/






























































































































































































Автор: Шрейнер Р.Т.
Похожие



Текст
магнитной индукции возможен переход к выражениям
электромагнитного момента через токи и потокосцепления обмоток в
конечной форме. Для физической и геометрической интерпретации
этого перехода целесообразно введение понятия ортогонального
потокосцепления. В итоге базовая формула определяет
электромагнитный момент в виде скалярного произведения векторов
токов и ортогональных потокосцеплений обмоток.
8. Использование относительных единиц при моделировании
режимов работы электрических машин и источников их питания, что
характеризуется рядом положительных моментов. Процедура
перехода к относительным единицам вносит элемент рационального
масштабирования уравнений модели и приводит их к виду, удобному
для математического моделирования, как цифрового, так и в
особенности аналогового. Запись уравнений модели в относительных
единиц позволяет оперировать с безразмерными величинами,
диапазон численных значений которых, как правило, значительно
меньше, чем в исходной системе уравнений. В сравнении с
абсолютными значениями переменных - токов, напряжений,
мощностей и других величин их относительные значения гораздо
нагляднее и непосредственнее показывают степень загрузки и
использования активных материалов.
Результаты аналитического исследования задач и
имитационного моделирования, полученные с использованием
относительных единиц, имеют большую степень общности в
сравнении с использованием абсолютной системы единиц. Знание
типовых конструктивных и параметрических пропорций и
относительных показателей работы машин облегчает выявление
ошибок в результатах аналитического исследования и имитационного
моделирования режимов их работы.
На основе сформулированных выше принципов получены
уравнения, определяющие динамические модели насыщенных машин
переменного тока в переменных y/s - у/г и Is - . Модели пригодны
для решения разнообразных задач управления, в том числе, задач
оптимизации. Уравнения характеризуют моделируемые объекты
управления как сложные нелинейные многомерные и многосвязные
динамические системы. Для эффективного управления такими
объектами необходимы совершенные автоматические устройства,
построенные с учетом всего комплекса специфических особенностей
электрических машин переменного тока.
272
Раздел третий
ВОПРОСЫ ТЕОРИИ СИСТЕМ
’’ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ -
ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА”
Глава тринадцатая
РАБОЧИЕ ПРОЦЕССЫ В СИСТЕМЕ
"АВТОНОМНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ -
АСИНХРОННЫЙ ДВИГАТЕЛЬ"
13.1. Общая характеристика полупроводниковых
преобразователей частоты для электропривода
Полупроводниковые преобразователи частоты для
электропривода подразделяются на два основных класса,
различающихся по способу связи двигателя с питающей сетью:
• непосредственные преобразователи частоты (НПЧ);
• двухзвенные преобразователи частоты (ДПЧ) с промежуточным
звеном постоянного либо переменного тока.
Непосредственные преобразователи частоты. В классе НПЧ
наибольшее практическое применение получили преобразователи с
естественной коммутацией. В них используются силовые
полупроводниковые приборы с неполным управлением (тиристоры),
273
коммутация которых производится за счет напряжения сети.
Непосредственный преобразователь частоты для управления
многофазными двигателями переменного тока представляет собой
комплекс быстродействующих реверсивных управляемых
выпрямительно-инверторных преобразователей, каждый из которых
питает одну фазу двигателя. Формирование необходимой частоты и
амплитуды переменного напряжения на зажимах двигателя
обеспечивается непрерывным циклическим изменением улов
управления комплектами преобразователей. Для построения НПЧ
применяются различные варианты схем реверсивных управляемых
выпрямителей: нулевые и мостовые, мало- и многопульсные, встречно-
параллельные и перекрестные, с совместным и раздельным
управлением и т.д. Пример выполнения принципиальной
электрической схемы тиристорного НПЧ приведен на рис. 13.1.
Входная коммутационная аппаратура, токоограничивающие реакторы
и защитные цепи на схеме не показаны.
Рис. 13.1. Трехфазный мостовой НПЧ с раздельным управлением
274
Основными достоинствами НПЧ с естественной коммутацией
являются:
• относительно высокий кпд, что достигается благодаря
однократному преобразованию электрической энергии;
• возможность двустороннего обмена энергией между питающей
сетью и двигателем, что обеспечивает как двигательные, так и
тормозные режимы электропривода с рекуперацией энергии в сеть;
• возможность использования естественной коммутации
полупроводниковых вентилей с неполным управлением, что
позволяет отказаться от устройств принудительной коммутации,
снижающих экономичность, надежность, перегрузочную
способность и ухудшающих массогабаритные показатели
преобразователя частоты;
• возможность получения сколь угодно низких частот выходного
напряжения преобразователя и обеспечения равномерного вращения
двигателя на малых скоростях;
• практически неограниченная мощность НПЧ;
• возможность конструирования преобразователей по блочно-
модульному принципу, обеспечивающему удобства эксплуатации и
резервирования.
Основные недостатки данных НПЧ :
• Ограничение максимальных значений выходной частоты на уровне
порядка 1/3 ... 2/3 от частоты питающей сети;
• наличие субгармоник и постоянных составляющих выходного
напряжения и тока при неблагоприятных соотношениях частот на
входе и выходе преобразователя;
• низкий коэффициент мощности, несинусоидальность и модуляция
входных токов преобразователя частоты как потребителя в системе
электроснабжения;
• сложность (многоэлементность) силовых цепей и цепей управления,
что является оправданным лишь при выполнении преобразователя
на сравнительно большие мощности.
В связи с этим непосредственные преобразователи частоты
получили применение в основном для регулируемых тихоходных
синхронных и асинхронных электроприводов средней и большой
мощности. Здесь используются НПЧ с естественной коммутацией,
получившие название циклоконверторы. Помимо рассмотренных
НПЧ, работающих в режиме источника напряжения, известны
токовые НПЧ, работающие в режиме источника тока.
Параллельно с циклоконверторами разрабатывались НПЧ с
принудительной коммутацией, реализация которых ориентирована на
полностью управляемые ключи переменного тока [107]. Однако
275
реализации на практике принципиальных преимуществ НПЧ с
принудительной коммутацией длительное время препятствовало
отсутствие необходимой элементной базы. Благодаря развитию
силовой полупроводниковой преобразовательной техники и средств
управления область целесообразного применения таких НПЧ ныне
существенно расширяется. Это обусловлено появлением мощных
быстродействующих полностью управляемых силовых
полупроводниковых приборов (IGBT, MOSFET), запираемых
тиристоров, высокоэффективных средств микропроцессорного
управления и разработкой алгоритмических путей улучшения качества
электропотребления и питания двигателей от НПЧ с принудительной
коммутацией на базе методов широтно - импульсной модуляции [40].
Двухзвенные ПЧ с промежуточным звеном переменного тока.
Силовая схема преобразователей данного типа состоит из двух
основных звеньев :
• преобразователя напряжения источника питания в переменное
напряжение повышенной частоты;
• непосредственного преобразователя переменного напряжения
повышенной частоты в переменное напряжение требуемой частоты и
амплитуды.
Пример выполнения принципиальной электрической схемы
НПЧ с промежуточным звеном переменного тока приведен на
рис. 13.2. Преобразователь данного типа по существу представляет
собой НПЧ с естественной коммутацией, снабженный
индивидуальным источником питающего напряжения повышенной
частоты. В описанных в литературе разработках промежуточное
звено переменного тока выполняется в виде обращенного НПЧ с
принудительной емкостной коммутацией, работающего в режиме
параллельного инвертора тока [92]. Введение такого промежуточного
звена позволяет устранить один из основных недостатков сетевых
НПЧ с естественной коммутацией - увеличить верхний предел
регулирования выходной частоты за счет увеличения частоты
источника питания. Естественно, что при этом ухудшаются
массогабаритные и энергетические показатели преобразователя в
целом.
Тем не менее в ряде случаев специального применения
двухзвенные ПЧ с промежуточным звеном переменного тока по
комплексу предъявляемых требований оказываются конкуренто-
способными с другими видами ПЧ. В качестве примера можно
привести электроприводы механизмов некоторых автономных
подвижных объектов с источником энергии в виде аккумуляторной
батареи. Сходные принципы организации системы питания и
частотного регулирования скорости двигателей переменного тока
276
используются и в некоторых видах электрических передач
транспортных механизмов с первичным источником энергии в виде
теплового двигателя [143].
Промежуточное звено Непосредственный
повышенной частоты преобразователь частоты
Рис. 13.2. Двухзвенный преобразователь частоты с
промежуточным звеном повышенной частоты
В целом ПЧ с промежуточным звеном переменного тока не
нашли широкого применения в электроприводе вследствие
относительной сложности силовой схемы и системы управления, а
также других отмеченных выше факторов.
277
Двухзвенные ПЧ с промежуточным звеном постоянного тока.
Основными звеньями данных преобразователей частоты являются
• выпрямитель с фильтром;
• инвертор.
Напряжение питающей сети (рис. 13.3) сначала выпрямляется
выпрямителем, а затем инвертируется, т.е. преобразуется в
переменное напряжение (или ток) требуемой частоты с помощью
инвертора. В системах частотного управления электродвигателями
переменного тока применяются автономные инверторы (АИ). Они
способны функционировать как при наличии, так и при отсутствии в
цепи нагрузки источников, способных развивать ЭДС и генерировать
активную энергию. В некоторых, например каскадных, системах
регулирования скорости машин переменного тока используются ПЧ с
зависимыми (ведомыми сетью) инверторами, которые способны
функционировать только при наличии в цепи нагрузки источников
активной энергии. Зависимые инверторы используются также в
схемах двухкомплектных выпрямителей для обеспечения возможности
двусторонней передачи энергии звеном постоянного тока.
Автономный инвертор представляет собой коммутатор, для
функционирования которого необходимы полностью управляемые
переключающие элементы (ключи). Наиболее подходящими для
автономных инверторов являются полностью управляемые
полупроводниковые приборы (силовые транзисторы, запираемые
тиристоры). В случае использования обычных тиристоров, т.е.
приборов с неполным управлением, схема инвертора дополняется
устройствами принудительной, как правило, емкостной коммутации.
Структура входных цепей и режим переключений коммутатора
могут быть организованы таким образом, что свойства АИ как
электрического генератора оказываются подобными свойствам либо
генератора напряжения, либо генератора тока. Инверторы первого
типа получили название автономные инверторы напряжения (АИН);
второго типа - автономные инверторы тока (АИТ). Инверторы
напряжения обеспечивают величину и форму выходного напряжения,
не зависимые (или почти не зависимые) от параметров нагрузки.
Величина и форма тока определяется параметрами нагрузки. В
отличие от них инверторы тока формируют в цепи нагрузки ток,
величина и форма которого не зависят от параметров нагрузки.
Зависимыми от параметров нагрузки оказываются величина и форма
выходного напряжения АИТ. Поэтому инверторы напряжения
непосредственно совместимы только с нагрузкой активно-
индуктивного характера, а инверторы тока - с нагрузкой активно-
емкостного характера. В противном случае между инвертором и
нагрузкой включаются буферные элементы индуктивного характера в
первом случае и емкостного характера во втором.
278
a)
УВ Ф АИН
б)
УВ ф АИТ
Рис. 13.3. Двухзвенные тиристорные преобразователи частоты
а) с автономным инвертором напряжения;
б) с автономным инвертором тока
279
Главными преимуществами двухзвенных ПЧ с промежуточным
звеном постоянного тока являются:
• возможность получения на выходе преобразователя широкого
диапазона частот, не зависимого от частоты питающей сети и
полностью покрывающего потребности электроприводов различного
назначения, в том числе высокоскоростных, среднескоростных и
тихоходных, прецизионных электроприводов с широким и
сверхшироким диапазоном регулирования скорости и др.;
• возможность использования относительно простых силовых
схем и систем управления ПЧ для электроприводов с невысокими
требованиями в части диапазона регулирования, быстродействия и
других показателей;
• возможность наращивания сложности силовой части и
системы управления преобразователя соразмерно уровню повышения
требований к электроприводу, не допуская чрезмерной избыточности
системы;
• возможность реализации в сравнительно малоэлементной
структуре преобразователя разнообразных алгоритмов управления,
удовлетворяющих требованиям, предъявляемым к электроприводам
различного назначения;
• легкость трансформации преобразователя для работы в
установках с питанием электрооборудования от автономных
источников либо локальной сети постоянного тока.
Основные недостатки ДПЧ с промежуточным звеном
постоянного тока:
• двукратное преобразование энергии, что увеличивает потери
энергии и ухудшает массогабаритные показатели преобразователя;
• наличие в звене постоянного тока силового фильтра как
неотъемлемого элемента дпч, содержащего батарею конденсаторов
значительной емкости (в схемах ДПЧ с АИН) либо реактор со
значительной индуктивностью (в системах ДПЧ с АИТ).
Элементы силового фильтра увеличивают массу и габариты
преобразователя, причем электролитические конденсаторы фильтра не
всегда удовлетворяют требованиям высокой надежности. Являясь
реактивным накопителем энергии, силовой фильтр звена постоянного
тока существенно влияет на динамику преобразователя частоты и
ограничивает динамические возможности электропривода, особенно
при амплитудно-импульсном (осуществляемом за счет выпрямителя)
регулировании величины выходного напряжения ДПЧ. Это
накладывает повышенные требования и усложняет структуру САР
инверторных электроприводов, обеспечивающих нормированные
процессы пуска, торможения и регулирования скорости при наличии
силового фильтра в контуре регулирования, [94,120,121,123].
280
Отмеченный недостаток преодолевается лишь при переходе от
амплитудно-импульсного к широтно-импульсному формированию и
регулированию выходного напряжения ДПЧ, осуществляемому за
счет автономного инвертора.
Наиболее массовое практическое применение в системах
регулируемых электроприводов переменного тока получили
двухзвенные преобразователи частоты с промежуточным звеном
постоянного тока, а из них - преобразователи с автономными
инверторами напряжения. Анализ истории развития двухзвенных ПЧ
позволяет выделить три характерных этапа.
Первый этап характеризуется освоением серийного производства
и промышленным использованием наиболее простых ДПЧ,
выполненных по схеме “управляемый тиристорый выпрямитель - LC
фильтр - автономный тиристорный инвертор напряжения с
принудительной коммутацией”. Первые модели (рис. 13.3,а) имели
однокомплектный управляемый выпрямитель, что не позволяло
рекуперировать энергию в сеть в тормозных режимах двигателя.
Инвертор напряжения выполнялся по трехфазный мостовой схеме с
обратными и отсекающими неуправляемыми вентилями и работой
тиристоров в режиме 120° управления. Это позволило использовать
простую систему принудительной межфазовой коммутации рабочих
тиристоров инвертора без применения вспомогательных
коммутирующих тиристоров [145]. Функция регулирования частоты
выходного напряжения преобразователя возлагалась на автономный
инвертор, а амплитуды выходного напряжения - на управляемый
выпрямитель. Системой управления обеспечивался закон связи
амплитуды и частоты выходного напряжения преобразователя,
близкий к пропорциональному с возможностью коррекции в области
малых частот. В системе предусматривались обратные связи,
обеспечивающие ослабление отрицательного влияния силового
фильтра на динамику электропривода.
Последующие модификации преобразователей частоты [106]
предусматривали возможность использования двухкомплектного
управляемого выпрямителя для реализации режима рекуперативного
торможения. Применялись более совершенные схемы принудительной
коммутации автономного инвертора, реализующие режим 180°
управления с улучшенной формой выходного напряжения.
Усовершенствовались системы регулирования и защиты,
конструктивное исполнение преобразователей. Параллельно с
преобразователями на базе инверторов напряжения развивались
преобразователи частоты с инверторами тока. Существенным
преимуществом последних является возможность рекуперации энергии
в сеть при помощи однокомплектного управляемого выпрямителя (см.
281
схему рис. 13.3,6). Преобразователи первого этапа сыграли важную
роль в создании и расширении области применения экономичных
регулируемых электроприводов переменного тока.
Основные недостатки преобразователей, освоенных на первом
этапе, это несииусоидальность выходного тока и неравномерность
вращения двигателя при малых частотах, что ограничивает диапазон
регулирования скорости; ограничение быстродействия, связанное с
наличием силового фильтра в канале амплитудного регулирования
величины выходного напряжения; несииусоидальность тока,
потребляемого из сети и низкий “сетевой” коэффициент мощности, что
обусловлено свойствами управляемого выпрямителя с естественной
коммутацией и фазовым управлением.
Второй этап характеризуется разработкой новых двухзвенных
полупроводниковых преобразователей, выполненных по схеме
“неуправляемый выпрямитель - LC фильтр - тиристорный либо
транзисторный автономный инвертор с широтно-импульсной
модуляцией выходного напряжения”.
НВ Ф АИН
Рис. 13.4. Двухзвенный преобразователь частоты с
неуправляемым выпрямителем и транзисторным АИН
Здесь за счет усложнения алгоритма переключения силовых
ключей на инвертор возложена функция регулирования не только
частоты, но и амплитуды основной гармоники напряжения на выходе
преобразователя при постоянстве напряжения в звене постоянного
тока. Переход от амплитудно-импульсного к широтно-импульсному
способу формирования и регулирования выходного напряжения
существенно изменил свойства преобразователей частоты [82].
282
Во-первых, существенно приблизилась к синусоиде форма
выходного тока и соответственно улучшилась равномерность
вращения двигателей, расширился диапазон регулирования скорости.
Во-вторых, значительно повысилось быстродействие
электропривода, т. к. силовой фильтр на выходе нерегулируемого
выпрямителя оказался фактически исключенным из каналов
регулирования параметров выходного напряжения преобразователя.
И, наконец, существенно улучшился коэффициент мощности
преобразователя как потребителя электроэнергии.
На основе таких преобразователей оказалось возможным
создание усовершенствованных регулируемых электроприводов как
массового применения, так и специализированных, удовлетворяющих
весьма высоким требованиям, например, транзисторных частотно-
регулируемых асинхронных электроприводов подачи металлорежущих
станков с диапазоном регулирования скорости порядка 1:1 000.
Быстро росло количество фирм-производителей преобразовательной
техники для электропривода переменного тока, расширялась
номенклатура изделий, улучшалось их качество.
Интенсивному развитию преобразователей частоты на этом
этапе способствовали значительные успехи, достигнутые в области
усовершенствования и создания новых силовых полупроводниковых
приборов и интегральных схем, развития цифровых информационных
технологий и разнообразных средств микропроцессорного управления
[1691-
Тем не менее, на данном этапе оказались недостаточно полно
проработаны некоторые вопросы энергосбережения, качества
электропотребления и электромагнитной совместимости
преобразователей.
Третий этап характеризуется решением этих вопросов на базе
использования в звене постоянного тока выпрямителей с
принудительной коммутацией, получивших название активных
выпрямителей * [ 134,136,158,162,165,183,184,189 и др.].
Структуру силовых цепей двухзвенного ПЧ с активным
выпрямителем напряжения иллюстрирует рис. 13.5. В силовой цепи
последовательно включены активный выпрямитель напряжения
(АВН), фильтр Ф и автономный инвертор напряжения АИН. Силовые
полупроводниковые переключающие элементы выпрямителя и
инвертора, обладающие полной управляемостью и двусторонней
проводимостью тока, условно показаны в виде ключей. Выпрямитель
АВН, выполненный по трехфазной мостовой схеме, преобразует
напряжение питающей сети переменного тока в стабилизированное
напряжение постоянного тока Ud на конденсаторе фильтра.
Трехфазный мостовой АИН работает в режиме широтно-импульсной
модуляции (ШИМ) и преобразует это постоянное напряжение в
283
переменное напряжение на выходе с требуемыми значениями частоты
и амплитуды основной гармоники. Это обеспечивает благоприятную
форму тока двигателя и равномерность его вращения в широком
диапазоне скоростей.
АВН Ф АИН
Рис. 13.5. Структура силовых цепей двухзвенного ПЧ с активным
выпрямителем и автономным инвертором напряжения
Активный выпрямитель выполняется по схеме, полностью
идентичной схеме инвертора и по существу представляет собой
обращенный АИН, также работающий в режиме ШИМ. Так же, как и
автономный инвертор, активный выпрямитель инвертирует
постоянное напряжение фильтрового конденсатора в импульсное
напряжение на своих зажимах переменного тока В\ и Ср Эти
зажимы связаны с питающей сетью через буферные реакторы БР. В
отличие от регулируемой рабочей (полезной) частоты напряжения на
зажимах переменного тока АИН А, В и С рабочая частота
напряжения на зажимах переменного тока АВН постоянна и равна
частоте питающей сети. Разность мгновенных значений
синусоидального напряжения питающей сети и импульсного
напряжения на зажимах переменного тока АВН воспринимаются
буферными реакторами БР, являющимися неотъемлемыми элементами
системы. Благодаря использованию режима ШИМ импульсное
напряжение, формируемое активным выпрямителем на стороне
переменного тока, имеет благоприятный гармонический состав, в
284
котором основная (полезная) гармоника и высшие гармоники
существенно различаются по частоте. Это создает благоприятные
условия для фильтрации высших гармоник тока, потребляемого из
питающей сети, буферными реакторами. Таким образом решается
задача потребления из сети практически синусоидального тока.
Фазовый угол потребляемого тока зависит от соотношения
амплитуд и фазовых углов напряжений, приложенных к реакторам со
стороны сети и со стороны активного выпрямителя, а также от
параметров (индуктивности и активного сопротивления) реактора.
Варьируя с помощью системы управления АВН параметрами
основной гармоники его переменного напряжения на зажимах В\
и С], можно обеспечить потребление из сети необходимого тока с
заданным фазовым углом. Иными словами, можно обеспечить работу
преобразователя частоты с заданным значением коэффициента
мощности, например равным единице, либо “опережающим”, либо
“отстающим” коэффициентом мощности. Поэтому преобразователь
частоты с активным выпрямителем в принципе может быть
использован в системе электроснабжения либо как нейтральный
элемент, либо как источник, либо как потребитель реактивной
мощности.
Как коммутатор тока активный выпрямитель преобразует
потребляемый из сети переменный, близкий к синусоидальному, ток в
пульсирующий выходной ток, содержащий переменную и постоянную
составляющие. Переменная составляющая замыкается через буферный
конденсатор, который ограничивает пульсации напряжения Uj в
звене постоянного тока от переменной составляющей выходного тока
АВН. Заметим, что данный конденсатор выполняет ту же функцию и
по отношению к переменной составляющей тока, потребляемого
автономным инвертором двухзвенного преобразователя. Постоянная
составляющая выходного тока АВН подпитывает буферный
конденсатор, компенсируя расход постоянного тока, отдаваемого во
входную цепь АИН. Описывающие эти взаимосвязанные процессы
математические модели АИН и АВН рассматриваются далее в гл. 24.
Как преобразователь энергии постоянного тока в энергию
переменного тока автономный инвертор обладает чрезвычайно
ценным свойством - возможностью двустороннего энергетического
обмена между сетями постоянного и переменного тока. Это свойство
сохраняется и в инверсной схеме включения автономного инвертора в
качестве активного выпрямителя. В итоге двухзвенный ПЧ с активным
выпрямителем обеспечивает двусторонний энергетический обмен
между питающей сетью и электрическим двигателем, в том числе
режимы рекуперации энергии в питающую сеть. Благодаря этому
возможно построение энергосберегающих систем электропривода в
285
различных сферах применения с высоким качеством потребления
электроэнергии.
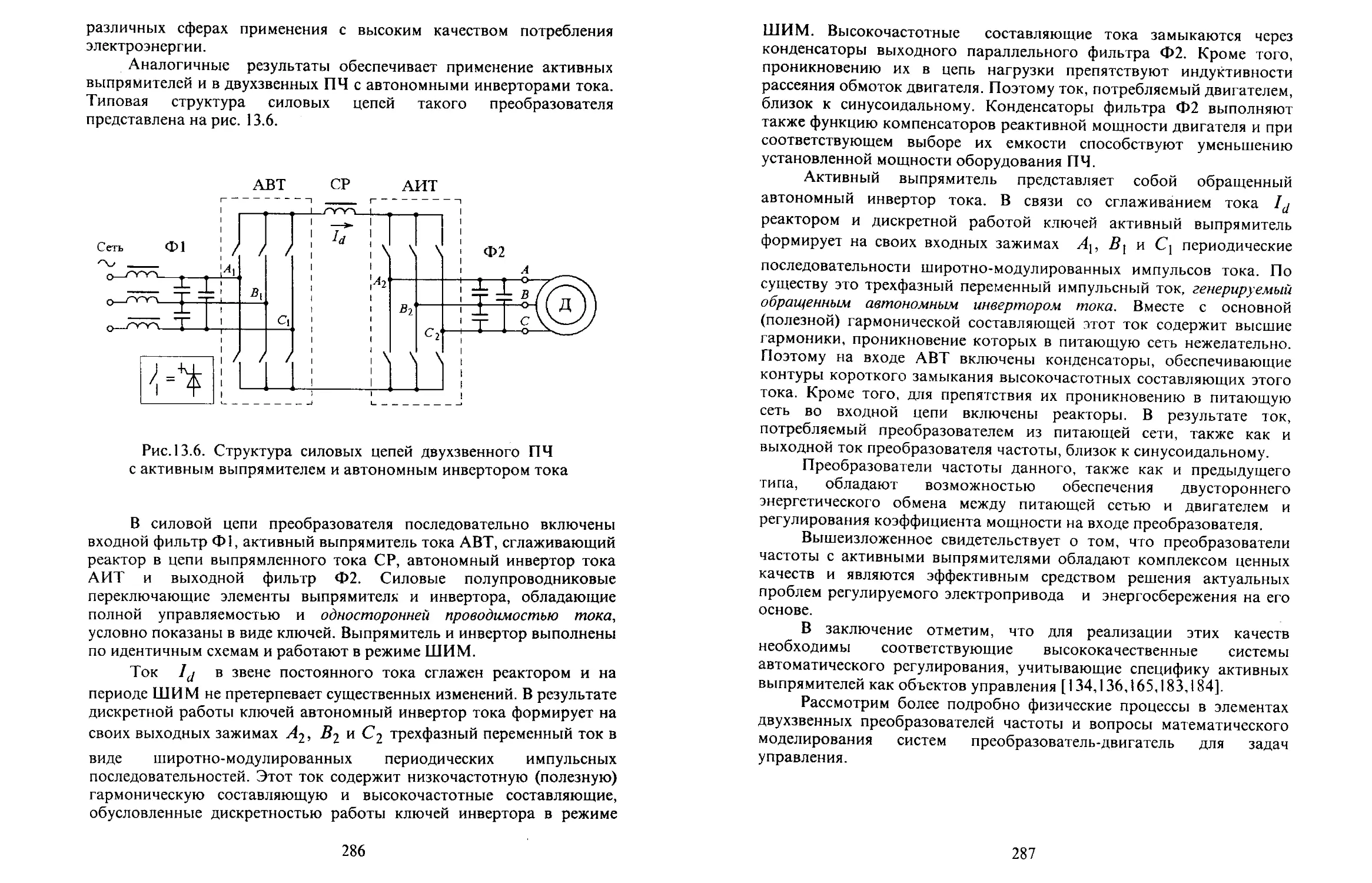
Аналогичные результаты обеспечивает применение активных
выпрямителей и в двухзвенных ПЧ с автономными инверторами тока.
Типовая структура силовых цепей такого преобразователя
представлена на рис. 13.6.
АВТ СР АИТ
Рис. 13.6. Структура силовых цепей двухзвенного ПЧ
с активным выпрямителем и автономным инвертором тока
В силовой цепи преобразователя последовательно включены
входной фильтр Ф1, активный выпрямитель тока АВТ, сглаживающий
реактор в цепи выпрямленного тока СР, автономный инвертор тока
АИТ и выходной фильтр Ф2. Силовые полупроводниковые
переключающие элементы выпрямителя и инвертора, обладающие
полной управляемостью и односторонней проводимостью тока,
условно показаны в виде ключей. Выпрямитель и инвертор выполнены
по идентичным схемам и работают в режиме ШИМ.
Ток в звене постоянного тока сглажен реактором и на
периоде ШИМ не претерпевает существенных изменений. В результате
дискретной работы ключей автономный инвертор тока формирует на
своих выходных зажимах ^2, и С 2 трехфазный переменный ток в
виде широтно-модулированных периодических импульсных
последовательностей. Этот ток содержит низкочастотную (полезную)
гармоническую составляющую и высокочастотные составляющие,
обусловленные дискретностью работы ключей инвертора в режиме
286
ШИМ. Высокочастотные составляющие тока замыкаются через
конденсаторы выходного параллельного фильтра Ф2. Кроме того,
проникновению их в цепь нагрузки препятствуют индуктивности
рассеяния обмоток двигателя. Поэтому ток, потребляемый двигателем,
близок к синусоидальному. Конденсаторы фильтра Ф2 выполняют
также функцию компенсаторов реактивной мощности двигателя и при
соответствующем выборе их емкости способствуют уменьшению
установленной мощности оборудования ПЧ.
Активный выпрямитель представляет собой обращенный
автономный инвертор тока. В связи со сглаживанием тока
реактором и дискретной работой ключей активный выпрямитель
формирует на своих входных зажимах А^, В^ и С\ периодические
последовательности широтно-модулированных импульсов тока. По
существу это трехфазный переменный импульсный ток, генерируемый
обращенным автономным инвертором тока. Вместе с основной
(полезной) гармонической составляющей этот ток содержит высшие
гармоники, проникновение которых в питающую сеть нежелательно.
Поэтому на входе АВТ включены конденсаторы, обеспечивающие
контуры короткого замыкания высокочастотных составляющих этого
тока. Кроме того, для препятствия их проникновению в питающую
сеть во входной цепи включены реакторы. В результате ток,
потребляемый преобразователем из питающей сети, также как и
выходной ток преобразователя частоты, близок к синусоидальному.
Преобразователи частоты данного, также как и предыдущего
типа, обладают возможностью обеспечения двустороннего
энергетического обмена между питающей сетью и двигателем и
регулирования коэффициента мощности на входе преобразователя.
Вышеизложенное свидетельствует о том, что преобразователи
частоты с активными выпрямителями обладают комплексом ценных
качеств и являются эффективным средством решения актуальных
проблем регулируемого электропривода и энергосбережения на его
основе.
В заключение отметим, что для реализации этих качеств
необходимы соответствующие высококачественные системы
автоматического регулирования, учитывающие специфику активных
выпрямителей как объектов управления [ 134,136,165,183,184].
Рассмотрим более подробно физические процессы в элементах
двухзвенных преобразователей частоты и вопросы математического
моделирования систем преобразователь-двигатель для задач
управления.
287
13.2. Обобщенная схема и диаграмма состояний
трехфазного инвертора с базовым законом коммутации
В настоящее время известны многочисленные варианты
построения главных цепей трехфазных автономных инверторов
напряжения, предназначенных для управления электроприводами
переменного тока. Несмотря на большое разнообразие этих схем,
отличающихся прежде всего типом переключающих элементов,
большинство из них строятся на основе одной и той же обобщенной
схемы, изображенной на рис. 13.7.
Рис. 13.7. Обобщенная схема трехфазного мостового инвертора
Трехфазный мост состоит из шести силовых управляемых
ключей 1А - 2С, выделенных окружностями. Каждый из этих ключей
должен обладать двусторонней проводимостью тока и содержит в
общем случае несколько полупроводниковых приборов. В реальных
схемах автономных инверторов напряжения прямая проводимость
каждого из силовых управляемых ключей (в направлении от
положительного к отрицательному полюсу источника питания
инвертора) обеспечивается управляемым полупроводниковым
прибором (тиристором или транзистором), а обратная проводимость -
обратным, как правило, неуправляемым вентилем. Таким образом,
, если управляемый элемент силового ключа находится во включенном
состоянии, то соответствующее плечо моста обладает симметричной
двусторонней проводимостью тока. Если же управляемый элемент
находится в выключенном состоянии, то соответствующее плечо
моста обладает лишь обратной проводимостью.
288
Инвертирование, т. е. преобразование постоянного напряжения
источника питания в трехфазное переменное напряжение необходимой
частоты на выходных зажимах А, В, С инвертора осуществляется
коммутацией ключей в плечах моста с определенной частотой и в
определенной последовательности. Форма выходного напряжения
инвертора определяется прежде всего выбранным законом
переключения ключей - законом коммутации. Существуют
инверторы, работающие с различными законами коммутации ключей,
основные разновидности которых будут рассмотрены далее.
Рациональным методом аналитического исследования процессов
в схемах полупроводниковых инверторов напряжения, является
раздельное рассмотрение рабочих и коммутационных
процессов [138]. Закономерности рабочих процессов определяется в
результате анализа работы обобщенной структурной схемы инвертора
на заданную нагрузку при принятом законе коммутации силовых
ключей инвертора. При этом отвлекаются от конкретного состава
элементной базы, способов включения и выключения управляемых
полупроводниковых приборов силовой схемы инвертора и
анализируют процессы так, как будто управляемые элементы
обладают полной управляемостью. Для упрощения анализа в первом
приближении обычно вводятся допущения об идеальности
характеристик силовых ключей: их сопротивления во включенном
состоянии считаются равными нулю, а при выключенном -
бесконечности; время переключения ключей принимается равным
нулю. Уточненные модели учитывают реальные вольтамперные
характеристики ключей.
Характер коммутационных процессов определяется с учетом
свойств конкретных полупроводниковых приборов, используемых в
конкретной схеме инвертора. В случае использования обычных
незапираемых тиристоров, обладающих, как известно, неполной
управляемостью, объектом анализа являются процессы в
устройствах искусственной коммутации, которыми
снабжаются автономные тиристорные инверторы. При
использовании в схеме инвертора запираемых тиристоров или
транзисторов, т.е. полностью управляемых приборов, задачей анализа
является учет реальных скоростей и траекторий переключения
силовых ключей инвертора.
В связи с высокими скоростями переключения современных
транзисторных ключей важное практическое значение приобретают
вопросы учета волновых процессов в линиях питания двигателя от
инвертора как цепях с распределенными параметрами и емкостными
связями. Особо актуальными являются проблемы электромагнитной
совместимости преобразователей частоты с питающей сетью и
окружающей средой.
289
Полученная методом раздельного рассмотрения рабочих и
коммутационных процессов полная картина электромагнитных
процессов в инверторе мало чем отличается от действительной
картины процессов, протекающих в полупроводниковых тиристорных
и транзисторных инверторах напряжения. Это прежде всего
определяется тем, что скорости протекания коммутационных
процессов намного выше в сравнении с рабочими процессами. Именно
это предопределяет возможность раздельного рассмотрения рабочих и
коммутационных процессов и, следовательно, упрощает первый и
второй этапы анализа.
Результаты, полученные на первом этапе, например форма
выходного напряжения и тока инвертора, практически одинаково
справедливы для самых разнообразных схем инверторов напряжения,
использующих различные типы полупроводниковых приборов и
различные способы их выключения, при условии, что все эти схемы
работают с одним и тем же законом коммутации ключей инвертора. В
результате рассмотрения рабочих процессов определяются также
некоторые начальные условия, необходимые для расчета
коммутационных процессов, например ток управляемого
полупроводникового прибора в предкоммутационный момент.
Рассмотрим основные особенности рабочих процессов в
трехфазном инверторе напряжения при работе его на асинхронный
двигатель в установившихся режимах.
Диаграмма состояний инвертора. На рис. 13.8,а представлена
диаграмма состояний трехфазного мостового инвертора, отражающая
порядок переключения его ключей в соответствии с законом
коммутации, который назовем базовым. Отличительными
свойствами базового в сравнении с другими законами коммутации
являются:
• наилучшее использование источника питания и нагрузочной
способности ключей инвертора по напряжению;
• минимально возможная частота переключения ключей
инвертора, необходимая для формирования выходного переменного
напряжения требуемой (рабочей) частоты.
Интервалы времени, в течение которых существует
симметричная двусторонняя проводимость соответствующих плеч
моста, выделены на диаграмме состояний жирными горизонтальными
линиями. Индекс горизонтали соответствует обозначению силового
управляемого ключа. В соответствии с показанной на диаграмме
последовательностью переключения каждый из ключей находится в
непрерывно включенном состоянии в течение полупериода
выходной частоты (Л = тг). В дальнейшем под терминами
«длительность включенного состояния» и «интервал проводимости
290
ключа» мы будем подразумевать именно непрерывный угловой
интервал Л, в течение которого существует симметричная
двусторонняя проводимость ключа и соответствующего плеча моста.
Из диаграммы рис. 13.8,а видно, что в течение периода рабочей
частоты (О...2тг) инвертор находится в шести последовательно
сменяющих друг друга состояниях (1....У1), каждое из которых
характеризуется определенной комбинацией включенных и
выключенных ключей.
а)
6)
Рис. 13.8. Диаграмма состояний и графики линейных
напряжений трехфазного инвертора при базовом
законе коммутации
Каждой из комбинаций состояний ключей соответствует
определенная комбинация подключения линий питания нагрузки А, В
и С к шинам источника питания инвертора.
13.3. Линейные напряжения на выходе инвертора
В каждом из состояний инвертора любая пара линий питания
нагрузки (например, А и В) подключена либо к разнополярным
шинам источника питания, либо к одной из шин источника и замкнута
накоротко через ключи инвертора. В первом случае линейное
напряжение на выходе идеализированного инвертора равно
напряжению источника питания, а во втором - нулю.
291
Соответствующие графики линейных напряжений на выходе
инвертора показаны на рис. 13.8,6. В случае, если нагрузкой
инвертора является обмотка статора трехфазного двигателя с
соединением в треугольник, то именно эти напряжения
прикладываются к соответствующим фазам его обмотки, т.е.
одновременно являются и фазными напряжениями двигателя.
Графики линейных напряжений идеализированного инвертора
при базовом законе коммутации ключей представляют собой
знакопеременные импульсные функции, амплитуда которых равна
величине напряжения источника питания, а частота равна частоте
коммутации ключей. Например, график линейного напряжения
описывается выражением
ил {$) = =
+ ип при
при
при
О при
(13.1)
где мп - напряжение источника питания инвертора;
i9 = QSZ - время в угловых единицах, определяемых частотой
выходного напряжения инвертора.
Как видно, временной график линейного напряжения
автономного инвертора является несинусоидальным. Он может
быть представлен в виде суммы гармонических составляющих
мЛ у(<9), не содержащей гармоник, кратных двум и трем:
Млр)= ЕМл.Д-9) »
V=1
(13.2)
где v = 1,5, 7,11,13,... - порядковый номер гармоники.
В развернутом виде с учетом вида функции (13.1) получаем
sin — sin 53' — sin 13' +
sin 11,9' + ...
J
(13.3)
где 3 ’ = 3 + тт/б .
292
Отсюда следует, что амплитуда основной гармоники линейного
напряжения несколько превышает напряжение источника питания:
2л/3
(13.4)
Амплитуды высших гармоник обратно пропорциональны их
номерам:
= -илХ . (115)
v
Эффективное (действующее) значение выходного линейного
напряжения:
I
= d19 =
V о
« 0.816 .
(13.6)
Эффективное значение основной гармоники линейного напряжения:
ил..эфф.\ — °'78 «п • (13.7)
Доля основной гармоники в полном эффективном значении
составляет
Uj,^A = - ® 0.955. (13.8)
U л.эфф
Форма и гармонический состав выходных линейных напряжений
автономных инверторов, работающих с Я = яг, не зависит от
параметров нагрузки, что является их преимуществом перед
инверторами с А < л.
13.4. Фазные напряжения
В случае соединения обмотки трехфазного двигателя в звезду
графики фазных напряжений могут быть найдены из анализа схем
питания фаз нагрузки, приведенных для каждого из состояний
инвертора на рис. 13.9. Здесь показаны только те ключи, которые
находятся в проводящем состоянии. Стрелками показаны выбранные
положительные направления токов. Как видно, в каждом из состояний
инвертора две фазы двигателя с помощью ключей соединены
параллельно и подключены к источнику питания последовательно с
293
третьей фазой. Поэтому напряжение источника питания
распределяется между фазами нагрузки (в случае их симметрии)
следующим образом: одна треть величины напряжения приходится на
каждую из параллельно включенных фаз и две трети - на
последовательно включенную фазу.
Интервал I : _ Интервал II • . Интервал III
Интервал IV ; Интервал V : Интервал VI
Рис. 13.9. Схемы питания нагрузки при базовом законе
коммутации и соединении фаз нагрузки в звезду
294
Например, график напряжения на фазе "А” нагрузки
представляет собой (рис. 13.10) знакопеременную импульсную
функцию, принимающую значения:
Нф(9 + *) =
(13.9)
Несинусоидальный график фазного напряжения также может
быть представлен в виде суммы гармонических составляющих за
исключением гармоник, кратных двум и трем:
sin Э + - sin 5<9 +-sin 7<9 + — sin 11 & + ... .(13.10)
Амплитуды основной и высших гармоник фазного напряжения:
Уф\ - —«п ~ 0 637 “п; (i3.li)
иф.у = ~иф1 , v = 5,7,11,13,... (13.12)
W v г-
Эффективное значение основной гармоники фазного напряжения:
ф. эффЛ
0.45 ц, .
(13.13)
ип
Доля основной гармоники в
полном эффективном значении
составляет
^ф. эфф. 1
U ф.эфф
0.955.
(13.14)
Существенным моментом спектрального анализа многофазных
систем является учет как амплитудно-частотных, так и фазовых
соотношений компонент по каждой из гармоник спектра.
295
Обобщенное выражение спектрального состава трехфазного
напряжения при базовом законе коммутации имеет вид:
^(•9)
^(>9)
_ис(5)
Uф.у sin (Qs )
1]ф v sin (fisvr -2я/3)
l/^vsin(Qsvz + 2я/3)
(13.15)
(13.16)
О у v Су О у । ,
(13.16,а)
где v - 1,5,7,11, 13, .... - порядковый номер гармоники;
UЛ) v — - амплитуда v-й гармоники фазного напряжения;
Оу у - обобщенная частота v-й гармоники трехфазного
напряжения. Знак этой величины отражает порядок
чередования фаз напряжений гармоники. При Оу v >0
гармоника имеет прямое чередование фаз, а при -
Оу у < 0 обратное. Данная алгебраическая величина
геометрически интерпретируется как скорость
вращения изображающего вектора напряжений v-й
гармоники;
Су - постоянный коэффициент, принимающий значение +1
при совпадении чередования фаз напряжений v-й
гармоники с чередованием фаз напряжений основной
гармоники; в противном случае cv = -1 .
В дальнейшем мы будем использовать представление
обобщенной частоты (13.6) не только в физических, но и в
относительных единицах. Относительные значения обобщенной
частоты v-й гармоники трехфазного напряжения определяются с
использованием базисной частоты напряжения питания двигателя:
(13.17)
Формулы (13.15) - (13.17) являются основой для анализа характеристик
трехфазного двигателя при полигармоническом питании.
296
13.5. Ток питания двигателя
Ток питания двигателя является несинусоидальным вследствие
несинусоидальности выходного напряжения инвертора. На рис. 13.10
приведены графики напряжения на зажимах фазы "А" и типичные
графики токов статора асинхронного двигателя в трех различных
режимах его работы: а) двигательном с номинальным скольжением
(51 = 5Н); б) режиме холостого хода (5j = 0) и в) генераторном (5| < 0).
Для каждого из режимов приведены графики токов в элементах схемы
инвертора и график электромагнитного момента двигателя.
Рис. 13.10. Графики фазных напряжений, токов в элементах схемы
и электромагнитного момента асинхронного двигателя
Используя спектральный подход, временной график фазного
тока в установившемся режиме работы двигателя можно описать
выражением
297
□о
ф)= IM*9) ; ^ = 1,5,7,11,13........... (13.18)
У=1
где • гармоническая составляющая тока, зависящая от
амплитуды и частоты напряжения данной гармоники, параметров
двигателя на соответствующей частоте и величины скольжения
ротора в поле v-й гармоники.
В принципе каждую из этих гармонических составляющих тока
можно рассчитать отдельно с помощью соответствующей схемы
замещения двигателя, а затем полученные результаты сложить.
Однако такой метод определения мгновенных значений тока весьма
трудоемок. Известен также более простой приближенный
аналитический метод, основанный на представлении вращающегося
двигателя в виде эквивалентной активно-индуктивной нагрузки и
расчете тока по интервалам состояний инвертора [80,104]. Однако
при этом не учитываются некоторые существенные особенности
работы двигателя, отличающие его от статической активно-
индуктивной нагрузки. Более точным является метод двух
составляющих, подробно разработанный в [110,138]. Основная идея
этого метода заключается в следующем.
Метод двух составляющих основан на представлении
мгновенных значений трехфазного симметричного несинусоидального
напряжения питания двигателя в виде суммы трехфазного
симметричного синусоидального напряжения основной гармоники
(первая составляющая) и совокупности всех высших временных
гармоник (вторая, несинусоидальная составляющая):
w0(5)
ис(5)
лЛ*9)
(13.19)
Каждая трехфазная гармоническая составляющая напряжения
создает в двигателе вращающееся магнитное поле, период вращения
которого зависит от периода, а направление вращения - от порядка
чередования фаз напряжений гармоники. Из формулы (13.17) следует,
что пятая, одиннадцатая и другие высшие гармоники напряжения с
номерами
v = 6n-l , л = 1,2,3,4,5,...
имеют чередование фаз, противоположное чередованию фаз
напряжений основной гармоники. Поэтому они создают поля,
298
вращающиеся в противоположном направлении в сравнении с
направлением вращения поля, созданного основной гармоникой
напряжения.
Седьмая, тринадцатая и другие высшие гармоники напряжения с
номерами
v = 6п +1 , « = 1,2,3,4,5,...
имеют чередование фаз, совпадающее с чередованием фаз напряжений
основной гармоники. Поэтому созданные ими поля вращаются в том
же направлении, что и поле основной гармоники.
Отмеченные закономерности удобно описать следующей
формулой:
«O.V = —- (13.20)
zp
Здесь - скорость вращения магнитного поля, созданного v-й
гармоникой трехфазного напряжения
(v = 1,5,7,11,13, ....). Знак этой алгебраической
величины характеризует направление вращения поля;
zp - число пар полюсов обмотки двигателя.
Итак, вследствие несинусоидальности питающего напряжения в
двигателе возбуждается множество магнитных полей, вращающихся с
различными скоростями в различных направлениях. Естественно, что
увлекаемый этим множеством полей ротор двигателя вращается с
какой-то одной скоростью. Поэтому относительные скольжения
ротора
(13.21)
в полях, созданных различными гармониками напряжения,
оказываются различными.
Изменение каждой из гармонических составляющих тока
статора двигателя при прочих равных условиях определяется
изменением скольжения ротора в поле соответствующей гармоники.
Между скольжением ротора в поле, созданном v-й гармоникой
напряжения (5V), и его скольжением в поле первой гармоники (50
существует простая связь:
1-5]
VK------------- . (13.22)
V
299
Отсюда следует, что, например, при изменении скольжения ротора в
поле основной гармоники в пределах от 0 до 1 ( что охватывает всю
область двигательных режимов) значения скольжения ротора в полях
высших гармоник изменяются в небольших пределах:
(13.23)
Поэтому токи всех высших гармоник изменяются несущественно.
Эти положения иллюстрируют приведенные на рис. 13.11
графики спектрального состава выходных напряжений инвертора с
Л = 71 и графики статических характеристик асинхронного двигателя
нормального исполнения. По оси абсцисс верхнего графика отложены
относительные значения обобщенной частоты cosv. Аргументами
последующих графиков являются скорость вращения ротора Q и
соответствующие скольжения ротора в полях первой, пятой и седьмой
гармоник (Sp и 57). В данном примере трехфазное выходное
напряжение инвертора имеет прямое чередование фаз. Поэтому
обобщенные частоты первой и седьмой гармоник напряжения
положительны, а обобщенная частота пятой гармоники отрицательна.
Это определяет направления вращения соответствующих магнитных
полей. Амплитуда и частота основной
инвертора соответствует номинальным
двигателя. Поэтому графики тока
электромагнитного момента
гармоникой напряжения, представляют
электромеханическую и механическую характеристики двигателя.
Их основные показатели в данном примере следующие. Ток
основной гармоники в режиме короткого замыкания (при 5| = 1)
составляет около шести номинальных значений, а в режиме холостого
хода - четверть номинального значения тока статора. Величина
пускового момента составляет 1.5, а критического момента в
двигательном режиме - около 2.5 номинальных значений
электромагнитного момента. В сравнении с основной высшие
гармоники напряжения инвертора с базовым законом коммутации
имеют меньшие амплитуды и большие частоты. Поэтому
потребляемые двигателем токи высших гармоник оказываются
сравнительно малыми, а моменты - очень малыми в сравнении с
токами и моментами от основной гармоники.
гармоники напряжения
данным асинхронного
статора и
созданного основной
собой естественные
300
Рис. 13.11. Статические характеристики асинхронного
двигателя при полигармоническом питании
В частности, амплитуды напряжений пятой и седьмой гармоник
((/55 и 17$ 7 ) составляют 1/5 и 1/7 от амплитуды основной гармоники.
При этом амплитуды токов пятой и седьмой гармоник ( /$ 5 и 7$ 7 ) в
режиме короткого замыкания составляют соответственно около 28%
и 15% от амплитуды номинального тока основной гармоники.
Расчетные значения моментов от пятой и седьмой гармоник (т$ и
т7) не превышают долей процента от номинального момента
двигателя. К тому же моменты этих высших гармоник действуют в
противоположных направлениях. Моменты от гармоник более
высокого порядка являются еще менее существенными. Поэтому
301
результирующая статическая механическая характеристика
практически не отличается от естественной.
В целях наглядности графики амплитудных значений токов
высших гармоник изображены в увеличенном (на порядок) масштабе,
а графики моментов от высших гармоник - в сильно (на два порядка)
увеличенном масштабе в сравнении с графиками тока и момента от
основной гармоники напряжения. Подчеркнем, что в данном
случае речь идет о постоянных составляющих моментов от
высших гармоник напряжения. Помимо этого высшие гармоники
напряжения питания вызывают пульсации момента двигателя,
механизм возникновения которых рассмотрен далее.
Как видно из приведенных графиков электромеханических
характеристик, при изменении скольжения ротора в поле основной
гармоники в пределах от 0 до 1 ток первой гармоники двигателя
изменяется в широких пределах (от тока холостого хода до тока
короткого замыкания), а токи высших гармоник изменяются
незначительно и определяются в основном параметрами короткого
замыкания двигателя на частотах соответствующих гармоник.
Аналогичный вывод можно сделать относительно всех остальных,
менее значимых высших гармоник тока.
В связи с этим мгновенные значения тока двигателя удобно
представить в виде суммы двух составляющих: тока
первой гармоники, существенно зависящего от скорости вращения
двигателя, и суммы токов всех высших гармоник, практически не
зависящей от скорости его вращения :
М) = (,1 (-9) + М-9) - (13.24)
00
ММ Е4Л-9). (13.25)
v> 1
Первое слагаемое легко определяется из схемы замещения или
круговой диаграммы двигателя для основной гармоники. Второе
слагаемое может быть определено различными методами. Наиболее
просто сумма токов высших гармоник находится из анализа режима
короткого замыкания. Распространив выражение (13.24) на режим
короткого замыкания, запишем:
ММ^М19) + th.vM (13.26)
г > 1
Если учесть указанное ранее свойство
(13.27)
302
то мгновенные значения суммы токов высших гармоник приближенно
определяются формулой:
(13.28)
Мгновенные значения суммарного тока короткого замыкания
двигателя могут быть легко определены для каждого из
интервалов состояния инвертора на основе приведения схемы
замещения заторможенного двигателя к эквивалентной активно-
индуктивной нагрузке [80] с параметрами RJK3 и L3KJ, включенной
на источник несииусоидального напряжения В данном случае
такая операция вполне правомочна, ибо эквивалентируется не
вращающийся, а заторможенный двигатель.
Первая гармоническая составляющая тока короткого замыкания
к-Д»?) определяется с помощью той же схемы замещения в случае
питания ее от источника напряжения основной гармоники
Итоговые формулы расчета мгновенных значений суммы всех
высших гармоник тока статора двигателя по интервалам (состояниям
1...Y1) инвертора с базовым законом коммутации имеют вид [138]:
(у.вг.1 ($)
КЗ
л.вг.
1.КЗ
s.e?
К0(2-Кн /(i9))-sin(<9-nJ]; (13.29)
Здесь - экспоненциальная функция;
п
^\.кз
амплитуда
основной
гармоники тока короткого замыкания двигателя;
э.кз
<Р\ жз = arctg
*'э.кз
тока короткого замыкания
напряжения питания двигателя;
фазовый сдвиг основной
относительно основной
гармоники
гармоники
303
Зг
акз = е 1кз " константы, зависящие от параметров двигателя.
Рис. 13.12 иллюстрирует описанный метод расчета токов высших
гармоник.
Рис. 13.12. Расчет суммы токов высших гармоник по методу
двух составляющих
304
Для отыскания формы тока вращающегося двигателя найденные
выражениям (13.29) мгновенные значения суммы токов высших
>моник, практически не зависящие от скорости вращения двигателя,
[адываются с мгновенными значениями тока первой гармоники,
следние, как отмечалось, легко определяются с помощью схемы
(ещения либо круговой диаграммы двигателя для первой
>моники.
I
I : II : III : IV : V : VI :
, I - 1 । । 1 !
О л 2л
Рис. 13.13. Построение графиков тока статора в различных
режимах работы двигателя методом двух составляющих
305
Таким образом, при расчете тока двигателя необходимо иметь
данные о форме питающего напряжения и располагать параметрами
схемы замещения двигателя либо его круговой диаграммой для первой
гармоники напряжения. Рис. 13.13 иллюстрирует результаты расчета
мгновенных значений тока вращающегося двигателя в различных
режимах его работы методом двух составляющих.
В заключение отметим, что метод двух составляющих приемлем
для расчета токов не только при базовом, но и при других "жестких"
законах коммутации инвертора, обеспечивающих независимость
формы его выходного напряжения от нагрузки двигателя, в том числе
при широтно-импульсной модуляции.
13.6. Распределение тока нагрузки по элементам схемы
и условия работы ключей инвертора
Распределение тока нагрузки по элементам схемы инвертора
определяется законом коммутации ключей. Типичные графики
мгновенных значений токов /]($) и *2($) силовых ключей К! и К2
фазы "А" инвертора с Л = тс в различных режимах работы двигателя
приведены на рис. 13.14. Токи ключей в фазах "В" и "С"
аналогичны показанным, но сдвинуты во времени соответственно на
одну треть и две трети периода рабочей частоты инвертора.
Проанализируем эти графики.
Ток силового ключа во время его интервала проводимости равен
току нагрузки данной фазы. Например, в течение первого
полупериода рабочей частоты инвертора токи ключей фазы "А":
г,(5) = /ад(5); Щ^) = 0.
В течение второго полупериода:
^(<9) = 0; '2 (-9) = - isa (-9) •
Как видно, эти токи являются знакопеременными и
поэтому силовые ключи автономного инвертора напряжения
должны обладать двусторонней проводимостью
тока. Как отмечалось, в реальных схемах автономных инверторов
напряжения прямая проводимость силовых управляемых ключей
обеспечивается управляемым полупроводниковым прибором
(тиристором или транзистором), а обратная проводимость -
обратным, как правило, неуправляемым вентилем.
В начале интервала проводимости ( например, интервала Л|) ток
ключа К1 является отрицательным (обратным или же инверсным). В
схемах тиристорных инверторов этот ток протекает по обратному
306
вентилю. В схемах транзисторных инверторов инверсный ток
распределяется между обратным вентилем и транзистором в
соответствии с инверсной вольтамперной характеристикой
транзистора и характеристикой образного неуправляемого вентиля.
Рис. 13.14. Графики токов ключей инвертора в различных режимах
работы двигателя : а) двигательном; б) генераторном
В конце интервала проводимости ток ключа отличен от нуля,
причем является положительным, т.е. протекает по управляемому
полупроводниковому прибору ключа. Это означает, что управляемый
прибор ключа должен быть полностью управляемым,
способным в заданные моменты времени не только включать цепь, но
и разрывать цепь при ненулевом значении тока.
307
a)
«И А ф------------
б)
Рис. 13.15. Распределение тока нагрузки по ключам инвертора
до и после коммутации :
а) в конце интервала проводимости ключа К1;
б) в начале интервала проводимости ключа К2
В течение интервала проводимости каждый из ключей инвертора
(см. рис. 13.15) включен последовательно с нагрузкой. Поэтому после
выключения ключа должна быть предусмотрена цепь для замыкания
тока, поддерживаемого в активно-индуктивной нагрузке за счет ее
ЭДС самоиндукции. В противном случае возникают перенапряжения,
ведущие к электрическому пробою ключей инвертора. Отсюда следует,
что после выключения прямого тока одним из ключей (например, К1)
немедленно должен быть включен (точнее, должен вступить в действие
в режиме инверсного тока) другой ключ фазы (соответственно К2).
Благодаря использованию неуправляемых обратных вентилей
своевременное вступление в работу очередных ключей происходит
автоматически под действием ЭДС самоиндукции нагрузки. Поэтому
включающий сигнал управления для вступающего в действие ключа
может быть подан позднее, но не позже момента окончания импульса
инверсного тока ключа. Благодаря этому смягчаются требования по
формированию и согласованию сигналов управления для каждой
пары ключей инвертора.
В реальных схемах управления вводят небольшие задержки
подачи включающих сигналов для устранения сквозных коротких
замыканий источника питания через пару управляемых приборов
фазы во время коммутации ключей. Это обусловлено тем, что время
выключения полупроводникового прибора, как правило, больше
времени его включения.
308
13.7. Условия работы источника питания инвертора
Условия работы источника питания инвертора напряжения
удобно проанализировать с помощью принципиальной электрической
схемы, изображенной на рис. 13.16. Силовая часть преобразователя
частоты состоит из выпрямителя, силового фильтра и автономного
инвертора напряжения. Амплитуда выходного напряжения инвертора
с базовым законом коммутации однозначно определяется величиной
напряжения в звене постоянного тока. Поэтому в системах
регулируемого электропривода в качестве источников питания таких
инверторов используются управляемые выпрямители. На них
возлагается функция регулирования напряжения в звене постоянного
тока, а следовательно и амплитуды выходного напряжения
инвертора. Функция регулирования частоты выходного напряжения
преобразователя возлагается на инвертор. Силовой LC фильтр в
звене постоянного тока служит для сглаживания пульсаций
выпрямленного напряжения и выполняет функцию буферного
элемента между выпрямителем и инвертором.
Сеть
Управляемый
выпрямитель
id i
Силовой
фильтр
Автономный инвертор
о
о
Рис. 13.16. Принципиальная электрическая схема системы
ПЧ с АИН - нагрузка
Ток питания (или же входной ток) инвертора /п определяется
тем фактом, что в каждом из состояний инвертора его ключи
соединяют определенным образом источник питания с фазами
нагрузки. Как следует из изображенных на рис. 13.9 схем питания
309
нагрузки, связь между входным и выходными токами инвертора при
базовом законе коммутации описывается формулами:
-
при
при
при
(13.30)
Типичные графики тока питания инвертора в различных
режимах работы двигателя изображены на рис. 13.17.
Рис. 13.17. Токи на входе и выходе инвертора в различных
режимах работы двигателя : а) двигательном ; б) генераторном
Как видно, входной ток представляет собой кусочно-
непрерывную периодическую функцию времени с периодом, равным
1/6 периода рабочей частоты инвертора. При каждой коммутации
310
ключей входной ток инвертора изменяется скачком. При малых
нагрузках и в режиме холостого хода двигателя (см. рис. 13.10,6)
входной ток инвертора дискретно изменяется не только по величине,
но и по направлению. Между тем, цепь питания инвертора
содержит индуктивные элементы (токоограничивающие реакторы на
входе выпрямителя или сглаживающие реакторы на его выходе),
препятствующие скачкообразным изменениям тока. Кроме того,
однокомплектные выпрямители обладают лишь односторонней
проводимостью цепи выпрямленного тока. В связи с этим возникает
проблема совместимости автономного инвертора с его источником
питания, выполненным на основе выпрямителя. Для разрешения этой
проблемы между источником питания и автономным инвертором
напряжения включают буферный элемент - конденсатор,
воспринимающий пульсации входного тока инвертора. Емкость
конденсатора выбирается с таким расчетом, чтобы обусловленные
пульсациями входного тока инвертора пульсации напряжения на
буферном конденсаторе не превышали допустимых значений.
Величина пульсаций входного тока инвертора определяется
разностью между его экстремальными значениями
А 4т “ 4т.макс 4т.мин ’
типичная зависимость которых от скольжения асинхронного
двигателя приведена на рис. 13.18. Как следует из графиков, пульсации
тока минимальны в режиме холостого хода и существенно возрастают
при увеличении нагрузки на валу как в двигательном (при 5] >0), так
и в генераторном режиме (при S] <0). При работе в двигательном
режиме пульсирующий входной ток инвертора становится
знакопеременным при < ^irp
Таким образом, буферный конденсатор в схеме инверторного
преобразователя частоты играет важную роль, а именно:
• обеспечивает совместимость характеристик инвертора и
первичного источника питания, являясь буферным накопителем
энергии и обеспечивая контур замыкания пульсирующей
составляющей входного тока инвертора;
• ограничивает пульсации напряжения на входе инвертора,
обусловленные пульсациями его входного тока;
• сглаживает пульсации выпрямленного напряжения первичного
источника питания, являясь элементом фильтра на выходе последнего.
Вместе с тем с позиций задач автоматического регулирования
силовой LC фильтр в цепи постоянного тока представляет собой
колебательное звено, значительно усложняющее проблему
обеспечения высокого качества процессов управления
электроприводом и ограничивающее его быстродействие.
311
Рис. 13.18. Зависимости входного тока инвертора от
скольжения асинхронного двигателя
Буферный конденсатор обеспечивает совместимость основных
звеньев преобразователя частоты лишь по переменной
составляющей токов и напряжений. Очевидно, что не менее важно
обеспечить совместимость этих звеньев и по постоянной
(усредненной) составляющей, несущей основную энергетическую
нагрузку. При постоянстве напряжения питания среднее значение
входного тока 1П ср инвертора пропорционально активной мощности
на зажимах нагрузки. Типичная зависимость среднего значения тока
питания инвертора от скольжения асинхронного двигателя при
постоянстве частоты и амплитуды напряжения показана на рис. 13.18.
Характер этой зависимости свидетельствует о следующем.
312
Автономный инвертор как элемент силовой цепи
преобразователя частоты обладает возможностью двустороннего
обмена энергией между входной цепью постоянного тока и выходной
цепью переменного тока. При работе двигателя в двигательном
режиме инвертор потребляет энергию из цепи постоянного тока и
передает ее в цепь двигателя, т.е. в цепь переменного тока. При
переходе двигателя из двигательного режима в режим
рекуперативного генераторного торможения направление потока
энергии изменяется на противоположное. Инвертор передает
генерируемую двигателем в цепи переменного тока активную
мощность во входную цепь постоянного тока. При этом направление
постоянной составляющей входного тока инвертора изменяется на
противоположное в сравнении с направлением входного тока при
работе двигателя в двигательном режиме. Этот ток вызывает
дополнительный заряд буферного конденсатора и соответственно -
увеличение напряжения на шинах питания инвертора. При отсутствии
условий утилизации поступающей энергии напряжение в звене
постоянного тока постепенно возрастает и с течением времени
достигает недопустимых значений.
Для обеспечения безопасного режима генераторного
торможения двигателя инверторный преобразователь частоты
должен быть снабжен устройством утилизации энергии, поступающей
в цепь постоянного тока со стороны инвертора. Возврат этой энергии
в питающую сеть и ее полезное использование возможны лишь в том
случае, если первичный элемент двухзвенного инверторного
преобразователя (выпрямитель) также, как и инвертор, обладает
свойством двустороннего обмена энергией. Таким свойством
обладают двухкомплектные управляемые выпрямители, вопросы
использования которых в преобразователях частоты рассмотрены в
[92].
Наиболее перспективным решением данного вопроса является
использование так называемых активных выпрямителей.
Эти устройства сочетают возможность двустороннего обмена
энергией между сетями переменного и постоянного тока с
возможностями значительного улучшения гармонического состава
потребляемого тока и коэффициента мощности преобразователя
частоты как элемента электропотребления.
В случае использования упрощенных схем выпрямителей, не
обеспечивающих рекуперацию энергии, преобразователь частоты
снабжается устройством рассеивания энергии. Оно
представляет собой резистор, подключаемый с помощью ключа
параллельно буферному конденсатору в звене постоянного тока в
режиме генераторного торможения двигателя.
313
13.8. Электромагнитный момент двигателя при питании
от инвертора напряжения
Электромагнитный момент двигателя при питании от инвертора
с базовым законом коммутации определяется, как отмечено выше,
основной гармоникой напряжения. Этот вывод сделан на основе
анализа влияния на механическую характеристику каждой из
гармоник напряжения в отдельности и последующего
наложения результатов, т. е . по существу - на основе метода
суперпозиции.
Как известно, метод суперпозиции адекватно описывает
процессы лишь в линейных системах. Однако электрический двигатель
как электромеханический преобразователь энергии является
нелинейным объектом, так как электромагнитный момент двигателя
выражается в форме произведения переменных - электрических
токов и магнитных потоков (или потокосцеплений). Поэтому
требуется дополнительный анализ особенностей и результатов
формирования электромагнитного момента двигателя при
несинусоидальном питании.
Рассмотрим результаты моделирования установившихся
режимов асинхронного двигателя, полученные с помощью
динамической модели (см. гл. 12), учитывающей фактор нелинейности
объекта. Условия модельного эксперимента следующие. Трехфазный
асинхронный двигатель общепромышленного назначения получает
питание от автономного инвертора напряжения с базовым законом
коммутации ключей. Амплитуда и частота основной гармоники
выходного напряжения инвертора соответствуют номинальным
данным двигателя. Нагрузка на валу - номинальная в двигательном
режиме и такая же по величине, но активная - в генераторном режиме.
На рис. 13.19 представлены в неподвижной системе координат
мгновенные векторные диаграммы и годографы изображающих
векторов напряжений, токов и потокосцеплений обмоток двигателя.
Справа в том же масштабе показаны временные диаграммы фазного
напряжения и тока статора, а также графики электромагнитного
момента двигателя в двигательном и генераторном режимах его
работы. На векторных диаграммах показано мгновенное
расположение изображающих векторов в моменты времени ,
выделенные на временных диаграммах.
Проанализируем эти диаграммы, имея в виду, что факторами
формирования электромагнитного момента являются
потокосцепления и токи обмоток двигателя.
314
a)
Рис. 13.19. Годографы изображающих векторов и временные
диаграммы напряжений, токов и электромагнитного момента
асинхронного двигателя при его работе:
а) в двигательном режиме; б) в генераторном режиме
Годографы изображающих векторов. Годограф изображающего
вектора напряжений Uv является дискретным (точечным). В течение
периода формируемого инвертором ступенчато-прямоугольного
напряжения изображающий вектор занимает последовательно ряд
315
фиксированных позиций (1 ... VI), оставаясь неизменным по длине и
скачком поворачиваясь против часовой стрелки на 60 градусов в
результате каждой коммутации инвертора.
В отличие от него годограф вектора потокосцеплении обмотки
статора ТЛ. является не дискретным, а непрерывным, по форме близким
к симметричному шестиугольнику. Это свидетельствует о
непрерывности временных графиков потокосцеплений фазных
обмоток статора и об улучшении их гармонического состава в
сравнении с гармоническим составом напряжений питания двигателя.
Годограф вектора потокосцеплений обмотки ротора
является также непрерывным и практически круговым, что
свидетельствует о значительном подавлении высших гармонических
составляющих во временных графиках потокосцеплений ротора. Это
обусловлено естественной фильтрацией высших временных гармоник
элементами внутреннего сопротивления двигателя.
Гармонический анализ временных графиков. Анализ графиков
потокосцеплений показывает следующее. Если пятая гармоника
напряжения составляет 1/5, т. е. 20% от основной гармоники, то в
графиках потокосцеплений обмоток статора, главных
потокосцеплений и потокосцеплений ротора пятая гармоника
составляет соответственно порядка 4% , 1.2% и 0.5% от величин
основных гармоник соответствующих потокосцеплений при работе
двигателя в номинальном режиме. Для седьмой гармоники
напряжения, составляющей 1/7, т. е. 14.3% от основной, отмеченные
потокосцепления имеют величины порядка 2%, 0.6% и 0.25% от
основных.
Токи статора и ротора в сравнении с потокосцеплениями имеют
худший гармонический состав. В частности, пятая гармоника в
каждом из токов составляет около 28%, а седьмая - 15% от основной
гармоники тока в номинальном режиме. Причина повышенного
содержания высших гармоник в токах двигателя заключается в том,
что (см. п. 13.2) по отношению к пятой гармонике напряжения
двигатель работает в режиме противовключения; по отношению к
седьмой - близком к режиму короткого замыкания и т. д. Годографы
векторов токов статора и ротора имеют характерный вид, по форме
напоминающий храповик. Отметим, что полученные в результате
использования динамической модели временные графики тока статора
(рис. 13.19) практически совпадают с графиками тока (см. рис. 13.13),
полученными по методу двух составляющих.
Теперь обратимся к анализу временных графиков
электромагнитного момента двигателя в двигательном и
316
генераторном режимах. Как видно из рис. 13.19, электромагнитный
момент содержит вместе с постоянной переменную
составляющую. Частота переменной составляющей или же пульсаций
момента в шесть раз выше рабочей частоты инвертора. Амплитуда
пульсаций составляет по результатам моделирования примерно 10%
номинального значения в двигательном и немного более - в
генераторном режиме.
Для теоретического обоснования результатов моделирования
рассмотрим формулу, описывающую в динамической модели
электромагнитный момент двигателя. Момент определяется (см. п. 6.3
и 10.2) в виде скалярного произведения векторов токов статора Is. и
ортогональных потокосцеплений ротора ВЧ^ :
т = ктВ^г •Is , (13.31)
где кт = Снкг - коэффициент, позволяющий оценивать момент
в долях от номинального значения;
В - матричный ортогональный поворотный множитель.
Разворачивая формулу (13.31) по компонентам векторов и
переходя к их полярным координатам, можно определить
электромагнитный момент двигателя как произведение модулей
изображающих векторов токов статора и потокосцеплений ротора на
синус угла между ними:
т - кт Is sin (pls , (13.32)
где
и - модули (длины) изображающих векторов;
- угол между ними.
При синусоидальном напряжении питания и работе двигателя в
установившемся режиме изображающие векторы имеют постоянные
длины и вращаются с постоянной скоростью. Угол между ними
неизменен во времени. Поэтому электромагнитный момент двигателя
(в рамках принятых для динамической модели допущений) имеет
только постоянную составляющую. Это утверждение справедливо по
отношению как к основной, так и к любой высшей гармонике
напряжения при условии, что данная гармоника действует автономно,
в условиях отсутствия других гармоник.
Переменная составляющая электромагнитного момента
появляется лишь при совместном действии различных гармоник
напряжения. Механизм взаимодействия различных гармоник при
формировании электромагнитного момента двигателя удобно
пояснить на следующем элементарном примере.
317
Предположим, что питающее напряжение содержит только
основную и пятую гармоники :
и, = иуЛ + иу>5 , (13.33)
а скорость вращения ротора постоянна.
Напряжения, потокосцепления и токи при постоянстве скорости
ротора связаны в динамической модели ненасыщенного двигателя
линейными дифференциальными уравнениями. Поэтому в данной
частной задаче анализа двигателя как элемента электромагнитной
цепи мы имеем дело с линейным объектом, для которого приемлем
принцип суперпозиции.
Следовательно, при наличии двух гармоник питающего
напряжения векторы поткосцеплений и токов будут содержать в
установившемся режиме тоже только основную и пятую гармоники'.
Т, = Т,., + ; (13.34)
I, I,.l I5.5 • (13.35)
Результаты решения этой задачи представлены на рис. 13.14 в
виде векторных диаграмм. Диаграммы отражают амплитудные и
фазовые соотношения напряжений, токов и потокосцеплений
двигателя, характерные для двигательного режима с номинальной
нагрузкой. Мгновенные положения изображающих векторов
соответствуют значению <9 = ^/2, т.е. моменту достижения
максимума графика основной гармоники фазного напряжения
w5(3(i9). Эти векторные диаграммы позволяют рассмотреть двигатель
в ином ракурсе, а именно - как нелинейный электромеханический
преобразователь энергии, электромагнитный момент которого
описывается нелинейным уравнением (13.31).
Учитывая гармонический состав токов и потокосцеплений,
запишем:
m = km В(ТЛ1 + Tr5) . (I.J + Ij 5) . (13.36)
Разворачивая скалярное произведение сумм векторов, получаем
выражение мгновенных значений момента в виде суммы:
где
т = тХ } +ml5 + m5j +m55 ,
т 1.1 ” * 1.5.1 ’
^1.5 ~ J • I5.5 ’
(13.37)
(13.38)
(13.39)
318
^5.1 * kl 5
^5.5 “ * ^л.5 •
(13.40)
(13.41)
Итак, наличие двух гармоник напряжения дает не две, а четыре
различных составляющих электромагнитного момента. Это является
основным признаком и ключевым моментом данной нелинейной
задачи. Проанализируем характер и типичное соотношение этих
составляющих.
Рис. 13.20. Векторные диаграммы двигателя, обусловленные
различными гармониками питающего напряжения:
а) основной гармоникой; б) пятой гармоникой
Для этого представим формулы составляющих момента в виде (13.32):
"’Ll = km*PrXIs.\ sin^’ ;
т 1.5 = ъ.\ Л.5 sin <р1ул ;
т5.\ sin^ ;
"’5.5=^^.5T.5Sin^5 .
rr.5
(13.42)
(13.43)
(13.44)
(13.45)
319
Соответствующие фрагменты векторных диаграмм для анализа
этих составляющих момента приведены на рис. 13.21.
а) б)
Рис. 13.21. Векторные диаграммы для определения
составляющих электромагнитного момента двигателя:
а) постоянной; б) переменных составляющих
Очевидно, что составляющая Шц представляет собой момент,
который развивает двигатель при его питании напряжением только
одной, основной гармоники. Действительно, при 17j5=0 величины
У^- 5-0, /Л5=0 , т[ 5 - m5i = т5$ = 0 и поэтому
результирующий момент двигателя т = гпц. Как следует из формулы
(13.42), данная составляющая электромагнитного момента двигателя
пропорциональна площади параллелепипеда, выделенного на
векторной диаграмме рис. 13.21,а штриховкой. Эта составляющая
момента двигателя во времени не изменяется, так как
образующие ее векторы । и 15] вращаются в установившемся
режиме с одной и той же постоянной скоростью 69s.j, имеют
неизменные модули и неизменное взаимное расположение
= const). Зависимость составляющей
от скольжения
™\Х
ротора двигателя показана на рис. 13.11, где эта величина обозначена
как т\.
320
Аналогичным образом легко доказать, что составляющая /??55
представляет собой момент, который развивает двигатель при его
питании напряжением только одной, пятой гармоники. Эта
составляющая момента также неизменна во времени, так как
образующие ее векторы потоков и токов пятой гармоники взаимно
неподвижны. Зависимость составляющей т55 от скольжения ротора
двигателя также показана на рис. 13.11, где она обозначена как
Совокупность величин и ^55 в формуле (13.57)
представляет постоянную составляющую результирующего
момента двигателя:
т= - \ + m55 - const.
(13.46)
Анализ показывает, что второе слагаемое данной формулы
представляет собой член высшего порядка малости, расчетные
значения которого не превышают долей процента от номинальной
величины момента.
Совокупность величин и в формуле (13.57)
представляет переменную составляющую результирующего
момента двигателя:
т^= т\.5 + W51 “ var-
(13.47)
Составляющая представляет собой момент, возникающий в
результате взаимодействия тока пятой гармоники с полем первой
гармоники. Как следует из векторной диаграммы рис. 13.21,6,
изображающий вектор первой гармоники потокосцеплений ротора
Ч',, । имеет постоянную длину и вращается против часовой стрелки с
постоянной скоростью G)s ।. Вектор пятой гармоники токов статора
1^5 также имеет постоянную длину, но вращается в
противоположном направлении со скоростью •
Следовательно, угол между этими векторами непрерывно изменяется
во времени со скоростью
СО*5 = —= с-69.,1 =-6 69,1. (13.48)
Интегрируя это уравнение во времени, получаем:
321
*fe(')=^(°)+z - c(°)- 6fi?v.iz • <i3-49>
Поэтому в соответствии с формулой (13.43) составляющая
электромагнитного момента изменяется во времени по
гармоническому закону:
"’1.5(0 = ™ 15. max sin(^ (°) “ 6 <°s.l • (13-50)
Амплитуда этой составляющей пропорциональна произведению
модулей образующих векторов :
1.5.max ~ ^r.1 Аг. 5 » (13.51)
а частота - в шесть раз выше частоты основной гармоники
питающего напряжения.
Оставшаяся составляющая 5 представляет собой момент,
возникающий в результате взаимодействия тока первой гармоники с
полем пятой гармоники. Как следует из анализа векторных диаграмм
рис. 13.20, скорость изменения угла между образующими векторами:
й/51 _ L/.5.1 5 = 6бЬ] . (13.52)
^г.5
Отсюда составляющая т5| момента изменяется по гармоническому
закону с той же частотой:
W5.1 (0 = "b.l.max sin1 (0) + 6 (У?1 Л (13.53)
\ f f * /
Амплитуда этой составляющей
^51.max — ^г.5 (13.54)
в сравнении с т 15 тах невелика вследствие малости ¥^5.
Пренебрегая в формуле (13.37) несущественными членами, для
оценки влияния на электромагнитный момент пятой гармоники
напряжения можно использовать приближенную формулу
т = , (13.55)
где . (13.56)
Амплитуда переменной составляющей в данном примере составляет
примерно 30% от номинального значения момента двигателя.
322
Изложенная методика позволяет проанализировать более
сложную, но практически более значимую задачу, а именно - оценить
совместное действие наиболее существенных по величине первой,
пятой и седьмой гармоник напряжения питания двигателя от
инвертора с базовым законом коммутации. Пренебрегая остальными
гармониками, примем:
иЛ. = и,, +их5+их7.
(13.57)
Оказывается, что наличие дополнительной (седьмой) гармоники
напряжения приводит к появлению в формуле момента двигателя ряда
дополнительных составляющих. Действительно,
т=кт В(ТН + Тг5 + Тл7) . (11Л + 1, 5 + 1.,.7) =
777ц + /7715 + т5.\ +т5.5 + тТ1 + т\1 +т1.\ + т5.7 + w7.5 • (13.58)
Итак, в сравнении с (13.37) появляются дополнительно
• постоянная составляющая /и 77, обусловленная автономным
действием седьмой гармоники. Эта величина имеет высший порядок
малости и может быть отброшена при практических расчетах;
переменная составляющая т 17, обусловленная
взаимодействием первой гармоники поля ротора и седьмой
гармоники тока статора. Благодаря согласному направлению
вращения и вследствие различия скоростей вращения векторов первой
и седьмой гармоник скорость изменения угла между ними:
(13.59)
Следовательно, частота этой составляющей момента, также как и
составляющей т 15, превышает частоту напряжения первой
гармоники в 6 раз. Относительная величина амплитуды момента т j 7
имеет тот же порядок, что и относительная величина седьмой
гармоники тока статора. Поэтому величина т (7 должна учитываться
в расчетах совместно с величиной т ] 5, имеющей ту же частоту и
соизмеримую амплитуду. Тем более, что переменные составляющие
т J 5 и т । 7 частично компенсируют действие друг друга так же, как
и постоянные составляющие 77755 и Это следует из анализа
векторной диаграммы рис. 13.21,6. Именно поэтому результирующая
амплитуда пульсаций момента (см. рис. 13.19) оказывается меньше
амплитуды составляющей т 15;
323
• малая переменная составляющая /и7], обусловленная
взаимодействием седьмой гармоники поля ротора и первой
гармоники тока статора;
• две малые переменные составляющие (W57 и th75),
обусловленные взаимодействием полей и токов пятой и седьмой
гармоник. Вследствие противоположного направления и различия
скоростей вращения векторов пятой и седьмой гармоник эти
составляющие момента имеют частоту, в 12 раз превышающую
частоту основной гармоники напряжения ( или же в 2 раза - частоту
составляющих момента т 15 и т ( 7). Иными словами, составляющие
т 15 и ^17 образуют основную, а ш57 и /и75 - вторую
гармонику периодического процесса mfy.
В практических расчетах можно использовать приближенную
формулу:
т - (13.60)
где ; + ml7 . (13.61)
Итак, высшие гармоники напряжения инвертора порождают не
столько дополнительные постоянные составляющие момента, сколько
переменные составляющие, обусловленные взаимодействием высших
гармоник с первой гармоникой и между собой. Наиболее значимыми в
механизме образования пульсаций электромагнитного момента
являются результаты взаимодействия пятой и седьмой гармоник тока с
основной гармоникой магнитного поля двигателя.
В соответствии с законами механики пульсации момента
порождают неравномерность вращения ротора, дополнительные
вибрации, шумы и условия для возникновения нежелательных
резонансных явлений в механической системе. При номинальной
частоте напряжения (50 Гц) вследствие повышенной частоты
пульсаций момента (50 х 6 =300 Гц) и инерции механической системы
пульсации скорости оказываются сравнительно небольшими,*
приемлемыми для многих электрифицированных механизмов. Однако
при понижении частоты инвертора и соответственно - частоты
пульсаций электромагнитного момента неравномерность вращения
ротора возрастает, так как ротор успевает "отрабатывать" пульсации
момента. При малых частотах возникает так называемый шаговый
режим работы двигателя с периодическими остановками ротора. Эти
факторы ограничивают допустимый диапазон регулирования
скорости электропривода при использовании базового закона
коммутации ключей инвертора.
324
Другим отрицательным фактором влияния несинусоидальности
питающего напряжения является наличие дополнительных потерь от
высших гармоник, что приводит к снижению допустимой полезной
нагрузки на валу двигателя по условиям его нагрева.
Для устранения отмеченных выше нежелательных явлений и
расширения диапазона регулирования скорости используют
усовершенствованные законы коммутации ключей инвертора. В связи
со значительным прогрессом силовой полупроводниковой
преобразовательной техники и средств управления в последние годы
наибольшее распространение получили инверторы с широтно-
импульсной модуляцией.
325
Глава четырнадцатая
АВТОНОМНЫЕ ИНВЕРТОРЫ
С ШИРОТНО - ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
НАПРЯЖЕНИЯ
14Л. Принцип широтно-импульсной модуляции
Принцип широтно-импульсной модуляции (ШИМ) удобно
рассмотреть на примере анализа элементарного широтно-
импульсного модулятора напряжения, изображенного на рис. 14.1.
Система
управления
Рис. 14.1. Элементарный широтно-импульсный модулятор
Силовые Источник
ключи питания
«п
2
326
Силовая часть модулятора выполнена в виде однофазного
автономного инвертора напряжения, питаемого от источника
постоянного тока. Нагрузка подключена к точке "А" соединения
ключей 1А и 2А инвертора и к средней точке источника питания, т. е.
в данном случае используется нулевая схема инвертирования.
Система управления обеспечивает коммутацию ключей
инвертора с высокой частотой, которую называют частотой
модуляции или же несущей частотой ШИМ. Система
содержит генератор опорного сигнала несущей частоты ГОСНЧ,
сумматор, нуль-орган НО и формирователи Ф1, Ф2 дискретных
сигналов f*, fi управления ключами инвертора.
Как функциональный элемент широтно-импульсный модулятор
напряжения преобразует непрерывный входной управляющий
(задающий) сигнал в высокочастотную периодическую
последовательность импульсов выходного напряжения При
постоянстве задания среднее значение выходного напряжения на
периоде модуляции пропорционально задающему сигналу. При изменении
величины задающего сигнала пропорциональное изменение среднего
значения выходного сигнала обеспечивается изменением ширины
импульсов, т.е. путем широтно-импульсной модуляции.
Работу широтно-импульсного модулятора при = const и
const иллюстрируют временные диаграммы рис. 14.2.
Генератор ГОСНЧ формирует линейно - изменяющееся во времени
опорное переменное напряжение ноп(7) несущей частоты. На каждом
периоде несущей частоты или же периоде модуляции Т
оно может иметь либо кососимметричную (см. рис. 14.2,а), либо
симметричную пилообразную форму (см. рис. 14.2,6). В первом
случае обеспечивается односторонняя модуляция, при
которой изменение задания w*(/) вызывает сдвиг только одного из
фронтов импульсов выходного напряжения модулятора
относительно опорного сигнала. Во втором случае реализуется
двусторонняя модуляция с симметричным сдвигом обоих
фронтов выходных импульсов на полупериодах модуляции.
Задающий и опорный сигналы суммируются и подаются на вход
нуль-органа, имеющего симметричную релейную характеристику.
Последний формирует дискретный сигнал задающий
состояния пары ключей инвертора.
327
Рис. 14.2. Временные диаграммы работы широтно-импульсного
модулятора напряжения:
а) с односторонней модуляцией;
б) с двусторонней симметричной модуляцией
Формирователи сигналов управления Ф1 и Ф2 имеют взаимно
инверсные релейные характеристики и сепарируют сигнал нуль-
органа по двум каналам управления ключами инвертора. Кроме того,
формирователи либо локальные устройства управления ключами
реальных схем предусматривают небольшие временные задержки
включения ключей (на графиках не показаны). Это необходимо для
предотвращения коротких замыканий шин питания через ключи
инвертора во время коммутации. Влияние отмеченных задержек
включения ключей на характеристики модулятора рассмотрено далее
в п. 14.9.
328
14.2. Закон широтно - импульсной модуляции
Рассмотренная схема реализует жесткий закон коммутации
ключей, согласно которому на каждом межкоммутационном
интервале один из ключей обязательно включен, а второй - выключен.
Поэтому напряжение на нагрузке может принимать два дискретных
значения: + ц,/2 (при включении 1А) и —1^/2 (при включении 2А).
Реализуемый данной системой управления закон ШИМ
описывается формулами:
при и > + Uq ;
при -Uq < и* < + (70 ;
при и < - Uq ;
(14.1)
(14.2)
где
du
задающий сигнал;
период модуляции;
продолжительности интервалов включенного
состояния соответственно ключей 1А и 2А
инвертора;
конструктивная постоянная системы управления.
Как при односторонней, так и двусторонней модуляции
конструктивная постоянная системы управления определяется
параметрами опорного сигнала:
(14.3)
о
где UqmT - амплитуда и период опорного сигнала.
Ввиду малости Т можно на каждом периоде модуляции принять
величину и*(/) постоянной. Соответствующие приведенным
формулам графики изображены на рис. 14.3. Порядок следования и
синхронизация временных интервалов 7] и 7\ относительно
опорного сигнала won(/J при односторонней и двусторонней ШИМ
показаны на рис. 14.2.
329
Рис. 14.3. Зависимости интервалов проводимости ключей
инвертора от задающего воздействия
Выходное напряжение широтно-импульсного модулятора
целесообразно представить в виде суммы двух составляющих:
• полезной составляющей, равной среднему значению
выходного напряжения модулятора за период модуляции;
• модуляционной составляющей, обусловленной дискретным
характером работы широтно-импульсного модулятора и
равной отклонению мгновенных значений выходного
напряжения модулятора от среднего значения за период
модуляции.
Полезная составляющая определяется формулой
ucp = r ju(t)dt .
1 о
(14.4)
Пренебрегая изменением напряжения питания ип на периоде
модуляции и падением напряжения на открытых ключах инвертора,
запишем:
м = 1 (14.5)
ср т \ 2 2 )
С учетом выражений (14.1),
(14.2) и
(14.5) получаем:
при
иср
п«‘
Ц1
при
(14.6)
при
330
I kun
где кп = —- = const
коэффициент передачи широтно-
импульсного модулятора в линейной зоне ( при
м* < и0).
С учетом конструктивной постоянной (14.3) системы управления
коэффициент передачи элементарного модулятора выражается через
параметры его силовой и управляющей части следующим образом:
» wn
«п ”-----•
2t/0
(14-7)
Модуляционная составляющая представляет
собой переменное импульсное напряжение, определяемое формулой
(14.8)
При постоянстве задания модуляционная составляющая является
периодической функцией времени с периодом, равным периоду
модуляции. Мгновенные значения ее первой гармоники при
симметричной двусторонней ШИМ описываются формулой
имод.\ 0) “ мод. 1 1 • (14.9)
Здесь и далее за начало отсчета времени t принято начало периода
модуляции Г, показанного на рис. 14.2.
Начальная фаза первой гармоники модуляционной
составляющей не зависит от задающего воздействия, что выгодно
отличает двустороннюю ШИМ от односторонней. Амплитуда и
частота этой гармоники определяются формулами:
при
при
при
и > + и0 ;
-Ц> - w < + Uq ;
(14.10)
(14.11)
О
Зависимости полезной составляющей и первой гармоники
модуляционной составляющей выходного напряжения от величины
331
задающего воздействия на входе модулятора представлены на
рис. 14.4.
t и
Рис. 14.4. Зависимости составляющих выходного
напряжения модулятора от задающего воздействия
Как видно, в линейной
и < и0)
полезная составляющая
зоне регулирования (при
напряжения модулятора
пропорциональна заданию. В зонах насыщения
модулятора
*
и
(при
U$) выходное напряжение ограничено значениями
+ Ц1/2
и - «и /2 .
Модуляционная составляющая выходного напряжения
инвертора также зависит от задающего воздействия, причем эта
зависимость является нелинейной. Амплитуда основной гармоники
модуляционной составляющей достигает экстремума
2мп
=------- (14-12)
71
при нулевом задании. На границах линейной зоны регулирования
модуляционная составляющая равна нулю. Частота первой
(основной) гармоники модуляционной составляющей равна частоте
опорного сигнала, что присуще модуляторам с нулевыми схемами
инвертирования. В этом отношении более эффективными являются
широтно-импульсные модуляторы не с нулевыми, а мостовыми
инверторами, которые будут рассмотрены далее.
332
При проектировании систем с ШИМ уровень несущей частоты, а
следовательно, и частоты модуляционной составляющей выбирается
достаточно высоким, лежащим за пределами полосы пропускания
частотной характеристики цепи нагрузки инвертора. Это позволяет
нейтрализовать действие модуляционной составляющей выходного
напряжения за счет фильтрующих свойств нагрузки. В некоторых
случаях для подавления модуляционной составляющей на выходе
инвертора включают специальные фильтры либо используют более
сложные схемы инверторов.
143. О принципе вибрационной линеаризации
С позиций теории автоматического управления рассмотренную
систему "автономный инвертор с ШИМ - нагрузка" можно
квалифицировать как нелинейную систему, снабженную устройством
технической вибрационной линеаризации
[10,68]. Это подтверждает структурная схема модели данной системы,
изображенная на рис. 14.5. Инвертор вместе с его локальной системой
управления, выделенной на рис. 14.1 штриховым контуром,
представлены на рис. 14.5 в виде безынерционного нелинейного
элемента с релейной характеристикой.
Рис. 14.5. Вибрационная линеаризация нелинейной системы
Для линеаризации характеристики этого элемента на его вход
подается вместе с задающим сигналом w* внешнее высокочастотное
периодическое воздействие - в данном случае это опорный сигнал
ШИМ uonm. Такое воздействие вызывает периодические
333
срабатывания (вибрации) релейного элемента и как следствие -
вынужденные высокочастотные колебания в системе.
Принципиально важно то обстоятельство, что благодаря
наложению на задающий сигнал внешнего периодического
воздействия соотношение времен Tj и Т2 пребывания
релейного элемента в его двух дискретных состояниях зависит от
величины задающего воздействия. Изменение соотношения времен
вызывает изменение среднего напряжения на нагрузке. Поэтому
оказывается возможным сколь угодно плавно регулировать среднее
напряжение на нагрузке путем плавного изменения задающего
воздействия. В этом смысле техническая линеаризация превращает
исходную дискретную нелинейную систему в непрерывную линейную,
реагирующую на сколь угодно малое изменение задания.
Рис. 14.6. Характеристика инвертора:
а) при отсутствии; б) при наличии линеаризующего воздействия
Рис. 14.6 позволяет сопоставить характеристики инвертора при
отсутствии и наличии периодического линеаризующего воздействия.
Как видно, введение линеаризующего воздействия превращает
релейную характеристику инвертора в непрерывную с участком
пропорциональной передачи задающего воздействия.
Ширина линейной зоны (зоны пропорциональной передачи
задающего воздействия) равна двойной амплитуде линеаризующего
воздействия. Уровень насыщения выхода определяется напряжением
источника питания инвертора. Эти два фактора определяют
коэффициент передачи инвертора в линейной зоне в соответствии с
формулой (14.7), В случае выхода задающего воздействия за границы
334
линейной зоны вибрационный режим работы инвертора прекращается
и в непрерывно включенном состоянии оказывается (в зависимости от
знака задающего воздействия) либо ключ 1А, либо ключ 2А.
Соответствующие участки насыщения модулятора показаны на
характеристике рис. 14.6.
14.4. Вопросы цифровой реализации систем ШИМ
Изображенная на рис. 14.1 структурная схема с генератором
опорного сигнала хорошо адаптирована для реализации в аналоговых
системах управления инверторами с ШИМ, где первоначально и
получила преимущественное распространение. В цифровых системах
управления возможна и альтернативная реализация алгоритмов
ШИМ, не требующая непосредственного воспроизведения опорного
линейно изменяющегося сигнала.
На рис. 14.7 представлен пример подобной микропроцессорной
реализация системы управления широтно-импульсным модулятором.
Рис. 14.7. Микропроцессорная реализация системы
управления широтно-импульсным модулятором
Здесь приняты следующие условные обозначения элементов
системы:
335
АЦП - аналого-цифровой преобразователь;
ГИ - опорный генератор импульсов;
ДЧ 1, ДЧ2 - делители частоты;
OBI, ОВ2 - одновибраторы;
МК - микроконтроллер.
Обозначения входов элементов, сигналов и их параметров:
П1, П2, ПЗ - порты микроконтроллера;
ЗП - вход прерывания микроконтроллера;
Р - вход управления (запуска) одновибратора;
Вх - счетный вход одновибратора;
f - частота опорного генератора;
fi - несущая частота ШИМ;
fo - частота заполнения одновибратора;
Kfi, Kf2 - коды коэффициентов деления частоты;
f\ ’ fl " сигналы управления ключами инвертора;
♦
и - заданное значение полезного сигнала на выходе
модулятора;
Т - заданная длительность периода ШИМ;
ип - напряжение источника питания модулятора.
Принцип действия состоит в следующем. Микроконтроллер МК
через порт П1 принимает от микроконтроллера верхнего уровня
данные, содержащие информацию о заданном значении полезного
сигнала на выходе модулятора и о заданной длительности периода
ШИМ. Через порт ПЗ в микроконтроллер поступает информация о
текущих значениях напряжения питания модулятора. На основе этой
информации микроконтроллер рассчитывает длительности Т\ и Г2
интервалов проводимости ключей инвертора, обеспечивающие
выполнение задания при текущих условиях работы силовой схемы.
Результаты расчетов выдаются через порт П2 и загружаются в
буферы данных программируемых преобразователей и
формирователей импульсных сигналов - делителей частоты ДЧ1, ДЧ2
и одновибраторов ОВ1 и ОВ2.
Работу этих элементов синхронизирует опорный генератор,
импульсы которого поступают на входы делителей частоты ДЧ1 и
ДЧ2. Коэффициент деления частоты Kfi задается микроконтроллером
в буфер данных ДЧ 1 с таким расчетом, что выходная частота делителя
частоты fj — 1 /Т, где Т - заданная длительность периода ШИМ.
Выходной сигнал ДЧ1, поступающий на вход прерывания ПР
микроконтроллера, синхронизирует его работу с другими элементами
микропроцессорной системы. Этим же сигналом периодически, с
336
частотой ШИМ запускается одновибратор ОВ1, выполненный на базе
программируемого интервального таймера. Он предназначен для
формирования "центрирующего” временного интервала Til'l,
необходимого (рис. 14.9) для симметрирования диаграммы
двусторонней ШИМ. Соответствующие данные поступают с порта П2
микроконтроллера в буфер данных ОВ1. На счетный вход
одновибратора ОВ1 поступают импульсы с частотой заполнения f2,
формируемые на выходе делителя частоты ДЧ2. Период следования
этих импульсов определяет шаг квантования временного интервала,
формируемого одновибратором ОВ1; поэтому частота f2
Соответствующий коэффициент деления частоты Kf2 «
задается микроконтроллером МК в буфер данных делителя ДЧ2.
Выходной сигнал ОВ1 является управляющим для
одновибратора ОВ2, выполненного также на основе
программируемого интервального таймера. Этот элемент
предназначен для формирования временного интервала 1\,
следующего за интервалом 7^/2 в соответствии с диаграммой работы
широтно-импульсного модулятора. Необходимые для формирования
этого интервала данные загружаются в буфер ОВ2 через порт П2
микроконтроллера. Частота заполнения для одновибратора ОВ2 та
же, что и для OB 1.
Включенные на выходах одновибраторов логические элементы
обеспечивают окончательное формирование сигналов и /2* (О
управления ключами инвертора.
Алгоритмы ШИМ. На рис. 14.8 приведен один из возможных
алгоритмов работы микроконтроллера в части формирования данных
для времязадающих элементов микропроцессорной системы ШИМ.
После ввода исходных данных и ограничения по минимуму
расчетного значения напряжения источника питания производится
расчет длительности интервала включения одного из ключей по
формуле:
ГТ1 *
Г|=-+^Т—, (14.13)
2 ц,
где А:* - заданный коэффициент передачи модулятора в
линейной зоне;
Т - заданный период ШИМ.
337
Рис. 14.8. Формирование уставок времязадающих
элементов микропроцессорной системы ШИМ
Учет текущего значения ип при расчете величины 7\
обеспечивает независимость коэффициента передачи модулятора от
колебаний напряжения питания инвертора. Об этом свидетельствуют
приведенные на рис. 14.9 характеристики модулятора при двух
различных значениях напряжения источника: wn и и’п >
(последние показаны прерывистыми линиями).
338
Рис. 14.9. Характеристики широтно-импульсного модулятора
с ограничением интервалов проводимости ключей
Как видно, с увеличением напряжения источника питания
расширяется линейная зона, но наклон характеристики модулятора
остается неизменном.
В аналоговых или цифровых системах, использующих опорный
сигнал, аналогичный эффект стабилизации коэффициента передачи
модулятора достигается путем изменения амплитуды опорного
339
сигнала пропорционально напряжению источника питания инвертора
по формуле
U
о
2^
(14.14)
Соответствующие величинам ии и ы'п значения амплитуд Uo
и C/q опорного сигнала показаны на рис. 14.9.
Следующий этап алгоритма - это ограничение длительности
интервалов, что будет рассмотрено отдельно далее.
Заключительным этапом алгоритма является расчет
центрирующего интервала
(14.15)
обеспечивающего симметричную двустороннюю ШИМ согласно
временной диаграмме рис. 14.9,а.
Очевидно, что последующая реализация рассчитанных
временных интервалов, например, с помощью синхронизированного
интервального таймера микропроцессорной системы уже не требует
воспроизведения линейно изменяющегося опорного сигнала.
Учет ограничений. Важным этапом алгоритма ШИМ является
ограничение длительности интервалов проводимости ключей по
минимуму (и соответственно по максимуму) на границах линейной
зоны регулирования. Необходимость данного ограничения
обусловлена следующими обстоятельствами. Современные силовые
транзисторные ключи инверторов (например, IGBT-модули)
характеризуются очень высокими скоростями переключения и
соответственно - высокой крутизной фронтов импульсов напряжения
на выходе инвертора.
С одной стороны, это позволяет уменьшить потери энергии при
коммутации ключей инвертора, увеличивать частоту коммутации и на
этой основе уменьшать пульсации токов и величину модуляционных
потерь в нагрузке инвертора.
С другой стороны, каждое вызванное быстрой коммутацией
ключей импульсное изменение выходного напряжения инвертора
представляет собой ударное возмущение на входе линии с
распределенными параметрами, каковой в сущности является кабель
питания двигателя от инвертора, а также и электромагнитные цепи
двигателя. Под действием этого возмущения в линии формируется
прямоугольная бегущая (падающая) волна, подверженная эффекту
отражения в точках нарушения однородности линии и появлению в
ней перенапряжений [11]. В результате этого каждая быстрая
340
оммутация ключей вызывает блуждающие волны в цепи нагрузки
нвертора, причем волны от каждой новой коммутации
вкладываются на затухающие волны от предыдущих коммутаций.
При перемещении рабочей точки модулятора к границам
инейной зоны регулирования длительность интервала проводимости
щного из ключей стремится к нулю, а другого - к длительности
(ериода модуляции. Следовательно, временной интервал между двумя
очередными коммутациями ключей и соответственно - ударными
юзмущениями на входе линии питания нагрузки также уменьшается и
тановится соизмеримым с временами протекания отмеченных выше
юлновых процессов в цепях с распределенными параметрами.
Тоэтому при работе модулятора у границ линейной зоны
клады вается неблагоприятная ситуация, в которой под действием
факторов отражения и наложения волн возникают значительные
более чем двукратные) перенапряжения в цепи нагрузки инвертора.
Одной из мер борьбы с этим явлением служит запрет слишком
лалых временных интервалов между очередными коммутациями
слючей, т. е. ограничение длительности интервалов проводимости
ключей по минимуму. Поэтому фигурирующая в алгоритме рис. 14.8
величина 7^п определяет минимально-допустимый временной
интервал между очередными коммутациями ключей в фазе инвертора
1ри его работе у границ линейной зоны, что способствует
ограничению опасных перенапряжений в цепи нагрузки.
В системах ШИМ с явно выраженным опорным сигналом задача
ограничения интервалов проводимости ключей решается
градиционными методами, известными из техники построения систем
лмпульсно-фазового управления (СИФУ) полупроводниковыми
зреобразователями постоянного и переменного тока. Как известно,
ограничение углов регулирования а является обязательным условием
сохранения работоспособности тиристорных преобразователей [70].
Цля этой цели используют ограничение задания, импульсное
зидоизменение опорного сигнала, формирование "дежурных"
импульсов и другие меры.
Ограничение интервалов проводимости ключей по минимуму
имеет наряду с положительным эффектом и негативные последствия, а
именно - ухудшает использование источника питания и ключей
инвертора по напряжению в режиме "максимального выхода". Как
следует из характеристик рис. 14.4, при отсутствии ограничения
интервалов проводимости ключей по минимуму (при 7^^= 0)
напряжение инвертора в режиме максимального выхода равно
wmax “ “у- (14.16)
341
Именно эта величина определяет максимально-допустимое
амплитудное значение полезной составляющей выходного напряжения
инвертора при синусоидальном изменении задания (здесь имеется в
виду режим работы инвертора с ШИМ как источника
квазисинусоидальнонго переменного напряжения регулируемой
частоты и амплитуды).
При введении ограничения интервалов проводимости (7^п > 0)
напряжение инвертора в режиме максимального выхода снижается:
_ МП Д
wmax ~ ~ ^и
где
(14.17)
(14.18)
Соответственно снижается амплитуда полезной составляющей
переменного напряжения, которое может быть получено на выходе
инвертора.
При прочих равных условиях величина недоиспользования
инвертора по напряжению Au тем больше, чем больше 7^п и мп.
Именно поэтому показанная на рис. 14.9 величина Au' больше, чем
Аы. Существенно, что повышение частоты ШИМ ( т.е. уменьшение
периода модуляции Т) также приводит к ухудшению использования
инвертора по напряжению. В частности, при Т—>27^in величина
Wrnax^O- Следовательно, ограничение интервалов проводимости
ключей является и фактором ограничения возможности повышения
частоты ШИМ для расширения диапазона рабочих частот системы.
14.5. Мостовые широтно-импульсные модуляторы
Существенными недостатками широтно-импульсных
модуляторов, использующих нулевые схемы инверторов, являются
плохое использование источника питания и ключей по напряжению и
высокий уровень модуляционной составляющей выходного
напряжения при малых значениях задающего воздействия. Более
благоприятными показателями обладают широтно-импульсные
модуляторы с мостовыми инверторами. Пример такого модулятора
приведен на схеме рис. 14.10.
В сравнении со схемой рис. 14.1 силовая схема инвертора
дополняется второй парой ключей (IX и 2Х), а система управления -
вторым комплектом управляющих устройств. Генератор опорного
сигнала для каналов управления "А" и "X" является общим. В цепи
342
адания для канала управления "X" включен линейный
нвертирующий элемент, обеспечивающий значения w* = -и*. Это
озволяст при изменении задания плавно регулировать усредненную
азность потенциалов между точками А и X , к которым
одключена нагрузка однофазного мостового инвертора.
Рис. 14.10. Мостовой широтно-импульсный модулятор
Временные диаграммы работы и характеристики мостового
ииротно-импульсного модулятора изображены на рис. 14.11. В
уравнении с нулевой (см. рис. 14.2) мостовая структура обеспечивает:
• возможность формирования на выходе не только
двухполярных, но и однополярных импульсов с
полярностью, зависящей от знака задающего сигнала;
• увеличение вдвое амплитуды импульсов, т.е. повышение
выходного напряжения и улучшение использования
источника питания инвертора по напряжению;
• удвоение выходной мощности модулятора за счет
повышения его выходного напряжения при одинаковом
343
напряжении источника питания и одних и тех же
допустимых рабочих напряжениях ключей инвертора;
удвоение частоты импульсов напряжения и соответственно
частоты модуляционной составляющей выходного
напряжения в сравнении с частотой опорного сигнала;
значительное улучшение соотношения полезной и
модуляционной составляющих, т.е. улучшение качества
выходного напряжения модулятора.
Это подтверждается сопоставлением приведенных на рис. 14.11,6
регулировочных характеристик модуляторов с мостовой и нулевой
схемами инвертирования.
Рис. 14.11. Временные диаграммы работы и характеристики
мостового широтно-импульсного модулятора
Регулировочные характеристики мостовой схемы модулятора
описываются следующими формулами.
344
Полезная составляющая выходного напряжения:
при
при
при
-< к„ и
и > + (70 ;
-Uo< и* < + UQ;
и <-Uq,
(14.19)
Un
где кп = —— = const - коэффициент передачи мостового широтно-
го
импульсного модулятора в линейной зоне.
Следовательно, при прочих равных условиях полезная
составляющая выходного напряжения мостового модулятора вдвое
выше, чем нулевого.
Основная гармоника модуляционной составляющей мостового
модулятора с двусторонней ШИМ описывается формулой
и мод. 1 (О мод. 1 cost t \ .
(14.20)
Здесь по-прежнему за начало отсчета времени принято начало
периода модуляции Т, показанного на рис. 14.11. Амплитуда и
частота основной гармоники определяются формулами:
при
UM<M =
п
----sin
п
♦
71U
при
(14.21)
при
и <-(70 >
4 л
мо Д1
(14.22)
Начальная фаза основной гармоники модуляционной
составляющей по-прежнему не зависит от задающего воздействия, что
является следствием сохранения симметричной двусторонней ШИМ.
Частота основной гармоники вдвое превышает частоту ШИМ.
Амплитуда основной гармоники (см. рис. 14.11,6) по-прежнему
зависит от задающего воздействия, однако при нулевом задании
значения амплитуд основной и всех высших гармоник модуляционной
составляющей обращаются в ноль. Это является существенным
преимуществом мостовой схемы в сравнении с нулевой, которая в этих
345
условиях дает экстремальное значение модуляционной составляющей
напряжения. Экстремальные значения амплитуд основной гармоники
нулевой и мостовой схем одинаковы, однако последняя, как
отмечалось, имеет удвоенную частоту и поэтому легче фильтруется в
цепи нагрузки инвертора. К тому же полезная составляющая
выходного напряжения мостового модулятора вдвое выше, чем
нулевого. Благодаря этому мостовые широтно-импульсные
модуляторы обеспечивают значительно меньшие пульсации тока в
цепи нагрузки.
Отметим также, что мостовые модуляторы выгодно отличаются
и тем, что не требуют вывода средней точки источника питания. Они
обладают большей гибкостью в управлении и допускают реализацию
различных алгоритмов ШИМ. В качестве примера отметим алгоритм,
предусматривающий переключение ключей модулятора с различными
частотами: одной пары ключей (например 1А - 2А) - с постоянной
высокой частотой, равной частоте опорного сигнала ШИМ, а второй
пары ключей (IX - 2Х) - с низкой частотой, равной частоте задающего
сигнала [63]. Это значительно снижает коммутационные потери в
схеме модулятора, но сопровождается увеличением пульсаций тока в
цепи нагрузки вследствие снижения частоты модуляционной
составляющей напряжения на нагрузке.
14.6. Трехфазные автономные инверторы с ШИМ
Объединив три рассмотренных выше однофазных модулятора в
трехфазную систему, получим схему трехфазного инвертора с ШИМ,
изображенную на рис. 14.12. В качестве нагрузки здесь показан
трехфазный асинхронный двигатель с соединением обмотки статора в
звезду без нейтрального провода либо в треугольник. При этом в
отличие от схемы рис. 14.1 нет необходимости вывода средней точки
источника питания инвертора, причем схема приобретает качества,
присущие мостовым широтно-импульсным модуляторам. Тем не менее
потенциал этой воображаемой средней точки (равный усредненному
значению электрических потенциалов положительной и
отрицательной шин питания инвертора) удобно использовать в
дальнейшем для анализа режимов работы системы “инвертор -
двигатель1*.
Система управления представлена в "классическом*' варианте с
использованием опорного сигнала, общего для всех фаз инвертора.
Эта структура применима для реализации как в аналоговых, так и
цифровых систем управления инверторами с ШИМ. Она весьма
удобна и с методической точки зрения как основа для изучения
различных алгоритмов ШИМ и построения так называемых
346
координатных трехмерных моделей системы “инвертор - двигатель”
130,183]. Подчеркнем, что все особенности режимов работы
инвертора с явно выраженным опорным сигналом справедливы и
реализуемы и в системах ШИМ, не использующих прямого
воспроизведения опорного сигнала.
Рис. 14.12. Трехфазный автономный инвертор с ШИМ,
питающий асинхронный двигатель
Рассмотрим работу системы инвертор-двигатель в
установившемся режиме. Пусть на входы системы управления
инвертора приложены задающие гармонические воздействия:
347
ub{i) = U cos (Usz- 2^/3)
u*(z) = t/*cos (Qs t - 4?r/3)
(14.23)
где U* - амплитуда;
Qs - угловая частота задающих воздействий, определяющая
рабочую частоту инвертора.
Пусть опорный сигнал имеет симметричную пилообразную
форму и описывается формулами
-Won(0 4
L70f- (f-nT)-l
Uo[ 3-- (t-nf)
при nT < t < riT+T/2 ;
при nT + T/2 <Z < (и + 1)Т,
(14.24)
где Uq - амплитуда опорного сигнала;
Т - период опорного сигнала или же период модуляции;
п = 0, 1, 2, 3,... - номер периода опорного сигнала.
Временные диаграммы рабочих процессов в системе инвертор-
двигатель представлены на рис. 14.13. Как видно, гармоническое
изменение во времени входного воздействия w*(z) по каналу фазы "А”
вызывает соответствующую модуляцию ширины высокочастотных
импульсов f* (z) на выходе нуль-органа, задающего закон
коммутации ключей данной фазы инвертора. График изменения
электрического потенциала точки "А” на выходе инвертора
аналогичен графику f*’(')1,11 рисунке показаны также графики
фазного напряжения wfl(z) на зажимах двигателя при соединении
обмотки статора в звезду и линейного напряжения u^c(z), не
зависящего от варианта соединения обмоток. График фазного
напряжения представляет собой пятиуровневую импульсную функцию
2 1 п 1 2
со значениями + —0, —и^, —а линейного
3 3 3
напряжения - трехуровневую импульсную функцию со значениями
+ Un , 0 , Ми.
348
Рис. 14.13. Процессы в системе инвертор-двигатель
при двусторонней синусоидальной ШИМ
349
фазы "А", но
трети периода
Импульсы модулированы по ширине в пределах каждого
полу периода рабочей частоты. Полезная составляющая фазного
напряжения (показана прерывистой линией) совпадает по фазе с
задающим воздействием Амплитуда полезной составляющей
пропорциональна амплитуде задающего воздействия.
В данном примере соотношение периода модуляции Ти периода
задающего воздействия Ts выбрано сравнительно небольшим
(ТITЛ = 1 /27 ), что позволяет показать форму напряжений и токов на
всем периоде рабочей частоты Ts.
Как видно из графиков, благодаря широтно-импульсной
модуляции выходного напряжения инвертора и фильтрующему
действию нагрузки ток статора двигателя значительно
приближен к синусоидальному в сравнении с формой тока при
базовом законе коммутации с А = л.
Графики управляющих сигналов, напряжений и токов в фазах
"В" и "С” имеют вид, аналогичный виду графиков
сдвинуты во времени, соответственно, на одну и две
рабочей частоты.
График тока zn(/), потребляемого инвертором от источника
питания, представляет периодическую последовательность
высокочастотных импульсов, модулированных по амплитуде и по
ширине. Среднее значение графика тока пропорционально активной
мощности нагрузки. Период импульсной последовательности
составляет 1/6 периода рабочей частоты инвертора. Вследствие
действия инвертора как коммутатора напряжений и токов график
тока zn(/) по существу синтезируется из коротких отрезков графиков
фазных токов нагрузки. Для иллюстрации этого на график тока
питания наложен график фазного тока (показан прерывистой
линией). Аналогичным образом в графике тока питания
отображаются графики других фазных токов. Данное обстоятельство
используется разработчиками систем управления и регулирования для
построения узла измерения фазных токов нагрузки по сигналу датчика
тока питания инвертора. Путем логической обработки сигнала с
учетом сигналов управления ключами инвертора и использования
устройств выборки-хранения оказывается возможным синтезировать
сигналы обратных связей по всем фазным токам, не прибегая к
установке датчиков тока на выходе инвертора.
350
14.7. Побочные эффекты ШИМ
Проектирование схем силовых цепей и выбор режимов работы
современных транзисторных преобразователей частоты с ШИМ
представляет сложную комплексную задачу. При ее решении требуется
учитывать не только преимущества, но и отрицательные побочные
эффекты ШИМ, в том числе:
♦ широкополосный спектр сигналов электромагнитных помех,
излучаемых линиями питания двигателя от инвертора, а также
распространяющихся через сетевые кабели питания преобразователя
частоты;
• генерацию емкостных токов в кабелях питания и элементах
конструкции двигателя, что обусловлено крутыми фронтами и
высокой частотой модуляционной составляющей выходного
напряжения инвертора;
• отмеченный выше эффект формирования в цепи нагрузки
блуждающих электромагнитных волн, создающих при
неблагоприятных сочетаниях параметров цепи и режимов работы
инвертора значительные перенапряжения, опасные для изоляции
обмотки двигателя;
• создание дополнительного модулированного шума двигателя,
что обусловлено модуляционными высокочастотными колебаниями
магнитной индукции в магнитопроводах двигателя, магнито-
стрикционным преобразованием этих колебаний в механические,
затем и акустические колебания;
• высокочастотные пульсации электромагнитного момента
двигателя, обусловленные модуляционной составляющей напряжения
инвертора.
Проявление этих отрицательных эффектов может быть
существенно ограничено установкой на выходе инвертора фильтров,
подавляющих модуляционную составляющую его выходного
напряжения и импульсные перенапряжения на зажимах нагрузки.
Уменьшение наведенных помех в питающей сети достигается
установкой фильтров в цепи питания преобразователя частоты.
Поэтому в типовых комплектах поставки современных транзисторных
преобразователей предусматриваются выходные и входные (сетевые)
фильтры. В технической документации оговариваются условия
применения фильтров, а также допустимые по условиям
электромагнитной совместимости электропривода правила монтажа,
заземления и экранирования оборудования и кабелей питания с
учетом их допустимой протяженности и удельных параметров.
351
14.8. Выбор частоты ШИМ
И
Важным инструментом удовлетворения заданных требований
разработчиками и пользователями преобразователей частоты с ШИМ
является частота модуляции. Оптимальный выбор этого параметра
представляет собой по существу вариационную задачу, содержание
которой определяют следующие противоречивые факторы.
Увеличение частоты ШИМ дает ряд положительных
эффектов:
• повышает динамическую точность воспроизведения широтно-
импульсными модуляторами входных задающих воздействий
(напомним, что в системах частотного управления - это переменные
величины, изменяющиеся не только в переходных, но и в
установившихся режимах работы электропривода);
• расширяет диапазон рабочих частот системы преобразователь -
двигатель;
• уменьшает амплитуды модуляционных пульсаций токов,
потокосцеплений и электромагнитного момента двигателя, а также
зависящие от них составляющие модуляционных потерь в двигателе и
цепи питания;
• уменьшает дополнительный модулированный шум двигателя,
что позволяет в некоторых случаях отказаться от установки выходных
фильтров;
• создает условия для повышения быстродействия и улучшения
других показателей качества замкнутых систем автоматического
регулирования электроприводов переменного тока и их
использования для управления технологическими процессами с
повышенными требованиями к электроприводу.
Вместе с тем повышение частоты ШИМ усугубляет ряд
отрицательных эффектов, а именно:
• вследствие повышения частоты коммутаций пропорционально
увеличиваются коммутационные потери в инверторе и снижается его
допустимая полезная мощность;
♦ увеличиваются действующие значения емкостных токов в
кабелях питания и элементах конструкции двигателя, что увеличивает
потери от этих токов в системе “преобразователь - двигатель”;
• усложняется проблема ограничения перенапряжений от
наложения блуждающих электромагнитных волн в цепи нагрузки и
ухудшается использование активных элементов преобразователя по
напряжению.
У меньшение частоты ШИМ дает обратный эффектна
именно: снижает коммутационные потери и увеличивает полезную
352
мощность инвертора, уменьшает потери от емкостных токов и
упрощает задачу ограничения перенапряжений от блуждающих волн.
Однако при этом сужается диапазон рабочих частот, возрастают
пульсации токов, потокосцеплений и электромагнитного момента,
увеличиваются модуляционные потери и уровень акустического
давления при работе двигателя. Для ограничения этих факторов
требуются материальные затраты на комплектацию преобразователя
выходными фильтрами и ухудшается использование выходного
напряжения преобразователя вследствие падения напряжения на
фильтрах от полезной составляющей тока нагрузки.
Оптимальное значение частоты модуляции выбирается в каждом
случае с учетом конкретных условий применения преобразователя и
доминирующих требований. Диапазон частот модуляции современных
транзисторных преобразователей частоты с ШИМ для
электропривода лежит в пределах от единиц до десятков килогерц.
14.9. Повышение точности воспроизведения
задающих воздействий
Точность воспроизведения задающих воздействий на зажимах
нагрузки реальными устройствами на базе инверторов с ШИМ
зависит от ряда факторов, к числу которых относятся изменения
напряжения источника питания, падения напряжения на силовых
ключах, а также наличие пауз между интервалами управляемой
проводимости ключей в каждой из фаз инвертора. Введение таких
пауз, образующих т. н. “мертвое время”, необходимо для исключения
коротких замыканий источника питания через фазы (стойки)
инвертора при коммутации его ключей. Вопросы учета и компенсации
в алгоритме ШИМ изменений напряжения источника питания
изложены в п. 14.4. Рассмотрим влияние и учет других перечисленных
выше факторов.
14.9.1. Учет влияния “мертвого времени”
На рис. 14.14 приведена расчетная схема, удобная для анализа
влияния пауз между интервалами управляемой проводимости ключей
на регулировочные характеристики элементарного широтно-
импульсного модулятора. В сравнении со схемой, приведенной на
рис. 14.1, здесь введены элементы задержки Э31 и Э32,
обеспечивающие временную задержку передних фронтов сигналов
управления /^10 и ключами модулятора (включающих
353
сигналов) относительно моментов переключения задающей ШИМ-
функции /*(0-
Обозначим времена задержки соответственно как и
Анализ проведем при допущениях о постоянстве (в течение периода
ШИМ) напряжения источника питания цД/), задающего воздействия
отсутствии падений напряжения на открытых ключах силовой
схемы модулятора и бесконечно малом времени их переключения.
Кроме того будем полагать, что в цепи нагрузки модулятора имеется
препятствующий
последовательный индуктивный элемент,
скачкообразному изменению тока нагрузки
Система
управления
Элементы Силовые
задержки ключи
и
Э31
Рис. 14.14. К учету анализа влияния “мертвого времени1’ на
характеристики широтно-импульсного модулятора
Источник
питания
Временные диаграммы работы широтно-импульсного
модулятора с элементами задержки включающих сигналов показаны
на рис. 14.15, а чередование состояний системы “модулятор-нагрузка”
на различных этапах периода ШИМ - на рис. 14.16. Эти иллюстрации
свидетельствуют о необходимости учета направления тока в цепи
активно-индуктивной нагрузки при анализе влияния “мертвого
времени ” на регулировочные характеристики модулятора.
Рассмотрим случаи, когда 1>0, т.е. ток в цепи нагрузки
протекает в направлении, показанном на рис. 14.14 стрелкой. Как
354
ВИДНО из диаграмм, в течение интервала задержки Tjj, формируемого
элементом Э31 (интервала 1), транзисторы обоих ключей модулятора
закрыты, т.к. f x = 0 и fy2~^- Однако под действием ЭДС
самоиндукции (либо ЭДС взаимоиндукции) элементов нагрузки,
поддерживающих ток данного направления, зажим “А” нагрузки
подключен к отрицательной шине источника питания модулятора
через обратный вентиль ключа 2А.
Рис. 14.15. Временные диаграммы работы широтно-импульсного
модулятора с элементами задержки включающих сигналов
при различных направлениях тока нагрузки:
а) при i > 0 ; б) при i < О
355
Следовательно, в течение интервала I напряжение на зажимах
нагрузки с учетом приятых допущений определяется как и = - un /2.
По истечении времени задержки Tjj начинается интервал 2, где
В результате включения (открытия) транзистора
ключа 1А нагрузка переключается с отрицательного на
положительный полюс источника питания, т.е. формируется фронт
положительного импульса выходного напряжения модулятора.
Поэтому на интервале 2 выходное напряжение и~+ип/2.
Интервал 4
Интервал 3
Интервал 2
Интервал 1
= 0
1У
iy
2У
2У
1А
схемы
при
Управ-
ление
ключами
Состо-
яние
яние
0
схемы
при
Рис. 14.16. Состояния системы “модулятор-нагрузка” на
различных интервалах в пределах периода ШИМ при задержке
включающих сигналов управления силовыми ключами модулятора
Интервал 3 начинается с момента выключения (закрытия)
транзистора ключа 1А и продолжается в течение выдержки времени
формируемой элементом задержки Э32. Здесь, как и на интервале
356
1, снова fy \ - 0 и fy2 = 0. Причем, под действием ЭДС нагрузки ток
нагрузки переходит с закрывшегося транзистора ключа 1А снова на
обратный вентиль ключа 2А, т.е. на данном интервале и — —ип/2.
Следовательно, фронт отрицательного импульса напряжения на
нагрузке формируется по факту закрытия транзистора ключа 1А и не
зависит от задержки 7^2 на открытие транзистора ключа 2А.
Интервал 4 начинается с момента открытия транзистора ключа
2А и продолжается до момента закрытия этого транзистора под
действием сигнала управления f В течение данного интервала
транзистор ключа 2А оказывается в инверсной схеме включения и
проводимость ключа обеспечивается в основном его обратным
вентилем. Напряжение на нагрузке здесь такое же, как на интервале 3.
Далее процесс периодически повторяется, причем переход от
интервала 4 к интервалу 1 вследствие закрытия транзистора ключа 2А
не влечет изменения напряжения на нагрузке, т.к. ток нагрузки по-
прежнему протекает по обратному вентилю ключа 2А.
С учетом вышеизложенного среднее за период ШИМ значение
выходного напряжения модулятора при / > 0 определяется как
Здесь
Ту Т2
' относительные продолжительности интервалов
7] и Tj, определяемых задающей ШИМ-функцией
(ее среднее значение пропорционально задающему
воздействию);
Тзх
Ту 1 =-- - относительная продолжительность задержки Tj j.
С учетом выражений (14.1), (14.2) и (14.5), учитывающих насыщение
узла ШИМ, получаем:
Un
при
кПи* - Аид]
ип
при
при
и
и > + с/0;
и
357
где
Wn
Kn ~ ~ const
n 2<7o
дифференциальный коэффициент
передачи широтно-импульсного модулятора в линейной зоне,
т. е. при
Au3j = rj|Uri - падение напряжения, обусловленное
задержкой включения ключа 1 А.
График функции приведен на рис. 14.17. Здесь же
прерывистой линией показана регулировочная характеристика
модулятора при отсутствии задержки.
Рис. 14.17. Характеристика модулятора при />0
Как видно, задержка приводит к вертикальному смещению
линейного участка характеристики на величину Aujj и к дискретному
изменению среднего значения выходного напряжения при и* = +U$
на ту же величину Aujj .
Смещение обусловлено тем обстоятельством, что во время
интервалов задержки транзисторы обоих ключей закрыты и ток
нагрузки в случае i > 0 замыкается через обратный вентиль ключа
2А. Иными словами, во время интервалов задержки нагрузка
подключается заведомо к отрицательному полюсу источника питания.
Именно поэтому среднее за период ШИМ значение выходного
напряжения модулятора уменьшается на величину, равную
произведению относительного времени задержки на напряжение
источника питания.
358
Скачок среднего значения выходного напряжения при и =
обусловлен тем, что в результате насыщения узла формирования
задающей ШИМ-функции /*(?) ШИМ входной сигнал /*(^)
элемента задержки ЭЗ1 превращается из импульсного в непрерывный
=1). Соответственно выходной сигнал Э31 также превращается из
импульсного (с паузами, равными длительности времени задержки) в
непрерывный, обеспечивающий поддержание транзистора ключа IA
в постоянно включенном состоянии. При этом на выходе модулятора
формируется постоянное напряжение и = ип /2.
Кроме того, введение задержки включающих импульсов
приводит к области и* < 0 уменьшению граничного значения
управляющего воздействия
w?p.l ~ — т3 ] j Uq ,
при котором выходное напряжение модулятора достигает предельного
отрицательного значения. В этой точке длительность импульсов
сигнала f\(t) на входе Э31 оказывается равной длительности
задержки. Поскольку элементы Э31 и Э32 задерживают лишь передние
фронты входных импульсов, то в данной ситуации длительность
выходных импульсов Э31 оказывается равной нулю. Поэтому на
выходе ЭЗ 1 формируется постоянный сигнал {fy\ - 0), под действием
которого транзистор ключа 1А удерживается в постоянно закрытом
состоянии. Транзистор ключа 2А продолжает работать в импульсном
режиме, периодически подключая нагрузку к отрицательному полюсу
источника питания. Так как i > 0, при открытии транзистор ключа 2А
оказывается в инверсной схеме включения и проводимость ключа
обеспечивается в основном его обратным вентилем. При закрытии
транзистора проводимость ключа 2А по-прежнему обеспечивается
обратным вентилем. В результате на выходе модулятора формируется
постоянное напряжение и = -ип/2.
Зависимости длительностей описанных выше временных интервалов
от задающего воздействия представлены на рис. 14.18. Здесь
штриховкой выделены зоны управляемой проводимости ключей, не
зависящие от направления тока нагрузки: справа - зона управляемой
проводимости ключа 1А, слева - ключа 2А. Анализ режимов работы
транзисторов при положительных значениях задания позволяет
выделить три характерные зоны.
359
Интервал 4
Интервал 3
Интервал 2
Интервал 1
Интервал 4
Интервал 3
Интервал 2
Интервал 1
О «гр2
и
Рис. 14.18. Зависимости временных интервалов
от задающего воздействия
В первой зоне (при значениях и* < ) транзисторы обоих
ключей работают в импульсном режиме с паузами, определяемыми
соответствующими интервалами задержки. При увеличении
задающего воздействия интервал управляемой проводимости ключа
1А увеличивается, а ключа 2А - уменьшается и стремится к нулю.
Во второй зоне (при 2 <w* < ^о) транзистор ключа 2А
оказывается в постоянно закрытом состоянии, а транзистор ключа 1А
продолжает работать в импульсном режиме, причем пауза между его
интервалами проводимости уменьшается от величины, равной сумме
и Tj2 до величины, равной Т^.
В третьей зоне (при дальнейшем увеличении задания до
w* > Vо) транзистор ключа 2А по-прежнему постоянно закрыт, а
транзистор ключа 1А переводится из импульсного режима в
постоянно включенное состояние, т.е. происходит насыщение узла
ЩИМ. Аналогичные зоны существуют и при отрицательных
значениях задания.
В течение интервалов управляемой проводимости транзистора
ключа 1А нагрузка подключается заведомо (независимо от
360
направления протекающего по ней тока) к положительному, а
управляемой проводимости транзистора ключа 2А - к отрицательному
полюсу источника питания. Во время пауз между интервалами
проводимости транзисторов (интервалов задержки) нагрузка
подключается при i > 0 заведомо к отрицательному полюсу
источника, что и вызывает описанное выше смещение регулировочной
характеристики модулятора.
В том случае, когда i < 0, т.е. ток в цепи нагрузки протекает в
противоположном направлении, анализ процессов дает несколько
иной результат. Как видно из рис. 14.15 и 14.16, принципиальное
отличие состоит в том, что во время интервалов задержки (т.е.
интервалов 1 и 3) нагрузка подключена через обратный вентиль не к
отрицательному, а к положительному полюсу источника питания.
Поэтому среднее значение выходного напряжения модулятора
(14.27)
2 ~ — относительная продолжительность задержки Т3 2 -
С учетом насыщения узла ШИМ в системе управления получаем:
и
wn
при и > + Uq ~2т32)’
при -1/0 < ы* < + С70(1 ~ 2тз2); (14.28)
при и < - Uq ,
где ~ т32ип " изменение напряжения, обусловленное задержкой
включения ключа 2А.
При равенстве времен задержки включения ключей
(^31 = т32 - т3) можно использовать выражение, обобщенное для
произвольного направления тока нагрузки:
при u* > t/pp 2 ;
при С7грЛ < и < 2 ,
при и <и^Л,
(14.29)
361
где
(1430)
(1431)
(1432)
(1433)
- соответственно коэффициент передачи в линейной зоне, изменение
напряжения от ‘‘мертвого времени” и абсциссы точек излома
(разрыва) регулировочной характеристики модулятора.
Влияние “мертвого времени” на регулировочные характе-
ристики при различных направлениях тока нагрузки иллюстрирует
рис. 14.19. Как видно, при оценке влияния этого фактора
существенную роль играют относительная величина временной
задержки и направление тока нагрузки модулятора.
Рис. 14.19. Регулировочные характеристики модулятора
при различных направлениях тока нагрузки
Изменение направления тока нагрузки вызывает неоднозначное
воспроизведение модулятором полезного сигнала в соответствии с
задающим воздействием, причем величина абсолютной погрешности
воспроизведения зависит от относительной величины временной
задержки. Для количественной оценки влияния этих факторов
рассмотрим следующий пример. Пусть длительность задержки
включения каждого из ключей составляет 1% от длительности периода
362
ШИМ, т.е. = Г32 - гз =0,01. Для оценки абсолютной
погрешности воспроизведения, обусловленной наличием этого
“мертвого времени”, используем выражение
Aw5 =wcp -wcp.o , (14.34)
Где ucp о - w*" выходное напряжение модулятора при отсутствии
“мертвого времени”. Тогда в линейной зоне действия узла ШИМ
Auj = т3 ^sign(z) - ±0,011^. (14.35)
Относительная погрешность воспроизведения зависит и от
относительной величины задающего воздействия, поскольку
^и3.отн = — = 2Г35° Sign (г). (14.36)
Ч?р.о w
Так, на границах линейной зоны, где w* = ±С7д и wcp0 = ±wn/2,
относительная погрешность в нашем примере составляет величину
&и3.отн = — = ±0,02
Однако при малых значениях задающего воздействия, например,
при и* = 0,05 величина &из.отн ~ —^3 0.05 - ±0,4 т.е.
погрешность возрастает до ±40%. В электроприводах переменного
тока это приводит к существенному искажению полезной
составляющей выходного напряжения и тока нагрузки
преобразователя частоты в зоне малых частот и напряжений.
Компенсации влияния “мертвого времени”. Один из возможных
способов компенсации влияния “мертвого времени” иллюстрирует
рис. 14.20, где в сравнении с рис. 14.16 в систему управления
модулятором введены блок компенсации, датчик тока нагрузки ДТ и
формирователь компенсирующего сигнала ФКС. Компенсирующее
воздействие икз формируется с учетом (14.27) в соответствии с
выражением
«к3 = 2т3и0 sign (1). (14.37)
Соответственно блок ФКС формирует релейный сигнал, знак
которого определяется направлением тока нагрузки, а величина -
амплитудой опорного сигнала ШИМ и относительной задержкой,
формируемой элементами Э31 и Э32.
363
Силовые
ключи
Источник
питания
Система
управления
Элементы
задержки
Блок
компенсации
Рис,. 14.20. Компенсация погрешностей воспроизведения
задающих воздействий модулятором
Теоретически такая компенсация устраняет неоднозначность
регулировочной характеристики модулятора в следующем диапазоне
изменения значений внешнего задающего воздействия:
-(1-2т3)(70 <и <+(1-2т3)(70. (14.38)
Это существенно повышает точность воспроизведения полезных
сигналов модулятором при изменениях задания и тока нагрузки.
Однако такая компенсация не устраняет разрывов регулировочной
характеристики модулятора в точке и — (1-2г^){7о при z>0 и
точке и* = -(1 “ 2 ПРИ z < 0- Это связано с тем, что вызванное
фактором “мертвого времени” вертикальное смещение характеристик
(см. рис. 4.14) компенсируется их горизонтальным смещением за счет
введения в канал задающих воздействий дополнительного
(компенсирующего) сигнала. Поэтому у границ диапазона
регулировочная характеристика остается разрывной и неоднозначной.
Для устранения этого недостатка может быть использовано
соответствующее выражению (14.38) ограничение по модулю
величины задающего воздействия либо избирательное уменьшение
времени задержки у границ диапазона регулирования. Последнее
вполне допустимо, так как (см. рис. 14.18) один из транзисторов в этой
области управлений постоянно закрыт и нет нужды вводить задержки
364
включения второго транзистора для устранения коротких замыкании
в фазе модулятора.
14.9.2. Учет падений напряжения на силовых ключах инвертора
На точность воспроизведения полезных воздействий на зажимах
нагрузки помимо перечисленных выше факторов оказывает влияние
падение напряжения на силовых ключах инвертора. Оно определяется
вольт-амперной характеристикой ключа, причем прямая ветвь
характеристики определяется свойствами транзистора, а обратная
ветвь - в основном свойствами обратного вентиля ключа. Если
обозначить падение напряжения на ключе при протекании по нему
прямого тока как Аикл пр, а при протекании инверсного (обратного)
тока как Амкл обр, то можно записать следующее обобщенное
выражение вольт-амперной характеристики открытого ключа:
АЦслОкл)
АЦсл.пр
.обр
при
при
(14.39)
^кл > 0 ’
*КЛ < 0 5
где *кл > 0 - прямой ток ; < 0 ‘ инверсный ток ключа.
Рис. 14.21. Аппроксимация вольт-амперной характеристики
ключа
365
Вольт-амперные характеристики полупроводниковых ключей
существенно нелинейны. Поэтому для упрощения их анализа
используют кусочно-линейную аппроксимацию прямой и обратной
ветвей характеристики открытого ключа (рис. 14.21) выражениями:
А^кл.пр
А^гр.пр
диф.пр ^кл
(14.40)
ДЦсЛ.Обр At/гр.обр + Гдиф.обр *КЛ ’
(14.41)
где А^гр.пр > 0 и ^^гр.обр < 0 - граничные падения напряжения;
Гциф.пр^*® и гдиф.обр> 0 - дифференциальные сопротивления
ключа для прямого и обратного токов. В общем случае
АЦ-р.пр А^гр.обр
^диф.пр Гдиф.обр*
а)
U1
б)
Рис. 14.22. К учету интервалов задержки включения и
падений напряжения на силовых ключах модулятора:
а) при i > 0 ; б) при i < 0
366
На рис. 14.22 изображены временные диаграммы управляющих
воздействий и выходных напряжений элементарного широтно-
импульсного модулятора, построенные с учетом рассмотренной выше
целенаправленной задержки включения силовых ключей и падения
напряжения на них от тока нагрузки.
Как следует из сравнения рис. 14.15 и 14.22, вследствие падения
напряжения на ключах изменяются амплитудные значения импульсов
напряжения на нагрузке в зависимости от направления и величины
тока нагрузки.
В случае, если I > 0, то среднее значение выходного напряжения
модулятора
(14.42)
причем
Awnp ~ АипрСкл.1а)’ гкл.1А " г »
Awo6p = Ай06рОкл.2а)’ *кл.2А ” ” * •
Здесь /клЛА, *кл.2А’ г _ соответственно токи ключей 1А, 2А и ток
нагрузки.
Для случая i < 0 получаем иное выражение::
причем
Awo6p Awo6p (гкл.1 А ) ’
Awnp ~ АипрСкл.2а)’
Aui.IA i ’
*кл.2А = — ’
Обобщенное для произвольного направления тока нагрузки
выражение wcp имеет вид:
мср = м* “ Ам3 - Дмкл > (14.44)
где кп = = const ; (14.45)
2t70
Ли3 = rjwnsign(i) ; (14.46)
=1!Г| “ г'!л"пр"+Ч4“°бр
|ДТ| + rjJAuo^p \Т2 TjjAunp
при
при
i > 0;
z<0.
(14.47)
367
Как следует из полученных выражений, падение напряжения на
силовых ключах вызывает дополнительное вертикальное смещение
регулировочной характеристики модулятора. Причем смещается не
только активный участок, но и участки характеристики,
обусловленные насыщением узла ШИМ в системе управления.
Для тех полупроводниковых ключей, у которых можно
пренебречь дифференциальным сопротивлением, а также различием
абсолютных значений прямого и обратного граничных падений
напряжения (т.е. допустимо принять гдиф пр ~ гдиф.обр = О >
Д^Ар.пр АЦрр.обр )
выражение
(14.47) существенно
упрощается:
Д«кЛ = AMppSign^') .
(14.48)
В этом случае компенсация падения напряжения на силовых
ключах может быть осуществлена совместно с компенсацией влияния
“мертвого времени” в рамках функциональной схемы, приведенной на
рис. 14.20, путем соответствующего изменения величины
компенсирующего сигнала на выходе блока ФКС:
sign (г).
(14.49)
В результате обеспечивается повышение точности воспроизведения
полезного сигнала в условиях действия рассмотренных факторов.
14.10. Практическая схема преобразователя частоты
с ШИМ для электропривода переменного тока
Пример выполнения силовой части преобразователя частоты
представлен на рис. 14.14. Основными функциональными элементами
преобразователя являются трехфазный неуправляемый выпрямитель и
автономный транзисторный инвертор напряжения, снабженные
комплексом входных и выходных устройств, выполняющих функции
коммутации, защиты установки и электромагнитной совместимости
элементов системы “сеть -преобразователь частоты - двигатель”.
В цепи питания установлены линейные плавкие предохранители,
обеспечивающие общую защиту питающего кабеля и преобразователя.
Предохранители смонтированы в блоке с рубильником-
разъединителем. Коммутирующим устройством подключения
преобразователя к питающей трехфазной сети переменного тока
служит главный контактор.
368
Сеть
Рубильник
Главный
контактор
Входной фильтр
Входной дроссель
Преобразователь
частоты
Выходной
дроссель
Синусоидальный
фильтр
Рис. 14.23. Принципиальная схема силовой части
двухзвенного преобразователя частоты с ШИМ
369
Для обеспечения электромагнитной совместимости
преобразователя с питающей сетью предусмотрены входной
экранированный фильтр и дроссель. Выходной дроссель обеспечивает
ограничение темпа нарастания и снижения импульсного напряжения
на выходе преобразователя, что способствует ограничению импульсов
емкостных токов в кабеле питания и элементах конструкции
двигателя. Выходной синусоидальный фильтр предназначен для
дополнительного улучшения формы выходного напряжения
преобразователя. За счет этого уменьшаются высокочастотные
пульсации тока, потери энергии и шум при работе электродвигателя, а
также снижаются емкостные токи в линии питания и перенапряжения
в ней от наложения блуждающих волн.
370
Глава пятнадцатая
МОДИФИЦИРОВАННЫЕ АЛГОРИТМЫ
И РЕЖИМЫ УПРАВЛЕНИЯ
ИНВЕРТОРАМИ С ШИМ
15.1. Структура модифицированной системы ШИМ
Существенное влияние на характеристики систем
преобразователь - двигатель переменного тока оказывает не только
частота, но и алгоритм ШИМ. Выше были рассмотрены основные
характеристики систем с базовым алгоритмом широтно-импульсной
модуляции, т.е. при симметричной двусторонней синусоидальной
ШИМ. Обладая рядом достоинств, базовый алгоритм вместе с тем
не позволяет использовать некоторые скрытые возможности
многофазных силовых схем инверторов с ШИМ. Поэтому для
многофазных схем используются усовершенствованные алгоритмы
широтно-импульсной модуляции. На рис. 15.1. изображена схема
системы преобразователь частоты - асинхронный двигатель (ПЧ-АД),
реализующей модифицированные алгоритмы управления инвертором
с ШИМ. В сравнении со схемой рис. 14.12, реализующей базовый
алгоритм ШИМ, силовая часть ПЧ и блок ШИМ системы
управления остаются неизменными. Усовершенствования алгоритма
обеспечиваются блоком предварительной модуляции
(или же предмодуляции). В состав этого блока входят генератор
сигнала предмодуляции и* и три сумматора этого сигнала с
задающими воздействиями и* т , и^ т и и* т на входах системы
управления.
371
Wn
Рис. 15.1. Система ПЧ-АД, позволяющая реализовать
модифицированные алгоритмы управления инвертором с ШИМ
Задающие воздействия на входах системы управления инвертором
(15.1)
372
формируются внешним задающим генератором (на схеме не показан)
либо регуляторами системы автоматического регулирования привода.
Здесь - модуль задающего вектора напряжений,
определяющий амплитуду полезной составляющей
напряжений на выходе инвертора;
0* - фаза (угол поворота) задающего вектора напряжений.
Скорость изменения фазы задающего вектора во времени, т.е.
скорость его вращения определяет частоту полезной составляющей
(рабочую частоту) выходного напряжения инвертора.
Блок предмодуляции формирует и вводит в каналы задания
аддитивное модулирующее воздействие ип , одинаковое для всех фаз.
Выходные сигналы блока предмодуляции
иа иа.т + ’
ub.m + ’
(15.2)
подаются на входы блока ШИМ, реализующего симметричную
двустороннюю ШИМ сигналов управления инвертором.
Блок ШИМ совместно с силовой схемой инвертора формируют на
зажимах двигателя трехфазное переменное напряжение в соответствии
с рассмотренным ранее базовым алгоритмом двусторонней ШИМ.
15.2. Вопросы терминологии и основные соотношения
Для анализа процессов в трехфазной мостовой схеме инвертора
напряжения при различных алгоритмах управления удобно
использовать понятие электрического потенциала.
Потенциалу узловых точек D+ , D_, А, В, и С схемы рис. 15.1
будем отсчитывать относительно потенциала средней точки "О"
источника питания инвертора, потенциал которой примем равным
нулю. Подчеркнем, что данный методический прием служит лишь для
удобства анализа процессов в схеме и не требует вывода средней
точки источника для функционирования реальной схемы.
Введем понятие потенциальной зоны источника
питания - области электрических потенциалов, ограниченной
потенциалами положительного (#>j+) и отрицательного (^_)
373
полюсов и соответствующих шин источника питания инвертора.
Границы потенциальной зоны источника питания определяются как
<Pd+ = +
2 ’
(153)
Введем понятие потенциальной зоны нагрузки-
области электрических потенциалов, ограниченной экстремальными
значениями потенциалов выходных зажимов А, В, С инвертора (или
же соответствующих выходных линий питания нагрузки). При этом
будем различать зоны мгновенных и усредненных
за период ШИМ потенциалов фаз нагрузки инвертора.
Зона мгновенных потенциалов фаз нагрузки. В результате
коммутации ключей в течение периода модуляции каждая из
выходных линий попеременно подключается то к положительной, то к
отрицательной шине источника питания. Поэтому мгновенные
электрические потенциалы каждой из выходных линий
идеализированного инвертора принимают одно из двух значений:
i = at Ь,с.
Следовательно, зона мгновенных значений электрических
потенциалов выходных линий идеализированного инвертора
напряжения при жестком законе коммутации не выходит за пределы
потенциальной зоны источника питания.
Амплитуды основных гармоник модуляционных составляющих
мгновенных потенциалов выходных линий инвертора:
ФкмодЛ
при
при
при
и*> + ^0;
-t/o < и* < + Uq ;
и* <-U0,
(15.4)
О
Частота основной гармоники модуляционных составляющих
мгновенных потенциалов выходных линий инвертора:
(15.5)
374
Зона усредненных потенциалов фаз нагрузки. Усредненные за
период ШИМ значения потенциалов выходных линий инвертора
определяются формулами
гас '
с/0
i — a,b,c -
при и* > + Uq ;
при - Uo < и* < + Uq ;
при U* < - Uf) ,
(15.6)
коэффициент передачи инвертора в
линейной зоне ШИМ;
амплитуда опорного сигнала ШИМ;
индекс линии (фазы) нагрузки инвертора.
Очевидно, что зона усредненных значений электрических
потенциалов выходных линий идеализированного инвертора также
не выходит за пределы потенциальной зоны источника питания.
Зависимость усредненных составляющих потенциалов выходных
линий трехфазного инвертора от задающих воздействий на входе
блока ШИМ представлена на рис. 15.2. Здесь же показаны
зависимости амплитуд первой и второй гармоник модуляционной
составляющей потенциалов от тех же задающих воздействий.
i.uod 1
Рис. 15.2. Зависимость потенциалов выходных линий
инвертора от задающих воздействий на входе блока ШИМ
375
Используя этот понятийный и аналитический аппарат, а также
приведенные графические зависимости, перейдем к рассмотрению
вопросов усовершенствования алгоритмов ШИМ за счет
предмодуляции задающих воздействий. Различные варианты
предмодуляции сопоставим путем анализа работы системы в
установившемся режиме при одних и тех же задающих воздействиях, а
именно постоянстве модуля и линейном изменении во времени фазы
задающего вектора:
U*m = const ; е*и= £ist + 6»*(0) ,
где = const ; $*(0) = 0 .
При этих условиях определяемые формулами (15.1) задающие
воздействия иат , и^т и и*спг на входах системы управления
представляют собой симметричную трехфазную систему
гармонических сигналов. Будем иметь в виду, что частота ШИМ
намного выше частоты гармонических задающих воздействий,
определяющих рабочую частоту инвертора. Поэтому на каждом
конкретном периоде ШИМ будем считать задающие воздействия
постоянными величинами.
15.3. Анализ базового режима симметричной
двусторонней синусоидальной ШИМ
Предположим сначала, что сигнал и* = 0 ; т.е. предмодуляция
отсутствует. Тогда задающие воздействия на входах блока ШИМ
также представляют симметричную трехфазную систему
гармонических сигналов:
w* =uLm 9 i = a,b,c. (15.7)
В итоге мы получаем описанный ранее базовый алгоритм
двусторонней симметричной синусоидальной ШИМ. Обратим
внимание на следующие особенности функционирования системы, с
таким алгоритмом модуляции.
В линейной зоне регулирования (при
*
i = a,b,c)
усредненная, т.е. полезная составляющая потенциала каждой из
выходных линий инвертора пропорциональна величине
соответствующего задания.
376
В зонах насыщения фазных модуляторов (при
i = а,Ь,с) усредненные потенциалы выходных линий инвертора
фиксируются на границах потенциальной зоны источника питания и
поэтому пропорциональная передача дальнейшего увеличения
задающего воздействия уже невозможна. Вследствие этого в полезных
составляющих выходных напряжений инвертора возникают
нелинейные искажения, в том числе низкочастотные гармоники.
Итак, для неискаженной передачи задающих воздействий
входные сигналы блока ШИМ не должны выходить за границы
пропорциональной зоны основной рабочей характеристики
изображенной на рис. 15.2. В случае гармонического изменения
задающих воздействий во времени режим максимального
неискаженного выхода инвертора обеспечивается при равенстве
амплитуды задающих воздействий величине амплитуды опорного
сигнала ШИМ\
(15.8)
Соответствующие графики задающих воздействий и
усредненных потенциалов выходных линий при работе инвертора в
режиме максимального неискаженного выхода приведены на рис. 15.3.
Снизу показаны временные графики относительных мгновенных
потенциалов выходной линии "А" инвертора, а также график фазного
напряжения питания двигателя иа при соединении его обмотки в
звезду и график линейного напряжения и^с на выходе инвертора.
Базой относительных значений здесь является напряжение источника
питания инвертора и^.
Как видно, при изменении угла поворота задающего вектора
0и фазные задающие воздействия и*, i~a,b,c поочередно достигают
предельно допустимых экстремальных значений +Ц) и — Uq.
Соответственно усредненные за период ШИМ потенциалы выходных
линий инвертора (р1ср , i = а,Ъ,с также поочередно достигают своих
экстремальных значений +1^/2 и -и^/2.
Зона усредненных потенциалов линий нагрузки выделена
штриховкой. Ширина этой зоны определяет полезные значения
линейных напряжений.
Действительно, усредненные за период ШИМ полезные
значения линейных напряжений на выходе инвертора определяются в
общем случае как разности усредненных потенциалов фаз.
377
2
О
2П
2р
ип
jqpyj ШфГ гНМ¥~
л
т
♦ «Ьс/Ип
л
О
л
Рис. 15.3. Режим максимального неискаженного выхода
при синусоидальной ШИМ
Поэтому запишем следующие выражения линейных напряжений
на выходе инвертора:
^ab .ср Фа.ср ФЬ.ср »
^Ьс.ср ~ Фь.ср ~ Фс.ср ’ (15.9)
^са.ср ~ Фс.ср ~ Фа.ср *
378
Например, при 0*и~ 0 имеем следующие значения потенциалов:
™ _ । wn . м ~ _ wn
<Pb.cp
и соответственно линейных напряжении инвертора:
и = —
иаЬ.ср о
ип
— = 0 *
л ’ иЬс.ср и *
^са.ср
значениях линейных
напряжений на фазах
Нетрудно показать, что при данных
напряжений средние за период ШИМ значения
симметричной трехфазной нагрузки при соединении фаз в звезду и
отсутствии нейтрального провода будут равны
Уа.ср ~ Ця/2 , Щ).ср ~ “Ц1/4 > uc cp — — •
При вращении задающего вектора средние значения фазных
изменяются пропорционально задающим воздействиям
напряжений
^а.ср
(15.10)
U
- амплитуда полезных значений фазных
на нагрузке в режиме максимального неискаженного
нелинейных
искажений
возникновения
при дальнейшем
При
лежит
этой
при
лимитируется
0*= 0 зона
4^
в пределах
зоны (т.е.
увеличении
насыщением
Здесь Um
напряжений
выхода инвертора ( при 1Гт ~ Uq).
Рассмотрим детали механизма
выходного напряжения инвертора
увеличении амплитуды задающих воздействий.
усредненных фазных потенциалов (см. рис. 15.3)
+ ...~Ип/4- Дальнейшее расширение
увеличение выходного напряжения инвертора
амплитуды задающего вектора)
модулятора в фазе "А" . Усредненный выходной потенциал этой фазы
уже достиг предельного значения (раср- +14^/2 и реагировать на
дальнейшее увеличение задания фаза "А" уже не может. В то же время
усредненные потенциалы других фаз <р^.ср ~ Фс.ср ~ т-е- не
достигли предельных значений. Поэтому эти фазы инвертора
379
отреагируют на увеличение задания пропорциональным изменением
потенциалов. В результате нарушения пропорционального закона
отработки заданий по всем фазам в трехфазной системе возникают
нелинейные низкочастотные искажения.
При 0* = л/З зона усредненных потенциалов нагрузки лежит в
пределах + 4i/4.... Цт/2- Здесь лимитирующим является
ограничение в фазе "С”, так как (pccp-~uu)2 . В фазах "А” и
"В" усредненные потенциалы (Pa.cp~(Pb.cp~+unl^^ т.е. не
достигают предельно допустимых экстремальных значений.
При 0* = 2тг/3 зона усредненных потенциалов нагрузки снова
лежит в пределах 4- «п/2...-«п/4, но лимитирующим является
ограничение в фазе "В" и т. д.
Итак, при непрерывном изменении угла поворота 0*и
потенциальная зона нагрузки периодически смещается
то к верхней, то к нижней границе потенциальной зоны источника
питания инвертора. В каждом из этих случаев лимитирует дальнейшее
повышение напряжения только одна из фаз инвертора,
регулировочные возможности которой оказываются исчерпанными.
Остальные две фазы инвертора имеют определенный запас, который
не использует синусоидальная ШИМ в режиме максимального
неискаженного выхода. Следствием этого недостатка является
неполное использование источника питания и ключей инвертора по
напряжению. В итоге оказывается, что симметричная синусоидальная
ШИМ обеспечивает в режиме максимального неискаженного выхода
трехфазного мостового инвертора напряжения следующие
амплитудные значения основных гармоник фазного и линейного
напряжений на нагрузке:
= (15.U)
илу = ~ Uh ж 0,866 Uh . (15.12)
Соответственно эффективные значения этих напряжений составляют
0.353Un ;
0.612Un.
(15.13)
(15.14)
380
Для сравнения напомним, что та же силовая схема инвертора
при базовом законе коммутации с Л ~ я ( т.е. без использования
ШИМ) дает следующие значения основных гармоник напряжений:
2 2л/3
UфХ ~ Цп ~ 0*637 ~ 1-1 Ц] >
я я
^ф.\.эфф~ ~ 0-45 «и , Uл \ Зфф = “ wn ® 0.78wn.
Следовательно, в сравнении с базовым законом коммутации при
А = я коммутация ключей по закону синусоидальной ШИМ дает
ухудшение показателей использования напряжения источника питания
инвертора примерно на 21.5%. Разумеется, ухудшение этого
показателя при ШИМ компенсируется улучшением гармонического
состава напряжений и токов, а также возможностью регулирования
напряжения на выходе инвертора при постоянстве напряжения
источника питания.
Однако существует принципиальная возможность улучшения
этого показателя трехфазной системы при сохранении основных
преимуществ ШИМ. Она заключается в модификации
алгоритмов ШИМ с целью более рационального размещения зоны
усредненных потенциалов нагрузки в потенциальной зоне источника
питания инвертора. Одним из способов реализации данной
возможности является введение предмодуляции задающих
воздействий.
15.4. Предмодуляции задающих воздействий
Введем аддитивно во все фазные каналы формирования заданий
и* на входах блока ШИМ (рис. 15.1) предварительное модулирующее
воздействие и*, одинаковое для всех фаз:
i = a,b,c ;
(15.15).
Величину этого воздействия выберем с таким условием, чтобы
*
полученные в результате предмодуляции значения м, не превышали
амплитудные значения опорного сигнала:
-t/0<w;<+c/0.
(15.16)
381
Тогда одинаковое для всех фаз предмодулирующее воздействие и*
вызовет одинаковое смещение усредненных потенциалов выходных
линий инвертора в потенциальной зоне источника питания:
Фахр ~ а.т+ п j ~ Фа.тхр ^Фср >
ФЬхр ~ b.m+ j “ Фь.т.ср + &Фср ’ (15.17)
Фсхр ~ j “ Фс.тхр + &Фср •
Здесь <Pi,m,cp ~ knu*i.m •> = а&с - усредненные потенциалы
выходных линий инвертора при отсутствии предмодуляции;
&(рср ~ kj\u*n ' смещение усредненных потенциалов
вследствие введения предмодуляции.
Одинаковое смещение не изменяет разности усредненных
потенциалов фаз. Поэтому усредненные за период ШИМ линейные
напряжения на выходе инвертора не зависят от величины и*:
Ь. с р Фа. с р Фь. с р
^Ьс.ср ~ ФЬхр ~~ Фсхр
Фа.т.ср ' Фь.т.ср
Фь.т.ср Фс.т.ср
(15.18)
— — — 1с I * *
Щ'а.ср ~ Фсхр ~ Фа.ср ~ Фс.тхр ~ Фа.тхр ~ ^а.т
Инвариантными к величине w* оказываются также и усредненные
фазные напряжения на нагрузке, соединенной в звезду без
нейтрального провода:
^ахр ~ »
^ахр кПиа т ,
(15.19)
^ахр ^п^а.т
Из вышеизложенного следует, что полезные составляющие
напряжений на нагрузке в трехфазной системе без нейтрального
ф *
провода определяются не полными значениями воздействий иа , и
ф ★ ♦
ис на входах блока ШИМ, а лишь их составляющими иат , и^т и
w* , действующими на входах системы управления. Существенно,
» J р
382
что в соответствии с формулами (15.1) эти воздействия удовлетворяют
условию
^а.т + ^а.т + ^а.т ® • (15.20)
В теории симметричных трехфазных машин переменного тока
совокупность фазных величин, обладающих подобным свойством
(см. гл. 1) квалифицируется как намагничивающая или же
в более общем смысле результативная составляющая полных
значений вектора фазных величин.
Вторая составляющая полных значений u* wl и и* на входах
блока ШИМ, а именно ип , является по отношению к полезным
составляющим напряжений на нагрузке нейтральной, не
оказывающей на них влияния. Но в то же время нейтральная
составляющая оказывает влияние на усредненные потенциалы каждой
из фаз. Отсюда главный смысл введения предмодуляции задающих
воздействий с помощью нейтральной составляющей состоит в
целенаправленном смещении зоны усредненных потенциалов нагрузки и
оптимальном размещении ее в потенциальной зоне источника питания
инвертора без изменения усредненных линейных, а следовательно и
фазных напряжений на нагрузке. Это улучшает характеристики
инвертора с ШИМ и прежде всего повышает его выходное
напряжение при неизменном напряжении источника питания.
Из сказанного очевидно, что концепция разложения переменных
многофазной системы на результативную и нейтральную
составляющие, разделение и объединение этих составляющих на основе
преобразования координат (см. разделы 1 и 2) оказываются
конструктивными элементами как теории электрических машин, так
и теории систем “преобразователь частоты - электрическая машина
переменного тока”. Подробнее эти вопросы обсуждаются в гл.20.
В зависимости от доминирующих требований, критериев и
средств управления конкретные варианты и способы формирования и
введения нейтральной составляющей могут быть различными.
Рассмотрим наиболее характерные и эффективные из них.
15.5. Симметрирование потенциальной зоны нагрузки
в потенциальной зоне источника питания
Основная идея такого управления состоит в том, чтобы за счет
предмодуляции уменьшить усредненную потенциальную нагрузку
наиболее загруженной (лимитирующей) фазы и соответственно (для
сохранения разности усредненных потенциалов фаз) увеличить
383
потенциальную нагрузку других, менее загруженных фаз инвертора.
Тогда образовавшийся симметричный двусторонний потенциальный
запас можно использовать для увеличения полезного напряжения
инвертора в режиме максимального неискаженного выхода.
Диаграммы, поясняющие идею и результаты управления с
симметрированием потенциальной зоны нагрузки в потенциальной
зоне источника питания приведены на рис. 15.4.
Рис. 15.4. Управление с симметрированием потенциальной зоны
нагрузки в потенциальной зоне источника питания
384
Здесь показан случай, в котором амплитуда внешних задающих
воздействий иат , иЬгп и ист такая же, как и в режиме
максимального неискаженного выхода при отсутствии
предмодуляции. Анализ флюктуаций потенциальной зоны нагрузки
при отсутствии предмодуляции (см. рис. 15.3) позволяет определить
закон формирования предмодулирующего воздействия, отвечающий
задаче управления:
^Ь.т
0.5uc\
при Uc т < — Ua.m >
При Uc m < Ua m < ’
при Ua m < Uc jn — Ufr m ,
При UaJn — ^b.m — Uc.m ’
при ^b.m — ua.m — ^c.m ’
при ~ Uc.m — ^a.m •
(15.21)
Как видно из рис. 15.4, при введении предмодуляции (15.21)
результирующие задающие воздействия иа , и*ь н и* на входах блока
ШИМ приобретают характерный уплощенный ” двухгорбый" вид,
причем их амплитудные значения уменьшаются в л/з/2 раз.
Аналогичный вид приобретают графики усредненных потенциалов
выходных линий инвертора, амплитудные значения которых также
уменьшаются в д/з/2 раз в сравнении с отсутствием предмодуляции.
Благодаря симметрированию потенциальной зоны нагрузки
(выделенной штриховкой) при всех значениях угла поворота
задающего вектора создается симметричный двусторонний
потенциальный запас. Его можно использовать для отработки
повышенных значений внешних задающих воздействий в режиме
неискаженного выхода инвертора. Новое предельно допустимое по
условиям неискаженного выхода значение амплитуды внешних
задающих воздействий при введении симметрирующей
предмодуляции составляет
^.доп ~ 1-155 Uq . (15.22)
Соответственно увеличиваются на 15.5% амплитудные значения
основных гармоник фазного и линейного напряжений на нагрузке:
385
-0.577;
Л.\ 41
Эффективные значения этих напряжений составляют
^ф. \ .эфф
0.707ип.
(15.23)
(15.24)
(15.25)
(15.26)
Таким образом, рассмотренный усовершенствованный алгоритм
ШИМ с симметрирующей предмодуляцией задающих воздействий
обеспечивает повышение выходного напряжения инвертора на 15.5% в
сравнении с алгоритмом синусоидальной ШИМ. В сравнении с
базовым алгоритмом при Я - лг (т.е. без использования ШИМ)
недоиспользование источника питания инвертора по напряжению в
режиме ШИМ снижается с помощью предмодуляции с 21.5% до
9.3% .
В отличие от высокочастотного опорного сигнала ШИМ
сигнал предмодуляции u*(f) является низкочастотным, так как его
частота (см. рис. 15.4) всего втрое превышает частоту полезного
выходного сигнала инвертора. Однако устанавливать специальные
фильтры для исключения низкочастотных составляющих (как
последствий предмодуляции) из фазных напряжений и токов нагрузки
нет необходимости. Отсутствие нейтрального провода в схеме
питания трехфазной нагрузки обеспечивает естественную фильтрацию
нейтральной составляющей силовой схемой и исключение этой
низкочастотной составляющей из напряжений и токов нагрузки.
Сигнал симметрирующей предмодуляции представляет собой
кусочно-гладкую функцию, которая синтезируется в соответствии с
формулой (15.21) с учетом соотношения величин внешних задающих
воздействий. Именно поэтому для функционирования показанного на
рис. 15.1 генератора предмодулирующего воздействия необходима
информация о задающих воздействиях.
Недостатком данного варианта предмодуляции является
относительная сложность синтеза предмодулирующего воздействия по
интервалам в виде кусочно-гладкой функции. Поэтому представляет
интерес ее аппроксимация единой гладкой аналитической функцией.
386
15.6. Приближенное симметрирование потенциальной
зоны нагрузки путем введения третьей гармоники
Как следует из анализа формы показанного на рис. 15.4 графика
функции w*|&*|, а также с учетом соотношения периода входных
задающих воздействий и предмодулирующего воздействия, в качестве
аппроксимирующей предмодулирующее воздействие может быть
выбрана гармоническая функция утроенной частоты в сравнении с
частотой задающего сигнала. Она описывается на всех интервалах
общим выражением
ип = - U* cos 30* , (15.27)
характеризующим ее как третью гармонику по отношению к
задающим воздействиям. Фаза предмодулирующего сигнала третьей
гармоники ип выбирается таким образом (рис. 15.5), чтобы
обеспечить симметричное уплощение предмодулированного сигнала
и* и уменьшение его амплитуды. Амплитуда предмодулирующего
сигнала выбирается исходя из следующего. При значениях аргумента
д^и—±7г/Ь функция н* = 0 и поэтому предмодулированный
сигнал
+ = . (15.28)
О Z
Итак, в точках 0* = +л/6 и 0* — -л/6 предмодулирующий
сигнал равен нулю, и поэтому за счет предмодуляции невозможно
получить значения функции меньшие, чем 0.866 £7^. Тогда
логично потребовать, чтобы эти точки были бы точками максимума
функции и*^0* ). Из условия экстремума этой функции
= - U* sin#* + 317* sin3 #* - О
- т и п и
следует, что данное требование выполнимо при
sin^ 1
-^и*т = -и*т. (15.29)
Ssm7^ 6
387
Итак, предмодуляции третьей гармоникой с определенными
выше параметрами уменьшает амплитуду результирующих задающих
воздействий м* , и ис на входах блока ШИМ в д/з/2 раз.
v*
"am
Рис. 15.5. Предмодуляция задающих воздействий сигналом
третьей гармоники
Этот результат в точности повторяет результат предшествующего
варианта предмодуляции. Поэтому данный вариант, также как и
предшествующий, создает двусторонний потенциальный запас, что
позволяет повысить напряжение инвертора в режиме максимального
неискаженного выхода на 15.5% в сравнении со случаем отсутствия
предмодуляции. Для оценки предельных возможностей инвертора
полностью справедливы формулы (15.23) - (15.26). По другим
показателям, например, пульсациям токов и электромагнитного
момента двигателя, рассмотренные варианты предмодуляции не
совпадают, но весьма близки.
Главным достоинством данного варианта является возможность
использования единой гладкой аналитической функции. Это упрощает
реализацию блока предмодуляции, особенно в тех системах
управления, где используется преобразование координат.
388
Рис. 15.6. Система управления инвертором с ШИМ,
использующая преобразование координат
На рис. 15.6 представлен один из вариантов реализации подобных
систем. Здесь можно выделить три основных функциональных блока:
предмодуляции, преобразования координат и широтно-импульсной
модуляции. Задающий вектор рассматривается как трехмерный объект
[130], первоначально представленный в трехмерной неподвижной
декартовой системе координат ОаДу или же в базисе Gv. Две
компоненты этого вектора задаются извне как внешние воздействия
вида
иа ~ Um C°S #* ; (15.30)
Up = U*m sin#* , (15.31)
где - модуль;
#* - угол поворота задающего вектора напряжений.
389
Эти переменные характеризуют результативную
составляющую трехмерного задающего вектора.
Третья компонента задающего вектора w* формируется внутри
системы с помощью генератора сигнала предмодуляции (ГСПМ) в
виде
где
(15.32)
(15.33)
Информация, необходимая для функционирования ГСПМ,
содержится во внешних сигналах
*
Г енератор
функционирует
соотношения
на основе известного
тригонометрического
ь
и
/ 2
cos3x = cosjv 4cos х-3
Учитывая, что и* = U*m cos#*; ~ sin#*, получаем
возможность формирования предмодулирующего сигнала в виде
(15.34)
Эта переменная определяет нейтральную составляющую
трехмерного задающего вектора.
Далее с помощью матрицы обратного преобразования А|1
производится преобразование координат трехмерного задающего
вектора в "фазный" базис Fy, т.е. к фазным переменным:
Результат преобразования имеет вид:
390
! I — и + и •
и I ^a.m ’
«ft=^COS 0*-~
*
4яЛ
(1536)
w*=C7mcos б£
т COS I э uu j Ucjn + un
и
Как видно из формул, структура матрицы А|1 позволяет
совместить преобразование внешних воздействий с введением
предмодулирующего воздействия в фазные каналы управления.
Далее осуществляется описанное ранее базовое ШИМ -
преобразование, результатом которого являются сигналы управления
ключами инвертора.
В рамках структуры, представленной на рис. 15.6, возможно
введение предмодулирующих воздействий не только в виде третьей
гармоники, но также и разнообразных других гладких или разрывных
функций. Для этого соответствующим образом изменяются внешние
связи и алгоритм функционирования ГСПМ. Рассмотрим
характерный пример, в котором предмодулирующий сигнал
представляет разрывную функцию угла поворота задающего вектора,
что позволяет “привязать” потенциальную зону нагрузки к границам
потенциальной зоны источника питания. При определенных условиях
это позволяет уменьшить частоту коммутации ключей и потери в
инверторе.
15.7. Привязка потенциальной зоны нагрузки к границам
потенциальной зоны источника питания
Принцип "привязки” потенциальной зоны нагрузки к границам
потенциальной зоны источника питания иллюстрирует рис. 15.7. Как
видно, здесь усредненные потенциалы фаз с наибольшей
потенциальной нагрузкой за счет предмодуляции не уменьшаются, а
наоборот, увеличиваются и поддерживаются на уровнях ближайших
потенциалов шин источника питания. Смысл такого варианта
смещения состоит в следующем. В течение интервалов искусственного
смещения и привязки усредненного потенциала наиболее загруженной
фазы к потенциалу шины источника питания модулятор этой фазы
оказывается в граничном состоянии насыщения, т.е. коммутация
ключей фазы прекращается. Модуляторы других, менее загруженных
фаз по-прежнему работают в режиме ШИМ. Благодаря одинаковому
391
смещению усредненных потенциалов всех фаз обеспечиваются
значения усредненных линейных и фазных напряжений на нагрузке, не
зависящие от величины смещения.
п
Л
2
О
-! Qst
-t—*-
2Л
: rJILTirii
п
п
зл
О
Рис. 15.7. Управление с привязкой потенциальной зоны
нагрузки к ближайшим границам потенциальной зоны
источника питания
392
В течение полного оборота задающего вектора ключи каждой из
фаз инвертора работают в режиме ШИМ только на двух интервалах
по 120° каждый. На оставшихся двух интервалах ’’привязки*',
протяженностью по 60° каждый, частота коммутации ключей каждой
из фаз равна нулю. Поэтому средняя за период вращения задающего
вектора частота коммутации ключей инвертора уменьшается на 1/3 в
сравнении с ранее рассмотренными режимами управления. Это
подтверждается сопоставлением представленных на рис. 15.7, 15.3 и
15.4 графиков мгновенных потенциалов непосредственно
отражающих коммутации ключей фазы ”А" инвертора при различных
вариантах управления. Вследствие уменьшения средней частоты
коммутации ключей в данном варианте управления существенно
уменьшаются коммутационные потери в схеме инвертора.
Закон формирования предмодулирующего воздействия для
данного варианта управления с привязкой потенциалов имеет вид:
при
при
при
~;г/6< 0* < + я/6 ;
тг/6< 0* < л/2 ;
л/2<0*и <5^/6;
при 5тг/6< 0* < 7я/6 ;
при 1л/6< 0* < Зтг/2 ;
при Зтг/2 < 0* < 1 \л/6 .
Выражению (15.37) соответствует разрывная периодическая
функция с частотой, втрое превышающей рабочую частоту инвертора.
Реализация алгоритма функционирования ГСПМ требует учета как
внешних воздействий и* и (косвенно задающих величину #*),
так и амплитуды опорного сигнала ШИМ Uq. Именно этим
обосновывается необходимость задания соответствующих переменных
на входы генератора предмодулирующего сигнала в рамках
структуры, изображенной на рис. 15.6.
В отличие от предшествующих данный вариант предмодуляции
создает не двусторонний, а односторонний потенциальный запас.
Однако принципиально важно то, что использование этого запаса при
дальнейшем увеличении задания происходит без искажения
соотношения усредненных линейных и фазных напряжений на
нагрузке. Поэтому, также как и предшествующие варианты
предмодудяции, данный вариант позволяет за счет полного
393
использования потенциального запаса трехфазной системы повысить
напряжение инвертора в режиме максимального неискаженного
выхода на 15.5%. Для его оценки также полностью справедливы
формулы (15.23) - (15.26).
В отличие от предшествующих вариантов в данном варианте
предмодуляции зависимости усредненных потенциалов фаз от угла
поворота задающего вектора имеют разрывный характер.
Это влечет как положительные, так и отрицательные последствия.
Первые связаны с тем, что фазные модуляторы скачком
преодолевают зону, в которой требуется соблюсти ограничение по
минимуму времени (Ттт) между очередными коммутациями ключей.
В этом отношении вариант с разрывным графиком усредненных
потенциалов обладает наилучшими характеристиками. Следует,
однако, отметить, что в случае увеличения задания и приближения
режима работы данной системы к режиму максимального
неискаженного выхода график усредненных потенциалов стремится к
непрерывному и указанное преимущество утрачивается.
Отрицательные последствия разрывного закона предмодуляции
рассмотрим в нижеследующем сопоставительном анализе.
15.8. Влияние предмодуляции задающих воздействий
на пульсации тока и момента двигателя
Являясь нейтральной по отношению к усредненным линейным
напряжениям, т.е. разностям усредненных потенциалов линий
нагрузки, предмодуляция вместе с тем непосредственно влияет на
мгновенные и усредненные потенциалы каждой из линий нагрузки.
Поэтому модуляционная составляющая выходного напряжения и
пульсации тока в цепи нагрузки инвертора оказываются зависимыми
от конкретного варианта предмодуляции. Для иллюстрации этой
особенности рассмотрим временные графики линейных потенциалов и
напряжений инвертора с ШИМ при фиксированном значении угла
поворота задающего вектора, например, при 0* =0. На рис. 15.8,а
отображен случай работы инвертора в режиме максимального
неискаженного выхода при отсутствии предмодуляции. При этом
значении угла задающие воздействия на входе блока ШИМ:
а
^а.т
0 ’
иЬ иЬ. т
^с.т
394
Рис. 15.8. Временные графики линейных потенциалов и напряжений
инвертора с ШИМ при фиксированном значении 0*= 0:
а) при отсутствии ; б) при введении симметрирующей
предмодуляции задающих воздействий
Потенциальная зона задающих воздействий на входе блока
ШИМ выделена на верхних графиках штриховкой.
Как видно, модулятор фазы "А" инвертора находится в
граничном состоянии насыщения. Коммутация ключей фазы
отсутствует и потенциал выходной линии (ра = + /2 = const.
Модуляторы других фаз не насыщены и их ключи коммутируются с
частотой опорного сигнала ШИМ. Поэтому график линейного
напряжения идеализированного инвертора представляет
последовательность однополярных импульсов с амплитудой, равной
величине напряжения источника питания инвертора и частотой,
395
равной частоте опорного сигнала ШИМ. Средние за период ШИМ
значения линейных выходных напряжений инвертора:
и — + и — 0 - и - „ 3
**ab.cp ~ ’ ubc.cp v > иса.ср д •
Введение симметрирующей предмодуляции (рис. 15.8,6) при тех
же внешних воздействиях и , uhn. и и* вызывает смещение
потенциальной зоны нагрузки к центру потенциальной зоны
источника питания (направление смещения показано стрелками). Это
обеспечивает коммутацию ключей во всех фазах инвертора.
Средние за период ШИМ значения линейных выходных напряжений
инвертора остаются неизменными. Графики линейных напряжений
V-ab (О и Ц?а(0 по-прежнему представляют последовательность
однополярных импульсов с амплитудой, равной напряжению
источника питания инвертора. Однако частота импульсов линейного
напряжения удваивается в сравнении с частотой опорного сигнала
ШИМ. Соотношение постоянной и переменной составляющих
потенциалов каждой из фаз изменяется. Поэтому в результате
предмодуляции амплитуда и частота пульсаций тока нагрузки
изменяются.
Описанную ситуацию удобно проанализировать с помощью
изображенных на рис. 15.9 и 15.10 регулировочных характеристик для
полезной и модуляционной составляющих линейных потенциалов и
напряжений инвертора с симметричной двусторонней ШИМ. Здесь
выделены рабочие точки, соответствующие ситуации, рассмотренной
нами во временной области.
Как видно, рабочий участок характеристики полезного выхода
модуляторов ср{и*j , i = a,b,c является линейным. Поэтому
одинаковое для всех фаз смещение задающих воздействий вызывает
одинаковое смещение усредненных потенциалов фаз. Разности
усредненных потенциалов фаз, г. е. полезные составляющие линейных
напряжений инвертора остаются неизменными.
В том же диапазоне задающих воздействий характеристики
первой (pi । (w*j , второй (pi U0() 2 j и других высших гармоник
модуляционной составляющей выходных потенциалов инвертора
являются нелинейными. Поэтому одинаковые для всех фаз
приращения задающих воздействий за счет предмодуляции вызывают
различные приращения амплитуд гармоник модуляционной
составляющей на выходах инвертора.
396
w >а.со
Рис. 15.9. Полезная и модуляционная составляющие линейных
потенциалов и напряжений инвертора с ШИМ при отсутствии
предмолуляции задающих воздействий
397
А (Л.
г /,ср
V
I
А<л.
г i.uod 2
I
Рис. 15.10. Полезная и модуляционная составляющие линейных
потенциалов и напряжений инвертора с ШИМ при введении
симметрирующей предмодуляции задающих воздействий
398
Например, в результате симметрирующей предмодуляции (см.
рис. 15.10) амплитуда первой модуляционной гармоники линейного
напряжения иа^ (ее частота равна частоте опорного сигнала
ШИМ) оказалась равной нулю, а амплитуда второй модуляционной
гармоники иа^МО()2 несколько увеличилась в сравнении с отсутствием
предмодуляции (см. рис. 15.9). При вращении задающего вектора, а
также изменении его модуля соотношение между полезной и
модуляционными составляющими изменяется и эффект влияния
различных способов предмодуляции на пульсации тока нагрузки
также изменяется. Для интегральной оценки этого влияния полезно
проанализировать изображенные на рис. 15.11 графики
установившихся режимов работы инвертора с ШИМ, нагруженного
на асинхронный двигатель. Во всех случаях внешние задающие
воздействия u* , и и* изменяются во времени по
гармоническому закону, т. е. модуль и частота вращения задающего
вектора постоянны. Амплитудные значения внешних задающих
воздействий составляют 75% амплитуды опорного сигнала, т.е. узлы
ШИМ работают в режиме неискаженного выхода. Соотношение
рабочей частоты и частоты ШИМ инвертора составляет 1/21.
Нагрузка на валу двигателя постоянна и составляет половину
номинального значения.
При отсутствии предмодуляции (см. рис. 15.11 ,а), т.е. в базовом
режиме синусоидальной симметричной двусторонней ШИМ,
модуляционные пульсации электромагнитного момента двигателя
имеют существенно полигармонический характер и составляют
величину порядка 10-20% среднего значения момента. Примерно таков
же и порядок пульсаций тока статора двигателя.
Введение симметрирующей предмодуляции (рис. 15.11,6) не
только "уплощает" график задания на входе узла ШИМ, но и
определенным образом упорядочивает характер пульсаций
электромагнитного момента и тока статора двигателя, снижая их
величину примерно до 10-12%. Поэтому использование такой
предмодуляции оправданно как с позиций расширения диапазона
регулирования выходного напряжения инвертора в режиме
неискаженного выхода, так и с позиций уменьшения пульсаций тока и
электромагнитного момента двигателя.
Введение предмодуляции сигналом третьей гармоники
(см.рис.15.11,в) также дает положительный эффект, близкий к
предшествующему. Этот вариант, как отмечалось, выгодно отличается
удобством формирования предмодулирующего сигнала.
399
Рис. 15.11. К сопоставлению различных вариантов
предмодуляции задающих воздействий для инверторов с ШИМ
400
Введение предмодуляции с привязкой потенциальной зоны
нагрузки к ближайшим границам потенциальной зоны источника
питания (рис. 15.12,а) приводит к существенному увеличению
амплитуды (примерно до 28%). и к двукратному уменьшению частоты
пульсаций тока и электромагнитного момента двигателя. Это является
серьезным недостатком данного варианта предмодуляции. Как
отмечалось ранее, его достоинство состоит в уменьшении средней
частоты коммутации ключей инвертора на одну треть и
соответствующем снижении коммутационных потерь в инверторе.
Рис. 15.12. Влияние частоты ШИМ на пульсации тока
статора и электромагнитного момента двигателя
401
Очевидно, что в случае необходимости пульсации тока и
момента могут быть снижены за счет повышения частоты ШИМ, т. е.
за счет ресурса коммутационных потерь. Рис. 15.12,6 иллюстрирует
процессы при увеличении частоты ШИМ на одну треть, т.е.
настолько, чтобы средняя частота коммутации ключей при данном
варианте предмодуляции оказалась равной частоте коммутации
ключей в базовом режиме без предмодуляции. Как видно, такое
повышение частоты ШИМ дает заметное уменьшение (примерно до
16%) пульсаций тока и момента, хотя и несколько уступающее другим
рассмотренным вариантам предмодуляции.
Отметим еще один недостаток, обусловленный разрывным
характером предмодулирующей функции. Каждое дискретное
переключение этой функции создает ударное возмущение в
механизме формирования пульсирующих составляющих тока и
момента двигателя. Вследствие дискретного изменения начальных
условий в результате каждого возмущения возникает дополнительная
апериодическая составляющая, которая накладывается на основной
периодический процесс пульсаций. Частота переключений
предмодулирующей функции невелика (она всего в шесть раз
превышает рабочую частоту инвертора). Поэтому в графике
электромагнитного момента двигателя возникает низкочастотная
пульсирующая составляющая (рис. 15.13), частота которой всего в
шесть раз выше рабочей частоты инвертора.
Рис. 15.13. К оценке влияния дискретности предмодулирующего
воздействия на электромагнитный момент двигателя
402
Это вызывает неравномерность вращения вала двигателя и при
неблагоприятном сочетании электромагнитных условий может свести
на нет принципиальные преимущества ШИМ как средства улучшения
равномерности вращения двигателя.
По изложенным причинам применение вариантов с разрывным
характером предмодуляции нуждается в серьезном обосновании и в
дальнейшей детализации алгоритмов ШИМ с учетом оптимальной
стыковки импульсных последовательностей до и после переключений
разрывных воздействий.
Рис. 15.14. Координатная система управления инвертором с ШИМ
Наряду с рассмотренными выше вариантами в литературе
анализируются и другие, в том числе, модифицированные алгоритмы
ШИМ с привязкой потенциальной зоны нагрузки не к ближайшим, а к
удаленным границам потенциальной зоны источника питания; с
фазовым смещением интервалов потенциальной привязки; с
расширением интервалов потенциальной привязки и др. [166-168].
403
15.9. Обобщенная структурная схема координатной
системы ШИМ
Модифицированные алгоритмы ШИМ реализуемы в рамках
обобщенной структурной схемы координатной системы управления
инвертором, изображенной на рис, 15.14. Она является логическим
развитием структурной схемы, изображенной на рис. 15.6. Основное
отличие состоит в том, что высокочастотный опорный сигнал ШИМ
вводится по каналу "у" совместно с низкочастотным
предмодулирующим сигналом. В структуре системы можно выделить
три основных блока: модуляции, преобразования координат и
релейный блок. Такая структура хорошо адаптирована к
использованию в векторных системах управления электроприводами
переменного тока с преобразованием координат, в том числе в
системах цифрового управления.
15.10. Выводы
1. Концепция разложения переменных многофазной системы на
результативную и нейтральную составляющие, разделение и
объединение этих составляющих на основе преобразования координат
оказываются конструктивными элементами как теории электрических
машин, так и теории систем “преобразователь частоты - электрическая
машина переменного тока”.
2. Главный смысл введения предмодуляции задающих
воздействий с помощью нейтральной составляющей состоит в
целенаправленном смещении зоны усредненных потенциалов нагрузки
и оптимальном размещении ее в потенциальной зоне источника
питания инвертора без изменения усредненных линейных, а
следовательно, и фазных напряжений на нагрузке. Это позволяет
улучшить характеристики инвертора с ШИМ и прежде всего повысить
его выходное напряжение при неизменном напряжении источника
питания.
3. Модифицированные алгоритмы ШИМ реализуемы в
рамках рассмотренных выше координатных систем управления
инверторами. Эти же модифицированные алгоритмы ШИМ имеют и
альтернативные варианты реализации, используемые в так
называемых векторных системах ШИМ.
404
Глава шестнадцатая
ВЕКТОРНЫЕ СИСТЕМЫ
ШИРОТНО - ИМПУЛЬСНОЙ МОДУЛЯЦИИ
16.1. Исходные положения
Методология и стратегия построения векторных систем ШИМ
[5,98,159,160,163,180,187 и др.] базируются на векторном
представлении совокупности выходных напряжений многофазного
инвертора и ориентированы на микропроцессорную их реализацию.
Рассмотрим эти вопросы сначала применительно к трех фазным
мостовым автономным инверторам напряжения.
Силовая структура АИН (рис. 16.1) содержит шесть ключей,
каждый из которых может находиться в одном из двух состояний -
включенном или выключенном. Каждая комбинация состояний
ключей инвертора обеспечивает определенную совокупность
линейных и фазных напряжений на выходе инвертора, т.е.
определенный вектор выходных напряжений.
Для нахождения возможного общего количества комбинаций
состояний ключей АИН и соответствующих им векторов напряжений
отбросим сначала запрещенные комбинации, приводящие к
короткому замыканию шин питания через ключи инвертора (при
одновременном включении обоих ключей в любой из фаз АИН).
Кроме того, исключим комбинации, не удовлетворяющие закону
жесткой коммутации, т.е. будем считать недопустимыми состояния с
одновременным выключением обоих ключей в любой из фаз
инвертора. Легко подсчитать, что для трехфазной структуры остается
8 допустимых комбинаций, представленных в таблице состояний
(рис. 16.1). Для каждого из состояний системы “АИН - нагрузка” в
таблице дается список включенных ключей инвертора и код
состояния, схема питания фаз нагрузки через ключи инвертора,
изображение вектора выходных напряжений и его координаты в
преобразованном и фазном базисах.
405
Номер
комбинации
Включены
ключи
Код
состояния
Схема
питания
нагрузки
Вектор
напряжений
3
Координаты
вектора:
WSOf
wsj8
wsy
Состояния схемы
4 - 5 6 7 8
2А1В 1С 2А2В 1С 1А2В 1С 1А1В 1С 2А2В 2(
011 001 101 111 000
АВС АВС АВС АВС АВС
* —5” + jj— ' ш ♦ .
.ж
—» —*
1/4 *5 ^6 и? из
Of Of Of а Of
Рис. 16.1. Структура и таблица состояний системы “АИН - нагрузка”
Итак, каждой из допустимых комбинаций состояний ключей
соответствует определенный вектор напряжений на выходе инвертора.
Из них шесть комбинаций дают шесть ненулевх векторов:
406
Ui„..,U6 и две комбинации - два нулевых вектора: и?=0и
U8=0. В случае симметрии нагрузки ненулевые векторы имеют
одинаковые длины:
Ul=U1=U3=U4=U5=U6 = lUn (16J)
и расположены под углами, кратными 60°. Геометрическим местом
концов нулевых векторов является начало координат.
Каждую из комбинаций характеризует трехразрядный
двоичный код состояния:
= f\A flB f\C ' С16-2)
где i = - номер состояния.
Значения разрядов кода Sjy описывают состояния трех ключей
(1А, 1В и 1С), соединенных с положительной шиной источника
питания инвертора. Единица соответствует включенному, а ноль -
выключенному состоянию ключа. При жестком законе коммутации
ключей АИН код состояния ключей 2А, 2В и 2С, соединенных с
отрицательной шиной источника питания инвертора, является
инверсным по отношению к коду . Поэтому код S^- однозначно
характеризует состояние всех ключей АИН, схему питания
трехфазной нагрузки и математические выражения координат
вектора выходных напряжений инвертора U1S- в базисах Fy и G y
(Up" - фазные , a - преобразованные значения).
16.2. Постановка задачи
Предположим, что в некоторое заданное мгновение времени
требуется получить на выходе инвертора вектор U /= U *, в
общем случае отличающийся от названных выше векторов. Из
аналитической геометрии на плоскости известно, что такой вектор
формально может быть представлен в виде линейной комбинации
названных различающихся векторов:
и*=£т(и,-- (1б.з)
I
407
Входящие в сумму (16.3) векторы выходных напряжений U,
назовем образующими векторами, а величины - весовыми
коэффициентами (долями) образующих векторов в их сумме.
и«’
Рис. 16.2. К постановке задачи синтеза векторной системы ШИМ
На рис. 16.2 представлен пример, где в качестве образующих для
заданного вектора U * использованы два ближайших к нему смежных
вектора выходных напряжений АИН - U2 и U3 :
U*= r2 U2 + r3 U3. (16.4)
Очевидно, что непосредственное использование формулы (16.4)
для формирования в заданное мгновение времени заданного вектора
выходных напряжений инвертора невозможно по следующим
причинам :
• образующие векторы могут быть реализованы (в
виде формирования соответствующих комбинаций напряжений на
выходе инвертора) не одновременно, а лишь поочередно;
• в структуре силовой схемы инвертора нет элементов,
позволяющих выделить в заданное мгновение времени
необходимые части (доли) образующих векторов.
408
Тогда можно сформулировать задачу иначе - потребовать, чтобы
заданный вектор U * формировался (аппроксимировался) в виде
периодической временной последовательности
образующих векторов, среднее значение которой
(16.5)
на некотором малом интервале времени Т ( периоде усреднения или
же периоде аппроксимации) было бы равно заданному
значению U *.
В более общей постановке можно говорить об эквивалентности
на малых временных интервалах Т интегральных значений
изменяющегося во времени задающего вектора, с одной стороны, и
аппроксимирующей его временной последовательности реализаций
дискретных образующих векторов - с другой. В цифровых системах
ШИМ значения изменяющегося во времени задающего вектора
дискретизируются и обновляются с периодом, равным либо кратным
периоду модуляции. Поэтому будем считать задающий вектор на
каждом малом интервале усреднения величиной постоянной.
Такая постановка задачи полностью удовлетворяет условиям
физической реализуемости ее решения.
Во-первых, здесь учитывается физическая возможность лишь
последовательной реализации образующих векторов.
Во-вторых, весовые коэффициенты г, теперь могут
рассматриваться как относительные продолжительности
реализации полных значений образующих векторов на
интервале усреднения :
(16.6)
Здесь
продолжительность интервала времени, в течение
которого на выходе АИН реализуется вектор U / ;
Т - продолжительность интервала усреднения (периода
аппроксимации);
/ - индекс образующего вектора.
Вместе с тем такая постановка задачи влечет за собой некоторые
существенные ограничения и дополнения. Во-первых, из физического
смысла задачи следует, что:
409
• временные интервалы реализации образующих векторов не
могут принимать отрицательные значения;
• значение каждого из интервалов реализации не может
превышать продолжительность интервала усреднения;
• их сумма должна быть равна интервалу усреднения.
Следовательно, при синтезе временной последовательности с
заданным усредненным значением должны быть выполнены
следующие условия:
о< т; < т
п
1Л=т
/=1
или же
или же
(16.7)
(16.8)
Вторая важная особенность связана с выбором количества
и состава векторов, способных образовать
последовательность с заданным усредненным значением. Из алгебры
известно, что усредненная (среднеарифметическая) величина всегда
лежит в пределах, ограниченных максимальной и минимальной
величинами, образующими эту последовательность. Поэтому в
составе величин, аппроксимирующих заданную величину, обязательно
должны быть предусмотрены величины как большие, так и
меньшие в сравнении с заданной. Причем, располагая
некоторым исходным набором дискретных величин
(возможных реализаций), целесообразно выбирать из них в качестве
величин, образующих последовательность, не просто большую и
меньшую величины, а ближайшие к заданной большую и
меньшую величины.
Данные очевидные утверждения тем не менее требуют более
детального рассмотрения в связи с многомерностью данной
задачи, в которой объектом анализа и синтеза являются не скалярные,
а векторные величины. Заданный вектор U *, как направленный
отрезок, характеризуется двумя компонентами: длиной (модулем) U*
и направлением (углом поворота) О*. Поэтому приведенные выше
утверждения должны быть спроектированы на каждую из компонент
вектора. В примере, изображенном на рис. 16.2, качестве образующих
выбраны векторы U2 и Us , хотя в принципе возможны и другие
варианты (например Ui и U3 или U2 и Щ)- Однако выбор U2 и
410
Us целесообразен именно потому, что углы поворота 6^2 и
этих векторов имеют ближайшие меньшее и большее значения
по отношению к заданной величине 0*. Варьируя соотношением
времен реализации т2 и Г3 этих векторов, можно плавно
регулировать угол поворота усредненного вектора в пределах от
#м2 до и в том числе обеспечить заданное значение О*.
Однако последовательность, состоящая только из двух близких
по направлению образующих векторов, недостаточна для обеспечения
заданного значения длины U* усредненного вектора и тем более -
для плавного регулирования этой величины. Причина заключается в
том, что длины образующих векторов (J72 ~ = — ип) превышают
длину J7* заданного в примере вектора. Иными словами, в составе
последовательности двух близких по направлению образующих
векторов отсутствует вектор, длина которого меньше длины
заданного вектора. Поэтому в состав последовательности
образующих векторов должен быть введен еще хотя бы один
"ближайший меньший" вектор. В качестве меньшей величины в
принципе могут быть использованы, например, либо противофазные
векторы U 5 и U 6, либо почти ортогональные к задающему векторы
Uj и U4, либо нулевые векторы U7 или Ug- Из них критерию
"ближайшего меньшего" удовлетворяют нулевые векторы U7 и Us,
геометрическим местом концов которых является начало координат.
В случае дополнения двух ненулевых образующих векторов
третьим (нулевым) вектором направление усредненного вектора по-
прежнему регулируется за счет изменения соотношения времен
реализации т2 и ненулевых векторов, а длина - за счет изменения
соотношения между суммарным временем реализации ненулевых
векторов и временем реализации нулевого вектора Гд.
Таким образом, для среднеарифметической аппроксимации
показанного на рис. Гб.2 заданного вектора U* достаточно и
целесообразно использовать три ближайших образующих вектора -
Два смежных ненулевых ( U2 и U3 ) и один нулевой ( U7 или U 8 )-
Использование ближайших образующих векторов и ограничение их
411
количества до минимально необходимого позволяет при
формировании временной последовательности минимизировать
дисперсию образующих векторов относительно заданного, т.е.
улучшить динамическую точность аппроксимации, а также уменьшить
количество переключений ключей инвертора на интервале усреднения.
16.3. Математическая модель
С математической точки зрения представленная
задача заключается в поиске решения алгебраических
(16.9) - (16.11) при соблюдении условий (16.12) :
на рис. 16.2
уравнений
Ucp = r2U2+r3U3+r0U0
г2 + гз + го -1;
(16.9)
(16.10)
(16.11)
0 < т2 < 1 ; 0 < т3 < 1 ; 0 < т0 < 1 .
(16.12)
Здесь U о = 0 - нулевой вектор.
Данная задача относится к
программирования с ограничениями в
решения векторные уравнения (16.9)
классу задач линейного
форме неравенств. Для ее
и (16.10) целесообразно
представить в виде матричного уравнения :
(16.13)
Здесь фигурируют координаты пространственных векторов
напряжений в базисе G?. Переходя к полярным координатам и
исключая нулевые компоненты векторов, получаем уравнение
(7* cos 0*
[/* sin Й*
U2 cos 0и2
U2 sin 0и2
U3 cos 0и3
U3 sin 0м3
(16.14)
Его решение имеет вид:
412
U* sin(0u3-0*j
I/ sin(0„3-0tt2) ’
(16.15)
При этом
и* sin(0„*
и sin(0M3-0H2)
(16.16)
(16.17)
Здесь U* , О*
2
U = -«п -
3 п
#и2 ’ ^/3 '
длина и угол поворота заданного вектора;
длина каждого из ненулевых образующих
векторов напряжений;
углы поворота образующих векторов.
Определяемые формулами (16.15) - (16.17) относительные
значения продолжительностей реализации , г3 и образующих
векторов U2 , U3 и Uo являются решением задачи в том случае,
если они удовлетворяют условиям (16.12). Физически это означает, что
выбранный набор образующих векторов позволяет синтезировать
временную последовательность с требуемым усредненным значением.
В противном случае условия задачи являются несовместимыми и
поэтому она не имеет решения. Иными словами, из выбранного
набора образующих векторов невозможно синтезировать временную
последовательность с требуемым усредненным значением.
16.4. Обобщение задачи
Нами обсуждена задача аппроксимации заданного вектора,
-занимающего промежуточное положение в секторе между векторами
U2 и U3. Очевидно, что если заданный вектор будет находиться в
каком-либо другом секторе (например, между векторами U3 и U4),
то по той же стратегии для его аппроксимации следует использовать
образующие векторы U3 , U4 и Uo. Если же заданный вектор
413
совпадает по направлению с одним из ненулевых векторов (например
с вектором U3) и имеет меньшую длину, чем вектор U3, то в состав
образующих достаточно включить только два вектора - U] и Uo.
Если же заданный вектор имеет большую длину в сравнении с
ненулевыми векторами, то задача его аппроксимации неразрешима.
Вышеизложенное позволяет записать формулы (16.15) ~ (16.17) и
(16.12) в более общем виде, справедливом для произвольного угла
поворота заданного вектора:
(16.18)
U* sinf0*-0<j
г> -----—т--------т ;
U sin(0„ -0„ I
Го =!-(г< + г>)'
(16.19)
(16.20)
0< г< < 1 ; 0 < < 1 ; 0 < r0 < 1 .
(16.21)
Здесь и - относительные продолжительности реализации
образующих ненулевых векторов, углы поворота которых имеют
ближайшие меньшее и большее 0> (либо равное) значения в
сравнении с углом поворота заданного вектора.
Алгоритм выбора этих векторов может строиться на основе
следующего соглашения :
при 0М1 < 9* < 9и1;
при еи2 < % оиз;
при 0u3 < < 0м4;
при 9и±<9*<9и5-,
при ди5 < 9* < 9и6;
при 9и6 <9* < 9и[ + 2л-.
(16.22)
414
3и1
3иЗ
3/6
Зч\
при eu{ < о* < eul;
при eul < e*u < eu3;
при 0u3 < 9* < 0u4 ;
при 0u4 < 0* < 0u5 ;
при 0м5 < 0* < 3,6 ;
при 3,6 < С З/i +2я •
(16.23)
На рис. 16.3 приведен пример решения задачи для непрерывного
изменения угла поворота заданного вектора (0* - var) при
постоянстве его длины (С/* = const). Такой режим используется в
системах ШИМ для формирования трехфазного выходного
квазисинусоидального напряжения инвертора.
Рис. 16.3. Зависимости относительных продолжительностей
времен реализации образующих векторов от угла поворота
заданного вектора при постоянстве его длины
Как видно из графиков (см., например, сектор #w2- -^w3)’ п0
мере увеличения угла поворота 0* заданного вектора время
реализации т2 вектора U2 (с ближайшим меньшим углом 0^)
уменьшается, а время реализации Г3 вектора U3 (с ближайшим
большим углом 0мз) - увеличивается. В следующем секторе 0^... 0^
415
вектор U3 переходит в разряд вектора с ближайшим меньшим углом
и время его реализации уменьшается.
В соответствии с формулами (16.18) и (16.19) максимальные
относительные значения времен реализаций каждого из ненулевых
векторов равны отношению длины заданного вектора к длине
ненулевых образующих векторов инвертора:
Лпах
(7*
3
2wn
(16.24)
Суммарное значение времен реализации ненулевых векторов
(показано на рис. 16.3 штриховой кривой ) достигает максимума
в середине каждого из секторов. Поэтому в соответствии с
формулой (16.20) время реализации Tq нулевого вектора Uo в этих
точках достигает минимального значения:
(16.25)
а на границах секторов - максимального значения:
^O.mav 1 ^тах • (16.26)
Как видно из рисунка, графики функций и
r3^w) полностью удовлетворяют ограничениям (16.21), и поэтому в
данном примере задача разрешима во всем диапазоне изменения угла
16.5. Основные этапы синтеза векторных систем ШИМ
В общем случае стратегия синтеза векторных ШИМ включает
следующие основные этапы.
1. Предварительный анализ координат заданного
вектора и при необходимости - их ограничение для обеспечения
принципиальной возможности решения задачи аппроксимации.
2. Выбор состава образующих векторов для
аппроксимации заданного вектора с учетом его пространственного
положения.
416
3. Определение длительностей интервалов
реализации каждого из образующих векторов в пределах интервала
усреднения в соответствии с требованием равенства усредненного
значения вектора напряжений инвертора заданному значению.
4. Выбор порядка следования реализаций
образующих векторов на интервале усреднения и синтез
сигналов управления ключами инвертора во временной области.
Рассмотрим некоторые особенности перечисленных этапов.
16.5.1. Ограничение входного воздействия
Необходимость ограничения. Как отмечалось выше, задача
аппроксимации разрешима не при всех реально возможных
соотношениях ее условий. На рис. 16.3 был представлен пример
разрешимой задачи, в которой времена реализаций образующих
векторов полностью удовлетворяют условиям (16.21). Однако из
формул (16.18) - (16.20) следует, что при увеличении длины заданного
вектора пропорционально возрастают времена реализаций ненулевых
векторов и соответственно уменьшается время реализации нулевого
вектора. Отсюда легко найти такое граничное значение
длины задающего вектора
(16.27)
при котором минимальное время реализации нулевого вектора
становится равным нулю.
Такая ситуация отображена на векторной диаграмме рис. 16.4.
Показанный здесь граничный вектор аппроксимируется временной
последовательностью, состоящей только из ненулевых векторов
(Гф =0) с равными временами их реализаций (т2 = Г3 =0.5).
Дальнейшее увеличение длины задающего вектора недопустимо, так
как ресурсы системы по обеспечению заданного среднего значения
при данном угле поворота задающего вектора уже использованы
полностью. Попытка решения задачи при U* > по приведенным
выше формулам даст отрицательное значение , а требуемые
времена реализации образующих векторов г2 и уже не уложатся в
период усреднения. Поэтому формирование на этой основе
аппроксимирующей последовательности векторов невозможно.
417
Рис. 16.4. К оценке граничных режимов управления инвертором
при различных вариантах ШИМ
Анализ задачи методами линейного программирования
показывает, что при вращении задающего вектора существует
непрерывная граница, разделяющая области его допустимых и
недопустимых значений. Эта граница представляет собой
правильный шестиугольник 2, показанный на рис. 16.4. Его
вершины задаются концами образующих векторов U1 U6.
Следовательно, допустимое значение длины задающего вектора
(с позиций возможности его воспроизведения на выходе инвертора в
виде усредненного значения импульсной последовательности)
зависит от его угла поворота.
Максимальное допустимое значение длины определяют
вершины шестиугольника, а наиболее "узкими местами" в этом
смысле являются средние точки a, b, с, d, е, f его сторон. Поэтому
можно утверждать, что проходящая через эти точки окружность 3
является геометрическим местом концов такого граничного
вектора, воспроизведение которого гарантированно
независимо от его угла поворота. При равномерном движении конца
задающего вектора по этой окружности инвертор формирует
418
неискаженное факторами ограничений симметричное трехфазное
квазисинусоидальное напряжение. Амплитуда полезной
составляющей фазного напряжения на выходе инвертора равна длине
граничного задающего вектора, т. е.
<16-28)
При этом амплитуда полезной составляющей линейного
напряжения :
^Л.л.гр ~ ^гр = • (16.29)
При использовании рассмотренной широтно-импульсной
аппроксимации большие задания в принципе не могут быть
отработаны без искажения формы полезного синусоидального
сигнала на выходе инвертора. Поэтому формулы (16.28) и (16.29)
характеризуют теоретически предельные возможности повышения
выходного квазисинусоидального напряжения инвертора с векторной
ШИМ.
Для сравнения различных вариантов управления инвертором на
рис. 16.4 показан также годограф гарантированно-граничного
вектора при традиционной синусоидальной ШИМ с пилообразным
опорным сигналом (окружность 4 с радиусом, равным ип/2 ). Здесь
же показан годограф основной гармоники вектора фазных
напряжений в базовом режиме 180-градусного управления без ШИМ
(окружность 1 с радиусом, равным 2ип/тг). Как видно, при одном и
том же напряжении источника питания (а оно лимитируется рабочим
напряжением ключей инвертора) наибольшее выходное напряжение
инвертора обеспечивается в базовом режиме 180-градусного
управления, а наименьшее - при использовании традиционной
синусоидальной ШИМ. Рассмотренная векторная ШИМ занимает
промежуточное положение. Присущее ей некоторое уменьшение
предельного напряжения (в сравнении с 180-градусным управлением)
является объективной платой за существенное улучшение
гармонического состава напряжения и тока нагрузки инвертора. От
традиционных синусоидальных ШИМ векторные выгодно
отличаются возможностью повышения выходного напряжения на
15.5% при одном и том же напряжении источника питания.
Следует обратить внимание на полное совпадение оценок
предельных возможностей инвертора, полученных с позиций как
координатной (см. гл. 15), так и векторной стратегий ШИМ.
В заключение данного вопроса важно отметить следующее.
Традиционные синусоидальные и модифицированные (координатные)
системы ШИМ, синтезируемые с использованием опорного сигнала,
419
также подвержены влиянию объективно существующих ограничений.
Превышение соответствующих пределов со стороны задания
сопровождается искажениями в отработке этих заданий на выходе
инвертора, т.е. нарушением режима пропорциональной отработки
задающих воздействий. Однако при этом не нарушается
работоспособность системы, так как данные ограничения вступают в
действие автоматически, "сами собой". В отличие от этого алгоритмы
синтеза векторных ШИМ базируются на иных математических
моделях, в частности, не использующих понятия опорного сигнала.
При этом существенно, что данные алгоритмы изначально
работоспособны лишь при совместимых условиях задачи. Они
попросту "не работают" в случае нарушения совместимости условий
задачи, например, вследствие превышения рассмотренных выше
пределов из-за увеличения задания или уменьшения напряжения
питания инвертора.
Поэтому предварительный анализ и ограничение задающего
вектора является необходимым этапом алгоритма работоспособной
векторной системы ШИМ.
Алгоритм ограничения входного воздействия. Один из
возможных алгоритмов функционирования микропроцессорной
векторной системы ШИМ на этапе предварительного анализа и
ограничения координат задающего вектора приведен на рис. 16.5.
Исходными данными для синтеза управления на каждом
интервале Т являются значения декартовых координат задающего
вектора и напряжения питания инвертора. Сначала определяются
длина и угол поворота задающего вектора. При этом учтено, что
используемые в языках программирования стандартные обратные
тригонометрические функции "возвращают" лишь главное значение
угла, в то время как необходимо определять угол в пределах полного
оборота задающего вектора. Ветвления алгоритма по условиям типа
неравенств исключают операции деления на ноль и позволяют при
вычислении либо табулировании значений функций вида у = arctg х
ограничиться областью значений аргумента — которой
соответствует область значений функции - ;г/4< у < + тг/4.
В заключительной части алгоритма длина задающего вектора
ограничивается на уровне, гарантирующем воспроизведение
неискаженной круговой траектории полезной составляющей вектора
выходных напряжений при текущем значении напряжения питания
инвертора. В случае необходимости граничное значение
дополнительно корректируется (уменьшается на величину A U) с
учетом требований ограничения по минимуму интервалов времени
между коммутациями ключей в фазах инвертора (см.п.14.4.).
420
Начало
1
Ввод координат задающего
вектора и величины напряжения
источника питания инвертора
Расчет модуля и угла поворота
задающего вектора напряжений
Возврат
Рис. 16.5. Анализ и ограничение координат задающего вектора
Здесь и далее математические выражения вида у = у + z
записаны на основе используемых в языках программирования
понятий "новое значение у" и "старое значение
421
16.5.2. Выбор состава и расчет времен реализации
образующих векторов
Как показано ранее, задача выбора образующих векторов может
иметь различные решения в зависимости от особенностей силовой
схемы и конкретных требований к системе ШИМ инвертора.
Дополнительной иллюстрацией этого могут служить векторные
системы ШИМ тока, которые будут рассмотрены далее.
Рис. 16.6. Выбор и расчет времен реализаций
образующих векторов
422
Для векторных систем ШИМ напряжения типичным решением
на каждом интервале аппроксимации является выбор трех
образующих векторов - двух ненулевых и одного нулевого в
различных вариантах его реализации. При выбранных образующих
векторах задача определения времен их реализации решается
однозначно в соответствии с приведенными выше формулами.
Один из возможных алгоритмов работы микропроцессорной
системы на этапах выбора состава и расчета времен реализаций
образующих векторов для каждого интервала усреднения приведен
на рис. 16.6. Здесь на основе анализа определенной ранее
величины угла поворота задающего вектора 0* определяется 60-
градусный сектор, для которого обобщенным переменным 0< и
присваиваются значения углов поворота ближайших ненулевых
образующих векторов. Здесь же назначаются коды состояний ключей
инвертора Sf и £]>, обеспечивающие реализацию данных
образующих векторов. Код состояния для реализации нулевого
вектора выбирается из двух альтернативных вариантов далее с учетом
выбора порядка следования реализаций ненулевых векторов. Затем
определяются индекс глубины модуляции /л и продолжительности
интервалов реализации всех образующих векторов на периоде
усреднения.
16.5.3. Выбор порядка следования реализаций
образующих векторов
Данная задача может иметь различные решения. Выбор
оптимального варианта производится с учетом выполнения ряда
требований, таких как:
• минимизация пульсаций тока в фазах нагрузки и потерь,
обусловленных дискретностью работы инвертора;
• минимизация числа коммутаций ключей инвертора за период
модуляции;
• ограничение по минимуму временных интервалов между двумя
очередными коммутациями каждого из ключей инвертора;
• максимальное использование нагрузочной способности ключей
инвертора по напряжению;
• симметричное управление фазами инвертора.
Перечисленные требования в большей части являются
противоречивыми друг другу и поэтому в каждом конкретном случае
выделяются доминирующие требования и критерии. Одним из
423
наиболее эффективных является энергетический критерий [40,78],
отражающий потери энергии, которые обусловлены переменной
(модуляционной) составляющей выходного ШИМ - сигнала
инвертора. Такой критерий может быть представлен в виде:
где
дг т
J = - JAT(/). ДТ(/)Л ,
2 о
I
АТ(г)- JaU(z)^ + C ;
AU(/) = u:G'(r)-uff0;
C = -lj }ди(г)ЛЛ;
1 о о
N- нормирующий коэффициент.
(16.30)
(6.31)
(16.32)
(16.33)
По своей структуре критерий (16.30) представляет интеграл
скалярного квадрата промежуточной векторной переменной АТ0.
Эта переменная представляет собой интеграл разности Аи(0
мгновенных значений заданного и фактического векторов выходного
напряжения АИН. Постоянная интегрирования С обеспечивает
равенство нулю среднего значения
функции A'P(f)
на интервале Т.
Благодаря исключению постоянной
составляющей переменная ДТ(г)
позволяет оценивать величину высокочастотных пульсаций
потокосцеплений и токов в цепях активно-индуктивной нагрузки, а
интегральный квадратичный функционал J - оценивать потери
энергии за период модуляции, обусловленные этими пульсациями.
Наилучшим считается алгоритм ШИМ, минимизирующий значение J
при данной частоте коммутаций ключей инвертора.
Базовый вариант распределения реализаций. На рис. 16.7
представлена диаграмма распределения во времени интервалов
реализаций образующих векторов, которая удовлетворяет данному
критерию в значительной части диапазона регулирования выходного
напряжения инвертора. Диаграмма обеспечивает отработку задания
(задающего вектора), показанного на рис. 16.2. Принцип
распределения заключается в следующем. Период модуляции Т
делится пополам и в течение одного полупериода последовательно
реализуются: нулевой вектор Ug в течение интервала времени,
424
равного 7q/4; ненулевые векторы U3 и U2 в течение интервалов
Г3/2 и Т}/!, а затем нулевой вектор U7 в течение интервала
времени 7^/4. Другой полупериод является зеркальным отражением
предыдущего, т.е. перечисленные векторы реализуются в обратном
порядке.
а b с
*
Вектор
напряжений
Функции
управ -
ления "
ключами
АИН
Номер
Код
Состояние
схемы
8
ООО
8
ООО
Выход
АИН
3
Рис. 16.7. Распределение реализаций образующих векторов
во времени
Рациональность такого распределения во времени состоит в
следующем.
425
• Переход к каждому очередному интервалу требует не более
одной коммутации в силовой схеме АИН. Об этом свидетельствуют
показанные на рис. 16.7 последовательности кодов состояния ключей
и схем питания нагрузки (переключающиеся фазы заштрихованы). Это
обеспечено, во-первых, выбором смежных ( U1 и U3) ненулевых
векторов, а во-вторых - выбором различных (U7 и Ue) вариантов
реализации нулевого вектора на границах полупериодов. Именно
поэтому выбор варианта реализации нулевого вектора связан с
порядком реализации векторов.
• Зеркальная симметрия диаграммы не требует коммутаций
ключей инвертора на границах полупериодов, так как примыкающие
к ним доли интервала Т$ попарно смыкаются. В результате графики
фазных коммутационных функций АИН f* (/) , (<)«/; и имеют
по два переключения, итого - шесть коммутаций на период модуляции.
• Дробление расчетных интервалов Tq , Т2 и Tj реализации
образующих векторов на полуинтервалы способствует снижению
пульсаций потоков и токов в фазах нагрузки, так как при прочих
равных условиях за меньшее время накапливаются меньшие
интегральные ошибки аппроксимации. В критерии (16.30) этот
фактор учитывается формулой (16.31). В итоге обеспечивается
снижение модуляционных потерь в системе “АИН - нагрузка”.
• На каждом из полупериодов модуляции относительные
временные доли реализации образующих векторов полностью
удовлетворяют условиям аппроксимации требуемого вектора на
данном полу периоде. Это дает возможность обновлять значения
изменяющегося во времени задающего вектора на каждом
полупериоде модуляции, т.е. существенно повысить скорость
реакции системы на изменение задания.
Рассмотренный вариант распределения реализаций на периоде
модуляции можно символически описать следующей формулой :
—/ Тл \ z Тз \ / Т? \ / То \ —►* / То \ “* / Ti \ z То \
Ц(“4~)"*" и2(“2~)-* и8(-д- )-х _ (16.34)
Графики рис. 16.7 и формула (16.34) характеризуют
распределение реализаций для фиксированного положения задающего
вектора, расположенного в секторе между векторами U 2 и U з. При
переходе задающего вектора в другие секторы состав образующих
векторов и распределение во времени их реализаций изменяются в
426
соответствии с диаграммой, изображенной на рис. 16.8. Здесь
выделено фиксированное значение аргумента которому
соответствуют временные графики рис. 16.7.
Рис. 16.8. Распределение реализаций образующих векторов
при изменении угла поворота задающего вектора
Другие варианты распределения интервалов реализаций
образующих векторов. Описанный выше базовый вариант
распределения реализаций не является единственно возможным и
может быть изменен с учетом конкретных доминирующих требований.
В качестве примера рассмотрим модифицированный вариант,
описываемый следующей формулой распределения:
/ То \ ~*“ / Тг \ ~* / \ / Т1 \ ✓ Тл х
и8(7) -* (-Т ) * из( т2) - ц М)-*и8 М )
(16.35)
Развернутая временная диаграмма распределения реализаций
при том же фиксированном значении задающего вектора представлена
427
на рис. 16.9. Отличие ее от предыдущей состоит в том, что один из
нулевых векторов (например U?) исключается из последовательности
полностью, но соответственно увеличивается вдвое время реализации
и
другого нулевого вектора (соответственно Ug).
8
Номер
Код
Состояние
схемы
Вектор
напряжений
Выход
АИН
Функции
управ -
гения ~
ключами
АИН
010
110
010
а b е
Uta
Рис. 16.9. Распределение реализаций образующих векторов
во времени с уменьшенной частотой коммутации ключей АИН
ООО
ООО
8
При этом полуинтервалы реализации вектора U2 смыкаются в
непрерывный интервал длительностью Т^. В результате экономятся
две коммутации, которые ранее были необходимы для включения и
428
выключения образующего вектора U7. Как видно из графиков
фазных коммутационных функций fb (О и /; (0, в течение
периода модуляции переключения происходят только в двух фазах
инвертора: А и В ; коммутации ключей в фазе С отсутствуют. При
вращении задающего вектора и переходе его в другие секторы
некоммутируемыми последовательно оказываются другие фазы
инвертора. Состав образующих векторов и распределение во времени
их реализаций изменяются в соответствии с диаграммой рис. 16.10.
Здесь также показано фиксированное значение аргумента 0*j ,
которому соответствуют временные графики рис. 16.9.
Рис. 16.10. Альтернативное распределение реализаций
образующих векторов при изменении угла поворота
задающего вектора
Таким образом, общее число коммутаций за период модуляции
уменьшено с шести до четырех, что существенно снижает
коммутационные потери в инверторе. При этом усредненное значение
429
вектора напряжении инвертора сохранено, сохранена также и
симметрия полупериодов модуляции.
Второй модифицированный вариант. Очевидно, что для графика
распределения, показанного на рис. 16.7, возможна и альтернативная
модернизация: полное исключение нулевого вектора Us при
соответственном увеличении вдвое времени реализации нулевого
вектора U7. Это дает смыканиеполуинтервалов реализации вектора
U3. Соответствующая формула распределения реализаций имеет вид :
(16.36)
И в этом случае число коммутаций за период модуляции сокращается
с шести до четырех при сохранении усредненного значения вектора
напряжений и симметрии полупериодов модуляции.
Вместе с тем обе альтернативные модернизации в большей части
диапазона регулирования влекут и отрицательное последствие -
увеличение пульсаций тока вследствие увеличения времен
непрерывной реализации оставшихся векторов.
Оценки коммутационных потерь в нагрузке для рассмотренных
вариантов распределения в общем случае не совпадают, а их
соотношение зависит от длины и угла поворота задающего вектора
[78]. Спектральные подходы к сопоставлению различных
алгоритмов ШИМ рассмотрены в работах [77, 166-168,190 и др.].
430
Глава семнадцатая
СИСТЕМЫ ШИРОТНО - ИМПУЛЬСНОЙ
МОДУЛЯЦИИ ТОКА
17.1. Фазовые системы ШИМ
Существенная несинусоидальность выходного тока автономных
инверторов тока (АИТ) вызывает повышенные потери энергии в
системах электропривода, пульсации электромагнитного момента
двигателей и неравномерность их вращения при малых частотах. Для
компенсации этих отрицательных факторов, в том числе, улучшения
равномерности вращения двигателей наряду с использованием
силовых фильтров на выходе инвертора могут использоваться
различные способы [45]:
• выбор законов частотного управления, обеспечивающих
минимум пульсаций электромагнитного момента двигателя в
заданном диапазоне изменения момента нагрузки и скорости;
• применение замкнутых систем стабилизации скорости и
электромагнитного момента двигателя, воздействующих на ток
статора;
• использование программных корректирующих устройств,
модулирующих по амплитуде ток статора двигателя таким образом,
чтобы скомпенсировать пульсации электромагнитного момента,
обусловленные дискретностью автономного инвертора [147];
• использование широтно-импульсной модуляции выходных
токов инвертора, что является наиболее действенным средством
улучшения равномерности вращения двигателя.
Следует подчеркнуть, что описанные выше алгоритмы ШИМ
непосредственно приемлемы лишь для инверторов напряжения.
Причина заключается в том, что во время реализации нулевых
векторов U? и Us все ключи, соединенные с одной из шин питания
инвертора (например 1А,1В,1С), выключаются, а все ключи,
соединенные с другой шиной питания инвертора (соответственно 2А,
431
2 В, 2С), включаются. Это приводит, с одной стороны, к разрыву цепи
постоянного тока на входе, а с другой стороны - к трехфазному
короткому замыканию на выходе, т. е. на зажимах нагрузки
инвертора.
Для автономных инверторов тока, содержащих во входной цепи
постоянного тока дроссель со значительной индуктивностью, а на
выходе - буферные конденсаторы, такие коммутации ключей
недопустимы. Входной дроссель как неотъемлемый элемент инвертора
тока не допускает мгновенного разрыва цепи постоянного тока в
вентильной схеме инвертора. Выходные буферные конденсаторы
принципиально необходимы для совместимости инвертора как
импульсного источника тока с индуктивной нагрузкой, не
допускающей мгновенного (скачкообразного) изменения тока. Кроме
того, выходные конденсаторы используются для улучшения формы
выходного напряжения, повышения коэффициента мощности
нагрузки инвертора тока и уменьшения его установленной мощности.
В этих условиях для успешной реализации ШИМ тока должны
быть предусмотрены меры, исключающие разрывы цепи входного
дросселя, а также трехфазные короткие замыкания выходных
конденсаторов через ключи АИТ. Для этого в схеме вентильного
коммутатора АИТ используют ключи с односторонней проводимостью
тока, предусматривают установку на выходе отсекающих вентилей и
другие меры. Соответствующим образом модифицируются и
алгоритмы работы ключей инвертора в режиме ШИМ.
Рассмотрим так называемые фазовые системы ШИМ [148],
принципиальная возможность построения которых обосновывается
анализом моделей автономных инверторов в полярной системе
координат [46,123].
Как видно из схемы модели инвертора (рис. 17.1), в отличие от
непрерывного амплитудного канала, описываемого формулой (17.1),
ь
угловой (фазовый) канал преобразования задающего воздействия 0* в
выходную величину 0^ идеализированного инвертора тока содержит
нелинейный элемент квантования по уровню, описываемой
формулой (17.2):
(17.1)
- п—
(17.2)
п = 1,2,3,4,...
432
В установившихся режимах работы инвертора аргумент 0*
задающего вектора изменяется во времени по линейному закону со
скоростью, соответствующей требуемой частоте выходного тока АИТ.
Нелинейный элемент квантования по уровню отражает дискретные
свойства инвертора, угол поворота выходного тока которого 0/
изменяется дискретно.
Рис. 17.1. Модель автономного инвертора с фазовой
модуляцией тока в полярных координатах
Для линеаризации объектов с подобными нелинейными
характеристиками, также как и для АИН, может быть использован
известный из теории автоматического управления метод
вибрационной линеаризации (см. п. 14.3). В соответствии с этим
методом в данном случае на входной (задающий) сигнал 0*
нелинейного элемента с релейной характеристикой (17.2)
накладывается периодический высокочастотный модулирующий
сигнал:
(17.3)
где
0тах ' амплитуда модулирующего сигнала;
Zvf(^,w О" нормированная по модулю периодическая функция
времени;
О w - частота модулирующего сигнала.
I рафики нормированных модулирующих функций, используемых в
системах фазовой ШИМ, приведены на рис. 17.2.
433
Рис. 17.2. Модулирующие функции фазовой ШИМ
Итак, в данном случае модулируется фаза задающего
вектора, что обеспечивает широтно-импульсную модуляцию
выходных токов инвертора (отсюда условный термин - фазовая
ШИМ). Благодаря высокочастотной модуляции фазы задающего
вектора в пределах периода рабочей частоты переключение инвертора
в каждое новое очередное дискретное состояние представляет не
единичный акт, а многократно повторяющийся процесс с временными
возвратами в предыдущее состояние. По мере вращения задающего
вектора соотношение времен пребывания инвертора в новом и старом
состояниях плавно изменяется в пользу нового состояния. Длина
вектора выходных токов инвертора во всех состояниях остается
неизменной. Поэтому фазовые системы можно квалифицировать как
особую группу векторных ШИМ, в которых не используются нулевые
векторы.
Спектр выходного сигнала инвертора при фазовой ШИМ
зависит от формы и амплитуды модулирующей функции [46]. Причем
для улучшения низкочастотной части спектра, оказывающей
наибольшее влияние на характеристики двигателя, можно
использовать арксинусоидальную, симметричную пилообразную
(треугольную) и синусоидальную модулирующие функции,
изображенные на рис. 17.2 (соответственно кривые 1, 2 и 3).
При арксинусоидальном модулирующем сигнале благоприятное
соотношение между амплитудой основной гармоники (кривая 1,
рис. 17.3,а) и 5, 7, 11, 13-й гармониками выходного тока
идеализированного инвертора (соответственно кривые 1, 2, 3 и 4
рис. 17.3,6) наступает при амплитуде модулирующего сигнала
втах ~ ^/4; а ПРИ ^тах ” ^/2 указанные высшие гармоники
подавляются полностью.
434
a)
б)
Рис. 17.3. К оценке гармонического состава выходного
тока АИТ при фазовой ШИМ
Использование треугольной и синусоидальной модулирующих
функций приводит к большему снижению основной гармоники при
увеличении 0тах (кривые 2 и 3, рис. 17.3,а). Однако и для этих
сигналов можно указать оптимальную величину при
которой первая гармоника снижается на 5 - 7% , а низкочастотные
высшие гармоники не превышают 6% по отношению к первой.
Широкое регулирование амплитуды основной гармоники
выходного вектора можно осуществить воздействием на входной ток
инвертора либо изменением алгоритма ШИМ. Вопросы
регулирования амплитуды полезной составляющей выходного сигнала
инвертора с фазовой ШИМ удобно рассмотреть в терминах общей
стратегии векторных ШИМ, частным случаем которых является
фазовая ШИМ.
17.2. Особенности векторных систем ШИМ тока
Рассмотрим принципиальную схему системы “автономный
инвертор тока - нагрузка”, изображенную на рис. 17.4. Предположим,
что требуется найти алгоритм ШИМ, обеспечивающий плавное
регулирование модуля и фазы усредненного вектора токов на выходе
при постоянстве входного тока инвертора.
435
Рис. 17.4. Принципиальная схема системы иАИТ - нагрузка”
Первым этапом является составление таблицы возможных и
допустимых состояний ключей и соответствующих им характеристик
состояний системы. При этом, как отмечалось, должны быть учтены
два требования, специфичные для схем с инвертором тока:
• запрет разрыва входной цепи инвертора в звене постоянного тока;
• запрет коротких замыканий фаз нагрузки через ключи инвертора.
При отсутствии отсекающих вентилей этим требованиям
удовлетворяют только такие состояния трехфазного АИТ, в каждом из
которых включены не три (в сравнении со схемой АИН, рис. 16.1), а
только два ключа, соединенные с различными шинами
источника питания. В трехфазной мостовой схеме этим признаком
обладают 9 состояний, которые можно разделить на две группы.
К первой группе относятся шесть состояний, в каждом из
которых два включенных ключа принадлежат различным фазам
инвертора (например, ключ 1А фазы “А” и ключ 2В фазы “В”).
Ко второй группе относится три состояния, в каждом из которых
включена пара ключей какой-либо одной фазы инвертора
(например, ключи 1А и 2А фазы “А”, либо ключи 1В и 2В фазы “В”,
либо ключи 1С и 2С фазы “С”).
Реализация первой группы состояний позволяет получить на
выходе АИТ шесть различающихся ненулевых векторов токов,
а второй группы - три нулевых вектора выходных токов без
разрыва входной цепи инвертора.
436
В зависимости от особенностей схемной реализации инвертора,
типа и свойств его ключей и устройств их коммутации, при синтезе
векторной ШИМ тока к числу допустимых могут быть отнесены либо
только первая, либо обе группы состояний. Рассмотрим каждый из
обусловленных этим обстоятельством вариантов задачи.
17.2.1. Система ШИМ тока без использования нулевых
образующих векторов (фазовая система)
Таблица состояний, допустимых для данного варианта,
приведена на рис. 17.5. В каждом из состояний 1 ... 6 включены два
ключа, связанные с различными шинами источника питания и
принадлежащие различным фазам инвертора. Обратим внимание на
то, что в двухключевом режиме коды состояния верхней и нижней
групп ключей (5\ и Уже не являются взаимно инверсными и
поэтому указываются оба.
Номер
комбинации
Включены
ключи
Коды: S*
^2
Схема
питания
нагрузки
Вектор
токов
Т
Координаты
вектора:
Состояния схемы
Рис. 17.5. Состояния системы АИТ - нагрузка
437
Диаграмма соответствующих возможных реализаций векторов
выходных токов 6 инвертора тока изображена на рис. 17.6.
Рис. 17.6. Векторная диаграмма
Выбор образующих векторов. Рассмотрим пример, в котором
задающий вектор I * расположен в секторе между векторами 12 и
I з • Тогда в состав образующих целесообразно включить ближайшие
ненулевые векторы 12 и I з -
Как показано ранее, для регулирования длины усредненного
выходного вектора в состав образующих векторов должен быть
включен ближайший "меньший'’ вектор. Ранее (см. п. 16.2) для этой
цели использовались нулевые векторы. Принципиальной
отличительной особенностью данного варианта задачи является
запрет использования нулевых векторов токов АИТ. В этих условиях
реализацию нулевого вектора можно заменить последовательной
реализацией любой пары ненулевых противофазных векторов с
равными временами их реализаций. Здесь возможны три варианта:
а) 11,14 ; б) 12,15 ; в) 1з,1б
438
С позиций минимизации числа коммутаций инвертора и
дисперсии координат выходного вектора относительно задающего
предпочтителен выбор первого варианта.
Определение длительности реализаций
задача сводится к решению уравнений
разующих векторов.
Эта
г1^1 + г2 I2 + + г4^4 >
(П-4)
т, + г2 + г3 + г4 = 1
(17.5)
при соблюдении условий
0<т, <1 ; 0< г2 ; 0< т3 <1 ; 0<г4<1. (17.6)
В системе (П.4) - (17.5) число скалярных неизвестных
(Гр г2'г3’г4) превышает число нетривиальных скалярных
уравнений. Поэтому решение системы, вообще говоря, неоднозначно.
Для упорядоченного перебора возможных вариантов решения введем
параметр
«0=—^—- (17.7)
Г] + Г4
представляющий собой долю времени реализации вектора в 11 в
общем времени реализации противофазных векторов 11 и 14.
Вариация этого параметра позволяет оптимизировать решение задачи
аппроксимации заданного вектора по различным критериям.
При выборе = 1/2, т.е. равенстве времен реализации
противофазных векторов решение задачи определения длительностей
реализации образующих векторов имеет вид, аналогичный (17.18) -
(17.21):
г2=-------j-------V; (П.8)
1 S’n(0,.3-0,2
I* sin {в* -0, 2
3 J sin(0,.3-0,.2
(17.9)
(17.10)
<г4<0,5. (17.11)
0 < г, < 0,5 ; 0 < r2 < 1 ; 0 < т3 < 1 ; 0
439
Здесь Z* , 0* - длина и угол поворота заданного вектора;
/ = zn - длина каждого из образующих векторов токов;
’ ^/3 ' углы поворота ближайших образующих
векторов;
ток питания инвертора;
коэффициент, зависящий от режима работы
ключей инвертора (в используемом
двухключевом режиме k-t = 2/V3).
При нарушении условий (П.11) задача аппроксимации
заданного вектора оказывается неразрешимой. Гарантированно-
граничное значение заданного вектора определяет формула
(17.12)
Эта формула определяет необходимый уровень ограничения задания в
алгоритме векторной системы ШИМ.
При равномерном вращении граничного задающего вектора
инвертор формирует на выходе неискаженный факторами
ограничений трехфазный симметричный ток, амплитуда полезной
составляющей которого равна длине граничного задающего вектора,
т. е.
Оптимальный порядок следования реализаций четырех
образующих векторов представлен на рис. 17.7. Времена реализаций
соответствуют отработке задания I*, показанного на рис. 17.6.
Принцип распределения во времени аналогичен ранее
рассмотренному для АИН. Период модуляции делится пополам и на
каждом из полупериодов последовательно реализуются выбранные
образующие векторы в течение полуинтервалов расчетных
длительностей, определяемых приведенными выше формулами. В
каждом последующем полупериоде модуляции порядок следования
образующих векторов изменяется на противоположный, поэтому
коммутаций ключей на границах полуинтервалов не требуется.
440
2
Номер
Код:
Вектор
токов
Функции
управ - .
ления “
ключами
2
* sa
tsp
Выход
АИТ
Рис. 17.7. Распределение реализаций образующих
векторов во времени при фазовой ШИМ
?4
2
001
100
010
100
010
001
100
001
АВС
010
001
АВС
Состояние
схемы
010
100
АВС
001
100
Соответствующая формула распределения реализаций:
441
При вращении задающего вектора и переходе его в другие
секторы векторной диаграммы соответственно обновляется состав
образующих векторов. Данная схема распределения удовлетворяет
требованию минимума числа коммутаций ключей инвертора -
обеспечивает шесть коммутаций за период модуляции.
Возможны и другие варианты выбора и распределения во
времени реализаций образующих векторов инверторов.
Фазовые ШИМ приемлемы для улучшения гармонического
состава выходных сигналов как инверторов тока, так и инверторов
напряжения, где могут быть реализованы и для трехключевого
режима.
17.2.2. Система ШИМ тока с использованием нулевых
образующих векторов (амплитудно-фазовая система)
В данном варианте (например, при наличии в силовой схеме
отсекающих вентилей) допустимыми являются девять отмеченных
выше состояний ключей, обеспечивающих формирование шести
ненулевых и трех нулевых векторов выходных токов инвертора
[136,183,184]. В этом случае представленная на рис. 17.6 задача
определения длительности реализаций образующих векторов сводится
к решению уравнений
I ср “ ^2 ^2+ I 3+ Го Io j (17.15)
Icp = 1* (17.16)
при соблюдении условий
тг + т3 + г0 =1;
0< т2 < 1 ; г3 <1 ; 0<т0^1.
(17.17)
(17.18)
При произвольном угле поворота задающего вектора решение
задачи имеет вид, аналогичный (16.18) - (16.21):
(17.19)
(17.20)
442
ro=l-(r< + r>);
О < r< < 1 ; 0< < 1 ; О< т0 < 1 .
(17,21)
(17.22)
сь /*, в* - длина и угол поворота заданного вектора ;
J - —- длины ненулевых образующих векторов ;
V3
т< и т> - относительные продолжительности
реализации ненулевых образующих
векторов, углы поворота которых имеют
ближайшие меньшее Of и большее Of
(либо равное) значения в сравнении
с углом поворота заданного вектора ;
Tq - относительное время реализации нулевого
вектора I о — 0.
Оптимальный порядок следования реализаций образующих
векторов также выбирается в соответствии с рассмотренными выше
принципами. Здесь же выбираются и конкретные варианты
реализации нулевого вектора из числа трех возможных вариантов.
Рис. 17.8. К оценке граничных режимов трехфазного АИТ
443
Рис. 17.8 иллюстрирует предельные возможности трехфазного
АИТ при различных законах коммутации ключей. Здесь показаны
геометрические места следующих векторов: 1 - основной гармоники
выходного тока АИТ при отсутствии модуляции, т.е. при 120-
градусной проводимости ключей инвертора; 2 - граничного
задающего вектора, воспроизводимого без искажений на выходе
инвертора с векторной ШИМ (либо с координатной ШИМ с
предмодуляцией задающих воздействий); 3 - гранично-
гарантированного вектора при работе инвертора с векторной ШИМ в
режиме синусоидального выхода; 4 - гранично-гарантированного
вектора при работе инвертора в режиме синусоидального выхода при
отсутствии предмодуляции задающих воздействий.
17.3. Выводы
Изложенные выше положения позволяют дать объективную
сопоставительную оценку векторного и координатного подходов к
синтезу систем широтно-импульсной модуляции выходного
напряжения либо выходного тока автономных инверторов.
1. Важно подчеркнуть, что на уровне фазных коммутационных
функций f* (г), (г) и f*(t) и мгновенных значений выходных
напряжений АИН ^0,^(0 и показанные на рис. 16.7 и 16.9
результаты типичных решений векторного подхода ничем ни
отличаются от результатов, которые дает координатный подход.
Здесь имеются в виду рассмотренные в главе 15 результаты
функционирования координатных ШИМ с предмодуляцией задающих
воздействий. Например, оказывается, что координатная ШИМ
напряжения с предмодуляцией задающих воздействий по условию
симметрирования экстремальных значений усредненных потенциалов
фаз в потенциальной зоне источника питания (см. п. 15.5) дает в
точности такие же результаты, как и векторная ШИМ с базовым
(центрированным) вариантом распределения во времени реализаций
образующих векторов (см. рис. 16.7 и 16.8. п. 16.5.3). Вариант
координатной ШИМ с привязкой экстремальных усредненных
потенциалов фаз к границам потенциальной зоны источника питания
АИН (п. 15.7) эквивалентен варианту векторной ШИМ с исключением
реализаций одного из нулевых векторов (см. рис. 16.9 и 16.10) и т. д.
Соответствующие аналогии существуют и между результатами
функционирования координатных и векторных ШИМ тока.
2. Как векторный, так и координатный подходы позволяют
выявить и в равной степени полностью использовать скрытые
444
предельные возможности трехфазных систем, а также оптимизировать
рабочие процессы в них по различным критериям. Сказанное
справедливо по отношению к системам ШИМ как напряжения, так и
тока.
Однако отсутствие принципиальных отличий результатов
координатного и векторного подходов в приведенных конкретных
примерах реализаций не умаляет достоинств векторного подхода к
синтезу систем ШИМ, а именно:
• его наглядности, гибкости, четкому структурированию и
относительной автономности этапов синтеза;
• вариативности и удобству реализации в микропроцессорных
системах управления.
С другой стороны, можно утверждать, что любое решение,
полученное в рамках векторного подхода, имеет адекватное по
конечным результатам решение в рамках координатного подхода.
Координатный подход имеет не менее мощное системообразующее
начало, базирующееся на идее преобразования координат и
модуляции преобразованных координат векторов. Координатный
подход обладает не менее важными достоинствами:
• он столь же физически нагляден;
• органично связан с традиционными системами синусоидальной
ШИМ, использующими опорный сигнал;
• хорошо структурирован и удобен для математического
моделирования и систематического исследования различных
вариантов модифицированных алгоритмов управления;
• адаптирован для реализации в векторных системах
микропроцессорного управления и регулирования с
высокоскоростной обработкой цифровых сигналов и
технологией интегральных схем конкретного применения.
3. Оба подхода реализуют принцип аппроксимации непрерывно
изменяющихся заданных величин напряжения (тока) импульсными
последовательностями, принадлежащими к ансамблю физически
реализуемых воздействий на выходе инверторов. Оба подхода в
равной степени, хотя и с несколько различающихся позиций,
используют математический аппарат преобразования координат
векторов. В функциональном и содержательном отношениях оба
подхода являются достаточно полными и не содержат
принципиальных противоречий друг другу. Более того, понятийный
аппарат, методология и результаты одного из них позволяют лучше
понять и выявить скрытые, неочевидные возможности другого
подхода и наоборот. Поэтому они взаимно дополняют и обогащают
друг друга.
445
Раздел четвертый
МАТЕМАТИЧЕСКИЕ МОДЕЛИ
СИСТЕМ ’’ПРЕОБРАЗОВАТЕЛЬ
ЧАСТОТЫ - АСИНХРОННЫЙ
ДВИГАТЕЛЬ” ДЛЯ ЗАДАЧ
УПРАВЛЕНИЯ
Глава восемнадцатая
МОДЕЛИРОВАНИЕ РАБОЧИХ ПРОЦЕССОВ В
СИСТЕМЕ “АВТОНОМНЫЙ ИНВЕРТОР
НАПРЯЖЕНИЯ - АСИНХРОННЫЙ ДВИГАТЕЛЬ”
18.1. Математическое описание силовой части асинхронных
электроприводов с автономными инверторами напряжения
В связи с развитием и применением полупроводниковой
преобразовательной техники в электроприводах переменного тока с
начала 60-х годов в нашей стране и за рубежом выполнено большое
количество работ [3,9,12-14,17,19,21,25,26,30,35-37,53,55,60,71 -73,79-
82,84,90,92,102,104-108,141,145 и др.], направленных на разработку
446
схем, исследование режимов, математическое моделирование и
создание методов расчета процессов в системах преобразователь-
двигатель. Этим вопросам посвящены также работы
[45,46,58,94,99,120-123,126,130,134-138,152,183,184 и др.]. В данной
монографии представлены материалы, являющиеся обобщением и
развитием этих работ в части математического моделирования
асинхронных электроприводов с инверторными преобразователями
частоты. При разработке моделей соблюден принцип единства
подхода, методологии и математического аппарата, используемого
для описания поведения двигателя и преобразователя частоты,
В качестве объекта моделирования выберем наиболее
распространенную на практике систему "преобразователь частоты -
асинхронный двигатель" (ПЧ-АД) с трехфазным мостовым
автономным инвертором напряжения (АИН) и короткозамкнутым
асинхронным электродвигателем. Идеализированная схема главных
цепей такой системы изображена на рис. 18.1.
Рис. 18.1. Главные цепи системы ПЧ-АД
Рассматривая систему ПЧ-АД как элемент более сложных
электромеханических систем, в основу построения модели положим
метод структурного моделирования в соответствии с рис. 18.2.
447
Рис. 18.2. Блок-схема модели системы ПЧ-АД
Уровень идеализации полупроводникового преобразователя
определяется рядом допущений, которые базируются на концепции
раздельного рассмотрения рабочих и коммутационных процессов
[138]:
• Все вентили инвертора представляются идеальными ключами,
сопротивление которых в проводящем состоянии равно нулю, а
в непроводящем - бесконечности.
• Управляемые вентили инвертора (рис. 18.3,а) рассматриваются
как полностью управляемые элементы; влияние устройств
искусственной коммутации реальных тиристорных вентильных
схем на форму выходного напряжения инвертора не
учитывается.
• Время переключения вентилей принимается равным нулю.
• Источник питания инвертора (рис. 18.3,6) представляется
идеальным источником ЭДС с LC фильтром на выходе;
внутреннее сопротивление реального источника учитывается
корректировкой параметров дросселя фильтра.
• Потери в конденсаторе фильтра не учитываются.
Обмотка статора двигателя соединена в звезду и подключена к
выходу инвертора по схеме без нейтрального провода. Сопротивление
шин отнесено к параметрам двигателя.
Рассмотрим математическое описание, позволяющее исследовать
рабочие процессы в системе ПЧ-АД при произвольных, заранее не
оговоренных законах изменения управляющих и возмущающих
448
воздействий. Условимся, что законы управления вентилями инвертора
могут быть любыми из числа допустимых - таких, при которых
исключается возможность одновременной подачи включающих
сигналов на анодный и катодный вентили одной и той же фазы
инвертора. Обратимся к схеме замещения (см. рис. 18.3,а), в которой
для удобства записи основных соотношений искусственно введена
средняя точка источника питания инвертора, а двигатель представлен
в виде трехфазного источника ЭДС с конечным внутренним
сопротивлением [58,152]. Введем векторы-столбцы напряжений на
анодной и катодной группах вентильных блоков инвертора и вектор
полных ЭДС фазных обмоток статора АД :
»|а
Ы1Й
_И|С
&sa
&sb
esc
5
Тогда можно записать следующие матричные уравнения:
U| + U2=unQ ;
\ 2 J
08.1)
где
wn - напряжение питания инвертора ;
u0 - разность потенциалов точки соединения обмоток статора и
средней точки источника питания инвертора ;
e=[i
1 - вспомогательный единичный вектор-столбец.
При любом законе коммутации для каждой пары вентильных
блоков, соединенных с фазной обмоткой статора двигателя, можно
выделить три допустимых состояния :
1. Один блок (нйпример TJa - Д]а) находится в проводящем
состоянии, а второй (Т2а ~ Даа) * в непроводящем.
2. Второй блок (Т2а -Д2а) - в проводящем, а первый
(Tia - Д1а) - в непроводящем состоянии.
f
3. Оба блока в непроводящем состоянии.
Из физических представлений следует, что для включения
управляемого вентиля (например, тиристора) необходимо и
достаточно одновременное выполнение двух условий:
449
• К силовым электродам вентиля приложено прямое
напряжение.
• На вентиль подан управляющий (включающий) сигнал.
а)
Рис. 18.3. Схема замещения главных цепей
450
Поэтому Для определения состояний и связанных с ними
ений на вентильных блоках автономного инвертора удобно
^пользовать понятия пороговых функций и аппарат
алгебры логики.
Для характеристики первого условия введем квадратные
пороговых функций напряжений на силовых
диагональные матрицы
электродах вентилей.
пороговыми функциями:
(18.2)
Элементы матриц описываются
(18.3)
Здесь и в дальнейшем используются пороговые функции вида
при
при
(183,а)
Для характеристики второго условия введем квадратные
диагональные матрицы функций управляющих сигналов:
(18.4)
элементы которых ///(i = l,2; j = a,b,c) принимают значения,
равные единице при подаче управляющих (включающих) сигналов и
нулю при снятии их.
Тогда необходимые и достаточные условия включения каждого
из управляемых вентилей могут быть определены следующими
логическими вектор-функциями:
451
О О fr\c_
fTla
Ftt — О
df
о
О
о
frib
О
О , (18.5)
/гЗс
Очевидно, что при выполнении условий для включения ij -го
управляемого вентиля /77; = !, в противном случае /77/-О.
J 1Г
Напряжения на вентильных блоках являются функциями
состояния не только их управляемых, но и неуправляемых обратных
вентилей. Последние оказываются в проводящем состоянии, если к
вентильным блокам прикладываются обратные напряжения. Поэтому
условия включения обратных вентилей анодной и катодной групп
инвертора можно описать с помощью следующих матриц:
гДе /д\] ~f\j ^flj ’ /д1] ~ flj Af\j (18.8)
Каждый из вентильных блоков переходит в проводящее
состояние вследствие включения либо управляемого, либо
неуправляемого вентиля. Следовательно, состояния вентильных
блоков инвертора описываются логическими вектор-функциями:
F. = О
df
О
о о
fxb О
О Tic
(18.9)
где
fij
(18.10)
В развернутом виде функции состояния вентильных блоков:
(18.11)
(18.12)
452
Если исключить из рассмотрения запрещенные комбинации
* ♦
управляющих сигналов (соответствующие /1уА^у=1), то для
реализации таблиц истинности логических функций (18.11) и (18.12)
можно использовать следующие более простые выражения:
(18.13)
(18.14)
Проводящему состоянию каждого из блоков соответствует
f • = 1, а непроводящему .• = 0. При переходе идеализированного
блока в проводящее состояние падение напряжения на нем щ .= О.
Из уравнений (18.1) следует, что напряжения на обмотках
статора АД могут быть вычислены тремя различными способами:
ufv
(18.15)
Например, для напряжения usa справедливы следующие выражения:
^sa + w2a ’
^sa “ h ha ~~ e$a *
Если в проводящем состоянии оказывается первый вентильный
блок - 1, иХа =0), то наиболее удобно использование первого
выражения, в соответствии с которым usa = u^Z - и0. Если в
проводящем состоянии находится второй блок - h и2а = 0)> то
более предпочтительно второе выражение, определяющее значение
Чад = “Нп/2-но. И, наконец, при одновременном отключении
обоих блоков usa - -esa. Для фиксации этого состояния в каждой из
фаз системы ПЧ-АД введем следующую квадратную диагональную
матрицу:
453
где
diag Узд Узе] ’
(18.16)
hj = f\j v flj\ j~a, b,c.
Элементы этой матрицы принимают значение 1 при
одновременном отключении соответствующих блоков.
Введенные выше функции дают возможность получения
обобщенного выражения вектора напряжений на обмотках
АД:
статора
(18.17)
Вычисляемые по законам алгебры логики элементы матриц
Fp F2 и F3 здесь используются с арифметическим смыслом, т. е. как
коммутационные функции, принимающие значения 1 либо 0. Для
определения переменной и0 можно воспользоваться условием
Q 5 Иул + Usc 0 ’
(18.18)
связанным с отсутствием нейтрального провода. Из формул (18.17) и
(18.18) следует, что
. (18.19)
Из схемы замещения рис. 18.3,а легко найти распределение тока
нагрузки 15 по элементам схемы инвертора. Токи, протекающие по
управляемым вентилям анодной и катодной групп инвертора:
' tFs.
irnb
(18.20)
Токи неуправляемых вентилей :
(18.21)
Результирующие токи вентильных блоков:
454
(18.22)
Ток, потребляемый инвертором от источника питания
zri = - QrFt (18.23)
фильтр в цепи питания инвертора (см. рис. 18.3,6) описывается
следующими скалярными уравнениями:
Р 4/ ~^d ~~ rd hl ~ мп ) ’
/’«п = сфА ic ; (18.24)
• « «
Ч' = ld “ zn ’
где е . ЭДС источника питания;
- ток, потребляемый от источника;
i - ток конденсатора фильтра;
Сф - емкость конденсатора фильтра;
lj^rd ’ параметры фильтра (определяются с учетом
внутреннего сопротивления источника е^).
Как видно из приведенных выше соотношений, напряжения и
токи в элементах схемы преобразователя являются в общем случае
функциями не только ЭДС источника питания и сигналов управления
вентилями инвертора, но и токов и ЭДС двигателя. Взаимосвязь этих
элементов иллюстрируется структурной схемой модели, изображенной
на рис. 18.2. Показанные здесь обратные связи по переменным
гп,15 и отражают реакцию инвертора как элемента нагрузки
фильтра и реакцию двигателя как элемента нагрузки инвертора.
18.2. Учет реакции двигателя как элемента нагрузки
инвертора
Важным вопросом построения модели является определение
реакции двигателя на переключение вентилей и учет влияния ЭДС
двигателя на выходное напряжение инвертора. Эта реакция
характеризуется векторами токов и ЭДС. Анализ физической картины
процессов в системе ПЧ-АД [58,138] показывает, что для определения
455
реакции АД при произвольном законе коммутации необходимо
учитывать следующие особенности.
При выключении управляемого вентиля (например, Т\а на
рис. 18.4) ток нагрузки (/ед) в момент Ц под действием фазной ЭДС
(сш) переходит на неуправляемый вентиль второго блока той же фазы
(диод Д2а)- При этом решающее значение имеет составляющая esa>
обусловленная явлением самоиндукции от потоков рассеяния статора.
Скачок потенциала точки "Л" ограничивается диодом на уровне
потенциала катодной шины инвертора. Это состояние сохраняется до
тех пор, пока ток isa не снижается до нулевого значения. Если в этот
момент времени подается включающий сигнал на вентиль , то ток
нагрузки изменяет направление и переходит на данный вентиль.
Рис. 18.4. К учету реакции двигателя как элемента нагрузки
инвертора
Однако, если к моменту затухания фазного тока включающие
сигналы не подаются ни на один из управляемых вентилей фазы, то
наступает режим разрыва электрической цепи фазной обмотки
вследствие перехода в непроводящее состояние. При этом
потенциал точки “А” зависит от ЭДС фазной обмотки и от схемы
подключения других обмоток через соответствующие вентильные
блоки к шинам питания инвертора. Здесь esa представляет собой ЭДС
взаимоиндукции с другими обмотками машины. Режим бестоковой
паузы сохраняется до тех пор, пока потенциал точки "А" находится в
пределах, ограниченных уровнями потенциалов анодной и катодной
шин питания инвертора. Заканчивается данный режим либо
вследствие подачи включающего сигнала на один из вентилей (Т]а
456
ли Т2д) либо вследствие выхода потенциала точки "А” на указанные
ше граничные уровни. В последнем случае под действием ЭДС
ВЬ исходит включение соответствующего неуправляемого вентиля.
рассмотренные условия переключения вентилей инвертора
омально описываются выражениями (18.2.) - (18.7), позволяющими
есть влияние ЭДС. Вместе с тем более детальное изучение вопроса
моделирования реакций двигателя с учетом требований устойчивости
модели приводит к неоднозначному его решению. Физической
предпосылкой к этому является отмеченное выше различие характера
ЭДС (самоиндукции и взаимоиндукции) в различных ситуациях. Для
процессов, возникающих при отключении
реакцию
моделирования процессов, возникающих при
управляемых и включении неуправляемых вентилей,
двигателя допустимо учитывать по формуле:
Е^ = -РТГ = -A;‘(Uv - Rv ij. (18.25)
Что касается моделирования процессов, протекающих во время
бестоковых пауз, то здесь использование этой формулы неприемлемо
вследствие неустойчивости структуры модели [71]. Для обеспечения
устойчивости модели необходимо значения ЭДС в разомкнутых
электрических цепях обмоток статора определять как следствие их
магнитной связи с замкнутыми электрическими цепями других
обмоток, и прежде всего - обмоток ротора. Система уравнений (2.95)
позволяет получить выражения ЭДС, справедливые для
(v = 0 (j - a,b,c):
Е* = -р(кЛлЛ) = -А.Ф(КХ) + <»аВКХ]. (18.26)
В связи с отмеченными особенностями удобно ввести
следующую матричную коммутационную функцию:
(18.27)
где е - малая положительная величина; j = а,Ь,с.
Тогда
Ef' = -A^F^U, - RA.IS) + (E - + р(К^г))‘.
(18.28)
матричная единица.
3 гтр бученная формула реакции обобщает алгоритм определения
двигателя в рассмотренных ситуациях, возникающих при
вкп^ЮЧеНИИ УпРавляемых вентилей, во время бестоковых пауз и при
очении управляемых либо неуправляемых вентилей.
457
18.3. Уравнения и структурная схема модели
Структура и взаимосвязь элементов рассмотренной
универсальной модели описывается следующими уравнениями.
Фильтр в цепи питания инвертора :
P^d ~ {^d ~ ~ ?d ^d ^d >
РЩ\ ~~ Сф (jd ~ ) •
(18.29)
Автономный инвертор напряжения :
-F2Q
458
Асинхронный короткозамкнутый двигатель:
и5 = А,(^)и*;
p^. = u,-^.bf5-rx;
р % = - {р)к - й>)В *Pr - RJ,.;
рОк = а>к>
pa> = J''(m - тс);
т = ¥?,• В1г;
(18.31)
Формулы реакции :
Ер' = -ApfF^U, - R+ (Е - F^BKX + ХКХ))]5
Е — diag [ 1
На рис. 18.5 показана структурная схема модели системы ПЧ-
АД, отражающая весьма сложный характер взаимосвязи ее элементов.
Принципы построения таких моделей впервые изложены в [58,152], где
описан аналоговый вариант модели системы АИН-АД с
регулируемым углом Л проводимости вентильных блоков инвертора.
Цифровая реализация универсальной модели разработана в [125].
Описание универсальной цифровой модели дано в гл. 23. Там же
приведены некоторые результаты моделирования процессов с системе
ПЧ-АД.
Представленная математическая модель дает полное
качественное и близкое количественное совпадение результатов
моделирования с реальными процессами. Она позволяет исследовать
переходные и установившиеся процессы как в разомкнутых, так и
замкнутых системах частотного управления. В частности, в работе [57]
на основе аналогового варианта модели проведено исследование
влияния ЭДС двигателя на процессы в системе ПЧ-АД с
регулируемым углом Л и получены интересные результаты изучения
тормозных режимов электропривода. Выявлены условия
возникновения неуправляемых процессов в системе.
459
Рис. 18.5. Структурная схема модели системы ПЧ-АД
при произвольном законе управления вентилями инвертора
Приведенное математическое описание позволяет исследовать
электромеханические процессы в асинхронных электроприводах с
автономными инверторами напряжения при различных законах
управления вентилями инвертора и напряжением источника питания.
Использование метода структурного моделирования позволяет в
каждом конкретном случае дополнить эту модель моделями других
элементов сложных электромеханических систем (первичных
источников питания, кинематической цепи механизма и т. д.), а также
исследовать динамику электроприводов переменного тока с другими
типами электродвигателей - синхронных с электромагнитным
возбуждением, вентильных с постоянными магнитами, гистерезисных
[34,133,135] и др.
Модель пригодна для описания рабочих процессов и в системах
с транзисторными инверторами. Однако здесь необходимо уточнение
условий, определяющих распределение инверсного тока в схеме
каждого из транзисторных ключей инвертора между транзистором и
обратным неуправляемым вентилем.
Рассмотрим наиболее практически важные частные случаи
трансформации и упрощения универсальной динамической модели
системы ПЧ -АД.
460
Глава девятнадцатая
МОДЕЛИ СИСТЕМ ПЧ-АД
С ЖЕСТКИМИ ЗАКОНАМИ КОММУТАЦИИ
19.1. Уравнения модели АИН с жесткими
законами коммутации
Сложность рассмотренной выше универсальной модели является
следствием сложности и многообразия процессов в системе ПЧ-АД
при заранее не заданном законе управления вентилями. Однако для
ряда практически важных случаев модель может быть существенно
упрощена. Известно [3,57,58,63,92,137,138 и др.], что с позиций
повышения управляемости системы ПЧ-АД целесообразно
использование так называемых жестких законов коммутации.
Здесь имеются в виду законы управления, обеспечивающие отсутствие
пауз между интервалами проводимости вентильных блоков в каждой
из фаз инвертора. В практике построения двухзвенных
преобразователей частоты с автономными инверторами напряжения
такие законы коммутации используются наиболее широко [92, 106 и
др.].
Рассмотрим вопросы трансформации универсальной модели
применительно к задачам исследования процессов с жесткими
законами коммутации. С позиций представления инвертора как
элемента систем автоматического управления (САУ) введем вектор
линейно независимых управляющих воздействий
тт/\У* Г * * *1
U = ип uh иг ,
df L J
формируемых управляющей частью САУ. Для обеспечения жесткого
закона коммутации выберем следующий алгоритм функционирования
локальной системы управления инвертором:
461
♦ \ / ♦
'J SgWft
F2 =diag sg -u*\ sg[~uh
(19.1)
Здесь используются пороговые функции Sg(x) вида (18.3,а).
Такой закон исключает паузы между интервалами проводимости
вентильных блоков инвертора.
Анализ формул (19.1), (18.5) и (18.6) позволяет представить в
уравнениях общего вида (18.17) и (18.19) разность матриц Ft и F2 в
виде диагональной матрицы:
F12 = Fj - F2 ~ diag sign w*
(19.2)
Сумма матриц Fj и F2 во всех точках непрерывности их
компонент равна единичной матрице:
f1 + f2=e,
(19.3)
а все элементы матрицы F3 равны нулю.
Следовательно, при жестком законе коммутации уравнения
общего вида (18.17) и (18.19) существенно упрощаются:
Ufv = f^ - MoQ ;
Здесь
(19.4)
(19.5)
(19.6)
есть вектор-функция управления, определяющая
состояние вентильных блоков в фазах инвертора.
С учетом формул (19.4) и (19.5) получим основное уравнение
АИН с жестким законом коммутации:
Здесь
(19.7)
(19.8)
462
являет результирующую коммутационную
пРедС Л п функцию АИН. В развернутом виде
вектор' т ’
Отсюда видно, что формула (19.9) может быть представлена в более
Тр/'Л’
компактном виде, как результат умножения слева вектора rw на
1
матрицу -М:
А*
Фр=-МЕр. (19.10)
и 2 и х z
Как и следовало ожидать, компоненты
коммутационной функции (19.10) линейно зависимы и удовлетворяют
условию
S/y-O.
Из формулы (19.7) следует, что такому же условию
удовлетворяют и компоненты wy/- (j = 6t,Z?5c) вектора Ufs. Это
утверждение справедливо для любого набора значений компонент
Uj вектора управления U^s .
Для определения реакции инвертора как элемента нагрузки
фильтра воспользуемся уравнением баланса мгновенных значений
мощности на входе и выходе инвертора
«Л = Up • Ip . (19.11)
С учетом формулы (19.7) получим выражение тока питания
инвертора в виде скалярного произведения векторов:
in = фр • 1р . (19.12)
463
Аналогичный результат можно получить и из формулы (18.23).
На рис. 19.1 изображена структурная схема модели инвертора,
описываемой формулами (19.6), (19.7), (19.10) и (19.12).
Рис. 19.1. Структурная схема модели АИН
с жесткими законами коммутации
Схема характеризует инвертор как существенно нелинейный
объект управления, в структуре которого имеется трехмерный
нелинейный элемент с разрывной характеристикой и нелинейные
элементы типа “перемножение переменных”.
19.2. Геометрическая интерпретация
Для более наглядной характеристики процесса преобразования
сигналов трехфазным инвертором на уровне, адекватном описанию
трехмерной модели АД, полезно рассмотреть следующую
геометрическую интерпретацию [125].
Введем в базисе Fy векторы, изображающие непрерывные
сигналы управления инвертором
дискретную вектор-функцию управления ключами инвертора
результирующую коммутационную функцию инвертора
и вектор фазных напряжений на обмотках статора двигателя
U v Usa MS. I 1ЛЛХ.
.У
.У •
464
Р9ЗоЛя._
НСТа' • "> г?
" *^а '- П
Упра
^Ия
Э ъ j
Р°СтРа„
цо . , нст
-м ,Л
(рРс. ?9 ^°6Ра^Прав^
- ,6Ны
6ес1со^н
Дискре^
7 ЗНаче^и fHs Bcejc
т°р р
* м°^ег
°- <»>*
П°ЭТОМу
ест&о г,
По
Л/*ПИЧ
И*
М13ОЖег^ Ве*ТОр
Вектор.фу
ИНГеР^лах
Поэго^ В
нД/л
Я ва
, fiepto
Рчс. 19
Упрэвле
*сний
УпРа$
НеГ1РерЬ
°Т/1рЧце
* - *•*
'' vt1^,p '
Ора лвп Н
^ЮТс
ЧН°ГО „..
°СТц
От ь
*о*е "СГ'РеРв
е-
’£п „* °"Ct,rbi
I/3O6,
пу р^зл:
Гео ^^bix
На рис. 19.3 приведена таблица, детализирующая закон
преобразования вектора U* в вектор Fw. Из нее следует, что при
любом положении вектора U* вектор Fw занимает такое
фиксированное положение, при котором его конец находится в
ближайшей к концу вектора U* вершине куба А\ + Н\.
Рис. 19.3. Геометрические места концов вектора коммутационной
функции АИН с жестким законом коммутации
Второй этап преобразования, определяемый формулой (19.9), дает
вектор результирующей коммутационной функции Фм с линейно
зависимыми координатами fa,fb,fc- В связи с наличием в формуле
матричного сомножителя
- L2 + 1 nl
значении < ±—, ±-, 0 >
3 3 1
М они имеют в базисе Fs. область
Геометрическим местом концов вектора
Фи является (см. п. 8.3) плоскость Р. Эта плоскость проходит через
начало координат и расположена ортогонально к прямой,
соединяющей вершины куба G] и Н\ с координатами (1,1,1) и
466
1 1) Соответствующий закон отображения точек А\+Н\ на
’ ть р иллюстрируется на рис. 19.3 таблицей. Как следует из
ф мулы (19.9), точка G] и точка Н\ отображаются в начало
координат. Следовательно, если радиус - вектор Fw направлен в одну
из указанных точек, то его преобразование в вектор Ф„ дает нулевой
вектор. Оставшиеся шесть точек (Д-^) отображаются
соответственно в точки А2 являющиеся вершинами правильного
шестиугольника с центром в начале координат. Для данного этапа
преобразования также справедлив закон "ближайшей точки".
Третий этап преобразования, определяемый формулой (19.7),
характеризует вектор Фм как направляющий по отношению к
вектору иу = ипФм. Итак, направление вектора, изображающего
фазные напряжения на нагрузке, задается вектором коммутационных
функций инвертора, а длина - величиной напряжения источника
питания инвертора.
19.3. Преобразование координат
То обстоятельство, что векторы Фу и U v лежат в плоскости Р,
свидетельствует о целесообразности наблюдения за ними в базисе G>y
и соответствующей ему (см. табл. 8.1) системе координат О ару. С этой
целью разложим векторы U*, Фм и Uy по векторам базиса GУ
и* ♦ ♦ Л ♦
-иаа+ирР +и7 / ;
fa & + fр Р + fy У 1
U, = usa а + Щр Р + Щу У
Соответствующие формулы преобразования координат этих
векторов имеют вид:
467
(19.13)
(19.14)
(19.15)
Годограф вектора Фм, изображающего в базисе G.s
результирующую коммутационную функцию инвертора (см. рис. 19.3),
весьма прост и удобен для построения годографа вектора
Us. - . Геометрические места концов вектора Фм
изображаются точками А^ F$ и точкой 0.
С учетом приведенных выше формул основное уравнение
инвертора (19.7) приобретает для преобразованных переменных
следующий вид:
и?'=мпФ^', (19.16)
а уравнение реакции (19.12) -
i = - ф°' • IGv
*п 2 w Л
Следовательно,
(19.17)
Второй этап преобразования координат. Возможно также
построение модели с преобразованием координат векторов к базису
Н. Для этого следует ввести преобразованный вектор управления
(19.18)
468
преобразованную
коммутационную функцию АИН
Фн = [л /у аГ = аМ)ф*.
" dfL
(19.19)
Тогда формулы
(19.7) и (19.12) преобразуются к виду :
(19.20)
Соответству
U -и Ф
.S* 5
(19.21)
юшие варианты модели изображены на рис. 19.5 и 19.6.
Рис. 19.4. Структурная схема модели АИН в базисе G v
Рис. 19.5. Структурная схема модели АИН в базисе Н
и
С помощью описанных моделей проанализируем наиболее
важные с практической точки зрения частные случаи режимов
управления автономными инверторами напряжения с жесткими
законами коммутации.
469
19.4. Базовый режим управления инвертором
с жестким законом коммутации ( Л = л )
Рассмотрим сначала базовый режим управления, в котором
интервал непрерывной проводимости каждого из вентильных блоков
равен полупериоду коммутационной функции АИН (Л-тг). Для
анализа данного режима воспользуемся моделью рис. 19.5, приняв
м*=0. Тогда вектор U*, изображающий управление U*, будет
расположен на плоскости Р. В связи с этим удобно (рис. 19.6) ввести
полярные координаты и и 0^к этого вектора по соотношениям:
* ♦ Л*
их = и cos 0ик;
иу = и sin 0ук;
(19.22)
(19.23)
(19.24)
Рис. 19.6. Представление управляющего вектора в
декартовой и полярной системах координат
470
Координаты вектора U* в базисах Gv и F1V определяются
формулами.
u* cos 6^
* • л*
и sin в..
V1
(19.25)
*
ub
*
ис
(19.26)
В этих формулах Д=2л/3, а угол
* * __
ви = &ик + &к
(19.27)
представляет собой угол поворота управляющего вектора U*
относительно оси О а.
Формула (19.26) позволяет для всех и* > О
вектор-функцию (19.6) векторного
дискретную
иЛ* - [и*
*
иь
аргумента 0*:
If
представить
аргумента
в виде дискретной вектор-функции скалярного
1Л„
(19.28)
Аналогичным образом можно представить и коммутационные
вектор-функции инвертора в виде функций непрерывного скалярного
аргумента О* :
4*1
ф^ = |а,мр„л=ф^(^).
(19.29)
(19.30)
471
Соответствующие этим формулам графики компонент
функции (19.29) и компонент/^*),/Д#*)
функции (19.30) изображены на рис. 19.7 сплошными линиями и
выделены штриховкой.
Рис. 19.7. Коммутационные функции АИН в базовом
режиме управления с Л-тг
Изображенный на рис. 19.8 годограф вектора оказывается
таким же, как на рис. 19.3, однако в связи с условием = 0 из числа
геометрических мест вектора Фг/ исключается точка 0. Полярные
координаты fu и 0и этого вектора: •
(19.31)
cos(9M=”- ; (19.32)
Ju
sin fl. -
(19.33)
и
472
a
Рис. 19.8. Представление изображающих векторов
в декартовой и полярной системах координат
С помощью формул (19.28) - (19.33) легко установить, что при
непрерывном изменении аргумента 0* угол 0и поворота вектора
Ф.. относительно оси
44
О а принимает ряд дискретных значений :
(19.34)
Vя- при (2и< <0*и <(2v + l)J;
о о о
v = o, ±1, ±2 ...
График функции 0J 0* j показан на рис. 19.7 и 19.9.
473
Рис. 19.9. Характеристики фазового канала инвертора
Приведенные соотношения позволяют произвести
эквивалентную замену кусочно-непрерывных функций (19.29) и (19.30)
непрерывного аргумента 0* непрерывными функциями
= Ф*(0М); (19.35)
(19.36)
дискретного аргумента 0и, связанного с непрерывным аргументом 0*
формулой (19.34). Тогда выражения U/ основного уравнения
инвертора (19,7) и (19.16) приобретают вид:
Up'
df
usa
usb
u.cosfl.
и
m5cos(^„ - A)
us cos(0u + A)
(19.37)
^sa
USy
wvcos6t
Ь-J
zrsinfi. ,
W
0
(19.38)
474
(19.39)
где
Сопоставление полученных формул с аналогичными по форме
представлениями входных величин (19.26) и (19.25) показывает, что
связь между входом и выходом инвертора наиболее просто
выражается через соотношение полярных координат векторов [123].
Соответствующая формулам (19.34) и (19.39) модель инвертора в
системе ПЧ-АД с представлением векторов в полярных координатах
показана на рис. 19.10.
Рис. 19.10. Структурная схема модели системы ПЧ-АД
в полярной системе координат
В структуре модели инвертора имеются два автономных канала
управления полярными координатами us и ви вектора Uy. В отличие
от первого (амплитудного) второй (фазовый) канал содержит
нелинейный элемент квантования по уровню, отражающий
дискретные свойства вентильной схемы инвертора.
Для определения реакции инвертора как элемента нагрузки
источника питания используется формула (19.17). Путем введения
полярных координат is и 01 вектора токов статора двигателя Is по
соотношениям
475
h у ha + hfl ’
cos 0^ — isa /is ,
sin6> = isfi/is
(19.40)
формула реакции с учетом выражений (19.31) - (19.33) приводится к
виду:
/и = zycos(0M - 0/) = iscos(p . (19.41)
Такая модель удобна для анализа свойств инверторов и поиска
рациональных путей технической линеаризацией их фазового канала
на основе принципа фазовой модуляции, разработанного
первоначально для автономных инверторов тока [46,148].
Для моделирования систем ПЧ-АД на вычислительных машинах
целесообразна трансформация модели из полярной в декартову
систему координат, соответствующую базису Gy. Для этого
необходимо вычисление тригонометрических функций углов 0* и
0W. Формула (19.34) позволяет установить следующий закон
соответствия между тригонометрическими функциями этих углов:
476
На основе этих формул в базисе G.s может быть построена
эквивалентная двумерная модель трехфазного инвертора:
cos#J =иа/и ;
cos0u =Fl(cos0*\;
fu = 2/3;
sin#* =и*р/и ;
sin#tt = F2(sin6£j;
д wn sin 0U ,
(19.44)
in = «га cos6l+^’Не-
структурная схема модели показана на рис. 19.11.
1
-------------------------------------------------------------------------------------------------------------------------------------------------1
Рис. 19.11. Структурная схема модели системы ПЧ-АД
в базисе G
ак видно, введение в структуру модели двух несложных
дискретных функциональных преобразователей, описываемых
формулами (19.42) и (19.43), позволяет избежать вычисления
тригонометрических функций.
477
19.5. Эквивалентные непрерывные модели систем I14-AJ
Рассмотренные выше модели позволяют исследовать процессы в
системе ПЧ-АД с учетом дискретности автономного инвертора.
Однако использование этих моделей для решения задач синтеза систем
автоматического регулирования встречает ряд трудностей,
обусловленных сложностью и наличием в их структурах нелинейных
элементов с разрывными характеристиками. В связи с этим
представляют интерес упрощенные модели, выполненные в виде
эквивалентных непрерывных систем на основе непрерывной
аппроксимации коммутационных функций инвертора.
Сущность данного подхода состоит в том, что из полных
значений переменных состояния системы выделяются и учитываются
лишь такие непрерывные составляющие, которые имеют смысл
полезных сигналов, несущих основную информационную либо
энергетическую нагрузку. Метод непрерывной аппроксимации
подробно разработан в монографии [17] применительно к
управляемым выпрямителям. Развитие этого метода в приложении к
системам электроприводов переменного тока с управляемыми
автономными инверторами дано в работе [55]. В этой и ряде других
работ метод непрерывной аппроксимации базируется на
представлении коммутационных функций инверторов, как
периодических функций времени. В связи с этим данный
метод строго обосновывается лишь для случая постоянной частоты
инвертора, поскольку при непрерывном изменении частоты
периодичность коммутационных функций нарушается. Отмеченный
недостаток устранен в рамках иного подхода, предложенного в
работе [120] и разработанного в [94,99,123,125,130,183]. Рассмотрим
подробнее этот вопрос.
Обратим внимание на то обстоятельство, что коммутационная
функция инвертора (19.29) рассматривается не как функция времени, а
как функция угла поворота управляющего вектора U *,
т. е. как пространственная функция. Поэтому вне
зависимости от закона изменения угла 0* во времени периодическая
дискретная пространственная вектор-функция Фм 16?w 1 с конечным
числом точек разрыва первого ряда на интервале повторяемости
0... 2я сохраняет свой вид.
Следовательно, она разлагается в ряд Фурье по аргументу 0* :
(19.45)
478
Г пмонические составляющие функции (19.45) непрерывны. В
и полезной непрерывной составляющей коммутационной
качестве вь1деляется ее основная пространственная гармоника
(19.46)
показанная на рис. 19.7 штриховыми линиями. Тогда из формул (19.7)
и (19 17) получаем следующие выражения непрерывных составляющих
вектора напряжений на обмотках АД и реакции инвертора:
(19.47)
(19.48)
При переходе к базису Gs формулы (19.46) - (19.48)
приобретают вид:
(19.49)
(19.50)
(19.51)
Структурная схема эквивалентной
вобп ^лсма эквивалентной непрерывной модели
аомои а На РИС‘ 19.12. Как видно, пренебрежение высшими
иками коммутационной функции (19.45) дает линеаризацию
479
характеристик функциональных блоков схемы рис. 19.11 (на рис. 19.12
прежние характеристики показаны штриховыми линиями). Кроме
того, несколько изменяется модуль вектора коммутационной функции,
что показано на рис. 19.7, Соответственно изменяется коэффициент
передачи элемента на выходе модели источника питания (см. рис.
19.12).
Рис. 19.12. Эквивалентная непрерывная модель
системы ПЧ-АД в базисе G.y
И, наконец, переходя к базису Н, получим следующую модель :
(19.52)
cos 0*к
sin 0*ик
О
(19.53)
480
(19.54)
Структурная схема эквивалентной непрерывной модели,
исываемой формулами (19.52) - (19.54), изображена на рис. 19.13.
Модель преобразователя
Рис. 19.13. Эквивалентная непрерывная модель
системы ПЧ-АД в базисе Н
Результат трансформации этой модели в полярную систему
координат показан на рис. 19.14. Из сопоставления структурных схем
рис. 19.14 и рис. 19.10 следует, что переход к эквивалентной
непрерывной модели влечет линеаризацию фазового канала и
некоторое изменение коэффициента передачи амплитудного канала
Рассмотренный подход к построению эквивалентных
непрерывных моделей дает корректные предпосылки для построения
на их основе систем автоматического частотного управления
электроприводами переменного тока как с автономными инверторами
напряжения, так и с инверторами тока [94,120 - 123 и др.].
481
Рис. 19.14. Эквивалентная непрерывная модель системы
ПЧ-АД в полярной системе координат
19.6. Моделирование рабочих процессов при асимметрии
нагрузки трехфазного инвертора
Рассмотрим некоторые особенности моделирования рабочих
процессов в случае асимметрии нагрузки инвертора. Пусть объектом
моделирования является система "трехфазный мостовой автономный
инвертор напряжения - асинхронный двигатель" (АИН-АД),
расчетная схема которой изображена на рис. 19.15.
Рис. 19.15. Расчетная схема системы ИН-АД
482
рабочие процессы опишем при следующих основных
ениях: первичный источник питания АИН - генератор
Д°ПУ жения с конечным внутренним сопротивлением; в цепи питания
НаП птора включен линейный LC фильтр; переключающие элементы
ИН птора - идеальные полностью управляемые ключи,
нтированные неуправляемыми обратными вентилями.
Закон коммутации (управления ключами АИН) - произвольный,
том числе несимметричный, но не допускающий короткого
замыкания шин питания через ключи АИН, а также бестоковых пауз в
(Базах нагрузки. Обмотка статора АД соединена в звезду без
нейтрального провода. Схема замещения каждой из фаз обмотки
статора двигателя содержит активное сопротивление г-,
индуктивность рассеяния /у и внутреннюю ЭДС
= й, с), индуцированную главным магнитным
общности предполагается, что
машины ej
полем. Для
ra^rb^rc^
еа+еь + ес.*0.
(19.55)
(19.56)
1а*1ь* lc ;
Для исследования рабочих процессов в системе при указанных
условиях в [126,130] разработана трехмерная модель несимметричной
системы АИН-АД, алгоритм функционирования которой
определяется следующими матричными и скалярными уравнениями:
(19.57)
(19.58)
(19.59)
(19.60)
(19.61)
(19.62)
(19.63)
(19.64)
Д сь фигурируют следующие матрицы:
483
Структурная схема модели изображена на рис. 19.16.
Рис. 19.16. Математическая модель системы АИН-АД
484
На
линейно
входе модели действует трехмерный вектор-столбец UG*
независимых управляющих воздействий w* , Up и и*.
Компоненты вектора управления задаются в виде
ит cos 0*
♦ Л*
ит sin
42^
(19.68)
где Uq -
в общем случае есть функция трех переменных:
(19.69)
геометрическом смысле
(рис. 19.17) эти
воздействия
рассматриваются как координаты
трехмерном ортогональном базисе
радиус-вектора управления в
(19.70)
Рис. 19.17. Радиус-вектор управления инвертором
Преобразователь координат ПК с матрицей преобразования At 1
вычисляет координаты и* и и* радиус-вектора управления в
азном трехмерном ортогональном базисе :
485
F, =
df
(19.71)
В соответствии с формулами (19.68) и (19.57) фазные координаты
вектора управления определяются выражением
*
*
иь
+
иг
M^COS(6>‘) + Mo
«X COS(6>* -А) + Ир
w^cos(/9* + A) + wq
(19.72)
где А = 2л/3
Релейный элемент РЭ
формирует дискретную вектор-функцию
управления инвертором
компоненты которой fa , и fc
sign \и* J
sign [u*h j ,
sign I и* I
(19.73)
определяют состояние ключей
АИН. С помощью матрицы Mw вычисляются по формулам (19.58) и
(19.59) главные составляющие результирующей коммутационной
функции инвертора
фЖ) =
Q1
(19.74)
= N G
Векторы фазных ЭД С и токов определяются из решения
дифференциальных уравнений модели двигателя. Ток питания
инвертора zn вычисляется по выражению (19.61) в форме скалярного
произведения вектор-функции управления ключами инвертора
F/ F*\ *F
FJ(U') и вектора фазных токов нагрузки 15 . Элементы
внутреннего сопротивления первичного источника питания и входной
фильтр инвертора описываются скалярными уравнениями (19.63) и
(19.64).
Формула (19.60) позволяет представить вектор фазных
напряжений на нагрузке в виде двух составляющих :
486
л.осн
5. ДОП
(19.75)
Первая (основная) составляющая
UF =ипФ/7 =— М
^Л.ОСН "П4!! 2 W W }
(19.76)
ппеделяется напряжением питания и управляющими воздействиями
на входе инвертора, которые могут представлять как симметричную,
так и несимметричную систему сигналов. Кроме того, данная
составляющая зависит от соотношения индуктивностей рассеяния
обмоток двигателя, входящих в выражение (19.66) матрицы Ми. В
случае симметрии индуктивностей рассеяния матрица приобретает вид
Mw
(19.77)
что совпадает с выражением (2.41) матрицы М. Следовательно, при
равенстве индуктивностей рассеяния величина каждой из них не
влияет на главные составляющие коммутационной функции инвертора
и соответственно - на величины фазных напряжений на нагрузке.
Вторая (дополнительная) составляющая вектора фазных
напряжений
U.f доп = N„ Rf if - Nu Ef (19.78)
возникает при асимметрии как индуктивностей, так и активных
сопротивлений либо ЭДС фаз двигателя, включенного на выходе
инвертора.
Приведенные формулы описывают случаи как несимметрии, так
и симметрии нагрузки инвертора. Проанализируем частный случай
симметрии нагрузки. Учтем, что вследствие отсутствия
нейтрального провода в схеме питания нагрузки мгновенные значения
фазных токов во всех случаях удовлетворяют условию
ha + hb + (ус 0
(19.79)
Тогда в
фазных
случае равенства
обмоток статора
т.е. величины
между собой активных сопротивлений
оказывается, что компоненты вектора
падений напряжения на активных
сопротивлениях нагрузки инвертора также удовлетворяют условию
hi ha 'b hb + ^с (ус ® •
(19.80)
487
В случае симметрии (равенства между собой) индуктивностей
рассеяния фазных обмоток двигателя определяемая формулой (19.67)
матрица Nw становится независимой от значений этих
индуктивностей:
(19.81)
Как видно, ее выражение совпадает с выражением (2.42) матрицы N.
Учитывая описанные в п. 2.2 свойства матрицы N, можно заключить,
что при оговоренных условиях результат входящего в формулу (19.78)
произведения
N„Rflf = 0. (19.82)
По тем ^е причинам оказывается, что в случае симметрии
фазных ЭДС (еа + + ес = 0) и равенстве индуктивностей рассеяния
фазных обмоток двигателя, входящее в формулу (19.78) произведение
NMEf = 0. (19.83)
Итак, в частном случае симметрии активных сопротивлений,
индуктивностей рассеяния и фазных ЗДС двигателя первая
составляющая вектора фазных напряжений полностью определяется
инвертором и не зависит от параметров нагрузки, а вторая
составляющая вектора фазных напряжений равна нулю. Поэтому
рассмотренные выше математические модели систем АИН-АД с
жесткими законами коммутации ключей и симметричной нагрузкой
инвертора являются частными случаями данной модели.
Это обстоятельство является существенным для моделирования
систем, в которых асимметрия является принципиальным фактором,
обусловленным конструкцией двигателя либо линии питания
двигателя от инвертора. В качестве примера можно указать на
линейные асинхронные двигатели, асимметрия параметров фазных
обмоток которых является следствием проявления краевого эффекта
на границах активной части индуктора.
Представленная модель ориентирована на исследование
разнообразных режимов управления инвертором. В частности, при
задании компонент вектора управления инвертором (19.68) по
условиям ит — const; 0* = Qs1; Mq = 0 модель описывает
базовый режим симметричного управления с интервалом
проводимости ключей А — 180°.
488
Важным
инструментом исследования более широкой
гаммы
♦
режимов
которая
• в
управления служит компонента вектора
может задаваться различным образом:
виде регулируемой константы;
управления
виде нормированной по модулю знакопеременной
(например, симметричной пилообразной либо гармонической)
функции аргумента 0и;
в виде нормированной по модулю периодической
знакопеременной (например, симметричной пилообразной
либо гармонической) функции времени;
• в виде комбинации приведенных выше и иных функций.
Соответствующие режимы управления инвертором рассмотрены
в гл 20. В первом случае за счет постоянного смещения, вводимого по
каналу у, искусственно создается асимметрия сигналов управления
ключами инвертора. Вследствие этого имеется возможность
регулирования основной гармоники выходного напряжения АИН за
счет изменения Uy при постоянстве ЭДС первичного источника еп и
при работе ключей инвертора на основной частоте a>s.
Во втором случае моделируются режимы синхронной ШИМ с
любой заданной кратностью несущей частоты по отношению к
рабочей частоте. Введение по каналу у периодического
модулирующего воздействия, выполняющего роль сигнала несущей
частоты, позволяет в этом случае более эффективно управлять
амплитудой и фазой полезной составляющей выходного напряжения
инвертора. Модель учитывает влияние параметров (формы,
амплитуды и начальной фазы) модулирующего воздействия на
гармонический состав напряжения инвертора.
В третьем случае при моделируются режимы классической
симметричной двухсторонней ШИМ, причем периодическое
модулирующее воздействие по каналу у выполняет роль независимого
высокочастотного сигнала несущей частоты, определяющего частоту
коммутации ключей инвертора.
В четвертом случае моделируются модифицированные режимы
ШИМ с различными вариантами предмодуляции задающих
воздействий.
Представленная модель позволяет также исследовать режимы
управления инвертором при фазовой ШИМ, описанной в гл. 17. Для
этого параметр управляющего вектора ®* представляется в виде
суммы полезного (например линейно изменяющегося во времени)
489
сигнала и периодического модулирующего сигнала
арксинусоидальной, треугольной, синусоидальной либо иной формы.
Благодаря векторному представлению задающего воздействия
модель инвертора легко согласуется с моделями векторных систем
ШИМ. Расчетная схема рис. 19.15 и уравнения модели системы АИН-
АД позволяют в случае необходимости учесть асимметрию
параметров не только двигателя, но и линии его питания от
инвертора.
19.7. Выводы
1. Представленные модели систем “преобразователь - двигатель”
построены на соблюдении принципа единства подхода, методологии и
математического аппарата моделирования трехфазного двигателя
переменного тока и полупроводникового преобразователя частоты.
2. При этом переменные состояния как двигателя, так и
преобразователя частоты геометрически интерпретируются
изображающими векторами в трехмерном пространстве с
использованием общих базисов F.v, G.v и Н. При непрерывном
изменении координат управляющего вектора вектор состояния АИН
перемещается по вершинами трехмерного . куба. Вектор,
изображающий результирующую коммутационную функцию АИН,
есть результат ортогонального проектирования трехмерного вектора
состояния АИН на двумерное подпространство . По отношению к
вектору напряжений на обмотках АД данный вектор является
направляющим. Удобными для наблюдения за механизмом
преобразования сигналов инвертором являются базисы G3 и Н.
3. На основе моделей, учитывающих дискретность работы
автономных инверторов, возможно построение эквивалентных
непрерывных моделей с представлением коммутационной функции
инвертора не как функции времени, а как функции угла поворота
управляющего вектора. Это обеспечивает корректное использование
аппарата коммутационных функций в динамических моделях и
задачах исследования рабочих процессов при переменной частоте.
4. Модель, представленная на рис. 19.16, пригодна для
упорядоченного исследования как симметричных, так и
несимметричных режимов системы АИН-АД, включая режимы
управления с модуляцией.
490
Главе двадцатая
МОДЕЛИРОВАНИЕ РЕЖИМОВ УПРАВЛЕНИЯ
С МОДУЛЯЦИЕЙ ВЫХОДНОГО НАПРЯЖЕНИЯ
ИНВЕРТОРА
20.1. Базовая модель для исследования режимов
управления с модуляцией
Базовый режим управления с используется в группе
инверторных электроприводов, в которых функция управления
амплитудой напряжения на зажимах двигателя возлагается на
управляемый источник постоянного тока, а функция управления
частотой - на автономный инвертор. По мере развития
полупроводниковой преобразовательной техники находят более
преимущественное распространение инверторные электроприводы, в
которых для питания инвертора используется источник постоянного
тока с нерегулируемым, либо стабилизированным выходным
напряжением, В этом случае обе отмеченные выше функции
управления возлагаются на автономный инвертор. Они реализуются
путем усложнения законов переключения вентилей [3, 25, 35-37, 82, 92
’ °^еспечивающих модуляцию выходного напряжения инвертора,
оделирование таких режимов управления в классе жестких законов
коммутации также возможно на основе структур, рассмотренных в гл.
И“ГЛ 19* Рассмотрим методику решения этих задач путем
здеиствия на компоненты управляющего вектора [125,130].
491
В качестве базовой модели используем уравнения модели АИН
с симметричной нагрузкой в базисе G$,:
G *
Представим вектор управления U ' в виде:
где
(20.2)
В результате обратного преобразования координат формируется
вектор фазных задающих воздействий иа, и ис, каждое из которых
представляет сумму составляющих ненулевой и нулевой
последовательностей :
(20.3)
492
Первая составляющая
иат
★
^Ьт ~~
♦
ист
задается компонентами иа
cos 3*
U* (cos б£ - А
U* (cos в* + А
и Up управляющего
(20.4)
вектора и
представляет симметричную систему
аргумента . Вторая составляющая
* * / /п
Un — Uy / л/ Z
гармонических функций
(20-5)
задается компонентой и* управляющего вектора и определяет
одинаковое для всех фаз смещение фазных задающих воздействий.
Оценим влияние компоненты w* (либо и*) вектора управления
на процесс и результат преобразования инвертором сигналов
управления.
20.2. Независимое задание / - компоненты
управляющего вектора
На рис. 20.1. изображена структурная схема модели,
соответствующей уравнениям (20.1). Первая составляющая вектора
управления формируется внешним задающим генератором (на схеме
не показан), а вторая - внутренним генератором, характер воздействий
которого существенно влияет на процессы в системе.
Рис. 20.1. К оценке влияния компоненты и*
493
Рассмотрим процесс преобразования сигналов при постоянстве
у - компоненты управляющего вектора.
Предположим сначала, что и*= 0 . В этом случае м* =0, и мы
получаем базовый режим управления с Л=я , показанный на
рис. 19.7. В этом режиме управления определяемая формулой (19.46)
амплитуда основной гармоники коммутационных функций
автономного инвертора т. е. не зависит от
амплитуды U*m сигналов внешнего задающего генератора. Поэтому
амплитуда основной гармоники выходного напряжения инвертора
также не зависит от амплитуды сигналов внешнего задающего
генератора и определяется величиной напряжения источника питания
инвертора. Частота основной гармоники выходного напряжения
определяется скоростью изменения во времени аргумента 0*, т.е.
частотой сигналов внешнего задающего генератора.
♦
При uz > 0 коммутационные функции инвертора изменяются
таким образом, что их основные гармоники уменьшаются. В
частности, при w* > V2 U*m, т.е. при м* > U*m их амплитуды
оказываются равными нулю, так как за счет значительного смещения
задающих воздействий полностью блокируются переключения ключей
инвертора. Следовательно, компонента w* в принципе может быть
использована для управления амплитудой полезной составляющей
выходного напряжения инвертора при постоянстве напряжения его
источника питания и параметра U*m внешнего задающего генератора.
На рис. 20.2 показан режим управления при промежуточном
. *
фиксированном значении компоненты и? , удовлетворяющем условию
и*т>ип>0.
(20.6)
Как видно, целенаправленное смещение фазных задающих
воздействий (они выделены штриховкой) вызывает определенную
асимметрию коммутационных функций и выходных напряжений
инвертора и как следствие - уменьшение их основных гармоник.
При непрерывном, например, линейном, изменении аргумента
*
0и во времени, частота полезной составляющей выходного
напряжения инвертора будет равна частоте сигналов внешнего
задающего генератора. С той же частотой переключаются ключи
инвертора. Жесткий закон коммутации сохраняется, поскольку
нулевые значения напряжений на нагрузке обеспечиваются путем
494
одновременного
группы инвертора.
включения всех
ключей анодной (либо катодной)
Рис. 20. 2. Режим управления инвертором при постоянстве
компоненты и* управляющего вектора (и* > 0 )
Вследствие отсутствия в схеме нейтрального провода вектор
фазных напряжений на нагрузке U^v не содержит составляющей
нулевой последовательности (в математической модели эта
составляющая исключается в результате действия матрицы М).
Поэтому компонента us? вектора преобразованных выходных
напряжений инвертора равна нулю и не зависит от компоненты
вектора управления.
Однако величина и? влияет на результат преобразования
величин ?/* и г.
а в величины usa и usp. Именно в этом заключается
495
роль компоненты и? управляющего вектора в процессе
преобразования сигналов в системе ПЧ-АД.
Недостатком режима управления с и? = const является
существенное ухудшение гармонического состава напряжения АИН
при снижении амплитуды основной гармоники.
Более благоприятные режимы управления обеспечиваются при
*
периодически изменяющемся сигнале и?. В связи с этим представляют
интерес следующие режимы управления.
20.3. Периодическое * изменение у - компоненты
в функции угла поворота управляющего вектора
* Рассмотрим процесс преобразования сигналов при U*m = const и
л
периодически изменяющемся сигнале w*, что иллюстрируется
структурной схемой модели рис. 20.3 и графиками рис. 20.4.
Рис. 20.3. Моделирование режима управления с периодическим
изменением у - компоненты в функции угла поворота
управляющего вектора
ф *
Здесь по-прежнему вектор фазных задающих воздействий иа,
и ис определяется формулами (20.3) и (20.4). Первое слагаемой
представляет симметричную систему гармонических функций/
*
аргумента 0и. Второе слагаемое определяет их вертикальное
смещение относительно оси абсцисс. Однако определяющая указанной
496
смешение
величинои
Здесь Un
*
компонента и? является в данном случае переменной
математическое описание которой имеет вид;
(20.7)
(20.8)
постоянная величина, представляющая собой
амплитудное значение функции и*п
нормированная по модулю формообразующая
периодическая функция угла поворота управляющего
вектора.
Рассмотрим пример, в котором f j представляет собой
симметричную пилообразную функцию угла поворота управляющего
вектора с периодом повторения О...2я/3 :
(20.9)
Здесь п — 0,1,2, 3,... - номер периода.
Значения аргумента 0* однозначно определяются компонентами
♦ *
иа и вектора управления в соответствии с формулой (20.2). Один
из возможных алгоритмов вычисления 0* приведен на рис. 6.5.
В данном случае целесообразно рассматривать вектор задания
фазных напряжений иа,иь и и* как результат наложения на
основные сигналы uafn, иЬт и ист (они показаны на рис. 20.4
СоотХ°ВЬ1МИ Линиями) модулирующего сигнала w* тройной частоты,
работы инве6 амплитУд этих сигналов существенно влияет на режим
497
Рис. 20.4. Режим управления инвертором при периодическом
♦
изменении компоненты и? в функции угла поворота
управляющего вектора
Если амплитуда основного сигнала превышает амплитуду
модулирующего (£7^ > Ц*п ), то последний не оказывает влияния на
работу системы и мы получаем рассмотренный ранее базовый режим
управления с Ключи инвертора работают с частотой, равной
частоте основного сигнала управления.
Если амплитуда основного сигнала имеет промежуточное
значение в интервале 0 < U*m < U* , то ключи инвертора работают на
тройной частоте. Соответствующие графики показаны на рис. 20.4.
Как следует из сравнения с режимом управления при Л=я (см.
рис. 7.11), в данном случае под действием модулирующего сигнала
возникают дополнительные переключения коммутационных функций.
При этом в диаграмме состояний инвертора возникают интервалы у с
одновременным включением всех ключей либо анодной (при
fj j — а>Ь,с\ либо катодной (при fj = -1) групп. В течение
498
этих интервалов значения коммутационных функций и выходных
напряжений инвертора равны нулю. Вне этих интервалов
коммутационные функции и выходные напряжения инвертора имеют
такие же значения, что и в режиме управления с 2=тг.
В результате получаем импульсную модуляцию,
позволяющую за счет изменения амплитуды основного сигнала
управления изменять амплитуду основных гармоник коммутационной
функции fu\. Соответственно изменяется и амплитуда Us\ основной
гармоники выходного напряжения инвертора от нулевого до
максимального значения при неизменной величине напряжения
источника питания. Соотношение между амплитудами основной
гармоники коммутационной функции инвертора, основным и
вспомогательным сигналами управления описывается
параметрической системой уравнений:
/Т COS
- [ 1 -2sin —
я- к 2 7
(20.10)
Решение этой системы уравнений представлено на рис. 20.5.
2
ТЕ
ТЕ
0.5
Рис. 20.5. Регулировочная характеристика инвертора
499
При показанном на рис. 20.3 соотношении начальных фаз
основного и вспомогательного сигналов управления начальная фаза
основной гармоники выходного напряжения инвертора полностью
определяется начальной фазой основного сигнала управления.
Частота основной гармоники выходного напряжения равна частоте
основного сигнала управления. Ключи инвертора работают на
утроенной частоте.
Такой режим управления может быть использован в случаях,
когда частотные свойства ключей либо устройств искусственной
коммутации тиристорных инверторов не позволяют реализовать
высокие кратности частоты переключения ключей в сравнении с
рабочей частотой инвертора.
Варьируя кратностью частоты, формой и начальной фазой
модулирующего сигнала, можно с помощью рассмотренной модели
исследовать различные режимы синхронной широтно-импульсной
модуляции (ШИМ), используемой в системах управления
транзисторными и тиристорными инверторами.
20.4. Периодическое изменение у - компоненты
в функции времени
Второй из отмеченных выше режимов управления используется
при отсутствии достаточно жестких ограничений на частоту
коммутации ключей инвертора. Тогда для моделирования может быть
использована структурная схема модели, изображенная на рис. 20.6.
Рис. 20.6. Моделирование режима управления с периодическим
изменением у - компоненты в функции времени
500
Здесь по-прежнему вектор фазных задающих воздействий w*,
и и* определяется формулами (20.3) и (20.4). Первая составляющая
* *
по-прежнему задается компонентами иа и Up управляющего вектора
и представляет симметричную систему гармонических функций
аргумента вц . Вторая составляющая задается компонентой и* ,
формируемой в виде высокочастотной периодической
времени с постоянной амплитудой и частотой :
л/2 uOI1 ,
функции
(20.11)
(20.12)
(20.12,а)
Моп(0 0 f (О ’
при пТ <t<nT + Т/2 ;
при riT + Т/2 < /<(и + 1)Т.
Здесь Uq
/(')
- амплитуда функции иоп (/);
- нормированная по модулю формообразующая
симметричная пилообразная функция времени с
периодом повторения 0 ... Т;
п = 0, 1, 2, 3,... - номер периода.
Временные графики сигналов при работе системы в данном
режиме изображены на рис. 20.7. В этом случае обеспечивается режим
классической двусторонней симметричной ШИМ с постоянной
частотой коммутации ключей. Сигнал Ц>п(0 выполняет роль
опорного сигнала несущей частоты. В результате наложения на
основной сигнал uafn ubm и ист высокочастотного модулирующего
сигнала won(/) нелинейные элементы модели формируют дискретные
широтно-модулированные функции f* и управления ключами
инвертора. На рис. 20.7. показаны также временные графики
компонент usa и и*р вектора напряжений на нагрузке и основные
гармоники этих напряжений usa ] и и*р\ (выделены пунктиром).
Режимы ШИМ подробно рассмотрены в гл. 14 и гл. 15. Отметим лишь
некоторые особенности их моделирования.
501
Рис. 20.7. Режим управления инвертором при периодическом
изменении компоненты и* в функции времени
и равномерном вращении управляющего вектора
При цифровом моделировании систем ШИМ с явно
выраженным опорным сигналом можно использовать алгоритмы
синтеза опорного сигнала, различным образом интерпретирующие
выражение (20.12). Один из возможных вариантов формирования
опорного сигнала в цифровой модели на каждом шаге расчета
приведен на рис. 20.8.
502
Рис. 20.8. Алгоритм расчета опорного сигнала ШИМ
503
Рис. 20.9. Алгоритм функционирования генератора
опорного сигнала ШИМ
После ввода (присвоения) текущего значения времени t и
заданных параметров (амплитуды и периода Т) опорного сигнала
ШИМ производится расчет относительного значения времени г на
504
тскушем периоде опорного сигнала tnT......tnT + Т. Дискретная
переменная 1пт вычисляется автоматически в результате
итерационного процесса с проверкой значений т. При монотонном
увеличении t это обеспечивает периодическое изменение значений г в
интервале 0 < т < 1. При задании начальных условий Czr(0) =/(О)
проверка инициирующего шаг итерации условия т < 0 может быть
исключена из алгоритма. Далее определяются значения
нормированной функции/(f), опорного сигнала won(f) и у-
компоненты вектора управления Отметим, что наличие явно
выраженной переменной / ограничивает область применения данного
алгоритма задачами с конечным временем процесса.
На рис. 20.9. приведен другой вариант алгоритма, в котором
исключена явно выраженная переменная t. Взамен ее фигурирует
приращение времени А/ на каждом шаге расчета. Это позволяет
использовать данный алгоритм для задач моделирования процессов с
неограниченным временем, а также и для синтеза цифровых
генераторов опорного сигнала в системах реального времени без
ограничений длительности процесса.
При использовании вращающейся системы координат
моделирование инверторов с модуляцией и в том числе с
координатными системами ШИМ целесообразно осуществлять в
соответствии со структурной схемой рис. 20.10.
Рис. 20.10. Моделирование режимов ШИМ во вращающейся
системе координат
505
Здесь сигнал несущей частоты по-прежнему задается
генератором, формирующим компоненту
U~ 'х/З Цэп ,
(20.13)
где функция wOn (0 описывается формулами (20.12), (20.12,а) и
может быть интерпретирована приведенными выше алгоритмами.
Такая структура удобна для моделирования инверторных
электроприводов переменного тока с векторными системами
управления, использующими вращающиеся системы координат, а
также для построения упрощенных эквивалентных непрерывных
моделей инверторных преобразователей частоты с ШИМ.
20.5. Эквивалентные непрерывные модели
инверторов с ШИМ
При достаточно высоком уровне несущей частоты [82] для
построения эквивалентных непрерывных моделей может быть
использован метод выделения полезных сигналов путем усреднения
мгновенных значений переменных в пределах периода несущей.
Рассмотрим основные соотношения, определяющие
непрерывную модель инвертора с симметричной двусторонней ШИМ.
Будем считать, что входные сигналы не превышают амплитуду
сигнала несущей частоты:
(20.14)
Тогда средние за период Т несущей частоты значения компонент
вектора выходных напряжений инвертора определяются формулой
(20.15)
где усредненная коммутационная вектор-функция АИН :
(20.16)
Полезная составляющая вектора преобразованных напряжений
506
«К1Г = Ал.(0А)ий’ = Кп U*,
(20.17)
где
Кп = diag
(20.18)
есть результирующий матричный коэффициент передачи
полезного сигнала инвертором.
Из формул (20.17) и (20.18) следует, что компонента вектора
выходных напряжений us^ — 0 независимо от компоненты и* вектора
* *
. Однако параметр компоненты
управления U — их
и* = и7 = V2L70 /(/)
управляющих воздействий их и иу на выход инвертора:
оказывает
влияние на коэффициенты передачи
(20.19)
2Ц>
(20.20)
Из последней формулы видно, что коэффициент передачи прямо
пропорционален величине напряжения источника питания инвертора
и обратно пропорционален амплитуде опорного сигнала ШИМ.
Следовательно, в условиях колебаний напряжения питания ии можно
стабилизировать коэффициент передачи инвертором полезного
*
сигнала на заданном уровне кп - const, если изменять амплитуду
опорного сигнала пропорционально напряжению источника питания:
(20.21)
Соответствующая связь показана на рис. 20.11 пунктиром.
Усредненные за период Т значения тока питания инвертора:
(20.22)
507
Соответствующая приведенным формулам эквивалентная
непрерывная модель системы ПЧ-АД с ШИМ изображена на рис.
20.11.
Рис. 20.11. Эквивалентная непрерывная модель системы
ПЧ с ШИМ - АД
Для уточненного анализа динамики системы “преобразователь -
двигатель” с учетом квантования сигналов и насыщения узла ШИМ в
связи с нарушением условия пропорционального управления (20.14)
следует использовать модель, изображенную на рис. 20.6.
20.6 Комбинированное формирование у - компоненты
как функции угла поворота и времени
Как показано в гл. 15, введение предмодуляции задающих
воздействий позволяет получить разнообразные режимы ШИМ и
улучшить характеристики инверторов. Моделирование этих режимов
возможно на основе комбинированного формирования у -
компоненты как функции двух переменных: угла поворота задающего
вектора и времени. Развернутая структурная схема
соответствующей модели приведена на рис. 20.12.
508
Рис. 20.12. Структурная схема модели системы ПЧ с ШИМ - АД
при комбинированном способе управления
Вектор управляющих воздействий на входе преобразователя
координат модели описывается следующим выражением:
(20.23)
где
В результате обратного преобразования координат формируется
вектор фазных задающих воздействий и*, и и* :
509
a um “n "on
(20.24)
Каждое из этих воздействий представляет сумму трех составляющих:
• заданного значения полезного сигнала и*т , J -a, bt с ;
• низкочастотного сигнала предмодуляции и*;
• высокочастотного опорного сигнала ШИМ иоп.
Первая составляющая в соответствии с формулами (20.3) и (20.4)
задается компонентами и*а и управляющего вектора
(20.25)
и представляет симметричную систему гармонических функций
аргумента 0^ с амплитудой U^. Эта составляющая формируется
внешним задающим генератором (на схеме рис. 20.12 не показан) либо
регуляторами САР электропривода.
Вторая составляющая формируется внутренним генератором
предмодулирующего сигнала (ГПМС) и представляет собой
периодическую функцию угла поворота управляющего вектора. Эта
составляющая предназначена для предмодуляции заданных значений
полезного сигнала по какому-либо из законов, рассмотренных в гл. 15.
Например, в случае предмодуляции сигналом третьей гармоники (см.
п. 15.6) составляющая ип формируется в виде функции компонент м*
и Up управляющего вектора:
1 .
— и„ —
(20.26)
и
*
Мд
510
Третья составляющая выражения (20.24) формируется
внутренним генератором опорного сигнала (ГОС) несущей частоты
ШИМ в соответствии с одним из рассмотренных выше алгоритмов.
В результате прохождения модулированных фазных задающих
воздействий w*, и и* через нелинейные звенья с релейными
характеристиками формируются дискретные функции f*,
определяющие состояния ключей в фазах инвертора,
преобразования
Л, /**
J и fc »
Линейные
(20.29)
определяют мгновенные значения
коммутационных функций и
выходных напряжений инвертора.
20.7. Выводы
1. Для упорядоченного исследования разнообразных режимов
управления трехфазным инвертором удобен координатный подход,
предполагающий наличие трехмерного управляющего вектора,
который воздействует на входы системы управления инвертором через
преобразователь координат. При этом моделирование режимов
управления с модуляцией обеспечивается путем воздействия на /
либо z - компоненту управляющего вектора. Для моделирования
511
режимов фазовой модуляции может быть использовано воздействие
на угол поворота управляющего вектора.
2. Структурная схема рис. 20.12 представляет пример
функционально законченной координатной системы ШИМ с
совмещением функций преобразования координат и введения
предварительного и основного модулирующих воздействий в каналы
задания фазных величин. В частности, введение предмодуляции
третьей гармоникой обеспечивает расширение зоны
пропорциональной передачи управляющих воздействий инвертором с
2
ШИМ в —= раз, т.е. на 15,5 %. Соответственно увеличивается
максимальное значение амплитуды полезного сигнала на выходе
инвертора.
3. В рамках приведенной на рис. 20.12 структуры возможно
моделирование и других вариантов модернизированных законов
ШИМ при соответствующем изменении функции генератора
предмодулирующего сигнала. Некоторые результаты моделирования
этих режимов приведены в гл. 15 и 16.
4. Рассмотренные примеры не исчерпывают возможностей
координатного подхода к моделированию и исследованию различных
режимов управления инверторами. Координатный подход дает не
только основу систематизированного исследования различных
алгоритмов ШИМ, но и представляет алгоритмическую базу
построения систем управления инверторами в электроприводах
переменного тока с координатными преобразованиями регулируемых
величин.
512
раздел пятый
ЦИФРОВЫЕ МАТЕМАТИЧЕСКИЕ
МОДЕЛИ СИСТЕМ
•ПРЕОБРАЗОВАТЕЛЬ - ДВИГАТЕЛЬ”
Глава двадцать первая
ЦИФРОВОЕ МОДЕЛИРОВАНИЕ
УСТАНОВИВШИХСЯ РЕЖИМОВ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
ПРИ ЧАСТОТНОМ УПРАВЛЕНИИ
21.1. Предварительные замечания
С математической точки зрения модель силовой части
электроприводов переменного тока с полупроводниковыми
преобразователями частоты описывается смешанной нелинейной
системой уравнений, включающей подсистемы дифференциальных и
алгебраических уравнений. Характерной особенностью последних
является наличие нелинейных функций, учитывающих насыщение
магнитной цепи двигателя и изменение параметров электрической
цепи ротора вследствие поверхностного эффекта, нелинейность
характеристик элементов механической системы, дискретность работы
и нелинейность характеристик полупроводниковых элементов
преобразователя частоты и другие факторы. В связи с этим к числу
наиболее специфичных особенностей цифровых алгоритмов и
моделирующих компьютерных программ относятся аналитическое
представление нелинейных характеристик элементов системы, выбор
методов численного решения алгебраических и интегрирования
Дифференциальных уравнений модели объекта, оптимизация диалога
пользователя с ЭВМ, документирование условий и результатов
эксперимента, а также упорядочение последовательностей отмеченных
процедур. Рассмотрим некоторые из этих вопросов сначала
513
применительно к задачам моделирования установившихся режимов
асинхронных двигателей при частотном управлении.
При моделировании установившихся режимов асинхронных
двигателей, получающих питание от различных источников,
возникает необходимость решения следующих основных
разновидностей задач:
• расчет характеристик АД при питании от источника
напряжения;
• расчет характеристик АД при питании от источника тока;
• расчет экстремальных характеристик АД как объекта
оптимального управления.
При учете насыщения магнитной цепи АД эти задачи не имеют
аналитического решения. Поэтому рассмотрим вопросы проблемно
ориентированного математического описания, алгоритмизации и
использования численных методов решения данных задач.
21.2. Уравнения цифровой математической модели
асинхронного двигателя
Система единиц. Уравнения модели АД запишем в
относительных единицах. Для относительных значений угловой
частоты напряжения и тока статора 0)s~ Cls/Q.6, амплитуды (либо
действующего значения) напряжения статора us—Us/Uq, тока
статора is = IS/I^ и относительной величины электромагнитного
момента т—М/М^ базисными примем их значения в точке
номинального режима двигателя:
^б Л.н ’ М$ — Л/элм.н • (21-0
Все токи (статора, результирующий намагничивающий и ротора)
представим в одном базисе, т. е.
Скорость вращения 69 — и абсолютное
скольжение
Р = (Ц) -
ротора выразим в долях от синхронной скорости
Qq при номинальной частоте:
— ^о.н ~ ^б/^
(21.2)
где zp - число пар полюсов машины.
514
Для относительных амплитуд (либо действующих значений) всех
потокосцеплений
выберем базисное значение
T6=^/Q6. (21.3)
Для активной ps = Ps/P6, реактивной Qs~Qs!^6^ полной
ss. = Ss/Pfi, механической Рмех~^мех!^б и мощности потерь
д^д = P^/Pfj базисной примем электромагнитную мощность в
номинальном режиме
^ЭМ.Н “ MfiQdr' (21-4)
Относительные значения параметров двигателя определим как
где Z6 - базисное сопротивление.
(21.5)
Уравнения модели двигателя. В основу построения цифровой
модели АД положим систему уравнений установившегося режима
[111,123], модифицированную следующим образом [124,125]:
со у - со + Р;
Wm=4Sm{0}-, ^=q6r{0}-,
ps = q а>0+К (а>s, 0)
cos <рл = ps ss ;
(21-6)
(21.7)
(21.8)
(21 -9)
(21.10)
(2I.H)
(21.12)
(21.13)
<
m~ q0\
Рмех
Ард =gK(«v,/?) +Ар
мех 4“ ДРдоб •
(21-14)
(21.15)
(21.16)
515
В системе уравнений модели введена вспомогательная
переменная q и использованы модифицированные базисные
функции £;(/?), и Это обеспечивает
нормирование базисных функций и исключение в цифровых
алгоритмах операций деления на ноль (при Д-0). В развернутом
виде модифицированные базисные функции скорости и абсолютного
скольжения имеют следующий вид :
Здесь коэффициенты b.c.d.e определяются аналогично [18] по
приведенным к статору относительным значениям параметров схемы
замещения АД при переменной частоте :
scr + гсг + ^гсг т ’
(21.18)
Для учета насыщения стали характеристика намагничивания АД
по главному пути представляется нелинейной функцией вида
Vт VGwOm)’ либо im
516
При этом связь между
формулой:
величинами 1//т, im и 1т определяется
' - т
т
(21.19)
Математическое описание нелинейной характеристики
намагничивания дано в п. 21.3.
Характеристические константы. В приведенных уравнениях
модели фигурируют постоянные коэффициенты:
5
кр
Элином
ном .
Они характеризуют удельный вес электрических потерь в обмотках
статора, ротора, потерь в стали на гистерезис и от вихревых токов по
отношению к электромагнитной мощности в номинальном режиме.
Важным параметром машины является константа
(21.20)
Можно показать (см. гл. 6), что эта величина численно равна
отношению полной и электромагнитной мощностей машины в
номинальном режиме:
ЭЛ/.Н
S.H •
(21.21)
Здесь 5S н - относительное значение полной мощности в
номинальном режиме.
Следующая константа определяется формулой:
+ 4а)Ч’Ч+'-гДн'1
(21.22)
Можно также показать, что несмотря на различие математических
выражений численные значения этих констант должны быть равны:
^н=£г PL23)
Это условие весьма ценно тем, что позволяет при разработке
додели получить уравнение для проверки непротиворечивости
раметров схемы замещения и паспортных данных машины.
517
Действительно, из (21.20), (21.22) и (21.23) следует квадратное '
уравнение вида
(21.24)
Лр2н+Врн+С = 0 ,
Решение этого уравнения позволяет уточнить значение
номинального скольжения /?н, строго соответствующего
относительным параметрам схемы замещения двигателя. Возможен
также и вариант коррекции относительных параметров модели по
заданному паспортному значению номинального скольжения. В
пояснение сказанного рассмотрим некоторые делали, ускользающие из
внимания неискушенных пользователей системы относительных
единиц.
21.3. Связь относительных единиц и параметров модели
Каждый реальный двигатель с фиксированными абсолютными
(неотносительными) значениями параметров , Rr, Lsa, Lro. и т. д.
при заданных параметрах питающего напряжения Us и обладает
вполне определенной статической механической характеристикой
м = /(□)., связывающей абсолютные значения электромагнитного
момента М и скорости Q. Альтернативными формами
представления механической характеристики являются функция
М = /(>?), связывающая абсолютный момент М и относительное
скольжение ротора
5 = (Q0 -Q)/Qo =(0^ -zpctyo.s (21.25)
либо функция М = f\p)> связывающая абсолютный
электромагнитный момент и абсолютное скольжение ротора
AQr = Qs- выраженное в относительных единицах [18]:
Р = (Qo -□) / П0.н =
(21.26)
518
По своему физическому смыслу график статической
еханической характеристики представляет геометрическое место
возможных установившихся
м
точек, характеризующих множество
режимов работы двигателя.
и При работе в каждой из точек механической характеристики
двигатель потребляет определенный ток, развивает определенный
вращающий момент и механическую мощность, работает с
определенным скольжением и несет определенные потери,
вызывающие его нагрев. Одна из точек статической механической
характеристики (например, показанная на рис. 21.1,а точка с
координатами 5Hj и Л/н]) квалифицируется как точка номинального
режима.
Рис. 21.1. Представление механической характеристики
асинхронного двигателя: а) в системе физических единиц;
б) в системе относительных единиц при двух значениях
номинального скольжения
Она выбирается по условиям нагрева и охлаждения с таким
расчетом, чтобы температура нагрева двигателя при работе в этой
точке соответствовала термостойкости изоляции его обмотки.
Соответствующие абсолютные значения тока, мощности, скорости и
Других величин указываются в паспортных данных либо определяются
из паспортных данных двигателя как номинальные. Некоторые из
519
них (ток статора, электромагнитная мощность, электромагнитный
момент) используются в качестве базисных величин системы
относительных единиц.
В зависимости от различных условий нагрева и охлаждения
(например, при различных значениях температуры окружающей
среды, относительной продолжительности включения в повторно-
кратковременном режиме работы и др.) один и тот же двигатель имеет
различные значения номинальной мощности. Иными словами,
изменение условий нагрева и охлаждения влечет за собой следующее:
в качестве номинальной определяется другая точка одной и
той же механической характеристики двигателя. Соответственно
изменяются номинальные значения скольжения (например, от 5н1
до 5н2) и электромагнитного момента ( от Л/н] до Л/н2), а также
тока статора, мощности и других показателей работы машины.
Вследствие изменения номинального тока и, соответственно,
базисного тока изменяется базисное сопротивление
системы относительных единиц, так как
Z6=U6/I6. (21.27)
Базисное сопротивление используется в приведенных выше формулах
(21.5) пересчета абсолютных параметров в относительные. Поэтому
при новом значении номинального скольжения двигатель с одними и
теми Же абсолютными параметрами схемы замещения Rs , Rr, Lsa,
Lr(J и Lm имеет новые относительные значения
параметров г. , г, Zvrr, lrrr и 1т и зависящих от них относительных
* «J г J Cz г Cz Ffl
констант и £н.
Вследствие изменения номинального и, соответственно,
базисного момента изменяется относительное значение критического
момента:
^кр ~ ’ (21.28)
так как абсолютный критический момент остается неизменным.
Соответственно (см. графики 1 и 2 рис. 21.1,6) изменяется и
относительная механическая характеристика тп- /(<»), связывающая
относительные значения электромагнитного момента т и скорости
й), либо скольжения ротора /3. Именно благодаря изменению
относительных параметров модель адекватно описывает измененную
механическую характеристику и другие рабочие характеристики
двигателя в новой системе относительных единиц.
520
Таким образом, определив однажды относительные параметры
вправе
изменяя
модели.
одном значении номинального скольжения, мы не
'матривать другое номинальное значение скольжения, не
Соответственно относительные значения параметров
совокупности
определенная
Именно эту
при
пасс,
соответственно относительные значения
Существует и обратная зависимость, а именно - в
относительных параметров модели скрыта
величина номинального скольжения двигателя,
зависимость между относительными параметрами и номинальным
скольжением двигателя выражает уравнение (21.24).
Изложенное полностью справедливо не только для статических,
н0 и для рассмотренных далее динамических моделей
электроприводов.
21.4. Аналитическое представление характеристики
намагничивания двигателя
Чаще всего исходная информация о характеристике
намагничивания двигателя представляется в графической либо
табличной форме, представляющей совокупность точек
п'Ьп.п)’ п ~ t -,N. В этом случае для аппроксимации
характеристики намагничивания удобно использовать следующую
гладкую аналитическую функцию:
к
= i = \,2,...,k. (21.29)
Z=1
Удобства оперирования со степенными многочленами
общеизвестны [103]. Выбор нечетных степеней полинома (21.29)
обеспечивает симметрию характеристики относительно начала
координат. В связи с возможным разбросом точек исходного массива
данных коэффициенты полиномиальной аппроксимации gi находятся
методом наименьших квадратов. Для удовлетворительной
аппроксимации характеристик намагничивания машин нормального
исполнения (в диапазоне изменения у/т- О...1,3 , включающем зону
существенного насыщения) практически достаточно в формуле (21.29)
ограничиться к ~ 4, т. е.
= g\ Wm + Z1 Чдп + g3 Vm + &4 Vm (21.30)
521
Применение процедуры полиномиальной регрессии к функции
(21.30) приводит к следующему матричному уравнению:
q
с2
с4
(21.31)
где
п = 1,2,...,N ;
п, N - соответственно порядковый номер и общее
количество точек из массива исходных данных.
Коэффициенты аппроксимации
gj=O.14845 g2 = 027737 gj = -0.5464 g4=0.4l725
Рис. 21.2. Аппроксимация характеристики намагничивания
522
В результате решения этого уравнения находятся коэффициенты
одинома gp Результаты работы компьютерной программы,
П.авизующей такой алгоритм, иллюстрирует рис. 21.2. Здесь
символом отмечены точки, координаты которых у/т.п и imn
введены в машину из массива исходных данных в процессе диалога,
результаты регрессии представляются значениями коэффициентов
gj ..g4 и графиком аппроксимирующей функции (21.29).
Полученные коэффициенты используются для аналитического
представления характеристики намагничивания АД в статических и
динамических моделях, учитывающих насыщение главной магнитной
цепи двигателя.
21.5. Учет вытеснения тока в обмотке ротора
Для повышения точности расчета рабочих характеристик
асинхронных двигателей с короткозамкнутым ротором в широком
диапазоне скольжений модель должна учитывать эффект вытеснения
тока в обмотке ротора. Этот поверхностный эффект существенно
проявляется у двигателей с глубоким пазом при больших частотах
тока в роторе. Вызывая неравномерное распределение плотности тока
по высоте стержней обмотки, поверхностный эффект приводит к
уменьшению эффективного сечения стержней, увеличению
эквивалентного активного сопротивления и уменьшению
индуктивности рассеяния обмотки ротора. Благодаря этому эффект
вытеснения тока полезно используется для улучшения пусковых
характеристик двигателей при питании от сети постоянной частоты.
Вытеснение тока в сторону воздушного зазора происходит в
основном только в пазовой части обмотки, которая помещена в
ферромагнитную среду. Поэтому для учета вытеснения тока
параметры обмотки ротора представляются в виде сумм [22] :
гг fг (<?) ^г.п ?Г.Л
U = //(£) и.п
(21.32)
(21.33)
где г и I
м 'г.п и 4ГСГ.П
Т и /
Г.Л И 1ГСГ.Л
- активное сопротивление и индуктивность
рассеяния пазовой части обмотки ротора при
равномерном распределении тока по сечению
стержней;
- параметры лобовой части обмотки, которые
полагаются неизменными;
523
" лй -
функции, учитывающие изменение параметров
пазовой части обмотки вследствие вытеснения
тока.
В теории электрических машин функции, учитывающие
изменение параметров пазовой части обмотки глубокопазного ротора
вследствие эффекта вытеснения тока, определяются формулами
Ф.Эмде:
sh 2£ + sin 2£
ch 2£ -cos 2£
Лй -
3 (sh2£ - sin 2^)
2£ (ch 2£ - cos 2£)
(21.34)
Графики функций /г(£) и //(£) представлены на рис. 21.3.
Рис. 21.3. Графики функций fr\%) и
В качестве аргумента этих функций фигурирует промежуточная
переменная зависящая от частоты тока в обмотке ротора и от
параметров машины. Ее можно представить в виде
£ = hj\0\ , (21.35)
где /3 - относительная частота тока ротора. В установившихся
режимах эта величина равна абсолютному скольжению,
определяемому формулой (2L26);
524
относительная высота стержня обмотки ротора,
определяемая формулой
А = -^~, (2136)
^пр.б
где Н
Нпр.
- высота стержня обмотки ротора, см ;
базисная эквивалентная глубина проникновения тока, см.
Последняя величина представляет собой эквивалентную
глубину проникновения тока в стержень в режиме
короткого замыкания при номинальной (базисной) частоте
напряжения питания двигателя. Она
следующим выражением:
определяется
(21.37)
Здесь р ~ удельное сопротивление стержня, Ом • мм2 / м;
// = = 0,4 л 10 - магнитная проницаемость вакуума, Г/см;
fSH =Qvh/2tt - номинальная частота питания, Гц.
Как следует из формулы (21.37), при стандартной частоте питания
fs н ~ 50 Гц и выполнении обмотки ротора из медных стержней с
удельным сопротивлением /7=0.02 Ом* мм /м базисная
эквивалентная глубина проникновения Нпр^~1см. Поэтому
относительная высота стержня численно равна высоте стержня,
выраженной в сантиметрах:
h « 77см /1см.
В случае выполнения обмотки из литых алюминиевых стержней,
имеющих в сравнении с медными примерно вдвое большее удельное
сопротивление, получаем /7Пр>б » 1.41см и величину
h « Нем / 1.41см.
Относительная высота стержня h является важным
конструктивным параметром обмотки, позволяющим оценить степень
влияния эффекта вытеснения тока в заданном диапазоне скольжений,
«оясним сказанное следующим примером.
525
Как видно из графиков рис.21.3, изменение параметров обмотки
фактически начинается при £> 1, где значения функции ~ ,
а при £ > 3/2 - значения Л(^) 3/(2£). В соответствии с
выражением (21.35) величина % зависит от относительной высоты
стержня и абсолютного скольжения. В режиме короткого замыкания
при номинальной частоте питания двигателя величина /3 ~ 1, т.е.
значение
Предположим, что обмотка ротора имеет параметр Л>1. Это
означает, что высота стержня превышает возможную глубину
проникновения в него тока в режиме короткого замыкания при
номинальной частоте. Иными словами, в данном режиме глубина
проникновения тока оказывается меньше высоты стержня, т.е.
поверхностный эффект препятствует равномерному распространению
тока по всей площади стержня в пазу.
Из характера функции /г(^) следует, что при й>1 этот
параметр можно квалифицировать как коэффициент
вытеснения, определяющий кратность увеличения
эквивалентного активного сопротивления пазовой части обмотки
ротора в режиме короткого замыкания при номинальной частоте в
сравнении с режимом идеального холостого хода.
Если же обмотка имеет параметр h < 1, то в том же режиме
короткого замыкания при номинальной частоте питания возможная
глубина проникновения тока превышает высоту стержня, т.е.
существуют условия более равномерного распределения тока по
сечению стержня. Поэтому в диапазоне режимов от идеального
холостого хода (/? = 0) до короткого замыкания при номинальной
частоте питания (/7=1) вытеснение тока в роторе несущественно. Это
подтверждается характером функций (21.34), значения которых при
£ < 1 близки к единице.
Вышеизложенное позволяет для обмотки ротора с любым
значением параметра h определить диапазон значений скольжения
- /7[р < Р < в котором влиянием эффекта вытеснения тока
можно пренебречь:
Др=±/Г2. (21.38)
Это положение иллюстрируют приведенные на рис. 21.4 графики
механической и электромеханической характеристик асинхронного
двигателя, рассчитанные без учета и с учетом изменения параметров в
526
с вытеснением тока. Здесь также показаны графики изменения
Триметров обмотки ротора в функции скольжения. В данном примере
обмотка ротора имеет параметр h = 3, т.е. Др = ± З-2 ® ± 0.11 .
Рис. 21.4. Характеристики асинхронного двигателя:
----- при постоянных параметрах;
-—--- при переменных параметрах обмотки ротора
Как видно из графиков, в этот диапазон скольжений попадает
полностью рабочая часть механической характеристики двигателя.
Поэтому эффект вытеснения тока практически не влияет на рабочий
участок характеристики, но проявляется при больших скольжениях,
существенно повышая кратность пускового момента двигателя.
В цифровых алгоритмах для вычисления функций (21.34)
целесообразно использовать выражения:
при
при
Л0 = Г
(21.39)
при £ &р ;
при £ < .
(21.40)
527
Здесь - малая положительная величина, в пределах которой
можно пренебречь изменением значений функций.
Рис. 21. 5. Алгоритм расчета переменных параметров ротора
528
формулы (21.39) и (21.40) позволяют исключить раскрытие
«рпеленности выражений (21.34) при /3 - 0 и ограничиться
неопр^л
мальным набором стандартных математических функции языков
миНИоаммирования. Соответствующий алгоритм расчета параметров
"бмотки ротора приведен на рис. 21.5.
° При некоторых допущениях и дополнительных определениях
аргумента ft как мгновенной частоты тока ротора
введенные выше формулы и алгоритмы расчета приемлемы для
Сближенного учета эффекта вытеснения тока как в статических, так
и^в динамических моделях двигателей.
21.6. Расчет характеристик асинхронного двигателя при
питании от управляемого источника напряжения
Рассмотрим алгоритм решения задачи, которая формулируется
следующим образом: при заданных значениях амплитуды и частоты
й)к напряжения источника питания АД рассчитать с учетом
насыщения его рабочие характеристики в заданном диапазоне
скольжений 0 = 0мин-Рмакс с шагом Др. Искомыми являются токи
i inv ir, потокосцепления у/х, \//г, электромагнитный момент
т и другие переменные системы (21.6) - (21.16).
Анализ показывает, что для каждого из значений скольжения
следует прежде всего определить магнитное состояние АД,
характеризуемое координатами рабочей точки кривой
намагничивания. Для этого необходимо решение следующей
нелинейной системы уравнений:
(2L41)
Данную систему целесообразно представить в виде одного
линейного алгебраического уравнения второго порядка
2
А0 W т + Vт irnfjPm} ^2 — Ч? ’
(21.42)
529
коэффициенты которого не зависят от насыщения главной магнитной
цепи:
гу (2rr(0s + rs0) + СУЛ2^(/УСТ + 2/гст)(уст
7 _ „2 . 2 j 2
^2 ~ sc '
Используя формулу (21.29), можно привести уравнение (21.42)
к виду:
^т) = Л+ЁЛТт=0- г = 12, ...2к-\. (21.44)
При к — 4 коэффициенты этого уравнения:
Л = g[ к3 + - gf;
У1 = 81ку,
Уз = 8з кз + si;
У4 = 84к3 + 2&2 S3 ;
(21.45)
У5 ~ 2&2 84 + S3 ’
Уб = 2S3 $4;
2
^7=#4-
Величины j/q, к% и к^ рассчитываются следующим образом:
_ ^1 ^2 1 +2gf, k^-k^ki^.
(21.46)
позволяет
Приведение исходных уравнений к виду (21.44) позволяет
использовать стандартные методы решения алгебраических уравнений
высокого порядка.
530
Алгоритм расчета координат магнитного состояния АД для
заданных величин и /? представлен на рис. 21.6.
Расчет
коэффициентов
уравнения
F(Vm) = 0
Решение
уравнения
Л^) = о
с заданной
погрешностью
Расчет координат
рабочей точки
характеристики
намагничивания
Рис. 21.6. Алгоритм расчета координат магнитного состояния АД
531
Ввод параметров
модели и условий
задачи
Установка данных
номинального режима
Расчет координат
магнитного состо-
яния АД и констант
для номинального
режима
Установка условий
задачи и начальное
приближение по
Расчет магнитного
состояния по
условиям задачи
Расчет искомых
величин
Приращение
аргумента
Рис. 21.7. Алгоритм расчета характеристик АД при питании от
управляемого источника напряжения
532
Вначале по формулам (21.43), (21.46) и (21.45) определяются
коэффициенты уравнения (21.44). Это уравнение решается методом
Ньютона с использованием итерационной формулы:
Wm.n+\ = Vm.n - Я ДуЦ (21-47)
F (,4'т)
2к-1 Г Ч ч 2А'-1 2-1
где F (п.)=2 Е ;
/=1
Л < 1 - коэффициент укорочения шага приближения,
способствующий улучшению условий сходимости решения.
Найденное значение используется для расчета других
координат рабочей точки характеристики намагничивания:
к
1~т = i = im = l„yfm . (21.48)
Z-1
Алгоритм решения задачи расчета характеристик АД с
использованием рассмотренной процедуры представлен на рис. 21.7.
После ввода параметров модели и условий эксперимента
производится расчет координат магнитного состояния (МС) и
констант для номинального режима 5т 7/, кс, кг и кв,
входящих в уравнения модели. Далее для каждого из значений
аргумента р производится расчет искомых величин, начинающийся с
расчета магнитного состояния, соответствующего условиям задачи.
Результаты выводятся в табличной и графической формах.
В качестве иллюстрации типичных результатов решения первой
задачи на рис.21.8 приведены рабочие характеристики АД
нормального исполнения при условиях, указанных в протоколе
(табл.21.1). Здесь же приведены результаты расчета данных
номинального режима работы двигателя, в том числе уточненное (см.
п.21.2) значение номинального скольжения. Так как по условиям
задачи амплитуда и частота напряжения питания двигателя us. — 1 и
69Л =1, т. е. соответствуют его номинальным данным, то полученные
зависимости ^(/?) и 4(/0 представляют его естественные
механическую и электромеханическую характеристики в
относительных единицах.
533
Таблица 21.1
Параметры системы и условия эксперимента
Параметры источника питания'.
Выходное напряжение иу = 1
Частота у = 1
Параметры двигателя:
Активное сопротивление обмотки статора г, = 0.0152
Индуктивность рассеяния обмотки статора 1,а = 0.1011
Активное сопротивление обмотки ротора гГ =0.0176
Индуктивность рассеяния обмотки ротора 1га = 0.0951
Коэффициенты полиномиальной аппроксимации характеристики намагничивания gi =0.14845 g2 = 021131 g3 = -0.5464 g4 =0.41725
Данные номинального режима:
Напряжение U.. „ = 1 Л.Н
Частота
Ток статора 4’.H “ 1
Электромагнитный момент m„ = 1 n
Электромагнитная мощность Рэм.н — 1
Скольжение Д, =0.0177
Главный магнитный поток <pmB = 0.94771
Намагничивающий ток imH = 0-2455
Главная индуктивность lm H = 3.8594
Полная мощность 5 =1.1201 H
Активная мощность д. H = 1.01703
Коэффициент мощности c0s^4.h ~ 0.908
Суммарные потери A/?H = 0.0587
Условия расчета: *
Минимальное скольжение Лин =-0-11
Максимальное скольжение /?макс = 0-11
Шаг расчета -2.5/;-04
534
Рис. 21.8. Характеристики асинхронного двигателя при питании
от управляемого источника напряжения ( us = 1; d)s — 1 )
Критические значения электромагнитного момента в
Двигательном (при /?>0) и генераторном (при /?<0) режимах
оказываются различными вследствие изменения магнитных потоков и
потокосцеплений обмоток машины. Их изменения обусловлены
изменением падений напряжения на активных сопротивлениях и
индуктивностях рассеяния двигателя при изменении скольжения и
токов в его обмотках. В частности, как видно из графика
главное потокосцепление достигает экстремума при небольшом
535
отрицательном скольжении. При номинальной амплитуде (ws-l ) и
частоте (б9Л=1) изменение главного и других потокосцеплений
вследствие изменения скольжения относительно невелико и не
приводит к существенному насыщению главного магнитного пути
машины. Однако при работе двигателя на малых частотах
относительная доля активного сопротивления обмотки статора в
общем балансе сопротивлений машины существенно возрастает [79].
Соответственно увеличивается степень изменения потоков машины
при изменении скольжения, причем существенную роль приобретает
фактор насыщения главной магнитной цепи.
Представленный выше алгоритм учитывает фактор насыщения
и поэтому может быть использован для расчета рабочих
характеристик АД в широком диапазоне частот и напряжений,
охватывающем различные законы частотного управления. Алгоритм
приемлем и для расчета характеристик двигателя при 0)s — 0 , т.е. в
случае его питания от источника постоянного тока для осуществления
динамического торможения. При необходимости учета вытеснения
тока алгоритм на каждом шаге расчета дополняется приведенными
выше в п. 21.4. формулами, учитывающими изменение параметров
обмотки ротора.
21.6.1. Расчет векторных диаграмм
Для построения векторных диаграмм двигателя при питании от
управляемого по частоте и амплитуде источника синусоидального
напряжения можно использовать следующие формулы расчета
компонент изображающих векторов в установившихся режимах.
Пусть заданы частота cos и компоненты usx, uSy вектора
напряжений источника питания в синхронно вращающейся системе
координат = a)s). Тогда для каждого значения скольжения /3
координаты изображающих векторов определяются следующим
образом.
Компоненты вектора токов статора:
(21.49)
(21.50)
536
где
(21.51)
равняют собой эквивалентные (кажущиеся) значения
Противления и индуктивности фазы двигателя.
Полное кажущееся сопротивление фазы:
активного
(21.52)
Потокосцепления ротора:
(21.53)
(21.54)
Токи ротора:
^гх Гг Р Ч/г у 5 Ку ГГ Р W ГХ ’ (21.55)
Результирующие намагничивающие токи:
l?nx ^хх + ^ГХ ’
(21.56)
Главные потокосцепления:
либо
Ч? тх Ч^гх Кх ks a
Ч^ тх ~ ^т Кпх >
Ч^ ту Ч/ry Ку К О’ (21.57)
Ч^ ту ^т^ту • (21.58)
Потокосцепления статора:
У/$х У7 тх + * 5.x ($ сг ’
Ч^ху V ту + ^ху ^ха ’
(21.59)
Расчет координат векторов по приведенным формулам и в
указанной последовательности позволяет устранить неопределенность
в формулах общего вида при расчете всех режимов, включая
идеальный холостой ход (/3 — 0) и динамическое торможение (бс^ - 0).
537
Для иллюстрации сказанного приведем эквивалентные
формулам (21.59) выражения потокосцеплений статора
5Л' ~ (Чуу ~ ’ V Sy ~ ~ &S (Ч$Х ~ Tv ksx) » (21.60)
которые непосредственно приемлемы для расчета только при a)s 0.
Для учета насыщения необходимо для каждой совокупности
V2 2
usx+ usy ’ cos и Р предварительно
произвести расчет координат магнитного состояния двигателя в
соответствии с алгоритмом рис. 21.6. По результатам этого расчета
находится значение параметра 1т и зависящих от него параметров
и
(21.61)
Пример результата расчета приведен на рис. 21.9.
Рис. 21.9. Векторная диаграмма АД в номинальном режиме
(ыА. = Г, a>s = 1; р = Дн )
538
21,6,2. Расчет характеристик асинхронных двигателей
без учета насыщения
В случае пренебрежения нелинейностью характеристики
магничивания двигателя расчет его рабочих характеристик при
частотном управлении возможен без обращения к процедурам анализа
магнитного состояния [18]. В этом случае для каждой пары
произвольных, но фиксированных значений амплитуды и частоты
питающего напряжения (us-const, cds-const) расчет его механической
электромеханической и магнитомеханической
характеристик целесообразно производить по формулам:
(21.62)
(21.63)
(21.64)
9
^<7 Гг Хр2+Гг
т ~ usJ / 9 ? -1 7 / ? 7 7\ ' (21.65)
и 2г.бУ /?+(/г +сгас I rr 'В1 +(б/ +е2й\ I г.
11 । J J * 1 < J F * 1 ijjr
Аналогично могут быть представлены и другие переменные (токи,
потокосцепления, мощности, потери) системы (21.6) - (21.16).
В данном случае не исключена возможность учета вытеснения
тока в роторе с помощью формул (21.32) - (21.37), определяющих
зависимости параметров обмотки ротора и lrM, a
следовательно и параметров модели b и с от скольжения f3 :
\ т 7
с = С{р) = /„ + („(/>) + .
(21.66)
(21.67)
539
Что касается величины 1т , то она полагается постоянной, что
по существу определяет крутизну линеаризованной характеристики
намагничивания
(21.68)
Из (21.62) - (21.64) следуют формулы, определяющие ток статора в
режиме идеального холостого хода (со = cos, /3 - 0)
(21.69)
ток короткого замыкания ( со = 0, /? = cos )
1Л. КЗ
(21.70)
и момент короткого замыкания (упора)
Щ со.,
ш = с -------------------:—
Н % к2 л. ^2^21 -12 , >2 ,„2 2\ г
2.Г.. C0v +1 о + С 6У., | Г- 6У. + (Cl + 6^ 6У v ) Л
Л Л I Л J л Л < Л I f
(21.71)
В случае пренебрежения эффектами насыщения главной
магнитной цепи и вытеснения тока в роторе возможно аналитическое
определение координат критических точек механической
характеристики двигателя в двигательном и генераторном режимах по
формулам:
Г/777\
I Id +е ю,
PKV= + r \у.----z-rf; (21.72)
i \b + c co v I
u
(21.73)
540
либо
ш
к?
и..
(21.74)
Правомочность практического использования приведенных выше
выражений (21.63) - (21.64) может быть оценена с помощью формулы
(21-65). Полученное из нее численное значение главного
потокосцепления у/т позволяет оценить, на каком из участков
реальной характеристики намагничивания (линейном либо участке
насыщения) работает двигатель при заданных условиях (амплитуде,
частоте напряжения и скорости вращения ротора). Отсюда можно
сделать вывод о степени соответствия использованного в расчете
параметра линеаризованной характеристики намагничивания
(/ =const) найденному из реальной нелинейной характеристики
намагничивания с учетом полученного расчетного значения
По результатам сравнения в принципе возможна коррекция
крутизны линеаризованной характеристики и, соответственно,
расчетного значения параметра 1т. Однако повторение того же
расчета режима двигателя при новом 1т вызовет изменение всех
величин и в том числе величины Поэтому потребуется
проведение новой коррекции, нового расчета и т.д. вплоть до
удовлетворительного согласования исходных параметрических
посылок с результатами решения задачи.
Именно это обстоятельство обосновывает необходимость и
целесообразность рассмотренной выше методики расчета
характеристик с учетом насыщения: для каждого сочетания заданных
условий анализируемого режима сначала организуется
итерационный процесс определения магнитного состояния (положения
рабочей точки на нелинейной характеристике намагничивания), а затем
с учетом соответствующего магнитному состоянию значения 1т
производится расчет всех искомых величин (момента, токов,
потокосцеплений и др.) данного анализируемого режима.
21.7. Расчет характеристик асинхронного двигателя
при питании от управляемого источника тока
Задача формулируется следующим образом: при заданных
значениях амплитуды i и частоты ОД тока источника питания АД
рассчитать его характеристики в заданном диапазоне скольжений
541
/3 “ Рмин---Рмакс с шагом \(3. Искомыми являются напряжение
токи im и ir, потокосцепления электромагнитный момент и
другие переменные системы (21.6) - (21.16).
Алгоритм решения такой задачи в целом аналогичен ранее
рассмотренному, но имеет следующие особенности. При питании АД
от источника тока для определения его магнитного состояния
необходимо решение следующей системы уравнений:
(у — hn ) ’
(21.75)
При использовании формулы (21.29) эта система также
приводится к уравнению (21.44), коэффициенты которого
определяются по формуле (21.45). Однако при питании АД от
источника тока величины J’q , и рассчитываются по формулам:
= Ь = рг(г* + 1*орг] к3 = 2(lr<Tk4 + gl). (21.76)
Таким образом, процедура расчета магнитного состояния АД
при решении данной задачи отличается от предшествующей лишь
формулами для расчета величин То ^3 и ^4 ^то касается общего
алгоритма решения задачи, то он строится на основе алгоритма
решения предыдущей задачи, в котором вместе с модификацией
процедуры расчета магнитного состояния переменная is переводится
в группу заданных, a us - в группу искомых величин.
Рис. 21.10 иллюстрирует результат решения задачи для этого же
двигателя при is ~ 1, cos ~ 1. Как видно, в области малых скольжений
главная магнитная цепь АД находится в зоне глубокого насыщения,
что подтверждает принципиальную необходимость учета
нелинейности характеристики намагничивания двигателя при
решении подобных задач.
Описанная процедура может быть использована и для расчета
характеристик АД в режиме динамического торможения с учетом
насыщения и вытеснения тока в роторе. Для этого достаточно задать
cos =0 и величину тока статора в режиме динамического
торможения, а также учесть изменение параметров обмотки ротора в
функции скольжения /3.
542
Рис. 21.10. Характеристики асинхронного двигателя при питании от
управляемого источника тока ( ix = 1; cos — 1 )
При построении векторных диаграмм расчеты координат
векторов проводятся по методике, аналогичной ранее рассмотренной.
Для каждой совокупности заданных значений частоты 69 v, тока
Г^2 *2
~ vl'sx+ lsy и скольжения предварительно производится расчет
координат магнитного состояния двигателя. По его результатам
находятся значения параметров, зависящих от насыщения. Расчет
координат изображающих векторов производится по формулам
543
(21.53) - (21.59). С помощью выражения (21.60) координаты вектора
напряжений статора определяются как
Уsy ' ^sy ~~ “>S Wsx ЛЛ$Т • (21.77)
В результате решения задачи с условиями /у = 1; a)s = 1;
/3 = /?н получаем векторную диаграмму, совпадающую с векторной
диаграммой рис. 21.9.
21.8. Расчет экстремальных характеристик асинхронного
двигателя как объекта оптимального управления
Данная задача в своей постановочной части подробно
рассмотрена в работах [111,115,123]. Она формулируется следующим
образом: при заданных условиями технологического процесса значениях
электромагнитного момента т и скорости со двигателя рассчитать
его характеристики в заданном диапазоне скольжений
P = P.VUH-PMaKc с тагом дф. Искомыми являются напряжение wy,
частота токи isi im и ir, потокосцепления i//j и другие переменные
системы (21.6) - (21.16).
Существом задач оптимального управления двигателями
является определение их предельных возможностей по заданным
критериям (минимизации потерь энергии, быстродействию и др.).
Анализ экстремальных характеристик двигателей позволяет найти
условия наиболее полного использования энергетических потоков и
активных материалов конструкции двигателей в процессе
электромеханического преобразования. Поэтому одним из важных
факторов достоверности результатов решения этих задач также
является учет насыщения магнитной цепи двигателя.
Алгоритм расчета экстремальных характеристик на цифровой
модели с учетом насыщения представлен на рис. 21.11. Процедура
расчета констант номинального режима не отличается от предыдущей.
Однако расчет магнитного состояния по условиям задачи не требует
обращения к итерационной процедуре вычисления так как для
этого достаточно использования второго уравнения группы (21.9). В
случае необходимости эффект вытеснения тока в роторе может быть
учтен в соответствии с методикой, описанной в п. 21.4.
На рис. 21.12 представлен типичный пример результатов расчета
экстремальных характеристик асинхронного двигателя нормального
исполнения для случая со = 1, т — 1.
544
Установка данных
номинального режима
Ввод параметров
модели и условий
задачи
Расчет координат
магнитного состо-
яния АД и констант
для номинального
режима
Установка условий
задачи
Расчет магнитного
состояния по
условиям задачи
Расчет искомых
величин
Приращение
аргумента
Рис. 21.11. Алгоритм расчета экстремальных характеристик АД
545
Рис. 21.12. Характеристики асинхронного двигателя как объекта
оптимального управления (со — 1, т = 1)
Приведенные графики подтверждают принципиальную
возможность множественного решения технологической
задачи - обеспечения функционирования двигателя с заданной
скоростью (а> = 1) и заданной нагрузкой (пгс =1) при различных
значениях скольжения.
Варьирование скольжением при заданных технологических
параметрах й) и т позволяет выявить условия минимизации потерь,
тока статора, напряжения, достижения максимума коэффициента
мощности и другие условия. В частности, из графиков рис. 21.12
видно, что при номинальной нагрузке минимум потерь и тока статора
двигателя достигается при значениях скольжения, существенно
меньших номинального (ZLnT < и значениях главного магнитного
/ VIII / п z
546
потока (главного потокосцепления), больших номинального
(У'т.опт > [П 1,139]. Реально для этого необходимо некоторое
повышение питающего напряжения в сравнении с номинальным
( ws.oht > ws.h ~ О- В области номинального скольжения двигатель
является специфичным элементом электрической цепи, так как при
увеличении напряжения статора us ток статора is уменьшается.
В связи с увеличением магнитного потока в оптимальном
режиме двигатель работает в зоне насыщения главной магнитной
цепи. Именно поэтому учет насыщения является одним из
существенных факторов достоверности результатов решения задач
оптимизации режимов работы электроприводов в широком диапазоне
скоростей и нагрузок.
На основе представленного алгоритма строятся более сложные
алгоритмы исследования экстремальных характеристик систем ПЧ-
АД, а также решения задач оптимизации установившихся режимов
электропривода в различных постановках, в том числе задач
оптимального управления с ограничениями [111,123,125].
21.9. Выводы
1. Для расчета рабочих характеристик асинхронных двигателей
при частотном управлении необходимы модели, учитывающие
насыщение их магнитной цепи. Учет насыщения имеет принципиально
важное значение для достоверности результатов анализа
экстремальных характеристик двигателей в задачах оптимизации и
для анализа режимов их работы в области малых частот, включая
режим динамического торможения.
2. Для повышения точности расчета рабочих характеристик
асинхронных двигателей с короткозамкнутым ротором в широком
диапазоне скольжений модель должна учитывать эффект вытеснения
тока в обмотке ротора. Этот фактор оказывается существенным для
достоверности оценки пусковых характеристик сетевых двигателей, а
также для анализа высших временных гармоник тока частотно-
регулируемых двигателей при питании их от полупроводниковых
преобразователей частоты с несинусоидальным выходным
напряжением.
3. При учете насыщения магнитной цепи двигателя задачи
расчета его рабочих характеристик не имеют аналитического
решения даже в случае аналитической аппроксимации характеристики
намагничивания в модели двигателя. Тем не менее выбор
аппроксимирующей функции существен с позиций упрощения
547
алгоритмов численного решения задач. Этому условию
удовлетворяют степенные полиномы с определением их
коэффициентов методом наименьших квадратов.
4. В связи с необходимостью использования численных методов
решения основу цифровой модели двигателя составляет проблемно
ориентированное математическое описание, адаптированное к
отмеченным выше факторам и другим особенностям алгоритмизации
и численного решения задач. К факторам адаптации математического
описания относятся использование относительных единиц,
рациональный выбор аппроксимирующих нелинейных функций,
нормализация промежуточных переменных, исключение
неопределенностей и операций деления на ноль, локализация
итерационных процедур приближенного решения нелинейных
уравнений, выбор рациональной последовательности выполнения
математических операций и др.
5. Использование относительных единиц создает значительные
удобства расчета и анализа рабочих характеристик двигателя. Этому
способствует использование данных номинального режима двигателя
в качестве базисных величин системы относительных единиц. Однако
в зависимости от условий нагрева и охлаждения один и тот же
двигатель имеет различные значения номинальной мощности.
Поэтому при использовании относительных единиц не следует
забывать о том, к какому конкретно номинальному режиму
“привязаны” относительные параметры модели и результаты
моделирования. Полезным этапом отработки модели является
проверка непротиворечивости ее относительных параметров
паспортным данным с помощью уравнения (21.24).
6. Представленные выше алгоритмы функционирования
цифровых моделей учитывают факторы насыщения и вытеснения
тока. Поэтому они могут быть использованы для расчета рабочих
характеристик АД в широком диапазоне частот и напряжений,
охватывающем различные законы частотного управления, в том числе
законы оптимального управления.
7. Представленные модели непосредственно приемлемы для
определения рабочих характеристик АД при питании от регулируемых
источников синусоидального напряжения или тока. Однако эти
модели можно использовать и для оценки влияния
несинусоидальности питания двигателя методом гармонического
анализа. Специфические особенности использования этого метода в
приложении к данному классу задач изложены в гл. 13.
548
Глава двадцать вторая
ЦИФРОВОЕ МОДЕЛИРОВАНИЕ ПЕРЕХОДНЫХ
РЕЖИМОВ АСИНХРОННЫХ ДВИГАТЕЛЕЙ ПРИ
ПЕРЕМЕННОЙ ЧАСТОТЕ
22.1 . Динамическая модель системы "источник
напряжения - асинхронный двигатель"
Исследование на моделях динамических режимов двигателей
переменного тока при их питании от управляемых источников
напряжения (ИН) и тока (ИТ) представляет собой комплекс более
сложных задач, требующих привлечения динамических моделей
двигателей и преобразователей частоты. Рассмотрим сначала
динамические модели систем, в которых двигатель питается от
идеализированных управляемых источников напряжения (ИН) или
тока (ИТ).
На рис. 22.1 изображена структурная цифровой динамической
модели системы ИН-АД, в которой асинхронный двигатель получает
питание от управляемого по частоте и амплитуде источника
трехфазного синусоидального напряжения.
Для основных элементов (блоков) модели приняты следующие
условные обозначения:
ФКС - формирователь командного сигнала и*;
ИН - источник напряжения питания двигателя Up;
ПК1 - преобразователь координат вектора напряжений ;
ПК2 - обратный преобразователь координат вектора токов
ФКФ - формирователь координатных функций Ф^(^);
БО - блок ориентации координатной системы Oxyz.
549
Рис. 22.1. Структурная схема динамической модели системы
"источник напряжения - асинхронный двигатель"
Переменными состояния электромагнитных контуров модели
двигателя являются потокосцепления обмоток статора и ротора
(система — у/г). Уравнения модели записаны в относительных
единицах по варианту 1 (см. п. 6.5). В схеме модели двигателя '
выделены основные функциональные звенья со следующими
условными обозначениями:
ЗПС - звено вычисления потокосцеплений обмотки статора;
ЗПР - звено вычисления потокосцеплений обмотки ротора;
ЗТ - звено вычисления токов обмоток статора и ротора;
ЗМ - звено вычисления электромагнитного момента;
ЗМС - звено вычисления момента статического сопротивления;
ЗМД - звено вычисления координат механического движения;
БВПК - блок вычисления переменных коэффициентов, зависящих
от насыщения.
Рассмотрим функциональное назначение и математическое
описание блоков модели.
Формирователь командного сигнала описывается нелинейным
дифференциальным уравнением, в соответствии с которым строятся
задатчики интенсивности (ЗИ) в системах управления
электроприводами :
550
(22.1)
где А - лимитируемый темп изменения выходного сигнала и
задатчика при отработке входного сигнала
о
Источник напряжения ИН формирует вектор напряжений
статора АД по следующим выражениям :
P0S = (22.2)
Fs
df
usa
U sb
(22.3)
где
И 6) = соли
функции, связывающие амплитуды фазных напряжений и частоту с
командным сигналом и .
Для моделирования простейших законов частотного управления
можно принять
*+к0-,
О ’
j ^4 const ’
где А?[, к^ к3 и к^ - коэффициенты передачи ИН по амплитудному и
частотному каналам; к$ и a>sconst - постоянные, независимые от
командного сигнала составляющие амплитуды и частоты.
Формулы (22.4) предусматривают возможность моделирования
как симметричных, так и несимметричных режимов питания АД при
частотном управлении. В случае необходимости учета амплитудной и
фазовой асимметрии при питании обмоток статора АД от автономных
источников вводятся соответствующие значения коэффициентов
к\...к3 и (pj, (j = a,b,c). При моделировании режимов
симметричного питания двигателя принимаем
= 0, <pb - -2^/3, срс - + 2я/3.
551
Формирователь координатных функций
дифференциальное уравнение
р0к = <*>к
и вычисляет двумерный вектор координатных функций
интегрирует
(22.5)
(22.6)
рх COS0k
Ру |_sin(?A.
Преобразователи координат реализуют процедуру двухэтапного
преобразования. Для ПК1 первый этап преобразования ( из базиса
F.y в базис G5 ) описывается формулами :
(22.7)
Второй этап - это преобразование координат вектора напряжений из
базиса Gy в базис Н :
Цул — Рх + Ру usp ’
Цуу — -ру USC£ рх Usp , (22.8)
Цуг ~ Щу '
Для ПК2 сначала производится преобразование координат
вектора токов из базиса Н в Gy :
ha ~ Рх hx Ру hy ’
hp ~~ Ру hx Рх hy ’ (22.9)
* •
hy ~ hz f
а затем из базиса Gy в Fy :
552
(22.10)
Двухэтапное преобразование позволяет значительно уменьшить
число обращений к процедурам вычисления тригонометрических
функций и в результате этого повысить быстродействие модели.
Блок ориентации определяет скорость вращения системы
координат в соответствии с принятым вариантом ориентации. В
первом варианте
0)k=<as, (22.11)
т.е. система координат вращается синхронно с вектором напряжений
статора; во втором {соу — 0) - система координат неподвижна
относительно статора; в третьем {со у — со) - неподвижна относительно
ротора; в четвертом - скорость вращения системы координат
определяется внешним воздействием (/). Номер варианта
выбирается пользователем.
Звенья потокосцеплений обмоток статора и ротора, а также
звено механического движения ротора описываются системой
дифференциальных уравнений (22.12), (22.13) и (22.14).
Звено потокосцеплений обмотки статора :
Р Vsx = usx - as6 Wsx + Vsy + &sC> kr Vrx ;
P Ф Sy “ USy ~ % у ~~ V^SX as6 kr ry 9
PWsz ~ ~ sz •
Звено потокосцеплений обмотки ротора :
Р Vrx = ~агб Vrx + (°>к - 'Pry + arv 'Psx ’>
Р 'Pry = ~агб 'Pry ~ («А - ®) Vrx + агб ks 'Psy
Звено механического движения :
ра>
(22.12)
(22.13)
(22.14)
553
Звено токов обмоток статора и ротора машины описывается
алгебраическими уравнениями:
(22.15)
Блок вычисления переменных коэффициентов вычисляет
зависящие от насыщения главной магнитной цепи коэффициенты
уравнений модели:
где lm i/fт
Для вычисления главного потокосцепления у/т используется
нелинейное уравнение связи:
(22.17)
ь ^2 / \2
т + т} “ \ \ гх + \^1 У^ гу ^2 ) »
- коэффициенты, не зависящие от насыщения главной магнитной
цепи.
Численное решение уравнения связи осуществляется следующим
образом. Вначале по текущим значениям переменных состояния
^vv, y/sv i//rx и i//ry рассчитывается правая часть уравнения связи :
= J(^l Wrx
2 2
+ c2^sx) + (^^+^2^)
(22.18)
Используя для описания характеристики намагничивания
аппроксимирующую функцию (21.29), левую часть уравнения (22.17)
можно представить в виде полинома:
554
где
при i = l;
при i> 1.
Тогда уравнение (22.17) приобретает вид:
/=1
(22.19)
(22.20)
(22.21)
Решение этого уравнения методом Ньютона по итерационной
формуле
W т.п+\ ~ W т.п ~ (22.22)
/=1
с укороченным (Л < 1) шагом приближения к корню дает искомое
значение главного потокосцепления. Далее определяются переменная
(22-23)
/=1
и коэффициенты (22.16).
На рис. 22.2 представлен соответствующий приведенным
формулам алгоритм расчета главного потокосцепления и параметров,
зависящих от насыщения. В качестве начального приближения
принимается у/т ~ у/. Для полиномиальной аппроксимации
характеристики намагничивания двигателя принято к = 4.
Вычисление степенных полиномов в итерационной формуле (22.22)
осуществляется по схеме Горнера.
Звенья электромагнитного момента двигателя и момента
статического сопротивления механизма (см. рис. 22.1) описываются
нелинейными алгебраическими уравнениями:
гу ?ГХ WГХ hy ) ’
тс - тс\т,со,т^,тЛ ,
(22.24)
(22.25)
где £н =‘S'.v.h/^элм.н ' номинальный параметр двигателя,
определяемый формулами (6.18) и (21.20). Он обеспечивает
555
определение относительного момента двигателя в долях от
номинального электромагнитного момента.
nip и та - реактивная и активная составляющие и момента
статического сопротивления механизма. Алгоритм вычисления те
приведен на рис. 23.4
Начало
Начальное
приближение
~ Vm
Да
т гр
Расчет
плавного
потокосцепления
с заданной
погрешностью
о ЛО г1
= 1/ I г
$Р l*SpJ S
Расчет
параметров,
зависящих
от насыщения
S “ I 1 За
*S.3 — >
ркг ~(кг -^)/дг;
~ ^5.3 rs 1
Гр
Рис. 22.2. Алгоритм расчета главного потокосцепления
и переменных параметров для системы y/s - у/г
556
22.2 . Второй вариант модели
На рис. 22.3 представлен другой вариант модели системы ИН-
АД, где модель источника питания остается прежней, а двигатель
моделируется по варианту zv — iyr.
Рис. 22.3. Вариант структурной схемы динамической модели
системы "источник напряжения - асинхронный двигатель"
Развернутое математическое описание такой модели АД имеет
следующий вид.
Звено токов статора (ЗТ):
P's.x = («5Л- - гх.э is-.x + а'г <Рг.х + °>кг Wry) + (»к hy ;
pisy = Ч'э (u.sy - гх.э iSy + a'r y/ry ~й)кг yrx} - a)kisx ; (22.26)
pi.sz ~ j ~~ Л- ) •
Звено потокосцеплений ротора (ЗП):
Р Фгх = кггг isx - аг щгх + (<уА. - ;
(22.27)
РФ г у ~ iSy ~~ ссг Ц?Гу ~ уС&к ~~ ф гх'
Звено механического движения :
рсо = J~\m -тс). (22.28)
557
Звено электромагнитного момента двигателя :
W ГД z sу У?г у h.x
(22.29)
Момент статического сопротивления механизма по-прежнему
вычисляется в соответствии с алгоритмом рис. 23.4.
Блок переменных коэффициентов вычисляет зависящие от
насыщения главной магнитной цепи коэффициенты уравнений модели
где
a'r = кгаг -ркг \
(22.30)
Для вычисления в
нелинейное уравнение связи:
данном варианте модели используется
I 2 / \2
У/т + 4 ст ~ у (jkrx + 4 ст ($х) + + ?га (уу) ’ (22.31)
Численное решение уравнения (22.31) осуществляется методом,
аналогичным ранее рассмотренному. Вначале по текущим значениям
z\y> У^гх и Wry рассчитывается правая часть уравнения :
— v (^ГЛ' + (^<у + ^гсг *
(22.32)
Левая часть уравнения (22.31) представляется в виде полинома:
,=1
(22.33)
где в отличие от ( 22.20) коэффициенты
при 1 = 1;
1 lrffgi ПРИ l >1-
(22. 34)
Тогда уравнение (22.31) приобретает вид, аналогичный (22.21):
‘-^ = 0, i = l,2,...,к.
1 = 1
(22.35)
558
Решение этого уравнения методом Ньютона по итерационной
формуле (22.22) дает искомое значение главного потокосцепления.
Далее по формулам (22.23) и (22.30) определяются переменная и
другие переменные коэффициенты модели.
I Начало
Начальное
приблюкение
^4 ~ Ут
г г ’
Расчет
главного
потокосцепления
с заданной
погрешностью
Расчет
параметров,
зависящих
от насыщения
Возврат
Рис. 22.4. Алгоритм расчета главного потокосцепления
и параметров, зависящих от насыщения
Да
На рис. 22.4 представлен соответствующий приведенным
формулам цифровой алгоритм расчета главного потокосцепления и
559
параметров, зависящих от насыщения. Начальное приближение
у/т - iff дает искомое значение с точностью до kr (по точной
формуле у/т = kry/).
22.3 . Динамическая модель системы ’’источник тока -
асинхронный двигатель”
Блочный принцип построения позволяет легко
трансформировать модель системы ИН-АД (см. рис. 22.1) в модель
системы ИТ-АД, в которой асинхронный двигатель получает питание
от идеализированного управляемого по частоте и амплитуде
источника синусоидального тока. Структурная схема такой модели
изображена на рис. 22.5.
Рис. 22.5. Структурная схема динамической модели системы
’’источник тока - асинхронный двигатель”
Структура формул (22.1) - (22.4), описывающих формирователь
командного сигнала, источник питания двигателя и преобразователи
координат, остается неизменной; их трансформация заключается лишь
в замене переменных:
560
(22.36)
(22.37)
(22.38)
Здесь Ia = 4(Z J ’ A=4(z*)> 4=Лу*) и °h = ^s(zJ
- функции, связывающие амплитуды фазных токов и частоту с
командным сигналом z*.
Формулы прямого двухэтапного преобразования токов,
осуществляемого блоком ПК1, имеют следующий вид:
(22.39)
z s v — Рх ha + Ру hfl ’
hy ~~ ~Ру ha + Pxhp ’ (22.40)
Z.S2 ” •
Звено токов модели рис. 22.1 трансформируется в звено
напряжений (ЗН) с представлением формул (22.26) в виде
h.3 Phx + h.3
hx <®k hy Wrx Wry ’
^sy h.j Phy + h.3 hy + ^khx 4hy 0) kr l//rx (22.41)
Phz h
Обратное двухэтапное преобразование напряжений в блоке
ПК2 производится по формулам:
561
(22.42)
usa
^Sp Ру Щ.Х Px ^sy ’
(22.43)
Математическое описание и алгоритмы цифрового
моделирования остальных элементов схемы рис. 22.5 такие же, как и
модели ИН-АД, изображенной на рис. 22.3.
22.4 . Примеры расчета динамических режимов
Для численного интегрирования дифференциальных уравнений
рассматриваемых моделей приемлемы итерационные методы как
параллельного [49], так и последовательного типа [6,7,8]. По
совокупности таких качеств как точность, устойчивость решения и
затраты машинного времени целесообразно в числе методов
параллельного типа применение методов Рунге-Кутта второго
порядка, а из последовательных - метода А.В. Башарина с двумя
итерациями. Ниже приводятся некоторые примеры результатов
расчета динамических режимов методом Рунге-Кутта.
На рис. 22.6. показан процесс прямого пуска маломощного
асинхронного двигателя нормального исполнения при подключении к
источнику трехфазного синусоидального напряжения,
соответствующего его номинальным данным (w5 = l, <s\=l).
Нагрузка на валу двигателя отсутствует (аис-0). В данном случае
явно выражен электромагнитный переходный процесс со
значительными колебаниями момента т и тока статора zy двигателя.
Рис. 22.7 иллюстрирует процесс динамического торможения
двигателя при следующих условиях: начальные значения амплитуды и
частоты напряжения источника питания us = 0.75, cos =0.75, момент
статического сопротивления реактивный (тс = 0.4), установившийся
ток динамического торможения z — 1. Процесс характеризуется
4 J ♦ г W- > t
562
Рис. 22.6. Прямой пуск асинхронного двигателя
Рис. 22.7. Динамическое торможение двигателя
563
значительными ударными переходными значениями тока статора и
электромагнитного момента и протекает при существенном
размагничивании главной магнитной цепи двигателя в начальной
стадии динамического торможения и ее последующим значительным
насыщением на заключительной стадии процесса.
На рис. 22.8 показан переходный процесс, возникающий при
ступенчатом увеличении (набросе) нагрузки на валу двигателя средней
мощности при следующих условиях : цу = 0.3, й)х =0.3, тис.нач- 0,
тсуа • Здесь также наблюдаются электромагнитные переходные
явления со значительными колебаниями тока статора,
электромагнитного момента и скорости двигателя.
Рис. 22.8. Наброс нагрузки на валу двигателя
Рассмотренные модели позволяют исследовать разнообразные
переходные и установившиеся режимы двигателя с
идеализированными источниками питания, включая режимы
частотного управления со ступенчатым или плавным изменением
частоты и амплитуды напряжения питания двигателя.
564
Глава двадцать третья
ЦИФРОВЫЕ ДИНАМИЧЕСКИЕ МОДЕЛИ
СИСТЕМ "ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ -
АСИНХРОННЫЙ ДВИГАТЕЛЬ"
23.1. Универсальная цифровая динамическая модель
системы ПЧ-АД с автономным инвертором напряжения
23.1.1. Структурная схема и математическое описание модели
Рассмотрим особенности цифровой реализации модели системы
ПЧ-АД, позволяющей исследовать рабочие процессы при различных
законах коммутации ключей инвертора. Математическое описание
такой системы дано в гл. 18. Основу цифровой реализации модели
[ 125] представляет структурная схема, изображенная на рис. 23.1.
Для элементов модели приняты следующие условные
обозначения :
ИП - источник питания инвертора;
АИ - трехфазный мостовой автономный инвертор напряжения;
ФСУ - формирователь сигналов управления ключами АИ;
ЗПС - звено вычисления потокосцеплений обмотки статора АД;
ЗПР - звено вычисления потокосцеплений обмотки ротора АД;
ЗТЭ - звено вычисления токов статора, ротора и ЭДС обмотки
статора двигателя.
Остальные элементы обозначены так же, как и в модели рис. 22.1.
565
Рассмотрим назначение и особенности математического
описания элементов модели.
Рис. 23.1. Структурная схема универсальной динамической модели
системы ПЧ - АД
Формирователь ФКС, в структуре которого имеется задатчик
интенсивности, генерирует соответствующие условиям эксперимента
задающие воздействия ^(0 и ^*(0’
Формирователь ФСУ интегрирует дифференциальное уравнение
Л* *
p0s = ;
(23.1)
и формирует соответствующие
дискретные сигналы управления
групп инвертора:
исследуемому закону коммутации
вентилями анодной и катодной
F,* =diagk*te
Здесь 0* - заданные значения угла поворота вектора напряжений на
выходе инвертора.
Для моделирования режимов управления инвертором с
регулированием угла проводимости вентильных блоков могут быть
использованы функции :
566
(233)
где " сигнал управления углом проводимости ключей
(0< ил <1 ) ;
(ра — 0, <Рь~ —2я/3, <рс — +2тг 3 - начальные фазы.
Фильтр в цепи питания инвертора описывается
дифференциальными уравнениями (18.29); блоки ФКФ и БО -
формулами (22.5), (22.6) и (22.11). Иными словами, предусмотрены
различные варианты ориентации системы координат, такие же, как в
модели рис. 22.1.
Автономный инвертор описывается системой уравнений (18.30)
со следующими видоизменениями. Для построения цифрового
алгоритма вычисления выходных напряжений usj (jatbtc") основное
уравнение ИН представляется в следующем виде:
zi]
(23.4)
где
-«о;
Чп
Такое представление возможно потому, что определяемые
формулами (18.13), (18.14) и (18.16) функции состояния вентильных
блоков /jy, f^j и f3j являются взаимоисключающими. С физической
точки зрения они отражают три возможных и допустимых состояния
каждой из пар ключей, образующих фазу инвертора ( / = Я, Ь, с) :
1) включен только ключ анодной группы
(/ij - ' hj fij - о);
2)
включен только ключ катодной группы
3)
не включен ни один из ключей
Это дает возможность строить последовательно ветвящийся
алгоритм (рис. 23.2) с формированием трех ветвей. Правая ветвь
соответствует истинности высказывания (18.13), левая - (18.14) и
средняя - (18.6).
567
Рис. 23.2. Алгоритм вычисления выходных напряжений
и тока питания инвертора напряжения
568
В системе (18.30) переменные № определены как функции
При построении цифрового алгоритма более целесообразно их
следующее модифицированное определение:
Малая положительная величина 8 определяет зону
нечувствительности релейных элементов модели.
Введение токов статора в число аргументов функций (23.5) и
(23.6) позволяет упростить моделирование процессов, возникающих
при выключении управляемого вентиля (см. п. 18.2.). Этот прием, а
также введение зоны нечувствительности, внутри которой ток (с точки
зрения его влияния на состояние вентильных блоков) считается
равным нулю, позволяет упростить формулу реакции в модели
двигателя (18.31). В этой формуле теперь достаточно определить ЭДС
только во время бестоковых пауз:
(23.7)
В цифровом алгоритме используются также вспомогательные
дискретные функции q\j и • Они позволяют устранить
автоколебания, возникающие при моделировании бестоковых пауз
вследствие квантования вычислительного процесса по времени.
Представленный на рис. 23.2 алгоритм выполняется
последовательно трижды: сначала для вычисления usa, затем us^ и ихс.
В правую ветвь алгоритма включена операция по накоплению
значений тока питания инвертора в соответствии с выражением
in = Е Л j isj > J = а> bс- (23.8)
*
Алгоритм предусматривает также вычисление в средней ветви
Целочисленной переменной L. Она определяется путем вычитания
числа фаз, находящихся в режиме бестоковой паузы, из общего числа
фаз. Математически эта величина определяется как
569
L = 3 - Е Л/ = S (flj + /2;). J = a,b,c
4
(23.9)
и используется на последующем этапе решения задачи.
Как следует из приведенных выше формул, для вычисления
напряжений us; необходимо располагать значением переменной и0.
Оно определяется вторым уравнением системы (18.30), которое можно
представить в следующем виде:
=о.
(23.10)
Это уравнение нелинейно, так как содержит сложные нелинейные
функции fij = /iy(wo) и flj “ /2y(wo)- Установлено [125], что для
его численного решения можно использовать следующую
итерационную формулу:
^О.и+1 п + Ln
(23.11)
(23.12)
причем начальным приближением может служить и$- 0.
Общий алгоритм вычисления переменных состояния инвертора
представлен на рис. 23.3. После вычисления сигналов управления
инвертором и ЭДС источника питания предусмотрен итерационный
цикл, в результате которого определяются выходные напряжения
инвертора и ток, потребляемый им от источника питания.
В итерационный цикл процедуры входят: расчет величин uSj
для начального значения Mq ; проверка выполнения условия
(23.13)
где е - малая величина, определяющая допустимую погрешность
решения; коррекция (в случае необходимости) величины по
итерационной формуле (23.11); новый расчет usj и т.д. Прерывается
итерационный процесс по условию (23.13). Для предотвращения
операции деления на ноль предусмотрено ограничение L по
минимуму. Заключительным этапом алгоритма является
570
преобразование координат вектора напряжений на выходе инвертора
в базис Н.
Рис. 23.3. Общий алгоритм вычисления переменных
состояния инвертора
Асинхронный двигатель представляется уравнениями (23.16) -
(23.22), в которых переменными состояния электромагнитных
571
контуров выбраны потокосцепления обмоток статора и ротора
(система Ниже приводятся развернутые по компонентам
векторов системы (18.31) формулы, описывающие звенья модели
двигателя.
В связи с отсутствием в системе ПЧ-АД нейтрального провода
используется двумерная преобразованная модель АД. При этом
преобразователь координат вектора напряжений (ПК1) описывается
формулами:
Чуа ~ Чад ’
(23.14)
Обратные преобразователи
(ПК2):
^sa ” Рх ?sx ~ Ру Цу ’
— Ру ^ s x + Рх lsy 5
« •
~ I sa ’
координат векторов токов и ЭДС
^sa ~ Рх ^sx ~ Ру е.чу ’
~~ Ру е$х Рх е$у ’ (23.15)
~ ^sa ’
1 ( \
esb ~ ~ (^.уа ’
(23.15,а)
1 / Я \
~-----I V/y + "V 3 €.
Лс \ Ш эр /
Звено потокосцеплений статора:
Р Wsx = usx + Vsy - rs ix.x -
P Vsy = uay - (°k ^sx - rx lSy
(23.16)
Звено потокосцеплений ротора:
P Vrx = {юк ~ ^ry - rr Kx ;
P Wry = -(®A - <») Wrx - rr irx
(23.17)
Звено механического движения:
рсо ~ тс} .
(23.18)
i
572
Блок вычисления переменных коэффициентов:
Звено токов и ЭДС :
Звено содержит также уравнения реакции двигателя
(23.20)
ПО
ЭДС во
У'г х Ркг
время бестоковых пауз:
- кг\ — СОШ
Л ♦ V г I / J
Электромагнитный момент двигателя:
(23.22)
Нелинейное звено вычисления результирующего момента
статического сопротивления механизма описывается следующим
образом [131]:
ma + mpSigrw
Л™, та)
при
при
(23.23)
Дт’"2тр) =
т
+ ^тр sign(m - ша)
при
при
т -
Л
т - т„
«
— ^тр ’
— ттр •
<
Здесь /и
а
- активная компонента момента сопротивления механизма;
573
- модуль реактивной компоненты момента сопротивления
при движении механизма;
модуль реактивной компоненты момента сопротивления
при трогании механизма;
£ - малая положительная величина.
Вспомогательная нелинейная функция /(ш, та} определяет
полный момент сопротивления механизма в состоянии покоя, где силы
активного и реактивного сопротивления механизма полностью
уравновешивают активное усилие со стороны электродвигателя
{тс = т ). Здесь же дано условие трогания в случае превышения
совокупности активных (способных вызвать движение механизма)
моментов двигателя т и нагрузки над величиной реактивного
момента трогания wTpi обусловленного силами трения и неупругой
деформации. Алгоритм вычисления тс представлен на рис. 23.4.
Начало
Да
тс = mcp + т.
Возврат
Рис. 23.4. Алгоритм вычисления момента статического
сопротивления механизма
574
23.1.2. Алгоритм расчета рабочих процессов
в системе ПЧ-АД
Специфика задачи расчета состоит в том, что модель объекта
описывается смешанной системой дифференциальных и
алгебраических уравнений, причем для решения последних на каждом
шаге интегрирования необходимы итерационные процедуры. С учетом
этого обстоятельства вычислительный процесс организован
следующим образом. Для численного интегрирования
дифференциальных уравнений использован метод Рунге-Кутта
второго порядка. Для удобства реализации этого метода
параллельного типа смешанные уравнения модели системы ПЧ-АД
разделяются на две группы.
В первую группу включены все дифференциальные уравнения
модели, а также уравнение для независимого переменного t :
рб* = <*>* ;
р°к = <»к;
Р id ~ id i^d ~ ~ ?d id) ’
РЦ1 — (id ~~ in ) ’
Р Wsx = usx + юк Vsy - rs i.s x ;
P Фsy ~~ ^sy ~~ ^k W SX ~ i$y ’
P Wrx = («А - ®) Wry - rr irx ;
P Wry = “ (^A ~ Wrx - rr iry;
par = J '(т-тЛ ;
Pi=T6.
(23.24)
Здесь p = d/dr - оператор дифференцирования переменных по
относительному времени т-1/Тб\
t - текущее время, с;
- базисное время системы относительных единиц, с.
Эти уравнения определяют переменные состояния системы,
совокупность которых представляется вектором состояния:
Л &к ld ип Vs* Wsy ^rx Wry z
Компоненты вектора X характеризуют состав
Условий задачи Коши для уравнений (23.24).
4
начальных
575
В правых частях уравнений (23.24) вместе с переменными из
группы X имеется вторая группа переменных, которые
представляются вектором:
бУд. in
irv т т(.
Т
Заметим, что сюда же включены внешние управляющие и
возмущающие воздействия.
Уравнения (23.24) можно записать в следующей компактной
форме:
pX = F(X,Y) . (23.25)
В отличие от линейно - независимых компонент вектора X в
составе компонент вектора Y имеются как независимые переменные,
характеризующие внешние воздействия (<УЛ. ), так и зависимые
от X переменные. Поэтому в общем случае
Y = Y(X)
(23.26)
Математическим выражением алгебраической вектор-функции
(23.26) является вторая группа уравнений, в которую входят все
алгебраические уравнения модели: (23.6), (23.11), (23.13), (23.14),
(23.16), (23.47), (23.49), (23.50), (23.51), (23.53) - (23.55), (23.59), (23.60),
(23.64) - (23.68). Эти уравнения содержат ряд промежуточных
переменных:
/1 р fip f\/’ flj* -fa]1* u$p Px^ Py> кг и др.
Взаимосвязь между группами дифференциальных и
алгебраических уравнений модели показана на рис. 23.5. Из
структурной схемы взаимосвязи между группами дифференциальных и
алгебраических уравнений следует, что по отношению к
дифференциальным алгебраические уравнения играют роль
уравнений связи. На основе информации о внешних воздействиях и
переменных состояния системы они доопределяют правые части
дифференциальных уравнений.
Существен и тот факт, что среди компонент вектора Y имеются
величины, весьма важные с точки зрения наблюдения за процессом.
Наконец, выделение алгебраических уравнений в отдельную группу
необходимо потому, что они выражают весьма сложные нелинейные
связи между переменными и нуждаются в применении отдельно
оформленных процедур их решения. Сюда относятся итерационные
процедуры вычисления переменных состояния инвертора, расчета
магнитного состояния двигателя с учетом насыщения и др.
576
Внешние
воздействия
Рис. 23.5. Взаимосвязь дифференциальных и алгебраических
уравнений динамической модели
В соответствии с рис. 23.6 процедура расчета рабочих процессов
на модели детализируется следующим образом. После ввода
параметров, начальных значений переменных состояния системы и
других условий эксперимента организуется циклический процесс,
параметром которого является дискретное время tn (п = 0,1, 2,
причем
^Л/+1 “ ’
где Лtn - шаг интегрирования, с . В данном случае \tn = AZ = const.
Первая процедура цикла заключается в решении уравнений связи
(23.19) в последовательности, описанной в п. 22.1. Соответствующий
алгоритм вычисления координат магнитного состояния и переменных
коэффициентов представлен на рис. 22.2. После этого производится
вычисление по формулам (23.20), (23.21) токов и ЭДС с
соответствующим преобразованием координат (23.15); расчет по
формуле (23.22) момента двигателя и по формулам (23.23) в
соответствии с алгоритмом рис.23.4 - момента статического
сопротивления механизма. Далее с помощью рассмотренных выше
алгоритмов (рис. 23.2 и 23.3) выполняется итерационная процедура
вычислений входных и выходных величин АИ.
После решения уравнений связи производится вывод данных, что
позволяет зафиксировать на внешних устройствах ЭВМ значения всех
переменных в начале шага интегрирования.
577
Рис. 23.6., Общий алгоритм расчета динамических процессов
в системе ПЧ - АД на цифровой модели
578
В случае прохождения показанной на рис. 23.6 развилки в
направлении продолжения цикла выполняется процедура численного
интегрирования дифференциальных уравнений модели методом
Рунге-Кутта второго порядка с дробным шагом при а = 0.5 [103]. Для
этого использованы следующие итерационные формулы :
Поясним смысл использованной верхней индексации
переменных. Пусть процедура (23.27) используется для
интегрирования дифференциальных уравнений на шаге, ограниченном
точками tn и (п~ 0, 1,2, ... - номер точки). Тогда индексация для
любой из переменных состояния A* G | О*, 0^ V/sx‘> |
означает следующее.
(£-1)
На первой итерации (к=Л) переменная xv 7 определяется как
величина х в начале шага интегрирования:
579
Определенная итерационной формулой переменная л? 7
приобретает значение, являющееся первым приближением для
решения хи) в середине шага интегрирования:
На второй итерации {к =2) переменная -х , т. е.
(*)
определяется как результат первой итерации, а переменная xv 7
приобретает искомое значение второго приближения значения x\t) в
конце шага:
__ х(2) _ х0
В соответствии с изложенным алгоритм рис. 23.6
предусматривает для каждого шага интегрирования фиксацию в
оперативной памяти ЭВМ начальных значений переменных состояния
и*(0) /з(0) /0) и
Начальные значения зависимых переменных
фиксируются по результатам решения
уравнений связи. С учетом этих данных по итерационным формулам
(23.27) находится первое приближение для
переменных состояния системы в средней точке шага интегрирования.
Для определения зависимых переменных в этой точке
производится повторное обращение к
процедуре решения уравнений связи. При этом в качестве аргументов
используются результаты первого приближения для переменных
состояния. Это обеспечивает все необходимые данные для второй
итерации, дающей искомые значения переменных состояния системы в
конце шага интегрирования.
Зависимые переменные определяются в результате нового
обращения к процедуре решения уравнений связи. Затем следует вывод
данных для точки и далее процесс повторяется для следующего
шага интегрирования. Остановка расчета происходит в результате
действия развилки, контролирующей истечение заданного временного
интервала для исследуемого процесса.
580
23.1.3. Некоторые результаты моделирования
Рассмотрим некоторые типичные результаты моделирования
переходных процессов в системе ПЧ-АД при различных вариантах
законов управления ключами инвертора.
На рис. 23.7 показан процесс, возникающий при ступенчатом
увеличении нагрузки - 1(/)шс уст) на валу асинхронного
двигателя средней мощности при следующих условиях. Частота
инвертора и ЭДС первичного источника его питания постоянны
(й>5 — const, — const). Угол проводимости ключей АИ постоянен и
равен 120° т.е. моделируется “мягкий” закон коммутации,
использовавшийся в первых промышленных образцах тиристорных
преобразователей частоты.
Рис. 23.7. Наброс нагрузки на валу двигателя в системе
ПЧ-АД (Л-120°)
581
Здесь хорошо видно влияние дискретности АИ на характер
графиков напряжения, тока и электромагнитного момента АД. Видно
также, что вследствие наличия сокращенных до 120° интервалов
проводимости ключей выходное напряжение инвертора существенно
зависит от изменения электромагнитного состояния двигателя в
переходном процессе. Наличие бестоковых пауз в графиках фазных
токов обусловливает повышенные пульсации электромагнитного
момента двигателя. По этим причинам использование режимов
управления с сокращенными интервалами проводимости ключей АИ
нецелесообразно.
Рис. 23.8. Наброс нагрузки на валу двигателя в системе ПЧ-АД
(Л = 180°)
На рис 23.8 показан процесс в системе при тех же условиях, но
при увеличении угла проводимости ключей инвертора до 180°, т.е.
при базовом, жестком законе коммутации. Как видно, использование
жесткого закона коммутации ключей стабилизирует форму выходного
582
напряжения инвертора и способствует уменьшению пульсаций
электромагнитного момента двигателя. Поэтому данный закон
коммутации оказался более приемлемым для практического
применения при построении усовершенствованных промышленных
тиристорных преобразователей частоты для регулируемого
электропривода переменного тока. Более подробно данный режим
управления проанализирован в гл. 13.
Приведенные примеры наглядно иллюстрируют возможности
модели по учету влияния дискретности инвертора на форму
напряжений, токов и пульсаций электромагнитного момента; учету
реакции двигателя на включение и выключение ключей инвертора и
его поведения во время бестоковых пауз, включая режимы повторного
отпирания неуправляемых вентилей [138]. Модель позволяет
исследовать влияние динамики силового фильтра, угла проводимости
вентильных блоков и других факторов поведения этой сложной
нелинейной многомерной и многосвязной динамической системы в
различных режимах. Модель пригодна для исследования не только
рабочих, но и некоторых аварийных режимов.
Для моделирования рабочих режимов инверторов с жесткими
законами коммутации модель может быть существенно упрощена.
Рассмотрим такую модель.
23.2. Модель системы ПЧ-АД с жестким законом
коммутации
В основу построения структурной схемы цифровой модели с
жестким законом коммутации (рис. 23.9) положена математическая
модель системы АИН-АД , описанная в гл. 19. Она предназначена для
моделирования базового режима управления инвертором (Л = 180°), а
также режимов управления с модуляцией, описанных в гл. 20.
Формирователь ФЗС формирует вектор задающих воздействий:
(23.28)
(23.29)
583
5
5
заданные значения амплитуды и частоты
напряжения питания двигателя.
_______________________________________________________________________L__________________________________________________________________________________________________________________________J
Рис.23.9. Структурная схема цифровой модели системы ПЧ-АД
с жестким законом коммутации ключей инвертора
В модели автономного инвертора напряжения вычисляются
компоненты вектор - функции управления, определяющей состояние
ключей в фазах инвертора:
sign (w* + «о
sign \uh+UQ
sign Iu*+Wq
(23.30)
Здесь Uq - опорный сигнал, используемый для моделирования
режимов широтно-импульсной модуляции.
При моделировании режимов симметричного питания
двигателя принимаем:
= кг = н <ра =$, <Рь = -2л-/3, д>с = +2^/3. (23.31)
584
Для моделирования базового режима управления инвертором с
Л = 180° достаточно установить = 0. Для моделирования режимов
ШИМ с предмодуляцией задающих воздействий в число аргументов
функции (23.30) вводится дополнительная переменная имод.
Алгоритмы ее формирования подробно рассмотрены в гл. 20.
Результирующая коммутационная вектор-функция АИН, вектор
выходных напряжений и ток питания инвертора с жестким законом
коммутации во всех случаях вычисляются по формулам:
(23.32)
(23.33)
(23.34)
При этом не требуется выполнение описанных выше
итерационных процедур, что существенно упрощает модель,
повышает ее точность и быстродействие. Двигатель и его нагрузка
моделируются аналогично предшествующему варианту по уравнениям
(23.14) - (23.23), однако в данном случае нет нужды вычислять ЭДС и
соответственно использовать уравнение (23.21).
Таким образом, модель инвертора с жестким законом
коммутации, являясь частным случаем универсальной динамической
модели, сочетает существенную простоту с возможностью
исследования широкой гаммы практически важных режимов
управления, включая базовый с Л~ 180°, базовый режим
симметричной двусторонней ШИМ и модифицированные режимы
ШИМ с предмодуляцией задающих воздействий. Полученные с
помощью данной модели результаты моделирования иллюстрируют
теоретические положения соответствующих разделов монографии.
Бесспорными и важными преимуществами цифровых моделей
являются стабильность результатов, удобство варьирования
условиями эксперимента и возможность получения полной, точной и
качественно представленной информации о поведении исследуемых
систем.
585
Глава двадцать четвертая
МОДЕЛИРОВАНИЕ АКТИВНЫХ
ВЫПРЯМИТЕЛЕЙ КАК ЭЛЕМЕНТОВ
ЭНЕРГОСБЕРЕГАЮЩЕГО
ЭЛЕКТРОПРИВОДА ПЕРЕМЕННОГО ТОКА
24.1. Моделирование активного выпрямителя напряжения
24.1.1. Математическое описание АВН
Общие принципы построения полупроводниковых
преобразователей частоты с активными выпрямителями и
преимущества их использования в системах высокосовместимого
энергосберегающего электропривода изложены в гл. 13. Рассмотрим
математическое описание типового трехфазного мостового активного
выпрямителя напряжения (АВН), работающего в режиме ШИМ
[134,183].
Принципиальная схема силовой части АВН представлена на
рис.24.1. Силовые ключи трехфазного мостового полупроводникового
коммутатора (ПК) обладают полной управляемостью, двусторонней
проводимостью тока при подаче включающего сигнала управления и
односторонней (обратной) проводимостью тока при отсутствии
включающего сигнала управления. Подобными свойствами обладают
силовые транзисторные ключи, снабженные обратными
неуправляемыми вентилями. Между зажимами питающей сети и
входами полупроводникового коммутатора включены буферные
реакторы, параметры которых - активное сопротивление г и
586
индуктивность / определяют наряду с емкостью Cj в звене
постоянного тока важнейшие свойства АВН. Нагрузка выпрямителя
представлена в общем виде сопротивлением Zh. В схеме двухзвенного
преобразователя частоты нагрузкой АВН является автономный
инвертор напряжения и двигатель переменного тока с
соответствующей системой автоматического регулирования.
Блок управления активного выпрямителя формирует широтно-
модулированные управляющие сигналы для полупроводниковых
ключей коммутатора, что обеспечивает формирование мгновенных
значений напряжений на силовом входе ПК wna, и такой
величины, формы и фазы, что потребляемые из сети токи ia, ic
являются практически синусоидальными. Управляющие сигналы и*а,
^пЬ и ^пс поступают на информационные входы АВН с выхода
регуляторов системы автоматического регулирования.
Рис. 24.1. Принципиальная схема активного выпрямителя
напряжения
Основой построения математической модели АВН являются
уравнения равновесия напряжений и токов. При записи этих
уравнений используется допущение об идеальности силовых ключей,
что в случае использования IGBT модулей является вполне
корректным.
587
Силовой схеме АВН соответствует схема замещения,
представленная на рис. 24.2. Рассматривается симметричная система,
для которой справедливы соотношения:
ra = rb = rc = r i
la=lb=lc=l-
Условно-положительные направления токов соответствуют
режиму работы схемы в качестве выпрямителя и отражают процесс
преобразования энергии сети переменного тока в энергию
постоянного тока.
Сеть Реакторы Активный выпрямитель Нагрузка
Ипа U*c
Рис. 24.2. Схема замещения выпрямителя
Введем абстрактные алгебраические векторы-столбцы,
составленные из мгновенных относительных значений напряжений
сети, напряжений и токов на силовом входе ПК и управляющих
воздействий на информационном входе активного выпрямителя:
(24.1)
wna
ЪуЬ
а также матрицы параметров буферных реакторов:
588
о
о о
гь О
О гс
(24.1 ,а)
Математическая модель АВН с учетом дискретности процессов в
нем описывается следующими уравнениями:
Un=«Af;
(24.2)
(24.3)
(24.4)
(24.5)
(24.6)
Здесь М =
- матричная константа;
дискретная коммутационная вектор-функция активного выпрямителя;
Fn ^U* , - дискретная вектор-функция, описывающая
управляющие сигналы и состояния ключей полупроводникового
коммутатора АВН.
Для систем ШИМ с явно выраженным опорным (несущим)
сигналом won (г) вектор - функция состояния ключей АВН
sign^w^ + won
+ won
(24.7)
Структурная схема модели АВН изображена на рис. 24.3.
589
*
м
Рис. 24.3. Структурная схема модели АВН
СфР
Ud
В соответствии с принципами, изложенными в гл. 13, активный
выпрямитель выполняется по схеме, идентичной схеме автономного
инвертора преобразователя частоты и по существу представляет собой
обращенный АИН, также работающий в режиме ШИМ. Поэтому так
же, как и для автономного инвертора, с целью расширения диапазона
регулирования активного выпрямителя в его каналы задания вводится
аддитивное предмодулирующее воздействие ип:
*
^па
*
(24.7,а)
Выбор рациональной формы предмодулирующего воздействия
для активного выпрямителя производится по тем же критериям, что и
для автономного инвертора преобразователя частоты.
24.1.2. Преобразование координат
В связи с периодическим изменением во времени анализируемых
величин в цепи переменного тока уравнения АВН целесообразнее
записывать не в фазных, а в преобразованных переменных с
использованием трехмерной ортогональной системы координат Oxyz,
оси которой вращаются в пространстве с произвольной скоростью
69 д.. Использование именно трехмерной системы преобразованных
координат позволяет наиболее просто учесть в математической
модели АВН различные алгоритмы ШИМ путем введения несущего и
предмодулирующего сигналов по координате z [123,130,183].
590
Введем векторы-столбцы, составленные из преобразованных
мгновенных относительных значений напряжений сети, напряжений и
токов на силовом входе ПК и управляющих воздействий на
информационном входе активного выпрямителя:
Для преобразования координат используем вещественную
матрицу
cos^. cos (0к - A) cos(^)
- sin вк -sin(^-A) -sin(#£-bA) ,
1 1 1
V2 V2 д/2
структура которой описана в п. 8.1. Запишем следующие формулы
преобразования переменных в схеме активного выпрямителя
напряжения:
U = A(^.)UF; (24.9)
Un=A(60u£; (24.10)
I = A(0a.)IF; (24.11)
U* =A(^.)U’nF (24.12)
где 0к - угол поворота системы координат.
В результате преобразования переменных математическая
модель АВН с учетом дискретности процессов в нем описывается во
вращающейся системе координат следующими уравнениями:
U = Un + RI + L—+©, BLI;
11 J Л ’
а г
Un ^ФП >
(24.13)
(24.14)
(24.15)
(24.16)
591
(Ок =
dOk
dr
(24.17)
(24.18)
В этих уравнениях фигурируют матричные константы:
О
1
О
В = сок 1А
dA~'
dr
-10] Г1 О
О 0 ; С - АМА"1 = 0 1
О
О
О
О
О
О О
а также преобразованные матрицы активных сопротивлений и
индуктивностей буферных реакторов на входе АВН:
R = rE ; L = /E , где Е - матричная единица.
Преобразованная коммутационная функция АВН и
преобразованная функция состояния ключей * полупроводникового
коммутатора имеют вид:
fnx
Учитывая типичные условия работы выпрямителя, выберем
величину
й)к=й)и, (24.19)
где сои - относительная частота напряжения питающей сети.
Тогда при симметрии и синусоидальности фазных напряжений
питающей сети их преобразованные значения оказываются
величинами, неизменными во времени.
24.1.3. Эквивалентная непрерывная модель АВН
Учитывая высокую частоту коммутации ключей в режиме
ШИМ, для анализа главных тенденций переходных и установившихся
режимов активного выпрямителя целесообразно использовать его
более простую эквивалентную непрерывную модель. Такая модель
АВН является частным случаем модели (24.13) - (24.18), полученным в
592
результате непрерывной аппроксимации его дискретной
коммутационной функции. Уравнения непрерывной модели АВН в
скалярной форме записи имеют следующий вид:
wn.v fnx ?
(24.20)
(24.21)
(24.22)
(24.23)
(24.24)
(24.25)
(24.26)
(24.27)
(24.28)
где L/q - амплитуда несущего сигнала ШИМ в схеме управления.
Уравнения непрерывной аппроксимации (24.22) - (24.23)
справедливы при условии
<UQ, j = a,b,c, (24.29)
т.е. тогда, когда ни один из фазных широтно-импульсных модуляторов
не потерял управляемости при насыщении узла ШИМ.
24.1.4. Активный выпрямитель напряжения как объект
управления
На рис. 24.4 представлена соответствующая уравнениям (24.20) -
(24.27) структурная схема непрерывной модели активного
выпрямителя напряжения.
593
Рис. 24.4. Структурная схема непрерывной модели АВН
Характеризуя АВН как объект управления, отметим следующее.
Управляющими воздействиями являются сигналы m*v и на
информационном входе, а возмущающими воздействиями - ток
нагрузки iH и компоненты вектора сетевого напряжения их и uv.
Координатами его состояния и одновременно выходными
(управляемыми) переменными являются напряжение на выходе
активного выпрямителя и компоненты вектора сетевых токов ix и iy.
В структуре модели имеются инерционные звенья, соединенные
цепями прямых и обратных связей. Эти цепи образуют внутренние
(присущие объекту) замкнутые контуры саморегулирования токов и
напряжений на входе и выходе ПК.
Процессы в схеме активного выпрямителя определяются
решениями системы уравнений (24.20) - (24.27), которая в
канонической векторно-матричной форме записи имеет следующий
вид:
^ = AnX + BnZ,
а т
(24.30)
594
df
df
ud
вектор переменных состояния и вектор возмущающих воздействий;
н
- соответственно системная матрица и входная матрица по каналам
возмущений.
Коэффициент мощности активного выпрямителя как элемента
системы электроснабжения определяется формулой:
cos<p -
(24.31)
Как следует из структуры уравнений модели, возмущающие
воздействия вводятся в объект аддитивно (на структурной схеме
рис.24.4 они поступают на входы сумматоров). В отличие от них
управляющие воздействия вводятся в объект мультипликативно.
Входя в выражения элементов системной матрицы объекта, они
оказываются сомножителями координат его состояния. В связи с этой
существенной особенностью активный выпрямитель напряжения как
объект управления квалифицируется в различных условиях работы
различным образом.
При постоянстве управляющих воздействий и w*v и
постоянном значении со^. ( в этом случае реальные управляющие
воздействия ur% и и*с представляют симметричную систему
гармонических функций времени) активный выпрямитель может
рассматриваться как линейный объект, описываемый линейным
Дифференциальным уравнением (24.30) с постоянными
коэффициентами.
595
При работе в разомкнутых системах, где управляющие
- * , Л
воздействия ипх и и^, являются независимыми переменными, активный
выпрямитель квалифицируется как особый (нестационарный)
линейный объект, описываемый линейным дифференциальным
уравнением (24.30) с переменными коэффициентами.
При работе активного выпрямителя в составе замкнутых систем
автоматического регулирования ситуация кардинально изменяется,
так как некоторые элементы системной матрицы АВН становятся
функциями переменных состояния системы. Поэтому даже при
линейных обратных связях по переменным состояния система
регулирования становится нелинейной. Например, при введении на
информационный вход АВН линейной обратной связи по
выпрямленному напряжению Wj получаем составляющую управления
в виде
^п.г(^) “ ~^ос ^d ’
вследствие чего в правой части дифференциальных уравнений
замкнутой системы появляются нелинейные члены
wn.x-(wj) _ k()C 2 3wnv(i/j) _ 3koc
------lb —-------Uyj и --------------lv —--------— U.j lr .
2lU0 d 2lU0 4и0Сф 4и0Сф d
Отмеченные особенности определяют приемлемый в каждом
случае арсенал методов анализа и синтеза систем автоматического
регулирования активных выпрямителей.
Суть проблемы управления режимами активного выпрямителя
напряжения в системах регулируемого электропривода заключается в
комплексном решении двух основных задач:
• обеспечения требуемого значения выпрямленного напряжения и
стабилизации его в условиях изменения тока нагрузки и
напряжения питающей сети;
• обеспечения требуемого качества потребления либо рекуперации
электроэнергии, важными критериями которого являются
гармонический состав потребляемого тока и коэффициент
мощности активного выпрямителя как элемента системы
электроснабжения.
Решение этих задач усложнено отмеченным фактором
нелинейности замкнутых систем регулирования АВН.
Приведение модели АВН к виду, удобному для синтеза САР.
Эффективным средством улучшения управляемости и упрощения
задач анализа и синтеза системы регулирования является
596
предварительное введение специальных компенсирующих связей,
подавляющих мультипликативный характер естественного действия
управляющих сигналов на информационном входе АВН. Одним из
возможных вариантов реализации этого средства является введение в
схему управления АВН линейной связи по выпрямленному
напряжению, воздействующей не на информационный вход, а на
амплитуду несущего сигнала ШИМ таким образом, что
t/0 - Ц)(цу) -
(24.32)
^4^
Здесь кл = const - параметр компенсирующей связи.
Введение такой внешней компенсирующей связи, показанной на
рис. 24.4 пунктиром, блокирует действие внутренней обратной связи
по напряжению Wj, т.е. фактически размыкает главный контур
саморегулирования объекта. Одновременно обеспечивается
инвариантность компонент вектора напряжений, формируемых на
силовом входе ПК, к величине :
Ц1Л*
*
^пу / * *
2U0(ud) ‘/ ~
(24.33)
Следовательно, входящий в выражение (24.32) параметр
компенсирующей связи кл приобретает смысл коэффициента
передачи, определяющего линейную зависимость напряжений на
силовом входе ПК от управляющих воздействий на информационном
входе компенсированного активного выпрямителя. При отсутствии
доступа к изменению параметра U$ узла ШИМ аналогичный эффект
может быть достигнут путем включения на информационном входе
АВН блоков деления управляющих воздействий на величину,
пропорциональную .
С физической точки зрения напряжения на силовом входе ПК в
цепи переменного тока формируются в результате инвертирования
напряжения на конденсаторе Сф в цепи постоянного тока. Поэтому
реально влияние величины на напряжения илх и не
устраняется полностью. В результате компенсации оно приобретает
вместо мультипликативного - ограничительный характер, так как для
формирования переменного напряжения на входе ПК принципиально
необходимо наличие напряжения на выходном конденсаторе.
Каждому значению соответствует определенное предельное
597
значение С/Пр амплитуды непрерывной составляющей переменного
фазного напряжения, которое может быть сформировано на входе ПК.
В частности, при работе ключей ПК в режиме синусоидальной ШИМ
предельная амплитуда непрерывной (полезной) составляющей фазного
напряжения на входе ПК
С/пр = ud/2 . (24.34)
При введении в алгоритм ШИМ предмодулирующего сигнала
третьей гармоники (см. п. 15.6) эта величина возрастает на 15.5% и
составляет
{7Пп ~ 0.5Hud. (24.35)
Приведенные формулы позволяют определить условия
физической реализуемости линейных зависимостей (24.33) в виде
ограничения
Цдл + 4iy — ^пр- (24.36)
В связи с отмеченными обстоятельствами требуется уточненный
анализ режимов включения активного выпрямителя в сеть, когда
значения ud в начальной стадии процесса малы и поэтому
существенно проявляются естественные ограничения.
Подчеркнем, что определяемое формулами (24.34) - (24.36)
ограничение имеет общий характер, поскольку отражает предельные
возможности полупроводникового коммутатора как инвертора
напряжения с ШИМ вне зависимости от наличия или отсутствия
компенсирующей связи. Однако компенсирующая связь, действуя в
рамках данных ограничений, нейтрализует влияние главной
внутренней обратной связи объекта и преобразует характер действия
управляющих сигналов. В результате существенно облегчается задача
управления.
Благодаря нейтрализации внутренней обратной связи
оказывается целесообразным структурное представление модели
компенсированного активного выпрямителя напряжения в виде
последовательного соединения двух основных укрупненных звеньев:
звена токов и звена напряжения.
В состав первого звена входит линейное двумерное
апериодическое звено с антисимметричными связями, описываемое
линейными дифференциальными уравнениями с постоянными
коэффициентами:
diY г . к* * 1
— — -- z + бУд. i + ~jux ’ (24.37)
ат I Л I I
598
(2438)
и нелинейное безынерционное звено, описываемое уравнением:
. _ 3 / . .4
2w \ ПЛ + wnyb J’
Второе динамическое звено описывается
дифференциальным уравнением:
(2439)
линейным
(24.40)
Следующим шагом, обеспечивающим дальнейшее приведение
модели АВН к виду, удобному для синтеза САР, является
автоматическая ориентация вращающейся системы координат по
вектору напряжений питающей сети. Математически условие
ориентации определяется следующим образом:
I/’
(24.41)
где 0и - угол поворота вектора, изображающего напряжения
питающей сети, в неподвижной системе координат.
При соблюдении условия ориентации (24.41) оказывается, что
ux=U\ wv=0, (24.42)
iV
где U - модуль вектора напряжений питающей сети.
При этом существенно упрощается выражение критерия качества
(2431):
(24.43)
Очевидно, что для получения cos^> = 1 достаточно обеспечить с
помощью системы регулирования величину iy = 0.
Структурная схема модели компенсированного АВН в
ориентированной системе координат приобретает вид, показанный на
рис. 24.5. Полученная структура обеспечивает необходимые
предпосылки для синтеза векторной САР активного выпрямителя
П 34,183] на основе принципов подчиненного регулирования с
последовательной коррекцией.
599
Рис. 24.5. Структурная схема модели компенсированного
активного выпрямителя напряжения
24.1.5. Векторная САР активного выпрямителя напряжения
Один из вариантов реализации системы автоматического
регулирования АВН [134] представлен на рис. 24.6. В соответствии с
двухзвенным структурным представлением модели объекта система
регулирования выполнена двухконтурной, содержащей внутреннюю
двухканальную систему регулирования потребляемых (сетевых) токов
и внешнюю одноканальную САР выпрямленного напряжения АВН.
Внутренняя система представляет собой комбинированную САР,
сочетающую принципы регулирования по отклонению и по
возмущению. Регулирование компонент вектора сетевых токов
осуществляется во вращающейся системе координат,
ориентированной по вектору сетевого напряжения. В соответствии с
этим в цепи обратной связи по току предусмотрен преобразователь
координат вектора сетевых фазных токов (ПКТ), измеряемых
датчиками тока ДЪ? и ДТ6 (третий ток вычисляется по условию
равенства нулю суммы фазных токов). Сигналы рассогласований
между заданными (f*, z*) и фактическими (ix,iy) значениями
преобразованных токов обрабатываются пропорционально-
интегральными (ПИ) регуляторами токов и после дополнения
сигналами компенсирующих связей и ограничения поступают на
входы преобразователя координат вектора управляющих напряжений
(ПКН) в прямом тракте САР. В результате обратного
600
преобразования координат формируются управляющие воздействия
ипЬ и ипс на информационном входе АВН. Особенностью ПКН
является совмещение в нем функций обратного преобразования
координат с формированием и введением предмодулирующего
воздействия в виде сигнала третьей гармоники, обеспечивающего
расширение диапазона управляемости ПК в соответствии с условиями
(24.35) и (24.36).
Нагрузка
Рис. 24.6. Функциональная схема векторной САР активного
выпрямителя напряжения
Для компенсации мультипликативного действия управляющих
сигналов и„ь и w*c предусмотрена компенсирующая связь по
выпрямленному напряжению воздействующая на дополнительный
вход блока управления. Для управления преобразователями
координат предусмотрен блок ориентации (БО), формирующий
601
координатные функции cos 0^ и sin 0^, а также сигналы модуля U
ориентирующего вектора и скорости вращения системы координат
со к, равной скорости вращения U ориентирующего вектора [123].
Информация, необходимая для ориентации системы координат по
вектору напряжений, поступает на вход БО от датчиков напряжений
питающей сети.
Внутренняя САР сетевых токов подчинена регулятору внешней
системы регулирования выпрямленного напряжения АВН. Здесь также
используется принцип комбинированного регулирования по
отклонению и по возмущению. В связи с этим предусмотрены датчики
выпрямленного напряжения и тока нагрузки. Задающее воздействие
Wj для САР выпрямленного напряжения, а также сигналы датчиков
поступают на входы блока регуляторов. Исходя из требований к
точности стабилизации выходного напряжения АВН регулятор
внешнего контура может быть как ПИ- , так и П-типа с введением в
случае необходимости линейных и нелинейных компенсирующих
связей, а также элементов ограничения переменных.
Синтез регуляторов производится исходя из настройки
внутренней системы на модульный, а внешней - на симметричный
либо модульный оптимум.
24.1.6. Результаты компьютерного моделирования
Ниже представлены некоторые результаты, полученные на
компьютерной модели АВН с векторной системой регулирования с
ПИ-регулятором напряжения.
Рис. 24.7 отображает процессы подключения АВН к питающей
сети в режиме холостого хода при нулевых начальных условиях и его
автоматической синхронизации с напряжением сети. Рис. 24.8
отображает процесс последующего наброса пассивной нагрузки
(zH >0), переводящей АВН в режим выпрямителя. Рис. 24.9
отображает процесс перевода АВН из выпрямительного в
инверторный режим работы вследствие ступенчатого изменения
направления тока нагрузки (zH < 0). Во всех случаях обеспечивается
режим поддержания единичного коэффициента мощности активного
выпрямителя за счет установки задания Z* = 0. Моделировались
режимы работы АВН при питании его от стандартной трехфазной
сети 50Гц, эквивалентная некомпенсируемая постоянная времени
7^ экв — 0.002 с , частота несущего сигнала ШИМ 1кГц.
602
Рис.24.7. Подключение АВН к питающей сети в режиме холостого хода
603
604 605
Рис. 24.8. Наброс
нагрузки в выпрямительном режиме АВН
Рис. 24.9. Перевод АВН в режим инвертирования
Анализ результатов показывает, что описанная векторная
система регулирования обеспечивает устойчивую работу активного
выпрямителя напряжения при включении в сеть, работе в
выпрямительном и инверторном режимах. Для уменьшения бросков
тока при включении АВН в сеть может быть использован
предварительный заряд конденсатора фильтра от маломощного
источника, либо временное включение токоограничивающих
элементов в цепь заряда конденсатора фильтра. Предварительный
заряд конденсатора фильтра и ориентация системы координат
способствуют также уменьшению переходных составляющих тока при
включении регуляторов САР.
При работе активного выпрямителя зоне, где не проявляются
естественные ограничения возможностей силовой схемы, качество
переходных процессов соответствует типовым показателям систем
подчиненного регулирования. В частности, система с ПИ-
регулятором напряжения при ступенчатом изменении тока нагрузки в
случае отсутствия компенсирующей связи по этому току обеспечивает
процесс со следующими показателями :
bUd *-3.8^^Д7н;
СФ
(24.44)
(24.45)
восст ~ ’
где: ДЦ/ - максимальный провал (выброс) выходного
напряжения, В;
Твосст" вРемя восстановления выходного напряжения, с;
Д/н - приращение тока нагрузки, А;
Сф - емкость выходного конденсатора, Ф;
7^ экв - эквивалентная некомпенсируемая постоянная времени
системы подчиненного регулирования, с.
Внешняя (нагрузочная) статическая характеристика АВН как
источника постоянного напряжения является абсолютно жесткой, так
как за счет действия ПИ-регулятора напряжения установившееся
значение выпрямленного напряжения не зависит от тока нагрузки :
^J.ycT ^Л/.уст
(24.46)
В случае использования П-регулятора напряжения выходное
напряжение АВН зависит от тока нагрузки. Уравнение внешней
статической характеристики выпрямителя имеет вид:
606
(24.47)
Для нормального функционирования трехфазного мостового
г г*
АВН величина задания с/^уст должна превышать значение
выпрямленного напряжения, обеспечиваемого трехфазным мостовым
неуправляемым выпрямителем при одном и том же напряжении
питающей сети переменного тока.
Как видно из формул (24.44) - (24.47), при прочих равных
условиях основные показатели качества САР определяются величиной
некомпенсируемой постоянной времени системы подчиненного
регулирования. Они тем лучше, чем меньше Т^.зкв. Увеличение
емкости выходного конденсатора также способствует повышению
динамической и статической точности САР напряжения.
Токи, потребляемые из питающей сети, при постоянстве тока
нагрузки близки к синусоидальным. Их высокочастотные пульсации
определяются параметрами буферных реакторов в цепи переменного
тока, частотой ШИМ и законом коммутации ключей
полупроводникового коммутатора АВН. Повышение частоты ШИМ
позволяет существенно уменьшить пульсации сетевых токов и
улучшить качество регулирования выходного напряжения за счет
повышения быстродействия САР.
Как отмечалось, установка задания /* = 0 обеспечивает режим
поддержания единичного коэффициента мощности активного
выпрямителя как элемента системы электроснабжения. Варьирование
заданием z* обеспечивает работу АВН как с “опережающим”, так и
“отстающим” коэффициентом мощности. Поэтому ДПЧ с активным
выпрямителем может использоваться в системе электроснабжения
либо как нейтральный элемент, либо как источник, либо как
потребитель реактивной мощности.
Сопоставление результатов моделирования, полученных на
непрерывной математической модели и на математической модели,
учитывающей дискретность работы силовых ключей в схеме АВН,
показало хорошее совпадение процессов по их главным тенденциям.
Это подтверждает корректность проведения синтеза регуляторов по
непрерывной математической модели АВН и позволяет проводить
исследования в системах, содержащих активный выпрямитель, по его
более простой непрерывной математической модели с достаточной
для инженерных расчетов точностью.
607
24.2. Моделирование активного выпрямителя тока
24.2.1. Математическое описание АВТ
Рассмотрим математическое описание типового трехфазного
мостового активного выпрямителя тока (АВТ), работающего в режиме
ШИМ [136,184]. Принципиальная схема силовой части АВТ
представлена на рис. 24.10.
Основой активного выпрямителя является трехфазный мостовой
полупроводниковый коммутатор (ПК), силовые ключи которого
обладают односторонней проводимостью тока и полной
управляемостью в проводящем направлении. Элементной базой
такого ПК могут быть, например, двухоперационные тиристоры либо
транзисторы с последовательно включенными диодами. Между
зажимами питающей сети и входами полупроводникового
коммутатора включен трехфазный сетевой LC фильтр нижних частот.
Полупроводниковый Сглаживающий
коммутатор реактор
Рис. 24.10. Принципиальная схема активного выпрямителя тока
608
На выходе коммутатора последовательно с нагрузкой включен
сглаживающий реактор. В схеме двухзвенного преобразователя
частоты (см. гл. 13) нагрузкой АВТ является автономный инвертор
тока и двигатель переменного тока с соответствующей системой
автоматического регулирования. Возможен также вариант питания от
АВТ и двигателя постоянного тока с регулированием скорости путем
изменения выпрямленного напряжения.
На информационные входы АВТ поступают управляющие
сигналы z*a, и z*c с выхода регуляторов системы
автоматического регулирования. Блок управления активного
выпрямителя формирует широтно-модулированные управляющие
сигналы для ключей коммутатора. Это обеспечивает формирование на
силовом входе ПК импульсных токов zna, и znc со спектром,
благоприятным для выделения основной гармоники и подавления
высших гармоник фильтром нижних частот. Таким образом,
благодаря широтно-импульсной модуляции входного тока
коммутатора и наличию сетевого фильтра нижних частот
потребляемые из сети токи ic оказываются практически
синусоидальными.
Сетевой фильтр
Активный Сглаживающй
выпрямитель тока реактор Нагрузка
Рис. 24.11. Схема замещения
Схема замещения АВТ представлена на рис. 24.11. Выбранные
положительные направления токов ориентированы на режим работы
схемы в качестве выпрямителя. Предполагается, что нагрузка
609
активного выпрямителя тока содержит источник противо - ЭДС еи.
Резистивные элементы нагрузки гн и /н отнесены (добавлены) к
параметрам и сглаживающего реактора в цепи выпрямленного
тока.
При записи уравнений
используется допущение об
коммутатора. Для удобства
конденсаторов сетевого фильтра
математической модели АВТ
идеальности силовых ключей
записи уравнений параметры
приводятся к схеме их включения в
звезду. Предполагается, что активный выпрямитель работает в режиме
непрерывного тока в цепи нагрузки. Модель активного выпрямителя
строится на основе координатного подхода.
Введем абстрактные алгебраические векторы-столбцы,
составленные из мгновенных относительных значений напряжений и
токов сети, токов конденсаторов и выходных напряжений сетевого
фильтра на входе ПК, токов на силовом входе ПК и управляющих
воздействий на информационном входе активного выпрямителя:
(24.48)
Введем также матрицы параметров дросселей и приведенных емкостей
конденсаторов сетевого фильтра:
О
lb
О
О О
сь 0
О сг
О
О
Рассмотрим симметричную трехфазную систему, в которой
610
Математическая модель АВТ с учетом дискретности работы
полупроводникового коммутатора описывается следующими
уравнениями:
F - С
ф Ч dT ’
(24.49)
(24.50)
Ф I >
* Г*/7
Fn =signlz ;
(24.51)
(24.52)
(24.53)
(24.54)
(24.55)
(24.56)
(24.57)
(24.58)
Рассмотрим структурную схему модели АВТ (рис. 24.12), смысл
ее уравнений (24.49) - (24.58) и их развернутые выражения.
Компоненты управляющего вектора zr*a,
inb и *nc на вх°Де
системы управления подвергаются линейному преобразованию (24.53)
с матрицей
Aw(^) = |
cos#;
cos + Д)
cos (в, - Д)
cos (в, - Д)
cos#;
cos (0j + Д)
cos (fl + Д)
cos (fl - Д)
COS#/
(24.59)
где Д = 2?r/3 ; #( = л/6.
611
Рис. 24.12. Структурная схема модели АВТ
В общем случае такое преобразование исключает из компонент
управляющего вектора нейтральную составляющую и поворачивает
его на угол ф [123]. Отметим, что в рассмотренной выше системе с
активным выпрямителем напряжения подобное преобразование
отсутствует. Введение его в систему с активным выпрямителем тока
обусловлено тем, что образующие векторы инвертора тока
(см.рис.17.6) смещены относительно образующих векторов инвертора
напряжения (см. рис. 16.2) на угол zr/б. Поэтому преобразование
(24.53) вводится для учета отмеченного смещения. При условии
0i - л/6 матрица преобразования (24.59) приобретает вид матричной
константы:
(24.60)
Активный выпрямитель тока выполняется по схеме, идентичной
схеме автономного инвертора преобразователя частоты и
представляет собой обращенный АИТ, работающий в режиме ШИМ.
С целью расширения диапазона регулирования АВТ в его каналы
задания вместе с периодическим высокочастотным модулирующим
612
воздействием 1Оп(г) вводится аддитивное предмодулирующее
низкочастотное воздействие 1*^. Соответствующее выражение (24.54)
в развернутой форме имеет вид :
(24.61)
Выбор формы предмодулирующего воздействия для активного
выпрямителя производится по тем же принципам (см. гл. 15), что и для
автономного инвертора преобразователя частоты.
В соответствии с формулой (24.55) релейный элемент РЭ системы
управления формирует вектор широтно-модулированных дискретных
сигналов:
sign (с а
signed
Sign(/^c
(24.62)
Последующее линейное преобразование (24.56) этих дискретных
сигналов дает дискретную кусочно-непрерывную коммутационную
вектор-функцию полупроводникового коммутатора АВТ:
(24.63)
На интервалах непрерывности функции (24.63) каждая из ее
компонент (fnaifnb и fnc) имеет область значений { +1, -1, 0}.
Полученная коммутационная функция определяет связь
мгновенных значений токов на входе и выходе коммутатора, а также
связь мгновенных значений его входных напряжений и выпрямленной
ЭДС. Эти связи описываются уравнениями полупроводникового
коммутатора АВТ (24.57) и (24.58), которые в развернутой форме
имеют вид:
613
ифа
ифЬ
(24.64)
па ифа + JnbU$b + Jnc ифс *
(24.65)
Дифференциальные векторно-матричные уравнения (24.49) -
(24.51) описывают динамику сетевого фильтра АВТ, а скалярное
дифференциальное уравнение (24.52) - процессы в цепи
выпрямленного тока.
24.2.2. Преобразование координат
Введем векторы-столбцы, составленные из преобразованных
мгновенных относительных значений напряжений сети, напряжений и
токов на силовом входе ПК и управляющих воздействий на
информационном входе активного выпрямителя:
(24.66)
Для преобразования координат используем вещественную
матрицу А = А(0д.), структура которой описана в п. 8.1. Запишем
следующие формулы преобразования переменных в схеме активного
выпрямителя тока:
614
иф = А(0,)и£; 1п = A(0fc)ln ; In = A(^,)rnF; (24.67)
C = A(^)i;F ; Il = A(0JI*/; Ion = A(^.)C ;
I>A(^)l^; Fn=A(^X; ФП=А(^)ФПГ,
где - угол поворота системы координат.
В результате преобразования переменных (24.67) математическая
модель АВТ с учетом дискретности коммутатора описывается во
вращающейся системе координат следующими уравнениями:
— *+а>А.ВСфиф;
(24.68)
(24.69)
т "п ’
* = I* + Т* + I
S т и оп >
F^A^signfAXJll
(24.70)
(24.71)
(24.72)
(24.73)
(24.74)
(24.75)
(24.76)
(24.77)
(24.78)
615
В этих уравнениях:
-1 О
О О
0 °.
COS0;
Dm = AAM А-’ =
sin di
cos#z
О
-матричные константы;
1 О
О
О
О
О
О
- транспонированная матрица Dw ; = я'/б ;
А = А(^) - матрица преобразования координат ;
R ф = Гф Е ; Ьф = /ф Е ; Сф = Сф Е - преобразованные матрицы
параметров фильтра;
- преобразованная дискретная коммутационная вектор-функция
полупроводникового коммутатора АВТ.
Скалярное дифференциальное уравнение (24.71)
преобразованием координат не затрагивается.
24.23. Эквивалентная непрерывная модель АВТ
В результате непрерывной аппроксимации дискретной
коммутационной функции может быть получена эквивалентная
непрерывная модель АВТ. Уравнения такой модели в скалярной
форме записи имеют следующий вид:
(24.79)
(24.80)
(24.81)
616
(24.82)
(24.83)
(24.84)
(24.85)
(24.86)
(24.87)
(24.88)
(24.89)
Здесь 7q -• амплитуда опорного сигнала ШИМ в схеме
управления.
На рис. 24.13 представлена соответствующая уравнениям (24.79)
- (24.88) структурная схема непрерывной модели активного
выпрямителя тока.
Коэффициент мощности активного выпрямителя тока как
элемента системы электроснабжения по-прежнему определяется
формулой (24.31).
Уравнения непрерывной аппроксимации (24.84) - (24.85)
справедливы при условии
(24.90)
когда ни один из фазных широтно-импульсных модуляторов не
потерял управляемости вследствие насыщения узла ШИМ.
Нарушение этих условий влечет появление нелинейных искажений в
полезных составляющих сигналов реального объекта при
воспроизведении управляющих воздействий. Поэтому работа
выпрямителя в зонах насыщения узлов ШИМ нежелательна.
Рассмотрим более подробно область неискаженного воспроизведения
управляющих воздействий в схеме активного выпрямителя тока.
617
Рис. 24.13. Структурная схема непрерывной модели АВТ
При отсутствии предмодуляции (/*=0) максимально-
допустимое значение амплитуды управляющих воздействий z* •,
А
удовлетворяющее условию (24.90), равно амплитуде опорного сигнала
ШИМ :
(24.91)
Поскольку преобразование (24.72) изменяет угол поворота, но не
изменяет длины управляющего вектора, то максимально допустимое
значение амплитуды воздействии на входе системы управления zny
также равно Zq :
^п.доп ~ Л) • (24.92)
618
При условии (24.91) амплитуда полезной составляющей фазной
коммутационной функции равна
Fnl = V3/2. (24.93)
При этом обеспечиваются следующие амплитудное 1Ц । и
эффективное /п j значения основной гармоники входного тока
полупроводникового коммутатора:
« 0.866
= (24.94)
В соответствии с формулой (24.88) в общем случае связь между
входным переменным напряжением ПК и средним значением
выпрямленной ЭДС можно определить в виде
3 р
?d = 2С/Ф>Г"-,со8^ф’
(24.95)
™ ^ф.1 -
Fn.l -
pu*
амплитуда фазного напряжения на входе ПК;
амплитуда основной гармоники фазной
коммутационной функции ПК;
угол сдвига основной гармоники фазной
коммутационной функции относительно основной
гармоники фазного напряжения на входе ПК.
Полагая = 0, из (24.95) получаем предельно допустимое
значение средней выпрямленной ЭДС:
За/З _3д/б..
е£/ д ^ф.1 4 и^.\.эфф
(24.96)
Эта величина оказывается значительно меньше, чем ЭДС
неуправляемого (пассивного) трехфазного мостового выпрямителя,
который, как известно, обеспечивает среднее значение выпрямленной
ЭДС
* 1-84 .
(24.97)
619
-2
-1.84
1.84
Акт йень1Й выг рямЕпель: тока
йЙМ':\Г-:
ссинусоида
О
4-
2.34
Пассивный
выпрямитель тока
-2.12
Акгивныйвы нтельтока
I • Г • • • ч г ч i ч i г г ..-.,... I , ......... . ь ч . г - . . - - -
с; м о ди фи ц ирс ванной 1ПЙМ .
-F
2
—h
-2
-2
—h
-2
4-
2
2.22
Активный
выпрямитель напряжения
с А=180°
ud>
2.83
выпрямнтежнапрявкення
сину«О!идальнойШЙМ
выйрям йт ель: напряженнее
ud>
“л
О
4
4
2
+
+
+
4
4
4
О
О
О
О
+
2
-+
2
-+-
2
2.45
Рис. 24.14. Физически реализуемые зоны функционирования
трехфазных мостовых активных выпрямителей
620
Различие ЭДС составляет 21.5%, что является объективной
платой за улучшение формы тока, потребляемого активным
выпрямителем с ШИМ из питающей сети. Тем не менее, введение
предмодуляции, например, сигналом третьей гармоники, позволяет
улучшить характеристики выпрямителя, так как условия (24.91)
(24.93) приобретают вид:
(24.97)
Отсюда следует, что предельные соотношения (24.94) и (24.96)
при использовании модифицированной ШИМ улучшаются:
Л1.1 ’ ^пХ.эфф ^2 w Ч 5
~ 2-12 иф1эфф.
(24.93)
(24.96)
На рис. 24.14 штриховкой показаны физически реализуемые
зоны функционирования активных выпрямителей тока и напряжения,
а также указаны граничные значения средней выпрямленной ЭДС,
соответствующие приведенным выше формулам. По оси абсцисс
отложены относительные значения выходных величин:
ud
ф .1, эфф
где иф\ эфф - эффективное значение основной гармоники фазного
напряжения на зажимах полупроводникового коммутатора активного
выпрямителя.
Как видно, зоны регулирования активных выпрямителей тока и
напряжения существенно различаются между собой. Активный
выпрямитель тока позволяет регулировать выпрямленное напряжение
вниз, а активный выпрямитель напряжения - вверх от величины
выпрямленной ЭДС пассивного выпрямителя тока.
Зоны функционирования выпрямителей также существенно
различны:
• активный выпрямитель тока функционирует при неизменном
направлении выпрямленного тока, но допускает изменение
полярности и регулирование выпрямленной ЭДС в
отмеченных выше зонах;
• активный выпрямитель напряжения функционирует при
неизменной полярности выпрямленного напряжения, но
допускает изменение направления выпрямленного тока.
621
24.2.4. Активный выпрямитель тока как объект управления
Сопоставление структурных схем моделей АВН и АВТ
свидетельствует о том, что модель АВТ содержит дополнительное
двумерное колебательное звено, отражающее динамику сетевого LC
фильтра активного выпрямителя тока. В практических схемах это
звено является существенно колебательным. Весьма малый
коэффициент затухания данного звена обусловлен тем
обстоятельством, что активное сопротивление колебательного
контура фильтра, вносящее демпфирование колебаний, не может быть
выбрано достаточно большим по соображениям ограничения потерь
энергии в фильтре и получения высокого КПД выпрямителя.
Поэтому решение задач управления активными выпрямителями
тока усложнено не только факторами многомерности, многосвязности
и мультипликативной нелинейности моделей, но высокой добротности
дополнительного колебательного звена в структуре АВТ. Однако
рассмотренные выше принципы приведения модели АВН к виду,
удобному для синтеза САР, приемлемы и для улучшения
управляемости и упрощения задач анализа и синтеза систем
регулирования активных выпрямителей тока. К ним относятся
введение специальных демпфирующих обратных связей,
использование компенсирующих связей для подавления
мультипликативного характера естественного действия управляющих
сигналов на информационном входе выпрямителя, использование
вращающейся системы координат и ее рациональная автоматическая
ориентация, применение принципов подчиненного регулирования с
последовательной коррекцией и др.
24.2.5. Результаты компьютерного моделирования
Ниже представлены некоторые результаты, полученные на
компьютерной модели АВТ с системой регулирования выходного
тока, построенной на основе отмеченных выше принципов.
Использовалась одноконтурная структура САР, сочетающая
регулирование выпрямленного тока по отклонению и по возмущению
и искусственное демпфирование колебаний в звене фильтра.
Моделировались динамические режимы работы активного
выпрямителя при питании его от стандартной трехфазной сети 50Гц.
Рис. 24.15,а отображает реакции АВТ на ступенчатое
увеличение, рис. 24.16,а - на уменьшение задания выпрямленного тока
при постоянстве противо-ЭДС нагрузки. В обоих случаях активный
выпрямитель работает в режиме выпрямителя. Расчет реакций
выполнен на уточненной (дискретной) модели АВТ.
622
a)
Рис. 24.15. Реакция АВТ на ступенчатое увеличение задания тока
623
a)
Рис. 24.16. Реакция АВТ на ступенчатое уменьшение задания тока
624
a)
Рис. 24.17. Реакция АВТ на ступенчатое изменение
направления ЭДС нагрузки
625
На рис. 24.15,6 и 24,16,6 представлены результаты расчета тех
же процессов, полученные на эквивалентной непрерывной модели, т.е.
без учета дискретности коммутатора АВТ.
Рис. 24.17 отображает процесс перевода АВТ из
выпрямительного в инверторный режим работы вследствие
ступенчатого изменения направления ЭДС нагрузки (ен < 0) при
неизменной величине задания тока. Здесь также представлено два
варианта расчета: а) - с учетом; 6) - без учета дискретности
коммутатора АВТ,
Анализ результатов моделирования показывает, что средствами
автоматического регулирования возможно обеспечить устойчивую
работу активного выпрямителя тока в выпрямительном и
инверторном режимах с демпфированием колебаний в звене сетевого
фильтра. При работе АВТ в зоне, где не проявляются естественные
ограничения возможностей силовой схемы, качество переходных
процессов близко к типовым показателям систем регулирования с
последовательной коррекцией.
Время реакции САР выпрямленного тока на изменение задания
составляет величину порядка 0.006 с, что обеспечено выбором
эквивалентной некомпенсируемой постоянной времени
7^ - 0.001 с. Частота несущего сигнала ШИМ 1кГц, Для
предмодуляции задающих воздействий использован вариант с
формированием сигнала третьей гармоники.
Как видно из графиков, активный выпрямитель тока как
элемент системы электроснабжения функционирует с опережающим
коэффициентом мощности, что обусловлено реактивной мощностью
конденсаторной батареи сетевого фильтра.
В соответствии с принципом действия АВТ как обращенного
инвертора тока, на входах полупроводникового коммутатора
формируются токи (см., например, графики тока in a(t) на рис. 24.15,а;
24.16,а и 24.17,а), имеющие существенно импульсный характер.
Однако широтно-импульсная модуляция этих токов и наличие
сетевого LC фильтра обеспечивают значительное приближение к
синусоидальным токов (см. графики тока ^(?)на тех же рисунках),
потребляемых из питающей сети. Графики выпрямленного тока ^(/),
приведенные на рис. 24.15,а; 24.16,а и 24.17,а, содержат
высокочастотные пульсации. Они определяются параметрами
сглаживающего реактора в этой цепи, частотой ШИМ и законами
коммутации ключей полупроводниковых коммутаторов выпрямителя
и инвертора в составе двухзвенного преобразователя частоты.
626
Повышение частоты ШИМ позволяет существенно уменьшить
высокочастотные пульсации токов и улучшить качество
регулирования процессов за счет повышения быстродействия САР.
Включение АВТ в сеть сопровождается значительными бросками
потребляемых токов, для уменьшения которых, а также для
форсированного гашения колебаний в звене сетевого фильтра может
быть использовано временное включение дополнительных
токоограничивающих резистивных элементов.
Для нормального функционирования АВТ в схеме двухзвенного
преобразователя частоты должен быть обеспечен необходимый запас
по выпрямленному напряжению с учетом рассмотренных выше
предельных возможностей силовой схемы АВТ, параметров нагрузки
выпрямителя и выбранного быстродействия САР, определяющего
необходимые форсировки ЭДС выпрямителя в динамических
режимах.
24.3. Выводы
Характеризуя активные выпрямители как динамические объекты
управления, отметим следующее. Структуры математических моделей
активных выпрямителей напряжения (см.рис.24.4) и тока (см.рис.24.13)
имеют много общего, что определяет общность ряда их свойств:
• многомерность и многосвязность активных выпрямителей как
объектов управления;
• наличие инерционных элементов, соединенных цепями прямых
и обратных связей, образующих внутренние (присущие объекту)
замкнутые контуры саморегулирования токов и напряжений на входе
и выходе выпрямителей;
• аддитивный характер ввода возмущающих воздействий и
мультипликативный характер ввода управляющих воздействий, что
определяет особые свойства активных выпрямителей как объектов
управления;
• принципиальная возможность регулирования выпрямленного
напряжения и сетевого коэффициента мощности активных
выпрямителей при благоприятной форме потребляемого тока;
• возможность некоторого расширения диапазона
регулирования выходного напряжения активных выпрямителей как
тока, так и напряжения с ШИМ путем введения предмодуляции
задающих воздействий;
• возможность двустороннего обмена энергией между питающей
сетью переменного тока и нагрузкой в цепи постоянного тока.
627
Вместе с тем существуют и значительные различия свойств
активных выпрямителей напряжения и тока. Они состоят в
следующем.
• В структуре модели АВТ имеется дополнительное, существенно
колебательное звено, отражающее динамику сетевого LC фильтра.
• Выходное напряжение активных выпрямителей напряжения
с синусоидальной и модифицированной ШИМ превышает
величину выпрямленного напряжения неуправляемого (пассивного)
выпрямителя тока, которое условно назовем базовым. Регулирование
выходного напряжения АВН возможно лишь в диапазоне значений,
превышающих базовое напряжение. Получение выходных
напряжений, меньших базового, принципиально невозможно.
В отличие от этого среднее выпрямленного напряжение на
выходе активных выпрямителей тока не превышает
.величину выпрямленного напряжения пассивного выпрямителя.
Получение выходных напряжений АВТ, больших базового,
принципиально невозможно. Регулирование выходного напряжения
АВТ осуществляется в диапазоне значений, не превышающих
базовое напряжение.
• В связи с наличием неуправляемых обратных вентилей в схеме
коммутатора АВН принципиально невозможно изменение полярности
его выпрямленного напряжения. Однако при этом активный
выпрямитель напряжения допускает изменение направления
выпрямленного тока в том случае, когда величина противо-ЭДС
нагрузки превышает величину выходной ЭДС активного
выпрямителя.
• Вследствие использования ключей с односторонней
проводимостью тока в схеме коммутатора АВТ данный активный
выпрямитель не допускает изменение направления выпрямленного
тока в цепи нагрузки. В принципе это изменение можно получить с
помощью двухкомплектной схемы АВТ при соответствующей схеме
соединения и согласования режимов работы комплектов. Однако
рассмотренная выше однокомплектная схема АВТ допускает
изменение полярности средней выпрямленной ЭДС при наличии в
цепи нагрузки источника ЭДС, способствующего протеканию
выпрямленного тока в проводящем для коммутатора направлении.
• Оба варианта активных выпрямителей могут работать как в
выпрямительном режиме, так и в инверторном режиме с рекуперацией
энергии в сеть переменного тока. Однако переход АВН из
выпрямительного режима в инверторный характеризуется изменением
направления выпрямленного тока при неизменной полярности
выпрямленного напряжения. В отличие от этого переход АВТ из
выпрямительного режима в инверторный характеризуется изменением
628
полярности средней выпрямленной ЭДС коммутатора при неизменном
направлении выпрямленного тока.
Исходя из вышеизложенного можно заключить, что
целесообразной областью применения активных выпрямителей
напряжения в схемах двухзвенных преобразователей частоты для
электропривода переменного тока является их использование в
качестве стабилизированных источников напряжения питания
автономных инверторов напряжения с ШИМ.
Целесообразной областью применения активных выпрямителей
тока в схемах двухзвенных преобразователей частоты для
электропривода переменного тока является их использование в
качестве регулируемых источников напряжения питания автономных
инверторов тока с различными алгоритмами управления, как
использующими, так и не использующими широтно-импульсную
модуляцию выходных токов инвертора. Возможно также
использование активных выпрямителей тока для регулирования
скорости двигателей постоянного тока и некоторых других типов
двигателей.
Сопоставление результатов моделирования, полученных на
непрерывных математических моделях и на математических моделях,
учитывающих дискретность работы силовых ключей активных
выпрямителей, показало хорошее совпадение процессов по их
главным тенденциям и показателям. Это позволяет проводить
исследования в системах, содержащих активные выпрямители, на их
более простых непрерывных математических моделях с достаточной
для инженерных расчетов точностью.
Применение математических моделей позволяет обоснованно
подходить к построению энергосберегающих систем электропривода
переменного тока с включением активных выпрямителей в состав
силовой схемы преобразователей частоты.
Активные выпрямители адаптированы к нормам по
электромагнитной совместимости с питающей сетью. Они могут быть
использованы как средство энергосбережения и управления
электрическими режимами систем электроснабжения с целью
улучшения их показателей качества.
629
ЛИТЕРАТУРА
ЕАдкинс В.А. Общая теория электрических машин / Пер. с англ. М.-Л.:
Госэнергоиздат, 1960. 272 с.
2. Алябьев М.И. К вопросу о классификации и выборе методов исследования
электрических машин //Электричество. 1959. № II. С. 1-6.
3. Аранчий Г.В., Жемеров Г.Г., Эпштейн И.И. Тиристорные преобра-
зователи частоты для регулируемых электроприводов. М.: Энергия, 1968. 128 с.
4. Архангельский Н.Л., Курнышев Б.С., Виноградов А.Б., Лебедев С. К.
Высокодинамичная система разрывного управления асинхронным
электроприводом //Электромеханика. 1991. № 3. С.59-66.
5. Архангельский Н.Л., Курнышев Б.С., Виноградов А.Б., Чистосердов В.Л.
Энергосберегающие векторные алгоритмы в преобразователях частоты. V
Всесоюзная научно-техническая конференция «Проблемы преобразовательной
техники». Киев: 15-20 сект. 1991 г. : Тез. Докл. В 5 ч. Киев: Ин-т. электродинамики
АН УССР. 1991. Ч. 1. С.10-11.
6. Башарин А.В. Расчет динамики и синтез нелинейных систем управления.
М.-Л.: Госэнергоиздат, 1960. 296 с.
7. Башарин А.В., Башарин И.А. Динамика нелинейных систем управления.
Л.: Энергия, 1974. 200 с.
8. Башарин А. В., Новиков В.А., Соколовский Г. Г. Управление
электроприводами. Л.: Энергоиздат, 1982. 392 с.
9. Бедфорд Б., Хофт Р. Теория автономных инверторов / Пер. с англ. М.:
Энергия. 280 с.
10. Бесекерский В.А., Попов Е.П. Теория систем автоматического
регулирования. М.: Наука, 1975. 768 с.
II. Бессонов Л. А. Теоретические основы электротехники. В 3 ч. Изд.
четвертое. М.: Высш, шк., 1964. 750 с.
12. Богрый В.С., Русских А.А. Математическое моделирование тиристорных
преобразователей. М.: Энергия, 1972. 184 с.
13. Бражников В.Ф., Соустин Б.П. Теория установившихся электромаг-
нитных процессов в многофазном асинхронном инверторном электроприводе. В
2ч. 4.2: Многофазный асинхронный инверторный электропривод. Красноярск:
Изд-во Красноярс. ун-та, 1985. 139 с.
630
14. Бродовский В.Н., Иванов Е.С. Приводы с частотно-токовым
управлением / Подред. В.Н. Бродовского. М.: Энергия, 1974. 168 с.
15. Бронштейн И. Н., Семендяев К. А. Справочник по математике для
инженеров и учащихся ВТУЗов. М.: Наука, 1986. 544 с.
16. Брынский Е. А., Данилевич Я. Б., Яковлев В. И. Электромагнитные поля
в электрических машинах. Л.: Энергия, 1979. 176 с.
17. Булгаков А.А. Основы динамики управляемых вентильных систем. М.:
Изд.-во АН СССР, 1963. 220 с.
18. Булгаков А.А. Частотное управление асинхронными
электродвигателями. 2-е изд., доп. М.: Наука, 1966. 297 с.
19. Булгаков А.А. Новая теория управляемых выпрямителей. М.: Наука,
1970. 320 с.
20. Веретенников Л.П. Классификация дифференциальных уравнений
Горева-Парка //Электричество. 1959. № И. С. 13-20.
21. Вейнгер А.М. Регулируемый синхронный электропривод. М.:
Энергоатомиздат, 1985. 224 с.
22. Вольдек А. И. Электрические машины: Учебник для студентов высш,
техн, учебн. заведений. 3-е изд., перераб. Л.: Энергия, 1978. 832 с.
23. Выбор схемы электронной модели асинхронного двигателя при
переменной скорости вращения / А, Д. Гильдебранд, Н.И.Зенкин,
В.М.Кирпичников, Н. И.Томашевский // Изв. Вузов: Электромеханика. 1967. № 2.
С. 131-137.
24. Гаинцев Ю. В. Новый экономичный регулируемый электропривод на
основе управляемого реактивного двигателя // Материалы всесоюз. науч.-техн,
совещ. “Регулируемые электродвигатели переменного тока”. Владимир:
ВНИПТИЭМ. 1988. С. 72 - 88.
25. Глазенко Т.А., Гончаренко Р.Б. Полупроводниковые преобразователи
частоты в электроприводах. Л.: Энергия, 1969. 184 с.
26. Грабовецкий Г.В., Куклин О.Г., Харитонов С.А. Непосредственные
преобразователи частоты с естественной коммутацией для электромеханических
систем: Учеб, пособие. Новосибирск: Изд.-во НГТУ, 1997. 4.1.60 с.
27. Гринберг Г. А. Избранные вопросы математической теории
электрических и магнитных явлений. М.-Л.: Изд.-во АН СССР, 1948. 727 с.
28. Дацковский Д.Х.. Тарасенко Л.М. Выбор структурных схем
асинхронного двигателя для систем подчиненного регулирования // Электротех-
631
ническая промышленность. Сер. Электропривод. 1974. Вып. 2(28). С. 3-6.
29. Демирчан К. С., Чечурин В. Л. Машинные расчеты электромагнитных
полей. М.: Высш, шк., 1986. 240 с.
30. Джюджи Л., Пелли Б. Силовые полупроводниковые преобразователи
частоты: Пер. с англ. / Под ред. З.А.Болдырева. М.: Энергоатомиздат, 1983. 400 с.
31. Дмитренко Ю.А. Выбор математической модели теплового переходного
процесса асинхронного двигателя при переменной скорости вращения // Преобра-
зователи частоты для электропривода. Кишинев: Штиинца, 1979. С. 22-32.
32. Домбровский В. В. Справочное пособие по расчету электромагнитных
полей в электрических машинах. Л.: Энергоатомиздат, 1983. 256 с.
33. Ефименко Е. И. Новые методы исследования машин переменного тока и
их приложения. М.: Энергоатомиздат, 1993. 227 с.
34. Ефимов А. А. Обобщенный подход к моделированию систем
электропривода переменного тока/ Вестник Красноярского государственного
технического университета, посвященный 65-летию проф. Б. П. Соустина: Сб.
научн. трудов / Под ред. Б. П. Соустина. Красноярск: КГТУ, 1998. С. 172-182.
35. Забродин Ю.С. Автономные тиристорные инверторы с широтно-
импульсным регулированием. М.: Энергия, 1977. 136 с.
36. Зиновьев Г.С. Основы преобразовательной техники. Ч.Ш: Методы
анализа установившихся и переходных процессов в вентильных преобразователях.
Новосибирск: НЭТИ, 1975. 92 с.
37. Зиновьев Г. С. Прямые методы расчета энергетических показателей
вентильных преобразователей. Новосибирск: Изд-во Новосиб. ун-та, 1990. 220 с.
38. Изосимов Д.Б., Макаров В.К. Вычисление потоксцепления ротора
асинхронной машины // Техническая электродинамика. 1982. № 4. С. 66-70.
39. Изосимов Д.Б. Многосвязный нелинейный идентификатор состояния
*
асинхронного двигателя на скользящих режимах // Проблемы управления
многосвязными системами. М.: 1983. С. 133-139.
40. Изосимов Д. Б., Рывкин С. Е. Улучшение качества энергопотребления
полупроводниковыми преобразователями с ШИМ // Электричество. 1996. № 4.
С.48-55.
41. Изосимов Д. Б., Козаченко В. Ф. Алгоритмы и системы цифрового
управления электроприводами переменного тока // Электротехника. 1999. № 4.
С.41-51.
42. Ильинский Н. Ф. Перспективы применения вентильно-индукторного
привода в современных технологиях // Электротехника. 1997. № 2.
43. Ильинский Н. Ф., Козаченко В. Ф. Общий курс электропривода: Учеб,
для вузов. М.: Энергоатомиздат, 1992. 544 с.
44. Казовский Е.Я. Переходные процессы в электрических машинах
переменного тока. М.: Изд.-во АН СССР, 1962. 624 с.
45. Калуцкий Ю.В., Кривицкий М.Я., Шрейнер Р.Т. Анализ пульсаций
электромагнитного момента асинхронного двигателя при питании от автономного
инвертора тока // Преобразователи частоты для электропривода. Кишинев:
Штиинца, 1979. С. 95-100.
*
46. Калуцкий Ю.В., Шрейнер Р.Т. Вопросы расширения диапазона
регулирования асинхронных электроприводов с автономными инверторами тока /
Проблемы преобразовательной техники: Тез. докл. Всесоюз. науч. - техн. конф.
Киев, 1979. Ч.З. С. 83-85.
47. Ковач К.П., Рац И. Переходные процессы в машинах переменного тока /
Пер. с нем. М.: Госэнергоиздат, 1963. 744 с.
48. Ковчин С.А., Сабинин Ю.А. Теория электропривода. СПб.:
Энергоатомиздат, 1994. 496 с.
49. Коллатц Л. Численные методы решения дифференциальных уравнений.
М.: Иностранная литература, 1963. 459 с.
50. Копылов И.П., Мамедов Ф.А., Беспалов В.Я. Математическое
моделирование асинхронных машин. М.: Энергия, 1969. 96 с.
51. Копылов И. П. Электромеханические преобразователи энергии. М.:
Энергия, 1973. 400 с.
52. Копылов И. П. Математическое моделирование электрических машин.
М.: Высш, шк., 1987. 248 с.
53. Копырин В. С., Ткачук А. А. Математическое моделирование
асинхронного частотно-регулируемого электропривода при рекуперативном
торможении // Электротехника. 1998, № 8. С. 19-25.
54. Костенко М.П. Электрические машины. Специальная часть. Л.:
Госэнергоиздат, 1949. 708 с.
55. Кривицкий С.О., Эпштейн И.И. Динамика частотно-регулируемых
электроприводов с автономными инверторами. М.: Энергия, 1970. 152 с.
56. Кривицкий М.Я., Шрейнер Р.Т. Оптимальное по нагреву частотное
управление асинхронным электроприводом // Динамика систем управления:
Материалы семинара по кибернетике. Ч. 1. Кишинев: Штиинца, 1975. С. 92-111.
633
57. Кротова Л.Н. Исследование системы преобразователь частоты -
асинхронный двигатель с автономным инвертором напряжения: Автореф. дис. . . .
канд. техн. наук. Свердловск, 1973. 25 с.
58. Кротова Л.Н., Шрейнер Р.Т. Математическое описание и аналоговое
моделирование системы преобразователь частоты - асинхронный двигатель с
автономным инвертором напряжения // Электроэнергетика и автоматика. Вып. 17.
Кишинев, 1973. С. 38-50.
59. Курнышев Б. С., Данилов С. П. Идентификация динамических
параметров асинхронного электропривода // Автоматизация и прогрессивные
технологии: Труды 11 межвузовской отраслевой науч.-техн. конф. ( 27 сентября-1
октября 1999 г.). Ч 1. Новоуральск, НИИ МИФИ, 1999. С. 257-260.
60. Лабунцов В.А., Ривкин Г.А., Шевченко Г.И. Автономные тиристорные
инверторы. М.: Энергия, 1967. 160 с.
61. Лайбль Т. Теория синхронной машины при переходных процессах/ Пер.
с нем. М.- Л.: Госэнергоиздат, 1957. 168 с.
62. Лайон В. Анализ переходных процессов в электрических машинах
переменного тока методом симметричных составляющих/ Пер. с англ. М.-Л.:
Госэнергоиздат, 1958. 400 с.
63. Лихошерст В. И. Полупроводниковые преобразователи электрической
энергии для электроприводов с двигателями переменного тока: Учеб, пособие.
Свердловск.: У ПИ, 1986. 72 с .
64. Мартынов В. А, Анализ динамических режимов индуктивных
электромеханических устройств // Электричество. 1955. № 3.
65. Мартынов В. А., Лабутин А. А. Математическая модель асинхронного
конденсаторного двигателя на основе метода зубцовых контуров // Электричество.
1998. №11. С. 37-43.
66. Математические основы теории автоматического регулирования / В. А.
Иванов, Б. К. Чемоданов, В. С. Медведев, А. С. Ющенко; Под ред. Б. К.
Чемоданова. М.: Высш, шк., 1971. 808 с.
67. Онищенко Г.Б., Локтева И.Л. Применение метода колеблющихся
координат при построении систем регулирования асинхронных двигателей //
Электротехническая промышленность. Сер. Электропривод. 1973. Вып. 9(26)
С. 3-6.
68. Основы автоматического управления / Под ред. В. С. Пугачева. М/
Наука. 1967. 680 с
634
69. Панкратов В. В., Глазырин М. В. Синтез идентификатора
потокосцеплений ротора и активных сопротивлений асинхронного двигателя для
системы векторного управления // Электроприводы переменного тока: Докл. X
науч.-техн. конф. ЭППТ-95 (14-17 марта 1995 г.). Екатеринбург, Урал. гос. техн,
ун-т, 1995. С. 132- 135.
70. Перельмутер В.М., Сидоренко В.А. Системы управления тиристорными
электроприводами постоянного тока. М.: Энергоатомиздат, 1988. 304 с.
71. Петров Л.П., Ладензон В.А., Печковский И.И. Физико-математическое
моделирование асинхронных электроприводов с преобразователями частоты //
Электричество. 1980. № 12. С. 45-47.
72. Плахтына Е. Г. Математическое моделирование электромашинно-
вентильных систем. Львов: Вища шк., 1986. 164 с.
73. Поздеев Д. А. Электромагнитные и электромеханические процессы в
частотно-регулируемых асинхронных электроприводах. Чебоксары: Изд-во
Чуваш, ун-та, 1998. 172 с.
74. Поляков В. Н., Шрейнер Р. Т. Математические модели двигателей
постоянного тока для задач управления: Учеб, пособие / Под. общ. ред. Р. Т.
Шрейнера. Екатеринбург: УГТУ, 1999. 162 с.
75. Принципы построения систем регулирования асинхронных
электроприводов с инверторными преобразователями частоты / Л.Х. Дацковский,
М.С.Карагодин, В.И.Роговой. Л.М.Тарасенко, Н.И.Томашевский, Р.Т.Шрейнер //
Электротехническая промышленность. Сер. Электропривод. 1974. Вып. 5(31). С.
26-32.
76. Проектирование электроприводов: Справочник / А.М. Вейнгер, В.В.
Карам ан, Ю.С. Тартаковский, В.П. Чудновский; Под ред. А.М. Вейнгера.
Свердловск: Сред.-Урал. кн. изд-во, 1980. 160 с.
77. Рац И., Халас Ш. Оптимизационный расчет ШИМ инверторов в
асинхронном электроприводе // Современные проблемы электромеханики: Тез.
докл. Всесоюзн. науч.-техн. конф. Ч.П. М.: МЭИ, 1989. С. 126.
78. Рывкин С. Е., Изосимов Д. Б. Широтно-импульсная модуляция
напряжения трехфазных автономных инверторов // Электричество. 1997. № 6. С.
33-39.
79. Сандлер А.С., Сарбатов Р.С. Частотное управление асинхронными
двигателями. М.: Энергия, 1966. 144 с.
80. Сандлер А.С., Сарбатов Р.С. Преобразователи частоты для управления
635
асинхронными двигателями / Под ред. М.Г.Чиликина // Библиотека по
автоматике. Вып. 159. М.-Л.: Энергия, 1966. 144 с.
81. Сандлер А.С., Сарбатов Р.С. Автоматическое частотное управление
асинхронными двигателями. М.: Энергия, 1974. 328 с.
82. Сандлер А.С., Гусяцкий Ю.М. Тиристорные инверторы с широтно-
импульсной модуляцией для управления асинхронными двигателями. М.: Энергия,
1968. 96 с.
83. Сили С. Электромеханическое преобразование энергии: Пер. с англ. М.:
Энергия, 1968. 376 с.
84. Системы подчиненного регулирования электроприводов переменного
тока с вентильными преобразователями / О.В. Слежановский, Л.Х. Дацковский,
И.С. Кузнецов и др. М.: Энергоатомиздат, 1983. 256 с.
85. Системы регулирования электроприводов с асинхронными
исполнительными двигателями / Л.Х.Дацковский, Б.Л.Коринев, И.В.Молостов,
В.А.Скрыпник, Р.Т.Шрейнер // Электротехн. пром-сть: Сер. Электропривод. 1983.
№3(113). С. 15-20.
86. Системы регулирования электроприводов переменного тока с
микропроцессорным управлением / В. Д. Кочетков, Л. X. Дацковский, А. В.
Бирюков, Ю. М. Гусяцкий, В. И. Роговой // Электротехн. пром-сть. Сер. 08.
Электропривод: Обзор, информ. 1989. Вып. 26. С. 1-80.
87. Сильвестер П., Феррари Р. Метод конечных элементов для
радиоинженеров и инженеров электриков. М.: Мир, 1986. 229 с.
88. Современное состояние и тенденции в асинхронном частотно-
регулируемом электроприводе / Л. X. Дацковский, В. И. Роговой, Б. И. Абрамов,
Б. И. Моцохейн, С. П. Жижин //Электротехника, 1996, № 10.
89. Страхов С.В. Переходные процессы в электрических цепях, содержащих
машины переменного тока. М.-Л.: Госэнергоиздат, 1960. 247 с.
90. Такеути Т. Теория и применение вентильных цепей для регулирования
двигателей / Пер. с англ. Л.: Энергия, 1973. 248 с.
91. Теоретические основы электротехники: Учебник для вузов. В 3 ч. Ч. 2 и
3. Нелинейные электрические цепи. Электромагнитное поле / Г.И. Атабеков, С.Д.
Купалян, А.Б. Тимофеев, С.С. Хухриков; Под ред. Г.И. Атабекова. 4-е изд.,
перераб. М.: Энергия, 1979. 432 с.
92. Тиристорные преобразователи частоты в электроприводе / А.Я.
Бернштейн, Ю.М. Гусяцкий, А.В. Кудрявцев, Р.С. Сарбатов; Под ред. Р.С.
Сарбатова. М.: Энергия, 1980. 328 с.
93. Тихонов А. Н., Самарский А. А. Уравнения математической физики. М.:
Наука, 1977. 735 с.
94. Томашевский Н.И., Шрейнер Р.Т., Федоренко А.А. Анализ и синтез
систем частотного управления асинхронными электроприводами с автономными
инверторами напряжения //Электротехника. 1977. № 9. С. 32-35.
95. Трещев И.И. Методы исследования электромагнитных процессов в
машинах переменного тока. Л.: Энергия, 1969. 235 с.
96. Уайт Д., Вудсон Г. Электромеханическое преобразование энергии / Пер.
с англ. М.-Л.: Энергия, 1964. 528 с.
97. Универсальный метод расчета электромагнитных процессов в
электрических машинах/ А. В. Иванов-Смоленский, Ю. В. Абрамкин, А. И. Власов,
В. А. Кузнецов. М.: Энергоатомиздат, 1986. 216 с.
98. Управление асинхронным двигателем с помощью цифрового
сигнального микроконтроллера / По материалам журнала Design & Electronic //
CHIP NEWS. № 1(10). 1997. С 22-26.
99. Федоренко А.А., Шрейнер Р.Т. Уравнения динамики вентильного
преобразователя частоты с автономным инвертором напряжения // Оптимизация
режимов работы систем электроприводов. Вып. 5. Красноярск: Краснояр. гос.
ун-т, 1977. С. 136-140.
100. Фильц Р.В. Дифференциальные уравнения напряжений насыщенной
асинхронной машины // Вопросы теории и регулирования электрических машин:
Научн, записки Львовского политехнического института. Львов, 1963. С. 22-32.
101. Фильц Р.В. Дифференциальные уравнения напряжений насыщенных
неявнополюсных машин переменного тока // Изв. вузов: Электромеханика. 1966.
№11. С. 1195-1203.
102. Фираго Б. И., Готовский В.С., Лисс З.А. Тиристорные
циклоконверторы. Минск: Наука и техника. 1973. 296 с.
103. Форсайт Дж., Малкольм М., Моулер К. Машинные методы
математических вычислений / Пер. с англ. Х.Д. Икрамова. М.: Мир, 1980. 280 с.
104. Хасаев О. И. Работа асинхронного двигателя от преобразователя
частоты на полупроводниковых триодах // Электричество. 1961. № 9.
105. Хашимов А.А. Электромеханические и тепловые процессы частотно-
управляемого асинхронного электропривода. Ташкент: Фан, 1976. 105 с.
106. Частотно-регулируемые электроприводы массовых серий / П.Д.
Андриенко, С.Ф. Буряк, Г.В. Грабовецкий и др. И Автоматизированный
электропривод. М.: Энергия, 1980. С. 157-161.
107. Чехет Э.М., Мордач В.П., Соболев В.Н. Непосредственные
преобразователи частоты для электропривода. Киев: Наукова думка, 1988. 224 с.
108. Чванов В.А. Динамика автономных инверторов с прямой коммутацией.
М.: Энергия, 1978. 168 с.
109. Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория
автоматизированного электропривода. М.: Энергия, 1979. 616 с.
110. Шрейнер Р.Т. Разработка и исследование реверсивного тиристорного
асинхронного электропривода с частотным управлением: Автореф. дис. ... канд.
техн. наук. Свердловск, 1967. 16 с.
111. Шрейнер Р.Т. Задачи экстремального частотного управления
асинхронными электроприводами // Асинхронный тиристорный электропривод.
Свердловск, Урал, политех, ин-т, 1971. С. 92-96.
112. Шрейнер Р.Т., Гильдебранд А.Д., Карагодин М.С. Некоторые вопросы
оптимального по быстродействию управления частотными асинхронными
электроприводами П Автоматизация электроприводов и оптимизация режимов
электропотребления. Красноярск, 1971. С. 84-90.
113. Шрейнер Р.Т., Гильдебранд А.Д. Оптимальное по быстродействию
частотное управление скоростью асинхронного электропривода в замкнутых
системах регулирования //Электричество. 1973. № 10. С. 22-27.
114. Шрейнер Р.Т., Карагодин М.С. Исследование оптимальных по
быстродействию процессов изменения скорости асинхронного двигателя при
частотном управлении // Изв. вузов: Электромеханика. 1973. № 9. С. 1013-1019.
115. Шрейнер Р.Т., Поляков В.Н. Экстремальное частотное управление
асинхронными двигателями //Электротехника. 1973. № 9. С. 10-13.
116. Шрейнер Р.Т., Кривицкий М.Я. Оптимальное частотное управление
асинхронным электроприводом с учетом электромагнитных явлений //
Электротехника. 1974. № 1. С. 14-17.
117. Шрейнер Р.Т. Оптимальное частотное управление асинхронными
электроприводами // Автоматизированный электропривод. Вып. 1. Свердловск,
Урал, политех, ин-т, 1974. С. 40-53.
118. Шрейнер Р.Т., Кривицкий М.Я. Оптимальное по нагреву управление
потокосцеплением асинхронной машины // Электроэнергетика и автоматика. Выл
19. Кишинев: Штиинца, 1974, С.71-81.
638
119. Шрейнер P.T., Федоренко А.А. О построении системы ориентации для
регулирования комплексных переменных асинхронного электропривода с
частотным управлением // Оптимизация режимов работы электроприводов.
Красноярск, Краснояр. политех, ин-т, 1974. С. 109-110.
120. Шрейнер Р.Т., Федоренко А.А. Система автоматического управления
асинхронным электроприводом с автономным инвертором напряжения //
Динамика систем управления: Материалы семинара по кибернетике. 4.1.
Кишинев: Штиинца, 1975. С. 134-150.
121. Шрейнер Р.Т., Гильдебранд А.Д., Федоренко А.А. Исследование
системы автоматического управления асинхронным электроприводом с
автономным инвертором напряжения // Преобразовательные устройства в
тиристорном электроприводе. Кишинев: Штиинца, 1977. С. 3-10.
122. Шрейнер Р.Т., Поляков В.Н. Бесконтактный широкорегулируемый
асинхронный электропривод переменного тока // Вентильный электропривод
переменного тока. Кишинев: Штиинца, 1981. С. 3-8.
123. Шрейнер Р.Т., Дмитренко Ю.А. Оптимальное частотное управление
асинхронными электроприводами. Кишинев: Штиинца, 1982. 234 с
124. Шрейнер Р. Т., Кустова Т. В. Расчет характеристик асинхронных
двигателей на персональных ЭВМ // Электрические машины и машинно-
вентильные системы: Сб. науч. тр. Свердловск: Свердл. инж.-пед. ин-т, 1989.
С.42-51.
125. Шрейнер Р.Т. Асинхронные электроприводы с полупроводниковыми
преобразователями частоты (математическое моделирование, оптимизация
режимов, структуры систем управления): Автореф. дис. ... докт. техн. наук.
Москва, 1990. 39 с.
126. Шрейнер Р.Т., Ивонин А.В. Расчет переходных процессов в системе
автономный инвертор напряжения - несимметричная нагрузка / Тез. докл. науч.-
практ. семинара по электромеханике (19-23 ноября 1991 г.). Екатеринбург, Урал,
политех, ин-т, 1991 .С. 112-114.
127. Шрейнер Р.Т. Управление намагничивающими силами
несимметричных многофазных обмоток машин переменного тока //
Электроприводы переменного тока: Докл. X науч.-техн. конф. ЭППТ-95 (14-17
марта 1995 г.). Екатеринбург, Урал. гос. техн, ун-т, 1995. С. 128 - 131.
128. Шрейнер Р. Т. Математическая модель машины переменного тока с
последовательным соединением обмоток статора и ротора // Современные
проблемы энергетики, электромеханики и электротехнологии: Вестник Урал. гос.
техн, ун-та. Ч. 2 : Электромеханика и электротехнология. Екатеринбург: Урал. гос.
техн, ун-т, 1995. С. 204-209.
129. Шрейнер Р, Т. Оптимальное управление намагничивающими силами
несимметричных многофазных обмоток электрических машин переменного тока //
Профессионально-педагогическое образование: Сб. науч, тр. В 2 ч. Ч. 2:
Исследования в предметных и методических областях. Екатеринбург: Изд-во Урал,
гос. проф.-пед. ун-та, 1995. С. 82-91.
130. Шрейнер Р. Т. Вопросы математического моделирования инверторных
асинхронных электроприводов / Автоматизация и прогрессивные технологии:
Материалы межотраслевого семинара - выставки (27-31 мая 1996 г.).
Новоуральск, МИФИ-2, 1996. С. 110-113.
131. Шрейнер Р. Т. Системы подчиненного регулирования
электроприводов. Часть 1 : Электроприводы постоянного тока с подчиненным
регулированием координат: Учеб, пособие для вузов. Екатеринбург: Изд-во Урал,
гос. проф.-пед. ун-та, 1997. 279 с.
132. Шрейнер Р. Т., Поляков В. Н. Адаптивная система векторного
управления асинхронным электроприводом с ориентацией поля ротора //
Электротехника. 1998. № 2. С. 23-29.
133. Шрейнер Р. Т., Тарасов В. Н., Ефимов А. А., Калыгин А. И.
Построение динамической модели гистерезисных электродвигателей И
Электротехника, 1998. №8. С. 25-28.
134. Шрейнер Р. Т. , Ефимов А. А. Активный фильтр как новый элемент
энергосберегающих систем электропривода // Электричество, 2000. № 3. С. 46-54.
135. Шрейнер Р. Т., Ефимов А. А. , Калыгин А. И. Развитие динамической
модели гистерезисных электродвигателей // Автоматизация и прогрессивные
технологии: Труды 11 межвузовской отраслевой науч.-техн. конф. (27 сентября-1
октября 1999г.). Ч 1. Новоуральск, НПИ МИФИ, 1999. С. 276-279.
136. Шрейнер Р. Т., Ефимов А. А., Калыгин А. И. Математическое описание
и алгоритмы ШИМ активных выпрямителей тока. // Электротехника. 2000. №10.
С. 42-49.
137. Шубенко В. А., Шрейнер Р. Т., Лихошерст В. И. Построение
преобразователей для частотного управления электроприводами //
Электротехника. 1965. № 10. С. 23-26.
138. Шубенко В.А., Браславский И.Я., Шрейнер Р.Т. Асинхронный
электропривод с тиристорным управлением. М.: Энергия, 1967. 96 с.
139. Шубенко В.А., Шрейнер Р.Т., Мищенко В.А. Оптимизация частотно-
управляемого асинхронного электропривода по минимуму тока // Электричество.
1970. №9. С. 23-26.
140. Шубенко В.А., Шрейнер Р.Т., Гильдебранд А.Д. Управление
потокосцеплением ротора асинхронного двигателя при частотно-токовом
регулировании //Электричество. 1971. № 10. С. 13-18.
141. Эпштейн И.И. Автоматизированный электропривод переменного тока.
М.: Энсргоиздат, 1982. 192 с.
142. Электрические машины: Специальный курс / Г. А. Сипайлов, Е. В.
Кононенко, К. А. Хорьков. М.: Высш. шк., 1987. 287 с.
143. Электрические передачи переменного тока тепловозов и
газотурбовозов / А. Д. Степанов, В. И. Андерс, В. А. Пречисский, Ю. И.
Гуселевский. М.: Транспорт, 1982. 254 с.
144. Янко-Триницкий А.А. Уравнения переходных электромагнитных
процессов асинхронного двигателя и их решения // Электричество. 1951. № 3.
С. 18-25.
145. Яцук В.Г., Талов В.В., Гром Ю.И. Принципы построения частотно-
регулируемых электроприводов на базе ТПЧ со звеном постоянного тока //
Промышленная энергетика. 1978. № II. С. 39-43.
146. А.с. 534842 СССР. Устройство управления короткозамкнутым
асинхронным двигателем / Р.Т. Шрейнер, А. А. Фе Доренко. Б.И. 1976. №41.
147. А.с. 642839 СССР. Частотноуправляемый асинхронный электропривод /
Р.Т.Шрейнер, М.Я.Кривицкий, Ю.В.Калуцкий. Б.И. 1979. № 2.
148. А.с. 680129 СССР. Частотноуправляемый асинхронный электропривод/
Р.Т.Шрейнер, Ю.В.Калуцкий, М.Я.Кривицкий. Б.И. 1979. № 30.
149. А. с 699639 СССР. Электропривод с асинхронной короткозамкнутой
машиной / Р.Т.Шрейнер, М.Я.Кривицкий, В.Н.Поляков. Б.И. 1979. № 43.
150. Alminoja J., Koivo Н. Fuzzy logic estimator of rotor time constant in
induction motor // Proc, of the 1997 Fin. Workshop on Power and Industrial
Electronics. Helsinki University of Technology. Espoo, Finland. Augyst 26. 1997.
151. Aaltonen M., Tiitinen P., Lalu J., Heikkila S. Direct torque control of AC
motor drives // ABB Reviev. 1995. No 3. P. 19-24.
152. Application of analogue, digital and hybrid computers to investigation of
dynamical perfomance of the electromechanical systems with variable structure
641
including thyristor controlled induction motors and elastic membera / G. Z. Ananiev,
M. G. Zhuk, S. A. Kazak etc // AICA Symposium "Simulation of complex systems".
Japan^Tokyo, 1971. P. F-16/1 - F-16/5.
153. Blachke F. Das Prinzip der Feldorientierung die Grundlage fur die
TRANSVEKTOR-Regelung von Drehfeldmaschinen // Siemens-Z. 1971. Bd.45. H. 10.
S. 757-760.
154. Blaschke F. Das Verfahren der Feldorientierung zur Regelung der
Asynchronmaschine // Siemens-Forsch, und Entwicklungsber. 1972. Bd. 1, H 1/72. S.
184-193.
155. Boothtman D. R., Elgar Everett C., Wooddall R. J., Rehder R. H. Motor
protection by solid state thermal tracking // IEEE Conf, Rec., Annu. Pulp and Pap. Ind.
Techn. Conf. Houston, Tex., N. Y, 1974. P. 7-17.
156. Depenbrosk M. Direkte Selbst-Regelung (DSR) fur hochdynamische
Drehfeldantriebe mit Stromrichterspeisung. ETZ-Archiv. Vol. 7. 1985. No 7. P. 211 -
218.
157. Depenbrosk M. Direct self control (DSC) of inverter-fed induction
machines. IEEE Trans. Power Electron. Vol. 3. No 4. Oct. 1985. P. 420 - 429.
158. Dixon J. W., Ooi B.T. Indirect current control of a unity power factor
sinusoidal current boost type three-phase rectifier. IEEE Transactions on Industrial
Electronics. Vol. 35. No 4. November 1988. P. 508-515.
159. Fukuda S., Hasegawa H., Iwaji Y. PWM technique for Inverter with
sinusoidal output current. PESC’ 88 RECORD. Apr. 1988. P. 35-41.
160. Fukuda S., Hasegawa H. Current source rectifier / Inverter system with
sinusoidal current. Conf. Rec. IEEE Ind. Appl. Oct. 1988, P. 909 - 914.
161. Garces L. J., Parameter adaptation for the speed-controlled static a.c. drive
with a squirrel-cage induction motor. IEEE Trans. Ind. Appl. Vol. IA-16. No 2. Mar. /
Apr. 1980. P. 173-178.
162. Ghijselen J.A.L., Van den Bosshe A.P.M. and Melkebeek J.A.A. Active
sinusoidal rectifier using a fixed switching pattern. International Symposium on Power
Electronics, Industrial Drives, Power Quality, Traction Systems. SPEEDAM. Capry,
Italy, 5 - 7 June, 1996. P. A5-29-A5-36.
163. Granado J., Harley R.G., Diana G. Understanding and designing a space
vector Pulse-Width-Modulator to control a three phase inverter. Trans. IEEE, Septem.
1989. P. 29-37.
164. Habetler T.G., Divan D.M. Control strategies for direct torque control
642
using discrete pulse modulation. IEEE Trans. Ind. Appl. Vol. 27. No5. Sept./Oct. 1991.
P. 893 -901.
165. Habetler T.G. A space vector-based rectifier regulator for AC/DC/AC
converters. IEEE Transactions on Power Electronics. Vol. 8, No I, 1993, P. 30-36.
166. Halasz S. Comparison of sinusoidal PWM methods. Periodica Polytechnica,
Ser. El. Eng. Vol. 37. No 4. 1993. P. 273-289.
167. Halasz S., Csonka G., Hassan A.A.M, Sinusoidal PWM techniques with
additional zero-sequence harmonics. I ECON 94, Bologna. 1994, P. 273-289,
168. Halasz S. Quality of two-phase PWM techniques. Proceedings of the
eleventh scientific-technical conference «Alternative current electrical drives» ACED'98,
24-26 feb. 1998, Ekaterinburg. Russia, 1998. P. 81-84.
169. Heumann K. Trends in semiconductors devices and impact on power
electronics and electric drives. PEMS-94, 20-22 sept. 1994. Warsaw, Poland, 1994. P.
1288-1299.
170. Holtz J. and Thimm T. Identification of machine parameters in a vector
controlled induction motor drive. Conf. Rec. of the IEEE IAS Annual Meeting (San
Diego.. CA. Oct. 1989. P. 601 - 606.
171. Hung K.T., Lorenz R.D. A rotor flux error-based, adaptive tuning approach
for feedforward field oriented induction machine drives. Conf. Rec. 1990. IEEE IAS
Annual Meet. Part 1, October 1990. P. 589 - 594.
172. Jansen P. L., Lorenz R. D. A physically insightful approach to the design
and accuracy assessment of flux observers for field oriented induction machine drives.
Conf. Rec. of the IEEE - IAS Annual Meeting. October 1992. P. 570 - 577.
173. Kessler C. Das Symmetrische Optimum // Regelungstechnik, 6, 1958, H. 11.
S. 395; H. 12. S. 432,
174. Kessler C. Ein Beitrag zur Theorie mehrschleifiger Regelungen. //
Regelungstechnik, 8, 1960. H. 8. S. 261.
175. Kubota H. and Matsuse K. Flux observer of induction motor with
parameter adaption for wide speed range motor drives. Conf. Rec. IPEC. Tokyo, 1980.
P. 1213- 1218.
176. Microprocessor based vector control system for induction drives with rotor
time constant identification function /Koyama M., Jano И., Kamiyama L, Jano S. //
Intern. Conf, of Evolution and Modem Aspects of Induction Machines. Turin, Italy,
1986. P. 564-569.
177. Moreira J. C., Hung K. T„ Lipo T.A, and Lorenz R. D. A simple and robust
643
adaptive controller for detuning correction in field oriented induction machines // IEEE
Trans. Ind. Appl. 1992. Nov/Dec. Vol. 28. No 6. P. 1359 - 1366.
178. Moreira J. C., Lipo T.A. A new method for rotor time constant tuning in
indirect field oriented control. Conf. Rec. of the IEEE Power Electronic Specialists
Conference. Vol. II. 1990. P. 573-580.
179. Nailen R. L. Factors to consider when specifying motor-temperature
detectors // Power. 1974. 118, No 2. P. 90-92.
180. Nielsen P. E., Thomson E. Ch., Nielsen M. T. Digital voltage vector control
with adaptive parameter tuning. Proc, of 3rd European Conf, on Power Electronics and
Applications. Aachen, 1989. P. 313-318.
181. F.-Z. Peng, T. Fukao. Robust speed identification for speed-sensorless
vector control of induction motors. IEEE Trans. Ind. Appl. Vol. 30. No 5. Sept./ Oct.
1994.
182. Salon S.I. Finite elemeht analysis of electrical machines. Kluwer Academic
Publishers, Doston/London/Dordrecht, 1955. 247 p.
183. Schreiner R. T., Efimov A. A., Zinoviev G.S., Smekhnov A.M., Kalygin A.I.
Energy efficient AC ED with active rectifier bazed AC/DC/AC converters /8th European
Conference on Power Electronics and Applications EPE’99, Lausanne (Switzerland).
7-9 Sept. 1999.
184. Schreiner R. T., Efimov A. A., Kalygin A.I. Active current rectifier
mathematical model I Pros. 9th International Conference on Power Electronics and
Motion Control ЕРЕ PEMC-2000, Kosice. (Slovakia). 5-7 Sept. 2000. P.2-188 - 2-192.
185. Sugimoto H., Tamai S. Secondary resistance identification of an induction-
motor applied model reference adaptive system and its characteristics. IEEE Trans. Ind.
Appl. Vol. 1A-23. No 2 . Mar. / Apr. 1987. P. 296 - 303.
186. Takahashi I., Ohmori Y. High performance direct torque control of an
induction machine. IEEE Trans. Ind. Appl. Vol. 25. No 2. 1989. P. 257 - 264.
187. Taniguchi K., Inoue M., Takeda Y., Mortimoto S. A PWM strategy
reducing torque-ripple in inverter-fed induction motor. IEEE Transaction on Industry
Application, Vol / 30. No 1. January / February 1994.
188. Tiitinen P., Pohjalainen P., Lalu J. The next generation motor control
method: direct torque control (DTC). EPE Journal, Vol. 5. No 1. March 1995. P. 14-
18.
189. Veas D.R., Dixon J.W. and Ooi B.T. A novel load current control method
for a leading power factor voltage source PWM rectifier. IEEE Transactions on Power
644
Electronics. Vol. 9. No 2. 1994. P. 153-159.
190. Van der Broeck H. W. Analysis of the harmonics in voltage fed inverter
drives caused by PWM schemes with discontinuous switching operation. Proceedings of
EPE-91 Conference. Firenze, Italy, 1991.
191. Walczyna A. M., Hill R. J. Novel PWM strategy for direct self-control of
inverter-fed induction motors. Prace institutu elektrotecniki, Zeczyt 179, 1994. P. 144-
165.
192. Walczyna A. M. Reduction of current and flux distortons of VST-fed
induction motors with direct self-control. Prace institutu elektrotecniki, Zeczyt 179,
1994. P. 107-121.
193. Wang C., Novotny D.V. and Lipo T.A. An automated rotor time constant
measurement system for inderect field-oriented drives. IEEE Trans. Ind. Appl. Vol. 24,
No I. Jan./Feb. 1988. P. 151 - 159.
194. Zai L.C., De Marco C.L. and Lipo T. A. An extended Kalman filter
approach to rotor time constant measurement in PWM induction motor drives. IEEE
Trans. Ind. Appl. Vol. 28. No 2. Mar. / Apr. 1992. P. 343 - 349.
645
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ
Раздел первый
Общие вопросы теории электрических машин
переменного тока
Глава первая. Исходные положения. Фазная обмотка как
элемент магнитной цепи машины.................
1.1. Исходные положения..........................
1.2. Магнитодвижущие силы фазных обмоток.........
1.3. Пространственные обмоточные функции фазных
обмоток...........................................
1.4. Улучшение качества обмоточных функций.
Распределение и укорочение шага обмоток............
1.5. Комплексное изображение обмоточных функций и
магнитодвижущих сил обмоток.......................
13
16
18
22
25
Глава вторая. Магнитодвижущие силы многофазных
обмоток....................................
2.1. Результирующая пространственная волна МДС
многофазной обмотки машины переменного тока......... 25
2.2. Нейтральные и намагничивающие токи
многофазных обмоток................................ 33
2.3. О задачах анализа и синтеза. Преобразование
переменных......................................... 38
2.4. Выводы........................................ 48
Глава третья. Магнитное поле машины переменного тока 51
3.1. Уравнения электромагнитного поля.............. 51
3.2. Главное магнитное поле........................ 58
3.3. Магнитные поля рассеяния...................... 64
3.4. Индуктивности рассеяния обмоток переменного тока 66
3.5. Методы расчета магнитного поля................ 67
3.5.1. Краевые задачи и их граничные условия.. 67
3.5.2. Методы решения уравнений электромагнитного
поля........................................... 69
Глава четвертая. Потокосцепления и электродвижущие
силы обмоток......................................... 79
4.1. Фазная обмотка как элемент магнитосвязанной
электрической цепи................................. 79
4.2. Потокосцепление и ЭДС витка фазной обмотки.... 82
4.3. Потокосцепление и ЭДС сосредоточенной обмотки
с нормальным шагом................................. 86
646
4.4. Потокосцепление и ЭДС распределенной обмотки. 91
4.5. Итоговые выражения........................ 94
Глава пятая. Вопросы электромеханики. Механические
силы электрической машины переменного тока....... 98
5.1. Исходные положения. Электромагнитный
момент витка................................... 98
5.2. Электромагнитный момент одной фазы......... 101
5.3. Электромагнитный момент многофазной машины... 102
5.4. Выражение электромагнитного момента через токи
и потокосцепления обмоток машины.............. 103
5.5. Выражение электромагнитного момента через токи
и потокосцепления машины в конечной форме.......... 109
5.6. Электромагнитный момент двухфазной обмотки... 112
5.7. Электромагнитный момент трехфазной обмотки... 116
5.8. Выражение электромагнитного момента в моделях,
использующих преобразование координат......... 118
5.9. О выражении электромагнитного момента в форме
векторного произведения токов и потокосцеплений.... 121
5.10. О взаимодействии электрических токов в обмотках
и магнитного поля машины........................... 125
5.11. Установившийся режим работы двухфазной обмотки
ротора асинхронной машины.......................... 134
5.12. Установившийся режим работы трехфазной обмотки
ротора асинхронной машины.......................... 144
Глава шестая. Использование относительных единиц...... 149
6.1. Предварительные замечания................... 149
6.2. Организация системы относительных единиц..... 151
6.3. Процедура преобразования уравнений модели
к системе относительных единиц................. 152
6.4. Система базисных величин.................. 154
6.5. Система относительных единиц с ориентацией
на переменные цепей статора и полную мощность
машины .......................................... 156
6.6. Система относительных единиц с ориентацией
на переменные цепей статора и электромагнитную
мощность машины................................... 159
6.7. Система относительных единиц с ориентацией
на переменные цепей ротора и электромагнитную
мощность машины.................................... 163
6.8. Система относительных единиц с ориентацией
на векторные системы управления током статора
и потокосцеплением ротора.......................... 166
6.9. Обратимость относительных единиц.
Частично-относительные уравнения моделей 168
647
Раздел второй
Математические модели машин переменного тока
для задач управления....................................... 174
Глава седьмая. Уравнения электромагнитных контуров
неявнополюсной машины двойного питания............ 174
7.1. Вопросы математического моделирования
электрических машин переменного тока.............. 174
7.2. Уравнения электрического равновесия цепей
статора и ротора ................................ 176
7.3 Магнитодвижущие силы обмоток статора и ротора ... 178
7.4. Главные потокосцепления и ЭДС фазных обмоток. 183
7.5. Потокосцепления рассеяния........................ 185
7.6. Полные потокосцепления фазных обмоток............ 188
Глава восьмая. Преобразование координат............... 189
8.1. Формулы преобразования переменных
симметричной трехфазной машины..................... 189
8.2. Геометрическая интерпретация................ 191
8.3. Ортогональное разложение изображающих векторов .. 193
8.4. Основные этапы преобразования координат........... 198
8.5. Итоговые выражения. Мнемоническая схема
преобразования координат........................... 207
Глава девятая. Преобразование уравнений
электромагнитных контуров. Ориентация систем
координат........................................ 212
9.1. Преобразование уравнений электромагнитных
контуров машины двойного питания...................... 212
9.2. Некоторые варианты математических моделей
электромагнитных контуров машины как объекта
управления.................................... 217
9.3. Частный случай. Переход к комплексным
уравнениям........................................ 222
9.4. Автоматическая ориентация системы координат.. 225
Глава десятая. Уравнения электромеханического
преобразования энергии............................... 234
10.1. Уравнение энергетического баланса................ 234
10.2. Формулы электромагнитного момента................ 237
10.3. Уравнения механического движения................. 239
10.4. Структура модели машины как управляемого
электромеханического преобразователя энергии...... 239
648
Глава одиннадцатая. Математическая модель
неявнополюсной машины с последовательным
соединением обмоток статора и ротора ................. 241
11.1. Схема питания обмоток машины. Уравнения
электрических связей.................................. 241
11.2. Преобразование уравнений электрических связей... 243
11.3. Уравнения модели машины. Структурная схема...... 244
Глава двенадцатая. Математические модели асинхронной
машины с короткозамкнутым ротором..................... 249
12.1. Особенности уравнений электромагнитных цепей
асинхронной машины с короткозамкнутым ротором ... 249
12.2. Модель общего вида.......................... 251
12.3. Модель в переменных 1д, — ..................... 255
12.4. Модель в переменных .................... 261
12.5. Выводы.......................................... 269
Раздел третий
Вопросы теории систем ’’преобразователь частоты
- двигатель переменного тока’’........................... 273
Глава тринадцатая. Рабочие процессы в системе
"автономный инвертор напряжения - асинхронный
двигатель"............................................ 273
13.1. Общая характеристика полупроводниковых
преобразователей частоты для электропривода...... 273
13.2. Обобщенная схема и диаграмма состояний
трехфазного инвертора с базовым законом
коммутации.......................................... 288
13.3. Линейные напряжения на выходе инвертора......... 291
13.4. Фазные напряжения.......................................... 293
13.5. Ток питания двигателя........................... 297
13.6. Распределение тока нагрузки по элементам схемы
и условия работы ключей инвертора..................... 306
13.7. Условия работы источника питания инвертора..... 309
13.8. Электромагнитный момент двигателя при
питании от инвертора напряжения ................................. 314
Глава четырнадцатая. Автономные инверторы с широтно-
импульсной модуляцией напряжения...................... 326
14.1. Принцип широтно-импульсной модуляции............ 326
14.2. Закон широтно - импульсной модуляции............ 329
14.3. О принципе вибрационной линеаризации............ 333
14.4. Вопросы цифровой реализации систем ШИМ.......... 335
649
14.5. Мостовые широтно-импульсные модуляторы...... 342
14.6. Трехфазные автономные инверторы с ШИМ
напряжения........................................ 346
14.7. Побочные эффекты ШИМ....................... 351
14.8. Выбор частоты ШИМ.......................... 352
14.9. Повышение точности воспроизведения задающих
воздействий....................................... 353
14.10. Практическая схема преобразователя частоты
с ШИМ для электропривода переменного тока......... 368
Глава пятнадцатая. Модифицированные алгоритмы и
режимы управления инверторами с ШИМ......... 371
15.1. Структура модифицированной системы ШИМ...... 371
15.2. Вопросы терминологии и основные соотношения. 373
15.3. Анализ базового режима симметричной
двусторонней синусоидальной ШИМ.............. 376
15.4. Предмодуляция задающих воздействий......... 381
15.5. Симметрирование потенциальной зоны нагрузки
в потенциальной зоне источника питания............ 383
15.6. Приближенное симметрирование потенциальной
зоны нагрузки путем введения третьей гармоники..... 387
15.7. Привязка потенциальной зоны нагрузки к ближайшим
границам потенциальной зоны источника питания..... 391
15.8. Влияние предмодуляции задающих воздействий на
пульсации тока и момента двигателя................ 394
15.9. Обобщенная структура координатной системы ШИМ.. 404
Глава шестнадцатая. Векторные системы широтно -
импульсной модуляции............................... 405
16.1. Исходные положения.......................... 405
16.2. Постановка задачи......................... 407
16.3. Математическая модель....................... 412
16.4. Обобщение задачи.......................... 413
16.5. Основные этапы синтеза векторных систем ШИМ. 416
16.5.1. Ограничение входного воздействия..... 417
16.5.2. Выбор состава и расчет времен реализации
образующих векторов.......................... 422
16.5.3. Выбор порядка следования реализаций
образующих векторов.......................... 423
Глава семнадцатая. Системы широтно - импульсной
модуляции тока....................................... 431
17.1. Фазовые системы ШИМ......................... 431
17.2. Особенности векторных систем ШИМ тока....... 435
650
17.2.1. Система ШИМ тока без использования нулевых
образующих векторов (фазовая система)............. 437
17.2.2. Система ШИМ тока с использованием нулевых
образующих векторов (амплитудно-фазовая
система)........................................ 442
17.3. Выводы........................................................... 444
Раздел четвертый
Математические модели систем ’’преобразователь
частоты - асинхронный двигатель” для задач
управления..................................................................... 446
Глава восемнадцатая. Моделирование рабочих процессов
в системе "автономный инвертор напряжения -
асинхронный двигатель”...................................................... 446
18.1. Математическое описание силовой части
асинхронных электроприводов с автономными
инверторами напряжения................................................ 446
18.2. Учет реакции двигателя как элемента нагрузки
инвертора............................................... 455
18.3. Уравнения и структурная схема модели ......................... 458
Глава девятнадцатая. Модели систем ПЧ - АД
с жесткими законами коммутации.......................... 461
19.1. Уравнения модели АИН с жесткими
законами коммутации..................................... 461
19.2. Геометрическая интерпретация......................................... 464
19.3. Преобразование координат ............................................ 467
19.4. Базовый режим управления инвертором
с жестким законом коммутации (Л = я ).................. 470
19.5. Эквивалентные непрерывные модели систем ПЧ-АД ... 478
19.6. Моделирование рабочих процессов при асимметрии
нагрузки трехфазного инвертора......................... 482
19.7. Выводы ............................................................ 490
Глава двадцатая. Моделирование режимов управления
с модуляцией выходного напряжения инвертора............. 491
20.1. Базовая модель для исследования режимов
управления с модуляцией .............................................. 491
20.2. Независимое задание у - компоненты
управляющего вектора.................................. 493
20.3. Периодическое изменение у - компоненты в
функции угла поворота управляющего вектора............. 496
20.4. Периодическое изменение у - компоненты в
651
функции времени.............................. 500
20.5. Эквивалентные непрерывные модели
инверторов с ШИМ................................. 506
20.6. Комбинированное формирование /-компоненты
как функции угла поворота и времени........... 508
20.7. Выводы..................................... 511
Раздел пятый
Цифровые математические модели систем
’’преобразователь - двигатель”...................... 513
Глава двадцать первая. Цифровое моделирование
установившихся режимов асинхронных двигателей
при частотном управлении......................... 513
21.1. Предварительные замечания.................. 513
21.2. Уравнения цифровой математической модели
асинхронного двигателя........................... 514
21.3. Связь относительных единиц и
параметров модели................................ 518
21.4. Аналитическое представление характеристики
намагничивания двигателя ........................ 521
21.5. Учет вытеснения тока в обмотке ротора...... 523
21.6. Расчет характеристик асинхронного двигателя при
питании от управляемого источника напряжения...... 529
21.6.1. Расчет векторных диаграмм............ 536
21.6.2. Расчет характеристик асинхронных
двигателей без учета насыщения......... 539
21.7. Расчет характеристик асинхронного двигателя при
питании от управляемого источника тока........... 541
21.8. Расчет экстремальных характеристик асинхронного
двигателя как объекта оптимального управления..... 544
21.9. Выводы..................................... 547
Глава двадцать вторая. Цифровое моделирование
переходных режимов асинхронных двигателей
при переменной частоте........................... 549
22.1. Динамическая модель системы "источник
напряжения - асинхронный двигатель" ............. 549
22.2. Второй вариант модели...................... 557
22.3. Динамическая модель системы "источник тока -
асинхронный двигатель"........................... 560
22.4. Примеры расчета динамических режимов....... 562
652
Глава двадцать третья. Цифровые динамические модели
систем ’’преобразователь частоты - асинхронный
двигатель”........................................ 565
23.1. Универсальная цифровая динамическая модель
системы ПЧ-АД с автономным инвертором
напряжения ....................................... 565
23.1.1. Структурная схема и математическое
описание модели....................... 565
23.1.2. Алгоритм расчета рабочих процессов
в системе ПЧ-АД............................... 575
23.1.3. Некоторые результаты моделирования..... 581
23.2. Модель системы ПЧ-АД с жестким законом
коммутации ........................................ 583
Глава двадцать четвертая. Моделирование активных
выпрямителей как элементов энергосберегающего
электропривода переменного тока................. 586
24.1. Моделирование активного выпрямителя напряжения... 586
24.1.1. Математическое описание АВН .............. 586
24.1.2. Преобразование координат ............ 590
24.1.3. Эквивалентная непрерывная модель АВН... 592
24.1.4. Активный выпрямитель напряжения как объект
управления.................................... 593
24.1.5. Векторная САР активного выпрямителя
напряжения.................................... 600
24.1.6. Результаты компьютерного моделирования. 602
24.2. Моделирование активного выпрямителя тока...... 608
24.2.1. Математическое описание АВТ.......... 608
24.2.2. Преобразование координат............. 614
24.2.3. Эквивалентная непрерывная модель АВТ... 616
24.2.4. Активный выпрямитель тока как объект
управления.................................... 622
24.2.5. Результаты компьютерного моделирования. 622
24.3. Выводы...................................... 627
Литература ....................................... 630
653
Научное издание
Рудольф Теодорович Шрейнер
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА
С ПОЛУПРОВОДНИКОВЫМИ
ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ
Рекомендовано к изданию
Институтом машиноведения
и НИСО УрО РАН
Технический редактор И. М.Циклина
ЛР 020764 от 24.04.1998
НИСО УрО РАН № 171(00). Подписано в печать 10.12.2000.
Формат 64x84/16. Бумага типографская. Печать офсетная.
Уч.-изд. л. 40.73. Усл. печ. л. 37.94. Тираж 450. Заказ 1573
620219, Екатеринбург, ГСП-207, ул. Первомайская, 91
АООТ “Полиграфист”. Екатеринбург, ул. Тургенева, 20.
fhcw э
V Fl V* fV Инженерно-производственное предприятие
Автоматизированные Системы и Комплексы
В лучших традициях автоматизации и электроприводов.
Адрес: 620049, РОССИЯ, Екатеринбург, а/я-148, пер. Автоматики 10
Адрес электронной почты: ascCbasc-ural.ru
Адрес Web: http: kww.asc-ural.ru
Телефон: (3432)74-06-55
Факс: (3432)74-53-80
• Автоматизированные системы управления технологическим
процессом.
• Автоматизированные электроприприводы переменного тока
• Автоматизированные рабочие места и промышленные сети
управления производством.
• Реконструкция прокатных станов и мощных электроприводов
постоянного тока на микропроцессорной базе.
• Электрооборудование ведущих фирм производителей,
изготовление объектно-ориентированных изделий на их основе.
Профиль деятельности
Комплекс услуг по автоматизации технологических процессов и установок:
• консультации по выбору оптимального решения,
• проектирование многоуровневых систем автоматизации на основе универсальных
контроллеров семейства SIMATIC S5/S7 фирмы SIEMENS, промышленных компьютеров
фирм ADVANTECH, OCTAGON SYSTEMS, GRAYHILL, ВНИИЭМ и др.,
• разработка сложных технологических регуляторов на основе SIMADYN О фирмы
SIEMENS: системы управления режимами станов, системы автоматического регулирования
толшины и натяжения, мерного реза и оптимального раскроя материала летучими
ножницами, положения нажимных устройств,
• создание управляющих АРМов операторов и обслуживающего персонала на основе
передовых SCADA систем (WinCC, InTouch, Genesis 32, Genie и др.) и их интеграция с
сетями предприятий,
• развертывание внутренних сетей предприятий (подразделений) на основе IntraNet-
технологий,
• комплектная поставка оборудования и программного обеспечения,
• монтаж, пусконаладочные работы и обучение персонала,
• сервисное обслуживание;
Комплекс услуг по автоматизированным электроприводам:
• обследование объекта. согласование технического задания,
• проектирование новых систем электропривода и модернизация устаревших на аппаратуре
фирм SIEMENS, ABB, В НИ И ЭМ
• разработка преобразователей частоты для электротранспорта,
• внедрение энергосберегающих технологий на основе регулируемых
электроприводов переменного тока импортного и отечественного производства;
• формирование заказа и поставка электроприводов фирм SIEMENS. ABB, ЧЭАЗ.
• монтажные и пуско-наладочные работы;
Разработка и изготовление объектно-ориентированных низковольтных комплектных устройств,
шкафов и пультов управления на базе изделий фирмы RITTAL. SCHROFF
Сфера применения
Промышленное производство (даны примеры наиболее крупных объектов):
металлургия:
• дугосталеплавильные печи (автоматизация ДСП на Чусовском металлургическом заводе),
• электролизное производство алюминия (система управления током серии электролизеров и
устройства управления выпрямительными агрегатами на Иркутском, Братском ,
Уральском,Богословском алюминиевых заводах),
• мелкосортные проволочные станы горячей прокатки (комплексная автоматизация и
модернизация электроприводов стана 250/320 Молдавского Металлургического Завода,
Белорецкого Металлургического комбината),
• листовые станы холодной прокатки (комплексная автоматизация стана "1300м Верх-
Исетского металлургического завода),
• агрегаты отделки и термообработки (комплексная реконструкция агрегата нанесения
электроизоляционного покрытия на Верх-Исетском металлургическом заводе),
• трубопрокатные станы и агрегаты(модернизация привода клети N1 непрерывного стана
ТПА 80 на Синарском трубном заводе);
целлюлозно-бумажная промышленность:
бумагоделательные машины (реконструкция главных приводов буммашины N1
Михайловской бумажной фабрики),
насосные станции (комплексная реконструкция насосной 2-го подъема Краснокамской
бумажной фабрики 4 Гознака);
электротранспорт (система автоматического управления трамваем и электроприводы тележек
городского трамвая "СПЕКТР").
История
Инженерно-производственное предприятие "Автоматизированные Системы и Комплексы"
организовано в 1989 году на базе Свердловского участка пуско-наладочного управления треста
У рал эл е ктро м о нтаж.
Работники предприятия имеют 40-летний опыт пуско-наладочных работ в России, СССР и за
рубежом (Индия, Иран, Корея, Нигерия, Пакистан, Турция и др.).
Разработки за последнее время
Автоматизация и асинхронный тяговый частотный электропривод трамвайного вагона "Спектр-1"
Краткая характеристика оборудования
Бортовой компьютер на базе МСУВТ-В10
Преобразователь привала инвертор напряжения на базе IGBT-транзисторов с микропроцессорной
системой управления разработка АСК.
белорецкий меткомбинат, Башкорзостан, Стан катанки "150"
Краткая характеристика оборудования:
Оборудование ф. Сименс.
Контроллеры. Simatic 85, Simadyn D;
Приводы. Simoreg, Simovert, главный привод (2*2MBA) проволочного блока с управляющим
контроллером Simadyn D;
Система визуализации HMI: WinCC (5 рабочих станции, 2 Сервера).
Богословский алюминиевый завод, г. Краснотурьинск Свердловской обл., Автоматизированная
система управления током серии:
Краткая характеристика оборудования:
Контроллеры ф. Сименс: Simatic S7;
Система визуализации HMI Intouch фирмы Wonderware.
АО "Металлургический холдинг", г. Нижние Серги
Система раскроя металла и реконструкция электропривода летучих ножниц мелкосортного стана
"250"
Краткая характеристика оборудования:
Привод ф. Сименс: Simoreg с техноплатой Т400 + панель оператора ОР7.
Лицензии и Сертификаты
• Лицензия на проведение проектных работ № Г214682.
• Лицензия на проведение пуско-наладочных работ № Г214683.
• Сертификат фирмы SIEMENS на услуги по автоматизации высшего класса.
• Сотрудники сертифицированы фирмой Microsoft (имеют статус МСР)
Microsoft
Certified
Professional
Партнеры: SI ЕМ ENS, ABB,
• Официальный партнер и дилер фирмы SIEMENS,
• Официальный дистрибьютор фирмы АВВ,
• Официальный дистрибьютор фирмы Semikron,
• Официальный партнер ВНИИЭМ г. Москва
Сведения о сотрудниках
Директор: Занчевский Владимир Юрьевич - zvu@8SC-ural.ru
Г данный инженер: Кривовяз Владимир Константинович - kvk@asc-ural.ru
Отдел маркетинга: Сысоев Олег Александрович - oleg_sysoev@asc-ural.ru
Отдел оборудования: Павлушин Андрей Иосифович - andrcw_pavlushin@asC-ural.ru
УЧЕБНО-НАУЧНО-ПРОИЗВОДСТВЕННЫЙ КОМПЛЕКС “ЭЛЕКТРОН
НОВОУРАЛЬСКОГО ПОЛИТЕХНИЧЕСКОГО ИНСТИТУТА МИФИ
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ “ПОИСК-93”
ПО ВАШИМ ТЕХНИЧЕСКИМ ТРЕБОВАНИЯМ ИЗГОТОВИМ И ПОСТАВИМ:
✓ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ ДЛЯ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Характеристики:
- мощность ( кВт ): 5 ...
- диапазон регулирования скорости ( частоты ): 1
- коэффициент нелинейных искажений напряжения сети (%): < 6,
SSTiiTifl
- cos <р со стороны сета: > 0.95,
- коэффициент нелинейных искажений тока статорной цепи
приводного двигателя (%): ^12,
250,
-50,
- коэффициент полезного действия:
- принудительное воздушное охлаждение, сети
0.96
Защиты:
- максимальная токовая,
• токовая ст перегрузки,
- токовая от несимметрии,
- минимальная по напряжению.
У ТИРИСТОРНЫЕ УСТРОЙСТВА
МЯГКОГО ПУСКА И ОСТАНОВКИ ДЛЯ
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Характеристики:
- мощность ( кВт): 30 -г 400,
- линейное напряжение (В): 380,
- дистанционное и местное управление и сигнализация.
- ограничение тока при пуске двигателя в пределах ( 1 - 5 ) Inom
Защиты:
- по максимальному току - мгновенного действия,
- от перегрузки по току,
- от всех видов несимметрии токов;
✓ ЭЛЕКТРОННОЕ УСТРОЙСТВО
ЗАЩИТЫ
ЭЛЕКТРОДВИГАТЕЛЕЙ ЛЮБОЙ
МОЩНОСТИ
Характеристики:
- максимальная токовая защита,
- защита от перегрузки,
- защита от несимметрии токов фаз.
J ИСТОЧНИКИ ПИТАНИЯ для
ПЛАЗМОТРОНОВ мощностью
ДО 100 кВт
Характеристики:
- ряд постоянных напряжений холостого хода на силовом
выходе, средние значения, В: 203; 280; 398; 515; 632;
750.
- максимально-допустимая активная мощность на дуге ,
кВт: 135.
Управление:
- Местное ручное.
- Дистанционное.
Блокировки:
- От поджига дуги при нарушении работы вентилятора.
- От нештатного состояния внешних систем и элементов.
Защиты:
- Максимальная токовая - вводной автоматический выключатель.
- Токовая от перегрузки - вводной автоматический выключатель.
- От обрыва тока анода при работе плазмотрона - автоматическое
выключение источника.
У ИСТОЧНИКИ ПИТАНИЯ для
ВРАЩАЮЩИХСЯ ПЕЧЕЙ
МОЩНОСТЬЮ ДО 100 кВт
Состав:
Универсальный трехканальный регулятор
температуры.
- Транзисторный преобразователь частоты для
асинхронных трехфазных электродвигателей.
- Коммутационное оборудование.
Характеристики:
Универсальный трехканальный регулятор температуры•
Мощность (1 канал, кВт) до 50
Статическая точность 5 °C
Индивидуальное задание температуры по каждому каналу;
Цифровая индикация величины текущей температуры
Транзисторный преобразователь частоты для асинхронных
электродвигателей.
Тип ПЧА-.../380 УХЛ4
трехфазных
й из типоряда мощностей (5.. .250) кВт
Наш. адрес:
Свердловская обл. г. Новоуральск, ул. Ленина, Э. 85,
УНПК "ЭЛЕКТРОН ", НПО "ПОИСК-93 ".
тел.- факс. (34370) 9-49-91; 9-25-99
E-maiI:poisk93 @aib. ru; tvs@mifi2. mplik. ru