/



















































































































































































































































































































Автор: Копылов И.П.
Теги: электротехника электрические машины и аппараты электронно-и аппаратостроение электрические машины математическое моделирование учебник для вузов
ISBN: 5-06-003861-0
Год: 2001




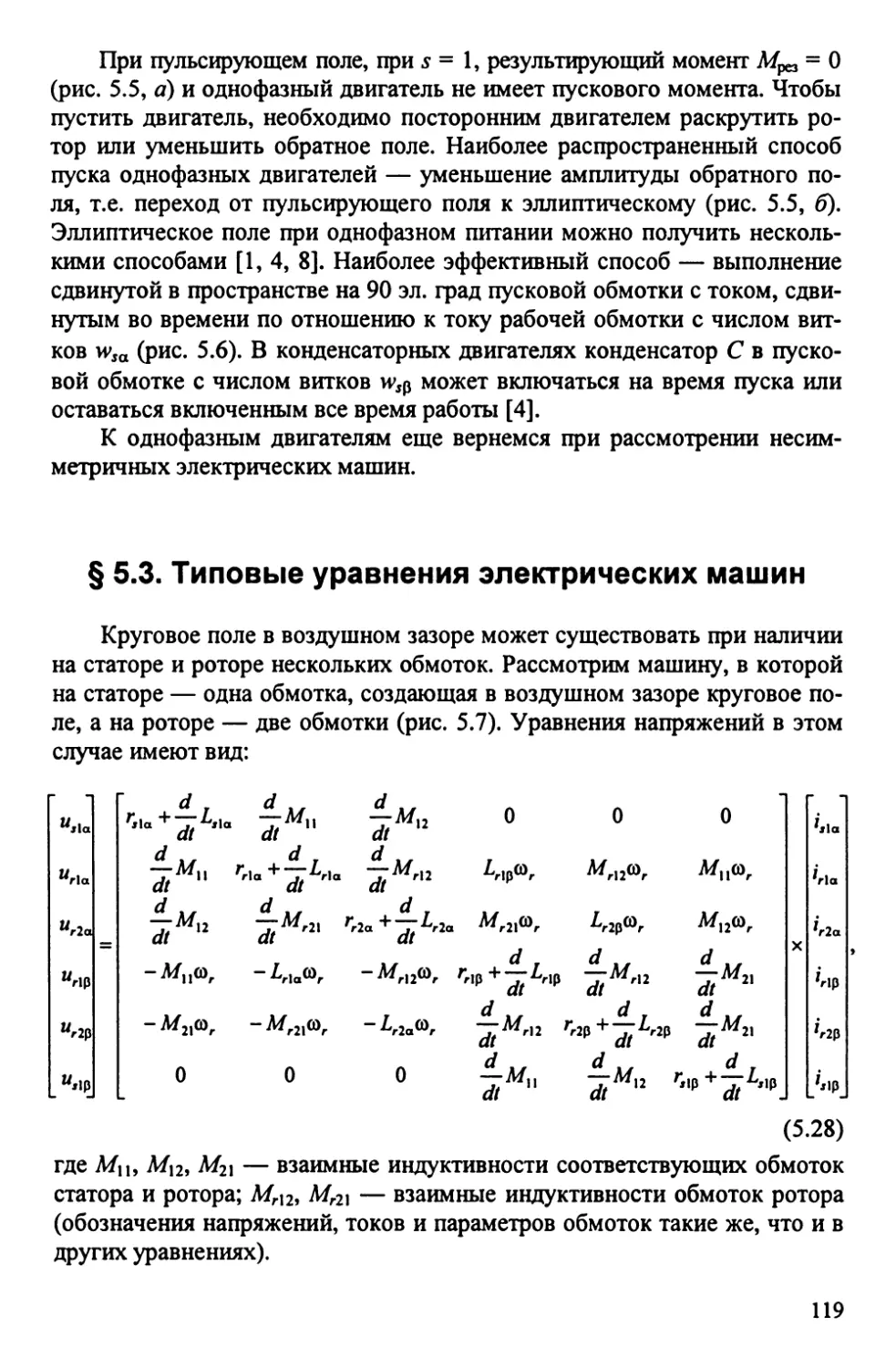
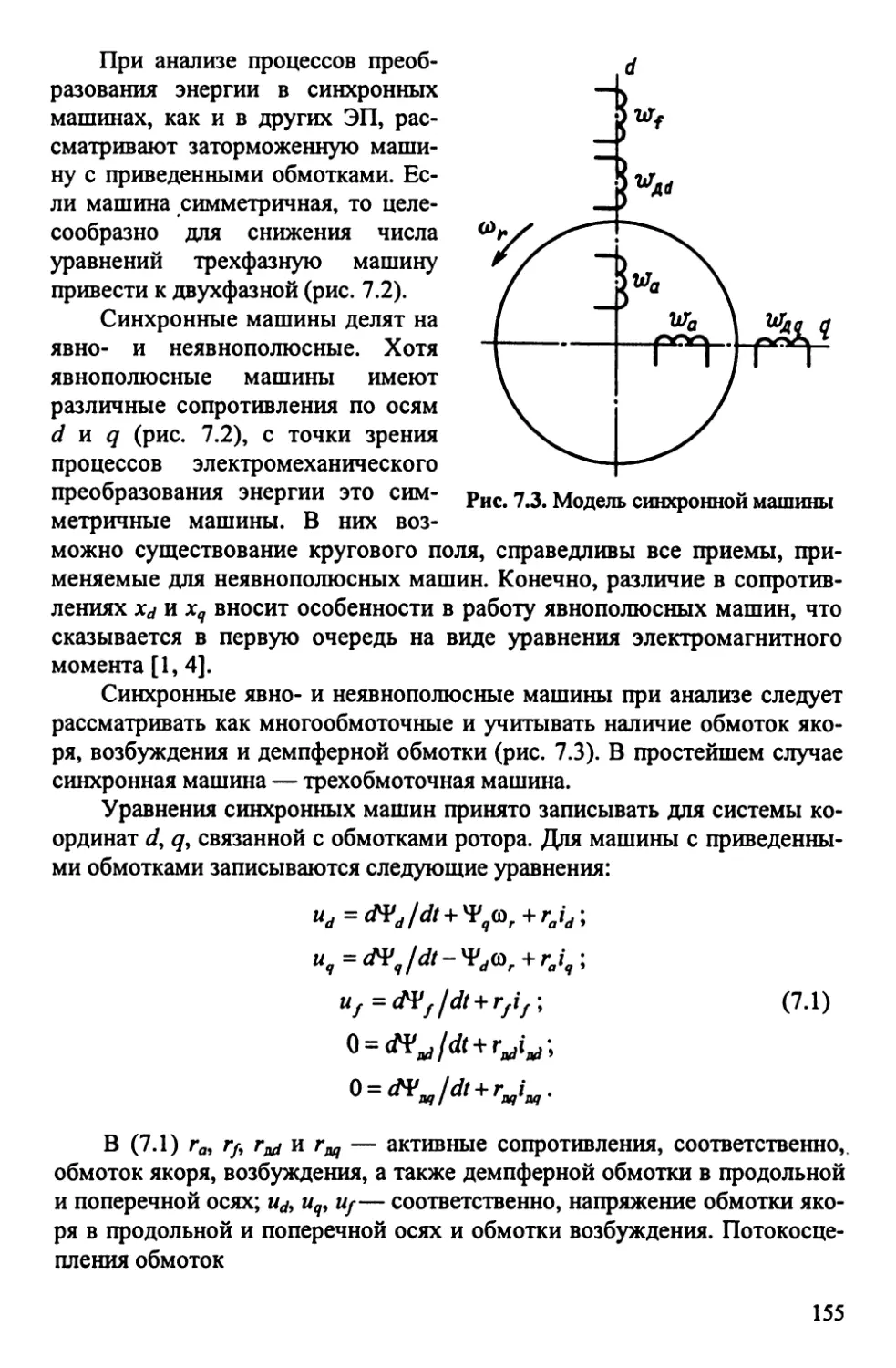
Текст
И.П.Копылов
Математическое
моделирование
электрических
машин
Издание третье, переработанное
и дополненное
Допуи^ено Министерством образования
Российской Федерации в качестве учебника
для студентов электротехнических
и энергетических специальностей вузов
•fab
Москва
«Высшая школа» 2001
УДК 621.313
ББК 31.26
К 65
Рецензент:
доктор техн. наук, проф. Ф. А. Мамедов
(Российский государственный аграрный заочный университет)
Копылов И. П.
К 65 Математическое моделирование электрических машин; Учеб.
для вузов. — 3-е изд., перераб. и доп. — М.: Высш. шк., 2001. —
327 с: ил.
ISBN 5-06-003861-0
Современная теория электромеханического преобразования энергии,
рассматриваемая в учебнике, позволяет составить уравнения для любого
случая, встречающегося в практике электромашиностроения.
В третьем издании B-е — 1994 г.) расширено представление об
электромагнитном моменте в динамических режимах. Более подробно
рассмотрено определение активной и реактивной мощности в переходных
режимах для многофазных, многомерных электрических машин. Дано
строгое определение динамического КПД и коэффициента мощности.
Приводится классификация электрических машин по виду их математического
описания.
Учебник был удостоен Государственной премии СССР.
Для студентов электротехнических и энергетических
специальностей, а также для аспирантов, инженеров и научных работников
электротехнического профиля, связанных с разработкой, исследованием и
эксплуатацией электрических машин и электромеханических систем.
УДК 621.313
ББК 31.26
ISBN 5-06-003861-0 © ГУЛ «Издательство «Высшая школа», 2001
Оригинал-макет данного издания является собственностью издательства
«Высшая школа» и его репродуцирование (воспроизведение) любым способом
без согласия издательства запрещается.
Книга издана к 70-летию
Московского энергетического института
(технического университета)
Предисловие
В основу данного учебника положен материал второго издания
книги «Математическое моделирование электрических машин», вышедшей в
издательстве «Высшая школа» в 1994 г.
Первое издание учебника вышло в 1987 г. и в 1990 г. было удостоено
Государственной премии СССР в области науки и техники.
По существу издание 1987 г. — второе, так как до этого в 1980 г.
вышел учебник «Применение вычислительных машин в
инженерно-экономических расчетах (электрические машины)». В связи с изменением
учебных планов переработанное издание в 1987 г. вышло уже под другим
названием.
В настоящем издании добавлена новая глава «Космическая
электромеханика», в которой в параграфе «Геоэлектромеханика»
сформулированы подходы к новому научному направлению в электромеханике —
электромеханике планеты Земля.
На базе уравнений обобщенного электромеханического
преобразователя сформулировано определение активной, реактивной и обменной
мощности в переходных процессах, а также дано строгое определение
энергетических динамических показателей. Несколько сокращен подход
к моделированию дифференциальных уравнений электромеханических
преобразователей на АВМ.
В книге использованы материалы лекций, которые много лет автор
читает в Московском энергетическом институте (ТУ), а также результаты
научных исследований, проводимых на кафедре «Электромеханика» под
руководством автора.
В подготовке рукописи к переизданию большую помощь оказали
супруга Лидия Васильевна Копылова и ст. лаборант кафедры Татьяна
Антиповна Киселева, которым автор выражает свою благодарность.
Особую благодарность автор выражает рецензенту проф. Ф. А. Ма-
медову.
Все замечания и пожелания по улучшению книги направлять в
издательство «Высшая школа» по адресу: 101430, Москва, СГП-4, Неглинная
ул. д.29/14.
Автор
3
Введение
Электрическая энергия — основной вид энергии, без которой нельзя
представить жизнь современного общества. И в обозримом будущем
электрическая энергия также останется основным видом энергии в
промышленности, сельском хозяйстве и в быту.
Почти вся электроэнергия на Земле вырабатывается электрическими
генераторами, а затем большая ее часть преобразуется электрическими
двигателями в механическую энергию. Электрические машины во
многом определяют технический уровень промышленного производства,
оказывают влияние на развитие современного общества.
К электрическим машинам относятся любые электромеханические
преобразователи, имеющие техническое применение. Теория
электромеханического преобразования энергии, рассматриваемая в данной книге,
применима для любого электромеханического преобразователя.
На рубеже тысячелетий электромеханика столкнулась с целым
рядом проблем в области теории электромеханического преобразования
энергии. До сих пор в теории используются классические представления
начала и середины XX в., когда господствовали уравнения
установившегося режима для синусоидальных величин, а сеть считалась сетью
бесконечной мощности. Основное место в теории занимали векторные
диаграммы и схемы замещения, а динамические режимы часто
рассматривались на основе уравнений статики.
До сих пор нет общепринятых представлений о активной и
реактивной мощности в переходных процессах при несинусоидальных
несимметричном напряжении питания, а также динамическом КПД и
коэффициенте мощности.
Рассматриваемая в данной книге теория обобщенного
электромеханического преобразователя послужит основой для развития классической
теории и предназначена для исследования электромеханических
преобразователей с бесконечным произвольным спектром гармоник поля в
воздушном зазоре и любым количеством контуров на статоре и роторе.
В книге главное внимание уделяется дифференциальным
уравнениям, из которых получаются как частный случай уравнения
установившегося режима. Даются определения активной, реактивной и обменной
мощности и энергетическим показателям в динамике.
Уравнения электрических машин записываются на основе теории
электрических цепей, исходя из того, что преобразование энергии
происходит в воздушном зазоре и магнитное поле известно. Математической
моделью для бесконечного спектра полей и любого числа контуров на
роторе и статоре является модель обобщенного электромеханического
4
преобразователя — электрической машины с тип обмотками на статоре
и роторе. Уравнения обобщенного электромеханического
преобразователя дают возможность получить математическую модель для решения
широкого класса задач, встречающихся в современном
электромашиностроении.
В данном учебнике рассматриваются математические модели
электрических машин при круговом поле и бесконечном спектре полей в
воздушном зазоре электрической машины, а также анализируются
уравнения многообмоточных и многомерных машин при несинусоидальном
несимметричном напряжении питания и нелинейных параметрах. В книге
показаны пути возможного переноса теоретических положений
индуктивных машин на емкостные и индуктивно-емкостные ЭП, а также
описано применение вычислительных машин для решения задач
электромеханики.
Предполагается, что читатель знаком с вычислительными
машинами, программированием и алгоритмическими языками. Цель учебника —
научить читателей составлять уравнения для анализа процессов
преобразования энергии в электрических машинах и приводить их к виду,
удобному для решения на вычислительных машинах.
Рассматриваемая в данной книге теория электромеханического
преобразователя является наиболее общей, обобщающей новейшие
достижения в электромеханике и обеспечивающей решение современных
сложнейших задач электромеханики.
После изучения данного курса студент должен уметь составлять
уравнения для любого случая, встречающегося в практическом
электромашиностроении. Квалификация инженера-электромеханика, по
современным представлениям, определяется умением не только составлять
уравнения, но и упрощать их без потери необходимой информации, а
также отвечать на вопрос о том, сколько времени потребуется для
решения уравнений и какая будет получена информация после их решения.
Часть специалистов, применяющих электрические машины, считают,
что в электромеханике основные открытия и достижения в области
теории уже сделаны. Но это далеко не так. Из трех основных классов
электромеханических преобразователей еще только один нашел широкое
применение и за сто лет совершил техническую революцию в промышленности, а
два класса машин — емкостные и индуктивно-емкостные до сих пор не
нашли применения в промышленности и только ждут своих создателей.
Электромеханика — фундаментальная наука. Она в своей основе
имеет строгие и красивые уравнения. Математические модели адекватно
описывают процессы преобразования энергии в электромеханических
преобразователях. Дальнейшее развитие электромеханики и применение
уравнений обобщенного электромеханического преобразователя таит в
себе новые удивительные достижения.
5
Глава 1
Введение в электромеханику
§ 1.1. Краткая история электромеханики
Знание истории развития электромеханики необходимо для
глубокого понимания идей и закономерностей, определяющих будущее
электротехнической науки и ее практическое применение. История
электромеханики убедительно свидетельствует о том, как научные открытия и
теоретические исследования дают новые инженерные решения, а практические
достижения обеспечивают дальнейшее развитие теории электричества.
Принято считать, что история электрических машин начинается с
изобретения Майклом Фарадеем электрического двигателя.
В 1821 г. М. Фарадей изобрел электрический двигатель, состоявший
из постоянного магнита 7, вокруг которого вращался проводник с током 2,
подключенный к батарее химических элементов Е (рис. 1.1). В этом
двигателе преобразование энергии осуществлялось при постоянном
магнитном поле и постоянном токе, протекающем в проводнике. Непременное
условие работы двигателя — наличие скользящего контакта между
неподвижной и перемещающейся частями электрической цепи. В двигателе
М. Фарадея контакт осуществлялся между ртутью, налитой в чашу 4, и
верхней опорой 3. Открытие М. Фарадея было подготовлено развитием
физики того времени. Несмотря на кажущуюся простоту, двигатель М.
Фарадея до сих пор не имеет строгой математической модели, а
униполярные машины не являются основным направлением в электромеханике.
Электрические машины существовали задолго до 1821 г. В середине
XVII в. О. Герике описал первую электрическую
машину, представляющую собой вращающийся
шар из серы, который натирался ладонями рук.
£ Это была емкостная машина трения с
электрическим рабочим полем. В начале XVIII в. Ф. Гаукс-
би заменил шар из серы полым стеклянным
шаром, насаженным на ось. В 1743 г. в конструкцию
ц машин трения ввели изолированный
металлический электрод, собирающий электрические
заряды, и машина могла непрерывно питать внешнюю
Рис 1.1. Схема электро- цепь. В XVIII в. электрические машины трения
двигателя М. Фарадея непрерывно совершенствовались, а разрабатывали
6
их М. В. Ломоносов, Г. В. Рихман, А. Т. Болотов и другие ученые. К
концу XVIII в. ротор машин трения стали выполнять из стеклянных дисков
диаметром до 2 м. Искры в этих машинах достигали длины более 1 м.
Большой вклад в развитие электротехники внес Луиджи Гальвани
A737—1798). Л. Гальвани заведовал кафедрой практической анатомии в
Болонском университете и занимался физиологией нервов и мышц. В
1786 г. он обнаружил сокращение мышц лапки лягушки при замыкании
контура «железо — медь — лапка». Гальвани утверждал, что он открыл
«животное электричество».
В своем обобщающем труде «Трактат о силах электричества при
мышечном движении» A791) он отмечал, что электрические явления
присущи всем животным, а значит, и человеку. В своих опытах Л.
Гальвани использовал электрическую машину трения. В XVIII в. такие
электрические машины широко использовались в научных исследованиях.
В 1729 г. англичанин С. Грей предложил делить вещества на
проводники и изоляторы. В 1733 г. француз Ш. Дюфе открыл существование
двух типов зарядов, а Б. Франклин ввел термины: положительный и
отрицательный заряды. Конденсатор был создан в 1745 г. В 1752 г. Б.
Франклин открыл «атмосферное электричество», а в 1753 г. в Петербурге при
аналогичных опытах погиб Г. В. Рихман, работавший вместе с М. В.
Ломоносовым.
Великий итальянский ученый А. Вольта A745—1827) в 1792 г.
опроверг утверждения Л. Гальвани о животном электричестве, считая, что
причиной сокращения мышцы лягушки и источником электричества
является контакт двух разных металлов.
Бурное развитие науки уже в начале ХГХ в. показало, что были
правы в одинаковой степени и Гальвани, и Вольта: существует источник
электричества в живых тканях, а пары разных металлов создают разность
потенциалов.
В XVin в. электрические машины применялись в различных
физиологических исследованиях и психологических опытах. Представление об
электричестве связывалось с живыми организмами и божественными силами.
В 1800 г. А. Вольта создал электрохимический генератор, который
состоял из цинковых и медных дисков, разделенных кислотой. Русский
академик В. В. Петров в 1802 г. сделал батарею из 4200 медных и
цинковых дисков и получил ЭДС, равную 1700 В при мощности 85 Вт.
В. В. Петров открыл явление электрической дуги и наблюдал магнитные
и тепловые действия электрического тока. В 1820 г. Ж. Био и Ф. Саварр
сформулировали закон взаимодействия тока и магнита. В этом же году
Г. Эрстед опубликовал работу, в которой было описано взаимодействие
магнитной стрелки и проводника с током, а Ф. Араго предложил
соленоид. В 1821 г. X. Дэви обнаружил влияние температуры и материала
проводника на проводимость.
7
После открытия М. Фарадеем
индуктивной электрической машины с
магнитным полем, в котором
осуществляется электромеханическое
преобразование энергии, основные
успехи в области электромеханики были
связаны с этим видом
электромеханических преобразователей энергии.
В 1824 г. П. Барлоу
сконструировал двигатель, состоявший из двух
медных зубчатых колец,
расположенных между полюсами постоянных
магнитов. Соприкасаясь со ртутью,
колесо Барлоу вращалось при
пропускании тока. В 1824 г. Ф. Араго
II WL Л f^Ji III обнаружил, что при вращении медно-
II 2зШ Ыу JII го диска магнитная стрелка, располо-
Ojjgfe- * i ~2ЭЧ женная над ним, увлекалась в сторону
"I ■■ |"> вращения диска.
Закон Ома был открыт Г. Омом в
1826 г. В 1831 г. М. Фарадей открыл
закон электромагнитной индукции.
Как утверждал М. Фарадей, ему
удалось превратить магнетизм в электричество. Открытие этого закона
явилось важным этапом развития электромеханики. Представления М. Фара-
дея о магнитном поле как об особом состоянии материи оказались
особенно плодотворными и имели важное значение для развития теории и
практики электромашиностроения [3].
В 1832 г. братья Пикси предложили генератор переменного тока с
вращающимся подковообразным постоянным магнитом 1 и
неподвижными катушками со стальными сердечниками 2 (рис. 1.2). Эта
конструкция хорошо подтверждала закон электромагнитной индукции.
Э. X. Ленц в 1832 г. сформулировал принцип обратимости
электрических машин, а в 1833 г. он экспериментально показал возможность работы
электрической машины в генераторном и двигательном режимах.
В 1834 г. Б. С. Якоби построил электродвигатель, который работал за
счет притяжения и отталкивания электромагнитов. Двигатель Б. С. Якоби
имел две группы электромагнитов: вращающуюся 1 и неподвижную 3
(рис. 1.3) Для изменения полярности вращающихся электромагнитов
использовался коммутатор 4, представлявший собой цилиндр, разделенный на
части изолирующими вставками. В четырехполюсной машине было четыре
медных и четыре изолирующих вставки. По цилиндру скользили
неподвижные щетки 2. Напряжение к ним подводилось от гальванической батареи.
8
Рис. 1.2. Конструкция генератора
братьев Пикси
Рис. 1.3. Конструкция
электродвигателя Б. С. Якоби
В 1838 г. Б. С. Якоби установил
на боте 40 электродвигателей,
работающих на два вала, и
гальваническую батарею, состоящую из 320
элементов. Бот плавал по Неве
несколько часов. Это было первым
практическим применением
электрических машин. Оно показало, что
гальванические источники
электрической энергии не могут обеспечить
длительную работу мощных
электродвигателей. Источниками
электроэнергии в дальнейшем стали
электрические генераторы,
преобразующие механическую энергию
паровой или гидравлической турбины.
В 1860 г. А. Пачинотти, а в 1869 г.
3. Грамм предложили кольцевой якорь (рис. 1.4). На кольцевой
магнитопровод 1 в первых машинах, выполнявшихся из стальной проволоки,
виток к витку наматывалась обмотка якоря 2. Щетки 3 в первых машинах
скользили непосредственно по обмотке. В непрерывной обмотке якоря
коммутация осуществлялась за счет замыкания витков щетками.
Магнитное поле создавалось магнитами 4 или электромагнитами. Если в машине
Якоби обмотка была разомкнутой, то в этой стала замкнутой. Эта машина
содержала все основные элементы современных электрических машин.
В 1873 г. кольцевой якорь был заменен Ф. Гефнер-Альтенеком
и В. Сименсом на барабанный. С 1878 г. на барабанном якоре
начали делать пазы, а в 1880 г. по предложению Т. Эдисона магнито-
проводы стали делать шихтованными.
Последние десятилетия
прошлого столетия были богаты
техническими открытиями. В 1879 г. на
промышленной выставке в Берлине была
построена первая электрическая
железная дорога. В 1885 г. венгерские
электротехники О. Блата, М. Дэри и
К. Циперновский предложили
однофазный кольцевой, броневой и
стержневой трансформатор с замкнутой
магнитной системой. В 1887 г.
итальянский ученый Г. Феррарис и
югославский ученый и изобретатель
Н. Тесла, работавший большую часть
9
Рис. 1.4. Электрическая схема
машины Пачинотти — Грамма
жизни в Америке, предложили двухфазный асинхронный двигатель.
В 1889 г. М. О. Доливо-Добровольский разработал трехфазную
систему переменных токов и построил трехфазный асинхронный двигатель с
короткозамкнутым ротором и трехфазный трансформатор.
Первой в мире трехфазной электростанцией и первой линией
электропередачи была Лауфенская, созданная в 1891 г. для электроснабжения
Международной электротехнической выставки во Франкфурте-на-Майне
(Германия). Этот выдающийся эксперимент был приурочен к
Международному конгрессу электротехников. Линия передачи была длиной 170 км и
передавала мощность около 300 л. с. На выставке впервые зажглись 1000
ламп накаливания, а асинхронный двигатель мощностью 100 л. с. привел
в действие красивый водопад.
Трехфазная система переменного тока заняла господствующее
положение в электроэнергетике.
В 1893 г. в России было осуществлено электроснабжение
Новороссийского элеватора. Общая мощность генераторов была 1200 кВ-А,
асинхронные двигатели имели мощность 3,5—15 кВт. Уникальной была
электрификация Охтенского порохового завода в Петербурге. Первой в
России линией электропередачи длиной в 21 км была установка на
Павловском прииске Ленского золотопромышленного района Сибири.
Электрификация Петербурга, Москвы, Киева, Риги и других крупных городов
началась в 1897 г. Паровая турбина была впервые соединена с
турбогенератором мощностью 1 мВт в 1899 г.
Широкое развитие энергетические системы получили в начале XX в.
Первые районные станции появились в Петербурге, Москве и на юге
вблизи г. Ессентуки.
Самая большая электростанция находилась в Богородске (ныне
Ногинск) под Москвой, где были установлены три турбогенератора по 5000
л.с. Линия напряжением 70 кВ связывала эту станцию с Москвой.
Измайловская подстанция кабелями связывалась со станцией на Раушской
набережной. В 1914 г. Богородская станция была самой крупной в мире
электростанцией, работающей на торфе.
После появления крупных электростанций в 90-х годах прошлого
века стали строиться электрифицированные участки пригородных и
магистральных железных дорог. К 1900 г. в России в 12 городах было
открыто трамвайное движение.
Нельзя назвать точную дату, когда электрическая энергия начала
свое победное шествие по планете. Но промышленное применение
электричества началось в 90-х годах XIX в. Изобретение М. О.
Доливо-Добровольским трехфазного асинхронного двигателя послужило мощным
толчком в развитии электрификации.
С конца ХЕХ в. началось внедрение электричества во все отрасли
промышленности. Уже в начале XX в. мощности электростанций во мно-
10
гих странах достигли десятков миллионов киловатт. Мощности
объединенных энергосистем достигли сотен миллионов кВт.
Развитие электрификации привело к появлению мощной
электротехнической промышленности.
В последние десятилетия выпуск электрических машин единых
серий в нашей стране достиг нескольких десятков миллионов штук в год,
число типоразмеров выпускаемых машин превышает сто тысяч [9].
В ХГХ и XX вв. емкостные машины совершенствовались и были
созданы оригинальные машины, однако успехи в развитии индуктивных
электрических машин были настолько впечатляющими, что постепенно о
емкостных машинах даже стали забывать.
Параллельно с развитием электрических машин развивалась теория
электромеханического преобразования энергии. Теория электрических
машин развивалась в работах А. Ампера, Г. Ома, Д. Джоуля, Э. X. Ленца,
Г. Гельмгольца и других выдающихся ученых начала ХГХ в. Особое
место занимают работы Д. Максвелла, обобщившего достижения
электротехники в «Трактате об электричестве и магнетизме» A873). Он
разработал теорию электромагнитного поля и вывел уравнения, составляющие
теоретическую основу электромеханики.
Большое значение имеют также работы Н. А. Умова A874) и Д. Пойн-
тинга A884) о передаче и преобразовании энергии. Первой теоретической
работой по электрическим машинам можно считать работу Э. Арнольда
по теории и конструированию обмоток электрических машин,
вышедшую в 1891 г.
В 90-х годах ХГХ в. М. О. Доливо-Добровольский, Г. Каппа и другие
разработали основы теории и проектирования трансформаторов. В 1894 г.
A. Гейланд теоретически обосновал круговую диаграмму асинхронной
машины. В 1907 г. К. А. Круг дал точное обоснование круговой
диаграммы. В 20-х годах нашего столетия Ю. Фортескью предложил метод
симметричных составляющих.
К 30-м годам XX в. в трудах Э. Арнольда, Р. Рихтера, А. Блонделя,
Л. Дрейфуса, М. Видмара, К. Штейнметца, К. А. Круга, К. И. Шенфера,
B. А. Толвинского, М. П. Костенко и других была достаточно глубоко
разработана теория установившихся режимов электрических машин.
Исследование переходных процессов в электрических системах
началось в 1910 г. До середины 30-х годов занимались исследованием
электромагнитных процессов в основном для расчетов токов короткого замыкания
с помощью метода симметричных составляющих. В 20-х годах произошли
первые случаи нарушения устойчивости дальних линий передачи
переменного тока. Изучение устойчивости энергосистем в середине 30-х годов
привело к необходимости исследования электромеханических переходных
процессов. Первой книгой по переходным процессам в
электроэнергетических системах была монография Р. Рюденберга, вышедшая в 30-х годах.
11
Первые работы по математической теории электрических машин
появились в середине 20—40-х годов. К ним относятся работы Р. Парка,
А. А. Горева, Г. Крона, Г. Н. Петрова и др. Фундаментальными работами
по математической теории электрических машин являются работы Г.
Крона, который предложил модель и уравнения обобщенной электрической
машины.
Теория переходных процессов, зародившаяся в начале этого
столетия, получила бурное развитие в 60—80-е годы XX в. благодаря
широкому применению вычислительных машин. В последние годы усилиями
многих ученых, таких, как Б. Адкинс, И. А. Глебов, Г. А. Сипайлов,
Е. Я. Казовский, С. В. Страхов, В. В. Хрущев и другие, математическая
теория индуктивных электрических машин развилась довольно глубоко.
Применение вычислительных машин позволило анализировать
установившиеся процессы как частный случай переходных процессов, подойти
к созданию автоматизированных систем проектирования электрических
машин.
До середины 50-х годов электромеханика развивалась как земная —
одномерная наука, когда в электрической машине была одна
вращающаяся часть — ротор. В середине прошлого века человек впервые вышел в
Космос и настала эра космической — шестимерной электромеханики.
Моменты инерции космического летательного аппарата соизмеримы с
моментами инерции гиродина — электрической машины —
энергетического сердца корабля. В трехмерном пространстве, когда шаровой ротор
и статор гиродина, закрепленный на осях летательного аппарата, они
имеют шесть степеней свободы.
В середине 80-х годов автор перенес достижения космической
электромеханики на нашу планету, показав, что Земля вращается вокруг
Солнца по тем же законам, что и станция «Мир» и другие космические
летательные аппараты вращаются вокруг Земли.
Новое научное направление — геоэлектромеханика уже сделала
первые шаги, продемонстрировав неисчерпаемые возможности
электромеханики [12].
Силами ученых Электротехнической академии РФ в 1999 г.
выпущено фундаментальное издание «История электротехники», в котором
подробно изложена история различных направлений электротехники до
конца XX в. [3].
Однако теория емкостных машин отстала в своем развитии, так как,
несмотря на усилия крупных ученых: А. Г. Иосифьяна, А. В. Иоффе,
Н. Д. Папалекси, Л. И. Мандельштама, А. Е. Каплянского, А. А.
Воробьева и других, — не удалось создать промышленных образцов таких ЭП.
В настоящее время одной из важных задач математической теории
электрических машин является создание общей теории ЭП,
объединяющей индуктивные, емкостные и индуктивно-емкостные ЭП.
12
В последние годы появилось много работ, развивающих отдельные
разделы математической теории электрических машин. Настало время
сосредоточить усилия на главном направлении — теории многофазного
/я, «-обмоточного обобщенного электромеханического преобразователя
энергии, объединяющего основные достижения теории цепей и теории поля.
На базе уравнений обобщенного электромеханического
преобразователя стало возможным определять активную, реактивную и обменную
мощности в переходных процессах. Можно надеяться, что определение
динамических энергетических показателей на базе дифференциальных
уравнений обобщенного электромеханического преобразователя в
ближайшие годы получит общее признание.
Развитие теории электромеханического преобразования энергии
приведет к созданию новых ЭП с необычной геометрией и для
нетрадиционных применений. Требуется создание электрических машин с малым
уровнем вибраций и шумов, высокой надежностью, с большим
диапазоном частот вращения. Новые задачи в электромашиностроении можно
решить только при углубленном развитии теории электромеханического
преобразования энергии, которая излагается в данной книге.
§ 1.2. Электрические машины —
электромеханические преобразователи энергии
В конце 80-х г. большинство кафедр «Электрических машин»
изменили название и стали именоваться кафедрами «Электромеханики». Это
было связано с тем, что вузовское образование стало больше
приближаться к университетскому и специальные курсы стали наполняться
большим научным содержанием.
Электрические машины преобразуют механическую энергию в
электрическую и обратно электрическую — в механическую.
Электромеханическое преобразование энергии из всех преобразований энергии в
окружающем нас Мире одно из важнейших. Изучение и применение
основных положений электромеханического преобразования энергии вышло за
рамки технических применений и находит благоприятную почву в
электробиологии и астрофизике.
Электромеханические преобразователи более емкое понятие, чем
электрические машины, к которым принято относить созданные
человеком машины, окружающего его в повседневной жизни и не требующие к
себе большого внимания. К электромеханическим преобразователям (ЭП)
относятся преобразователи, созданные природой и человеком — это
более емкое понятие и в дальнейшем к нему будем относить все ЭП.
В ЭП концентрация и электромеханическое преобразование энергии
осуществляется в магнитном, электрическом и одновременно в магнит-
13
Индуктивно-емкостные ЭП
Электромагнитное поле
/ \
Индуктивные
Емкостные
Магнитное поле
Электрическое поле
Рис. 1.5. Классы электромеханических
преобразователей
ном и электрических полях. По
этому признаку ЭП делятся на
три класса
индуктивно-емкостные, индуктивные и
емкостные ЭП (рис. 1.5). В
индуктивно-емкостных ЭП
концентрация и преобразование энергии
происходит в
электромагнитном поле, в индуктивных — в
магнитном поле, а в
емкостных — в электрическое поле.
Емкостные ЭП появились
раньше индуктивных, но
индуктивные за сто лет
совершили техническую революцию в
промышленности, а емкостные ЭП, несмотря на усилия многих
талантливых ученых, так и не нашли применения, как силовые
преобразователи. Ждут своего часа и индуктивно-емкостные ЭП. На рис. 1.6 на шкале
мощностей представлено примерное распределение предпочтительных
областей распространения индуктивных, емкостных и индуктивно-
емкостных ЭП. Индуктивные ЭП господствуют в области больших
мощностей и в астрофизике. Емкостные ЭП занимают область небольших
мощностей, а индуктивно-емкостные занимают область средних мощностей.
Биологические двигатели в основном емкостные ЭП, а более
мощные — индуктивно-емкостные. На шкале мощностей отмечена мощность
107 Вт — мощность самого маленького электродвигателя ворсинки
бактерии. Только одна бактерия имеет несколько десятков таких двигателей
для вращения ворсинок. Такими двигателями занимаются
электробиологи, которым нужна помощь и участие электромехаников.
На шкале мощностей есть еще одна замечательная веха — 109 Вт —
мощность турбогенератора, созданного человеком. Мощность
индуктивных ЭП может в
астрофизических объектах
достигать огромных значений
(см. рис. 1.6).
Ориентировочно мощность
униполярного двигателя нашей
планеты равна, примерно,
1024Вт.
Индуктивно-емкостные
машины можно было
создать, объединив емкостную
и индуктивные машины.
14
А
К"
8с
|-<о
Ч
6i
1
8
-ч-
**.
ч*
, .^^
<^ ^*С L
n S ^ч
N ХХ
\ / LC
\/
. ^ ^^^_ С
О Ю-17 1 109 Вт °°
Рис. 1.6. Предпочтительные области
распространения различных классов электромеханических
преобразователей на шкале мощностей
Однако этого пока нельзя сделать из-за большого различия в единичной
мощности. Хотя индуктивно-емкостные ЭП занимают наиболее важную
область на шкале мощностей, но они еще ждут своих создателей.
Может быть и не надо создавать такие машины, так как человек с его
мышцами может управлять мощными индуктивными ЭП (например,
электроинструментами, электровозом и целыми энергосистемами), когда
энергия мышц сливается с энергией электрической машины. Эволюцию
окружающего нас мира можно представить как заполнение шкалы
мощностей электромеханическими преобразователями. Вначале появились
индуктивные преобразователи, а через миллиарды лет — емкостные ЭП,
а затем появились разумные существа и вершина цивилизации —
человек. Сегодня человек управляет мощными электрическими машинами, а
завтра научится управлять ЭП астрофизических объектов.
В настоящее время большинство электромехаников работают над
созданием новых и совершенствованием уже созданных электрических
машин, работающих в промышленности, сельском хозяйстве и в быту.
Серии машин выпускаются миллионами штук в год, поэтому улучшение
их технико-экономических показателей имеет важное значение. Большой
отряд электромехаников трудится в космической электромеханике.
Сегодня теория электромеханики претендует на участие в развитии
электробиологии и астрофизики.
Развитие теории электромеханического преобразования энергии, в
основном, базируется на достижениях в области индуктивных
электрических машин, но предполагается, что основные положения теории могут
быть распространены на емкостные и индуктивно-емкостные машины.
Емкостные и индуктивно-емкостные ЭП будут кратко рассмотрены в гл. 13.
Изложение материала учебника в дальнейшем, в основном, будет
касаться индуктивных машин.
§ 1.3. Законы электромеханики
Электромеханика — часть физики, занимающаяся
электромеханическим преобразованием энергии.
Как и другие фундаментальные науки, электромеханика имеет свои
законы. Хотя электромеханика имеет давнюю историю, законы
электромеханики сформулированы недавно [5]. Рассмотрим три основных закона
электромеханики.
Первый закон. Электромеханическое преобразование энергии не может
осуществляться с коэффициентом полезного действия, равным 100%.
В общем виде электрическую машину с внутренним сопротивлением
ZBH можно представить как шестиполюсник с двумя электрическими
15
а) ш 5) я вьгоодами, характерюуемыми на-
^^| z5„ [^ «в—i г—» пряжением с/и частотой/, двумя
^°i ■ " ■ г°п f °i * Р"°п механическими вьшодами с мо-
4 I ментом на валу М и частотой вра-
Q t щения л, двумя тепловыми выво-
Рис. 1.7. Представление электромехани- дами с количеством выделяемой
ческого преобразователя в ввде многопо- в машине тепловой энергии Q и
111001111X3 температурой / (рис. 1.7, а).
Представляя электрическую машину как шестиполюсник, следует
отметить, что электромеханические преобразователи — сложные
преобразователи, в которых преобразование электрической энергии (Рзп) в
механическую (/'мех) и обратно происходит с обязательным выделением
тепловой энергии (Рт).
Нельзя построить электрическую машину, в которой
электромеханическое преобразование энергии осуществлялось бы без потерь. Чтобы не
было потерь, необходимо иметь обмотки с активным сопротивлением,
равным нулю. Но при этих условиях уравнения электромеханического
преобразования не имеют решения. Если в контурах электрической
машины нет активного сопротивления — это не ЭП, а сверхпроводящий
накопитель энергии, в котором циркулируют токи, а электромагнитного
момента нет.
Электрические машины со сверхпроводящими обмотками
переменного тока должны иметь внешние контуры с активными
сопротивлениями. В таких машинах электрические потери выводятся во внешнюю цепь,
что обеспечивает снижение массы машины.
Обмотки возбуждения синхронных машин и машин постоянного
тока выполняются сверхпроводящими, потери в них могут быть равны
нулю, так как они косвенно участвуют в процессе преобразования энергии.
Так как энергия постоянного тока обмоток возбуждения не преобразуется
в электрическую или механическую энергию, сверхпроводящая обмотка
возбуждения может быть заменена постоянными магнитами или машина
может быть выполнена без обмотки возбуждения (в случае, когда поле
создается реактивной составляющей переменного тока). В синхронных
машинах, работающих параллельно с сетью бесконечной мощности, поле
создается как постоянным током, протекающим в обмотке возбуждения,
так и переменными токами, протекающими в обмотке якоря.
Если представлять ЭП как четырехполюсник (рис. 1.7, б), то КПД
электрической машины можно определить как отношение полезной
мощности к мощности, подводимой к электрической машине. Для
режимов генератора и двигателя КПД определяется соответственно:
л = Лл/-Ри«; 0-1)
n = PMJP,„. A,2)
16
В соответствии с ГОСТ более точно КПД для режимов генератора и
двигателя рассчитывают следующим образом:
Л = Ю0[A-Рт)/(Рэл + />мех)]; A.3)
Л = 100A- PJPJ. A.4)
При проектировании электрических машин стремятся повысить
КПД, т. е. снизить потоки тепловой энергии, что приводит к уменьшению
габаритов и стоимости машины. В электрических машинах большой
мощности rj = 98,2%, а в трансформаторах rj = 99,8%. Такими высокими
энергетическими показателями обладают только электрические машины
большой мощности, микромашины могут иметь КПД всего несколько
процентов.
Электромеханика является наукой о замкнутых контурах:
электрический ток, протекающий в обмотках машины, замыкается и во внешней
цепи. Электромагнитный момент уравновешивается моментом
сопротивления, характеризующим нагрузку.
Обычно при анализе процессов преобразования энергии в
электрических машинах считают, что сопротивление электрической цепи, к
которой подключена электрическая машина, равно нулю (сеть бесконечной
мощности). Момент сопротивления на валу машины постоянен. Нагрев
машины не влияет на температуру окружающей среды. Однако при
исследовании электрических машин следует иметь в виду, что могут
изменяться напряжение, частота и сопротивление сети, а также момент
инерции на валу машины и момент сопротивления. Машина может работать в
ограниченном пространстве, а температура среды, окружающей ее, не
остается постоянной.
Во избежание ошибок при анализе процессов преобразования
энергии необходимо рассматривать тепловой контур. Можно создать
электрическую машину, которая при работе будет охлаждаться. Для этого
используется эффект Пельтье, когда холодные спаи, поглощающие
теплоту, помещаются внутри машины, а горячие спаи, выделяющие теплоту, —
вне машины. Такие электрические машины в качестве силовых
преобразователей не применяются, так как существующие спаи проводниковых
материалов обеспечивают охлаждение при низких плотностях токов.
Электрические машины, из которых выводится теплота за счет эффекта
Пельтье, имеют большие габариты и низкие энергетические показатели.
Упрощая анализ процессов преобразования энергии в ЭП,
необходимо упрощать математическое описание сопротивления ZB„, переходя от
его сложных матриц к сопротивлению ZBH, состоящему из активного и
индуктивного сопротивлений, а затем — только к активному или
индуктивному. В пределе можно считать ZB„ = 0. Тогда ЭП можно представить
в виде четырехполюсника с двумя электрическими и двумя механиче-
17
скими выводами (рис. 1.7, б). Однако такое упрощенное представление
можно использовать лишь при анализе энергетических систем с большим
числом ЭП и трансформаторов. Изучение электрических машин без учета
внутреннего сопротивления машины теряет смысл. Чем более сложной
матрицей сопротивления представляется электрическая машина, тем
больше информации учитывается при исследовании математической
модели ЭП.
Второй закон. Все электрические машины обратимы, т. е. одна и
та же машина может работать в режимах двигателя и генератора.
Обратимость электрической машины — основное отличие ЭП от
других преобразователей. Работа в режимах двигателя и генератора —
важнейшее преимущество ЭП, обеспечивающее широкое применение
электрических машин в промышленности.
В режиме генератора активная мощность забирается с вала машины
и преобразуется в электрическую, в режиме двигателя она поступает из
сети и преобразуется в механическую. При этом реактивная мощность,
идущая на создание магнитного поля, может «поступать» в ЭП или
«отдаваться» в сеть независимо от режима работы ЭП.
Режим параллельной работы синхронной машины с сетью
бесконечной мощности зависит от момента на валу. Потребляет машина
реактивную мощность из сети или отдает ее в сеть — это определяется током
возбуждения. Синхронные машины, работающие параллельно с сетью в
режиме холостого хода, применяются достаточно широко и называются
синхронными компенсаторами. В ЭП возможен режим работы, когда
электрическая или механическая мощность преобразуется только в
теплоту — режим холостого хода.
В обычных машинах поток тепловой энергии не изменяет
направления и потери, как правило, необратимы. Однако существуют ЭП, в
которых тепловая энергия преобразуется в электрическую или механическую.
Если в ЭП в результате изменения температуры изменяется магнитная
или диэлектрическая постоянная, то меняется и поток магнитного или
электрического поля, что дает возможность создавать ЭП различных
конструктивных модификаций, преобразующих тепловую энергию. Для
получения ЭП с приемлемыми энергетическими и массогабаритными
показателями необходимо, чтобы машина работала при температуре, близкой
к точке Кюри и была выполнена из специальных материалов (см. § 10.4).
Одна из основных особенностей ЭП — та, что они являются
концентраторами энергии. В линиях электропередачи электромагнитная анергия
передается по линии, распределяясь вдоль проводов в бесконечности.
Энергия магнитного поля концентрируется в трансформаторах и
электрических машинах.
В трансформаторах энергия магнитного поля концентрируется в
основном в магнитопроводе, а в генераторах и двигателях — в воздушном
18
зазоре (пространстве между ротором и статором). Можно утверждать,
что там и происходит электромеханическое преобразование энергии.
В электрических машинах в небольшом объеме воздушного зазора
могут концентрироваться огромные мощности, достигающие в
современных машинах 1600 МВт. В хорошо спроектированных электрических
машинах удельная мощность воздушного зазора при изменении
мощности в 10—100 раз изменяется всего в 3—5 раз. Удельная мощность
воздушного зазора равняется примерно 0,5 Вт/мм3.
Одним из свойств ЭП является адаптивность, т. е. возможность
приспосабливаться к тем или иным условиям работы.
В последние годы проявилась тенденция к объединению ЭП с ЭВМ»
которые позволяют управлять и контролировать как отдельными
машинами, так и комплексом электрических машин. Появился даже термин
«умные машины».
Однако из-за увеличения стоимости и снижения надежности по
этому пути следует идти лишь в отдельных случаях там, где это диктуется
условиями эксплуатации.
Большинство серийных электрических машин представляют собой
замкнутые системы автоматического регулирования, в основе своей
имеющие обратные связи, демпфирующие контуры, блоки усиления,
датчики и другие элементы систем автоматического регулирования.
Многие термины из электромеханики перекочевали в теорию
автоматического регулирования. Появление новых требований к ЭП, которые
решаются путем объединения ЭП с ЭВМ, необходимо передавать
электрическим машинам, внося изменения в их конструкцию. Один из примеров
будет рассмотрен в § 9.4, когда за счет включения выпрямителей в цепь
ротора обеспечивается синхронизация двигателя и автоматическое
регулирование тока возбуждения от нагрузки.
В последнее время теория технической электромеханики удачно
перенесена на биологические и астрофизические объекты, где адаптивность
ЭП проявляется с наибольшей наглядностью.
Третий закон. Электромеханическое преобразование энергии
осуществляется полями, неподвижными относительно друг друга, а
результирующее поле в машине создается полями статора и ротора. Ротор
может вращаться с той же скоростью, что и поле, или с другой
скоростью, однако поля ротора и статора в установившемся режиме
неподвижны относительно друг друга.
Из третьего закона следует, что скольжение
5 = (сос±сог)/сос, A.5)
где сос — угловая скорость поля; сэг — угловая скорость ротора.
При изменении сог частота токов f2 в роторе изменяется. При этом
исходя из A.5)
19
/,=/;*, A.6)
где /i — частота сети (частота токов в статоре).
Поля ротора и статора неподвижны относительно друг друга и
создают электромагнитный момент
A/,=crt, A.7)
где Рэ — электромагнитная мощность или мощность,
сконцентрированная в магнитном поле в воздушном зазоре машины.
Поля, перемещающиеся относительно друг друга, не создают
электромагнитного момента, а создают только поток тепловой энергии, тем
самым косвенно влияя на распределение потоков механической и
электрической энергии.
Как и в других преобразователях, в электрических машинах
возможен резонанс, когда частота сети определяется соотношением
/, = />Л> 0.8)
где р — число пар полюсов.
Процессы преобразования энергии в двухполюсной и
многополюсной машинах протекают идентично, лишь с той разницей, что в
многополюсной машине угловая скорость поля в р раз меньше, чем в
двухполюсной.
Можно ограничиться двумя первыми законами электромеханики.
Однако третий закон позволяет записывать и преобразовывать уравнения
электромеханического преобразования энергии.
§ 1.4. Основные подходы к решению
задач электромеханики
История развития электромеханики свидетельствует о
существовании двух крайних подходов к теории электромеханического
преобразования энергии: на базе теории поля и теории цепей. Теория поля
развивается на основе уравнений Максвелла, а теория цепей — на основе
уравнений Кирхгофа.
Третий наиболее прогрессивный подход к анализу процессов
электромеханического преобразования энергии — комбинированный подход,
сочетающий теорию поля и теорию цепей. Магнитное поле неотделимо от
токов, его создающих, а токи не могут существовать без магнитного поля.
Третий метод, объединяющий два фундаментальных метода, и составляет
теоретическую основу данной книги, когда, исходя из картины поля в
воздушном зазоре ЭП, записывают уравнения напряжений, а через токи или пото-
косцепления выражаются уравнения электромагнитного момента.
20
Рис. 1.8. Картина магнитного поля асинхронной машины
Электромеханическое преобразование энергии в индуктивных
электрических машинах происходит в воздушном зазоре — пространстве, где
сосредоточена энергия магнитного поля. Зная картину поля (рис. 1.8),
можно определить напряжения, токи, моменты, потери, электрические
параметры ЭП в установившихся и переходных процессах. Определить
электромагнитное поле в любом, даже самом простом ЭП — сложная
задача, решить которую трудно даже с помощью вычислительной
техники. Однако приближенное представление картины поля в воздушном
зазоре ЭП дает достаточную точность решения для большинства задач
электромеханики.
За последние десятилетия накоплено значительное число методов
анализа и расчета электромагнитных полей. Отправной точкой для
расчетов электромагнитного поля являются уравнения Максвелла, которые
обычно приводятся в дифференциальной форме.
Одно из уравнений Максвелла устанавливает связь между вектором
напряженности магнитного поля Н и вектором плотности тока j:
21
rotH = j. A.9)
Интегрирование обеих частей уравнения A.9) по площади Sh
например для простого двухмерного случая магнитного поля дает выражение
J(rotH),J5= j}kdS. A.10)
s, s,
Применив теорему Стокса J(rotH)A</S= fa<//, из A.10) получим
s, i
закон полного тока:
fBWl = Jj,<tf, A.11)
/ s,
где 5 — площадь рассматриваемой поверхности, внутри которой
протекает ток / плотностью j в направлении вектора к (ток / ограничен
замкнутым контуром /)•
Правая часть A.11) для контуров /, полностью охватывающих токо-
ведующее сечение 5, превращается в выражение для полного тока:
likdS = Ik. A.12)
s,
Вектор индукции магнитного поля В определяется через магнитную
проницаемость среды ц, в которой создана напряженность магнитного
поля Н, т.е.
В = цН. A.13)
При этом
divB = 0, A.14)
что характеризует факт невозможности существования источников и
стоков магнитного поля, т.е. отсутствия свободных магнитных зарядов.
Составляющие магнитного поля В и Н можно найти, если уравнения
поля решены для частей ЭП конкретной конфигурации при соблюдении
граничных условий — неразрывности нормальных составляющих
вектора индукции на границах раздела сред с различными магнитными прони-
цаемостями:
В1м=В2„ A.15)
и тангенциальных составляющих напряженности магнитного поля
Я„ = #2/, A.16)
(при условии отсутствия токовых слоев на этих граничных
поверхностях). Уравнения A.12)—A.16) позволяют найти магнитное поле
аналитическим путем только для весьма ограниченного круга задач с
простейшими граничными условиями.
22
Для реальных участков магнитопроводов электрических машин со
сложными формами магнитных сердечников и токоведущих тел
приходится идти на ряд допущений при необходимости получения даже
приближенного решения. Можно допустить упрощения, касающиеся форм
поверхностей, распределения токов, свойств сред, законов их движения.
Если источники поля находятся достаточно далеко от рассматриваемой
зоны поля (т.е. j = 0), то целесообразно ввести понятие скалярного
магнитного потенциала фт. Ввиду безвихревого характера такого поля (rot H = 0)
напряженность магнитного поля
H = -grad(p„,. A.17)
Для скалярного поля справедливо уравнение Лапласа
v2<p. = d^Jdx'+d^Jdy'+d^Jdz2 = о. (i.i8)
Линии поля при этом оказываются прерывистыми. Магнитные
потенциалы источников и стоков поля различны. Потенциалы зависят от
распределения токов в обмотках ЭП и определяются с точностью до
постоянной в любой локальной области.
Для скалярного магнитного поля в электрических машинах большая
часть граничных условий удовлетворяет условиям Дирихле, что обычно
благоприятно сказывается на решении, особенно при использовании
приближенных методов. Результатом расчета поля являются составляющие
напряженности магнитного поля по трем осям:
tfx=-dcpw/a*; Hy=-dq>Jdy; Hz=-dq>Jdz9 A.19)
по которым с использованием A.13) находят составляющие вектора
индукции и далее магнитные потоки и потокосцепления. Размерность
магнитного потенциала — ампер, поэтому по смыслу он соответствует
магнитодвижущей силе (МДС).
При расчетах вихревых электромагнитных полей широко
используется понятие векторного магнитного потенциала А, вводимого
соотношением
В = rot А. A.20)
Совместное решение A.11), A.13), A.15) и A.20) приводит к
уравнению Пуассона
V2A = -W\ A.21)
в котором векторный магнитный потенциал, рассчитываемый с
точностью до постоянной, приобретает четкий физический смысл. Циркуляция
векторного потенциала по контуру оказывается равной магнитному
потоку через поверхность, опирающуюся на этот контур. Важно, что форма
поверхности не имеет никакого значения и может быть произвольной.
23
Уравнение A.21) разбивается в трехмерном случае на три отдельных
уравнения, записанных в проекции на координатные оси. Нередко в
электрических машинах допустимо рассматривать плоскую двухмерную
картину поля с составляющей тока, например, по оси г.
d2Az/dx2 + d2A2/dy2=-iiiz. A.22)
В этом случае векторный магнитный потенциал приобретает смысл
магнитного потока на единицу длины в направлении z. Составляющие
вектора индукции по осям х и у
вх = элх/ду; ву = ау а*. 0.23)
Определение магнитного поля в электрических машинах чаще
проводится при граничных условиях второго рода — условиях Неймана.
Функция потока в векторном поле А соответствует МДС, так как функция
потенциала пропорциональна магнитному потоку. Часто для определения
магнитного поля используются методы подобия, методы физического и
математического моделирования.
Понятия скалярного и векторного магнитных потенциалов с равным
успехом применяются при моделировании магнитных полей, хотя
реализация граничных условий при использовании этих двух понятий
существенно различна. Для решения задач с учетом индуцированных токов
понятие векторного магнитного потенциала является вообще единственно
приемлемым, и при этом уравнение Пуассона должно быть заменено
аналогичным уравнением теплопроводности.
Решить полученные уравнения магнитного поля при условиях A.15),
A.16) на границах сред можно разными способами. Наиболее
интенсивное развитие получили первоначально методы непосредственного
решения, например методы изображений и разделения переменных.
Важное значение в развитии методов исследования магнитного поля
имеют конформные преобразования областей решения, при которых
сложные граничные условия существенно упрощаются. Решение
уравнения Лапласа находится для относительно простых зон и далее
используется для исходной области. Инвариантами, т.е. величинами,
неизменными при преобразованиях, остаются магнитные потенциалы, магнитные
потоки, модули векторов индукции и напряженности. Само решение в
преобразованной плоскости находится либо точно, если это возможно, либо
приближенно аналитическим или численным способом. Методы
конформного преобразования развиты в основном для безвихревых полей. Ряд задач
для вихревого поля решается методами интегральных уравнений.
В последние десятилетия быстро развивались эффективные
приближенные численные способы расчета, основанные на методах конечных
разностей и конечных элементов. Внедрение приближенных способов
расчета дало возможность получать решение искомой функции (потен-
24
циала) в области поля для каждого конкретного случая. Существенный
недостаток методов — невозможность получения общего решения, но все
возрастающие возможности вычислительной техники это компенсируют.
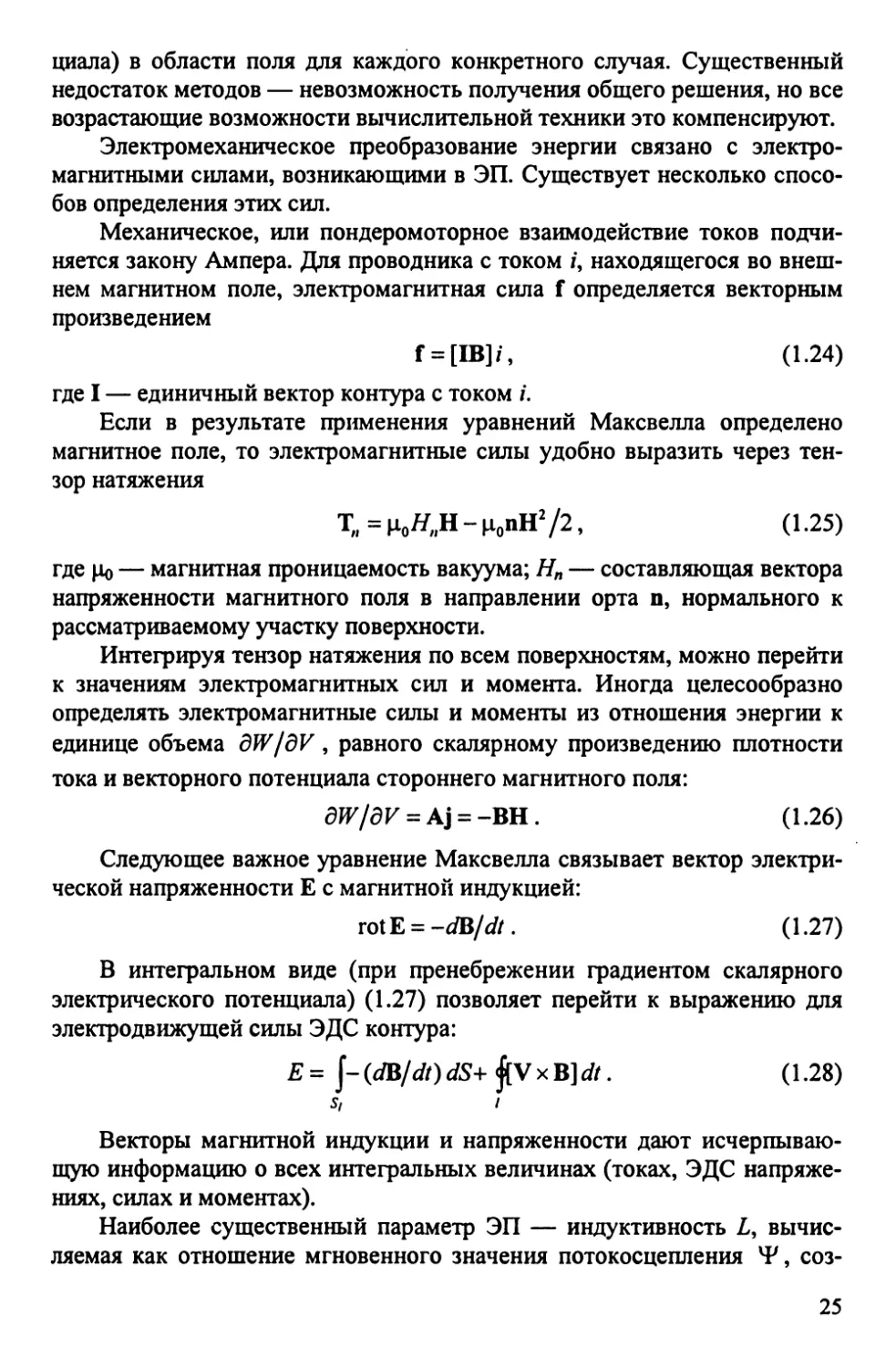
Электромеханическое преобразование энергии связано с
электромагнитными силами, возникающими в ЭП. Существует несколько
способов определения этих сил.
Механическое, или пондеромоторное взаимодействие токов
подчиняется закону Ампера. Для проводника с током /, находящегося во
внешнем магнитном поле, электромагнитная сила f определяется векторным
произведением
f = [IB]/, A.24)
где I — единичный вектор контура с током /.
Если в результате применения уравнений Максвелла определено
магнитное поле, то электромагнитные силы удобно выразить через
тензор натяжения
Т^^Я^Н-ЦоПН2^, A.25)
где Цо — магнитная проницаемость вакуума; Н„ — составляющая вектора
напряженности магнитного поля в направлении орта п, нормального к
рассматриваемому участку поверхности.
Интегрируя тензор натяжения по всем поверхностям, можно перейти
к значениям электромагнитных сил и момента. Иногда целесообразно
определять электромагнитные силы и моменты из отношения энергии к
единице объема dW/dV, равного скалярному произведению плотности
тока и векторного потенциала стороннего магнитного поля:
dW/dV = A} = -BH. A.26)
Следующее важное уравнение Максвелла связывает вектор
электрической напряженности Е с магнитной индукцией:
rotE = -dB/dt. A.27)
В интегральном виде (при пренебрежении градиентом скалярного
электрического потенциала) A.27) позволяет перейти к выражению для
электродвижущей силы ЭДС контура:
Е = J- (dB/dt) dS+ fir xB]dt. A.28)
Si l
Векторы магнитной индукции и напряженности дают
исчерпывающую информацию о всех интегральных величинах (токах, ЭДС
напряжениях, силах и моментах).
Наиболее существенный параметр ЭП — индуктивность L,
вычисляемая как отношение мгновенного значения потокосцепления Ч*, соз-
25
данного током /, к самому току:
/, = ¥//. A.29)
Если ток и потокосцепление принадлежат одной обмотке или
проводнику, то индуктивность называется самоиндуктивностью. Если ток и
потокосцепление связаны с несколькими обмотками, то индуктивность
называется взаимоиндуктивностью.
Для поля, описываемого уравнением Лапласа, потокосцепление
определяется с использованием A.19) и A.23) после нахождения потока в
пределах сечения, охватываемого проводником.
Зная векторный магнитный потенциал A.20)—A.22) для
поверхности Aj и относительно начального значения А0, потокосцепление в
сечении S определится следующим образом:
V=j(Al-A0)dSi/S. A.30)
s
Для плоскопараллельного поля определение потокосцепления
сводится к простым арифметическим операциям, если проводник
разделяется на конечное число элементарных площадок, для каждой из которых
расчетом поля установлено значение векторного магнитного потенциала.
Потокосцепление для проводника или обмотки с числом витков w,
когда поток Ф для всех точек поперечного сечения обмотки постоянен,
*F = Z/ = wO. A.31)
Если ввести понятие магнитной проводимости
Л = Ф/^, A.32)
то индуктивность
L = wFA/i = w2A, A.33)
где F— МДС проводника или обмотки.
Из A.33) следует, что индуктивность не зависит от значений тока и
потока и определяется только магнитной проводимостью и числом
витков.
В частном случае, когда энергия магнитного поля сосредоточена в
воздушных промежутках,
L = w2A =w2vl0X, A.34)
где X = Л/цо — коэффициент магнитной проводимости для потоков,
созданных МДС.
Индуктивность по A.34) внешне зависит только от геометрических
размеров и материалов, однако следует помнить соотношение A.29), из
которого следует, что индуктивность — не параметр, присущий какому-
26
либо проводнику или обмотке, а отражение условий существования
магнитного поля в ЭП. При изменениях потоков, наличии короткозамкнувдх
контуров на путях прохождения переменных по времени и амплитуде
магнитных потоков, наличии гистерезиса и нелинейных характеристиках
намагничивания участков магнитопроводов ЭП индуктивности не
остаются постоянными, а существенно меняются. Определение индуктивно-
стей сопряжено с большими трудностями и проводится недостаточно
последовательно. Причина — не в непонимании самой природы
описываемого явления, а в чрезвычайной сложности количественного учета
всех влияющих факторов и возможности лишь приближенных решений.
Через само- и взаимоиндуктивности можно рассчитать
электромагнитную силу при / = const, исходя из изменения собственной энергии поля:
/ = -dWjdx = -(i2/2)dL/dx . A.35)
Соотношение A.35) показывает, что изменение индуктивности
необходимо для электромеханического преобразования энергии.
Несмотря на несложный вид исходных уравнений поля (уравнения
Лапласа, Пуассона) и простой характер граничных условий, решение
уравнений поля в ЭП с его многочисленными пространственно
расположенными катушками и контурами, наличием явления нелинейности и
гистерезиса получено только в последние годы с помощью численных
методов при весьма многочисленных допущениях. При использовании
аналитических и графоаналитических методов расчета число допущений
ещё более возрастает. К ним, в частности, можно отнести предположение
о плоскопараллельности главного поля, о независимости индуктивных
сопротивлений различного рода рассеянии от главного поля и друг от
друга. Обычно выделяются проводимости, соответствующие потокам
пазового, лобового и дифференциального рассеяния обмоток, что
делается достаточно приближенно. Зубчатые поверхности сердечников статора
и ротора в электрических машинал заменяются гладкими, их зубчатость
учитывается с помощью вводимых значений коэффициентов воздушного
зазора. Часто при расчетах ЭП магнитная проницаемость
ферромагнитных участков принимается равной бесконечности. Допускается, что
процессы преобразования энергии определяются основными гармониками
тока и магнитного потока, а высшими гармониками пренебрегают. Часто
пренебрегают также вихревыми токами в магнитопроводах и т.д.
В ряду приближенных важное значение имеют численные методы
решения уравнений поля, особенно широко применяется метод конечных
разностей. С развитием вычислительной техники растет популярность
методов расчета электромагнитных полей на основе конечно-разностной
аппроксимации непрерывных уравнений самого различного вида.
Основная идея метода конечных разностей состоит в замене
непрерывного распределения скалярного или векторного магнитного потен-
27
-V
Мг J
\а0 1
т. ич т
циала дискретным распределением той же
самой функции в ограниченном количестве точек
рассматриваемой области. Точки по
определенному закону распределяются по области
решения, т.е. область покрывается
координатной сеткой. В методе конечных разностей эта
сетка носит регулярный характер. Наиболее
используемыми сетками являются
прямоугольная или ее частный случай — квадратная и по-
Рис. 1.9. Прямоугольная лярная.
сетка координат На рис. 1.9 показано разбиение
прямоугольной сеткой пространства неявнополюсной
машины на протяжении одного полюсного деления. Система координат к
форме ячеек сетки выбирается так, чтобы наиболее точно
аппроксимировать границы расчетной области и внести минимальные погрешности в
конфигурации областей, в которых производится расчет. Построение
сетки на этом этапе часто носит интуитивный характер, зависит от опыта
и мастерства исследователя и может быть автоматизировано только в
локальных зонах.
Уравнения поля, записанные в частных производных, переводятся в
конечно-разностную форму.
В случае, иллюстрированном рис. 1.9, лапласиан для точки со
значением функции А0 принимает вид
у2л*!тЕD-А>)..., 0.36)
где h — шаг квадратной сетки. Ошибка дискретизации определяется
производными четвертого порядка в искомой функции и может быть
уменьшена дроблением шага сетки А.
Решение уравнения Лапласа в конечно-разностной форме сводится к
элементарным арифметическим операциям. Число узлов решения на
практике может быть очень велико (достигает нескольких тысяч),
поэтому для решения получившейся системы уравнений высокого порядка
применяются итерационные или статистические способы. Прямое
решение системы уравнений (например, методом Гаусса) оказывается
невозможным. При итерационном способе расчета значения искомой
функции на первом этапе задаются либо произвольно, либо исходя из каких-
либо физических соображений, в дальнейшем улучшающих сходимость
решения. Многократным последовательным обходом всех узлов сетки и
решением конечно-разностного соотношения, подобного A.36),
добиваются уменьшения остатка до заранее заданного значения. Число
повторов, т.е. число итераций, может достигать нескольких десятков, сотен и
даже тысяч. При этом не всегда обеспечена сходимость решения. Итера-
28
ционный способ весьма стандартен, легко формализуется для ЭВМ,
гарантирован от сбоев расчета, так как возможные ошибки и сбои
корректируются на последующих шагах. В настоящее время разработаны и
применяются варианты метода конечных разностей, дающие хорошую
сходимость при одновременной высокой точности результатов.
Вид сетки, накладываемой на область, влияет на точность решения,
что в последние годы стимулирует поиск наилучших видов разбиения
пространства. Возможна последовательная оптимизация структуры
сетки, опирающаяся на вычисление производных высшего порядка на
достигнутом этапе решения, с тем чтобы плотность применяемой сетки на
последующем этапе была увеличена в области большого значения этих
производных.
Особенной гибкостью в разбиении пространства при расчете
электромагнитного поля обладает развитый в последние годы метод
конечных элементов. Разработанный поначалу для нужд строительной
механики, этот метод оказался весьма удобным в расчетах электромагнитных
полей в электрических машинах, где имеют место сложные по
конфигурации границы, присутствуют нелинейности и наведенные токи. Область
определения искомой функции подразделяется на конечное число
элементов, в качестве которых чаше всего используются треугольники с
прямо- или криволинейными сторонами. Размеры и плотности
размещения элементов могут существенно различаться в зависимости от
ожидаемой интенсивности изменения поля. Внутри элементов искомая функция
считается подчиняющейся определенной зависимости. В простейших
случаях применяют сплайн-функции первой степени.
Тогда в двухмерном случае функция А(х, у) для треугольного
элемента с координатами вершин */, у& хт, ут; хп, у„ может быть записана так:
А(х,у) = N,A, + NmAm + NnAn , A.37)
где N,=— [0/+V + c/j>];
2A
\bi=ym-y„> A = l/2;
Аналогично вычисляются Nm и Nn.
Тем самым для каждого элемента уравнения A.37) определяется
свой полином, подобранный таким образом, чтобы сохранялась
непрерывность функции вдоль границ элемента. Для нахождения значений в
узлах сетки используются вариационные принципы. При вариационной
формулировке решение задачи по нахождению двухмерного магнитного
поля внутри области Л, описываемого уравнением Пуассона A.21),
эквивалентно минимизации некоего энергетического функционала:
29
1 х
1 х„
У1
Ут
Уп.
A.38)
F= Г |[1д <»]&#- jjjAdxdy. A.39)
R
Функционал A.39) обладает тем свойством, что любая
минимизирующая его функция удовлетворяет как дифференциальным уравнениям
A.37), так и граничным условиям. При нелинейных зависимостях
процесс минимизации сводится к решению системы нелинейных
алгебраических уравнений. Для этого чаще всего используется метод Ньютона—
Рафсона, обеспечивающий хорошую сходимость.
Расчеты магнитных полей в электрических машинах, основанные на
методах конечно-разностной и конечно-элементной аппроксимации,
повышают точность определения характеристик и параметров
электрических машин. Однако применение этих методов связано с
необходимостью сохранения ряда допущений, правомерность которых не всегда
бесспорна. Одно из этих допущений — рассмотрение магнитных полей при
фиксированном взаимном положении зубчатых сердечников статора и
ротора. Само это положение часто выбирается произвольным без
достаточных на то оснований, и результаты расчета полей переносятся на
другие возможные взаимные положения. Для расчета магнитных полей при
перемещении зубчатых сердечников требуется значительное время,
поэтому они становятся практически нереальными. Особенно много
времени и большой объем машинной памяти требует расчет зоны воздушного
зазора с наиболее интенсивным магнитным полем. Вместе с тем
неоднородность сред в этой зоне носит довольно регулярный характер, что
позволяет избежать большой доли шаблонных расчетов.
Усилиями ряда ученых удалось создать метод расчета, при котором
поля реальных обмоток представляются как совокупность полей
простейших контуров, размещенных на зубцах сердечников (рис. 1.10).
Сечения проводов контура совпадают с сечениями проводов реальной
обмотки, находящейся в этих пазах. Контур может охватывать один или
несколько зубцов или целиком располагаться в зазоре, иметь и
неодинаковые стороны, размещающиеся в неодинаковых по форме и размерам пазах.
Существенным моментом
разработанного метода, названного
методом проводимостей зубцовых
контуров, является то, что поле контура
должно определяться не для
реальных, а для особых граничных
условий, которые могут быть получены
только искусственным путем. Вне
зоны контура магнитная
проводимость воздушного зазора между
ротором и статором принимается рав-
mwwk ?/>///Ш 'яшм*.
Рис. 1.10. Представление поля
электрической машины по методу
зубцовых контуров
30
ной бесконечности. При таких граничных условиях силовые линии поля
имеют одинаковое направление и концентрируются в зоне,
незначительно отличающейся от зоны самого контура тока. При этом МДС контура
определяется падением магнитного напряжения в зазоре. При удалении
от контура в обе стороны поле быстро затухает. При искусственных
граничных условиях оно обладает интересной особенностью. Магнитный
поток через зазор, образованный током контура, не отличается от
униполярного потока, сцепленного с контуром, если разность
скалярных магнитных потенциалов между сердечниками равна току контура.
Соответственно магнитная проводимость для потока контура через
поверхность невозбужденного сердечника совпадает с проводимостью
для потокосцепления контура при униполярном намагничивании и
имеет место для любого вида двусторонней зубчатости и любом
размещении проводников контура в пазах или зазоре. Это
фундаментальное свойство потоков и потокосцеплений зубцовых контуров дает
возможность обосновать создание расчетных схем для определения
поля в электрических машинах с учетом двусторонней зубчатости
сердечников.
Такая схема, напоминающая схему расчета методом конечных
элементов, имеет свои особенности. Некоторые из элементов схемы,
воспроизводящих проводимость воздушного зазора, непостоянны и
рассчитаны заранее с помощью сеток методами конечных разностей, конечных
элементов или аналитическим путем методами конформных
преобразований. В память ЭВМ заложены данные этого расчета в виде
аппроксимирующих кривых или таблиц. Зубцы и ярма сердечников разбиваются
на ряд элементов, размеры которых без внесения заметной погрешности
можно выбрать значительно более крупными, чем в методе конечных
разностей или конечных элементов. Нелинейные характеристики этих
элементов определяют, исходя из зависимостей В = J{H)
соответствующих материалов. Так же как и в других методах, магнитная
проницаемость внутри отдельного элемента считается постоянной. Магнитное
состояние элементов сердечников задается ориентировочно и уточняется
при решении системы полученных нелинейных уравнений методом
Ньютона. Расчетная схема по методу проводимости зубцовых контуров при
высокой точности воспроизведения поля, особенно в зоне зазора, имеет
относительно невысокий порядок, что дает возможность расчета полей
при переходных процессах в электрических машинах с учетом влияния
зубчатости сердечников, дискретности структуры обмоток, насыщения и
наведенных токов. Уравнения всех контуров записываются без
дополнительных координатных преобразований.
Несмотря на достижения в создании моделей электрических машин
на базе уравнений поля, более успешно моделируются электрические
машины с помощью уравнений, составленных на основе теории цепей.
31
В общем случае при наличии п магнитосвязанных контуров
уравнения Кирхгофа можно записать в виде
d d
dt 2
2 dt 2
dt " dt a
-мпх ±мп2
dt "' dt
dt 2l
d г
' dt
dt "
dt Xn
—м2п
dt 2n
d_
dt
Mir
d г
dt "
A.40)
В A.40) входят мгновенные значения токов /ь /2,..., /,,...., i» и
напряжений щ, и2,..., и,-, ..., и„; гь г2,..., п,..., гп — активные сопротивления
обмоток; Lb L2,..., Lh ..., Ln — полные индуктивности обмоток; М\Ъ М2и ...,
Min,..., Mni — взаимные индуктивности обмоток.
Считая, что имеется общий поток Ф, связанный со всеми обмотками,
а каждая обмотка имеет свой поток рассеяния, полные индуктивности
Lx=M + lal, Z,2=M + /o2,...,
Z,, =M + /0/,..., L„=M + lai
A.41)
где М— взаимная индуктивность обмоток; /сЬ /ст2, ..., /„,-,..., 1ап —
индуктивность рассеяния обмоток.
Уравнения электромеханического преобразования энергии
получаются, если к A.40) добавить уравнения движения и решать совместно
уравнения движения и уравнения напряжений, в которые вводятся ЭДС
вращения.
Система уравнений электрических цепей и уравнений
электромагнитного момента описывает электромеханическое преобразование
энергии с учетом нелинейностей параметров, несинусоидальности и
несимметрии напряжений в переходном и установившемся режимах.
Наиболее удачным подходом к составлению уравнений
электромеханического преобразования энергии является применение уравнений
обобщенного электромеханического преобразователя. Теория
обобщенного электромеханического преобразователя исходит из представления
поля в воздушном зазоре машины, которое формируется токами,
протекающими в т обмотках на статоре и п обмотках на роторе. Теория
обобщенного электромеханического преобразователя объединяет теорию поля
и теорию цепей, соединяя достижения обоих этих направлений.
32
Таким образом, теория поля позволяет определять с достаточной
точностью параметры машины, а используя уравнения теории цепей,
удобно рассчитывать показатели машины в переходных и
установившихся режимах. Наилучшим подходом к решению задач электромеханики
является сочетание в одной программе уравнений цепей и поля.
Применение комбинированных программ открывает новые
возможности для более глубокого изучения процессов электромеханического
преобразования энергии. При дальнейшем развитии теории имеет важное
значение объединение в одни программы уравнений электрических цепей
и уравнений электромагнитных и тепловых полей. Решение на ЭВМ
таких программ сдерживается возможностями вычислительной техники,
поэтому особое значение приобретает умение упрощать математическое
описание задачи, не теряя при этом в большой мере точность решения.
§ 1.5. Развитие математических моделей
электрических машин
Основные успехи в теории электрических машин на всех ее этапах
истории были связаны с развитием математических моделей. Первый
этап развития теории электромеханического преобразования энергии был
связан с уравнениями установившихся режимов. Основные достижения в
теории электрических машин в последние десятилетия были достигнуты
в создании математических моделей электромеханического
преобразования энергии в динамических режимах.
Процессы преобразования энергии в электрических машинах в
установившихся режимах описываются общеизвестными комплексными
уравнениями. Например, для симметричных асинхронных машин с ко-
роткозамкнутым ротором при синусоидальном напряжении они выглядят
следующим образом:
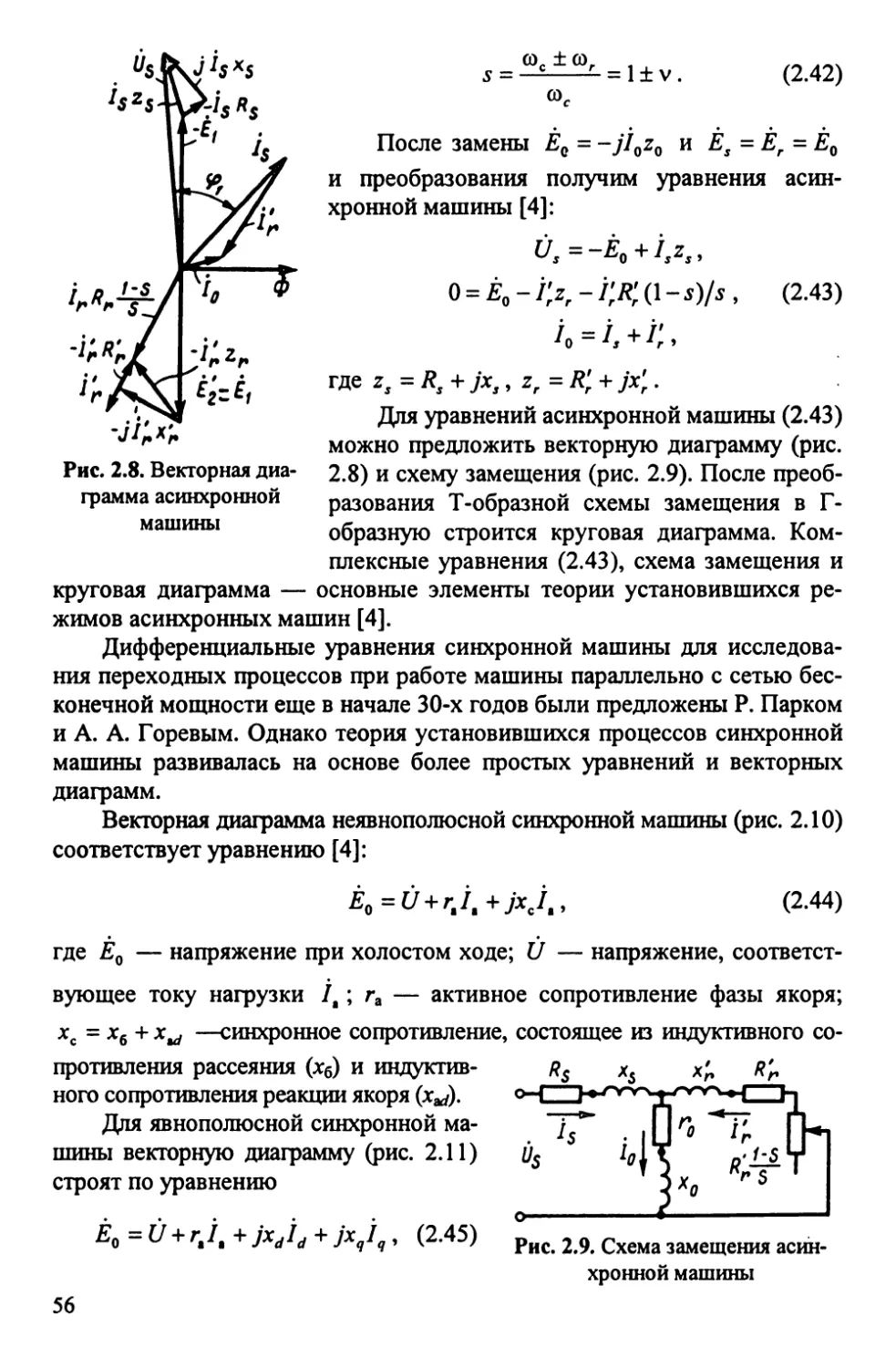
(/,=-£0 + 7,2,;
0 = £0-/iz;-/Jr2'(l-j)/j;
/0=/,+/;,
A.42)
где (/,,/,, 1[ — соответственно напряжения и токи фазы статора и
ротора; /0, Е0 — ток и ЭДС холостого хода; zx и z\ — полные
сопротивления обмоток статора и ротора; s — относительная частота вращения
(скольжение); V2r[{\-s)ls — потери, эквивалентные полезной
мощности на валу машины [4].
Геометрическим образом уравнений A.42) являются получившие
2-179 33
Рис. 1.11. Векторная диаграмма
асинхронного двигателя
широкое распространение векторные
диаграммы и схемы замещения (рис.
1.11 и 1.12).
Использование комплексной
плоскости для изображения векторов,
характеризующих процессы
преобразования энергии в электрических
машинах, было настолько прогрессивным и
наглядным, что практически этот
метод был единственным, применяемым
в электромеханике многие годы.
На рис. 1.11 и 1.12 показаны
векторная диаграмма и схема замещения
для приведенной машины, у которой
числа витков обмотки статора и ротора
равны друг другу. Здесь z, = гх + jxx, а
22 = Г2 + JX2 (Г1 И Г2 i *1 И Х2 С00Т"
ветственно активные и индуктивные
сопротивления обмотки статора и
ротора; х\2 — индуктивное сопротивление
взаимной индукции); Ё0 = Ёх = -Е\.
При условии постоянства параметров — активных и индуктивных
сопротивлений или коэффициентов перед зависимыми переменными в
A.42) — достаточно широкое применение в теории электрических машин
до последнего времени находили круговые диаграммы (рис. 1.13) [4].
Схемы замещения и векторные диаграммы получили настолько
большое распространение, что стали забывать о том, что они всего-
навсего являются геометрическим образом комплексных алгебраических
уравнений, пригодных для описания процессов в электрических машинах
в установившемся режиме и при круговом поле в воздушном зазоре, т.е.
они применимы для самого простейшего частного случая
электромеханического преобразования энергии. Однако в некоторых работах и сейчас
схемы замещения и векторные диаграммы необоснованно применяются
для анализа несимметричных, многообмоточных машин, при наличии
спектра гармоник
поля в воздушном
зазоре и т.п.
Важным шагом в
развитии теории
электромеханического
преобразования энергии
явилось создание ма-
34
Рис. 1.12. Схема замещения асинхронного двигателя
Рис. 1.13. Круговая диаграмма
асинхронного двигателя
тематических моделей,
описывающих динамические режимы [5].
Дифференциальные
уравнения синхронных машин
появились в конце 20-х годов в
работах Р. Парка и А. А. Горева.
Дифференциальные уравнения
трансформаторов были
составлены Г. Н. Петровым в начале
30-х годов. Особое значение
имели работы Г. Крона, который
в это же время написал
уравнения динамики для обобщенной
электрической машины [3,4].
Геометрическим образом уравнений электромеханического
преобразования энергии является модель простейшей электрической машины,
показанная на рис. 1.14, а.
Если к модели, показанной на рис. 1.14, а, добавить представление о
том, что энергия магнитного поля в электрических машинах
концентрируется в воздушном зазоре, а за счет сдвига токов во времени и обмоток в
пространстве в воздушном зазоре создается круговое поле, получается
четкая панорама, раскрывающая глубинные процессы
электромеханического преобразования энергии. Математическая модель на базе
дифференциальных уравнений значительно богаче схем замещения и
векторных диаграмм и имеет более глубокий физический смысл и адекватно
отражает процессы электромеханического преобразования энергии.
Обращаясь к модели электрической машины (см. рис. 1.14, а), следует
отметить, что все напряжения и токи в ней образуют единую идеальную
систему, которая при определенных условиях (пространственный сдвиг
обмоток — 90° и временной сдвиг токов — 90 эл. град) находится в
электромеханическом резонансе, когда электрическая энергия преобразуется в
механическую и обратно с максимальными энергетическими показателями.
Любые произведения токов и напряжений в математической модели
(см. рис. 1.12, а) имеют физический смысл, так как эта модель адекватно
отражает процессы преобразования энергии в электрических машинах с
круговым полем в воздушном зазоре [4, 5].
Электромагнитный момент электрической машины определяется
всеми возможными комбинациями произведений токов, протекающих в
контурах статора и ротора машины.
Если обратиться к простейшей модели (см. рис. 1.12, а), то окажется, что
произведения
lmls$ 1*а1ф
определяют вращающий момент. Произведения
токов статора и ротора в одной оси /то/га + /^/^ характеризуют вибрации и
35
ПП..Л t
"s,fiUS2fi V
Лк
Рис. 1.14. Модель простейшей электрической машины (а), двухфазного
обобщенного ЭП (б) и многофазного обобщенного ЭП (в)
шумы. Произведения токов /^/^ и /га/гр связаны с деформационными
моментами, действующими в основном на лобовые части обмоток статора и ротора
При перечислении принятых допущений следует обязательно
отмечать форму определения момента.
В математической модели (см. рис. 1.14, а) имеют глубокий смысл
не только произведения токов, но и произведения напряжений и токов.
36
Для модели, показанной на рис. 1.14, я, сумма произведений uS0Lisa + us^is{i
определяет активную мощность, забираемую из сети (режим двигателя),
или активную мощность, отдаваемую в сеть (режим генератора). Если и к
ротору также подводится (отбирается) мощность, то необходимо
учитывать произведения напряжений и токов в роторе umira + wrp/rp.
Определение реактивной мощности в переходных процессах с
каждым годом становится все более актуальным, однако представления,
сложившиеся о вей в установившихся режимах, нельзя переносить на
переходные процессы, когда ни о каком угле между напряжением и
током (cos ф) не может быть и речи.
Математическая модель на базе дифференциальных уравнений дает
четкое определение реактивной мощности. Обращаясь к модели,
представленной рис. 1.14, а, следует отметить, что остаются единственные
пары произведений напряжений и токов umis^ -u^i^ . Эти произведения
и определяют реактивную мощность электрической машины. Как в
установившихся режимах, так и в переходных процессах реактивная
мощность идет на создание магнитных полей в машине.
При питании машины со стороны статора и ротора определение
реактивной мощности усложняется. При этом следует учитывать
произведения umi^ - wrp/ra, а также произведения токов и напряжений статора и
ротора uj# - w,p/ra + wra/,p - и^т .
В последующих главах уравнения напряжения электромагнитного
момента, определение активной, реактивной и обменной мощности будут
рассмотрены подробно.
Математическая модель простейшей электрической машины не
учитывает наличия многих контуров на статоре и роторе, а также бесконечного
спектра гармоник поля в воздушном зазоре реальной электрической машины.
В середине 60-х годов для описания процессов преобразования
энергии в машине с бесконечным числом гармоник и бесконечным числом
контуров на статоре и роторе была предложена математическая модель
обобщенного электромеханического преобразователя (рис. 1.14, б) [3, 4].
Уравнения обобщенного электромеханического преобразователя в
символической форме выглядят следующим образом:
[C/] = [Z][/], Mw=M[IsIr], A.43)
где [U] и [/] — субматрицы напряжений и токов, включающие
напряжения и токи в тип обмотках статора и ротора по осям а и Р; [Z] —
сложная матрица сопротивлений; [Л, 1Г] — бесконечное число пар
произведений токов в обмотках статора и ротора.
Простейшая электрическая машина описывается пятью уравнениями, а
уравнения обобщенного электромеханического преобразователя включают
37
2т + 2п уравнений напряжения. Число пар произведений токов уравнения
момента равно 2тп. Геометрическим образом уравнений A.43) является
модель с т обмотками на статоре и п обмотками на роторе (рис. 1.14, б).
Математическая модель обобщенного электромеханического
преобразователя позволяет исследовать электрические машины с несколькими
обмотками на статоре и роторе с учетом насыщения,
несинусоидальности, несимметрии и любых пространственных гармоник, т.е. решать
практически все задачи современного электромашиностроения.
В общем случае трехфазные и многофазные машины нельзя
приводить к двухфазным, поэтому при исследовании их следует обращаться к
моделям трех- и многофазной машины (рис. 1.12, в).
Современные ЭВМ дают возможность для двух- и трехфазных
моделей решать оптимизационные задачи для двух-трех гармоник с учетом
двух-трех контуров с нелинейными коэффициентами. Поэтому важно не
только составить уравнения, но и записать их с упрощениями,
обеспечивающими решение задачи с необходимой точностью и с наименьшей
затратой машинного времени.
Математические модели, показанные на рис. 1.12, несмотря на свою
сложность, составлены для одномерных машин, имеющих одну степень
свободы (в этих моделях есть одна вращающаяся часть — ротор). В
последнее время все чаще приходится решать задачи, когда вращаются и
ротор и статор (двухмерные задачи). Находят применение также
электрические машины с шаровым ротором (трехмерные задачи). В космической
электромеханике приходится решать шестимерные уравнения [6].
Уравнения многомерных электрических машин отличаются от
уравнений одномерной машины наличием двух или нескольких уравнений
движения и дополнительного уравнения, связывающего частоты вращения
нескольких вращающихся частей машины с синхронной частотой вращения поля.
Если в уравнениях A.43) заменить индуктивности на емкости, а
напряжения — на токи, то можно получить математические модели
емкостных электромеханических преобразователей.
Объединяя уравнения индуктивных и емкостных машин, можно
получить уравнения индуктивно-емкостных машин.
Геометрическим образом уравнений таких ЭП могут быть модели,
подобные моделям, представленным на рис. 1.14, в контурах которых L
заменены на С, а активные сопротивления — на проводимости.
Геометрическим образом уравнений индуктивно-емкостных машин может быть
комбинация контуров индуктивной и емкостной машин.
В теории индуктивных машин достигнуты значительные результаты,
позволяющие составлять математические модели для любой задачи,
встречающейся в практике электромашиностроения. Однако в теории
емкостных и индуктивно-емкостных электромеханических
преобразователей сделаны лишь первые робкие шаги.
38
Глава 2
Обобщенная электрическая машина
§ 2.1. Идеальная электрическая машина
Простейшей электрической машиной является машина с круговым
полем в воздушном зазоре. Синусоидальное поле в воздушном зазоре
электромеханического преобразователя может быть только в идеальной
машине, когда в зазоре нет временных и пространственных гармоник.
Нельзя создать реальную машину с круговым полем, поэтому
простейшая идеальная машина может существовать лишь в нашем воображении.
Такая машина имеет и самое простое математическое описание, т.е.
простейшую математическую модель.
Электрическая машина — это определенная комбинация токов,
изменяющихся во времени, и контуров — обмоток в пространстве. В
обмотках электрической машины протекают токи, сдвинутые во времени на
определенный угол. При создании электрических машин стремятся
получить в воздушном зазоре вращающееся магнитное поле. Оно может
создаваться: двухфазной системой токов — при сдвиге обмоток в
пространстве на 90° и сдвиге токов во времени на 90°; трехфазной системой токов —
при сдвиге обмоток в пространстве на 120° и токов во времени на 120°; в
общем случае /я-фазной системой токов — при сдвиге обмоток в
пространстве на 360%? и токов во времени на 360°//и. Вращающееся поле
может также создаваться постоянным током. Для этого обмотка,
обтекаемая постоянным током, должна вращаться. При наличии переменных
токов обычно обмотки неподвижны.
При круговом поле в воздушном зазоре поле синусоидальное, т.е.
имеется одна гармоника поля, вращающаяся с неизменной частотой и
имеющая постоянную амплитуду. Простейшая схема машины с круговым
полем — идеализированная двухфазная электрическая машина, так как в
реальных электрических машинах всегда наряду с основным полем
имеются высшие гармоники, вызванные насыщением, наличием зубцов на
статоре и роторе, несинусоидальным распределением МДС и другими
причинами.
Идеализированная электрическая машина — симметричная
электрическая машина, имеющая гладкий воздушный зазор, стальные
участки с нулевым магнитным сопротивлением и синусные обмотки. В такой
39
Ч«
i/3 v.
м
"rfl
Рис. 2.1. Модель
обобщенной электрической машины
машине при синусоидальном симметричном
напряжении питания поле в воздушном
зазоре синусоидальное.
Обобщенная электрическая машина —
двухполюсная двухфазная симметричная
идеализированная машина, имеющая две пары
обмоток на роторе и статоре (рис. 2.1).
Здесь wsa, w5p — число витков обмотки статора
по осям а и Р; wra, w,q — число витков обмотки
ротора по осям а и Р; мш, us$, wm, u$ —
соответственно напряжения по осям а и р на статоре и
роторе; сог — угловая скорость ротора.
Рабочие процессы в многополюсной машине можно свести к
процессам в двухполюсной, поэтому обычно рассматривается двухполюсная
машина. В двухфазной машине — четыре обмотки и уравнений
напряжения также четыре (минимальное число уравнений но сравнению с числом
уравнений в одно-, трех- и m-фазной машинах). Исследуется
идеализированная машина с гладким воздушным зазором без пазов на роторе и
статоре, с обмотками в виде токовых слоев, имеющих синусоидальное
распределение МДС. Она ненасыщена, не имеет нелинейных
сопротивлений, поэтому при питании обмоток синусоидальным напряжением поле в
воздушном зазоре синусоидальное.
Все электрические машины с круговым полем в воздушном зазоре
могут быть получены из обобщенной электрической машины (рис. 2.1).
Несинхронная (асинхронная) машина из обобщенной машины
получается, когда к обмоткам статора с числом витков wsa и и>,р подводятся
синусоидальные напряжения частотой/;, сдвинутые во времени на 90°. В
обмотках ротора при этом проходят токи частотой f2 = f\s, которые
создаются приложенными к ротору напряжениями или наводятся токами
обмоток статора. В асинхронной машине угловая скорость ротора не
равна синхронной угловой скорости поля (сог * сос); а поля ротора и статора
неподвижны относительно друг друга, так как сумма угловой скорости
ротора и угловой скорости поля ротора относительно ротора равна сос [4, 5].
Синхронную машину можно получить из обобщенной машины, если
к обмоткам статора подвести переменные напряжения, а к обмоткам
ротора — постоянное напряжение или, наоборот, к статору — постоянное, а
к обмоткам ротора — переменные напряжения. При этом сог = сос, т.е.
поля статора и ротора неподвижны относительно друг друга. Если
постоянное напряжение подводится к обмоткам статора, то магнитное поле
ротора вращается в направлении, противоположном направлению вращения
ротора, а поля статора и ротора снова неподвижны относительно
неподвижной системы координат. При питании обмоток постоянным током
40
Рис. 2.2. Модель машины
постоянного тока и коллекторной
машины переменного тока
достаточно иметь одну обмотку
возбуждения, у которой результирующая
намагничивающая сила равна
геометрической сумме намагничивающих сил
каждой обмотки.
В машинах постоянного тока в
обмотке якоря протекает многофазный
переменный ток, преобразованный
коллектором — механическим
преобразователем частоты (ПЧ) — из постоянного
тока. Если привести многофазную систему
к двухфазной, то получим машину
постоянного тока (рис. 2.2). В машинах
постоянного тока поле якоря вращается
в направлении, противоположном
направлению вращения якоря. При сог = сос
поле якоря неподвижно относительно обмотки возбуждения и
неподвижной системы координат. В синхронных машинах и машинах постоянного
тока скольжение равно нулю.
Коллектор можно заменить преобразователем частоты на
полупроводниковых элементах, герконах или каких-либо других устройствах. В
этом случае процессы преобразования энергии в воздушном зазоре
принципиально не изменяются. При наличии коллектора частота жестко
зависит от скорости сог, а с помощью полупроводникового преобразователя
можно создать гибкую обратную связь между /2 и юг. По роду питания
машина с коммутатором на полупроводниках — машина постоянного
тока. Для таких машин существует несколько названий: вентильные,
машины с полупроводниковыми коммутаторами, бесконтактные машины
постоянного тока и т.п.
В коллекторных машинах переменного тока в обмотках статора и
ротора протекают переменные токи, а преобразователь частоты
преобразовывает переменный ток частоты сети в переменный ток частоты
скольжения (см. рис. 2.2). Как и во всех электрических машинах, поля
статора и ротора в коллекторных машинах переменного тока
неподвижны относительно друг друга. Эти машины могут быть однофазными,
трехфазными или многофазными; обмотки статора и ротора могут
соединяться последовательно или параллельно, или иметь магнитную связь [4].
Обобщенная машина при скорости ротора сог = 0 превращается в
электромагнитный преобразователь — трансформатор. При анализе
электромагнитного преобразования энергии в трансформаторе достаточно
рассматривать отдельно пару обмоток на статоре и роторе по оси а или р,
так как при неподвижном роторе отсутствует связь между обмотками,
смещенными в пространстве на 90°.
41
В трансформаторах частоты в первичной и вторичной обмотках
одинаковы, поэтому можно считать, что, как и в других электрических
машинах, поля в трансформаторах неподвижны относительно друг друга.
Как следует из приведенных выше рассуждении, электрические
машины всех основных типов приводятся к обобщенной электрической
машине. Все электрические машины объединяет то, что они преобразуют
электрическую энергию в механическую и обратно.
С развитием теории изменялось представление об обобщенной
машине. В книге показано, как усложняется математическая модель
обобщенной машины с учетом многих явлений при процессе преобразования
энергии в ЭП с учетом возрастающих возможностей вычислительной
техники.
§ 2.2. Математическая модель
обобщенной электрической машины
Для обобщений электрической машины (см. рис. 2.1) справедливы:
уравнения напряжения
"*
**р
d d
*° Л т dt
d d
—М rra+—Ln
dt m dt n
-Mor
О
— L со
га r
о
о
4p«>r
dt
-M
о
Ma,
ф dt rp dt
d
r*+7t*.
X
'*, "
'm
'Vp
и
.
,B.1)
уравнение электромагнитного момента
M^Md^-iJ^), B.2)
уравнение движения
J^±MC = M,. B.3)
at
Система уравнений электромеханического преобразования энергии,
описывающая процессы преобразования энергии, состоит из четырех
уравнений Кирхгофа для четырех обмоток B.1), а также B.2) и B.3),
которые объединяют и получают систему из пяти уравнений.
В этих уравнениях wJa, w5p, wm, w^, /Ja, /5p, /m, i# — соответственно
напряжения и токи в обмотках статора и ротора по осям a и Р; гш, r5p, rm,
42
frfi — активные сопротивления обмоток статора и ротора; М— взаимная
индуктивность; Lsa, Ls$9 Z,m, Ьф — полные индуктивности обмоток
статора и ротора по осям аир.
Индуктивности обмоток определяют по известным соотношениям:
^=А/ + /М; I* =*/ + /*;
где /5а, /5р, /га, /ф — индуктивности рассеяния обмоток статора и ротора по
осям аир.
При исследовании обобщенной машины предполагается, что
обмотки статора и ротора имеют одинаковое число витков, т.е. рассматривается
приведенная электрическая машина. Взаимная индуктивность и
индуктивности рассеяния обмотки фазы в B.1) определяются расчетным или
опытным путем (по схемам замещения и формулам проектирования).
Предполагается, что имеется рабочий поток, сцепленный с обмоткой
статора и ротора, и потоки рассеяния, связанные только с одной обмоткой
ротора или статора.
Уравнения B.1) записываются для заторможенной машины.
Приведение вращающейся машины к неподвижной — один из важных этапов в
преобразовании уравнений, с помощью которых составляется
математическая модель ЭП. Чтобы сохранить инвариантность мощности в
реальной машине и машине с неподвижными обмотками, в уравнения вводят
выражения ЭДС вращения, равные Lr^(ori^ + Мюг/,р для обмотки ротора
по оси а и -Lm(orim - Ma>risa — для обмотки ротора по оси р.
Уравнения Кирхгофа B.1) содержат выражения напряжений,
падений напряжения на активных сопротивлениях, ЭДС вращения и
трансформаторных ЭДС:
d d d d
L<n —/' + M — / ; M — i' + Lm —/ .
sa dt ra dtm dt 5a ra dt m
Аналогично можно записать трансформаторные ЭДС для обмоток,
расположенных по оси р.
В уравнении движения B.3) J — момент инерции. Если
электрическая машина исследуется вместе с приводным механизмом, то в
выражении J должен учитываться момент инерции ротора и приведенный к
частоте вращения ротора момент инерции приводного механизма.
При изучении электрических машин момент сопротивления Мс
принимают постоянным, в электромеханических системах — изменяется во
времени. Системы уравнений электрических машин отличаются от
систем уравнений других электротехнических устройств наличием
уравнения электромагнитного момента (Мэ) B.2). Возникновение электромаг-
43
А?
/
+
• _
1^ 1
Л \/
+
чв
\"9
\>
/ А:
/ 1*«
м.| /^\ /^N м нитного момента в электрических маши-
^ I / + \ / + \ L нах объясняется тем, что токи,
протекающие в обмотках статора и ротора,
расположенных по осям аир,
взаимодействуют между собой и возникают
усилия, стремящиеся повернуть ротор B.2).
Электромагнитный момент равен
произведению токов во всех контурах машины.
Рис. 2.3. Зависимость электро- в обобщенной машине значение момента
магнитного момента и токов определяется двумя произведениями зна-
статора и ротора от времени чений токов? пр0текающих в обмотках
фаз аир статора и ротора. Знаки в B.2)
согласуются со знаками в B.1). Можно поменять знаки перед
произведениями токов в B.2), тогда необходимо изменить знаки в B.1) перед ЭДС
вращения в уравнениях напряжения обмоток ротора.
Произведения токов /,р/т и isai^ в различных осях статора и ротора
определяют значение электромагнитного момента, действующего
непрерывно на вал машины и имеющего среднюю за период составляющую
Мср (рис. 2.3). Так как токи по осям аир сдвинуты по времени на 90°,
произведения токов /50t/^ дадут такую же картину Л/э, что и токи /jp/ra, но
сдвинутую во времени.
В симметричной машине токи статора и ротора по одной оси /Ja/m и
ispir$ не создают вращающего момента, а вызывают лишь тяжения и
вибрации. В несимметричной машине в переходных процессах эти
произведения необходимо учитывать, так как из-за несимметрии токи по осям
машины различны.
Система уравнений электромеханического преобразования энергии
B.1)—B.3) при постоянных коэффициентах перед переменными —
нелинейная (так как в уравнение электромагнитного момента B.2) входят
произведения зависимых переменных) и не имеет аналитического
решения. Приближенные решения с высокой точностью, часто даже не
нужной для решения инженерных задач, получаются при расчетах на ЭВМ.
В пяти уравнениях электромеханического преобразования энергии
пять независимых переменных (обычно это напряжения на обмотках usa,
w*p, wra и u^ и момент сопротивления на валу машины Л/с), пять
зависимых переменных (токи isa, /5р, /га и /^ и угловая скорость сог).
Коэффициенты перед зависимыми переменными называют параметрами
электрической машины; ими являются активные сопротивления и индуктивности
и взаимные индуктивности обмоток B.1), а также момент инерции J.
В зависимости от формы записи уравнений электромеханического
преобразования энергии параметрами могут быть индуктивные
сопротивления, но независимо от формы уравнений это всегда коэффициенты
44
перед переменными. Ошибочно параметрами называют массу, КПД и
другие показатели машины.
Уравнения электромеханического преобразования энергии не имеют
решения, если один из параметров, входящих в уравнения, равен нулю
или бесконечности. Если активные или индуктивные сопротивления
равны бесконечности, то токи равны нулю и машина не развивает момента Мэ.
При J = оо ЭП разгоняется бесконечно долго. При J = О машина не
может достигнуть установившейся скорости, так как ротор реагирует на все
изменения токов, создающих момент, и непрерывно реверсируется. При
равенстве взаимной индукции нулю магнитная связь между обмотками
отсутствует и Мэ = 0 B.2). Если в контурах, где замыкаются токи,
отсутствует активное сопротивление, то устройство работает как накопитель
энергии. Постоянные времени равны бесконечности, между токами
статора и ротора нет сдвига по фазе и электромагнитный момент равен
нулю. Момент в машинах переменного тока создается, если между токами
статора и ротора есть сдвиг по фазе, т.е. ток статора или ротора имеет
реактивную составляющую. Если в роторе и статоре модели обобщенной
машины есть только активные составляющие переменного тока, то
момент равен нулю, так как отсутствует связь между обмотками,
обусловливаемая реактивными токами, создающими магнитное поле.
Независимые и зависимые переменные в B.1)—B.3) могут меняться
местами, и тогда они описывают токовый привод.
В уравнениях электромеханического преобразования существуют
оптимальные соотношения между параметрами, при которых
электрическая машина имеет максимальный КПД, большой cos ф, минимальную
массу или желаемый вид выходных характеристик. Однако проводить
оптимизацию машины по уравнениям B.1)—-B.3) практически нельзя,
так как минимальное значение токов в них (зависимых переменных) еще
не определяет оптимальную машину (см. гл. 14).
В членах уравнения B.1), определяющих трансформаторную ЭДС,
под знак производной входят индуктивности и токи. В большинстве
электрических машин переменными являются токи, но преобразование
энергии из электрической в механическую и обратно возможно, если
токи постоянны, а индуктивности изменяются по гармоническому закону.
Такие машины составляют целый класс параметрических машин, среди
которых наибольшее применение получили индукторные машины. В
общем случае в электрических машинах индуктивности и токи изменяются
по гармоническому закону.
Электромеханическое преобразование энергии осуществляется в
большинстве ЭП, если изменяются напряжения, токи и параметры. В
некоторых электрических машинах изменяются только напряжения и
токи, а коэффициенты перед переменными — постоянны.
Преобразование энергии в ЭП также возможно при постоянных напряжениях, но из-
45
меняющихся параметрах. При этом электромеханическое преобразование
энергии возможно при изменении как индуктивностей, так и активных
сопротивлений, входящих в уравнения ЭП. При изменении момента
инерции происходит накопление или отдача энергии в сеть.
§ 2.3. Уравнения обобщенной электрической
машины в различных системах координат
В предыдущем параграфе были
предложены уравнения, описывающие
процессы электромеханического преобразования
энергии в обобщенной электрической
машине. Рассмотрим, как с помощью
логических рассуждении можно подойти к этим
уравнениям.
Рассмотрим идеализированную
двухфазную двухполюсную электрическую
машину, у которой вращаются обмотки
Рис. 2.4. Пространственная Р0Т0Ра и неподвижны обмотки статора,
модель машины в непреобра- Совместив с осями обмоток ортогональ-
зованной системе координат ные системы координат статора as, bS9 и
ротора ап Ъп получим машину в непреоб-
разованной системе координат (рис. 2.4). Векторы токов фазы и потокос-
цеплений в этой модели совпадают с осями обмоток.
Системы координат ротора и статора перемещаются относительно
друг друга, при этом угол 0 между осями определяет относительную
угловую скорость
юг=Л/Ж. B.4)
Дифференциальные уравнения напряжений в естественных или не-
преобразованных фазных координатах для модели машины (см. рис. 2.4)
имеют вид
-Ura=rJra+<Wra/df,
-urb=rrbhb+<Wrbldt.
Частоты токов B.5) в статоре и роторе различны, а знаки «-» перед
напряжениями ротора означают, что уравнения записаны для режима
двигателя.
Потокосцепления обмоток в B.5)
46
%а = LsJsa + Af cose/^ - Msin6/r6 ;
^ = V,* + A/cose/* + A/sinG/m ;
%a = LrJra + ^ COSG/^ + A/ SU19lj4 J
^гб = КьКь + А/созв/л - A/sine/,,.
Если подставить значения B.6) в B.5), то получатся громоздкие
уравнения с периодическими коэффициентами. Чтобы упростить
уравнения, надо, чтобы токи в статоре и роторе имели одинаковые частоты и
обеспечить инвариантность мощности, т.е. сохранить мощность на валу,
потери, потребляемую мощность в приведенной машине такими же, что и
в реальной.
Рассмотрим процессы преобразования энергии в воздушном зазоре
реальной машины. Благодаря определенной комбинации обмоток в
пространстве и временному сдвигу токов и напряжений в зазоре образуется
вращающееся поле. При симметричных синусоидальных напряжениях на
выводах идеализированной машины в воздушном зазоре имеется
круговое поле. Частоты токов в статоре и роторе в соответствии с третьим
законом электромеханики взаимосвязаны и поля статора и ротора
неподвижны относительно друг друга.
Круговое поле в обобщенной электрической машине можно
получить, если к обмоткам статора подвести напряжения
ит = Um sin со/; м,р = Um cos Ш. B.7)
Круговое поле в воздушном зазоре удобно представлять
результирующими векторами соответственно индукции и потокосцеплений:
В, = Я* + JB„; Вг = Вф + JBn, B.8)
^=^+У*«; ¥г = ч%+/рт. B.9)
В виде единых результирующих векторов можно представлять
напряжения статора U, и ротора \]п а также токи статора I, и ротора 1г.
Уравнения B.5), записанные для результирующих векторов, имеют
вид
V=IgRt+(t¥jdt; }
3 s s , } B.10)
где Rs = rsa = rsb; Rr = rra = rrb.
Запись уравнений в виде B.10) является простейшей записью
уравнений напряжений ЭП в теории электрических машин.
Чтобы разобраться в преобразовании координат в электрических
машинах, рассмотрим коллекторную машину с вращающимися щетками
(рис. 2.5). В этой машине на статоре расположена трехфазная или
многофазная обмотка 7, к которой подводится переменное напряжение, соз-
47
Рис. 2.5. Схема электрической
машины с вращающимися щетками
дающее в зазоре вращающееся поле. К
фазам А, В, С трехфазной обмотки
статора подводится трехфазное
напряжение, создающее вращающееся поле с
синхронной угловой скоростью сос. На
роторе 2 имеется многофазная
обмотка, секции которой подключены к
коллектору. Машина имеет вращающиеся
щетки, укрепленные на траверсе 3.
Ротор вращается с угловой скоростью юг,
частота токов в роторе f2 = f\s, при
этом поля статора и ротора
неподвижны относительно друг друга.
Мощность в этой машине
отводится от вращающихся щеток. Если
статор неподвижен, то частота fK на
щетках коллектора зависит от синхронной угловой скорости поля сос и
угловой скорости щеток: сос ± сок. С траверсой жестко связывается
система координат.
Изменяя угловую скорость системы координат юк, получаем
переменную частоту/с. Таким образом, в произвольной системе координат,
вращающейся с произвольной скоростью, частоты тока и напряжения
определяются частотами вращения поля и системы координат. С этими
частотами связано преобразование энергии и инвариантность мощности.
Для координатных осей, вращающихся с произвольной скоростью,
G>K=dQjdt. B.11)
Так как cosG + ysinG = e+j/G, векторные уравнения B.10) для
координатных осей, вращающихся с произвольной скоростью,
U, еА = Rsls eA + (№, еА /Л;
Ur е'(в"-в) = Rrlr eJiQ*-Q)+cWr еле"-в)/Л.
Продифференцировав B.12), получим
иг=Лг1г + ^М + Л©.-Юг)*г..
Уравнения напряжений результирующих векторов получены для
координатных осей, вращающихся с произвольной скоростью, и
представляют собой наиболее простой и общий вид уравнений Кирхгофа для
обобщенной машины. В таком виде уравнения применяются редко.
Наибольший интерес представляют уравнения в координатных осях а, Р, ко-
B.12)
B.13)
48
гда сок = 0, и в координатных осях d, q, когда сок = сог, которые широко
используются для исследования синхронных машин. Если сок = сог = сос, то
моделирование процессов преобразования энергии ведется на
постоянных токах.
Для неподвижной системы координат а, Р (сок = 0), когда оси
связаны со статором, уравнения B.13) приобретают вид
Va=R,Ia+<t¥jdt;
Vr=Rrlr+cWr/dt + i(*r%,
Разложив результирующие векторы по осям а, р, получим
UM=iMrM+(t¥jdt; Um=imrm + dVjdt + <br4f4\
^ = hb + ttVjdt; U^ = /^ + tf¥jdt-(x>,4m.
Подстйрляя в B.15) выражения потокосцеплений
B.14)
B.15)
B.16)
получим уравнения электромеханического преобразования энергии в
системе координат а, р, выраженные через токи B.1).
При переходе от непреобразованной системы координат к системе а,
Р из рис. 2.4 необходимо определить проекции напряжений и токов
ротора на оси статора по соотношениям
um=uracosQ-urbsmQ, u^=urasmQ + urbcose9 B.17)
'm =/„cos9-lysine, i# = irasinQ + irbcosQ. B.18)
Вторая, наиболее распространенная система координат — система, в
которой координаты d и q жестко связаны с ротором. Здесь сок = сог. Из
B.13) следует
V,=RaIt+<f¥jdt + j®,%, Ur=RrIr+<Wr/dt. B.19)
Разложив результирующие векторы по осям d и q, получим
уравнения обобщенной машины
**« =^sd+^sJdt-<or4frq;urd=irdrrd^d^rJdt;]
и,ч =i*raq+(t¥aq/dt + (ur4nliu^ = irqrrq+d¥rqldt. J
Выразив потокосцепления через токи, индуктивности и взаимные
индуктивности, так же, как для системы координат а, Р, получим
уравнения электромеханического преобразования энергии в осях d, q,
выраженные через токи:
49
r.w+ — L., —M
•sd
d_
dt
dt
usd
dt
M '•«/+—^
О
Mat,
d_
dt
О
— L at
О
-Mor
О
Lrn(Or
d d
rq dt rq dt
d d
—M rM+—Lw
dt sq dt sq
*rd
rq
'sq
,B.21)
-J—f-±Mc = pMA 1ы -ij ).
p ш
B.22)
Уравнения электромеханического преобразования энергии в системе
координат w, и, вращающихся с произвольной угловой скоростью сок,
имеют вид
"л,
d
r'"+dt "
dt
dt
г* +—A
" dt '
Mat.
i»"»«
n> *pVwk
-Л/(сок-сог) -Z„,(a>K -cor) rn,+-jtK
— L со
-Mco
Z^K -cor) Л/(сок-сог)
dt
d r
r«, +—Ln
"' dt n
dt
-J—f-±Mc= pM{\Jm - ijw).
p dt
B.23)
B.24)
Уравнения обобщенной электрической машины в системе координат
w, v — наиболее общие. Из них получаются уравнения в системе
координат а, р, если в B.23) и B.24) подставить сок = 0. Уравнения в системе
координат d, q B.21) и B.22) получаются из B.23) и B.24), если считать,
что сок = сог.
Можно считать, что в электромеханике существует бесчисленное
число систем координат. Однако в практике нашли применение в
основном системы координат а, Р и d, q.
Систему координат а, Р целесообразно применять для исследования
асинхронных машин, систему координат d, q — для описания процессов
преобразования энергии в синхронных машинах, систему координат w, v —
при исследовании машин с вращающимся ротором и статором. При
питании машины от преобразователей частоты удобно подавать на обмотки
50
непреобразованные напряжения и моделировать систему уравнений с
периодическими коэффициентами.
Преобразование координат позволяет упростить уравнения и
получить постоянные коэффициенты перед переменными, но не уменьшает
число уравнений.
В теории электромеханики широко используется метод замены
переменных. Один из способов упрощения уравнений — использование
выражений потокосцеплений A.29)—A.31). Для обобщенной машины
токи через потокосцепления и индуктивности
Ка — "
B.25)
L.L-M2 ' ,p L.L.-M1
s r
Подставив B.25) в уравнения напряжений и момента B.1)—B.3),
получим уравнения электромеханического преобразования энергий,
выраженные через потокссцепления.
Для многофазной машины уравнение электромагнитного момента
Мэ = (/я/2)М(/,3/га - ij+). B-26)
где т — число фаз; isa, isn9 im и /^ — соответственно фазные токи в
статоре и роторе.
При приведении симметричной /w-фазной машины к двухфазной
достаточно воспользоваться B.26), а в уравнениях напряжения B.1)
пользоваться значениями параметров фазы и фазными токами.
Подставив выражения токов из B.25) в уравнение момента B.3),
получим
М> = (W2), ?Мжж2С¥+Чт-ЧшЧ*) • B.27)
LsLr-M
Уравнения напряжений B.1) и уравнение момента B.27),
выраженные через потокосцепления, дают наиболее устойчивую на ЭВМ модель
процессов преобразования энергии.
Электромагнитный момент можно определить через
потокосцепления и токи статора
МЭ=(/^2)(Ч^-^)- B.28)
В справедливости уравнения B.28) можно убедиться, подставив в
B.28) выражения
51
и после простых преобразований, считая Lsa = Z,5p, получить выражение
момента через токи.
Момент можно определить также через потокосцепления и токи ротора:
M,=(m/2)Q¥mb-4Jm). B.29)
В справедливости B.29) можно убедиться, подставив в B.29)
выражения
и приравняв Lra к Ьф.
Электромагнитный момент можно определить также через энергию
поля в воздушном зазоре или из выражения вектора Пойнтинга [4].
В теории установившихся процессов электрических машин широко
используется понятие тока холостого хода /0 = /, + 1Г, при исследовании
динамики — мгновенные значения тока холостого хода:
*0а = *sa + *т ' 'ор = '* + '* > С2'30)
где /оа, /ор — мгновенные составляющие тока холостого хода по осям аир.
Преобразованными уравнениями с использованием B.30) удобно
пользоваться при исследовании ЭП с учетом насыщения.
Модификации уравнений обобщенной машины не исчерпываются
рассмотренными выше. Здесь показаны лишь основные направления, по
которым можно преобразовать уравнения.
§ 2.4. Уравнения электрической машины
при установившемся режиме
Установившийся режим — частный случай динамического режима,
поэтому уравнения установившегося режима получаются из уравнений
переходного режима.
Уравнения напряжений установившегося режима ЭП получаются из
дифференциальных уравнений электромеханического преобразования
путем замены в них оператора дифференцирования d/dt наусо.
Для обобщенной машины в системе координат а, Р уравнения
установившегося режима могут быть получены из B.1) в следующем виде:
ия
-оп
-0*
U»
г, +jxt
jxm
-v*m
0
jxm
r2 + jx2
-vx2
0
0
vx2
r2 + J'x2
Pm
0
vxm
jxm
г,+удг,_
x
I,
i,
I
i.
4
B.31)
52
Здесь v = сог/сос — относительная скорость; гиг2 — активные
сопротивления обмоток статора и ротора; х\ = <oL\ — индуктивное сопротивление
обмотки статора; х2 = (oL2 — индуктивное сопротивление обмотки
ротора; хт = соМ— сопротивление взаимной индукции.
В установившемся режиме (dldt = 0) и уравнение движения
вырождается
Мс=рМэ> B.32)
Уравнение электромагнитного момента в установившемся режиме
имеет вид:
М,=(тр/2)МAтш1ф+11. -1фш15аш -/гРр/,ар), B.33)
где /5аа, /5ра, /„и, /^а — соответственно активные составляющие токов
статора и ротора по осям а и Р; /шр, /5Рр, /гар, 1фР — соответственно
реактивные составляющие токов статора и ротора по осям аир.
Из уравнений установившегося режима для обобщенной машины
B.31)—B.33) можно получить уравнения для асинхронных и синхронных
машин, а также для трансформаторов. В уравнениях обобщенной машины не
учитывается наличие нескольких контуров токов в реальных машинах,
несимметрия, насыщение и другие факторы. Поэтому вывод уравнений
установившегося режима (они получены в теории электрических машин раньше
дифференциальных уравнений) для всех типов электрических машин
представляет определенные трудности. Логично так проводить все новые
разработки в области теории ЭП, чтобы уравнения статики были частным случаем
уравнений динамики. Уравнения установившегося режима, так же как и
дифференциальные уравнения, могут записываться в любых координатных осях.
Для трансформаторов и асинхронных машин подробно вывод
уравнений установившегося режима из уравнений динамики дается в общем
курсе [4].
Рассмотрим кратко получение уравнений для трансформатора и
асинхронной машины.
Дифференциальные уравнения трансформатора могут быть
получены из уравнений обобщенной машины, когда сог = 0. Если угол между
осями неподвижных обмоток 90°, то связи между ними отсутствуют,
поэтому можно рассматривать электромагнитные процессы независимо по
осям а или р. Обозначая, как это принято в теории трансформаторов,
первичную обмотку и ее параметры индексом «1», а вторичную —
индексом «2», получим из B.1) уравнения двухобмоточного трансформатора:
B.34)
-
и,
~иг
=
Г d T
г, +—L.
1 dt '
d ,,
—М
L dt
d ,, 1
—М
dt
d T
r,+—L,
2 dt 2J
X
"
'.
'2
53
В B.34) знак «-» перед и2 свидетельствует о том, что активная
мощность подводится к первичной обмотке и снимается со вторичной.
Заменяя в B.34) dldt на усо, получим уравнения трансформатора для
установившегося режима:
j(oLx jcoM
j(oM r2 +j(oL2_
Считая, что
j(bLxIx = усоМ/, + Ую/о1/,, j<uL2i2 = j(oMI2 + j(ula2j2, B.36)
Г0}1 Jrl+JcoLt JcoM If/,]
l-Uj L №* r2+j<oL2] [l2\
и введя замену переменных /0 = /, + /2 из B.35) получим
Ux = /,r, + IJiuM + i2j(oM + Дд:, = /,r, + j(aMJ0 + jllxl = -£, + /,z,; 1
-1/2 = /2r2+ij<uM+ijj(nM+fi2x2 = /2r2 + jo>Mi0+ji2x2 = -k2 + i2z2 ,J
B.37)
где £, = -jaMi0; £2 = £, = -у'шМ/0; x, = ю,/о1; x2 = w/o2; z, = r, + jxt;
Таким образом, из дифференци-
л, альных уравнений B.34) получаются
Е> комплексные уравнения
трансформатора с приведенным числом витков:
-£,
(/,=-£,+/,2,,
U2=E'2-i'2z2,
/, = /,+£•
B.38)
^Ц
л 2 к
-У1'г*г\
[^
j
а^- -^
W'i|
; Г"
Ъ Ф
иг-£'г-Цг'г
Рис. 2.6. Векторная диаграмма
трансформатора
Для уравнений трансформатора
B.38) на комплексной плоскости
строится векторная диаграмма (рис. 2.6).
Для комплексных уравнений B.38) и
векторной диаграммы может быть
предложена схема замещения
трансформатора (рис. 2.7). Уравнения
статических режимов — это частный
случай уравнений динамики. При
решении новых задач электромеханики
надо начинать с дифференциальных
уравнений, а затем, получив из них
уравнения установившегося режима,
предлагать схемы замещения и
векторные диаграммы. Нельзя, не рискуя
54
сделать ошибок, идти от
частного к общему, т.е.
использовать уравнения
установившегося режима для решения задач
динамики. Анализ сложных
задач статики необходимо
начинать со строгого
математического описания и
последовательно упрощая задачу, полу- Рис. 2.7. Схема замещения трансформатора
чать инженерные решения.
Уравнения асинхронных машин также могут быть получены из
уравнений обобщенной машины. Уравнения напряжений в
установившемся режиме из B.1) имеют вид
V* = RsL +J<»LSL +УсоЛ//га ;
Up = RJ* + №** + JVM**;
- Um = Rrim + j(oLrIm + jcoMI^ + M7,pcor + Lrij*r;
- 0ф = R,i+ + №1<,1ф + j<oMist -MimG>r- Ir/ra(Dr.
Для асинхронной машины с короткозамкнутым ротором Um- 0;
C/rp = 0. С учетом j(uLg = joM + у©/я; y©Lr = усоЛ/ + усо/т; х0 = ©Л/;
де, = ©/го; хг = со/т и относительной скорости v = cor/co5, уравнения для
асинхронной машины примут вид
и* = RsL +JxsL +J*oL +;Vm;
■^*P = ^*Лр + УХ*Лр + АоЛр + .7*0 Afl '
0 = -R,Im - jxrim - jx0Im - jxjsa + x0/,p v + (xr + x0 )/rpv;
B.40)
Учитывая, что /J(J = yYTO, /^ = y/ra и пропуская промежуточные
преобразования для обмоток статора и ротора, расположенных по одной
оси, получим
Us=Rsis+JXsis+JXoh>
Os-J?r/r-/rr(l-v)/r-./re(l-v)/r->e(l-v)/f; B.41)
/0=/,+/г.
Приведя обмотки ротора к обмоткам статора и используя выражение
для скольжения, получим
55
s = — - = l±v.
CO.
B.42)
Рис. 2.8. Векторная
диаграмма асинхронной
машины
После замены EQ = -jl0z0 и Ё5 = Ёг= Ё0
и преобразования получим уравнения
асинхронной машины [4]:
О = £0-/;*г-/;#A-*)/*, B.43)
где z, = Rs+jxs, zr = /?; +/х;.
Для уравнений асинхронной машины B.43)
можно предложить векторную диаграмму (рис.
2.8) и схему замещения (рис. 2.9). После
преобразования Т-образной схемы замещения в Г-
образную строится круговая диаграмма.
Комплексные уравнения B.43), схема замещения и
круговая диаграмма — основные элементы теории установившихся
режимов асинхронных машин [4].
Дифференциальные уравнения синхронной машины для
исследования переходных процессов при работе машины параллельно с сетью
бесконечной мощности еще в начале 30-х годов были предложены Р. Парком
и А. А. Горевым. Однако теория установившихся процессов синхронной
машины развивалась на основе более простых уравнений и векторных
диаграмм.
Векторная диаграмма неявнополюсной синхронной машины (рис. 2.10)
соответствует уравнению [4]:
£0=<У + г./.+>с/., B.44)
где Ё0 — напряжение при холостом ходе; U — напряжение,
соответствующее току нагрузки 1а; га — активное сопротивление фазы якоря;
хс = х6 + х^ —синхронное сопротивление, состоящее из индуктивного
сопротивления рассеяния (дгб) и индуктив- rs
ного сопротивления реакции якоря (xj).
Для явнополюсной синхронной
машины векторную диаграмму (рис. 2.11)
строят по уравнению
Е0=и + гш1ш+ jxdId + jxi , B.45)
Рис. 2.9. Схема замещения
асинхронной машины
56
jlqXq,
О lara
Рис. 2.10. Векторная диаграмма неяв-
нополюсной синхронной машины
'а
Рис. 2.11. Векторная диаграмма явно-
полюсной синхронной машины
где Id и / — соответственно токи в продольной и поперечной осях
машины; xd — индуктивное сопротивление в продольной оси; xq —
индуктивное сопротивление в поперечной оси.
В B.44) и B.45) коэффициенты перед независимыми переменными
(токами) — значения активных и индуктивных сопротивлений. В
зависимости от математического описания процессов преобразования энергии
параметры (коэффициенты перед переменными) изменяются.
Для машин постоянного тока в классической теории используют еще
более простые уравнения:
U = E0±ItrtH, £0=/(/.,/^), B.46)
где Д — ток возбуждения; Fqd — продольная составляющая поперечной
реакции якоря; гвн — внутреннее сопротивление машины.
Машины постоянного тока обычно выполняются с несколькими
обмотками. Между обмоткой якоря и обмотками статора при нагрузке возникают
сложные взаимодействия. Поэтому уравнения машин постоянного тока —
уравнения многообмоточных машин с нелинейными коэффициентами.
Простейшие уравнения синхронных машин и машин постоянного
тока B.44), B.45) и B.46) можно получить из представления машины как
четырехполюсника (см. рис. 1.5) с внутренним сопротивлением га и хс —
для неявнополюсной машины, ra, xd и xq — для явнополюсной и гвн — для
машин постоянного тока. При этом сложные нелинейные связи
учитывают путем введения нелинейных зависимостей параметров от токов.
Дифференциальные уравнения, описывающие процессы
электромеханического преобразования энергии, позволяют исследовать переходные
процессы и, как частный случай, установившиеся режимы.
57
Вычислительная техника позволяет достаточно быстро решать
уравнения, описывающие установившиеся процессы. Если при решении
оптимизационных задач или исследований некоторых схем включения
электрических машин уравнения получаются слишком сложными, то,
прежде чем заниматься их решением, следует упростить математическое
описание. Создание математических моделей электрических машин для
установившихся и переходных режимов, удобных для решения на
ЭВМ,— важная задача математической теории электрических машин, так
как, прежде чем начинать моделировать уравнения, необходимо
научиться составлять уравнения, достаточно точно описывающие процессы
преобразования энергии в ЭП и удобные для моделирования.
§ 2.5. Математическая модель идеализированной
трехфазной обобщенной машины
Круговое поле в воздушном зазоре может быть не только в
двухфазной, но и в трех-, четырех- и /я-фазной обобщенной электрической
машине. Если многофазная машина симметричная, а напряжения на ее
обмотках синусоидальные, то удобно анализировать многофазную машину,
приведя ее к двухфазной (§ 2.3). Однако при исследовании
несимметричных машин, при исследовании машин с учетом пространственных
гармоник или при несинусоидальных напряжениях приводить машину к
двухфазной неправомерно, так как поля в зазоре двухфазной и многофазной
машин в этих условиях отличаются друг от друга.
Рассмотрим трехфазную идеализированную машину. Как и
идеализированная двухфазная, эта машина двухполюсная, имеет гладкий
воздушный зазор, все параметры ее
линейные, а напряжения на
выводах синусоидальные. В модели
машины имеются три обмотки на
статоре с числом витков wA, wB и wc и
три обмотки на роторе с числом
витков wa, wbi и wc соответственно,
фазы которых сдвинуты на 120°
(рис. 2.12).
В непреобразованной системе
координат при перемещении
обмоток взаимные индуктивности
между ними изменяются, a dQ/dt = сог.
Рис. 2.12. Пространственная модель Д™ трехфазной машины в
нетрехфазной идеализированной машины преобразованной системе в фазных
58
осях координат А, В, С, а, Ь, с дифференциальные уравнения имеют вид
"а = rJa + dVjdf, ив = RBiB + d¥B/dt;
ис = Rcic + cWc/dt; ua = Raia + <№jdt; \ B.47)
u„ = R„ib + dVjdt; uc = Rcic + dVjdt,
d<£>
B.48)
где щ — напряжения (i = A, В, C, a, b, c); /, — токи; Rt — активные
сопротивления обмоток фаз статора и ротора; *Р, — результирующие потокос-
цепления.
Результирующие потокосцепления трехфазной машины по
сравнению с потокосцеплениями двухфазной B.6) имеют более сложный
характер, так как в трехфазной машине шесть контуров с током вместо
четырех. Потокосцепление для фазы А
^а = Wa + Мав*в + MACic + MAaia + MAbib + MJC. B.49)
Аналогично записываются потокосцепления для пяти других контуров.
В непреобразованных естественных координатах индуктивности и
взаимные индуктивности в потокосцеплениях B.49) — периодические
коэффициенты, изменяющиеся по гармоническому закону при вращении
ротора машины. Уравнения B.47)— B.48) после подстановки в них
выражений результирующих потокосцеплений имеют громоздкие решения
с несколькими десятками членов, содержащих периодические
коэффициенты. Чтобы избавиться от периодических коэффициентов, необходимо
перейти к заторможенной системе координат и выполнить те же
преобразования, что и для двухфазной машины (см. § 2.2).
Модель трехфазной машины в заторможенной системе координат
(а, Р, у) показана на рис. 2.13. Трехфазная
система заторможенных координат стала
применяться сравнительно недавно и нет
установившегося ее обозначения. Автор
считает, что, по аналогии с двухфазной
системой координат, трехфазную и
многофазные системы методически наиболее
правильно называть системой а, Р, у,
заимствуя буквы из греческого алфавита, а
для системы d, q — из латинского,
например </, q, s.
В трехфазной системе координат а,
Р, у, так же как и в двухфазной системе
координат а, Р, в воздушном зазоре поле
Рис. 2.13. Модель трехфазной
машины в заторможенной
трехфазной системе координат
59
круговое и его можно представиггь результирующими векторами (см. § 2.3).
Проецируя результирующие вектора токов ротора, напряжений и пото-
косцеплений на оси а, Р, у статора, находят выражения для
преобразованных значений. Матрица преобразований для трехфазной системы
М =
1 0 0
0 1 0
0 0 1
ООО
0
0
0
К cos 8
0 0
0 0
0 0
%cos@+p) ^cos(G-p)
ООО Kcos(G-p) %cos6 Kcos(9+p)
[_0 0 0 5<cos(e+p) Kcos(O-p) #cos8
B.50)
где p = 2тг/3 .
В табл. 2.1 даны значения взаимных индуктивностей обобщенной
машины в трехфазных непреобразованных координатах для
двухполюсной машины. При приведении многополюсных машин к двухполюсной
используется член /?со, где со — синхронная частота вращения
многополюсной машины.
Обычно в электромеханике многофазные электрические машины
приводят к двухфазной, так как при этом уменьшается число уравнений.
При приведении в уравнение электромагнитного момента вводится
коэффициент 3/2, а токи и коэффициенты в уравнениях берутся для одной
фазы. Можно не вводить коэффициент в уравнение электромагнитного
момента, но тогда в выражения для индуктивностей надо ввести
коэффициент 2/3 так, как это сделано в B.50).
Если возникает необходимость приведения многофазной машины к
трехфазной, необходимо ввести коэффициент /я/3, где т — число фаз. В
трехфазной машине за один оборот ротора взаимные индуктивности
трижды изменяют амплитуды. Эти пульсации определяют токи и
напряжения нулевой последовательности. Частота токов нулевой
последовательности зависит от числа фаз машины: в трехфазной машине она равна
трем, в четырехфазной — четырем и т.д.
В трехфазной системе координат, так же как и в двухфазной,
могут быть записаны уравнения с учетом нелинейности
параметров, несинусоидальности питания и т.д. При этом в трехфазной
системе число уравнений напряжения в полтора раза больше, чем в
двухфазной.
В общем случае для многофазных машин число уравнений
напряжения N = пт/2, где п — число уравнений напряжения для двухфазной
машины в рассматриваемом аналогичном режиме; т — число фаз.
60
и
ее
Й
S
S
1
о
о
и
2
s
в
ее
й
е
с*
ю
о
о
о-
Б
s
Я
■в-
И
4>
CU
н
аз
2
a
s
a
ее
Z
)S
о
s
s
Ю
о
vo
о
о
в
OQ
В
В
u)
2
в
в
ее
ее
S
в?
Ю
ее
H
a
о
индуктив»
V
нь
>заим
m
^
ca
av
?=
0*
a"
Оси
ел
CN
1
1
ъ
8
5>
~
CO
+
1
8
3
<^
CO
О
s
CN
1
CN
^
1
Si
8"
ел4
*
CN
+
t.
^
8
Si
3
^
CO
О
О
/Лч
ел
1
1
8
5>
$
1
S!
CN
}
a£
1
CO
О
О
/>-**
ГО
(N
1
I
8
/~\
CO
CN
+
3
a.
8
S
<N
^
1
CN
*
«Л
>-
CN
^
1
CN
*
*
^
eo
fN
+
8.
v
8
*
/-s
ГО
"б*
IN
1
1.
8
^
3
«^
CO
О
О
«r
CN
$
1
*
(N
^
1
/■"
ГО
*
CN
1
1
^
8
5!
3
*.
CO
О
О
/-s
го
(N
+
1
8
v.
C2L
*
(N
?
CN
^
1
3
Mcosp
S~\
го
CN
+
8.
8
*
/Лч
ГО
CN
I
3
CO
8
£
Используя матрицу преобразования B.50), запишем уравнения B.47)
в преобразованной трехфазной системе координат:
u„=r„in+(t¥jdt; B>51)
-«« =гш/т+Л'ш/А + (^-^H)г/^3;
-«* = bb+tWjdt + Wr, -Ч'тКА/з;
Потокосцепления в B.51)
*« = £«'« -^м,р "^ +^Оа - 2»щ " 2^); B*52)
4% = V* -|лл„ --М5(Х + М(/гр --/ш --/„); B.53)
^=V^-{M--~M,P+^(^-^---^Vp); B.54)
^=^^+^0^-^-^^)-^^-^, B.55)
4% = V* +М(-^~ Нр '2isr)~2Min ~2Mra; B'56)
^ = ^ + А/(-_/я --/j(J + /jy)--Mra --Mr3. B.57)
Подставляя выражения потокосцеплений B.52)—B.57) в B.51),
получим уравнения напряжений обобщенной машины в заторможенных
трехфазных координатах, позволяющие решать целый ряд задач, которые
уравнениями двухфазной машины описываются с большими допущениями.
Электромагнитная энергия, сконцентрированная в воздушном зазоре
машины,
где /=1,2,..., N— число контуров с fOKOM (обмоток) машины.
Для трехфазной машины (см. рис. 2.13) электромагнитный момент и
электромагнитная энергия соответственно:
dW
Мэ=р-^; B.59)
^ = \фт1я + Чу,3 +.Vsy + *ш'ш + V*+ *Л) ■ B'6°)
62
После подстановки выражений токов в уравнения машины в
трехфазных заторможенных координатах
V3
Мэ = р—M[(iJn +/fp/m +/jyifP)-(ijei^ + i#in + Vm)]. B.61)
Выражение B.61) содержит все возможные пары произведений
токов для трехфазной машины, определяющие значение электромагнитного
момента. Токи в статоре и роторе по одной оси в идеализированной
машине не создают электромагнитного момента. Эти пары токов создают
тяжения и вибрации в реальной машине.
Система уравнений напряжения и движения описывает процессы,
электромеханического преобразования энергии в трехфазной машине.
Так же как и для трехфазной машины, могут быть записаны уравнения
для многофазных электрических машин. Однако во всех случаях, когда по
условиям задачи допустимо преобразование многофазной машины к
двухфазной, это необходимо делать.
§ 2.6. Применение вычислительных машин
для решения задач электромеханики
Уравнения электромеханического преобразования энергии имеют
аналитическое решение лишь при достаточно больших допущениях da^/dt = О
или линейном изменении скорости. В этом случае уравнения напряжений
B.1) и уравнение движения B.3) могут решаться независимо друг от
друга. Исследование переходных процессов при изменяющейся скорости
вращения возможно только с помощью вычислительных машин, так как
уравнения содержат произведения переменных. Широкое внедрение в
практику вычислительных машин в последние десятилетия позволило
решить целый ряд задач, считавшихся ранее недоступными. При этом
может быть получена высокая точность решения, которая не является
необходимой для большинства практических задач.
В настоящее время наибольшее применение получили электронные
вычислительные машины, делящиеся на аналоговые вычислительные
машины (АВМ), цифровые вычислительные машины (ЦВМ) и гибридные
вычислительные машины (ЦАВМ).
В АВМ все переменные представляются в виде непрерывно
изменяющихся физических величин (токов и напряжений), изменение
которых дает решение задачи. Любая динамическая характеристика
воспроизводится с помощью регистрирующего прибора (например, на экране
электронного осциллографа). На аналоговых устройствах целесообразно
ставить задачи не полностью определенные, постановка которых уточня-
63
ется в процессе их исследования. Недостатками АВМ являются их
невысокая точность и малая универсальность. Однако точность, равная
нескольким процентам, бывает вполне достаточной для многих
инженерных исследований, так как исходные данные часто задаются с меньшей
точностью.
Малая универсальность АВМ определяется тем, что переход от
решения одной задачи к другой связан с изменением структурной схемы
модели машины. Сейчас АВМ строятся для решения задач, связанных с
интегрированием обыкновенных дифференциальных уравнений,
моделированием алгебраических и трансцендентных уравнений, а также для
решения уравнений в частных производных. АВМ удобны при
исследовании динамических режимов ЭП.
В настоящее время ЦВМ вытеснили АВМ и они, практически, в
учебном процессе не применяются.
Для решения математических задач, требующих высокой точности,
применяются ЦВМ. В ЦВМ вся входная и выходная информация
представляется в числовой форме, благодаря чему в таких машинах
реализуются численные методы решения задач. Точность вычислений,
достигаемая в ЦВМ, определяется количеством цифровых разрядов и
ограничивается лишь объемом оборудования вычислительной машины. Особенность,
современных ЦВМ состоит в том, что они автоматизируют
вычислительный процесс, производят арифметические действия с большой
точностью. Поэтому они неизмеримо расширяют возможности проведения
расчетов. В отличие от АВМ на ЦВМ ставятся задачи, с алгоритмом
решения, определенным полностью, для которых составлена программа
работы машины. ЦВМ предназначены для решения широкого круга
задач. Переход от решения одной задачи к другой в этих машинах не связан с
изменением структуры, а требует лишь изменения программы ее работы.
Вследствие технической сложности и благодаря универсальности
большие ЦВМ сосредоточиваются в централизованных вычислительных
центрах, обеспечивающих техническую эксплуатацию вычислительных
машин, математическую подготовку решаемых задач и их
программирование (перевод задачи на язык машины, т.е. представление в форме,
необходимой для автоматического решения). Большие ЦВМ —
дорогостоящие машины, для размещения которых требуются площади, их
обслуживает квалифицированный персонал.
В ЦВМ производятся действия над дискретными величинами —
числами, представленными в определенной системе исчисления.
Основными преимуществами ЦВМ являются высокая точность решения (до 20
десятичных знаков и более) и универсальность. На ЦВМ можно решать
широкий класс задач. К недостаткам можно отнести большие затраты
времени на программирование и отладку программы, на расшифровку
результатов, полученных в виде дискретных значений.
64
За истекшие четверть века быстродействие, емкость памяти и
надежность ЭВМ повысились на несколько порядков. Одновременно с
улучшением параметров и характеристик ЭВМ происходит быстрое
уменьшение их габаритов, потребления энергии в удельной стоимости.
В начале 70-х годов появились первые ЭВМ четвертого поколения,
характеризующиеся использованием средних (сотни вентилей на
кристалле) и больших (тысячи вентилей на кристалле) интегральных схем.
Для четвертого поколения ЭВМ характерно широкое применение
полупроводниковой памяти, расширенный набор команд,
микропрограммирование, встроенные подпрограммы и автоматизация отладки программ,
значительное повышение надежности, количественный рост и
качественное разнообразие внешних устройств и каналов, наличие интерфейсов,
расширение использования специализированных процессоров, создание
многомашинных и мультипроцессорных вычислительных комплексов.
Появление универсальной автоматической цифровой
вычислительной машины, позволяющей производить арифметические и логические
операции с большой скоростью, раскрывает новые качественные
возможности ЭВМ, состоящие в сочетании теоретических исследований с
постановкой контрольных экспериментов.
Созданы комплексы гибридных вычислительных машин, состоящих
из ЦВМ и аналоговых устройств. В США создана ЦВМ, совершающая в
1 с операции, на которые обычные ЭВМ потратили бы сотни лет. В
указанном комплексе ЦВМ является управляющей машиной, одновременно
выдающей исходную информацию для дальнейшего решения задач на
аналоговых устройствах. Этот комплекс при подключении к нему
системы соответствующих датчиков может управлять экспериментом,
реализуя связь от анализа информации до принятия решения. При этом
появляются новые возможности поиска оптимального режима на принципе
самообучения системы.
В последнее десятилетие широкое распространение получили
персональные ЭВМ.
Выделяют три класса ЭВМ, которые по своим показателям могут
быть отнесены к категории персональных ЭВМ: настольные
персональные компьютеры, портативные персональные компьютеры,
профессиональные рабочие станции.
Настольные персональные компьютеры предназначены для
построения автоматизированных рабочих мест разного назначения.
Портативные персональные компьютеры приобретают качества,
свойственные более мощным настольным персональным компьютерам.
Их ориентируют на применение в обычных рабочих помещениях.
Профессиональные рабочие станции, так же как настольные и
портативные ПЭВМ, рассчитанные на работу одного пользователя, обладают
существенно большими функциональными возможностями. В качестве
3-179 65
перспективного направления применения персональных компьютеров
можно выделить их использование в системах коммуникаций и для дрс-
тупа к банкам информации. По мере развития элементной базы,
используемой при создании микроЭВМ, происходит совершенствование
и расширение технических возможностей самих персональных
компьютеров.
По мере внедрения персональных компьютеров в различные сферы
деятельности, разработки для них математического обеспечения и
создания большого количества прикладных программ возникла необходимость
оснащения микроЭВМ элементами внешней памяти на магнитных
носителях. В первых ЭВМ использовались магнитофоны «дейтарекордер»,
которые в дальнейшем были вытеснены дисководами со сменными
гибкими магнитными дисками (флоппи-диск) размером 5,25 и 3,5 дюйма.
Широко используются как одинарные, так и двойные дисководы с
объемом общей памяти от 140 до 1600 Кбайт. Активно стали применяться
также постоянные носители на магнитных дисках (хард-диск), объем
памяти которых равен 10, 20 и 40 Мбайт. В моделях микроЭВМ последних
лет часто используются смешанные блоки внешней памяти: дисковод с
«флоппи-диск» и дисковод с «хард-диск», что позволяет применять
самые емкие программы и решать практически любые сложные задачи.
Компьютерный бум в развитых капиталистических странах, высокий
спрос на микроЭВМ на мировом рынке привели к массовому
производству дешевых персональных компьютеров — копий в странах юго-
восточной Азии. Копируя модели ЭВМ ведущих западных фирм, фирмы-
продуценты этих стран в большинстве случаев улучшают технические
характеристики моделей прототипов, что при удовлетворительном
качестве и дешевизне моделей (на 30—50% ниже стоимости моделей-
прототипов) позволяет этим фирмам довольно успешно конкурировать на
мировом рынке с ведущими американскими, японскими и
западноевропейскими фирмами.
Развитие и совершенствование персональных компьютеров идет по
следующим основным направлениям:
— разработка и использование в ЭВМ многоразрядных и
быстродействующих микропроцессоров;
— увеличение объема оперативной памяти до 10—14 Мбайт;
— создание более емких внешних блоков памяти;
— более широкое использование смешанных блоков памяти типа
«флоппи-диск» и «хард-диск»;
— разработка и внедрение в дисководах лазерных дисков с объемом
памяти до 2 Гбайт;
— создание многооперационных персональных компьютеров,
способных использовать программное обеспечение, предназначенное для
различных типов микроЭВМ;
66
— внедрение систем предохранения от несанкционированного
доступа к памяти микроЭВМ и защиты информации, накопленной на
магнитных носителях;
— уменьшение веса, габаритов, потребляемой мощности
электропитания и улучшения разрешающей способности средств отображения
информации персональных компьютеров;
— создание новых структурных схем построения и обработки
данных в микроЭВМ на базе достижений микроэлектроники.
На базе персональных ЭВМ для исследования динамических и
статических характеристик электрических машин создаются
автоматизированные лабораторные практикумы удаленного доступа, которые
реализуют программное управление конфигурацией исследуемого объекта и
экспериментами по заранее сформированным заданиям: замену
измерительных приборов многоканальной сенсорной подсистемой, которая
производит замеры и запись данных в память микроконтроллера;
обеспечивает для удаленных рабочих мест виртуальное воспроизведение
реального стенда.
Применение персональных ЭВМ позволяет создать обучающие
системы, использующие математические модели, рассматриваемые в данной
книге, что обеспечивает глубокое изучение теории электромеханического
преобразования энергии.
При исследованиях электрических машин надо использовать как
аналитические методы расчета, так АВМ и ЦВМ. Умение сочетать те или
иные методы исследования определяет уровень и глубину решения задачи.
Основная роль ЭВМ состоит в развитии теории и практики
электромеханического преобразования энергии.
Глава 3
Преобразование энергии в машинах
с круговым полем в воздушном зазоре
§ 3.1. Переходные процессы при круговом поле
в воздушном зазоре машины
В установившихся режимах электрические машины могут
характеризовать три режима: номинальный режим, режим холостого хода и
короткого замыкания. Переходные процессы значительно разнообразнее и
сложнее установившихся процессов, которые являются частным случаем
переходных процессов.
Переходные процессы в электрических машинах происходят при
изменениях напряжений и частоты на выводах машины, а также нагрузки
на валу, при включении машины и отключении ее от сети, реверсе,
коротких замыканиях, при изменении ее параметров и т.п. В реальных
условиях переходные процессы протекают при одновременном изменении
нескольких факторов. Комбинации факторов, влияющих на динамику,
могут быть весьма разнообразны (изменение напряжения, частоты и
параметров, напряжения и нагрузки и т.д.), поэтому при исследовании надо
уметь выбрать «главное» и не усложнять, без необходимости, задачу.
По важности и числу выполненных работ переходные процессы
делятся на процессы при пуске, торможении, реверсе, повторном
включении и изменении нагрузки. Эти процессы могут протекать при
симметричных и несимметричных напряжениях в симметричных и
несимметричных машинах. Динамика асинхронных машин отлична от динамики
синхронных машин. Наличие коллектора или иного преобразователя
частоты вносит соответствующую специфику. Переходные процессы в
трансформаторах и других электромагнитных преобразователях
отличаются от процессов во вращающихся машинах.
Исследовать динамику электрической машины — значит ответить,
как влияют параметры и изменения независимых переменных на
переходные процессы, а также выбрать с учетом условий, в которых будет
работать электрическая машина, оптимальные параметры и характер
изменения независимых переменных. Переходные процессы в ЭП столь
многообразны, что полностью их изучить невозможно. С развитием элек-
68
Мз
Ur
»f
i
0,f с
тромеханики приходится
заниматься такими вопросами, как
равномерность вращения машины
внутри каждого оборота,
влияние на точность навигационных
электромеханических приборов
технологических погрешностей,
внешних воздействий и других
факторов.
Во многих случаях характер
переходных процессов
определяет выбор установленной
мощности оборудования, массы и
электромагнитных нагрузок
электрических машин, например
приводов с ударной нагрузкой, с
тяжелыми условиями пуска, реверсивных быстродействующих приводов
и т.п. При проектировании электрических машин, работающих в
переходных режимах, важно правильно рассчитывать потери и распределение
активной и реактивной мощности. Чтобы исследовать переходные
процессы, необходимо составить описывающие их уравнения, преобразовать
к виду, удобному для моделирования на ЭВМ, и решить с помощью ЭВМ.
На рис. 3.1 представлены зависимости М3 =/(/) и со, = ДО при пуске
асинхронного двигателя АОЗ-24-4 мощностью 3 кВт, 2р = 4, U = 380 В,
когда нагрузка на валу равна нулю (Мс = 0). На рис. 3.2 для этого же
двигателя даны зависимости токов в статоре /,а и роторе /га от времени. Ос-
Рис. 3.1. Осциллограммы
электромагнитного момента и угловой скорости ротора
двигателя АОЗ-24-4 при пуске
ft/Ww^,
Рис. 3.2. Осциллограмма токов двигателя АОЗ-24-4 при пуске
69
Шг
llJll ,JL
Цишш '
in1
OJc
Urn *-
1 1 ^
t,c
Рис. 3.3. Осциллограмма электромагнитного момента и угловой скорости ротора
двигателя 4АЗ 12М8УЗ при пуске
\rt-roc
Рис. 3.4. Осциллограмма токов двигателя 4А315М8УЗ при пуске
циллограммы рис. 3.1 и 3.2 получены на ЭВМ при решении уравнений
B.1)—B.3) при подстановке в уравнения значений параметров в режиме
насыщения A/, Ls и Lr.
Как видно из рис. 3.1 и 3.2, в первые два-три периода токи в статоре
и роторе имеют максимальные (ударные) значения, что и обусловливает
70
Рис. 3.5. Осциллограмма асинхронного двигателя 4A250S4 мощностью 75 кВт
при пуске
Рис. 3.6. Осциллограмма двигателя А2-122-12 мощностью 500 кВт при пуске
максимальные значения электромагнитного момента. Затем токи
затухают, колебания Мэ сокращаются и значение угловой скорости ротора <ог
приближается к установившемуся.
На рис. 3.3 и 3.4 даны осциллограммы пуска при Мс = 0
асинхронного двигателя 4А315М8УЗ мощностью 11 кВт, U = 380 В, 2р = 4. Пуск
этого двигателя отличается от пуска двигателя меньшей мощности. На
рис. 3.5 даны осциллограммы пуска асинхронного двигателя 4А-250
номинальной мощностью Риом = 75 кВт, а на рис. 3.6 — осциллограмма
пуска двигателя А2-122-12, Риом = 500 кВт.
Характер переходного процесса зависит от мощности двигателя, а
точнее, параметров, входящих в уравнение электромеханического
преобразования энергии. Двигатели с малым моментом инерции разгоняются
за два-три периода до установившейся скорости, но затем значение
угловой скорости ротора еще некоторое время «качается» около
установившегося значения. Двигатель мощностью Рном = 500 кВт разгоняется очень
медленно, но после подхода к установившемуся значению скорости не
имеет перерегулирования. Наиболее показательными являются процессы
пуска двигателей серии 4А мощностью 10—75 кВт (рис. 3.3—3.5).
71
шШт
Рис. 3.7. Осциллограмма асинхронного двигателя АД-31-4 мощностью 2,2 кВт
при реверсе
На рис. 3.7 представлены осциллограммы реверса асинхронного
двигателя АД-31/4 (Риом = 2,2 кВт, U= 220 В, 2р = 4).
При изменении направления вращения двигателя сначала двигатель
отключается от сети, а затем подключаете^ к сети с обратным
следованием фаз. При этом происходит наложение процессов, вызванных
отключением двигателя, на процессы, вызванные включением. Процесс реверса
отличается от процесса пуска; влияние параметров на ударный момент,
ударный ток и время разгона иное, чем при пуске. Переходный процесс
при пуске определяется временем коммутации и зависит от того, успело
ли затухнуть поле в воздушном зазоре. При мгновенном переключении
процессы протекают одновременно, что приводит к увеличению ударных
токов и моментов.
Процесс повторного включения двигателя в сеть характеризуется
наибольшими ударными токами и моментами, он состоит как бы из двух
процессов, накладывающихся друг на друга: процессов отключения от
сети и включения двигателя. Процессы повторного включения происходят
Рис. 3.8. Осциллограмма двигателя
АД-31-4 с затухшим полем при
повторном включении
Рис. 3.9. Осциллограмма двигателя с
незатухшим полем при повторном
включении
72
непрерывно в тяговых двигателях, когда при движении
электрифицированного транспортного устройства нарушается контакт двигателя с
сетью. Характер переходных процессов при повторном включении зависит
от того, как быстро снова подключается двигатель к сети и успело ли
затухнуть поле в зазоре. На рис. 3.8 и 3.9 показаны осциллограммы
переходного процесса при повторном включении асинхронного двигателя с
затухшим и незатухшим полем.
При исследовании повторных включений система уравнений
электромеханического преобразования энергии остается такой же, что и при
исследовании пуска, но вместо нулевого начального значения угловой
скорости сог = 0 берется скорость сог * 0.
Из качественного анализа пуска, реверса и повторного включения
следует, что эти процессы отличаются друг от друга характером
изменения токов, ударных моментов и угловой скорости. Влияние параметров
на протекание различных переходных процессов неодинаково.
Переходные процессы в реальных машинах отличаются от
процессов, полученных путем моделирования на ЭВМ, однако расхождения, как
правило, небольшие. Чем больше факторов, влияющих на переходные
процессы, надо учесть, тем сложнее уравнения.
Многообразие переходных процессов в электрических машинах
определяется многообразием сочетаний параметров, их нелинейными
зависимостями, влиянием включенных в статор и ротор элементов,
обратными связями, несимметрией и несинусоидальностью напряжений,
характером движения и конструктивными исполнениями ЭП.
В приложении 1 приведены данные двигателей серии 4А, их
параметры, базовые величины, значения коэффициентов для записи
уравнений в потокосцеплениях, масштабы переменных и коэффициенты
передач усилителей модели для моделирования уравнений на АВМ.
В табл. 3.1 приведены в относительных единицах основные
показатели переходных процессов для рассматриваемого отрезка серии: /п —
время переходного процесса, Му — ударный момент, Isy — ударный ток в
обмотках статора, 1^ — ударный ток в обмотке ротора.
Таблица 3.1. Показатели переходных процессов асинхронных
двигателей серии 4А
казатели
/п
A/v
Ay
/«_
Типоразмеры
4А-
80А4
11,0
4,3
3,55
3,5
4А-
112М4
19,5
4,5
5,12
5,12
4А-
132М4
33,3
4,25
5,26
5,21
4А-
180М4
88,1
3,25
5,21
4,92
4А-
250L4
113,2
3,16
4,89
4,8
4А-
250S4
213,8
3,5
5,08
4,85
4А-
250М4
232,7
3,42
4,65
4,5
4АН-
250М4
270,4
2,37
4,35
3,64
73
Ударные токи короткого замыкания в машинах переменного тока
могут достигать 10—15-кратного значения номинального тока.
Пусковые токи асинхронных короткозамкнутых двигателей
ограничиваются ГОСТом в пределах 5—7-кратных значений /ном. В синхронных
машинах ударные токи в основном определяются xd, которое во
многом определяется демпферной системой. Чем мощнее демпферная
система, тем больше x'd и тем меньше ударные токи в переходных
режимах. В турбогенераторах максимальные токи короткого
замыкания достигают 15—18-кратного значения /ном, а в гидрогенераторах —
5—8-кратного. Максимальные ударные токи возникают при
несимметричных коротких замыканиях. Значительные ударные токи,
достигающие 30-кратных значений /ном, могут возникать при неправильной
синхронизации с сетью синхронных машин и при реверсе
асинхронных двигателей.
Переходные токи опасны для машины из-за своего теплового и
механического действия. Обычно переходные процессы
кратковременные, поэтому можно считать, что вся теплота поглощается медью
обмотки и ее дополнительный нагрев можно подсчитать по
полуэмпирической формуле
Ае = (У2~у02)/175, C.1)
где у иу'о — мгновенная и начальная плотности тока, А/мм2.
Принято считать, что допустимый прирост температуры 4—5 град/с.
Быстрый нагрев обмотки вызывает нежелательные деформации меди
обмоток, паек и изоляции, что ведет к появлению трещин и
преждевременному выходу из строя машины.
Переходные токи создают значительные усилия в лобовых
частях обмотки. В крупных машинах усилия, действующие на лобовые
части обмоток при 15-кратных ударных токах, достигают 75 кг/см.
При частых переходных процессах в асинхронных двигателях
лобовые части подвергаются деформирующим вибрациям, что приводит к
преждевременному выходу из строя обмотки. Ударные моменты
воздействуют на вал, муфты, а также на болты, крепящие статор к
фундаменту. В машинах, имеющих длинный вал, соединенный муфтой с
турбиной или приводным механизмом, могут возникнуть
резонансные колебания, которые иногда сопровождаются крутильными
колебаниями.
При некоторых переходных процессах возникают высокочастотные
колебания и перенапряжения, когда при коммутации в силовых цепях
машины возникают резонансные колебания, вызванные наличием
емкости во внешней цепи и частичных емкостей в обмотках машины.
74
§ 3.2. Влияние параметров асинхронных машин
на их динамические характеристики
Параметрами электрической машины являются коэффициенты перед
независимыми переменными в уравнениях электромеханического
преобразования энергии. В зависимости от формы записи уравнений
параметрами могут быть индуктивности, активные сопротивления, момент
инерции и индуктивные сопротивления. Параметры машины определяют ее
показатели: массу, КПД, cos ер, ударные токи и моменты, а также
стоимость и надежность.
Точность результатов вычислительного эксперимента определяется
точностью задания начальных параметров. В переходных процессах,
особенно при пуске, значения индуктивностей и активного сопротивления
из-за насыщения значительно изменяются, поэтому нельзя подставлять
значения параметров машины в установившемся режиме в
дифференциальные уравнения, описывающие переходные процессы.
В теории синхронных машин широко применяются понятия об
установившихся, сверхпереходных и переходных состояниях машины и
характеризующих их параметрах.
Развитие общей теории электрических машин и теории переходных
процессов асинхронных машин привело к необходимости введения
переходных параметров для асинхронных машин. Индуктивные
сопротивления при пуске значительно отличаются от индуктивных сопротивлений в
установившемся режиме. При аналитическом определении индуктивных
параметров вычисляются их установившиеся значения. Переходные
параметры можно определить, применяя для решения уравнений
электромеханического преобразования энергии вычислительные машины.
Уравнения трансформаторов получаются из уравнений обобщенной
машины и теория трансформаторов и вращающихся машин близки друг к
друг. Поэтому и в трансформаторах целесообразно ввести понятие
установившихся и переходных индуктивных сопротивлений. Тогда в
формулах для определения ударного тока короткого замыкания не надо будет
вводить коэффициент а [4]:
Хк
где а — коэффициент 1,8—1,3, соответственно, для мощных
трансформаторов и трансформаторов небольшой мощности; /„ — номинальный
ток; U\ — мгновенное значение напряжения при к.з.; х'к — переходное
сопротивление к.з.
75
My,H»M, ly,A
ч
p
<
\
Ly
_-*
S
^
^
«№
—
-—
^—■
't„
/£J
/ 2 J~~4 5 6 Rr%On
My, Нм, ly,A
4
A
4^
^^
t;
6
2 U 6 8 10 12 М.Гн
Рис. ЗЛО. Зависимости времени пуска, Рис. 3.11. Зависимости времени пуска,
ударного тока, ударного момента от ударных токов и момента от взаимной
активного сопротивления ротора индукции
Му,Н-м,1у,А, tn,C
2 Ч 6 в 10 J,Hm
Рис. 3.12. Зависимости времени пуска,
ударных токов и моментов от момента
инерции
i
/
г
и
т
«^
7
/
tn
iy
My
.
Му,Н-м
12
6
if
2
о\-о
tn<c
Г
\
N
^
ч
к
»
г**»
0,25 0,50,75 1,01,25 Ьг6,Гн
Рис. 3.13. Зависимости времени пуска,
ударных токов и момента от
индуктивности рассеяния ротора
Анализируя осциллограммы пуска асинхронных двигателей
различной мощности, нетрудно обнаружить, что длительность и характер
протекания процессов в двигателях (изменения токов, колебаний моментов)
различны, так как параметры двигателей значительно различаются.
На рис. ЗЛО приведены зависимости Му =J(Rr), /y =./№■); tn =flfif) при
пуске; на рис. 3.11 — зависимости тех же величин от взаимной
индуктивности (величины воздушного зазора); на рис. 3.12 — зависимости
Щ =AJ)> 'у =AJ)i 'п =AJ) от момента инерции, а на рис. 3.13 —
зависимости тех же величин от индуктивности рассеяния ротора. Эти
зависимости представлены для асинхронного двигателя А2-102-8, у которого
76
M,f,
6\
s\
J
2
4
1
0
H-M,iy
1 i
A
\tn
г s
^j
j»
%
iy
*
% ,
5 Ь
-
'/?r
5
5
4
2
,0M
Рис. Э.14. Зависимости времени
переходного процесса, ударных токов и
момента при реверсе от активного
сопротивления ротора
ЬтА
(пр;Му,Н-м
8
2
О
у
/
f
/
tn
7~
..J
My
1 г з и 5J.H-M
Рис. 3.16. Зависимости переходного
процесса, ударных токов и момента
при реверсе от момента инерции
ММ..//-М
5
И
J
2
1
L0
•
^
II
M¥
tn
J
~~A
in, С
A2
2 4 в 8 10 MJh
Рис. 3.15. Зависимости времени
переходного процесса, ударных токов и
момента при реверсе от взаимной
индуктивности
Ьц,А
121
8
и
0
"у
в
6
10
,"•
м
tn
ч
ty
*л«*
0,25 0,5 0,75 1t0 1t25 Lr6Jn
Рис. 3.17. Зависимости времени
переходного процесса, ударных токов и
момента при реверсе от
индуктивности рассеяния ротора
Рюм = 100 кВт; 2р = 8; £/= 220 В; Rs = 0,03 Ом; Rr = 0,024 Ом; Л/= 13610^
Гн; U = Lr = 151, МОГ4 Гн; У = 6 кгм2.
Приведенные осциллограммы (рис. 3.10—3.13) позволяют оценить
влияние параметров на динамические характеристики двигателя при
пуске. Однако по ним нельзя определить оптимальные с точки зрения
динамики параметры, при которых, например, будет минимальное время раз-
77
гона или минимальный ударный момент и т.д. Уменьшение или
увеличение только одного из параметров не может привести к оптимизации
двигателя. Существуют оптимальные соотношения между коэффициентами
уравнений, когда необходимые показатели имеют экстремальные значения.
На рис. 3.14 представлены зависимости Му =J{Rr), /y -J{Ri)\ tn =J[Rr)
при реверсе для двигателя А2-102-8; на рис. 3.15 — зависимости этих же
величин от взаимной индуктивности; на рис. 3.16 — зависимости Му =
=AJ)> h ~AJ)> 'п =Х-0 от момента инерции, а на рис. 3.17 — зависимости
этих же величин от индуктивности рассеяния ротора. Переходные
процессы при реверсе сложнее процессов при пуске, влияние параметров на
процессы при реверсе отличается от влияния их на процессы при пуске.
Оптимальные параметры при пуске, реверсе или других динамических
режимах отличаются друг от друга.
Представляет интерес исследование процесса реверса при незатух-
шем поле. При достаточно быстром переключении порядка следования
фаз на выводах машины поле в воздушном зазоре не успевает отдать
запасенную энергию и подключение к сети происходит, когда в воздушном
зазоре поле еще не затухло. В этом случае необходимо рассчитать
начальные значения потокосцепления обмоток статора и ротора. Наиболее
тяжелые условия — при мгновенном переключении контакторов
(контакторы переменного тока срабатывают в течение 0,03—0,05 с). Наиболее
благоприятным для исследования такого переходного процесса является
программный режим работы АВМ.
Один из интересных динамических режимов — режим повторного
включения. Система уравнений и, следовательно, структурная схема
остаются прежними, но подключение к сети происходит при ненулевой
угловой скорости. Исследования показывают, что повторное включение
при значении сог, близком к номинальному, т.е. при кратковременных
перерывах питания, сопровождается максимальными значениями токов и
моментов, превышающими максимальные значения при пуске и реверсе.
Можно исследовать повторное включение при незатухшем поле. Для
этого необходимо вычислить начальные условия для потокосцеплений.
§ 3.3. Электромагнитный момент и энергетические
показатели в динамических режимах
Определение электромагнитного момента Мъ как произведения
всех токов, протекающих в контурах машины, является наиболее
общим. Для машины с круговым полем в воздушном зазоре (см. рис. 2.1)
электромагнитный момент состоит из трех видов комбинаций
произведений токов [4]:
78
Мэ = М,р + Мщиб + Л/деф = M(imi# - ум ) +
+M(Um + Vrp) + ^ *'*Лр " A^r'm'rP > С3'2)
где Мвр — вращающий момент; Мвиб — вибрационный момент; Мле$ —
деформационный момент, действующий на лобовые части обмоток
статора и ротора; Л/— взаимная индуктивность между обмотками статора и
ротора; Ms, Mr — взаимные индуктивности соответственно между
обмотками статора и между обмотками ротора (Ms « Mr « M)\ isa, /5р, /m, /^ —
мгновенные значения токов в обмотках статора и ротора.
Так как поток рассеяния обмоток статора и ротора, определяемый М5
и Л/г, составляет небольшую часть от рабочего потока Л/, Л/цСф можно не
учитывать в большинстве задач, но при определении надежности эта
составляющая имеет решающее значение. Вибрационный момент создает
вибрации и шумы.
В установившемся режиме для определения вибраций и шумов можно
использовать только одну составляющую электромагнитного момента AfB„6.
Деформационный момент зависит от способа выполнения лобовых
частей, числа фаз и других факторов. Создав определенные условия,
можно использовать МДСф для получения сложных перемещений.
Вибрационный момент в некоторых случаях может быть больше вращающего
момента, например в двигателях с катящимся ротором.
В большинстве случаев считают, что электромагнитный момент
равен вращающему моменту. Так как в идеальной машине отсутствуют
вибрации и деформации, во второй главе было принято, что Мэ = Л/вр.
При исследовании реальных машин необходимо оговаривать форму
записи электромагнитного момента.
Глубокий смысл в математических моделях электрических машин
имеют произведения напряжений и токов. Обращаясь к модели,
представленной на рис. 2.1, и считая, что ротор короткозамкнутый (мга = 0, и$ =
= 0), можно выделить пары, определяющие мгновенную активную и
мгновенную реактивную мощности [4]:
P = wVra+V'P' C.3)
Я = »т*ф-и**ша- (З-4)
В динамических режимах, как и в установившихся, реактивная
мощность идет на создание полей в машине.
Зная мгновенные значения активной (р) и реактивной (q) мощностей,
можно оперировать представлениями о полной мгновенной мощности:
s = ylp2+q2 . C.5)
Вычислительные машины оперируют с мгновенными значениями,
поэтому нетрудно с помощью стандартных программ переходить к сред-
79
ним значениям за период и за время переходного процесса. Средние
значения активной и реактивной мощностей дают возможность при решении
практических задач пользоваться понятиями КПД и коэффициента
мощности в динамических режимах. При этом предлагается считать, что
период в динамическом режиме равен периоду первой гармоники в
установившемся режиме [4].
При напряжениях на роторе мга и и^, не равных нулю,
принципиально математическая модель остается прежней, но появляются новые пары
произведений напряжений и токов только для ротора:
ит*т+иф*ф'> C-6)
Wm'rP-*Wm- C.7)
При этом C.6) является активной, а C.7) — реактивной мощностью
ротора.
В машине двойного питания в воздушном зазоре одно поле и
преобразование энергии осуществляется так же, как и при питании со стороны
только статора или ротора, когда usa и и5$ или мт и и^ равны нулю. При
работе машины двойного питания в режиме двигателя активная
мощность, поступая со стороны ротора и статора, преобразуется в
механическую. При этом реактивная мощность может поступать со стороны
статора и ротора или с одной из обмоток.
Машины двойного питания часто используются как преобразователи
частоты, когда активная и реактивная мощности поступают из одной
обмотки (например, статора), а с обмотки ротора снимается мощность
другой частоты, зависящая от скольжения. В этом случае два источника
электрической энергии обмениваются активной и реактивной
мощностями. Во вращающихся преобразователях обычно происходит
преобразование напряжения и частоты, а в трансформаторах, как правило, частота
остается неизменной.
Происхождение термина «обменная мощность» относится к началу
развития энергетики, когда генераторы и трансформаторы стали
включаться на параллельную работу и энергосистемы обменивались активной
и реактивной мощностями [3]. Целесообразно сохранить эти
представления и в динамических режимах при наличии источников с
синусоидальным и несинусоидальным несимметричным напряжениями, с учетом
несимметрии и нелинейностей. Математические модели позволяют четко
разделить и определить в динамике эти три составляющие мощности:
активную, реактивную и обменную.
Обменная мощность появляется в том случае, когда напряжения на
обмотках статора и ротора не равны нулю, т.е. возможен переток
электрической энергии из обмоток статора и ротора (из одного источника
энергии в другой).
80
Составляющие активной C.6) и реактивной C.7) мощностей
характеризуют переданную со статора на ротор или с ротора на статор
активную и реактивную мощности. Часть активной мощности с ротора может
идти в сеть, а другая часть преобразуется в механическую энергию.
Реактивная мощность, забираемая из сети, расходуется на создание
поля рассеяния обмотки статора, передается в воздушный зазор и идет на
создание поля рассеяния обмотки ротора. Часть реактивной мощности
может передаваться к источнику, подключенному к ротору, она и
является обменной мощностью.
Следует отметить, что при ит = 0 и и^ = 0 есть члены
Kja'rH-Vm» C.9)
которые определяют переданную на ротор активную C.8) и реактивную
C.9) мощности. При этом C.8) и C.9) не следует относить к обменной
мощности, так как они непосредственно участвуют в создании
электромагнитного момента в машине.
В процессе преобразования энергии происходит обмен мощностями
между статором и ротором, между фазами обмоток, между витками
обмотки и т.д., но это не обменная мощность в нашем представлении.
Только часть активной и реактивной мощности, передаваемая от
электрических входов статора и ротора из одной энергосистемы в другую, является
обменной мощностью.
Мгновенные активная и реактивная мощности и полная мгновенная
мощность соответственно:
Р = UJsa + и#'ф ; (ЗЛО)
й = "*/«-и«1/4и C3.ii)
s=V/>2+22 =V(««'«J+(V*)a+(V«J+(I'«'-iiJ • (ЗЛ2>
В простейшей машине (см. рис. 2.1) в установившемся режиме при
синусоидальном питании происходит колебание мгновенной мощности с
двойной частотой относительно среднего значения (рис. 3.18).
Определение активной, реактивной и полной мощностей
обобщенной машины по C.10)—C.12) достаточно наглядно. Однако определение
этих понятий в одно- и многофазных электрических цепях многими
авторами трактуется по-разному и до сих пор нет общепринятых определений.
При переменном напряжении u = Umsm(ot в цепи протекает ток
/ = lm sin(co/-ер), сдвинутый по фазе относительно напряжения на угол ср.
Используется понятие мгновенной мощности:
P = ui = UmIm sin со/ sin(co/ - ф) = —UmIm [соБф - cosBco/ - ф)]. C.13)
81
U J cos (f
Рис. 3.18. Зависимость мгновенной
мощности, тока и напряжения в
установившемся режиме от времени
Мгновенная мощность
колеблется вокруг среднего
значения (см. рис. 3.18), называемого
активной мощностью:
Рш=1/Т \uidt=-UmIm cosy =
о l
= Wcos(p, C.14)
где Т — период, a U и / —
действующие значения напряжения и
тока.
При сдвиге тока
относительно напряжения на угол ер часть полупериода приемник получает энергию
от источника, а в течение другой части отдает ее обратно источнику.
При сдвиге тока и напряжения на угол ф = ±90° средняя мощность
равна нулю, так как приемник отдает столько же энергии, сколько получает.
Выражение для мгновенной мощности можно записать иначе:
р = и/ = C//coscp(l -cos2co/)-t//sin(psin2co/ =
= Scos9(l-cos2cD/)-Ssin(psin2co/ =
= P(\ -cos2co/)-£?sin2co/, C.15)
где Q = UIsinq> — реактивная мощность; S = UI —полная мощность.
Реактивная мощность при синусоидальном напряжении
Q = \\<t)di{t),
C.16)
Эта формула используется при интегральных методах расчета
реактивной мощности.
При несинусоидальных периодических процессах определение
активной, реактивной и обменной мощности, несмотря на наличие сотен
статей в этой области, даже в установившихся режимах нет
общепринятых подходов. Определение этих понятий в динамике при
несинусоидальных несимметричных напряжениях будет рассмотрено в § 6.3.
Для выбора геометрических размеров и расчета потерь в
электрических машинах, работающих в динамических режимах, необходимо знать
средние за период энергетические показатели. При этом за период в
переходном процессе целесообразно принять
Т = 2тс/со0 ,
где со0 — угловая скорость основной гармоники напряжения в
установившемся режиме.
82
Тогда средняя мощность за период Т
т *+Т m
к = \
тжРк=Т-] \ukikdt.
О
Средняя за период реактивная и полная мощности соответственно:
t+T
Q^^T-'lQd, C.18)
где Uk и Д — средние квадратичные значения напряжения и тока за период Г.
Средний за период коэффициент мощности
m
Р I*
**=-=-*—= ~1*=- C-20)
1ад 2>й
Коэффициент полезного действия для двигателя в переходном
режиме можно определять как отношение усредненных величин полезной
мощности на валу двигателя Р2с к активной потребляемой мощности из
сети Рс:
где
Пс=^с/^с C.21)
ITI If/
Р1с = Г \P2dt = @,7- \M,dt. C.22)
Зная средний коэффициент мощности и средний КПД в переходном
режиме, можно определить геометрические размеры электрической
машины, работающей в динамических режимах, используя методику
расчета в установившемся режиме.
В переходных режимах КПД всегда ниже, чем в установившемся
режиме. Если принять, что в установившемся режиме КПД «1, а в
начальный момент при пуске (сог = 0) КПД * 0, то средний КПД при
разбеге двигателя равен примерно 0,5.
Для экономии электроэнергии двигатель, работающий в повторно-
кратковременных режимах, иногда целесообразно отключать от сети.
Однако при отключении двигателя энергия, запасенная во вращающихся частях и
магнитном поле, преобразуется в теплоту. При подключении двигателя к
сети снова запасается кинетическая энергия во вращающихся частях, а после
83
Рис. 3.19. Диаграмма
потребления энергии двигателем во
время цикла работы
затухания электромагнитных переходных
процессов и в магнитном поле.
Для определения целесообразного
времени нахождения двигателя во
включенном состоянии обратимся к
идеализированной диаграмме потребления энергии
при холостом ходе, при включении и при
отключении двигателя (рис. 3.19).
На рис. 3.19: Ах — энергия,
сэкономленная отключением двигателя от сети;
А2 — энергия, израсходованная
дополнительно при разгоне; А3 — энергия, которая
была бы израсходована, если бы вместо
разгона двигатель работал в режиме холостого хода; Р\ — активная мощность,
потребляемая двигателем в режиме холостого хода; t\ — время нахождения в
выключенном состоянии; t2 — время разгона; /ц—длительность цикла.
Если известны потребляемая мощность Ри энергия А2 и А3, время /2,
то можно определить время нахождения в выключенном состоянии /ь
при котором будет выполняться условие АХ>А2.
Из диаграммы (рис. 3.19):
Л2=(Л2 + Л3)-Лэ=(Л+Л3)--/>/2.
Если в неравенстве А\ > А2 вместо А\ и А2
C.23) и C.24), получим
/>,/1>(^2+^з)-^2- C.25)
Из C.25) время tx нахождения двигателя в выключенном состоянии
/I>(i42+i4,)/Pl. C.26)
Для того чтобы рассчитать время t\ по выражению C.26), рассчитаем
общую энергию А2 + Ау Обозначим ее P(t2).
Энергию P(t2) определим как энергию, потребляемую двигателем
при разгоне до достижения установившегося режима:
>>(':) = II }«*(/)/*</)*. C-27)
А = 1 //=0 ,
В C.27) /2 — время разгона двигателя от включения до
установившейся частоты вращения.
Зная P{tln) = А2 + А3 и /2, можно из графика изменения мгновенной
мощности (рис. 3.19) определить потребляемую мощность Рх. Если Рх в
режиме холостого хода периодически изменяется, то ее определяют как
C.23)
C.24)
i2 подставить выражения
84
среднюю величину мгновенной мощности в режиме холостого хода. Для
этого достаточно выбрать на временной оси промежуток времени /х = пТ
и определить Рх за этот промежуток времени:
C.28)
где
C.29)
4=1w*0
После определения t2 можно также найти время цикла /ц = /2 + /,, а
затем и частоту включения и выключения двигателя в кратковременных
режимах при оптимальном потреблении электроэнергии.
Представляет интерес влияние динамического режима работы
двигателя на его энергетические показатели в повторно-кратковременных
режимах типа S3, S4, S5, iS7, S8.
В повторно-кратковременном режиме типа S3 кратковременные
периоды неизменной номинальной нагрузки (рабочие периоды) чередуются с
периодами отключения машины (паузами). Режим S4 — такой режим, при
котором периоды пуска и кратковременные рабочие периоды чередуются с
паузами. В повторно-кратковременном режиме с частыми пусками,
электрическим торможением S5 периоды пуска, кратковременный рабочий режим и
режим электрического торможения чередуются с паузами. В режиме 57
периоды реверса чередуются с рабочими периодами, а в режиме S8 двигатель
работает с двумя или более угловыми скоростями и, соответственно, при
различных нагрузках. Во всех этих
режимах температура отдельных
частей машины, как правило, не
достигает установившихся
значений*. Но практически во всех этих
режимах потери при пуске,
реверсировании, электрическом
торможении и переходе двигателя с
одной угловой скорости на другую
оказывают существенное влияние
на температуру частей машины и
на процесс электромеханического
преобразования энергии в машине.
Поэтому необходимо уточнить
определение энергетических
показателей асинхронных двигателей,
работающих в таких повторно-
кратковременных режимах.
Рис. 3.20. Диаграмма потребляемых
мощностей при работе двигателя в повторно-
кратковременном режиме типа S4
85
Рассмотрим режим 54 работы асинхронного двигателя (рис. 3.20).
Первый участок диаграммы соответствует динамическому режиму работы,
например пуску двигателя, а второй — номинальному режиму работы с
номинальными параметрами (энергетические показатели — коэффициент
полезного действия т|р и коэффициент мощности режима к^р). В динамическом
режиме работы двигатель имеет средние энергетические показатели т|д и Л^д,
которые рассчитываются по методике, приведенной в этой главе.
Для определения энергетических показателей двигателя,
работающего в режиме S4, целесообразно использовать средний коэффициент
мощности асинхронного двигателя за время цикла и средний коэффициент
полезного действия за время цикла:
**« = (*мЛ + *мЛ )/('д + 'Р). C.30)
Пц=0Уд + ЛР'р)/('д+'Р). C.31)
Здесь /д — время работы в динамическом режиме: время разгона при
пуске, реверсе или повторном включении. Параметры динамического
режима определяются из расчета энергетических показателей двигателя в
динамических режимах, а параметры номинального режима — из расчета
электромеханических характеристик.
В общем случае в цикле работы двигателя могут быть различные
динамические режимы, например: пуски и номинальные режимы работы
при различных нагрузках, реверс, повторное включение, торможение. В
этом случае после определения энергетических показателей для каждого
режима отдельно средние энергетические показатели асинхронного
двигателя в кратковременном режиме определяются следующим образом:
п _ Лд/д! + Лдг'дг + - + ЛдЛ, + ЛР1'Р1 + Прг'рг + - + ЛрЛ* п „ч
Лц — » yD.DZ,)
/Я1 +/Л +.» + /„,+/pi +/р2 +.» + /,*
, _ *м.д1*д! * *м.д2*д2 "** — "** *м.д//дп + ^м.р1*р1 + *м.р2*р2 + •" "** *м.ря*ря ,- ~~ч
'д!+'д2 +••• + '*, +'plH2+--'H»
где Лдь •••» Лдл — отношения активных мощностей рассматриваемых
динамических режимов продолжительности /д1, ... tm\ r|pI, ..., Лрл —
коэффициенты полезного действия номинальных режимов при различных
условиях; £мдь ..., kujm — коэффициенты мощности рассматриваемых
динамических режимов; £мрЬ ..., кмрп —коэффициенты мощности
номинальных режимов.
Энергетические показатели отражают основные эксплуатационные
затраты, связанные с преобразованием электрической энергии в
механическую.
При оптимальном расчетном проектировании асинхронных двигателей
эти параметры должны быть учтены при определении размеров и парамет-
86
ров двигателей, исходя из
минимума затрат на 5ксплуатацию
машин. Следует иметь в виду,
что КПД отражает затраты,
связанные с потерями
электроэнергии, в то время как
коэффициент мощности отражает
затраты на компенсацию
реактивной энергии.
Асинхронные двигатели
общего назначения при работе
в повторно-кратковременных
режимах, соответствующих
номиналам типа S3, S4, S5, S6,
S7, 58, должны достаточно
эффективно работать в
широком диапазоне изменения
угловой скорости вращения.
Отсюда следует, что
энергетические показатели, такие, как г|ц из C.32), кмя из C.33), должны
соответствовать наиболее вероятному режиму работы, а не номинальному.
♦<4
пес
гос
Рис. 3.21. Структурная схема решения
уравнений C.34)
§ 3.4. Применение аналоговых вычислительных
машин для решения задач электромеханики
при круговом поле
При моделировании на АВМ необходимо учитывать особенности
работы аналоговой модели, сочетая форму записи уравнений и
благоприятные условия их решения.
При подготовке к моделированию уравнения B.1) преобразуются к
виду
dt
dt
1
V" 4
1 Rs
L. 'P L.
/~ --
Ли--
Ls dt
L dt
C.34)
dim _ Я
dt
di
dt
-t:-~
M di„
l.%+"l.
L, dt
M di*
--(О
/• M ■ ^
л+ш'(,-+Г,-)-
87
Структурная схема решения уравнений C.34) представлена на рис.
3.21. Решение C.34) связано с интегрированием выражения токов.
Наличие положительных обратных связей между суммирующими
усилителями 7, 7, 4, J 0 может привести к самовозбуждению модели, так как
коэффициенты передачи к2, kg, ^, £13 усилителей в этой модели больше единицы.
Чтобы повысить устойчивость математической модели, необходимо
проинтегрировать C.34), освободиться от производных и получить
уравнения, удобные для моделирования:
'« = (l/PX<*lUm - <*2**а ) - <Vm ;
'* = О/рЖ ",р - <v*) - <vVp;
'm =(VP)[-e7'm-©r(*rP+Vsp)]-e9'je; C.35)
*ф =0/P)[-flIO»rH +®rOm +«II»«)]-«l2'*p;
/?сог=я|4(Мэ-Мс),
где a, = a4 = 1/1,; я2 = я5 = RjLs ; я3 = a6 = M/Ls ; a7 = al0 = 7?r/Z,r;
az=a9=an= aI2 = A//7?L ; au = (m/2)pM ; a14 = /?/У; 1/p обозначает
операцию интегрирования.
Структурная схема решения C.35) представлена на рис. 3.22. Для
удобства выражения в скобках на схеме обозначены: ахит -a2'ia = 4a»
<Wp - ^sdp = Ар; -^7'ifj - ЮгС. = ^m; "* ю'гр - «А = ^; /^ + а8/,р = С,;
4:
Рис. 3.22. Структурная схема решения уравнений асинхронной машины в токах
88
Структурная схема (см. рис. 3.22) содержит положительные и
отрицательные обратные связи, и работа аналоговой модели может иметь
устойчивый и неустойчивый характер. Если коэффициенты положительной
обратной связи (усилители 2 и 8, 5 и 11) по абсолютной величине меньше
коэффициентов отрицательной обратной связи (усилители 3 и 6, 9 и 12), то
модель устойчива.
Модель также устойчива, если уравнения обобщенной машины
C.34) записаны через потокосцепления:
<W«M = e,»„-e24'ja+eJ4'fa;
dV^/dt = aAu# - а^ф + а^;
dVjdt = -a7¥ra + a8¥M - a>,¥m ;
da>r/dt = al2(M,-Mc),
где о, = а4 = 1; а2 = а5 = R,Lr/(LsLr-M2); a3=a6 = R,M/(LsLr-M2);
a7=a9 = RrLs/(L,L,-M2); a,=a10 = RrM/(LsLr-M2); аи=(тр)М/
/(LsLr-M2);an=p/J.
Из C.36) и B.16) токи в статоре и роторе определяются, исходя из
выражения
lsa = ^13 * «х "" а1А * га ' '*Р = Д15 * *Р ~~ Д16 * гр »
'га = °П *га ~~ Д18Тих ' 'гр = Д19^гР ~~ Д20 * *р '
где al3=al5=Lr/(LsLr-M2); axl =al9 = Ls/(LsLr-M2); al4=al6 =
= a„=a20=M/(LsLr-M2).
Структурная схема решения C.36) дана на рис. 3.23, в которой
отрицательные связи преобладают над положительными, поэтому модель
устойчива.
Один из видов записи, распространенных при моделировании,— это
запись уравнений относительно токов и потокосцеплений:
dVjdt = -©,¥„ -(a5im/d¥rt)/dt = cor^m - aj^ ;
^ = ^ra;^p = ^^p-^,o^; C.37)
'га = a\\ * га "~ fll2 * «x » JVp = ai3 * гр ~ ^ 14 * *p '
^, = М'Л "'Л) i *>,/<* = в,б(А/, " A/e),
где a, = a3 = 1; a2 = a4 = Д,; я5 = a6 = Дг; an = a9 = Lr/{LsLr-M2); a8 =
89
Рис. 3.23. Структурная схема решения уравнений асинхронного двигателя
в потокосцегшениях
=al0=al2 = al4=M(LsLr-M2); а15=(тр/2)(М/Ьг); al6=p/J; аи = аи =
=м/AЛ-^2).
Структурная схема решения C.37) показана на рис. 3.24. Работа
модели устойчива в широком диапазоне изменения параметров, модель
может использоваться для решения многих задач при круговом поле в
воздушном зазоре машины.
Распространено еще несколько видов записи уравнений обобщенной
машины: через намагничивающие токи, токи и потокосцепления статора
или ротора и др.
Аналоговую модель выбирают из условия устойчивости ее работы,
величины коэффициентов передач решающих блоков, а также
допустимого времени интегрирования. Важный этап при подготовке задачи к
моделированию — выбор масштабов переменных и расчет
коэффициентов передачи решающих блоков модели. Каждой физической величине
реального объекта при моделировании на АВМ соответствует ее аналог в
виде токов и напряжений. Связь между ними осуществляется через
масштабные коэффициенты. Чтобы не превысить рабочий диапазон АВМ,
90
для расчета коэффициентов следует
брать максимально возможные
значения переменных величин:
А = Мхх, C.38)
где А — амплитудное значение
некоторой переменной величины
модели; Мх — масштаб зависимой
переменной; х — зависимая переменная.
Время протекания переходных
процессов в модели
/м=М,/р, C.39)
где Mt —масштаб времени; /р —
время протекания переходных
процессов в реальном объекте.
При расчете масштабов
напряжений токов, потокосцеплений и
моментов необходимо брать их
максимальные значения с учетом наиболее тяжелых режимов работы.
При этих условиях масштаб напряжения Ми =100/f/^v2 ;
масштаб тока М, =100//ll+v2*/; масштаб электромагнитного момента
Мум = 100/Л/эм£э; масштаб потокосцепления М^ =100/4/н^ч, ; масштаб
угловой скорости Мщ =100/юг .
При определении масштабов модели нужно использовать кратности
токов кj = 1тлх /IWM ; электромагнитного момента кэ = Мэтлх /Мзи ;
потокосцеплений ^=^шт/^ном-
Масштабы времени C.45) выбираются исходя из замедления или
ускорения процесса решения уравнений. При соблюдении условий выбора
масштабов, изложенных выше, полностью используется рабочий
диапазон АВМ. При этих условиях коэффициенты передач решающих блоков
определяются следующим образом: для суммирующего усилителя
kz - MM1Mai/MMX; для интегрирующего усилителя к^ = M%uxajM%xMt ;
для суммирующего усилителя с двумя входами k'z = Л/выхя/М1х1Мшх2; для
интегрирующего усилителя с двумя входами к\ = М9ЫХа/Мшх]Мшх2М,.
Здесь Мвых и Мвх — соответственно масштабы представления
выходной и входной переменных величин усилителя; а — коэффициент в
исходном уравнении перед переменной на входе усилителя. Коэффициенты
•*>**—W 'fa
Рис. 3.24. Структурная схема
решения уравнений асинхронного
двигателя в потокосцеплениях и токах
91
передачи усилителей большинства АВМ должны выбираться в пределах
0,01 —10.
Успешная реализация той или иной модели на АВМ зависит от
соотношения электромагнитной и электромеханической постоянных
времени. Если эти постоянные отличаются на несколько порядков A03—10 ), то
модель на АВМ неустойчива (гироскопические двигатели,
высокочастотные ЭП).
Если моделирование в реальных величинах встречает трудности, то
следует перейти к относительным единицам. При правильном выборе
базовых величин можно получить коэффициенты передачи модели,
повышающие эффективность использования АВМ. Наиболее удобными
базовыми величинами являются /б = 1К^^2 ; и6 = £/эф>/2, соб = со0 = 2я/0, а
производными от них — базовые мощность Рб = (m/2)i6U6, момент
Мб =Рб(об, потокосцепление Ч^ = С/б/соб, время /б = 1/©б, сопротивление
Z6 = U6/i6, индуктивность L6 = хб/<о6 и момент инерции J6 = А/б/юб.
Математическая модель ЭП с записью дифференциальных
уравнений через потокосцепления в безразмерных единицах имеет вид
c№sJdt = а4и# - а^ + ^4% ;
*¥jdt = -а7¥га + *8У,р - <or%,; C 4Q)
dVjdt = -a94% + al0^ + cor^ra ;
</сог/А = а12(Мэ-Мс),
где ax =a4 =1; a2 =a5 =-
аз
= a6
тРи
_ R.M
~ L^-M1"
M ¥62.
L,Lr-M2 6'
RrLs _ RrM
~"9~ LML,-M2'*1 a%~a"~ L,Lr-M*tb' M"~ 2 LsLr-M2M6
При этом структурная схема модели остается прежней.
Моделирование уравнений в относительных единицах обеспечивает
большую устойчивость модели. Структурная схема содержит
положительные и отрицательные обратные связи. Степень влияния тех или иных
связей на устойчивость модели зависит от соотношения параметров
исследуемого двигателя. Выбор той или иной аналоговой модели
определяется типом ЭП, его показателями и характером переходных процессов.
Аналоговый вычислительный комплекс АВК-2 предназначен для
моделирования динамических систем, решения обыкновенных линейных
92
и нелинейных дифференциальных уравнений. Комплекс представлен
несколькими моделями:
АВК-2 A) — для решения дифференциальных уравнений до 20-го
порядка со сложными нелинейными зависимостями, с постоянными и
переменными коэффициентами;
АВК-2 B) — для решения дифференциальных уравнений 20-го
порядка с большим числом постоянных коэффициентов;
АВК-2 C)—для решения дифференциальных уравнений до 16-го
порядка с постоянными и переменными коэффициентами; позволяет
решать задачи линейного программирования, уравнения в частных
производных и др.;
АВК-2 D) — для решения дифференциальных уравнений 10-го
порядка с большим числом переменных коэффициентов;
АВК-2 E) — для решения дифференциальных уравнений до 80-го
порядка с постоянными и переменными коэффициентами (эта модель
состоит из пяти моделей АВК-2 C) и периферийной аппаратуры).
Глава 4
Обобщенный электромеханический
преобразователь энергии
§ 4.1. Спектр полей в воздушном зазоре
электрической машины
Пространство, где концентрируется энергия магнитного поля в
электрической матине, называется воздушным зазором. Большая часть
энергии магнитного поля сосредоточена в небольшом объеме между
ротором и статором машины. Небольшая часть энергии магнитного поля
связана с потоками рассеяния. Точно определить пространство, где
концентрируется энергия поля и происходит преобразование энергии
невозможно, но при решении большинства задач в этом нет необходимости.
Круговое поле в воздушном зазоре можно представить
существующим в воздушном зазоре идеализированной электрической машины. В
реальных машинах в воздушном зазоре наряду с основной гармоникой
имеется бесконечное число гармоник поля. Эти гармоники имеют
частоты выше и ниже основной, но принято называть их высшими
гармониками. Высшие гармоники отличаются друг от друга амплитудами и
частотой. Обычно исследуют высшие гармоники, имеющие частоты, кратные
частоте первой — основной гармоники. Нечетные гармоники, имеющие в
3, 5, 7 и т.д. раз большие частоты, есть в воздушном зазоре всех машин,
четные появляются при подмагничивании и в несимметричных
электрических машинах.
Высшие гармоники делят на временные и пространственные.
Временные гармоники — это те, которые попали в воздушный зазор
машины со стороны выводов машины (см. рис. 1.5). Пространственные —
гармоники, появившиеся из-за конструктивных особенностей и
нелинейности параметров машины, т.е. те, которые породила сама машина.
Если рассматривать электрическую машину как шестиполюсник, то
можно считать, что временные гармоники попадают в воздушный зазор
со стороны электрической сети, со стороны вала — механического
вывода, а также со стороны теплового вывода (рис. 1.5).
В установившемся режиме основной источник высших временных
гармоник — несинусоидальное напряжение на выводах машины. Если к
94
двухфазному идеализированному двигателю подведено
несинусоидальное симметричное напряжение, то индукция в воздушном зазоре
повторит форму приложенного напряжения при условии U^ « Е^. В
воздушном зазоре вращающееся поле будет содержать наряду с первой
гармоникой еще и высшие гармоники. Таким образом, зная форму
подведенного к выводу машины напряжения, можно определить гармонический
состав поля в воздушном зазоре.
Если форма напряжения прямоугольная, то амплитуды высших
гармоник максимальны. При этом амплитуда третьей гармоники равна V3,
пятой — 75, и /-й гармоники — V, от амплитуды первой гармоники. При
синусоидальном напряжении высшие гармоники в зазоре
идеализированной машины отсутствуют. При всех промежуточных формах напряжения
амплитуды высших гармоник соответственно меньше, чем при
прямоугольной форме, и больше нуля. Для определения амплитуд гармоник и
сдвига их по фазе относительно друг друга можно воспользоваться
справочниками и стандартными программами разложения несинусоидальных
кривых в гармонические ряды.
В переходном процессе в общем случае йри несинусоидальном
напряжении питания частота и амплитуда напряжения могут изменяться по
нелинейному закону. При этом в воздушном зазоре будет изменяться
спектр высших гармоник от изменения частоты и напряжения.
Рассуждения, приведенные выше, относятся как к режиму двигателя,
так и к режиму генератора. Если сеть автономная и мощность двигателя
соизмерима с мощностью генератора, то несинусоидальность поля в
воздушном зазоре приведет к появлению на выводе машины
несинусоидального напряжения и токи высших гармоник будут замыкаться в сети
генератора. Высшие гармоники от несинусоидальности напряжения
генератора замыкаются в нагрузке.
Второй источник временных гармоник в воздушном зазоре — вал —
механический выход машины (см. рис. 1.5). При нелинейном изменении
момента нагрузки Мс или частоты вращения в воздушном зазоре
появляются высшие гармоники. Максимальное значение амплитуд высших
гармоник имеет место при ударной нагрузке двигателя, когда момент
сопротивления изменяется по прямоугольному закону. В этом случае, так же
как и при прямоугольном напряжении, амплитуды третьей гармоники
равны V3, пятой — V5 и /-и — V, от амплитуды первой гармоники.
Если мощность двигателя соизмерима с мощностью сети, к которой
он подключен, то высшие гармоники от ударных моментов могут из
зазора «выйти» на электрический вывод и исказить напряжение сети.
Со стороны механического вывода высшие гармоники в воздушном
зазоре могут появиться при нелинейном изменении частоты вращения, а
также при одновременном нелинейном изменении Мс и п. При линейном
95
^r^
Рис. 4.1. Форма кривых
высших временных гармоник
поля
изменении Мс, а также при синусоидальном
изменении нагрузки на валу двигателя в
воздушном зазоре высшие гармоники не
появляются.
Высшие временные гармоники могут
«прийти» в воздушный зазор и с теплового
вывода (см. рис. 1.5). При нелинейном
изменении температуры среды, окружающей
электрическую машину, в воздушном зазоре
появляются высшие гармоники и магнитное
поле искажается. Наибольшие амплитуды
высших гармоник имеют место при
тепловых ударах. Спектры гармоник,
появляющихся в воздушном зазоре со стороны теплового вывода, еще
недостаточно исследованы.
В общем случае временные гармоники могут появиться в воздушном
зазоре при одновременном воздействии нелинейных возмущений на три
«входа» в электрическую машину, т.е. со стороны электрических,
механических и тепловых выводов (см. рис. 1.5).
Временные гармоники отличаются от пространственных не только
происхождением, но и тем, что частоты вращения временных гармоник
равны частоте вращения первой гармоники. Это видно из рис. 4.1.
Полюсное деление третьей гармоники т3 в три раза меньше, чем первой ть а
частота третьей гармоники /3 = 3/,. Для ;'-й гармоники полюсное
деление т, = т,//, а /=//,. Поэтому частоты вращения высших временных
гармоник, такие же, что и первой. На рис. 4.1 В^ — индукция
результирующего поля, В] — индукция первой гармоники, В3 — индукция третьей
гармоники [4].
Пространственные гармоники имеют больше причин для
возникновения в зазоре машины, они часто оказывают значительное влияние на
процессы преобразования энергии в электрической машине, поэтому
посвятим им отдельный параграф.
§ 4.2. Пространственные гармоники поля
электрической машины
Пространственные гармоники в воздушном зазоре машины
появляются из-за особенностей конструкции электрической машины.
Существуют десятки причин, вызывающих искажение магнитного
поля в зазоре машины. Рассмотрим наиболее распространенные из них.
96
Рис. 4.2. Форма МДС обмоток в зависимости от способа выполнения обмоток
К основным пространственным гармоникам относятся гармоники
МДС, зубцовые, гармоники, связанные с нелинейностью параметров ЭП,
технологические и гармоники комбинационных частот.
Обмотки электрических машин — контуры с током, они создают в
воздушном зазоре МДС. Простейшая обмотка — катушка, состоящая из
одного или нескольких витков. Если шаг катушечной обмотки у равен
полюсному делению т, то обмотка в равномерном зазоре создает МДС
прямоугольной формы (рис. 4.2, а). При укороченном шаге катушечной
обмотки, когда у < т, форма МДС также прямоугольная (рис. 4.2, б).
Можно получить трапецеидальное распределение МДС, если обмотку в
зоне т = у выполнить распределенной. В многофазных обмотках якоря
машин постоянного тока получается треугольное распределение МДС. В
однослойных или двухслойных обмотках, состоящих из двух или
нескольких катушек, МДС имеет вид ступенчатой кривой (рис. 4.2, в). При
распределении витков в обмотке по синусоидальному закону можно
получить синусоидальное распределение МДС. Таким образом, в
зависимости от выполнения обмотки МДС может иметь форму от прямоугольной
до синусоидальной [4]. Раскладывая в гармонический ряд выражение
МДС, следует отметить, что при прямоугольном ее распределении
высшие гармоники имеют максимальные амплитуды, они уменьшаются при
укороченном или удлиненном шаге обмотки и становятся еще меньше в
обмотках, состоящих из нескольких катушек. Только при
синусоидальном распределении витков по гладкой цилиндрической поверхности
зазора идеализированной электрической машины высшие гармоники МДС
отсутствуют.
Для катушечной обмотки или для одного витка без укорочения
амплитуды гармоник составляют:
Fx=D/n)Fk; F,=CW/*)Fk;
Fb = С'зММЪ 5 ^v = С/*№/*№, D.1)
где Fk = Iw/2; /— ток в витке; w — число витков в катушке.
4-179
97
При укорочении шага или выполнении обмоток с числом пазов на
полюс и фазу, большим единицы, высшие гармоники МДС имеют
небольшие амплитуды. Однако в реальной машине снизить амплитуды
гармоник МДС до нуля невозможно.
Спектр высших гармоник МДС определяется не только формой
МДС, но и числом фаз обмотки. В трехфазных симметричных обмотках
возникают гармоники порядка
v = 6c±l, D.2)
где с = О, 1,2,..., причем гармоники порядка 6с + 1 G, 13, 19,...)
вращаются с частотой в 7, 13, 19,... раз меньшей, чем частота основной
гармоники, и в ту же сторону, что и гармоника первого порядка. Гармоники
порядка 6с - 1 E, 11, 17, ...) вращаются с частотой в 5, 11, 17, ... раз
меньшей гармоники первого порядка и в противоположном направлении.
Для двухфазных симметричных обмоток
v = 4c±l. D.3)
Гармоники порядка 4с + 1 вращаются в ту же сторону, что и первая,
а гармоника порядка 4с - 1 — в противоположную сторону [4].
Из-за несимметрии обмоток фаз каждая высшая гармоника МДС
может иметь прямую и обратную волны. Итак, только от
несинусоидального и несимметричного распределения МДС могут существовать два
множества гармоник в воздушном зазоре.
Гармоники пятого порядка в трехфазной и двухфазной машинах
вращаются в противоположные стороны. Гармоника третьего порядка в
трехфазной машине находится в особых условиях, а в двухфазной
машине гармоника третьего порядка имеет наибольшую амплитуду из
гармоник высшего порядка.
На характеристики ЭП большое влияние оказывают также
множество зубцовых гармоник. В электрических машинах обмотки расположены
в пазах, поэтому характер поля в воздушном зазоре определяется как
распределением МДС, так и неравномерностью проводимости
воздушного зазора:
B(x) = X8(x)F(x). D.4)
Индукция в воздушном зазоре в функции координаты,
отсчитываемой по окружности, пропорциональна удельной магнитной
проводимости. Аналитическое определение Хь(х) затруднено из-за наличия пазов на
роторе и статоре и относительного перемещения ротора и статора.
Принято величину удельной проводимости воздушного зазора определять как
произведение относительных удельных магнитных проводимостей,
рассчитанных отдельно для статора и ротора в предположении, что пазы
имеются только на одной стороне зазора:
98
^6 - ^61^52 »
D.5)
где A,5i — относительная удельная магнитная проводимость в
предположении, что пазы есть на статоре, а ротор — гладкий, 152 — то же, при
наличии пазов на роторе и гладком якоре [4].
На амплитуды зубцовых гармоник значительное влияние оказывает
соотношение чисел пазов на статоре и роторе. Некоторые соотношения
недопустимы, так как вызывают значительные вибрации и шум. При
пуске, когда ротор проходит синхронную частоту вращения
пространственной гармоники, имеющей большую амплитуду, может произойти
«застревание ротора» на этой гармонике. Для фазных асинхронных машин к
недопустимым соотношениям зубцов на статоре zx и на роторе z2
относятся:
zx-z2 = О,1,2, 3,4;zx -z2 =p,p± 1;
zx-z2 = 2р\ 2р± 1; 2р ± 2; 2р ± 3; 2р ± 4;
z,-z2 = 3/7. D.6)
Недопустимые соотношения чисел пазов на роторе и статоре зависят
от числа полюсов и фаз машины. Эти соотношения приводятся в книгах
по проектированию [9].
Пространственные гармоники обычно имеют частоту вращения
ниже частоты вращения основной. Частота пространственной гармоники
индукции Bv определяется напряжением Uu а полюсное деление —
числом пазов и зубцов. Поэтому скорость волны гармоники индукции Bv, в v
раз меньше, чем основной.
Подбирая соотношения между количеством пазов на роторе и
статоре, раскрытие и скос пазов, укорачивая шаг обмотки, можно уменьшить
амплитуду пространственных гармоник или, наоборот, выделить одну из
пространственных гармоник, обеспечив ей главенствующее положение в
спектре гармоник. В этом случае основной — первой гармоникой —
является высшая пространственная гармоника, так как ее амплитуда
наибольшая.
Так как пространственные гармоники имеют частоту вращения ниже
частоты вращения основной гармоники, вместо многополюсных машин
можно применять ЭП, работающие на пространственной гармонике, как
на основной. Такие двигатели называются редукторными. Они
тихоходны и могут заменить двигатели с механическим редуктором. Недостаток
этих двигателей — большой разброс механических характеристик, так
как состав гармоник поля определяется многими факторами, а не только
зубцовыми гармониками [ 1 ].
Гармоники с частотой вращения ниже частоты вращения первой
гармоники могут возникать в многополюсных машинах также из-за
различий магнитных проводимостей под разными полюсами и модуляции
основной гармоники. Такие гармоники называются субгармониками.
99
Пространственные гармоники
возникают в воздушном зазоре также
из-за нелинейностей параметров
машины (г, L, М и 7), входящих в
уравнения электромеханического
преобразования энергии.
Наибольшее влияние на характе-
ристики машины оказывает насыще-
н ние магнитной системы ЭП, т.е. нели-
Рис. 4.3. Ввд характеристик намаг- нейное изменение А/ и L в зависимо-
ничиванияЭП ста от намагничивающего тока,
нагрузки и других факторов. В общем
случае взаимная индукция и полные индуктивности нелинейны и
являются функцией времени. Гармонический состав полей в воздушном
зазоре определяется характеристикой намагничивания стали (в общем случае —
линия 4 на рис. 4.3). При линейной зависимости (прямая 1 на рис. 4.3),
когда в зазоре отсутствуют другие пространственные гармоники, поле
синусоидальное. При прямоугольной зависимости В =/(#) (линии 2 и 3
на рис. 4.3) в воздушном зазоре высшие гармоники имеют максимальные
амплитуды: третья — 73, пятая — 75, а v-я гармоника — 1/v от
амплитуды первой гармоники. Таким образом, так же, как и для МДС,
прямоугольная зависимость В = f(H) в наибольшей степени искажает поле в
воздушном зазоре. Все характеристики намагничивания ЭП
располагаются в области, ограниченной линиями 2 и 3.
В уравнениях электромеханического преобразования энергии
нелинейными могут быть активные сопротивления статора и ротора и момент
инерции. Активные сопротивления в статоре могут меняться из-за
изменения температуры или включения нелинейных резисторов (диодов,
транзисторов и т.п.). Активное сопротивление короткозамкнутой
обмотки ротора меняется из-за вытеснения тока. В некоторых приводах в
динамике происходит изменение приведенного к валу двигателя момента
инерции.
Нелинейные изменения параметров образуют соответствующие
спектры пространственных гармоник. Влиянию нелинейностей на
характеристики машины посвящена гл. 8.
Значительное влияние на состав пространственных гармоник
оказывают технологические факторы. На форму зазора влияют эксцентриситет
расточки статора и ротора, конусность и эллипсность ротора,
несоосность статора и ротора и т.д. В этой области ведутся исследования на
многих заводах, однако не систематично и обобщения пока отсутствуют.
Электрическая машина — нелинейная система, в которой
достаточно иметь две гармоники, чтобы они породили бесконечные спектры ком-
бинационных частот [4], но и без них в зазоре машины имеется бесчис-
100
ленное множество гармоник, поэтому гармоники комбинационных частот
мало изучены. Их влияние на выходные показатели следует учитывать
при исследовании специальных электрических машин.
Одна из причин появления гармоник в воздушном зазоре машины —
несимметрия машины или несимметрия напряжений на выводах машины.
В переходных процессах изменяются не только амплитуды и
частоты гармоник поля, но происходит изменение и периода основной
частоты, по отношению к которой ведется отсчет частот высших гармоник.
Поэтому в динамике в воздушном зазоре машины имеет место
бесконечный произвольный спектр гармоник поля, когда в воздушном зазоре
имеются все дробные гармоники.
Таким образом, в воздушном зазоре машины существует
бесконечный произвольный спектр гармоник поля, который можно разбить на
множества гармоник. Это деление можно производить по их
происхождению. Сложившееся деление гармоник на временные и
пространственные достаточно условно. Все гармоники связаны с энергией поля и не
могут рассматриваться вне пространства и времени.
Большинство из высших гармоник имеют бесконечно малые
амплитуды и незначительно влияют на работу электрической машины.
Поэтому в электромашиностроении обычно учитываются лишь несколько
гармоник. Обычно ограничиваются исследованием двух-трех высших
гармоник. Умение правильно определить, какие пространственные и
временные гармоники оказывают наибольшее влияние на процессы
преобразования энергии в конкретном случае, важно для исследования и
определяется квалификацией инженера.
§ 4.3. Модель обобщенного
электромеханического преобразователя
Поле в воздушном зазоре машины можно представить состоящим из
основной и высших гармоник. Каждую гармонику можно создать парой
обмоток, расположенных на статоре или роторе, в которых протекают
токи соответствующих амплитуд и частот, обеспечивающих сдвиг по
фазе гармоник относительно друг друга. Имея бесконечно много
обмоток, в зазоре электрической машины можно создать поле любой формы.
Модель такой машины представлена на рис. 4.4.
Обобщенный ЭП — идеализированная двухполюсная электрическая
машина с т обмотками на статоре по осям аи Pun обмотками на
роторе по осям аир (рис. 4.4). Идеализированная электрическая машина —
значит ненасыщенная, с синусными обмотками и гладким воздушным
зазором. Она отличается от обобщенной электрической машины Г. Крона
101
Рис. 4.4. Модель обобщенного
электромеханического преобразователя
наличием т обмоток на статоре и
п обмоток на роторе, к которым
могут подводиться напряжения
разных частот и амплитуд.
Рассматривается двухфазная машина,
но симметричные многофазные
многополюсные машины могут
быть приведены к двухфазной
двухполюсной. При этом
координаты а, Р для машины на рис. 4.4
взяты как наиболее
распространенные.
На рис. 4.4 каждая обмотка
имеет обозначение,
показывающее ее принадлежность к осям а и
Р, порядковый номер, а также
расположение ее на роторе или на
статоре. Здесь w,la, ws2a9 .., vv5ma, wrla, wr2a, ..., w^ — числа витков
обмотки статора и ротора по оси a; w5ip, w,2p, ..., и>,тр,.и>г1р, и^р, ..., и%р —
числа витков обмотки статора и ротора по оси р; us\a9 us2a, ..-, и5та, иг\а,
Wr2a> ..., ита — напряжения, приложенные к обмоткам статора и ротора
по оси а; млр, и,2р, ..., wJWp, мир, "r2p, .-., w™p —напряжения, приложенные
к обмоткам статора и ротора по оси р.
В модели обобщенного ЭП (рис. 4.4) статор неподвижен, а ротор
вместе с п обмотками по осям аир вращается с угловой скоростью сог.
Каждая пара обмоток может питаться от независимых источников или
составлять любые комбинации с другими обмотками при питании от
одного источника. В схеме обобщенного ЭП на одной оси могут находиться
обмотки, связанные индуктивно с другими обмотками и не связанные в
магнитном отношении.
Математическая модель обобщенного ЭП позволяет исследовать
электрическую машину с любым числом гармоник в воздушном зазоре и
любым числом контуров на статоре и роторе.
Уравнения, описывающие процессы в большинстве электрических
машин, можно получить, преобразуя уравнения обобщенного ЭП. Для
этого необходимо, зная форму поля в воздушном зазоре, разложить в
гармонический ряд МДС, составить расчетную схему машины с
необходимым числом обмоток, соответствующими амплитудами и частотами
напряжений.
Представление об обобщенной электрической машине развивается
вместе с развитием теории и практики электромашиностроения.
Обобщенная машина Г. Крона — двухфазная с двумя парами обмоток на ста-
102
Рис. 4.5. Модель трехфазного обобщенного ЭП
торе и роторе (см. рис. 2.1). Обобщенный ЭП — двухфазная /и,
«-обмоточная машина (рис. 4.4). Однако даже такая сложная математическая
модель не может обеспечить описание многих процессов
электромеханического преобразования энергии в трехфазных электрических машинах.
На рис. 4.5 представлена пространственная модель обобщенного ЭП
в трехфазной системе координат а, Р, у.
Уравнения обобщенной электрической машины при круговом поле в
воздушном зазоре в трехфазных заторможенных координатах
рассмотрены в § 2.5. По сравнению с двухфазной /и, «-обмоточной машиной в
трехфазной /и, w-обмоточной машине в полтора раза больше уравнений
напряжений и токов, а матрица сопротивлений содержит в двухфазной
системе 12 субматриц D.7), а в трехфазной системе 27 субматриц.
Значительно усложняется уравнение момента.
Применение трехфазной заторможенной системы координат
удобно, когда в воздушном зазоре две-три гармоники, а на роторе и
статоре два-три контура. Для моделирования уравнений 15—18-го
порядка в трехфазных заторможенных координатах необходимо
применять большие ЭВМ.
В общем случае можно рассматривать четырех-, пяти- и /я-фазные
заторможенные координаты. На рис. 4.6 представлена пространственная
103
модель,
соответствующая математической
модели машины в /и-фаз-
ной системе координат
Применение /я-фазной
заторможенной
системы координат для
решения практических
задач невозможно даже
для одной обмотки на
статоре и роторе. Но
обобщенные
представления облегчают
решение частных задач.
Хотя /я-фазный
обобщенный ЭП сложен, можно
представить еще более
сложные машины с
несколькими роторами, с
перемещающимися
статором и ротором и т.п.
Представления об
обобщенной машине
развиваются, хотя в
настоящее время можно
составить уравнения,
адекватно отражающие
процессы преобразования энергии для сколь угодно сложных ЭП. Однако
вычислительная техника пока не дает возможности решать в условиях
вуза уравнения выше 50-го порядка.
Рис. 4.6. Модель обобщенного ЭП в m-фазной
системе координат
§ 4.4. Уравнения напряжений обобщенного
электромеханического преобразователя
Уравнения напряжений обобщенного ЭП выражаются в виде
сложной матрицы, сходной с матрицей Крона для двухобмоточной машины:
D.7)
и«"
U*P_
=
"Ага
А
Вар
0
А,га
Ага
Da
0
0
Dp
Arp
Ajrp
0 "
«Pa
A,p_
X
a
га
Лз_
104
В D.7) входят четыре матрицы-столбца напряжений и токов и
двенадцать субматриц сопротивлений. Уравнения D.7) в более простом
символическом виде:
[U] = [Z][I]. D.8)
В D.7) каждый элемент сложной матрицы — субматрица. Здесь usa,
Um» u^, u,p — матрицы-столбцы:
usa =
"".«,"
*.
_ /та-
; ura=
"".m"
m
J* lira _
; u,p =
~uw~
«2ф
_UntQ_
; u,p=
~ы]
M2,P
_M™pJ
В D.7) isa, ira, Ць i,p — матрицы-столбцы:
im =
Г • ~l
llsa
hsa
- wa-
> lra —
'l«
;2ra
_ ига _
; i^ =
7lrP
72rp
.'wrP-
; tp-
1
'i*p
lls$
JiwP-
D.9)
D.10)
В уравнении D.9) wb w2» •••> wm, м„ — напряжения по осям a и Р на
статоре и роторе соответственно. В D.10) /ь /2,..., /т, /„ — токи по осям a
и р на статоре и роторе соответственно (см. рис. 4.4).
В матрицу сопротивлений Z D.8) входит двенадцать субматриц. По
диагонали располагаются четыре матрицы полных сопротивлений Asa,
Am, Аф и А,р вида
А, =
d d
Г,+ Ьг М
dt
л
dt
12
lm
J d
Л 21 2 dt 2 dt 2m
d d
—Л/ , —M,
L dt
dt
ml
d r
m dt m
D.11)
где rb r2,..., rm — активные сопротивления обмоток статора по оси a; Lu
Ьг,..., Lm — полные индуктивности обмоток статора по оси а; Мхъ ..., МтХ —
взаимные индуктивности обмоток, расположенных по оси a на статоре.
Например, Мп — взаимная индуктивность первой и второй обмоток,
расположенных на статоре по оси а, и т.д. (см. рис. 4.4).
Для машины с приведенным числом витков взаимные
индуктивности всех обмоток, расположенных на одной оси, одинаковы. Полная ин-
105
дуктивность обмотки L определяется как сумма взаимной индуктивности
и индуктивности рассеяния данной обмотки A.41).
Субматрица А,р подобна А,а и получается путем замены индексов а
на р. Субматрицы Ага иА^в D.7) получаются из Asa и А,р путем замены
индекса s на г.
Субматрицы Ajra, А„а, Asr$ и А„р отражают связи между статорными
и роторными обмотками; Asm имеет вид:
А =
d d
dt " dt ,2
d d
—M2] —M22
dt 2] dt n
d и
... — М2п
dt 2"
d d d
Vdt ml dt ml dt m%.
D.12)
Здесь M\\ — взаимная индуктивность первых обмоток на статоре и
роторе по оси а; Мтп — взаимная индуктивность /w-й обмотки на статоре и п-
обмотки на роторе по оси а.
Субматрица А5/р получается из матрицы D.12) путем замены индекса
a на р. Субматрица Апа получается из А,га путем замены индексов s на г
и т на п\ А„р получается из Апа путем замены индекса a на р.
Индуктивность Msrmna в общем виде не равна Мппта, но во многих случаях их
можно считать равными.
Субматрицы Da и Dp, а также В^ и Вра относятся к вращающимся
обмоткам и в них входят ЭДС вращения. Субматрицы Da и Dp,
соответствующие полным индуктивным сопротивлениям обмоток ротора по
осям аир, имеют вид:
D =
Г -4,а°>г
-Кг.аЮ,
1-Мт1а<й,
-МгПа(ь, ■
-42а»г •
-Мт1а<йг .
■ -Мгъа<!>г~
■ -К2«а°>г
• -Ln„(ar \
D.13)
Dft =
Мгн\Ь<ЬГ Мп*Ъ®г - Lr»t®r
D.14)
106
В D.13) и D.14) взаимные индуктивности обмоток ротора: Мг\1а —
взаимная индуктивность первой и второй обмоток на роторе по оси а;
M-i2p — то же, по оси р.
Субматрицы Вор и Вра отличаются знаками и соответствуют
взаимным индуктивностям обмоток статора и ротора:
"-М11асог -М12асог ... -М1шасаг
ВаР
-М21асог -Л/22асог ... -Л/2шасог
-Л/,||аюг -М„2асог ... -Л/;уиасог.
D.15)
где Mi 1а, ..., М\та — взаимные индуктивности первой обмотки на роторе
по оси р и обмотки статора по оси а; M„la,..., М^а — то же, для л-й
обмотки на роторе и m-й обмотки на статоре.
Субматрица ВРа связывает обмотки ротора по оси а с обмотками
статора по оси р. Знаки в матрице положительные. Субматрица ВРа
получается из D.15) путем замены индекса а на р.
Если соединить субматрицы D.9)—D.15) в соответствии с D.7),
получим уравнения напряжений, в символическом виде записанные в D.8).
§ 4.5. Электромагнитный момент обобщенного
электромеханического преобразователя
Электромагнитный момент в модели обобщенного ЭП
определяется всеми токами, протекающими в контурах машины.
Вращающий момент для электрической машины с т обмотками на
статоре и п обмотками на роторе по осям аир (см. рис. 4.4) может быть
записан в следующем виде:
^■р = ^jrlla'jla'rlp ""^jrllp'jlp'rla + ^sr\2als\alr2^ ~"
~~™„12^яф1Г2а + — + Msrlftalslalmp - Msr{npls,p/nia -
+М„21а1*2а*гф ~~ ™sr2\$ls2$lrla + ™ Sr22als2alr2$ ~~
^^sr22^s2^r2a + •" + ™ srlnJsltJn® ~~ ^sr2n^ls2^lnm + •"
• • • + Msrmna isma /r//p - Msniutp75mpinta . D.16)
В D.16) входят все возможные комбинации произведений токов,
протекающих в обмотках, расположенных по разным осям на статоре и
роторе. Токи в статоре и роторе по одной оси в идеальной машине не
образуют вращающего момента.
Выражение для вращающего момента симметричной машины, в ко-
107
тором коэффициенты взаимной индукции по осям аир одинаковы для
всех обмоток и равны Л/, получается из D.16) в виде
la + ls2a + ls3a + ••• + lSma X'rlfl + *r2p +
+7r3p +... + /rmp)-(/,ip +'j2p +/53(J +-" + /5wp)(/rla +/r2a +
43.+-+U1- D-17)
Из D.17) следует, что электромагнитный момент можно представить
в виде двух произведений четырех несинусоидальных токов. Входящие в
уравнения D.16) и D.17) члены можно разделить на две группы. К первой
группе относятся члены, связанные с созданием вращающих, тормозных
или генераторных моментов, ко второй — пульсирующих моментов.
Первые создаются полями статора и ротора, неподвижными
относительно друг друга, вторые — перемещающимися относительно друг друга
полями.
Вращающие моменты создают токи, входящие в произведения в
выражении D.17), вида
^*г11сЛ|а7гф ~^jrll|J;*l37rla> •••>
Мsrmmalsmalrm$ ~ ^srmmH1 зпф1 гта * И* ^ °)
Пульсирующие моменты образуются полями, перемещающимися
относительно друг друга, и обусловлены произведениями вида
Мsrrrnta lsma 1пф " ™ srmnfl lsm$ lma' D-19)
Пульсирующие моменты вызывают вибрации и в установившемся
режиме не создают средней составляющей момента.
В несимметричных электрических машинах необходимо учитывать
токи в статоре и роторе в обмотках, расположенных и по одной оси.
В обобщенном электромеханическом преобразователе (см. рис. 4.4)
кроме вращающих моментов есть вибрационные и деформационные
моменты, которые в общем виде записываются следующим образом:
\ *./ kj J
М*и6 = Mb
т,п
Zj lsaki lraki 2^ **№ 1г{Ш
\ k,i к J J
D.21)
где к — номер обмотки статора (изменяется от 1 до /и), / — номер
обмотки ротора (изменяется от 1 до п).
Деформационные моменты, действующие соответственно на
лобовые части обмотки статора и на обмотки ротора (М » М5 х Мг):
108
A/,M*=Mr/J/ra,/rp, . D.23)
Увеличивая число фаз, можно представить модель /w-фазной
машины с числом обмоток т в каждой фазе статора и с п обмотками на роторе
(рис. 4.6). Для математической модели /w-фазного обобщенного
электромеханического преобразователя на базе уравнений двухфазного
обобщенного ЭП можно записать уравнение электромагнитного момента для
/w-фазной электрической машины. Уравнения моментов /w-фазной
машины получаются из D.20)—D.23) путем круговой перестановки индексов
фаз а, р, у, , т [6].
Для практики наибольший интерес представляет уравнение
электромагнитного момента для трехфазной машины с круговым полем в
воздушном зазоре (см. рис. 4.5). Электромагнитный момент трехфазной
машины состоит из трех составляющих:
^.иб = M(Um + VrP + Vit) ; D*25)
^деф = A/, (ij# + 1Л1^ + /^ ) +
+ Mr(!j* + '„Лу +'Vrr) ' <4'26)
При определении токов в задачах динамики необходимо решать
систему уравнений электромеханического преобразования энергии,
состоящую из уравнений напряжения и уравнения движения. При этом число
уравнений напряжений равно числу контуров с токами в принятой
математической модели. Современные вычислительные машины позволяют
решать оптимизационные задачи электромеханики, состоящие из 40—50
уравнений с нелинейными параметрами. Это дает возможность
учитывать всего два-три контура на статоре и роторе и две-три гармоники в
воздушном зазоре машины [4].
Сложность уравнений электромеханики приводит к необходимости
упрощения уравнений. Одной из возможностей этого упрощения
является учет в D.16)—D.19) и D.20)—D.23) только членов с одинаковыми
индексами. Пренебрежение пульсирующими составляющими в
электромагнитном моменте упрощает уравнение момента, снижая точность
расчетов на 5—8%. Умение упростить задачу без потери необходимой
точности определяет квалификацию ученого и инженера-электромеханика.
У большинства электромеханических преобразователей основное
значение в преобразовании энергии имеет вращающий момент Л/вр. Од-
109
нако при несимметрии воздушного зазора все большее значение
приобретает вибрационный момент Мвиб. В машинах с катящимся и волновым
ротором Мвиб вносит основной вклад в движение ротора. Можно
представить ЭП со сложными перемещениями обмоток, когда основную роль в
преобразовании энергии будет играть деформационный момент МДСф.
Усилия, возникающие при взаимодействии токов в многофазных
обмотках, могут дать в электромеханических преобразователях оригинальные
решения при необходимости получения любых сложных перемещений в
трехмерном пространстве.
Вращательное движение, хотя и самое распространенное в
электрических машинах, является самым простым, так как используется лишь
одна из составляющих электромагнитного момента. Одновременное
использование всех трех составляющих электромагнитного момента
открывает новые возможности в электромеханике. Уравнения
электромагнитного момента в более общей форме позволяют с большей точностью
решать сложные задачи электромеханики и открывают новые возможности
для создания электромеханических преобразователей со сложными
законами движения ротора.
Определение динамических энергетических показателей
рассматривается в последующих главах для конкретных примеров
электромеханического преобразования энергии.
Глава 5
Электромеханическое преобразование
энергии при эллиптическом поле
§ 5.1. Математическая модель электрической
машины при эллиптическом поле
Простейшая электрическая машина — машина, у которой в воздушном
зазоре имеется одно синусоидальное поле. Следующей по степени
сложности уравнений, описывающих процессы электромеханического
преобразования энергии, является машина с двумя синусоидальными полями.
В электрической машине с эллиптическим полем в воздушном зазоре
имеются два синусоидальных поля, вращающихся с одинаковой
скоростью в противоположных направлениях. В общем случае амплитуды
прямого и обратного полей отличаются друг от друга, а при
пульсирующем поле они одинаковые. Когда обратное поле отсутствует, в
электрической машине имеется круговое поле.
Эллиптическое поле в воздушном зазоре машины появляется в
симметричной машине при несимметричном синусоидальном напряжении, а
также при симметричном напряжении, но в несимметричной машине и в
общем случае — в несимметричной машине при несимметричном
напряжении на электрических зажимах машины.
Составление математической модели для электрической машины с
эллиптическим полем рассмотрим на примере однофазного двигателя
(рис. 5.1). Однофазный двигатель имеет одну обмотку на статоре с
числом витков и>1, к которой подводится однофазное
синусоидальное напряжение Uc. Ротор двигателя
симметричный с короткозамкнутой обмоткой.
В воздушном зазоре однофазного двигателя
создается пульсирующее поле, которое состоит из
двух полей — прямого и обратного, имеющих
одинаковые амплитуды и вращающихся в
противоположные стороны с одинаковой частотой.
Математическая модель электрической машины
с двумя полями в воздушном зазоре имеет две пары
обмоток на статоре и роторе (рис. 5.2). К одной паре Рис 5д Схема од-
обмоток с числом витков w5la, w5ip подводится на- нофазного двигателя
111
пряжение прямой последовательно-
"sz«
"Stic
i
\VS2X
era
Uxm
sin со/ и
Uxm
cosco/, a к
А«#
4i/* "up
"rtfi
Рис. 5.2. Математическая модель
однофазного двигателя
2 2
другой паре vv,2a и ws2p — напряжение
обратной последовательности
Uxm Uxm .
—■—cosco/ и —■—sin со/. На роторе
также имеются две пары обмоток с
токами прямой и обратной
последовательностей. Так как ротор
короткозамкнутый, напряжения иг\а, wr!p и
Wr2a> wr20 раВНЫ НуЛЮ.
Модель машины с двумя
полями в воздушном зазоре — частный
случай модели обобщенного ЭП (см. рис. 4.4).
В математической модели однофазного двигателя (рис. 5.2) не
учитывается наличие в зазоре полей высших гармоник, для их учета
необходимо добавить еще несколько пар обмоток, соответствующих введенным
фиктивным контурам, чтобы число пар обмоток на статоре и роторе
стало равно числу гармоник поля в воздушном зазоре машины.
В модели машины при эллиптическом поле с двумя парами обмоток
на статоре и роторе не учитывается наличие других контуров (контуров
вихревых токов, короткозамкнутых витков).
Для электрической машины с эллиптическим полем в воздушном
зазоре (см. рис. 5.2) из уравнений обобщенного ЭП записываются
следующие уравнения
Г ~1
",1а
«,2а
0
0
0
0
«,IP
_",2Р_
=
Г»1а +~Т^,\а
О
d м
-А/,.„о),
dt
А/„„
r'2a + d,L'2a
— М-
dt
22а
о -л/22а©г
о
о
d
'На+-^а
О
-^1а©г
О
О
О
О
— ^22а
л 22а
о
d
Гг2а +"Т Lr2a
О
-Ал
о
о
112
bocd
да
cHh dzb
W"
CFCP
"..'.
u2,fz
Рис. 5.3. Схема машины с двумя стато- Рис. 5.4. Схема машины с двумя
статорами и двумя роторами рами и общим ротором
В E.1) us\a, us2a, w*ip, w,2p — напряжения прямой и обратной
последовательностей, isla9 /,2а, /гЮэ 'г2а, 'rip, 'r2p> /*10> '*2p ~ СООТВеТСТВеННО ТОКИ
прямой и обратной последовательностей в статоре и роторе; r5l0t, r52ct, >*г1а,
>>2а> ^rip5 >>2р> riip» г52р — активные сопротивления обмоток статора и
ротора прямой и обратной последовательностей; Ls\a, Ls2a, LrXa, £r2a, £rip> ^ггр>
^jip» ^2p — полные индуктивности обмоток статора и ротора прямой и
обратной последовательностей; MUa> МПр, М22а, Л^ггр — взаимные
индуктивности прямой и обратной последовательностей по осям аир.
Уравнения E.1) описывают процессы в ненасыщенной машине,
поэтому связи между прямой и обратной последовательностями
отсутствуют (М\2 и М2\ равны нулю).
Для записи уравнения момента следует рассмотреть схемы двух
машин: с двумя статорами и двумя роторами, соединенными муфтами (рис.
5.3), и с двумя статорами и общим ротором (рис. 5.4).
0
£|РЮГ
0
d
rrip+^~4ip
0
d
7мт
0
0
0
V*r
0
d
Гг2Р+^А-2Р
0
d
jMm
0
A/Iipa>r
0
d
JtM"»
0
d
riip+^4ip
0
0
0
Л/22рсог
0
d
JtMm
0
d
ri2p+^42p
Vlp
*r2p
'jIP
**2P
E.1)
113
В упрощенной модели с двумя роторами и двумя статорами (рис. 5.3) к
одной машине подводится напряжение прямой последовательности (щ,
/i), а к другой машине — обратной (w2,/i). Обе последовательности
создают моменты, вращающие роторы первой и второй машин в
противоположных направлениях.
Для этой машины вращающий момент:
МЧ = ^('Vrla ~ Wrlp) - М(**2**г2а " Wr2f») E«2)
ИЛИ
A/ip=A/II-A/22. E.3)
Машина с общим ротором и двумя статорами (рис. 5.4) более
сложная, так как в этой машине в создании результирующего момента
участвуют токи статора и ротора прямой и обратной последовательностей.
В схеме с общим ротором существует связь между прямыми и
обратными последовательностями и уравнение момента имеет вид
А*.р = MOV'la - Wrip)-(Wr2a ~ Wr2(J ) +
"К'лр'гга ~~ls\alr2$'\Js2V1r\a "" ls2alrty)\ =
= Mn-M22+MI2-M2l. E.4)
В E.2) и E.4) взаимная индуктивность М= MUa = M22a = А/цР = М22р,
так как рассматривается ненасыщенная симметричная машина.
Токи прямой и обратной последовательностей статора и ротора
создают пульсирующие моменты М\2 и Л/2Ь которые в установившемся
режиме не имеют средней составляющей, но влияют на характер
протекания переходного процесса.
Для модели двухфазного двигателя с эллиптическим полем и общим
ротором (см. рис. 5.4) электромагнитный момент с учетом вибрационных
и деформационных моментов записывается в следующем виде:
^*»р = ^Vjip'rla ""fila'rip + ,*2p'r2a -,*2а'г2Э +'псЛгр ~~
~~lslJr\$ + 'г2сЛ|р "" '*1сЛ 2Р ) » W-5)
Мшиб = ^\ls\alr\a + /*ip'rip +7j2a'r2a +'*2р'г2Р + ls\alr2a +
+75ip'r2P + ^2а'г1а + 'j2p'rip) ' E.6)
^деф = W^W,IP +W,2P + W,2P + W*ip) +
+A*r (Wrip + 'r2a'r2P + Wr2P + Wrip) ' EЛ)
Кроме записи уравнений при эллиптическом поле в форме E.1)
удобно при моделировании на ЭВМ записывать их в потокосцеплениях.
Эллиптическое поле в симметричном двигателе получается при пи-
114
тании обмото.. несимметричными напряжениями. В этом случае
уравнения в потокосцеплениях
'<Wrla/dt = Rriria-p<i>r4>rla,
<Wrip jdt = Л,;г.р + p&Wv;
<Wrta/A = -ty,2ll + /w>/F(.2e,
^Щ»/* = -ЯЛ2Р - РЮг^л2Р •
Разложив выражения потокосцеплений и токов на симметричные
составляющие, можно получить уравнения в координатах a, (J через пото-
косцепления и токи ротора. Чтобы при моделировании на ЭВМ
потребовалось меньше суммирующих блоков, потокосцепления целесообразно
представить как сумму произведений токов на индуктивности в
относительных единицах:
%.« = Ufa + МПа . ^20, = V,2a + ^'г2а J
%Ul = 4'г.а + Mi,la > ^г2а = Vr2a + Щг* J E.9)
^ip = 4',1р+Щ*» ^гр = ^'.гр+л^',2р;
^rip = Vrip + Mi,V . ^,2Р = Vr2P + М,2Р •
Решив алгебраические уравнения, входящие в общую систему
уравнений E.8), относительно токов /fla, i^a, /г)р, /г2р, выраженных через
потокосцепления Т,1ш Ч'мр.^ггш *fr2p E.6), получим
rf/rla/* = aMjla+(VML/rlo-/fla(B + C)-(pcof/aIrL/rip;
difV/dt = au,v +(b/M)%v -i,v(B+C)-ipa,/oLrL»rta;
Дг2в/А = aus2a + (b/M)Vr2a -i,le(* + C) + (/*»,M,L',* ;
Лг2Э /A = ±<ш,2р + F/A/)«Fr2|, - /r2p (В + C) - (/и», /ctL, )Tr2o ;
d¥rjA = -Rjr]a-pnr%*'> E'10)
с№г1р/Л = -Лл,р + /ногТг1а;
^W* = _/гг'г2Р - Р<йг%га ;
^*э = * Mp'rla — * rla'rip + *г2р'г2а - *r2a'r2P + *г1р'г2а —
- * Па'г2Р + *r2p'rla ~* r2a'rIP ' E.11)
115
где a = M/(oLsLr); b = RrM/(cLsLr); B = Rs/(oLs); С = MRr/(GLsLr),a
g — коэффициент рассеяния a = L/M.
Для уравнений E.8)—E.11) составляется структурная схема
решения на ЭВМ или программа для решения на ЦВМ. Так же, как и при
круговом поле, исследуются различные переходные процессы, влияние
параметров, проводится оптимизация.
Отладка структурной схемы модели на ЭВМ производится
следующим образом. Сначала отлаживается часть модели, соответствующая
уравнениям прямого поля, затем для обратной последовательности.
После этого производится одновременное включение схемы для прямой и
обратной последовательностей. При этом значения электромагнитного
момента и угловая скорость ротора должны равняться нулю. Уравнения,
описывающие процессы преобразования энергии при эллиптическом
поле, значительно сложнее уравнений при круговом поле, поэтому
применение вычислительных машин дает наиболее существенные результаты.
Так же, как для ЭП с круговым полем, уравнения для ЭП с
эллиптическим полем усложняются при учете одного или двух контуров на
статоре и роторе, создаваемых вихревыми токами, технологическими
контурами, параллельными ветвями или реальными обмотками (например,
компенсационными в коллекторных двигателях) и т.д.
§ 5.2. Исследование установившихся режимов
При исследовании симметричных машин с эллиптическим полем в
установившемся режиме могут быть использованы уравнения машин,
записанные для кругового поля B.1)—B.3), когда напряжения на входе
несимметричные, а также уравнения, полученные из E.1)—E.4) или
E.8)—E.11) заменой dldt наусо.
Используя B.1), в установившемся режиме для двигателя получим
E.12)
Vm \rs+JXs 0 jXm О
*** L ° rs+JXs 0 JXm IM*
-^ш JXm ™т rr+jX, VXr I |/„
где v = npn/30(oc .
Напряжения на фазах статора или ротора имеют разные знаки.
Используя метод симметричных составляющих, получим
Um = й,щ + U*, 0ф = -jU^ + jUlo6, E.13)
116
где USJV и Uso6 — напряжения прямой и обратной последовательностей
статора.
Напряжения f/jnp и - jUsnp создают круговое поле прямой
последовательности, a Uso6 и jUso6 — поле обратной последовательности. При
этом
L=isv+ Аоб > Лр = -Апр + УЛоб > E-14)
где isnp и - jlsiv;. Iso6 и jIso6 — соответственно токи прямой и обратной
последовательностей статора.
Для ротора записываются уравнения:
L = in*+^гоб> /* = - Апр+Д*. E.15)
где 0^, С/гоб, 1^, /гоб — напряжения и токи ротора прямой и обратной
последовательности.
Уравнениям E.12)—E.15) соответствует модель машины (см. рис. 5.2)
с четырьмя обмотками на статоре и роторе. Так как машина ненасыщена,
связи между обмотками прямой и обратной последовательностей
отсутствуют. Для определения момента можно применять модель машины с
общим ротором или с двумя статорами и двумя роторами.
Рассматривая процессы в машине по оси а для прямой
последовательности, из E.12)— E.15)
^я* = (l + К )/«, + JXmin* > E-16)
-Vn,=J*mi«* +VXmHin*) + (rr+JXrVn* + V*r ("Аир ) * EЛ7)
Аналогично для обратной последовательности
V«*=(r,+jx,)iu*+J****** E-18)
-^гоб=>т^об+^тО'Лоб) + (Гг+Аг)^+^г(Дгоб)- E«19)
Так же, как и при выводе уравнений для кругового поля, заменим
полные индуктивные сопротивления х5 и хг сопротивлением взаимной
индукции хт и сопротивлением рассеяния статора и ротора ха\ и ха2.
Получим
*>«, = A + >с )/„, + У*. (/„, + '*,). E.20)
- Утр = Pjsap - JVXj^ + (Гг + jxa2 )I ^ +
+ JXm*rnp ~ J^Xmlгпр -Мо2/гпр. E.21)
117
После преобразований уравнение E.21) для ротора приобретает вид
- Vn* = Рт A - v)/inp + jxm A - v)/^ +
+ jxa2(l-v)inv+rrirv. E.22)
Таккак l-v = l-(or/(oc =^,то
- Оп* = 7v(',np + /^) + У*.2*Лч, + 'Л, • E-23)
Разделив обе части E.23) на s, получим
-OJs-jxji^ + i^ + i^irJs + jx^). E.24)
Уравнения для напряжений прямой последовательности статора и
ротора E.20) и E.24) описывают процессы в асинхронной машине для
прямой последовательности. Им соответствует схема % замещения вида
(рис. 2.9), в которой
r,/s = r,+r,(l-s)/s. E.25)
Потери в роторе rr(\-s)/s пропорциональны полезной мощности
на валу машины [4].
Аналогично можно получить уравнения для обратной
последовательности:
^,об = (rs + К\ )Лоб + JXm 0So6 + Коб ) э
-^гоб = А*,0 + VX',o6 +/гоб) +AolO + V)/^ +гЛб ' E-26)
Так как 1 + v = l + cor/coc =2 -$, то
-^=A«B-JX/^+/^) + Aa2B-*)/^+rr7^. E.27)
Для исследования установившегося режима можно пользоваться
математической моделью, адекватной пространственной модели, представленной
на рис. 5.3, для динамического режима — моделью, показанной на рис. 5.4.
Рис. 5.5. Механические характеристики однофазного Рис. 5.6. Схема ковден-
асинхронного двигателя саторного двигателя
118
При пульсирующем поле, при 5=1, результирующий момент М^ = О
(рис. 5.5, а) и однофазный двигатель не имеет пускового момента. Чтобы
пустить двигатель, необходимо посторонним двигателем раскрутить
ротор или уменьшить обратное поле. Наиболее распространенный способ
пуска однофазных двигателей — уменьшение амплитуды обратного
поля, т.е. переход от пульсирующего поля к эллиптическому (рис. 5.5, б).
Эллиптическое поле при однофазном питании можно получить
несколькими способами [1,4, 8]. Наиболее эффективный способ — выполнение
сдвинутой в пространстве на 90 эл. град пусковой обмотки с током,
сдвинутым во времени по отношению к току рабочей обмотки с числом
витков wsa (рис. 5.6). В конденсаторных двигателях конденсатор С в
пусковой обмотке с числом витков и>,р может включаться на время пуска или
оставаться включенным все время работы [4].
К однофазным двигателям еще вернемся при рассмотрении
несимметричных электрических машин.
§ 5.3. Типовые уравнения электрических машин
Круговое поле в воздушном зазоре может существовать при наличии
на статоре и роторе нескольких обмоток. Рассмотрим машину, в которой
на статоре — одна обмотка, создающая в воздушном зазоре круговое
поле, а на роторе — две обмотки (рис. 5.7). Уравнения напряжений в этом
случае имеют вид:
"Па
"г2а|
Иг2Р|
щ
d d d
-jtM" rn«+^Ai« ~dtM'n L'1*®' M'n*r M,,(Dr
d d d
1tMn TtMrlx rr2a*~diLr2a Mr2,0)' Lrl^r MnG>r
d d d
-Л/Пю, -W>, -Mrl2m, rrip+—4,p -jtM'n ~dtMlx
-M2XG>, -Mr2XG)r -Lr2a(ur "JtMm Ър+^ггр -JtMlx
ООО ±MH ±Mn г„+±Ь
'*1P
E.28)
где Мм, Мм M2\ — взаимные индуктивности соответствующих обмоток
статора и ротора; Мг]2, Мг2\ — взаимные индуктивности обмоток ротора
(обозначения напряжений, токов и параметров обмоток такие же, что и в
других уравнениях).
119
ОС
>s^*
"Mfi -
Рис. 5.7. Модель машины с одной
обмоткой на статоре и двумя обмотками
на роторе
urt0
Рис. 5.8. Модель машины с двумя
обмотками на статоре и одной
обмоткой на роторе
В систему E.28) входит шесть уравнений напряжения: два для
статора и четыре для ротора. Число уравнений напряжений равно числу
обмоток. Напряжения на роторе равны нулю, если ротор
короткозамкнутый. При питании всех трех обмоток и при наличии в воздушном зазоре
кругового поля напряжения статора и двух обмоток ротора должны
создавать неподвижные относительно друг друга магнитные поля.
Уравнение момента для этой схемы:
Кр = Mu(irJsXt-isJrXi) + M{1(irlJsXb-isXJrli). E.29)
В E.29) входят две составляющие:
М.?=М,и+М,п. E.30)
Первая составляющая электромагнитного момента обусловлена
взаимодействием токов в первых обмотках на статоре и роторе, вторая —
взаимодействием токов в обмотке статора и во второй обмотке ротора.
Система уравнений для электрической машины по схеме,
показанной на рис. 5.7, состоит из шести уравнений напряжений E.28), в четыре
из которых входят выражения ЭДС вращения. Выражение
электромагнитного момента содержит четыре пары произведений токов E.29).
Круговое поле в воздушном зазоре при наличии двух обмоток на
статоре и одной на роторе (рис. 5.8) описывается шестью уравнениями
напряжений, а электромагнитный момент (без учета Л/деф и Л/виб) имеет вид:
Мэ=Мэ11+Л/э21. E.32)
В этом случае процессы преобразования энергии описываются
четырьмя уравнениями напряжений для статора с нулевыми значениями
ЭДС вращения и двумя уравнениями напряжений для ротора, в которые
входят выражения ЭДС вращения.
120
В систему уравнений, описывающую электрическую машину с
двумя парами обмоток на статоре и роторе (рис. 5.2) и круговым полем в
воздушном зазоре, входят восемь уравнений напряжений и уравнение
электромагнитного момента, содержащее восемь произведений токов:
мъ = ^u(W,i3 - Wnp) +AMWizp - Wr2p) +
rla7j2P '*2o'rlp ); E.33)
Мэ=Мэ11+Л/э22+Мэ12 + Мэ21. E.34)
При дальнейшем увеличении числа обмоток на статоре и роторе
растет число уравнений напряжения и усложняется уравнение
электромагнитного момента. При этом закономерности, отмеченные выше,
сохраняются.
Два поля в воздушном зазоре могут иметь различные частоты
вращения и амплитуды. Один из основных примеров ЭП при наличии двух
полей в воздушном зазоре — эллиптическое поле. При эллиптическом
поле машина может иметь несколько токовых контуров на статоре и
роторе. Все токи, протекающие в обмотках и короткозамкнутых контурах,
участвуют в создании электромагнитного момента.
Как отмечалось в § 5.2, математическая модель машины с
эллиптическим полем в зазоре состоит из восьми уравнений напряжений и
уравнения момента, содержащего четыре составляющих:
М,=МЛ1-МЪП+ММ-ММ. E.35)
Знаки в уравнении момента E.35) зависят от направления вращения
полей.
Если в машине с двумя полями в воздушном зазоре увеличивать
число обмоток на статоре и роторе, то число уравнений напряжений
будет увеличиваться в соответствии с числом контуров с токами, а
уравнение электромагнитного момента будет содержать парные произведения
всех токов, протекающих в контурах статора и ротора.
Для машины с эллиптическим полем при учете контуров вихревых
токов на статоре и роторе пространственная модель, соответствующая
математической модели, имеет вид, соответствующий рис. 5.9.
При учете контура вихревых токов только на роторе система
уравнений содержит десять уравнений напряжений, а уравнение момента
Л/, = А/э1| + Мэ22 + Л/э12 + Мэ13 + Мэ21 + Мэ23. E.36)
Если контур вихревых токов имеется только на статоре, то
уравнение момента
Л/э = А/э|| + Мэ22 + Мэ12 + Мэ21 + Мэ31 + Мэ32. E.37)
В машине с эллиптическим полем с учетом дополнительных
контуров на статоре и роторе уравнение момента
121
Рис. 5.9. Модель машины с тремя полями в воздушном зазоре
Мэ = А/э1| + Мэ22 + Л/э33 + А/Э|2 + Мэ13 + Мэ21 + Мэ23 + Мэ31 + Мэ32. E.38)
Следующая по сложности система уравнений — система,
описывающая работу машины с тремя полями в воздушном зазоре. Три поля
могут содержать основную гармонику и две высшие гармоники,
например эллиптическое поле с учетом одной высшей гармоники.
При наличии трех полей в воздушном зазоре и трех пар обмоток на
статоре и роторе с токами трех гармоник (рис. 5.9) в систему уравнений
электромеханического преобразования энергии входит 12 уравнений
напряжений и уравнение момента с 18 парами произведений токов. Число
уравнений напряжений равно числу обмоток, а уравнение момента имеет
вид E.38). При добавлении одного контура число уравнений напряжений —
14, а в уравнении момента — 24 пары произведений токов.
§ 5.4. Классификация электромеханических
преобразователей по виду математической модели
Принято делить электрические машины на синхронные и
асинхронные, беря за основу классификации соотношение между угловыми
скоростями сог, и сос. Общепринятым делением электрических машин является
также деление их по роду питания. Следует отметить, что любые деления
электрических машин на типы являются условными, так как одна и та же
электрическая машина может работать как синхронная, так и асинхрон-
122
ная. При включении в сеть переменного тока выпрямителей можно
машину постоянного тока использовать в сети переменного тока.
Наиболее строгая классификация электрических машин может быть
проведена по их математическим моделям. Предлагаемая классификация
электрических машин по числу полей в воздушном зазоре и числу контуров,
участвующих в преобразовании энергии, также условна, так как в
воздушном зазоре реальной машины существует бесконечный спектр гармоник, а в
преобразовании энергии участвует бесконечное число контуров. Однако
деление машин по числу уравнений, адекватно отражающих процессы
электромеханического преобразования энергии, заслуживает внимания.
В табл. 5.1 для определенного числа полей и числа обмоток на
статоре и роторе дано число уравнений напряжений и число пар
произведений токов в статоре и роторе в уравнении электромагнитного момента.
Эта таблица составлена для двухфазных ЭП без учета Мви6 и Л/деф.
Таблица 5.1. Классификация математических моделей двухфазных ЭП
Число
обмоток
2
3
4
•
п
Число уравнений напряжений и произведений токов в уравнении
момента при числе гармоник
1
Идеальная
машина 4; 2
бур. С/;
4 пары
8yp.U;
8 пар
•
4w yp. U;
8/7 пар
2
8ур.£/;
8 пар
Юур.С/;
12 пар
12ур. С/;
18 пар
:
4/7 + 4 ур. U;
16 п пар
3
12ур.£/;
18 пар
14ур.£7;
24 пары
16ур.С/;
32 пары
4л +12ур. U;
24л пар
т
Ат ур. U;
8/77 пар
6/77 ур. U;
18/77 пар
8/77 ур. U;
32/77 пар
;
Уравнения
обобщенного ЭП
При исследовании различных уравнений электрических машин
следует проводить сравнение с простейшей машиной, у которой круговое
поле в воздушном зазоре и две пары обмоток, и с реальной машиной с
бесконечным числом полей и контуров.
Пользуясь таблицей, можно для машины с определенным числом
обмоток и гармоник в воздушном зазоре представить сложность
уравнений, оценить необходимое время для программирования.
Такую же таблицу можно составить для трехфазных электрических
машин. Представляя трехфазную обобщенную электрическую машину в
заторможенных координатах а, р, у, следует отметить, что простейшая
машина с круговым полем в воздушном зазоре и одной парой обмоток на
статоре и роторе описывается системой уравнений из шести уравнений
напряжений и уравнением электромагнитного момента из шести
составляющих. Добавив одну обмотку на статоре или роторе, получим девять
123
уравнений напряжения. С добавлением каждой новой обмотки в
трехфазной системе координат прибавляются три уравнения. Чтобы получить
эллиптическое поле в воздушном зазоре, надо иметь 12 обмоток и,
следовательно, 12 уравнений напряжений. Дальнейшее усложнение уравнений
за счет добавления контуров по трем осям увеличивает число уравнений
на три. Математическая модель машины с тремя полями в воздушном
зазоре состоит из 18 уравнений напряжений.
Четырехфазной машине при круговом поле в воздушном зазоре
соответствуют 8 уравнений напряжений и, без учета пульсирующих
составляющих, 8 пар произведений токов в уравнении момента.
На практике встречаются шестифазные системы, которые при
круговом поле в воздушном зазоре описываются двенадцатью уравнениями
напряжений, а вращающий момент без учета пульсирующих
составляющих имеет двенадцать пар произведений токов. Учет еще одной
гармоники или одного контура добавляет еще двенадцать или шесть
уравнений, если учитывать на статоре или роторе один дополнительный контур.
Предлагаемая классификация ЭП по виду уравнений позволяет
достаточно быстро представить сложность задачи и необходимые ЭВМ для
ее моделирования.
Анализ данных табл. 5.1 показывает, что все двухфазные
электрические машины со своими сложными полями и множеством контуров
находятся в границах обобщенной машины и обобщенного преобразователя,
которым соответствуют 5 уравнений электромеханического
преобразования энергии и бесконечное множество уравнений. Это относится и к
многофазным ЭП. Минимальное число уравнений для двухфазных машин —
пять, для трехфазных — семь и т.д.
Классификация ЭП по виду их математической модели позволяет
бегло представить систему дифференциальных уравнений для
исследуемого случая и определить объем и время, необходимое для составления
программ и моделирования.
Классификация ЭП по виду математического описания свидетельствует
о том, что каждой электрической машине соответствует система
дифференциальных уравнений, а каждой системе уравнений, составленных по
законам, рассмотренным выше, соответствует ЭП. Без упрощений
электрическим машинам соответствуют уравнения обобщенного ЭП с бесконечным
спектром гармоник и множеством контуров на роторе и статоре.
Классификация ЭП по виду их математических моделей использует
практику моделирования задач электромеханики и накопления
стандартных программ для персональных ЭВМ. С помощью банка данных
стандартных программ решений типовых уравнений по табл. 5.1 можно
сравнительно быстро определить динамические и статические
характеристики для широкого круга задач электромеханики, не прибегая всякий раз к
составлению уравнений и программ.
Глава 6
Процессы преобразования энергии
в машине при несинусоидальном
и несимметричном напряжении питания
§ 6.1. Уравнения электрических машин
при несинусоидальном и несимметричном
напряжении питания
Напряжение на выводах электрических машин обычно бывает
несинусоидальным. Оно может поступать на вывод машины от
полупроводниковых преобразователей. Из-за обилия нелинейных элементов,
входящих в энергосистему, часто и в мощных электрических сетях напряжение
отличается от синусоиды.
При исследовании машины при несинусоидальном напряжении на ее
выводе предполагается, что машина идеализированная, форма индукции
в воздушном зазоре повторяет форму приложенного напряжения.
Идеализированная машина не создает пространственных гармоник (шумов), и
для того, чтобы найти гармонический состав индукции в зазоре,
достаточно разложить в гармонический ряд фазные напряжения. Направления
вращения временных гармоник зависят от числа фаз машины и номера
гармоники (см. § 4.1).
Будем считать, что каждая из гармоник поля создается двумя парами
обмоток, расположенными на статоре или роторе по осям аир.
Пространственная модель такой машины (рис. 6.1) имеет т обмоток на
статоре и роторе по осям а и Р и сходна со схемой обобщенного ЭП.
Уравнения для машины при питании несинусоидальным
несимметричным напряжением могут быть получены из уравнений обобщенного
ЭП D.7), в которых матрицы напряжений и токов имеют тот же вид, что
D.9) и D.10), а отличаются матрицей сопротивлений.
Субматрицы напряжений и токов состоят из выражений напряжений
и токов по осям аир статора и ротора. В этих уравнениях i/Jla, w5ip —
напряжения на статоре основной частоты; us2a, wj2p — напряжения на
статоре, создающие поле третьей гармоники. Эти напряжения имеют
частоту /з = 3/ь а амплитуда напряжения соответствует амплитуде поля
125
гармоники третьего порядка; us3a,
и*зр — напряжения,
соответствующие гармонике пятого
порядка/5 = 5/ь и т.д.; usma, wjmP —
напряжения гармоники т-го
порядка частотой^ = mf\. Фазы
и направления вращения
гармоник поля задаются
соответствующими напряжениями на
обмотках статора. Если в
воздушном зазоре имеются
субгармоники, т.е. поля, имеющие
частоты ниже основной частоты, то к
части обмоток подводится
напряжение с частотами ниже
основной. Если напряжение
содержит четные гармоники, то к
части обмоток подводятся
напряжения четных гармоник.
Каждой паре обмоток на статоре соответствует пара обмоток на
роторе. Для асинхронной машины напряжения на обмотках ротора равны
нулю, если обмотка ротора замкнута накоротко, а питание подводится к
статору; /5ia, /Лр, /rja, /rip — токи первой гармоники статора и ротора; is2a,
top, toa, top — токи третьей гармоники статора и ротора; isma, /5/ир, w, /^p —
токи /w-й гармоники статора и ротора.
Четыре матрицы сопротивлений в D.7), располагающиеся по
диагонали матрицы Z, имеют вид
Рис. 6.1. Модель обобщенного
электромеханического преобразователя для
исследования ЭП при несинусоидальном
напряжении
а.._ —
d т
г.+—L,
1 а '
о
d т
2 dt 2
О
О
О
m dt m
F.1)
где ru r2, ..., rm — активные сопротивления обмотки для токов первой,
второй и /w-й гармоник (эти сопротивления можно считать одинаковыми,
если не учитывать вытеснение тока); Lu Z,2,..., Lm — полные
индуктивности контуров токов 1, 2 и m-й гармоник.
Полные индуктивности обмоток статора и ротора для разных
гармоник из-за различия индуктивностей рассеяния могут отличаться друг от
126
друга. Матрица Am получается из Asa заменой индекса s на г у
обозначений сопротивлений и индуктивностей, а А^ — из Ага заменой индекса а
на р. Матрица полных сопротивлений А5р получается из Asa заменой
индекса а на р.
Так как машина ненасыщена, связи между обмотками статора,
расположенными в модели на одной оси, отсутствуют. Фиктивные обмотки,
создающие поля в воздушном зазоре, не связаны друг с другом;
несинусоидальные токи в исследуемой машине протекают в одной обмотке.
Субматрица А5га имеет вид
А =
л
о
о
о
— My
dt г
О
О
... — мт
dt M
F.2)
где Ми, Л/22, ..., Мтт — взаимные индуктивности между контурами
статора и ротора, по которым замыкаются гармоники одного порядка в
статоре и роторе.
Матрицы А„а, А,ф и А„р получаются из А5Га путем замены
индекса а на Р и заменой s на г у обозначений взаимных индуктивностей.
При учете нелинейностей взаимные индуктивности контуров статора
и ротора и, наоборот, ротора и статора могут отличаться друг от
друга. В идеализированной машине взаимные индуктивности равны друг
другу:
D =
Г-
L , со
0
L о
=
iP<»r
0
0
0
-42a«V
0
0 ..
Ir2ptor ..
0 ..
0
0
- -^™««>,J
0 '
0
• ^™р<°г_
.
F.3)
F.4)
Субматрицы Вор и Bpa отличаются знаками элементов и индексами a
и р, s и г:
127
US1*fi US2^2 ••• u$m'i>fm'i a$mfm U$fff и52*Ь ■ uSm-bf/n-t abm*fm
^--да-ш---£4
3R
Рис. 6.2. Схема машины для
определения электромагнитного момента с т
статорами и т роторами
А
3-£
Рис. 6.3. Схема машины с т статорами
и общим ротором
»* =
-МИа(ог О
О
О
-М22а&
О
О
О
-м.
(О
F.5)
где МПа, М22ш ...» Мята — взаимные индуктивности контуров ротора и
статора, по которым протекают токи соответствующих гармоник.
Объединив субматрицы напряжений, токов и сопротивлений F.1)—
F.5), получим уравнения электрической машины при несинусоидальном
напряжении питания, записанные для каждой гармоники.
Как и в случае эллиптического поля, при выводе формулы
электромагнитного момента можно рассматривать модели двух машин. В первой
машине (рис. 6.2) имеется т статоров и т роторов, соединенных между
собой. К каждому статору подводятся напряжения первой и высших
гармоник. В уравнении момента имеются только произведения с
одинаковыми индексами; пульсирующие составляющие отсутствуют, а
электромагнитный момент
F.6)
Во второй машине (рис. 6.3) с т статорами и общим ротором все
гармоники взаимодействуют между собой и в уравнении момента есть
произведения всех токов статора на все токи высших гармоник ротора. В
этих произведениях имеются члены с различными индексами, а
электромагнитный момент
^вр = A/OVip'jIa ~";НсЛ|р + /'r2p'*la "г2а7лр +'" + 'r2|jfs2P "
-|г2сЛ2р + *•• + lrmtfsma ~ lrmalsm$ ) * (°-')
После преобразований
128
Мш> = MWsla + ',2а + - + ',ma Х'гф + »г2Р + - + 'ли* ) "
"('ЛИ + *ж2Э + - + W )(*г1« + 'г2« + - + *n«e I • ' F'8)
Произведения токов различных гармоник учитывают
взаимодействие перемещающихся друг относительно друга полей, которые создают
пульсирующие моменты. Эти моменты в установившемся режиме не
учитываются, а в динамике их неучет дают погрешность в пределах 10—15%.
При моделировании ЭП с несинусоидальным напряжением на
выходе можно использовать уравнение D.9) и систему уравнений F.1)—F.8),
где несинусоидальные напряжения и токи раскладываются на гармоники,
а также систему уравнений B.1)—B.3) с несинусоидальными
напряжениями.
Модель с разложением напряжений на число гармоник, большее
четырех, значительно сложнее модели с четырьмя уравнениями
напряжения, однако дает значительно большие возможности для исследования.
Модели с большим числом уравнений целесообразнее применять при
использовании ЦВМ, а модель с четырьмя уравнениями — при
моделировании на АВМ, когда используется генератор несинусоидального
напряжения.
При несинусоидальном несимметричном напряжении питания как
первая, так и высшие гармоники имеют прямые и обратные поля.
Поэтому в пространственной модели выделяется пара обмоток на статоре и
роторе для прямого поля и еще пара — для обратного. В зазоре
увеличивается число полей в математической модели — число уравнений,
причем уравнения не изменяются и остается выбрать те гармоники, влияние
которых надо учесть, и решать приближенно поставленные задачи.
К рассматриваемому в этой главе классу задач относятся также
задачи исследования двигателей с питанием обмоток от источников с
различной формой напряжения или различными частотами.
Двухфазные двигатели с питанием обмоток статора от источников с
различными частотами применяются в случае, когда одна фаза
подключена к сети, а другая — к тиристорному преобразователю или обе фазы
подключены к автономным преобразователям, имеющим различные
частоты. Тогда следует рассматривать пульсирующие поля по каждой
гармонике и проводить анализ процессов преобразования энергии при
наличии в зазоре не менее четырех полей, пользуясь математической
моделью, соответствующей пространственной модели с четырьмя парами
обмоток на статоре и роторе. Математическая модель имеет 16 уравнений
напряжений, а в уравнении момента — 16 пар произведений токов.
Система уравнений — 17-го порядка.
Энергетические характеристики в этом случае значительно хуже,
чем при наличии кругового поля, а в остальном процессы преобразования
энергии сходны с процессами в машине с несинусоидальным питанием.
5-179 129
Иногда для снижения объема статических преобразователей
целесообразно использовать такие схемы, когда одна фаза машины подключается
к сети, а другая — к преобразователю. В электропроводах часто
используется динамическое торможение, когда к одной из обмоток двигателя в
переходном процессе подключается постоянное напряжение.
Рассмотрим электрическую машину, в воздушном зазоре которой
происходит изменение спектра полей высших гармоник. Вследствие
изменения амплитуд и фаз гармоник поля в зазоре будет происходить
изменение угловой скорости, когда ротор переходит с одной синхронной
скорости на другую из-за изменения амплитуд гармоник. При этом
можно получить экономичное регулирование угловой скорости. Однако
конструктивное выполнение такой машины весьма сложно и требует
специальных преобразователей частоты. Теоретически можно получить законы
изменения амплитуд гармоник, при которых угловая скорость изменяется
линейно.
§ 6.2. Моделирование уравнений электрических
машин при несинусоидальном напряжении питания
Исследование электрических машин при несинусоидальном
напряжении на выводе начинается в предположении, что сеть или источник
несинусоидального напряжения имеет бесконечную мощность. В этом
случае не учитывается влияние нагрузки на форму напряжения при
несинусоидальном несимметричном напряжении.
При исследовании ЭП на ЭВМ используются специальные схемы
питания моделей. Наиболее широко применяют схемы, воспроизводящие
режимы работы тиристорного преобразователя, совмещающие принципы
математического и физического моделирования. Для вентильной части
Рис. 6.4. Схема генератора несинусоидального напряжения
130
Рис. 6.5. Схема генератора прямоугольно-ступенчатой формы напряжения
выполняется физическая модель, а соединенные с ней электрические
части ЭВМ представляют собой математическую модель электрической
машины. Считая, что двигатель подключен к сети несинусоидального
напряжения бесконечной мощности, на ЭВМ можно создать генераторы
несинусоидальных напряжений и использовать их вместо генераторов
синусоидальных напряжений в структурных схемах решения уравнений ЭП.
Имитировать питание электрической машины от магнитного
усилителя можно, реализовав на ЭВМ следующие зависимости:
"i@ = I Um sin co/| Um sin (о/, w2(/) = | Um cosco/| Um cos со/. F.9)
Структурная схема модели генератора несинусоидального
напряжения приведена на рис. 6.4. Гармонический состав изменяется при
подаче на БП1 и БП2 напряжений i*l(/) = |tfMsina>/|(/msin(cD/ + q>) и
иг@ = I ^m cosco/| Um cos(co/ + ер) вследствие изменения угла ср.
Прямоугольно-ступенчатую форму напряжения на выходе
полупроводниковых преобразователей обеспечивает генератор
несинусоидальных напряжений (рис. 6.5).
Схема генератора выходного напряжения автономного инвертора с ши-
ротно-импульсной модуляцией и вид формируемых этой схемой
напряжений даны на рис. 6.6 а, б. Усилитель 1 формирует разнополярные
пилообразные импульсы и2, которые поступают на вход сумматора 2 и сравниваются с
синусоидальным напряжением м3- Управляющим элементом схемы является
реле РП29 его контакты формируют разнополярные, промодулированные по
ширине прямоугольные импульсы щ (рис. 6.6). Если к неподвижным
контактам А и Б реле 1РП2 подвести изменяющееся во времени напряжение
131
. и, и j
ис -±Um sin со/,
то схема будет
осуществлять и
амплитудную
модуляцию. В этом
случае вид
напряжения, которое
формируется реле
/77/,
соответствует виду
напряжения и условиям,
имеющимся в
однофазном
инверторе с широтно-
импульсной
модуляцией.
На рис. 6.7
приведена релей-
но-диодная
схема с двумя
поляризованными
реле 1РП1 и 2РП2
и двумя диодами
Д1 и Д2,
воспроизводящая
режимы работы тири-
сторного привода
с амплитудным
управлением.
Структурные схемы моделей преобразователей, которые набираются
из стандартных решающих блоков ЭВМ, позволяют воспроизводить
типичные формы выходных напряжений магнитного усилителя, мостового
инвертора, автономного инвертора с широтно-импульсной модуляцией,
тиристорного преобразователя. Эти схемы достаточно просто
реализуются на АВМ и надежны в диапазоне частот 0,1—10,0 Гц. Модели
позволяют изменять частоту, амплитуду и гармонический состав выходного
напряжения. С помощью таких схем с достаточной точностью можно
исследовать как статические, так и динамические режимы работы
электрических машин.
При моделировании трехфазных и многофазных электрических
машин при несинусоидальном напряжении не следует приводить их к
двухфазным, так как картины поля в двухфазных и многофазных маши-
лППм
иииии
Рис. 6.6. Схема инвертора с широтно-импульсной
модуляцией (я); напряжения, формируемые на выходе генератора (б)
132
+coscot
о
+cos(o>t-os)
нах при одном и том же
несинусоидальном фазном напряжении
различны. В этом случае следует
пользоваться заторможенными
трехфазными и многофазными координатами.
Значительно большие
возможности для решения уравнений при
несинусоидальном несимметричном
напряжении питания имеют ЦВМ.
Для решения уравнений F.1)—F.8)
широко используют численный метод
Рунге—Кутта. При решении
уравнений важно правильно выбрать
величину шага, что определяет время и
точность решения. Обычно шаг
выбирают равным 73—*/4 полупериода
высшей гармоники. При этом широко
используют стандартные программы разложения кривых в
гармонический ряд, определения действующих значений и начальной фазы
гармоник. Уравнения решают как для трехфазных, так и для двухфазных
машин, с учетом и без учета включенных в статор и ротор многополюсников.
При определении статических характеристик машины при
несинусоидальном несимметричном напряжении питания сначала определяются
токи статора и ротора для различных значений угловой скорости ротора.
Для установившегося режима среднее за период значение момента
Л/,=A/Г)/А/,(/)Л, F.10)
Рис. 6.7. Релейно-диодная схема
тиристорной ячейки
где Т — период напряжения основной гармоники.
Если определены гармонические составляющие токов статора и
ротора
'(') = /0 + Zt7M*. sin(nrw/ + ФA)], F.11)
где |i — номер гармоники, то, подставляя выражения токов в уравнения
F.6)—F.8), определяют моменты по каждой гармонике. Затем определяют
F.12)
^=^30+ZM3n>
где момент от постоянной составляющей
М* = (тр/2)МAю01^-1ф015а0). F.13)
Момент ц-й гармоники через активные и реактивные составляющие
133
MW = (mP/2W(Ira^Is^ + /га|ЧЛР||р -^^iu -^MP^JOMp)' FЛ4)
Здесь /a — активные; Ip — реактивные составляющие токов для ц-й
гармоники соответственно для статора и ротора по осям аир.
Если есть прямая и обратная составляющие токов статора и ротора
по осям а, р, то опуская индекс гармоники ц, получим:
'а = А,, + '<* = 0 up, + А*..) + J (Аф.Р + 'обр W«.+ Ар;
h = "У1* + #* = ('пр.р - 'обр) + ./('об.. - 'пр.. ) = 'р. + Ар-
Подставив F.15) в F.14), после преобразований получим
М^М^-М^. F.16)
Для каждой гармоники момент состоит из симметричных
составляющих прямой и обратной последовательностей. Мощность на валу
л=Ло+2Л- F-17)
м
Здесь мощность постоянной составляющей (без учета добавочных
потерь) и мощность ц-й составляющей соответственно
^(л/^)^; F.18)
Р2ц=(л/9,55)МЭЙ. * F.19)
Активная мощность, потребляемая машиной,
P,=P10 + XRe5M, F.20)
где Р\0 — мощность постоянного тока, потребляемая от сети; второе
слагаемое — активная мощность переменного тока; 5Ц — полная мощность
|х-й гармоники, равна сумме комплексных мощностей фаз статора и ротора:
s,= Z(*vi). <6-21)
где / — сопряженное комплексное значение тока.
Для симметричных машин через симметричные составляющие токов
и напряжений
5Ц = m{Uj'm + UJ'* + Uj'^ + Uj^). F.22)
При несинусоидальных напряжениях из-за появления мощности
искажения следует учитывать cos ер по каждой гармонике:
coscp = /;/V F.23)
Для режима двигателя КПД
г\ = Р2/Р19 F.24)
134
F.15)
для режима генератора
r\ = PjP2. F.25)
Обычно решение на ЭВМ проводится для трех—пяти гармоник и
трех—пяти нелинейных контуров, т.е. для уравнений 20—25-го порядка.
При несинусоидальном напряжении питания следует отметить
увеличение пульсаций токов, момента и скорости, зависимость характера
протекания переходного процесса от момента включения двигателя. При
прямоугольном напряжении питания асинхронных двигателей ток
холостого хода может увеличиваться почти в два раза по сравнению с
током холостого хода при синусоидальном питании. Для исполнительных
двигателей КПД может снижаться на 20—30%. Энергетические
характеристики двигателей общего назначения ухудшаются на 10—15%.
§ 6.3. Энергетические показатели электрических
машин при несинусоидальном несимметричном
напряжении питания
Определение энергетических показателей при несинусоидальном
напряжении питания в динамических режимах имеет важное значение
при проектировании машин, работающих в автономных системах с
полупроводниковыми преобразователями. Следует иметь в виду, что и
напряжение сети часто в некоторых ее участках — несимметричное и
отличается от синусоиды.
Представления о энергетических показателях при несинусоидальном
несимметричном напряжении питания значительно усложняются по
сравнению с идеальной машиной. Модель для этого случая получается из
модели обобщенного преобразователя, если представить, что на статоре и
роторе имеется одинаковое число обмоток /и, не имеющих в
ненасыщенной машине между собой связи (см. рис. 6.1). При этом учитывается
только форма питающего напряжения, а машина считается идеальной и
не вносит в зазор пространственных гармоник.
Электромагнитный момент определяется по схеме с т статорами
(см. рис. 6.2) или т статорами и общим ротором (см. рис. 6.3). Схема рис
6.3 позволяет учитывать пульсирующие моменты от произведений токов
разных частот. В статике достаточно использовать более простую схему
рис. 6.2. Однако в переходных процессах неучет пульсирующих
составляющих дает погрешность в определении ударных моментов и времени
переходного процесса в пределах 10—15%.
При несинусоидальном напряжении на зажимах машины принято
полную мощность (S) представлять в виде:
135
S = JP2+Q2+T2 , F.26)
где Р — активная мощность; Q — реактивная мощность; Т — мощность
искажения. Это представление справедливо и для динамических
режимов.
При условии, что ротор короткозамкнутый, из модели обобщенного
электромеханического преобразователя для несинусоидального питания
активная мощность
Р = UJ\a + Vu> + W2a'*2a + W2p'2p + - + UmJma + Um^ ' <6'27)
Реактивная мощность
Q = "la'ip ~ Vl« + W2a'2P " W2P*2a + - + «U'-P + WmPU • F-28)
Мощность искажения определяется перебором всех оставшихся пар
произведений напряжений и токов:
Т = U\Jla + НЫ + - + М1«'"« + V-Ф + - + "«a'le + W"A + - +
"^^1Я—1,<Х ^/ЖХ
-+ "mct'ip + "Via + ••• + "m-l.aCp + *Vl,p'/na • F-29)
Таким образом, в уравнении для определения мощности искажения
входят пары произведений напряжении и токов по одной оси и по разным
осям. В этом смысле мощность искажения имеет активную и реактивную
составляющие. Мощность искажения определяется перебором
произведений токов и напряжений различных частот. Эти составляющие не
создают вращающегося момента, но косвенно участвуют в процессе
преобразования энергии в электрической машине, увеличивая потери —
преобразование электрической энергии в теплоту. В динамике мощность
искажения расходуется на создание пульсирующих моментов и на
покрытие части электрических и магнитных потерь (части так называемых
добавочных потерь).
При таком рассмотрении процессов преобразования энергии в
модели машины участвуют все возможные комбинации пар произведений
токов и напряжений, создавая активную, реактивную части общей
мощности и мощность искажения.
При несимметричных несинусоидальных напряжениях представляют
каждую гармонику, состоящую из прямой и обратной
последовательностей. При этом модель машины остается прежней, и в выражениях для
определения активной и реактивной мощности и мощности искажения
появляются новые пары произведений, токов и напряжений.
Для определения средних за период энергетических показателей при
несинусоидальном напряжении питания в переходных процессах период
выбирается равным периоду первой гармоники в установившемся режиме.
136
Общее выражение активной мощности для ее среднего значения:
т t+T т /+Г
W = Ъ1Т \р№ = £1/Г |(и„ + ии +...
*=1 t *=1 t
m oo t+T
... + utlk + ...)(/0, + i]k +... + itlk +...) = YHMT \и«1«л +
*=1л=0 /
m oo t+T m oo /+7" m a,
+ZEvr Jv*<*=ZZvr fr*k<*=ZIX • F.30)
Из F.27) следует, что средняя за период активная мощность равна
сумме активных мощностей постоянной и всех гармонических
составляющих.
Средний за период коэффициент мощности
m oo
ilk
p(t\ Lalu^A
*„(')= . cU =—,*;"- , , F.3i)
1ад* ZJZ^JZ7-
*=l *=i V/i=o Vw=o
где U„k, I„k — текущие действующие значения w-x гармоник напряжения и
тока в фазе «Ъ>. Они определяются как средние квадратичные значения за
период основной гармоники:
£/«=ЛХ' F-32)
'.=JZ'i. F-33>
Г/1=0
г
где игл = 1/Г Ji& (/)А, С = 1/7" JU (/) А.
О О
Средние за период коэффициент мощности и КПД позволяют при
проектировании учесть энергопотребление в переходных процессах и
правильно выбрать геометрию электрической машины.
Средний коэффициент мощности для цепи с линейным активным
сопротивлением kw(t) = 1, в остальных случаях kMC(t) < 1.
Для режима двигателя в переходном режиме при несинусоидальном
напряжении целесообразно говорить о среднем КПД за период как
отношении средней механической мощности на валу к активной мощности,
потребляемой из сети:
137
Л(/) = 5с@ F34)
t+T t+T
Средние за период КПД и коэффициент мощности —
энергетические показатели электрической машины при несинусоидальном
напряжении в переходных процессах. Зная эти показатели, можно рационально
проектировать электрические машины, работающие в динамических
режимах, используя методики проектирования в установившихся режимах,
правильно определять необходимость регулирования напряжения и
частоты в электропроводах, работающих при изменяющейся нагрузке.
Средние за период КПД и коэффициент мощности при несинусоидальном
напряжении меньше, чем в установившемся режиме, и зависят от
параметров машины и характера переходного процесса.
При несинусоидальном напряжении питания высшие гармоники
напряжения вызывают дополнительные потери, характеризуемые
мощностью искажения Pm(t):
I m оо
' = ^2£'«*(').
V k=\ /1=0
^0=^12/..* (')• F.35)
На увеличении мощности при несинусоидальном напряжении
питания сказывается также несимметрия питающих напряжений. Мощность
несимметрии
\ РАО = ZV(^@-^@J + (^@-^@J . F.36)
При несинусоидальном несимметричном напряжении питания
полная мощность
Sc@ = №(t) + ql(t) + Pi(l)+PXt) . F.37)
Коэффициент фазового сдвига характеризует степень смещения
основной гармоники тока относительно основной гармоники напряжения:
*,(') = , /с@, ■ F.38)
VI2 @+9с (О
В установившемся режиме это средний коэффициент фазового
сдвига и имеет смысл cos cpcp.
Коэффициент искажения
138
M')= \-f~, F.39)
№
/1=1
где I\ — действующее значение первой гармоники тока; 1к —
действующее значение тока к-й гармЪники.
Коэффициент несимметрии, характеризующий несимметричность,
распределения нагрузки по фазам,
*Н(/) = М>. F.40)
£2(/)
Тогда коэффициент мощности
U') = *c (')*„(')*„(')• F.41)
Коэффициент нелинейных искажений km(t) = kH(t)kH(t) позволяет
судить о совместном влиянии на коэффициент мощности искажения
формы токов и несимметрии напряжения.
Если провести сравнение процессов преобразования энергии в
простейшей машине при синусоидальном и несинусоидальном напряжении
питания, то следует отметить, что при том же моменте на валу
потребление электрической энергии при несинусоидальном напряжении больше,
чем при синусоидальном напряжении. В большинстве случаев снижение
КПД из-за несинусоидальности составляет 10—15%.
Ухудшение энергетических показателей можно оценить
коэффициентом искажения Ки, который характеризует влияние высших гармоник
на дополнительные потери. Увеличение потерь при несинусоидальном
напряжении характеризуется мощностью искажения F.29), учитывающей
мощности всех гармоник, кроме первой:
I m со
ад=£/„^2/* • F-42)
Значительное влияние на процессы преобразования в
электромеханических преобразователях оказавают: насыщение, нелинейности других
параметров, электрическая и магнитная несимметрия и другие факторы.
Все они влияют на форму поля в воздушном зазоре машины. Поэтому
целесообразно ввести понятие коэффициента искажения (Ки),
учитывающего несколько факторов, влияющих на снижение энергетических
характеристик машины.
Коэффициент искажения поля в воздушном зазоре Ки можно
определить как отношение полезной мощности на валу при несинусоидальном
магнитном поле в воздушном зазоре машины (Ргпн) к полезной мощности
при круговом поле (РгпкУ-
139
*-=-jK F-43)
"l гас
Коэффициент искажения всегда меньше единицы и зависит от
параметров машины и независимых переменных в уравнениях, а также от
времени и характера протекания переходных процессов.
Зная Ки и динамические показатели машины при круговом поле в
воздушном зазоре, можно определить энергетический коэффициент за
период
Кж=КЩтКшКт, F.44)
где КПДдп — КПД динамический за период; Кип — коэффициент
мощности за период; Кт — коэффициент искажения за период;
Энергетический коэффициент за время переходного процесса
К}па=КПДтпКыш,Ктп, F.45)
Здесь коэффициенты имеют то же значение, что и в F.44), но за
время переходного процесса.
В F.44) и F.45) Кт — коэффициент искажения за период, а К^ —
коэффициент искажения за время переходного процесса. При этом
динамические КПД и Км берутся для идеальной машины (машины с круговым
полем).
Зная среднее значение коэффициентов искажения за период и за
время переходного процесса, можно определять КПДц и К^ для
большинства режимов электрических машин.
Коэффициенты искажения в большинстве практических случаев,
встречающихся в электромеханике, изменяются в пределах
1 > ЛГИ > 0,5. F.46)
Коэффициент искажения для большинства встречающихся в
практике электромеханических систем может быть определен достаточно быстро и
точно. Для этого надо обобщить накопленный опыт и составить таблицы.
При Ки = 1 процессы электромеханического преобразования
происходят в идеальной машине. Кн = 0 — в многомерной, многофазной
машине, когда вся электрическая энергия в двигательном режиме
преобразуется в тепло. Такую машину можно представить, когда жидкий
шаровой ротор имеет /w-фазную несимметричную систему статора. Оба
крайних случая могут существовать лишь в нашем воображении, так как не
бывает идеальных машин, а многомерные, многофазные машины с
нелинейными коэффициентами и несинусоидальным питанием можно
представить лишь бесконечным числом уравнений.
В переходных режимах, так же, как и в установившемся режиме, на
процессы электромеханического преобразования энергии влияют энерге-
140
тические показатели ЭП, их определение имеет важное значение при
проектировании электрических машин, работающих в динамических
режимах [4].
§ 6.4. Моделирование асинхронного двигателя в
динамических режимах при несинусоидальном
напряжении питания
Процесс решения на ЭВМ уравнений обобщенного ЭП,
примененных для описания асинхронного двигателя с питанием
несинусоидальным напряжением, можно разбить на следующие этапы.
Ввод в ЭВМ параметров контуров асинхронного двигателя и фазных
напряжений, необходимых для решения уравнений.
Создание общих областей с помощью оператора алгоритмического
языка ФОРТРАН IV для передачи необходимых сведений между главной
программой и подпрограммами, входящими в структурную схему.
Создание информационного массива для передачи параметров,
полученных в результате решения системы дифференциальных уравнений,
в подпрограмму расчета энергетических показателей.
Задание начальных условий для аргумента и зависимых параметров.
Вычисление параметров и выражений, не зависящих от времени или от
результатов решения системы дифференциальных уравнений. При
решении системы дифференциальных уравнений удобно использовать
стандартную подпрограмму решения методом Гира.
Расчет параметров контуров с учетом вытеснения тока, вычисление
правых частей интегро-дифференциальных уравнений, определение
энергетических показателей в различных режимах работы.
Для учета несинусоидальности напряжения питания используется
метод логического формирования напряжений Usa и C/jp при соблюдении
условия сходимости ряда Фурье для функций, значения которых в местах
разрыва, т.е. при переходах через 0, п и 2тс, меняются скачкообразно.
Структурная схема алгоритма программы расчета энергетических
показателей асинхронного двигателя состоит из следующих трех
основных видов блоков.
Блок общей области размещения параметров и передачи результатов
интегрирования системы дифференциальных уравнений из главной
программы.
Блок усреднения мгновенных энергетических показателей в
зависимости от периода основной гармоники.
Блоки расчета параметров для пуска, повторного включения, реверса
при нулевых и ненулевых начальных условиях.
141
Рис. 6.8. Зависимости мгновенных значений мощностей двигателя 4A132S4Y3
при пуске от времени
Рис. 6.9. Зависимости средних значений мощностей двигателя 4A132S4Y3 при
пуске от времени
После расчета мгновенных энергетических характеристик двигателя
производится расчет средних энергетических показателей.
Интегрирование производится методом трапеций.
142
Рис. 6.10. Зависимости мгновенных и средних значений коэффициентов
мощности и КПД двигателя 4A1325SY3 при пуске от времени
Рис. 6.11. Зависимости мгновенных значений мощностей двигателя при пуске от
времени (с учетом вихревых токов и вытеснения тока)
S, кВ A; q, кбар: Р,квт
Рис. 6.12. Зависимости средних значении мощностей двигателя при пуске
от времени (с учетом вихревых токов и вытеснения тока)
Рис. 6.13. Зависимости мгновенных и средних значений коэффициентов
мощности и отношения активных мощностей двигателя при пуске при
несинусоидальном питании (с учетом вихревых токов и вытеснения тока) от времени
При создании автоматизированной системы проектирования блок
динамики входит в подсистему оптимального проектирования
асинхронных двигателей (§ 13.3).
В переходных процессах токи в роторе несинусоидальные.
На рис. 6.8 представлены мгновенные значения мощностей
двигателя 4A132S4Y3 при пуске на холостом ходу.
Средние значения мощностей для этого же двигателя даны на рис. 6.9.
На рис. 6.10 показаны мгновенные и средние значения
коэффициента мощности и КПД при пуске на холостом ходу двигателя 4A132S4Y3.
На рис. 6.11—6.13 представлены те же характеристики с учетом
вытеснения тока и вихревых токов при несинусоидальном напряжении.
При несинусоидальном напряжении, близком к прямоугольному,
энергетические показатели ухудшаются на несколько процентов;
значительно усложняется характер энергообмена и вид колебаний мгновенного
коэффициента мощности; увеличиваются колебания мощности. В
переходном процессе происходит обмен энергией между источником и
двигателем, между основной и высшими гармониками.
Несинусоидальное напряжение большее влияние оказывает на
установившиеся процессы, чем на динамические. Это объясняется тем, что и
при синусоидальном напряжении в переходном процессе токи
несинусоидальные.
Обычно программы составляются для исследования процессов в
машинах с несинусоидальным напряжением питания, а в частном случае
получаются результаты для машин с синусоидальным напряжением
питания.
§ 6.5. Вентильные двигатели
Общепринятое определение вентильных двигателей отсутствует. К
вентильным двигателям обычно относят электромеханические системы, в
которых электрические машины функционально объединяются с
управляемыми полупроводниковыми коммутаторами. Полупроводниковые
преобразователи и регуляторы по габаритам больше электрических
машин и, как правило, выполняются отдельными блоками [1,8].
Конструкции и схемы включения вентильных двигателей весьма
разнообразны. Рассмотрим подход к математическому моделированию
систем с полупроводниковыми преобразователями на примере тиристор-
ного регулятора напряжения — асинхронного двигателя.
Проблема создания регулируемого асинхронного электропривода
решается, в основном, в двух направлениях: использованием тиристорных и
транзисторных преобразователей частоты и совершенствованием способа регу-
145
лирования частоты вращения
асинхронных двигателей путем
изменения напряжения с
помощью тиристоров. При
регулировании частоты вращения за
счет скольжения электропривод
имеет низкие энергетические
показатели, так как при этом
энергия скольжения
рассеивается в виде теплоты в двигателе.
Однако благодаря простоте
схемных решений, надежности
и хорошим регулировочным
свойствам этот вариант находит
применение в электроприводах
с вентиляторным характером
момента нагрузки — в приводах
компрессоров, вентиляторов,
воздуходувок и др.
Система, приведенная на рис. 6.14, близка к асинхронному
электроприводу с дросселями насыщения, так как регулирование угла открытия
тиристоров приводит к изменению и дополнительному сдвигу первой
гармоники тока двигателя относительно напряжения сети. Иными
словами, каждую пару вентилей, включенных по встречно-параллельной схеме
(рис. 6.14), можно рассматривать как некоторое фиктивное нелинейное
реактивное сопротивление, являющееся функцией угла открытия
тиристоров, параметров и скольжения двигателя. Применение тиристоров
вместо дросселей насыщения для регулирования напряжения статора
дает ряд преимуществ: тиристорные регуляторы практически
безынерционны, имеют большой коэффициент усиления по мощности, более
высокий КПД и сравнительно небольшие габариты и массу.
Наряду с преимуществами тиристорный электропривод имеет
существенный недостаток по сравнению с электромашинными системами
регулирования частоты вращения — включение в сеть нелинейностей
искажает синусоидальность напряжения. Несинусоидальность напряжения
сети ухудшает энергетические показатели энергосистемы. Для того
чтобы снижение энергетических показателей не было слишком
значительным, целесообразно ограничивать мощность нелинейных
преобразователей до 10—15% от мощности энергосистемы. Дальнейшее увеличение
мощности тиристорных электроприводов может привести к недопустимому
искажению напряжения сети и снижению энергетических показателей сети.
Теоретический анализ систем асинхронных двигателей с тиристор-
ными регуляторами напряжения представляет определенные трудности,
146
ТРН
Рис. 6.14. Реверсивная тиристорная схема
питания асинхронного двигателя
вызываемые, например, нелинейностью вольт-амперных характеристик
полупроводниковых вентилей в динамических и в квазиустановившихся
режимах работы, когда электропривод находится в последовательно
сменяющих друг друга переходных режимах, вызванных непрерывным
изменением схемы включения машины. Системы нелинейных
неоднородных дифференциальных уравнений, описывающие асинхронную машину
при симметричном и несимметричном включении фаз статора, имеют
переменную структуру.
Вследствие неуправляемости диодов и неполной управляемости
тиристоров выходные характеристики тиристорного регулятора
напряжения (углы коммутации, форма напряжения) оказываются зависящими от
электромагнитных переходных процессов в двигателе, т.е. напряжения,
питающие двигатель, зависят от углов открытия тиристоров, параметров
и частоты вращения двигателя.
Для решения уравнений математической модели рассматриваемой
системы применяются ЭВМ. При решении дифференциальных
уравнений асинхронного двигателя особые требования предъявляются к форме
записи уравнений и рациональному выбору переменных. Этот выбор
необходимо производить с учетом процесса, подлежащего исследованию, а
также факторов, определяющих точность, объем и надежность работы
модели. Моделирование системы тиристорный регулятор напряжения —
асинхронный двигатель на ЭВМ требует создания специальных
устройств, имитирующих дискретный характер и сложный процесс его работы.
Для исследования схем с тиристорами в цепи статора удобна запись
дифференциальных уравнений асинхронного двигателя содержащая
выражения токов статоров и потокосцеплений роторов:
0:
Um
«1»
= ~Гг
= r,im
= V,(j
L. т
+ oLs
+ oLs
dt
dt
■ + -=-
К
4.
+—
dt
dt
*m+ ~+ <»,
m dt
' »
»
МИ
L r dVj,
0 = -гР-^/,$+-^,р+-^-шгЧ'га;
p at
F.47)
147
Рис. 6.15. Расчетная схема тиристорного асинхронного электропривода
где а — коэффициент рассеяния; Ч*т, Ч^ — составляющие вектора
потокосцепления ротора по осям а, Р; signcorMc — момент нагрузки
типа сухого трения.
Моделирование асинхронного двигателя с учетом насыщения
несимметрии и несинусоидальности напряжения на АВМ невозможно
Сложность тиристорных схем обусловлена множеством состояний. Число
состояний зависит от числа фаз. Приведение многофазной системы к
двухфазной в случае тиристорного привода неэквивалентно.
На рис. 6.15 приведена принципиальная схема подключения обмоток
статора двигателя к сети через последовательно включенные тиристор-
ные элементы. При проводящем состоянии одного из тиристоров какого-
либо тиристорного элемента (ключ замкнут) сопротивление его близко к
нулю; если тиристорный элемент закрыт (ключ разомкнут), то
сопротивление его бесконечно велико.
В динамических и статических режимах работы моменты включения
тиристоров и диодов определяются нелинейными неоднородными
дифференциальными уравнениями, описывающими совместную работу
тиристорного регулятора напряжения и асинхронного двигателя. В
произвольный момент времени система может находиться в одном из пяти
состояний: 1) открыты соответствующие тиристоры трех фаз; 2) открыты
тиристорные элементы фаз В, С; 3) открыты тиристорные элементы фаз
А, С; 4) открыты тиристорные элементы фаз А, В; 5) закрыты все
тиристорные элементы. Поэтому для каждого временного интервала,
соответствующего двум соседним коммутациям тиристорных элементов,
решается частичная задача, а решение состоит из последовательного решения
большого количества различных частичных задач. По основному закону
коммутации начальные значения токов и потокосцеплений для очередной
частичной задачи определяются по предыдущей.
Из схемы рис. 6.15 по второму закону Кирхгофа
148
UBC+icRC-UMbc~hRB=Q>
^+'A-",ca-^c=0. F.48)
Из системы уравнений F.48) можно определить токи, а затем и
напряжения на тиристорных элементах:
и - / д = ^Uab ""Usab ^R*Rc ~ ("CA " UsCA )R*Rb /6 4m
Ra^c + ^a^b + ^c^B
Аналогично можно получить urB и w*;. Уравнения для w^, итВ и и^
дают возможность найти напряжения на тиристорных элементах при
различных проводимостях тиристоров, что необходимо для составления
программы расчета на ЭВМ.
При разработке математической модели желательно максимально
приблизить ее структуру к реальным схемам исследуемых тиристорных
электроприводов. В схемах с естественной коммутацией при
независимой работе тиристоров какой-либо фазы относительно тиристоров других
фаз работу каждого Nrvo тиристора описывает логическая функция
XNIZNI+YNI. F.50)
В F.50) Xst соответствует напряжению на тиристоре, ZNi —
напряжению сигнала открытия на вентиль, YNi — току через вентиль, знак
умножения означает логическую операцию «И», а знак сложения —
логическую операцию «ИЛИ».
Логические функции XNh YNi, ZNi равны единице, если
соответствующие напряжения и ток тиристора положительны, и равны нулю, если они
отрицательны.
В трехфазных схемах с изолированной нейтралью работа тиристоров
всех фаз взаимосвязана и имеет свои особенности. Допустим, система
находится в режиме нулевой проводимости «0». Найдем логическую
функцию, описывающую включение тиристоров в режим трехфазной
проводимости ЛВС. При этом одновременно смогут работать только
определенные тройки тиристоров, два из которых проводят ток в одном
направлении, а третий — в обратном:
А>з = ^ а\^в\^С1^а\^в\^с1 +XAlXB2XC2ZAlZB2ZC2 +
+XAIXB2XCIZAIZB2ZCI + XA2XBlXclZA2ZBlZcl +
+Х А2Х B2XCXZ A2Z B2ZCX +XA2XBlXC2ZA2ZBlZC2. F.51)
Если система работает в режиме ЛВС и состояние вентилей не
меняется, то логическая функция, описывающая удержание тиристоров в этом
режиме, имеет вид
^33 = YA\YBlYC2 + YA\YB1YC\ + YA\YB1YC1 +
+YA2YBlYCl + YA1 YB1 YC\ + YA1YB\YC1 • F-52)
149
В уравнениях F.51) и F.52) XNi — логические функции,
соответствующие напряжениям utN, определяются .по вышеприведенным формулам
для напряжений на тиристорных элементах. Так, например, если и^ > О, то
^n = l(*^eO),eOTHii*<0,TOA^
при ia<0 ^2=1G^=0).
Логические функции, подобные F.51) или F.52), можно составить
для любого состояния схемы.
Проведенный логический анализ позволяет в зависимости от
состояния проводимости тиристоров и диодов осуществить переход от одной
системы дифференциальных уравнений к другой.
Алгоритм расчета состояния тиристоров построен так, что анализ
проводится последовательно для отрезков времени, в течение которых
сигналы на всех вентилях регулятора не изменяются. Изменение
состояния системы в течение этого времени возможно или вследствие открытия
тиристора (изменяется знак напряжения на вентиле, имеющем сигнал),
или вследствие закрытия тиристорного элемента (изменяется знак тока).
Поиск моментов коммутации и соответствующих им значений
переменных ведется путем дробления шага интегрирования.
Подставив полученные значения напряжений в уравнения
асинхронного двигателя, можно определить все необходимые показатели
тиристорного привода.
§ 6.6. Импульсные электромеханические
п реобразовател и
Большинство электромеханических систем — системы, в которых
непрерывно происходит электромеханическое преобразование энергии
постоянного тока или периодическое изменение энергии переменного
тока. Наряду с системами постоянного и переменного тока имеются
электромеханические системы, в которых преобразование энергии
осуществляется за счет импульсов электромагнитной мощности в импульсных
электромеханических преобразователях. Такие системы в последние
десятилетия получили большое развитие. Это связано с внедрением
шаговых двигателей, преобразующих импульсы напряжения в угловые
перемещения, и созданием ударных генераторов для питания различных
электрофизических установок мощными импульсами тока.
Импульсные ЭП работают как в двигательном, так и в генераторном
режиме. При работе в режиме двигателя их называют шаговыми
двигателями, а импульсные генераторы — ударными генераторами. Шаговые
двигатели имеют небольшую мощность (обычно до нескольких сотен
ватт), а ударные генераторы, как правило, строятся на большие мощности
(до десятков мегаватт).
150
Шаговые двигатели преобразуют электрические импульсы в
дискретные угловые или линейные перемещения с фиксацией ротора в
определенных положениях. Шаговые двигатели проектируют с учетом
коммутирующих устройств и нагрузки на валу ротора. Для каждого шагового
двигателя существует определенная частота коммутации, при которой
ротор следует за скачкообразно изменяющимся полем в воздушном
зазоре. Это частота приемистости. Она определяется всей системой —
полупроводниковым коммутатором (генератором импульсов), шаговым
двигателем и нагрузкой на валу.
Большинство шаговых двигателей — многополюсные,
многофазные синхронные машины. Обмотки статора питают либо отдельно,
либо группами и в различных сочетаниях однополярными или двух-
полярными импульсами. При этом ротор шагового двигателя «внутри
оборота» вращается неравномерно, следя за скачкообразным
перемещением магнитного поля. Для снятия сигналов ротор шагового
двигателя фиксируется в определенных положениях, что обеспечивается
специальными устройствами или конструкцией двигателя. Изменяя
порядок следования импульсов, можно изменять направление
вращения двигателя и, таким образом, суммировать положительные и
отрицательные импульсы в угловые перемещения. В области создания
дискретных электромеханических систем в последние годы
достигнуты большие успехи.
Шаговые ЭП, как и все электрические машины, обратимы. Они
могут использоваться как источники маломощных импульсов. Создание
мощных импульсов — до 100 кДж с крутым фронтом, следующих друг за
другом с большой частотой и имеющих определенную форму,— одна из
сложных проблем электромеханики.
Импульсные генераторы должны накапливать энергию, для чего
имеется две возможности: за счет кинетической энергии вращающихся
частей и за счет энергии магнитного поля. Этой энергией необходимо
управлять, и такие генераторы должны иметь небольшую постоянную
времени. В электромеханике эти требования противоречивы, однако
создание таких генераторов возможно. Часто к импульсным генераторам
предъявляются требования, которые в индуктивных ЭП выполнить
трудно, поэтому целесообразно применять конструкции емкостных или
индуктивно-емкостных импульсных генераторов. Для накопления большой
энергии в магнитном поле применяются сверхпроводящие магнитные
системы.
Для анализа процессов электромеханического преобразования
энергии в импульсных ЭП можно использовать те же приемы и уравнения,
что и при исследовании обычных ЭП При импульсном напряжении
структура уравнений остается такой же, что и при несинусоидальном
напряжении. При моделировании шаговых двигателей уравнения обычно
151
упрощают, так как требуется учет характера нагрузки и внутреннего
сопротивления источника питания.
Непрерывное синусоидальное напряжение питания можно
представлять состоящим из бесконечного числа изменяющихся по амплитуде
импульсов. При отклонении от синусоидальной формы ротор вращается
неравномерно, а при определенной форме поля и его перемещениях
получаются шаговые двигатели, отрабатывающие сигналы управления в
углы поворота. Таким образом, импульсные двигатели и генераторы в
основе своей имеют одни и те же уравнения и подчиняются общим
законам электромеханического преобразования энергии [1,4, 8].
Глава 7
Многообмоточные электрические машины
§ 7.1. Общие сведения о многообмоточных машинах
Все электрические машины можно рассматривать как
многообмоточные, многоконтурные машины. Как правило, электрические машины
имеют стальные магнитопроводы, по которым замыкается магнитный
поток. При изменениях потока в магнитопроводах возникают вихревые
токи, которые замыкаются в листах электротехнической стали, в
массивных активных частях и в различных технологических контурах,
образующихся при изготовлении машины. Большинство электрических
машин имеет несколько обмоток.
Электрическую машину, пространственная модель которой имеет
одну пару обмоток на статоре и роторе, называют идеализированной
машиной. Машины с одной-двумя парами обмоток на статоре и роторе —
частный случай многообмоточных электрических машин.
Синхронные машины имеют на роторе демпферную обмотку и
обмотку возбуждения. Без учета вихревых токов они рассматриваются как
машины с одной обмоткой на статоре и двумя на роторе.
Машины постоянного тока имеют обмотки добавочных полюсов и
компенсационную, а обмотка возбуждения может состоять из обмоток
параллельного и последовательного возбуждения. С учетом вихревых
токов это трех—пятиобмоточная машина. Электромашинный усилитель
поперечного поля имеет несколько обмоток управления.
Электротехническая промышленность изготовляет асинхронные
машины с двумя обмотками на статоре и двумя-тремя обмотками на
роторе. Эти многоскоростные машины с переключением числа пар полюсов
составляют широкий класс машин с короткозамкнутым ротором с
двойной клеткой. К многообмоточным машинам можно отнести машину с
глубоким пазом, если ее стержень рассматривать как несколько
проводников, соединенных параллельно. При пуске асинхронного двигателя
благодаря вытеснению тока по высоте паза ток распределяется
неравномерно, что можно учесть, решая уравнения с учетом параллельного
соединения п проводников в роторе.
Обмотку статора часто выполняют из нескольких параллельных
проводников. Если эти проводники находятся в магнитном отношении в
различных условиях, то неравномерное распределение токов можно
учесть, решая уравнения многообмоточной машины.
153
Электромагнитные преобразователи — трансформаторы — строят
двух- и трехобмоточными. Специальные трансформаторы могут иметь
несколько обмоток на различные напряжения. Таким образом, даже без
учета вихревых токов, трансформаторы и автотрансформаторы являются
многообмоточными электромагнитными преобразователями энергии.
Уравнениями двухфазной машины с т обмотками на статоре и п
обмотками на роторе являются уравнения D.7)—D.17). Для двухфазной
гипотетической /я, «-обмоточной машины записывается 2{т + п)
уравнений напряжения, а в уравнении момента присутствует 2{тп)
произведений токов статора и ротора. Так как в математической модели
учитываются процессы в реальных обмотках, можно считать, что все обмотки
имеют приблизительно равные взаимные индуктивности, а полные
индуктивности отличаются из-за различия индуктивностей рассеяния.
Из уравнений /и, «-обмоточной машины могут, в частном случае,
быть получены уравнения для ЭП с любым встречающимся на практике
числом обмоток [4].
§ 7.2. Уравнения синхронных машин
В установившемся режиме в синхронных машинах со, = сос. В
синхронных машинах возможны качания, когда угловая скорость при
постоянной нагрузке и постоянном напряжении колеблется относительно
установившейся скорости. Обычно частота качаний на порядок или два
порядка ниже частоты сети и определяется параметрами синхронной
машины. Чтобы уменьшить амплитуду и частоту качаний, в синхронные
машины вводят демпферную обмотку (рис. 7.1).
Рис. 7.1. Модель трехфазной синхрон- Рис. 7.2. Схема двухфазной синхронной
ной машины машины
154
При анализе процессов
преобразования энергии в синхронных
машинах, как и в других ЭП,
рассматривают заторможенную
машину с приведенными обмотками.
Если машина симметричная, то
целесообразно для снижения числа
уравнений трехфазную машину
привести к двухфазной (рис. 7.2).
Синхронные машины делят на
явно- и неявнополюсные. Хотя
явнополюсные машины имеют
различные сопротивления по осям
d и q (рис. 7.2), с точки зрения
процессов электромеханического
преобразования энергии это
симметричные машины. В них воз-
Рис. 7.3. Модель синхронной машины
можно существование кругового поля, справедливы все приемы,
применяемые для неявнополюсных машин. Конечно, различие в
сопротивлениях Xd и xq вносит особенности в работу явнополюсных машин, что
сказывается в первую очередь на виде уравнения электромагнитного
момента [1, 4].
Синхронные явно- и неявнополюсные машины при анализе следует
рассматривать как многообмоточные и учитывать наличие обмоток
якоря, возбуждения и демпферной обмотки (рис. 7.3). В простейшем случае
синхронная машина — трехобмоточная машина.
Уравнения синхронных машин принято записывать для системы
координат d, q, связанной с обмотками ротора. Для машины с
приведенными обмотками записываются следующие уравнения:
u^cWjdt + V^r+rJ,;
u^cWjdt-V^ + rJ,,;
uf=<M>f/dt + rfif; G.1)
0 = ^/* + ^.
В G.1) га, г/, Гл4 и гщ — активные сопротивления, соответственно,
обмоток якоря, возбуждения, а также демпферной обмотки в продольной
и поперечной осях; ud, uq, и/— соответственно, напряжение обмотки
якоря в продольной и поперечной осях и обмотки возбуждения. Потокосце-
пления обмоток
155
G.2)
В G.2) Ld, Lqi Lf, L^, Lm — соответственно индуктивности обмоток
якоря, обмотки возбуждения и демпферной обмотки по осям d и q; M^ и
Мод — взаимные индуктивности обмоток по осям d и q. При этом
предполагается, что взаимные индуктивности обмоток, расположенных в
одной оси, одинаковы, а индуктивности рассеяния обмоток — различны.
Электромагнитный момент определяется через токи и потокос-
цепления или через токи
Мэ=Чу,-Чу„, G.3)
А/э = M(ifiq + уд, - \а\щ ). G.4)
Равенство G.4) составлено для неявнополюсной машины. Для явно-
полюсной машины добавляется составляющая, учитывающая различие
проводимостей по осям d и q.
В установившемся режиме электромагнитная мощность явнополюс-
ной машины:
Py=UE/Xdsme + U2/2(\/xq-\/xd)sm2e,
G.5)
где 0 — угол нагрузки (угол между U и Ё или угол между осью поля и
осью полюсов). На рис. 7.4 показана зависимость электромагнитной
мощности от угла 0 неявнополюсной 1 и явнополюсной 2 машин.
Пунктиром показан реактивный момент, возникающий из-за различия
магнитных сопротивлений в продольной и
поперечной осях машины.
Токи в демпферной обмотке и
токи id и \ч создают асинхронный
момент. В установившемся режиме
эти токи влияют на качания ротора
машины.
Уравнения синхронной
машины при несинусоидальном
напряжении с учетом нелинейностей и
многих контуров можно получить
из уравнения обобщенного ЭП,
Рис. 7.4. Угловые характеристики син- если представить, что вращается
хронных машин обмотка якоря, а неподвижны
156
демпферная обмотка и обмотка возбуждения (рис. 7.3). Надо стремиться
уменьшить число вращающихся обмоток, тогда при моделировании
потребуется меньше блоков перемножения. Обмотки, так же, как для
асинхронных машин, следует приводить к обмотке якоря.
При моделировании синхронных машин удобно пользоваться
относительными единицами. Принимаем за базовые величины угловую
скорость соб = о>с> ток статора /б = /тф, напряжение и6 = мтф. Тогда потокосце-
пление у¥6 = мб/соб, сопротивление z6 = мб//б , индуктивность
Lb = z6/oN = мб//бсоб . В этом случае Mad = xad\ Maq = xaq\ Ld = xd\ Lq = xq\
~/"= xfi ^nd = xof^ ^Щ "" ХЩ*
При моделировании синхронных машин с постоянными магнитами
степень возбужденности магнита характеризуется произведением тока 1М
на взаимную индуктивность обмоток якоря и фиктивного тока магнита.
Постоянные магниты заменяются эквивалентным безынерционным
контуром без потерь, включенным на источник постоянного тока.
Моделирование синхронных машин усложняется изменением
параметров при изменении нагрузки, что обусловлено насыщением, а в явнополюс-
ной машине дополнительно смещением оси поля относительно оси полюсов.
Переходные процессы в синхронных машинах начали изучать
раньше, чем в других электрических машинах. Необходимость изучения
переходных процессов в синхронных машинах была обусловлена развитием
энергосистем и влиянием аварийных режимов в одной машине на
устойчивость параллельной работы других машин. Отсутствие
вычислительных машин не давало возможности решать уравнения G.1) при
изменении угловой скорости. Поэтому приходилось упрощать исходные
уравнения, выделяя главные явления, определяющие поведение машины в
наиболее важных для практики режимах работы, что приводило к
необходимости разработки расчетного и экспериментального определения
совокупности параметров, характеризующих работу машины, причем
наибольшее внимание уделялось исследованию переходных процессов
при внезапных коротких замыканиях. Всплески токов в обмотках статора
при трехфазном или несимметричных коротких замыканиях могут
достигать 10—15-кратных значений по сравнению с номинальными. Процесс
короткого замыкания делится на стадии.
При наличии демпферной обмотки первая стадия процесса
определяется сверхпереходным индуктивным сопротивлением по продольной оси:
Xd =*оа+У(У*а<*+У*о/+У*о**)> О7'6)
где хаа — индуктивное сопротивление рассеяния обмотки якоря; xad —
индуктивное сопротивление реакции якоря в продольной оси; ха/ —
индуктивное сопротивление рассеяния обмотки возбуждения; xRd —
индуктивное сопротивление рассеяния демпферной обмотки по оси d.
157
При этом ударный ток короткого замыкания без учета
апериодической составляющей
Iam=Em/X"d, G.7)
где Ет — амплитудное значение фазной ЭДС.
Вторая стадия переходного процесса при коротком замыкании
характеризуется таким положением, когда поток реакции якоря проходит
демпферную обмотку и начинает проникать в обмотку возбуждения. Это
состояние машины определяется переходным индуктивным
сопротивлением в продольной оси
*:=*-+, *, - а*)
Установившийся ток короткого замыкания определяется
индуктивным сопротивлением в продольной оси
Xd ~ Хаа + Xad
и равен
Куст = Em/Xd •
Текущее значение тока в процессе короткого замыкания определяется
значением установившегося тока короткого замыкания, переходного и
сверхпереходного тока короткого замыкания. Затухание переходного тока
определяется постоянной времени T'd , а сверхпереходного TJ, T'd > TJ.
В токе короткого замыкания можно выделить периодическую и
апериодическую составляющие. Апериодическая составляющая затухает до
нуля с постоянной времени Та, зависящей от индуктивности обмотки
якоря и от активного сопротивления якоря.
Апериодические составляющие токов обмоток якоря создают поле,
неподвижное относительно якоря, поэтому в переходном процессе
участвуют контуры и в поперечной оси машины. При этом рассматривают
переходное и сверхпереходное индуктивные сопротивления в поперечной
оси машины.
Сверхпереходное индуктивное сопротивление в поперечной оси
х^х^+УО/^+У*^). G.9)
где х^ — индуктивное сопротивление реакции якоря в поперечной оси
машины; xGnq — индуктивное сопротивление рассеяния демпферной
обмотки в поперечной оси машины.
Переходное сопротивление по оси q из G.9):
х;-*,*-^. G.Ю)
158
Величина апериодической составляющей тока якоря пульсирует с
двойной частотой между значениями Emjx"d и Emjx"q, так как x"d * x"q.
При таком анализе сложных процессов в синхронной машине
делается много допущений, но при этом хорошо раскрываются физические
процессы и достигается необходимая точность. Сложность изучения
процессов в многообмоточной насыщенной машине заключается в
определении параметров.
При анализе статической и динамической устойчивости
параллельно^ работы синхронных машин широко используется линеаризация
уравнений. При этом рассматриваются режимы малых колебаний,
приращения переменных считаются линейными. Исследование статической
устойчивости на основе малых гармонических возмущений оправдано,
так как в таких задачах необходимо учитывать параметры линии и других
электрических машин и трансформаторов, работающих в одной сети с
рассматриваемой синхронной машиной. Для анализа динамики
синхронных машин имеет важное значение исследование сложных переходных
процессов при неправильной синхронизации, повторном включении,
исследование крутильных колебаний валопроводов мощных агрегатов.
Создание в последние годы турбогенераторов единичной
мощностью 1,2—1,6 млн. кВт, усложнение энергосистем ставят новые сложные
задачи по исследованию переходных процессов в синхронных машинах.
Необходимо более строго анализировать переходные процессы при
асинхронных режимах, повторном включении в сеть синхронных генераторов
при грубой синхронизации и ряде других аварийных режимов работы
синхронных машин в энергетической системе [4].
§ 7.3. Уравнения машин постоянного тока
В машинах постоянного тока многофазная обмотка якоря через
механический преобразователь частоты — коллектор — подключается к
сети постоянного тока. Если не рассматривать коммутацию и привести
многофазную обмотку якоря к двухфазной, то простейшую машину
постоянного тока можно привести к схеме, показанной на рис. 7.5.
Машины постоянного тока — многообмоточные машины.
Большинство схем двигателей и генераторов постоянного тока можно привести к
упрощенной схеме с двумя обмотками на статоре по осям d и q и одной
обмоткой на роторе по осям d и q (рис. 7.5). В полной схеме обмотка
якоря представляется симметричной обмоткой wnd, wnq. По оси d на статоре
располагаются две обмотки возбуждения: wB — число витков обмотки
независимого возбуждения и wc — число витков обмотки
последовательного возбуждения. По оси q на статоре расположены компенсационная
159
№м
We
У/Л
w0d
—ьл-
Ум WA
Рис. 7.5. Модель машины
постоянного тока
обмотка с числом витков и>к и обмотка
добавочных полюсов с числом витков
и>д. Машины постоянного тока по
процессам электромеханического
преобразования энергии ближе всего к
синхронным машинам. Уравнения
машин постоянного тока, как и
уравнения синхронных машин, удобно
рассматривать в осях d, q.
Моделирование машин постоянного тока
усложняется наличием нелинейных
связей, обусловленных насыщением,
поперечной, продольной и
коммутационной реакцией якоря, а также
влиянием вихревых токов. Точно учесть
перечисленные выше факторы невозможно. Поэтому при исследовании
машин постоянного тока характеристика холостого хода обычно
линеаризуется, параметры считаются неизменными и не учитываются
вихревые токи.
Исследование динамики машин постоянного тока на ЭВМ с учетом
насыщения, влияние реакции якоря, компенсационной обмотки,
коммутационной реакции якоря представляет большие трудности и чаще
используются физические модели. Фундаментальные работы, обобщающие
коммутацию в вентильных двигателях и двигателях с механическим
коллектором отсутствуют.
Теория установившихся режимов машин постоянного тока исходит
из простейших представлений машины как четырехполюсника с
внутренним сопротивлением
^■н = R% + Rc + ^ + RK ,
где ЯЯ9 /?с, Лд, RK — соответственно активные сопротивления обмотки
якоря, сериесной, добавочных полюсов и компенсационной обмоток якоря.
В уравнениях динамики кроме активных сопротивлений необходимо
рассматривать индуктивности и взаимные индуктивности обмоток,
входящих в простейшую модель машины постоянного тока (рис. 7.6).
При вращении якоря все контуры машины, расположенные на осях d
и q, связаны между собой. Часть связей показана на рис. 7.6. В уравнения
электромеханического преобразования энергии кроме коэффициентов
взаимной индукции между обмотками Л/АВ, Л/дс, А/вх, Мдк и других
необходимо ввести коэффициенты взаимной индукции, обусловленные
продольной, поперечной и коммутационной реакциями якоря, которые
являются специфическими для машины постоянного тока и определяются
конструктивными особенностями коллекторной машины.
160
Рис. 7.6. Модель машины постоянного
тока с магнитными связями
ран
Рис. 7.7. Модель машины постоянного
тока, учитывающая реакцию якоря
Влияние реакции якоря в уравнениях машины постоянного тока
поясняется на модели машины с двумя обмотками на статоре и роторе по
осям d и q (рис. 7.7).
На рис. 7.7 Mp^ М^ —'взаимные индуктивности обмотки якоря в
продольной оси обмотки возбуждения и компенсационной обмотки, MpqB
лЦ>?к — взаимные индуктивности обмотки якоря в поперечной оси с
обмоткой возбуждения и компенсационной обмоткой. Машина постоянного
тока описывается системой нелинейных уравнений, где М^ Ф Mpbd,
М -Ф-М и т.д.
Коммутационная реакция якоря может быть учтена коэффициентами
взаимной индукции Мк м с, Мкжв (рис. 7.6).
Уравнения машин постоянного тока значительно сложнее уравнений
асинхронных и синхронных машин из-за большего числа контуров,
участвующих в преобразовании энергии и сложных нелинейных связей
между ними.
Достаточно точные результаты при исследовании динамики машин
постоянного тока дают упрощенные уравнения, полученные из схемы
замещения цепи нагрузки и обмотки возбуждения.
Используя электрическую схему замещения (рис. 7.8) и учитывая
электромагнитные взаимодействия между обмотками, для обмоток якоря
и возбуждения генератора можно составить следующие уравнения:
d d
d . d .
6-179
161
1
II*
ft*
о
jLJ
"л
"д <-д
ч.
I
"с
*е 1-е
_iM_
и„ ,
°к ^*
"и
"
п
7 1
Рис. 7.8. Электрическая схема
замещения цепи якоря машины
постоянного тока
В этих уравнениях мя —
мгновенное значение напряжения
нагрузки; eVK1 — ЭДС вращения;
Дмщ — падение напряжения на
щеточном контакте; Яяя = RBH —
активное сопротивление цепи
якоря, равное сумме
сопротивлений обмоток якоря, сериесной,
добавочных полюсов и
компенсационной; /ця —ток в цепи якоря;
/ц в — ток в обмотке возбуждения;
Ьця — полная индуктивность цепи
якоря:
К. = к + 1с + Ьл + LK + 2Мас -Mat + 2Af„ ±Ш^ ±2МКЖС -2ММК + М„с,
где Л/со — обратный коэффициент взаимодействия между цепью
возбуждения и якоря (Л/с.о = Мем - MWB); Men — прямой коэффициент
взаимоиндукции между цепью якоря и возбуждения:
Меп = Мшс ±М?Л±Мт -М„ + М„ .
В режиме генератора частоту вращения ротора можно считать
неизменной, поэтому ограничиваются исследованием уравнений напряжения.
При исследовании динамики важно правильно определить
ер* = /(О И учесть действие намагничивающих и размагничивающих
сил. Это можно сделать, используя характеристику намагничивания,
переходную характеристику и соотношения
М =С 1 Ф
еря=Се"Фр«.
где Се, См — коэффициенты, зависящие от данных машины [1,4]; Ф^ —
определяется по переходной характеристике.
Для моделирования на ЭВМ уравнения для режима двигателя
записываются в следующем виде:
_1_
L.
^ = _£^„ф ik, +_„;
dt L. f / « • •
dO
dt
R..
1
2/7CT©, 2/ктю,
и;
G.11)
dt
375
162
где а — коэффициент рассеяния -L-
главных полюсов; Фм — магнит- "*wТ~[н^\уп о I (Г?Ъ ** * [^^*°
ный поток пои холостом ходе: П9т*~\ и* ILU^ l^
ч*' ITN^'J
lH3>-^rB>-lM
ныи поток при холостом ходе;
Фрл — поток реакции якоря, */д — * Ц__
момент инерции двигателя.
На структурной схеме для " *—К; ,
решения уравнений G.11)
двигателя постоянного тока (рис. 7.9) . ,. ф -^
1—6 — блоки усилителей; #1— ф^'П]^!^ "'" ||[^^—*
#4 — блоки нелинейностей. ез 1е °
Вращающееся поле в маши- ***\^
нах постоянного тока создается ГПЧ^^л Г>ч^ *м
многофазной обмоткой якоря, в ^^
которой после преобразователя
частоты протекают переменные Рис. 7.9. Структурная схема для решения
токи (§ 2.1). С точки зрения ма- уравнений двигателя постоянного тока
тематического описания
процессов преобразования энергии не принципиально, каким образом в
воздушном зазоре создается вращающееся поле — с помощью механического
или полупроводникового преобразователя постоянного тока в переменный.
Как отмечалось в § 2.1, машины постоянного тока отличаются от
синхронных машин наличием преобразователя постоянного тока в
многофазный переменный. Машины постоянного тока с механическим
преобразователем частоты имеют коллектор, при этом связь между
механической частотой и электрической — жесткая. В машинах постоянного
тока с полупроводниковыми коммутаторами эта связь может быть гибкой.
Машинные системы постоянного тока с полупроводниковыми
коммутаторами принято называть вентильными. Вентильные двигатели
часто применяются вместо двигателей постоянного тока. Обычно
вентильные двигатели выполняются на базе синхронных или асинхронных машин.
Многие годы теории синхронных машин и машин постоянного тока
развивались различными путями, так как процессы коммутации не
отделялись от рабочих процессов в машине. Если рассматривать процессы
преобразования энергии в воздушном зазоре машины постоянного тока,
то после приведения многофазной обмотки якоря к двухфазной вполне
оправдано применение векторных диаграмм и схем замещения. В
классическом исполнении машины постоянного тока — явнополюсные машины
с неподвижной обмоткой возбуждения. Однако в вентильных машинах
широко применяются конструкции с неподвижными обмотками
переменного тока. Применяют неявнополюсные машины постоянного тока с
компенсационной обмоткой. Обобщение теорий синхронных машин и
машин постоянного тока обогащает теорию электрических машин,
позволяет использовать одни и те же алгоритмы и программы расчета.
163
Если не исследовать коммутацию, то моделирование коллекторных
машин переменного тока можно проводить по уравнениям машин
постоянного тока. В коллекторных машинах переменного тока
преобразователь частоты работает в более тяжелых условиях, так как в нем
осуществляется преобразование переменного тока постоянной частоты в
переменный ток изменяющейся частоты. При этом вращающееся поле имеет
форму еще более отличную от синусоидальной, чем поле машины
постоянного тока [4].
§ 7.4. Трансформаторы, реакторы,
сверхпроводящие индуктивные накопители
Трансформаторы и автотрансформаторы — электромагнитные
преобразователи энергии. В них обмотки неподвижны относительно друг
друга. В большинстве случаев в трансформаторах происходит
преобразование напряжений и токов, однако может преобразовываться число фаз и
частота [4].
Трансформаторы — многообмоточные электротехнические
устройства. Они могут иметь две или несколько обмоток. Если учитывать
вихревые токи в сердечниках, то наименьшее число контуров в уравнениях,
описывающих преобразование энергии в трансформаторах, — три.
Схема многообмоточного однофазного трансформатора приведена
на рис. 7.10, где м>ь ..., wn — число витков обмоток.
Так же, как и для многообмоточных машин, для многообмоточного
однофазного трансформатора (рис. 7.10) могуг быть записаны п
уравнений напряжения G.12):
d
-ut
-и„
d d
1 dt ' dt ,2
M,
2 dt 2
d d
dt " dt n
d d
— M„x —Л/„,
dt '" dt
dt "
dt ь
' dt '
dt
dt
d_
dt
M,.
Л/,
dt '"
d ,
r»+7tL°i
. G.12)
В G.12) ri, r2,..., /V,..., r„ — соответственно активные сопротивления
первой, второй, i-й и и-й обмоток; 1ь L2, ..., Ц, ..., L„ — полные
164
индуктивности обмоток. При записи уравнений
G.12) предполагается, что мощность подводится
к первичной обмотке, а с остальных (и - 1)
обмоток мощность снимается, о чем
свидетельствуют знаки перед напряжениями в уравнениях
G.12). Предполагается, что в магнитопроводе
существует рабочий поток, сцепленный со
всеми обмотками, который определяет взаимную
индуктивность Л/, а каждая обмотка имеет свой
поток рассеяния, обусловленный взаимной
индуктивностью рассеяния /а. Поэтому полные рИс. 7.10. Схема много-
индуктивности обмоток, равные L = Л/ + /с, от- обмоточного однофазно-
личаются друг от друга. Как и в установивших- го трансформатора
ся режимах, рассматривается приведенный
трансформатор с одинаковым числом витков обмоток. Хотя каждый
отдельный ток создает свой поток, при анализе работы трансформатора
удобно говорить об общем рабочем потоке трансформатора и потоках
рассеяния обмоток.
В трансформаторах энергия магнитного поля концентрируется, в
основном, в магнитопроводе и небольшая часть — в пространстве,
занимаемом полем рассеяния. Как и в электрических машинах, из-за
нелинейности коэффициентов в G.12) в магнитном поле трансформатора
появляются высшие гармоники. В основном, это гармоники, связанные с
насыщением магнитопровода — нелинейностью взаимной индуктивности.
Исследование динамики трансформаторов важно для определения
ударных токов, перенапряжений, динамической стойкости и влияния
трансформаторов на сложные переходные процессы в энергосистеме.
При исследовании динамики в трансформаторах при несинусоидальном
несимметричном напряжении питания, так же, как при исследовании
вращающихся машин, можно пользоваться уравнениями двух-, трех-
обмоточного трансформатора, когда напряжения несинусоидальны.
Можно также вводить фиктивные контуры, к которым подводятся
синусоидальные напряжения первой и высших гармоник. При этом в
ненасыщенном трансформаторе связи между фиктивными контурами отсутствуют.
Для учета насыщения вводятся либо нелинейности в уравнения
трансформатора, либо контуры, к которым подводятся напряжения
соответствующих высших гармоник, возникновение которых связано с насыщением.
Хотя уравнения трансформатора значительно проще уравнений
вращающихся машин, моделирование процессов в трансформаторах
затрудняется большим разбросом значений номинальных токов и токов
короткого замыкания.
Многофазные трансформаторы могут иметь для каждой фазы
отдельную магнитную систему или общую магнитную систему (рис. 7.11, а).
165
а)
S)
3 1111
i з э эт "•
Рис. 7.11. Различные схемы электромагнитных преобразователей
Чтобы все фазы многофазной системы находились в одинаковых
условиях, целесообразно делать кольцевую, объемную, а не плоскую магнитную
систему. В зависимости от решаемой задачи можно учитывать магнитные
связи между фазами или рассматривать процессы отдельно в каждой фазе
со сдвигом во времени. Несимметричные короткие замыкания, сложные
переходные процессы в энергетических системах в первую очередь
следует анализировать с учетом элементов системы — электрических
машин, выключателей и линий электропередачи.
В автотрансформаторах наряду с магнитной связью между
обмотками имеется электрическая связь (рис. 7.11, б). Так как токи в первичной и
вторичной обмотках трансформатора имеют встречное направление, при
объединении обмоток в автотрансформаторах при небольших
коэффициентах трансформации достигается экономия материалов. При анализе
процессов преобразования энергии в автотрансформаторах обычно
используются математические модели трансформаторов.
Если в трансформаторе оставить одну обмотку или в
автотрансформаторе не делать отпаек для вторичного напряжения, то получим схему
реактора (рис. 7.11, в). Реакторы используются для ограничения токов
короткого замыкания. Они могут выполняться со стальным сердечником
или без него. Для регулирования реактивной мощности выпускаются
регулируемые реакторы, или дроссели насыщения. В последние годы для
подавления высших гармоник в энергосистемах часто применяются
фильтры.
Математические модели перечисленных выше электротехнических
устройств записываются на основе уравнений трансформаторов. Хотя в
реакторе всего одна обмотка, но она, как правило, состоит из нескольких
параллельных ветвей. При определении распределения токов в
параллельных ветвях и проводниках необходимо применять уравнения G.12).
Если индуктивную катушку выполнить го сверхпроводящего
материала и использовать ее при сверхнизких температурах, то получим
сверхпроводящий индуктивный накопитель [4,8].
Электрические машины — не только электромеханические
преобразователи, они являются и накопителями энергии. Энергия в электриче-
166
ских машинах запасается в виде кинетической энергии вращающихся
частей и в виде энергии магнитного поля.
Наиболее перспективные накопители — сверхпроводящие
индуктивные накопители, которые представляют собой сверхпроводящие
катушки индуктивности. В сверхпроводящем индуктивном накопителе
энергия запасается в постоянном магнитном поле. В конструкции
отсутствуют ферромагнитные сердечники.
В 60-х годах были открыты сплавы и соединения, сохраняющие
сверхпроводящее состояние в сильных магнитных полях при высоких
значениях тока, протекающего по сверхпроводнику (до 200 А/мм2).
Созданы сверхпроводящие индуктивные накопители на энергию
30 МДж. Обычно они отдают энергию в виде импульсов.
Современные сверхпроводящие накопители имеют максимальный ток в
импульсе 10 000 А и напряжение 50 кВ, максимальную мощность 500 МВт
при длительности импульса 5 мс.
Количество накоплений энергии определяется обычным
соотношением W = Ll\ /2, где L — индуктивность катушки; 10 — ток,
протекающий в обмотке.
Для большинства сверхпроводящих материалов зависимость
критической плотности тока Ус от индукции магнитного поля В, превышающей
4—5 Тл, с достаточной точностью аппроксимируется выражением Bjc =
= const. При создании сверхпроводящих соленоидов выявилось явление
деградации, заключающееся в снижении критического тока по
сравнению с током длинной прямой проволоки.
Снижение критического тока в катушке объясняется
неравномерностью распределения тока в массивном проводнике. Проводник можно
представить в виде бесконечного числа токовых слоев, каждый из
которых находится в условиях, отличающихся от условий других слоев.
Индуктивные сопротивления слоев, лежащих внутри катушки и на
ее периферии, различны. Чтобы выровнять сопротивления токовых слоев,
надо применить транспозицию. В сверхпроводниках это обеспечивается
выполнением их из тонких слоев и скруткой.
Для расчета допустимого критического тока могут быть
использованы формулы многообмоточных систем G.12) при условии г = 0.
Обеспечение устойчивости магнитных систем сверхпроводящих
накопителей связано с транспозицией элементарных нитей обмотки и
секционированием катушек.
Для сверхпроводящих индуктивных накопителей количество
сверхпроводника, необходимое для накопления заданного уровня энергии,
является основным фактором, определяющим стоимость их создания и,
значит, конкурентоспособность с накопителями энергии других типов.
Применение секционированной обмотки облегчает решение одной из
167
самых серьезных технических проблем, возникающих при разработке
магнитных систем сверхпроводящих индуктивных накопителей,—
проблемы обеспечения высокой токонесущей способности проводника при
низком уровне потерь энергии в рабочих режимах и высокой надежности.
При параллельном включении секций величина полного тока,
протекающего в магнитной системе, определяется числом секций, а
распределение токов по секциям — соотношением эффективных индуктивностей
секций. Изменяя размеры секций и величину зазоров между ними, можно
обеспечить равенство тока в них, транспонировав проводник в масштабе
всей обмотки.
Секционировать сверхпроводники можно в аксиальном и
радиальном направлениях. При секционировании и оптимальном выборе
величины аксиальных и радиальных каналов при том же объеме
сверхпроводника запасенная в сверхпроводящем индуктивном накопителе энергия
магнитного поля увеличивается. Для каждой магнитной системы существует
своя оптимальная геометрия, при которой обеспечивается лучшее
использование дорогостоящего материала обмотки.
В сверхпроводящем индуктивном накопителе, хотя и отсутствует
стальной магнитопровод, а магнитный поток замыкается по воздуху, говорят
о магнитной системе накопителя, имея в виду обмотки и магнитное поле.
В сверхпроводящих индуктивных накопителях наиболее ярко
проявляется представление о неразрывной связи магнитного поля и системы
токов. Можно представить тончайшие токовые слои, с которыми связаны
мельчайшие дискретные участки поля. Результирующее поле состоит из
бесчисленного числа элементарных полей, а результирующий ток — из
бесконечного числа токовых слоев.
В сверхпроводящих индуктивных накопителях наиболее четко
проявляется представление о независимом существовании магнитного поля,
связанного с током, и результирующего поля как суммы полей,
полученных в результате наложения бесчисленного числа элементарных полей,
связанных с элементарными токовыми слоями. Дискретное
представление магнитного поля оправдывает применение принципа наложения в
линейных и нелинейных системах и придает более глубокий смысл
представлению о независимом существовании магнитных полей.
Сверхпроводящие магнитные системы используются в качестве
обмоток возбуждения крупных синхронных машин. Создан турбогенератор 300
МВт со сверхпроводящей обмоткой возбуждения. Создание таких
турбогенераторов позволяет подготовить условия для проектирования
турбогенераторов, которые в традиционном исполнении не могут быть выполнены.
Электрические машины со сверхпроводящими обмотками имеют
более высокий КПД, так как не требуется мощность для создания поля
возбуждения, и меньшую массу по сравнению с машинами традиционного
исполнения.
168
Для создания математических моделей электрических машин со
сверхпроводящими обмотками полностью применимы теория и
математическое описание процессов преобразования энергии, рассматриваемые
в данной книге.
Основные положения теории электромеханического преобразования
энергии, получившие развитие при изучении и создании ЭП, работающих
при нормальных температурах, с успехом оправдываются при
сверхнизких температурах. В свою очередь, изучение сверхпроводящих
индуктивных накопителей дает новые стимулы для развития теории
электромеханического преобразования энергии.
§ 7.5. Асинхронный двигатель с двойной клеткой.
Учет влияния вихревых токов
Модель машины с одной обмоткой на статоре и двумя обмотками на
роторе можно использовать для исследования машин с короткозамкну-
тым ротором с двойной клеткой и для учета вихревых токов в роторе.
Установим, что следует понимать под вихревыми токами в коротко-
замкнутом роторе. При расчете двигателя, как правило, учитывают
действие одной короткозамкнутой обмотки, т.е. стержней и колец. При этом
не учитывают, что сердечник ротора электропроводен и в нем возникают
токи, а также и то, что обмотка от сердечника не изолирована, т.е. в
расчетных методиках физический процесс идеализируется. Это можно было
бы считать допустимым, если бы в некоторых случаях не требовался
уточненный расчет пусковых характеристик в режимах работы
двигателя, когда частота тока в роторе становится близкой к частоте питающей
сети, а при реверсе противотоком даже превышает ее вдвое.
В высокочастотных двигателях на 400—1000 Гц влияние вихревых
токов заметнее. Если из сердечника ротора удалить короткозамкнутую
обмотку и оставить сердечник ротора с пустыми пазами, то при
подключении статора к сети ротор будет вращаться с устойчивой скоростью
даже при изолированных между собой листах активной стали сердечника.
Соединив листы активной стали пакета медными стержнями, плотно
посаженными в пазы, получим короткозамкнутый ротор. Двигатель с
таким ротором без короткозамыкающих колец, т.е. с разомкнутой
клеткой, развивает момент вращения, разворачивается до устойчивой
скорости, может нести нагрузку, равную примерно одной трети номинальной.
Если в первом случае ротор вращается под действием вихревых токов,
возникающих в каждом листе активной стали сердечников, то во втором
случае — под действием вихревых токов в контурах сталь—стержень—
сталь.
169
Такие контуры в любом короткозамкнутом роторе существуют и
даже в более ярко выраженной форме, поскольку листы пакета активной
стали ротора обычно не изолируются друг от друга, а «беличья клетка»
выполняется, как правило, заливкой алюминием, т.е. электрически
надежно контактирует с пакетом сердечника.
Таким образом, двигатель с одноклеточным ротором по схеме
замещения подобен трансформатору с одной первичной и одной вторичной
обмотками только в том случае, когда короткозамкнутая обмотка ротора
изолирована от стали, а пакет сердечника ротора собран из тщательно
изолированных друг от друга листов активной стали. Если этого нет, то
схема замещения двигателя должна быть аналогична схеме замещения
многообмоточного трансформатора с числом вторичных обмоток,
равным числу рассматриваемых контуров, или схеме с двумя вторичными
обмотками, если свойства всех контуров вихревых токов в роторе
суммируются в одной интегральной обмотке вихревых токов.
Модель обобщенного ЭП позволяет учесть влияние всех контуров
вихревых токов; каждый контур вплоть до контуров в отдельных листах
шихтованной стали можно представить в виде самостоятельной обмотки
со своими параметрами.
Приведя контуры вихревых токов к одной эквивалентной обмотке
можно рассматривать машину с одной обмоткой на статоре и двумя
обмотками на роторе (см. рис. 5.1), считая, что эта схема позволяет учесть
вихревые токи в роторе обычной асинхронной машины.
Уравнения напряжения для машины (см. рис. 5.1) в координатах а, Р
после преобразований имеют следующий вид:
dL u„ R, . М di,ln M й\гГп
*jg _
-»«,--
dt L, L, m L, dt L, dt
^L = H±-3i.i М Л'* М Л"»
dt L. L.%* L. dt L. dt
^!«-=Jk,- -J*Li x* oAf 1 м dt„ Mrdirla
dt Lrl
Л'9 _ Rn
W**'"*!»1-*} Lrl dt Lrl dt 'GЛЗ)
dt L. *
(M M Л Mdi^ M,dirW
ur\
{Lr> « ~ LrX ~) Lrl dt Ln dt
dina _ Rn . [ M . . Mr .
dt ~ Lr2'rla Л42,,* + 1'Ч1+4Г,Л
M dim M, di,la
Кг dt L,2 dt
^p___A2_; ^SlL, ^, +*L; 1 Mr a'V M di*
* k;'"'^
j га гдх j
Lrl dt Lrl dt
170
где Мг -^ взаимная индуктивность обмоток ротора.
Индуктивности обмоток статора и ротора в G.13):
1,=А/ + /Л, Zrl=M + Lrlo, Lr2=M + Lr2a, G.14)
где lsa, lr\a, lr2a — индуктивности рассеяния обмоток статора и ротора.
Уравнение движения для схемы машины с двумя обмотками на роторе
dv/dt = \/(J/p)[(mp/2)M(yrla -imirli + i#ir2a -iJrifi)]-Mc- G.15)
Система уравнений G.13) и G.15) описывает процессы
преобразования энергии в асинхронной машине с учетом вихревых токов в роторе.
Можно показать, что для установившегося режима, когда скорость
вращения ротора постоянна, дифференциальные уравнения G.13)
преобразуются в комплексные уравнения для фазы двухклеточной
асинхронной машины. Заменив в уравнениях напряжений G.13) оператор
дифференцирования наую, для установившегося режима получим
й# = R,U + №,U + УюА^пэ + J<u№rli;
+ Mr/r2pv + y©A/r/r2a;
- ^np = KiKv + JnLJn*+ >^з - ^a v;
- 4l'rlaV " Mr'lrlaV + j®K*,2» S .*; ; G.16)
- Ur2a = Rjr2a + ycDlr2/r2a + j®Mn + M/,p v + Ir2/r2pv +
+ Mr/rlpV + ycoMr/rIct;
- ^r20 = KlKlt + Mrl'r* + >^ - Мя V - Ir2/r2a V -
-Mr/rlav + ycoMr/rip.
Подставив соотношения G.14) в уравнения G.16), разделив члены
уравнений, содержащие выражения ЭДС вращения, на частоту
напряжения сети, получим
U^ = RsL + У*|Л« + JXoL + Ao^rle + АЛ* i
^ip = Я,/,э + JX\I# + /*oAp + АЛ10 + АсЛгр'
" ^rla = Л,Л|« + ./Vrl« + УVrla + УV« + V*V' +
+ (x2 + x0 )/rip v' + jx'Ir2a + ух0/
r2a + x /r2pV + x0/r2p v'; G.17)
"" ^rlp = KJrty + JXl*r\$ + JXo'rty + УХоЛр "" *<ЛаУ ~
171
- (х2 + х0 )/г|а v' + у*7г2р + jxjr2fi - х7г2аv' - х0/г2аv';
+ (х2 + x0)/r23v4yx7rIa +>0/г1а +x7ripv4x0/ripv^; G.17)
"" ^г20 = ^V2 *r20 + /*з'г2Э + JX0*r2fl + АоЛр "" *0*jaV ~
-(х2 +x0)/r2ov4yx7rip +yVnp -^n«vf-VneV-
B уравнении G.17) принято: *i = co/ja; х2 = a>/ri0; *з = Ызв5 *о = юМ;
v' = v/co; v = d9/A; х' — сопротивление взаимной индукции обмоток
ротора.
Учитывая, что
Ла ~* Рф у Via ~* .A* rip » *г2а " J'rty >
G.18)
процессы в симметричном режиме можно рассматривать лишь для одной
фазы машины. Тогда, подставив соотношения G.18) в уравнения G.16)
для одной фазы, получим:
й, = R,i, +АЛ +jx„0,+iri +Л2);
-UrX = Rrjrl +£2/г1A-v0+A.(l-v«)/rI + £,A-V)/. +
+Mi-V)/,2+AoO-vO/,i;
- t/,u = КгК г + Mi A - V)+>00 - v')/r2 + /t,(l - V)/. +
+ Ml-V)/ri+AoO-V)/„. G-19)
После приведения обмоток ротора к обмотке статора и введения
намагничивающего тока /„=/,+ i'r} + I'ri в уравнения G.16) получим
U,=R,i,+jxj,+jxJ9\ |
о=я;,/;,+у*;/;,*+/*,*/,+>w;2; G.20)
о=л;2/;2+jx'3i'r2s+jx0si0+у*'*/;,.]
Здесь s — скольжение.
После преобразований из уравнений G.20) получим систему G.21),
описывающую классическую схему замещения двухклеточной
асинхронной машины:
#,=/,*, + /,*,; .
о=i0z0+/;,z2+/;,*;, о -*)/*+К/;2;
o=/0z0+/;2z2+/;2/?;2(i-S)A+a2,/;i;
G.21)
172
Для решения уравнений машины с двумя обмотками на роторе на
ЭВМ целесообразно использовать модель с уравнениями токов, как
наиболее предпочтительную для исследования машин с изменяющимися
параметрами. Более устойчивая модель с уравнениями потокосцеплений
становится неудобной при исследовании машины с изменяющимися
параметрами обмоток, поскольку для изменения какого-либо одного
индуктивного сопротивления требуется пересчет всех коэффициентов в
уравнениях и перестройка такого же количества коэффициентов усиления на
модели.
Исследовать машину с двумя обмотками на роторе с помощью АВМ
можно лишь при постоянных параметрах обмоток. При изучении
процессов в широком диапазоне изменения скольжения целесообразно выбирать
параметры для скольжения, отвечающего начальной стадии переходного
процесса. Решать задачу при переменных параметрах обмоток можно с
помощью ЭВМ. Решению уравнений должно предшествовать
определение параметров контуров. Определение параметров интегрального
контура вихревых токов можно обосновать идентичностью параметров
интегрального контура и массивного ротора того же размера.
Экспериментальные исследования и расчеты подтверждают, что при
учете роторных вихревых токов обеспечивается более высокая
сходимость опытных данных с расчетными. Расхождение электромагнитных
моментов с учетом и без учета контура вихревых токов для двигателя
АОЗ-24-4 при частоте 50 Гц составляет -10%, а для АОЗ-24-4 при частоте
400 Гц 16%. Расчеты показывают, что неучет влияния роторных
вихревых токов приводит к большим погрешностям для двигателей
повышенной частоты, где наблюдается более ощутимая доля влияния
вихревых токов на электромагнитный момент.
Любой асинхронный двигатель надо рассматривать как
многоконтурную систему. Роторные вихревые токи можно учитывать путем
введения в схему замещения интегрального контура вихревых токов. Учет
влияния этого контура необходим при расчетах динамических режимов и
в установившихся режимах при работе двигателей в широком диапазоне
изменения скольжения, а также для двигателей повышенной частоты.
Вихревые токи оказывают значительное влияние на механическую
характеристику. На рис. 7.12 М\ —
механическая характеристика токов
рабочей обмотки, Мг — вихревых токов.
Так как контур вихревых токов имеет
большое активное сопротивление,
критическое значение скольжения этой
механической характеристики находит- ° 5« -W'
ся в области больших скольжений. Ре- Рис. 7.12. Механическая характе-
зультирующая механическая характе- ристика асинхронного двигателя
173
ристика Мрез получается после
наложения двух механических
характеристик М\ и М2.
Механическая характеристика
асинхронного двигателя имеет
четыре характерные точки: номиналь-
1 Г ный момент Л/ном при smu, близком к
Рис. 7.13. Механическая характери- нУшо^ максимальный момент Мтах
сгика с учетом высших гармоник при sK9 пусковой момент при s = 1 и
минимальный момент при smin.
Провал в механической характеристике — уменьшение момента при s « s^ —
объясняется влиянием вихревых токов (рис. 7.12). Увеличение пускового
момента связано с влиянием в области больших скольжений момента
вихревых токов.
Как было отмечено в гл. 6, высшие гармоники искажают
механическую характеристику, но вблизи своей синхронной угловой скорости
вращения они создают узкие глубокие провалы характеристики момента
(рис. 7.13).
Механическая характеристика вихревых токов является
интегральной характеристикой влияния многочисленных контуров на процессы
преобразования энергии в асинхронной машине. Поэтому, изменяя
сопротивление контуров, можно менять наклон и вид механической
характеристики. Когда сопротивление контуров вихревых токов будет равно
нулю, характеристика М2 сольется с М\.
Изменяя параметры контуров ротора, можно получить
механическую характеристику асинхронной машины любого вида, лежащую в
пределах незаштрихованной зоны на рис. 7.13 и прямой, которая является
геометрическим местом точек максимального момента при изменении
скольжения.
Анализ уравнений асинхронной машины с двумя контурами на роторе
приводит к выводу, что все механические характеристики М^
ограничиваются характеристикой двухобмоточного двигателя без учета контуров
вихревых токов М\ и характеристикой двигателя с массивным ротором А/*
§ 7.6. Математическая модель
асинхронного двигателя с учетом
вихревых токов в статоре и роторе
Учет влияния контуров вихревых токов на статоре и роторе
необходим при расчетах динамических режимов и в установившихся режимах
при работе двигателей в широком диапазоне изменения скольжения.
174
Пространственная модель электрической машины с двумя
обмотками на статоре и роторе и круговом поле в воздушном зазоре содержит
четыре обмотки по осям аир (см. рис. 5.2). Считая, что между
обмотками статора и обмотками статора и ротора взаимная индуктивность
определяется М, а взаимная индуктивность обмоток ротора А/„ после
соответствующих преобразований получаем уравнения:
dt L
R.,
-».!„ ~-
М di,
г2о
М dL
Ltl dt L3l dt
di,
ila _
dt
\г2
M di.
usl
u»2
dt
dt
M di,.
us2
us2
dt
di
rla _
dt
R.,
' M . M . M, . ]
~T~ '** +l~''2»+lrl» + _Г-,г2Р "
>rl Lr\ Lr\ J
M di
jla
M di
L„ dt
j 2a
M, di
rla
dt
dt
di.
/2a _
dt
R.
Ma ~v\
M di,.
M
M
'*ip
"'*2р+,г2р'
M,
'ПР
: M <#,2a
dt
url
dt
Mr dirla
L., dt
dt
dis2<t
dt
dt
",.p
Rr
L,
R,x . M dim M ditl{i M diri(i
7~гч» ~
dt
dt
dt
R.
'j2P~
M dirlfi M di,v M dim
">2
u»2
dt
us2
dt
u»2
dt
rip Rrl . \M . M . . Mr .
M di,y M di,i9 Mr dirl9 Mr dir^
dt
di
r2P
R.
dt
-*Г2Р +VI
Lrj dt
M
1
dt
»la
M .
. dt
M,
rla
M ditlfi M <fl,2p M, dirV
ur2
dt
ur2
dt
ur2
dt
G.22)
-Jt = y(J/P)[(mP/Z)M(Wrla ~ Wr.p + ',.p'r2a " Wr2P +
+'j2p'rla - '*2a'rlp + 'j2p'j2a ~ Ma'rty) ~ ™e J.
G.23)
175
Из G.22), заменяя dldt на у'©, можно получить уравнения
установившегося режима:
^2=0 = /,2zf2+/«z.;
-£/„ =0 = /;,г;1 +/Л +Vri(y-s)ls + jx'Vn; G.24)
-i/r2=o=/;2r;2+/A+/^^2(i-*)/j+/r'/;I;
В G.24) сопротивления по осям обмоток аир считают
одинаковыми, токи и напряжения имеют обозначения, говорящие об отношении к
первой или второй обмотке статора или ротора.
Решив G.22) и G.23) на ЭВМ, можно оценить влияние контуров
вихревых токов на динамические и статические режимы работы
асинхронных машин.
Как показывают исследования, для асинхронного двигателя мощностью
7 кВт степень влияния контура вихревых токов на время разгона больше,
чем роторного контура вихревых токов. На ударный ток в обмотке статора
одинаково влияют контуры вихревых токов ротора и статора. Применяя
метод планирования эксперимента для двигателей различной мощности с
разным числом полюсов, можно оценить влияние контуров вихревых токов
статора и ротора на динамические и статические характеристики.
При наличии нескольких контуров, участвующих в процессе
преобразования энергии, большое значение имеет точность определения
параметров обмоток. В многоконтурных схемах для этого целесообразно
использовать частотный метод. Параметры контуров вихревых токов
статора можно определить по величине потерь в стали. Чем более полно
методика расчета учитывает технологические факторы, тем точнее
результаты. Влияние вихревых токов на характеристики машины обусловлено
взаимодействием всех коэффициентов, входящих в G.22) и G.23). Выбор
толщины листов стали ротора и статора, сорта стали, тех или иных
технологических операций определяется после исследования G.22) и G.23),
а также с учетом экономических факторов.
По уравнениям G.22) и G.23) можно в динамических режимах
определить распределение токов в параллельных ветвях обмотки, считая, что
обмотки на статоре или роторе соединены параллельно. Даже при небольших
расхождениях в значениях индуктивных и активных сопротивлений
параллельных ветвей токи по ветвям распределяются неравномерно, что
оказывает влияние на нагрев машины в переходных и установившихся режимах.
Математическое моделирование ЭП с учетом нескольких контуров
на статоре и роторе позволяет решать многочисленные практические
задачи электромашиностроения [4].
176
Глава 8
Математические модели электрических
машин с нелинейными параметрами
§ 8.1. Подход к анализу электрических машин
с нелинейными параметрами
Как уже отмечалось, система уравнений динамики при постоянных
коэффициентах нелинейна, так как в нее входит уравнение
электромагнитного момента, содержащее произведения зависимых переменных —
токов. При переменной частоте вращения система уравнений
электромеханического преобразования энергии не имеет аналитического решения.
Рассмотрим влияние на процессы преобразования энергии в ЭП
нелинейных коэффициентов в уравнениях электромеханического
преобразования энергии (Z,, M,lmrur2nJ)H независимых переменных (U,f9 Mc).
Все коэффициенты, входящие в уравнения, могут быть нелинейными.
Активное сопротивление ротора изменяется за счет вытеснения тока, а
активные сопротивления статора и ротора зависят от нагрева.
Индуктивные сопротивления связаны с насыщением. Момент инерции в некоторых
приводах зависит от частоты вращения ротора. Параметры зависят от
напряжения, нагрузки и других показателей, но в общем случае являются
функциями времени.
Возможны два подхода к анализу уравнений электромеханического
преобразования энергии с нелинейными
коэффициентами. Один из них состоит в том,
чтобы в уравнениях вместо постоянных
коэффициентов использовать нелинейные
коэффициенты. Второй подход состоит в
замене уравнений с нелинейными
коэффициентами бесчисленным числом линейных
уравнений с постоянными коэффициентами.
Пространственная модель машины с
нелинейными коэффициентами с одной парой
обмоток на статоре и роторе показана на рис. 8.1. Рис. 8.1. Модель элекгри-
Схеме машины рис. 8.1 соответствуют урав- ческой машины с нелиней-
нения (8.1)—(8.3): ными параметрами
Lt(t)r,(t)
177
г
«i«
«m
U*
U*
L
=
г,@ + ^1,(/)
-Л/(/)ш,
О
dt
M(t)
r2(/) + ^L2@
Zj(/)CU,
-z,2(/K r2(o+—12@
a/
J/
M@
0
тж
i™
r,(/)+^A@
X
',«
'm
'*
/fP J
^. = ^[Мэ_Мс(/)].
Л J(/) э
(8.1)
(8.2)
(8.3)
В (8.1) в обозначениях параметров обмоток индекс 1 относится к
статору, а индекс 2 — к ротору.
С одним нелинейным коэффициентом уравнения (8.1)—(8.3) могут
решаться на ЭВМ с использованием нелинейных блоков. При двух-трех
нелинейных коэффициентах используются ЦВМ.
Нелинейность хотя бы одного коэффициента в уравнениях
электромеханического преобразования энергии приводит к появлению
бесконечного спектра гармоник поля, а уравнения становятся сходными с
уравнениями обобщенного ЭП. Отличие состоит в том, что при составлении
модели берется одинаковое число обмоток на статоре и роторе, а
определение связей между гармониками (в модели —связей между фиктивными
обмотками) имеет особенности для каждого параметра. При изменении
нагрузки или напряжения на выводах ЭП связи между гармониками (в
уравнениях — взаимные индуктивности) не остаются постоянными.
Процессам преобразования энергии в воздушном зазоре
симметричной двухфазной насыщенной машины с одной парой обмоток на статоре
и роторе при синусоидальном симметричном напряжении питания
аналогичны процессам в машине с т обмотками на статоре и роторе (см. рис. 6.1).
Трехфазной машине соответствует модель, представленная на рис. 4.5.
Так как в зазоре имеется спектр полей, то каждую гармонику поля в
модели обобщенного электромеханического преобразователя можно
создать, выбирая пару обмоток на статоре или роторе и подавая на их
выводы синусоидальные напряжения соответствующей амплитуды и частоты
с определенным сдвигом по фазе, как это делалось при исследовании ЭП
с несинусоидальным напряжением питания (см. § 6.1).
Модели ЭП (рис. 7.1) соответствуют уравнения напряжения (8.4).
Уравнение момента получается из D.16) путем замены индекса п на т.
178
об
I I *
J .-? J
t s- 3
af s>
3 3
о э э
Si Si
e t ?
si si
з"
1
3
5
1 J
«a «a
•«l-s-el^
1 J
af af ••
It*
• s? af af -
f -? »
+
v.-
о.
• af
!
' a?
J s5
! ^ af
+« ■*!*
af af af
•o|^
I I
a- af
"в I ^-ч 1-5
J з
•в I-в I
+ аз
J '
a»
i
i
a» af
af
I
I Д
аз" af
!
af af
^ s s
i
sf sf af
•? af af
i
t -
a! a4
a4
Отличие уравнений с нелинейными параметрами (8.4) от уравнений
при несинусоидальном напряжении питания F.1)—F.5) состоят в том,
что в (8.4) появляются связи между гармониками, которые в уравнениях
ЭП отражаются выражениями Мп, Afi3, ..., Mim ..., М^у,. Определение
этих связей будет рассмотрено ниже.
При исследовании уравнений с нелинейными коэффициентами, а
также при анализе уравнений ЭП с постоянными коэффициентами
широко применяется принцип наложения.
Таким образом, исследовать электрическую машину с нелинейными
коэффициентами можно, используя две формы записи уравнений. Задав
параметры в виде функций, зависящих от токов, времени или других
факторов, реализовать эти функции на нелинейных блоках АВМ или в
виде таблиц на ЦВМ и решить (8.1)—(8.3). Второй путь — выбрать
необходимое число гармоник в /w-обмоточной машине, составить систему
уравнений, описывающих работу машины (8.4), и решить их на АВМ и
ЦВМ при постоянных коэффициентах, определяющихся теми или иными
факторами (нагрузкой, температурой, напряжением и т.п.). Оба подхода
дают приближенные решения.
Уравнения с учетом гармоник громоздкие, но они дают большие
возможности для исследования. Например, по ним можно определить
влияние каждой гармоники на момент, учитывать токи различных
гармоник, изменять связи и т.п. Решение уравнений (8.1)—(8.3) более простое,
но многие задачи по ним решать труднее или вообще невозможно.
Уравнения с нелинейными параметрами не имеют точного решения,
что хорошо видно из анализа системы (8.4). Однако можно, применяя
ЭВМ, получить высокую точность, которая необходима при решении
практических задач.
§ 8.2. Учет насыщения
При проектировании электрических машин для снижения массы
машины рабочая точка выбирается на нелинейном участке характеристики
намагничивания. При изменении напряжения, частоты и нагрузки
насыщение изменяется, а это влияет на характеристики машины. В
переходных и установившихся режимах необходимо учитывать характер
изменения во времени индуктивностей и взаимных индуктивностей.
При учете насыщения в уравнениях электромеханического
преобразования энергии необходимо учитывать изменение во времени I, М и /0.
В общем случае L = fx(j), М = /2(/) и /с = /3(/). При этом
индуктивности рассеяния обмоток статора и ротора, а следовательно, и полные
индуктивности Ls и Lr изменяются по-разному.
180
В первом приближении можно считать, что поток рассеяния
замыкается по воздуху и индуктивности рассеяния статора и ротора не зависят
от насыщения. Затем можно сделать допущение о том, что L и М
изменяются по одному и тому же закону:
Z,(/) = A#(/) + /e; Lr(t) = M(t) + lar. (8.5)
Тогда
*« = 4W- + Щ*Ут; ч+ = 4 С)/* + А/(/)/„;
Для упрощения структурной схемы решения уравнений с
нелинейными L и М введем новые переменные:
'та = 'я + 'га » 'яф = '*Р + 'гр » (8-7)
что позволит сократить число произведений при моделировании
уравнений. Сумма мгновенных значений токов в статоре и роторе по осям аир
есть соответственно мгновенное значение намагничивающего тока по
осям аир.
Уравнения для двухфазной машины после преобразований с
использованием (8.5) и (8.7) с учетом M=f(i) примут вид
( d \ d
* К ' Am)* dt '"* (8.8)
Um =iRr +^/or)ra +^M(/)/^ +C0^[I^ + M(/)/-P];
Уравнение электромагнитного момента
M,=pMW,*im-U«\- (8-9)
В машинах с большим рассеянием можно учитывать только
нелинейное изменение индуктивностей рассеяния, тогда с учетом того, что
ад = А/ + /ш(/), Lr(/) = M+ /„(/), (8.10)
уравнения (8.8) преобразуются:
Аналогично преобразуются уравнения для wra, и,р и м,р. Уравнение
момента имеет вид (8.9) и при постоянном М.
181
Более сложные уравнения и программы получаются при
использовании ЭВМ, когда выбираются различные законы изменения Ь,Ми /9.
Как показывают исследования уравнений (8.1)—(8.4), (8.6) и (8.11),
индуктивные сопротивления рассеяния влияют на величину ударных
токов, моментов и время разгона больше, чем сопротивление взаимной
индукции. Характер изменения Ми/„ влияет на вид токов и моментов, но
меньше влияет на время разбега и значения ударных токов и моментов.
Определяющим является значение параметров в начальный момент
переходного процесса. Поэтому в первом приближении можно не учитывать
изменение М и /а, а решать уравнения с постоянными коэффициентами,
подставляя в них значения параметров с учетом насыщения. В конце
переходного процесса статические характеристики определяются
параметрами в установившемся режиме. В переходных процессах, описываемых
уравнениями с нелинейными коэффициентами, происходит изменение
параметров, влияющее на процессы преобразования энергии в меньшей
степени, чем влияют начальные условия.
Переходные процессы в насыщенных машинах протекают иначе,
чем в ненасыщенных машинах. Машина в течение первых одного-двух
периодов забирает из сети необходимую для разгона мощность, а затем
происходит обмен мощностью между сетью и машиной. В зависимости
от параметров скорость ротора ЭП может превышать синхронную
скорость (при малом моменте инерции) или медленно приближаться к
установившейся скорости (при большом моменте инерции). Высоковольтные
двигатели имеют пусковые характеристики, сходные с характеристиками
двигателей с большим моментом инерции. В насыщенной машине
больше ударные токи и моменты, разгоняется она быстрее ненасыщенной.
Выше были рассмотрены уравнения насыщенной машины с
бесконечным спектром гармоник в воздушном зазоре (8.4). Учет связей между
гармониками сложен. Рассмотрим определение связей между
гармониками в насыщенном ЭП на примере трансформатора.
При гармоническом напряжении, приложенном ко входу
трансформатора, полные и взаимные индуктивности обмоток при этом описываются
формулами
Z,, (/) = LQ + Lx cos(co/ + а,) + L2 cosBco/ + а2) +..., (8.12)
M(t) = M0 + Л/, cos(cd/ + а, ) + M2cosBco/ + a2) + .... (8.13)
При этом уравнения трансформатора рассматриваются как
уравнения с периодическими коэффициентами. Однако эти уравнения не
отражают полностью процессов в нелинейном трансформаторе, так как в
цепях с нелинейными параметрами гармоники влияют друг на друга.
Нелинейный (насыщенный) трансформатор является генератором
высших гармоник. Его можно представить как линейный многополюсник с
сопротивлением Z^ (рис. 8.2), у которого на вход подается синусоидальное
182
напряжение wi частоты /ь а на выходе — - ■ — Вы*од
спектр гармоник и,,/,; u2,f2;...; «ьЛ -.•; «W»-
В нелинейном трансформаторе энергия
доставляется одной или несколькими
обмотками с синусоидальной ЭДС одной
частоты, а потребление энергии и обмен
энергиями происходят не только на первой, но и
на высших, низших и дробных гармониках.
Причем сумма мощностей, входящих и
выходящих из многополюсника, на всех
частотах равна нулю.
Свойства линейного w-полюсника с
гармоническими источниками напряжений определяются относительно
вывода матрицей полных сопротивлений Z и комплексными
амплитудами напряжений на выводе Е\9 Е2,..., Eh .... Еп. Предполагается, что каждая
обмотка имеет синусоидальную ЭДС и в ней протекают токи только
одной частоты, так как в каждой обмотке есть идеальные фильтры, не
допускающие протекания токов иных частот.
Если рассматривать трансформатор со стороны выхода, то его
можно характеризовать матрицей:
d
Вход
Рис. 8.2. Представление
нелинейного трансформатора в
вцде линейного шумящего
многополюсника
d d
r.+—Z,. —Mn
1 dt l dt ,2
d d
dt 21 2 dt 2
d d
dt " dt n
d d
L dt "' dt
dt "
—M2,
dt V
' dt '
—Ми,
dt '"
d
-M,
dt
-M...
Матрица сопротивления
2ii Zi? .». Ztj
dt
dt '"
" dt ".
n
. (8.14)
Z =
zn z/2 ... zu
(8.15)
Zn\ Znl ••• Zni ••• Zm
183
Квадратную матрицу (8.15), характерюую1цую
внутренние источники гармонических напряжений,
назовем шумовой матрицей трансформатора. В
матрицах (8.14) и (8.15) физический смысл имеют
члены 21Ь Z22, ..., га, ..., zm, расположенные на главных
диагоналях матриц и представляющие собой
полные сопротивления обмоток эквивалентного
многополюсника. Остальные члены матрицы Z, характе-
_ л„ ТЛ ризуюпще взаимное влияние гармоник в насыщен-
Рис. 8.3. К определе- J хж хж хж Х£ ,
нию коэффициентов ной системе М12, М2Ь ..., Л//т .... Mlm назовем коэф-
связи между гармони- фициетами связи между гармониками различных
ками частот. Такое взаимное влияние гармоник имеется
только в нелинейной системе [4].
Аналитическое определение коэффициентов связи между
гармониками представляет большие трудности, так как необходимо иметь
аналитическое выражение характеристики намагничивания. Поэтому
целесообразно воспользоваться графическим способом определения связей
между гармониками. Если известна зависимость В = ДД) для
синусоидального напряжения основной гармоники (рис. 8.3), то площадь
криволинейного треугольника D пропорциональна взаимной индукции обмоток.
[ В = ДН) третья гар-
[ т.д. При линейной
зависимости В = Д//) высшие гармоники отсутствуют. Исходя из этого,
приближенно рассчитывается коэффициент связи между первой и
третьей гармониками Л/13:
М13 = VAWU D/AOAC = (Х)ШП . (8.16)
где D — площадь криволинейной фигуры D; АО АС — площадь
прямоугольного треугольника ОАС\ Мп — взаимная индуктивность обмоток
ненасыщенного трансформатора.
Определив связи между первой и третьей, первой и /-й гармониками,
можно найти
Ми = (ХЖ„ D/AOAC = (Х)Шц . (8.17)
Коэффициент связи между /-й и (/ - 1)-й гармониками
^-,)/=(Х)[1/0-1)]^п. (8.18)
Рассмотрение насыщенного трансформатора как линейного
многополюсника с внутренними источниками напряжений позволяет
определить обменную мощность каждой гармоники отдельно, а также мощность
всего трансформатора по всему спектру гармоник.
Рассмотрение насыщенного трансформатора как линейного
шумящего многополюсника дает возможность наглядно представить рабочие
Кроме этого, при прямоугольной форме зависимости В
моника составляет /3 амплитуды первой, пятая —V5, и •
184
процессы в умножителях и делителях частоты. Полученные уравнения
удобны для моделирования на вычислительных машинах. Хотя способ
определения связей между гармониками дан на примере трансформатора,
его можно перенести и на вращающиеся машины [4].
Для анализа процессов преобразования энергии в насыщенных ЭП
имеется несколько способов. Однако все они дают приближенные
решения, обеспечивающие обычно необходимую для инженерных расчетов
точность.
§ 8.3. Учет вытеснения тока в пазу
В предыдущем параграфе было рассмотрено влияние нелинейных
изменений индуктивностей и взаимных индуктивностей на динамические
характеристики машины. В этом параграфе исследуется влияние на них
нелинейного изменения активных сопротивлений.
Изменение активного сопротивления обмоток может быть вызвано
изменением температуры, вытеснением тока при изменении частоты и
включении нелинейных резисторов. В большинстве случаев изменение
активного сопротивления под влиянием температуры происходит
медленно и не сказывается на динамике. Включение в силовые цепи
электрических машин управляемых и неуправляемых вентилей приводит к
изменению формы напряжения и исследуется так, как это было
рассмотрено в гл. 6.
При работе ЭП наибольший интерес представляет исследование
влияния вытеснения тока в пазу на динамические характеристики. При
изменении угловой скорости ротора в нем изменяется частота тока, что
влияет на распределение плотности тока по высоте проводника,
находящегося в пазу (рис. 8.4). Ток в проводнике (или проводниках,
соединенных параллельно) изменяется по высоте паза за счет различного
индуктивного сопротивления проводников, лежащих на дне паза и ближе к
зазору. При этом изменяется и
амплитуда токов и фаза.
Распределение А/ по высоте паза показано
на рис. 8.4. Ток распределяется
неравномерно и по ширине паза.
Коэффициент кп
учитывающий увеличение активного
сопротивления за счет
вытеснения тока, зависит от типа
обмотки, геометрических данных паза _
п ч Рис. 8.4. Распределение тока по высоте
(Л, с\ числа и размеров элемен-
Vf#, W, inwio и pcwwivpvo ^tvmwo ЭЛвКТрИЧвСКОЙ МЭШИНЫ
185
а
/
/ s
Рис. 8.5. Зависимость
Кг и Кх от скольжения
(8.19)
кх* к* тарных проводников Bа, Ь\ материала проводников
и частоты тока в них. Индуктивное сопротивление
рассеяния также изменяется за счет вытеснения
тока. Это учитывается коэффициентом кх.
Коэффициенты кгикх при изменении скорости вращения
ротора изменяются по нелинейному закону.
Качественное изменение кг и кх в относительных единицах для
глубокого паза приведено на рис. 8.5.
Определив закон изменения активного и
индуктивного сопротивлений паза, моделируют уравнения
электромеханического преобразования энергии с
учетом изменения сопротивлений обмотки ротора и
геометрии паза.
При исследовании уравнений с нелинейными параметрами обмотки,
зависящими от токов или от времени, удобно пользоваться уравнениями,
записанными в следующем виде:
/,а =о/4Р)^-(л,/4Р)^-(л//4>га;
/,э = о/w* -(Д,/4 Р)/,э -(m/i,)/^ ;
/ш =(Я,/Р)<"га -(l/VpcoJ-Mc^;
/„ = (Лг/Р)а/^ -A/Р)рсо^-Л/ш,р;
d<or/dt = (p/J)(M,-Mc).
В этих уравнениях 1/Р — символ интегрирования; a = l/Z,r;
При исследовании на ЭВМ имеются возможности для раздельного
учета увеличения активного и уменьшения индуктивного сопротивлений
ротора при изменении частоты и их взаимного влияния. Исследование
показывает, что нелинейное изменение активного сопротивления ротора
оказывает наибольшее влияние на динамику при пуске асинхронных
двигателей. За счет вытеснения тока в пазах ротора уменьшается время
разгона, снижаются ударные токи и моменты.
Форма пазов влияет на закон изменения кг и кх, что сказывается на
динамических характеристиках. Однако большее влияние на процессы
преобразования энергии оказывают начальные и конечные значения
сопротивлений. Характер изменения сопротивлений ротора (вид
нелинейной зависимости сопротивлений от времени) имеет второстепенное
значение. Вычислительные машины позволяют провести исследования при
различных комбинациях линейных и нелинейных параметров и
различных законах изменений кг и кх от времени, т.е. для любой формы пазов.
186
Задача учета вытеснения тока в пазу сводится к решению
уравнений машины с многообмоточным ротором, упрощая которые можно
получить уравнения для машины с двойной клеткой. Ротор
асинхронного двигателя с двойной клеткой более трудоемок для исполнения и
имеет больший диаметр, чем ротор с глубокими пазами грушевидной
или бутылочной формы. Подбирая форму паза, можно получить
сходные динамические характеристики для машины с двойной клеткой и
машины с глубоким пазом.
В реальной асинхронной машине на процессы пуска наряду с
вытеснением тока большое влияние оказывают насыщение магнитопро-
вода и вихревые токи. Провести совместное исследование этих
факторов позволяют уравнения многообмоточной машины с нелинейными
коэффициентами.
В машине с глубоким пазом имеется п слоев в проводниках ко-
роткозамкнутой обмотки, которые можно привести к одной обмотке с
нелинейными коэффициентами. Шихтованный магнитопровод ротора
также имеет т контуров, которые можно привести к одному контуру с
нелинейными коэффициентами. В реальной машине таким контуром
является массивный стальной ротор.
В 30-х годах К. И. Шенфер предложил массивный ротор с проф-
резерованными пазами, в которые укладывались медные стержни ко-
роткозамкнутой обмотки. Ротор К. И. Шенфера, представляющий
собой двухконтурную систему, является реальной моделью
многообмоточной машины с п электрическими контурами обмотки и т
контурами вихревых токов.
Для уменьшения влияния вытеснения тока на работу синхронных
машин и машин постоянного тока в установившемся режиме
выполняют транспозицию проводников и уменьшают их сечение. В
асинхронных машинах эффект вытеснения тока используется для
улучшения динамических характеристик.
Осталось рассмотреть влияние последнего коэффициента перед
зависимыми переменными — нелинейного изменения момента
инерции J. Момент инерции может быть нелинейным в динамических
режимах в приводах насосов, компрессоров и других механизмах.
Момент инерции оказывает значительное влияние на длительность
процессов, ударные токи и моменты. Однако вид нелинейного изменения
J влияет на длительность переходного процесса меньше, чем
начальное значение момента инерции. Характерной особенностью
динамических процессов ЭП при изменении J является изменение
кинетической энергии, накапливаемой во вращающихся частях электрической
машины.
187
§ 8.4. Преобразование энергии при изменяющихся
независимых переменных
Обычно в уравнениях электромеханического преобразования
энергии независимыми переменными являются напряжение и момент
сопротивления. В этих уравнениях содержится и частота напряжения,
определяющая частоту тока. В общем случае одновременно могут изменяться
напряжение (и частота) и момент сопротивления, но в большинстве
случаев влияние момента сопротивления на динамические и статические
характеристики электрических машин изучается при неизменных
напряжениях, а изменение Uuf— при постоянном моменте сопротивления.
Исследование переходных процессов при изменяющихся
напряжениях и частоте на выводах двигателя имеет важное значение при
изучении автономных электромеханических систем, когда необходимо за счет
изменения напряжения и частоты получить оптимальный характер
переходных процессов, а также при пуске двигателей, когда мощности
двигателя и источника питания соизмеримы.
Исследовать процессы преобразования энергии в электрических
машинах при изменяющихся напряжениях и частотах можно с помощью
математических моделей, которые рассматривались выше. В зависимости
от сложности задачи и необходимой точности выбираются те или иные
уравнения.
Исследование динамики асинхронных машин на ЭВМ при
изменении частоты и напряжения сети требует специальной схемы питания.
Периодические функции sin Ш и cos со/ переменной частоты можно
получить, решив два уравнения:
dxjdt = ©у; dyjdt = -сох. (8.20)
При этом для стабилизации амплитуды напряжения,
пропорционального sin со/ и cos о/, необходимо дополнительно применить схему
для решения уравнения
sin2o>/ + cos2(D/-l = 0. (8.21)
При изменении амплитуды напряжения из-за наличия обратной
связи осуществляется компенсация погрешностей.
Структурная схема питания при изменяющейся амплитуде
напряжения и постоянной частоте определяется после решения уравнения
dxjdt + <djc = 0. (8.22)
Амплитуда напряжения и частота могут быть функциями
действующих значений намагничивающего тока, потокосцеплений и угловой
скорости ротора. С учетом этого составляют структурную схему для
решения уравнений асинхронного двигателя с постоянными параметрами.
188
Рассмотрим переходные процессы при изменяющемся напряжении
питания и неизменной частоте. Закон изменения напряжения
воспроизводится на блоках нелинейности. При этом изменение напряжения
ограничивается номинальным значением UH0M и начальным и конечным
значениями напряжений, равными -0,8 и 1,2 от UH0M. В двигателях малой и
средней мощности наибольшие ток и момент наблюдаются в первые
один-два периода, когда напряжение еще мало изменяется. Поэтому
характер изменения напряжения на время разгона в этих машинах влияет
слабо. В двигателях большой мощности наибольший ток и момент
сохраняются в течение 8—-12 периодов, поэтому закон изменения
напряжения больше влияет на характер протекания переходных процессов. Это
относится к высокочастотным двигателям и двигателям с большим
моментом инерции.
Результаты исследования показывают, что значения ударных токов и
моментов зависят от характера начального изменения питающего
напряжения. Поэтому производная а = dujdt или dujdV во многом
характеризует протекание переходного процесса.
На время пуска изменение питающего напряжения влияет больше в
двигателях малой и средней мощностей. Влияние уменьшения
напряжения при разгоне двигателей меньше, чем влияние увеличения
напряжения. Для двигателей, у которых наибольшего значения ток й момент
достигают за один-два периода, влияние нелинейности взаимной
индуктивности (насыщения) проявляется на переходных процессах меньше, чем
уменьшение взаимной индуктивности.
Представляет интерес исследование динамики асинхронных
двигателей при одновременном изменении частоты и напряжения, а также
нелинейных параметров двигателя. Эту задачу можно решить на ЭВМ.
Считая параметры двигателя постоянными, можно сделать следующие
выводы. Переходный процесс носит характер двух процессов: а) при
£/= var и/= const; б) при/= var и U = const. Переходные процессы в
сильной степени определяются начальными значениями напряжения и
частоты. Частным случаем являются переходные процессы при U = const
или/= const.
В электромеханике ЭП часто ра- м
ботает при неизменном напряжении и
периодически изменяющейся нагрузке
(приводы дробилок, прокатных станов
и т.д.). Характер изменения момента
сопротивления Мс может быть весьма
различным. При ударной нагрузке
(рис. 8.6) в воздушном зазоре имеются
гармоники с максимальными ампли-
7^\
Рис. 8.6. Ударное и гармоническое
изменение момента нагрузки в
зависимости от времени
189
тудами, а при синусной нагрузке они отсутствуют. Если ЭП соизмерим
по мощности с сетью, то ударная нагрузка искажает напряжения и токи в
ЭП, а высшие гармоники влияют на работу других устройств.
В уравнениях электромеханического преобразования энергии
зависимые переменные (токи и частота вращения) могут меняться местами с
независимыми переменными (напряжениями и моментом
сопротивления). Такие электромеханические системы получили название токового
привода.
Токовый привод в последнее время получил применение в системах
с полупроводниковыми элементами. В них управление производится по
току, а не напряжением, так как даже кратковременные броски тока
могут вывести из строя полупроводниковый преобразователь. В некоторых
приводах токовый привод обеспечивает лучшие технико-экономические
показатели.
Исследовать все возможные комбинации независимых переменных и
нелинейные изменения параметров на одной программе из-за громоздко-
сти системы уравнений нецелесообразно. Поэтому в зависимости от
решаемой задачи выбираются те или иные комбинации нелинейных
параметров и независимых переменных.
Глава 9
Несимметричные электрические машины
§ 8.1. Подходы к исследованию
несимметричных электрических машин
В теории электромеханического преобразования энергии обычно
говорится о симметричных ЭП. Однако почти все ЭП несимметричны.
Несимметричные машины можно разделить на ЭП с электрической,
пространственной и магнитной асимметрией. К электрическим машинам
с электрической асимметрией принадлежат машины, у которых
различаются активные или индуктивные сопротивления фаз, например
асинхронные однофазные двигатели с различными фазосмещающими
элементами, включенными в пусковые обмотки.
В ЭП с пространственной асимметрией оси обмоток соседних фаз
сдвинуты в пространстве на угол, отличающийся от 2я//и электрических
радиан. Это двигатели с экранированными полюсами, совмещенные
сельсины-двигатели и другие машины.
Электрические машины с магнитной асимметрией имеют
неравномерный зазор, а в некоторых случаях и несимметричный магнитопровод.
Некоторые машины обладают одновременно несколькими видами
асимметрии, например однофазный асинхронный двигатель с коротко-
замкнутым витком на полюсе, у которого имеются три вида асимметрии.
Наряду с асимметричными машинами, у которых наличие асимметрии
связано с принципом действия, представляет интерес исследование
симметричных машин, у которых появляется асимметрия вследствие
различных технологических факторов.
Важное место в теории электрических машин занимает исследование
симметричных машин при несимметричных напряжениях на выводах.
Несимметричные режимы работы синхронных машин, трансформаторов
и асинхронных машин в установившихся и переходных процессах имеют
особое значение при исследовании режимов работы энергосистем.
Теория установившихся режимов несимметричных электрических
машин рассмотрена во многих работах, однако несимметричные
многофазные ЭП многообразны, и эта теория постоянно развивается [1,4].
Важны для исследования несимметричных ЭП метод симметричных
составляющих и метод вращающихся полей. Оба метода имеют
преимущества при исследовании тех или иных типов машин и видов несимметрии.
191
В несимметричных машинах при синусоидальном напряжении поле
в воздушном зазоре искажается из-за появления отраженных волн.
Поэтому круговое поле может быть лишь в частных случаях при
определенной нагрузке, несимметрии машины и питающего напряжения.
При определении момента в симметричных электрических машинах
учитываются токи в статоре и роторе, протекающие в различных осях на
статоре и роторе. Токи, протекающие в одних и тех же осях в статоре и
роторе, в симметричной машине не создают электромагнитного
вращающего момента, так как
В несимметричных машинах при синусоидальном напряжении токи
по одной оси влияют на электромагнитный момент, который в
несимметричной машине можно определить, считая взаимные индуктивности фаз
обмоток статора и ротора одинаковыми, для двухполюсной машины
следующим образом:
Л/э = уЛ/(/,э/га -iJv + iJn - V^). (9.2)
В несимметричных машинах с учетом различия взаимных индуктив-
ностей по осям машины момент удобнее определять через потокосцепления.
В общем виде для несимметричной многофазной, многополюсной
машины математическое описание процессов преобразования энергии
сводится к бесконечной системе уравнений обобщенного ЭП. Двигаясь
от простого к сложному, целесообразно рассмотреть отдельные частные
случаи анализа несимметричных электрических машин.
Приведение несимметричных трехфазных или многофазных машин
к двухфазной —нестандартная операция, поэтому при исследовании
переходных процессов для трехфазных машин следует пользоваться
трехфазной заторможенной системой координат.
Математическое описание процессов преобразования энергии в
симметричных ЭП является частным случаем несимметричных. Поэтому
перенос теоретических достижений, касающихся симметричных машин,
на несимметричные машины не всегда правомерен. Однако как бы ни
были сложны несимметричные машины и многообразны
несимметричные режимы — все сводится к изучению поля в воздушном зазоре. Надо
знать область (зазор), где сосредоточена энергия магнитного поля, и дать
математическое описание процессов преобразования энергии.
В несимметричной машине при симметричных напряжениях
питания в зазоре имеются прямое и обратное поля первой гармоники. В
трехфазных и многофазных машинах при определенных условиях возникают
поля нулевой последовательности. При несинусоидальном напряжении и
наличии пространственных гармоник в воздушном зазоре появляются
192
отраженные волны не только по первой, но и по каждой высшей
гармонике. Изучение сложного взаимодействия полей в несимметричном ЭП
при учете многих факторов, влияющих на формирование поля в зазоре,
только начинается.
Несимметрия является причиной появления в зазоре поля обратной
последовательности. Изучение процессов преобразования энергии в
несимметричных машинах сводится в первом приближении к решению
уравнений электромеханического преобразования энергии при наличии
двух полей в воздушном зазоре.
§ 9.2. Электрическая и магнитная несимметрия
Рассмотрим двухфазную машину, у которой wra * и>,р, числа пазов
на полюс и фазу различны, сечение провода по длине в фазах различное.
Эти условия вызывают не только электрическую, но и магнитную
несимметрию — различное насыщение по осям машины. Оба вида
несимметрии отражаются в уравнениях различными параметрами по осям машины.
Если ротор машины симметричный, следует привести одну обмотку
статора к другой и рассматривать соответствующие уравнения. Если
статор симметричный, ротор приводится к статору.
Введем коэффициент приведения:
1/к = MjMAa = (wBkMlwAkMf , (9.3)
где Л/де, МАа — коэффициенты взаимной индукции между обмотками
статора и ротора; к^Ву к^л — обмоточные коэффициенты фазы В и А
(рис. 9.1).
При этом взаимные индуктивности по оси а: Ма = МАа = М\
взаимные индуктивности по оси Р: Мр = Мвь = М.
Тогда МЛа =МаА= A/cosG, М^ = MbB = *A/cos9, МАЬ = МЬА =
=-Л/sinG, Мь^Ма^ кМsinO.
При этом потокосцепления
*л =*« =LJ,a +A/(cos9/ra -sinG/,,);
Чв = Ч# = V* + *M(sin9/ra + cosG/Vp);
¥e = ¥га = LJm + A/cos0ira + Шзшвц;
*F, = 4% = V* -^sin9ira + AA/cosO/^).
(9.4)
7-179
193
Определив потокосцепления, можно
для этого случая асимметрии составить
уравнения напряжений
и„ =Л„1„+-
Л *
(9.5)
Рис. 9.1. Модель
электрической машины с электрической
несимметрией g несщ^ехричных машинах при
составлении уравнений необходимо учитывать все возможные комбинации
токов и для двухфазной машины (см. рис. 9.1):
М, = MJJq - MAbiJ^ + MJn - kMis^. (9.6)
Значение электромагнитного момента несимметричной машины
можно получить как частную производную общего запаса
электромагнитной энергии по геометрическому углу:
M,=pdWjdQ, (9.7)
де
дв
+%-К'~J +(/*J]+2A/(AV« -U*)} • (9-8)
При этом
я~=я-ъ= а.
39 9s 99 9s сос©г '
где ar = dajdt — угловое ускорение ротора.
Аналогично,
&мф = #«» Ar . 9/„ = d*m flr
99 9s (pccor ' 99 9s ©сшг
Считая, что
5/^/& = 0 и 9/^/95 = 0,
получим уравнение момента
(9.9)
(9.10)
(9.П)
А/, =Кр{-^-^-[(^J +(^J] + 2M(*iVra ~ W*)i (9.12)
194
Рис 9.2. Схема приставки ЭВМ для Рис 93. Схема приставки ЭВМ для
решения уравнений (9.14) решения уравнений (9.15)
В (9.12) имеются две составляющие: первая определяется
изменением индуктивности рассеяния обмотки ротора, вторая — изменением
энергии в воздушном зазоре. Энергия, запасаемая в поле рассеяния
ротора при изменении ускорения, участвует в электромеханическом
преобразовании энергии. Если поле рассеяния достаточно большое (энергия,
запасенная в нем, составляет существенную часть), то в переходном
процессе следует учитывать эту составляющую.
Если не учитывать изменения энергии поля рассеяния, то уравнение
момента из (9.12) примет вид
M,=pM(ki#im-iJ4). (9.13)
При несимметричных ЭП часто в одну из фаз включаются фазосдви-
гающие элементы. Обычно это конденсаторы и активные сопротивления.
При этом уравнения для фазы, в которую включен конденсатор (С —
емкость конденсатора), имеют вид
«*=«« — /'**• (9Л4)
При наличии С и добавочного сопротивления r^*
и* = "«* —g /'**-'»■'*• (9Л5>
При наличии пусковой и рабочей емкостей
"'P^-FtWv*' (9Л6>
где С„ и Ср — соответственно пусковая и рабочая емкости.
Алгоритмы набора уравнений несимметричных машин сходны с
алгоритмами обычных машин. Если исследуется ЭП с конденсаторами или
добавочными сопротивлениями, к схеме добавляют решающие
усилители. Например, при решении уравнений для двигателя с пусковой или
рабочей емкостью (9.14) добавляется элемент Ви отключающий емкость С„
195
(рис. 9.2). При наличии емкости и добавочного сопротивления (9.15)
используют схему, приведенную на рис. 9.3.
Имея математическую модель несимметричной машины, на ЭВМ
можно исследовать влияние параметров машины и фазосдвигающих
элементов на статические и динамические характеристики.
§ 9.3. Пространственная несимметрия
Для создания кругового поля в ЭП
между обмотками создаются определенные
пространственные углы. В двухфазной машине
этот угол равен 90 эл. град, в m-фазной —
2яЛи. В общем случае углы между
обмотками могут быть любыми, что и создает
пространственную несимметрию в машине.
Любая несимметрия, в том числе и
пространственная, приводит к возникновению
обратного поля в воздушном зазоре машины.
Рассмотрим задачу, когда в двухфазной
машине одна из обмоток смещается
относительно другой на угол 5 от 90 до 0° (рис.
9.4). При повороте обмотки поле в
воздушном зазоре становится эллиптическим и при
8 = 0°—пульсирующим. При повороте обмоток относительно друг друга
в эллиптическом поле изменяются амплитуды прямого и обратного полей.
Если совместить оси обмоток, то получится схема однофазного двигателя.
В машине с пространственной асимметрией
Ucoswt
Рис. 9.4. Переход от
кругового поля к пульсирующему
при повороте обмоток друг
относительно друга
1ла =Loa= A^cosO, LAb = LbA = MsinO;
LBt =LbB=M sin(8 - в), LBa=LaB=M cos(8
-«J (9л7)
При наличии несимметрии обмоток и сдвиге их в пространстве по-
токосцепления обмоток фаз машины
Ч?л = la1a + LABh + A/(cos9/e - sin Qib);
ЧГВ = LBiB + LBAiA + *M[cos(8 - Q)ia + sin(8 - в)/, ];
^a = Laia+McosQiA +*A/cos(8-e)/5;
% = Lbib -MsinQiA + kMsin(b-Q)iB).
(9.18)
При преобразовании системы уравнений к системе координат ос, р
следует учесть, что
196
*Л = *mt > h = '** C0S8 + '* Sin6 * (9Л9)
Значение электромагнитного момента несимметричной машины при
произвольном угле 6 из (9.12):
Л/э = pM[4J^(l^kcos2 8) + 0,5isin28(/ra/ra -/*/„) +
+ *sin26/ra/,p. (9.20)
Общим для всех несимметричных машин является наличие
эллиптического поля. Применяя ЭВМ, можно решить уравнения
несимметричных машин и исследовать как переходные, так и установившиеся режимы
работы. При исследовании статических характеристик можно сравнить
возможности амплитудного и фазового регулирования, влияние фазос-
двигающих элементов, параметров машины и т.п.
Динамические режимы несимметричных машин отличаются от
соответствующих режимов симметричных машин большей
неравномерностью частоты вращения, большими пульсациями момента, уменьшением
скорости холостого хода и увеличением времени переходного процесса.
Наличие в воздушном зазоре машины прямого и обратного полей
ухудшает статические и динамические характеристики по сравнению с
характеристиками машины с круговым полем. Пренебрежение высшими
гармониками при эллиптическом поле дает погрешности в пределах 10—
15%. Если не учитывать высшие гармоники и вихревые токи в машине с
двумя эллиптическими полями, то погрешность окажется больше, чем в
случае кругового поля в воздушном зазоре машины.
В несимметричных машинах процесс пуска зависит от положения
ротора относительно статора. При пуске явнополюсных синхронных
двигателей переходный процесс определяется положением ротора и
моментом включения. Хотя явнополюсная синхронная машина в
установившемся режиме — симметричная машина, при пуске в асинхронном
режиме это машина несимметричная.
Момент включения и положение ротора влияют также на характер
других переходных процессов (при реверсе, повторном включении и др.),
исследование которых имеет важное значение для практики и сопряжено
с большими трудностями.
§ 9.4. Однофазные двигатели
Однофазные двигатели находят широкое применение в бытовых
приборах и иногда в тяговых приводах, что обусловлено наличием
однофазной системы питания [1,4,8].
197
Рассмотрим идеализированный однофазный двигатель, у которого в
воздушном зазоре есть только прямое и обратное поля. Такой двигатель
имеет распределенную синусную обмотку, ненасыщен, с гладким
зазором. В реальном двигателе невозможно выполнить такую обмотку,
поэтому в воздушном зазоре всегда есть спектр высших гармоник. Наряду с
обычными пространственными гармониками в однофазных двигателях
появляются отраженные волны магнитного поля, так как однофазная
обмотка занимает в отличие от двух-, трех- и многофазных обмоток часть
полюсного деления.
В идеализированном однофазном двигателе напряжения прямой и
обратной последовательностей статора равны друг другу и составляют
половину амплитуды приложенного напряжения. Параметры обмоток в
математической модели для прямой и обратной последовательностей
могут быть одинаковыми. Процессы преобразования энергии в
однофазном двигателе при отмеченных выше условиях описываются
уравнениями E.1)—<5.4).
При равенстве амплитуд прямого и обратного полей двигатель не
имеет пускового момента. Поэтому необходимо уменьшить обратное
поле и получить при s = 1 разницу в моментах от прямого и обратного
полей — пусковой момент. Одна из мер уменьшения обратного поля —
применение дополнительной обмотки, сдвинутой в пространстве
относительно основной, и наличие устройства, обеспечивающего сдвиг во
времени между токами в обеих обмотках. Для сдвига между токами удобно
использовать конденсатор. Однофазные двигатели, имеющие две
обмотки, в одну из которых включен конденсатор (см. рис. 5.6), называют
конденсаторными двигателями.
Наиболее простым по конструкции и распространенным
несимметричным двигателем является однофазный двигатель с экранированными
полюсами — с короткозамкнутым витком на полюсе (рис. 9.5, а).
Несмотря на простое конструктивное оформление, математическое
описание процессов преобразования энергии в двигателях с экранированными
полюсами наиболее сложное.
В короткозамкнутом витке 4 (рис. 9.5, а), расположенном на полюсе
2, вследствие изменения потока, созданного обмоткой 3, образуется ток,
смещенный во времени относительно тока, проходящего в обмотке
возбуждения. Так как обмотки смещены в пространстве (рис. 9.5, я, б), а
токи — во времени, в зазоре появляется бегущее поле. Это —
эллиптическое поле с большой обратной составляющей. Благодаря взаимодействию
токов статора с токами в короткозамкнутом роторе 1 двигатель имеет
пусковой и вращающий моменты.
Для схемы (рис. 9.5, а) можно составить уравнение преобразования
энергии, если определены параметры обмоток с числом витков wsa и и>,р и
198
Рис. 9.5. Схемы однофазных асинхронных двигателей
напряжения прямой и обратной последовательностей для эквивалентной
модели с обмотками, сдвинутыми на 90°.
Однофазный двигатель с двумя или несколькими короткозамкнуты-
ми витками на полюсе (рис. 9.5, б) для составления математических
моделей сложнее, чем двигатель с одним витком. На рис. 9.5 и^р и н>,.р —
число витков эквивалентных обмоток, сдвинутых соответственно на углы
6' и 5*.
В однофазных несимметричных двигателях вихревые токи
оказывают значительное влияние на характеристики. Используя вихревые токи,
можно создать однофазные двигатели, имеющие достаточный пусковой
момент. На рис. 9.5, в показан двигатель с несимметричной магнитной
системой. В стали полюсов в поперечной оси этого двигателя 5
создаются вихревые токи вследствие изменения потока в однофазной обмотке,
расположенной в продольной оси машины. Эти токи сдвинуты во
времени относительно токов в обмотке возбуждения 5, а контуры, где
замыкаются вихревые токи, сдвинуты в пространстве на 90° (см. рис. 9.1).
Однофазные двигатели с несимметричной магнитной системой могут иметь
лучшие энергетические показатели по сравнению с двигателями с
экранированными полюсами и выпускаются промышленностью для бытовых
вентиляторов.
В однофазных явнополюсных ЭП энергия магнитного поля
концентрируется под полюсом. Из-за различия магнитных проводимостей под
полюсом и между полюсами в воздушном зазоре (пространстве между
ротором и полюсным наконечником) возникают отраженные волны,
которые ухудшают характеристики однофазных двигателей.
При конструировании несимметричных ЭП магнитная система
обмотки, а также детали конструкции могут выполняться несимметричны-
199
ми. Конструкция несимметричных ЭП наиболее сходна с конструкциями
ЭП с возвратно-поступательным движением и электрических аппаратов,
обеспечивающих линейные перемещения с определенным ускорением.
Электрические машины — это определенное расположение обмоток
в пространстве и определенный сдвиг токов, протекающих в обмотках, во
времени. При произвольном сдвиге обмоток и токов в несимметричных
ЭП электрическая энергия будет преобразовываться в основном в
теплоту. Идеальный случай — это наличие кругового поля.
Математические модели несимметричных машин более сложные по
сравнению с симметричными ЭП, которые являются частным случаем
несимметричных машин. При составлении уравнений несимметричных
машин необходимо об этом помнить и по этому признаку
контролировать математические модели.
Глава 10
Уравнения электрических машин при
различных конструктивных исполнениях
§ 10.1. Линейные электромеханические
преобразователи
Электрические машины имеют высокие энергетические показатели и
небольшой расход активных материалов при вращательном движении.
При возвратно-поступательном движении и произвольных перемещениях
ЭП имеют низкие энергетические показатели и большие габариты. Во
многих электроприводах используется возвратно-поступательное
движение, которое обычно создается за счет механического преобразования
вращательного движения электрической машины. Высокие
технико-экономические показатели при вращении ЭП имеются благодаря наличию
электромеханического резонанса. В линейных двигателях в воздушном
зазоре всегда есть отраженные волны, поэтому круговое поле в них
получить нельзя.
Линейные ЭП имеют низкие технико-экономические показатели и
их следует применять, когда двигатель с вращательным движением и
механическим преобразователем неприемлем. Линейные ЭП получаются
из обычных (рис. 10.1, а), если располагать обмотки в части пазов.
Например, две фазы обмотки трехфазного двигателя подключить к
двухфазному напряжению. При этом часть зубцовой зоны не будет
использоваться и в зазоре появятся отраженные полны. Хотя напряжения
симметричны и в конструкционном отношении машина симметричная, поле в
зазоре такой машины будет несинусоидальное. Если убрать
Рис 10.1. Схемы электромеханических преобразователей
201
Рис 10.2. Конструкция линейного и
торцевого двигателя
неиспользуемые пазы и участок
магнитопровода, то получим
машину с сегментным статором
(рис. 10.1, б), а затем, увеличив
радиус сегмента до
бесконечности, •— линейный двигатель
(рис. 10.1, в). В режиме
генератора такие электрические
машины работают редко, хотя
известны случаи применения
генераторов, преобразующих
возвратно-поступательное
движение штока дизеля или паровой машины в электрическую энергию.
Если в линейном двигателе выполнить магнитопровод 1 замкнутым
(рис. 10.2, а), то получится торцевой двигатель (рис. 10.2, б). В торцевом
двигателе нет отраженных волн и поле может быть синусоидальным:
амплитуды гармоник поля по длине машины различны, так как зубцовые
деления 2 по длине зазора разные. В этом основное отличие торцевых
машин от обычных. Из-за более сложной технологии торцевые машины
применяются сравнительно редко, хотя имеют преимущества при
выполнении встраиваемой в механизм конструкции электрической машины. На
рис. 10.2, б ротор обозначен цифрой 2, обмотка статора 3.
От конструкции обычного двигателя можно перейти к конструкции
линейного, а через торцевой двигатель снова вернуться к обычному. При
переходе от одной конструкции к другой изменяется поле в воздушном
зазоре машины, что приводит к различиям в виде уравнений,
описывающих процессы преобразования энергии.
Линейные двигатели бывают асинхронными и синхронными, а по
роду питания — переменного и постоянного тока. Конструктивные
исполнения не менее многообразны, чем у обычных двигателей. Отметим
только, что в качестве ротора может использоваться стальной лист или,
например, железнодорожный вагон.
Линейные двигатели, работающие в режиме непрерывного
реверсирования, называются двигателями колебательного движения. К ним
относятся вибрационные двигатели электробритв и силовые установки для
получения вибраций. Так как частоты вращения двигателя непрерывно
изменяются, КПД низкий и большая часть электрической энергии
преобразуется в тепловую.
В атомной энергетике применяются линейные двигатели, у которых
статор выполнен в виде трубы. Для перемещения грузов внутри трубы
удачно применяется граммовская обмотка. Можно представить гибкую
конструкцию двигателя, которая обеспечивает транспортировку грузов
по произвольной траектории (рис. 10.3). Такой двигатель имеет ферро-
202
Рис. 103. Схема линейного двигателя с Рис 10.4. Зависимость магнитной про-
гибкой магнитной системой ницаемости от пространственной
координаты в линейном двигателе
магнитный статор 2 и шаровидный ротор 3, перемещающийся внутри
трубы. Двухфазная или трехфазная обмотка наматывается в виде спирали
/ на трубу и создает бегущее поле.
При анализе процессов преобразования энергии в линейных
двигателях часто используют уравнения Максвелла. Зависимость магнитной
проницаемости ц и ее производной от пространственной координаты
X = д\х/дх дана на рис. 10.4.
В линейных двигателях определяется мгновенное электромагнитное
усилие, действующее на рабочее тело:
f, = \BI2dV. A0.1)
v
Интегрирование по объему сводится к умножению ширины рабочего
тела 2а на величину приведенного воздушного зазора 6':
f,=2ab'\BI2dx, A0.2)
где В — индукция в воздушном зазоре; /2 — вторичный ток в зоне
индуктора.
Мгновенное значение электромагнитной мощности A\ — ток в статоре)
Ру = \EIxdV . A0.3)
v
Проектирование линейных двигателей сопряжено с большими
трудностями, так как определение характера поля в реальной машине весьма
затруднительно из-за необычности конструктивных исполнений и
наличия отраженных волн.
Линейные двигатели часто рассчитывают, как обычные, вводя при
этом коэффициенты, учитывающие уменьшение энергетических по-
203
у? казателей за счет краевых эф-
^4* фектов и других особенностей
2 ^-^^^^ работы. При этом уравнения
___±rrrh-T~~— "*^^ напряжений составляют так же,
;^|ииииииии>у как ддя обычной
несимметричной машины, с учетом коэффи-
Рис. 10.5. Электрокагапульта циентов, зависящих от
исполнения линейного двигателя, а
усилие определяют из условия равенства мощности при вращательном и
поступательном движении:
M(l/pJnf(l-s9) = F2T/0-O, A0.4)
где sBnsn — скольжение при вращательном и поступательном движении.
Конечно, такой подход дает лишь приблизительные результаты, но в
многополюсных машинах и при прикидочных расчетах он может быть
оправдан.
В последние годы линейные двигатели проектируются для
использования в высокоскоростных транспортных системах на магнитной
подушке. В таких устройствах статор имеет длину, равную десяткам и сотням
километров, а ротором является вагон, находящийся над полотном.
При создании транспорта на магнитной подушке необходимо
решать задачи стабилизации вагона, управления и снизить стоимость
такой дороги.
В теории линейных двигателей имеется много сложных и
нерешенных проблем, но наиболее сложная — создание электрокатапульты. Еще
в середине 30-х годов были созданы электрокатапульты (рис. 10.S),
которые сообщали дополнительное ускорение летательным аппаратам. Если в
транспортных системах зазор между полотном / и вагоном 2 необходимо
выдерживать с большой точностью, то при электрокатапультировании
зазор изменяется (ротор улетает) и изменяется масса. В уравнениях,
описывающих электромеханическое преобразование энергии в
электрокатапульте, изменяются параметры, а при их моделировании необходимо
рассчитать усилия и ускорения.
Несмотря на недостатки, линейные двигатели находят применение в
графопостроителях, металлокантователях, толкателях и других
устройствах. Линейные двигатели являются как бы промежуточным звеном между
электрическими машинами и аппаратами, в которых силовые элементы
совершают в основном линейные перемещения при изменяющихся
параметрах электрических цепей.
Несмотря на большое многообразие конструкций, все линейные
двигатели могут быть рассчитаны по математическим моделям, полученным
на основе уравнений обобщенного ЭП. Отличие пространственной
модели линейных двигателей от модели обычных вращающихся машин со-
204
т
L
'rair'rpt
%Ц11
Чу/fW!
1^
*»/'!
Phc. 10.6. Пространственная модель линейного двигателя
стоит в том, что у линейного двигателя обмотки фаз занимают
неодинаковые в магнитном отношении положения по длине статора и ротора
(вторичного тела). Это является одной из причин различия индуктивных
параметров фаз двигателя, вызывающих несимметричные фазные токи
при симметричном напряжении питания. Другой особенностью
линейных двигателей является вход вторичных контуров в область
преобразования энергии и выход из нее.
Пространственную модель, отражающую эти особенности линейных
двигателей, можно представить в заторможенной трехфазной системе
координат а, Р, у так, как это показано на рис. 10.6. Модель состоит из
приведенных обмоток статора и ротора с числом пар полюсов равным /?,
расположенных на разомкнутых магнитопроводах ограниченной ширины
и длины, а также из токовых контуров по краям рабочей зоны ротора,
названных соответственно левыми и правыми контурами.
На рис. 10.6 имеется п элементарных трехфазных машин, в которых
токи отличаются друг от друга, а результирующая сила создается как
средняя составляющая от всех сил элементарных машин. Здесь wJla, wJip,
W/iy, ..., H>,te, ws#, wskf,..., wsna, w,„p, wsnf -— обмотки статора. Обмотки
ротора в обозначениях отличаются заменой индекса s на г (и>п1, ..., и^;
н^ль •••» Wnk —обмотки ротора вне зоны статора, расположенные справа и
слева от рабочей зоны).
Для схемы линейного двигателя (см. рис. 10.6) уравнения
напряжений могут быть записаны в следующем виде:
Usaj ~~ <*Vq/'*q/ +"
<fv,
«v
dt
-rsoMj+-
<W,
A0.5)
»fi/
dt
205
"Sfj ЛХТ0*ТA
dt
(Ю.5)
где Иф, %, «0, i^, /p7, %, Лсу, %, Д^, 4^, Ч^,, Ч^, — соответственно
фазные напряжения, токи, активные сопротивления и потокосцепления для
обмоток фаз статора и ротора (/=1,2,..., *,..., л); ега, е#, еп — ЭДС,
индуктированные в роторе при входе вторичных контуров в рабочую зону и
выходе из нее и при переходе из зоны одного промежуточного двигателя
в зону другого.
Потокосцепления элементарных машин (см. рис. 10.6) определяются
по сложной матрице и учитывают различные условия работы
элементарных машин по длине линейного двигателя.
Электродвижущие силы, индуктированные в роторе при входе и
выходе контуров из зоны одного промежуточного двигателя в другую,
возникают в основном в витках обмотки на крайних полюсных делениях.
Эти ЭДС следует учитывать при расчетах высокоскоростных линейных
двигателей.
Нельзя дать строгих рекомендаций для расчета ЭДС входа и выхода,
но они пропорциональны разнице потокосцеплений крайних
элементарных машин и скорости движения подвижной части (v):
Полные уравнения напряжений линейного двигателя при
последовательной схеме соединения катушек фаз запишутся в виде
а при параллельной схеме
Щ = 2Х
",="/>;
/,=/„, A0.7)
',=£',. (Ю.8)
где/ = а,р,у;у=1,2,...,л.
Расчет линейных двигателей до сих пор остается глубоко не
проработанным и, как видно из математических моделей линейных машин, не
может быть на сегодняшний день достаточно точным.
206
После решения системы A0.5)—A0.8) получаются несимметричные
фазные токи при прочих симметричных условиях, что подтверждается
многочисленными экспериментальными данными, опубликованными в
отечественной и зарубежной литературе.
Следует отметить, что ввиду электромагнитной асимметрии
трехфазные линейные двигатели с небольшим числом пар полюсов
неправомерно приводить к двухфазной системе. Такое приведение может быть
осуществлено лишь в отдельных случаях для многополюсных
тихоходных двигателей, когда два крайних полюсных деления играют
незначительную роль в процессе преобразования энергии.
Уравнение движения для линейного двигателя записывается в
следующем виде:
m—FT-FC, A0.9)
где т — масса подвижной части; v — скорость подвижной части; Fr и Fc —
соответственно силы тяги и сопротивления.
Электромагнитные силы в линейном двигателе могут быть
определены так же, как и электромагнитный момент во вращающихся машинах,
по изменению сконцентрированной в воздушном зазоре энергии
магнитного поля при бесконечно малом перемещении подвижной части в
направлении действия силы в условии постоянства либо токов
возбуждающих контуров, либо потокосцеплений.
Электромагнитную силу можно разложить на три составляющие:
продольную — силу тяги; поперечную — силу, стремящуюся вытолкнуть
вторичное тело из рабочего зазора; нормальную — силу притяжения
(отталкивания). В большинстве случаев при симметричном расположении
вторичного тела в воздушном зазоре поперечной силой можно
пренебречь. Другие составляющие электромагнитной силы необходимо определить
для каждого промежуточного двигателя и затем найти интегральную силу.
Предполагая, что известно распределение энергии магнитного поля
линейного двигателя по осям х, у, z, можно определить силу тяги по
выражению
dw 1 я IY А _ , . .
+ zlMnfijokWscJt + 2LMrrmW^ г
+i^v-| Aол°)
207
где Mnaftb ..., Msniak —соответственно взаимные индуктивности между
обмотками ротора и статора и обмотками статора и ротора.
В общем случае при учете насыщения взаимные индуктивности между
соответствующими обмотками статора и ротора отличаются друг от друга.
При наличии ферромагнитного сердечника и пазов с токами на
вторичном теле линейного двигателя нормальная сила является силой
притяжения и определяется следующим образом:
F =^ = J-
п ду 28
./-1
/W*"'*J
A0.11)
где 8 — воздушный зазор.
Основную часть Fn создают произведения токов в статоре и роторе
по одной оси. Произведения токов на самих себя оказывают воздействия
на обмотки.
Если вторичное тело состоит из электропроводящего немагнитного
материала, то в этом случае преобладает сила отталкивания (левитации),
которая определяется по формуле
ду 8,
2^М***щ11п; +J<
V-1
y-i
М^ММ)'
■Х^СгЛгЛт/
>•»
A0.12)
где 8, = 8+6р — воздушный зазор (расстояние между статором и
немагнитным ротором); ftp — ширина немагнитного ротора.
В линейных двигателях возникает пульсирующая сила, связанная с
изменением токов в крайних контурах статора и ротора.
Система уравнений A0.5)—A0.12) описывает достаточно точно,
несмотря на их сложность, процессы электромеханического
преобразования энергии в линейных двигателях.
§ 10.2. Некоторые модификации
электромеханических преобразователей
Рассмотрим некоторые модификации ЭП, которые приводят к
изменению вида уравнений электромеханического преобразования энергии.
Отвод теплоты от электрической машины — такая же важная
проблема, как и улучшение энергетических показателей. В обдуваемых.
208
электрических машинах вентилятор
вращается вместе с ротором и
продувает или обдувает ЭП. Но в
исполнительных двигателях при
низкой частоте вращения, когда такая
вентиляция неэффективна, можно
сделать машину с двумя роторами
(рис. 10.7). Первый ротор с
большим моментом инерции / —
внутренний — используется для
вращения вентилятора, а второй 5,
выполненный в виде полого стакана, явля-
Рнс. 10.7. Схема
электромеханического преобразователя с двумя роторами
егся ротором исполнительного двигателя. Машина имеет общий статор 2.
Благодаря тому, что ротор 1 имеет небольшое активное сопротивление,
при изменении напряжения, его скорость почти не изменяется, а частота
вращения полого ротора зависит от напряжения.
Уравнения машины с двумя роторами содержат два уравнения
движения с А/э, определяемыми произведениями токов в статоре и роторе, и
шесть уравнений напряжений. В уравнениях напряжений имеется два
уравнения для обмотки статора по осям аир, в которых отсутствует
ЭДС вращения, и четыре уравнения напряжений соответственно по осям
аир для обмоток двух роторов. Система из восьми уравнений описывает
процессы преобразования энергии в такой машине.
Рассматривая ЭП с п роторами и общим статором, можно составить
п + 2 уравнения напряжений для статора. Система имеет п уравнений
движения.
Уравнения ЭП с л роторами могут быть перенесены с допущениями
на ЭП с жидким ротором, если считать, что жидкость имеет п непереме-
шивающихся слоев.
Если смещать ротор относительно
статора, то в предельном случае, когда ротор
почти касается статора, получаем новый
ЭП — двигатель с катящимся ротором (рис.
10.8). В двигателе с катящимся ротором
перемещение ротора связано с силами
одностороннего магнитного притяжения. Если
при равномерном зазоре момент в ЭП равен
произведению токов статора и ротора,
протекающих в разных обмотках фаз, то в
двигателе с катящимся ротором тяжение
создается за счет токов, принадлежащих одной
фазе, и определяется вибрационным
моментом:
Рис 10.8. Схема двигателя с
-- катящимся ротором
209
Рис 10.9. Схема машины с катящимся Рис 10.10. Электромеханический пре-
ротором при F]» F2 образователь с тремя роторами
M9=MJJm-Mfah. A0.13)
Так как Ма и Л/р значительно отличаются друг от друга, возникает
момент тяжения. При вращении поля точка касания А (рис. 10.8)
вращается со скоростью поля вдоль расточки статора. При этом ротор
вращается с частотой
п2 = щ (Я, -Лг)/Лг = 60/(Д, -Дг)/Дг, A0.14)
Так как двигатели с катящимся ротором выполняются
двухполюсными, скорость ротора зависит от частоты сети и разности между
радиусом статора и ротора. Двигатели с катящимся ротором как бы совмещают
в себе механический редуктор и электрическую машину — это
тихоходные двигатели, имеющие большой момент. Их недостатки — большие
вибрации и связанная с этим недолговечность подшипников и шум.
В обычной машине токи обмоток одной фазы статора и ротора не
определяют вращающий момент. Однако при исследовании вибраций их
надо учитывать. В двигателе с катящимся ротором токи обмоток одной
фазы статора и ротора определяют вращающий момент. К этому типу ЭП
относятся двигатели, у которых ротор выполнен из гибкого
ферромагнитного материала, т.е. с волновым ротором. При вращении поля волны
деформации ротора перемещаются синхронно с магнитным полем и
происходит обкатывание статора ротором. Частота вращения гибкого ротора
определяется теми же соотношениями, что и в двигателе с катящимся ротором.
Если диаметр ротора значительно меньше диаметра статора (рис.
10.9), то поле статора, вращающееся со скоростью wc, воздействуя на
ротор, создает усилия F\ и F2, отличающиеся друг от друга, так как вблизи
статора поле значительно сильнее. При F\ » F2 ротор проворачивается и
вращается в сторону, противоположную направлению вращения поля
статора (рис. 10.9). Это нетрудно увидеть, если в статор вместо ротора
поместить металлический шарик.
Более сложные взаимодействия происходят, если в расточке статора
поместить два, три или п роторов (рис. 10.10). При математическом опи-
210
сании такой электромеханической системы следует учитывать влияние
каждого ротора друг на друга и связь с полем статора. Многороторные
ЭП с орбитальным расположением роторов в общем магнитопроводе
статора находят применение в орбитальных вентиляторах и приводах
хлопкоуборочных машин.
В электроприводах находят применение двигатели с внешним
ротором, у которых неподвижная часть с обмоткой находится внутри ротора.
Такие ЭП применяются в приводах транспортеров и там, где нужно
иметь большой момент инерции. Математическое описание таких
электрических машин не отличается от описания обычных.
Описанные выше модификации ЭП получены путем изменения
конструкции вращающихся частей машины, конструкция статора оставалась
неизменной.
Существует группа электрических машин, в которых
электромеханическое преобразование энергии осуществляется за счет изменения
параметров — коэффициентов перед токами в уравнениях напряжений.
Такие машины называются параметрическими. Наиболее распространенные
из них — индукторные машины.
В матрицу сопротивления Z в уравнениях электромеханического
преобразования энергии входят члены вида
—Li;—Mi. A0.15)
dt dt
Обычно по гармоническому закону изменяются и токи, и
индуктивности. При преобразовании уравнений стремятся получить уравнения с
постоянными коэффициентами и индуктивностями и переменными токами.
Можно получить преобразование энергии при / = const и L = var, M=
= var, т.е. иметь уравнения с членами вида
i—L; i—M. A0.16)
dt dt
Конструктивно выполнить ЭП, у которого по гармоническому
закону изменяются L и М, можно несколькими путями. Предпочтительным
является ЭП, в котором при вращении ротора изменяется по
гармоническому закону проводимость воздушного зазора (рис. 10.11). Если сделать
ротор в виде звездочки 5, а число пазов ротора взять равным половине
Рис 10.11. Конструкция индукторного электромеханического преобразователя
211
числа пазов статора 2, то при вращении поле в такой машине будет
пульсировать и за счет этого в обмотках статора 4 будет наводиться ЭДС.
Чтобы пульсации резко не влияли на момент и не вызывали вибрации, на
валу / выполняют два ротора, сдвинутых относительно друг друга на 90
эл. град. Поле в такой машине создается обмоткой возбуждения 3 с
постоянным током (рис. 10.11). Преимущество такой машины — отсутствие
обмоток на роторе; возможно создание таких машин на высокие частоты
вращения.
Параметрические ЭП также можно разделить на синхронные и
асинхронные. Они могут работать на первой или на высотах гармониках в
режимах двигателя, генератора, тормозном и трансформаторном
режимах. В этих машинах преобразование энергии также происходит в
воздушном зазоре. Обмотки, создающие поле в зазоре, могут находиться или
на статоре, или на роторе. Уравнения электромеханического
преобразования энергии дают возможность не только объяснить работу ЭП,
сложных по принципу действия с точки зрения классической теории, но и
найти пути для создания новых ЭП.
Параметрические ЭП выпускаются промышленностью. Это
индукторные генераторы автономных энергосистем, высокочастотные
генераторы, тихоходные индукторные двигатели и др.
Рассматривая различные модификации ЭП, нельзя не отметить
совмещенные электрические машины. Наиболее удачные сочетания
электрических и магнитных цепей — в одноякорных преобразователях,
совмещающих синхронный двигатель и генератор постоянного тока; в
трехфазных трансформаторах — три однофазных; в
двигателях-усилителях — магнитные усилители и исполнительные двигатели и в ряде
других конструкций. Совмещение в одном агрегате различных элементов
электромеханических систем — одно из основных направлений развития
электромеханики [4].
§ 10.3. Магнитный подвес
Традиционные конструкции электрических машин с ротором,
вращающимся на шарикоподшипниковых или газовых опорах, в ряде
случаев оказываются неприемлемыми. При создании ЭП, рассчитанных на
сотни тысяч оборотов в минуту, с повышенными требованиями по
долговечности и надежности, а также их работе при высоких и сверхнизких
температурах, в качестве опор ротора применяется магнитный подвес.
При магнитном подвесе ротора устраняется механический контакт
между вращающейся и неподвижной частями машины, что позволяет
поднять ресурс работы опор до уровня ресурса работы электротехниче-
212
Рис. 10.12. Высокоскоростной электрошпиндель
ских материалов. Эффективно применение магнитного подвеса в
обычных электрических машинах для снижения вибраций и шумов.
Магнитный подвес использовался еще несколько десятков лет назад для
разгрузки подпятников гидрогенераторов, когда при вертикальном исполнении
гидрогенератора за счет смещения ротора относительно расточки статора
возникала подъемная сила в осевом направлении.
Магнитный подвес широко используется в космической
электромеханике при создании силовых и приборных гироскопов и маховичных
двигателей. В станкостроительной промышленности магнитный подвес
применяется в электрошпинделях, в приводе микро-турбодетандеров, в
центрифугах и турбокомпрессорах.
На рис. 10.12 показан высокоскоростной электрошпиндель,
состоящий из асинхронного двигателя 4, магнитных опор 2 и колец 7,
выполненных из антифрикционного материала и обеспечивающих посадку
ротора 3 на статор при аварийных режимах работы. На валу шпинделя
крепится рабочий инструмент 5.
В электрошпинделе использованы магнитные опоры активного типа
с совмещением радиальной и осевой стабилизации ротора. С этой целью
магнитопроводы статоров опор имеют коническую форму. Магнитные
опоры выдерживают радиальные нагрузки до 600 Н и осевые до 300 Н.
Частота вращения шпинделя 60000 об/мин, а точность положения
вращающегося ротора в воздушном зазоре 10~* м.
Точность положения ротора обеспечивается датчиками и
системой управления токами в силовых обмотках магнитного подвеса.
Регулирование токов может осуществляться как по резонансной, так и
по активной системам управления. Часто для стабилизации ротора в
осевом направлении используются кольцевые постоянные магниты,
213
установленные на роторе и статоре одноименными полюсами
навстречу друг другу.
В практике не всегда необходим полный магнитный подвес, т.е.
ограничение перемещений по пяти степеням свободы. В ряде случаев
необходимые характеристики достигаются при использовании магнитного
подвеса для ограничения перемещения ротора лило» по отдельным степеням
свободы. В настоящее время существует несколько типов магнитного
подвеса: полный, частичный, активный и комбинированный. Выбор типа
магнитного подвеса зависит от условий работы и технических требований.
В настоящее время осуществлен магнитный подвес роторов массой
от нескольких грамм до тысячи килограмм и более. Достигнута
фантастическая скорость ротора, подвешенного в магнитном поле, равная
100000000 об/мин.
Одной из основных проблем в этой области является создание
математических моделей, адекватно отражающих поведение
электромеханической системы электрическая машина — магнитный подвес в
статических и динамических режимах. В этом трудном направлении
электромеханики теория обобщенного электромеханического преобразователя
демонстрирует свои неисчерпаемые возможности. Систему уравнений,
описывающих такую электромагнитную систему, можно разделить на
три подсистемы: подсистему уравнений напряжений двигателя D.7)—
D.15), подсистему уравнений магнитных опор и подсистему уравнений
движения ротора.
Для уравнений напряжений записываются уравнения вида D.8), в
которые входят субматрицы напряжений и токов, учитывающие
основную гармонику с числом пар полюсов р и дополнительные поля с числом
пар полюсов р±\. Эти составляющие появляются за счет смещения
ротора в расточке статора из-за податливости магнитных опор.
Субматрицы сопротивлений составляются так же, как для других
пространственных гармоник, например для гармоник, связанных с
насыщением. По диагонали субматриц располагаются полные сопротивления
основной гармоники и гармоник р±\. Остальные члены субматриц
сопротивлений учитывают связи между гармониками.
Можно записать уравнения напряжений для магнитного подвеса с
учетом любых факторов, рассматриваемых в предыдущих главах для
машин с обычными подшипниками.
Как и для одномерных машин, матрица сопротивлений содержит
четыре столбцовых субматрицы напряжений и токов и двенадцать
субматриц сопротивлений, но в них основное положение занимают гармоники с
числом р и р ± 1 пар полюсов.
Магнитный подвес может быть представлен системой из трех
дифференциальных уравнений — по числу каналов регулирования а, Р, z.
214
При этом каналы регулирования по осям а, Р двух радиальных опор
полностью идентичны. Тогда
r din . dL„ f _ , d5„ , 0
_ dL . dLz c d5-
2 2* z dt z dt г г г dt
A0.17)
Здесь z/a, wp, wz, /а, /р, /z — напряжения и токи в каналах регулирования
подвеса; га, гр, гг — активные сопротивления подвеса; La, Z,p,
Zz — полные индуктивности обмоток подвеса; кау *р, к2 —
коэффициенты усиления каналов регулирования по величине изменения
воздушных зазоров из-за смещения ротора; kd, к±, к, — коэффициенты
усиления каналов регулирования магнитного подвеса по скорости
изменения воздушных зазоров; к<ф, *Ра — коэффициенты усиления
перекрестных связей каналов а, Р, обеспечивающих компенсацию
гироскопических эффектов; 5а, 5Р, 5, — воздушные зазоры в магнитных
опорах по осям а, р, z.
Повороты ротора вокруг осей ос, Р воспринимаются системой
регулирования как соответствующие изменения воздушных зазоров 5а и 8Р.
Механическое движение ротора, подвешенного в магнитном поле
опор, описывается шестью уравнениями. Три из них описывают
поступательные перемещения ротора по осям а, р, z, a три других определяют
движение ротора вокруг осей а, Р, z.
В уравнения поступательного движения ротора входят
центрирующие силы, стабилизирующие положение ротора и зависящие от
изменения зазора, а также силы одностороннего магнитного тяжения,
возникающие при смещении ротора и дополнительно нагружающие магнитный
подвес. В уравнения движения входят вращающие и вибрационные
моменты, а также моменты от внешних нагрузок.
Система дифференциальных уравнений в зависимости от способа
осуществления магнитного подвеса, а также от числа учитываемых
гармонических форм колебаний ротора и упругих связей усложняется и
решение ее — довольно трудная задача даже для современных
вычислительных машин.
Применение магнитного подвеса — одно из прогрессивных
направлений развития современного электромашиностроения.
215
§ 10.4. Магнитотепловые электромеханические
преобразователи
Иногда считают, что в МГД-генераторах происходит
непосредственное преобразование тепловой энергии в электрическую. При этом имеют
в виду, что при МГД-преобразовании нет необходимости в паровой
турбине в отличие от классического цикла преобразования тепловой энергии
в электрическую.
Имеются электрические машины, непосредственно преобразующие
тепловую энергию в электрическую или механическую. Принцип
действия таких ЭП основан на изменении магнитной проницаемости
ферромагнетиков при температуре, близкой к точке Кюри. При изменении
температуры изменяются параметры обмоток. Магнитотепловые
преобразователи были предложены Н. Тесла и Т. Эдисоном еще в конце XIX в.,
однако не получили широкого применения из-за низких технико-
экономических показателей. Интерес к таким ЭП в последние годы снова
возрос, что объясняется потребностью в автономных источниках
электрической энергии, использующих энергию солнечного излучения и
остаточной тепловой энергии атомных и тепловых электростанций, а также
тепловые отходы промышленных предприятий.
Магнитотепловой генератор (рис. 10.13) в простейшем виде
представляет собой магнитопровод (постоянный магнит 2), обмотку 3, с
которой снимается переменное напряжение, и термочувствительную вставку
7. В основе принципа действия термоиндуктивного генератора лежит
изменение магнитной проницаемости \х и намагниченности Я
ферромагнитного материала при его циклическом нагревании и охлаждении.
В упрощенном виде термоиндуктивный генератор можно представить
схемой рис. 10.14, когда нагревается весь магнитопровод, выполненный из
термочувствительного материала. На этом рисунке к обмотке возбуждения с
числом витков w, подводится питание от источника постоянного
напряжения щ, а с выходной обмотки с числом витков и>2 снимается переменное
напряжение и2. Термочувствительный магнитопровод выполнен из набора
Рис. 10.13. Схема магнитотепловой) Рис. 10.14. Схема термоиндуктивного
генератора генератора
216
JUL, 10'Ги/М
I /
Г4""^
—-—
_t
*•**
w
h
/
A
J TWtt°D
Рис. 10.15. Зависимость магнитной
проницаемости от температуры
Рис. 10.16. Циклы изменения
магнитной проницаемости
пластин, которые нагреваются и охлаждаются агентами QH, Q0,
подводимыми к магнитопроводу.
При сильных магнитных полях под воздействием теплоты на
термочувствительный элемент его магнитная проницаемость изменяется по
определенному закону. На рис. 10.15 дана зависимость ц =/7) при Я =
= 1,6 А/м для пермаллоя 50НП. В исходном нагретом состоянии материал
имеет Ц! = ц^. При температуре Т2 \i2 = IW, а при Г3> большей
температуры точки Кюри, материал потеряет магнитные свойства и
Из=Ит»*Фо-
Если отключить нагревающий агент QH и подать охлаждающий агент
Q0, то магнитная проницаемость начнет возрастать и при Т2 вновь
достигнет Цщах при условии отсутствия у данного материала температурного
гистерезиса. Если время, необходимое для нагрева, /„, а время,
необходимое для охлаждения, /0> то время цикла нагрева и охлаждения /ц = /„ + /0,
характер цикла показан на рис. 10.16.
Циклические изменения магнитной проницаемости, а следовательно,
и магнитного сопротивления термочувствительного материала приведут
к изменению магнитного потока в выходной обмотке, зависимость е2 =
=Л0 будет несинусоидальной:
е, = -w.
</Ф
Лун)
2 dt 2 dt
A0.18)
где Я— напряженность поля, создаваемая обмоткой с числом витков wx
(А/м); s — поперечное сечение термочувствительного элемента.
При Я = const
е2 = w2sH
dt
A0.19)
217
Математическая модель термомагнитного генератора (см. рис. 10.14)
состоит из шести уравнений
rf(V,) | d(Mi2),
dt
dt
A0.20)
111 dt dt
Я@/ = />,+/>2;
и = /('),
где гь г2 — активные сопротивления обмоток с числом витков w} и и>2; Lu
L2 —полные индуктивности обмоток; М — взаимная индуктивность; г„,
L„ — активное сопротивление и индуктивность нагрузки; / — длина
средней линии магнитопровода.
Уравнения A0.20) моделируются на ЭВМ.
В термочувствительном элементе теплообмен достаточно учесть в
общем виде
Т = /(/). A0.21)
На рис. 10.17 показана принципиальная схема магнитотепловой)
двигателя, в котором подводимая тепловая энергия в присутствии
магнитного поля преобразуется в механическую. Ротор двигателя /
выполняется из магнитомягкого материала. Тепловая энергия подводится к
участкам 2 ротора, которые при нагревании до температуры Кюри
теряют свои магнитные свойства, в результате чего реактивные
сопротивления по продольной и поперечной осям становятся различными и
возникает момент вращения. Таким образом, магнитотепловой двигатель
является реактивным (параметрическим) двигателем. Использование
материалов с высокой магнитной проницаемостью
делает такие двигатели
конкурентоспособными с известными реактивными
двигателями. Статор двигателя 3 может быть
выполнен в виде постоянного магнита или с
электромагнитным возбуждением.
Магнитотепловые двигатели,
встроенные в обычные электрические машины,
позволят при доработке повысить КПД машин
Рис. 10.17. Схема термомаг- традиционного исполнения, имеющих
нитного электродвигателя большие потери.
218
§ 10.5. Электромеханические преобразователи
с жидким и газообразным ротором
Статор в линейном
двигателе можно
выполнить в виде трубы и создать
внутри бегущее поле. Если
труба заполнена магнитной
жидкостью или газом, то
магнитное поле увлекает
жидкость или газ. Такой
ЭП называют магнитогид-
родинамическим насосом.
Если в канале продувать Рис. 10.18. Схема МГД-генератора
ионизированный газ —
плазму или пропускать магнитную жидкость, то получим
магнитогидродинамический генератор (МГД-генератор) (рис. 10.18) [4].
В МГД-генераторе преобразуется механическая энергия частиц
плазмы в электрическую при движении электропроводной плазмы в
канале 3, в котором катушками 2 создается магнитное поле.
Электропроводность горячего газа увеличивается за счет ионизации — присадки
щелочного металла. Таким металлом может быть, например, калий.
Движение плазмы со скоростью v = vi - v2 в магнитном поле вызывает
появление на электродах 1 напряжения и тока /, который проходит во внешней
цепи RH. Ток нагрузки, замыкаясь поперек канала, создает реакцию якоря,
искажая поле возбуждения. Как и во всех электрических машинах,
направление тока перпендикулярно плоскости Bv.
Постоянный ток собирается электродами и преобразуется
инвертором в переменный. Каждый сегмент МГД-канала изолируется от другого.
Электроды работают в тяжелых условиях и от их срока службы зависит
время работы МГД-генератора. Перспективными являются импульсный и
кратковременный режимы работы.
Процесс МГД-преобразования может быть открытого цикла, когда
рабочая среда проходит через канал только один раз, или замкнутого
цикла — при рециркуляции рабочей среды через МГД-генератор.
Генератор открытого цикла называют МГД-генератором фарадеевского типа.
Еще в 1843 г. М. Фарадей обнаружил существование электрического
напряжения между берегами реки Темзы. Вода реки, двигаясь в магнитном
поле Земли, создает небольшие напряжения. М. Фарадей описал
магнитогидродинамический эффект, когда еще электрические машины только
начинали применяться.
219
Магнитная гидродинамика, изучающая закономерности движения
жидких и газообразных электропроводящих сред в магнитном поле, —
область электромеханики, так как при движении проводящей среды в
магнитном поле происходит преобразование механической энергии в
электрическую и обратно.
При движении проводящей среды во внешнем магнитном поле в
направлении, перпендикулярном плоскости Bv, наводится ЭДС и с
электродов можно снять постоянный ток низкого напряжения. Как и в
обычных ЭП, в МГД-генераторе ток нагрузки влияет на внешнее поле, при
этом появляются электромагнитные силы, которые влияют как на
движение среды в целом, так и на движение отдельных областей. При
изменении индукции внешнего поля В также происходит преобразование
энергии. К МГД-генераторам применимы законы электромеханики и поэтому
они относятся к электрическим машинам.
В последние годы проводятся работы по созданию МГД-генера-
торов, у которых рабочим телом является плазма. Успехи в создании
термоядерных реакторов, проблемы космологии и астрофизики придают
особый интерес этому разделу электромеханики, хотя по технико-
экономическим показателям в земных условиях МГД-генераторы
уступают обычным ЭП.
Конструктивные видоизменения МГД-насосов и МГД-генераторов
достаточно многочисленны. Математическое исследование процессов
преобразования энергии в МГД-генераторах требует совместного
решения уравнений Максвелла, описывающих электромагнитные процессы, и
уравнений Навье—Стокса, описывающих процессы в жидкости.
Совместное решение этих уравнений возможно лишь для простейших случаев
при ламинарном течении. Если допустить, что все частицы жидкости
движутся с постоянной скоростью, т.е. жидкость ведет себя как твердое
тело, задача упрощается, и процессы преобразования энергии в МГД-
генераторах можно изучать, применяя уравнения обычных ЭП.
Уравнения цепей вида B.1>—B.3) или D.7)—<4.17) совместно с уравнениями
магнитной гидродинамики позволяют исследовать переходные процессы
в МГД-генераторах.
Эффективность ЭП с жидким и газообразным ротором зависит от
индукции поля В и скорости истечения v. Поэтому в МГД-генераторах
применяют сверхпроводящие магнитные системы, обеспечивающие
получение сильных магнитных полей. Механическая энергия увеличивается
благодаря нагреву газа до 2000—3000 К и ускорению его с помощью сопла.
Пожалуй, самым интересным МГД-двигателем является
униполярный двигатель с жидким ротором планеты Земля. Этот МГД-двигатель
расположен на границе твердого и жидкого ядра нашей планеты. Он
вращает Землю миллиарды лет при температуре около 6000 градусов и
давлении около 104 атмосфер и имеет мощность, примерно, 1024 Вт.
220
St'
HZZJt'
Рис. 10.19. Схема феррожцц-
костного уплотнителя
Подробно МГД-генератор и МГД-дви-
гатель планеты рассмотрены в § 12.4.
В последнее время в электромеханике
стали применяться намагничивающиеся
жидкости (феррожидкости). Это коллоидные
жидкости, предельные характеристики
которых определяются устойчивостью и
размерами частиц. Намагничивающиеся жидкости
находят применение в уплотнениях.
Постоянные магниты (рис. 10.19) создают поле в зоне, разделяющей
вращающуюся 3 и неподвижную / части. При этом в феррожидкости 2
создаются цепочки, ориентированные вдоль силовых линий поля, что
повышает эффективность уплотнений без значительных конструктивных
изменений. Намагничивающиеся жидкости находят и другие
применения, однако их магнитные свойства значительно уступают
электротехническим сталям.
Конструктивные видоизменения индуктивных ЭП — неисчерпаемы,
и в этой главе рассмотрены лишь основные направления, по которым
может цдти их дальнейшее развитие.
Глава 11
Анализ процессов преобразования
энергии в реальной машине
§11.1. Электрическая машина как элемент
электромеханической системы
Электрические машины, как правило, работают в
электромеханических системах. Наиболее простым вариантом является параллельная
работа генератора или двигателя с сетью бесконечной мощности, когда
напряжение и частота сети остаются неизменными, а внутреннее
сопротивление сети Zc = 0.
В автономных энергетических системах мощности генератора и
нагрузки соизмеримы. При изменениях режима работы генераторов и
двигателей, входящих в электромеханическую систему, имеет место
изменение напряжения, частоты и электромагнитных моментов электрических
машин. В общем случае в обмотки статора и ротора могут быть
включены активные и индуктивные нелинейные элементы (статические
преобразователи, дроссели и емкости), которые необходимо учитывать при
расчете переходных процессов. Если в системе бесконечной мощности на
исследуемом ЭП изменяются только зависимые переменные и
параметры, то в автономных энергосистемах изменяются независимые, а также
зависимые переменные и параметры (коэффициенты перед зависимыми
переменными). Включенные в цепи статора и ротора элементы можно
рассматривать как симметричные и несимметричные многополюсники Z,
и Zr (рис. 11.1).
При этом за основу в составлении математических моделей
целесообразно брать процессы, происходящие в электрической машине.
Исследуя машину как элемент системы, удобно двухфазную Машину
представлять как двухканальный восьмиполюсник, как показано на рис.
11.2, где usnp, «,об, и™,» i/^б — напряже-
—|—о ния статора и ротора прямой и обратной
Zrp* последовательностей.
Используя метод симметричных
Рис 11.1. Простейшая электро- составляющих и зная параметры схемы
механическая система замещения для прямой и обратной по-
HEMP
222
Рис. 11.2. Представление двухфазного электромеханического преобразователя в
виде двухканального восьмиполюсника
следовательностей, определяют токи и характеристики машины. Такой
подход позволяет решать сложные задачи для несимметричных машин
при несинусоидальном и несимметричном напряжении питания.
Если не учитывать внутренние сопротивления элементов
электрической цепи, включенных в статор и ротор электрической машины, то
погрешность результатов может быть достаточно большой.
Только в тех задачах, где можно считать, что машина подключена к
сети бесконечной мощности, можно исследовать процессы
преобразования энергии без учета элементов, включенных в статор и ротор машины.
Выше, при анализе процессов преобразования энергии в машине, эта
оговорка делалась.
При расчете несимметричной машины можно выделить расчетную
симметричную машину и четырехполюсник, включающий в себя
комплексное сопротивление, характеризующее несимметричную часть
машины. Таким образом, несимметричная электрическая машина
рассматривается как симметричная с включенным в статор или ротор
несимметричным многополюсником. Такой подход успешно применяется при
расчетах несимметричных электрических машин.
Исследуя электрическую машину в электромеханической системе,
нетрудно представить, что она окружена многополюсниками, к которым
могут быть приведены включенные в обмотки статора и ротора элементы
электрической цепи. Поведение электрической машины в
электромеханической системе описывается уравнениями машины и окружающих ее
многополюсников. Для исследования таких систем может быть с успехом
использован тензорный анализ, так удачно примененный Г. Кроном [4]. В
виде многополюсников можно представлять объекты, включенные на
механические и тепловые выводы электрической машины, и, таким
образом, наращивать сложность математического описания процессов
преобразования энергии в электрической машине. Однако при решении
технических задач необходимо, не слишком усложняя математическую модель,
с наименьшей затратой времени, с допустимыми погрешностями дать
ответ, удовлетворяющий заказчика и исполнителя.
Несмотря на впечатляющие успехи в области производства и
применения электрической энергии на рубеже тысячелетий в теории и
практике электротехники возникли сложные проблемы, от решения
"S/7P,
uso6
ЭП
223
которых зависит будущее энергетики. Это касается в первую очередь
вопросов теории.
К сожалению, до сих пор в процессах энергопреобразования
господствуют классические представления о синусоидальности напряжений и
токов и сети бесконечной мощности. Нет общепринятых понятий
активной и реактивной мощности в динамических режимах. Проводятся
работы по улучшению энергетических показателей за счет введения в
электромеханические системы новых нелинейных элементов, которые и без
того уже наводнили сети высшими и низшими гармониками.
Отсутствие общего научного руководства развитием энергетики и
электрификации страны приводит к экономии энергии в отдельной
отрасли при общем увеличении потерь в энергосистемах.
Специалисты в различных научных направлениях электротехники
часто говорят на разных языках и их объединяют лишь уравнения
Максвелла и Кирхгоффа. Всех электротехников и энергетиков могут
объединить математические модели и теория обобщенного
электромеханического преобразователя.
§ 11.2. Выбор математических моделей
динамических режимов электрических машин
На динамику электрических машин влияют в отдельности и в
сочетаниях такие факторы: насыщение магнитной системы, вытеснение
тока, наличие контуров вихревых токов, форма напряжения и др.
Рассмотрим выбор той или иной модели для изучения динамики на
примере асинхронных двигателей серии 4А в диапазоне мощностей от 3
до ПО кВт.
Для оценки адекватности модели реальному объекту следует
сравнить результаты, полученные на ЭВМ, с экспериментальными. Реальную
машину можно сравнить с идеализированной. Если обратиться к табл.
5.1, в которой приводится классификация моделей электрических машин,
то идеализированная машина находится в левом верхнем углу, а реальная —
в правом нижнем. Таким образом, между моделью реальной машины и
идеализированной существует бесконечное число моделей, которые
могут дать результаты, с той или иной степенью приближающиеся к
реальной машине. Число моделей увеличивается также из-за того, каким
образом учитывается нелинейность коэффициентов в уравнениях
электромеханического преобразования энергии.
В качестве базовой возьмем математическую модель асинхронного
двигателя в заторможенных трехфазных координатах (рис. 4.5) с двумя
контурами на роторе, предусматривающую возможность питания сину-
224
соидальным и несинусоидальным напряжением, и с постоянными и
нелинейными коэффициентами перед токами.
Для двигателей 4A100S4Y3, 4А132МУЗ, 4А315МУЗ
рассматриваются следующие математические модели:
1 — для идеализированной машины, значение взаимной
индуктивности с учетом насыщения;
2 — для идеализированной машины, значение взаимной
индуктивности без учета насыщения;
3 — для учета насыщения главного магнитного пути методом
статических индуктивностей;
4 — для учета насыщения путей потоков рассеяния статора и ротора
методом статических индуктивностей;
5 — для учета насыщения главного магнитного пути и путей потоков
рассеяния методом статических индуктивностей;
6 — для учета насыщения главного магнитного пути методом
динамических индуктивностей;
7 — для учета насыщения путей потоков рассеяния методом
динамических индуктивностей;
8 — для учета насыщения главного магнитного пути и путей потоков
рассеяния методом динамических индуктивностей;
9 — для учета вихревых токов в роторе;
10 — для учета вытеснения тока в стержнях ротора;
11 — для учета полного насыщения методом статических
индуктивностей, роторных вихревых токов и эффекта вытеснения тока в стержнях
ротора;
12 — для учета полного насыщения методом динамических
индуктивностей, роторных вихревых токов и эффекта вытеснения тока в
стержнях ротора;
13 — модель без учета непостоянных параметров, значение
взаимной индуктивности — насыщенное, питающее напряжение —
прямоугольной формы. Максимальное значение напряжения рассчитано по
формуле ищпйк = £/,я/4, где U\ —значение амплитуды синусоидального
напряжения;
14 — для учета полного насыщения методом статических
индуктивностей, роторных вихревых токов и эффекта вытеснения тока в
стержнях ротора, напряжение — прямоугольной формы;
15 — для учета полного насыщения методом динамических
индуктивностей, роторных вихревых токов и эффекта вытеснения тока в
стержнях ротора, напряжение — прямоугольной формы;
16 — модель без учета непостоянных параметров, значение
взаимной индуктивности — насыщенное, форма питающего
напряжения—ступенчатая. Максимальное значение напряжения рассчитано по формуле
8-179
225
UCTmix=Uln/3, значение напряжения первой ступени кривой
^ст1=0Д/стт,х;
17 — для учета полного насыщения методом статических индук-
тивностей, роторных вихревых токов и эффекта вытеснения тока в
стержнях ротора, напряжение — прямоугольно-ступенчатой формы;
18 — для учета полного насыщения методом динамических ин-
дуктивностей, роторных вихревых токов и эффекта вытеснения тока в
стержнях ротора, напряжение — прямоугольно-ступенчатой формы.
В моделях 1—12 питание синусоидальное.
Далее рассмотрены комбинации перечисленных выше вариантов.
Варианты 101, 105, 107—197 и 301, 303, 305—399 представляют
результаты расчета модели без учета непостоянных параметров (модель 1) при
напряжении питания, содержащем только нечетные гармоники.
Первая цифра номера варианта 1 или 3:
1 — кривая напряжения состоит из нечетных гармоник, исключая
третью и гармоники, кратные трем;
3 — кривая напряжения состоит из всех нечетных гармоник.
Вторая и третья цифры номера варианта обозначают номер
последней гармоники, из которых состоит кривая напряжения.
Все перечисленные варианты просчитывались на ЭВМ и результаты
сведены в таблицы. В табл. 11.1 и 11.2 /Ауд — ударный ток статора, /ауд —
ударный ток первого роторного контура, Л/эуд — ударный
электромагнитный момент; /п — время пуска.
Таблица 11.1. Результаты расчета переходного процесса пуска
асинхронного двигателя 4А132М4УЗ
№
модели
1
2
3
4
' 5
6
7
8
9
10
И
12
13
'Ауд
А
194,907
193,786
194,551
223,309
223,697
194,983
235,709
235,650
210,894
191,516
235,150
242,827
270,141
%
0
-0,61
-0,183
14,572
14,771
0,039
20,934
20,904
8,202
8,260
20,647
24,586
38,600
'•уд
А
-188,376
-189,135
-189,421
-217,173
-218,974
-188,607
-228,946
-229,324
-171,992
-185,054
-194,781
-201,048
-194,939
%
0
0,403
0,555
15,287
16,243
0,123
21,537
21,737
-8,698
-1,764
3,400
6,727
3,484
М.уд
Нм
191,488
193,772
171,538
333,190
289,655
159,743
280,280
251,743
232,064
225,302
304,311
300,266
212,605
%
0
1,214
-10,400
74,037
51,297
-16,561
46,400
31,494
21,215
17,685
58,952
56,839
11,051
'п
с
0,1070
0,1080
0,0870
0,0840
0,0910
0,1175
0,0810
0,0875
0,0305
0,0810
0,0710
0,0700
0,0825
%
0
0,943
-18,69
-21,495
-14,95
9,81
-24,299
-18,224
-24,766
-24Д99
-33,645
-34,579
-22,897
226
Продолжение табл. 11.1
модели
14
15
16
17
18
'Ауд
А
292,617
297,030
205,073
232,593
245,257
%
50,132
52,396
5,216
19,336
10,441
'■уд
А
-192,509
-205,048
-199,659
-192,105
-200,410
%
2,194
8,850
5,990
1,980
6,388
Л/Э.уд
Нм
332,818
351,881
223,379
330,439
355,634
%
73,843
83,800
16,679
72,600
87,760
'п
с
0,0585
0,0500
0,0810
0,0585
0,0525
%
-45,327
-53,271
-24,299
-45,327
-50,935
Таблица 11.2. Результаты расчета переходного процесса пуска
асинхронного двигателя 4А132М4УЗ
№
варианта
105
107
111
113
117
119
123
197
303
305
307
309
311
313
315
317
319
321
323
399
(*уд
А
195,684
196,943
197,041
197,816
197,258
198,668
200,376
198,465
235,211
242,255
245,965
248,197
249,047
251,622
247,159
249,095
248,958
250,860
250,236
259,724
%
0,399
1,045
1,095
1,493
1,206
1,930
2,806
1,825
20,679
24,293
26,196
27,341
27,777
29,098
26,809
27,802
27,732
28,708
28,387
33,255
'аул
А
-189,69
-191,241
-191,366
-192,046
-192,175
-193,541
-195,195
-193,685
-188,270
-189,649
-191,295
-191,209
-191,564
-192,081
-191,162
-190,740
-189,493
-190,422
-190,314
-192,821
%
0,676
1,521
1,587
1,948
2,017
2,742
3,620
2,818
-0,056
0,676
1,550
1,504
1,692
1,967
1,479
1,255
0,593
1,086
1,029
2,360
А/3
Нм
197,132
202,151
212,586
202,524
216,128
216,490
216,114
225,699
195,215
197,173
202,196
208,289
203,352
202,423
213,973
215,879
211,870
216,572
215,736
215,114
•уд
%
2,969
5,591
11,041
5,785
12,891
13,080
12,884
17,890
1,968
2,990
5,614
8,797
6,218
5,733
11,766
12,761
10,667
13,123
12,686
12,362
t
с
0,0808
0,0816
0,0800
0,0780
0,0792
0,0772
0,0796
0,0792
0,0796
0,0756
0,0900
0,0860
0,0884
0,0800
0,0844
0,0860
0,0808
0,0824
0,0808
0,0792
п |
%
-24,49
-23,74
-25,23
-27,10
-25,98
-27,85
-25,61
-25,98
-25,61
-29,35
-15,89
-19,63
-17,38
-25,23
-21,12
-19,62
-24,49
-22,99
-24,49
-25,98
При сравнении за базовую модель принята модель
идеализированной машины по первому варианту.
На рис. 11.3—11.5 основные результаты расчетов для двигателя
4А132М4УЗ представлены в виде диаграмм.
Табл. 11.1 и 11.2 содержат данные для одного двигателя, но такие же
таблицы могут быть получены для двигателей другой мощности и для
всех модификаций единых серий. Обилие результатов свидетельствует о
227
Чл.у-
50 V
40
30
го
ю
о
Ш!
Ill
I
I I I
1 i !
4 I I
I I I
I
I »
! i
и
1 2 34 5 6 7 8 91011 11131415161115
Номера модели
Рис. 11.3. Диаграмма значений
ударного тока статора двигателя 4А132М4УЗ
м*уд» У>
80
70
60
50
U0
30
20
10
Нп
п
Щ i ' ! !
I i i i i п
гн
1 ' i l i ' '
{ i i I i
I i i i i
l l i I i
I I I H '
М | I I
JLA. ! I..
11
I
I I I
II.
I I I I
» ' '
разнообразии и неисчерпаемости
динамических показателей
электрических машин.
Влияние несинусоидальности
напряжения на ударный
электромагнитный момент для вариантов
101—197 показано на рис. 11.6, а,
для вариантов 301—399 — на рис.
11.6,6.
Таблицы и диаграммы дают
представление о влиянии
различных факторов и их совокупности
на показатели машин в
зависимости от мощности и формы
напряжения питания.
При учете насыщения главного
пути потока методами статических
и динамических индуктивностей
Л/Э.уд для двигателя 4А132М4УЗ
уменьшается соответственно на 13
и 15,5%, а время пуска
увеличивается на 11 и 8%.
При учете влияния
насыщения на рабочий поток и потоки
рассеяния методом статических и
динамических индуктивностей
получаются качественно одинаковые
картины переходного процесса. Так
как применение метода
динамических индуктивностей более
громоздко, целесообразно применять
метод нелинейных зависимостей М=
=Х0, L =//) в уравнениях ЭП.
Влияние вихревых токов
ротора и вытеснения тока
увеличивается с возрастанием мощности
двигателя. Для двигателя 4А132М4УЗ Л/эуд 7,5 и 2,5%, а для 4А315М8УЗ —
64 и 106%. Время пуска 4А132М4УЗ 2 и 7%, а для 4А315М8УЗ — 41 и 19%.
При учете всех факторов (модель 12) результаты, полученные на
ЭВМ, приближаются к экспериментальным. На рис. 11.7 и 11.8 для
сравнения показаны осциллограммы пуска двигателя с учетом реальных
факторов. При несинусоидальном напряжении питания значительно
возрастают ударные токи и моменты и уменьшается время разбега.
228
113456768 Ю И 12131* 15161116
Номера модели
Рис. 11.4. Диаграмма значений
ударного электромагнитного момента
5\
0
-5
-10
-15
-20
-25\
-30
-35
-U0
-U5
-50
1 2
i
тт
П
У*
56
7 8
ттптпт
I
I I I I I
I I I I
U I • I I
I
I I
II...
» I I I
I I I I
I I I I I
I I I I I
Utf I Ш
9 10 И 12131*15 lid 10*
Номера модели
Рис. 11.5. Диаграмма времени пуска
двигателя 4А132М4УЗ
а)
М9-УА>
П
в
О
%
I
г—I
I I
I I I
-L.
101 105107 111 ИЗ \П 119 123 197
Вариант
б)
де
,%
I
г-|
i i
гГ1, !
" -1- "
301303305307309311313 315317319 321323 339
Вариант
Рис. 11.6. Диаграмма ударного электромагнитного момента двигателя
4А132М4УЗ
-М,
If
^ 0,05с
V—"ау
\ / \j'°
Рис. 11.7. Пуск в ход двигателя
4А132М4УЗ (модель!)
Рис. 11.8. Пуск в ход двигателя
4А132М4УЗ (модель П)
Влияние различных факторов на переходные процессы при реверсе,
повторном включении и других процессах разное и требует такого же
детального исследования. Оптимальные параметры в статике —
неоптимальные в динамике. Инженер-электромеханик должен не только уметь
выбирать математическую модель, но и представлять, какие факторы в
данной задаче являются определяющими, а влиянием каких факторов
можно пренебречь.
8М79
§11.3. Учет влияния технологических факторов
на характеристики электрических машин
Рис. 11.9. Основные типы технологических
отклонений электрических машин
Характеристики
электрических машин, имеющих одни
и те же паспортные данные,
отличаются друг от друга.
Отличие в характеристиках
зависит от технологических
отклонений и различия показателей
электротехнических
материалов. Поэтому для получения достоверных данных о реальной машине
необходимо провести исследования нескольких десятков машин и
получить усредненные характеристики. Наибольшее влияние на разброс
характеристик оказывает разброс параметров зазора и наличие
технологических короткозамкнутых контуров.
При изложении теории ЭП принято считать зазор равномерным, но в
реальной машине из-за различных технологических факторов зазор не
бывает равномерным. Это можно объяснить эксцентриситетом ротора
относительно статора (рис. 11.9, а), эллипсностыо ротора (рис. 11.9, б),
конусностью статора и ротора (рис. 11.9, в), несоосностью статора и
ротора (рис. 11.9, г) и рядом других причин. Для расчета добавочных
потерь, вибраций, погрешностей и других показателей машины необходимо
в математической модели учитывать неравномерность зазора.
В многополюсных машинах можно по длине и по расточке машины
выделить элементарные машины, которые имеют различные параметры.
При наличии в обмотках параллельных ветвей из-за различия
индуктивных сопротивлений неравномерно распределяются токи, а при
последовательном соединении элементарных машин из-за различия индуктивных
сопротивлений неравномерно распределяются напряжения.
Если машина многополюсная, то в случаях, иллюстрированных рис.
11.9, а, б, по ее длине можно выделить п машин с различными зазорами, а
по окружности зазора — т машин. В случаях, иллюстрированных рис.
11.9, в, г, по длине машины есть п машин, имеющих различный
воздушный зазор. В многополюсной машине в случаях, показанных на рис. 11.9,
а, б, при наличии параллельных ветвей токи в элементарных машинах
распределяются неравномерно. Для случаев, показанных на рис. 11.9, в, г,
когда элементарные машины соединены последовательно, напряжение по
ним распределяется неравномерно.
Рассмотрим машину с неравномерным по длине воздушным зазором
из-за конусного ротора (рис. 11.10, а) или из-за того, что магнитопровод
состоит из пакетов (рис. 11.10, б), и разобьем ее по длине на п частей.
230
Обычное исполнение машин с
разбивкой на пакеты при равномерном
воздушном зазоре также можно отнести к
этому случаю, так как крайние и
средние пакеты в магнитном отношении
находятся в различных условиях.
В первом приближении можно
считать, что машина имеет п статоров
и общий ротор. Если допустить, что
связь между п статорами отсутствует, то уравнения напряжений можно
записать в следующем виде:
"D
D
A1.1)
Рис. 11.10. Типы неравномерностей
воздушного зазора машины
Q
L
В A1.1) ub u2, ..., и„ ..., ил — матрицы напряжений элементарных
машин; ib i2,..., i„ ..., i„ — матрицы токов.
В матрице сопротивлений A1.1) квадратики — матрицы
сопротивлений машины с круговым полем. В каждую матрицу элементарной
машины входят параметры, отличающиеся друг от друга из-за различия
воздушного зазора.
Результирующий момент равен сумме моментов в каждой
элементарной машине:
М,=М1+М2+... + М1+... + Мп. A1.2)
В модели машины с общим ротором в уравнении момента A1.2)
имеются произведения токов не только каждой элементарной машины,
но и все парные произведения токов п статоров и ротора. При общем
роторе между всеми п машинами (рис. 6.3) связь осуществляется через ротор.
При последовательном соединении элементарных машин в
установившемся режиме
Uc=U^U2^^Un. A1.3)
При параллельном соединении ток сети
A1.4)
В уравнениях A1.3) и A1.4) соответственно /,, /2,..., 1п и С/,, С/2,
..., Un :— токи и напряжения в элементарных машинах.
/в =/,+/2+••• + /«
231
Если учитывать связи между элементарными машинами не только
через токи в роторе, а, например, считать, что машина насыщена, то в
A1.1) будет заполнена вся матрица сопротивлений:
l~ui
Г2
Уравнения A1.1)—A1.5) сходны с уравнениями обобщенного ЭП и
подходят для исследования торцевых машин, у которых распределение
поля в периферийных и расположенных ближе к центру зонах
воздушного зазора различно.
К технологическим факторам, влияющим на характеристики ЭП,
относятся также короткозамкнутые контуры, образующиеся в машине
после механической обработки, сварки и прессовки магнитопровода статора
и ротора. Учесть влияние этих факторов на характеристики можно
введением контуров и различных параметров в элементарные машины, так как
это сделано для многообмоточных машин (см. гл. 7).
Обычно для ЭП характерна комбинация различных технологических
факторов и учет их сложен. Используя уравнения т, и-обмоточной
машины, можно исследовать влияние большинства этих факторов на
характеристики машины.
§ 11.4. Анализ реальной электрической машины
Рассмотрим математическое описание процессов
электромеханического преобразования энергии в реальной электрической машине на
примере асинхронной машины. В симметричной асинхронной машине
обмотки располагаются в пазах стального шихтованного магнитопровода.
При синусоидальном питании в воздушном зазоре имеются спектры
гармоник намагничивающих сил, гармоник, связанных с нелинейностью
активных и индуктивных сопротивлений, технологических, зубцовых и
комбинационных гармоник, т.е. в асинхронной машине в воздушном
зазоре имеются все виды пространственных гармоник. В несимметричных
машинах добавляются отраженные волны. При несинусоидальном
несимметричном напряжении питания в воздушном зазоре появляются
спектры временных гармоник.
'D D ... D ... D|
D D ... D ... D
D D ... D ... 0|
D D ... D ... d
A1.5)
232
Асинхронная машина — многообмоточная машина, при расчете ее
необходимо учитывать контуры вихревых токов статора и ротора;
параллельные ветви обмотки статора могут находиться в различных условиях.
При этом активная часть машины может быть разделена на крайние и
средние пакеты, магнитные условия в которых различны.
Очевидно, что не может быть точного математического описания
процессов электромеханического преобразования энергии в реальной
электрической машине, так как каждый из источников пространственных
гармоник создает бесконечный спектр гармоник, а источников гармоник
в ЭП имеется несколько десятков. Наиболее общим математическим
описанием процессов электромеханического преобразования энергии в
обычной асинхронной машине является система уравнений обобщенного
ЭП с постоянными и нелинейными коэффициентами.
Хотя описание процессов в ЭП всегда приближенно,
вычислительная техника позволяет получить достаточную точность в большинстве
задач, встречающихся в электромеханике. Следует иметь в виду, что и
при экспериментальном исследовании ЭП можно получить только
приближенные сведения.
При синусоидальном напряжении на входе, допустив, что параметры
ЭП не зависят от нагрузки, можно использовать уравнения с
постоянными коэффициентами.
В насыщенной машине в намагничивающем токе имеются нечетные
гармоники, которые благодаря пространственному сдвигу обмоток и
токов во времени создают в воздушном зазоре поля, перемещающиеся
относительно ротора с различным скольжением. Пользуясь моделью
обобщенного ЭП, в модели насыщенной машины можно учесть т пар
обмоток на статоре и роторе по осям аир, к которым приложены напряжения,
создающие в воздушном зазоре поле, такое же, как и в реальной машине.
Считая связи между гармониками равными нулю, получим
уравнения F.1)—F.7) и модели машины (см. рис. 6.1—6.3) с т обмотками на
статоре и роторе, что соответствует питанию несинусоидальным
несимметричным напряжением идеализированной электрической машины.
Таким образом, рассматривая машину с переменными параметрами с
синусоидальным напряжением на выводах, можно представить машину с
постоянными параметрами и несинусоидальным напряжением на выводах.
Уравнения насыщенной машины отличаются от уравнений асинхронной
машины при несинусоидальном напряжении наличием коэффициентов
Мжгзш Mima, Misp, .., Л/,г,тр, ..., М*,р, ..., Мп1т$ и других, отражающих
ферромагнитные связи между гармониками.
Влияние несинусоидального распределения намагничивающей силы
на спектр гармоник в воздушном зазоре рассмотрено в § 4.1. Если
считать, что ц стало бесконечно велико, а воздушный зазор гладкий, то фор-
233
ма магнитной индукции поля в воздушном зазоре повторяет форму
распределения намагничивающей силы. Зная спектр гармоник в воздушном
зазоре — их амплитуды и фазы, с помощью уравнений обобщенного ЭП,
считая, что на статоре и роторе имеется одинаковое число фиктивных
обмоток, соответствующее выбранному числу гармоник, составляем
математическое описание процессов, происходящих в такой машине.
Исследование должно ограничиваться учетом трех—пяти гармоник.
Активные сопротивления фиктивных обмоток можно считать равными
активным сопротивлениям реальных обмоток. Определение индуктивно-
стей фиктивных обмоток сложнее. Приблизительно можно считать
взаимные индуктивности по высшим гармоникам намагничивающей силы
для третьей гармоники, равной V3 амплитуды первой, для пятой — V5 и
т.д. Коэффициенты связи между гармониками Мы не могут быть больше
взаимных индуктивностей между первыми гармониками Ми.
Коэффициенты в уравнениях электромеханического преобразования энергии
зависят от нагрузки. Итак, уравнения машины с несинусоидальным
распределением МДС такие же, что и для насыщенной машины, и отличаются
одно от другого только значением коэффициентов и амплитудами гармоник.
Если же машина ненасыщена и МДС распределена по
синусоидальному закону, а зазор гладкий, но не равномерный по технологическим
причинам (неконцентричное расположение ротора и статора, эллипс-
ность, конусность и т.д.), то в зазоре возникает спектр технологических
гармоник. Как в аксиальном, так и в радиальном направлении можно
анализировать процессы в машине, разбив ее на m, n частей. Нетрудно
получить уже известную схему машины с т статорами и общим ротором.
При этом можно считать, что напряжение сети равномерно
распределяется между т машинами, а параметры этих элементарных машин мало
отличаются друг от друга. Даже если считать параметры одинаковыми,
задача будет бесконечно сложной, так как в каждой элементарной машине
имеется свой спектр гармоник, зависящий от эксцентриситета. Спектр
гармоник содержит пространственные гармоники, которые связаны
между собой и влияют одна на другую.
С учетом влияния неравномерности воздушного зазора и других
технологических факторов вновь получим уравнения обобщенного ЭП, в
которых надо правильно подставить значения параметров и определить
амплитуды и фазы гармоник. Неравномерность воздушного зазора,
обусловленная наличием пазов на статоре и роторе, как и во всех случаях,
рассматриваемых выше, создает определенный спектр гармоник поля.
Здесь математическое описание такое же, что и в случаях,
рассматриваемых выше [4].
Наибольшее влияние на работу машины оказывает насыщение
магнитной системы машины, т.е. нелинейности ЬиМ, входящие в уравнения
напряжения. Высшие гармоники, связанные с насыщением, ухудшают
234
энергетические характеристики. Это влияние можно учесть,
воспользовавшись представлением динамических КПД и коэффициента мощности,
так же, как это было сделано для несинусоидального напряжения
питания. При этом средний за период КПД для двигательного режима
двухфазной машины
кпд„ = /» ,,/хЁ^, (п.6)
оо
где-Рг* — средняя за период механическая мощность; ^/^ —активная
/1=0
мощность, потребляемая из сети и определяемая как сумма мощностей
всех гармоник в течение периода.
Для определения среднего за время переходного процесса КПД надо
знать средние за время переходного процесса механическую и активную
мощности для математической модели электрической машины,
учитывающей насыщение при симметричном синусоидальном напряжении на
клеммах.
Средний за период коэффициент мощности для модели машины,
учитывающей насыщение,
2 оо
ZJz^Jz^
l^f f /1=0 1 м-1
где UnkUlnjc — напряжения и токи в обмотках модели насыщенной машины.
Из A1.6) и A1.7) следует, что определение средних динамических
КПД и коэффициента мощности насыщенной машины производится так
же, как для идеальной машины при несинусоидальном напряжении питания.
При нелинейных изменениях активных сопротивлений или
момента инерции и отсутствии других факторов, порождающих высшие
гармоники в воздушном зазоре, математическая модель остается такой
же, что и для насыщенной машины. При этом изменяются амплитуды
фазы и частоты гармоник и параметры фиктивных обмоток в
математической модели.
Для несимметричной машины определяется спектр полей в
воздушном зазоре при исключении всех остальных факторов, обусловливающих
появление гармоник в воздушном зазоре. Математическая модель
двухфазной несимметричной машины без учета других высших гармоник
выглядит так же, как и для насыщенной машины.
При моделировании на ЭВМ насыщенной машины в уравнениях
напряжений будут связи между гармониками, а при учете несимметрии и
235
отсутствии других причин, вызывающих появление высших гармоник,
связей между обмотками в уравнениях напряжений нет.
В многофазных машинах в A1.6) и A1.7) берется сумма при к = /и, а
в двухфазных — к = 2.
При исследовании реальных электрических машин, в которых всегда
имеется несколько причин, вызывающих появление спектров высших
гармоник поля, целесообразно определять динамические КПД и ки для
идеальной машины с синусоидальным магнитным полем, а затем
учитывать уменьшение этих показателей за счет введения коэффициентов,
учитывающих несинусоидальность напряжения, насыщение и другие факторы.
В электромеханике применяются коэффициент несинусоидальности
напряжения, характеризующий несимметричность нагрузки по фазам,
коэффициент насыщения и др. Математические модели электрических
машин позволяют отдельно учесть все факторы, приводящие к
появлению высших гармоник в воздушном зазоре. Таких основных причин
свыше десятка, поэтому целесообразно ввести один коэффициент (#„),
учитывающий несколько факторов.
Коэффициент искажения поля в воздушном зазоре Кн можно
определить как отношение полезной мощности на валу при несинусоидальном
магнитном поле (/^.и) к полезной мощности при круговом поле (Л*):
Коэффициент искажения меньше единицы и зависит от параметров
машины и независимых переменных в уравнениях электромеханического
преобразования энергии. Коэффициент искажения также зависит от
времени и от характера протекания переходных процессов.
Если известны динамические КПД и коэффициент мощности при
круговом поле, то, зная среднее значение за период и за время
переходного процесса коэффициента искажения, можно определять
динамические КПД и коэффициент мощности для различных случаев
несинусоидального поля в воздушном зазоре. Для этого предварительно
необходимо провести значительные исследования математических моделей
электрических машин на ЭВМ при различных параметрах и условиях работы
(при несинусоидальном напряжении, насыщении, несимметрии и т.д.) и
определить коэффициенты искажения по A1.8).
Зная коэффициент искажения и динамические показатели идеальной
машины, можно определить энергетические коэффициенты
соответственно за период и за время переходного процесса;
К^^ШЩ^^К.; A1.9)
К^КПД^Ли,- (НЛО)
В A1.9) и A1.10) Ки — коэффициент искажения за период; Кип —
коэффициент искажения за время переходного процесса; КПД,, КПД, п и
236
#м.т #м.п.п — коэффициенты полезного действия соответственно за
период и за переходный процесс и коэффициент мощности для идеальной
машины синусоидального напряжения.
Зная спектры гармоник, вызванных различными факторами, можно
определить динамические КПД и коэффициент мощности в общем
случае для многофазной машины при несинусоидальном напряжении с
учетом нелинейностей, несимметрии машины и других пространственных
гармоник. При этом
КПД.^/еЁъ. A1.11)
Динамический коэффициент мощности
2 оо
*™= г и"'* I. • A1Л2)
Уравнения обобщенного электромеханического преобразователя
позволяют учесть m, n контуров на статоре и роторе. Поэтому, имея
математическое описание процессов электромеханического преобразования
энергии с учетом /и, п контуров на статоре и роторе, можно определить
энергетические показатели и для этого случая. В общем случае их можно
вычислять и при наличии нескольких контуров на статоре и роторе и
нескольких гармоник в воздушном зазоре машины.
Итак, в реальной ненасыщенной машине существуют бесконечные
множества пространственных гармоник, обусловленных
несинусоидальным распределением намагничивающей силы и неравномерностью
воздушного зазора, за счет наличия пазов на статоре и роторе и наличия экс-,
центриситета. В насыщенной машине появляются еще и спектры
гармоник, связанные с нелинейностью параметров индуктивностей и взаимной
индуктивности, а также комбинационные частоты. Однако только
небольшая часть высших гармоник оказывает заметное влияние на работу
машины, так как большинство из них имеют бесконечно малые
амплитуды и практически не влияют на рабочие процессы в машине.
Представления об обобщенной машине непрерывно развиваются.
Уравнения обобщенного ЭП описывают процессы преобразования
энергии в ЭП при несинусоидальном несимметричном напряжении питания в
насыщенной машине с учетом всех пространственных гармоник и
наличия нескольких степеней свободы. Более общей моделью обобщенного
ЭП является модель многофазной /и, л-обмоточной машины с п
степенями свободы [4].
237
Усложнение математического описания не всегда возможно. Во
многих задачах, наоборот, требуется умение упростить задачу, оставив
необходимую для инженерного решения информацию. В сложных
электромеханических системах, например, состоящих из многих
электрических машин, необходимо упрощать представления о процессах
преобразования энергии, уменьшая число уравнений. При этом необходимо четко
представлять, что позволяют получить упрощения и чем можно
пренебречь. При исследовании процессов в энергосистемах, состоящих из
большого количества ЭП, упрощения необходимы. Однако во многих
случаях усложнение математического описания исследуемой задачи не
дает ожидаемых результатов.
Для анализа рабочих процессов в реальной машине необходимо, во-
первых, четко представлять, что решение этой задачи может быть только
приближенным; во-вторых, надо ограничить число уравнений (число
гармоник и контуров, которые будут рассматриваться); в-третьих, и это
самое сложное, определить амплитуды и фазы гармоник, а также
параметры уравнений электромеханического преобразования энергии. После
этого надо решить уравнения с помощью ЭВМ. Проделав все эти
операции, получим приближенное решение. Однако оно может совпадать с
результатами, полученными на реальной машине, т.е. погрешности
измерений будут одного порядка с погрешностями, полученными в результате
решений уравнений.
Несмотря на сложность процессов в многоконтурной
электрической машине и на различные причины появления гармоник в зазоре,
математическое описание процессов преобразования энергии в
электрических машинах можно проводить с помощью одних и тех же уравнений
т, п-обмоточной машины.
Развитие теории электромеханического преобразования энергии
вступило в новую стадию своего развития, когда классические
представления о синусоидальности и бесконечной мощности сети могут все реже
применяться при решении практических задач. Возрастает сложность
решаемых проблем, когда только применение дифференциальных
уравнений и ЭВМ для их решения позволяют подойти к их решению. В этих
условиях применение теории обобщенного электромеханического
преобразователя является наиболее результативной и, пожалуй, единственной
для большинства современных сложных задач электромеханики.
Глава 12
Космическая электромеханика
§ 12.1. Конструктивные особенности космических
электромеханических преобразователей
Вся история человечества до последних лет проходила на Земле,
поэтому основные научные достижения и успех в науке, технике и культуре
связаны с земными условиями. Это относится, в первую очередь, к
физике и ее большой части — электромеханике. В окружающем нас мире
земные условия уникальные, а в Космосе действуют более общие законы
электромеханики, которые необходимо изучать, так как человек в своих
исследованиях с каждым годом все больше будет уходить в космические
дали.
Классическая земная электромеханика — одномерная
электромеханика, когда электрические машины, как правило, имеют одну степень
свободы: вращающийся ротор и неподвижный статор. Статор
укрепляется на фундаментной плите, жестко соединенной с землей. Таким образом,
одна часть электрической машины имеет бесконечно большой момент
инерции и не может двигаться под воздействием электромагнитного
момента, развиваемого машиной.
Электромеханические преобразователи энергии, работающие в
космосе, находятся в условиях невесомости и имеют соизмеримые моменты
инерции якоря и индуктора, поэтому могут двигаться в пространстве обе
части машины. Электрическая машина в космосе получает несколько
степеней свободы, и уравнения электромеханического преобразования
энергии усложняются, приобретая более общий вид.
Однако не следует думать, что рассматриваемые ниже
математические модели могут применяться только для космических объектов. Есть
области применения многомерных уравнении сугубо земные. Например,
электромеханика подводных аппаратов. Кроме подводных лодок,
имеющих большую массу, широко используются для подводных работ
аппараты, масса которых соизмерима с массой вращающихся частей
электромеханических преобразователей. Кроме подводных аппаратов многомерные
уравнения используются в машинах с магнитным подвесом ротора,
линейных транспортных двигателях и других установках.
Рассмотрим несколько необычных космических ЭП.
239
Зависимостями, которые связывают ЭДС, наводимую в контуре
машины, с электромагнитными нагрузками и геометрией, как в космосе, так
и в земных условиях, являются
e = Blv9 A2.1)
где В — индукция; / — длина витка; v — скорость движения витка.
С другой стороны
е = ~, 02-2)
Л
где Ф — магнитный поток; / — время. При этом Ф = BS, где S —
площадь контура, пронизываемая потоком.
В обычных машинах индукции равны сотням или тысячам гауссов,
длина — десяткам сантиметров или нескольким метрам, а скорости —
десяткам или сотням метров в секунду. В космической электромеханике
индукции обычно небольшие и равняются нескольким десятым гаусса.
Так, на поверхности Земли в средних широтах индукция магнитного поля —
ЗССГО 0,3 ГС. ОДНАКО ПДШа КОНТура, В ШЩШ Шбдится ЭДС, может
быть сотни и тысячи метров. Нетрудно представить контуры длиною в
тысячи километров. Скорость перемещения витков может достигать
тысяч метров в секунду, будучи меньше первой космической скорости или
больше второй космической скорости. A2 км/с).
В космосе при небольших индукциях, но при больших длинах
контуров и больших скоростях, можно получить высокие напряжения,
измеряемые десятками киловольт.
Одним из примеров ЭП космической электромеханики является
импульсный генератор (рис. 12.1). Идея работы такого генератора проста: из
космического корабля выбрасывается проводящий контур. В нем наводится
ЭДС за счет изменения площади контура В—. Хотя индукция магнитного
поля в космосе небольшая, за счет быстрого изменения площади контура
могут создаваться достаточно
большие импульсные
напряжения. Такой генератор
отбирает мощность от космиче-
скоп) аппарата, влияя на его
^ Е^ в5Г ' I траекторию полета.
Технические трудности состоят в
выполнении контура, который
не должен скручиваться в
космосе и мог бы сматываться и
Рис. 12.1. Импульсный генератор выбрасываться несколько раз.
240
На космических аппаратах для
стабилизации и успокоения качаний
применяются магнитодвигатели, которые
представляют собой катушку,
двигающуюся в магнитном поле Земли. Три
катушки, расположенные по трем осям
космического корабля, взаимодействуя с „ _ _ __
r J Рис. 12.2. Ионный двигатель
внешним магнитным полем, создают
моменты, обеспечивающие успокоение качаний при движении по орбите.
Недостатком магнитодвигателей является ухудшение их
эффективности при увеличении радиуса орбиты из-за ослабления
магнитного поля Земли.
Представляет интерес генерация мощности в таких контурах в
сильных магнитных полях при полетах автоматических станций в районах
радиационных поясов Земли.
Малоисследованными являются вопросы использования в космосе
емкостных электрических машин. Наибольший интерес среди емкостных
ЭЯёПрОивХйШЧЁ&Ш йр88б{ййбватёлё§" представляет ионный двигатель
(рис. 12.2). Ионы, образующиеся на источнике питания 7, ускоряются в
сильном электрическом поле, которое создается на обкладках 2, и
выбрасываются в космос через сопло 3. Таким образом, образуется реактивная
тяга и космический аппарат получает ускорение. Создаваемый ионным
двигателем реактивный момент достаточен для космических полетов в
космосе. Преимущество ионного двигателя — небольшая масса по
сравнению с другими ускорителями [6].
Земной шар вместе с ионосферой и стратосферой представляет из
себя многослойный конденсатор, обкладки которого находятся под
высоким напряжением, а сам такой конденсатор имеет огромную емкость,
равную десяткам фарад. Если соединить через линию передачи обкладки
такого конденсатора, то можно будет снимать с этого устройства
электрическую энергию. Существуют проекты подъема в стратосферу с
Земли кабеля, по которому электрические заряды будут стекать в линию
передачи на землю.
Однако надежность и экологическая* безупречность такого проекта
не исследованы.
Наиболее проработанным проектом использования энергии Космоса
является создание энергетических платформ на стационарных орбитах,
на которых развертываются солнечные батареи. Преобразование
солнечной энергии в фотодиодах с КПД = 7—10% обеспечивает промышленное
получение электрической энергии постоянного тока. С площади
примерно 10 км2 можно снять 1 млн. кВт.
Для передачи энергии на Землю необходимо электрическую энергию
преобразовать в СВЧ-энергию с частотой 1012 Гц. СВЧ-лучи пронизыва-
241
ют атмосферу почти без потерь и на Земле попадают на приемную
антенну — реактенну, а затем преобразуются в частоту 50 Гц. Технические
проблемы создания такой энергетической системы вполне разрешимы.
Большинство из них связаны с электромеханикой. Однако реализация
такого проекта связана с большими экономическими затратами и пока он
не выходит из стадии обсуждения [11].
Слабым местом установок, использующих солнечную энергию,
являются фотодиоды, которые подвержены старению за счет воздействия
на них Космоса. Фотодиоды можно заменить электромеханическим
устройством, преобразующим тепловую энергию в электрическую. Принцип
действия таких установок основан на изменении проницаемости (ц)
ферромагнетиков или диэлектрической проницаемости, (е) сегнетоди-
электриков при температуре, близкой к точке Кюри [6].
При вращении платформы в Космосе температура поверхности,
обращенной к Солнцу, по отношению к части, находящейся в тени,
изменяется на 60 °С. При изменении ц или г изменяется магнитное
сопротивление сердечника или диэлектрика в конденсаторе, что при нелинейном
характере зависимости ц = /(/) или 8 = /(/) приводит к изменению тока
и мощности в обмотках преобразователя. Магнитотепловые
электромеханические преобразователи, имея высокую надежность и лучшие
энергетические показатели, могут стать конкурентами фотодиодных
преобразователей при применении на космических платформах [6].
§ 12.2. Переход от одномерной машины к трехмерной
Система уравнений простейшей одномерной машины описывается
пятью уравнениями B.1)—{2.3), которые достаточно подробно
рассматривались в гл. 2 и 3.
Двухмерную машину с вращающимся ротором и статором можно
получить из обычной электрической машины, если статор 1 отделить от
фундамента и
обеспечить ему возможность
вращаться (рис. 12.3).
При этом машина
имеет две степени
свободы и
превращается в двумерную. На
рис. 12.3
короткозамкнутый ротор 2
расположен в
расточке статора, который
Рис. 12.3. Двухмерная электрическая машина
242
также может свободно вращаться. На обмотки статора напряжение
подается через контактные кольца 3. Машина имеет два выходных конца вала,
к которым приложены моменты сопротивления (нагрузки) ротора Мг и
статора Ms. В двухмерных машинах понятие статора, как неподвижной
части теряет смысл и можно говорить о первом и втором роторе. Такие
машины иногда называют машинами двойного вращения или
контрроторными.
Двухмерная машина конструктивно отличается от обычной лишь
тем, что в ней обеспечивается вращение статора и ротора, а нагрузка
может быть приложена к обеим частям машины. Однако математическое
описание имеет ряд важных особенностей, что и определяет ряд ее новых
качеств и дает возможность глубже разобраться в процессах
электромеханического преобразования энергии.
Система уравнений двухмерной машины записывается в следующем
виде:
; A2.3)
-
к
к
«р
i";
=
r-+JL-
dt
-M(or
-M<as
—M
dt
a dt "
~L>r
~L>,
Ipco,
Гэ©г
dt
-
Mo5
Mor
dt
r'+—L'
r*+dt\
X
-]
к
'"
'p
'p
М,=рМ(#'а-ф;
p dt
J. da
= M,±Mr;
£_ __
= M,±A/.
p dt
и,=аг± со.
A2.4)
A2.5)
A2.6)
A2.7)
Как и во всех электромеханических преобразователях,
преобразование энергии происходит в воздушном зазоре (в пространстве), где
концентрируется энергия магнитного поля. Уравнение электромагнитного
момента A2.4) имеет такой же вид, как и в обычной машине.
Рассматривается идеальная двумерная машина, поэтому электромагнитный момент
равен вращающемуся моменту, а его вибрационные и деформационные
составляющие отсутствуют. Вращающий момент приложен к статору и
ротору, которые вращаются в противоположные стороны.
Принципиальным отличием уравнений двухмерной машины от одномерной является
наличие двух уравнений движения A2.5) и A2.6).
243
В двухмерных и многомерных электрических машинах стираются
различия между синхронными и асинхронными машинами. Равенство
сог = юс остается справедливым только тогда, когда статор неподвижен
(со, = 0). Это и есть случай, когда машина одномерная.
В двухмерной машине сог ± со5 = сос. При этом можно говорить о
скольжениях (относительных скоростях) для ротора и статора
Если сложить sr и ss, то получим уравнение A2.7).
Подобные простейшие преобразования справедливы и для л-мерных
электрических машин.
Многомерная электромеханика, являясь более общей по сравнению с
одномерной электромеханикой свидетельствует о том, что даже такие
фундаментальные представления классической электромеханики, как
синхронные и асинхронные машины нельзя переносить на более общие
случаи электромеханического преобразования энергии, какими и
являются многомерные электрические машины.
Так как в многомерной электромеханике исчезает понятие
синхронных и асинхронных машин, господствующее в классической
электромеханике, в космической электромеханике следует пользоваться термином
«электромеханические преобразователи».
Так как вращаются и статор, и ротор, в уравнения напряжений
статора и ротора A2.3) входят ЭДС вращения.
Система уравнений A2.3) и A2.7) имеет шесть независимых и шесть
зависимых переменных. Она устойчиво моделируется на ЭВМ,
обеспечивая определение динамических и статических характеристик.
В одномерной машине установившаяся скорость не зависит от
момента инерции, а в двухмерной установившиеся скорости статора и
ротора определяются моментами инерции Js и Jn а также моментами нагрузки
Ms и Мп При пуске часть машины с меньшим моментом инерции
разгоняется быстрее и достигает большой скорости, так как юс = сог + со,. При
изменении нагрузки на одном валу, изменяются скорости вращения
обеих частей машины.
Двухмерные электрические машины находят применение в
тихоходных энергоустановках. В тихоходных ЭП число пазов и зубцов, как и в
других машинах, зависит от числа пар полюсов Z = 2mpq. При десяти
оборотах в минуту при частоте 50 Гц т = 3, р = 300 и даже при q = 0,5 в
трехфазной машине Z = 900 независимо от мощности машины из
технологических соображений надо выбирать диаметр в 3—4 м.
244
Рис. 12.4. ЭП со сферическим
ротором — трехмерная
электрическая машина
Если ротор и статор вращаются в
противоположные стороны со
скоростью 10 об/мин, то машина
рассчитывается на скорость 20 об/мин. При
этом р = 150, a Z = 450, что дает
возможность уменьшить диаметр почти в
два раза. В ряде случаев, например, в
безредукторных тихоходных
гидроагрегатах уменьшение диаметра агрегата
имеет решающее значение.
Конструкция трехмерной машины
значительно отличается от двухмерной
(рис. 12.4). Она имеет три дуговых
статора /, повернутых в пространстве
на 120° друг относительно друга.
Ротор 2 выполняется в виде шара, который подвешен над полукольцевыми
статорами за счет магнитных или шаровых опор.
Полукольцевые статоры имеют двухфазные или трехфазные
обмотки, обычно расположенные в пазах. Поле в воздушных зазорах сходно с
полем сегментного статора, а при больших диаметрах ротора его можно
привести к полю линейного двигателя. В некоторых конструкциях
двигателей статоре выполняются разъемными с симметричным
расположением пазов и зубцов на цилиндрическом магнитопроводе.
Трехмерные электромеханические преобразователи имеют три
степени свободы и, как и во всех этих электрических машинах,
преобразование энергии в них происходит в воздушном зазоре — пространстве, где
концентрируется энергия магнитного поля.
Система уравнений идеальной трехмерной машины включает
двенадцать уравнений напряжений (по четыре для каждого статора) и три
уравнения движения.
Уравнения напряжений в символической форме можно записать в
виде
1Л.
Zi
Л
A2.8)
В A2.8) £/], Z], /ь U2, Z2,1ъ U3, Z3, /3 — субматрицы напряжений,
сопротивлений и токов для первого, второго и третьего двигателя,
создающих электромагнитный момент в осях х, у; х9 z\ у, г. Обычно параметры
для трех двигателей одни и те же. В уравнениях A2.8), когда ротор
неподвижен, можно не учитывать магнитные связи между тремя статорами.
При необходимости их можно учесть, введя в A2.8) сопротивления Z12,
245
Z2b Z13, Z31, Z23 и Z32. При вращении ротора в уравнениях напряжений
появляются ЭДС вращения, учитывающие скорости по трем осям
машины.
Если учитывать краевые эффекты и несинусоидальность поля за счет
неравномерности воздушного зазора и других причин, число уравнений
возрастает соответственно в два или несколько раз. При учете тех или
иных факторов необходимо помнить о возможностях вычислительных
машин и ограничивать число уравнений.
Для трехмерной машины записываются три уравнения движения:
А/ж-А/в; A2.9)
Мэу-Мсу; A2.10)
Л/^-Л/^, A2.11)
где Jn, Jry> Jn — моменты инерции ротора по осям х, у, z (обычно, для
сферического ротора моменты инерции по трем осям одинаковые); со,*,
в>гу, <*>« — скорости вращения ротора, по осям х, у, z\ A/w, Мэу, М^ —
электромагнитные моменты по осям jc, у, z; Mw M^ Ma — моменты
сопротивлений по осям х, у у z.
Электромагнитный момент создается токами, протекающими в трех
статорах и стальном шаровом роторе и раскладывается на три
составляющие по осям х, у у z
М^М^+М^+М^. A2.12)
Уравнение скоростей трехмерной машины
©,=©„+@^+0^. A2.13)
Синхронная скорость поля сос определяется частотой питающей сети
и числом пар полюсов статоров машины. Предполагается, что источник
питания один, а число пар полюсов для трех статоров одно и то же.
При равенстве мощностей, потребляемых статорами в симметричной
машине, когда М^ = Мсу = М^ = Л/с и Мж = Мъу - Мх, а также
•/„ = */,у = •/« > скорости по осям х, у, z равны друг другу и
со/х=(о/у=(о„=(ос/3. A2.14)
Четырехмерную электрическую машину можно получить из
трехмерной, если дать возможность одному статору перемещаться
относительно ротора (см. рис. 12.4). Особенность системы уравнений
четырехмерной машины состоит в том, что она имеет четыре уравнения
движете,,
Л
!2L —
. d(n„
dt
246
ния, а в уравнениях напряжений одна из машин имеет ЭДС вращения как
в уравнениях ротора, так и статора.
Пятимерная электрическая машина получается из трехмерной, когда
два статора по отдельному могут перемещаться относительно ротора (см.
рис. 12.4).
В системе уравнений пятимерной машины пять уравнений
движения, а в уравнениях напряжений в обоих уравнениях статора
присутствуют ЭДС вращения.
Энергия в двухмерной машине подводится и к ротору, и к статору,
т.е. в воздушный зазор — в магнитное поле энергия поступает от двух
источников, включенных в обмотки статора и ротора. При этом частоты
статора и ротора не имеют жесткой связи, как в одномерных машинах.
Поэтому процессы в многомерных ЭП удобнее рассматривать
относительно поля машины. К многомерным машинам применимы законы
электромеханики. Поля, создаваемые токами взаимодействующих частей
машины, неподвижны относительно друг друга. В многомерных машинах
более наглядно представляется независимость и единство магнитных
полей, связанных с токами.
Многомерные электрические машины могут работать как в режиме
двигателя, так и в режиме генератора. Исследование уравнений
многомерных электрических машин при изменении знаков моментов
сопротивления представляет теоретический и практический интерес.
Многомерные электрические машины не могут осуществлять
электромеханическое преобразование энергии без потерь. Можно
представить сверхпроводящий многомерный индуктивный накопитель энергии,
который описывается уравнениями вида A2.9)—A2.13), в которых
значения активных сопротивлений равны нулю. Многомерный
сверхпроводящий индуктивный накопитель вырождается в обычный
сверхпроводящий индуктивный накопитель.
§ 12.3. Уравнения космической электромеханики
Шестимерные электромеханические преобразователи — машины с
шестью степенями свободы — конструктивно можно свести к машине,
показанной на рис. 12.4. Если дать возможность перемещаться статору с
тремя жестко связанными полукольцевыми магнитопроводами
относительно шарового ротора, такая машина будет иметь шесть степеней
свободы: три у ротора и три у статора.
Если машину с шаровым ротором установить на борту космического
аппарата, закрепив статор на его борту, то такая система будет
описываться системой уравнений шестимерной машины. Масса космического
247
корабля соизмерима с массой ротора, поэтому вращение ротора будет
влиять на траекторию полета.
Космическая электромеханика — это шестимерная электромеханика
с шестью уравнениями движения. Система уравнений
электромеханического преобразования энергии шестимерной электрической машины
включает систему уравнений напряжений, состоящую для идеальной
машины из двенадцати уравнений с ЭДС вращения в обмотках статора и
ротора, при необходимости учета насыщения, вытеснения тока,
технологических погрешностей изготовления или других факторов, число
уравнений напряжений растет также, как в классической электромеханике.
Уравнения скоростей вращения выглядят следующим образом:
юс =ю„ +со^ +со^ +юЛ +ю^ + юс, A2.15)
где со,*, со^ <оп, (oSx> ®*у> <*>« — соответственно, скорости вращения
ротора и статора по осям *, у, z.
Шесть уравнений движения шестимерной электрической машины
имеют вид:
Л^-Л/^; A2.16)
Л/^-Л/^; A2.17)
Л/^-Д/^; A2.18)
Л/^-Л/^; A2.19)
Л/у-А/^; A2.20)
Л^-Л/^, A2.21)
где Jn,..., Jn и Ухх,..., Jsx — моменты инерции ротора и статора по осям х,
у, z\ Мт •. •> Мел и A/w,..., Maz — моменты сопротивления ротора и
статора по осям jc, у, z.
При решении уравнений космической электромеханики, обычно
исходят из двух допущений. В первом случае считают, что момент инерции
ротора много меньше момента инерции космического аппарата и тогда,
по существу, решение уравнений сводится к трехмерной системе уравнений.
Во втором случае разбивают условно момент инерции космического
аппарата на три части, относя их к осям х, у, z. В этом случае необходимо
решать всю систему уравнений шестимерной машины или учитывать
Лх
JV
J,.
Ja
J«
J,
dt
d<av
dt
~dT
dt
d(ov
dt
dt
=
=
=
=
=
=
248
смещение космического аппарата по одной оси. При этой учитывается
изменение траектории полета из-за влияния электромагнитных моментов
электрической машины. Так как космические аппараты могут летать в
течение нескольких суток и даже лет, а для коррекции орбиты требуется
значительная энергия, учет влияния вращающихся масс, расположенных
на борту ^ на траекторию полета, имеет важное значение. При этом
математическая модель космической электромеханики зависит от цели
исследования, возможностей, вычислительной техники, требуемой точности и
времени решения задачи.
Энергетическим сердцем космических летательных аппаратов
являются гиродины — электрические машины с большим моментом инерции
и рассчитанные на высокую скорость вращения, что позволяет запасать в
них большую кинетическую энергию, которая расходуется на коррекцию
орбиты и жизнеобеспечение корабля.
Шаровые гиродины обычно вместо обычных подшипников имеют
опоры на магнитном подвесе и для снижения механических потерь
работают в вакууме [5, 6]. Шаровой шестимерный гиродин в большинстве
космических летательных аппаратов заменяют тремя двухмерными гиро-
динами, расположенными в трех опорных плоскостях летательного
аппарата. Три таких гиродина описывается теми же уравнениями, что и
шаровой гиродин, но они удобнее в эксплуатации и имеют меньше
погрешностей.
Обращаясь к шестимерной системе уравнений космической
электромеханики A2.16)—A2.21), можно ответить на вопросы, как влияет
момент сопротивления (внешнее магнитное поле), расположение
приборов и грузов по осям корабля и ряд других факторов на траекторию полета.
На космических летательных аппаратах устанавливаются десятки
электрических машин, которые воздействуют на борт, пытаясь смещать
его при полете относительно своих осей вращения. Поэтому необходимо
так устанавливать электрические машины, чтобы результирующий
момент их стремился к нулю.
Гипотетическая электрическая машина с п степенями свободы
представляет теоретический и практический интерес. Такая машина с
бесконечным числом степеней свободы состоит из бесчисленного числа сфер,
свободно вращающихся внутри друг друга.
К л-мерной машине можно привести жидкую ферромагнитную
сферу, вращающуюся в магнитном поле трех статоров. Чтобы составить
уравнение для жидкого ротора, следует представить шаровой ротор,
состоящим из п слоев, которые перемещаются друг относительно друга.
Это и будет одним из вариантов модели я-мерной машины.
Принципиальной особенностью я-мерных машин является то, что
они вырождаются в электромагнитные преобразователи, так как
уравнения скоростей содержат п составляющих. Скорость вращения приближа-
249
ется к нулю, если оос имеет конечное значение, а и-мерный
электромеханический преобразователь превращается в электромагнитный
преобразователь, не имеющий вращающихся частей. При этом
электромеханическая энергия в л-мерной машине преобразуется в тепло.
§ 12.4. Геоэлектромеханика
До середины XX в. электромеханика развивалась в земных условиях,
но в 50—60-х годах электрические машины, а за ними и человек вышли в
Космос. Для этого потребовалось создать теорию космической
электромеханики и электромеханические системы, воплотившие все новейшие
достижения классической земной электромеханики.
Если классическая электромеханика — одномерная (т.е. она имеет
дело с ЭП, у которых вращается одна часть машины — ротор), то
космическая электромеханика — шестимерная, когда ротор и статор ЭП могут
перемещаться в трехмерном пространстве. Уравнения космической
электромеханики значительно сложнее, так как они имеют шесть уравнений
движения и дополнительное уравнение скоростей, учитывающее
движение ЭП по шести степеням свободы.
В середине 80-х годов автор перенес достижения космической
электромеханики на астрофизические объекты [11]. Наиболее проработанным
и удачным является представление нашей планеты Земля, как
электромеханической системы [12]. Показано, что Земля движется вокруг Солнца
по тем же законам, что и летательные космические аппараты и станция
«Мир», двигаются по своим орбитам вокруг Земли, а в основе движения
планет вокруг Солнца лежат не законы механики, а законы
электромеханики. Источником глобальных энергетических процессов являются
электродинамические процессы в электрической машине планеты.
Одной из главных проблем электромеханики является поиск новых
источников промышленного получения электроэнергии.
Неисчерпаемыми источниками экологически чистой энергии
являются Космос и Океан. Однако энергия океана до сих пор используется
плохо. Энергия морских течений, волн, приливов и отливов практически
не используется. Медленно ведутся работы по созданию тихоходных без-
редукторных гидрогенераторов на 2—10 об/мин для бесплотинных ГЭС.
А время не ждет, и сжигать органическое топливо в огромных
количествах уже сегодня неразумно.
Существующие проекты использования энергии Солнца путем
создания в Космосе стационарных платформ с преобразованием световой
энергии в СВЧ энергию и передача ее на Землю из-за больших
экономических затрат не выходят из стадии обсуждения.
250
Рис. 12.5. Электрическая машина — планета Земля
Проект использования энергии динамических процессов в
электрической машине планеты для получения электроэнергии заслуживает
серьезного внимания.
На рис. 12.5 дан разрез планеты и показаны токи, создающие
магнитное поле Земли, а также изображены; твердое ядро 7, жидкая часть
ядра, переходящая в жидкую магму 2, твердая магма 3 и земная кора 4,
окруженная газовой оболочкой.
Магнитное поле Земли (см. рис. 12.5) создается токами ядра
Земли GЯЗ) и токами радиационных поясов GР.П), оно неподвижно
относительно ядра и коры Земли. В центре Земли индукция достигает, по
некоторые данным, 100—150 Гс, а на поверхности — в средних
широтах — всего 0,3 Гс. Магнитное поле Земли простирается в
бесконечные просторы Космоса и является составной частью единого поля
Солнца и Галактики.
251
Электромеханическая модель Земли состоит из двух электрических
машин: МГД-генератора, преобразующего механическую энергию
космических частиц в электрическую энергию, токов радиационных поясов
GрП) и токов в ядре (Д3) и униполярного двигателя, ротором которого
является жидкая часть магмы, а статором — твердое ядро и литосфера.
Обе машины объединены магнитным полем Земли и образуют
электрическую машину — планету Земля.
Частицы солнечного ветра и космические частицы, попадая в
магнитное поле Земли, тормозятся и отдают механическую энергию, которая
в МГД-генераторе преобразуется в электрическую энергию токов ядра
Земли и радиационных поясов. МГД-генератор имеет огромные размеры
и, несмотря на небольшие индукции в канале генератора и невысокую
плотность потока космических частиц, мощность его составляет десятки
процентов от мощности всего потока энергии, получаемой Землей от
Солнца.
МГД-генератор планеты является МГД-генератором открытого типа,
который получает энергию за счет движения Солнечной системы в
Галактике и вращения Земли вокруг Солнца со скоростью 29,76 км/с. Таким
образом, космическое пространство и время являются неисчерпаемыми
источниками экологически чистой энергии.
Космический МГД-генератор планеты — генератор
последовательного возбуждения. Обмотка возбуждения и обмотка якоря в нем
совмещены в одной кольцевой обмотке, в которой протекает ток ядра Земли.
Естественно далее предположить, что, как и во всех машинах
постоянного тока, ток нагрузки МГД-генератора создает поток поперечной
реакции якоря, который искажает магнитное поле Земли, смещая ось
поля с геометрической нейтрали — географической оси вращения на
физическую нейтраль, совпадающую с осью магнитного поля Земли.
Естественно предположить, что круговые токи радиационных поясов связаны с
МГД-генератором планеты и являются токами поперечной реакции якоря
генератора. В сферическом МГД-генераторе токи 1рю протекая на
границе газообразной части планеты и Космоса, не имеют устойчивого
положения в плоскости, перпендикулярной плоскости токов 1ЯЗ и смещаются к
плоскости тока 1пг (см. рис. 12.5). МГД-генератор отдает энергию
униполярному двигателю (МГД-насосу), который создает момент, вращающий
Землю. На рис. 12.6 показана электромеханическая система планеты,
которая работает подобно тому, как в технической электромеханике
система генератор-двигатель [4—6].
МГД-генератор и МГД-двигатель планеты совмещены друг с
другом, и энергия постоянного тока циркулирует в одних и тех же контурах
генератора и двигателя. И только энергия переменного тока,
возникающая в системе благодаря переходным процессам, передается через канал
связи.
252
Космос
Земля
МГД-
генератор
т\
Канал связи
Униполярный
двигатель
т\
М3
<*ъ
тепло тепло
Рис. 12.6. Электромеханическая система планеты
На рис. 12.6 Л/к и пк момент и скорость Земли по отношению к
Космосу; Ur9fr — напряжение и частота на выходе МГД-генератора^ ил,/д —
напряжение и частота на входе униполярного двигателя; М3 и оо3 —
момент и частота вращения Земли; Рх — мощность на входе МГД-гене-
ратора; Р2 — мощность на входе униполярного двигателя.
Электромеханическая система планеты опирается на Космос,
подобно тому, как в технической электромеханике электрические машины
работают параллельно с сетью.
Ток нагрузки МГД-генератора является током, протекающим в
обмотках униполярного двигателя планеты (МГД-насоса).
Как и все электрические машины, униполярный двигатель имеет
статор и ротор. Статором его является твердое ядро, твердая магма и кора
Земли (см. рис. 12.5). Ротором двигателя планеты служит жидкая часть
ядра и жидкая магма, двигающаяся в сферической оболочке между
твердым ядром, твердой магмой и корой Земли.
Исходя из законов электромеханики, униполярный двигатель имеет
ток поперечной реакции якоря GП), замыкающийся на границе жидкой и
Рис. 12.7. Поперечный ток на плоском изображении Земли
253
твердой магмы (см. рис. 12.5). Поперечный ток имеет важное значение в
жизни нашей планеты. В проекции на плоскость поперечный ток 1п имеет
вид синусоиды (рис. 12.7). Его направление совпадает с направлениями
основных океанических течений, поперечный ток определяет
перемещения материковых плит (F)> «энергетические зоны» планеты, где
образуются тайфуны (Филиппины и юго-восточная часть Тихого океана). В
этих зонах продольный ток 1ЯЯ и поперечный ток 1„ и ток радиационных
поясов /р.п находятся на ближайших расстояниях. Поперечный ток 1„
определяет теплые (Т) и холодные (X) зоны планеты.
Поперечный ток также, как и /рл1, искажает магнитное поле Земли,
смещая ось магнитного поля по отношению к оси вращения на 10—11°.
На такой же угол смещается ось результирующего поля в обычных
машинах постоянного тока.
Ближайшим аналогом электрической машины планеты является ги-
родин со сферическим ротором (рис. 12.4). Отличие двигателя планеты от
сферических гиродинов космических летательных аппаратов состоит в
том, что униполярный двигатель Земли имеет жидкий ротор, внутренний
статор и внешнюю оболочку. Обычно технические гиродины питаются
переменным током высокой частоты, а гиродин планеты — униполярный
двигатель.
Масса гиродина и масса космического корабля соизмерима, поэтому
при изменении моментов ротора гиродина в трехмерном пространстве
изменяются моменты в трех осях и самого космического аппарата, что
изменяет его ориентировку в пространстве.
Электрическая машина — планета Земля — шестимерная
электрическая машина, в которой статор и ротор могут перемещаться друг
относительно друга в трехмерном пространстве. Процессы
электромеханического преобразования энергии в шестимерной машине описываются
системой уравнений A2.15>—<12.21).
Как и в обычных электрических машинах, Мэ создается всеми
токами, протекающими в контурах статора и ротора машины [А—6]. Токи
электромеханической системы планеты имеют постоянную и
переменную составляющие.
Переменная составляющая в токах Земли, создающих ее магнитное
поле, появляется благодаря изменению моментов инерции планеты по
осям де, у, z, что обусловлено, в основном, влиянием Луны. Постоянная
составляющая момента М^ создается постоянными токами 10.
Уравнение электромагнитного момента можно представить в виде
•М9=М*+МЯ9 A2.22)
где А/эо — постоянная составляющая момента; А/эп — переменная
составляющая момента.
254
•;
F* L Apc
Вращающий момент, в
основном, создается Mjq, аЛ/эп —
составляет всего несколько процентов от Мэ.
Но эти доли процента влияют на
мгновенную скорость вращения
Земли и на все глобальные процессы на
планете, которые влекут за собой
выделение огромной энергии.
Динамические процессы в электрической
машине являются источником
энергии тайфунов, циклонов и других
глобальных явлений. Об этом
свидетельствуют трех-, шести-,
семидневные и более продолжительные циклы
в жизни нашей планеты,
совпадающие с изменениями токов,
электромагнитных моментов и скорости
вращения Земли вокруг своей оси.
Момент вращения Земли вокруг
своей оси создается токами ее ядра, а
электромеханическое преобразование
энергии в МГД-двигателе происходит
в зоне наибольшей концентрации
энергии магнитного поля — в зоне на
границе твердого ядра и его жидкой части
и магмы. В униполярном двигателе
планеты развиваются огромные
электромагнитные силы и моменты,
которые как и в обычных электрических
машинах, должны быть приложены к
железным участкам твердого ядра.
Исходя из этих предположений, строение рабочей поверхности
твердого ядра должнло состоять из трех зон: гладкой экваториальной зоны /,
бугристой (пазовой) зоны в средней части 2 и гладких полярных зон 3 в
северном и южном полушариях ядра (рис. 12.8, а). Токи ядра Земли (/„)
состоят из нескольких параллельных ветвей и протекают в
«углублениях» («пазах») твердого ядра (рис. 12.8, б).
Струи жидкого ротора подходят к ядру в экваториальной гладкой
зоне и, ускоряясь в пазовой части, от полярных областей ядра по
спиралевидным траекториям удаляются к внутренней части твердой магмы и
коры Земли.
Усилия, перемещающие магму в северном и южном полушариях,
направлены встречно и пытаются деформировать ядро, сжимая его в эк-
255
V-
/\*>
Рис. 12.8. Конструкция
униполярного двигателя планеты и
возникновение электромагнитного момента
ваториальной зоне. Поэтому форма твердого ядра должна быть несколько
сплющенная в экваториальной зоне и яйцевидная, с бугристой
поверхностью в зоне средних широт (рис. 12.8).
Возникновение вращающего момента можно объяснить скосом
пазов бугров (см. рис. 12.8). Результирующие /у и F^ в северном и южном
полушариях состоят из продольных Fdc и F^ поперечных Fqc и F^
составляющих (рис. 12.8). Продольные составляющие ,
^*o=^cosa,
A2.23)
перемещают магму, а поперечные
F7C=Fpcsina;
A2.24)
создают вращающий момент. Продольные составляющие направлены
встречно, а поперечные совпадают по направлению, причем
Fd0"Fdn»F4t»F4n, A2.25)
угол а небольшой и равен нескольким градусам.
На первый взгляд, кажется удивительной идентичность
возникновения электромагнитного момента в обычных электрических машинах и в
электрической машине планеты. Но, как показывает опыт и время,
фундаментальные технические решения обычно близко совпадают с
найденными и принятыми Природой в процессе эволюции.
Шаровая электрическая машина планеты — шестимерная
электрическая машина. При исследовании уравнений шестимерной машины планеты
проще рассматривать три
двухмерных машины —
три гиродина, в осях ху,
yzy xz (рис. 12.9). На рис.
12.9 обмотки статора и
ротора по осям х, у, z
имеют соответственно
обозначения w^, wcy, wa,
VV, wpy и w^. Для
упрощения на статоре и
роторе машины показано по
одной обмотке; в
действительности по каждой
оси имеется множество
контуров, которые могут
находиться в атмосфере,
Рис. 12.9. Шестимерный гиродин планеты
256
литосфере, твердой и
жидкой магме и в железном
ядре Земли [4—б].
Рассматривая в первом
приближения вращение
Земли вокруг своей оси в
плоскости ху (без учета влияния
гиродинов xz и yz\ можно
использовать модель,
показанную на рис. 12.10. Эта
модель — двухмерная с
вращающимся ротором и
статором. При решении
целого ряда задач ее можно
рассматривать как
одномерную с неподвижным
статором или ротором: здесь Рис. 12.10. Модель двухмерного гиродина пла-
и>, — контур возбуждения, неты
который совмещен с токами
1ж» wn — поперечный контур; и^ и w?nq — соответственно, эквивалентные
числа витков контура радиационных поясов по осям dnq; w„j и^ —
эквивалентные короткозамкнутые контуры в литосфере Земли по осям dnq^w^
и w^ — эквивалентные короткозамкнутые контуры в атмосфере Земли по
осям dn q, мг*!, Wgg, w^ Wup — контуры ротора и магмы по осям dnq.
Пульсации электромагнитного момента приводят к пульсациям токов в
контурах машины и пульсациям скорости вращения Земли, что и влияет на
глобальные энергетические процессы, происходящие на Земле. Можно
подсчитать, что кинетическая энергия Земли составляет примерно 7-1022 кВт-ч и
даже незначительные пульсации скорости вращения связаны с огромной
энергией, которая выделяется в тех или иных контурах планеты [4—6].
Энергия тайфунов, примерно, равна суммарной энергии нескольких
атомных бомб, энергия циклонов лишь несколько меньше. Погодные
циклы и количество тайфунов хорошо согласуются с частотами
переменных составляющих в токах и пульсациями электромагнитного момента
электрической машины планеты.
Электропроводящие контуры, в которых за счет электромагнитной
индукции наводятся токи и происходит концентрация энергии, могут
образовываться поверхностью морей, облаками, замыкаясь дождем или
туманом. Тайфуны образуются в энергетических узлах планеты, где токи ядра
Земли, радиационных поясов и поперечный ток находятся на ближайших
расстояниях. Контурами для накачки электромагнитной энергии могут
быть водная поверхность океана и электропроводящее слои атмосферы.
Основная проблема, которую должны решить электромеханики, яв-
257
ляется создание новых промышленных, экологически чистых источников
электроэнергии. Использование энергии Космоса на наземных
космических установках — один из вариантов решения этой проблемы.
Представляет большой интерес использование естественных контуров,
которые могут состоять из рек и морей. Соединив истоки рек сравнительно
короткими перемычками, можно получить контуры, имеющие огромные
площади на поверхности Земли.
Требуют особого внимания контуры, созданные линиями
электропередач, газопроводами и нефтепроводами. В первую очередь, надо
зафиксировать наводки с периодом в 7 и 14 суток, т.е. по-существу наводки
постоянного тока. Если будут получены экспериментальные
подтверждения наводок в естественных контурах, связанных с изменением скорости
вращения Земли, появятся реальные возможности для создания
космических наземных энергетических установок.
Самой простой схемой сферической электромеханической системы
планеты, объединяющей в одном агрегате МГД-генератор и
униполярный двигатель, может быть система генератор-двигатель, широко
используемая в промышленных электроприводах [4].
В системе Г—Д планеты генератор и двигатель имеют смешанное
возбуждение и шунтирующее сопротивление R, которое имитирует токи
утечки, не участвующие в создании вращающего момента в униполярном
двигателе (рис. 12.11). Активное сопротивление Rn — сопротивление
контура продольных токов ядра Земли, в котором протекают токи МГД-
генератора и униполярного двигателя. Последовательная обмотка в
генераторе (ОВГ) включена встречно, а в двигателе (ОВД) — согласно с
независимой обмоткой (ОНГ и ОНД).
Благодаря огромному моменту инерции и при наличии мощных
последовательных обмоток, в системе Г—Д возникают качания, но система
не теряет устойчивости [4]. При качаниях в системе происходят
дополнительные перетоки мощности от двигателя к генератору и обратно, при этом в
совмещенной электромеханической системе изменяется и частота вращения.
I S\ ОВД ОНД
г)пп
Рис. 12.11. Схема генератора — двигателя планеты
258
Систему Г-Д, заменяющую электромеханическую систему планеты,
удобно рассматривать приближенно-для анализа динамической
устойчивости и колебаний мгновенной скорости вращения Земли вокруг своей
оси. Однако достоверность результатов зависит от более глубокого
исследования электромеханического преобразования энергии в МГД-гене-
раторе и униполярном двигателе планеты.
Магнитное поле на поверхности Земли очень слабое и в средних
широтах характеризуется индукцией около 0,3 Гс и напряженностью около
0,7 Э. Чтобы получить при пульсациях магнитного поля достаточно
большие ЭДС, необходимо иметь контуры, охватывающие площадь в
тысячи и десятки тысяч квадратных километров.
Вариации магнитного поля Земли бывают систематические и
случайные. К систематическим относятся суточные, сезонные и
одиннадцатилетние. Случайные (спонтанные) вариации связаны с солнечными
вспышками, землетрясениями, ядерными взрывами и др.
Минимальные амплитуды поля, связанные с суточными
изменениями, лежат в пределах C—5)-10~4 Э, а максимальные амплитуды,
зависящие от сильных магнитных бурь, равны B—3)-10 Э.
В одновитковом контуре, проходящем по полярному кругу, при
суточных вариациях будет наводиться ЭДС, равная всего 43 В, но при
сильных магнитных бурях максимальная ЭДС будет уже 43 кВ. При
выполнении такого контура из меди из-за большого активного
сопротивления не удается снять ощутимой мощности. Выходом из этой, казалось бы,
безнадежной ситуации является изготовление контура из
сверхпроводящих материалов. Применение сверхпроводящих материалов позволит
снизить внутреннее сопротивление контура почти до нуля и уменьшить
сечение витка на порядок. Сверхпроводящий энергетический контур
целесообразно выполнять из нескольких десятков витков, снижая при этом
площадь контура. В зависимости от мощности можно применять
сверхпроводящий кабель или провод.
Таким образом, при использовании сверхпроводящих магнитных
систем в качестве энергоустановок, использующих энергию магнитного
поля Земли, основной проблемой является стоимость такой установки.
Снижение стоимости установки будет зависеть от применения более
дешевых материалов с возможным выходом на азотные и более высокие
температуры. Представляет интерес совмещение установки как
генератора и как накопителя энергии и как линии передачи. Эффективность
энергетических установок, использующих энергию магнитного поля Земли,
может быть значительно повышена за счет создания их в районах с
аномально высокими параметрами магнитного поля, используя энергию
тайфунов, циклонов и антициклонов.
Дальнейшее исследование электромеханической системы планеты
имеет важное значение для большинства наук о Земле.
Глава 13
Индуктивно-емкостные и емкостные
электромеханические преобразователи
§ 13.1. Основы дуально-инверсной
электромеханики
Окружающий нас мир состоит из преобразователей энергии. Среди
них более сложными и важными для нас являются электромеханические
преобразователи.
Из трех классов ЭП наибольшие успехи достигнуты в области
индуктивных электрических машин (см. гл. 1). Индуктивные ЭП имеют
исключительное применение в промышленности.
Емкостные ЭП появились раньше индуктивных, но индуктивные ЭП
за сто лет совершили техническую революцию в промышленности.
Емкостные ЭП до сих пор, несмотря на усилия многих талантливых ученых,
так и не нашли применения в промышленности. Как силовые
преобразователи, ждут своего часа и индуктивно-емкостные ЭП.
Теория индуктивных электрических машин разработана достаточно
глубоко. В настоящее время созрели все условия для того, чтобы
попытаться перенести достижения в области теории индуктивных
электрических машин на емкостные и индуктивно-емкостные ЭП. Имея
математическое описание процессов преобразования энергии в емкостных и
индуктивно-емкостных ЭП, необходимо попытаться создать новые ЭП с
высокими технико-экономическими показателями.
Уравнения, описывающие процессы преобразования энергии в
индуктивных и емкостных ЭП, не изменяются, если произвести дуально-
инверсную замену:
Электрическое поле
Qe, электрический заряд
Фе, электрический поток
£/, напряжение
е,ЭДС
С, емкость
g, проводимость < > г, активное сопротивление
Магнитное поле
Qm магнитный заряд
Фм, магнитный поток
U ток
Л,МДС
Z, индуктивность
260
Использование понятия магнитного заряда дает возможность
симметрировать уравнения электромагнитного поля. При этом
математические описания явлений в электрических и магнитных полях становятся
идентичными.
Схема замещения индуктивной электрической машины состоит из
индуктивностей и активных сопротивлений, схема замещения емкостной
машины — из емкостей и проводимостей. Вся сложность и бесконечное
разнообразие электрических цепей состоят из комбинаций всего трех
элементов — Z,, С и R. Все ЭП также состоят из Z,, С, R9 а также из
магнитных, электрических, тепловых и механических полей.
Энергия электромагнитного поля определяется следующим
выражением:
^ = (бб0£2+цц0Я2)/2, A3.1)
где ЕиН— напряженности электрического и магнитного полей; еиц —
относительные электрические и магнитные проницаемости; е0 и цо —
электрические и магнитные постоянные.
В A3.1) энергия электрического поля определяется величиной ееоЕ2,
а Ц|До#2 обусловливает плотность энергии магнитного поля.
Полная энергия электромагнитного поля
W = Wt+WM= 0,5 J(ED + HB) dv, A3.2)
v
где We =0,5\EDdv — энергия электрического поля; Wu = 0,5 \HBdv —
У У
энергия магнитного поля.
В индуктивных ЭП концентрируется энергия магнитного поля.
Электрическое поле играет вспомогательную роль. В емкостных ЭП
имеет место обратная картина — вспомогательную роль играет магнитное
поле.
На основании теории дуально-инверсных систем можно составить
следующие выражения:
e = -^ = -^ = -i-flMS = -(^dS+ f(vxB)d; A3.3)
л л л\ let Г
dt dt dt\ let I
где D — электрическое смещение (кВ/м2).
Если vlBldl и vlDldl, то из A3.2) и A3.3) получаются значения
ЭДСиМДС:
261
e = Blv, A3.5)
h = Dlv9 A3.6)
где / — длина проводника в индуктивных ЭП, равная ширине электрода в
емкостных ЭП.
Явление электромагнитной индукции используется в индуктивных
ЭП, а емкостной индукции — в емкостных ЭП. В индуктивных ЭП
используются вращающиеся поля. Аналогично, используя двухфазные,
трехфазные и /и-фазные системы электродов, можно создавать
вращающиеся электрические поля.
Процессы электромеханического преобразования энергии в
индуктивных ЭП обусловлены взаимодействием магнитных зарядов —
магнитных полюсов и индуцирования электрического поля, источниками
которого являются электрические заряды. Преобразование энергии в
емкостных ЭП происходит за счет взаимодействия электрических зарядов и
индуцирования магнитного поля, источниками которого являются
магнитные заряды. Индуктивно-емкостные ЭП объединяют в одном агрегате
индуктивные и емкостные ЭП и в них происходит взаимодействие
магнитных и электрических зарядов.
§ 13.2. Емкостные электромеханические
преобразователи
Для емкостных ЭП из предположений дуально-инверсной
электромеханики для обобщенного емкостного ЭП можно составить уравнения,
дуально-инверсные уравнениям индуктивной машины B.1)—B.3):
'*
'*
g,
±с
dt
-Сюг
О
±С
dt
-Cm<or
О
О
8*+JtC«
dt
Сю,
^С
dt
d
8*+J,
'sfi
"rfi
M*
A3.7)
Л*,=С(и*ит-«яи,ц). A3.8)
В уравнениях токов A3.7) и момента A3.8) произведена замена
и <-> i, индуктивностей на емкости Lsar$ <-> С, а г р, взаимной
индуктивности М на взаимную емкость С, а активных сопротивлений г,>а,г,р на
проводимости gw,p.
262
Полные емкости включают емкость между
электродами статора и ротора С и собственную
емкость Сс. Для пластины фазы статора а,
например,
С„=С + С
A3.9)
Рис. 13.1. Схема
емкостной синхронной машины
где Сса — собственная емкость пластины
статора по оси а.
Обобщенной индуктивной машине
соответствует схема обобщенной емкостной машины, в
которой вместо обмоток с числом витков wWtp
имеются электроды с потенциалами ww>p.
Так же, как и индуктивные, емкостные ЭП могут быть двухфазными,
трехфазными и многофазными. Симметричная многофазная машина
приводится к двухфазной.
Емкостные ЭП могут работать в двигательном, генераторном и
трансформаторном режимах. На базе емкостей удачно выполняется
накопитель энергии, работающий при обычных температурах.
Емкостные ЭП, как и индуктивные, делятся на синхронные,
асинхронные, коллекторные ЭП и трансформаторы.
В синхронной емкостной машине (рис. 13.1) ©г = сос и на ротор
подается постоянное напряжение. Электроды А, В, С (вместо обмоток)
создают вращающееся электрическое поле, имеются взаимные и собственные
емкости, которые при вращении изменяются по гармоническому закону.
Уравнения синхронной емкостной машины в координатах d, q
имеют вид
ы
ы
гч
dt
-Сюг
dt
-с„©,
rd
8,
О
*-с
dt
g,
О
Со,
и
dt
г Л ц
»rd
^, =£(«*«*-"-л^'
A3.10)
A3.11)
В уравнениях A3.10) и A3.11) usd, usq, и^ ищ — напряжения на
статоре и роторе двухфазной емкостной машины в системе координат d, q\
i*d, *sq, ird* irq — токи в электродах статора и ротора; gsd, gsq, gr* grq —
проводимости электродов статора и ротора; QgAr — полные емкости
обмоток; Cd,q,r,s = С + Qf,rfJ, где Qf.r,, —собственные емкости (емкости рас-
263
сеяния) электродов статора и ротора; С — емкости между электродами
статора и ротора.
Асинхронная емкостная машина, получается из синхронной
машины, если в ней ротор заменить на диск из диэлектрика или сделать его с
числом фаз, равным числу фаз статора, и подвести к ротору напряжения
частоты скольжения. v
Коллекторные емкостные машины получаются из синхронной
машины, если в цепь переменного напряжения включить коммутатор.
В индуктивных ЭП вращающееся магнитное поле образуется
синхронными генераторами, работающими параллельно с сетью
бесконечной мощности. К сожалению, нет емкостных генераторов, которые могли
бы создать достаточно мощное электрическое вращающееся поле.
Поэтому емкостные аналоги индуктивных ЭП не созданы, и копирование
емкостных ЭП на базе индуктивных обречено на неудачи.
Уравнения емкостных ЭП можно записать по аналогии с
индуктивными ЭП, но это еще не значит, что будут созданы промышленные
образцы на этих принципах.
Наиболее удачная конструкция в индуктивных преобразователях —
конструкция трансформатора. В емкостных преобразователях
конструкция трансформатора содержит перемещающиеся части, так как для
изменения емкости необходимо изменять либо площадь конденсатора, либо
расстояния между пластинами, либо вводить и выводить диэлектрик. В
обычных трансформаторах нет движущихся частей, а в емкостных —
перемещение лежит в основе работы трансформаторов.
В емкостных ЭП электромагнитный момент определяется
произведениями напряжений A3.8), A3.11). Поэтому емкостные электрические
машины должны быть высоковольтными.
Одной из причин отсутствия применения емкостных ЭП в
промышленности является копирование индуктивных ЭП, которые при
вращательном движении нельзя заменить емкостными. Надо создавать
емкостные ЭП для тех применений, где индуктивные ЭП имеют плохие
технико-экономические показатели. Это, в первую очередь, ЭП с возвратно-
поступательным движением, ЭП, обеспечивающие точные перемещения
в трехмерном пространстве, и др.
Область применения емкостных ЭП — машины
возвратно-поступательного движения. Определить силу Fx можно из выражения,
характеризующего изменение энергии электрического поля:
dw
их
где Fx — сила по координате х.
Сила притяжения к площадке ds
264
Vf
щ
Рис. 13.2. Схема ионного двигателя
fdS = fdS, A3.13)
где/— единичная сила.
Работа, обусловленная этой
силой, равна
fdSA, A3.14)
где Л — бесконечное малое
перемещение, вызванное движением
проводника.
Произведение dldS есть элементарный объем и работа есть jfdSds ,
поэтому
W = 0J5ED, A3.15)
т.е. в любой точке поверхности плотность механических сил равна
объемной плотности энергии в этой же точке.
Один из примеров удачного применения емкостных ЭП — ионный
двигатель (рис. 13.2). В этом двигателе в электрическом поле происходит
ускорение заряженных частиц (v2 > vx). Вследствие изменения
кинетической энергии конденсатор, выполненный в виде сопла, перемещается
вместе с бортом, на котором установлен ионный двигатель. Возможность
иметь большие скорости истечения (свыше скорости звука) и сильные
электрические поля позволяет строить малогабаритные двигатели.
Как было отмечено на шкале мощностей емкостные ЭП занимают
область ультрамалых энергий, но они могут надежно и легко включаться
на параллельную работу. Поэтому в ионных двигателях целесообразно
иметь не одно большое сопло, а много небольших сопел, по площади
равных одному.
При изучении индуктивных ЭП было отмечено
удачное применение МГД-генератора, в котором
происходит ускорение в магнитном поле плазмы. В
режиме двигателя применение магнитогидродинами-
ческого ЭП с газообразным рабочим телом не имеет
перспектив, а емкостных ионных двигателей —
весьма реально.
Наиболее удачная промышленная конструкция
емкостной машины — конвекционный генератор Ван-
де-Граафа (рис. 13.3). В этой машине заряды
разделяются коронным разрядом 1 и переносятся лентой 2
через контакт 3 на сферу 4> находящуюся на
изоляционной подставке 5. Этот генератор даже по внешнему
виду отличается от обычных ЭП. Его мощность Р = в
кВт, напряжение £7=15 МВ, сила тока / = 1000 мА.
а
м
+++♦♦+
Рис. 133.
Конструкция генератора Ван-
де-Граафа
9-179
265
Это сооружение высотой 15—20 м, помещенное в кожух, наполнено
газом под высоким давлением. Применяется в испытательных установках.
Следует отметить, что на базе индуктивных ЭП создать испытательную
установку с постоянным напряжением 15—20 МВ практически
невозможно.
Генератор Ван-де-Граафа лучше других демонстрирует положение о
том, что электрические машины разделяют заряды. В течение десятков
минут работы генератора между сферой и землей создаются напряжения
в миллионы вольт. Конвекционные генераторы имеют целый ряд
непохожих друг на друга конструктивных модификаций.
§ 13.3. Пьезокерамические и параметрические
емкостные электромеханические преобразователи
При механических деформациях в определенном направлении
кристаллов кварца, титаната бария, сегнетовой соли и некоторых других
веществ на их гранях возникают электрические заряды противоположных
знаков. Это явление называют пьезоэффектом. Пьезоэлектрический
эффект в кристаллах кварца наблюдается вдоль электрических осей
кристалла, перпендикулярных его главной оси. Изменение направления
деформации кристалла вызывает изменение знаков зарядов на
противоположные.
Возникает и обратный пьезоэлектрический эффект, когда под
действием электрического поля происходит изменение линейных размеров
кристаллов. Изменение направления электрического поля вызывает
изменение направления деформации.
Исследования пьезокерамических материалов показывают, что
кривая зависимости усилия от заряда имеет линейный участок, а при
больших усилиях эта связь становится нелинейной. Наблюдается явление
диэлектрического гистерезиса, зависимость величины заряда от
деформации напоминает характеристику намагничивания стального сердечника.
Пьезокерамические ЭП могут использоваться в качестве
импульсных генераторов в системах зажигания. Делаются попытки применить
такие ЭП в качестве импульсных высокочастотных двигателей. Хотя
деформации в них, как правило, невелики, но большое число их можно
преобразовать в необходимые линейные перемещения.
Пьезокерамические ЭП имеют два электрических и два
механических вывода. Для них особое значение имеет электромеханический
резонанс. Как и в других емкостных ЭП, преобразование энергии в
пьезокерамических ЭП происходит в материале. Перенося достижения в области
электромеханики на эти ЭП, можно предположить, что в установившемся
266
режиме внутреннее сопротивление пьезокерамического ЭП можно
представить в виде Т-образной схемы замещения, которая состоит из
емкостей и проводимостей.
В пьезокерамических ЭП процессы происходят по основным
законам электромеханики, на них можно распространить теорию
электромеханического преобразования энергии. Наряду с пьезоэффектом
существует магнитострикционный эффект, когда происходит изменение объема
и формы ферромагнетика при его намагничивании. Используя магнито-
стрикцию, можно создать магнитострикционные вибраторы,
преобразующие энергию магнитного поля в механическую энергию. В
пьезокерамических ЭП тоже возможен режим генератора, когда при деформации
ферромагнетиков происходит изменение намагниченности. Как в
практической реализации пьезокерамических и магнитострикционных ЭП, так и
в области теории еще не достигнуты удовлетворительные результаты, но
такие ЭП представляют интерес для электромеханики.
В индуктивных ЭП энергия магнитного поля концентрируется в
воздушном зазоре за счет наличия стального магнитопровода. В емкостных
ЭП из-за низкого пробивного напряжения воздуха (-30 кВ-см)
объемные силы и удельная мощность получаются весьма небольшими,
примерно в 104 раз меньше, чем у индуктивного ЭП. Поэтому энергию
электрического поля пытались сосредоточить в диэлектриках. Академик
А. Ф. Иоффе использовал для этой цели керосин (е = 2). При заполнении
зазора сжатым газом напряженность электрического поля может
достигнуть 600 кВ хм. Еще бблыпие возможности имеются при применении
твердых диэлектриков и сегнетодиэлектриков. Кристаллы титаната
бария, дигидрофосфата калия имеют е = 9-103+105. Если в индуктивных ЭП
энергия магнитного поля сосредоточена в зазоре, то в емкостных ЭП она
должна концентрироваться в жидких или твердых диэлектриках. Но в ЭП
должны быть перемещающиеся относительно друг друга части, поэтому
в конструкциях емкостных ЭП предусматривают наличие механических
зазоров либо применяют в качестве ротора жидкие материалы.
Принцип работы емкостных параметрических ЭП основан на
периодическом изменении емкости при постоянном напряжении возбуждения.
Один га примеров применения параметрического емкостного генератора —
волновой емкостный генератор, использующий энергию прибоя (рис.
13.4). Попытки преобразовать хаотиче- _
ское движение волн в электрическую У&ЬьЗСг j>#an/*JHf' f °
энергию с помощью механических уст- ^^^^Ш^^^Шг] и»\
ройств и обычных электрических ма- =^Щ=2§нйрЗ^ Ти* I
шин пока не позволили получить при- у^уУ**
емлемых инженерных решений.
Емкостный генератор состоит из Рис 13.4. Схема волнового емко-
металлического стержня /, покрытого спюго генератора
267
слоем диэлектрика 2 с большим 6. Стержень укрепляется на фундаменте 3. В
генераторе одной обкладкой конденсатора является стержень 7, а другой
— поверхность моря. При возникновении волн изменяется емкость уст-
ррйства (волна то закрывает стержень, то обнажает его), а при
постоянном £/„ изменяется заряд конденсатора, и в цепи нагрузки £/„ проходит
переменный ток i = dq/dt. Соединяя параллельно множество таких
стержней и выпрямляя ток, можно получить на выходе достаточную
мощность. Конечно, такой генератор отличается от обычного, но и это ЭП.
Одной из особенностей волнового емкостного ЭП является то, что
после ухода волны выступающая над водой поверхность стержня должна
быть сухой. Для этого его поверхность должна быть покрыта
специальной краской.
Для емкостных ЭП есть математическое описание процессов
преобразования энергии и практически нет мощных работающих конструкций.
Это объясняется попытками копировать индуктивные машины, в то
время как емкостные машины занимают особое место в ряду ЭП, не заменяя,
а дополняя индуктивные ЭП.
§ 13.4. Биологические электромеханические
преобразователи
При рассмотрении истории электрических машин (см. § 1.1) было
подчеркнуто, что емкостные ЭП появились значительно раньше
индуктивных. На первых этапах развития электротехники биологические и
электромеханические системы изучались одними и теми же
исследователями. К середине XIX в. электробиология имела значительно большие
достижения, чем электромеханика.
В 30-е годы XIX в. в Берлинском университете ботаник М. Шлей-
ден и зоолог Т. Шванн открыли клетки у растений и в тканях
животных. Большое влияние на развитие электробиологии оказала школа
профессора И. Мюллера. Его учениками были Р. Вихров — один из
создателей клеточной физиологии, Э. Геккель, сформулировавший
биогенетический закон, Г. Гельмгольц — один из авторов закона
сохранения энергии [11].
Ученик профессора И. Мюллера Э. Дюбуа-Реймон — отец
электрофизиологии — исследовал влияние амплитуды и закона изменения тока на
реакцию мышц. Он сформулировал первые законы электробиологии, создал
методику для определения биопотенциалов. Трудно переоценить работы Н.
Нернста, предложившего формулу для определения диффузионного
потенциала, а также В. Ю. Чаговца, И. Р. Тарханова, И. М. Сеченова, В. Оствальда
и других, заложивших основы математической теории электробиологии.
268
а) 61 61
Рис 13.5. Натрий-калиевый насос
Фундаментальным достижением явилось создание мембранной
теории биопотенциалов Ю. Бернштейном в 1902 г. В 1912 г. вышла книга
Ю. Бернштейна «Электробиология», в которой излагались положения
мембранной теории. В основе мембранной теории лежит представление о
том, что потенциал возникает на мембране за счет различной
концентрации ионов снаружи и внутри клетки. Каждая клетка — это мешочек или
пузырек, покрытый оболочкой — мембраной, разделяющей жидкости
разного состава. Если внутри клетки имеется много свободных ионов,
например, калия, а снаружи таких ионов нет, то клеточная мембрана
пропускает только ионы К* и они начинают выходить из клетки — двигаться
по градиенту концентрации. При этом на мембране будет возникать
разность потенциалов, которую называют потенциалом покоя. В последние
десятилетия по мембранам выполнено множество работ, которые
печатаются в специальных журналах. Были определены удельные
сопротивления мембран и предложены эквивалентные схемы клеточной мембраны
для различных организмов в химических соединениях.
В 30-х и 60-х годах трудами М. Березина, В. А. Белищера, ф. Липма-
на, Д. Певзнера, В. А. Энгельгардта и других был осуществлен переход
от клеточной к молекулярной электробиологии. Важно отметить, что
успехи в исследовании биохимических преобразований энергии были
достигнуты благодаря применению идей и методов термодинамики.
Применение второго закона термодинамики к биологическим процессам
привело к обоснованию центральной роли АТФ (аденозинтрифосфорной
кислоты) и ее аналогов в биохимических превращениях энергии.
На рис. 13.5 показана принципиальная схема работы
натрий-калиевого насоса. В этой электрической машине ротор, состоящий из белка и
активных центров, из внешней среды захватывает ион калия, а из
внутренней — ион натрия (рис. 13.S, а). Потребляя АТФ, ротор (белковая
молекула) поворачивается внутри мембраны на 180° и освобождает
захваченные ионы, при этом калий попадает внутрь клетки, а ион натрия
выбрасывается наружу (рис. 13.S, б). Молекула вновь поворачивается на
269
Рнс 13.6. Биологические электродвигатели бактерий
180° и занимает исходное положение (рис. 13.5, в). Этот белок, открытый
в 19S7 г., биологи называют натрий-калиевым насосом.
В 1961 г. английский ученый П. Митчел выдвинул гипотезу о том,
что энергия пищи сначала преобразуется в электрическую энергию, а
затем затрачивается на производство АТФ.
В 1974 г. американский микробиолог Адлер опытным путем показал,
что движение бактерий может происходить без преобразования энергии
окисления пищи в АТФ. В. П. Скулачев предположил, что бактерии для
движения непосредственно используют энергию мембранного
потенциала. Любопытно, что биологи считают бактерии первыми электриками
Земли. Они «изобрели» электромотор с подшипником, передачу
электроэнергии и электрические аккумуляторы, Исследования показали, что
мембранный потенциал, при котором работает мотор, равен примерно
200 мВ, что мощность его около 10~17 Вт и через жгутик входит внутрь
бактерии примерно 1000 протонов в секунду.
Принято считать, что природа «не применяла» колесо, а оказывается
бактерии — первые живые образования на Земле, уже использовали
вращательное движение. Электромеханики иногда спорят, когда появилась
первая электрическая машина, а оказывается, она появилась в природе в
первых живых организмах...
На рис. 13.6 показана работа бактериального электромотора и
передача энергии на расстояние у цианобактерий: a — схематическое
изображение «электромотора», вращающего жгутик бактерий; б — передача
электроэнергии вдоль колонки, клеток цианобактерий (линейный
двигатель). При освещении «головы» колонки возникает мембранный
потенциал за счет работы мембранной помпы; через межклеточные контакты
ток протекает в другие клетки и вызывает в них работу «электромоторов».
Ток, текущий при этом в наружной среде, удается зарегистрировать.
За последние 100—ISO лет ученые— биологи и электромеханики
разошлись так далеко, что биологи не знают достижений электромехани-
270
ки, а большинство электромехаников даже не представляют, что в живых
организмах, как и в электрических машинах, осуществляется
электромеханическое преобразование энергии. Если в середине нашего века успехи
в биологии определялись привлечением достижений термодинамики, то
сегодня можно утверждать, что грядущие успехи, по-видимому, будут
определяться соединением биологии с электромеханикой.
Однако развитие теории электромеханики исподволь готовило базу
для познания процессов электромеханического преобразования энергии в
технических и биологических электромеханических преобразователях.
Еще в работах десяти—двадцатилетней давности вводилось
представление об электрических машинах как концентраторах энергии любого
конструктивного исполнения. Была введена классификация электрических
машин на индуктивные, емкостные и индуктивно-емкостные, исходя из
того, в каком поле происходят концентрация и преобразование энергии [5].
Все электрические машины разделяют заряды (генераторный режим)
или соединяют их (двигательный режим). В емкостных машинах этот
процесс нагляден и очевиден. В индуктивных электромеханических
преобразователях все процессы связаны с напряжениями и токами; часто
забывают, что / = dqjdt, т.е. ток есть не что иное, как непрерывное
изменение заряда то времени.
На рис. 13.5 показана принципиальная схема натрий-калиевого
насоса, а на рис. 13.3 дана схема генератора Ван-де-Граафа, в котором при
коронном разряде заряды переносятся лентой и накапливаются на
полусфере, расположенной на изоляционных подставках. В своей основе эти
два ЭП близки друг к другу: в натрий-калиевом насосе заряды
переносятся белковой молекулой, которая вращается, а в генераторе Ван-де-Граафа
заряды переносятся бесконечной лентой. Как в том, так и другом случае
заряды переносятся медленно и токи небольшие.
До сих пор перед электромеханиками не ставилась задача создания
микродвигателей в габаритах молекулы или клетки. Однако делаются
попытки создать электродвигатели для микросхем не толще
человеческого волоса — диаметром около 50—70 мкм.
При создании индуктивных электрических машин таких габаритов
основные трудности состоят в создании вращающегося поля. При
обычной технологии может быть выполнено зубцовое деление, равное
нескольким миллиметрам. Выполняя зубцы и пазы из микропроводов,
можно получить зубцовые деления, равные нескольким микронам. Из
проволоки можно создавать ткани, из которых затем изготавливаются
статор и ротор машины. Такие ЭП могут иметь различные
конструктивные исполнения. На рис. 13.7 представлен индуктор двухкоординатного
линейного двигателя, имеющего ярмо и две взаимоперпендикулярные
обмотки с числом фаз (заходов), равным трем (А, В, С). Обмотки
271
выполнены в виде тканого
полотна с переплетением
перпендикулярно
расположенных проводов. При этом
фазы обмоток двух слоев
располагаются в шахматном
порядке. При подаче
трехфазного напряжения
создается бегущее поле в одном
направлении, а при подаче
напряжений на вторую
обмотку — в
перпендикулярном направлении.
Одновременная подача напряжений
на обе обмотки с
изменением частоты питания по
определенному закону приво-
X $ с дит к перемещению вторич-
Рис. 13.7. Индуктор двухкоординагаого ли- ного элемента в плоскости
нейного двигателя с двумя взаимно перпецди- индуктора по заданной тра-
кулярными обмотками из тканого полотна ектории. Каждая ячейка
такой магнитной системы
представляет собой R, ^-контур. Пропуская в ткани нейлоновые шли,
можно создать Л, I, С-контуры.
В биологических двигателях создать высокую концентрацию
электрического поля легче, чем магнитного, так как могут использоваться
жидкости с большой диэлектрической постоянной, поэтому емкостные
электрические машины играют основную роль в электромеханическом
преобразовании энергии в живых организмах.
Создать ультрамикродвигатель на минимальные мощности и
габариты, которые имеют биологические двигатели, по-видимому, возможно,
заимствуя уже созданное природой. Такие двигатели найдут применение
в микросхемах.
В электромеханике принято к индикаторным двигателям
относить двигатели, у которых полезная мощность на валу равна нулю
(приборы времени, сельсины, датчики угла и т.п.). При этом они
могут потреблять из сети десятки ватт. По-видимому, следует
различать микродвигатели по потребляемой мощности и, как показывают
биологические двигатели, они могут иметь ничтожные мощности
(КГ10— 10"|7Вт).
В живой природе имеется безграничное разнообразие форм, поэтому
используются и индуктивные электромеханические преобразователи, но
реже, чем два других класса электрических машин.
272
Изучение биологических электромеханических преобразователей
может многое дать для электромехаников и значительно расширяет
представления об электрических машинах. Электромеханикам
хотелось, чтобы в электробиологии все было как в классической
электромеханике: электроэнергия вырабатывалась генераторами, а в
биологических электродвигателях электроэнергия преобразовывалась в
механическую энергию. Принципиально так это и происходит, но сложнее,
чем, например, в промышленной автономной энергосистеме. В
промышленных автономных энергосистемах электрическая энергия
вырабатывается непрерывно и тут же преобразуется в другие виды энергии
(в большинстве случаев — в тепловую и механическую).
В биосистемах электрическая энергия вырабатывается непрерывно, а
расходуется импульсами. Поэтому надо уметь хорошо накапливать
электроэнергию, передавать потребителю ее и быстро, и медленно. Ясно, что
для передачи электроэнергии мгновенно необходимо иметь линию
передачи. В биологических системах для этой цели широко используются
накопители энергии (зарядов), которые транспортируются с любой
скоростью. Такими накопителями могут быть емкости, двигающиеся в
жидком диэлектрике, или индуктивности со сверхпроводящими контурами
токов. В созданных человеком промышленных энергосистемах выгоднее
иметь одну мощную машину, а в биологических системах
осуществляется параллельная работа бесчисленного множества электрических машин
s небольшой мощности.
Электробиологию и электромеханику связывают общие принципы
электромеханического преобразования энергии, а следовательно, и общие
математические модели. Использование законов электромеханики и
математических моделей, заимствованных из электромеханики, может дать
значительные результаты в электробиологии.
Изучение электробиологии электромеханиками позволит создать
новые емкостные электрические машины, которые немыслимо сделать,
применяя традиционную технологию электромашиностроения.
В биологических двигателях и генераторах осуществляется
электромеханическое преобразование энергии и могут применяться одни и
те же математические модели. При исследовании
электромеханического преобразования энергии в биодвигателях необходимо шире
привлекать фундаментальные достижения электромеханики. Взаимное
проникновение достижений электромеханики в электробиологию
обеспечит в ближайшие годы прогресс как в электробиологии, так и в
электромеханике.
273
§ 13.5. Индуктивно-емкостные
электромеханические преобразователи
"t
**
HHh
*ю о-»
Рнс 13.8. Схема индуктивно-
емкостного
электромеханического преобразователя
Индуктивно-емкостный ЭП можно
получить, если объединить в один агрегат
индуктивную и емкостную машины. В
индуктивно-емкостном ЭП концентрация
и преобразование энергии происходят и в
магнитном, и в электрическом полях.
Примером индуктивно-емкостного ЭП
может служить машина, представленная
на рис. 13.8. Это, по существу, линейный
индуктивный ЭП. Здесь в катушке 1
движется стальной сердечник 2, совершая
возвратно-поступательное движение.
Катушка / возбуждается постоянным током
от источника Ub. Через коромысло 4,
укрепленное на опоре 3, индуктивная машина соединяется с емкостной,
которая представляет собой конденсатор б с движущимся диэлектриком.
Между обкладками конденсатора б движется диэлектрик 5. К конденсатору
подводится постоянное напряжение Ub. Катушка индуктивности через
сопротивление RH соединена с конденсатором. При резонансной частоте
©0 = l/VZc, когда <o0L = 1/со0С, наступает электромеханический
резонанс. Частота сети и механическая частота одинаковы и ЭП, находясь в
электромеханическом резонансе, имеет наилучшие
технико-экономические показатели.
В этом ЭП в одном агрегате органически сочетаются индуктивная и
емкостная машины. Этот индуктивно-емкостный ЭП, как и любая
электрическая машина, обратим. Машина может работать в режиме
генератора, забирая механическую энергию Л или двигателя, преобразуя
электрическую энергию в механическую. Для этого надо подавать
электрическую энергию в электрическую цепь ЭП (рис. 13.8).
На рис. 13.9 представлена схема другого индуктивно-емкостного
ЭП, принцип действия которого основан на изменении линейных
размеров сердечника под воздействием электромагнитного поля.
Рассматриваемый ЭП состоит из магнитострикционной 1 и пьезоэлектрической 2
частей.
В качестве магнитострикционного материала можно использовать
пермендюр или чистый никель, а материалом с наилучшими пьезосвой-
ствами является твердый раствор цирконатотитаната свинца.
Явление магнитострикции в этом ЭП связано с изменением формы и
объема ферромагнетика при его намагничивании. Соединяя механически
274
магнитострикционный и
пьезоэлектрический материалы, можно настроить
обе части на резонанс. В свою очередь,
электрическая цепь (рис. 13.9), которая
состоит из обмотки, создающей поле с
индукцией В, и внутреннего
сопротивления пьезоматериала, настраивается в
резонанс с механическими
колебаниями стержней. При этом осуществляется
электромеханическое преобразование
энергии. Такой ЭП обратим. Хотя он в
конструктивном отношении отличается
"мех
И9Л
Рис 13.9. Схема вибрационного
тщукгавно-емкостного
электромеханического преобразователя
от обычных электрических машин, для анализа его работы применима
теория ЭП.
Делаются попытки создать двухфазные сегнетомагнетики,
представляющие сочетание пьезодиэлектрика и магнитострикционного материала.
В композиционных сегнетомагнетиках магнитоэлектрический эффект
является результатом механического взаимодействия пьезомагнитной и
пьезоэлектрической фаз. За счет механической деформации
осуществляется линейная связь между магнитным и электрическим полями.
В реальных сегнетомагнетиках, представляющих смесь метатитаната
бария и кобальтового феррита, магнитоэлектрический эффект составляет
всего несколько процентов/Дальнейшее применение новых материалов
может привести к созданию новых ЭП, имеющих техническое назначение.
Развитие электромеханики во многом зависит от прогресса в
создании электротехнических материалов, которые ведут себя в сильных
магнитных полях как хорошие электротехнические стали, а в сильных
электрических полях — как диэлектрики.
Особое значение имеют индуктивно-емкостные ЭП с жидким
ротором при работе в режиме двигатель —
генератор с непрерывной рекуперацией энергии,
наличием внутренних обратных связей и
управлением от микропроцессоров. Важным
является совмещение в одном агрегате индуктивной
и емкостной машин, подобно тому как это
сделано в классических случаях совмещения
индуктивных ЭП, когда имеются общие
конструктивные части для потоков активной и
реактивной мощностей.
На рис. 13.10 в координатах Е, Н показана
область применения емкостных машин
(большие значения Е и небольшие Н), область
индуктивных ЭП (большие значения Н и малые
275
Рис 13.10. Области
существования различных
классов
электромеханических преобразователей
в координатах £, Я
Е) и область индуктивно-емкостных машин (большие значения £ и Я). В
комбинированных ЭП возможны более высокие удельные показатели и
бблыпие концентрации энергии.
Для достижения более высоких показателей в индуктивных ЭП
используют медь, а в емкостных — газообразные диэлектрики, твердые
диэлектрики с большой диэлектрической проницаемостью 8. Эти условия
трудно выполнить, когда рабочим телом являются неорганические
вещества. Требования к рабочему телу индуктивно-емкостных ЭП могут быть
менее жесткими, что расширит перечень активных материалов,
применяемых в электромашиностроении.
Математическое описание процессов преобразования энергии в
индуктивно-емкостных ЭП состоит из системы уравнений индуктивной и
емкостной машин:
MyL = ЩКК). М* = М(и,иг). A3.17)
В уравнениях A3.16) и A3.17) uL и iL — соответственно субматрицы
напряжений и токов индуктивной машины вида B.1) или D.9), D.10); \с и
пс — субматрицы токов и напряжений емкостной машины, подобные
субматрицам индуктивной машины; ZL — матрица сопротивления
индуктивной машины вида B.1) или D.11)—D.15); Ъс — матрица
сопротивления емкостной машины, подобная матрице индуктивной машины;
МЪ1 — момент индуктивной машины; Мус — момент емкостной машины.
Уравнения момента A3.17) могут иметь различные видоизменения.
Система уравнений A3.16), A3.17) совместно с уравнением
движения описывает процессы индуктивно-емкостного ЭП в переходных и
установившихся режимах.
В предыдущей главе рассматривалась наша планета как индуктивная
электрическая машина A2.4). Но Земля является и огромным
многослойным конденсатором. Между поверхностью планеты и ионосферой
напряжения составляют миллионы вольт, а емкость земного шара равна,
примерно, одной фараде. Каждую минуту на планете происходит
грозовой разряд, что связано с обменом зарядами и, следовательно, с
электромагнитным преобразованием энергии. Таким образом, наша планета
может считаться индуктивно-емкостным ЭП. Взаимодействие магнитных и
электрических полей ждет своих исследователей.
Обобщенный электромеханический преобразователь дает
возможность записать уравнения для m-фазных машин с бесконечным спектром
гармоник поля в воздушном зазоре для многомерных машин с
магнитным, электрическим и электромагнитным рабочим полем. При этом в
276
уравнениях электромеханического преобразования могут участвовать
индуктивности, емкости, сопротивления и проводимости.
Рассматривая три класса ЭП, следует отметить, что область
применения индуктивных ЭП — это вращательное движение, сравнительно
низкие частоты и напряжения. Емкостные ЭП должны применяться
при возвратно-поступательном движении в высоковольтных
высокочастотных ЭП. Индуктивно-емкостные ЭП объединяют лучшие
качества обоих классов ЭП
При развитии общей теории ЭП удобно будет начинать
рассмотрение электромеханического преобразования энергии с уравнений
индуктивно-емкостной электрической машины с рабочими магнитными и
электрическими полями, а затем как частные случаи изучать уравнения
индуктивных и емкостных машин. Представление индуктивно-емкостных
ЭП, как электрических машин с более общим математическим
описанием, дает возможность шире использовать теорию индуктивных
электрических машин.
Электромеханика — развивающаяся наука, и есть целые классы
электрических машин, которые только теперь начинают исследоваться.
Изучение емкостных и индуктивно-емкостных ЭП позволяет найти
новые возможности для создания ЭП, расширяет теорию
электромеханического преобразования энергии.
Глава 14
Синтез электрических машин
§ 14.1. Подход к оптимизации
электромеханических преобразователей
Целью изучения теории электрических машин является создание
оптимальных электрических машин и их рациональное применение и
эксплуатация. Синтез ЭП — проектирование электрических машин, которое
состоит из расчета и конструирования. Расчет и конструирование
неотделимы друг от друга и от технологии изготовления машин. Расчет машины
в общем случае представляет математически неопределенную задачу со
многими решениями, так как число определяемых неизвестных обычно
больше числа уравнений. При расчетах задаются значениями некоторых
величин, базируясь на опыте эксплуатации и проектирования
электрических машин. При проектировании из нескольких расчетных вариантов
выбирают оптимальный [9].
Критерием оптимизации может быть минимум суммарных затрат в
процессе изготовления и эксплуатации, минимальная масса, стоимость и
другие показатели. Критерий оптимизации зависит от области
применения ЭП, времени, а также цен на материалы и электроэнергию. Все это
усложняет оптимизацию электрических машин [1,4,9,10].
Существует много методов оптимизации электрических машин. В
основе каждого метода лежат те или иные математические модели,
связывающие входные и выходные показатели электрических машин. В
основе большинства методов лежат уравнения проектирования,
полученные как аналитическим, так и опытным путем. В некоторых методах
используются уравнения, полученные из схемы замещения. В последнее
время делаются попытки использовать дифференциальные уравнения в
качестве математической модели при проектировании ЭП.
Применение дифференциальных уравнений электромеханического
преобразования энергии при проектировании дает возможность учесть
как статические, так и динамические характеристики ЭП. Использование
ЭВМ позволяет получать характеристики установившегося режима как
частный случай переходных режимов. Теперь можно идти не к динамике
от схемы замещения (т. е. от частного к общему), а от общих уравнений
переходных процессов к статике [5].
278
Эти модели выдвинули задачи строгого упрощения математических
описаний процессов преобразования энергии, создали понятие удельной
мощности, сконцентрированной в воздушном зазоре ЭП, которая
оказывается одинаковой в хорошо спроектированных электрических машинах,
отличающихся по мощности и применению.
Как правило, задачи, связанные с оптимизацией ЭП, имеют
несколько решений. Цель оптимизации — нахождение наилучшего решения
среди многих потенциально возможных. Однозначная задача не требует
оптимизации. Оптимизация осуществляется с помощью многих методов —
от весьма сложных аналитических и численных до применения ручного
счета.
Задача синтеза электрических машин в общей постановке сводится к
оптимизации (минимизации или максимизации) некоторого функционала:
х, ->min =>S\xa., A4.1)
seS, x,eZ>.
Здесь D—область, определяемая элементами
/= 1,2, ...,m,s = {1,2,...,5, ...,*}, A4.2)
где s — множество номеров структур (типов исполнений) электрических
машин; х^ — вектор оптимальных параметров оптимального типа машины.
Задача A4.1) включает как структурную, так и параметрическую
оптимизацию, условия A4.2) выражают ограничения, накладываемые
техническими требованиями на разработку машины и описывают
допустимую область D. Причем областью определения функций Fs(xs) и ф„{х,)
является некоторая область Du ограниченная условиями
Ч,А*,)> 0,у =1,2,...,/. A4.3)
В случае s = {1}, т.е. когда требуется оптимизировать заданный тип
машины, оптимальное проектирование сводится к определению
F(x)-»min=>x*, xeD A4.4)
с ограничениями типа неравенств
<р,(х) > 0, /=1,2,..., т. A4.5)
Оптимальное проектирование электрических машин сводится к
задаче нелинейного программирования, имеющей общий характер, причем
ее особенностями являются пологость целевой функции, многопарамет-
ричность, многоэкстремальность, овражность гиперпространства
допустимых решений. Если в большинстве экстремальных задач «овраг»
образуется сильной вытянутостью (в топологическом представлении) линий
уровня целевой функции, то в задачах электромеханики овражные ситуа-
279
ции чаще образуются из-за малости угла, образованного линиями уровня
целевой функции и границей допустимой области.
Методы оптимизации отличаются сложностью программирования,
временем счета и скоростью сходимости. Значительно усложняет
стратегию поиска оптимума наличие в модели процедур округлений диаметров
проводников по табличным значениям и стандартных геометрических
размеров.
Ограничения при проектировании ЭП связаны с перегревом
обмоток, стоимостью, габаритами и т.д. Наиболее распространены следующие
методы учета ограничений.
1. Фиксация граничных значений переменных, которую удобно
применять для градиентных методов и координатного поиска, когда
ограничения наложены на независимые переменные.
2. Метод штрафных функций, учитывающий ограничения типа
неравенств и основанный на новой функции
J(x,u,t) = F(x,u,t)+ID(x,u,t),
где F(x, u, t) — исследуемая целевая функция; J(x, u, t) — вновь
организованная функция; Ш(х, u, t) — штрафная функция.
Знак штрафной функции зависит от хода решения: при поиске
максимума штрафная функция имеет отрицательный знак, а при
минимизации функции она положительна. Каждая штрафная функция позволяет
создать численный метод для непосредственного решения задачи.
3. Метод множителей Лагранжа, достаточно эффективно
учитывающий наличие условий типа равенств. Учет этих условий основан на
организации новой целевой функции, в которую с помощью множителей
Лагранжа вводятся указанные условия. Поиск экстремума новой функции
может осуществляться обычными методами математического
программирования.
Методы оптимизации можно разделить по характеру сбора
информации на методы локального и нелокального поисков. Методы
локального поиска предусматривают анализ результатов каждого эксперимента
(расчета математической модели) и использование полученной таким
образом информации при подготовке очередного эксперимента.
Характерным для методов локального поиска является то, что каждый раз
используется информация о поведении математической модели
проектируемого устройства лишь в малой окрестности значений параметров
предыдущего эксперимента. Проведение локального поиска требует
умеренных затрат машинного времени, но в результате определяется в лучшем
случае лишь один локальный экстремум. Важнейшим элементом
локального поиска является выбор направления движения к оптимуму, который
осуществляется путем оценки градиента в методе конечных разностей
либо на основе статистической информации (случайный поиск), либо по
280
оценкам частных производных. В некоторых случаях направления могут
быть выбраны заранее (например, вдоль координатных осей или
произвольный набор из ортогональных направлений).
При решении многоэкстремальных задач и в так называемых
овражных ситуациях автономная работа алгоритмов локального поиска
оказывается неэффективной. Это потребовало разработки методов
нелокального поиска, которые фактически состоят в определенной организации
проведения некоторой последовательности локальных поисков. Так,
нелокальный алгоритм решения многоэкстремальных задач состоит в выборе
начальных точек в пределах заданной области и обработке результатов
локальных поисков, произведенных из этих точек. В ходе работы этого
алгоритма производится изучение заданной области, определяется
местонахождение локальных экстремумов. Специальные алгоритмы
нелокального поиска применяются также при решении овражных задач.
Для решения задач оптимизации электрических машин разработано
множество численных методов, которые подразделяются на
одноступенчатые и многоступенчатые.
В одноступенчатых методах используется информация о самой
функции в одной точке и не производится итераций. К этим методам
относятся методы Эйлера, Рунге—Кутта и др.
В многоступенчатых методах при нахождении значений переменной
используются данные о нескольких предыдущих ее значениях. При этом
требуются итерации, но время счета получается меньше. К этим методам,
называемым методами прогноза и коррекции, относятся методы Хеминга,
Адамса, Гира и др.
Наиболее эффективными и точными численными методами решения
дифференциальных уравнений с начальными условиями являются
комбинации одношагового и многошагового методов. При этом первый
используется для получения начальных значений для многошагового
метода, который используется для вычисления остальных точек.
Основные численные методы интегрирования применимы только
для дифференциальных уравнений, записанных в нормальной форме
Копта. Уравнения электромеханического преобразования энергии для
динамических задач обычно получаются в так называемой канонической
форме, поэтому создаются трудности при переходе к уравнениям в форме
Коши, что объясняется наличием не только дифференциальных, но и
алгебраических уравнений и увеличением числа уравнений в современных
математических моделях электрических машин.
Система уравнений обобщенного ЭП с учетом насыщения не имеет
нормальной формы, поэтому классические численные методы
интегрирования обыкновенных дифференциальных уравнений не применимы для
ее решения без дополнительных процедур. Наиболее приспособленными
для этих целей являются численные методы и алгоритмы в канонической
281
и неявной формах, не требующие специального обращения матрицы
Якоби и решения нелинейных алгебраических уравнений.
В первых работах по оптимизации электрических машин в качестве
метода оптимизации использовался последовательный обход узлов
пространственной сетки. Для этого допустимая область изменения по
каждой из переменных разбивалась на т число шагов и при обходе
образующей сетки отыскивался оптимальный вариант. При всей своей
простоте метод, однако, становится весьма громоздким при увеличении
числа переменных и уменьшении шага приращения.
Затем широкое применение получил релаксационный метод
Гаусса—Зайделя. Идея метода заключается в последовательном поиске
частного экстремума выходной функции по каждой переменной. Поиск
прекращается, когда очередная точка пространства оказывается точкой
экстремума по всем координатным направлениям. Эффективно применение
данного метода к объектам, в которых отсутствует корреляционная связь
между независимыми переменными. В таких случаях единственный
обход по всем переменным приводит к решению поставленной задачи. Для
объектов же с большим числом переменных и наличием корреляционной
связи между ними метод оказывается громоздким.
Метод скорейшего спуска представляет собой модернизированный
метод градиента. Идея метода заключается в движении по направлению
противоположному градиенту. Если /(*я+,) < /(*„), то решается задача
минимизации, следующий шаг делается в том же направлении и так до
тех пор, пока не окажется, что на некотором шаге /(*„+,) > /(*,,). Тогда
осуществляется возврат в точку хк и, вновь вычислив градиент,
продолжают поиск прежним образом. Этот метод эффективнее градиентного
метода. Однако неэффективность метода в овражной ситуации сужает
его возможности, особенно при оптимизации многопараметрических
объектов.
В последнее десятилетие предложены метод конфигураций, методы,
основанные на квадратичной сходимости, и другие. Рассмотренные выше
численные методы поиска экстремума можно отнести к
детерминистическим методам, так как в них направление движения однозначно
определяется логикой поискового процесса.
В практике решения задач оптимального проектирования
электрических машин широко применяется и другая группа методов —
стохастические (случайные) методы. Направление движения в этих методах
выбирается случайно. Если по какому-либо направлению наблюдается
улучшение целевой функции, то движение в этом направлении ведется
вплоть до получения экстремума, после чего начинается следующая
итерация. Эти методы оказываются достаточно эффективными при
отыскании экстремума функции, о характере поведения которой ничего не из-
282
вестно. Однако случайный поиск не использует информации от
предыдущего движения и о характере гиперповерхности, что ведет к
значительным потерям времени.
В этой связи наиболее перспективными представляются методы,
которые удачно сочетают в себе элементы детерминистических и стохастических
методов поиска. Один из них — комплекс-метод — является модификацией
симплексного метода и сохраняет его основную идею. В комплекс-методе
используется N+ Р вершин (Р*0), каждая из которых должна
удовлетворять ограничениям всех к этапов. В допустимой области факторного
пространства эти вершины формируются случайным образом. Затем в каждой
вершине комплекса вычисляется значение целевой функции. Вершина, в
которой/х) имеет наихудшее значение, заменяется новой вершиной,
находящейся на прямой, проходящей через отброшенную точку. Центр тяжести
оставшихся вершин комплекса расположен на расстоянии, равном или
большем, чем расстояние от отброшенной точки до центра тяжести. Если
окажется, что в новой вершине — наихудшее значение по сравнению со
всеми вершинами в новом комплексе, то новая вершина формируется на
половине расстояния от худшей точки к лучшей вершине комплекса. При
удачном движении происходит расширение комплекса с деформацией его в
сторону экстремума. Процесс поиска продолжается до тех пор, пока
комплекс не будет стянут в центр тяжести в пределах заданной точности. Метод
позволяет успешно решать многоэкстремальные задачи.
Фундаментальные определения активной и реактивной мощностей в
динамических режимах, позволяющие определять мгновенные и средние
значения потерь, дают возможность более просто подойти к оптимизации
электрических машин в переходных режимах. Минимум суммы потерь
является наиболее подходящим обобщающим критерием оптимизации,
который позволяет наилучшим образом связать оптимизацию машин в
установившихся и переходных процессах.
В настоящее время поиски методов оптимизации продолжаются.
Нельзя считать, что когда-нибудь останется один метод оптимизации.
По-видимому, для определенных классов задач будут найдены
наилучшие методы оптимизации, но число задач, которые необходимо решать,
растет быстрее, чем число методов оптимизации.
§ 14.2. Применение метода планирования
эксперимента для синтеза электрических машин
В последние десятилетия метод планирования эксперимента (ПЭ),
позволяющий значительно уменьшить число экспериментов и объем
вычислений на ЭВМ, получает все большее развитие [5].
283
В большинстве задач электромеханики при наличии математической
модели необходимо путем перебора параметров ЭП отыскать
оптимальные показатели при определенном сочетании параметров. Как уже
отмечалось, изменение одного параметра при неизменных других не дает
возможности найти нужные соотношения и требует больших затрат
машинного времени. Метод ПЭ позволяет правильно провести эксперимент и
обеспечивает уменьшение числа опытов.
Особое значение метод ПЭ имеет при проведении математических
экспериментов на вычислительных машинах. Предполагается, что метод
ПЭ известен и ниже лишь систематизируется накопленный опыт его
применения в электромеханике.
Применение метода ПЭ при проведении исследований позволяет
выбрать стратегию постановки опытов по некоторой заранее
составленной схеме, разрешающей получить зависимости между параметрами
электрической машины и ее показателями в простой математической
форме — в виде полинома:
п п п
/■1 К) Ы\
где b0, bh btp Ьц — коэффициенты полинома; xh xj — переменные
параметры, факторы; у — исследуемый показатель электрической машины; п —
количество варьируемых факторов.
Метод ПЭ обладает высокой эффективностью, т.е. для получения
требуемой информации ставится минимальное число опытов; позволяет
проводить одновременное исследование влияния нескольких переменных
параметров машины на ее показатели; при наличии случайных
погрешностей можно поставить опыты таким образом, чтобы дисперсия в
оценке коэффициентов полинома a2 {bt} была наименьшей.
Основы теории ПЭ базируются на том, что результаты любых
опытов в п-мерном факторном пространстве могут быть представлены
линеаризованными уравнениями вида
У! = *о А+*А+*2 А +...+*Л +..., )
а а , , \ A4.7)
Ум - *<kh.iA +*i(/+i)^i +*2<лиА +".+xa(/+iA +..'.J
ТеЩЪШЫ МвШШ ff Матричной форме имеют вид
Y = XB, A4.8)
где Y — вектор-столбец наблюдений; X — информационная матрица;
В — вектор-столбец коэффициентов.
284
в=
Ъг
V
A4.9); Y =
Уг
Уы1
A4.10); X =
*олг л1лг
**i
**2
*jWJ
. A4.11)
Получение матрицы В, т. е. определение коэффициентов полинома,
связано с транспонированием и обращением информационной матрицы
X. Конечное выражение для В имеет вид
B = C",XrY, A4.12)
где С~! — обратная матрица по отношению к С = Х,Х; X, —
транспонированная матрица.
Термин «планирование эксперимента» относится прежде всего к
специальному построению информационной матрицы X. В зависимости
от того, как построена информационная матрица, различают и виды
планирования — ортогональное, рототабельное и др. Структурой
информационной матрицы определяются расчетные формулы для нахождения
коэффициентов полинома и дисперсии при определении коэффициентов
полинома. Путем специального построения матрицы X получают
формулу для определения коэффициентов полинома с дисперсией в N раз
меньшей, чем дисперсия при постановке одного опыта:
a*<W«o*{y>/tf. 04.13)
На практике информационная матрица определяет значение
переменных параметров хь х2,..., хп при проведении опытов. Если подставить
в виде координатной плоскости двухмерное факторное пространство
(рис. 14.1), то таблица планирования (табл. 14.1) полного факторного
эксперимента (ПФЭ) типа 22 имеет вид
7Жх2 2
6.
-f
«и
Таблица 14.1. ПФЭ типа 22
№ опыта
1
/ 2 1
3 • 1
4
[ Значение переменных
факторов
*i
-1
1 +1 J
-1 1
+1 1
*2
-1 1
1 "J /
+1
+1 1
9
Рис. 14.1. Двухмерное
факторное пространство
Из приведенной таблицы следует, что эксперимент проводится толь*
ко в точках, координаты которых представляют собой все сочетания
верхних и нижних значений варьируемых факторов — точки 1, 2, 3, 4.
Матрица планирования второго порядка, обладающая свойствами рото-
285
табельности, требует проведения эксперимента еще дополнительно в
точках 5, 6, 7, S. В зависимости от информационной матрицы, т.е. от
точек проведения эксперимента, получаются полиномиальные зависимости
между переменными факторами и показатели машины, обладающие
различными свойствами, которыми являются простота расчета
коэффициентов полинома и величина дисперсии, определяющая эти коэффициенты.
Расчет коэффициентов полинома проводится по простым формулам
при планировании первого порядка и усложняется при планировании
второго порядка.
При планировании первого порядка информационная матрица ПФЭ
обладает простотой расчетных формул коэффициентов полинома, а
также их одинаковой и минимальной дисперсией. При планировании
второго порядка первое и второе свойства противоречивы.
Адекватность полинома объекту исследования характеризуют
величины соответствия целевой функции, полученной из эксперимента — у и
рассчитанной по полиному у. Величина, характеризующая несовпадение
этих величин, называется дисперсией неадекватности. Проверка
адекватности проводится с помощью критерия Фишера. Если значение
вычисленного критерия меньше, то описание считается адекватным объекту.
Задачи электромеханики, в которых используется метод ПЭ, можно
разделить на три класса. Первый класс — задачи испытания
электрических машин, элементов электрических машин или электромеханических
систем. Второй класс — задачи исследования методом ПЭ физических и
математических моделей и аналогов или частей электрических машин,
которые из-за специфики и сложности не могут использоваться
непосредственно для решения задач синтеза электрических машин. Третий
класс — задачи аппроксимационного типа, когда метод ПЭ позволяет
заменить сложное математическое описание процесса преобразования
энергии в электрических машинах простым полиномом с явной связью
между переменными параметрами и показателями машины.
К первому классу относятся задачи изучения математических или
физических моделей электрических машин, а также такие, как, например,
проведение ускоренных испытаний.
При решении задач, которые относятся ко второму классу, часто
требуется уменьшить влияние нестабильности аналоговой модели на
результаты экспериментальных исследований. Сокращение числа
экспериментальных (расчетных) точек в рассматриваемой задаче не является
главным. Требование неизменности диапазона варьирования факторов
вносит ряд особенностей в планирование эксперимента. Так как диапазон
изменения факторов достаточно велик и возможно получение
неадекватных моделей, необходимо повышать уровень планирования. На первом
этапе изучения аналоговой модели используют планы первого порядка, и
если модель неадекватная, то переходят к планам второго порядка.
286
Планирование второго порядка существенно отличается от
планирования первого порядка, так как в нем нет экспериментальных планов,
сочетающих в себе простые расчетные формулы и высокую точность
полиномов.
При решении задач электромеханики используются, в основном, два
типа планов — ортогональный и рототабельный. Преимущества
ортогонального плана состоят в относительной простоте расчетных формул и
меньшем числе опытов по сравнению с рототабельным.
При исследовании аналоговых и физических моделей, когда вопрос
точности полинома при заданных интервалах варьирования факторов
является первостепенно важным, следует использовать рототабельное
планирование. Увеличение опытов по сравнению с ортогональным
незначительно, но оно позволяет получить более высокую точность.
Использование рототабельных планов при исследовании физических
и математических моделей электрических машин обеспечивается
применением современных ЭВМ.
При исследовании задач второго класса существует возможность
введения замены переменных и разбиения диапазона варьирования
факторов на два подынтервала, что сводит задачу к планированию первого
порядка. Планирование второго порядка, хотя и более сложное, но при
наличии стандартных программ дает лучшие результаты.
Задачи третьего класса — аппроксимационные задачи —
встречаются довольно часто при исследовании динамических и статических
режимов работы электрических машин. Одна из характерных задач —
изучение переходных процессов в электрических машинах. Решение системы
дифференциальных уравнений при несинусоидальном напряжении
питания с учетом четырех гармоник, например, занимает на вычислительной
машине несколько минут машинного времени. Оптимизационные задачи
требуют от 300 до 500 таких решений, что не всегда реализуемо на ЭВМ
Поэтому необходимо заменить систему дифференциальных уравнений
более простой и компактной зависимостью — полиномом.
Основной особенностью ПЭ для рассматриваемого класса задач
является то, что объект исследования имеет строго математическое
описание, которое из-за громоздкости в явном виде неудобно. Это уравнение
можно решить на ЭВМ или другими средствами. Оно однозначно
определяет связь между переменными параметрами и целевыми функциями,
т.е. объект исследования стабилен. Характерным для третьего класса
задач является использование матриц планирования, что означает замену
сложного математического описания простой полиномиальной моделью.
При этом главное — точность аппроксимации, а число расчетных точек в
данном случае минимизируется нежестко.
Применяя метод ПЭ для решения задач аппроксимации, необходимо
иметь в виду, что любая аппроксимация вместе с простотой функцио-
287
налъных связей вносит в результаты расчета и дополнительные
погрешности. Оценка целесообразности использования метода ПЭ для решения
аппроксимационных задач проводится для каждого конкретного случая.
Решение большинства оптимизационных задач электрических
машин затрудняется тем, что функционально связи между переменными
параметрами машин и ее показателями имеют неявновыраженную
форму. Решение оптимизационных задач с применением метода ПЭ
существенно упрощается, так как этот метод позволяет получить явную
полиномиальную связь между переменными параметрами машины и
функциями цели. Для ряда задач это позволяет получать оптимальные
решения аналитическими методами.
Если решение оптимизационных задач проводится численными
методами, то полиномы и построенные с их помощью двухмерные сечения
позволяют обоснованно подойти к выбору численного метода поиска.
Выбор метода поиска является важной и актуальной задачей.
Как показывает практика проектирования электрических машин, в
настоящее время определенные поисковые методы нельзя рекомендовать
как универсальные.
В каждом конкретном случае выбору метода должен предшествовать
определенный анализ области факторного пространства, в котором
находится решение. Осуществить такой анализ можно путем построения
серии двухмерных сечений на базе полиномов. В результате применения
метода ПЭ можно получить зависимости между показателями двигателя
и переменными параметрами — активным сопротивлением ротора Rr и
активным сопротивлением статора R,. Например, для двигателя А-42-6
Л = 0,851-0,014Яг -0,022Д,;
coscp = 0,83+0,036ЯГ - 0,018Д, + 0,026ДГЯ,;
/п = 6,56-1,44Яг -1,69Д, +0,81ЛГЯ,; A4.14)
/уд = 0,38 - 0,03ЯГ - 0,041/?,;
А/уд = 0,83+0,036ДГ -0,039Д, + 0,064ДГЛ,.
Полученные полиномиальные зависимости достаточно просты, так
как задача решается при варьировании всего лишь двумя переменными
параметрами. Можно предположить, что поиск оптимума в этих случаях
не встречает затруднений, однако анализ различных вариантов решений
дает другие результаты.
Наиболее характерны случаи оптимизации электрических машин,
когда область поиска резко сокращена. Зоны, в которых целевая функция
удовлетворяет наложенным ограничениям, малы и получать их для
организации шаговых процедур без построения сечений трудно. Для решения
оптимизационных задач подобного класса трудно выбрать исходную
288
точку для начала направленного поиска, так как асинхронная машина
является исследуемым объектом, достаточно изученным как с
теоретической, так и с практической точки зрения. Серийные машины при
имеющихся ограничениях достаточно близки к оптимальным, поэтому
возможности улучшения их характеристик невелики и зона допустимого
поиска решения мала.
Полиномиальные зависимости и зоны существования, полученные с
помощью метода ПЭ, помогают в данном случае формировать исходную
точку для организации движения направленного поиска. Встречаются
задачи, в которых область поиска разрывна и есть вероятность при
численных методах поиска принять за оптимальную точку частного
экстремума. Избежать этой ошибки помогает анализ зон двухмерных сечений,
полученных с помощью метода ПЭ.
Применение метода ПЭ в электромеханике позволяет
преобразовать математическую модель обобщенной, машины в простые
полиномиальные зависимости показателей работы машины от ее параметров.
Метод ПЭ позволяет выделить основные и второстепенные факторы,
влияющие на те или иные показатели. Благодаря развитию метода
планирования удается получить математические модели ЭП более высоких
порядков и перейти к геометрическому программированию.
§ 14.3. Применение метода геометрического
программирования при проектировании
электрических машин
Геометрическое программирование является методом
математического программирования, который успешно применяется для решения
оптимизационных задач электромеханики. Этим методом эффективно
решают задачи минимизации, в которых критерии оптимальности и
ограничения выражаются нелинейными функциями определенного вида.
Геометрическое программирование в сочетании с методом ПЭ
обеспечивает получение новых математических моделей для синтеза ЭП.
Геометрическое программирование в частных случаях позволяет
решать задачи аналитическим путем для вполне определенного класса
функций вида
g(o=!>,(/), ^(o=Qr'»,/2^,...,/:-, A4.15)
где щ9 иг> ..., и„ — положительные компоненты функции g(t); Cu С2, ...
..., С„ — положительные постоянные коэффициенты; ai} —произвольные
289
вещественные числа (/=1,2,..., n\j = 1, 2,..., /и); th t29..., tm —
положительные независимые переменные.
Такие функции называют позиномами (нелинейные полиномы с
положительными коэффициентами), они занимают центральное место в
геометрическом программировании. Основное требование
геометрического метода — представление исследуемых функций линейными
суммами положительных компонент щ.
В технических задачах функции часто бывают сформулированы в
неявном виде. Путем соответствующего преобразования функцию можно
привести к позиномиальной форме и решить обычную задачу
геометрического программирования.
Функция вида
*КО=/@+ДО)Г*('), A4.16)
где ДО» 8@ и А(/)—позиномы от независимого переменного; t = (/,, /2,...
..., /т) и а > О, с помощью дополнительного независимого переменного /0
превращается в позином
g(x) = /@+C*@ A4.17)
при условии
tfqif) < 1. A4.18)
Здесь т = (/о, Л, t2$..., /«) — минимизирующая (преобразованная)
векторная переменная. Функция вида
*(') = /@-и@, A4.19)
где !/(/) — одночленный позином, также относится к классу задач,
решаемых данным методом, так как минимизация функции A4.19)
равносильна минимизации функции вида
g(T) = l/'o A4.20)
при ограничении '«/«(О+/(')/*(') < 1. где т = ДО)-/(/),*i> *г> ••••> 'J:
Предметом исследования геометрического программирования
является выражение
вСО^ЕПМОГ/Р-Р^ • A4.21)
где qt/j) np0(t) — позиномы; ау и by — положительные постоянные
величины.
Знакопеременность позинома приводит к разновидности
ограничений — неравенств, которые являются предметом изучения обратного
геометрического программирования. Обратное геометрическое
программирование не является частью выпуклого программирования и соответ-
290
ственно большинство важных теорем исходного геометрического
программирования для этого случая не применимы.
Метод геометрического программирования построен на
классическом неравенстве, согласно которому среднее арифметическое не
превышает среднее геометрическое:
«.С/. +52£/2 +... + 8.С/. > У?1, 1% ,.-, С# , A4.22)
где U\, иъ ..., U» — произвольные положительные числа (компоненты
функций); 5,, &2, ...» 8„ —произвольные положительные веса,
удовлетворяющие условиям нормализации
5|+82+...+8„=1. A4.23)
Для переменных щ = 5t(/,, и2 = 62С/2,..., ип= &nU„ геометрическое
неравенство приобретает вид
и, + и2 +...+«. > (щ/*1)Нщ/Ь)нАъ/*.)*я • A4.24)
Между весами 8, и положительными компонентами функции
имеется взаимно однозначное соответствие. В точке оптимума веса 5/
представляют собой относительные величины этих членов, поэтому векторы
6F,, 52,..., 6„) и и(ии i<2,..., и„) параллельны.
При решении задач с ограничениями положительные составляющие
вектора нормализации являются ненормализованными:
&,+82+... + 8,*1. A4.25)
Нормализация происходит с помощью множителя А* который равен
сумме ненормализованных весов:
X = А, + А2 +...+Дя, A4.26)
где Аь Л2,..., Д, — ненормализованные веса; X — множитель,
связывающий каждый нормализованный вес с соответствующим
ненормализованным весом:
А, = Х8, ,/=1,2,..., л.
Геометрическое неравенство с ненормализованными весами имеет
вид
(f/l+n2+...+fOx > (и1/А,)А,(и2/Д2)А2.-(^/Дя)АяЛх0. A4.27)
Задача геометрического программирования состоит в минимизации
целевой функции
&*•(«> > A/1/А|)АЧ«2/Д2)А2.»К/Дп)А"Лх0. A4.28)
при ограничениях
291
1 > glk 00 > П («АL' rtAV . A4-29)
itjW k-\
где* =1,2, ...,p,
J(k) = {mk, mM,..... nk}, * = 0,1,2 p, A4.30)
Каждому члену g*[u@] ограничивающих функций (* = 1, 2,..., р)
соответствует одна из переменных 6У. Ограничивающие функции g*(/)
создают множители Хк. Целевая функция не влечет за собой появления
множителя А*, так как в соответствии с условием нормализации Хк = 1
для к = 0, т.е. принята нормализация А* - 1. Условие нормализации
представляет собой единственную часть задачи оптимизации, в
которой различаются целевая функция g0(t) и позиномиальные
ограничения g*(/), *= 1, 2,..., р.
Если выразить положительные компоненты целевой и
ограничивающих функций через независимые переменные /ь /2> •••» 4и» то
соотношение примет вид
*.<о > [п^/м* Тп^ Yi av . A4.3D
где С, — постоянные коэффициенты при положительных компонентах и<;
t, —положительные независимые переменные; Dj — линейная
комбинация показателей степеней независимых переменных;
и
Я> =Z8'e* J" Li -.«• О4-32)
Здесь а;; — произвольные вещественные числа, с помощью которых
строится матрица экспонент [ау].
Правая часть выражения A431) называется преддвойственной
функцией и обозначается ГE, /). Она является функцией положительных
весов и независимых переменных, принимает минимальное значение в
том случае, когда линейные комбинации равны нулю:
£в,а,«0. " A4.33)
/«1
В этом частном случае все независимые переменные /, возводятся в
нулевую степень и преддвойственная функция зависит только от
положительных весов.
Число строк п матрицы экспонент я,// = 1, 2, ..., m;j = 1, 2, ..., п)
представляет собой размерность вектора показателей и находится в
строгом соответствии с числом членов всех позиномов. Число столбцов т
292
определяет размерность пространства показателей и равно числу
независимых переменных целевой функции.
Если число строк равно или меньше числа столбцов, т.е. размерность
вектора показателей больше размерности вектора-столбца матрицы
экспонент, то невозможно соблюдение условия ортогональности.
Следовательно, задача не имеет решения. Величина
</ = л-(/я + 1) A4.34)
называется степенью трудности задачи.
Если размерность вектора показателей больше размерности вектора-
столбца матрицы экспонент, в этом частном случае решение носит
аналитический характер.
Когда п = т + 1, вектор решения всегда ортогонален всем векторам-
столбцам матрицы показателей. Условие ортогональности, которое
образует векторное подпространство и-мерного пространства, однозначно
определяет двойственный вектор 8 без проведения операции
нормализации. При этом числа неизвестных и нелинейных уравнений,
удовлетворяющих условиям двойственной программы вида равенств, равны. В
более общем случае, когда п > т + 1, все решения условий ортогональности
определяют лишь двойственное пространство, размерность которого
равна п - /и. Выражение A4.31) принимает вид
v(8) = [n(C//8/N']flAV 04.35)
и называется двойственной функцией, а 6Ь 82,..., 5„ — двойственные
переменные. При этом имеются линейные ограничения двух видов:
неравенства и равенства.
Первое условие, налагаемое на вектор 5, — условие
неотрицательности двойственных переменных:
5,>0,82>0,...,8Я^0. A4.36)
Условия A4.36) отражают тот факт, что компонента 8 не может быть
отрицательной.
Согласно второму виду линейных ограничений сумма компонент,
соответствующих прямой функции, равняется единице (нормализация).
Третье условие линейных ограничений — ортогональность векторов.
Оно появляется в связи с использованием неравенства, которому должно
удовлетворять скалярное произведение л-мерных векторов. Условие
ортогональности лежит в основе построения теорий двойственности и
требует, чтобы вектор 8 принадлежал пространству, ортогональному
векторам-столбцам матрицы экспонент (матрицы показателей линейно
независимы). Для геометрических задач с нулевой степенью трудности
двойственная область содержит одну точку. Решение двойственной и прямой
293
задач сводится к решению системы линейных уравнений, определитель
которой отличен от нуля. Система уравнений имеет единственное решение.
При положительной степени трудности двойственная область имеет
высокую степень произвольности. Система линейных уравнений не
имеет единственного решения.
Двойственная функция проще, чем прямая. Программа двойственной
функции имеет преимущества при работе на ЭВМ. Это объясняется тем,
что двойственные ограничения линейны, а ограничения прямой
программы — нелинейны. Поэтому на первом этапе решения задач
геометрического программирования определяется двойственный вектор,
удовлетворяющий условиям ортогональности и нормализации.
Решение системы линейных уравнений
5,+62+...+6п=1;
а1161 + л1252+...+а1л8я=0;
A4.37)
полностью характеризует направление двойственного вектора.
Двойственный вектор 8'E|, 62,..., 5'п) дает возможность определить
двойственную функцию по выражению
vE') = (Cjb'tf* (С2/б'2N> ...{CMf* AV • A4.38)
По теории двойственности максимизирующие двойственные
переменные 5), образуют минимизирующие независимые переменные
целевой функции //. Поэтому
С,О^...С =8;vF'), /=l,2,...,/i. A4.39)
Логарифмируя выражения A4.39), получаем систему п линейных
уравнений от независимых переменных //, прямой функции, решение
которой определяет искомые оптимальные значения целевой функции.
Аналогично линейному программированию метод геометрического
программирования базируется на теории двойственности. Отличие
состоит в том, что при переходе от прямой к двойственной программе
нелинейная функция A4.21) линеаризуется благодаря переходу из области
независимых переменных в область показателей степеней.
Теория геометрического программирования строится для выпуклых
функций, определенных на выпуклом множестве. Согласно основной
теореме выпуклого программирования любая точка локального
минимума функции является также точкой глобального минимума данной
функции. Поэтому отпадает необходимость получения Локальных
экстремумов и их сопоставления для выбора глобального решения.
294
Представляет интерес обратное геометрическое программирование,
которое является обобщением геометрического программирования.
Основной категорией метода геометрического программирования
является целевой ограничитель. На целевую функцию (критерий
оптимальности) могут быть наложены различные ограничения типа равенств
или неравенств. При проектировании электрических машин это —
стоимость, габариты, перегрев и т.д.
Существует несколько методов ограничений. К ним, в первую
очередь, относятся фиксация граничных значений, штрафных функций,
множителей Лагранжа и др. При решении практических задач методом
геометрического программирования число ограничений может быть
велико, что затрудняет применение этого метода. Использование
функционального ограничения — целевбго ограничителя, эквивалентного всем
отдельным ограничениям, эту трудность устраняет.
Целевой ограничитель — одночлен
Ц(С№..е) <1, A4.40)
где С — коэффициент целевого ограничится (С > 0); /ь /2> •••» tm —
независимые переменные проекта; хи х2, ...,хп — целевые показатели
степеней.
Имея q функциональных ограничений, приходится составлять Хи Хъ ...
..., X ь ..., \ множителей Лагранжа. Каждой множитель Лагранжа
соответствует весу ограничения. Так как целевой ограничитель
объединяет все ограничения, ему соответствует один множитель Лагранжа —
целевой множитель
bu=b,W 04.41)
Когда область определения целевой функции — точка, поиск
экстремального значения функции и соответствующих координат сводится к
целенаправленному одноразовому расчету.
Целевой ограничитель может применяться не для всех задач. Его
можно использовать при решении задач нулевой степени трудности и
при методах ПЭ и геометрического программирования.
Проектирование электрических машин с помощью геометрического
программирования начинается с применения метода планирования
эксперимента. По известным формулам проектирования ставятся планы в
соответствующей области исследования функции. Получается первая
система линейных уравнений, охватывающих всю априорную
информацию о машине, например,
295
cosq> = Cxxxx + CI2x2 + r.. + Clwxw;]
Л = C21X1 + C22*2 + ••• + C2m*m '>
A4.42)
кi - CrjX| + Cr2x2 +...+Crmxm9
где cos ф, л — КПД, kt — кратность тока — выходные характеристики
электрической машины; хих2,..., хт — целевые показатели степеней
независимых переменных целевого ограничителя; Сп, Сп> ...,Ст —
коэффициенты регрессии; г — число ограничивающих функций оптимального
проектирования.
Для оптимального проектирования методом геометрического
программирования функции приводят к позиномиальному виду.
Например, массу обмотки статора определяют по формуле
G = gSnzxqV+l,)9 A4.43)
где G — масса обмотки; g — плотность материала обмотки статора; Sa —
число эффективных проводников в пазу; i\ — число пазов статора; q —
площадь сечения эффективного проводника; / — длина сердечника
статора; /, — средняя длина лобовой *Щ£$§М9тШЩ)8:
Пбблё подстановки значения длины лобовой части и простого
преобразования выражение для массы обмотки статора примет вид
G^gSazxql^qSagknXYxnD^
+gSnqknXYxnhzX + 2gSnZxqB, A4.44)
где k„i и В — величины, характеризующие геометрические размеры
лобовой части обмотки; Yx — шаг обмотки статора; Д — внутренний
диаметр статора; hzX — расчетная высота паза статора.
Определив площадь паза
Sa=(h:lb„kiM)/q, A4.45)
где Ьп — ширина паза; к>м — коэффициент заполнения паза медью,
получаем
G = gzAuKhJ + gy^uKxKuKKA +
+*Vi«tf* AA**i + 2gzxkyubah:XB. A4.46)
Формула для КПД в виде
*1 = 0-£^1н)ЮО% A4.47)
не может исследоваться методом геометрического программирования.
Но после преобразований, считая, что максимальному КПД
соответствуют минимальные потери, получаем сумму потерь в позиномиальном
виде
296
J^P = Pt+Pi+... + P„t A3.48)
/si
где P\, P2, ..., P» — отдельные потери в машине, которые можно
определить через геометрические размеры.
Аналогично можно получить выражение для стоимости машины,
нагрева и других показателей. В зависимости от постановки задачи
искомыми величинами могут быть параметры схемы замещения, напряжение,
момент и др.
Пусковой момент можно представить в позиномиальном виде
1 со. г2 2о>. _ со, _2 , со, хх
ТГ = —VV 7^+~V?'^ —Т-7 +
мп тхих г2 тхих тхих тхих г2
/w,w, r[ mxu\ r2
Решение системы уравнений A4.42) используется во второй системе
линейных уравнений, которая определяет связь элементов матрицы экс-
ШШШ ДрбШЗ U ВвЛвШШ&ИШх состюШощик дв6&таенног9 ваддорз;
a1151 + flr1262+... + alw6/J=0;
а21&х+а22&2+...+ а2пЬп=0;
^miS, + ада262 -f-... -h а^б,, = О,
A4.50)
где а\и ..., (*тп — показатели степеней независимых переменных
оптимального проектирования; 6|, 52, ..., 5„ — положительные составляющие
минимизирующего двойственного вектора.
Система уравнений A4.50) — зависимость матрицы экспонент
проекта и положительных составляющих минимизирующего двойственного
вектора. Последний вектор-столбец матрицы экспонент — решение
первой системы линейных уравнений. Независимые переменные второй
системы — положительные составляющие минимизирующего
двойственного вектора. Коэффициенты при переменных составляют матрицу
экспонент A4.50), отражают условие нормализации и ортогональности
положительных составляющих двойственного вектора. Эта система имеет
единственное решение при нулевой степени трудности задачи, когда
число независимых переменных проектирования на одно меньше числа
слагаемых задачи.
Коэффициенты при переменных третьей системы равны показателям
степеней независимых переменных проекта:
10-179 297
auz,+fl21z2+... + aWIzw=&1; ]
a12zl + a22z2+... + aw2zm=62;
a\nZ\ + °2nZ2 + - + amnZm = К :
A4.51)
где zb z2, ..., zm — логарифмы абсолютных величии независимых
переменных проекта; Ьи Ь2, ..., Ът — логарифмы произведения
положительных составляющих минимизирующего двойственного вектора и целевой
функции минус логарифмы коэффициентов при переменных
положительных компонент целевой функции.
Конечные результаты проектирования получаются путем
потенцирования решения третьей системы линейных алгебраических уравнений.
Для примера рассмотрим задачу поиска геометрических размеров
ЭП, обеспечивающих заданные выходные статические и динамические
показатели при минимальном расходе меди.
Целевая функция — масса обмотки выражается A4.46), зависит от
четырех переменных Д, /, Ью hz\. Обозначим Хи Хъ Х$, Х4 показатели
степеней соответственно для переменных Ью hzU /, Д. Тогда выражение для
ограничивающих функций примет вид A4.42). Результаты решения
A4.42) дают возможность составить целевой ограничитель:
C*bxnlh**lX3D;* < 1. A4.52)
Уравнения A4.50) для этого случая примут вид
18,+162+153 + 184+085=1;
15,+182+153 + 164-x,83=0;
15|+152+153 + 254-*285=0; [ A4.53)
18, + 052 + 053 + 054 - х355 = 0;
08, + 052 +153 + 054 - *485 = 0.J
Решая A4.53) с учетом A4.43), получаем оптимальное
(минимальное) значение целевой функции
A4.54)
В оптимальной точке отдельные слагаемые равны произведению
минимального значения целевой функции на соответствующие
положительные (составляющие минимизирующего двойственного вектора) 5:
298
83Gmb=7c*JM*iIigVi*„^iA;|
846^ =nkyukaXgyxbnhzl.
Прологарифмировав каждое из уравнений A3.55), получим
In^G^ ) = 1п(*э Mzxg) + In bn + In hsl + In /;
In^G^ ) = 1пB*эм^,Д) + ]nbn + In A2|;
^(836^ ) = lnGc*,M*fligVi)+\nbn + lnAxl + InD,; |
In^G^) = 1пG1*эм*л1^ )+)nbn + 21n Axl.
Введя обозначения
^lntf.G^-ln^z.g);
62=ln(82Gmin)-InB*JMgzI5);
*3=ln(83Glnin)-ln(^3M*;i.gV.);
^=ln(84G^)-lnGc*,^i^i);
z, = ln6n,z2 =lnA.pZ3 =ln/,z4 = lnD,,J
получим третью, определенную систему уравнений
lz,+lz2+lz3+0z4 =6,;
lzj + lz2 + 0z3 + 0z4 = Ъг\ |
lz, + lz2 + 0z3 + lz4 = bz\
lz, + 2z2 + 0z3 + 0z4 = bA.)
A4.55)
A4.56)
A4.57)
A4.58)
Потенцирование результатов решения A4.58) дает координаты
минимизирующей точки целевой функции. Конечные результаты
определяются выражением вида
bn=eZl, h:l=eZ2J = e:\ Dt=eS4.
A4.59)
Применение метода геометрического программирования позволяет
получить зависимости между выходными и входными показателями
объекта исследования в виде систем линейных алгебраических уравнений.
Основные показатели независимых переменных целевого
ограничителя и положительные составляющие минимизирующего двойственного
вектора для части серии электрических машин изменяются в
незначительных пределах. Это дает возможность, рассчитав тщательно
параметры одной машины, получить параметры, пригодные для других машин
серий без больших затрат времени на расчеты.
299
§ 14.4. Системы автоматизированного
проектирования электрических машин
Использование ЭВМ для проведения инженерных расчетов
электрических машин началось в конце 50-х годов. К середине 70-х годов
наметилась тенденция к объединению отдельных программ в системы,
позволяющие осуществлять оптимальные расчеты серий электрических
машин. Современный период применения вычислительной техники в
процессе проектирования электрических машин характеризуется
перестройкой методов проектирования на основе создания автоматизированных
систем проектирования. Однако создание систем автоматизированного.
проектирования (САПР) электрических машин, обеспечивающих
выполнение проектных работ от приема заказа до выдачи рабочих чертежей,
потребует еще много времени и больших усилий разработчиков.
Система автоматизированного проектирования (САПР) —
комплекс технологических, информационных и математических средств,
предназначенных для автоматизации процессов проектирования и
конструирования с участием человека. Анализ проекта в условиях САПР
производится с помощью моделирования на ЭВМ. Синтез проекта и его
оптимизация также происходят путем потребления из памяти ЭВМ
информационных ресурсов (знаний) в диалоговом взаимодействии
проектировщик — ЭВМ, а проектная деятельность приобретает характер
«проектирования на ЭВМ». Здесь ЭВМ выступает как средство интеграции
частных моделей процессов и методик (процедур принятии решений) на
основе общей информационной и программно-технической базы САПР.
В САПР процесс проектирования неотделим от технического,
программного и информационного комплексов. Связь с ЭВМ
осуществляется через технические средства ввода, вывода, накопления, передачи
алфавитно-цифровой и графической информации.
Создание САПР экономически оправдано, если обеспечивается
выбор оптимального варианта решения задач, необходимая точность
решения, сокращение сроков решения задач, рациональное формирование
первичной информации, рациональная обработка информации,
максимальная эффективность использования эксплуатационных возможностей
ЭВМ и технических средств.
Уровень автоматизации определяется исходя из экономической
целесообразности с учетом: информационной мощности, трудоемкости
решения, логической емкости, периодичности решения, многовариантности
решения задач.
К основным показателям, используемым для оценки эффективности
при проектировании в рамках САПР, относятся: производительность
300
труда, технологические показатели качества решения задач, сроки
разработки проектно-конструкторской документации.
В электротехнической промышленности наибольшие успехи
достигнуты в создании САПР асинхронных машин (САПР AM). В САПР AM
предусматривается оптимизация расчетов, выполнение графических
работ и выпуск чертежей при автоматизированном конструировании
низковольтных асинхронных двигателей общепромышленного применения.
Разработка системы расчетов и выполнения графических работ ведется в
автоматизированных режимах человек — машина.
В систему входят усовершенствованные математические модели и
графические системы асинхронного двигателя, включающие типовые
детали и узлы; которые должны создаваться в процессе проектирования.
При этом представляется, что машина состоит из стандартных узлов и
деталей, форма и материалы которых определены ГОСТ и ОСТ. Это
подшипники, болты, гайки, шпонки и т.п. Размеры узлов и деталей могут
изменяться по линейным законам (валы, пакет статора и др.) и
нелинейным законам (лобовые части, листы статора и ротора и др.), некоторые
узлы должны быть сконструированы при проектировании в режиме
человек — ЭВМ. При проектировании двигатель компонуется из элементов,
полученных расчетом или из памяти машины. САПР AM на каждом
этапе отражает графические решения на дисплее или чертежном столе.
Один из важных этапов автоматизации проектирования
электрических машин — создание системы оптимального расчетного
проектирования. Для оптимизационного расчета электрических машин необходим
пакет прикладных программ, в который входят программы, реализующие
алгоритмы локального поиска, включающего в себя алгоритмы
оптимизации критерия в допустимой области и движения в допустимую область
из произвольной начальной точки, предварительного исследования
заданной области поиска для выявления количества и расположения
экстремумов и оврагов и решения овражных задач.
Для выполнения с помощью ЭВМ связанных с конструкцией
графических построений необходима разработка определенной
графоаналитической модели, которая давала бы возможность, базируясь на основных
размерных данных сердечников статора и ротора, получить
соответствующие этим основным размерам графическое изображение конструкции
машины.
Автоматизированное проектирование конструкции электрической
машины разделяется на две основные стадии: проектирование и
вычерчивание общего вида машины в продольном и поперечном разрезах;
проектирование и вычерчивание сборочных единиц и деталей конструкции с
надлежащим оформлением чертежей для дальнейшего их использования
в технологических службах и в производстве.
301
Обе стадии проектирования конструкции машины базируются
прежде всего на результатах электромагнитного и тепловентиляционного
расчетов, выполненных на ЭВМ с автоматическим поиском оптимального
варианта размеров и параметров машины по соответствующему
критерию. Полученные при этом геометрические размеры элементов активной
части машины, т.е. сердечников статора и ротора с их пазами и
обмотками, кладутся в основу графического проектирования в обеих стадиях.
Конструкция машины на первом этапе проектирования должна
носить некоторые общие черты, присущие машинам данного вида.
Дальнейшая проработка общей конструкции должна вестись уже в порядке
диалога конструктора и ЭВМ, т.е. в активном режиме взаимодействия, с
введением в этот процесс всех необходимых промежуточных расчетов:
механических, виброакустических, выбора и применения
стандартизованных деталей и пр. Чертеж общего вида машины можно представить
как сумму отдельных элементов, каждый из которых практически
являлся бы соответствующей производственной сборочной единицей или же
деталью конструкции.
Конструктор, работающий с ЭВМ, призван оценивать полученные
результаты и либо принять их для дальнейшей проработки, либо внести в
графику необходимые изменения. Изменения могут потребоваться после
механического расчета вала, расчета подшипников, проверки глубины
щитов или длины станины на соответствие вылетам лобовых частей
обмотки, подбора стандартного крепежа и т.п., а также при доводке
конструкции по требованиям технического задания.
После окончательной отработки чертежа общего вида машины
может быть начата вторая стадия проектирования, т.е. проработка входящих
в конструкцию двигателя сборочных единиц, деталей, относящихся к
ним, а также других элементов с определением массы и всех
необходимых для производства размеров и допусков к ним и как конечный итог —
автоматическое вычерчивание на графопостроителе рабочих чертежей с
соблюдением всех предъявляемых к ним требований стандартизации.
Подсистема ведения чертежного хозяйства осуществляет выдачу
конструктивных и технологических чертежей и позволяет значительно
сократить сроки проектирования и подготовки производства.
Вопросы хранения, поиска и обработки данных приобретают в
современных системах проектирования первостепенное значение и
оказывают существенное влияние на структуру и принципы
функционирования системы в целом. Комплекс массивов данных и программ,
предназначенных непосредственно для организации централизованного
хранения и поиска информации, а также для связи с прикладными
программами, выполняющими ее обработку, называют банком данных. В системах,
основанных на банке данных, прикладные программы получают данные
для обработки не от внешних носителей информации, а от программ бан-
302
Ввод
данных
\_z
Вывод
информации
Банк
данных ЭП
библиотека]
ЭП
z~s
\К'биЬлиоте*а
ЭП
Й...Й Ш...Ш
Рис. 14.2. Схема банка
данных ЭП
ка — систем управления базой данных,
которая в свою очередь организует поиск,
ввод и представление информации
соответствующим программам из специально
организованных массивов — баз данных.
Одна из важных проблем САПР
электрических машин (САПР ЭМ) — создание
банка данных электромеханических задач.
Необходимо подчинить все проектные и
расчетные работы, проводимые в области
ЭП, требованиям САПР ЭМ. Проект нового
ЭП должен выполняться таким образом,
чтобы его результаты могли вводиться и храниться в банке данных
электромеханических задач. Это позволит использовать результаты каждой
работы для последующих разработок.
Хранение информации в банке данных осуществляется в
иерархически организованных библиотеках (рис. 14.2). В каждой библиотеке
должны храниться данные по определенным типам электрических машин.
Библиотека ЭП хранит данные по расчету элементов ЭП и может
содержать стандартные типовые решения.
Математическое обеспечение САПР ЭМ можно подразделить на
общее, специальное, сервисное управление базой данных и программное
управление диалогом. Общее математическое обеспечение, инвариантное
объекту проектирования, составляют пакеты прикладных программ
решения общематематических задач различных классов: математического
программирования, систем линейных и нелинейных алгебраических
уравнений, систем дифференциальных уравнений, математической
статистики и т.п.
Сервисное математическое обеспечение и программное обеспечение
управления диалогом предназначены для осуществления эффективной
связи с ЭВМ в интерактивном режиме. Проблемно-ориентированной
частью математического обеспечения САПР ЭМ является специальное
программное обеспечение. Важность тщательной разработки специального
программного обеспечения вызвана тем, что в конечном итоге качество
разработанных математических моделей ЭП определяет эффективность САПР.
Основными требованиями, предъявляемыми к структуре
математического обеспечения САПР ЭМ, являются модульность — высокая
степень автономии подсистем; открытость — возможность наращивания
системы или ее корректировки в рамках структуры без изменения других
блоков; обеспечение функциональной полноты, т.е. набор проектных
операций, реализуемых в САПР, который должен быть функционально
полным, чтобы обеспечить работу САПР на всех стадиях проектирования —
от технического задания до рабочей документации на ЭП.
303
Прием
заказа
ТемВиэионт
изображение
сгз
ц
з
Оптимизация] Г
\ЭП В з*актро\тт\
меканичес*ой\
системе
Переход отЛ I испытания
параметров \++\ Оп дез
к геометрии] \и$1о*ю6*ени*\
Выдача
чертежей
Рис. 143. Схема САПР электрических
машин
Создание САПР ЭМ требует
больших капиталовложений и
значительного времени. При выборе
архитектуры САПР ЭМ, чтобы
получить наибольшую отдачу,
необходимо максимально использовать
возможности САПР. Для этого, в
первую очередь, следует
использовать наиболее универсальные
математические модели ЭП и сократить
время от приема задания до выпуска
готовой машины.
Наиболее универсальны математические модели — модели,
составленные на базе дифференциальных уравнений обобщенного ЭП, которые
описывают процессы в переходных и установившихся режимах.
Увеличение числа и сложности систем дифференциальных уравнений
выдвигает важную проблему упрощения математических моделей и оценки
точности решаемых задач.
Очень трудной и важной задачей является создание САПР ЭМ для
проектирования машин, работающих в электромеханической системе,
включающей управляющие элементы, обратные связи и элементы
контроля. При этом электрическая машина работает при изменяющихся
частоте и напряжении, различных внешних условиях, выпускается
небольшими сериями или индивидуально. Возможности во времени для
проектных работ и привлечения большого штата разработчиков ограничены.
Система автоматического проектирования электрических машин
состоит из нескольких подсистем, каждая из которых решает отдельные
задачи в режиме человек — ЭВМ (рис. 14.3).
Первая подсистема обеспечивает оптимизацию параметров машины
в электромеханической системе. Имея математическое описание
процессов электромеханического преобразования энергии и уравнения
элементов системы, можно перейти к рассмотрению машины и питающей
системы как многополюсников и осуществить синтез многополюсников.
В электроприводах двигатель, как правило, питается либо от
генератора, либо от статических управляющих элементов, которые могут быть
подключены к статору или ротору. Систему, питающую двигатель,
можно расчленить на сеть бесконечной мощности и питающий
многополюсник, который в свою очередь разделяется на пассивный многополюсник и
ЭДС.
Универсальная программа позволяет рассчитать характеристики
машины при питании обмоток статора или ротора от сети
несинусоидального несимметричного напряжения через линейный многополюсник
произвольной конфигурации, имеющий внутренние источники энергии.
304
Электрическая машина может быть двухфазной несимметричной или т-
фазной симметричной с источником питания постоянного или
переменного тока. После разложения в гармонический ряд определяется
действующее значение гармонической и ее начальная фаза. Затем для каждой
гармоники производится расчет характеристик и определяются
комплексные сопротивления машины и обобщенного шестиполюсника.
Применяя стандартные программы, предварительно определяют
оптимальные параметры машины и управляющего многополюсника с точки
зрения электромеханической системы.
Вторая подсистема обеспечивает переход от параметров к
геометрии машины. Задачу перехода к оптимальной геометрии при заданных
оптимальных параметрах электрической машины можно сформулировать
как задачу нелинейного программирования. Математической моделью,
устанавливающей зависимость критерия перехода, может служить
обычный поисковый расчет машины на ЭВМ.
Применение стандартных программ оптимизации позволяет в
короткие сроки найти условный экстремум целевой функции. Переход от
расчета параметров к расчету геометрии машины можно ускорить
применением метода геометрического программирования. После того как
определены геометрические размеры машины, определяются параметры
(коэффициенты при переменных в исходных уравнениях) и снова проводится
проверка на оптимум их в системе. Если расхождение между
оптимальными параметрами в первой и второй подсистемах неприемлемо,
проводятся новые расчеты.
Третья подсистема осуществляет выдачу конструктивных и
технологических чертежей. Она позволяет значительно сократить сроки
проектирования и подготовки производства.
Если геометрические данные машины хранятся в памяти ЭВМ,
представляет интерес создание подсистемы, обеспечивающей телевизионное
изображение разрабатываемой машины. В сочетании с
автоматизированной системой управления отрасли эта подсистема позволит зрительно
представить машину и ускорить ее проектирование.
Достижения в области теории электрических машин и современная
вычислительная техника дают возможность рассматривать создание
подсистемы испытаний электрической машины без ее изготовления.
После перевода геометрии машины на язык команд на станках с
программным управлением изготовляют часть машины. Для этого удобно
ротор выполнять в натуральную величину или геометрически подобным.
Используя достижения математической теории электрических машин,
можно накопить материал для перехода к роторам большинства ЭП.
Например, для асинхронных машин вместо шихтованного ротора с
обмоткой выполняется массивный ротор. Затем ротор испытывается в
условиях, приближающихся к реальным, а на ЭВМ прогнозируются основные
305
показатели машины — масса, энергетические показатели, надежность и
осуществляется переход к реальной машине.
Таким образом, в будущем можно представить САПР ЭМ как
комплекс, позволяющий выполнить расчетные и проектно-конструкторские
работы — от приема заказа и технического задания до выпуска
технологической документации и испытания машины без изготовления опытных
образцов.
После распада СССР в России осталось примерно 40%
промышленного и научного потенциала электротехнической промышленности. Это
резко ухудшило финансирование и координацию работ в области САПР
ЭМ.
В настоящее время на электротехнических заводах имеются
программы расчетов на ЭВМ отдельных типов электрических машин,
подсистемы выдачи конструкционной и технологической документации,
прием и оформление заказов на ЭВМ. Однако элементы испытаний без
изготовления опытных образцов не отрабатываются.
САПР в полном объеме от приема заказа и выдачи технической
документации без изготовления опытных образцов осуществлен в мировой
практике только самолетостроительной фирмой «БОИНГ».
В последнее время развитие САПР идет по пути создания
экспертных систем или инженерии знаний. В основе экспертных систем лежат
программы, предназначенные для представления и применения
фактических знаний из специальных областей к решению практических
инженерных задач. Экспертные системы манипулируют знаниями в целях
получения удовлетворительного и эффективного решения в узкой
предметной области. Экспертные системы ориентированы на решение широкого
круга задач. С помощью экспертных систем специалисты, не знающие
программирования, могут самостоятельно разрабатывать интересующие
их приложения. С помощью экспертных систем могут быть достигнуты
результаты, не уступающие специалистам-экспертам. Основой
экспертной системы является совокупность знаний, структурированных в целях
упрощения процесса принятия решения. База знаний экспертной системы
содержит факты и правила, использующие их как основу для принятия
решений.
Чаще всего используются семантические сети, основанные на
сетевой структуре. Семантические сети состоят из узлов и связывающих их
дуг. Узлы соответствуют объектам, концепциям или событиям. Дуги
используются для представления иерархии, типа агент, объект, реципиент.
Экспертные системы, достигая промышленной стадии,
обеспечивают высокое качество решения задач при минимуме времени и памяти.
Обобщение задач, решаемых экспертной системой, позволяет переходить
к стадии коммерческой системы, пригодной не только для собственного
использования, но и для продажи различным потребителям.
306
§ 14.5. Блок динамики в системе
автоматизированного проектирования
электрических машин
В САПР ЭМ может входить несколько подсистем. Каждая
подсистема может включать несколько блоков, которые могут использоваться
по мере необходимости в зависимости от решаемой задачи.
Одной из составных частей САПР ЭМ является подсистема
оптимизационного расчетного проектирования, в рамках которой возможно
оптимизационное проектирование асинхронных двигателей с учетом
динамических режимов, что является необходимым при разработке
модификаций и специализированных исполнений, когда динамический режим в
работе является определяющим. Подсистема оптимизационного
расчетного проектирования асинхронных двигателей разрабатывается на основе
математического моделирования статических и динамических режимов
двигателей. Она содержит блок расчета статических характеристик,
выполняющий проектный расчет АД без учета динамических режимов.
Входными параметрами этого блока являются данные, полученные из
статического режима. Подсистема строится таким образом, что блок
динамики в зависимости от решаемой задачи включается в решение
оптимизационной задачи или осуществляет контроль динамических режимов
после ее решения. При этом реализуются оптимизационный расчет
статического режима с последующим контролем динамического режима,
оптимизационный расчет динамического режима и совместная
оптимизация.
Для произведения поверочных и поисковых расчетов асинхронных
двигателей в статическом режиме используется методика, разработанная
ВНИИЭМом, которая является математической моделью активной части
двигателя и позволяет проводить электромагнитные, тепловые,
экономические расчеты. Геометрические размеры активной части определяются с
помощью варьирования размеров, причем для удобства варьирования
задаются относительные значения параметров. Обычно при расчете
двигателя прибегают к графическим решениям, различным кривым или
специальным функциям. В математической модели указанные зависимости
для расчета на ЭВМ не используются в общепринятом виде, а задаются в
аналитической или табличной форме.
При моделировании динамических режимов используется
математическая модель в трехфазных заторможенных координатах, состоящая из
одного контура на статоре и двух контуров на роторе. Модель позволяет
осуществлять расчет переходных процессов с учетом насыщения по
главному магнитному пути и путям потоков рассеяния, роторных
вихревых токов и эффекта вытеснения тока в стержнях ротора.
307
В зависимости от конкретной задачи проектирования в подсистеме
для расчета динамических режимов предусматривается выбор
следующих математических моделей:
— модель для расчета переходных процессов асинхронного
двигателя с учетом насыщения по главному магнитному пути и путям потоков
рассеяния, вытеснения тока в стержнях ротора и роторных вихревых токов;
— модель расчета переходных процессов с учетом насыщения по
главному пути и путям потоков рассеяния, вытеснения тока в стержнях
ротора;
— модель расчета переходных процессов идеализированного
асинхронного двигателя.
При численном решении дифференциальных уравнений в блоке
динамики используется канонический неявный одношаговый метод
интегрирования, не требующий специального обращения матрицы Якоби. Для
учета переменного насыщения магнитной системы применяется метод
статических и динамических индуктивностей, основанный на едином
подходе к учету насыщения главного магнитного пути и путей потоков
рассеяния. При этом составляется матрица динамических параметров, в
которую входят статические и динамические индуктивности, зависящие
от результирующих токов машины и частоты вращения ротора.
Статические и динамические индуктивности, в свою очередь, определяются из
характеристик намагничивания, а характеристики намагничивания путей
потоков рассеяния статора и ротора — из характеристик короткого
замыкания. Роторные вихревые токи учитываются вторым роторным
контуром в схеме замещения асинхронной машины. Эффект вытеснения тока в
стержнях ротора характеризуется коррекцией активных и индуктивных
сопротивлений основного роторного контура на каждом шаге
интегрирования дифференциальных уравнений с помощью коэффициентов,
рассчитанных при использовании метода разделения стержня на элементарные
слои.
При решении задач оптимизации используется метод
многокритериальной оптимизации, основанный на исследовании пространства
параметров ЛПТ. Этот метод позволяет учитывать столько критериев, сколько
необходимо для полного анализа функционирования асинхронного
двигателя с позиции различных противоречивых критериев качества, а также
дает возможность проанализировать пути и возможности дальнейшего
совершенствования модели. Равномерный обзор пространства
параметров при сравнительно небольшом числе испытаний производится с
помощью равномерно распределенной ЛПт-последовательности,
обладающей дополнительным свойством равномерности.
При решении многокритериальной задачи оптимизационного
проектирования обосновывается и строится содержательное допустимое
множество решений, выделяется из него паретовское подмножество и опре-
308
деляется лучший вариант решения с позиции всех противоречивых
критериев качества. Для оптимизационного расчета асинхронного двигателя
предусматривается 25 варьируемых параметров, из которых 15
параметров на входе блока статики: номинальная мощность, внешний диаметр
сердечника статора, длина сердечника статора, относительное значение
внутреннего диаметра сердечника статора, относительные значения
высот пазов статора и ротора (простая клетка или верхняя часть двойной
клетки), относительное значение высоты нижнего паза ротора (двойная
клетка), относительное значение высоты шлица нижнего паза ротора
(двойная клетка), относительное значение ширины или диаметра верха
паза статора, относительное значение ширины или диаметра верха паза
ротора (простая клетка или верхняя часть двойной), относительное
значение ширины или диаметра верха нижнего паза ротора (двойная клетка),
относительное значение ширины или диаметра дна паза статора,
относительное значение ширины или диаметра дна паза ротора (простая клетка
или верхняя часть двойной), относительное значение ширины или
диаметра дна паза ротора (двойная клетка) и индукция в воздушном зазоре.
На входе блока динамики предусмотрено десять варьируемых
параметров: сопротивления обмоток статора и ротора, момент инерции
вращающихся частей машины.
При учете динамического режима на стадии проектного расчета зона
варьирования параметров на входе блока динамики соответствует
изменению этих величин на выходе блока статики и отвечает зоне
варьируемых величин на входе блока статики.
В процессе поиска оптимального варианта учитываются тринадцать
функциональных ограничений. Критериев оптимизации предусмотрено
37. Для блока статики: минимум суммарных затрат; минимальные
стоимость и длина двигателя; минимальный расход меди; максимальные
допустимая номинальная мощность, КПД и КПД при частичной нагрузке;
максимальные коэффициент мощности и коэффициент мощности при
частичной нагрузке; минимальный первичный ток; максимальное
значение кратности максимального момента; минимальное значение кратности
пусковой мощности; максимальное значение кратности пускового
момента; минимум скорости нарастания температуры; минимум
превышения температуры обмотки статора.
Для блока динамики: максимумы мгновенных значений фазных
токов первого контура; максимумы мгновенных значений фазных токов
второго роторного контура; максимум мгновенного значения
электромагнитного момента; ток, эквивалентный по активным потерям фазному
статорному току в динамическом режиме; максимумы мгновенного
значения полной мощности и мгновенного значения активной мощности;
максимум мгновенного значения полезной мощности; максимум
мгновенного значения соотношения активных мощностей; максимум мгно-
309
венного значения коэффициента мощности; средние за один период
питающего напряжения значения полной, активной и полезной мощностей;
соотношение, активных мощностей; коэффициент мощности.
Время рассмотрения переходного процесса определяется заданием
величины отклонения частоты вращения ротора от синхронного
значения. В качестве примера приводятся результаты оптимизационного
расчета режима пуска асинхронного двигателя. Для двигателя мощностью 11
кВт типа 4А132М4УЗ оптимизируется режим пуска с целью получения
минимальных ударных значений фазных токов статора и ротора (первого
и второго контуров) и максимального ударного электромагнитного
момента: Ф\ = /луд, Ф2 = /^д, ФЪ = /'суд, Ф4 = /о1уд, Ф5 = /Муд, <Р6 = /с1уд, Ф1 =
= toy* Ф8 = /ь2уд> Ф9 = /с2уд, Ф10 = 1/Л/уд при одном функциональном
ограничении — отклонении мгновенного значения частоты вращения
ротора от синхронного значения.
Оптимизационная задача решается в 20%-ной зоне варьирования
параметров: 1\ — длина сердечника статора; Bg — индукции в воздушном
зазоре; АхЬ Ъии bg\ — геометрия паза статора (высота паза статора,
ширина верха паза статора, ширина дна паза статора); hzl, 6#, Ь# — геометрия
паза ротора (высота паза ротора, ширина верхней части паза ротора,
ширина дна паза ротора).
Соответствующие параметры на вход блока динамики задаются с
входа блока статики в интерактивном режиме. Число испытаний 32.
Характеризующие переходный процесс значения динамических показателей
модели, оптимальных по Парето, приведены в табл. 14.2.
Таблица 14.2. Таблица моделей Парето
ф\
А
234,5
Ф2
А
204,9
ФЪ
А
190,0
Ф4
А
195,9
ФЪ
А
169,1
Ф6
А
141,1
Ф7
А
43,5
Ф8
А
35,0
Ф9
А
38,4
Ф10
1/Н-м
0,003
Оптимальной модели соответствует двигатель с параметрами: 1\ =
= 190 мм; Bg = 0,996 Тл; Azl = 19,42 мм; Ъкх = 6,78 мм; bgl = 9,34 мм; Ъл =
= 23,86 мм; bia = 5,17 мм; Ь& = 1,5 мм.
Дальнейшее совершенствование динамических моделей позволит с
наименьшими затратами времени решать сложные оптимизационные
динамические и статические задачи электромеханики. Создание
стандартных программ типовых уравнений электрических машин позволит
ускорить обучение студентов и проведение научно-исследовательских
работ.
Глава, посвященная синтезу электрических машин, не может
претендовать на полноту и законченность подходов к синтезу ЭП. В этой
области работают десятки научных коллективов, возглавляемых талант-
310
ливыми инженерами-электромеханиками. Сложность проблем и
многообразие задач характеризуют электромеханику, как одно из базовых
направлений в развитии технического прогресса.
Опыт создания САПР ЭМ свидетельствуют о том, что инженер-
электромеханик должен иметь глубокие знания в области
электромеханического преобразования энергии, быть знакомым с достижениями
математики, программированием и умением работать с современными
ЭВМ. Трудно отдать предпочтение одному из этих направлений, но, без
сомнения, главным остается глубокое знание теории и практики своей
специальности — электромеханики.
Заключение
За последние десятилетия электромеханика достигла значительных
успехов: созданы машины предельных показателей, точнейшие
навигационные электромеханические системы, все чаще электрические машины
сливаются с микропроцессорами.
Электрические машины стали применяться во всех отраслях
промышленности, в науке, в сельском хозяйстве, в быту и медицине.
Большие успехи достигнуты в области теории электромеханического
преобразования энергии.
Но было бы неправильно считать, что лучшие годы электромеханики
прошли, что все уже сделано. Вспомним блистательные изобретения и
успехи в теории установившихся процессов в конце прошлого и начале
нашего века, выдающиеся достижения в теории переходных процессов в
последние десятилетия и бурный рост электротехнической
промышленности в послевоенные годы. Основное еще впереди как в области теории,
так и в области практических достижений.
В области теории электромеханического преобразования энергии
предстоит совершенствовать математические модели электрических
машин, соединяя достижения в области теории поля и цепей.
Только в последние годы удалось подойти к пониманию сущности
активной и реактивной мощностей в переходных режимах. Более
глубокие представления об электромагнитном поле, описание процессов,
происходящих в сверхпроводящих магнитных системах, в астрофизике и
биодвигателях ждут своего решения.
Автор надеется, что дальнейшее развитие теории обобщенного
преобразователя приведет к общепринятым представлениям об активной,
реактивной и обменной мощности, а определение динамического КПД и
коэффициента мощности станет общепринятым. Настало время, когда
представления о синусоидальности токов и напряжений все больше будут
уходить на второй план, а решение дифференциальных уравнений
электромеханического преобразования энергии на ЭВМ на базе обобщенного
электромеханического преобразователя с каждым годом будет занимать
лидирующее положение.
Успехи в теории электромеханики естественно будут
сопровождаться новыми достижениями в практическом электромашиностроении.
Созданы электрические машины предельных мощностей,
напряжений, токов, электрические машины с частотой вращения от одного
оборота в сутки до 1 млн. оборотов в минуту. Но надо создать электрические
машины с микронным зубцовым делением, с изменяющимся полюсным
312
делением, необходимо создать линейные ЭП, обеспечивающие точные
перемещения в трехмерном пространстве, и другие электрические
машины предельных параметров и показателей.
К сожалению, три четверти электроэнергии до сих пор
вырабатывается на тепловых электростанциях за счет сжигания органического
топлива. Попытки использовать в энергетике в больших масштабах энергию
ветра, морских течений, геотермальную энергию пока не дали
положительных результатов. Решение проблем использования возобновляемых
источников энергии зависит от достижений в теории и практике
электромашиностроения, так как получение электроэнергии в больших
количествах и с высоким КПД возможно только за счет электромеханического
преобразования энергии.
Автор уверен, что геоэлектромеханика с каждым годом будет
приобретать новых энтузиастов в различных областях естествознания, а в
недалеком будущем будут получены экспериментальные подтверждения
правильности основных положений геоэлектромеханики и начнутся
проектные работы по созданию наземных космических энергетических
установок.
Нет сомнений, что на базе биодвигателей будут созданы емкостные
ЭП, которые найдут применение в медицине и микросхемах.
В ближайшие годы должны быть найдены решения,
обеспечивающие техническое применение индуктивно-емкостных, магнитотепловых
и других новых электромеханических преобразователей.
В области теории и практики электромеханики сделано много, но
предстоит еще решить более сложные и важные проблемы. Ближайшие
десятилетия XXI в. станут годами успешного решения фундаментальных
проблем электромеханического преобразования энергии.
йо" §. о
?S = --".SSS Ч 3 о. So Ж 8
moo
CS **2 -* -Л —* О VO л *-Г *-Г fN Г** л4 _*Г _Г —Г
^н О О О
О ч* *н О
О
OS
01 Os О О О О <* << е? ^ ^
О fN О О
1
ZjI *^ лл л Л Л л •"■ * Л *
00 О О О О
о ^ о о
© © © © — .-г0©™^©©^©
2
со <s cs ^ <ч
„ °* <Ч © © © — N о © © ° © © °
2
<4
5 О 0*
- <-яa sal
~ 8 § g §§
*> ол °г °г оЧ
;SS
• - н N л ? О О
° О О
оо
<
ел VO
гч #sT «Г * * Os чХ ^л ^л ^** /^Г _*Г •» О О *
S о о о
о
«о
Os 00 t** со On ^
«О со ^ Г^
л М WA W И Г1 W1 V П _J h. |Д Ч» Г1 -^ Г»
СЧ JГ V© «П <N ч* Os *Я ^ Г* -^Г -J* °* °* О ^
^^^^^ГЯ^-н ООс^^^ООгСО
2
*saSK-fS$s
^щ «ч.1 «41 ГЛ /-4 _•»
о 0- о о
о
3
OS
■ *» s г ® ** я £ °. я£ ^ - s б s g § г«
о
I
££««3<3<S<3<3«2££ I I
1 'я *я
Д-вЧв^^свв?** HaJ^^J*e,-^^
8
|
Г
2М4
со
3
1
CN
*-н
f-н
1
5
4t
3
s
"*
^t
«<
1
1
3
^
3
диница
мерения
Щ g
величины
Базовые
О
f-H
со
о
СО
о
со
о
со
о
f-н
со
о
f-H
со
о
f-H
со
0Q
II
5
о
со
f-н
со
со
<ч
cn
On
S
*-н
О
?-Н
00
со
о
<
*
II
<Ч
о
f-H
оГ
f-н
cn
00
On
со
О
О
со
8
СЮ
wo
f-H
00
3
^
5
и
«о
14154,5
8
СО
Г*
00
f-н
ON
СО
О
ч*
W0
f-H
00
CN
Г*
f-H
&
•*•
и
ч*
f-н
СО
f-H
со
СО
ч*
со
^
f-н
со
f-H
со
f-H
со
7о
о
3
II
«о
3
VO
ON
00
ON
On
wo
00
On
vo
ON
«n
00
ON
VO
ON
wo
00
On
vo
On
«О
00
ON
vo
On
w>
00
ON
$
WO
00
ON
^
\
<4 «в
318
8
о"
00
f-H
CO
8.
©
00
CO
s
о
00
f-H
CO
s
cT
00
f-H
CO
s
о4
CO
f-H
00
s
о4
00
CO
о
«о
3
f-H*
II
w*>
wo
<4
CO
cn
w-^
w?
CO
со
CO
vo
f-H
о
00
On
00
о
3
wo
о
«о
3
в-
II
f-H
5?
о
7o
f-H
о
f-H
wS
VO"
w->
г»
f-H
CO
CO
t
о
VO
f-H
CO
oC
T
о
f-H
00
VO^
wo
«4
fa
<s «о
3
'J
II
00
On
©*
On
о
00
ON
о4
00
ON
о4
r*
00
ON
о"
00
On
о4
00
On
о
«о
3
5
II
«о
s
ON
О
On
О
ft
©*
ON
о"
4t
Г*
On
О
On
о"
On
О
Ph
«4 «О
3
II
«ч to
>
CN
CN
О
о4
о4
f-H
О
ON
<4
о
r>-
ON
w->
о"
f-H
CO
f"H
II
100,6
ел
wo
00
v©^
w-T
4t
CN
CO
о
CN
CO
CN
CO
wo^
f-H
-r
^
II
CN
CO
о
о4
CO I
si
©"
VO
о
3
о"
00
On
оол
О
CO
*°*
f-H
4
CN
>
о
СП
I
сч Д °^ о4
00 Г*
г< °1 <**
о о
~4 *^>
* со
СО Q
CN О
гл 0*
о
СП
CN
CN
00
СП
£
ON
«О
00
On
00
0,003
00
ел
ел
t
NO
СП
r»
00
On
О
Tf
t-
<*
О
СП
,00
о
00
oC
ел
СП
°b r* 4> +
P* r^ ON Д
oo ^ ел гл
00
СП
vo 2
8 g go
00 О IS
u p» « "> * «*>
2 «S 5 g 3v g
$ $ 8- - S.
<s ° °
00
СП
о <4
^ CN
VO
00
CN
VN
v©
4f
СП
VO
On
«n
00
ON
00
СП
8
о'
On © Г*
о -« °*
CN ^ О
CN
*■ 5* -*. ^
r^ a s 9
On § On 5
о" 0- ™ о"
VO
«О r». |^ ^
*-* *s ** *-*
i-H <N СП СП
)£ ^н гл О Г*
ON го -^ *-н 00
£ 8 ® л *-
* § -
P
I
О
CN
VO
00
§ ? 8
О P gN 5 ^t
«-H * ON ^ ,_<
VO
ел
£
ON
985
00
ел
0,00
vn
-
о
l-H
00
rt
On о
~ О
Я
56 H 7 -T^^S Svo
t
s> •
и и
•в. г b з
■ir b x и
11 з
• 3
II II
(S «О «о Г4 Ю
3 3 3 * »
**^ ^ ""^ ^! ^ »
^ b E> и *»
и II ll » H >
Таблица случайных чисел
Пз
78
51
66
19
51
79
73
63
86
97
93
40
06
97
\вв\
05
12
07
52
16
89
51
08
69
[~50~
66
57
86
83
78
68
53
99
28
96
41
24
06
81
06
68
79
16
01
84
99
12
99
ГбГ
28
32
65
52
57
96
93
25
30
47
69
74
16
26
42
46
26
16
92
05
98
60
47
Г04
55
22
64
47
26
26
70
69
02
59
96
36
25
03
28 1
24
55
69
23
58
34
44
39
26
Г231
80
27
60
53
17
60
50
02
35
97
07
42
98
89
48 |
07
89
61
56
21
47
39
23
52
ПЕГ
47
12
55
65
34
70
48
09
71
56
97
40
17
1 39
Г12
60
60
67
62
48
88
12
61
48
Г47~
46
72
59
00
87
39
21
04
30
33
50
33
78
|46
08 j
60
09
85
95
79
09
75
73
06
[~57
41
72
75
51
96
83
47
03
32
24
81
04
80
1 67
05
29
71
72
80
74
31
10
84
30 1
[~9Г
90
27
36
93
23
66
74
35
06
87
79
46
36
21
75 1
29
87
37
97
73
54
60
89
00
ГТзП
08
77
75
51
95
56
63
78
47
36
59
24
85
1 I?
26
93
89
41
63
72
88
36
18
18 j
1 28
30
95
01
10
05
04
05
84
28
89
73
10
91
03
13
71
19
56
30
73
81
05
62
39
29
74
85
91
33
43
85
90
55
83
20
89
50
45
41 \
43
71
28
38
27
13
60
62
97 |
ГбГ
43
62
54
46
18
13
40
90
53
40
96
07
27
44
00
00
15
30
52
2*
84
98
16
пгг
65
60
96
96
08
37
25
65
09
69
05
76
78
66
97
51
00
92
89
58
51
07-
29'
ГооП
24
53
72
86
51
00
24
77
48
80
68
21
37
88
1в{
26
72
41
30
И
01
57
85
18 |
Примечание. Для исключения систематической ошибки при проведении опытов на
ЭВМ проводят рандомизацию, т.е. обеспечивают случайное чередование опытов, которое
обеспечивается этой таблицей при фиксации какой-то цифры и движении по горизонтали,
вертикали или диагонали.
Квантили распределения Стьюдента
1
2
3
4
5
6
7
8
9
10
11
12
13
14
1 15
0,9
6,31
2,92
2,35
2,13
2,02
1,943
1,895
1,860
1,833
1,812
1,796
1,782
1,771
1,761
1,753
Р
0,95
12,71
4,30
3,18
2,77
2,57
2,45
2,36
2,31
2,26
2,23
2Д0
2,18
2,16
2,14
2,13
0,99
63,7
9,92
5,84
4,60
4,03
3,71
3,50
3,36
3,25
.3,17
3,11
3,06
3,01
2,98
2,95 |
317
Продолжение табл.
Квантили распределения Стьюдента
/оп
16
17
18
19
20
Р
0,9
- 1,746
1,740
1,734
1,729
1,725
0,95
2,12
2,11
2,10
2,09
2,09
0,99
2,92
2,90
2,88
2,86
2,84
Примечание. По критерию Стьюдента (/-критерию) производится проверка
гипотезы о значимости коэффициентов в полиномах,/оп — число степеней
свободы (разница между числом различных опытов и числом констант, найденных по
этим опытам). Р — уровень доверительной вероятности (обычно Р = 0,95).
Критерий Фишера при р = 0,95
УОП
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1 20
1
164,4
18,5
10,1
7,7
6,6
6,0
5,5
5,3
5,1
5,0
4,8
4,8
4,7
4,6
4,5
4,5
4,5
4,4
4,4
4,4
2
199,5
19,2
9,6
6,9
5,8
5,1
4,7
4,5
4,3
4,1
4,0
3,9
3,8
3,7
3,7
3,6
3,6
3,6
3,5
3,5
Число степеней свободы/^
3
215,7
19Д
9,3
6,6
5,4
4,8
4,4
4,1
3,9
3,7
3,6
3,5
3,4
3,3
3,3
зд
за
3,2
3,1
34
4
224,6
19,3
9,1
6,4
5,2
4,5
4,1
3,8
3,6
3,7
3,4
3,3
зд
3,1
3,1
3,0
3,0
2,9
2,9
2,9
6
234,0
19,3
8,9
6,2
5,0
4,3
3,9
3,6
3,4
3,2
3,1
3,0
2,9
2,9
2,8
2,7
2,7
2,6
2,6
2,6
24
249,0
19,4
8,6
5,8
4,5
3,8
3,4
3,1
2,9
2,7
2,6
2,5
2,4
2,3
2,3
2,2
2,2
2,1
2,1
2,1
Примечание. Проверка адекватности полинома и процессов в электрической
машине производится по критерию Фишера (/^критерию), f^ — число степеней
свободы.
Список литературы
1. Бут Д. А. Бесконтактные электрические машины. — М: Высшая школа, 1990.
2. Веников В. А. Переходные электромеханические процессы в электрических
системах.— М.: Высшая школа, 1985.
3. История электротехники/Под ред. И. А. Глебова. — М.: Издательство МЭИ,
1999.
4. Копылов И. П. Электрические машины. — М.: Высшая школа, 2000.
5. Копылов И. П. Математическое моделирование электрических машин. — М.:
Высшая школа, 1994.
6. Копылов И. П. Космическая электромеханика. Текст лекций по курсу
«Электроомеханика». — М.: Издательство МЭИ, 1998.
7. Сипайлов Г. Л., Кононенко Е. В., Хорьков Г. А. Электрические машины
(Специальный курс). — М.: Высшая школа, 1987.
8. Специальные электрические машины. Источники и преобразователи энергии.
В 2-х кнУАЛ. Бертинов, ДА. Бут, С. Р. Мизюрин и др.; Под ред. Б. Л. Алиев-
ского. — М.: Энергоатомиздат, 1993.
9. Справочник по электрическим машинам. В 2-х тУПод общей ред. И. П. Копы-
лова и Б. К. Клокова.—М: Энергоатомиздат, 1988,1989.1 т. 2 т.
10. Электротехнический справочник: В 4 т. Т. 2. Электротехнические изделия и
устройстваУПод общ. ред. профессора МЭИ В. Г. Герасимова и др. (гл. ред.
И. Н. Орлов). — М.: Издательство МЭИ, 1998.
11. Копылов И. П. Электромагнитная Вселенная. — М.: Издательство МЭИ, 1999.
12. Копылов И. П. Геоэлектромеханика. — М.: Издательство МЭИ, 2000.
Предметный указатель
Автоматизированная система
проектирования 300
Автотрансформаторы 166
Адекватность
— модели реальному объекту 224
— полинома объекту исследования
286
Активная мощность в динамике 79
Банк данных 303
Вектор
— единичный контура с током 25
— индукции 25
— напряженности 25
— результирующий 47
Векторный магнитный потенциал 24
Величины
— базовые 91
— реальные 91
Влияние
— вибраций 99
— вихревых токов 169
— вытеснения тока в пазу 185
— несимметрии 111,191
— параметров на динамические
характеристики асинхронных машин 75
— технологических факторов 230
Выбор масштаба 90
Гармоники
— временные 95
— комбинационных частот 100
— пространственные 96
— высшие 101
Геоэлектромеханика 250
Генератор
— Ван-де-Граафа 265
— волновой емкостный 267
— гармоник 183
— импульсный 240
— магнитотепловой 216
— ударный 150
Гиродин 249,256
Двигатель
— биологический 268
— вентильный 145
— двухфазный 37,131
— ионный 265
— конденсаторный 118
— линейный 201
— однофазный 118
— редукторный 100
— с двойной клеткой 168
— с катящимся ротором 209
— с экранированными полюсами 199
— термомагнитный 218
— торцевой 202
— трехфазный 72,302
— униполярный 224
— шаговый 150
Диаграмма векторная
— асинхронной машины 56
— неявнополюсной синхронной
машины 57
— трансформатора 54
Динамический КПД 83
Дисперсия 273
Единицы относительные 92
Законы электромеханического
преобразования энергии 15
Замена переменных 18
Заряд
— магнитный 260
— электрический 260
Инвариантность мощности 43
Индуктивность
— взаимная 25,32
— обмоток статора и ротора полные
26,32,43
— рассеяния обмоток статора и
ротора 32,43
320
Космическая электромеханика 239
Коэффициент
— искажения 139,236
— масштабный 91
— мощности 83,137
динамический 245
за период 138
— за время переходного
процесса 139
— полезного действия 14
динамический 83,235
за период 83,235
за»время переходного
процесса 83,235
— связи между гармониками 183
— передачСфешающих блоков 90
— полинома 286
— энергетический 236
— — за период 236
за время переходного процесса
236
Критерий
— оптимизации 278
— Стьюдента317
— Фишера 286,318
Магнитный подвес 212
Магнитострикция 274
Матрица
— информационная 285
— обратная 285
— преобразований 60
— сопротивлений 105,245
— столбец 105
— трансформатора шумовая 183
Машина
— асинхронная 40,55,153,169
— двойного вращения 242
— идеальная 39
— импульсная 150
— индукторная 211
— коллекторная 41
— контрроторная 242
— обобщенная 39
— постоянного тока 41,159
— синхронная 40,154
— униполярная 6,253
— электрическая 6,13
двухмерная 242
трехмерная 245
четырехмерная 246
планета Земля 251
простейшая 39
пятимерная 247
шестимерная 247
/7-мерная, гипотетическая 249
элементарная 39
МГД-генератор 219,252
Метод
— Адамса281
— Гира281
— градиентный 280
— детерминистический 283
— динамических индуктивностей 225
— комплексный 283
— локального и нелокального поиска
280
— множителей Лагранжа 280
— Ньютона—Рафсона 30
— планирования эксперимента 283
— проводимости зубцовых контуров
' 30
— релаксационный Гаусса—Зайделя
282
— Рунге—Кутта 281
— симплексный 283
— скорейшего спуска 282
— случайного перебора 282
— статических индуктивностей 226
— стохастический (случайный) 282
— штрафных функций 280
Модели математические ЭП
— с нелинейными параметрами 177
— с несколькими степенями свободы
239
— полиномиальные 288
— простейших электрических машин
33,40
Момент
— вращающий 35,79,108,128
— вибрационный 35,79
— деформационный 35,79,108
— инерции приведенный 43,77
— максимальный (ударный) 73,173
321
— минимальный 173
— номинальный 173
— пульсирующий 108
— пусковой 173
— сопротивления (тормозной) 53
— электромагнитный 35,52,107
Мощность
— активная 37,79
— искажения 136
— обменная 79
— полная 81,84
— мгновенная 81,84
— реактивная 37,79
— средняя за период 137
— удельная в воздушном зазоре 19
— электромагнитная 20
Накопители энергии
сверхпроводящие 166
Насос магнитогидродинамический
220,253
Несиммегрия
— магнитная 193
— пространственная 196
— электрическая 193
Обмотка
— двухфазная 40,102,194
— демпферная 155
— добавочных полюсов 160
— катушечная 97
— компенсационная 160
— многофазная 36,104
— независимого возбуждения на
статоре 159
— однофазная 198
— последовательного возбуждения
160
— распределенная синусная 97
— трехфазная 40,58,103
Оператор дифференцирования 50
Параметры
— интегрального контура вихревых
токов 173
— машины 25, 44,75,262
Переменные
— зависимые 44
— независимые 44
Плазма 220
Планирование эксперимента
— первого порядка 286
— второго порядка 286
— ортогональное 285
— рототабельное 285
Позином 290
Полином 284
Полиномиальные зависимости 290
Поле
— высших гармоник 94,125
— вращающееся 19,39,263
— круговое 21,40
— магнитное 14,21,251
— механическое 252
— прямое 112,198
— обратное 112,198
— пульсирующее 111
— тепловое 17,216
— электрическое 14,262
— электромагнитное 14,260
— эллиптическое 112
Преобразователи энергии
— электромеханические (ЭП) 13, 16,
260
— биологические 268
— емкостные 262
— импульсные 150
— индуктивно-емкостные 260
— индуктивные 13,16,42
— линейные 201
— магнитотепловые 216
— параметрические 266
— пьезокерамические 266
— с жидким и газообразным ротором
219
Привод токовый 45
Программирование
— геометрическое 289
— линейное 299
Пьезоэффект 266
Реактивная мощность в динамике 79
Реактор 166
Реакция якоря 160,253
322
Регулятор напряжения тиристорный 146
Режим
— динамический 42
— повторного включения 72
— пуска 69
— реверса 72
— установившийся 52
Резонанс электромеханический 274
Силы
— притяжения 207
— тяги 207
— электродвижущие 25,33
— электромагнитные 25,42
Скольжение 19
Сопротивление
— активное 32
обмотки статора 32,53
обмотки ротора 32,53
— взаимной индукции 32,53
— внутреннее электрической машины
16
— индуктивное 32
— машины постоянного тока
внутреннее 160
— переходное 158
в продольной оси 158
в поперечной оси 158
— поперечной оси синхронной
машины 57,156
— продольной оси синхронной
машины 57,156
— рассеяния 56
обмоток статора и ротора 55
— сверхпереходное 158
по поперечной оси 158
по продольной оси 158
— синхронное 57
Субгармоники 94,99
Субматрицы 105
Схема
— замещения 54
асинхронной машины 56
трансформатора 55
цепи якоря машины
постоянного тока 161
— структурная 87,90
Ток
— возбуждения 57
— короткого замыкания 75,158
— ударный 70,75
— поперечный радиационных поясов
252
— ядра Земли 251
— якоря 56,160
Трансформатор
— двухобмоточный 53
— многообмоточный 164
— нелинейный 182
— трехобмоточный 164
Уравнения
— движения 42,248
в установившемся режиме 53
— индуктивно-емкостной машины 276
— Кирхгофа 32
— Лапласа 23
— Максвелла 21
— машин постоянного тока 159
— многообмоточных машин 153
— напряжений 42,104
— обобщенной машины 42
— обобщенного
электромеханического преобразователя 104,107
— однофазного двухобмоточного
трансформатора 53
— поля 22
— синхронных машин 57
— трансформатора 53,164
— электромагнитного момента 42,78,
107
— электромеханического
преобразования энергии
в системе координат а, р 42
в системе координат d, q 50
преобразователя с одной
обмоткой на статоре и двумя обмотками
на роторе 120,169
при несинусоидальном
несимметричном напряжении питания
126
Учет
— вытеснения тока 185
— влияния вихревых токов 174
323
— насыщения 180
— технологических факторов 230
Феррожидкости 221
Функция
— времени 177
— двойственная 293
— преддвойственная 292
— целевая 279,292
Электрокатапульта 204
Элементы
— сложной матрицы 105
— фазосдвигающие 119,195
Электродинамические показатели 73,75
Эффект
— Пельтье 17
— пьезоэлектрический 266
обратный 266
Оглавление
Предисловие 3
Введение 4
Глава 1; Введение в электромеханику 6
§ 1.1. Краткая история электромеханики „ 6
§ 1.2. Электрические машины — электромеханические преобразователи
энергии... 13
§ 1.3. Законы электромеханики 15
§ 1.4. Основные подходы к решению задач электромеханики 20
§ 1.5. Развитое математических моделей электрических машин 33
Глава 2. Обобщенная электрическая машина 39
§ 2.1. Идеальная электрическая машина 39
§ 22. Математическая модель обобщенной электрической машины 42
§ 2.3. Уравнения обобщенной электрической машины в различных системах
координат „ 46
§ 2.4. Уравнения электрической машины при установившемся режиме 52
§ 2.5. Математическая модель идеализированной трехфазной обобщенной
машины. 58
§ 2.6. Применение вычислительных машин для решения задач
^ электромеханики. 63
Глава 3. Преобразование энергии в машинах с круговым полем в
воздушном зазоре 68
§ 3.1. Переходные процессы при круговом поле в воздушном зазоре
машины. 68
§ 32. Влияние параметров асинхронных машин на их динамические
характеристики 75
§ 3.3. Электромагнитный момент и энергетические показатели в
динамических режимах 78
§ 3.4. Применение аналоговых вычислительных машин для решения задач
электромеханики при круговом поле 87
Глава 4. Обобщенный электромеханический преобразователь
энергии 94
§ 4.1. Спектр полей в воздушном зазоре электрической машины 94
§ 42. Пространственные гармоники поля электрической машины 96
§ 4.3. Модель обобщенного электромеханического преобразователя 101
§ 4.4. Уравнения напряжений обобщенного электромеханического
преобразователя 104
§ 4.5. Элекгромагнитньш момент обобщенного электромеханического
преобразователя 107
325
Глава 5. Электромеханическое преобразование энергии при
эллиптическом поле 111
§ 5.1. Математическая модель электрической машины при эллиптическом
поле 111
§ 5.2. Исследование установившихся режимов 116
§ 5.3. Типовые уравнения электрических машин 119
§ 5.4. Классификация электромеханических преобразователей по виду
математической модели 122
Глава б. Процессы преобразования энергии в машине при
несинусоидальном и несимметричном напряжении питания .....125
§ 6.1. Уравнения электрических машин при несинусоидальном
и несимметричном напряжении питания 125
§ 6.2. Моделирование уравнений электрических машин при
несинусоидальном напряжении питания _ 130
§ 6.3. Энергетические показатели электрических машин при
несинусоидальном несимметричном напряжении питания 135
§ 6.4. Моделирование асинхронного двигателя в динамических режимах при
несинусоидальном напряжении питания 141
§ 6.5. Вентильные двигатели 145
§ 6.6. Импульсные электромеханические преобразователи 150
Глава 7. Многообмоточные электрические машины 153
§ 7.1. Общие сведения о многообмоточных машинах 153
§ 7.2. Уравнения синхронных машин 154
§ 7.3. Уравнения машин постоянного тока. 159
§ 7.4. Трансформаторы, реакторы, сверхпроводящие индуктивные
накопители 164
§ 7.5. Асинхронный двигатель с двойной клеткой. Учет влияния вихревых
токов 169
§ 7.6. Математическая модель асинхронного двигателя с учетом вихревых
токов в статоре и роторе ;.. 174
Глава 8. Математические модели электрических машин с
нелинейными параметрами 177
§ 8.1. Подход к анализу электрических машин с нелинейными параметрами. 177
§ 8.2. Учет насыщения 180
§ 8.3. Учет вытеснения тока в пазу. 185
§ 8.4. Преобразование энергии при изменяющихся независимых переменных 188
Глава 9. Несимметричные электрические машины 191
§ 9.1. Подходы к исследованию несимметричных электрических машин 191
§ 92. Электрическая и магнитная несимметрия 193
§ 9.3. Пространственная несимметрия 196
§ 9.4. Однофазные двигатели 197
326
Глава 10. Уравнения электрических машин при различных
конструктивных исполнениях 201
§ 10.1. Линейные электромеханические преобразователи 201
§ 10.2. Некоторые модификации электромеханических преобразователей 208
§ 10.3. Магнитный подвес 212
§ 10.4. Магнитотепловые электромеханические преобразователи 216
§ 10.5. Электромеханические преобразователи с жидким и газообразным
ротором 219
Глава 11. Анализ процессов преобразования энергии в реальной
машине 222
§ 11.1. Электрическая машина как элемент электромеханической системы.... 222
§ 11.2. Выбор математических моделей динамических режимов
электрических машин 224
§ 11.3. Учет влияния технологических факторов на характеристики
электрических машин 230
§ 11.4. Анализ реальной электрической машины. 232
Глава 12. Космическая электромеханика 239
§ 12.1. Конструктивные особенности космических электромеханических
преобразователей 239
§ 12.2. Переход от одномерной машины к трехмерной 242
§ 12.3. Уравнения космической электромеханики 247
§ 12.4. Геоэлектромеханика. 250
Глава 13. Индуктивно-емкостные и емкостные
электромеханические преобразователи 260
§ 13.1. Основы дуально-инверсной электромеханики. ..„ 260
§ 13.2. Емкостью электромеханические преобразователи 262
§ 13.3. Пьезокерамические и параметрические емкостные
электромеханические преобразователи 266
§ 13.4. Биологические электромеханические преобразователи 268
§ 13.5. Индуктивно-емкостные электромеханические преобразователи 274
Глава 14. Синтез электрических машин 278
§ 14.1. Подход к оптимизации электромеханических преобразователей 278
§ 14.2. Применение метода планирования эксперимента для синтеза
электрических машин 283
§ 14.3. Применение метода геометрического программирования при
проектировании электрических машин 289
§ 14.4. Системы автоматизированного проектирования электрических
машин 300
§ 14.5. Блок динамики в системе автоматизированного проектирования
электрических машин 307
Заключение 312
Приложение 314
Список литературы 319
Предметный указатель 320
Учебное издание
Копылов Игорь Петрович
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ЭЛЕКТРИЧЕСКИХ МАШИН
Редактор Н.Е. Овчеренко
Художник К.Э. Семенков
Художественный редактор Ю.Э. Иванова
Корректоры О.В. Шебашова, В. А. Жилкина
Набор и компьютерная верстка С.Ч. Соколовского
ЛР № 010146 от 25.12.96. Изд. № ВТИ-87. Подп, в печать 24.10.2000.
Формат 60x88 Vie- Бум. газетная. Гарнитура «Тайме». Печать офсетная.
Объем 20,09 усл. печ. л., 20,09 усл. кр.-отт. 19,63 уч.-изд. л.
Тираж 8000 экз. Заказ №179
ГУЛ «Издательство «Высшая школа», 101430, Москва,
ГСП-4, Неглинная ул., 29/14.
Факс: 200-03-01, 200-06-87 E-mail: V-Shkola@g23.relcom.ru
http: // www.v-shkola.ru
Отпечатано в ОАО «Оригинал», 101898, Москва, Хохловский пер., 7.