АО), преобразователь кода в напряжение (ПКН),
градационный преобразователь (ГП), звено оптической печати (ЗОП)
и, наконец, получатель изображения. Большинство из этих звеньев,
основные технические характеристики которых обосновываются ниже,
связано с УВВИ.
Для согласования шумовых характеристик упомянутого тракта с
характеристиками получателя видеоинформации необходимо нелиней-
нелинейное преобразование видеосигнала (см. [26]). В случае, когда таким по-
получателем является человек, целесообразно использовать критерий не-
незаметности шума квантования этого сигнала с помощью ПНК, т. е.
|ДВ,-|<ДВап=Вв6к(В,),
G.6)
где Ба — оптическая яркость произвольного элемента выходного изо-
изображения; б к (Ба) — функция порогового контраста зрения человека;
АБ2 — максимальное отклонение оптической яркости Б2, вызываемое
шумом квантования; ЛБап — пороговое значение ЛБ2, замечаемое
человеком.
Условимся, что характеристика воспроизведения полутонов при
анализе не является обратной соответствующей характеристике при
синтезе, а контраст синтезируемого изображения имеет еще и тот диа-
диапазон яркостей, когда закон Вебера—Фехнера (бк (Ба) = бк = const)
не выполняется.
Пусть Un — сигнал на входе ПНК, a AUn — его приращение,
отвечающее одной ступеньке квантования. Тогда АВ2 = (dB2/dUa) x
X Л?/„ < Яа6к (В,).
Для минимизации числа градаций яркости элементов Ly следует
положить
bBt = (dB2/dUn)bUn. G.7)
График зависимости бк = / (lg J52) для наиболее благоприятных
условий наблюдения изображения (см. [26]) приведен на рис. 7.5.
Аппроксимируя ее двумя прямыми АВ (закон Вебера—Фехнера не
выполняется) и ВС (упомянутый закон выполняется), получим бк E2)=
= — a lg 52 + lg с = lg (cBj*) (для прямой А В) и бк E2) = бк0
(для прямой ВС) (а, с, бк0 — соответствующие константы). Найдем
зависимость 5а (Un), интегрируя выражение G.7) с учетом G.6) и
250
|оследних соотношений. Получим
exp [-^{inc-ln (cB
2-aln) ехр
при Un
Г 6к0 1
В20ехр —— (Un —Un0) при U
Un < Um;
n0
(Ua-UBmla)
G.8)
ДУп1п10, lnc+lnB2m1n
Uno = Unmla+ In — ,
a ln с -fin B^a
^nmtn' ^nmax. B2min—минимальные и максимальные значения
соответствующих величин.
1000 г
0.08
0,06
ОМ
0,01
0
IV
1\
\
\
US \
—
2,0
15
800
600
400
200
3,0
Рис. 7.5. График зависимости
6/(lB)
г 4 б 8 ю ил,5
Рис. 7.6. График зависимости
Наконец, полагая 5а = ЪВ\ (Вг — оптическая яркость соот-
соответствующего элемента входного изображения; b и d—некоторые дейст-
действительные положительные постоянные), с помощью G.8) получим
ДУП 1и 10 In с—a In (bBfmln)
t/Bmla+—- ln inc-aln(bS?) ПРИ
U
no
ln
» < Bi < Blmax,
?
где 5l
— минимальное и максимальное значения Вг; В10 =
Выражение G.9) позволяет определить минимальное число града-
градаций яркости Ly, при котором шум квантования еще не заметен:
In с—a In I
lnc-alnBa,
1
bSlmax
G.10)
°к» д*о
! Значение Ly, подсчитанное по G.10), для зависимости бк (В2)
(рис. 7.5) оказалось ^ 130. График зависимости В2 = f (Un) в тех же
условиях и, к примеру, при t/nmin = 0' ^пщах = Ю В показан на
рис. 7.6. Аналогично находится и кривая Ua = f (Вх). Зная функцию
251
2 / (п) и функцию боспроизЁедения полутонов звеном оптичё-
ской печати, можно известным многоквадрантным способом найти так-
также необходимую характеристику ГП. Характеристика НП однознач-
однозначно определяется зависимостью Un = f (Bj).
Помимо шумов квантования видеосигнала в тракте присутствует
и собственный шум ФЭП (фотоэлектронный умножитель, диссектор
и др.). Для часто применяемых ФЭП эффективное значение шума
Овг = ^V~B~! (v — некоторая постоянная). В связи с этим возникает
задача выбора таких градационных характеристик НП и ГП, при ко-
которых та или иная оценка действия упомянутого шума, согласованная
со свойствами получателя информации и некоторым критерием, ми-
минимальна. Если выходное изображение воспринимается человеком и
используется критерий относительной незаметности шума ФЭП, га-
гарантирующий различение на изображении заданного числа градаций
яркости, то методика нахождения зависимостей, реализуемых НП и
ГП, во многом аналогична методике, изложенной выше. Однако в ряде
задач получателем информации является алгоритм ее обработки (ви-
(видеотракт ограничивается ФЭП, НП и ПНК), а соответствующий ему
критерий оценки действия шума — весьма специфический.
Рассмотрим случай, когда обработка изображения производится
с целью фотометрии, т. е. измерения яркости его элементов. Здесь целе-
целесообразен критерий минимизации средней мощности шумов.
Будем искать зависимость UB (Bj) как результат минимизации оп-
определенного интеграла:
"lmax
Dlmax
^lmln Bi mill
где оив = v\^Bx (dUJdBx) — эффективное значение шума ФЭП, при-
приведенное к входу ПНК; р (Un) = р (Е) (dBx/dUn), p (Вх) — плот-
плотности распределения соответствующих величин.
В классе монотонно возрастающих функций UB (Вх) наибольший
интерес в данном случае представляет поле экстремалей вида
dBt
Bt
Bimin
где С — произвольная постоянная.
Если яркость Вх распределена в диапазоне Blmla <I Вх <1 Вх
закону равной плотности, то
где Un (Яшах) = иитлх.
Полученный результат отвечает найденной ранее функции U1
при условии справедливости закона Вебера—Фехнера.
252
по
Рассмотрим оценку времени преобразования /пр напряжения Uп
f двоичный код. Конечность этого времени ведет к появлению динами-
ой ошибки Uo (t), поскольку результат преобразования относится
актически не к отсчетному времени / = кТ0 (То — интервал отсчета,
= 0, 1, ...), а к случайному моменту времени t + Atx, Ak€U.
}'-\- 'npb Можно показать, что математическое ожидание динамиче-
динамической ошибки М {Uo (/)} = 0, а ее дисперсия D {Uo (/)} « [dUB (/)/
]dt]2 tip/12, если Д/н распределено в интервале [t, t + /np] равномер-
равномерно.
Действительно, пусть fmax — граничная частота спектра сигнала
in (t), поступающего на вход ПНК. Тогда в соответствии с теоремой
Котельникова
и
1где ©о = л/У 0 ^ 2л/тах.
Смещение отсчетной точки относительно момента времени t = иТ
|на величину At* ведет к появлению динамической ошибки:
sin(ceo<—хя)
Полагая Ua (иГ0 + Д^) да Un (хГ0) + U'n (иГ0) At* (Un (t)
dUJdt), найдем
х=о
Тогда математическое ожидание ошибки будет равно
м {и0 m=- 2
ч=о
sin (cop t—ия)
так как код на выходе ПНК не должен зависеть от номера отсчета.
С учетом последнего выражения можно написать М {Uo (t)} =
= — М {At} Un (t), так как спектр сигнала Un (t) также ограничен
частотой /max (дифференцирование — линейная операция). Выбирая
отсчетные точки так, чтобы М {At} = 0, получим М {Uo (t)} — 0.
Корреляционная функция ошибки может быть определена из вы-
выражения
K{Uo(t)}=M{Uo(t1)Uo(h))=K(ti,ti)-
2 2
о
—»«! Я) Sin((uo^—Х2Я)
253
где U0 (t) = Uo (t) — М {U0(t)}, а ее дисперсия
=D
Если Д^ распределено в интервале It, t+ tnv] равномерно, то
что и требовалось показать.
Положим, что Un (t) = ?/пюах exp {— [(t — to)ITm]*} (t0, Тш —
некоторые константы). Тогда максимальное значение Dmax {^o @} =
D ^f/ [1/Fе*Гщ)] (е— основание натурального лога-
лога(ур
^пр^птах/СКбеТш). Видим, что а
Т О
юах
рифма), а аюах = Ктах прптах/СКбТш). Видим, что аюах
увеличивается с уменьшением Тш. Однако на мелких деталях конт-
контрастная чувствительность зрения человека понижается. Действитель-
Действительно, функция порогового контраста бк = с/ад (ад—угол зрения, под
которым наблюдается деталь, рад; с = 6,28- 10 при Вг > 30 нт).
Найдем максимальное значение *пр = *Пртах. при котором динамиче-
динамическая ошибка преобразования не будет замечена человеком на выходном
изображении, из условия Заюах = AU п, полагая, что во всем диапа-
диапазоне яркостей элементов этого изображения справедлив закон Вебера—
Фехнера и шум квантования незаметен. Имеем
ду _ "коптах cUnтах
In (Ва щлх/Вг mln) «д In (В
t a У
Зад In (Ba max/Sa mln.)
Пусть временные размеры наблюдаемой детали составляют 47" ш
(сигнал Un (t) отсчитывается по уровню, равному 0,02 Unmax), а на
снимке она наблюдается с расстояния LH. Тогда ад= /Д/1Д(/Д = 4и0КТш
— ее линейные размеры; vcR — линейная скорость сканирования).
С учетом последних соотношений найдем максимальное время преоб-
преобразования:
<пр max = Т/б~ес1д/[ 12уОк In (В2 юах/В2 юш)] • G.11)
Для СЦОИ «Схема» (см. §7.6) v0K = 1,884 м/с. Полагая Z.H=0,4 м, а
S2max/S2min = 50, получим <пртах » 2 мкс.
Точностные характеристики УВВИ зависят, как правило, от точ-
точности и стабильности работы его электронных и электромеханиче-
электромеханических компонент, номенклатура и порядок соединения которых между
собой определяются принципом построения устройства.
Пусть (xlt уг); (ха, уа) — координаты соответствующих точек на
входном и выходном снимках в системах координат, связанных с их
краями; (х[, у[); (х'2, у'2) — машинные значения этих координат;
t^x-L = хх — х{, Ауг = ух — у[, Ахг = х% — х'2, Ау2 = Уг — у2 — по-
погрешности ввода — вывода (предполагается, что какие-либо коорди-
254
латные преобразования изображения в ЭВМ отсутствуют). Ё;УВВИ с
Электромеханической разверткой барабанного типа стабильность шагов
Дискретизации снимка по строкам hx и по кадру hv связана с различ-
различными факторами. Кадровая развертка в устройствах такого типа реа-
1изуется электромеханическими средствами. Если электромеханиче-
электромеханические узлы УВВИ изготовлены с высокой точностью и биениями, люф-
гами, вибрациями и т. п. в них можно пренебречь, то Ауг а; Ау% = 0.
Значения же Axlt Ах2 в аналогичных условиях зависят от стабильно-
стабильности hx = 2nn6R6/F0 (R6 — радиус барабана, п0 — угловая скорость
|его вращения, /0 — частота строчной дискретизации изображения).
|Находя полный дифференциал этого выражения и заменяя все диффе-
дифференциалы конечными приращениями, получим
Расчеты показывают, что при hx = 0,06 мм составляющими Ahx,
•связанными с AF0 и А/гб, можно пренебречь, если нестабильность ча-
частот импульсов, синхронизирующих строчную дискретизацию и вра-
вращение барабана, не превышает 10~4. Как правило, это имеет место,
поскольку эти импульсы вырабатываются обычно генераторами, ста-
стабилизированными кварцевым и камертонным элементами соответствен-
соответственно. Тогда, полагая хг = х2 = х, Ахх — Ах% = Ах, а радиус барабана
R6 (х) = Ro + А#ф + AR (х), для элемента с координатой х найдем,
что
х
- GЛ2)
где Ro — номинальное значение R6; ARi^ — систематическая погреш-
погрешность, связанная, например, с применением фотоматериала нестандарт-
нестандартной толщины; AR (х) — погрешность, вызванная некачественной
обработкой поверхности барабана.
Непосредственное измерение зависимости AR (х) для СЦОИ «Схе-
«Схема» и последующее численное интегрирование по G.12) показывают, что
второй составляющей Ах (AR6) можно пренебречь. Что же касается
первой составляющей, то уже при Д^?ф ='„0,1 мм она может достигнуть
¦в конце строки ~ 0,3 мм.
В УВВИ с электронно-механической разверткой сканирование изо-
изображения в рамках фрагмента заранее программируемых размеров
(существенно меньших, однако, предельных размеров АКИ) осущест-
осуществляется электронными средствами, реализуемыми, как правило, на
базе электроннолучевой трубки высокого разрешения, а переход от
^фрагмента к фрагменту осуществляется электромеханическим переме-
перемещением снимка вдоль двух взаимно перпендикулярных направлений.
Такая развертка, например, имеет место в СЦОИ «Модель» (см. § 7.6),
Стабильность шагов hx и ку связана здесь с идентичными факторами.
К ним прежде всего следует отнести нелинейные искажения растра
>ЭЛТ, точность изготовления механических компонент и погрешности
^Электромеханического позицирования изображения. Нелинейные ис-
255
кажёнйя растра ЭЛТ могут быть скомпенсированы аппаратурными ИЛИ
программными средствами до 0,5 элемента разложения. При hx — hy =
= 15 мкм механические компоненты должны изготовляться с точно-
точностью ~ 5 мкм. Погрешности электромеханического позицирования
сравнительно простыми средствами могут быть ограничены значения-
значениями ~ 7—10 мкм.
Геометрическая точность обработки изображений зависит не только
от точности ввода—вывода, но и от вида координатных преобразова-
преобразований в ЭВМ. Запишем последние в виде xi = fx (х\, у\), у2 = /„ (х\, у\).
С учетом погрешностей ввода—вывода они перепишутся следующим
образом: хг = fx {хх — Ахх, ух — Аух) + Ах2, у2 = fv (хг — Axlt уг —
— Дг/Х) + Ау2. Если положить Аух = Ау2 « 0, как это имеет место
в СЦОИ «Схема», то ха = fx {хг — Axv yt) + Ах2, у2 = fv (xt —
— Axv ух). Тогда погрешности АХ, AY, вызванные вводом, преобра-
преобразованием и выводом изображения, можно записать в виде
bX=fx(xt, yi)—x%=[fx(xu yi)—fx(Xi—bxit yt)]— Дх,;
bY=fv(xit yi)—y%=[fv (xityi)—fu(xi—/lixi, y{)],
что при достаточно малых Ахх трансформируется в выражения
dxt
А t
¦Дх,.
При отсутствии геометрических преобразований
=0, IiX=bxi—l
ДУ=0,
а при Axt = Ax2 AX = 0.
Таким образом, полученные выше выражения позволяют теоретиче-
теоретически и практически оценить основные технические характеристики уст-
устройств ввода—вывода изображений с электромеханической разверткой
барабанного типа.
§ 7.4. ВЫБОР РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ УСТРОЙСТВ
ВВОДА-ВЫВОДА ПРИ РАСПОЗНАВАНИИ ГЕОМЕТРИЧЕСКИХ
КОНТУРОВ
При разработке системы автоматического ввода в ЭВМ изобрази-
изобразительной информации об объектах важен правильный выбор разрешаю-
разрешающей способности системы и степени дискретизации вводимой информа-
информации. Разрешающую способность системы будем характеризовать раз-
размером элемента дискретизации вводимого изображения (растра) вдоль
осей х я у:
где ?*max, Lymax — соответственно максимальные линейные размеры
растра вдоль осей х и у; Nx, Ny — соответственно число элементов
дискретизации растра вдоль осей х и у.
Для квадратного растра LXma=LUm = Lmax, и если NX = NV =
— N,ionx = fty. Выбор значения разрешающей способности зависит от
256
алгоритма распознавания. Имея в виду систему 6гпрйзнакоЁ распоз-
распознавания и соответствующий им алгоритм классификации, выбираем
разрешающую способность системы.
В этом алгоритме распознавания в качестве критерия распознава-
распознавания используется степень «схожести» площадей фигур, найденных дву-
двумя различными способами для одного и того же изображения объекта,
вычисляемая в соответствии с выражением
где Sr,, 5И.—соответственно «геометрическая» и «интегральная»
площади изображения (контура); / — номер анализируемого изобра-
изображения (j = 1, 2, ...).
Поскольку площади Sr и 5И вычисляются через координаты то-
точек контуров, замеряемых с погрешностями, очевидно, что значение
критерия |EГ, — 5ир/5г^1тах соответствует пороговому значению ко-
коэффициента а} для каждой /-й фигуры:
а) пор =
Огл maT *-
"jmax
r./max
где Д5Г , Д5И, х — погрешности в измерении площадей.
Однако воспользоваться этим выражением для выбора разрешающей
способности затруднительно, так как вычислить величину Д5и,шах
сложно. Поэтому можно использовать другую зависимость для опре-
определения а;ПОр, заведомо «загрубив» этот критерий:
rJmax
urJ max
Покажем, что приведенное выше утверждение справедливо, т. е.
Д5Г > Д5И
vmax ss^ ./max
Для доказательства рассмотрим квадрат.
Найдем погрешности в измерении геометрической и интегральной
площадей А5Гшах и ASHmax-
Погрешность Д5гтах = 5Гтах— 5Г, здесь Sr = б^, поэтому
Srmax =
2Дв.) =
2б2Дв1
где Да, и Дв, — предельные абсолютные погрешности считывания
координат точек контура, через которые определяются стороны квад-
квадрата 81 и б2.
В случае квадрата бх = б2 = б, и если принять Да, = До, = Да.
то
Погрешность
<Ъ итах
257
Здесь для йахождеаия^нтах воспользуемся формулой трапеций,
4
приведеннойк.виду SH = ДAyth, где h — шаг дискретизации (кван-
(квантования) по оси х (считаем его постоянным); п — число точек контура
(периметра квадрата); Ayt— приращение ординаты точек контура с аб-
абсциссой xt. Так как для квадрата h = ~-{б1§2, то
UiE<n<oo, n=5,9, 13,...).
Поскольку при отсутствии погрешностей в координатах точек
к — »i = о2 = б, то
л (n-D/4
с ^t^
П—1 Juid ' ~ '
Переходя к предельному случаю, получим
4
что и требовалось доказать.
A JLfйствительности приращения Ayh как правило, отличаются
Ь меньше чем на величину ± 2Да, что приводит к неравенству
lAVKlASnmaxI и l;ASH|<|;ASrmai|.
Найдем зависимость а;вор от числа точек, которыми задается кон-
контур, и точности их для некоторых наиболее типичных геометрических
Квадрат. Для этой фигуры
от
кон-
конСпо —
П°Р
Введем в рассмотрение величину, определяющую число шагов дис-
kShtv3D?H: B/anpaB^HHf минимального размера нормализованного
контура, т. е. пх = Eli2)mIn//z.
Очевидно, «i = -^ , ^ = в, = М = «ZJ. Л, я = 4Л1 + 1.
Тогда
GJ3)
Таким образом, порог сравнения площадей S. и S, зависит не
К°1ГН0СТИ СЪШа К°0РДИНаТ ТОчек А<> но и 0^ числа шагов на
Г , от
258
Семейство кривых апор = / (пх) при Ae =¦= const для квадрата
приведено на рис. 7.7.
Следовательно, чем меньше точность Ав, тем большим числом точек
необходимо описывать квадрат.
Таким,образом, задаваясь допустимой степенью несовпадения Sr
и Sa, т. е. величиной опор, можно оценить величину nlt при которой
алгоритм распознавания работает надежно.
Однако возможно совпадение с некоторой точностью площадей изо-
изображений различных объектов (квадрата, окружности и т. д.), что при-
приведет к ошибке в распознавании контуров.
0,6
0,5
О Л
0,3
0,2
0,1
I 3 5 7 9 II 13 15 17 19 л,
Рис. 7.7. Графики зависимости
<Tnop = f(ni) при Дб =const ДЛЯ
квадрата и окружности:
/ —Дв =0,1; 2 — Дв =0,05
\
у
\
\
-
\
\
ч
ч
i
-f
|
ч
,^_
1
1 1
Г
7
¦С
1
-я
0,5
0А
0,3
0,1
0,1
1
\
\
ч
II
к
11
г*
А
г
\
II 15
15 п,
Рис. 7.8. Графики зависимости
anop=f(rti) при Дв = const и k =
=const для прямоугольника:
^ — Д ft =0,1; fe=2; 2-Д6=0.1; ft = 4;
3 —Да =0,05; k=2; 4 — Д $ =0,05; k-4
->окр
Среди наиболее часто встречающихся стандартных фигур (см. § 3.3)
машине легче всего «спутать» квадрат с окружностью, радиус которой
равен половине стороны квадрата. Относительная разница в площадях
квадрата SKB = ЬгЬ2 и окружности S0KP = (л/4) 6^ (при 6а = 62)
должна быть больше порога распознавания, т. е. апор <
- 0,215.
Таким образом, чтобы алгоритм надежно отличал квадрат от ок-
окружности при апор<0,1, необходимо, чтобьг квадрат описывался
следующим количеством точек:
п > 4«j, + 1 = 9 при Аб = 0,05, пх = 2;
« > 4«i + 1 = 17 при Ав = 0,1, пх = 4.
Прямоугольник (см. рис. 3.7, фигура 7). Для этой фигу-
ры Sr = 6162, при ЬхфЬг, a ASrmax = Srmax—Sr. Считаем, что Ав, =
— Ав, = Ав. Определяется максимальная площадь прямоугольника:
Тогда
259
ASrmai=2Fi+62)An+4Ae и
Если нормализация прямогольника приводится таким образом, что
^i > 6,, то> введя коэффициент «вытянутости» прямоугольника
к=6^, G.14)
получим, что 62 = nxh — п~Х h; Ьг = knji, п = 2пх (k + 1) + 1,
2 (ft + 1)
и окончательно
Поскольку для квадрата k — 1, то приходим к формуле G.13).
На рис. 7.8 приведены зависимости апор = / (%) при Дв = const
и k = const.
Криволинейный «прямоугольник» (см. рис. 3.7,
фигура 8). Для этой фигуры 5Г = 62 (б3 + б6)- Степень искривления
«прямоугольника» будем характеризовать коэффициентом
P=(VfA)/6i<,. G.15)
Для квадрата и прямоугольника р — 1, для всех остальных фигур
р<\.
Степень «вытянутости» фигуры будем оценивать коэффициентом
k = bJ62. ЕСЛИ Д«, = Дв, = ... = Дв, ТО Srmax = б2б8 + б266 +
+ 2б2Дв + 263Дв + 265Дв + 4Д|; ASrmax = 2 (82 + 63 + 65) Дб +
+ 4Д|. Тогда
ва (б, + б5) +2 (ба + б3 + бв
С учетом G.14), G.15) и того, что для
выражение приводится к виду
1 62 = nji, последнее
Если же k < 1, то 6Х = nji и
Зависимости апор = / (пх) при k = const ир = const для наибо-
наиболее характерных коэффициентов k и р показаны на рис. 7.9.
Эллипс и окружность (см. рис. 3.7, фигуры 11 и 10).
Поскольку окружность — частный случай эллипса, получим выраже-
выражение (тпор для эллипса, а из него найдем апор = / (па) для окружности.
Площадь эллипса Sr = (я/4) ЬгЬ2 при бх Ф б2. Считаем, что Дб, =
- Дв, = Дв- Тогда Srmax = (я/4) [6А + 2 (бх + б,) Дв + 4Д|] и
ASrmax = (Я/4) [2 (вх + в,) Дв + 4ДЦ.
Наконец,
ОпоР = [4(б4+б2)Дв+8Д|]/[б1б2 + 2(б1+б2)Дв+4Д|]. G.16)
Так как для окружности 61 = 62 = 6, то порог распознавания опре-
определится как
260
Для эллипса справедливы соотношения k = ба/б2 ^ 1, пх —
(п — 1)/2, ба = nji = 1(п — 1)/2] h, б2 = [(п — 1)/26] h. В этом
| случае G.16) примет вид
А.п. h rn-i-feVfelA.-+-Kflf
G.17^
Для окружности k — 1 и
G.18)
Примечание. Полученные
формулы справедливы только для
случая, когда на размере б2 укла-
укладывается целое число шагов А.
На рис. 7.7 и 7.10 приведе-
приведены графики зависимостей, по-
построенных по G.17) и G.18).
Параболоид (см. рис.
3.7, фигура 3). Для этой фигуры
Sr = B/3) 6аб2, k = 6t/62, A6l =
= Дв,= Дв. Тогда Srmax=B/3)X
Х[6162+2F1+ 62) Дв+4Д§],
ASrmax= B/3)[2(ба+62) Д6+
+ 4ДЛ) и
4(б1+62)Д6+8Д§
^ пор
1,5
0,5
0,1
щ
S
'<
1
г
1
5В бч- 71 80 88 95 П,
9 11 !3 15 17 19 21 23 25 V 29 л,
Если 6а = n-Ji, то
Рис. 7.9. График зависимости аПОр =
=f(«i) при 4 g = const, ?=const для
криволинейного «прямоугольника»:
а — ;—Д в=0,1; ftp=0,03 (ft=0,3; р=0,1);
2_дв =0,05;. ftp=0,03 (ft=0,3; р=0,1): 3—Ag =
=¦0,1; ftp=0,24 (fc=0,3; p-0,8); 4~Д§ =0,05;
fcp=0,24 (ft=0,3; p=0,8); б— /-Д6 =0,1; kp-
=0,4 (ft=4; p=0,l); 2—Д6—0,05; fcp=0,4 (ft-4;
p=0,l); 3—Да=0,1; *р=3,2 (fc=4; p=0,8);
4—\ь =0,05; fep = 3,2 (ft=4; p-0,8)
4n1A[(l+ft)/ft]Ae + 8A|
CTnop —
Графики зависимостей апор = / (nt) приведены на рис. 7.10 и 7.11.
Трапеция (см. рис. 3.7, фигура 4). Обозначим размер наимень-
наименьшего основания трапеции через а — F263 — 6t62 + 26а64)/б3. Изме-
Изменения этого параметра при постоянных значениях 6а и 62 приводят к
модификациям трапеции. Например, если а ->¦ 0, трапеция превра-
превращается в треугольник, а при а —*¦ 62 — в прямоугольник.
Если ввести еще параметр k = 81/62, то изменения величин а
и k дадут всевозможные разновидности трапеций.
Для трапеции имеем Sv = 0,58х (а + 62). Тогда Srmax—
= 0,5 [6ja + б^, + 2 B6Х + а + 62) Дб + 8Д$]; ASrmax = B6t +
261
a+62)Ae+4Ag и
б1а+б16г+2Bб1+а+б2)Дв+8Д| '
Если обозначить р = а/62 @ < р < 1) и иметь в виду, что 62 = пгк,
а 6Х = kb2, то
По этой зависимости на рис. 7.12 приведены кривые для наиболее
характерных значений параметров р и k при различных точностях
Лв съема координат точек трапеции.
vnop
0,8
0,5
ОЛ
¦0,3
0,2
0,1
13 5 7 9 11 13 15 п,
Рис. 7.10. График зависимости
0nop=/(ni), при Дв = const и
fe=const для эллипса и окружно-
окружности:
/-Лв-0,1; ft-0,5; 2-Д — o,i; ft=0,l;
3—Д,5=О,О5; k=0,5; 4—Лв = 0,05; ft-0,1
¦V
Х-
/
¦"¦*—,
-—
-о
0,8 г
0,1
\
\
>
\
Si
ч
)
(г
2
Г
V
5 7 9 11 13 15 17 19 21 23 25 2729 п,
Рис. 7.11. График зависимости
<7nop=/(ni) при Дв = const и
k=2 для «параболоида»:
/—Д6=0,1; fc=2; 2-Дб = 0,05; k = 2
262
пор
0,6
0,5
ОЛ
0,3
0,2
0,1
¦f.
\
ч
J
5 7 9 11 13 15 п.
-'пор
0,6
0,3
0,1
1
л
J
^—
х
1 Ъ
Рис. 7.12.
5 7 9 11 13 15 п.
График зависимости
/() при Ae = const, k=
=const и />=const для трапеции:
а — 1—Дв=0,1; fcp=0,05 (fc-0,5; p—0,1);
2 —Д6 = 0,1; fep=0,4 (fc-0,5; p-0,8);
3-Дв = 0,05; кр=0,05 (fc-0,5; p—0,1):
4-Дб = 0,05; ftp=0,4 (fc=0,5; p=0,8); б —
'—Дб=0'1: *Р=0,4 (fc-4; р—0,1); 2—Дв =
=0,1; kp=Z,2 {k=i; p=0,8); 3—Дв -0,05;
ftp=0,4 (fc=4: р=0,1): 4— Дв =0,05; fcp-
-3,2 (fc=4; p=0,8)
Анализ графиков для рассмотренных фигур позволяет сделать сле-
следующие выводы: если в качестве порога выбрать апор ^0,1, то опре-
определяющей для всех фигур будет величина (п^шах криволинейного
«прямоугольника»; если точность считывания координат точек конту-
контуров принять равной Ав = 0,1, то (n!)mai = 36; для Ав = 0,05 (п^та* =
= 18; если же условия совпадения площадей Sr и Sa сделать более
жесткими, например считать аПОр ^ 0,05, то для той же фигуры при
Ав = 0,1 (n^max = 85, а при AS = 0,05 Ышах = 34.
Очевидно, чем меньше порог апор, тем большая надежность распоз-
распознавания. В этой связи можно рекомендовать максимально использо-
использовать точностные возможности устройства считывания, так как это по-
позволит при прочих равных условиях иметь меньшую величину апор,
а следовательно, задавать геометрические .контуры наименьшим чис-
числом точек, повысив тем самым быстродействие распознающей системы.
Выбрав величину апор, можно определить значение пг. Этот пара-
параметр позволяет оценить необходимое число элементов дискретизации
растра.
Пусть d > Lmin/Lmax. где Lmin, Lmax — соответственно наимень-
наименьший ч наибольший размер изображения распознаваемого объекта.
Будем считать, что квадратный растр, в котором располагается
плоское изображение пространственного объекта, формируется в
центре электроннолучевой трубки. Тогда шаг квантования изображе-
изображения h — P/-min/rti (р — масштаб изображения объекта), а число эле-
элементов дискретизации квадратного растра N2 = [pLmax/^]2 = (njdJ.
С учетом удобства представления координат точек изображений объек-
объектов в ЭВМ выбираем N = 2r >> (njd) (r — разрядность координат
х и у точек растра).
§ 7.5. УСТРОЙСТВО ВВОДА ИЗОБРАЖЕНИЙ В ЭВМ
НА БАЗЕ ПРОМЫШЛЕННОЙ ТЕЛЕВИЗИОННОЙ УСТАНОВКИ
Устройство ввода изображений (УВИ) должно с учетом возмож-
возможностей ЭВМ автоматически дискретизировать, кодировать и вводить в
память машины пиктурное изображение анализируемого объекта.
В качестве чувствительного (воспринимающего) элемента исполь-
используется промышленная телевизионная установка ПТУ-101 с передающей
трубкой суперортикон. Нормальная чересстрочная стандартная раз-
развертка в устройстве переведена на прогрессивную, что позволяет уп-
упростить логику алгоритмов предварительной обработки инфор-
информации.'
УВИ дискретизирует изображение объекта, получаемое на экране
передающей трубки, примерно на 260 000 элементов E12 строк по 512
элементов разложения на строке), кодирует по пяти градациям
яркости (в случае необходимости предусмотрено увеличение числа
градаций до семи), осуществляет адресный и безадресный ввод за 20,
48; 10, 24; 5, 12 с; производит при вводе минимизацию вводимой ин-
информации и обладает рядом логических возможностей.
Структурная схема УВИ. Структурная схема устройства ввода
изображений представлена на рис. 7.13. Объект воспринимается пере-
263
ЭВМ
Рис. 7.13. Структурная схема УВИ
дающей ЭЛТ ПТУ, имеющей разрешающую способность около 800
элементов разложения на строке.
Видеосигнал ВС с ПТУ поступает в блок кодирования видеосигна-
видеосигнала по яркости БКВЯ, где квантуется в соответствии с выбранной шка-
шкалой градаций яркости. Длительность элемента квантования составляет
80—90 не. С помощью блока ограничения растра БОР производится
выделение из телевизионного растра матрицы элементов разложения
изображения размером 512 X 512.
Каждый элемент кодируется в блоке формирования координат
БФК. При этом ему приписываются значения координат (Xi, yi) и яр-
яркости Ви. Предусмотрено по девять двоичных разрядов на каждую ко-
координату и по два разряда на
код яркости. Так как точки
фона не несут никакой инфор-
информации в процессе анализа
введенной в ЭВМ информа-
информации, они исключаются бло-
блоком минимизации фона ВМФ.
По той же причине при вводе
информации предусмотрено
два режима кодирования эле-
элементов разложения: адресный
и безадресный. Во втором ре-
режиме работы минимизация
фона отсутствует. Выбор ре-
режима работы определяется характером вводимой информации и
может решаться автоматически самой системой ввода.
Для сопряжения УВИ с ЭВМ используют блок выходных регистров
БВР и блок согласующих регистров БСР. Синхронизация работы
всех блоков системы осуществляется сигналами, поступающими с
ПТУ-101, с ЭВМ, а также вырабатываемыми в блоке управления вы-
выходными регистрами БУВР и в блоке формирования импульсов опро-
опроса БФИО.
Поскольку в процессе отработки отдельных устройств и всей систе-
системы в целом в рабочих режимах работы желательно вести оперативный
контроль вводимой в ЭВМ информации, в системе предусмотрено ви-
видеоконтрольное устройство — блок визуального контроля БВК, на
экран ЭЛТ которого параллельно с занесением информации в машину
выносится считываемое изображение. В качестве ЭЛТ используется
трубка «Флакон» с послесвечением. Питание всех блоков системы
осуществляется от комплекта стандартных блоков питания.
Функциональная схема УВИ. Рассмотрим работу УВИ по ее функ-
функциональной схеме (рис. 7.14).
Входными сигналами устройства ввода, поступающими с телеви-
телевизионной установки ПТУ-101, являются видеосигнал ВС, кадровые
гасящие импульсы КГЦ, строчные гасящие импульсы СГИ. Кроме
того, с пульта управления всей системой подаются в соответствующие
моменты времени импульсы установка нуля (Уст. 0) и Пуск.
264
Блок ограничения растра (БОР). Перед началом
работы системы подается сигнал Уст. О, устанавливающий схему в ис-
исходное состояние. При этом состояние триггеров 77 и Т2 оказывается
таким, что прохождение через схемы совпадения И1 и И2 соответствен-
соответственно импульсов КГ И и СГИ запрещается.
Ввод изображения в ЭВМ начинается с подачи импульса Пуск,
который устанавливает триггер Т1 в состояние, разрешающее прохож-
прохождение через схему И1 импульса КГИ. Эти импульсы, пройдя через схе-
схему совпадения, дифференцируются и поступают на инвертор Hel. Зад-
Задний фронт продифференцированного импульса КГИ запускает триг-
триггер Т2, тем самым разрешая прохождение импульса СГИ через схему
совпадения И2. Импульсы СГИ, пройдя через схему И2, поступают на
схему ИЗ, которая имеет разрешение по одному из входов инвертиро-
инвертированным импульсом КГИ. Такое двойное клапанирование СГИ требует-
требуется для того, чтобы из всех СГИ выделить только те, которые совпадают
по времени следования с КГИ. Импульсы СГИ, прошедшие через схе-
схему ИЗ, дифференцируются. При этом продифференцированный перед-
передний фронт импульса СГИ поступает на схему И4, а задний — на схе-
схему И5. Схема И4 в это время открыта разрешающим уровнем напряже-
напряжения с триггера ТЗ (он был установлен в это состояние импульсом со
схемы И1, соответствующим заднему фронту импульса КГИ). Импуль-
Импульсы, прошедшие через схему И4, поступают на шестиразрядный счет-
счетчик СТ1, который был установлен в исходное состояние импульсом со
схемы И1, соответствующим заднему фронту импульса КГИ. Счетчик
отсчитывает 56 импульсов, прошедших через схему И4, соответствую-
соответствующих 56 верхним строкам растра ПТУ. После прохождения 56 строк
срабатывает схема И48 и формирователь F3 начинает формировать ко-
короткий импульс, устаналивающий триггер ТЗ в состояние, разрешаю-
разрешающее прохождение сигналов через схему И5 и запрещающее прохожде-
прохождение импульсов через схему И4.
Схема И5 была раньше открыта по одному входу импульсом с триг-
триггера Т4, установленным в это состояние импульсом, соответствующим
заднему фронту импульса КГИ. Теперь схема И5 полностью открыта
по двум управляющим входам и через нее могут проходить импульсы со
схемы ИЗ (продифференцированные), соответствующие заднему фрон-
фронту импульса СГИ. Прошедшие через схему И5 импульсы поступают
далее на счетчик СТ2 координат у в блоке БФК, а также через линию
задержки Л31 в блок БФИО. Активная переменная линия задержки
Л31, задерживающая считываемые импульсы начала каждой строки
на 2—6 мс, нужна для того, чтобы совместить левый край ограничен-
ограниченного кадра с первыми считываемыми точками каждой строки. Импульсы,
поступающие, на схему И2, соответствуют строкам уже ограниченного
сверху кадра. Когда 9-разрядный счетчик координат у отсчитывает
512 строк кадра, сигнал его переполнения после дифференцирования
подается в блок БОР на триггер Т4, устанавливая его в состояние,
дающее запрещение на прохождение сигналов через схему И5.
Таким образом, за один кадр в блок БФИО поступит только 512
импульсов, соответствующих заднему фронту импульса СГИ, т. е.,
иначе говоря, импульсов, соответствующих началу строк, причем Все
266
512 строк расположены в центральной части кадра, так как было
проведено ограничение сверху 56 строк, затем пропущего в блок
БФИО 512 импульсов (по одному на строке) и, наконец, ограничение
кадра снизу на 625 — E12 + 56) = 57 строк. Теперь, когда придет
следующий импульс КГИ, импульс соответствующий его заднему фрон-
фронту, перебросит триггер ТЗ в состояние, при котором он закроет по вто-
второму входу схему И5 и откроет схему И4. Этот же импульс перебросит
триггер Т4 в состояние, при котором он снова откроет по первому входу
схему И5, но, так как эта схема закрыта по второму входу, то им-
импульсы, соответствующие заднему фронту импульса СГИ, через него
пройти не смогут. Этот же импульс устанавливает счетчик СТ1 в нуле-
нулевое состояние.
На этом цикл работы описанных элементов схемы заканчивается
и вновь повторяется в следующем кадре.
Содержимое 9-разрядного счетчика СТ2 в соответствующие мо-
моменты времени является координатами у считываемых точек. Дейст-
Действительно, перед началом каждого кадра счетчик СТ2 сбрасывается в
нулевое состояние сигналом, соответствующим заднему фронту им-
импульса КГИ, а затем считает импульсы, соответствующие заднему
фронту импульса СГИ, т. е. перед началом каждой очередной строки
на счетчике СТ2 уже сформирована ее координата у}.
Блок формирования координат (БФ К). Рас-
Рассмотрим работу элементов схемы при формировании координат Xi то-
точек дискретизации. Импульс Усш.О устанавливает триггер Т5 в состоя-
состояние, запрещающее прохождение сигналов черех схему И6, и сбрасы-
сбрасывает в нулевое состояние счетчик СТЗ координат xt.
Первый после начала работы импульс, соответствующий переднему
фронту импульса КГИ и приходящий из блока БОР, поступает на схе-
схему И6. Однако разрешение на его прохождение через эту схему совпа-
совпадения с триггера Т5 появится спустя только 2 мкс. Эта задержка обес-
обеспечивается линией задержки Л32.
Таким образом, если выбран режим ввода информации в ЭВМ, при
котором за один проход электронным лучом строки считывается толь-
только один элемент дискретизации, то на счетчик координат х в первом
кадре импульс не поступит, т. е. координата хг считываемых точек
будет равна нулю.
Если же режим работы предусматривает за один проход строки
электронным лучом считывание двух точек кадра, то для формирова-
формирования координат хг "точек с номером более 256 используется кроме
8-разрядного счетчика СТЗ дополнительный триггер Т7,.выполняющий
роль старшего разряда кода координат x-v. Этот триггер перед началом
каждой строки кадра сбрасывается импульсом, формируемым по зад-
заднему фронту импульса СГИ, приходящим с дифференцирующей цепоч-
цепочки (после прохождения схемы ИЗ) блока БОР, в единичное состояние.
Первый импульс опроса, соответствующий первой считанной точке на
строке, приходящий из блока БФИО, перебрасывает триггер Т7
•в нулевое состояние, а второй импульс —снова в единичное состояние.
Таким образом, в старшем разряде кода координаты Xi для точек
левой половины каждой строки будет записан нуль, а для правой по-
9* 267
ловины каждой строки — единица. Полное же значение кода коорди-
координаты Xi каждой точки дискретизации будет складываться из^показа-
ний триггера 77 и восьми разрядов счетчика СТЗ. Когда этот счетчик
отсчитывает 256 кадров, появится сигнал его переполнения, который
после дифференцирования подается в блок БОР, где перебрасывает
триггеры 77 и Т2 и дает запрет на схемы совпадения И1 и И2 для про-
прохождения кадровых и строчных сигналов в УВИ. Это означает конец
ввода изображения в ЭВМ.
По окончании цикла считывания очередной точки растра коорди-
координаты xt и у, со счетчиков СТЗ и СТ2 поступают в регистр RG1 в блоке
БВР и представляют собой адрес очередного элемента дискретизации
растра. В этот же регистр заносится код градации яркости точки.
Старший разряд кода координаты xt поступает сразу в ЭВМ, где уп-
управляет регистром адреса ОЗУ так, чтобы считанные точки 1—256
каждой строки записывались в одни ячейки памяти машины, а точки
257—512 — в другие. Такая запись позволяет уменьшить на один
разряд длину ячейки памяти, необходимую для записи информации
об одной точке растра (хг, у]у В^) в 20-разрядную ячейку памяти.
• Блок формирования импульсов опроса
(Б Ф И О ). Импульсы, формируемые по заднему фронту СГИ, про-
прошедшие через схему И5 и линию задержки Л31, запускают одновибра-
тор S1 в блоке БФИО. Одновибратор формирует импульсы длительно-
длительностью 40—50 мкс. Импульсы, формируемые по переднему фронту им-
импульса, соответствующего левому краю кадра, запускают триггер Т6
схемы автоматической задержки импульсов опроса по строке. С этой
' целью используются генераторы пилообразного напряжения ГПН-1
и ГПН-2. Генератор ГПН-1 формирует напряжение строчной разверт-
развертки, а генератор ГПН-2 — медленно меняющееся пилообразное напря-
напряжение длительностью примерно 10—20 с.
Генератор ГПН-2 запускается импульсом Пуск, а окончание его
работы происходит после ввода кадра в ЭВМ.
Генератор ГПН-1 запускается импульсом с триггера Т6, передний
фронт которого соответствует левому краю кадра. Оба пилообразных
напряжения подаются на схему сравнения СС, где вырабатывается
сигнал сравнения, перебрасывающий триггер Т6, что соответствует
началу работы генератора ударного возбуждения ГУВ, построенного
на контуре ударного возбуждения. Одновременно заканчивается фор-
формирование пилообразного" напряжения'с ГПН-1.
ГУВ начинает генерировать гармонические колебания такой ча-
частоты, чтобы формирователь F1 за один прямой ход луча по строке
сформировал из синусоидального напряжения два импульса длитель-
длительностью 80—90 не каждый. Частота генератора подобрана и может
регулироваться в соответствии с выбранным режимом работы так,
чтобы сформированные два импульса были сдвинуты друг относитель-
относительно друга на 256 элементов дискретизации кадра. В каждом последую-
последующем кадре положение импульсов опроса меняется на 80—90 не (проис-
(происходит сдвиг импульсов опроса по строке на величину элемента дискре-
дискретизации от кадра к кадру) за счет меняющегося напряжения с ГПН-2.
Спустя 256 кадров, когда изображение будет полностью введено в
268
ЭВМ, произойдет совпадение импульса опроса с импульсом конца
строки, соответствующего заднему фронту импульса, получаемого на
рдновибраторе S1. При этом сработает схема И49 и спустя некоторое
время, определяемое одновибратором S2, прекратится работа генера-
генератора ГНП-2.
Импульсы опроса, формируемые в описанном блоке, поступают в
блоки управления выходными регистрами БУВР и кодирования видео-
видеосигнала .по яркости EKBfl.
1 Блок кодирования видеосигнала по я р-
[кости (Б К В Я). Импульс- опроса, сформированный схемой F1
\ в блоке БФИО, поступает на амплитудный модулятор AM, где импуль-
¦ сы опроса модулируются напряжением видеосигнала ВС так, что на
выходе AM формируются сигналы с амплитудой, пропорциональной
; ВС или яркости соответствующего элемента дискретизации. С AM
импульсы поступают далее на вход квантователя уровней, где в за-
зависимости от амплитуды входных сигналов на выходе получаем то или
иное число коротких импульсов.
Эти импульсы затем последовательно поступают в шифратор CD1,
, где преобразовываются в соответствующий их числу двоичный код.
Этот код градации яркости точек заносится в регистр RG1 блока БВР.
После того как произошло формирование кода градации яркости,
шифратор через 10 мкс сбрасывается в исходное состояние импульсом
с линии задержки Л37 блока БУВР.
Блок управления выходными регистрами
(БУВР). Выходными сигналами для блока БУВР являются импульсы
опроса. Блок БУВР может работать в адресном и безадресном режимах.
Адресному режиму работы блока БУВР на схеме соответствуют
положения переключателей в позиции /. Блок БУВР формирует сиг-
сигналы Запись, Перезапись, Сброс шифратора, Прием кода. Последний
сигнал — управляющий для ЭВМ, поскольку разрешает запись в ЗУ
содержимого регистра RG2. Сигнал Запись формируется из каждо-
каждого импульса опроса, задержанного линией Л34 на 2 мкс. Эта задержка
необходима для того, чтобы успел сформироваться код градации ярко-
яркости считываемой точки. Сигнал Запись поступает на схемы совпадения
И7—И26 и производит перезапись в регистр RG1 содержимого счетчи-
счетчиков СТ2, СТЗ и шифратора CDL
Сигнал Перезапись формируется из сигнала Запись путем допол-
дополнительной задержки на линии Л35 на 3 мкс. Этот импульс через пере-
переключатель П2 проходит на схему собирания ИЛИ2 и далее в блок
БВР на схемы совпадения И27—И46, производя перезапись информа-
информации из регистра RG1 в регистр RG2, откуда коды могут уже поступать
непосредственно в память ЭВМ.
Сигнал Сброс шифратора формируется из импульсов опроса, за-
задержанных линией Л37 на 10 мкс, и сбрасывает шифратор CD1 в ис-
исходное положение.
Сигнал Прием кода формируется из -сигнала Перезапись путем за-
задержки его схемой Л38 на 3 мкс. Таким образом, через 8 мкс после
момента считывания очередного элемента растра имеется возможность
для записи его в ЭВМ.
269
При работе БУВР в безадресном реоюиме все переключатели нахо-
находятся в положении 2. В этом случае в блок БВР поступают только
трехразрядные коды градации яркости Вц точек растра. Поэтому в
одну 20-разрядную ячейку памяти записываются данные о шести точ-
точках. С этой целью из блока управления на регистр RG1 поступает пос-
после записи очередного кода яркости сигнал Сдвиг, по которому записан-
записанный код сдвигается в регистре RG1 на три разряда влево, освобождая
крайние правые три разряда для приема кода яркости следующей точки.
Сигнал Перезапись подаётся из блока БУВР в блок БВР теперь уже
только после шестой считанной точки. Аналогично с задержкой вы-
вырабатывается сигнал Прием кода. Сигналы Запись и Сброс шифратора
формируются так же, как при работе в адресном режиме.
Сигнал Сдвиг формируется из сигнала Запись путем задержки по-
последнего на 5 мкс с помощью линии задержки Л36. Таким образом,
импульс Сдвиг отстает от импульса опроса на 7 мкс. Импульсы Пере-
Перезапись вырабатываются следующим образом. Сигнал опроса поступает
на счетчик СТ4, используемый в качестве делителя импульсов на 6.
После каждого шестого импульса опроса счетчик сбрасывается на
нуль, а перепад выходного напряжения дифференцируется, задержи-
задерживается на 5 мкс линией ЛЗЗ, формируя импульс Перезапись. Далее этот
импульс через переключатель ПЗ и схему собирания ИЛИ2 попадает
в блок БВР.
Сигнал Прием кода формируется из сигнала Перезапись так же,
как и в первом режиме.
Блок минимизации фона- (БМФ). При работе
УВИ в адресном режиме предусматривается исключение точек фона
при записи информации в ЭВМ.
Схема минимизации состоит из элементов Т8, И47, F2 амплитуд-
ного'ограничителя АО. Последний проводит амплитудную селекцию
видеосигнала по уровням «фон» и «не фон».
Для уровня «не фон» вырабатывается на триггере Т8 сигнал раз-
разрешения для схемы И47 и информация из регистра RG2 может быть
переписана в память ЭВМ.
Для уровня «фон» разрешения на запись информации в ЭВМ не
дается и эти точки исключаются из дальнейшего рассмотрения.
Блок визуального контроля (Б В К). В систе-
системе автоматического ввода для контроля вводимой в ЭВМ информации
имеется блок визуального контроля БВК, построенный на ЭЛТ
«Флакон». Входными сигналами для блока являются видеосигнал
и импульсы с блока БКВ$. Видеосигнал подается на селектор синхро-
смеси, где из него выделяются кадровые и строчные синхронизирующие
импульсы, поступающие затем в блоки кадровой и строчной разверток.
В блоке БВК происходит преобразование и усиление промодули-
рованных импульсов опроса таким образом, чтобы получить достаточ-
достаточные для управления модулятора напряжения. На экране ЭЛТ в ра-
рабочем режиме оператор может наблюдать изображение объекта, после-
последовательно во времени вводимое в вычислительную машину. Этим же
устройством можно пользоваться в режиме отладки ПТУ.
Блок управления режимом работы ЭЛТ обеспечивает ее питание.
270
§ 7.6. ПРИНЦИПЫ ПОСТРОЕНИЕ ВЫСОКОКАЧЕСТВЕННЫХ
УСТРОЙСТВ ВВОДА-ВЫВОДА ЭВМ
Разработка высококачественных устройств ввода—вывода инфор-
информации (УВВИ) в настоящее время весьма актуальная задача, поскольку
их фактическое отсутствие в распоряжении пользователей делает мно-
многоцелевую обработку больших объемов аэрокосмической видеоинформа-
видеоинформации, получаемой сейчас достаточно оперативно с помощью разнооб-
разнообразных средств, совершенно неприемлемой по срокам, номенклатуре
решаемых вопросов, полноте извлечения необходимых данных, фор-
формам представления результатов. Поэтому изложим принципы построе-
построения УВВИ систем «Схема» и «Модель», относящихся к лучшим отече-
отечественным и зарубежным системам подобного типа.
Принципы построения УВВИ с электромеханической разверткой
барабанного типа. СЦОИ «Схема» имеет среднюю производительность.
Такие системы могут эффективно использоваться в научных исследо-
исследованиях, а также при решении отдельных уникальных и производствен-
производственных задач обработки изображений. Производительность СЦОИ «Схе-
«Схема» определяется в основном типом используемой ЭВМ и характером
функционирования УВВИ. В качестве ЭВМ выбрана М-222, УВВИ
реализовано на базе оптико-механических развертывающих устройств
барабанного типа. Достоинство такой развертки в том, что она хорошо
«вписывается» в СЦОИ средней производительности, поскольку мно-
многие важные характеристики ввода—вывода (высокие стабильность
и отношение сигнал/шум, низкий уровень нелинейных искажений и др.)
достигаются при этом с меньшими аппаратурными затратами; недоста-
недостаток связан со специфическим построчным форматом размещения дан-
данных во внешней памяти (ВП) в процессе ввода—вывода (как было по-
показано в § 6.4, рациональная организация обмена информацией между
оперативной и внешней памятью позволяет значительно снизить влия-
влияние этого недостатка на производительность систем).
Основные технические характеристики УВВИ СЦОИ «Схема» при-
приведены в табл. 7.1. Добавим к этому, что типовой режим обмена инфор-
информацией между М-222 и УВВИ — массовый при ее размещении в НМЛ
и использовании в качестве буферных накопителей НМБ и МОЗУ ма-
машины. Управление вводом (выводом) данных, в том числе изменением
таких параметров анализа (синтеза) изображения, как формат, разре-
разрешение (масштаб), — программное. Видеоконтроль обмена УВВИ *->¦
ЭВМ— электрохимический, при обмене УВВИ «->• ЭВМ изображение
может выводиться также на фотопленку или фотобумагу.
Примечание. Градационные, точностные и динамические характери-
характеристики УВВИ обоснованы в § 7.3. Поэтому ниже излагаются лишь принципы по-
построения устройства. Вопросы его аппаратурного и программного сопряжения
с ЭВМ рассмотрены в § 7.7.
Агрегатирование УВВИ с М-222 во многом предопределило не
только организацию обмена информацией между ними, но и структуру
устройства (рис. 7.15). УВВИ состоит из блоков анализа Б А, синте-
синтеза БС и управления БУ. Блок Б А осуществляет развертку входного
изображения, преобразование получаемого при этом видеосигнала
271
Таблица .7.1
Показатели
Тип ЭВМ
Емкость опера-
оперативной памяти,
байт
Тип развертки
Формат изобра-
изображения, см2
Разрешение, эле-
элементов/мм
Времи анализа
элемента, мкс
Число градаций
яркости
Система обработки (страна)
СЦОИ
ИППИ АН
(СССР)
БЭСМ-6
400 К
Барабаи-
иая
22x30
5
400
128
«Схема»
(СССР)
М-222
90 К
Барабаи-
иая
42x61
16
30
128
«Р-1700>
(США)
32 К
Барабаи-
ная ^
12x17
5-40
30
256
«DICO-
MED»,
(США)
—
—
«Бегущий
луч»
35x43
50
20
256
«Зенит»
(СССР)
«Минск-
22»
37 К
«Бегущий
луч»
30X30
30—200
10
128
«Модель»
(СССР)
ЕС-1030
256 К
«Бегущий
луч»
30x30
4—32
10
128
ВС1 (рис. 7.16) в коды плотности элементов, упаковку упомянутых
кодов в стандартные машинные слова и выдачу последних в инфор-
информационную магистраль каналов М-222. Блок БС (см. рис. 7.15)
производит прием из ЭВМ машинных слов, их распаковку на коды
плотности отдельных элементов, преобразование этих кодов в отве-
отвечающие им значения видеосигнала ВС2 (рис. 7.16), а также син-
синтез выводимого изображения. Управление работой блоков Б А, БС
(см. рис. 7.15), а также обменом информацией между УВВИ и ЭВМ
осуществляет блок БУ.
Развертка анализируемого изображения, его дискретизация по
кадру и формирование видеосигнала ВС1 реализуются развертываю-
развертывающим узлом УР1 блока анализа (рис. 7.16). Вращение его барабана Б1,
на котором закрепляется упомянутое изображение, производится
с помощью редуктора РД1 и двигателя Д1, приводимого в действие
через усилитель мощности У Ml сигналом привода двигателя, выраба-
вырабатываемым стабилизированным камертонным генератором КГ. В узле
УР1 имеется также ходовой винт В1. На нем размещена сканирующая
головка с оптической системой ОС1 и фотоэлектронным умножителем
ФЭУ. Вращение винта В1 и, следовательно, перемещение головки вдоль
образующей барабана Б1 осуществляются с помощью шагового двига-
двигателя ШД1, управляемого импульсами Ш1, формируемыми блоком уп-
управления. Двигатель ШД1 связан с ходовым винтом В1 через муфту
сцепления МС1, срабатывающую при нажатии кнопки Подача 1
272
ГбА~
Щ
ЭВМ „M-ZZZ"
Гбс
1 „___« —.а
' ccz
Глу
_ "iiz~7~l \^1
'0HV \-
Рис. 7.15. Структурная схема СЦОИ «Схема»
Рис. 7.16. Структурная схема узлов развертки УВВИ
273
(одновременно контактный датчик муфты вырабатывает сигнал подачи
головки П1, воспринимаемый блоком управления как сигнал готов-
готовности узла УР1 к работе)..Видеосигнал ВС1 формируется усилителем
постоянного тока УПТ, на который поступает выходной сигнал ФЭУ.
Для синхронизации работы цифровых узлов УВВИ с вращением бара-
барабана Б1 в узле УР1 с помощью датчиков фазовых импульсов ДФИ
и ДФИ1 вырабатываются фазовые импульсы ФИ и ФИ1, временное
положение которых с меньшей (ФИ) или большей (ФИ1) точностью
привязано к начальному угловому положению барабана Б1.
При вводе данных видеосигнал ВС1 поступает на функциональный
усилитель ФУ1, формирующий необходимую характеристику преобра-
преобразователя напряжения в код ПНК (см. рис. 7.15). Активный ^С-фильтр
низкой частоты ФНЧ служит-для получения требуемой частотной ха-
характеристики видеотракта. Преобразователь ПНК преобразует напря-
напряжение видеосигнала под действием тактовых импульсов ТИ1—ТИ8, по-
поступающих из блока БУ, в 7-разрядный двоичный код оптической
плотности элемента (код Э). Упаковку кодов шести соседних элементов
в стандартное машинное слово (в ЭВМ М-222 адресация производится
к 45-разрядным двоичным словам) осуществляет с помощью сигналов
(ТИ9 и Э1—Э6) коммутатор К1 путем последовательной их записи в
соответствующие разряды 42-разрядного буферного регистра Р1 с ак-
активной записью 0. Из регистра Р1 сформированное слово по сигналу
ВК выдачи кода поступает через схемы согласования СС1 в магистраль
каналов М-222. Эти схемы служат для согласования характеристик
сигналов, действующих в УВВИ и ЭВМ.
При выводе изображения машинное слово, посылаемое М-222 в
УВВИ, через схемы согласования СС2, выполняющие ту же роль, что
и СС1, поступает на 42-разрядный двоичный регистр Р2 с пассивной
записью 0, где запоминается. По окончании распаковки этого слова на
коды плотности отдельных элементов регистр Р2 устанавливается в
исходное состояние под воздействием сигналов ТИП и Э6 (перед на-
началом работы это производится с помощью сигнала общей начальной
установки ОН У, вырабатываемого БУ). Распаковка реализуется ком-
коммутатором К2 по сигналам ТИ10 и Э1—Э6 путем последовательной вы-
выборки из регистра Р2 хранимых в нем кодов плотности и записи их
в 7-разрядный двоичный регистр РП с активной записью 0, являющий-
являющийся приемным регистром преобразователя кода в напряжение ПКН.
В контрольном режиме КВВ код очередного элемента считывается ком-
коммутатором К2 не с регистра Р2, а с выходного регистра ПНК. Преоб-
Преобразователь ПКН преобразует прямой или обратный код (в зависимости
от значения сигнала позитив—негатив П—Н), находящейся в реги-
регистре РП, в эквивалентное значение видеосигнала. Функциональный уси-
усилитель ФУ2 формирует необходимую характеристику выходного
видеотракта. Его выходной сигнал ВС2 при соответствующем значении
сигнала открытия газосветной лампы ОГЛ поступает в развертываю-
развертывающий узел УР2 для синтеза изображения.
Узел УР2 во многом идентичен по структуре узлу УР1 (см. рис. 7.14).
Элементы Б2, РД2, Д2, УМ2, В2, ШД2, МС2, Подача2, ДФИ2 его
схемы по своему построению и назначению аналогичны в порядке
274
упоминания элементам Б1, РД1, Д1, УМ1, В1, ШД1, МС1, Подача1,
ДФИ1 схемы УР1, а сигналы Ш2, П2, ФИ2 — сигналам Ш1, П1,
ФИ1. Видеосигнал ВС2 поступает на схему управления газосветной
лампой УГЛ, модулирующей яркость свечения лампы ГЛ, фокусиров-
фокусировка светового потока которой на поверхность фотоматериала, закрепляе-
закрепляемого на барабане?2, выполняется оптической системой ОС2. Синхрон-
Синхронное и синфазное вращение барабанов Б1 и Б2, необходимое, например,
в режиме автономной работы УВВИ, обеспечивается идентичностью
сигналов ПБ, действующих в узлах УР1 и УР2, а также схемой фази-
фазирования СФ и муфтой сцепления МС, приводимых в действие сигналом
ФИ.
Блок Б У goctoht из схемы формирования тактовых импульсов
СФТИ, схемы нумерации элементов СНЭ, узла управления обменом
. УУО и пульта управления ПУ. Схема СФТИ имеет в своем составе
генератор Г, частота импульсов которого стабилизирована кварцевым
резонатором, управляемый делитель частоты ДЧ и распределитель
импульсов РИ. Делитель ДЧ, представляющий собой пересчетную
схему с возможностью изменения коэффициента пересчета, позволяет
изменять строчное разрешение вводимого (масштаб выводимого) изо-
изображения в k раз (k = 1, 2, ..., 8). Это происходит за счет изменения
в k раз частоты преобразования видеосигнала ВС1 в код при вводе или
распаковке машинных слов при выводе (частота вращения барабанов
Б1 и Б2 неизменна). Значение k определяется сигналами Ml—МЗ,
поступающими из узла УУО. Изменение же разрешения (масштаба)
изображения по кадру реализуется программными средствами. Рас-
Распределитель РИ выполнен по обычной схеме такого рода и обеспечи-
обеспечивает получение импульсов ТИ1—ТИ12, синхронизирующих работу
различных узлов УВВИ. Формирование импульсов ТИ1—ТИ12 на-
начинается с приходом из узла УУО сигнала ТП триггера пуска. Перед-
Передний фронт сигнала ТП отвечает моменту времени, когда апертура уз-
узлов УР1 или УР2 находится на линии начала строк изображения.
Схема СНЭ, состоящая из счетчика элементов СЭ с коэффициентом
пересчета, равным 6, и дешифратора элементов ДЭ, осуществляет
управление процессами упаковки и (или) распаковки машинных слов,
вырабатывая сигналы Э1—Э6. Сигнал переполнения счетччка СЭ по-
поступает в узел УУО, где воспринимается как сигнал готовности ма-
машинного слова ГМС. Пульт ПУ позволяет оператору производить
начальную установку УВВИ (сигнал НУ), пуск и останов последнего,
визуальное наблюдение за состоянием отдельных элементов и узлов
устройства, а также задание одного из четырех режимов его работы
(ОБМ, KB, ABT, КВВ).
Режим ОБМ, являясь основным рабочим режимом обмена УВВИ <->
<-> ЭВМ, дае^ возможность вводить и выводить изображения с приве-
приведенными выше характеристиками.
В режиме KB реализуется лишь ввод изображения. Одновременно
осуществляется его синтез с целью контроля качества ввода, для чего
машинные слова, посылаемые УВВИ в ЭВМ М-222, принимаются и на
регистр Р2.
275
Режим АВТ — профилактический. УВВИ в этом режиме работает
автономно, цепи его связи с ЭВМ М-222 разорваны, а сигналы управ-
управления, вырабатываемые блоком БУ, обеспечивают работу устройства,
аналогичную его работе в режиме КВ.
В режиме КВВ машинные слова в УВВИ не формируются и в ЭВМ
М-222 не передаются, несмотря на наличие физической связи между
ними. Организуемая связь между преобразователями ПН К и ПКН,
о которой шла речь ранее, позволяет проверить работу устройства на
отвечающем этой связи уровне.
Высокие технические.и эксплуатационные характеристики, широ-
широкие возможности общего и специального математического обеспечения
СЦОИ «Схема» позволяют ей успешно конкурировать с лучшими оте-
отечественными и зарубежными образцами систем подобного типа. Од-
Однако потребности сегодняшнего и завтрашнего дня требуют дальней-
дальнейшего совершенствования тактико-технических параметров этих си-
систем. Опыт разработки и эксплуатации СЦОИ «Схема» дает возможность
сделать в этом отношении следующие выводы.
В системах, базирующихся на использовании вычислительных
средств общего назначения, целесообразно применение моделей ЕС
ЭВМ средней или повышенной производительности, обладающих до-
достаточно высоким быстродействием, большими объемами оперативной
и внешней памяти, унифицированными средствами сопряжения и уп-
управления устройствами ввода—вывода данных, возможностью побайт-
побайтного обмена информацией, совершенным общим программным обеспе-
обеспечением, совместимостью различных моделей.
Последовательно-строчный принцип ввода—вывода изображений
предполагает выполнение в типовом режиме таких этапов обработки,
как построчное сканирование и ввод исходного изображения во внеш-
внешнюю память, последовательная организация во внешней памяти фай-
файлов необходимой структуры, их перепись в оперативную память и со-
соответствующая обработка, преобразование результата обработки в
форму с последовательно-строчным размещением элементов выходного
изображения и их запись во внешнюю память, вывод и синтез изобра-
изображения. Все это существенно усложняет процедуру обработки данных
и ведет к значительным затратам машинного времени. Упомянутый
принцип ввода—вывода ограничивает также возможность использо-
использования УВВИ в качестве внешней памяти, приводит к неэкономному
расходованию ресурсов ЭВМ при нанесении алфавитно-цифровой
и графической информации на выходной фотодокумент. Наконец,
применение лишь электромеханической развертки снижает скорость
ввода (вывода) данных, относящихся не только к изображению в целом,
но и к любому его фрагменту, а невозможность автоматического изме-
изменения анализирующей и синтезирующей апертур ухудшает качество
изображений, вводимых (выводимых) со средним или низким разреше-
разрешением, усложняет их фильтрацию, дешифрирование и т. п.
Одноканальность СЦОИ «Схема» по вводу—выводу данных, отсут-
отсутствие возможности оперативного изменения ее конфигурации сущест-
существенно затрудняют решение задач автоматизации стереоизмерений,
сравнения снимка местности с картой, а также снимков земной поверх-
276
I
ности, полученных в различных спектрах или в различные моменты
^Принципы построения УВВИ с электронно-механической разверткой
типа «бегущий луч»: Приведенные соображения были положены в ос-
основу проектирования высокопроизводительной СЦОИ «Модель», уп-
упрощенная структурная схема которой приведена на рис. 7.17, а основ-
основные технические характеристики - в табл. 7.1. Система включает
в себя ЭВМ ЕС-1030 и три однотипных УВВИ, подключенных к селек-
селекторным каналам. Каждое из уст-
устройств состоит из блоков сопря-
сопряжения БС, управления БУ, ди-
динамической фокусировки БДФ,
формирования растра БФР, пре-
преобразования кода в ток Б ПКТ,
привода кареток Б ПК, управле-
управления подсветом БУП, кодирова-
кодирования плотности БКП, электрон-
электроннолучевой трубки с системой фо-
фокусирующих и отклоняющих ка-
катушек ФОК, оптической системы
ОС и фотоэлектронных умножи-
умножителей ФЭУ1 и ФЭУ2.
В УВВИ реализован элек-
электронно-механический принцип
развертки АКИ. При этом в ка-
качестве ЭЛТ используется трубка
«Кумир-2», с помощью которой
генерируется электронный растр
размером до 6 X 6 см с числом
элементов до 4096 X 4096. По-
Положение и размеры сканируемо-
сканируемого фрагмента изображения зада-
задаются следующей системой пара-
параметров (рис. 7.18, а, бу.хЪк, #°к
(ХК, УК) — 16-разрядные коор-
УШ2_1_ z
Рис. 7.17. Структурная схема
«Модель»
СЦОИ
динаты положения каретки со снимком; х°р, у% (XR, YR) — 12-разряд-
12-разрядные координаты начальной точки фрагмента; Л/ф, N$, (DC, ST)—12-раз-
ST)—12-разрядные значения числа элементов в строке и числа строк во фрагмен-
фрагменте соответственно; Д*гр, Дг/гр (DX, DY) — коды расстояний между
соседними элементами фрагмента, содержащие знаковые разряды, 7-
разрядные целые и 8-разрядные дробные части; йл, Ы (DL, BL) —
4-разрядное значение диаметра луча и 8-разрядное значение его яр-
яркости в порядке упоминания. Функциональное назначение устройства
(ввод или вывод), а также режимы сканирования изображения опре-
определяются четырьмя разрядами ар0, ап, ар2, арз байта признаков:
йро= 1 (PRD) — ввод изображения, ар0 = 0 (PRM) — вывод изо-
изображения; ап = 1 (LIN) — фрагмент растра представляет собой ли-
линию (рис. 7.19, д); ар1 = 0 (МАТ) — точки фрагмента образуют ма-
матрицу (рис. 7.19, а—г); ар8 = 1 (STB), ар8 = 0 (STR) — элементы
277
матрицы перебираются по столбцам (рис. 7.19, в, г) и строкам (рис.
7.19, а, б); ар2 = 1 (NTR) — направления перехода от точки к точ-
точке в двух соседних столбцах (рис. 7.19, г) или строках (рис. 7.19, б)
различны; аР2 — О (RET) — эти направления одинаковы
(рис. 7.19, а, в). . .
Примечание. В скобках приведены обозначения параметров и режи-
режимов сканирования, используемые в макрокомандах управления УВВИ.
У'гк
Кг
р
f
t
tip
в)
?гк
Угк
"¦$
%
С
¦<-Р
1
х°гр
k
N
*гк
]А*гр
Г t
Ф ^
хгр
-лугр
>гр
Рис. 7.18. Параметры сканирования:
а — матричного; б — линейного
Перечисленные параметры и признаки режимов сканирования пере-
передаются по специальным командам, описанным ниже, из ЭВМ в УВВИ:
*2к. У2к — в блок Б ПК; х%, у%, Nfr.Nb, Axrp, Аугр, ар1, ар%, арз —
в блок БФР; йл — в блок БДФ; ?м — в блок БУП; ар0 — в блок БУ.
5)
4 •>• •
Г/г/
Рис. 7.19. Режимы дканирования:
a-MAT, STR, RET; б-MAT, STR. NRT; в — MAT, STB, RET; г —
MAT, STB, NRT; б — LIN
Под управлением блока Б У блок формирования растра БФР выра-
вырабатывает координаты точек растра в системе координат ЭЛТ, опреде-
определяемые в общем случае выражениями
l)pipap8plKapiVap3)t + flpi apa-aplap2ap3aplx
р; Угр = tfp + (-l)o«aP*ePjeP«[(«piVap3) i + ар1Ъръ-
— аР1 аР2 ар8 ар4 (iV$— 1)] Д(/гр,
где i, \ — номер элемента в строке и номер строки соответственно
(i€ {0, 1, ..., ЛГф - 1}, /€ {0, 1, ... 'N* - 1}, aVi = / (mod 2)).
278
В зависимости от значений признаков ар1, аР2, арз этот блок реа-
реализует всего пять режимов сканирования (рис. 7.19):
№р =
-MAT, STR, NRT; хгр
, STR, RET;
, STB, RET;
+ Д*гр/, угр =¦ у°гр+
-Л1ЛГ, STB, NRT;
-1)"Р* X
Коды координат хтр, угр поступают в процессе сканирования изо-
изображения в блок преобразования кода в ток БПКТ, где преобразуются
в токи отклонения луча ЭЛТ. Четыре старших разряда каждого из этих
кодов используются также в
блоке БДФ для формирования _длт
тока динамической фокусиров-
пз
Рис. 7.20. Структурна?
ная схема БУП и
ур
ки, пропорционального (х\р +
+ у1р). Последний подается в
катушку динамической фокуси-
фокусировки ФОК с целью устранения
расфокусировки луча, связан-
связанной с несовпадением плоскости
экрана ЭЛТ с плоскостью опти-
оптимальной фокусировки. Требуе-
Требуемый размер светового пятна устанавливается путем преобразования
кода йл в соответствующее ему значение тока, направляемого в фоку-
фокусирующую катушку ФОК-
Одна из основных причин, ограничивающих применение ЭЛТ в
УВВИ, — неравномерность световой отдачи люминофора в различ-
различных точках экрана. Для современных ЭЛТ она достигает 5% и более.
Известные технические решения, связанные со снижением уровня не-
неравномерности до 1 % и менее, позволяют получить хорошее качество
лишь при вводе изображения. В системе же «Модель» реализован ори-
оригинальный принцип компенсации структурной помехи люминофора до
уровня 0,5—0,8% как при вводе, так и при выводе изображения, что
позволило совместить функции считывания и регистрации изображе-
изображения в одном устройстве.
Рассмотрим работу соответствующих узлов УВВИ в режимах вво-
ввода—вывода изображения, используя рис. 7.17 и 7.20. На последнем
из них представлены упрощенные структурные схемы блоков БУП
и БКП. Как видим, блок БУП включает в себя функциональный пре-
преобразователь кода в напряжение ФПКН, схему сравнения СС, моду-
модулятор М и накопительный элемент НЭ2, а блок кодирования плот-
плотности.— функциональный преобразователь напряжения в код ФПНК
и накопительный элемент НЭГ.
Пусть в исходном состоянии ЭЛТ заперта отрицательным смеще-
смещением, подаваемым на управляющий электрод с модулятора М, а на-
279
пряжения на выходах накопительных элементов НЭ1 и НЭ2 равны 0.
При вводе изображения на ФПКН из ЭВМ поступает максимальное
значение кода. По сигналу Подсвет модулятор М, представляющий
собой линейный усилитель выходного напряжения преобразователя
ФПКН, формирует импульс подсвета ЭЛТ, вызывая номинальное све-
свечение люминофора в заданной позиции луча. Часть светового потока,
пройдя через полупрозрачное зеркало ПЗ и фотоснимок Ф, преобразует-
преобразуется фотоэлектронным умножителем ФЭУ1 в соответствующее напряже-
напряжение, поступающее на вход накопительного элемента НЭ1. Другая его
часть отражается от ПЗ и преобразуется в напряжение, являющееся
входным для накопительного элемента НЭ2. В результате на выходах
этих накопительных элементов формируются монотонно возрастаю-
возрастающие напряжения
ux{t) = к±
00
J
ОО
) = K2%ll J В (х) h2 (t— %
где кх, к2 — константы; "Уф, ^л — коэффициенты пропускания фото-
фотоснимка и световой отдачи люминофора соответственно; hx, h2 — им-
импульсные переходные характеристики накопительных элементов НЭ1
и НЭ2; В (т) — функция изменения яркости светового пятна. •
Выходное напряжение накопительного элемента НЭ2 сравнивается
схемой сравнения СС с выходным напряжением «к преобразователя
ФПКН. В момент tcp их равенства модулятор М формирует для ЭЛТ
запирающее напряжение. При идентичных характеристиках накопи-
накопительных элементов НЭ1 и НЭ2, т. е. при hx (t) = h2 (t), для этого мо-
момента
С) = «к,
Таким образом, в момент срабатывания схемы СС напряжение
их (t) не зависит от коэффициента\л и пропорционально величине "Уф-
Режим вывода отличается от режима ввода лишь тем, что амплитуда
напряжения подсвета с выхода модулятора М устанавливается про-
пропорциональной величине принятого из ЭВМ кода плотности, а вместо
фотоснимка помещается светочувствительный материал. Такое схем-
схемное решение позволяет не только скомпенсировать влияние нерав-
неравномерности световой отдачи люминофора, но и обеспечивает наилуч-
наилучшее выделение полезного сигнала из шумов.
Объединение функций ввода и вывода изображений в одном уст-
устройстве дает возможность оперативно изменять конфигурацию СЦОИ
«Модель», приспосабливая ее к той или иной задаче.
Пусть необходимо дешифрировать некоторое природное образование по двум
спектрозональным снимкам с вводом результата дешифрирования на третий сии-
мок и выполнить геометрическую обработку изображения для получения двух
его различных проекций. В первом случае в СЦОИ, содержащей три УВВИ, два
из них назначаются вводными и одно — выводным, а во втором случае имеет
место обратная ситуация.
Оригинальным является и блок привода каретки УВВИ. В нем
реализован принцип импульсного форсированного управления двига-
двигателями постоянного тока с помощью цифровых следящих систем. В ре-
280
зультате достигнуты высокие экономичность, надежность, точность
и быстродействие привода.
Блок сопряжения БС служит для сопряжения УВВИ с селектор-
селекторным каналом ЕС ЭВМ, обеспечивая унификацию принципов обмена
информацией между ними, форматов данных, последовательностей и
параметров управляющих сигналов, схем и конструкций электрических
связей.
Блок управления Б У предназначен для микропрограммного управ-
управления выполнением в УВВИ команд, принимаемых из канала. Форми-
Формирование канальной программы осуществляется пользователем с помо-
помощью макрокоманд МК системы программного управления СПУ СЦОИ
«Модель». Состав, структура и назначение этих макрокоманд поясня-
поясняются в § 7.7.
§ 7.7. АГРЕГАТИРОВАНИЕ СРЕДСТВ ВВОДА, ВЫВОДА
И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ С ЭВМ
Рассмотрим аппаратное и программное сопряжения УВВИ
(см. § 7.6) с ЭВМ.
Агрегатирование с ЭВМ УВВИ барабанного типа. УВВИ СЦОИ «Схе-
«Схема» подключено к четвертому каналу ЭВМ М-222, работающему на
ее вторую информационную магистраль, причем обмен информацией
между УВВИ н ЭВМ выполняется в специальном режиме (ТВЗ) и но-
носит массовый характер. Управление обменом осуществляет ДИСПЕТ-
ДИСПЕТЧЕР М-222, соответствующим образом модернизированный в связи
с подключением УВВИ. Обращение к ДИСПЕТЧЕРу для иницииро-
инициирования ввода—вывода реализуется задачей с помощью системных мак-
макрокоманд или оператором путем посылки специальных приказов с
электрифицированной пишущей машинки ЭМП.
Особое значение при вводе (выводе) изображения имеют подгото-
подготовительная и исполнительная команды массового обмена, формируемые
ДИСПЕТЧЕРОМ с кодами операций 50 и 70 соответственно и показан-
показанные в табл. 7.2. Здесь щ, ai+3 — двоичные признаки модификации t-x
адресов команд, i = 1, 2, 3; Ьх — 5 (Ъх¦= 1) — признак ввода (выво-
(вывода) данных; Лн, Ак — начальный и конечный адреса ячеек МОЗУ,
участвующих в обмене. При выполнении подготовительной коман-
Таблица 7.2
Признаки
модификации
Код
операции
Адрес 1
Адрес 2
Адрес 3
а± а2 а3
а4 аъ ав
а2 а3
Подготовительные и исполнительные МК
50 | 415&! I 0000
7 О
5 О
0 0 0 0
МК 50 ДИАЛОГ
4 3 5 7 I
0 0 0 0
А,
1сл. отв
281
ды канал посылает в УУО устройства (см. рис. 7.15) сигнал ВЗК
(рис. 7.21, а). Если питающие напряжения на цифровые узлы УВВИ
поданы, то УУО в ответ на этот сигнал вырабатывает сигнал возврата
ВЗРК, после чего реализация команды 50 продолжается обычным по-
порядком. В противном случае ее выполнение прекращается. Сигналы
Откр. К, Закр. К, отвечающие команде 70, свидетельствуют в поряд-
порядке упоминания о начале и конце цчкла обмена, сигнал ГМ — о готов-
готовности машины к обмену очередным словом, а сигнал ОРК — об окон-
окончании работы канала после обмена числом слов, равным Л„ — Лн+ 1
(рйс. 7.21, б, в). Причем если Ьх = 5, то выдача слова из УВВИ в
"aJlifitiUNi I
S)
If §f
VA
Рис. 7.21. Сигналы, действующие при Рис. 7.22. Сигналы, действующие в
выполнении подготовительной н испол- цикле выполнения команды 50
ннтельной команд массового обмена ДИАЛОГ
информационную магистраль для записи его в МОЗУ сопровождает-
сопровождается синхроимпульсом СИК, поступающим из УУО в канал; если же
Ьг = 1, то прием слов из канала в устройство происходит по сигналу
ГК, формируемому УУО.
Для программного управления работой УВВИ используется также
команда 50 ДИАЛОГ, формат которой показан в табл. 7.2, а сигналы,
действующие в цикле ее выполнения, — на рис. 7.22 (Лсл. с, Лсл. огв —
адреса ячеек, в которых помещаются так называемые управляющие
или служебные слова и слово ответа соответственно; СССл— сигнал,
формируемый каналом как признак команды 50 ДИАЛОГ; СИМ —
синхроимпульс сопровождения управляющего слова, посылаемого в
УУО). Если в 43-м разряде служебного слова находится 1, то имеет
место режим выполнения команды 50 ДИАЛОГ, называемый ОПРОСом
СОСТОЯНИЯ (рис. 7.22, а). В этом режиме, как видим, спомощью
сигналов ГМ и СИК в канал посылается слово ответа, вырабатывае-
вырабатываемое в узле УУО и характеризующее состояние УВВИ. В противном
случае команда 50 ДИАЛОГ выполняется в обычном режиме (рис.
7.22, б). Программное управление работой УВВИ предполагает на-
наличие в нем узла, осуществляющего прием управляющих сигналов и
слов, поступающих из канала, выдачу в канал информации о состоя-
состояний устройства, а также формирование других сигналов, необходимых
для нормального функционирования системы. Таким узлом является
УУО (рис. 7.23), состоящий из схем согласования ССЗ и СС4, анало-
аналогичных схемам СС2 n'CCl соответственно; схем приема управляющих
слов СПУС, формирования приказов СФП, синхронизации обмена
282
I ССО, пуска и останова СПО, формирования слова ответа СФСлО, уп-
I равления шаговыми двигателями СУШД и выработки управляющих
сигналов СВУС; мультивибратора конца строки МКС и триггера стро-
строба Т5.
Прием служебного слова производится в цикле выполнения соот-
соответствующей ему команды 50 ДИАЛОГ. В связи с этим сигналы
Откр. К и СССл (см. рис. 7.22) устанавливают триггеры канала 77
и служебного слова Т2 в состояние 1, формируя сигнал ТСС, разре-
4-й канал ЭВМ „ М-222 "
1Ш1 1
1Ш2
ТО
311
ВЗК
Мй
гмс
тос
ГМ
Т8В
31
1ИУ
АВТ
КВВ
тп
НУ
КСП
КСА\
СВУС
ВЗР/С
СИК
ГК
8К
огл
ОНУ
Рис. 7.23. Структурная схема УУО
шающий прием на регистр РССл упомянутого слова. Сброс триггеров
77 и Т2 в исходные состояния осуществляется импульсами ОНУ и
I Закр.К.
I Служебное слово, посылаемое каналом в узел УУО, фиксируется
| на регистре РССл. Каждому информативному разряду этого слова,
л исключая 44-й разряд, отвечает свой триггер регистра, устанавливаю-
' щийся в состояние 1 после приема слова, если упомянутый разряд со-
содержит 1. Соответствие между номерами информативных разрядов
управляющего слова и сигналами на «единичных» выходах триггеров,
отвечающих этим разрядам, а также краткое обозначение кодируемых
признаков следующее:
ВВОД ВЫВОД МАСШТАБ ШАГ 1 ШАГ 2 ОПРОС КСП ПУСК
Номер разря-
разряда управляюще-
управляющего слова . • •
«Единичный»
сигнал триггера
разряда . . . .
6 7
39
41
43
44 45
ТВ ТВВ Ml M2 МЗ ТШ1 ТШ2
ТОС КСП ТО
283
Сигнал программного окончания строки КСП, как это видно из
рис. 7.23, формируется с помощью схемы И4. Наконец, отметим, что
содержать единицу могут несколько отдельных разрядов одного и
того же слова. Сброс всех триггеров регистра РССл происходит по
сигналам Закр. К и ОНУ.
Схема ССО выполняет синхронизацию обмена информацией между
УВВИ и ЭВМ с вращением барабанов Б1 и Б2, вырабатывая импуль-
импульсы начала строки НС, запроса прерывания ЗП и Уст. О ТС (установки
триггера Т5 в состояние 0), временное положение которых показано
на рис. 7.24. При ВВОДе изображения или работе УВВИ в режимах
АВТ и КВВ эти импульсы формируются из сигналов ФИ, ФИ1, а при
ВЫВОДе — из сигнала ФИ2. Им-
Импульс НС определяет точку начала
физической строки на Б1 или Б2.
В режиме АВТ с его помощью МКС
вырабатывает также сигнал авто-
автономного окончания строки КС А.
Импульс ЗП используется для фор-
формирования в СВУС сигнала запро-
запроса канала ЗК, который вызывает пе-
Рис. 7.24. Временная диаграмма сле-
следования импульсов ЗП, УстД ОТС,
НС
реход к выполнению диспетчерской
программы обмена информацией между УВВИ и ЭВМ, если необхо-
необходимое для этого время не превышает 20 мс. В противном случае УВВИ
не считается готовым к обмену, хотя реально задержка в обработке вы-
вычислителем ЭВМ М-222 сигнала ЗК всегда связана с работой машины.
ДИСПЕТЧЕР судит об этом по значению сигнала ТС, вырабатывае-
вырабатываемого триггером Т5.
Работа схемы СПО направлена в основном на обслуживание ко-
команд 50, 70 массового обмена (см. рис. 7.21); блокировка ее работы при
выполнении приказа ОПРОС СОСТОЯНИЯ осуществляется сигна-
сигналом ТСС. К моменту появления импульса НС подготовительная ко-
команда 50 оказывается уже реализованной, а триггер ТЗ готовности
машины — установленным в состояние 1 сигналом ГМ, действующим
в цикле выполнения команды 70. В этой ситуации сигнал НС вы-
вызывает переход триггера пуска Т4 в состояние 1 и, следовательно, фор-
формирование сигнала 777, разрешающего анализ или (и) синтез изобра-
изображения. Установка триггеров ТЗ и Т4 в состояние 0 производится им-
импульсом ОНУ, вырабатываемым схемой СВУС.
Схема СФСО формирует 4-разрядное слово ответа по приказу
ОПРОС СОСТОЯНИЯ в соответствии с логическими зависимостями
(см. с. 283):
(\р) = ТС А ТВ А ТОС Л ГМ, Bр) =Ш Л ТВ Л ТОС А ГМ,
(Зр) =ТС А ТВВ А ТОС А ГМ, Dр) = (Ш V KB) А ТВВ/\ТОС АГМ,
где (ip) — содержимое t-ro разряда слова ответа (t = 1, 2, 3, 4).
Это слово выдается на схему СС4 по сигналу ГМ (см. рис. 7.22, а).
Как видим, неготовность УВВИ к работе может быть связана с задерж-
задержкой в обработке сигнала ЗК (ТС = 0) при ВВОДе или ВЫВОДе,
284
ш
о чем шла речь выше, отсутствием сигнала П1 при ВВОДе, сигнала
П2 при ВЫВОДе, а также установкой на пульте ПУ устройства ре-
режима KB при ВЫВОДе. При возникновении любой из этих ситуаций
заявка на прерывание не принимается, о чем ДИСПЕТЧЕР сообщает
с помощью ЭВМ оператору.
Схема СУЩД формирует импульсы Ш1, Ш2 и Уст. 0 ТШ (установ-
(установки в 0 триггеров РССл, вырабатывающих сигналы ТШ1 и ТШ2) для вы-
выполнения соответствующих приказов (см. с. 283). Каждый из сиг-
сигналов ТШ1 или ТШ2 вызывает появление серии из семи мощных им-
импульсов U11 или Ш2, осуществляющих поворот двигателей ШД1 или
ШД2 на заданный угол. Импульс 0 ТШ формируется по окончании по-
последнего импульса серии. В режиме КВВ импульсы Ш1, Ш2 и Уст. 0
ТШ вырабатываются под воздействием сигнала КС А.
Схема СВУС реализует следующие логические зависимости
(см. с. 283 и рис.7.21, 7.22): ЗК = (ТШ~1уТШ2)/\Т0/\ЗП, ВЗРК =
= ПИТ/\ВЗК, СИ К = (ТВ /\ГМС)\/ (ТОС /\ГМ), Г К = ТВВ[\
Э1[\ТИ9, ВК= (ТВуАВТ)/\ГМС, ОГЛ = (ТВВУАВТ\/КВВ)Д
ТП, ОНУ — НУ\/КСП\1 КСА, где полагается, что при подаче питания
на цифровые узлы УВВИ сигнал ПИТ = 1. Выработка сигнала ЗК
блокируется при выполнении приказов ШАГ1, ШАГ2, а также от-
отсутствии приказа ПУСК; сигнал СИК формируется при отработке
приказов ВВОД и ОПРОС СОСТОЯНИЯ, сигнал ГК — при отработке
приказа ВЫВОД, ВТ — приказа ВВОД и в режиме АВТ, ОГЛ —
приказа ВЫВОД и в режимах АВТ и КВВ. Все сигналы, определяе-
определяемые приведенными зависимостями, вырабатываются под воздействием
импульсов ЗП, ВЗК, ГМС или ГМ, Э1 и ТИ9, ГМС, ТП, НУ, или
КСП, или КСА соответственно. Последнее, в частности, означает, что
массовый обмен информацией между УВВИ и ЭВМ организуется
ДИСПЕТЧЕРОМ с помощью команд 50, 70 столько раз, сколько строк
изображения подлежит вводу—выводу.
Опишем теперь работу СОИ в случае, например, ввода изображе-
изображения с его записью на магнитную ленту. При этом предположим, что
включены напряжения, питающие все блоки УВВИ, вращается бара-
барабан Б1, нажата кнопка Подача1 и ДИСПЕТЧЕРОМ получена заявка
на обмен.
При получении заявки ДИСПЕТЧЕР настраивает все свои компо-
компоненты (служебные слова, команды массового обмена, параметры циклов
и т. д.), организующие ввод изображения, а также команды записи
данных на НМЛ в соответствии с характеристиками, определяемыми
ею, а затем посылает в УВВИ с помощью команды 50 ДИАЛОГ управ-
управляющее слово, задающее приказ ПУСК в качестве основного прика-
приказа, подлежащего выполнению устройством. В этом слове целесообраз-
целесообразно указать и другие приказы, например приказы ВВОД и МАСШТАБ.
Тогда содержимое 5—7-го разрядов слова определится значением k,
1-й и 45-й разряды будут содержать 1, а остальные — 0, т. е. после
приема упомянутого слова на регистр РССл описанным выше способом
вырабатываются сигналы ТВ, Ml, M2, МЗ и ТО (см. рис. 7.23). Вы-
Выполнив описанные действия, ДИСПЕТЧЕР передает управление про-
программе, прерванной при поступлении заявки. За 20 мс до начала фи-
285
зической строки изображения схема ССО вырабатывает сигнал ЗП,
по которому схема СБУС формирует импульс ЗК, вызывающий вновь
прерывание текущей программы и передачу управления ДИСПЕТЧЕ-
Ру. Последний опрашивает текущее состояние УВВИ с помош,ью ко-
команды 50 ДИАЛОГ, ОПРОС СОСТОЯНИЯ и если устройство готово
к вводу первой строки изображения, переходит к выполнению команд
массового обмена 50, 70. Сигнал ГМ, вырабатываемый каналом в цик-
цикле выполнения команды 70, устанавливает в состояние 1 триггер ТЗ,
а сигнал НС — триггер Т4, разрешая тем самым формирование машин-
машинного слова, которое по сигналу ВК выдается в канал, а по сигналу
СИК записывается в соответствующую ячейку МОЗУ. Оба последних
сигнала вырабатываются схемой СВУС под воздействием импульса
ГМС. После обмена числом слов, указанном в командах 50, 70, выпол-
выполнение команды 70 завершается; ДИСПЕТЧЕР восстанавливает ис-
исходное состояние цифровых схем УВВИ, перемещает сканирующую
головку устройства УР1 на следующую строку, а также оповещает
устройство о необходимости обмена очередной строкой с помощью
команд 50 ДИАЛОГ, содержащих 1 в 44-м, 49-м и 1,5—7-м (соот-
(соответственно значению k), 45-м разрядах управляющих слов в порядке
упоминания; управление передается программе, прерванной по сиг-
сигналу ЗК. Далее описанный выше процесс обмена строкой повторяется.
Выполнив ввод максимально возможного числа строк, при котором
МОЗУ еще не переполняется, ДИСПЕТЧЕР организует их перепись
в очередную зону НМЛ. Процесс обмена информацией между УВВИ и
ЭВМ завершается после ввода числа строк, указанного в заявке, его
инициировавшей. Изложенный порядок обмена позволяет во
время холостого хода барабана решать на ЭВМ М-222 любые за-
дачч.
Агрегатирование с ЭВМ УВВИ типа «бегущий луч». Система про-
программного управления СЦОИ «Модель» реализована на базе дисковой
операционной системы (ДОС) ЕС ЭВМ и концепций, положенных в
ее основу, причем особое внимание уделялось учету специфики боль-
большинства задач цифровой обработки изображений, упрощению описа-
описания процедур работы СЦОИ, обеспечению автоматической организа-
организации связей отдельных компонентов упомянутых процедур, сокращению
общего времени написания и отладки программ обработки. Для этого
была доработана физическая система управления вводом—выводом,
входящая в состав супервизора ДОС, и разработаны новые макросред-
макросредства языка управления работой СЦОИ.
При коррекции физической системы управления вводом—выводом
доработаны макроопределения генерации ядра супервизора и мони-
монитор обработки сбоев внешних устройств, разработаны новые транзит-
транзитные фазы обработки сбоев УВВИ. Новое ядро супервизора, сгенери-
сгенерированное с использованием скорректированных макроопределений,
содержит в составе своих таблиц всю необходимую информацию об
УВВИ и обеспечивает совместно с монитором обработки сбоев после-
последовательный вызов транзитных фаз избавления от сбоя.
Отличительной особенностью разработанной системы макрокоманд
является то, что она является открытой, т. е. может быть расширена
286
путем простого добавления к ней новых МК, создаваемых на базе уже
имеющихся, без изменения структуры СПУ. В систему входят МК
UWWI, DTFTBW, DTFFT, MODTB, MODCCW, SAP1, SAP2, SAP3,
СНТ1, UPRA, SOST, QOTC, UPRX, UEND. При этом процедура уп-
управления устройствами СЦОИ записывается в виде
<UWWI> (МК) [(МК)] ... (МК) (UEND).
Здесь в квадратных скобках указываются необязательные элементы
процедуры, а выражения, ограниченные символами <>, являются
мнемоническими кодами МК.
Процедура открывается и закрывается макрокомандами UWWI
и UEND соответственно. МК UWWI организует запуск ввода—
вывода, блок управления данными ССВ и обращение к супервизору
для перехода на время выполнения операции ввода—вывода к подпро-
подпрограмме обработки. МК UEND обрабатывает данные, накопленные в
процессе трансляции предшествующих этой макрокоманде команд
процедуры, с целью формирования единой канальной программы.
Макрокоманды DTFTBW и DTFFT применяются для формирова-
формирования таблиц исходных данных, необходимых для управления УВВИ.
В СПУ для этих целей используются две таблицы, в первую из кото-
которых заносятся в строго определенном порядке значения параметров
DX, DY, DC, PR, DL, XK, YK, а во вторую— XR, YR, DX, DY,
DC, ST, PR, BL, DL. В МК DTFTBW значения параметров задаются
в виде списка, а в DTFFT — в ключевом формате.
МК MODTB позволяет изменять значения параметров в упомяну-
упомянутых выше таблицах и организовать разветвление программы, если
значения указанных в макрокоманде элементов таблиц удовлетво-
удовлетворяют заданным условиям. МК MODCCW организует модификацию как
отдельных полей команд канальной программы CCW, так и команд
в целом. В поле макрокоманды указываются адрес модифицируемой
CCW, а также операнды модификации, замены и удаления.
Макрокоманды SAP1 и SAP2 используются для организации пере-
передачи из ЭВМ в УВВИ параметров и признаков режимов сканирова-
сканирования, описанных ранее. Поля операндов этих МК отличаются наборами
ключевых слов элементов соответствующих таблиц: в поле операндов
SAP1 допустимо задание значений элементов в соответствии с первой
таблицей, a SAP2 — в соответствии со второй (см. МК DTFTBW,
DTFFT). Макрокоманда SAP1 ориентирована на задачи геометриче-
геометрической обработки изображений, нанесения алфавитно-цифровой и графи-
графической информации на фотодокументы и другие задачи, в основу которых
- может быть положен аппарат кусочно-линейной аппроксимации.
МК SAP2 особенно эффективна тогда, когда требуется оперативное
изменение положения, параметров и режимов сканирования фрагмен-
фрагментов изображения.
МК SAP3, СНТ1 и SOST предназначены соответственно для ор-
организации вывода из ЭВМ кодов оптической плотности элементов изо-
изображения, ввода в машину этих кодов и передачи в ЭВМ байтов уточ-
уточненного состояния УВВИ. При этом режим и параметры сканирования
предварительно задаются макрокомандами SAP1 или SAP2. Наконец,
287
MK UPRX, UPRA, GOTC обеспечивают в порядке упоминания фор-
формирование в канальной программе команд ХОЛОСТОЙ ХОД, ПЕРЕ-
ПЕРЕХОД УВВИ в АВТОНОМНЫЙ РЕЖИМ РАБОТЫ и ПЕРЕХОД
в КАНАЛЬНОЙ ПРОГРАММЕ. Операнды UPRX и UPRA описыва-
описывают особенности формируемых ими CCW, a GOTC— имя МК, на CCW
которой осуществляется переход.
МК обеспечивают высокоэффективное и доступное пользователям
управление работой СЦОИ на логическом уровне. Дальнейшее раз-
развитие СПУ целесообразно осуществить посредством создания новых
макрокоманд, реализующих более сложные функции. Такое нара-
наращивание целиком вписывается в описанную систему МК.
§ 7.8. ПОВЫШЕНИЕ ПРОИЗВОДИТЕЛЬНОСТИ ВЫЧИСЛИТЕЛЬНЫХ
СИСТЕМ ОБРАБОТКИ И РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ
Исследование вопросов ускорения геометрических преобразований
АКИ, проведенное в гл. 6, а также результаты обработки реальных
снимков на системах, подобных системе «Схема», свидетельствуют о
необходимости разработки более эффективного программно-аппарат-
программно-аппаратного метода преобразования изображений, в котором выполнение мас-
массовых операций, связанных с пересылкой данных, происходило бы
на уровне УВВИ без использования ресурсов ЭВМ. Применительно
к СЦОИ «Модель» (см. § 7.6—7.7) этот метод заключается в том, что
общие выражения геометрического преобразования заменяются с за-
заранее задаваемой точностью б кусочно-линейными приближениями
хх = xlP\ + Ад^рх», У\ = Утр\ + А(/гр1/, где i — номер элемента на
аппроксимируемом отрезке 1—2, / ? {0, 1, ..., Ыф — 1}. В ЭВМ
по определенному способу, изложенному ниже, вычисляются длина
отрезка Ыф и коэффициенты линейных приближений:
'
где Xrpi = fx1 {х'тР2, У%2) + б, у'грх — /у1 (ХгР2, #?Р2) + б. Далее
из ЭВМ в УВВИ1 передаются значения x?pi, утР\, Ахгр1, Аугр1,
ар1=1, ар0=1, в УВВИ2 — х? у? Ах Д О
ар1
редаются з
=1, ар0=1, в УВВИ2 —
1 1
i, утР\, хгр1, Аугр1, Ыф,
Ахгр2, Д(/гр2 = О, Ыф,
т в авй
р1, ар01, в УВВИ2 — х?р2, у?р2, Ахгр2, Д(/гр2 = О, Ыф,
аР1 = 1, аро = 1 и оба устройства переходят в автономный по отно-
отношению к ЭВМ режим работы, освобождая машину для расчета пара-
параметров аппроксимации следующего фрагмента изображения (см.
рис. 7.17). Дальнейшая процедура обработки изображения со-
состоит в последовательном считывании в УВВИ1 элементов изображе-
изображения, находящихся на отрезке 1—2, передаче кодов оптической плот-
плотности этих элементов с блока БКП этого устройства по магистральной
линии связи на блок БПУ УВВИ2 и их регистрации в последнем уст-
устройстве в точках, лежащих на отрезке Г—2'. Завершив передачу—
прием Ыф элементов, УВВИ1 и УВВИ2 переходят в режим совместной
работы с ЭВМ и начинается цикл преобразования следующего фраг-
фрагмента изображения.
288
Цикл программно-аппаратной обработки каждого фрагмента изо-
изображения состоит из трех этапов: 1) вычисление в ЭВМ параметров
аппроксимирующих отрезков; 2) передача этих параметров в УВВИ1
и УВВИ2 и переход последних в автономный режим работы; 3) пере-
пересылка элементов фрагмента из УВВИ1 в УВВИ2. Рассматриваемый
метод допускает полное совмещение во времени выполнения этапов
1 и 3, так что общее время обработки изображения
где Мф — число участков аппроксимации для всего снимка; ttl, ti2
и tta — время выполнения этапов 1, 2 и 3 обработки 1-го фрагмента.
Простейший способ отыскания параметров аппроксимации (способ
равномерного разбиения) заключается в том, что синтез выходного
изображения производится отрезками равной длины Мф, параллель-
параллельными оси о2х2. Величина Ыф, гарантирующая заданную точность при-
приближения б, определяется для этого способа выражением
max
Фрагменты длиной Мф элементов регистрируются в плоскости
о2л:2(/2 внутри вертикальных зон, образованных прямыми х2 = О,
х2 = Ыф, х2 = 2Ыф, ..., а параметры аппроксимации для исходного
изображения рассчитываются по формулам G.19). Если, однако, диа-
диапазон изменения 52%/Ex2J и (или) d2yj(dx2J по полю изображения
является чрезмерно широким, то целесообразно использовать моди-
модификацию рассмотренного способа, в соответствии с которой синтезируе-
синтезируемый снимок разбивается на горизонтальные зоны; для каждой из по-
последних находится, как и ранее, свое значение Ыф, а ширина Мф зоны
вычисляется из выражения
#ф (№) ± АЛГф=Ent [41А/[М20 (у,+ Лф1 ],
где ЛМф — допустимое изменение Ыф (у2) при увеличении координа-
координаты г/2 (обычно АМф принимается равным 1), для чего предварительно
в результате решения экстремальной относительно переменной х2
задачи находятся функции М20 (у2) и ЛГф (у2) = Ent t4j//Al2o (#г)Ь
К достоинствам способа равномерного разбиения следует отнести
простоту организации вычислительного процесса в СЦОИ и малые
затраты машинного времени на вычисление параметров аппроксима-
аппроксимации. Вместе с тем при сложной геометрической обработке, характери-
характеризующейся большими значениями частных производных д2хх1{дх2J
и д^ЛдХъJ, длины Мф аппроксимирующих отрезков уменьшаются,
что ведет к росту времени обработки в ЭВМ прерываний по вводу—
выводу для перехода УВВИ1 и УВВИ2 в автономный режим работы
и обратно. В этом случае целесообразно использование способа мини-
минимального покрытия, когда все поле синтезируемого изображения «на-
«накрывается» минимальным числом фрагментов.
289
Пусть начиная с точки /' плоскости о2х2у2 (рис. 7.25) изображение
синтезируется вдоль оси о2х2. Такому изменению переменной х2 со-
соответствует некоторое изменение координат хх и ух (рис. 7.26, а, б).
Определим граничные значения x'TV>2, х"Р2 координаты х2, при кото-
которых имеет место линейное приближение к функциям хъ ух с предельно
!'
xi °z хгр1
Рис. 7.25. Формирование строки изображения
допустимой ошибкой б. Искомый результат можно найти путем реше-
решения двух пар уравнений, составленных при рассмотрении рис. 7.26:
х-/Г1 (*°
г°Р2,
F*
= 0.
G.20)
G-21)
J
Первые уравнения в системах G.20), G.21) используются для опре-
определения значений |ж, 1У координаты х2, при которых ошибка аппрок-
аппроксимации достигает своего мак-
максимального значения, а из
вторых уравнений по найден-
найденным 1Х, 1У определяются ве-
величины дггР2, .v"P2. В качестве
граничного значения аппрок-
аппроксимирующего отрезка окон-
чательно выбирается мень-
шее из величин x'TV2, *гр2-
При синтезе следующего от-
д
хгрг
Рис.
7.26. Графическая иллюстрация
При синтезе следующего от-
фор- резка изображения в качест-
ве л:?2 принимаются либо
ве л:?Р2
min (лггр
элемента
принимаются
либо
:гр2>
ли-
лиР) + гр2>
следующей строки.
бо значения координаты начального элемента следующей строки.
Решение систем в общем случае нелинейных уравнений G.20),
G.21) связано с большими вычислительными затратами. Более простые
уравнения могут быть получены при разложении функций /J1, fc1 в
ряды Тейлора относительно точек (xr°p2, y%2), (i*, y%z), ilv, У?Р2):
290
\х
2!
К'
•=2б;
.21
К
2!
где К,
3!
3!
К"
1
4!
G.22)
ч.
^L> ^a
G.23)
значения второй,
третьей и т. д. производных функций fx х и //х пол:2 в точках (х?Р2, г/?рг),
Aа-. У?р2) И (Х%2, У%2), Aу, Угр2) В ПОрЯДКе уПОМИНЭНИЯ.
На практике в системах G.22), G.23) достаточно ограничиться
членами второй и третьей степени, тогда поставленная задача может
быть решена аналитически.
В заключение отметим, что СЦОИ «Модель» подготовлена к реали-
реализации программно-аппаратного метода геометрических преобразова-
преобразований АКИ во всех отношениях. Этой цели, 6 частности, служит общая
магистральная линия связи между УВВИ1 и УВВИЗ, а также опи-
описанная выше система макрокоманд, позволяющая организовать прак-
практически произвольные траектории сканирования как анализируемого,
так и синтезируемого изображений, а также автономный режим ра-
работы участвующих в преобразовании устройств.
Заключение
Технические средства цифровой обработки и распознавания изображений
отличаются разнообразием.
Описанное в настоящей главе малокадровое телевизионное устройство спе-
специально спроектировано для ввода в ЭВМ изображений в темпе их сканирования
лучом ЭЛТ. Оно просто и удобно в эксплуатации, имеет невысокую стоимость.
Если в распоряжении пользователя есть промышленная телевизионная установ-
установка, то ввод видеоинформации в ЭВМ на ее основе можно организовать так, как опи-
описано в § 7.5. Оба устройства можно использовать при проектировании роботов-
манипуляторов, а также при решении многих исследовательских задач по цифро-
цифровой обработке и распознаванию изображений. Однако для них характерны невы-
невысокое качество передачи полутонов и сравнительно малая геометрическая точ-
точность сканирования.
Из высококачественных в отношении передачи полутонов и геометрической
точности устройств ввода и вывода видеоинформации устройство с разверткой
барабанного типа обладает большей надежностью и стабильностью работы и
меньшей стоимостью. Однако для него характерны крайне неудобные форматы
размещения данных в памяти ЭВМ в процессе ввода—вывода изображений, а
также невозможность использования вводимого изображения в качестве внешней
памяти.
Устройство ввода—вывода с электронно-механической разверткой свобод-
свободно от этих недостатков, но более сложно в эксплуатации. На его основе возмож-
возможно применить эффективный программно-аппаратный метод преобразования изо-
изображений, позволяющий реализовать это преобразование в темпе ввода—вывода
видеоинформации (см. § 7.8). В данной главе рассмотрены также вопросы аппа-
аппаратного и программного сопряжения устройств ввода—вывода изображений с
вычислительными машинами, в том числе с ЭВМ ЕС (см. §7.7).
ЛИТЕРАТУРА
1. Фу К. Последовательные методы в распознавании образов и обучении
машии. М., 1971.
2. Dinneen G. P. Programming Pattern Recognition. — Proceedings of the
WJCC, 1955. 5
3. Барабаш Ю. Л. Учет свойств признаков при распознавании. — Изве-
Известия АН СССР. Техническая кибернетика, 1965, № 5.
4. Бирман Н. Я- Статистические способы выделения признаков и оценка
качества распознанания. — В кн.: Автоматическое чтение текста. — М.:
ВИНИТИ, 1967.
5. Kullback S. Information theory and statistics New Jork, 1959.
6. Борисов А. Н., Кокле Э. А. Распознавание размытых образов по призна-
признакам. — В кн.: Кибернетика и диагностика. Рига, 1970, вып. 4.
7. Ивахненко А. Г. Самообучающиеся системы распознавания и автоматиче-
автоматического управления. Киев, ^969.
8. Себестиан Г. Процессы принятия решения при распознавании образов.
Киев, 1965.
9. Ни М. К- Visual Pattern Recognition by Moment Invariants. — IRE
Transactions on Information Theory, 1962, № 2.
10. Нильсон Н. Обучающие машины, 1967.
11. Tenery S. Apattern recognition function of integral geometry. IEEE
transactions on military electronics, MIL — 7, 1963, №2—3.
12. Лбов Г. С. Выбор эффективной системы зависимых признакон. —
В кн.: Вычислительные системы. — ИМ СО АН СССР, 1965, №19.
13. Барабаш Ю. Л,, Барский Б. В. и др. Автоматическое распознавание
образов. — Киев: КВВАИУ, 1963.
14. Шеннон К. Работы по теории информации и кибернетике. М., 1963.
15. Загоруйко Н. Г. Методика оценки информационной эффективности не-
независимых параметров речевого сигнала. — В кн^.Вычислительные системы. —
Новосибирск; СО АН СССР, 1964, вып. 10.
16. Гимельфарб Г. Л. О выборе усредненных эталонных изображений. —
В кн.: Читающие автоматы и распознавание образов. Киев, 1965.
17. Турбович И. Г., Гитис В. Г., Маслов В. К. Опознавание образов. Детер-
минированно-статистический подход. М., 1971.
18. Optical Character Recognition Spartan Books. Washington, 1962.
19. Chu J. T. Optimal Decision Functions for Computer Character Recogni-
Recognition. Journal the Association for Computing Machinery, 1965, vol. 12, № 2.
20. Quine W. The problem of simplifying of truth functions. Math. Monthly,
1952, v. 59, №8. 3
21. Me. E Gluskey. Minimization of Boolen functions. Bell system Rech. J.,
1956, v. 35, №6.
22. Sezaki N., Katagire H.. Character recognition by follew method. Pro-
Proceeding of IEEE, 1965, v. 53, № 5.
23. Bradshaw J. A. Letter recognition using a captive scan. IEEE transac-
transactions on electronic computers. ES—12, 1963, № 1.
24. Скиридов А. С. Стереофотограмметрия. М., 1951.
25. Толченников Ю. С, Хазанова Т. М. Критерий оптической классифика-
классификации ландшафтов. — В кн.: Исследование природной среды космическими сред-
средствами. Геология и геоморфология. М., 1973.
26. Орловский Е. Л. и др. Теоретические основы электрической передачи
изображений. М., 1962.
ОГЛАВЛЕНИЕ
Стр.
о
Предисловие °
Введение *
\Глава 1. Методы обработки точечных изображений '2
§ 1.1. Особенности цифровой обработки точечных изображений . . 12
§ 1.2. Формирование эталонных и предварительная обработка реаль-
реально наблюдаемых точечных изображений 13
§ 1.3. Идентификация точечных изображений по методу трасс ... 20
§ 1.4. Квазикорреляционный метод идентификации точечных изо-
изображений 25
§ 1.5. Корреляционные методы идентификации точечных изобра-
изображений 31
§ 1.6. Зонно-комбинаторный метод идентификации точечных изо-
изображений 35
Заключение 39
Глава 2. Методы предварительной обработки плоских изображений прост-
пространственных объектов 41
§ 2.1. Особенности цифровой обработки проекций пространствен-
пространственных объектов 41
§ 2.2. Фильтрация плоских изображений пространственных объектов 43
§ 2.3. Минимизация визуальной информации ; 50
§ 2.4. Препарирование сложных многосвязных плоских изображений 52
§ 2.5. Методы нормализации плоских изображений 55
§ 2.6. Принципы построения алгоритма синтеза контуров 64
Заключение 66
Глава 3. Системы признаков при распознавании объектов по их крупно-
крупномасштабным изображениям 68
§ 3.1. Критерий полезности признаков при распознавании объектон 68
§ 3.2. Некоторые системы признаков при распознавании объектов 70
§ 3.3. Система геометрических б^-признаков при распознавании объ-
объектов 77
§ 3.4. Геометрические моменты-признаки при распознавании гео-
геометрических фигур 83
§ 3.5. Эффективность признаков при распознавании двух классов
объектов . , 90
§ 3.6. Определение ошибки распознавания объектов методом дихо-
дихотомий 94
§ 3.7. Эффективность признаков при распознавании трех (и более)
классов объектов "'
§ 3.8. Информативность статистически независимых признаков и
мера надежности при .распознавании объектов. Минимизация
пространства признаков '"О
293
Стр.
§ 3.9. Информативность статистически связанных признаков при
распознавании объектов 105
§ 3.10. Построение минимальных описаний классов объектов, обес-
обеспечивающих требуемую вероятность их распознавания .... 108
§ 3.11. Связь вероятности распознавания объектов с информативно-
информативностью признаков 120
§ 3.12. Выделение областей попарного разделения классов .... 122
§ 3.13. Алгоритм отбора эффективных признаков. Составление эта-
эталонных описаний классов 125
Заключение 127
Глава 4. Обучение ЭВМ и принятие решений при распознавании объектов
по их крупномасштабным изображениям 128
§ 4.1. Автоматизация получения статистических данных в процессе
обучения ЭВМ 128
§ 4.2. Принципы математического моделирования процесса про-
пространственного обзора 134
§ 4.3. Вероятностные методы обучения ЭВМ распознаванию объектов 138
§ 4.4. Вероятностные методы принятия решения 149
§ 4.5. Обучение ЭВМ и принятие решения в системах распознавания
порогового типа 154
§ 4.6. Обучение ЭВМ по эталонным описаниям . . 161
§ 4.7. Распознавание объектов по эталонным описаниям классов 169
§ 4.8. Способ повышения вероятности распознавания объектов . . 170
Заключение 174 •
Глава 5. Фото- и стереофотограмметрические аспекты в задаче распозна-
распознавания трехмерных объектов 175
§5.1. Основная проблематика фотограмметрических преобразова-
преобразований в задаче распознавания объектов 175
§ 5.2. Система координат и элементы ориентирования одиночных
и стереопарных снимков 176
§ 5.3. Основы теории преобразования стереопарных снимков в за-
задаче распознавания объектов 179
§ 5.4. Исследование проективных свойств отдельных групп объектов 184
§ 5.5. Пространственная нормализация объектов 195
§ 5.6. Формирование пространственных описаний объектов в услови-
условиях помех наложения 199
§ 5.7. Анализ точности получения пространственных описаний
объектов 200
Заключение 203
Глава 6.' Обработка аэрокосмических изображений на ЭВМ .... 204
§ 6.1. Особенности цифровой обработки аэрокосмических изобра-
изображений 204
§ 6.2. Математические модели геометрических преобразований изо-
изображений 206
§ 6.3. Методы ускорения геометрических преобразований изобра-
изображений 218
§ 6.4. Выбор способов рациональной организации обмена информа-
информацией между оперативной и внешней памятью при геометриче-
геометрических преобразованиях изображений 225
§ 6.5. Методика частичного дешифрирования изображений и наие-
сения условной графической информации на выходной фото-
фотодокумент 231
Заключение 237
294
Глава 7. Технические средства распознавания пространственных объектов
и цифровой обработки изображений 239
§ 7.1. Способы и средства ввода видеоинформации в ЭВМ 239
§ 7.2. Малокадровые телевизионные средства ввода видеоинформа-
видеоинформации в ЭВМ 244
§ 7.3. Градационные, динамические и точностные характеристики вы-
высококачественных устройств ввода—вывода видеоинформации 250
§ 7.4. Выбор разрешающей способности устройств ввода—вывода при
распознавании геометрических контуров 256
§ 7.5. Устройство ввода изображений в ЭВМ на базе промышленной
телевизионной установки 263
§ 7.6. Принципы построения высококачественных устройств ввода—
вывода ЭВМ 271
§ 7.7. Агрегатирование средств ввода, вывода и отображения ин-
информации с ЭВМ 281
§ 7.8. Повышение производительности вычислительных систем об-
обработки и распознавания изображений 288
Заключение . 291
Литература 292
БОРИС ВЛАДИМИРОВИЧ АНИСИМОВ,
ВИКТОР ДМИТРИЕВИЧ КУРГАНОВ,
ВЛАДИМИР КОНСТАНТИНОВИЧ ЗЛОБИН
РАСПОЗНАВАНИЕ
И ЦИФРОВАЯ ОБРАБОТКА
ИЗОБРАЖЕНИЙ
Заведующая редакцией Н. И. Хрусталева. Редактор Л. П. Андрианова
Младшие редакторы Т. Ф. Артюхниа, С. Ф. Шабарнна
Художник В. М. Хомяков. Художественный редактор В. И. Мешалкни.
Технический редактор Э. М. Чижевский. Корректор Г. И. Кострнкова
ИБ № 3392
Изд. № СТД—355 Сдано в набор 08.07.82. Подп. в печать 11.02.83. Т-01265
Формат бОХЭО'Де Бум. тнп. № 2. Гарнитура литературная. Печать высокая.
Объем 18,5 усл. печ. л. 18,5 усл. кр.-отт. Уч.-нзд. л. 19,08.
Тираж 10.000 экз. Зак. № 1053. Цена 90 коп.
Издательство «Высшая школа». Москва, К-51, Неглннная ул., д. 29/14.
Московская типография № 4 Союзполнграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
129041, Москва, Б. Переяславская ул., д. 46