

















































































Автор: Родионов А.И. Сазонов А.Е.
Теги: водный транспорт география картография мореходство мореплавание навигация издательство транспорт судовождение литература по транспорту
ISBN: 5-277-00781
Год: 1992




А. И. РОДИОНОВ
А. Е. САЗОНОВ
АВТОМАТИЗАЦИЯ
СУДОВОЖДЕНИЯ
А. И. РОДИОНОВ
А. Е. САЗОНОВ
АВТОМАТИЗАЦИЯ
СУДОВОЖДЕНИЯ
3-е издание,
переработанное и дополненное
Утверждено
Департаментом морского транспорта
Министерства транспорта
Российской Федерации
в качестве учебника для курсантов
специальности 24.02 «Судовождение»
морских академий
МОСКВА "ТРАНСПОРТ" 1992
УДК 656.61.052.65.0I1.56(075.8)
Родионов А. И., Сазонов А, Е. Автоматизация судовожде-
ния: Учеб, для вузов.— 3-е изд., перераб. и доп — М.: Транс-
порт, 1992.— 192 с.
Приведены основные понятия о некоторых математических
методах исследования процессов автоматизации, связанных с мо-
реплаванием. Изложены методы и средства получения и обработ-
ки навигационной информации, структурные схемы автоматизи-
рованных систем и комплексов, используемых при управлении
судном.
2-е издание вышло в 1983 г. Б 3-м издании учтены последние
достижения в области автоматизации судовождения.
Для учащихся судоводительской специальности морских
академий
Ил. 92, табл. 10, библиогр. 23 назв.
- Учебник написали: Введение, гл. 1,2 (кроме § 12),
4 —д-р техн, наук А. И. Родионов; гл. 3, § 26, 27 и 29 гл. 5 —
д-р техн, наук А. Ё. Сазонов; § 12 гл. 2 и §-28 гл. 5 написаны
авторами совместно.
Р еце н зе н т Л. Л. Вагущенко
Заведующий редакцией И. В. Макаров
Редактор А. М Левина
Учебник
Родионов Александр Иванович,
Сазонов Анатолий Ефимович
АВТОМАТИЗАЦИЯ СУДОВОЖДЕНИЯ
Технический редактор С. В. Щукина
Корректор-в ычитчи к Т. А Ионова
Корректор А. Н. Конева
ИБ 4358
Сдано в набор 21.10.91. Подписано в печать 09.06.92 л
Формат бОхЯЗ'Лб. Бум. тип. № 2. Гарнитура литературная. Офсетная печать
Усл. печ. л. 11,76. Усл. кр.-отт. 12. Уч.-изд. л. 12,76. Тираж 2000 экз. Заказ 1453. С, 175.
Изд. № I-1—1/8 № 5296
Ордена «Знак Почета» издательство «ТРАНСПОРТ», 107174, Москва; Басманный туп., 6а
Московская типография № 4
Министерства печати и информации РФ
129041, Москва, Б. Переяславская 46.
*
3205040000-175 •
049(01)-92 10иа2
ISBN 5-277-00781
© А. И. Родионов, А. Е. Сазонов, 1992
Введение
Непрерывное возрастание экономических связей и перевозок
между государствами ведет к интенсивному росту числа морских
судов, их водоизмещения и скорости. Увеличивается плотность
транспортных потоков судов различных типов. Все труднее стано-
вится осуществлять безопасное плавание высокоскоростных судов,
так как традиционные методы сбора и обработки навигационной ин-
формации и принятия на ее основе решений по управлению судном
не всегда своевременны и достаточно эффективны.
Возникает необходимость в автоматизации процесса судовож-
дения, т. е. в применении математических методов и специальных
технических средств для повышения точности и надежности работы
судовых систем контроля и регулирования, освобождения судоводи-
теля от непосредственного выполнения некоторых стандартных опе-
раций по управлению судном, что создает условия для своевремен-
ного принятия им оперативных решений.
Как показывает практика внедрения и эксплуатации различных
автоматизированных систем, они являются наиболее эффективным
средством повышения производительности труда судоводителей.
Автоматизация процессов и операций на судах приводит к умень-
шению потерь ходового времени до 5 %, снижению себестоимости
перевозок от 4 до 15 % вследствие экономии топлива и смазочных
материалов, сокращения численности экипажей, повышения надеж-
ности, оборудования, уменьшения потерь от аварийности [5, 18,261.
Значительную роль играют также психологические и социологиче-
ские аспекты комплексной автоматизации.
В области судовождения автоматизации подлежат операции, ко-
торые традиционно выполняет человек на основе длительной прак-
тической деятельности, поэтому формализация их, т. е. выявление
математических, логических и управляющих действий, посредством
которых достигается результат, является наиболее важной и слож-
ной проблемой.
При этом используются основные положения общей теории уп-
равления — кибернетики с единым подходом к рассмотрению про-
цессов управления в системах различной природы и организации,
разработкой математического аппарата для количественного описа-
ния процессов, основанного на теориях регулирования, вероятно-
стей, информации, надежности работы и др. L9, 23, 24].
3
цель, задачи управления
Рис. 1. Структура системы управления
‘Процессы управления протекают в системе, под которой подразу-
мевается некоторая обособленная совокупность элементов (частей).
Взаимосвязь между элементами определяет свойства, состояния
системы и их изменения во времени. Для управления любым объ-
ектом, процессом требуется иметь информацию об их состоянии, ре-
сурсах и ограничениях в системе, о внешней среде и ее изменениях.
Информация возникает на основе наблюдений, измерений, вычисле-
ний. При этом особое значение имеют обратные связи — каналы,
по которым в систему вводятся данные о состояниях ее элементов и
результаты реализации управляющих воздействий. Схематически
. структура любой системы изображается в виде прямоугольников,
связанных между собой линиями со стрелками, указывающими на-
правление передачи воздействий.
В простейшем случае систему можно изобразить состоящей из
четырех частей: управляемой (объекта управления), измеритель-
ной, управляющей и исполнительной (рис. 1).
На основе измерений, поступающих от датчиков информации —
гирокомпаса, лага, радиолокационной (РЛС) и радионавигационной
(РНС) станций — по обратным связям, управляющая часть (су-
доводитель) сравнивает фактическое состояние объекта с желаемым,
которое определяется заданной извне целью управления (задачей).
Вырабатываются законы управления исполнительными средствами
(авторулевым, винтом регулируемого шага, подруливающими уст-
ройствами и т.д.) с учетом ограничений. Управляющие воздействия
4
на объект вызывают его движение к заданному состоянию и компен-
сируют отклонения, которые возникают от возмущающих воздейст-
вий внешней среды.
Как бы детально и тщательно ни изучалось поведение системы,
всегда неизбежно наличие некоторых случайных факторов, влияю-
щих на ее состояние.
Разработка методов выполнения отдельных операций, формули-
рование целей и учет различных факторов должны основываться
на хорошем знании морской практики, поэтому формализацию опе-
раций осуществляют в тесном контакте со специалистами, практи-
чески занимающимися судовождением.
Во многих случаях при описании операций и процессов прихо-
дится привлекать сложный математический аппарат либо упрощать
взаимодействие переменных величин, отступая от реальной дейст-
вительности, В результате создается математическое описание про-
цесса выполнения операции — его математическая модель. Даль-
нейшее исследование модели позволяет выявить и решить проблемы
получения необходимой информации, ее переработки и использова-
ния, установить возможность создания автоматизированной системы,
соответствующей по качеству, стоимости и надежности поставленным
целям, с учетом наличия конкретных датчиков, вычислительных
устройств, регуляторов и т. п.
Во многих случаях выясняется, что создать автоматизирован-
ную систему, соответствующую поставленным целям, не представ-
ляется возможным либо из-за отсутствия ее математических описа-
ний (алгоритмов) и технических средств, либо по экономическим при-
чинам. Возникает проблема компромиссного выбора структуры и
функций системы, при этом исходят из расчетной эффективности ее
работы и требующихся затрат на создание.
На морском флоте детальнее всего разработанными и экономи-
чески обоснованными являются автоматизированные системы обслу-
живания и регулирования параметров судовой энергетической ус-
тановки, главных и вспомогательных двигателей, различных судо-
вых устройств и систем. Темп их внедрения на судах растет.
В области судовождения детально разработанными являются
процессы определения местоположения и скорости судна по данным
различных навигационных систем, стабилизации судна на заданных
курсе и маршруте, получения, обработки и индикации радиолока-
ционной информации об элементах движения встречных судов и си-
туациях сближения с ними, управления средствами радиосвязи.
Созданы навигационные комплексы, которые успешно решают эти
задачи. Они установлены на пассажирских лайнерах и крупнотон-
нажных грузовых судах.
Другие процессы также автоматизируют по мере разработки
алгоритмов решения задач их автоматизации. К таким задачам от-
носятся управление перегрузочными операциями на танкерах, пла-
5
Рис. 2. Структура системы управления судном на основе экспертной ЭВМ
нирование размещения и учет груза на сухогрузных судах, а также
финансовые, снабженческие и другие расчеты.
В то же время имеется довольно много задач, которые еще не
формализованы, поэтому освободить судоводителя от их решения
пока невозможно. К таким задачам относятся выбор маршрута
плавания на основе правильной оценки гидрометеоинформации,
управление судном в стесненных навигационных условиях, выполне-
ние расхождения с судами, проведение швартовных операций и др.
Чтобы своевременно и правильно принимать ответственные ре-
шения, судоводитель наряду с традиционными приемами управ-
ления судном должен обладать знаниями и навыками работы с ав-
томатизированными системами судовождения.
Человек принимает решения и выполняет действия на основе ти-
пичных, стандартных ситуаций, для которых уже выработаны оп-
ределенные правила поведения.
Несомненно, что в области контроля и управления в бли-
жайшем будущем найдут широкое применение специализирован-
ные. экспертные системы, воспроизводящие ход успешного ре-
шения человеком определенных практических задач и выполне-
ния операций. Использование экспертных систем поможет даль-
нейшей формализации и стандартизации процессов в области
судовождения и позволит специалистам решать практические
задачи на высоком профессиональном уровне. В перспективе .
возможно внедрение диалоговой системы управления судном на
базе экспертной ЭВМ (рис. 2).
В связи с этим необходимо, чтобы будущие судоводителе
знали современные научные методы, применяемые при автома-
тизации судовых процессов и операций, порядок постановки и
алгоритмы решения задач управления судном.
6
Глава 1
МАТЕМАТИЧЕСКИЕ МЕТОДЫ ИССЛЕДОВАНИЯ
ПРОЦЕССОВ И ОПЕРАЦИЙ
1. Методы математической статистики
и теории вероятностей
В большинстве случаев при изучении 'какого-либо явления
его упрощают. Из многих факторов, влияющих на это явление,
выделяют главные, а остальными пренебрегают, считая их вто-
ростепенными. Однако получаемый результат полностью не ли-
шен их влияния, проявляющегося в виде «погрешностей», «воз-
мущений», отклонений от предрассчитанного состояния, которые
называют случайными. Чем точнее хотят предсказать результат,
тем более факторов следует учитывать. Однако практически
учесть все факторы — от существенных до самых ничтожных —
невозможно.
Цель вероятностных методов исследования заключается в
том, чтобы, минуя сложное изучение каждого отдельного явле-
ния, обратиться к их массе, когда отдельные особенности явле-
ний взаимно погашаются (нивелируются), а средний результат
оказывается практически уже не случайным, и его можно прог-
нозировать.
Каждая наука содержит, основные понятия (в геометрии — это
точка, прямая линия; в механике — сила, масса, скорость, уско-
рение и т.д.). В теории вероятностей основными понятиями явля-
ются случайное событие, вероятность события, случайная величина
(СВ) и случайная функция.
Под случайным событием А понимают такое событие, которое в
определенных повторяемых условиях появляется с некоторой час-
тотой
Р*(Л)=т/п, (!)
где т —число появлений события;
п — общее число наблюдений.
Частоту появления события Р* (Л) называют статистической
вероятностью события. При большом числе наблюдений статисти-
ческая вероятность стабилизируется и сходится к математической
вероятности события Р (.4), т. е.
Р*(Л)->Р(Л) при п-х». (2)
Вероятность события может изменяться от 0 до 1; причем до-
стоверное событие, которое непременно должно произойти, оцени-
вают единицей, а невозможное — нулем.
7
В своей деятельности человек использует Принцип практической
уверенности, считая, что если вероятность появления события А в
данной ситуации С весьма мала, то при однократном воспроизведе-
нии ситуации это событие не произойдет. В каждом конкретном слу-
чае это значение малости устанавливают в зависимости от важности
события, его влияния на достижение цели.
Как правило, при решении многих задач требуется учитывать
возможность появления некоторых событий и определять вероят-
ности других событий, связанных с ними. При этом пользуются ос-
новными теоремами сложения и умножения вероятностей событий,
которые бывают несовместными и совместными, независимыми и за-
висимыми.
Если случайные события А и В вместе произойти не могут (не-
совместные события), то вероятность того, что появится либо собы-
тие А, либо событие В (что обозначается как А 4- В), равна сумме
вероятностей этих событий (теорема сложения):
Р(А4В) = Р(А)-ЬР(В). (3)
Для произвольного числа несовместных событий Л,
р( s aj= 2 р(лг). (з')
\(=1 /
Отсюда следует, что сумма вероятностей всех возможных не-
совместных событий At, а также двух противоположных событий
А и А
2 Р(Л{) = 1 и Р(А) + Р(А) = 1. (4)
i = 1
Последнее равенство используют в теории надежности, где со-
бытие А — работа прибора, а А — отказ в его работе на том же про-
межутке времени.
Если события А и В появляются совместно, то это событие обо-
значают А-В. Если вероятность события А не изменяется от того,
произошло или нет событие В, то события А и В называют независи-
мыми, а если эта вероятность изменяется, — зависимыми. Напри-
мер, вероятность обнаружения надводного объекта на заданной
дистанции с использованием РЛС (событие Л) зависит от волнения
моря (событие В).
Вероятность события А, вычисленная при условии, что событие
В (или несколько событий. Во, Bt, В2 ...) произошло, называется ус-
ловной вероятностью: Р (Л/В) или Р (А/В^В^).
Вероятность совместного появления двух событий определяется
формулой (теорема умножения)
Р(А-В) = Р(В) Р(А/В) = Р(А) Р(В/А). (5)
8
Для независимых событий
Р(АВ) = Р(Л)Р(В), (6)
а для произвольного числа независимых событий А
р( П Дг| = П Р(Лг). '• (6')
\ t=l / е=1
На практике редко встречаются задачи, для решения которых
применяют только теоремы сложения и умножения вероятностей
простых событий. Как правило, вероятность события, которую требу-
ется определить, представляют в виде суммы нескольких возможных
событий, каждое из которых в свою очередь может быть* представ-
лено произведением простых событий.
Если сложное событие, вероятность появления которого требу-
ется отыскать, имеет много вариантов, целесообразно переходить к
противоположным событиям. Например, событие С (столкновение
судов) может произойти в случае события В (опасной их встречи) и
события М (невыполнения маневра расхождения), т. е. вероятность
события С
Р(С) = Р(ВМ) = Р(В) р(м).
Вероятность события С, противоположного событию С (отсутст-
вия столкновения),
Р (с) —1—Р (С) ^1 —[1 —Р(В)] [1 —Р (Л1)] = Р (5) —-Р (М) —Р(в) Р (Л4).
Следовательно, надо избегать опасных встреч судов и повышать
их способность к своевременному выполнению маневра.
Если требуется определить вероятность некоторого события А,
которое может произойти только вместе с одним из нескольких не-
совместных событий Н2 ... (называемых гипотезами), то его
вероятность подсчитывают по формуле полной вероятности
Р(Д)= 2 P(Ht)P(A/Ht). • (7)
/=1
Пример 1. Вероятность выхода судна в заданный пункт с точностью s
(событие Л) в ясную видимость днем Р(Л/Я2) — 0,95; в штормовую погоду
ночью Р(А/Н2) ~ 6,8; в плохую видимость Р(Л/Н3) = 0,6. Прогноз пого-
ды имеет следующие вероятности: = 0,1; Р(Н2) — 0,2; Р(НЛ) ~~ 0,7.
Вероятность выходам заданную точку
Р(Л) = 0,95 • 0,1 + 0,8 • 0,2 + 0,6 - 0,7 = 0,675.
Пример 2, Вероятность обнаружения некоторых судов на заданном рас-
стоянии (событие Л) Р(А/НУ) = 1,0; Р(А/Н2) — 0,9; Р(Л///3) — 0,7. Суда
данного типа могут встретиться с вероятностью Pf/ZJ = 0,5; Р(Н2) — 0,4;
Р(//3)=0,1.
Вероятность обнаружения судна на заданной дистанции
Р(Л) = 0,5 • 1 Ч- 0,4 0,9 # 0,1 • 0,7 = 0,98.
9
Пример 3. Имеется система обнаружения двух несовместных сигналов.
Вероятность появления сигнала первого типа Р'(ЯХ) = р, условная вероят-
ность ошибки системы при действии на входе сигнала первого типа Р(А/НХ) —
“ а, сигнала второго типа Р(А/Н.^ = р. Найти вероятность правильного
распознавания сигнала (событие Л) и ошибки системы.
Решение. Так как сигналы несовместны, то Р(Я2) 1 ~ Р> Условные
вероятности правильного распознавания сигнала (событие Л) относительно
событий Нх и Н2 соответственно Р(А/НГ) — 1 — а, Р(А/Н2) = 1 — Под-
ставляя их в формулу (7), при п — 2 получим вероятность правильного ре-
шения
Р(Л) = Рпр>р = р(1-а) + (1-р) (*—£)> (8)
Ч • • • ч
вероятность ошибочного решения
РОш = ра— (1— р) р. (9)
Следствием теоремы умножения и формулы полной вероятно-
сти является формула Бейеса
Р—=—————1--------у , 1 = 1,2.п. (10)
2 P(fii) P(A/Hi)
1—1
Формула (10) позволяет уточнить условные вероятности каждой
гипотезы после появления события А.
Пример 4. Вероятность того, что во время перехода судна ветер будет
встречным, равна 0,6, попутным —0,3. Вероятность того, что ветра не бу-
дет (штиль), равна 0,1. Вероятность выполнения перехода в срок при встреч?
ном ветре равна 0,5, при попутном — 0,8, при штиле —0,9. Рейс (переход)
был выполнен в срок (событие Л). Найти вероятность того, что на следую-
щий аналогичный переход ветер будет встречным, попутным или его не бу-
дет, т. е. уточнить условные вероятности выполнения рейса в срок.
Решение. Возможные гипотезы: Нг — ветер встречный, Н2 — ветер
попутный, Н3 — ветра нет. Вероятности гипотез до опыта: Р(НА = 0,6;
Р(Я2)= 0,3; Р(Я3) = 0,1.
Условные вероятности прибытия судна в срок (событие Л) при гипотезах
Н2, Н$ соответственно
^ + = 0,5;
Hl
А А
Р----= 0,8; Р-----= 0,9.
Вероятности гипотез о наличии встречного, попутного ветра и штиля
по формуле Бейеса:
„ th 0,6*0,5 0,3 л п
А 0,6-0,5 + 0,3-0,8 + 0,1-0,9 0,63
Н2 0,3*0,8
р-Т~—Т^ =0.381 >0,3;
А 0,63
На 0,1-0,9
Р~Г= ’ 143 >0,1.
А 0,63
0,6*0,5
10
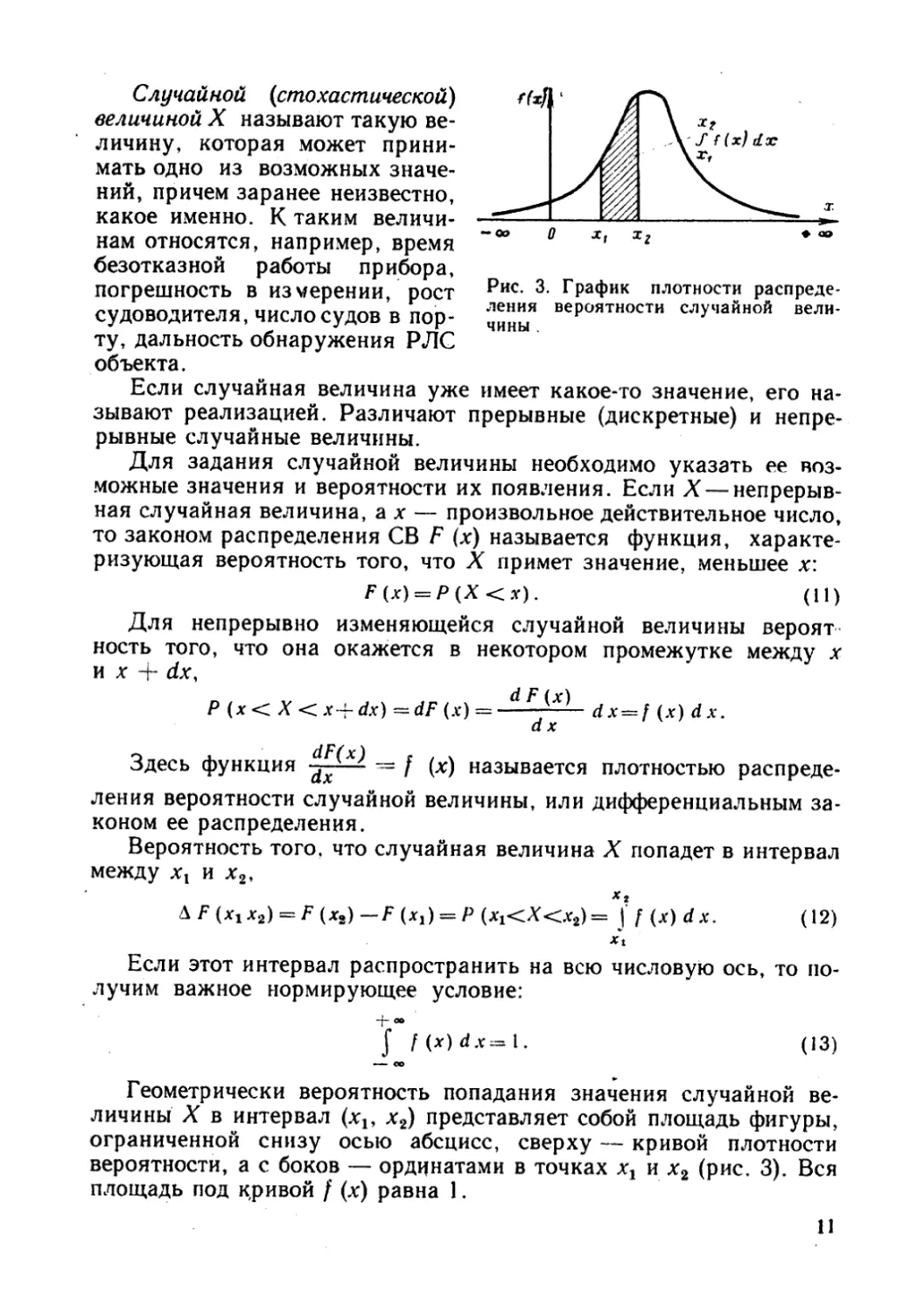
Рис. 3. График плотности распреде-
ления вероятности случайной вели-
чины
Случайной (стохастической)
величиной X называют такую ве-
личину, которая может прини-
мать одно из возможных значе-
ний, причем заранее неизвестно,
какое именно. К таким величи-
нам относятся, например, время
безотказной работы прибора,
погрешность в измерении, рост
судоводителя, число судов в пор-
ту, дальность обнаружения РЛС
объекта.
Если случайная величина уже имеет какое-то значение, его на-
зывают реализацией. Различают прерывные (дискретные) и непре-
рывные случайные величины.
Для задания случайной величины необходимо указать ее воз-
можные значения и вероятности их появления. Если X — непрерыв-
ная случайная величина, ах — произвольное действительное число,
то законом распределения СВ F (х) называется функция, характе-
ризующая вероятность того, что X примет значение, меньшее х:
F(x) = P(X<x). (11)
Для непрерывно изменяющейся случайной величины вероят
ность того, что она окажется в некотором промежутке между х
и х + dx,
Р (х < X < х—- dx) — dF (х) = —dx=f (х) d х.
Здесь функция = f (х) называется плотностью распреде-
ления вероятности случайной величины, или дифференциальным за-
коном ее распределения.
Вероятность того, что случайная величина X попадет в интервал
между X! и х2,
Л F (Xi х2) = F (xs) — F (Xj) = Р (Х1<Х<х2) = J f (х) d х. (12)
х'1
Если этот интервал распространить на всю числовую ось, то по-
лучим важное нормирующее условие:
со
У f(x)dx~l. (13)
— со
Геометрически вероятность попадания значения случайной ве-
личины X в интервал (хь х2) представляет собой площадь фигуры,
ограниченной снизу осью абсцисс, сверху — кривой плотности
вероятности, а с боков — ординатами в точках х, и х2 (рис. 3). Вся
площадь под кривой / (х) равна 1.
11
Во многих случаях для решения практических задач достаточно
знать только основные числовые характеристики СВ — математи-
ческое ожидание тх и дисперсию Dx (или среднее квадратическое
отклонение ох — УТ)Х).
Математическое ожидание (среднее значение):
для прерывных СВ
(14)
i=l
' для непрерывных СВ
?«х = J xf(x)dx. (14')
—< оо
В механической интерпретации тх представляет собой абсциссу
центра тяжести системы точек под кривой f (х). Это число уже -не
случайное.
Дисперсия СВ, являющаяся мерой ее рассеивания отно-
сительно математического ожидания:
для прерывных СВ
= £ (Xi-mx)* Pt= V (15)
i=i i=i
для непрерывных СВ
Dx= | (х— тх)2f (x) dx. (15')
— co
В механической интерпретации дисперсия представляет собой
момент инерции распределения масс под кривой f (х) относительно
центра тяжести.
При наблюдении жизненных явлений, производственных про-
цессов и операций часто выявляются типичные законы распределе-
ния случайных величин. К ним относятся, например, для дискрет-
ных случайных величин биномиальное распределение (Б.. Бернул-
ли) и его частные случаи — распределения Пуассона и Муавра —
Лапласа; для непрерывных случайных величин — распределения
экспоненциальное (показательное), равномерное, нормальное (за-
кон Гаусса), Релея, а также некоторые другие виды распределения
[8].
Рассмотрим нормальное распределение случайных величин.
Нормальное распределение СВ (закон Гаусса)
проявляется особенно часто и именно в тех случаях, когда случай-
ная величина X представляет собой результат сложения большого
числа малых независимых или слабозависимых СВ, математические
ожидания которых равны, а рассеивания малы по сравнению с рассеи-
ванием всей суммы.
12
О) fM
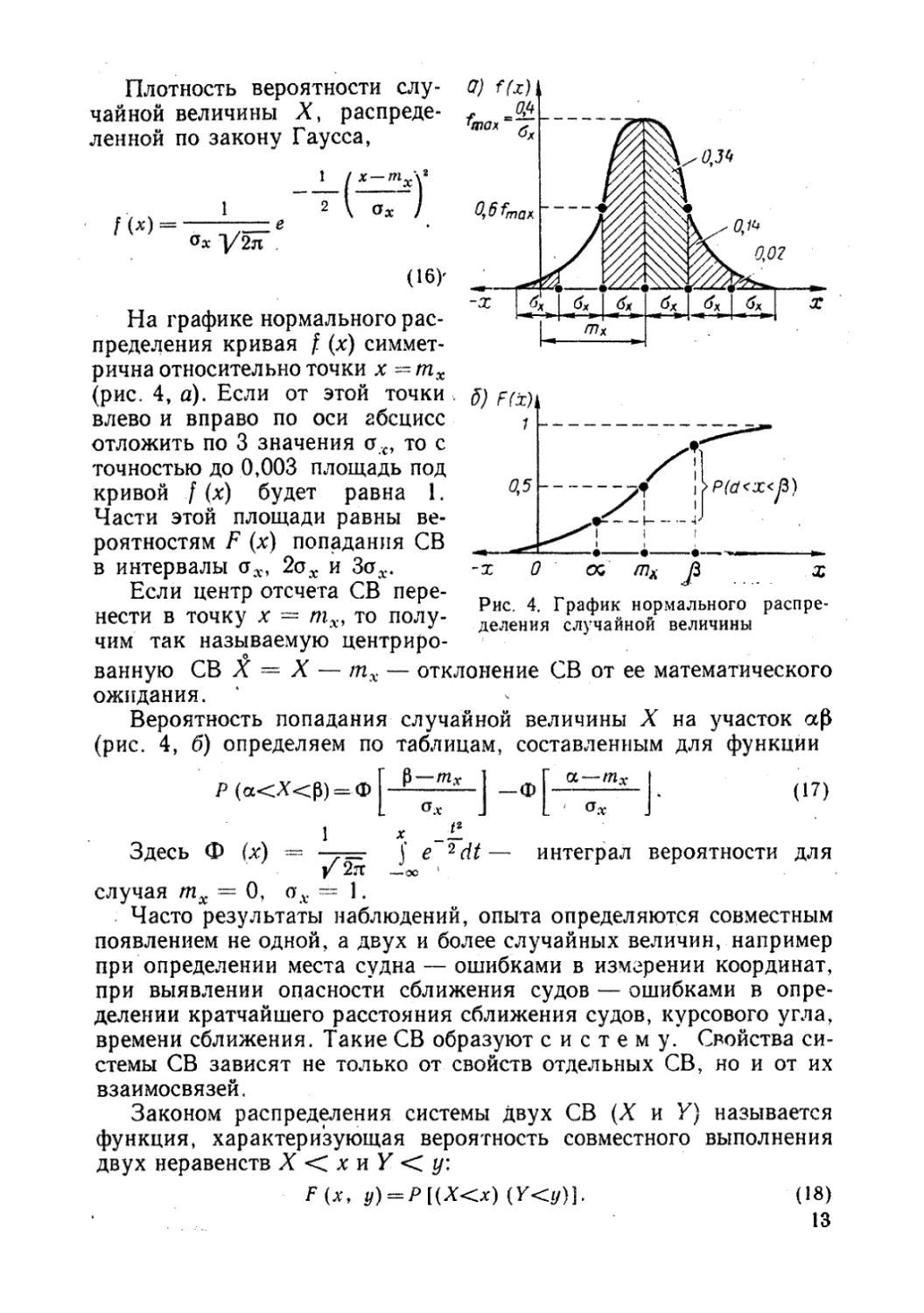
Плотность вероятности слу-
чайной величины X, распреде-
ленной по закону Гаусса,
1 / X — ^Пх\2
1 ~\ /
f(x) = ——е
(16)'
На графике нормального рас-
пределения кривая f. (х) симмет-
рична относительно точки х — тх
(рис. 4, а). Если от этой точки
влево и вправо по оси абсцисс
отложить по 3 значения о€, то с
точностью до 0,003 площадь под
кривой f (х) будет равна 1.
Части этой площади равны ве-
роятностям F (х) попадания СВ
в интервалы ах, 2ох и Зох.
Если центр отсчета СВ пере-
нести в точку х = тх, то полу-
чим так называемую центриро-
ванную СВ Я = X — тх — отклонение СВ от ее математического
ожидания. ’
Вероятность попадания случайной величины X на участок оф
(рис. 4, б) определяем по таблицам, составленным для функции
Рис. 4. График нормального распре^
деления случайной величины
Р (а<Х<Р) = Ф [-2——
а—тх
(17)
—Ф
Ox J
х. - —
У е 2dt— интеграл вероятности для
Здесь Ф (х) = -7-=-
случая тх = 0, ах 1.
Часто результаты наблюдений, опыта определяются совместным
появлением не одной, а двух и более случайных величин, например
при определении места судна — ошибками в измерении координат,
при выявлении опасности сближения судов — ошибками в опре-
делении кратчайшего расстояния сближения судов, курсового угла,
времени сближения. Такие СВ образуют систему. Свойства си-
стемы СВ зависят не только от свойств отдельных СВ, но и от их
взаимосвязей.
Законом распределения системы Двух СВ (X и У) называется
функция, характеризующая вероятность совместного выполнения
двух неравенств X < х и Y < у:
F(x, y)=P[(X<x)(Y<y)].
(18)
13
Совместная плотность распределения вероятностей системы двух
СВ
или
* у
. / F (х, </)=] J f (х, у) dxdy. (19)
— оо
Этот интеграл от элементарных вероятностей геометрически оп-
ределяет объем фигуры (рис. 5), распространенный на всю область
возможных значений СВ (X — 1 и Y = 1.).
Закон распределения случайной величины X при известном зна-
чении у другой случайной величины Y называется условным зако-
ном распределения СВ X при данном значении у величины Y и обо-
значается f(x/y).
Совместная плотность вероятности двух СВ равна произведению,
полученному от умножения плотности вероятности одной из них на
условную плотность вероятности другой:
/ (х, у)=Л. (x)ft(y/x)
или
У)=/2(у)(1(х/|/). (20)
Если закон распределения одной СВ не изменяется, когда ста-
новится ивестным значение другой СВ. то такие СВ называют не-
зависимыми, и их совместная плотность вероятности
/ {х, y)—fi(x)f2 (у). (21)
Линейную вероятностную связь между СВ и их рассеивание до
некоторой степени характеризует корреляционный момент
3 (Yt-mv)pt. (22)
I — i
или коэффициент корреляции
гхУ =Кху/(рх Оу) . (23)
Коэффициент корреляции независимых СВ всегда равен нулю.
Однако обратное утверждение недействительно, при гху — О СВ
могут быть зависимыми (нелинейно). Если коэффициент корреляции
близок к 4-1 или —1, то зависимость между СВ X и Y близка к
функциональной линейной зависимости.
’ На практике часто встречаются случайные величины, которые
изменяются в процессе наблюдений, опыта в зависимости от времени
или каких-либо других аргументов. Такие переменные СВ называют
случайными функциями. Описывают они явления, которые называ-
ются случайными процессами. К таким процессам относятся откло-
14
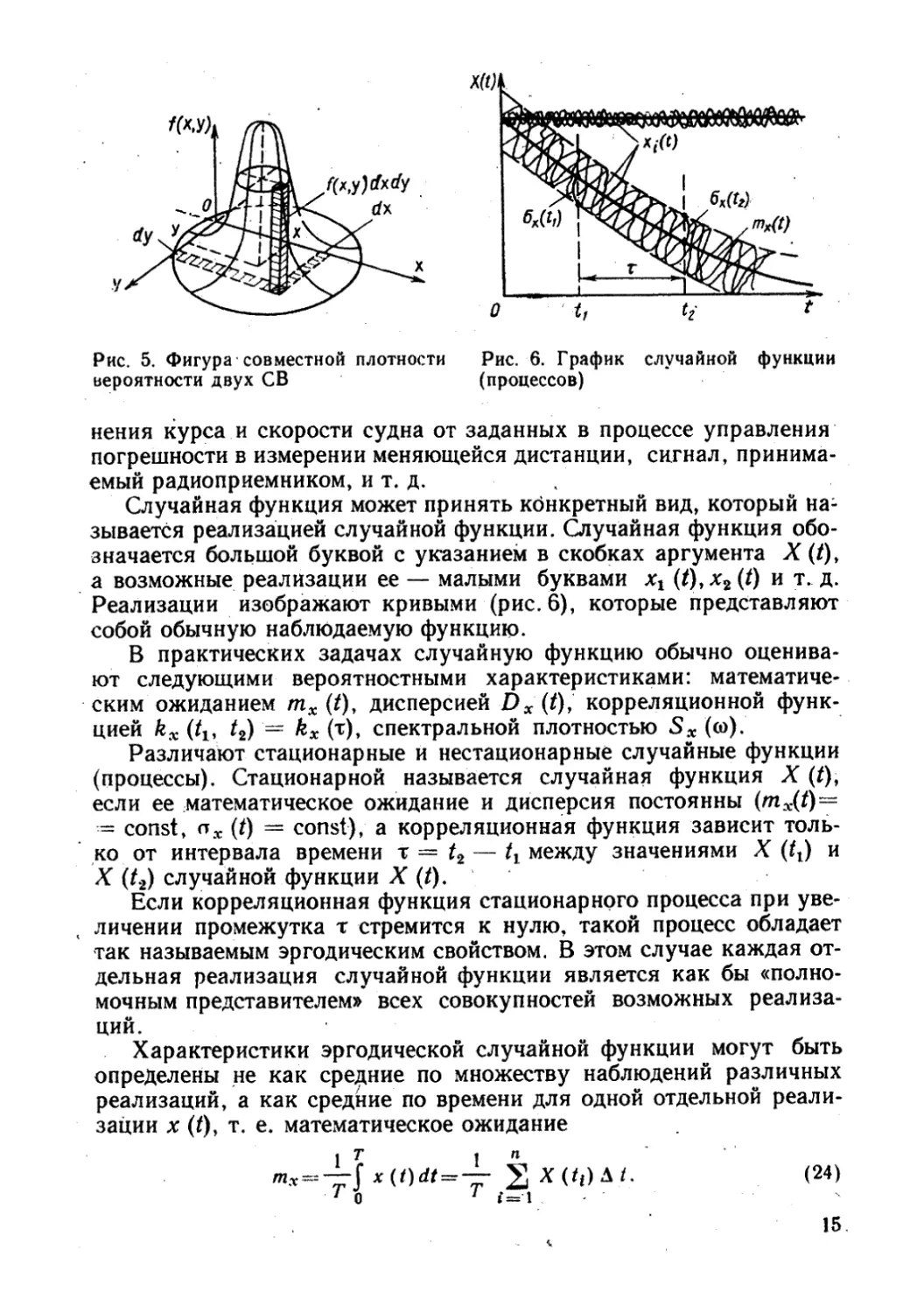
Рис. 5. Фигура совместной плотности
вероятности двух СВ
Рис. 6. График случайной функции
(процессов)
нения курса и скорости судна от заданных в процессе управления
погрешности в измерении меняющейся дистанции, сигнал, принима-
емый радиоприемником, и т. д.
Случайная функция может принять конкретный вид, который на-
зывается реализацией случайной функции. Случайная функция обо-
значается большой буквой с указанием в скобках аргумента X (/),
а возможные реализации ее — малыми буквами и т. д.
Реализации изображают кривыми (рис. 6), которые представляют
собой обычную наблюдаемую функцию.
В практических задачах случайную функцию обычно оценива-
ют следующими вероятностными характеристиками: математиче-
ским ожиданием тх (/), дисперсией Dx (/), корреляционной функ-
цией kx (tt, t2) - kx (т), спектральной плотностью Sx (со).
Различают стационарные и нестационарные случайные функции
(процессы). Стационарной называется случайная функция X (/),
если ее математическое ожидание и дисперсия постоянны (m«(0=
= const, пж (t) — const), а корреляционная функция зависит толь-
ко от интервала времени т = t2 — между значениями X (Q и
X (Л2) случайной функции X (/).
Если корреляционная функция стационарного процесса при уве-
, личении промежутка т стремится к нулю, такой процесс обладает
так называемым эргодическим свойством. В этом случае каждая от-
дельная реализация случайной функции является как бы «полно-
мочным представителем» всех совокупностей возможных реализа-
ций.
Характеристики эргодической случайной функции могут быть
определены не как средние по множеству наблюдений различных
реализаций, а как средние по времени для одной отдельной реали-
зации х (t), т. е. математическое ожидание
1 Т ] и
vfхS хА(24)
15.
Рис. 7. График дисперсии гармоник
случайного процесса
Рис. 8. График спектральной плотно-
сти
Здесь Т — nkt должно быть достаточно большим, и корреляци-
онная функция для промежутка т
I Т—т J п
- f x(t) x(t + T)dt^—— 2 (*, + ?) Af, (25)
1 -T 0 1 -T
где X (tt) — X (ti) —mx (<г); X (Zf + т) = X —mx (Zi4“T) при т—0,
Kx(0) = a*.
При исследовании различных процессов в физике и технике для
оценки качества работы автоматических систем важно знать, како-
го рода колебания преобладают, какова внутренняя структура про-
цесса. Для этого используют понятие «спектральный состав процес-
са».
Спектром процесса (функции) называется за-
висимость, описывающая распределение амплитуд по различным
частотам, тч е. показывающая рассеяние изучаемого процесса по
частотам. Спектр процесса получается в результате разложения
функции, описывающей процесс, на гармонические колебания раз-
личных частот ®0, (£>lt (о2, й)8, ..., Амплитудами этих колебаний
являются дисперсии Dx (рис. 7).
Если расстояние между соседними частотами неограниченно
уменьшать (Л® 0), а по оси ординат откладывать дисперсию, при-
ходящуюся на единицу данного интервала частот, т. е.
Dv
Sx(w)= lim (26)
Дю
получим кривую, изображающую плотность распределения диспер-
сий по частотам непрерывного спектра. Сама функция (<а) назы-
вается спектральной плотностью дисперсии (рис.8).
Площадь, ограниченная кривой Sx (со), равна дисперсии Dx:
Dx=f Ss((o)d(o. v (27)
b
16
Часто пользуются на практике нормированной спектральной
плотностью
Sx (©) г*
Sx (0>) = - и Г 5Х (со) d CD = 1. (28)
Q
Спектральная плотность связана с корреляционной функцией
процесса интегралом Фурье
2 00
Sx (<о) —---- ( kx (т) cos о) т d т (29)
Л q
и
<ю
(т) ==J Sx (ю) cos © т4т. (30)
о
Разработка методов регистрации, обработки и анализа статисти-
ческих экспериментальных данных составляет предмет специаль-
ной науки — математической статистики, с использованием кото-
рой решают следующие задачи:
определение теоретического закона распределения СВ (системы
случайных величин);
проверка подобия найденной теоретической закономерности
опытным данным;
определение числовых характеристик СВ (системы СВ), оценка
их точности и надежности.
Ниже приведен порядок обработки статистических данных.
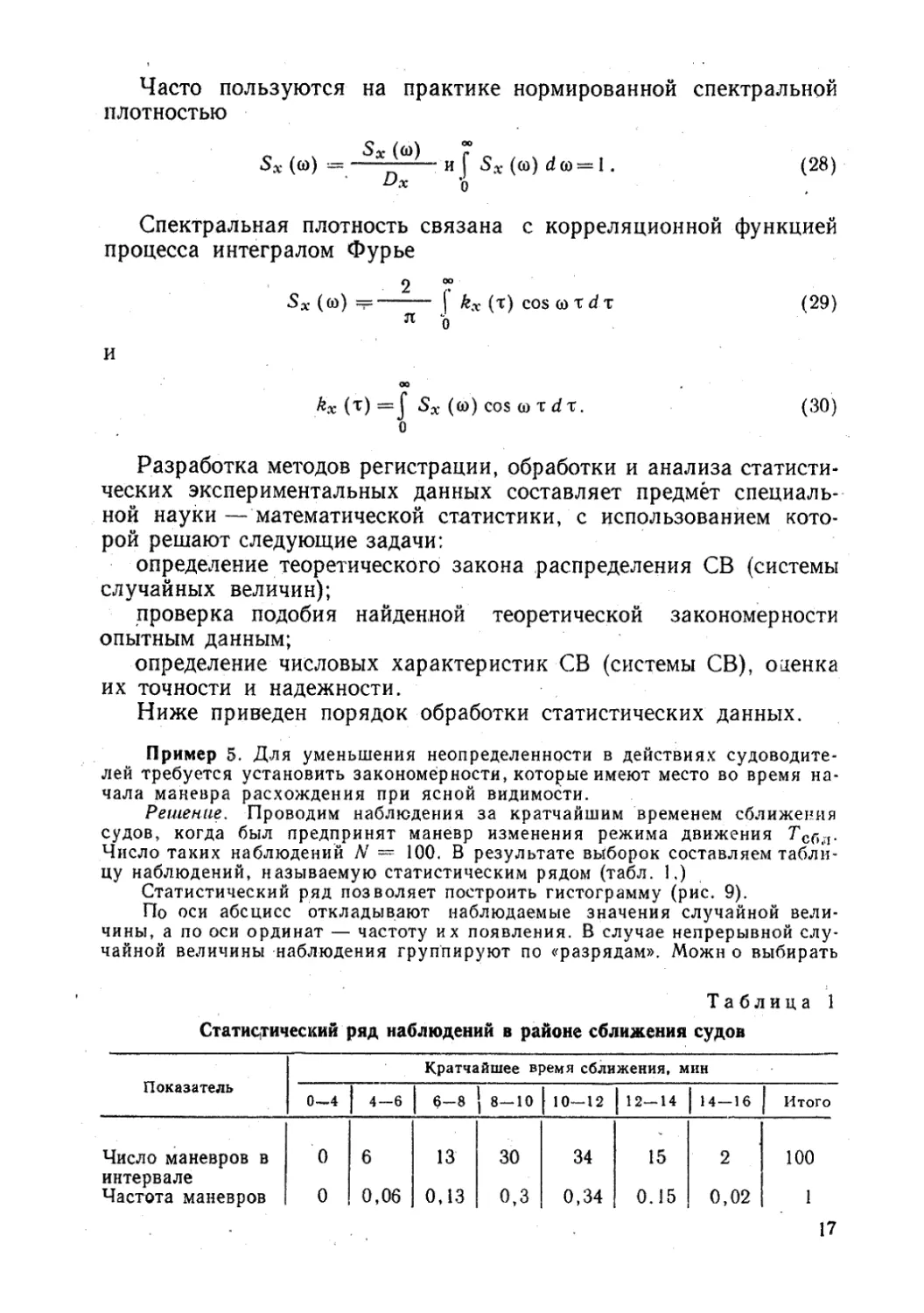
Пример 5. Для уменьшения неопределенности в действиях судоводите-
лей требуется установить закономерности, которые имеют место во время на-
чала маневра расхождения при ясной видимости.
Решение, Проводим наблюдения за кратчайшим временем сближения
судов, когда был предпринят маневр изменения режима движения Гс6;1.
Число таких наблюдений N' — 100, В результате выборок составляем табли-
цу наблюдений, называемую статистическим рядом (табл. 1.)
Статистический ряд позволяет построить гистограмму (рис. 9).
По оси абсцисс откладывают наблюдаемые значения случайной вели-
чины, а по оси ординат — частоту их появления. В случае непрерывной слу-
чайной величины наблюдения группируют по «разрядам». Можн о выбирать
Таблица 1
Статистический ряд наблюдений в районе сближения судов
Показатель Кратчайшее время сближения, мин
0-4 4—6 6-8 j 8-10 10—12 12-14 14-16 Итого
Число маневров в 0 6 13 30 34 15 2 100
интервале Частота маневров 0 0,06 0,13 0,3 0,34 0.15 0,02 1
17
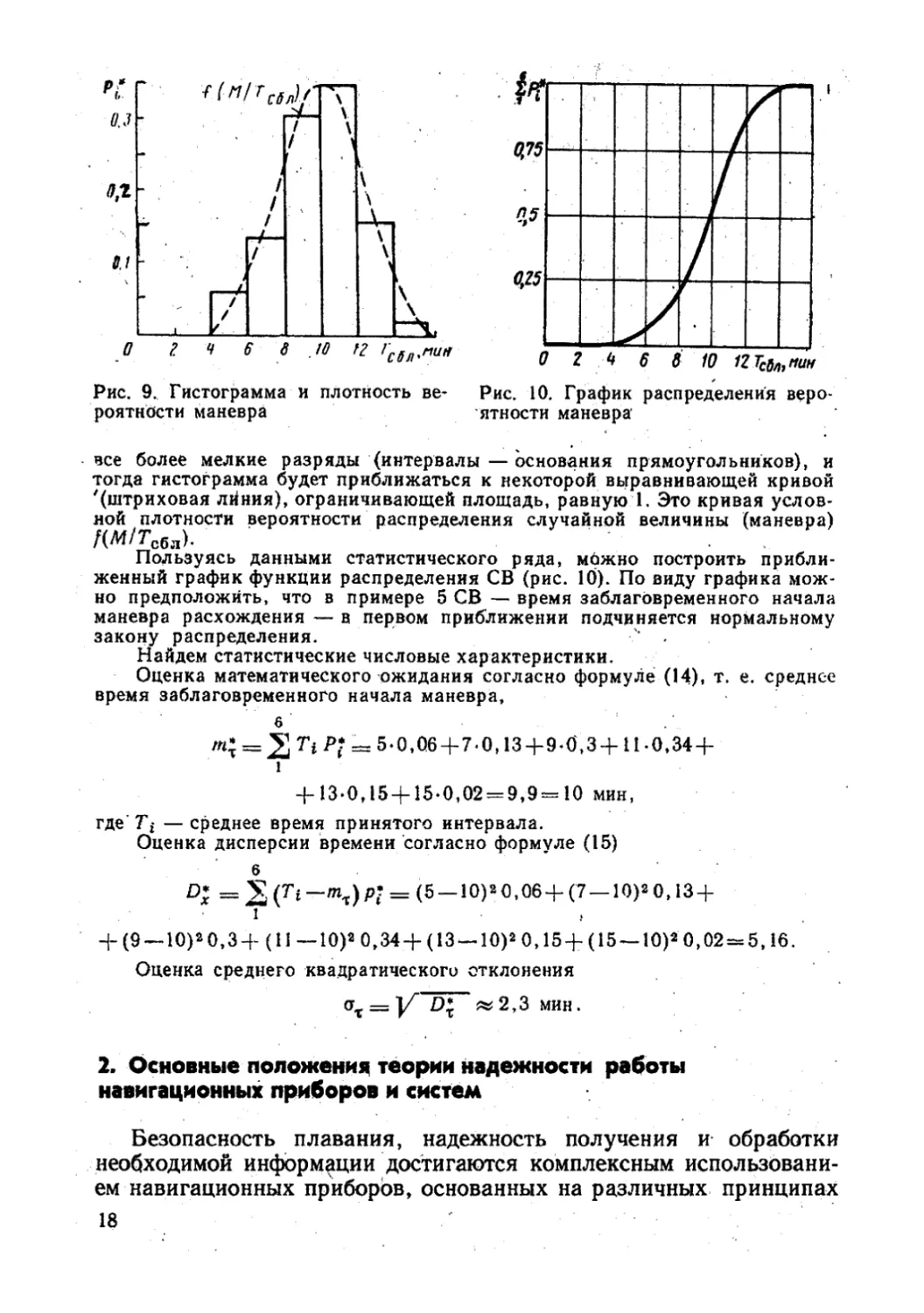
Рис. 9. Гистограмма и плотность ве- Рис. 10. График распределения веро-
роятности маневра ятности маневра
все более мелкие разряды (интервалы—основания прямоугольников), и
тогда гистограмма будет приближаться к некоторой выравнивающей кривой
'(штриховая линия), ограничивающей площадь, равную 1. Это кривая услов-
ной плотности вероятности распределения случайной величины (маневра)
/(М/Тсбл)’
Пользуясь данными статистического ряда, можно построить прибли-
женный график функции распределения СВ (рис. 16). По виду графика мож-
но предположить, что в примере 5 СВ — время заблаговременного начала
маневра расхождения — в первом приближении подчиняется нормальному
закону распределения. -
Найдем статистические числовые характеристики.
Оценка математического ожидания согласно формуле (14), т. е. среднее
время заблаговременного начала маневра,
6
= ^* = 5-0,06 + 7.0,13 + 9-0,3+11-0,34 +
1
+ 13-0,15 +15-0,02 = 9,9= 10 мин,
где Ti —среднее время принятого интервала.
Оценка дисперсии времени согласно формуле (15)
6
Dx = £(П-/Мр; = (5-10)20,06+(7-10)»0,13 +
+ (9 —10>20,3+ (II—10)2 0,34+(13 —10)2 0,15+(15 — Ю)2 0,02 = 5,16.
Оценка среднего квадратического отклонения
ot = ]/ D* «2,3 мин.
2. Основные положения теории надежности работы
навигационных приборов и систем
Безопасность плавания, надежность получения и обработки
необходимой информации достигаются комплексным использовани-
ем навигационных приборов, основанных на различных принципах
18
действия, при этом каждая включенная в комплекс аппаратура в от-
дельности и весь комплекс в целом должны быть надежными в ра-
боте.
Под надежностью понимают свойство объекта сохранять во вре-
мени в установленных пределах значения всех параметров, харак-
теризующих способность выполнять требуемые функции в задан-
ных режимах и,условиях применения, технического обслуживания,
хранения и транспортирования. Одной из характеристик надежно-
сти является безотказность — свойство объекта непрерывно сохра-
нять работоспособное состояние в течение некоторого времени или
наработки.
Показателями безотказности являются вероятность безотказной
работы в течение заданного времени Р (/), средняя наработка до от-
каза Тер, интенсивность отказов X (/), эксплуатационные коэффици-
енты технического использования kw и вынужденного простоя kn
системы и др.
Рассмотрим эти показатели.
Вероятностью безотказной работы системы (изделия, прибора,
элемента) 1 называется функция случайного времени Т, определя-
ющая вероятность того, что в пределах этого времени не возникает
ни одного отказа (рис. 11)
Р (/) = Р (Т>/).. (31)
Отказом называют событие, заключающееся в нарушении работо-
способного состояния объекта. Отказ может наступить из-за выхода
параметров элемента за допустимые пределы без повреждения са-
мого элемента.
Вероятность отказа 2 (см. рис. 11) как противоположного несов-
местного события
<7(0=1 -р (0 = P(T<t), (32)
т. е. представляет собой интегральную функцию распределения слу-
чайного времени Т безотказной работы аппаратуры.
Оценивают вероятность отказа на основе испытаний по формуле
(33)
где п (/) — число отказавших элементов за время t;
Na — число элементов (изделий), поставленных на испытание.
, Если иметь кривые безотказной работы систем и вероятности их
отказов и задаться промежутком времени т = t2 — ilt то можно оп-
ределить вероятность отказа q (т) системы (изделия) в этом проме-
жутке.
19
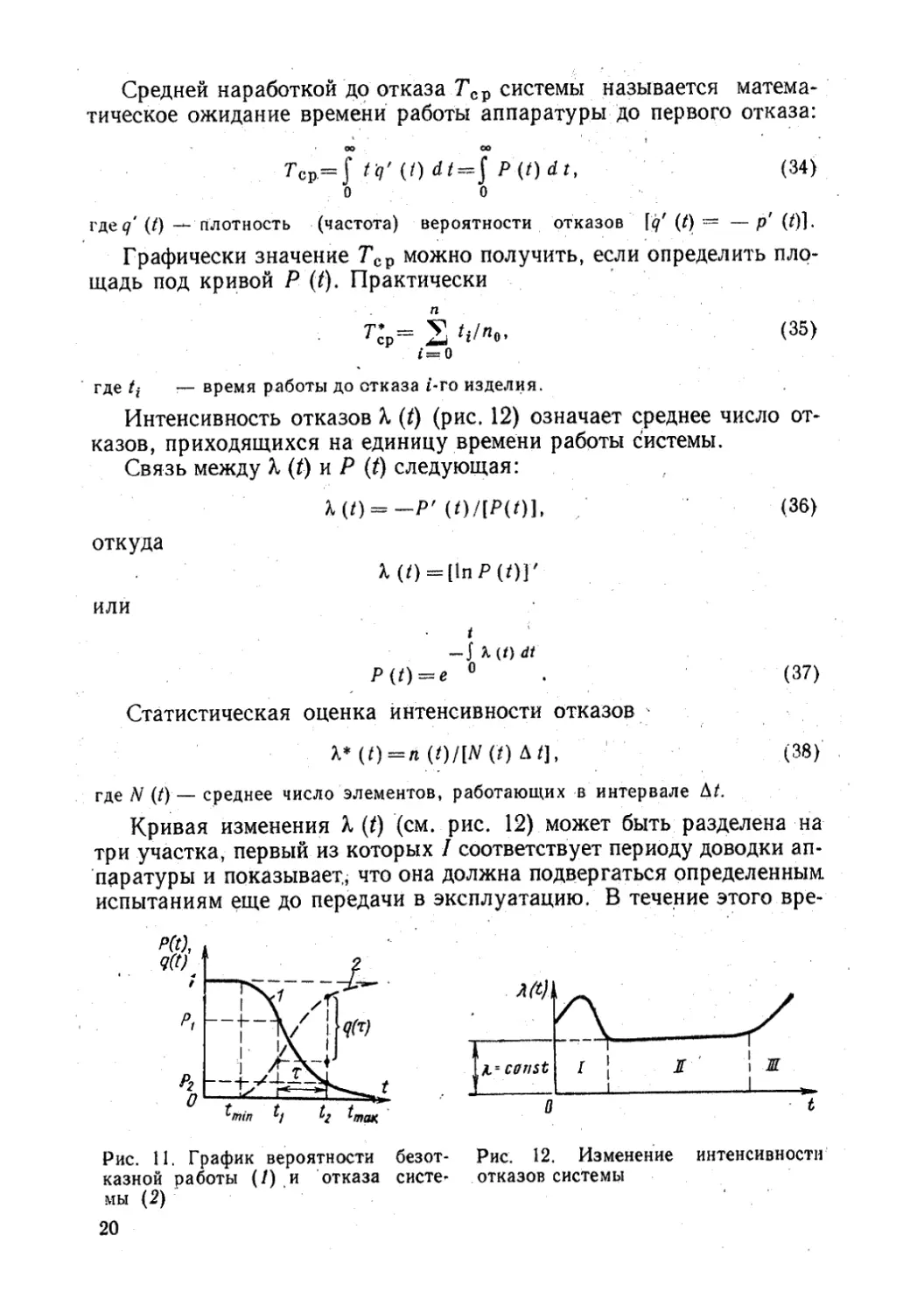
Средней наработкой до отказа Тср системы называется матема-
тическое ожидание времени работы аппаратуры до первого отказа:
= J t P(t)dt, (34)
о о
где/(О— плотность (частота) вероятности отказов [/(/)— —р' (/))•
Графически значение Tev можно получить, если определить пло-
щадь под кривой Р ((). Практически
КР- S (35>
/ = 0
где ti — время работы до отказа f-го изделия.
Интенсивность отказов X (() (рис. 12) означает среднее число от-
казов, приходящихся на единицу времени работы системы.
Связь между X (0 и Р (t) следующая:
k(t) = -P' (t)/[P(t)], (36)
откуда
МО = ПпР(ПГ
или
t
-J Л (О dt
P(t) = e 0 . (37)
Статистическая оценка интенсивности отказов
Л/], ' (38)
где /V (0 — среднее число элементов, работающих в интервале Д/.
Кривая изменения X (0 (см. рис. 12) может быть разделена на
три участка, первый из которых / соответствует периоду доводки ап-
паратуры и показывает, что она должна подвергаться определенным
испытаниям еще до передачи в эксплуатацию, В течение этого вре-
Рис. 11. График вероятности безот-
казной работы (/)(и отказа систе-
мы (2)
20
Рис. 12. Изменение интенсивности
отказов системы
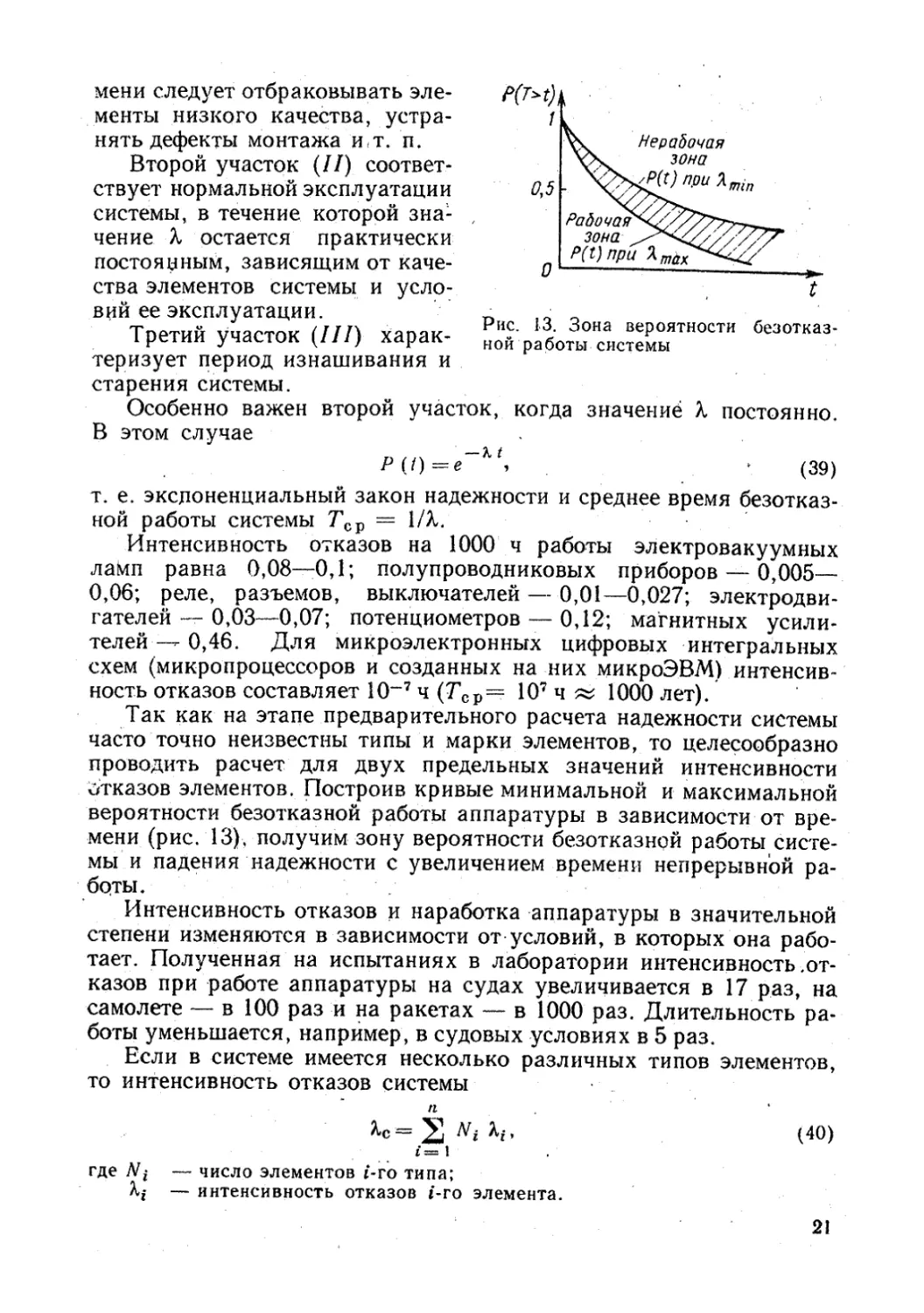
Рис. 13. Зона вероятности безотказ-
ной работы системы
мени следует отбраковывать эле-
менты низкого качества, устра-
нять дефекты монтажа и т. п.
Второй участок (//) соответ-
ствует нормальной эксплуатации
системы, в течение которой зна-
чение А, остается практически
постоянным, зависящим от каче-
ства элементов системы и усло-
вий ее эксплуатации.
Третий участок (Z/Z) харак-
теризует период изнашивания и
старения системы.
Особенно важен второй участок, когда значениё X постоянно.
В этом случае
P(t)=e~K‘, ' (39)
т. е. экспоненциальный закон надежности и среднее время безотказ-
ной работы системы 7'ср = 1/Х.
Интенсивность отказов на 1000 ч работы электровакуумных
ламп равна 0,08—0,1; полупроводниковых приборов — 0,005—
0,06; реле, разъемов, выключателей — 0,01—0,027; электродви-
гателей — 0,03—0,07; потенциометров — 0,12; магнитных усили-
телей — 0,46. Для микроэлектронных цифровых интегральных
схем (микропроцессоров и созданных на них микроЭВМ) интенсив-
ность отказов составляет 10-7 ч (7'ср= 107 ч « 1000 лет).
Так как на этапе предварительного расчета надежности системы
часто точно неизвестны типы и марки элементов, то целесообразно
проводить расчет для двух предельных значений интенсивности
отказов элементов. Построив кривые минимальной и максимальной
вероятности безотказной работы аппаратуры в зависимости от вре-
мени (рис. 13). получим зону вероятности безотказной работы систе-
мы и падения надежности с увеличением времени непрерывной ра-
боты.
Интенсивность отказов и наработка аппаратуры в значительной
степени изменяются в зависимости от условий, в которых она рабо-
тает. Полученная на испытаниях в лаборатории интенсивность .от-
казов при работе аппаратуры на судах увеличивается в 17 раз, на
самолете — в 100 раз и на ракетах — в 1000 раз. Длительность ра-
боты уменьшается, например, в судовых условиях в 5 раз.
Если в системе имеется несколько различных типов элементов,
то интенсивность отказов системы
(40)
1=1
где — число элементов i-го типа;
X,- — интенсивность отказов t-ro элемента.
21
Комплексные показатели (коэффициенты) надежности применяют
для характеристики восстанавливаемой аппаратуры, они позволя-
ют оценить ее готовность к работе, затраты времени на ремонт, тех-
ническое обслуживание, расход запасных элементов, стоимость экс-
плуатации.
Коэффициент технического использования системы
£ис = ^ср/(^ср + ^п) > (41)
где /п — среднее время простоя, затраченное на ремонт и техническое об’
служивание аппаратуры во время ее эксплуатации.
Коэффициент вынужденного простоя системы
^п=/п/(ТСр + /п). (42)
Сумма значений коэффициентов
&ИС + Лп = 1 *
Коэффициент профилактики системы
^ир — ^пр/(Т'раб "Нпр) > (43)
где ^пр — время необходимое для осмотров и ремонта:
Граб — время работы между осмотрами.
Коэффициент расхода элементов
i= (лрТ'Яиз f)/(Aff А 0 5=5 М (1 + Лиз i/^i) » (44)
где Л; — число отказов из-за элементов pro типа;
диз/ — число элементов pro типа, изъятых в процессе осмотров и ремонта
аппаратуры за время Д/;
— общее число элементов pro типа в системе.
Коэффициент стоимости эксплуатации системы
^с.э = СГэ/Сн> (45)
где Сг,э — стоимость годовой эксплуатации;
Си — стоимость изготовления системы.
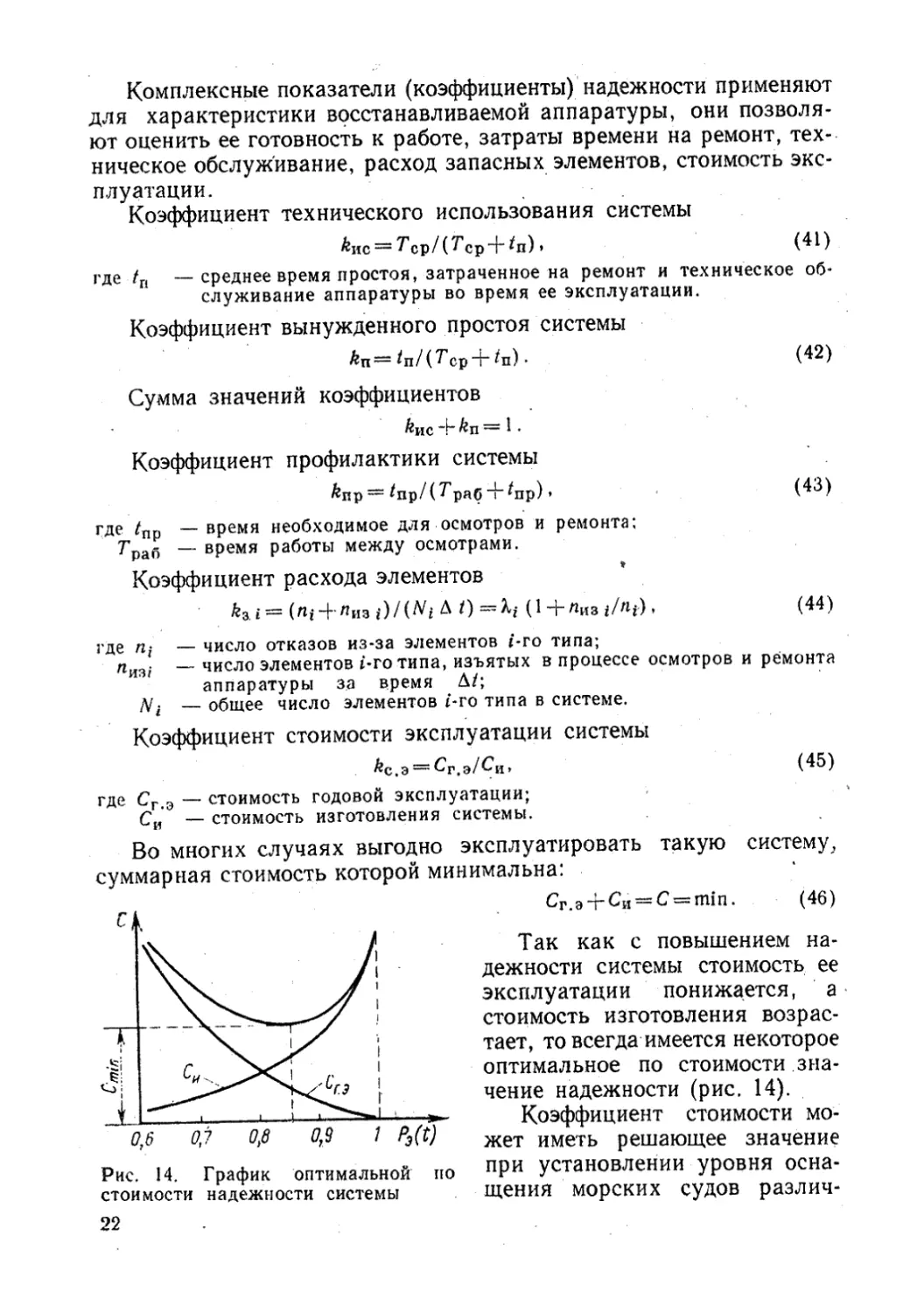
Во многих случаях выгодно эксплуатировать такую систему,
суммарная стоимость которой минимальна:
Рис. 14. График оптимальной по
стоимости надежности системы
22
Cr.9q-Cn — C = min. (46)
Так как с повышением на-
дежности системы стоимость ее
эксплуатации понижается, а
стоимость изготовления возрас-
тает, то всегда имеется некоторое
оптимальное по стоимости зна-
чение надежности (рис. 14).
Коэффициент стоимости мо-
жет иметь решающее значение
при установлении уровня осна-
щения морских судов различ-
Рис. 15. Графики вероятности без
отказной работы (а) и интенсивно
сти отказов (б) системы
Рис. 16. Графики интенсивности от-
казов (а) и вероятности безотказной
работы (б) системы
ними автоматизированными системами. При этом часто используют
комбинированный критерий надежности системы
^(0 = *г(1~*пр) Р(0. (47)
Пример 6. Надежность системы Р(/) убывает со временем по линейному
*ну (рис. 15). Найти Л(/) и Гср.
Решение. На участке (О/о)
Р (/) = ! — t/t0 при 0</</о;
МО—...................Ч!». —!_
/>(/) 1-1.4, 1,-1
Т ср “ — Zq/2 .
Пример 7. Интенсивность отказов Л(/) меняется так. как показано на
рис. 16. Найти надежность системы P(t).
Решение. На участке (01)
(0=3—2/;
t t
—J % (/) d — j (3-2/) dt
— e ° же ° = e—(3f-/‘) ПрИ (^1;
(I) =£-2 = 0,13 при
23
a)
б)
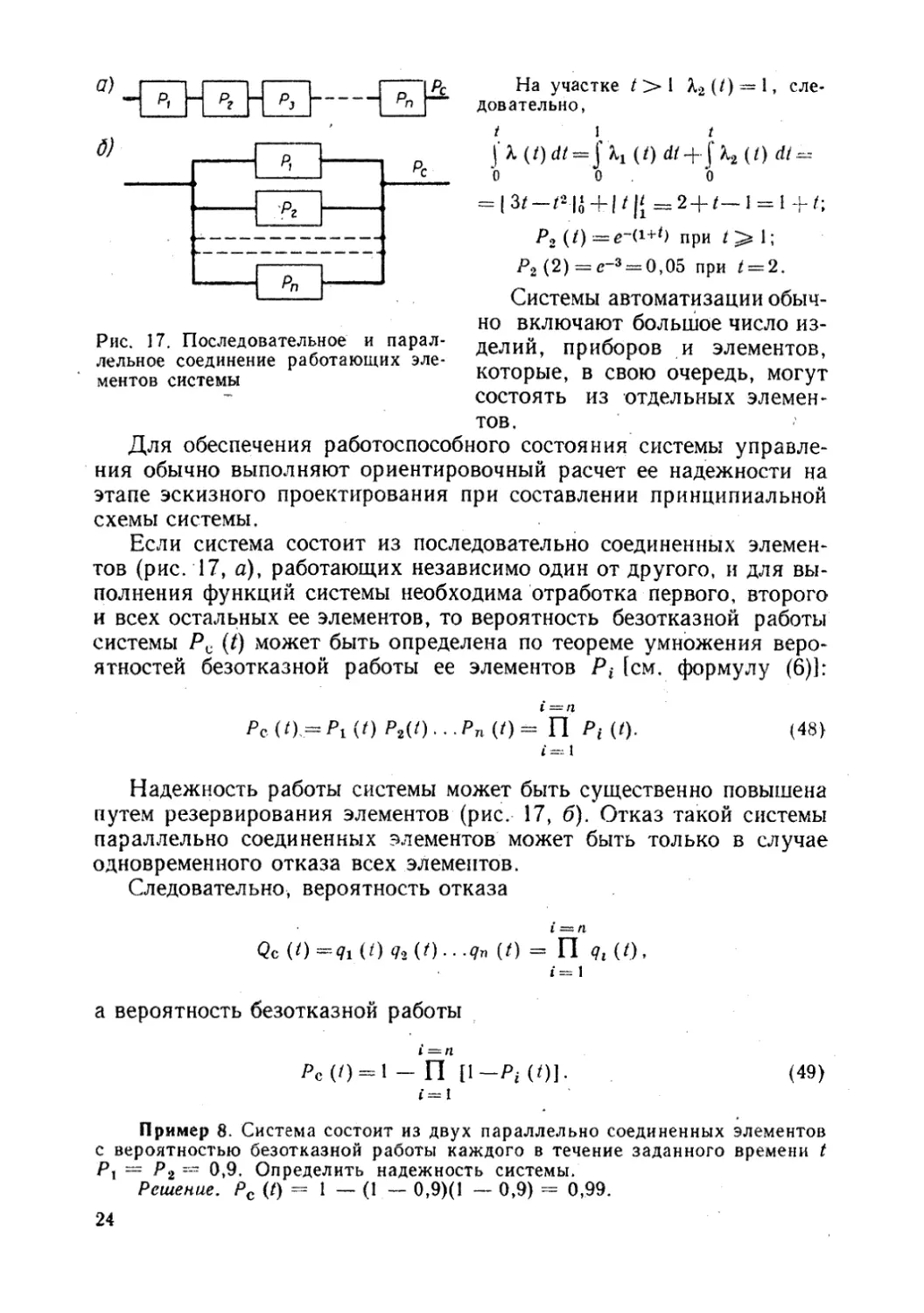
Рис. 17. Последовательное и парал-
лельное соединение работающих эле-
ментов системы
На участке / >1 (/) = !, сле-
довательно ,
t ] t
f X(/)di-=j4i (/) di-r -|Ч2 (0 dt~
о о . b
= [3<-рц+|/|^2+/-1 = 1 + /;
Р, (t) =e~<l+t) при z>l;
Р2 (2) = е-з = 0,05 при / = 2.
Системы автоматизации обыч-
но включают большое число из-
делий, приборов и элементов,
которые, в свою очередь, могут
состоять из отдельных элемен-
тов.
Для обеспечения работоспособного состояния системы управле-
ния обычно выполняют ориентировочный расчет ее надежности на
этапе эскизного проектирования при составлении принципиальной
схемы системы.
Если система состоит из последовательно соединенных элемен-
тов (рис. 17, а), работающих независимо один от другого, и для вы-
полнения функций системы необходима отработка первого, второго
и всех остальных ее элементов, то вероятность безотказной работы
системы Рс (/) может быть определена по теореме умножения веро-
ятностей безотказной работы ее элементов Р, [см. формулу (6)J:
i — п
Рс(0 = Р1(0 р2(/)...р„ (/)= п Pi(t).
i = 1
(48)
Надежность работы системы может быть существенно повышена
путем резервирования элементов (рис. 17, б). Отказ такой системы
параллельно соединенных элементов может быть только в случае
одновременного отказа всех элементов.
Следовательно, вероятность отказа
i - п
Qc (0 =91 (О (0 • -<7п (О = П <7, (0,
1 = I
а вероятность безотказной работы
i = п
Рс(/) = 1 - П [1 - Pi (0b
I-1
(49)
Пример 8. Система состоит из двух параллельно соединенных элементов
с вероятностью безотказной работы каждого в течение заданного времени t
Р] — Р2 ~~ 0»9. Определить надежность системы.
Решение. Рс (/) - I — (1 — 0,9)(1 — 0,9) = 0,99.
24
Перспектива появления на судах сложных систем обработки раз-
личной информации, автоматического регулирования и управления
требует надлежащей подготовки обслуживающего персонала и орга-
низации баз технического обслуживания.
В-последнее время созданы службы надежности и проводятся спе-
циальные мероприятия по повышению надежности аппаратуры.
К таким мероприятиям относятся оценка надежности в процессе про-
ектирования, использование сменных блоков, автоматизированное
производство герметичных миниатюрных блоков (микромодульных
конструкций), применение твердых и пленочных схем.
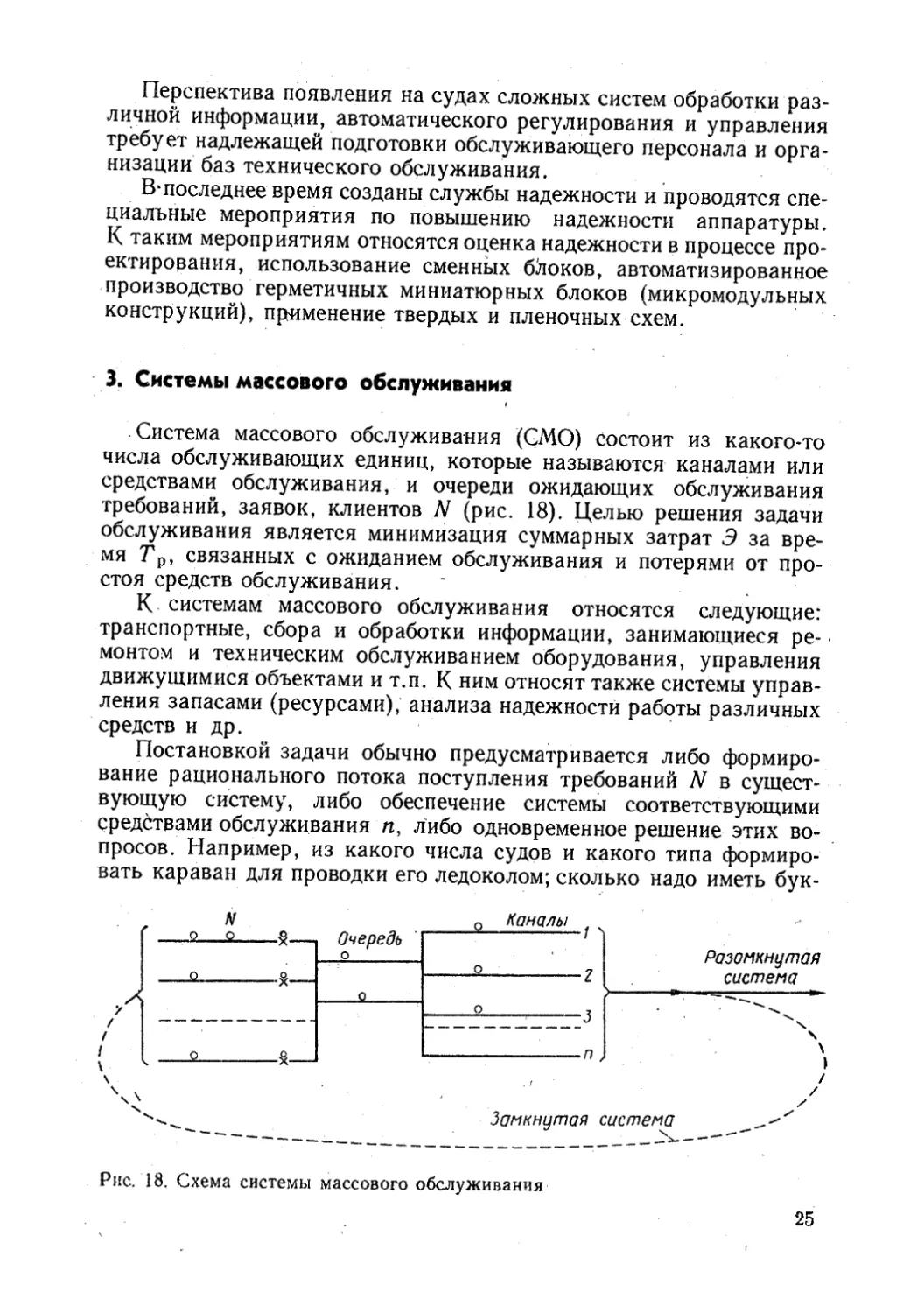
3. Системы массового обслуживания
Система массового обслуживания (СМО) состоит из какого-то
числа обслуживающих единиц, которые называются каналами или
средствами обслуживания, и очереди ожидающих обслуживания
требований, заявок, клиентов N (рис. 18). Целью решения задачи
обслуживания является минимизация суммарных затрат Э за вре-
мя Тр, связанных с ожиданием обслуживания и потерями от про-
стоя средств обслуживания.
К системам массового обслуживания относятся следующие:
транспортные, сбора и обработки информации, занимающиеся ре-
монтом и техническим обслуживанием оборудования, управления
движущимися объектами и т.п. К ним относят также системы управ-
ления запасами (ресурсами), анализа надежности работы различных
средств и др.
Постановкой задачи обычно предусматривается либо формиро-
вание рационального потока поступления требований N в сущест-
вующую систему, либо обеспечение системы соответствующими
средствами обслуживания п, либо одновременное решение этих во-
просов. Например, из какого числа судов и какого типа формиро-
вать караван для проводки его ледоколом; сколько надо иметь бук-
Замкнутая система
Рис. 18. Схема системы массового обслуживания
25
сиров, швартовщиков, причалов в порту; как часто надо вводить в
судовую ЭВМ обновляющуюся внешнюю' информацию и как часто
необходимо выдавать судоводителю обработанные результаты;
сколько и каких специалистов надо иметь на судне для обеспечения
безопасности плавания и эффективности работы судовых систем и
т. д.
Основным понятием при анализе процесса обслуживания явля-
ется состояние системы, т. е. ее описание, на основании которого
можно предсказать ее вероятное поведение в будущем. При этом
обычно прогноз ведется в рамках марковской теории, когда поступ-
ление потока требований и их обслуживание принимаются: простей-
шими (пуассоновскими), а именно стационарными — однородными
и не зависимыми от начала отсчета времени; без последствия, когда
число требований за период t + т не зависит от числа их за период
/; ординарными, когда невозможно поступление одновременно бо-
лее одного требования за малое время т.
При этих условиях законы распределения времени поступления
требований и их обслуживания за малое время т принимаются экс-
поненциальными. Поэтому при постоянной интенсивности поступле-
ния требований 1 и их обслуживания р вероятность поступления
требований за время т
Fn (т) =/>(/„< т)=1К (50)
где — математическое ожидание времени до поступления очередного
требования — I/X).
Вероятность обслуживания требования за время т
/?0б(т) = р(^0б<т)=1—(51)
где /Оо — математическое ожидание времени обслуживания требования
(7о0 = 1/р).
Чем сложнее система массового обслуживания и чем больше
она имеет каналов, тем точнее’ результаты, полученные в рамках
марковской теории.
Различают системы массового обслуживания двух типов:
с отказами, когда поступившее требование в случае занятости
всех каналов навсегда покидает систему;
с ожиданием (очередью), когда поступившее требование ожидает
освобождения одного из каналов ограниченное или неограниченное
время; это требование принимают на обслуживание в порядке по-
ступления по случайной выборке или с приоритетом.
В теории систем массового обслуживания существуют математи-
ческие описания процессов обслуживания (модели СМО) и соотно-
шения' для вычисления их основных характеристик. Наметились
тенденции использования теории СМО для исследования системы
26
управления судном (СУС), при этом необ-
ходимые исходные данные обычно полу-
чают из статистического анализа реальных ,
Процессов.
Термины теории СМО используются на
Морском транспорте следующим образом:
канал обслуживания — судоводители
или ЭВМ, использующие комплекс техни-
ческих средств информации и управления;
требование или заявка — появление
Необходимости в выполнении той или иной
операции;
интенсивность требований X — среднее
число навигационных и других задач, по-
Рис. 19. Граф использо-
вания системы массово-
го обслуживания для си-
стемы управления суд-
ном
Ступающих для выполнения за определенный промежуток времени;
интенсивность обслуживания р — среднее число задач (опера-
ции), выполняемых системой за определенный промежуток времени.
Для СУС могут быть приемлемы различные модели СМО в зави-
симости от рода решаемых задач, внешних условий и организации
службы на судне. Иногда поступающие требования могут ожидать
некоторое время начало обслуживания каким-либо каналом, а иног?
дп должны быть обслужены немедленно, иначе наступит отказ СУС.
Наиболее просто составляются модели и оценивается эффектив-
ность работы одноканальных СМО с отказами.
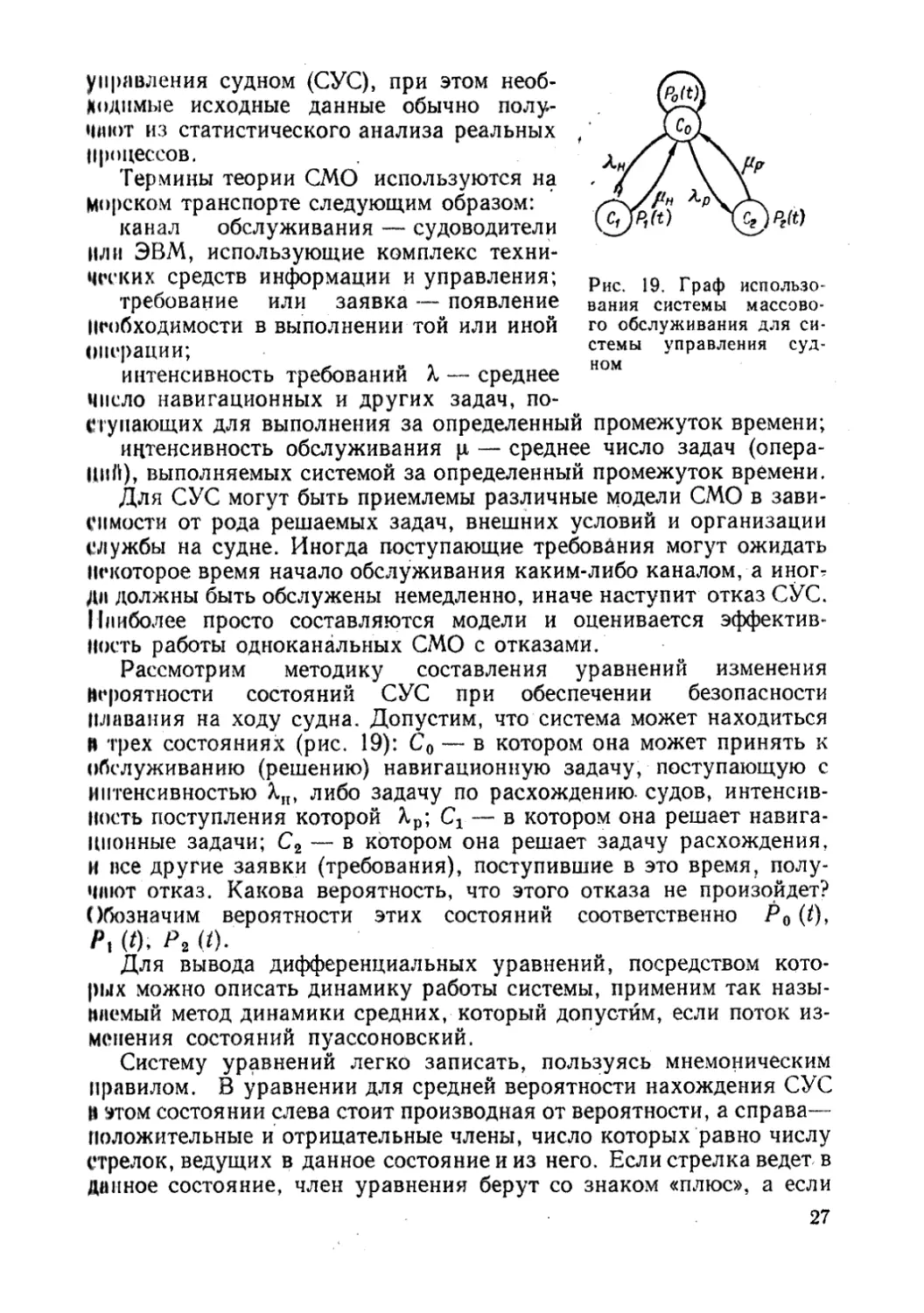
Рассмотрим методику составления уравнений изменения
йсроятности состояний СУС при обеспечении безопасности
Плавания на ходу судна. Допустим, что система может находиться
й трех состояниях (рис. 19): Со — в котором она может принять к
обслуживанию (решению) навигационную задачу, поступающую с
интенсивностью Х„, либо задачу по расхождению, судов, интенсив-
ность поступления которой Хр; С\ — в котором она решает навига-
ционные задачи; С2 — в котором она решает задачу расхождения,
и псе другие заявки (требования), поступившие в это время, полу-
чают отказ. Какова вероятность, что этого отказа не произойдет?
Обозначим вероятности этих состояний соответственно Ро (/),
(О, (/).
Для вывода дифференциальных уравнений, посредством кото-
рых можно описать динамику работы системы, применим так назы-
ваемый метод динамики средних, который допустим, если поток из-
менения состояний пуассоновский.
Систему уравнений легко записать, пользуясь мнемоническим
правилом. В уравнении для средней вероятности нахождения СУС
И этом состоянии слева стоит производная от вероятности, а справа—
положительные и отрицательные члены, число которых равно числу
стрелок, ведущих в данное состояние и из него. Если стрелка ведет в
данное состояние, член уравнения берут со знаком «плюс», а если
27
из данного состояния — со знаком «минус». Каждый член уравне-
ния равен средней вероятности состояния, из которого ведет стрел-
ка, умноженной на интенсивность потока требований. Если из дан-
ного состояния есть несколько переходов, то интенсивность разде-
ляется пропорционально вероятностям переходов.
Для условия, отраженного на рис. 19, уравнения динамики сред-
них вероятностей состояний имеют следующий вид:
dPi (0/(rfO =^/’o(0-gHPi(0;l 52
d р2 (t)/(dt) =ЛР Ро (/)-|хр Рг (О .J
Третье уравнение для работы системы найдем из нормирующего
условия
Л.(0 + '>1(0 + /,*Ю = 1- (53)
Исследовать поведение функций Рп (t), Р} (t), Рг (I) с течением
времени — это значит найти динамику средних вероятностей состо-
яний на любом промежутке работы СУС.
Ограничимся частным решением при /-»- оо, когда система при-
дет в установившееся (стационарное) состояние и производные мож-
но приравнять нулю. Получим систему алгебраических уравнений
^-Н Р0 Ин Р\ —
^•р р»—Пр Рг
4-+ ?, = !.
(54)
Найдем из первого и второго уравнений выражения для Р} (t) и
Р2 (/), подставим их в третье уравнение и получим:
Р«~т (^н/Нн) ^«+(VM р<>~ с
откуда вероятность, что система не допустит отказа,
1 (Л-н/Цн) -г (^р/Ир)
Это выражение отражает относительную пропускную способ-
ность системы и показывает, какая часть общего числа требова-
ний, появившихся на входе системы, может быть в среднем обслу-
жена. По формуле (51) можем определить коэффициент загрузки
(использования) СМО:
а=Х/ц — к ГО(5.
Тогда формула (55) примет вид:
Р0 — 1 /(1 -Ган4“ар) — 1 / (1 ®н ^об.н Т^р ^об.р) • (56)
Пример 9. Определять место судна требуется 4 раза в течение 1 ч (л.н --
= 4). На каждое определение места требуется время /Об.н ~ 3 мин ~ ®.О5 ч..
Задачу расхождения судов решают 2 раза в течение 1 ч (т. е. кр — 2) с затра-
той времени /од --- 6 мин - 0,1 ч. Найти процент решения задач.
28
Решение. По формуле (56)
(14-4-0,05 + 2.0,1) * ’
Следовательно, системой может быть обслужено без отказа только 72 %
требований.
Если сократить затраты времени на определение места и расхождение на
50%,тоР0 = 0,84, т. е. 84 % требований будет обслужено без отказа.
При наличии на входе только однородных требований (заявок,
задач)
Р0=х1/(1+а). (56')
При небольших значениях коэффициента загрузки вероятность
отказа мала, и система в основном находится в ожидании; при боль-
ших значениях (а > 1) вероятность отказа велика; при а — 1 Ро—
— Qo — 1/2, т. е. половина требований получает отказ и в то же
время половину времени функционирования система простаивает.
Это происходит потому, что при случайном входящем потоке требо-
вание, поступившее в конце времени обслуживания предыдущего
требования, получает отказ, а система, вскоре освободившись, про-
стаивает до тех пор, пока не подойдет еще одно требование.
Чтобы обеспечить обслуживание системой требований с задан-
ной вероятностью, необходимо выполнить условие
а^(1-Р0)/Р0. (57)
Так как X = N/Tn\ р — l/ZoG, то а — Л//Об/Тп и условие (57)
примет вид:
?об<Тп(1-Ро)/(^ Ю-
Пример 10. Определить вероятность своевременной обработки радиоло-
кационной информации автоматическим устройством, если на судно оно за-
трачивает в среднем — 0,1 ч, а встречные суда появляются на экране
устройства в среднем через 15 мин, т. е. Л = 4 судна в 1 ч.
Решение. При а = 4 • 0,1 — 0,4 получим, что PQ — 1/(1 + 0,4) ~ 0,71.
Абсолютная пропускная способность системы в 1 ч
Ра ~Л Ро = 40,71 =2,84 судна.
Если необходимо обеспечить вероятность своевременной обработки ин-
формации — 0,95 при одном канале и том же потоке судов (X = 1 судно
в 15 мин), то
15(1 — 0,95)
'обС “—-----------=0,8 ч, или 48 с.
U,Уо * 1
Такое быстродействие легко обеспечивается человеком в ясную видимость.
29
Когда система с отказами имеет п каналов, то предельные веро-
ятности ее состояний (t-* оо) могут быть найдены по формуле
Эрланга 19, 211:
где к — число занятых каналов (к — 0, 1,2.п.)
Вероятность того, что будет свободен хотя бы один канал (л -
—« = 1) и, следовательно, требование будет обслужено, равна до-
полнению до единицы вероятности занятости всех каналов (л =к);
а"
Ро= !_/>„ = !
п
S
к —О
п 1
ак
к!
(59)
Для нахождения пропускной способности Р9 этих систем мож-
но воспользоваться также графиками (рис. 20). Например, при
«кан - 2 и а = 0,4 получим Ро — 0,92, т. е. наличие второго опе-
ратора по обработке информации увеличивает пропускную спо-
собность на 0,21, или 30 %.
Для одноканальной СМО с ожиданием при неограниченном чис-
ле возможных требований состояния системы определяются следу-
Рис. 20. График пропускной способ-
ности системы массового обслужива-
ния
ющими зависимостями.
Вероятность того, что единст-
венный обслуживающий канал
свободен,
Р„=1-<х. (60)
Вероятность, того, что един-
ственный обслуживающий канал
занят,
Р3=а. (60') .
Среднее время ожидания на-
чала обслуживания
Тср = /оба/(1-а). (61)
Возможное число требований
в очереди
г = а2.(1—а). (62)
Вероятность того, что длина
очереди равна г.
Л+г = «1+г (I—а). (63)
30
Вероятность того, что время
ожидания в очереди превысит t,
Р (Тож>1)=ае-<'~а)11‘. (64)
Пример 11. Используя данные
примера 10 (X = 4 судна в 1ч,
/об = 0,1 ч, ц — 10 судов в 1 ч и
а = 0,4), определить характеристи-
ки работы одноканальной СМО с
ожиданием.
Решение. Ро = 0,6; Р3 = 0,4;
7'ср = 0,07 ч = 4,2 мин; г = 0,268;
Р^-0,96; Р(Тож >0=0,4.
Таблица 2
К определению максимального
числа причалов
Число причалов Вероятность простоя Суточные затраты, тыс. р.
1 0,500 60 0
2 0,200 40 0
3 0,062 36 2
4 0,015 41 5
5 0,003 50 3
Выбор вариантов построения и организации СМО обусловлива-
ется также экономическими соображениями. При этом использует-
ся экономическая функция следующего вида:
(65)
Э — ki г + с2 (п—«)] 7'p = min,
где потери от простоя в единицу времени требований и средств
обслуживания соответственно;
.V
г — число требований в очереди (г = S (г — п) Рг-}; .
i ~ rt-j-1
К
— число занятых каналов;
i =rt
= 2 (п — i) Pi — число свободных каналов;
п — к
Гр — время расчета издержек.
Пример 12. Требуется определить оптимальное число причалов порта,
предназначенного для приема скоропортящихся грузов (любой простой
судна связан с порчей груза). Поток прибытия судов характеризуется интен-
сивностью в 1 сут А, = 0,5 судна. Время разгрузки /об в среднем равно 2 сут.
Стоимость груза q = 1 000 000 р., стоимость эксплуатации причала в сут-
ки = 10 000 р.
Решение, Вероятность отказа (простоя) в обслуживании Рп подсчитыва-
ем по формуле (58) при п — к и а = = 0,5 *2=1. Математическое
ожидание суточных затрат *
1 Э — сг Ру Ч~пс2.
По данным табл. 2 можно сделать вывод, что оптимальное число прича-
лов равно 3.
4. Основы теории информации
Под информацией обычно понимают какое-либо сообщение (све-
дение) о появлении событий, состояниях объектов, процессов или
явлений. Получивший информацию может более определенно су-
дить об интересующем его событии, процессе и прогнозировать его
возможные изменения.
3)
Обмен информацией является непременным условием работы
любой управляющей системы, так как уничтожает неопределенность
появления события, факта, несогласованность в действиях, разно-
образие в понятиях, а их уменьшение является целью всякого уп-
равления.
Теорией информации называется наука, изучающая количест-
венные закономерности, связанные с получением, обработкой, хра-
нением и передачей информации [9, 23]. Информация может пере-
даваться посредством различных физических сигналов — элект-
рических, акустических, световых, магнитных и др. В теории ин-
формации рассматриваются вопросы пропускной способности кана-
ла связи, наилучшего кодирования сообщения при наличии помех,
оценки различных ситуаций и прогнозирования возможностей их
изменения на основе статистических закономерностей.
Очевидно, что сообщение приобретает смысл только тогда, когда
состояние события, ситуации, процесса заранее неизвестно (иначе
нет необходимости передавать об этом сообщение). Однако можно
заранее говорить о частоте или вероятности Pt наступления тех или
иных 1-х состояний, одно из которых обязательно должно наступить,
i=n
т. е. У, Pt = I-
i = l
С увеличением числа возможных состояний п неопределенность
наступления какого-либо из них возрастает. Для измерения этой
неопределенности американский ученый К. Шеннон ввел понятие
среднего количества информации Н, называемого энтропией, и ха-
рактеризующего степень организованности (упорядоченности) из-
менений ситуации, процесса, системы. При независимости измене-
ния состояний энтропия системы по формуле К. Шеннона
i = п 1
н= — Pt\ogtPi, (66)
1 = 1
где i — число возможных состояний, выборов (I — 1,2, ..., л);
Pl — вероятность наступления »-го состояния.
Логарифм в формуле (66) берут при основании 2, так как в ка-
честве единицы измерения количества информации (энтропии) при-
нимают единичный выбор из двух равновероятных возможностей,
и в этом случае Н — 1 двоичной единице на выбор или бит (binary
digital).
Если все состояния равновероятны (pt = р = 1/п), то Н —
= log2 п, что является мерой максимального разнообразия, состоя-
ний, введенной Р. Хартли.
32
Пример 13. Имеется два возможных состояния (выбора) с вероятностя-
I '
ми Pl = р2 = g, тогда
" (т; у) = “(т1481 т + Т '« т) “ “Т [<-'’+1 1
двоичная единица/выбор.
Если — б/i Рг “ 6,9, то, воспользовавшись таблицами логарифмов,
при основании 2, получим log29 3,16; log210 — 3,32, тогда
/1 9 \ 1 1 9 9
я(То": ~) = ~Л71об2ЛГ“"io” Og2-io’=0’476 двоичкой едини'
цы/выбор, т. е. мера неопределенности меньше в 2,1 раза.
11 1 1
Если Л=—; рг = ~Г’ рз=“; —, ТО -
_ О О
7
= — = 1,75 двоичной единицы/выбор.
4
1 1
гн2-
2 ’ * 4
, 1 , 1 , 2 1
+ T10g2T + T10g2T
Для нормального закона распределения СВ (см. формулу (22)]
при тх — 0 энтропия
tf(x) = log2/ 2лесг* . (67)
Информация I (х), которая устраняет неопределенность (не-
организованность), равна энтропии, взятой с обратным знаком:
/ (х) = - Я (х).
Процесс передачи информации не может осуществляться без ис-
кажений, которые получаются вследствие квантования сигналов и
случайных помех, шумов. При наличии помех, шумов, ошибок ко-
личество принятой информации / (х) будет меньше на размер потерь
в канале связи у:
Цх) = -Н (х) + Н (х/у) , (68)
где Н (х/у) —условная энтропия, потеря информации на один элементар-
ный сигнал (символ) в канале связи.
Например, при передаче сигнала, имеющего нормальное рас-
пределение, количество информации, двоичная единица/символ,
/ (х) = log2 у 2пе(о« + ®^) — log-г У 2л е а* ==
1 , + 1 ,
. < = Т'°е- —~ -'°ь
ас \
—+1 -
°Ш /
где ас и ош — средние квадратические отклонения сигнала и шума.
Максимальное количество информации, которое может быть
передано по каналу связи в единицу времени, называется пропуск’
ной способностью -канала с. измеряемой числом двоичных единиц в
секунду/
2 Зак. 1453
(69)
33
При частоте сигналов F пропускная способность канала связи
С — 1 (x)lkt. Следовательно, принимая по теореме В. А. Котельни-
кова А/ = 1/'(2F), получим, что пропускная способность канала,
двоичная единица/с,
c = 2F/ = f log2 (a*/a* + l). .
Пример 14. Если F ~ 500 кГц, тогда при = 10 с = 5 • 10® X
X log2(l 1) = 17 , 10s двоичных единиц/с, при = 0,1 с= 5 • 10е X
X log2(l,l) = 75 • 103 двоичных единиц/с. Следовательно, пропускная спо-
собность канала уменьшилась в 24 раза.
Получение надежных сообщений возможно, если снизить ско-
рость источника передачи. ’ -
Важной характеристикой является ценность информации, кото-
рую определяют относительно заданной цели ее использования.
Если мера степени удовлетворения информации i-м требованиям,
определяющим цель, pit а вес этих требований тогда мерой цен-
ности информации может служить функция
(70)
- т с 1
в которой V = 1 И 0 < Pi < р.1 П1ах.
5. Методы математической логики
и алгоритмизация логических операций
Если в подлежащем автоматизации процессе встречаются слож-
ные логические задачи и операции, то для них должен быть найден
свой алгоритм. Его составляют из простейших операций, описываю-
щих логические связи между входными параметрами (данными) и
выходными сигналами (решениями), устанавливая однозначное со-
ответствие между ними.
При этом привлекают аппарат теоретической логики: исчисле-
ние.высказываний, предикатов, классов и т. д. Одним из простей-
ших разделов теоретической логики является исчисление выска-
зываний. В нем изучаются простейшие утверждения или высказыва-
ния, каждое из которых обозначается каким-либо символом и мо-
жет быть либо ложным, либо истинным. Обычно истинное высказыва-
ние обозначается единицей; а ложное — нулем.
Простые высказывания могут быть связаны между.собой союза-
ми И, ИЛИ и частицей НЕ. Условились каждое из них обозначать
для краткости символом подобно тому, как в арифметике вместо
слов «плюс», «минус», «умножить», «разделить» пользуются соот-
ветствующими символами. Союз И принято обозначать знаком Д и
34
называть логическим умножением (конъюнкцией), союз ИЛИ —
знаком V и называть логическим сложением (дизъюнкцией), части-
цу НЕ — черточкой над высказыванием и называть отрицанием вы-
сказывания. Например, А читается «не А». В тех случаях, когда в
алгоритме обычные алгебраические действия не применяются, мож-
но пользоваться символами умножения • и сложения 4~-
Каждое сложное высказывание (логическая функция) у может
быть либо истинным, либо ложным в зависимости от комбинации ис-
тинности и ложности входящих в него логических аргументов (про-
стых высказываний) хх, х2, ха и т. д. Значение сложного высказыва-
ния у от двух аргументов хх и х2 для логических умножения и сло-
жения, а также некоторые преобразования для аргументов хх, х2,
х3 выглядят следующим образом:
Х1Лх2=={/ хх V хг = у 0\/х==х
0-0 = 0 04-0 = 0 0-х = 0
0-1=0 0-|-Г=1 1-х = х
1-0 = 0 1 -|-0=1 Xi4-x2=x24-xi
1-1 = 1 14-1=1 z хх-х2 = х8-хх
х==у х1ух!! = х~1Лх^ xi4-x24-xs=(x14-x2)4-x3
0=1 ^1Л X4 = *iVx2 хх-(х8-х3) = (хх-х2) х3
1=0 Х1-(х24-х3)=х1-х24’Х1-х3.
Верны также следующие соотношения:
х-х-х —х; х-|-х+х=х; х—j-l = l;
х1+х2.х3=(х1 + х2)*(х1 + х3).
Существуют также более сложные логические высказывания.
Пример 15. Изобразить в виде логической функции следующее вы-
сказывание Международных правил предупреждения столкновений судов:
«В ясную видимость необходимо выполнить маневр расхождения, если
встречное судно наблюдается по носу ИЛИ с курсовых углов правого борта
И пеленг на него заметно НЕ изменяется».
Решение. Обозначим простые высказывания:
х, -= I — судно наблюдаемся по носу (топовые огни или мачты почти в
створе);
х2 = 1 _ судно наблюдается с курсового угла правого борта до 112,5°;
х3 — 1 — пеленг на судно заметно не изменяется.
Логическая функция, определяющая необходимость маневра,
^ = Л-х3+х2-х3=(х1 + х2) х,
или
V Хй) А Х9
Серийно изготовляют логические элементы различной физической
природы (электронные, пневматические, механические), реализую-
щие простые и сложные высказывания И, ИЛИ, НЕ.
2* ‘ 35
Рис, 21. Схема управления лифтом
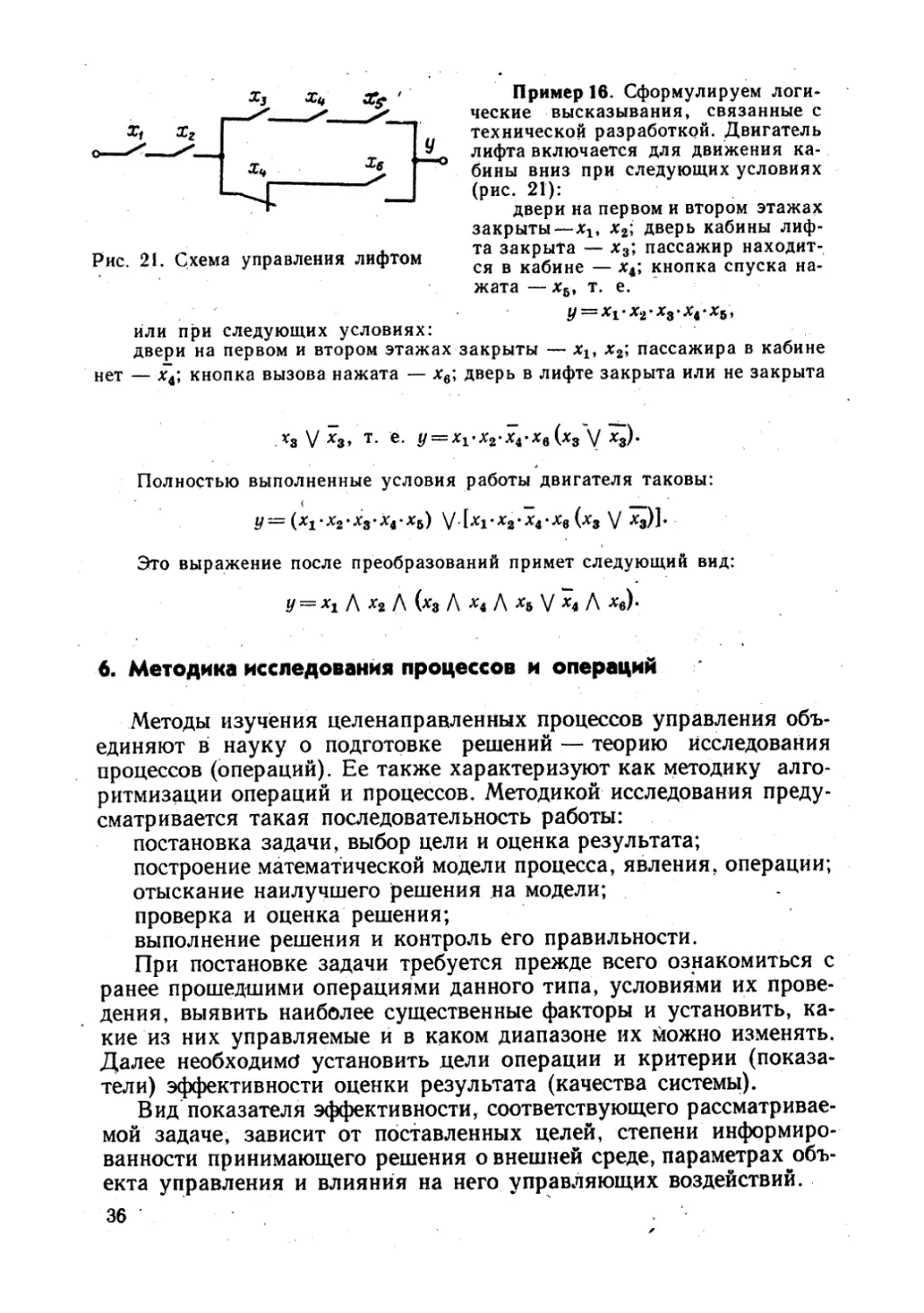
Пример 16. Сформулируем логи-
ческие высказывания, связанные с
технической разработкой. Двигатель
лифта включается для движения ка-
бины вниз при следующих условиях
(рис. 21):
двери на первом и втором этажах
закрыты—х14 х2; дверь кабины лиф-
та закрыта — х3; пассажир находит-
ся в кабине — х4; кнопка спуска на-
жата — х5, т. е.
t/ = xrx2-x3-xrx5,
или при следующих условиях:
двери на первом и втором этажах закрыты — хь х2; пассажира в кабине
нет — х^; кнопка вызова нажата — хв; дверь в лифте закрыта или не закрыта
Ла V *з- т- ®- </ = *r-«2-74-x6(xs у ^)-
Полностью выполненные условия работы двигателя таковы:
У= (*i-x2-xs-x4-xe) у.[хгх2-х4-х6(х3 V Хз)].
Это выражение после преобразований примет следующий вид:
у = *1 Л XS Л (*з Л *4 Л х6 V Л Xg).
6. Методика исследования процессов и операций
Методы изучения целенаправленных процессов управления объ-
единяют в науку о подготовке решений — теорию исследования
процессов (операций). Ее также характеризуют как методику алго-
ритмизации операций и процессов. Методикой исследования преду-
сматривается такая последовательность работы:
постановка задачи, выбор цели и оценка результата;
построение математической модели процесса, явления, операции;
отыскание наилучшего решения на модели;
проверка и оценка решения;
выполнение решения и контроль его правильности.
При постановке задачи требуется прежде всего ознакомиться с
ранее прошедшими операциями данного типа, условиями их прове-
дения, выявить наиболее существенные факторы и установить, ка-
кие из них управляемые и в каком диапазоне их можно изменять.
Далее необходимо установить цели операции и критерии (показа-
тели) эффективности оценки результата (качества системы).
Вид показателя эффективности, соответствующего рассматривае-
мой задаче, зависит от поставленных целей, степени информиро-
ванности принимающего решения о внешней среде, параметрах объ-
екта управления и влияния на него управляющих воздействий.
36
Существуют три вида задач:
детерминированные, когда решения принимаются в условиях
полной определенности и все последующие состояния объекта
управления могут быть предварительно рассчитаны с необходимой
точностью;
вероятностные (задачи с риском), когда в связях между различ-
ными факторами имеется некоторая неопределенность. Они не яв-
ляются «жесткими» и могут изменяться, вследствие чего «на выходе»
могут быть получены различные состояния объекта или процесса,
вероятности достижения этих состояний могут быть оценены толь-
ко статистически;
задачи в условиях полной неопределенности, когда принимаю-
щий решение не имеет информации о возможных результатах своих
действий и не может сопоставить вероятности достижения желаемо-
го результата.
В детерминированных операциях критерием выбора решения
обычно является максимальная полезность результата—«чем боль-
ше, тем лучше», и показатель эффективности имеет размерность (руб-
ли, мили, часы, тонны и т. д.).
В задачах с неопределенностью (риском) основной оценкой слу-.
жит вероятность достижения желаемого результата, который мо-
жет быть только достигнут либо не достигнут — «все или ничего».
В сложных процессах применяются комбинированные оценки —
вероятность достижения детерминированного результата.
После получения операции и выбора показателя эффективности
составляют ее модель.
Каждая модель имеет вид уравнения, в котором критерий сцен- .
ки полезности операции приравнивается к некоторому соотноше-
нию, связывающему между собой некоторое множество управляе-
мых и неуправляемых переменных, определяющих процесс достиже-
ния цели. Это уравнение должно отражать структуру и поведение ре-
альной операции с точностью, достаточной для прогнозирования ее
основных особенностей. Кроме того, в модель могут входить ограни-
чения на различные параметры в виде неравенств.
В самой общей форме математическая модель процесса имеет
вид:
W=f (X, У), <₽ (X, У) >0, '
где IF — ожидаемая полезность результата (скаляр);
‘ X — управляемые переменные (вектор);
У — неуправляемые переменные (вектор).
Решение такой модели получается путем отыскания значения X
(как функции У), максимизирующего W.
Примецим методику исследования операций к формулированию
количественной оценки эффективности операций судовождения.
37
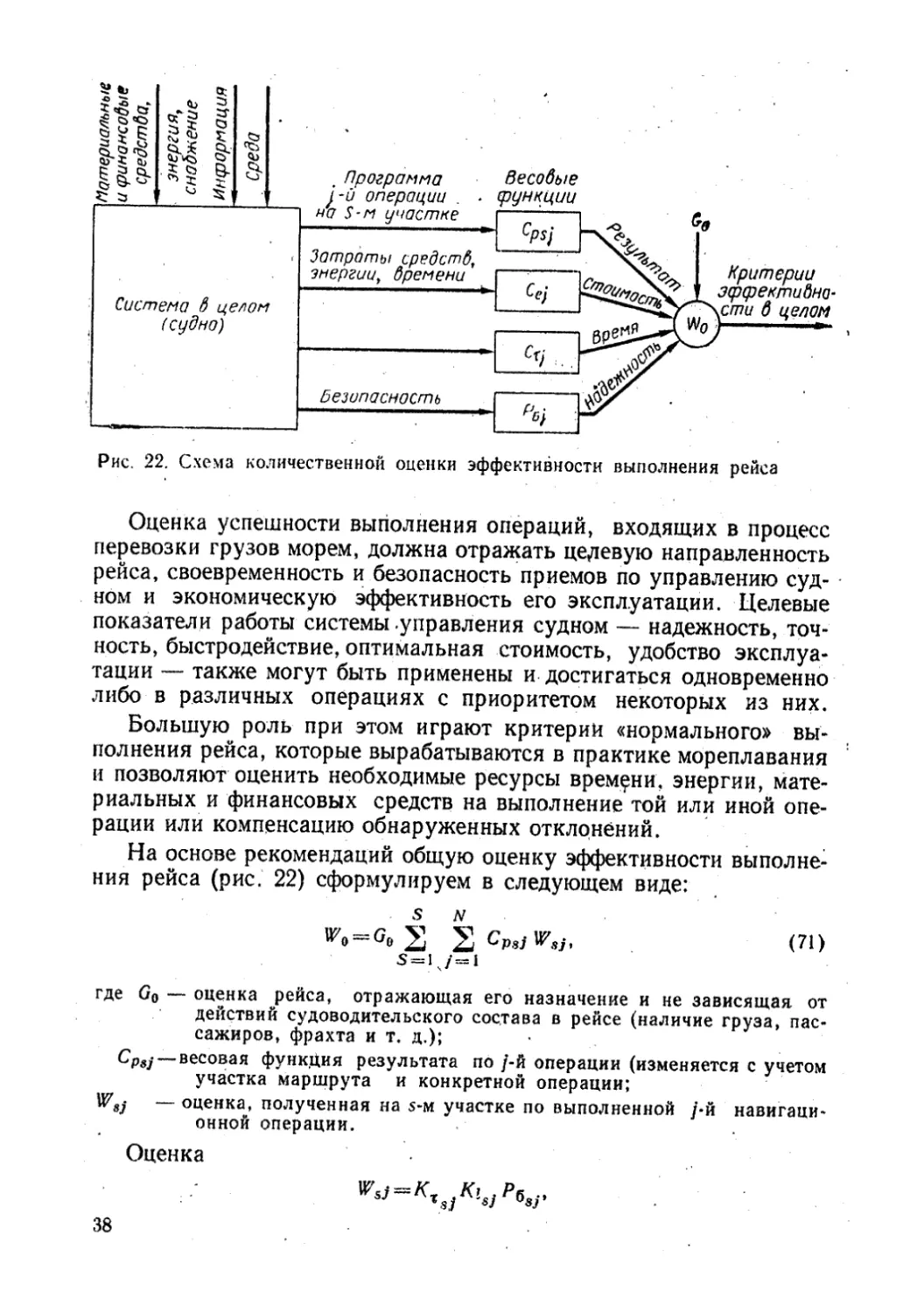
Рис. 22. Схема количественной оценки эффективности выполнения рейса
Оценка успешности выполнения операций, входящих в процесс
перевозки грузов морем, должна отражать целевую направленность
рейса, своевременность и безопасность приемов по управлению суд-
ном и экономическую эффективность его эксплуатации. Целевые
показатели работы системы .управления судном — надежность, точ-
ность, быстродействие, оптимальная стоимость, удобство эксплуа-
тации — также могут быть применены и достигаться одновременно
либо в различных операциях с приоритетом некоторых из них.
Большую роль при этом играют критерии «нормального» вы-
полнения рейса, которые вырабатываются в практике мореплавания
и позволяют оценить необходимые ресурсы времени, энергии, мате-
риальных и финансовых средств на выполнение той или иной опе-
рации или компенсацию обнаруженных отклонений.
На основе рекомендаций общую оценку эффективности выполне-
ния рейса (рис. 22) сформулируем в следующем виде:
з N
= 2 S Cp'iVsi’ (71)
S=!/=i
где Go — оценка рейса, отражающая его назначение и не зависящая от
действий судоводительского состава в рейсе (наличие груза, пас-
сажиров, фрахта и т. д.);
CPsj— весовая функция результата по /-й операции (изменяется с учетом
участка маршрута и конкретной операции;
WSj — оценка, полученная на s-м участке по выполненной /-й навигаци-
онной операции.
Оценка
38
,ж Kt>)
и Ki . — оценки выполнения /-й операции соответственно по
времени и по расходам энергии (или других ресурсов);
PfiSj — вероятность безопасного выполнения навигационной
/-Й операции на s-м участке маршрута.
Оценки
К = е-Ст7Т>/Ц
где Cxj и Сц — весовые функции расхода соответственно времени и энер-
гии на /-ю операцию (изменяются с учетом цели рейса, уча-
стка,маршрута и конкретной операции);
rj и lj — отклонение соответственно расхода времени и энергии от
средних значений; •
tsj и 3^ — средние значения (математические ожидания) расходов со-
ответственно времени и энергии на операцию, определяе-
мые по предшествующему опыту.
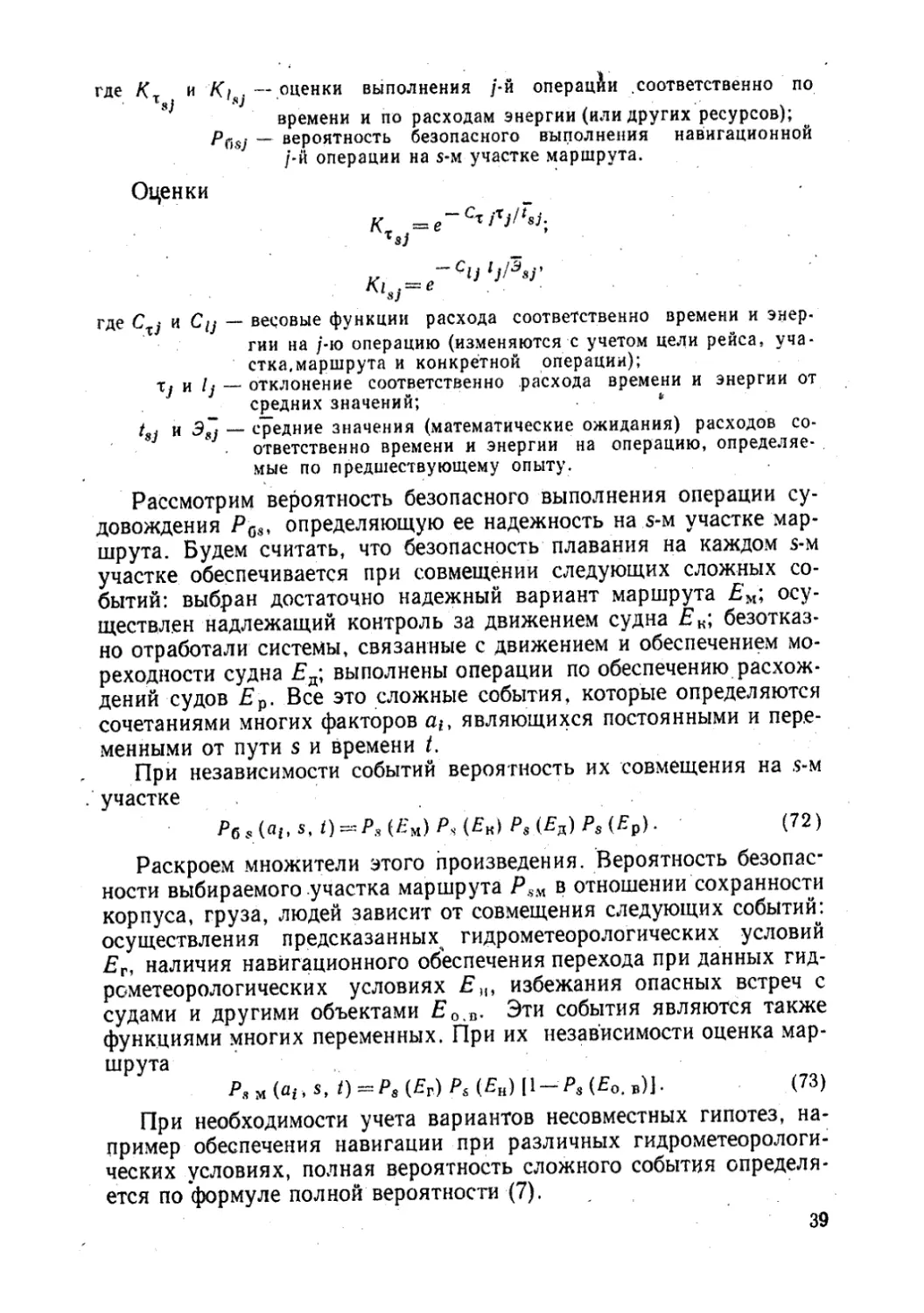
Рассмотрим вероятность безопасного выполнения операции су-
довождения Р0з, определяющую ее надежность на s-м участке мар-
шрута. Будем считать, что безопасность плавания на каждом s-m
участке обеспечивается при совмещении следующих сложных со-
бытий: выбран достаточно надежный вариант маршрута £м; осу-
ществлен надлежащий контроль за движением судна Ек; безотказ-
но отработали системы, связанные с движением и обеспечением мо-
реходности судна Ед; выполнены операции по обеспечению расхож-
дений судов Ер. Все это сложные события, которые определяются
сочетаниями многих факторов аг, являющихся постоянными и пере-
менными от пути s и времени t.
При независимости событий вероятность их совмещения на s-м
участке
Рб П~РЯ (£„) Ps (£к) Р,(Ел)Р,(Ер). (72)
Раскроем множители этого произведения. Вероятность безопас-
ности выбираемого участка маршрута Ря!л в отношении сохранности
корпуса, груза, людей зависит от совмещения следующих событий:
осуществления предсказанных гидрометеорологических условий
Ег, наличия навигационного обеспечения перехода при данных гид-
рометеорологических условиях Еи, избежания опасных встреч с
судами и другими объектами £0.в- Эти события являются также
функциями многих переменных. При их независимости оценка мар-
шрута
PgM(af,s, П = /’в(£г)^(£и)|1-/>в(£о.в)]. (73)
При необходимости учета вариантов несовместных гипотез, на-
пример обеспечения навигации при различных гидрометеорологи-
ческих условиях, полная вероятность сложного события определя-
ется по формуле полной вероятности (7).
39
Успешность контроля за перемещением судна на s-м участке PSK
зависит от своевременного осуществления обсервации Е()бс его
места посредством хотя бы одного из множества L независимых в со-
вокупности тех или иных навигационных методов и технических
редств, имеющихся в распоряжении судоводителя на судне, по-
тому
L
PSK(az,S,/) = l- П [1-Р5(£обс)/Ь (74)
1 = 1
где Ps (£обС)( — вероятность получения надлежащих определений места
на s-м участке выбранного маршрута при данных гидро-
метеорологических условиях какими-либо техническими
средствами (для счисления пути радионавигационными,
радиолокационными, астрономическими, визуально-слу-
ховыми и другими возможными способами).
Вероятность успешного выполнения этой операции контроля с
использованием какого-либо (-го навигационного технического
средства зависит от нескольких факторов: его точности; геомет-
рических параметров, определяющих возможность* его использова-
ния; устойчивости к гидрометеорологическим, ионосферным и дру-
гим внешним возмущениям; технической надежности; пропускной
способности; возможности обнаружения и опознавания.
Влияние всех этих факторов может быть оценено соответствую-
щими вероятностями:
Ps (£обс)< = Pll pzl P3I Pil Ptl P«l (75)
Безотказность работы систем управления движением судна Р,д
определяется надежностью энергетических и других установок,
способствующих работе винта Ев и руля Ер:
Ра,S, /) = РД£п).Р,(£р). ; (76)
Вероятность выполнения операции предупреждения столкно-
вений судов Ps (Ер) зависит также от осуществления некоторых по-
следовательных событий, а именно: обнаружения встречного судна
Еоб, своевременного определения элементов сближения судов £э.с
с достаточной точностью, логического анализа ситуации, выбора це-
лесообразного варианта маневра Ев.м, отработки систем управле-
ния движением судна Ес.у. Следовательно,
Ps'p (ai > 0 ~ Ps (^об) Рs (Pq, с) Ps (£р. м) Р$ (£с. у) - (77)
Таким образом, общая оценка безопасности плавания будет со-
стоять из нескольких множителей, в общем случае функционалов,
характеризующих выполнение всех операций, которые необхо-
димы для достижения заданной цели.
Достижение максимальной безопасности плавания при наличии
ограничений на затраты времени и энергии формулируется в мате-
40
Таблица 3
Оценка эффективности вариантов достижения подцелей
ЛА >
max S, /).= max П Psj(aitSrt) (7S)
/=1
на каждом s-м участке пути при условии» что ’
S W _ 5 ЛА _
2 2(Ст/«>)<СЛ и 2 2 (С//^)<СгЭр, (79)
$=1 /=[ $=1 /~\
где 7{) и Эр — средние значения (математические ожидания) затрат времени и
энергии на рейс.
При наличии нескольких вариантов (стратегий) выполнения той
или иной операции выбор наилучшего может быть сделан на основе
экспертных оценок. Эксперты определяют вес Сг каждой i-й под-
цели в данной операции (например, обеспечения безопасности i = 1,
п
экономии времени i — 2, энергии i =3), причем 2 Сг = 1. Далее
г=1
оценивают влияние ейг каждого k-vo варианта Bh на достижение i-x
подцелей. Эта оценка изменяется от нуля до единицы. Оценка «О»
означает, что при данном варианте вероятность достижения под-
цели весьма мала. Оценка «I» означает обеспечение достижения
данной подцели (вероятность велика). Затем составляют таблицу
эффективности вариантов (табл. 3).
При наличии основного варианта с оценкой Wo сравнение с ним
может быть выполнено с использованием коэффициента относи-
тельного улучшения
Лу=1 + Д1Гк/Г0, (80)
где — увеличение показателя эффективности для k-ro варианта.'
41
Г л а в а 2
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА
7. Основные понятия и классификация
систем автоматического регулирования
При исследовании различных процессов широко применяется
операционное исчисление, в частности, преобразование Лапласа.
Сущность его заключается в том, что изменяющиеся во времени
функции, включающие в себя операции дифференцирования и интег-
рирования, по определенным правилам заменяются оператор-
ными (лапласовыми) изображениями. Посредством алгебраических
действий над ними получаются решения для изображений искомых
величин, после чего осуществляется обратный переход от изобра-
жений и к временным функциям этих величин. Есть и некоторая
аналогия с использованием логарифмов, когда сложные операции
(умножение и деление) заменяются простыми (сложение и вычи-
тание).
Пусть имеется функция времени f (/), которую называют ориги-
налом.
Изображением данной функции (оригинала) по Лапласу называ-
ется новая функция, связанная с оригиналом соотношением
0.
где р — комплексная величина, применяющаяся как символ операторной за-
писи (иногда вместо р применяют символ s =т= а + ib)
|р = а + ib (а > 0)].
От изображения функции можно перейти обратно к оригиналу.
Операции взаимного перехода записывают таким образом:
F(p)=LiHoi ино=ь-’И(р)ь
Обычно изображения функций и обратный переход находят по-
таблицам, соблюдая некоторые правила:
изображение суммы функций равно сумме изображений этих
функций;
42
изображение произведения функции на постоянный множитель
равно произведению, полученному от умножения этого множителя
на изображение функции;
изображение производной оригинала (при нулевых начальных
условиях) равно произведению, полученному от умножения диффе-
ренцируемой функции на р;
изображение интеграла от функции равно частному от деления
изображения подынтегральной функции на р (при нулевых началь-
ных условиях).
Изображение некоторых функций по Лапласу в зависимости от
оригинала f (t) следующее:
А
1. А I (/)......................... —
Р
2. l(t) ......... . .р F1(p)
at
3. (fHOdt . . . ..... . . Д^-+А(0)
J p
4. at . .
5.
6. a sin co t
a
P2
ч
p+VT
a co
p2 + co2'
7. a cos cd/ . . . .
8. ae“a*sin co t . .
9. cn?”a/costo t . .
10. e~^a * cos (co / ± cp)
li. f sin (co t ± <p)
др
’ Р2 + СО2
a co
*(p + a)a+<o2
Д (p+a)
*(p+a)2+c°2
(p-ba) coscp^F cosiny
* ’ (p + a)2 + co2
co cos у T (p -j-oQ sin <p
(p + co2
12. /“
nl
p«+l
13. fi(/—T) . .......................... F1(p) e px
t
14. f/i.(T)fs(f~T)di....................Fi(p)f3(p)
о
15. f (oo)............................... JimpF(p)
p->0
43
Приведем примеры использования операционного исчисления
для решения дифференциальных уравнений.
Пример 17. Найти решение уравнения
dx
——+х=1 при / = 0, хо = О.
dt
Решение. Находим изображения членов исходного уравнения, восполь-
зовавшись пи. 1 и 2 примеров изображения функций/
рХ(р) + Х(р)=— или (р+1)Х(р)=—,
Р Р
откуда
Х Р(р+1) Р р+1
В соответствии с пп. 1 и 5 оригинал (решение) функции следующий:
х(0 = 1— Н.
Пример 18. Найти решение уравнения
dx
—--r3x = e"2f при / = х0 —0.
dt
Решение. Согласно пп. 1, 2 и 5 примеров изображения функций
рХ(р) + ЗХ(р)=-— Х(р) (р + 3)=-^—;
р “г 2 р 2
х^=(р+з)'(,+2) «и—’1-'-”- •
Рассмотрим физическую сторону явления, описываемого реше-
нием примера 18. Если входное воздействиее~2‘ уравнения считать
порывом ветра, а результат — рысканием судна, то поведение по-
следнего можно изобразить кривой х (t) (рис. 23). Таким образом,
операционное исчисление позволило простыми математическими
операциями получить функциональное преобразование корпусом
судна входного воздействия в выходное. В связи с этим в теории ав-
томатического регулирования применяется так называемая переда-
точная функция W (р) звена или системы, под которой понимается
отношение изображения выходного сигнала к изображению входно-
го сигнала. Такая функция значительно облегчает анализ и синтез
автоматических систем при нулевых начальных условиях.
Одной из основных функций автоматических устройств являет-
ся регулирование, т. е. поддержание на определенном уровне или
изменение по требуемому закону некоторой величины (курса судна,
частоты вращения вала двигателя и т. п.).
44
Рис. 23. График функционального
преобразования входного воздейст-
вия в выходное с учетом первого (/)
и второго (2) членов уравнения
Агрегат, в котором осуществляется регулирование (судно, дви-
гатель, генератор и т. д.), называют объектом регулирования, а уст-
ройство, решающее задачу регулирования данного объекта, — ре-
гулятором.
Объект регулирования и автоматический регулятор образуют си-
стему автоматического регулирования (САР).
В зависимости от закона изменения регулируемой величины раз-
личают следующие системы:
• стабилизации, которые поддерживают постоянное заданное зна-
чение регулируемой величины;
программного регулирования, которые изменяют регулируемую
величину по заранее заданному закону;
следящие, которые отрабатывают на выходе переменную входную
величину, причем закон изменения последней заранее неизвестен.
Несмотря на различие автоматичееких систем по назначению,
конструктивным схемам, происходящим в них физическим процес-
сам принципы их построения, методы расчета и оценки качества ра-
боты практически одинаковы [4].
В судовых САР используют так называемую отрицательную об-
ратную связь, т. е. передачу значения информации с выхода систе-
мы на ее вход с обратным знаком. При этом из заданного значения
вычитается текущее значение регулируемой величины и наличие
рассогласования (ошибки) служит сигналом для работы корректи-
рующего исполнительного устройства.
При ручном регулировании человек сам сравнивает заданное и
текущее значения и соответствующим образом воздействует на регу-
Рис. 24. Структурная схема системы управления курсом судна
45
Рис. 25. Структурная схема системы автоматического регулирования курса
судна
лятор (рис. 24). При построении автоматической системы регулирова-
ния курса судна необходимо избавить человека от функций сравне-
ния заданного курса К3 с текущим Кт и перемещения рулевого при-
вода. Если эти функции переданы автоматическим устройствам,
действует САР курса судна (рис. 25), которая состоит из следующих
элементов: сравнения 2, усилительно-преобразующего (усилитель,
рулевой привод) 3, исполнительного (двигатель) 4, регулирующего
(руль) 5, объекта регулирования (корпус судна) 6 и измерительного
(компас) 7.
Рис. 26. Схемы автоматических устройств
46
Все элементы, кроме объекта регулирования, обычно объединя-
ют под названием регулятор.
На основании внешней информации, например от РНС о место-
положении судна, судоводитель может принять решение изменить
курс следования, т. е. приложить задающее (управляющее) воздей-
ствие (штриховые линии), внешнее для САР. Этим действием
судоводитель выполняет функции задающего (управляющего)
элемента 1.
К внешним воздействиям относятся также возмущения системы,
вызванные изменением состояния объекта или его взаимодействия
со средой (например, для судна это изменение загрузки, скорости,
действия ветра, течения и т. д.), а также изменение энергопитания
системы.
Процесс регулирования характеризуется передачей внутренних
воздействий от одного звена системы к другому по единому замк-
нутому контуру, поэтому нельзя определить качество работы систе-
мы, не зная, что происходит в данный момент в других звеньях и объ-
екте регулирования. Не может быть плохого или хорошего регуля-
тора вообще, если ничего не говорится об объекте, если этот регуля1
тор не исследован совместно с объектом регулирования.
В комплексных системах управления может содержаться не-
сколько отдельных САР, связанных одна с другой посредством раз-
личных вычислительных устройств. К таким системам относятся
системы управления самолетрм или судами на подводных крыльях,-
где необходимо регулировать взаимосвязанные величины — курс,
крен, дифферент, работу двигателя и др.
Имеются также автоматические устройства, выполняющие более
узкие задачи, например устройства автоматического контроля
(рис. 26, а), пуска (рис. 26, б), сигнализации (рис. 26, в), защиты и
стабилизации (рис. 26, г), в которых обычно используются различ-
ные физические свойства отдельных элементов. Эти устройства не
имеют связи между выходом и входом, что приводит к появлению
ошибок из-за воздействия различных помех и изменений характе-
ристик элементов..
Если расстояния между элементами системы оказываются столь
большими, что в систему включают дополнительные элементы свя-
зи—передатчики и приемники (радиотехнические, оптические, аку-
стические и др.), такие системы называют телемеханическими. На-
пример, системы телеконтроля, телеизмерения, телерегулирования
и телеуправления.
Системы, включающие в себя объекты с одним входом, называ-
ются одномерными, а системы, у которых объекты имеют несколько
входов и выходов, — многомерными (суда на подводных крыльях,
воздушной подушке, самолеты и др.).
47
8. Переходные процессы и типы основных звеньев
автоматических систем
В случае приложения к САР задающих либо возмущающих воз-
действий все элементы в системе регулирования начинают изменять
свое состояние. Возникает так называемый переходный процесс,
который по истечении некоторого времени обычно успокаивается,
и наступает установившееся (статическое) состояние в элементах
системы и на ее выходе.
Несмотря на разнообразие отдельных звеньев САР по конструк-
ции и принципу действия (электрические, механические, гидравли-
ческие и т. д.), изменение их состояния и выходной величины может
быть описано дифференциальным уравнением или эксперименталь-
но снятой характеристикой вполне определенного вида. В зависи-
мости от видов переходных процессов (вида дифференциального
уравнения) в теории автоматического регулирования существует
классификация звеньев систем, а их основные свойства определяют
посредством общих статических и динамических характеристик.
К статическим характеристикам звеньев относятся: коэффици-
ент передачи (преобразования, усиления), погрешность передачи,
порог чувствительности (разрешающая способность) и др.
Коэффициентом передачи (преобразования, усиления) называется
соотношение между входной х и выходной у величинами, которое
получается после того, как’ переходный процесс заканчивается и
наступает статический режим.
По виду статической зависимости у = f (х) все звенья автомати-
ческих систем делятся на линейные и нелинейные.
Если нелинейная зависимость имеет линейный участок Оа
{рис. 27), для которого у = kx, то постоянная величина fe0 = у/х—
= tg^o будет коэффициентом передачи. Для входных величин,
Рис. 27. Линеаризация статической
характеристики
больших ха, коэффициент пере-
дачи будет изменяться (умень-
шаться).
Обычно все звенья рассчиты-
вают на один режим работы (ба-
зовый, номинальный), отклоне-
ния от которого .будут незна-
чительны, т. е. используется
только небольшой участок стати-
ческой характеристики. Этот
участок заменяют прямой — ка-
сательной в точке С.
Замена реальной нелинейной
характеристики на линейную,
основанная на малости отклоне-
48
ний, называется линеаризацией. Для линеаризованного участка
Д«/ = k0\x или в пределе ka = tgr]0.
Единица коэффициента передачи зависит от единиц входной и вы-
ходной величин. Для электродвигателя единицей входной величины
(напряжения) х является вольт (В), выходной величины (угловой
скорости) у — радиан в секунду, коэффициента передачи k — радиан
в секунду на вольт. Для судна единицей входной величины (угла
кладки руля) х является градус, выходной величины (угло-
вой скорости) у — радиан в секунду, коэффициента передачи
k — радиан в секунду на^градус. Если для судна единицей входной
величины (частоты вращения винта) х является секунда в минус
первой степени, выходной (скорости) у — метр в секунду, то едини-'
цей коэффициента передачи k минута в минус,первой степени.
Для усилителя, редуктора, трансформатора коэффициент передачи
безразмерный. .
Если выходная величина у зависит от нескольких входных.вели-
чин xlf ха, то коэффициенты передачи kx^ — kX2 — ^р<й£т. д.,
а изменение выходной величины
4,_(_a_)44+(jL-k„+ . .
\ 3*! / X dxt J
Обычно в литературе по теории автоматического регулирования
знак А перед х и у опускают, подразумевая, что малые отклонения
входных и выходных величин совершаются относительно точек ба-
зового режима (начало осей координат х и у находится в точке С).
Погрешностью передачи называется изменение выходной вели-
чины у, возникающее вследствие изменения внутренних состояний
звеньев либо изменения внешних условий.
Различают погрешности абсолютную Ду (разность между
полученным у' и расчетным у значениями), относит е~Л ь -
ную Ау/у и приведенную относительную
&у/Утах- . i, '
Порогом чувствительности {разрешающей способностью) называ-,
ется минимальное значение отклонения входной величины, вызыва-
ющее заведомое изменение выходной величины. s/5
К динамическим характеристикам звеньев относятся функции,
описывающие переходный процесс. Это описание может быть пред-
ставлено в виде либо явной функции времени и ее графика, либо диф-
ференциального уравнения, либо так называемых передаточных и
частотных передаточных функций.
Для удобства сопоставления динамических свойств различных
звеньев на вход подается одна из стандартных (типичных) входных
величин — скачкообразная хс-1 (t) (рис. 28, а) либо импульсная
x{t) — 6 (/) — l’(t) (Дирака) (рис. 28, б) функция (умножение ка-
49
О . * г | | <
кои-либо функции на 1 (0 озна-
чает, что она существует только
при t > 0; при I < 0 она обра-
щается в нуль).
При подаче на вход скачко-
образной функции хс-1 (0 в зави-
симости от вида переходного
процесса различают шесть основ-
ных типов звеньев: безынерцион-
ные, апериодические, колеба-
Рис. 28. Графики скачкообразной и
импульсной функций
тельные, интегрирующие, дифференцирующие, с чистым запазды-
ванием.
В безынерционном звене (рис. 29, а) скачок на входе мгновенно
передается на выход с изменением пропорционально коэффициен-
ту передачи звена, т. е. переходного процесса нет и звено описыва-
ется алгебраическим уравнением, совпадающим со статической ха-
рактеристикой
yc — kxc. (81)
К этим звеньям относятся рычаги, механические передачи, транс-
форматоры, электронные усилители, реле и другие устройства, в ко-
торых практически можно не учитывать время передачи входного
сигнала на выход. ' . -
При математическом исследовании свойств звеньев и автомати-
ческих систем часто применяют преобразование Лапласа и динами-
ческие характеристики звеньев представляют в виде передаточных
функций.
Передаточной функцией W (р) называется отношение изображе-
ний У (/?) по Лапласу выходной величины у (t) звена к изображению
X (р) входной величины х (0 при нулевых начальных условиях:
(82)
А (р)
Воспользовавшись таблицами преобразований (операционного
исчисления), получим передаточную функцию безынерционного
звена
W(p)=k. (83)
В апериодическом звене (рис. 29, б и в) скачок на входе передает-
ся на выход с замедлением, происходит запаздывание в передаче.
К своему установившемуся значению выходная величина приходит
апериодически по закону экспоненты
у (О==А;хс(1—.(84)
где Т — постоянная времени звена, характеризующая замедление в передаче
входного сигнала на выход из-за инерционности звена.
50
Знание постоянной времени позволяет легко ориентироваться в
изменении выходной величины. Например, через промежуток вре-
мени t — Т она достигнет 0,63 ус, или 63 % установившегося зна-
чения, через t — 2 Г на выходе будет 87 %, а через t — 3 Т — 95 %.
Длительность переходного процесса £пер (с точностью до 5 % окон-
чательного значения) практически принимается равной ЗТ,
К рассмотренному звену можно отнести устройства типа термо-
пар, электрические контуры, двигатели по изменению угловой ско-
рости, баллоны при наполнении их газом, суда при наборе скорости,
ж) У
Рис. 29. Графики звеньев систем ав-
томатического регулирования
51
а также угловой скорости для изменения курса на циркуляции и
др. В частности, постоянные времени при изменении скорости (для
транспортных судов водоизмещением от 10 до 100 тыс.т) имеют зна-
чения от 3 до 15 мин и более.
Подобный апериодический процесс описывается дифференциаль-
ным уравнением 1-го порядка
Ту+у=кхс, (85)
решением которого и является зависимость (84).
Передатачная функция апериодического звена
W (p)=k/(T р+1). (86)
Динамические свойства звена полностью характеризуются двумя
параметрами: коэффициентом передачи k и постоянной времени Т.
К апериодическому звену относят также звенья, переходный
процесс в которых состоит из двух сопрягающихся экспонент (см.
рис. 29, в). Для его описания справедливо дифференциальное урав-
нение 2?го порядка
Tly+T^'+y^kxc. . * (87)
При 7\ > 2Т2 передаточная функция
Г(р)=й/(7’»р»+Т1л+1). . (88)
Аналитические свойства этого звена характеризуются коэффици-
ентом передачи и двумя постоянными времени 7\ и Т2. Постоянная
времени 7\ характеризует факторы, обусловливающие рассеяние
энергии (трёние, сопротивление), а постоянная времени Т2 — факто-
ры, поддерживающие движение (масса, напряжение, перепад дав-
ления, температуры и т.д.).
В колебательном звене (рис. 29, г) при скачкообразном измене-
нии входной величины выходная величина приходит к новому уста-
новившемуся значению ууст, совершая затухающие колебания. К
этим звеньям относятся механические устройства, обладающие уп-
ругостью и вязким трением, гироскопические элементы и др.
Колебательное звено описывается дифференциальным уравне-
нием 2-го порядка [см. формулу (87)1 при 7\ <. 2 Т2. Его переда-
точная функция по виду совпадает с формулой (88).
При нулевых начальных условиях решение дифференциального
уравнения следующее:
х/(/) = йхсГ1 —е fcos +—---------sin.<o/)], (89)
L \ г9 <о /J
где Гэ — постоянная времени экспоненты затухания амплитуды колебаний
(см. рис. 29, в) [Тэ= 2Г«/Г1);
<в — собственная круговая частота колебаний [<о — ДАТ* — T^/^T*)].
52
В частном случае, когда рассеяние энергии незначительно
(7\ та 0), Тэ = оо, ® = 1/Т2 и решение будет описывать незатуха-
ющие колебания на выходе звена:
j/ = Axc (1—cos (90)
В интегрирующем звене (рис. 29, д) выходная величина увеличи-
вается пропорционально интегралу по времени от входной величи-
ны:
t
y=k$x(t)dt. (91)
0 .
К этим звеньям относятся резервуары, заполняемые жидкостью,
суда при изменении курса и др.
У гол наклона асимптоты ah к оси абсцисс зависит от коэффициен-
та передачи звена, т. е. при оо tg лр = kxc, а точка пересечения
асимптоты с осью дает возможность найти постоянную времени Т.
Различают идеальное 1 и реальное 2 интегри-
рующие звенья.В идеальном звене выходная величина из-
меняется по закону у — kxct.
Передаточная функция такого звена
W(p) = k/p. (92)
Реальное интегрирующее звено обладает инерционностью, в нем
выходная величина изменяется следующим образом:
y—kxct — kxcT(\— . (93)
т. е. имеется некоторое замедление, характеризующееся постоян-
ной времени звена Т.
Реальное интегрирующее звено описывается дифференциальным
уравнением
Ty+y=kxc. (94)
Следовательно, его передаточная функция
b
(ю)
Ее можно представить в виде произведения передаточных функ-
ций усилительного, идеального интегрирующего и апериодическо-
го звеньев: IF (р) = fe - *, ,.
Р 1 РX 1
В дифференцирующем звене (рис. 29, е) выходная величина про-
порциональна скорости изменения входной величины:
(96)
at
53
К этому типу звеньев относятся тахогенераторы, электрические
контуры с активным и емкостным или индуктивным сопротивлением,
суда, замедляющие скорость после остановки движителя, и др.
Различают идеальное дифференцирующее
звено, в котором выходная величина появляется в виде импуль-
са, и реальное дифференцирующее звено,
в котором процесс изменения выходной величины совершается по
убывающей экспоненте
у=_^е-(//П, (97)
где Т — постоянная времени звена, характеризующая замедление в пере-
даче из-за его инерционности.
Знание постоянной времени позволяет легко определить изме-
нение выходной величины: при t = Т она равна 37 % первоначаль-
ной, при t — 2Т — 13 % и при t = ЗТ — 5 %. В последнем случае
переходный процесс считается практически закончившимся.
Реальный процесс изменения выходной величины в звене описы-
вается дифференциальным уравнением 1-го порядка
Ty+y*=kx. (98)
Передаточная функция
т Р-Н
В звене с чистым запаздыванием (рис. 29, ж) на выходе воспроиз-
водится переходный процесс с некоторым постоянным временем за-
паздывания т. Такими звеньями являются реле с выдержкой време-
ни, конвейеры, трубопроводы, линии дистанционной передачи ин-
формации. Процесс описывается зависимостью
y=kx(t—т) при/<ти</=0. (100)
Передаточная функция усилительного звена с чистым запазды-
ванием
W(p)=;ke-Zp, (101)
апериодического звена с чистым запаздыванием (см. рис. 29, ж,
штриховая линия)
Системы автоматического регулирования включают в себя слож-
ные устройства, соединенные между собой. Для описания поведе-
ния системы необходимо составить систему дифференциальных урав-
нений, в которой число уравнений должно соответствовать числу не-
зависимых обобщенных координат, определяющих ее состояние.
54
Рис. 30, Соединения звеньев автоматических систем
Обычно система уравнений решается относительно отклонения
регулируемой величины у (t) от заданного значения, т. е. ошибки х (/),
либо относительно самой регулируемой величины у (t).
Составление основных уравнений САР значительно облегчается,
если использовать понятия передаточных функций типовых звеньев
и применять определенные правила нахождения передаточных
функций их соединений. При этом выполняют следующие условия:
сигналы в звеньях могут проходить только в одном направле-
нии — от входа к выходу;
подключение последующих звеньев не влияет на характер проте-
кания процессов в предыдущих.
Наиболее часто встречаются следующие соединения звеньев:
последовательное, параллельное и с обратной связью. Если извест-
ны передаточные функции отдельных звеньев при их последова-
тельном соединении (рис. 30, а)
w (п\ Г1(р) т гл \w (П\. Гз(р)
1 (р) х, (р) ’ 2 (₽) Хг (р) ’ 8 {р} Х3 (р) ’
то, составив их произведение и.учитывая, что Kj (р) — Х.г (р) и
Y2 (р) — Х3 (р), получим результирующую передаточную функцию
всего соединения
W'1(p)W’2<p)U73(p)=-^a~- = ir(p). (102)
*i(P)
При п звеньях
Г(р)= П W{ (р). (ЮЗ)
i=i
При параллельном соединении звеньев (рис. 30, б) на вход подается
общийлсигнал X (р), а выходной сигнал Y (р} является суммой вы-
ходных сигналов отдельных звеньев:
У (р) = У1 (р) + (р) + га (р) = (р) + wt (р) + Г, (р)] X (р).
55
Значит,
^(р) = “т4' = »’’1(р)+»'г(р) + и7з(р)- (Ю4)
А (Р)
При п звеньях
^(p)=S^i(p). (Ю5)
,=]
При соединении звеньев с обратной связью (рис. 30, в) фактиче-
ский выходной сигнал Yg, (р) подается на вход через звенья обратной
связи и вычитается из'желательного входного сигнала X (р). По-
лучающийся сигнал рассогласования X (р) — У3 (р) поступает на
первое звено. Следовательно,
Л(Р) =1Х (р)-Уа(р)]«71(Р)^2(Р)
или, учитывая, что Y3 (р) = Y2 (р) W3 (р),
У4(Р) П + W, (р) 1У2 (р) Г3 (р)] = 1Г1 (р) W3 (р) X (р).
Тогда общая эквивалентная передаточная функция замкнутого
соединения
Ъ (Р) ^2 (Р)
(р} = -W.'. = .
КР> Х(р) 1+ГхСр) Г2(р)Г3(р)
(106)
Составим уравнение динамики системы автоматического регули-
рования курса судна (рис. 31). Блоки I и II представляют собой
регулятор типа АБР, а блок III — объект регулирования (судно).
В блок I, формирующий управляющий сигнал, входят параллель-
но соединенные звенья: безынерционное {линейный вращающий
трансформатор (ЛВТ курса)], идеальные дифференцирующее (тахо-
генератор) и интегрирующее. В блок II входят: безынерционное
звено (усилители) и идеальное интегрирующее звено — исполни-
тельный двигатель ИД с дополнительной безынерционной отрица-
Рис. 31. Структурная схема системы автоматического регулирования курса
судна . •
56
тельной обратной связью (ЛВТ руля). Передаточная функция зве-
на с основной обратной связью (гирокомпаса) принята равной еди-
нице.
Передаточная функция регулятора
' (107)
а {Р)
Здесь W, („)-*, + ktP + Г„ („) = =
p/(A4A5)A7
Так как коэффициенты передачи kt и Ай много больше единицы, то
первым членом в знаменателе по сравнению с А, можно пренебречь.
Тем самым пренебрегаем длительностью перекладки руля.
Подставляя в формулу (107) значения (р) и Wtl (р), получим
, Н^рег (р) = *7 (Ai-pAj р-}-А3/р). (108)
Тогда уравнение изменения перекладки руля
₽ (0=-7— (^1а + ^аа + ^з (109)
я7
Если взять отношение выходной величины ДАТ (р) к входной
ошибке а (р), то получим передаточную функцию разомкнутой САР
Д&Т (р)
И7 (р) = = (р) й7с (р).
а (р)
С учетом того, что Айт (р) = ДЛ3 (р) — а (р),
ДА, (р)
---= 1+ WW (Р) Wc (р)
а(Р)
или
П+№'рег(р)^с(р)]а(р)==ДА3(р). (ЦО)
Подставив значения передаточных функций регулятора и судна,
получим
1 г А3 \ Ас 1
1 +“Г” А2 Р +-- “77—~7~ а (р) = Д А3 (р).
L А" \ . Р / Р (7сР+ I) 1
При стабилизации (регулировании) заданного курса судна
Д£3 (р) •= 0 и уравнение будет иметь следующий вид:
(Гс А;Р3+(А74-А? Ас) рг4-АсА1р-(-Ас А31 а (р)--=0.
Выражение в квадратных скобках совпадает с характеристиче-
ским уравнением системы, записанным в символическом виде
(р = ^). При обычной записи получим дифференциальное уравне-
57
ние, описывающее изменение ошибки САР курса в переходном ре-
жиме и по окончании его:
я "И (^7~г^4 &с) я ka a-,- kc kg = 0. (ill)
В качестве примера использования аппарата передаточных функ-
ций звеньев получим уравнение, характеризующее изменение ско-
рости судна при уменьшении частоты. вращения винта (рис. 32).
Судоводитель передвигает ручку телеграфа 1 на угол фс, характе-
ризующий уменьшение скорости. Изменение частоты вращения вин-
та п судовой энергетической установки 2 характеризуется переда-
точной функцией UZ2 (р). Уменьшение скорости судна v (0 3 описы-
вается передаточной функцией 1^3 (р).
Передаточная функция системы
Гс {р}== (Р) wa
4с (Р) Ид P H) ("с Р-Н)
или
TFC (Р) = *с е —
(112)
где kc — коэффициент преобразования системы:
*<! = *! Мз! Л = Т;1ТС-, ТХ^ТЯ + ТС.
Используя формулу (112), получим
(7'?p»+7’1p-H)HP)“ftePs«“,p4c(p)
или, переходя к оригиналам фс (/?) = фс (t)/p,
П v (0 + 7\v (0 + v (0 = Мс (f - т).
Рис. 32. Структурная схема разомкнутой системы управления скоростью суд-
на (а) и времеиные характеристики звеньев системы (б)
58 '
Рис. 33. График вынужденных колебаний систем автоматического регулиро-
вания:
а—с большой инерционностью (гирокомпаса); б —с малой инерционностью (магнит-
ного компаса)
Так как фс = const, то фс = 0, следовательно,
П и (0 + Л v (t) + v.(t) - 0. (из)
Формула (113) — это дифференциальное уравнение 2-то порядка
1см. формулу (87)1, характеризующее апериодический процесс при
Тг > 2Т2. Если постоянные времени 7’д = 2 мин, Тс — 5 мин,
тогда Т1 — ТЛТС — 10 мин и Т2 — 3,3 мин, а 7\ == Та + Тс~
= 7 мин, т. е. условие Тг >. 2Т2 выполняется.
Большое значение имеет качество работы звеньев системы авто-
матического регулирования при периодических возмущениях, на-
пример. при качке. Периодические воздействия на входе вызывают
на выходе свободные и вынужденные колебания. Свободные колеба-
ния с течением времени (по окончании переходного процесса) пре-
кращаются. На выходе отстаются лишь установившиеся вынужден-
ные колебания, которые соверщаются по тому же закону и с той же
частотой, что и периодические воздействия на входе, но отличаются
по амплитуде и сдвинуты по фазе.
Обычно е возрастанием частоты входных колебаний со и инер-
ционности (постоянной времени) звеньев и систем амплитуда вы-
ходных колебаний ау уменьшается и их отставание по фазе ср уве-
личивается (рис. 33).
Частотная передаточная функция получается из обычной пере-
даточной функции подстановкой р — j<&, где / = У—1, и обо-
значается W (j®). Так как входная и выходная величины соверша-
ют незатухающие колебания, то их изображения по Лапласу сле-
дующие:
(О
cocoscp-bpsiny
59
а передаточная функция
IF (р) = -,Р~ = -^-(cos<p+— sin Ф ). (114)
X (р) ах Д <о )
Подставив в уравнение (114) р — jta, получим
W (j w) = A (со) (cos <р-Н sin ф) —U (со) + / V (со) (115)
или, используя формулу Эйлера,
lF(/w)=A (со) , (116)
где А (со) — модуль частотной передаточной функции [А (со) = ау1ах\
U(to) и V(<o) — соответственно вещественная и мнимая составляющие
частотной передаточной функции;
<р (со) — аргумент частотной передаточной функции.
Например, из передаточной функции апериодического звена по-
лучим:
k k . fe со Г . '
Г ~ J+(7’co)s~; 1 + (Тсо)2’
. k
А м u'+v‘ =у1+(Г<
ф (ш) = — arctg (в Г;
ИРНой-----*------- arclr <<./ )
У1 + (Гсо)2е
Для наглядного представлении об изменениях, модуля и аргу-
мента в зависимости от частоты колебаний используют графики, ко-
торые называются амплитудной частотной характеристикой (АЧХ)
(рис. 34, а), фазовой частотной характеристикой (ФЧХ) (рис. 34,6),
60
амплитудно-фазовой частотной характеристикой (АФЧХ)
(рис. 34, в).
Подбором параметров k и Т звеньев можно менять пределы про-
пускаемых частот. Если входной сигнал осложнен «высокочастотны-
ми флуктуациями», то вследствие непропускания системой высоких
частот выходной сигнал будет более гладким, сглаженным. Такая
система является фильтром нижних частот (сглаживающим фильт-
ром).
Для исследования работы соединения нескольких звеньев необ-
ходимо находить произведение передаточных функций. Значитель-
ное упрощение получается, если при этом использовать графики час-
тотных характеристик, построенных в логарифмическом масштабе,
так называемых логарифмических амплитудных и фазовых частот-
ных характеристик (ЛАЧХ и ЛФЧХ). Логарифм частотной переда-
точной функции [см. формулу (116)1 равен комплексному числу,
вещественной частью которого является логарифм модуля, а мнимой
частью—фаза:
1п П7(/й>) = 1п А (<1>).4-/<р (ш). (117)
9. Качество процесса регулирования
В результате переходных процессов в звеньях изменение на вы-
ходе регулируемой величины происходит по закону, зависящему от
свойств всей системы в целом.
Кривая процесса регулирования у (t), отражающая фактическое
значение выходной величины, должна лежать вблизи заданной про-
граммной кривой g (t) (рис. 35, штриховая линия), не выходя за до-
пустимые пределы. Если имелось начальное рассогласование у0,
то при быстрой ликвидации его система может «по инерции» пройти
за требуемое значение в противоположную сторону. Такое отклоне-
ние называется забросбм, или
перерегулированием, и является
динамической ошибкой. Процесс
установится через время tn с не-
которым постоянным отклоне-
нием хс — статической ошибкой.
Время затухания переходного
процесса, размер перерегулиро-
вания, число колебаний, ошибку
хс объединяют под общим наз-
ванием качество переходного
процесса.
При создании автоматической
системы необходимо выполнить
Рис. 35. График качества переходно-
го процесса
61
основные требования — обеспечить заданную точность регулирова-
ния при желаемом качестве переходных процессов. При этом глав-
ной задачей является формирование управляющего сигнала, ко-
торый обычно образуется из сигналов, поступающих от чувстви-
тельных элементов, корректирующих устройств и обратных связей.
Процесс улучшения качества регулирования посредством вклю-
чения корректирующих устройств рассмотрим на примере системы
регулирования курса судна (см. рис. 31).
Если управляющий сигнал сформировать только по размеру
рассогласования а, то двигатель будет работать на отклонение
руля от диаметральной плоскости (ДП) все время, пока существует
сигнал (7, — fejcc. Двигатель выключится только тогда, когда судно
придет на заданный курс (а — 0). Следовательно, судно будет вы-
ходить на заданный курс с рулем, отклоненным от ДП, и продол-
жит движение под действием руля и по инерции.
Работа схемы не способствует успокоению колебаний, и судно не
будет устанавливаться на курсе. Необходимо обеспечить следующие
условия ее работы: .
когда судно под действием руля остановилось, перекладка руля
должна прекращаться;
при возвращении судна на заданный курс руль должен отводить-
ся в прямое положение;
когда судно подойдет к заданному курсу, руль должен быть в
диаметральной плоскости — «прямо» ф = 0) либо переложен на
другой борт, чтобы обеспечить сдерживание судна.
Первые два условия обеспечиваются тем, что в схему управления
авторулевого введено дополнительное устройство, выдающее сиг-
налы о состоянии регулирующего органа (руля). Для этого осу-
ществлена дополнительная отрицательная обратная связь руля со
входом усилителя.* Напряжение, пропорциональное углу (3 откло-
нения руля, Uy — — ki Р вычитается из основного управляющего
сигнала Ux.
На вход усилителя теперь поступает разность двух сигналов:
feja—*7₽ = (/. . . (118)
Вследствие этого на усилителе и двигателе напряжение будет от-
сутствовать не при а = 0, а раньше, когда разность напряжений бу-
дет равна нулю. Рулевой привод выключится заблаговременно,
когда а =/?7//гф. При возвращении судна к заданному кур-
су угол а уменьшится, разность напряжений U изменит знак и
руль будет перекладываться обратно в прямое положение. Пере-
кладка руля до момента остановки судна может регулироваться из-
менением. коэффициентов kx и /г7.
Чтобы обеспечить сдерживание и устранить нежелательные ко-
лебания судна, необходимо выполнить опережение перекладки руля
с учетом тенденции движения корпуса. Это достигается введением в
62
, управление корректирующего
сигнала от тахогенератора, на-
пряжение которого пропорцио-
нально угловой скорости судна
^2 ~ ^2^*
Рассмотрим физическую сто-
рону процесса регулирования
при наличии этого сигнала.
Сложение сигналов по а и а
на участке ОА (рис. 36), где
угол а растет, форсирует дейст-
вие руля, и максимальное откло-
нение судна от курса (положе-
ние /) будет меньше (штриховая
кривая). На участке А В вследст-
вие вычитания сигналов откло-
нение руля уменьшается, и он
придет в ДП раньше (точка D,
положение 2), еще до перемеще-
ния ДП судна на заданный курс.
В дальнейшем (участок DB) за
время t' руль будет переложен
на противоположный борт, чем
и обеспечивается .сдерживание
(положение 3).
В случае несимметричности
корпуса, работы винтов или
рыскания судна на волнении
(рис. 37) наблюдается уход суд-
на с заданного направления.
Если на графике суммы площа-
дей слева и справа от заданного
курса равны, то в среднем судно
будет идти правильно. Если же
они не равны, то наблюдается
статическая ошибка ас — по-
стоянное отклонение судна в
сторону большей площади (на
пример, «судно идет на ветер»),
равен разности указанных пло
дения:
Рис. 36. График корректировки си-
стемы автоматического регулирова-
ния:
а—углов отклонения судна от заданного
курса а; б — скорости их изменения а;
в — угла перекладки руля 3
Рис. 37- График рыскания судна от-
носительно заданного курса
Средний угол отклонения (сноса)
цадей, деленной на время наблю-
t
ac==(S+-S_)//=faA/f. (119)
о
63
' Для исключения этой статической ошибки ас в схему авторуле-
вого введено последовательное корректирующее звено, интегрирую-
щее углы рыскания судна и создающее сигнал управления, пропор-
циональный этому интегралу Ua = k3 J a dt.
Под действием этого управляющего сигнала руль отклоняется от
диаметральной плоскости на некоторый постоянный угол 0С. Соз-
дается вращающий судно момент сил, компенсирующий отклонение
судна от заданного направления.
Система автоматического регулирования, не имеющая статиче-
ской ршибки в выходной величине, называется астатической.
Иногда законы регулирования формируются по более сложным
нелинейным и логическим зависимостям, включающим ограничения
на координаты, скорости их изменения и возможные ускорения в
системе. При этом достигается оптимизация какого-либо критерия
качества переходного процесса (максимум быстродействия, мини-
мум ошибок или перерегулирования и т.д.).
Окончательно характер переходных процессов и качество регу-
лирования (быстродействие, точность) определяют при решении урав-
нений движения [см. формулу (111)] путем использования специаль-
ных методов и критериев.
Для исправной работы любой САР необходимо, чтобы переход-
ные процессы, вызванные внешними воздействиями, с течением вре-
мени затухали, т. е. чтобы система была устойчива. Устойчивость
системы определяется частью уравнения движения САР [см. форму-
лу (111) без правой его части]. При этом необходимо и достаточно,
чтобы все корни характеристического уравнения имели отрицатель-
ную вещественную часть.
Однако вычисление корней характеристического уравнения
представляет известную сложность, поэтому в теории регулирова-
ния разработаны оценки, используя которые, можно судить об ус-
тойчивости системы непосредственно по коэффициентам уравнения
без вычисления корней. Такие оценки называются критериями
устойчивости системы. К ним относятся алгебраический критерий
Гурвица, графоаналитические критерии Михайлова и Найквиста,
оценки логарифмических частотных характеристик и др.
Например, по критерию Гурвица' переходный процесс в системе,
описываемой уравнением 3-го порядка, устойчив, если при положи-
тельных значениях всех коэффициентов при переменной произведе-
ние средних коэффициентов будет больше, чем крайних. Для САР
курса судна [см. уравнение (111)1
* ( *7 4~ *2 *с) *С *1 ТС *7 *3
ИЛИ
*14- k2 kc/ki-Тс k3 > 0. (120)
64
Таким образом, для устойчивости системы необходимо иметь оп-
ределенные соотношения между коэффициентами передачи kit
/г2, k3, к-, звеньев регулятора и /гс, Тс судна. Значения kc иТс за-
висят от загрузки судна, дифферента, скорости, волнения и других
факторов, поэтому для получения лучшего качества переходного
процесса судоводителю приходится в море регулировать коэффици-
енты усиления общего kt, сигнала тахометра fe2 и обратной связи k,.
Для повышения точности регулирования увеличивают чувстви-
тельность выносных измерительных преобразователей и коэффици-
ент усиления регулируемой величины, включают в закон управле-
ния интегральные сигналы; для повышения устойчивости вводят сиг-
налы по производной, уменьшают постоянные времени звеньев.
При этом наблюдается противоречие: повышение точности системы
обычно ведет к снижению ее устойчивости, увеличение запаса ус-
тойчивости ведет к снижению быстродействия.
Для исследования и синтеза систем автоматического регулирова-
ния и, в частности, для анализа переходных процессов широко при-
меняются вычислительные машины аналогового и дискретного дей-
ствия. Моделирование процессов на вычислительных машинах по-
зволяет выбрать наилучший вариант построения сложной САР, ее
отдельные параметры и установить с достаточной точностью воз-
можное качество процесса регулирования.
В аналоговых машинах физический процесс, протекающий в ре-
альной системе (напряжение, сила тока, угол поворота), моделиру-
ется аналогично (описываемый теми же дифференциальными урав-
нениями) в вычислительной машине (ВМ). Имеется возможность мо-
; делировать всю систему в целом и ее отдельные части, включать
в модель реально существующие технические звенья. Особенно удоб-
ны аналоговые ВМ для исследования линейных с переменными ко-
эффициентами и нелинейных систем.
Однако развитие программного обеспечения ЭВМ привело к соз-
данию стандартного модуля автоматизированного анализа и синте-
за систем. Применение модуля позволяет наглядно оценить качество
работы САР при различных вариантах построения и настройки, по-
лучая результаты в виде графиков переходного процесса и распе-
чатки.
Качество автоматической системы может оцениваться по вре-
мени переходного процесса, минимуму перерегулировки, установив-
шихся погрешностей, колебательности, расхода энергии или макси-
муму надежности в условиях эксплуатации и другим показателям
качества. Систему, в которой добиваются минимума или максимума
одного из критериев качества, называют оптимальной по этому пока-
зателю.
Не существует единственного универсального критерия качества
для всех систем. Когда одинаково важны два каких-либо критерия,
то составляется новый, комбинированный показатель качества,
з Зак. 1453 65
41
экстремальное значение .которого нужно обеспечить. Этот показа- <
тель называется критерием оптимальности системы.
Методы достижения оптимальности качества системы рассматри-j
ваются в теории оптимальных систем, которая определяет лишь ма-
тематические операции в системе над входной функцией, приводя-
щие к желаемому результату, но не определяет структуру и парамет-
ры оптимальных систем.
Вопросы построения оптимальных систем иногда решают исходя
из комплексных интегральных оценок качества процесса регулиро-
вания:
1
f I(aa)2 + (fca)a+(^)2l^ = min,
о
где Тр — время регулирования;
а, Ь, с — коэффициенты, зависящие от внешних условий и гидродинамиче-
ских характеристик судна.
Следовательно, стремятся достигнуть плавности переходного
процесса с малыми отклонениями судна от заданного курса и руля
от диаметральной плоскости.
Включение в структуру системы управления судном микроЭВМ
позволяет создавать самонастраивающиеся и самоприспосабливаю-
щиеся системы, адаптирующиеся к изменению многих внешних
и внутренних факторов, влияющих на результат управления.
Например, управление судном будет различным в зависимости от
видимости, течения, ветра, загрузки, извилистости фарватера,
числа встречных судов и других факторов. Подобные системы
обладают способностью запоминать характерные черты управ-
ляемого процесса, количественно и логически анализировать об-
становку и на основании анализа автоматически изменять програм-
му действий, приспосабливаясь всякий раз к изменениям условий
и обстоятельств плавания.
10. Принципы программного управления судном по курсу
Автоматизация определения местоположения судна с достаточ-
ной быстротой и точностью позволяет перейти к автоматизирован-
ному управлению курсом судна при плавании по заданным путям.
Для автоматизации управления курсом судна необходимы следу-
ющие операции:
задание программы плавания;
приложение управляющих воздействий к объекту;
при наличии отклонений выработки траектории возвращения
судна на заданный путь и коррекции курсов дальнейшего движения.
66
Под программой плавания понимают заданную траекторию суд-
на, т. е. совокупность последовательных точек, через которые дол-
жен пройти центр тяжести судна, с наложением ограничений на ори-
ентацию его диаметральной плоскости. Она может быть задана либо
координатами опорных точек поворотов, либо аналитическим урав-
нением, занесенными в память ЭВМ, либо линиями пути, нанесен-
ными судоводителем на электронной карте дисплея.
Принципиальное отличие системы программированного плавания
от применяемых авторулевых состоит в том, что авторулевой авто-
матически регулирует курс, заданный ему судоводителем, тогда
как система должна автоматически выдерживать движение центра
тяжести судна по заданной линии пути с учетом воздействия течения,
ветра, т. е, курс судна в данном случае является величиной пере-
менной.
Смещение с заданного пути совершается, как правило, под влия-
нием внешних воздействий. Возвращение судна на заданный путь
подчинено определенному закону, называемому программой выхо-
да, в которой учитывают обнаруженное значение начального сме-
щения с пути, допускаемое по навигационным ограничениям изме-
нение курса исходя из его габаритных размеров, осадки, динамиче-
ских характеристик (постоянной времени и радиуса циркуляции),
и некоторые дополнительные условия — критерии оптимальности.
Следовательно, возможны различные программы выхода на за-
данный путь. Выбор одной из них обусловливается конкретными об-
стоятельствами и осуществляется человеком либо системой управ-
ления судном по заранее разработанным алгоритмам.
Задать программу плавания можно в виде заблаговременно наме-
ченных (исходя из навигационных и гидрометеорологических усло-
вий) координат опорных точек О (<p, X), 0г (фц Ij), 02 (ф2, ?
(рис. 38) и т. д., в которых необходимо изменить направление движе-7
3* 67
ния на некоторую постоянную величину. Координаты этих точек
последовательно извлекаются из запоминающего устройства ЭВМ
и служат для расчета курсов плавания.
В случае длительных переходов из пункта отправления (точка
О) в пункт прибытия (точка OJno ортодромии применяется формула
sin Kpi — cos <₽i sin (Хх—X) /1/1—cos4 S. (121)
Здесь cos S = sin cp sin <px + cos <p cos cos (Xr — X).
Заменяя в этих формулах координаты пункта отправления теку-
щими счислимо-обсервованными координатами, можно получить
курсы плавания по дуге большого круга.
Если расстояние между опорными точками не превышает
150 миль, то плавание можно совершать по локсодромии и формулу
(121) заменить более простой:
sinKi =AXfcoS(pCp./’|/'A(p^-|-(Akicos<pCpj)2 . (122)
Здесь ДХ|=Хг+1—Xi; Д<рг = <р(+1 —Фер, = (ф1+1 + ф<)/2-
Для нахождения квадранта, в котором располагается курс, тре-
буется выполнить логические операции:
"*h АХ$; . 0<Kf<90°;
при + Дфг < = 0; .“АХг; + АХ^; = 270° < Kt < 360°; 90о<Кг< 130°; (123)
при — Дф; < = 0; Kf = I80°;
>-АХ^ 180° < < 270°;
—I- АХ j i Ki -90°;
при [—AXt; Kf=270°.
Разность в курсах, полученных по формулам (121) и (122), ха-
рактеризует угол схождения меридианов и определяется ортодроми-
ческой поправкой б/<; = ЛХг sin фсР{, которая при плавании
вдоль меридиана равна нулю. При разности же долгот 1—2° даже в
высоких широтах (до 75 °) она не превышает Г.
Если в результате эпизодического определения места судна бу-
дет получена обсервованная точка Л4в (<р0> Хо), не совпадающая с
линией заданного пути, возникает задача возвращения судна на этот
путь и коррекции курса с учетом влияния ветра, волнения, течения
и ошибок управления, обусловивших смещение судна.
Смещение судна
lj = Дф^ sin Ki — cos фер^ cos К i (124)
68
Здесь Деру <рг — q>0; А^ = Хг — Хо; ФсР; = (ф« + Фо)/2.
Если [/;| < |/зад|, то судно находится в заданной зоне движе-
ния, если |/J >|/зад|, то необходима корректировка курса для вы-
хода в точку Of+1 (<pi+1, Xi+1).
При отсутствии навигационных ограничений программа выхода
может состоять в изменении курса на постоянную величину, рас-
считанную по формуле (122), с использованием координат обсерво-
ванной точки Мо и пункта прибытия Oj. Для компенсации воздейст-
вия внешних факторов в полученное значение курса вводят поправку
на снос
(SPi+l — Фо)2+ (^-i+1 — A.o)sCOS2<pcpf
Для определения знака («+» или «—») в формуле(125) выполня-
ют определенные логические операции.
В случаях когда имеются навигационные ограничения и требует-
ся более точное выполнение заданной программы плавания, возвра-
щение судна на заданную линию пути обычно совершается по не-
которой асимптотической кривой Мо СВ.
Закономерности изменения курса зависят от смещения I и неко-
торых параметров траектории выхода, которые устанавливают исхо-
дя из наличия навигационных и динамических ограничений.
Предположим, что судно должно двигаться по программной тра-
ектории выхода МйСВ (см. рис. 38), которая описывается функцией
l=lQe~{aS)‘t (126)
где а — некоторый коэффициент, характеризующий изменение значения I как
функции от времени;
Если принять, что вектор скорости судна совпадает с его ДП,
то изменение курса &Kt в каждой точке траектории равно углу меж-
ду касательной в этой точке и линией заданного пути:
dl
tg(180-A^) = -tgAKi = —.
Для крупнотоннажных судов при малых смещениях судна из-
менения курса должны быть небольшими (менее 15°) и можно при-
нять, что tgAKj № l\Ki и S = vt cos AKj « vt.
Тогда
bKi (S)=2aMeSe-(aS>’. (127)
Максимальное изменение курса, которое, очевидно, будет в точ-
ке перегиба кривой выхода с(—k=
\_aV2 Ve
77=1 = al0V2/e.
69
Если расстояние Н до навигационных препятствий мало и срав-
нимо с длиной судна L, то существует ограничение для изменения
курса
L/2
Следовательно, должно выполняться неравенство Д/(4 та)[ <
< Д^доп или al0V2le с АКД0П,
откуда
<»•>
Подставляя значение а в формулу (127), получим конкретную
закономерность изменения курса судна при выполнении программы
выхода по функции (126), удовлетворяющей навигационным ограни-
чениям. Однако далее следует проверить, сможет ли СУС по своим
динамическим свойствам осуществить программу выхода и какие
управляющие воздействия для .этого необходимы.
Должны быть следующие ограничения:
dK dK 1 .
~Т— < Шц max ИЛИ —— < —-----------, ( 129)
dt dS tfiimhi
гДе max — максимальная угловая скорость судна;
шin — минимальный радиус циркуляции судна.
Если эти ограничения выполняются, то могут быть привлечены
критерии оптимизации программы выхода, например, расстояние
или время возвращения на заданный курс должны быть минималь-
ными: 5ВЫХ = min или (вых — min.
Могут быть привлечены также комплексные критерии:
V I
I=$[P+(q i)2]d/=min. ф (130)
0
Для обеспечения дальнейшего движения по линии заданного пу-
ти в курс следования судна должна быть введена поправка на снос
С с целью компенсации воздействия причин, обусловивших сме-
щение судна.
11. Динамические характеристики судна
как объекта управления
В 60 — 80-е годы водоизмещение транспортных судов иг увеличи-
лось в 10—20 раз, а их скорости о возросли в 1,5—2 раза. Следова-
тельно, количество движения mv, которое необходимо изменять при
управлении движение^, возросло в 15—40 раз. Поэтому при срав-
70
нительно небольших управляющих воздействиях для изменения ре-
жима движения судна требуется обычно длительное время.
Совокупность навигационных свойств судна, обеспечивающих его
перемещение в нужном направлении с требуемой скоростью, назы-
вают маневренностью судна. Маневренность судна не постоянна.
Изменения ее происходят под влиянием скорости, загрузки, крена,
дифферента, обрастания подводной части корпуса морскими орга-
низмами, мелководья, волнения, ветра и других факторов.
Рассмотрим влияние наиболее существенных из них.
Перемещение судна создает предпосылки для работы руля. При
этом чем больше скорость, тем лучше судно слушается руля. При
заднем ходе скорость уменьшается, на руль перестают действовать
струи от винтов, в результате поворотливость судна ухудшается.
Ось вращения судна проходит через центр сил сопротивления
движению и не имеет постоянного положения. При движении судна
вперед она располагается ближе к носу (на расстоянии 0.2--0.3 дли-
ны судна от форштевня), при движении назад она перемещается к
корме, поэтому момент сил, поворачивающий судно, на переднем
ходу больше, чем на заднем.
Изменение в расположении грузов на судне приводит к переме-
щению его центра тяжести и изменению момента инерции. Если
сильно загружены оконечности судна, то оно поворачивается мед-
леннее и с трудом возвращается на курс. При крене судно ували-
вается в сторону возвышенного борта. При дифференте на нос ско-
рость снижается, появляется рыскливость. Корма легче отклоняет-
ся в сторону под действием руля и винта, при небольшом дифференте
на корму скорость несколько увеличивается, но ухудшается управ-
ляемости. Большой дифферент на корму приводит к резкому сниже-
нию скорости.
Обрастание подводной части корпуса морскими организмами так-
же ведет к снижению скорости судна и ухудшению управляемости.
При плавании на мелководье и в узких каналах создается допол-
нительное сопротивление воды движению судна, последнее теряет до
25 % своей скорости, появляется рыскливость.
Волнение способствует рыскливости судна, винт и руль времена-
ми оказываются выше уровня воды, что ведет к ухудшению манев-
ренности.
Ветер сильно влияет на суда, имеющие большие надстройки и
значительный дифферент. Попутный ветер вызывает рыскливость,
при боковом ветре на судах с кормовыми надстройками нос судна
уклоняется к ветру, при заднем ходе к ветру отклоняется корма.
Наличие течения также сказывается на управляемости судна.
При следовании против течения оно управляется лучше, чем при
следовании по течению. Боковое течение сбивает судно с курса.
Возрастание тоннажа судов, применение бульбообразных носо-
вых наделок также ведут к ухудшению маневренности.
71
Отсутствие вращающих моментов сил, однозначно определяющих
движение носовой и кормовой оконечностей судна при различных
влияющих факторах, не позволяет формализовать операции манев-
рирования и формулировать требования к системе автоматизации
этих процессов.
Управление одновинтовыми крупнотоннажными судами в слож-
ных условиях—весьма сложная задача, решение которой достигает-
ся длительным накоплением навыков в практических услови-
ях. Поэтому необходимо дальнейшее внедрение на флоте эффектив-
ных вспомогательных маневренных средств (подруливающих и тор-
мозных устройств, активных рулей, поворотных насадок, новых
типов двигателей), а также развертывание работ по применению ме-
тодов математической логики для описания взаимосвязей между
различными факторами, действующими на судно.
Динамическим характеристикам судна как объекта управления
посвящено большое число фундаментальных исследований. В неко-
торых работах с достаточной для практического применения точно-
стью изменения курсов и скорости судов описаны сравнительно про-
стыми зависимостями. Рассмотрим результаты этих исследований.
Поворот ДП судна вокруг вертикальной оси под действием пере-
кладки руля рк приближенно описывается дифференциальным урав-
нением 2-го порядка
Л а + а =-М„, (131)
где 7\ — постоянная времени судна по углу поворота;
а — угловая скорость ДП судна (рис. 39, а);
&i— коэффициент преобразования.
Угловая скорость ДП судна а — соц (рис. 30, б): .
«ц = *1₽к(1—
а=Мк (132)
где — <оуСт — установившаяся угловая скорость судна.
В зависимости от загрузки судна, его скорости и кладки руля
параметры k± (рис. 40, а) и 7\ (рис. 40, б) для судов морского флота
изменяются в следующих пределах: — 0,01-4-0,08 с-1; 7\ =
= 104-70 с при = 10-4-30°.
Рис. 39. Графики временных характеристик судна при изменении его курса
72
Рис. 40. Изменение коэффициента кладки руля (а) и постоянной времени (б)
танкера «Белград» в грузу
При предельных отклонениях руля существенно снижается эф-
фективность его действия — коэффициент kv На малых скоростях
постоянная времени стремится к бесконечности. Происходит потеря
управляемости судна. При изменении направления движения одно-
временно значительно падает скорость судна. Падение скорости
зависит от угла кладки руля (рис. 41). Эта зависимость аппроксими-
руется на графике прямой линией.
Установившаяся скорость циркуляции
иц. уст Рк — 1'н—Я1 Рк»
(133)
где а, — коэффициент пропорциональности (а, = Дс'ц.уст Рк/Рк, Для тан‘
кера «Белград» он равен 0,33 уз/... °, или 0,173 м/с- ...°).
Процесс падения скорости судна подразделяется на два этапа
(рис. 42, а): равнозамедленное движение (до точки а) и экспоненци-
альное движение. Ускорение
равнозамедленного движения
/а + ТЭ ta+T9 ’
(134)
где Гэ — постоянная времени экс-
поненты.
Ускорение равнозамедлен-
ного движения для условий, от-
раженных на рис. 42, (оп „ =
= 0,0256 м/с2.
Рис. 41. Зависимость падения ско-
рости танкера «Белград» от угла
кладки руля
73
Таким образом, изменение скорости судна на циркуляции
pH—ша. ц/ при << /о;
Уц(0 = 1 _(t—t \/т (135)
ЦОц (Л»)—уц. уст $к] « - а э + ^ц. уст Рк при ta<J<tycT•
Процесс изменения скорости судна при управлении движителем
описывается функциями двух видов. Во время реверса винта
(рис. 42, б) процесс протекает равнозамедленно (кривые 1—3), а
при уменьшении частоты вращения и остановке винта подчиняется
экспоненциальному закону (кривые 4—6). При маневрировании да-
же такими радикальными воздействиями, как реверс с «полного хо-
да вперед» на «полный ход назад» (рис. 42, в), тормозной путь и вре-
мя торможения довольно значительны (табл. 4).
При этом виде воздействий необходимо учитывать время запазды-
вания в обработке системой управляющего сигнала. Это время ха-
рактеризует взаимодействие комплекса управляющий орган — ре-
гулятор — энергетическая установка. В зависимости от типа энерге-
тической установки и средств передачи сигнала это время может быть
сравнительно большим —- 50—60 с и при частичном изменении ско-
рости судна достигать 30 % времени переходного процесса.
74
Таблица 4
Время торможения и тормозной путь судов при реверсе
Тип судна Водоизмеще- ние, т Скорость, Уз Тормозной путь Время торможе- ния, мин
В Кб в длинах судна
Танкер 206 000 16,6 25,6 14,0 20,9
120 000 17 14,5 14,0 11,0
61 600 16,7 7,5 14,0 14,0
Пассажирский лайнер 45 000 27 7,4 14,0 4,0
Грузовое судно 18 000 15,5 9,1 11,0 7,0
14 000 14,5 5,3 7,0 4,3
10 000 15,5 5,1 7,7 4,0
Ледокол 14 700 19,54 2,2 4,6 1,6
С учетом запаздывания скорость судна
[1 — (/—
1УД. уСТ ~Ь (УН—УЛ. уст) е ( В’
(136)
где он — начальная скорость;
/т — время полного торможения при реверсе;
Од.уст — установившаяся (заданная) скорость судна;
Тв — постоянная времени судна по уменьшению его скорости при
снижении частоты вращения винта.
12. Структура системы управления движением судна
и алгоритмизация задач управления
Управление предполагает воздействие на объект, для того чтобы
перевести его из одного состояния в другое. При этом предусматри-
вается, что управляющая часть системы достаточно точно отражает
состояние объекта, четко представляет состояние, которого надо до-
стигнуть, а также способы выработки надлежащих воздействий.
Отсутствие ясности в законах движения объекта под влиянием
управляющих воздействий, ограниченность выбора самих воздейст-
вий, внешние случайные возмущения создают рассогласование эф-
фекта управления с составленной программой. Появляется необхо-
димость своевременно откорректировать управляющие воздействия
либо изменить программу и выбрать один из «запасных» вариантов
достижения цели. Чем больше возможностей переведения объекта
из одного состояния в другое, тем легче управление. Чем тщатель-
нее изучены информационные связи и динамические качества эле-
ментов системы управления, чем точнее выработаны алгоритмы уп-
равления, тем больше эффект и пределы управления.
75
Структурная схема системы управления судном (рис. -13), включа-
ющая в себя человека-судоводителя /.относится к системе «человек -
техника». Информация о внешней обстановке и текущем состоянии
управляемого объекта 8 поступает по различным каналам от приборов
2 (гирокомпаса, лага, РЛС, РНС, спутника Земли) и <7 (радиолокато-
ра) и систем измерения навигационных параметров 10. К исполни-
тельной части СУС относятся основные системы управления винтом 4
(ДАУ) и рулем 5 (АР) и 5' (СЭУ) и вспомогательные системы под-
руливающие, тормозные и якорные устройства 6, которые могут
в определенных условиях использоваться в отдельности и совмест-
но. В обратную связь СУС включено встречное судно 7, относи-
тельно которого осуществляется управление движением объекта при
расхождении судов.
В сложных условиях плавания в систему управления обычно
включают дополнительный контур управляющей части СУС— капи-
тана, который принимает на себя отдельные обязанности по управле-
нию. Появляются дополнительные дублирующие информационно-
контролирующие связи 11. Включение в СУС информационно-уп-
равляющей вычислительной машины (ИУВМ) 9 и дополнительных
ЭВМ 9' позволяет в значительной мере улучшить качественные пока-
затели системы управления — быстродействие, точность, надеж-
ность, пропускную способность.
Структура системы, выбор информационных и управляющих ка-
налов обычно изменяются в зависимости от условий и ограничений
внешней среды, надежности технических средств и прочих обстоя-
Рис. 43. Структурная схема системы управления судном
76
тельств плавания. При хорошей видимости в основном работает сле-
дующий контур: судоводитель 1 — исполнительные системы 4—6—
объект 8 — информационные блоки 2, 3, 7, 10. При ограниченной
видимости сигналы информационных блоков 2 и 3 должны быть пре-
образованы судоводителем в образы реальной обстановки. Такой
перевод сигналов является одним из труднейших умственных дейст-
вий и требует развитого образного мышления.
Обязанности судоводителя как управляющего звена СУС могут
быть разделены на две части:
наблюдение (за курсом, скоростью, внешней обстановкой); раз-
личного рода вычисления (счислимого или обсервованного места,
поправок приборов и т.д.), ведение судна к пункту назначения по
избранному маршруту;
анализ окружающей обстановки, учет метеорологических усло-
вий плавания (местных, в пункте назначения и прогнозируемых),
выбор- пути следования, выполнение маневров при расхождении с
другими судами, осуществление рейса при наиболее благоприятных
обстоятельствах (безопасная и качественная доставка груза или пас-
сажиров, максимальный экономический эффект).
Квалифицированный судоводитель — это человек, овладевший
необходимыми специальными знаниями и обладающий, кроме того,
инициативой, способностью критически оценивать обстановку и
предвидеть события. Он организует процесс движения и координи-
рует работу всех элементов СУС, связывая их в единое целое. Его
активная деятельность зависит от различных факторов и, в частно-
сти, от влияния на него окружающей обстановки, состояния его здо-
ровья, режима и продолжительности выполняемой работы.
Особенно большое влияние на деятельность судоводителя оказы-
вает появляющееся со временем в течение работы утомление. Оно
снижает качество восприятия окружающей обстановки, приводит к
уменьшению быстроты реакции, что приводит к ошибочным дейст-
виям. Утомление человека-оператора неравнозначно влияет на от-
дельные виды его работы. Особенно быстро начинают ухудшаться
своевременность и надежность обнаружения световых сигналов и
оценка информации, а также способность к принятию решений при
наличии большого числа факторов и неоднозначных алгоритмов ре-
шения.
Время, необходимое на оценку опасности при сближении судов
на носовых курсовых углах, иногда достигает 80% всего времени пос-
ле нахождения отметки встречного судна на экране РЛС. Затраты
времени на распознавание опасного судна по сравнению со временем
нахождения его на экране РЛС в течение вахты непрерывно возраста-
ют, достигая к концу ее 90 %.
Время оценки информации и принятия решений в значительной
степени зависит также от тренировки оперативного мышления судо-
водителя. Математически обучаемость судоводителей ^оц в зависи-
77
мости от числа тренировок лтр {рис. 44) можно выра ши. » н чующим
образом:
Гоц = д
где 4, В, лер — средние значения коэффициентов, характерные дли конкрет-
ных групп обучающихся:
А мин
В, мин
Пер .
Курсанты
(группа I) /
7
1
3
Курсанты
(группа II) 2
4,5
2
2
Капитаны ,?
3,5
1
2
Значение В — 1-?2 мин может быть принято за критерий обу-
чаемости судоводителя по оценке радиолокационной информации
и принятию решений о маневре.
Использование тренажеров, воспроизводящих реальную .карти-
ну процесса, позволяет выработать навыки быстрого нахождения
верного решения в любой конкретной ситуации, так как она будет
представляться ему в виде знакомой для решения задачи.
После тренировки у судоводителя формируются алгоритмы по-
иска. Происходит объединение параметров ситуации и формирование
некоторой обобщенной оценки, относительно которой распределя-
ются воспринимаемые объекты в каждом конкретном случае. Созда-
ние систем индикации, в которых выполнено объединение информа-
ционных сигналов в пространственно-временные структуры, на-
иболее полно отражающие эти оценки, является эффективным мето-
дом повышения безошибочности и быстроты действий судоводителя.
Рис. 44. График обучаемости судово-
дителей
Общее время прохождения
сигналов по контуру СУС со-
ставляется из времени:
получения исходной инфор-
мации от контрольно-измери-
тельных систем /н;
переработки информации,
оценки результата и принятия
решения /оп;
реализации решения — фор-
мирования команд и передачи
их исполнительному органу
изменения состояния объекта
(маневра)— переходного про-
цесса /м.
Продолжительность выполне-
ния каждого этапа в тех или
иных условиях конкретной СУС
в общем случае является случай-
78
Таблица 5
Оценка составляющих затрат времени
на прохождение сигналов (мин) по контуру СУС
Внешние условия *оц Маневрирование
Хорошая видимость (днем) 0,1 0,1 Курсом г 0,3 2
Плохая видимость 3 2 Скоростью 0,5 6
ной величиной с некоторым математическим ожиданием. Оценка
времени может быть получена на основе либо вычислений времени
переходных процессов, либо статистических наблюдений, либо в
результате экспертных данных. В последнем случае получают так
называемую пессимистическую t„; и оптимистическую ioj оценку
продолжительности выполнения.
Пессимистическое время — это максимальная продолжитель-
ность выполнения этапа при самых маловероятных и неблагоприят-
ных обстоятельствах; оптимистическое время—это минимальная
продолжительность выполнения данного этапа при самых благопри-
ятных условиях.
Если кроме верхней и нижней оценок известно наиболее вероят-
ное время выполнения этапа т.}, то его продолжительность
h = (tOJ+4mj+tn})/6. (137)
Мера неопределенности оценки характеризуется рассеива-
нием—дисперсией
а?==[(-'п/-4>,)/61г. (138)
Таблица 6
Характеристики надежности основных звеньев СУС
Звено ч-*0"4 Гср’ ’ гв-' Рэ (24) Р <100)
РЛС «Океан» 100 100 1,75 0,98 0,96 0,37
Гирокомпасы «Курс-4» 4,0 2500 3 0,999 0,99 0,96
(«Курс-5») Лаг МГЛ-25 5,0 2300 3,5 0,999 0,98 0,95
ЦВМ 33,0 300 10 0,97 0,9 0,71
Авторулевой 3,0 3500 0,5 0,999 0,999 0,97
СЭУ судна 3,35 3000 83,5 0,975 0,97 0,96
РНС 33 300 0,5 0,99 0,84 0,71
«Бриэ-Е» 13 780 — — 0,97 0,87
79
При этом вводится основное допущение, что продолжительности
этапов являются независимыми величинами по теории вероятностей,
а величины tj и о/ являются «истинными» теоретико-вероятностны-
ми величинами. Отклонения от математического ожидания, превы-
шающие Зег,-, настолько маловероятны, что ими можно пренебре-
гать. Наиболее значительные затраты времени приходятся на полу-
чение и обработку радиолокационной информации и выполнение
маневра изменения скорости в условиях плохой видимости (табл.5).
Нормальное функционирование технической части СУС для обе-
спечения безопасности плавания зависит от многих факторов (кон-
струкции системы, условий эксплуатации, организации обслужива-
ния). Примерные оценки характеристик надежности основных звень-
ев СУС для судов морского флота (табл. 6) получены некоторыми ис-
следователями.
Каждое звено в отдельности имеет довольно высокую вероят-
ность р (24) безотказной непрерывной работы в течение суток. Од-
нако, если система судовождения будет включать комплекс звень-
ев 1—6, то вероятность того, что он будет нормально функциониро-
вать в течение 24 ч, равна только 0,70. Длительная же непрерывная
работа в течение продолжительного рейса не может быть обеспечена.
Поэтому на судах широко применяются дублирующие технические
средства (рис. 45), работа которых основана на различных принци-
пах.
По международным правилам все судоводители должны пройти
контрольную проверку на электронных тренажерах, поэтому для
подготовки судоводителей к управлению крупнотоннажным судном
в различных условиях плавания используются довольно сложные
тренажерные установки. Обучающемуся обеспечивается эффект при-
сутствия на мостике реального судна, оснащенного навигационным
оборудованием и приборами управления, работа которых имитиру-
ется специальными моделями на ЭВМ.
80
Сопоставление затрат на создание и эксплуатацию тренажеров
и обучение на них с затратами на обучение на судовых техниче-
ских средствах показывает, что первые в 8—10 раз меньше.
Затраты на тренажеры окупаются в течение 2—3 лет их экс-
плуатации.
Критериями оценки действий человека при управлении мо-
гут быть временные показатели, максимальные и средние квадрати-
ческие отклонения от заданных величин, «серьезность» и число
ошибочных решений, интегральные показатели качества управ-
ления.
С появлением на судах персональных ЭВМ создается возмож-
ность их использования в обучении и тренировке членов экипажа по
выполнению своих функций, а также для контроля знаний.
Глава 3
АВТОМАТИЗАЦИЯ ПОЛУЧЕНИЯ И ОБРАБОТКИ
НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА СУДНЕ
13. Основные понятия по обработке
навигационной информации
С момента появления астрономических методов определения ко-
ординат места судна мореплаватели стремились упростить процесс
их вычисления. С этой целью создавались специальные таблицы,
номограммы и другие пособия. Так, для расчета эфемерид светил ис-
пользуются морские астрономические ежегодники (МАЕ), для вы-
числения азимутов и высот светил — специальные таблицы. Однако
наличие этих пособий не освобождает штурмана от необходимости
выполнения расчетных работ.
Процесс определения координат места судна одновременно по
двум светилам от начала измерения до нанесения обсервованного
места на карту еще и сегодня занимает не менее 20 мин.
Появление гиперболических РНС (фазовых и фазово-импульс-
ных)-потребовало решения задачи преобразования гиперболических
координат в географические. С этой целью используются, например,
специальные карты с заранее рассчитанными и нанесенными сет-
ками гипербол.
Навигационные системы с использованием искусственных спут-
ников Земли (ИСЗ) требуют выполнения на судне большого объема
вычислений по расчету координат спутника на момент измерения
навигационных параметров и собственных координат судна. Если по-
ручить эти вычисления штурману, то они потребуют значительных
затрат времени на их выполнение. Поэтому навигационные системы
с ИСЗ создаются при условии обязательного использования в судо-
вых приемоиндикаторах встроенных ЭВМ.
Требования к точности определения места судна и допустимому
времени на эти определения в зависимости от района плавания сле-
дующие:
Точность
Узкости (100 — 150 м) . . . . ± (54-10) м
Подходы к портам и узкостям ±(50 ±100) м
Прибрежное плавание . ±(0,14-0,2) мили
Открытое море ....................±(0,54-1,0) мили
Допустимое время
обработки данных
Непрерывное
определение
То же
Менее I мин
Менее 5 мин
Поэтому вычислительные работы за судоводителя все в большем
объеме выполняют вычислительные устройства, машины и системы.
К ним можно отнести, например, вычислительные устройства для
82
расчета счислимых координат (автосчислители), вычислители для
решения задачи расхождения судов, микроЭВМ, входящие в инди-
каторы навигационной ситуации РЛС, персональные ЭВМ и т.д.
Появление радиосекстанов также влечет за собой дополнитель-
ные расчеты по обработке информации, связанной с вычислением
координат места судна, стабилизацией антенны и ее наведением.
Создание новых навигационных систем не уменьшает, а увеличива-
ет число вычислительных процедур, которые необходимо выпол-
нить в процессе определения места судна. Эта тенденция несовмести-
ма с требованиями по безопасности мореплавания, освобождению
судоводителя от дополнительных обязанностей наблюдения за
навигационной обстановкой и непосредственного управления совре-
менным судном.
Решение навигационных задач на ЭВМ, в том числе вычисление
координат места судна, может быть выполнено с автоматическим и
ручным вводом исходных данных. Математические методы вычисле-
ния координат места судна остаются неизменными для тех и других
ЭВМ.
Решение всего комплекса задач, обеспечивающих вычисление
координат места судна, принято условно подразделять на первич-
ную и вторичную обработки навигационной информации.
К первичной обработке относят решение задач по повышению на-
дежности и точности измеряемого навигационного параметра, обес-
печению работы приемоиндикаторов различных навигационных си-
стем. К таким задачам можно, например, отнести выбор состава на-
вигационного комплекса на момент измерения, исключение гру-
бых погрешностей из измерений, определение и исключение система-
тических погрешностей. К задачам по обеспечению работы приемо-
индикаторов относят поиск навигационного сигнала, синхрониза-
цию, автоматическое слежение за сигналом, разрешение многознач-
ности в гиперболических навигационных системах.
Вторичная обработка навигационной информации включает в
себя вычисление координат места судна с оценкой точности.
14. Выбор численных методов решения
навигационных задач на ЭВМ и порядка измерений
Значительную часть стоимости современных ЭВМ, в том числе и
навигационных, составляет подготовка их алгоритмического и про-
граммного обеспечения. Сложность программного обеспечения ЭВМ
в большой степени зависит от выбора численных методов решения
навигационных задач.
Специфика вычисления задач судовождения на ЭВМ предъявля-
ет определенные требования к численным методам их решения. Эти
требования вытекают из постановки задач и из особенностей их
83
решения на ЭВМ. Часто эти требования бывают противоречивы.
Специфика постановки задач предъявляет требования к времени и
точности вычислений, а также к последовательности их решения.
Требования к численным методам решения задач на ЭВМ сле-
дующие:
число команд в программах должно быть минимальным, что по-
зволит уменьшить объем памяти постоянного запоминающего уст-
ройства ЭВМ и сократить время решения;
число исходных данных и промежуточных результатов также
должно быть минимальным, что позволит уменьшить емкость опе-
ративного запоминающего уетройства ЭВМ;
состав операций, реализуемых при решении задач, должен быть
по возможности минимальным, а операции простыми, что позволит
упростить устройство управления ЭВМ. Требования к точности
вычислений не должны быть завышены, что позволит использовать
минимальную разрядную сетку, сократить объем оборудования и
повысить надежность ЭВМ;
программы, обеспечивающие взаимодействие между задачами,
должны быть легко реализуемыми и не приводить к излишнему ус-
ложнению устройства управления ЭВМ.
Для удовлетворения этих требований более всего подходят ите-
ративные методы, позволяющие осуществлять циклическое решение
задач, последовательно приближаясь к получению конечного ре-
зультата вычислений с заданной точностью. Однако эти методы иног-
да не удовлетворяют заданному времени решения задачи и приводят
к необходимости повышения быстродействия ЭВМ. Это обычно про-
исходит при неправильном выборе приближённых начальных значе-
ний вычисляемых величин, что приводит к необходимости иметь
большое число последовательных приближений.
В то же время итеративные методы позволяют уменьшить число
команд в программах решения задач, сократить объем постоянного
запоминающего устройства, повысить надежность ЭВМ.
В навигационных ЭВМ эти методы находят широкое примене-
ние. Например, они используются при вычислении обсервованных
координат места судна. Так как при решении задач на ЭВМ воз-
можны случайные сбои, желательно, чтобы численные методы были
самоисправляющимися, позволяющими получить при этом резуль-
тат с заданной точностью.
Выбор численного метода в большой степени зависит от поста-
новки задачи. Поэтому следует прежде всего хорошо представлять,
где и с какой целью будет использоваться судоводителем результат
решения. Всегда необходимо стремиться, чтобы объем исходной ин-
формации, вводимой в ЭВМ для решения задачи судоводителем, был
минимальным. Это позволяет освободить судоводителя от дополни-
тельной загрузки. При постановке задачи следует также добиваться,
чтобы объем информации, выводимой на печать или на индикацию,
84
был также минимальным, но максимально информативным по со-
держанию.
Допущенные математические приближения при постановке за-
дач и при выводе формул должны обеспечивать заданную точность
вычисления. При подготовке задачи для решения на ЭВМ также оце-
нивают: влияние ошибки округления на результат вычисления;
максимально возможное число итераций, требуемое для вычисления
с заданной точностью; время вычисления; методы контроля вычис-
ления; трудоемкость программирования и отладки программ.
В состав современных судовых навигационных комплексов вхо-
дят приемоиндикаторы различных навигационных систем. Их
число с каждым годом продолжает увеличиваться. Средняя квадра-
тическая погрешность определения координат места судна по каждой
из навигационных систем не является постоянной и зависит от мно-
гих причин: местонахождения судна в различных участках их рабо-
чих зон, гидрометеорологических условий, времени суток и т. д.
В то же время судоводитель всегда заинтересован в определении
координат места судна с заданной средней квадратической погреш-
ностью за минимально возможный промежуток времени. Может так-
же ставиться задача но определению координат места судна с мак-
симально возможной точностью за заданный промежуток времени.
Эти задачи решаются путем подбора определенного сочетания нави-
гационных систем, приемоиндикаторы которых входят в состав на-
вигационного комплекса.
В некоторых случаях определяют и порядок измерения навига-
ционных параметров по выбранным системам. Под навигационным
измерением понимаю! определение значения физической величины,
соответствующей навигационному параметру, с использованием на-
вигационных систем. Критерием для выбора порядка измерения
служит заданное значение средней квадратической погрешности оп-
ределения места судна. По времени эта задача предшествует непо-
средственному измерению навигационных параметров. При реше-
нии задачи используют следующую методику. По значениям теку-
щих счислимых координат судна <рс и Хс рассчитывают прогнози-
руемые координаты <рпр и %пр на момент измерения по известным
значениям скорости v и путевого угла ПУ:
фпр = фс+cos ПУ\
^пр = Хс + и< sin/7У sec (рср,
где t — время измерения;
Фср — средняя географическая широта (<рСр — (Фпр + Фс У^].
По значениям <рпр и 1пр выбирают априорные средние квадра-
тические погрешности ог (i = 1, 2, N) всех навигационных изме-
рений ЛГ, которые можно выполнить с использованием навигацион-
ных систем, входящих в состав навигационного комплекса.
85
Из общего числа измерений 2V выбирают измерений, которые
обеспечивают заданное значение средней квадратической погрешно-
сти определения координат места судна озад, а также, если это тре-
буется, и порядок их выполнения.
С этой целью последовательно анализируют все возможные ва-
рианты сочетаний навигационных измерений и выбирают вариант,
обеспечивающий заданное значение средней • квадратической по-
грешности при минимальном числе навигационных измерений или
максимально возможное ее значение при заданном промежутке вре-
мени (при удовлетворении последнего условия учитывают время вы-
полнения каждого навигационного измерения в отдельности).
Эта задача даже при сравнительно небольшом числе рассматри-
ваемых сочетаний навигационных измерений может быть решена
только на ЭВМ. Потребуется большое время для ее решения, если
оценивать координаты места судна посредством эллипса погрешно-
стей.
15. Исключение грубых погрешностей из измерений
Понятие о грубых погрешностях. Грубыми принято считать по-
грешности, порядок которых не соизмерим с ожидаемой погреш-
ностью измерений. Грубая погрешность наряду со случайной и си-
стематической является составной частью погрешностей измере-
ния. В практике навигационных измерений при определении коор-
динат места судна возможность исключения грубых погрешностей
появляется при наличии не менее двух избыточных измерений.
Наиболее удачно эта задача решается при условии обработки всей
совокупности проведенных наблюдений при их ограниченном и не-
ограниченном числе.
Автоматизация исключения грубых погрешностей из измере-
ний применительно к навигационным системам, обеспечивающим
получение большого объема навигационной информации в малые
промежутки времени, ставит задачу проверки наличия грубых по-
грешностей в первых измерениях, не дожидаясь получения всей их
совокупности. Необходимость для судов, имеющих большие скоро-
сти, при плавании в опасных для судовождения районах непрерыв-
но иметь координаты своего места, заставляет переходить к последо-
вательной проверке погрешностей в каждом измерении в отдельно-
сти, не дожидаясь получения всей их совокупности.
Поэтому целесообразно рассмотреть возможные методы проверки
первых измерений в серии, последовательные методы проверки каж-
дого измерения в серии, а также исключения грубых погрешностей
при обработке всей совокупности проведенных измерений.
Исключение грубых погрешностей из первых измерений в се-
рии. Проверка первых измерений необходима для того, чтобы
86
иметь -уверенность в надежности обеспечения исходной информа-
ции приемоиндикатором (например, в отсутствии неизвестных сис-
тематических сбоев). Критерием для проверки служат рассчиты-
ваемые ЭВМ счислимые значения измеряемого навигационного пара-
метра по известным счислимым координатам места судна. Можно
также сравнивать первые обсервованные и известные счислимые
координаты места судна. При этом необходимо принимать во вни-
мание точность счисления.
Учитывая то обстоятельство, что счислимое место часто бывает
ненадежным, считать этот метод удачным нельзя. Однако в системах
автоматизации обработки навигационной информации он пока
является единственным.
Предположим, что в момент начала сеанса измерения навига-
ционного параметра d судно имело счислимые координаты <рс и
и Хс. Зная счислимые координаты и координаты навигационного
ориентира (ИСЗ, ведущих и ведомых станций фазовых или фазово-
импульсных РНС и т.д.), нетрудно рассчитать счислимое значение
навигационного параметра d0 на момент начала сеанса измерения.
Тогда, определяя-разность \d — dc| = I и сравнивая ее с заданным
значением /зад (которое зависит от точности счисления пути судна)
М —4зад| < /аад, можно определить наличие грубой погрешности.
Анализ можно также осуществлять по расстоянию переноса ли-
нии положения от счислимого места. С этой целью после вычисле-
ния элементов линии положения значение переноса Ап сравнивают
с предельной погрешностью счисления пути ос.пр. Эта погрешность
заранее записывается в запоминающее устройство ЭВМ с пульта.
Перенос
Д п = V | /2—9ст2|/(а«—6®) ,
где / — свободный член уравнения поправок измеренного навигационного
параметра;
а — средняя квадратическая погрешность измерения;
а и b — частные производные.
За предельную погрешность принимают трехкратное значение
средней квадратической погрешности счисления ос исходя из тех
соображений, что превышение значения Зас маловероятно: ос,пр —
= 3 ас.
Если Ал < Ос.цр, то навигационное измерение не отбрасывает-
ся и признак наличия грубой погрешности не индицируется. Если
Ал < сгс,пр. то измерение не обрабатывается, а признак индици-
руется.
Погрешность счисления пути может быть также вычислена на
ЭВМ по формуле
= / СТоб~°с ,
где aoCj и ас — погрешности обсервации и счисления, заранее рассчитанные и
записанные в запоминающее устройство ЭВМ.
87
За погрешность аоб принимают среднюю квадратическую по-
грешность обсервации, от которой ведется счисление, а за <>,.
среднюю квадратическую погрешность счисления пути, зависящую
от времени и гидрометеорологических условий плавания.
Определение наличия грубой погрешности может быть выпол-
нено и после вычисления обсервованных координат места судна.
В этом случае сравнивать можно и непосредственно по координатам:
I Фоб—Фс I Дфзад! 1^06 — I ^ Д^-зад.
где Дфзад и ДХзад — допустимые заданные разности географических широт
и долгот, зависящие от точности счисления пути судна.
Последовательная проверка наличия грубых погрешностей в
измерениях в серии. Предположим, что в момент времени измерен
навигационный параметр dr и определены координаты судна <рг и
Хр Известны скорость судна v и его курс К, а также уравнения дви-
жения навигационного ориентира в случае, если он подвижен (на-
пример, навигацирнного искусственного спутника Земли).
Тогда заранее на момент второго измерения t2 можно рассчитать
значения <рпр и Хпр:
фпр=Г (ф1> v< ^s)> Л.пр—(^l- V > Ki ^2) >
а следовательно, и счислимое значение dc.np:
. пр — f (фпр> ^цр> Ф Д)|
где Ф, 1 — координаты навигационного ориентира.
При |d2 — <2с.ир|>/аад можно судить о наличии грубой по-
грешности (значение 1аад устанавливают с учетом точности счисле-
ния). Эта процедура продолжается в течение всего сеанса измере-
ний.
Если в очередном измерении в серии окажется грубая погреш-
ность, ЭВМ рассчитывает счислимые координаты на момент времени
t3 и т. д. В случае повторений грубых погрешностей ЭВМ подает
сигнал.
В некоторых навигационных системах есть возможность после
первых измерений в серии перейти к контролю по первым или даже
по вторым разностям между последовательно проводимыми измере-
ниями. Этот переход возможен только при условии знания зако-
нов движения навигационного ориентира (например, ИСЗ) и суд-
на, определяющего свои координаты.
Использовать этот метод наиболее целесообразно при больших
скоростях навигационного ориентира или подвижного объекта, оп-
ределяющего свои координаты, и постоянной дискретности измере-
ния навигационного параметра.
Если в момент времени измерено значение навигационного па-
раметра dlt а в момент времени 1г — параметра d2, тогда при
/d2—
88
фиксируется наличие грубой погрешности
Ad=|&dT J+|a|,
где ДЛТ — расчетная разность значений параметров;
а — средняя квадратическая погрешность измерения навигацион-
ного параметра.
В случае наличия грубой погрешности в момент /2 ЭВМ рассчи-
тывает для сравнения разность 2Ad, и грубая погрешность в мо-
мент /3 определяется при условии, что |d3 — dj > 2Ad.
Расчетные разности могут меняться в процессе одного сеанса из-
мерений и зависят от законов движения навигационного ориентира.
Исключение грубых погрешностей из всей совокупности измере-
ний. При определении координат места судна грубые погрешности
могут быть вычислены при обработке всей совокупности проведен-
ных навигационных измерений. В этом случае имеется возмож-
ность исключать грубые погрешности из всей серии измерений од-
ного и того же навигационного параметра, рассматривая их как од-
новременные.
Эту задачу целесообразно рассматривать с учетом ограничен-
ного числа измерений, как это обычно бывает в практике навига-
ционных определений координат места судна.
Предположим, что сделано пиз измерений (но не менее двух) од-
ного и того же навигационного параметра d со средней квадрати-
ческой погрешностью о.
Среднее значение d в случае равноточных измерений находят как
среднее арифметическое:
d=^dt/n,
1
где i = 1,2.. пиз.
Рассматривая эти пиз измерений как случайную выборку из ге-
неральной совокупности возможных измерений этого параметра,
имеющих нормальный закон распределения, можно найти отноше-
ние
/=(d-d)/[<rV(n+!)/«]>
где оД/(п-|- 1)/п—средняя квадратическая погрешность вычисленного средне-
го арифметического значения d, имеющая плотность ве-
роятности, которая определяется функцией распределения
Стьюдента с числом степеней свободы л — 1.
Функция распределения Стьюдента случайной величины t
г(—\
\ 9 I , ,о ( 62 \--ч/2
5^(0=^-J / [я(л-1)Г1/2 1 +—-) , (139)
где Г — гамма-функция.
89
Распределение Стыодента используется при решении задач ма-
тематической статистики в случае ограниченного числа измерений и
определяется одним параметром — их числом. Характерной осо-
бенностью распределения Стыодента является его асимптотическое
приближение к-нормальному распределению с параметрами т = О
и ст -- 1 (т — математическое ожидание, ст — среднее квадрати-
। ческое отклонение).
Функция распределения Стьюдента при л — 1 =
V (1 + ,./„)«+.>/>
Уяя(п/2)
может быть выражена через элементарные функции посредством
сложных рекуррентных формул.
Если Sk (0 вычислена в явном виде как функция t, то можно най-
ти, при каком значении t вероятность (t) принимает заданное
значение 1—0. Причем £ можно выбрать, например, равным 0,01;
0,025; 0,005 или 0,001. Тогда вероятность того, что значение t прев-
зойдет границу t — ip, равна р. Абсолютное значение t может прев-
зойти границу /р с вероятностью 20 (с учетом знака /р).
Правило, согласно которому гипотетическую величину d отвер-
гают, если абсолютное значение t превосходит границу t$, называ-
ется критерием Стьюдента.
Значение t* зависит от значения р и от числа степеней свободы
К = п — 1. Границы значений fp заранее рассчитываются и запи-
сываются в памяти ЭВМ в виде таблицы.
Значение /р рассчитывают по формуле
t ^-5
Э aV(/i+l)/n ’
откуда допустимое отклонение от среднего арифметического значе-
ния
di—~d = е=а V(n+ 1 )/n,
хгде о — средняя квадратическая погрешность одного измерения.
Вероятность появления этой погрешности
о
где К — число степеней свободы (число проведенных измерений минус еди-
ница).
Задаваясь вероятностью появления величины е, например Р —
— 0,01, и проведенным числом измерений п, можно подсчитать зна-
чение отношения е/ст, для чего заранее можно составить таблицу и
записать ее в запоминающее устройство ЭВМ.
90
Так как е/о = /рУ(п + 1)/п, то е — a (е/а).
Сравнивая последовательно разности d — dc со значением е,
следует отбраковывать те измерения, которые не удовлетворяют ус-
ловию d—d < е.
При исключении грубых погрешностей из всей совокупности
измерений в серии может быть также использован метод сравнения
со счислимыми значениями измеряемого параметра. Увеличение чис-
ла измерений п приводит распределение величины t к нормальному
закону,
16. Исключение систематических погрешностей
из измерений
Под систематической погрешностью а понимают часть погрешно-
сти измерения, остающуюся постоянной или изменяющуюся по оп-
ределенному закону. Из практики обработки навигационных изме-
рений известны различные методы исключения и учета систематиче-
ских погрешностей. Применительно к рассматриваемым здесь зада-
чам систематические погрешности можно подразделить на постоян-
ные и переменные.
Постоянной называется погрешность, повторяющаяся в каждом
навигационном измерении без изменения по знаку и по значению.
Переменная погрешность от измерения к измерению навигаци-
онного параметра может изменять свой размер и знак, следуя опре-
деленному закону.
Каждую погрешность измерения е можно представить суммой
случайной и систематической погрешностей, последнюю из которых
подразделяют на постоянную и переменную:
е=6+ст-|-а',
где б — случайная погрешность измерения;
а — постоянная систематическая погрешность;
а' — переменная систематическая погрешность.
Для исключения систематических погрешностей из навигацион-
ных измерений необходимо сначала выявить причины возникнове-
ния, а затем, если это возможно, устранить их. С этой целью исполь-
зуют несколько методов обработки навигационной информации,
применяемых на ЭВМ. Один из них — метод определения постоян-
ной систематической погрешности при наличии избыточного треть-
его измерения.
Предположим, что проведено измерение трех значений одного и
того же навигационного параметра одним и тем же приемоиндика-
тором по трем различным навигационным ориентирам.
91
(140)
Уравнения поправок этих линий положения следующие:
Gj Д Ф 4“ bi А X *4~ /1 — 61 -f* п;
А ф-г^я А Л-|-= 6g+ <>;
. а3 А ф + Ь3 Д Х+/3 = 63 + о,,
где 6lr 62t 63 — случайные погрешности;
а — постоянная (повторяющаяся) систематическая погрешность.
Разность
— di —d$ c,
где di — измеренный навигационный параметр.
Частные производные
ddt д dt
ai==~^~' йг="7Г-
Задача сводится к определению постоянной систематической по-
грешности а. Найдем формулу для ее вычисления. С этой целью за-
меним систему уравнений (140) системой из трех редуцированных
уравнений:
Составим систему нормальных уравнений
[АА]ДФ + [АВ]ДХ+(АЦ=0;|
[А В] Д<р+(В В] Д1-г[В L] = O.J ' ’
Найдем из системы уравнений (142) Д<р и ДХ, которые свободны
от постоянной систематической погрешности:
, [A L] (В В]-[В Ц[А В] Дг
[AAHBL]-IABJ[AL] Да
да=----------------------- —-—.
Здесь Д = [АД] [ВВ] — [АВ]2.
Подставив значения Д<р и ДХ в систему уравнений (141), последо-
вательно найдем:
Ы л _i_ Ю А1 [Z1 - [а]Д1 -I-
— 4ф+—д1+—----------+
НД2 U1 _ 1 1
— з “(HAt + m д.) +— [И-
а =
92
Вычисленное значение постоянной систематической погрешности
измеряемого навигационного параметра исключается непосредствен-
но из измеряемых в серии его последующих значений.
Быстродействие современных ЭВМ разрешает исчислять задачу
определения постоянной систематической ошибки с заданной на-
дежностью и точностью. С этой целью последовательно повторяют
серии из трех измерений и определяют среднее значение постоянной
систематической погрешности
п
О = ^(Л/п.
1
Выбрав значения надежности Р и точности е, например, Р =
= 0,999 ив = ± 0,001, можно определить необходимое число изме-
рений (по три).
Для этого можно воспользоваться отношением <р = е/о. Здесь
ст = 1/ 2Ц-о)/[л(п-1)] . (143)
г 1
Подставляя формулу (143) в формулу (139), находят текущее
значение Зк (/) Сравнивают рассчитанное текущее значение на-
*р
дежности с заданной: р < 2 J Зд (/) dt.
о
Измерения повторяют до удовлетворения этого условия. После
выполнения этого условия постоянную погрешность исключают из
последующих измерений в серии.
Наиболее сложно определить и исключить из измерений пере-
менную систематическую погрешность. Установившихся приемов
решения этой задачи не существует. Можно применительно к авто-
матической обработке навигационных измерений рекомендовать ис-
пользование следующего методического приема. Этот прием спра-
ведлив только при допущении, что систематическую погрешность
можно считать постоянной в определенные промежутки времени.
Он сводится к задаче определения систематического сдвига в изме-
рениях.
Предположим, что предварительно из навигационных измере-
ний исключена систематическая погрешность. Из полученных трех
уравнений поправок находим их среднее значение
v=[ft)/3. Здесь t>i=cn.
Для того чтобы определить, содержится или нет в значении v си-
стематическая погрешность, воспользуемся критерием Аббе [14].
Условия для критерия Аббе следующие:
1 1 1 ”
g? =-------- у (vf+i—vj)8; S? =------ у (v<—v)*.
S1 2(л —1) ** 11+1 ' ' 1 я-1 w '
i = 1 Z= 1
93
Затем рассмотрим отношение ъ — gf/S*. Сравнивая г с в, опре-
деляем наличие систематического сдвига в повторяющейся погреш-
ности. Значение? выбираем из таблиц, которые заранее записаны в
память ЭВМ._ _
Если е < е, то среднее значение v систематической погрешности
не содержит; если 8 е, то систематическая погрешность содержит-
ся, и необходимо вновь повторить процедуру ее определения. Пос-
ле определения значения систематической погрешности ее исключа-
ют из навигационных измерений.
Наличие систематического сдвига в навигационных измерениях
вновь можно определить посредством критерия Аббе.
Для исключения систематической погрешности или медленно ме-
няющейся составляющей части погрешности в гиперболических
РНС существует метод, основанный на замене измеренной разно-
сти расстояний на свободное от влияния систематической погрешно-
сти приращение разности расстояний по каждому каналу РНС [3].
Предположим, что по двум парам РНС соответственно измерены
разности расстояний dt — d2 и d:i — d2. Выражения для двух раз-
ностных линий положения соответственно:
di—rdj=2aj;
d2— d2 —2д2 *
Уравнения линий положения приращений разности расстояний
имеют следующий вид:
Ki A'fji = (dj—d,) (dj da);
K1AtM=(di-dJ) (d,-d,).
где Kj н X, — линейные эквиваленты фазовых циклов;
Дфм и Дф83 — выраженные в циклах приращения гиперболических коорди-
нат.
Эта система уравнений имеет четыре неизвестных: <px, Х.1, <р2 и
Х2. С целью исключения двух неизвестных будем считать, что рас-
стояние, пройденное судном при перемещении из точки с коорди-
натами <pj и Хх в точку с координатами <р2 и Х2, может быть за корот-
кий промежуток времени (время измерения) рассчитано по данным
счисления с достаточной точностью.
Тогда, считая Д<р и ДХ известными и записав <рх — ф2 — Дф;
Xi = Х2 — ДХ, получим систему двух уравнений с двумя неизвест-
ными. Решение этих двух уравнений позволит получить координаты
Ф2 и Х2, свободные от влияния систематических погрешностей.
94
17. Комллексирование навигационных систем
Совместное преобразование информации, получаемой от различ-
ных навигационных систем, обеспечивающее в конечном счете опре-
деление координат места судна с минимальным значением средней
квадратической погрешности, называется комплексированием. Ха-
рактер погрешностей измерений навигационных параметров по этим
системам различен и, как правило, меняется в зависимости от мес-
тоположения судна, времени суток и других факторов.
Точность и надежность определения координат места судна мо-
гут быть улучшены в результате совместного использования навига-
ционных систем. Наиболее часто совместно используют спутнико-
вые, фазовые и фазово-импульсные РНС, которые , несмотря на воз-
действие широкополосных помех, имеют хорошую долговременную
стабильность навигационного параметра, и автономные навига-
ционные системы, например лаг и гирокомпас, погрешности кото-
рых накапливаются в зависимости от времени плавания, а сигналы,
соответствующие навигационному параметру, имеют хорошую крат-
ковременную стабильность.
Это обстоятельство позволяет получать наибольший эффект от
комплексировання, так как навигационные системы имеют различ-
ные частотные характеристики погрешностей. Так, погрешности
фазовых, фазово-импульсных и спутниковых РНС — высокочастот-
ные, автономных систем (лага, гирокомпаса) — низкочастотные
(рис. 46). Совместное использование этих систем позволяет, сохра-
няя достоинства каждой из них в отдельности, повысить точность и
надежность определения места судна.
Комллексирование навигационных измерений возможно лишь
в том случае, если различные навигационные системы объединены в
автоматизированный навигационный комплекс с использованием
ЭВМ. Обработка навигационных измерений в автоматизированном
комплексе включает несколько задач, среди которых наиболее
сложной является фильтрация— выделение полезного сигнала из
смешения этого сигнала со случайной помехой.
Все навигационные измерения и их погрешности рассматривают-
ся при этом как случайные функции времени с известными статис-
тическими характеристиками.
Алгоритм, позволяющий вы-
делить полезную составляющую
сигнала в соответствии с задан-
ным критерием оптимальности,
называется оптимальным фильт-
ром. Передаточная функция это-
го фильтра должна обеспечивать
минимальную среднюю квадра-
Рис. 46. График погрешностей авто-
номных систем ес и РНС ерлс
95
Ьрие (t)-ec(t)
Рис. 47. Схема компенсации Рис. 48. Частотные характеристики
погрешностей счисления и РНС
тическую погрешность выделения сигнала, которая и будет кри-
терием оптимальности.
К алгоритмам оптимального навигационного фильтра предъяв-
ляются специфические требования, вытекающие из характера нави-
гационных измерений. Так, алгоритм должен быть справедлив
для случая нестационарных процессов, обеспечивать фильтрацию
при коррелированных и некоррелированных помехах.
Использование в качестве критерия оптимальности минималь-
ного значения средней квадратической погрешности имеет следую-
щие преимущества:
оценка не зависит от закона распределения, а в случае нормаль-
ного распределения совпадает с принципом максимального правдо-
подобия;
оценка совпадает с принятой в практике судовождения оценкой
точности проведенных навигационных измерений.
Наиболее часто в качестве основы для комплексирования исполь-
зуется метод компенсации, который позволяет иметь сравнительно
простой алгоритм.
Рассмотрим использование метода компенсации при совместной
обработке навигационных измерений от автономной навигацион-
ной системы и от фазово-импульсной РНС (рис. 47). В этом случае
непосредственно на вход фильтра поступает разность между изме-
ренным значением радионавигационного параметра и вычисленным
его значением по счислимым координатам места, определенным по
показаниям лага и гирокомпаса. Задачей фильтра является выделе-
ние погрешности автономной навигационной системы.
Можно было бы выделить погрешность РНС, но в этом случае
полоса пропускания фильтра будет значительно шире (рис. 48), чем
при выделении погрешности автономной системы. Кроме того, при
выделении погрешности РНС часть полезного сигнала (заштрихо-
ванная на рис. 48) была бы пропущена фильтром. Так как спект-
ры погрешностей значительно различаются, (например, <ос =
96
= 0,18-10~4; Ирнс = 0,1- Ю-1), то этот случай наиболее благопри-
ятен.
Задача решается более удачно, если спектры погрешностей не пе-
рекрываются. Выделенная фильтром погрешность с учетом знака
суммируется со значением навигационного параметра, рассчитанного
по показаниям автономной навигационной системы. Окончательное
значение навигационного параметра используется для определе-
ния координат места судна.
Измеренное значение радионавигационного параметра х (/) со-
стоит из его истинного значения х' (/) и погрешности ернс (/) (см.
рис. 47):
х (О = х' (О 4"®рнс (О-
По счислимым координатам фс и к2, определенным в соответст-
вии с показаниями лага и гирокомпаса, по известным координатам
береговых ведомой и ведущей станций РНС, кодовым задержкам,
скорости распространения радиоволн рассчитывают счислимое зна-
чение радионавигационного параметра хе (t) на момент измерения:
хс (t\=x' (0+вс (0.
где ес (/) — погрешность автономной навигационной системы.
На вход фильтра после вычитания поступает разность погреш-
ностей двух систем:
ернс (0 —(0 =[х' (0 + врНс (0] — [<* (0— ес(<)].
На выходе фильтра выделяется погрешность автономной навига-
ционной системы ес (/). Спектры погрешностей, имеющих высоко-
частотный и низкочастотный характер, перекрываются (см. рис. 48).
Поэтому выделить низкочастотную погрешность автономной систе-
мы полностью не представляется возможным.
Следовательно, погрешность ес (t), выделяемая на выходе фильт-
ра, будет иметь, в свою очередь, погрешность, зависящую от пере-
даточной функции фильтра F (р).~
Сигнал на выходе схемы компенсации можно записать следую-
щим образом:
х (<)“*' (0 +«с (0+^(р)[«рнс (0—вс(0] =
=х' (П+f (Р)врнс (П + П-f (Р)]8с(0.
где F (р)врнс(/) 4- [1 — F (p)J ec(Z) — окончательная погрешность прове-
денного навигационного измерения, получаемая в ре-
зультате совместной обработки, не зависящей от истин-
ного значения измеряемого навигационного параметра.
4 Зак. 1453 97
Если рассматривать погрешности ес (/) и еРНс (0 как независи-
мые, можно записать выражение для дисперсии окончательной по-
грешности е на выходе комплексной системы:
4-00
У {[ | f G (О) р SPHC (в) ] + [ 1 -I F (j ®) р Sc (<о)]} d <о,
где ы —круговая частота;
1 4- «•
— J SpHc = Стрнс — дисперсия погрешности РНС;
ционной системы;
SpHC (©) и Sc (в)—спектральные плотности погрешностей соот-
ветственно РНС и автономной системы.
В случае если спектральные плотности погрешностей систем
находятся в различных частотных спектрах, дисперсия <т| всегда
будет меньше дисперсий о'рнс и о? в отдельности.
Таким образом, задача синтеза оптимального навигационного
фильтра сводится к нахождению его физически реализуемой переда-
точной функции F (р). В конечном счете задача фильтрации заключа-
ется в определении импульсной реакции оптимального навига-
ционного фильтра посредством интегрального уравнения.
Весовая или импульсная переходная функция линейной систе-
мы представляет собой реакцию этой системы в момент t на единич-
ный импульс, действующий на систему в момент т. Зависимость меж-
ду входом и выходом оптимального навигационного фильтра в об-
щем виде может быть представлена как линейный интегральный опе-
ратор
4/(0 = У Ж',*) [«рис (0—«с(О]<*т.
где у (/) — выход фильтра;
g (/,т) — весовая или импульсная переходная функция;
ернс — ес (О = х (/) — вход фильтра.
На выходе фильтра (рис. 49) получается значение погрешности
счисления пути судна, которое используется далее при вычислении
свободных членов уравнений поправок.
Наибольший интерес для построения фильтра представляют ме-
тоды, в которых используется пространство состояний, позволяю-
щие упростить синтез оптимального фильтра. Решение с использо-
ванием этих методов имеет рекуррентную форму и легко реализуется
на ЭВМ. Они позволяют осуществлять синтез для стационарных и не-
стационарных процессов во временной и частотной областях, обес-
98
Рис. 49. Структурная схема обработки навигационных измерений при нали-
чии фильтра
печивая при этом оценки с минимальными дисперсиями среди всех
линейных несмещенных оценок.
Чаще для синтеза оптимального фильтра используется один из
этих методов — метод дискретной фильтрации [1]. Он обладает сле-
дующими преимуществами:
применим для стационарных и нестационарных процессов (для
случая установившегося режима):
справедлив в частотной и временной областях, однако решение в
частотной области очень сложно, поэтому основные преимущества
метода проявляются во временной области;
не требует хранения в памяти ЭВМ результатов измерений;
позволяет сравнительно легко определить структуру фильтра.
Для построения фильтра необходимо иметь заранее вычислен-
ные корреляционные функции погрешностей навигационных систем,
входящих в навигационные комплексы.
18. Автоматизация счисления пути судна
В навигации счисление пути судна можно осуществлять различ-
ными способами:
графическим — путем графических построений на карте;
письменным — путем вычислительной работы по таблицам;
аналитическим — путем определения вектора скорости и ин-
тегрирования его по времени.
При автоматизации счисления может быть применен только ана-
литический способ, в котором предусматривается наличие алгорит-
мов обработки исходных данных и вычисления счислимых коорди-
нат места судна.
Рассмотрим счисление пути судна по относительному лагу и
компасу. При построении пути судна в прямоугольной системе ко-
ординат хОу или AfOF (рис. 50) в начальный момент вводятся дан-
4* ЭД
ные места отправления — условные х0, у0 или географические %,
Хо. Если известны линия пути (путевой угол ПУ) и путевая скорость
уп или скорость судна относительно воды v и его курс К, а также
скорость va и угол общего сноса под воздействием течения и дрейфа
б, то пройденное расстояние относительно грунта в условной прямо-
угольной системе координат, ориентированной относительно мери-
диана углом у, определим по формулам
t t
х—х0= f i'n cos (у—ПУ) dt = | [v cos (y—К) cos (6—y)J dt;
о 0
( <
У—ye = j’vnsin (у— ПУ) Г[у sin (y —K)4-u6 sin (6—y)]d/.
o o
Если ось Ox направить на заданный пункт следования, например
в точку 0i(xlt У]), то получим так называемые маршрутные коорди-
наты, в которых координата х — пройденное расстояние, а у —
боковое смещение от заданной линии пути. Угол поворота осей в
этом случае равен заданному курсу. Очевидно, что плавание будет
совпадать с заданным путем, только если боковое смещение у = 0.
Если же принять у = 0, т. е. ось Ох направить вдоль меридиана,
то получим систему географических координат, в которых
180 , 180
d ф =--—- dx; dx—-----------du,
я R nRcosq
<a=
где R — радиус Земли.
В результате интегрирования получаем изменения координат
широты места
180 .< 180 с
ф— <р0 =--—— k ип cos ПУ dt = — I (v cos K-|-oe cos 0) dt
п о Я о
и долготы места
. , 180 r-Vn sin ПУ 180 с и sin К + v/. sin 6 ,
л— Л» =---— I ---------dt =---—- I -----------х----dt.
- Я R J cos ф я R J cos ф
Метод счисления пути судна по лагу и компасу является основ*
ным методом навигации. Однако недостаточно тонное знание век-
тора скорости течения и влияния ветра на дрейф судна сильно
ограничивает его возможности.
С появлением на судах радионавигационных, радиолокационных
и спутниковых систем появилась возможность достаточно точного
определения места судна в различных условиях с недлительными
перерывами, в течение которых требуется обеспечить счисление
пути с наименьшей погрешностью. В связи с этим после очередного
100
Рис. 50. Схема счисления пути суд-
на в прямоугольной системе коорди-
нат
Рис. 51. Схема счисления пути суд-
на в полярной системе координат
определения места можно рассчитать путевую скорость и путевой,
угол действительного перемещения судна, записать в память ЭВМ,
а затем использовать их для текущего счисления пути до следую-
щей обсервации и возможной коррекции. Такое использование вы-
числительных данных действительного движения вместо исполь-
зования показаний лага и компаса получило название обсерваци-
онного счисления.
Рассмотрим способ вычисления путевой скорости ип и путевого
угла ПУ при наличии на судне средств автоматической радиоло-
кационной прокладки (САРП) и неподвижного радиолокационного
ориентира.
Имея полярные координаты D и П неподвижного ориентира А
(рис. 51), можно определить: __________
модуль вектора путевой скорости цп — V Ь2 + (D/7)2;
путевой угол ПУ — П — е — П — arctg
угол сноса С = ПУ — К,
а также кратчайшее расстояние, на котором судно пройдет данный
ориентир, DKf) — Dsine = D2flivn.
При использовании абсолютного лага составляющие скорости
движения по географическим осям рассчитывают по формулам
оЛ, =t'xcos К —vy sin К; vE = vx sin K-\-vy cos К,
где vx и Vy — соответственно продольная и поперечная составляющие скоро-
сти судна относительно грунта.
Ввиду того что погрешность счисления пути накапливается с
течением рремени, желательно найти интервал времени между дву-
мя очередными коррекциями, который называют периодом коррек-
ции.
Обозначим погрешность метода, используемого для коррекции,
Мк, а допустимую погрешность в определении места по счислению
101
Л4Д. Как только погрешность счисления пути Ms достигнет зна-
чения допустимой погрешности Мд, необходима коррекция, в ре-
зультате которой погрешность счисления снижается до значения
чувствительности корректора Mv. После этого корректирующее
средство может быть отключено до момента, когда значение Ms
вновь достигнет значения М д, и т. д.
Чем быстрее накапливается погрешность счисления Afs и мень-
ше разность Мд — Мк, тем короче период коррекции Т, и наобо-
рот, — чем медленнее накапливается погрешность Мя и чем боль-
ше разность Мд — Мк, тем реже надо применять коррекцию.
Из навигации известно, что средняя квадратическая погреш-
ность счисления пути по компасу и лагу (пренебрегая погрешно-
стью интервалов времени) определяется зависимостью
gs = У (ов/)2+(<тпу vn/)2 = un tУ(ar/vn)2 + a^y ,
где од — путевая скорость;
<тв и опу — средние квадратические погрешности измерения соответственно
скорости и путевого угла.
Зная допустимые погрешности счисления Мд, корректирую-
щего навигационного средства Мк, а также то, что 6v„ = (1-j-3)6„
и 6/7У — (1-гЗ)6Пу, найдем период коррекции
г_ Мд-Мк
Пример 19. Оценим численное значение периода коррекции, Пусть
дПУ = 1° = 0,02 рад; бо/оп = 2% = 0,02; Л1д = 0,1 мили; Л4Н = 0,03 ми-
ли и оп = 20 миль/ч. Подставляя эти значения в формулу (144), получим;
0,1—0,03
20 У 0,022 + 0,022
= 0,125 ч = 7,5 мин.
При определении коэффициентов и свободных членов уравнений
поправок (см. § 19) приходится находить счислимые значения dc
и Ас. Для их расчета пользуются формулами сферической триго-
нометрии, которая не учитывает сфероидичность Земли. Погреш-
ностью в азимуте при обработке азимутальных измерений можно
пренебречь. Погрешностью при вычислении dc пренебрегать нель-
зя, так как современные фазовые и фазово-импульсные РНС поз-
воляют определять место на расстояниях до нескольких тысяч ки-
лометров.
Существует несколько способов учета сфероидичности Земли.
Один из них заключается в равнопромежуточном изображении эл-
липсоида на шаре при условии совмещения полюсов. При этом ра-
венство меридианов достигается введением поправок А<р и АХ,
рассчитываемых по формулам. Поправками Аср исправляются ши-
роты точек, а АХ — разность долгот между ними.
102
Поправка
Ц — R (90° -<pQ arc 1°
Я arc 1°
где £f — расстояние по меридиану от полюса до точки определения места
судна;
<pz- — широты точек, между которыми рассчитывается расстояние;
R — радиус шара при условии, что масштаб п изображения эллипсоида
на шаре по средней параллели фср был равен единице:
_ flcos (фср + Л<Р)
Wcoscpcp
где W — нормальный радиус кривизны;
Фср — средняя параллель:
Фер = Ф1 + Фг/2>
где Ф1 и <р2 — координаты станций РНС.
Поправка
-Ь- „ "7^ , и-*.).
L R cos (фСр + Д<₽) J
где X] и ij- координаты места судна.
Радиус шара
О________‘V — ^-ср tg <Рср_
~ 1 — (90° — <рСр) tg <рсР аге 1° ’
где £ср — расстояние по меридиану от полюса до точки на средней параллели
Ч’ср-
Интересен также способ Андунайе—Ламберта, применение ко-
торого дает возможность использовать стандартные программы для
расчета тригонометрических и других функций на ЭВМ. Он позво-
ляет рассчитать поправку на сфероидичность Ad непосредственно
к вычисленному расстоянию d на сфере с известной большой полу-
осью а и первым эксцентриситетом референц-эллипсоида е. Поправ-
ка для вычисленного расстояния d между точками, широты кото-
рых соответственно срх и <р2,
Д d = P (sin фх-J-sin <p2)2 — q (sin <p, — sincp2)2.
Здесь
8 ' V ' cos2 (1/2) d’
a /, 3sin d— d
Выражение | (1 — ]/1 — г2) вычисляют заранее. Для эллипсои-
да Красовского оно равно 2672,753 м, для второго спутникового
международного эллипсоида 2672,706 м.
103
Учесть сфероидичность Земли можно также по формуле, пред-
ложенной проф. В. П. Морозовым:
A d = a [Р d—Q sin d cos (2v±d)J.
Здесь P=l-(e2/4±3e*/64) cos2a=I — Kjcos2»; Q=(3e2/4±
±3e4/16) cos2a=K2cos2a; v = arcctg (cos A ctg q>); cos2a=l —
— (cos <p sin 4)2.
Значения и Кг для эллипсоида Красовского и второго
международного спутникового эллипсоида соответственно Ку ~
• 0,00167545 м; К2 - 0,00502845 м.
Во всех случаях расстояние dc рассчитывают по обычным форму-
лам сферической тригонометрии. Например, значение dc может
быть найдено из формулы sin3y — sin2^=^ + sin3^ cos<pccosd>.
Погрешности вычисления геодезического расстояния по форму-
лам В. П, Морозова достигают ±30 м при расстоянии до 104 км.
19. Автоматизация вычисления координат места судна
Автоматизация вычисления координат места судна является
частью задачи ведения обсервационного счисления координат <р
и Л. Методы вычисления координат подразделяют на прямые и
косвенные. Под прямыми понимаются методы, позволяющие выде-
лять корни уравнений в явном виде:
4i=fi (Ф-М; 42 = F2(<p, 1), (145)
где dy и d2 — измеренные значения навигационных параметров.
Координаты соответственно <р — ф^, d2); X — фг^, d2). Слож-
ность алгебраических преобразований при этом зависит от слож-
ности функциональных зависимостей Fy и F2. При наличии более
двух навигационных измерений решение усложняется. В этом слу-
чае последовательно решают пары уравнений и находят их корни,
а затем среднее весовое значение.
Использование прямых методов на ЭВМ не всегда целесообразно,
так как они не позволяют добиться единообразия решения всех за-
дач вычисления координат места судна при условии измерения раз-
личных навигационных параметров, что приводит к увеличению
объема постоянного запоминающего устройства ЭВМ. К преиму-
ществам этих методов относится отсутствие необходимости в зна-
нии приближенных корней уравнений, что требуется при косвен-
ных методах. Прямые методы иногда находят применение в специа-
лизированных ЭВМ, встраиваемых в приемоиндикаторы.
104
Наиболее широко для вычис-
ления координат места судна
используются косвенные методы.
К этим методам относится и ши-
роко используемый в навигации
обобщенный метод
линий положения [221.
Решение задачи вычисления ко-
ординат места судна с использо-
ванием этого метода подразде-
ляется на следующие этапы: ре-
шение обратной геодезической
0 У
Рис. 52. График определения места
задачи, вычисление счислимых судна азимутальным приемом
значений измеряемых навига-
ционных параметров, коэффициентов уравнений поправок линий
положения, коэффициентов нормальных уравнений, координат ме-
ста и средних квадратических погрешностей или элементов эллип-
са погрешностей.
Для определения места судна в море в зависимости от исполь-
зуемых навигационных систем измеряют различные навигацион-
ные параметры (углы, расстояния, разности расстояний, высоту
светил и т. д.), каждому из которых соответствует своя изолиния,
т. е. линия равных значений параметра. Знание на момент опреде-
ления обсервованных координат места судна его счислимых коор-
динат с той или иной точностью дает возможность решать задачи
перехода от счислимых координат к обсервованным, используя
проведенные навигационные измерения. Независимо от вида на-
вигационного определения можно всегда воспользоваться азиму-
тальным приемом перехода.
Предположим, в момент определения места судно находилось в
точке С (рис. 52). Измеренный навигационный параметр дает ли-
нию положения II, на которой (следует считать) находится судно
в случае надежности счислимого места. Задача сводится к опреде-
лению значения и направления переноса Ап.
Распределение численных значений всякой функции U (изме-
ряемого навигационного параметра) представляется на картогра-
фической проекции изолиниями этой функции. Градиент характе-
ризует скорость и направление быстрейшего изменения функции
д у du
g= lim —— — —
дп-о Ал ап
(146)
С некоторым приближением можно записать
g—AU/л. п.-
105
Здесь
^U ^(Un3K + v)-Uc,
где t/lI3M — измеренное значение функции;
v — поправка;
Uc — счислимое значение функции.
Тогда
5=((Уизм + о)-Ус1/Лп. (147)
Линия положения // определится уравнением
A<pcosr+A(i>sinr = An, (148)
где Дю — приращение плавания.
Из формулы (147) Ап = (С7ИЗМ — Uc + v)ig. Подставив это зна-
чение в уравнение (148), решим его относительно v:
v=g cos тДф+g sin тДю— (t/изм—^c)-
Обозначив a = gcosr; b = gsinv, I = —At/ = — t/c, полу-
чим уравнение поправок v = aAq> + bAw + I.
Число уравнений поправок будет соответствовать числу прове-
денных навигационных измерений. Задача сводится к нахождению
А<р и Aw.
Величины а и b находим в зависимости от вида проведенного на-
вигационного измерения. С этой целью наиболее удобно добиваться
общности решения, разложив приращение функции АС/ в ряд
Тейлора и ограничиваясь первыми членами разложения, т. е.
приведением уравнений поправок к линейным уравнениям:
Дю— (t/II3M —Uc).
Здесь
Таким образом, методика составления уравнений поправок не
зависит от вида навигационного параметра. Формулы же для вы-
числения коэффициентов уравнений поправок различны в зависи-
мости от вида навигационного измерения.
106
Переход or уравнений поправок к нормальным уравнениям и
их решение также не зависят от вида навигационного измерения.
Их выполняют следующим образом.
Предположим, что проведены три независимых, равноточных
навигационных измерения, которым соответствуют следующие урав-
нения поправок:
Й2 Дф “1“ ^2 “Ь ^2 ~
а3 Дф+63 Aw-H3 = vs.
Так как уравнений поправок меньше, чем число неизвестных,
то для их решения используем способ наименьших квадратов,
вводя условие о2 -- [vv] = min.
Составим систему нормальных линейных уравнений:
[да] Дф + (й/>] Д<о-НаИ=0^
[а*] Дф-НМ] Ла>+[М] = 0.) ' '
Решение этой системы уравнений наиболее целесообразно при
небольшом числе навигационных измерений выполнять на ЭВМ ме-
тодом определителей, а при большом числе нормальных уравнений —
методом Гаусса—Зейделя. Недостатком метода определителей при
большом числе навигационных измерений является большой объем
вычислений.
Решение системы нормальных уравнений методом определите-
лей таково:
Дф =
[а/] [аб]
[Ы] [bb]
[аа] [а*]
[«И [bb]
Дй> =
IM [а/]
И] [Ы1
[да] [а£>]
Раскроем определители:
_ -[М] [дЛ-ЬИ] [Н] .
ф [aoJ[W]— [дб] [д5] ’
А [а&На11-1даНЫ]
Дсо==--------------------
[да] [£>Z>] —[aft] fai»]
При ручном счете эти уравнения преобразуют, при машинном —
преобразования не нужны.
Повторение вычислительного процесса продолжаем до выпол-
нения условия
| Дф,+! | — | Дф4 | <е; | До>г+11 —I ДШ|.| < S, (150)
где е — заданная точность вычисления.
Решение систем нормальных уравнений методом Гаусса—Зей-
деля заключается в следующем. Из уравнений (149) находим зна-
чения Д<рн = —J-Я; А®н = —пгт- Выбираем наибольшее из зна-
107
чений А(рн и Дсон» обеспечивая этим наиболее быструю сходимость
метода. Выбранное наибольшее значение подставляем в первое
нормальное уравнение.
Если Дю > А<р, из первого уравнения системы уравнений (149)
получим:
[дб] Дю-Цд/]
Подставив это выражение во второе уравнение системы уравне-
ний (149), найдем формулу для определения Ашь которое вновь
подставим в первое уравнение системы уравнений (149). Этот про-
цесс продолжаем до удовлетворения условий неравенств (150).
Обсервованные широту и долготу окончательно вычислим по
формулам <р = <рс + А<р; Л — Л,с + Аюзесф.
Средняя квадратическая погрешность обсервованного места
судна
==> Г7 М М
У \ [ад] [Ы»]~• [аб] [а*] [ад] [&&]—[аб] [аЬ] )
где а0 — погрешность одного навигационного измерения (п0 ==
= V(vv]//(rt — г) , где г — число неизвестных).
Оценка в некоторых ЭВМ выполняется посредством
ния элементов эллипса погрешностей:
2[ц&]
tg2T =----— -----;
А=У ^-{[a2]4-V([aa]-p*])2-4[ai>]2} 1
вычисле-
(151)
5 = ]/ 4-{[^]-У([аа]-[6*])2-4[дй|О .
где Т — угол ориентации большой полуоси эллипса погрешностей;
А и В — соответственно большая и малая полуоси эллипса погрешностей.
Рассмотренная методика вычисления координат места судна
предопределяет совместную обработку проведенных навигационных
измерений. Такой порядок вычисления требует хранения в запо-
минающем устройстве ЭВМ всех проведенных измерений.
С целью уменьшения объема запоминающего устройства ЭВМ
и повышения быстродействия можно использовать последователь-
ный метод вычисления координат места судна [221.
20. Расчет коэффициентов и свободных членов
уравнений поправок
Во многих навигационных ЭВМ коэффициенты и свободные чле-
ны уравнений поправок рассчитывают по азимуту ас и расстоя-
нию dt. (рис. 53), вычисленных относительно счислимых коорди-
108
нат судна. В некоторых случаях
(например, при последователь-
ной обработке навигационных
измерений) эти координаты мо-
гут быть счислимо-обсервован-
ными или даже обсервованными.
Введем следующие обозначе-
ния в навигационном сфериче-
ском треугольнике:
Фл?> — географические ко-
ординаты навигационного ориен-
тира;
ФС,ХС — географические коор-
динаты счислимого места судна
Рис. 53. Сферический навигационный
треугольник
в момент определения;
dc — расстояние от счислимого места судна до навигацион-
ного ориентира;
ас — азимут со счислимого места судна на навигационный
ориентир.
Найдем выражения для коэффициентов и свободных членов
уравнений поправок основных видов навигационных определений.
При определении места судна по измеренным расстояниям урав-
нение изолинии.равных расстояний будет иметь вид:
cos d = sin<p?v sin фс-г cos фд, pos <pc cos(XJV — Ae).
Расстояние между счислимой точкой и навигационным ориенти-
ром
d0 = arc cospin фд, sinфс + cosфдУсоз фс cos(Хд,— Хс)[.
Продифференцировав уравнение по ф и X, получим
ddc _ , -1
о =-----=
дф у 1— cos2dc
[sin фд, cos фс—sin фссоз фд, cos (Хд,—XC)J.
Выразив sin фс и со8фс через ас и воспользовавшись уравнением
cos d0 = sin фд, cos фс cosec (Хд,— Xe) — sin фс созфд, ctg(Xv — Xc), (152)
найдем a = —cosac; b — 7-[cos(pccos«)1Vsin (kN — Xc)] =
(/Л SIH uq
= sinaccos(pc; ^изм dc-
При определении места судна по высотам светил коэффициенты
и свободные члены уравнений поправок в случае измерения высот
светил h находят аналогично случаю измерения расстояний. Ис-
ходное уравнение для счислимого значения измеренной высоты
hc = arccos [sin фс sin 6-}-cos фс cos 6 cos (Xc— /rp)]t
где 6 — склонение светила;
/гр — гринвичский часовой угол.
109
Выражения для коэффициентов и свободного члена уравнения
поправок соответственно а = cosac; b — sinaccos<pc; I — Лизм — h,..
При определении места судна по гиперболическим радионави-
гационным системам измеряемым навигационным параметром явля-
ется разность расстояний. Вывод коэффициентов и свободного члена
уравнений поправок аналогичен предыдущей методике с той лишь
разницей, что находим разность вычисленных по формуле (152)
расстояний dcl и dc2 от счислимого места судна до навигационных
ориентиров с координатами фдг,, Х#, и срлгг, Х/а. Соответственно
формулы для определения а, b и I
a = cosac2— cosaC1; Z> = sinaC2—sina01;
l = (^2— ^1)изм-(^C2 — dcj).
При определении места судна по радиопеленгам и'сходное урав-
нение для получения коэффициентов и свободного члена уравне-
ний поправок в случае измерения радиопеленга следующее:
ctg ac = tg (Pjv COS фс cosec (XH— Xc) —sin <pc ctg (Xw — Xc).
Азимут
ac = arcctg [tg фдг cos <pc cosec (Xw—Xc)—sin <pc ctg (XH — Xc)].
Продифференцировав уравнение по переменным <р и X, получим:
а= — sin ac cos tpN cos dc; 6 = sin фл, sin dc—cos фусоз dc cos ac;
Z — (&ИЭМ — ac) sin dc cos фдг.
Таким образом, все коэффициенты и свободные члены уравне-
ний поправок вычисляют по значениям ас и dc. Для их расчета
могут быть использованы следующие, более удобные для програм-
мирования на ЭВМ формулы:
sin «с sin (Хс—Хн)
sin (90° — фд;) = sindc
. ,ю)
sin aQ
Чтобы получить формулу, удобную для вычисления cosdc, пре-
образуем уравнение (152), воспользовавшись следующими зависи-
мостями:
sin фс sin ф#=—[c°s (фс—<P/v)~С0ЧФс + Флг)];
COS фс COS Ф№=-^-[СО5 (фс + фл/) Н-COS (фс— Фдг)].
110
Подсинит их п уравнение (152) и сделав соответствующие пре-
образования, получим:
V сон (/сл« “[cos (<Рс— фд,) — COS (фс+ фдг)] +
-|- 4“ lcos (Ф° + Флг) + С08 (фс— фу)! cos (Хс — kN).
Значение а(. по формуле (153) неоднозначно. С целью определе-
ния знака ас по значению sinac через arcsinac находим в первой
четверти величину
По формуле
sin ф„ —sin фс cos dc
cosac =---------:,
cos фс sin ac
полученной из уравнения
cos (90° — фд/) — cos (90°—фс) cosdc-|-sin (90° —фс) sin dc cosac,
находим cosac с соответствующим знаком. Сравнивая знаки sinac
и cosac, определяем четверть. Зная d.c<) и четверть, где находится
направление, вычисляем значение азимута в круговом счете.
Расчет коэффициентов уравнений поправок по градиенту ли-
нии положения и азимуту направления от счислимого' места судна
на навигационный ориентир обеспечивает единый подход к реше-
нию всех задач. Однако при этом требуется анализ знаков sina и
cosa с целью определения четверти.
Вычислить коэффициенты и свободные члены уравнений по-
правок на ЭВМ без анализа знаков и нахождения свободного члена
по разности функций измерений и счислимой величины в неявном
виде можно также путем определения сферических треугольников
по формулам сферической тригонометрии, отказавшись от решения
обратных тригонометрических функций [221.
21. Вычислительные системы, алгоритмическое
и программное обеспечение ЭВМ
Все вышил птельпые системы в зависимости от их отношения
к классу решаемых задач делятся на универсальные, проблемно-
ориентированные. программно-ориентированные и специализиро-
ванные.
Универсальные ih.piцелительные системы характеризуются тем,
что совокупность решаемых па них задач предъявляет требования
только к их функциональным характеристикам и прежде всего к
вместимости ними in, iipcMetiit решения, разрядности.
Лроблелгшьо/>ш7шш/л1л//и»ыс вычислительные системы предназ-
начены для решении Ш1Дпч, отпоенщпхея к одному классу, что поз-
111
воляет специализировать алгоритмический язык и каналы ввода и
вывода внешней информации.
Программно-ориентированные вычислительные системы харак-
теризуются наличием заранее составленных алгоритмов решаемых
задач, которые обычно жестко коммутируются в постоянной памя-
ти систем. На программно-ориентированную систему возлагается
лишь решение задач за заданное время при условии изменения ис-
ходных данных.
Специализированные вычислительные системы применяются при
решении ограниченного числа задач, алгоритмы которых реализуют-
ся структурой вычислителя в виде единого вычислительного про-
цесса.
Вычислительные системы, используемые в навигационных авто-
матизированных комплексах, в зависимости от степени автоматиза-
ции могут быть специализированными, программно-ориентирован-
ными и проблемно-ориентированными. Так, например, вычислитель
РЛС «Океан», предназначенный только для решения задач расхож-
дения судов, вычислители, решающие задачу преобразования ги-
перболических координат в географические в цифровых приемо-
нндикаторах спутниковых, фазовых и фазово-импульсных РНС,
относятся к специализированным системам.
Электронные вычислительные машины, предназначенные для
работы в автоматизированных навигационных комплексах, имеют
заранее составленные и жестко записанные в их постоянной памяти
программы решения задач. Решение дополнительных задач путем
записи программ с пульта или с использованием других средств их
ввода невозможно. Эти навигационные вычислительные системы
относятся к программно-ориентированным'. Решаемые в них зада-
чи — это вычисления координат места судна и расхождения судов.
Намечается переход к использованию в автоматизированных
навигационных комплексах проблемно-ориентированных вычисли-
тельных систем, что объясняется необходимостью решения задач
экономико-эксплуатационного и диагностического характера. Эти
системы являются открытыми для новых задач. Проблемно-ориен-е
тированные системы имеют в своей постоянной памяти записанны
программы решения основных навигационных задач с автоматиче-
ским и ручным вводом данных.
В проблемно-ориентированных навигационных вычислительных
системах большое значение имеет их математическое обеспечение —
комплекс программ, позволяющий перейти от математической мо-
дели задачи к программе ее реализации на ЭВМ. Началом матема-
тического обеспечения ЭВМ считается появление стандартных под-
программ, таких, как вычисление тригонометрических функций.
Стандартные подпрограммы составлялись, как и программы
вообще, на языке, присущем данной машине. Причем каждая
команда расписывалась в машинном коде команд. Постепенно наме-
112
тйлся переход к записи машинных команд в буквенном виде. Пе-
рекодировку команд от буквенного вида к числовому стала выпол-
нять машина. Появились языки символического кодирования и
автокоды. В основе всех автокодов продолжает оставаться система
команд тон или иной конкретной машины.
Наиболее трудоемкой частью решения задач на ЭВМ была от-
ладка программ, на которую уходило много времени, а число оши-
бок не уменьшалось. Необходимы были методы составления про-
грамм, которые позволяли бы уменьшить вероятность появления
ошибок. С этой целью появились алгоритмические языки. Если
автокод присущ системе команд конкретной ЭВМ, то алгоритми-
ческий язык зависит только от класса решаемых задач.
Наиболее распространенными в мире являются алгоритмичес-
кие языки «СИ», «Паскаль» и «Бейсик». Они имеют простую струк-
туру и программу перевода с машинно-независимого языка на язык
конкретной машины. Такие программы перевода получили назва-
ние трансляторов. Широкое распространение получили также алго-
ритмические языки «Ада», ПЛ/1, «Фортран», «Алгол».
Имеются языки с четко выраженной ориентацией. Например,
для решения задач управления производством был предложен
язык «Кобол», который применяется также при решении эксплуа-
тационно-экономических задач, для решения задач в области на-
учных исследований — язык ЛИСП, для переводов текста — «Сво-
бод» и др. Последние три языка является проблемно-ориентиро-
ванными.
Стремление максимально использовать машинное время, авто-
матизировать процесс решения большого числа задач привело к
многопрограммной работе ЭВМ -- мультипрограммированию. Про-
стейшим случаем мультипрограммирования является пакетная об-
работка задач, когда машина автоматически решает их в заданной
последовательности.
Многопрограммная работа потребовала создания сложных уп-
равляющих программ, позволяющих осуществлять параллельную
работу различных устройств ЭВМ. Такая управляющая программа ,
получал.'! название супервизора. Управляющая программа, обес-
печивающая одновременное решение многих задач, называется мо-
нитором.
Большое быстродействие современных ЭВМ позволяет иметь
несколько корреспондентов (выносных пультов) для одновременной
работы нескольких операторов. Вводимые с нескольких пультов
в ЭВМ программы выполняются практически одновременно. Такая .
система pwricilini называется системой с разделением времени, кото-
рая может orymci ТНЛНТ1. решение с приоритетом. Несмотря на до-
вольно большое число разработанных алгоритмических языков,
назрела потребность а создании универсального алгоритмического
языка, у'штыш1111|цщо достижения мультипрограммирования.
из
Глава 4
АВТОМАТИЗАЦИЯ РЕШЕНИЯ ЗАДАЧ РАСХОЖДЕНИЯ СУДОВ
22. Принципы автоматизации приема, обработки
и индикации радиолокационной информации
Предпосылками к автоматизации решения задач предупрежде-
ния столкновений судов в море являются получение, обработка и
индикация необходимой судоводителю информации о внешней об-
становке и параметрах движения надводных объектов посредством
систем РЛС-ЭВМ. В автоматизированных системах (рис. 54) функ-
ции обнаружения целей, их захват, сопровождение, измерение ко-
ординат, вычисление параметров движения, элементов сближения и
дальнейшая передача данных на дисплей полностью автоматизи-
рованы.
Кроме обычного комплекта РЛС, в систему входят специфические
устройства: обнаружения отраженных полезных сигналов, буфер-
ное запоминающее устройство, ЭВМ и индикатор обстановки.
Для выделения полезного отраженного сигнала на фоне помех
используются два его свойства: во-первых, амплитуды импульсов
полезного сигнала U в среднем больше, чем амплитуды шумовых
выбросов Um, и, во-вторых, отраженный от цели сигнал пред-
ставляет собой пачку (серию) импульсов, разделенных равными ин-
тервалами повторения посылок (рис. 55). При ширине диаграммы
направленности 0, частоте следования посылок f и времени обо-
рота антенны Тоб точечная цель отразит пачку импульсов (за-
штрихованные части графика), число которых
ли = (0Тоб/36О°.
Например, для РЛС «Еннсей-Р» на шкале 4—8 миль (/ -
= 1500 имп./с, 0 = 0,8°, Т„а 4 с) получим отраженную пачку
примерно из 13 импульсов. Шумовые выбросы не могут образовать
подобную пачку импульсов с такими же равными интервалами меж-
ду ними.
Для обнаружения пачки применяются цифровые счетчики числа
импульсов между началом и концом пачки. Если число импульсов
в пачке превышает некоторое число порога, то принимается реше-
ние об обнаружении цели (рис. 56). Такие цифровые обнаружите-
ли работают по определенной логической программе и легко сопря-
гаются с ЭВМ.
Вокруг полученной отметки / цели ЭВМ формирует кольцо с
внешним радиусом, равным t'ma'xT06, и внутренним — t’miiJ’oc-
114
Рис. 54, Блок-схема автоматизированной системы
Рис 55. Пачка импульсов сигнала, отраженных от точечной
цели
Рис. 56, Принципиальная схема ав- Рис, 57. Траектории сопровождае-
тоза хвата цели мых целей
115
При втором обзоре в это кольцо могут попасть несколько отметок
2, 2’, 2". По двум точкам (/ и 2) вычисляются скорость и направле-
ние движения предполагаемой цели, экстраполируется их место-
положение на третий обзор 3, 3’, 3" и т. д. Вокруг экстраполируе-
мых отметок ЭО формируются области их вероятного отклонения на
основе ошибок предсказания. При попадании следующей отметки в
эту область цель считается реальной и принимается на сопровожде-
ние.
Таким образом, ЭВМ непрерывно наблюдает за каждой целью в
отдельности, и координаты одной цели при этом не могут быть при-
няты за координаты другой цели, так как по существу анализиру-
ются их траектории {рис. 57).
Случайное пропадание цели в каком-либо цикле обзора не пре-
рывает слежения за нею. В этом случае вместо действительных ко-
ординат учитывают упрежденные координаты предыдущего цикла
измерений для вычисления упрежденных координат последующего
цикла, т. е. ведется счисление координат движения цели. Машина
как бы восстанавливает цель при случайном кратковременном ее
пропадании.
Погрешности в экстраполяции координат снижают разрешаю-
щую способность РЛС-ЭВМ, особенно при первых (после появления
цели) циклах измерений координат, когда траектория цели еще не-
достаточно ясна. При последующих циклах измерений координат
закон перемещения цели определяется более точно и область не-
определенности автоматически уменьшается. В конце концов об-
ласть неопределенности будет характеризоваться только неточным
выявлением траектории цели (из-за погрешностей в измерении ко-
ординат) и возможностями —цели совершить маневр за время
эстраполяции.
Так как при вычислении скорости цели по измеренным ее коор-
динатам получаются большие случайные погрешности, то опреде-
ление траектории цели и ее прогнозирование (экстраполяция во
времени) проводятся путем сглаживания, усреднения значения и
направления скорости цели.
Процесс сглаживания состоит в том, что координаты цели и ско-
рости их изменения определяются с учетом предыдущих измерений,
который осуществляется таким образом, что роль более ранних
измерений постепенно снижается. Для этого ведется осреднение
нескольких измерений, каждое из которых умножается на весовой
коэффициент, снижающийся при переходе к более ранним измере-
ниям.
При качке судна возникают искажения в, изображении и изме-
ряемых координатах цели. Изображение на экране «размывается»,
а значительные крены могут привести к потере цели. Поэтому
успокоение бортовой качки судна, кроме создания благоприятных
условий для пассажиров и экипажа, облегчения нагрузок на кор-
116
лус и работ по креплению груза и т. п., необходимо также для
улучшения работы радиолокационных и других навигационных сис-
I тем информации.
Изображение окружающей обстановки появляется на экране
ЭВМ в виде обычной картины индикатора РЛС (часто совмещенной
с картой района плавания) и векторов перемещения целей (курса,
I скорости, местоположения) в относительном или истинном движе-
। нии, с ориентацией по курсу или меридиану, со смещением центра
развертки по желанию оператора-судоводителя. На экране ЭВМ
могут быть получены данные о параметрах движения любой цели
(курсе, скорости, времени и дистанции сближения, пеленге и рас-
11 стоянии до цели). Опасные цели индицируются особыми отметками
на цветном экране с подачей звукового и светового сигналов на
пульте управления.
II. ‘ '
23. Информационная модель и математическая
формулировка операции расхождения судов
Процесс управления судном при расхождении судов является
| нормальной навигационной операцией, необходимость в которой
। возникает в результате появления случайного события — наличия
опасного сближения двух или нескольких движущихся судов.
Операция расхождения судов должна выполняться, как и обыч-
ные навигационные операции, безопасно и рационально. В опера-
ции участвуют сложные динамичные объекты, люди, принимающие |
ответственные решения, технические средства, входящие в комплекс ।
системы управления судном. Существуют навигационные, гидро-
метеорологические, правовые и другие ограничения при расхожде-
нии.
Положение судов и течение процесса сближения могут быть |
предсказаны только с определенной долей вероятности на основе
изучения полученной информации и имеющегося опыта работы су-
доводителей в конкретных условиях плавания. Логически вся опе-
рация может быть представлена в виде ряда последовательных эта-
пов (рис. 58). На каждом этапе применяются определенные методы ।
и технические средства. Своевременное получение высококачест-
венного результата на предыдущем этапе является исходным и
определяющим фактором, дающим возможность выполнить последую-
щий этап и всю операцию в целом. |
Исходным следует считать этап выбора маршрута плавания,
который необходимо оценить с точки зрения возникновения необ-
ходимости выполнения операции расхождения судов, а также по-
лучения дополнительной информации Ио. ||
В пути первым этапом является обнаружение встречного судна
Ot. Если в условиях хорошей видимости при надлежащим образом
117 |
организованной вахтенной службе вероятность Р о6 достоверного
обнаружения 0г можно считать равной единице, то в условиях пло-
хой видимости дальность обнаружения зависит от гидрометеороло-
гических условий, эксплуатационно-технических данных радио-
локатора, типов судов, тренированности наблюдателя и других
факторов.
Второй этап Э2 операции заключается в определении элементов
сближения и параметров, необходимых. для анализа ситуации.
К ним относятся время и дистанция кратчайшего сближения, ра-
курс, курсовой угол встречного судна и относительная скорость
сближения судов. В условиях ограниченной видимости на получе-
ние и обработку информации судоводитель затрачивает некоторое
время 7Н, а результаты могут иметь большие погрешности, создаю-
щие неопределенность ситуации Рэ.с.
Третий этап операции предусматривает вероятностно-логический
анализ Д3 сложившейся ситуации с учетом действующих междуна-
родных и местных правил плавания, навигационных и других ог-
раничений.
Различные внешние условия, недостаточная четкость рекомен-
даций Международных правил предупреждения столкновения судов
(МППСС), в которых применяются только понятия качества («хо-
рошая морская практика»), наличие ограничений и признаков, не
являющихся строго детерминированными, приводят к необходи-
мости использовать статистические оценки опасности ситуации.
Эти оценки вырабатываются мореплавателями в течение длитель-
ного времени управления судами в реальных условиях плавания,
их уточняют на основе статистических наблюдений.
При выявлении безопасности дальнейшего движения выполне-
ние основной цели рейса продолжают. При наличии потенциаль-
ной опасности принимают решение о времени и виде маневра рас-
хождения.
На четвертом этапе В4 формируется дальнейшая программная
траектория с учетом навигационных ограничений, гидродинами-
ческих характеристик и размеров корпуса судна, а также возмож-
е 7 г з
У^31\э1Л3\в1,М5(К,У)Кв |р7
Рис. 58. Схема этапов операции расхождения судов
118
Судоводитель оператор
Цели, оценки r0Art Формирование
Технические средство Возмущения, ограничения
Объект
S(p, Л, tj
ограничения
I; l, в,7 ♦
Si !
«||
>1
=S t
"J
Вычисление
текущей
оценки
AP JI
1 Звуковые
j сигналы
nl
Рх, Л D
№, VOf РК, Д /7, v,t
Вычисление
элементов сбли
желая судов
Лае
Компас
РЛС
Время
I
lx
I к
Встречное
судно
| Визуальная связь-световые, здукобые\
сигналы, радиотелефон I
I_______________________________
Логико-вероятностная связь
Возмущения,
ограничения
^npj
1Й1
Рис. 59. Блок-схема информационных связей в системе управления движени-
ем судна
ностей системы управления создать надлежащие ускорения. Чем
сложней ситуация и меньше времени на ее анализ, тем чаще воз-
никают ошибки в решениях человека, принятых на основе предва-
рительных суждений.
На пятом этапе принятое решение о маневре выполняется сис-
темами, управляющими курсом и скоростью судна МкЪ, Мк< в6,
Мо5. Оценка этого этапа Рм может формироваться на основе теории
систем оптимального управления. Отклонение фактической тра-
ектории от программной контролируется Кв, и в случае необхо-
димости происходит коррекция управляющих воздействий либо
операция считается законченной Я,.
Существуют определенные информационные связи между от-
дельными элементами системы, участвующими в выполнении опе-
рации расхождения судов (рис. 59). Встречное судно включено в
контур обратной связи, т. е. оно рассматривается как элемент сис-
темы, и все возможные ограничения и изменения его состояния
должны учитываться при выполнении операции. Наиболее неопре-
деленным возмущающим фактором являются действия, предприни-
маемые судоводителем этого встречного судна.
Неопределенность в состоянии и поведении встречного судна
отражается на правильности решения об управляющих воздейст-
виях. Отсутствие или необнаружение встречного судна ведет к
разрыву информационных связей, и операция не осуществляется.
Между отдельными звеньями указанной информационной схемы
связей имеются переменные величины, существуют ограничения.
119
Некоторые из них могут быть измерены, рассчитаны либо предпо-
ложительно известны из статистического анализа.
В обычных условиях операция расхождения судов обычно тре-
бует незначительных затрат времени и энергии по сравнению с
затратами, необходимыми для достижения основной цели рейса.
Однако ее выполнение ограничивается ресурсом времени, имею-
щимся у судоводителя после обнаружения опасности.
В связи с этим математически (согласно формулам (78) и (79)1
задачу операции расхождения судов можно сформулировать в
следующем виде.
Обеспечить максимальную надежность (безопасность) операции
расхождения по всем этапам:
max IFo.p = max (1 —Ро в)Роб РЭфСРм> , (154)
где Р0.и, Ро6, P».c< рм — вероятности опасных встреч и этапов обнаруже-
ния, расчета элементов сближения и маневра при
условии, что их исполнение ограничено проме-
жутком времени То до кратчайшего сближения
судов после обнаружения встречного судна:
2 /г<Тв = ((Ооб, г/0), (155)
1=1
где ti — время выполнения Лго этапа операции;
Do6 — дистанция обнаружения встречного судна;
и0 — относительная скорость сближения судов.
Чтобы решить поставленную в таком виде задачу, необходимо
конкретизировать множители формулы (154), т. е. получить мате-
матическую модель выполнения операции и определить пути мак-
симизации безопасности В7ор в каждой реально сложившейся си-
туации с учетом ограничения по времени (см. формулу (155)5.
Для получения конкретных оценок, характеризующих успеш-
ность выполнения этапов операции, используют методику исследо-
вания операций, изложенную в § 6.
24. Оценки успешности выполнения этапов
операции расхождения судов
Оценка возможности опасных встреч и обнаружения судна.
Возможность появления опасного объекта на пути движения за-
висит от нескольких не зависимых один от другого факторов (плот-
ности движения, скоростей и направлений движения судов, гидро-
метеонавигационных условий и т. д.) и может быть выявлена из
наблюдений и статистического анализа.
Исследования показывают, что вероятность наступления опас-
ной встречи Р0.п в течение времени плавания, в данном районе
120
/</Пл подчиняется экспонен-
циальному закону
Р0-в (/</пл) = 1—е”Хо.в *пл, (156)
где 1о.р — интенсивность опасных
встреч, ч~1:
k
^о-в
к — I
— интенсивность вхождения
судов k-ro типа в опас-
. ную зону;
PBft — вероятность нахождения
судов й-го типа в данном
районе.
Рис. 60. График вероятностей обна-
ружения надводных объектов
Обнаружение надводных объектов зависит от геометрической
дальности видимости, оптической дальности источников света, ост-
роты зрения наблюдателя, конструктивных параметров РЛС, от-
ражающих свойств объектов, прохождения радиоволн, трениро-
ванности операторов и других факторов.
Вследствие указанных причин дальность обнаружения являет-
ся случайной величиной и закономерности ее изменения могут быть
выявлены только с использованием математической статистики.
Обычно вероятности обнаружения объектов имеют вид кривых
/, Г (рис. 60). Для вероятности, близкой к единице, их можно ап-
проксимировать прямыми 2, 2' либо экспонентами 3, 3'. В таком
случае вероятность обнаружения объекта РОб на расстоянии Dоб
больше заданного Озая:
/’об (Ооб>Озад) = 1-(Ооб-Озал)/(6а0) = (е-£>об-£>заД)/<60«>, (157)
где />зад — дистанция обнаружения, при которой данный объект будет
практически обнаружен с вероятностью, близкой единице:
о0 — среднее квадратическое отклонение.
Назначая, скорость, судоводитель должен учитывать появление
того или иного объекта на своем пути с определенной долей вероят-
ности. Если ориентироваться на объекты с минимальной дистанцией
обнаружения (сейнера, катера и др.), то скорости крупных судов
будут необоснованно заниженными, особенно при малой вероятнос-
ти появления таких судов в данном районе. В таких случаях можно
принимать дистанцию как средневзвешенную величину
_ k
/-’зад =2 /’в* ^задк’ (158)
1
где D3aflfc — дистанция достоверного обнаружения судов fe-ro типа.
Однако эта величина является решающей в обеспечении опера-
ции расхождения, и ее обоснование, по-видимому, требует специаль-
ных разработок и мероприятий.
121
Судоводители крупных судов
находятся в более сложных ус-
ловиях, чем судоводители малых
судов, поскольку при одних и
тех же средствах обнаружения
имеют меньше времени на вы-
полнение операции расхожде-
ния. Если учесть возросшую
инерционность крупных судов
(в связи с тем, что их тоннаж
увеличивается), то дефицит вре-
мени становится еще большим.
Рис. 61. График ресурсов времени
на операцию расхождения судов
Средние дистанции обнаружения судов (рис. 61) с использова-
нием РЛС (на судах водоизмещением 1000—3000 т) 1 — 8 миль,
по топовым огням (на судах водоизмещением 200 т) 2 — 5 миль,
по бортовым огням (на катерах) 3 — 2 мили. Увеличение скоростей
судов с 1975 по 1990 г. на 6—8 м/с привело к уменьшению ресурса
времени на 40—50%.
Оценка успешности определения элементов сближения. После
обнаружения подвижного объекта возникает этап определения эле-
ментов сближения с ним: дистанции, пеленга и его изменения, кур-
сового угла, ракурса, дистанции и времени кратчайшего сближения,
наличия ограничивающих факторов и т. д. При визуальном обна-
ружении на получение этих элементов человек затрачивает не-
сколько десятков секунд и получает их с достоверностью и точно-
стью, достаточными для выполнения последующих этапов операции.
В условиях пониженной видимости, тумана, мглы единственным
пока средством, позволяющим выявить некоторые из этих элементов,
является радиолокатор, который дает возможность непосредст-
венно измерить только дистанцию и пеленг (курсовой угол) до
встречного судна. Все остальные элементы необходимо получить
специальными измерениями и вычислениями либо графическими
построениями.
Процесс сближения может быть рассмотрен в истинном и отно-
сительном движении. Для формализации этого этапа целесообраз-
но использовать исходную информацию — расстояние до объекта
и курсовой угол (пеленг) на него, т. е. все элементы получить через
относительные полярные координаты встречного судна (рис. 62).
Из треугольника ОЛ0С0 получим
D„ = Dsin«; (159)
5 = и07' = У (160)
T—D cos6/n0, (161)
где D, S, 6 — переменные во времени величины, причем D > DK.
122
Разложив вектор v0 относительной скорости на направление
пеленга (курсового угла) и перпендикулярное ему, получим ра-
диальную и касательную составляющие:
o0cos6 = D; vosin6=/7£>. (162)
Следовательно,
= / D2 + (/7D)4 • (163)
Подставляя формулу (162) в формулу (159), получим:
DK = ± f]D2/va = ± tlD*lV (164)
или
1/ 1+02(-75-)2 • (165)
a D / У \ a U /
Знак функции DK зависит от взаимного расположения и пере-
мещения судов. Если пересечение курса происходит справа по но-
су или слева по корме судна О, то DK будет иметь знак «плюс»,
а при пересечении курса слева по носу или справа по корме — «ми-
нус».
Вторая полярная координата точки кратчайшего сближения
Со — пеленг /7С.О (см. рис. 62):
Лс.о = Л± (90°-6). (166)
Перед вторым членом уравнения принимают знак «плюс» при
положительном изменении пеленга и знак «минус» — при отрица-
тельном. Если второй член уравнения больше первого, к результа-
ту прибавляют 360°.
Рис. 62. График процесса движения судов в координатах DK и Т
123
о
I
Рис. 63. График определения рас-
стояния DK
Скорость изменения пеленга
обратно пропорциональна квад-
рату расстояния, и поэтому на
дистанциях между судами в 8
миль и более она мала (рис. 63).
Значения дистанции DK можно
определить по средней дистан-
ции Dcp и изменению пеленга в
градусах на милю сближения.
Когда D'1 D'k, относительная скорость может быть принята
I радиальной, и тогда, используя формулу (165), получим
dn
DK=D’——, (167)
a D
] откуда
dn = —— dD.
D2
I Проинтегрировав это выражение, получим
Д n=ni-nl = DK(D1-Di)/(D1Di)
или
£>к = П1О2Д/7/ДР. (168) I
Если расстояние Di изменилось за промежуток времени t„ на • '
AD, то оставшееся время до кратчайшего сближения
7'0= (Dj/Д D—1) Д/н. (169) 1
Если расстояния измеряются сравнительно точно, то
6D„ = DiD26(A Л)/ДР. (170) ।
Значения возможных погрешностей D приведены в табл. 7.
I
Таблица 7 .
Возможные погрешности определения элементов
сближения судов при Д£>=0,25 7)
D, кб б(Д/7), ...° । D. кб б(Д/7), ...°
0,2 0,4 0,6 0,8 1,0 0,2 0,4 0,6 0,8 1,0
ПО 1,36 2,7 4,1 5,4 6,8 60 0,78 1,56 2,4 3,1 4J
80 1,04 2,1 3,1 4,2 5,5 1 40 0,52 1,04 1,56 2,1 2,7
124
Успешность нахождения кратчайшего сближения оценим ко- '
эффициентом точности
= + = (171)
Из треугольника скоростей aAoOi (см. рис. 62) найдем скорость
встречного судна
VB*=Vo-i-o«-2v0vcos(/Cy + 6) (172)
и угол пересечения векторов скоростей судов
sin 0=—^2- sin (КУ ±6). (173)
Vb
Знак перед величиной 6 выбираем в зависимости от изменения
пеленга. При уменьшении его требуется знак «плюс», а при увели-
чении — «минус». Истинный курс встречного судна равен ИКВ =
—И К + Q при КУ левого борта и ИКВ = 360е—Q + И К при КУ
правого борта. Для ракурса встречного судна
tg РК= (v0 sin sin КУ)/(и0 cos 6—исозКУ). (174)
Анализ ситуации сближения судов. Выбрать параметры, харак-
теризующие ситуацию сближения судов, можно на основе матема-
тической модели процесса, инженерных соображений и интуиции,
а также из статистического анализа наблюдений, проведенных в
реальной обстановке. Связь признаков и оценок с существом про-
цесса устанавливается кинематическими условиями сближения, на-
вигационными и гидрометеорологическими ограничениями, а так-
же Международными правилами предупреждения столкновения су-
дов и другими регламентирующими положениями.
В МППСС записаны общие принципы действий встречающихся
в море судов и отражается многолетний опыт, традиция, определен-
ные взаимоотношения и связи, возникающие в типичных опасных
ситуациях. В Правилах предлагаются наиболее рациональные спо-
собы действия судов.
Качественное изменение флота, техническое оснащение его новы-
ми средствами получения и обработки информации ведут к расши-
рению взаимосвязей. Возникает естественная необходимость в их
глубоком научном обобщении и разработке дополнений, рекомен-
даций, логически вытекающих из новых информационных взаимо-
связей и динамических качеств судов.
Соблюдать МППСС — это значит считаться с возможностями
приближающегося судна и в случае необходимости помочь ему спра-
виться со своими обязанностями безопасно, облегчить его дейст-
вия, проявлять доброжелательность и не злоупотреблять ско-
ростными и техническими возможностями своего судна или прио-
ритетом.
125
Анализ ситуации и необходимость изменения режима движе-
ния судов при наличии опасности столкновения регламентируются
частью «В» МППСС-72 «Правила плавания и маневрирования».
Приведем некоторые выдержки из этих Правил, которые мо-
гут послужить основой для формализации и обоснования решений
судоводителя.
При нахождении одного судна на виду у другого:
правило 7 — «... опасность столкновения должна считаться существую-
щей, если пеленг приближающегося судна заметно не изменяется»;
правило 8 — «... любое действие ... должно быть уверенным, своевре-
менным и соответствовать хорошей морской практике ..., привести к рас-
хождению на безопасном расстоянии» и не вызывать «чрезмерного сближения
с другими судами»;
правило 13 —«... каждое судно, обгоняющее другое, должно держаться в
стороне от пути обгоняемого судна. Судно считается обгоняющим другое
судно, когда оно подходит к нему с направления более 22,5° позади тра-
верза последнего»;
правило 14 — «... когда два судна ... сближаются на противоположных
или почти противоположных курсах так, что возникает опасность столкно-
вения, каждое из них должно изменить свой курс вправо с тем, чтобы каж-
дое судно прошло от другого по левому борту»;
правило 15—«... когда два судна ... идут пересекающимися курсами
так, что возникает опасность столкновения, то судно, которое имеет другое
на своей правой стороне, должно уступить дорогу другому судну и при этом
оно должно, если позволяют обстоятельства, избежать пересечения курса
другого судна у него по носу»;
правило 17 (а) (0 — «Когда одно из двух судов должно уступить доро-
гу другому, то это другое судно должно сохранить курс и скорость»; (0(0
«Однако это другое судно, когда для него становится очевидным, что судно,
обязанное уступить дорогу, не предпринимает соответствующего действия,
требуемого этими правилами, может предпринять действие, чтобы избежать
столкновения только собственным маневром»;
(в) «Когда по какой-либо причине судно... обнаруживает, что оно нахо-
дится настолько близко к другому судну, что столкновения нельзя избежать
только действием судна, уступающего дорогу, оно должно предпринять такое
действие, которое наилучшим образом поможет предотвратить столкновение».
При плавании судов в ограниченную видимость (туман, мгла, снегопад,
ливень):
правило 19—«... судно, которое обнаружило присутствие другого
судна только с помощью радиолокатора .... должно своевременно предпри-
нять действие для расхождения, причем если этим действием является
изменение курса, то, насколько это возможно, следует избегать:
(0 изменения курса влево, если другое судно находится впереди травер-
за и не является обгоняемым;
(*0 изменения курса в сторону судна, находящегося на траверзе или по-
зади траверза».
Анализ взаимного движения судов и выбора вида маневра по-
казывает, что не обязательно знать истинный курс и скорость
встречного судна. Необходимая внешняя информация может со-
держать значение и направление изменения пеленга и расстояния,
расстояние и время кратчайшего сближения судов, курсовой угол
на встречное судно, ракурс встречного судна.
126
Информация первых двух положений необходима для экстрапо-
лирования движения, выявления опасной ситуации, срочности про-
ведения маневра и прогнозирования его результата. Последние два
положения позволяют выявить приоритет и логику выбора вида
маневра расхождения.
Если в условиях хорошей видимости при наличии потенциаль-
ной опасности курсовой угол правого или левого борта на встреч-
ное судно больше 112,5°, то оно является обгоняющим и ситуацию
подпадает под правило 13. Ту же самую информацию в отношении
судна дает ракурс встречного судна. Если РК > 112,5°, то судно
является обгоняющим и надлежит выполнять правило 13. Если же
РК< 112,5°. то курсы судов пересекаются и при хорошей види-
мости выполняются правила 14, 15 и 17.
Правило 14 должно выполняться в том случае, когда курсовой
угол на встречное судно и его ракурс почти равны нулю, так как
только в этом случае суда могут сближаться противоположными
или почти противоположными курсами. Правило 15 должно вы-
полняться, когда КУ < 112,5° правого борта.
Объединим правила 14 и 15 и примем, что необходимо выполнять
маневрирование в отношении судов, опасно приближающихся
встречными курсами в секторе курсовых углов от 15° левого борта
(или 345° при круговом отсчете КУ) до 112,5° правого борта.
Таким образом, анализ МППСС позволяет написать следующие
логические условия необходимости выполнения маневра Лм при
наличии потенциально опасного сближения:
в ясную видимость и при PKi < 112,5°
л [1, при 345° < КУ, < 112,5° (правило 14 и 15);
Ям=Ц0, при 112,5°< КУ,< 345° (правило 17); (175)
в ограниченную видимость или при PKi > 112,5° (правило 13)
Лм=1. (175')
Оценка успешности выбора программы уклонения. Успешность
выбора программы уклонения оценим вероятностью ее выполнения
в определенных условиях сближения и назовем эту вероятность
кинематической надежностью выбранного маневра расхождения.
Взаимное движение судов при выполнении маневра рассмотрим
в системе прямоугольных пространственно-временных координат
с осями ОТ, 0DK, начало которых совпадает с точкой О нахожде-
ния судна наблюдателя (см. рис. 62). Ось ОТ (временная) парал-
лельна линии относительного движения ЛОД, т. е. направлена
в сторону встречного судна под углом КУй + 60 к диаметральной
плоскости судна. По этой оси фиксируется промежуток времени
Т = Т0—t движения встречного судна до точки кратчайшего
127
сближения судов Со. Другая ось 0DK (пространственная) перпен-
дикулярна ей и направлена в точку Со.
Точку А 0 местонахождения встречного судна назовем изо-
бражающей точкой, а ее траекторию, характеризующую кинема-
тику взаимного перемещения судов — фазовой траекторией на
пространственно-временной плоскости DKT. Изменение траектории
движения точки Ло может быть осуществлено маневрами судна О
и встречного судна.
Примем, что вектор скорости центра тяжести судна при манев-
рировании совпадает с его диаметральной плоскостью. Элементар-
ные приращения относительной скорости сближения на осях D„ и
Т при изменении судном О курса и скорости
do0DK = ucos (КУ 4-6) dtf + sin (Ky-|-6)du; (176)
dvoT = t>$in (КУ4-6) dK—cos(Ky4-6)dv. (177)
Скорость изменения координаты DK
, D °м
——- = j n cos (КУ 4-6) dK-h j sin (КУ + 6) dv+bK<>,
О о
а текущая координата
*м.к ‘мс
£)„== С dt С V cos (КУ 4-6) d к+ J dt f sin (Ky + &)dv +
0 0 0 0 1
+ ^Wm+^k0, (178)
где vM, £MtK, /м — изменения соответственно курса, скорости и длитель-
ности маневра курсом и скоростью (в общем случае
ограничены условиями текущей обстановки плавания);
£)к и £Кф — начальные значения соответственно координаты крат-
чайшего сближения судов и скорости ее изменения.
Относительная скорость сближения при маневрировании
fo.M = fo4- f «sin (КУ4-6) dK- f cos (КУ+6) dv, (179)
о b
где u0 — начальная относительная скорость сближения.
Текущая координата
T=Tq vo/c>0‘M —
или
Т = Г0--------------------V-2—o-------------------1. (180)
км VM
VO4- [ vsin (КУ+&) dK- [ cos (КУ 4-6) dv
128
Параметрические зависимости (178) и (180) связывают коорди-
наты DK и Т с управляющими воздействиями Лм и vM, которые под-
лежат определению, и параметрами ситуации сближения То, ЛУ,
6, ц0, которые считаются известными.
Прогнозирование координат DK и Т на некоторый промежуток
времени может быть выполнено с учетом изменения режима дви-
жения встречным судном, если в зависимостях (178) и (180) заме-
нить соответственно курсовой угол КУ на ракурс РК, v на ив и
взять возможные пределы Км.в, ум.в, ^м.в Для встречного судна:
Д —^м.в.к I vBcos(P/C— <5) d Кв-|-^мв о ! (РК 6)dvB;
Гм.в = Т0 1-f Sin (PK-S)dKB+----- f cos(PK-6)x
X d
(181)
В случае совместного маневрирования экстраполируемые ко-
ординаты точки А
Вз—Он+л ^к.м. в;
7а = Т + Тм.в.
(182)
Из зависимостей (178) и (180) следуют положения:
при сближении судов на малых курсовых углах увеличение
координаты £),< достигается легче изменением курса, а увеличение
координаты Т — уменьшением скорости;
чем значительнее и интенсивнее управляющие воздействия Км
и им, тем быстрее достигается необходимый результат в изменении
координат;
чем раньше, заблаговременнее приложить управляющие воз-
действия, тем легче достигаются заданные значения координат при
тех же воздействиях, однако обоснованность этих заданных зна-
чений уменьшается из-за интегрирования возможных погрешнос-
тей в определении элементов сближения и изменения режима дви-
жения встречным судном;
уменьшение относительной скорости сближения судов и0.м ве-
дет к возрастанию координаты Т, т. е. к возрастанию ресурса вре-
мени на выполнение последующих этапов операции.
Если результат маневрирования заключается в достижении
программного кратчайшего сближения £)к п, то при определенных
параметрах ситуации и навигационных ограничениях вероятность
5 Зак. 1453 1 29
достижения результата при условии выбора маневра Mj может быть
оценена следующим образом:
Р (^К.п/М j) =Dk,m/&K.U
или.
£>КО+ j Т V cos (КУ+ dK+ jj rsin(O4-6)<fo
Р (DK.n/Mj) ------5--------------------°--------------. (183)
В общем случае возможны восемь вариантов маневрирования
курсом и (или) скоростью (/ — 8). Однако некоторые варианты от-
падают в результате, ограничений накладываемых логическими
функциями.
Оценку кинематической надежности того или иного вида ма-
невра выполняют только после того, как проверено логическое ус-
ловие его применимости. В случае если кинематическая надеж-
ность маневра по координате DK не может быть выполнена с доста-
точно высокой вероятностью, возникает необходимость увеличения
временной координаты Т, что достигается уменьшением относи-
тельной скорости сближения.
Невыполнение заблаговременного маневрирования встречным
судном ведет к необходимости выполнения той же задачи, но при
значительно меньшем ресурсе времени, и, следовательно, к приме-
нению максимально возможных управляющих воздействий — ма-
невру последнего момента. При этом крупнотоннажные суда, имею-
щие большую инерционность, оказываются в более трудной ситуа-
ции, чем малые, маневренные суда.
Надежность исполнения маневра расхождения. Надежность ис-
полнения логически правильно выбранной программы уклонения
зависит от готовности исполнительных систем к применению, их
технической надежности и динамических характеристик звеньев,
входящих в контур управления.
Воспользовавшись математическим аппаратом теории надежно-,
сти и методикой учета влияния надежности технических средств
при выполнении каких-либо операций, составим логическую схему
работы основных исполнительных контуров СУС (рис. 64).
Этап маневрирования будет выполнен, если безотказно и свое-
временно отработают заданную программу контуры управления
курсом и (или) скоростью судна.
Вероятность этого события
РМ=1-<?к<?0=1-[1-РкП1-Рг]- (184)
Здесь
Рк = '4±к (^к.п/± ^р.у ^г.н! * (185)
Рр —^4±о Р (^к.п/±и)^>сэУ ^г.с> (186)
130
где Рр.у и вероятности безотказной работы судовых систем управ-
ления — соответственно рулевого устройства и энерге-
тической установки (обычно их надежность достаточно
высока);
4Г.К, £г.с — коэффициенты готовности судовых систем управления.
Коэффициенты готовности контуров учитывают временные за-
траты на исполнение программ. Если на исполнение команд управ-
ления требуется среднее время 7У(1< и а на переходный процесс
и то контур управления курсом
^г.к“ ^м.к/Ом.к "Н ^у.к) (187)
и контур управления скоростью
^г.с ~ *м.с//0м.с + ^у.с)* (188)
Если надежность исполнительных контуров достаточно высока
(больше 0,9), то оценка исполнения маневра [см. формулу (184)1
рм = е'-(|-₽«)(1-₽о). (189)
Пример 20. Проведем примерный подсчет надежности маневрирования
при использовании рулевого устройства, движителя и совместного маневри-
рования.
Примем А— А±г — I; Р (^к.н/ i К) — Р (£>н.и/ ± у) “ 1; Рр,у (0 =
= ^сэу (О =0,998; /у.к = 0,Змин; /м.к = 2 мин; fy.C“l»5 мин; /м.с = 6 мин.
2
Решение * Получим, что Рк"Рр.у (0 ^г.к~0»998 =0,865, или
2, о
86,5%; Рв = Рсэу (П йг.с = 0,998—-7- = 0,799, или 79,9%.
1 ' 7,5
Следовательно, эффективность маневрирования курсом на 6,6 % выше
маневрирования скоростью при одинаковой кинематической и технической
надежности контуров.
Рис, 64. Логическая схема работы исполнительных контуров СУС
5*
131
Если учесть, что при маневрировании курсом контур управления ско-
ростью остается в резерве и при этом не меняются режимы энергетических
и силовых систем, то становится понятным стремление судоводителей в пер-
вую очередь изменять направление движения.
При совместном маневрировании (считая действие контуров в первом
приближении независимым) по формуле (184)
= 1 — (1 — 0,865)(1 ~ 0,799) = 1 - 0,027 = 0,973, или 97,3 %.
Комплексная оценка операции расхождения. В конкретных па-
раметрах процесса оценка операции расхождения 1см. формулу
(154)] с учетом формул (155)—(157), (171) и (189)
_ б (Л П)
ip _ р~^о.в *пл „ “ doO~Dot/(6 а°) л ЬП
(190)
Необходимо стремиться к достижению максимума IFon при ус-
ловии, отраженном в формуле (155):
<оп=Лн + ^оц + *у+*м^7о. (191у
где /он — математическое ожидание времени выполнения всех этапов опера-
ции расхождения.
Это условие показывает, что выполнение операции расхождения
может быть затруднено или операция не будет выполнена вследст-
вие недостатка времени при работоспособном состоянии техни-
ческих средств и человека-судоводителя. Это ограничение оценим
коэффициентом обеспеченности операции надлежащим ресурсом
времени:
А„=1 —1оа/Т0^е-1оп./т«. (192)
Общая комплексная оценка
1₽'о=«!,опй0.. (193)
Если взять натуральный логарифм этой оценки, то ее можно
преобразовать к более простому виду:
б (Д11)
Eq— Хо.р ^пл Н-Ооб—Dot/(6
Д П
+ (1-Рк) (1-Р„)-Ноп/7'о. (194)
Для получения наибольшей эффективности выполнения опера-
ции расхождения это выражение следует минимизировать. Каждое
из слагаемых уравнения (194) указывает путь совершенствования
операции.
Первое слагаемое указывает на тривиальное решение выбора
маршрута с наименьшей интенсивностью движения, который, од-
нако, подчиняется более общей оценке рентабельности работы
судна.
132
Второе слагаемое указывает на необходимость совершенствова:
ния средств сигнализации и обнаружения, а также получения до-
полнительной информации о вероятности местонахождения малых
судов в данном районе. Развитие этого пути особенно повысит без-
опасность выполнения операции расхождения для крупнотоннаж-
ных судов.
Третье слагаемое показывает необходимость повышения точ-
ности пеленгования. Применение РЛС значительно улучшает эту
оценку по сравнению с тем, когда обнаружение происходит во вре-
мя плохой видимости только по звуковым туманным сигналам,
направление которых очень неопределенно.
Необходимо совершенствовать технические средства измерения
скорости изменения направлений. Увеличение же знаменателя тре-
тьего слагаемого формулы (194) путем повышения длительности
наблюдения ведет к уменьшению ресурса времени на последующие
этапы операции.
Четвертое слагаемое уравнения (194) свидетельствует о необхо-
димости безошибочного выполнения логических операций, назначе-
ния кинематически надежной программы уклонения и повышения
безотказности и быстродействия исполнительных систем. Именно
на этом этапе возможны ошибки человека и задержка в принятии
им решения, а следовательно, именно эти его обязанности необхо-
димо в первую очередь облегчить и контролировать посредством
информационных автоматических систем.
Каждый из перечисленных путей требует затрат средств, вре-
мени, совершенствования технических разработок, проведения до-
полнительных организационных мероприятий. Взаимосвязь сла-
гаемых уравнения (194) указывает на возможность принимать ре-
шения, минимизирующие величину Ео при наличии определенных
ресурсов.
25. Алгоритмизация решения задач управления судном
при расхождении судов
Единообразная оценка ситуации сближения судов. Получить
строгие аналитические зависимости для оценки ситуации сближе-
ния судов затруднительно, поэтому целесообразно привлечь статис-
тические методы. Вполне логично считать, что судоводители обла-
дают более или менее одинаковым опытом и решают задачи управле-
ния в основном своевременно и правильно, с учетом всех требова-
ний хорошей морской практики, сопоставляют и анализируют ана-
логичные признаки, факторы, параметры. Выявленные на основа-
нии реальных наблюдений средние числовые характеристики про-
цесса будут определять хороший морской опыт, а также вероят-
ность действий встречных судов. Отклонения же в каждом отдельном
133
случае от этих средних норм будут характеризовать индивидуаль-
ность судоводителей в оценках различных ситуаций, для разных
судов и районов плавания.
Условимся под ситуацией понимать область пространства е мно-
жества параметров (сигналов) ЛГ, в пределах которой судоводитель
предпринимает и выполняет те или иные решения, под опасной си-
туацией — область пространства параметров, в пределах которой
(при заданном пороге) возникает необходимость изменить вектор
управляющих воздействий маневрирования М.
Выделим три области ситуаций:
5 — наблюдения и безопасности дальнейшего движения ввиду
наличия резерва времени или дистанции сближения либо совмест-
но того и другого;
М — маневрирования, в которой практически осуществляют
нормальные изменения режима движения судов для выполнения
операций расхождения, руководствуясь положениями части «В»
МППСС (правила 7, 8, 13-15, 17 и 19);
О — непосредственной опасности, при вхождении в которую
возникает необходимость безусловного изменения режима движения
для обеспечения безопасности согласно правилам 17 (а) и (в), 19.
Каждая область характеризуется определенными значениями
параметров Nобразующих систему случайных величин.
Событие, состоящее в попадании какой-либо реализации в об-
ласть ег, характеризуется вероятностью совместного выполнения
неравенств Nт1 < < Nnt (где и Nnt — граничные значе-
ния параметров для данной i-й области).
Область маневрирования с внешней стороны ограничивается
Некоторыми предельными значениями величин для ясной и туман-
ной погоды, вне которых ситуация считается безопасной. С внут-
ренней стороны область маневрирования переходит в область не-
посредственной опасности, когда маневр для расхождения безус-
ловно необходим.
При наблюдении наиболее удобно фиксировать значения пара-
метров ситуации для области маневрирования, т. е. в момент, когда
судоводителями предпринимаются первые действия для расхожде-
ния и значит складывающаяся ситуация оценивается ими как по-
тенциально опасная. Натурные наблюдения и их анализ, выпол-
ненные некоторыми исследователями 112,17J, показали, что на оценку
ситуации сближения и принятие решения влияют следующие пара-
метры: кратчайшее сближение DK, время до этого сближения Г,
дистанция между судами DM, курсовой угол, водоизмещение судна,
условия видимости и др. Условные законы распределения начала
маневра по каждому из параметров были близки к нормальным, ма-
тематические ожидания и средние квадратические отклонения первых
трех указанных параметров приведены в табл. 8.
134
Рис. 65. Распределение плотности вероятности маневра по параметрам £>к
и Т
При ограниченной видимости судоводители предпринимают ма-
невр заранее (см. табл. 8) в среднем на 4 мин, по дистанции этот ре-
зерв равен 14 кб.
Закон распределения вероятности начала маневра по двум ос-
новным параметрам — кратчайшему сближению DK (рис. 65. а)
и времени до него Т (рис. 65, б) в ясную погоду 1 и туман 2 может
быть записан в виде функции выполнения двух неравенств [см.
формулу (18)1
F(M)=P[(DKi<DK,n)(Ti<.Tn)],
где DKi, Tt — реализации;
DK>n и ~ некоторые предельные значения, определяющие безопасную
область.
При независимости влияния параметров на оценку ситуации
совместная плотность вероятности маневра [см. формулу (21)]
f(M/DK, Т)—f (M/DK) f (М/Т)
ИЛИ
1
f Г)- —---------------exp
2л cjDk от
I T-mr \2’
|
\ °т /
1 Г
Ок V
QDk /
2
(195)
Та блица 8
Математические ожидания гп и средние квадратические
отклонения о параметров Dlit Г, DM при сближении судов
Видимость кб Т, мин D , кб м
tri'j' mD* м
Хорошая 0 2,0 9,7 2,0 32 10
Ограниченная (туман) 0 2,6 13,5 2,2 46 10
135
Рис. 66. Решающие эллипсы, разде-
ляющие области ситуаций
Отсюда эллипсы равной плот-
ности вероятности маневра
^/^к + Г-тг)>МС®. (196)
Установив для хорошей и
ограниченной видимости пре-
дельные значения Т6, То а и DKe,
получим решающие эллипсы / и
2 (рис. 66), разделяющие области
ситуаций. Чем ближе распола-
гается реализация к началу си-
стемы координат, тем больше
опасность. Необходимость ма-
невра возрастает.
Из уравнений эллипсов найдем временное координаты
Л = Г6]Л 1-^/% ; . (197)
Если Т, > Тг, реализация находится в области безопасности Б;
если Т2 < Ti Tlt реализация находится в области М и действия
согласовываются с правилами МППСС; если Т, < Т2, реализация
находится в зоне непосредственной опасности О и требуется «ма-
невр последнего момента».
Так как параметры DKi и Tt такие же и для наблюдателя встреч-
ного судна, то появляется возможность единообразной оценки си-
туации и уменьшения неопределенности в действиях судоводителей
для выхода из опасных областей, а также разработка соответствую-
щих алгоритмов и, следовательно, создание предпосылок для авто-
матизации решения задачи расхождения судов.
Прогнозирование дистанции кратчайшего сближения судов.
Обычно кратчайшие расстояния, на которых расходятся суда, изме-
няются в зависимости от обстоятельств плавания, под которыми по-
нимают внешние и внутренние воздействующие факторы и ограни-
чения. Некоторый «нормальный» порог DK.n является функцией:
погрешностей в определении DK из-за наличия ошибок при изме-
рении параметров движения и координат встречного судна;
методических ошибок, возникающих в результате применения
приближенных способов для получения элементов сближения;
изменений в процессе в результате воздействия неучтенных фак-
торов и изменения режима движения встречным судном.
Погрешности во входной информации и методах ее обработки
оцениваются эллипсом равных значений вероятностей ошибок в оп-
ределении места встречного судна. Его уравнение в прямоугольной
системе координат 6D и 7)6/7 (рис. 67)
6D®/a&-p /7г/ст^ = А2 при А=1, 2, 3, (198)
где at) и оп — средние квадратические отклонения в измерениях соответст-
венно Д к D.
136
Средний квадратический радиус круга погрешностей в опреде-
лении кратчайшего сближения
DK.nor = V6r>2-h(DS/7)2. (199)
Если встречное судно имеет длину Lc и ширину Вс, то дистанция
кратчайшего сближения с учетом габаритных размеров встречного
судна должна быть увеличена (см. рис. 67) на величину
Z?K.r= ^-с sin (РЛд —®э) 4“ cos (РКэ— ®э) • (200)
Запас в дистанции кратчайшего сближения, учитывающий из-
менение режима движения встречным судном,
£>к.м=ЛуГ [l+sin(PK3-da)]. (201)
Решение о включении дистанции DK.M в дистанцию опасного
сближения основывается на прогнозировании, т. е. на способности
человека опережающе отражать действительность, предсказывать
пространственно-временной интервал будущих событий. Эта способ-
ность основана на имеющейся информации и знании законов раз-
вития процессов, на интуитивно развивающихся логических, ве-
роятностных и других связях между различными условиями и па-
раметрами ситуации. В результате их анализа происходит осозна-
ние ситуации, т. е. появляется возможность имитировать динамику
развития событий с учетом возможных реакций встречного судна.
137
Если не рассматривать случайные технические отказы исполни-
тельных систем, то изменение режима движения встречным судном
может быть следствием наличия какой-либо опасности его движе-
нию либо выполнением заданного маршрута движения.
Вероятность изменения режима движения встречным судном
при наличии опасности сближения с другим судном может быть оце-
нена по выражению (175). Логические функции выполнения МППСС
-4В{1, 0} и изменения маршрута движения 0}.определяют-
ся условиями плавания в данном районе. Обычно они известны су-
доводителю с определенной долей вероятности.
Таким образом, учет обстоятельств встречи позволяет оценивать
изменение режима движения встречным судном следующим обра-
зом:
^в.м = ^к.м Рв (44) -4В v 4в.м1- (202)
Окончательно программное расстояние кратчайшего сближения
£\‘.п==£>к.пог“Ь^к.г ~г^в.м-геупр> (203)
где еупр — ошибки управления от неучтенных факторов (влияние ветра, те-
чения, волнения и т.п.).
Если, например, суда встречаются на контркурсах в устье реки
или подходном канале, то
ХУ = p/C = S = O; Ав {0,1} —Хв (0,1} = 8уПр = 0.
Тогда
DK.n= V6D4-(£>6 Л)Ч Вс,
т. е. безопасная дистанция определяется только погрешностями в
исходных наблюдениях и габаритными размерами судов.
Пример 21. Если Вс = 20 м, D ~ 9000 м, 6/7 = 1°, 6Z) = 90 м, то £>КЛ1
«= 200 м.
Если фарватер имеет ответвления и приближающееся судно может из-
менять направление движения (Дв,м — 1) или наблюдается опасная для него
ситуация (РП(Л1) 1), а навигационные условия и МППСС не ограничивают
встречное судно в маневре (Лв = 1), то дистанцию DBjM необходимо включать
в дистанцию £)к.п. (Для танкера «Белград» при /э = о мин получим Dti м —
” 10 кб и, следовательно, ” 2000 м.)
Разумеется, точную информацию о динамических свойствах
встречного судна и его предстоящем поведении можно получить
только путем установления с ним непосредственной радиолокаци-
онной связи или радиосвязи, как это делается на речном транс-
порте.
Установление такой связи на международных морских путях
представляет известные трудности, поэтому предположения о ди-
намических качествах и действиях встречных судов могут основы-
ваться только на статистических характеристиках и установленных
138
правилах плавания судов в данном районе. Судоводители на осно-
вании опыта выработали вполне определенные количественные зна-
чения предельной дистанции.
По статистическим данным, для Дальневосточного бассейна
кратчайшие дистанции при сближении равны 6—8 кб, для некото-
рых районов Балтийского моря — 3—9 кб. Логично предполо-
жить, что эти статистические оценки отражают некоторый целесо-
образный критерий безопасности. По-видимому, этот ресурс ди-
станции связан с динамикой поворотливости судов, когда для раз-
ворота на 180° необходимо свободное пространство, равное 3—5
значениям длины судна.
Логические функции выбора вида маневра. Требования МППСС
и рекомендаций морской практики позволяют формализовать неко-
торую часть поведения судоводителя. Например, по правилу 15
МППСС уступающее дорогу судно может осуществлять различные
маневры. Целесообразными признаны следующие:
изменение курса вправо, если курсы следования судов пересе-
каются под тупым углом (обычно в такой ситуации КУ < 60е);
остановка машин и задний ход, если курсы следования судов
пересекаются под прямым углом;
уменьшение скорости или циркуляции влево, если курсы судов
пересекаются под острым углом.
Основными параметрами и условиями, определяющими логику
поведения при наличии опасных ситуаций, являются курсовой
угол на встречное судно, его ракурс, метеорологические условия и
навигационные ограничения.
Каждый параметр может находиться внутри некоторых задан-
ных значений и вне их. Событию, заключающемуся в наличии,
или нахождении некоторого параметра внутри заданной области,
поставим в соответствие величину == 1; противоположному со-
бытию — Xj — 0.
Введем обозначения основных параметров, характеризующих
следующие моменты.
Кинематика встречи: х0 = 1—опасная ситуация, х0 = 0 —
безопасная ситуация, xr = 1 — 345° < КУ С 60°, х2~ 1 — 60° <
< КУ С 112,5°; х3 = 1 — 112,5° < 247,5°, х4 = 1 — 247,5° <
< КУ < 345°; х5 = 1 — PKt < 112,5°, хБ = 0 — PKt > 112,5°.
Условия видимости: хв — 1 — хорошая видимость, хв = 0—
плохая видимость.
Навигационные ограничения (мели, лед, течение, ветер, волне-
ние): х7 — 1 — ограничений для поворота вправо нет, х7 = 0 —
запрет поворота вправо; х8 = 1 — ограничений к повороту влево
нет, х8 — 0 — запрет поворота влево; хл~ 1 — имеется возмож-
ность уменьшить скорость, х9 -- 0 — отсутствие этой возможности,
х1в — 1 — имеется возможность увеличить скорость, х10 — 0 —
отсутствие этой возможности.
139
Таблица 9
щей условиям сохранения курса и скорости судна, является логи-
ческая зависимость
Л0==х0 (x3+x4xe) nP« T2<Ti<7’I. (204)
Значения функции соответствия изменению курса вправо полу-
чим из табл. 9.
Маневр
ЛДК = *о1х1НЧ*2 + *з + *4)*5 + *Лвк7- (205)
Аналогично можно составить
Рис. 68. Схема встречи судов (стрел-
ки показывают направления движе-
ния) :
*i, хц х2, х2; xs, х,; xs, х2; х5, —со-
четание параметров, характеризую-
щих кинематику встречи
140
функции соответствия:
изменению курса влево
_дх ~ х0 (xj-J-x2-[-х3) х3 х8; (206)
уменьшению скорости
^_дц~х'о Ixx-T-faH-
+ (хз+х4) xs-|-xe]xe; (207)
увеличению скорости
Л+д0 = хо (x2-x5+x3) xio. (208)
Логические функции выбора
вида маневра (204)—(208) могут
быть составлены подобным же
образом для любых наблюдае-
мых судов, если предположить,
что параметры (обстоятельства)
встречи известны.
В ситуации встречи несколь-
ких судов (рис. 68) значения
логических функций для каж-
дого из них следующие; Судно-
наблюдатель О поставлено в ус-
ловия, когда целесообразен
только маневр уменьшения скорости; судно 1 может отвернуть
вправо и уменьшить ход; судно 2 имеет такие же варианты, как и
судно/, а судну 3 запрещается поворот влево.
Для судна О
Ло = О; А+дк = 0; А_дК = 0; Л_До=1; Л + Ди=0.
Для судов / и 2
Ао = °; ^ + дк = 1; Л_Д£=0; А_д р=1; ^4-до=0-
Для судна 3
^о==1; Л+дК= 1; А_дд = 0; А_д 0=1; 4+Д1)=1.
Оценка понятия «безопасная скорость». Возрастание эконо-
мических связей и технический прогресс на морском флоте непре-
рывно ведут к увеличению скоростей судов. Практически не су-
ществует какого-либо критерия, который мог бы служить оценкой
скорости для определения ответственности при столкновении судов
и одновременно позволил бы эффективно использовать получае-
мую при использовании технических средств дополнительную ин-
формацию для повышения скорости. Количественная оценка «бе-
зопасной скорости» в операции расхождения судов может быть сле-
дующей.
Столкновение судов, как и навигационные аварии, можно счи-
тать отказом СУС в выполнении своих функций ввиду отсутствия
условий, необходимых для ее нормальной работы. Операция рас-
хождения судов будет выполнена успешно, если произошло свое-
временное обнаружение потенциального препятствия движению,
правильно сформулировано требование к системе управления, об-
ладающей надлежащей пропускной способностью и технической на-
дежностью. Своевременность обнаружения предусматривает вы-
полнение условия
^оп^^от/1'о> (209)
где — среднее время на выполнение всей операции [см. формулу (191)|;
£>от — средняя дистанция достоверного обнаружения встречных судов,
которые с известной вероятностью могут находиться в районе пла-
вания [см. формулу (158)1.
Чем раньше произошло обнаружение, тем рациональнее и без-
опаснее может быть выполнена операция расхождения. Система
управления примет это требование на обслуживание с вероятно-
стью, соответствующей ее пропускной способности, следователь-
но,
/опС-^21- Ро.
Vo
141
Для простейшей системы с отказами [см. формулу (55)1 получим
предельную относительную скорость сближения
/оп 1 + ^н ^обн + ^р ^обр
где Хн, Хр, /ОбН. *обр— соответственно интенсивности поступления и среднее
время выполнения требований по операциям навигации
и расхождения судов системой управления.
Относительная скорость сближения судов складывается из
проекций их безопасных скоростей щ и v„ на линию относительного
движения (ЛОД):
v0 — vb cos (КУ 4-6) 4-t>B cos (РК—6).
Следовательно,
<______1 I ^от ______________1________
cos (КУ 4-6) I foa 1 -|- Хн ^обн4~лр /обр
— cos (РК— 6) . (2111
При встречах на контркурсах, когда КУ + 6 = РК -- 6 — 0.
D от —
(212)
^оп
Из выражения (211) следует, что пути повышения безопасности
плавания, которые намечались в результате рассмотрения комплекс-
ной оценки операции 1см. формулу (194)1, те же самые.
Кроме совершенствования технических средств заблаговремен-
ного обнаружения объектов, в ситуации сближения судов необходи-
мо следующее:
уменьшать скорость, если встречные суда следуют с большой
скоростью;
не допускать частых обгонов судов, особенно в сложных нави-
гационных условиях;
придерживаться средней скорости, чтобы не уменьшать скорость
всего потока судов.
Когда возросшая интенсивность потока требований Хр начина-
ет сдерживать скорости судов, необходимо переходить к разделе-
нию и установлению рекомендованных путей. Эффективность раз-
деления может быть оценена относительной величиной увеличения
скорости судов.
Суда, приближающиеся с кормовых курсовых углов или имею-
щие ракурс около 90°, не оказывают влияния на скорость судна.
При различиях в пропускной способности СУС однотипных судов
(в навыках судоводителей, аппаратуре и др.) их безопасная ско-
рость при одинаковых внешних условиях будет различной.
142
Когда на контркурсах встречаются два полностью идентичных
судна (Ро та 1) с равной безопасной скоростью, каждое из них может
быть остановлено в пределах расстояния, равного половине даль-
ности визуальной видимости:
vdCDoT/(27on)- (213)
Соотношение (211) может, служить для оценки эффективности
внедрения новых методик обработки информации, технических
средств и организационных мероприятий.
Пример 22. Если для встречных судов ОоТ = 3 мили, /оп — 9 мин =
= 0,15 ч, то по формуле (213) ов < 3/(2 - 0,15) = 10 уз.
Если на одном из судов внедрена новая методика обработки информации
или новые технические средства, позволяющие уменьшить время 70П на
1,5 мин, то < 3/2 - 0,125 = 12 уз., т. е. скорость этого судна может быть
увеличена на 20%.
Если внедрение тормозных и подруливающих устройств позволит умень-
— 3
шить значение /оп еще на 1,5 мин, то 2 . о । =1 15 У3-> т.) е. скорость
может быть увеличена на 25%.
Описание операций управления судком. Необходимо разрабо-
тать алгоритмы, описывающие операции маневрирования, и тем
самым создать предпосылки для прогнозирования результатов дей-
ствий судоводителей, а после апробации автоматизировать эти
сложнейшие операции управления крупнотоннажными морскими
судами.
Для управления судном надо иметь программу плавания №пр,
определяемую функцией от фазовых координат места (<р, 1), центра
тяжести судна и параметров его движения (о, К, t):
^пр=Нч>. v, К. /)•
В случае отклонения какого-либо /-го состояния объекта от
программного требуется применение управляющих (корректирую-
щих) воздействий U, т. е. выполнить условие иУпр — W, — U при
наличии ограничений на управляющие воздействия (3, п, навига-
ционные условия В, h с учетом габаритных размеров судна Lc,
Вс, Тс и его динамических характеристик.
Ввиду того что корректировать состояние фазовых координат
места, не зависимых одна от другой, не представляется возможным,
приходится всегда решать связанную систему дифференциальных
уравнений при изменяющихся параметрах объекта с добавлением
некоторого оптимизирующего критерия, например /кор = min.
Обычно отклонение от заданной программы становится извест-
ным после выполнения очередных измерений какого-либо навига-
ционного параметра, соответствующих расчетов и сравнений. В ре-
зультате получается система уравнений в отклонениях Д№п =
143 •
= £/(£, п, t), в которой надо найти правые части — управляющие
воздействия регулирующих органов (руля, винта, подруливающих
и других устройств).
Получается система из пяти уравнений, описывающая процесс
движения судна:
д <рп (О
Д Хп (/)
ДКп(0
Д va (/)
ДТП(П
= У(₽, п, t),
(214)
из которой может быть получено некоторое множество решений и
найдено единственное решение. Система может оказаться несовмест-
ной. если решения найти невозможно. Это чаще всего получается,
когда габаритные размеры судна и навигационные размеры аква-
тории сравнимы, а управляющие воздействия по отношению к внеш-
ним возмущениям ограничены.
( Отклонения в координатах места судна от программных компен-
сируются только при наличии некоторой свободной акватории для
маневрирования, и, следовательно, требуется представить в соот-
ветствующих координатах траекторию (трассу) судна при движе-
нии его к заданной линии пути или пункту назначения.
В наиболее простом случае коррекцию осуществляют изменением
курса на постоянную величину с учетом сноса судна [см. формулу
(125)1. В более сложных условиях траектория движения судна мо-
жет быть представлена дифференциальным уравнением
Т?7-|-Т1/+/=1/(р, п, 0. (215)
где и Т2 — параметры траектории, которые должны быть выбраны с
учетом ограничений и критерия оптимальности.
Встречи судов при наличии опасности столкновения вызывают
необходимость изменения заданной программы плавания 1Гпр и
выработки новой программы уклонения от опасности которая
должна быть выполнена вследствие применения управляющих воз-
действий наиболее рационально (при наличии навигационных и ло-
гических ограничений).
При этом решают систему уравнений — f/(P, п, t), в которой
определяют правую часть — управляющие воздействия.
При выполнении маневра программа уклонения формируется в
относительных координатах: дистанции кратчайшего сближения
144
судов DK и времени до этого момента Тк. Поэтому решают систему
уравнений и неравенств:
Л DK >h (и, К, КУ}\ 1
ЛТк>^(й, К, КУ). )
Здесь
K=l/j (р, t) при ДКсДКдоп;
v=t/2(P, п, t) при Де<Дгдоп;
^м<)1рес-
Работу руля и винта для выполнения установленных программ
определяют с учетом динамических характеристик объекта —
судна. Ввиду значительной инерционности динамика объекта упро-
щенно представляется апериодическими звеньями 1-го порядка:
TpK+K = t/1(P> *₽, 0; | (217)
Tv v + v—Ui (n, An. р. -*) I
Постоянные времени Тр и Tv, коэффициенты преобразования <
руля fep и винта kn изменяются в зависимости от скорости, угла пе-
рекладки руля, загрузки, дифферента судна, мелководья и других
факторов. Вследствие этого добавляют функциональные зависи-
мости, определяющие настраиваемые коэффициенты, законы регу-
лирования и квазипостоянные параметры всей связанной системы
управления текущими состояниями движения судна.
Таким образом, в общем случае для описания процесса маневри-
рования судном составляют и решают с достаточным быстродейст-
вием систему связанных дифференциальных уравнений, состоящую
из восьми—десяти равенств и двух—четырех неравенств.
Глава 5
СУДОВЫЕ АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ
26. Особенности судовых ЭВМ
Электронные вычислительные машины находят широкое приме-
нение в системе автоматизации судовождения, под которой пони-
мается весь автоматизированный комплекс средств и методов, обес-
печивающий управление судном при плавании на открытых аква-
ториях и в узкостях. Развитие системы автоматизации судовожде-
ния характеризуется, кроме использования в ней встраиваемых
ЭВМ, увеличением числа датчиков исходной навигационной инфор-
мации и развитием систем дистанционного автоматического управ-
ления (ДАУ) судовым энергетическим комплексом непосредственно
из ходовой рубки.
При выполнении экономических и других вычислений большое
значение для судоводителей имеет использование персональных
ЭВМ, которыми оборудуются их автоматизированные' рабочие мес-
та (АРМ).
Электронные вычислительные машины используются во всех
подсистемах общесудовой системы эксплуатации судна (рис. 69).
В результате их использования на судах получили развитие авто-
матизированные методы сбора, обработки и представления информа-
ции, централизованное управление с автоматической регистра-
цией аварийной и учетной информации, автоматизация оповеще-
ния обслуживающего персонала о наступлении граничных условий
функционирования и неисправностях объекта и системы управле-
ния.
Известны два принципиально различных структурных способа
построения систем автоматизации судовождения с использованием
ЭВМ: \ .
централизованное управление на базе единой многофункцио-
нальной ЭВМ;
децентрализованное управление на базе микроЭВМ.
Второе направление стало развиваться в последние годы вслед-
ствие развития микропроцессорной техники. Термин микропроцес-
сор (МП) употребляется в специальной литературе сравнительно не-
давно. Микропроцессором называют электронный компонент, вклю-
чающий в себя законченное в функциональном отношении устрой-
ство обработки цифровой информации. Весь микропроцессор вы-
полняется на одной или нескольких больших интегральных схе-
146
мах (БИС). Электронная вычислительная машина, состоящая из
микропроцессора, устройства памяти, различных устройств ввода
и вывода информации, называется микроЭВМ.
Персональные ЭВМ, которыми оснащены автоматизированные
рабочие места судовых специалистов, позволяют решать навигацион-
ные и административно-хозяйственные задачи, а также делать
расчеты остойчивости, прочности, непотопляемости судов и др.
Персональные ЭВМ изготовляют в морском исполнении и оснащают
устройствами ручного ввода данных, алфавитно-цифровой печати,
визуального представления информации, графопостроителями.
Основные характеристики микропроцессоров определяются их
логическими структурами: они должны быть гибкими, технологич-
ными, обеспечивать высокое быстродействие. Логическая структура
микропроцессоров зависит от используемых в них методов управле-
ния. В зависимости,от используемых методов управления микро-
процессоры бывают с фиксированным набором команд (жесткая
логика) и с использованием принципа микропрограммного управле-
ния.
Наибольшая гибкость управления достигается в микропроцес-
сорах с использованием микропрограммного принципа. Большая
надежность, малая потребляемая мощность и низкая стоимость при-
вели к широкому использованию микропроцессоров и микроЭВМ в
системах автоматизации судовождения. Большая часть используемых
микропроцессоров четырех-, восьми- и шестнадцатиразрядные.
Обобщенная структурная схема микропроцессора (рис. 70)
включает в себя обрабатывающую и управляющую части. Код
команды, состоящий из операционной и адресной частей через бу-
фер данных БД из блоков памяти, внешних по отношению к микро-
процессору, поступает в регистр команды Р,(0М и далее в дешифра-
тор команды ДШком- Далее адреса операндов, под которыми опера-
ция будет выполняться, поступают в регистры общего назначе-
ния РОН и оттуда через буфер адреса БА во внешние по отношению
к микропроцессору устройства.
Рис. 69. Структура общесудовой системы эксплуатации судна
147
Считанные по адресам операнды через буфер данных поступают
в РОН и далее в арифметико-логическое устройство АЛУ. Код
операции дешифруется и в устройстве управления выполнением
операции УУВО преобразуется в последовательность управляю-
щих импульсов во времени и в пространстве, обеспечивающих вы-
полнение очередной команды.
В программном счетчике ПС формируется и хранится адрес
текущей команды, который через буфер адреса передается во внеш-
нее по отношению к микропроцессору устройство памяти, где хра-
нится программа решаемой задачи.
Структурная схема обрабатывающей части микропроцессора
состоит из следующих элементов:
арифметико-логического устройства, выполняющего арифмети-
ческие и логические операции;
регистров общего назначения, предназначенных для хранения
исходных данных, промежуточных результатов решения и резуль-
татов вычислений;
шин А и В, обеспечивающих передачу информации;
регистра сдвига Рсдв, выполняющего операцию сдвига чисел;
буферного регистра БР, позволяющего повысить производи-
тельность микропроцессора путем согласования по быстродейст-
вию работы АЛУ с работой других устройств.
Большинство изготовителей микропроцессоров наряду с ин-
тегральными схемами самих микропроцессоров выпускают сов-
местимые большие интегральные схемы, на базе которых строятся
микроЭВМ. Стандартный набор обычно состоит из схем микро-
процессора, постоянного и оперативного запоминающих устройств,
мультиплексорных и селекторных каналов, микропрограммного по-
Рис. 70. Структурная схема, микро-
процессора
148
Рис. 71. Структурная схема микро-
ЭВМ
стоя иного запоминающего устройства. Совокупность этих схем но-
сит название микропроцессорный набор.
Структурная схема микроЭВМ (рис. 71) состоит из трёх раздель-
ных шин для передачи адресов команд и операндов, данных и сиг-
налов управления. Синхронизируется работа микроЭВМ посредст-
вом генератора тактовых импульсов ГТИ.
В состав микроЭВМ входят:
постоянные запоминающие устройства ПЗУ, предназначенные
для постоянного хранения программ и данных на весь период экс-
плуатации ЭВМ;
оперативное запоминающее устройство ОЗУ, предназначенное
для временного хранения исходных данных, промежуточных и окон-
чательных результатов решения;
аппаратурное и программное обеспечение (интерфейс) для обме-
на информацией между микроЭВМ и внешними по отношению к ней
запоминающими устройствами ЗУ.
Встраиваемые микроЭВМ используются, например, в цифровых
приемоиндикаторах для спутниковой навигационной системы «Тран-
зит», РНС «Лоран» и «Омега».
На основе микропроцессоров созданы настольные судовые каль-
куляторы, предназначенные для решения астрономических задач,
расчета распределения груза, используя которые можно быстро
вычислить напряжение в корпусе судна, его полную грузоподъем-
ность, осадку носом и кормой, изгибающий момент, остойчивость.
Рассмотрим принцип построения судовых вычислительных сис-
тем на примере навигационного комплекса. Основными задачами,
решаемыми навигационным комплексом, являются счисление пу-
ти судна и его коррекция по данным позиционных источников на-
вигационной информации, а также получение параметров движения
судна с точностью и надежностью, необходимыми для обеспечения
навигационной безопасности. •
В свою очередь, навигационный комплекс является составной
частью системы автоматизации судовождения. Помимо навигаци-
онного в систему автоматизации судовождения входят следующие
комплексы: предупреждения столкновений судов, управления дви-
жением судна, автоматической регистрации и документирования на-
вигационной информации.
Развитие микропроцессоров и микропроцессорных систем из-
менило подход к структуре судовых вычислительных систем и при-
вело к использованию однородных вычислительных систем (ОВС),
состоящих из одинаковых микропроцессоров и микроЭВМ.
Практика использования МП и микроЭВМ в различных нави-
гационных системах и комплексах позволяет сформулировать не-
которые основные требования к построению вычислительных сис-
тем.
149
Рис. 73. Схема распределения микро-
ЭВМ в навигационном комплексе
Рис. 72. Структурная схема двух-
уровневой навигационной систе-
мы
Предположим, что автоматизированный навигационный комп-
лекс предназначен для реализации следующего несколько расши-
ренного состава задач: счисления и коррекции счисления пути
судна; определения его места по отдельным и нескольким навига-
ционным системам, а также по РЛС; выдачи рекомендаций по рас-
хождению судов; обеспечения работы индикатора навигационной
ситуации (ИНС).
Характерной особенностью решения этих задач является опре-
деление места судна по отдельным навигационным системам и по
всей их совокупности. Актуальна задача повышения надежности
навигационного комплекса. Для этого требуются децентрализация
аппаратуры и централизация управления (программная). Поэтому
наблюдается тенденция использования ОВС комбинированной
структуры с децентрализацией на низших уровнях и централиза-
цией на высших уровнях решения задач (рис. 72). В состав двух-
уровневой системы входят подсистемы и S2, представляющие со-
бой соответственно навигационный комплекс и комплекс предупреж-
дения столкновения судов.
Однородная вычислительная система для автоматизированных
навигационных комплексов должна быть разделимой по матричной
структуре и различным математическим обеспечением по иерар-
хическим уровням и одинаковой на одном уровне иерархии управ-
ления, построенной на основе одной базовой микроЭВМ (рис. 73).
Основные требования к микропроцессорам и микроЭВМ, пред-
назначенным для использования в навигационных комплексах, сле-
дующие:
унифицированное стандартное программное обеспечение;
150
унифицированная структура процессора, внутреннего и внеш-
него интерфейса, программная совместимость.
Наличие в системах автоматизации судовождения ЭВМ повыша-
ет экономическую эффективность эксплуатации судна и улучшает
условия труда экипажа. Однако актуальными становятся зада-
чи определения оптимальной численности судового экипажа и его
переквалификации, разработки методов оптимального взаимодей-
ствия судоводителя с автоматизированной системой и ее техничес-
кого обслуживания.
Экономическая эффективность внедрения систем судовой авто-
матизации слагается из прямого и косвенного экономического эф-
фекта. Так, например, установка автоматизированного судового
навигационного комплекса позволяет вследствие увеличения точ-
ности и надежности измерения навигационных параметров сокра-
тить время на определение координат места судна. Прямой эконо-
мический эффект образуется вследствие уменьшения вероятностей
столкновения и посадки на мель, сокращения лоцманских расходов,
увеличения средней технической скорости, времени для наблюде-
ния за навигационной обстановкой и выбора оптимальных путей.
Косвенный экономический эффект складывается из повышения без-
опасности жизни на море, конкурентной способности пароходств и
других факторов.
Из требований, предъявляемых к надежности систем автомати-
зации судовождения, вытекают требования к надежности навига-
ционных ЭВМ, которые, в свою очередь, зависят от характера задач,
решаемых системой. Наиболее сложными являются задачи судо-
вождения, которые лимитируют время решения и требуют наиболее
высокой точности вычислений. Поэтому под отказом ЭВМ, находя-
щейся в составе автоматизированного навигационного комплекса,
понимают состояние машины, при котором не обеспечивается задан-
ная точность решения задачи. При вычислении координат места
судна — это точность их определения.
Так как ЭВМ, включенная в состав навигационного комплек-
са, функционирует при участии судоводителя, вероятность досто-
верного решения задачи 119]
Ра Рм W Ря (?) + П -Рд (О (01 Р«,
где — вероятность правильного восприятия судоводителем результата
решения; ;
Рм (^) — надежность ЭВМ в системе автоматизации судовождения;
Рд (О — вероятность неисправного состояния датчиков информации;
" Рп — вероятность исправления судоводителем ошибки» допущенной
ЭВМ*
Вероятность неисправного состояния датчиков
Рд (О^^Д^Д.С
151
где /?г,д — коэффициент готовности датчиков навигационной информации,
измеряющих навигационные параметры, необходимые для
решения данной задачи;
/’д.с (О ~ вероятность неисправного состояния датчиков навигацион-
ной информации.
Использование ЭВМ в автоматизированных навигационных
комплексах целесообразно, если
Pc(t)>Q,
где Q — надежность решения задач без использования ЭВМ.
Надежность ЭВМ
/’м(0=йг.мЛ(0Рд.р(0/’п.о,
где. /?г.м — коэффициент готовности судовой ЭВМ;
R(t) — вероятность безотказной работы судовой ЭВМ;
Рд.р(() — вероятность достоверной работы;
Рп.о — вероятность безотказной работы программного обеспечения
ЭВМ.
8п.0 = Pq Ра,
где Рд — вероятность отсутствия погрешностей в программном обеспечении;
Ра — вероятность безотказной работы алгоритмов решаемых задач.
Надежность ЭВМ, входящей в состав автоматизированного на-
вигационного комплекса, > 0,9678, наработка до отказа — не
менее 9850 ч. Ошибки программного обеспечения практически ис-
ключены, так как они исключаются на этапах программирования,
отладки и испытаний.
Эффективность использования ЭВМ зависит не столько от их
технического использования, сколько от их программного обеспе-
чения. Программное обеспечение ЭВМ приобрело значение, соиз-
меримое с их проектированием. Затраты на создание математичес-
кого обеспечения зачастую превышают стоимость самих ЭВМ.
Программное обеспечение встраиваемых ЭВМ имеет особенности
по сравнению с программным обеспечением универсальных ЭВМ.
Программное обеспечение встраиваемых ЭВМ подразделяют на спе-
циальное (функциональное) и общее.
Специальное программное обеспечение предназначается для ре-
шения конкретных задач судовой системы управления, обеспечиваю-
щей ее функционирование. Это задачи первичной и вторичной об-
работки навигационной информации, выработки управляющих воз-
действий на авторулевой и др.
Общее программное обеспечение необходимо для организации
вычислительного процесса, его контроля, подготовки и отладки
программ и автоматизации программирования. Его разрабатывают
одновременно с созданием встраиваемых ЭВМ или используют уже
готовое.
152
27. Преобразователи навигационной информации
для ЭВМ
Классификация преобразователей. Вводимая в ЭВМ информация
по форме представления подразделяется на аналоговую и знаковую.
Например, получаемая автоматически информация с лага и гиро-
компаса — аналоговая, а вводимая в ЭВМ вручную информация
об измерениях оптическим секстаном высоты светил — знаковая.
Аналоговая и знаковая информации первоначально могут быть
представлены различными физическими сигналами. Например, ана-
логовая — непрерывно изменяющимися напряжением (при изме-
рении температуры), углом, направлением на цель в РЛС, разностью
фаз в фазовых РНС; знаковая — буквами при обозначении стран
света, цифрами при вводе измеренных значений высоты светил.
Электронно-вычислительные машины оперируют с цифровой
информацией, представленной в подавляющем большинстве слу-
чаев в двоичном коде. Поэтому при вводе исходной навигационной
информации в ЭВМ она преобразуется из аналоговой или знаковой
формы в двоичный код.
Устройства, предназначенные для ввода информации, подразде-
ляются на аналого-цифровые преобразователи и устройства ввода
знаковой информации. Например, автоматический ввод информа-
ции об измеренных радиолокационных параметрах (дальности и
угле) осуществляется посредством аналого-цифровых преобразова-
телей. Устройства для ввода знаковой информации используются
для любого текста или цифр, вводимых с участием оператора и в
режиме автоматического считывания. Устройствами ввода знаковой
информации, например, являются различные клавиатуры, перфо-
карты, перфоленты.
Использование в составе автоматизированных навигационных
комплексов ЭВМ и различных цифровых вычислительных устройств
обусловливает наличие в них систем взаимодействия не только с
датчиками исходной информации, но и с исполнительными устрой-
ствами, для чего используются цифро-аналоговые преобразователи.
Исполнительными устройствами могут быть авторулевой, путе-
прокладчик. Для вывода знаковой информации применяются уст-
ройства печатающие, вывода на перфокарту и перфоленту, графо-
построители, экраны.
Предназначенное для индикации результатов вычислений уст-
ройство индикации может использоваться для контроля первона-
чально вводимой информации, промежуточных результатов реше-
ния, а также при решении контрольных тестовых задач.
Аналого-цифровые преобразователи. Эти преобразователи вхо-
дят в состав систем взаимодействия датчиков исходной навигацион-
ной информации с ЭВМ. Автоматически вводимая в ЭВМ исходная
информация поступает часто в виде непрерывно изменяющегося во
153
Рис. 74. График квантования
времени сигнала, при преобразовании которого в цифровую форму
приходится осуществлять его квантование по времени или по уров-
ню, а в некоторых случаях по времени и по уровню одновременно.
Квантование по времени заключается в представлении непре-
рывно изменяющегося сигнала ординатами, а квантование по уров-
ню — мгновенными цифровыми значениями. В автоматизирован-
ных навигационных комплексах квантование по времени осуществ-
ляется, например, при преобразовании разности фаз в фазовых сис-
темах, разности времени в фазово-импульсных системах; кванто-
вание по уровню — при преобразовании угла поворота антенны
РЛС, при использовании преобразователя, реализующего принцип
счета.
Сигнал, несущий навигационную информацию U, может быть
представлен непрерывной кривой как функцией времени. Тогда
процесс квантования по времени (рис. 74, а) следует рассматривать
как замену кривой точками, взятыми на этой кривой с постоянной
или переменной последовательностью. Частота выбираемых точек
на кривой зависит от заданной точности воспроизведения формы
сигнала. Так как кривые, представляющие сигнал во времени, как
правило, предварительно аппроксимируются, большое значение
имеет точность их аппроксимации.
Для определения частоты квантования по времени используют-
ся Уеоремы В. А. Котельникова.
Теорема 1. Любую функцию /(/), состоящую из частот от 0 до
fc, можно представить в следующем виде:
+ “ sinwcP—К7(2/с)
f (° = °К Г-К/(2'с)
(218)
где DK — постоянное число, зависящее от f (/;) при 0,1, п, т. е.
измеряемые мгновенные значения функции и любая функция,
представленная формулой (218), состоят из частот от 0 до/с;
К — целое число.
Теорема 2. Любую функцию /(/), состоящую из частот от 0 до
/с, можно передавать с любой точностью числами, следующими одно
за другим через промежутки l/(2fc).
154
При квантовании по уровню (рис... 74, б) непрерывно изменяю-
щийся сигнал заменяется ступенчатой функцией. Квантование по
уровню может рассматриваться как приближенное представление
сигнала, и точность зависит от шага квантования Д(7. Последний
может быть величиной постоянной и переменной. От шага кванто-
вания зависит разрешающая способность преобразователя.
Учитывая, что в результате квантования по уровню и преобра-
зования в ЭВМ вводится код числа в двоичной системе счисления
(например, при преобразовании угла поворота антенны РЛС), и
цена младшего разряда равна шагу квантования, необходимо иметь
преобразователь с числом двоичных разрядов
n=log2y,
где <V — число шагов квантования в диапазоне измерения непрерывного
сигнала:
= (О)тях—{U_ (O)mln , ।
д и
Если число разрядов преобразователя известно заранее, то шаг
квантования
д у _ Ю)гпах—{6'(<))min
2"— 1
Существуют два основных класса аналоговых сигналов: меха-
нические и электрические. Поэтому аналого-цифровые преобразо-
ватели разделяют на преобразователи механических, перемещений
(угловых и линейных) и электрических сигналов (напряжений и то-
ков).
Преобразователи механических перемещений в цифровой код
разделяют на работающие на принципах счета и непосредственного
считывания и с промежуточным преобразованием во временной ин-
тервал.
Принцип счета заключается в фиксировании определенных зна-
чений механических перемещений (квантов), каждое из которых со-
ответствует единице цифрового кода. Преобразователи, работа ко-
торых основана на этом принципе, преобразовывают только при*
ращение параметра, а не его абсолютное значение.
Принцип непосредственного представления заключается в циф-
ровом кодировании каждого квантованного уровня.
Принцип с промежуточным преобразованием во временной ин-
тервал реализуется в два этапа. Первый этап — непосредственное
преобразование во временной интервал, второй — заполнение по-
лученного временного интервала импульсами, следующими через
заданные интервалы времени, и их подсчет.
Аналого-цифровые преобразователи электрических сигналов в
цифровой код могут быть подразделены по принципу их создания
155
на три типа: время-импульсные, использующие принцип сравнения
с заданными эталонными значениями, с обратной связью.
Одним из главных параметров, используемых для характеристи-
ки преобразователей, является средняя квадратическая погрешность
преобразования <тпр. В наибольшем числе аналого-цифровых пре-
образователей эта погрешность складывается из средней квадра-
тической погрешности квантования ок и средней квадратической
инструментальной погрешности <ти:
апр = К а£+°и •
Значение о„ определяют обычно как погрешность квантования
только по уровню. Время квантования по времени (т. е. время счи-
тывания измерения) выбирают обычно намного меньше цены шага
квантования по времени, на точность преобразования оно не влияет.
Значение ои зависит от точности изготовления деталей и элементов,
шумов и др. Соотношение этих погрешностей бывает различным в
зависимости от типа преобразователя, но обычно значение ок
бывает в несколько раз больше значения а„.
Средняя квадратическая погрешность квантования не является
погрешностью восстановления той или иной непрерывной функции,
так как квантование происходит по уровню, а не по времени.
Значение средней квадратической инструментальной погрешности
влияет на точность воспроизведения непрерывной кривой функции
только в точке измерения. Нельзя также смешивать точность кван-
тования при измерении с точностью соответствия измеряемого сигна-
ла его действительному значению.
Наибольшее распространение при преобразовании механичес-
ких перемещений в цифровой код получили преобразователи непо-
средственного считывания, в которых каждый квантованный уро-
вень кодируется определенной последовательностью кодов. Это
обеспечивает независимость каждого отсчета от предыдущего и от-
сутствие явления накапливания погрешности.
В зависимости от способа реализации кодирования квантован-
ных уровней преобразователи непосредственного считывания раз-
деляют на шкальные, матричные и фазометрические. В шкальных
используются преобразующие кодовые шкалы (кодовые маски), в
матричных — кодирование квантованных уровней посредством спе-
циальных матриц (дешифраторов), в фазометрических — умножи-
тели частот.
Наиболее распространены шкальные преобразователи с двоич-
ными кодовыми шкалами, что позволяет для каждого квантованного
уровня иметь определенную кодовую последовательность. Имеются
различные способы составления этих последовательностей. Число
разрядов в каждой последовательности зависит от заданной точ-
ности измерения е и диапазона измерения величины: 0 < L <
<Lmax. Число разрядов двоичного числа п log2 (Lmax!e).
156
a)
0123456789
T - г г - I,,},!,
Рис. 75. Двоичные кодовые шкалы
(заштрихованная часть — код нуля,
незаштрихованная — код единицы)
На четырехразрядных (Хх — Х4) двоичных кодовых шкалах
для измерения линейных (рис. 75, а) и угловых (рис. 75, б) величин
считывающие элементы позволяют одновременно считывать всю
двоичную последовательность. Недостатком таких шкал является
появление погрешностей считывания на границе рядом лежащих
последовательностей от неодновременности считывания по дорож-
кам. Погрешности могут достигать больших значений, так как сбои
могут быть не в одном, а в нескольких разрядах.
Существует несколько способов борьбы с этими погрешностями.
Один из них — способ ограничения зон считывания (рис. 75, в), при
котором считывания при переходе от одной зоны в другую не проис-
ходит. Это достигается путем введения зон нечувствительности при
переходе от одного квантованного уровня к другому. Однако при-
менение этого способа приводит к снижению точности и быстродей-
ствия ЭВМ.
Получило распространение использование для кодирования
каждого квантованного уровня циклических кодов. Эти коды поз-
воляют обеспечить отличие находящихся рядом кодированных по-
следовательностей лишь в одном разряде, что повышает точность
преобразований. Наиболее простым из них является код Грея,
который строится по специальной диаграмме (рис. 76). Использо-
вание кода Грея (рис. 77) позволяет повысить точность кодирова-
ния приблизительно в 2 раза по сравнению с двоичным кодирова-
нием при одной и той же разрешающей способности. Вторым до-
157
Рис. 76. Диаграмма формирования
да Грея
Рис. 77. Круговая (а) и линейная (б)
шкалы с кодом Грея
стоинством кода Грея является простота перевода десятичного
числа в двоичное. Соответствие десятичных и двоичных чисел коду
Грея следующее:
Десятичное число Двоичное число Код Грея Десятичное число Двоичное число Код Грея
0 . 0000 0000 6 . ОНО 0101
I ...... . 0001 0001 7 . 0111 0100
2 . 0010 ООП 8 ..... . 1000 1100
3 . ООН 0010 9 . 1001 1101
4 . 0100 оно 10 . 1010 1111
5 . 0101 0111
Перевод двоичного числа в циклический код Грея осуществляется
следующим образом:
ЙП-1 = Ьп~1',
ап-2~ ^«-1»
Яп-з =. + Ьп-±\
а0“ ^о+ »
кде ап_ь ап-2* • ао — разряды циклического кода Грея;
бп„1т — разряды двоичного числа;
п — число разрядов.
158
Обратный перевод циклического кода Грея в число в двоичной
системе счисления выполняется по следующему правилу:
Ьп -2 = ап-2 4“ bn-it
, bn-Q~&n-3-\-bn-2r
b$ — йо *4” ь^.
Пример 23. Пусть двоичным числом будет 1010. Переведем его в цикли-
ческий код Грея:
а3 — ^3 — h а2 — ^2 4* Ь3 ~= 0 -|~ 1 =2 1;
-р ^2 = 1 -Г 0 == I j Uq = Ь$ -р ~ 1 = 1 •
Двоичному числу 1010 будет соответствовать циклический код Грея 1111.
Пусть циклический код Грея будет 1111. Переведем его в двоичное чис-
ло:
Ь$ === йд 1: ^2 = tig + ь2 14~ 1== 0»
bi = czj 4~ b2 -- i -p 0 — 1; Ь$ = g0 -f- b± — 1 4~ 1 “ 0.
i
Циклическому коду Грея будет соответствовать двоичное число 1010.
Преобразование циклического кода Грея в двоичное число мо-
жет быть выполнено с использованием логических схем.
Широкое распространение для преобразования механических
и электрических величин получили преобразователи с промежуточ-
ным преобразованием во временной интервал. Для преобразования
механических величин эти преобразователи наиболее часто исполь-
зуются с фазовращателями или с магнитными барабанами. Для пре-
образования электрических величин используются преобразова-
тели, в которых происходит сравнение измеряемого напряжения с
пилообразным или со ступенчатым. Суть этого метода заключается
в преобразовании измеряемого значения во временной интервал с
последующим его заполнением временными импульсами и их под-
счетом.
Общей частью этих преобразователей является схема преобра-
зования временного промежутка в двоичный код (рис. 78, а). Пре-
образователь состоит из генератора счетных импульсов Г, логичес-
кого элемента И (вентиля), двоичного счетчика Сч и триггера уп-
равления Тру (S и R — соответственно единичный и нулевой вхо-
ды триггера). Эта схема осуществляет подсчет числа импульсов за
измеряемый интервал времени. В момент, соответствующий нача-
лу измеряемого промежутка времени, триггер перебрасывается внеш-
ним импульсом, открывая вентиль. Импульсы генератора счетных
импульсов начинают поступать на вход счетчика, который их под-
считывает.
159
в> ' Л Л|Л Л А Л Л Л|Л Л L_
г
J
। । *
in Л Л Л Л Л_! .
i
е
Рис. 78. Преобразование временного промежутка в двоичный код:
а — структурная схема; б — диаграмма преобразования импульсов: / — поступающих с
генератора счетных импульсов на вентиль; 2 — соответствующих началу и окончанию
измеряемого промежутка времени; <3 — поступающих на счетчик
В момент, соответствующий концу измеряемого промежутка
времени, на вход триггера управления вновь поступает сигнал,
который возвращает его в исходное состояние. В результате вен-
тиль закроется и прекратится поступление импульсов на вход счет-
чика. Этот процесс может быть представлен временной диаграм-
мой (рис. 78, б).
При этой методике преобразования временного интервала в дво-
ичный код точность преобразования зависит в основном от периода
следования импульсов с генератора. При уменьшении периода сле-
дования импульсов точность увеличивается, с увеличением —
уменьшается.
Для того чтобы оказать влияние частоты следования импульсов
эталонного генератора на погрешность измерения, проведем рас-
чет необходимого числа разрядов счетчика для системы взаимодей-
ствия эхолота с ЭВМ.
Пример 24. Частота импульсов генератора счетных импульсов f —
— 5,5 кГц, скорость распространения звука в воде = 1500 м/с. Рассчи-
тать число разрядов двоичного счетчика для частоты генерирования им-
пульсов 5,5 кГц.
Решение. Максимальная погрешность преобразования ЛЯ — v33/f =
= 1500/5500 = 0,275. Будем считать, что эта погрешность является допусти-
мой.
Найдем максимальное число импульсов Я, которое соответствует диа-
пазону изменения измеряемой глубины от максимальной Ятазс до минималь-
ной, Ящ1П, т, Я щах — //т!п“ЮО0 м*
м 2(Ящах—//min) ______ 2000
N =-----------------= Q1 7о0и импульсов.
Здесь 2 (Ятах — ЯП1]П) — двойное значение глубины, проходимой зву-
ком в прямом и обратном направлениях.
Полученное четырехразрядное десятичное
число 7300 в двоичной системе счисления
будет представлено 13 разрядами
(I НО 010 000 100). Следовательно, двоич-
ный счетчик в этом случае должен иметь
13 разрядов.
160
Рис. 79. Преобразование напряжения в
двоичный код:
а — структурная схема: б —диаграмма: / —
начало запуска генератора пилообразного
напряжения; 2 — момент совпадения пилооб-
разного и измеряемого напряжений
Схема косвенного преобразования напряжения в двоичный код
(рис. 79, а) позволяет измерять промежуток времени между мо-
ментами запуска и- совпадения генерируемого пилообразного на-
пряжения на схеме сравнения с измеряемым. Эта схема состоит из
генератора пилообразного напряжения Гп я, генератора Г, счет-
чика Сч, схемы сравнения, триггера запуска Тр.лап. По диаграмме
(рис. 79, б) измеряют промежутки времени Д^ и Л/2 между момен-
тами времени, соответствующими точкам 1 и 2 на оси t.
В рабочее состояние схема (см. рис. 79, а) приводится импуль-
сом, который запускает генератор Гп.и и перебрасывает триггер
запуска Трзяп. При этом схема И откроется и на вход счетчика
начнут поступать импульсы. Пилообразное напряжение с генера-
тора импульсов Гп.н поступает на схему сравнения одновременно
с измеряемым напряжением U (/). В момент совпадения пилообраз-
ного напряжения с измеряемым напряжением на выходе схемы срав-
нения образуется импульс, который перебросит триггер. При этом
схема И закроется и импульсы с генератора Гп п перестанут по-
ступать на счетчик.
Частота следования импульсов с генератора Г
f = Nmax/t ’
где Л/щах — максимальная точность измерения'напряжения;
t — время линейной развертки генератора пилообразного напряже-
ния.
6 Зак. 1453 . 161
Рис. 80 . Схема цифро-аналогового
преобразователя:
(о. с, Ло.с—соответственно сила тока
и сопротивление в цепи обратной
связи
Цифро-аналоговые преобразователи. Задачей цифро-аналоговых
преобразователей является преобразование результатов вычисле-
ний, получаемых в цифровом виде, в сигналы для управления раз-
личными исполнительными устройствами. Эти управляющие сигна-
лы могут быть импульсными и непрерывными.
Наиболее часто. применяются цифро-аналоговые преобразова-
тели весового типа, в которых происходит разложение двоичного
числа по целым степеням основания системы счисления 2 и их сум-
мирование:
i ~п
ап ап~1...а0 = 2п ап + 2"-* ап-1-г ... 4-2° ав== У at 2‘.
1 = 0
Каждому разряду числа в этом случае соответствуют напряже-
ние или сила тока со своим весом, которые суммируются.
В трехразрядном преобразователе (рис. 80, а) имеются три ис-
точника напряжения Ео, Elt Е2, каждое из которых пропорцио-
нально целой степени основания системы счисления 2 (Е„ — 2°Е-,
Ег — 2Х£; £2 — 22£), внутренние сопротивления источников на-
пряжения r0, rlt г2, сопротивление нагрузки /?„. В схему входят
также триггеры (трехразрядный регистр) и логические элементы И
(вентили).
Соответствующий вентиль И открывается при поступлении на
единичный вход триггера Трп, Трг или Тр2 сигнала, соответствую-
щего 1, и подключает весовое напряжение к выходу. На выходе
же будет суммарное весовое напряжение £11Ь1Х, соответствующее
преобразуемому числу,
= У ai^1,
1=0
162
где — масштабный коэффициент:
— Ян/
п
2 ai (ri + rnf) + Ян
i^O
При этом считается, что переходное сопротивление гп. мало, т. е.
п
Уз (ri + rnj) *< Rit-
i=0
В цифро-аналоговом преобразователе с усилителем постоянного
тока (рис. 80, б) суммирующий усилитель У с глубокой отрица-
тельной обратной связью и весовыми сопротивлениями на входе
R„, Rj и R2 обеспечивает высокую точность преобразований (£0,
£\ и Е2 — напряжения на вхрде).
В схеме преобразования цифрового кода в угол поворота (рис. 81)
вычислитель служит для получения разности между вводимым чис-
лом х, соответствующим углу, на который необходимо повернуть
вал, и числом х0, соответствующим углу исходного положения вала.
Эта разность поступает в цифро-аналоговый преобразователь, пре-
образующий ее в электрический сигнал, который после усиления
по напряжению и мощности .поступает на исполнительное устрой-
ство-электрический двигатель. Поворот продолжается до сведе-
ния значения разности к нулю.
Аналого-цифровые и цифро-аналоговые преобразователи реша-
ют основную задачу, возлагаемую на системы взаимодействия ЭВМ
с датчиками информации и исполнительными устройствами. На
системы взаимодействия часто также возлагается решение задач
предварительной обработки навигационной информации, ее анали-
за и хранения. С этой целью в их состав включают дополнительные
устройства.
К системам взаимодействия предъявляют следующие основные
требования: передаваемая информация не должна искажаться;
быстродействие системы должно быть согласовано с частотой по-
ступления информации, быстродействием ЭВМ и исполнительных
устройств; система должна об-
ладать высокой надежностью.
Устройства ввода знаковой
информации. В ЭВМ исполь-
зуются различные устройства
ввода знаковой информации.
Наиболее часто используются
устройства ручного ввода, по-
строенные по принципу избира-
тельных схем (шифраторов).
Здесь шифраторы кодируют де-
Рис. 81. Схема преобразования циф-
рового кода в угол поворота
6* 163
сятичные цифры или буквы в двоично-десятйчные. Каждому раз-
ряду десятичного числа при этом соответствует четырехразряд-
ный двоичный эквивалент, например: 1 —0001, 2 — 0010, 3 —
ООП и т. д. В ЭВМ двоично-десятичный код преобразуется в дво-
ичный. Упрощенная схема устройства ручного ввода (рис. 82) со-
стоит из следующих основных узлов: набора кнопок ввода, шифра-
тора, системы логических элементов и блока управления вводом.
Набор кнопок ввода (клавиатура) включает в себя десять кнопок
для ввода десятичных цифр от 0 до 9 и четыре кнопки для обозначе-
ния стран света (север — JV, юг — S, восток — Ей запад — W).
В случае необходимости состав набора кнопок может быть изменен.
Порядок ввода может быть заранее оговорен. Часто добавляют
кнопки правильного и неправильного набора, после нажатия кото-
рых информация переписывается в устройства ЭВМ либо стирает-
ся, если она введена неправильно. Введенная информация при этом
выдается на индикатор для проверки.
Шифратор чаще всего представляет собой матрицу на диодах'.
Нажатию первых десяти кнопок соответствует образование на вы-
ходе шифратора следующих десяти четырехзначных кодов: 0 —
0000; 1 — 0001; 2 — 0010; 3 — ООП; 4 — 0100; 5 — 0101; 6 — ОНО;
Рис. 82. Схема устройства ручного ввода
164
7 — 0111; 8 — 1000; 9 — 1001.
Коды, соответствующие буквам
S, Е и N, U7, объединены, так
как они относятся к разным ве-
личинам — широтам и долготам.
Величинам, обозначаемым бук-
вами S и Е, может соответство-
вать специально подобранный
код, например 101 Г, величинам,
обозначаемым буквами N, W, —
1101.
Блок управления вводом ис-
пользуется для выработки сиг-
нала разрешения ввода и форми-
рования сигнала его окончания.
Сигнал об окончании ввода по-
ступает в устройство управления
ЭВМ, дающее разрешение на
выполнение следующей коман-
ды.
Сигнал разрешения ввода поступает с блока управления на вто- »
рые входы логических элементов И. В зависимости от ввода того или
иного числа на выходе логических элементов последовательно обра-
зуется соответствующий код числа с признаком. После ввода числа
и образования соответствующего ему двоично-десятичного кода на
выходе шифратора блок управления формирует сигнал об окончании
ввода. . .
В судовых ЭВМ существуют различные модификации устройств
ручного ввода, но функционально принцип их действия одинаков.
Устройства индикации. Такое устройство (рис. 83) позволяет
индицировать шестиразрядное десятичное число. Устройство инди-
кации цифр состоит из шестиразрядного регистра индикации, ре-
гистра числа, двухступенчатого дешифратора, регистра адреса
разряда визуальных регистров со своим дешифратором (последний
на рис. 83 не показан).
Каждый разряд визуального регистра позволяет выдавать лю-
бую цифру от 0 до 9 вследствие использования, например, индика-
торной лампы, работающей по принципу неоновой. В ней имеются
общий анод и десять катодов, повторяющих конфигурацию цифр.
В зависимости от того, на какой из катодов будет подано напряже-
ние, вокруг электрода лампы образуется тлеющий разряд в форме
цифры, поэтому изображение цифры буде" значительно больше
самого электрода.
Четырехразрядный регистр числа предназначен для хранения
выдаваемых из ЭВМ двоично-десятичных кодов, соответствующих
одному разряду десятичного числа. Первая ступень двухступенча-
165
того дешифратора регистра числа позволяет выбрать одну из деся-
ти шин в зависимости от записанного в регистре числа двоично-де-
сятичного кода, соответствующего десятичным цифрам от 0 до 9.
К каждой из десяти выходных шин первой ступени дешифратора
подключено шесть логических элементов И (вентилей). Таким об-
разом, на десяти выходных шинах первой ступени дешифратора
имеется 60 логических элементов И, представляющих собой вторую
ступень дешифратора.
На каждый разряд визуального регистра (одну лампу) при-
ходится десять схем И второй ступени дешифратора. В результате
вторая ступень дешифратора состоит из шести групп схем по десять
схем в каждой группе. Для выбора соответствующей индикаторной
лампы для записи, т. е. для выбора одной из шести групп, исполь-
зуется регистр адреса с дешифратором. Имеются также некоторые
дополнительные элементы, обеспечивающие нормальный режим ра-
боты индикаторных ламп.
Индикация цифры в разряде визуального регистра осуществля-
ется в такой последовательности. В четырехразрядный регистр чис-
ла устройства индикации поступает двоично-десятичный код одного
разряда шестиразрядного десятичного числа. На соответствующем
(одном из десяти) выходе дешифратора первой ступени образуется
сигнал, который поступает на один из входов шести логических
элементов в зависимости от выбранной цифры в разряде. Одновре-
менно на одном из выходов дешифратора адреса разрядов числа об-
разуется сигнал, который поступает на десять логических элемен-
тов И. Сигнал с выхода логического элемента И (на который посту-
пают одновременно оба сигнала) зажигает соответствующую цифру
лампы выбранного разряда.
28. Состав автоматизированных систем судовождения
Задачи автоматизации судовождения. В нашей стране и за ру-
бежом интенсивно ведутся работы по созданию, совершенствованию
и внедрению на судах автоматизированных систем судовождения
(рис. 84).
Состав систем, объем решаемых ими задач, конструкция, так-.
тико-технические и эксплуатационные характеристики различны.
Имеются системы, выполняющие либо только вычислительно-ин-
формационные функции при решении задач навигации, либо функ-
ции предупреждения столкновений судов, либо и те и другие вмес-
те. Есть системы так называемой интегрированной навигации, в ко-
торых решается больший объем задач, а результаты выдаются не
только на информационные устройства, но и на системы управления
движением судна.
166 '
Рис. 84. Структурная схема автоматизированной системы судовождения
Автоматизируется решение множества задач, связанных с судо-
вождением.
В области навигации это решение следующих задач:
автономное счисление пути судна по компасу и лагу;
непрерывная либо эпизодическая коррекция данных счисления
по обсервациям;
комплексирование различных радионавигационных и спутнико-
вых систем с целью определения наиболее точных координат
места судна;
расчет курсов плавания по локсодромии и ортодромии, дистан-
ции и времени до их изменения;
расчет поправок компаса, лага, суммарного сноса судна;
изображение «электронной» карты на экране цветного индика-
тора ситуаций;
коррекция данных электронного выносного измерительного пре-
образователя, поправок, на условия распространения радиоволн,
сфероидичности Земли и др.;
прокладка линии пути судна на путевой и «электронной» кар-
тах.
В области предупреждения столкновения судов это решение сле-
дующих задач:.
167
автоматическое обнаружение целей в заданной зоне и автомати-
ческое их сопровождение;
определение элементов движения целей;
отображение данных о степени опасности и параметров движения
встречных судов на индикаторе ситуаций и табло;
автоматическая сигнализация об опасных встречах;
ручное и автоматическое «проигрывание» маневров расхождения.
В области управления движением судна по заданной траекто-
рии это решение следующих задач:
определение отклонений от.заданной программ^ плавания;
оптимизация законов управления движением судна по траекто-
рии в зависимости от условий плавания и его гидродинамических
характеристик; ।
формирование сигналов управления и их передача на авторуле-
вой;
сигнализация об отказах элементов системы и регистрация дан-
ных (навигационных параметров, элементов маневрирования, опас-
ных сближений и др.);
контроль и управление судовой энергетической установкой.
При управлении грузовыми и' балластными операциями это
решение следующих задач: планирование грузовых операций; конт-
роль дифферента, расчет остойчивости, балластировки и посадки
судна, напряжений в корпусе и т. д.
При выполнении эксплуатационно-экономических, материаль-
но-снабженческих и других расчетов это решение следующих за-
дач: расчет продолжительности рейса; рейсовый отчет; расчет рас-
хода топлива и смазочных материалов; расчет заработной платы
и др.
Комплексы «Бриз» и «Бирюза». В состав комплекса «Бриз» вхо-
дят, радиолокационный комплекс (РЛК), навигационный комплекс
(НК), система гидроакустических лагов (ГАЛ), и информационно-
вычислительный комплекс (ИВК). Каждый из перечисленных комп-
лексов и систем может работать автономно и совместно с ИВК.
Радиолокационный комплекс содержит двухдиапазонную на-
вигационную радиолокационную станцию, устройство первичной
обработки радиолокационной информации и индикатор ситуации
(ИС). Структура РЛК при автономной его работе обеспечивает
получение радиолокационной информации о надводной обстановке,
индикацию ее на индикаторах кругового обзора и ситуации, изме-
рение расстояний и направлений до надводных объектов и их отра-
жение на ИС при пересечении ими сигнальных колец дальности.
Совместно с информационно-вычислительным комплексом РЛК
обеспечивает автоматическое и полуавтоматическое сопровождение
объектов, выработку координат и параметров их движения, автома-
тическое выявление опасных объектов, ручное «проигрывание» ма-
невра на расхождение.
168
Навигационный комплекс предназначен для автономного полу-
чения информации о курсе, скорости, пройденном расстоянии. Сов-
местно с ИВ К он обеспечивает определение места судна, выработку
маршрутных координат и выполнение отдельных навигационных
расчетов. '
При определении места судна происходит выработка счислимых
географических координат места судна с оценкой точности и про-
кладкой на карте, а также поправок в счислимые координаты, на-
хождение скорости и путевого угла по данным РНС «Декка» й по
данным РЛК при вводе координат ориентира с автопрокладчика
или вручную. Кроме того, осуществляется выработка поправок к
координатам по данным РНС «Лоран» и «Омега», а также по изме-
ренным высотам звезд.
Выработка маршрутных координат заключается в определении
смещения судна с заданной траектории, оставшегося расстояния до
точки поворота и курса, которым судно должно следовать до очеред-
ной точки поворота.
В навигационные эпизодические расчеты входят вычисления
расстояния и азимута на заданную точку по ортодромии и локсо-
дромии; угла ветрового дрейфа; широты и долготы места, рассчи-
танных по заданным значениям курса, скорости и интервала вре-
мени; курса и счислимых координат, в которых должен быть изме-
нен курс при плавании по дуге большого круга; поправки к пока-
заниям магнитного компаса; элементы линии положения по изме-
ренным высотам Солнца.
Оперативное управление решением задач в автоматизированном
комплексе «Бриз» осуществляется с навигационного пульта, вы-
полненного в виде отдельных секций.
Информационно-вычислительный комплекс предназначен для
автоматической обработки информации, поступающей от НК и
РЛК, регистрации результатов работы судовых технических средств.
Решение навигационных задач осуществляется со следующей
точностью: определение счислимых координат ±3%, пройден-
ного расстояния; определение координат места судна по радиоло-
кационной станции «Бриз» ±(20—400) м, радионавигационным стан-
циям «Декка» ±(90—900) м, «Лоран-А» ±(900—1300 ) м, «Лоран-С»
±(300—600) м, «Омега» ±(5,5—11,8) миль; Выработка маршрутных
данных — смещение с заданной траектории ±0,01 мили, расстоя-
ние до точки поворота ±0,01 мили, заданный курс в точке пово-
рота ±0,1°. Входящие в комплекс «Бриз» комплексы и системы
работают автономно.
Модификацией комплекса «Бриз» является система «Бирюза»
(рис. 85), в которой решаются новые задачи: совместная обработка
информации, поступающей от различных навигационных средств,
управление судном по заданной программе, определение места
судна по системам спутниковой навигации. Она включает в себя
169
шесть модулей: навигационный НК, судовождения С, предупреж-
дения столкновений «Бриз-Е», контроля мореходно-прочностных
характеристик КМ, регистрации Р и информационно-управляющий
ПУ, обеспечивающий ввод, вывод, преобразование информации,
вычисления и управление интерфейсным процессом.
В системе значительно расширен объем задач по выполнению
грузовых и балластных операций.
Индикатор ситуации «Бриз-Е». Индикатор выполнен в виде
пульта консольного типа, в нижней части которого расположена
специализированная ЭВМ. На вертикальной панели пульта (под
углом 70°) расположены экран диаметром 40 см и основные органы
управления. Индикатор может работать с радиолокационными стан-
циями «Енисей», «Океан», «Наяда» в трех- и десятисантиметровых
диапазонах, а также при совместной обработке сигналов обоих диа-
пазонов. Данные о курсе (от гирокомпасов «Курс» или «Вега») и
скорости (от лагов МГЛ-25 или ИЭЛ-2) вводятся в индикатор авто-
матически. Предусмотрена возможность и ручного ввода.
На экране индикатора одновременно с обычным первичным
радиолокационным изображением индицируется вторичная гра-
фическая и цифровая информация, получаемая от ЭВМ в результа-
те обработки данных РЛС (рис. 86). Вторичная информация по же-
ланию судоводителя может изображаться на шкале 4, 8 или 16 миль.
Начальный захват объектов на сопровождение осуществляется
судоводителем либо вручную путем наведения на цель специаль-
ного маркера, либо автоматически при пересечении эхо-сигналом
Рис. 85. Структурная схема автоматизированной системы «Бирюза»
170
Рис. 86. Экран системы «Бриз-Е> со
вторичной информацией:
1 — время прогноза; 2 — цель взята на со-
провождение, но ее параметры еще не
выбраны; 3 — маркер на кольце сопро-
вождения подвижной цели; 4 —* кольцо со-
провождения на подвижной цели с векто-
ром истинного движения; 5 — кольцо со-
провождения на неподвижной цели; 6 —
кольцо собственного судна с вектором ис-
тинного движения; 7 — курс и скорость
собственного судна; 8 — время до точки
кратчайшего сближения; 9 — дистанция
кратчайшего сближения; 10 — скорость
цели; // — курс цели; Л2 — дистанция до
цели; 13— пеленг на цель
кольца автообнаружения. Одновременно можно сопровождать до
20 целей.
Автоматическая обработка данных РЛС на ЭВМ включает в
себя: измерение • пеленга и дальности сопровождаемых объектов
на каждом обзоре; вычисление курсов и скоростей сопровождаемых
объектов по линиям относительного (ЛОД) и истинного движения
(ЛИД), а также расстояний кратчайшего сближения с ними и вре-
мени следования до точки кратчайшего сближения; вычисление экст-
раполированной ситуации при «проигрывании» маневра курсом на
безопасное расхождение в опасной ситуации; выработку данных,
необходимых для индикации вторичной информации на экране по
всем сопровождаемым объектам.
Вторичная информация включает в себя сведения о маркере,
кольце сопровождения, векторе относительной или истинной ско-
рости объекта (линии направления движения), цифровые данные о
курсе и скорости судна, формуляр — цифровые данные о сопровож-
даемых объектах. •
Маркер, представляющий собой кольцо диаметром 10 мм с точ-
кой в центре, используется для ручного захвата объектов на авто-
сопровождение, сброса целей с сопровождения, вызова на индика-
цию формуляра сопровождаемого объекта, измерения пеленга и
дальности до любого несопровождаемого объекта, установки ди-
станции кольца автообнаружения, ручного ввода скорости судна.
Управляют положением маркера на экране посредством шара
наведения, расположенного справа на горизонтальной панели ин-
дикатора. Использование маркера для выполнения указанных
функций позволило значительно сократить число органов управле-
ния и сделать простой и удобной работу судоводителя с индика-
тором.
Для ручного захвата объекта на автосопровождение необходи-
мо совместить маркер с радиолокационной отметкой и нажать кла-
171
вишу «Захват»,. Вокруг отметки появится кольцо автосопровожде-
ния диаметром 8 мм и слева от него символ «->-». Это значит, что
объект взят на сопровождение и можно переходить к захвату сле-
дующего объекта или к выполнению других операций. Вся процеду-
ра захвата объекта занимает 3—4 с. Через 1 мин после начала
сопровождения вырабатываются параметры движения и на экране
индицируется вектор скорости, а символ «+» гаснет.
Длина вектора соответствует перемещению объекта за прогно-
зируемое время, которое выбирается и устанавливается судоводи-
телем. Для контроля его значения индицируются в левой части
экрана. Диапазон возможных установок от 1 до 30 мин. В течение
следующей минуты, параметры движения объекта уточняются, и
через 2 мин после захвата их точность достигает максимального зна-
чения. В различных ситуациях точность выработки параметров дви-
жения зависит от многих факторов — расстояния до объекта, ско-
рости относительного сближения и др. Самым общим показателем
точности может служить максимальная погрешность в выработке
дистанции кратчайшего сближения для опасных объектов через
2 мин после начала сопровождения, которая не превышает 0,2 ми-
ли. Как показала практика, в 90% случаев точность не превышает
0,1 мили.
Кольца сопровождения и векторы опасных целей мигают, что
позволяет быстро выделить их на экране индикатора. Встречная
цель считается опасной, если дистанция кратчайшего сближения и
время до точки кратчайшего сближения меньше заданных значений.
Они выбираются судоводителем в зависимости от условий плавания
и устанавливаются посредством специальных переключателей.
Если совместить маркер с кольцом сопровождаемого объекта
и нажать клавишу «Формуляр», то в нижней части экрана индици-
руются цифровые данные об этом объекте. Формуляр содержит пе-
ленг и дальность до объекта, направление и скорость его движения
(по ЛИДу или ЛОДу), дистанцию кратчайшего сближения и время
плавания до нее. Если маркер находится не на сопровождаемом
объекте, то формуляр содержит только пеленг и дальность до места
положения маркера. Это позволяет автоматически измерять пеленг
и дальность до любого навигационного ориентира. В правой части
экрана непрерывно воспроизводятся курс и скорость собственного
..судна.
Над экраном расположен специальный светоплан, на котором
индицируются параметры, характеризующие режим работы индика-
тора: шкала, ориентация изображения (курс или север), режим вос-
произведения (ЛОД или ЛИД), установленные дистанция и время,
размер задержки для выполнения выбранного маневра на безопас-
ное расхождение. Размещение цифровой индикации непосредст-
венно на экране и наличие светоплана делают удобной работу судо-
водителя, так как все необходимые данные сосредоточены в одной
172
зоне обзора. Во многих зарубежных аналогичных системах циф-
ровая индикация и данные о режимах работы расположены в сто-
роне от экрана, что, безусловно, менее удобно для судоводителя.
В индикаторе предусмотрен режим экстраполяции ситуации для
. выбора маневра курсом (вправо или влево) на безопасное расхожде-
ние. При «проигрывании» выбираемого маневра учитываются дина-
мические характеристики собственного судна и время задержки
маневра.
Работа с автоматизированным радиолокационным индикатором
ситуации «Бриз-Е» показала высокую его эффективность в обеспе-
чении безопасности мореплавания, простоту и удобство эксплуата-
ции.
Система «Океан-С». Эта система предупреждения столкновений
судов включает в себя двухдиапазонную (3 и 10 см) радиолокаци-
онную станцию, гирокомпас, лаг и ЭВМ. Система автоматически
обнаруживает, захватывает и сопровождает не менее 55 целей.
После обработки в ЭВМ информация о параметрах движения целей
поступает на экран и светодиодное цифровое табло индикатора.
Неподвижные цели отображаются на экране в виде кружков,
а движущиеся — в виде корабликов с векторами, равными прогно-
зируемому пути за время, устанавливаемое судоводителем. Рядом с
целью высвечиваются данные о ней, при совмещении с нею мар-
кера — либо пеленг и дальность, либо курс и скорость, либо ди-
станция и время кратчайшего сближения. Изменением яркости от-
меток цели классифицируются на расходящиеся и опасные отметки.
Критерием опасности считается условие, когда дистанция и время
кратчайшего сближения становятся меньше допустимых (установ-
ленных судоводителем). При этом включается световая и звуковая
сигнализация.
Предусмотрена возможность «проигрывания» ситуации сближе-
ния при маневрировании курсом и (или) скоростью с ускорением
времени сближения в 32 раза. Судоводитель может изменить число
отображаемых целей сбросом вручную или ограничением зоны об-
зора по дальности, выделением сектора или сегмента, а также осу-
ществить смещение изображения своего судна (центра развертки) в
пределах радиуса экрана.
Погрешности вычисления параметров движения целей следую-
щие: курса — 3°, скорости — 1 уз, расстояния кратчайшего сбли-
жения — .0,25 мили, времени — 1 мин через 2—4 мин после за-
хвата цели. Погрешности параметров движения своего судна не
превышают Г (курс) и 0,5 уз (скорость).
В случае шести пропусков цели она сбрасывается с сопровожде-
ния, после чего вновь'может захватываться. Это может произойти
при маневрировании цели или своего судна либо при сильной
качке.
173
Оператор вводит информацию посредством сенсоров и кнюп-
пеля. Сенсор представляет собой электронный элемент с двухстроч-
ным световым табло и пластиной, прикасание к которой изменяет
состояние элемента. Кнюппель — это двухскоростной двухкоор-
динатный орган ввода числовых данных об изменении какого-либо
параметра или двух координат на экране. Орган имеет рукоятку
управления, наклоном которой в различных направлениях опе-
ратор осуществляет это изменение. Сторона и угол наклона ру-
коятки кнюппеля кодируются пятью- — шестнадцатиразрядными
словами и передаются в ЭВМ.
Системы «Панорама-1» и «Панорама-СТ». Система «Панорама-1»
предназначена для решения следующих задач: навигационных, уп-
равления движением судна, автоматической радиолокационной про-
кладки (АРП), отображения стилизованной навигационной инфор-
мации на экране, ‘составления грузового плана с расчетом остой-
чивости. прочности и посадки судна. Все перечисленные задачи ре-
шаются комплексом, состоящим из систем «Панорама-1», «Панора-
ма-СТ» или «Панорама-СТ-1», «Панорама-СТ-2», «Панорама-СТ-3».
Состав комплекса может меняться в зависимости от тоннажа
судов. Так, например, на судах водоизмещением менее 10 тыс. т
устанавливают только систему автоматической радиолокационной
прокладки «Панорама-СТ-2». В таком случае в состав навигацион-
ных задач входят следующие: определение счислимых географичес-
ких координат места судна и корректировка счислимых координат
по данным радионавигационных систем «Декка», «Лоран-С» и «Оме-
га», спутниковых навигационных систем, судовых радиолокацион-
ных станций; расчет поправки скорости судна, плавания по дуге
большого круга, поправки компаса по Солнцу, скорости судна и
пройденного пути; прогнозирование значений географических ко-
ординат места судна, скорости и времени прибытия для любой точ-
ки маршрута.
Пакет задач автоматической радиолокационной прокладки вклю-
чает в себя:
отображение навигационной и картографической информации
на шкалах РЛС 0,25; 0,5; 1; 2; 4; 8; 16; 32; 64 мили;
слежение за 60 надводными объектами на дальностях от 0.1 до
20 миль;
- расчет безопасных курсов и зон безопасного движения;
обнаружение маневра курсом сопровождаемого объекта в те-
чение 30 с с момента его начала;
имитация собственного маневра курсом или скоростью с целью
обеспечения безопасного расхождения;
определение координат и параметров движения сопровождае-
мых объектов.
Решение задач по управлению движением судна обеспечивает
стабилизацию судна на заданном курсе, удержание его на заданной
174
траектории, управление судном при выполнении заданного пово-
рота, навигационное планирование рейса (по заданию начальной,
конечной и любых других точек маршрута и скорости), идентифи-
кацию маневренных характеристик судна по данным маневра «Зиг-
заг», индикацию на экране заданного и исполняемого маршрутов
плавания и навигационных параметров движения (до 2000 точек);
контроль местонахождейия судна на маршруте; индикацию пока-
заний всех навигационных измерительных преобразователей.
Регистрация информации по желанию судоводителя осущест-
вляется в кассетном накопителе на магнитной ленте (КНМЛ). Ав-
томатически печатаются результаты решения навигационных задач
по управлению движением судна, состоянию измерительных пре-
образователей, а также ежечасно заданный набор навигационных
параметров движения судна.
В качестве устройств отображения информации используются
цветные и монохроматические телевизионные, индикаторы, экраны
которых имеют размеры по диагонали 510 и 610 мм соответственно.
' Система «Панорама-СТ» имеет модификации: «Панорама-СТ-1»,
«Панорама-СТ-2», «Панорама-СТ-3».
Конструкция пультов судовождения и АРП соответствует меж-
дународному стандарту. В системе выполнены требования Между-
народной морской организации (ИМО) к рабочим диаметрам экра-
нов для решения задач АРП.
Комплекс «Бирюза СН-4». Использование в приемоивдикаторах
РНС встраиваемых микроЭВМ позволяет значительно расширить
их функциональные возможности. Таким прнемоиндикатором явля-
ется комплекс спутниковой навигации «Бирюза-СН-4», который
обеспечивает решение следующих основных задач: определение гео-
графических координат места судна и высоты над уровнем моря по
сигналам спутниковых навигационных систем «Навстар» (США) и
«Гланасс» (СНГ); определение курса и скорости судна; установка
до 100 маршрутных точек; расчет расстояния и курса на марш-
рутную точку по локсодромии или ортодромии, а также даты и
времени прихода в эту точку; выдача сигнала тревоги при отклоне-
нии судна от курса, приходе его в заданную маршрутную точку или
в случае дрейфа при якорной стоянке; расчет времени появления
спутников в зоне радиовидимости при неполном созвездии спут-
ников. Кроме того, он дает сведения о точном времени.
Комплекс обеспечивает определение координат места судна на
расстоянии не более 100 м. Для судна, находящегося на стоянке,
точность составляет не более Юм. При отсутствии сигналов от
спутников комплекс определяет счислимые географические коор-
динаты места судна по показаниям лага и гирокомпаса. Встроенный
индикатор позволяет индицировать географические координаты
места судна, курс, скорость, время, дату и другие параметры.
175
Система «Дата Бридж-7». Характерной особенностью этой сис-
темы является то, что помимо решения основной задачи по обна-
ружению и сопровождению целей, она решает и ряд дополнитель-
ных навигационных задач, связанных с плаванием в стесненных ус-
ловиях и маневрированием.
По составу решаемых задач система может работать в следующих
основных режимах: визуального отображения курса и скорости
своего судна и целей, навигационной радиолокационной прокладки,
маневрирования и обучения. Для решения этих задач система по-
лучает информацию от лага, гирокомпаса, одной или двух радио-
локационных станций.
Скорость и курс собственного судна высвечиваются на экране
индикатора кругового обзора в режиме истинного движения как
вектор, началом которого является центр развертки. Направление
вектора характеризует курс судна, а его длина — скорость. Все
суда-цели, взятые на автоматическое и ручное сопровождение, так-
же представляются векторами, характеризующими их скорость и
направление. На встроенном в индикатор кругового обзора бук-
венно-цифровом табло высвечиваются курс и скорость собственного
судна, а также курс, скорость, дистанция кратчайшего сближения и
время до точки кратчайшего сближения для сопровождаемой
цели.
Система обеспечивает также определение счислимых координат
места судна по показаниям лага и гирокомпаса. Наличие счисли-
мых координат и координат известных навигационных ориентиров
позволяют осуществлять автоматическое сопровождение послед-
них и вычислять суммарный снос судна. В режиме автоматического
сопровождения навигационных ориентиров имеется возможность
установления маршрута плавания по фарватеру путем введения
данных о ширине фарватера и точках поворота. При выходе судна
на кромку фарватера предусматривается специальная сигнализация.
Наличие навигационного режима в системе позволяет пользо-
ваться радиолокационными картами, которые хранятся в памяти
встроенной ЭВМ. Построение радиолокационной карты возможно
осуществлять с пульта управления путем клавишного набора ко-
ординат точек, соединяемых на карте линиями. Возможно также
построение карты непосредственно с индикатора кругового обзо-
ра (ИКО) и ее запоминание. При реализации режима маневрирова-
ния возможно отображение на ИКО траекторий предполагаемых
маневров с целью расхождения с опасными встречными судами.
Заданные при «проигрывании» маневра курс и скорость непрерыв-
но высвечиваются на буквенно-цифровом табло, а прогнозируемые
положения своего судна и целей отображаются на экране ИКО.
Это позволяет прогнозировать ситуацию до фактического выполне-
ния маневра.
176
Режим обучения позволяет обучать судоводителей работе с сис-
темой в порту и в рейсе. Для этого имеются четыре имитационные
программы.
Вычислительная система «Дата Бридж-7» состоит из трех взаи-
мосвязанных микропроцессорных подсистем, первая из которых
решает задачи сопровождения целей, вторая — обнаружения и
и захвата целей и третья — обработки сигналов ИКО.
К системе подключают лаг, гирокомпас и одиночные или сдво-
енные радиолокационные станции.
Система «Дата Бридж-20001». Эта система объединяет в себе
систему автоматической радиолокационной прокладки и навигаци-
онный комплекс, обеспечивающий получение координат места суд-
на по любым навигационным системам и визуальным наблюдениям.
В отличие от всех указанных ранее систем в ней предусматривается
предварительный ввод координат точек выхода, прихода, поворота
судна и других, а также заданной скорости и расчетного времени.
Предусматривается корректировка первоначально введенной ин-
формации. Плавание может осуществляться по локсодромии, ор-
тодромии, а также комбинированное.
Система решает задачи выбора наивыгоднейшего курса, конт-
роля за расходом топлива, позволяет осуществлять одновременный
ручной и автоматический захват и сопровождение 50 целей в зоне
до 55 миль.
Управление решением различных задач осуществляется по-
средством специальных клавиш.
Возможно последующее восстановление всей информации о
маршруте благодаря возможности ее документирования и хранения
на Дисках. Это позволяет в случае необходимости восстановить всю
навигационную прокладку. Информация отражается на цветном
дисплее.
Наличие интерфейса’ обеспечивает включение в состав системы
лага, гирокомпаса и приемоиндикаторов навигационных систем
«Транзит», «Декка», «Лбран-С». Система осуществляет обсерва-
ционное счисление пути судна. В комплект входят также эхолот,
авторулевой, графический прокладчик, печатающее устройство.
Осуществляется связь с судовой энергетической установкой в ре-
жиме контроля и дистанционного управления ее режимами. В сис-
теме реализован процесс представления электронной навигацион-
ной карты.
Система «Атлас НКИС-1800». Эта система состоит из персональ-
ной ЭВМ с графическим монитором и автоматическим вводом дан-
ных от лага, гирокомпаса и датчиков позиционирования, состав
которых может изменяться.
Система решает следующие задачи:
навигационное планирование рейса;
177
ввод и редактирование путевых точек с графическим отображе-
нием маршрута на экране;
счисление, расчет оптимальной скорости, ожидаемого времени
прихода в заданную точку пути;
расчет элементов выполнения маневра (времени и точки начала
поворота, углов перекладки руля);
построение графика приливов и отливов для района плавания;
Предоставление информации о рекомендуемом времени безопас-
ного прохода через бары рек и под мостами;
указание курсовых секторов предполагаемой наиболее сильной'
качки судна;
выдача рекомендаций по выбору скорости или осадки и посадки
судна с целью избежания резонанса при качке;
выдача информации о водных путях по планируемому маршру-
ту с расчетом безопасной скорости в зависимости от глубины и с
учетом возможного проседания судна.
По навигационному обеспечению выполнения рейса система
дает возможность получить отображение счислимого обсервованно-
го места судна с линией пути (планируемого и истинного) на гра-
фическом экране со стилизованной электронной навигационной кар-
той, а также курсов и дистанций для выхода в заданные путевые
точки, рекомендаций по маневрированию в зависимости от реаль-
ных условий плавания, а также по выполнению поисковых опера-
ций в соответствии с руководством по выполнению поисково-спа-
сательных работ, траектории маневрирования с учетом скорости и
направления течений для районов Северного моря.
При решении общесудовых задач система предоставляет:
отображение судовой маневренной документации в соответствии
с международными рекомендациями ИМО для «лоцманских карто-
чек»;
программы по редактированию стилизованных электронных на-
вигационных карт;
справочную информацию по сигнальным флагам, а также гра-
фическую информацию о видах облаков;
рекомендации по предупреждению столкновений судов (перечень
мер, которые должны быть приняты при ограниченной видимости,
расчет ограничений для судна при маневрировании);
расчеты безопасной скорости судна в зависимости от шкалы даль-
ности РЛС или реальной дальности видимости, начальной остой-
чивости по измерению качки или по результатам выполнения экспе-
римента по'кренованию судна;
кодирование текущей гидрометеорологической информации с уче-
том международного погодного кода;
прогнозы о волнении моря.
178
29. Системы автоматизации управления судовыми
энергетическими установками
Общие положения. Системы контроля, диагностирования судо-
вых энергетических установок (СЭУ) и управления ими включают
в себя большое число устройств различного функционального
назначения. Все они включают в себя выносные измерительные пре-
образователи температуры и давления, ЭВМ, устройства печати,
сигнализации и отображения информации.
Наибольшее распространение получили информационно-кон-
тролирующие системы СЭУ, которые состоят из выносных измери-
тельных преобразователей, коммутатора точек измерения, анало-
го-цифрового преобразователя, блока сравнения, запоминающего
устройства констант, накопителя помех, устройств управления, ре-
гистрации параметров и помех.
Выносные измерительные преобразователи предназначаются для
непосредственного измерения контролируемых параметров, каж-
дый из которых имеет свой номер. Коммутатор точек измерения
осуществляет по жесткой программе последовательное подключение
исходных выносных измерительных преобразователей. Аналого-
цифровой преобразователь превращает сигнал в двоичный код.
В блоке сравнения происходит сравнение измеренного значения па-
раметра с заданными предельными значениями, выбираемыми из
запоминающего устройства констант. Обычно используются две
схемы для одновременного сравнения минимально и максимально
допустимых предельных значений. В случае выхода измеренного
параметра за предельные значения сигнал помехи поступает на на-
копитель помех, который, в свою очередь, после их накопления (с
целью избежания случайного сбоя) запускает устройство регистра-
ции помех и сигнализацию. Основной цикл периодически дополня-
ется подключением устройства регистрации основных параметров
на печать и в случае необходимости на индикацию.
Аналогичные системы могут работать и не по жесткому циклу,
что приводит к усложнению устройств управления, памяти и к ис-
пользованию ЭВМ. Решение на этих .системах задач диагностиро-
вания полностью утверждает приоритет ЭВМ.
Система решает следующие основные задачи:
контролирует измеряемые параметры, позволяющие проверять
работу цилиндров, расход топлива, температуру отработанных га-
зов;
выдает выходную информацию на печать, индикацию и устрой-
ства сигнализации;
управляет включением резервных насосов (охлаждающей воды,
смазочного масла, пускового воздуха главного двигателя).
Информационно-контролирующие системы выполняют также
расчет технико-экономических параметров.
179
Задачи диагностики решаются методом анализа логических со-
отношений между значениями отдельных контролируемых величин
на основе анализа причинно-следственных связей между возможны-
ми нарушениями в контролируемом процессе. По мере разработки
алгоритмов диагностирования их решение возлагается на ЭВМ.
Системы дистанционного автоматического управления (ДАУ)
главного двигателя и вспомогательного оборудования позволяют
осуществлять пуск, остановку, реверс и изменение режима их ра-
боты. Современные системы ДАУ создаются на базе микропроцес-
соров и микроЭВМ, реализующих по программе основные логичес-
кие функции управления. Их использование позволяет добиться и
конструктивной унификации ДАУ.
Правилами классификации и постройки морских судов при при-
менении автоматизированных устройств управления главными и
вспомогательными механизмами и системами в зависимости от на-
личия обслуживающего персонала и порядка несения вахты пред-
усматриваются:
1) при постоянной вахте в машинном помещении — управление,
контроль, защита и сигнализация;
2) при постоянной вахте в центральном пульте управления
(ЦПУ) — устройства дистанционного управления, защиты, конт-
роля, автоматического переключения, аварийной и предупреди-
тельной сигнализации;
3) при отсутствии постоянной вахты в машинных помещениях и
ЦПУ — системы автоматического и дистанционного управления,
устройства централизованного контроля, защиты, сигнализации
и регистрации аварийных отклонений управляемых и контролируе-
мых величин.
Судам со степенью автоматизации, предусматриваемой п. 2, при-
сваивается знак автоматизациии Аь а п.З —А2.
Правилами Регистра СССР также предусматривается на судах
со степенью автоматизации А, и А2 численность специалистов, до-
статочная для периодического технического обслуживания систем
автоматизации, а в случае отказа этих систем — для управления
механической установкой с местных постов для прихода судна в
ближайший порт, для выполнения работ по использованию спаса-
тельных Средств, обеспечению, живучести судна й борьбе с пожа-
рами.
Требования по надежности оборудования автоматизации ого-
вариваются специально в Правилах Регистра СССР и предусмат-
ривают не менее 5000 ч работы в течение Уода без наладок и под-
регулировок.
Устанавливаемое на судах оборудование систем и устройств ав-
томатизации должно надежно работать в следующих условиях:
при длительном крене судна до 15° и дифференте до 10°;
180
Таблица 10
Температура окружающей среды для надежной работы
оборудования систем автоматизации , °C
Расположение оборудования Неограниченный район плаваниях Плавание вне тропической зоны
Воздух Охлаж- дающая среда Воздух Охлаж- дающая среда
Машинное помещение или другое помещение с дополнительными источ- никами тепла Открытая палуба Другое помещение +45 или +35* ... —10** +45... —30 +40...—10** +30 +40 или +35*...—10** +40... —30 +40... —10** +25
♦ При принудительном воздушном охлаждении с забором воздуха с открытой па-
лубы.
** Для гидравлических систем устанавливается в каждом конкретном случае.
при бортовой качке до 45° и килевой до 10° с периодом качки от
5 до 17 с;
при вибрациях с частотой от 5 до 30 Гц (с амплитудой 1 мм при
частотах от 5 до 8 Гц и с ускорением 0,5 при частотах от 8 до 30 Гц);
при ударах с ускорением 3g частотой от 40 до 80 ударов в мину-
ту (g— ускорение свободного падения);
при относительной влажности воздуха (75±3)% при температу-
ре (+45±2) °C; (80±3)% — (+40±2) °C; (95±3)% — +25±2) °C
и при температуре окружающей среды, приведенной в табл. 10.
Функции судоводителя на судах усложняются — на него все
больше возлагаются задачи по управлению, контролю за работой
судовых энергетических установок, а в необходимых случаях —
и принятию оперативных управленческих решений. Поэтому боль-
шое значение имеет характеристика пропускной способности судо-
водителя на различных этапах передачи информации. Эффектив-
ность и надежность работы судоводителя находятся в прямой зави-
симости от средств представления информации.Эти средства долж-
ны позволять обеспечивать оптимальную скорость переработки
информации с целью принятия решения по оперативному управле-
нию.
Большое значение имеет организация информационной модели
контролируемого объекта с учетом различных взаимосвязей пара-
метров в форме, удобной для восприятия человеком. В настоящее
время еще многие системы контроля насчитывают большое число
стрелочных и цифровых индикаторов. Недостатками этих прибо-
ров являются отсутствие наглядности, большие габаритные разме-
• 181
ры и масса. Эти недостатки не позволяют получать хорошие инфор-
мационные характеристики систем контроля и управления, соз-
давать компактные, сосредоточенные мнемонические и структурные
модели и получать интегральную оценку .состояния систем в слож-
ных условиях. Поэтому информация в современных системах вы-
свечивается на электронных экранах.
Система дистанционного автоматического управления СЭУ. Та-
кие системы обеспечивают управление всеми режимами работы без
посредничества центрального пульта управления СЭУ машинного
отделения.
Использование ДАУ решает следующие задачи:
безопасная эксплуатация главного двигателя при маневриро-
вании;
осуществление оптимальной последовательности операций уп-
равления главным двигателем, обеспечивающей повышение точ-
ности и скорости выполнения маневров;
минимальная загрузка вахтенного штурмана по управлению дви-
гателем;
освобождение вахтенного механика от постоянного пребывания
у поста управления главным двигателем.
При этом достигается снижение трудозатрат судовой команды по
управлению двигателем и повышение безопасности мореплавания.
Системами ДАУ оборудовано много судов, имеющих различ-
ные СЭУ — дизельные и паротурбинные. Все суда с полным или с
частичным вахтенным обслуживанием машинного отделения обо-
рудованы системами дистанционного управления из рулевой руб-
ки. Эту систему устанавливают не только на строящихся, но и на
эксплуатируемых судах при их модернизации.
Система ДАУ задает частоту вращения гребного винта. Причем
переход от одной частоты вращения к другой, а также выполнение
команд остановки СЭУ и ее пуска осуществляются с учетом характе-
ристик конкретной установки и гидродинамических характеристик
судна. В некоторых системах ДАУ предусматривается возможность
изменения программ в зависимости от показаний измерительных
преобразователей, характеризующих режимы эксплуатации, таких,
как давление масла в смазочной системе, температура охлаждаю-
щей воды, угол поворота вала и др. Система соединена с этими
измерительными преобразователями и получает от них информа-
цию. Наличие информации необходимо прежде всего для выполне-
ния программ пуска и реверса СЭУ. Программой обеспечивается
расчет давления и времени пуска воздуха, установка распредели-
тельного вала и масса впрыскиваемого топлива.
Так, программа обычного изменения частоты вращения греб-
ного винта дизельной установки, мощность которой равна 1000 кВт
(рис. 87), обеспечивает переход от первоначального значения п0 =
= 25 мин-1 к значению П] = 45 мин"1 за 2 с, к значению пг = .
482
Рис. 87. Графики изменения частоты вращения гребного винта по программе:
а—обычной; б — ускоренной; а — экстренной; г — критической
= 80 мин-1 за 25 с, к значению птах = 120 мин-1 за 10—12 мин.
Время, необходимое для перехода дизеля из состояния нормально-
го вращения винта до ускоренного, равно 10 с. Ускоренная про-
грамма обычно выполняется судоводителем только в экстренных
(аварийных) ситуациях путем нажатия специальной кнопки на
пульте управления. При нарастании частоты вращения винт про-
ходит диапазон критических частот, в пределах которого/ возмож-
ны резонансные явления. Поэтому программой предусматривается
более быстрое прохождение этого диапазона. Так, изменение часто-
ты вращения винта судовой дизельной установки мощностью
1000 кВт Дп — 5 мин-1 происходит за время Д/;= 0,5 с.
В системах ДАУ также предусматривается замедленная про-
грамма разогрева двигателя, обеспечивающая время его разгона
от 15 мин до 10 ч. Время разгона двигателя устанавливают вручную
с ЦПУ или с местного пульта управления.
Структурная схема системы ДАУ судовым малооборотным ди-
зелем (рис. 88) состоит из поста управления (расположенного в
рулевой рубке) /, блока задания скорости 2, схемы сравнения за-
данного значения скорости с текущим 3, блока формирования и
передачи текущего значения скорости (угла положения) 4, логи-
ческого блока программного пуска и остановки дизеля 5, электри-
ческих, гидравлических или пневматических усилителей 6; пре-
Рис. 88. Структурная схема системы ДАУ
183
дельных выносных измерительных преобразователей 7, обеспечи-
вающих программный пуск и остановку дизеля.
К узлам, обеспечивающим дистанционное автоматическое управ-
ление режимами судового дизеля И, относятся также следующие
вспомогательные приборы и механизмы: регулятор скорости 8,
топливные насосы 9, привод 10, обеспечивающий пуск и реверс.
Заданное значение скорости с машинного телеграфа в машинное
отделение передается посредством сельсина-датчика (СД) и сель-
сина-приемника (СП), расположенных соответственно н-а мостике
и в машинном отделении. В систему передачи также входят усили-
тель, сервомотор и регулятор скорости.
Систему передачи комплектуют обычно из следующих основных
узлов:
в рулевой рубке — машинного телеграфа, панели управления,
сигнала тревоги, устройства регистрации (печати) команд (допол-
нительно на больших судах устанавливают машинные телеграфы
на левом и правом крыльях мостика);
в центральном пульте управления — репитера команд, панели
управления, сигнала тревоги;
в машинном отделении — источников питания и узлов, обеспе-
чивающих контроль и индикацию; непосредственно на главной ма-
шине — привода, сервомеханизма, переключателя положения и та-
хогенератора.
Машинный телеграф в рулевой рубке предназначен для авто-
матического управления режимами главной машины. Этот теле-
граф посредством сельсина-датчика и сельсинов-приемников сое-
динен с репитером команд в ЦПУ и на мостике. Команды с этого те-
леграфа также поступают на логические схемы, обеспечивающие
пуск и остановку дизеля по программе.
При управлении режимами работы СЭУ с использованием сис-
темы ДАУ судоводителю необходимо знать время выбега судна
после подачи команды «Стоп». С этой целью составляют график
(рис. 89). Время выбега может быть уменьшено путем подачи контр-
воздуха в цилиндры двигателя внутреннего сгорания.
Определить расхождение между заданной и установленной на
телеграфе в рулевой рубке скоростью и показаниями тахометра в
машинном отделении можно по графику (рис. 90).
Большое значение при оценке системы ДАУ имеет время раз-
гона двигателя по нормальной программе. Необходимо, чтобы вре-
мя разгона не было затяжным и обеспечивало условия выполнения
маневра скоростью.
Система дистанционного автоматического управления гребным
винтом регулируемого шага. С целью повышения к. п. д, гребного
винта, а следовательно, уменьшения нагрузки СЭУ, на судах при-
меняются гребные винты регулируемого шага. Для изменения шага
винта используют систему дистанционного управления (рис. 91, а).
184
Рис. 89. График выбега судна после
подачи команды «Стоп>:
1 — в полном грузу без подачи контрвоз-
духа; 2 — в полузагруженном состоянии
без подачи контрвоздуха; 3в балласте
с подачей контрвоздуха
Рис. 90. График определения'скоро-
сти судна:
1 — ход вперед: 2 — ход назад
Существуют также системы автоматического управления шагом
гребного винта в зависимости от положения топливной рейки.
Однако с целью повышения надежности они дублируются устрой-
ствами дистанционного управления с мостика и из ЦПУ машинно-
го отделения. Управление системой дистанционного управления
винтом регулируемого шага является обязанностью вахтенного
помощника (на некоторых судах — вахтенного механика).
Эта система состоит, как правило, из двух пультов дистанцион-
ного ручного управления, один из которых 1 установлен в руле-
вой рубке, второй 3 — в ЦПУ машинного отделения. Кроме ста-
ционарных пультов управления, могут быть переносные пульты с
кнопочным управлением на ходовом мостике, в кормовой 5 или но-
Рис. 91. Система дистанционного управления винтом регулируемого шага
185
совой 6 частях судна. Так, например, на судах-паромах переносной
пульт установлен в кормовой части судна, на судах ледового пла-
вания — в носовой.
Основным блоком системы дистанционного управления явля-
ется устройство 2, выполняющее управление шагом гребного винта
посредством сервопровода 4, механически соединенного с винтом.
Панели управления в рулевой рубке и машинном отделении
включаются в общие пульты управления и по устройству обычно
одинаковы. Известны различные типы панелей управления винтом
регулируемого шага, однако можно выделить следующие основные
их элементы (рис. 91, б): ручка для установки шага гребного вин-
та 6\ индикаторы включения пульта в машинном отделении 7 и ру-
левой рубке 2; индикаторы перегрузки двигателя при переднем 1
и заднем 5 ходах; переключатели пультов управления 8, пере-
ключатель переднего и заднего хода 4\ регулятор освещения 3.
Для предотвращения перегрузки главного двигателя на топ-
ливном насосе устанавливают специальный переключатель, кото-
рый срабатывает при заданном положении топливной рейки. В этом
случае перегрузка двигателя устраняется автоматически — изме-
нением шага винта без вмешательства оператора.
Работа системы, обеспечивающей автоматическое изменение ша-
га гребного винта, заключается в следующем. Через несколько се-
кунд после появления на панели сигнала перегрузки начинается
постепенное изменение шага гребного винта. Этот процесс продол-
жается до тех пор, пока не погаснет сигнал перегрузки. Если изме-
нение шага происходит медленно (сигнал перегрузки горит), то
шаг может быть изменен поворотом маневровой ручки машинного
телеграфа до нейтрального положения и немедленным возвращением
ее в желаемое положение.
Система дистанционного автоматического управления судовыми
дизель-генераторами. В некоторых проектах морских судов пред-
усматривается использование системы ДАУ судовыми дизель-гене-
раторами (СДГ), устанавливаемой непосредственно в рулевой рубке.
Эта система предназначена для обеспечения дистанционного авто-
матического запуска СДГ из непрогретого и прогретого состояний;
его обычной и экстренной остановки; автоматического поддержания
дизель-генератора в прогретом состоянии и в готовности к немедлен-
ному запуску и приему нагрузки; осуществления нескольких по-
вторных дистанционных запусков при несостоявшемся предыду-
щем запуске; автоматической защиты дизель-генератора путем ос-
тановки при падении давления масла, перегреве масла и воды, па-
дении давления или уровня воды, разносе двигателя или по сигна-
лу от внешних защит; выдачи сигнала на прием и распределения
нагрузки после достижения установленных значений давления мас-
ла, температуры воды и масла, частоты вращения двигателя; руч-
ного пуска.
186
Рис. 92. Функциональные блоки си-
стемы дистанционного управления
судовым дизель-генератором
Система ДАУ СДГ обеспе-
чивает следующую сигнализа-
цию: о состоянии «горячий ре-
зерв» (т, е. о готовности дизель-
генератора к немедленному пус-
ку), о работе дизеля; о готов-
ности дизель-генератора к прие-
му нагрузки.
Система состоит из следую-
щих основных функциональных
блоков (рис. 92):
блока управления 4, предназначенного для задания режимов
пуска и остановки и управления ими. В нем сосредоточены логичес-
кие функциональные устройства, обеспечивающие реализацию про-
грамм пуска и остановки;
основного пульта управления 2, который расположен в зави-
симости от типа судна либо в ЦПУ машинного отделения, либо в
ЦПУ на ходовом мостике. Он состоит из органов управления и све-
товых.табло оперативной и аварийной сигнализации. На нем уста-
новлен переключатель выносных пультов управления;
выносного пульта управления 3, который может быть установ-
лен на ходовом мостике, в ЦПУ машинного отделения или других
судовых помещениях. Он предназначен для управления работой
СДГ /, но объем управления и контроля по сравнению с основным
пультом управления меньше.
В системах ДАУ СДГ применяется схема функционального конт-
роля для проверки исправного состояния системы методом выпол-
нения контрольного теста. С целью проверки судоводителю доста-
точно нажать кнопку «Контроль системы» на основном или вынос-
ном пульте управления. При этом программа имитирует подключе-
ние выносных измерительных преобразователей и их срабатывание.
Этим обеспечивается последовательное функционирование всех ло-
гических блоков программного управления, входных усилителей,
реле и сигнализации.
. Если система находится в исправном состоянии, то загорается
табло «Система исправна», если в неисправном, то это табло не за-
горается. Нажав вторично кнопку «Контроль системы», можно по
оперативным табло определить функциональный блок, который не-
исправен.
В современных системах ДАУ СДГ имеются устройства пере-
ключения программы.
Цифровая система контроля и регистрации параметров СЭУ.
Эта система обеспечивает последовательный дискретный контроль
параметров работы СЭУ. Она выдает выходную информацию в ви-
де десятичных чисел на печать и на индикацию. В случае выхода
значения измеряемого параметра на заданные предельные значения
187
включается аварийная сигнализация. Система выполняет также
частично функции управления, автоматически управляя включением
или выключением резервных насосов охлаждающей воды, смазоч-
ного масла и пускового воздуха главного двигателя.
Структурная схема системы состоит из следующих блоков:
выносных измерительных преобразователей первичной информа-
ции (ДПИ), число которых в современных системах достигает 400.
Все они последовательно пронумерованы по порядку. Порядковый
номер преобразователя называют номером точки замера, а каждый
преобразователь—точкой замера. Программа опроса обеспечивает
обегающий контроль последовательно всех преобразователей или
некоторых из них в режимах «Море» и «Берег», т. е. опрос на ходу
и на стоянке. В случае выхода за заданные пределы какого-либо
измеряемого параметра предусматривается более частый опрос пре-
образователя, соответствующего этому параметру. Все измеритель-
ные преобразователи (в основном давления, температуры и уровня)
последовательно подключены к единственному в системе измери-
тельно-контролирующему каналу, который состоит из аналоговой
и цифровой частей;
переключателя точек замера (ПТЗ), обеспечивающего последо-
вательное подключение преобразователей к измерительно-контроли-
рующему каналу по программе;
измерительно-контролирующего канала (ИКК), содержащего
входную цепь согласования, цепи измерения и контроля;
запоминающего устройства констант (ЗУК), предназначенного
для хранения эталонных минимальных и максимальных значений
контролируемых параметров;'
накопителя помех (НП), который осуществляет последователь-
ное накопление информации по заданной программе с целью защиты
системы от случайных сбоев. Наличие накопителя помех исключает
срабатывание устройств сигнализации от случайных сбоев;
устройства управления (УУ), формирующего программу опроса.
Устройство управления состоит из блоков формирования цикла оп-
роса (БФЦ) и программ опроса (БФП) и блока времени (БВ);
устройства регистрации параметров (УРП);
. устройства регистрации наличия помех (УРНП), осуществляю-
щего регистрацию параметров, вышедших за допустимые пределы,
и состоящего из печатающего блока и светозвуковой сигнализации;
исполнительных механизмов, осуществляющих включение ре-
зервных насосов.
Система функционирует следующим образом. В БФП формиру-
ется адрес (номер) измерительного преобразователя, подлежащего
опросу, который поступает в ПТЗ. Преобразователь точек замера
подключает соответствующий преобразователь к ИКК, в котором
осуществляются следующие функции:
.188
входное напряжение, соответствующее измеренному параметру,
нормализируется и преобразуется к стандартному входному диапа-
зону измерительной преобразующей цепи;
нормализованное входное напряжение преобразуется аналого-
цифровым преобразователем в двоично-десятичный код (8421) и
запоминается;
измеренное значение подается на две схемы для одновременного
сравнения с минимальным и максимальным предельными значения-
ми, которые выбираются из ЗУК по сигналу с ПТЗ.
Сигналы, возникающие при выходе измеренного значения за за-
данные пределы, поступают в накопитель помех. После накопления
нескольких сигналов о выходе параметра из заданных пределов
сигнал с НП запускает УРНП, осуществляется одноразовая печать
регистрируемого параметра, запускается сигнализация и подает-
ся сигнал на исполнительные механизмы.
В случае если измеренное значение параметра не выходит за за-
данные пределы, никаких сигналов не создается. Основные пара-
метры с заданной частотой (2 ч, 15 мин, 5 мин) могут выдаваться на
печать через УРП. Каждый из измеряемых параметров может быть
вызван на индикацию нажатием на кнопку, соответствующую номе-
ру измерительного преобразователя.
После окончания печати на БФП выдается сигнал об окончании
обработки параметра, и БФП формирует следующий адрес датчика
(точки замера). Цикл измерения и контроля повторяется.
Рассматриваемая .система построена на цифровых элементах за
исключением входной цепи согласования и частично измерительно-
контролирующей цепи.
Система автоматизации работы СЭУ «Даматик». Эта система
имеет преимущества перед другими системами* так как позво-
ляет иметь минимальное число различных блоков аппаратуры, стан-
дартизированные программы, удобную связь «человек — машина»,
эффективно обучать экипаж судна.
Система «Даматик» обеспечивает обегающий контроль и аварий-
ную сигнализацию, управление балластными операциями, регули-
рование температуры, пуск судового дизеля.
Основой построения системы является однородная вычисли-
тельная сеть, состоящая из микроЭВМ, причем характерной осо-
бенностью является выполнение каждой функции собственным
микропроцессором. В случае выхода из строя одного микропроцес-
сора система продолжает находиться в работоспособном состоянии.
Процессоры системы «Даматик» выполняют следующие функции:
управление ограниченным числом входов и выходов, передачей
данных, видеомонитором, клавиатурой, печатающим устройством
аварийных значений параметров и сигнализацией.
Связь с оператором осуществляется посредством стандартного
пульта, цветного видеомонитора и устройства печати аварийных
189
параметров. Состав этого оборудования для представления инфор
мании может быть значительно расширен установкой мнемосхем,
самописцев и т. д.
Вычислитель среднего индикаторного давления «Аутроника-
НК-5». Эта система позволяет получать на экране следующие па-
раметры: среднее индикаторное давление, частоту вращения; мак-
симальное давление сгорания, давления сжатия на линии расшире-
ния и продувочного воздуха, угол между максимальным давлением
сгорания и верхней мертвой точкой (ВМТ), нагрузки цилиндра, мак-
симальное давление впрыскивания топлива и давление топлива в
момент открытия иглы форсунки, угол между давлением топлива в
момент открытия иглы форсунки и ВМТ.
Система «Аутроника-НК-5» полностью контролирует техническое
состояние судового дизеля. Она позволяет получать кривые давле-
ния и параметры сгорания и впрыскивания топлива. Возможности
системы позволяют, используя измерительные преобразователи
давления сгорания и давления впрыскивания топлива, одновременно
контролировать работу четырех дизелей.
Система состоит из цветного дисплея и запоминающего устрой-
ства на гибком диске. На гибком диске могут храниться все значе-
ния измеренных параметров с задаваемой оператором дискретно-
стью. В последующем вся эта информация может быть передана в
береговые центры для дальнейшей обработки и решения диагности-
ческих задач.
На экране в обычных условиях непрерывной работы появляют-
ся текущие измеренные значения и кривая давления для каждого
цилиндра. На экран могут быть вызваны для сравнения из памяти
эталонные значения или прошлые значения измеряемых парамет-
ров. Для того чтобы упростить сравнения, эталонные и текущие зна:
чения могут быть представлены в виде таблицы.
Экран системы может быть подключен к преобразователям со-
стояния поршневых колец. Все кривые и данные с экрана могут
быть выведены по желанию оператора на печатающее устройство.
К системе может быть подключен центральный блок давления
сгорания НК-50, работающий от преобразователей давления сго-
рания. Этот блок индицирует максимальное давление сгорания по
каждому цилиндру; осуществляет тревожную сигнализацию ми-
гающим светом при превышении уставки, а также когда отклонение
максимального давления одного из цилиндров переходит верхнюю
или нижнюю уставки относительно среднего значения для всех
цилиндров. К блоку может быть подключена главная звуковая
система тревожной сигнализации.
400
Список литературы
. 1. Ада'мченко В. Н. Один алгоритм комплексирования измере-
ний по импульсно-фазовой РНС и автономной навигационной системе//Тео-
ретические основы автоматизации процессов управления судном. М.: Реклам-
информбюро Минморфлота СССР, 1974. С. 21—24.
2. Балашов Е< П., Пузан ко в Д. В. Микропроцессоры и мик-
ропроцессорные системы. М.: Радио и связь, 1981. 322 с.
3. Баскаков В. Ф., Брусенцов В. П. Комплексное ис-
пользование автономной системы счисления и РНС//Вычислительная тех-
ника на морском флоте: Сб. науч. тр. Л.: ЛВИМУ, 1972. С. 43—50,
4. Б е с е к е р с к и й В. А., П опов Е. П. Теория систем автомати-
ческого регулирования. М.: Наука, 1966. 992 с.
5. Бондаренко В. С., С о б о л е в Л. Г., Яшкевич Е. В.
Автоматизация морских судов. М.: Знание, 1975. 64 с.
6. Б о у л А. Г., Джоу нз К. Д. Пособие по использованию средств
автоматической радиолокационной прокладки. Л.: Судостроение, 1986.
128 с.
• 7. В а г у-ще и ко Л. Л. Обработка навигационных данных на ЭВМ.
М.: Транспорт, 1985. 172 с.
8. В е н т ц е л ь Е. С. Теория вероятностей. М.: Физматгиз, 1969.
576 с.
9. В е н т ц е л ь Е. С. Ис&ледование операций.,М.: Советское раню,
1964. 388 с.
10. Г и т и с Э. И., П и с к у л о в Е. А. Аналого-цифровые преобра-
зователи. М.: Энергоиздат, 1981. 359 с.*
11. Жерлаков В. А., Зимин Н. С;, Кононов О. В. Радио-
локационные системы предупреждения столкновений судов. Л.: Судострое-
ние, 1984. 194 с. -
12. Ж и д к о в Э. М. Статистический анализ факторов, влияющих на
процесс расхождения судов в море (автореф. дне.). Л: ЛВИМУ, 1972. 22 с.
13. Леонтьев В. А. Формирование профессиональных навыков су-
доводителей. М.: Транспорт, 1987. 224 с.
14, Лесков М. М:, Баранов Ю. К., Г а в р ю к М. М. Нави-
гация. М.: Транспорт, 1980. 344 с.
15. Л и н.н и к Ю. В. Метод наименьших квадратов и основы мате-
матико-статистической теории обработки наблюдений. 2-е изд., перераб.
и доп. М.: Физматгиз, 1962, 355 с.
16. Н а й д е н о в Е. В. Исследование процесса принятия решения
судоводителем при расхождении судов (автореф. дис.). Л.: ЛВИМУ, 1972.
20 с.
17. П е с к о в Ю. А., Самойленко Ю. Н. Методы навигацион-
ного использования САРП: Учеб, пособие. М,.: В/О «Мортехинформреклама»,
1988. 45 с. ,
18. Применение микропроцессорных средств в системах передачи ин-
формации/Б. Я- Советов, О. И. Кутузов, Ю. А. Головин, Ю. А. Аветов. М.:
Высшая школа, 1987. 255 с.
19. Сазонов А. Е. Вычислительная техника в судовождении. М.:
Транспорт, 1982. 176 с.
20. Т а р а н В. А., Б.ру д ни к С. С., К о ф а н о в Ю. Н. Матема-
тические вопросы автоматизации производственных процессов. М.: Высшая
школа, 1968. 250 с.
21. Управление крупнотоннажными судами/В. И. Удалов, И. Ф. Мас-
санюк, В. Г. Матевосян, С. Б. Ольшамовский. М.: Транспорт, 1986. 229 с.
22. Ф и ли ппов Ю. М., Сазонов А. Е. Теоретические основы
автоматизации судовождения. Л.: Судостроение, 1971. 312 с.
23. Честнат Г. Техника больших систем. М.: Энергия, 1969. 656 с.
191
ОГЛАВЛЕНИЕ
Введение .......................................................... 3
Глава 1. Математические методы исследования процессов и опера-
ций . ...................................7
1. Методы математической статистики и теории вероятностей . 7
2. Основные положения теории надежности работы навигацион-
ных приборов и систем . ........................... 18
3. Системы массового обслуживания......................... 25
4. Основы теории информации.................... . . . .. 31
5. Методы математической логики и алгоритмизация логических
операций ...................................................34
6. Методика исследования процессов и операций...................36
Глава 2. Автоматизация управления движением судна . * . 42
7. Основные понятия и классификация систем автоматического
регулирования ............................................. 42
8. Переходные процессы и типы основных звеньев автоматичес-
ких систем................................................. 48
9. Качество процесса регулирования.....................61
10. Принципы программного управления судном по курсу ... 66
II. Динамические характеристики судна как объекта управления 70
12. Структура системы управления движением судна и алгорит-
мизация задач управления.....................................75
Глава 3. Автоматизация получения и обработки навигационной ин-
формации на судне.................................. .... 82
13. Основные понятия по обработке навигационной информации . 82
14. Выбор численных методов решения навигационных задач на
ЭВМ и порядка измерений.......................................83
15. Исключение грубых погрешностей из измерений .... 86
16. Исключение систематических погрешностей из измерений . 91
17. Комплексирование навигационных систем........................95
18. Автоматизация счисления пути судна...........................99
19. Автоматизация вычисления координат места судна . \ . 104
20. Расчет коэффициентов и свободных членов уравнений попра-
вок ........................................................108
21. Вычислительные системы, алгоритмическое и программное
обеспечение ЭВМ . . . . ..................... .111
Глава 4. Автоматизация решения задач расхождения судов . 114
22. Принципы автоматизации приема, обработки и индикации ра-
диолокационной информации.......................... . . .114
23. Информационная модель и математическая формулировка
операции расхождения судов..................................117
24. Оценки успешности выполнения этапов операции расхождения
судов .................................................... 120
25. Алгоритмизация решения задач управления судном при рас-
хождении судов .............................................133
Глава 5. Судовые автоматизированные системы ... .146
26. Особенности судовых ЭВМ...................................146
27. Преобразователи навигационной информации для ЭВМ . . 153
28. Состав автоматизированных систем судовождения . ’ . . . 166
29. Системы автоматизации управления судовыми энергетически-
ми установками . ... . . ......................179
Список литературы . ..................... . . . .191
192