/









































































































































































































Текст
ffil 1
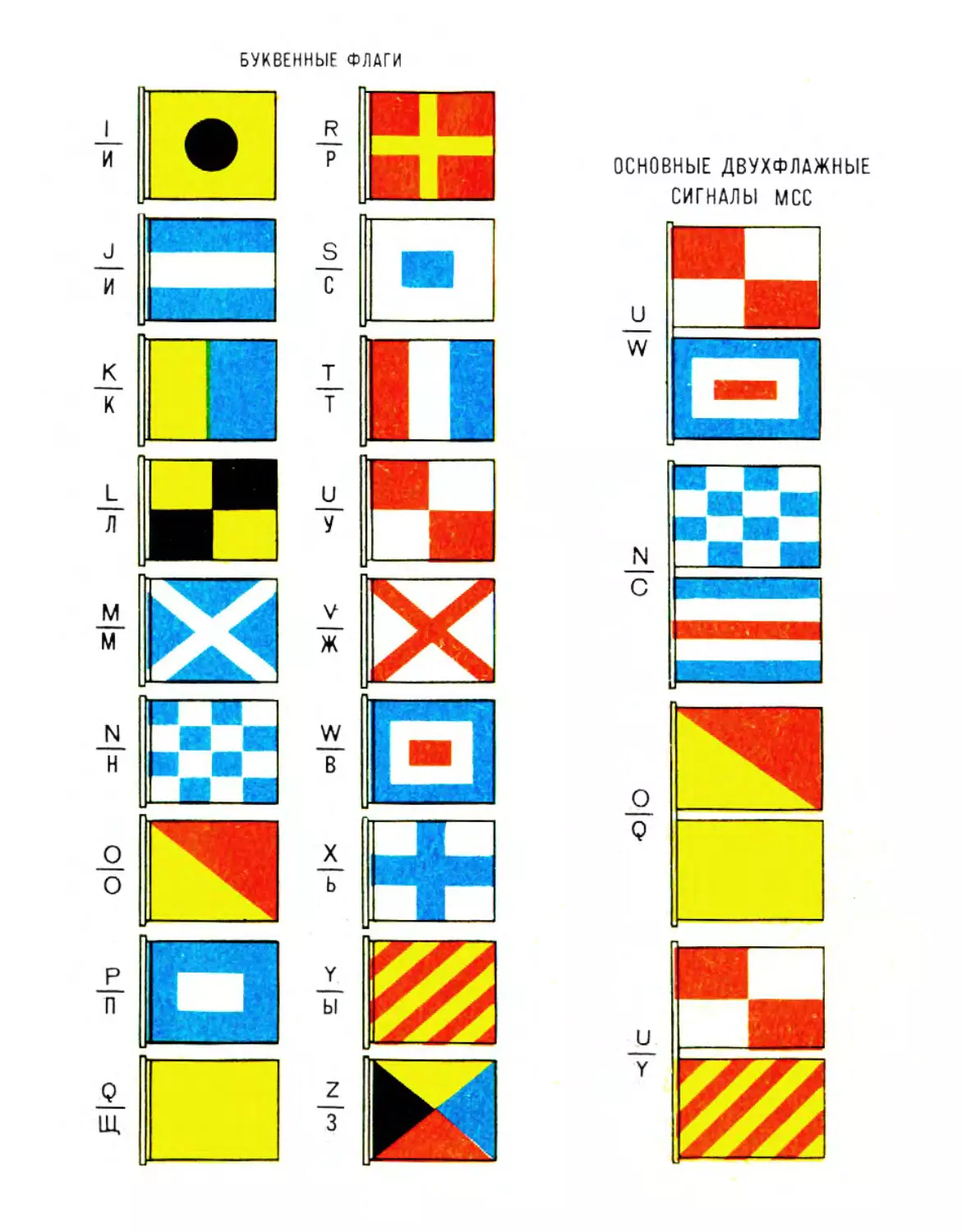
БУКВЕННЫЕ ФЛАГИ
ОСНОВНЫЕ ДВУХФЛАЖНЫЕ
СИГНАЛЫ МСС
УДК 656.605.629.123
ББК 39.47
445
Рецензент Г. И. Файн
Заведующий редакцией И. В. Макаров
Редактор Е. О. Голопанова
Черниев Л. Ф.
445 Азбука судовождения: Учеб, пособие для сред*
них ПТУ. — 3-е изд., перераб и доп. — М.: Транс-
порт, 1984. — 223 с., ил.
Автор книги, капитан дальнего плавания, профессор, знакомит
тех, чей труд связан с морем, и тех, кто хочет стать моряком, с
основами судовождения, организацией службы на судах, устройств
вом судна, методами определения направления в море и пройден-;
ного расстояния, морскими картами, штурманскими приборами, ло-
циями и другими пособиями.
Книга предназначена в качестве учебного пособия для учащихся
средни:< профессионально-технических училищ, а также будет ин-
тересна для членов яхт-клубов, морских кружков, клубов ДОСААФ
и молодых специалистов морского и рыбопромыслового флота.
3605040000-064 ББК 39.47
049(01)-84 228-84 6Тq 2
© Издательство «ТРАНСПОРТ», 1984
Краткий очерк
истории мореплавания
Мореплавание известно с очень давних времен. Особен-
но развито оно было у народов средиземноморских
стран. Первыми вышли в открытое море и затем за-
служенно стали считаться лучшими мореплавателями
финикийцы. Финикийские купцы основали колонии на
Кипре, в Сицилии, Сардинии, на юге Франции, в Испа-
нии и Северной Африке. Именно общение с колониями
и торговля с ними послужили толчком для развития
судовождения.
Мореплавание также было развито у египтян, наро-
дов Крита, Греции, Македонии и других стран.
Морские плавания совершали и наши предки —
славяне (анты, руссы, венеды). Культура мореплава-
ния славян была столь высокой, что их приглашали
для руководства морскими операциями и в другие стра-
ны. Из летописей известно о том, что ант Доброгаст ко-
мандовал византийской черноморской эскадрой. В на-
чале VII в. руссы совершали походы по Средиземному
морю на остров Крит (623 г.). Русские купцы доходи-
ли до Северной Африки и торговали с Андалузией. Нов-
городцы плавали по всей Балтике. Они вели торговлю
со Швецией, Данией и т. д.
В начале развития мореплавания основная задача
судовождения заключалась в том, чтобы провести ко-
рабль из одного пункта в другой, сохранив судно и
груз. Этому способствовал только личный опыт море-
плавателей, который накапливался в результате мно-
гочисленных плаваний в одном и том же районе, а за-
тем передавался из поколения в поколение.
3
Суда были несовершенными, не было карт, лоций,
поэтому на длительные дальние плавания тогда еще не
отваживались. Мореплаватели не знали методов точ-
ного определения места судна в море, поэтому плава-
ния совершались лишь вблизи берега, днем ориенти-
ровались по его очертаниям, а ночью — по звездам.
Подводные опасности обнаруживали примитивным спо-
собом: с помощью весла или шеста, которые заменяли
приборы, измеряющие глубины.
С развитием производительных сил и товарно-денеж-
ных отношений возникла необходимость освоения новых
районов, а следовательно, расширялись районы плава-
ния. В связи с этим суда нужно было водить из одного
пункта в другой не только самым безопасным, но и
наиболее выгодным путем.
Итак, с уверенностью можно сказать, что морепла-
вание берет начало в глубокой древности и осваива-
лось в течение многих веков. Этот длительный про-
цесс можно условно разделить на два основных пе-
риода: период открытий и первоначального изуче-
ния океанов и период систематических исследова-
ний.
Мореплаватели первого периода не ставили своей
целью изучение океанов — они плавали для открытия
новых земель. Освоение вновь открытых земель способ-
ствовало изучению условий плавания у их берегов и
на путях к ним. Характерными работами для этого пе-
риода являлись описи берегов и составление первых
карт морей и океанов.
В эпоху Возрождения (XV—XVI вв.) началось уско-
ренное совершенствование методов и средств судовож-
дения. Быстрое экономическое и политическое развитие
ряда стран вызывало бурное развитие торговли и, как
следствие, мореплавания. На судах появились магнит-
ные компасы, карты и песочные часы. Средства прими-
тивные, но они обусловили возможность счисления пу-
4
ти судна (учет пройденного расстояния по заданному
направлению) и плавания вдали от берегов.
В поисках дешевого сырья для помышленностн
снаряжали большие экспедиции для отыскания новых
морских путей и земель. С 1487 по 1522 г., т. е. за 36
лет, было открыто более половины всей поверхно-
сти Земли. Этот период вошел в историю под названи-
ем эпохи великих географических открытий.
К наиболее важным плаваниям этого периода отно-
сят в первую очередь плавание Христофора Колумба и
открытие им Америки (1492 г.), затем плавание Васко
да Гамы (1497—1499 гг.) и первое кругосветное пла-
вание Магеллана (1519—1522 гг.).
Колумб считал, что путь в сказочную и богатую Ин-
дию короче и легче через Атлантический океан, чем
вокруг Африки. Поэтому 3 августа 1492 г. три испан-
ские каравеллы под его командованием вышли из Па-
лоса в Атлантический океан в поисках западного пути
в Индию. Совершив переход через Атлантический оке-
ан, Колумб достиг Багамских островов, затем — Кубы
и Гаити. В последующих двух плаваниях он открыл ос-
трова Доминика, Ямайка, Тринидад, Маргарита, группу
Малых Антильских островов, острова Зеленого Мыса,
дельту реки Ориноко.
Васко да Гама возглавлял португальскую экспеди-
цию, состоящую из четырех кораблей. 8 июля 1497 г.
она вышла из Лиссабона в поисках восточного пути в
Индию. Обогнув Африку и перейдя Индийский океан,
корабли достигли берегов Индии. Заключив выгодные
торговые сделки, Васко да Гама вернулся в Португа-
лию.
Плавание продолжалось 26 месяцев и было на-
столько трудным, что на родину возвратилось менее тре-
ти экипажа.
Позднее (1502—1503 и 1524 гг.) Васко да Гама со-
вершил еще два плавания в Индию.
5
Открытие морского пути из Европы в Индию и ус-
тановление с ней прямых торговых отношений явилось
началом колониальной политики европейцев в Индии.
20 сентября 1519 г. из Севильи в поисках западного
пути в Индию вышла испанская эскадра из пяти ко-
раблей и 265 человек экипажа. Ее возглавлял Фернан
Магеллан. Эскадра пересекла Атлантику и достигла
Бразилии. Затем, следуя вдоль побережья на юг, она
прошла проливом (впоследствии — пролив Магеллана),
вышла в Тихий океан, пересекла его и достигла Филип-
пинских островов. На этих островах Магеллан был убит
в схватке с местными жителями. В 1522 г., обогнув юж-
ную оконечность Африки, одно уцелевшее судно воз-
вратилось в Испанию. Каково же было удивление мо-
ряков, когда они обнаружили, что вернулись в пятницу,
между тем как по их счету был четверг. Ошибиться
они не могли, так как тщательно вели судовой
журнал. В те времена еще не было понятия о линии
смены дат. Так завершилось первое кругосветное пла-
вание.
Захват и освоение вновь открытых земель, раз-
витие процесса первоначального накопления капитала,
зарождение мирового рынка знаменовало собой начало
эпохи колониализма.
Но наряду с этим великие географические открытия
способствовали ускоренному развитию науки. Они вне-
сли большой вклад не только в географическое изуче-
ние Земли, но значительно расширили знания в бота-
нике, зоологии, геологии и т. п.
Период систематических исследований мирового оке-
ана начался в XVIII веке.
Замечателен период Великих русских географических
открытий XVIII—XIX вв. Витус Беринг (1681—1741 гг.),
датчанин по происхождению, офицер русского военного
флота, принадлежит к числу великих мореплавателей и
полярных исследователей.
6
Возглавляемые Берингом Первая и Вторая камчат-
ские экспедиции охватили своими исследованиями се-
верное побережье Евразии, всю Сибирь, Камчатку, мо-
ря северной части Тихого океана, открыли неведомые
ученым и мореплавателям северо-западные берега Аме-
рики. В Первой экспедиции (1725—1730 гг.) вместе с
талантливым морским офицером А. И. Чириковым он
обошел восточный берег Камчатки, южный и восточный
берега Чукотки и вошел в пролив между Азией и Аме-
рикой (впоследствии — Берингов пролив). Беринг от-
крыл ряд островов, в том числе и остров Св. Лаврен-
тия. Во Второй Камчатской экспедиции (1733—1743 гг.)
Беринг командовал пакетботом «Св. Петр», а А. И. Чи-
риков — «Св. Павел». В 1741 г. корабли вышли из
Авачинской бухты и направились к берегам Северной
Америки. Во время шторма они потеряли друг друга, и
первым достиг берегов Северной Америки «Св. Павел»,
несколько позже у островов Кадьяк — «Св. Петр». На
обратном пути В. Беринг открыл некоторые из группы
Алеутских островов, остров Укамок и др. У Командор-
ских островов «Св. Петр» получил сильные поврежде-
ния, экипаж зимовал на острове. Условия зимовки бы-
ли очень тяжелыми, некоторые моряки погибли, скон-
чался от цинги и Беринг. Впоследствии этому острову,
а также самому северному морю дали имя Беринга.
Камчатские экспедиции Беринга, а также экспеди-
ции П. К. Креницина и М. Д. Левашова, И. И. Бил-
лингса и Г. А. Сарычева положили начало освоению
Тихоокеанского побережья Северной Америки.
С целью расширения владений Российской импе-
рии и развития торговли на Тихом океане в 1799 г. бы-
ла создана Российско-американская компания, которая
могла организовывать экспедиции, присоединять новые
земли и основывать русские поселения. Одной из самых
выдающихся экспедиций, организованных этой компани-
ей, явилось первое русское кругосветное плавание
7
(1803—1806 гг.) И. Ф. Крузенштерна и Ю. Ф. Лисян-
ского на шлюпах «Нева» и «Надежда». Экспедиция вы-
шла из Кронштадта, пересекла Атлантический океан,
обогнула Южную Америку и вышла в Тихий океан-
В период плавания были обследованы восточный и за-
падный берега Сахалина, а также проведены важные
океанографические исследования и собраны этнографи-
ческие коллекции.
Два кругосветных плавания (в 1807—1813 гг. и в
1817—1819 гг.) совершил отважный русский мореплава-
тель В. М. Головнин, который был одним из выдающих-
ся моряков того времени.
В 1815—1818 гг. О. Е. Коцебу совершил кругосвет-
ное плавание на бриге «Рюрик». Эта экспедиция была
посвящена в основном научным целям.
К началу XIX в. единственной почти совершенно не-
изученной областью земного шара оставались районы
Антарктиды. В 1819 г. была организована экспедиция
для изучения антарктических районов и исследования
новых земель в южных широтах. Возглавили ее офице-
ры русского флота Ф. Ф. Беллинсгаузен и М. П. Лаза-
рев. Это плавание закончилось открытием Антарктиче-
ского материка, кроме того, на карты было нанесено 29
неизвестных ранее островов, на основании метеорологи-
ческих наблюдений составлено представление о клима-
те Антарктиды, выполнены обширные океанографичес-
кие наблюдения ранее не изученных районов Мирового
океана.
Плавание экспедиции продолжалось 751 сутки. Она
достигла 69°53' южной широты, а открытием антарк-
тического материка она снискала себе славу на веч-
ные времена.
В 1821—1824 гг. экспедиция Ф. П. Литке изучила
Северный морской путь. Она исследовала побережье'
Новой Земли и Мурманский берег. С 1826 по 1829 г.
Ф. П. Литке командовал судном «Сенявин» в кругосвет-
8
ном плавании, во время которого было открыто 12 ост-
ровов в Каролинском архипелаге (Микронезия) и опи-
сано 26 групп и отдельных островов. Собран богатый
материал по течениям, приливам и отливам. Составлен
мореходный атлас из 50 карт и планов. Опубликован-
ный Ф. П. Литке отчет о плавании был удостоен Ака-
демией наук Демидовской премии, а сам он был избран
членом-корреспондентом Академии.
Экспедиции Г. И. Невельского (1813—1876 гг.) рас-
ширили круг географических знаний о Дальнем Восто-
ке. В 1848—1849 гг. на транспорте «Байкал» он про-
шел из Кронштадта в Петропавловск-на-Камчатке.
В 1849—1855 гг. руководил исследованиями в Татар-
ском проливе, в низовьях Амура и на о. Сахалине.
Окончательно установил островной характер Сахалина
и показал, что Амур доступен для морских судов. Ос-
новал русские поселения в устье Амура, в том числе
Николаевск-на-Амуре. Экспедиции Невельского способ-
ствовали окончательному установлению границы между
Россией и Китаем на Дальнем Востоке. В честь Не-
вельского названы: часть Татарского пролива (откры-
тая им), мыс в этом проливе, залив, гора и город на
Сахалине. Пролив Невельского — самая узкая (около
8 км) часть Татарского пролива, через который прохо-
дит важный морской путь из Японского моря в Охот-
ское.
Его имя носит Дальневосточное высшее инженерное
морское училище.
Завершая краткий обзор главнейших кругосветных
плаваний и выдающихся открытий русских моряков, не-
обходимо отметить большую работу экспедиции 1820—
1824 гг. по изучению Северного Ледовитого океана, ру-
ководимой Ф. П. Врангелем. В 1825—1827 гг. он воз-
главил кругосветную экспедицию на судне «Кроткий».
Среди русских мореплавателей особое внимание и
благодарную память заслужил флотоводец С. О. Ма-
9
каров. Им проведены большие океанографические ис-
следования в Тихом океане, исследованы течения в
проливе Босфор, в результате которых было установ-
лено наличие непрерывного обмена вод между Черным
и Средиземным морями. Он является основоположни-
ком учения о непотопляемости корабля. По его проекту
был построен и в 1898 г. спущен на воду первый в мире
мощный ледокол «Ермак». Этим ознаменовалось начало
новой эпохи в ледовом плавании. Имя С. О. Макарова
носит Ленинградское высшее инженерное морское учи-
лище.
Дальние плавания совершенствовали и методы су-
довождения, улучшались старые и появлялись новые
приборы, карты пополнялись новой информацией об
островах, проливах, побережьях, глубинах и тече-
ниях.
В XVII в. повысилась точность геодезических работ,
а следовательно, и точность навигационных карт, что
позволило определять место судна по береговым ори-
ентирам. В XVIII в. появились секстан и хронометр, а
это дало возможность определять место судна в откры-
том море по небесным светилам. Развивались также
теоретические методы судовождения, создавались от-
дельные дисциплины, которые охватывали широкий
круг знаний.
Появление электронавигационных приборов и откры-
тие радио великим русским ученым А. С. Поповым
(1895 г.) явилось мощным толчком в дальнейшем раз-
витии судовождения. Как известно, 7 мая 1895 г. счи-
тается днем изобретения радио. В этот день А. С. По-
пов продемонстрировал «грозоотметчик» — первую при-
емную станцию. В следующем году он осуществил ра-
диотелеграфную передачу, а в 1897 г. радиосвязь была
установлена между двумя военными кораблями, нахо*
дящимися друг от друга на расстоянии трех миль. Со-
здание гироскопических компасов, электромеханических
10
и гидравлических лагов значительно повысило точность
счисления пути судна и в итоге дало возможность авто-
матизировать процесс ведения счисления.
После Великой Октябрьской социалистической ре-
волюции, в годы первых и особенно последних пятиле-
ток, развитие всего комплекса морского транспорта шло
высокими темпами как в количественном, так и в ка-
чественном отношении. Росла и совершенствовалась
сеть учебных заведений. В 1944 г. были созданы
высшие инженерные морские училища для подготовки
высококвалифицированных специалистов для морского
флота. Это создало благотворные условия для повыше-
ния культуры судовождения и безопасности морепла-
вания.
В настоящее время подготовка специалистов для
морского транспорта осуществляется в 5 высших и 15
средних специальных учебных заведениях, имеющих 29
заочных и вечерних филиалов факультетов и учебно-
консультационных пунктов. Они готовят морских инже-
неров по 15 и техников , по 13 плавательным и берего-
вым специальностям.
Подготовку рабочих кадров осуществляют 15 море-
ходных школ и 21 профтехучилище. Они выпускают
матросов, мотористов, машинистов, электриков для су-
дов и береговых предприятий морского транспорта.
Многие из них получают совмещенные профессии: мат-
рос-моторист, матрос-электрик и пр.
Высшие инженерные морские и мореходные учили-
ща ММФ охватывают основные морские бассейны. Это
позволяет готовить специалистов по территориальному
принципу.
В высших морских учебных заведениях ведутся боль-
шие научно-исследовательские работы и осуществля-
ется высокоорганизованный учебный процесс, соответст-
вующий современным требованиям развития морского
флота.
11
В системе морских учебных заведений созданы ус-
ловия для проведения высокоорганизованной плава-
тельной практики. Курсанты много месяцев находятся в
море, на судах, где приобретают производственные на-
выки по теоретическим знаниям, приобретенным в сте-
нах училищ.
Кроме транспортных судов пароходств ММФ, на
которых курсанты проходят плавательную практику,
учебные заведения ММФ имеют 18 учебных и учебно-
производственных судов типа «Профессор Щеголев» и
«Горизонт». Все они оснащены современной техникой,
оборудованием и помещениями для проведения органи-
зованных учебных занятий и совершают интересные
дальние плавания.
Ленинградское высшее инженерное морское учили-
ще им. адмирала С. О. Макарова (ЛВИМУ) одно из
старейших училищ. В нем работала и продолжает ра-
ботать замечательная плеяда ученых и педагогов. Из
стен училища вышло много инженеров-судоводителей,
инженеров-судомехаников, инженеров-электромехани-
ков, инженеров-гидрографов и радиоинженеров. В на-
стоящее время строится новый комплекс зданий
ЛВИМУ в живописном пригороде Ленинграда — посел-
ке Стрельна.
Высококвалифицированным профессорско-препода-
вательским составом, отличной учебной базой и органи-
зацией учебного процесса располагает Одесское высшее
инженерное морское училище имени Ленинского ком-
сомола (ОВИМУ).
В ОВИМУ построены новые учебные корпуса.
В светлых просторных классах и лабораториях разме-
щена современная аппаратура и техника. На специ-
альных тренажерах отрабатываются приемы судовож-
дения, интенсивно используется тренажер комплексной
автоматизации судовых силовых установок. В планета-
рии училища курсанты закрепляют знания по мореход-
12
ной астрономии. Созданы замечательные лаборатории
по радионавигационным системам (РНС) и электрона-
вигационным приборам (ЭНП). Факультет автоматики
располагает самыми современными типами ЭВМ.
В училище готовят инженеров-судоводителей, инже-
неров-судомехаников, инженеров-электромехаников и
инженеров-теплоэнергетиков.
Дальневосточное высшее инженерное морское учи-
лище им. адмирала Г. И. Невельского (ДВВИМУ) так-
же располагает высококвалифицированным профессор-
ско-преподавательским составом, современной лабора-
торной базой и четкой организацией учебного про-
цесса.
В ДВВИМУ скомпонованы в единый ансамбль учеб-
ные, жилые и вспомогательные корпуса, которые распо-
ложены у берега Амурского залива.
В училище готовят инженеров-судоводителей, инже-
неров-судомехаников и инженеров-электромехаников.
В 1975 г. было открыто Новороссийское высшее ин-
женерное морское училище (НВИМУ). В течение не-
скольких лет, благодаря упорной работе его лаборато-
рии пополнились современной техникой, хорошо органи-
зован учебный процесс и создан опытный профессорско-
преподавательский коллектив.
В училище готовят: инженеров-судоводителей, инже-
неров-судомехаников и судовых радиоинженеров.
Одесский институт инженеров морского флота
(ОИИМФ) готовит высококвалифицированных специа-
листов для береговых предприятий ММФ. Он имеет
шесть факультетов: гидротехнический, кораблестрои-
тельный, судомеханический, управление водным тран-
спортом, инженерно-экономический и механизаторский.
Значительными событиями второй половины XX века
явились исследования Арктики и Антарктики.
В историю летописи изучения Арктики золотыми
буквами вписаны имена ледоколов «Георгий Седов»,
13
«Челюскин», «Красин», «Ермак» и др. Они явились
предшественниками первого в мире атомного ледокола
«Ленин» (44 тыс. л. с.) и самого мощного в мире
(75 тыс. л. с.) атомного ледокола «Арктика»*.
В 1977 году атомный ледокол «Арктика» совершил
беспримерный рейс. 17 августа он достиг Северного по-
люса. Рейс продолжался 174 часа, в течение которых
было пройдено более двух с половиной тысяч миль в
тяжелых ледовых условиях. Победный гудок ледокола
на Северном полюсе возвестил о начале нового этапа
освоения Арктики. Цель экспедиции носила научно-
практический характер и определялась грандиозными
планами, которые наметила партия в области народно-
хозяйственного освоения гигантских северных просторов
нашей Родины с их огромными природными ресур-
сами.
Одновременно с изучением Арктики возобновилось
изучение районов Антарктиды. Их ежегодно посещала
китобойная флотилия «Слава», на борту которой всег-
да находилась группа ученых. Интенсивная деятель-
ность ученых по изучению Антарктиды началась в пе-
риод подготовки и проведения Международного геофи-
зического года (1956—1958 гг.). В конце 1955 г. для
изучения Антарктиды отправилась первая комплексная
антарктическая экспедиция (400 человек). Ее возглав-
лял один из выдающихся исследователей Арктики
М. Сомов. Судами «Обь», «Лена» и другими командо-
вали видные капитаны: И. Ман, А. Пинежанинов,
А. Ветров, Н. Инюшкин и М. Цыганков. Шли годы, од-
на советская экспедиция сменяла другую. Антарктика
раскрывала свои тайны. Совершались важные научные
и географические открытия. Теперь в Антарктиде рабо-
тают семь советских исследовательских баз. Старейшая
среди них — поселок Мирный.
Ныне — «Леонид Брежнев».
14
За все эти годы значительно расширилась и воз-
росла научная основа судовождения. Создано много
штурманских приборов и навигационных пособий. Со-
ветскими учеными Н. Д. Папалекси, Л. И. Мандель-
штамом и Е. Я. Щеголевым была разработана теория
фазового метода измерений расстояний, а затем созда-
на радионавигационная система «Радиодальномер».
В судовождении начали широко применяться фазовые,
импульсные, смешанные и другие радионавигационные
системы. Прочно вошла в судовождение радиолокация,
которая стала «глазами» штурмана в условиях плохой
видимости.
Ф. Н. Красовским на основании весьма точных из-
мерений были вновь определены размеры земного сфе-
роида. Это способствовало созданию более точных на-
вигационных карт, что, в свою очередь, повысило точ-
ность и безопасность судовождения.
Успешный запуск 4 октября 1957 г. первого совет-
ского искусственного спутника Земли (ИСЗ) позволил
создать новые навигационные системы для определе-
ния места судна — спутниковые РНС. Они построены
на принципе приема радиосигналов с искусственных
спутников с использованием эффекта Доплера.
Быстрое развитие вычислительной техники и внед-
рение ее в навигацию позволило создать навигационные
комплексы. В них счетно-решающие устройства сопря-
жены с датчиками исходной информации, а это позво-
ляет полностью или частично автоматизировать процесс
навигации, т. е. счисление пути судна с одновременным
получением контрольных обсерваций. Такие системы
уже применяются на крупнотоннажных судах.
В разработке научных методов судовождения и
создания навигационных пособий много сделали совет-
ские ученые А. Н. Крылов, Н. Н. Матусевич, В. В. Кав-
райский, А. П. Ющенко, И. Д. Женголович и другие.
Прекрасные учебники, по которым учились многие по-
15
коления моряков, написали Н Н. Матусевич, Н. А. Са-
келлари, К. С. Ухов, Б. П. Хлюстин, А. П. Ющенко,
А. П. Белобров, Н. Ю. Рыбалтовский, В. Ф. Дьяконов
и другие.
В развитии судовождения большую роль играют на-
учно-исследовательские институты ММФ СССР.
Немного о судне
и безопасности мореплавания
Путь от челна, выдолбленного из ствола дерева, до
современного судна исчисляется многими тысячеле-
тиями.
На смену первым челнам, а затем лодкам и ладь-
ям, приводимым в движение с помощью весел и паруса,
пришли морские суда. Они также приводились в движе-
ние при помощи весел и паруса и в течение долгого
времени были единственным средством сообщения по
морю.
Около четырех тысяч лет назад у китайцев появи-
лись джонки. Это удобные и мореходные лодки, кото-
рые распространены в Юго-Восточной Азии и в настоя-
щее время.
Полинезийцы, населявшие множество островов в Ти-
хом океане, создали остойчивые суда — катамараны.
Строительство судов в Древнем Вавилоне началось
примерно в XVII в. до н. э.
В развитии судостроения много сделали финикийцы.
Их суда отличались большой прочностью, удобствами
и украшениями. На носу судна они изображали лоша-
диную голову — эмблему финикийцев.
Арабы строили суда — доу. На них они плавали в
Индийском океане.
16
В XV—XII вв. до н. э. начали строить суда в Древ-
нем Египте, Греции и Риме. Чтобы увеличить скорость
судов, увеличивали число гребцов, размещая их
ярусами. Так появились униремы, биремы и триремы,
т. е. суда в которых гребцы сидели в один, два и три
яруса.
Суда, которые строили для боевых операций, были
узкими и длинными. В них размещалось больше греб-
цов, а следовательно, увеличивалась скорость. Суда,
предназначенные для торговых целей, строили широки-
ми, т. е. более вместительными. Их грузоподъемность
достигала 300 тонн.
Развитию судоходства и судостроения способство-
вал изобретенный китайцами магнитный компас.
Археологические раскопки разных мест свидетельст-
вуют о том, что древние славяне уже строили челны
более трех тысячелетий назад. Затем их сменили ла-
дьи. На ладьях плавали по Черному морю до Констан-
тинополя. В XII веке казаки плавали на запорожских
«чайках». Они передвигались с помощью весел и пару-
са, были быстроходными и вмещали до 70 человек.
В IX—XI вв. началось интенсивное судостроение на
севере России. Новгородцы вели торговлю со страна-
ми бассейна Балтийского моря и ходили в северные
моря на промыслы рыбы и морского зверя. Строившие-
ся поморские ладьи в XII в. имели по три больших
паруса на трех мачтах, были устойчивы, мореходны и
вмещали около 200 т груза.
По праву первыми судами ледового плавания счита-
ют поморские суда кочи. Это были плоскодонные, одно-
палубные и одномачтовые суда с парусами из оленьих
шкур. На них ходили у берегов Северного Ледовитого
океана и по рекам.
С развитием науки и техники совершенствовались
судостроение, парусное вооружение, навигационные при-
боры и судовое оборудование.
17
Началом эпохи чисто парусного флота можно счи-
тать XIII в. В Европе появились большие, одномачто-
вые суда — нефы, с высокими бортами и башнями на
носу и корме. Их грузоподъемность доходила до 1000 т.
На корме в несколько ярусов размещались каюты и
вместо груза можно было брать до 800 пассажиров.
В эпоху Великих географических открытий (XV—
XVI вв.) строились каравеллы. Эти суда имели три или
четыре мачты и очень высокую корму.
С развитием торговли возникла потребность в су-
дах с увеличеннной грузоподъемностью и улучшенны-
ми боевыми и мореходными качествами. Появилось
много различных типов парусных судов (рис. 1). Наи-
более примечательными судами были: фрегаты — трех-
мачтовые корабли с двумя палубами и прямыми пару-
сами, бриги — двухмачтовые суда с прямыми паруса-
ми, барки — трех- или четырехмачтовые суда с пря-
мыми парусами, но последняя мачта несла косые па-
руса.
Среди торговых парусных судов большое распростра-
нение получили шхуны. Они имели несколько мачт, но
все с косыми парусами. Их обслуживала сравнительно
небольшая команда и считались они наиболее экономич-
ными, но были неустойчивы на курсе. По этой причине
появились суда со смешанным парусным вооружени-
ем — бригантины (двухмачтовые) и баркентины (трех-
или четырехмачтовые). На этих судах первая мачта от
носа несла прямые, а остальные — косые паруса (см.
рис. 1).
Наиболее совершенными парусными судами были
клиперы. Они имели большую площадь парусности, а
следовательно, обладали большой скоростью (рис. 2).
На них перевозили пассажиров и ценные грузы — чай.
Их скорость 18—19 уз. (33—35 км/ч), рекордная —21 уз
(39 км/ч), грузоподъемность 1000—2000 т, а длина до-
стигала 60—80 м.
18
Рис. 1. Основные типы парусных судов:
о. — фрегат; б — шхуна; в — бриг; г — барк; д — бригантина; е — бар-
кептина
В России регулярное строительство морских судов
началось в XVII в. В 1669 г. в Дединове на р. Оке был
построен первый военный парусный корабль «Орел».
В создании морского флота выдающуюся роль сыграл
Петр I. Под его руководством в России было постро-
ено около 30 верфей.
К концу XVIII в. Россия превратилась в могущест-
венную морскую державу.
19
Рис. 2. «Чайный» клипер
Эпоха парусного флота закончилась в начале XIX в.,
а последнее судно «Падуя» спущено на воду в 1926 г.
Здесь следует заметить, что интерес судовладельцев
и судостроителей к использованию ветровой энергии
для движения морских транспортных судов опять воз-
ник в середине 70-х годов текущего столетия. Обуслов-
лено это резким ростом мировых цен на нефть (с 1970
по 1980 г. более чем в 8 раз) и возможной перспекти-
вой ее дальнейшего удорожания, связанной как с
уменьшением мировых запасов органического топлива,
так и с перемещением его добычи в новые труднодос-
тупные районы (Арктика, океанский шельф и т. п.), тре-
бующие значительных капиталовложений.
20
Многими судостроителями проводятся большие рас-
четные, теоретические и экспериментальные исследова-
ния по гидро- и аэродинамике транспортных судов с па-
русным вооружением. В 1980 г. вступило в эксплуата-
цию первое в мире современное транспортное парусно-
моторное судно — японский танкер дедвейтом 1600 т.
В настоящее время число судов такого типа ежегодно
увеличивается в ряде государств. Возобновилось строи-
тельство парусных судов и для учебных целей.
В первой половине XIX в. на смену деревянным кон-
струкциям приходят железные, а во второй половине
XIX в. для постройки судов начинают применять сталь.
XIX в. — век паровых судов и железного судострое-
ния. В конце XVIII в. были построены первые речные
колесные пароходы, которые совершали рейсы по ре-
кам Северной Америки.
В 1815 г. в России был построен первый в мире
морской колесный пароход «Елизавета», совершавший
рейсы Петербург—Крондштадт (рис. 3).
Американский трехмачтовый колесный пароход «Са-
ванна» первым пересек Атлантический океан, но в ос-
новном он шел под парусами.
Гребные колеса в морских условиях часто лома-
лись. На смену им в качестве судового движителя при-
шел гребной винт.
Совершенствование и увеличение мощности паро-
вых машин, двигателей внутреннего сгорания и созда-
ние экономичных паровых турбин способствовало бы-
строму развитию судостроения.
В XX в. гражданское судостроение достигло боль-
шого развития. Причиной этому послужил непрерыв-
но увеличивающийся объем грузов, перевозимых мо-
рем.
Современные суда строят большими, с хорошим ар-
хитектурным внешним видом и прекрасными бытовы-
ми условиями. Они имеют большую скорость и безо-
21
Рис. 3. Первый в мире русский морской пароход (1815 г.).
пасны в мореплавании. Длина пассажирских лайнеров
превышает 300 м, а скорость — 35 уз. Грузоподъем-
ность крупнейшего в мире французского танкера «Ба-
тиллус» достигла 540 000 т, а длина 390 м.
За последние 10—15 лет с целью повышения эконо-
мической эффективности работы морского флота опре-
делилась специализация судов по их назначению.
Увеличивается мощность паровых турбин и двига-
телей внутреннего сгорания. Продолжается развитие
новых типов главных энергетических установок. Широ-
кое распространение получим малооборотные эконо-
мичные судовые дизели, газотурбинные и атомные энер-
гетические установки. По применению газотурбинных
22
и атомных установок на гражданских судах наше го-
сударство занимает первое место в мире.
В 1959 г. наш флот пополнился атомным ледоколом
«Ленин». Через несколько лет в США было построено
грузопассажирское судно «Саванна», в ФРГ атомный
рудовоз «Отто Ган», в Японии научно-исследователь-
ское судно «Муцу». В СССР построены атомные ледо-
колы «Арктика» в 1974 г. и в 1977 г. — «Сибирь».
Достигнутые успехи в автоматизации и механиза-
ции судовых работ и управлении судном позволили со-
кратить экипажи больших судов до 30—40 чел. и повы-
сить рентабельность эксплуатации судов.
Вторая мировая война нанесла нашей судострои-
тельной промышленности огромные потери. Но к концу
первой послевоенной пятилетки были восстановлены и
значительно реконструированы судостроительные заво-
ды.
Советские судостроители в послевоенный период до-
стигли больших успехов в освоении новой прогрессив-
ной технологии в постройке судов. Был совершен пере-
ход от клепки судовых корпусов к их сварке, освоены
секционный и блочный методы постройки судов, а так-
же механизированы и автоматизированы ручные трудо-
емкие процессы по обработке корпусной стали и изго-
товлению корпусных конструкций. В монтажных рабо-
тах была внедрена новая технология.
В 50—60-х годах в Советском Союзе были построе-
ны серии сухогрузных судов грузоподъемностью от
5000 до 16000 т, крупнотоннажные сухогрузы типов
«Славянск» и «Капитан Кушнаренко», большие серии
лесовозов, серии танкеров типов «Казбек», «Великий Ок-
тябрь», «Прага» и «София», грузоподъемностью соот-
ветственно 10000, 15000, 30000 и 50000 т, суда для пе-
ревозки навалочных грузов грузоподъемностью 35000 т,
ледокольно-транспортные суда, пассажирские суда ка-
ботажного плавания типа «Киргизстан» и морские же-
23
лезнодорожно-пассажирские паромы типа «Советский
Азербайджан».
В эти годы промысловый флот пополнился десят-
ками мощных промысловых баз различного назначе-
ния. Среди них краборыбоконсервные плавучие заводы,
большие рефрижераторно-морозильные рыболовные тра-
улеры, морозильные суда, транспортные рефрижера-
торы и др.
В годы девятой и десятой пятилеток в отечествен-
ном судостроении были созданы принципиально новые
типы морских транспортных, вспомогательных, научно-
исследовательских и промысловых судов. Примером мо-
гут служить танкеры типа «Крым» грузоподъемностью
150 000 т, суда с горизонтальной грузообработкой типов
«Капитан Смирнов» и «Иван Скуридин», контейнерово-
зы типов «Сестрорецк» и «Александр Фадеев», рудово-
зы «Зоя Космодемьянская», универсальные сухогрузные
•суда типов «Герои панфиловцы» и «Николай Жуков»,
лесовозы-пакетовозы, научно-исследовательские суда
«Космонавт Юрий Гагарин», «Академик Сергей Коро-
лев», мощные океанские спасатели, супертраулеры, са-
моподъемные буровые установки типа «Каспий», плаву-
чие краны грузоподъемностью 300 и 1600 т и т. д.
Возникновение и развитие качественно новых транс-
лортно-технологических систем (контейнерных, лихтеро-
возных, ролкерных, паромных и др.) значительно повы-
сило эффективность перевозок, провозоспособность
флота, сократило сроки доставки грузов и стоянки су-
дов в портах под грузовыми операциями, а также по-
высило сохранность перевозимых грузов.
По данным Регистра СССР, морской флот СССР на
1 января 1983 г. насчитывал 7477 судов валовой вмес-
тимостью 23 049 тыс. per. т, дедвейтом 26 373 тыс. т, в
том числе 3051 транспортных судна валовой вместимо-
стью 16 685 тыс. per т, дедвейтом 22 339 тыс. т (журнал
«Морской флот», 1983, № 5).
24
На всех современных судах усовершенствованы су-
довые устройства, системы и противопожарные средст-
ва. Установлены радионавигационные системы, радио-
локаторы и значительно улучшено навигационное обес-
печение судовождения, а следовательно, и безопасность
мореплавания в любую погоду и в любое время суток.
Последняя четверть века ознаменовалась появлени-
ем прочно вошедших в практику судов на подводных
крыльях и воздушной подушке. В создание судов на
подводных крыльях большой вклад внесли советские
конструкторы и судостроители. Теплоходы на подвод-
ных крыльях: «Ракета», «Метеор», «Циклон», «Восток»
и другие, получили большое признание у нас и за ру-
бежом. Скорость судов этого типа будет увеличивать-
ся, а следовательно, повысится конкурентоспособность
с авиацией.
В дальнейшем судостроение- должно развиваться в
направлении повышения эксплуатационно-экономиче-
ских показателей судна в целом. Этот главный фактор
повлечет за собой увеличение скорости и грузоподъем-
ности судов, а также повышение надежности и эконо-
мичности судовых механизмов. Созданы все предпо-
сылки для дальнейшего расширения автоматизации и
механизации процессов управления судном с внедре-
нием ЭВМ. В строительство будут внедряться легкие,
прочные и дешевые материалы. Повысится научная ор-
ганизация труда и улучшатся условия жизнедеятель-
ности экипажа. Будут создаваться новые типы судов
для обеспечения всесторонне растущих потребностей
народного хозяйства.
Теперь познакомимся с общей классификацией
гражданских судов, принятой в настоящее время, и
эксплуатационными и мореходными качествами, обес-
печивающими безопасность мореплавания.
Все гражданские суда классифицируют по основ-
ным признакам, отличающим их друг от друга. Таких
25
Рис. 4. Схема общей компоновки и устройства сухогрузного
судна
признаков много: назначение, район плавания, средства
движения, тип главного двигателя, характер движения
по воде, род движителя, материал корпуса, архитектур-
но-конструктивный тип, количество гребных винтов,
ледовые классы и т. д.
Главным признаком классификации судов являет-
ся их назначение. По назначению суда подразделяются
на транспортные, промысловые, служебно-вспомога-
тельные и суда технического флота.
Транспортные суда предназначены для перевозки
пассажиров и различных грузов. Они составляют осно-
ву морского и речного флота и, в свою очередь, подраз-
деляются на грузовые, пассажирские, грузопассажир-
ские и специальные.
Грузовые суда делятся на два основных класса: су-
хогрузные (рис. 4) и наливные.
Класс сухогрузных судов, в зависимости от особен-
ностей груза, подразделяется на суда общего назначе-
ния и специализированные.
26
Суда общего назначения перевозят генеральные
(или штучные) грузы, т. е. грузы в упаковках (ящи-
ках, бочках, тюках, мешках, кипах и т. д.) или в от-
дельных местах (машины, металлоконструкции, сталь-
ные отливки, оборудование и т. д.).
К специализированным сухогрузным судам отно-
сятся:
рефрижераторные суда, предназначенные для пере-
возки скоропортящихся грузов (мяса, фруктов, рыбы).
В их трюмах установлены холодильные установки, обес-
печивающие охлаждение трюмов;
контейнеровозы, предназначенные для перевозки
груза, упакованного в большие стандартные ящики —
контейнеры;
баржевозы (или лихтеровозы) предназначены для
перевозки плавучих контейнеров — барж большой гру-
зоподъемности;
суда с горизонтальным способом грузообработки
(«ро-ро» или ролкеры). На таких судах в грузовой час-
ти судна отсутствуют поперечные переборки. Вместо
них для размещения груза построено несколько палуб.
В кормовой или носовой части судна имеются открыва-
ющиеся ворота с перекидывающимся на причал мос-
том — аппарелью, по которой производится загрузка и
разгрузка судна;
суда для перевозки навалочных грузов (или балке-
ры) предназначены для перевозки угля, минеральных
удобрений, строительных материалов, руды, рудных
концентратов, древесной щепы, зерна, сахара, цемента
и т. д. Эти суда могут иметь некоторые особенности в
постройке в зависимости от особенностей груза. В ос-
новном они однотипны и с большой грузоподъемностью;
лесовозы предназначены для перевозки лесных гру-
зов. Они имеют только одну палубу и усилены ледовы-
ми подкреплениями, позволяющими плавать в северных
морях, откуда в основном вывозят лес.
27
Наливные суда подразделяют на танкеры и газо-
возы.
Танкеры перевозят сырую нефть и нефтепродукты.
Это однопалубные суда, в корме которых расположено
машинное отделение и надстройка. Грузовая часть тан-
кера разделена поперечными и несколькими продоль-
ными переборками на грузовые отсеки, которые назы-
вают грузовыми танками. С целью обеспечения безо-
пасности грузовые танки в кормовой и носовой частях
судна отделены от соседних помещений узкими, газо-
непроницаемыми сухими отсеками — коффердамами.
Грузоподъемность танкеров очень большая и в зави-
симости от их назначения колеблется в пределах от
500 до 500000 т.
Газовозы предназначены для перевозки сжиженных
природных и выделяющихся при добыче нефти газов —
метана, пропана, бутана и аммиака. Перевозят эти
грузы в изолированных цистернах в сжиженном охлаж-
денном состоянии или под давлением.
В последние годы стало быстро развиваться строи-
тельство комбинированных судов. Такие суда выгодны
тем, что они исключают порожние балластные перехо-
ды на встречных перевозках. К таким судам относят-
ся нефтесухогрузы, нефтерудовозы, хлопколесовозы
и т. д.
Как упоминалось, к транспортным судам относятся
пассажирские суда. Они обслуживают регулярные пас-
сажирские линии на морях и реках и туристские путе-
шествия (круизы).
Пассажирские суда имеют несколько палуб и много-
ярусную развитую надстройку. Крупные суда оборудо-
ваны системами кондиционированного воздуха и успо-
коителями качки. Особое внимание уделяется обеспе-
чению безопасности мореплавания и непотопляемости
судна. В каютах предусмотрены удобства, а для отдыха
на судне имеются салоны, рестораны, бары, комнаты
28
Рис. 5. Плавучий кран «Черноморец» грузоподъемностью 100 т
игр, спортзалы, плавательные бассейны, читальные за-
лы, библиотеки, почта, телеграф и др.
Промысловые суда предназначены для добычи, пе-
реработки и транспортировки рыбы, крабов и морских
растений. Устройства промысловых судов определяются
видом промысла и технологией переработки продукции.
Служебно-вспомогательные суда — большая по но-
менклатуре группа судов, обслуживающих флот, порто-
вое хозяйство, водные пути и акватории. К ним отно-
сятся ледоколы, научно-исследовательские суда, букси-
ры, спасатели, плавучие маяки, плавучие гостиницы.
Суда технического флота обеспечивают техниче-
ское обслуживание портового хозяйства, различных су-
дов и водных путей. Разнообразие различных работ по-
служило причиной создания разных типов судов тех-
нического флота: плавучие краны (рис. 5), грунтоот-
29
возные шаланды, дноуглубительные снаряды, плавучие
доки, плавучие мастерские, крановые суда, суда-неф-
тесборщики (для сбора остатков разлитой нефти на
воде), промышленно-хозяйственные суда и др.
Итак, судно является сложным инженерным плаву-
чим сооружением, которое, подобно городу, полностью
обеспечивает его экипажу и пассажирам нормальные
условия для труда, отдыха и проведения культурно-
массовых мероприятий.
Чтобы общее представление о современном судне
было более полным, познакомимся с его главными экс-
плуатационными и мореходными качествами. К эксплу-
атационным качествам судна относятся: грузоподъем-
ность, грузовместимость, скорость, дальность плавания,,
автономность, обитаемость, прочность, стойкость, живу-
честь и др. К мореходным качествам — плавучесть, ос-
тойчивость, непотопляемость, ходкость, управляемость
и мореходность.
Грузоподъемность — масса перевозимых судном гру-
зов. Она является важнейшей эксплуатационной харак-
теристикой, которая определяет транспортные возмож-
ности судна, обусловленные его размерами и конструк-
цией. Различают чистую грузоподъемность и дедвейт.
Чистая грузоподъемность — предельная масса пере-
возимого полезного груза при загрузке судна по грузо-
вую марку, т. е. масса груза в трюмах и масса пасса-
жиров с багажом и предназначенных для них пресной
водой и провизией.
Дедвейт (или полная грузоподъемность) — общая
предельная масса перевозимого полезного груза при
загрузке судна по грузовую марку. Дедвейт состоит из
чистой грузоподъемности и массы запасов топлива, ко-
тельной воды, масла, экипажа с багажом, запасов про-
визии и пресной воды для экипажа.
С целью обеспечения безопасности мореплавания в
конце XIX века была введена грузовая марка, которая
30
в зависимости от размеров судна, времени года и рай-
она плавания определяет допустимую величину над-
водного борта. Грузовую марку пересматривали много
раз. В настоящее время ее наносят на правом и левом
бортах в средней части судна в соответствии с Пра-
вилами Регистра СССР, основанными на Международ-
ной конвенции о грузовой марке 1966 года.
Контроль за посадкой'судна, т. е. осадкой носом,
кормой и на миделе (средняя часть судна), осуществля-
ется по маркам углубления. Их наносят арабскими циф-
рами в дециметрах на обоих бортах судна на форштев-
не (в носу судна), в районе мидель-шпангоута и на ах-
терштевне (в корме судна).
Судно характеризуют объемными и массовыми из-
мерителями: водоизмещение объемное — объем подвод-
ной части судна, измеряемый в кубических метрах, и
массовое водоизмещение — масса судна, измеряемая в
тоннах.
Полное водоизмещение судна (т. е. с полным гру-
зом) состоит из водоизмещения порожнего судна (в
тоннах) и дедвейта (в тоннах).
Грузовместимость судна характеризуется суммар-
ным объемом всех грузовых трюмов и помещений. Она
измеряется в кубических метрах.
Грузовместимость и грузоподъемность не дают пол-
ного представления о величине судна. Поэтому в меж-
дународной морской практике для единообразной оцен-
ки размеров судов принята объемная мера — регистро-
вая вместимость, в которой за единицу объема прини-
мают регистровую тонну, равную 2,83 м3 (или 100 куб.
фута).
Различают чистую вместимость (нетто) и валовую
вместимость судна (брутто). Чистая вместимость —
условный объем, который состоит из грузовых помеще-
ний или помещений, предназначенных для перевозки
пассажиров, т. е. коммерчески эксплуатируемых поме-
31
щений. Валовая вместимость — объем помещений суд-
на, определяемый специальными Правилами обмера;
служит для оплаты сборов и пошлин в портах и статис-
тического учета флота. В валовую вместимость включа-
ется объем всех помещений под верхней палубой, в за-
крытых надстройках за исключением некоторых поме-
щений, оговоренных в Правилах (отсеки двойного дна,
топливных и балластных цистерн и др.). Валовая вмес-
тимость измеряется в регистровых тоннах.
Каждое судно имеет мерительное свидетельство, в
котором указывается валовая и чистая регистровая
вместимость. Обмеры в каждой стране производятся по
национальным Правилам обмера. Правила обмера для
судов, проходящих Суэцким и Панамским каналами,
несколько другие. Поэтому для таких судов выдаются
дополнительно соответствующие мерительные свиде-
тельства.
Скорость — важнейшее эксплуатационное качество
судна. Скорость морских судов измеряется в узлах.
Узел — единица скорости, равная одной морской миле
в час (1,852 км/ч, или 0,514 м/с). Скорость речных су-
дов измеряется в км/ч.
При проектировании судов скорость определяют на
основании экономических расчетов. В настоящее время
скорость сухогрузных судов составляет 16—19, а у
быстроходных сухогрузных лайнеров — 22—26 уз. Ско-
рость крупных контейнеровозов — 24—30 уз, танке-
ров — 16—18, а крупнейших пассажирских лайнеров —
30—36 уз.
Дальность плавания — расстояние, которое судно
проходит с заданной скоростью без пополнения запа-
сов топлива, воды и масла. Дальность плавания за-
висит от назначения судна. У транспортных судов она
достигает 15000—20 000 миль.
Автономность судна — предельная длительность
пребывания его в море без пополнения топлива, во-
32
ды, провизии и других расходных материалов, необхо-
димых для эксплуатации судна и нормальной деятель-
ности экипажа и пассажиров. Автономность судна так-
же зависит от его назначения и колеблется в очень
больших пределах: от 3—5 сут (суда, обслуживаю-
щие короткие линии) до одного года (ледоколы,
научно-исследовательские суда, промысловые базы
и т. д.).
Обитаемость судна характеризуется удобствами раз-
мещения на нем пассажиров и экипажа, размерами и
оборудованием бытовых помещений.
Прочность (или надежность) судна характеризует-
ся способностью судна и его конструкций противостоять
разрушающим воздействиям внешних сил. Это важное
эксплуатационное качество, которое наряду с мореход-
ными качествами обеспечивает безопасность морепла-
вания.
Стойкость конструкций су дна состоит в способности
материалов, из которых они изготовлены, противостоять
воздействию различных физико-химических факторов.
Живучесть судна — одно из главных его свойств,
обеспечивающее безопасность мореплавания. Оно про-
является в способности судна при получении повреж-
дений сохранять эксплуатационные и мореходные ка-
чества.
Мореходные качества судна являются главной ха-
рактеристикой. Они обеспечивают безопасность море-
плавания.
Плавучесть — способность судна плавать с задан-
ной осадкой, неся на себе определенную нагрузку (груз,
людей, снабжение и т. п.).
Для обеспечения безопасности мореплавания каж-
дое судно имеет запас плавучести, т. е. обладает спо-
собностью принять дополнительную сверх назначенной
ему нагрузку, оставаясь при этом в плавучем состоя-
нии на поверхности воды.
2-3793 33
Рис. 6. Метацентрическая высота при устойчивом (а) и неустой-
чивом (б) равновесии
Остойчивостью называется способность судна, от-
клоненного внешними силами от положения равновесия,
возвращаться в исходное положение после прекраще-
ния действия этих сил.
Мерой остойчивости судна является метацентриче-
ская высота. Метацентр — это условная точка, от по-
ложения которой по отношению к центру тяжести судна
зависит устойчивость его равновесия. Метацентр — М
(рис. 6) есть точка пересечения направления выталки-
вающей (подъемной) силы, действующей со стороны
воды на плавающее судно и приложенной в центре
давления — ЦД, с плоскостью симметрии судна. По-
ложение метацентра М меняется при изменении угла
крена судна. Равновесие плавающего судна будет ус-
тойчивым, если центр тяжести его — ЦТ лежит ниже
метацентра М, так как пара сил, образованная силой
тяжести и поддерживающей силой, будет поворачивать
кренящееся судно в обратном направлении. Если ме-
34
тацентр М расположен ниже центра тяжести судна
ЦТ, то равновесие неустойчивое.
Расстояние между метацентром М и центром тяже-
сти судна ЦТ называется его метацентрической высотой
и является одной из основных мер его остойчивости.
Непотопляемость — способность судна оставаться
на плаву после затопления части внутренних помеще-
ний (отсеков) и сохранять остойчивость и некоторый
запас плавучести.
При проектировании судов проверяют посадку суд-
на при различных вариантах затопления отсеков и
полученные результаты сравнивают с требованиями, ко-
торые предъявляются в части непотопляемости к раз-
личным типам судов. Для пассажирских судов требо-
вания сформулированы в Международной конвенции по
охране человеческой жизни на море 1974 года. По Пра-
вилам Регистра СССР такие требования предъявляют-
ся как к пассажирским, так и к другим типам судов.
При аварийных ситуациях возможно резкое умень-
шение остойчивости. Особенно опасны кренящие мо-
менты, возникающие от несимметричного затопления
отсеков. Примером этого может служить трагическая
гибель в 1956 г. итальянского пассажирского лайне-
ра «Андреа Дориа», столкнувшегося со шведским
лайнером «Стокгольм».
Ходкость — способность судна перемещаться по
воде с заданной скоростью при наименьшей затрате
мощности.
Управляемость судна характеризуется поворотли-
востью и устойчивостью на курсе. Поворотливость вы-
ражается в способности судна изменять направление
движения по желанию судоводителя. Устойчивость на
курсе — способность судна сохранять заданное ему
прямое движение. Неустойчивые суда на курсе назы-
ваются рыскливыми. Управляемость судна — одно из
2* 35
важнейших мореходных качеств, обеспечивающих бе-
зопасность мореплавания.
Мореходность — способность судна противостоять
морскому волнению, которое является причиной качки
судна, потери скорости и рыскливости на курсе. Для
уменьшения бортовой качки на судах применяют ус-
покоители качки. Самыми простыми являются обыкно-
венные скуловые кили. Они уменьшают амплитуду кач-
ки в 1,5—2 раза. Значительное уменьшение амплитуды
от 15—20° до 2—3° достигается с помощью активных бо-
ковых рулей. Такими успокоителями оборудованы со-
ветские лайнеры типа «Иван Франко», «Белоруссия»
и др. Существуют и другие способы для успокоения
качки судна.
Организация службы на судах
Министерства морского флота СССР
Основы организации службы на судах Министерства
морского флота, а также основные обязанности и пра-
ва лиц судового экипажа определяет Устав службы на
судах Министерства морского флота Союза ССР.
Положения Устава распространяются на членов
экипажа судна как при нахождении их на судне, так
и при исполнении служебных обязанностей на берегу,
а также на других лиц, временно пребывающих и вы-
полняющих служебные обязанности и работы на судне.
Традиции советских моряков сложились давно. Они
стали нормой поведения и законом жизни каждого, кто
посвятил себя морской службе. Имя судна, на кото-
ром совершает плавание экипаж, всегда является сим-
волом особой гордости каждого члена экипажа и спо-
собствует сплочению их в единую дружную семью.
Уставом службы на судах морского флота СССР оп-
ределено, что «Поднятый на судне в установленном по-
36
рядке Государственный флаг Союза ССР указывает на
принадлежность судна Союзу Советских Социалистиче-
ских Республик».
Отличительным обозначением принадлежности суд-
на Министерству морского флота СССР является крас-
ный пояс на дымовой трубе с нанесенной на нем эмбле-
мой серпа и молота золотого или желтого цвета.
Государственный флаг Союза ССР во время стоянки
судна поднимается на кормовом флагштоке, на ходу —
на гафеле бизань-мачты или кормовом флагштоке.
Флаг поднимают на ходу и на стоянке ежедневно в 8 ч
и спускают с заходом солнца.
При входе и выходе судна из порта, при встрече с
военными кораблями и торговыми судами, идущими под
флагом СССР, Государственный флаг поднимается ра-
нее установленного времени, а также не спускается
после захода солнца. В полярных морях его поднима-
ют в 8 ч ежедневно и он находится в таком поло-
жении в зимнее время в пределах видимости, а летом
до 20 ч.
При входе и выходе судна из порта, а также при
стоянке в порту, кроме Государственного флага Союза
ССР, на носовой мачте, а в отсутствие ее на носовом
флагштоке поднимается вымпел Министерства морско-
го флота. Он представляет собой красное треугольное
полотнище с эмблемой «Серп и молот».
В особо торжественные дни и в дни революционных
праздников производится торжественный подъем Госу-
дарственного флага Союза ССР с одновременным под-
нятием вымпела Министерства морского флота.
Если на судне в качестве официальных лиц нахо-
дятся Председатель Президиума Верховного Совета
СССР, Председатель Совета Министров СССР или
иные лица, представляющие Верховный Совет СССР,
Президиум Верховного Совета СССР и Совет Минист-
ров СССР, а также дипломатические представители и
37
консулы СССР, с согласия указанных лиц, кроме Го-
сударственного флага Союза ССР, поднимаемого на
кормовом флагштоке или гафеле, на фор-стеньге носо-
вой мачты также поднимается Государственный флаг
Союза ССР и держат его на протяжении всего време-
ни пребывания их на борту судна.
При встречах с военными кораблями СССР, а так-
же с военными кораблями государств, находящихся в
дипломатических отношениях с Советским Союзом, суда
морского флота приветствуют их однократным приспус-
канием Государственного флага Союза ССР.
При встрече с военными кораблями государств, не
состоящих в дипломатических отношениях с СССР, при-
ветствие Государственным флагом производится толь-
ко в территориальных и внутренних водах этих госу-
дарств.
Все суда при встрече в море приветствуют друг дру-
га приспусканием флага. Первыми салютуют суда мень-
шего тоннажа крупнотоннажному судну; судно, выхо-
дящее из порта, — судну, входящему в него; все суда—
судну, на котором поднят флаг членов правительства
СССР и Министерства морского флота, а также судну,
имеющему правительственные награды.
Охрана Государственного флага Союза ССР и под-
держание его престижа — почетная обязанность каж-
дого члена экипажа судна.
Ежедневный подъем и спуск флага являются торже-
ственными минутами в жизни моряков.
Поднимать Государственный флаг нужно в развер-
нутом виде. Подъем и спуск флага производит вахтен-
ный матрос по распоряжению вахтенного помощника
капитана.
В дни всесоюзных и местных праздников суда СССР,
стоящие в портах и на рейдах, расцвечиваются флага-
ми Международного свода сигналов. Они разносятся
через топы мачт от форштевня до гакаборта. На тех
38
судах, где это невозможно, расцвечивание допускается
от форштевня до клотика фок-мачты.
Обязанности каждого члена экипажа, обслуживаю-
щего судно, регламентированы Уставом службы на су-
дах Министерства морского флота Союза ССР.
Численность экипажа определяется штатным распи-
санием каждого судна и зависит от типа, назначения и
размеров судна.
Экипаж судна состоит из командного состава и су-
довой команды.
К командному составу относятся: капитан, помощни-
ки капитана, механики и электромеханики, начальник
радиостанции, электрорадионавигатор, судовой врач,
радиотехник, радиооператор, боцман, директор ресто-
рана и администратор пассажирской службы. Из них
старшим командным составом являются: капитан, стар-
ший помощник капитана, первый помощник и старший
механик.
К судовой команде относятся все остальные члены
экипажа.
Все члены экипажа должны иметь медицинские за-
ключения о годности к работе на занимаемых должно-
стях.
Лица командного состава должны иметь соответст-
вующие 'дипломы на право занятия определенной долж-
ности, а члены судовой команды — соответствующие
квалификационные свидетельства.
Все члены экипажа распределены по службам:
служба эксплуатации обеспечивает безопасное судо-
вождение и производственную деятельность судна. Ее
возглавляет старший помощник капитана;
служба технической эксплуатации обеспечивает тех-
ническую эксплуатацию и исправность судовых техни-
ческих средств;
служба быта обеспечивает обслуживание экипажа
судна;
39
пассажирская служба обеспечивает обслуживание
пассажиров;
радиотехническая служба;
медико-санитарная служба.
Распределение по заведованиям определяется Уста-
вом: судовыми расписаниями, должностными инструк-
циями и утверждается капитаном.
Каждый член экипажа обязан поддерживать пре-
стиж Советского Союза, честь и достоинство советского
моряка, хранить государственную тайну и беречь соци-
алистическую собственность.
Особенности морской службы обязывают каждого
члена экипажа добросовестно выполнять служебные
обязанности и повседневно бороться за повышение про-
изводительности труда, хорошо знать свою специаль-
ность, четко выполнять свои обязанности по борьбе за
живучесть судна, твердо знать и строго соблюдать пра-
вила техники безопасности. Каждый член экипажа дол-
жен быть дисциплинированным, чисто и опрятно оде-
тым, а также соблюдать правила ношения форменной
одежды.
Все члены экипажа обязаны выполнять объявлен-
ные капитаном аварийные и авральные работы.
При исполнении служебных обязанностей взаимное
обращение должно быть официальным, распоряжения
по службе должны отдаваться в форме приказаний.
Увольнение на берег членов экипажа производится
по указанию капитана и с разрешения своих непосред-
ственных командиров. При увольнении на берег на
борту судна должна оставаться часть экипажа, способ-
ная обеспечить безопасность судна и выполнение необ-
ходимых работ.
Члены экипажа, которые добросовестно относятся к
выполнению своих служебных обязанностей, выполняют
и перевыполняют производственные задания, проявляют
творческую инициативу, берегут государственную собст-
40
венность и экономят производственные материалы, по-
ощряются и награждаются грамотами ММФ и знаком
«Почетному работнику морского флота». Среди работ-
ников морского флота многие награждены правитель-
ственными орденами и высшими званиями Героя Со-
циалистического Труда.
Капитан является руководителем судового экипажа,
доверенным лицом государства и отвечает за жизнь
людей, сохранность судна и перевозимый груз. Управ-
ление судном капитан осуществляет на основе едино-
началия и подчиняется непосредственно начальнику па-
роходства.
Все распоряжения пароходства поступают на судно
через капитана, отвечающего за их выполнение. Капи-
тан отвечает за судовождение и выполнение судном
производственных планов, правильное техническое ис-
пользование судна и политико-моральное состояние эки-
пажа.
В своей работе капитан опирается на общественные
организации судна и руководствуется: Уставом службы
на судах морского флота Союза ССР, Кодексом тор-
гового мореплавания Союза ССР, Правилами техниче-
ской эксплуатации судов морского флота, междуна-
родными конвенциями, договорами, приказами и ука-
заниями пароходства и соответствующих вла-
стей.
Первый помощник капитана подчиняется капитану
и непосредственно отвечает за политико-моральное со-
стояние судового экипажа. Свою практическую работу
он проводит в соответствии с Положением о первом по-
мощнике капитана на судах Министерства морского
флота и совместно с судовой партийной организацией
проводит воспитательную работу среди членов экипа-
жа. Он организует на судне массово-политическую, ин-
тернациональную, культурно-просветительную и спор-
тивную работу.
41
Старший помощник капитана подчиняется капита-
ну судна и является его первым заместителем. Он от-
вечает за организацию службы и состояние дисципли-
ны на судне. В отсутствие капитана на судне старший
помощник капитана замещает его. Ему в администра-
тивном отношении подчинен весь экипаж судна. Он яв-
ляется начальником службы эксплуатации и руководит
службой быта, медико-санитарной службой, работой
второго, третьего и четвертого помощников капитана и
помощника капитана по хозяйственной части. Старший
помощник капитана отвечает за правильное техническое
использование корпуса, палуб, надстроек, судовых по-
мещений, общесудовых систем, рангоута и такелажа,
рулевого, грузового, якорного и швартовного устройств,
спасательных средств и т. п.; отвечает за подготовку
трюмов и других грузовых помещений к приему груза;
обеспечивает безопасную погрузку и контролирует пра-
вильность укладки и сепарирования грузов, ведает раз-
мещением на судне запасов и перемещением их из од-
ного отсека в другой.
Старший помощник капитана руководит аварийно-
спасательным и противопожарным отделениями и обес-
печивает борьбу за живучесть и непотопляемость судна;
несет ходовую вахту.
Второй помощник капитана несет ходовую и стоя-
ночную вахты. При выполнении швартовных операций,
он обязан находиться на корме и обеспечивать там вы-
полнение работ и соблюдение правил техники безопас-
ности. Одной из основных его обязанностей является
приемка, выдача, размещение и обеспечение сохранно-
сти перевозимых на судне грузов, почты и пассажир-
ского багажа.
Третий помощник капитана ведает навигационными
пособиями, навигационным оборудованием на судне,
средствами визуального наблюдения, различного вида
сигнализацией и т. д.; отвечает за состояние штурман-
42
ской и рулевой рубок. Третий помощник оформляет су-
довые роли, приход и отход судна; несет ходовые и
стояночные вахты. При выполнении швартовных опе-
раций третий помощник капитана находится на баке и
обеспечивает там организацию работ и соблюдение пра-
вил техники безопасности.
Обязанности четвертого и пятого помощников капи-
тана в основном устанавливаются приказом капитана.
Старший механик является заместителем капитана
по технической эксплуатации судна и несет ответствен-
ность за техническое состояние корпуса и технических
средств судна. Старший механик является начальником
службы технической эксплуатации, ведает планирова-
нием и выполнением работ по техническому обслужива-
нию и ремонту технических средств судна. Он обес-
печивает личное руководство управлением механиче-
ской установкой при входе судна в порт или выходе из
него и во время швартовных операций.
Первым заместителем старшего механика является
второй механик. Он отвечает за надежную работу и
техническое состояние: двигателей (включая движите-
ли и рулевое устройство); балластных, водоотливных,
и масляных систем; судовых технических средств по-
жаротушения, а также ведает материально-техническим
снабжением и является ответственным руководителем
работ по механической части.
Второй механик несет ходовые вахты с 0 до 4 ч и
с 12 до 16 ч.
Служба технической эксплуатации наиболее много-
численна, в нее входят: третий и четвертый механики,
механик по судовым системам и сменный механик, по-
мощники механика (I и II класса), помповый машинист
(донкерман), мотористы (трюмный, старший и др.),
кладовщик, токарь, рефрижераторный механик, элек-
тромеханики, электрики, боцман, подшкипер, матросы
и другие лица.
43
Наряду с Уставом службы на судах Министерства
морского флота Союза ССР важнейшим документом
для службы технической эксплуатации, регламентирую-
щим организацию и правильную эксплуатацию морского
судна, являются Правила технической эксплуатации су-
довых технических средств (ПТЭ). Этими Правилами
определены технические условия, которым должны от-
вечать морские суда и их оборудование. ПТЭ определя-
ют основные обязанности и ответственность лиц команд-
ного состава за техническое состояние судна. Правила
распространяются не только на все транспортные и тех-
нические суда, а также на суда специального назначе-
ния.
В ПТЭ изложены положения о судовых документах,
об оборудовании и содержании морских судов, их над-
строек и помещений, мачт, рангоута, такелажа, рулево-
го, грузового, якорного и швартовного устройств, спа-
сательных средств, противопожарного оборудования,
судовых систем, навигационно-штурманского оборудова-
ния и т. д. ПТЭ определяют порядок приема на работу
и проверку технических знаний работников морского
флота.
В развитие ПТЭ Министерством морского флота ут-
верждаются специальные правила обслуживания и ухо-
да за вспомогательными механизмами, двигателями
внутреннего сгорания, радиоустановками, электрообо-
рудованием, навигационно-штурманским оборудованием
и ряд других.
Навигационно-гидрографическое и штурманское обес-
печение является важнейшим условием для безопас-
ного плавания и повышения эффективности работы
флота. При этом важное значение имеют современ-
ность, точность и полнота информации судов об изме-
нениях навигационной и гидрометеорологической обста-
новки, четкость организации штурманской служ-
бы на судах и оперативность со стороны руководства
44
береговых органов, обеспечивающих безопасность пла-
вания.
Поэтому наряду с Уставом службы на судах Минис-
терства морского флота СССР и Правилами техниче-
ской эксплуатации важнейшим документом является
Наставление по организации штурманской службы на
судах Министерства морского флота (НШС—82). Оно
развивает соответствующие положения Устава службы
на судах ММФ СССР и другие официальные документы,
обобщает опыт судоводителей по обеспечению безава-
рийного плавания судов. В нем подробно освещены:
роль руководящих и контролирующих органов, штур-
манские обязанности командного состава, штурманская
работа в рейсе, плавание в особых условиях, регламен-
тирована штурманская документация и правила ее веде-
ния.
Особым видом выполнения служебных обязанностей
на судах является вахтенная служба. Лица, находящие-
ся на вахте, именуются вахтенными.
Вахтенная служба, которая установлена круглосу-
точно, должна обеспечивать управление судном, его
безопасность, живучесть, производственную деятель-
ность и осуществлять контроль за посещением судна.
Ответственность за организацию вахтенной службы
возложена на капитана, а руководство организацией
вахтенной службы — на старшего помощника капитана
и старшего механика.
Судовые вахты разделяются на ходовые и стояноч-
ные. Вид вахт назначает капитан, исходя из конкрет-
ных обстоятельств. Продолжительность ходовой вахты
4 часа. На продолжительной стоянке обычно назнача-
ются круглосуточные вахты.
На ходу судна вахтенный помощник капитана несет
вахту на штурманском мостике. Перед заступлением на
вахту помощник капитана должен ознакомиться с рай-
оном плавания судна и навигационной обстановкой.
45
Принимая вахту, он должен получить у сдающего вахту
полную информацию об условиях плавания и раз-
личных обстоятельствах, сопутствующих плаванию, про-
верить на карте место судна, курс и исправность ходо-
вых огне$. Вахтенный помощник капитана ведет беспре-
рывное наблюдение за окружающей обстановкой, ведет
счисление пути судна, возможно чаще проверяя место
судна путем обсерваций.
На стоянке судна вахтенный помощник капитана
должен знать полную информацию о навигационном и
эксплуатационном состоянии судна, о наличии на судне
экипажа, о грузовых операциях, о количестве выт-
равленной якорь-цепи и состоянии швартовных кон-
цов, следить за гидрометеорологической обстановкой
и т. д.
На судне вахтенными помощниками капитана ведет-
ся судовой журнал. В него вахтенные помощники, каж-
дый в конце своей вахты и по определенным правилам
ведения судового журнала, записывают всю навигаци-
онную и эксплуатационную деятельность на судне.
Все механики, кроме старшего, несут вахты в ма-
шинном отделении.
Большое значение в организации судовой службы
имеет подготовка судна к выходу в плавание, как од-
ного из важнейших условий обеспечения успешного вы-
полнения предстоящего рейса.
Подготовка судна к плаванию заключается в про-
ведении таких мероприятий, выполнение которых обес-
печивает безопасность плавания судна, сохранность гру-
зов, создает хорошие условия для пассажиров, нормаль-
ные условия работы и отдыха экипажа.
Чтобы судно могло выполнять поставленную задачу,
оно должно быть полностью обеспечено судовым
снаряжением, бункером, водой, продовольствием и дру-
гим снабжением.
46
В конце предыдущего рейса начальствующий состав
судна под руководством старшего помощника капитана
определяет остатки материалов, бункера, воды и состав-
ляет требования на все виды судового снабжения, ис-
ходя из намечаемых на судне работ и характера пред-
стоящего рейса. Требования вручаются агенту или в
соответствующие службы пароходства. По указанию
старшего помощника капитана продовольствие заготав-
ливает артельщик. Питьевую и мытьевую воду заказы-
вает старший помощник капитана, котельную — стар-
ший механик. Требования на материалы, инвентарь и
инструменты по палубной части готовит и получает
боцман.
Обеспечением машинного отделения необходимыми
материалами и запасами ведают старший, второй и тре-
тий механики.
В соответствии с Кодексом торгового мореплавания
СССР суда укомплектовывают экипажем в составе,,
обеспечивающем безопасное плавание. Перед выходом
в рейс судно должно иметь оформленные судовые доку-
менты. Выдачу и оформление документов производят
соответствующие органы на основании проверки тех-
нического состояния судна, его устройств и механиз-
мов.
Номенклатура судовых документов и порядок их вы-
дачи регламентируются: Правилами технической эксплу-
атации судов морского флота, Уставом службы на
судах Министерства морского флота СССР, Кодексом
торгового мореплавания СССР и международными кон-
венциями. Выдачу документов и их продление произ-
водят: Регистр СССР, инспекция портового надзора,
портовые санитарно-карантинные власти, пожарная ох-
рана и другие органы.
Каждое судно должно быть зарегистировано в од-
ном из портов СССР. Порт приписки указывается на
корме судна.
47
Навигационная подготовка судна к рейсу начина-
ется с момента прихода судна в порт. Во время стоянки
в порту лица начальствующего состава по своему за-
ведованию производят необходимый ремонт, налажива-
ние навигационного оборудования, сигнальных средств
и др. Все спасательные средства и запасы снабжения
на предстоящий рейс проверяются со всей тщательно-
стью. Тщательно проверяется и подготавливается ру-
левое устройство, которое должно надежно обеспечить
управление судном.
Третий помощник капитана по заранее составленно-
му требованию получает из навигационной камеры не-
обходимые карты и навигационные пособия. Перед вы-
ходом проверяет исправность навигационного, электро-
навигационного оборудования и радионавигационных
приборов, всего штурманского имущества, устройств
для подачи световых и звуковых сигналов, ракет, сиг-
нальных огней, карт, лоций, пособий и т. д.
В обязанности третьего помощника капитана вхо-
дят: составление судовых ролей, сбор дипломов и сви-
детельств командного состава судна и оформление от-
хода судна в инспекции портового надзора. Перед от-
ходом судна третий помощник капитана сверяет судо-
вые часы в машинном отделении, в рулевой рубке и
кают-компании с судовыми часами в штурманской руб-
ке, которые заведомо поставлены точно по хронометру.
Он же сверяет показания магнитных компасов и под-
готавливает все необходимое для прокладки пути
судна.
Боцман под руководством старшего помощника ка-
питана проверяет надежность крепления палубного
груза, закрытий грузовых и прочих люков, воздуш-
ных и замерных трубок, наличие брезентовых чехлов
и т. д.
Все лица судового состава готовят судно по-поход-
ному.
48
Перед выходом из порта старший помощник капи-
тана проверяет наличие команды на борту и доклады-
вает капитану.
В назначенное время на судно прибывает лоцман
для проводки судна из порта. Так начинается рейс.
Лоцманская служба обеспечивает безопасность мо-
реплавания, проводки судов при выходе и на подходах
к морским портам, в пределах вод этих портов, а также
между портами, независимо от флага и ведомственной
принадлежности судна. Кроме этого, установлены рай-
оны обязательной и необязательной лоцманской провод-
ки, которые доводятся до всеобщего сведения в обяза-
тельных постановлениях морских портов, лоциях и «Из-
вещениях мореплавателям».
Присутствие на судне лоцмана не снимает с капита-
на ответственности за управление судном.
Лоцманская служба порта находится в подчинении
капитана порта. Права и обязанности лоцмана опре-
деляются Кодексом торгового мореплавания Союза ССР
и Положением о государственных морских лоцманах,
утвержденным министром морского флота СССР.
Для обеспечения живучести судна Уставом службы
на судах Министерства морского флота Союза ССР оп-
ределена организация обеспечения живучести судна.
Она осуществляется в соответствии с Наставлением по
борьбе за живучесть судов Министерства морского фло-
та Союза ССР. Наставление является основным доку-
ментом, определяющим организационно-технические
и предупредительные мероприятия, подготовку и дейст-
вия экипажа по борьбе за живучесть судна.
Организация обеспечения живучести судна состоит
в постоянном поддержании судна и его технических
средств в исправном состоянии, в наблюдении за суд-
ном и окружающей обстановкой, в постоянной готовно-
сти средств борьбы за живучесть судна и наличии на
борту установленного количества экипажа.
49
Для осуществления борьбы за живучесть на судне
создаются постоянные аварийные партии (группы), а
на пассажирских судах дополнительно партии обеспе-
чения охраны порядка.
На каждом судне старший помощник составляет
расписание по тревогам, в которых определяет обязан-
ности всех членов экипажа. Расписание утверждает ка-
питан.
Расписания составляются по общесудовой тревоге
(в том числе по борьбе с пожаром, водой и др.), по тре-
воге «Человек за бортом» и по шлюпочной тревоге (при
оставлении судна). Сигналы тревоги подаются звонком
громкого боя по установленным правилам и дублиру-
ются голосом по судовой трансляционной сети.
Над койкой каждого члена экипажа находится кар-
точка, где указаны его обязанности по тревогам.
Для отработки действий по борьбе за живучесть на
судне проводятся тренировочные учения (учебные тре-
воги) не реже одного раза в месяц, а на пассажирских
судах — один раз в неделю.
Предотвращение загрязнения
моря судами
В организации службы на морских судах огромную
роль играет охрана окружающей среды и, в особенно-
сти, предотвращение загрязнения моря.
Промышленные предприятия, все силы технического
транспорта, теплоэлектростанции и другие формы про-
цессов вносят в атмосферу углекислый газ, окись угле-
рода, окись серы, окись азота, твердые частицы и т. д.
Ученые считают, что за последние 20 лет, концентрация
углекислого газа в атмосфере увеличилась более чем
на 10%. Если эта тенденция сохранится и дальше, то,
50
по мнению ученых, к концу второго тысячелетия содер-
жание углекислого газа в атмосфере будет грозить че-
ловечеству многими нежелательными явлениями. Уже
теперь термин «болезнь Минамата» применяется в ме-
дицине для диагноза отравления людей промышленными
отходами.
В настоящее время установлены в биосфере суще-
ственные изменения содержания кислорода, углерода,
азота, минеральных веществ и других компонентов, что
приводит к нарушению экологического равновесия.
По данным Организации Объединенных Наций, из-
за этого уже исчезло 106 видов зверей и 139 видов птиц.
На грани исчезновения оказалось еще около 500 видов
животных, которые занесены в Красную книгу.
Моря и океаны занимают около двух третей поверх-
ности нашей планеты. Они являются аккумуляторами
и источниками тепла и регулируют климат на Земле. В
морях и океанах сосредоточены колоссальные биоло-
гические и другие ресурсы. Моря и океаны поглощают
огромное количество углекислого газа и взамен выделя-
ют кислород. Биологическое богатство мирового океа-
на — фитопланктон. Он вырабатывает около 50% кис-
лорода, находящегося в атмосфере, и является кормо-
вой базой рыб и средством самоочищения океана.
В ближайшие десятилетия потребление населением
морской рыбы достигнет примерно 60—100 млн. т в год.
Более того, богатства океана могут стать одним из ос-
новных источников продовольствия для человека. Вот
почему моря и океаны нуждаются в особой охране от
загрязнения.
Существует много источников загрязнения моря
нефтью: нефтеперерабатывающие заводы, береговые
промышленные предприятия, нефтебазы, трубопроводы,
буровые установки нефтедобычи в прибрежной полосе
и в открытом море и др. Все это в конечном итоге вы-
носится реками в море.
5Г
Одной из основных причин загрязнения морей и
океанов, кроме выноса реками загрязненной воды, явля-
ется морская транспортировка нефти и ее продуктов.
По данным национального исследовательского Со-
вета США, в Мировой океан ежегодно поступает около
6 млн. т нефти. Около 35% (2133 тыс. т) разливается
при транспортировке (включая аварии судов); 31%
(1900 тыс. т) поступает из рек и городских стоков и
13% (800 тыс. т) — из береговых нефтеперерабатываю-
щих заводов и стоков промышленных предприятий, ос-
тальное — из морских нефтяных скважин и атмосферы.
В марте 1967 г. либерийский танкер «Торри Кань-
он», имевший на борту 119 тыс. т сырой нефти, следо-
вал рейсом из Персидского залива в Милфорд-Хейвен.
В 16 милях от южных берегов Корнуэльского полуостро-
ва Англии он с полного хода сел на рифы Семь Кам-
ней. В результате катастрофы более 100 тыс. т нефти
ушло в море. По своим масштабам это первое гранди-
озное событие загрязнения моря, которое показало все-
му миру большую опасность транспортировки нефти в
супертанкерах.
Загрязнение воздуха, земли, рек и морей в конеч-
ном итоге приводит к глобальному загрязнению мор-
ской среды, а это может привести к тяжелым биоло-
гическим изменениям в жизни нашей планеты.
Коммунистическая партия и Советское правительст-
во проявляют большую заботу об охране природы и
рациональном использовании ее богатств. Издан ряд
правительственных постановлений, повышающих ответ-
ственность за осуществление государственных и между-
народных законов по охране окружающей среды. Про-
ведены мероприятия, которые обязывают судостроитель-
ные заводы и строительные организации строить суда
и береговые сооружения в строгом соответствии с тре-
бованиями по предотвращению загрязнения рек и мо-
рей.
52
Государственными планами СССР ежегодно преду-
сматривается финансирование научных исследований,
на основе которых разрабатываются мероприятия по
предотвращению загрязнения рек и морей. В результа-
те за последнее десятилетие на всех объектах флота
СССР проведена большая работа по обеспечению ути-
лизации отработанных нефтепродуктов и поддержанию
чистоты портовых акваторий.
В 1954 г. была созвана Международная конфе-
ренция морских государств. Результатом ее работы
явилась Международная конвенция 1954 г. Это первый
документ, который установил международные нормы и
требования по охране моря от нефтяных загрязнений в
результате судоходства. Она вошла в силу с 26 июля
1958 г.
Конвенция 1954 г. установила прибрежные зоны,,
в которых было запрещено сливать в море нефтеводя-
ные смеси. Конвенция учредила официальный юридиче-
ский документ — Журнал нефтяных операций.
Международная конвенция 1954 г. была дополнена
в 1969 и 1971 гг.
В октябре 1973 г. в Лондоне принята новая Между-
народная конвенция по предотвращению загрязнения
с судов. В ней по сравнению с прежней соглашение ка-
сается не только нефти, но и других перевозимых вред-
ных веществ и отходов, образующихся на судах в ре-
зультате их эксплуатации. В приложениях к основному
документу изложены международные стандарты допус-
тимых сливов, а также даны рекомендации по оснаще-
нию судов оборудованием, необходимым для сохране-
ния чистоты морской воды.
Согласно Конвенции каждое судно обязано иметь
сертификат — свидетельство о том, что корпус, меха-
низмы и другая аппаратура соответствуют Правилам
предотвращения загрязнения моря. Выполнение этих
условий должно проверяться во время специальных ин-
53
спекций при заходе судов в порты на всей акватории
Мирового океана.
Конвенция устанавливает нормы содержания нефти
•в воде, сбрасываемой танкерами. Так, суда с вмести-
мостью более 70 тыс. брутто-регистровых тонн должны
иметь отдельные емкости для приема чистого баллас-
та. Для особых районов (Балтийское, Средиземное,
Черное и некоторые другие моря) принят единый ре-
жим: полный запрет слива нефтесодержащих вод со
всех судов вместимостью свыше 400 брутто-регистровых
тонн. Слив должен производиться только на береговые
приемные устройства.
Наряду с Международной конвенцией 1954 г. был
принят ряд других конвенций.на случай аварий, приво-
дящих к загрязнению нефтью, о создании международ-
ного фонда для возмещения ущерба от загрязнения
нефтью, загрязнения моря сбросами отходов и других
материалов и т. д.
Большую роль в предотвращении загрязнения мор-
ской среды играют региональные соглашения и особые
национальные и территориальные требования.
В СССР ведется большая работа по охране окру-
жающей среды. Установлена юридическая ответствен-
ность за загрязнение внутренних и территориальных
•морских вод. Издано постановление ЦК КПСС и Сове-
та Министров СССР от 14 февраля 1974 г. «Об усиле-
нии борьбы с загрязнением моря веществами, вредны-
ми для здоровья людей или для живых ресурсов моря»,
а затем Указ Президиума Верховного Совета СССР от
.26 февраля 1974 г. «Об усилении ответственности за
загрязнение моря веществами, вредными для здоровья
.людей или для живых ресурсов моря». В 1976 г. изда-
но постановление Совета Министров СССР «О мерах
по предотвращению загрязнения моря с судов». Вместе
с этим изданы постановления по отдельным бассей-
нам.
54
На судах морского флота ответственность за предот-
вращение загрязнения моря возложена непосредствен-
но на капитана судна и лиц, ответственных за выпол-
нение операций, связанных с возможным загрязнением
моря. Контроль по предотвращению загрязнения ведет-
ся с помощью специально разработанных служебных,
документов — Журнала нефтяных операций и Журна-
ла операций с вредными веществами, не являющимися
нефтью и перевозимыми морем в упаковке, грузовых
контейнерах, съемных танках или автодорожных и же-
лезнодорожных цистернах.
В результате осуществления принятых мер по пре-
дотвращению загрязнения моря за последние годы на
морских судах и других объектах значительно усилилась
работа по обеспечению охраны чистоты окружающей
среды и моря.
Что такое судовождение?
Современное судовождение требует от помощника ка-
питана (штурмана) больших знаний из различных об-
ластей наук. В самом широком смысле под судовожде-
нием подразумевают науку о том, как плавать по воде.
Она охватывает большой и очень разнообразный круг
знаний. Поэтому судовождение уже давно разделилось
на ряд самостоятельных наук, и все они решают одну
основную задачу — перейти из одного порта в другой
наивыгоднейшим путем, безопасно, точно по намеченно-
му пути и в кратчайшее время.
Наиболее важными научными дисциплинами, вхо-
дящими в судовождение, являются навигация, лоция,
мореходная астрономия, электронавигационные прибо-
ры, радионавигационные системы, автоматизация судо-
вождения, магнитно-компасное дело, навигационно-гид-
55*
рометеорологическое обеспечение плавания судов, уп-
равление судном и его техническая эксплуатация, ор-
ганизация, экономика и планирование работы морского
флота.
Среди всех научных дисциплин, входящих в судо-
вождение, ведущее место занимает навигация.
Для того чтобы совершить переход из одного порта
в другой, необходимо прежде всего изучить район пла-
вания и выбрать самые безопасные и наиболее выгод-
ные пути, по которым должно будет следовать судно.
Во время плавания по этим направлениям необходимо
учитывать пройденное судном расстояние. Это дает воз-
можность в любой момент судить о местонахождении
судна.
Направление в море (курсы-судна) указывают ком-
пасы, а пройденное расстояние — лаги. Этим прибо-
рам, как и всем другим, свойственны погрешности в
показаниях. Поэтому в рассчитанном месте судна по
курсу и по пройденному расстоянию также будут со-
держаться погрешности. Дополнительно возникают по-
грешности от неучтенного течения и дрейфа. Со вре-
менем они увеличиваются и достигают значительной ве-
личины, что может привести к аварии судна, например к
посадке его на мель, особенно при плавании вблизи
берегов. Поэтому наряду с рассчитанным (или счисли-
мым) местом судна во всех случаях, когда это возмож-
но, определяют место судна специальными методами по
наблюдениям маяков, которые расположены на мор-
ских берегах, или по каким-либо другим заметным бе-
реговым ориентирам, указанным на картах. В условиях
плохой видимости место судна вблизи берегов опреде-
ляют с помощью радиолокаторов, а вне видимости бе-
регов применяются радиотехнические средства.
Все способы определения места судна, определение
направлений и учет пройденного судном пути изучает
навигация.
56
Особенно большое значение в судовождении имеют
морские навигационные карты. На них ведут графи-
ческую прокладку направлений, по которым движется
судно, откладывают пройденные расстояния и по ре-
зультатам наблюдений береговых объектов производят
графические построения для определения места судна.
Слово «лоция» означает «проводка судна». Лоциями
называются также описания океанов, морей, заливов,
проливов и т. п., основанные на изучении побережья,
морского дна, различных опасностей, гидрометеорологи-
ческих условий плавания.
Выше мы говорили о том, что перед выходом судна
в море необходимо выбрать самый безопасный и наи-
выгоднейший путь. Вместе с этим необходимо изучить
условия предстоящего плавания.
Безопасный и наивыгоднейший путь — это не толь-
ко кратчайший путь, но и путь с достаточными глуби-
нами, свободный от подводных камней, мелей и т. д.
Кроме того, при выборе пути нужно учесть попутные
течения и благоприятные ветры на время плавания в
данном районе.
Для многих морских районов, портов, каналов, про-
ливов, прибрежных зон существуют особые местные пра-
вила плавания, которые также необходимо знать судо-
водителю.
Путь выбирают таким, чтобы он имел достаточное
количество маяков, радиомаяков, работающих по оп-
ределенным программам (по ним определяют место
судна), а также навигационного оборудования (буи,
вехи, бакены и т. д.), указывающего места мелей, под-
водных камней или других каких-либо опасностей. На-
вигационное оборудование в опасных для плавания
районах расставляют по определенным системам.
Судоводителю необходимо знать не только гидро-
метеорологические условия плавания (ветры, течения,
туманы и т. п.), но и географические и экономические
57
характеристики прибрежной полосы (приморские го-
рода, порты, бухты, рейдовые стоянки, хорошо защищен-
ные от ветра, и т. д.).
Вся эта большая информация сосредоточена в раз-
личных пособиях — картах, лоциях, атласах, справочни-
ках, наставлениях и т. д., которые называются навига-
ционными пособиями для плавания. Описания этих по-
собий, правила'пользования ими в практике морепла-
вания, освещение вопросов по их созданию, системы ог-
раждения навигационных опасностей, правила плава-
ния в отдельных районах и вопросы, которые выше рас-
смотрены, составляют предмет лоции.
Еще в древности, плавая вдали от берегов, человек
-определял направление движения судна по небесным
светилам — звездам, планетам, Солнцу и Луне. Впос-
ледствии с развитием астрономии были открыты ме-
тоды астрономических определений места судна в море,
а также способы контроля показаний компасов. Со вре-
.менем в астрономии накопилось много методов, которые
были приемлемы только для мореплавания, их выдели-
ли отдельно, и они составили научную дисциплину —
мореходную астрономию.
Как уже ранее упоминалось, определение направле-
ния в открытом море является первостепенной задачей.
Выбрав наилучший путь для судна, необходимо его
направить по этому пути, а во время плавания бес-
прерывно следить, чтобы оно двигалось в желаемом на-
правлении. Указателем направления в море служит ком-
пас.
Все вопросы о том, как влияют магнитные поля
Земли и судового железа на работу магнитного компа-
са, как это влияние уменьшают и как работает компас,
изучает магнитно-компасное дело.
Особое значение имеют радиопеленгаторы, с помо-
щью которых определяют направление на источник из-
лучения радиоволн на большом расстоянии от берего-
58
вых объектов. По этиАм направлениям определяют место
судна. В настоящее время радиопеленгование очень раз-
нообразно по методу, а радиопеленгаторы — по уст-
ройству. На принципе радиопеленгования созданы ра-
дионавигационные системы.
После второй мировой войны на судах стали приме-
нять радиолокаторы, на экране которых появляется изо-
бражение окружающей судно обстановки. С помощью
этих приборов определяют место судна, а при плохой
видимости они «заменяют» штурману глаза и помогают
предотвращать столкновения судов. За короткий срок
радиолокаторы снискали всеобщее признание и стали
весьма эффективным средством судовождения.
Успешный запуск 4 октября 1957 г. в Советском
Союзе первого в мире искусственного спутника Земли
(ИСЗ) и последующие достижения науки и техники в.
освоении космического пространства позволили создать
принципиально новые навигационные системы — спут-
никовые РНС. В них определение места судна постро-
ено на приеме радиосигналов с искусственных спутни-
ков с использованием эффекта Доплера. Создание на-
вигационных спутниковых систем является большим до-
стижением современной науки и техники. С их помощью
можно определить место с высокой точностью в любой
точке Земли.
Теорию и устройство гирокомпаса, эхолотов, лагов,
радиолокаторов, радиопеленгаторов и других различно-
го рода приемоиндикаторов и правила их эксплуатации
изучает дисциплина «Электронавигационные и радио-
навигационные приборы».
Судно, как известно, подвергается воздействию воз-
душной и водной сред. Изучением законов движения
воздушных масс и масс воды применительно к решению
задач судовождения и обеспечения безопасности море^
плавания занимается навигационная гидрометеороло-
гия. Эта наука помогает судоводителям уклоняться от
59
ураганов, учитывать скорость и направление течений,
которые могут снести судно с заданного пути.
В последние десятилетия в судовождение интенсив-
но внедряются автоматизация и вычислительная техни-
ка. Автоматизация повышает эффективность и безопас-
ность судовождения, а следовательно, повышает и рен-
табельность работы морского флота.
С огромным увеличением количества судов, разных
по назначению (пассажирские, сухогрузные, танкеры,
контейнеровозы, лихтеровозы, суда технического флота
и т. д.) и размерам, большую роль играют дисциплины:
«Управление судном и его техническая эксплуатация»
и «Организация и планирование работы судов».
Умелое управление судном, правильная его эксплуа-
тация, оптимальная организация и планирование рабо-
ты судов, построенных на научной основе с одновремен-
ным внедрением передовой технологии погрузочных и
разгрузочных работ, в сочетании с грамотным судовож-
дением являются основным фактором повышения эко-
номической эффективности работы морского флота.
Все что достигнуто в судовождении и является для
него экономичным и надежным, должно использовать-
ся наилучшим образом, постоянно обновляясь и совер-
шенствуясь. Этого требует безопасность мореплавания
и охрана человеческой жизни на море.
Вот коротко о том, что необходимо знать судоводи-
телю, что он должен изучить, прежде чем выйти в море
и вести свое судно из одного порта в другой. Остано-
вимся на некоторых вопросах более подробно.
Основные понятия из навигации
Морская навигационная карта — основное навигацион-
ное пособие для штурмана. На ней определяют направ-
ление, по которому должно идти судно, производят гра-
<60
фические построения направлений, по которым оно пе-
ремещается, откладывают пройденное им расстояние и
ведут графические построения для определения места
судна по наблюдениям береговых маяков, радиомаяков
и небесных светил (звезд, планет, Солнца и Луны). На
морской карте сосредоточена вся навигационная инфор-
мация: береговая линия с нанесенными на ней маяками,
населенными пунктами и подводными опасностями. На
ней указывают глубины, течения, тип грунта, места за-
тонувших судов и т. п.
Построение морской навигационной карты зависит
от формы и размеров Земли и от принятых на ней ос-
новных направлений. От построения обычных географи-
ческих карт построение навигационных отличается вы-
бором проекции.
В настоящее время форма и размеры Земли опреде-
лены достаточно точно. Действительная форма Земли
представляет собой неправильное геометрическое тело
(слегка сжатый шар), носящее название геоида. Он бли-
же всего подходит к эллипсоиду вращения, форму ко-
торого принято называть земным сфероидом, т. е. ша-
ром, слегка сжатым у полюсов и немного вытянутым
вдоль экватора.
Размеры земного сфероида определены в 1940 г.
Центральным научно-исследовательским институтом
геодезии, аэрофотосъемки и картографии. Это самые
точные определения, так как в них были использованы
наиболее строгие методы и самые точные измерения. По-
становлением Совета Министров СССР от 7 апреля
1946 г. для всех геодезических, картографических и дру-
гих работ в Советском Союзе предложено руководство-
ваться размерами Земли, выведенными проф. Ф. Н. Кра-
совским. Такими размерами являются большая полуось
(радиус экватора), равная 6 378 245 м, и малая полуось
(половина земной оси вращения), равная 6 356 863 м, а
также сжатие Земли, которое равно 1:298,3. Сжатие
61
Рис. 7. Основные круги
и географические коор-
динаты точки на зем-
ной поверхности
Земли характеризуется отношением разности между
большой и малой ее полуосями к большей полуоси, т. е.
если обозначим через а сжатие Земли, через а боль-
шую и b малую полуоси, то
„_а-ъ_______1
а - 298,3 ‘
При решении задач, где не требуется очень высо-
кая точность, форму Земли часто принимают за шар
с радиусом 6371,1 км.
Для удобства решения многих задач Земля условно
разделена на две системы взаимно перпендикулярных
кругов (рис. 7). Первая система кругов, параллельных
земному экватору, — это земные параллели. Экватор
перпендикулярен земной оси и делит Землю на два рав-
ных полушария — северное и южное. Относительно эк-
ватора определяют положения всех параллелей.
Другая система кругов — земные меридианы, про-
ходящие через земные полюса (все они перпендикуляр-
62
ны параллелям). В 1884 г. в Вашингтоне состоялась
Международная конференция по установлению нулево-
го меридиана, необходимого для сравнения положения
меридианов. На этой конференции был принят началь-
ный меридиан, проходящий через Гринвичскую обсер-
ваторию (близ Лондона), и он получил название грин-
вичского меридиана. Такой выбор удобен тем, что ме-
ридиан 180° проходит в основном по незаселенной зем-
ной поверхности — Тихому океану.
Положение какой-либо точки на земной поверхнос-
ти, например точки А на рис. 7, определяется с помо-
щью географических координат: широты и долготы, ко-
торые соответственно обозначаются через <р и X. Широта
измеряется дугой земного меридиана от экватора до
рассматриваемой точки. Широту экватора принимают
равной 0°, а широту земного полюса — равной 90°.
Наименование широты всегда одноименно с наимено-
ванием полушария, в котором находится рассматривае-
мая точка. Долгота какой-либо точки измеряется ду-
гой экватора от гринвичского меридиана до меридиа-
на, проходящего через данную точку. Долготе приписы-
вают наименование восточное (Е) или западное (W) —
в зависимости от того, в каком полушарии относительно
гринвичского меридиана находится точка. Величины
долгот измеряются в пределах от 0 до 180°.
Географические координаты выражаются в угловой
мере. Расстояния измеряют в линейных единицах. Что-
бы выразить одним и тем же числом расстояние как в
линейной мере, так и в угловой мере, за единицу дли-
ны приняли морскую милю, равную 1' дуги меридиана.
Но длина морской мили на земном сфероиде непостоян-
на, а изменяется с широтой в пределах примерно 20 м.
Поэтому в 1928 г. Международное гидрографическое
бюро за стандартную морскую милю приняло округлен-
ное значение ее средней величины, равное 1852 м.
В 1931 г. к этому решению присоединился СССР.
63
Десятая часть мили называется кабельтовым (т. е.
!/ю мили=1 кб). Следовательно, стандартное значение
кабельтова составляет 185,2 м.
В судовождении часто рассматривают взаимное рас-
положение двух точек на земной поверхности, например
точки А (ф1, Zi), из которой вышло судно, и точки В
(ф>2, Хг), куда оно пришло. Для этого введены понятия:
разность широт (РШ) и разность долгот (РД). Под
РШ понимают разность широт между конечной и на-
чальной точками перехода, т. е. РШ=^2—<рь а под
разностью долгот — разность между долготами конеч-
ной и начальной точек, т. е. РД = К2—Аь
Если судно идет в северном направлении, то раз-
ности широт приписывают северное наименование N, в
южном — южное наименование S.
Аналогично разность долгот имеет восточное наиме-
нование — Е, если судно идет в восточном направлении,
и западное W, если в западном.
Важное значение имеют понятия об основных точках,
кругах, линиях и плоскостях в месте, где находится на-
блюдатель. В данной точке земной поверхности наблю-
датель имеет одно из главных и определенных направ-
лений, указываемых ему свободно висящим отвесом. Он
указывает вверху над наблюдателем зенит — Z, а вни-
зу надир — п (рис. 8). Через отвесную линию можно
провести бесчисленное множество вертикальных плос-
костей. Вместе с тем можно избрать систему плоскос-
тей, которые будут перпендикулярны отвесным плоско-
стям, т. е. горизонтальные плоскости. Та из горизон-
тальных плоскостей, которая проходит через глаз на-
блюдателя, носит название плоскости истинного гори-
зонта наблюдателя. Одну из вертикальных плоскостей,
которая проходит через глаз наблюдателя, земные по-
люса, зенит и надир, называют плоскостью истинного
меридиана наблюдателя. Значение этой плоскости очень
велико, так как она, пересекаясь с поверхностью Земли,
64
Рис. 8. Главные напра-
вления и плоскости на
Земле
образует на ней большой круг, носящий название ме-
ридиана наблюдателя. Пересечение плоскости мериди-
ана наблюдателя с плоскостью истинного горизонта оп-
ределяет направление истинного меридиана, т. е.
основное направление линии север—юг (N—S). Верти-
кальная плоскость, перпендикулярная плоскости истин-
ного меридиана, носит название плоскости первого вер-
тикала. Она, пересекаясь с плоскостью истинного гори-
зонта, образует направление восток—запад (Е—W).
Рассмотренные три плоскости для наблюдателя, на-
ходящегося в данном месте Земли, занимают вполне
определенное и постоянное положение. Образованные
ими линии N—S и Е—W делят плоскость истинного го-
ризонта на четыре четверти NO, SO, SW и NW, кото-
рые служат для определения необходимых судоводите-
лю направлений.
Еще в древние времена, в эпоху зарождения море-
плавания, каждая четверть горизонта делилась на
3—3723 65
восемь частей, а следовательно, весь горизонт — на 32
части. Эти 32 направления получили названия румбов,
угловая величина которых равна 360° : 32= 1Р/Л Рум-
бы нумеровались и имели названия, составленные по
определенной системе. Ими широко пользовались во
времена парусного флота.
Шло время, парусные суда уходили в прошлое и ус-
тупали место паровым. Точность судовождения повы-
силась, и система определения направлений по румбам
начала терять свое значение. Появилась новая систе-
ма, в которой каждая четверть горизонта делилась на
SO0. Счет градусов начинался от направлений север
(N) или юг (S) к направлениям восток (Е) или запад
(W) от 0 до 90°. Этой системой пользуются и в настоя-
щее время.
Системой счета горизонта по румбам в упрощенном
виде сейчас пользуются только для определения при-
ближенных направлений ветра и течения.
На границе девятнадцатого и двадцатого столетий
появилась наиболее совершенная и удобная система
счета горизонта. В ней горизонт разделили на 360°, и
направления начали указывать числом градусов от 0
до 360° па часовой стрелке от северной части мериди-
ана наблюдателя.
Штурман для определения места судна в море по-
стоянно пользуется двумя видами направлений. Одно
указывает движение судна, а другое — направление
на какой-либо объект (рис. 9).
Первое называют истинным курсом (ИК), второе —
истинным пеленгом (ИП). Особенностью истинного пе-
ленга является то, что его величина не зависит от на-
правления движения судна, а следовательно, и от на-
правления диаметральной плоскости последнего.
При решении ряда навигационных задач приходит-
ся иметь дело с обратным ИП, т. е. направлением, от-
личающимся от ИП на 180°, или, другими словами, если
66
Рис. 9. Зависимость ме-
жду истинным курсом,
истинным пеленгом и
курсовым углом
ИП указывает направление с судна на береговой объ-
ект, то обратный ИП указывает направление с берего-
вого объекта на судно.
Мы рассматривали два направления относительно
истинного меридиана. Во многих случаях возникает не-
обходимость определять направления на объект отно-
сительно диаметральной плоскости судна. Такие на-
правления носят название курсовых углов (КУ) левого
и правого борта, так как их* счет ведется от носовой час-
ти диаметральной плоскости судна по правому и левому
борту до направления на объект в пределах от 0 до
180°
Между истинным курсом, истинным пеленгом и кур-
совым углом существует зависимость, которую легко
получить из рис. 9:
ИК = ИП + КУ л/б
и ИК = ИП — КУ пр/6,
Истинные курсы, истинные пеленги и курсовые углы
могут быть определены с помощью компасов, о которых
будет сказано ниже.
3* fZ
Для указания приближенных направлений моряки
часто пользуются выражениями: «на крамболе», «на
траверзе» или «на раковине», добавляя дополнительно
«слева» или «справа». Эти направления соответствуют
приближенно курсовым углам 45, 90 и 135°.
Здесь уместно рассмотреть вопрос о том, на каком
расстоянии от судна будут открываться вершины гор
и маяки при подходе судна к берегу. Читатель, оче-
видно, не раз наблюдал за появлением судна из-за го-
ризонта. В ясную погоду сначала виден дым, затем
мачты, трубы и, наконец, появляется весь корпус. Это
явление объясняется шарообразностью Земли. Прибли-
жающееся судно можно увидеть и на очень большом
расстоянии, но тогда наблюдатель должен подняться
на какую-либо возвышенность. Это явление хорошо зна-
комо морякам, ибо при подходе к берегу они опознают
его, отыскивают маяки, которые нужны для определе-
ния места судна. Поэтому очень важно знать дальность
видимого горизонта и дальность видимости предме-
тов.
Видимый горизонт — это линия раздела воздушной
и водной масс, которую мы видим на горизонте. Его
дальность зависит от того, на какой высоте над уровнем
моря находится глаз наблюдателя, или, как принято го-
ворить, от высоты глаза наблюдателя. Дальность ви-
димого горизонта в морских милях
Д = 2,08
Эта формула очень важна, так как, зная высоту гла-
за наблюдателя е, всегда можно определить расстоя-
ние до видимого горизонта Д, а также до появляющего-
ся из-за горизонта предмета (маяка, горы и т. д.). Как
видно из рис. 10, дальность видимости предмета Дп со-
стоит из суммы дальности видимости горизонта Де с
68
высоты глаза наблюдателя и дальности видимости го-
ризонта с высоты открывающегося предмета Дн, т. е.
Дп = Дн+ Де = 2.08 (j/77 + /F).
На морских картах и в различных пособиях по су-
довождению дальность видимости маяков приводится с
высоты глаза наблюдателя, равной 5 м. Это наиболее
распространенная высота. Если высота глаза наблюда-
теля другая, то указанные дальности видимости маяков
исправляют поправкой, которая обозначается греческой
буквой дельта (Д):
Д =2,08 УГ—4,7.
Рассчитываемые по формулам дальности видимости
маяков носят названия геометрических, или географи-
ческих, дальностей видимости. Ночью дальность види-
мости маяков будет зависеть от силы их огня и устрой-
ства маячного аппарата. Такую дальность видимости
называют оптической. Плохие атмосферные условия час-
то уменьшают ее, поэтому, устанавливая источники све-
69
та на маяках, их силу рассчитывают так, чтобы опта»
ческая дальность была несколько больше геометриче-
ской.
Определение направлений
в море
Совершая плавание из одного порта в другой, суд-
но идет по заранее намеченному пути, при этом прой-
денный путь обязательно учитывается, т. е. ведется
счисление пути судна. Основным прибором, указываю-
щим направление в море, является компас. Существу-
ют три типа компасов: магнитные, гироскопические и ги-
ромагнитные. В судовождении пользуются магнитными
и гироскопическими компасами.
Применять магнитную стрелку для указания на-
правлений стали очень давно. Известно, что магнитная
стрелка располагается вдоль магнитных силовых ли-
ний Земли и одним концом указывает направление на
северный магнитный полюс, а другим — на южный.
Это свойство лежит в основе устройства магнитного
компаса.
Современные суда строят из судовой стали. Поэто-
му судно, находясь в магнитном поле Земли, намагни-
чивается подобно железному бруску и образует вокруг
себя магнитное поле. К нему дополнительно прибавля-
ются магнитные поля от электроустановок и электро-
проводов. В результате магнитные поля Земли и суд-
на образуют общее магнитное поле, поэтому магнитная
стрелка компаса, установленного на судне, располага-
ется в направлении силовых линий общего магнитного
поля. Это направление называют компасным меридиа-
ном. Угол между северной частью истинного и компас-
ного меридианов является поправкой компаса ЛК.
70
Итак, в показаниях магнитного компаса, как и в по-
казаниях какого-либо другого прибора, существует по-
правка. Штурману очень важно знать точное ее значе-
ние, так как от этого зависит, насколько точно движет-
ся судно по намеченному пути, а также точность опре-
деления места судна по различным береговым ориенти-
рам.
Создатели теории магнитно-компасного дела — рус-
ские ученые И. П. Белавенец, И. П. Колонг, А. Н. Кры-
лов, Н. Н. Оглоблинский, В. Я. Павлинов и др. Благо-
даря их работам магнитно-компасное дело в нашей
стране получило большое развитие, а конструкция
127-мм магнитного компаса, разработанная этими уче-
ными, считается и до настоящего времени лучшей в мире.
По назначению компасы делятся на главные, путе-
вые и шлюпочные. Главным на судне избирают тот
компас, по которому ложатся на избранные курсы и
берут пеленги земных ориентиров и небесных светил.
Его устанавливают в диаметральной плоскости1 судна
на верхнем мостике.
По путевому компасу, который устанавливают в ру-
левой рубке, рулевой удерживает судно на заданном
курсе.
Морской магнитный 127-мм компас системы ГУ (рис.
11) — единственный тип магнитного компаса, который
применяется на судах советского морского флота. Этот
прибор дает точные и надежные показания. Основными
частями компаса являются: девиационный прибор 1,
нактоуз 2, котелок с картушкой в жидкости 3 и пелен-
гатор 4. Картушка состоит из системы магнитных
стрелок, поплавка с вделанным в него слюдяным дис-
ком, на который наклеен бумажный диск, разделен-
ный на румбы и градусы.
1 Диаметральная плоскость судна перпендикулярна палубе и
проходит по середине судна между его бортами.
71
Рис. 11. Общий вид
127-мм магнитного мор-
ского компаса
Котелок компаса представляет собой латунный ре-
зервуар, разделенный на две камеры и залитый жидко-
стью, состоящей из раствора этилового спирта (43%'
по объему) в дистиллированной воде, которая замер-
зает при температуре —26°. Картушка компаса нахо-
дится в верхней камере. Нижняя камера служит для
компенсации изменения объема компасной жидкости.
Котелок устанавливают в кардановом кольце, которое
сохраняет его горизонтальное положение.
Пеленгатор служит для определения направления на
видимые предметы и небесные светила, т. е. для опре-
деления пеленгов и курсовых углов.
Нактоуз представляет собой полую цилиндрическую
или квадратную основу, на которой крепят все части
компаса. Внутри нактоуза находится девиационный при-
бор.
72
Рис. 12. Общий вид
шлюпочного компаса:
о — котелок; б — футляр
На малых судах, катерах и спасательных шлюпках
применяются магнитные компасы малых размеров и уп-
рощенного устройства марок КТ-М1м и КТ-М2м, а
также новые типы компасов для малых судов КМ-100
и КМ-69 и их последующие модификации.
Шлюпочный компас КТ-М1м состоит из котелка с
картушкой и футляра с фонарем (рис. 12). Котелок
заполнен компасной жидкостью и так же, как и мор-
ской магнитный 127-мм компас, состоит из двух ка-
мер. В основной камере находится картушка компаса,
которая вращается на острие шпильки. Шкала картуш-
ки разделена на румбы и на ней нанесены деления че-
рез 2°. Цифры на картушке указывают число десятков
градусов, например цифра 10 указывает 100°, а цифра
15 — 150°. В основной, камере установлены две
курсовые нити из латунной проволоки. Они располо-
жены в одной вертикальной плоскости, проходящей че-
рез центр котелка, и служат для отсчета кру-
гов.
Котелок шлюпочного компаса установлен в пружин-
ном подвесе нижней части металлического футляра.
Верхняя съемная часть футляра имеет застекленный
73
вырез и прикрепленный к ней фонарь для освещения от-
счетов картушки в ночное время.
Конструкция катерного магнитного компаса марки
КТ-М2м в основном такая же, как и морского 127-мм
магнитного компаса, но упрощена, и он меньших раз-
меров.
Преимущества магнитного компаса по сравнению с
другими типами компасов заключаются в том, что он
прост по устройству, автономен, мал по размерам и по-
стоянно готов к работе. Но его показания необходимо
исправлять поправкой, величина и знак которой зависят
от магнитных полей Земли и судна, — это его первый
недостаток. Второй, весьма существенный, заключается
в следующем. За последние два десятилетия появились
приборы, как, например, радиопеленгатор, авторулевой
и другие, которые должны работать в зависимости от
показаний компаса, но последний не может передавать
свои показания другим приборам и в любое помещение
судна.
В начале XX в. начались изыскания по изобретению
такого прибора, который бы указывал направление
судна в море, а его работа не зависела бы от магнит-
ных полей Земли и судового железа. Поиски увенчались
успехом. Был изобретен гирокомпас. Гироскопические
компасы (гирокомпасы) обладают рядом преимуществ
по сравнению с магнитными. В их устройстве использо-
вано свойство быстровращающегося тела (гироскопа)
сохранять в пространстве постоянное направление глав-
ной оси вращения, что повышает точность ведения суд-
на по заданному курсу. При помощи ряда специальных
устройств ось гирокомпаса располагается в плоскости
гирокомпасного меридиана, направление которого поч-
ти совпадет с плоскостью истинного.
Существуют различные типы гирокомпасов, но все
они построены на одном и том же принципе. На транс-
портных судах морского флота Советского Союза ши-
74
рокое распространение получил гирокомпас «Курс-4».
В настоящее время внедряется гирокомпас «Вега». На
судах рыбопромыслового и вспомогательного флота
пользуются гирокомпасами типа «Амур», которые име-
ют меньшие размеры, чем гирокомпасы типа «Курс».
Основной компас состоит из чувствительного элемен-
та — гиросферы, устройства для обеспечения подвеса
чувствительного элемента и его работы, следящей сис-
темы и ряда дополнительных устройств. Главное на-
значение следящей системы в гирокомпасах — переда-
вать показания основного компаса на судовые приборы
курсоуказания.
Основной компас устанавливают в отдельном по-
мещении — гиропосту. Его показания с помощью ре-
питеров передаются в рулевую и штурманскую рубки,
на крылья мостика и в другие помещения, где устанав-
ливаются приборы курсоуказания. Совместно с гиро-
компасом работает курсограф — прибор, автоматиче-
ски записывающий курсы судна.
Репитеры, в зависимости от их назначения, несколь-
ко видоизменены. Репитеры, предназначенные для пе-
ленгования, подвешиваются на специальных колонках,
называемых пелорусами. Пелорусы находятся на крыль-
ях мостика. Пеленгаторы, с помощью которых пеленгу-
ют береговые объекты или небесные светила, имеют
специальную оптическую систему и устанавливаются на
репитерах пелорусов.
Гирокомпас — прибор механический, поэтому он не
зависит от магнитных полей Земли, судна и электроус-
тановок. Гирокомпас можно отрегулировать так, что он
будет показывать истинные курсы и направления, а сле-
довательно, упростятся вычисления. Точность показаний
гирокомпаса составляет около 0,1°, что выше показаний
магнитных компасов.
Гирокомпасы используются для осуществления
автоматического удержания судна на курсе при по-
75
Рис. 13. Унифицирован-
ный авторулевой
мощи специального прибора — авторулевого (рис. 13).
Гирокомпас по сравнению с магнитным компасом име-
ет также и недостатки, например сложность конст-
рукции и необходимость в специальном обслуживании.
Большое количество вспомогательного электрооборудо-
вания лишает гирокомпас автономности, а для введе-
ния его в рабочее состояние необходимо некоторое время.
В районе географического полюса Земли гироком-
пас, как и магнитный компас в районе магнитного по-
люса, перестает указывать направление.
Все современные суда снабжаются магнитными ком-
пасами и гирокомпасами, что позволяет взаимно конт-
ролировать работу этих приборов.
76
Рис.
14.’ Магнитное по-
ле Земли
Итак, мы рассмотрели назначение компасов и об-
щую идею их устройств. Теперь рассмотрим, как с по-
мощью компасов определяют направления и как ими
пользуются.
Магнитное поле Земли представляет собой прост-
ранство, в котором действуют магнитные силы Земли.
Оно подобно магнитному полю, которое создал бы боль-
шой магнитный брусок, расположенный в Земле и на-
правленный южным концом в северную часть Амери-
ки — Гудзонов залив, а северным — в Антарктиду —
Землю Южной Виктории (рис. 14). Магнитный полюс
Рт, расположенный в северном полушарии, называют
северным магнитным полюсом, а в южном — южным
Рт'. Магнитные силовые линии земного поля выходят
из южного магнитного полюса, покрывают земную по-
верхность и сходятся в северном магнитном полюсе, об-
разуя замкнутые кривые. Магнитные полюсы не зани-
мают постоянного положения, их географические коор-
динаты медленно изменяются. В настоящее время коор-
динаты приблизительно следующие: северного магнит-
77
ного полюса — широта <p = 72°N, долгота Z = 96°W;
южного магнитного полюса — широта <p = 70°S, долго-
та Х = 150°.
В каждой точке земной поверхности сила магнит-
ного поля характеризуется напряженностью, которая
имеет определенное направление. По этому направле-
нию стремится расположиться свободно подвешенная
магнитная стрелка. Вертикальную плоскость, в которой
располагается ось свободно подвешенной магнитной
стрелки, называют плоскостью магнитного меридиана.
Она не совпадает с плоскостью истинного мериди-
ана.
Напряженность магнитного поля имеет ряд харак-
теристик. Для штурмана наиболее важная из них —
магнитное склонение d, т. е. угол между плоскостями
истинного и магнитного меридианов. Магнитное склоне-
ние условились отсчитывать от северной части истин-
ного меридиана к востоку или западу с соответствую-
щим наименованием. При вычислениях восточному маг-
нитному склонению приписывают знак плюс, а запад-
ному — минус. Значения магнитных склонений указаны
на путевых морских картах2 откуда штурман снимает
их для расчета курсов. Их также указывают и на спе-
циальных магнитных картах.
Следует отметить, что магнитное склонение, как и
другие характеристики магнитного поля Земли, со вре-
менем изменяется. Это изменение, т. е. вариация, носит
периодический и непериодический характер. Изменения
периодического характера подчинены определенной за-
кономерности, и к ним относят вековые, годовые и су-
точные вариации. Для судовождения имеют значения
вековые изменения, потому что они достигают значи-
тельной величины, иногда 30—40°.
На морских навигационных картах величину магнит-
ного склонения указывают на определенный год, а для
расчета на другие годы приводят годовое изменение.
78
К непериодическим изменениям относят магнитные
бури, которые сравнительно кратковременны и длятся
несколько суток, иногда часов и даже минут. Они воз-
никают во время северных сияний и во время появления
пятен на Солнце. В больших широтах эти явления
встречаются чаще и достигают значительной величи-
ны. В 1937 г. вблизи острова Беликовского в Арктике
во время дрейфа ледокола «Седов», который продол-
жался 812 дней, гидрограф В. X. Буйницкий наблюдал
магнитную бурю с изменением магнитного склонения
на 52°. Большие магнитные бури наблюдались и в дру-
гие годы.
Резкие отклонения магнитных склонений происходят
и по другим причинам. В некоторых местах Земли на-
ходятся залежи магнитных пород (например, большие
залежи руды), которые создают отклонения в магнит-
ных полях. Такие районы называются местами магнит-
ных аномалий. Их границы указывают на морских кар-
тах. Штурман в таких районах должен особенно тща-
тельно следить за работой магнитного компаса и в
большей мере полагаться на гирокомпас.
В морях, омывающих СССР, магнитные аномалии
встречаются нередко. Большие аномолии встречаются
в Балтийском, Белом, Баренцевом и Охотском морях, а
на Черном море — в Одесском заливе. Особенно боль-
шая магнитная аномалия находится у западных бере-
гов Австралии.
Мы уже упоминали, что на магнитную стрелку ком-
паса, установленного на судне, кроме магнитного поля
Земли большое влияние оказывает магнитное поле, об-
разованное судном. Магнитное поле судна отклоняет
стрелку компаса от магнитного меридиана, и она зани-
мает новое положение. Это дополнительное отклонение
называют девиацией. Она измеряется углом между маг-
нитным и компасным меридианами. Девиацию обозна-
чают греческой буквой б и отсчитывают от северной
79
части магнитного меридиана к востоку и западу с соот-
ветствующими наименованиями. При вычислениях вос-
точным наименованиям девиации приписывают знак
плюс, а западным — минус.
Большая девиация создает значительные затрудне-
ния при пользовании магнитным компасом. Поэтому на
судах ее уничтожают. Это очень трудоемкая работа, ее
выполняют специалисты-девиаторы, а иногда — сами
судоводители. Девиацию уничтожают с помощью желез-
ных брусков, расположенных около компаса и в девиа-
ционном приборе, помещенном в нактоузе компаса.
Этим железом искусственно создают в центре компаса
магнитные силы, одинаковые по характеру, равные по
величине, но противоположные по направлению силам,
вызывающим девиацию.
Уничтожить девиацию полностью не удается, поэто-
му определяют оставшуюся девиацию (она обычно ма-
ла) и затем составляют специальные таблицы оставшей-
ся девиации для данного компаса, которыми штурман
пользуется при вычислениях. Об одном простом спосо-
бе определения девиации будет рассказано ниже.
Подводя итог, можно сказать, что поправка магнит-
ного компаса состоит из двух величин: магнитного скло-
нения и девиации, т. е.
= 4 4- ь.
По этой формуле определяют поправку у магнитных
компасов на каждом новом курсе и при смене мест, в
которых изменяется значение магнитного склонения.
Магнитные склонения d рассчитывают, пользуясь пу-
тевой навигационной картой, а девиацию б — в за-
висимости от курса выбирают из таблицы девиации.
Для облегчения всех расчетов в судовождении при
пользовании магнитным компасом различают три ме-
ридиана: истинный, магнитный и компасный. Относи-
тельно этих трех меридианов определяют истинный,
80
Рис. 15. Зависимость
между истинным, маг-
нитным и компасным
направлениями
магнитный и компасный курсы, а также истинный, маг-
нитный и компасный пеленги. Понятия курсов и пелен-
гов являются основными понятиями в судовождении.
Курсы указывают направления движения судна, а пе-
ленги служат для определения места судна в море.
Истинным курсом судна (ПК) называют угол меж-
ду северной частью истинного меридиана и носовой ча-
стью диаметральной плоскости судна, измеряемой по ча-
совой стрелке в пределах от 0 до 360° (рис. 15).
Магнитным курсом судна (МК) называют угол меж-
ду северной частью магнитного меридиана и носовой
частью диаметральной плоскости судна, измеряемый по
часовой стрелке в пределах от 0 до 360°,
Компасным курсом судна (КК) называют угол меж-
ду северной частью компасного меридиана и носовой
частью диаметральной плоскости судна, измеряемый по
часовой стрелке в пределах от 0 до 360°.
Аналогично, истинным пеленгом (ИП) какого-либо
объекта называют угол между северной частью истин-
ного меридиана и направлением на данный объект, из-
меряемым по часовой стрелке в пределах от 0 до 360°.
81
Магнитным пеленгом (МП) какого-либо объекта на-
зывают угол между северной частью магнитного мери-
диана и направлением на данный объект, измеряемый
по часовой стрелке в пределах от 0 до 360°.
И, наконец, компасным пеленгом (КП) какого-либо
объекта называют угол между северной частью компас-
ного меридиана и направлением на данный объект, из-
меряемый по часовой стрелке в пределах от 0 до 360°.
Если пользуются гирокомпасом, показания которого
не зависят от магнитных полей Земли и судна, то всег-
да будет только два направления: истинное и компас-
ное. Они различаются между собой на поправку гиро-
компаса, величина которой обычно постоянна и не за-
висит от избранного курса.
На навигационной карте прокладывают только истин-
ные курсы и пеленги, компасные отсчитывают по ком-
пасам. Штурман при выполнении навигационных вычис-
лений переходит от компасных направлений к истин-
ным и обратно. В судовождении переход от истинных
курсов или пеленгов, снятых с карты, к компасным при-
нято называть переводом курсов или пеленгов. Перевод
курсов необходим в тех случаях, когда, зная истинный
курс, по которому должно идти судно, необходимо дать
рулевому компасный курс, по которому он должен уп-
равлять судном. Переход от компасных курсов или пе-
ленгов, полученных по компасу, к истинным называют
исправлением курсов или пеленгов. Исправлением пе-
ленгов пользуются в тех случаях, когда для определе-
ния места судна пеленгуют с помощью компаса бере-
говые объекты, а на карте прокладывают их истинные
пеленги.
Для решения этих задач пользуются соотношениями,
которые очевидны из рис. 15:
ИК = КК + Д# и ИП = КП + д/с,
где
д# = б/4-&.
82
Как ранее упоминалось, магнитные склонения d бе-
рут с карты в районе плавания, а девиацию б — из
таблиц девиации компаса.
Зависимости между истинным курсом ИК, компас-
ным курсом КК, поправкой компаса ЛК, истинным пе-
ленгом ИП, компасным пеленгом КП, магнитным
склонением d и девиацией 6 имеют большое зна-
чение, и штурман очень часто ими пользуется при
расчетах.
При рассмотрении магнитного склонения и девиации
магнитного компаса видно, что эти величины могут из-
меняться по многим причинам, поэтому рассчитанная
поправка магнитного компаса по магнитному склоне-
нию и девиации нуждается в дополнительном контроле.
Необходимо также определять поправку гирокомпаса,
которая нужна не только для расчета курсов, но и для
контроля работы гирокомпаса.
Существует много способов определения поправки
компаса, например по створам, небесным светилам и по
сличению двух компасов, поправка одного из которых
известна.
Створ — это два, а иногда и три навигационных
знака, расположенных на берегу по одной линии и хо-
рошо видимых с моря. Ночью они освещаются опреде-
ленным цветом огня с постоянной характеристикой так,
чтобы их можно было легко заметить с моря и легко
отличить от других огней. Направление створа, т. е. его
истинный пеленг, точно определен и нанесен на карту.
Если необходимо определить поправку компаса, то
в момент пересечения линии створа замечают его ком-
пасный пеленг. Истинный пеленг снимают с карты. Раз-
ность в показаниях истинного и компасного пеленгов
составляет поправку компаса, которую рассчитывают по
формуле
&К — ИП — КП.
83
В открытом море штурман поправку компаса опре-
деляет по небесным светилам: звездам, планетам, Солн-
цу и Луне. Для этого наблюдают компасный пеленг
светила и замечают время. По времени и географиче-
ским координатам места судна рассчитывают истинный-
пеленг светила. Как и в прежнем случае, разность
пеленгов дает поправку компаса.
Малые суда (катера, яхты и др.) часто уходят в
открытое море или отходят от берегов за пределы их
видимости. Нередко совершают и большие переходы, в
которых поправка компаса должна надежно рассчиты-
ваться по магнитному склонению и девиации. На таких
судах девиация должна быть определена обязательно.
Существуют способы определения девиации, которыми
могут воспользоваться лица, не имеющие специальной
подготовки. Один из наиболее простых и легко выпол-
нимых на малых судах состоит в следующем.
Сущность определения девиации вытекает из суще-
ства ее природы. Следовательно, чтобы ее определить,
необходимо по магнитному компасу заметить с судна
компасный пеленг и сравнить его с известным магнит-
ным пеленгом того же предмета. Как видно из рис. 15,
ее значение будет равно разности между магнитным и
компасным пеленгами, т. е.
ъ = МП — КП.
Девиация магнитного компаса зависит от курса суд-
на, поэтому ее определяют на разных курсах, лучше
всего — на восьми основных, а именно: N, NE, Е, SE, S,
SW, W и NW. После этого девиацию легко рассчитать
на любых курсах.
Также прост способ определения девиации по взаим-
ным пеленгам. Он состоит в следующем. На берегу ус-
танавливают магнитный компас. В месте его установ-
ки должна отсутствовать магнитная аномалия, обеспе-
чена хорошая взаимная видимость с судном. Компас
84
должен находиться вдали от магнитного влияния желез-
ных масс и электропроводов. Он находится только под.
влиянием магнитного поля Земли.
Судно может быть и на акватории яхтклуба, но в
таком месте, где его можно будет легко разворачивать
и устанавливать на главные курсы. На каждом курсе
судно должно стоять не менее 5 мин, чтобы на этом
курсе произошло перемагничивание судового железа
земным магнетизмом. После этого два наблюдателя
(один — с судна, другой — с берега) пеленгуют друг
друга. Пеленгование производят одновременно, о вре-
мени должны договориться заранее и дать определен-
ный сигнал. Для контроля и ослабления влияния слу-
чайных погрешностей наблюдений необходимо на каж-
дом курсе заметить отсчеты трех—пяти пеленгов и за-
тем рассчитать средние значения.
Так как в этом методе выполняется взаимное пелен-
гование, то компасный пеленг магнитного компаса,,
на берегу и магнитный пеленг компаса на судне,,
на который действуют магнитные поля Земли и судна,
будут отличаться между собой, кроме девиации, еще на
180°. Окончательно девиацию рассчитывают по формуле-
Ъ = (МП— 180°) — кп.
В таблице девиации на компасные курсы, разделен-
ные одинаковым интервалом, приводятся значения де-
виации.
Определение пройденного судном
расстояния и измерение
глубин в море
Во время плавания штурману необходимо знать место,
где находится судно в данный момент. Поэтому, кроме
направления, по которому оно перемещается, необходи-
8&
мо знать пройденное судном расстояние, которое опре-
деляют по лагу.
Для определения пройденного судном расстояния и
скорости на море приняты другие единицы, отличные
от принятых на суше. Это обусловлено особенностями
построения морских карт. Так, например, за единицу
расстояния принята морская миля, равная длине одной
минуты дуги меридиана, если принять форму Земли за
шар. В СССР длина морской мили принята 1852 м.
Десятая часть морской мили — кабельтов, его считают
равным 185 м.
Поэтому, измеряя расстояние между двумя точками
на карте масштабом минут боковой рамки карты, по-
лучим расстояние, выраженное в милях.
Долгое время, включая даже шестнадцатое столе-
тие, для определения пройденного расстояния, а следо-
вательно, и скорости судна пользовались методом гол-
ландского лага. Идея определения скорости этим мето-
дом заключалась в том, что с судна в воду бросали
плавающий предмет и замечали время, за которое он
проходил мимо двух наблюдателей, стоявших на палу-
бе на известном расстоянии друг от друга. Таким об-
разом, измерив время прохождения судном известного
расстояния между наблюдателями, рассчитывали ско-
рость судна, а затем и пройденное за определенное вре-
мя расстояние.
Как видно, определение скорости судна этим мето-
дом простое. Особенность его состоит в том, что он не
требует специальных приборов, достаточно иметь часы
с секундной стрелкой и знать определенную длину вдоль
судна. Поэтому на парусных судах, яхтах и там, где
отсутствуют специальные приборы для определения
скорости судна или пройденного расстояния, этим спо-
собом пользуются и в настоящее время.
В конце XVI в. на парусных судах появился ручной
лаг.
86
Устройство его примитивно, прибор прост в обра-
щении, а при малых скоростях является достаточно
точным. Поэтому до начала XIX в. он служил единст-
венным прибором для определения скорости судна.
С ним познакомиться полезно потому, что с примене-
нием ручного лага связано возникновение термина
узел — морской единицы скорости.
Ручной лаг состоит из деревянного сектора, лаглиня
и вьюшки. Длина лаглиня разделена на определенные
расстояния, которые отмечены вплетенными кончиками;
с одним, двумя и т. д. узелками.
Для замера скорости деревянный сектор выбрасыва-
ют за корму судна. Он погружается в воду перпенди-
кулярно ее поверхности и почти не имеет поступатель-
ного движения. Затем, пользуясь секундомером, счита-
ют, сколько узелков окажется за бортом судна в тече-
ние 30 с (1/120 ч). Следовательно, если лаглинь
разбит на 15,4 м 15,43 м), то количество вытрав-
ленных узелков укажет количество пройденных миль в
час. Так появилось определение скорости судна — узел.
Один узел — это одна морская миля в час.
В начале XIX в. появился механический лаг, со-
стоявший из вертушки и коробки с механическим счет-
чиком. Коробка соединялась с вертушкой коротким тро-
сиком. Вся эта система буксировалась за кормой. Та-
кой лаг давал большую точность, чем ручной, но он был
неудобен, так как для получения отсчета его надо бы-
ло выбирать из воды.
В конце XIX в. механический лаг был усовершенст-
вован: вертушку буксировали за кормой судна на лаг-
лине, а счетчик, показывающий пройденное расстояние^
с прикрепленным к нему лаглинем устанавливали в кор-
мовой части судна. Позже показания счетчика при по-
мощи специального приспособления дублировались на
штурманском мостике.
87
Современные лаги устроены так, что они показывают
одновременно пройденное расстояние и скорость
судна.
Лаги подразделяют на относительные и абсолютные.
Первые измеряют скорость судна и пройденное им рас-
стояние относительно воды, которая, в свою очередь,
может перемещаться относительно грунта; вторые —
относительно грунта.
В зависимости от принципов устройства и их рабо-
ты современные относительные лаги бывают вертушеч-
ные, гидродинамические и индукционные. В настоящее
время скорость и пройденное расстояние на судах мор-
ского флота измеряют в основном гидродинамическими
лагами.
Абсолютные лаги — это гидроакустические измери-
тели скорости (доплер-лаги), геомагнитные измерители
скорости и инерциальные лаги.
Вертушечные лаги могут быть механическими и эле-
ктромеханическими. Известно, что вода обладает незна-
чительной вязкостью и несжимаемостью. Воспользовав-
шись этими свойствами, скорость судна определяют с
помощью буксируемой вертушки с насаженными на нее
винтообразными лопастями. Шаг лопастей подобран
так, что вертушка делает определенное количество обо-
ротов за 1 милю пройденного судном расстояния. Ко-
личество оборотов вертушки подсчитывают механиче-
ским или электромеханическим способом; отсюда — на-
звания вертушечных лагов: механические забортные и
электромеханические днищевые.
Электромеханические днищевые лаги имеют лопаст-
ную вертушку, которая вращается в подводной части
судна. Она находится в специальной мечеобразной тру-
бке, выпускаемой под днище судна. Скорость вращения
вертушки зависит от скорости судна. Ее обороты под-
считывают различными способами, которые явились при-
чиной создания различных конструкций электромехани-
ке
Рис. 16. ГО-M-IV:
а — вертушка подводного механизма; б — счетчик пройденного расстояния
ческих днищевых лагов. Представителем этого типа ла-
гов является лаг ГО-M-IV, изображенный на рис. 16.
Гидродинамические лаги отличаются большой чув-
ствительностью, точностью и надежностью в работе по
сравнению с вертушечными. Принцип их действия за-
ключается в измерении с помощью приемника давления
(мембранного аппарата) разности между статическим
и полным (суммарным) давлением. Полное состоит из
динамического, создаваемого движением воды (или
судна), и статического давления.
Работа гидродинамического лага показана на рис.
17. Под днищем судна выпущена приемная трубка 5.
Она имеет два приемных отверстия 6 и 7. Каждое из
этих приемных отверстий с помощью отдельных трубо-
за
Рис. 17. Принцип действия гидродинамического лага:
1 — приемник давления; 2 — диафрагма; 3 — шток; 4 — статический тру-
бопровод; 5 — приемная трубка; 6 — приемное отверстие; 7 — отверстие
полного давления; 8 — трубопровод полного давления
проводов 4 и 8 соединено с приемником давления 1.
Приемник давления разделен эластичной диафрагмой
2 на две полости: верхнюю, предназначенную для ста-
тического РСт, и нижнюю — для полного, т. е. статиче-
ского Рст и динамического давления. Итак, прием-
ное отверстие 6 соединено с верхней статической по-
лостью, а отверстие 7 — с нижней, предназначенной для
полного давления, так как его плоскость отверстия пер-
пендикулярна линиям тока воды.
Если судно получит ход, то давление в нижней по-
лости увеличится. Под действием этого давления диаф-
рагма 2 приподнимается. Прикрепленный к диафрагме
шток 3 передает свое движение стрелке, которая будет
90
указывать скорость на градуированной шкале и соот-
ветственно пройденное расстояние.
Показания скорости и пройденного расстояния пе-
редаются с основного прибора в любое помещение суд-
на при помощи счетчиков скорости и пройденного рас-
стояния, т. е. приборами-репитерами.
На судах морского флота наибольшее распростра-
нение получили лаги МГЛ-25 и МГЛ-25М с механиче-
скими компенсациями, а также используются лаги
ЛГ-25 и ЛГ-2.
Такие лаги устанавливаются на судах среднего и
крупного тоннажа и позволяют измерять скорости до
25 уз. Отличительной особенностью исполнения гидро-
динамического лага ЛГ-25 является то, что он приспо-
соблен для нормальной работы в тропических услови-
ях, т. е. при повышенной влажности и температуре.
В последние годы появились индукционные лаги.
Принцип их работы основан на использовании явления
электромагнитной индукции. В днище судна установле-
но приемное устройство, состоящее из П-образного эле-
ктромагнита. По его обмотке пропускается переменный
ток. В основание прибора вмонтированы серебряные
электроды. При движении судна магнитные силовые ли-
нии пересекают морскую воду. Соленая морская вода
является токопроводящей, поэтому создается разность
потенциалов, которая измеряется электродами. Напря-
жение, снимаемое с электродов приемного устройства,
пропорционально его скорости в воде. Следовательно,
величина напряжения является мерой для определения
скорости судна.
По сравнению с гидродинамическими лагами индук-
ционные имеют ряд преимуществ: приемное устройство
простое, не требует ухода, имеет малые размеры, не-
большую массу и не выступает за обводы судна, поэто-
му такой лаг может быть использован при плавании во
льдах и на мелководье. На малых скоростях он работа-
91
ет с большей точностью, чем гидродинамический. Су-
ществующие индукционные лаги, как показали испыта-
ния, работают и в пресной воде.
В связи со строительством крупнотоннажных танке-
ров были созданы гидроакустические измерители ско-
рости судна относительно грунта, т. е. абсолютные лаги
(доплер-лаги). Они определяют скорость судна относи-
тельно грунта с большой точностью.
Действие гидроакустического лага основано на эф-
фекте Доплера. Физический смысл этого эффекта
состоит в том, что при движении источника волн (элек-
тромагнитных или звуковых) относительно приемника
последний воспринимает колебания, частота которых
отличается от частоты излучателя. Следовательно, гид-
роакустические системы работают следующим обра-
зом.
В днище судна близко друг от друга устанавливают
излучатель и приемник системы. Излучатель посылает
ультразвуковые волны с определенной частотой в сто-
рону морского дна в виде узкого луча и под определен-
ным углом к плоскости горизонта. При движении судна
на скорость распространения ультразвуковой волны на-
кладывается его скорость, которая определяет величину
доплеровского смещения. По этой величине определяют
скорость судна.
Лаг, как и любой другой прибор, дает показания с
некоторой погрешностью. Величину, на которую пока-
занное лагом расстояние отличается от истинного, при-
нято называть поправкой лага Дл и определять (в про-
центах) по формуле
или коэффициентом лага
к _S
л рол ’
где S —• истинное расстояние;
>92
рол *-* разность отсчетов лага по счетчику пройденного рассто-
яния.
Более точно поправка лага определяется на мерных
линиях, которые представляют собой водный полигон,
свободный от навигационных опасностей, защищенный
от ветров и волнений и имеющий достаточную глубину.
Мерные линии оборудованы секущими створами, пер-
пендикулярными оси фарватера, т. е. определенного на-
правления, по которому должно следовать судно. Фар-
ватеры отмечают ведущими створами или вехами. Мер-
ные линии указывают на картах. Более полные сведе-
ния о них приводятся в лоциях.
Поправка лага не остается постоянной. Ее измене-
ние зависит от скорости судна, поэтому штурман опре-
деляет эту поправку, насколько возможно, часто и не
только для обычного полного хода, но и для среднего и
малого.
Если лаг неисправен, то пройденное расстояние рас-
считывают по скорости судна, определяемой по оборо-
там винта. Зависимость между числом оборотов винта
и скоростью при известной осадке судна также получа-
ют на мерных линиях. Затем составляют таблицу, в ко-
торой указывают скорости при различных оборотах
винта.
Такой таблицей штурман пользуется при расчетах
пройденного судном расстояния.
Для безопасности проводки судна, а также для вы-
бора места якорной стоянки штурману нередко прихо-
дится измерять глубины. Иногда это может служить для
приближенного определения места судна.
Глубины измеряют с помощью специальных прибо-
ров — лотов. В зависимости от принципа работы и их
устройства лоты подразделяют на ручные, механиче-
ские и электромеханические (эхолоты).
Наиболее простым по своему устройству является
ручной лот (рис. 18). Им измеряют глубины до 50 м
93
и
Рис. 18. Ручной лот (а)
присоединение к не-
му лотлиня (б)
и при скорости судна не больше 3—4 уз. Он состоит из
свинцовой или чугунной гири 1 с небольшой стропкой 2
и лотлиня 3. Гиря массой от 3 до 5 кг изготовлена в
форме конуса. Одновременно с измерением глубины
часто берут пробу грунта, что помогает выбрать место
якорной стоянки или приближенно опознать место суд-
на. Для этого в нижней части гири имеется выемка,
которую заполняют смесью сала с мелом. Ил или пе-
сок прилипает к смеси, а каменистый грунт делает вмя-
тины в ней. Лотлинь для удобства отсчета глубины раз-
бит на марки.
Самые современные приборы для измерения глу-
бин — это эхолоты. В настоящее время ими снабжены
все суда морского флота. Эхолоты работают по прин-
ципу измерения промежутка времени между моментом
посылки ультразвукового сигнала и моментом его при-
ема. Ультразвуковой сигнал посылается вибратором-
излучателем, а принимается вибратором-приемником.
Оба вибратора установлены в днище судна.
В настоящее время на судах морского флота СССР
наибольшее распространение получили эхолоты типов
НЭЛ-5 и НЭЛ-10.
94
Рис. 19. Эхолот НЭЛ-5:
а — указатель глубин; б — самописец эхолота
Эхолот НЭЛ-5 (рис. 19) имеет два диапазона изме-
рений глубины: от 0 до 100 м и от 0 до 2000 м. Точ-
ность эхолота ±0,5 м при измерении глубин от 1 до 20 м
и ±2,5% при больших глубинах.
У эхолота имеется самописец с тремя диапазонами
измерений: 0—200 м, 1—1000 и 1000—2000 м. Точность
отсчета глубины, зафиксированной на ленте самописца,
равна 1 м при работе в диапазоне 0—200 м.
Эхолот НЭЛ-10 устанавливают на крупнотоннаж-
ных судах. Он позволяет измерять глубины в преде-
лах от 1 до 2000 м. Указатель глубины может работать
в двух диапазонах: от 1 до 100 м и от 50 до 1000 м и
соответственно этому имеет две шкалы. Точность изме-
рения глубин от 1 до 40 м составляет от ±0,3 до ±0,4 м
и ±1% при больших глубинах. Эхолот оборудован уст-
ройством, сигнализирующим о выходе судна на задан-
ную глубину.
Самописец эхолота НЭЛ-10 имеет четыре диапазо-
на: 1—100 м, 15—300, 50—1000 и 50—2000 м. Самописцы
95
дают наглядное представление об изменении глубины,
а следовательно, и о рельефе морского дна.
Особенно широко эхолоты применяются на рыбопро-
мысловых судах для обнаружения косяков рыбы. Их
устройство отличается от навигационных эхолотов, ко-
торые предназначены только для измерения глубин.
На средних и больших рыбопромысловых судах
большое распространение получили рыбопоисковый эхо-
лот «Омар» и гидроакустическая рыбопоисковая стан-
ция «Палтус-М».
Опыт работы с рыбопоисковыми эхолотами показал,
что рыбы дают эхо-сигналы самых разнообразных ви-
дов, поэтому правильная расшифровка показаний инди-
катора по обнаружению косяков и установлению вида
рыбы достигается лишь при длительной работе с при-
борами.
Время на судне
На судах, как и в обыденной жизни на берегу, необхо-
дима определенная система счета времени. Время на
судне необходимо для выполнения расписания трудо-
вой жизни экипажа, организации вахтенной службы,
связи с берегом по радио, для счисления пройденного
пути и, наконец, для определения места судна с помо-
щью радиотехнических средств по маякам, по звездам
и Солнцу. С этой целью на судне организована служба
времени, которой ведает третий помощник капитана, а
руководство и контроль осуществляют старший штур-
ман и капитан.
Прежде чем перейти к практическим вопросам
счета времени, познакомимся с основами его измере-
ния. Чтобы измерять время, необходимо избрать посто-
янную единицу. Для выбора единицы времени еще очень
давно обратились к таким явлениям природы, которые
96
протекают всегда точно в течение одного и того же от-
резка времени.
Так, за основную единицу измерения времени при-
няли время полного оборота Земли вокруг своей оси и
назвали его звездными сутками. Звездные сутки удоб-
нее рассматривать как промежуток времени между дву-
мя последовательными одноименными кульминациями
постоянной точки на небесной сфере — точки весеннего
равноденствия1 на одном и том же меридиане. Под
кульминацией подразумевают явление, когда светило
или какая-либо точка на небесной сфере проходит через
меридиан наблюдателя. За начало звездных суток при-
няли момент верхней кульминации точки весеннего рав-
ноденствия. Звездные сутки делят на более мелкие еди-
ницы: звездные часы, минуты и секунды. На судах не
пользуются часами, идущими по звездному времени.
Однако их показания используют как вспомогательные
при определении места судна астрономическими мето-
дами.
Начало звездных суток (а следовательно, одно и то
же звездное время) в течение года приходится на раз-
личную пору суток. Эта особенность не позволяет ис-
пользовать его для обыденной жизни, которая тесна
связана с суточным движением Солнца. Поэтому на-
ряду со звездным возникло истинное солнечное время,
в основу измерения которого положено суточное дви-
жение Солнца. Истинным оно называется потому, что
для его измерения пользуются видимым (истинным)
Солнцем. Для измерения этого времени приняты истин-
ные солнечные сутки, т. е. промежуток времени между
двумя последовательными одноименными кульминация-
1 Точка весеннего равноденствия — это точка пересечения не-
бесного экватора с эклиптикой, в которой Солнце переходит из
южной полусферы в северную. Солнце в нее приходит ежегодно
21 марта.
4—3723 97
ми центра видимого Солнца на одном и том же мери-
диане.
Несмотря на простоту измерения времени по Солнцу
и согласованность его с трудовой деятельностью чело-
века, этот способ имеет очень большой недостаток, так
как истинные солнечные сутки в течение года являются
величиной непостоянной. Летом (16 сентября) истин-
ные сутки короче, а зимой (24 декабря) — длиннее. Ука-
занная разность достигает 51 с и возникает от неравно-
мерного годового перемещения Солнца по небесной
сфере. Поэтому истинное солнечное время имеет только
вспомогательное значение как переходное звено к сред-
нему времени.
Вместо истинных солнечных суток ввели постоянные
по величине средние солнечные сутки, а время, измеря-
емое средними сутками и их долями, назвали средним
солнечным временем, или средним временем. Чтобы
средние сутки согласовывались с видимым движением
Солнца, их величину приняли как среднее значение ис-
тинных солнечных суток в течение года. Для измерения
таких суток выбрали соответствующую точку на небес-
ной сфере и назвали ее средним солнцем. Так возникли
средние сутки (промежуток времени между двумя по-
следовательными одноименными кульминациями сред-
него солнца на одном и том же меридиане), за начало
которых принят момент нижней кульминации среднего
солнца, т. е. полночь. Средние сутки делятся на средние
часы, минуты и секунды.
Вследствие вращения Земли начало средних суток
(а следовательно, и счет среднего времени) на всех ме-
ридианах начинается не в один и тот же физический
момент. Среднее время, отсчитываемое от меридиана
данного места, называют местным средним временем.
В один и тот же момент на разных меридианах оно бу-
дет отличаться на разность долгот, выраженную во вре-
менной мере. Вполне понятно, что вести счет времени
98
по каждому меридиану практически невозможно. Поэто-
му многие страны вводят на всей своей территории еди-
ное время. Но и это оказалось неудобным для стран,
имеющих большую территорию.
Наиболее удобной системой счета времени оказалась
система счета по поясам. Она была предложена в 1879 г.
канадским инженером Флемингом. В те времена бурно
развивавшиеся железные дороги начали перевозить
большое количество пассажиров и груза. Возникла ост-
рая необходимость в упорядочении счета времени.
В 1884 г. состоялся Международный астрономический
конгресс, который принял решение ввести для всего
земного шара систему поясного времени. Весь земной
шар разделили на 24 пояса по 15° долготы в каждом
(рис. 20). И так как земной шар содержит 360° долго-
ты. что соответствует 24 ч, то пояс в 15° по долготе ра-
вен 1 ч.
Начальный меридиан, проходящий через Гринвич-
скую обсерваторию (долгота его равна 0°), послужил
для построения начального, или нулевого, пояса. Этот
пояс заключен между долготами 7,5°W и 7,5Е. От на-
4* 99
чального пояса в восточную и западную стороны идут
пояса с номерами от 1 до 12 с названиями Е или W.
Двенадцатый пояс считается одновременно восточным,
если пояса считают в восточном направлении, и запад-
ным, если — в западном. Все пояса имеют центральные
меридианы, долготы которых кратны 15, т. е. О, 15, 30,
..., 165, 180°. Если долгота центральных меридианов вы-
ражена в часах, то получим номера их поясов: 0° —
0; 15° — 1; 30° — 2; 45° — 3 и т. д. Границы поясов по-
лучаются, если к 7,5° поочередно прибавлять 15°, т. е.
22,5°, 37,5°, 52,5° и т. д. в стороны Е и W.
На всей территории каждого часового пояса прини-
мается единое время — местное среднее время цент-
рального меридиана этого пояса. Таким образом, пояс-
ное время — это местное среднее время центрального
меридиана пояса, принятое одинаковым для всего по-
яса.
Разность между долготами центральных меридианов
соседних временных поясов составляет 15°. Поэтому раз-
ность поясных времен между двумя соседними поясами
равна 1 ч. При переходе из пояса в пояс к востоку вре-
мя увеличивается на 1 ч, а к западу — уменьшается.
Показания минут и секунд во всех поясах, в том числе
и нулевом, будут одинаковыми.
Время нулевого пояса принято называть гринвич-
ским, всемирным, или мировым временем.
Границы поясов избирают так, чтобы они совпадали
с государственными, административными границами или,
в крайнем случае, естественными границами — река-
ми, побережьями, горными хребтами и т. д. На мало-
населенных территориях и на морях границы поясов
проходят по земным меридианам.
После первой мировой войны в России и во многих
других государствах по распоряжению правительств
стрелки часов переводились на 1—2 ч вперед. В основ-
ном это делалось на летний период и по чисто эконо-
100
мическим соображениям — для более рационального ис-
пользования светлого времени суток. Такое время, ус-
танавливаемое правительственным декретом, принято
называть декретным временем.
В СССР постановлением СНК СССР от 16 июня
1930 г. введен круглогодичный декретный час, т. е. по
всем поясам стрелки часов переведены на 1 ч вперед
относительно поясного времени. Таким образом, на на-
шей территории декретное время можно рассматривать
как видоизмененное поясное. Каждый населенный пункт
живет не по времени своего пояса, которому он при-
надлежит по географическому положению, а по сосед-
нему восточному поясу.
В 1981 г. для более рационального использова-
ния светлого времени суток, а следовательно, в целях
экономии электроэнергии на нашей территории в пери-
од с 1 апреля по 1 октября введено летнее время, т. е.
стрелки часов переводятся на 1 ч вперед.
Время, принятое во втором поясе, к которому при-
надлежит Москва, называется московским временем.
Московское время на территории СССР является основ-
ным. По московскому времени составляют расписания
морского, железнодорожного и авиационного транспор-
та, работает радиотелеграфная связь с отечественными
судами и т. д.
Московское время в летний период, т. е. с 1 апреля
по 1 октября, опережает гринвичское на 4 ч, так как ко
времени второго пояса прибавлен один декретный и
один летний час, а с 1 октября по 1 апреля — на 3 ч,
так как ко времени второго пояса прибавлен только
один декретный час. Итак, жители Москвы и всего вто-
рого пояса в летний период пользуются временем чет-
вертого восточного пояса, а в зимний период — време-
нем третьего восточного пояса.
Подобно нулевому поясу в СССР пояса, идущие к
востоку, имеют следующие названия: европейский, мос-
101
ковский, волжский, уральский, западно-сибирский, ени-
сейский, иркутский, амурский, приморский, охотский,
камчатский и чукотский.
На судах, как и на берегу, экипажу судна удобна
планировать свою трудовую деятельность по поясному
времени. С этой целью часы на судне устанавливают по
времени того пояса, в котором оно находится. Отсюда
и пошло название «судовое время», т. е. поясное время,,
по которому установлены судовые часы. Счет судового
времени ведется от 0 до 24 ч с точностью до 1 мин.
Многие суда, особенно пассажирские, совершают пла-
вание вблизи берегов с частыми заходами в порты.
В этих случаях для удобства пассажиров и экипажа су-
довые часы устанавливают по тому времени, которое
принято в посещаемых судном портах. При переходе
судна из одного пояса в другой стрелки судовых часов
переводят на 1 ч вперед, если переход совершается в во-
сточном направлении, и назад, если — в западном.
К чему приводит такой искусственный перевод стре-
лок на судах, совершающих кругосветное плавание?
Допустим, что от гринвичского меридиана одновремен-
но отплыли два судна: одно — в восточном направле-
нии, а другое — в западном. На первом судне при пе-
реходе из пояса в пояс часовую стрелку передвигали
на 1 ч вперед. После кругосветного плавания судна
возвратилось на гринвичский меридиан с передвинутой
стрелкой в целом на 24 ч вперед. Этим самым искусст-
венно было создано дополнительное календарное число.
На другом судне передвигали стрелку часов назад, по-
этому после прихода на гринвичский меридиан искус-
ственно сократили одно календарное число. В итоге
после прихода судов на гринвичский меридиан у перво-
го судна календарная дата будет больше, а у второго—
меньше на единицу относительно даты Гринвича.
Известно много случаев расхождения дат. Так бы-
ло, например, в первом кругосветном путешествии экспе-
102
диции Магеллана в 1522 г. Когда моряки возвратились
на родину, они, к великому удивлению, узнали, что
днем их возвращения была пятница, между тем как по
их счету должен был быть четверг.
В связи с этим возникает вопрос, где и каким об-
разом производить смену дат на судах?
Возьмем какую-либо дату, например 15 мая. В пол-
день в нулевом поясе время будет равно 12 ч. В этот
же момент время каждого соседнего восточного пояса
будет на 1 ч больше, чем предыдущего. В двенадца-
том поясе время будет 24 ч 15 мая или 0 ч 16 мая.
В западных часовых поясах время на 1 ч уменьшается;
таким образом, в двенадцатом поясе, если следовать в
западном направлении, время будет 0 ч 15 мая. Как
видно, в одном и том же поясе в один и тот же момент
показания времени одинаковы — 0 ч, но даты различ-
ные — 15 и 16 мая. Следовательно, именно в двена-
дцатом поясе необходимо производить смену дат.
За границу смены дат принят земной меридиан,
долгота которого 180°. Этот меридиан называют ли-
нией смены дат. Иногда его называют линией перемены
(разграничения) дат, или демаркационной линией.
К востоку от линии смены дат календарные числа на
единицу меньше, чем к западу.
Все суда, пересекающие линию смены дат в восточ-
ном направлении, повторяют одну и ту же дату дважды,
а в западном — одну дату пропускают.
Полная информация о времени, принятом в тех пли
иных государствах, границах часовых поясов и смене
дат, приведена на карте часовых поясов мира. На этой
карте приведены поправки для перехода от поясного,
или летнего, .времени к всемирному времени для стран
и районов с постоянными поправками и также отдельно
для тех, в которых поправки непостоянны: указаны да-
ты года, когда вводится летнее время.
103
Рис. 21. Морской хро-
нометр
Для показаний времени морские суда снабжают су-
довыми часами, хронометрами и секундомерами.
Судовые часы — это качественно изготовленные
пружинные часы с анкерным ходом. Их крепят на пе-
реборках в штурманской рубке, машинном отделении,
радиорубке, в каюте капитана, старшего механика, в
каютах помощников и в других местах. Судовые часы
устанавливают по судовому времени с точностью до
1 мин. Предназначены они для навигационных работ,
вахтенной службы и организации трудовой жизни эки-
пажа. По этим часам ведут счисление пути судна, про-
изводят навигационные определения, замечают время
показания приборов и ведут судовой и машинный жур-
налы.
Для астрономических определений места судна в
море необходимо знать более точное время. Основным
прибором, предназначенным для показаний точного вре-
мени на судне, является хронометр (рис. 21). Хронометр
изобретен в 1735 г. и к настоящему времени достиг вы-
сокого совершенства. Этот прибор представляет собой
104
часы особого устройства. Устанавливают его на судне
по времени начального меридиана, т. е. он показывает
гринвичское среднее время.
Кроме того, на судах устанавливают кварцевые ча-
сы. Сущность их работы заключается в следующем.
Пластинка, вырезанная соответствующим образом из
кристалла кварца, обладает особыми свойствами. Если
эту пластинку кварца сжимать, то на ее гранях воз-
никает электрический заряд, и, наоборот, если к кварцу
подключить электрический ток, то он будет сжиматься
и разжиматься, т. е. совершать колебания. Периодиче-
ские колебания кварца имеют исключительно точную
продолжительность периодов. Это замечательное свой-
ство кристалла кварца позволило построить очень точ-
ные часы.
Кварцевые часы состоят из высокостабильного, очень
малого по размерам, кварцевого генератора и очень
экономичного и устойчивого в работе преобразователя
колебаний кварца в движение часовых стрелок. Часы
работают на полупроводниках.
Кварцевые часы питаются электроэнергией от сети
переменного или постоянного тока. Если прекращается
подвод электроэнергии, то они переходят на энергию,
накопленную специальными аккумуляторами, которые
находятся в корпусе.
Ход кварцевых часов за сутки не ниже ±0,01с.
Кварцевые часы устойчивы в работе. Слабо подвер-
гаются изменениям внешней среды — температуры,
влажности, давления и т. д.
Кварцевые часы образуют систему единого времени
по всему судну, так как их датчики, выражающие вре-
мя в цифровой форме, устанавливаются в любом месте
судна.
В службу времени входит много задач, но все они
подчинены основной цели — обеспечить точным време-
нем навигационные и астрономические определения,
105
связь с берегом, расписание трудовой деятельности эки-
пажа и организацию вахтенной службы на судне. Хо-
рошо организованная и четко поставленная служба вре-
мени способствует безопасному плаванию.
Некоторые сведения
из морской лоции
Морская лоция является составной частью науки судо-
вождения и содержит круг вопросов, которые необходи-
мо знать мореплавателям для успешного выполнения
рейса.
Эта наука объединяет следующий основной круг
вопросов:
навигационные опасности и их ограждение;
навигационное оборудование морских путей;
сигналы и сигнальные станции;
карты, книги, руководства для плавания и пользо-
вание ими;
плавание во льдах;
приливы и приливо-отливные явления и проработка
маршрута.
Навигационные опасности делят на две группы —
постоянно существующие и временные. К первой отно-
сят опасности рельефа морского дна и затонувшие суда,
ко второй — опасности, обусловленные гидрометеоро-
логическими факторами (ветер, туман, течение, волне-
ние и т. п.), минные заграждения и плавающие предме-
ты (сорванные с якорей мины, буи, притопленные пред-
меты, рыболовные сети и т. п.).
Основные опасности рельефа морского дна следую-,
щие.
Мель — более или менее обширное по площади, сло-
женное из нетвердых грунтов возвышение на материко-
106
вой отмели, глубины над которым малы сравнительно с
окружающими.
Мелководье — часть моря с малыми или относи-
тельно малыми глубинами независимо от того, обеспе-
чивают или не обеспечивают эти глубины плавание над-
водных кораблей.
Отмель — мель, простирающаяся от берега, глуби-
ны над которой постепенно увеличиваются от берега
в море.
Подводная коса — узкая, длинная отмель, являю-
щаяся подводным продолжением полуострова, мыса или
надводной косы.
Бар — мель или ряд мелей, отгораживающих устье
реки от моря.
Банка — общий навигационный термин, относящий-
ся ко всем изолированным и ограниченным по площади
резким поднятиям морского дна.
Скала — отдельное, небольшое по площади резкое
возвышение дна, сложенное из твердых пород (грани-
та, базальта, известняка). Скалы бывают подводные,
надводные и осыхающие.
Риф — опасное для плавания подводное или осыха-
ющее возвышение морского дна со скалистым грунтом
или скопление подводных и осыхающих камней.
Буруны — пенящиеся волны, разбивающиеся на
некотором удалении от берега, иногда и в открытом мо-
ре над банками или над рифами.
Навигационные опасности наносят на карту с доста-
точной точностью. В тех случаях, когда местоположение
навигационной опасности определено, а следовательно,
и нанесено на карту приближенно, употребляют обозна-
чение «положение сомнительно» — ПС; если опасности
нанесены на карту по не вполне достоверным (сомни-
тельным) источникам, ставят обозначение «существо-
вание сомнительное» — СС.
ЮГ
Форма береговой черты и отдельных участков вод-
ного пространства имеет следующую терминологию.
Залив — часть океана или моря, вдающаяся в сушу.
Бухта — залив небольших размеров.
Губа — местное название заливов вытянутой формы.
Лиман — мелководный, глубоко вдающийся в сушу
залив с косами и пересыпями, представляющий собой
затопленную морем долину устьевой части реки или
затопленную прибрежную низменность.
Лагуна — вытянутый вдоль берега, как правило,
мелководный залив (бухта) с соленой или солоноватой
водой, соединенный с морем небольшим проходом или
совершенно отделенный от моря косой. Лагуной назы-
вают также внутренний водоем атолла.
Фьорд — узкий, глубокий и далеко вдающийся в
гористую сушу залив (бухта) с высокими и очень кру-
тыми берегами.
Фарватер — безопасный путь плавания судов сре-
ди различного рода препятствий (между островами,
подводными опасностями, в районах, опасных от мин,
и т. д.), показанный на карте и обычно обозначенный
средствами навигационного оборудования.
Морской канал — канал, искусственно прорытый в
морском дне для прохода судов через мелководье, обо-
значенный средствами навигационного оборудования.
Морской полигон — район в море, выделенный для
испытаний боевых и технических средств флота или для
проведения учений.
Рейд — участок водного пространства у берега или
среди островов, расположенный обычно перед портом,
гаванью, приморским населенным пунктом или устьем
реки, используемый для стоянки, а в некоторых случа-
ях — для перегрузки судов.
Осушка — часть берега или отмели, обнажающаяся
в малую воду.
108
Мыс — оконечность любой части суши, выступаю-
щей в море.
Коса — низкое и узкое наносное образование, вытя-
нутое от мыса параллельно общему простиранию берега
или направленное в глубь заливов (бухт).
Стрелка — низкое и узкое наносное образование,
выступающее от берега в сторону моря.
Для главных гидротехнических сооружений порта
принята следующая терминология.
Волнолом — не связанное с берегом внешнее огра-
дительное сооружение порта.
Мол — связанное с берегом внешнее оградительное
сооружение.
Дамба — сооружение в виде укрепленной насыпи
(вала) на берегу или вблизи берега, предназначенное
для предохранения берега от затопления и размывания
морем, для защиты каналов и рейдов от волнения и
заносов, для соединения между собой различных уча-
стков суши.
Пирс — причальное сооружение в виде дамбы, вы-
ступающее от берега и служащее для швартовки судов
с продольных сторон, а иногда и с головной (мористой)
части.
Дебаркадер — понтон, расположенный у берега и
предназначенный для причала небольших судов и для
перегрузочных операций.
В помощь мореплавателям для обеспечения безопас-
ности судовождения созданы специальные станции. Они
сообщают судам различную информацию и, в случае
необходимости, оказывают им помощь. К ним относятся
радио- и телефонные станции, семафор, лоцманские и
спасательные станции и др. Сведения о станциях при-
водятся в лоциях, на картах и в других навигационных
пособиях («Огни и знаки», «Радиотехнические средства
навигационного оборудования», Извещения мореплава-
телям, вып. № 1 каждого года и др.).
109
Радиостанции, обслуживающие мореплавателей, раз-
личны по своему назначению. Они передают гидроме-
теорологическую информацию, радионавигационные из-
вещения, сигналы времени и др. Ведомственные радио-
станции поддерживают непрерывную связь с судами,
радиопеленгаторные — передают сигналы, по которым
определяют место судна в море, и т. д.
Семафор предназначен для передачи сведений и для
ведения переговоров с судами. Иногда его используют
для сообщения о запрещенных для плавания районах,
о курсах, ведущих к опасности, и т. д.
Лоцманские станции (или вахты) по запросу судов
посылают лоцманов для их проводки. Они находятся
в портах, на специальных лоцманских судах и на пла-
вучих маяках. Сведения о лоцманских станциях, о по-
рядке вызова лоцмана на судно, об оплате лоцманских
услуг и другие сведения приведены в лоциях.
Спасательные станции (или посты) предназначены
для оказания помощи судам, терпящим бедствие, и для
спасения людей. Расположены они в портах, при неко-
торых береговых и плавучих маяках.
О режиме движения судов мореплавателей инфор-
мируют специальными сигналами, правилами и инст-
рукциями, а также навигационными и гидрометеороло-
гическими радиоизвещениями.
Сигналы передают по радиотелеграфу, радиотелефо-
ну, Международному своду сигналов (МСС), семафо-
рами, огнями и ракетами различных цветов, звуком,
фигурами (шар, конус, цилиндр и т. д.) в различном
их сочетании, выстрелами и др.
По назначению сигналы разделены на следующие
группы: сигналы, предостерегающие об опасности; сиг-
налы безопасности; сигналы срочности, тревоги, бедст-
вия; сигналы о тральных работах; о районах с ограни-
чением пути следования; сигналы рыболовных судов,
лоцманские сигналы; сигналы о приливах и отливах,
ПО
о течениях, о высоте воды, о проходе мостов, штормо-
вые сигналы и др.
Полные сведения о всех сигналах, месте, времени
и форме их передачи приводятся в лоциях, в описаниях
местных правил плавания и в некоторых других нави-
гационных пособиях.
Для предупреждения судов о местных правилах пла-
вания (глубинах на фарватере, приливах и отливах,
течениях и т. д.) в портах и на маяках установлены сиг-
нальные мачты для передач сигналов судам и берего-
вым работникам, которым необходима такая информа-
ция. Наиболее эффективным средством передачи на
суда всех видов информации является радиотеле-
граф.
В декабре 1898 г. английский плавучий маяк Ист
Гудвин оборудовали беспроволочным телеграфом. Маяк
находился на своем штатном месте у восточной части
песчаных отмелей Гудвин-Сэндз. Ранним утром 3 марта
1899 г. на него натолкнулся пароход «Мэттьюз». Впер-
вые в истории в эфир были поданы сигналы бедствия.
Их приняли и выслали на помощь буксиры, которые от-
вели плавучий маяк на мелкое место и сняли с него
экипаж.
6 февраля 1900 г. капитан ледокола «Ермак» полу-
чил радиограмму следующего содержания: «Команди-
ру ледокола «Ермак». Около острова Лавенсаари отор-
вало льдину с пятьюдесятью рыбаками. Окажите не-
медленно содействие спасению этих людей». Капитан
направил ледокол в район происшествия. Льдину об-
наружили и рыбаков сняли. Выдающийся успех нового
средства связи доказал всему миру огромное практиче-
ское значение радиотелеграфа.
3 ноября 1906 г. в Берлине Международной радио-
телеграфной конвенцией был установлен для радиосвя-
зи единый сигнал бедствия SOS. Это короткий и рит-
мичный сигнал, состоящий из трех точек, трех тире и
1И
трех точек. Его легко передавать и принимать даже в
случае быстрой и непрерывной передачи.
В настоящее время сигналы бедствия передают по
радиотелеграфу в виде нескольких групп SOS, по ра-
диотелефону — словом «Мэйдэй», по Международному
своду сигналов — флагосочетанием НЦ. Его передают
и визуальными сигналами: флаг с шаром над ним или
под ним, пламя на судне, клубы дыма оранжевого цве-
та, ракеты, выбрасывающие с парашютом красные звез-
ды или имеющие красный свет, непрерывный звук лю-
бого аппарата, медленное, повторяемое поднятие и
опускание рук, вытянутых в стороны, и т. п. Все суда,
принявшие такие сигналы, должны оказать максималь-
но возможную помощь терпящим бедствие.
Навигационные пособия
по судовождению
Для успешного выполнения морских и больших океан-
ских переходов штурман должен иметь обширную на-
вигационную информацию и различного рода справоч-
ный материал. Все это можно найти в навигационных
пособиях, которые делятся на три больших раздела:
морские карты, информации и книжные издания.
Морские карты, информации и большую часть книг
в СССР издает Главное управление навигации и оке-
анографии Министерства обороны (ГУНиО МО СССР),
а в зарубежных странах — гидрографические службы
(департаменты). Суда торгового флота снабжают кар-
тами и пособиями через навигационные камеры паро-
ходств, т. е. через специальные отделы при пароходст-
вах, а в иностранных портах — через агента.
Морские карты в зависимости от их назначения под-
разделяются на три основные группы: навигационные,
специальные и справочно-вспомогательные.
112
Навигационные карты по своему назначению под-
разделяются на четыре подгруппы: морские навигацион-
ные карты, радионавигационные, навигационно-промыс-
ловые, озерные и речные.
Морские навигационные карты (МНК) образуют
основную подгруппу морских карт. Они предназначены
для выполнения самой ответственной задачи судовож-
дения — на них ведется счисление пути судна» оп-
ределяется его местонахождение и непосредственно
обеспечивается навигационная безопасность морепла-
вания.
В зависимости от района плавания на морских на-
вигационных картах (рис. 22) изображают часть при-
брежной полосы материка и водную территорию, в по-
лосе береговой черты наносят населенные пункты, мая-
ки, радиомаяки, огни, приметные знаки, здания, памят-
ники (например, в Одессе — памятник Неизвестному
матросу в парке Шевченко, в Нью-Йорке — памятник
Свободы при входе в порт), вышки и весь другой нави-
гационный и обзорный материал, который необходим
для ориентировки с моря и служит для определения мес-
тоположения судна в океане.
Кроме того, на морскую карту до мельчайших под-
робностей наносят все навигационные опасности у бе-
реговой черты. На территории водной поверхности ука-
зывают глубины, линии, соединяющие одинаковые глу-
бины (изобаты), тип грунта, подводные, надводные и
осушаемые камни, затонувшие суда с указанием глуби-
ны над ними, вехи и другой материал, который необхо-
дим судоводителю для полного обеспечения безопасно-
сти плавания.
Морские навигационные карты издают в масштабах
от 1:500 до 1:5 000 000. Выбор масштаба обусловлен рай-
оном плавания судов. В зависимости от масштаба МНК
подразделяются на генеральные, путевые, частные и
планы.
113
13°09/ 0я от Гринвича 20*
Условные
обозначения:
о
красный цвет
©
зеленый цвет
желтый цвет
Рис. 22. Подход
к морскому порту
Генеральные карты предназначены для общего изу-
чения всего пути плавания. Их масштаб от 1:500000 до
1:5000000. На генеральных картах выполняется предва-
рительная прокладка курса судна, производятся общие
навигационные расчеты и откладываются контрольные
суточные пройденные расстояния судном. На гене-
ральных МНК нанесены важнейшие маяки, навига-
ционные опасности и плавучие средства навигацион-
ного ограждения, которые расположены вдали от
берегов.
Путевыми картами пользуются при плавании вдоль
побережий и на некотором удалении от берегов. Их
масштаб от 1:100000 до 1:500000. На путевых картах
ведется беспрерывное счисление пути судна с возмож-
но частыми определениями его места по береговым ори-
ентирам. На них нанесена подробно вся навигационная
информация.
Частные карты служат для обеспечения безопасно-
сти мореплавания в непосредственной близости от бе-
регов и в стесненных навигационных условиях. Их
масштаб от 1:2 500 до 1:75 000, на них навигационная
информация нанесена более подробно, чем на путевых,
включая рейдовую и портовую.
Планами пользуются при входах в порты, гавани,
бухты и для ориентировки передвижения в пределах
этих акваторий. Планы издаются отдельно или нередко
их помещают на свободных местах частных и путевых
карт.
Радионавигационные карты представляют собой
морские навигационные карты, но с дополнительной
системой нанесенных линий. По этим линиям графи-
ческим путем определяют место судна с помощью ра-
дионавигационных систем.
Навигационно-промысловые карты также являются
морскими навигационными картами, но на них нанесе-
на информация промыслового характера.
115
Озерные и речные карты служат для обеспечения
безопасности мореплавания на озерах и реках.
Специальные карты предназначены для решения
задач судовождения при плавании в особых условиях.
Вспомогательные и справочные карты различные
по содержанию и имеют одно и то же назначение обес-
печить безопасность мореплавания. К ним относятся
карты рекомендованных путей, гидрометеорологической
информации (течения и направления ветров), часовых
поясов и т. д.
Несмотря на такую подробную навигационную
информацию, к некоторым картам необходимо отно-
ситься с большой осторожностью, особенно если они пе-
реизданы с иностранных источников и охватывают не-
достаточно изученные районы. Известны аварии судов
из-за не точно нанесенной на карту навигационной об-
становки.
Например, в начале нашего века пароход «Элинга-
майт» следовал из Сиднея в новозеландский порт Ок-
ленд. На борту судна находились груз и около 200
пассажиров. Недалеко от порта назначения судно по-
пало в полосу густого тумана. Капитан приказал умень-
шить ход и послал впередсмотрящих на бак. Но не про-
шло и часа, как с бака раздался крик матроса: «Прямо
по носу буруны!» По приказу капитана машинам дали
ход назад. Однако судно не смогло погасить инер-
цию и через несколько минут выскочило на гряду под-
водных рифов острова Уэст в группе островов Трех
королей. Судно оказалось в тяжелом положении, по-
явились пробоины, через которые вода хлынула в ма-
шинное отделение и жилые помещения. Команда пред-
приняла энергичные меры, но не могла спасти пароход.
Прошло менее часа, и «Элингамайт» пошел ко дну.
Большая часть экипажа погибла.
После расследования суд вынес решение: «Винов-
ником кораблекрушения считать капитана Джона Эт-
116
твуда. Управляя судном близ острова Трех королей, он
не учел магнитное склонение и не придал значения
действию прибрежных течений...». Однако капитан еще
долго проверял свои расчеты, но так и не нашел истин-
ной причины аварии. Ответ пришел несколько позже,
и Верховный суд Австралии оправдал капитана Эт-
твуда.
Дальнейшие события жестоко наказали истинного
виновника трагической гибели экипажа «Элингамайт»:
гидрографическое судно «Пандора» во время тумана
выскочило на рифы тех же островов Трех королей. При
более тщательном расследовании оказалось, что гид-
рографы, работавшие ранее на «Пандоре», нанесли
положения островов на карту с ошибкой в три мили.
Для счисления пути судна, т. е. учета его переме-
щения, карта должна показывать строго согласован-
ное с натурой взаимное расположение пунктов прихода
и отхода, средства навигационного оборудования и т. п.
Поверхность Земли нельзя изобразить на плоскости
без искажений. Эти искажения подчиняют определен-
ной закономерности, выбор которой зависит от целе-
вых назначений карты. Избранный способ условного
изображения поверхности Земли на плоскости является
картографической проекцией, а полученная в этом слу-
чае система меридианов и параллелей — картографи-
ческой сеткой.
Карты различают по способу построения картогра-
фической сетки и характеру искажений углов или пло-
щадей. По характеру искажений их делят на равно-
угольные, равновеликие и произвольные; по методу
построения картографической сетки — на азимуталь-
ные, конические, цилиндрические и условные.
Навигационные карты для мореплавания строят в
равноугольной цилиндрической проекции, что вызвано
некоторыми требованиями, предъявляемыми к картам
и вытекающими из особенностей судовождения. Эти
117
Рис. 23. Локсодромия
требования станут ясными после того, когда мы рас-
смотрим два важных понятия — ортодромию и локсо-
дромию.
Кратчайшим расстоянием между двумя точками
на земной поверхности является дуга большого круга,
проходящая через эти точки, — ортодромия. Она пере-
секает все земные меридианы под разными углами.
Если бы штурман пожелал вести судно строго по орто-
дромии, то ему пришлось бы беспрерывно менять курс
судна, производя много вычислений и графических по-
строений. Ортодромия в переводе с греческого языка
-означает «прямой бег». Судно, совершая плавание од-
ним и тем же постоянным курсом, идет по кривой ли-
нии, которая носит название локсодромии («косой
бег»). Свойство локсодромии сохранять постоянный
угол (курс) между земными меридианами и линией,
по которой идет судно, оказалось весьма ценным для
судовождения.
118
На поверхности Земли локсодромия изображается1
линией двоякой кривизны (рис. 23). Она всегда выгну-
та от ближайшего полюса, а ее кривизна меняется на
экваторе. Локсодромия спиралеобразно приближается к
полюсу. Разность в длине между локсодромией и орто-
дромией даже при больших переходах незначительна.
К плаванию по дуге большого круга прибегают при
океанских переходах, длина которых исчисляется в
несколько тысяч миль. Такое плавание носит условный
характер. В этом случае на дуге большого круга, как
на кратчайшем расстоянии, рассчитывают несколько'
точек, между которыми плавание совершают по локсо-
дромии.
Во время плавания учет курса судна и учет прой-
денного им пути удобно вести на навигационной карте
графическим способом. Таким же способом удобно про-
кладывать направления на различные объекты или ли-
нии пеленгов, служащих для определения места судна.
Отсюда следует, что для удобства и правильной работы
с навигационной картой необходимо, чтобы линия кур-
са и линия пеленгов на ее картографической проекции
изображались прямыми линиями. Все это возможно в
том случае, если углы на картографической проекции,,
избранной для навигационных целей, будут равны уг-
лам на поверхности Земли.
Решение задачи оказалось нелегким. Лишь в 1569 г.,
голландский картограф Герард Кремер (Меркатор)
предложил картографическую проекцию для морских
карт, которая удовлетворяла поставленным требовани-
ям. Это было величайшим открытием, способствовав-
шим дальнейшему успешному развитию мореплавания,
и картографии. Проекция, предложенная Меркатором,
получила название меркаторской. Она относится к раз-
ряду нормальных цилиндрических проекций, и ее до>
настоящего времени применяют для построения мор-
ских навигационных карт.
119>
Рис. 24. Цилиндричес-
кая проекция, служа-
щая для построения
морских навигационных
карт
Как получают меркаторскую проекцию? Для этого
надо описать цилиндр вокруг Земли так, чтобы он своей
образующей касался экватора, а ось цилиндра совпа-
дала с осью Земли (рис. 24). Если теперь на боковую
поверхность этого цилиндра спроектировать изображе-
ния земных меридианов и параллелей, а затем разре-
зать цилиндр по образующей и развернуть его в плос-
кость, то получим нормальную цилиндрическую проек-
цию. На этой проекции все меридианы представляются
прямыми линиями, параллельными между собой и пер-
пендикулярными экватору. Параллели изображаются
также прямыми линиями, параллельными экватору и
пересекающими миридианы под прямыми углами. Рас-
стояние параллелей от экватора зависит от географи-
ческой широты данной параллели. Эту зависимость
можно подобрать так, что цилиндрическая проекция
будет равноугольной, т. е. такой, которая удовлетворяет
требованиям, предъявляемым к морским навигацион-
ным картам.
Итак, локсодромия на морских навигационных кар-
тах, которые составлены в меркаторской проекции, про-
водится в виде прямой линии. Ортодромия на этих кар-
тах имеет вид кривой линии, которая всегда должна
{20
быть своей выпуклостью обращена в сторону ближай-
шего полюса.
Штурману очень удобно пользоваться морской на-
вигационной картой, построенной в меркаторской про-
екции. Курсы, по которым движется судно, и направле-
ния на береговые объекты, или, как их принято назы-
вать, пеленги, служащие для определения места судна,,
изображаются прямыми линиями. Пройденные судном
расстояния откладывают в милях, которые циркулем-
измерителем снимают с боковой рамки карты, где одна
минута дуги равна одной миле.
Для судовождения, кроме навигационных карт, из-
даваемых в меркаторской проекции, издаются карты и
в других проекциях, но они носят вспомогательный ха-
рактер и служат для решения частных задач.
Так, например, издаются карты в гномонической
проекции, на которых ортодромия изображается в виде
прямой линии. При очень больших переходах, когда не-
обходимо совершать плавание по ортодромии, ее на-
носят на карту в гномонической проекции, разбивают
на определенное число отрезков, определяют кооорди-
наты точек концов внутренних отрезков и дуги боль-
шого круга. Затем наносят их на морскую карту в мер-
каторской проекции. Соединив эти точки, получают
отрезки локсодромий, по которым должно плыть
судно.
Перед тем как пользоваться любой навигационной
картой, ее необходимо изучить. Поэтому судоводитель
должен знать условные обозначения, применяемые на
морских картах, и уметь их читать.
Изучение карты начинают с ее заголовка и знаком-
ства с общими сведениями о ней (масштаб, год изда-
ния, годовое изменение склонения, эпоха, к которой она
относится, и пр.). Затем изучают примечания, предосте-
режения и навигационно-географические данные изо-
браженного на ней района.
121
На водной части карты указаны глубины и харак-
теристика грунта. Линии равных глубин (изобаты) и
характеристика грунта позволяют судить о рельефе мор-
ского дна. Плавный рельеф, отсутствие банок и островов
более благоприятны для мореплавания, чем сложный
рельеф с резкими скачками глубин, наличием банок и
островов, который опасен для плавания и требует боль-
шего внимания и предосторожностей.
На отечественных морских картах нанесены нави-
гационно-гидрографическая терминология, условные
знаки и сокращения. Они помещены в книге «Условные
знаки морских карт и карт внутренних водных путей».
Несмотря на обширный материал, помещаемый на
•картах, они все же не могут дать исчерпывающих све-
дений, необходимых для осуществления проводки судна
по наивыгоднейшему и безопасному пути. На картах не
полностью отражены гидрометеорологические условия,
не показаны вид берега с моря, внешний вид знаков
навигационного ограждения, не указаны подробности
использования радиотехнических средств, специальные
правила плавания в определенных районах и т. д. На-
конец, с течением времени навигационная обста-
новка меняется. Весь этот материал и много других
полезных сведений штурман получает из книжных из-
даний.
Книжные издания подразделяются на два больших
раздела: руководства для плавания и справочные и вы-
числительные пособия. Они содержат весь вспомога-
тельный справочный материал, необходимый для осу-
ществления различных расчетов по судовождению.
Руководства для плавания, в свою очередь, делятся
на общие и специальные^ К общим относятся: лоция,
пособия по огням и знакам и радиотехническим средст-
вам навигационного оборудования, к специальным —
правила плавания, описания запретных для плавания
районов и навигационно-гидрографические обзоры.
122
Большой интерес представляют лоции, которые из-
даются для всех морей и океанов на срок примерно до.
10 лет. В промежутке между изданиями и переиздани-
ями лоций выпускают дополнения к ним. Каждая ло-
ция охватывает определенный водный бассейн и:
дополняет морские карты сведениями, которые не-
могут быть помещены на карте;
содержит материал для решения навигационных за-
дач, имеющих характер подготовки к рейсу, описания
гидрометеорологических условий и другие справочные
материалы;
содержит фотографии и зарисовки берегов, примет-
ных мест, маяков и знаков, облегчающих общее опозна-
вание места и ориентировку при подходе к берегам.
Все сведения в лоции приведены к определенной
дате.
Навигационное пособие «Огни и знаки» издается
для определенных морских районов. Полное издание
охватывает все морские районы и дает судоводителям
необходимые сведения о маяках, огнях, навигационных
знаках и других средствах навигационного оборудова-
ния. Чтобы получить сведения о маяке какого-либо рай-
она, необходимо взять «Огни и знаки» того района,
в котором находится этот маяк, и найти его в Алфавит-
ном указателе. Каждому маяку в данном руководстве
присвоен номер. По номеру находят страницу, на ко-
торой приведены полные сведения о маяке (его коорди-
наты, высота и характер огня, рисунок, характерные
черты для опознания и др.).
Пособие «Радиотехнические средства навигационно-
го оборудования» содержит систематизированные све-
дения о радиомаяках, радиопеленгаторных станциях,
аэрорадиомаяках, а также о береговых станциях, пере-
дающих навигационные радиоизвещения.
К справочным пособиям относятся: методические
руководства, гидрометеорологические атласы, описания
123
передачу результатов в местные управления гидро-
метеослужбы.
Большую гидрометеорологическую информацию со-
бирают и передают искусственные метеорологические
спутники Земли. Особую помощь они оказывают при
плавании в слабо освещенных гидрометеорологической
информацией районах Мирового океана.
Анализ информации, получаемой от искусствен-
ных метеорологических спутников Земли, показал, что
для целей судовождения наиболее успешно использу-
ются телевизионные снимки поверхности Земли и об-
лачного покрова. Они дают изображения участков
земной поверхности на плоскости в центральной про-
екции.
На снимках изображаются объекты суши. Поэтому
при изучении облачности и морских льдов возможно
осуществить географическую привязку снимка и опре-
делить штормовые зоны, границы льда, изучить нап-
равление дрейфа льда и т. д .
Информация искусственных метеорологических
спутников Земли играет огромную роль при опреде-
лении гидрометеорологических условий в районах Ми-
рового океана.
Радиостанции ММФ согласно «Расписанию факси-
мильных гидрометеорологических радиопередач» пере-
дают гидрометеорологическую информацию по всем
штатным районам. В срочном порядке передают штор-
мовые предупреждения.
Прогнозы погоды по данному району и ежеднев-
ные гидрометеорологические бюллетени погоды достав-
ляет пароходству, морскому агенту «Инфлот», службам
мореплавания и аварийно-спасательных подводных и
технических работ (АСПТР) пароходств, а также ка-
питану порта бюро погоды.
Радиостанции пароходств, по установленному ими
расписанию, передают суточные прогнозы погоды и
126
волнения моря, уточнения н изменения, штормовые
предупреждения, ледовые прогнозы и обзоры. Гидроме-
теорологическую информацию, особенно штормовые
предупреждения, передают всеми средствами связи и
сигнализации, в том числе сигнальными постами и мач-
тами.
Познакомимся с основными физическими явления-
ми, происходящими в атмосфере, а также некоторыми
метеорологическими и океанографическими элементами.
Атмосферу — газовую оболочку Земли принимают
равной высоте 1000 км. Верхний слой атмосферы —
ионосфера. Она имеет повышенную электропроводимость
и способность отражать радиоволны. Нижняя грани-
ца ионосферы находится на высоте 70—80 км. Под
ионосферой расположена стратосфера с нижней грани-
цей на высоте 10 — 12 км. Здесь наблюдаются сильные
ветры. Самый нижний слой — тропосфера, в ней обра-
зуются облака, выпадают осадки, происходит сильная
конвекция воздуха и т. п. Температура в тропосфере
убывает с высотой, в среднем 0,5° на 100 м.
Процессы, протекающие в воздушной среде, харак-
теризуются метеорологическими элементами. К ним
относятся: температура и влажность воздуха, туман и
осадки, атмосферное давление, ветер и ураганы.
Суточный ход температуры воздуха над морем
несколько меньше, чем над сушей. Наименьшая темпе-
ратура наблюдается перед восходом Солнца и наиболь-
шая около 12 ч 30 мин (над сушей около 14' ч). Го-
довой ход температуры воздуха в малых широтах мал
и увеличивается с увеличением широты.
Массу (в граммах) водяного пара, находящегося
в 1 м3 воздуха, называет абсолютной влажностью.
Количество водяного пара в воздухе чаще выражают
величиной его упругости е, выраженной в ^миллимет-
рах ртутного столба (в миллибарах): е=0,0008 (t—t')p.
Здесь t и t' температуры соответственно по сухому и
127
смоченному термометрам психрометра, ар — атмос-
ферное давление.
Абсолютная влажность тем больше, чем больше
температура, особенно после полудня, в теплые меся-
цы и в наиболее теплых морях. Если в воздухе при
данной температуре содержится максимально возмож-
ное количество пара, то его называют насыщенным.
Температуру воздуха, когда при заданной абсолютной
влажности наступает насыщение, называют точкой
росы.
Отношение упругости водяного пара, содержащегося
в воздухе, к упругости водяного пара, насыщающего
воздух при данной температуре, называют относитель-
ной влажностью. Над морями относительная влажность
примерно постоянна и составляет около 80%.
Влияние низкой температуры на суда отрицатель-
но, ибо образуется ледовый покров, затрудняющий
продвижение судна. При низких температурах воздуха
происходит обмерзание водяных брызг, попадающих
на надводную часть судна и вызывающих обледене-
ние, снижение скорости и уменьшение остойчивости.
Высокие температуры снижают мощность главных
двигателей (например, дизелей, для которых важна
масса заряда воздуха, всасываемого в цилиндр), вы-
зывают нагревание корпуса и создают сложные усло-
вия для хранения перевозимого груза. Высокая влаж-
ность воздуха в сочетании с высокой температурой
при определенных условиях может привести к конден-
сации влаги в трюмах и порче грузов.
Температуру и влажность воздуха измеряют с по-
мощью аспирационного психрометра, который состоит
из двух ртутных термометров. Резервуар правого тер-
мометра обернут батистом, и перед измерением тем-
пературы его смачивают дистиллированной водой. По
показаниям температур сухого и смоченного термомет-
ров с помощью специальных таблиц определяют аб-
128
солютную и относительную влажность воздуха, а так-
же точку росы. Для непрерывной записи относитель-
ной влажности воздуха служит гидрограф, температу-
ры — термограф.
Давление, создаваемое массой воздуха, называют
атмосферным. Нормальное давление воздуха уравно-
вешивает столб ртути в 760 мм на уровне моря в
широте 45° и при температуре 0°С. Атмосферное дав-
ление измеряют барометром-анероидом, а непрерывно
регистрирует его изменения барограф.
В высоких слоях атмосферы образуются облака, ко-
торые представляют собой скопление мельчайших
капель или кристаллов льда. Летом облачность чаще
появляется ранним утром и после полудня, а зимой —
утром и ночью. На земном шаре наибольшая облач-
ность наблюдается в экваториальной зоне и в широте
60—80°. Облачность измеряют в баллах: от 0 до 10; 0 —
небо чистое, 10 — небо полностью закрыто облаками.
Облака делят на три класса: нижнего яруса (с вы-
сотами меньше 2 км), среднего (от 2 до 6 км) и верх-
него (более 6 км).
Из облаков выпадают осадки: дождь, снег, ледяной
дождь, ледяная крупа, снежная крупа, град и т. д.
Некоторые осадки выделяются на поверхности земли:
роса, иней, изморозь, гололед, жидкий налет и т. д.
Количество осадков определяют толщиной слоя, покры-
вающего земную поверхность, и измеряют его в мил-
лиметрах. В СССР наибольшее количество осадков
выпадает в Батуми, в среднем за год 2500 мм, а на
земном шаре — в Черрапунджи (Индия) — 12 665 мм.
Конденсация водяного пара в слоях воздуха, при-
легающего к земной поверхности, образует туман.
Различают дымку, слабый и сильный туман.
Ветер — горизонтальное передвижение воздуха,
вызванное разностью давлений в атмосфере. Ветер
характеризуется скоростью, направлением и силой.
5—3723 129
В районе экватора массы воздуха перемещаются
от центров высокого давления к центрам низкого дав-
ления и совпадают с направлением барического гради-
ента (уменьшения давления). По сторонам от эквато-
ра ветер отклоняется от направления градиентов
вправо в северном и влево в южном полушариях. По-
этому, если встать спиной к ветру, то низкое давле-
ние в северном полушарии будет слева от наблюдате-
ля, а в южном — справа.
Сила ветра зависит от разности давлений, т. е. от
величины барического градиента. Ее оценивают с по-
мощью специальной шкалы Бофорта, которая имеется
в Мореходных таблицах и других пособиях.
На движущемся судне наблюдают кажущийся
ветер, который является результатом сложения ско-
ростей истинного и курсового ветров. Вектор скорости
курсового ветра равен вектору скорости судна, но на-
правлен в противоположную сторону. Скорость ка-
жущегося ветра на судне замеряют с помощью руч-
ного анемометра, а его направление определяют по
специальному конусу на мачте, надуваемому ветром,
или просто по направлению дыма, выходящего из
трубы.
Направление и скорость истинного ветра определя-
ют с помощью треугольника векторов, как это показа-
но на рис. 25. Из точки О откладывают вектор кажу-
щегося ветра Vkb и в том же масштабе — вектор
курсового ветра — W. Замыкающий вектор ВА, про-
веденный с конца вектора курсового ветра в конец
вектора кажущегося ветра (или параллельный ему
ОС), будет вектором истинного ветра УИв и укажет его
направление и скорость.
На судне направление истинного ветра и его ско-
рость определяют с помощью ветрочета — круга СМО,
который устроен на принципе построения треугольни-
130
Рис. 25. Графический
способ определения ис-
тинного ветра
ка векторов. Скорость ветра утром обычно возраста-
ет, вечером — уменьшается.
В малых, а иногда и в умеренных широтах в лет-
нее время наблюдаются смерчи. Это вихри большой
разрушительной силы с диаметром 500—100 м и высо-
той до 1000 м. Одна из разновидностей смерча —
торнадос, он больше по размерам, обладает большой
скоростью вращения и огромной разрушительной си-
лой. Торнадосы наиболее часто возникают в Север-»
ной Америке, на территории США.
Увеличение ветра от штиля до значительной вели-
чины называют шквалом.
Пассаты — постоянные ветры, дующие в полосе
от экваториальной полосы затишья до широты 30°.
В северном полушарии их направление от северо-вос-
тока, в южном — от юго-востока. Сила ветра неболь-
шая (3—5 баллов). В полосе пассатов обычно ясная
погода и малое количество осадков.
Муссоны — достаточно устойчивые ветры, меняю-
щие свое направление от зимы к лету. Зимой в уме-
ренных широтах муссоны дуют с материка на океан,
а летом — с океана на материк. Летние муссоны
5* 131
отличаются высокой влажностью, облачностью, сопро-
вождаются осадками; зимние — сухие и при ясной по-
годе. Смена муссонов происходит в апреле — мае и в
октябре-ноябре.
К местным ветрам относят бризы, бора, фен и
некоторые др.
Бризы — это ветры па приморских побережьях,
днем они дуют с моря на сушу, ночью — с суши на
море; бора — холодный ветер очень большой силы,
дует от охлажденных мест вдоль крутых склонов к
морю, наблюдается в Новороссийске и у северных бе-
регов Адриатического моря, а также на Новой Земле
и Средиземноморском побережье Франции; фен — су-
хой и теплый ветер, дующий с гор. Полные сведения о
ветрах на морях приводятся в морских атласах и на
ежемесячных гидрометеорологических картах.
Наиболее резко погода изменяется при прохожде-
нии линии фронтов, т. е. линии соприкосновения двух
воздушных масс, обладающих различными физическими
свойствами и проходящих над поверхностью моря или
земли.
В теплом фронте теплые массы воздуха наполза-
ют на холодные. Перед теплым фронтом падает дав-
ление, появляются перистые облака и наблюдаются
туманы. Затем появляются перисто-слоистые, высоко-
слоистые и слоисто-дождевые облака, из которых
впереди ’линии фронта в полосе до 200 км выпадают
обложные осадки. Ветер усиливается и поворачивает
вправо.
В холодном фронте холодные воздушные массы
вклиниваются под теплые. Если холодный воздух
движется быстро, то теплый воздух бурно вытесняет-
ся кверху, и по фронту возникают сильные порывы вет-
ра и шквалы. В поднимающемся теплом воздухе об-
разуются мощные кучево-дождевые облака, из которых
выпадают ливневые осадки, сопровождающиеся гроза-
132
ми. Если холодный воздух движется медленнее отсту-
пающего теплого, то давление перед фронтом падает и
наступает зона обложных осадков.
Бывают случаи, когда теплая масса располагается
между двумя холодными, догоняющими одна другую,
причем теплая — вытесняется вверх. В результате
происходит смыкание холодных масс, называемое
окклюзией. Фронт между этими массами называется
фронтом окклюзии. Он сопровождается пониженной
видимостью, осадками, сильным ветром, который вы-
зывает волнение моря.
Циклон — область низкого давления, зарождаю-
щаяся на границе двух масс воздуха разной темпера-
туры. В развившемся циклоне изобары (линии одина-
кового давления) образуют систему замкнутых кон-
центрических кривых. Понижение давления в циклонах
направлено от периферии к центру. Это обусловливает
направление ветров: в северном полушарии — «вихрь»
против часовой стрелки, в южном — по часовой (рис.
26). Диаметры циклонов, образующихся в умеренных
широтах, — от нескольких сот до 2 000 миль. Скорость
их перемещения достигает 30 — 60 км/ч.
Наблюдая за циклонами, т. е. за облачностью, на-
правлением ветра, изменением атмосферного давления
и температурой воздуха, можно сделать некоторые
важные выводы. Если движение облаков не совпадает
с направлением ветра у земли, то наблюдатель нахо-
дится в передней части циклона. Через один-два дня
следует ожидать продолжительных осадков и пониже-
ния температуры летом и повышения зимой. Если ку-
чевые облака и ветер у земли движутся в одном на-
правлении, то наблюдатель находится в концевой части
циклона и следует ожидать улучшения погоды.
Нетрудно установить положение судна относитель-
но пути движения центра циклона. Если в северном
полушарии направление ветра изменяется по часовой
133
стрелке, то наблюдатель находится в правой полови-
не циклона, если против часовой стрелки, — то в ле-
вой. Для южного полушария следует сделать обрат-
ное заключение.
Циклоны, возникающие в тропиках, называют
тропическими (в Вест-Индии — ураганами, к востоку
от Азии — тайфунами). Тропические циклоны имеют
некоторые особенности: они меньших размеров (200—
300 миль в диаметре), у них значительно большие из-
менения в атмосферном давлении, а скорость ветра
достигает ураганной силы — 100 км/ч.
При приближении тайфуна появляется зыбь, иду-
щая в сторону, противоположную направлению, от
которого дует или дул ранее ветер. Наступает пред-
грозовое затишье с удушливой жарой. При приближе-
нии центра тайфуна атмосферное давление резко па-
дает. Слоистые облака сменяются нагромождением ку-
чевых и кучево-дождевых облаков. Затем температура
воздуха падает, дождь переходит в тропический ливень.
134
В северном полушарии ветры в области тайфуна
отклонены от направления на его центр вправо в сред-
нем на 60°, а при приближении к центру увеличивают-
ся до 90°. Поэтому, чтобы определить центр тайфуна,
необходимо стать спиной к ветру, тогда он будет на-
ходиться впереди, примерно на 60° влево от направле-
ния ветра.
В центре тайфуна («глаз бури») — слабый ветер
и бурное море. При прохождении центра тайфуна
ветер усиливается до ураганного, затем постепенно
слабеет.
Чтобы правильно выбрать курс для избежания
встречи с центром тропического циклона в северном
полушарии, необходимо руководствоваться следующи-
ми правилами: при прохождении правой половины
тропического циклона лечь в бейдевинд правого галса
(ветер привести в правую скулу, см. рис. 26) и сохра-
нять этот курс, пока барометр не начнет подниматься;
при прохождении левой половины — лечь в бакштаг
правого галса (привести ветер в корму справа) и дер-
жать этот курс до выхода из зоны тропического цик-
лона. Если судно оказалось на пути центра тайфуна,
то также перекладывают руль в бакштаг правого гал-
са и держатся, как указано ранее.
В южном полушарии при прохождении левой по-
ловины циклона ложатся в бейдевинд левого галса,
сохраняя курс до начала подъема барометра, в правой
половине — в бакштаг левого галса и держат, как ука-
зано ранее. Если судно находится на пути тайфуна,
то необходимо привести ветер в бакштаг левого галса
и так держать до выхода из зоны тропического ци-
клона.
Антициклон — область повышенного атмосферно-
го давления. Антициклоны приносят значительное пони-
жение температуры, ясную погоду и хорошую види-
мость.
135
Процессы, протекающие в водной среде, характе-
ризуются океанографическими элементами. К таким
элементам относятся: рельеф дна, географическое рас-
пределение глубин, изменения уровня моря, состав и
соленость морской воды, ледовый режим, течения и
волнения.
Поверхность земного шара приблизительно на 71%
покрыта водой. Рельеф морского дна состоит из:
материковой отмели, т. е. полосы глубиной до
200 м, — 5%;
материкового склона с глубинами от 200 до
2440 м — 15%;
ложа Мирового океана с глубинами от 2440 до
6000 м 76% всей площади морского дна.
Наиболее глубокое место океана — Марианская
впадина (Тихий океан) — 10 899 м.
Средняя температура поверхности Мирового океа-
на + 17,4°С. Годовое колебание температуры воды Ми-
рового океана невелико, порядка нескольких градусов,
а суточная амплитуда на поверхности воды в откры-
тых океанах не превышает 1°. Наиболее высокая тем-
пература (до 35° летом) наблюдается в Персидском
заливе, но зимой она понижается до 22°.
Соленость воды выражается в промилле ('%»). Об-
щая соленость открытых океанов в среднем 35%о. Это
значит, что на 1 кг воды 35 г составляют растворен-
ные в ней соли. Особое и пока необъяснимое явление—
загадочная «солонка» в Красном море около пор-
та Джидда. Здесь на глубине 150 м соленость воды
составляет 270°/оо, а температура превышает 44°.
Плотность морской воды находится в зависимости
от солености и температуры (с увеличением солености
и уменьшением температуры плотность возрастает).
В свою очередь, осадка судов зависит от плотнос-
ти, а следовательно, от солености и температуры воды.
Грузовая марка судов учитывает зону плавания я
136
время года. Изменение осадки с переходом судна из
речной воды в морскую с соленостью примерно 35'%о У
больших судов достигает 0,3 м.
Прозрачность морской воды определяется средней
глубиной видимости в ней белого диска диаметром
30 см. Наибольшая прозрачность наблюдается в Сар-
гассовом море (Атлантический океан) — 66 м; наи-
меньшая в Северном море —от 6 до 22 м.
Морская вода замерзает при температуре ниже
0° С в зависимости от ее солености. Практически за-
мерзание моря начинается при температуре воздуха
(-6) - (-8)° С.
По стадиям нарастания морской лед разделяют на
ледяные иглы, ледяное сало, нилас, шуга и т. п.; по
подвижности — дрейфующий лед и припай. Под вли-
янием постоянных течений и ветрового дрейфа скоп-
ления дрейфующих льдин создают ледовые образова-
ния — массив льда, пояс льда, ледяная перемычка и
т. п.; Сталкивающиеся во время дрейфа льдины об-
ламываются, создавая ледяные нагромождения — то-
росы, имеющие различные формы — ропаки, под со вы,
стамухи.
Проходимость судами льдов зависит от сплочен-
ности (густоты) последних, возраста (толщины) и
торосистости и оценивается по специальной шкале
в баллах. В морях умеренных широт зимой редкий и
разреженный лед могут проходить все суда, кроме ка-
теров и шлюпок, самостоятельно. В сплоченном и очень
сплоченном льдах необходима проводка судов ледо-
колами.
Кроме морских льдов, в море встречаются и мате-
риковые.
Большую опасность для мореплавания представля-
ют айсберги. Они образуются в результате обламыва-
ния концов материковых и островных ледников-глетче-
ров, сползающих в море. Айсберги, подхватываемые
137
морскими течениями, дрейфуют в низкие широты океа-
нов и постепенно тают до полного разрушения. По
мере таяния они теряют остойчивость и нередко пе-
ревертываются. Айсберги достигают огромных разме-
ров (более 100 км длины и 400 м надводной высоты).
Со времени гибели парохода «Титаник» (14 апре-
ля 1912 г.) была создана специальная ледовая служ-
ба, которая следит за айсбергами и сообщает о них
судам, находящимся в районе их продвижения. При-
мерно около 80% айсберга скрыто в воде, поэтому
приближение к нему опасно из-за подводных таранов.
Летом 1893 г. канадский пароход «Поршиа» следо-
вал в северо-западной части Атлантического океана.
С судна заметили большой айсберг. Капитан удовлет-
ворил просьбу пассажиров, жаждавших его рассмот-
реть, и подошел к ледяному исполину — его высота
составляла около 60 м, а длина надводной части —
почти четверть километра. Примерно в. 70 м от айсбер-
га судно остановилось.
Вдруг надводная часть айсберга начала удаляться
от парохода. Пароход вздрогнул, сильно накренился
на левый борт и начал подниматься над водой. Пас-<
сажиры и матросы с ужасом увидели, что судно боль-
ше не качается на волнах, а лежит на ледовом поле.
Произошло роковое совпадение — оттаявший айсберг
начал переворачиваться. Из-за большой массы судна он
не смог окончательно перевернуться и ушел под воду.
Пароход тоже погрузился в воду и закачался на вол-
нах, но корпус деформировался и образовалась боль-
шая течь. С большим трудом он дошел до ближайше-
го порта.
Морские течения характеризуются направлением
и скоростью (в узлах). По продолжительности действия
течения бывают постоянные и временные.
Скорости постоянных течений в разных частях
Мирового океана различны. Самые большие скорости
138
течений наблюдались: Гольфстрим — 5,7 уз в февра-
ле, Куросио — 5,5 уз в ноябре, мыс Игольный — 5 уз
в сентябре.
Пользуясь постоянными течениями, мореплавате-
ли стараются использовать попутные и обойти встреч-*
ные течения.
Переменные, главным образом приливо-отливные,
течения наиболее значительны в узкостях и проли-
вах. Чтобы уменьшить их отрицательное влияние, су-
доводители при выборе пути стремятся рассчитать пе-
реход так, чтобы путь судна во время перехода сов-
падал с направлением приливного течения.
Волнение моря наблюдается в поверхностном слое
океана (до глубины 50 м) и возбуждается ветрами.
Оно характеризуется высотой и длиной волны (в мет-
рах), периодом и направлением распространения волн.
Потеря скорости судна на волнении в основном зави-
сит от типа судна, высоты волны и угла, под которым
движется судно по отношению к фронту волны. Быстро-
ходные суда имеют меньшие потери скорости от вол-
нения по сравнению с тихоходными, и чем больше раз-
меры судна, тем меньше влияние волнения на его
скорость.
Навигационное оборудование
на морских путях
Как уже говорилось ранее, для безопасного и успеш-
ного плавания судов на берегу, вблизи навигацион-
ных опасностей или непосредственно на них установ-
лены средства навигационного оборудования: маяки
различных типов, светящие и несветящие берего-
вые знаки, башни, буи, баканы, вехи, а также радио-
технические средства и различные средства сигнали-
зации.
139
Рис. 27. Маяк
Навигационное оборудование устанавливают в за-
висимости от географической обстановки, т. е. в зави-
симости от очертания берегов, рельефа дна, наличия
опасностей, гидрометеорологических условий, а так-
же интенсивности судоходства в этом районе плава-
ния.
Навигационное оборудование, установленное на
суше у береговой черты, составляет группу берегового
ограждения. К ней относятся маяки, навигационные
знаки, огни и створы.
При следовании судна в пределах видимости бере-
гов маяки облегчают ориентировку, помогают опознав
вать берега, и, самое главное, являясь основными бе-
реговыми ориентирами, служат для точного опреде-
ления места судна, так как положения всех маяков оп-
ределены и с большой точностью нанесены на морские
карты.
140
Маяки представляют собой капитальные инженер-
ные сооружения в виде башен различных форм (рис.
27). Башни маяков обладают прочной и устойчивой
конструкцией, способной противостоять ветру и раз-
рушительной силе волн. Их верхушки заканчиваются
ажурными надстройками, в которых размещаются
мощные оптические световые аппараты. Дальность
видимости огня маяков составляет в основном 15 —
30 миль, а отдельные маяки при ясной погоде могут
быть открыты с моря на расстоянии 30—50 миль, как,
например, маяк Паргу в Атлантическом океане па
о-ве Мадейра.
Различают маяки днем по форме, окраске и харак-
терным признакам, а ночью — по характеру огня.
Характер огня может быть постоянным, проблесковым,
частопроблесковым, затмевающимся, группозатмева-
ющимся и т. д.
У некоторых маяков по направлениям может менять-
ся цвет огня. Но каждый маяк имеет постоянный ха-
рактер огня и период его свечения. Светит маяк с за-
хода до восхода Солнца.
На современных маяках дополнительно могут быть
установлены радиотехнические, радиоакустические, аку-
стические или какие-либо другие средства навигацион-
ного оборудования.
Навигационный знак — сооружение более легкой
конструкции, чем маяк, и может быть светящим и не-
светящим. Дальность видимости огня не превышает 15
миль.
Огонь — светотехническое устройство, большей
частью автоматического действия, с дальностью види-
мости до 15 миль.
Створ — система маяков, знаков или огней. Они
указывают границы районов и служат для обеспечен
ния следования судов по заданному направлению.
141
Рис. 28. Плавучие огра-
ждения:
а — плавучий маяк; б —
буй; в — морская веха
Плавучие маяки (на рис. 28, а —маяк«Ирбенский»),
буи, вехи (рис. 28,’ б, в) и баканы составляют группу
плавучего ограждения. Плавучие ограждения, как
говорит само название, выставляют на воде вблизи
опасностей или на них.
Плавучий маяк — навигационный ориентир, пред-
ставляющий собой судно с резко отличительной окрас-
кой, характерными надстройками; он находится в оп-
ределенном месте, которое указано на карте. На таком
судне есть маяк, установки для подачи туманных сиг-
налов, а также может быть радиомаяк, лоцманская и
другие станции.
Буй — техническое устройство, несущее на себе
ажурную надстройку для фонаря. Осветительные ап-
параты на нем действуют автоматически. Имеются
приспособления для подачи звуковых сигналов (коло-
кол, ревун, сирена), на некоторых буях устанавлива-
ют радиолокационные отражатели.
Веха — шест с топовой фигурой. Ее устанавливают
в определенном месте с помощью якорного устройства.
В некоторых случаях вехи несут огни и пассивные ра-
диолокационные отражатели.
Бакан — буй без надстройки.
Главной характеристикой огня, устанавливаемого
на навигационном оборудовании, является его период
освещения, т. е. промежуток времени, в течение кото-
рого проходит полный цикл изменений, присущих дан-
ному огню.
К радиотехническим средствам навигационного обо-
рудования относят береговые радиолокационные стан-
ции, пассивные и активные радиолокационные отража-
тели, береговые радиопеленгаторные станции, радио-
маяки кругового действия (РМ), радиомаяки направ-
ленного излучения и всенаправленные (ВРМ-5, «Кон-
сол») и системы радионавигации («Декка», «Омега»,
«Лоран-А», «Лоран-С» и др.).
143
Плавучие средства навигационного оборудования
расставляют по определенным системам в зависимости
от навигационно-географической обстановки.
Морские державы пользуются различными систе-
мами ограждения опасностей, а также различной фор-
мой и окраской знаков навигационного оборудования.
С описанием таких систем и знаков можно познако-
миться в лоциях и навигационных пособиях «Огни и
знаки».
В водах СССР приняты пять видов систем: карди-
нальная, ограждения рыболовных снастей, латераль-
ная, обозначения осей фарватеров и рекомендованных
курсов и локальная.
По кардинальной системе, или по системе относи-
тельно сторон горизонта, знаки расставляют вокруг
опасностей по главным (кардинальным) направлениям
сторон света. К северу от опасности выставляют южные
знаки (судно, приближаясь к опасности, должно оста-
вить их к югу). На южной стороне опасности выставля-
ют северные знаки (в этом случае судно должно оста-
вить их к северу). Аналогично западные знаки выстав-
ляют у восточной части опасности и восточные — у
западной. Для опознания знаков характер огня, их
окраска и форма установлены в соответствии с их рас-
положением относительно опасности.
Отдельно лежащие опасности размером не более
1 кб ограждают крестовыми предостерегательными зна-
ками. Они имеют определеную окраску и характер огня.
Ограждение рыболовных снастей производится по
кардинальной системе с помощью вех. На вехах могут
выставляться огни (см. форзац).
В латеральной, или боковой, системе знаки расстав-
ляют по сторонам безопасного пути, который называют
фарватером. Наименование сторон определяется направ-
лением движения судна с моря. Знаки правой стороны
окрашены в черный цвет, имеют белый огонь и нечетные
144
номера буев; знаки левой стороны—красный цвет, крас-
ный огонь и четные номера буев. Номера облегчают на-
хождение буев и уточнение места судна.
Система обозначения осей фарватеров и рекомендо-
ванных курсов (осевая) применяется там, где широкий
район плавания не имеет навигационных опасностей по
курсу, а рекомендованная осевая система сокращает
путь и указывает наиболее глубокую часть фарватера.
Локальная система указывает на ограждения от-
дельных мест: затонувших судов, районов прокладки
подводных кабелей и обозначение мест якорных и ка-
рантинных стоянок.
В 1976 г. Международная ассоциация маячных
служб (МАМС) и Межправительственная морская кон-
сультативная организация (ИМКО) завершили разра-
ботку новой унифицированной системы плавучих средств
навигационного ограждения. Она получила название
«Система А—комбинированная кардинально-латераль-
ная система плавучего ограждения (красный слева)»
(см. форзац).
В новой системе ограждений кардинальный и лате-
ральный методы используются раздельно и совместно.
Она состоит из малого числа знаков. В ночное время
знаки ограждения легко и надежно опознаются по цве-
ту и характеру огня (зеленые и красные огни присвоены
только латеральным знакам, а кардинальные знаки
несут белые огни, характеристики которых резко от-
личаются друг от друга). В дневное время опознавание
знаков производится по расцветке, форме и топовым
фигурам. В новой системе затонувшие суда и все дру-
гие навигационные опасности ограждаются кардиналь-
ными или латеральными знаками, а также предусмот-
рена возможность усиления ограждения новых опасно-
стей (в том числе и затонувших судов), но еще не нане-
сенных на карты и не оповещенных в других навигаци-
онных документах.
145
Международные правила
предупреждения столкновений судов
в море 1972 г. (МППСС-72)
Одним из распространенных видов аварий на- море
являются столкновения судов. Они часто сопровождают-
ся человеческими жертвами, гибелью судов и груза,
что, в свою очередь, наносит большие убытки. Поэтому
безопасное расхождение судов в море всегда явля-
лось важной задачей мореплавания, особенно в послед-
ние десятилетия, когда возросла интенсивность движе-
ния судов, увеличились их размеры и скорость.
В открытых морях и соединенных с ними водах, дос-
тупных для плавания морских судов, в настоящее вре-
мя действуют МППСС—72.
На реках, озерах, водохранилищах и других вну-
тренних водных путях СССР действуют Правила пла-
вания по внутренним водным путям СССР, издаваемые
Министерством речного флота.
Для отдельных бассейнов рек, озер, каналов, проли-
вов и т. д. издаются местные правила плавания.
Если яхты участвуют в гонках, то расхождение
участвующих в них яхт регулируется Правилами па-
русных соревнований, утвержденными Комитетом по
физической культуре и спорту при Совете Минист-
ров СССР.
Правила предупреждения столкновений судов в мо-
ре вырабатывались постепенно на основе обобщения
опыта мореплавания. Они существуют уже несколько
столетий.
Одним из первых достоверных источников, отра-
жающих порядок движения судов, является Свод зако-
нов о мореплавании и торговле, действовавший на
острове Родос в IV в. до н. э.
146
В нем указывалось, что судно, имеющее ход, должно
обходить суда, стоящие на якоре, или обезветрившиеся
в море. Для судна, не имеющего хода, предписывалось
зажигание огня или подача звуковых сигналов (голо-
сом). В этом же Своде была оговорена ответственность
сторон за столкновение. В дальнейшем, в первую оче-
редь в странах наиболее развитого мореплавания, пра-
вила расхождения развивались и совершенствовались.
В России в 1837 г. впервые были изданы Правила
для плавания казенных и частных пароходов во всех
проходах и реках Российской империи.
В 1848 г. Англия и Франция приняли соглашение
о взаимном признании Правил для предупреждения
столкновений судов в море. Эти Правила были при-
знаны Россией и рядом других стран. В 1852 и 1863 гг.
их текст уточнялся, а в 1884 г. были введены дополне-
ния. В этих Правилах регулировалось расхождение
парусных и паровых судов и впервые появилось поня-
тие об умеренном ходе.
Наиболее долго действовал текст ППСС, составлен-
ный на Международной конференции по охране чело-
веческой жизни на море, состоявшейся в Вашинг-
тоне в 1889 г.
В 1910 г. текст Правил был дополнен Английским
адмиралтейством в соответствии с решением Брюссель-
ской конвенции 1910 г. В СССР эти Правила были
введены приказом Народного комиссара путей сообще-
ния в 1922 г. и действовали до 1 января 1954 г. С этого
года вошли в силу новые ППСС, выработанные в Лон-
доне в 1948 г. на очередной конференции по охране че-
ловеческой жизни на море.
В 1960 г. на Международной конференции по охране
человеческой жизни на море, которая состоялась в Лон-
доне, был принят новый текст ППСС—60. Правила
только уточнялись и дополнялись, отражая развитие
флота, появление гидросамолетов и новой техники.
И7
В них в виде приложения включены Рекомендации по ис-
пользованию радиолокационной информации для пред-
отвращения столкновений судов в море. Правила 1960 г.
вступили в силу с 1 сентября 1965 г.
Накопленный опыт мореплавания, качественный и
количественный рост морского флота, а также опреде-
ленные недостатки ППСС—60 послужили причиной их
пересмотра и разработки новых Правил предупрежде-
ния столкновений судов в море. Эту работу возглавила
Межправительственная морская консультативная орга-
низация (ИМКО), которая начала работу в сентябре
1968 г. и завершила в октябре 1972 г. В 1972 г. в Лон-
доне состоялась Международная конференция, на кото-
рой впервые в истории мореплавания заключена Кон-
венция о Правилах предупреждения столкновений су-
дов в море и выработан текст Правил, которые получи-
ли статут международных, что отражено в их названии
(МППСС—72). Они вошли в силу с 15 июля 1977 г.
Общее построение Правил более удобно для изуче-
ния и применения. В ряде случаев Правила более четко
сформированы и уточнены. Введены и уточнены новые
термины, например «безопасная скорость», которая обя-
зывает судно следовать не только в плохую видимость»
но всегда согласовывая ее с условиями и обстоятель-
ствами плавания.
В Правилах получил развитие порядок плавания в
узкостях, более четко разделена ответственность за рас-
хождение между судами в зависимости от их маневрен-
ных возможностей. В связи с этим введены новые тер-
мины. Для больших судов увеличена дальность види-
мости огней.
Новые Правила стали более четкими, ясными и крат-
кими, из них исключены и перенесены в приложения
требования к расположению и некоторым техническим
характеристикам огней, знаков и звукосигнальных
устройств. Перенесенная в приложения техническая
148
информация не входит в обязательный круг знаний
судоводителя и не требуется непосредственно для
предупреждения столкновения судов. По той же причи-
не из Правил перенесено в приложения описание сигна-
лов бедствия. Следует отметить, что в приложениях тре-
бования к техническим характеристикам для судовых
навигационных огней и звукосигнальных устройств по-
лучили значительное развитие.
В приложении даны также сигналы для рыболовных
судов, занятых совместным ловом рыбы. Это новое при-
ложение основано на практике работы рыболовных су-
дов.
МППСС—72 состоят из пяти частей (38 правил и
4 приложения).
Остановимся на общем содержании основных частей
МППСС.
Часть А — Общие положения. Здесь в соответствии
с принятой структурой, помещены общие положения,
относящиеся ко всем Правилам. Часть содержит три
правила (1, 2 и 3). В первом указывается о том, что
они распространяются на все суда в открытых морях и
соединенных с ними водах, по которым могут плавать
морские суда, и о возможном установлении дополни-
тельных местных правил по внутренним водным путям.
Второе—определяет ответственность за последствия,
могущие произойти от невыполнения этих правил.
В третьем правиле даны определения терминов и слов,
встречающихся в тексте МППСС—72.
Часть В — Правила плавания и маневрирования.
Часть содержит три раздела, объединяющие 16 правил.
Этими разделами определяется режим плавания судов
при любых условиях видимости, находящихся на виду
Друг у друга и при ограниченной видимости.
Раздел 1 — Плавание судов при любых условиях ви-
димости, содержит семь правил. Четыре правила (4, 5,
6 и 7) определяют применение их, организацию наблю-
149
дения и ее задачу, выбор безопасной скорости и описа-
ние тех факторов, которые надлежит учитывать при
выборе, а также определение наличия опасности столк-
новения. Для определения наличия опасности столкно-
вения следует использовать все имеющиеся средства
(визуальное пеленгование, радиолокационные наблю-
дения и др.). Опасность столкновения следует считать
существующей, если пеленг приближающегося судна
заметно не изменяется, а иногда даже при заметном
изменении пеленга (большое судно, малое расстоя-
ние и т. д.).
Остальные три правила (8, 9 и 10) определяют дей-
ствия для предупреждения столкновения судов, в них
сформулированы основные принципы маневрирования
и указан порядок плавания в узкостях и по системам
разделения движения.
Раздел II — Плавание судов, находящихся на виду
друг у друга, содержит восемь правил (11 —18). Ими
определяется применение этих правил, маневрирование
парусных судов, устанавливается режим обгона и трак-
туются понятия обгоняющего и обгоняемого судов.
Логично и четко определяются действия в ситуации
сближения судов, идущих прямо друг на друга, и в ситу-
ации пересечения курсов. Определены действия судна,
уступающего дорогу» и действия судна, которому усту-
пают дорогу. Последнее правило (18) этого раздела оп-
ределяет взаимные обязанности в маневрировании судов
с механическим двигателем, парусных и других судов,
лишенных возможности управляться или занятых про-
мыслом.
Раздел III — Плавание судов при ограниченной ви-
димости. Содержит одно правило — 19. Оно определяет
режим плавания при ограниченной видимости. В четвер-
том пункте этого правила говорится о действиях судна,
использующего радиолокатор для расхождения в усло-
виях ограниченной видимости.
150
Часть С— Огни и знаки. Содержит 12 правил (20—
31). Правила описывают огни и знаки, предписанные
различным судам на ходу, занятым буксировкой, ли-
шенным возможности управляться, ограниченным в воз-
можности маневрировать и т. д.
Правилами предписываются такие огни.
Топовый огонь представляет собой белый огонь, рас-
положенный в диаметральной плоскости судна, освеща-
ющий непрерывным светом дугу горизонта в 225° и
установленный таким образом, чтобы светить от напра-
вления прямо по носу до 22,5° позади траверза каждого
борта.
Бортовые огни представляют собой зеленый огонь
па правом борту и красный огонь—на левом, каждый
из этих огней освещает непрерывным светом дугу гори-
зонта в 112,5° и установлен таким образом, чтобы
светить от направления прямо по носу до 22,5° позади
траверза соответствующего борта. На судне длиной
менее 20 м бортовые огни могут быть скомбинированы
в одном фонаре, выставляемом в диаметральной пло-
скости судна.
Кормовой огонь представляет собой белый огонь,
расположенный, насколько это практически возможно,
ближе к корме судна, освещающий непрерывным све-
том дугу горизонта в 135° и установленный таким обра-
зом, чтобы светить от направления прямо по корме
до 67,5° в сторону каждого борта.
Буксировочный огонь представляет собой желтый
огонь, имеющий такие же характеристики, как и кормо-
вой.
Круговой огонь представляет собой огонь, освещаю-
щий непрерывным светом дугу горизонта в 360°.
Проблесковый огонь представляет собой огонь, даю-
щий проблески через регулярные интервалы с частотой
120 или более проблесков в минуту.
151
По предписанной дальности видимости огней суда
разделены на три группы: суда длиной 50 м и более;
суда длиной 12 м и более,, но менее 50 м; суда длиной
менее 12 м.
Так, на судах длиной 50 м или более огни должны
быть видимы не менее как: топовый огонь—6 миль;
бортовой огонь—3 мили; кормовой огонь—3 мили; бе-
лый, красный, зеленый или желтый круговой огни —
3 мили; буксировочный огонь — 3 мили.
На судах длиной менее 12 м огни должны быть ви-
димы не менее как: топовый огонь — 2 мили; бортовой
огонь—1 миля; кормовой огонь—2 мили; буксировочный
огонь—2 мили; белый, красный, зеленый или желтый
круговой огни—2 мили.
Судно с механическим двигателем на ходу несет
следующие ходовые огни: топовый огонь впереди; вто-
рой топовый огонь позади и выше переднего топового
огня, однако судно длиной менее 50 м не обязано, но
может выставлять такой огонь; бортовые огни; кормо-
вой огонь.
Судно на воздушной подушке, находящееся в нево-
доизмещающем состоянии, в дополнение к вышеуказан-
ным огням, должно выставлять круговой проблесковый
желтый огонь.
Судно с механическим двигателем длиной менее 7 м,
имеющее максимальную скорость не более 7 уз, может
вместо огней, предписанных судам с механическим дви-
гателем, выставлять белый круговой огонь. Такое судно,
если это практически возможно, выставляет также бор-
товые огни.
Судно с механическим двигателем, занятое букси-
ровкой, должно выставлять: два топовых огня впереди,
расположенных по вертикальной линии. Если длина
буксира, измеренная от кормы буксирующего судна до
кормы буксируемого, превышает 200 м, — три таких ог-
ня (третий топовый огонь позади и выше передних; суда
152
длиной менее 50 м не обязано, но может выставлять та-
кой огонь); бортовые огни; кормовой огонь; буксировоч-
ный огонь, расположенный по вертикальной линии над
кормовым огнем; ромбовидный знак на наиболее вид-
ном месте.
Буксируемое судно или буксируемый объект должны
выставлять: бортовые огни; кормовой огонь; ромбовид-
ный знак на наиболее видном месте, если длина букси-
ра превышает 200 м.
Если толкающее судно и судно, толкаемое вперед,
жестко соединены в сочлененное судно, они должны рас-
сматриваться как судно с механическим двигателем
и выставлять соответствующие огни, ему предписан-
ные.
Парусное судно на ходу должно выставлять: борто-
вые огни и кормовой огонь. Если длина парусного суд-
на менее 12 м, то огни, предписанные парусному судну,
могут быть скомбинированы в одном фонаре, выставля-
емом на топе или около топа мачты на наиболее вид-
ном месте.
Парусное судно на ходу может в дополнение к
огням, выше указанным, выставлять на топе или около
топа мачты на наиболее видном месте два круговых
огня, расположенных по вертикальной линии, верхний
из которых должен быть красным, а нижний—зеленым,
но эти огни не должны выставляться вместе с комбини-
рованным фонарем, разрешенным для парусных судов
длиной менее 12 м.
Парусное судно длиной менее 7 м, если это практи-
чески возможно, должно выставлять огни, предписан-
ные выше парусному судну на ходу или парусному суд-
ну длиной менее 12 м. Если судно длиной менее 7 м их
не выставляет, оно должно иметь наготове электри-
ческий фонарик или зажженный фонарь с белым огнем,
который должен заблаговременно выставляться для
предупреждения столкновения.
153
Судно, идущее на веслах, может выставлять огни,
предписанные для парусных судов, но, если оно их не
выставляет, оно должно иметь наготове электрический
фонарик или зажженный фонарь с белым огнем и дей-
ствовать так, как предписано парусному судну длиной
менее 7 м.
Судно, лишенное возможности управляться, должно
выставлять: два красных круговых огня, расположен-
ных по вертикальной линии на наиболее видном месте;
два шара или подобных знака, расположенных по вер-
тикальной линии на наиболее видном месте. Если суд-
но имеет ход относительно воды, то, в дополнение к
указанным огням,—бортовые огни и кормовой огонь.
Судно на якоре выставляет на наиболее видном мес-
те в носовой части белый круговой огонь или шар, а
на корме или вблизи нее и ниже носового якорного
огня еще один белый круговой огонь. Если стоящее на
якоре судно имеет длину менее 50 м, то оно может вы-
ставлять один якорный огонь на наиболее видном мес-
те. Если такое судно имеет длину 100 м, то дополни-
тельно должны быть огни, освещающие его палубу.
Судно, ограниченное в возможности маневрировать,
должно выставлять: три круговых огня, расположен-
ных по вертикальной линии на наиболее видном месте;
верхний и нижний из этих огней должны быть красны-
ми, а средний — белым; три знака, расположенных по
вертикальной линии на наиболее видном месте; верхний
и нижний из этих знаков должны быть шарами, а сред-
ний—ромбом; топовые огни, бортовые и кормовой огонь»
если судно имеет ход относительно воды; если оно сто-
ит на якоре, то вместо топовых, бортовых и кормового
огней — якорные огни.
Судно на мели должно выставлять якорные огни и
дополнительно к ним два красных круговых огня и три
шара на наиболее видном месте, расположенных по
вертикальной линии.
154
Во всех случаях огни выставляют в темное время
суток, а знаки — днем.
Часть Д — Звуковые и световые сигналы. Содержит
шесть правил (32—37), в которых определены терми-
ны, описано оборудование для подачи звуковых сигна-
лов, предписаны сигналы маневроуказания и предупре-
ждения, звуковые сигналы при ограниченной видимости
и для привлечения внимания. Последнее правило регла-
ментирует подачу сигналов бедствия, предписанных
Приложением IV к настоящим Правилам.
Часть Е — изъятия. Содержит одно правило — 38.
Оно регламентирует вопросы, связанные с переобору-
дованием существующих судов для соблюдения ими тех-
нических требований новых МППСС—72.
МППСС—72 является официальным международ-
ным документом и охватывает широкий круг вопросов,
которые нуждаются в дополнительном разъяснении
многих толкований этих Правил в зависимости от об-
стоятельств и условий плавания. Наиболее полный ана-
лиз Правил и их комментарии приведены авторами в
книге «Новые МППСС» (см. список литературы).
Сигнализация на море
Морские суда оборудованы средствами внутренней и
внешней сигнализации в соответствии с требованиями
Правил Регистра СССР и Табелем снабжения судов мор-
ского флота. Хорошо организованная сигнальная служ-
ба, исправная и надежная работа сигнальных средств,
а также умение хорошо ими пользоваться являются
необходимым условием безаварийного плавания.
Сигнализацию разделяют на внутрисудовую и
внешнюю.
Внутрисудовая сигнализация предназначена для
обеспечения безопасности людей, судна и груза. К ней
155
относятся: авральная (оповещает об аврале), пожар-
ная (о пожаре и месте его возникновения), водяная
(о течи и месте поступления воды на судно), темпера-
турная (об изменении температуры в грузовых помеще-
ниях), служебная (о служебных распоряжениях) и т.'д.
Средства внешней сигнализации могут быть визу-
альными, звуковыми и радиотехническими. К внешней
сигнализации относятся Международный свод сигналов,
семафор, азбука Морзе, условные звуковые сигналы,
пиротехнические средства сигнализации и др.
Международный свод сигналов (см. форзац) слу-
жит для переговоров между судами и береговыми стан-
циями и т. д. Переговоры ведутся путем передачи со-
четаний групп букв какими-либо средствами связи.
Наиболее часто применяется флажная сигнализа-
ция. Имеется 40 флагов, которые состоят из 26 буквен-
ных (четырехугольной формы с различной расцветкой);
10 цифровых (треугольных с различной расцветкой); 3
треугольных, заменяющих любой из 36 основных флагов
в случае их повторения в одном и том же сигнале. По-
следний — один флаг (вымпел свода) — оповещает о
том, что переговоры ведутся по Международному своду
сигналов.
Свод содержит около 70 тыс. группосочетаний, со-
стоящих из одно-, двух-, трех-, четырех- и пятифлажных
сигналов. Их значение одинаково на всех языках. Фла-
ги поднимают один над другим и читают сверху вниз.
Однофлажные (однобуквенные) сигналы предназна-
чены для срочных и важных сообщений; двухфлажные—
сигналы бедствия, маневрирования, повреждения, на-
вигации, метеорологии и т. д.; трехфлажные — сигналы,
служащие для различных переговоров общего характе-
ра, и т. д-
Сигналы набирают и разбирают по. книгам свода,
которые издают многие государства на своем языке с
приведением английского перевода. Отечественный свод
156
состоит из двух книг — разборной и наборной. В разбор-
ной в алфавитном порядке расположены сигналы и ря-
дом приведено их значение на русском и английском
языках. В наборной книге расположены по алфавиту
основные слова передаваемых фраз, затем сами фразы,
а рядом — соответствующие сигналы.
Семафор представляет собой азбуку, в которой
каждой букве соответствует определенное расположе-
ние рук. Удобен для переговоров днем с людьми на
шлюпках и при различных аварийных обстоятельствах.
Ночью применяют световую сигнализацию по азбу-
ке Морзе. В ней буквы соответствуют определенным со-
четаниям точек и тире. Для переговоров по азбуке Мор-
зе может быть использован любой источник света. Ко-
роткая вспышка означает точку, длинная — тире.
Звуковые сигналы передают гудками, сиренами,
свистками, воздушными тифонами, колоколами и т. д.
В портах, на берегах каналов и побережьях морей
расположены сигнальные станции. Они следят за дви-
жением судов и сигналами с них, за погодой, сообщают
судам гидрометеорологическую и навигационную инфор-
мации и т. д. Сигнализация производится днем с по-
мощью сочетаний фигур (шаров, цилиндров, конусов),
флагов, ночью — сочетаний огней различного цвета.
Морские суда независимо от размеров и назначения
должны быть оборудованы и снабжены средствами
сигнализации в соответствии с Правилами Регистра
СССР (Правила классификации и постройки морских
судов, ч. V «Сигнальные средства») и Международными
правилами для предупреждения столкновений судов в
море.
Смысловое значение сигнализации определяют: Меж-
дународные правила для предупреждения столкновений
судов в море, Международный свод сигналов и условные
значения сигналов определенных служб.
157
Счисление пути судна
Обеспечение безопасности плавания и экономичность
перехода — два важнейших условия, определяющих
выбор пути судна из одного пункта в другой. Эти усло-
вия очень часто противоречат друг другу, поэтому вы-
бор пути для судна является сложной задачей, требу-
ющей тщательного изучения районов плавания. Снача-
ла выбранный путь, по которому должно следовать суд-
но, наносят на генеральную карту в виде прямых
линий с указанием их истинных курсов. Этот подгото-
вительный этап принято называть предварительной про-
кладкой. Особое внимание обращают на то, чтобы из-
бранный путь имел достаточные глубины и был без-
опасен в навигационном отношении. Точки поворотов
должны избираться так, чтобы их можно было опреде-
лить легко и быстро, например удобно выбирать точки
поворотов, когда береговые предметы находятся на
траверзе судна, т. е. когда их курсовые углы равны 90°,
или на определенном пеленге, или когда судно проходит
створ каких-либо двух береговых предметов и т. д.
Кроме того, надо позаботиться о том, чтобы во вре-
мя следования по избранному пути можно было произ-
водить достаточное количество наблюдений для опреде-
ления места судна. Хорошо, когда на берегу достаточ-
но световых маяков, радиомаяков и других известных
приметных объектов. При предварительной прокладке
заранее рассчитывают протяженность каждого курса, а
затем подсчитывают общее число миль и время всего
перехода.
Переход должен быть выбран с наименьшей затра-
той времени на его осуществление. Для этого следует
учитывать гидрометеорологические условия плавания,
например течения и попутные ветры.
Итак, изучая переход по картам, лоциям и другим
навигационным пособиям, капитан судна выбирает
158
кратчайший и наивыгоднейший путь и выполняет пред-
варительную прокладку на генеральных картах всего
предстоящего перехода.
Затем необходимо обеспечить движение судна по
намеченному пути. Учитывают движение судна графи-
ческим методом или путем вычислительного процесса,
конечные результаты которого наносят на карту. Пер-
вый принято называть графическим счислением пути,
или прокладкой, второй — письменным счислением.
Прокладка имеет существенное преимущество по срав-
нению с письменным счислением — она наглядна, по-
этому и является основным методом учета движения
судна.
Прокладку выполняет штурман на путевых навига-
ционных картах с помощью прокладочного инструмен-
та: транспортира, параллельной линейки и циркуля-из-
мерителя. Положение судна наносят на карты путем
отложения пройденных расстояний в направлении его
движения.
Вблизи берегов, где обычно небольшие глубины и
очень часто встречаются подводные и надводные опас-
ности, штурман ведет особенно тщательную прокладку.
Допущенные ошибки могут повлечь за собой аварию и
даже гибель судна.
3 августа 1961 г. танкер «Казбек» с грузом нефте-
продуктов вышел из Мурманска и следовал в Тикси.
5 августа погода была пасмурной и дул северо-восточ-
ный ветер. В 4 ч 40 мин штурман, определяя место
судна по радиолокатору, допустил грубую ошибку, при-
няв о. Бритвин за мыс Кусов Нос. В связи с этим про-
ложенные на карте курсы судна огибали опасности.
В действительности же судно следовало на банку Про-
кофьева. В 6 ч 20 мин эхолот показал уменьшение
глубин, но на «Казбеке» не обратили на это внимание.
В 6 ч 26 мин танкер почти на полной скорости сел на
159
каменистую банку. Он получил значительные поврежде-
ния днища и потерял около 200 т груза.
Переход, или рейс, судна начинается с момента вы-
хода его из порта или снятия с якоря. Выход из порта
или отход от места якорной стоянки на чистую воду
осуществляется по планам или по подробным картам с
наиболее крупным масштабом. В окружающей обста-
новке ориентируются на глаз. На этом начальном этапе
перехода судоводителю необходимы большой опыт, хо-
рошее знание мореходных качеств своего судна и уме-
ние им управлять. Выйти из иностранного порта, кото-
рый незнаком капитану судна, или из порта со слож-
ной навигационной обстановкой капитану помогает
лоцман. По выходе на чистую воду определяют место
судна по береговым предметам. Полученное на карте
точное место судна является начальной точкой, от кото-
рой начинают вести прокладку.
Начальная точка в зависимости от местных условий
может быть определена различными способами. Обыч-
но ее определяют по пеленгам маяков или по каким-ли-
бо другим хорошо заметным береговым предметам.
Исходная точка, поскольку она получена из наблю-
дений, носит название обсервованной. Ее обводят не-
большим кружком, центр которого указывает место суд-
на. У исходной точки в виде дроби записывают судовое
время (числитель) и показание лага (знаменатель).
Все места, получаемые графическим путем на ос-
новании показаний лагов и компасов, называют счис-
лимыми точками. Их отмечают на проложенной линии
курса небольшой черточкой. У счислнмых точек также
записывают судовое время и показания лага. Такая
система записей позволяет вести непрерывный учет
движения судна и в любой момент проверять его
место.
В ряде случаев лаг может отсутствовать (яхты, ка-
тера и т. д.) или быть неисправным. Тогда вместо от-
160
-30' 45' 136" 15' 30' 45'
Рис. 29. Графическая прокладка пути судна с учетом дрейфа
и течения
счетов лага записывают скорость, которая определяется
по оборотам винта или другими способами, которые
описаны ранее.
Остановимся на графической прокладке пути судна.
На рис. 29 показана такая прокладка с учетом дрейфа
и. течения.
На картах прокладывают только линии истинных
курсов, о которых говорилось выше. Над линиями ис-
тинных курсов надписывают компасные курсы, а в скоб-
ках — поправки компасов. Для того чтобы судно пе-
ремещалось по линии истинного курса, рулевой должен
держать компасный курс.
Географическую широту любой точки на навигаци-
онной карте определяют ее параллелью по левой или
по правой боковой рамке, а долготу — меридианом по
верхней или по нижней рамке карты. Пройденные рас-
стояния (в милях) снимают циркулем-измерителем с
боковой вертикальной рамки карты примерно в той
широте, в которой расположено измеряемое расстояние.
6—3723 161
На боковой рамке карты 1 мин широты соответству-
ет 1 миле.
Несколько усложняется прокладка при наличии дрей-
фа и течения. Дрейф — это перемещение судна под
действием ветра. Ветер отклоняет судно с избранного
курса и изменяет его скорость. Больший дрейф у тех
судов, которые имеют высокие надводные борта, разви-
тые надстройки и неглубоко погружены в воду. Осо-
бенно большой дрейф у парусных судов.
Угол между направлением ветра и диаметральной
плоскостью судна принято называть курсовым углом
ветра. Направление ветра определяется наименованием
той точки горизонта, откуда он приходит, или, как го-
ворят моряки, ветер «дует в компас». В зависимости от
курса относительно ветра движение судна получило раз-
личные названия (рис. 30). Если ветер дует с носа (его
курсовой угол равен 0°), то ветер считается противным;
при остром курсовом угле ветра, равном примерно 45°,
говорят, что судно идет в бейдевинд; при боковом ветре
(курсовой угол около 90°) —судно идет в галфинд; при
ветре с кормы (курсовой угол примерно 135°) — судно
идет в бакштаг; когда ветер дует в корму, судно идет по-
путным ветром, или на фордевинд. В тех случаях, когда
ветер дует с правого борта, говорят, что судно идет
правым галсом, если с левого — левым галсом. Силу
ветра определяют по скорости движения частиц возду-
ха с помощью прибора анемометра или оценивают ее
по баллам шкалы Бофорта.
Дрейф легко обнаружить по отклонению струи во-
ды за кормой судна от его диаметральной плоскости.
Существуют разные способы определения дрейфа, но
все они сводятся к определению величины этого угла.
Линию действительного перемещения судна при на-
личии дрейфа принято называть линией пути судна, а
угол, который она составляет с северной частью мери-
диана, — путевым углом судна.
162
Рис. 30. Направление
движения судна относи-
тельно ветра
Рис. 31. Дрейф судна при наличии ветра
6*
Как видно из рис. 31, если судно идет левым галсом,
то ветер сносит его вправо. В этом случае линия пути
будет правее линии истинного курса на угол, равный
дрейфу, а его путевой угол будет больше истинного кур-
са, т. е. ЛУ=ЯК4-ал/г. При правом галсе линия пути
будет левее истинного курса, а путевой угол судна —
меньше истинного курса, т. е. ПУ=ИК.—апр/т- По этим
соотношениям рассчитывают путевой угол судна, если
задан истинный курс и известен дрейф, или находят ис-
тинный курс, на который следует ложиться при нали-
чии дрейфа, чтобы судно перемещалось по заданному
пути.
Изучить влияние ветра на движение судна очень
сложно, так как ветер создает волну и дрейфовое тече-
ние, которые также влияют на скорость судна. В СССР
по изучению природы дрейфа и его влияния на скорость
судна большие работы проведены в Государственном
океанографическом институте и в Центральном научно-
исследовательском институте морского флота
(ЦНИИМФ).
Перемещения масс морской воды называют мор-
ским течением. Морские течения имеют направление и
скорость. Направление определяется направлением точ-
ки горизонта, куда направлено течение, или, как при-
нято говорить, «течение идет из компаса». Его скорость
иногда достигает значительной величины (например,
течение Гольфстрим у Флориды имеет скорость около
5 уз).
Для навигации течения подразделяют на три вида:
постоянные, приливо-отливные и дрейфовые, или ветро-
вые. Данные о течениях (их скорость и направление)
выбирают из лоций, атласов течений и специальных, из-
даваемых ежегодно пособий по приливам и приливо-
отливным течениям.
Данные о течениях в различных пособиях иногда
могут расходиться с действительностью. Эти расхожде-
164
ния большей частью обусловлены влиянием ветра на
верхние слои воды.
Если на судно действует течение, то необходимо со-
блюдать особую осторожность и чаще определять место
судна. Затем, сопоставляя счислимые и обсервованные
места, при отсутствии ветра более достоверно опреде-
ляют направление и скорость течения, что улучшает
дальнейшее счисление пути судна.
Учет течения в счислении пути судна более сложен,
чем учет дрейфа. Если масса воды неподвижна, то дви-
жение судна относительно воды совпадает с его движе-
нием относительно дна моря и берегов. В случае, когда
вода при наличии течения перемещается, то действи-
тельное перемещение судна будет происходить по рав-
нодействующей скорости собственного перемещения и
скорости течения, а диаметральная плоскость судна
будет сохранять направление заданного курса. Лаги не
учитывают течения, так как оно не вызывает дополни-
тельного смещения судна относительно перемещающей-
ся воды. Это следует учитывать при графическом счис-
лении пути судна, так как, кроме учета пройденного
расстояния по лагу, надо учитывать и течение.
Течение относительно движения судна может быть
направлено в левый или в правый борт. Если течение
направлено в левый борт, то путевой угол судна боль-
ше истинного курса и линия пути будет располагаться
правее линии курса. В этом случае действительно ра-
венство
пу = ик + ₽.
Если течение направлено в правый борт, то
ПУ = ик — ₽.
Для иллюстрации сказанного может служить рис. 39,
на котором под стрелкой «ветер» следует понимать на-
165
правление течения, а угол дрейфа а — считать углом
течения р.
Сумму углов аир называют суммарным углом сно-
са, т. е. С=а+р. При прокладке пути судна на карте
можно писать только значение угла С.
Навигация, а следовательно, и счисление пути в ус-
ловиях плавания во льдах Арктики и Антарктики ос-
ложнено по многим причинам. В больших широтах нет
плавучего навигационного ограждения, магнитный и
гироскопический компасы работают менее надежно,
практически невозможно пользоваться лагами (из-за
предосторожности поломок убирают днищевые прием-
ные трубки), суда часто меняют курсы и режим работы
двигателей, наличие льда сопровождается плохой види-
мостью, затрудняется использование радиолокационной
станции (РЛС), возникают трудности в определении
дрейфа, постоянные заботы об обеспечении безопасно-
сти корпуса судна и т. д.
Плавание во льдах осуществляется под проводкой
ледокола и самостоятельно. При плавании путь судна
стремятся выбирать по чистой воде или в местах наи-
более слабого или разреженного льда. Выбор маршрута—
ответственная и трудная задача. Для этого судово-
дитель использует карты ледовой обстановки, данные
авиаразведки, информацию впереди идущих судов и т. д.
Когда среди льдов выбирают наивыгоднейший путь,
то часто изменяют курс судна и его скорость. Графиче-
ская прокладка становится слишком громоздкой. Еще
адмирал С. О. Макаров предложил прокладывать на
картах генеральный курс (средний) и пройденное рас-
стояние за определенный промежуток времени (обычно
за 1 ч). Для этого в табличной форме через каждые
5—6 мин. записывают компасный курс КК и возможно
чаще скорость судна V. Затем путем осреднения получа-
ют генеральный курс и среднюю скорость за 1 ч и
прокладывают нх от последнего счислимого места. В
166
итоге получают счислимое место судна по истечении
каждого часа плавания во льду.
Скорость судна определяют по оборотам, РЛС и по
методу «планширного» лага. Метод «планширного» лага
наиболее распространенный. На лед бросают заметный
предмет и при прохождении им траверзов двух крайних
точек на судне замечают время. Получив промежуток
времени и зная пройденное расстояние, легко рассчи-
тать скорость. Для удобства по известному расстоянию
заранее составляют рабочую таблицу. Вместо выбрасы-
ваемого за борт предмета можно воспользоваться про-
ходящей льдиной.
Трудности плавания во льдах обязывают судоводи-
теля тщательно вести счисление пути судна и принимать
все меры по обеспечению безопасности судовождения.
Все основные данные счисления пути судна заносят
в судовой журнал, являющийся одним из важнейших су-
довых документов. Сведения об обстоятельствах пере-
хода записывают в судовой журнал так, чтобы по ним
можно было восстановить заново всю прокладку. Кар-
ты с нанесенными на них прокладками, определениями
и всеми записями сохраняют до начала следующего рей-
са. В случае аварии и оказания помощи судам по спа-
сению карты с прокладкой сохраняют до полного за-
вершения разбора аварии.
Определение места судна
по навигационным ориентирам
Выше мы говорили о том, что положение судна может
быть определено при помощи счисления пути. Однако
как бы тщательно не велась графическая прокладка
пути судна, она не может обеспечить безопасность пла-
вания. В показаниях компаса и лага всегда существуют
167
какие-то неучтенные погрешности, например не всегда
удается точно учесть дрейф и течение. Эти и ряд других
причин приводят иногда к значительным отклонениям
судна от намеченного пути, т. е. в счислении пути на-
капливаются погрешности. Поэтому определение места
судна, особенно вблизи берегов или вблизи навигаци-
онных опасностей, — необходимое условие обеспечения
безопасности мореплавания.
В основу способов определения места ’ судна,,
т. е. определения его широты и долготы, положены из-
мерения расстояния или направлении (или тех и дру-
гих) до маяков. Выбор способа для определения места
судна (обсервации) зависит от желаемой точности и от
расположения маяков или других каких-либо берего-
вых ориентиров.
Определить место судна можно аналитическим или
графическим путем. Аналитический метод более трудо-
емкий, требующий решения задач по тригонометрии,
поэтому он применяется редко и большей частью носит
вспомогательный характер. Основным методом, кото-
рый широко вошел в штурманскую практику, является
графический, или графоаналитический.
Все методы определения географических координат
места судна основаны на понятии о линии положения
(навигационной изолинии). Линия положения — это та-
кая линия, все точки которой имеют одинаковое посто-
янное значение измеренной величины, т. е. навигацион-
ного параметра.
В судовождении используют следующие основные
линии положения: пеленг, расстояние, горизонтальный
угол, разность расстояний и отношение расстояний.
В чем сущность каждой линии положения и как она
может быть использована для определения места судна?
Рассмотрим это с помощью рис. 32.
С помощью компаса получают компасный пеленг
маяка А и, исправив его поправкой компаса, опреде-
168
Рис. 32. Навигационные определения места судна по пеленгам (а);
расстояниям (б); горизонтальным углам (в); гиперболическим ли-
ниям положений (г)
ляют истинный пеленг. Теперь проложим на карте ли-
нию пеленга АП под углом к меридиану, равным истин-
ному пеленгу (рис. 32, а). Линия пеленга проходит че-
рез маяк А и место судна. Можно утверждать, что в
момент взятия пеленга судно находилось где-то на этой
линии, ибо в противном случае значение пеленга было
бы другим. Прямая линия пеленга АП, которая в мо-
мент наблюдения имела значение ИП, и будет на-
зываться в данном случае линией положения — пе-
ленгом.
Одна линия положения еще не определяет места
судна. В тот же момент необходимо заметить и проло-
жить на карте пеленг другого маяка — В. Те же рас-
суждения приводят к выводу, что судно одновременно
находится и на другой линии положения, т. е. пеленге
ВП{. Следовательно, местом судна будет точка пересе-
чения двух линий пеленгов маяков А и В.
Способ определения места судна по двум пеленгам
широко применяется в судовождении. Он прост, доста-
точно точен, удобен в наблюдениях, особенно учитывая,
что в пределах видимости судна обычно бывает не ме-
нее двух маяков.
С большей надежностью определяют место судна,
когда наблюдают три маяка. В этом случае место суд-
на будет на пересечении трех линий пеленгов. Третий
пеленг одновременно служит контролем достоверности
определения. Кроме маяков, пеленгуют и другие объек-
ты (мысы, отдельные островки, горы, утесы, памятники,
приметные строения и т. д.), положения которых нане-
сены на картах.
При прокладке трех пеленгов может образоваться
треугольник погрешностей. Его появление вызывают
случайные и систематические погрешности. Если он по-
явился вследствие случайных погрешностей, то размеры
его малы и не превышают 0,5 мили, т. е. размеров
случайных погрешностей. Место судна в таком случае
170
принимают либо в его центре, если треугольник равно-
сторонний, либо ближе к малой стороне.
Большой треугольник появляется в том случае, когда
допущен промах или имеются систематические погреш-
ности. Чтобы установить причину, повторяют наблюде-
ния. Если повторная прокладка по-прежнему дает боль-
шой треугольник, тогда он вызван систематической по-
грешностью.
Систематические погрешности происходят из-за не-
верного положения пеленгуемого объекта на карте, не-
правильной поправки компаса и неодновременного пе-
ленгования объектов. Чтобы исключить погрешность в
пеленге из-за неверного положения на карте пелен-
гуемого объекта, следует сменить объекты пеленго-
вания.
Систематическую погрешность, вызванную погреш-
ностью в принятой поправке компаса, легко определить
и исключить. Для этого изменяют на несколько градусов
полученные компасные пеленги и заново их проклады-
вают на карте. Вновь полученный треугольник может
оказаться больше или меньше прежнего, но подобный
ему. После этого подобные вершины треугольников сое-
диняют прямыми, которые пересекутся в одной точке.
Полученная точка будет местом судна, свободным от си-
стематической погрешности (в пределах случайных по-
грешностей наблюдений). Саму систематическую по-
грешность, в данном случае поправку компаса, опреде-
ляют следующим образом. С карты снимают значения
истинных пеленгов и, сравнивая их с соответствующими
компасными пеленгами, вычисляют поправку компаса
как среднее значение из трех разностей между истин-
ными и компасными пеленгами.
Что касается пеленгования, в котором измеренные
пеленги должны соответствовать одному моменту, то
необходимо всегда придерживаться следующего поло-
жения. В первую очередь пеленгуют объект, находя-
171
щийся ближе к диаметральной плоскости судна, и во
всех случаях наблюдения выполняют быстро.
Если пеленгование по каким-либо причинам проис-
ходит медленно, а судно имеет большую скорость, то
для уменьшения погрешности от разновременного пе-
ленгования пеленги необходимо приводить к одному
моменту. Для этого пеленгуют первый объект и полу-
чают пеленг П\, затем второй — П2 и снова первый —
771". Полагая, что пеленги измеряются пропорционально
времени, рассчитывают средний из пеленгов первого
объекта
Для определения места прокладывают пеленги 771 и
П2. Судовое время и показание лага замечают при взя-
тии второго пеленга П2.
Если место определяют по трем ориентирам, то на-
блюдения и расчеты проводят аналогично предыдущим.
Судовое время и отсчет лага записывают у обсервован-
ной точки.
Расстояния до маяков или других каких-либо при-
метных объектов наиболее часто измеряют при помощи
радиолокаторов, реже — дальномером. Существуют и
другие способы, которые применяются большей частью
на малых судах и яхтах, где отсутствуют радиолокато-
ры и дальномеры. Например, можно рассчитать рас-
стояние D, если измерить секстаном угол видимого
предмета а, высота Н которого заранее известна. Рас-
четы производятся по формуле D=//ctga. Для удоб-
ства в Мореходных таблицах приведена таблица рас-
стояний по вертикальному углу. Расстояния (в милях)
приведены по высоте предмета и вертикальному углу.
Сведения о высоте предмета (маяк, огонь) можно по-
лучить из пособия «Огни и знаки», лоций и т. д.
172
После того как получено расстояние, например D\,
от судна к маяку А (рис. 32, б), его принимают за ра-
диус и строят окружность, центр которой совпадает с
маяком А. Здесь линией положения является окруж-
ность и можно утверждать, что место судна находится
где-то на этой окружности, так как все ее точки рав-
ны измеренному расстоянию до маяка А. Измерив рас-
стояние Di до второго маяка В, получают вторую ли-
нию положения — тоже окружность. Таким образом,
судно находится одновременно и на второй окружности.
Следовательно, место судна будет в точке пересечения
этих окружностей.
Определение места судна по горизонтальным углам
основано на свойстве вписанных в окружность и опира-
ющихся на одну и ту же дугу углов. Известно, что все
вписанные углы, вершины которых лежат на окружно-
сти и опираются на одну и ту же дугу, равны между
собой. Отсюда следует, что если измерить с судна угол
а между двумя маяками А и В (рис. 32, в), то на кар-
те можно провести окружность, вмещающую этот угол
и проходящую через оба маяка. Судно находится на
этой окружности. Если дополнительно измерить еще
один угол между одним из этих маяков и третьим, то
получим дополнительную окружность. На пересече-
нии этих двух окружностей будет обсервованное место
судна.
Определение места судна по горизонтальному углу
является одним из наиболее точных способов. Его до-
стоинство заключается еще и в том, что отпадает не-
обходимость в пеленговании. Последнее обстоятельство
важно тем, что на некоторых судах, например яхтах,
не всегда имеется нактоуз или пеленгование невозмож-
но произвести по каким-либо причинам.
Рассмотрим практическую сторону самого общего
случая, когда измерены углы трех смежных объектов
А В и С (рис. 33). Углы измеряют секстаном (см. ни-
173
Рис. 33. Определение
места судна по горизон-
тальным углам
же). Чтобы измерения привести к одному моменту, вна-
чале измеряют угол он, например между объектами А
и В, затем угол 0 между объектами В и С и угол ме-
жду первыми объектами, который теперь будет сс2. Тог-
да для момента измерения угла 0 соответствует сред-
нее значение угла
а1 + а2 .
“ 2
Показания судового времени и лага замечают в мо-
мент измерения угла 0. Построения проще выполнять
с помощью кальки. Для этого из произвольной точки
О на кальке проводят прямую ob и по обе стороны от
нее у точки О строят углы а и 0. Затем накладывают
кальку на карту и двигают ее так, чтобы добиться од-
новременного прохождения прямых оа, ob и ос через
объекты Д В и С. Место судна на карту можно пере-
нести уколом циркуля в точке О.
Существует еще много других линий положения
(изолиний). Здесь уместно упомянуть о тех, которые
174
образуются постоянством разности расстояний, измеряе-
мых до двух маяков:^ — Д2 = ДД; Д[ — Д2 = и т. д.
В данном случае линией положения будет гипер-
бола (см. рис. 32, г).
Гиперболические линии положения широко приме-
няются в современных радионавигационных системах,
предназначенных для определения места судна.
Во всех случаях мы рассмотрели однотипные линии
положения и определили, как ими пользуются при на-
хождении места судна. В практике судовождения час-
то применяются комбинированные способы, например,
пеленг и расстояние, горизонтальный угол и пеленг и
т. п. Выбор и применение их зависят от точности ра-
боты навигационных приборов, расположения береговых
ориентиров, гидрометеорологических условий плавания
и ряда других причин.
Все эти методы в основном носят визуальный харак-
тер наблюдений и обладают большой точностью.
Существует много различных способов оценки точ-
ности обсервации, каждый из которых приемлем для
определенного метода получения места судна.
Мы уже говорили о том, что роль обсерваций в
счислении пути судна огромна. Они не только уточня-
ют положение места судна, но и вводят исправления в
принятые для этого поправки лага и компаса, а также
уточняют принятые величины дрейфа и течения. В тех
случаях, когда обсервованное место не совпадает со
счислимым на одно и то же судовое время, в счислении
пути судна вводят исправления. На карту наносят об-
сервованное место, делают невязку от счислимого мес-
та к обсервованному и далее от него ведут прокладку.
С развитием мореплавания улучшились навигацион-
ные приборы и методы счисления пути, но особенно
развились способы и средства определения места суд-
на. В этой области большие заслуги принадлежат со-
ветскому ученому В. В. Каврайскому.
175
Определение места судна
по небесным светилам
Мореходная астрономия как наука, изучающая спосо-
бы определения места судна в море по небесным све-
тилам, возникла в XV в. В истории ее развития особо
важное место занимает изобретение секстана и хроно-
метра, а затем открытие и освоение высотных линий по-
ложения.
Астрономические методы определения места судна
в море имеют ряд преимуществ, например: полная не-
зависимость определений от береговых объектов, про-
стота инструментов, служащих для наблюдений, неза-
висимость точности определения от расстояния судна
до берега. Последнее преимущество выгодно отличает
астрономические методы от радиотехнических. Вместе
с тем астрономические методы имеют и свои недостат-
ки: в плохую погоду (облачность, туман и т. д.) место
судна определить невозможно; астрономические вычис-
ления трудоемки и требуют специальных знаний и на-
выков.
Сущность астрономических определений места суд-
на в море сводится к построениям на морской карте
линий положения, пересечение которых дает обсервован-
ное место судна. Эти линии называют высотными ли-
ниями положения. Измеренные высоты светила из лю-
бой точки высотной линии положения этого светила бу-
дут равны между собой.
Таким образом, любое определение места судна ос-
новано на измерении высоты светила, соответствующих
вычислениях и построениях высотных линий положения
на морской навигационной карте.
Измерение высоты светила в море и приборы, слу-
жащие для этой цели, существенно отличаются от ме-
тодики измерения высоты на суше и береговых прибо-
167
ров, которые предварительно устанавливают на проч-
ную основу (фундамент, треногу и т. д.). Горизонталь-
ные круги астрономических приборов при помощи уров-
ней устанавливают в плоскости горизонта, а плоскости
вертикальных кругов должны проходить через зенит.
После этого из наблюдений получают высоты светил
или другие какие-либо величины.
Основным морским астрономическим угломерным ин-
струментом является секстан. Этим прибором измеряют
высоты светил над видимым морским горизонтом. Изме-
рение высот светил основано на принципе совмещения
в поле зрения трубы секстана прямо видимого горизон-
та и дважды отраженного от зеркал светила.
Секстан принадлежит к точным штурманским прибо-
рам (рис. 34). Он состоит из рамы 1, лимба 2, боль-
шого зеркала 8, малого зеркала 7, астрономической или
земной трубы 10, алидады 3, бесконечного винта с от-
счетным барабаном 4, светофильтров перед большим и
малым зеркалами 6, 5, подъемного механизма 9. Боль-
шое зеркало перпендикулярно плоскости лимба секста-
на и вращается вокруг оси, перпендикулярной лимбу.
Малое зеркало также перпендикулярно плоскости лим-
ба, но неподвижно. Оба зеркала установлены так, что
их отражающие поверхности направлены друг к
Другу.
При измерении высоты наблюдатель смотрит через
трубу на горизонт. Лучи от светила падают на большое
зеркало, отражаются от него и падают на малое
зеркало. Затем отражаются от малого зеркала и попа-
дают в поле зрения трубы. Такой ход лучей будет толь-
ко при определенной установке большого зеркала, вра-
щающегося вокруг оси. В поле зрения трубы светило
Должно быть совмещено с горизонтом. Когда дважды
отраженное изображение светила и горизонт совмеще-
ны, т. е. усматриваются по одному направлению, то угол
между направлениями на действительное светило и го-
177
Рис. 34. Секстан
ризонтом равен удвоенному углу между зеркалами.
Угол между зеркалами измеряют с помощью лимба.
Так как оцифровка штрихов на лимбе увеличена в два
раза, то, снимая отсчет с лимба, получают величину
измеряемой высоты светила.
Для определения места судна астрономическим спо-
собом необходимо знать истинную геоцентрическую вы-
соту светила, т. е. угол между плоскостью истинного
горизонта и направлением из центра Земли в центр
светила. Для того чтобы перейти от измеренной секста-
ном высоты к истинной, необходимо ввести ряд попра-
вок, основные из которых следующие: астрономическая
рефракция, наклонение видимого горизонта, радиус све-
тила и параллакс.
Лучи от небесных светил, проходя через земную ат-
мосферу, преломляются. В атмосфере лучи идут по
изогнутой кривой, обращенной выпуклостью в сторону
зенита. Поэтому у глаза наблюдателя возникают два
направления: одно на истинное положение светила, а
другое на его видимое место. Угол между этими на-
178
правлениями составляет астрономическую рефракцию.
Величина астрономической рефракции зависит от высо-
ты светила. У горизонта, где луч проходит сравнитель-
но большую толщину атмосферы, рефракция дости-
гает наибольшей величины — 35'. Эта величина по-
чти равна видимому диаметру Солнца (32'). Если
светило находится в зените, то его рефракция равна
нулю.
Вторая поправка — наклонение видимого горизон-
та, т. е. угол между плоскостью истинного горизонта и
направлением на видимый горизонт. Наклонение гори-
зонта зависит от высоты глаза наблюдателя над уров-
нем моря. Чем больше высота глаза, тем больше нак-
лонение горизонта и наоборот.
Как уже говорилось ранее, у светил, имеющих боль-
шой видимый угловой диаметр (Солнце, Луна), изме-
ряют высоты нижнего края диска. Для расчетов
необходимо знать высоты центра светила. Поэтому из-
меренную высоту исправляют поправкой за угловую ве-
личину радиуса и получают высоту центра светила.
Значение угловой величины радиуса светила берут из
Морского астрономического ежегодника (МАЕ). Еже-
годник составляет и разрабатывает Ленинградский ин-
ститут теоретической астрономии Академии наук СССР,
а издает Главное управление навигации и океанографии
МО. В МАЕ приводятся данные о положении светил на
все даты года и на целые часы гринвичского времени,
а это дает возможность вычислять положения светил
на любое время.
В чем заключается идея астрономического оп-
ределения места судна в море по линиям равных
высот?
Если во время измерения высот двух каких-либо
светил заметить моменты по хронометру, который уста-
новлен по гринвичскому времени, то с помощью МАЕ
можно вычислить их гринвичские часовые углы /rpi и
179
Рис. 35. Круг равных
высот
Л-рс1, а также склонения этих светил 61 и бг1 2, т. е. не-
бесные координаты, указывающие положение светил на
небесной сфере.
Изобразим Землю и небесную сферу так, чтобы их
центры находились в центре Земли О (рис. 35). Ду-
га qq' — земной, а дуга QQ' — небесный экваторы.
Точки и Ра соответственно будут земной полюс и
полюс мира. В точке Гр находится Гринвич, а его зе-
нит — на небесной сфере в точке Zrp. На Земле грин-
вичский меридиан изображается дугой ркГ-pq, а на не-
бесной сфере — меридиан, проходящий через зенит
Гринвича, PnZ^Q. Рассмотрим на небесной сфере све-
тило, находящееся в точке А. Проекцию этого светила
на земную поверхность (точка а) принято называть по-
люсом освещения.
1 Гринвичский часовой угол — дуга небесного экватора от
гринвичского меридиана до меридиана светила.
2 Склонение — дуга меридиана светила от небесного эквато-
ра до светила.
180
Теперь измерим секстаном высоту светила А и вы-
числим его зенитное расстояние z=90°—h. После это-
го, приняв за центр полюс освещения а светила А, по-
строим окружность со сферическим радиусом, равным
полученному зенитному расстоянию. Все точки этой ок-
ружности обладают тем свойством, что они будут рав-
но удалены от полюса освещения на расстояние z =
=90°—/1.
Из этого вытекает важный практический вывод, а
именно: если измерять высоты светила А из любой точ-
ки окружности aj'Pi, то все высоты будут равны между
собой. Такая особенность свойственна только точкам
этой окружности, поэтому ее называют окружностью
равных высот. В дальнейшем, как это принято в судо-
вождении, ее будем называть кругом равных высот,
или кругом равных зенитных расстояний.
Итак, если измерить высоту светила А и вычислить
его зенитное расстояние z, затем из полюса освещения
а сферическим радиусом, равным полученному зенит-
ному расстоянию, провести круг, то можно утверж-
дать, что место судна находится где-то на этом круге
равных высот. Но это еще не определяет точное место
судна.
Необходимо еще измерить высоту второго светила,
вычислить его зенитное расстояние и, воспользовав-
шись им, провести второй круг равных высот. Очевидно,
что судно должно находиться и на этом круге.
Удовлетворить условию, чтобы судно одновременно-
находилось на обоих кругах равных высот, возможно
только в том случае, если судно будет находиться в
точке пересечения этих кругов. Но круги равных высот
пересекаются в двух точках, расстояние между которы-
ми очень большое и исчисляется тысячами миль, на-
пример, если одна точка находится в Тихом океане, то
Другая может оказаться, в Атлантическом или даже
где-то на материке. В какой именно точке находится
181
в данный момент судн^кТ^
координаты, так как ош' м счи^ редк^
гает 30-40 миль. стро% 1Я °%леления ме.
Все рассмотренные ^Ть н Чя Г * г^еде q
ста судна легко выполН^^све>^ зем^ необ> ' 3
на него нанести полюс дгот^ния, к /од им по
координаты: широту и Д м ocl Та* й наЛти^ в зе.
ношению к своим полю^ать1 ещейЯ 0 г Одятс*‘че
ните, то небесные коорЛени^ ^вет^ иМ^ЗующуК)
координаты полюса осве^ая к буду* рав^ Мнению
зависимость: географичек ЛИроЛ/ у/ускЛсВетила’
а долгота — гринвичски ичс ДС0В(?^р0Й лу •
Склонение светила и гр^вак^й ч^oiHb^™g п0 3^
нее упоминалось, рассчй*етр * с п<йт ^^ений.
меченному времени хрой^ ов * м<й н^люД ГЛ(К
После нанесения поЛ*> х нд^ещ^ кРУьЛ“ ных вы.
бусе необходимо вокруг * зе1|^ртй| асс-Л ИЗМе.
сот с радиусами равный ая кЧ>ныМ Хому0*™* точкд
ренных светил. Ближай^ х в УчисЛ дСТ “Цитель,
пересечения кругов рав^бсер/^от %й то. де"с
ным местом судна, т. е- рА>ва/ вЫсЛкои- зеМноМ
Чтобы ПОСТРОИТЬ КРУ ИМО^НЫХ стИ Vp^yrH, по.
глобусе с учетом необХ/Г Дц точЛ пр к 1 околп
требуется большая сфеРл0ОГО ^Метр^ пр^МеР^сКИ Hq
7 Такие размеры 3$.
позволяют работать с ши ^бне^ й> нд °™рых ве.
ющимися на судне мор1-’ ^арт0 котчг
дется прокладка. „^дизц зцм°г<^ мррТа суднд
На морских картах ₽ т за счис^ пря^ “есТкОТорую
часть круга равных вЫ^д посияй’ В^ои> трОения
называют высотной лиН^исл^^же^еСта v по
на карте выполняют от рЫСог.^ого нйи к^^ения на
Сущность построений ^ющ%й Л‘ Зб/Ол°* сЧИсл Л
карте заключается в сЛ^ nO0JM (РрСвеЩ^’ 7светилд,
мои точки в направлен» мутгЛса >а, дываю-г
которое определяется Ч све иткл^
812
Рис. 36. Графические по-
строения высотных ли-
ний положения при аст-
рономических определе-
ниях места судна
разность между истинной, т. е. полученной из наблюде-
ний, и счислимой высотами. Счислимая высота вычис-
ляется по специальным формулам для счислимого ме-
ста судна. В конце отложенного отрезка разности вы-
сот наносят точку, которую называют определяющей.
Через эту точку проводят линию, перпендикулярную на-
правлению на полюс освещения. Полученная линия и
есть высотная линия положения. Если такое построение
выполнить для второго светила, то в результате полу-
чим вторую линию положения. Точка пересечения этих
двух линий положения будет обсервованным местом
судна. У обсервованного места судна на карте записы-
вают судовое время в момент наблюдений и отсчет лага.
Дальнейшее счисление пути ведут от полученной обсер-
вованной точки.
Такова общая идея определения места судна по
высотным линиям положений. В практике астрономиче-
ских определений места судна наблюдения часто прово-
дят так, чтобы одно из наблюдаемых светил находилось
в меридиане или являлось Полярной звездой. Частные
случаи выгодны тем, что в них значительно сокраща-
ется объем вычислений и, следовательно, меньше
183
Рис. 37. Звездный гло-
бус
затрачивается времени для получения окончательного
результата. Например, если для вычисления и построе-
ния одной высотной линии необходимо около 10 мин,
то в частных случаях — лишь 3—5 мин.
Для определения места судна штурман днем изме-
ряет высоты Солнца, а вечером и утром, когда хорошо
виден горизонт, — высоты звезд и планет. Это время
совпадает с сумерками. Хорошо видны планеты и яркие
звезды, но не всегда их удается опознать и определить
названия, особенно если часть неба покрыта облаками.
В таких случаях штурман пользуется звездным глобу-
сом, который помогает ему определить названия звезд
и планет, подобрать звезды для наблюдений и заранее
приближенно определить их высоту и направления.
Звездный глобус (рис. 37) — это пустотелый шар,
изображающий небесную сферу с нанесенными на нем
основными кругами, линиями и положениями звезд.
Для определения, например, названия звезды штурман
по географической широте и времени устанавливает
звездный глобус так, чтобы он изображал небесную
сферу с таким же расположением звезд. Измерив вы-
184
соту звезды и определив направление (азимут) на нее,,
штурман находит ее на звездном глобусе и определяет
название.
Радиопеленгование на судах
На возможность использования радио на маяках ука-
зал А. С. Попов. Он разработал способ пеленгования
маяков, основанный на свойстве мачт задерживать эле-
ктромагнитные волны. Это заинтересовало моряков, и
вскоре были созданы радиотехнические средства опре-
деления места судна в море.
В России в 1912 г. М. И. Ренгертен создал радио-
пеленгатор. Радиопеленгаторы с судна пеленгуют бере-
говые радиостанции (радиомаяки), которые в большин-
стве случаев устанавливают рядом со световыми мая-
ками. Такие радиомаяки называют радиомаяками кру-
гового действия.
В 1926 г. появились радиомаяки направленного дей-
ствия. Они дают возможность определить место судна
с помощью обыкновенного радиоприемника. Для осо-
бых обстоятельств плавания созданы створные и враща-
ющиеся радиомаяки.
Радиотехнические средства (РТС) судовождения ос-
нованы на различных технических и геометрических
принципах. Мы рассмотрим РТС, которые относятся к
угломерным, т. е. азимутальным, системам. Они изме-
ряют пеленги на источник излучения электромагнитных
воли. К этой группе принадлежат радиопеленгаторы
(судовые и береговые) и радиомаяки - направленного
действия.
Полные сведения о радиомаяках, о программах их
работы, дальности действия и другие сведения, а так-
же географические координаты расположения каждого
радиомаяка и списки групп, в которых они работают,
185
приводятся в навигационных пособиях «Радиотехниче-
ские средства навигационного оборудования». Положе-
ния радиомаяков нанесены также на морские карты, о
них указывается в лоциях.
На судах морского флота применяются радиопелен-
гаторы трех типов: со слуховым приемом, автоматиче-
ские со следящей системой и автоматические визуаль-
ные. Наиболее широкое распространение получили ра-
диопеленгаторы со слуховым приемом. Рассмотрим, в
чем заключается идея радиопеленгования.
Для осуществления пеленгования вся радионавига-
ционная система должна состоять из радиопередающего
и радиоприемного устройств. Радиопередающим устрой-
ством служат радиомаяки кругового действия, а радио-
приемным — радиопеленгаторы.
Работа радиомаяка кругового действия основана на
общеизвестном положении из физики. Если через вер-
тикально установленный провод пропускать электриче-
ский ток, то вокруг него образуется электромагнитное
поле. Оно состоит из магнитных силовых линий, рас-
положенных концентрически вокруг проводника и име-
ющих определенные направления. Если ток идет вверх
по проводу, то силовые линии магнитного поля будут
направлены против часовой стрелки (если смотреть
сверху), и, наоборот, если ток идет вниз, то — по часо-
вой стрелке. Если ток по такому проводу будет быстро
проходить то вверх, то вниз, будет создано электромаг-
нитное поле, силовые линии которого направлены то в
одну, то в другую сторону соответственно направлению
тока в проводе. Таким образом, в пространстве вокруг
проводника действуют взаимно связанные электрические
и магнитные силы, т. е. образуется переменное электро-
магнитное поле. Провод начинает излучать радиовол-
ны, которые распространяются от источника излуче-
ния — антенны (радиомаяка) — во все стороны. Ско-
рость распространения электромагнитных волн такая
186
же, как скорость распространения света, т. е. 300000
км/с. Эти волны распространяются на поверхности Зе-
мли по кратчайшим расстояниям, которые являются ли-
ниями дуг больших кругов.
Радиомаяк кругового действия состоит из передатчи-
ка и антенны. Передатчик работает на антенну, которая
равномерно излучает волны во все стороны.
Каждый радиомаяк работает по определенной про-
грамме, которая характеризуется временем его работы,
длиной волны (или частотой), позывными сигналами,
состоящими из точек и тире (азбука Морзе), длинного
тире, служащего для пеленгования, и т. д. Для того
чтобы маяк выполнил передачу назначенной программы,
его передатчик снабжен автоматическим устройством,
которое включает маяк в соответствии с программой его
работы. Дальность действия радиомаяков кругового из-
лучения достигает 300 миль.
Как уже говорилось выше, чтобы определить место
судна, необходимо иметь не менее двух радиопеленгов,
пересечение которых на карте дает обсервованное ме-
сто судна. Поэтому радиомаяки располагают группами
с таким расчетом, чтобы в определенном районе обес-
печить судам надежные определения их мест. Обычно
маяки, входящие в одну группу, работают на одной вол-
не, а программы их работы согласованы так, что пос-
ле окончания передачи одного радиомаяка начинает
работать другой, затем третий и т. д. Несмотря на про-
стой принцип работы, современные радиомаяки пред-
ставляют собой сложное радиотехническое устройство.
Для определения радиопеленгов на радиомаяки су-
да снабжают радиопеленгаторами. Принцип радиопе-
ленгования заключается в следующем. Если на пути рас-
пространения электромагнитных волн разместить вер-
тикальный проводник, то в нем появится электродвижу-
щая сила. После соответствующих преобразований ее
можно обнаружить в различном виде, в частности в
187
виде звука. Это свойство положено в основу устройст-
ва рамочной антенны радиоприемника.
Разместим два проводника параллельно плоскости
распространения электромагнитной волны на некото-
ром расстоянии друг от друга. В ближайшем к радио-
маяку проводнике возникает большая электродвижущая
сила, чем в проводнике, расположенном дальше от ра-
диомаяка. Если теперь вертикальные проводники заме-
нить рамкой, то ее можно рассматривать как систему
двух вертикальных разнесенных антенн с противным
включением. Подводя концы рамочной антенны к при-
емнику, мы обнаружим на его зажимах напряжение.
Оно будет равно разности электродвижущих сил, воз-
буждаемых электромагнитным полем в обоих провод-
никах. Такую конструкцию называют рамочной антен-
ной, или рамкой, она является важной частью радио-
пеленгатора.
Установим рамочную антенну так, чтобы ее плос-
кость располагалась перпендикулярно направлению
распространения радиоволн. Так как в этом случае обе
ветви находятся на одинаковом расстоянии от радио-
маяка, то возникающие в них электродвижущие силы
•будут равны по величине. На входе приемника отсут-
ствует их разность, поэтому звука в телефонах не будет.
Если плоскость рамки расположить в направлении
распространения радиоволн, то в обоих ее ветвях воз-
никнут разные электродвижущие силы. Теперь на входе
приемника будет наибольшая их разность и, следова-
тельно, в телефонах появится наибольший звук.
Поворачивая рамку в вертикальной плоскости, мож-
но получить наименьшую, наибольшую или промежуточ-
ную интенсивность принимаемого сигнала. По интен-
сивности звука можно определять направление на ра-
диомаяк, посылающий сигналы.
Направление на радиомаяк определяют по миниму-
му сигнала, так как в этом случае при повороте рам-
188
ки на небольшие углы вызывается заметное на слух
изменение в слышимости сигнала. Если поворачивать
рамку около положения максимума громкости сиг-
нала, то изменение силы звука будет меняться незна-
чительно, поэтому величина определяемого направ-
ления на радиомаяк может колебаться в больших
пределах.
Из всего сказанного следует, что пеленгование «по
минимуму» является более точным, чем пеленгование
«по максимуму». Метод пеленгования «по минимуму»
получил широкое распространение.
Итак, в зависимости от угла поворота антенны гром-
кость сигнала будет изменяться. В момент приема ми-
нимума слышимости сигнала положение указателя, пер-
пендикулярного плоскости рамки, укажет направление
на радиомаяк. Угол поворота рамки, определяемый от-
носительно диаметральной плоскости судна, является
курсовым углом радиомаяка, а угол, определяемый от-
носительно северной части меридиана, — истинным ра-
диопеленгом.
В настоящее время на судах применяются радиопе-
ленгаторы с двумя взаимно перпендикулярными непод-
вижными рамками. Они соединены с гониометрическим
устройством, которое предназначено заменить враще-
ние рамки вращением небольшой катушки. Сущность
пеленгования остается той же.
Итак, радиопеленгатор (т. е. радиоприемное устрой-
ство с рамочной антенной) состоит из антенного уст-
ройства, радиоприемника и индикатора. Антенное уст-
ройство, идею работы которого мы уже рассмотрели, яв-
ляется наиболее характерным узлом радиопеленгатора,
определяющим специфику его работы.
Радиоприемник выбирает из всех сигналов, приня-
тых антенным устройством, сигнал нужной частоты, уси-
ливает и преобразовывает его, а затем подает на инди-
катор. В соответствии с международными правилами
189
Рис. 38. Радиопеленгатор «Рыбка»
для морского радиопеленгования выделены диапазоны
радиоволн от 255 до 535 и от 1605 до 2850 кГц.
Индикатор указывает, при каком положении антен-
ного устройства можно брать отсчет по шкале радио-
пеленгатора, или непосредственно выдает отсчет на-
правления на радиомаяк. В зависимости от типа инди-
катора радиопеленгаторы подразделяют на слуховые и
визуальные.
В слуховых радиопеленгаторах определение пеленга
осуществляется при помощи телефонов или громкогово-
рителей по силе звука на выходе приемника. Слухо-
вые радиопеленгаторы просты по устройству, их стои-
мость сравнительно мала. При работе с ними требует-
ся значительное время для взятия пеленга, а процесс
сравнения слышимости сигналов связан с появлением
субъективных ошибок. В настоящее время из слуховых
радиопеленгаторов широкое распространение получил
190
радиопеленгатор «Рыбка» (рис. 38). Им оборудуют су-
да рыбопромыслового и морского флотов неограничен-
ного района плавания в любых широтах.
Радиопеленгатор «Рыбка» выпускается в различных
вариантах в зависимости от типа питающей сети, спо-
соба аварийного питания и типа гирокомпаса, с кото-
рым радиопеленгатор сопрягается, типа примененного
рамочного антенного устройства и т. д.
В визуальных радиопеленгаторах индикатором слу-
жит прибор с визуальным отсчетом, например стрелоч-
ный прибор, электронно-лучевая трубка (ЭЛТ) и т. д.
Слуховые радиопеленгаторы относят к группе про-
стых, т. е. неавтоматических. В них диаграмму направ-
ленности вращают вручную, а положение антенного
устройства, при котором можно брать отсчет пеленга,
определяют на слух.
В автоматических радиопеленгаторах сам индика-
тор автоматически непрерывно показывает величину пе-
ленга по соответствующему отсчету. Наибольшее рас-
пространение получили двухканальный визуальный ра-
диопеленгатор с электронно-лучевой трубкой «Румб»
(рис. 39), одноканальный визуальный радиопеленгатор
с вычерчивающейся диаграммой направленности.
Радиопеленгатор «Румб» имеет визир, вдоль которо-
го проведена диаметральная линия. Чтобы определить
направление на радиомаяк, необходимо повернуть ви-
зир и совместить его диаметральную линию со светя-
щейся линией на экране. Отсчет по неподвижной шка-
ле будет направлением на радиомаяк относительно ди-
аметральной плоскости судна.
В одноканальном визуальном радиопеленгаторе с
вычерчивающейся диаграммой направленности на экра-
не ЭЛТ вычерчивается фигура, имеющая форму «двух-
лопастного пропеллера». Отсчет пеленга снимают так-
же по неподвижной шкале, совмещая визир с осью «про-
пеллера».
191
Рис. 39. Визуальный радиопеленгатор «Румб»
Место судна определяют так же, как и по визуаль-
ным пеленгам: на карте прокладывают радиопеленги от
радиомаяков, а за обсервованное место принимают точ-
ку их пересечения.
С помощью радиопеленгатора определяют направле-
ние на радиомаяк относительно диаметральной плоско-
сти судна. Угол между носовой частью диаметральной
плоскости судна и направлением на радиомаяк назы-
вают радиокурсовым углом (рис. 40). Если к истинно-
му курсу прибавить радиокурсовой угол, получим истин-
ный радиопеленг, который служит для прокладки ра-
диопеленгов.
Современные радиопеленгаторы дают показания сов-
местно с подведенными к ним репитерами гирокомпа-
сов. Поэтому штурман при пеленговании может полу-
192
Рис. 40. Соотношение
между истинным курсом
судна и радиокурсовым
углом (f — радиодеви-
ация, ip — ортодроми-
ческая поправка)
чить непосредственно компасный радиопеленг, а после
исправления его соответствующими поправками — ис-
тинный.
При расчете и прокладке радиопеленги исправляют
поправками, которые зависят от навигационной карты
и от внешних условий распространения радиоволн.
На точность радиопеленгования влияет множество
внешних факторов (например, электромагнитное поле
судна, создающее радиодевиацию, ночной эффект, бе-
реговая . рефракция и др.). При правильной методике
наблюдений влияние этих факторов значительно сни-
жается.
Особенно важно при радиопеленговании учитывать
радиодевиацию. Это явление заключается в том, что на-
правление, показываемое радиопеленгатором, определя-
ется в искаженном поле и отлично от направления при-
хода сигнала от радиомаяка, Искаженное поле возни-
кает вследствие влияния дополнительного электромаг-
нитного поля, создаваемого металлическими частями
судна. Радиодевиация иногда достигает большой вели-
чины, особенно при неудачном расположении радиопе-
ленгатора; Для уменьшения ее влияния рекомендуется
7—3723 19Э
устанавливать рамку пеленгатора возможно выше и так,
чтобы все крупные металлические части судна распола-
гались симметрично относительно рамки. Величина ра-
диодевиации находится в тесной связи с радиокурсовым
углом радиомаяка.
Существуют различные способы уничтожения радио-
девиации, однако полностью уничтожить ее практически
не удается. Поэтому путем специальных наблюдений оп-
ределяют ее остаточное значение и учитывают его при
вычислении радиопеленгов.
Ночью на рамочную антенну поступают поверхност-
ные и отраженные от ионосферы радиоволны. Их сум-
марная величина порождает ночной эффект. Он вызы-
вает увеличение и расплывчатость угла молчания, его
смещение, а сила сигнала часто колеблется. Особой ин-
тенсивности ночной эффект достигает во время восхода
и захода Солнца. Его влияние также сильно сказыва-
ется на расстояниях более 25—30 миль. Для уменьшения
влияния ночного эффекта радиостанции стараются пе-
ленговать с возможно более близкого расстояния и по
возможности избегают радиопеленгования за 1—2 ч
перед (или после) восходом и заходом Солнца.
На границе раздела вода—суша возникает берего-
вая рефракция — изменение фазовой структуры элект-
ромагнитного поля. Это вызывает изменение направле-
ния распространения радиоволн. Объяснение сущности
береговой рефракции дано в работах советских ученых
академиков Л. И. Мандельштама, Н. Д. Папалекси,
В. А. Фока и др.
Точность радиопеленгования зависит от многих фак-
торов, поэтому штурман должен всегда анализировать
обсервованное место судна, полученное по радиопелен-
гам, и давать ему критическую оценку.
В судовождении широко используются и радиомая-
ки направленного действия: секторные, вращающиеся и
створные. Секторные (всенаправленные) радиомаяки
194
дают возможность определить пеленг от направленного
радиомаяка, который в сочетании с пеленгом другого
секторного радиомаяка дает обсервованное место
судна.
Направленные радиомаяки имеют большую даль-
ность действия. При благоприятных условиях она дости-
гает 1000—1500 миль. Пользоваться ими на расстояниях
меньше 25 миль не рекомендуется, так как возможны
большие погрешности. На малых расстояниях сектор-
ный радиомаяк может быть использован как радиома-
як кругового действия.
Достоинство секторных радиомаяков заключается в
том, что для определения пеленга их сигналы можно
принимать с помощью обычного средневолнового радио-
приемника. Процесс приема сигналов очень прост и
заключается в подсчете точек и тире, передаваемых сек-
торным радиомаяком. Если пользуются радиопеленга-
тором, то прием ведут на вертикальную антенну.
Секторный радиомаяк состоит из трех антенн, рас-
положенных на одной линии и удаленных друг от дру-
га на расстояние около 2 миль. Все антенны пита-
ются от одного общего передатчика. Во время ра-
боты радиомаяка в течение цикла в пространстве по
смежным секторам передается 60 точек и 60 тире, т. е.
направленные излучения. Точки и тире будут слышны
в определенных секторах (рис. 41). На линиях пересе-
чения секторов точек и тире будет слышен сплошной
звук. Эти линии называют радиосигнальными
зонами.
В момент начала передачи сигналов направления
равносигнальных зон точно известны, так как для дан-
ного маяка они всегда одни и те же. Затем все секто-
ры и их равносигнальные зоны равномерно поворачи-
ваются, занимая место соседних.
В направлениях, в которых в начале цикла прослу-
шивались тире, в конце будут прослушиваться точки.
7* 195
Рис. 41. Характеристика
секторного излучения
всенаправленных маяков
Такое перемещение направленных секторов достигается
управлением фаз антенных токов.
Рассмотрим определение радиопеленга с судна на
секторный радиомаяк. Допустим, что судно находится в
точке А — сектор точек (см. рис. 41). Для того чтобы
определить пеленг на радиомаяк, необходимо дополни-
тельно определить угол между равносигнальной зоной
3 и пеленгом точки А. Этот угол определяют подсче-
том точек между началом работы цикла передачи то-
чек и моментом, когда равносигнальная зона 3 про-
ходит через место судна А. Для точного определения
момента прохождения равносигнальной зоны через ме-
сто судна существуют разные способы, например под-
счет точек и тире, пользование секундомером и т. д.
Точно так же определяют пеленг второго радиомаяка.
Место судна находят на пересечении двух радиопелен-
гов.
196
Штурманы для определения места судна пользуют-
ся специальными картами секторных радиомаяков. На
них заранее вычерчены линии пеленгов, у которых ука-
зано количество точек и тире. Место судна будет на-
ходиться в точке пересечения двух линий, соответст-
вующих подсчитанным значениям знаков секторных ра-
диомаяков. Обсервованное место переносят на путе-
вую карту, по которой ведут счисление пути судна.
Направленные вращающиеся радиомаяки получили
значительное распространение (например, в Японии).
Дальность их действия сравнительно небольшая (50—
100 миль). Однако простой прием сигналов, удобный
расчет пеленгов и несложная аппаратура делают их но-
дулярными для определения места судна, особенно сре-
ди рыбопромысловых судов. Сигналы вращающихся
радиомаяков могут быть приняты с помощью обыкно-
венного приемника. Если используется приемник радио-
пеленгатора, то он должен быть переключен на верти-
кальную антенну.
Вращающийся радиомаяк работает на принципе при-
ема минимума сигнала. Диаграмма излучения имеет
форму восьмерки, или кардиоиды, которая равномерно
вращается в горизонтальной плоскости. В момент, ког-
да угол молчания совпадает с характерным направле-
нием, например севером, югом, востоком или западом,
подаются специальные сигналы (буква азбуки Морзе),
вслед за ними передают точки. Каждая точка соответст-
вует повороту диаграммы на 1 или 2°.
Чтобы определить направление на радиомаяк, необ-
ходимо сосчитать точки от момента начала работы ма-
яка до момента, когда слышимость точек исчезает или
доходит до минимума, т. е. когда через место судна
проходит угол молчания. Количество подсчитанных то-
чек служит для расчета пеленга с маяка на судно или
обратно. Для облегчения их подсчета тон подачи меня-
ют через каждые десять точек.
197
Каждый вращающийся радиомаяк работает на опре-
деленной частоте и по определенной программе. Полные
сведения о характере работы такого радиомаяка и таб-
лицы для определения пеленгов по подсчитанным точ-
кам даны в навигационном пособии «Радиотехнические
средства навигационного оборудования».
К рассматриваемой группе маяков относятся также
створные радиомаяки. Их назначение — указать суд-
ну безопасное направление, фарватер среди навигацион-
ных опасностей. Ими можно пользоваться в любое вре-
мя суток, но самую большую услугу морякам они ока-
зывают в плохую погоду (дождь, туман и т. д.).
У створного радиомаяка антенна состоит из двух
неподвижных рамок, расположенных под постоянным’
углом друг к другу. Антенны излучают узконаправлен-
ными секторами два сигнала—две буквы азбуки Мор-
зе. Секторы направлены так, что они частично пере-
крывают друг друга. В местах перекрытий образуется
равносигнальная зона, где обе буквы прослушиваются
с одинаковой силой и сливаются в одно сплошное тире*
По сторонам равносигнальной зоны образуются двух-
сигнальные зоны. В них один из сигналов прослуши-
вается сильнее другого.
Антенны створного радиомаяка располагают такг
чтобы .границы равносигнальной зоны целиком помеща-
лись в безопасном направлении. Если во время прохож-
дения судна вдоль фарватера прослушивается равно-
сигнальная зона, то это значит, что судно движется в;
безопасном направлении; если судно выходит за грани-
цы равносигнальной зоны, то, следовательно, где-то-
близко навигационные опасности.
Следует отметить, что радиомаяки кругового дейст-
вия имеют ряд существенных недостатков:
ночной эффект при пеленговании вызывает расплыв-
чатость угла молчания, сила сигнала колеблется, что?
затрудняет обсервацию;
198
при постоянной погрешности в отсчете пеленга воз-
никает погрешность в положении линии пеленга, и она
увеличивается с увеличением расстояния до маяка.
В районах интенсивного радиообмена пеленгование
затруднено из-за помех станций, работающих на вол-
нах, близких к волне радиомаяков.
В СССР в 30-е годы были созданы радионавигацион-
ные системы дальнего действия, которые не имеют недо-
статков, присущих азимутальным системам, — они более
совершенны и точны.
Радиолокация
Очень трудно совершать рейс в условиях плохой види-
мости— в это время резко снижается безопасность пла-
вания. Встречные суда, айсберги и берега из-за тумана,
дождя, снега становятся видны только в непосредствен-
ной близости, когда уже невозможны маневры, предот-
вращающие аварию. Чтобы избежать столкновения пли
посадки на мель, суда в плохую видимость плавают с
умеренной скоростью, штурманы применяют звуковые
сигналы, выставляют специальных наблюдателей на
баке судна — впередсмотрящих и т. д.
История мореплавания знает много случаев гибели
судов. Особенно часты аварии из-за того, что в плохую
видимость навигационные опасности обнаруживались
слишком поздно.
Так, например, произошло с трансатлантическим
пароходом «Титаник», который погиб, получив пробо-
ину из-за столкновения с айсбергом. Причина аварии
заключалась и в том, что на судне не были приняты ме-
ры предосторожности после получения по телеграфу со-
общения от других судов о замеченном айсберге («Тита-
ник» не сбавил хода, а по-прежнему шел со скоростью
22 уз).
199
Гибель «Титаника» вызвала острую необходимость
создания такого прибора, с помощью которого можно»
было бы наблюдать окружающую обстановку при лю-
бой погоде и видимости.
В 1938—1939 гг. почти одновременно в СССР, Анг-
лии и США появились принципиально новые радиотех-
нические средства судовождения — радиолокационные
станции (РЛС), которые позволяют не только опреде-
лять место судна, но и получать на экране изображение
окружающей’ обстановки (суда, бер’ега, острова, айс-
берги и т. п.) при плохой визуальной видимости. При
помощи РЛС, или радиолокаторов, как их еще назы-
вают, стало возможным во время плохой видимости
вводить суда в порты и выводить из них, осуществлять
проводку судов по каналам и рекам, а также быстро и.
точно определять место судна. Так как на экранах ра-
диолокаторов изображается окружающая обстановка, то
в основу радиолокационных методов определения места
судна в море положены методы, применяемые при визу-
альных наблюдениях береговых объектов.
Радиолокаторы кругового обзора воспроизводят на
электронно-лучевой трубке изображение местности в ви-
де светового плана, который состоит из совокупности
ярких отметок. Для штурмана1 особенно важно такое
наглядное представление об окружающей обстановке^
хотя представление об объемных размерах объектов
теряется, что вызвано расположением отметок в одной
плоскости, на которой получается световой план окру-
жающей местности в масштабе, установленном шка-
лой дальности радиолокаторов.
Работа радиолокатора основана на приеме отражен-
ных радиоволн от объектов. Основные части радиоло-
катора — это передатчик, приемник, антенна с волно-
водным устройством и индикатор.
Передатчик вырабатывает имйульсы колебаний
сверхвысокой частоты, которые затем передаются по
200
волноводу в антенну. Волновод является лучшим сред-
ством для передачи энергии сверхвысокой частоты. Он
представляет собой хорошо отполированную прямоуго-
льного сечения трубку, вдоль которой распространяется
радиоволна. Высокочастотные импульсы подводятся по
волноводу к раструбу, откуда поступают на щелевую
.антенну. Она собирает энергию сверхвысокой частоты
в узкий пучок и посылает ее в определенном направле-
нии. Это можно сравнить с источником света, помещен-
ным в фокусе прожекторного рефлектора, который дает
вместо слабого и рассеянного света узкий луч большой
силы.
Посланные антенной радиоимпульсы встречают-
ся с объектом и отражаются от него. Большинство от-
раженных радиоимпульсов рассеивается объектом в
окружающее пространство, а остальная часть возвраща-
ется и попадает на эту же антенну. С антенны энергия
определенной частоты вводится в волновод, а затем по
волноводу энергия поступает в приемник, в котором
слабо отраженные сигналы усиливаются, преобразуют-
ся и передаются на индикатор. Последний фиксирует
наличие объекта в данном направлении и расстояние
ют пего до радиолокатора. Процесс усиления отражен-
ных сигналов до величины, которая способна привести
в действие индикатор, очень сложный. Объясняется
это тем, что отраженные сигналы имеют очень малый
уровень (силу), а их усиление не должно исказить
«отличительную форму отраженного импульса.
Индикатор радиолокатора может иметь различное
устройство. На морских судах в качестве индикатора
используют электронно-лучевую трубку кругового обзо-
ра. Такой индикатор дает изображение окружающей
обстановки и позволяет определить направление на
объекты и расстояние до них.
Изображение на индикаторе формирует линейная
развертка. Она вращается и на экране имеет вид вра-
201
Рис. 42. Радиолокацион-
ная панорама
щающейся светящейся радиальной линии. Ее начало —
в центре экрана, который совпадает с местом поло-
жения судна (рис. 42).
Положение диаметральной плоскости судна на
экране определяется также по светящейся радиальной
линии, которая идет от центра в направлении положе-
ния носа судна. Она носит название отметки курса.
Направление на объекты определяют с помощью
неподвижной шкалы (азимутального круга) и подвиж-
ной, которая связана с гирокомпасом. Отсчеты пеленгов
и курсовых углов определяют с помощью визира.
Изображение окружающей обстановки на индика-
торе кругового обзора ориентируется относительно се-
верной части земного меридиана либо относительно
диаметральной плоскости судна.
Расстояния до объектов определяют с помощью под-
вижного круга дальности (ПКД) и неподвижных кон-
центрических кругов дальности (НКД). Измерение рас-
202
стояния с помощью подвижного круга дальности явля-
ется более точным.
При измерении расстояния с помощью ПКД его
радиус измеряют так, чтобы круг коснулся светящего-
ся изображения отраженного сигнала. Расстояние ука-
зывает счетчик дальномерного устройства. Неподвиж-
ные круги дальности дают приближенное общее пред-
ставление о расстояниях до объектов.
В радиолокаторе существуют различные шкалы
дальности. В зависимости от их установки получают
соответствующий масштаб изображения.
Мы указывали, что место судна на экране индика-
тора обычно изображается в его центре. Поэтому, если
судно движется, то на экране перемещается изображе-
ние панорамы окружающей обстановки, т. е. наблюда-
ется картина относительного движения. Такие радио-
локаторы получили название радиолокаторов с отно-
сительным движением. Им присущи два недостатка.
Первый вытекает из сущности относительного движе-
ния. Перемещается изображение панорамы, поэтому но-
вые световые отметки не совпадают со старыми и гра-
ницы отметок, попавших на старое изображение, раз-
мываются и теряют четкость очертаний. Второй заклю-
чается в том, что на панораме экрана не выделяется
истинное движение других плывущих судов среди не-
подвижных объектов, которое более привычно глазу
наблюдателя.
В этом отношении более удобны радиолокаторы, по-
казывающие картину истинного движения. В них изоб-
бражается неподвижная панорама берега и действите-
льная картина перемещения всех судов, в том числе и
того, на котором производятся наблюдения.
Судовые радиолокаторы работают на радиоволнах
сантиметрового диапазона. Такие радиоволны хорошо
отражаются от объектов, а их распространение и отра-
жение происходит по таким же законам, как
203
распространение и отражение световых волн, но с не-
сколько большим коэффициентом рефракции.
Наибольшая дальность действия радиолокатора
определяется радиолокационным горизонтом. Она за-
висит от высоты антенны над уровнем моря и от высо-
ты наблюдаемых объектов. Дальность обнаружения не-
которых объектов меньше дальности действия радиоло-
катора. Это объясняется отражающей способностью
объекта, которая зависит от размеров, форм, строения
поверхности, положения объекта и т. д. Высокие крутые
каменистые берега обнаруживаются на большем рассто-
янии, чем низкие, пологие и с обыкновенными грунтами..
Металлические суда также обнаруживаются на большем
расстоянии, чем суда таких же размеров, но деревян-
ные. Дождь, туман и снегопад уменьшают дальность
радиолокационного горизонта. В зависимости от интен-
сивности этих явлений его дальность может уменьши-
ться на 10—40%. При особых гидрометеорологических
условиях, когда разность между температурой воздуха
и поверхностью воды велика, наблюдается большое на-
рушение в нормальном распространении радиолока-
ционных сигналов. Это приводит к значительному
уменьшению дальности обнаружения объектов или, на-
оборот, к ее увеличению. Первое явление называют
субрефракцией, второе — сверхрефракцией.
На работу радиолокаторов влияет много внешних
факторов, которые снижают точность его показаний.
Неблагоприятные гидрометеорологические условия
(дождь, грозовые облака, сильное волнение моря
и т. д.) ограничивают использование радиолокатора для
навигационных целей. Так, с помощью радиолокатора
трудно измерять расстояние до береговой линии в тех
местах, где она не возвышается над уровнем моря. Бе-
рега, покрытые ледниками с гладкой поверхностью,
очень плохо обнаруживаются на экране. Волнение мо-
ря создает засветку экрана, особенно на шкалах малых
204
расстояний. Засветка иногда бывает настолько яркой,
что на ее фоне могут исчезнуть отраженные сигналы
даже крупных судов. У радиолокатора имеются теневые
секторы, которые в основном создаются мачтами и
реже другими судовыми надстройками. Они мешают
круговому обзору горизонта.
Наименьшая дальность действия — это наименьшее
расстояние от антенны радиолокатора, на котором еще
возможно обнаружение объектов. Наименьшая даль-
ность — важная навигационная характеристика радио-
локатора, так как она определяет возможность прохо-
да узкостей и выполнения маневров судна в условиях
плохой видимости.
Наиболее важные характеристики достоинства ра-
диолокатора — это наибольшая разрешающая способ-
ность локатора по дальности и направлению (по углу).
Первая характеризуется наименьшим расстоянием меж-
ду двумя объектами на местности, расположенными
по одному направлению от судна, когда на экране их
отраженные сигналы еще видны раздельно. Вторая
определяется наименьшим углом между двумя объекта-
ми, находящимися на одинаковом расстоянии от суд-
на, когда на экране отраженные сигналы от них еще
видны раздельно.
В настоящее время радиолокаторами оборудованы
все суда дальнего и почти все суда малого плавания.
Определить место судна по радиолокатору несложно.
На это затрачивается мало времени. С помощью радио-
локатора определяют расстояние и пеленг до наблю-
даемого объекта. Это позволяет использовать при ра-
диолокационных определениях места судна все способы,
которыми пользуются при визуальных наблюдениях.
Предпочтение отдают тем способам, которые основаны
на измерениях радиолокационных расстояний, так как
они измеряются значительно точнее, чем радиолока-
ционные пеленги.
205
Рис. 43. Общий вид
электронного индикато-
ра ситуации
С целью повышения точности радиолокационных
определений места судна пеленг большей частью изме-
ряют с помощью компаса.
Особенно важное значение радиолокатор приобре-
тает в условиях плохой видимости для обнаружения
и предупреждения столкновений судов в море.
Решать эту важную задачу штурману помогает
электронный индикатор ситуаций — ЭИС (рис. 43).
С помощью его определяют параметры (скорость, курс)
движения встречных судов, степень опасности ситуации
встречи с ними и выбирают необходимые маневры для
безопасного расхождения с одним, двумя или тремя
судами одновременно. ЭИС используются на судах
совместно с РЛС «Океан» или другими РЛС, в которых
предусмотрена дистанционная выдача на индикаторе
видеосигналов, углов поворота антенны и запускающе-
го импульса.
Кроме задачи предупреждения столкновений судов,
с помощью ЭИС можно решать и некоторые навигаци-
206
онные задачи. Так, например, если сопровождать не-
подвижный точечный ориентир, можно определить ско-
рость и курс своего судна.
Перечисленные особенности радиолокации должны
предостерегать судоводителя от чрезмерного доверия к
судовому радиолокатору и критически относиться к об-
щей его информации.
Известны случаи, когда из-за излишнего доверия к
радиолокаторам нарушались Правила предупреждения
столкновений судов в море (ППСС), что, в свою оче-
редь, вело к тяжелым авариям судов. Так, например,
в Атлантическом океане вблизи берегов Северной Аме-
рики в ночь на 25 июля 1956 г. произошло столкнове-
ние двух современных пассажирских судов — итальян-
ского «Андреа Дориа» и шведского «Стокгольм». В ре-
зультате столкновения погиб лайнер «Андреа До-
риа». Из находившихся на борту 1706 человек погибло
45, а теплоход «Стокгольм» получил большие повреж-
дения в носовой части.
Для облегчения опознания низменной береговой
черты, повышения отражающей способности небольших
навигационных объектов (буи, бакены, вехи) на них
устанавливают пассивные отражатели, представляю-
щие собой небольшую многогранную металлическую
конструкцию. К недостаткам пассивных отражателей
следует отнести то, что их отражающая сила иногда не-
достаточна для того, чтобы выделить их на фоне дру-
гих сильных сигналов. Кроме того, при наблюдении
пассивных отражателей можно ошибиться в их опоз-
нании.
За последние годы начали широко внедряться ак-
тивные радиолокационные отражатели. Их также назы-
вают маяками-ответчиками. Они представляют собой
излучающее устройство релейного действия. Маяк-от-
ветчик всегда готов к работе, но в обычном состоянии
нс излучает сигналов. При включении радиолокатора на
207
судне импульсы от него попадают на такой маяк и
вводят его в рабочее состояние. Маяк-ответчик начина-
ет работать, посылая ответные импульсы — сигналы.
Чтобы избежать ошибок в опознании маяка-ответчика,
его сигналы кодируются и на экране индикатора изоб-
ражаются в виде нескольких дуг и точек.
Неблагоприятные метеорологические условия неред-
ко вызывают серьезные затруднения в работе многих
портов мира. Особенно сложно судам входить в порт,
если подход к нему имеет значительную протяженность.
Имеющиеся на судах радиолокаторы не могут полно-
стью гарантировать безопасный подход к порту и вход
в него.
Для того чтобы в условиях плохой видимости ус-
пешно провести судно к порту и поставить его к прича-
лу, пользуются береговыми радиолокационными станци-
ями. Их начали применять с 1948 г., и к настоящему
времени они установлены во многих портах мира (Ле-
нинград, Одесса, Гавр, Роттердам и др.).
Портовые радиолокационные станции имеют более
высокую разрешающую способность, чем судовые. На
их экранах изображение местности получается с мель-
чайшими подробностями, в более крупном масштабе и
также с круговым обзором.
Если подход к порту имеет большую протяженность,
то на берегу устанавливают несколько радиолокацион-
ных станций. Районы обзора частично перекрывают
друг друга. Это обеспечивает беспрерывную проводку
судна по всему пути следования.
Между береговыми радиолокационными станциями
существует связь. Для передачи сведений проводимым
судам применяется радиотелефонная связь.
Методы радиолокационного судовождения совершен-
ствуются из года в год. В настоящее время разрабаты-
ваются и внедряются новые типы судовых и береговых
радиолокаторов.
208
Рис. 44. Внешний вид
индикаторов РЛС «Оке-
ан»
Значительно улучшилось качество судовых радиоло-
кационных станций. В них увеличилась дальность обзо-
ра, снизилась минимальная дальность действия (мерт-
вая зона), повысились разрешающие способности по
расстоянию и углу, увеличился масштаб изображения,
введена индикация истинного движения, расширился
диапазон частот и т. д. Применяются различные уст-
ройства для ослабления помех от морских волн и ат-
мосферных осадков. Новые РЛС имеют повышенную
надежность в работе, а их масса и габариты умень-
шились.
В настоящее время на судах широко применяются
судовые РЛС: «Океан», «Дон», «Лоция», «Миус», «На-
яда» и «Енисей».
РЛС «Океан» имеет ряд преимуществ перед други-
ми радиолокационными станциями, поэтому ею снаб-
жают все крупнотоннажные суда. В целом она рабо-
209
тает более надежно и дает лучшее изображение пано-
рамы. РЛС «Океан» имеет наибольшую дальность об-
зора — 64 мили и наименьшую — 50 м. Предназначе-
на для обеспечения безопасности плавания судов в от-
крытом море, вблизи берегов, в узкостях, в условиях
плохой видимости, а также для решения задач расхож-
дения со встречными судами. Имеет два индикатора
(рис. 44), в которых предусмотрена ориентация изобра-
жения по курсу и норду. В этой станции изображения
Могут быть в режимах относительного и истинного дви-
жения.
1 ' В РЛС «Океан» осуществлено автоматическое со-
провождение объекта и выдача линии относительного
движения, применены вычислитель и система сигнали-
зации о появлении объекта в заданном секторе обзора.
Вычислитель рассчитывает расстояние кратчайшего
сближения с сопровождаемым судном, время следова-
ния до точки кратчайшего сближения, курс и скорость
сопровождаемого судна и рекомендуемые маневры,
обеспечивающие расхождение с ним па заданном - рас-
стоянии.
С помощью сигнализатора цели штурман в желае-
мом направлении, например в направлении движения
судна, может установить определенную величину угла
сектора с необходимым расстоянием. При появлении
объекта в этом секторе на установленном расстоянии
радиолокатор подает сигнал о появлении объекта, на-
пример судна, айсберга, берега и т. д. Такие приспо-
собления облегчают работу штурмана.
РЛС «Наяда» и «Енисей» устанавливают в основном
на судах большего и среднего тоннажа. Наибольшая
дальность обзора — 64 мили. На судах малого тонна-
жа устанавливают радиолокационную станцию «Ми-
ус». Ее дальность обзора 24 мили.
Судовая РЛС «Лоция» — малогабаритная станция.
Ее устанавливают на малых судах, быстроходных су-
210
дах на подводных крыльях и на судах крупного и
среднего тоннажа в качестве резервной станции. Она
состоит из антенны, приемопередатчика, индикатора
пульта управления и блока питания. Антенна устроена
в виде секторного рупора прямоугольного сечения с
волноводным щелевым излучателем.
Станция работает с повышенной надежностью. Пре-
дусмотрена возможность быстрой замены блоков и сме-
ны панелей, находящихся внутри блоков. Время запуска
4 мни.
РЛС «Миус» предназначена для малотоннажных
морских и рыбопромысловых судов. Радиолокаторы
этого типа образуют целую серию РЛС. Надежность
эксплуатации радиолокационных станций серии «Миус»
значительно повысилась за счет широкого применения
полупроводниковых и высококачественных электроваку-
умных приборов, а также за счет введения встроенной
автоматизированной системы контроля нх работы.
РЛС «Наяда» и «Енисей» — одни из самых совре-
менных станций. В настоящее время их вводят в экс-
плуатацию на транспортных судах. Они отличаются вы-
сокими техническими и эксплуатационными характерис-
тиками.
Современные радионавигационные
системы и навигационные
спутники Земли
Радионавигационные системы часто называют гипербо-
лическими, так как они дают линию положения (т. е.
изолинию) в виде гиперболы. Гипербола — это кривая,
точки которой обладают тем свойством, что разность
расстояний от них до двух данных точек, именуемых
фокусами, величина постоянная. В фокусах гиперболы
211
размещены станции, излучающие радиоволны. Разность
расстояния от точек гиперболы до фокусов измеряется
различными методами.
В зависимости от избранного метода гиперболиче-
ские радионавигационные системы разделяют на им-
пульсные, фазовые и смешанные.
Фазовые системы в СССР были разработаны в
1930 г. Они с успехом применялись в Арктике при гид-
рографических работах и показали высокую точность.
В разработке этих систем большая заслуга принадле-
жит советским ученым Л. И. Мандельштаму, Н. Д.
Папалекси, Е. Я. Шеголеву. Импульсные системы раз-
работаны в 1942 г. в США.
Импульсная система дальнего действия — система
«Лоран А», широко применявшаяся на судах морского
флота, начала терять свое практическое значение из-за
ряда недостатков. На базе импульсной и фазовой си-
стем созданы смешанные радионавигационные системы
(РНС) — импульсно-фазовые. В них объединены пре-
имущества первых и вторых систем. Рассмотрим идею
работы импульсной системы. Принцип ее работы очень
прост.
С помощью приемного устройства, состоящего из
специального приемника с индикатором в виде элек-
тронно-лучевой трубки, измеряют промежуток времени
между моментами прихода двух импульсов, посланных
двумя станциями, для чего на экране трубки совмеща-
ют изображения импульсов этих станций, одна из кото-
рых ведущая, а другая ведомая. После этого на счет-
чике получают цифры, указывающие разность момен-
тов приема (в микросекундах).
На рис. 45 в точке А размещена ведущая станция,
а в точке В — ведомая. На рисунке показаны гипер-
болы, изображающие линии положения этой системы.
Для заданной разности расстояний существуют две ги-
перболы, что вызывает неоднозначное определение ли-
212
Рис. 45. Схема гипербо-
лической системы двух
станций
нии положения, например, судно может находиться в-
точке К либо К'. Это исключается тем, что ведомая
станция, расположенная в точке В, передает сигналы с
определенным и постоянным запаздыванием, которое
равно времени, необходимому для прохождения сигна-
лом длины базы, т. е. расстояния между станциями,
и срабатывания электрических цепей у ведомой стан-
ции.
Посылка сигналов ведомой станции с запаздыванием
приводит к тому, что посылаемые импульсы ведущей
станции приходят в любую точку раньше, чем импульсы-
от ведомой. Теперь каждой разности моментов соответ-
ствует только одна гипербола, т. е. одна линия поло-
жения.
При рассмотрении сущности определения места суд-
на было показано, что для определения места необхо-
димо иметь не менее двух линий положения, точка пе-
ресечения которых будет обсервованным местом судна.
Следовательно, и в гиперболических системах место*
судна можно получить только тогда, когда пересекутся
две гиперболы.
213
Чтобы упростить вычисления и быстро получить об-
сервованное место судна, издают специальные карты.
Существуют также специальные таблицы, с помощью
которых можно получить место судна непосредственно
на путевой карте.
Дальность действия импульсных систем над морем
днем 600 миль, ночью, до 1200 миль. Практика показы-
вает, что точность определения места судна по волнам,
которые распространяются вдоль поверхности Земли,
т. е. по поверхностным волнам, составляет порядка
5—7 миль.
К недостаткам импульсных систем следует отнести
низкую точность и сложность конструкции приемного
устройства, что затрудняет его обслуживание.
Фазовые радионавигационные системы получили ши-
рокое применение при гидрографических работах в
Арктике (радиолаг и радиодальномер). В судовожде-
нии распространена система «фазовый зонд» (англий-
ское название «Декка»). В настоящее время во всем
мире работает около 64 береговых устройств фазовой
системы. Они обслуживают судоводителей в северо-
восточной части Атлантического океана с прилегающи-
ми к нему морями: Балтийским, Норвежским, Грен-
ландским, Баренцевым и др. и большую северную часть
Тихого и Индийского океанов.
Береговые устройства фазовой системы состоят из
трех пар станций. Основную станцию называют веду-
щей. Она является общей для всех трех пар и распола-
гается в центре равностороннего треугольника, а ведо-
мые — в его вершинах. Каждая пара станций излуча-
ет когерентные колебания, т. е. колебания, частоты ко-
торых соотносятся между собой как простые целые чис-
ла 1/2, 2/3, 3/4, 4/5 и т. д.
Для определения места судна по фазовой радиона-
вигационной системе в точке приема измеряют раз-
214
Рис. 46. Карты гипербол двух пар станций фазовой системы
«Декка»
ность фаз двух когерентных колебаний. В зависимости:
от места приема разность фаз может изменяться, так-
как пройденный путь от ведущей и ведомой станции
до точки приема различный. Принятая величина раз-
ности фаз характеризует разность расстояний между
точкой приема и станциями. Поэтому линией положе-
ния, как и в импульсной системе, будет гипербола. Все
точки гиперболы характеризуются одной и той же раз-
ностью фаз. Одна пара береговых станций создает
215»
одну систему гипербол. Вторую систему создает вторая
пара радиостанций. Для повышения надежности опре-
делений пользуются третьей системой гипербол, кото-
рую создает третья пара станций. Обсервованное место
судна по фазовым радионавигационным 'системам по-
лучается на пересечении гипербол, определяемых по из-
мерениям разности фаз в точке приема. Последнюю
измеряют с помощью специальных приборов — фазо-
метров.
Для быстрого определения места судна пользуются
специальными картами, на которых нанесены системы
гипербол. Оцифровка гипербол одинакова с отсчетами
шкал фазометров.
Рассмотрим рис. 46. На нем показана ведущая
станция и только две ведомых — красная и зеленая.
Они называются так потому, что для удобства в работе
соответствующие им на картах гиперболы и остальные
промежуточные линии, а также счетчики фазометров
тоже окрашены соответственно в красный или зеленый
цвет.
Расстояние между ведущей и ведомой станциями
разбито примерно на 10 зон, обозначенных буквами
А, В, С, Д, ... и т. д. Каждая зона содержит опреде-
ленное количество дорожек, например красная — 24,
зеленая — 48. Дорожки, в свою очередь, разбиты на
100 линий положения. В углу рисунка показаны счет-
чики ведомых станций. Чтобы определить место судна,
настраивают приемное устройство, затем с его счетчи-
ка, например красного, снимают отсчет: зона / (в око-
шечке счетчика), дорожка 16 (внешняя оцифровка
циферблата) и линия положения 30 (внутренняя оциф-
ровка). На карте находим зону / между ведущей
станцией и ведомой красной. В этой зоне находим до-
рожку /бив ней линию положения 30. Этому отсчету
(1, 16. 30) соответствует, как показано на том же ри-
сунке, линия положения — гипербола, нанесенная точ-
216
ками. Таким же способом определяют и другую линию»
положения (D 36.80). На пересечении этих двух линий
получают место судна.
Точность определения места судна фазовыми систе-
мами по сравнению с другими радионавигационными'
системами очень высокая. На расстоянии около.
200 миль место судна определяют днем с точностью'
до 0,2 мили, а ночью — до 0,5 мили.
Фазовые радионавигационные системы имеют и не-
достатки:
рабочий радиус действия 250—300 миль; на больших
расстояниях точность определения места судна снижа-
ется — при существующих расстояниях между стан-
циями линии гипербол пересекаются под очень острым
углом; ночью сказывается влияние ночного эффекта, &
в определении дорожек в зонах возникают затрудне-
ния из-за их неоднозначности, обусловленной особен-
ностью работы фазовых систем.
В настоящее время в практику судовождения проч-
но вошли принципиально новые РНС — импульсно-фа-
зовые, которые лишены недостатков импульсных и фа-
зовых систем. В этих системах одновременно сочета-
ются преимущества первых (большая дальность дейст-
вия и однозначность определений) и вторых (высокая-
точность определений) РНС.
Самой распространенной импульсно-фазовой систе-
мой является радионавигационная система «Лоран-С»
(«Сайтак»). Ее относят к смешанной группе РНС.
Первая цепочка этой системы из трех станций начала
работать в 1957 г. Сейчас практически все побережья
континентов северного полушария обслуживаются РНС
«Лоран-С».
Работа импульсно-фазовых РНС построена на из-
мерении разности времени прихода импульсов от веду-
щей и ведомых станций и на измерении разности фад
высокочастотных колебаний, заполняющих эти импуль-
21Г
Рис. 47. Судовой приемоиндикатор КПИ-4
сы. Таким образом, для измерения разности расстоя-
ний в импульсно-фазовой системе пользуются двумя
методами. С помощью импульсного метода производят
первое (грубое) определение места и устраняют много-
значность в отсчетах. С помощью фазового метода оп-
ределяют место с высокой точностью.
Измерение навигационных параметров на судне (за-
паздывания импульса от ведомой станции относитель-
но момента приема импульса ведущей станции) произ-
водится при определении места по импульсным РНС с
помощью приемоиндикатора отечественного производ-
ства марки КПИ-4 (рис. 47), а для приема сигналов
импульсно-фазовой РНС «Лоран-С» используется новый
приемоиндикатор КПИ-5Ф.
Специальные испытания показали, что «Лоран-С»
может обеспечить точность ±300 м на расстоянии до
218
1000 миль. Система может работать круглосуточно. Она
рассчитана для работы на расстояниях до 2000 миль.
Система «Омега» является фазовой сверхдлинновол-
повой (сверхнизкочастотной) РНС глобального дейст-
вия. Она состоит из восьми станций. Опытная эксплуа-
тация нескольких станций началась в конце 60-х годов.
Все восемь станций вступили в постоянную эксплуата-
цию с 1976 г. Такое количество станций с особенно-
стями их работы обеспечивают определение места суд-
на в пределах всего Мирового океана. Кроме того, при-
менение в РНС сверхдлинных волн позволяет подвод-
ным лодкам определять место на глубине до 20—30 м.
Точность определения места судна 1—2 мили в наибо-
лее благоприятных условиях и до 5—10 миль — в пери-
оды возмущений ионосферы.
Большая база станций позволяет определять местом
судна на расстояниях до 10 тыс. миль от этих станций.
Каждая станция имеет буквенное обозначение: А —
Норвегия; В — Либерия; С — Гавайские острова; D —
Северная Дакота (США) и т. д. Станции имеют пере-
датчики с большой мощностью излучения —10 кВт и
антенные устройства больших размеров.
Все станции работают на одних и тех же сверхдлин-
ных волнах с частотой 10—14 кГц (22—30 км). Излу-
чение всех береговых станций синхронизировано по все-
мирному времени. Десятисекундные циклы передачи
начинаются с 00.00 ч. Синфазность колебаний в си-
стеме достигается стабилизацией частот с точностью
1-10“12 на каждой станции с помощью атомных (цезие-
вых) стандартов частоты. Благодаря этому любые две
станции могут образовать пару с определенными гипер-
болическими линиями положения.
В будущем, при появлении на судах высокостабиль-
ных эталонов времени, станции могут быть использова-
ны в дальномерном режиме определения. Тогда линия-
ми положения будут окружности.
219
Приемоиндикатор на судне принимает колебания
«береговых станций, запоминает фазу принятых колеба-
ний на время, равное периоду повторения сигналов, и
измеряет разность фаз между ними. Кроме этого, про-
изводится опознавание и выбор пар станций, синхрони-
зация работы приемоиндикатора с циклом работы стан-
ций, получение отсчета точного мирового времени и др.
Для получения места судна по измеренным значени-
ям разностей фаз издаются специальные радионавига-
ционные карты и таблицы. Наиболее просто место суд-
на определяется с помощью радионавигационных карт.
На них находится точка пересечения гипербол пар, для
которых измерена разность фаз.
В последних моделях приемоиндикаторов на элект-
ронном табло выдаются географические координаты
места судна.
Запуск в Советском Союзе 4 октября 1957 г. перво-
го в мире искусственного спутника Земли (ИСЗ),
открыл новую эру в освоении космоса. Достижения сов-
ременной науки и техники создали условия для разра-
ботки принципиально новой навигационной спутниковой
системы. В настоящее время система «Транзит» нахо-
дится в эксплуатации и обладает рядом преимуществ:
большим радиусом действия, хорошей помехоустойчи-
востью и высокой точностью определения места при
любых метеорологических условиях.
Определить географические координаты судна по на-
вигационным искусственным спутникам Земли (НИСЗ),
зная их расположение в любой момент, можно разны-
ми методами. Наиболее эффективны и просты методы,
основанные на использовании эффекта Доплера. Сущ-
ность этого эффекта заключается в том, что при дви-
жении источника излучения в направлении распростра-
нения волны происходит кажущееся уменьшение излу-
чаемой длины волны, так как каждая следующая волна
излучается из точки, расположенной ближе к ранее из-
220
лученной, и наоборот. Это излучение измеряется прием-
ником как измерение доплеровской частоты и являет-
ся навигационным параметром.
Весь комплекс состоит из следующих устройств:
•специальных НИСЗ, выведенных по определенной про-
грамме на орбиты; наземного комплекса оборудования
со службой определения и предвычисления координат
(эфемерид) НИСЗ; судовой аппаратуры для измерения
навигационного параметра — изменения доплеровской
частоты и системы связи для передачи предвычислсн-
ных координат на спутник либо в бортовую систему.
Точность определения места судна с помощью НИСЗ
порядка 0,5 мили. Дискретность определения поряд-
ка 1 ч.
Новая спутниковая РНС «Навстар», предназначен-
ная для непрерывного определения трех координат
подвижных объектов (широты, долготы и высоты),
разработана в США. В этой системе определяются рас-
стояния одновременно по четырем ИСЗ, которые нахо-
дятся в зоне видимости судна или самолета. Измерение
доплеровской частоты позволяет определить скорость
движения объектов.
Спутниковая РНС «Навстар» состоит из: ИСЗ, на-
земных станций управления и приемоиндикаторов, ус-
танавливаемых на судах, самолетах и других объектах.
До 1978 г. на орбиты в системе «Навстар» было вы-
ведено шесть ИСЗ. Это позволяет определять три ко-
ординаты объектов в некоторых районах Земли.
В 1978—1981 гг. количество спутников увеличилось
до 11 и создало условия для непрерывного определе-
ния двух горизонтальных координат и периодического
•определения трех координат в пределах всего земного
шара.
К 1984 г. в строй вступят остальные ИСЗ, после че-
го станет возможным непрерывное определение трех
координат на всей поверхности Земли.
221
Список литературы
1. Васильев В. Н., Топалов В. П. Справочник молодо-
го моряка. Киев—Одесса, Высшая школа, 1982. 216 с.
2. Гришин Ю. А. История мореплавания. М.: Транспорт^
1972. 160 с.
3. Гусев А. А., Черка шеи инов Б. А. Матрос II клас-
са. М.: Транспорт, 1974. 232 с.
4. Дамаскин А. М., К рыса к М. С. Учебное пособие для
матроса и боцмана. М.: Транспорт, 1975. 272 с.
5. Жуков Е. И. Судовые спасательные средства. М.: Тран-
спорт, 19'70. 143 с.
6. Макаров И. В. Основы судовождения. М.: Транспорт,.
1976. 112 с.
7. Макаров И. В., Корж С. М. Морские профессии. М.:
Транспорт, 1974. 128 с.
8. Потемкин А. Э. Радиоэлектроника в судовождении.
2-е изд. перераб. и доп. М.: Транспорт, 1977. 128 с.
9. Файн Г. И. Навигация, лоция и мореходная астрономия.
М.: Транспорт, 1977. 271 с.
10. Фрид Е. Г. Устройство судна. 3-е изд. перераб. и доп.
Л.: Судостроение, 1978. 359 с.
11. Черниев Л. Ф. Азбука судовождения. 2-е изд. перераб.
и дол. М.: Транспорт, 1976. 176 с.
Оглавление
Краткий очерк истории мореплавания .... 3
Немного о судне и безопасности мореплавания ... 16
Организация службы на судах Министерства морского
флота СССР ...........................................36
Предотвращение загрязнения моря судами .... 50
Что такое судовождение? .......................55
Основные понятия из навигации 60
Определение направлений в море 70
Определение пройденного судном расстояния и измерение
глубин в море.........................................85
Время на судне............................................96
Некоторые сведения из морской лоции .... 106
Навигационные пособия по судовождению . . .112
Навигационно-гидрометеорологическое обеспечение морепла-
вания ...................................125
Навигационное оборудование на морских путях . . 139
/Международные правила предупреждения столкновений су-
дов в море 1972 г. (МППСС--72) . . . .146
Сигнализация на море . .........................155
Счисление пути судна.....................................158
Определение места судна по навигационным ориентирам . 167
Определение места судна по небесным светилам . .176
Радиопелепгование на судах............................. 185
Радиолокация ........................................... 199
Современные радионавигационные системы и навигационные
спутники Земли.......................................211
Список литературы .......................................222
ЛЕОНИД ФЕДОРОВИЧ ЧЕРНИЕВ
АЗБУКА СУДОВОЖДЕНИЯ
Переплет художника В. К. Бисенгалиева
Технический редактор Н. Б. Усанова
Корректор-вычитчпк М. Г. Плоткина
Корректор Н. А. Лобунцова
И Б 2720
Сдано в набор 18.07.83. Подписано в печать 06.02.84. Т-00945. Формат
70Х108’/з2. Бум. тип. № 2. Гарнитура литературная. Высокая печать. Усл*
печ. л. 9,8. Усл. кр.-отт. 11,56. Уч.-изд. л. 10,03. Тираж 40 000 экз.
Заказ 3723. Цена 45 коп. Изд. № 1-1-3/11 № 2195.
Ордена «Знак Почета» издательство «ТРАНСПОРТ»,
107174. Москва, Басманный туп., 6а.
Ордена Трудового Красного Знамени тип. изд-ва Куйбышевского обком»
КПСС г. Куйбышев, пр. Карла Маркса, 201
КАРДИНАЛЬНЫЕ ЗНАКИ
ОГРАЖДЕНИЕ НАВИГАЦИОННЫХ ОПАСНОСТЕЙ
ААААаААААААААААААШ
ЗНАКИ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
д Q Д Ж
ЛАТЕРАЛЬНЫЕ ЗНАКИ
ОГРАЖДЕНИЕ СТОРОН ФАРВАТЕРОВ (КАНАЛОВ)
На левой стороне фарватера
На правой стороне фарватера
ЗНАКИ, ОГРАЖДАЮЩИЕ
ОТДЕЛЬНЫЕ НЕЗНАЧИ-
ТЕЛЬНЫХ РАЗМЕРОВ
ОПАСНОСТИ
ЗНАКИ, ОБОЗНАЧАЮЩИЕ
НАЧАЛЬНЫЕ ТОЧКИ И ОСЬ
ФАРВАТЕРА (КАНАЛА,
И СЕРЕДИНУ ПРОХОДА
Выставляются над опасностью
45 коп.
РУЧНАЯ СЕМАФОРНАЯ АЗБУКА