/















































































































































































Текст
АВТОМАТИЗАЦИЯ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Ю.К.Мелюшев
основы АВТОМАТИЗАЦИИ ХИМИЧЕСКИХ ПРОИЗВОДСТВ И ТЕХНИКА ВЫЧИСЛЕНИЙ
ИЗДАНИЕ 2-«, ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством высшего и среднего
специального образования СССР в качестве учебника
для химических техникумов Т --------------------------ч
f ГИЬЛИОТЕКА d
ы химлки-.чехчническао t
| техникума I
f г. Северодонецк |
МОСКВА, ХИМИЯ, 1982
6П7.08
М48
УДК /66.012-52+681.32/.33/ (0,75.32)
Мелюшев Ю. К.
Основы автоматизации химических производств и техника вычислений: Учебник для техникумов.— 2-е изд., перераб. и доп. — М.: Химия, 1982— (серия «Автоматизация химических производств»). — 360 ic., ил.
В книге рассматриваются современные методы автоматического контроля и регулирования технологических параметров химических производств, конструкции, принцип действия в характеристики некоторых серийных средств автоматизации, а также даются начальные сведения о вычислительной технике в науке и производстве. Кратко излагаются принципы проектирования схем автоматизации.
Книга является вторым изданием ранее вышедшего учебного пособия «Основы автоматизации химических производств». Однако содержание и состав ее значительно переработаны.
Книга предиазиачеиа для учащихся средних специальных учебных заведений (техники-технологи и техники-механики для химической и родственных ей отраслей промышленности), изучающих дисциплину «Основы автоматизации химических производств и техника вычислений».
Приведенные сведения могут также быть полезны для широкого круга инженерно-технических работников, интересующихся вопросами автоматизации производства.
360 с., 10 табл., 259 рис., список литературы 18 ссылок.
Рецензент — ДИАНОВ В. Г.
(МИНХ и ГП каид. техн, наук, доцент)
.2801010000-072
М‘ 050(01 )-82 7282
© Издательство «Химия», 1982 г.
СОДЕРЖАНИЕ
Введение
6
РАЗДЕЛ 1.
АВТОМАТИЧЕСКИЙ КОНТРОЛЬ ......
Рлава I. Местный и дистанционный контроль .
Местный контроль.................................
Дистанционный контроль...........................
Т Электрические системы дистанционного контроля .
Пневматические системы дистанционного контроля .
Системы телеметрического контроля............
10
13
13
13
17
23
25
//, Контроль давления.....................................
стиые приборы.............................................
1НИЫС приборы.............................................
ШС сведения о выборе, установке и эксплуатации пружинных при
26
28
33
40
Йв ///. Контроль температуры.......................
Йратурные шкалы ...................................
Ьщтри расширения...................................
Ьаатрмческис термометры............................
йвчккис термометры сопротивления..................
йммктричсскис термометры...........................
ЫЙкИ погрешностей приемных устройств погружения . юм*тры излучения . ....................
Owe Случаи намерения температуры...................
IV, Контроль уровня
пиры
►мары
для жидкостей.....................
для сыпучих твердых материалов .
Контроль массы, объема и расхода материалов . массы, объема и расхода жидкостей и газов массы твердых материалов....................
расхода жидкостей, газов и паров . . . .
•« Раеходомеры переменного перепада давления .
5КХ0Д0М0ры постоянного перепада давления . лохтромагиитпыс расходомеры........................
Sl Расходомеры переменного уровня.....................
* Чроаанне твердых и жидких материалов................
К
мрама
43
43
46 51
54 69
84 91
96
98
99
105
107
108
116
117
117
128
130
132
133
3
Глава VI. Контроль качества и состава материалов . . .
Измерение концентрации жидкостей ...............................* .
Измерение концентрации водородных ионов в растворах (рН-метрия) . .
Измерение плотности жидкостей......................................
Измерение влажности................................................
Контроль влажности газов.......................................
Контроль влажности твердых тел . . . ,.......
Измерение вязкости жидкостей.......................................
Газовый анализ.............................................
Хроматография......................................................
Масс-спектрометрия ............................................
РАЗДЕЛ 2.
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ............................ . . .
Глава VII. Линейные автоматические системы регулирования . .
Статические и динамические характеристики . . . . . . Передаточная функция........................................ . .
Структурные схемы и правила их преобразования....................
Типовые элементарные динамические звенья..........................
Автоматические системы, их классификация и принципиальные схемы .
Понятие об устойчивости систем . ..........................
Глава VIII. Объекты регулирования и их основные свойства ....
Уравнения объектов регулирования ..............................
Свойства объектов регулирования..........................." . .
Возмущающие воздействия..........................................
Глава IX. Автоматические регуляторы, их классификация и характеристики .......................................
Классификация регуляторов................................... . .
Позиционные регуляторы...........................................
Интегральные регуляторы................................... •
Пропорциональные регуляторы..............................
Пропорционально-интегральные регуляторы...........................
Дифференциальные регуляторы .....................................
Качество процесса регулирования и настройка регуляторов ...
Глава X. Конструкции, принцип действия, характеристики серийных средств автоматизации ................................. ,
Регулятор температуры прямого действия типа РТ...................
•Регуляторы непрямого (косвенного)' действия.....................
Командные электропневматические приборы..........................
Машины автоматического контроля и регулирования..................
Исполнительные устройства........................................
Вспомогательные устройства систем автоматики.....................
Глава XI. Принципы составления схем автоматизации................
Условные обозначения в схемах автоматики.........................
Щиты и пульты.................................... . . ...
Электрические схемы..............................................
Текстовые документы.............................................
РАЗДЕЛ 3.7 • • „
ОСНОВЫ ТЕХНИКИ ВЫЧИСЛЕНИИ ........................................303
Глава XII. Вычислительная техника в современной науке и производстве 304 .. с
Глава XIII. Аналоговые вычислительные машины ....... 308
Глава XIV. Цифровые вычислительные машины.........................318
Общие сведения о цифровых вычислительных машинах..................318
Основные устройства цифровых вычислительных машин.................325
Элементы программирования.............................• 340
Литература........................................................”4»
Предметный указатель............................................. 350
ВВЕДЕНИЕ fl
Автоматизация — одна из ведущих отраслей науки и техники, fl развивается в настоящее время особенно динамично, она прони- кает во все сферы человеческой деятельности. 'fl
Развитие автоматизации производства подразделяется на че- I дыре этапа, значительно отличающиеся один от другого в техни- 1 ческом, экономическом и организационном отношениях. 1
Первый этап — механизация труда, сущность которой сводит- 1 ся к тому; что машины и аппараты выполняют вместо человека работу, требующую физических усилий. |
Второй этап — автоматизация контроля производства, харак- 1 теризуется созданием и применением приборов, выполняющих I функции наблюдения за ходом технологического процесса. Такие .1 приборы значительно надежнее человека могут следить за изме- 1 пением параметров, характеризующих технологический процесс. 1
Третий этап — автоматизация управления отдельными агрега- | тами, т. е. частичная автоматизация производства. На этом этапе 1 механизмам и приборам передают некоторые функции управле- ния, выполнявшиеся ранее человеком. ,fl
Четвертый этап, который бурно развивается в настоящее вре- 1 мя, — комплексная автоматизация производственных процессов.
Термин «комплексная автоматизация», получивший в шестиде- - сятых годах широкое распространение в технической литературе, 1 не всегда правильно понимался. Вместо комплексного подхода j у при решении проблем автоматизации управления, «комплексная 1 автоматизация» рассматривалась зачастую, как задача «полной <1 автоматизации», что ни с технической, ни тем более с экономиче- | ской стороны не было повсеместно оправданным. 1
Этот этап знаменуется широким внедрением вычислительной техники, открывающим путь к резкому повышению производи- 1 тельности труда.
Автоматизация качественно изменяет характер труда рабо- . ’ чих, неизмеримо облегчая его, делая более содержательным. Ко- ' ренным образом меняется и квалификационно-профессиональный состав рабочих. В цехах с автоматизированным производством < главной фигурой становится специалист новой формации— оператор, программист, рабочие других ранее не существовавших профессий.
6
В течение ряда десятилетий под автоматикой понималось прежде всего выполнение без участия человека некоторых действий, однозначно связывающих причину и следствие.
Сущность современного этапа развития автоматизации можно было бы кратко охарактеризовать как переход от автоматизации «действий» к автоматизации «принятия решений».
В техническом плане этот этап ознаменовался переходом от так называемой цикловой (обеспечивающей . выполнение чисто-повторных действий) автоматики и автоматической стабилизации технологических режимов к использованию средств, обеспечивающих оптимизацию процессов, к осуществлению органической связи основного производственного оборудования с автоматикой.
В каждом производственном процессе исходные продукты или сырье перерабатываются в готовую продукцию, т. е. имеется некоторая система с несколькими входами (по числу исходных продуктов) и несколькими выходами (по числу видов готовой продукции). В пределах такой системы имеются потоки сырья, полуфабрикатов, вспомогательных продуктов. Эти «вещественные потоки» претерпевают загрузку, выгрузку, транспортирование, переработку, сортировку, упаковку, погрузку и т. д. Подобные операции могут быть выполнены либо вручную, либо с помощью механизмов.
Наряду с «вещественными потоками» в производственном процессе существуют совершенно другие потоки, которые можно назвать «информационными». Они представляют собой некоторую первичную информацию о ходе производственного процесса и необходимы для контроля и управления. Эта информация передается на соответствующие пункты управления (например, в операторную, диспетчерскую и т. п.), где подвергается обработке и используется для принятия решений при управлении процессом.
Если сравнивать, производство недалекого прошлого, где автоматизация использовалась слабо, с современным автоматизированным производством, то в первую очередь необходимо отметить, что производство прошлого осуществлялось лишь по законам технологии, а современное производство — по законам и технологии, и управления.
В конце 50-х годов на приборостроительных заводах введена в серийное производство единая государственная система приборов и средств автоматизации — ГСП, которая является основой осуществления технической политики в области создания средств автоматизации.
ГСП имеет стройную классификацию, минимальное число типовых серий, универсальное применение; предусмотрены полная взаимозаменяемость элементов, возможность постоянного совершенствования и использования отдельных блоков для комплектования сложных систем, высокая степень стандартизации и нормализации элементов и узлов. Все это обеспечивает технологичность
7
' : : 1' -Я
v;;’ /*
< ' /Ц
я простоту производственного освоения. Система' позволяет ис-Я пользовать приборы и устройства в различных сочетаниях, необ-' Я ходимых для построения любой схемы передачи, переработки и ,,-;я использования информации в каждой отрасли промышленности. <1
ГСП позволила приборостроителям сэкономить сотни миллио- 1 нов рублей на снижении трудоемкости изготовления приборов, Я резко повысить удовлетворение нужд производства в приборах, s увеличить фондоотдачу в приборостроении примерно на 40%, сни- Я зить среднюю трудоемкость приборостроительной продукции бо- I лее чем в 2,5 раза, увеличить среднюю долговечность работы при- I боров, снизить затраты на их ремонт и т. д. .2
Автоматизация технологических процессов и вспомогательных , I служб связана не только с совершенствованием производства и I улучшением условий труда, но и с повышением его рентабельно- I сти за счет улучшения технико-экономических показателей и сни- I жения материальных и трудовых затрат на единицу продукции. |
Экономические факторы являются определяющими при вы- | боре объектов автоматизации. Лишь в случаях, когда автомата- 9 зация вводится для обеспечения безопасности обслуживающего I персонала (устранение непосредственного контакта с вредными I веществами и материалами, опасными для жизни и здоровья), I Экономическая эффективность автоматизации не имеет решаю- г щего значения. I
' При создании схем автоматизации важно знать, является ли . I процесс непрерывным или периодическим (дискретным). Автома- J тизация непрерывных процессов приводит к бблыиему эффекту. Кроме1 того, их легче автоматизировать, так как число парамет- 1 ров управления этих процессов невелико. Автоматизировать дис- j кретные процессы значительно труднее вследствие значительно 1 большего числа параметров управления. .и
Одним из основных требований, предъявляемых как к отдель- Я йЫм элементам, так и к автоматическим системам в целом, явля- я ется их надежность. . я
Надежность — это1 безотказность работы различных дета--'ч лей, узлов и устройств на протяжении определенного заранее за-1 Д данного времени при сохранении эксплуатационных показателей, j
При современном уровне производства вопросы надежности и * долговечности элементов и систем автоматики приобретают пер- ] постеленное значение. Ведь выход из- строя только одного эле- /] мента иЛи узла, например в системе управления химическим или теплдэнергетическим процессом, может привести к аварии и че- • ' 1 ловеческим жертвам. i
Данные по надежности общепромышленных средств автомати- 1 кй показывают, что средняя их наработка на отказ в настоящее • время- составляет 25—400 суток. Для системы управления крупным цехом (насчитывает до 1000 элементов) отказы отдельных элементов в среднем происходят один-два раза в смену. Для обеспечения безотйазной работы технологичееких установок, дли-8
тельное» работы которых, например, в химической промышленности, составляет от 0,5 до 5 лет, необходимо повысить надежность автоматических систем в 1000—10 000 раз? Достигнуть этого можно двумя путями: либо при тщательном проектировании, доброкачественности изготовления каждого элемента из соответствующих материалов, изыскании новых материалов, улучшении отделки и т. д., либо за счет применения резервирования, т. е. переноса функций отказавшего элемента на другой, специально предназначенный для этого элемент.
Поскольку трудно ожидать, что в ближайшие годы надежность элементов автоматических систем удастся повысить в тысячи раз за счет улучшения проектирования и использования новых материалов, основным путем обеспечения надежности систем автоматики надо пока считать резервирование. ;
За показатель повышения надежности вследствие резервирования (И70_) можно принять степень повышения надеж* но ст и, измеряемую как отношение средних наработок на отказ резервированной и нерезервированной автоматических систем:
Г0==Тт/7'
где Тт — средняя наработка на отказ резервированной системы, ч; Т — средняя наработка на отказ нерезервированной системы, ч.
В настоящее время автоматические системы, как правило, резервируются с тем, чтобы в случае отказа автоматики был осу1 ществлен переход на ручное управление на период, позволяющий произвести замену отказавшего элемента.
В этой книге рассматриваются средства и .схемы автоматиче? ского контроля и регулирования различных физических величин, характеризующих процесс, а также средства вычислительной техники, которая широко используется в автоматизированных производствах.
я простоту производственного освоения. Система позволяет использовать приборы и устройства в различных сочетаниях, необходимых для построения любой схемы передачи, переработки и использования информации в каждой отрасли промышленности. > ГСП позволила приборостроителям сэкономить сотни миллионов рублей на снижении трудоемкости изготовления приборов, резко повысить удовлетворение нужд производства в приборах, увеличить фондоотдачу в приборостроении примерно на 40%, снизить среднюю трудоемкость приборостроительной продукции более чем в 2,5 раза, увеличить среднюю долговечность работы приборов, снизить затраты на их ремонт и т. д.
Автоматизация технологических процессов и вспомогательных служб связана не только с совершенствованием производства и улучшением условий труда, но и с повышением его рентабельности за счет улучшения технико-экономических показателей и снижения материальных и трудовых затрат на единицу продукции.
Экономические факторы являются определяющими при выборе объектов автоматизации. Лишь в случаях, когда автоматизация вводится для обеспечения безопасности обслуживающего персонала (устранение непосредственного контакта с вредными веществами и материалами, опасными для жизни и здоровья), экономическая эффективность автоматизации не имеет решающего значения.
При создании схем автоматизации важно знать, является ли Процесс непрерывным или периодическим (дискретным). Автоматизация непрерывных процессов приводит к ббльшему эффекту. Кроме того, их легче автоматизировать, так как число парамет- . ров управления этих процессов невелико. Автоматизировать дискретные процессы значительно труднее вследствие значительно большего числа параметров управления.
Одним из основных требований, предъявляемых как к отдель- НЫм -элементам, так и к автоматическим системам в целом, является их надежность.
Надежность — это безотказность работы различных деталей, узлов и устройств на протяжении определенного заранее за- • данного времени при сохранении эксплуатационных показателей.
При современном уровне производства вопросы надежности и долговечности элементов и систем автоматики приобретают первостепенное значение. Ведь выход из- строя только одного эле- . Мента или узла, например в системе управления химическим или ; теплоэнергетическим процессом, может Привести к аварии и че- ловеческим жертвам.
“ Данные по надежности общепромышленных средств автомати-кй показывают, что средняя их наработка на отказ в настоящее время составляет 25—400 суток. Для системы управления крупным цехом (насчитывает до 1000 элементов) отказы отдельных элементов в среднем происходят один-два раза в смену. Для обеспечения-безотказной работы технологических установок, дли
8
тельност& работы которых, например, в химической промышлен* ности, составляет от 0,5 до 5 лет, необходимо повысить надеж* ность автоматических систем в 1000—10 000 раз. Достигнуть этого можно двумя путями: либо при тщательном проектировании, доброкачественности изготовления каждого элемента из соответствующих материалов, изыскании новых материалов, улучшении отделки и т. д., либо за счет применения резервирования, т. е. переноса функций отказавшего элемента на другой, специально предназначенный для этого элемент.
Поскольку трудно ожидать, что в ближайшие годы надежность элементов автоматических систем удастся повысить в тысячи раз за счет улучшения проектирования и использования новых материалов, основным путем обеспечения надежности систем автоматики надо пока считать резервирование.
За показатель повышения надежности вследствие резервирования (1Г0) можно принять степень повышения надежности, измеряемую как отношение средних наработок на отказ резервированной и нерезервированной автоматических систем:
где Тт — средняя наработка на отказ резервированной системы, ч; Т — средняя наработка на отказ нерезервированной системы, ч.
В настоящее время автоматические системы, как правило, резервируются с тем, чтобы в случае отказа автоматики был осу-ществлен переход на ручное управление на период, позволяющий произвести замену отказавшего элемента.
В этой книге рассматриваются средства и ,схемы автоматичен ского контроля и регулирования различных физических величин. Характеризующих процесс, а также средства вычислительной техники, которая широко используется в автоматизированных производствах.
У
РАЗДЕЛ 1 V
автоматический контроль
.
При любом виде управления производством одним из важнейших этапов является получение информации о состоянии объектов управления. Этот этап связан с определением (измерением) различных величин (давление, температура, расход и количество, । некоторые качественные показатели перерабатываемых веществ), I отражающих ход технологического процесса.
Следовательно, чтобы управлять производством надо сначала измерить необходимые величины.
Всеми вопросами, связанными с измерениями, занимается специальная наука — метрология (от греческого metron — мера и logos— учение).
Измерить какую-либо физическую величину — значит сравнить ее с другой однородной величиной (мерой), принятой за единицу измерения.
Основное уравнение измерения имеет вид: *
N = qC
где АГ — измеряемая величина; С —единица измерения; q — числовое значение измеряемой величины.
Измерения могут быть прямыми, косвенными, совокупными и совместными.
При прямых измерениях измеряемая величина определяется непосредственно из опытных данных по показаниям приборов.
При косвенных измерениях измеряемая величина определяется на основании известной зависимости между нею и величина-’ ми, значения которых получены в результате прямых измерений (например, определение плотности тела по его массе и геометрическим размерам, площади прямоугольника по произведению двух прилегающих сторон и т. д.).
При совокупных измерениях числовые значения измеряемой величины определяются в результате решения ряда уравнений, полученных из совокупности прямых измерений одной или нескольких однородных величин, например определение температурного коэффициента электрического сопротивления
Г1оо — г 0’ а== 1СЮг0
где г0 и гюо—сопротивление материала соответственно при 0° и 100 °C.
10
Совместные измерения предусматривают одновременное измерение двух или нескольких неоднородных величин, которые позволяют определить искомую величину, например определение скорости равномерно движущегося тела v по измеренным 'пути As и времени At
v = ks/M
Совокупными и совместными измерениями пользуются преимущественно в исследовательской работе.
Прежде чем измерять физические величины необходимо установить единицы измерения.
В народном хозяйстве СССР с 1 января 1980 г. введен в действие в качестве ГОСТа стандарт Совета Экономической Взаимопомощи СТ СЭВ 1052-78 «Метрология. Единицы физических величин», который предусматривает обязательное применение единиц Международной системы единиц (сокращенно SI или в русской транскрипции —СИ).
Основными единицами СИ являются: метр, килограмм, секунда, ампер, кельвин, моль и кандела (свеча); вспомогательными — радиан и стерадиан (единица телесного угла), а производные образуются из основных и дополнительных единиц с помощью простейших уравнений связи между величинами (единица давления— паскаль: Па = кг/(м-с2), единица плотности: кг/м3, единица площади: м2 и т. д.).
Наравне с единицами СИ допускается применение и некоторых внесистемных единиц, нашедших широкое применение в практике, это тонна, минута, час, сутки, литр, а для измерений плоского угла — градус, секунда, минута.
Изъяты из употребления такие ранее широко применяемые единицы, как центнер, дина, техническая атмосфера (кгс/см2), миллиметры водяного и ртутного столба, лошадиная сила, пуаз, стокс, калория и др.
Для образования кратных и дольных единиц следует пользоваться Множителем десять в соответствующей степени или приставкой. Например, множитель 103 обозначается приставкой кило, 10е — мега, 10® — гига, 10-3 — милли, 10~6 — микро, 10-9 — нано и т. д. Тогда длина 1000 м запишется как километр, или км; давление в 1 000 000 паскалей — как мегапаскаль, или МПа, и т. д.
Основными компонентами всякой системы управления являются измерительные средства, к которым относятся меры, измерительные приборы и различные вспомогательные устройства (источники питания, стабилизаторы, усилители и т. п.).
Мера — средство измерения, предназначенное для воспроизведения физической величины заданного значения (гиря — мера массы, плоскопараллельная концевая мера — эталон длины и т. д.).
Измерительный прибор — средство для выработки сигнала измерительной информации в форме, доступной для непосредственного восприятия наблюдателем.
И
~ f*':' '... i
В число измерительных входят следующие приборы:
аналоговые (от греческого analogos — соответственный), по- 1 казания которых являются непрерывной функцией измеряемой • величины (например, термометр, показывающий температуру д тела);
цифровые, автоматически вырабатывающие дискретные (от латинского discretus — прерывистый) сигналы, представленные в цифровой форме (например часы-табло);
показывающие, допускающие только отсчитывание показаний с помощью отсчетных устройств (например шкалы и стрелки);
регистрирующие, в которых измеряемые значения величины фиксируются на специальной диаграммной бумаге в виде непрерывной линии, точек, цифр и т. п.;
интегрирующие, дающие интегральное (по времени или другой независимой переменной) значение измеряемой величины (например» электросчетчик, спидометр, планиметр и др,);
суммирующие, показания которых есть сумма двух или нескольких величин,, подводимых к прибору по разным каналам (например, ваттметр, измеряющий сумму мощностей несколыких электрических генераторов);
измерительные преобразователи, или датчики, вырабатывающие сигналы измерительной информации в форме, удобной для передачи по каналам связи, но не поддающейся непосредственному восприятию наблюдателем.
Измерительные приборы могут иметь несколько устройств в одном корпусе, т. е. быть показывающими и регистрирующими, показывающими и интегрирующими или суммирующими и т. д.
Класс точности средств измерений является обобщенной характеристикой, определяемой пределами допускаемых основных и дополнительных погрешностей, а также другими свой-ствами средств, измерения.
Классы точности измерительных приборов устанавливаются „ • ГОСТом и обычно указываются на их шкалах цифрами, взятыми в кружочек.
Отечественной промышленностью выпускаются технические приборы следующих классов точности: 0,2; 0,5; 1; 1,5; реже 2,5; 4. i. Чтобы с помощью класса точности определить пределы допустимых (основных, дополнительных и других), погрешностей, надо, вычислить один процент (сотую часть) верхнего предела измерений и умножить полученное на число, характеризующее класс точности. J
В качестве примера определим пределы допустимых погреш- q ностей вольтметра переменного тока со шкалой 0—150 В и классом точности 0,5 J
-^0,5-0,75 Ответ: ±0,75В
В'приведенном примере класс точности вольтметра характери-зует пределы допускаемой основной погрешности и допускаемых
12
i -
изменений показа-ний; обусловливаемых внешним магнитным по-лем'' и ^отклонениями .от' нормальных. значений таких ..влияющих величин, как температура окружающей среды, частота перемен-ного тока и др.
В целях обеспечения единства и достоверности измерений во всей стране, систематического совершенствования парка измерительных средств и поддержания их в исправности, осуществляется метрологический контроль, который проводится единой метрологической службой, руководимой Государственным комитетом стандартов.
ГЛАВА I
МЕСТНЫЙ И ДИСТАНЦИОННЫЙ КОНТРОЛЬ
В зависимости от назначения системы автоматического контроля подразделяются на системы местного, дистанционного и телеизмерительного (от латинского tele — далеко) контроля.
местный контроль
В тех случаях, когда для удобства обслуживающего персонала измерительные приборы устанавливаются иа самих объектах контроля, или, как говорят «по месту», значение контролируемой величины считывается здесь же, около самого объекта, с помощью показывающих, регистрирующих или иных приборов. Примером может служить установкаипоказывающего манометра, непосредственно на трубопроводе, в котором измеряется давление, у или жидкостно-стеклянного термометра для определения температуры в какой-либо емкости.
При установке приборов «по месту» следует учитывать, в каких условиях протекает работа самого объекта контроля: имеет ли место вибрация или сотрясения, как сильно изменяются окружающие условия (температура, атмосферное давление, влажность воздуха). От этих факторов во многом будет зависеть выбор исполнения прибора (вибро-тряскоустойчивый, ударопрочный и т. п.).
Особых условий монтажа требуют приборы, устанавливаемые па объектах, круглогодично работающих иа открытом воздухе.
В настоящее время местный контроль — явление редкое и его удельный вес в системах управления чрезвычайно мал.
ДИСТАНЦИОННЫЙ КОНТРОЛЬ
Ход технологического процесса обычно характеризуется ие-сиолькими физическими величинами. Так, например, при автома-ТИэации процесса сушки материала в барабанной сушилке при-
Ч 13
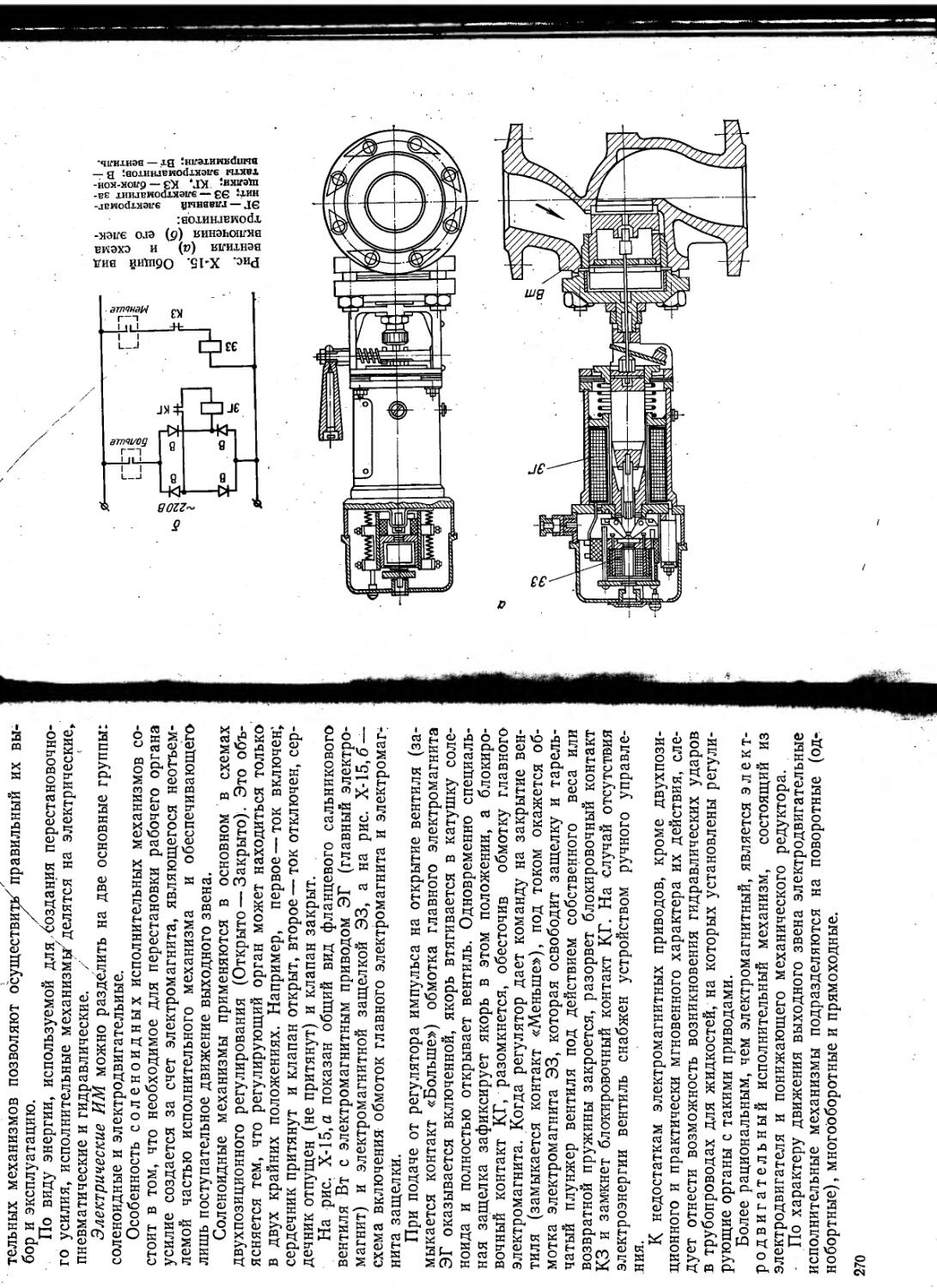
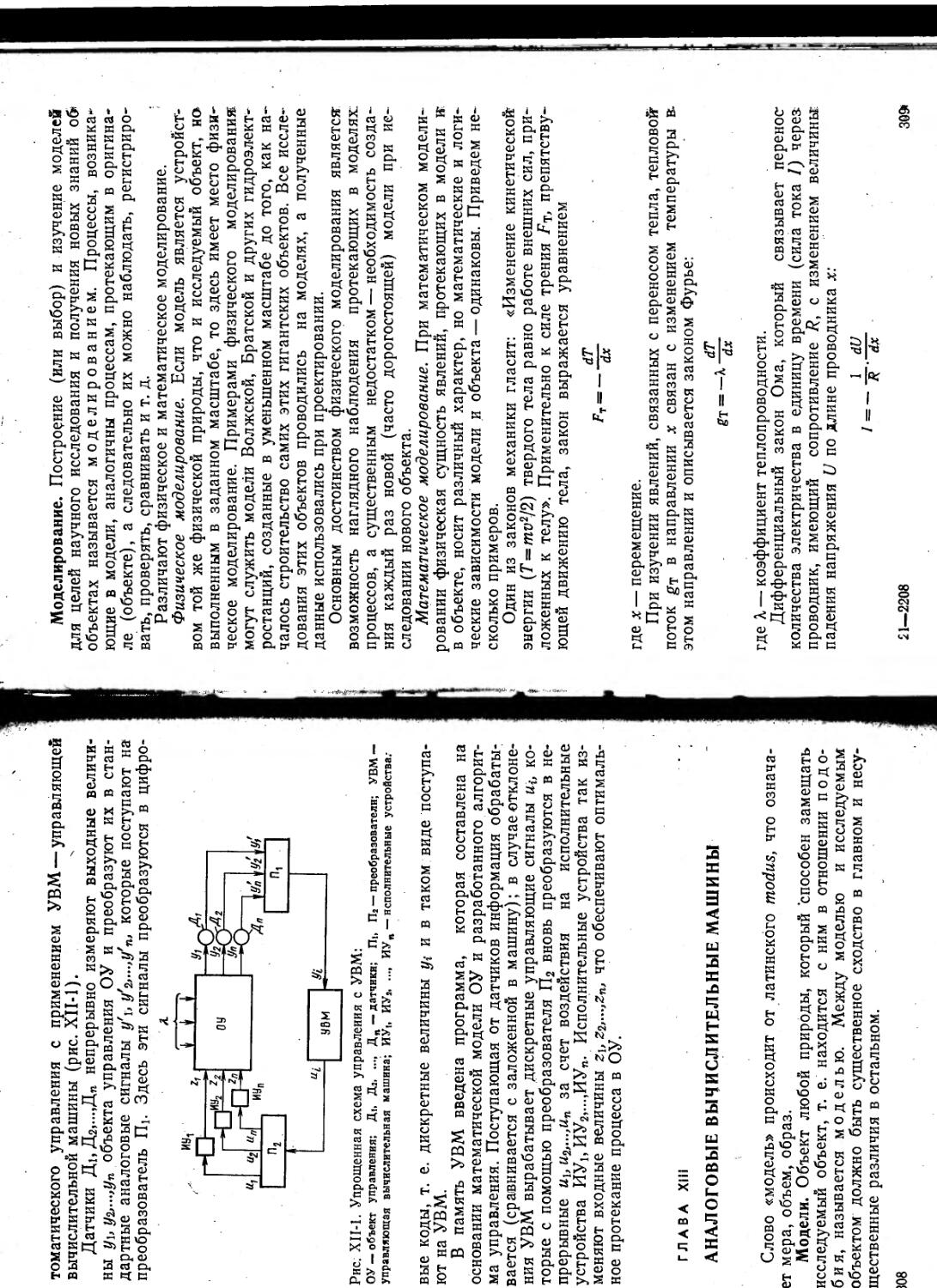
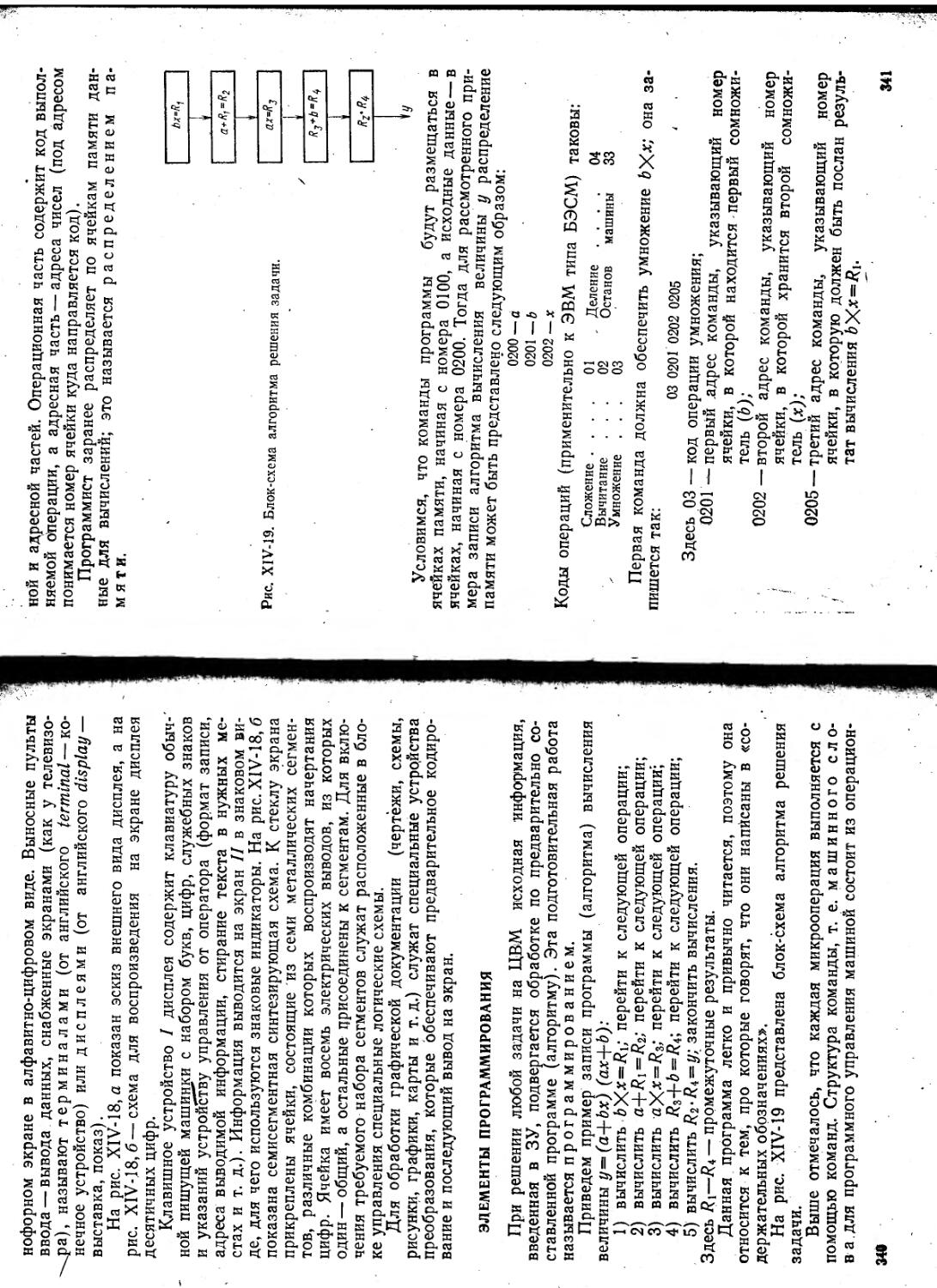
Д вп
Рис. 1-1. Схема дистанционной передачи:
Д — датчик; ВП — вторичный прибор; КС — канал связи.
ходится измерять (и регулировать) такие величины, как* расход воздуха и топлива, температура и давление. Очень часто основным параметром процесса является какой-либо показатель качества или состав вещества. В ряде случаев такое обилие контролируемых величин обусловливает установку большого числа приборов, наблюдение за которыми становится затруднительным даже для целой группы наблюдателей. Поэтому большое число измерительных приборов, необходимых для получения информации о процессе, располагают не «по месту» или вблизи от объектов, а в специальном помещении (пункт управления, диспетчерская и т. п.), группируя и размещая на щитах и пультах. Рядом же с объектами располагают лишь устройства, которые измеряют определен-
ный параметр и по линиям связи передают результаты измерений к приборам, расположенным в диспетчерской.
Такая система централизованного контроля позволяет одному. оператору осуществлять контроль за работой технологической установки или группы установок, а в ряде случаев — даже в пределах цеха или целого предприятия. Если в диспетчерской или пункте управления приборов особенно много, операторов может быть несколько и каждый из них следит за определенной группой приборов.
Системы, которые позволяют вести контроль объекта на расстоянии (в пределах цеха, небольшого предприятия, где длины каналов связи измеряются сотнями метров), носят название дистанционных передач (передач ближнего действия). Дистанционные передачи состоят из трех основных частей (рис. 1-1): датчика (первичного преобразователя), вторичного прибора и канала связи.
Датчик преобразует контролируемую или управляемую величины в выходной сигнал, удобный для передачи по каналам связи. Классифицируют датчики по ряду признаков:
а) по виду контролируемой величины (датчики давления, температуры, уровня, расхода, качества и состава материалов);
б) по 'принципу действия;
в) по виду и характеру выходного сигнала.
В настоящей главе речь идет о схемах дистанционных передач, в которых датчики различают лишь по виду и характеру выходного сигнала. Принцип действия различных датчиков по виду контролируемой величины будет рассмотрен в соответствующих главах этой книги.
Выходные сигналы подразделяются по роду энергии; они мо-* гут быть электрическими, пневматическими и гидравлическими. При изменении контролируемой (управляемой) величины на выходе датчика изменяется напряжение, сила тока, частота, или фа
14
за (для электрических датчиков), давление, либо расход газа или жидкости (для пневматических и гидравлических датчиков). Сигналы могут быть непрерывными, когда их длительность не ограничена, и прерывистыми (дискретными), когда их длительность ограничена некоторыми значениями.
Установлены следующие унифицированные (единообразные) выходные сигналы для электрических и пневматических датчиков:
По току, мА . . . . По напряжению, В
для переменного тока для постоянного тока По частоте, Гц .
По давлению сжатого воздуха, МПа................
1 0—5; 0—20; 0—100
0-2
0-10 500—2500
0,0196—0,098
Важнейшей характеристикой датчика является вид функциональной зависимости между контролируемой (управляемой) величиной и выходным сигналом; предпочтительна линейная зависимость.
Датчик состоит из одного или нескольких преобразователей, главным из которых является первичный преобразователь или чувствительный элемент, непосредственно воспринимающий контролируемую величину.
В отличие от других устройств систем автоматического контроля и управления, датчики находятся в особенно тяжелых условиях эксплуатации: они размещаются либо на самом объекте контроля и управления, либо возле него, работают при переменных температурах и давлениях окружающей среды, часто в условиях сотрясений и вибраций. В зависимости от характера контролируемой среды чувствительные элементы могут контактировать с химически активными, вязкими, коагулирующими, затвердевающими и другими веществами.
Поэтому обеспечение высокой эксплуатационной надежности датчиков требует весьма тщательного выбора принципов их построения, конструктивных элементов и материалов.
Если необходимо иметь информацию о контролируемой величине непосредственно по месту установки датчика, он может иметь отсчетные и записывающие устройства. Датчики без этих устройств называют «слепыми»; их используют только для передачи показаний на расстояние.
Вторичный прибор — устройство, воспринимающее сигнал от датчика и преобразующее его в перемещение указателя относительно шкалы, а также осуществляющее, в случае необходимости, эанись значений контролируемой величины на специальной диаграммной бумаге и сигнализацию (световую или звуковую) при достижении контролируемой величиной установленных минимального или максимального значений.
В корпусы вторичных приборов могут встраиваться регулирующие устройства. В этом случае вторичный прибор позволяет не
15
Ж ’Ц
только производить отсчет, запись или сигнализацию, но'и выда- вать управляющий сигнал для воздействия на объект управления,Ш т. е. будет работать как регулятор. -Я
Обычно вторичные приборы устанавливаются на специальных -Я стандартных щитах, откуда их шкалы хорошо просматриваются Я обслуживающим персоналом.
Показания вторичных приборов зависят от условий их экс- я плуатации. К каждому прибору, будь это измеритель температу- Я ры, давления, расхода и т. д., прилагается инструкция по экс- плуатации, в которой оговариваются допустимые значения внеш- I них факторов (температура и влажность воздуха, барометриче- Я ское давление, наличие' внешних магнитных полей, радиация и ч т. д.), в пределах которых не искажаются показания приборов. I Требования инструкции должны неукоснительно соблюдаться. Я
Вторичные приборы классифицируются по виду сигнала, по- Я ступающего на их вход, и по функциональным признакам. Клас- Я сифицировать их по виду контролируемой величины нет смысла, I так как для целого ряда параметров может быть использован i один и тот же вторичный прибор (разница будет лишь в градуи- Я ровке шкалы). По виду поступающего на вход сигнала они мо- И гут быть электрическими и пневматическими, а по функцио- I нальным признакам — показывающими, самопишущими, сумми- у рующими, сигнализирующими (регулирующими). «
Канал связи или импульсная линия в дистанционные переда- | чах служит для передачи сигнала от датчика к вторичному при- 1 бору. Если сигнал электрический, то в качестве канала использу- ~1 ются провода или кабель. Применяются провода установочные медные и алюминиевые с резиновой изоляцией, в оплетке из хлоп- ,1 чатобумажной ткани сечением 0,75—2,5 мм2 и кабели контроль- J ные с медными или алюминиевыми жилами сечением 1,0—2,5 мм2. 1 Прокладка проводов в большинстве случаев осуществляется в I защитных трубах, коробах, лотках. Способ прокладки проводов j и кабелей выбирается в зависимости от условий, существующих в помещениях или на наружных установках, для которых проекта- « руется система дистанционной передачи. Например, во взрыво- я опасных помещениях классов В-1, В-la, В-2 провода и неброниро- -я ванные кабели должны прокладываться, в стальных трубах. I
Если сигнал пневматический, или гидравлический, то в качест- ;< ве каналов связи используются стальные, медные, алюминиевые или полиэтиленовые трубы внутренним диаметром 6—8 мм. Для J уменьшения запаздывания при передаче сигнала длина трубных линий между датчиком и вторичным прибором должна быть мини-мальной и не превышать 300 м. Прокладку трубных проводок необходимо предусматривать параллельно стенам, междуэтажным перекрытиям и колоннам; следует стремиться к минимальному числу поворотов. В местах прокладки труб не должно быть резких колебаний температуры окружающего воздуха, сильного на-, гревания или охлаждения. Металлические трубы можно прокла- j 16 v 1
.t
цывать непосредственно по стальным, бетонным и кирпичным поверхностям с креплением стальными крепежными деталями, а полиэтиленовые трубы рекомендуется прокладывать в металлических или пластмассовых коробах, стальных защитных трубах, гибких металлических рукавах, в лотках или каналах.
Наибольшее распространение в современных схемах централизованного контроля и управления получили электрические и пневматические дистанционные передачи, причем пневматические передачи нашли применение главным образом во взрыве- и пожароопасных производствах, где применение электрических передач исключено.
Электрические системы дистанционного контроля
Электрические системы дистанционного контроля базируются на различных электрических преобразователях, поэтому и существует несколько различных электрических передач.
Особенно часто в таких передачах используются электромеханические преобразователи, которые преобразуют в электрический сигнал такие величины, как угловое или линейное перемещение, скорость и ускорение движущихся деталей, давление, расход веществ, температура жидкостей, газов и паров, уровень материалов и другие величины.
Рассмотрим лишь некоторые элекромеханические преобразователи и дистанционные передачи на их основе.
Дифференциально-трансформаторный преобразователь. На рис. 1-2 показана схема дифференциально-трансформаторного цилиндрического преобразователя с распределенной первичной об- . моткой, принцип действия которого основан на изменении взаимной индуктивности двух обмоток при перемещении элемента маг-нитопровода.
Катушка из пластмассы (рис. 1-2, а) имеет одну первичную» (а»|) и две вторичные обмотки (а>2 и w3). Снаружи катушка охватывается цилиндрическим магнитопроводом М из листовой электротехнической стали для защиты от влияния внешних магнитных полей И железных масс. Первичная обмотка размещена равномерно по всей длине катушки, к ее концам (точки 1, 2) подводится напряжение питания U переменного тока промышленной частоты (50 Гц). Вторичные обмотки выполнены в виде двух секций, каждая из которых расположена точно на половине всей длины катушки, и имеет одинаковое число витков. Они включены встречно, т. е. конец обмотки w2 соединен с концом обмотки w3t. а начала этих двух обмоток выведены на клеммную панель (точки 3, 4) для подключения с помощью проводов ко вторичному прибору.
Внутри катушки находится плунжер П (сердечник) из мягкого железа (магнитопровод), длина которого меньше длины ка-Тушкн. Плунжер через шток Ш связан с чувствительным элементом датчика (на рисунке не показан) ’ ' 2-иов
ИА/-Л.Е.5, чнического
У-.ПХКума г. Сгвьродонецк
При питании переменным током напряжением U первичной обмотки Wi, образуется магнитный поток, состоящий из общего потока Фо, охватывающего обе вторичные обмотки ш2 и w3, и частных потоков Ф1 и Ф2, охватывающих соответственно верхнюю (w2) и нижнюю (оу3) обмотки.
Рис. 1-2. Схема цилиндрического дифференциально-трансформаторного преобразователя:
« — общий вид; б — схема расположения обмоток; 1—4 — выводы обмоток; П — сердечник; III — шток.
В результате пересечения магнитными потоками вторичных обмоток в них индуктируются электродвижущие’ силы £; и Е2, величины которых равны:
Ш Ct)
El = уу-^2(фо + ф1) Ег =тт.Шз(Фо + ф2)
где © — круговая частота; a = 2nf (здесь f— частота питающего тока).
Когда плунжер П находится внутри катушки в среднем положение, э. д. с., индуктируемые в каждой вторичной обмотке, равны, направлены навстречу друг другу, и между началами этих-обмоток (точки 3, 4 на рис. 1-2,6) тока нет, т. е. ДЕ=0.
Если же плунжер сместится от среднего положения, магнитные потоки, пронизывающие вторичные обмотки, окажутся различными, вследствие чего индуктируемые в них э.д. с. не будут равны и между точками 3 и 4 появится разность потенциалов, т. е. АЕ=Н=0. Фаза и величина этой разности потенциалов будет зависеть от величины и направления смещения плунжера в катушке. При смещении плунжера, например вверх, увеличивается значение Ф; и уменьшается Ф2. В этом случае Ei>E2.
У преобразователя рассмотренного типа рабочий ход плунжера составляет ±3,5 мм от среднего положения.
18
Схему дистанционной передачи (рис. 1-3), в которой используется дифференциально-трансформаторный преобразователь, рассмотрим на примере дистанционного контроля уровня жидкости в емкости (объект контроля ОК).
Датчик Д устанавливается в непосредственной близости от объекта контроля так, что его чувствительный элемент ЧЭ (по-
рно. 1-3. Схема дифференциально-трансформаторной дистанционной передачи: ОК —объект контроля; Д —датчик; П, П' —плунжеры; К —кулачок; ЛП —линия питания; ИЛ — импульсная линия- ВП — вторичный прибор; ЧЭ — чувствительный элемент; ЭУ — электронный усилитель; Рд — реверсивный двигатель; ПС — показывающая стрелка; Шк — ШИйла.
ПЛВВОк) через систему рычагов связан с плунжером П преобразователя датчика.
Когда значение уровня в емкости (ОК) соответствует номинальному, плунжер П занимает по отношению к вторичным обмоткам Ш| и среднее положение и на выходе преобразователя (ТОЧКН I и 4) разность потенциалов отсутствует (£’=0). Если контролируемая величина (уровень) изменит свое значение, то ИЯ выходе преобразователя появится разность потенциалов, фаза и величина которой будет зависеть от величины и направления смещения плунжера в катушке, т. е, от того, повысился или понизился уровень в емкости.
Вторичный прибор ВП монтируется на специальном щите обычно в центральном пункте управления, например цеха или заводя; катушки дифференциально-трансформаторного преобразователи ВП и датчика Д (первичная обмотка w'i и вторичные обмотки w'2 и w'3, точно такие же, как обмотки катушки датчика Wi, и Юз) соединены электропроводами. Обмотки возбуждения датчика и»| и вторичного прибора w'i соединены линией питания ЯП последовательно и питаются напряжением от трансформатора, встроенного в корпус вторичного прибора.
2*
19
' ? " -v
Выходы вторичных обмоток катушек датчика (точки 3, 4) и вторичного прибора (точки 3' и 4') включены с помощью им- 5 пульсной линии ИЛ встречно, т. е. находятся в противофазе (это ". значит, что если например, потенциал точки 4 катушки датчика в данное мгновение положителен, то потенциал точки 4' катушки вторичного прибора тоже положителен). Последовательно со вторичными обмотками преобразователей датчика и вторичного при- . ’ бора в импульсную линию включен электронный усилитель ЭУ.
Устройство и принцип действия электронных усилителей в I этой книге не рассматриваются, так как предполагается, что чи- < татель знаком с этими вопросами из соответствующих курсов. Заметим лишь кратко, что в дистанционных передачах электронные! ’! усилители служат для усиления по напряжению и мощности! -сравнительно слабых электрических сигналов, уровень которых! изменяется в пределах: по напряжению — от долей микровольта до вольта, по току — от 10~14 ампера до десятков миллиампер. Среди прочих параметров электронные усилители характеризуются коэффициентом усиления, который представляет собой отношение величины сигнала на выходе усилителя к величине сигнала, поступающего на его вход. Усилители, которые используются в рассматриваемых здесь дистанционных передачах, имеют коэффициенты усиления 40—100-Ю3*.
Если выходная разность потенциалов Е преобразователя датчика, пропорциональная контролируемой величине, не равна выходной Е' разности потенциалов преобразователя вторичного’прибора, то в импульсной линии ИЛ появится напряжение небаланса АД, которое усилится электронным усилителем ЭУ и с его выхода поступит на обмотку управления асинхронного реверсивного двигателя РД. Ротор реверсивного двигателя начнет вращаться и ' - с помощью кулачка К, который кинематически связан с ротором (эта связь условно показана пунктиром), переместит плунжер ЕГ внутри катушки преобразователя вторичного прибора так, чтобы ои занял по отношению к своим вторичным обмоткам w't и а/3 такое же положение, какое занял плунжер П внутри катушки датчика по отношению к обмоткам ш2 и w3. В этом случае разности потенциалов катушки вторичного прибора Е' и катушки датчика Е станут равными; при этом сигнал небаланса АД в линии связи, а следовательно и на входе электронного усилителя, будет равен нулю и ротор реверсивного двигателя остановится. Остановится и показывающая стрелка ПС, ось которой также кинематически связана с ротором РД, перемещавшаяся относительно шкалы Шк, градуированной в единицах уровня.
При использовании дифференциально-трансформаторных преобразователей длина дистанционной передачи может достигать не
* Кроме электронных усилителей в автоматических контрольно-измерительных приборах, регуляторах, системах дистанционных передач и других устройствах применяются также полупроводниковые и магнитные усилители, которые в книге не рассматриваются.
20
скольких сотен метров, а при включении в импульсную линию некоторых, дополнительных устройств— до 4—6 км.
Сельсины. Основными элементами сельсинной передачи явля-' ются преобразователи, которые носят название сельсинов — само-синхронизирующихся электрических машин, внешне похожих на небольшие электромоторчики.
Рис, 1-4. Схемы преобразователя сельсинного типа:
а — поперечный разрез; б — соединение обмоток ротора и статора и их расположение; в — упрощенная схема сельсина; /—ротор; 2 — однофазная обмотка; 3 — статор; 4 — трехфаа-ная обмотка; 5 — ось ротора.
Сельсины имеют две обмотки (рис. 1-4). Одна из них трехфазная 4, выполненная по схеме «звезда»; она располагается в пазах статора 3 со сдвигом фаз 120° и называется обмоткой синхронизации. Другая — однофазная 2 расположена на роторе 1 и называется обмоткой возбуждения. На оси 5 ротора установлены два контактных кольца (на рисунке не показаны), через которые с помощью щеток к обмотке возбуждения подводится напряжение переменного тока (обычно 110 В, 50 Гц).
При протекании переменного тока через обмотку возбуждения создается намагничивающая сила, которая синусоидально распределяется по окружности ротора и пронизывает трехфазную обмотку статора. Во всех трех фазах его трехфазной обмотки возникнут э. д. с., которые будут синфазны, но различаться по амплитуде. Например, если ось потока однофазной обмотки сдвинута относительно оси первой фазы трехфазной обмотки на угол а, то э.д.с. первой фазы будет пропорциональна величине потока и синуса угла а, э. д. с. второй фазы — величине потока и синусу угла а -Ь12(Г, э.д. с. третьей фазы — величине потока и синусу угла а +240°.
Итак, при постоянном значении потока однофазной обмотки ротора, выходная э.д.с., наводимая в трехфазиой обмотке (выходной сигнал сельсин-преобразователя), будет пропорциональна углу поворота ротора.
Схема дистанционной передачи с использованием сельсин-пре-образователей работает следующим образом (рис. 1-5).
21
ка с помощью проводов линии связи
Рис. 1-5. Схема дистанционной сельсинной передачи:
СК — сельсин-датчик; СП — сельсин-приемник; Ст,. Ста—обмотки статоров; Рт,. Рта —обмотки роторов; Тр — трос; Б — барабан; Пр — противовес; ОК — объект контроля; ЧУ — чувствительный элемент; Пс — показывающая стрелка; Шк — шкала.
Объектом контроля ОК является высокая емкость, в которой измеряется уровень. Чувствительный элемент ЧЭ (поплавок) с помощью троса Тр, который переброшен через барабан Б, связан с противовесом Пр. Барабан жестко укреплен на оси ротора сель-син-датчика СД. Трехфазная обмотка статора Ст; сельсин-датчи-соединена с идентичной обмоткой статора Ст2 сельсин-приемника СП, а ось ротора Рт2 сельсин-приемника через систему передач: соединена с показывающей стрелкой ПС. Однофазные обмотки роторов сельсин-датчика и сельсин-приемии-ка параллельно подключены к сети переменного тока. Если уровень жидкости в емкости начнет изменяться, то поплавок ЧЭ и противовес Пр начнут перемещаться в вертикальной плоскости, а барабан Б вместе с ротором Pti повернутся по или против часовой
стрелки (при понижении
или повышении уровня),
что приведет к изменению выходной э. д. с., индуктируемой в обмотке статора Ctj сельсин-датчика, и в линии связи ИЛ потечет ток. Этоу ток, протекая через трехфазную обмотку статора Ст2 сельсин-приемника СП, обусловливает изменение магнитного по-' тока, вследствие чего ротор Рт2 начинает поворачиваться.
Трехфазные обмотки Cti и Ст2 включены встречно, вследствие чего наводимые в иих э.д. с. направлены навстречу одна другой.
Как только ротор Рт2 повернется на такой же угол, что и Рть ток в импульсной линии станет равным нулю, ротор Рт2 остановится и с помощью стрелки ПС можно производить отсчет по шкале Шк.
Таким образом ротор сельсин-датчика будет синхроиио и сии-фазно следовать за поворотом оси ротора сельсин-приемника.
Нашей промышленностью выпускается несколько типов сельсинов, как контактных, так и бесконтактных.
Недостатком контактных сельсинов, один из типов которых был описан выше, является наличие контактного перехода (кольца— щетки), в результате чего резко снижается надежность сельсина. Бесконтактные сельсины хотя и имеют более сложную конструкцию, лишены этого недостатка, показывают более высокую надежность и стабильность характеристик.
Особенность дистанционной передачи с использованием сель
22
син-преобразователей состоит в том, что она позволяет с высокой точностью передавать на расстояние любое требуемое число оборотов выходной оси преобразователя, тогда как при дистанционных передачах других типов (например при использовании дифференциально-трансформаторной) ход подвижного элемента (плунжера или рамки) ограничен.
Пневматические системы дистанционного контроля
Основным элементом пневматической дистанционной передачи является преобразователь типа «сопло — заслонка» (рис. 1-6).
В трубку Тр небольшого диаметра, непрерывно поступает сжатый воздух под давлением р0 и, пройдя через дроссель постоянного сечения di, истекает в атмосферу через дроссель (сопло) d2.
Перед дросселем d2 находится заслонка Зс. Если изменять зазор z между соплом d2 и заслонкой, то давление воздуха pi в междроссельном пространстве будет тоже изменяться: увеличиваться с приближением заслонки к соплу и уменьшаться при удалении заслонки от сопла. Происходит как бы изменение сечения сопла d2 заслонкой,! в связи с чем сопло называют еще дросселем переменного сечения.! Изменение давления pi в междроссельном пространстве контролируется манометром М. I
Зависимость между величиной зазора z и давлением сжатого воздуха pt в междроссельном пространстве графически представлена на рис. 1-6, б; аналитически эта зависимость выражается следующим равенством:
d^_ -if ргЬр 4d2 Г (Pi — Pa)Pa
где Др — перепад давления (разность давлений) на дросселе di Др = ро — pj = idem
Ро — постоянное давление питания; ра — атмосферное давление.
Принципиальная схема пневматической дистанционной передачи показана на рис. 1-7.
Пусть пневматический датчик Д предназначен для измерения разности двух давлений pi и р2, причем pt>p2. Чем больше эта разность, тем сильнее прогнется вниз упругая мембрана — чувствительный элемент ЧЭ измерительной части датчика. Через систему передач чувствительный элемент связан с заслонкой 1, которая приблизится к соплу 2, из которого непрерывно истекает в атмосферу сжатый воздух. Воздух к соплу 2 подводится от специальной магистрали сжатого воздуха, через фильтр 12, служащий для очистки воздуха от механических примесей (пыль, масло, влага), редуктор 11, который снижает давление до величины Ро (1,22-104 Па) и дроссель постоянного сечения 3.
23
1 С приближением заслонки к соплу давление воздуха в линии сопла (в междроссельном пространстве) начнет возрастать, что приведет к увеличению давления внутри камеры Б металлического корпуса 4; Внутри этого корпуса находится блок из двух гармониковых пружин круглого сечения 5 и 6, называемых си ль-<Ь о н а м и_ г.и.пьгЬпи малого диаметра 6 вставлен в сильфон большого диаметра 5, дно у сильфонов общее, а меж-* сильфонное пространство соединено с атмосферой. К Дну сильфонов, жестко прикреплен шток 7, на конце которого находится тарельчатый клапан 8.
• С увеличением давления в камере Б сильфоны начнут сжиматься (как гармоника), дио сильфонов вместе со штоком в тарельчатым клапаном переместится вниз и дав-
фонами. Сильфон малого диаметра
Рис. 1-6. Пневматический преобразователь типа «сопло — заслонка»:
; в —схема преобразователя; б — статическая характе-
! рнстика преобразователя; Тр — трубка; di, d2 — дрос сели; Зе — заслонка; М—манометр.
ление воздуха в камере А -корпуса 4 начнет повышаться так как тарельчатый клапан удалится от тор-ца тРубки» Я, дух поступает через редуктор 11, и прикроет отв р , р которое воздух сбрасывается в атмосферу.
Соотношение площадей дна наружного и сильфо-
нов 5 и 6 подобрано таким образом, что когда давлв™е в°здухз S ГкХ А под^льфо^ам°и^ТследЯов^телыю, в импул^ой S/и ет»™а”^гаЛыО< Па. %S\”FBya33BBae““r матического устройства, включающего дета птлпиииым /усилителем (на практике его называют щ Р
р еле)..Наличие усилителя позволяет преобразователю «сопло, заслонка» работать при небольших Давлевиях сжатого воздуха» чем устраняется реактивное действие СТРУИ зозду (с VRa„y* , &им образом, с приближением заслонки к соплу (с увели-чением измеряемой разности давлений р\ к ^nn„nHOMV ппибопу ' ре А увеличивается и по линии связи 16 ко р у р РУ ВП (измерителю давления, шкала которого градуирована в еди-ницах измеряемой величины) передается сигца .
Так как перемещение заслонки 1 относи™°
на несколько микрон приводит к заметному’ ппелставлена
в междроссельном пространстве (эта зависимость представлена графиком на рис. 1-6,6), а сама заслонка ™ее_ од. заВйси’
то для ограничения этого хода и для 'пол^в„ воздуха в ли-мости между перемещением заслонки и давлением ду нии сопла введена жесткая обратная связь.
24
• Узел жесткой обратной связи состоит из металлического корпуса 13 сильфона 14, дно которого штоком 15 через систему рычагов связано с заслонкой 1.
Когда давление воздуха в линии связи 16 увеличивается, сильфон обратной связи 14 сжимается и шток 15 стремится отвести заслонку от сопла. В результате совместного воздействия
Рис. 1-7. Схема пневматического дистанционного контроля:
Д —датчик; ВП—вторичный прибор; 1 — заслонка; 2 — сопло; а —дроссель постоянного сечения; 4, /3 — металлические корпусы; 5, 6, 14 — сильфоны; 7, 15 — штоки; 8 — тарельчатый клапан; 9 — трубка подачи воздуха; 10— отверстие для выпуска в атмосферу; 11 — редуктор; 12 — фильтр; 16 — линия связи.
на заслонку чувствительного элемента (сверху вниз) и сильфона узла обратной связи 14 (снизу вверх) достигается малое (порядка сотых долей миллиметра) перемещение заслонки, что не только линеаризует зависимость между измеряемой величиной и выходным давлением воздуха датчика Д, но й улучшает динамические КВЧества этого датчика (подробнее обратные связи будут рассмотрены во втором разделе книги).
Системы телеметрического контроля •
Возможности рассмотренных выше дистанционных передач становятся недостаточными при увеличении расстояний между объектами, охваченными централизованным контролем. В пре--делах крупных химических заводов, на заводах по переработке нефти, использующих и перерабатывающих газ, не говоря уже о магистральных трубопроводах, расстояния между отдельными контролируемыми объектами могут достигать десятков и более километров. В подобных случаях для дистанционного автоматического контроля требуются специальные средства передачи информации — средства телемеханики, к которым относятся и системы телеизмерения (передачи дальнего действия).
25'
Рис. 1-8. Обобщенная блок-схема телеизмерительной системы:
/ — датчик; 3 — передатчик; 3 — приемник; 4 — вторичный прибор.
(ток, напряжение, сопротивление,
При передаче информации об измеряемых величинах на значительные расстояния наибольшие технические трудности связаны с устранением или ограничением погрешностей, возникающих как вследствие изменения рабочих характеристик линий связи,, так и в результате действия помех.
В системах телеизмерения измеряемая величина преобразуется в сигнал такого вида, который обеспечивает его минимальное искажение при передаче по линии связи.
На рис. 1-8 представлена структурная схема телеизмерительной системы. Измеряемая величина х при помощи датчика 1 преобразуется в электрическую величину Е емкость или индуктивность),
пропорциональную х. Передатчик 2 преобразует величину Е в сигнал у\, который передается по каналу связи (кабель, провода). В зависимости от характеристик канала связи и помех этот сигнал несколько искажается (до у2) и поступает на вход приемника 3, далее на вторичный прибор 4, который и воспроизводит значение измеряемой величины.
Для телеизмерений используются как непрерывные (аналоговые), так и прерывистые (дискретные) сигналы.
ГЛАВА II
КОНТРОЛЬ ДАВЛЕНИЯ
Давлением (Р) называют физическую величину, равную отношению силы (dF), действующей на элемент поверхности нормально к ней, к площади dS этого элемента, т. е.
dF р= dS
При равномерном распределении силы F по поверхности площадью S давление выражается формулой
P = F/S
В качестве единицы давления в Международной системе единиц (СИ) принято давление в один ньютон (1 Н) на один квадратный метр (1 м2), т. е.
[р] = “пк = 1 н/м’
26
Эта единица получила название паскаль и обозначается Па.
Ранее в качестве единицы давления широко использовалась техническая атмосфера:
1 кгс
I ат = 1 см, = 9,81-104 Па
Эта единица изъята из употребления, но в эксплуатации находится большое число приборов для измерения давления, шкалы которых градуированы в атмосферах.
Так как единица давления Па невелика, то широко используются кратные единицы: килопаскаль (кПа), мегапаскаль (МПа), гигапаскаль (ГПа).
Различают давление абсолютное (рабс) и избыточное (ризб)-
Представим себе, что имеется цилиндр, сообщенный с атмосферой. Очевидно, что давление воздуха в цилиндре равно атмосферному, т. е. барометрическому (Рбар/ Если цилиндр разобщить с атмосферой и находящийся в нем воздух сжать (например, с помощью поршня), то полное давление в цилиндре будет равно атмосферному плюс давление, возникшее от сжатия. Такое полное давление называется абсолютным давлением. С таким давлением приходится часто встречаться, например, в термодинамике— при изучении состояния рабочего вещества, в физике— при определении температуры кипения различных жидкостей и т. д.
Однако, в технике в подавляющем большинстве случаев приходится иметь дело с избыточным давлением, которое отсчитывается от условного нуля, в качестве которого принято атмосферное давление. Избыточное давление называют еще манометрическим.
Таким образом из приведенных определений следует:
Рвбв " Ривв + Рбвр
Вели абсолютное давление ниже барометрического, то
Рбар ~~Р»вс ш Рв
где ра — вакуумметрическое давление, или разрежение.
Интервал давлений, применяемых в химической, нефтехимической, газовой и других отраслях промышленности, чрезвычайно велик: от миллионных долей паскаля (мк Па) до миллиардов паскалей (ГПа).
Для измерения давления в таком широком интервале создано много разновидностей приборов, которые по принципу действия делятся на следующие группы: жидкостные, пружинные, грузопоршневые, электрические*.
* Грузопоршневые и электрические приборы в книге не рассматриваются.
27
По роду измеряемой величины приборы делятся на: манометры — для измерения избыточного давления; вакуумметры — для измерения вакуума (разрежения); мановакуумметры — для измерения избыточного давления и вакуума;
напоромеры — для измерения небольших избыточных давлений (ие более 3,9-104 Па);
тягомеры — Для измерения небольших разрежений (не более 3,94-104 Па);
тягонапоромеры — для измерения и тяги, и напора;
дифференциальные манометры — для измерения разности двух давлений;
барометры — для измерения атмосферного (барометрического) давления.
Принятый ниже порядок описания приборов для измерения давления исходит из классификации их по принципу действия.
ЖИДКОСТНЫЕ ПРИБОРЫ
Принцип действия жидкостных приборов основан на уравновешивании измеряемого давления гидростатическим давлением Столба жидкости. В качестве рабочей жидкости в зависимости от величины измеряемого избыточного давления или разрежения, а также от химических свойств измеряемого вещества, применяются: вода, спирт, ртуть и минеральные масла небольшой вязкости.
Простота конструкции и надежность гидростатического метода, лежащего в основе работы этих приборов, а также достаточно высокая точность, объясняют их широкое'применение. Жидкостные приборы используются, как для лабораторных, так и для технических измерений небольших избыточных давлений, разрежений, разности двух давлений, атмосферного давления. В качестве образцовых приборов они служат для поверки манометров некоторых типов, вакуумметров, тягомеров, напоромеров, барометров, дифференциальных манометров.
Наиболее распространенным и самым простым по устройству является {/-образный прибор (рис. П-1).
Он состоит из изогнутой в виде буквы U стеклянной трубки 1, примерно до половины заполненной рабочей жидкостью 2. С помощью скобок 5 трубка прикреплена к доске 3, а между ветвями трубки укреплена шкала 4.
Когда давления р\ и р2 равны, уровни жидкости в левой и правой ветвях {/-образной трубки будут находиться против нулевой отметки шкалы. При неравенстве давлений, например, если Pi>P2, уровень в левой ветви опустится, а в правой — поднимется. Отсчет надо производить от нуля вниз до уровня в левой ветви, затем от нуля вверх до уровня в правой ветви и полученные значения отсчетов сложить; сумма отсчетов будет равна h. Два
28
отсчета рекомендуется производить потому, что. трубки обеих ветвей прибора могут немного отличаться по диаметру, а раз так, то жидкость будет опускаться в левой и подниматься в правой ветвях на неодинаковую величину.
Рис. П-1. Схема U-образного прибора: -
1 — стеклянная трубка; 2 —рабочая жидкость; 3 — доска; 4— шкала; 5 — крепежные скобы»
Рис. П-2. Схемы трубных манометров: а — чашечный; б — микроманометр с наклонной трубкой.
Значение измеряемой величины (разности давлений pi и р2) определится по шкале прибора так;
Pi — Pi~hps
где р —плотность рабочей жидкости; g —ускорение свободного падения.
CZ-образные приборы с водяным заполнением, служащие для намерения избыточного и вакуумметрического давления нейтральных газов, сернйио изготавливаются на следующие верхние пределы измерения: 980,6; 2450; 3920; 4980 Па.
Погрешность отсчета показаний не превышает ±2 мм столба рабочей жидкости.
Кроме (/-образных приборов в лабораторной и поверочной практике находят применение. чашечные приборы и микроманометры с наклонной трубкой (однотрубные манометры).
Тот и другой приборы (рис. П-2) состоят из сосуда большого диаметра (с?=100 мм) и трубки (d=3 м>м), сообщающихся между собой.
Если подвести измеряемое избыточное давление р к сосуду чашечного прибора (рис. П-2, а), а трубку оставить сообщенной С атмосферой, то уровень рабочей жидкости незначительно понизится в сосуде на величину hi, а в трубке заметно поднимется на величину й2. Пренебрегая значением будем иметь
P = h2pg
J9
Такие приборы позволяют измерять не только избыточное; давление, но и разрежение, а также разность двух давлений. При измерении разрежения сосуд сообщается с атмосферой, а разрежение подводится к трубке. Если измеряется разность давлений, то большее давление подводится к сосуду, а меньшее —к трубке.
Пределы измерений чашечного прибора с вертикальной трубкой 1560; 2450; 3990 и 6180 Па, а основная погрешность показаний ±1,5% от верхнего предела измерения.
Чтобы уменьшить погрешности обычных 17-образных и чашечных приборов, не прибегая к применению оптических устройств, повышающих точность отсчета, применяются микроманометры (тягонапоромеры) с наклонной трубкой (рис. П-2, б).
Подключение к измеряемым избыточному давлению, разрежению или разности давлений производится так же, как и у чашечного прибора.
Если напримёр измеряется избыточное давление которое подводится к сосуду, то жидкость в наклонной трубке начнет перемещаться вдоль шкалы. Значение измеряемого давления определится из следующего равенства:
Pi = hPg = Ipg sin а
Из этого выражения видно, что при постоянной плотности рабочей жидкости предельное давление будет тем меньше, чем меньше sin а, т. е. чем меньше угол наклона а. С другой стороны, число миллиметров шкалы, соответствующее давлению в паскалях, будет тем больше, чем меньше угол наклона. Вследствие этого при обычной ошибке отсчета по шкале (примерно 1 мм) в единицах давления ошибка будет уменьшена, что повышает точность этого прибора против чашечного.
Выпускаются микроманометры, у которых угол наклона трубки постоянный или может изменяться в определенных пределах.
Микроманометры с постоянным углом наклона трубки выпускаются на следующие пределы измерения (в паскалях): 4 гПа (а=8°10'); 6,3 гПа (а=14°20'); 1 кПа (а=22°15'); 1,6 кПа (а = 38°). Основная допустимая погрешность ±1,5% максимального значения пределов измерения.
В тех случаях, когда приходится измерять давления или разрежения, меняющиеся в сравнительно больших пределах, применяются микроманометры с переменным углом наклона трубки.
Так, например, у выпускаемого серийно прибора типа ММН имеется пять фиксированных положений наклонной трубки с указанием значений (0,2; 0,3; 0,4; 0,6; 0,8). Прибор выпускается с пределами измерения от 0 до 2,4 пПа и имеет класс точности 1,0.
В производственных условиях для измерения небольших избыточных давлений, разрежений и разности давлений применяются серийно выпускаемые нашей приборостроительной промышлен
но
ностью жидкостно-механические приборы: поплавковые колокольные и кольцевые*.
Схема поплавкового дифференциального манометра показана иа рис. П-З. /
Сосуды 1 и 6 являются сообщающимися сосудами, частично заполненными рабочей жидкостью. В сосуде 1 на поверхности жидкости находится поплавок 2 (поэтому сосуд называется поплавковым), который через систему передач в уплотнение 5 (сальник) в корпусе поплавкового сосуда связан с показывающей стрелкой 4, перемещающейся относительно шкалы 3.
Если измеряется избыточное давление р\, то оно подводится к поплавковому сосуду («плюсовой» сосуд), а сосуд 6 («минусовой» сосуд) сообщается с атмосферой. При измерении разности двух давлений большее из них (pi) подводится к поплавковЬму сосуду, а меньшее (р2) к сосуду 6. Если же измеряется разрежение (р2), то оно подводится к сосуду 6, а поплавковый сосуд соединяется с атмосферой. При таком подключении измеряемых величии жидкость из поплавкового сосуда начнет перемещаться в сосуд 6, уровень ее в поплавковом сосуде понизится, а в сосуде 6 повысится, поплавок 2 опустится вниз и переместит стрелку относительно шкалы. Перемещение жидкости из сосуда в сосуд будет происходить до тех пор, пока измеряемая ве
личина (давление, разность давлений или разрежение) не уравновесится высотой столба h рабочей жидкости.
Чтобы можно было изменять верхний предел измерения, сосуд 6 делается сменным (поэтому его и называют сменным сосудом). Внутренний диаметр (d, мм) и длина (I, мм) сменного сосуда рассчитываются исходя нз следующих данных:
г . D*
Ьрн-г ~ d’ 2
днффе-мано-
Рнс, П-З. Схема поплавкового ренцнального метра: / — поплавковый
2 — поплавок; 3 — шкала;.
4 — показывающая стрелка; 5 — сальник; 6 — сменный сосуд.
сосуд;
d1=3 D
где D — внутренний диаметр поплавкового сосуда' (величина постоянная), мм; Арм— максимальная измеряемая разность давлений (Ap=pi—р2), мм столба рабочей жидкости; z — максимальный ход поплавка вместе с перемещающейся в поплавковом сосуде рабочей жидкостью, соответствующий максимальной измеряемой разности давлений Ар (для серийно выпускаемых приборе® эта величина также является постоянной), мм.
* Кольцевые приборы в книге не рассматриваются.
31
Из приведенных выше формул видно, что чем больше максн< мальное значение измеряемой величины (Лрм), тем меньше диаметр d й тем больше длина I сменного сосуда.
Поплавковые дифференциальные манометры серийно выпускаются нашей промышленностью (по разности давлений) от 6
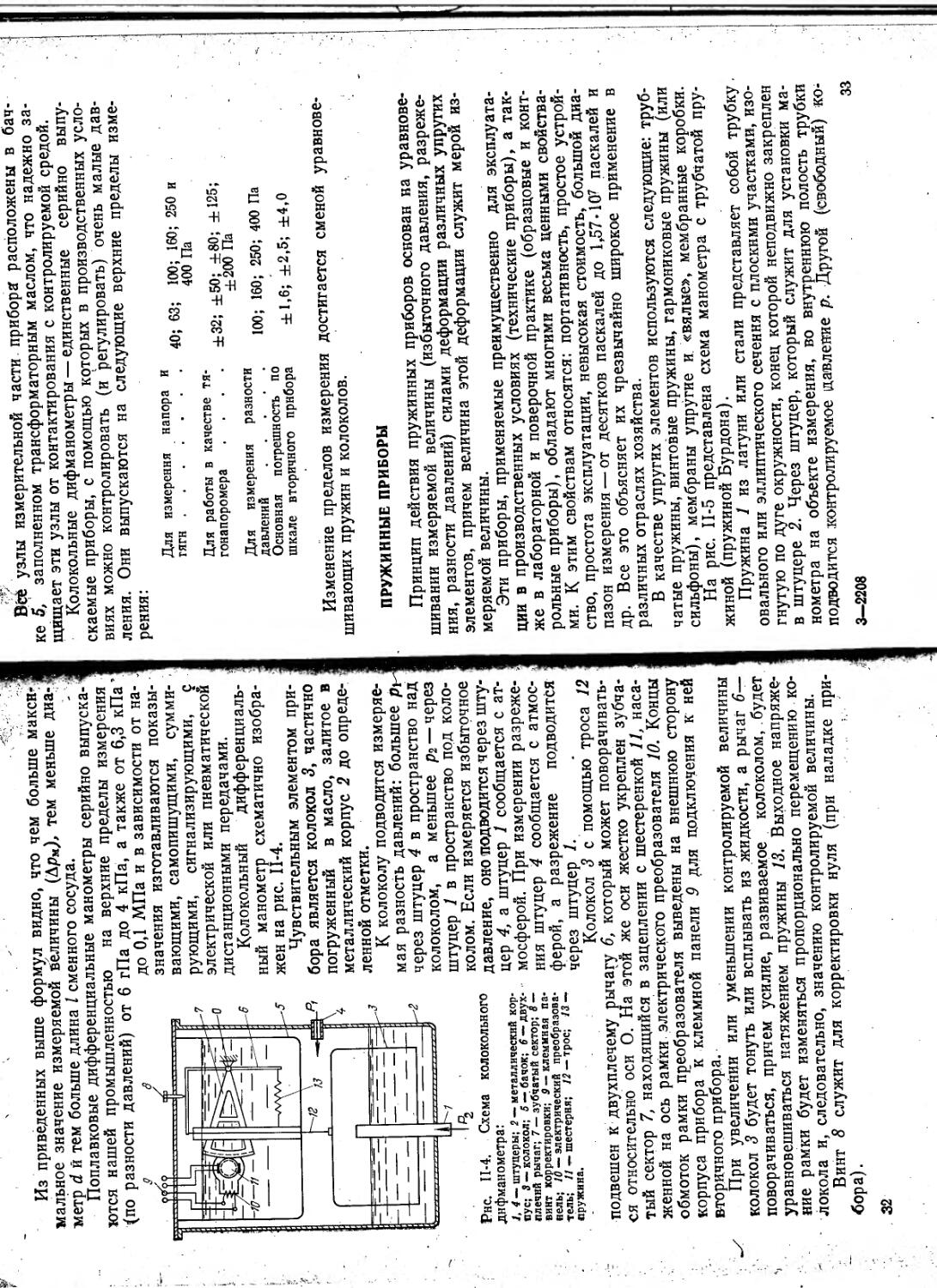
Рнс. П-4. Схема колокольного дифманометра:
J, 4 — штуцеры; 2 — металлический корпус; 3 — колокол; 5 — бачок; 6 — двух-плечнй рычаг; 7 — зубчатый сектор; 8 — винт корректировки; 9 — клеммная цапель; 10 — электрический преобразователь; 11 шестерня; 12 — трос; 13 — пружина.
на верхние пределы измерения гПа до 4 кПа, а также от 6,3 кПа до 0,1 МПа и в зависимости от назначения изготавливаются показывающими, самопишущими, суммирующими, сигнализирующими, с электрической или пневматической дистанционными передачами.
Колокольный дифференциальный манометр схематично изображен на рис. П-4.
Чувствительным элементом прибора является колокол 3, частично погруженный в масло, залитое в металлический корпус 2 до определенной отметки.
К колоколу подводится измеряемая разность давлений: большее р^ через штуцер 4 в пространство над колоколом, а меньшее р2 — через штуцер 1 в пространство под колоколом. Если измеряется избыточное давление, оно подводится через штуцер 4, а штуцер 1 сообщается с атмосферой. При измерении разрежения штуцер 4 сообщается с атмосферой, а разрежение подводится через штуцер 1.
Колокол 3 с помощью троса 12 подвешен к двухплечему рычагу 6, который может поворачиваться относительно оси О. На этой же оси жестко укреплен зубчатый сектор 7, находящийся в зацеплении с шестеренкой 11, насаженной на ось рамки электрического преобразователя 10. Концы обмоток рамки преобразователя выведены на внешнюю сторону корпуса прибора к клеммной панели 9 для подключения к ней вторичного прибора. .
При увеличении или уменьшении контролируемой величины колокол 3 будет тонуть или всплывать из жидкости, а рычаг 6— поворачиваться, причем усилие, развиваемое колоколом, будет уравновешиваться натяжением пружины 13. Выходное напряжение рамки будет изменяться пропорционально перемещению колокола и, следовательно, значению контролируемой величины.
Винт 8 служит для корректировки нуля (при наладке прибора).
32
Всё узлы измерительной части прибор? расположены в бачке 5, заполненном трансформаторным маслом, что надежно защищает эти узлы от контактирования с контролируемой средой.
Колокольные дифманометры — единственные серийно выпускаемые приборы, с помощью которых в производственных условиях можно контролировать (и регулировать) очень малые давления. Они выпускаются на следующие верхние пределы измерения:
Для измерения напора и тяги .......
Для работы в качестве тя-гонапоромера . . . .
Для измерения разности давлений .................
Основная погрешность по шкале вторичного прибора
40; 63; 100; 160; 250 и 400 Па
±32; ±50; ±80; ±125; ± 200 Па
100; 160; 250; 400 Па
±1,6; ±2,5; ±4,0
Изменение пределов измерения шивающих пружин и колоколов.
достигается сменой уравнове-
ПРУЖИННЫЕ ПРИБОРЫ
Принцип действия пружинных приборов основан на уравновешивании измеряемой величины (избыточного давления, разрежения, разности давлений) силами деформации различных упругих элементов, причем величина этой деформации служит мерой измеряемой величины.
Эти приборы, применяемые преимущественно для эксплуатации в производственных условиях (технические приборы), а также в лабораторной и поверочной практике (образцовые и контрольные приборы), обладают многими весьма ценными свойствами. К этим свойствам относятся: портативность, простое устройство, простота эксплуатации, невысокая стоимость, большой диапазон измерения — от десятков паскалей до 1,57-107 паскалей и др. Все это объясняет их чрезвычайно широкое применение в различных отраслях хозяйства.
В качестве упругих элементов используются следующие: трубчатые пружины, винтовые пружины, гармониковые пружины (или сильфоны), мембраны упругие и. «вялые», мембранные коробки.
На рис. П-5 представлена схема манометра с трубчатой пружиной (пружиной Бурдона).
Пружина 1 из латуни или стали представляет собой трубку. овального или эллиптического сечення с плоскими участками, изогнутую по дуге окружности, конец которой неподвижно закреплен в штуцере 2. Через штуцер, который служит для установки манометра на объекте измерения, во внутреннюю полость трубки подводится контролируемое давление р. Другой (свободный) ко-
3—2208
33
нец трубки герметизирован заглушкой 5 и соединен с зубчатым сектором 3 с помощью тяги 4.
Под действием контролируемого давления трубчатая пружина несколько раскручивается и ее свободный конец 5 немного переместится вправо и вверх (если измеряемая величина — разрежение, то трубка будет скручиваться, а ее свободный конец переместится влево и вниз). При этом зубчатый сектор повернется относительно оси 0 на некоторый угол и повернет вокруг своей оси шестеренку (трибку) 6, с которой находится в зацеплении. На оси шестеренки жестко укреплена показывающая стрелка 7, которая переместится- относительно шкалы 8, градуированной в единицах давления (разряжения). Для ликвидации мертвого хода в зубчатом зацеплении трнбки с сектором к оси трибки прикреплен спиральный волосок 9, другой конец которого закреплен жестко. Вследствие такого устройства зубцы трибки всегда прижаты к зубцам сектора, что уничтожает зазоры в зацеплении, являющиеся причиной мертвого хода.
Таким образом угол поворота стрелки будет зависеть от величины измеряе-
< мого давления (разрежения), причем эта зависимость имеет ли- нейный характер.
Однако линейная зависимость между измеряемой величиной и углом раскручивания трубчатой пружины наблюдается до определенного предела, называемого пределом пропорциональности данной пружины. Выше этого предела (если трубке сообщать постепенно возрастающее давление) деформация начнет расти быстрее давления и пропорциональность между давлением и перемещением конца трубки не сохранится.
Из этого следует, что каждая трубка может быть нспользо-i вана на такое давление, которое не будет выше предела пропорциональности для этой трубки. На практике же, чтобы избежать, явления остаточной деформации, максимальное давление для трубки назначают меньшим ее предела пропорциональности, т. е.. вводят запас прочности. Если через обозначить предел пропорциональности трубчатой пружины, а через рм — максимальное давление, на которое она будет работать, то вь1рм = К, где К — коэффициент прочности трубки, выбираемый на основе экспериментальных данных (обычно он равен 2).
Вакуумметр с трубчатой пружиной имеет устройство, совершенно аналогичное устройству манометра. Вследствие того, что при разрежении трубка скручивается, стрелка вакуумметра бу
34
дет, в отличие от манометра, двигаться справа налево, а нулевая отметка на шкале прибора будет справа, тогда как у манометра она слева.
В промышленности эксплуатируются установки, которые работают попеременно: то при давлении, то при разрежении. Для измерения этих параметров применяется мановакуумметр, который имеет двухстороннюю шкалу: слева от нуля отсчитывается вакуум, справа — избыточное давление.
Манометры, вакуумметры и мановакуумметры показывающие, общего назначения, с трубчатой пружиной серийно изготавливаются нашей промышленностью для измерения в производственных условиях давления (разрежения) и выпускаются в круглых корпусах диаметром 40, 60, 100, 160 и 250 мм на следующие классы точности: 0,6; 1; 1,5; 2,5; 4.
Приборы выпускаются в обыкновенном или пылезащищенном корпусе из металла или пластмассы, защищающим механизм от загрязнения или попадания внутрь корпуса воды, а также пыли.
На шкалу прибора наносятся: единицы измерения, класс точности, товарный знак предприятия-поставщика, год выпуска, заводской номер прибора, номер ГОСТа (некоторые из перечисленных величин указаны на корпусе прибора).
Если характер измеряемой среды таков, что требует специального исполнения прибора (химическая активность, взрывоопасность и т. п.), то на шкалу прибора следует наносить наименование измеряемой среды, например, «Водород», «Соляная' кислота», «Кислород» и т. п. Кроме того на кислородных приборах должна быть надпись: «Маслоопасно».
Образцовые приборы с трубчатой пружиной применяются для поверки манометров, вакуумметров и мановакуумметров, а также для измерения в лабораторных условиях давления и разрежения жидкостей, газов или паров. Они выпускаются в корпусах диаметром 160 и 250 мм на верхние пределы от 105 до 10э Па (для манометров) и 105 Па (для вакуумметров) и имеют установленные классы точности 0,16; 0,25 и 0,4.
Контрольные манометры представляют собой переносные приборы для поверки рабочих манометров на месте их установки, а также для измерения давления при испытании аппаратов в лабораторных условиях.
Контрольные манометры имеют две независимые трубчатые пружины, впаянные в общий держатель. Свободные концы пру-\ живы соединены с самостоятельными секторными передаточными механизмами.
Дублирование измерительных деталей прибора позволяет быстро определить неисправность прибора по расхождению показаний стрелок. Основная допустимая погрешность приборов не превышает ±0,6% верхнего предела шкалы.
По принципу действия образцовые и контрольные приборы ие отличаются от технических, но более тщательно изготовлены.
а* 35
Кроме указанных выше приборов с'трубчатой пружиной нашей промышленностью серийно изготавливаются манометры, вакуумметры и мановакуумметры сигнализирующие, с электрической и пневматической дистанционными передачами и регистрирующие.
Рис. П-6. Схема манометра с винтовой трубчатой пружиной:
1 — штуцер; 2 — пружина; 3 — скоба; 4 — ось.
Рнс. П-7. Схема прибора с гармоннковой пружиной:
7 — гармониковая пружина (сильфон); 2 — корпус; 3 — штуцер; 4—шток; 5 — стрелка; 6-* шкала.
Принципиальная схема манометра, в котором в качестве упругого элемента использована винтовая пружина, приведена на рис. П-6.
Винтовая трубчатая пружина 2 имеет в сечении форму вытянутого овала или эллипса и своим левым концом неподвижно прикреплена к штуцеру 1, через который внутрь пружины подается измеряемое давление. Свободный (правый) конец трубки припаян к скобе 3, которая жестко укреплена на оси 4.
Под действием измеряемого давления винтовая пружина начинает раскручиваться и. ее свободный конец повернет ось 4, на которой крепится стрелка (на схеме не показана). Угол раскручивания составляет примерно 50—60°, что позволяет с помощью простейшей рычажной передачи получить достаточно большой угол перемещения стрелки.
Приборы с винтовыми трубчатыми пружинами обычно изготавливаются на верхние пределы измерения до .16 МПа и используются как самописцы и датчики в системах дистанционной передачи;—
Гармониковые пружины (сильфоны) представляют собой тонкостенные цилиндрические сосуды с кольцевыми складками (гофрами). Схема прибора с таким упругим элементом показана на рис. П-7.
36
Сильфон 1 помещен внутрь металлического корпуса 2. Если через штуцер 3 подвести измеряемое давление р, то сильфон,' внутренняя полость которого сообщается с атмосферой, сожмется в осевом направлении и переместит вниз шток 4, который своим верхним, концом жестко прикреплен к дну сильфона. Со штоком через систему передач (на схеме показано упрощенно) связана показывающая стрелка 5, перемещающаяся относительно шкалы 6.
Если штуцер 3 соединить с атмосферой, а полость сильфона — с объектом, где измеряется разрежение, то сильфон будет сжиматься пропорционально изменению этого параметра.
Разность двух давлений также может быть измерена, если большее давление подвести внутрь корпуса 2, а, меньшее — к внутренней полости сильфона. В этом случае перемещение дна сильфона будет пропорционально разности давлений.
Деформация (сжатие) сильфона обусловлена тем, что в осевом направлении возникает сжимающая сила F, равная по величине произведению измеряемого давления р на эффективную площадь сильфона S3, т. е.
F = рЗэ
Средний радиус сильфона /?Ср весьма близок к радиусу эффективной площади его и определяется из равенства:
D Rh + Fbh
Аср = 2
Отсюда эффективная площадь сильфона будет равна
5Э = л??сра
Таким образом сжимающая сила F, а следовательно и перемещение дна сильфона будет тем больше, чем больше измеряемое давление и средний радиус сильфона. Величина деформации зависит также от толщины стенки, коэффициента Пуассона, модуля упругости материала сильфона и от числа гофр.
Зависимость между перемещением сильфона и измеряемым давлением в значительных пределах остается линейной.
Изготавливаются сильфоны из латуни, фосфористой и бериллиевой бронзы.
Отечественной промышленностью серийно изготавливаются сильфонные манометры, дифманометры, вакуумметры и манова-куумметры показывающие, самопишущие, с дистанционной - передачей (датчики); их класс точности равен 1; 1,5; 2,5 и 4. Часто для придания большей жесткости внутрь сильфона помещают винтовую цилиндрическую пружину.
Сильфоны рассчитаны иа максимальное давление не выше 4-105Па.
Схемы приборов, где в качестве чувствительных элементов используются мембраны, показаны на рис. П-8.
37
Металлические мембраны плоские, гофрированные или более сложного профиля изготавливаются из фосфористой или бериллиевой бронзы, хромоникелевой стали толщиной от 0,05 до 1,5 мм.
Мембраны из неметаллических материалов (резина, прорезиненная ткань, пластмассы и др.) имеют толщину от 0,2—0,4 до 5—1 мм.
Рис. П-8. Схемы мембранных приборов:
в— с плоской мембраной; б—с гофрированной мембраной; в —с вялой мембраной; / — мембрана; J — корпус; 3 — устройство для отсчета; 4 — шток; 5 — обмотки катушки; 6 — плунжер; 7 — пружина; 8 — трубка из немагнитного материала.
В обычных указывающих приборах плоские мембраны не применяются, так как они имеют небольшие прогибы при рабочих давлениях и обладают нелинейной характеристикой прогиба в зависимости от измеряемой величины. Однако они применяются в манометрах специальных конструкций (например, манометры для измерения переменных давлений).
Гофрированные мембраны используются в приборах, где применение трубчатых пружин нежелательно (агрессивные и вязкие среды). Гофры, выдавливаемые на мембране, бывают синусоидальной, круговой, трапециевидной и треугольной формы. Они способствуют снижению жесткости мембраны.
На рис. П-8, а и б показаны схемы приборов с плоской и гофрированной мембраной. Между фланцами корпуса 2 плотно зажаты по периметру мембраны 1. Под действием разности давлений р[ и р2 (pi>pz) мембраны прогибаются вверх и это перемещение через систему передач передается устройству для отсчета 3.
Стабильность характеристик мембран определяется постоянством величины эффективной площади и жесткости.. Удовлетворение обоих этих условий в одном элементе часто бывает затруднительно, поэтому находят практическое применение чувствительные элементы, имеющие некоторую эффективную площадь и нулевую жесткость. К этим элементам относятся мягкие или, как их еще называют, «вялые» мембраны, изготавливаемые из ткани (капрон, шелк), пропитанной бензо- и маслостойкой резиной.
38 '
Схема датчика— дифманометра с «вялой» мембраной показана на рис. П-8, в.
Между фланцами корпуса 2 плотно зажата «вя-лая» мембрана из прорезиненной ткани 1 с жестким металлическим центром, к которому прикреплен шток 4 с плунжером 6 из мягкого железа.
а
Рис. П-9. Общий вид мембранной коробки (а) и схема мембранного дифманометра с электрической дистанционной передачей (б):
/, 2—крышки корпуса; 3 — глухая перегородка; 4, 5 — мембранные коробки; б —ниппель; 7 — шток; 8 — плунжер; 9 — трубка; 10 — крышка; 11 — обмотки преобразователя; 12 — колпак; 13, 14 — вентили.
Под действием измеряемой разности давлений р\ и р2 (pi> >р2) мембрана переместится вверх до такого положения, при котором развиваемое на мембране усилие уравновесится упругой силой-сжавшейся пружины 7. Плунжер перемещается внутри трубки 8 из немагнитного материала (например стали 1Х18Н10Т), с внешней стороны которой одета катушка с обмотками 5 преобразователя дифференциально-трансформаторного типа, и выходной электрический сигнал будет пропорционален измеряемой величине.
При необходимости дальнейшего снижения жесткости металлических гофрированных мембранных элементов и увеличения их прогиба в приборах применяются мембранные коробки, образованные двумя спаянными гофрированными мембранами.
Общий вид мембранной коробки показан на рис. П-9, а. Под действием измеряемого давления р верхняя мембрана коробки будет выгибаться вверх и через систему передач переместит относительно шкалы устройство для отсчета.
Следует отметить, что зависимость между измеряемым давлением и перемещением мембраны коробки не является линейной и поэтому для получения равномерной шкалы в систему передач вводятся элементы, линеаризующие эту зависимость.
39
Мембранные коробки широко применяются в тягомерах,'на--^ щоромерах и дифференциальных манометрах.
Схема дифманометра с электрической дистанционной переда-^ чей, где в качестве чувствительных элементов используются ' мембранные коробки, показана на рис. П-9, б.
Корпус дифманометра состоит из двух фланцев 1 и 2, соединенных болтами, между которыми плотно зажата глухая перегородка 3. Эта перегородка разделяет внутренний объем корпуса Лна две камеры: «плюсовую» +, к которой через вентиль 13 и импульсную трубку подводится большее давление, и «минусовую» —, к которой через вентиль 14 и импульсную трубку подводится меньшее давление. Внутри камер находятся мембранные коробки 4 и 5, сообщающиеся одна с другой через ниппель 6 в перегородке 3 и заполненные дистиллированной водой. Под действием разности давлений в «плюсовой» и «минусовой» камерах мембранная коробка 4 сжимается, жидкость из нее перетекает в мембранную коробку 5, обусловливая перемещение вверх ее центра, к которому жестко прикреплен шток 7 с плунжером 8 на конце. Плунжер 8 изолирован от внешней среды трубкой из немагнитного материала 9 с крышкой 10, которая ввернута в фла- j нец 1 корпуса прибора. С внешней стороны трубки 9 на нее одета катушка с обмотками 11 дифференциально-трансформаторного преобразователя, а сама катушка закрыта колпаком 12, на- котором находится разъемное штепсельное соединение для подключения катушки с помощью проводов ко вторичному прибору, работающему в комплекте с дифманометром.
Дифманометры этого типа выпускаются серийно на следующие верхние пределы измерения разности давлений (перепада): 1,6;4; -• 6,3; 10; 16; 25 кПа и (0,4; 0,63; 1; 1,6; 2,5; 4; 6,3).10s Па. Предельные статические давления 6,3; 16; 25 и 63 МПа. Класс точности 1 и 1,5.
J ОСНОВНЫЕ СВЕДЕНИЯ О ВЫБОРЕ, УСТАНОВКЕ И ЭКСПЛУАТАЦИИ ПРУЖИННЫХ ПРИБОРОВ
При выборе шкалы манометра следует иметь в виду, что для . уменьшения погрешности прибора необходимо, чтобы максимальное измеряемое давление (при измерении постоянного давления) было возможно ближе к верхнему пределу, но не превышало бы 8Д верхнего предела шкалы. Если измеряемое давление переменнее* (изменяющееся со скоростью более 1 %/с от суммы абсолютных значений пределов измерения), то максимальное значение не должно превышать 2/з верхнего предела шкалы.
Приборы следует устанавливать в местах, не подверженных сотрясениям, без ощутимых колебаний температуры окружающей среды.
"Место отбора давления на объектах измерения необходимо выбирать так, чтобы’результаты измерения не искажались динами
40
ческим действием потока и завихрениями, которые образуются вблизи местных сопротивлений. Так, нельзя предусматривать от*, бор давления из колен и тройников трубопроводов, вблизи вентилей, клапанов, различных регулирующих органов.
В случае измерения давления газа или пара в горизонтальных и наклонных трубопроводах отбор давления следует производить
a. S
Рис. П-10. Схема установки технических манометров:
и — па паропроводе; б —для измерения агрессивной среды; / — паропровод; 2 —сифонная трубка; 3 — четырехходовой край; 4 — манометр; 5 — трубопровод; б —запорный вентиль; / — патрубок для отбора; 8, // — краны; 9 — патрубок, заполненный разделительной жидкостью; 10 — разделительный сосуд.
пэ области выше оси трубопровода, а при измерении давления жидкостей — ниже оси трубопровода.
Импульсные линии, соединяющие места отбора давления с манометрами, должны прокладываться с уклоном (не менее 1 :50). Р сторону мест отбора, если измеряемая среда газ или пар (чтобы не образовывались жидкостные пробки внутри трубок), или I сторону манометра, если измеряемая среда — жидкость (чтобы ио образовывались газовые пробки).
Длииа импульсных линий не должна превышать 30 м, если изменяемое давление не более 1 гПа, а при измерении более высоких давлений длина импульсных линий не должна быть более 60 м.
Перед манометром обязательно устанавливается .трехходовой край, с помощью которого манометр плавно включается в работу, производится поверка нулевой точки шкалы, поверка показания манометра в рабочей точке (с помощью контрольного манометра), а также продувка импульсной линии.
В тех случаях, когда измеряемая среда действует разрушающе МВ чувствительный элемент прибора, или имеет высокую темпе-₽ИУРУ. слишком большую вязкость, или загрязнена, применяются рндслительпые сосуды, которые устанавливаются на импулье-МЫХ линиях ближе к местам отбора давления и которые пред
охраняют чувствительный элемент прибора от соприкосновения с такой средой.
На рис. П-10, а показана установка технического манометра для измерения давления водяного пара.
В паропроводе 1 сверлится отверстие, к которому приваривается сифонная трубка 2, изогнутая в виде петли. К концу этой трубки на резьбе укрепляется трехходовой кран 3, а к последнему, также на резьбе, прикрепляется манометр 4. Кран некоторое время закрыт; в результате конденсации пара внутри сифонной трубки собирается вода (конденсат), которая довольно быстро охлаждается до температуры окружающего трубку воздуха. Затем кран 3 плавно открывают и пар будет действовать на пружину манометра через остывший конденсат, не вызывая дополнительной деформации пружины в результате температурных напряжений.
На рис. П-10, б показана схема установки технического манометра для измерения давления агрессивной жидкости.
Агрессивная жидкость, протекающая по трубопроводу 5, давление в котором измеряется, через патрубок 7 с запорным вентилем 6 сообщается с верхней полостью разделительного сосуда 10, нижняя полость которого заполнена разделительной жидкостью, плотность которой больше плотности измеряемой жидкости. Давление измеряемой жидкости через разделительную жидкость, заполняющую патрубок 9, передается манометру 4.
Через патрубок с краном 8 заливают разделительную жидкость и выпускают из сосуда воздух, а патрубок с краном 11 является контрольным, ниже которого не должен опускаться уровень разделительной жидкости.
В зависимости от свойств измеряемой среды и условий эксплуатации в качестве разделительных жидкостей применяются: вода, глицерин, этиленгликоль, керосин, четыреххлористый углерод и др.
Разделительные жидкости должны удовлетворять следующим требованиям: не смешиваться и не соединяться с измеряемой средой, быть нейтральными по отношению к материалу чувствительного элемента прибора, не изменять своих физических свойств.
Исполнение корпусов пружинных приборов для измерения давления разрежения и разности давлений предусматривает как индивидуальный их монтаж на месте измерения, так и монтаж на специальных щитах.
ГЛАВА III
КОНТРОЛЬ ТЕМПЕРАТУРЫ
Температура (от латинского tempera.tu.ra — состояние)—это величина, характеризующая тепловое состояние тела или системы. Практически все физические свойства различных веществ оказываются зависящими от их температуры (линейные размеры твердых тел, плотность, твердость, вязкость, модуль упругости, электропроводность и др.). От температуры зависит также химическая активность вещества.
Измерить температуру непосредственно, т. е. так, как это делается при измерении ряда других величин, путем сравнения их с мерами или образцами (длина, объем, масса, площадь и т. д.), не представляется возможным, так как нет образца единицы этой величины. Поэтому определение температуры вещества производят путем наблюдения за изменением некоторых свойств другого вещества (называемого термометрическим веществом), которое приводится в соприкосновение с телом, температура которого измеряется, и вступает с ним через некоторое время в тепловое равновесие.
Выбор единицы измерения температуры связан с установлением шкалы температур.
ТЕМПЕРАТУРНЫЕ ШКАЛЫ
Для создания температурной шкалы необходимо прежде всего выбрать термометрическое вещество, одно из физических свойств которого заметно изменялось бы с изменением температуры окру-жающсЙ среды. Затем выбираются две какие-либо основные точки (главные рбперы от французского герёге — знак), которые выражают температуры двух состояний термометрического вещества и которые легко воспроизвести па практике, например, температуры затвердевания или кипения. Этим температурам приписываются произвольные численные значения, например ti— температура затвердевания и /2— температура кипения. Полученный температурный интервал t2—ti> который принято называть основным интервалом температурной шкалы, делится на некоторое целое число N равных частей и 1/N, часть основного интервала принимается за единицу температуры с присвоением ей наименования ♦ градус» (от латинского gradus — шаг, ступень).
Таким образом
1 градус = —jj—
При делении основного интервала температурной шкалы на целое число N равных частей предполагалось, что выбранное термометрическое свойство вещества (Е) изменяется при измене
43
нии температуры (t) по линейному закону, т. е. принималась спра- "• ведливость равенства (в дифференциальной форме):
dt=kdE
где k — коэффициент пропорциональности, зависящий от вида, выбранного термометрического вещества.
г
Рис, Ш-1. Схемы, иллюстрирующие создание температурной шкалы:
О —прибор; б — нижний репер шкалы; в —верхний репер; г —шкала; / — ртуть; 2 —стеклянный шарик; 3 —капилляр: / — запаянный конец капилляра; 5 —горелка. \
Чтобы процесс создания температурной шкалы был более понятен; проиллюстрируем его примером.
Для создания шкалы изготовим такой прибор. Полый стеклянный шарик диаметром 5—6 мм заполним ртутью и припаяем к нему стеклянную капиллярную трубочку длиной 250—'300 мм, внутренним диаметром 0,1 мм и наружным диаметром 2—3 мм. Откачаем из капилляра воздух изапаяем его сверху (рис. Ш-1, а).
Затем поместим прибор в сосуд с тающим льдом и, выдержав его там некоторое время, отметим положение мениска столбика ртути в капилляре, обозначив эту отметку цифрой 0; это и будет ti — нижний репер шкалы (рис. Ш-1, б).
Потом перенесем прибор в сосуд с водой, кипящей при атмосферном давлении, и станем наблюдать за столбиком ртути в капилляре (рис. Ш-1, в). Так как вследствие повышения температуры окружающей среды ртуть начнет расширяться в замкнутом объеме, столбик ртути начнет «ползти» вверх и, когда температура ртути станет равной температуре воды, расширение ее прекратится, а мениск займет новое, верхнее положение, которое мы отметим и обозначим цифрой 100; это /2 — верхний репер шкалы.
Полученный основной интервал температурной шкалы между отметками 100 и 0 (t2 и ti) разделим на сто равных частей, нанесем эти деления и продолжим их вниз от отметки 0 и вверх от отметки 100 (рис. Ш-1, г). У полученной температурной шкалы один градус будет иметь значение 0,01 температурного интервала.
44
Шкала может быть нанесена в виде черточек (рисок) на поверхности капилляра, либо на специальной пластинке.
Если теперь поместить прибор в среду с неизвестной температурой, то мениск столбика ртути в капилляре расположится против отметки на шкале, соответствующей этой температуре и можно оценить — на сколько градусов температура контролируемой среды выше или ниже температуры плавления льда (затвердевание воды).
Построение температурных шкал, предложенных в свое время немецким физиком Фаренгейтом (в 1715 г.), французским физиком Реомюром (в 1730 г.) и шведским астрономом Цельсием (в 1742 г.) основывалось на приведенном выше принципе, однако сами шкалы значительно отличались одна от другой, так как их авторы применяли различные термометрические вещества и выбирали различные реперные точки, а сами температурные интервалы делили на разное число равных делений. Основные интервалы этих температурных шкал (между точками, соответствующими температуре плавления льда и кипения воды f2) разделены соответственно на 100 (у Цельсия), на 80 (у Реомюра) и на 180 (у Фаренгейта) равных частей.
Жизнь требовала создания единой температурной шкалы, которая не зависела бы от свойств термометрических веществ и могла использоваться в широком интервале температур.
Такая шкала была предложена в 1848 г. английским физиком Кельвиным.
В этой книге нет необходимости рассказывать о том, как создавалась шкала-'Кельвина. Отметим лишь, что путь к ее созданию был найден благодаря использованию законов термодинамики. На основании работ французского физика и инженера Сади Карно/1796—1832), который последовал законы работы тепловых машин и ввел понятие цикла, Кельвин предложил определять температуру на основании равенства:
7*к _ Ок То - Qo
Это равенство, вытекающее из уравнения для обратимого цикла Ка'рно, показывает, что при работе теплового двигателя отношение количества тепла (QK)> получаемого рабочим веществом от нагревателя к количеству тепла, отдаваемого им холодильнику (Qo) пропорционально только отношению температур нагревателя (Тк) и холодильника (То) и не зависит от свойств самого рабочего вещества.
В нашей стране допущены к применению (стандарт СЭВ 1052-78) две температурные шкалы: термодинамическая и Международная практическая. Температура, измеренная по термодинамической шкале, обозначается символом Т и выражается в кельвинах (К), а измеренная по Международной практической шкале —символом t и выражается в градусах Цельсия (°C).
45
В термодинамической шкале Кельвина нижней границей температурного интервала служит точка абсолютного нуля (ОК), а верхней границей — тройная точка воды (273,16 К). Тройной точкой воды называется температура равновесия между тремя агрегатными состояниями воды (лед, жидкость и пар); эта точка лежит на 0,01 К выше точки таяния льда.
Таким образом один кельвин (единица измерения температуры по термодинамической температурной шкале) равен 1/273,16 части интервала от абсолютного нуля температуры до температуры тройной точки воды.
Соотношение между температурами по термодинамической шкале Кельвина Т и Международной практической шкалой t таково:
Т = t + 273,15 к
Числовое значение температуры всегда должно сопровождаться единицей измерения (К или °C)'. Например, следует писать 300 К, или —215 °C и нельзя писать 300°, или —215°.
Приборы для измерения температуры классифицируются в зависимости от физических свойств термометрических веществ, положенных в основу измерения. Учитывая это, приборы для измерения температуры могут быть разделены на следующие группы по принципу действия:
А. Термометры для измерения температуры контактным методом.
1. Термометры расширения, измеряющие температуру по тепловому расширению жидкости или твердых тел.
2. Манометрические термометры, использующие зависимость между температурой и давлением термометрического вещества в .замкнутой термосистеме.
3. Термометры сопротивления, использующие изменение электрического сопротивления вещества при изменении температуры окружающей среды.
4. Термоэлектрические термометры, действие которых основано на изменении термоэлектродвижущей силы термопары при изменении температуры среды, в которую она помещена. .
Б. Пирометры для измерения температуры бесконтактным методом.
1. Яркостные пирометры, измеряющие яркость нагретого тела в узком диапазоне длин волн излучения.
2. Радиационные пирометры для измерения температуры по тепловому действию лучеиспускания накаленного тела во всем 'Спектре длин волн.
ТЕРМОМЕТРЫ РАСШИРЕНИЯ
В приборах данного типа используются свойства твердых и жидких тел изменять свою длину или объем под влиянием температуры окружающей среды.
46
Эти приборы можно разделить на три группы: 1) биметаллические, 2) дилатометрические, 3) жидкостные стеклянные.
Принципиальная схема биметаллического (от латинского Ы— двух-) термометра приведена на рис. Ш-2.
Две тонкие металлические пластинки (рис. Ш-2, а) из материалов с разными температурными коэффициентами линейного
Рис. III-2. Схемы биметаллических термометров:'т,-То О
а — с плоским элементом; б — со спиральным элементом (показано его сечение).
Рис. Ш-З. Схема дилатометрического термометра: т» - %
7 — трубка; 2 — стержень; 3 — устройство для отсчета.
расширения жестко соединены между собой по всему периметру (спаяны, сварены, (склепаны и т. п.).
При изменении температуры произойдет деформация (изгиб) биметаллического элемента, причем величина деформации будет зависеть от окружающей температуры. Например, если температура повысится, то изгиб элемента произойдет в сторону пластины с малым температурным коэффициентом. Через систему передач элемент можно соединить с отсчетным устройством.
Чтобы увеличить деформацию элемента с изменением температуры, т. е. повысить его чувствительность, ему придают форму спирали (рис. Ill-^ftf).
В качестве материалов с большим температурным коэффициентом линейного расширения (аб) применяют никель, латунь, сталь (аб=(20—30) • 10_6 1/°С), а для пластин с малым коэффициентом линейного расширения (аМ/) чаще всего применяется инвар (сталь, содержащая 36% Ni; ам = 2-10-6 1/°С).
Биметаллические термометры используются для измерения температуры в пределах от —150 до 700 °C; их погрешность составляет 1—1,5%.
Дилатометрический термометр (от латинского dllatare — расширять и греческого metreo — мерю), схема которого представлена на рис. Ш-З, состоит из трубки 1, выполненной из металла с большим температурным коэффициентом и стержня 2 — из мате-
47
риала с малым температурным коэффициентом. Стержень прикреплен к дну трубки жестко, а сама трубка помещается в контролируемую среду, причем правый конец ее крепится неподвижно. Если температура среды начнет возрастать, то трубка удлиняется, т. е. дно ее начнет перемещаться влево и стержень, который удлиняется очень мало, также переместится влево, переме-
Рис. Ш-4. Виды жидкостных стеклянных термометров:
а — с вложенной шкальной пластиной; б — палочного; в — с прикладной шкалой.
стив относительно шкалы отсчетное устройство 5. Область применения дилатометрических термометров та же, что у биметаллических.
Как биметаллические, так и дилатометрические приборы для непосредственных измерений температуры применяются сравнительно редко. Зато они широко используются в различных схемах сигнализации, блокировки, управления.
Измерение температуры жидкостными стеклянными термометрами основано на наблюдении видимого изменения объема термометрической жидкости, заключенной в стеклянный резервуар.
По конструктивным признакам жидкостно-стеклянные термометры (рис. III-4) могут быть разделены на три основные группы:
1. Термометры с вложенной внутрь стеклянной оболочки шкальной пластиной. Они получили наиболее широкое применение. Капиллярная трубка припаяна к термобаллону с термометрической жидкостью, а шкала, обычно, в виде пластины из стекла молочного цвета крепится к капилляру.
2. Палочные термометры. Выполнены в виде массивного толстостенного капилляра наружным диаметром 5—8 мм, который 48
Рис. III-5. Виды технических жидкостных стеклянных термометров угловых:
а — с хвостовой частью под углом 90’; б — с хвостовой частью под углом 135°.
переходит в термобаллон с жидкостью. Деления шкалы нанесены на наружную поверхность капилляра.
3. Термометры с прикладной шкалой. Капиллярная трубка диаметром 2—6 мм, с припаянным к ней термобаллоном, крепится к деревянной (пластмаосовой) пластине или вставляется в оправу,, на которую (пластину или оправу) нанесена шкала.
По назначению выпускаемые термометры подразделяются на следующие: метеорологические, для нефтепродуктов, лабораторные, промышленные, для сельского хозяйства, бытовые, специальные. Принцип действия их одинаков и они отличаются один от другого лишь конструкцией, размерами, ценой деления шкалы, термометрической жидкостью.
В жидкостных термометрах чаще всего -используется ртуть, коэффициент расширения которой примерно в 500 раз больше, чем тот же коэффициент для стекла. При температуре минус 39 °C ртуть
замерзает, а при 356,7 °C и нормальном давлении — закипает. Если пространство капилляра над ртутью заполнить инертным газом (например, азотом) под давлением, то температура кипения ртути возрастает, что позволяет изготавливать ртутные термометры со шкалой до 900 °C.
Наряду с ртутью, для измерения низких температур обычно используются различные органические жидкости, например, метиловый спирт (от-96до+65°C), 96%-ный этиловый спирт (от — 117 до +78°C), технический пентан (от —200 до +30°C), толуол от (—95 до +110°C), керосин (от 0 до 200 °C) и другие.
В зависимости от верхнего предела измерения термометры изготавливаются из стекла различных марок.
Технические жидкостные стеклянные термометры служат для измерения температуры в производственных условиях и изготавливаются только с вложенной внутрь стеклянной оболочки шкальной пластиной из стекла молочного цвета. Кроме технических термометров с прямой хвостовой (погружаемой) частью (как это показано на рис. Ш-4, а), выпускаются термометры угловые с хвостовой частью, изогнутой под углом 90° и 135° (рис. Ш-5).
Для удобства монтажа технических стеклянных термометров, предохранения их от механических повреждений, а также для безопасной работы в случае установки их на агрегатах, рабо-
4—2208
49
тающих под давлением, применяются защитные оправы из стали 10, 20 и ЗОХГСА на условное давление 6,3-106 Па. По форме оправы, как и термометры, разделяются на прямые (рис. III-6) и угловые, изогнутые под углом 90° и 135°.
На объектах контроля термометры в оправах чаще всего устанавливаются с помощью бобышек, вид которых показан на рис. Ш-7. Штуцер защитной арматуры ввинчивается в бобышку,
Рис. Ш-7. Конструкция бобышки:
1 — объект контроля; J — бобышка.
Рис. Ш-6. Конструкция защитной оправы для прямых стеклянных термометров: 4 — погружаемая часть; 2 — штуцер; 3 — выступающая часть; 4 — смотровое окно.
а хорошее уплотнение достигается благодаря прокладке между штуцером и бобышкой и соответствующему натягу резьбового соединения. Есть и другие способы установки технических жидкостных термометров, например, с помощью фланцев.
При эксплуатации жидкостных стеклянных термометров следует иметь в виду ряд обстоятельств, которые так или иначе влияют на величины погрешностей при измерениях. А эти погрешности зависят от ряда причин, например, влияния внутреннего и внешнего давлений, величины вертикального столба рабочей жидкости в термометре, «старения» стекла, обусловливающего смещение нулевой точки, глубины погружения термометра и ряда других обстоятельств.
Однако для технических измерений температуры имеют существенное значение только глубина погружения термометра и изменения, возникающие при его длительной эксплуатации («старение») .
Неправильные показания термометров возможны и в тех случаях, когда столбик жидкости внутри капилляра разорван. В этом 50
случае термометр нагревают до соединения всей жидкости и медленно охлаждают.
При соблюдении правил установки и эксплуатации жидкостные стеклянные термометры позволяют производить измерения5 температуры с высокой точностью.
Однако, они не лишены ряда недостатков, к главным из которых относятся: механическая непрочность, недостаточная четкость и наглядность шкалы, невозможность регистрации показаний на бумаге и передачи показаний на расстояние и другие.
МАНОМЕТРИЧЕСКИЕ ТЕРМОМЕТРЫ
Принцип действия манометрических термометров основан на; зависимости между температурой и давлением рабочего (термометрического) вещества, которое заключено в замкнутую систему и не имеет возможности свободно расширяться от нагревания.
Замкнутую герметизированную систему манометрического-термометра составляют (рис. Ш-8): термобаллон 1, манометр с-трубчатой пружиной 2 и капиллярная трубка 3. Эта система заполняется либо газом, либо жидкостью, либо смесью жидкости с ее насыщенным паром, в связи с чем манометрические термометры получили соответственно названия газовых, жидкостных или-, конденсационных (парожидкостных).
Термобаллон помещается в контролируемую среду. С повышением температуры этой среды возрастет и температура рабочего-вещества внутри термобаллона, в результате чего в системе повышается давление и трубчатая пружина манометра деформируется, перемещая стрелку относительно шкалы, градуированной в-единицах температуры. При понижении температуры контролируемой среды понизится и температура рабочего вегцества, что приведет к уменьшению давления внутри замкнутой системы, вследствие чего стрелка манометра переместится против часовой стрелки и покажет меньшую температуру.
Термобаллоны манометрических термометров изготавливаются из нержавеющей стали марки Х18Н10Т и в зависимости от типа (газовые, жидкостные или конденсационные) имеют диаметр от 12 до 20 мм, а длину — от 25 до 500 мм.
В качестве капилляра применяется толстостенная трубка из латуни наружным диаметром 2,5 мм и внутренним диаметром 0,35 мм, причем снаружи капилляр защищен металлическим рукавом или полиэтиленовой оболочкой для предохранения его от механических повреждений. Длины капиллярных трубок стандартны и имеют следующие значения:
Для газовых термометров 1,6; 2,5; 4; 6; 10; 25 и
40 м
Для жидкостных . . . 1,6; 2,5; 4; 6 и 10 м
Для конденсационных . . 1; 1,6; 2; 2,5; 4; 6; 8;
10; 12; 16 м
4* 51
ма манометрического термометра:
1 — термобаллон;
2 — манометр; 3 -* капилляр.
Кроме манометров с трубчатой пружиной в манометрических'^ термометрах используются манометры с винтовой цилиндрической пружиной.
Манометрические термометры независимо от термометрического вещества, заполняющего герметизированную 'систему, серийно изготавливаются нашей приборостроительной промышленностью только как технические приборы-. Пределы измерения от —50 до 600 °C, причем приборы выпускаются как показывающие, самопишущие и как датчики с пневматической и электрической дистанционными передачами классов точности 1; 1,5; 2,5; 4.
х В газовых манометрических термометрах в качестве рабочего вещества используются азот или аргон, которые являются химически инертными веществами, близкими по свойствам к «идеальному газу».
При нагревании газа в сосуде постоянного объема наблюдается увеличение давления, подчиняющееся уравнению Клайперона:
Vp = mRT
где р— давление; V —удельный объем; /и —масса газа; 7? — удельная газовая постоянная; Т — температура.
Отсюда следует, что в замкнутой системе, где объем не изменяется, температура и давление связаны линейной зависимостью:
Т = КР причем постоянная
К~ mR
А это значит, что шкала газовых манометрических термометров — равномерная.
На показаниях газовых приборов сказывается колебание температуры среды, окружающей капилляр и .'манометр, так как при этом изменяется их объем. Эта погрешность может быть учтена расчетным путем, а также существенно снижена введением различных корректирующих устройств.
В жидкостных манометрических термометрах термосистема заполняется кремнийорганической жидкостью ПМС-5.
Зависимость изменения давления жидкости в термосистеме от ее температуры выражается следующим уравнением:
52
где Др — изменение давления, Па; — коэффициент объемного расширения жидкости, 1/°С; ц— коэффициент сжимаемости жидкости, Па-1; Д/ — изменение температуры жидкости, град.
У этих приборов, как и у газовых, зависимость между температурой среды и давлением в термосистеме линейна.
Влияние температуры среды, окружающей и капилляр и ма-
нометр, учитывается так же, как
При эксплуатации жидкостных термометров может возникнуть погрешность от разности высот установки термобаллона и манометра (рис. Ш-9). Если эта разность равна h, м, а плотность жидкости в термосистеме равна р, кг/м3, то дополнительное давление в системе от столба жидкости будет равно: рд—hpg, Па.
При установке термобаллона выше манометра величина вычитается из величины рабочего давления в термосистеме, а при установке ниже манометра — добавляется к рабочему давлению
для газовых термометров.
Рис. Ш-9. Схема установки манометрического термометра при расположении термобаллоиа ниже манометра: -
1 — объект контроля; 3 — термобаллон; 3 — капилляр; 4 — манометр.
в термосистеме.
Как газовые, так и жидкостные манометрические термометры заполняются рабочим веществом под некоторым начальным давлением порядка Ю6—2-106 Па. Это делается для того, чтобы снизить так называемую барометрическую погрешность, т. е. погрешность, связанную с отклонением атмосферного давления от нормального значения.
В конденсационных манометрических термометрах термобаллон лишь частично (примерно на 2/з его объема) заполнен низ-кокипящей жидкостью, а остальное его пространство заполнено насыщенным паром этой жидкости. В качестве рабочей жидкости используются: фреон, хлористый метил, ацетон. Внутри капилляра и пружины манометра находится либо та же что и в термобаллоне жидкость, либо насыщенный пар этой жидкости. Если термобаллон помещен в среду с температурой ниже, чем
температура воздуха, окружающего капилляр и манометр, то внутри капилляра и трубчатой пружины находится насыщенный пар, а если температура контролируемой среды выше, чем темпера-
тура воздуха вокруг капилляра и манометра, то внутри них —
жидкость.
С увеличением температуры среды, в которую помещен термобаллон конденсационного термометра, возрастает испарение легкокипящей жидкости, что ведет к повышению давления пара над жидкостью. Это давление через капилляр передается пружине манометра.
53
Такие приборы имеют важное преимущество перед газовыми и жидкостными: изменение объема термосистемы и давления в ней под действием температуры среды, окружающей капилляр и манометр, не изменяют их показаний. Кроме того, они обладают хорошей чувствительностью, меньшим запаздыванием и имеют меньшие размеры термобаллона.
Однако этим приборам свойственен и ряд недостатков. Так как зависимость между температурой контролируемой среды и упругостью насыщенного пара в термобаллоне нелинейна, шкала манометра неравномерна, в данном случае имеет расширяющиеся к концу деления. К концу шкалы чувствительность при-.бора гораздо выше, чем в ее начале. При случайном перегреве термобаллона давление в термосистеме возрастает очень сильно, что ведет к ее разгерметизации. В приборах, измеряющих отрицательные температуры, даже при временном нахождении в жаркой комнате, могут быть поломки.
При эксплуатации манометрических термометров следует иметь в виду, что термобаллон должен быть полностью погружен в контролируемую среду. Положение термобаллона в контролируемой среде для газовых и жидкостных приборов может быть любым, а для парожидкостных должно быть вертикальным (капилляром вверх) или горизонтальным (если на внешней поверхности термобаллона выбито слово «верх»).
Если давление контролируемой среды не превышает 6,3-• 106 Па, то термобаллон погружается в среду без защитной гильзы. При более высоких давлениях, но не превышающих 2,5-107 Па, термобаллон погружается в контролируемую среду в специальной защитной гильзе.
Серийно выпускаются манометрические термометры показывающие, регистрирующие, сигнализирующие, с пневматической и электрической дистанционными передачами.
ЭЛЕКТРИЧЕСКИЕ ТЕРМОМЕТРЫ СОПРОТИВЛЕНИЯ
Принцип действия электрических термометров сопротивления основан на свойстве проводниковых и полупроводниковых материалов изменять свое электрическое сопротивление при изменении температуры окружающей их среды. При этом с повышением температуры проводниковые материалы увеличивают свое сопротивление (их температурный коэффициент электрического сопротивления положителен), а полупроводниковые — уменьшают (их температурный коэффициент отрицателен). Таким образом, омическое сопротивление проводника или полупроводника представляет собой некоторую функцию его температуры, вид которой зависит от природы материала.
Однако измерить температуру одним лишь термометром сопротивления нельзя. Необходим прибор, который бы фиксировал изменение сопротивления термометра в зависимости от тем
54
пературы окружающей его среды. Такимй' приборами являются либо мосты (уравновешенные или неуравновешенные), либо ло-гометрьц
Электрический термометр сопротивления (чувствительный элемент) погружается в контролируемую среду и соединяется электрическими проводами с вторичным прибором (мостом или лого-метром), шкала которого градуируется, в единицах температуры.
Для изготовления чувствительных элементов из проводниковых материалов должны применяться чистые металлы, отвечающие следующим основным требованиям:
1. Иметь большой температурный коэффициент сопротивления, который принято определять следующим уравнением (температурный коэффициент сопротивления а показывает, как изменяется сопротивление материала при изменении температуры окружающей среды на 1 °C):
г100 — го
а- го-1ОО
где г0 и гюо — сопротивление материала соответственно при 0 и 100 °C.
2. Зависимость сопротивления металла от температуры при графическом ее представлении должна выражаться прямой или плавной кривой линиями.
3. Металл должен быть химически и механически стойким в измеряемой среде.
4. Удельное сопротивление материала должно быть достаточно большим с тем, чтобы чувствительный элемент имел небольшие габариты.
Наиболее полно указанным требованиям отвечают платина и мед!>, из которых серийно изготавливаются технические термометры сопротивления для измерения температуры в интервале от —200 до 750°C (платиновые) и от —50 до +180°C (медные).
Зависимость сопротивления платины от температуры в интервале от 0 до 650 °C выражается уравнением:
rt = r0(l+^ + B/«) , ...
а в интервале от —200 до 0 *С уравнением: >
rt = гв [ 1 + At + Bt* + Ct* (t -100)]
Зависимость сопротивления меди от температуры в интервале от —50 до +180 °C выражается следующим равенством;
П = г0(1 + а/) «
В приведенных равенствах приняты следующие обозначения: Н — электрическое сопротивление материала при температуре t, °C; г0 — электрическое сопротивление материала при 0*С; А, В, С — постоянные коэффициенты, значения которых определяются при градуировке термометров (4 = 3,96847-10~3 1/°С, В=
+
Б5
= —5,847-IO-7 1/°C; C=— 4,22* 10-12 17°C); a — температурньп коэффициент сопротивления меди (a=4,26-10“3 1/°C).
На рис. III-10 приведены графики изменения сопротивления"
в зависимости от температуры для меди, а также для железа и никеля (ради сравнения).
Чувствительный элемент платинового термометра сопротивления представляет собой спираль из тонкой платиновой проволоки диаметром 0,07 мм, помещенная в ка-
Рис. Ш-10. График изменения электрического сопротивления некоторых материалов в зависимости от температуры.
пиллярных керамических трубках, заполненных керамическим порошком. Длина этого чувствительного элемента может быть 40, 55 или 105 мм. Он помещается в специальную защитную арматуру из латуни, меди, сталей различных марок (например Л-63, Ml, Х18Н10Т и др.).
Чувствительный элемент медного термометра сопротивления выполнен в виде безындукционной (бифилярной) обмотки из медной проволоки диаметром 0,1 мм, по-'" крытой фторопластовой пленкой и помещенной в тонкостенную металлическую
гильзу, заполненную керамическим порошком. Длина чувствительного элемента составляет 50 или 80 мм. Он также помещен в защитную арматуру (рис. Ш-11). Крепление арматуры на объекте контроля чаще всего осуществляется с помощью бобышки
аналогично креплению арматуры жидкостных стеклянных термометров (см. рис. Ш-7).
В зависимости от назначения термометры сопротивления выпускаются различной длины, причем длина монтажной части (расстояние от рабочего конца до опорной плоскости штуцера) может быть от 20 до 3200 мм й должна соответствовать значе-
ниям из ряда предпочтительных чисел R20 (ГОСТ 8032—56).
Длину наружной части I следует выбирать из этого же ряда чисел.
Необходимо иметь в виду, что к термометру сопротивления может быть подключен лишь один вторичный прибор. Если возникает необходимость подключения двух вторичных приборов (один из которых, например, устанавливается у объекта измерения, а другой на центральном пункте управления), то необходимо применять двойные термометры сопротивления. В двойных: термометрах имеется два теплочувствительных элемента, электрически не связанных между собой, которые помещены в одну и ту же арматуру и имеют самостоятельные клеммы для подключения к Двум различным приборам.
Технические термометры сопротивления, как платийовые (обозначаются ТСП), так и медные (ТСМ) выпускаются взаимо
56
заменяемыми, т. е. стандартных градуировок: они имеют строго определенные значения сопротивления обмотки при О °C (го). Это сопротивление должно быть достаточно большим, так как для точного измерения нужно, чтобы приращение сопротивления термометра от измеряемой температуры было заметным, С другой стороны, увеличение сопротивления г0 требует применения бо-
Рис. Ш-11. Общий вид термометра сопротивления:
L — длина погружаемой части арматуры; / — длина выступающей части арматуры; / — теплочувствительный элемент; 2 — трубка; 3 — защитный чехол; 4 — выводы; 5 — штуцер; б — выступающая часть защитной арматуры; 7 — вкладыш; в —головка; 9 — штуцер для подвода соединительных проводов. ,
лее тонкой проволоки, что ведет к уменьшению механической прочности обмотки термометра.
В технических термометрах сопротивления отечественного производства приняты следующие значения г0 (в скобках указана градуировка):
Для платиновых . . . 10 Ом (Гр 20); 46 Ом
(Гр 21), 100 Ом (Гр 22)
Для медных .... 53 Ом (Гр 23); 100 Ом
(ГР 24)
Обозначение градуировки термометра обычно выбивается на головке защитной арматуры.
Основные данные серийно выпускаемых платиновых и медных термометров сопротивления приведены в табл. Ш-1.
Таблица 111-1.
Тип термометра сопротивления Сопротивление при 0‘С, Ом Градуировка Пределы измерения температур прн длительном применении, °C
нижний верхний
тсп 10 Гр 20 0 620
тсп 46± 0,023 Гр 21 -200 500
тсп 100 Гр 22 -200 500
тем 53± 0,053 Гр 23 —50 180
тем 100±0,05 Гр 24 -50 180
Кроме металлических термометров сопротивления в измери тельной технике достаточно широко применяются полупроводни ковые термометры сопротивления (терморезисторы).
57
Полупроводниковые термосопротивления изготавливаются и* окислов различных металлов: титана, меди, кобальта, железа, магния, никеля, урана и др. или из смеси этих окислов.
Достоинствами термосопротивлений являются их малые габа* риты и очень большой по сравнению с платиной и медью (в 8— 15 раз больше) температурный коэффициент сопротивления: от —3 до —6% (у платины и меди ~0,4%), что дает возможность измерять температуру с высокой точностью, используя менее чувствительные, чем в случае термометров сопротивления, вторичные измерительные приборы.
Зависимость сопротивления г терморезистора от температуры выражается уравнением:
(В в \
I Т 293 I
г = W '
где Г2о — начальное сопротивление терморезистора при температуре 20 °C, Ом; е — основание натуральных логарифмов; В —постоянный коэффициент, К; Т— температура, К.
Отечественная промышленность выпускает терморезисторы нескольких типов, предназначенные для измерения температуры; основные параметры терморезисторов приведены в табл. Ш-2.
Таблица Ш-2.
Параметр Характеристика терморезисторов различных типов
MMT-1 ММТ-4 ММТ-6 KMT-1 | KMT-4
Номинальное сопротивление, кОм 1- -200 10—1000 20—1000
Температурный коэффициент при 20 °C, %/°С До -3,4 До -6 До -6
Интервал рабочих температур, От —70 до 4-120 От —70 до 4-120 От —70 до 4-180
Давление измеряемой среды прн установке без герметичных гильз, Па От 1,3-103 до 9,8-105 ~10в От 1,3.10» до 9,8-10»
В терморезисторах приведенных типов приняты следующие обозначения: ММ — медно-марганцевый, КМ — кобальто-марган-цевый, Т — терморезистор; 1,4,6 — исполнение (1,6—незащищенное, 4 — герметизированное).
На рис. III-12 приведены общий вид и габаритные размеры терморезисторов некоторых типов и их температурная характеристика.
Терморезисторы обладают одним существенным недостатком/ который сильно ограничивает область-dix применения: они не взаимозаменяемы, так как вследствие большого разброса параметров характеристики терморезисторов одного и того же типа не совпадают. Объясняется это тем, что наличие даже ничтожных долей примесей в материале терморезистора заметно сказывает-
58
4
ся на его электрических свойствах, а технология производства их еще такова, что не удается получить полупроводниковый материал высокой чистоты.
Рассмотрим принципиальные схемы измерительных (вторичных) приборов, работающих в комплекте с термометрами сопротивления.
Рис. Ш-12. Общие виды герметизированного (а) и не защищенного (б) терморезисторов и их температурная характеристика (в):
'/ — выводы; 2—контактные колпачки; 3 —тело терморезистора; / — чехол; 5 — металлическая фольга; 6 — стеклянный изолятор; 7 —KMT-1; 8 — MMT-1; 9 — медный термометр сопротивления (для сравнения).
Неуравновешенные мосты. Принципиальная схема неуравновешенного моста показана на рис. III-13. Здесь г\, г <2, и г3— постоянные сопротивления плеч моста, выполненные в виде катушек с обмоткой из манганиновой проволоки (манганин — разновидность нихрома, которая обладает практически нулевым температурным коэффициентом сопротивления, т. е. не изменяет своего сопротивления при изменении температуры окружающей среды); rt — термометр сопротивления, погружаемый в контролируемую среду; гк — контрольное сопротивление; Б — источник питания моста напряжением 1,5—4 В (аккумулятор или батарея сухих элементов); гв— реостат для поддержания постоянным напряжения питания моста; Т — милливольтметр; гвн— сопротивление внешней линии (проводов, соединяющих термометр сопротивления с мостом); П — переключатель (положение И — измерение; К — контроль); a, b, с, d— вершины моста; а—Ь, с—d — диагонали моста.
" Непременным условием измерения должно являться постоян-..ство напряжения, подаваемого от источника тока Б в диагональ моста с—d. А так как со временем напряжение падает, перед началом измерений рекомендуется каждый раз производить повер-
59
Ш-13. Принципи-
Рис.
альная схема неуравновешенного моста.
ку и подрегулировку напряжения питания моста UCd. Для этого; переключатель П переводят в положение К, в результате чего контрольное сопротивление гк подключается к схеме моста, а термометр сопротивления rt — отключается.
Если напряжение питания UCd имеет номинальное значение, то стрелка милливольтметра Т должна остановиться против красной черты, специально нанесенной на шкалу прибора. Если же UCd отличается от номинального значения и стрелка против красной черты не устанавливается, то с помощью реостата гв изменяют UCd до тех пор, пока стрелка установится на красную черту.
После установки напряжения питания переключатель переводится в положение И, при этом сопротивление гк отключается, а вместо него к схеме моста подключается термометр 1сопроти1вления rt с соединительными проводами. Если после переключения будет иметь место зависимость
(rt + 2гВн) Г2 = Г1Г3 (1
что означает равенство произведений сопротивлений противолежащих плеч, то разность потенциалов в точках а и & будет равна нулю и через милливольтметр Т ток протекать не будет (сила тока /м=0), т, е. стрелка прибора будет находиться у начальной отметки шкалы..
Это значит, что температура среды, в которую погружен термометр сопротивления, равна начальному значению (например 0°С).
С увеличением температуры контролируемой среды начнет возрастать сопротивление термометра, вследствие увеличения rt равенство (1) превратится в неравенство и через милливольтметр потечет ток (/м>0), что приведет к отклонению стрелки от начального положения. Чем сильнее изменилась температура по сравнению с первоначальным значением, тем сильнее изменится rt и тем сильнее возрастет сида тока /м в диагонали моста а—Ь. Шкала милливольтметра, относительно которой перемещается стрелка, градуированная в/единицах температуры, позволит оценить саму температуру изк(еряемой среды.
' Таким образом угол' поворота стрелки <р милливольтметра зависит от силы тока /м, протекающего по диагонали моста а—Ь,
т. ё. определяется зависимостью ф = с/м
(2)
где С — коэффициент пропорциональности, постоянный для данного прибора.
60
Однако изменение силы тока 1М связано с изменением сопро- / тивления термометра rt нелинейной зависимостью, поэтому шкала милливольтметра получается неравномерной, что является серьезным недостатком измерительного комплекта. К недостаткам-следует отнести также и то обстоятельство, что периодически приходится производить контроль постоянства и подрегулировку напряжения питания моста UCd-
Эти и некоторые другие недостатки ограничили область применения неуравновешенных мостов при измерении температуры, хотя в различных приборах качественного анализа (хроматографы, газоанализаторы, плотномеры и др.) неуравновешенные мостовые схемы применяются достаточно широко (см. гл. VI).
Уравновешенные мосты выпускаются серийно как лабораторные (переносные, неавтоматические) и как технические (стационарные, автоматические).
Принципиальная схема уравновешенного моста в комплекте* с металлическим термометром сопротивления приведена на рис. Ш-14.
Эта схема отличается от схемы неуравновешенного моста (см. рис. II1-13) тем, что постоянное сопротивление г3 заменено регулируемым, которое носит название «реохорд»; отсутствует контрольное сопротивление гк и переключатель П; в цепи питания моста нет регулировочного реостата гъ для поддержания постоянства напряжения UCdl милливольтметр Т заменен нуль-гальваномет-ром НГ (нуль-гальванометр — чувствительный прибор, имеющий шкалу с нулем посередине, и служащий не для измерения, а лишь, для обнаружения тока в цепи).
/ Когда соблюдается условие равновесия моста, т. е. когда соблюдается равенство (/) в диагонали а—b (см. рис. Ш-14) тока 'чист и стрелка нуль-гальванометра стоит против нулевой отметки.
При изменении температуры контролируемой среды сопротивление термометра rt изменится, мост выйдет из состояния равновесия, в диагонали потечет ток (7о>О), стрелка нуль-гальванометра отклонится от нулевой отметки. Чтобы вновь привести мост в равновесное состояние, необходимо изменять величину регулируемого сопротивления г3 до тех пор, пока стрелка нуль-гальванометра установится на нуль. В этом случае на основании равенства (1) значение сопротивления термометра rt определится так:
— 2гвн (3)г
1 2
Если считать величину сопротивления внешней линии (соединительных проводов) гвн постоянной и известной, и учесть что Г] : r2=const, можно сделать вывод о том, что каждому значению rt (а значит и измеряемой температуре) соответствует определенное значение сопротивления г3, величина которого определяется положением его подвижного контакта. Этот подвижный
6»
^контакт соединен со стрелкой, перемещающейся относительна. . шкалы, расположенной вдоль сопротивления г3. Зная зависимость изменения сопротивления термометра г< от температуры измеряемой среды, шкалу можно сразу градуировать в °C.
Итак, каждый раз, когда изменяется температура контролируемой среды, необходимо приводить мост в равновесное состояние и затем уже производить отсчет.
Рис. Ш-14. Принципиальная схема уравновешенного моста.
Рис. Ш-15. Принципиальная схема уравновешенного моста с термометром сопротивления, подключенным по трехпроводной схеме.
На точности показаний прибора не сказываются колебания напряжения питания, подаваемого в диагональ с—d, что выгодно отличает его от прибора, работающего по схеме неуравновешенного моста.
До сих пор делалось допущение, что сопротивление внешней линии (соединительных проводой) 2гвн— величина постоянная. Действительно, сопротивление линии легко измерить с тем, чтобы учесть эту величину при измерении температуры. Однако сопротивление (медных проводов) .заметно изменяется при изменении температуры окружающего роздуха, что вносит ошибку в результаты измерений. /
Чтобы уменьшить погрешнр'сть, обусловленную колебаниями сопротивления соединительной линии или вовсе ее избежать, термометр сопротивления подключают к мосту по трехпроводной схеме (рис. Ш-15).
При такой схеме включения источник питания Б вместо вершины моста d подключается к клемме d' головки термометра, где и происходит разветвление токов (Ц и по двум цепям. В этом случае каждый из двух соединительных проводов гвн оказывается включенным в противоположное плечо моста, т. е. rt суммируется с гвн левым, а г3 —с гвн правым.
62
Условие равновесия моста при трехпроводной схеме включения запишется так (равенство произведений сопротивлений противолежащих плеч моста):
(rt + Гвн) Г2 — (^з + Гвн) fl (4Х
НИЯ
Но и при таком включении термометра изменение сопротивле-каждого из соединительных проводов гвн приводит к измене-
схема электронного автоматического уравновешен-
Ш-16. Принципиальная моста.
Рис. и ого
нию сопротивления’ обоих противоположных плеч, что тоже ведет к некоторой ошибке. Полностью влияние соединительных проводов при трехпроводной схеме устраняется только в случае, если сопротивление каждого из соединительных проводов гва одинаковы и мост-симметричный, т. е. Г1 = гг-
В рассмотренных схемах уравновешенных мостов движок реохорда перемещается вручную до момента равновесия, т. е. до установления стрелки нуль-гальванометр а на нулевой отметке..
В автоматических электронных уравновешенных мостах, которые являются производственными стационарными вторичными приборами, движок реохорда перемещается автоматически.
Нашей промышленностью выпускаются несколько модификаций электронных, автоматических уравновешенных мостов. Они отличаются одна от другой наличием или отсутствием различных: дополнительных устройств, встраиваемых в корпус прибора (сигнальные, самопишущие, регулирующие и др.), в то время как их измерительные схемы принципиально одинаковы.
На рис. Ш-16 приведена принципиальная (упрощенная) схема электронного автоматического уравновешенного моста с питанием переменным током, осуществляющего измерение и запись, (регистрацию) температуры на дисковой диаграммной бумаге..
В схеме приняты следующие обозначения:
Г\, г2, г3, г4 — постоянные сопротивления плеч моста, выполненные из манганина; гр — реохорд с подвижным контактом а.
63
(обмотка реохорда выполнена из манганиновой проволоки);' rt — термометр сопротивления стандартной градуировки; гвн— соединительные провода медные (обычно ПР-500, сечением 1,0— 1,5 мм2), сопротивление которых искусственно (с помощью специальных уравнительных катушек) подгоняется под определенное стандартное значение; U — источник питания моста переменного или постоянного тока; Тр — входной трансформатор (если питание моста осуществляется постоянным током, то перед трансформатором устанавливается специальный преобразователь, преобразующий сигнал в диагонали а—b в пульсирующий ток, который можно трансформировать); ЭУ — электронный усилитель, который служит , для усиления слабого по напряжению и мощности сигнала в диагонали а—b до значений в несколько вольт (по напряжению), достаточных для управления реверсивным двигателем; РД — реверсивный двигатель; ПС — показывающая стрелка; Шк — шкала; ДБ — диаграммный бумажный диск; ЗС — записывающая стрелка (перо),
, Воспользовавшись правилом, по которому произведения сопротивлений противолежащих плеч должны быть равны, запишем условия равновесия этого моста:
(Г< + Гвн + Г1 + г') г3 = (г4 + гвн) (г2 + г") (5)
Равенство (5) показывает, что с изменением сопротивления термометра rt при изменении температуры контролируемой среды равновесие моста может быть снова достигнуто изменением сопротивлений плеч реохорда г' и г", т. е. изменением положения движка реохорда а.
Ра бота моста протекает следующим образом.
ТСогда температура контролируемой среды изменяется, а еле-' довательно,. изменяется величина сопротивления термометра rt, мост выходит из равновесного состояния и в его диагонали а—b появляется ток небаланса, который через трансформатор Тр поступает на вход электронного усилителя ЭУ. Усиленный по напряжению и мощности ток поступает затем на реверсивный двигатель РД. В зависимости от знака тока небаланса реверсивный двигатель, ротор которого через систему передач связан с движком реохорда гр (подвижной контакт а), перемещает его в сторону, уменьшающую разбаланс моста. Двигатель РД прекратит ра- ' боту, когда в диагонали моста a—/b исчезнет ток, т. е. когда вновь будет иметь место равновесное состояние, соответствующее равенству (5). /
Во время работы реверсивный двигатель приводит в движение показывающую стрелку ПС, которая перемещается относительно шкалы Шк, градуированной в °C, и записывающую стрелку— перо ЗС, которая записывает на диаграммной бумаге ДБ кривую, представляющую собой функцию температуры от времени. Диаграммная бумага приводится в движение специальным синхронным двигателем (на схеме не показан). Все кинематиче
64
ские связи реверсивного двигателя с движком реохорда, показывающей и записывающей стрелками условно показаны пунктирными линиями.
Все узлы и детали моста смонтированы в специальном металлическом корпусе, размеры и форма которого зависят от типа прибора.
Мосты с источником питания измерительной схемы постоянным током (мосты постоянного тока) применяются в тех случаях, когда термометр сопротивления устанавливается на объектах или в помещениях взрыво- и пожароопасных. При этом нужно иметь в виду, что сам мост в таких помещениях устанавливать нельзя. Он должен устанавливаться в обычных помещениях.
Электронные автоматические уравновешенные мосты работают в комплекте с техническими термометрами сопротивления стандартных градуировок, причем каждый мост работает с термометрами лишь определенной градуировки. Для этого на шкале йрибора и на диаграммной бумаге указывается градуировка термометра сопротивления, работающего в комплекте с данным мостом (например Гр21 или Гр23).
Промышленностью серийно изготавливаются электронные ав-. тематические мосты показывающие и регистрирующие, одното-J чечные и многоточечные, сигнализирующие и регулирующие, име-? ющие классы точности. 0,25; 0,5; 1.
В комплекте с мостами некоторых типов могут работать несколько (до 12) однотипных термометров сопротивления, которые устанавливаются в различных местах контроля температуры. В этом случае мост имеет автоматический переключатель, кото-рый поочередно подключает термометры, а запись на диаграм-> мной бумаге осуществляется специальным печатным устройством L с указанием номера ’подключенного в данный момент термометра. . Логометры (от латинского logos — отношение и греческого k metreo — измеряю) серийно выпускаются нашей промышленно-fa стью, как технические приборы для работы в комплекте с термо-к* метрами сопротивления стандартных градуировок и служат для ц- измерения и регулирования температуры.
г Упрощенная схема показывающего логометра приведена на К рис. Ш-17.
Ж Между полюсными наконечника П1 и П2 постоянного подко-Ж вообразного магнита NS находится неподвижный цилиндрический М сердечник Ц из мягкого железа. Зазор между выточками полюс-К ных наконечников и цилиндрическим сердечником является не-Jk равномерным: он минимален в средней части и увеличивается к «•периферии. В этом зазоре находится подвижная система, состоявшая из двух одинаковых рамок т3 и г4, расположенных под углом Яодна к другой и жестко скрепленных. Рамки представляют собой ддрегкис каркасы из картона с обмотками из тонкой медной эма-ЗИвировапной проволоки. Подвижная система может поворачивать-ЗНвя ПО или против часовой стрелки относительно горизонтальной
65
оси, на которой укреплена стрелка ПС, перемещающаяся относительно шкалы Шк.
Электрическая схема логометра состоит из двух цепей, питаемых от общего источника питания Б (сухая батарея, аккумулятор, выпрямитель). Левая цепь, по которой протекает ток /], состоит из последовательно
Рис. Ш-17. Упрощенная схема показывающего лого-
метра:
NS — полюса подковообразного магнита; Пь Па —полюсные наконечники; Ц — цилиндрический сердечник; и, г2 — постоянные сопротивлеиня; rt — термометр сопротивления; Гз, г, — рамки; ПС — показывающая стрелка; Шк —шкала; Б — источник питания.
соединенных источника питания Б, постоянного сопротивления г\ и обмотки рамки г3; правая цепь, по которой протекает ток 12, состоит из последовательно соединенных источника питания Б, термометра сопротивления rt, помещенного в контролируемую среду, постоянного сопротивления г2 и обмотки рамки Г4. Подвод тока к рамкам производится с помощью спиральных пружинок, которые, помимо подвода тока, служат для возвращения подвижной системы в исходное положение при снятии напряжения питания. Направление токов Л и 12 таково, что вращающие моменты рамок и М2 оказываются направленными навстречу один другому.
п Если в какой-то момент времени сопротивление левой цепи будет рав-г но сопротивлению правой, т. е. будет иметь место равенство
Г1 + Г3 = rt + Г2 + Г4 (6)
то и токи Ii и /2, протекающие по этим цепям, будут равны. В этом случае вращающие моменты рамок будут также равны, а так как они направлены встречно, подвижная система ока-
жется в равновесном состоянии. Вращающие моменты рамок соответственно равны
Mj = C2B2I i л М2 = С2В212
где Ci и С2 — постоянные, зависящие от геометрических размеров и числа витков рамок; Bi w В2— магнитные индукции в зоне расположения рамок. /
В момент равновесия /
С1В1/1 = С2В2/2 (7)
или
Ij______В2 __________ В2
/2 ~ с, В, -с в,
(8)
66
Правая часть уравнения (8) зависит от угла <р отклонения подвижной системы и изменения неравномерного зазора между выточками полюсных наконечников и цилиндрическим сердечником. Так как зазор изменяется по вполне определенной закономерности, то можно написать следующее:
7L = /(<P) О)
*2
т. е. угол отклонения подвижной системы (а значит и показывающей стрелки) определяется отношением токов, проходящих через рамки гз и г4 (отсюда понятно — почему логометр получил такое название).
При равновесном положении подвижной системы, определяемом равенством (7), стрелка прибора находится против начальной отметки шкалы. Если изменится контролируемая температура, то изменится величина сопротивления термометра rt и следовательно тока Iz и равенство (7) превратится в неравенство, а это значит, что через рамки г3 и г4 будут протекать разные по величине токи 1\ и /2.
Предположим, что температура контролируемой среды возросла и сопротивление термометра увеличилось. Это приведет к тому, что ток /2 уменьшится и, следовательно, уменьшится вращающий момент М2 рамки г4 и Mi станет больше М2. В результате этого подвижная система начнет поворачиваться по часовой стрелке и рамка г3, через которую протекает больший ток, начнет перемещаться в сторону большего зазора, где магнитная индукция слабее, и ее вращающий момент Mj начнет ослабевать. Наоборот, рамка т4 с меньшим током начнет перемещаться в сторону меньшего зазора и ее вращающий момент М2 начнет возрастать. Когда Mi вновь станет равным М2, подвижная система остановится, а стрелка ПС переместится по шкале Шк в новое положение. Можно производить отсчет.
Серийно изготавливаемые логометры имеют более сложную электрическую схему чем изображенная на рис. Ш-17. Обмотки рамок последовательно включены в диагональ неуравновешенного моста, что повышает чувствительность прибора, уменьшает погрешности, обусловленные колебанием температуры среды, окружающей соединительные провода и сам прибор. Логометры выпускаются показывающими и регистрирующими, одноточечными и многоточечными, сигнализирующими и регулирующими, их класс точности 1,5.
Так же как на шкалах электронных автоматических уравновешенных мостов, на шкалах логометров указывается тип стандартного термометра сопротивления, в комплекте с которым должен работать логометр.
При измерениях температуры электрическими термометрами сопротивления в комплекте с электронными мостами или лого-5* 67
метрами может возникать ряд дополнительных погрешностей, вы*; званных следующими причинами:
1. Неправильная установка термометра сопротивления.
2. Неточная подгонка сопротивления соединительных линий.
3. Изменение сопротивления линии при изменении температуры окружающей среды.
4. Дополнительный нагрев обмотки термометра протекающим по ней током.
5. Неблагоприятные условия эксплуатации вторичных приборов. ' 1
Неправильная установка термометра сопротивления, как и любого термоприемника может привести к весьма значительным погрешностям. Подробно этот вопрос будет рассмотрен ниже.
Вторичные приборы (мосты и логометры), работающие в комплекте с металлическими термометрами сопротивления, градуируются с учетом определенного значения сопротивления соединительной линии Гвн- Это номинальное значение сопротивления внешней линии обычно указывается на шкале прибора (например, гВн = 5 Ом) и специально подгоняется с помощью уравнительных катушек.
Если термометр подключен к измерительному прибору по двухпроводной схеме (см. рис. III-14), подгонка сопротивления линии может быть осуществлена с помощью одной уравнител'Ьной катушки, включенной либо в левую, либо в правую ветвь соединительной линии. При трехпроводной схеме включения (см. рис. Ш-15, Ш-16) термометра сопротивления соединительных проводов Гвн левой и правой ветвей должны быть одинаковыми, так как эти провода входят в разные плечи моста. Поэтому подгонка сопротивления линии должна вестись с помощью двух уравнительных катушек.
Уравнительная катушка имеет обмотку из манганиновой проволоки с определенным известным сопротивлением. Одна или две уравнительные катушки (в зависимости от того по двух- или трехпроводной схеме подключается термометр) прилагаются к автоматическому—мобту или логометру заводом-изготовителем. Перед тем, как подогнать линию до значения, указанного на шкале прибора, с помощью омметра измеряют сопротивление линии. Затем с уравнительной катушки сматывают часть провода с тем, чтобы сопротивление линии в сумме с сопротивлением, оставшейся на уравнительной катушке обмоткой, равнялось бы номинальному, указанному на шкале прибора, значению сопротивления линии.
При применении высокоомных термометров сопротивления градуировок 22 и 24 (го=ЮО Ом) влияние ошибок вследствие неточной подгонки сопротивления линии уменьшается. Если в комплекте со вторичным прибором работает терморезистрр, имеющий сопротивление 103 и более Ом, то влиянием сопротивления линии можно пренебречь, и не производить подгонку линии.
68
ТЕРМОЭЛЕКТРИЧЕСКИЕ ТЕРМОМЕТРЫ
Термоэлектрическими термометрами называют устройства для измерения температуры, в комплект которых входит электроизмерительный прибор (милливольтметр, потенцио-
метр) -и термопара, соединенные электрическими проводами.
Принцип действия этих термометров основан на явлении термоэлектрического эффекта, сущность которого заключается в следующем. Если рассматривать замкнутый контур, образованный двумя проводниками (термоэлектродами) А и В из разных металлов или сплавов (рис. Ш-18,а), концы которых
Рис. Ш-18. Схемы термоэлектрических цепей: а — замкнутый контур; б — подключение электроизмерительного прибора Э с разрывом контура в месте соединеиня; в — то же, с разрывом контура в термо-, электроде.
1 и 2 соединены, а температуры мест соединения различны (соответственно t\ и to), то в таком контуре возникает электродвижущая сила Еав (t\, to), называемая термоэлектродвижущей силой (т. э. д. с.). Величина и направление этой т. э. д. с. зависит от материалов термоэлектродов А и В (термопары) и от разности температур t] и to (чем эта разность больше, тем больше т.э. д.с.).
Термоэлектрический эффект можно несколько упрощенно объяснить наличием в металлах термоэлектродов термопар свободных электронов, концентрация которых при одной и той же температуре различна для разных металлов. Если, например, в металле термоэлектрода А содержание свободных электронов больше, чем в металле электрода В, то электроны в местах спаев будут диффундировать из электрода А в электрод В, при этом электрод А буцет заряжаться положительно, а электрод В — от-
рицательно.
Электрическое поле, возникающее в местах соприкосновения проводников препятствует этой диффузии, и когда скорость диффузии электронов станет равной скорости их обратного перемещения из электрода В в электрод А, наступит состояние подвижного равновесия. При таком состоянии между электродами возникает некоторая разность потенциалов.
Из допущения о том, что ti>to, следует вывод о более интенсивном переходе электронов .из А в В в месте соединения /, чем в месте соединения 2, при этом потенциал точки 1 будет выше потенциала. е<0 точки 2.
Помимо описанного явления в каждом из электродов А и В электроны будут переходить от более нагретого конца (точка 1)
69
к менее нагретому концу (точка 2), что также будет влиять на величину т. э. д. с.
Результирующая т. э. д. с. термопары будет равна:
EAB(t1,tQ) = et1—et„ (10)
или, выражая и etQ через функции температур мест соедине-лий 1 и 2, можно написать
(И)
Из равенств (10) и (И) видно, что суммарная т. э. д', с. термопары (рис. Ш-18, а) зависит как от температуры места соединения 1, так и от температуры места соединения 2. Это значит, что при изменении этих температур по какому-то неизвестному закону величина EAB(t1,tl)) будет неопределенной.
Если, например, температуру t0 поддерживать постоянной и известной, то результирующая т. э. д. с. термопары будет зависеть только от температуры места соединения термоэлектродов /, а равенство (И) примет вид:
Еав(Ч,^ = Ш-С (12)
где
С — f (t0) = const
Функциональная зависимость, представленная равенством (12), является достаточно сложной и выразить ее аналитически затруднительно. При графическом изображении этой зависимости общий характер ее имеет вид, показанный на рис. Ш-19 при условии, что /о=О°С. '
Т. э.д. с., развиваемая термопарами, изготовленными из различных материалов, невелика (0,01—0,06 мВ/°С), но с помощью электроизмерительного прибора может быть измерена с высокой точностью.
Однако изк<ерить т. э^д. с. термопары в замкнутом контуре (см. рис. Ш-18,.а)__Е1е__11реДставляется возможным. Необходимо разорвать контур и в место разрыва подключить электроизмерительный прибор.
На рис. Ш-18, б показана схема подключения электроизмерительного прибора Э в цепь термопары с разрывом контура в месте соединения 2, а на рис. Ш-18, в — с разрывом контура в термоэлектроде В (точки 3- 3'). В этих схемах в контур термопары введены проводник С и электроизмерительный прибор Э. Однако это не исказит результирующей величины т. э. д. с. термопары если температуры концов термоэлектродов в местах разрыва равны, т. е. to=t'o (см. рис. Ш-18, б) и t2 = f2 (см. рис. Ш-18,в). В этом случае равенства (10), (И) и (12) сохраняются.
Чаще всего электроизмерительный прибор Э включается в контур термопары с помощью проводников С по схеме, показан-
70
Рнс. Ш-19. Зависимость т. э. д. с. от температуры горячего спая термопары.
ной на рис. Ш-18, б. Термопара своим соединенным концом 1 погружается в контролируемую среду. Этот конец является рабочим и носит название горячего спая, а конец 2—2', к которому подключаются соединительные провода электроизмерительного прибора, является свободным и носит название холодного спая. Если температура холодного спая поддерживается постоянной, т. е. /o = f'o=const, а температура горячего спая равна температуре контролируемой среды, в которую помещена термопара, то т. э. д. с. термопары будет отражать измене-
ния контролируемой температуры: будет увеличиваться при увеличении 6 и уменьшаться при ее понижении. На основании этой зависимости, в общем виде выраженной равенством (12), шкала прибора Э может градуироваться в единицах температуры.
Из рассмотренного выше вытекают следующие основные положения, касающиеся применения термопар:
1) . термоэлектродвижущая сила, (развиваемая термопарой, зависит как от температуры рабочего конца, так и от температуры свободного конца;
2) температура свободного конца должна поддерживаться постоянной и иметь вполне определенное значение, в этом случае т. э. д. с. термопары является функцией только температуры рабочего конца, т. е. контролируемой температуры;
3) введение третьего проводника в контур термопары не изменяет величины результирующей т. э. д. с. при условии, что места подключения концов этого третьего проводника имеют одинаковую температуру.
При измерении разности температур в двух точках применяется так называемая дифференциальная термопара, состоящая из двух одинаковых, встречно включенных термопар (рис. Ш-20,а). Если температуры точек, разность которых измеряется, равны, то и температуры горячих спаев t\ и /2 будут одинаковы, а это значит, что т. э. д. с., развиваемые термопарами, будут также равны. В этом случае ток в цепи термопар будет равен нулю (так как при встречном включении э. д. с. одной термопары компенсирует э. д. с. другой) и электроизмерительный прибор (милливольтметр Мв) покажет нуль. Если же температуры Л и /2 будут разные, то в зависимости от того, какая температура выше, ток в цепи термопар, пропорциональный разности температур t\—tz, будет протекать в одном или другом направлении, что зафиксирует прибор мВ.
Для увеличения точности измерения незначительно изменяющихся температур иногда применяется термобатарея (рис.
71
Рис. Ш-20. Схема дифференциальной термопары и термобатареи:
а — дифференциальная термопара; б — термобатарея; в —термопара с двумя подключенными вторичными приборами.
Ш-20, б), состоящая из нескольких одинаковых, последовательно соединенных термопар, рабочие концы которых t (так же как н свободные /о) расположены вместе в зоне одной температуры. Результирующая т. э.д.с. батареи, измеряемая прибором мВ, пропорциональна числу включенных термопар.
В случае необходимости к одной термопаре разрешается подключать два электроизмерительных прибора mBi и мВг (рис.
Ш-20,в). Такое включение применяется, когда необходимо производить отсчет измеренной температуры непосредственно у места измерения и одновременно передавать результаты измерения на какой-либо централизованный пункт управления.
Чтобы поддерживать температуру холодных спаев термопары . постоянной и известной, применяются специальные устройства.
В производственных условиях", когда в ком-
плекте с термопарой работает милливольтметр,' термостатирова-ние холодных спаев осуществляется либо с помощью специального термостата (небольшого шкафа), обогреваемого электронагревателем, (температура регулируется контактным термометром), либо с помощью специальной компенсационной коробки, осуществляющей автоматическую коррекцию (см. рис. Ш-21).
Автоматический корректор выполнен по схеме неуравновешенного моста, плечн которого в виде небольших катушек с обмотками из манганиновой rlt Гч, г3 и медной г4 проволоки смонтиро-ван-ьь-внутри''термокомпенсационной коробки /, изготовленной из пластмассы. Мост питается постоянным током напряжением 4 В от источника сетевого питания, который включен в диагональ ^моста с—d. Термоэлектродные провода КП от термопары 2 присоединяются к зажимам 6 и 7 внутри коробки, а соединительные медные провода СП— к клеммам 7 и 5 также внутри коробки и к милливольтметру 4.
Компенсационные провода предназначены для перемещения холодных спаев термопары из зоны с переменной температурой fo— в зону со стабильной температурой /0-
При температуре воздуха, окружающего коробку, равной +20 °C, мост находится в равновесии и не оказывает влияния на т.э.д.с. термопары. Отклонение температуры воздуха от +20°С изменит величину медного сопротивления г4, нарушит равновесие
72
моста и в диагонали моста ..а—b появится разность потенциалов, тем большая, чем больше отклонение температуры воздуха, окружающего коробку, от +20 °C. Эта разность потенциалов должна быть равна по величине и противоположна по знаку изменению т.э. д. с. термопары, вызванному отклонением температуры ее холодных спаев от +20 °C.
Термопара может быть изготовлена из любой пары разнородных проводников, однако далеко не всякая такая термопара будет пригодна для практических целей, ибо современная техника измерений предъявляет к термоэлектродным материалам ряд весьма серьезных требований: стойкость в диапазоне измеряемых температур (неизменность физических и химических свойств); возможно большая т. э. д. с., развиваемая парой электродов; возможно близкая к линейной зависимость между температурой горячего спая и развиваемой т.э.д.с.; гомоген-
Рис. Ш-21. Схема автоматической компенсации температуры холодных спаев термопары:
/ — термокомпенсационная коробка из пласт-мас£ы; 2—термопара; 3 — источник сетевого питания; 4 — милливольтметр; 5, 6, 7 —клеммы.
ность (однородность) материа-
лов термоэлектродов, обеспечивающая взаимозаменяемость тер-
мопар.
До сих пор не удалось создать термопару, которая была бы пригодна для измерения температуры в большом температурном интервале и в любой среде, так как не существует материалов, полностью отвечающих перечисленным выше требованиям. Поэтому пришлось создать несколько типов стандартных термопар, каждая из которых имеет свои особенности и с помощью которых можно осуществить контроль температуры различных сред в раз-
личных пределах.
В результате длительного отбора у нас 'в стране в качестве стандартных приняты и серийно изготавливаются пять типов тех-
нических термопар, основные характеристики которых приведены в табл. Ш-З. .
Конструктивно термопары представляют собой следующие устройства. Электроды из соответствующих материалов, сваренные своими концами, изолируются один от другого с помощью керамических втулок или бус. Термоэлектроды термопар платиновой группы изготавливаются из проволоки диаметром 0,05 или 0,1 мм, а термопар из неблагородных материалов — из проволоки диаметром 0,7—3,2 мм. Электроды помещаются в защитную арматуру из стали (такую же как и для электрических термометров со-
%.
73
Таблица 111-3.
Тнп термопар* Градуировка Материалы термоэлектродов Пределы измерения, °C
длительного кратковременного
ТПП ПП-1 Платинородий (10% родия) — платина —20—1300 1600
ТПР ПР-30/6 Платинородий (30% родия) — платинородий (6% родия) 300—1600 1800
ТХА ХА Хромель — алюмель —50—1000 1300
тхк ХК Хромель — копель —50—600 . 800
ТВР** ВР-5/20 Вольфрам — рений (5%' Re) — вольфрам —рений (20% Re) 800—1800 2300
ТВР** В Р-10/20 Вольфрам — рений (10% Re)— вольфрам — рений (20% Re) 100—1800 2300
* Первым в названии термопары указывается положительный электрод.
•* Термопары ВР требуют индивидуальной градуировки.
противления, см. рис. Ш-11), а при измерении температуры агрессивных сред—из металлокерамики или из стали, покрытой слоем тугоплавкой .и химически стойкой эмали. Крепление арматуры на объектах измерения такое же, как и для термометров сопротивления— обычно с помощью бобышек (см. рис. Ш-7).
При выборе нужного типа термопары следует руководствоваться не только пределами измерения (см. табл. Ш-3), но и знать особенности поведения термоэлектродных материалов в измеряемой среде. Следует иметь в виду, что термопары платиновой группы надежно работают в нейтральной и окислительной средах, а в восстановительной атмосфере, особенно при наличии окислов Металлов и кремнезема вблизи электродов, быстро разрушаются. Термопара градуировки хромель-алюмель надежно работает в окислительной среде и быстро разрушается в восстановительной. Термопара градуировки хромелыкопель устойчиво работает в окислительной и несколько менее устойчиво в восстановительной средах.^^
Особенностью термопар градуировки ПР 30/6 и ВР является то, что при температурах до + 200'°С, развиваемые ими т. э'д. с. практически равны нулю; это позволяет применять их без учета поправки на температуру холодного спая.
Обычно в соответствующей справочной литературе приводятся градуировочные таблицы, в которых указывается развиваемая стандартными термопарами т. э. д. с. (в мВ) в зависимости от температуры горячего спая при температуре холодного спая /о= = 0°С.
Все стандартные технические термопары являются взаимозаменяемыми, что несомненно является их достоинством. Выпускаются они различной длины, причем длина их погружаемой и на-
74
Рис. Ш-22. Схема милливольтметра:
Л'Л — полюса магнита; П>, ГЬ — полюсные наконечники; Ц — сердечник; /? — рамка; ПС — показывающая стрелка; Шк — шкала; О — ось; Д — подпятник; С — спиральные пружинки.
ружной частей выбирается из предпочтительного ряда чисел от 80 до 3500 мм.
На арматуре каждой термопары, кроме товарного знака завода-изготовителя и ГОСТа выбиваются: обозначение типа термопары, пределы измерения, марка материала погружаемой части защитной арматуры, условное давление контролируемой среды, длина погружаемой части, обозначение, устойчивости к механическим воздействиям (обычная, вибротряскоус-тойчивая, ударопрочная), условное обозначение степени инерционности, год и месяц выпуска.
Милливольтметры. Принцип их действия основан на взаимодействии рамки, по которой протекает ток, с полем постоянного магнита.
На рис. Ш-22 приведена схема милливольтметра.
Рамка R, представляющая собой легкий каркас из картона с обмоткой из тонкой, медной, эмалированной проволоки, имеет возможность поворачиваться относительно оси О в равномерном кольцевом зазоре, образованном выточками полюсных наконечников П1 и Па постоянного подковообразного магнита W—S и неподвижным цилиндрическим сердечником Ц из мягкого железа.
Оси О крепятся в подпятниках Д и
прикреплена показывающая стрелка ПС. Кроме того, к осям также прикреплены своими концами спиральные пружинки С (другие их концы заделаны неподвижно), предназначенные для создания противодействующего момента, возвращения рамки в исходное положение, когда по рамке не протекает ток, и для подвода к обмотке рамки тока от термопары.
Ток от термопары, протекая через рамки, образует вращающий момент:
Мв = ClrlnBl (13)
где С—коэффициент, зависящий от параметров рамки; г — радиус рамки; I — длина витка в зазоре между полюсным наконечником и сердечником; п — число витков; В — магнитная индукция в зазоре между полюсными наконечниками и сердечником (поскольку зазор кольцевой, равномерный, B = const); /—сила тока, протекающего через рамку от термопары.
Для определенных магнитной и подвижной систем милливольтметра все множители правой части равенства (13), кроме силы тока I (которая зависит от измеряемой температуры), по-
к одной из них жестко
75
стоянии. Тогда равенство (13) примет вид:
М,= CtI (14)
где
С\ = C2rlnB
Величина противодействующего упругого момента Мф , создаваемого спиральными пружинками, пропорциональна модулю упругости материала пружинок Е и углу закручивания <р, т. е.
Мф = Я£ф (15)
где К — постоянный множитель, зависящий от геометрических размеров упругой пружинки. В момент равновесия Мб = Мф или С17=К£<р.
Отсюда угол поворота подвижной системы
<Р = / = К]/ (16)
где - КЕ
Равенство (16) показывает, что угол поворота рамки <р, а следовательно и показывающей стрелки ПС прямо пропорционален току от термопары, т. е. контролируемой температуре. Это значит, что шКала прибора Шк равномерная.
-Существуют конструкции милливольтметров, в которых рамка крепится не на стальных осях, а на ленточках-растяжках из фосфористой бронзы (например в нуль-гальванометрах). Эти растяжки служат одновременно и для подвода тока в рамку.
1 Схема измерительного комплекта, состоящего из стандартной технической термопары и стандартного технического милливольтметра, приведена на рис. Ш-23.
Термопара ТП, погруженная в контролируемую среду, с помощью термоэлектродных КП и соединительных СП проводов подключена к (клеммам а, Ь милливольтметра, шкала которого градуирована в °C.
Холодный спай термопары f0 с помощью термостатирующего устройства Ту поддерживается при постоянной температуре t$.
В соединительную линию последовательно включена уравнительная катушка гу для подгонки сопротивления линий до градуировочного значения (установлены следующие градуировочные значения соИротивлений соединительной линии: 0,6; 5; 15 Ом). Это градуировочное значение обязательно указывается на шкале прибора (например, гВн=5 Ом).
Подгонка сопротивлений линий производится так же, как и для комплекта, состоящего из термометра сопротивления и подключенного к нему по двухпроводной схеме моста или лого-метра.
те
Последовательно с рамкой J? милливольтметра включена катушка г№ с обмоткой из манганиновой проволоки, которая снижает температурный коэффициент прибора. Дело в том, что медная обмотка рамки прибора заметно изменяет свое сопротивление при изменении температуры окружающего воздуха (температурный коэффициент сопротивления меди acu = 4,26-10-3 1/°С), а это обу-
Рис. Ш-23. Схема измерительного комплекта стандартных технических термопары и милливольтметра:
ТП — термопара; МВ — милливольтметр; КП и СП — термоэлектродные и соединительные провода; ТС — термостат; R — рамка; гу — уравнительная катушка; гн — манганиновое сопротивление.
Рис. Ш-24. Принципиальная схема потенциометрического измерения температуры;
I — компенсационный контур; II — контур термопары.
словливает дополнительную погрешность комплекта. Манганиновая обмотка, последовательно включенная с рамкой милливольтметра, увеличит общее сопротивление рамки, но за счет составляющей, которая от температуры окружающей среды не зависит (манганин обладает практически нулевым температурным коэффициентом сопротивления), температурный коэффициент милливольтметра понизится. А
Милливольтметры серийно изготавливаются как переносные, так и стационарные, предназначенные для щитового монтажа, причем последние выпускаются следующих типов: показывающие и самопишущие; показывающие и регулирующие; показывающие, самопишущие и регулирующие. На шкале прибора, кроме значения сопротивления соединительной линии указывается: обозначение градуировки, внутреннее сопротивление милливольтметра и напряжение на зажимах прибора, соответствующее конечной отметке шкалы.
Потенциометры (от латинского potentia— возможность и греческого metreo — мерю). Потенциометрический или компенсаци
онный (от латинского compensate — уравновешивать) метод/ измерения заключается в уравновешивании неизвестной, измеряемой т. э. д. с. термопары известным падением напряжения от постороннего источника тока, которое в момент равновесия измеряется с высокой точностью.
Принципиальная схема потенциометрического метода измерения температуры приведена на рис. Ш-24.
Схема состоит из двух контуров I и II. Контур I является компенсационным, ой образован последовательно соединенными: источником Б питания постоянного тока (сухая батарея, 1,5 В), реохордом гр, милливольтметром мВ, регулировочным реостатом Гь для регулировки рабочего тока /1 в контуре. Контур термопары II образован последовательно соединенными: термопарой ТП, соединительными проводами СП нуль-гальванометром НГ, участком сопротивления реохорда длиной ab. В точке а контуры соединены неподвижно, а в точке b — с помощью скользящего по обмотке реохорда контакта.
Включены контуры таким образом, что токи /1 и It направлены встречно, а на участке реохорда ab совпадают по направлению, Т. е. If+It = Iab-
Величину тока 1\ в контуре I необходимо поддерживать постоянной (сухая батарея Б со временем «садится» й величина Ji уменьшается). Это осуществляется с помощью реостата гь и милливольтметра мВ: если стрелка мВ отклонилась от отметки шкалы, соответствующей номинальному значению /1, то перемещая движок реостата Ь, ее вновь устанавливают на эту отметку.
Рассмотрим контур термопары, замкнутый на участок реохорда ab. На основании второго закона Кирхгофа величина т. э. д. с. термопары Et будет равна:
Et = (Гнг + Гт + Гл) + Iabrp (ab) — 11 (гНГ 4" ГтГл) 4" 71гр (аЪ) 4" Лгр (ab) откуда i
= (гнг 4-гт-f-гл + Гр -f-/jrp (nj)
И / Et —!irp (ab)
ГНГ 4* rT 4- Гл + Гр (ab) (17)
где rHr — сопротивление нуль-гальванометра; rT — сопротивление термопары; гл — сопротивление соединительных проводов (линии); Гр(аь)— сопротивление участка ab реохорда.
Величина 7гР(аь) в уравнении (17) представляет собой падение напряжения U аь от источника питания Б на участке реохорда длиной ab, т. е. С7аь=71Гр(а&).
Передвигая движок реохорда (контакт Ь) вдоль сопротивления реохорда, можно найти такое положение, при котором ток в цепи контура II будет равен нулю, т. е. It = 0 (это возможно, если э.д.с. источника питания больше самой большой т. э. д. с., развиваемой термопарой, т. е. £)>£<).
78
В момент равенства нулю тока It в контуре // на основании уравнения (17) будем иметь
Ef — Ilrp(ab) = О
Ef = /1Гр (ab) ( 1®)
Равенство (18) позволяет заключить, что при постоянной величине тока /1 в контуре / измеряемая т. э. д. с. термопары Et будет прямо пропорциональна сопротивлению участка реохорда гр(аь)-
Сопротивление участка реохорда ab определится из равенства: р
Гр (ab) — tub (19)
а сопротивление всего реохорда длиной ас
_ _Р_, гр (ас) — 5 *ас
(20)
где р — удельное сопротивление материала обмотки реохорда; S — сечение проволоки обмотки реохорда; 1аь — длина участка реохорда сопротивлением rp(0&); lac — длина реохорда сопротивлением Гр(ас).
Решая совместно равенства (19) и (20), будем иметь
Гр (ас) , Гр (а&) — iac ‘ab
(21)
Подставляя значение гР(аь) из равенства (21) в равенство (18), получим:
Et = li lab (22)
'’ОС
Так как /i = const, rP(aC)=const, /ac = const
гР (ас)
/, —7---= Cj = const
lac
а равенство (22) примет вид:
Et = С^аь (23)
Однако, с известным допущением, т.э.д.с. термопары Et прямо пропорциональна температуре горячего спая Л (т. е. измеряемой температуре) при постоянной температуре холодного спая (io—const), т. е.
Et^C2tt (24)
где Сг — коэффициент пропорциональности, зависящей от материалов термоэлектродов термопары.
Совместное решение равенств (23) и (24) дает следующий результат:
Zf = £ lab (25)
79
где
Анализируя равенство
С, п С = const
Gs
(25), следует сделать следующий ос-
новной вывод: контролируемая температура ti может быть определена по положению движка b реохорда, т. е. зависит от величи-
/
Рис. III-25. Схема потенциометра, установка рабочего тока в котором осуществляется компенсационным способом:
/ — компенсационный контур; II — контур термопары; III — контур нормального элемента.
ны сопротивления участка реохорда длиной ab. Движок b соединен с отсчетным устройством, которое, перемещаясь вдоль шкалы Шк, градуированной в °C, позволяет произвести отсчет температуры Л.
Большим достоинством потенцио- . метрического метода измерения по сравнению с методом, использующим милливольтметр, является то, что сопротивление соединительных про.во-- дов, которое колеблется в зависимости от колебаний температуры .окружающего их воздуха, не влияет на результат измерения, ибо в момент компенсации ток в контуре термопары отсутствует (Л=0).
Однако рассмотренная потенциометрическая схема (см. рис. Ш-24) не получила распространения, так как наличие двух стрелочных приборов НГ и мВ ограничивает точность измерения. Распространение получили
схемы, в которых установка и контроль рабочего тока в компенсационном контуре (7) производится также компенсационным способом. Такая схема приведена на рис. Ш-25. По сравнению с предыдущей схемой здесь отсутствует контрольный милливольтметр мВ в компенсационном контуре и добавлен контур 777 — контур нормального элемента НЭ, который с помощью переключателя П можетбыть замкнут на постоянное сопротивление г9.
Нормальные элементы, электродами которых служат' ртуть (+) и амальгама кадмия (—) являются эталонами напряжения, и серийно выпускаются отечественной промышленностью. При 4-20°C они развивают постоянную э.д.с., равную 1,018 В, причем срок службы их можно считать неограниченным, если будут соблюдаться следующие условия эксплуатации: через них ни в коем случае нельзя пропускать или брать от них ток свыше 0,001 мА, их нельзя нагревать, подвергать действию сильных источников света, встряске и взбалтыванию.
Для установки рабочего тока Ц в компенсационном контуре (7) переключатель П переводится в положение 7, благодаря че
80
му нормальный элемент замыкается на постоянное сопротивление из манганина гэ. Если падение напряжения на сопротивлении гэ от источника Б равно э.д. с. нормального элемента Ев. э, т. е. если соблюдается равенство
/1^3= ^Н.Э (26У
то в контуре нормального элемента (контур III) ток будет отсут- -ствовать (так как НЭ и Б включены встречно) и стрелка нуль-гальванометра будет показывать нуль. Это значит, что ток /1 имеет номинальное значение.
Если же ток Л изменился (например «села» батарея Б), то равенство (26) нарушится, в контуре III появится ток и тогда с помощью реостата гъ надо так изменить величину тока 1\, чтобы стрелка нуль-гальванометра вновь встала на нулевую отметку.
После установки рабочего тока переключатель П переводится в положение 2 и производится измерение температуры так же, как это было описано выше.
Электронный автоматический потенциометр. Прибор предназначен для'автоматического контроля (а в зависимости от модификации и для записи сигнализации, регулирования) температуры в производственных условиях. Это стационарный прибор, который обычно устанавливается на специальном щите.
\ В отличие от рассмотренных выше принципиальных схем потенциометрического метода измерения в схемах автоматических электронных потенциометров такие операции, как компенсация т.э.д. с. термопары и введение поправки на изменение температуры холодного спая термопары, осуществляются автоматически. .
Различные модификации электронных потенциометров, серийно выпускаемых нашей приборостроительной промышленностью, различаются по наличию или отсутствию дополнительных устройств, встраиваемых в. корпус прибора (записывающих, сигнализирующих, регулирующих). Но принцип их действия одинаков.
На рис. Ш-26 приведена принципиальная схема электронного автоматического потенциометра.
В схеме приняты следующие обозначения: г\—г3 — постоянные сопротивления плеч измерительного моста из манганина, опреде-г ляющие нижний и верхний пределы измерения; гр— реохорд, обмотка которого выполнена из манганиновой проволоки; гк — медное или никелевое сопротивление для автоматической коррекции температуры холодного спая, подключаемой к прибору термопары; Б — стабилизированный источник питания мостовой измерительной схемы (стабилизатор напряжения), который встраивается в корпус прибора; ТП —термопара стандартной градуировки, погруженная в контролируемую среду; ВП — вибрационный преобразователь, который служит для преобразования постоянного тока, поступающего с мостовой измерительной схемы в переменный; Тр — трансформатор; ЭУ — электронный усилитель; РД — риверсивный двигатель, ротор которого кинематически связан
6-2208
81
(условно показано пунктиром) с движкам реохорда гр и поиазы* -вающей стрелкой ПС, (перемещающейся относительно шкаль/ Шк.
Цепь источника тока измерительной мостовой схемы (бДтареи Б) состоит из двух ветвей: рабочей, в которую включен реохорд гр с постоянными сопротивлениями гг и г2, и вспомогательной, со-
Рис. Ш-26. Принципиальная схема электронного автоматического потенциометра.
стоящей из сопротивлений г3 и гк. Ток от источника Б разветвляется в вершине моста b и через рабочую ветвь протекает ток 12, а через вспомогательную — ток 1\.
Термопара ТП подключается к автоматическому'потенциометру в диагональ моста cd с помощью термоэлёктродных (компенсационных) проводов КП, причем концы этих проводов заводятся внутрь корпуса к специальным клеммам, рядом с которыми расположена катушка гк с обмоткой из медной проволоки. Таким образом, холодный спай термопары t'o как бы перенесен внутрь корпуса потенциометра и находится в одинаковых температурных условиях с медной катушкой гк.
Вибрационный преобразователь и электронный усилитель в схеме электронного потенциометра выполняют функции нуль-гальва-йометра, т. е. являются индикатором рассогласования. _^"'Если падение напряжения Ucd между точками си d моста, равное алгебраической сумме падений напряжения на участке реохорда г'р, на сопротивление г\ и на сопротивление гк, равно т..э. д. с. термопары Et, то в контуре термопары ток отсутствует (он скомпенсирован) и на вход вибропреобразователя ВП сигнал не поступает. В этом случае имеет место равенство:
гр'/24-Г1/2 — гк71
В результате изменения температуры контролируемой среды величины Et изменится и в контуре термопары появится ток небаланса, направление которого будет зависеть от того, больше или меньше станет Et по сравнению с Ucd- Этот ток поступит через ВП и ЭУ на реверсивный двигатель РД, который переместит дви*
82
жок\ реохорда с в новое положение, изменив величину UCd так, что она вновь станет равной уже новому значению Et. Одновременно переместится показывающая стрелка ПС относительно шкаль! Шк, фиксируя новое значение измеряемой температуры.
Автоматическая компенсация температуры холодного спая термопары осуществляется следующим образом. Как говорилось выше, холодный спай t'o термопары с помощью термоэлектродных проводов КП как бы перенесен внутрь корпуса потенциометра и изменение температуры воздуха внутри корпуса одинаково изменит температуру холодного спая и обмотки катушки.
Пусть температура внутри корпуса возросла от t0 до t'o, при этом увеличилась температура холодного спая, а это при неизменной температуре горячего спая приведет к уменьшению т. э. д. с. термопары на величину hEt, падение же напряжения на сопротивлении гк за счет увеличения его сопротивления в связи с увеличением температуры внутри корпуса, возрастет. Тогда будет иметь место равенство
A£=£tj, t#— t0 = Лгр'+ ^2ri — Лгк—(27)
где Etvt9—т.э.дис. термопары до изменения температуры холодного спая; Et;,, t0— величина приращения т. э. д. с. за счет изменения температуры холодного спая от to до \гк — приращение сопротивления гк за счет изменения температуры внутри корпуса прибора от t0 до t'o.
Чтобы движок реохорда сохранил свое прежнее положение и потенциометр продолжал как прежде показывать температуру контролируемой среды, необходимо обеспечить выполнение равенства
£*о'. *о = 11&Гк
L ,
при любом изменении температуры внутри корпуса потенциометра, а это достигается расчетом величины г«."
На шкалах электронных автоматических потенциометров обязательно указывается градуировка термопары, которая предназначена для работы в комплекте с этим прибором . (например: Гр ХК или Гр ПП). 7
Подобно автоматическим уравновешенным мостам, электронные потенциометры выпускаются как одноточечные, так и многоточечные. К многоточечному потенциометру с помощью термоэлектродных проводов может быть подключено до 12 однотипных термопар.
Термоэлектрический метод измерения температур обладает высокой точностью, но при его использовании может возникнуть ряд погрешностей, основными источниками которых являются: неправильный выбор и установка термопары; отклонение характеристики термопары от стандартной градуировочной; неправильный учет температуры холодного спая термопары; несоответствие
6* 83
Термоэлектрической характеристики термоэлектродных проводов характеристике термопары. /
Дополнительные погрешности в измерительном , комплекте, состоящем из термопары и термоэлектрического милливольтметра, обусловливаются: неправильным подбором сопротивления внешней (соединительной) линии; изменением температуры среды, окружающей милливольтметр и соединительные провода; воздействием внешних магнитных полей.
Выбор типа термопары для технических измерений определяется в основном верхним пределом измеряемой температуры. При длительной эксплуатации термопары вблизи верхнего температурного предела происходят сложные окислительно-диффузионные процессы, ведущие к выгоранию элементов, изменению химического состава электродов, что ведет к уменьшению числа свободных электронов и снижению т. э. д. с., и как следствие — к отклонению характеристик термопар от градуировочных.
Поэтому, выбирая термопару соответствующей градуировки, рекомендуется предусматривать, чтобы ее верхний температурный предел был на 100—300 °C ниже максимально допустимого по таблице.
Конструктивные особенности термопар (наличие и тип штуцера и головки, .материал защитной арматуры, устойчивость к механическим воздействиям и т. д.) выбираются с учеток условий их работы.
При подсоединении термоэлектродных проводов к термопаре должна обязательно соблюдаться полярность: положительный электрод термопары должен соединяться с положительной жилой термоэлектродного провода.
.Если в помещении, где предполагается установить измерительный комплект, ожидаются значительные колебания температуры воздуха, то лучше отдать предпочтение комплекту, состоящему из термопары и потенциометра.
Рассмотренные выше погрешности измерений термоэлектрических термометров могут иметь место при исправном состоянии всего комплекта. Помимо того, причиной больших искажений показаний может явиться ряд неисправностей приборов (плохие контакты, заедание подвижных частей, выход из строя электрон-нйХ'ламптГт. д.) и плохое состояние линии.
Правильное измерение температуры термоэлектрическими термометрами обеспечивается лишь при строгом соблюдении всех правил их установки и эксплуатации.
ИСТОЧНИКИ ПОГРЕШНОСТЕЙ ПРИЕМНЫХ УСТРОЙСТВ ПОГРУЖЕНИЯ
В каждом из разделов этой главы говорилось о конструктивных особенностях и источниках погрешностей, свойственных каким-то определенным приемным устройствам погружения: жид-
54 .
кос^ио-стекляиным и манометрическим термометрам, электрическим термометрам сопротивления, термопарам.
Но имеются также источники характерных для всех этих элементов погрешностей (обусловлены теплообменом между средой и погруженным в нее приемным устройством); это следующие факторы:
Рис. III-28. Схема сечения погружаемой части медиого электрического термометра:
1 — обмотка из медной проволоки; 2 — фторпластовая пленка; 3 — тонкостей-иая металлическая гильза; 4 — керамический порошок.
Рис. Ш-27. Пример монтажа термоприемника погружения на объекте контроля: I — объект контроля; 2 — погруженная часть арматуры; 3, 3' — теплоизоляция; 4 — выступающая часть арматуры; 5 — бобышка.
теплопроводность защитной арматуры;
лучеиспускание;
неплотности установки термоприемников;
неправильное положение приемного устройства относительно потока среды;
скорость потока;
погрешности, обусловленные тепловой инерцией.
В практике промышленных измерений обычно делается допущение, что приемное устройство, помещенное в контролируемую среду, всегда принимает ее температуру. На самом же деле оно участвует в теплообмене как с контролируемой, так и с граничащими с ней средами, его температура отлична от окружающей среды, а само приемное устройство является каналом, по которому отводится или подводится тепло. Отсюда возникает погрешность измерения.
Особенно заметны эти погрешности у приемных устройств, заключенных в защитную арматуру. Для уменьшения теплоотвода по защитной арматуре ее следует изготавливать из материала с наименьшим коэффициентом теплопроводности (например, керамика, сталь, стекло, кварц предпочтительнее меди, латуни или алюминия) и брать длину арматуры большей, а толщину стенки — наименьшей. Следует хорошо теплоизолировать выступаю-
Шую наружу часть защитной арматуры и участок, где она Делится на объекте измерения (рис. Ш-27). Чтобы увеличить/ко-эффициент теплоотдачи от среды к защитной арматуре, ее необходимо устанавливать в местах с большей скоростью среды.
Улучшение теплопередачи от арматуры к чувствительному элементу является обязательным условием правильного измерения. В конструкциях выпускаемых в настоящее время приемных устройств предусматриваются специальные теплопередающие устройства. На рис. Ш-28 показано сечение электрического термометра сопротивления, выполненное плоскостью, перпендикулярной образующей погружаемой части защитной арматуры.
В приемных устройствах, у которых отсутствуют теплоотводящие детали, для улучшения теплопередачи от защитной арматуры к чувствительному элементу рекомендуется:
для термометров расширения — заполнять зазор между внутренней стенкой погружаемой части арматуры и термометром (не превышая высоты резервуара термометра) следующими материалами:
Глицерин ................
Компрессорное масло .
Бронзовые илн чугунные опнлкн . . ' .
Керамический порошок .
t, °C
Ниже О О—1-200
Выше -f-200 —200—р-700
для манометрических термометров — заполнять термобаллон на всю его длину;
для термометров сопротивления — заполнять гильзу на длину его активной части, т. е. обмотки;
для термопар — предусматривать в арматуре концевой изолятор, который передает тепло от арматуры к горячему спаю.
Следует иметь в виду, что заполнение арматуры указанными веществами снижает погрешности измерения, однако увеличивает тепловую инерцию термоприемников.
Особым случаем температурных измерений в производственных условиях следует считать измерение температуры газойых потоков. Дело в том, что в газовой среде приемное устройство уча-'"--ствует во всех трех видах теплообмена с поверхностями, находя-щимисяпвблизи него: лучистом, за счет теплопроводности и,конвективном (в жидких средах лучеиспускание влияния на измерение не оказывает).
Если, например, рассматривать влияние лучеиспускания на приемное устройство, погруженное в трубопровод, то погрешность измерения от лучеиспускания Д/ будет такова:
где fCp — температура среды в трубопроводе, °C; tT, Тт — температура термометра, °C и К; /ст, Т’ст — температура стенки трубы,
86
°C и К; Ci — константа лучеиспускания для материала арматуры термоприемника (Ci = l,16 Дж/(м2-с-К4); си — коэффициент теплопередачи от среды к термометру.
Уравнение (28) показывает пути снижения погрешности от лучеиспускания. Для уменьшения защитную арматуру рекомендуется снаружи полировать или применять экранирование (например, для полированной латуни Ci = 0,2, для сильно окисленной стали Ci = 4,0, т. е. в 20 раз больше). Увеличение скорости среды в дозвуковых пределах всегда увеличивает щ, а значит уменьшает М, и поэтому более целесообразно проводить измерение в местах с относительно большей скоростью. Защитная арматура малых диаметров более целесообразна, так как при данной скорости это увеличивает щ. Повышение температуры стенки (fCT) в месте установки термоприемника снижает погрешность. Поэтому в месте измерения трубопровод необходимо изолировать.
Экранирование (рис. Ш-29) заключается в установке вокруг защитной арматуры термоприемника 1 тонкого цилиндрического экрана 3 из металла с полированной внутренней поверхностью. В этом случае лучистый теплообмен защитной арматуры происходит не с внутренней поверхностью трубопровода 2, а с поверхностью экрана, имеющей более высокую температуру, чем температура стенки трубопровода. Снаружи трубопровод имеет термоизоляцию 4.
Таблица 111-4.
Труба Погрешность (в %) вследствие излучения прн различных скоростях потока
5 м/с 10 м/с 30 м/с
без экрана с экраном без экрана с экраном без экрана с экраном
Неизолированная 24,8 0,7 13,2 0,25 3,6 0,03
Изолированная 7,8 0,27 3,4 0,07 0,8 0,007
Резкое снижение погрешности измерения, в случае применения экранирования (рис. Ш-29) иллюстрируется данными табл. Ш-4.
Если контролируемая среда находится под разрежением (газоходы котлов и печей, вакуумные линии и т. д.), через трещины в стенках и неплотности в местах установки термоприемников происходит интенсивный присос наружного воздуха. Поэтому, как правило, место установки термоприемника должно быть хорошо уплотнено.
Для сред под давлением, особенно в случае высоких температур, заметное влияние оказывают трещины в защитной арматуре (особенно в фарфоровой и керамической). В этом случае обмотка термометров сопротивления и термоэлектроды термопар могут взаимодействовать с контролируемой средой, что ведет к
87
выходу их из строя. Во всех этих случаях единственной мерой защиты является периодическая смена измерителей и их регулярная поверка <в лаборатории.
От того, как расположено приемное устройство в контролируемой среде, во многом зависит теплопередача от этой среды “ термоприемнику, а значит и точность измерения.
к
Рис. П1-29. Схема экранирования термоприемника погружения:
1 — защитная арматура термоприемиика; 2 — трубопровод; 3 — экран; 4 — термоизоляция.
Рис. Ш-30. Варианты установки термоприемника погружения в контролируемой среде:
Г-не в центре потока; 2 —в центре потока; 3 —навстречу потоку; 4— после поворота.
Схема, приведенная на рис. Ш-30, позволяет сделать общие для всех приемных устройств погружения выводы о влиянии положения этих устройств в контролируемой среде на точность измерения. По трубопроводу диаметром 100 мм, имеющему тепловую изоляцию, течет перегретый пар под давлением 1,2740s Па. Сравнение показаний термоприемников 1—4, полученных при измерении температуры перегретого пара, является весьма наглядным (табл. Ш-5). У приемного устройства 1 велико рассеяние тепла (массивная защитная арматура), кроме того, оно помещено не в центре потока, а значит омывается током с уменьшенной ско-'рбстБюГУстройство 2, хотя и имеет массивную арматуру, но помещено в центр потока. Приемное устройство 4 установлено вне изоляции на массивной бобышке, рассеивающей много тепла, что приводит к большой погрешности. Только приемное устройство 3, расположенное концом навстречу потоку и имеющее достаточную глубину погружения, практически не дает погрешностей. Установка приемника по схеме 3 должна применяться во всех случаях, как наилучшая.
Таблица Ш-5.
Параметр Значения, характеризующие термометры 1—4 (см. рис. 1П-30)
1 2 3 4 .
Температура, °C Погрешность, °C 88 371 15 384 2 386 0 341 45
• Уже отмечалось, что с увеличением скорости потока происходит более интенсивное омывание погруженной части приемного устройства, а это ведет к увеличению коэффициента теплопередачи а от среды к термоприемнику. В среднем можно считать, что для умеренных скоростей (примерно до 70 м/с)
a = KVv (29)
где К—коэффициент пропорциональности; v — скорость среды.
Следовательно, увеличение скорости среды, например вдвое, повысит коэффициент теплоотдачи а на У2=1,41, т. е. на 41%.
В трубопроводах с очень малыми скоростями рекомендуется обеспечивать местное сужение потока (например, с помощью диафрагмы), создающее повышенную скорость в месте установки приемного устройства.
В местах завихрений (так называемые «мешки»), где мала поступательная скорость потока, установка приемных устройств нецелесообразна.
Применяемые в настоящее время в технике очень большие скорости 'потока, приближающиеся к скорости звука в среде и превосходящие ее, отрицательно сказываются на результатах измерения температуры этой среды. Ударяясь о поверхность термоприемника, часть потока тормозится, и ее кинематическая энергия переходит в тепловую, что повышает температуру термоприемника.
Для измерения температуры потока, движущегося с большими скоростями, применяются так называемые «тормозные» термопары (рис. Ш-31). В прямоугольное окно защитной арматуры попадает часть набегающего потока, вследствие чего происходит его торможение. Поток выходит наружу через малое отверстие в противоположной стороне арматуры, причем площадь этого отверстия составляет 5% площади входного. Защитная арматура должна быть очень точно изготовлена и тщательно отполирована снаружи.
Всякий теплотехнический объект, в котором измеряется температура, нагревается или охлаждается с определенными скоростями, выражаемыми, например, в °С/мин. Для объектов, где эти скорости очень малы, влияние инерции термометра может совершенно не 'сказаться на результатах измерения. Но при значительных скоростях нагрева и охлаждения объекта может создаться положение, когда измерение становится вообще невозможным.
Мерой инерции приемного устройства, по определению ГОСТ, является время, необходимое для того, чтобы при внесении термометра в среду с постоянной температурой разность температур среды и любой точки внесенного в него термоприемника, стала равной 0,37 того значения, которое она имела в момент наступления регулярного теплового режима. Таким образом, если скорость измерения температуры среды 1Л превышает скорость разогрева чувствительного элемента в этой среде Vs, то может возникнуть
89
значительная погрешность. Измерение будет иметь малую погрешность, а выбор термоприемника следует считать удачным только если V2>Vi.
Для улучшения динамических свойств приемных устройств целесообразно уменьшать их размеры, ибо, чем меньше масса термометра и чем больше его поверхность, тем меньше его тепловая
Рнс. Ш-32. График скоростей прогрева хромель-алюмелевых термопар различных конструкций:
/ — без защитной арматуры; 2 —в карборундовой трубе; 3— в шамотной трубе диаметром 50 мм; 4 — в шамотной трубе диаметром 75 мм.
Рис. Ш-31. Схема «тормозной» термопары.
инерция (поверхность растет пропорционально квадрату размера, а масса — кубу размера). Динамические свойства зависят от а, следовательно, чем лучше теплопередача к термометру, тем меньше его инерция, а значит и погрешность.
На рис. Ш-32 приведен график скоростей прогрева хромель-алюмелевых" термопар, установленных в печи с температурой 450 °C. Анализ приведенных кривых позволяет сделать вывод о желательности применения термопар без защитной арматуры. Однако использование термопар (да и термометров сопротивления) без защитной арматуры для снижения инерционности^ обычно нежелательно, так как большинство сред образуют с материалами чувствительных элементов твердые растворы или химические соединения, что искажает градуировку.
Итак, основным фактором, от которого зависит инерционность приемных устройств, является коэффициент теплопередачи от среды к устройству. В широком диапазоне температур их динамические характеристики не зависят от окружающей температуры и определяются только конструкцией и коэффициентом теплоотдачи.
90
ПИРОМЕТРЫ ИЗЛУЧЕНИЯ
Все нагретые тела излучают энергию, интенсивность которой, а также распределение ее по длинам волн, зависят от температуры и физических свойств излучателя.
Теоретическая зависимость между температурой и интенсивностью лучистой энергии излучателя установлена только для так называемого абсолютно черного тела, понятие о котором давно введено в термодинамику.
Абсолютно черным называют такое тело, которое полностью поглощает падающую на него лучистую энергию. В природе не существует реальных тел, строго отвечающих этому условию. Однако, можно создать модель абсолютно черного тела.
Такой моделью (рис. Ш-ЗЗ) является замкнутая полость из любого непрозрачного материала с малым отверстием А. Лучистая энергия,;, прошедшая через это отверстие, и многократно отразившаяся от внутренних стенок полости, почти полностью поглощается те
лом. Если все точки этой полости будут иметь одинаковую температуру, то излучение, наблюдаемое из отверстия, будет подчиняться строгим закономерностям, независимо от формы и материала тела.
Зависимость между излучаемой абсолютно черным телом полной энергией и его температурой выражается законом Стефана — Больцмана:
ф = аЛ (30)
где <р — полная энергия, излучаемая в 1 с по всем направлениям с 1 м2 абсолютно черного тела (интенсивность излучения), Вт/м2; о — постоянная Стефана — Больцмана, равная 5,67-10~8 Вт-м~2-•Т-4; Т — температура тела, К.
Лучистая энергия выделяется раскаленным телом в виде волн различной длины. При сравнительно низких температурах (до 500 °C) нагретое тело испускает инфракрасные лучи, не воспринимаемые человеческим глазом. По мере повышения температуры цвет тела от темно-красного доходит до белого, содержащего волны всех воспринимаемых глазом длин.
Зависимость изменения интенсивности излучения абсолютно черного тела для какой-либо определенной длины волны (монохроматическое излучение) с изменением температуры характеризуется уравнением Планка:
/ — V1
Фх = С1Х-б \ е кт —1) (31)
где фл, — интенсивность монохроматического излучения абсолютно черного тела; X — длина волны; Т—абсолютная температура
91
излучателя; е —> основание натуральных логарифмов; Ci и Cj — постоянные, соответственно равные 3,74» 10-8 Вт-м2 и 1,44» • 10 м~2-град.
В тех случаях, когда температура тела ниже 4000 °C при % = = 0,45 мкм и ниже 3000° при Х=0,65 мкм, уравнение Планка может быть заменено (с точностью 0,3 град) более удобной при расчетах формулой Вина, которая является следствием уравнения Планка: ! - ;
— —2—
п = С^е кт (32)
здесь все обозначения те же, что и для уравнения Планка.
Рассмотрим, как изменяется с температурой энергии полного и монохроматического излучения.
После дифференцирования уравнений Стефана — Больцмана (30) и Вина (32) получим следующие.равенства:
S,T_ Ь_т,^ С2 <РХ
(33)
где А1Т — приращение температуры, соответствующее приращению энергии полного излучения А<р; МТ — приращение температуры, соответствующее приращению энергии монохроматического излучения Дер ь.
' Из равенств (33) следует, что наиболее чувствительным методом измерения температуры является метод, основанный на измерении интенсивности монохроматического излучения. Если, например, предположить, что приращение энергии полного А<р и монохроматического А<рх излучений одинаковы и составляют 0,03 при температуре тела 7=1500 К, то соответствующие приращения температур, вычисленные по равенствам (33), будут составлять: Д1Т» 11 К и МТ~3 К (при Х=0,65 мкм). Это значит, что ошибка измерения температуры тела, когда его истинная температура равна 1500 К, будет меньшей при. использовании монохроматического излучения (всего 3 град) и большей, при использовании полного излучения (11 град).
Излучение реальных тел, как уже упоминалось, зависит не только от температуры, но и от их физических свойств, состояния поверхности, чистоты ее обработки. Поэтому излучение реальных тел не подчиняется законам теплового излучения, установленных для абсолютно черного тела, а измерение интенсивности полного или монохроматического излучений позволяет судить лишь о так называемой условной температуре. Условная температура может быть радиационной, яркостной и цветовой.
Радиационной температурой реального тела называется такая температура абсолютно черного тела, при которой 92
полные энергии, испускаемые реальным и абсолютно черным телами, равны между собой.
Яркостной температурой реального тела называют такую температуру абсолютно черного тела, при которой монохроматические яркости этих тел при постоянной длине волны равны между собой.
Цветовой температурой реального тела называется такая температура абсолютно черного тела, при которой отношение монохроматических яркостей при двух длинах волн у реального и абсолютно черного тел равны между собой.
Радиационная и яркостная температуры всегда меньше истинной температуры тела; цветовая температура может оказаться больше или меньше истинной температуры тела. Для измерения истинной температуры реальных тел по их излучению необходима точно измерить условную температуру (радиационную, яркостную или цветовую), а затем к полученному результату ввести поправку, величина которой зависит от так называемого коэффициента черноты реального тела; этот коэффициент показывает/в какой степени излучение реального тела отличается от излучения абсолютно черного тела. Для большинства реальных тел коэффициенты черноты известны и приводятся в соответствующих справочниках.
В зависимости от метода измерения температуры реальных тел по их излучению сами измерители — пирометры излучения, можно разделить на радиационные и оптические.
Большим достоинством пирометров излучения является то, что измерение температуры различных объектов осуществляется бесконтактным способом, на определенном расстоянии от этих объектов, что исключает непосредственное воздействие контролируемой среды на чувствительные элементы, а это удлиняет срок эксплуатации приборов, повышает их надежность.
Радиационные пирометры служат для измерения температуры тел по их полной энергии излучения. Поэтому они еще называются пирометрами полного излучения.
На рис. Ш-34 показана принципиальная схема радиационного пирометра. Он состоит из телескопа Л и измерительного прибора мВ. В телескопе находятся: оптическая система, состоящая из объектива О, окуляра Ок, диафрагмы d и лучеприемника П. С помощью объектива и окуляра телескоп визируется на объект измерения. Тепловой поток от нагретого тела через линзу объектива и диафрагму попадает на лучеприемник, установленный в фокусе линзы, и нагревает его тем сильнее, чем выше температура объекта измерения.
В качестве лучеприемника обычно применяется термобатарея, состоящая из 9—10 последовательно соединенных миниатюрных хромель-копелевых термопар с электродами диаметром 0,05— 0,1 мм. Рабочий конец выполнен в виде тонких лепестков, черненых с одной стороны. Площадь приемной поверхности такой тер-
эа
мобатареи 2—3 мм2. Свободные концы термопар закрепляются в специальном держателе и приводятся в хороший тепловой контакт с корпусом телескопа.
На рис. Ш-35 приведена конструкция лучеприемника. Рабочие концы термопар 1 смонтированы в форме звезды; свободные кон-
Рис. Ш-34. -Принципиальная схема радиационного пирометра:
7 —нагретое тело (объект измерения); Л —телескоп; О — объектив; Ок —окуляр; Пт-луче* приемник; d — диафрагма; мВ — милливольтметр.
Рис. III-35. Конструкция лучеприемника радиационного пирометра: /—рабочие концы термопар; 2 — свободные концы термопар; 3 —слюдяное кольцо.
цы 2 приварены к тонким медным пластинам, зажатым между слюдяными кольцами 5.
Развиваемая термобатареей э.д. с. пропорциональна радиационной температуре объекта измерения и фиксируется измерительным прибором, шкала которого градуирована в °C.
’ Одним из существенных требований, предъявляемых к конструкции телескопа радиационных пирометров, является независимость их показаний от расстояния между приборами и источником питания (в определенном диапазоне) и от размеров источника излучения. Чтобы размеры телесного угла не менялись при различных расстояниях телескопа от объекта, между лучеприемником П и линзой объектива О устанавливается диафрагма d (см. рис. Ш-34). В случае отсутствия такой диафрагмы изображение объекта может перекрыть не только рабочие концы термопар термобатареи, но и их свободные концы, что приведет к соответствующему изменению э. д. с. и внесет ошибку в измерение.
Радиационные пирометры являются стационарными техническими приборами, выпускаются в нескольких модификациях и служат для измерения температуры тел в диапазоне от 400° до 2500 °C. Нормальные условия работы пирометра соответствуют температуре корпуса телескопа, не превышающей 100 °C.
В зависимости от модификации прибора основная погрешность «составляет от ±8 до ±30°C.
Радиационный метод обладает двумя недостатками: 1) большие расхождения между радиационными температурами реаль
94
ных тел; 2) значительная зависимость радиационной температуры от поглощения излучений в промежуточной среде, учет которого затруднителен.
Однако сравнительная простота конструкции, удобство в эксплуатации и относительно невысокая стоимость обеспечили им
Рис. Ш-36. Схема фотоэлектрического пирометра:
1 — накаленное тело (объект контроля); 2 — лниза; 3 — заслонка модулятора; 4 — светофильтр; 5 — фотоэлемент; 6 — электронный усилитель; 7 — детектор; 8 — показывающий потенциометр; 9 — сопротивление; 10— лампа.
достаточно широкое применение в тех случаях, когда не требуется высокой точности, а важна бесконтактность измерения.
Оптические пирометры служат для измерения температуры тел по их одноцветному (монохроматическому) излучению.
Принцип их действия основан на сравнении яркостей излучения определенной длины волны объектом измерения и эталонным излучателем. В качестве эталонного излучателя применяется специальная пирометрическая лампа, яркость излучения которой регулируется, а сравнение осуществляется с помощью фотоэлемента для фотоэлектрических пирометров или глаза наблюдателя для пирометра с исчезающей нитью.
В качестве примера рассмотрим принцип действия и устройство фотоэлектрического пирометра (рис. Ш-36).
Излучение от накаленного тела 1 через линзу объектива 2 и красный (монохроматический) светофильтр 4 попадает на фотоэлемент 5. На этот же фотоэлемент направлен световой поток от эталонной пирометрической лампы 10. Световые потоки от накаленного тела и лампы попеременно прерываются заслонкой 3 модулятора света с частотой 50 Гц, причем конфигурация отверстий в заслонке выбрана так, что на фотоэлемент попадают синусоидальные изменяющиеся световые потоки от обоих источников света. Фазы обоих световых потоков сдвинуты на 180°.
Результирующий ток на выходе фотоэлемента поступает а электронный усилитель 6 и далее на фазочувствительный детектор 7, нагрузкой на выходе которого служит лампа 10.
Последовательно с лампой включено калибровочное сопротивление 9. Падение напряжения на этом сопротивлении, пропорцио-
95
нальное току лампы, измеряется электронным потенциометром 8, шкала которого градуирована в единицах температуры.
Фотоэлектрические пирометры серийно выпускаются для измерения бесконтактным способом сравнительно высоких температур (от 500 до 4000°C). Основная погрешность показаний пирометров не превышает ±1% верхнего предела измерения при измерении до 2000 °C и ±1,5% — свыше 2000 °C.
ОСОБЫЕ СЛУЧАИ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ
Из всех особых случаев измерения температур рассмотрим лишь способы измерения температуры вращающихся поверхно-г стей и температуры газовых потоков.
Измерение температуры вращающихся, в частности цилиндрических, поверхностей осуществляется приборами и методами, уже описанными в этой главе; здесь применимы и электрические термометры сопротивления, и термоэлектрические термометры, и пирометры излучения.
Однако конструктивное оформление чувствительных элементов имеет свои особенности. - •
Для кратковременных и периодических измерений температуры применяются так называемые лучковые термопары (рис. Ш-37). Термоэлектроды в виде ленточек (например, из хромеля и копеля) сварены встык, образуя рабочий конец 5 (горячий спай), а свободные концы ленточек прикреплены к упругому луч-. ку 1, который растягивает ленточку. К концам ленточек прикреплены соединительные провода, идущие к милливольтметру 3, шкала которого градуирована в ’С. Лучек крепится к кронштейну с рукояткой 4.
Наблюдатель, взяв за ручку лучковую термопару, прижимает ленточки к контролируемой, вращающейся поверхности и производит отсчет по шкале милливольтметра.
Недостатком таких термопар является дополнительная погрешность, возникающая в результате выделения тепла вследствие трения ленточных термоэлектродов о вращающуюся поверхность. /
Этого недостатка лишена вращающаяся термопара (рис. Ш-38). Диски А (копель) и В (сталь) катятся по поверхности, температура которой контролируется. В местах контактирования с поверхностью С возникает т. э. д. с., пропорциональная температуре этой поверхности и замеряемая милливольтметром МВ, шкала которого градуирована в °C.
Недостатком вращающейся термопары является неодинаковый износ дисков А и В, что ведет к ухудшению условий их контактирования с контролируемой поверхностью и к заметным погрешностям.
Бесконтактные методы измерения температуры поверхностей более надежны, хотя и здесь имеют место некоторые погрешно-96
сти, обусловленные обменом тепла между измеряемой поверхностью и термоприемником, осуществляемым путем излучения и конвективного теплообмена.
Принципиальная схема бесконтактного датчика температуры показана на рис. Ш-39.
Рис. III-37. Схема лучковой термопары:
/ — упругий лучок; 2 — термоэлектроды; 3 — милливольтметр; 4 — ручка; 5 — горячий спай.
Рис. Ш-38. Схема вращающейся термопары.
Перед контролируемой поверхностью 1 установлен рефлектор 2, в фокусе которого крепится терморезистор 3 (например, типа КМТ или ММ.Т). С помощью резьбового соединения рефлектор крепится к неподвижной поверхности хомутом 6. Соединительные провода 5, проложенные внутри штанги 4, подключа-’-ются к измерительному мосту.
С изменением температуры поверхности изменяется полная .1энергия излучения и тепловая энергия, сфокусированная на тер-
I, III 39. Принципиальная схема бесконтактного датчика температуры: Й<1И1|п1.'1пруемая поверхность; 2 — рефлектор; 3 — термореаистор; 4 — штанга; 5—соедини-провода; 6 — хомут.
I
Коннор, изменяет его температуру, а следовательно, и сопро-еинс, которое и будет пропорционально температуре поверх-ВТН.
Измерение температуры газовых потрков имеет свои особен-JTti, обусловленные тем, что чувствительный элемент, погру-iKliwfi В контролируемую газовую среду, участвует во всех ви-twe 97
установки погру-
Рис. Ш-40. Рекомендуемая схема термоприемников жения: 1 — термоприемиик; бопровод (колено): лоизоляция; 4 — экран.
дах теплообмена с этой средой и внутренней стенкой трубопровода (конвективный, за счет теплопередачи, лучистый). Здесь ошибки измерения возникают и за счет лучистого теплообмена приемного устройства со стенкой трубопровода, температура которой обычно ниже температуры приемного устройства, и за счет утечки тепла через защитную арматуру, и за счет снижения скоростей газа (при малых скоростях коэффициент теплоотдачи невелик).
Для обеспечения достаточно высокой точности измерения температур газового потока, протекающего по трубопроводу, приемное устройство рекомендуется устанавливать так, как показано на рис. Ш-40.. Снижению погрешностей измерения способствует:
изоляция трубопровода на участке установки приемного устройства;
увеличение глубины погружения приемного устройства в контролируемую среду;. , установка приемного устройства в центре потока, где скорость выше, а следовательно больше коэффициент теплоотдачи от газа к защитной арматуре приемника;
уменьшение толщины стенок защитной арматуры (уменьшение коэффициента теплопроводности материала защитной арматуры);
уменьшение длины выступающей части арматуры и ее изоляция;
установка цилиндрического экрана во-
круг защитной арматуры с блестящей (полированной) поверхностью внутренней стенки. В этом случае лучистый теплообмен защитной арматуры происходит не со стенкой трубы, а с поверхностью экрана, температура которой превышает температуру стенки трубопровода.
В тех случаях, когда скорость потока мала и передача тепла к приемному устройству незначительна вследствие малой величины коэффициента теплоотдачи, прибегают к искусственному повышению скорости газа с помощью специальных отсасывающих устройств (например, эжекторов), которые повышают скорость омывания арматуры газом.
2 — тру-
3 — теп-
ГЛАВА IV
КОНТРОЛЬ УРОВНЯ
Устройства, которые служат для контроля уровня жидкостей и твердых сыпучих материалов или положения границы раздела двух несмешивающихся жидкостей в различных резервуарах, ем
98
костях, бункерах и т. д., носят название уровнемеров. Уровнемеры можно разделить на предназначенные соответственно для измерения уровня жидкостей и твердых сыпучих материалов. Однако основная классификация уровнемеров базируется на принципе действия их чувствительных элементов, т. е. устройств, непосредственно измеряющих уровень или какую-либо косвенную величину, однозначно связанную с уровнем.
Существует множество принципиальных решений конструкций уровнемеров. Рассмотрим некоторые из них, нашедшие наибольшее распространение.
УРОВНЕМЕРЫ ДЛЯ ЖИДКОСТЕЙ
Для контроля уровня жидкостей чаще других применяются ви-(уальные, поплавковые, буйковые, пьезометрические, гидростатические, электрические, радиационные и акустические уровнемеры.
Визуальные уровнемеры. Определение уровня с помощью визуальных уровнемеров основано на принципе сообщающихся сосудов. Такие уровнемеры называют водомерными, или указательными стёклами (рис. IV-1). Наблюдая за положением уровня жидкости в стеклянной прозрачной трубке, можно судить о положении уровня в контролируемом объекте. Трубка заключена И защитную металлическую арматуру и снабжена запорной арматурой, а если водомерное стекло устанавливается на объекте, работающем под давлением, то стекла снабжаются обратными клапанами, которые разобщат трубку и объект в случае ее поломки. Длина выпускаемых водомерных стекол не превышает 500 мм, их рабочее давление нс превышает 1,57 • 10б Па.
Поплавковые уровнемеры. Чувствительный элемент — поплавок, плавающий на поверхности жидкости, перемещается вверх «ли вниз в зависимости от повышения пли понижения уровня (рис. IV-2). С помощью системы передач поплавок связан с от-счетиым устройством.
Выпускаются поплавковые уровнемеры нескольких типов. На рИС. IV*3 показан одни пл них — поплавковый уровнемер с сельсином.
Поплавок / подвешен на тросе 2, который навивается на барабан .1 Одни оборот барабана соответствует перемещению поплавка на 0,5 м. На ось 4 барабана 3 насажено зубчатое колесо 6'. Оно сцеплено с шестерней, укрепленной на осд ротора сельсина-датчика 5, и с шестерней валика счетчика 7. Натяжение троса обеспечивает противовес 8, который укреплен на тросе 9, ивппнающемся па барабан 10. Барабаны 3 и 10 жестко укреплены ив одной и той же оси 4.
Сельсин-датчик 5 связан с сельсином-приемником вторичного Прибора, благодаря чему осуществляется дистанционная передача показаний.
7*
99
когда уровень повышается, поплавок перемещается вверх, натяжение троса 2 ослабевает, но под действием груза 8 трос 9 начинает сматываться с барабана 10 и вновь натягивает трос 2, при этом вращение передается ротору сельсина-датчика 5 и валику счетного механизма 7.
Пределы измерения уровня 0—10 м.
Рис. IV-1. Схема установки водомерного стекла.
Рис. IV-2. Схема поплавкового уровнемера.
Буйковые уровнемеры. Чувствительным элементом прибора данного типа является металлический цилиндрический буек, частично погруженный в контролируемую жидкость.
На рис. IV-4 изображена схема буйкового уровнемера одного из выпускаемых типов.
Рис. IV-3.’Схема поплавкового уровнемера с сельсином:
1 — поплавок; 2, 9 — тросы; 3, /0 —барабаны; 4— ось; 5 — сельсин-датчик; 6 — зубчатое колесо; 7—счетчик; 8—противовес.
Рис. IV-4. Схема буйкового уровнемера:
1 — объем' Контроля; 2 — упругий элемент; 3 — рычаг; 4 — сильфои; 5 — вторичный прибор; 6 — соединительная линия; 7 —дроссель постоянного сечеиия; 8—сопло; 5 —заслонка; 10 — буек; 11 — камера.^
Объект 1, в\отором контролируется уровень, сообщен с камерой 11, где находится буек 10, подвешенный на тросе к рычагу 3. Через упругий элемент 2 рычаг выведен из камеры и кинематически связан с заслонкой 9 и дном сильфона жесткой обратной связи 4. К соплу 8 через постоянный дроссель 7 подается сжатый воздух давлением 1,37-106 Н/м2.
100
Изменение уровня в объекте скажется на величине уровня в камере 11, в результате чего изменится выталкивающая сила, действующая на буек, и он переместится либо вверх (при повышении уровня), либо вниз (при его понижении). При этом переместится рычаг 3, а вместе с ним и заслонка 9 относительно сопла 8. Это приведет к изменению давления воздуха в линии 6 вторично-
Рис. IV-5. Схема пьезометрического уровнемера:
/ — пьезометрическая трубка; 2— манометр; 3— контрольный стаканчик; 4—редуктор; 5 сжатый воздух.
Рис. 1V-6. Схема гидростатического уровнемера.
го прибора 5 и внутри сильфона 4, который, воздействуя на рычаг 3, стремится возвратить заслонку в исходное положение. Шкала прибора 5 градуирована в мм или м.
Уровнемеры этого типа нашли широкое применение для измерения уровня самых разнообразных жидкостей в диапазоне от О до 9000 мм на самых различных объектах и при любых давлениях.
Пьезометрические уровнемеры. Измерение уровня этими устройствами осуществляется методом непрерывной продувки газа через слой контролируемой жидкости. В сосуд с жидкостью (рис. IV-5) помещают пьезометрическую трубку 1, к которой подводят сжатый воздух (или другой газ в зависимости от свойств жидкости) через редуктор 4 и контрольный стаканчик 3. Контрольный стаканчик позволяет поддерживать нормальную подачу воздуха (60—100 пузырьков в 1 минуту). Чем выше уровень жидкости в сосуде, тем труднее воздуху барботировать через слой жидкости, тем выше давление в пьезометрической линии. Это давление, пропорциональное уровню, измеряется манометром 2, шкала которого градуирована в единицах уровня.
Прибор служит для контроля уровня агрессивных, кристаллизующихся жидкостей и пульп в открытых емкостях. Пределы измерения 250—4000 мм (по воде).
Гидростатические уровнемеры. Принцип их действия основан на измерении давления столба жидкости в контролируемом объ
101
екте 1рис. 1V-6). Зная плотность жидкости, можно определить ее уровень Н по показанию манометра М:
Р
Рё
где р— давление столба жидкости; р— плотность жидкости; g —
ускорение свободного падения.
Рис. IV-7. Схема гидростатического уровнемера с дифманометром:
1 — объект; 2, 3 — вентили; 4 — пробка; 5 — сосуд постоянного уровня; 6 — дифманометр.
Этот метод применим только для резервуаров, работающих под атмосферным давлением.
Для измерения уровня различных жидкостей как. в открытых, так и в закрытых сосудах широко используются гидростатические уровнемеры с дифманометром (рис. IV-7). При их применении обязательно устанавливается уравнительный сосуд, наполненный до строго определенного уровня той же жидкостью, что и в контролируемом сосуде. Уравнительный сосуд предназначается для обеспечения постоянного давления в одном из колен дифманометра за счет столба жидкости Но постоянной высоты. Высо-
та столба жидкости Н создает давление во втором колене дифманометра; оно зависит от уровня жидкости в контролируемом объекте. Таким образом, дифманометр замеряет перепад давления Но— —Н, пропорциональный только уровню
в объекте, а значит, шкалу дифманометра можно градуировать в
единицах уровня.
В качестве дифманометров-уровнемеров применяются поплавковые, мембранные и сильфонные дифманометры, шкалы которых можно градуировать практически на любые значения уровней.
Электрические уровнемеры. Чувствительный элемент этих приборов выдает электрический сигнал, пропорциональный уровню в объекте измерения. ,
Чаще других электрических уровнемеров применяются ем-костные приборы, чувствительным элементом которых является электфцческий конденсатор специальной конструкции (емкостный датчик)\ погружаемый в контролируемую среду.
На рис. IV-8 показана упрощенная схема емкостного уровнемера, который состоит из емкостного датчика ЕД, моста переменного тока М, диодного детектора ДД, вторичного прибора ВП со шкалой, градуированной в единицах уровня, и генератора высокой частоты (на схеме не пбказан).
Емкостный датчик представляет собой цилиндрический конденсатор, выполненный в виде двух соосно расположенных метал-
102
лических трубок (труба в трубе). Емкость С такого конденсатора выразится следующей зависимостью:
еЖ^ ЕГ (^0 — 1g (Р/D')
С = 0,24
где еж, Бг — диэлектрические проницаемости соответственно контролируемой жидкости и газовой среды над жидкостью; Но — вы
Рис. IV-8. Схема емкостного уровнемера.
сота трубок конденсатора; D и D' — соответственно внутренний и наружный диаметры большей и меньшей трубок.
Мост М, плечи которого образованы индуктивностями Л2 и £3, переменным конденсатором Сч (для регулировки моста при установке нуля) и емкостным датчиком ЕД, питается от генератора высокой частоты через колебательный контур, образованный индуктивностями Ьч и L3, конденсатором Сь При изменении уровня в контролируемом объекте' изменяется емкость датчика, в результате чего нарушается равновесие моста М и на вход диодного детектора ДД (в диагональ ab) поступает сигнал в виде высокочастотного напряжения небаланса. С выхода детектора (диагональ cd) сигнал, уже в виде постоянного тока, поступает на вход вторичного прибора ВП (милливольтметр или потенциометр), шкала которого градуирована в единицах длины, т. е. уровня.
В зависимости от модификации приборы этого типа обеспечивают измерение уровня различных жидкостей (вода, растворы кислот и щелочей, минеральные и растительные масла и др.) в диапазоне 0—5 м. Возможна конструкция уровнемера, при которой датчик имеет один электрод, а вторым является корпус объекта, в котором измеряется уровень.
Для измерения агрессивных и электропроводящих жидкостей применяются емкостные датчики, у которых трубки покрыты винипластом или фторопластом 4.
Радиационные уровнемеры. Принцип действия радиационных или, как их еще называют, радиоактивных уровнемеров, основан
103
на «просвечивании» контролируемого объекта потоком радиации, причем обычно в качестве излучателя применяется радиоактивный кобальт 60Со, испускающий у-лучи. Контролируемая величина— уровень, является границей раздела двух сред: жидкой и газообразной, по-разному поглощающих проходящее через них
Рис. IV-9. Схема счетчика радиоактивного излучения:
/ — источник радиоактивного излучения; 2—изолятор; 3 — стержень; 4 —трубка; 5 — контакт.
Рис. 1V-I0. Схемы радиоактивных уровнемеров:
а — излучатель и счетчик неподвижны; б — столб жидкости мал; в — поплавок находится внутри объекта; 1 — источник; 2 — счетчик.
х у-излучение. Это обстоятельство положено в основу метода измерения.
Кратко рассмотрим принцип действия счетчика у-излучения, который является непременной составной частью радиационного уровнемера любой конструкции.
Упрощенная принципиальная схема датчика приведена на рис. IV-9.
В металлической или стеклянной герметизированной трубке 4, внутренняя стенка которой покрыта фольгой, находится разреженный газ. Внутрь трубки вставлен стержень 3, изолированный от трубки изолятором 2. К стержню и к стенке трубки (контакт 5) подведено напряжение постоянного тока 800 В- Если к трубке поднести источник радиоактивного излучения 1, то газ внутри трубки будет ионизироваться, станет проводником элект-'.рического тока и в цепи источника появится ток. Падение напряжения на сопротивлении г будет тем большим, чем мощнее источник или чем ближе он поднесен к трубке. Если источник излучения убрать, то ток в цепи прекратится, так как неионизированный газ в трубке не является проводником электрического тока. Падение напряжения измеряется прибором В.
Возможны три принципиальные схемы радиоактивных уровнемеров (рис. IV-10).
Схема, приведенная на рис. IV-10, а, может применяться для контроля уровня в узком интервале, если излучатель и счетчик ' 104
неподвижны. При понижении уровня поглощающая способность среды (жидкость — газ) уменьшается и счетчик выдает сигнал более высокого уровня, а при повышении — поглощающая способность среды возрастет и в счетчик придет ослабленный поток радиации, в результате чего выходной сигнал счетчика будет иметь более низкий уровень. Поглощающая способность стенок резер-
вуара— величина постоянная, она не влияет на поглощающую способность среды.
Схему, приведенную на рис. IV-10, б, можно применять при небольшом столбе жидкости (до 1 м).
Схему, показанную на рис. IV-10, в, целесообразно применять, когда в объект можно поместить поплавок с встроенным источником излучения.
Следует иметь в виду, что при соблюдении правил эксплуатации радиационных уровнемеров они совершенно безопасны в работе.
Радиационные уровнемеры целесообразно применять для контроля (и регулирования) уровня в сосудах под высоким давлением, уровня кипящих, бурлящих, химически активных
Рис. IV-11. Схема акустического уровнемера.
сред, вязких и липких веществ, для контроля положения линии раздела двух несмешиваю-щихся жидкостей. Приборы нельзя применять для контроля жидкостей, используемых в производствах пищевых продуктов, лекарств
и т. п., а также тех, которые являются радиоактивными.
. В зависимости от типов радиационных уровнемеров с их помощью можно контролировать уровень в диапазоне 0—15 м.
Акустические уровнемеры. Так же как и радиационные уровнемеры, эти приборы позволяют контролировать уровень разнообразных жидкостей бесконтактным методом.
В акустических уровнемерах обычно используется принцип отражения ультразвуковых волн (частота свыше 15000 Гц) от границы раздела жидкость — газ. Такие уровнемеры называют также ультразвуковыми.
На внешней стороне дна объекта контроля (рис. IV-11) установлен датчик, состоящий из генератора и приемника ультразвук ковых колебаний. Отражаемые от зеркала жидкости волны возвращаются под некоторым углом ф к приемнику. При перемещении уровня изменяется угол <р, что ведет к смещению отраженных колебаний и к изменению выходного сигнала приемника. Этот сигнал и является мерой уровня.
УРОВНЕМЕРЫ ДЛЯ СЫПУЧИХ ТВЕРДЫХ МАТЕРИАЛОВ
Для контроля уровня сыпучих материалов могут быть при-< менены уже описанные выше емкостный и радиационный уровнемеры. Кроме того, разработан ряд специальных устройств.
105
Весовые измерители уровня. На рис. IV-12 изображена схема весового измерителя уровня в бункерах.
С увеличением уровня сыпучего материала в бункере 5 возрастает давление на его опоры, одной из которых является месдо-за 2. Месдоза представляет собой металлический корпус с поршнем, герметизированным гибкой мембраной. Полость 1 под мем-
Рис. IV-12. Схема весового измерителя уровня:
I — жидкость; 2 — месдоза; 3 — импульсная трубка; 4 — манометр; S — бункер.
Рис. IV-13. Схема механического уровнемера для сыпучих материалов:
/ — электромотор; 2 — редуктор; 3—барабан; 4— кулачок; 5 — шомпол; 6 — электрически® датчик; 7 — вторичный прибор.
браной, импульсная трубка 3 и внутренняя полость пружины манометра 4 заполнены жидкостью. Давление, измеряемое манометром 4, пропорционально уровню, а шкала манометра градуирована в единицах уровня.
Механический уровнемер, схема которого представлена на рис. IV-13, работает следующим образом. Электродвигатель 1 соединен с редуктором 2, на выходном валу которого находится барабан лебедки 3, сочленяющийся с валом редуктора с помощью специальной фрикционной муфты. На барабан навит трос, на конце которого укреплен шомпол 5. Когда шомпол не касается уровня материала, трос натянут, барабан не сочленен с валом редуктора, и шомпол опускается вниз. Как только шомпол войдет в материал, натяжение троса ослабнет,-барабан сочленится с валом редуктора и начнет наматывать трос. В момент выхода шомпола из материала барабан вновь отключится. В результате нижняя часть шомпола все время держится на уровне материала. Через кулачок 4 барабан связан с рамкой электрического преобразователя 6, который выдает сигнал на вторичный прибор 7.
ГЛАВА V
КОНТРОЛЬ МАССЫ, ОБЪЕМА И РАСХОДА МАТЕРИАЛОВ
В химических производствах постоянно приходится иметь дело с точным отмериванием (дозированием) или непрерывной подачей определенной массы либо определенного объема жидких, газообразных, парообразных и твердых веществ в единицу времени или за некоторый промежуток. Эти вещества либо участвуют в химических реакциях, либо идут на дальнейшую переработку, либа являются конечным продуктом производства.
Таким образом, имеется настоятельная необходимость определения количества и расхода жидкостей, газов и паров.
Количество вещества определяется его массой т или объемом V, протекающим через рассматриваемое сечение канала, например трубы, за какой-то произвольно взятый промежуток времени. Приборы, измеряющие количество вещества, носят название счетчиков.
Расходом вещества в данный момент называется отношение массы dm или объема dV вещества, протекающего через сечение трубы или другого канала за некоторый промежуток времени; dt, к этому промежутку времени при условии, что значение последнего стремится к нулю. Поэтому расход за бесконечно малое время (мгновенный расход) может быть выражен формулой:
объемный
массовый
Если расход не изменяется во времени, то для его определения можно пользоваться соотношением
или
О______?- .--ZL
~ '2-*i ~ t
Здесь t = ti—1\ — промежуток времени, за который измеряется расход вещества.
Указанные соотношения показывают, что объемный расход вещества измеряется в ‘м3/с, а массовый — в кг/с. Наряду ,с этим широко используются и следующие единицы: дм3/с, м3/ч, л/мин, кг/ч и т/ч.
ЮТ
Приборы, измеряющие расход, носят название расходомеров.
Счетчики и расходомеры иногда бывают конструктивно объединены. Например, расходомер снабжается особым механизмом — интегратором, который фиксирует количество вещества, прошедшего через расходомер за определенный промежуток времени, а счетчики могут снабжаться указателем, показывающим расход вещества в единицу времени.
ИЗМЕРЕНИЕ МАССЫ, ОБЪЕМА И РАСХОДА
ЖИДКОСТЕЙ И ГАЗОВ
По принципу действия счетчики жидкостей и газов делятся на скоростные и объемные. - ~
Скоростные счетчики устроены таким обр'азом, что жидкость, протекающая через камеру прибора, приводит во вращение вертушку (или крыльчатку), угловая скорость которой пропорцио-.нальна скорости потока, а следовательно, и расходу.
Объемные счетчики. Поступающая в прибор жидкость (или газ) измеряется отдельными, равными по объему дозами, которые затем суммируются.
Для измерения количества жидкостей применяются как скоростные, так и объемные счетчики, а для измерения количеств газа — только объемные.
В качестве основных характеристик счетчиков приняты следующие:
Калибр — диаметр условного прохода входного патрубка в мм. Серийно выпускаются счетчики следующих калибров: 15, 20, 25, 30, 32, 40, 50, 60, 80, 100, 125, 150, 200, 250 мм.
Потеря напора — разность давлений во входном и выход< ном патрубках прибора, обусловленная гидравлическими и механическими сопротивлениями движению рабочего органа и.связанных с ним механизмов.
Погрешность показаний. Обычно пользуются относительной погрешностью, т. е. погрешностью показаний, отнесенной к фактическому количеству и выраженной в процентах:
где Q сч — показание счетчика; — истинное количество (измеренное, например, с помощью образцового прибора).
Характерный расход — количество вещества, которое проходит через счетчик за 1 ч при установившемся потоке и потере напора 9,81-105 Па. Это условная величина, которая служит для оценки счетчиков различных конструкций.
Нижний предел измерения — наименьший расход, при котором счетчик еще дает показания с допустимой погрешностью.
408
Верхний предел изм ер ени я — наибольший расход, при котором обеспечивается кратковременная (не более 1 ч в течение суток) работа счетчика.
Нормальный расход — наибольший длительный расход, при котором погрешность показаний не выходит за установленные пределы, а потеря напора не создает в приборе усилий, приводящих к быстрому износу трущихся деталей прибора.
Рис. V-1. Конструкция скоростного счетчика с винтовой вертушкой:
/ — корпус; 2 — вертушка; 3 — струевыпрямитель; 4 — передаточный механизм; 5 — счетный механизм.
Порог чувствительности — наименьший расход, при котором счетчик начинает давать показания, погрешность которых превышает допустимую.
Эти характеристики относятся в основном к счетчикам количества жидкости. Основные характеристики газовых счетчиков•— это’номинальный расход и нижний предел измерения.
В зависимости от требуемых условий (испытания, наладка различных установок) счетчики используют как для стационарных, так и для временных измерений.
Скоростной счетчик с винтовой вертушкой. Служит для измерения больших объемов воды и в зависимости от калибра (от 50 до 300 мм) рассчитан на номинальные расходы от 15 до 250 м3/ч. В ^основном диапазоне измерения погрешность его составляет
Поток жидкости (рис. V-1), поступая в прибор, выравнивается струевыпрямителем 3 и попадает на лопасти вертушки 2, которая выполнена в виде многозаходного винта с большим шагом ло-
109
Рис. V-2. Кинематическая схема скоростной передачи вращения от вертушки к счетному механизму счетчика с винтовой вертушкой:
/ — счетный механизм; // — редуктор; / — вертушка; 2 — червячная пара; 3— трибка; 4— стрелки счетного механизма; 5 — циферблат; 6 — сальник;
7 — перегородка.
пасти. Вращение вертушки через червячную пару и передаточный механизм 4 передается счетному устройству 5. Для регулировки прибора одна из радиальных лопастей струевыпрямителя делается поворотной, благодаря чему, изменяя скорость потока, можно ускорить или замедлить вращение вертушки.
На рис. V-2 приведена кинематическая схема пер.е-। дачи вращения от вертушки I к счетному механизму.
I Скоростной счетчик с I вертикальной крыльчаткой 1 применяется для измерения [сравнительно небольших расходов воды и выпуска;, ется на номинальные расходы от 1 до 6(3 м3/ч при калибрах от 20 до 40 мм.
В зависимости от распределения потока воды, поступающего на крыльчатку,, различаются две модификации счетчиков — одноструйные и многоструйные.
На рис. V-3 показана устройство одноструйнога счетчика, а на рис. V-4 — схема камеры многоструйного счетчика. Жидкость,
подводится к крыльчатке тангенциально -(по касательной) к окружности, описываемой средним радиусом лопастей. Вращение крыльчатки передается счетному механизму с помощью такого же передаточного устройства, как и для счетчиков с горизонтальной вертушкой (см. рис. V-2).
Преимуществом многоструйных счетчиков является сравнительно небольшая нагрузка на опору и ось крыльчатки, а недостатком — более сложная по сравнению с одноструйными конструкция, а также возможность засорения струеподводящих отверстий.
Вертушки и крыльчатки счетчиков изготавливаются из целлулоида, пластических масс и эбонита, а для работы в средах при температуре свыше 40 °C — из никеля, нержавеющей стали, латуни и термостойких пластмасс.
Счетчик устанавливается на линейном участке трубопровода,, причем на расстоянии 8—ЮР перед ним (D— диаметр трубопровода) не должно быть устройств, искажающих поток (колена, тройники, задвижки и др.). В тех случаях, когда все же ожидается некоторое искажение потока, перед счетчиками устанавливаются дополнительные струевыпрямители.
ПО
Основным условием нормальной работы счетчика является соответствие пределов его измерения фактической нагрузке. Поэтому при выборе прибора необходимо знать наименьший расход воды в течение суток.
Счётчики с горизонтальной вертушкой можно устанавливать на горизонтальных, наклонных и вертикальных трубопроводах,
Рис. V-3. Схема одиоструйного счетчика с вертикальной крыльчаткой: / — корпус; 2 — крыльчатка; 3 — счетный механизм; / — передаточный механизм.
тогда как счетчики с вертикальной крыльчаткой — только на горизонтальных трубопроводах.
Объемный жидкостный счетчик с овальными шестернями. Действие этого счетчика основано на вытеснении определенных объемов жидкости из измерительной камеры прибора овальными шестернями, находящимися в зубчатом зацеплении и вращающимися под действием разности давлений во входном и выходном патрубках прибора.
Схема такого счетчика приведена на рис. V-5. В первом исходном положении (рис. V-5, а) (поверхность ГА шестерни 2 находится под давлением поступающей жидкости, а равная ей поверхность ВГ — под давлением выходящей жидкости, которое меньше входного. Эта разность давлений создает крутящий момент, вращающий шестерню 2 по часовой стрелке, причем жидкость из полости 1 и полости, расположенной под шестерней 3, вытесняется в выходной патрубок. Крутящий момент шестерни 3 равен нулю, так как поверхности А1Г1 и ВД! равны и находятся под одинаковым входным давлением, а равные поверхности А]Б| и Б|В; — под одинаковым выходным давлением. Следова'--гельно, шестерня 2 — ведущая, а шестерня 3 —ведомая.
П L
Рис. V-4. Схема камеры многоструйного счетчика с вертикальной крыльчаткой (корпус показан пунктиром).
Кинематическая схема
В промежуточном положении (рис. V-5, б) шестерня 2 вращается в прежнем направлении, но ее крутящий момент будет меньше, чем в положении, показанном на :рис. V-5, а, вследствие воздействия противодействующего момента, созданного давлением на поверхность ДГ (Д — точка контакта шестерен). Поверхность ДА1В1 шестерни 3 находится под давлением входящей, а поверхность В1Б1Д — под давлением выходящей жидкости. На шестерню действует крутящий момент, направленный против часовой стрелки. В этом положении обе шестерни являются веду* щими.
Во втором исходном положении (рис. V-5, e) шестерня 3 находится под действием наибольшего крутяще* го момента и является ведущей, в то время как крутящий моМент шестерни 2 равен нулю (она — ведомая).
Однако в любом из положений суммарный крутящий момент обеих шестерен остается постоянным.
За время одного оборота (один цикл работы счетчика) полости 1 и 4 два раза заполняются и два раза опорожняются. Объем четырех доз жидкости, вытесненной из этих полостей, и составляет измерительный объем счетчика.
счетчика с овальными шестернями при
ведена на рис. V-6.
Чем больше расход жидкости через счетчик, тем с большей скоростью вращаются шестерни, вытесняя отмеренные объемы. Передача от овальных шестерен к счетному механизму осуществляется через магнитную муфту, которая работает следующим образом. Ведущий магнит укреплен в торце овальной шестерни 3, а ведомый — на оси, связывающей муфту с редуктором 5. Камера, где расположены овальные шестерни, отделена от редуктора 5 и счетного механизма 6 немагнитной перегородкой. Вращаясь, ведущий магнит увлекает за собой ведомый.
Счетчики с овальными шестернями могут применяться для измерения количества таких жидкостей, как неагрессивные нефтепродукты, кислоты, щелочи и нейтральные жидкости, сырой и дистиллированный парафин, жирные кислоты и др.). Они выпускаются следующих калибров: 25, 40, 50, 60, 80 мм, с максимальными расходами до 72 м3/ч; класс точности 0,5.
Объемный жидкостной счетчик с цилиндрическим поршнем. Принцип действия этого счетчика основан на вытеснении из измерительной камеры (цилиндра) определенных объемов жидкости 112
цилиндрическим поршнем, который перемещается за счет разности давлений измеряемой жидкости до и после счетчика.
По числу поршней счетчики делятся на однопоршневые и многопоршневые. Для уплотнения поршней применяются манжеты из кожи, пластмассы, резины или металлические кольца.
Рис. V-5. Схема объемного жидкостного счетчика с овальными шестернями: а — первое исходное положение; б — промежуточное положение; в — второе исходное положение; 1 — вытесняемый объект; 2, 3 — овальные шестерни; пунктиром показано зубчатое зацепление.
Счетчики этого типа широко используются для измерения количества мазута.
Ниже рассматривается схема однопоршневого счетчика (рис. V-7). В положении, показанном на рис. V-7, а, жидкость из трубопровода через четырехходовой кран 1 поступает в полость над
Рис. V-6. Кинематическая схема счетчика с овальными шестернями:
I — измерительная камера; 2, 3 —овальные шестерни; 4— магнитная муфта; 5 — редуктор; 6 — счетный механизм; 7—стрелка; 8— роликовый счетный указатель.
поршнем измерительной камеры 5 и за счет разности давлений под поршнем и над ним перемещает поршень 5 вниз до тех пор, пока переключающее устройство не переключит кран в новое положение (рис. V-7,б). До переключения жидкость из камеры под поршнем вытесняется через выходную полость четырехходового крана в трубопровод. Переключающее устройство состоит из эуб-
8—2208
113
-чатой рейки-штока 4 и шестерни <7, связанной с краном, которые -находятся в зубчатом зацеплении.
После переключения жидкость поступает под поршень и перемещает его вверх до крайнего положения, пока переключающее устройство вновь не повернет кран на 90°. Из верхней полости жидкость вытесняется в трубопровод.
Рис. V-7. Схема однопоршневого объемного жидкостного счетчика:
с *- вытеснение; б — всасывание; 1 — четырехходовой кран; 2 — счетный механизм; 3 шестерня; 4 —г рейка-штск; 5 — поршень; 6 — измерительная камера.
Рис. V-8. Схема объемного газового барабанного счетчика:
J, 4 ,6, 7 —камеры; 2—выходной патрубок; 3 — входная труба; 5 — жидкость.
Число ходов штока и, следовательно, число вытесненных объемов фиксирует счетный механизм 2.
Недостатками поршневых счетчиков являются: большие габариты и масса, сравнительно малая пропускная способность и высокая потеря напора (около 6,8-10 Н/м2).
К достоинствам счетчика можно отнести малую чувствительность к загрязнениям жидкости, слабое влияние вязкости и температуры жидкости на результаты измерения.
Калибр выпускаемых счетчиков 15 или 30 мм, верхний предел измерения до 4000 л/ч, основная погрешность ±1,5 и ±2,5%.
Объемный газовый барабанный счетчик широко применяется главным образом в лабораторной практике, где требуется высокая точность измерения малых объемных количеств газа.
Металлический барабан (рис. V-8), имеющий четыре камеры (1, 4, 6 и 7) одинаковой емкости, погружен в затворную жидкость 5, заполняющую часть корпуса, уровень которой расположен выше оси барабана. Перегородки камер имеют щели: нижние— а, Ь, с, d и верхние — a', b', с', d'. Газ поступает через входной патрубок 3 и по трубе, которая является одновременно осью барабана, заполняет камеру 7 и только начинает заполнять камеру 6 через щели & и с. Так как давление на наклонную перегородку в камере 7 больше давления на эту же перегородку со стороны камеры 1, сообщенной с выходным патрубком через щель
114.
а', то на эту перегородку действует вращающий момент, заставляющий барабан поворачиваться по часовой стрелке. При повороте барабана щель Ь' камеры 7 выйдет из затворной жидкости и газ начнет поступать из нее в выходной патрубок.
Ось барабана соединена со счетным механизмом, и, таким образом, по числу оборотов барабана можно определить объем га-
за, прошедшего через счетчик.
Счетчики выпускаются на номинальный объем 0,4 м3/ч при рабочем давлении газа не более 5,9-103 Н/м2.
Объемный газовый ротационный счетчик предназначен для учета количества очищенных неагрессивных горючих газов на установках промышленных и коммунальных предприятий. Эти счетчики имеют большую пропускную способность и выпускаются на номинальные расходы от 40 до 1000 м3/ч.
Счетчик (рис. V-9) состоит из корпуса с входным и выходным патрубками, двух лопастных поршней-роторов, имеющих форму восьмерки, и счетного механизма, который связан с осью одного из роторов с помощью кулачковой 'муфты и редуктора.
Принцип действия ротационного счетчика аналогичен принципу действия счетчика с овальными шестернями для жидкостей.
Рис. V-9. Схема объемного газового ротационного счетчика.
Вал каждой из лопастей имеет цилиндриче-
скую зубчатую шестерню (шестерни находятся вне корпуса). Шестерни находятся в зацеплении, и вращение одной лопасти влечет за собой вращение другой. При этом происходит взаимное обкатывание поверхностей роторов и вытеснение газа из камер, ограниченных внутренней поверхностью корпуса и боковой поверхностью
лопасти.
Для правильного выбора объемного жидкостного счетчика необходимо знать характеристики измеряемой жидкости (вязкость, смазочную способность, давление и температуру), пределы по расходу, при которых будет работать счетчик, а также режим его работы. Калибр выбирается таким, чтобы счетчик работал в диапазоне расходов, соответствующих его верхнему и нижнему пределам измерений. При непрерывной работе расход не должен превышать нормального, а при периодической — 80—90% верхнего предела измерения.
Для счетчиков калибром до 100 мм потеря давления при длительной нагрузке не должна превышать 1,5-104 Н/м2, а тЕри кратковременной 4-Ю4 Па; для счетчиков калибром более 100 мм потеря давления не должна превышать соответственно 1-Ю4 и 3-104Па.
8!
• 115
При установке счетчика необходимо следить, чтобы направление потока измеряемой жидкости совпадало с направлением стрелки, отлитой на его корпусе.
Ротационные газовые счетчики надежно работают при расходах, ограниченных нижним и верхним пределами их измерений. Перегрузка на 20% по сравнению с номинальным расходом допустима только в течение 6 ч в сутки. Температура газа должна быть в пределах 0—50 °C, а давление до 105 Па.
ИЗМЕРЕНИЕ МАССЫ ТВЕРДЫХ МАТЕРИАЛОВ
Обычно масса твердых кусковых и сыпучих материалов измеряется с помощью взвешивания на весах.
По типу весы можно разделить на поворотные и рычажные. Весы обоих типов работают по принципу уравновешивания моментов силы, действующих на тело, которое может поворачиваться вокруг точки опоры.
Поворотные весы (рис. V-10) устроены таким образом» что момент силы тяжести материала т уравновешивается моментом силы тяжести постоянного 'груза q. Чаша для материала подвешена на ленте, огибающей шкив радиуса г. Постоянный груз q укреплен на подвижном рычаге, образуя плечо I.
Под действием веса материала т шкив вместе с грузом, радиус вращения которого R, поворачивается вокруг точки 0 на угол <р до тех пор, пока моменты, создаваемые грузами т и q, не уравновесятся
mr = ql = qR sin <р откуда
R . „ .
т — q — sin <р = A sin ф где
К = qR/r
Рычажные весы (рис. V-11) представляют собой рычаг, к плечам которого I и /1 подвешены чаша для измеряемого материала т и подвижный груз q. Равновесие наступает при ml == qlf откуда
т = qlji
и достигается передвижением груза т относительно плеча 1\ со шкалой, по которой и проводится отсчет.
При промышленных измерениях используются автоматические весы периодического и непрерывного действия.
Порционные весы автоматически отмеривают определенные порции измеряемого материала, непрерывно поступающего из загрузочного бункера, сбрасывают материал в приемную емкость,
116
а счетчик весов суммирует отмеренные дозы. Обычно эти весы имеют опрокидывающийся ковш или открывающееся дно ковша.
Весы для непрерывного взвешивания характерны тем, что конструктивно они неразрывно связаны с системой транспортирования материала.
ИЗМЕРЕНИЕ РАСХОДА ЖИДКОСТЕЙ, ГАЗОВ И ПАРОВ
Классификация расходомеров достаточно сложна вследствие большого разнообразия принципов их действия. Наиболее широко применяемые приборы для измерения расхода веществ, протекающих по трубопроводам, можно разделить на следующие группы:
расходомеры переменного перепада давления;
расходомеры постоянного перепада давления (обтекания); индукционные (электромагнитные) расходомеры;
расходомеры переменного уровня.
Расходомеры переменного перепада давления
Измерение расхода на основе переменного перепада’ давления — наиболее изученный it распространенный в производственной практике метод; он обладает рядом достоинств, к которым следует отнести:
сравнительно высокую точность измерения;
117
удобство и универсальность;
возможность измерения расхода- веществ, находящихся при различных температурах и давлениях;
наличие налаженного серийного производства.
Суть метода заключается в следующем.
В трубопроводе, по которому протекает контролируемое вещество, устанавливается специальное сужающее устройство, про-
Рнс. V-12. Схема, поясняющая характер изменения потока и график распределения статического давления:
I—I11 -• сечения потока.
ходное сечение которого, соосное с трубопроводом, значительно меньше его по сечению (рис. V-12).
Вследствие перехода части потенциальной энергии потока в кинетическую его средняя скорость в суженном сечении повышается, в результате, статическое давление в данном сечении становится меньше статического давления перед сужающим устройством.
Характер изменения статического давления р на участке трубопровода /, где установлено сужающее устройст-' во, показан на графике. Изменение давления струи по оси трубопровода практически совпадает с изменением давления около его стенки, за исключением, участка, расположенного непосредственно перед торцом сужающего устройства и в самом сужающем устройстве, где давление потока по-оси трубы снижается (пунктирная линия). В начале участка поток установившийся, в сечении I еще не сказыва
ется возмущающее воздействие сужающего устройства, а абсолютное статическое давление равно р'\. Перед самым сужающим устройством, где поток начал деформироваться и скорость его упала, абсолютное статическое давление возросло до величины рь Далее поток начинает проходить через сужающее устройство, его скорость возрастет, а давление падает и у торца сужающего устройства (за ним) примет значение р^. Пройдя сужающее устройство,
поток, по инерции еще продолжает сужаться; самая узкая его часть будет в сечении II при абсолютном статическом давлении p'i. После этого поток вновь расширяется до полного сечения трубопровода и в сечении III становится установившимся.
Однако давление р3 в этом сечении будет меньше давления в сечении I на величину рп (потеря давления), так как часть кинетической энергии потока израсходовалась на преодоление сил трения в сужающем устройстве и на завихрении до и после сужения (мертвые зоны).
118
Разность (перепад) давлений до и после сужающего устройства тем больше, чем больше расход вещества, и, следовательно, может служить мерой расхода.
Зависимость между расходом несжимаемой жидкости и перепадом давления можно установить, пользуясь уравнением Бернулли и уравнением неразрывности струи (предполагается, что поток жидкости идеальный: отсутствуют обмен энергией с окружающей средой и трение, скорости потока в любой точке сечения I, а также сечения II одинаковы, трубопровод горизонтальный) :
Pi' Р2' > °2*
Pi + 2 р2 + 2
(34)
Р1У1^1 — Р2Г2*^2
где Vi и иг — скорости потока в сечениях I и II; рь рг — плотности жидкости в сечениях I и II; Sb S2— площади сечений I и II.
Уравнение Бернулли, показывает что для двух сечений сплошного потока общая энергия его неизменна, а условие неразрывности утверждает, что при любом движении капельной жидкости ее объем, втекающий в рассматриваемый неподвижный объем и вытекающий из него, равны между собой.
Так как при прохождении через сужающее устройство плотность жидкости почти не изменяется pi = p2 = p, можно записать
р
Pl'-P2'=-2- fr?-”!2) (35)
UiSj = w2S2
Решая систему (35) относительно и2, получим:
1 7
"2 ]/l—(S2/Sj)2 V Р Ра)
(36)
Объемный расход равен произведению скорости на площадь сечения потока, т. е.
1 / 2
<37>
Это уравнение справедливо для идеального потока несжимаемой жидкости. Если же перейти к реальным потокам сжимаемых сред, а также учесть, что практически перепад давления р'\—р'? измеряется у торцов сужающего устройства, где он равен р\—рг, а вместо площади потока S2 в самом узком месте пользуются площадью сечения самого сужающего устройства So, то уравнение для измерения объемного расхода (в м3/с) реального потока примет следующий вид: ,______
Q =aeS0|/"-^-(pf — р2) (38)
119
Дляопределения массового расхода (в кг/с) применяется следующее равенство: .
Qm — aeS0 f^2p (рх — р^ (39)
В уравнениях (38), (39) приняты следующие обозначения: а — коэффициент расхода — безразмерная величина, определяемая только экспериментально; зависит от типа сужающего устройства, его модуля m=(d/Z))2 (где d и D — соответственно диаметры проходных сечений сужающего устройства и трубопровода) и характера потока (критерия Рейнольдса). Этот коэффициент показывает, во сколько раз действительный расход вещества, протекающего через сужающее устройство, меньше или больше теоретического
________1 п-т)’
е — поправочный множитель, учитывающий изменение плотности измеряемой среды при прохождении через сужающее устройство; зависит от типа и модуля сужающего устройства, величины отношения (pi—рч)1р (пае р — абсолютное давление измеряемой среды) и показателя адиабаты компонента. Для жидкостей е=1-Для практического использования уравнений (38) и (39) в них производят следующие преобразования: So выражают через, диаметр сужающего устройства, т. е. S0 = jtd2/4 (м переводят в мм), а секундный расход выражают через часовой. После этого рабочие формулы объемного (в м3/ч) и массового (в кг/ч) расходов будут иметь следующий вид:
Q = 0,01252aed2 /Др7р (40)
Qm = 0,01252aed2 ИАРР (41)
где Др=р1—р2, Н/м2, или Др= (pi—р2)9,81, кгс/см2, тогда
0,01252 = /2^81
Полученные зависимости справедливы для горизонтальных, наклонных и вертикальных трубопроводов. Они показывают, что расход связан с перепадом давления квадратичной зависимостью?
Схема расходомера (рис. V-13) состоит из следующих основных частей:
а) стандартного сужающего устройства 1, установленного на трубопроводе, по которому протекает контролируемое вещество;
б) дифференциального манометра-расходомера 3 жидкостного (поплавкового, колокольного, кольцевого) или пружинного (мембранного, сильфонного), шкала которого градуирована в единицах расхода (м3/ч, кг/ч) или в %. В зависимости от требований дифманометр может быть показывающим, самопишущим, сигнализирующим и регулирующим. Выбирать дифманометр необхо-120
Рис. V-13. Схема установки расходомера:
1 — сужающее устройство; 2 — соединительные линии; 3 — дифманометр-расходомер.
димо, руководствуясь ГОСТ 18140—77; предельный номинальный перепад давления выбирается из ряда чисел, указанных в ГОСТе, а верхний предел измерения дифманометра Qn по наибольшему измеряемому расходу Qmax> причем Qn должен быть ближайшим большим к Qmax числом из приведенного ряда чисел;
в) соединительных (импульсных) линий 2, служащих для соединения с дифманометром-расходомером мест отбора до и после сужающего устройства, проложенных трубами из стали, меди, алюминия диаметром 10—15 мм или полиэтилена диаметром 8 мм. Длина соединительных линий от сужающего устройства до дифманометра не должна превышать 50 м.
Стандартные сужающие устройства. Для измерения расхода методом переменного перепада давления используются стандартные диафрагмы, сопла и сопла Вентури. Они называются стандартными потому, что методика и формулы их расчета, основные данные для расчета, требования к расходомерам и методика их поверки, а также методика определения погрешностей измерения долж-
ны соответствовать требованиям «Правил 28—64 измерения расхода жидкостей газов и паров стандартными диафрагмами и соплами», которые утверждены Госкомитетом стандартов, мер и измерительных приборов.
Приведенные в «Правилах» указания справедливы при соблюдении следующих условий измерения:
измеряемое вещество заполняет все поперечное сечение трубопровода перед сужающим устройством и за ним, а поток является практически установившимся;
фазовое состояние вещества не изменяется при прохождении через сужающее устройство (например, жидкость не испаряется, растворенные в жидкости газы не выделяются, водяной пар остается перегретым);
измерение коллоидных растворов допустимо в тех случаях, • когда раствор (например, молоко) по степени дисперсности и физическим свойствам мало отличается от однофазной жидкости.
На сужающие устройства, которые должны изготавливаться из материалов, устойчивых к длительному воздействию измеряемой среды, наносятся следующие обозначения: типоразмер и заводской номер; диаметр отверстия сужающего устройства при 20°С (с?2о, мм); принятый для расчета внутренний диаметр трубопровода при 20°C (Г>2о, мм); стрелка, показывающая направление потока; марка материала сужающего устройства.
121
К сужающему устройству прилагается выпускной аттестат, где указываются: наименование и параметры измеряемой среды; формулы, по которым проверялась правильность расчета; основные характеристики сужающего устройства и дифманометра; сведения, удостоверяющие, что качество изготовления сужающего устройства соответствует требованиям «Правил».
Рис. V-14. Отбор давлений до и после стандартной диафрагмы:
а — через цилиндрические отверстия в теле трубопровода; б — в теле специальной обоймы; в — с помощью кольцевых камер; 1, V— трубопровод; 2, 2' — фланцы; 3 — болтовые соединения; 4 — диафрагма.
Стандартная диафрагма. Устанавливается в трубопроводах с внутренним диаметром не менее 50 мм и при условии, что 0,05^ ^m^0,7 (т — модуль диафрагмы). Представляет собой плоский диск толщиной не более 0,05 О20 с цилиндрической входной и конической выходной частями. Толщину диафрагмы определяют путем расчета или из соответствующей номограммы «Правил 28—64», исходя из механической прочности диска.
Входная кромка отверстия диафрагмы должна быть острой и не иметь заусенцев или зазубрин, так как это приводит к искажению потока и снижает точность измерения.
Имеется несколько конструктивных решений (рис. V-14) отборов давлений рх (до) и р2 (после диафрагмы), необходимых для измерения дифманометром-расходомером их разности Ар.
Отбор давлений через отдельные цилиндрические отверстия в теле трубопровода (рис. V-14, а) или через отдельные цилиндрические отверстия в теле специальной обоймы (рис. V-14,6), зажатой с помощью болтовых соединений между фланцами трубопровода, рекомендуется- применять, когда внутренний диаметр трубопровода не менее 400 мм.
Отбор давлений с помощью кольцевых камер (рис. V-14, в) следует применять для трубопроводов внутренним диаметром меньше 400 мм. Кольцевые камеры изготавливаются в виде двух детал'ей, между которыми соосно помещается диафрагма. Весь этот пакет зажимается между фланцами трубопровода. Каждая камера — плюсовая (+), устанавливаемая перед диафрагмой, и минусовая (—), устанавливаемая после диафрагмы, сообщается 122
с внутренней полостью трубопровода через кольцевую щель. Кольцевые камеры обеспечивают выравнивание давлений по сечению трубопровода и позволяют получить действительное значение среднего перепада давления даже при неблагоприятном распределении давлений в потоке, а местные возмущения меньше
сказываются на измерении. И*
Рис. V-I5. Схема стандартного сопла:
а —отбор давлений с помощью кольцевых камер; б — то же. через отдельные отверстия.
Рис. V-16. Схема стандартного сопла Вентурн:
/ — сопло длинное; II — сопло короткое.
Внутренний диаметр корпусов обойм или кольцевых камер должен быть равен (с допустимым отклонением ±1%) внутреннему диаметру трубопровода, принятому при расчете диафрагмы.
Обоймы и кольцевые камеры должны изготавливаться из материалов, устойчивых к длительному воздействию измеряемой среды. На корпусах обойм и камер выбиваются знаки «+» (плюс) и «—» (минус).
Стандартные сопла. Могут применяться в трубопроводах внутренним диаметром не менее 50 мм при одновременном соблюдении условия 0,05^т^0,65.
Сопло (рис. V-15) состоит из профильной входной части, выполненной с плавным сопряжением дуг, и цилиндрической выходной части, кромка которой на выходе должна быть острой. На конце сопла делается расточка, предохраняющая острую выходную кромку от механических повреждений.
Так же как и у диафрагм, отбор давлений производится либо б помощью кольцевых камер (рис. V-15,а), либо с помощью отдельных отверстий в теле трубопровода (рис. V-15,б). Длина сопла 0,604 Т>2о; остальные размеры, соответствующие «Правилам 28—64», приведены на рисунке.
Стандартное сопло Вентури применяется в трубопроводах внутренним диаметром более 50 мм, если 0,050,6 и d2o> >20 мм. Состоит из профильной входной части (такой же, как и у стандартных сопел), цилиндрической средней части и кониче
123
ской выходной части — диффузора (рис. V-16). Сопло Вентури может быть длинным (вариант /), если наибольший диаметр диффузора равен внутреннему диаметру трубопровода, и коротким (вариант II), если наибольший диаметр диффузора меньше внутреннего диаметра трубопровода. Угол конусности диффузора должен выполняться в пределах 5°^Чг^30°.
Рис. V-17. Схема установки дифманометра-расходомера для измерения расхода жидкостей:
а — ниже сужающего устройства; б — выше сужающего устройства; 1 — камерная диафрагма; 2, 3 —вентили; 4 — отстойные сосуды; 5 — дифманометр; 6 — газосбориики.
Отбор давлений осуществляется через кольцевые камеры. Передняя («плюсовая») камера зажимается между фланцем трубо-. провода и корпусом сопла Вентури, а задняя («минусовая») устанавливается на цилиндрической части сопла и соединяется с внутренней полостью трубопровода с помощью отдельных отверстий б, расположенных в цилиндрической части.
Основные правила монтажа и эксплуатации расходомеров. Для обеспечения нормальной работы расходомеров и получения достаточно высокой точности измерения необходимо не только правильно их рассчитать и спроектировать, но и правильно смонтировать. Для этого следует выполнить ряд требований как общего порядка, так и относящихся к отдельным типам сужающих устройств, дифманометров и соединительных линий.
При проектировании установки расходомера лишь диаметр проходного сечения сужающего устройства d2o является расчетной величиной; все остальные данные либо задаются, либо выбираются с помощью «Правил 28—64», исходя из конкретных условий измерения расхода. Тип самого сужающего устройства также выбирается с учетом особенностей измерения расхода (об этом будет сказано ниже), но методика расчета диафрагм, сопел
124
и сопел Вентури является одинаковой и приводится в «Правилах». „ ,
1_При установке сужающих устройств следует соблюдать следующие условия.
Сужающее устройство' крепится между фланцами соосно с трубопроводом; плоскость его входного торца должна быть пер-
Рис. V-18. Схема установки дифманометра-расходомера для измерения расхода газов:
а —выше сужающего устройства; б — инже сужающего устройства; / — камерная диафрагма; 2, 3 —вентили; 4 — дифманометр; 5 — отстойные сосуды.
V
Рис. V-19. Схема установки дифманометра-расходомера для измерения расхода паров:
а — выше сужающего устройства; б —ниже сужающего устройства; 1, 3 — вентили; 2 —отстойные сосуды; 4 — разделительные сосуды; 5 — камерная диафрагма; б —пробки; 7 —дифманометр; 8 — газосбориик.
пендикулярна осщ а уплотнительные прокладки, которые устанавливаются между сужающими устройствами и фланцами, недолжны выступать во Внутреннюю полость трубопровода. На внутренней поверхности участка трубопровода длиной 2 Р2о перед сужающим устройством и за ним не должно быть никаких уступов, наростов, неровностей, сварных швов и т. п.
Поток вещества на участке трубопровода, где установлено сужающее устройство, не должен искажаться. Этого можно достигнуть, если длина участка трубопровода до и после сужающего устройства достаточно велика, сам участок является линейным, а вблизи сужающего устройства отсутствуют местные сопротивления (колена, угольники, тройники, краны, задвижки, вентили, регулирующие клапаны и т. п.). Минимальные длины прямых участков трубопроводов до и после сужающего устройства зависят от его типа и модуля, от вида местного сопротивления и определяются в соответствии с требованиями «Правил 28—64». Например, при полностью открытой задвижке, установленной перед сужающим устройством с модулем т = 0,5, минимальное расстояние-между ними должно быть не менее 20 _02о> а если перед сужающим: устройством находится регулирующий клапан, то не менее 100Z)2a-
125
Поэтому регулирующие органы рекомендуется устанавливать после сужающего устройства. Необходимые свободные участки трубопровода после сужающего устройства в зависимости от его модуля могут составлять от 6 до 8 Иго- Длина прямых участков может быть сокращена вдвое, если отбор перепада давления осу
ществляется с помощью кольцевых камер.
Рис. V-20. Схема установки разделительных сосудов при измерении расхода агрессивных, вязких и коагулирующих сред: ti — плотность измеряемой жидкости меньше плотности разделительной; б — больше плотности разделительной; 1 — камерная диафрагма; 2 — разделительные сосуды; 3, 5 — вентили; 4—дифманометр; 6 — газосборники.
Соединительные линии от сужающих устройств к дифманометрам должны быть проложены по кратчайшему расстоянию, вертикально или с уклоном к горизонтали, составляющим не менее 1:10, а изгибы трубок должны быть плавными.
При измерении расхода жидкостей рекомендуется устанавливать дифманометр ниже сужающего устройства (рис. V-17,а), если же по условиям эксплуатации это невозможно, то дифманометр располагают выше сужающего устройства, а монтаж осуществляют по схеме, показанной на рис. V-17, б. Для горизонтальных и наклонных трубопроводов соединительные линии должны подключаться к нижней половине сужающего устройства. Если в жидкости имеются твердые частицы, выпадающие в осадок, то в нижней части соединительных линий устанавливаются отстойные сосуды.
При измерении расхода газов рекомендуется устанавливать дифманометр выше сужающего устройства (рис. V-18,а), а в случае необходимости его установки ниже су
жающего устройства, надо руководствоваться схемой, приведенной на рис. V-18,6. Соединительные
линии должны подключаться к верхней половине сужающего устройства.
В случае измерения расхода паров, в непосредственной близо-
сти от сужающего устройства устанавливаются уравнительные (конденсационные) сосуды — специальные металлические стаканы, которые обеспечивают равенство уровней конденсата в обеих соединительных линиях (рис. V-19). Оба сосуда вместе с участками соединительных линий до дифманометра заполняются конденсатом и располагаются на одной высоте. Дифманометр следует располагать ниже сужающего устройства (рис. V-19,б), а
126
при давлении паров более 1,85-Ю5 Па допускается установка дифманометра выше сужающего устройства (рис. V-19,а).
Если контролируется агрессивная, вязкая, либо коагулирующая среда, то на соединительных линиях вблизи сужающего устройства устанавливаются разделительные сосуды — металлические стаканы, которые до половины заполняются разделительной жидкостью. Их назначение аналогично функции разделительных, сосудов, упоминавшихся при описании измерения давления в главе II. На рис. V-20, а изображена схема установки разделительных сосудов для случая, когда плотность измеряемой жидкости меньше плотности разделительной; если же она больше плотности разделительной жидкости, то разделительные сосуды следует устанавливать по схеме, приведенной на рис. V-20, б.
Выбор сужающих устройств основан на учете следующих факторов: потеря давления в сужающем устройстве рп, сложность-изготовления и монтажа, стоимость, длина линейного участка трубопровода, условия износа сужающего устройства.
В тех случаях, когда необходимо обеспечить наименьшую потерю давления рп, следует применять сопла Вентури или сопла,, например, при модуле щ = 0,5 отношение рп/\р имеет следующие-значения (в %):
Для диафрагмы....................................50
Для сопла........................................28
Для сопла Вентури короткого.................................; . 8
длинного .................................... 7
При одних и тех же расходах и перепадах давления для сопел требуется более короткий монтажный участок трубопровода, а при одних и тех же значениях модуля и перепада давления сопла позволяют измерять больший по сравнению с диафрагмами расход с более высокой точностью измерения (особенно при малых: модулях). Более высокую по сравнению с диафрагмами точность-измсрсппя обеспечивают сопла и при измерении расхода газов и паров.
Расход агрессивных и загрязненных сред, а также потоков с высокими скоростями целесообразно измерять с помощью сопел, так как сопла значительно более стойки к износу по сравнению с диафрагмами, у которых острая входная кромка быстро изнашивается. По стоимости и простоте изготовления диафрагмы являются лучшим сужающим устройством. Они могут быть изготовлены почти в любой механической мастерской, тогда как сопла-изготавливаются с помощью специального оборудования (копировально-фрезерные станки, установки для прецизионного литья).
При измерении расхода наибольшее распространение получили диафрагмы, так как при достаточно высокой точности измерения они сравнительно дешевы, просты в изготовлении и установке.
127
Расходомеры постоянного перепада давления
Эти устройства называются еще расходомерами обтекания, или ротаметрами. Принцип их действия основан на восприятии динамического напора контролируемой среды чувствительным элементом (например, поплавком), помещенным в
Рис. V-21. Схема ротаметра со стеклянной конусной трубкой:
1 — ограничители хода поплавка; 2 — уплотнители; 3 — поплавок; 4 — стеклянная трубка.
Рис. V-22. Схема ротаметра-дат-чнка с дифференциально-трансформаторной передачей:
1 — металлическая трубка; 2 — направляющие; 3 —диафрагма; 4 — поплавок;
5 — шток; 6 — плунжер; 7 — корпус из немагнитного материала; 3 — подключение вторичного прибора.
поток; в результате воздействия потока чувствительный элемент перемещается, а величина перемещения служит мерой расхода. В момент равновесия чувствительного элемента разность давлений, действующих на него с обеих сторон, остается постоянной, поэтому он и получил название расходомера постоянного перепада. Схема, приведенная на рис. V-21, поясняет работу ротаметра. Он состоит из вертикальной конусной трубки, 4, расширяющейся кверху, внутри которой помещен поплавок 5, свободно перемещающийся в ней. В зависимости от пределов измерения и контролируемой среды поплавок изготавливается из эбонита, анодированного алюминия или дюралюминия, нержавеющей стали, фторопласта и стекла. Коническая трубка имеет внутренние ограничители хода поплавка 1. Она крепится на вертикальном участке трубопровода с помощью специальных фланцев и уплотнителей 2. На внешнюю сторону конической стеклянной трубки нанесена равномерная шкала в пределах от 0 до 100 без указания единицы измерения.
Поток контролируемого вещества поступает в трубку снизу вверх и увлекает за собой поплавок, перемещая его вверх на вы
128
соту Л. При перемещении поплавка вверх увеличивается кольцевой зазор между ним и стенкой конической трубки, в результате чего уменьшается скорость жидкости (газа) и возрастает давление над поплавком.
На поплавок действуют следующие силы:
снизу вверх j. С
F1 — Р1$ 2 , ' . > п 2
сверху вниз
. F2 = p2s + G <"
где pi и р2 — давления вещества на поплавок снизу и сверху; S — площадь сечения поплавка; G — вес поплавка.
В момент равновесия Fi = F2, откуда р\—p2=G/S или &p = GIS.
Так как величина G/S постоянна, то равновесие поплавка возможно только при постоянном перепаде давления Др = const.
При этом объемный расход вещества Q, м3/с, может быть подсчитан по формуле
Q = C(SK-S)/A^p (42)
где SK — площадь сечения конической трубки на высоте ft, м2; S— площадь верхней торцевой поверхности поплавка, м2; Др — перепад давления, Па; р — плотность измеряемой среды, кг/м3; С — коэффициент, зависящий от размеров и конструкции ротаметра.
Отсчет показаний прибора производится следующим образом. По вертикальной шкале ротаметра считывается отметка, против которой остановился поплавок, и затем с помощью таблицы, а чаще графика, производится окончательное определение расхода. Градуировать шкалу в единицах массового или объемного расхода нельзя, так как при поточном производстве стеклянных конических трубок их невозможно изготовить совершенно одинаковыми.
Ротаметры со стеклянной трубкой применяются только для визуальных отсчетов расхода и лишены устройств для передачи показаний на расстояние. Кроме того, давление контролируемой среды не должно превышать 5,9-105 Па, а 'ее температура — + 100 °C. Они монтируются только на вертикальных участках трубопровода с помощью фланцевых, ниппельных или штуцерных соединений. Серийно выпускаются с диаметрами условного прохода 4, 6, 10, 15, 16, 25 и 40 мм на верхние пределы измерения от 0,0025 до 3,0 м3/ч (по воде) и от 0,063 до 40 м3/ч (по воздуху). Нижний предел измерения составляет 20% верхнего, основная погрешность ±2,5%.
Ротаметры с металлической трубкой снабжены электрической или пневматической дистанционной передачей и позволяют измерять расход жидкостей, находящихся под давлением до 6,3-•10е Па.
На рис. V-22 показана схема ротаметра с дифференциально-трансформаторной передачей.
9-2208
129
Цилиндрическая металлическая трубка I с помощью фланцев крепится на участке трубопровода (подвод жидкости снизу вверх,, отвод по горизонтальному участку трубопровода) в вертикальном’ положении. Внутри трубки неподвижно укреплена диафрагма 3. Конический поплавок 4 под действием потока жидкости может перемещаться в отверстии диафрагмы, дросселируя поток. Соосность поплавка и отверстия диафрагмы достигается благодаря направляющим 2. С помощью штока 5 поплавок связан с плунжером 6 дифференциально-трансформаторного преобразователя, который отделен от катушки с обмотками корпусом 7 из немагнитного материала. Перемещение поплавка зависит от изменения расхода, значит, сигнал на выходе дифференциально-трансформаторного преобразователя также пропорционален расходу и измеряется вторичным прибором, шкала которого градуирована в единицах расхода.
Серийно выпускаются ротаметры с дифференциально-трансформаторной передачей на верхние пределы измерения от 0,025 до 16 м3/ч (по воде) с диаметрами условного прохода 6, 10, 15, 25, 40, 70, и 100 мм на давления измеряемой среды до 6,4 ПО6 Па.
Ротаметры с пневматической дистанционной передачей выпускаются на верхние пределы измерения (по воде) от 0,1 до • 16 м3/ч с диаметрами условного прохода 10, 15, 20, 25, 40, 50, 70 и 100 мм.
Ротаметры получили применение благодаря ряду .достоинств, основными из которых являются: возможность измерения малых расходов, равномерность шкалыУмалая и постоянная потеря давления, большой диапазон измерения (Qmax • <?пип = ТО: 1), постоянство погрешности измерения во всем диапазоне шкалы, возможность измерения агрессивных и стерильных веществ.
Электромагнитные расходомеры
Расходомеры этого типа применяются для измерения расхода только электропроводящих жидкостей, электропроводимость которых не менее 1 • 10~4 см/м.
Принцип действия электромагнитных (индукционных) расходомеров основан на измерении э. д. с., индуктирующейся в потоке жидкости под действием внешнего магнитного поля и пропорциональной расходу этой жидкости.
Согласно закону Фарадея, на концах проводника I, движущегося со скоростью v в направлении, перпендикулярном своей оси и силовым линиям магнитного поля с индукцией В, возникает некоторая э. д. с.
E=tBv (43>
В соответствии с этим законом э. д. с., индуктирующаяся в; электропроводящей жидкости, пропорциональна только скорости потока при условии постоянства величин В и I, а скорость жидкости и ее расход связаны линейной зависимостью.
130
Измерительный комплект электромагнитного расходомера (рис. V-23) в простейшем случае состоит из датчика и вторичного прибора (измерителя э.д.с.).
Датчик представляет собой трубку 3 из немагнитного материала (например, нержавеющей стали Х18Н10Т), внутренняя поверхность которой 4 футерована ] полуэбонитом или стеклопластиком. Два электрода 5 из нержавеющей стали установлены диаметрально противоположно друг другу. Их концы А и Б контактируют с протекающей по трубе жидкостью (от тела трубы электроды изолированы). Труба датчика длиной (8—12) D с обоих концов имеет фланцы 6 для монтажа на трубопроводе, а с ее внешней стороны расположены полюса 1 и 2 электромагнита; их обмотки питаются от сети переменного тока напряжением 220 В и частотой 50 Гц.
С помощью экранированных проводов 8 электроды датчика соединены с вторичным прибором маторного тппа), шкала которого хода.
Если в уравнении (43) длину проводника I заменить величиной DB (внутренний диаметр трубы датчика), а среднюю скорость потока выразить через расход
Q Q Q
°ср= S = лОв4 = 1,27 DB2
4
Рис. V-23. Схема электромагнитного расходомера:
1, 2 —полюса электромагнита; 3 —труба датчика; 4 — футеровка; 5 — электроды;
6 — фланец; 7 — вторичный прибор; 8 — соединительные провода; А, Б—торцы электродов.
7 (дифференциально-трансфор-градуирована в единицах рас-
то э. д. с., индуктируемая в жидкости при пересечении магнитных силовых линий, выразится так:
Е = lBvcp = DBB 1,27Q/Db2
откуда
1,27В £~С£
(44)
где C=D,B/1,27 В — величина, постоянная для конкретного типа прибора.
Равенство (44) показывает, что расход жидкости и наводимая в ней э. д. с. связаны линейной зависимостью, следовательно, шкала вторичного прибора будет линейной.
Электромагнитные расходомеры ^обладают следующими достоинствами:
S*
131
не создают дополнительных препятствий протеканию жидкости, благодаря чему не приводят к потере давления;
позволяют измерять расход загрязненных и химически активных жидкостей с твердыми включениями (пульпы);
могут быть использованы (легко приспособлены) для измере-• ния потоков переменного направления;
обеспечивают незначительное влияние температуры и вязкости контролируемой среды на точность измерения;
позволяют измерять как очень малые, так и очень большие расходы;
обеспечивают независимость показаний от характера потока.
Датчики расходомеров могут устанавливаться на горизонтальных, наклонных и вертикальных трубопроводах при непременном условии, что контролируемая среда будет заполнять все сечения трубы датчика.
Выпускается несколько модификаций и типоразмеров расходомеров с внутренним диаметром трубы датчика от 10 до 800 мм и верхними пределами измерения от 0,32 до 5000 м3/ч.
Основная погрешность ±1 и ±1,5.
Расходомеры переменного уровня
Расходомеры переменного уровня, которые еще называют щелевыми, предназначены для измерения расхода особо активных жидкостей, находящихся под атмосферным давлением. Принцип их действия основан на зависимости уровня жидкости в сосуде со свободным стоком через калиброванное отверстие (щель) от расхода.
Датчик расходомера (рис. V-24, а) представляет собой корпус 1, разделенный внутри глухой перегородкой 2, в которой имеется щель 3 для истечения (показана на рис. V-24,б). Жидкость, расход которой Q измеряется, поступает в левую полость камеры и через щель перетекает в правую часть, откуда через свободный слив поступает к потребителю. Над кромкой щели образуется уровень, высота которого Н тем больше, чем больше расход Q, т. е.
Q = КН (45)
где К — коэффициент пропорциональности, зависящий от максимальных Значений расхода (Qmax) И УРОВНЯ (Ящах)
К = Qmax/Ящах
Зависимость ширины щели х от уровня Н определяется из равенства:
х__ Qmax 1
a /2g Яшах V Н
где а — коэффициент расход, (примерно равен 0,6); g — ускорение свободного падения.
132
Рис. V-24. Схема расходомера переменного уровня:
а — датчик; б — форма отверстия истечения; /—корпус; 2 — перегородка; 3 — отверстие истечения; 4 — пьезометрическая трубка; 5 — манометр; 6— блок питания воздухом.
расходование исходных ма
При заданном Qmax и при выбранном Нтлх, задаваясь текущими значениями Н, можно найти х для любой высоты.
Уровень жидкости Н измеряется пьезометрическим методом (см. гл. IV) с помощью пьезометрической трубки 4 и манометра 5, градуированного в единицах уровня. '
Расходомеры выпускаются на верхние пределы измерения 1; 1,6; 2,5; 4; 6,3; 10; 20; 30 и 50 м3/ч с основной погрешностью измерения ±1,5 и ±4. Корпус изготавливается из сталей марок Х18Н9Т и ОХ23Н28МЗДЗТ.
Воздух для пьезометрической трубки подается из заводской магистрали (0,2—1) -10® Па через блок питания 6.
ДОЗИРОВАНИЕ ТВЕРДЫХ
И ЖИДКИХ МАТЕРИАЛОВ • Л Л
В ряде технологических процессов (особенно в химических производствах) дозирование является одной из основных операций. Качество готовой продукции и рациональн!
териалов во многом зависит от дозирования.
Дозирование сыпучих и жидких материалов — это определение заданной дозы материала (по массе или объему). Применяемые для этой цели приборы и устройства называются дозаторами.
Сыпучие и жидкие материалы дозируются объемным и весовым методами; по степени автоматизации процессы дозирования могут быть ручными, полуавтоматическими и автоматическими.
Весьма важным моментом в успешной работе дозаторов является обеспечение поступления к ним дозируемого материала равномерным потоком. Механизмы, применяемые в дозаторах для передачи материала, можно разделить на две основные группы. К первой из них относятся различного типа побудители, устанавливаемые непосредственно во впускных воронках дозаторов и служащие для разрыхления материала, предотвращения образования сводов (мешалки, вибраторы). Ко второй можно отнести специальные питающие механизмы, или питатели (транспортные, лотковые, барабанные, шнековые, тарельчатые, вибрационные), подающие материалы из бункеров и других хранилищ к дозатору.
Из большого числа различных дозирующих устройств остановимся лишь на некоторых, наиболее распространенных.
Механический объемный дозатор для сыпучих материалов (см. рис. V-25) работает таким образом. Полый цилиндр 3 вращается на оси 4. В стенке цилиндра имеется отверстие 2, через которое дозируемый материал самотеком поступает в цилиндр из выпуск
133
ной воронки 1. При повороте цилиндра на 180° материал из него высыпается в приемный бункер 5, откуда через выпускное отверстие 6 поступает по назначению.
Полуавтоматический весовой дозатор. На рис. V-26 показан циферблатный указатель с фотоприставкой, который используется для полуавтоматического весового дозирования сыпучих мате-
Рис. V-25. Схема объемного дозатора:
/ — воронка; 2 — загрузочное отверстие; 3 — пол$яй цилиндр; 4 — ось; 5 — бункер; в — выпускное отверстне.
Рис. V-26. Схема циферблатного указателя с фотопрнставкой:
1 — шкала; 2 — фотореле;. 3 — стрелка; 4 — флажок.
риалов. Имеющаяся на весах шкала 1 служит для установки дозы передвижением гирь по шкале. При этом стрелка весов 3 показывает на циферблате заданную массу. При поступлении дозируемого материала на весы стрелка постепенно подходит к нулевому делению, поворачиваясь против часовой стрелки; при совпадении стрелки с нулем имеющийся на оси стрелки флажок 4 пересечет световой луч и вызовет срабатывание фотореле 2, которое связано с устройствами отсекания подачи материала и выгрузки его по назначению.
Этот же циферблатный указатель может быть использован для работы в комплекте с сельсин-датчиком. Для этого стрелка весов 3 кинематически связывается с ротором сельсин-датчика, который будет выдавать электрический сигнал, пропорциональный массе материала.
Во многих случаях в качестве элемента установки, дозирующей жидкость, широко применяется насос. Причем он может служить и источником напора, и самостоятельным дозирующим агрегатом.
Насосы-дозаторы с возвратно-поступательным движением поршня (рис. V-27) служат для дозирования различных жидко-
134
стей, в том числе химически активных и вязких. На их входных и выходных патрубках установлены клапаны. Когда привод перемещает поршень оправа налево, происходит наполнение цилиндра через входной клапан, а когда поршень, дойдя до крайнего положения, начнет перемещаться слева направо, клапан на входе
Рис. V-27. Схема поршневого насоса-дозатора.
Рнс. V-28. Схема дозирования серной кислоты з производстве суперфосфата;
/ — питатель; 2 — весовой автоматический дозатор; 3 —датчик; 4 — смеситель; 5 — иасос-до-затор; 6 — бак; 7 — управляющее устройство.
закроется, клапан на выходе откроется и жидкость будет вытеснена в приёмное устройство.
Для непрерывного дозирования находят применение шестеренчатые насосы, производительность которых может меняться в зависимости от числа оборотов шестерен. Конструкция и принцип их действия хорошо известны и здесь не рассматриваются.
Связи дозаторов с технологическими схемами производства определяются характером установок и могут быть весьма разнообразны. Схема, приведенная на рис. V-28, иллюстрирует эти связи на примере дозирования серной кислоты в производстве суперфосфата.
Фосфат из бункера через питатель 1 поступает на весовой автоматический дозатор 2, датчик которого 3 выдает электрический (или пневматический) сигнал, пропорциональный массе. Этот сигнал поступает на управляющее устройство 7, которое в зависимости от массы фосфата, вырабатывает управляющий сигнал, воздействующий на привод насоса-дозатора 5. Насос-дозатор подает из бака 6 серную кислоту в смеситель 4. Если, например, подача фосфата увеличится, то возрастет и управляющий сигнал на привод насоса-дозатора, который увеличим подачу серной кислоты.
ГЛАВА VI
КОНТРОЛЬ качества И СОСТАВА МАТЕРИАЛОВ
Параметры, контроль которых был рассмотрен в предыдущих главах, позволяют судить либо о состоянии вещества (температура, давление), либо о его количественных характеристиках (расход, доза, количество, уровень).
Не менее важной, а в ряде случаев и более важной задачей, чем контроль состояния и количества вещества, является автоматический контроль параметров, характеризующих само вещество. Таких параметров очень много, они позволяют судить о химических и физических свойствах, реакционной способности вещества и пр. К ним относятся: объемное или массовое соотношение компонентов в смеси, концентрация вещества, его вязкость, влажность, цветность, прозрачность, кислотность или щелочность и многие другие.
До недавнего времени основным методом контроля состава и качества материалов, полупродуктов и конечного продукта был лабораторный метод, связанный с отбором проб веществ на различных стадиях процесса и их анализом в лаборатории. На это уходило много времени, и часто случалось так, что информация о результатах анализа настолько запаздывала, что уже не' представляла интереса для производства.
С применением автоматических приборов контроля и регулирования качества и состава материалов эффективность производственных процессов значительно повысилась.
Действие аналитических приборов обычно основывается на измерении физических или физико-химических параметров, характеризующих состав или качество материалов.
Принципы действия и конструкции аналитических приборов весьма многообразны. В дальнейшем будем рассматривать их по назначению.
ИЗМЕРЕНИЕ КОНЦЕНТРАЦИИ ЖИДКОСТЕЙ
В химических производствах часто приходится контролировать концентрацию растворов твердых веществ в жидкостях и жидкостей в жидкостях.
Существует несколько методов контроля, из которых широкое применение получили следующие:
кондуктометрический (от латинского conductor — проводник и греческого metreo — мерю), основанный на измерении электропроводимости жидкостей, зависящей от их концентрации;
оптический, основанный на, законах поглощения и отражения светового потока, поступающего в контролируемую среду;
136
электрометрический, основанный на измерении разности потенциалов специальных электродов, погруженных в контролируемую среду, зависящей от ее кислотности или щелочности (рН-метрия).
Кондуктометрические приборы. Водные растворы электролитов проводят электрический ток. Зависимость между'удельной электропроводимостью раствора, природой растворенного вещества и о,в его концентрацией определяется
<3* /7,4
S' /7,2
О 2 4 6 8 10 12 14 15
В,. моль/м 3
Рис. VI-1. Зависимость электропроводности растворов некоторых веществ от их концентрации.
о = аСв (ек-|-еа)
где а — удельная электропроводимость раствора, См/м; а — степень диссоциации, т. е. отношение числа диссоциировавших молекул к общему их числу в растворе; Св — мольная концентрация растворенного вещества; ук и Va — соответственно подвижности ионов (катионов и анионов)
в электрическом поле при градиенте (перепаде) напряжения, равном единице.
Различают «сильные» и «слабые» электролиты. В «сильных» электролитах практически все молекулы диссоциированы на ионы, в «слабых» — имеется некоторое число недиссоциированных молекул.
На рис. VI-1 приведен график зависимости удельной электропроводимости некоторых сильных электролитов от их концентрации.
Как видно из графика, с увеличением концентрации удельная электропроводимость сначала быстро возрастает, достигая некоторого максимума, а затем начинает уменьшаться.
Так как одному и тому же значению удельной электропроводимости могут соответствовать два значения концентрации (например, удельные электропроводимости 10% и 58%-ной серной кислоты совпадают), то для получения однозначной зависимости надо проводить измерения лишь в одном интервале: либо от 0 до максимума, либо от максимума до 100%.
Электропроводимость раствора сильно зависит от его температуры: с повышением температуры на 1 °C электропроводимость увеличивается в среднем на 2%. Это обстоятельство необходимо учитывать путем внесения поправок или введения различных корректирующих устройств.
При измерениях электропроводимости растворов следует пользоваться переменным током, так как в отличие от постоянного он в значительно меньшей степени приводит к поляризации измерительных электродов.
137
В зависимости от способа взаимодействия с измеряемой средой кондуктометрические концентратомеры подразделяются на электродные и безэлектродные.
Электродные кондуктометры. Измерительным (чувствительным) элементом этих приборов является электродная ячейка, состоящая из двух электродов, помещенных в контролируемую среду на определенном расстоянии один от другого (рис. VI-2).
Рис. VI-2. Схема измерительного мента электродного кондуктометра: мА — миллиамперметр.
Рис. VI-3. Схема кондуктометра с термокомпенсатором:
М—мост; гя — электродная ячейка; ЭУ — электронный усилитель; РД — реверсивный двигатель; и, Гь rs —плечи моста; гр — реохорд; С — конденсатор.
Электродная ячейка характеризуется электрическим сопротивлением г, Ом, которое при площади электродов S, расстоянии между ними I и удельной электропроводимости раствора о определится выражением
1 I
Для измерения сопротивления ячейки используются мостовые схемы.
На рис. VI-3 приведена схема кондуктометра, электродная ячейка которого с термокомпенсатором гя включена в плечо электронного автоматического уравновешенного моста переменного тока М (rt, Г2, гз — постоянные сопротивления плеч моста; гр—реохорд; С — конденсатор, устраняющий сдвиг фаз между напряжением питания и напряжением небаланса; ЭУ — электронный усилитель; РД — реверсивный двигатель).
При измерении концентрации контролируемого раствора изменяется сопротивление электродной ячейки и мост, шкала которого градуирована в единицах концентрации, измеряет эту в.еличину.
138
Для термокомпенсации контролируемой среды параллельно электродам гх включено шунтирующее сопротивление гш (например, из манганина), обладающее низким температурным коэффициентом. Благодаря этому температурный коэффициент сопротивления параллельной цепи гх—гш значительно снижается по сравнению с температурным коэффициентом раствора и приближается к температурному коэффициенту термометра сопротивления rt,
Рис. VI-4. Схема низкочастотного безэлектродного кондуктометра: а — принципиальная; б — эквивалентная.
Рис. VI-5. Схемы датчиков высокочастотных кондуктометров: а — конденсаторный; б — индуктивный.
но имеет противоположный знак. Таким образом, общее сопротивление цепи (электродной ячейки) гя почти не изменяется при колебаниях температуры контролируемого раствора.
Безэлектродные кондуктометры. В приборах этого типа отсутствует непосредственный контакт электродной ячейки с контролируемой средой, а это исключает химическое взаимодействие электродов с электролитом или возникновение на поверхности электродов непроводящих пленок, осадков и т. п.
В зависимости от частоты переменного тока безэлектродная кондуктометрия бывает низкочастотной (до 1000 Гц) и высокочастотной (свыше 1000 Гц).
Низкочастотная кондуктометрия. На рис. VI-4, а изображена принципиальная схема низкочастотного безэлектродного кондуктометра, а на рис. VI-4, б — эквивалентная.
Труба из диэлектрического материала образует замкнутый жидкостной виток, заполненный непрерывно протекающим контролируемым раствором. Снаружи на трубу намотаны обмотки двух трансформаторов: возбуждающего Tpi и измерительного Тр2. Таким образом, замкнутый жидкостной виток сопротивлением г выполняет роль вторичной обмотки трансформатора, Tpi и первичной трансформатора Тр2 (их коэффициенты трансформации равны соответственно Ki и К2). Электрический ток в жидкостном витке индуктируется магнитным полем трансформатора Tpi и си
139
Рис. VI-6. Схема, поясняющая колориметрический метод измерения концентрации.
Ла тока Ii определяется электрической проводимостью жидкости, если напряжение V, подаваемое в первичную обмотку Трь является неизменным. Протекая по жидкостному витку, ток индуктирует во вторичной обмотке Тр2 э. д. с. Е, которая пропорциональна контролируемой величине.
Высокочастотная кондуктометрия. Высокочастотный метод измерения концентрации растворов следует применять для жидко-костей, имеющих очень низкую электропроводимость.
В качестве датчиков таких кондуктометров применяются конденсаторные и индуктивные ячейки (рис. VI-5). Анализируемый раствор находится в сосуде из диэлектрика (например, стекла). У конденсаторных ячеек (рис. VI-5,а) с внешней стороны сосудов крепятся две изолированные друг от друга металлические обкладки; у индуктивных (рис. VI-5,6)—сосуд помещен в качестве сердечника внутрь катушки индуктивности. Емкость конденсатора, либо индуктивность катушки датчика, включенного в измерительную мостовую схему, питается током высокой частоты и зависит от проводимости раствора, а, следовательно, и от концентрации.
Ячейки индуктивного типа более пригодны для контроля растворов высокой концентрации; во всех остальных случаях они уступают конденсаторным ячейкам.
Оптические приборы. Оптические методы контроля концентрации жидкостей находят широкое применение как в лабораторной практике, так и в практике технических измерений. Эти методы выгодно отличаются от других своей универсальностью, высокой чувствительностью, бесконтактностью измерений.
Из ряда оптических методов контроля концентрации растворов остановимся лишь на колориметрическом и рефрактометрическом.
Колориметры. Колориметрический метод (от латинского color — цвет) основан на зависимости поглощения светового потока, проходящего через контролируемый раствор, от его окраски, являющейся функцией концентрации (рис. VI-6).
Монохроматический поток световой энергии интенсивности Фо падает на контролируемый объект толщиной I (например, прозрачная камера, заполненная исследуемой жидкостью), проходит через него и выходит частично ослабленным за счет поглощения. Теперь его интенсивность равна Фг. Зависимость между -интенсивностями падающего и прошедшего через раствор световых потоков определяется законом Ламберта — Бугера — Бера и выражается следующим образом:
Ф/ = Фо. 10~8/с
140
или
ig-^-=ezc
где е—мольный коэффициент гашения, который показывает, какая часть светового потока поглощается раствором толщиной 1 см; С — концентрация раствора.
Величину, выраженную логарифмом отношения Фо/Ф/, называют оптической плотностью поглощающего вещества и обозначают буквой D.
Оптическая плотность и концентрация раствора связаны линейной зависимостью. Однако это наблюдается далеко не во всех случаях и характерно лишь для разбавленных растворов.
Для регистрации интенсивности светового потока, прошедшего через контролируемый раствор, применяются различные типы фотоэлементов, поэтому приборы с такими приемниками получили название фотоколориметров.
Так как степень поглощения светового потока различными растворами зависит от длины волны падающего излучения, то желательно знать спектральную характеристику исследуемого вещества, т. е. определить тот небольшой участок длин волн, который максимально поглощается этим веществом. Для выделения такого участка в фотоколориметрических приборах применяются соответствующие светофильтры, помещаемые между источником света и фотоприемником. Автоматические фотокблориметры обычно работают по дифференциальной схеме; их можно подразделить на две группы:
приборы, основанные на одновременном сопоставлении двух потоков;
приборы, основанные на поочередном сравнении двух потоков.
Упрощенная принципиальная схема прибора, работающего по принципу одновременного сопоставления двух потоков, приведена на рис. VI-7.
Световой поток от лампочки Л разделяется на два потока и, отражаясь от зеркал 3, попадает на одинаковые фотоэлементы Ф1 и Ф2. Поток, идущий через верхний световой канал, проходит через светофильтр Сф, конденсор К и оптический клин ОК, а идущий через нижний световой канал — через светофильтр Сф, конденсор К и прозрачную кювету А, заполненную контролируемым веществом. Фотоприемники Ф[ и Ф2 соединены встречно; в их контур включен электронный усилитель ЭУ.
Изменяя положение ч клина ОК, добиваются равенства световых потоков в обоих каналах. Тогда фотоприемники выдадут одинаковые фототоки, сигнал разбаланса на входе электронного усилителя будет равен нулю, указатель индикатора нуля ИН также будет на нулевой отметке; с помощью отсчетного устройства, связанного с клином ОК, можно производить отсчет. В автоматических приборах перемещением клина обычно управляет реверсив-
141
н'ый двигатель, включенный на выходе электронного усилителя вместо индикатора нуля.
Схема прибора, основанного на методе поочередного сравнения двух потоков (рис. VI-8), отличается от предыдущей наличием обтюратора Об с электроприводом М, а также тем, что вместо двух фотоэлементов используется один.
Рис. VI-7. Схема автоматического фотоколорнметра, основанного иа одновременном сопоставлении двух потоков:
Л —лампа; 3 —зеркала; СФ — светофильтры; К — конденсоры; А —кювета; Ф>, Фа—фотоэлементы; ЭУ — электронный усилитель; ИН — индикатор; ОК — оптический клин.
Рис. VI-8. Схема автоматического фотоколориметра, основанного на поочередном сравнении двух потоков:
Л —лампа; 3 —зеркала; Сф — светофильтры; Об — обтюратор; М —моторчик; К —конденсоры; ОК — оптический клнн; А —кювета; Ф — фотоэлемент; ЭУ — электронный усилитель; ИН — индикатор нуля.
Двигатель вращает обтюратор с постоянной скоростью и поочередно прерывает световые потоки то в верхнем, то в нижнем оптических каналах. Фотоэлемент Ф поочередно воспринимает их. Если эти потоки не равны по интенсивности, то от фотоэлемента на усилитель поступают разные величины напряжения, в результате чего на выходе усилителя появляется переменная составляющая, пропорциональная напряжению небаланса.
Схемы с двумя фотоэлементами страдают существенным недостатком вследствие того, что характеристики двух однотипных фотоэлементов отличаются одна от другой, причем со временем они изменяются неодинаково. Это ведет к дополнительным погрешностям. Схема с одним фотоэлементом лишена этого недостатка, но она более сложна.
Рефрактометры. В рефрактометрическом методе (от латинского refractus — преломленный) используемся зависимость показателя преломления контролируемого раствора от его концентрации.
Для растворов одной природы, но различной концентрации справедлива зависимость
142
тде Сх и Са—концентрации контролируемого и эталонного растворов; пх и Па — показатели преломления растворов; «о — показатель преломления растворителя.
Наиболее распространенными методами определения показателя преломления являются спектрометрический и метод полного внутреннего отражения.
Рис. VI-10. Схема автоматического рефрактометра:
1 — осветитель; 2 — коллиматор; 3 —кювета; 4, 5 — призмы; 6 — фотоэлементы.
Спектрометрический метод основан на определении показателя преломления по углу наименьшего отклонения светового луча в стеклянных призмах, заполненных контролируемым раствором. Используются специальные призмы — кюветы дифференциального типа (рис. VI-9). Кювета состоит из двух камер, разделенных прозрачной- перегородкой, одна из которых заполнена эталонным раствором заданной концентрации, а другая — контролируемым раствором. При равенстве показателей преломления эталонной п и контролируемой п' жидкостей луч света проходит через обе камеры без отклонений, а при изменении концентрации контролируемой среды показатель п' изменяется и луч света отклоняется. Отклонение луча тем больше, чем заметнее различие между концентрациями эталонной и контролируемой жидкостей. Конструкция дифференциальной кюветы обеспечивает температурную компенсацию, т. е. равенство температур, при которых находятся обе жидкости.
Автоматический рефрактометр с дифференциальной кюветой (рис. VI-10) работает следующим образом. Луч света от осветителя 1 проходит через диафрагму, коллиматор 2 (служат для формирования светового потока) и кювету 3 (через рабочую камеру которой непрерывно протекает контролируемая жидкость), отражается от грани неподвижной призмы 4 и попадает на грань поворотной призмы 5. Если концентрации эталонной и контролируемой жидкостей равны, то световой поток совпадает с оптической осью системы и равномерно освещает оба фотоэлемента 6, включенных встречно. В этом случае выходной сигнал электрон-
143
кого усилителя ЭУ равен нулю и реверсивный двигатель РД не работает.
При изменении концентрации контролируемой среды световой поток сместится с оптической оси, фотоэлементы будут освещены по-разному, что приведет к появлению сигнала небаланса в цепи фотоэлементов и срабатыванию реверсивного двигателя. Ревер-
Рис. VI-U. Схема, поясняющая явление полного внутреннего отражения.
Рис. VI-I2. Блок-схема автоматического рефрактометра:
Л —лампа; СФ—светофильтр; Ф1, Ф2 —фотоэлементы; ЭУ— усилитель; К — коиденсор; ИП — измерительная призма; РД — реверсивный двигатель; Р — редуктор; ПС — показывающая стрелка.
сивный двигатель, кинематически связанный с осью подвижной призмы 5 (см. пунктир), будет поворачивать ее до тех пор, пока световой поток вновь совпадет с оптической осью, вновь одинаково осветит оба фотоэлемента, вследствие чего сигнал небаланса исчезнет. Одновременно с осью призмы реверсивный двигатель перемещает (см. пунктир) показывающую стрелку ПС относительно шкалы, градуированной в единицах концентрации.
Полное внутреннее отражение. Другой метод определения преломления основан на использовании явления полного внутреннего отражения, которое заключается в следующем (рис. VI-11). При переходе светового луча из.среды с показателем преломления zit в среду с показателем Преломления «2 соблюдается следующая зависимость:
sin gf n2
sin ₽2 — «1
где i₽i — угол падения луча на границу раздела сред; (?2— угол преломления этого луча.
При определенном угле падения луча света из среды с большим показателем преломления в среду с меньшим показателем преломления отраженный луч идет по поверхности раздела двух сред 3—3' или возвращается в первоначальную среду (3—А]),, т. е. претерпевает полное внутреннее отражение.
Блок-схема автоматического рефрактометра, в котором используется принцип полного внутреннего отражения,, приведена на рис. УЫ2. Прибор работает следующим образом.
144
.Свет от лампочки Л через светофильтр Сф и линзу К (конденсор) попадает на сферическую поверхность измерительной призмы ИП, плоская грань которой омывается контролируемым раствором. Световой поток, отраженный от плоской поверхности измерительной призмы, проходит через ее сферическую выходную» поверхность, выполняющую роль объектива. Показатель преломления материала призмы больше показателя преломления контролируемой жидкости, поэтому изменением угла падения выходного светового луча всегда можно обеспечить полное внутреннее отражение луча в измерительной призме. Отраженный свет делится на две зоны — световую и затемненную, и воздействует иа два фотоэлемента Ф1 и Ф2, один из которых (Ф2) закреплен неподвижно, а второй может перемещаться с помощью реверсивного двигателя РД и редуктора Р. Равновесие измерительной системы соответствует положению, когда граница светотени (см. штриховку) проходит через фотоэлемент Фь
Изменение концентрации раствора смещает границу светоте* ни, и фотоэлемент Ф1 оказывается целиком в светлой или темной зоне, отчего его фототок будет либо больше, либо меньше, а реверсивный двигатель РД, вращаясь в ту или ную сторону, будет смещать Ф[ опять на границу светотени. Через редуктор Р с осью реверсивного двигателя РД связана также стрелка ПС вторичного прибора.
Достоинством рефрактометров этого типа является возможность измерения концентрации непрозрачных сред.
ИЗМЕРЕНИЕ КОНЦЕНТРАЦИИ ВОДОРОДНЫХ ИОНОВ
В РАСТВОРАХ (рН-МЕТРИЯ)
В производствах, где применяются водные растворы различных кислот и щелочей, часто определяющих ход химических реакций, первостепенное значение приобретает контроль кислотности и щелочности сред. Кислотность или щелочность раствора зависит от концентрации в нем водородных и гидроксильных ионов;
В воде всегда имеются ионы водорода и гидроксила, так как часть молекул воды диссоциирует по схеме
НОН [Н+] + [ОН-]
Согласно закону действия масс, произведение концентраций ионов при данной температуре есть величина постоянная; при температуре 20°С она равна [Н+] • [ОН~] = 10~14. Эта величина» называемая ионным произведением воды, показывает, какая доля молекул воды из общего числа распалась на ИОНЫ. Так как число ионов водорода и гидроксила в чистой воде одинаково, то в 1 моль воды имеется по 10-7 молей ионов Н+ и ОН".
При растворении в воде кислота диссоциирует на ионы ВОДО- . рода и кислотного остатка, концентрация ионов водорода увеличивается по сравнению с концентрацией ионов ОН и раствор
10—2208 ИВ
приобретает кислотный (кислый) характер, а при растворении щелочи, которая диссоциирует на ионы металла и гидроксила, возрастает концентрация гидроксила и раствор становится щелочным.
Если выражение [Н+] • [ОН-] = 10-14 прологарифмировать, получим
lg [Н+] + 1g [ОН-] = —14
откуда
lg[H+] = lg[OH-]=-7
что соответствует нейтральной жидкости.
Кислотность или щелочность электролитов принято характеризовать водородным показателем pH, который численно равен десятичному логарифму концентрации водородных ионов, взятому с обратным знаком, т. е.
РН ---lg [Н+1
Согласно этому определению, при pH = 7 раствор нейтральный, при рН>7 — щелочной, при рН<7 — кислотный.
На рис. VI-13 изображена шкала, охватывающая значения pH, встречающиеся на практике. В растворах, с которыми приходится иметь дело в производстве, pH обычно не бывает ниже 2 и выше 10. Однако в концентрированных кислотах pH может понижаться до —2, а в концентрированных щелочах повышается до 15 и более.
Наибольшее распространение получили два метода измерения pH: а) колориметрический, основанный на добавлении к контролируемому раствору индикаторов (лакмус, метилоранж, фенолфталеин) и последующем сравнении окраски раствора с серией стандартных веществ, и б) электрометрический (потенциометрический), основанный на количественной зависимости между э.д. с., развиваемой специальным элементом-датчиком, помещенным в
,0 7 2 3 4 5 6 7 в 9 10 11 12 13 14
( 1 J А 1 J ' А 1 J А 1 Н
I И I 2F У Ш
Рнс. VI-13. Шкалы pH для растворов:
I — сильнокислый^// — слабокнслый; III — •нейтральный; IV—слабощелочной; V~ снльноЩелочной.
контролируемую среду, и pH этой среды.
Колориметрический метод является точным и широко используется в лабораторной практике, но мало пригоден для автоматических измерений в производственных условиях.
Электрометрический способ
дает высокую точность измерения и незаменим в условиях производственного контроля, так как обеспечивает возможность непрерывного контроля и регулирования pH, регистрации и дистанционной передачи результатов измерения. При этом способе измерения необходимы два электрода; между одним из них и раствором (на границе электрод — жидкость) возникает разность потенциалов, обусловленная обменом
U46
ионами между материалом электрода и средой. Эта разность потенциалов должна изменяться с изменением состава среды. Разность потенциалов, возникающая между другим электродом и сре-' дой (раствором), должна сохранять постоянное значение. Первый, электрод называется измерительным, а второй — сравнительным. -
В практике технических измерений обычно используются стеклянный (измерительный) и каломельный (сравнительный) электроды. Существуют и другие типы измерительных электродов (водородный, хингидронный, сур-мяный и др.), но они не являются универсальными, - значительно уступают стеклянному и поэтому здесь не рассматриваются.
Пара электродов —каломельный и стеклянный, являющаяся датчиками pH-метра, помещается в контролируемую среду (рис. VI-14).
Каломельный электрод КЭ представляет собой стеклянную пробирку, в закрытый конец которой впаян вывод-контакт 1. В этом конце пробирки помещается небольшое количество ртути 2, затем паста из ртути и кало--мели 3 (хлористая ртуть Hg2C12); все
Рис. VI-14. Схема датчика pH-метра с каломельным и стеклянным электродами:
/ — цилиндрическая трубка; II — каломельный электрод; III — шарик; 1 — выводы; 2 — ртуть; 3 — каломель; / — тампоны; 5 —насыщенный раствор КС1; 6 — кристаллы КС1; СЭ — стеклянный электрод; КЭ — каломельный электрод; Э — измерительный прибор.
это поддерживается тампоном 4 из волокнистого материала (например, асбеста). Остальную часть пробирки заполняет насыщенный раствор хлористого калия КС1. Чтобы раствор хлористого калия оставался насыщенным при различных температурах среды, внутрь пробирки помещены кристаллики хлористого калия 6. Нижняя
часть пробирки закрыта пробкой (тампоном) из волокнистого ма-
териала 4.
Стеклянный электрод СЭ состоит из стеклянной цилиндрической трубки I (обычное стекло) и приваренного к ней шарика III из специального стекла. В трубку вставлен вспомогательный каломельный электрод II, точно такой же, как и описанный выше. Внутрь стеклянного электрода наливается эталонный раствор, pH
которого строго постоянна.
Специально отработанное и приготовленное стекло шарика (содержит литий или натрий) имеет следующую особенность: на границе раздела стекло—раствор возникает потенциал, изменяющийся при изменение концентрации водородных ионов в раство
10*
147
ре. Этот потенциал возникает вследствие проникновения из раствора в стекло ионов водорода при переходе из стекла в раствор ионов металла (лития или натрия).
Электрическая цепь датчика pH-метра (см. пунктир) складывается из следующих четырех самостоятельных элементов, каждый из которых влияет на величину суммарной э.д. с. датчика:
Еа — разность потенциалов в сравнительном каломельном электроде КЭ;
Ех— разность потенциалов между контролируемым раствором и наружной стенкой стеклянного шарика измерительного электрода, зависящая от величины pH контролируемого раствора; '
£в — разность потенциалов между внутренней стенкой шарика и эталонным раствором внутри шарика;
Ez — разность потенциалов во вспомогательном электроде II.
Все разности потенциалов, кроме Ех, постоянны; их значения зависят только от температуры контролируемой среды. Таким образом, суммарная э.д. с., которую измеряет прибор Э, зависит только от Ех, а значит, от pH среды. При изменении pH на одну единицу э. д. с. датчика меняется на величину до 58 мВ.
Стеклянный электрод обладает очень высоким сопротивлением (от 500 до 5200 МОм, в зависимости от марки стекла)'.
Измерение э.д. с. датчика pH-метра имеет много общего с измерением э.д.с. маломощных источников напряжения, например термопар, и осуществляется обычно компенсационным способом, т. е. с помощью потенциометра. Вследствие большого сопротивления стеклянного электрода потенциометры имеют высокоомный вход. Шкала потенциометра градуируется в единицах pH.
ИЗМЕРЕНИЕ ПЛОТНОСТИ ЖИДКОСТЕЙ
Плотность вещества р, кг/м3 — это физическая величина, определяемая массой т этого вещества в единице объема V
р = т/У
Кроме стандартной единицы плотности кг/м3 пользуются другими (внесистемными) единицами: г/см3, г/дм3, кг/л, г/мл и др.
В некоторых случаях пользуются относительной плотностью Рот, которая определяется как отношение плотности данного вещества к плотности дистиллированной воды рв при +4 °C
Рот = Р/Рв
Плотность является одной из основных физических величин, характеризующих свойства вещества.
Приборы для измерения плотности жидкостей по принципу действия делятся на:
весовые (пикнометрические), измеряющие плотность путем взвешивания определенного постоянного объема жидкости;
148
гидростатические, измеряющие плотность по изменению давления столба жидкости постоянной высоты;
ареометрические (поплавковые), измеряющие плотность с помощью поплавка постоянной массы, вытесняющего определенный объем жидкости;
Рис. VI-15. Конструкция весового плотномера:
/ — сжатый воздух; // — к манометру; / — петлеобразная трубка; 2 — скобка; 3 — резиновые трубки; 4, 5 —штуцеры; 6 — съемное колено; 7 — заслонка; 8 — сопло; 9 — трубка; 10, 15 — тяги; // — сильфон; 12 — выходная линия; /3 — противовес; 14— ось; 16 — коромысло; 17 — упоры; 18 — надрезы.
радиоактивные, в которых используется поглощение веществом радиоактивного излучения.
Ниже рассматриваются принципиальные схемы этих плотномеров для автоматических измерений в производственных условиях.
Весовые плотномеры. Чувствительным элементом прибора (рис. VI-15) является петлеобразная труба Г, с помощью резиновых трубок 3 она соединена со штуцерами 4 и 5, сообщающимися с внутренней полостью трубопровода, по которому протекает контролируемая жидкость. Резиновые трубки, вилка, в которой укреплена петлеобразная труба, и скоба 2 дают возможность трубе перемещаться в вертикальной плоскости. Съемное колено 6 позволяет производить чистку трубы. Тяга 15 соединяет петлю с коромыслом, поворачивающимся на оси 14. На правом плече коромысла помещены противовес 13 и тяга 10, соединенная с дном сильфона обратной связи 11. На конце коромысла укреплена заслонка 7, а перед ней расположено сопло 8, к которому через
149
трубку 9 подается сжатый воздух. -Левое плечо коромысла имеет надрезы 18 для установки грузов (если понадобится изменить пределы измерения). Ход коромысла ограничен упорами 17.
С увеличением плотности жидкости, протекающей по петле, последняя становится тяжелее, перемещается внйз, а коромысло поворачивается против часовой стрелки и зазор между соплом и
Рис. VI-16. Принципиальная схема пьезометрического дифференциального плотномера:
1, 5 —сосуды; 2, 4 — трубки; 3 — дифманометр; 6 — дополнительная трубка.
Рнс. VI-17. Принципиальная схема поплавкового плотномера:
1 »- равноплечий рычаг; У —тяги; 3 — промежуточный сосуд; 4, б—поплавки; 5 — цилиндр с эталонной жидкостью; 7 —трубка; 8 — измерительный сосуд; S — подвижный груз; 10— 'стрелка; 11 — опора.
заслонкой уменьшается. При этом увеличивается давление в линии сопла и внутри сильфона 1Г, сильфон разжимается и перемещает коромысло по часовой стрелке, стремясь восстановить нарушенное равновесие. В выходной линии 12 устанавливается давление, пропорциональное новому значению плотности жидкости; оно измеряется манометром, градуированным в единицах плотности.
Плотномеры этого типа выпускаются в нескольких модификациях и измеряют плотность в пределах от 500 до 2500 кг/м3. Они стабильны в работе, достаточно точны, но громоздки и сложны.
Гидростатические плотномеры. На рис. VI-16 показана принципиальная схема пьезометрического дифференциального двухжидкостного плотномера с непрерывной продувкой через жидкость инертного газа. Контролируемая жидкость непрерывно протекает через сосуд 1, уровень в котором поддерживается постоянным. Сосуд 5 постоянного уровня заполнен эталонной (сравнительной) жидкостью, плотность которой известна. Инертный газ по трубке 2 проходит (барботирует) через слой исследуемой жидкости и 1ВЫХОДИТ в атмосферу. По трубке 4 тот же газ барботирует через эталонную жидкость, затем по дополнительной трубке 6 проходит через небольшой слой исследуемой жидкости и также уходит в
« 150
атмосферу. Дополнительная трубка 6 обеспечивает независимость показаний прибора от колебания уровня или расхода исследуемой жидкости.
При известных глубинах погружения трубок давление газа внутри них будет пропорционально суммарной высоте столба и плотностям вытесненных жидкостей, а разность этих давлений, измеряемая дифманометром 3, градуированным в единицах плотности, будет равна
Лр = [ftjp — (Л2р + ЛоРо)1 g = (Лр — ЛоРо) S
где р и ро — плотности измеряемой и эталонной жидкостей; g — ускорение свободного падения.
Приборы обеспечивают контроль плотности жидкостей в интервале 400—800 кг/м3, просты по конструкции, но очень чувствительны к нестабильности температуры, уровня среды и расхода продуваемого газа.
Поплавковые плотномеры. Различают две их разновидности: с плавающим поплавком (ареометр постоянного веса) и с погруженным поплавком (ареометр постоянного объема).
Приборы первой группы измеряют глубину погружения поплавка, обратно пропорциональную плотности жидкости. В приборах второй группы глубина погружения остается постоянной, а изменяется действующая на поплавок выталкивающая сила, пропорциональная плотности жидкости.
Ареометры постоянного веса изготавливаются из стекла, реже металла, и используются для периодических измерений плотности различных жидкостей (растворы кислот, щелочей, солей, нефтепродукты, молоко, сыворотка, морская вода и др.).
Ареометры постоянного объема применяются для непрерывного контроля плотности в. производственных условиях. Принципиальная схема двухпоплавкового плотномера, работающего по данному принципу, приведена на рис. VI-17.
Поток контролируемой жидкости поступает в промежуточный сосуд 3, где омывает цилиндр 5 с эталонной жидкостью и по трубке 7 переливается в измерительный сосуд 8; уровень в этом сосуде поддерживается постоянным с помощью переливного устройства. В эталонную и контролируемую жидкости погружены одинаковые пдплавки 4 и 6, которые с помощью тяг 2 подвешены к концам равноплечевого рычага 1, поворачивающегося относительно опоры И. С рычагом связана показывающая стрелка 10, а подвижный груз 9 служит для регулировки равновесия рычага при погружении поплавков в жидкости одинаковой плотности. Так как температуры эталонной и омывающей цилиндр рабочей жидкости одинаковы, то температурной погрешности нет.
Радиоактивные плотномеры обладают, существенным преимуществом перед описанными выше — бесконтактностью измерения. Поэтому приборы данного типа целесообразно применять в тех
151
Рис. VI-18. Схема радиоактивного плотномера:
1, 6 — источники излучения; 2 — контролируемая среда; 3, S — приемники излучения; 4, 9 — формирующие блоки; 5 — блок сравнения; 7 — металлический клин; /0 — реверсивный двигатель; 11 — преобразователь; 12 — вторичный прибор.
случаях, когда контролируемое вещество находится под высоким давлением, имеет высокую температуру или является вязким, агрессивным, абразивным (т. е. содержит твердые частицы).
Блок-схема радиоактивного плотномера изображена на рис. VI-18. Потоки радиоактивного излучения от двух одинаковых источников 1 и 6 проходят соответственно через контролируемую
Среду 2 и компенсационный клин 7, поступают в приемники излучения 3 и 8, а от них — на . формующие блоки 4 и 9. Отсюда сигналы направляются в электронный блок 5, где сравниваются. Если потоки излучения по основному и вспомога- -тельному каналам ослаблены (сре-дой и клином) одинаково, то на выходе электроннрго блока управляющий сигнал будет равен нулю. Если плотность среды изменится, то на выходе электронного блока появится сигнал, пропорциональный . этому отклонению, реверсивный двигатель 10 начнет перемещать компенсационный клин (см. пунктир) до тех пор, пока мощность потоков, поступающих на электронный блок, вновь не уравновесится. С клином связано отсчетное устройство, а для дистанционной передачи служит дифференциально-трансформаторный преобразователь 11 и вторичный при-бор 12.
В качестве источников радиоактивного излучения применяются радиоактивные кобальт (Со60), цезий (Cs137) и др.
Суммарная толщина стенок просвечиваемого объекта не должна превышать 25 мм (по стали). Нижний предел измерения может составлять от-300 до 1500 кг/м3.
ИЗМЕРЕНИЕ ВЛАЖНОСТИ
Влажность воздуха является одним из основных технологических факторов кондиционирующих, сушильных и холодильных установок. В химической промышленности актуальны задачи контроля и регулирования влагосодержания чистых газов: азота, водорода, кислорода, метана и др.
Влага является одним из обязательных компонентов большинства твердых неметаллических материалов и служит показателем их качества, оказывает большое влияние на свойства веществ. Поэтому количественное определение влажности твердых материалов необходимо во всех отраслях промышленности.
152
Контроль влажности газов
Содержание влаги в газах характеризуется абсолютной и относительной влажностью.
Абсолютная влажность f— это масса водяного пара, содержащегося в 1 м3 газовой смеси при нормальном давлении. Абсолютная влажность измеряется в г/м3 сухого, либо влажного газа.
Относительная влажность <р, или степень насыщения, есть отношение массы водяного пара, содержащегося в 1 м3 смеси, к максимально возможному содержанию его при той же температуре. Выражается в процентах; ее значение обычно вычисляют по формуле
ф - /7/н
где f' и /н — соответственно содержание водяных паров в газе в г/м3 влажного газа при фактическом и нормальном атмосферном давлении.
Из большого числа существующих методов контроля влажности, газов наибольшее практическое применение нашли: психрометрический, метод точки росы и гигрометрический.
Психрометрический метод. Основан на измерении температуры двумя одинаковыми термометрами, из которых один «сухой», а другой «мокрый», вследствие того, что его резервуар непрерывно смачивается водой. Испарение с поверхности резервуара «мокрого» термометра происходит .тем интенсивнее, чем суше окружающий его газ; разность показаний термометров (психрометрическая разность температур, от греческого psihria — холод) зависит от влажности.
Относительная влажность определяется по формуле
Рв — А Ос — ^в) ф = Рс •
где рв — давление паров, насыщающих испытуемую среду, при температуре tB влажного термометра; рс — давление паров, насыщающих испытуемую среду при температуре tc сухого термометра; А — психрометрический коэффициент, зависящий от размеров термометров, скорости обдувания влажного термометра газом и давления газа.
Электронный автоматический психрометр. Датчик прибора (рис. VI-19) заключен в силуминовый корпус /; с помощью вкладыша 6 из влагостойкого теплоизоляционного материала в корпусе установлены два электрических термометра сопротивления 4 («сухой») и 5 («мокрый»), В нижнюю часть корпуса через ниппель 2 поступает вода из специального бачка; уровень воды поддерживается постоянным с помощью трубки 3. Специальный вентилятор, установленный отдельно от датчика (на схеме не показан), подает анализируемый газ через фильтры 7 в камеру; при-
153
чем газ омывает термометры с постоянной скоростью. В зависимости от влажности газа термометры будут иметь разную температуру, а следовательно, и сопротивление. С помощью соединительных проводов термометры сопротивления подключаются к измерительному прибору, шкала которого градуируется в процентах, относительной влажности.
Рис. VI-19. Конструкция датчика электронного автоматического психрометра: / — корпус; 2 — ниппель; 3 —трубка; 4, 5 — термометры сопротивления; S— вкладыш; 7“» фильтры.
Измерительный прибор представляет собой электронный автоматический уравновешенный мост, упрощенная принципиальная схема которого показана на рис. VI-20.
Особенностью прибора является его измерительная часть, состоящая из сдвоенного моста. В плечо моста I включен «сухой» термометр сопротивления гс, а в плечо моста II — «мокрый» термометр гв. Сигнал небаланса сдвоенного моста, снимаемый с диагонали АВ (точка А — контакт движка реохорда гр), пропорционален психрометрической разности температур, а влажность газа - отсчитывается по шкале прибора Е.
Метод точки росы_заключается в определении температуры, до которой необходимо охладить (при неизменном давлении) .газ ддя_того, чтобы, довести его до состояния насыщения (точка росы). Зная температуру точки росы tp и температуру исследуемого газа t, легко определить его относительную влажность
<P=100ptp/Pt
где ptp, pt — давление насыщенного пара соответственно при температурах tp и t.
Автоматический влагомер. Принципиальная схема автоматического влагомера, в котором используется метод точки росы, приведена на рис. VI-21.
154
Через камеру 6 непрерывно проходит газ I, влажность которого измеряется, В камере находится зеркало 4, изготовленное из металла,с хорошо полированной поверхностью. В тело зеркала вмонтирована термопара 5, соединенная с милливольтметром 1, контролирующим температуру повёрхпосттг зеркала. Зеркало охлаждается с помощью распылительной установки 3. На зеркаль-
Рис. VI-20. Принципиальная схема измерительной части автоматического психрометра:
1, //—мосты; гс, гв — сопротивления «сухого» и «мокрого» термометров соответственно; Е— вторичный прибор.
Рнс. VI-21. Принципиальная схема влагомера, основанного на методе точки росы:
/ — контролируемый газ; II — вода; 1 — милливольтметр; 2 — нагреватель; 3 — распылитель; 4— зеркало; 5 —термопара; б —камера; 7 —лампа; 8 — фотоэлемент; 9 — усилитель; Р — обмотка реле; К — контакт реле; Б — источник питания.
иую поверхность падаех^световой луч от лампочки 7 и, отразившись, попадает на фотоэлемент 8. Еслй~на зеркальной поверхности нет конденсада, значит, ее~Тёмпература еще не соответствует точке росы. В этом случае сигнал, поступающий от фотоэлемента на усилитель 9, имеет максимальное значение и обмотка реле Р держит разомкнутым контакт К, благодаря чему цепь источника питания Б обесточена, и нагреватель 2 не включен. При этом температура поверхности зеркала падает. Как только температура зеркала достигнет значения^-дри. KOTopSZiiiaiPr—содержащийся в газе, начнет конденсироваться (будет достигнута точка росы), отражающая способность зеркала ухудшится (зеркало запотеет), фототок от фотоэлемента уменьшится и реле замкнет цепь обогревателя 2, после чего температура зеркала/ начнет повышаться и конденсат напарится; отражающая способность зеркала вновь улучшится. возрастет фототок и т д.
Шкала вторичного'прибора 1, фиксирующего точку росы с помощью термопары 5, градуируется в процентах относительной влажности.
Гигрометрический метод (от греческого hygros — влажный). Основан на зависимости некоторых физических свойств материа
155
лов, поглощающих влагу из анализируемого газа, от влатосодер-жания последнего. Приборы, измеряющие влажность газа, называются гигрометрами; различают сорбционные гигрометры деформационного типа и электрические гигрометры.
Сорбционные гигрометры основаны на свойствах некоторых твердых материалов изменять свои линейные размеры в зависи-
Рис. VI-22. Схема электрического гигрометра с подогреваемым датчиком: / — трубка; 2 — стеклянная вата; 3 —спирали; / — термометр сопротивления; 5— сетчат»» трубка.
мости от влажности окружающего газа. Чувствительным элементом таких приборов является человеческий волос или капроновая нить, которые растягиваются или сжимаются при изменении. влажности (волосяные гигрометры). Однако, несмотря на простоту устройства, область их применения ограничена метеорологическими и аэродинамическими измерениями.
Электрические гигрометры основаны на зависимости электрических свойств некоторых материалов от влажности окружающей среды.
На рис. VI-22 показана схема электрического гигрометра с подогреваемым датчиком. Чувствительный элемент прибора, погружаемый в контролируемую среду, представляет собой тонкостенную трубку 1 из нержавеющей стали, покрытую стеклянной ватой 2. Вата пропитана раствором хлористого лития. Сверху на стеклянную вату намотаны изолированные друг от друга спирали 3 из серебряной проволоки, которые питаются переменным током напряжением 24 В. На элемент надевается металлическая сетчатая трубка 5, задерживающая сильные газовые струи. В трубку 1 помещен малоинерционный термометр сопротивления 4, к которому подключен измерительный прибор 6 (мост или логометр), градуированный в единицах измерения абсолютной влажности.
Температура хлористого лития, которым пропитана стеклянная вата 2, автоматически поддерживается на точке росы. Достигается это так.
При подаче напряжения на серебряные спирали через раствор хлористого лития проходит электрический ток, нагревая его. Раствор нагревается до температуры кристаллизации хлористого лития, что ведет к резкому увеличению сопротивления между элект
156
родами, ток уменьшается и температура датчика понижается. Понижение температуры продолжается до тех пор, пока вследствие поглощения влаги из окружающей среды проводимость раствора между обмотками не повысится вновь, что снова приведет к повышению температуры датчика.
Контроль влажности твердых тел
Для характеристики содержания влаги в твердых материалах пользуются влагосодержанием и влажностью.
Влагосодержание U — это отношение массы влаги М, содержащейся в теле, к массе абсолютно сухого тела
и = М/Мо
Влажность W — это отношение массы влаги М, содержащейся в теле, к массе влажного материала Mi
М _ М
и = м0 * w~ м„ + м
Иногда эти величины выражаются в процентах. В таком случае приведенные выражения примут вид
и=~М^'100 и Ws= Мо + М ,10°
Одним из наиболее распространенных методов измерения влажности твердых тел является высушивание (или сушка) до постоянной массы, заключающееся в том, что точно взвешенная порция контролируемого материала высушивается в специальной печи или шкафу, после чего вновь взвешивается. Влажность определяется по разности масс до и после высушивания. Однако это лабораторный метод.
Для автоматического контроля и регулирования влажности применяются электрические методы, из которых наиболее перспективны емкостной и кондуктометрический.
Емкостной метод измерения влажности основан на принципе использования зависимости между влажностью вещества, и его диэлектрической проницаемостью. В качестве датчиков используются плоские или цилиндрические конденсаторы, в электрическое поле которых вводится испытуемое вещество (аналогичны 'рассмотренным в гл. IV конденсаторам емкостных уровнемеров) и емкость которых (при прочих неизменных факторах) есть функции диэлектрической проницаемости е.
Этот принцип широко используется для измерения влажности материалов, являющихся диэлектриками. Поскольку диэлектрическая проницаемость воды близка к 81 (е«81), а для большинства твердых веществ в сухом состоянии е = 2—10, то даже незначительное изменение влажности вещества заметно влияет на его диэлектрическую проницаемость.
157
Д
Рис. VI-23. Блок-схема емкостного влагомера:
Д — датчик; П — преобразователь; ВП — вторичный -прибор.
Конструкция датчика влагомера зависит от свойств вещества, влажность которого определяется.
Для сыпучих волокнистых веществ и жидкостей в качестве датчиков применяются плоские и цилиндрические конденсаторы. Для измерения влажности ленточных материалов (бумага, доски, ткань) применяют датчики в виде развернутых конденсаторов, состоящих из двух или нескольких пластин. Блок-схема емкостного влагомера приведена на рис. VI-23.
Изменение влажности материала АДГ, приводящее к изменению емкости конденсатора АС датчика Д, преобразуется преобразователем П в электрический сигнал Au который измеряется
вторичным прибором — электронным автоматическим потенциометром (ВП).
Датчики влагомеров емкостного типа работают на частотах от 50 Гц до нескольких десятков мегагерц. При более высоких частотах влияние активной проводимости вещества на результаты измерений снижается, но это- уменьшает чувствительность измерительной .схемы, Выбирая частоты измерения, необходимо учитывать частотную зависимость вещества от его влажности.
Кондуктометрический метод измерения влажности основан на зависимости между влажностью вещества и его электрическим сопротивлением и аналогичен методу измерения концентрации жидкостей, рассмотренному в этой главе.
Датчики кондуктометрических влагомеров выполняются в виде игольчатых щупов, гребенок, вальцев, роликов и т. п. Игольчатые щупы и гребенки используются для пластинчатых материалов (кожа, дерево), вальцы — для сыпучих (зерно), ролики — для ленточных материалов (ткань, бумага). Для измерения применяются мостовые схемы.
ИЗМЕРЕНИЕ ВЯЗКОСТИ ЖИДКОСТЕЙ
Вязкость является важной характеристикой материалов во многих химических производствах (искусственное волокно, синтетические смолы, краски, смазочные масла, растворы каучука и др.).
Как известно, жидкость протекает по сечению трубопровода с неодинаковой скоростью: в центре трубы эта скорость максимальна, у стенок—практически равна нулю. Эпюра скоростей жидкости в сечении А—А трубопровода приведена на рис. VI-24. Согласно закону Ньютона, тангенциальная сила, возникающая при малом сдвиге AZ двух слоев жидкости, связана с вязкостью
158
т] следующим равенством:
аи
И
где F — тангенциальная сила; AS— площадь поверхности слоя, на которую .рассчитывается сила '.внутреннего трения; и — скорость течения слоя; dl — расстояние между параллельными слоями жидкости (плоскостями); dujdl — градиент скорости.
Если принять площадь внутреннего трения и градиент скорости равными единице, то численно г] будет равно F.
В Международной системе единиц (СИ) единица вязкости равна силе в 1 Н, которая способна между двумя параллельными плоскостями, имеющими площадь 1 м2
и находящимися друг от друга на расстоя- .д^^уудд. , япюря ск0-нии 1- м, поддерживать градиент...скоростй" ростей жидаостй^в сече-течения жидкостщпддаиаиГТ’с-1. Это — еди- нии трубопроводах ница дина^цщееябирязкости, она выража- V
ется © ра-с. {
На,-практике часто пользуются “кинематической 'ТзЯзкеетйю, которая/ представляет собой., отношение ^динамической вязкости к плотиЬсти жидкости и в СИ выражаемся в м2/с.
Д-чя измерения вязкости применяются приборы — вискози-м е т ^ ы, в которых иенрль-^юттчк следующие методы: истечения, падающего- телар)фУ'^й®й^&Момента, вибрационный, ультразвуковой.
Метод истечения. Измерение вязкости по методу истечения заключается в измерении времени, за которое жидкостр определенного объема вытечет из емкости через калиброванное отверстие, или в измерении разности давлений на входе и/выходе из капиллярной трубки, через которую протекает контролируемая среда.
Метод падающего тела (обычно металлического шарика) сводится к отсчету времени, в течение которого шарик, опущенный в контролируемую среду, пройдет определенный участок пути в этой среде. ? . •,
Как тот, та*1е”Й"'др^гой методы нашли применение в лабораторной практике; иногда их используют в производственных условиях для разовых экспресс-измерений вязкости.
В автоматических приборах используются методы крутящего момента, вибрационный и ультразвуковой.
Ротационные вискозиметры. Действие этих приборов основано на измерении крутящего момента, передаваемого жидкостью (рис. VI-25).
Вискозиметр с коаксиальным цилиндром работает следующим образом. Наполненный контролируемой жидкостью внешний ци-
15»
линдр 4 приводится в равномерное вращение с помощью электродвигателя 5 (рис. VI-25,a) и стремится увлечь во вращение внутренний цилиндр 2, который удерживается в неподвижном положении весовой платформой с грузом 3. Груз создает вращающий момент, равный произведению веса груза на радиус шкива 1, через который проходит нить с грузом. Равновесного состояния
ir»)itr)fmg!t^a77>»77r
7727777777!7f7777271^' ;
Рис. VI-25. Схемы ротацио‘йЙ1Х';вий^ознметро»:.г-1
а —с коаксиальным цилиндром; б —с втелом; с Параллельными Дисками;
1 — шкив; 2 — внутренний цилиндр; 3 — груц 4—> иие^оддй. цилиндр; 5,— электродвигатель.
7
определяется из равен-
добиваются подбором груза; вязкость’ ства
г; = Ш/ш
от размеров цилиндров; груза; г — радиус шкива;
где k — коцстанТа прибора,- зависящая M=Gr — вращающий момент; G— вес <о — постоянна^ угловая скорость вращающего цилиндра.
Вискозиметр с вращающимся телом. По другому варианту выполнен вискозиметр с вращающимся телом, погруженным в контролируемую среду, его ротор может иметь шарообразную форму или быть выполненным в виде соосного с сосуд оМщи линдр а (рис. VI-25,6). Сопротивление, оказываемое жидкостью-вращению ротора, можно рассчитывать по закручиванию упругой подвески ротора, а вязкость определить из равенства
Ч = й'<р/ш
где k' — коэффициент пропорциональности, зависящий от размеров ротора и упругих свойств подвески; <р — угол закручивания упругой подвески.
Вискозиметр с параллельными дисками (рис. VI-25, в) имеет два диска, погруженных в контролируемую среду, причем один 160
вращается с постоянной скоростью, сообщаемой электродвигателем, а другой стремится к вращению за счет сил вязкостного трения и при этом растягивает пружину, деформация которой и будет мерой вязкости.
Вибрационные вискозиметры. При вибрационном методе вязкость оценивается по изменению амплитуды вынужденных коле-
12
N
10
fS
1/
Рис. VI-26. Схема электрического вибрационного вискозиметра:
1 — сердечник; 2, 12 — ленты; 3 — сменная шайба;
4, 5. 7, 9— обмотки; 6 — регистрирующий прибор;
8 — стабилизатор; 10 — насадка; 11 — шток; 13 —• постоянный магнит.
баний тела, погруженного в контролируемую среду, в зависимости от вязкости этой среды.
К сердечнику 1 из мягкой стали (рис. VI-26), закрепленному на лентах 2 и' 12, с помощью стержня 11 присоединена насадка 10, погруженная в измеряемую среду. Сердечник помещен в магнитную систему, состоящую из постоянного магнита 13 и двух катушек 4 и 9 .. с одинаковыми характери-t стиками. Эти катушки вклю-£ чены таким образом, что со-’ здаваемые ими магнитные в" потоки складываются. При 1 пропускании переменного г'Тока через обмотки катушек «м-ле, которое взаимодействует здает периодически действующую силу, приложенную к сердечнику. Амплитуда вынужденных колебаний зависит от потерь энер->гии вибрирующими подвижными частями, а эти потери связаны лавным образом с вязкостью среды (если не считать потерь, сеянных с деформацией пружин и трением сердечника о воз-
создается переменное магнитное по-с полем постоянных магнитов и со-
Амплитуда колебаний сердечника преобразуется в пропорцио-альиые ей величины электрического тока или напряжения, ко-^торые регистрируются прибором 6. Катушки 4 и 9 питаются от 'Стабилизатора напряжения 8 через обмотки 5и 7. Масса подвиж-'Шых частей прибора подгоняется до требуемой величины с по-4'мощью сменных шайб 3.
if Ультразвуковые вискозиметры. В вязкой среде амплитуда сво-'^бодных колебаний тела постоянно, уменьшается и при этом тем быстрее, чем больше внутреннее сопротивление среды. Измеряя степень затухания колебаний, можно судить о вязкости жидкости. На этом принципе и работает большинство ультразвуковых вискозиметров.
Чувствительный элемент одного из таких вискозиметров пред-, ставлен на рис. VI-27.
11—2208
161
Плоская магнитострикционная* пластина 1 размером 100Х ХЗХ0.3 мм впаяна в центр дна 2 цилиндрического корпуса 3, Причем одна ее половина выступает наружу, а другая — находится внутри корпуса и охвачена находящейся в ней обмоткой 4. От электронного блока в обмотку поступают кратковременные
импульсы тока, что вызывает
3 4
Рис. VI-27. Схема чувствительного элемента ультразвукового вискозиметра:
1 — магнитострикционная пластина; 2 — дно; 3 — корпус; 4 — обмотка.
мгновенные удлинения и сокращения пластины (прямой магнитострикционный эффект), т. е. в пластине. возникают собственные продольные колебания с частотой, зависящей от свойств материала пластины и ее длины (обычно 30 кГц). Вместе с пластиной колеблется дно корпуса, испытывающее демпфирующее действие окружающей жидкости, что приводит к затуханию колебаний пластины в промежутках
между импульсами тока. Затухающие колебания пластины индуцируют в охватывающей ее обмотке переменную э. д. с. (обратный магнитострикционный эффект) той же частоты и формы. Эта э.д.с. поступает на вход электронного блока, где преобразуется в выходной сигнал постоянного тока, зависящий от демцфирующего действия среды, а, следовательно, от ее вязкости. Обмотка 4 чувствительного элемента соединена имеющим индикатор со шкалой, мерения вязкости.
кабелем с электронным блоком, градуированной в единицах из-
ГАЗОВьТй АНАЛИЗ
В процессах газоочистки, при анализе воздуха промышленных помещений иа содержание в нем вредных для здоровья примесей, при анализе топочных газов и т. д. не обойтись без приборов — газоанализаторов — которые позволяют количественно оценивать содержание интересующего компонента в газовой смеси.
Для проведения точного газового анализа обычно применяются лабораторные, а для непрерывных измерений в производственных условиях—автоматические газоанализаторы.
Газовый анализ возможен, если компонент, концентрация которого в газовой смеси определяется, отличается от остальных компонентов по крайней мере одним свойством (чем отличие больше, тем измерение чувствительнее). Выбор метода газового1 анализа определяется контролируемым физико-химическим свой
* Магнитострикция — изменение формы и размеров тела при намагничивании. Обычно измеряется относительное удлинение образца в направлении поля (продольная магнитострикция) или перпендикулярно направлению поля (поперечная магнитострикция).
162
ством анализируемого компонента. Методы газового анализа можно разделить на химические, физико-химические и физические.
Химический а н а л и з основан на поглощении определенного компонента газовой смеси каким-либо веществом, вступающим в химическое соединение с данным компонентом, в то время как
Рис. VI-28. Схема переносного химического газоанализатора:
/ — фильтр; 2 — гребенка; 3, 5, 7 — поглотительные сосуды; / — распределительная трубка; в —резиновый мешочек; « — резиновая трубка; 9 — стеклянный цилиндр; 10 — бюретка; II — уравнительный сосуд; А—Г — краны.
другие компоненты смеси не поглощаются (избирательное поглощение) .
Физико-химический м е т о д базируется на различных химических реакциях, сопровождающихся тем или иным физическим явлением (например, выделением тепла).
Физические методы анализа основаны на определении какого-либо физического свойства анализируемого компонента смеси, отличающегося от этого же свойства других компонентов.
Наиболее распространены химические, термокондуктометрические, магнитные и оптические газоанализаторы.
Химические газоанализаторы выполняются главным образом в виде переносных неавтоматических приборов для периодических измерений процентного содержания одного или нескольких компонентов газовой смеси (по объему) в лабораторных или производственных условиях.
Схема газоанализатора для раздельного поочередного контроля трех компонентов газовой смеси (двуокиси углерода, кислорода и окиси углерода) приведена на рис. VI-28.
Для анализа с помощью бюретки 10 емкостью 100 см3 отбирается строго определенная порция газа; для уменьшения влияния температуры бюретка помещена в стеклянный цилиндр 9, наполненный водой. Внутренняя .полость бюретки с помощью pe
ll*
163
зиновой трубки 8 соединена с уравнительным сосудом 11, заполненным насыщенным раствором поваренной соли. При опускании уравнительного сосуда вода из бюретки перетекает в сосуд и, благодаря создавшемуся разрежению, через фильтр 1 в бюретку засасывается проба газа емкостью 100 см3. Затем кран А перекрывают, кран Б открывают и уравнительный сосуд поднимают вверх. Благодаря этому газ по распределенной гребенке 2 поступает в поглотительный сосуд 3, ‘заполненный раствором КОН, где поглощается СО2. Для полного поглощения СО2 газ прокачивают через сосуд 3 несколько раз (поднимая и опуская сосуд 11). Пос-ле этого с помощью бюретки измеряют оставшийся объем газа и рассчитывают количество СО2.
Затем открывают кран В, и оставшийся объем газовой смеси несколько раз пропускается через сосуд 5, заполненный растворенными в воде КОН и пирогаллолом С6Н3(ОН)з, где происходит поглощение О2. Вновь измеряют остаток смеси и рассчитывают количество О2 в 100 см3 смеси. После этого через кран Г в сосуд 7, заполненный растворенными в воде полухлористой медью Си2С12, хлористым аммонием NH4C1 и 25%-ным раствором аммиака NH3, пропускают оставшуюся смесь и производят аналогичные операции.
Для предохранения поглотительных растворов от соприкосновения с воздухом в газоанализаторе имеется резиновый мешочек 6, соединенный с сосудами распределительной трубкой 4.
Все детали прибора монтируются в деревянном футляре, удобном для переноски.
Физико-химические газоанализаторы. Из большого числа приборов этой группы рассмотрим принцип действия термохимического газоанализатора, основанного на использовании теплового эффекта химической реакции.
Термохимический газоанализатор. Электрическая схема прибора (рис. VI-29) представляет .собой неуравновешенный мост постоянного или переменного тока. Рабочий г\ и сравнительный г2 термометры сопротивления^ помещенные соответственно в рабочую Ill и сравнительную II измерительные ячейки, включены в плечи моста, два других плеча которого образованы постоянными сопротивлениями г3 и (сопротивление г5 служит для установки нуля прибора). В цепь питания моста включен реостат Ге для установки силы тока и выключатель К.
Анализируемая газовая смесь / последовательно проходит через обе ячейки: сравнительную и рабочую. Если она не содержит анализируемого компонента, то температура, а значит, и сопротивление термометров в обеих ячейках одинаковы. С появлением в газовой смеси анализируемого компонента н^^^а^а^^дре V, ч засыпанном в рабочую ячейку, происходит экзотермическая реакция, причем количество тепла, выделяемого в результате реакции, пропорционально количеству анализируемого компонента, прошедшего через рабочую ячейку в единицу времени. Под дей
164
ствием выделенного тепла температура в ячейке повышается, что вызывает изменение сопротивления термометра и разбаланс моста. В диагональ моста включен милливольтметр мВ, шкала которого градуируется в объемных процентах анализируемого компонента.
Газоанализаторы этого типа предназначены для контроля го-
рючих газов в кислороде и содержания кислорода,
углерода и водорода в горючих газах.
Физические газоанализаторы. Рассмотрим наиболее распространенный термокондуктометрический газоанализатор.
Термокондуктометрический газоанализатор. Если теплопроводность всех компонентов газовой смеси, кроме анализируемого, примерно одинакова, то общая теплопроводность смеси будет зависеть от концентрации определяемого компонента. Следовательно, функции газоанализатора сводятся к измерению теплопроводности газовой смеси.
а также окиси
Рис. VI-29. Электрическая схема термохимического газоанализатора:
I — вход газа; II и III — сравнительная и рабочая ячейки; IV—i выход газа; V — катализатор.
Измерительная часть газоанализатора— неуравновешенный мост (рис. VI-30), плечи которого образованы че-
тырьмя одинаковыми ячейками. Каж-
дая ячейка представляет собой цилиндрическую камеру из хоро- -шо проводящего тепло материала, по оси которой натянута плати- г'
новая нить, являющаяся одновременно нагревательным элементом ( нагрев осуществляется от источника тока Б, включенного в диагональ моста) и термометром сопротивления. Через две ячей-
ки с сопротивлениями п и г3 непрерывно пропускается анализируемая газовая смесь (измерительные ячейки), а две другие, с сопротивлениями г2 и 4, заполнены чистым воздухом и герметизированы (сравнительные ячейки).
Когда в газовой смеси нет анализируемого компонента, теплопроводности смеси и воздуха в сравнительных ячейках равны, температуры и сопротивления всех четырех плеч моста одинаковы, мост находится в состоянии равновесия. С появлением в смеси анализируемого компонента ее теплопроводность изменится, следовательно, изменится характер теплообмена между разогретой нитью и окружающей средой. Это приведет к изменению температуры и сопротивления нитей в измерительных ячейках, следствием чего явится разбаланс моста. Ток разбаланса моста будет пропорционален температуре нитей в измерительных ячейках и, следовательно, концентрации анализируемого компонента. Этот ток измеряется милливольтметром мВ, шкала которого градуирована в процентах анализируемого газа.
165
Термокондуктометрические газоанализаторы могут использоваться для анализа таких газов, как водород, двуокись азота, метан, двуокись серы, сероводород, двуокись углерода. Коэффициенты теплопроводности этих газов заметно отличаются от коэффициента теплопроводности воздуха.
Рис. VI-30. Схема измерительной части термокондуктометрическогв газоанализатора:
И—rt — сопротивления плеч моста; Б — источник 'питания моста; мВ — милливольтметр; ---—анализируемая смесь.
Рис. VI-31. Компенсационная измерительная схема газоанализатора:
I, 77— рабочий и сравнительный мосты; 77/— контролируемая смесь; Тр — трансформатор; ЭУ — усилитель; РД — реверсивный двигатель; ПС — показывающая стрелка; А —Г —вершины мостов; 1,4— измерительные ячейки; 2, 3, 5—8 — сравнительные ячейки.
-—.
Основными источниками погрешностей измерения приведен-, ной выше схемы являются:
колебания температуры окружающей среды, приводящие к изменению температуры стенок измерительных ячеек;
колебания напряжения источника питания моста;
изменение скорости прохождения газовой смеси через измерительные ячейки;
наличие водяных паров в анализируемой смеси.
В качестве источника питания моста применяются специальные стабилизаторы, а для поддержания постоянной скорости прохождения газа через измерительные ячейки устанавливаются регуляторы расхода.
Все эти дополнительные устройства усложняют конструкцию газоанализатора, делают ее более громоздкой. Поэтому большее применение получили схемы термокондуктометрических газоанализаторов компенсационного типа (рис. VI-31).
Измерительная схема такого прибора состоит из двух неуравновешенных мостов: рабочего / и сравнительного II. Мосты питаются от вторичных обмоток трансформатора Тр. Все ячейки находятся в общем металлическом блоке. В измерительных ячейках ,/ и 4 сопротивления омываются потоком контролируемой смеси III; четыре сопротивления в сравнительных герметизированных
166
ячейках 2, 3, 6 и 7 находятся в газовой смеси, соответствующей началу шкалы газоанализатора; два сопротивления в сравнительных герметизированных ячейках 5 и 8 находятся В газовой среде, соответствующей концу шкалы. При изменении концентрации контролируемого компонента мост I выходит из состояния равновесия, в его диагонали А—-Б появляется сигнал небаланса, который усиливается электронным усилителем ЭУ; реверсивный двигатель РД перемещает движок реохорда гр, включенного в диагональ В—Г моста II. Движок реохорда будет перемещаться до тех пор, пока снимаемое с реохорда напряжение не уравновесит напряжение небаланса в диагонали А—Б моста I. С ротором реверсивного двигателя связана показывающая стрелка ПС. Регулировочное сопротивление гъ служит для подгонки величины напряжения питания мостов I и II.
Магнитные газоанализаторы. Кислород обладает особым физическим свойством — парамагнетизм ом: он притягивается магнитом, тогда как другие газы либо очень слабо парамагнитны, либо диамагнитны, т. е. отталкиваются магнитным полем. Парамагнитные свойства кислорода значительно уменьшаются с повышением температуры. Магнитные газоанализаторы предназначены для автоматического контроля следующих величин: содержание кислорода в смеси газов; чистота получаемого кислорода; наличие кислородных примесей в азоте, аргоне и других газах; протекание процесса горения в топках и двигателях внутреннего сгорания. В химической промышленности определять содержание кислорода необходимо для контроля многих процессов, например каталитического крекинга нефти, производства серной кислоты, аммиака и т. п.
Наибольшее применение получил термомагнитный метод, который использует эффект изменения объемной магнитной восприимчивости кислорода при изменении его температуры.
Принципиальная схема термомагнитного газоанализатора кислорода приведена на рис. VI-32.
Анализируемая смесь через входной патрубок А поступает в измерительную камеру 1 с постоянной скоростью и выходит через патрубок Б. Между полюсами постоянного магнита 2, который расположен с внешней стороны измерительной камеры, помещена (внутри камеры) платиновая проволока сопротивлением П; в другой части камеры расположена точно такая же платиновая проволока сопротивлением г2. Эти сопротивления, а также постоянные манганиновые сопротивления г3 и являются плечами неуравновешенного моста. Сопротивления и и г2 нагреваются до 200—300 °C электрическим током от источника питания Е.
При отсутствии кислорода в анализируемой смеси поток разделяется на две равные части, омывающие сопротивления и и г2, не нарушая равновесия моста. При наличии кислорода в смеси холодная газовая смесь притягивается магнитом, охлаждает сопротивление гь а сама нагревается и теряет парамагнитные свой-
167
ства. Более холодные свежие порции смеси вытесняют нагретые, •создавая таким образом термомагнитную конвекцию («магнитное дутье»). С охлаждением платиновой проволоки л ее сопротивление уменьшается, вследствие чего в измерительной диагонали моста появляется ток небаланса, сила которого зависит от ско-
Рис. VI-32. Схема термомагнитного газоанализатора:
/ — измерительная камера; 2 — полюса постоянного магнита; 3 — измерительный прибор; А и Б — входной и выходной патрубки; Е — источник питания.
РисЛуЬЗЗ. Принципиальная схема оптико-акустического газоанализатора: /—излучатели; 2 — сферические отражатели; 3 — стабилизатор; 4 —обтюратор; 5, 8 —фильтровые кюветы; 6 — измерительная кювета; 7 — электропривод; 9 —плоский отражатель; 10 — лучепрнемник; // — перегородка с отверстиями; /2 — усилитель; /3 — реверсивный двигатель; 14 — шток: /5 — компенсационная кювета; 16 — подвижная перегородка; 17 — реохорд; 18 — вторичный прибор (мост).
рости движения газа, т. е. термомагнитной конвекции, являющейся функцией содержания кислорода в смеси.
Измерительный прибор 5, включенный в измерительную диагональ (обычно потенциометр), имеет шкалу, градуированную в процентах О2.
Оптические газоанализаторы. В основу работы газоанализаторов этого типа положено изменение степени поглощения лучистой энергии в невидимой части спектра (инфракрасной и ультрафиолетовой) тем или иным газом или жидким сорбентом, поглотившим газ. В первом случае поглощение лучистой энергии происходит непосредственно в газе (оптико-акустические и ультрафиолетовые газоанализаторы), во втором—в растворе, окрашенном в результате реакции взаимодействия жидкого сорбента с анализируемым компонентом газа (фотоколориметрические газоанализаторы).
Оптико-акустические газоанализаторы или газоанализаторы поглощения основаны на принципе поглощения двуатомными или 168
многоатомными газами и Парами излучения в инфракрасной части спектра (от 0,75 до 15 мкм), причем речь идет о газах, молекулы которых состоят из двух или нескольких разных атомов (например, СО, СО2, NH3). Газы, молекулы которых состоят из одинаковых атомов (кислород Ог, водород Нг, азот N2 и др.), не поглощают инфракрасной радиации.
Принципиальная схема оптико-акустического газоанализатора показана на рис. VI-33.
Нихромовые излучатели /, выполненные в виде спиралей и нагретые током от стабилизатора 3 до 700—800 °C, помещены в фокусы сферических отражателей 2, от которых тепловые лучи идут по двум параллельным оптическим каналам: измерительному (правому) и сравнительному (левому). Оба потока одновременно прерываются с частотой 6 Гц обтюратором 4, работающим от электропривода 7.
В измерительном канале после обтюратора поток последовательно проходит через фильтровую камеру 5, заполненную газами, сопутствующими анализируемому, измерительную кювету 6 (через нее непрерывно протекает анализируемая газовая смесь) и с помощью отражателя 9 поступает в правую камеру лучеприемника 10.
В сравнительном канале после обтюратора поток проходит через фильтровую кювету 8, заполненную, как и камера 5, газами, сопутствующими анализируемому, компенсационную кювету 15, заполненную воздухом или анализируемым компонентом, концентрация которого соответствует нижнему пределу измерения по шкале прибора, и, отразившись от скошенной отражающей поверхности подвижного штока 14, поступает в левую камеру .лучеприемника 10.
Если анализируемая газовая смесь содержит контролируемый компонент, то часть инфракрасной радиации поглотится в камере б и в правую камеру лучеприемника 10 придет более слабый поток, чем в левую, так как в левом оптическом канале поглощения нет. Эти потоки нагревают содержащийся в лучеприемнике газ, повышают его давление, причем в левой камере нагрев и давление будут выше, чем в правой. Обе камеры лучеприемника 10 заполнены анализируемым газом и разделены перегородкой 11 с малыми отверстиями и перегородкой из фольги 16-, перегородки 11 и 16 образуют неподвижную и подвижную обкладки конденсатора микрофона.
В связи с тем, что потоки прерываются обтюратором, в обеих камерах лучеприемника возникают колебания температуры и давления, которые характеризуются частотой прерывания. Амплитуда колебаний давления в правой камере меньше, чем в левфй. Конденсаторный микрофон с подвижной перегородкой 16 воспринимает возникающий перепад давления и выдает электрический сигнал, пропорциональный содержанию определяемого компонента, иа электронный усилитель 12. Малые отверстия (капилляры)
169
в перегородке 11 служат для выравнивания давлений в камерах в промежутки времени, соответствующие перекрытию излучателей 1 обтюратором 4.
После усиления ток небаланса приводит во вращение ротор реверсивного двигателя 13, который через редуктор перемещает подвижный шток 14, изменяя (уменьшая) отраженный от его скошенной поверхности поток радиации до тех пор, пока интен-
Рис. VI-34. Принципиальная схема газоанализатора ультрафиолетового поглощения с оптиче-скб1Ькрмпенсацией:
1 — генератор высокой частоты; 2 — лампа; 3 — измерительная кювета; 4 — сравнительная кювета; 5 — обтюратор; 6 — фотоэлемент; 7 — усилитель; 8 — реверсивный двигатель; 9 — вторичный прибор; 10 — компенсационная заслонка; 11 — заслонка.
сивность потоков в обоих каналах не уравняется. Как только момент компенсации наступит, амплитуды колебаний давления в обеих камерах лучеприемника совпадут и выходной сигнал конденсатора станет равным нулю, что приведет к остановке ротора реверсивного двигателя.
Одновременно с перемещением штока 14 реверсивный двигатель перемещает движок реохорда 17, включенный в измерительную схему электронного уравновешенного автоматического моста 18, шкала которого гра-
дуирована в процентах анализируемого газа.
Газоанализаторы ультрафиолетового поглощения. Принцип их действия основан на явлении поглощения некоторыми газами и парами (галоиды, некоторые органические соединения, пары металлов) ультрафиолетового излучения длиной волны от 200 до 380 нм.
Прибор работает следующим образом (рис. VI-34). От ртутной лампы холодного свечения 2, которая питается от генератора
высокой частоты 1, потоки ультрафиолетового излучения направляются по двум каналам: в измерительном (прабом) канале поток проходит через измерительную кювету 3, а в компенсационном (левом)—через компенсационную заслонку 10, заслонку 11 регулировки нуля прибора и сравнительную кювету 4. Оба потока попеременно прерываются обтюратором 5 с частотой 50 Гц и направляются на фотоэлемент 6, в цепи которого появляется фототок, пульсирующий с той же частотой.
Если через измерительную камеру 3 протекает газовая смесь,
содержащая анализируемый компонент, то по измерительному каналу на фотоэлемент поступит более слабый, чем по компенсационному каналу, поток. Это приведет к изменению фазы и разности фототоков фотоэлемента и на входе электронного усилителя' 7 появится переменная составляющая, пропорциональная процентному содержанию анализируемого компонента в смеси. В результате реверсивный двигатель 8 переместит компенсационную заслонку 10 (которая уравнивает интенсивности потоков в обоих
170
каналах) и показывающую стрелку вторичного прибора^ со шкалой, градуированной в процентах анализируемого газа.
Фотоколориметрическце газоанализаторы. Принцип их действия основан на изменении цвета соответствующим образом подобранных веществ (в результате их реакции с анализируемым компонентом газовой смеси) при последующем просвечивании окра-
Рис. VI-35. Принципиальная схема фотоколометрического газоанализатора:
Ф1 в Ф, — фотоэлементы; Л — лампа; У — усилитель; РД — реверсивный двигатель; 1 — поглотитель; 11 — анализируемый газ; / — сравнительная ячейка; 2 —абсорбер; 3 —рабочая ячейка; 4— клин.
шейного раствора световым потоком и измерении интенсивности его поглощения.
Принцип действия иллюстрирует схема прибора, приведенная на рис. VI-35.
Специальный поглотитель I (жидкость) с постоянной скоростью поступает в сравнительную прозрачную ячейку 1, а из нее через абсорбер 2 — в рабочую ячейку 3. Через абсорбер с постоянной скоростью проходит анализируемый газ //; если он содержит контролируемый компонент, то жидкость в абсорбере и в рабочей ячейке окрашивается тем сильнее, чем выше концентрация этого компонента. Световые потоки от лампочки Л проходят через сравнительную и рабочую ячейки и далее поступают на фотоэлементы Ф1 и Ф2, включенные встречно. Различие интенсивности световых потоков, прошедших через ячейки 1 и 3 на фотоэлементы, приводит к появлению в цепи фотоэлементов э.д.с. небаланса, которая усиливается усилителем У.
Реверсивный двиг.атель РД изменяет положение оптического клина 4 и связанного с ним отсчетного устройства, уравнивая интенсивность световых потоков в обоих каналах и приводя схему в равновесие.
Область применения фотоколориметрических газоанализаторов— измерение микроконцентраций токсических примесей (оксидов азота, сероводорода и др.) в воздухе.
171
; ХРОМАТОГРАФИЯ 7
В химической, нефтехимической и других отраслях промышленности получают и находят применение сложные' смеси газов, жидкостей и паров, разделение и анализ которых отнимает много времени, сил и средств, посколько это связано с привлечением многочисленного высококвалифицированного обслуживающего персонала. Для решения такой сложной задачи были разработаны 'Хроматографические методы анализа многокомпонентных смесей в производственных условиях.
Хроматография является физико-химическим методом анализа, заключающимся в первоначальном разделении смеси на составные части с последующим (массовым, объемным или процентным) определением количества каждой составной части в смеси. Разделение основано на различии сорбционных свойств составных компонентов смеси, движущейся через слой сорбента — вещества, способного удерживать эти компоненты ’на своей поверхности (адсорбция) или поглощать их всем своим объемом (абсорбция).
Явление хроматографии впервые было открыто и исследовано русским ботаником М. С. Цветом в 1903 г. при изучении разделения растительных пигментов. Поскольку во время опытов М. С. Цвет получил дискретные полосы окрашенных веществ, он назвал этот метод хроматографией (от греческого chromos — цвет и grapho — пишу), т. е. буквально цветопись. В настоящее вфемя хроматографический метод применяется и для анализа бесцветных веществ.
Вещества, подлежащие разделению, распределены между двумя фазами. Одна из таких фаз неподвижна, а другая подвижна и фильтруется сквозь слой неподвижной фазы.
В качестве неподвижной фазы обычно выбирают твердые вещества и тяжелые нелетучие жидкости, а в качестве подвижной— газы и жидкости. Если в качестве неподвижной фазы используются твердые тела, то имеют в виду газоадсорбционную хроматографию (газожидкостная распределительная хроматография).
При разделении многокомпонентных жидких смесей, которые будут подвижной фазой, в качестве неподвижной можно использовать твердые вещества и жидкости, не смешивающиеся и не реагирующие с подвижной фазой. В этом случае будет иметь место жидкостная хроматография, соответственно подразделяющаяся на абсорбционную и распределительную.
Все эти виды жидкостной хроматографии могут быть реализованы несколькими методами, которые получили следующие названия: проявительный анализ, фронтальный анализ, вытеснительный анализ. Рассмотрим технику каждого из этих анализов на примере жидкостной абсорбционной хроматографии (неподвижная фаза—твердое вещество, подвижная — жидкая смесь).
17?
следующим об-
Рис. VI-36. Схема ч проявительного анализа:
а —колонка; б —порядок выхода компонентов.
выходе появится
Проявительный анализ. В верхнюю часть колонки (рис. VI-36,a), заполненной твердым сорбентом, вводится небольшое количество анализируемой жидкой смеси. Для простоты предположим; что смесь содержит только два компонента А и В, причем вещество В сорбируется сильнее вещества А. По-видимому, компоненты смеси расположатся в сорбенте разом: верхние слои займет компонент В, обладающий лучшими сорбционными свойствами, а нижние — компонент А, который сорбируется хуже. После того как процесс сорбции завершился, через колонку начинают непрерывно с малой скоростью пропускать жидкость С (проявитель), которая не сорбируется твердым сорбентом или сорбируется значительно хуже компонентов Л и В, но может растворять их в себе. По мере пропускания жидкости С через колонку взятая для анализа проба смеси постоянно передвигается к выходу из колонки, причем скорость передвижения будет разной: (С+Л) — раствор компонента А в проявителе С — перемещается быстрее, чем (С+В)—раствор компонента В, вследствие различия сорбционных свойств. Чем длиннее колонка, тем полнее и лучше разделяется смесь.
Рис. VI-36,6 иллюстрирует порядок выхода' разделенных компонентов из колонки: первым на
чистый проявитель С, который «проскакивает» колонку, не сорбируясь, затем начнет выходить раствор компонента А в проявителе С, далее опять чистая полоса проявителя, потом раствор компонента В в проявителе С и, наконец, когда вымывание компонентов из слоя сорбента завершилось, на выходе вновь будет только чистый проявитель С. После этого процесс разделения можно считать законченным.
По мере выхода из колонки разделенные компоненты поочередно поступают в детектор, где определяется их количественный состав (об этом будет сказано ниже).
К преимуществу проявительного анализа относится высокая степень разделения с четким разграничением разделенных компонентов зонами чистого проявителя. Недостатками являются трудность разделения на одном сорбенте веществ, сильно отличающихся по сорбционным свойствам, неполнота вымывания компонентов из слоя сорбента проявителем, медленное перемещение сильно сорбирующихся компонентов вдоль колонки.
Фронтальный анализ. Так же, как и в случае проявительного анализа, двухкомпонентная смесь непрерывно, в течение всего процесса разделения, пропускается через колонку с сорбентом (рис. VI-37,а). Компонент В с лучшими сорбционными свойствами постепенно распространяется по колонке, смещая к выходу
173
границу (фронт) раздела с менее интенсивно сорбирующимся веществом А (рис. VI-37,6). Вещество А, не задерживаясь в колонке, выходит из нее в чистом виде. Как только на выход колонки начнет «проскакивать» компонент В—сорбциоцная емкость колонки исчерпана, процесс разделения завершился/
Рис. VI-38. Схема вытеснительного анализа:
а —колонка; б—порядок выхода компонентов.
Рис. VI-37. Схема фронтального ана-лиза:
а — колонка; б — порядок выхода компонентов.
Отсутствие возможности получить все вещества (кроме первого) в чистом виде значительно умаляет достоинства этого метода; его можно успешно применять для выделения примеси сильно сорбирующего компонента из основной массы смеси, для простоты принимаемой за один компонент.
—— Вытеснительный анализ. На первой стадии вытеснительный анализ аналогичен проявительному. В колонку (рис. VI-38, а) вводят небольшое количество анализируемой смеси А-|-В, принимают те же, что и в предыдущем случае допущения о количестве компонентов смеси и их сорбционной способности и выжидают, пока сорбционный процесс завершится. После этого через колонку непрерывно пропускают вещество D, которое сорбируется значительно сильнее и компонента А, и компонента В. Заполняя объем сорбента, вещество-вытеснитель D вытесняет из него ранее сорбировавшиеся компоненты и смещает их к выходу из колонки (D вытесняет В, а В вытесняет А). Взаимное вытеснение приведет к разделению веществ, и они будут покидать колонку в определенной последовательности (см. рнс. VI-38, б) согласно их сорбционным способностям. Вытеснительный анализ заканчивается, как только на выход колонки начнет «проскакивать» вытеснитель D.
От фронтального анализа он выгодно отличается возможностью выделения некоторых количеств компонентов в чистом виде, однако обладает существенным недостатком — нечеткостью разделения компонентов, их взаимным наложением.
Обычно анализ жидких смесей ведется в паровой фазе; смесь первоначально испаряется в специальном аппарате, а затем поступает на анализ. Поэтому все описанные выше методы могут 174
быть применены и в случаях анализа многокомпонентных газовых смесей.Х
Наибольшее практическое применение получили газоадсорб-. ционная и газораспределительная хроматография, а также хрома-термография. \
В газоадсррбционной хроматографии используется проявителыцлй метод анализа. В качестве твердого сорбента применяется активированный уголь, силикагель, алюмогель, активированный боксит, окись магния и т. п., а в качестве проявителя— чистый воздух, азот, гелий, водород и другие газы, которые носят название газов-носителей.
В г а з о р а сп р ед е л ит е л ьн о й хроматографии также применяют проявительный метод и используют газ-носитель. Неподвижная фаза — нелетучая жидкость, выбираемая в зависимости от состава анализируемой смеси (органические эфиры, парафиновые углеводороды, силиконы и др.), в виде тонкой пленки наносится на какое-либо твердое вещество, инертное по отношению к анализируемой смеси, и поглотителю (кизельгур, огнеупорный кирпич особого помола и др.).
Применение газораспределительной хроматографии дает следующие преимущества:
получение узких проявительных полос (проявитель+компо-нент) в отличие от широко размытых полос в газоадсорбционной хроматографии;
ускорение анализа вследствие допущения большей скорости потока газа-носителя.
Однако имеются и ограничения: трудно подобрать неподвижную фазу для низкокипящих компонентов; стабильность и летучесть неподвижной фазы сильно зависят от температуры разделительной колонки.
Метод газораспределительной хроматографии применим лишь для летучих веществ (спирты, эфиры, ароматические углеводороды и др.).
Хроматермография заключается в одновременном воздействии на анализируемую, газовую смесь потока газа-проявителя (газа-носителя) и движущегося температурного поля, что значительно расширяет возможности анализа, позволяя анализировать смеси с очень малыми концентрациями компонентов, варьировать емкость сорбента и разделять сложные смеси, резко отличающиеся одна от другой по своим качествам.
Хроматографы и хроматермографы серийно изготавливаются как лабораторные и как автоматические приборы.
Принципиальная схема хроматографа приведена на рис. VI-39.
Газ-носитель из баллона 4 через ротаметр 5 (для контроля расхода) поступает в сравнительную камеру А детектора 7, где омывает терморезистор гг и далее направляется к крану-переключателю 2. Кран переключается в одно из двух положений.
175
Рис. VI-39. Принципиальная схема хроматографа:
/ — анализируемая смесь; II — сброс в атмосферу; / — испаритель; 2 — кран-переключатель;
3 — дозировочная трубка; 4 — баллон; 5 —ротаметр; 6 — автоматический потенциометр; 7 — детектор; « — измерительная схема; 9 -* адсорбционная колонка; 10 — нагреватель.
В одном газ-носитель из камеры А детектора через испаритель жидкой пробы 1 (включается в случае анализа жидкой смеси) поступает в колонку 9, а из нее в измерительую камеру Б детектора, где омывает терморезистор гь и выходит/в атмосферу. Во втором положении (кран повернут на 60°, что/оказано пунктиром) газ-носитель из баллона 4 и камеры А захватывает и вытесняет пробу смеси определенного объема, отсеченную в дозировочной трубке 3, и далее направляет efe в колонку 9, где происходит разделение смеси на составные компоненты, которые поочередно поступают в измерительную камеру детектора и из нее — в атмосферу.
В лабораторных хроматографах кран-переключатель 2 поворачивают вручную, в автоматических — с помощью специального переключающего устройства — таймера, который позволяет устанавливать цикл анализа продолжительностью 14, 28 и 42 мин (в зависимости от числа компонентов смеси).
Если анализируется жидкая проба, ее с помощью шприца вводят в испаритель 1 (через резиновые прокладки), где она быстро испаряется; дальнейший анализ ведется обычным путем (как для газовой смеси)..
Адсорбционная колонка изготовлена в виде спирали из стальной или медной трубки внутренним диаметром 6 мм и и длиной 2, 4 и 6 м (в зависимости от числа компонентов смеси и применяемого сорбента). Спираль заключена в металлический корпус, внутри которого с
помощью нагревателя 10 поддерживается определенная температура.
Измерительная схема 8 детектора представляет собой неуравновешенный мост, два плеча которого гз и — постоянные сопротивления из манганина, а два других и и г2 — терморезисторы. Мост питается от источника тока v, включенного в диагональ a — b. В другую диагональ моста с — d включен электронный автоматический потенциометр с записью показаний в прямоугольных координатах на рулонной диаграммной бумаге.
Детектор представляет собой цилиндрический блок из нержавеющей стали, объем каждой камеры которого А и Б пример-но .равен 0,2 см3. Действие детектора основано на термокондуктометрическом принципе, уже описанном при рассмотрении тер-мокондуктометричес’ких газоанализаторов. Когда оба терморезис
176
тора Г\ и нагретые током от источника питания v, омываются только газом-носителем, мост 8 находится в состоянии равновесия и записывающее устройство потенциометра 6 чертит на диаграммной бумагё «нулевую» прямую линию. Когда же из колонки в камеру Б поочередно выходят разделенные компоненты, теплопроводность которых отлична от теплопроводности газа-носителя.
Рис. VI-40. Вид хроматограммы: 1—4 — номера компонентов смеси.
Рис. VI-41. Графическое определение площади «пика» хроматограммы: а — полное разделение; б — неполное; в — с учетом времени выхода.
измерительный мост 8 выходит из равновесия при поступлении каждого компонента, причем величина и продолжительность сигнала разбаланса пропорциональны содержанию компонента в смеси. Записывающее устройство потенциометра 6 вычертит на движущейся бумаге «пик», высота и ширина которого будут зависеть от величины сигнала, а значит, от процентного содержания компонента. Число «пиков» соответствует числу компонентов смеси (рис. VI-40).
Полученную на диаграммной бумаге запись (хроматограмма) необходимо расшифровать, чтобы ответить на вопрос о процентном содержании каждого компонента в смеси. Персоналу, производящему расшифровку, известно, какие компоненты входят в состав смеси и какому из них соответствует каждый «пик» хроматограммы.
Существует несколько способов расшифровки хроматограмм (расчета содержания компонентов). Наиболее простым из них является замер площадей «пиков». Сумму площадей всех «пиков» принимают за 100%; содержание отдельного компонента (площадь отдельного пика) рассчитывают по отношению к 100%.
Для определения площади «пика» его рассматривают как треугольник; высоту пика h измеряют от базовой (нулевой) линии до вершины (рис. VI-41,a). Затем измеренную высоту делят пополам и на расстоянии, равном ее половине, измеряют среднюю линию треугольника а. Площадь «пика» будет равна а-п.
При вычислении площади каждого «пика» в случае их неполного разделения учитывают наложение двух «пиков» друг на дру-
12—2208
177
га. Например, в отличие от пика 1 (hi) высота пика X(Лг) должна измеряться так, как указано на рис. VI-41,6. ,z
Можно пользоваться и другим методом (рис. v/-41,e), в соответствии с которым измеряют высоту h отдельных''«пиков» и время ях выхода. Для определения времени выхода «пиков» по хроматограмме замеряют отрезок I, соответствующей отрезку време-
Рис. VI-42. Принципиальная схема хроматермографа:
/ — адсорбционная колонка; 2 — печь; 3 — осушительная колонка; 4 —ротаметр; 5 — потенциометр; 6 — соединительные провода; 7 — детектор.
ни от начала опыта (впуск пробы анализируемого газа) до получения максимума «пика». Затем вычисляется величина l-h. Сумму всех произведений l-h принимают за 100%; содержание каждого компонента рассчитывают как отношение произведения, соответствующее данному компоненту, к сумме всех произведений.
Хроматермо графы выпускаются нескольких типов. Принцип действия прибора с непрерывным пропусканием анализируемой смеси через слой сорбента при периодическом продвижении электропечи вдоль этого слоя (печь обеспечивает нагрев по зонам fi, /2, 1з, ti) иллюстрирует схема, приведенная на рис. VI-42.
Анализируемый газ I поступает в осушительную колонку 3, а из нее в трубку 1, имеющую вид незамкнутого кольца, заполненную твердым сорбентом. Компоненты смеси, адсорбируясь, постепенно заполняют емкость трубки, перемещаясь к ее выходу. В этом же направлении вдоль трубки движется дугообразная печь 2 с электрообогревом, создающая температурное поле, изменяющееся на 4,5°C на каждый сантиметр длины (градиент равен 4,5°С/см). При наложении на кольцевую трубку (адсорбционная колонка) температурного поля (Л, f2, Лз, h) разделение смеси на составные части происходит не только в зависимости от их сорбционных свойств, но и под действием этого поля, благодаря чему разделенные объемы компонентов («пакеты») получаются более плотными, хорошо разделенными. Выйдя из колонки, разделенные компоненты проходят через детектор 7 (напри
178
мер, описанного выше термокондуктометрического типа), а иэ него через ротаметр 4, контролирующий расход, в атмосферу. Детектор связан проводами 6 с самопишущим потенциометром 5, который фиксирует результаты в виде хроматограммы.
МАСС-СПЕКТРОМЕТРИЯ
Масс-спектрометры находят все большее применение в лабораторной практике и в производственных условиях. Они дают возможность изучать быстропротекающие процессы, кинетику химической реакции, позволяют проводить автоматический аналив многокомпонентных газообразных, жидких и твердых веществ. В случае твердых и жидких веществ анализируемую пробу испаряют и анализ ведут в паровой фазе.
Действие масс-спектрометра основано на использовании различия траекторий движения положительных ионов анализируемого вещества, отличающихся один от другого отношением массы к заряду. Процесс, масс-спектрометрического анализа состоит из следующих последовательных операций:
образование положительных ионов анализируемого вещества и формирование ионного пучка в электрических полях;
разделение ионного пучка на составляющие, различающиеся величиной отношения массы ионов к их зарядам;
улавливание и регистрация ионного пучка для каждой его составляющей в отдельности.
В современных масс-спектрометрах используется несколько методов разделения ионного пучка по массе (получение спектра масс); преимущественное применение получило разделение ионов в поперечном однородном магнитном поле.
Принципиальная схема масс-спектрометра для анализа газа, иллюстрирующая разделение ионов при помощи однородного магнитного поля, показана на рис. VI-43.
В ионизационную камеру 1, в которой создается глубокий вакуум порядка 1,33-10~2—1,33-10~5 Н/м2, вводится анализируемая газовая смесь. Молекулы газа подвергаются бомбардировке пучком электронов, испускаемым накаленным катодом (на схеме не показан). Получающиеся в результате бомбардировки положительные ионы, обладающие положительным зарядом е, но различными массами т (все компоненты смеси различны по массе), первоначально имеют незначительную начальную энергию. Под действием электрического поля, обусловленного приложением к стенкам ионизационной камеры разности потенциалов U, ионы получают ускорение и вылетают в камеру анализатора 2, где действует однородное магнитное поле, создаваемое магнитом 3, с вектором напряженности Н, направленным перпендикулярно плоскости чертежа. В зависимости от величины U ъ Н, а также величины т различные ионы опишут траектории различных радиусов гь гг, гз и т. д., причем эти траектории могут быть определены
12*
179
из условия равенства центробежной и центростремительной сил, действующих на ион
Рис. VI-43. Принципиальная схема масс-спектрометра:
Z — аналнзируемый газ; //—пучок электронов; 1 — ионизационная камера; 2 —камера анализатора; 3 — магнит; 4 — коллектор; 5 — электронный усилитель; 6 — щель; 7 — потенциометр.
Из этого уравнения следует, что изменяя напряженность магнитного поля И или ускоряющее напряжение U, можно выделить из газовой смеси интересующие нас ионы (с определенным значением отношения т/е), описывающие траекторию определенного радиуса. Этот выделенный поток ионов через щель 6 камеры анализатора попадает на коллектор 4, соединенный через сопротивление R с землей (заземление). Ионный ток создает на сопротивлении R падение напряжения, величина которого пропорциональна величине ионного потока, т. е. концентрации данного компонента в смеси.
Изменяя величины Н и U, можно направлять на коллектор различные по массе ионы в определенной последовательности и регистрировать их на диаграммной бумаге (в виде «пиков», как на хроматографе) вторичного прибора — электронного автоматического потенциометра 7, куда сигнал поступает после электронного усилителя 5.
Основными параметрами, определяющими метрологические свойства масс-спектрометров, являются интервал массовых чисел, разрешающая способность, порог чувствительности, относительная погрешность.
Верхний предел измерений по массовым числам (за унифицированную единицу атомной массы принимают 1/12 массы атома углерода С) в современных .приборах достигает 1000—1500 у.е.м. (унифицированных атомных единиц массы).
Разрешающая способность прибора, характеризующая возможность раздельной регистрации компонентов с малой относительной разностью масс, определяется отношением М!/\М, где М — максимальное массовое число компонентов, регистрируемого раздельно от другого компонента, массовое число которого отличается от максимального на величину AAf, равную единице. Разрешающая способность современных масс-спектрометров достигает 10000.
Порог чувствительности прибора обычно характеризуется минимальной относительной концентрацией регистрируемого компонента и не выходит из пределов 10-4—10-10.
РАЗДЕЛ 2
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
Современные крупные предприятия химической, нефтехимической, газовой и других родственных отраслей промышленности базируются на технологических процессах, характеризующихся сложностью, быстротой протекания, взрыво- и пожароопасностью, высокими (или наоборот низкими) температурами, высокими (сверхвысокими) давлениями или глубоким вакуумом. А к качеству получаемых продуктов предъявляются повышенные требования.
Исполйзуя одни лишь средства и системы автоматического контроля, о которых шла речь в разделе 1 книги, обеспечить нормальное протекание таких технологических процессов не представляется возможным. Для управления ими нужны специальные автоматические средства и системы управления.
Под управлением понимают такую организацию того или иного процесса, которая обеспечивает достижение определенной цели.
Система управления — это совокупность различных технических средств для управления объектом и персонал, принимающий участие в управлении.
В процессе управления производством выполняются следующие операции:
1) получение информации о состоянии объекта управления с помощью средств и систем автоматического контроля;
2) обработка и анализ полученной информации, благодаря которым формируется решение о характере воздействия на управляемый объект;
3) реализация принятого решения с помощью устройств, непосредственно воздействующих на объект (например, путем изменения материальных или энергетических потоков).
Вторая и третья операции управления осуществляются с помощью систем автоматического управления (САУ) и автоматизированных систем управления (АСУ). лгу - r/v *
При управлении непрерывными технологическими процессами широко используются автоматические системы регулирования (АСР), которые являются частным случаем САУ. Эти системы получили такое название от латинского слова regulare—подчинять определенному порядку, упорядочивать. Назначение АСР — состоит в поддержании без участия человека заданных значений физических величин, характеризующих протекание технологиче
181
ского' процесса, или в изменении их по определенному закону 1 (программе). Однако функциональные возможности САУ и АСР 1 ограничены.
Научно-техническая революция поставила вопросы управления в число наиболее важных и актуальных проблем современности. Резко возросла сложность задач управления народным хозяйством в целом и производственными процессами в частное* ти, так как значительно увеличилась номенклатура изделий, воз- ] росла средняя сложность изделий и трудоемкость их изготовле- , ния, увеличились темпы обновления оборудования и выпускаемой J продукции, возникли новые задачи управления, которых не было в прошлом.
Повсеместное решение объективно необходимых задач управ* ления становится возможным на основе разработки и применения АСУ с широким использованием электронно-вычислительных машин (ЭВМ). '
Принято различать автоматические и автоматизированные ; системы управления. Их различие состоит прежде всего в том, что автоматические системы могут "работать без участия человека, в то время как в автоматизированных системах j часть функций управления объектом выполняется техническими средствами, а часть — людьми. Таким образом важным признаком j АСУ является наличие человека в процессе управления. :
Область применения САУ — управление некоторыми сравни- ; тельно несложными технологическими процессами, отдельными машинами и агрегатами (например, насосной или компрессорной станцией, прокатным станом, блоком котел — турбина, химическим или атомным реактором и т. п.). •
АСУ применяются в первую очередь для организационного (административного) управления, объектом которого являются прежде всего люди, коллективы.
Научные основы управления формируются на базе философии, экономики, математики, техники, социологии, психологии и целого ряда других дисциплин. Но особое место занимает здесь сравнительно новая наука — кибернетика — наука об общих законах управления (от греческого Kibernos— рулевой, кормчий), одним из создателей которой был американский ученый Норберт Винер (1894—1964). Именно кибернетика стала теоретической базой создания и внедрения АСУ.
В настоящее время в нашей стране эксплуатируются и разрабатываются АСУ нескольких основных классов:
Для предприятия (сюда входит и АСУТП,
т. е. АСУ технологическими процессами) . АСУП ,
-Для отрасли..........................ОАСУ ’
Для общегосударственных масштабов , . ОГАС
В этой книге АСУ не рассматриваются. Она посвящена рассмотрению автоматических систем контроля и систем автоматике-
182
ского управления (главным образом АСР — автоматических систем регулирования). Но рассматриваемые здесь средства контроля и регулирования, а также автоматические системы находят широкое применение в АСУ.
Современное понимание сущности автоматических устройств базируется на математическом по своему происхождению поня-
тии алгоритма, возникновение которого относится еще к IX веку; оно происходит, вероятно, от слова А1-goritmi, которое является латинской транслитерацией имени арабского математика Аль-Хорезми, с трудами которого было связано знакомство в Европе с позиционной .системой матема
Рис. 2-1. Схемы АСР:
а — принципиальная; б — структурная; 1 — поплавок; 2 — заслонка.
тики.
В настоящее время под алгоритмом понимают такую систему правил, следуя которой разрешают определенную математическую задачу, производя при этом твердо установленную последовательность необходимых операций.
Примером алгоритма может служить обычная последовательность выполнения такой арифметической задачи, как получение наибольшего делителя от любой пары целых неотрицательных чисел (алгоритм Эвклида).
Различают алгоритмы функционирования и управления.
Алгоритм функционирования— совокупность предписаний, имеющих целью правильное выполнение технологического процесса.
Алгоритм управления — совокупность предписаний, определяющих характер управляющих воздействий на объект и обеспечивающих выполнение алгоритма функционирования.
Всякая система автоматического управления предполагает наличие двух составных частей, взаимодействующих между собой: управляемого объекта и автоматического управляющего устройства.
На рис. 2-1 приведены принципиальная и структурная схемы АСР. Структурной схемой, или блок-схемой в автоматике называют такое условное изображение, в котором отдельные элементы или узлы изображаются прямоугольниками, а связи между ними изображаются линиями со стрелками, показывающими направление передачи сигнала. На рис. 2-1, а изображена принципиальная схема регулирования уровня воды Н в паровом котле. Поплавок 1 связан системой рычагов с регулирующей заслонкой 2. При увеличении уровня заслонка прикрывает трубу,
183
по которой подается вода, что ведет к понижению уровня, и наоборот. На структурной схеме (рис. 2-1,6) регулируемый уровень Н воздействует на регулятор (поплавок 1, заслонка 2, рычаги), который и изменяет уровень в нужном направлении путем увеличения или уменьшения расхода воды QB; образующийся при этом пар Qn подается потребителю.
Управляемый объект — устройство (совокупность устройств), осуществляющее технологический процесс (например работающая промышленная установка или целая технологическая цепочка), который нуждается в оказании специально организованных воздействий извне для выполнения алгоритма его функционирования.
Автоматическое управляющее устройство осуществляет воздействие на управляемый объект, в соответствии с алгоритмом управления. Большая группа таких устройств (о которых пойдет речь в этой книге), вырабатывающих• управляющие воздействия в результате сравнения действительного (изме-. ренного) и заданного значений управляемой величины, носит название автоматических регуляторов, или просто регуляторов.
Регулируемой величиной называется параметр технологического процесса (давление, температура,- уровень, расход, концентрация, вязкость и т. д.), значение которого автоматический регулятор поддерживает постоянным или закономерно изменяющимся. .
х Значение регулируемой величины, которое следует поддерживать в данный момент по условиям нормального протекания технологического процесса, называется заданным значением регулируемой величины, а измеренное в данный момент времени значение регулируемой величины называется текущим значением регулируемой величины.
Нерегулируемые величины, влияющие на регулируемую величину, называются возмущающими воздействиями, или возмущениями.
Возмущения вызываются различными причинами: изменением притока или расхода вещества (энергии), изменением температуры и давления окружающей среды, утечкой тока и сжатого воздуха в импульсных линиях, ухудшением электрических контактов и т. д.
При проектировании, монтаже, наладке и эксплуатации автоматических систем, а также в технической и учебной литературе принято и системы в целом, и их отдельные элементы, называемые обычно звеньями, представлять как устройства, преобразующие внешние воздействия на них со стороны других систем или звеньев, в собственные воздействия на те же или иные звенья и системы. При этом внешние воздействия х называются входными величинами, а места .их приложения — входами данного звена или системы. Соответственно воздействия у дан-
184
кого звена или системы на другие звенья или системы носят название выходных величин, а места их проявления — выходами данного звена или системы (рис. 2-2).
Следует отметить, что понятие о входных и выходных величинах не всегда совпадает с понятием о входных и выходных величинах технологических потоков.
Рис. 2-2. Структурная схема звена (системы): «—входная величина; # —выходная величина; г — возмущающие воздействия.
Рис. 2-3. Схема каналов воздействия в объекте регулирования (ОР).
Если обратиться к принципиальной и структурной схемам АСР (см. рис. 2-1), то для них входной величиной х будет расход воды QB, а выходной у — уровень Н (а не расход пара Qn).
Различают два режима работы автоматических систем и их элементов: статический и динамический. С т а т и ч е с к и м (равновесным) называют режим, при котором выходные величины системы (элемента) постоянны во времени. Если же выходные величины изменяются во времени, то режим называют динамическим (неустановившимся).
В реальных условиях объект регулирования постоянно подвергается различным возмущающим воздействиям, которые приводят к отклонениям регулируемой величины от заданного значения (это отклонение носит название разбаланса). С появлением разбаланса вступает в действие автоматический регулятор, т. е. приходит в движение вся автоматическая система.
Между входными и выходными сигналами системы или элемента существует причинно-следственная связь: изменение каждой входной величины приводит к изменению каждой выходной. Поэтому число каналов воздействия равно произведению числа входных на число выходных величин. Так, например, если объект регулирования ОР (рис. 2-3) имеет две входных величины Xi и х2 и две выходных у\ и у2, то входная величина Xi действует на У! по каналу 1—1 и на у2 — по каналу 1—2, а х2 — «а ух по каналу 2—1 и на у2 — по каналу 2—2.
ГЛАВА VII у
ЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ
РЕГУЛИРОВАНИЯ
Систему называют линейной, если соблюдается принцип суперпозиции, т. е. если линейной комбинации произвольных входных сигналов .ставится в соответствие та же линейная комбинация сигналов на выходе. Если этот принцип не соблюдается, то система называется нелинейной.
Для иллюстрации принципа суперпозиции проведем на объекте эксперимент, позволяющий судить о его линейности (или нелинейности). Этот эксперимент должен состоять по крайней мере из трех опытов (рис. VII-1).
Опыт I. На вход объекта подается сигнал хД/) и определяется изменение выходной величины y\(t) под действием этого сигнала.
Опыт II. На вход этого же объекта подается другой сигнал *2(0 и вновь определяется изменение выходной величины yz(t).
Опыт III. На вход этого же объекта подается сигнал, равный сумме двух первых, т. е. *з(0 =Х1(О+*г(О и определяется выходной сигнал yz{t).
Если для любого времени t при любых x\(t) и х2(0 соблюдается равенство г/з(С =У1(О+^г(О, то принцип суперпозиции выполняется и система линейна.
Линейными являются системы, описываемые линейными дифференциальными уравнениями, т. е. уравнениями, в которых искомая функция и все ее производные содержатся в первой степени, например:
ЯтУ(п) (О + ат-14'(л_1) (04-Н W (0 4- аоу (<) =
= + +М'(04-М(0 (46)
где у и х — выходные и входные величины; п и и— порядок производных; ат,.... а0 и bk.b0 — коэффициенты, характеризующие
конструктивные параметры объекта, физические и химические свойства веществ, участвующих в производстве, а также различные гидродинамические и тепловые константы.
Для линейных систем разработаны точные, удобные и весьма эффективные методы их анализа и синтеза, чего нельзя сказать о нелинейных системах, так как решение уравнений высоких порядков представляет определенные трудности.
В большинстве своем реальные объекты управления являются нелинейными и поэтому всегда желательно — хотя бы приближенно заменить нелинейную систему (объект, звено) линейной. Такая замена называется линеаризацией.
Линеаризация возможна на том основании, что входные и выходные величины нелинейных систем (объектов, звеньев) в ре-
186
альных условиях обычно изменяются в узком диапазоне около определенных равновесных значений управляемой величины или, как говорят, изменяются «в малом».
На графике, приведенном на рис. VII-2, показано, что для -нелинейной функции в любом узком интервале изменения аргумента ±Ах кривую y=f(x) можно с заданной точностью заменить
Рис. VII-1. Схема опытов, иллюстрирующая
Рис. VII-2. Линеаризация нелинейной функции.
У
Уо
принцип суперпозиции.
касательной к этой кривой (точка А), что даст нам л ине ар и-зованнуюфункцию.
Приведенный графический способ линеаризации «в малом» применим только для функций одного аргумента.
Однако существуют объекты (звенья), которые линеаризовать нельзя даже «в малом». Например реле, математическое описание которых представляет собой разрывную функцию. Подобные объекты (звенья) называются существенно нелинейны-м и.
СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Статической характеристикой звена или системы (независимо от конструкции и назначения) называется зависимость его выходной величины у от входной х в установившемся состоянии. В общем случае уравнение статической характеристики линейного звена запишется в виде
у = kx
Здесь k — коэффициент усиления звена (системы), показывающий, во сколько раз изменение выходной величины больше или меньше изменения входной.
Если звено (система) имеет несколько входных и выходных величин, то его статическая характеристика является многомерной функцией, получение и применение которой связано с определенными трудностями. В связи с этим чаще всего пользуются статическими характеристиками по отдельным каналам, т. е. за
187
висимостями между равновесными значениями какой-либо одной из входных и одной из выходных величин при фиксированных значениях остальных входных величин.
Линейная статическая характеристика оценивается углом наклона описывающей ее кривой к оси абсцисс. Отношение выходной величины к входной для любой точки линейной характеристи-
Рис. VII-З. График статической характеристики линейного звена.
Рис. VII-4. Схема установки для снятия статической характеристики: / — емкость (газгольдер); 2, 3 — вентили с ручным управлением; 4— манометр.
ки—величина постоянная и может быть выражена через тангенс угла наклона
tga=-y = *
Статические характеристики иногда представляют в виде таблиц, а чаще в виде графиков. При графическом изображении статической характеристики по оси абсцисс откладывается значение входной, а по оси ординат —выходной величины. На рис. VII-З приведен график статической характеристики линейного звена. Определять статические характеристики можно экспериментальным путем, а также аналитически (расчетным путем).
Для получения статической характёристики экспериментальным путем обычно поступают следующим образом. В установившемся режиме замеряют значения входной и выходной величин звена или системы. Затем немного изменяют входную величину, точно измеряя ее новое значение, наблюдают, как изменилась выходная величина, и точно фиксируют это изменение. Далее вновь изменяют входную и фиксируют выходную величины и т, д. Данные о значениях входной и соответствующих значениях выходной величины заносят в таблицу; по полученным данным строят график.
Однако такой метод определения статических характеристик не всегда возможен, особенно на действующих промышленных установках, так как он может привести к срыву технологического процесса. Поэтому не менее (если не более) важен аналитический метод.
188
Пример VII-1. Расчет статической характеристики объекта управления—* емкости под давлением (рис. VII-4).
По одной трубе в емкость подается газ, по другой его забирают; управляемая (регулируемая) величина — давление р в емкости — контролируется манометром 4.
Уравнения притока газа в емкость Qn и его расхода QP можно записать так:
где <хп и аР—коэффициенты расхода для притока газа н его расхода; fn и fP— проходные сечеиия вентилей соответственно 2 и 3; pi, Рз — плотности газа в линиях притока и расхода; p,.pi, Pz — давление газа в разных точках схемы.
В равновесном состоянии, когда давление р не изменяется, приток газа равен его расходу, т. е. Qn=QP, поэтому
Допуская, что коэффициенты расхода и плотность газа при прохождении через дросселирующие устройства 2 и 3 изменяются незначительно, т. е. принимая (с известным допущением), что ап = аР, a pi=pj, получим
fn VPi — Р —fpVp — Pz откуда
,+(r) I+(r)
где p — выходная, a pi, pz, fn и /р — входные величины.
Это уравнение и есть статическая характеристика объекта управления. Задаваясь значениями одной из входных величин и полагая все другие неизменными, можно построить график статической характеристики.
Динамической характеристикой звена или системы называется зависимость выходной величины от входной в переходном режиме при определенном законе изменения входной величины. Г
Обычно динамические свойства аналитически выражаются дифференциальными уравнениями, а графически —кривыми в системах координат, где по оси абсцисс откладывается время, а по оси ординат — значения выходной величины (при определенном значении входной величины).
Графики переходных процессов (а динамические характеристики есть не что иное, как вид переходного процесса) для одного и того же параметра будут различны при разных законах изменения возмущающих воздействий. Поэтому принимаются типовые по характеру возмущающие воздействия (единичный скачок, гармонические- колебания, прямоугольные периодические импульсы). Но и такие возмущающие воздействия могут быть различными как по продолжительности, так и по величине. Поэтому изменение выходной величины принято рассматривать при совершенно определенном изменении входной.
189
Для оценки динамических свойств объектов (звеньев) обычно принято пользоваться временными (кривые разгона), импульсными и частотными характеристиками.
Если динамическая характеристика получена при однократном мгновенном скачкообразном изменении входной величины, то, ее называют временной характеристикой или кривой разгона.
Импульсной характеристикой называется кривая изменения во времени выходной величины в переходном процессе, возникшем вследствие однократного импульсного возмущения входной величины.
Частотная характеристика описывает поведение системы при протекании в ней гармонических колебательных процессов в зависимости от частоты этих процессов.
Здесь рассматриваются лишь кривые разгона, которые широко используются в практике.
Так же, как и статические характеристики, динамические характеристики звеньев и систем можно определить экспериментально и аналитически.
При экспериментальном получении кривой разгона на вход системы вруч-
Рис. VII-5. Кривая разгона: J — начальное установившееся значение (ось абсцисс); 2 — новое установившееся значение.
ную наносится единичное ступенчатое (скачкообразное) воздейст-
вие— резкое изменение подачи вещества или энергии (на схеме, рис. VII-4, единичное ступенчатое воздействие может быть нанесено резким прикрытием или открытием вентиля 2 или 5).
На верхнем графике (рис. VII-5) показана кривая разгона, полученная в результате единичного ступенчатого воздействия А, нанесенного в момент времени to (нижний график); до этого момента звено (система) находилась в равновесном состоянии.
Значение единичного ступенчатого воздействия А должно составлять 5—15% максимально возможного при данном режиме значения входной величины.
По кривой разгона определяют следующие динамические параметры: запаздывание, постоянную времени и коэффициент передачи. Эти параметры используются при настройках регуляторов (см. гл. IX).
Если в точке п (точка перегиба), соответствующей максимальной скорости изменения выходной . величины, провести касательную к кривой разгона и продолжить ее до пересечения с линией начального установившегося значения 1 выходной величины (осью абсцисс), то отрезок времени от момента внесения возмущения до точки пересечения касательной с осью определит общее запаздывание объекта т.
190
Отрезок времени от момента пересечения касательной с ли* иней начального установившегося значения до момента ее пере* сечения с линией нового установившегося значения называется постоянной времени Т\ это условное время, в течение которого выходная величина изменилась бы от начального до нового установившегося значения, если бы это изменение происходило со скоростью, постоянной и максимальной для данного процесса.
Коэффициент передачи представляет собой отнесенное к единичному возмущению на входе изменение выходной величины объекта при переходе из начального установившегося состояния в новое. За единичное возмущение принимают изменение входной величины объекта на 1% (перемещение регулирующего органа, расхода регулируемой среды и т. д.). Коэффициент передачи Коб вычисляют по формуле
где t/о и yk — значения выходной величины соответственно в начальном и новом установившихся состояниях; Ац — значение вносимого возмущения, выраженное в % хода регулирующего органа. 1
В общем случае, чем меньше отношение т/Т, тем лучше динамические свойства.
Аналитический путь получения кривой разгона проследим иа примере.
Пример VII-2. Получение кривой разгона печи с электрообогревом.
Исходные данные. Температура воздуха, окружающего печь, 0В=2О°С. Известно, что в течение 90 мин с момента отключения тока питания печь охлаждается с 500 до 100 °C.
Решение. Скорость изменения температуры печи с течением времени t есть производная температуры печи по времени dQ^dt.
При уменьшении температуры — это производная убывающей функции, т. е. величина отрицательная. Но так как речь идет о скорости 'изменения температуры при охлаждении, то скорость этого физического процесса следует рассматривать как величину неотрицательную, т. е. как производную, взятую с противоположным знаком. Таким образом, скорость охлаждения печи определится как -d&ldt.
С другой стороны, скорость охлаждения определяется выражением:
Л(0П —20)
где k — коэффициент пропорциональности (й>0),.
Приравнивая производную к этому выражению, приходим к дифференциальному уравнению:
=*(0п-2°)
ИЛИ \\
Фп —20 = ~kdi (47)
Интегрируя (47) почленно, получим:
1п(0п —20) =—«4-с
191
На основании определения логарифма будем иметь:
. 0п-2О = е-«+с
или
6п_20 = е-«ес ’
Положив ес—т, получим: •
0П —20 = гаг« (48)
Определим величины т и k.
При t = 0 температура электропечи 0П=5ОО°С. Подставляя эти значения в уравнение (48), получим: 480=те°, откуда zn = 480.
Следовательно
0П —20 = 480e-fe/ (49)
Остается определить значение k. Известно, что за 90 мин печь охлаждается до 100 °C, т. е. при / = 90 мин 0П=1ОО°С. Отсюда, приходим к соотношению
100 — 20 = 480е-в»*
откуда е-90*=^2_или e~k= (0,166)1,90 . Теперь равенство (49) можно переписать так:
0П —20 =480-0,16б'/»о (50)
Равенство (50) и есть динамическая характеристика управляемого объекта. Задаваясь значениями t и подставляя их в уравнение (50), можно получить графическое изображение кривой разгона.
Типичные формы переходных процессов в автоматических, системах, полученные в результате единичных скачкообразных возмущающих воздействий, показаны на рис. УП-бЦПри графическом изображении таких процессов по оси абсцисс принято откладывать время t, а по оси ординат — значение управляемой величины у.
Переходный процесс, представленный на графике VII-6, а, называется апериодическим (неколебательным). Если переходный процесс протекает относительно медленно, действительное значение управляемой величины может значительно отклоняться от заданной (заданное значение совпадает с осью абсцисс), а это ведет к ухудшению качества управления. В большинстве случаев такой переходный процесс нежелателен.
График, приведенный на рис. VII-6,б, соответствует устойчивому затухающему • колебательному процессу. Амплитуда колебаний управляемой величины постепенно уменьшается до нуля. Такая форма переходного процесса наиболее желательна, так как действительное значение управляемой величины быстро и без больших отклонений достигает заданного значения.
Незатухающийг колебательный процесс с постоянной амплитудой, кривая которого изображена на рис. VII-6, в, в большинстве случаев нежелателен, хотя и может быть допущен при незначительной амплитуде колебаний. Здесь система не приходит в равновесное состояние, а управляемая величина все вре-
192
мя колеблется в известных пределах относительно своего заданного значения.
Расходящийся колебательный процесс, кривая которого представлена на рис. VII-6, г, недопустим в САУ, поскольку амплитуда колебаний управляемой величины с течением вре-
ис. VII-6. Типичные формы переходных процессов в САУ, возникающих в ре-;льтате приложения к ним единичных скачкообразных возмущающих воздей-гвий:
— апериодический; б — устойчивый затухающий колебательный; в — незатухающий колеба-Ьльный с постоянной амплитудой; г — расходящийся колебательный.
Вис. VII-7. Формы переходных процессов в САУ, вызванных изменением задаю-Btro воздействия:
в— апериодический процесс; б — колебательный затухающий процесс; 1 и 2 — прежнее н но-значения управляемой величины; 3 —изменение управляемой величины.
ени возрастает. Это может явиться результатом неправильного Ьчетания динамических характеристик отдельных звеньев.
। Переходный процесс может возникать не только в результате Возмущающих воздействий, но также и при изменении задания;* к. е. при перенастройке системы на новое значение управляемой величины. В этом случае отклонение управляемой величины жтремится не к нулю, а к новому установившемуся значению |рис. VII-7).
% При прохождении возмущающего- воздействия через САУ Сигнал, поступивший на вход, изменяется по амплитуде и претерпевает сдвиг по фазе. Величина этого изменения зависит от свойств '^управляемого объекта. Для компенсации этих явлений и служит управляющее устройство, которое должно подавлять эти отклонения.
ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
Одной из основных динамических характеристик объекта (звена), которой широко пользуются в теории и практике автоматического управления, является передаточная функция.
13—2208 гдз
Математический аппарат передаточной функции построен на преобразовании Лапласа* *, используемом во многих задачах прикладной математики.
Для уяснения понятия передаточной функции остановимся кратко на преобразовании Лапласа, передав лишь основную идею этого метода.
Преобразованной по Лапласу функцией (прямое преобразование Лапласа) называется функция комплексного переменного, определяемая соотношением:
00
X (р) » J х (0 е-Р‘ di (51)
о
где x(t) — исходная функция действительного переменного t, называемая оригиналом; р — комплексная переменная, p = a+i®, 1=У—1; а,® — действительные переменные; е — основание натурального логарифма.
Функция х(р) называется изображением по Лапласу, функции х((). Иначе это можно записать в виде:
L {х (0) = х (р) rhe L — символ преобразования Лапласа.
Обратный переход от изображения к оригиналу осуществляется по формуле:
C-f-ioO
*(Р)—f x(p)epldp (52)
c—ioo
где с — абсцисса сходимости функции x(t), т. е. произвольное положительное число, обеспечивающее сходимость интеграла.
Комплексное число является математической абстракцией, а выражение (=У—1 не имеет физического смысла, т. е. является понятием чисто условным. И тем не менее использование комплексных чисел позволяет простыми и наглядными методами исследовать качества и динамические свойства САУ.
Комплексные числа изображаются иа комплексной плоскости. Абсцисса, т. е. горизонтальная ось, называется вещественной или осью вещественных чисел, а ордината, т. е. вертикальная ось, называется мнимой или осью мнимых чисел. Так абсциссой точки р (рис. VII-8) является вещественная часть комплексного числа, а ординатой — его мнимая часть. Для задания положения точки р на плоскости в полярных координатах необходимо установить длину отрезка М между точкой и началом координат, а также угол <р между этим отрезком и положительным направлением (вправо) вещественной оси. Отрезок М называется модулем, или абсолютной величиной комплексного числа и тогда очевидно -
М = + S а.2 + со2
* Лаплас Пьер Симон (1749—1827) выдающийся французский астроном, математик, физик. Ему принадлежит ряд открытий в механике, теории дифференциальных уравнений, теории вероятностей.
194
Угол <р называется аргументом, или фазой и определяется:
<p = arctg —
Если а=0, то комплексное число будет называться мнимым числом, а при ®=0—вещеетвеиным. Если, например, а=3, а> = 2, то запись i® соответствует мнимому числу +У—4=2^— 1, а запись a+i® — комплексному числу 3 + 12. Комплексные числа считаются равными, если их вещественные и мнимые части равны.
Рис. VII-8. Изображение комплексного числа и а плоскости.
Рис. VI1-9. Изображение траисцеидеитиой функции иа плоскости.
Для большого числа функций, встречающихся иа практике, составлены таблицы соответствия между оригиналами и изображениями, значительно облегчающие применение преобразования Лапласа (таблица VII-1).
Использование преобразования Лапласа значительно упрощает решение уравнений особенно высоких порядков, описывающих динамическую характеристику данного объекта или звена.
Пример VII-3. Нахождение изображения траисцеидеитиой ской) функции (рис. VII-9), оригинал которой имеет вид:
х (t) = e~at (t > 0)
Запишем значение оригинала:
(неалгебраиче-
00 00
х (р) = J e-ate-P(dt = J е-(°+Р) ‘ dt о о
00 е-(б+р)t
>
___1
а, + Р
1 а + р
Таким образом, изображением является алгебраическая функция. Отметим, что для нахождения изображения можно было воспользоваться данными, приведенными в табл. VI1-1.
Передаточной функцией объекта (звена) W(p) называется отношение преобразованной по Лапласу выходной величины объекта (звена) у(р) к преобразованной по Лапласу входной величине х(р) при нулевых начальных условиях, т. е.
* (р) = с53)
193
13'
Таблица VIT-1.
Преобразование по Лапласу некоторых функций
оригинал изображение
1
л—
P+k
k
sm kt
P2 + &
cos kt P
p2 -f- 4k2
te~kt Г
(p + k)2
k
t sin kt
(p + A)a + A2
/cos kt p + &
(p + k)2+k2
I/A_ f 0 при /<0 1
‘W (. 1при/>0 , P
t 1
P2
kt k
P2
Она характеризует динамику объекта (звена) по определенному каналу, связывающему конкретный вход объекта (звена) с выходом. Если в объекте имеется несколько входов, то каждому каналу связи входа с выходом будет соответствовать своя передаточная функция.
Пример VII-4. Нахождение передаточной функции объекта. На вход объекта подан единичный ступенчатый сигнал х(0 = 1(0. который вызвал реакцию на выходе, описываемую уравнением y(t)=kt.
Найдем изображение по Лапласу для входного и выходного сигналов:
*(р) = -у У(Р)“-£Г
Передаточная функция объекта W(p) будет равна
Если задано дифференциальное уравнение объекта (звена), то для получения передаточной функции необходимо преобразо
196
вать это уравнение по Лапласу и из полученного алгебраического уравнения найти отношение у(р)/х(р).
В соответствии с преобразованиями ,по Лапласу при нулевых начальных условиях (начальные зщ'ачения выходной величины и ее производных все порознь равны нулю, т. е. г/(0)=0; у'(0) = 0...у(л_1)(0) =0) дифференциальное уравнение для линейного объекта в общем виде (46) запишется так:
атР^У (р) + ат-1Р(л-1,У (Р) + • • • + а1РУ (Р) + аоУ О’) ~ = bkp(u>X (р) Н--------1- Ь1Рх (р) + Ьох (р)
ИЛИ
У (р) №тР<п} + ат-1Р(л'П Ч---F а1Р + ао] = X (р) [bkpW + • • • + Ьр + Ы
откуда
™ . = У (р) = ^Р(ц) -I----1- V + Z>0_____
(Р) х (р) атР(п) + ат.1Р^-1) + ... + а1Р 4- а0 ,?
Достоинство передаточной функции заключается В том, что наряду с дифференциальным уравнением и кривой разгона она характеризует динамические свойства объекта (звена) и позволяет просто, в компактной форме получить ряд практических соотношений при преобразовании структурных схем САУ и их элементов (об этом будет сказано ниже). д ।
СТРУКТУРНЫЕ СХЕМЫ И ПРАВИЛА ИХ ПРЕОБРАЗОВАНИЯ
С понятием структурной схемы мы уже познакомились. А теперь рассмотрим более подробно правила составления и преобразования структурных схем.
Составление структурной схемы является первым этапом исследования сложных систем управления и значительно облегчает составление общего математического описания систем. Кстати, одной из областей применения передаточной функции является структурный анализ сложных систем.
При составлении структурной схемы систем или объекта отдельные звенья этой системы или объекта изображаются прямоугольниками, внутри которых записывается передаточная функция звена. Точка на линии связи между звеньями, в которой происходит разветвление линии (т. е. один и тот же сигнал подается на входы, других звеньев) называется узлом. Алгебраическое сложение нескольких сигналов изображается в виде кружка с крестиком на линии связи и называется сумматором.
На рис. VI1-10 приводятся условные изображения основных элементов структурных схем.
Как бы ни была сложна структурная схема, она может быть изображена с помощью соединений звеньев трех основных типов: последовательного, параллельного и с охватом обратной связью.
При последовательном соединении динамических звеньев (рис. VII-41, а) образуется (разомкнутая цепь: выход предыдущего
157
звена действует на вход последующего. Передаточная функция такой цепи равна произведению передаточных функций п составляющих звеньев:
И7(р) = й71(р).й72(р).....ГГ„(р)
В данном и последующих случаях предполагается, что все рассматриваемые звенья обладают направленностью действия,
Рис. VI1-10. Условные изображения основных элементов структурных схем: а — звено с указанием входной х, выходной у величии н передаточной функции V звена; б — узел; виг — сумматоры.
т. е. пропускают воздействие лишь в одном направлении — от входа к выходу. Такие звенья называются детектирующими.
При параллельно включенных звеньях (рис. VII-11,6) образуется многоконтурная замкнутая цепь, причем входной сигнал х является одновременно входным сигналом для каждого
а
Рис. VII-11. Схемы соединения звеньев:
а — последовательное; б — параллельное; в — с использованием обратной связи.
звена, а выходной у равен сумме сигналов всех п параллельно включенных звеньев. Передаточная функция такой цепи будет равна
(Р) = ^1 (Р) 4- (р) + • • • + wn (р)
Систему из п параллельных звеньев можно заменить одним сложным звеном. Операция приведения всех уравнений звеньев сложной системы к одному уравнению называется свертыва-ниемсхемы. .
Устройством о б р а т н о й связи (рис. VII-ll,e) называют звено или совокупность звеньев, передающих воздействие с вы-198 ’
хода одного звена на его вход или на .вход одного из предшествующих звеньев этой же системы.
Будем считать W7! (р) звеном • прямого преобразования, а 1Г2(р)—эвеном обратной связи. _
На выходе звена W72(p) сигнал будет иметь значение: 1
*о.с = А>.с1/
Здесь k0.c — коэффициент обратной связи.
Если сигнал х0.с суммируется с входным сигналом х звена IFi(p), то обратная связь называется положительной. В этом случае на входе звена прямого преобразования суммарный сигнал будет равен .....
X + *о.с = X + ko.d/
Если сигнал х0.с вводится на (вход звена Wi(p) со знаком, противоположным сигналу х, то обратная связь называется отрицательной. При таком включении на входе звена прямого преобразования получается сигнал, величина которого будет равна
х—х0.с = х— kosy
Передаточная функция цепи с обратной связью будет равна: Для положительной обратной связи
„ пМр)
1 _ «7, (р) ТГ2 (р)
Для отрицательной обратной связи ™ (р)____
1 + «7, (р) Й72 (р)
Главную роль в САУ играют отрицательные обратные связи, которые, хотя и уменьшают коэффициент усиления звена, но улучшают переходный процесс (уменьшается инерционность), снижают погрешность звена, улучшают устойчивость, подавляют колебания в системе.
По своей структуре отрицательные обратные связи разделяются на следующие типы.
Жесткие обратные связи передают сигналы с выхода звена на его вход, не изменяя их характера; осуществляются с помощью усилительного звена. Простая жесткая обратная связь описывается уравнением:
Хо.с ~ Ьо.сУ
Гибкие обратные связи передают с выхода звена на его вход производные (первую, вторую н т. д.) выходных величин по времени.
Уравнение простой гибкой обратной связи _ h dy
ХО.С — «о .с
199
Сложные структурные схемы реальных систем можно пре.-образовывать и упрощать, причем упрощение осуществляется в несколько этапов. На каждом этапе сначала выделяются группы исходных элементов, соединенных между собой одним из рассмотренных выше способов, а затем каждая такая группа заме-
Рис. VII-12. Этапы (а—г) упрощения структурной схемы.
няется одним элементом, эквивалентным этой группе по динамическим свойствам.
В качестве примера упрощения сложной системы рассмотрим структурную схему на рис. VII-12, а.
На первом этапе заменим группу параллельно соединенных звеньев IFi, W2 и W3 одним звеном с передаточной функцией
w, (р) = (р) 4- ед + rs (р)
и группу последовательно соединенных звеньев Wt и W5 звеном с передаточной функцией
№в (Р) = W* (р) W& (Р)
После этого структурная схема упростится (рис. VII-12,б).
На втором этапе последовательно соединенные звенья W: и ГГ8 заменим одним с передаточной функцией
IT, (р) = (Р) (Р)
и построим вторую упрощенную схему (рис. VII-12,в). В этой схеме так же заменим два звена IFg и 1Гб (третий этап), из которых—одно соответствует прямому преобразованию (И^э)» а ДРУ’ гое — обратной положительной связи (ТГб), одним звеном с передаточной функцией )
W = 1 _тг99(р)Гв(р)'
и получим окончательную, сведенную к одному звену, схему (рис. VII-12, г) с теми же свойствами, что и сложная схема, приведенная на рис. VII-12, а.
200
ТИПОВЫЕ ЭЛЕМЕНТАРНЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
Автоматические системы состоят из отдельных элементов, принадлежащих как объекту управления, так и управляющему устройству. Эти элементы отличаются друг от друга по назначению, принципу действия и конструкции. Однако классификация
Рис. VII-13. Схемы усилительных звеньев и их характеристики:
а— зубчатая пара; б —рычаг; в —триод; а—кривая разгона; б —условное изображение звена; х, у — входная и выходная величины.
их по этим показателям была бы очень разветвленной и не отражала бы основной сущности звеньев — их динамических свойств, т. е. характера протекающих в них переходных процессов. Если осуществить классификацию звеньев по динамическим свойствам, то это позволит свести их конструктивное многообразие к небольшому числу.
Существует 6 основных типов элементарных динамических звеньев: 1) усилительное, 2) апериодическое, 3) колебательное, 4) интегрирующее, 5) дифференцирующее, 6) чистого запаздывания.
Переходный процесс каждого из этих звеньев описывается линейным дифференциальным уравнением не выше второго порядка, Динамические звенья изображаются на схемах в виде прямоугольника, как это было показано на рис. VII-10, но внутри контура прямоугольника изображается кривая разгона, соответствующая данному звену или его передаточная функция.
Чтобы определить динамические свойства элементарного звена, обычно рассматривают его кривую разгона.
Усилительное звено (безынерционное). Это простейшее элементарное звено, которое образуется в случае передачи входного сигнала на выход без каких-либо замедлений или ускорений во времени (т. е. переходный процесс отсутствует). Примеры усилительных звеньев приведены на рис. VII-13.
Свойства элемента описываются уравнением
y(t) = kyx(t)
где ky—постоянная, называемая коэффициентом усиления усилительного звена.
Передаточная функция звена представляет собой постоянную величину: . ^у(р) = *у
201
Элементы, уравнения динамики которых представляют собой алгебраические уравнения, носят названия элементов нулевого порядка (что указывает на нулевой порядок дифференциального. уравнения этого элемента). Их динамические характеристики не зависят от частоты процесса или скорости его протекания,
Апериодическое звено (инерционное). Образуется при соединении физического элемента, обладающего емкостью по отношению к какому-либо веществу или энергии, с элементом, создающим сопротивление потоку этого вещества или энергии, направляю-
Рис. VII-14. Схемы апериодических звеньев и их характеристики:
а — цепочка гс; б — цепочка Lr; в — магнитный усилитель; г — термопара; д — электродвигатель; е — кривая разгона; ж — обозначение звена.
щемуся в емкость (или из нее). Оно называется также статическим звеном первого порядка, так как при постоянном входном сигнале с течением времени устанавливается постоянная выходная величина, причем зависимость между входной и выходной величинами описывается дифференциальным уравнением первого порядка:
Тап"2$~ Ч" У = ^ап*
где Тап — постоянная времени звена; ksu—коэффициент усиления звена.
Апериодическое звено называется еще инерционным потому, что в результате мгновенного изменения входного воздействия выходная величина изменяется не мгновенно, а с переменной скоростью, которая постепенно уменьшается до нуля.
Передаточная функция апериодического звена имеет вид:
Гап (Р) = ТапД 1
Примеры апериодических звеньев приведены на рис. VII-14.
Колебательное звено. Такое звено образуется при соединении двух элементов, обладающих емкостью по отношению к какому-либо веществу (или энергии) и способных взаимно обмениваться 202
веществами (или энергией) через сопротивление. В процессе такого обмена возникают колебания выходной величины. Если в результате колебаний запас энергии уменьшается, то колебания затухают и звено является устойчиво колебательным; если запас энергии увеличивается, то колебания усиливаются и звено оказывается неустойчивым.
Колебательное звено называется также статическим звеном второго порядка и описывается следующим диф-
Рис. VII-15. Схемы колебательных звеньев и их характеристики:
о — электрическая цепь rcL\ б — мембранный исполнительный механизм; в —демпфер; г — поплавковый дифманометр; д — кривая разгона; е — условное изображение звена.
ференциальным уравнением:
Т 2 ...Т ’A
* К2 ^2 + * К1 г У — «К*
где Ткг — постоянная времени колебательного звена; T«i — постоянная времени демпфирования (затухания) колебательного звена} kK — коэффициент усиления колебательного звена.
Передаточная функция колебательного звена имеет вид:
_ kK
^к(р)=Тк22 + Тк1р+1
Примеры некоторых колебательных звеньев приведены на рис. VII-15.
Интегрирующее звено характеризуется определенным соотношением между значением входной величины и скоростью изменения выходной величины. Такое звено называется также астатическим звеном первого порядка.
Дифференциальное уравнение звена dy Г
= kKx или у = xdt
б
где ka — коэффициент усиления звена.
203
Передаточная функция звена имеет вид: / ч IFH(p)=-y
Одним из распространенных устройств; которое относится к интегрирующим звеньям, может служить электрический индукцион-
Рис. VI1-16. Схемы интегрирующих звеньев и их характеристики:
а — электрический индукционный счетчик; б — гидрдрлический исполнительный механизм; в —кривая разгона; г — изображение звена.
ный счетчик (рис. VII-16,а), гидравлический исполнительный механизм (рис. VII-16,б), электродвигатель малой мощности, у которого угловая скорость 'вращения якоря со пропорциональна напряжению 17 в цепи якоря (®=W),
Дифференцирующее звено. Различают идеальное и реальное дифференцирующие звенья.
Идеальное дифференцирующее звено характеризуется уравнением
. х у - кл dt
где кл — коэффициент усиления звена.
к Передаточная функция звена имеет вид:
(р)=ЬдР
Выходная величина идеального дифференцирующего звена пропорциональна скорости изменения входной величины и, следовательно, при изменении входной величины переходный процесс должен происходить мгновенно. Такое звено можно представить в виде устройства, изображенного на рис. VII-17, а, где выходное сопротивление равно нулю. Кривая разгона такого звена при подаче на вход скачкообразного возмущающего воздействия изобразится прямой, совпадающей с ординатой, т. е. получается выходной импульс, теоретически имеющий бесконечно большую
204
амплитуду, соответствующую бесконечно большой скорости изменения входной величины в момент подачи скачка (рис. VII-17, <?).
Однако практически осуществить идеальное звено не представляется возможным. Поэтому применяются звенья, выполняющие дифференцирующее действие приближенно, т. е. реальные дифференцирующие звенья.
Рис. VII-17. Схемы дифференцирующих звеньев и их характеристики:
« — электрическая Цепь идеального звена; б, в — электрические цепи реальных звеньев; г — успокоитель в механических цепях; д — кривые разгона (1 — идеального, 2 — реального звена); «.— условное изображение звена.
Их уравнение может быть записано в следующей форме:
Т dy JL „ !:Т Х
1 д dt "г У ~ д dt
где Тд — постоянная времени звена; ka — коэффициент передачи звена.
Передаточная функция дифференцирующего звена имеет вид: / kj/T по
(Р) = ТдР+ 1
Примеры конструктивного исполнения реальных дифференцирующих звеньев приведены на рис. VII-17.
Звено чистого запаздывания образуется в тех случаях, когда временем прохождения сигнала от входа звена до его выхода пренебречь нельзя: при транспортировании вещества на некоторое расстояние с ограниченной скоростью либо при прохождении вещества или энергии через бесконечное множество (практически — большое число) соединений емкость — сопротивление, т. е. в случаях, когда параметры элемента следует рассматривать как распределенные.
Выходная величина звена воспроизводит без искажения изменения входной величины, но с некоторым постоянным запаздыванием и тогда уравнение звена будет иметь вид:
y(t)=x(t — т)
где т — чистое запаздывание.
205
Передаточная функция звена чистого запаздывания имеет вид: ^чз(р)=в-рт /
В качестве примера звена чистого запаздывания можно назвать длинный трубопровод, в первом приближении, также некоторые тепловые объекты (печи, нагреватели), длинную электри-
Рис. VII-18. Схема звена чистого запаздывания и его характеристики: о —ленточный транспортер; б —кривая разгона; в —условное изображение звена.
ческую линию без потерь, транспортирующие устройства. Одно из таких звеньев показано на рис. VII-18, а.
Из рассмотрения элементарных типовых звеньев можно сделать вывод о том, что они сравнительно просты, легко технически реализуются, широко распространены в технике, описываются однотипными дифференциальными уравнениями, у которых в левой части — выходные величины и их производные, а в правой — входные величины и их производные [сравним уравнения типовых элементарных звеньев с уравнением (46) для линейной системы в общем виде]. Практически любой многоканальный элемент системы может быть разбит на элементарные звенья, свойства которых хорошо известны, что значительно упрощает построение автоматической системы с заданными свойствами.
АВТОМАТИЧЕСКИЕ СИСТЕМЫ, ИХ КЛАССИФИКАЦИЯ
* И ПРИНЦИПИАЛЬНЫЕ СХЕМЫ
Каждую автоматическую систему характеризует алгоритм управления, алгоритм функционирования и наличие (отсутствие) способности к самоприспосабливанию. Эти существенные признаки были положены в основу классификации автоматических систем.
По характеру алгоритма управления автоматические системы подразделяются на: .... ....
206
автоматические системы с разомкнутой цепью воздействия, или разомкнуты ё\с и с т е м ы (входные воздействия поступают только извне); \
автоматические системы с замкнутой цепью воздействий, или системы с обратными связями (входные воздействия приходят не только извне, но и из самой автоматической системы); в свою очередь, они подразделяются на автоматические системы регулирования и системы автоматического поиска: в АСР управляющее воздействие вырабатывается в результате сравнения действительного значения управляемой величины с заданным; в системе автоматического поиска управляющее воздействие вырабатывается с помощью пробных воздействий и анализа их результатов.
По характеру алгоритма функционирования автоматические системы делятся на стабилизирующие, программные и следящие.
Стабилизирующими называются автоматические системы, алгоритм функционирования которых содержит предписание поддерживать постоянное значение управляемой величины.
Программными называются автоматические системы, алгоритм функционирования которых содержит предписание изменять управляемую величину в соответствии с заданной программой.
Следящими называют автоматические системы, алгоритм функционирования которых содержит предписание изменять управляемую величину в зависимости от значения заранее неизвестной переменной величины на входе автоматической системы.
По признаку наличия или отсутствия способности к самопри-спосабливанию автоматические системы подразделяются на не обладающие самоприспосабливанием и самоприспосабливающиеся. В с а м о п р и с п ос а б л и в а ю щ и х с я системах имеется дополнительное автоматическое устройство, которое в процессе работы изменяет параметры, структуру или программу САУ для обеспечения выбранного критерия оптимальности (совершенства) при произвольно меняющихся внешних условиях и переменных параметрах объекта управления. Критерии, определяющие степень совершенства работы управляемых объектов, называемые критериями оптимальности, могут быть весьма разнообразными (максимальная производительность установки, минимум расхода топлива или сырья, выбор наилучшей скорости работы установки и т. д.). Системы, не обладающие самоприспосабливанием, не имеют устройств, изменяющих структуру САУ, в связи с чем они работают в обычном режиме сравнения регулируемой величины с заданным значением. В соответствии с приведенной выше классификацией рассмотрим принципиальные схемы автоматических систем.
Разомкнутые системы. Управляющее устройство воздействует «а объект, но обратного воздействия (объекта на управляющее устройство) нет, т. -е. отсутствует обратная связь.
На рис. VII-19 приведена схема регулирования давления р в объекте ОР — газгольдере. По трубопроводу I газ поступает в газгольдер (поток Qn),*a через трубопровод II поступает к потребителю (поток Qc). Перепад давления Api на сужающем устройстве D] зависит от расхода газа/Qn и измеряется дифманометром ДМ1. Перепад давления Д^2 на сужающем устройстве D2 зависит от расхода газа Qc на линии потребления II и измеряется дифманометром ДМ2.
Как только изменится расход Qn или Qc (возмущающее воздействие), изменится и перепад Api или. Др2, что приведет к деформации упругого элемента дифманометра (мембраны) ДМ1 или ДМ2, а эта деформация через систему рычагов передается на регулирующий орган РО, который изменит величину Qn до такого значения, когда Qn=Qc (если расходы на линиях I и II будут равны, то p=const);
Управление разомкнутыми системами базируется на принципе регулирования по возмущению или принципе Пон селе (по имени французского ученого), так как регулирующее воздействие вырабатывается регулятором (состоит из следующих звеньев: Di или D2, DM1 или DM2 и РО) в результате изменения не регулируемой величины (давление Р), а возмущения (расход Qn или Qc).
Разомкнутые автоматические системы устойчивее замкнутых вследствие отсутствия обратной связи. Благодаря этому такие системы могут обладать большим коэффициентом усиления и быстродействием, чем замкнутые.
Основной недостаток разомкнутых систем, значительно сужающий область их применения, — отсутствие информации о результатах управляющего воздействия, могущее привести к большим отклонениям управляемой величины от заданного значения.
Система с замкнутой цепью воздействия (с обратной связью). В этих системах входное воздействие непосредственно зависит от значения выходной величины.
В замкнутых системах управление базируется на принципе-регулирования по отклонению или принципе Ползунова — Уатта (в честь русского и английского изобретателей И. И. Ползунова и Д. Уатта, сконструировавших первые промышленные регуляторы). Регулятор в этих системах изменяет регулирующее воздействие при отклонении (разбаланс) регулируемой величины от заданного значения независимо от причин, вызвавших это отклонение (см. рис. 2-1,а).
Автоматические системы, базирующиеся на принципе регулирования по отклонению, обладают важными достоинствами: один регулятор способен устранять разбаланс в системе, вызванный всей совокупностью возмущений, независимо от их числа; вследствие постоянного стремления к устранению разбаланса в системе, регулятор не допускает накопления ошибки.
208
Однако в таких\системах регулятор как., бы «дожидается» появления разбалансам^только после этого начинает действовать, результатом чего можёт быть не только устранение разбаланса, но и отклонение регулируемой величин^ в противоположную сторону.. Такое явление называется перерегулированием; при
ОР —объект регулирования; Q„, Qc —расходы иа линиях притока (/) и стока (//); Дь Д2 — сужающие устройства; ДМ1, ДМ2 — дифманометры; РО — регулирующий орган; Др,, Др2— перепады давления на сужающих устройствах.
Рнс. VII-20. Схема двухконтурной АСР:
/—подача топлива; 2 —подача воздуха; 3 — форсунки в топке; •/ — выход дымовых газов: 5, S —вход и выход продукта; Tl, Т2 — термопары; РБ — регулирующий блок; ИУ —исполнительное устройство.
проектировании АСР применяются специальные расчетные методы, учитывающие это явление.
При регулировании по отклонению трудно одновременно выполнить условия точности, устойчивости и быстродействия.
Наиболее эффективными являются комбинированные А С Р, в которых сочетаются оба рассмотренные выше принципа.
В зависимости от имеющегося числа цепей (контуров) системы с замкнутой цепью воздействий подразделяются на одноконтурные и многоконтурные.
Автоматическая система называется одноконтурной, если ее элементы соединены между собой связями, образующими только один контур. Примером такой системы может служить схема регулирования уровня жидкости в паровом котле (см.рис.2-1,а). В этой системе лишь один контур: при изменении уровня Н поплавок 1 воздействует на заслонку 2, изменяя расход QB, вследст-ствие чего уровень вновь приходит к прежнему значению.
Автоматические системы, в которых управление ведется по двум или более величинам (имеются две или более замкнутых цепей воздействия), называются многоконтурными. Характерной особенностью многоконтурной автоматической системы является то, что воздействие, приложенное к какой-либо ее точ-14-2208 209
ке, может обойти систему и вернуться в первоначальную точку, следуя по нескольким параллельным путям /контурам).
На рис. VII-20 показана принципиальная схема двухконтурной системы автоматического регулирования температуры продукта на выходе из трубчатой печи,/ работающей на газовом топливе. Температуру поддерживает7 регулятор РБ, воздействующий на подачу топлива, поступающего к форсунке топки. Основной регулируемой величиной является температура продукта на выходе из печи 71. Вспомогательной регулируемой величиной является скорость изменения температуры дымовых газов, измеряв емая специальной скоростной термопарой 72.
Главный контур регулирования состоит из термопары 71, регулирующего блока РБ, исполнительного устройства ИУ, топки печи, теплового сопротивления и тепловой емкости труб и продукта, заполняющего трубы. Этот контур характеризуется значительным запаздыванием, отрицательно влияющим на качество процесса регулирования. •
Вспомогательный контур регулирования состоит из термопары 72, регулирующего блока РБ, исполнительного устройства ИУ и топли печи. Этот контур характеризуется относительно небольшим запаздыванием, что позволяет использовать изменение температуры дымовых газов в качестве упреждающего сигнала, направляемого в регулятор температуры продукта.
Когда возмущающие воздействия на объект управления (трубчатая печь) отсутствуют, температура дымовых газов не изменяется, сигнал от термопары 72 равен нулю и регулятор температуры выдает управляющий сигнал лишь в зависимости от температуры выходного продукта. Если же в результате возмущающих воздействий изменится температура дымовых газов, то управляющее воздействие регулятора на исполнительное устройство ИУ будет зависеть как от сигнала 71, так и от сигнала 72.
Стабилизирующие автоматические системы. Большинство систем автоматического управления, применяющихся в настоящее время, характеризуется тем, что заданное значение управляемой величины устанавливается оператором и сохраняется постоянным длительное время.
Примером может служить система автоматического регулирования температуры в печи с электрообогревом (рис. VII-21). В камеру печи Э введена термопара 7, т.э.д.с. которойEt сравнивается с падением напряжения м0 на сопротивление г3 задающего устройства, подключенного к источнику питания задатчика и2. Задаваемое напряжение устанавливается вручную (по шкале, отградуированной в °C) путем перемещения движка b реостата Гз. Если текущее и заданное значения температуры не равны, то в цепи термопары появится напряжение разбаланса Ди, которое усиливается электронным усилителем ЭУ и поступает на вход реверсивного двигателя РД, заставляя его ротор вращаться. Направление вращения зависит от знака разбаланса, т. е. от того, 2цо
i
будет ли температурив печи выше или ниже заданной. Ротор реверсивного двигателХперемещает движок а реостата г, включенного в цепь питания обмотки обогрева печи Э. Перемещение движка а прекратится, когда температура в камере печи станет равной заданной, так как в эФом случае Ам=0.
Приведенная схема, как
впрочем и другие, о которых пойдет речь ниже, идеализирована: предполагается, что процессы в звеньях протекают мгновенно, что изменение тока в цепи обмотки обогрева вызывает моментальное изменение температуры в печи, а термопара мгновенно изменяет э.д. с. и т. д. Но она близка к реальной и наглядно передает прин-
Рис. VI1-21. Схема стабилизирующей автоматической системы:
РД — реверсивный двигатель; Э — электропечь; Т — термопара; г —реостат; г3 — реостат задатчика; ЭУ — усилитель; а и Ь — движки реостатов; ип — источник питания электропечи; ид — питание задатчика; и»—заданное напряжение; Ди — разбаланс.
цип действия стабилизирующей системы.
Программные автоматические системы находят применение в тех случаях, когда в ходе технологического процесса управляемую величину необхо-
димо изменять по заданному
закону (программе). Рассмотрим систему программного регулиро
вания температуры в печи, обогреваемой горячим газом (рис. VII-22).
Требуемый характер изменения во времени температуры в печи задается с помощью профильной рельефной диаграммы, выполненной в виде ленты 8, которая с помощью часового механиз-
ма или синхронного электродвигателя 9 движется с постоянной скоростью. Задаваемое изменение температуры посредством ролика 7, катящегося по контуру ленты графика и прижатого к нему, и тяги 6 передается двуплечему рычагу 5, который может поворачиваться вокруг оси О. Подвижный контакт 4 кинематически связан (см. пунктир) со стрелкой указателя температуры 3 объекта, измеряемой термопарой 2. Заслонка 11, управляющая подачей теплоносителя в печь, связана (см. пунктир) с исполнительным механизмом — реверсивным двигателем 10.
При несоответствии между текущим и заданным в данный момент значениями температуры в печи подвижный контакт 4 будет касаться одного нз неподвижных контактов 4' рычага 5, включая питание реверсивного электродвигателя 10. Ротор электродвигателя будет вращаться в соответствующую сторону, перемещая заслонку в направлении, обеспечивающем требуемое изменение подачи теплоносителя. Это обусловливает изменение температуры в печн согласно графику. Когда требуемая по гра
14
211
фику и фактическая температуры соответствуют одна другой, подвижный контакт 4 не. касается неподвижных контактов 4' и электродвигатель обесточивается. Ес/щ шток 6 программного устройства зафиксировать в определенном положении, то система превратится в стабилизирующую.
превратится в стабилизирующую.
Следящие автоматические системы. В системах этого типа закон изменения заданного значения управ- j ляемой величины заранее неизвестен и определяется какой-либо другой величиной, пройзвольно изменяющейся во времени.
Задача управляющего > устройства (регулятора) состоит в том, чтобы с возможно большей точностью j обеспечить слежение теку- .( щей управляемой величины за независимой задающей величиной. Пример такой системы — регулирование соотношения расходов двух потоков (рис. VII-23).
По двум трубопроводам в реактор (на схеме не по- ] казан) поступают газы. Чтобы обеспечить максимальный выход ; и требуемое качество продукта, получающегося в результате ре- ;
§
Рис. VII-22. Схема программной автоматической системы:
/ — печь; 2 — термопара; 3 —указатель температуры; 4, 4' — подвижный и неподвижные контакты; 5 —двухплечий рычаг; 6 — тяга; 7 —ролик; о —профильная диаграмма; 9 — синхронный двигатель; !0 — реверсивный двигатель; И — регулирующий орган (заслонка); О, О' — оси вращения.
1
акции, газы должны поступать в реактор при строго определенных объемах в единицу времени. Если расход газа в одном трубопроводе изменится, то в другом он должен измениться так, чтобы соотношение расходов осталось прежним.
Разность давлений Api на диафрагме Dt трубопровода I пропорциональна расходу в этом трубопроводе (задающая величина или ведущий параметр) и измеряется дифманометром ДМ1. Разность давления Др2 на диафрагме D2 в трубопроводе II пропорциональна расходу в этом трубопроводе и измеряется дифманометром DM2 (ведомый параметр). Если соотношение расходов в трубопроводах I и II равно заданной величине — подвижный контакт К; который через систему передач связан с мембранами дифманометров, находится в среднем положении. При увеличении расхода, например в трубопроводе I, перепад давления Api ; возрастает, мембрана дифманометра DMi прогнется вправо, контакт Ki также переместится вправо, замкнется на неподвижный < контакт к3. В результате обмотка Б реверсивного двигателя РД > окажется под напряжением и; ротор РД начнет перемещаться в сторону открытия регулирующего органа РО и расход в трубо
212
проводе II тоже увеличится, что приведет к увеличению Др2 и прогибу мембраны дифманометра DM2 влево. Когда усилия, развиваемые мембранами обоих дифманометров, окажутся равными (соотношение расходов соответствует заданному значению), контакт к1 вновь займет среднее положение и система придет в уста-новшееся состояние. Если бы расход в трубопроводе I уменьшил-
Рнс. VH-23. Схема следящей автоматической системы:
/, // — трубопроводы; Д,. Д, — диафрагмы; ДМ,, ДМ5 — дифманометры; Kt, Kj, Ki“ контакты; РО — регулирующий орган; РД — реверсивный двигатель; А, Б — обмотки статора; u — питание двигателя.
ся, то подвижный контакт Ki замкнулся бы на неподвижный контакт к2, под напряжением и оказалась бы обмотка А реверсивного двигателя и он начал бы осуществлять поворот заслонки в сторону ее закрытия, т. е. уменьшения расхода в трубопроводе II.
Все рассмотренные системы (стабилизирующая, программная, следящая) относятся к группе автоматических систем регулирования (АСР), у которых текущее значение регулируемой величины сравнивается с ее заданным значением и в случае рассогласования этих величин управляющее устройство вырабатывает сигнал, который воздействует на регулирующий орган и приводит систему в установившееся состояние.
В последние годы получили большое развитие и широкое использование в производстве более сложные системы, в частности системы автоматического поиска.
Системы автоматического поиска. Одной из важных групп этих систем являются системы экстремального регулирования, осуществляющие автоматический поиск оптимального значения управляющего воздействия, обеспечивающего экстремум некоторого показателя эффективности процесса (термин происходит от латинского слова exstremum — крайнее, и объединяет понятия «максимум» и «минимум»). Работа объекта управления может считаться оптимальной при максимальном к.п.д., либо при
213
Рис. VII-24. Блок-схема .управляемого объекта:
Xi, хг, .... хп — входные величины; у — выходная величина; z — возмущающие воздействия.
мента раз и навсегда
минимальной себестоимости единицы продукции, минимальной затрате энергии на выработку единицы продукции и т. д.
Предположим, что управляемый объект имеет п каналов, по которым в него поступают потоки вещества и энергии. Обозначим входы объекта через х2....... хп (рис. VII-24).
Допустим, что показателем, который нужно поддерживать на экстремальном уровне, является выходная величина у. Задача оптимизации объекта состоит в подборе таких значений входных величин х2, хп, при которых выходная величина у примет экстремальное значение.
Помимо входных величин, которые можно измерить в производственных условиях и которыми можно управлять, на объект ' действует большое число неконтролируемых возмущающих воздействий г. К ним могут относиться: изменение теплотворной способности топлива, старение катализатора, изменение атмосферных условий и т. д.
Если бы на объект управления не действовали возмущения г, то в принципе можно было бы путем вычисления или экспери-найти значения входных величин, которые
обеспечили бы экстремум у и с помощью стабилизирующих АСР поддерживали их постоянными. Однако наличие у большинства объектов неконтролируемых возмущающих воздействий, приводящих к изменению у, делает невозможным поддержание выходной величины на экстремальном уровне путем стабилизации входных^, величин объекта.
Эта задача может быть решена методом непрерывного поиска таких значений величин Xi, х2, ..,х„, при которых у принимает максимальное или минимальное значение.
Имеется большое число объектов управления, экстремальное значение выходной величины которых зависит в основном от одного входного параметра. Такие системы экстремального регулирования носят еще название одноканальных оптимизаторов. О них и пойдет речь ниже.
В момент включения системы экстремального регулирования поиск начинается с принудительного изменения входной величины в случайном направлении. Если это воздействие приведет к увеличению у, значит, оно сделано в правильном направлении н его следует продолжать до достижения экстремума. Если принудительное изменение входной величины в случайном направлении оказалось неправильным, это приведет к уменьшению у, следовательно, нужно изменить направление управляющего воздействия.
Если бы поставленную задачу решал человек, то он постоянно менял бы'настройку и, наблюдая за изменением управляемой 214
величины, определял бы на глаз, когда прибор, измеряющий управляемую величину, дает максимальные показания. Изменив настройку слишком сильно, человек увидит, что управляемая величина прошла максимум, и изменит настройку в обратном направлении. Примером таких действий человека может служить операция непрерывной подстройки радиоприемника на волну пе
редающей радиостанции, частота которой недостаточно стабильна.
Таким образом, основной процесс в экстремальной системе — непрерывный поиск — заключается в изменении входной величины объекта, анализе воздействия, вызвавшего это изменение, и определении дальнейшего направления изменения входной величины с целью достижения экстремума выходной величины объекта.
На производстве в качестве теплоносителя часто использует-
Рис. VII-25. График зависимости: температура в печи — расход воздуха.
ся тепло газов, получаемых в ре-
зультате сжигания топлива в топочных устройствах. Зависимость между расходом воздуха, необходимого для горения, и температурой топочных газов носит экстремальный характер: максимальная температура топочных газов 7"тах соответствует данному расходу QT сжигаемого топлива при определенном расходе подаваемого в топку воздуха QB (рис. VII-25). Если подавать воздуха меньше, чем необходимо для сжигания топлива, температура в печи будет ниже экстремальной. Это относится и к тому случаю, когда воздух будет в избытке, так как избыток воздуха снижает температуру топочных газов.
При данном расходе топлива QT0 для получения максимальной температуры Тщахо необходимо, чтобы расход воздуха был равен Qbo- Если подача топлива изменится, например возрастет, и станет равной QTi, то для достижения нового максимального значения температуры Tmaxi нужно поддерживать новый расход воздуха Qbi.
Обычно подача топлива — управляемое возмущение. Его влияние можно учесть, например, с помощью следящей системы соотношения топливо — воздух. Однако’ вследствие наличия неуправляемых возмущений, таких как например изменение калорийности топлива, подсосы воздуха в топку, температура топочных газов отклоняется от экстремального значения. Обычная АСР не
может выполнить задачу оптимизации, поскольку для этого должно быть известно задание по управляемому параметру и то, в каком направлении надо менять управляющее воздействие, чтобы привести управляемую величину к заданному значению..
215
В качестве примера системы экстремального регулирования рассмотрим печь, отапливаемую мазутом и управляемую экстре* мальным регулятором (рис. VII-26).
Так угла ф
как расход воздуха QB, подаваемого в топку, зависит от поворота заслонки 4, то зависимость между температурой в топке Т и углом поворота заслонки также носит экстремальный характер (рис. VII-26, б). Для обеспечения максимальной температуры в топке должно быть соблюдено условие dT/dip = Q, которому отвечают значения Т=Ттах и ф =фопт- Если ф<фопт, то производная больше нуля, а при, Ф> фопт — меньше нуля.
Заметим, что
dip dt ’ dt
где T' и ф' — производные по времени от температуры и угла поворота заслонки.
Следовательно, состояние Ф<фопт определяется одновременным существованием двух неравенств: Т'>0 и ф'>0, либо Т'<0 и ф'>0.
то должно быть Т,>0 и ф'<0 лйбо
т
т
%пт
Рис. VII-26. Принципиальная схема экстремальной системы (а) и график (б) зависимости Т от <р
/ — мазут; //—воздух; / — топка; 2 —форсунка; 3 — вентиль; 4 — заслонка; 5 — знаковое реле; 6 — редуктор; 7 — реверсивный двигатель;
8 — тахогенератор; 9 — дифференцирующее устройство; 10 — усилитель; 11 — термопара.
должен работать на
Аналогично, если ф>ф0Пт, Т'<0 и ф'>0.
Пока максимум не достигнут, т. е. пока производная по температуре больше нуля, необходимо, чтобы электродвигатель работал на увеличение открытия заслонки (увеличение угла ф), а когда максимум перейден, т. е. когда производная по температуре меньше нуля, электродвигатель уменьшение открытия заслонки.
Система, изображенная на рис. VII-26, а, работает следующим образом.
В топку печи 1, которая является объектом -экстремального регулирования, с помощью форсунки 2 подается топливо (мазут). ^Расход топлива к форсунке определяется положением вентиля 3. Расход воздуха, подаваемого для сжигания мазута, регулируется с помощью заслонки 4. Температура в топочном пространстве измеряется малоинерционной термопарой 11. Сигнал от термопары усиливается электронным усилителем 10 и далее поступает на дифференцирующее устройство 9, где преобразуется в сигнал, пропорциональный скорости изменения температуры, т. е. производной температуры по времени. Далее этот сигнал через пере
216
ключающие контакты реле П1 поступает на одну из обмоток (А или Б) знакового реле 5, которое включает обмотки статора Г илн D реверсивного электродвигателя 7. При включении обмотки D реверсивный двигатель через редуктор 6 отрабатывает закрытие заслонки и уменьшение подачи воздуха к форсунке; при включении обмотки Г — увеличение подачи воздуха.
Рис. VII-28. Структурная схема само-приспосабливающейся системы:
/, и — вход и выход системы; 1 — регулятор; 2 — объект управления; 3 — устройство для оценки хода процесса; 4 — логический элемент; 5 — усилитель; 6 — устройство для оценки внешнего воздействия.
Рис. VII-27. График процесса регулирования в экстремальной системе.
На оси реверсивного электродвигателя установлен тахогенератор 8, который измеряет скорость вращения ротора реверсивного двигателя н выдает иа обмотку В знакового реле сигнал постоянного тока, пропорциональный по времени углу поворота регулирующей заслонки, т. е. производной угла поворота по времени. Обмотки знакового реле включены таким образом, что при изменении подачи воздуха в сторону увеличения температуры в топочном пространстве переключений в нем не происходит. Если же расход воздуха изменяется в сторону уменьшения температуры, то знаковое реле производит реверсирование электродвигателя 7, направленное на приближение к максимуму.
Процесс регулирования (при допущении, что топка печи является безынерционным объектом) иллюстрируется графиком рис. VII-27. После включения экстремального регулятора знаковое реле находится в устойчивом состоянии, так как
dT dtp
И -57->0
В момент t\ достигается максимум; после его прохождения знаковое реле находится в неустойчивом состоянии
217
dT
dtp ~ n и -dT>°
и срабатывает в момент t2 -после того, как будет пройдена зона нечувствительности знакового реле. Благодаря реверсированию электродвигателя знаковое реле снова оказывается в устойчивом состоянии.
В этом состоянии находится знаковое реле, изображенное на рис. VII-26 (включена обмотка Б). Знак напряжения на этой обмотке позволяет включить обмотку D реверсивного двигателя. Напряжение тахогенератора имеет знак, при котором обмотка знакового реле удерживает включенной обмотку Б. По' мере приближения к максимуму напряжение на выходе дифференцирующего устройства И уменьшается. В момент /3 (см. рис. VII-27) его знак изменяется. В момент t\ вновь преодолевается зона нечувствительности знакового реле и обмотка Б (см. рис. VII-26)" переключает контакт, замыкая обмотку Г электродвигателя. Напряжение на выходе тахогенератора меняет знак. Обмотка В знакового реле переключает контакт, включая обмотку А. Однако реверсирование электродвигателя не происходит, так как напряжение на выходе дифференцирующего устройства удерживает контакт, управляющий электродвигателем, в прежнем положении. Затем процесс повторяется (см. рис. VII-26, точки ts —18). Система совершает незатухающие колебательные движения («рыскает») около максимума. Период «рыскания» обозначен через Тро.
Вследствие того что система находится в непрерывном движении, регулируемая величина не равна своему экстремальному значению, а лишь проходит через него в процессе колебаний. Поэтому среднее установившееся значение температуры Тер не равно экстремальному (в данном случае максимальному). Разность между максимальным и средним установившимся значением регулируемой величины называется потерей на «рыскание». На рис. VII-27 потеря на рыскание обозначена через Dpc. Эта потеря названа нечувствительностью знакового реле.
Если изменение расхода топлива приводит к смещению максимума (см. рис. VII-25), то система экстремального регулиро- i вания автоматически переходит в режим колебания около нового значения максимума.
В настоящее время разработано несколько типов систем автоматического поиска, использующих различные способы нахождения экстремума. '
Рассмотренная выше экстремальная система является про- 1 стейшей и использует способ взятия производной.
Самоприспосабливающиеся системы представляют собой класс | . автоматических систем, более сложных по сравнению с обычны- | ми САУ. Их применяют для автоматического управления про- j цессами, о которых нет достаточной информации: например, точ- i ныё характеристики объекта неизвестны, или меняются во време- ' 218 .
ни по заранее неизвестному закону, либо неизвестны характеристики среды и т. д.
Не рассматривая сложных принципиальных схем такого рода, приведем лишь типовую структурную схему самоприспосабли-вающейся системы (рис. VII-28).
Характерной особенностью этих систем является наличие в них следующих элементов:
устройства, осуществляющего автоматический поиск наилучшего значения управляемой величины, контура самонастройки;
устройств, позволяющих изменять некоторые параметры, характеристики или структуры системы;
алгоритма, меняющегося в процессе работы;
логических и вычислительных устройств;
нелинейных элементов.
ПОНЯТИЕ ОБ УСТОЙЧИВОСТИ СИСТЕМ
Практическая пригодность системы управления в первую очередь определяется ее устойчивостью (или неустойчивостью) и приемлемым качеством процесса управления. Поэтому необходимо рассмотреть вопросы, относящиеся к определению понятия устойчивости систем автоматического управления.
Система называется устойчивой, если после снятия возмущающего воздействия она с достаточной для практики точностью возвращается в исходное положение равновесия. Неустойчивая система не возвращается к состоянию равновесия, из которого она по тем или иным причинам вышла, а наоборот, непрерывно удаляется от него или совершает около него недопустимо большие колебания. -- *1
Простейшие примеры устойчивых и неустойчивых систем приведены на рис. VII-29.
Если шарик, лежащий на дне чаши (рис. VII-29, а) переместить на ее стенку и отпустить (нанести и снять возмущающее воздействие), то после нескольких колебаний он возвратится в исходное положение. Это пример устойчивой системы. Причем, если возмущающее воздействие может быть сколь угодно большим (при бесконечно длинных стенках чаши), то такая система называется устойчивой «в большом». Система называется устойчивой «в малом» при определенных ограничениях, накладываемых на начальные отклонения ее координат. Пример такой системы приведен на рис. VII-29, б; она остается устойчивой, если начальные отклонения шарика не выходят за пределы участков АВ и АС.
Система называется нейтральной, если после снятия возмущающего воздействия она приходит в состояние равновесия, но не первоначальное, т. е. равновесие наступает при произвольном значении выходной координаты системы. Примером нейтральной системы может служить шарик, катящийся по горизонтальной плоскости (рис. VII-29,в).
219
А
Рис. VI1-29. Простейшие схематические примеры систем с различной устойчивостью:
в — устойчивость <в большом»; б — устойчивость «в малом»; в — нейтральность; г — неустойчивость.
Пример неустойчивой системы приведен на рис. VII-29, г. Ма-лейшее отклонение шарика в ту или иную сторону приводит к его скатыванию вниз.
Как уже говорилось выше, система автоматического управления, как любая динамическая система, характеризуется переходным процессом, возникающим в ней при нарушении ее равновесия вследствие нанесения какого-либо воздействия. Переходный процесс y(f) зависит как от свойств системы, так и от вида возмущения. В переходном процессе всегда следует различать две составляющие: свободное движение системы хс (/), определяемое начальными условиями и свойствами самой системы, и вынужденное движение хв (/), определяемое возмущающими воздействиями и свойствами системы. Таким образом, можно записать:
у(0 = *с(0 + *в(0
Чтобы система могла правильно реагировать на сигнал управления, настройки или изменения нагрузки, свободная составляющая с течением времени должна стремиться к нулю, т. е.
limxc----> О
7—>оо
Следовательно, характер свободного движения системы определяет ее устойчивость или неустойчивость. Если условие
Ишхс —> О /->©0
не выполняется—система неустойчива.
Об устойчивости САУ судят, решая дифференциальное уравнение САУ и анализируя корни и коэффициенты его характеристического уравнения (эти вопросы в книге не рассматриваются).
ГЛАВА VIII
ОБЪЕКТЫ РЕГУЛИРОВАНИЯ И ИХ ОСНОВНЫЕ СВОЙСТВА
Объектом регулирования (а далее речь пойдет об объектах регулирования) называется технологический процесс или аппарат, режим которых зависит от внешних воздействий и
220
может быть поддержан на заданном уровне автоматической системой регулирования (АСР). Объекты могут быть простыми (емкость, где регулируется уровень жидкости, участок трубопровода с регулируемым давлением, трубчатый теплообменник с регулируемой температурой выходной жидкости и т. д.) и сложными (химический реактор, ректификационная колонна и т. д.).
УРАВНЕНИЯ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
Построение любой системы управления обычно начинается с изучения управляемых объектов и составления их математических описаний. Очевидно, что математическое описание всей АСР составляется из математических описаний ее отдельных элементов, причем стандартные средства автоматики, такие как регуляторы, датчики, регулирующие органы и др., имеют заведомо известные характеристики и описываются известными уравнениями.
Математическое описание (или, как говорят, математическая модель) может быть получено экспериментальным, аналитическим или комбинированным (экспериментально-аналитическим) методом. При экспериментальном методе уравнения получают либо путем постановки специальных экспериментов на объекте (активный метод), либо путем обработки результатов длительной регистрации физических величин (например, на диаграммной бумаге) в условиях нормальной эксплуатации объекта (пассивяый метод).
Аналитический метод получения математической модели основан на использовании главных физико-химических закономерностей процессов, протекающих в описываемом объекте, т. е. на знании механизма этих процессов.
Экспериментально-аналитический путь подразумевает составление уравнений аналитическим методом с последующим уточнением коэффициентов этих уравнений экспериментальным путем.
Уравнения, описывающие поведение объекта в установившемся режиме, называются уравнениями статики и представляют собой алгебраические или дифференциальные уравнения, содержащие производные по какому-либо параметру, кроме времени (условие неизменности координат во времени).
Уравнения динамики описывают неустановившийся (переходный) режим в объекте, причем выходная величина объекта является функцией времени. Значит уравнения динамики будут дифференциальными уравнениями, содержащими производные по времени.
Зная математическую модель АСР, можно предсказать, как будет изменяться регулируемая величина в ответ на любое возмущающее воздействие, что важно для оценки работающих и проектирования новых АСР.
Одной из важных характеристик объекта является число его степеней свободы, т. е. число независимых физических величии.
221
полностью характеризующих состояние объекта в любой момент времени. Так например, точка в пространстве обладает тремя степенями свободы (ее положение определяется тремя координатами) , а точка на плоскости имеет две степени свободы (определяется двумя координатами). Если процесс в химическом реакторе полностью характеризуется, например, температурой и
Рис. VIII-1. Схемы объектов с одной степенью свободы:
с — электрический контур; б — гидравлическая емкость; в —тепловая емкость; / — бак; 2, 3 — трубы; 4 — слив.
эта температура одинакова для всех точек аппарата, то такой объект обладает одной степенью свободы.
В зависимости от числа степеней свободы все объекты можно разделить на объекты с сосредоточенными и распределенными параметрами.
Объекты с сосредоточенными параметрами обладают конечным числом степеней свободы.
В качестве примера составления дифференциальных уравнений простейших динамических систем с сосредоточенными параметрами рассмотрим ряд систем с одной степенью свободы.
Электрическая система (рис. VIII-l,a) подчиняется законам Кирхгофа. Используя второй закон Кирхгофа (сумма мгновенных значений падений напряжений, подсчитанных в определенном направлении по любому замкнутому контуру электрической цепи, равна нулю) и выбрав в качестве обобщенной координаты заряд q емкости С, определим значения падений напряжения в контуре:
на емкости -^ч.
Uc = -q/C
на омическом сопротивлении
dq , Ur----rI=-r-^- = -rq’
на индуктивности , d! . d*q
UL----L dt----L dti = Ltf
на источнике напряжения
[7BX — входная величина системы.
222
Следовательно, искомое уравнение будет иметь второй поря* док:
L<f 4"ГЯ' 4" ~q~ Я = (55)
На рис. VIII-1,6 представлена система, носящая название «гидравлическая емкость». В бак 1 с поперечным сечением S по трубе 2 непрерывно подводится поток (Qn) жидкости, а по трубе 3 он (Qct) непрерывно отводится.
Напор на стоке стабилизирован с помощью переливной тру* бы 4. Регулируемой величиной системы является уровень в баке (выходная координата). В этом случае имеет место зависимость:
dll Qn — Qct
dt ~ S
HO „
Qct = a Vh
где a — коэффициент расхода; a=const и, следовательно, уравнение «гидравлической емкости» выразится дифференциальным уравнением первого порядка:
a z— 1
Л* 4*“у уТ™ у Qn (56>
Уравнение «тепловой емкости» (рис. VIII-l,e) будет иметь следующий вид:
Т'4-ЬТ-ЙТВЯ (57)
где Т — температура жидкости в баке (регулируемая величина);, Гвн— температура жидкости, поступающей в бак.
Объекты с распределенными параметрами обладают бесконечным числом степеней свободы, т. е. для определения состояния такого объекта в каждый момент времени требуется задать бесконечно большое число независимых переменных. Примером такого объекта 'может служить трубчатый теплообменник, где температура непрерывно изменяется по длине трубки или, иначе-говоря, температура жидкости «распределена» по длине теплообменника (если предположить, что стенки трубок прогреваются с одинаковой скоростью во всех точках, а температура нагреваемой жидкости одинакова в любой точке поперечного сечения).
Для примера приводится уравнение теплопередачи от стенки трубы к жидкости в каком-либо рассматриваемом сечении:
дТ\ , дТ-t т. .-о,
dt ° dl —“(‘i— ^i) (58)'
где Т\ и Тг — температуры нагреваемой жидкости и стенки трубы; V — скорость жидкости; I — длина (текущая) трубы теплообменника до рассматриваемого сечения; t — время; k — постоянный коэффициент.
223
Отметим, что получение математической модели объектов с распределенными параметрами представляет определенные трудности и условимся, что в дальнейшем будем рассматривать только объекты с сосредоточенными параметрами.
Таким образом уравнения динамики объектов с сосредоточенными параметрами являются обыкновенными дифференциальными уравнениями [см. уравнения (55) — (57)}, а объектов с распределенными параметрами — уравнениями в- частных производных [см. уравнение (58)].
Между механическими, электрическими, гидравлическими, тепловыми и другими динамическими системами существует глубокая аналогия—во многих случаях они описываются однотипными дифференциальными уравнениями. Сходство уравнений указывает на сходство динамических процессов в объектах и, следовательно, на возможность перенесения результатов, полученных для одних объектов, на объекты другой физической природы. Это обстоятельство лежит в основе современных методов моделирования динамических систем.
СВОЙСТВА ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
При всем разнообразии объектов управления наиболее часто, встречающиеся из них могут быть распределены на сравнительно небольшое число типов, обладающих аналогичными динамическими характеристиками и характеризующихся следующими свойствами: емкостью, способностью к самовыравниванию, запаздыванием процесса.
Ёмкость. Работа любого управляемого объекта связана с притоком, расходом и преобразованием некоторой материальной среды или энергии..
Многие объекты обладают способностью аккумулировать рабочую среду, запасать ее внутри объекта. Такая способность называется аккумулирующей способностью или «мкостью объекта.
Накопление вещества или энергии возможно благодаря тому, что в каждом объекте имеется сопротивление выходу. Например,-если бы не было гидравлического сопротивления сливных Tpvii у объектов, в которых- регулируется уровень (см. рис. VIII-!, ^7 J жидкость не могла бы накапливаться и сосуд не обладал би] емкостью. Если бы тепловой объект — печь, где регулируется температура, не имела тепловой изоляции, то тепловая ем костя не создавалась бы вследствие рассеивания тепла. J
Объекты управления подразделяются на одноемкостные я многоемкостные. Объект управления является одноемкостя ным, если он состоит из одного сопротивления й емкости. Ра<я пространеннымп в промышленности одноемкостными объектам являются аппараты, в которых регулируется уровень жидкости теплообменники смешения с непосредственными контактами те Л 224 £
/Я
лоносителя и нагреваемого (или охлаждаемого) вещества; аппа-раты, в которых регулируется давление газа или пара .при отсутствии значительных гидравлических сопротивлений; участки трубопроводов, на которых регулируется давление или скорость потока и т. п.
Многоемкостными объектами называются такие, кото-рые имеют две (или более) емкости, участвующие в процессе
Рис. VHI-2, Схемы объектов, обладающих емкостью:
а — теплообменник смешения; б — трубчатый теплообменник; а — ректификационная колонна,
управления и разделенные переходными сопротивлениями. Большинство промышленных объектов управления имеет не одну, а несколько емкостей, разделенных сопротивлениями. Многоемкостными объектами являются различные теплообменные аппараты с передачей тепла через стенку, сложные гидравлические системы и т. д.
На рис. VIII-2 приведены примеры объектов, обладающих емкостями.
В теплообменнике смешения (рис. VIII-2, а) температура потока воды QB регулируется изменением подачи водяного пара Qn; это одноемкостный объект. Здесь емкостью является общая теплоемкость жидкости, а сопротивлением — гидравлическое сопротивление трубы на выходе*.
Трубчатый теплообменник (рис. VIII-2, б), где по трубам протекает вода, а в межтрубном пространстве — пар, является двухъемкостным объектом. Этот объект обладает следующими тепловыми емкостями: пар в межтрубном пространстве, жидкость в трубах. Сопротивлением здесь является термическое сопротивление металла трубок и трубчатых решеток.
Многоемкостным объектом является, например, ректификационная колонна (рис. VIII-2, в); число ее емкостей определяется числом тарелок. . .
* Тепловой емкостью кожуха, мешалки, трубок и др. можно пренебречь, так как тепловая емкость металла значительно меньше тепловой емкости пара и жидкости.
15-2208
225
В многоемкостных объектах различают емкости на входе и выходе (или на стороне подачи и потребления). Например, у трубчатого теплообменника емкостью на входе является тепловая емкость пара, находящегося в межтрубном пространстве, а на выходе — тепловая емкость жидкости в трубах.
Мерой емкости объекта служит коэффициент емкости — количество вещества или энергии, которое нужно подвести к объекту, чтобы изменить управляемую величину на единицу:
dt
где С — коэффициент емкости; AQ— разность между притоком; и расходом вещества или энергии; у — управляемый параметр;. t — время.
Коэффициент емкости может быть переменной величиной. Если, например, регулируется уровень жидкости в сосуде переменного сечения (конический, сферический), то коэффициент емкости будет тем больше, чем больше площадь поперечного сечения-сосуда.
Из сказанного следует, что чем больше коэффициент емкости* объекта, тем меньше скорость изменения управляемого параметра при одном и том же изменении количества подаваемого продукта. А это значит, что легче поддаются управлению те объекты,, коэффициент емкости которых больше.
Самовыравнивание. Установившееся (стационарное) состояние объекта, работающего при постоянной нагрузке, может быть-нарушено путем изменения притока или расхода вещества или энергии, т. е. нанесением возмущающих воздействий. При этом-управляемые величины будут увеличиваться или уменьшаться в зависимости от того, что окажется больше: приток или расход.
Способность объекта приходить после возмущения в новое-установившееся состояние без вмешательства управляющего устройства (регулятора) называется самовыравнивани-ем (саморегулированием) объекта. Такие объекты называются объектами с самовыравниванием или статическими.
Самовыравнивание является следствием наличия внутренней отрицательной обратной связи в устойчивом объекте (влияние-управляемой величины на приток и расход вещества или энергии). Чем больше величина самовыравнивания, тем меньше отклоняется управляемый параметр от состояния равновесия, существовавшего до возмущения. Самовыравнивание способствует стабилизации управляемой величины в объекте и таким образом облегчает работу управляющего устройства.
Управляемая величина объекта, не обладающего самовыравниванием, после приложения возмущающего воздействия свободно изменяется, возрастая или уменьшаясь, т. е. управляемый па-
226
раметр никакого обратного воздействия на приток или расход не
оказывает.
Управляемые объекты, не обладающие самовыравниванием, называются нейтральными или астатическими.
При отсутствии возмущающего воздействия нейтральный объект может находиться в состоянии равновесия при любых зна
чениях управляемой величины. При нарушении равновесия процесса скорость изменения управляемой величины пропорциональна величине возмущающего воздействия. Отсутствие само-выравнивания ухудшает возможности управления объектом.
Рассмотрим примеры объектов, не обладающих и обладающих самовыравниванием.
Объектом без самовы-равнивания является резервуар, в который через одну трубу жидкость подается, а
Рис. VIII-3. Схема объекта регулирования без самовыравнивания (а) и его кривая разгона (б):
/ — вентиль; 2 — иасос постоянной производительности.
через другую откачивается; на этой трубе установлен насос постоянной производительности (рис. VIП-З,а).
Если, например, в момент времени to, до которого объект находится в установившемся состоянии (приток Qn был равен стоку Qct}, скачкообразно увеличить приток (резко увеличить открытие вентиля 1), то при постоянном стоке (насос 2 имеет постоянную производительность, не зависящую от уровня Н) уровень в резервуаре начнет возрастать, что в конечном итоге приведет к нарушению работы объекта.
Переходный процесс представлен кривой разгона (рис. VIII-3,6, нижний график); верхний график соответствует ступенчатому, мгновенному, единичному возмущению.
Самовыравнивание может быть как на притоке, так и на стоке управляемого объекта.
Объект с самовыравниванием на стоке схематически изображен на рис. VIII-4, а.
Если скачкообразно увеличить приток жидкости Q„ путем резкого открытия вентиля 1, то уровень в резервуаре начнет ИЛййно возрастать. Одновременно возрастает гидростатическое ДОлгнне н плоскости сливной трубы 2, что ведет к увеличению рМЯОЛй пи стоке QCT. Через некоторый промежуток времени ИОСЛР нлигсгиня возмущения приток вновь станет равным стоку, рост уровня прекратится и объект придет в установившееся со-«ТОИШ1Р (pile. VIII-4, б).
ИД*
227
Объект с самовыравниванием на притоке схематически пока--зан на рис. VII1-5, а.
В резервуар почти до самого дна опущена труба 3; по ней через вентиль 1 поступает жидкость. На стоке установлен насос 2, производительность которого может скачкообразно изменяться за счет ступенчатого изменения числа оборотов асинхронного элект-
Рис. VIII-4. Схема объекта регулирования с самрвыравниваиием иа стоке (а) и его кривая разгона (б):
1 = вентиль; 2 — сливная труба.
ромотора — привода насоса (на схеме не-показан). При резком увеличении производительности насоса расход на линии стока QCt ступенчато возрастает. Это приведет к плавному понижению уровня и одновременно к уменьшению подпора в выходном сечении трубы 3. С уменьшением подпора начнет возрастать приток и через время Л приток и сток уравняются, уровень перестанет изменяться, достиг-
нув нового установившегося значения (рис. VIII-5,6).
Если на линии стока вместо насоса установить вентиль, т. е. расход Q сделать зависимым от уровня Н, то получим объект с
самовыравниванием на притоке и стоке.
Рис. VIII-5. Схема объекта регулирования с самовыравниванием на притоке (а) и его кривая разгона (б):
I — вентиль; 2 — насос; 3 — труба.
Кривая разгона такого объекта показана на рис. VIII-6.
В самом деле, при резком увеличении притока Qn уровень начнет возрастать, что приведет к увеличению гидростатического давления, а значит, и стока QCt- Когда через время h приток станет равен расходу, уровень Н перестанет изменяться.
228
Некоторые объекты обладают идеальным самовыравниванием. Примером такого объекта может служить резервуар с переливной трубой, обеспечивающей постоянный уровень при любых изменениях притока жидкости (рис. VIII-7, а). Кривая разгона такого объекта приведена на рис. VIII-7, б.
Рис. VIII-6. Кривая разгона объекта с самовыравниванием на притоке и стоке.
Рнс. VIII-7. Схема объекта регулирования с идеальным самовыравниванием (а) и его кривая разгона (б).
Самовыравнивание объектов характеризуется коэффициентом (степенью) самовыравнивания, который определяется следующей зависимостью:
. rf(Xn-XCT) rf(AX)
р dy dy
где Xn = Qn/Qmax — относительный приток; Аст = фст/<2п1ах —относительный расход (сток); ДХ = АП—Хет— относительное возмущение.
Характер зависимости управляемой величины от нагрузки объекта с различной степенью самовыравнивания можно проиллюстрировать графически (рис. VIII-8).
Кривая 1 характеризует объект со степенью самовыравнива-ння р = оо; управляемая величина не изменяет своего значения при любых возмущениях. Это объект с идеальным самовыравниванием, он не нуждается в управляющих устройствах.
Кривая 2 является характеристикой объекта с нормальным самовыравниванием (оо>р>0).
Кривая 3 характеризует объект, не обладающий самовырав-ппванием (р=0).
Коэффициент самовыравнивания не является постоянной величиной— он зависит от нагрузки объекта. Максимальной нагрузке соответствует максимальный для данного объекта коэффициент самовыравнивания.
229
В рассмотренных выше управляемых объектах коэффициент самовыравнивания р — величина положительная. Однако «могут встретиться объекты с отрицательным самовыравниванием (неустойчивые объекты), у которых возникшее после возмущения не
равенство притока и расхода не стремится к самовыравниванию,
Рис. VIII-8. Зависимость статических характеристик управляемых объектов от коэффициента самовыравииваиия:
/ — яхеальное самовыравнивание;
2 — нормальное самовыравнивание; а-отсутствие самовыравмнваиня.
паздывание,
а прогрессивно нарастает. Примером такого объекта могут служить аппараты, в которых протекают автокаталитические реакции. Если процессом не управлять, то при положительном автокатализе реакция самоускоряется и бурно нарастает, а при отрицательном — скорость реакции уменьшается вплоть до прекращения реакции.
Запаздывание. До сих пор принималось, что управляемая величина начинает изменяться одновременно с нарушением установившегося состояния объекта. В действительности между моментом нарушения равновесия и началом изменения управляемой величины проходит некоторое время — за
затрудняющее управление процессом; с ним
нельзя
не считаться.
- Запаздывание объясняется наличием сопротивлений и инерционностью системы.
Различают два вида запаздывания: чистое, или транспортное, и переходное, или емкостное.
Чистым запаздыванием называется время т от момента внесения возмущающего воздействия до начала изменения управляемой величины. Это время необходимо для того, чтобы поток вещества или энергии, обладающий скоростью v, прошел расстояние I от места внесения возмущающего воздействия до места, в котором измеряется значение управляемой величины (т=
Чистое запаздывание смещает во времени начало изменения выходной величины после начала изменения входной, при этом величина и форма выходной величины остается такой же как и у входной.
Пример объекта с чистым запаздыванием уже рассматривался выше, когда речь шла о звене чистого запаздывания (см. гл. VII). На рис. VII-18 была представлена схема транспортера и его кривая разгона.
Минимальным чистым запаздыванием обладает объект, работающий при максимальной нагрузке, или объект, через который сигнал распространяется с большой скоростью. Например, изменение давления или скорости потока жидкости, полностью заполняющей гидравлическую систему, распространяется настолько
239
быстро, что чистое запаздывание ничтожно мало (за исключением длинных трубопроводов).
Обычно в управляемых объектах имеется не только чистое, но и переходное (емкостное) запаздывание, которое характерно для многоемкостных объектов. В многоемкостных объектах переходное запаздывание возникает при преодолении
потоком вещества или энергии сопротивлений, разделяющих гидравлические, тепловые и другие емкости объекта.
Например, в двухъемкостном объекте (рис. VIII-9,a) емкости 1 и 2 разделены гидравлическим сопротивлением R. Если приток Qn скачкообразно увеличится в момент времени /0 (рис. VIII-9, б), то скорость изменения уровня жидкости в емкости 2, не обладающей са-мовыравниванием, будет в течение некоторого-времени возрастать от нуля до значения, которому соответствует tg а (рис. Ш-9,в, касательная к сплошной линии).
Пунктиром показана кривая разгона для объекта, не имеющего переходного запаздывания. У объекта, обладающего самовыравниванием и (рис. VIII-9,a), кривая разгона
Рис. VII1-9. Схема объекта с переходным запаздыванием:
а —схема объекта; б — график изменения входной величины; в — кривая разгона объекта без самовыравнивания; г — с самовыравнива-инем; 1. 2 —емкости; R — сопротивление.
переходным запаздыванием
имеет характерную точку переги
ба П. Время переходного запаздывания тп определяется отрезком, отсекаемым на оси абсцисс касательной к кривой разгона, прове-
денной в точке перегиба.
Пунктиром показана кривая разгона для аналогичного объекта, не обладающего запаздыванием.
В процессе эксплуатации объектов величины переходного запаздывания могут значительно возрастать. В теплообменных аппаратах, например, это вызывается главным образом загрязнением поверхностей теплообмена, в гидравлических системах — загрязнением или засорением вентилей и труб, соединяющих аппа-
раты, в насадочных аппаратах колонного типа — загрязнением, завораживанием, частичным разрушением и обвалом насадки и т. д.
Переходное запаздывание определяется числом емкостей и величиной переходных сопротивлений. Поскольку величины переходных сопротивлений в процессе эксплуатации объекта могут изменяться, величины запаздываний могут возрастать.
231
Общее запаздывание то в объекте управления равно сумме чистого т и переходного тп запаздываний
т0 = т + тп
Как чистое, так и переходное запаздывание всегда неблагоприятно сказывается на качестве управления. Поэтому при проектировании и монтаже систем автоматики следует стремиться к возможному уменьшению запаздываний. Достигнуть этого можно выбором рациональных конструктивных решений объектов управления, размещением измерительных элементов и регулирующих органов управляющих устройств как можно ближе к управляемым объектам, применением малоинерционных чувствительных элементов и т. д.
ВОЗМУЩАЮЩИЕ воздействия
Как уже отмечалось, при нарушении материального или энергетического баланса в результате любого возмущающего воздействия равновесие в объекте нарушается и действительное значение управляемой величины отклоняется от заданного. Чем больше амплитуда и скорость возмущающего воздействия, тем труднее управляющему устройству восстановить равновесие в объекте при небольших и непродолжительных колебаниях управляемой величины.
Основным источником возмущений является изменение нагрузки управляемого объекта. Расход сырья и энергии можно авто-
Рис. VIII-10. Схема объекта (а) и графики переходных процессов (б) в зависимости от места ввода возмущающих воздействий:
7—< « емкости; 6 — измерительное устройство; 7 — блок регулятора; 8 — регулирующий орган; 9—11 — возмущающие воздействия; 12—14 — кривые разгона.
матически стабилизировать до поступления в объект. Состав же сырья на входе в объект обычно трудно стабилизировать и его изменения являются источником возмущающих воздействий.
Изменение нагрузки объекта (в случае необходимости) следует проводить достаточно медленно, чтобы система авторегулирования плавно, без больших и продолжительных колебаний пе
232
решла на новый режим работы. Кроме того, при больших изме* нениях нагрузки может потребоваться изменение настроек управляющих устройств, так как изменение нагрузки влияет на дина* мические и статические характеристики управляемых объектов. Например, при уменьшении нагрузки увеличивается чистое за* паздывание, уменьшаются коэффициент самовыравнивания, коэф* фициент емкости и постоянная времени объекта.
В многоемкостных управляемых объектах форма переходного процесса зависит не только от вида возмущающего воздействия, но и от места его приложения.
Представленный на рис. VIII-10, а объект состоит из емкостей 1—5. Выходная величина объекта (у) измеряется с помощью измерительного устройства 6, передающего сигнал на воспринимающий блок регулятора 7; последний воздействует на регулиру* ющий орган 8, установленный на входе в объект.
При изменении нагрузки объекта х (входная величина) на величину Ах форма кривой разгона зависит от места приложения возмущающего воздействия. Если возмущающее воздействие 11 приложено к выходной емкости 5, то соответствующая кривая разгона 12 имеет форму экспоненты—как у одноемкостного объ-екта. При приложении возмущающего воздействия 10 перед емкостью 3 кривая разгона 13 имеет форму, соответствующую переходному процессу в трехъемкостном объекте. Если возмущающее воздействие 9 введено перед емкостью 1, кривая 14 соответствует пятиемкостному управляемому объекту. Из графика, приведенного на рис. VIII-10, б, видно, что чем ближе место возмущающего воздействия к измерительному устройству, тем больше свободное начальное отклонение управляемой величины у от заданного значения: отклонение Аг/i соответствует возмущающему воздействию 11; \у2 — возмущающему воздействию 10; Дг/3 —возмущающему воздействию 9.
Следовательно, возмущающие воздействия на входе управляемого объекта приводят к меньшим отклонениям управляемой величины от заданного значения, чем равные им по величине возмущающие воздействия, приложенные на выходе.
Если возмущающие воздействия устранить нельзя, а запаздывания в объекте велики, следует применять управляющее устройство с вспомогательными измерительными элементами, выдающими сигналы, опережающие воздействия. Это приведет к тому, что управляющее устройство начнет воздействовать на регулирующий орган раньше, чем начнет изменяться выходная величина; в результате повысится качество управления.
ГЛАВА IX
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ, ИХ КЛАССИФИКАЦИЯ И ХАРАКТЕРИСТИКИ
Всякая автоматическая система регулирования состоит из двух взаимодействующих между собой частей: объекта регулирования и регулятора (см. структурную схему на рис. 2-1,6). При этом качество переходного процесса и устойчивость регулирования зависят не только от статических и динамических свойств объекта, но от свойств регулятора. '
Автоматические регуляторы представляют собой большую группу автоматических управляющих устройств, которые вырабатывают регулирующее воздействие в АСР, если регулируемая величина отклонится от заданного значения.
Существует большое число разнообразных типов регуляторов, однако все они представляют собой совокупность некоторых специфических элементов, выполняющих определенные функции (рис. IX-1): датчика 1, устройства сравнения 2, задающего устройства 3, управляющего устройства 4, исполнительного механизма 5 и регулирующего органа 6.
Датчик производит непрерывное измерение текущего значения регулируемой величины у в объекте управления 1, который испы-
тывает возмущающие воздействия X, и преобразует эту величину в сигнал У1 (например, электрический или пневматический).
Задающее устройство выдает сигнал у0, соответствующий заданному значению регулируемой величины. Устройство 2 сравнивает сигналы от датчика и задатчика и в случае их различия (если заданное значение регулируемой величины в данный момент не равно текущему)
Рис. IX-1. Структурная схема регулятора:
/ — объект регулирования: II — регулятор; 1 — датчик; 2 — устройство сравнения; 3 — задатчик; 4 — управляющее устройство; 5 — исполнительный механизм; « — регулирующий орган.
выдает сигнал рассогласования (разбаланс) Аг/ на управляющее устройство.
Управляющее устройство преобразует, а в случае необходимости усиливает этот сигнал, и с помощью
исполнительного механизма и регулирующего органа осуществляет управляющее воздействие ц на объект управления I, изменяя входную величину (х) так, чтобы выходная величина у приняла первоначальное значение.
В конкретных случаях отдельные элементы регулятора могут быть объединены в одном блоке или вовсе отсутствовать.
234
Все элементы регулятора (кроме задающего устройства) об-разуют замкнутую цепь воздействий, в которой соблюдается принцип детектирования (сигнал от выхода к входу проходит в одном направлении).
КЛАССИФИКАЦИЯ РЕГУЛЯТОРОВ
Автоматические регуляторы классифицируются по разным признакам: например, по виду регулируемого параметра, по роду и способу действия, по характеристике действия и т. д.
В зависимости от вида регулируемой величины различают регуляторы: давления, расхода, уровня, температуры и др. Конструкция этих регуляторов может быть самой разнообразной, однако часто одна и та же конструкция применяется для регулирования различных параметров.
По роду действия автоматические регуляторы подразделяются на регуляторы прерывистого и непрерывного действия. Регуляторами прерывистого действия называют такие, у которых регулирующий орган перемещается только при достижении непрерывно изменяющейся регулируемой величины определенных заданных значений.
Регуляторами непрерывного действия называются такие, регулирующий орган которых при непрерывном изменении регулируемой величины перемещается непрерывно.
По способу действия различают регуляторы косвенного и прямого действия. Регуляторами косвенного (непрямого) действия называются такие, у которых для перемещения регулирующего органа используется энергия, подводимая извне. По виду подводимой энергии регуляторы косвенного действия подразделяются на пневматические, электрические и гидравлические. Регуляторами прямого действия называются
такие, в которых для перемещения регулирующего органа используется энергия, взятая у самого регулируемого объекта. Регуляторы прямого действия отличаются простотой конструкции, они дешевы и несложны в обслуживании, надежны в работе. Однако понижен-
Ду
Регулятор
ная чувствительность и невысокая точность ограничивают область их'Применения.
Рассмотренные выше виды классификации регуляторов не являются определяющими, так как не характеризуют их свойства. Основной
Рис. IX-2. Обозначения входной и выход-
ной величин регулятора:
Ду —разбаланс; перемещение регулирующего органа.
признак, по которому классифицируются регуляторы независимо от принадлежности к одной из перечисленных выше групп, является характеристика действия, т. е. зависимость между изменением
регулируемой величины и перемещением регулирующего органа. 11о характеристике действия регуляторы подразделяются на сле-
дующие:
235
Обозначение
Позиционные .... Пз-регуляторы Интегральные .... И-регуляторы Пропорциональные . . , П-регуляторы Пропорционально-интегральные ..... ПИ-регуляторы Пропорционально-дифференциальные .... ПД-регуляторы Пропорционально-интегрально-дифференциальные ПИД-регуляторы
Входной величиной регулятора является сигнал, пропорциональный разности между заданным и текущим значениями управляемой (регулируемой) величины; выходной — положение регулирующего органа (рис. IX-2).
ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ
Автоматические регуляторы, у которых регулирующий орган может занимать ограниченное число определенных положений, называются позиционными. Они относятся к группе регу--ляторов прерывистого действия. Чаще всего применяется двух- и трехпозиционные регуляторы. У двухпозиционных регуляторов, в зависимости от знака отклонения управляемой величины, регулирующий орган либо полностью открыт (приток вещества или энергии максимальный), либо полностью закрыт (приток равен нулю). У трехпозиционных регуляторов, кроме двух крайних, регулирующий орган имеет еще одно (среднее) положение, что способствует более 'плавному изменению управляемой величины и сокращению числа срабатываний- регулирующего органа в единицу времени.
Принцип действия позиционного регулятора рассмотрим на примере регулирования уровня (рис. IX-3).
В объекте управления — бак 1 по трубе 2 подается жидкость;
. по трубе 10 она расходуется потребителем.
Чувствительный элемент регулятора — поплавок 6 измеряет ‘ уровень в баке; текущее значение уровня определяется положением штока 5 и жестко с ним соединенного рычага-контакта 7, ко-. торый через пружину 11 соединен с источником питания током U. Заданные значения верхнего и нижнего уровней определяются положением передвижных упоров-контактов 8 и 9, устанавливае- • мых вручную.
При подъеме уровня выше заданного контакт 7 замкнется cJ контактом 8 и под напряжением окажется обмотка Б тягового электромагнита, благодаря чему сердечник 4 мгновенно переме-1 стится вверх, что приведет к закрытию регулирующего органа! (клапана) 3. При понижении уровня ниже заданного контакт 7] замкнется с контактом 9, под напряжением окажется обмотка А1 тягового электромагнита, якорь 4 переместится вниз, что приве-1 дет к открытию регулирующего органа. 1
2зе J
Приведенная схема является примером двухпозиционного ре- , гулирования.
Уравнения регулятора:
ц = 0приДу>0 и ц= 1 при Ду<0 (59)
На рис. IX-4 показана статическая характеристика двухпозиционного регулятора. Из графика видно, что повышение уровня
Рис. IX-3. Принципиальная схема Пз-регулятора:
/ — объект; 2, /0 —трубы; 3 — регулирующий клапан; 4 — сердечник; 5 — шток; б — поплавок; 7 — рычаг-контакт; 8, 9 — передвижные упоры-контакты; // — пружина.
Рис. IX-4. Статическая характеристика Пз-регулятора:
7 —заданное значение; // — нейтральная зона; 1—6 — точки характеристики.
в баке соответствует перемещению по точкам 1, 2, 3, 4 статической характеристики; точки 2 и 3 соответствуют мгновенному перемещению регулирующего органа из положения «открыто» в положение «закрыто», когда замкнутся контакты 7 и 8 (см. рис. IX-3). Понижение уровня соответствует перемещению по точкам 4, 5, 6, 1 статической характеристики.
ИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ
Автоматические регуляторы, у которых одному и тому же значению регулируемой величины могут соответствовать различные положения регулирующего органа, называются интегральными, или астатическими (от греческого astatos — неустойчивый, беспокойный). Скорость перемещения регулирующего • •ргана этих регуляторов тем больше, чем больше отклонение регулируемой величины от заданного значения.
На рис. IX-5 показана принципиальная схема гидравлического 11-регулятора косвенного действия.
При изменении давления р в трубопроводе изменяется давлено на сильфон 1, дно которого перемещается, что ведет к пово-;"iv рычага АВС относительно точки А и перемещению поршней • к п ипка 2 вверх или вниз.
237
Предположим, что давление в трубопроводе стало выше заданного. Тогда дно сильфона переместится вниз, рычаг АВС повернется по часовой стрелке, поршни золотника опустятся также вниз и масло под давлением начнет поступать из камеры е цилиндра золотникового устройства в полость т цилиндра исполнительного механизма 7. Поршень исполнительного механизма,
Рис. IX-5. Принципиальная схема И-регулятора косвенного действия:
/ — сильфон; 2—золотник; 3 —подача масла под давлением; 4, 9 — вентили; 5 — слив масла; 6 — регулирующий орган; 7 — исполнительный механизм; 8 —задатчик.
связанный штоком с регулирующим органом (шибер) 6, начнет перемещаться вверх, увеличивая степень открытия шибера; это поведет к снижению давления р. В результате снижения давления сильфон 1 разжимается, возвращая рычаг АВС в исходное положение, поршни золотника перекрывают доступ масла в цилиндр исполнительного механизма, регулирующее действие прекращается.
Во время перемещения поршня исполнительного механизма вверх масло из полости п цилиндра вытесняется по трубке через камеру // цилиндра золотникового устройства и сбрасывается на слив 5. Слившееся масло очищается и вновь подается в камеру е специальной насосной установкой (на схеме не показана).
Если предположить, что давление р стало ниже заданного, то дно сильфона 1 переместится вверх, рычаг АВС повернется против часовой стрелки, переместив поршни золотника вверх, и масло через полость е начнет поступать в полость п цилиндра исполнительного механизма. Это поведет к закрытию шибера и увеличению давления р. При этом масло из полости цилиндра исполнительного механизма через полость f цилиндра золотникового» устройства поступает на слив.
Заданное значение регулируемой величины устанавливается с помощью задатчика 8. Когда усилия, развиваемые сильфоном и
238
пружиной задатчика, равны, рычаг АВС находится в нейтральном положении и масло из камеры е не поступает в цилиндр исполнительного механизма.
Для изменения быстродействия регулятора служит вентиль с ручным управлением 4.
В И-регуляторах отсутствует обратная связь, они просты по устройству. Важнейшей их особенностью является то, что независимо от величины нагрузки регулируемого объекта они приводят регулируемую величину к заданному значению. Однако они обладают и некоторыми недостатками, обусловленными их динамическими свойстрами. Как бы ни было мало отклонение регулируемой величины от заданного значения, И-регулятор будет (хотя и медленно) продолжать перемещать регулирующий орган вплоть до положения полного открытия или закрытия. Перемена направления движения регулирующего органа наступает лишь тогда, когда регулируемая величина проходит заданное значение.
Закон регулирования предусматривает воздействие регулятора' со скоростью, пропорциональной отклонению регулируемой величины, и описывается уравнением
du
-^- = -$0Ду (60)
Здесь So — специально рассчитываемый настроечный параметр регулятора. Обычно при расчетах пользуются обратной величиной, временем исполнительного механизма Тим — отрезком времени, в течение которого регулирующий орган переместится из одного крайнего положения в другое при максимальной входной величине. Знак минус в правой части уравнения означает, что при положительном отклонении регулируемой величины регулирующий орган перемещается в сторону закрытия, а при отрицательном отклонении (уменьшении против заданного значения) — в сторону открытия.
Если уравнение (60) проинтегрировать, получим уравнение регулятора в интегральной форме:
t
(i=-S0Ja^ (61)
о
откуда и происходит название регулятора — интегральный. Передаточная функция регулятора имеет вид
Н(р) So = - р
На рис. IX-6, а показана статическая характеристика И-регу-лятора. Предположим, что заданное значение регулируемой величины у составляет 50% шкалы регулятора (например, регулятор рассчитан на давление до 2Л06 Н/м2, а заданное значение составляет 1 • 106 Н/м2). Когда регулируемая величина ниже заданного
239
значения, регулирующий орган находится в крайнем нижнем положении.
Как только регулируемая величина достигнет заданного значения, регулирующий орган начнет перемещаться в сторону открытия и может остановиться в любой точке вертикального отрезка характеристик.
Рис. IX-6. Характеристики И-регулятора:
в — статическая; б —кривая разгона; в —переходный процесс.
Кривая разгона И-регулятора приведена на рис. IX-6, б. Начиная с момента t0, когда регулируемая величина у скачкообразно изменилась, регулирующий орган перемещается с постоянной скоростью, изменяя приток.
В результате действия регулятора регулируемая величина у • приходит к заданному значению через некоторое время tv, называемое временем регулирования (рис. IX-6, в); причем переходный процесс является колебательным, затухающим.
Увеличивая или уменьшая степень открытия вентиля 9 (см. рис. IX-5), можно изменять время регулирования в определенных пределах.
И-регуляторы можно применять лишь на объектах, обладающих самовыравниванием; в противном случае система будет неустойчивой. Поскольку быстродействие регулятора невелико, са-мовыравнивание объекта должно быть значительным, постоянная времени — малой, запаздывание небольшим, а изменения нагрузок— плавными и редкими.
Если управляемый объект часто подвергается воздействию возмущений, качество регулирования будет невысоким; иногда это может привести к «раскачке» — явлению, заключающемуся в ухудшении процесса вместо успокоения и стабилизации.
На рис. IX-7, а, показана схема И-регулятора прямого действия, а на рис. IX-7, б — его динамическая характеристика.
На трубопроводе 1 (регулируемый объект) с помощью фланцевых и болтовых соединений укреплен корпус регулятора 7. Если регулируемая величина — давление р после регулятора — будет изменяться, изменение давления через импульсную линию 8 и веи-,240
тиль 9 будет передаваться на мембрану 4 исполнительного механизма, связанную с регулирующим органом 6 с помощью штока 5. В точке т имеется шарнир, соединяющий шток с рычагом 3, на котором укреплен груз 2, являющийся задающим устройством. Рычаг может поворачиваться относительно точки 0.
Рис. IX-7. Принципиальная схема (а) и динамическая характеристика (б) И-регулятора прямого действия:
1 — трубоиропд; 2 — груз: 3 — рычаг; 4—мембрана; 5 —шток; 6 — регулирующий орган;
7 — корпус; 8 — импульсная линия; 9 — вентиль.
Регулируемое давление р зависит от притока среды, т. е. от степени открытия регулирующего органа 6. Когда р равно заданному значению, усилия, развиваемые мембраной 4 и грузом 2, равны, и шток 5 неподвижен. При увеличении или уменьшении давления по сравнению с заданным шток и регулирующий орган 6 будут перемещаться соответственно вниз или вверх, причем скорость перемещения будет пропорциональна отклонению фактической величины регулируемого давления от заданной. С помощью вентиля 9 можно влиять на скорость перемещения регулирующего органа, т. е. изменять время регулирования.
Как видно из графика (рис. IX-7, б) при изменении нагрузки х объекта в момент to начинает изменяться регулируемая величина у и перемещаться регулирующий орган. Изменение перемещения регулирующего органа происходит в момент перемены знака регулируемой величины (точки t\, tz).
ПРОПОРЦИОНАЛЬНЫЕ РЕГУЛЯТОРЫ
Автоматические регуляторы, у которых отклонение регулируемой величины от заданного значения вызывает перемещение регулирующего органа на величину, пропорциональную величине этого отклонения, называются пропорциональными, или статическими (от греческого statos — стоящий). Каждому значению регулируемого параметра соответствует одно опреде
16- 2208
241
ленное положение регулирующего органа. Эта пропорциональная зависимость достигается за счет действия жесткой обратной связи, поэтому П-регуляторы называются также регуляторами с жесткой обратной связью. Скорость перемещения регулирующего органа таких регуляторов пропорциональна скорости изменения
Рис. IX-8. Принципиальная схема П-регулятора косвенного действия:
/ — сильфон; 2 —золотник; 3—вход масла под давлением; 1— вентиль; 5— слив масла; € — регулирующий орган; 7 — исполнительный механизм; 8 — шток; 9 — задатчик.
регулируемой величины. Так же как и интегральные, П-регуляторы могут быть косвенного и прямого действия.
Эта схема (рис. IX-8) отличается от схемы И-регулятора (см. рис. IX-5) тем, что рычаг АВС не имеет шарнира в точке А, а с помощью штока 8 соединен с поршнем исполнительного механизма 7; это соединение и образует жесткую обратную связь. Предположим, что положение рычага АВС соответствует установившемуся режиму. В результате возмущающего воздействия, которое приводит к возрастанию давления р в трубопроводе, точка С переместится в положение С', а точка В — в положение В' и рычаг займет положение АВ'С'.
При этом поршни золотника 2 сместятся вниз и масло начнет поступать в полость т цилиндра исполнительного механизма, перемещая поршень исполнительного механизма, а вместе с ним и регулирующий орган 6 вверх. Вместе с поршнем из положения А в положение А' (вверх) переместится левый конец рычага АВС (повернется относительно точки С'), точка В' возвратится в положение В, а поршни золотника 2 возвратятся в исходное положение, перекрыв доступ масла в исполнительный механизм. На этом процесс регулирования закончится.
Измерительный узел (сильфон 1) и механизм обратной связи воздействуют на регулирующий орган практически одновременно. Поэтому перемещение регулирующего органа надо рассматривать
242
как результат действия измерительной системы, уменьшенный на какую-то величину обратной связью. Не следует полагать, что термин «жесткая обратная связь» связан с обязательным использованием рычага. Обычно исполнительный механизм регулирующего органа находится на значительном расстоянии (десятки, а то и сотни метров) от собственно регулятора, который монтирует-
Рис. IX-9. Характеристики П-регулятора:
а — статические; б — кривая разгона; в — переходные процессы; 1 — статическая ошибка невелика; 2 — то же, несколько больше; 3 — то же, большая.
ся на щите в специальном помещении, а обратная связь осуществляется с помощью специальных устройств.
Быстродействие пропорционального регулятора выше, чем И-регулятора; он сравнительно быстро стабилизирует процесс и приводит систему в равновесное состояние. Однако при работе такого регулятора возникает так называемая статическая ошибка, или остаточное отклонение, заключающееся в том, что, стабилизируя процесс, регулятор не приводит регулируемую величину к заданному значению.
Простейший статический, регулятор представляет собой усилительное звено и описывается уравнением
р, = —St&y (62)
Здесь S] — настроечный параметр (коэффициент усиления) пропорционального регулятора.
Параметр S] часто заменяют выражением Si = l/6, где б — предел пропорциональности или степень неравномерности регулятора, характеризующая отношение изменения регулируемой величины к перемещению регулирующего органа. Пределом пропорциональности называется интервал шкалы регулятора, пыраженный в процентах от ее длины, в диапазоне которого регулирующий орган перемещается из одного крайнего положения и другое.
На рис. IX-9, а изображено семейство статических характеристик П-регулятора при различных значениях предела пропорциональности.
16* 243
Из графика видно, что регулирующий орган начинает переме-«даться только при достижении регулируемой величиной нижнего предела пропорциональности. Предположим, что регулируемая величина соответствует 50% шкалы регулятора, а предел пропорциональности настроен на 40% (6=40%). Регулирующий орган занимает среднее положение (ц = 50% хода). Этому положению •соответствует точка А на характеристике. Если теперь регулируемая величина начнет возрастать, то регулирующий орган станет перемещаться в сторону закрытия. Передаточная функция П-регу-.лятора W(p) = —Si.
Кривая разгона П-регулятора (рис. IX-9, б) аналогична усилительному звену. Если в момент времени t0 регулируемая величина у скачкообразно изменится (например, возрастет), регулирующий орган также скачкообразно переместится (р.) в сторону закрытия.
На характер переходных процессов в автоматической системе с П-регулятором в сильной степени влияют установленные пределы пропорциональности. Это наглядно иллюстрируют графики переходных процессов, представленные на рис. IX-9, в. С увеличением коэффициента усиления Зь или, что то же, с уменьшением предела пропорциональности б, переходный процесс протекает в виде медленно затухающих колебаний, а статическая ошибка z/ст невелика (кривая 1). При оптимальном для данного объекта коэффициенте усиления Зь а значит, и пределе пропорциональности, переходный процесс быстро затухает, однако статическая ошибка уст несколько возрастает (кривая 2). Если коэффициент усиления S] слишком мал (6 — велик), то переходный процесс может стать апериодическим с большой статической ошибкой (кривая 3).
Величина статической ошибки зависит как от настройки регулятора, так и от характеристики и режима работы объекта.
Настройка регулятора на необходимую величину б (применительно к схеме, изображенной на рис. IX-8) производится путем изменения соотношения плеч ВС и АВ рычага АВС. Чем меньше АВ, тем больше б.
Пропорциональные регуляторы могут применяться для управления процессами, протекающими в объектах, как обладающих, так и не обладающих самовыравниванием. При этом нужно иметь в виду, что изменения нагрузки должны быть невелики, чтобы статическая ошибка оставалась в допустимых пределах.
Принципиальная схема П-регулятора прямого действия и его динамическая характеристика изображены на рис. IX-10.
В отличие от И-регулятора, изображенного на рис. IX-7, у П-регулятора прямого действия усилие, развиваемое мембраной, уравновешивается не грузом, а пружиной 4; чем больше отклонение давления р от заданного значения, тем сильнее прогибается мембрана, но тем плотнее сжимается пружина, противодействуя прогибу; этим и достигается пропорциональность между регули
244
руемой величиной и перемещением регулирующего органа. Настройка регулятора осуществляется регулировочным винтом 3, изменяющим натяжение пружины.
График динамической характеристики П-регулятора прямого действия (рис. IX-10, б), показывает, что при увеличении нагрузки Q объекта в момент времени to регулируемая величина у воз-
Рис. IX-10. Принципиальная схема (а) и динамическая характеристика (6} П-регулятора прямого действия:
1 п трубопровод; 2 — мембраяа; 3 — винт; 4 — пружина; 5 — шток; 6 — регулирующий оргаж;
7 — импульсная линия; 8 — корпус.
растает, но, благодаря перемещению регулирующего органа в сторону закрытия, через некоторое время tp она стабилизируется. Однако в силу статической ошибки ее величина будет отличаться от заданного значения на г/ст.
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ
Сравнение П-регуляторов и И-регуляторов показывает, что первые обладают преимуществом по динамическим свойствам и обеспечивают лучший переходный процесс регулирования; преимущество вторых — отсутствие статической ошибки, т. е. лучшие статические свойства.
Пропорционально-интегральный (ПИ) регулятор совмещает оба эти (регулятора. Однако, во избежание ухудшения его статических свойств, обратная связь осуществляется не по положению регулирующего органа, как у П-регулятора (жесткая отрицательная обратная связь), а по скорости его перемещения, т. е. используется гибкая, или упругая, обратная связь. В этом случае действие обратной связи полностью проявляется в переходном процессе регулирования и затем в установившемся режиме исчезает (снимается), вследствие чего автоматический регулятор с гибкой обратной связью не имеет статической ошибки.
Упругая обратная связь, используемая в ПИ-регуляторах, называется изодромной, а сами регуляторы — изодромными (от греческого isos — равный, подобный; dromos — бегущий! на-
245
- звание это не отвечает 'принципу действия современного ПИ-регу-лятора, оно сохранилось со времени его разработки и применения в энергетике).
Таким образом, аналогично И-регулятору изодромный регулятор поддерживает постоянное значение регулируемой величины вне зависимости от нагрузки объекта, а при отклонении ее от за-
Рис. IX-11. Принципиальная схема ПИ-регулятора:
/ — сильфон; 2 — золотник; 3 —масло под давлением; 4 — вентиль; 5 — слив масла; 6 —регулирующий орган; 7 — исполнительный механизм; 3 —поршень; 9 — цилиндр; 10 — жружв-на; И — задатчик; 12 — игольчатый вентиль.
данного значения в начальный момент времени переместит регулирующий орган на величину^ пропорциональную величине отклонения (как П-регулятор), затем (за счет гибкой обратной связи) продолжит перемещение регулирующего органа до исчезновения статической ошибки, т. е. приведет регулируемую величину к заданному значению.
Обычно ПИ-регуляторы являются регуляторами косвенного действия. Принципиальная схема такого регулятора гидравлического типа приведена на рис. IX-11.
В первоначальный период регулятор работает как пропорциональный. С увеличением регулируемой величины (давление р) поршень исполнительного механизма 7 и регулирующий орган 6 начнут перемещаться вверх. Поршень исполнительного механизма 7 соединен с точкой А рычага АВС не жестко (как у П-регуля-тора), а через устройство изодрома. Последнее состоит из цилиндра 9, заполненного маслом, поршня 8, жестко соединенного штоком с поршнем 7, игольчатого вентиля 12, установленного на линии перелива масла из полостей g и h и пружины 10, противодействующей перемещению точки А.
При сравнительно быстром перемещении поршня исполнительного механизма 7 цилиндр 9 и поршень 8 также перемещаются 246
вверх, как одно целое, так как проходное сечение дросселя 12 невелико и масло не успевает перетечь из полости g в полость h. Точка А рычага АВС перемещается вверх, пружина 10 сжимается, а поршни золотникового устройства возвращаются в исходное положение, прекращая подачу масла в цилиндр исполнительного механизма. Регулятор сработал как пропорциональный (имеется статическая ошибка), но его действие на этом не закончи- / лось. Сила пружины 10, приложенная к цилиндру 9 в точке А, / заставит последний перемещаться вниз относительно неподвижного поршня S; при этом масло из полости g начнет перетекать через вентиль 12 в полость h. Точка А начнет опускаться вниз (рычаг АВС поворачивается относительно точки С), точка В также опустится вниз и это приведет к дополнительному срабатыванию исполнительного механизма, т. е. к дополнительному перемещению регулирующего органа вверх.
Действие регулятора прекратится, когда пружина 10 израсходует всю свою энергию, т. е. при достижении регулируемой величиной заданного значения (в этом случае точка А и поршни золотника 2 займут исходное положение). Естественно, что быстродействие изодромной составляющей регулятора будет зависеть от степени открытия вентиля 12.
ПИ-регуляторы могут применяться в тех случаях, когда необходима высокая точность регулирования, для объектов любой емкости как при наличии, так и при отсутствии самовыравнивания, при больших, но плавных изменениях нагрузки.
При резких и частых изменениях нагрузки замедленное действие И-составляющей привело бы к большим динамическим ошибкам.
ПИ-регулятор действует быстрее, чем И-регуляторы, но медленнее, чем П-регуляторы.
Уравнение изодромного регулятора имеет вид: t
ц = — Ар + So J Aprff) (63)
о
Это уравнение обычно записывается в такой форме: t
|Л = — -у ( Ар + -jr- J bydt j (64)
о
где -у- = а Т£ =
Здесь Ti — время изодрома или время удвоения, т. е. период, в течение которого регулирующий орган под действием изодромной составляющей удвоит предварительное перемещение, полученное за счет пропорциональной составляющей. В современных регуляторах это время настраивается в пределах от 3 с до 1000 мин.
247
ПИ-регулятор имеет два параметра настройки: предел пропори ционально'сти б и время изодрома Т{.
Статическая характеристика ПИ-регулятора показана на* рис. IX-12, а. Пусть регулятор настроен так, что при изменении: регулируемой величины у, составляющем от 20 до 80% шкалы, регулирующий орган перемещается из одного крайнего положения:
Рис. IX-12. Характеристики ПИ-регулятора:
а — статическая; б — кривая разгона; в — кривые переходных процессов; г — кривые вынуж—. денных переходных процессов для ПИ- и И-регуляторов: 1—5 — точки, характеризующие положение регулирующего органа; 6—10 — кривые переходных процессов,
в другое (6 = 60%), и пусть система находится вначале в равновесном состоянии при у =50 % и ц = 50% (точки 1 и 2). Предположим, что регулируемая величина скачкообразно возросла до 60% шкалы (точка 3). Тогда вследствие воздействия пропорциональной составляющей регулятора положение регулирующего органа быстро изменится и достигнет примерно 68% своего хода (точка 4). Затем начнет медленно действовать узел изодрома, который возвратит регулируемую величину к заданному значению (точка 5); действие регулятора прекратится при новом положении регулирующего органа (точка 5'), соответствующего примерно 73% хода.
Поскольку в процессе работы регулятора предел пропорциональности не меняется, можно сделать вывод, что изодром как бы перемещает статическую характеристику параллельно самой себе (пунктирная линия).
Как видно из кривой разгона ПИ-регулятора (рис. IX-12, б), при скачкообразном возмущающем воздействии (резкое уменьшение регулируемой величины) в момент to регулирующий орган быстро перемещается на величину Дц под действием пропорциональной составляющей. Затем он будет продолжать перемещаться в том же направлении с постоянной скоростью (линии АВ) под действием изодромной составляющей. Если в схеме регулятора (см. рис. IX-11) дроссель изодрома 12 закрыт (Т{ = оо), то регу»
248
лятор работает как пропорциональный и его характеристикой является пунктирная линия АС на рис. IX-12, б. Чем больше открыт дроссель изодрома, т. е. чем меньше время изодрома Tit тем больше скорость перемещения регулирующего органа, т. е. тем круче линия АВ.
Передаточная функция ПИ-регулятора имеет вид:
П7(р)= -(v" + si)
На рис. IX-12, в изображены кривые вынужденных переходных процессов при различной настройке коэффициента усиления и времени 7\ регулятора. Кривая 6 соответствует переходному процессу при слишком большом Si или при слишком малом 7\. Время переходного процесса велико, колебания затухают медленно. Кривая 7 представляет оптимальный переходный процесс. Кривая 8 соответствует процессу при слишком малом коэффициенте усиления или слишком большом времени изодрома. Процесс апериодический, протекает медленно, регулируемая величина медленно возвращается к заданному значению.
Для сравнения качества регулирования одного и того же объекта с помощью И--и 'ПИ-регуляторов при одинаковых условиях на рис. IX-12, г приведены соответствующие кривые вынужденных переходных процессов. Из сравнения кривых видно, что при ПИ-регуляторе (кривая 10) время и колебательность процесса меньше, чем при И-регуляторе (кривая 9).
ДИФФЕРЕНЦИАЛЬНЫЕ РЕГУЛЯТОРЫ
Как отмечалось выше, дифференциальные регуляторы бывают двух видов: ПД-пропорционально-дифференциальные и ПИД — пропорционально-интегрально-дифференциальные. И те и другие называются регуляторами с предварением.
К регуляторам с предварением относятся такие, у которых перемещение регулирующего органа включает составляющую, пропорциональную производной отклонения регулируемой величины от заданного значения, т. е. скорости изменения регулируемой величины.
Такие регуляторы целесообразно применять в тех случаях, когда нагрузка объектов регулирования изменяется часто и быстро, а запаздывания велики.
Ниже приводится уравнение изодромного регулятора с предварением (ПИД-регулятор)
t
VL^-ls^y + S^^ydt + S,-^-^ (65)
о
Здесь S2 — параметр настройки регулятора, учитывающий скорость изменения регулируемой величины по времени.
249
Сущность предварения (без учета запаздывания) заключается в следующем.
Пусть регулируемый параметр у изменяется по экспоненте 1 (рис. IX-13, а). Первая производная от параметра (кривая 2) представляет собой тангенс угла наклона касательной к соответ* ствующей точке экспоненты 1 и имеет максимальное значение в
Рис. IX-13. Характеристики регулятора с предварением:
а —переходный процесс (/) и его производная (2); б, в — варианты перемещения регулирующего органа: I— для П-регулятора; /2 —для Д-регулятора«
начальный момент, когда параметр только начинает изменяться, а в момент t\, когда изменение прекращается, равно нулю.
Эффект предварения можно представить так. Если регулируемая величина у (рис. IX-13, б) изменит свое значение на величину А, то выходной сигнал регулятора ц, подаваемый на регулирующий орган, будет иметь характер, соответствующий сплошной кривой. Для сравнения пунктиром показано действие П-регулятора. В процессе регулирования в регуляторах с предварением происходит как бы изменение пределов пропорциональности. Причем вначале это отклонение резкое, а затем оно приходит к настроечному значению.
При непрерывном изменении регулируемой величины у, начиная с момента времени t0 (рис. IX-13, в), регулирующий орган П-регулятора будет перемещаться согласно пунктирной прямой I, а у Д-регулятора — согласно сплошной линии II. Регулятор как бы предваряет ожидаемое отклонение параметра. Время предварения tn определяет относительную величину дополнительного сигнала по производной (оно связано с настроечным параметром) и настраивается обычно .в пределах от 0,1 до 10 мин.
Действие регулятора с предварением рассматривается на примере регулирования температуры в объекте управления ОУ, где в качестве теплоносителя используется горячий газ (рис. IX-14).
Устройство, осуществляющее действие с предварением, состоит из трех термопар 1, 2, 3, которые являются чувствительным
250
элементом регулятора. Термопары 1 и 2 включены последовательно (их т.э.д.с. складываются), а термопара 3 включена встречно (ее т.э.д.с. вычитается из суммы двух первых). Масса горячего спая термопары 3 значительно больше массы спаев каждой из первых двух. В состоянии теплового равновесия все три спая имеют одинаковую температуру и развивают равную т. э. д. с. Общая
Рис. IX-14. Принципиальная схема регулятора с предварением:
ОР — объект регулирования; 1—3 — термопары; г — реостат задатчика; ЭУ — усилитель; РД — реверсивный двигатель; РО — регулирующий орган.
Рис. IX-15. Графики переходных процессов ПИ- и ПИД-регуляторов.
т.э.д.с. такой батареи будет равна т. э. д.с. одной из термопар 1 или 2.
Если регулируемая температура t в объекте управления начнет изменяться с определенной скоростью, то т. э. д. с. первых двух термопар с одинаковой скоростью будут отражать эти изменения, а изменение т. э. д. с. термопары 3 будет отставать от первой и второй тем больше, чем больше различие масс горячих спаев термопар 1 и 2, с одной стороны, и термопары 3 — с другой, а также, чем больше скорость изменения температуры.
Таким образом, термопара 1 вырабатывает сигнал, пропорциональный самой регулируемой величине (температуре t), а термопары 2 и 3 — сигнал, пропорциональный скорости ее изменения (О-
Результирующая т. э. д. с. всех трех термопар и сравнивается с падением напряжения м0 на сопротивлении г задатчика, которое пропорционально заданному значению регулируемой величины. Термобатарея из трех термопар и источник питания иа задатчика включены встречно. При нарушении температурного режима в объекте на вход электронного усилителя ЭУ поступает сигнал Ам = Ыо—и, причем в первый момент величина сигнала значительна и реверсивный двигатель РД интенсивно перемещает регулирующий орган РО, резко изменяя подачу теплоносителя, а затем, когда сигнал Дм, достигнув максимума, начнет уменьшаться, реверсивный двигатель начнет плавно перемещать РО в другую сторону, уменьшая подачу теплоносителя и приводя параметр к заданному значению.
251
Передаточная функция ПИД-регулятора имеет вид:
W(p)=-S? + S1Pp+Sipi
На рис. IX-15 показан график переходных процессов для ПИ-и ПИД-законов регулирования.
Для регулирования процессов в объектах с очень малой постоянной времени (малоинерционные объекты) иногда применяются регуляторы, у которых сигнал по производной используется для некоторого замедления перемещения регулирующего органа. Такое предварение называется обратным в отличие от рассмотренного выше прямого предварения.
КАЧЕСТВО ПРОЦЕССА РЕГУЛИРОВАНИЯ
И НАСТРОЙКА РЕГУЛЯТОРОВ
Проблема устойчивости — важная, но не единственная проблема построения АСР. Не менее важной является проблема качества процессов регулирования.
Наиболее распространенными критериями качества в автоматике являются: статическая и динамическая ошибки регулирования, время регулирования, степень колебательности, интегральные критерии.
Из графика на рис. IX-16 легко определить некоторые критерии качества, а именно:
статическая ошибка равна разности между установившимся значением регулируемой величины уу и ее заданным значением г/зад;
динамическая ошибка yRmi равна наибольшему отклонению в переходном процессе регулируемой величины от ее установившегося значения;
время регулирования /р приближенно равно времени, за которое регулируемая величина станет практически равна заданной или установившейся (на графике — установившейся уу);
степень колебательности характеризует интенсивность затухания колебательного процесса, причем не всего переходного процесса, а наиболее медленно затухающей составляющей (рис. IX-17). Количественной оценкой интенсивности затухания служит степень затухания ф, определяемая по формуле:
'Р Л
Наиболее часто используемые на практике значения ф лежат 1 в пределах от 0,75 до 0,9.
Различают несколько видов интегральных критериев, из которых наибольшее распространение получил интегральный
252
квадратичный критерий /Кв, определяемый по формуле:
СО /кв=рЧ0<« о
Наибольшее значение имеет начальный участок процесса, когда наблюдается наибольшее отклонение регулируемой величины; «хвост» же переходного процесса практически не влияет на /ив.
Рис. IX-16. Критерии качества процесса регулирования.
Рис. IX-17. График, характеризующий степень затухания колебательного процесса.
Для оценки качества работы АСР существенными являются следующие вопросы: приведет ли регулятор регулируемую величину точно к заданному значению или будет иметь место статическая ошибка; какова максимальная величина разбаланса в ходе регулирования; каково быстродействие, системы, т. е. как быстро завершится переходный процесс. Ответить на эти вопросы* можно, зная как свойства объекта, так и свойства регулятора. Но, если динамические свойства объекта изменять трудно, то динамику системы можно изменить, варьируя свойства регулятора», т. е. устанавливая такие значения параметров настройки регулятора, при которых АСР работает наилучшим образом (оптимальная настройка), обеспечивая оптимальный переходный процесс в? системе регулирования.
В ответ на скачкообразное возмущающее воздействие — наиболее тяжелое для системы — регулируемая величина начнет отклоняться от заданного значения, а затем под действием регулятора будет возвращаться к заданному значению. В большинстве-случаев регулируемая величина изменяется по колебательному закону (см. например, рис. IX-12, в, кривая 7 для ПИ-регулятора) и переходный процесс оценивается статической ошибкой уСг (для. 11И-регулятора она отсутствует), динамической ошибкой г/ДИн,. временем регулирования /р, степенью затухания ф и квадратичным интегральным критерием /кв.
Очевидное требование при настройке регулятора состоит в. уменьшение уст, улии> tPt /Кв, и увеличении ф. Однако реальные-
25&
свойства системы таковы, что улучшение одного параметра ведет к ухудшению другого. Например уменьшение уяип ведет к увеличению /р. Поэтому стремятся найти такие параметры настройки регулятора, которые минимизируют один показатель, при условии, что другие показатели переходного процесса не выходят за рамки некоторых ограничений.
В большинстве случаев оптимальным считается такой переходный процесс, для которого /кв—>min при ф«0,75 (при ф>0,75 увеличивается г/дию а при -ф<0,75 сильно увеличивается (р).
Существуют достаточно точные, а также приближенные методы расчета оптимальных настроек регуляторов (в этой книге они не рассматриваются). Эти значения, полученные по расчетным данным, устанавливаются на специальных настроечных устройствах регуляторов.
Так ПИ-регулятор имеет два настроечных устройства. Одно устройство служит для установки расчетного значения времени изодрома, а другое — для установки диапазона дросселирования, связанного с коэффициентом усиления регулятора.
ГЛАВА X
КОНСТРУКЦИИ, ПРИНЦИП ДЕЙСТВИЯ, ХАРАКТЕРИСТИКИ СЕРИЙНЫХ СРЕДСТВ
АВТОМАТИЗАЦИИ
Первый промышленный регулятор был изобретен в 1765 г. русским механиком И. И. Ползуновым и установлен на созданной им паровой машине в г. Барнауле. Регулятор поддерживал постоянным уровень в паровом котле (схема этого регулятора была приведена на рис. 2-1).
В 1784 г. английский механик Джеймс Уатт сконструировал центробежный регулятор для стабилизации числа оборотов вала своей паровой машины, причем принцип его работы был аналогичен созданному Ползуновым.
Большой вклад в разработку и создание регуляторов для различных целей внесли русские и советские ученые И. А. Вышнеградский, А. М. Ляпунов, Ц. Е. Жуковский, Н. Н. Богомолов, В. С. Кулебакин, В. А. Трапезников, М. А. Айзерман, Я. 3. Цыпкин, А. М. Летов и другие.
В настоящее время нашей приборостроительной промышленностью серийно выпускаются различные автоматические регуляторы давления, температуры, расхода, уровня, состава вещества, причем они могут быть как прямого, так и косвенного действия.
Объем и содержание этой книги не дают возможности познакомиться даже с небольшой частью серийных регуляторов, поэтому мы рассмотрим лишь некоторые из них, широко используемые в автоматизации химических и родственных ям производств.
РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ ТИПА РТ
Предназначен для автоматического поддержания заданной температуры жидких и газообразных сред путем изменения расхода греющей или охлаждающей среды.
254
Контур регулирования состоит из термометрической системы и регулирующего клапана (рис. Х-1). Термометрическая система представляет собой жидкостной манометрический термометр. Термобаллон 1 этого термометра устанавливается иа объекте управления ОУ, где должна поддерживаться постоянная задаииая температура, и с помощью капилляра 2 соединен с корпусом 5, образуя замкнутую термосистему.
Рис. Х-1. Принципиальная схема регулятора температуры прямого действия типа РТ:
/—термобаллон; 2 —капилляр; 3 —сильфон; 4 — пружина; 5 — корпус; 6 — клапан; 7— плунжер; 8 — седло.
С повышением температуры давление в термосистеме возрастает. С ростом1 давления сильфон 3 сжимается, вследствие чего шток перемещает вниз плунжер 7; это ведет к уменьшению кольцевого зазора между плунжером и седлом 8 и уменьшению расхода теплоносителя, протекающего через клапан 6. Уменьшение подачи теплоносителя приведет к тому, что температура внутри объекта управления начнет падать, возвращаясь к заданному значению. Пружина 4 сильфона 3 уравновешивает усилие, развиваемое сильфоном, а также-служит для настройки регулятора иа заданную регулируемую величину. Это делается путем изменения натяжения пружины 4.
.Регуляторы температуры прямого действия изготавливаются с прямыми или обратными клапанами. Прямые клапаны применяются, если регулируется температура греющего вещества. В этом случае при повышении температуры регулируемой среды клапаны закрываются. При регулировании температуры охлаждающего вещества применяются обратные клапаны, закрывающиеся при понижении температуры регулируемой среды. (На рисунке приведена схема регулятора с прямым клапаном.)
Корпус клапана регулятора 6 с помощью фланцев монтируется иа трубопроводе Тр вблизи объекта управления. Длина капилляра выбирается из ряда: 1,6; 2,5; 4,0; 6,0 м в зависимости от типоразмера (диаметра условного прохода в мм).
РЕГУЛЯТОРЫ НЕПРЯМОГО (КОСВЕННОГО) ДЕЙСТВИЯ
Несмотря на то что регуляторы непрямого действия конструктивно более-сложны, чем регуляторы прямого действия, и имеют значительно более сложные коммуникации, оии очень широко используются практически во всех производствах, поскольку дают высокое качество регулирования сложных объектов со-взаимосвязанными параметрами и обеспечивают любой закон регулирования.
Рассмотрим принципиальные схемы некоторых промышленных регуляторов-непрямого действия.
Электрические регуляторы. Для воздействия иа регулирующий орган в электрических (электромеханических и электронных) регуляторах используется переменный или постоянный ток.
255
Их преимуществом перед регуляторами, в которых используются другие виды энергии, является возможность передачи командных сигналов от регулятора к промежуточным устройствам и исполнительному механизму на практически неограниченные расстояния и с минимальным запаздыванием передачи. К серьезным недостаткам следует отнести их непригодность для работы во взрыво- и пожароопасных помещениях.
Рис. Х-2. Схема двухпозициоиного регулятора:
4 — объект; 2 — термометр сопротивления; 3 — мост; 4 — усилитель; 5 — реверсивные двигатель; 6, 7 — диски; 8, 9 — пружины; 10 — показывающая стрелка.
Электрические регуляторы отличаются большим разнообразием конструкций и принципов действия. Их изготавливают как аппаратные системы (служащие для выполнения только функций регулирования) и как приборные системы (наряду с регулированием выполняющие указание и запись регулируемой величины).
Автоматические электрические регуляторы аппаратной и приборной систем обеспечивают отработку одного или нескольких основных законов регулирования, т. е. выпускаются как позиционные, астатические (интегральные), статические (пропорциональные), изодромиые (пропорционально-интегральные), а также дифференциальные (регуляторы с воздействием по производной).
Ниже рассматривается схема и принцип действия позиционного регулятора.
При проектировании и внедрении систем автоматического контроля и управления следует иметь в виду, что там, где по условиям технологии не предъявляется жестких требований к качеству регулирования, наряду со сложными регулирующими устройствами необходимо широко применять наиболее дешевые, простые в наладке и надежные в эксплуатации позиционные автоматические регуляторы.
Наиболее распространенными являются двухпозициониые регуляторы. Схема электрического двухпозициоиного регулятора, который может встраиваться ® корпуса электронных автоматических уравновешенных мостов, электронных автоматических потенциометров и других вторичных приборов показана иа рис. Х-2.
Объект регулирования 1 представляет собой сушильную камеру с электро-обогревом, причем система обогрева устроена так, что, если температура _стаиет ниже допустимой, то должна включаться обмотка обогрева большой мощности, а если температура стала выше допустимой, то вместо обмотки должна включиться обмотка обогрева w2 малой мощности, вследствие чего резкого снижения температуры ие произойдет.
В качестве чувствительного элемента применяется электрический термометр сопротивления 2, который подключей к электронному автоматическому мосту 3 по трехпроводиой схеме. Если температура в сушильной камере изменится, изменится сопротивление термометра и в диагонали а—b моста появится сигнал небаланса. Усиленный электронным усилителем 4 сигнал приводит во вращение
256
ротор реверсивного двигателя 5; направление вращения зависит от знака небаланса, т. е. от того, повысилась или понизилась температура. С ротором ревер* сивиого двигателя кинематически связаны диски 6 и 7, положение которых зависит от угла поворота ротора, а' следовательно, от положения движка а реохорда и показывающей стрелки 10 моста. К профилю дисков с помощью пружин 8 и 9 прижаты ролики направляющих контактов kj и к2.
Диски 6 и 7 имеют вид профили-
рованных кулачков со впадинами. При их вращении контактная группа Kt. замкнута в интервале показаний прибора от начала шкалы до впадины диска 6 и разомкнута в интервале от впадины до максимума шкалы. Контактная группа к2, наоборот, разомкнута в интервале показаний прибора от начала шкалы до впадины диска 7 и замкнута в интервале от впадины до максимума шкалы.
Настройка регулятора иа задан
Рис. Х-3. Унифицированная конструкция блоков:
/ — панель щита; 2 —передняя панель корпуса; 3 — сварной корпус; 4 — рама с выдвижным шассн; 5 — панель штепсельных разъемов.
ное значение температуру в сушильной камере осуществляется вручную установкой впадины диска 6 на нижний предел регулирования, а впадины диска 7 иа верхний предел регулирования (для этого диски снабже-
ны специальной шкалой).
При достижении нижнего температурного предела разрывается контактная группа К;, включаются контактная группа к2 и обмотка большой мощности ws, что ведет к заметному повышению температуры в сушильной камере. При до
стижении верхнего температурного предела Kt замыкается, а к2 размыкается, что ведет к медленному снижению температуры, так как включается обмотка о>2 малой мощности. Как только будет достигнут нижний температурный предел,
картина повторится, и т. д.
Конструкция задающего устройства регулятора позволяет устанавливать заданное значение регулируемой величины в пределах от 5 до 95% шкалы прибора. Допустимая погрешность срабатывания контактов позиционного устройства ±1%.
В различных отраслях, промышленности находит применение новая электрическая система автоматического регулирования «Каскад», которая рассчитана на работу с выпускаемыми отечественной промышленностью измерительными приборами, имеющими унифицированный выходной сигнал постоянного тока О—5 мА.
Особенностями системы являются блочно-модульное исполнение, использование современных высоконадежных элементов, малые габариты по фронту щита, унифицированная конструкция блоков.
Систему «Каскад» образуют группы измерительных, регулирующих, алгебраических (выполняют операции суммирования, умножения, деления сигналов и извлечение квадратного корня) и других блоков, преобразователи, задатчики, усилители и различные вспомогательные устройства. Эти блоки и устройства имеют уннфицироваииую конструкцию (рис. Х-3).
' Корпус 3 вставляется в прямоугольный вырез (160X80 мм) в панели щита 1, а передняя панель 2 корпуса, которая имеет большие размеры, чем вырез, фиксирует корпус иа щите и крепится специальными винтами. С передней стороны в корпус вдвигается рама с шасси 4 и штепсельным разъемом 5. На выдвижном шасси набираются взаимозаменяемые модули, выполняющие определенные функции (органы настройки, питания, усилители и т. д.). Основой модуля является заключенная в пластмассовую рамку печатная плата. Все модули объединяются общей печатной платой, которая размещается иа шасси.
. Группа регулирующих блоков представлена релейными блоками Р21 и Р23, рассчитанными для работы в.схемах трехпозиционного регулирования, а также
17—2208
257
для формирования совместно с исполнительным механизмом П- и ПИ-законов регулирования, а также аналоговыми блоками Р12 и Р132, предназначенными для формирования П-, ПИ- и ПИД-законов регулирования.
Блоки и устройства системы «Каскад» рассчитаны на эксплуатацию во взрывобезопасных помещениях, при температуре окружающего воздуха 5-—50 °C, относительной влажности 30—80%, отсутствии в окружающей среде агрессивных примесей. Напряжение питания от сети переменного тока 220 В, 50 Гц.
Пневматические регуляторы. В химической и родственной отраслях промышленности эти регуляторы получили большое распространение, так как они по-жаро- и взрывобезопасны, сравнительно Просты по конструкции и дешевы, надежны в тяжелых условиях работы химических производств. Их отдельные недостатки, такие как невысокое быстродействие, запаздывание в передаче сигналов, необходимость в специальном источнике питания (чистый, осушенный сжатый воздух), окупаются их достоннствамн.
Тенденция в создании пневматических устройств автоматики такова, что пневматический прибор создается не в виде принципиально новой конструкции, а' в’ зависимости от его назначения собирается из универсальных пневматических элементов, каждый из которых выполняет лишь простейшие функции.
Рассмотрим кратко систему приборов контроля и регулирования «Старт» (система автоматических регуляторов завода «Тизприбор»), которая построена на универсальных элементах промышленной пневмоавтоматики (УСЭППА)*.
Конструктивно почти все элементы выполнены из квадратных секций, приспособленных для установки на платах из органического стекла. Они имеют латунные «ножки» унифицированных размеров и шага, что позволяет легко и быстро производить замену отдельных элементов. «Ножки» элементов вставляются в специальные гнезда (аналогично установке электронных ламп на панели радиоприемника) и связь между элементами осуществляется через отверстия в «ножках» и каналы в платах.
На рис. Х-4, где показан чертеж пневмоемкости, используемой для создания инерционных звеньев, приведены размеры монтажных ножек.
УСЭППА состоит из следующих элементов: пневматические сопротивления и емкости, усилители сигнала, задатчики, элементы сравнения, реле, пневмокнопки, конечные выключатели и др.
Одним из важных элементов любого пневматического регулятора системы «Старт» является элемент сравнения, схема которого показана на рис. Х-5.
Элемент предназначен для сравнения двух непрерывных пневматических сигналов р, и рп и получения выходного сигнала рВЫх, если сравниваемые сигналы не равны друг другу. Выходным сигналом может быть либо «0» (0 Па), либо «1» (1,4• 105 Па).
Корпус элемента сравнения собран из пластин с прямоугольными вырезами. Между этими пластинами зажаты тканевые, прорезиненные мембраны (/) с жесткими металлическими центрами (II и II'), которые по оси связаны штоком (III), и образуют камеры А, Б, В и Г.
В камеру А через штуцер 1 и сопло С] подается сжатый воздух питания, а камера Г через сопло С2 и штуцер 6 сообщается с атмосферой.
Через штуцеры 3 и 4 в камеры Б и В подаются сравниваемые давления Pi и pz. При рассогласовании этих давлений перемещается мембранный блок (мембраны I с жесткими центрами II, II') и открывается и закрывается соответствующее сопло (С| и С2).
Например, если Pi>Pt, то мембранный блок переместится вниз, сопло Ci откроется, С2 закроется, давление питания через сопло Ci и штуцер 2 поступит на выход элемента и давление на выходе будет равно рВЫх=1,4-105 Па (сигнал «1»). Если Pi<p2, то мембранный блок переместится вверх, сопло С, закроется, а сопло С2 — откроется. Тогда камеры А и Г через штуцеры 2, 5 и 6 окажутся сообщенными с атмосферой и на выходе элемента будет сигнал рВых=0 (сигнал «0»).
Габаритные размеры элемента 40X40X74 мм.
* За разработку УСЭППА группа ученых и инженеров была удостоена Ленинской премии.
258
На рис. Х-6 приведена схема позиционного регулятора типа ПР1.5, который предназначен для двухпозиционного регулирования и может быть использован в качестве сигнализатора.
Регулятор выдает дискретный пневматический сигнал «1» (рВЫх= 1,4-105 Па) при отклонении регулируемой величины от заданного значения. Если регулируемая величина не выходит за пределы заданного значения, то на выходе сигнал отсутствует, т. е. рВых = 0 (сигнал «О»),
Рис. Х-4. Конструкция пневматической емкости.
Рис. Х-5. Схема элемента сравнения:
/—тканевые прорезиненные мембраны; II, //' — жесткие центры мембран; III — шток; 1— 6 — штуцеры.
Для получения сигнала «1» прн превышении регулируемой величиной заданного значения регулятор настраивается на максимум (max). Настроенный на минимум (min) регулятор выдает сигнал «1» при понижении регулируемой величины ниже заданного значения. Настройка на max или min осуществляется с помощью переключателя VI. На рис. Х-6 регулятор настроен на минимум (min).
Непрерывный стандартный пневматический сигнал от датчика Дт (рд= = 2-104—105 Па), измеряющего регулируемую величину, подается через переключатель VI в камеру В элемента III, а в камеру Б этого же элемента подается пневматический сигнал р3 от задатчика, пропорциональный заданному значению регулируемой величины. Задание устанавливается с помощью винта 1 изменением натяжения пружины 2, которая воздействует на шариковый клапан 3. Питание задатчика осуществляется через дроссель II сжатым воздухом 1,4-105 Па, который попадает в нижнюю камеру задатчика и через кольцевой зазор между шариковым клапаном 3 и отверстием в жесткой перегородке 4 частично выходит в атмосферу. Установившееся давление задатчика р3 контролируется манометром V.
Пока давление от датчика рл больше давления задания р3, сопло Ci закрыто и сигнал на выходе элемента III равен «О» (рс=0). Как только рд станет меньше р3, сопло С; откроется, в С2 закроется, и на выходе элемента III появится сигнал «1» (рс=1,4-105 Па).
При настройке регулятора на максимум (max) Рд подается через переключатель VI в камеру В, а р3 — в камеру Б.
Если рд<р3, сопло Ci закрыто, а С2 —открыто и сигнал на выходе звена /ч=0. Если рд>р3, сопло Ci откроется, С2—закроется и рс=1.
Выходное давление рс с выхода элемента сравнения III подается в камеру )) усилителя мощности IV. Когда рс=1 мембранный блок усилителя вместе с трубкой 5 перемещается вниз, трубка перемещает вниз шариковый клапан 6
17
259
и сжатый воздух питания (1,4- 10s Па) из камеры К через кольцевой зазор, образовавшийся между отверстием в жесткой перегородке 7 и клапаном 6, поступит в камеру Ж н далее — на выход регулятора, где сформируется сигнал «1» Ip™,. = 1,4• 105 Па). Когда рс=0, клапан 6 перекроет доступ воздуха питания из камеры К в камеру' Ж и камера Ж через трубку 5 и камеру Е окажется сообщенной с атмосферой. При этом на выходе регулятора сформируется сигнал «0» (р ВЫХ = 0).
Рис. Х-6. Принципиальная схема позиционного регулятора ПР 1.5:
/ — задатчик; II — постоянный дроссель; III — элемент сравнения; IV — усилитель; V — манометр; VI — переключатель; 1 — внит задатчика; 2, 8 — пружины; 3, 6— шариковый клапаи; 4, 7 —жесткие перегородки; 5 —трубка.
Следует отметить, что когда сигнал рс н рвы* равны «1», они равны н по давлению (1,4-105 Па), но отличаются по расходу воздуха: расход воздуха на выходе регулятора (фвых) больше расхода воздуха на выходе элемента сравнения III (Qc); это важно при использовании сигнала рВых для воздействия на исполнительный механизм.
Все элементы регулятора смонтированы в металлическом корпусе размером 86X106X141 мм.
Устанавливается регулятор непосредственно у объекта регулирования (настенный монтаж) или с помощью штекерного разъема на приборе контроля.
Кроме рассмотренного позиционного регулятора серийно изготавливаются регуляторы системы «Старт» и других типов, осуществляющие более сложные законы регулирования (П-, ПИ-, ПИД-регуляторы).
В систему «Старт» также входят оптимизаторы (для поддержания оптимального режима работы инерционных объектов), функциональные, вычислительные приборы и устройства (алгебраического суммирования, извлечения квадратного корня, умножения, деления и др.), пневматическая управляющая машина, вторичные приборы показывающие и самопишущие и др.
В последнее время начала интенсивно развиваться новая отрасль пневмоавтоматики— струйная пневматика, которую по аналогии с электроникой называют пневмоникой.
Струйная автоматика основана на использовании гидроаэродннамических эффектов (в частности, эффектов, получаемых при взаимодействии струй и при обтекании струями стенок) для выполнения всех основных первичных операций контроля и управления.
В процессе исследования и разработки принципов построения элементов струйной автоматики было установлено, что выполнять эти первичные операции можно без использования каких бы то ни было механических подвижных частей (например, мембран), а сами элементы и построенные на них приборы могут изготавливаться методом печатных схем (напоминает типографский способ печатания книг), который принят в электронике.
Приборы струйной техники имеют ряд важных преимуществ.
260
Первичные операции контроля и управления выполняются элементами гид-, роаэродинамнческого действия со скоростями, в сотни, а в некоторых случаях: даже в тысячи раз превышающими скорости, достигаемые в пневматических системах «Старт».
Приборы струйной техники имеют малую массу и малые габаритные размеры, обладают высокой эксплуатационной надежностью, не подвержены воздействиям радиации и вибрационных нагрузок, могут работать (при соответст»
Рис. Х-7. Схемы (а, б, г, е, и) и статические характеристики (б, д, ж, з) простейших струйных элементов.
вующем выборе материала) как при очень низких, так и при очень высоких температурах, просты в изготовлении и эксплуатации, имеют невысокую стоимость. Широкое применение струйной техники для контроля и управления технологическими процессами должно дать большой экономический эффект.
На рис. Х-7 показан простейший струйный элемент — один из основных первичных элементов, используемых для построения приборов гидроаэродинами-ческого действия; работает он следующим образом. Каналы 1, 2 и 3 расположены в одной плоскости. В канал 1 подается сжатый воздух под постоянным давлением питания рПИт, а в канал 2— сжатый воздух от измерительного устройства рупр, давление которого изменится от нуля до максимума при изменении контролируемой величины от нуля до максимума. Если рупр=0, то воздушная струя, истекающая из канала 1 (показана пунктиром), не отклоняется от своего направления. Если рупр начинает возрастать, то струя воздуха, истекающего из канала 2, начинает отклонять более мощную струю, истекающую из канала 1, прн этом давление рВЫх в выходном канале 3 начнет возрастать. Если Рупр возрастет до максимального значения и отклонит воздушную струю, истекающую из канала /, в положение, показанное на рис. Х-7, б, то давление рм& в канале 3 возрастет до максимума.
На рис. Х-7, в приведен график, показывающий, как будет изменяться дав»' лсние рвах иа выходе струйного элемента при изменении давления от измерительного устройства рУпр от минимума (рис. Х-7, а) до максимума (рис. Х-7, б).
Если приемный канал 3 расположен относительно 1 так, что при отсутствии давления от измерительного устройства (рУпр=0) воздушная струя из канала 1 занимает положение, приведенное на рис. Х-7, а, то давление рВЫх на выходе из канала 3 будет иметь максимальное значение; кривая этой зависимости показана на рнс. Х-7, б.
Прн соединении выходного канала описанного струйного элемента с каналом управления следующего такого же элемента (рис. Х-7, е) получаем характеристику (зависимость рВЫх от рУпр), показанную на рис. Х-7 ж. Эта характеристика показана сплошной линией, она аналогична изображенной на схеме Х-7, в (показана пунктирной линией на рис. Х-7,ас), но имеет большую крутизну. При
261
.таком же соединении трех элементов получаем характеристику, приведенную на рис. Х-7, з (сплошная линия); она имеет большую крутизну, чем характеристика, .приведенная на рис. Х-7,д. Таким способом получают струйные элементы — усилители давления.
Показанный на рис. Х-7, г струйный элемент при использовании в нем сопла 1 в качестве одного из каналов управления (при соответствующем располо-
Рис. Х-8. Схемы простейших релейных элементов:
а — элемент прямого действия; б — инверсный элемент; 1 — канал питания; 2 — канал управления; 3 — приемный канал; 4 — стенка.
жении этого канала относительно каналов 2 и 3) может выполнять также функции элемента сравнения. К характеристикам элемента сравнения предъявляется следующее требование: выходное давление рВЫх не должно претерпевать изменение при равенстве сравниваемых давлений р\ и р2 (рис. Х-7, и), подводимых к каналам управления 1 и 2, какой бы ни была их абсолютная величина; оно должно зависеть только от рассогласования между этими давлениями. Поэтому сигнал рвых возрастает при увеличении pi и уменьшается при увеличении р2.
Для современной техники контроля н управления очень важны такие операции, как получение релейных характеристик.
На рис. Х-8 показаны схемы струйных релейных элементов. Струя, вытекающая из сопла 1 (рис. Х-8,а), протекает вдоль стенки 4, в которой имеется канал управления 2. Если рУпр=0, струя течет вдоль стенки по направлению, показанному пунктиром. При некотором значении рупр>0 струя отрывается от стенки и релейно (скачком) переходит в положение, показанное сплошными линиями.
Такой элемент имеет чисто релейную характеристику изменения выходного давления рвы* при плавном увеличении управляющего давления рУпР, изображенную на рис. Х-9, а. При уменьшении рупр до значения, прн котором произошел отрыв струи, она снова скачком возвращается к стенке; таким образом, рассматриваемая характеристика является однозначной. Если при соответствующем выборе профиля- стенки н условиях течения отрыв струи от стенки и возвращение ее к стенке происходят не при одних и тех же значениях руПр, то релейная характеристика примет вид, изображенный на рис. Х-9, в. Чтобы такой элемент превратился из элемента прямого действия в инверсный (обратного действия), имеющий характеристики, изображенные на рис. Х-9, б, г, достаточно изменить расположение приемного канала 3, установив его так, как показано на рис. Х-8, б.
С помощью элементов, построенных на указанном принципе, просто реализуются и первичные логические операции. Например, инверсный элемент релейного действия, схема построения и характеристика которого были показаны соответственно на рис. Х-8, б и Х-9, б, может также служить элементом, выполняющим. логическую операцию отрицания (операцию «Нет»). Характеристика такого элемента показана на рис. Х-9, <5. При давлении управления, совпадающем с . входным (рУпр=Рвх) и равным условной единице, рВых=0 и наоборот; при рупр = 0 на выходе элемента создается полное давление, принятое равным условной единице (рвых 1).
•262
Как отмечалось выше, исключение из приборов каких бы то ни было механических подвижных частей и выполнение всех первичных операций на потоках рабочей среды создают необходимые условия для изготовления приборов струйной пневмоавтоматики способом печатных схем.
При -изготовлении приборов этим способом все элементы приборов: сбпла, струйные элементы в целом, дроссели, камеры, коммуникационные каналы и др,, образуются благодаря углублениям, сделанным на поверхности плоских деталей,
Рнс. Х-9. Характеристики релейных элементов:
а, в — прямого действия; б, г — инверсного; д — логического.
или же сквозным просечкам в пластинах. Комплекс операций выполняется путем нанесения сочетаний просечек различной формы; они образуют первичные элементы, выполняющие определенные функции.
Наглядное представление о том, как получают приборы струйной автоматики при их изготовлении методом печатных схем, дают схемы, приведенные иа рис. Х-10. В пластине 1 (рис. Х-10, а) сделаны углубления, образующие два каскада усилителя непрерывного действия, схема которого приводилась на рнс. Х-7, е. Если перекрыть пластины 1 крышкой 2, получится готовый усилитель. Для его включения следует лишь подвести рабочую среду при нужном давлении к каналу питания (отверстие в крышке рПят). Давление на выходе такого усилителя рВЫх изменяется в зависимости от давления, создаваемого в канале управления.
Рис, Х-10. Схема компоновки приборов струйной автоматики: « — однослойная; б — многослойная; / — пластина; 2 —крышка.
Схема, приведенная на рис. Х-10, б, иллюстрирует другой способ, характерный тем, что прибор получается многослойным: отдельные узлы образуются благодаря выемкам, сделанным не в одной общей, а в нескольких отдельных, пластинах, разделенных прокладками. В прокладках имеются каналы, по которым потоки рабочей среды, передающие сигналы управления, поступают из; ндиой системы в другую.
263
Технология печатных схем позволяет изготавливать приборы струйной автоматики из пластмассы, металла, керамики, стекла и других материалов, используя штамповку, фотохимическое травление, прецизионное лнтье.
Особенностью приборов пневмоникн, предназначенных для промышленного использования, является то, что онн надежно работают при избыточных давлениях питания, не выходящих за пределы ста или тысяч» паскалей. При этом
энергетические затраты уменьшаются во
Рис. Х-11. Принципиальная схема гидравлического И-регулятора:
1 — струйная трубка; 2 — задатчик; 3 — сопловая плитка; 4 — упоры; 5 — дифманометр; 6 — поршневой исполнительный механизм; 7 — задвижка; 8 — резервуар; 9 — шестеренчатый насос.
много раз по сравнению с затратами, с которыми была бы связана'работа этих же приборов при принятом в пневматике стандартном давлении питания 1,4-105 Па. Вместо дорогостоящих, сложных в эксплуатации компрессорных установок для подачи воздуха к приборам пневмоники можно применять вентиляторы, дешевые в изготовлении и не требующие специального ухода при эксплуатации.
Гидравлические регуляторы.
В качестве энергии, необходимой для
перестановки регулирующих органов, в гидравлических регуляторах используется энергия жидкости под давлением; эта жидкость подводится от специальной насосной установки, входящей в комплект регулятора. Рабочими жидкостями служат мине-
ральные масла (турбинное, трансформаторное), специальные смеси и вода, в которую добавлены различные пассиваторы — вещества, ослабляющие коррозию.
Гидравлические регуляторы предназначены для поддержания давления, раз-
режения, перепада давления, расхода, уровня, а также соотношения двух давлений или расходов веществ.
Онн отличаются простотой конструкции, надежностью в работе, несложностью обслуживания. Однако им свойственны недостатки, основными нз которых являются громоздкость, необходимость тщательной герметизации, ограниченный радиус действия, наличие специальной насосной установки, устройств по очистке рабочей жидкости и т. д.
В настоящее время гидравлические регуляторы наиболее часто применяются для автоматизации котельных и турбинных установок электростанций небольшой мощности, а также некоторых теплоэнергетических установок.
В промышленности наибольшее распространение получили регуляторы со струйными усилителями, работающие на трансформаторном масле. Такие регуляторы реализуют И- и ПИ-законы регулирования.
На рис. Х-11 показана принципиальная схема И-регулятора; принцип его действия иллюстрируется примером регулирования расхода в трубопроводе.
Полная струйная трубка 1 с сопловой насадкой может поворачиваться относительно оси О в вертикальной плоскости до упора 4. Во внутреннюю полость струйной трубки под давлением 7,84-105—9,80-105 Н/м2 (8—10 кге/см2) подается масло, истекающее из сопла со скоростью 25—30 м/с. Для подачи масла используется шестеренчатый насос 9 с электроприводом; он забирает масло из специального резервуара 8.
На струйную трубку действуют встречные усилия: от чувствительного элемента дифманометра 5 (это усилие тем больше, чем больше расход в трубопроводе) и от задатчика 2, натяжение пружины которого изменяется с помощью
специального винта н устанавливается вручную пропорционально заданному значению расхода. Если заданное и текущее значения регулируемой величины равны, то равны усилия, действующие на струйную трубку, и она будет находиться в среднем положении. Прн этом масло, сильной струей вытекающее из сопла, будет бить в плоскость сопловой плитки 3, затем через слив оно попа-
264
даст в резервуар 8, откуда вновь закачивается в струйную трубку насосом ff.
Предположим, что расход в трубопроводе превысил заданный. В этом случае усилие от чувствительного элемента дифманометра возрастет н струйная трубка повернется до правого упора 4', а сопло установится против правого канала сопловой плитки 3. Через этот канал масло начнет поступать по трубопроводу на поршень исполнительного механизма 6 н задвижка 7 (регулирующий орган) переместится вниз, что приведет к уменьшению расхода. Как только усилия от задатчика и дифманометра уравняются, струйная трубка вернется в исходное положение и действие регулятора прекратится. Если расход в трубопроводе станет меньше заданного, то струйная трубка переместится до упора 4 и масло начнет поступать в нижнюю полость цилиндра исполнительного механизма 6, что явится причиной перемещения задвижки 7 вверх и увеличения расхода.
КОМАНДНЫЕ ЭЛЕКТРОПНЕВМАТИЧЕСКИЕ ПРИБОРЫ
Под термином «командные приборы» понимаются устройства, автоматически выдающие сигналы (команды), которые обеспечивают регулирование по времени и обеспечение последовательности различных операций технологических и иных процессов (по заданному графику) посредством быстродействующего включения или выключения электрических и пневматических цепей.
Рассмотрим командный электропневматический прибор типа КЭП-12у. Узлы смонтированы внутри металлического корпуса размером 295X271X108 мм, который крепится к панели щита в вертикальном положении с помощью болтов (навесный монтаж).
Основными узлами прибора являются: распределительный вал с кольцевыми пазами, в которых крепятся двенадцать пар кулачков; синхронный электродвигатель, осуществляющий привод распределительного вала через редуктор; блок путевых выключателей, на которые воздействуют кулачки распределительного вала. В каждой канавке вала может быть установлено от 1 до 4 ку-
лачков.
Перед началом работы кулачки устанавливаются в позиции, соответствующие очередности и продолжительности воздействия на путевые выключатели Эта операция производится вручную по таблице продолжительности цикла, прилагаемой к прибору.
Прибор включается тумблером В (рис. Х-12). При этом зажигается сигнальная лампочка Л и электродвигатель М начнет вращать вал с кулачками. Возможен дистанционный пуск прибора с помощью кнопки Кн, замыкающей цепь соленоида Р, воздействующего на блокировочные контакты пуска К. Кулачки, расположенные на валу, через определенные промежутки времени (в зависимости от настройки) сбрасывают и взводят защелки быстродействующих выключателей (левый кулачок сбрасывает защелку, а правый — возводит ее).
В зависимости от типа прибора (пневматический, электрический или комбинированный) путевые выключатели воздействуют на
электрические контакты или на поршни пневматических золотников (рис. Х-13). При положении поршня пневматического золотника, соответствующем взведенной ннцелке (рис. Х-13,а), воздух из сети через нижнее отверстие золотинка поступает в верхнее и далее — в исполнительный механизм, который открывает либо, закрывает клапан на линии газа или жидкости к агрегату. При сброшенной за-’ щелке поршень закрывает нижнее отверстие (рис. Х-13, б) и сообщает исполни^ тельный механизм с атмосферой. ... „
Приборы изготавливаются на различное число пневматических и электрических цепей в соответствии с данными таблицы Х-1. -
Рис. Х-12. Принципиальная электрическая схема КЭП42у.
265
Таблица X-l.
Прибор можно настраивать на продолжительность циклов от 3 мин до 18 ч, питается он от сети напряжением 127 В, частотой 50 Гц. Пневматические цепи питаются сжатым воздухом под давлением 1,47-105 Н/м2, очищенным от пыли, влаги, масла и механических примесей.
Рнс. Х-13. Положение поршней КЭПа при взведенной (а) и сброшенной (б)' защелках:
I — газ или жидкость; 77 — к объекту; III — питание; 1 — исполнительный механизм; 2 — золотник; 3 —защелка.
МАШИНЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И РЕГУЛИРОВАНИЯ
В крупных цехах с большим числом точек контроля и регулирования потребовалось бы большое число регуляторов, что усложнило бы схему управления и потребовало бы установки щитов большой протяженности.
Для наилучшей организации централизованного контроля и регулирования в таких случаях применяются специальные машины.
Одной из них является электронная машина автоматического регулирования, регистрации и сигнализации МАРС-300, обслуживающая 300 контрольных точек замера температуры, расхода и давления.
Машина работает по методу периодического подключения (обегания) точек контроля со скоростью 10 точек в 1 с. Таким образом, цикл обегания всех точек контроля занимает 30 с. Техническая скорость регистрации одной точки составляет 3 с.
В случае отклонения какого-либо параметра от нормы, обегание приостанавливается на время регистрации отклонившегося параметра. Информация выдается машиной в цифровой форме, что исключает отсчет по шкалам, при котором возможны ошибки. Кроме цифровой записи, отклонение параметра сигнализируется на мнемосхеме.
Машина производит цифровую запись на специальных картах: карте регистрации отклонений и карте периодической регистрации.
На карте регистрации отклонений числовое значение отклонившегося параметра печатается красной краской с указанием времени отклонения и номера точки, в которой установлен датчик. После возвращения параметра к норме его числовое значение печатается черной краской, также с указанием времени возврата к норме и номера точки.
266
На этой же карте регистрируются параметры по вызову оператора, что отмечается на карте особым значком. Таким образом, карта регистрации отклонений является текущим оперативным документом цеха.
Карта периодической регистрации служит для записи значений параметров процесса через установленные промежутки времени (15, 30, 60 и 120 мин). Периодически регистрируемые параметры группируются на карте по технологическому признаку, что облегчает анализ хода производства, устанавливает внут-
Рнс. Х-14. Упрощенная блок-схема МАРС-300.
ренние связи между параметрами процесса и позволяет совершенствовать его. Значения отклонившегося параметра также печатаются на этой карте красной краской. Каждой регистрируемой точке отведена особая графа.
Периодически могут регистрироваться либо контролируемые точки, либо выбранное число наиболее важных параметров, определяющих ход процесса.
На рис. Х-14 показана упрощенная блок-схема машины МАРС-300. Машина работает следующим образом. От часового устройства ЧУ подается запускающий импульс, поступающий в блоки управления БПУ. Этим импульсом запускается генератор импульсов ГИ, который в свою очередь подает в блоки управ-, леиия серию программных импульсов, осуществляющих по заданной программе автоматическую проверку основных блоков н цепей машины. Если машина исправна, блок управления включает ее на цикл периодической регистрации или регистрации отклонений. Затем включаются местные коммутаторы датчиков МКД, шаговые искатели которых начинают последовательно подключать датчи-. ки через переключающиеся реле ПР к стандартной измерительной схеме.
Измерительная схема состоит из фазочувствительного усилителя небаланса УФМ и балансирного мотора М, осуществляющего компенсацию сигнала неба-’ ланса перемещением движка реохорда или сердечника дифференциально-трансформаторной схемы. Одновременно балансирный мотор поворачивает кодирующий, диск цифрового преобразователя ЦП, каждому углу поворота которого соответ-1 етвует определенная комбинация контактов щеточного устройства.
Со щеточного устройства код поступает на релейный дешифратор Дш, преобразующий принятый код в нужную комбинацию контактов реле, которые.! включают соленоиды печатающего устройства ПУ.
Отклонения контролируются непрерывно или через установленный промежуток времени. При этом происходит синхронное переключение местных коммута/
267'
Торов датчиков МКД и коммутаторов уставок КУ, "подключающих (через контакты реле ПР) датчики и соответствующие установки к фазочувствительным усилителям релейного действия УФР.
В случае отклонения от нормы сигнал фазочувствительного усилителя поступает в блок управления БПУ, который приостанавливает обеган'ие и через контакты переключающего реле ПР подключает отклонившийся датчик к цепи измерения и регистрации. Печатающее устройство ПИ регистрирует красной краской время, номер и значение параметра.
Одновременно от блока программирования и управления БПУ сигнал по-, ступает в запоминающее устройство ЗУ, где соответствующее реле запоминает отклонившийся датчик, при этом оно самоблокируется. От контактов этого реле поступает сигнал на мнемосхему МС. После этого цикл обегания продолжается. При повторном прохождении шаговым искателем отклонившейся точки она не регистрируется до тех пор, пока параметр не возвратится к норме. Возвращение отклонившегося параметра к норме приведет к срабатыванию соответствующей логической цепи, сигнал которой разблокирует соответствующее реле запоминающего устройства и включит устройство регистрации, которое отпечатает черной краской время, номер точки и значение параметра.
Конструктивно машина выполнена в виде стенда, состоящего из ряда ячеек. Размеры стенда 2,0X2,0X0,6 м. Машина состоит из отдельных блоков, устанавливаемых в ячейки и соединяющихся в общую схему с помощью штекерных разъемов.
Основными являются релейные блоки, блоки шаговых искателей и блоки усилителей небаланса.
Блочное выполнение машины позволяет быстро заменять отдельные блоки в случае их неисправности, что увеличивает надежность машины в эксплуатации.
Применение местных коммутационных блоков позволяет сократить число коммуникаций от датчиков к машине, что имеет большое значение при разбросанности точек контроля. Местные блоки, вмещающие по 50 точек замера, содержат реле датчиков и местные коммутаторы на шаговых искателях.
Машина рассчитана на питание от сети переменного тока напряжением 220 В; средняя потребляемая его мощность составляет около 250 Вт; машина может работать с любыми датчиками, имеющими электрический выходной сигнал.
Кроме контроля и регистрации машина МАРС-300 может выполнять ряд функций управления: включать и выключать агрегаты, обеспечивать аварийную защиту, позиционное регулирование.
ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА
Исполнительное устройство. В автоматических системах исполнительным устройством называется элемент, который непосредственно воздействует на технологический процесс в соответствии с командной информацией, поступающей от регулятора или устройства дистанционного управления. Командная информация поступает , на исполнительное устройство в виде давления сжатого воздуха в диапазоне 2-Ю4—105 Па, тока силой 0—5 мА или в какой-либо иной форме.
Исполнительные устройства состоят из двух основных функциональных блоков: исполнительного механизма и регулирующе- i го органа. От свойств этих функциональных блоков, как и каждого звена, входящего в автоматическую систему, зависит устойчивость и качество процесса.
Исполнительный механизм (ИМ) — это звено исполнительного устройства, предназначенное для перемещения затвора регулиру-.
268.
ющего органа в соответствии с управляющими сигналами (командной информацией). \
Как правило, мощности управляющего сигнала недостаточно для непосредственнного перемещения затвора регулирующего органа, поэтому исполнительный механизм можно рассматривать как усилитель мощности, с помощью которого слабый входной сигнал, усиливаясь во много раз за счет энергии источника питания, передается на регулирующий орган.
В настоящее время в технике автоматизации существует довольно большое число разнообразных исполнительных механизмов. Их конструкция и принцип действия зависят как от характера работы, которую они должны выполнять, так и от рода используемой энергии.
Помимо конструктивных, эксплуатационных и экономических факторов, основными показателями, с помощью которых судят о качестве и производят сравнительную оценку исполнительных механизмов разных типов, приняты быстродействие и точность.
Быстродействием называют величину, обратную отрезку времени, затрачиваемого на переход исполнительного механизма из одного установившегося состояния в другое под воздействием управляющего сигнала. При этом за одно установившееся состояние можно принять среднее (или одно из крайних) положение исполиительного механизма, а за другое — максимальное отклонение (или другое крайнее положение).
Точностью называют величину, обратную максимально возможной ошибке установления исполнительного механизма в новое состояние равновесия.
Кроме этих основных показателей характеристика исполнительных механизмов зависит от следующих факторов:
номинальная нагрузка (момент или усилие, при котором исполнительный механизм работает с отдачей максимальной полезной мощности); максимальная нагрузка (наибольший момент или максимальное усилие, которое может передать исполнительный механизм);
коэффициент полезного действия (отношение максимальной полезной мощности, получаемой на выходе исполнительного механизма, к мощности, получаемой от источника энергии при оптимальном режиме работы);
зона нечувствительности (область, в пределах которой изменение величины управляющего сигнала не приводит исполнительный механизм в движение).
Исполнительный механизм, работающий в системе автоматического управления, должен не только совершать работу по перемещению регулирующего органа, но и обеспечивать это перемещение с возможно меньшими Искажениями законов регулирования, формируемых регулятором.
Перечисленные1 выше основные показатели работы исполни-
269
тельных механизмов позволяют осуществит^/ правильный их выбор и эксплуатацию. /
По виду энергии, используемой для Создания перестановочного усилия, исполнительные механизм^/делятся на электрические/ пневматические и гидравлические. / '
Электрические ИМ можно разделить на две основные группы: соленоидные и электродвигательиые.
Особенность соленоидных исполнительных механизмов состоит в том, что необходимое для перестановки рабочего органа усилие создается за счет электромагнита, являющегося неотъемлемой частью исполнительного механизма и обеспечивающего лишь поступательное движение выходного звена.
Соленоидные механизмы применяются в основном в схемах двухпозиционного регулирования (Открыто —Закрыто). Это объясняется тем, что регулирующий орган может находиться только в двух крайних положениях. Например, первое — ток включен; сердечник притянут и клапан открыт, второе — ток отключен, сердечник отпущен (не притянут) и клапан закрыт.
На рис. X-I5, а показан общий вид фланцевого сальникового вентиля Вт с электромагнитным приводом ЭГ (главный электромагнит) и электромагнитной защелкой ЭЗ, а на рис. Х-15, б — схема включения обмоток главного электромагнита и электромагнита защелки.
При подаче от регулятора импульса на открытие вентиля (замыкается контакт «Больше») обмотка главного электромагнита ЭГ оказывается включенной, якорь втягивается в катушку соленоида и полностью открывает вентиль. Одновременно специальная защелка зафиксирует якорь в этом положении, а блокировочный контакт КГ, разомкнется, обесточив обмотку главного электромагнита. Когда регулятор дает команду на закрытие вентиля (замыкается контакт «Меньше»), под током окажется обмотка электромагнита ЭЗ, которая освободит защелку и тарельчатый плунжер вентиля под действием собственного веса или возвратной пружины закроется, разорвет блокировочный контакт КЗ и замкнет блокировочный контакт КГ. На случай отсутствия электроэнергии вентиль снабжен устройством ручного управления.
К недостаткам электромагнитных приводов, кроме двухпозиционного и практически мгновенного характера их действия, следует отнести возможность возникновения гидравлических ударов в трубопроводах для жидкостей, на которых установлены регулирующие органы с такими приводами.
Более рациональным, чем электромагнитный, является элект-родвигательный исполнительный механизм, состоящий из электродвигателя и понижающего механического редуктора.
По характеру движения выходного звена электродвигательиые исполнительные механизмы подразделяются на поворотные (однобортные), многооборотные и прямоходные.
270
Рис. Х-16. Электрическая схема включения многооборотного исполнительного механизма.
На рис. Х-16 показана электрическая схема включения элект-родвигательного многооборотного исполнительного механизма, который через редуктор кинематически связан с регулирующим органом. /
Пуск электродвигателя, обеспечивающий открытие или закрытие регулирующего органа, производится контактами 1РБ и 2РБ реле регулятора, причем длительность подачи кбманды может быть очень мала. Если, например, замкнулся контакт 1РБ, то под током оказалась обмотка В реверсивного магнитного пускателя, в результате чего главные контакты ВО пускателя включат в сеть электродвигатель М и блок-кои-такт В1 пускателя шунтирует контакт 1РБ регулятора, который может тут же разомк1 нуться, но цепь останется под током. Электродвигатель перемещает регулирующий орган в сторону открытия; в тот момент, когда он достигнет крайнего положения, путевой микропереключатель КВО переключит контакт из положения J в положение 2, обесточивая обмотку магнитного пускателя В. При этом главные контакты ВО размыкаются, двигатель останавливается, а сигнальная лампа ЛО зажигается, сигнализируя о полном открытии регулирующего органа. При замыкании контакта 2РБ регулятора под ток попадает обмотка Н реверсивного магнитного пускателя, замыка
ются его главные контакт НО и блокировочный контакт Н1, ротор реверсивного двигателя М начнет вращаться в другую сторону, отрабатывая закрытие регулирующего органа. Когда регулирующий орган полностью закроется, путевой микропереключатель КВЗ переключит контакт из положения 1 в положение 2, разомкнется цепь обмотки Н магнитного пускателя, двигатель остановится, а лампа ЛЗ загорится.
Путевые, микропереключатели КВО и КВЗ смонтированы внутри корпуса редуктора.
Кнопка КС служит -для аварийного останова двигателя М.
Пневматические ИМ выпускаются в двух модификациях, они могут быть мембранными и поршневыми.
Мембранные исполнительные механизмы могут обладать поступательным перемещением штока для управления регулирующими дроссельными клапанами, конструктивно объединенными с ними в единый блок, или угловым перемещением рычага, шарнирно связанного со штоком (рыжачные предназначены для управления поворотными заслонками).
272
Схема мембранного исполнительного механизма с поступательным перемещениемЧцтока приведена на рис. Х-17.
Он состоит из следующих основных узлов: корпуса головки 1, мембраны из прорезиненной\ткани 2, зажатой по периметру между фланцами корпуса с помЬедью болтов 6, металлического диска 3, штока 4, жестко скрепленного с даоком, и пружины 5.
Рис. Х-17. Схема мембранного исполнительного механизма:
1 — корпус головки; 2 — мембрана; 3 — диск; 4 — шток; 5 — пружина; 6 — болты.
• При отклонении регулируемой величины от заданного значения давление воздуха р, поступающего от пневматического регулятора через медную трубку диаметром 6X1 мм в полость над мембраной 2 и диском 3, изменяется, шток перемещается либо вниз (при увеличении давления), либо вверх (при уменьшении давления). Причем зависимость между давлением воздуха и перемещением штока имеет линейный характер. Шток, связанный с регулирующим органом РО непосредственно или через рычаг, переставляет его в новое положение.
Поршневой исполнительный механизм (рис. Х-18) состоит из цилиндра 1 с поршнем 2, шток которого 3 сочленяется с регулирующим органом РО. В зависимости от того, в какую полость цилиндра (А или Б) будет поступать управляющий сигнал Рупр от регулятора, поршень со штоком будет перемещаться либо вправо, либо влево.
Максимальное усилие, развиваемое исполнительным механизмом, равно 4,4 • 104 Н, а максимальный ход поршня составляет 300 мм.
Гидравлические ИМ предназначены для преобразования сигнала (разности давлений масла), поступающего от гидравлического регулятора, в перемещение регулирующего органа. Выпускается два типа гидравлических ИМ: прямого хода (с поступательным движением штока) и кривошипные (имеющие поворотный вал).
Гидравлический исполнительный механизм прямого хода представляет собой цилиндр с поршнем; по принципу действия он ана
18—2208
273
логичен пневматическому поршневому ИМ/(см. рис. Х-18). Если шток 3 соединить с кривошипом, то пол у угги схему кривошипного исполнительного механизма, управлявшего поворотными (заслоночными) регулирующими органа.мХ.
Регулирующий орган (РО) — з'то звено исполнительного устройства непосредственно воздействующее на процесс путем
Рнс. Х-19. Схемы регулирующих органов:
а — дисковый (заслоночный); б, в — одно- н двухседельный клапаны; г — трехходовой.
изменения пропускной способности; представляет собой переменное гидравлическое сопротивление, воздействующее на расход среды за счет изменения своего проходного сечения.
Для непрерывного и позиционного регулирования применяются регулирующие органы следующих типов:' дисковые (заслоночные); односедельные и двухседельные (клапаны); трехходовые (клапаны); шланговые и диафрагмовые.
Дисковые (заслоночные) регулирующие органы (рис. Х-19, а). Изменение гидравлического сопротивления в этих РО достигается за счет поворота относительно горизонтальной оси диска (заслонки), помещенного в специальную обойму.
В сравнении с другими регулирующими органами заслонки имеют небольшие габариты и массу; в открытом положении они создают меньшее гидравлическое сопротивление (потери давления меньше), не создают застойных зон, где могут скапливаться пыль и грязь, меньше подвержены износу.
Для определения момента М привода поворотных заслонок следует воспользоваться равенством
М = cdSnbp3
Здесь с—коэффициент, зависящий от угла поворота а и* равный отношению плеча, к которому приложено усилие, к ширине заслонки; может быть взят по ’специальным графикам, приводимым в справочниках; например, при а=30°С с=0,016; при а = 60°С
274
с = 0,05; при а=75 °Скс=0,08; при а=90°С с=0; d — диаметр заслонки; Sn-—площадь полотна заслонки; Др3 — перепад давления, создаваемый заслонкой.
Заслонки служат для регулирования больших расходов при условной пропускной способйости 20—20 000 м3/ч (условный проход 50—1000 мм). Регулирующая заслонка не может служить запорным органом, так как при ее изготовлении предусматриваются увеличенные зазоры между корпусом и подвижной частью для уменьшения сил трения при перестановке, вследствие чего она' не обладает достаточной герметичностью.
Одно- и двухседельные регулирующие клапаны. В односедельных (рис. Х-19, б) и двухседельных (рис. Х-19, в) регулирующих клапанах изменение гидравлического сопротивления достигается с помощью поступательного перемещения затвора (плунжера) вдоль проходов одного или двух седел.
По сравнению с двухседельными односедельные клапаны обладают тем преимуществом, что в закрытом положении обеспечивают герметичное перекрытие потока. Однако плунжеры односедельных клапанов испытывают большее выталкивающее усилие со стороны регулируемой среды и поэтому требуют более мощных исполнительных механизмов.
Основным преимуществом двухседельных регулирующих клапанов является наличие разгруженного затвора (плунжера). Усилие, развиваемое регулируемой средой, благодаря наличию перепада давления на клапане действует одновременно, но в противоположных направлениях, на оба жестко связанных плунжера.
Трехходовые регулирующие клапаны (рис. Х-19, г) предназначены для смешения двух потоков или для разделения одного потока на два.
При перемещении исполнительным механизмом штока с одно-или двухседельными плунжерами в вертикальном направлении зазоры м.ежду плунжерами и седлами изменяются (один зазор увеличивается, другой уменьшается), что ведет к изменению расходов через эти клапаны.
В комплекте с регулирующими клапанами обычно применяются пневматические мембранные исполнительные механизмы, соединенные в один блок; в таком виде их монтируют на трубопроводах. Для трехходовых регулирующих клапанов могут применяться также и электродвигательные ИМ.
На рис. Х-20 приведена типичная конструкция двухседельного регулирующего клапана с мембранным пневмоприводом.
С помощью фланцев 18 корпус клапана присоединяется к трубопроводу. Корпус мембранного исполнительного механизма 5 с помощью соединительной гайки 14 присоединен к верхнему фланцу 17 корпуса, в котором заключено сальниковое устройство, состоящее из грундбуксы 12, накидной гайки 13, втулки 15 и сальниковой набивки. Нижний фланец 21 клапана имеет сливную пробку.
18*
275
Рис. Х-20. Общий вид двухседельного регулирующего клапана с пневмоприводом:
1, 4 — крышки головки; 2 — жесткий центр;
3 — мембрана; 5 — корпус исполнительного механизма; 6 — пружина; 7 — шток; 8 — кольцо; 9 — упорный подшипник; 10, 15 — втулки; 11 — указатель положения плунжера; 12 — грундбукса; 13 — накидная гайка; 14 — соединительная гайка; 16 — лубрикатор; 17, 18, 2/ —фланцы; 19 — плунжер;
20 — седло; 22 — сливная пробка.
Исполнительный механизм имеет ^Мембранную головку, состоящую из верхнего 1 и ниж-негб 4 фланцев. Между фланцами крышек зажата мембра-хна из прорезиненной ткани 3 с жестким (металлическим), центром 2, который связан со штоком 7. На нижнем конце штока находятся плунжеры 19.
С увеличением сигнала от регулятора (давление ру) мем* брана 3 с центром 2 и штоком 7 переместится вниз, сжимая пружину а зазор между плунжерами 19 и седлами 20 уменьшится. Это приведет к уменьшению расхода вещества через клапан.
Сжатие пружины регулируется втулкой 10, ввернутой в корпус исполнительного механизма. Втулка передает усиление на пружину через упорный подшипник 9 и кольцо 8.
Для смазки штока и сальниковой набивки предусмотрен лубрикатор 16.
На штоке укреплен указатель 11 положения плунжера. Пневматические регулирующие клапаны подразделяются на два типа: ВЗ— «Воздух закрывает» (с повышением давления воздуха на мембрану исполнительного механизма клапан закрывается) и ВО — «Воздух открывает» (с повышением давления воздуха клапан открывается).
Клапаны типа ВЗ примени-. ются в том случае, когда при аварийном прекращении пода-. чи сжатого воздуха к испол-. нительному механизму по технологическим условиям более безопасно иметь открытую ли-
276
нию. В противном случае ставят клапаны обратного действия, т. е. ВО.
Регулирующие клапаны устанавливаются на прямолинейных участках трубопровода: при их монтаже следует предусматривать обводные линии (рис. Х-21). Это необходимо для того, чтобы в случае неисправности клапана его можно было выключить и пустить поток мимо него, регулируя вручную. В этом случае вентили с ручным управлением 2 закрывают, а вентиль 3 открывают; регулирующий клапан 1 с пневмоприводом оказывается отключенным. Подачу вещества к потребителю можно регулировать, изменяя вручную степень открытия вентиля 3.
В зависимости от условного прохода клапаны применяются для регулирования:
Рис. Х-21. Схема установки регулирующего клапана на трубопроводе:
/ — основной трубопровод; // — обводная (байпасная) линия; 1 — регулирующий клапан с ИМ; 2, 3 — вентили.
Средних расходов (4—1600 м3/ч)
Малых расходов (0,1—4 м3/ч)
Микрорасходов (менее 0,1 м3/ч)
Условный проход, ьгй
25—300
6-25
10 и менее
По значению условного давления выпускаемые одно- и двухседельные клапаны подразделяются на три модификации: для низких давлений (до 1,6 МПа), средних (от 2,5 до 16 МПа) и высоких (от 20 до 150 МПа).
Шланговые регулирующие органы отличаются от остальных тем, что регулируемое вещество проходит в них через эластичный патрубок (шланг), который, деформируясь под действием исполнительного механизма, изменяет площадь проходного сечения, а следовательно, и расход. Применяются для регулирования потоков самых разнообразных сред; в зависимости от вида среды эластичные патрубки могут быть изготовлены из бензо-стойких, маслостойких, химически стойких, эрозионноустойчивых материалов.
Шланговые клапаны имеют ряд преимуществ; исключают застой продукта; не имеют сальникового уплотнения штока; обеспечивают быструю и удобную замену эластичного патрубка. К их недостаткам следует отнести: ограниченную температуру регулируемых сред (до 80°C), невысокое давление среды (до 9,8-•105 Н/м2), сравнительно невысокий срок службы эластичного патрубка.
В качестве привода используется мембранный пневматический исполнительный механизм.
277
Диафрагмовые регулирующие клапаны изменяют свое гидравлическое сопротивление благодаря поступательному перемещению центра диафрагмы относительно седла, представляющего собою перегородку в корпусе. Применяются для регулирования потоков, агрессивных жидкостей.
Корпус диафрагмового клапана изготовляется из чугуна, а внутренняя поверхность покрывается кислотостойкими материалами. В зависимости от максимальной допустимой температуры это может быть:
'доп.
Полиэтилен............................... 60
Резина................................... 80
Фторопласт-42 . ............. 100
Эмали..................................... 120
Фторопласт-40............................. 150
Основные преимущества диафрагмовых регулирующих клапанов— возможность применения дешевых антикоррозионных материалов и бессальниковая конструкция.
Регулирующие органы являются конечными силовыми элементами систем регулирования, непосредственно воздействующими на технологический объект. Вследствие ряда специфических особенностей довольно трудно получить точные характеристики регулирующих клапанов без применения вспомогательных средств. Так, перемещение плунжера и клапанов зависит не только от давления командного воздуха, но также от трения штока в сальнике, от перепада давления среды, протекающей через регулирующий орган и т. д. Поэтому во многих случаях большое значение имеет точность срабатывания исполнительного механизма и стабильность его работы.
Таким вспомогательным устройством является позиционное пневматическое устройство, или позиционное реле, называемое также п о з и ц и о н е р о м.
Позиционер служит для усиления мощности сигнала и обеспечения строгой пропорциональности перемещения штока исполнительного механизма величине давления командного воздуха.
На рис. Х-22 показана схема позиционного реле. Воздух от регулятора, давление которого в зависимости от изменения регулируемой величины изменяется от 0,19-105 до 0,98-105 Па поступает в полость между сильфонами 8; его давление уравновешивается пружиной 7. Дно сильфонов жестко связано с клапаном 10 пневматического усилителя. Воздух от компрессора через фильтр 15 и редуктор 14 поступает в камеру пневматического усилителя под давлением 1,47-105—4,4b 105 Па. С помощью трубки 9 камера усилителя соединена с головкой 1 мембранного пневматического исполнительного механизма 2. Если давление воздуха от регулятора повышается, то сильфон пропорционально перемещает клапан 10 вверх. При этом увеличивается приток воздуха в камеру усилителя и уменьшается «отравление» воздуха в атмос*-
278
феру. Давление воздуха над мембраной (в головке 1 исполнительного механизма) возрастает, мембрана прогибается и шток 18 исполнительного механизма перемещает плунжер регулирующего органа (на схеме не показан). Жесткая обратная связь, состоящая из рычага 3, укрепленного на штоке 18 исполнительного механизма, и рычагов 4 и 5, увеличивает сжатие пружины 7 и вос-
Рис. Х-22. Принципиальная схема позиционного реле:
I — головка исполнительного механизма; 2 — исполнительный механизм; 3—5 — рычаги; 6 — подвижный шарнир; 7 — пружина; 8 — сильфоны; S — трубка; 10— клапан; 11—13 — манометры; 14— редуктор; /5 — фильтр; 16 — воздух от компрессора; 17 — воздух от регулятора; 18 — шток.
станавливает равновесие в позиционном реле, перемещая клапан 10 в направлении, обратном первоначальному. Манометры 11—13 служат для контроля давления воздуха в соответствующих линиях. Требуемый коэффициент обратной связи устанавливается подвижным шарниром 6.
Несмотря на то что позиционеры дают известные преимущества, их применение при работе с исполнительным механизмом далеко не всегда является обязательным, так как системы управления являются замкнутыми и имеют достаточно большой общий коэффициент усиления, а поэтому погрешности отдельных звеньев, в том числе исполнительных механизмов, могут не оказывать существенного влияния на точность отработки сигнала для системы в целом.
Применение позиционеров обязательно в следующих случаях: при значительных перепадах давления на регулирующих клапанах (в особенности односедельных, шланговых, диафрагмовых), когда возникают большие неуравновешенные усилия на штоке ИМ;
279
при настройке регулятора на широкие пределы пропорциональности, если малые изменения управляемой величины приводят к незначительному изменению давления командного воздуха;
при нестандартных значениях давлений командного воздуха (когда необходимо увеличить мощность ИМ);
при необходимости увеличить скорость срабатывания ИМ;
при необходимости увеличить расстояние между ИМ и регулятором.
Выбирая исполнительное устройство по пропускной способности, определяют следующие параметры этих устройств: условная пропускная способность РО, диаметр условного прохода, вид пропускной характеристики (для плунжерных клапанов), рабочее давление, диапазон перепада давления на клапане или заслонке.
Условной пропускной способностью Kvy называется номинальный расход (м3/ч) жидкости плотностью 1000 кг/м3, протекающей через полностью открытый регулирующий орган при перепаде давления на нем, равном 0,98-105 Па (1 кгс/см2). Действительная максимальная пропускная способность, достигаемая при 100%-ном перемещении плунжера Кыоо. может отличаться от условной на ±10%.
Условная пропускная способность Лгу зависит от диаметра условного прохода регулирующего органа Dy и коэффициента а, зависящего от вида регулирующего органа
KVy = aDy2
Коэффициент а имеет следующие значения:
а
Для трехходовых, односедельных и диаф-
рагмовых клапанов .................0,012
Для двухседельных клапанов .... 0,016
Для заслонок...........................0,02
Для шланговых клапанов.................0,05
Условные проходы регулирующих органов Dy, т. е. размеры присоединительных патрубков, выбирают из стандартного ряда чисел, в интервале от 15 до 1000 мм.
Пропускной характеристикой называется зависимость пропускной способности от перемещения затвора, т. е.
К«-/(0
где I — ход затвора.
Наиболее распространенными являются линейная и равнопроцентная пропускные характеристики.
Линейной называется пропускная характеристика, при которой приращение пропускной способности пропорционально перемещению затвора (рис. Х-23, а), а равнопроцентной — та, при которой приращение пропускной способности по ходу пропорционально текущему значению пропускной способности (рис. Х-23, б).
280
Односедельные, двухседельные и трехходовые клапаны, обычно имеют линейную или равнопроцентную пропускную характеристику. У других регулирующих органов эти характеристики более сложны.
Рабочее давление рр, т. е. допустимое давление при заданной рабочей температуре, устанавливается по условному допустимому давлению ру. В связи с тем, ,
что с повышением температуры прочность металлов понижается, для исполнительных устройств рабочие давления меньше условных
о/
Рр — Ру ^20 °с
Рис. Х-23. Линейная (а) и равнопроцентная (б) характеристики регулирующего органа.
еде о/ — допустимое напряжение материала при рабочей температуре; од20 °C — допу-
стимое напряжение материала при 20 °C.
Перепад давления Др на регулирующем органе определяет
усилия, на которые рассчитываются все подвижные детали исполнительного устройства, а также износ дроссельных поверхностей. Допустимый перепад давления зависит от конструкции и раз-
меров регулирующего органа, размеров исполнительного механизма, от допустимых величин кавитации (нарушение сплошности протекающей среды), вибрации и шума. Допустимый перепад давления для газа больше, чем для жидкости.
Правильный расчет и выбор размера регулирующего органа определяется по значению условной пропускной способности Kvy и в общем случае состоит из следующих этапов:
1) определение физических параметров и свойств регулируемой среды (давление, температура, вязкость и др.);
2) расчет или определение перепада давления и расхода среды, пропускаемой РО;
3) определение Kvy и выбор типа РО;
4) выбор, расчет или графическое построение пропускной характеристики РО;
5) определение динамических свойств исполнительного устройства и выяснение влияния его на динамику САУ в целом.
Сложность, объем и необходимая точность расчетов на каждом этапе полностью определяются параметрами и свойствами среды и. требованиями к качеству управления. С методикой выбора и расчета исполнительных устройств можно ознакомиться по соответствующей литературе*.
* Емельянов А. И., Емельянов В. А. Исполнительные устройства промышленных регуляторов. М., Машиностроение, 1975, 224 с.
281
ВСПОМОГАТЕЛЬНЫЕ УСТРОЙСТВА СИСТЕМ АВТОМАТИКИ
Байпасная панель дистанционного управления (БПДУ) предназначена для работы в комплекте с пневматическим регулятором и служит для переключения управления пневматическим исполнительным механизмом с автоматического на ручное и наобо-
а—а — варианты положения крана: 1 — редуктор давления воздуха; 2 — показывающий манометр; 3 — кран-переключатель; 4 — подвод сжатого воздуха; 5 — подвод воздуха от регулятора; 6 — подвод воздуха к регулятору; 7 — подвод воздуха к регулирующему клапану.
рот, а также для подачи сигналов на ИМ при ручном управлении (т. е. для осуществления ручного управления).
Схема внутренних соединений БПДУ при различных положениях рукоятки крана-переключателя показана на рис. Х-24.'
Рукоятка крана переключателя 3 может быть установлена в три положения:
«автоматическое» (рис. Х-24,а), при котором управление исполнительным механизмом производится регулятором;
«среднее» (рис. Х-24,б), при котором линия подачи воздуха к исполнительному механизму перекрывается;
«ручное» (рис. Х-24, s), при котором сжатый воздух от редуктора 1 поступает непосредственно к пневматическому исполнительному механизму, минуя регулятор. Изменение давления воздуха, которое контролируется манометром 2 (от 0 до 1,5'105 Па) осуществляется вращением рукоятки редуктора в соответствии с табличкой «больше — меньше».
БПДУ устанавливается на близости от регулятора (обычно под более 100 м от исполнительного меха-
щите в непосредственной ним) и на расстоянии не
низма.
Редуктор давления воздуха. Служит для преобразования высокого переменного давления в низкое стабилизированное. Редуктор представляет собой мембранный регулятор прямого действия с ручным пружинным задатчиком (рис. Х-25). Очищенный воздух через трубку 3 поступает в камеру 4 и через отверстие во втулке 12 направляется к соплу 10. Под действием пружины 13 отверстие сопла перекрывается вкладышем из резины, укрепленным в золотнике 2. Когда золотник перемещается вниз, воздух проникает в камеру 5 и далее через отверстие в корпусе редук-
282
Рис. Х-25. Конструкция редуктора давления воздуха:
1 — гайка; 2 — золотник; 3, 11 — трубки; 4, 5 — камеры; 6 — мембрана; 7, 13 — пружины; 8 головка; 9 — контргайка; 10 — сопло; 12 — втулка.
10S
Рис. Х-26. Общий вид фильтра воздуха:
1 — корпус; 2 — штуцер; 3 — фетровые прокладки; 4 — трубка: 5 — вентиль.
тора в выходную трубку 11. Давление воздуха зависит от степени открытия сопла 10. Вращением головки 8 изменяется натяжение пружины 7 и прогиб мембраны 6, которая перемещает'‘золотник 2 относительно сопла 10, изменяя давление воздуха в камере 5, а [следовательно, и в выходной трубке 11. Контргайка 9 служит для закрепления головки 8 в установленном положении.
Фильтр воздуха (рис. Х-26) устанавливается перед редуктором и служит для очистки сжатого воздуха от пыли, влаги, масла. При поступлении воздуха через штуцер 4 в полость корпуса I > скорость его снижается и частицы пыли и влаги оседают на дно корпуса. Дополнительно примеси задерживаются фетровыми прокладками 3. Очищенный воздух отводится через штуцер 2. Вентиль 5 служит для спуска влаги. Фильтр рассчитан на максимальное давление 9,8• 105 Па (10 кгс/см2).
ГЛАВА XI
ПРИНЦИПЫ СОСТАВЛЕНИЯ СХЕМ
АВТОМАТИЗАЦИИ
Проектирование систем автоматизации технологических процессов выполняется специализированными проектными организациями в строгом соответствии с требованиями Единой системы конструкторской документации (ЕСКД). Согласно ГОСТ ’2.103—68 предусматривается пять стадий разработки конструкторской документации на изделия* всех отраслей промышленности:
техническое задание;
техническое предложение;
эскизный проект;
технический проект;
рабочая документация. -
Техническое задание устанавливает основное назначение, показатели качества разрабатываемого изделия, его технические и тактико-технические характеристики, технико-экономические тре
* По ГОСТ 2.101-68 изделием называется любой предмет или. набор предметов производства, подлежащих изготовлению на предприятии: а) детали-изделия, изготовленные из однородного по наименованию и марке материала, без применения сборочных операций (литой корпус, отрезок кабеля и т. д.); б) сборочные единицы-изделия, составные части которых подлежат соединению между собой с помощью сборочных операций (манометр, электронно-вычисли- ’ тельная машина и т. д.); в) комплексы — два и более специфицированных (т. е. состоящих из двух и более составных частей) изделий, ие подвергнутых сбороч- ным операциям, но предназначенных для выполнения взаимосвязанных эксплуатационных функций (цех-автомат, завод-автомат и т. д.); г) комплексы, состоящие из двух и более изделий, не прошедших сборочные операции, и представ-, ляющие собой набор изделий, имеющих общее эксплуатационное назначение вспомогательного характера (комплексы запасных частей, измерительной аппаратуры и т. д.).
284
бования, предъявляемые к нему, необходимые стадии разработки конструкторской документации, ее состав, а также специальные требования к изделию.
Техническое предложение — это совокупность конструкторских документов, которые должны содержать технические и техникоэкономические обоснования целесообразности разработки документации изделия. Составляются на оснований анализа технического задания заказчика, различных вариантов решений изделий, их сравнительной оценки (с учетом конструктивных и эксплуатационных особенностей разрабатываемого и существующих изделий), а также патентных материалов.
После согласования и утверждения в установленном порядке техническое предложение является основанием для разработки эскизного и технического проекта.
Эскизный проект — это совокупность конструкторских документов, которые должны содержать принципиальные конструктивные решения, дающие общее представление об устройстве и принципе работы изделия, а также данные, определяющие назначение, основные параметры и габаритные размеры разрабатываемого изделия.
После согласования и утверждения в установленном порядке эскизный проект служит основанием для разработки технического проекта или рабочей документации.
Технический проект — это совокупность конструкторских документов, которые должны содержать окончательные технические решения, дающие полное представление об устройстве разрабатываемого изделия, и исходные данные для разработки рабочей документации.
Технический проект после согласования и утверждения в установленном порядке служит основанием для разработки рабочей документации.
Рабочая документация включает корректировку конструкторских документов по результатам изготовления головной (контрольной) серии.
Проектирование автоматических систем для всех отраслей промышленности осуществляется либо в две стадии — технический проект и затем рабочие чертежи, либо в одну — техно-рабочий проект (он является составной частью «рабочей документации») .
Техно-рабочий проект выполняется обычно для небольших и технически несложных объектов, а также в тех случаях, когда можно повторно применять ранее выполненный или типовой проект.
Рабочие чертежи выполняются в соответствии с ЕСКД, действующими стандартами на условные обозначения, руководящим» и нормативными документами по проектированию и монтажу систем автоматики, а также нормами и правилами строительного, санитарного, электрического и противопожарного проектирования,
28S
По рабочим чертежам ведется монтаж автоматических систем.
Состав проекта на стадии «рабочие чертежи» или «технорабочий проект» включает следующую техническую документацию (перечисляются лишь наиболее важные документы):
1) структурные и функциональные схемы автоматических систем;
2) принципиальные электрические, гидравлические, пневматические схемы управления, регулирования, блокировки, сигнализации, а также электрические схемы питания;
3) общие виды и монтажные схемы щитов и пультов;
4) схемы внешних электрических и трубных проводок, а также мх монтажные чертежи (чертежи трасс); >
5) чертежи установки аппаратуры, вспомогательных устройств, щитов и пультов;
6) пояснительная записка;
7) спецификация средств автоматики и смета стоимости оборудования и монтажа;
8) перечень нормалей, используемых в проекте и т. д.
Основными чертежами проекта автоматизации являются функциональные и принципиальные схемы автоматизации, на которых условно обозначается взаимосвязь между технологическим оборудованием, коммуникациями, органами управления и средствами .автоматизации.
Средства автоматизации изображаются на принципиальной схеме либо упрощенно, отображающими функциональное значение системы, либо развернуто — с изображением всех элементов системы. Вспомогательные аппаратура и устройства на схеме не показываются.
Наряду с принципиальными разрабатываются элементные электрические и! пневматические схемы, на которых при помощи стандартных условных обозначений изображаются аппараты, устройства и их части с электрическими или пневматическими связями между ними.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ В СХЕМАХ АВТОМАТИКИ
В соответствии с ОСТ 36-27—77 «Приборы и средства автоматизации. Обозначения условные в схемах автоматизации технологических процессов» устанавливаются обозначения измеряемых величин, функциональные признаки приборов, линий связи, а также способы и методика построения условных графических обозначений приборов и средств автоматизации. Этот ОСТ является исходным документом при проектировании систем автоматизации технологических процессов, при выполнении функциональных схем автоматизации и изображении их на технологических схемах, при выполнении схем внешних электрических и трубных цроводок, принципиальных пневматических схем и др.
286
Таблица XI-1.
№ п/п Наименование Обозначение
1. 2. Первичный измерительный преобразователь (датчик); прибор, устанавливаемый по месту: на технологическом трубопроводе, аппарате, стене, полу, колонне, металлоконструкции Прибор, устанавливаемый на щите, пульте Ъф
3. 4. Исполнительный механизм. Общее обозначение. Положение регулирующего органа при прекращении подачи энергии или управляющего сигнала ие регламентируется Регулирующий орган 5 10 |
5. Линия связи
0,2^0,3
6. Линии связи без соединения и с соединением друг с другом
Примечания:
1. В отдельных обоснованных случаях разрешается изображать приборы (п.п. 1, 2) зна-
вместо окружности.
2. Размеры условных обозначений, приведенные в п.п. 1, 3, 4, должны соблюдаться при составлении чертежей и схем автоматизации.
3. Подвод линии связи к символу прибора (датчика) допускается изображать в любой точке окружности (сиерху, снизу, сбоку).
4. При необходимости на линиях связи допускается наносить стрелки, указывающие направление передачи сигнала.
Условные графические изображения должны соответствовать указанным в таблице XI-1.
Условные обозначения измеряемых величин выполняются "еле-' дующими заглавными буквами латинского алфавита:
D — плотность;
Е — любая электрическая величина;
F —расход;
G — размер, положение, перемещение;
Н — ручное воздействие;
К — время, временная программа;
L — уровень; •:
М — влажность;
Р —давление, вакуум;
<2—качество (состав, концентрация и т. п.);
R —радиоактивность;
S —скорость, частота;
Т —температура;
U — несколько разнородных величин, измеряемых одним прибором;
V— вязкость;
W — масса;
X—резервная буква (для обозначения не предусмотренных стандартом величин)
Функции, выполняемые приборами (показание, регистрация, сигнализация, регулирование и т. д.) также обозначаются заглавными буквами латинского алфавита:
А —сигнализация;
С — регулирование, управление;
I—показание;
R — регистрация;
S — включение, отключение, переключение.
Для уточнения значений измеряемой величины и указания верхнего и нижнего пределов измеряемой величины также используются заглавные буквы латинского алфавита:
D — разность, перепад;
F — соотношение, доля, дробь;
Н — верхний предел измеряемой величины;
I — автоматическое переключение, обегание;
L — нижний предел измеряемой величины;
Q — интегрирование, суммирование по времени.
Для развернутого способа построения условных обозначений при выполнении функциональных схем автоматизации вводятся дополнительные буквенные обозначения.
Так для отражения функциональных признаков приборов применяются следующие заглавные буквы латинского алфавита:
288
Е — первичные преобразователи (термопары, термометры Сопротивления, сужающие устройства, датчики индукционных расходомеров и т. п.);
Т — приборы с дистанционной передачей показаний (манометрические термометры, бесшкальные манометры и др.)-;
К — приборы со станциями управления (переключатель «автоматическое — ручное»);
У — преобразователь сигналов и вычислительных устройств.
Эти дополнительные буквенные обозначения вписываются в верхней части окружности, изображающей прибор, на втором месте после буквы, обозначающей измеряемую величину. Например: ТЕ — термопара, термометр сопротивления; РТ—бесшкальный манометр с дистанционной передачей.
При обозначении преобразователей сигналов и вычислительных устройств применяются следующие дояелйительные буквенные обозначения и символы:
Е, Р, G — сигналы соответственно электрический, пневматический, гидравлический;
AD — сигналы соответственно аналоговые и дискретные;
2, К, X, fn,Vr— операции соответственно суммирования, умножения на постоянный коэффициент, умножения, деления, возведения сигнала в степень, извлечения корня.
Эти дополнительные буквенные обозначения указываются-вне окружности, изображающей преобразователь, справа от нее.
Следует обратить внимание на то, что в некоторых случаях . одна и та же буква латинского алфавита обозначает совершенно разные признаки, например, D — плотность и разность (перепад); F — расход, а также соотношение, доля, дробь; Н — ручное воздействие, а также- верхний предел измеряемой величины, и т. д.
Ниже будет показано, что это обстоятельство не затрудняет чтения схем автоматики.
Установлены два способа построения условных графических обозначений: упрощенный и развернутый.
Упрощенный способ применяется для изображения приборов на технологических схемах, а развернутый — для выполнения функциональных схем автоматизации, принципиальных пневматических схем, а также схем внешних электрических и трубных проводок.
При упрощенном способе приборы и средства автоматизации, осуществляющие сложные функции (контроль, сигнализация, ре- гулирование и т. п.) и выполненные в виде отдельных блоков, г s показывают с помощью одного условного графического обозначен -НИЯ.
Развернутый способ предполагает изображать сложные приборы, выполняющие несколько функций, несколькими окружностями, расположенными рядом и касающимися одна другой/;
Методика построения графических условных обозначений является общей для обоих способов: в верхней части окружности, 19—2208 289
изображающей прибор, устанавливаемый по месту или на щите, вписываются буквенные обозначения измеряемой величины и функциональных признаков. Последовательность буквенных обозначений (слева направо) должна быть следующей:
1) обозначение основной измеряемой величины;
2) обозначение, уточняющее основную измеряемую величину;
3) обозначение функционального признака прибора.
Порядок расположения буквенных обозначений функциональных признаков (если их несколько в одном приборе) должен быть следующий: I, R, С, S, А (показание, регистрация, регулирование или управление, включение или отключение или переключение, сигнализация). ’
В нижней части окружности, изображающей прибор, наносится обозначение позиций (цифровое или буквенно-цифровое), которое служит для нумерации приборов и средств автоматизации в соответствии с ведомостью-спецификацией, имеющейся в текстовых документах проекта.
В схемах автоматизации широко используются обозначения различных устройств, заимствованные из стандартов ЕСКД. Некоторые примеры отдельных устройств приведены в-табл. Х1-2.
Первичный измерительный преобразователь (чувствительйый элемент) для измерения температуры, установленный по месту. Например: термопара, термометр сопротивления, термобаллон, датчик пирометра и т. п.
Прибор для измерения температуры показывающий, установленный по месту. Например: термометр ртутиый, термометр манометрический и т. п....................
Прибор для измерения температуры показывающий, установленный на щите. Например: милливольтметр, логометр, потенциометр, мост автоматический и т. п. .
Прибор для измерения температуры с автоматическим обегающим устройством, регистрирующий установленный на щите. На-дример: многоточечный самопишущий потенциометр, мост автоматический и т. п.
Прибор для измерения температуры регистрирующий, регулирующий, установленный на щите. Например: любой самопишущий регулятор температуры (термометр манометрический, милливольтметр, логометр, потенциометр, мост автоматический и т. п.)
Таблица XI-2.
Наименование Номер ГОСТа Обозначение
Звонок электрический 2.741-68
Сирена электрическая (пиевма- А
тическая) тг
Гудок электрический »
Лампа сигнальная (табло) 2.732-68
Электродвигатель - 2.722-68
Регулятор температуры бесшкальный, установленный по месту. Например: дилатометрический регулятор температуры . .*
Комплект для измерения температуры регистрирующий, регулирующий, снабженный станцией управления, установленный на щите. Например: вторичный прибор и регулирующий блок системы «Старт»
Регулятор давления, работающий без использования построенного источника энергии (прямого действия) «до себя» .
./Рассмотрим некоторые примеры построения условных обозначений:
290
Прибор для измерения любой электрической величины показывающий, установленный по месту. Примечание: надписи, расшифровывающие конкретную измеряемую электрическую величину, располагаются либо рядом, либо в виде таблицы на поле чертежа......................... . .
19*
291
Первичный измерительный преобразователь для измерения качества продукта, установленный по месту. Например: датчик рН-метра.............................. •
Прибор для измерения радиоактивности, показывающий, с контактным устройством, установленный по месту. Например: прибор для показания и сигнализации предельно-допустимых концентраций а и (5-лучей .
Прибор для измерения вязкости раствора, показывающий, установленный по месту. Например: вискозиметр показывающий .
Преобразователь сигнала, установленный иа щите. Входной сигнал электрический, выходной — тоже электрический. Например: преобразователь для преобразования т. э. д. с. термопары в сигнал постоянного тока......................................
Преобразователь сигнала, установленный по месту. Входной сигнал — пневматический, выходной — электрический . ,
Вычислительное устройство, выполняющее функцию умножения. Например: множитель на постоянный коэффициент л .
щиты и пульты
Основное назначение щитов и пультов — централизация Средств контроля и управления производственным процессом (машиной, технологической установкой, цехом или комплексом цехов), которые выполняют функции постов управления и являются связующим звеном между объектом управления и оператором.
Щиты представляют собой вертикальные металлические панели или шкафы, на которых устанавливаются и крепятся приборы контроля и регулирования, сигнальные устройства, мнемонические схемы, накладные надписи с пояснениями назначения отдельных панелей и т. д.
Пульты — корпуса, имеющие форму стола с наклонной плоскостью (столешницей), которые используются для размещения на них аппаратуры управления, сигнализации и переключателей измерительных цепей.
По назначению щиты разделяются на местные, агрегатные, блочные и центральные.
292
Местным называют щит с приборами для управления индивидуальной установкой, который устанавливается вблизи этой установки. Обычно на этих щитах устанавливаются показывающие и регистрирующие, реже регулирующие приборы.
Агрегатным называют щит с аппаратурой для управления одним агрегатом, группой однотипных агрегатов или для управле-
1200
Тип щита ширина Глубина.
Шкафной 600 800 1000 1200 800 1000 1200
Панельный 600 800 1000 1200 —
Рис. XI-1. Общие виды шкафного щита (а), пульта (б), размеры панельного щита (в) и рекомендуемые размеры щитов (г).
ния технологическими установками, расположенными в одном помещении.
Блочным является щит, на котором размещены приборы для управления взаимосвязанными агрегатами, сблокированными в единую комплексную установку (например котел-турбина).
Центральным называется щит, на котором установлены приборы для управления технологическим процессом цеха, завода или комплекса технологически связанных производств.
Кроме перечисленных применяются вспомогательные, релейные щиты и щиты питания.
По конструкции щиты делятся на шкафные (полно- и малогабаритные) и панельные (полно- и малогабаритные), а пульты— на шкафные, приставные и отдельно стоящие.
Шкафные применяются для установки в запыленных помещениях, в условиях повышенной влажности и при возможности механических повреждений.
Панельные устанавливаются в специальных щитовых помещениях (диспетчерских, центральных и операторных пунктах управления) .
В настоящее время все шире используются панельные и шкафные щиты с каркасом, особенностью которых является металли
20-2208 293
ческий каркас. На этом каркасе крепятся все трубные и электрические проводки к приборам, паиель с приборами. Это решение позволяет унифицировать элементы металлоконструкций (корпусов) щитов, облегчает выполнение коммутационных операций и т. д.
Все основные части конструкций щитов, пультов и вспомогательных элементов изготавливаются из стали 10КП (для прибор-
120Q
Рис. XI-2, Пример сочетания щитов (фасад и план) для создания многошкафного Г-образного щитй:
1 — шкафной щит с левой дверью; 2, 3 — шкафные щиты открытые с двух сторон; 4 — вставки угловые; 5 — шкафной щит с правой дверью.
ных панелей, корпусов, каркасов—толщиной Змм; для боковых и задних стенок, крыш и полотен дверей — толщиной 2 мм).
В щитах и пультах делаются вырезы под приборы и устанавливаются детали крепления приборов и вспомогательных устройств (скобы, кронштейны и т. д.).
На рис. XI-1 приведены общие виды шкафного щита (рис. XI-1, а) и пульта (рис. XI-1,б), габаритные размеры панельного щита (рис. Х1-1,б) и таблица размеров шкафного и панельного щитов (рис. XI-1,г).
Размеры щитов и пультов выбираются в зависимости от следующих данных: числа и размеров аппаратуры, устанавливаемой как снаружи, так и внутри щи-
тов и пультов; места расположения; требований техники безопасности, назначения. При наличии приставного пульта на фасадной стороне щитов размещаются показывающие, самопишущие и регист-
рирующие приборы, светосигнальная аппаратура, а также мнемо-
схемы.
Мнемонические схемы представляют собой упрощенное графическое изображение агрегатов, технологических установок и связей между ними. При отсутствии пульта на фасадной стороне панелей щита, кроме перечисленной аппаратуры, устанавливаются переключатели к приборам контроля и управления.
На наклонной панели пульта помещаются переключатели измерительных приборов, оперативная аппаратура управления и сигнализации, некоторые показывающие приборы (амперметры, вольтметры и т. п.), допускающие установку в наклонном положении.
Приборы на щите должны располагаться в последовательности, определяемой технологическим процессом, их показания должны считаться слева направо или сверху вниз.
С целью экономии места, занимаемого щитом управления, сокращения его протяженности, защиты обслуживающего персонала от возможности прикосновения к открытым токоведущим ча
294
стям приборов и сборкам зажимов, а также для защиты приооров от механических повреждений неоперативная аппаратура систем автоматизации (электрическая, пневматическая, гидравлическая) и различные вспомогательные устройства (выключатели, предохранители, трансформаторы, выпрямители, источники питания, сопротивления, реле, фильтры, редукторы и т. п.) обычно монтируются внутри шкафных щитов или на обратной стороне щитов панельного типа.
* В зависимости от места их расположения полногабаритные щиты шкафного и панельного типов, приставные пульты к ним, а также отдельно стоящие пульты могут быть установлены на бетонном основании, на металлическом перекрытии и т. д.
Малогабаритные щиты шкафного и панельного типов могут быть прикреплены к кирпичной или бетонной стене с помощью специальных ригелей.
Многопанельные щиты. Для установки большого числа приборов используются многопанельные щиты, которые компонуются из отдельных щитов и пультов.
На рис. XI-2 приведен пример сочетания щитов для создания многошкафного Г-образного щита. Используемые при компоновке многошкафного (многопанельного) щита угловые вставки представляют собой детали из листовой стали 10КП толщиной 3 мм, предназначенные для соединения двух смежных щитов или пультов, устанавливаемых под углом один к другому.
На фасадных панелях щитов приборы и аппаратуру следует устанавливать на следующей высоте (в мм) по отношению к основанию щита:
Показывающие приборы и арматура сигнальных ламп................. 800—1100
Самопишущие приборы .... 900—1600
Переключатели, ключи, кнопки . . 900—1500
Мнемонические .схемы .... 1000—2000
Обычно щиты и пульты изображаются на функциональной схеме автоматизации в виде прямоугольника произвольных размеров, который помещается в нижней части схемы. Внутри контура прямоугольника располагаются условные обозначения приборов, средств автоматизации, аппаратуры управления и сигнализации, которые устанавливаются на этих щитах и пультах.
Отборное устройство (или первичный преобразователь), которое обычно устанавливается на самом объекте контроля или управления (термопара, термометр сопротивления, термобаллон манометрического термометра, сужающее устройство, поплавок уровнемера и т. д.) и связано с постоянно подключенным вторичным прибором, не имеет сцепиального обозначения. Связь между этим отборным устройством и вторичным прибором показывается тонкой сплошной линией, связывающей изображение технологического аппарата (или машины) с изображением прибора.
20*
295
Во избежание путаницы и усложнения: схем линии связи, идущие от изображений аппаратов (машин) к приборам, разрешается обрывать и на концах обрывов ставить одинаковые номера этих линий связи.
Рис. XI-3. Функциональная схема автоматизации процесса ректификации.
На линиях связи в непосредственной близости от условного изображения щита (прямоугольник) указываются рабочие значения контролируемых (регулируемых) величин.
Название аппаратов и машин, условно изображенных на функциональных или технологических схемах автоматизации, указываются обычно рядом с этим аппаратом или машиной (например: «ректификационная колонна», «дефлегматор», «конденсатор» в Т; Д.).
В качестве примера на рис. XI-3 приведена функциональная схема автоматизации процесса ректификации. - '
296
ЭЛЕКТРИЧЕСКИЕ СХЕМЫ
В современных системах автоматического контроля и управления различными технологическими процессами значительное место занимают электрические приборы, аппараты, устройства, которые служат для обеспечения управления, блокировки, сигнализации и защиты.
Для изображения взаимной электрической связи приборов и устройств служит электрическая схема. По своему назначению электрические схемы подразделяются на принципиальные, полные и монтажные.
'Принципиальные схемы служат для того, чтобы наиболее просто и наглядно условно изобразить устройства, входящие в схему, показать взаимную электрическую связь между ее отдельными элементами с учетом последовательности работы, т. е. дать представление о принципе действия. Обычно эти схемы охватывают отдельные автономные установки или участки автоматизированной системы.
, Полные схемы. На основании принципиальных схем в некоторых случаях составляют полные электрические схемы, охватывающие весь комплекс агрегатов.
Монтажные схемы. По монтажным схемам производится монтаж соответствующей аппаратуры и устройств. Эти схемы выполняются по принципиальным схемам с учетом территориального расположения всей аппаратуры, вида зажимов, способов и направлений прокладки соединительных проводов и кабелей и т. п.
Форма исполнения принципиальных электрических схем должна облегчать их чтение, усвоение и анализ. Поэтому в практике проектирования получили распространение так называемые развернутые схемы, в которых изображения аппаратов, приборов и устройств расчленяются на составные элементы. Эти элементы связывают между собой в отдельные цепи в порядке протекания тока от полюса к полюсу или от фазы к фазе. Схема в целом состоит из ряда цепей, расположенных слева направо или сверху вниз в порядке последовательности действия отдельных элементов во времени.
Чтобы приобрести навык в изображении и чтении принципиальных электрических схем, рассмотрим схему технологической сигнализации, в которой учтены следующие основные требования:
каждый измерительный прибор имеет электроконтактное устройство, которое срабатывает при достижении контролируемой величиной верхнего или нижнего заданных значений; при этом должна загораться соответствующая сигнальная лампа;
звуковой сигнал является общим для всех точек контроля; обслуживающий персонал может его отключить («гашение сигнала»), после чего сигнализатор (гудок, звонок) вновь будет готов сработать от включения любых контактов;
предусмотрена возможность проверки всех сигнальных ламп одновременно без включения контактов измерительных приборов;
297
обеспечена возможность проверки звукового сигнала.
Схема, удовлетворяющая этим требованиям (рис. XI-4), может состоять из любого числа точек сигнализации. Аппаратура сигнализации каждой точки контроля составляет отдельный участок схемы (показано два таких участка и один общий, относящийся к звуковой сигнализации и проверке ламп). В схеме пред-
Рис. XI-4. Схема технологической сигнализации.
усмотрено применение промежуточных реле двух типов: чувствительных (ЧР) и обычных (Р). Для включения Р требуется значительно больший ток, чем для включения ЧР.
Питание схемы сигнализации осуществляется через рубильник В, понижающий трансформатор Тр, предохранители П.
При замыкании контактов 1Т первого измерительного прибора включается электрическая цепь; обмотка реле 1Р, его размыкающий контакт 1Р—2, сопротивление С и обмотка чувствительного реле ЧР. В первый момент реле 1Р еще не может сработать, так как сопротивление цепи (учитывая сопротивление С) будет очень велико. Срабатывает более чувствительное реле ЧР, замыкаются его контакты ЧР-1, включая две цепи — обмотки реле ЦР и звуковой сигнализатор ЗС; подается звуковой сигнал, одновременно включаются замыкающие контакты ЦР-1 и ЦР-2. Питание звукового сигнализатора производится теперь уже по двум цепям: через контакты ЧР-1, контакты ЦР-1 и кнопку гашения сиг-, нала (с размыкающими контактами) КГС. По тем же двум цепям питается и обмотка реле ЦР.
Включение контактов ЦР-2 шунтирует сопротивление и обмотку реле ЧР. Ток, протекающий через реле 1Р, сразу же возрастает и реле 1Р срабатывает. Замыкаются его контакты 1Р-1
298
и IP-3 и размыкаются контакты 1Р-2 и 1Р-4. Контакт 1Р-1 блокирует обмотку реле и оставляет ее под током до тех пор, пока не будут разорваны -контакты. 1Т. измерительного прибора. Контакт 1Р-3 включает сигнальную лампу 1ЛС. Контакт 1Р-2 размыкается и выключает ток, подаваемый к реле ЧР и контакту ЦР-2. Реле ЧР приходит в первоначальное состояние, а его контакт ЧР-1—в свое нормальное разомкнутое положение. Однако это не приводит к отключению реле 1Р, блокированного своим кон-, тактом ИР-1, и звукового сигнализатора ЗС, питаемого теперь уже через одну цепь — контакт ЦР-1 и кнопку КГС, одновременно блокирующие обмотку-реле ЦР.
Все действие схемы занимает весьма небольшой промежуток времени (доли секунды), поэтому звуковой и световой сигналы подаются практически одновременно.
Звуковой сигнал может быть отключен нажатием кнопки КГС. При этом размыкается цепь питания сигнализатора, а также цепь питания обмоткн реле ЦР. Звуковой сигнал прекращается, и одновременно приходят в разомкнутое состояние контакты ЦР-1 и ЦР-2. После того как кнопка КСГ возвратится в исходное замкнутое положение (прекращение нажатия), звуковой сигнал не возобновится, так как цепь питания реле ЦР будет разомкнута. Лампа 1ЛС остается включенной до тех пор, пока не разомкнутся контакты 1Т измерительного прибора. После их размыкания обмотка реле 1Р будет обесточена, все контакты его вернутся в свое исходное положение и лампа 1ЛС погаснет.
Проверка работы звукового сигнала осуществляется кнопкой проверки сигнала КПС, имеющей две пары контактов: размыкающие и замыкающие. Нажимая на кнопку КПС (верхнюю), включают звуковой сигнал и одновременно размыкают линию к реле ЦР, чем исключают бесцельное включение этого реле.
Исправность ламп можно проверить нажатием кнопки КПЛ. Ток в этом случае протекает через контакты 1Р-4 и 2Р-4 и лампы 1ЛС и 2ЛС.
Нормальная работа механизма может быть нарушена неполадками не только в его электрическом, но и в механическом оборудовании, а также при аварии на другом механизме, связанном с данным технологией производства. -Например, отказ насоса смазки нарушает нормальную работу механизмов станка; остановка одного из ленточных транспортеров, работающих в единой транспортной цепочке, создает угрозу завала и т. д.
Во всех этих случаях необходимо прекращать работу аварийных механизмов. Для этого служат электрические блокировки схем автоматического управления.
С помощью электрических блокировок при автоматическом управлении обеспечиваются пуск и останов взаимосвязанных механизмов в заданной последовательности, точная остановка механизма в заданных точках пути, автоматизация технологическо-ских процессов и т. п.
299
Простейшая блокировка, исключающая одновременную работу двух двигателей, предусмотрена в схеме, представленной на рис. XI-5. Она осуществляется бдок-контактами 1К и 2К, включенными в цепи втягивающих катушек контакторов, соответственно 2К и 1К.
Управление приводом осуществляется так: для пуска электродвигателя 1Д нажимается кнопка «Пуск 1», замыкающая цепь
Рис. XI-5. Схема блокировки.
катушки 1К; контактор- 1К срабатывает и главными контактами подключает к сети электродвигатель 1Д. Работа двигателя 2Д при этом исключена, так как цепь катушки контактора 2К разомкнута блок-контактом 1К.
При необходимости пуска двигателя 2Д вначале нажимается кнопка «Стоп-1», отключающая от сети двигатель 1Д. Только после отключения двигателя 1Д контакт 1К в цепи катушки 2К замыкается и представляется возможным с помощью кнопки «Пуск-2» произвести включение двигателя 2Д. Подобная зависимость работы электродвигателей сохраняется и при пуске первым двигателем 2Д.
Защита двигателей осуществляется плавкими предохранителями 1П и 2П, а также тепловым реле 1РТ и 2РТ. Цепи управления защищены плавкими предохранителями ЗП.
; При разработке принципиальных электрических схем все аппараты и приборы, участвующие в схеме, получают условное обозначение или марку, причем марка, присвоенная аппарату, используется для обозначения (маркировки) всех его элементов.
Наибольшее распространение получила буквенная система -маркировки, при которой марка аппарата составляется из начальных букв наименования прибора или аппарата и его функции в схеме: например, контактор К,, лампа сигнальная ЛС, реле напряжения PH, реле времени РВ, кнопка «Стоп» КС и т. д.
300
При наличии в одной схеме нескольких однотипных элементов к буквенному обозначению обычно слева добавляется цифра, соответствующая порядковому номеру прибора или аппарата. Например, при наличии в одной схеме несколько однотипных реле они будут обозначаться как 1Р, 2Р, ЗР и т. д.
Если реле имеет несколько контактов, то они маркируются порядковыми номерами, причем цифры проставляются справа от буквенного обозначения реле. Например, контакты трехконтактного промежуточного реле будут маркированы так: РП-1, РП-2, РП-3.
ТЕКСТОВЫЕ ДОКУМЕНТЫ
Большое и важное место в проектной документации принадлежит текстовым документам на изделия; требования к ним и правила их выполнения устанавливаются ГОСТ 2.105-68 и ГОСТ 2.106-68.
Текстовые документы подразделяются на документы, содержащие в основном сплошной текст (технические описания, паспорта, расчеты, пояснительные записки, инструкции и т. п.) и документы, содержащие текст, разбитый на графы (спецификации, ведомости, таблицы и т. п.).
В состав текстовых документов входят:
ведомости спецификаций;
ведомости ссылочных документов (перечисление документов, на которые имеются ссылки в конструкторских документах изделия, например.республиканские, отраслевые стандарты и стандарты предприятий, руководящие технические материалы и т. д.);
ведомости покупных изделий (не изготавливаемых на данном предприятии, а получаемых в готовом виде);
ведомости технического предложения;
ведомости эскизного проекта;
ведомости технического проекта;
пояснительная записка;
программа и методика испытаний;
расчеты.
Ведомость спецификаций. В нее записывают: спецификацию изделия, спецификации составных частей изделия, спецификации комплектов. Ведомость спецификаций заполняют по разделам в следующей последовательности: вначале сборочные единицы, затем комплекты. В раздел «Сборочные единицы» записывают спецификации сборочных единиц, входящих в состав изделия, а в раздел «Комплекты» — спецификации комплектов (монтажных частей, сменных и запасных частей, инструментов и принадлежностей и пр.).
Ведомости «Технического предложения», «Эскизного проекта» и «Технического проекта». В них записывают все конструкторские документы, вновь разработанные для данного технического пред
301
ложения, эскизного и технического проектов и взятые из других проектов и рабочей документации на ранее разработанные изделия. Запись документов производят по разделам в следующей последовательности: общая документация; документация по сборочным единицам.
Пояснительная записка. В общем случае пояснительная записка должна состоять из следующих разделов:
введение (с указанием, на основании каких документов разработан проект) ;
назначение и область применения проектируемого изделия; техническая характеристика;
описание и обоснование выбранной конструкции (схемы автоматизации);
расчеты, подтверждающие работоспособность и надежность конструкции;
описание организации работ с применением разрабатываемого -изделия;
ожидаемые технико-экономические показатели.
В зависимости от особенностей изделий (в‘ частности, автоматических систем) отдельные разделы можно объединять или исключать, а также вводить новые.
Расчеты. Порядок изложения расчетов определяется характером рассчитываемых величин. В общем случае расчеты должны содержать:
эскиз Или схему рассчитываемого изделия;
задачу расчета (с указанием того, что требуется определить при расчете);
данные для расчета;
условия расчета;
расчет;
заключение.
Эскиз или схему разрешается вычерчивать в произвольном масштабе, обеспечивающем четкое представление о рассчитываемом изделии.
РАЗДЕЛ Т
ОСНОВЫ ТЕХНИКИ ВЫЧИСЛЕНИИ
Человек начал считать еще в давние времена. Египетские папирусы — самые' древние из дошедших до нас исторических источников — содержат описания правил вычисления различных величин с использованием определенной системы счисления, т. е. способов наименования и записи чисел.
«Числа правят миром, — говорил древнегреческий философ Платой (427— 347 до н. э.), ну а числа появились задолго до появления письменности»
Счет, или более широкое понятие — вычисления, могут быть выполнены устно, письменно или с использованием специальных ииструмеитов.
Древнейшим «счетным инструментом» у человека была его собствеииая рука. От пальцевого счета берет начало десятичная система счисления (пальцы двух рук).
Издревле для счета употреблялись деревянные палочки (бирки), камешки, веревки с узелками и др.
На рубеже XVI—XVII веков появились русские счеты.
Начало XVII столетия знаменуется выдающимся достижением инструментального счета, которое связано с именем шотландского ученого Джона Непера (1550—1617) и имело своей целью упростить операции умножения и деления чисел. Это достижение—введение понятия о логарифмах, с помощью которых любая задача на умножение и деление превращается в задачи на сложение и вйчитание, А это, в свою очередь, послужило основой для изобретения такого удобного инструмента, как логарифмическая линейка, которая является надежным помощником инженеров всего мира вот уже более 350 лет.
Эра механических вычислительных машин началась с 1649 г., когда французский математик, физик и философ Блез Паскаль (1623—1662) получил «королевскую привилегию» (патент), дающую право на изготовление и продажу машин. Числа в машине Паскаля изображались с помощью счетных колес (барабанов), на которых наносились цифры от 0 до 9. Число барабанов соответствовало числу разрядов (барабаны единиц, десятков, сотеи, тысяч и т. д.). При полном обороте барабана с цифрами младшего разряда соседний барабан с цифрами старшего разряда повернется на 1/10 оборота и т, д., и через окно-прорезь к крышке, закрывающей барабаны, будет видна цифра. В современных измерительных приборах с интеграторами этот принцип работы машины Паскаля широко используется (водосчетчики, электросчетчики, спидометры, тахометры и др.).
Суммирующая машина Паскаля, как и некоторые другие машины, пусть даже усовершенствованные, изготавливались в нескольких экземплярах и не получили в XVII—XVIII веках сколько-нибудь серьезного применения, так как не были по настоящему необходимы, были капризны, ненадежны и громоздки.
В XIX в., в связи с бурным ростом промышленности и транспорта, расширением коммерческих связен между странами необходимость в создании быстродействующих и надежных счетных машин резко возросла. В 1885 г. американский механик Уильям С. Берроуз (1857—1898) создал печатающую суммирующую машину («бухгалтерская машина») и выпуск таких машин продолжался, свыше 60 лет. * .
В России с 1894 г. и вплоть до середины шестидесятых годов нашего столетия выпускались арифмометры, которые явились своего рода предками современных клавишных машин. ....
303
Вычислительными машинами занимались также великий русский математик и механик XIX века П. Л. Чебышев (1821—1894), крупнейший ученый и инженер А. Н. Крылов (1863—1945).
Механические вычислительные машины были ручными, т. е. требовали участия оператора в процессе вычислений, производительность их была небольшой. Поэтому параллельно с работами по созданию механических машин велись работы и по конструированию автоматических вычислительных машин. В этой области пальму первенства следует отдать замечательному английскому ученому, инженеру и изобретателю Чарльзу Бэббеджу (1791—1871), который в 1834 г. изобрел универсальную вычислительную машину с программным управлением, и назвал ее аналитической машиной.
Машина Бэббеджа намного обогнала свое время. Достаточно сказать, что универсальные цифровые вычислительные машины, изобретенные почти столетие спустя, повторяли по существу структуру машины Бэббеджа!
Следующим шагом по пути автоматизации вычислений была счетно-аналитическая машина, изобретенная американским инженером Германом Холлеритом (1860—1929) в конце XIX в. Основная идея Холлерита состояла в изображении различных характеристик отверстиями в определенных местах перфокарты.
Коротким был век релейных счетных машин, в которых для управления операциями использовались реле-переключатели. Созданные в сороковых годах нашего столетия релейные машины были громоздкими (имели несколько тысяч реле), имели небольшой объем оперативной памяти, не отличались быстродействием, обладали малой надежностью. В этой связи они были быстро вытеснены электронными, машинами, в которых вместо механических и электромеханических элементов использовались электронные лампы, что позволило резко увеличить скорость выполнения операций.
Первая электронная вычислительная машина (ЭВМ) была создана в 1945 г. в США под руководством американских ученых Дж. В. Моучли и Д.П. Эккерта и предназначалась для расчета баллистических таблиц (машина строилась по заказу артиллерийского управления). Это сооружение содержало свыше1 18 тысяч электронных ламп и потребляло около 150 кВт.
В нашей стране первая электронная вычислительная машина БЭСМ (быстродействующая электронная счетная машина) была сконструирована в начале пятидесятых годов под руководством академика С. А. Лебедева.
Началась эра электронной вычислительной техники.
ГЛАВА XII
ВЫЧИСЛИТЕЛЬНАЯ ТЕХНИКА
В СОВРЕМЕННОЙ НАУКЕ И ПРОИЗВОДСТВЕ
Создание ЭВМ явилось одним из наиболее существенных этапов научно-технической революции. Если промышленная революция XVIII—XIX вв. привела к замене физического труда человека машинами, то интенсивное применение ЭВМ позволило автоматизировать ряд областей умственной и производственной деятельности человека. ЭВМ выполняют сотни тысяч, а некоторые из них миллионы операций в секунду, тогда как опытный работник с помощью арифмометра мог выполнять не более 2000 таких расчетов за смену.
; Успех дальнейшего развития материально-технического уровня страны невозможен без широкого внедрения в народное хозяйство
вычислительных устройств, из всей совокупности которых наиболее сложными и совершенными являются ЭВМ.
Вычислительные машины можно классифицировать по следующим признакам: принципу действия, конструктивному признаку, назначению, способу управления, классу решаемых задач.
По принципу действия различают вычислительные машины непрерывного действия (аналоговые), дискретного действия (цифровые) и комбинированные.
Аналоговые вычислительные машины. При их использовании математические величины изображаются в виде непрерывных физических величин (а не набора цифр), чаще всего электрических напряжений, пропорциональных действительным значениям измеряемой величины. Результаты вычислений (также в виде напряжений) непрерывно выводятся на самопишущие приборы и отображаются на бумаге в виде плавной кривой или передаются на экран осциллографа.
Эти машины строятся в соответствии с математической моделью, т. е. уравнением или системой уравнений, описывающих изучаемый процесс, поэтому они называются также моделирующими. А аналоговыми они называются потому, что различные явления могут описываться аналогичными математическими зависимостями.
Положительными качествами машин непрерывного действия являются:
относительная простота и надежность в эксплуатации;
наглядность вычислительного процесса (каждый блок этих машин выполняет определенную операцию — сложение, умножение, деление, интегрирование и т. д.);
простота изучения и эксплуатации, обусловливаемая блочностью их конструкции;
практически мгновенное получение результатов вычислений.
Однако этим машинам присущи недостатки:
ограниченная точность вычислений (0,1—0,5%);
зависимость точности решения задач от характеристик отдельных устройств машины (потенциометры, осциллографы, трансформаторы и др.);
узкая специализация, обусловливаемая тем, что они предназначаются для многократного решения задач, ойисываемых одними и теми же уравнениями.
Цифровые вычислительные машины. При их использовании значения всех величин, начиная с исходных и кончая результатами вычислений, представляются в виде набора цифр. Каждая цифра, соответствующая определенному разряду числа, устанавливается на отдельном цифровом элементе (счетном колесе, триггере и др.). Поэтому эти машины называются цифровыми. Так как современные вычислительные машины построены с применением электронных элементов, то они называются еще и электронными.
315
Преимущества цифровых вычислительных машин заключаются в их универсальности, т. е. способности решать любые задачи (научно-технические, экономические), данные которых можно представить в виде набора цифр, и возможности обеспечить любую наперед заданную точность вычислений.
Комбинированные вычислительные машины (аналого-цифровые) представляют собой объединенные в единый комплекс с помощью устройства связи цифровую и аналоговую машины. Основное назначение устройства связи—преобразование непрерывных сигналов в дискретные и обратно при обмене информацией между аналоговой и цифровой ЭВМ. Такое сочетание машин позволяет использовать быстродействие аналоговой и высокую точность цифровой ЭВМ.
По конструктивному признаку вычислительные машины бывают механические, гидравлические, пневматические, электромеханические и электронные в зависимости от принципа действия основных. элементов этих машин (суммирующих, умножения, извлечения квадратного корня, интегрирующего, дифференцирующего и др.).
В процессе своего развития они всегда характеризовались конструктивно-технологическим использованием и логической организацией, что обеспечило им приоритет среди других вычислительных машин. Это дало возможность выделить несколько поколений ЭВМ, условно принимая, что критерием машин того или иного поколения служит их элементная база, т. е. основные элементы, из которых создаются электронные схемы машин.
ЭВМ первого поколения. К ним относятся ламповые ЭВМ 50-х годов, которые строились на вакуумных лампах и обычных радиодеталях: резисторах, конденсаторах, трансформаторах.
ЭВМ второго поколения (1960—65 г.г.). В них электронные лампы были полностью заменены полупроводниковыми элементами— транзисторами, что позволило создать более сложные машины, обладающие большими вычислительными возможностями, высокой надежностью, меньшими габаритами и быстродействием.
ЭВМ третьего поколения появились в начале 70-х годов. Они были основаны на применении интегральных схем.
Основным в микроэлектронике является понятие интегрализа-хии, применяемое как к элементам, так и к средствам их защиты )т внешних воздействий. Интегрализация элементов заключается в получении максимального числа функционально связанных >лектронных элементов и их соединений в законченном конструк-'ивном исполнении (блоке). Полученная таким образом совокуп-юсть элементов и соединений между ними носит название и н-сегр альной схемы (употребляются также термины «ф у н к-I и овальный модуль», «микросхема»). Каждая интег->альная схема представляет собой отдельный прибор (усилитель, югическую схему и др.), заключенный в самостоятельный кор-:ус, имеющий несколько выводов. Размеры прибора невелики,
)6
например 8,5X6,3X4,8 мм. Применение интегральных схем повышает надежность и быстродействие машин, сокращает их габариты и массу.
ЭВМ четвертого поколения, период которых начался в настоящее время, основан на применении больших интегральных схем, что обеспечивает им еще большее быстродействие, повышение надежности при минимальных габаритах и значительное снижение потребляемой мощности.
ЭВМ пятого поколения уже создаются в лабораторных условиях. Они основаны на оптико-электронных элементах. Носителями энергии в них служат не электроны, а фотоны (кванты света), что значительно увеличит скорость передачи сигналов, вследствие чего быстродействие машины возрастает до сотен миллионов операций в секунду. Здесь найдут применение такие элементы, как лазеры, светоизлучающие диоды, световоды и фотоприемники.
Переход от одного поколения ЭВМ к другому состоит не только в изменении элементно-технологической базы; он непременно сопровождается и более глубокими изменениями в структуре машины, принципах соединения различных устройств, практике эксплуатации и т. п.
Замечено, что через каждые 5—10 лет появляются машины нового поколения.
По назначению ЭВМ делятся на математические, управляющие и информационные.
Математические ЭВМ используются для производства сложных расчетов во всех областях науки и техники.
Управляющие машины используются в автоматических и автоматизированных системах управления и обеспечивают оптимальное протекание технологического процесса.
Информационные машины предназначены для запоминания обработки и оценки по заданным критериям большого числа данных и применяются для решения планово-экономических задач, учета, статистики и т. д.
По способу управления вычислительные машины подразделяются на автоматические, где вычислительный процесс идет без участия человека, а по сигналам, предписывающим те или иные действия, и полуавтоматические, где процесс вычислений требует участия человека (например при переходе от одного этапа вычислений к другому).
По классу решаемых задач вычислительные машины делятся на универсальные, служащие для решения широкого круга задач в различных областях науки и техники, и специализированные, предназначенные для решения узко специальных задач (например система «Каскад» для управления аммиачным заводом).
В качестве примера применения вычислительных машин в .сфере управления производством рассмотрим схему системы ав-
307
тематического управления с применением УВМ— управляющей вычислительной машины (рис. ХП-1).
Датчики Д1,Д2,...,Дп непрерывно измеряют выходные величины у\, у2,—>Уп объекта управления ОУ и преобразуют их в стандартные аналоговые сигналы y'i, у'2,...,у'п, которые поступают на преобразователь Пь Здесь эти сигналы преобразуются в цифро-
л
Рис. ХП-1, Упрощенная схема управления с УВМ:
ОУ — объект управления; Дь Да..... Дп — датчики; Пь Па — преобразователи; УВМ —
управляющая вычислительная машина; ИУь ИУа...... ИУП — исполнительные устройства.-
вые коды, т. е. дискретные величины г/г- и в таком виде поступают на УВМ.
В память УВМ введена программа, которая составлена на основании математической модели ОУ и разработанного алгоритма управления. Поступающая от датчиков информация обрабатывается (сравнивается с заложенной в машину); в случае отклонения УВМ вырабатывает дискретные управляющие сигналы и{, которые с помощью преобразователя П2 вновь преобразуются в непрерывные «ь и2,...,ип за счет воздействия на исполнительные устройства ИУЬ ИУ2,...,ИУП. Исполнительные устройства так изменяют входные величины zi, 22,...,2п, что обеспечивают оптимальное протекание процесса в ОУ.
ГЛАВА XIII
АНАЛОГОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
Слово «модель» происходит от латинского modus, что означает мера, объем, образ.
Модели. Объект любой природы, который способен замещать исследуемый объект, т. е. находится с ним в отношении подобия, называется моделью. Между моделью и исследуемым объектом должно быть существенное сходство в главном и несущественные различия в остальном.
Моделирование. Построение (или выбор) и изучение моделей для целей научного исследования и получения новых знаний о& объектах называется моделированием. Процессы, возника*-ющие в модели, аналогичны процессам, протекающим в оригинале (объекте), а следовательно их можно наблюдать, регистрировать, проверять, сравнивать и т. д.
Различают физическое и математическое моделирование.
Физическое моделирование. Если модель является устройством той же физической природы, что и исследуемый объект, на выполненным в заданном масштабе, то здесь имеет место физическое моделирование. Примерами физического моделирования: могут служить модели Волжской, Братской и других гидроэлектростанций, созданные в уменьшенном масштабе до того, как началось строительство самих этих гигантских объектов. Все исследования этих объектов проводились на моделях, а полученные данные использовались при проектировании.
Основным достоинством физического моделирования является возможность наглядного наблюдения протекающих в моделях: процессов, а существенным недостатком — необходимость создания каждый раз новой (часто дорогостоящей) модели при исследовании нового объекта.
Математическое моделирование. При математическом моделировании физическая сущность явлений, протекающих в модели и: в объекте, носит различный характер, но математические и логические зависимости модели и объекта — одинаковы. Приведем несколько примеров.
Один из законов механики гласит: «Изменение кинетической энергии (T = mv2/2) твердого тела равно работе внешних сил, приложенных к телу». Применительно к силе трения Fy, препятствующей движению тела, закон выражается уравнением
Лт---dx
где х — перемещение.
При изучении явлений, связанных с переносом тепла, тепловой-поток gT в направлении х связан с изменением температуры в. этом направлении и описывается законом Фурье:
, dT
St---
где % — коэффициент теплопроводности.
Дифференциальный закон Ома, который связывает перенос количества электричества в единицу времени (сила тока I) череа проводник, имеющий сопротивление R, с изменением величины: падения напряжения U по длине проводника х:
_ 1 dU
1----R'dx
21—2208
309»
В физической химии (раздел «Кинетика») одним из основных является закон Фика, связывающий перенос количества вещества (поток вещества gb) в некотором направлении х с изменением концентрации С вещества в этом направлении:
где D — некоторая постоянная.
Во всех этих физических законах легко замечается одинаковая форма математических выражений, тогда как физическая сущность процессов различна. Такие одинаковые по форме математические соотношения называются изоморфными (от греческого isos — равный, одинаковый+morphe— форма, т. е. сходный по форме).
Краткие сведения о математических моделях были приведены в гл. VIII.
Основное преимущество математического моделирования заключается в возможности исследования явлений природы, трудно поддающихся изучению на хорошо известных явлениях.
Аналоговые вычислительные машины (АВМ) служат для исследования процессов и явлений в динамических системах, которые описываются математическими уравнениями; АВМ применяются для решения линейных и нелинейных дифференциальных уравнений любого порядка, описывающих поведение объекта самой различной физической природы.
Решение дифференциальных уравнений и их систем аналитическим путем не всегда возможно, поэтому решение их на АВМ приобретает большое практическое значение. .
В большинстве случаев математические модели удобно строить на электрических элементах, поэтому наиболее широкое применение получили электронные моделирующие устройства.
АВМ состоят из набора линейных и нелинейных блоков, а также вспомогательных блоков, соединяемых в той или иной последовательности в зависимости от вида решаемого уравнения.
На рис. XIII-1 приведена упрощенная схема АВМ, которая состоит из следующих основных устройств: решающего (2), ввода (1), управления и контроля (4), и регистрирующего (3).
Решающее устройство обеспечивает решение уравнений и состоит из решающих элементов, каждый из которых служит для выполнения одной определенной математической операции (сложение, вычитание, умножение, деление, интегрирование). Математические операции выполняются с помощью операционных (решающих) усилителей, которые, таким образом являются основным базовым элементом модели. Решающие усилители являются усилителями постоянного тока с большим коэффициентом усиления (несколько десятков тысяч), охваченными отрицательной обратной связью, с большим входным и малым выходным сопро-310
Рнс. XIII-1. Упрощенная структурная схема АВМ:
1 — устройство ввода; 2 — решающее-устройство; 3 — регулирующее устройство; 4 — устройство управления и контроля.
- тивлениями (для облегчения условия согласования усилителей между собой).
Решение задачи с помощью АВМ состоит в измерении интересующих нас переменных величин, которые подаются на входы операционных усилителей в виде напряжений (машинных переменных). Независимой математической переменной в АВМ является время.
Масштабирование зависимых математических .переменных — один из важных этапов программирования. Ни одна машинная переменная не должна выходить из рабочего диапазона линейности усилителей ограниченного интервалом ±100 В для ламповых машин, или ±50 В для машин на полупроводниках.
Зависимые математические пере-
менные х, у, z с помощью напряжений и масштабов представляются в следующем виде:
Ux = тхх Uy = туу U 2 = mz2
где Ux, Uv и Uг — напряжения, соответствующие переменным х, у, z, а тх, ту, тг — масштабы, которые имеют размерность вольт/единица измерения переменной.
Соответственным образом масштабируется независимая пере-* менная — время t, которому соответствует машинное время т= ; = mtt, где mt — масштаб времени. Если т<=1, то моделирование
| осуществляется в реальном масштабе времени.
В электронных моделях используются суммирующие, инвер-i тирующие, интегрирующие и дифференцирующие усилители.
i Рассмотрим принцип действия некоторых решающих элементов.
На рис. ХШ-2, а, приведена схема включения операционного усилителя, который выполняет операцию изменения масштаба» или умножения на постоянный коэффициент:
U
______^2. у
ВЫХ - и
вх
где —сопротивление на входе; 7?о— сопротивление обратной связи; Uж, ивых — входное и выходное напряжения усилителя постоянного тока U,
Величина коэффициента передачи K=Ro[Ri устанавливается изменением 7?0 и /?]. Если R0=Rlt то происходит инвертирование входного сигнала, т. е. умножение его на минус единицу. Уси-
21* - 311
*
литель с несколькими входами (7?i.../?n) становится сумматором (рис. ХШ-2, б);
Увих — — ^~р7~ Usxt
i=l
Если в схеме, приведенной на рис. ХШ-2, а вместо сопротивления обратной связи Ro включить конденсатор С (рис. ХШ-2, в),
'Рис. ХШ-2. Схемы включения операционных усилителей:
а — множительный элемент, осуществляющий умножение на постоянный коэффициент; б — сумматор; а — интегратор.
то операционный усилитель превращается в интегрирующий усилитель:
t
- 1 Г
б^ВЫХ — J^Q I ^ВХ^
О
где = коэффициент передачи.
Устройство ввода обеспечивает ввод исходных данных в машину; оно может производить следующие операции: соединение решающих элементов между собой в соответствии с заданной ' системой управления (с помощью перемычек и коротких гибких! шнуров со штекерами); установку коэффициентов передачи сум-1 мирующих и интегрирующих элементов; задание начальных зна- j чений переменных и др. Все эти операции осуществляются вруч- : ную.
Устройство управления и контроля осуществляет управление всеми узлами машины и обеспечивает визуальное наблюдение за решением на экране электронно-лучевого индикатора. Процесс решения начинается по сигналу «Пуск» с пульта управления, а ав- ; •тематическое управление всеми режимами АВМ. осуществляется -с помощью специальной схемы. Устройство управления обеспечи-.
312
вает также возможность прекращения процесса решения (останов) для промежуточной фиксации результата и возвращения всех блоков и элементов в исходное состояние (сброс).
Регистрирующее устройство предназначено для регистрации результатов решения. В качестве регистрирующих устройств используются измерительные приборы: цифровые и стрелочные
вольтметры постоянного тока, электронные осциллографы, регистрирующие приборы.
Процесс решения задачи с помощью АВМ может быть проиллюстрирован с помощью схемы, изображенной на рис. ХШ-З.
На этапе постановки задачи необходимо:
а) дать описание объекта моделирования и четко сформулировать цель исследования;
б) получить математическую модель исследуемого объекта, определить численные значения параметров и начальных значений переменных и (или) диапазонов, в которых они могут изменяться в процессе исследований;
в) оценить скорости изменения переменных, их производных и функций (<на рисунке это действие показано пунктиром);
Этап программирования состоит из а) преобразование математической для моделирования на АВМ;
' | начало\
♦ _______________
I-------( Постановка задачи г
| Программирование |——
Набор задачи и настройка решающие устройств
_ Контроль правильности, настройки и набора
----**| Пробные решения\-
Окончательное решение и анализ результатов
I Коней, |
Рис. ХШ-З. Блок-схема процесса решения задачи на АВМ.
следующих операций: модели в форму, удобную
I
I
б) разработка п р о г р а м м ы — структурной схемы моделиро-
вания;
в) разработка коммутационной схемы, т. е. структурной схемы для конкретной АВМ.
Набор задачи на АВМ и настройка решающих устройств заключается в соединении между собой блоков АВМ (в соответствии с коммутационной схемой) и установке коэффициентов передачи (начальных условий) этих блоков по данным, полученным на этапе программирования.
На этапе контроля правильности настройки и набора проводят проверку соответствия соединений решающих устройств и значений их коэффициентов передачи математической модели.
На этапе пробных решений осуществляют уточнение программы и все необходимые изменения фиксируются на структурной и коммутационной схемах.
После корректировки выполняется окончательное решение, результаты регистрируются и тщательно анализируются.
313
Математическое описание широкого класса объектов автоматического регулирования (например, теплообменной аппаратуры, химических реакторов и др.) приводит к необходимости решения линейного дифференциального уравнения n-го порядка с постоянными коэффициентами.
Проследим процесс подготовки задачи к решению с помощью АВМ на примере обыкновенного линейного дифференциального уравнения третьего порядка с постоянными коэффициентами, имеющего вид:
• d3x , d2x , dx
ао + а1 ^/2 + а2 ft + °3Х = У (О
где do, ab az, а3— постоянные коэффициенты; х, у — переменные; / — время.
Примем начальные условия:
Далее произведем замену уравнения высокого (третьего) порядка эквивалентной системой уравнений первого порядка, для чего разделим все члены уравнения на коэффициент при старшей производной (а0) и введем обозначения:
dx dxr _ d2x
xi= dt *2 _ dt -"dt*
fl, О» On 1
— = b1 — = b„ — = b3 — = Ьл
a0 1 a0 2 a0 3 a0 4
В результате проведенных преобразований получим: j
= ~ь1Хз - Ьгхг - Ь3х + Ь4у (/)
dx _ dxx _
dt " X1 dt = *2
Для этой системы уравнений начальные условия будут иметь вид:
х (0) = Bi Xi (0) = В2 хг (0) =
По виду уравнений, входящих в данную систему, нетрудно определить, какие блоки потребуются для выполнения всех математических операций, имеющихся в этих уравнениях. Вполне очевидно, что переменная х может быть получена в результате 'интегрирования переменной хц Для определения переменной х\ нужно проинтегрировать переменную х2. А для определения х2 необходимо все переменные умножить сначала на соответствующие .коэффициенты и просуммировать полученные произведения, а затем проинтегрировать сумму.
314
Если учесть особенности реальных блоков АВМ (например, возможность совмещения операций интегрирования, суммирования и умножения на постоянные коэффициенты, с отрицательным знаком в одном блоке), то структурная схема решения приведенного дифференциального уравнения третьего порядка примет вид, показанный на рис. ХШ-4. На схеме структура набора отдельных
Рис. ХШ-5. Графики процессов, полученные при различных масштабах времени.
Рис. ХШ-4. Структурная схема решения линейного дифференциального уравне-. ния третьего порядка:
/ — усилитель, интегрирующий сумму входных сигналов; 2 — интегрирующие усилители; 3 — усилители переменного знака.
уравнений показана сплошными линиями, а соединения выходов отдельных операционных блоков с соответствующими входами — пунктирными линиями. Цифры у входных цепей обозначают коэффициент передачи по данному входу.
Поскольку все входы и выходы блоков математической модели имеют одну общую заземленную точку (на рис. ХШ-4 не показана), то структурная схема изображается однопроводной.
При масштабировании переменных надо также иметь в виду, что входные и выходные напряжения блоков АВМ не должны быть меньше определенного уровня, т. к. в противном случае значительно возрастает ошибка, решения.
Если никаких сведений о максимальных значениях зависимых переменных нет, то масштаб определяется методом проб. Для первой пробы берется обычно масштаб поменьше. Если при этом все переменные уложатся в рабочий диапазон напряжений, то по полученному решению легко оценить максимальные значения всех переменных и произвести уточнение масштаба. В случае неудачного выбора масштаба при первой пробе, его изменяют дальше до тех пор, пока все переменные не будут укладываться в рабочий диапазон напряжений АВМ (±100 или ±50 В).
Предположим, что исследуется процесс влияния температуры на ход реакции в химическом реакторе при изменении температуры от 200 до 150 °C, т. е. в интервале Д/ = 50 град. Будем иметь
315
в виду, что максимальное значение входного и выходного напряжений решающих усилителем (УЮах=100 В. Тогда масштаб по температуре t° (зависимая переменная) будет:
tAnax 100
m/° = ~ы~ = “50“ = 2 В/гРад
Изменение масштаба времени — независимой переменной, значительно расширяет возможности АВМ и позволяет решать задачи, которые в реальном масштабе времени решены быть не могут. Примерами могут служить исследования кинетики химических реакций, протекающих с большими скоростями. В таких случаях исследования проводятся в «растянутом» масштабе времени. И, наоборот, исследование, например, теплопередачи в массивных телах с малыми коэффициентами теплопроводности или медленно протекающих химических реакций, необходимо проводить в «ускоренном» масштабе времени.
На рис. ХШ-5 приведены графики процессов, полученные при различных масштабах времени, из которых .видно, что, в отличие от реального масштаба времени znt=l, ускорение будет происходить при тг<1, замедление—при nif>l.
Выбор масштаба времени производится не только из соображений удобства наблюдения и регистрации, но и погрешностей в работе решающих устройств. В связи с этим максимальное время решения задачи должно продолжаться от нескольких секунд, до 15 минут.
После определения масштабов зависимых переменных и масштаба независимой переменной находят коэффициенты передачи решающих блоков по каждому входу. Принцип определения коэффициентов передачи рассмотрим на примере основных линейных математических операций, выполняемых на АВМ: суммирования и интегрирования. Предположим, что требуется выполнить операцию суммирования двух переменных:
У = ^1-^1 ^2^2
Тогда для суммирующего устройства (см. рис. ХШ-2, б) будет, справедливо следующее равенство:
^ВЫХ = -К^ВХ 1 -^2^ВХ 2
Пусть напряжение 17Bxi изображает величину в масштабе mxi напряжение UBX 2 — 'величину х2 в масштабе тх2, а напряжение на выходе изых = туу.
Следовательно, уравнение туу= — (К\тх\Х\+К2тх2Х2) вполне зправедливо.
Сравнение этого уравнения с заданным показывает, что они зовпадают, если выполняются соотношения
„ к -
1\ 1 а «И А 2 —
1 тх1 2 тхг
16
Данный вывод может быть легко распространен на случай, когда число слагаемых больше двух.
Теперь рассмотрим моделирование зависимости t
у = —a J xdt о
с помощью интегрирующего усилителя (см. рис. ХШ-2, в). При-няв UBT=mxx, иБых = туу, x==mtt, получим:
t
тУУ = J mxXmidt
* °
Чтобы интегрирующий усилитель моделировал интересующую нас зависимость, должно быть выполнено соотношение:
1 тиа 1 а
~а~г = и Г ПРИ тх = ти н Тг =
Следует иметь в виду, что одинаковый масштаб переменных применяется только в тех случаях, когда максимальные значения переменных имеют один и тот же порядок. В противном случае напряжения, соответствующие различным переменным, могут значительно отличаться по величине.
При подборе коэффициентов передачи принимают также во внимание, что для различных типов решающих усилителей этот выбор ограничен определенными пределами. Так например для АВМ типа МН-7 коэффициент передачи интегрирующего усилителя из соображений обеспечения наименьшей погрешности рекомендуется выбирать в пределах от 0,1 до 10. •
В науке и технике решение многих практических задач приводит к нелинейным дифференциальным уравнениям. Используя известные приемы, можно провести линеаризацию уравнений и сравнительно просто найти решение задачи (о некоторых приемах линеаризации нелинейных уравнений было рассказано в гл. VII). Но при линеаризации часто значительно искажается картина физических явлений, да и составление линейных уравнений — работа довольно трудоемкая. Поэтому еще одним преимуществом АВМ является возможность исследования нелинейных систем без их предварительной линеаризации.
Для решения нелинейных дифференциальных уравнений используются нелинейные блоки, у которых выходное напряжение представлено нелинейной функцией только входных напряжений и не зависит от времени в явном виде.
Методика решений нелинейных уравнений на АВМ здесь не рассматривается.
Следует лишь отметить, что аналоговое моделирование — это нс формализованная процедура, а экспериментальный поиск, опи
317
рающийся на выработанные практикой приемы и схемы. Специалисту в области техники и технологии, не знакомому с модели-' рованием, несложно освоить искусство моделирования; к его услугам имеется необходимая литература (см. список литературы).
ГЛАВА XIV
ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ МАШИНЫ
ОБЩИЕ СВЕДЕНИЯ О ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИНАХ
Решение задачи на цифровой вычислительной машине сводится к расчленению вычислительного процесса на элементарные арифметические и логические операции и к их последовательному выполнению согласно принятому алгоритму — точному предписанию о выполнении в определенном порядке некоторой группы операций над исходной информацией. Каждая элементарная операция выполняется под воздействием команды — кодовой комбинации (группы цифр), несущей информацию о том, какую операцию и над какими числами следует выполнить.
ЦВМ содержат следующие основные устройства (рис. XIV-1):
А — арифметическое устройство (арифметика);
ЗУ — запоминающее устройство (память);
У — устройство управления;
У В В.— устройство ввода — вывода (ввод данных и вывод результатов вычислений).
Кроме того, машина снабжена пультом ручного управления и сигнализации.
Тесная функциональная связь и идентичная элементная база арифметического устройства и устройства управления сделали целесообразным их объединение в единое устройство — процессор.
Современные цифровые машины работают в двоичной системе счисления*, где, в отличие от общеупотребительной позиционной десятичной системы, для изображения любого числа достаточно лишь двух цифр: 0 и 1.
В общем случае десятичное число У может быть представлено в следующем виде:
N = ащр"1 + + • • • + flip' + аор° +
т
+ О-1Р"1 -|-F a-k+iP~k+1 + a-kP~k = 2 atpI'
* Другие формы счисления, например восьмиричная, здесь не рассматриваются.
118
где ai может принимать значения от 0 до 9; р=10; т и k — целые положительные числа.
Приведенный общий вид записи чисел соответствует не только десятичной системе, но и любой другой позиционной системе счисления (с любым основанием р). Например, десятиричное число
Рис. XIV*!. Блок-схема вычислительной машины.
цифровой'
267,8 может быть представлено в виде:
267,8 = 2.102 + 6-101 + 7-10°+ 8-10-1
а двоичное число W=1 0 1 1 — в'виде:
W = 1 О 1 1 = 1р3 + 0р2+ 1-рЧ- 1-р° = 1-23 + 0-22+ 1-21 + 1-2»= 11
Эта последняя запись означает, что двоичному числу 10 11 соответствует число 11 в десятичной системе счисления.
Приведем еще один пример:
10 11110 10= 1-28+ 0-2’+ 1-2«+ 1-2® + 1-24 4-+ Ь23 + 0-22+ 1-21 Н- 0-2° =378 или
1 0 1 1 1 1 0 1 0(2) =378(10)
где индексы (2) и (10) означают двоичную и десятичную системы счисления.
Для перевода целого числа из десятичной системы в двоичную его нужно последовательно делить на основание 2. Деление осуществляется до тех пор, пока не получится частное 1 или 0. Правила перевода в двоичную систему правильных дробей и смешанных чисел здесь не рассматриваются.
Пример XIV-1. Перевести целое десятичное число 125 в двоичную систему:
е
319
Искомое двоичное число, соответствующее заданному десятичному числу 125, запишется в виде:
125(h) = 1(Ж) 1(e) 1(д)1(Г)1(в)0(б) 1(a) = 1 11110 1(2)
Примечание. Для большей ясности в данном примере все остатки и последнее частное снабжены буквенными индексами от а до ж.
Арифметические действия сложения, вычитания и умножения над двоичными числами выполняются в соответствии с приведенными ниже выражениями так же, как и для чисел десятичной системы счисления:
0 + 0 = 0 0 — 0 = 0 0X0 = 0
0+1 = 1 1-0= 1 0X1=0
1+0=1 1-1=0 1X0 = 0
1+ 1 = 10 10 — 1 = 1 1X1 = 1
Выполнение операции деления на ЦВМ является самым сложным из всех четырех арифметических действий и с помощью соответствующих кодов сводится к сложению.
Пример X1V-2. Сложить два двоичных числа 1 1 0 0 1 (25 в десятичной системе) и 110 1 (13 в десятичной системе):
Пояснение. В результате сложения двух первых справа разрядов получ-или двоичное два, т. е. 1 0 и записали нуль в первом разряде суммы, а единицу переносим во второй разряд. Сумма вторых справа разрядов слагаемых равна нулю плюс единица переноса, во втором разряде суммы пишем единицу. Сумма третьих разрядов слагаемых равна единице. Сумма четвертых разрядов равна 2, т. е. 1 0, в четвертом разряде суммы пишем нуль, а единицу переносим в пятый справа разряд. Сумма пятых справа разрядов равна единице. Прибавляя единицу переноса из четвертого разряда, получаем 2, т. е. 1 0, в пятом разряде суммы пишем нуль и в шестом разряде — единицу.
Расшифровывая результат (сумму), получаем:
1 0 0 1 1 0(2) = 38(io)
Пример X1V-3. Найти разность двоичных чисел 1 000 (в десятичной системе) и 1 1 (Зв десятичной системе)
_1 0 0 О
________1 1 1 0 1(2)= 5(10)
Пояснение, В четвертом разряде уменьшаемого занимаем единицу и переносим ее в третий разряд. Тогда в третьем разряде будет две единицы, так как единица любого разряда равна двум единицам предыдущего младшего разряда (аналогично тому, как в десятичной системе единица любого разряда равна десяти единицам предыдущего младшего разряда). Далее, из двух единиц, имеющихся в третьем разряде, занимаем одну единицу и переносим ее во второй разряд вычитаемого, в результате чего во втором разряде запишутся две единицы, а в третьем — одна единица. Затем, одну единицу из второго разряда перенесем в первый разряд, где будет две единицы. Таким образом в результате переноса единицы в первом разряде уменьшаемого будет две единицы, во втором и третьем разрядах — по единице, а в четвертом разряде — нуль.
320
Пример XIV-4. Выполнить умножение двоичных чисел:
110 1
110 0
0 0 0 0
0 0 0 0
1 1 0 1
1 1 0 1
10011100
Пояснение. Операция умножения сводится только к сдвигу множимого в дальнейшему сложению, с которым мы ознакомились выше.
Как уже отмечалось, ЦВМ наряду с арифметическими выполняет и логические операции.
Так как результат операции, выполняемой на машине, есть двоичное число, то операционную схему можно рассматривать как некоторый функциональный преобразователь, на входах и выходах которого — двоичные числа. Еще удобнее считать аргументами и значениями функции отдельные разряды двоичных чисел. В этом случае наш функциональный преобразователь приобретает вид устройства с несколькими входами и выходами, причем на каждый вход подается и с каждого выхода снимается двоичная цифра либо 0, либо 1, т. е. речь идет о переменных и функциях, принимающих лишь значения 0 или 1. Такие переменные и функции носят название л о г и ч е ск'и х, или буле,в-ских — по имени математика и логика Джорджа Буля (1815— 1864), создателя символической логики. Изучением этих функций занимается область математики, называемая алгеброй логики.
Логика (от греческого logike) — наука о формах и законах мышления. Алгебра логики — применение алгебраических правил в формальной логике.
Основным понятием, используемым в алгебре логики, является высказывание — любое утвердительное предлох<ение, которое может быть либо истинным, либо ложным. Например, высказывание: 5—нечетное число является истинным, а лед — жидкий — ложным.
Отдельные высказывания обозначаются буквами латинского алфавита А, В, С, D,... и могут иметь только два значения: либо истинное, либо ложное. Условно принято изображать истинное высказывание через единицу (например А — истинно, запишется А = 1), а ложное —через нуль (например С —ложно, запишется С = 0).
В силу изложенного высказывания является двоичной переменной и соответствует цифрам в двоичной системе счисления.
Ниже рассматриваются основные элементарные логические операции.
321
Логическое отрицание, инверсия (от латинского inversio—перестановка), .называемое также операцией НЕ. Пусть имеется некоторое высказывание А. Его отрицанием будет другое высказывание, которое обозначается символом А и читается «не А». Если высказывание А истинно, т. е. А = 1, то А ложно и, следовательно А=0. Если А ложно, т. е. А = 0, то А—истинно и А=-1.
Значение отрицания по значению основного высказывания устанавливается таблицей
0=1
7 = о
Логическое умножение, конъюнкция (от английского conjunction— объединение), называемое также операцией И, это -операция умножения двух высказываний А и В, которая обозначается знаком Д, т. е. А/\В.
Результатом логического умножения двух высказываний А и В является другое высказывание Р=А/\В. Значения конъюнкции по значениям аргументов находятся по правилам логического умножения:
ОДО = о 1Д0 = 0
0Д1 = 0 1Д1 = 1_
или на основании данных: ДД0 = 0; ДДА=0; ДД1=А.
Значения истинности конъюнкции двух высказываний будут такими:
если А —0 и В = 0, то Р=А/\В
если А = 0 и В= 1, то Р = 0
если А = 1 и В = 0, то Р = 0
если А = 1 и В= 1, то Р= 1.
Логическое сложение, дизъюнкция (от английского disjunction— разъединение, размыкание), называемое также операцией ИЛИ, является сложным высказыванием, которое истинно при истинности хотя бы одного из его составляющих и ложно, если ложны оба высказывания, его образующие.
Логическое сложение обозначается знаком V> например А\/В, имеет смысл союза «ИЛИ» и читается так: А или В.
Значения дизъюнкции по значениям составляющих ее высказываний будут такими:
ovo=o ivo = o
OV1=O ivi = i
Операции логического умножения и сложения справедливы для цобого числа высказываний, т. е.
ддвлсдо...
AV5VO/0---
При решении задач возникает необходимость преобразования югических выражений, которые производятся с помощью опреде-22
ленных правил, основными из
которых являются следующие:
А ДВ = В ДА А\/В = B\JA
ЛЛЛ=ЛЛ0=0 Л\М = Л\/1 = 1
ЛДЛ = АД/А = ЛД1 = Л\/0 = А (А/\В)ДС = ЛД(ВДС) = ЛДВДС MVS)VC = А\ДВ\/С) = А\/В\/С I (А/\В)\/С = WQAWQ
(лувудс = (лде)у(вдс)
При подстановке в эти выражения значений 0 и 1 для всех переменных можно убедиться в справедливости приведенных формул.
В ЦВМ существует две формы представления чисел: естественная, или с фиксированной запятой, и нормальная, или с плавающей запятой (отсюда и названия: машина с фиксированной или с плавающей запятой). Запятая в машине кодом не изображается. -
Машины с фиксированной запятой. Положение запятой, отделяющей целую часть числа от дробной, фиксировалось в них & определенном месте ячейки памяти машины. Однако, такая форма представления чисел вызывает определенные трудности при программировании и от нее вскоре отказались (первые зарубежные и отечественные машины были с фиксированной запятой).
Машины с плавающей запятой. В современных ЦВМ используется форма записи чисел с плавающей запятой.
Числа в форме с плавающей запятой записываются в виде
W = iy0-10^
где 10 означает основание системы счисления; No — мантисса, представляющая собой число, которое меньше единицы (правильная дробь); р — порядок числа (целое положительное или отрицательное число).
Например, десятичное число W = 207,025, записанное в естественной форме, к нормальному виду приводится так:
^= 0,207025-103
где 0,207025—мантисса; 3 — порядок числа.
В этом случае запятая не имеет постоянного фиксированного положения, так как число 207,025 может быть представлено и иначе, а именно: 0,0207025-104, или 0,00207025-105 и т. д.
Двоичное число М=101, 010 1 может быть представлено следующим образом:
= 1 О 1,0 10 1-10°= 1 0,1 О 1 О 1-101 = 1,0 10 10 l-10J0 =
= 0,1 0 10 10 1-104 = 0,0 10 10 10 1-Ю100 и т. д.
323
Здесь показатели степени (порядок числа — р) представлены в двоичной системе счисления, а основание 10 — тоже двоичное (Два).
Порядок числа р (с учетом его знака) показывает, на сколько разрядов влево (при отрицательном знаке порядка) или вправо (при положительном знаке порядка) надо передвинуть запя-
н
1
записи двоичного запятой в ячейке
Рис. XIV-2. Схема числа с плавающей памяти: J — знаковый разряд мантиссы; III— знаковый ] /V — разряды порядка числа.
числа; //—разряды разряд порядка;
° s и
///
— —3
7 1 1 0 0 1 О о 7 0 7 О 0 0 0 о 1 0 1
t
О в
Рис. XIV-3. Графическая иллюстрация способов представления цифр в ЦВМ: а — потенциальный; б — импульсный; в — динамический.
тую, чтобы от нормальной перейти к естественной форме записи числа.
Предположим, что в ячейку памяти машины следует записать число N — —1 1001, 00101. В нормальной форме это число имеет вид:
# = —0,1 1 0 0 1 0 0 1 О 1-10101
Тогда схема записи этого числа в ячейке памяти будет иметь вид, показанный на рис. XIV-2.
Так как порядок представляет собой целое число, то при записи порядка в ячейке памяти крайний правый разряд следует считать младшим разрядом, т. е. в крайнем правом разряде единица соответствует 1-2°, а во втором справа разряде она равна 1 - 2 и т. д.
При умножении двух чисел их мантиссы перемножаются, а порядки складываются, при делении двух чисел мантиссы делятся, а порядки вычитаются.
Для изображения чисел в ЦВМ применяются прямой, обратный и дополнительный коды.
Отрицательные числа изображаются с помощью обратного и дополнительного кодов, позволяющих заменить операцию вычи-324
тания сложением и значительно упростить арифметическое устройство машины.
Прямой код совпадает с записью самого числа в принятой двоичной системе счисления с учетом знака.
Обратный код отрицательного числа формируется путем замены цифр в числовых разрядах прямого кода единиц нулями и нулей единицами. Значение знакового разряда будет равно единице. Например, обратный код отрицательного числа — 0, 1 1 1 0 1 будет соответствовать 1, 00 010.
Дополнительный код здесь не рассматривается.
Использование этих кодов в ЦВМ позволяет свести все четыре арифметические действия к сложению.
Числа и команды в ЦВМ, представляемые набором двух цифр, реализуются двумя различными сигналами: один соответствует изображению единицы, другой — изображению нуля. В зависимости от вида этих сигналов различают три способа представления двоичных цифр в ЦВМ:. потенциальный, импульсный и динамический.
При потенциальном способе единице соответствует высокий уровень напряжения Ui (рис. XIV-3, а) а нулю —низкий Uo.
При импульсном способе единице соответствует наличие импульса, нулю — отсутствие (рис. XIV-3, б).
При динамическом способе единице соответствует серия импульсов, нулю — отсутствие импульсов (рис. XIV-3, в).
Числа, закодированные с помощью электрических сигналов, вводятся в ЦВМ последовательно (по одной электрической цепи последовательно: разряд за разрядом) или параллельно (каждый разряд —по своей электрической цепи).
. ОСНОВНЫЕ УСТРОЙСТВА ЦИФРОВЫХ ВЫЧИСЛИТЕЛЬНЫХ МАШИН
Возвратимся вновь к блок-схеме ЦВМ (рис. XIV-1) и познакомимся с основными устройствами машины.
Арифметическое устройство (А). Предназначено для выполне-нения основных арифметических и логических операций, а также различных сдвигов (речь идет о машинах с плавающей запятой) .
В состав' арифметических устройств входят: сумматоры, регистры, множительные устройства, логические элементы.
Сумматор — основа арифметического устройства, производящий суммирование кода чисел. Различают накапливающие сумматоры (слагаемые поступают на входы последовательно) и комбинационные (слагаемые поступают одновременно). Более широкое распространение получил сумматор накапливающий, схема которого показана на рис. XIV-4.
В момент времени t\ на счетный вход ИЛИг триггера (знакового реле), предварительно установленного в нулевое состояние, поступает цифра а первого слагаемого и запоминается. Спу-
> ’ . 325
'
__ . ’4 - ...
стя промежуток времени А/ на вход ИЛИ1 поступает цифра b второго слагаемого и происходит сложение цифр а и b по модулю, что соответствует реализации логической функции
Рис. XIV-4. Функциональная схема (я) и временная диаграмма (б) одноразрядного накапливающего сумматора.
fi = a/\b\/a/\b
Спустя еще один промежуток Af на этот же вход ИЛИ1 подается цифра с переноса из младшего разряда, в результате чего триггер Т будет реализовать логическую функцию
ft = fiAA/'hAc
Подставив значение fi из предыдущего выражения в fi и преобразовав полученную формулу по правилам алгебры логики, придем к формуле
fz =• a/\fi/\c\/a/\b/\c\/a/\b/\c\/a/\b/\c
что является суммой цифр в данном разряде.
Правильность выработки сигнала переноса в старший разряд осуществляется элементом Hi, реализующим функцию
/з = fiAc
Эта составляющая возникает при взаимодействии цифр слагаемых с сигналом переноса с из младшего разряда. Вторая составляющая вырабатывается при взаимодействии цифр а и b первого и второго слагаемых и реализуется элементом И2, на один из входов которого подается сигнал с нулевого триггера (0), а на другой — слагаемое b через элемент задержки т. Схема реализует функцию
ft = fi/\b^=a/\b
Окончательно сигнал переноса на выходе схемы ИЛИ2 определяется выражением:
D = f3\'fi = a/\c\/b/\c\/a/\b
Регистры. Устройство для запоминания машинных слов (содержимое отдельной ячейки памяти) и простейших их преобразований называется регистром. Регистр состоит из триггеров, число которых соответствует числу разрядов в машинном слове (цифровом коде).
На рис. XIV-5 приведена схема четырехразрядного регистра параллельного действия.
326
В исходное нулевое состояние триггеры Ti,T2,...,T<,...,Tn устанавливаются импульсом сброса (установка нуля). К единичным входам триггеров присоединяются цепи передачи разрядных сигналов (считаем, что старшинство разрядов возрастает справа налево.) Запись числа производится одновременной подачей на единичные входы триггеров кодов чисел Хь x2,...,Xi,...,xn. При подаче
Рис. XIV-5. коде.
Блок-схема регистра для приема
машинного слова в параллельном
Рис. XIV-6. Схема множительного устройства.
кода «1» триггер переводится в состояние 1, остальные триггеры— в состоянии 0. Записанное число считывается с единичных выходов триггеров Qb Qb-,Qi>-,Qn-
Множительные устройства выполняют операции умножения. Схема такого устройства, обеспечивающего умножение двух л-разрядных чисел, приведена на рис. XIV-6.
Рассматриваемая схема предусматривает выполнение операции умножения со сдвигами множителя и сумм частных произведений в сумматоре.
В регистры множимого РМ2 и множителя PMi поступают коды обоих сомножителей. Триггер Т старшего разряда множителя является управляющим и сигнал с его выхода_(потенциал) поступает на схемы элементов И (вентили). Если в старшем разряде содержится единица, то триггер открывает вентили И по одному входу. Затем в схему поочередно посылают два тактовых импульса: импульс суммирования ис и импульс сдвига «Сд.
При поступлении первого импульса ис кодовые импульсы из регистра множимого РМ2 передаются в накапливающий сумматор НС. Если в это время в старшем разряде множителя находится единица, то множимое всеми своими разрядами одновременно переходит через схемы элемента И и переписывается в младшие разряды НС. Следующий за этим тактовый импульс сдвига исд сдвигает содержимое сумматора и регистра множителя РМ] на один разряд влево, в сторону старших разрядов. Второй такто
327
вый импульс ис снова посылает множимое в НС, но теперь уже со сдвигом вправо, так как находящаяся там сумма предыдущим импульсом «ед была смещена влево на один разряд.
Так как при умножении двух «-разрядных чисел максимальное число разрядов в произведении равно 2п, то накапливающий сумматор рассчитывается на 2п разрядов.
Рис. XIV-7. Принципиальные схемы инвертора (а), конъюнктора (б) и дизъ-юиктора (в).
Логические элементы — электронные устройства, осуществляющие логические операции НЕ, И, ИЛИ.
Устройство, осуществляющее логическую операцию НЕ (логическое отрицание), носит название инвертора и работает следующим образом (рис. XIV-7, а).
Если высказывание А истинно, то на базу транзистора Т поступает положительный сигнал, и транзистор будет заперт, т. е. коллекторный ток 1 равен нулю, падение напряжения на резисторе Ek—IkR отсутствует и напряжение на коллекторе Uk равно Ek- Это значит, что снимаемый с выхода транзистора .сигнал А обратен сигналу А, подаваемому на базу транзистора.
Если высказывание А ложно, на базу транзистора поступает отрицательный сигнал, транзистор открывается, появляется, коллекторный ток h> на резисторе Rh отмечается падение напряжения IhRk^Ek, в результате чего напряжение на коллекторе Uk»0. Таким образом при подаче на базу транзистора отрицательного сигнала с коллектора снимается_ сигнал высокого уровня, т. ё. сигнал, обратный поданному: Р—А.
Логическая операция И — конъюнкция (логическое умножение) реализуется с помощью устройства, называемого конъюнк-тором (рис. XIV-7, б). Эта схема служит для логического умножения трех высказываний: P—A/\B/\D.
.Если хотя бы одно из высказываний А, В или D ложное, то на соответствующий диод поступает низкий потенциал, через этот диод потечет ток и на резисторе R создается падение напряжения. В результате потенциал на выходе (С) становится низким и равным Ea—IR, т. е. Р=ЛДВД£) = 0 (ложно). Лишь когда все высказывания А, В и D истинны, на входы всех трех диодов поступают высокие потенциалы, эти ДйоДы запираются, ток в цёйй.
328
конъйзнктора не протекает и падение напряжения на резисторе R отсутствует. В результате потенциал на выходе (С) становится высоким и равным Еа, следовательно высказывание P=A/\B/\D=1 (истинно)?
' Логическая операция ИЛИ — дизъюнкция (логическое сложение) реализуется с помощью устройства, называемого дизъюнкта р о м (рис. XIV-7, в).
Если хотя бы одно из высказываний А, В или D истинно, соответствующий диод открыт и в цепи, в том числе на участке MN, протекает ток I, а потенциал на выходе (С) высокий и больше потенциала земли на величину IR.
Если же все высказывания ложны, на входы всех диодов поступают низкие потенциалы, диоды заперты, тока в цепи нет и потенциал на выходе (С) становится низким и равным потенциалу земли. А это значит, что высказывание Р—А\/В\/Е = (У\/0\/0 = = 0 (ложно).
Запоминающее устройство (ЗУ), или память. Предназначено для приема, хранения и выдачи исходных данных: команд, чисел, а также промежуточных и конечных результатов вычислений.
Основными эксплуатационными характеристиками ЗУ являются емкость и быстродействие.
Под емкостью понимают число единиц информации, которое память может хранить одновременно. В качестве единиц информации применяются: машинное слово — многоразрядный код числа или команды; бит — один двоичный разряд числа, равный 0 или 1; байт — восьмиразрядное двоичное число;
под быстродействием понимают скорость записи и считывания данных из запоминающего устройства.
Информационная емкость и быстродействие — противоречивые характеристики ЗУ, так как высокое быстродействие при значительном увеличении информационной емкости невозможно. Поэтому в ЦВМ используются:
ОЗУ — оперативное запоминающее устройство, которое непосредственно связано с арифметическим устройством и из него производится считывание и запись информации;'
ВЗУ — внешнее запоминающее устройство, которое непосредственно не участвует в обмене информацией с другими устройствами ЦВМ.
Обычно ОЗУ характеризуется быстродействием, но имеет сравнительно небольшую емкость, ВЗУ предназначено для хранения большого объема информации, но работает с небольшой скоростью.
В оперативных запоминающих устройствах всех отечественных и большинства зарубежных ЦВМ в качестве запоминающих элементов применяются сердечники из феррита (смесь окислов железа, магния и марганца), которые изготавливаются в виде тороидов (колец). Ферриты обладают высокой магнитной проницаемостью и малым временем перемагничивания.
22—2208 329
Поясним работу запоминающего элемента (ферритовый сердечник) с помощью схемы (рис. XIV-8, а).
Если через обмотку w пропустить электрический ток I, то последний создает в сердечнике магнитный поток, величина которого Ф определяется напряженностью внешнего магнитного поля Н, образованного в окружающем обмотку пространстве током I.
Рис. XIV-8. Схема запоминающего элемента (а) и его петля гистерезиса (б}: I—V1I — кривые намагничивания и размагничивания.
Рис. XIV-9. Схема сердечника с двумя обмотками (а) и графики импульсов (б) и (в), снимаемых с выходной обмотки.
Магнитная индукция В, которая является отношением величины магнитного потока Ф к площади сечения сердечника S (В = Ф/5) зависит от Н, т. е. B = где H=Iwll. Здесь гр —число витков обмотки; I — длина магнитопровода, принимаемая за длину средней окружности тороида.
Графически процесс намагничивания и размагничивания представлен на рис. XIV-8, б.
Размагниченному состоянию сердечника соответствует начало координат (0). По мере увеличения тока I положительной полярности (а значит и И) будет увеличиваться и В (кривая /) до значения Bs (индукция насыщения). При уменьшении тока / размагничивание будет происходить по кривой II, отличающейся от кривой I, так как в кристаллической структуре феррита всегда имеются внутренние напряжения, дефекты и пустоты, инородные включения. Поэтому даже при отключении тока (77=0) в ферритовом сердечнике сохранится состояние намагниченности (остаточная магнитная индукция +ВГ).
Чтобы полностью размагнитить сердечник надо создать внешнее поле противоположной полярности, т. е. пропустить ток I про
330
тивоположного направления (кривая III). При напряженности поля— Нс (коэрцитивная 'сила) В = 0. Если далее увеличить ток I противоположного направления (кривая IV), то сердечник перемагнитится в противоположном, направлении и его магнитная индукция станет равной —Bs.
Аналогично будет протекать процесс размагничивания (кривые V и VI) и нового намагничивания (кривая VII).
Как видно из графика, при / = 0 магнитный поток может иметь два значения: или —Вг; эти состояния можно использовать
для запоминания двоичных цифр 1 (+ВГ) и 0 (—Вг).
Однако информацию, заполненную сердечником, надо не только хранить, но и считывать для дальнейших операций.
Считывание происходит с помощью второй обмотки сердечника-обмотки выхода w2 (рис. XIV-9, а).
При изменении магнитного потока Ф, вызванном изменением тока 1вх в обмотке wlt в выходной обмотке индуктируется (как в трансформаторе) ток Дых-
Предположим, что на сердечнике была записана единица. Тогда с выходной обмотки w2 мы снимаем два импульса Ui и U2 противоположной полярности, которые соответствуют изменению магнитной индукции от +ВГ до —Bs и от —Bs до —Вг (см. рис. XIV-8, б). Так как IBr+Bsl>|Bs—ВтI, то UV>U2 (рис. XIV-9, б).
Если же на сердечнике был записан нуль, то импульсы С73 и ZJ4 на выходе обмотки w2 будут равны по амплитуде (рис. XIV-9, в), так как при этом магнитная индукция изменялась от —Вг до —Bs и от — Bs до — Вг (рис. XIV-8, б).
Следовательно, по разнице в амплитудах снимаемых импульсов можно определить, что записано на сердечнике.
Ферритовый сердечник изготавливается в виде кольца с наружным диаметром «0,51 мм, внутренним «0,31 мм и временем переключения порядка 0,2 мкс.
Существуют различные варианты построения магнитных оперативных запоминающих устройств на ферритовых сердечниках, из которых наибольшее распространение получили матричные запоминающие устройства.
Если емкость ЗУ составляет п чисел, то п сердечников, соответствующих одному разряду всех п чисел, располагаются в виде плоской квадратной матрицы (рис. XIV-10), представляющую собой решетку, образованную взаимно перпендикулярными адресными шинами: горизонтальными xj, х2,...,хп и вертикальными Уъ Уъ-.Уп. Кроме того, все сердечники последовательно пронизываются шиной z, называемой обмоткой считывания. Каждая шина — проводник, пронизывающая сердечник, играет роль одновитковой обмотки (да = 1).
Для записи в ЗУ m разрядов двоичных чисел используется . пг матриц, которые набираются в пакет, располагаясь одна над другой й образуя куб памяти.
224 331
Работа матричного ЗУ протекает следующим образом. Если, - например, нужно записать код единицы по адресу х2уз, то для этого по. адресным шинам Х2 и уз посылаются положительные импульсы тока с амплитудой 7тах/2, в два раза меньшей по сравнению с требуемой для перемагничивания сердечника. Сердечники 3, //, 15 на шине уз своего состояния не изменяют, и только сердеч-
Рис. XIV-10. Схема плоской квадратной матрицы:
1—16 — сердечники.
ник 7, находящийся на пересечении адресных шин хз и уз, будет приведен в единичное состояние в результате действия складываемых магнитных полей.
Для считывания информации по тому же адресу ХзУз в адресные шины х<2 и уз посылаются импульсы тока с амплитудой /гаах/2, но отрицательной полярности. Сердечник 7 перебрасывается в нулевое состояние. При этом в обмотке считывания возникает полезный сигнал, передаваемый в выходной регистр.
После считывания единицы сердечник остается в нулевом состоянии, т. е. записанная информация разрушается и возникает необходимость в ее вое* становлении. Для этого в адресные шины посылаются двухполярные сигналы. Первые импульсы считывания отрицательной полярности — Ixi и —lyi; складываясь, считывают единицу, приводя сердечник в нулевое состояние, а суммарное поле, образованное следующими за ними импульсами записи положительной полярности 4-7x2 и 4-/»2, вновь записывает единицу.
Чтобы избежать записи единиц в те сердечники, в которых при считывании были нули, используется четвертая шина — шина запрета z, по которой специальная схема регенерации (на рисунке не показана) посылает отрицательный импульс —1з, нейтрализующий импульс 1У2, а оставшийся импульс 7=7тах/2 вести сердечник в единичное состояние.
Запись новой информации производится после бранной ячейке старой информации.
В качестве внешних запоминающих устройств менных ЦВМ применяются накопители на магнитных лентах (НМЛ), на магнитных барабанах (НМБ) и магнитных дисках (НМД).
Работа всех накопителей основана на свойстве ферромагнитных материалов намагничиваться в одном и двух противоположных направлениях и сохранять остаточную намагниченность неограниченно долго.
Поверхность ленты, барабана или диска покрывается специ- : альным ферролаком-или гальваническим слоем (толщина покры
не может пере-
стирания в вы-
(ВЗУ) в совре-
332
тия 0,3—0,8 мкм) и. как в магнитофонах, запись и считывание осуществляется с помощью магнитных головок.
На рис. XIV-ll,a приведена схема кольцевой магнитной головки, сердечник которой состоит из полуколец 1 и 2, соединенных латунной прокладкой 3 для уменьшения остаточного намагничивания самого сердечника. Внизу между полукольцами — воздуш-
Рис. XIV-11. Схема магнитной головки (а) и запись и считывание кода ИОН (б): /—V — номера дорожек; 1, 2 — полукольца; 3 —латунная прокладка; 4 — заземленная точка; 5 — пленка.
ный зазор шириной около 50 мкм, обращенный к рабочей поверхности носителя 5 (пленка, покрытая ферролаком). На сердечник нанесены две обмотки wt и w2, имеющие общую заземленную точку 4. Одна из обмоток служит для записи единицы, а другая — нуля. При прохождении импульса тока по обмотке в сердечнике возникает магнитное поле, силовые линии которого встречают со стороны воздушного зазора большое сопротивление и поэтому часть их замыкается через ферромагнитную поверхность движущейся ленты. Участок поверхности ленты, оказавшийся под зазором • сердечника, намагничивается в строго определенном направлении.
Для записи каждой двоичной цифры используются импульсы различной полярности и магнитная поверхность пленки намагничивается в противоположных направлениях (рис. XIV-11,6).
Считывание информации с носителя осуществляется той же головкой.
Головки, число которых зависит от ширины ленты, располагаются по одной линии поперек направления движения ленты. Каждой головке соответствует своя дорожка записи на ленте.
Магнитный барабан (рис. XIV-12, а) представляет собой цилиндр (1) диаметром от 100 до 800 мм из немагнитного материала (например, латунь, алюминий), на поверхность которого нанесен ферролак толщиной до 40 мкм или гальваническое покрытие никель — кобальтового сплава, толщиной 7—15 мкм. С помощью электродвигателя через вал <3 барабан вращается с постоянной угловой скоростью от 750 до 6000 об/мин (в зависимости от конструкции). Магнитные головки 4 расположены вдоль образующей барабана с зазором 20—50 мкм и каждая головка производит запись на дорожке 2, расположенной по окружности.
333
Существует три способа нанесения информации на барабан: параллельный, при котором двоичное число располагается вдоль образующей, последовательный, когда каждое число размещается на одной дорожке барабана и параллельно-последовательный, при котором поверхность барабана делится на зоны и каждая зона представляет собой след записи нескольких головок.
Рис. XIV-12. Схемы запоминающих устройств на магнитном барабане (а) и магнитных дисках (б):
/ — барабан; 2 — дорожки; 3 — вал; 4 — головки записи — считывания; 5 — вал дисков; 6 — диски; 7 — механизм привода; 8 — пружинный рычаг; S — плавающая головка записи — считывания.
Магнитные диски (рис. XIV-12, б) широко используются в ЦВМ третьего поколения. Диски изготавливаются из алюминиевого листа толщиной 3 мм, диаметром 100—600 мм и покрываются с обеих сторон ферромагнитным слоем. Обычно применяется сменный пакет из шести дисков 6, насаженных на вал 5, скорость вращения которого равна 900—3600 об/мин.
Информация записывается на обеих поверхностях дисков вдоль концентрических окружностей-дорожек, число которых достигает 512. Для записи и считывания информации применяются универсальные плавающие магнитные головки 9, установленные на пружинных рычагах выборки 8. Рычаги укреплены на механизме привода 7, обеспечивающего точное перемещение головок вдоль радиуса диска на нужную дорожку.
Устройство управления (У). Его назначение — управление выполнением программы вычислений, т. е. алгоритма вычислений.
Всякая выполняемая в ЦВМ операция (арифметическая, логическая, посылочная и др.) может быть разделена на ряд более мелких этапов — микроопераций.
Например, вычитание двух чисел состоит из следующих операций:
334
вызов первого операнда (вычитаемого) из ОЗУ во входной регистр А;
вызов второго операнда (уменьшаемого) из ОЗУ в сумматор;
изменение знака вычитаемого на обратный (преобразование прямого кода в обратный);
поразрядное сложение кодов уменьшаемого и вычитаемого;
перенос единиц из младших разрядов в старшие;
передача результата вычисления в ОЗУ.
Каждая микрооперация выполняется с помощью специального сигнала (команды), который вырабатывается в У и посылается на ‘соответствующую шину. Время, затраченное на выполнение микрооперации, называется тактом.
Устройство управления, схема которого показана на рис. XIV-13, имеет йрежде всего счетчик команд 1, содержащий адрес команды, которая должна исполняться, регистр команды 2, куда эта команда вызывается из памяти, дешифраторы операции 3 и 4, преобразующие двоичное число в выходной сигнал, блок распределения управляющих импульсов 5 и генератор тактовых импульсов 6, который определяет темп работы ЦВМ.
Важной составной частью устройства управления У является пульт управления и сигнализации. На вертикальной панели пульта размещается большое число различных лампочек схемы сигнализации, а на горизонтальной панели размещены различные кнопки, (клавиши, тумблеры, переключатели и т. д.
Устройство ввода—вывода (УВВ), Это устройство, как и устройства ВЗУ, относятся к внешним или периферийным устройствам ЦВМ. Информация, привычная человеку (комбинации арабских цифр, латинских и русских букв), предварительно переводится на язык, понятный машине (комбинации двоичных кодов, последовательности электрических импульсов и др.). Обратное преобразование происходит при выводе.
Для ввода в память машины все команды, составляющие программу, и числа, участвующие в решении задачи, предварительно наносятся на машинные носители информации, к которым главным образом относятся перфокарты и перфоленты.
Процедура ввода предполагает последовательное использование двух независимых устройств: устройства подготовки данных, переносящего входную информацию на первичный носитель, и читающего устройства — собственно устройства ввода, переносящего информацию с машинного носителя (перфокарты, перфоленты) в ЗУ машины.
Перфокарта (рис. XIV-14) представляет собой плотный, эластичный, картонный бланк толщиной 0,18 мм и размером 187,4Х Х82,5 мм с обрезанным верхним левым углом (для удобства подбора и укладки в колоды или, как их называют, массивы). Поле перфокарты разбито на 12 строк; десять из них помечены цифрами от 0 до 9 и называются нулевой позицией, первой позицией и т. д.; 11-я и 12-я позиции расположены сверху, над нулевой. Каж
335
дая строка содержит 80 колонок, четные номера которых напечатаны снизу и сверху карты.
Информация фиксируется на перфокартах в виде пробивок (на рисунке перфокарты пробивки изображены черными прямоугольниками), которые «просматриваются» устройствами считывания, преобразуются в комбинации двоичных цифр и посылаются для
/12 ч 5 В W 1? 14 16 13 ?а П 24 25 28 Зв 32 М 36 38 40 42 44 45 48 50 Л 54 55 58 Й R « и» И 70 П 14 76 78 «I
0B'C9ett9.9OO.0G9OO000OOD)OO))OOOOOODOttOOOOOOOOD8QQDBOC08OOOOODOOOOO.G0eno9OOCatOOOOO
й 1 iifitii iii । if 1 ii 11 и 111111 и 1111 н 1 nut 11111 н 11 ii ill 11 ни и 11111 и ин пип
72222222222227222222222222222222122?22222222?272222??22222J?72??222222?2272?2?2? х
3 зз$93333333зизаззззээззззззззззззазззззззлззззззззззэзззззэзззэзэзззззззззззззз *
з 444424 4'1'44 <4 41 |«||« И |«< <44444 1 1 <|444 4 4444444 <44 <<<4444 I <4<4<<<<<4444 *
ь 5555S55S5Sj5S55S5S55S55SS55SSS5S55555SSS5S55555S55SSS5SSbSS55551555S;iSSSfS53SS5j
£ 6336315636 6Е556666Б6666666666Ь566666Б66666Б6666666666Б6666666666666ЕЬ6616666' СИ (5
77777777777777777711777777777777717777777777777777717777777777777777777777777777
> в в в в в в 6 8 t в 6 6 Б 6 6 Б 8 6 в в 8 в в Е в 8 8! £14 3 0 в 8 Е 6 6 8 6 6 Б Б 4 Е Е 6 Б Б 6 ! О S 6 Е 4 Е ( 4!! 6 в 8 в 6 6 Б Б ! 6 ! Б ! 61, в в 8 в
12 4 3 3 13 12 11 16 13 И' П 24 К 13 30 32 34 38 И 40 К 41 43 43 S3 И S1 S3 51 63 61 SI 6! S3 13 72 74 7S 7S К
990 9'199999999999999992 9:I999999I>9999IHI>993S9I>939399S39S99999999999999993999999S9S
Рис. XIV-14. Вид перфокарты с просечками.
записи в ОЗУ. Наличие отверстия на перфокарте означает «1», отсутствие отверстия — «0».
Принято два способа нанесения информации на перфокарты: построчный, когда число или команда занимает одну строку (позицию), и поколонный, когда каждая колонка перфокарты используется для размещения одной цифры восьмиричного или десятичного числа или символа.
Перфолента (рис. XIV-15) изготавливается из плотной бумаги в виде сравнительно узкой полосы с дорожками (a, b, с, d, е) для нанесения информации в виде пробивок (на рисунке большие точки) и синхронизирующей дорожкой (f) (малые точки), которая служит для протяжки ленты без проскальзывания.
Пробивки в поперечном направлении ленты образуют строки и содержат служебный знак/,
Рис. XIV-15. Вид перфоленты с записью служебного знака (2) и числа (//):
а. Ь, с, d, е — дорожки; f — синхронизирующая дорожка.
предваряющий запись цифровой информации и запись числа II. Против каждого синхронизирующего отверстия на дорожках ленты имеется место для пяти пробивок, различными комбинациями которых и изображается информация (на ленте, показанной на рис. XIV-15, изображены служебный знак 110 11 и число 109084356).
336
Для удобства размещения и последующего поиска нужного цифрового и командного материала перфолента делится на зоны, причем перед началом каждой зоны набивается знак, обозначающий границу зоны.
Перфокарты прочны, способны долго хранить информацию, позволяют быстро найти ошибки и внести исправления, допускают автоматизированный поиск и выборку нужной информации с помощью сортировальной машины. Однако они занимают большой объем при хранении, а скорость считывания информации ограничена.
Перфоленты имеют малую прочность, допущенные при пробивке ошибки трудно устранимы (участок ленты с ошибкой вырезается и заменяется другим), однако у них есть достоинства — относительно высокая скорость ввода (до 1500 строк в 1 с) и удобство хранения (в виде катушек).
К устройствам подготовки данных на машинных носителях информации относятся: перфораторы карт, перфораторы лент, контрольники, перфокарты-репродукторы.
Перфораторы карт и лент, хотя и различны по конструкции, имеют много общего в работе по набору алфавитно-цифровых знаков. И у одного и у другого перфораторов набор знаков осуществляется оператором вручную на клавишном устройстве, электрически связанном с перфоратором.
Контрольники перфокарт и перфолент служат для проверки правильности нанесения данных на машинные носители информации. Проверка перфокарт заключается в сравнении данных проверяемой перфокарты с данными, которые повторно набираются оператором на клавиатуре контрольника. При расхождении данных загорается сигнальная лампа.
Проверка перфолент производится на специальном контроль-но-считывающем устройстве путем считывания данных проверяемой ленты с данными на второй ленте, подготовленной другим оператором. При несовпадении пробивок вырабатывается сигнал остановки контрольно-считывающего устройства.
Перфораторы-репродукторы предназначены для переноса пробивок с одной перфокарты (перфоленты) на другую чистую карту (ленту).
Устройства считывания с перфолент и перфокарт служат для преобразования информации, записанной в виде пробивок, в соответствующую систему электрических импульсов, вводимую потом в ОЗУ.
На рис. XIV-16 показаны электромеханические и фотоэлектрические считывающие устройства для перфолент.
Электромеханический способ (рис. XIV-16, а) заключается в перемещении перфоленты 1 (перфокарты) между контактным валиком 2, подсоединенным к положительному полюсу источника тока, и металлическими щетками 3 (число щеток соответствует числу дорожек), которые соединены с отрицательным полюсом
337
источника тока. В момент прохождения пробивки (отверстия) между валиком и щеткой упругая металлическая щетка контактирует о^валиком, происходит замыкание электрической цепи и возникает импульс, соответствующий коду «1».
Фотоэлектрический Способ считывания (рис. XIV-16, б) состоит в перемещении непрозрачного носителя информации 1 (ленты
Рис. XIV-16. Схемы электромеханического (а) и фотоэлектрического (б) считывающих устройств:
/—лента; 2 — токопроводящий ролик; 3 — щетка; 4 — источник света; 5 — фотоэлемент.
Рис. XIV-17. Схема узла печати барабанного типа:
I — барабан; 2 — печатающий молоточек; 3 — электромагнит; 4 — бумажная лента; 5 — красящая лента.
или карты) между лампой 4 и блоком фотодиодов 5. При наличии пробивок в носителе луч света попадает на фотодиоды, которые преобразуют световой сигнал в электрический.
Первый способ применяется в основном для считывания с перфокарт со скоростью до 300 карт в 1 мин, а второй способ — и для карт, и для лент со скоростью до 1000 карт в 1 мин и до 1500 строк в 1 с (у лент).
В настоящее время созданы устройства, способные считывать данные непосредственно с машинописного или рукописного текста, выполненного стилизованным шрифтом (знаки, соответствующие эталонам, как по геометрическим размерам, так и по способу написания; пример стилизованного шрифта — шестизначный номер почтового отделения, который мы указываем на конверте письма в специальных рамках). Такие считывающие устройства исключают использование перфорированных карт и лент, что упрощает и ускоряет решение задач на ЦВМ. Машинным носителем информации в этом случае является специальный бланк с текстом.
К устройствам вывода результатов вычислений относятся: перфораторы выходные для карт и лент, быстродействующие печатающие устройства и алфавитно-цифровые печатающие устройства.
Выходные перфораторы мало отличаются от входных, однако применение их ограничено, так как информация на перфокартах 338
трудна для восприятия человеком и используется лишь, когда полученные данные будут служить входами при решении другой задачи.
Быстродействующие печатные устройства (узкая печать) осуществляет печать на узкой бумажной ленте по 16 символов в
Рис. XIV-18. Эскиз внешнего вида терминала (а) и схема для воспроизведения десятичных цифр (б):
I — клавишное устройство дисплея; II — экран; 1—7 — сегменты.
строке, причем символами могут быть только цифры и знаки плюс и минус. Скорость печати — 20 строк в 1 с.
Алфавитно-цифровые печатающие устройства (широкая печать) предназначены для вывода на печать различной информации в виде арифметических и алгебраических действий, текстов с использованием букв русского и латинского алфавитов, синтаксических и логических знаков. Печать осуществляется на бумажной ленте шириной 215 мм (скорость 400 знаков в 1 мин) и шириной около 500 мм (скорость 400 строк в 1 мин, при 128 разрядах в строке).
В качестве примера на рис. XIV-17 приведена схема узла печати барабанного типа.
Барабан 1 состоит из набора печатающих колес, на которых в виде выпуклых литер изображены все печатаемые символы. Число колес равно числу символов в печатной строке: 16 для узкой и 128 для широкой печати. Колеса закреплены так, что одинаковые литеры располагаются по образующим барабана.
Над поверхностью барабана на некотором расстоянии от бумаги 4 укреплены подвижные молоточки 2, причем каждый молоточек имеет свой электромагнит 3. Между барабаном и бумагой находится красящая лента 5. Если в обмотку электромагнита некоторого молоточка от специального блока управления печати поступает сигнал в виде посылки электрического тока, то молоточек резко переместится к барабану, ударит через бумагу и красящую ленту по знаку (литере) и на бумаге останется этот знак.
Существуют и другие методы и устройства печати (фотографические, электростатические, электрохимические и др.).
Удобной формой представления информации, легко воспринимаемой человеком, является форма отображения данных на люми-
339
нофорном экране в алфавитно-цифровом виде. Выносные пульты ввода — вывода данных, снабженные экранами (как у телевизо-\ра), называют терминалами (от английского terminal — конечное устройство) или дисплеями (от английского display — выставка, показ).
На рис. XIV-18, а показан эскиз внешнего вида дисплея, а на рис. XIV-18, б — схема для воспроизведения на экране дисплея десятичных цифр.
Клавишное устройство I дисплея содержит клавиатуру обыч-' ной пишущей машинки с набором букв, цифр, служебных знаков и указаний устройству управления от оператора (формат записи, адреса выводимой информации, стирание текста в нужных местах и т. д.). Информация выводится на экран // в знаковом виде, для чего используются знаковые индикаторы. На рис. XIV-18, б показана семисегментная синтезирующая схема. К стеклу экрана прикреплены ячейки, состоящие из семи металлических сегментов, различные комбинации которых воспроизводят начертания цифр. Ячейка имеет восемь электрических выводов, из которых один — общий, а остальные присоединены к сегментам. Для включения требуемого набора сегментов служат расположенные в блоке управления специальные логические схемы.
Для обработки графической документации (чертежи, схемы, рисунки, графики, карты и т. д.) служат специальные устройства преобразования, которые обеспечивают предварительное кодирование и последующий вывод на экран.
ЭЛЕМЕНТЫ ПРОГРАММИРОВАНИЯ
При решении любой задачи на ЦВМ исходная информация, введенная в ЗУ, подвергается обработке по предварительно составленной программе (алгоритму). Эта подготовительная работа называется программированием.
Приведем пример записи программы (алгоритма) вычисления величины у=(а-\-Ьх) (ах-\-Ь):
1) вычислить Z>Xx=/?i; перейти к следующей операции;
2) вычислить a-\-Ri = R2i перейти к следующей операции;
3) вычислить a'Xx=R3; перейти к следующей операции;
4) вычислить 7?3-|-b = 7?4; перейти к следующей операции;
5) вычислить Rz-R^y; закончить вычисления.
Здесь R\—Ri — промежуточные результаты.
Данная программа легко и привычно читается, поэтому она относится к тем, про которые говорят, что они напйсаны в «содержательных обозначениях».
На рис. XIV-19 представлена блок-схема алгоритма решения задачи.
Выше отмечалось, что каждая микрооперация выполняется с помощью команд. Структура команды, т. е. машинного с лова, для программного управления машиной состоит из операцион-
340
ной и адресной частей. Операционная часть содержит код выполняемой Операции, а адресная часть—адреса чисел (под адресом понимается номер ячейки куда направляется код).
Программист заранее распределяет по ячейкам памяти данные для вычислений; это называется распределением па-
Условимся, что команды программы будут размещаться в ячейках памяти, начиная с номера 0100, а исходные данные —в ячейках, начиная с номера 0200. Тогда для рассмотренного примера записи алгоритма вычисления величины у распределение памяти может быть представлено следующим образом:
0200 —а
0201 —Ь
0202 - х
Коды операций (применительно к ЭВМ. типа БЭСМ) таковы:
Сложение . . . 01 . Деление .... 04
Вычитание . . 02 Останов машины 33
Умножение . . 03
Первая команда должна обеспечить умножение Ь'Хх; она запишется так:
03020102020205
Здесь 03 — код операции умножения;
0201 —первый .адрес команды, указывающий номер ячейки, в которой находится первый сомножитель (Ь);
0202 —второй адрес команды, указывающий номер ! ячейки, в которой хранится второй сомножи-
; тель (х);
0205 — третий адрес команды, указывающий номер
/ ячейки, в которую должен быть послан резуль-
i тат вычисления b'Xx=Ri.
341
Приведенная команда читается так: «Умножить число, находящееся в ячейке 0201, на содержимое ячейки 0202 и результат операции послать в ячейку 0205».
Аналогичным образом составляются последующие команды:
Вторая команда . . 01 0200 0205 0206
Третья команда . . 03 0200 0202 0207
Четвертая команда . . 01 0207 0201 0208
Пятая команда . . 04 0206 0207 0209
Ответ на решенную задачу находится в ячейке номер 0209.
Такой переход от содержательных обозначений к языку машины и является кодированием.
Любая из приведенных команд является трехадресной, а ЦВМ, работающие по таким командам, называются трехадресными.-
Если результат операции записывается в ячейку ОЗУ, указанную во втором адресе или остается в сумматоре, то команда (и ЦВМ) будет двухадресной.
Если результат операции всегда остается в сумматоре и действия производятся над числами, одно из которых предварительно вводится в сумматор, а другое находится в ячейке ОЗУ, то такая команда (и ЦВМ) будет одноадр есной.
Анализ алгоритмов различных задач позволяет сделать вывод о том, что многие вычисления и процедуры в этих задачах являются однотипными. Для таких часто встречающихся при вычислениях операций создаются стандартные программы, которые образуют библиотеку программ. Сюда входят программы перевода из двоичной системы счисления в десятичную и наоборот, программы вычисления элементарных функций и т. д. Библиотека программ является первым шагом в автоматизации программирования и служит неотъемлемой частью математического' обеспечения ЦВМ.
При решении обычных задач средней сложности распределение памяти может выполняться не программистом, а механически, т. е. самой машиной. Для этого, прежде всего, нужно иметь возможность ввести в память машины программу, написанную в содержательных обозначениях. Осуществить это можно с помощью алфавитно-цифрового перфоратора с клавиатурой, содержащей, кроме цифр, еще и буквы алфавита, на котором пишется программа. Перфоратор переведет каждый знак в двоичное число, но при этом команда может изобразиться громоздким машинным словом, так что нельзя будет выполнить ее непосредственно. Однако ее структуру можно преобразовать с помощью специальной преобразующей программы, которая приведет команду к виду, пригодному для дальнейшего использования.
Способ, при котором кодирование осуществляется специальной программой, называют автоматическим кодированием, а программа, осуществляющая перевод с языка содержательных обозначений на язык машинных кодов, называется а в-
342
т о к о д Ц р о в щ и к о м, или транслятором (переводчиком). В этом случае сам процесс кодирования называется трансляцией (переводом.).
В настоящее время существует большое число машинных языков программирования, что говорит об отсутствии универсального языка, удобного для всех областей применения ЦВМ. ,
Работа по созданию языков программирования идет главным образом в направлении конкретных областей применения, т. е.. задач определенного типа.. Такие языки называют проблемно-ориентированными. Первые проблемно-ориентированные языки создавались для задач вычислительной математики.
Одним из таких языков был ФОРТРАН (от сокращения английских слов Formula — формула и Translation — преобразование), которым сейчас широко пользуются* (с момента своей первой публикации в 1954 г. он несколько раз модернизировался и расширялся).
Остановимся кратко на основах программирования с использованием языка Фортран.
Фортран-программа состоит из последовательности операторов или инструкций, определяющих арифметические операции, изменяющих порядок их выполнения, содержащих описание входной и выходной информации и должна быть транслирована (переведена) на язык конкретных машин («Минск-32», ЕС ЭВМ и др.).
Как и любой другой язык, Фортран имеет свои грамматические правила, которые необходимо очень тщательно выполнять.
В основу языка Фортран положены следующие идеи и принципы.
В качестве символов язык использует 26 прописных латинских букв, десять арабских цифр и знаки « = » (равно), «+» (плюс), «—» (минус), «*» (звездочка), «/» (дробная черта), «(» и «)» (открывающая и закрывающая скобки), «,» (запятая), «.» (точка) и «‘» (кавычка)**.
Фортран допускает запись чисел (констант) двух типов: целых, которые точно переводятся в двоичную систему и обратно и вещественных, которые записываются в нормальной форме, т. е. в виде мантиссы и порядка, при этом порядок от мантиссы отделяется символом Е (так, например, число 1974 запишется в виде 0.1974Е+01).
Логические константы записываются в виде:
TRUE — «истина» и FALSE — «ложь».
* Другими распространенными языками программирования являются международный алгоритмический язык АЛГОЛ (от сокращения английских слов Algoritmic Language — алгоритмический язык) и язык для программирования задач экономического характера КОБОЛ. А всего существует более 700 различных по назначению алгоритмических языков.
** Для ЭВМ «Минск-32» используется язык Фортран в варианте, расширенном за счет букв русского алфавита.
343
Переменные величины записываются на Фортране с помощью идентификаторов, т. е. комбинаций из букв и цифр (не более шести), причем целые переменные всегда начинаются с одной из букв: I, J, К, L, М, N; вещественные переменные — с любых других букв алфавита (последним символом идентификатора не должна быть буква F, используемая для задания функций).
Предположим, что массив (переменные с индексами) информации (TABLE) состоит из 90 элементов. В этом случае запись оператора имеет следующий вид:
DIMENSION TABLE (90).
При выполнении арифметических действий (например, при вычислении одного из корней квадратного уравнения ах2-\-Ьх-\-с= =0) в левой части арифметического оператора Фортрана должен стоять идентификатор переменной, но не выражение, а в правой части — порядок вычислений, причем все вычисления выполняются слева направо:
X REAL !=(.—В + SQRTE (В**2 — 4М*С))/(2*Л).
Вычисления ведутся в следующем порядке: возведение в степень (**), деление (/) й умножение (*); сложение (+) и вычитание (—); в первую очередь выполняются все действия внутри скобок.
Для выполнения операций чтения или записи данных используются операторы READ (читать) и PRINT (печатать), например:
READXXX, List,
где XXX — номер оператора FORMAT, a List (список) — список переменных, которые должны быть прочитаны с перфокарт;
PRINTXXX, List.
Оператор FORMAT (формат)—информация о вводимых и выводимых данных, числе колонок на перфокарте, занимаемой каждой величиной, количестве знаков и т. д.
Операторы передачи управления предназначены для изменения хода вычислительного процесса, эффективного управления логикой выполнения программы. Например оператор GO ТО (перейти к), оператор IF . (если) —для изменения порядка вычислений, оператор DO (выполнить)—повторные вычисления по одному и тому же участку программы и др.
В настоящее время все чаще и чаще вместо термина «вычислительная машина» употребляется термин вычислительная система.
Дело в том, что машина состоит из постоянного числа устройств определенного назначения, а система представляет собой объединение различных устройств, число и назначение которых может заметным образом изменяться в зависимости от потребностей.
344
Основными составляющими вычислительной системы являются главная (оперативная) память и центральный процессор, причем система может включать различные модели процессоров, обладающих необходимыми характеристиками.
Примером такой системы может служить единая система ЕС ЭВМ, разработанная и выпускаемая социалистическими страна-
Рис. XIV-20. Вариант компоновки блоков ЕС ЭВМ:
/ — процессор; 2 —основная оперативная память; 3 — накопитель на сменных магнитных дисках; 4 — мультиплексный канал; 5 — селекторный канал; 6, 7 — устройства вывода с перфокарт и перфолент; 8 — устройство ввода с перфоленты; 9 — устройство ввода с перфокарт; 10 — устройство управления; // — накопитель на магнитной ленте; /2 —стойка питания; 13 — печатающее устройство; 14— пишущая машинка; /5 — графопостроитель; /8 —дисплей.
ми — участниками Совета экономической взаимопомощи, и агрегатная система средств вычислительной техники (АСВТ), которые относятся к машинам (системам) третьего поколения.
На рис. XIV-20 приведен состав ЕС ЭВМ.
В практике технических расчетов существует обширный класс задач, которые по ряду причин нецелесообразно решать на больших быстродействующих ЭВМ. К их числу относятся задачи средней сложности, для решения которых требуется выполнить несколько десятков или сотен арифметических и логических операций. Подобные задачи часто приходится решать студентам вузов и учащимся техникумов при выполнении различных домашних заданий, курсовых и дипломных проектов.
Одной из современных ЭВМ, конструктивно выполненной на интегральных схемах, является программно-управляемая, электронная, клавишная вычислительная машина ^Искра-125», предназначенная для инженерно-технических расчетов малой и средней 23—2208 345
сложности. Наиболее эффективно эта машина может быть использована в научно-исследовательских, проектных и конструкторских организациях при работе над проектами и различными расчетными заданиями в вузах и техникумах. Простота, компактность и удобство эксплуатации, а также бесшумность в работе
Рис. XIV-21. Схема клавиатуры машины «Искра-125»:
/ — индикатор включения; II— переключатель; III — регулятор яркости; IV — переключатель разрядиостн.
позволяют использовать эту машину непосредственно на рабочем месте. •
ЭВМ «Искра-125» имеет следующие технические данные:
а) обеспечивает работу в режимах ручного счета (с клавиатуры) и программного счета (ввод программы либо с клавиатуры, либо с магнитной карты);
<б) диапазон представления чисел от 1ХЮ“64 До 1ХЮ64—1;
в) представление числа — десятичное с плавающей запятой;
г) обеспечивается индикация вводимых данных и результатов вычислений на экране (электронно-лучевая трубка), что дает возможность редактирования программы и исправления ошибок;
д) емкость оперативной памяти составляет 8192 бит, емкость постоянного запоминающего устройства равна 65536 бит;
е) различные операции производятся за следующие отрезки времени, с:
Сложение и вычитание........................0,005
Умножение и деление..........................0,02
Извлечение квадратного корня . ' . . . . 0,2
Решение элементарных функций .... 0,4
На клавиатуре машины (рис. XIV-21) можно выделить четыре основных группы клавиш: цифровая, операционная, функциональная и управляющая.
Цифровая клавиатура служит для ввода исходных данных в процессе решения задачи, а также для ввода констант и задания цифровых символов входного языка при вводе программы. В состав цифровой клавиатуры входят десять цифровых клавиш (от «0» до «9») и клавиша запятой («,»).
Операционная клавиатура служив для задания вида и последовательности выполняемых операций при ручном счете, а также 346
для ввода программы. Приведем значения знаков на некоторых клавишах:
Возведение в целую степень .
Равенство с засылкой результата в регистр.................. .
Изменение знака ...............
Нахождение абсолютной величины Выделение целой части числа .
Накопление результата в регистре памяти......................
Перевод из радианной меры в градусную и обратно . . . . Вычисление натурального логарифма .........................
Обращение к регистру памяти Обращение к индексному регистру памяти ........................
.Вывод иа память . / .
Сброс числа, символа . . . .
t
з!
н
S
Р-Г и Г-Р
Ln А
И
Ск
Функциональная клавиатура обеспечивает ввод (набор) программы, работы с машиной при счете по программе, а также при редактировании программы. Ниже приводятся некоторые обозначения на клавишах:
Больше или меньше . . . .
Равно ........................
Безусловный переход <
Метка.........................
Подпрограмма..................
Пробел........................
Символ специального оператора Символ набора переменных, вводимых с пульта ...............
Старт — стоп..................
Индикация ....................
Индикация по шагам . . . .
>или<
М П
F
Н 3 Инд Шаг
Управляющая клавиатура служит для включения машины, начальной установки и задания режимов работы.
Приведем некоторые обозначения клавиш:
Включение и выключение машины
Вычисление при индикации с естественной или плавающей запятой Магнитная карта или лента .
Начальная установка . .
Ввод программы, счет по программе, ручной счет . . . .
ЕЗ, ПЗ
МК, МЛ
НУ
ВПр, СПр, РСч
23'
347
Считывание с' магнитной карты, запись на магнитную карту .
СМк, ЗМк
Регулятор яркости .... ( О )
В качестве примера формульных выражений без использования памяти приводится расчет выражения:
2/ = /(2 + 3)3 + tg31e
Последовательность нажатия клавиш машины изобразится так:
(2 + 3)ft + 31Г—Р tg => Ответ
Процесс вычисления этой зависимости с индикацией результатов на экране представится следующим образом (таблица XIV-1).
Таблица X1V-1.
Обозначения последовательно нажимаемых клавиш Получаемая индикация Обозначения последовательно нажимаемых клавиш Получаемая индикация
(2 2 V- 1.118031о+0’1
+ 2.ООООО1о+м 4- 1.11803Ю+0’1
3 3 31 31
) 5.ООООО1о+°° Г—Р 5.4Ю3210-31
t 2.5ОООО1о+01 tg 6.00861 „-о1
t 1.25ООО1о+02 1.178121О+01
Если в процессе вычислений допущена ошибка при вводе последнего набираемого числа, то оно может быть сброшено нажатием клавиши «СК». Если ошибка набора замечена в уже выполненной операции, то выражение надо вычислить заново, для чего нажимается кнопка «НУ».
Приведенные в этой главе сведения о ЦВМ и основах программирования являются лишь самыми общими; для более подробного ознакомления с этими вопросами рекомендуется обратиться к специальной литературе. /
ЛИТЕРАТУРА
Автоматические приборы, регуляторы и вычислительные системы. Справочное пособие. Л., Машиностроение, 1976. 488 с.
Адабашьян А. К., Минаев П. А. Монтаж систем контроля и автоматики. М., Стройиздат, 1974. 407 с.
Бирштейн А. А., Филиппов В. Д., Цветков В. Н. Электронные вычислительные машины и программирование. М., Статистика, 1975. 256 с.
Г утер Р. С., Полунов Ю. Л. Математические машины. М., Просвещение, 1975. 287 с.
Емельянов А. И., Емельянов В. А. Исполнительные устройства промышленных регуляторов. М., Машиностроение, 1975. 224 с.
348
Казаков А. В., Кулаков М. В., Мелюшев Ю. К. Основы автоматики и автоматизации химических производств. М., Машиностроение, 1970. 376 с.
Кириллов В. В., Моисеев В. С. Аналоговое моделирование динамических систем. Л., Машиностроение, 1977. 276 с.
Клюев А. С., Глазов Б. В., Дубровский А. X. Проектирование систем автоматизации технологических процессов. М., Энергия, 1980. 5Г2 с.
Кривицкий Н. А., Миронов Г. А., Фролов Г. Д. Программирование. М„ Наука, 1966. 600 с.
Кулаков М. В. Технологические измерения и приборы для химических производств. М., Машиностроение, 1974. 464 с.
Малов А. Н., Иванов Ю. В. Основы автоматики и автоматизация производственных процессов. М„ Машиностроение, 1974. 368 с.
Мелюшев Ю. К. Основы автоматизации химических производств. М., Химия, 1973, 368 с.
Патрунов Ф. Г. Электронные модели. М., Московский рабочий, 1973. 42 с.
Урмаев А. С. Основы моделирования иа АВМ. М., Наука, 1978. 272 с.
Чекваскин А. Н., Семин В. Н., Стародуб К. Я. Основы автоматики. М., Энергия, 1977. 440 с.
Чертов А. Г. Единицы физических величин. М., Высшая школа, 1977. 287 с.
ОСТ 36-27—77. Приборы и средства автоматизации. Обозначения условные в схемах автоматизации технологических процессов.
ГОСТ 3244—68. Щиты и пульты автоматизации производственных процессов.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолютно черное тело 91 Автокодировщик 343 Автоматизация 6 сл.
комплексная 6
Автоматика струйная 260 сл.
Автоматические системы регулирования 206 сл.»
алгоритм управления 206 сл.
комбинированные 209 линейные 186 сл.
многоконтурные 209, 210
нейтральные 219
нелинейные 186
неустойчивые 219
с обратными связями 207 сл.
одноконтурные 209
программные 207, 211, 212
разомкнутые 207, 208
самоприспосабливающиеся 207, 217 сл.
следящие 207, 212, 213
стабилизирующие 207, 210, 211 схемы принципиальные 206 сл. устойчивые 219 экстремальные 213 сл.
Алгебра логики 321
Алгол 343
Алгоритм 183
Анализ газовый 162 сл.
хроматографический вытеснительный 174
— проявительный 173
— фронтальный 173, 174
Анализаторы качества
.кондуктометрические 137 сл. оптические 140 сл.
Аналоговые вычислительные машины 310 сл.
программы 313
устройство ввода 312
— регистрирующее 313
— управления и контроля 313
Аргумент 195
Арматура защитная см. Защитна* арматура
АСВТ 345
АСР 181 сл.
АСУ 181, 182
Байпасная панель дистанционного управления 282
Байт 329
Барометры 28
Бернулли уравнение 119
Библиотека программ 342
Бит 329
Блок-схемы см. Структурные схемы Бурдова пружина 33 Быстродействие
запоминающего устройства 329
механизма исполнительного 269 регулятора 243
Вакумметры 28, 34 сл. Ведомости
документов ссылочных 301
изделий покупных 301 спецификаций 301
технического предложения, эскизного проекта, технического проекта 301, 302
Вентури сопла 121, 123 сл.
Весы
поверочные 116, 117
350
Весы
‘порционные 116, 117
рычажные 116, 117
Вискозиметры 159
вибрационные 161
ротационные см. Ротационные вискозиметры
ультразвуковые 161, 162
Влагомер автоматический 154, 155 Влагосодержаиие 157 Влажность 152, 157
газов 153
твердых тел 157 сл.
Водомерное стекло 100 Возмущение/я/ 184, ,232, 233 единичное 189, 190 типовые 189
Время изодрома 247
Время исполнительного механизма 239
Время предварения 240, 252
Входы /входные величины/ 184, 185 Выходы /выходные величины/ 185 Вычислительные машины
аналоговые см. Аналоговые вычислительные машины
цифровые см. Цифровые вычислительные машины
электронные см. Электронные вычислительные машины Вязкость жидкости 158 сл.
Газоанализаторы 162 сл.
магнитные 167, 168 оптико-акустические 168 сл. оптические 168 сл.
термокондуктометрнческие 165 сл.
ультрафиолетового поглощения 170, 171
физико-химические 164, 165 физические 165 фотоколориметрические 171 химические 163, 164
Гигрометры
сорбционные 156 электрические 156
Гбфры 36, 38
Градус 43, 45
ГСП 7, 8
Давление 26 абсолютное 27 избыточное 27
Датчнк/и/ 14, 15
«слепые» 15
температуры бесконтактный 97
Двоичное счисление 318 сл.
Диафрагмы 121 сл.
Дизъюнктор 329
Дизъюнкция 322, 323
Дилатометры 47, 48
Динамическое звено 201 сл.
апериодическое 202, 203 дифференцирующее 204, 205 интегрирующее 203 сл.
колебательное 202, 203
усилительное 201, 202
чистого запаздывания 205, 206
Дисплей 304
Дифманометр 28, 31 сл.
Дифманометр-расходомер 125, 126
Дозатор
весовой полуавтоматический 134 объемный механический 133, 134
, поршневой 134, '135
Дозирование 433 сл.
Единицы измерения 11
давления 26, 27
Емкость запоминающего устройства 329 объекта 224
ЕСКД 284 сл.
ЕС ЭВМ 345
Жидкость '
рабочая 29
разделительная 42
Задание /заданное значение/ 184
351
Закон Стефана — Больцмана 91, 92 Запаздывание 190, 230 'сл.
. переходное /емкостное/ 231 чистое 230
Запоминающее устройство 329 внешнее 332 матичное 332
Защитная арматура приемных устройств 85, 86 . экранирование 87, 88
Звено апериодическое /инерционное/ 202
АСР/184, 185 астатическое первого порядка 203, 204 детектирующее 198 динамическое см. Динамическое звено
дифференцирующее 204, 205 запаздывания чистого .205, 206 интегрирующее 203, 204 колебательное 202, 203 свойства динамические 190 соединение. параллельное 198 —последовательное 197 статическое 202, 203 усилительное /безынерционное/ 201
характеристика динамическая 189, 190
— статическая 187 сл.
Зона нечувствительности 269
Идентификатор 344
Изделие 284 Измерсние/я/ компенсационный метод 78 прямые, косвенные и совокупные 10, 11
Измеритель уровня см. Уровнемер Измерительные приборы ill сл. аналоговые 12 вторичные 14 сл. давления см. Манометры интегрирующие 111 класс точности И, 12
352
Измерительные приборы показывающие II1 преобразователи 11 регистрирующие '1’1 суммирующие 11 цифровые 11
Изображение по Лапласу 194 Изодром 245 сл.
Импульсные линии 14, 16, 17 длина и прокладка 41
Инверсия 322
Инвертор 328
Инерционность приемных устройств 89, 90
Ионное произведение водь! 145 Исполнительное устройство 268 сл. пропускная способность условная 280
Исполнительный/е/ механизм/ы/ быстродействие 269 время 239 гидравлические 273, 274 мембранные 272, 273 нагрузка номинальная 269 пневматические 272, 273 поршневые 273 соленоидные 270 точность 269 электрические 270 сл. электродвигательные 270, 272
Кабель 16
Калибр счетчика 108
Каналы связи см. Импульсные линии «Каскад» 257, 258
Качество регулирования 256
Кельвин 46
Кельвина шкала 45,- 46
Кибернетика 182 Клавиатура операционная 346, 347 управляющая 347, 348 функциональная 347 цифровая 346
Клапаны регулирующие 2f4 сл.
Класс точности 11
Кобол 343
Код прямой, обратный и дополнительный 324, 325
Кодирование 342
автоматическое 342, 343
Колориметры '140 сл.
Компенсация температуры холодного спая термопары 73, 83
Комплексные числа 194 сл.
Кондуктометрия
высокочастотная 140
низкочастотная 139
Кондуктометры 138 сл.
безэлектродные 139, 140
электродные 138, 139
Контроль 10 сл.
метрологический 13
Контрольники перфокарт и перфо-
. лент 337
Концентрация
ионов водородных 145 сл.
контроль кондуктометрический 137 сл.
— оптический 136, 140 сл.
----колориметрический 140 сл.
----рефрактометрический 142 сл.
— электрометрический 137
Коиъюнктор 328
Конъюнкция 322
Коробка мембранная 39, 40
Коэффициент
емкости 226
передачи 191
полезного действия 269
самовыравнивания 229, 230
черноты реального тела 93
Кривая разгона 190 сл.
Критерий
интегральный квадратичный 252, 253
оптимальности 207
Лапласа преобразование 193, 194, 196
Линеаризация 186, 187
Линии импульсные см. Импульсные линии
Логометры 65 сл. •
Лучеприемник 93, 94
Магнитострикция 162 Мановакуумметры 28, 35, 36 Манометры 27, 28, 32 сл.
дифференциальные 28, 31
колокольные 32, 33
поплавковые 31, 32 пружинные 32 жидкостные 28 сл.
трубные 29
U-образные 28, 29
контрольные 35 мембранные '38, 39 пружинные 33 сл.
выбор 40 установка 41, 42 эксплуатация 42 сильфонный 36, 37 с трубчатыми винтовыми пружинами 36
чашечные 29
МАРС-300 268
Масса 107, 116 сл.
Масс-спектрометр 179 Масс-спектрометрия '179 сл. Математическая модель 309 получение 221
Машинные языки проблемно-ориентированные 343, 344
Машины вычислительные электронные см.
Электронные вычислительные машины
контроля и регулирования автоматического 26(5, 267
Микроманометры 29, 30 Милливольтметры 75 сл.
Мембраны 33, 38
Мембраны 33, 38
«вялые» 33, 38, 39 гофрированные 38 плоские 38 упругие 33
Мера 11
Месдоза 106
353
Метод анализа
газового 163
— термомагнитный 167
Метод измерения
влажности гигрометрический 155, 156 емкостной 157 кондуктометрический 158 психрометрический 153 пр «точке росы» 154, 155
вязкости 159, 160
компенсационный 78
концентрации кондуктометрический 146, 147 оптический 136, 137 электрометрический 137
показателя преломления
полное внутреннее отражение 1144
спектрометрический 143
PH
колориметрический 146
электрометрический 146, 147
Метод
истечения 159
падающего тела 159
Метрология 10, '11, 13
Механизм исполнительный см. Исполнительный механизм
Мнемосхемы 294
Моделирование 309
математическое и физическое 309
Модель 308
математическая см. Математическая модель
Модуль комплексного числа 194 Мосты
неуравновешенные 59 сл. •
уравновешенные 61 сл. • электронный автоматический 63 сл.
Нагрузка исполнительного механизма номинальная 209
Надежность 8
Накопители 332
Напоромеры 28
Наработка иа отказ 8, 9
Насос-дозатор 134, 435
Настройка регулятора 252
Нормальный элемент 80
Нуль-гальваиометр 61
Обмотка считывания 321
Обратная связь 198, 207 сл.
«жесткая» 243, 245
отрицательная 199
гибкая 199, 200
жесткая 199
устройство 498, 199
Объект управления /регулирования/ 484, 185, 221 сл.
астатический /нейтральный/ 227 емкость 224 сл.
запаздывание 190 многоемкостной 225
с параметрами распределенными 223, 224
-----сосредоточенными 222, 223 передаточная функция 195 сл.
свойства динамические 190
число степеней свободы 221, 222
Объемный счетчик
барабанный 114, 115
газовый 114 сл.
жидкостной ПО сл.
с поршнем цилиндрическим 112, 113
ротационный 115, 116
с шестернями овальными 111 сл.
Оправы защитные для термометров 50
Оптимизаторы одноканальиые 214 Ось
вещественная 194
мнимая 194
Отрицание логическое 322
Ошибка
динамическая 252
статическая 252
Память машинная 329 сл.
354
Панель дистанционного управления байпасная 282
Паскаль 26, 27
Передаточная функция 193 сл.
объекта 195 сл.
преобразование Лапласа 193, 194
Передача дистанционная 14 дифференциально трансформаторная 19
пневматическая и электрическая 17
сельсинная 22, 23
Передача дальнего действия 25, 26
Перерегулирование 209
Переходный процесс 189 апериодический 192 колебательный затухающий 192 — незатухающий 192 — расходящийся 193 при перенастройке системы 193 при типовых возмущениях 189, 193
Перфокарты 335, 336
Перфоленты 336, 337
Перфораторы
выходные 338, 339
карт и лент 337
Перфораторы-репродукторы 337 «Пик» хроматограммы 177 Пирометр/ы/ излучения 91 сл.
радиационные 46, 93 сл. фотоэлектрический 95 яркостные 46, 95, 96 Пирометры оптические 95, 96 Плотномеры
весовые 149, .150 гидростатические 150, 151 поплавковые 151 радиоактивные 151, 152 Плотность жидкости 148 сл. Пневмоавтоматика 258 сл. Пневмоннка 260 сл.
Погрешиость/и/ допустимые 12, 13 приемных устройств погружения 84 сл.
способы снижения 98
счетчика объемного 108
Погрешность (и)
термометров термоэлектрических 84
— сопротивления 68, 85
термопары с милливольтметром
84
Позиционер 278, 279
Показатель водородный 146
Ползунова —Уатта принцип 208
Понселе принцип 208
Порог чувствительности 109
Постоянная времени 191
Потенциометр/ы/ 77 сл.
электронный автоматический 81 сл.
Потеря
напора 108
на «рысканье» 218
Пояснительная записка 286, 302
«Правила 28—64 измерения расхода»
121, 124, 125
Предварение 249, 252
Предел пропорциональности 34, 243
Преобразование Лапласа 193, 194,
196
Преобразователь 15
дифференциально-трансформаторный 17 сл.
первичный 14, 15
сельсинного типа 21 сл.
«сопло — заслонка» 23, 24
Приборы
для анализа качества кондуктометрические 137 сл.
------оптические Г40 сл.
измерительные см. Измерительные приборы
командные электропневматиче-ские 265, 266
образцовые 35
системы ГСП 7, 8
устанавливаемые «по месту» 13
Приемные устройства, инерционность
89, 90
Принцип
Ползунова — Уатта 208
Понселе 208
регулирования
355
Принцип
по возмущению 208
по отклонению 208
суперпозиции 186, 187
Провода
компенсационные 72
установочные 16, 17 Программирование 340 сл. Программы
для АВМ 313
библиотека 342
Проект
рабочий 285
технический 285
техно-рабочий 285, 286
эскизный 285, 301
Пропускная характеристика клапана 280
линейная 280, 281
равнопроцентная 280, 281
Процесс переходный см. Переходный процесс
Пружнна/ы/
винтовые 33
трубчатые 36
гармониковые 36, 37
трубчатые /Бурдона/ 33, 34
Психрометр электронный автоматический 153
Пульты 292 сл.
Рабочая документация 285
Рабочие чертежи 285, 286
Разбаланс 185
Расход
агрессивных, загрязненных и высокоскоростных сред 127 жидкостей, газов и паров 126, 127
нормальный 109 характерный 108 Расходомеры 108, 125, 126 классификация 117 обтекания 128 переменного уровня /щелевые/ 132, 133 перепада давления
Расходомеры перепада давления переменного 117 сл. постоянного 128 сл.
установка 121 электромагнитные /индукционные/ 130 сл.
Расчеты проектные 302
Регистр 326
Регулирование автоматическое 181 сл. качество 252 экстремальное 213 сл.
Регулируемая вёличииа 184
Регулирующие клапаны 274 сл.
Регулирующие органы 274 сл.
диафрагмовые 278
дисковые /заслоночные/ 274, 275 одно- и двухседельные 275 сл. расчет и выбор 28Г шланговые 275
Регулятор/ы/ 184, 234 сл. гидравлические 264 двухпозиционные 255, 256 действия
косвенного 242, 245; 255 сл. непрерывного 235
прямого 235, 240, 241, 245, 254, 255
дифференциальные 249 сл. изодромиый 245 интегральные 237 сл.
настройка 252 пневматические 258 сл. позиционные 236, 237 с предварением 249 сл. пропорционально-интегральный 245 сл.
пропорциональные /статические/ 241 сл.
температуры 254
типа ПР 1,5 259
типа ПР 1,5 260
типа РТ 255
электрические 255
Редуктор давления воздуха 282, 283 Резервирование 9
Реле
вторичное 24
356
Реле
позиционное 278, 279
Реомюра шкала 45
Реохорд 61
Рефрактометры 142, 143
Ротаметры 128 сл.
Ротационные вискозиметры
с вращающимся телом 160
с коаксиальным цилиндром 159, 460
с параллельными дисками 160
Самовыравиивание 226 сл.
САУ 181, 182
Свертывание схемы 198
Связь обратная см. Обратная связь Сельсины 21 сл.
Сигналы входные 14
непрерывные и дискретные 15 унифицированные 15
Сильфоны 24, 36, 37
Система/ы/
вычислительная 344
ЕС ЭВМ 345
«Каскад» 257, 258 контроля
дистанционного 17 сл., 23 сл. телеметрического 25, 26 электрические 17 сл.
регулирования автоматические см. Автоматические системы регулирования
«Старт» 258 управления '181 автоматизированные 182 автоматические 1811, 182
Система единиц международная СИ 11
Система конструкторской документации единая /ЕСКД/ 284
Система приборов и средств автоматизации единая государственная /ГСП/ 7, 8
Система средств вычислительной техники агрегатная /АСВТ/ 345 Система элементов пневмоавтоматики универсальная /УСЭППА/ 258 сл.
Скоростной счетчик с вертушкой винтовой 109 сл. с крыльчаткой вертикальной ПО
сл.
Слово машинное 329, 340
Сложение логическое 322, 323
Сопла 121, 123
Вентури '121, 123 сл.
Сосуды разделительные 126, 127
Спай термопары горячий 71 холодный 71, 73
Спецификации 286, 301
Средства автоматизации серийные 254 сл. системы ГСП 7, 8
«Старт» 258
Степень затухания 252, 253
Степень колебательности 252
Степень самовыравнивания 229, 230
Степень свободы 221, 222
Структурные схемы определение 183 правила преобразования 187 сл. свертывание 198, 200
Сужающие устройства 118
выбор 127 стандартные 121 сл.
Сумматор 197, 325, 326
Суперпозиция 186, 187
Схемы автоматизации 284 сл. принципиальные 206 сл., 297 структурные см. Структурные схемы
функциональные 296 электрические монтажные 297, 298
— полные 297
— принципиальные 297
Счетчик излучения радиоактивного 104 объемный см. Объемный счетчик скоростной см. Скоростной счетчик
Такт 335
Телеизмерение 25, 26
357
Температура 43
измерение 96 сл.
бесконтактное 96, 97
снижение погрешности 98
радиационная 92, 93
холодного спая термопары 71, 73, 83
цветовая 93
яркостная 93
Терминал 340 /
Термобаллон 51 сл.
Термобатарея 71, 72
Термометр/ы/
жидкостной стеклянный 48
защитная оправа 50
погрешность 85
контактные 46
манометрические 46, 86
газовые и жидкостные 51 сл.
конденсационные 53, 54
погрешность 85
расширения 46 сл., 86
биметаллические 47, 48
дилатометрические 47, 48
сопротивления 46, 54 сл., 86
двойные 56
медные и платиновые 56, 57
погрешности 68, 85
полупроводниковые 57 сл.
термоэлектрические 46, 69 сл.
Термопара/ы/ 69 сл., 86 •
вращающиеся 96, 97
выбор 84
лучковые 96, 97
погрешность 85
стандартные 73, 74, 77
«тормозные» 89, 90
Термопрнемннки погружения 98
Терморезисторы 57 сл.
Термоэлектроды 73
Технический проект 285, 301
Техническое задание 284, 285
'Техническое предложение 285, 301
Техно-рабочий проект 286
Транслятор 343
Трансляция 343
Трубка капиллярная 48, 49, 51
Тягомеры 28
Тягонапоромеры 28
Узел 197
Умножение логическое 322
Управление 181 ,
автоматическое 181 сл.
Уравнение Бернулли 119 (
динамики 221 статики 221
Уровень 98 сл.
Уровнемеры 1
для жидкостей 99 сл. акустические 105 буйковые 100, 101 визуальные 99 гидростатические 101, 102 емкостные 102, 103 пьезометрические 101, 102 радиационные 103 сл. электрические 102 для сыпучих и твердых материалов 105 сл. весовой 106 механический 106 Усилитель 20, 24 Устойчивость 219 Устройство/а/ арифметическое 325, 326 ввода — вывода 335 запоминающее см. Запоминающее устройство исполнительное см. Исполнительное устройство множительные 327, 328 печатающие алфавитно-цифровые 339 .печатные быстродействующие 339 приемные 85, 86, 89, 90 сужающие см. Сужающие устройства считывающие 337, 338 управления 334, 335 управляющие автоматические 184 УСЭППА 258
Фаза 195
Фаренгейта шкала 45
-358
Фильтр воздуха 283, 284
Фортран 343, 344
Фотоколориметры 141, 142
Функция/и/
булевские /логические/ 321
линеаризованная 189
передаточная см. Передаточная функция
траисцедентная 195
Характеристика/и/
динамическая 189, 490, 197 сл.
импульсная 190
клапана пропускная см. Пропускная характеристика клапана
статические 187, 188, 197 сл.
частотная 190
Хроматермограф 175, 178, 179
Хроматермографня 175
Хроматограмма 177, 178
Хроматограф 175 сл.
Хроматография 172 сл.
анализ вытеснительный 174
— проявительный 173
— фронтальный 173, 174
газоадсорбцнонная 172, 175
газораспределительная 175 жидкостная 172
Цзльсия шкала 45
Цифровые вычислительные машины 305, 318 сл.
двухадресные 342
с запятой плавающей '323, 324
---фиксированной 323
одноадресные 342
трехадресные 342
устройство арифметическое 325, 326
— множительное 327, 328
Чертежи рабочие 285, 286
Числа
двоичные 318 сл.
комплексные 494 сл.
мнимые 195
Число степеней свободы 221, 222
Чувствительность 109 Чувствительный элемент 15
Шкалы температурные 43 сл.
Щиты 16, 292 сл.
агрегатные 293
блочные 293
местные 293
центральные 293
многопанельные 295
панельные 293 шкафные 293
Экранирование защитной арматурь» 87, 88
Экстремум 213
Электрод
измерительный 147
каломельный 147, 148
сравнительный 147,148
стеклянный 147, 148
Электронные вычислительные машины /ЭВМ/ 304 сл. автоматические 307 аналоговые см. Аналоговые вычислительные машины информационные 307 комбинированные /аналого-цифровые/ 306 математические 307 полуавтоматические 307 специализированные 307 универсальные 307 управляющие 307, 308
цифровые см. Цифровые вычислительные машины
Элемент/ы/
логические 328, 329
нормальный 80
нулевого порядка 201, 202 пневмоавтоматики
релейные 262, 263
струйные 261
чувствительный 15 Эскизный проект 285, 301
рН-метрия 145 сл.
359"
ЮРИИ КОНСТАНТИНОВИЧ МЕЛЮШЕВ
ОСНОВЫ АВТОМАТИЗАЦИИ ХИМИЧЕСКИХ ПРОИЗВОДСТВ И ТЕХНИКА ВЫЧИСЛЕНИЙ
Редактор Р. М. Степанова
Художественный редактор Н. М. Биксентеев
Художник А. К- Малкин
Технические редакторы О. В. Тюрина, В. В. Лебедева
Корректор Т. С. Васина
ИБ № 480
Сдано в наб. 17.12.81. Подп. к печ. 01.03.82. Т. 00979.
Формат бумаги бОХЭО'/ц. Бумага тип. № 2. Гарн. литературная.
Печать высокая. Усл. печ. л. 22,5. Усл. кр.-отт. 22,5. Уч;-нзд. л. 25,24.
Тираж 22 000 экз. Заказ 2208. Цена 1 р. Изд. № 1417.
Ордена «Знак Почета» издательство «Химия».
107076, Москва, Стромынка, 13.
Московская типография № 11 Союзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли.
Москва, 113105, Нагатинская ул., д. 1. .