/

































Автор: Казаков А.В. Кулаков М.В. Мелюшев Ю.К.
Теги: основы химической технологии химия производство автоматика
Год: 1970




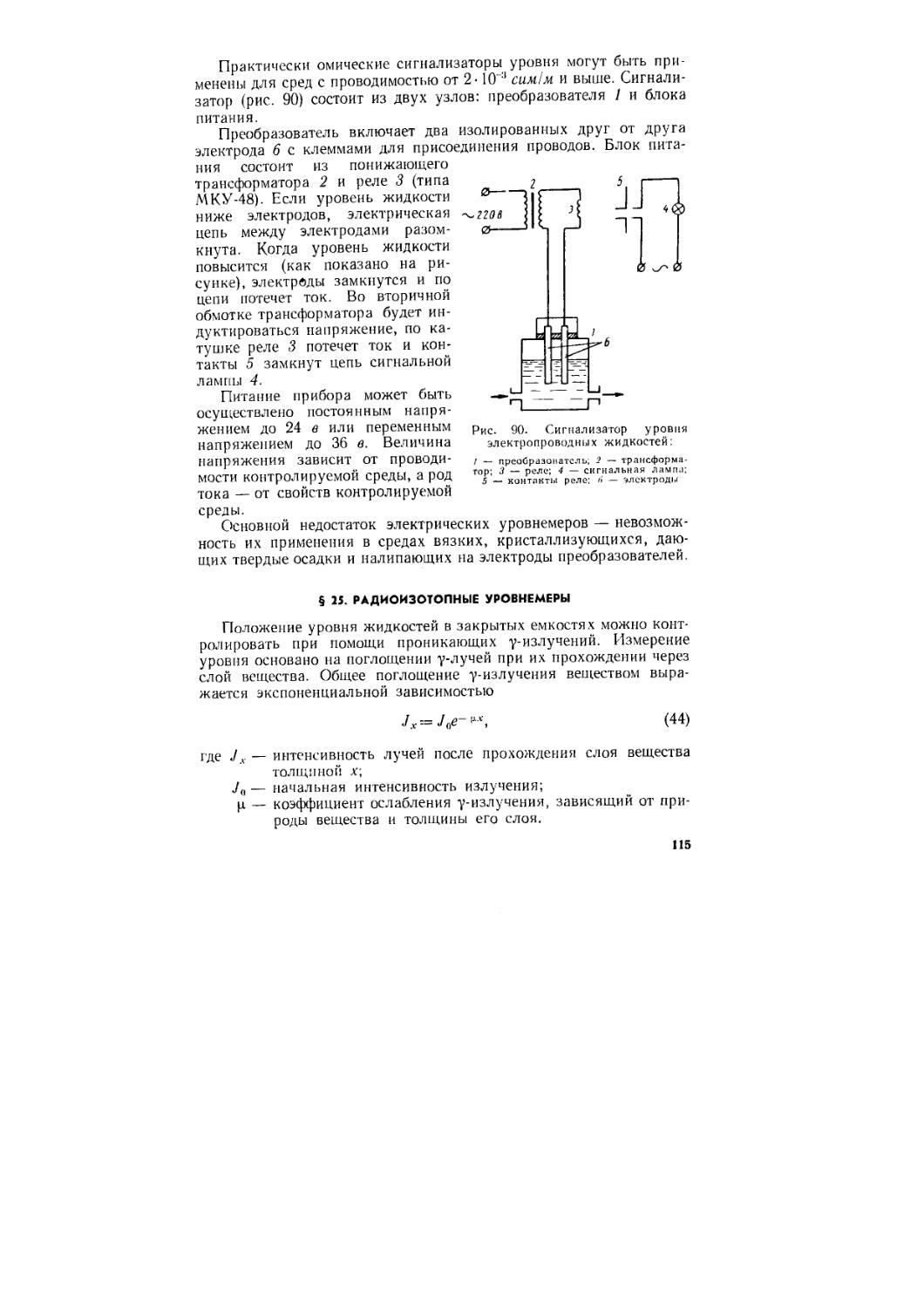
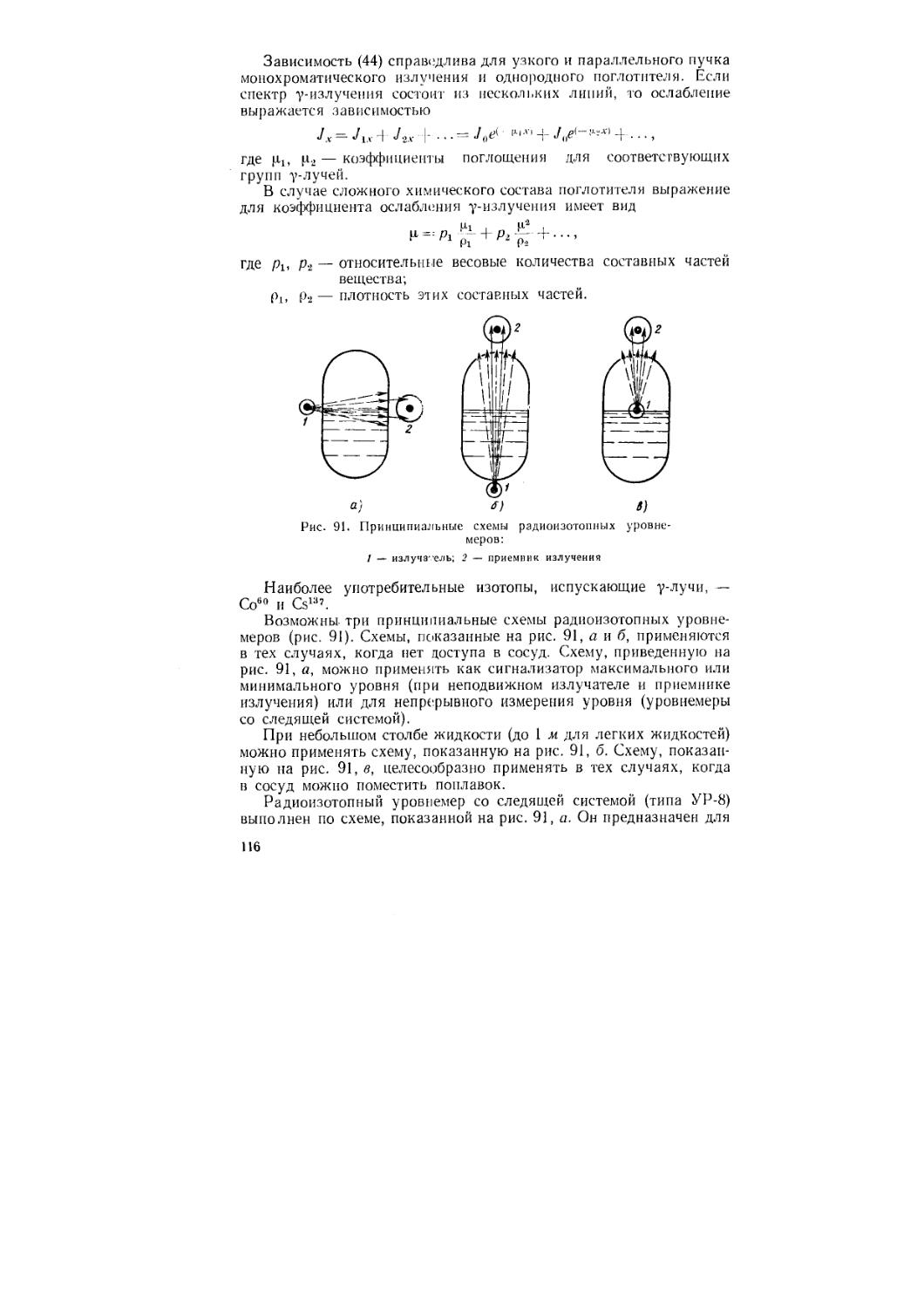
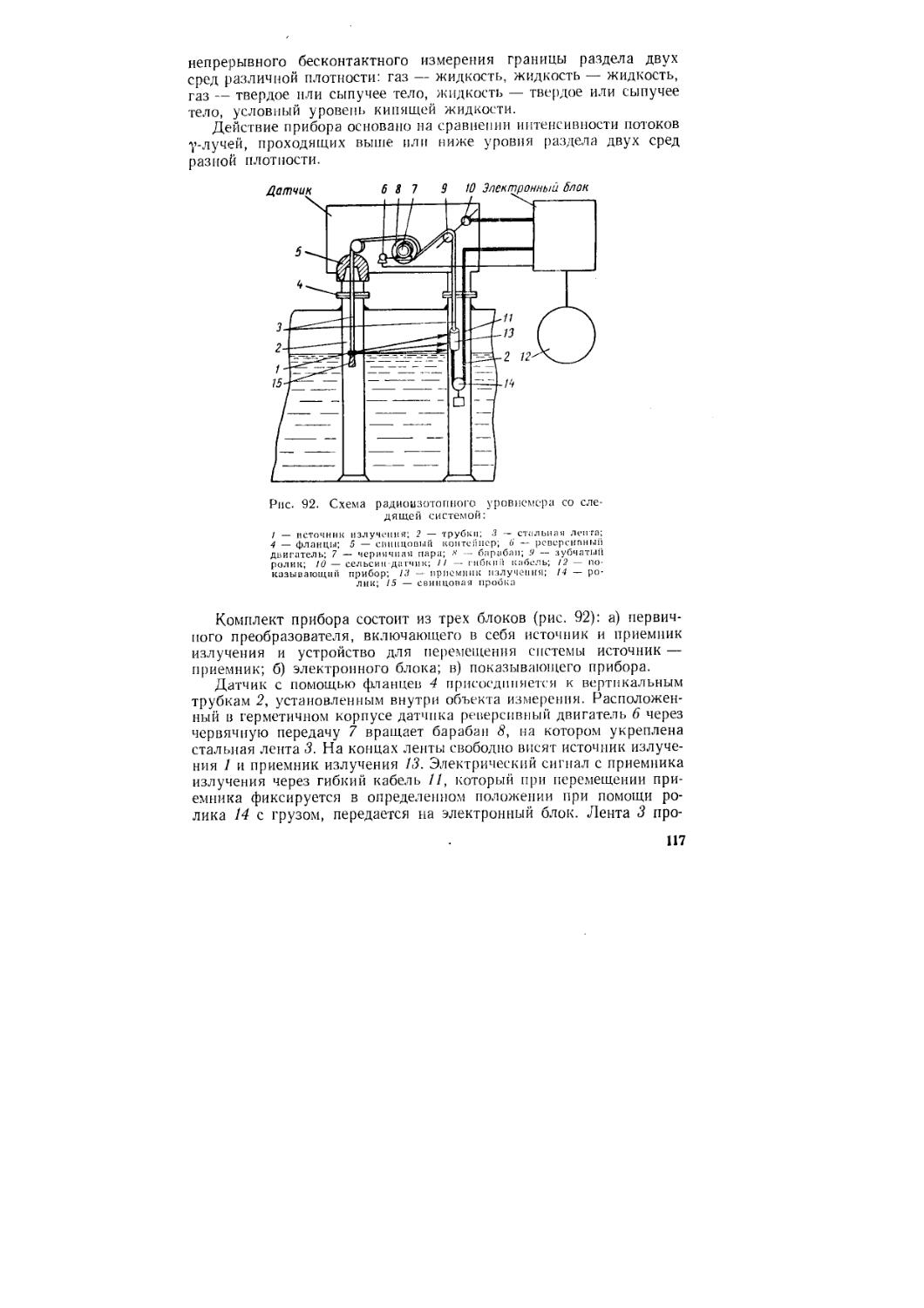
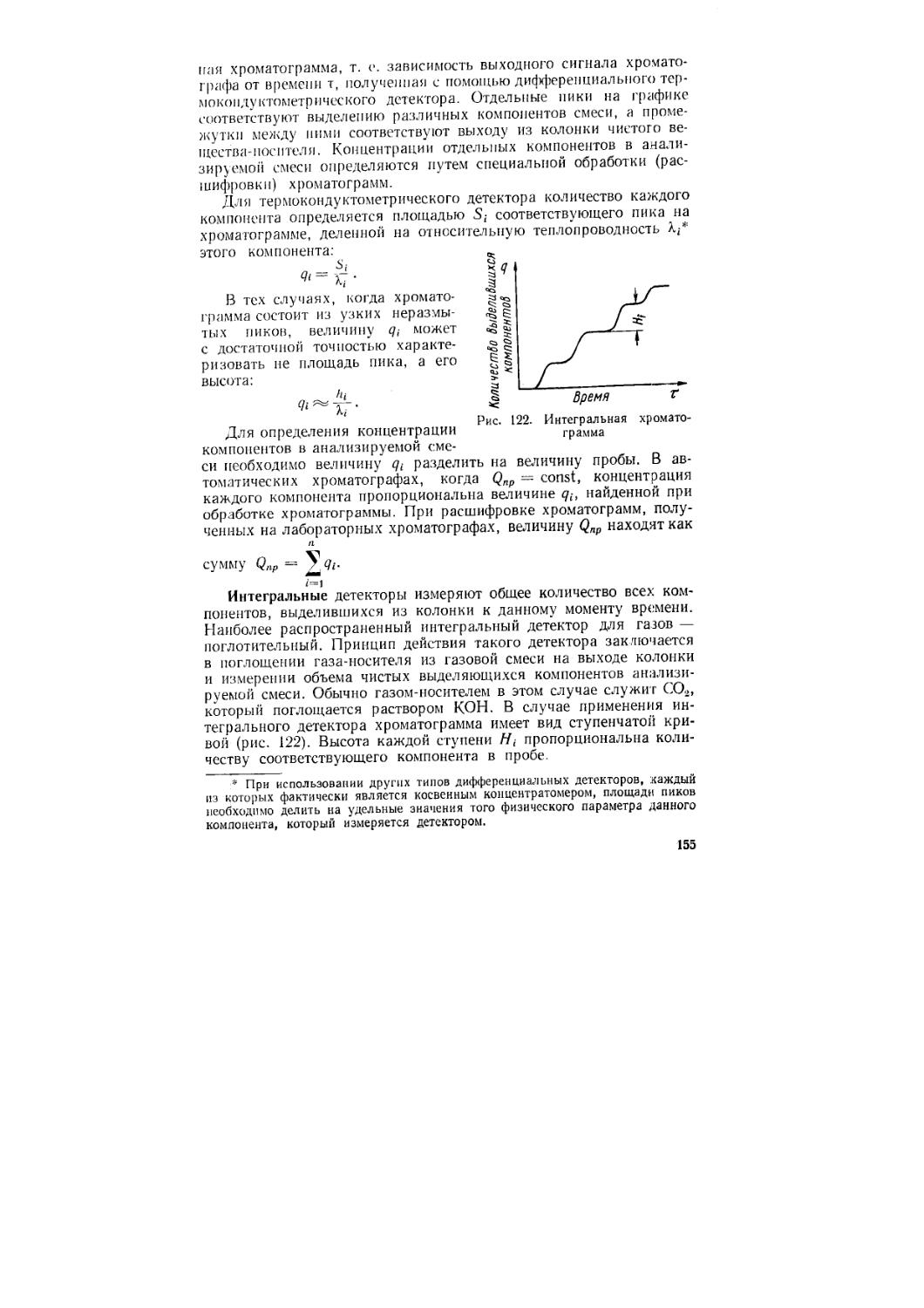
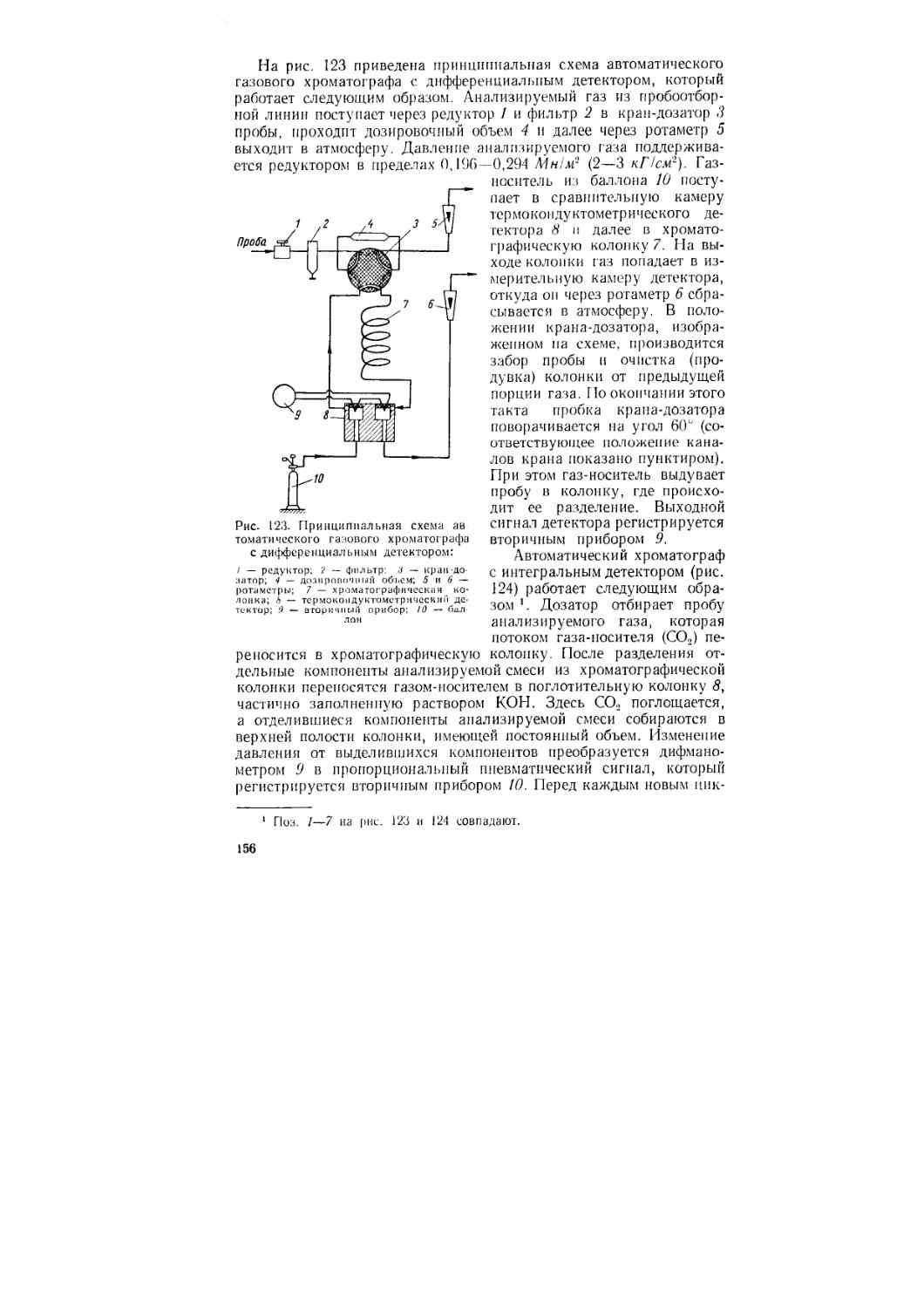
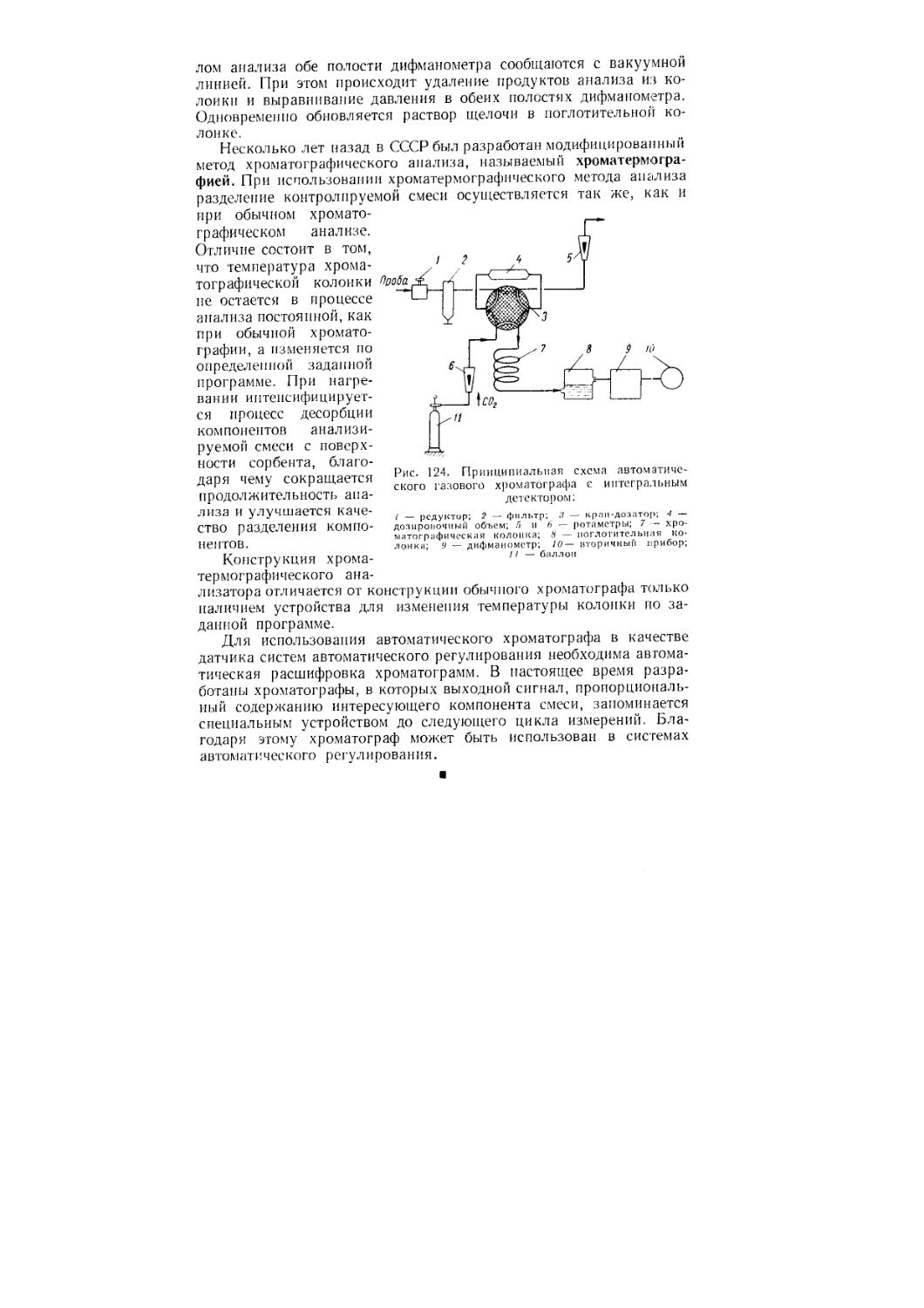
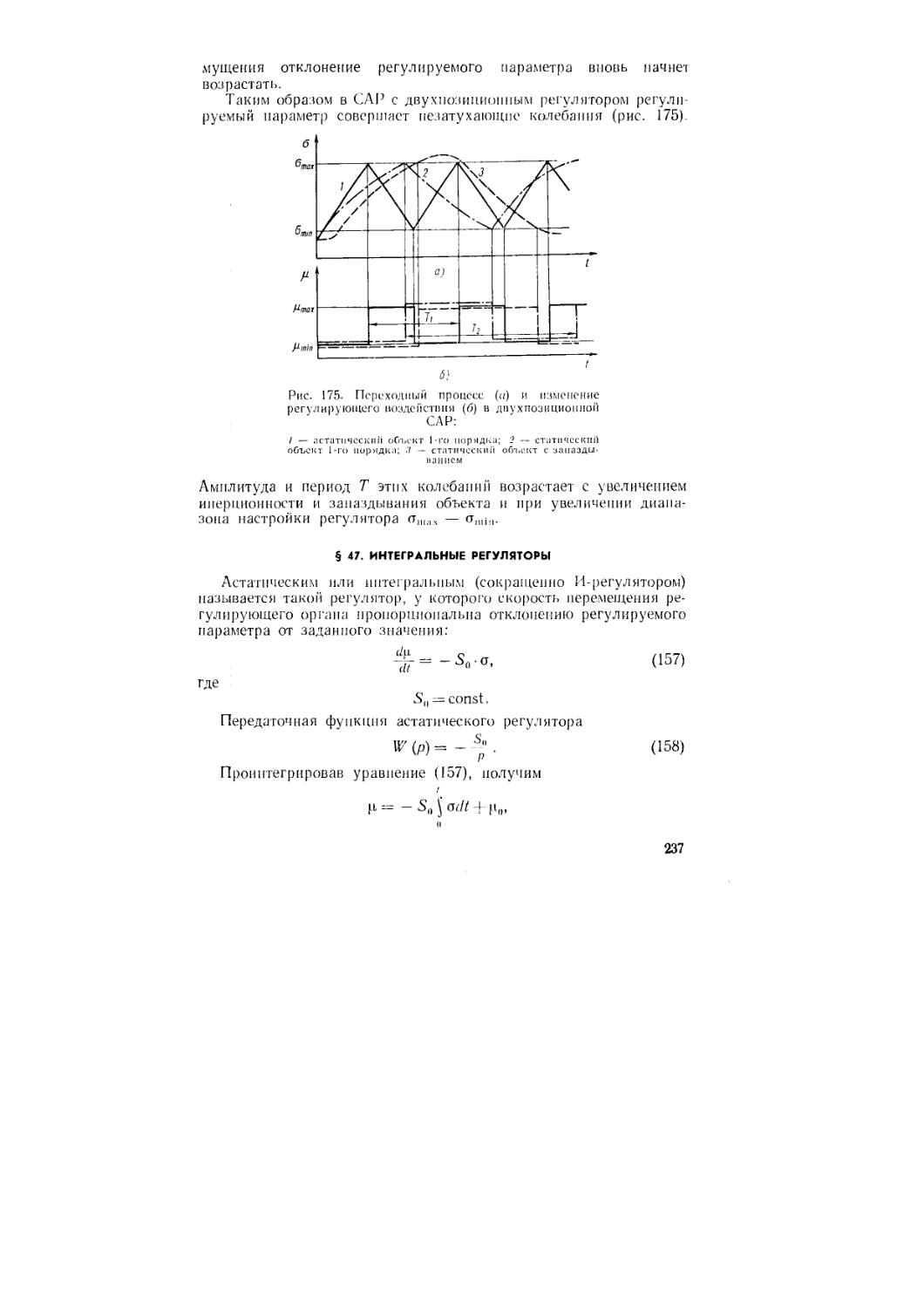
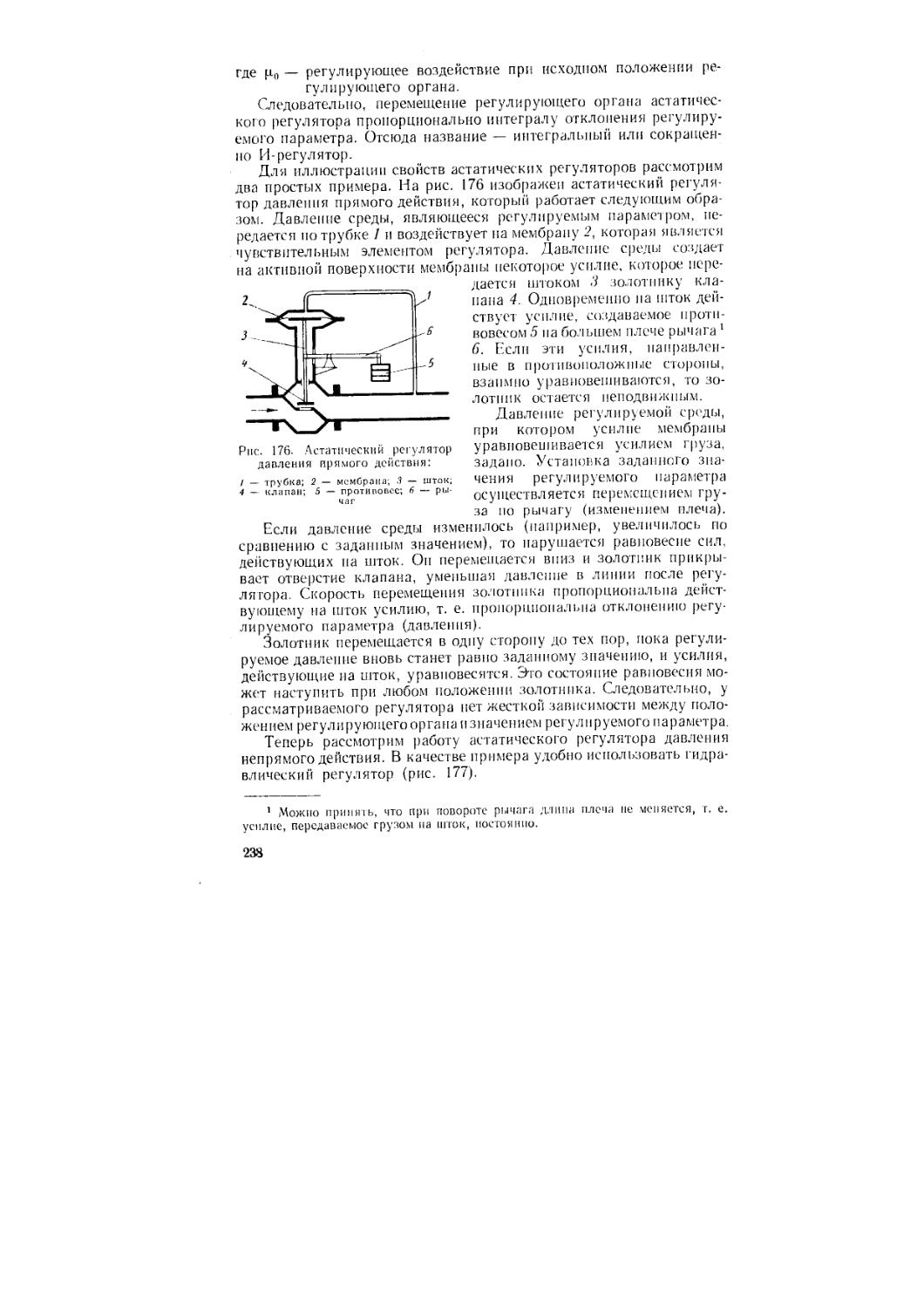
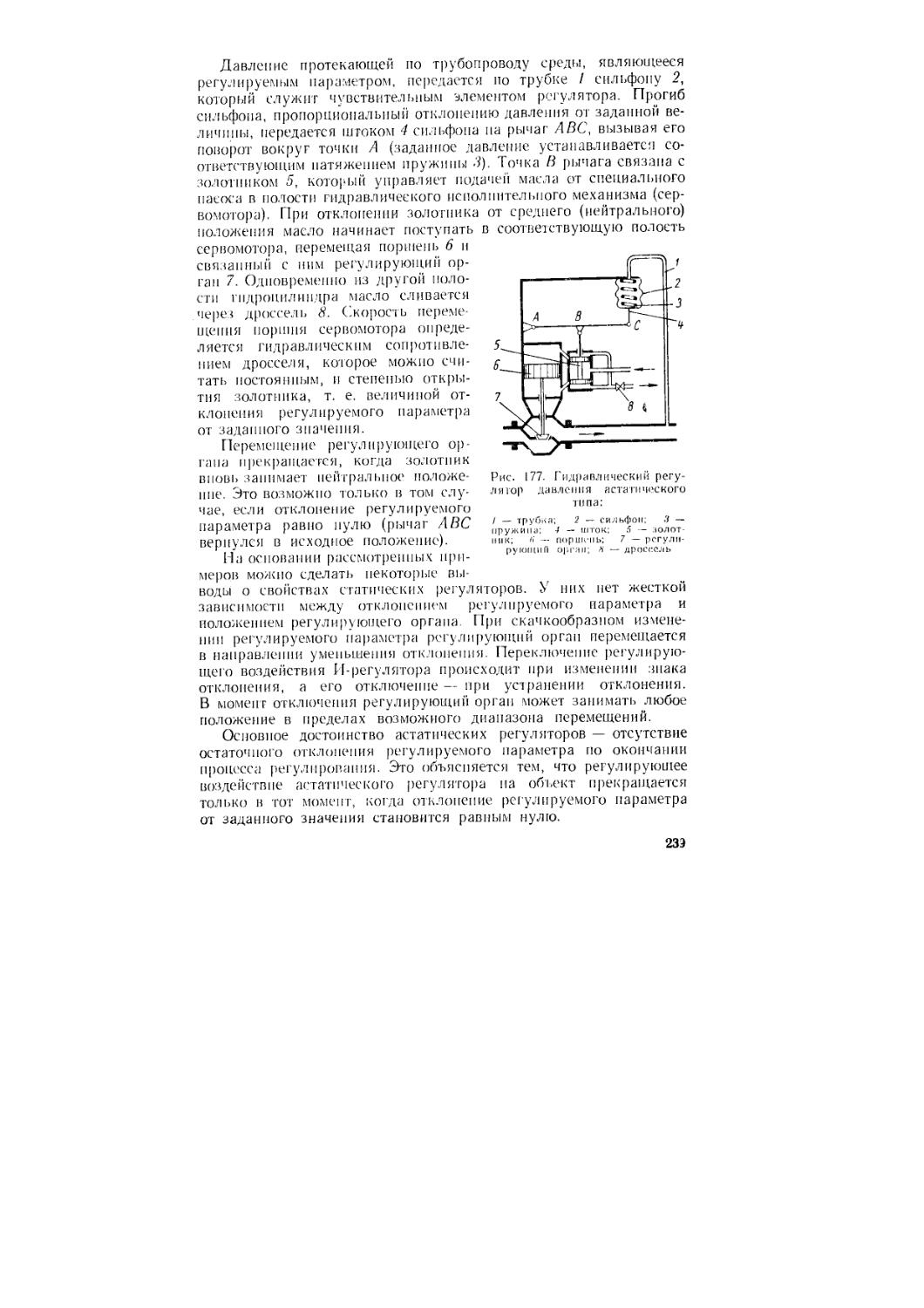
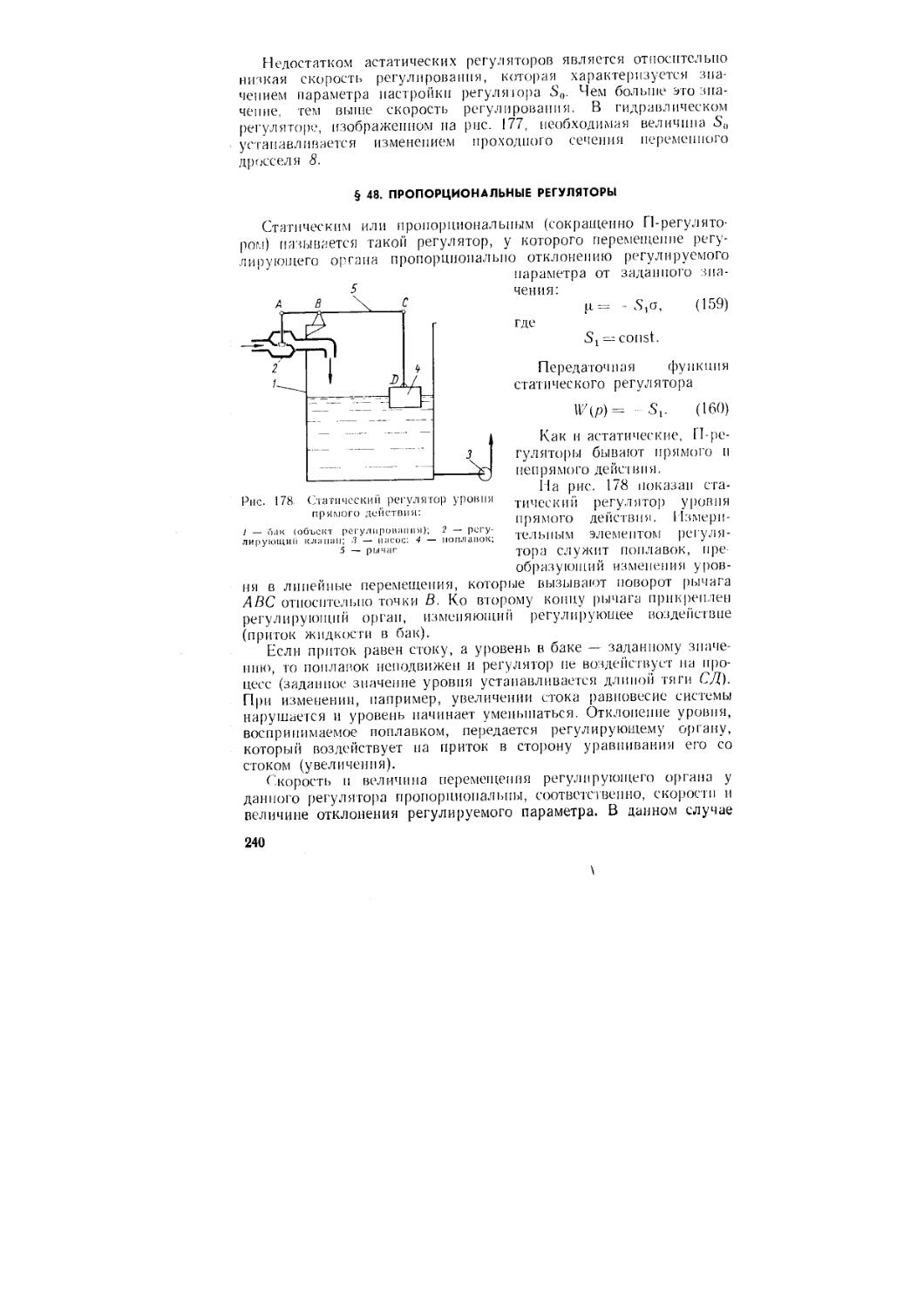
Текст
А. В. КАЗАКОВ, М. В. КУЛАКОВ, Ю. К. МЕЛЮШЕВ
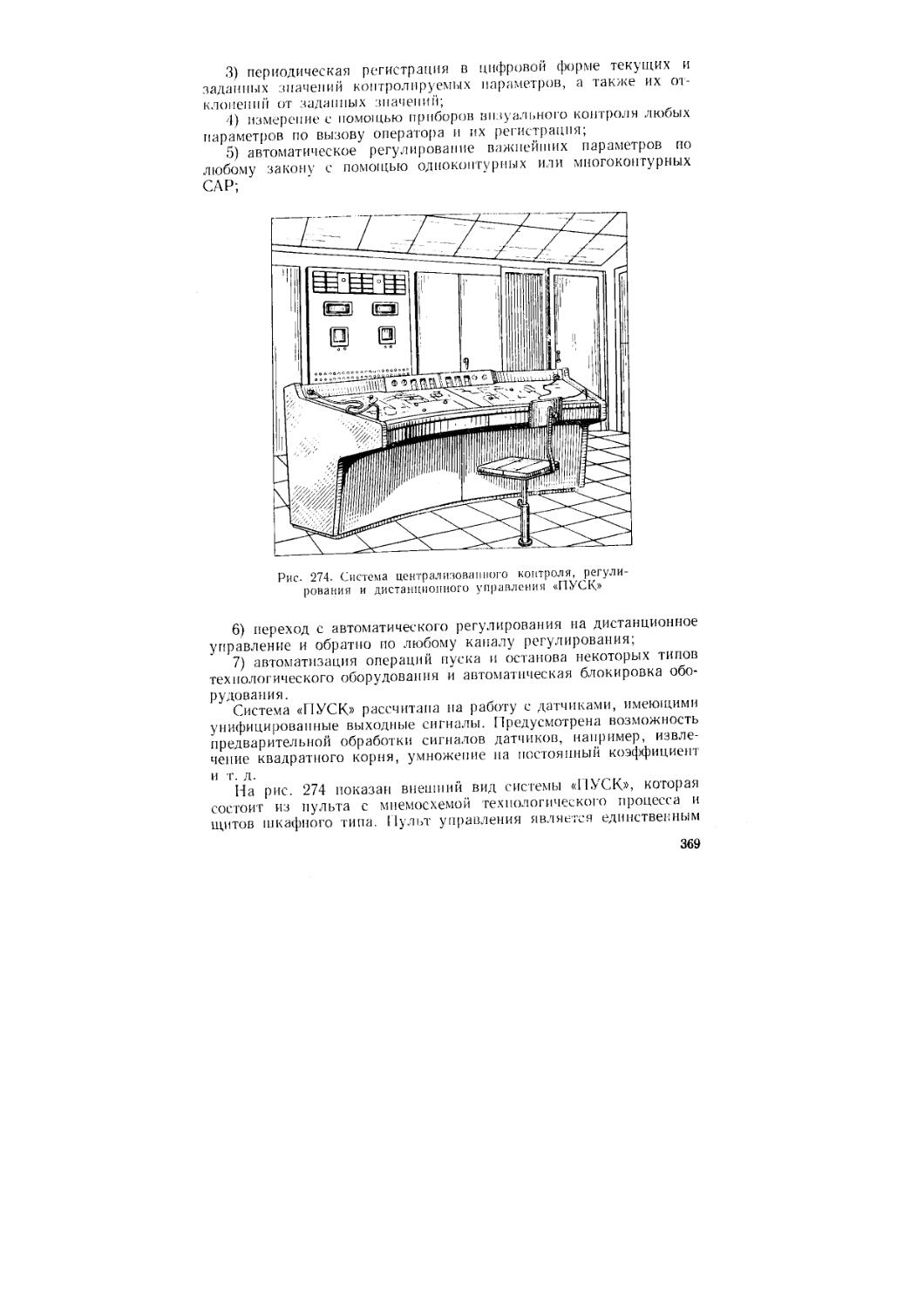
ОСНОВЫ АВТОМАТИКИ И АВТОМАТИЗАЦИИ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Допущено Министерством высшего и среднего специального образования РСФСР в качестве учебного пособия для химико-технологических специальностей и специальностей химического машиностроения
Й
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ» Москва 1970
УДК 66.01 : 65.011.56 : 62-50(075.8)
Основы автоматики и автоматизации химических производств. Учебное пособие для вузов. К а з а к о в А. В., Кулаков М. В., Мелюшев Ю. К- М., «Машиностроение», 1970, стр. 376.
В учебном пособии описаны методы автоматического контроля основных технологических параметров химико-технологических процессов. Рассмотрены элементы теории и техники автоматического регулирования непрерывных производственных процессов. Описаны системы автоматического регулирования типовых технологических процессов и даны примеры систем автоматизации химических производств.
Книга предназначена для студентов всех специальностей вузов химического профиля, не специализирующихся по автоматизации производственных процессов; она может быть полезна широкому кругу инженерно-технических работников химической и родственных ей отраслей промышленности, не имеющих специальной подготовки в области автома-
Уфимский
Рецензенты — кафедра «Автоматизация производственных процессов» МИНХ и ГП им. И. М. Губкина
(канд. техн, наук, доц. А. Е. Бершадский, канд. техн, паук, доц. В. Г. Дианов).
Канд. техн, наук А. Э. Софиев
Редактор — инж. П. А. Кунин
3-14-2
304-70
ПРЕДИСЛОВИЕ
Автоматизация производственных процессов является одним из основных направлений технического прогресса производства. Она оказывает большое влияние на выполнение программы построения материально-технической базы коммунизма в нашей стране, намеченной решениями XXII и XXIII съездов КПСС.
Весьма важное значение имеет автоматизация химической промышленности, темпы развития которой за последние годы резко возросли. Автоматизация позволяет увеличивать производительность технологического оборудования и производительность труда обслуживающего персонала, улучшает качество продукции, повышает безопасность работы, а также позволяет осуществлять новые высокоинтенсивные процессы, недоступные при ручном управлении.
Являясь качественно новым этапом в совершенствовании про' изводства, автоматизация активно вторгается в смежные области, требуя перестройки технологии,'аппаратуры и организации производства. Наибольший эффект внедрение автоматизации приносит в тех случаях, когда производство проектируется с учетом ее требований, т. е. когда технологи, конструкторы, специалисты по организации и планированию работают в тесном контакте со специалистами но автоматизации. Такая совместная работа требует их взаимопонимания, которое может быть достигнуто лишь в том случае, если специалисты различных профилей будут иметь хотя бы общие представления об автоматизации производственных процессов. Поэтому в учебные планы всех специальностей вузов химического профиля введен предмет «Основы автоматики и автоматизации химических производств» с целью ознакомить студентов, не специализирующихся по автоматизации, с элементами теории и техники автоматического управления химико-технологическими процессами.
!•
3
В основу данной книги положена программа курса «Основы автоматики и автоматизации химических производств», читаемого в Московском институте химического машиностроения.
При изложении материала предполагалось, что читатель знаком с материалами курсов «Основы промышленной электроники», «Процессы и аппараты химической технологии» и «Высшая математика» в объеме программы вузов химического профиля.
Гл. I—VI и VIII написаны М. В. Кулаковым; гл. VII, IX—XIII и XVI—XVIII написаны А. В. Казаковым; гл. XIV и XV написаны А. В. Казаковым и Ю. К- Мелюшевым совместно.
Авторы с признательностью примут все критические замечания, направленные па улучшение книги.
ВВЕДЕНИЕ
«Автоматизация производства — этап машинного производства, характеризуемый освобождением человека от непосредственного выполнения функций управления производственными процессами и передачей этих функций автоматическим устройствам» Е
Понятие «управление производственным процессом» подразумевает целенаправленное воздействие на этот процесс, которое обеспечивает оптимальный или заданный режим его работы. Процесс управления складывается из многих элементарных операций, которые по их назначению можно объединить в три группы:
Г/ получение и обработка информации о фактическом состоянии управляемого технологического процесса;
2) анализ полученной информации и, если режим процесса отличается от требуемого, принятие решения о целесообразном воздействии па него;
3) осуществление принятого решения, т. е. непосредственное воздействие на технологический процесс путем изменения материальных или энергетических потоков и другими способами.
Управляемый технологический процесс вместе с оборудованием, в котором он осуществляется, называется объектом управления. Совокупность технических средств, используемых для управления, и персонал, принимающий в нем непосредственное участие, образуют совместно с объектом систему управления (СУ).
Первая функция СУ — получение информации о состоянии объекта управления. Ее выполняет часть СУ, которая называется системой контроля.
Состояние объекта управления характеризуется значениями величин, называемых параметрами управляемого технологического процесса.
При управлении химико-технологическими процессами чаще всего приходится контролировать следующие параметры: температуру, давление (разрежение) и уровень рабочих сред в технологиче-
1 Энциклопедия современной техники. Автоматизация производства и промышленная электроника. Под ред. А. И. Берга и В. А. Трапезникова. Государственное научное нзд-во «Советская Энциклопедия», М., 1962,
б
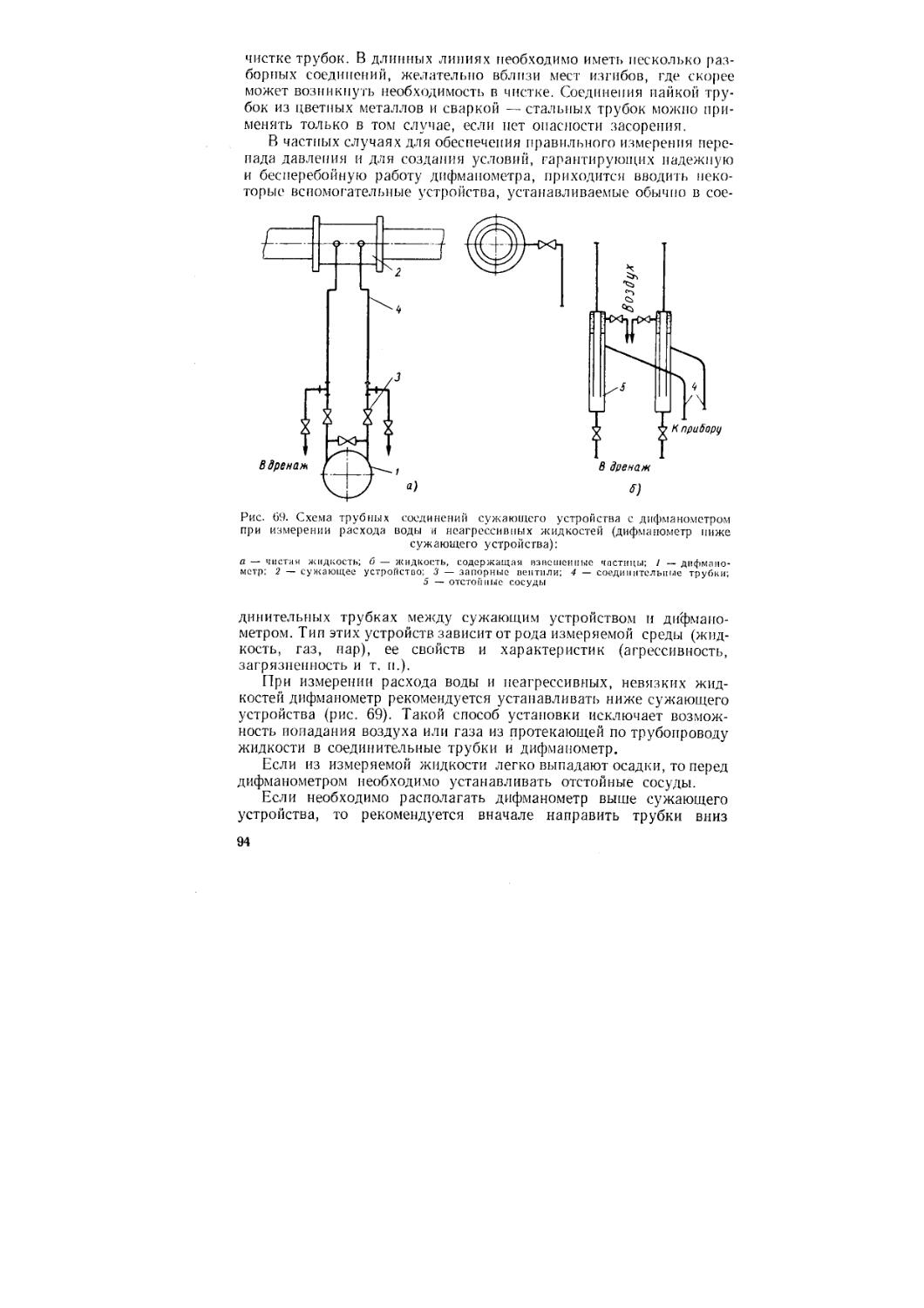
ских аппаратах, расходы газа, жидкости или пара, проходящие по технологическим трубопроводам, а также химический состав рабочих сред на разных стадиях производства.
Информация об объекте получается путем измерения значений параметров, совокупность которых достаточно полно характеризует его состояние.
Сколько параметров и какие именно необходимо контролировать для управления объектом — зависит от его свойств. Например, для управления процессом нагрева потока жидкости в кожухотрубчатом теплообменнике достаточно контролировать всего один параметр — температуру выходящего потока (если она отличается от заданной, то по величине отклонения можно принять решение о том, как следует изменить расход теплоносителя, чтобы это отклонение устранить). А при управлении таким сложным технологическим процессом, как ректификация, количество контролируемых параметров на каждой установке может исчисляться десятками.
Контролируемые параметры измеряют с помощью контрольно-измерительных приборов, которые составляют основную часть всякой системы контроля.
Контрольно-измерительные приборы в системах управления, отбирающие и передающие первичную информацию о состоянии объекта управления, называют датчиками СУ. В состав системы контроля, кроме контрольно-измерительных приборов, входят также различные устройства для преобразования и хранения полученной информации.
Первая часть данной книги посвящена описанию методов измерения наиболее распространенных параметров химико-технологических процессов и технических средств (контрольно-измерительных приборов и некоторых преобразователей), получивших широкое распространение в системах контроля таких процессов.
Наиболее ответственные и сложные функции СУ — анализ информации, поступившей от системы контроля, и принятие решений о необходимом воздействии на объект управления. Трудности ее осуществления вызваны, прежде всего, многообразием задач, возникающих при управлении производственными процессами.
Рассмотрим основные из этих задач на примере непрерывных химико-технологических процессов, наиболее распространенных в химической промышленности.
Возможны три основных режима работы непрерывного процесса: режим пуска — остановки; режим нормальной эксплуатации и аварийный режим. Задачи СУ при работе на разных режимах существенно различны. При пуске (остановке) технологического процесса необходимо обеспечить выход его на заданный режим (или остановку) за кратчайшее время при минимальных потерях материалов, энергии и т. д. В режиме нормальной эксплуатации обычно требуется поддерживать заданные условия протекания технологического процесса при действии на него различных возмущающих
6
факторов. При аварийном режиме необходимо обеспечить безопасность обслуживающего персонала, сохранность оборудования и скорейший вывод процесса из аварийного состояния.
Помимо разнообразия задач, возникающих при управлении производственными процессами, сложность их решения вызвана необходимостью учета специфических свойств объекта, определяющих его поведение после изменения управляющих воздействий. Влияние этих свойств можно проиллюстрировать на упоминавшемся ранее примере управления работой теплообменника.
Предположим, что в какой-то момент аппаратчик обнаружил отклонение температуры выходящего потока от заданного значения. Оценив величину и знак отклонения, он решает увеличить па определенную величину расход теплоносителя и открывает соответствующий вентиль. Однако температура выходящего потока начнет увеличиваться не сразу, так как процесс теплопередачи в кожухотрубчатом теплообменнике весьма инерционен. Обнаружив через некоторое время, что температура все еще не достигла заданной величины, и не принимая во внимание инерционность теплообменника, аппаратчик еще больше откроет вентиль. В результате этого температура вскоре не только достигнет заданного значения, но и превысит его. Постепенно, работая с данным теплообменником, этот аппаратчик достаточно хорошо изучит его свойства, как объекта управления, и будет их учитывать при выборе управляющего воздействия. Однако, если его переведут на другой участок и поручат управление другим теплообменником, ему вновь придется изучать его свойства.
Многообразие задач управления производственным процессом и сложность их решения явились причиной того, что до недавнего времени основные функции СУ (т. е. анализ информации о состоянии объекта и принятие решения о воздействии на него) выполнял человек. Однако развитие теории и техники автоматического управления постепенно привели к созданию автоматических управляющих устройств. По мере совершенствования им поручаются все более сложные функции управления и достигается более высокий уровень автоматизации производственных процессов.
В зависимости от степени участия человека в управлении различают следующие разновидности СУ:
1. Системы ручного управления, в которых все функции по анализу состояния объекта, принятию решений о воздействии на него и осуществлению этих решений, а также часть функций по контролю выполняет человек 1. Обычно это бывает аппаратчик, непосредственно обслуживающий технологический аппарат или несколько аппаратов — объектов управления. На большинстве современных химических производств такие системы управления уже не применяются.
1 Т. е. аппаратчик контролирует один или несколько параметров вручную.
7
2. Системы автоматического контроля и ручного дистанционного управления, с помощью которых человек управляет технологическим процессом на отдельном производственном участке. Он получает всю необходимую информацию о состоянии объекта по показаниям автоматических контрольно-измерительных приборов, принимает решения о необходимых воздействиях на процесс и осуществляет их из общего пункта управления с помощью специальных устройств для дистанционного управления.
3. Системы частичной автоматизации, обеспечивающие автоматическое управление технологическим процессом в режиме нормальной эксплуатации по некоторым из его параметров. Обычно такие СУ дополняются системой автоматического контроля и дистанционного управления по остальным параметрам.
4. Системы комплексной автоматизации, полностью обеспечивающие автоматическое управление технологическим процессом в режиме нормальной эксплуатации и выполняющие часть функций управления в режиме пуска — останова и в аварийном режиме. Неавтоматизированные функции управления в двух последних режимах осуществляет человек с помощью устройств дистанционного управления. Кроме того, в таких системах обычно предусматривается возможность перехода с автоматического на ручное дистанционное управление по любому параметру.
5. Системы полной автоматизации, обеспечивающие автоматическое управление технологическим процессом в любом возможном режиме его работы.
Выбор той или иной СУ зависит от многих причин, главные из которых — технический уровень производства, степень его механизации, изученность технологического процесса, наличие необходимых технических средств автоматизации и, прежде всего, средств получения информации о технологических параметрах, экономическая эффективность предлагаемой СУ. Однако в целом достигнутому в настоящее время уровню теории и особенно техники автоматического управления непрерывными технологическими процессами в наибольшей степени соответствует применение систем комплексной автоматизации в масштабе производственных участков, отделений и цехов.
Большинство непрерывных химико-технологических процессов рассчитано на длительную эксплуатацию без остановок, следовательно, для них не характерны режимы пуска — останова (как и аварийный режим). Поэтому наиболее важной задачей СУ является управление процессом в режиме нормальной эксплуатации. Обычно этот режим задается как совокупность определенных значений ряда технологических параметров, так что задача СУ сводится к поддержанию этих значений. Частный случай управления, цель которого — поддержание заданного режима технологического процесса, т. е. заданных значений его параметров, называется регули-
8
роваиием. Как и управление, регулирование может осуществляться вручную и автоматически.
Системы автоматического регулирования (САР) составляют основу систем частичной и комплексной автоматизации, а также входят в состав систем полной автоматизации. В настоящее время они являются наиболее распространенными компонентами систем автоматизации любых непрерывных производственных процессов, поэтому во второй части книги САР уделено основное внимание. В гл. IX—XIII изложены методы исследования САР и их отдельных частей, а также методы разработки САР заданного качества.
В гл. XIV приводится описание технических средств автоматизации, получивших наибольшее распространение в системах автоматизации производственных процессов химической промышленности .
В книге уделено также некоторое внимание вопросам технического проектирования систем автоматизации, которые изложены в гл.; XV. Это сделано, прежде всего, для того, чтобы учащиеся, не специализирующиеся по автоматизации (механики и технологи), яснее представляли себе практические методы проектирования систем автоматизации и учитывали их при разработке технологии и аппаратурного оформления производства, а также при составлении заданий на проектирование системы автоматизации производства.
Кроме того, этот раздел предназначен в помощь студентам при выполнении ими курсовой работы, предусмотренной программой курса «Основы автоматики и автоматизации химических производств», а также при выполнении соответствующего раздела дипломного проекта. С этой целью в гл. XVI приводится описание систем автоматизации типовых химико-технологических процессов, которые входят в состав различных химических производств, а в гл. XVII рассмотрено несколько примеров реальных систем автоматизации отдельных цехов и производственных отделений.
Необходимо отметить, что в состав системы комплексной автоматизации, кроме систем автоматического регулирования различных технологических параметров, обычно входят также системы автоматической сигнализации и блокировки.
Система автоматической сигнализации предназначена для оповещения обслуживающего персонала о выходе контролируемых параметров за допустимые пределы. Система автоматической блокировки обеспечивает осуществление таких операций, как автоматическое отключение основного оборудования в случае его неисправности и включение резервного оборудования, перекрытие клапанов па линиях подачи сырья и топлива в случае аварии и т. д. Обе эти системы носят специфический характер и в книге не рассматриваются.
Часть первая
СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Глава I ОСНОВНЫЕ ПОНЯТИЯ ОБ ИЗМЕРЕНИЯХ И ИЗМЕРИТЕЛЬНЫХ ПРИБОРАХ
§ 1. ИЗМЕРЕНИЯ
Измерить какую-либо величину — значит сравнить ее с другой однородной величиной (мерой), принятой за единицу.
Число q, выражающее отношение измеряемой величины Q к единице измерения U, называется числовым значением измеряемой величины
7 = ^ или Q = qU. (1)
Уравнение (1) является основным уравнением измерения: его правая часть называется результатом измерения.
Результат измерения всегда именованное число и состоит из единицы измерения U, которая имеет свое наименование, и числа q, показывающего, сколько раз данная единица содержится в измеряемой величине Q.
При измерении физических величин не всегда возможно непосредственно сравнивать измеряемую величину с мерой и в этих случаях измерение производится сравнением с какой-либо другой физической величиной, однозначно связанной с измеряемой (например, измерение температуры производится по величине электрического сопротивления).
Измерения делятся па прямые, косвенные и совокупные.
Прямыми измерениями называются такие, при которых значение измеряемой величины определяется непосредственным сравнением ее с мерами или показаниями измерительных приборов, градуированных в выбранных единицах измерения.
Основные методы прямых измерений: непосредственного определения, компенсационный (нулевой) и дифференциальный (разностный).
Методом непосредственного определения значение измеряемой величины прямо преобразуется в выходную величину прибора, т. е. приборы непосредственно показывают (или записывают) изме-10
ряемую величину. Метод непосредственного определения широко используется в приборах промышленного контроля.
Компенсационный (нулевой) метод состоит в уравновешивании неизвестной измеряемой величины известной. Значение измеряемой величины находится после достижения равновесия по значению уравновешивающей (известной) величины. Момент равновесия фиксируется устройством или прибором, называемым иуль-индикато-ром; К числу приборов, основанных на компенсационном методе, относятся потенциометры, уравновешенные мосты, дифманометры с силовой компенсацией и др.
Компенсационный метод более точен, чем метод непосредственного определения.
Дифференциальный (разностный) метод заключается в том, что прибором определяется разность между измеряемой и некоторой известной (образцовой) величиной, после чего измеряемая величина находится путем алгебраического сложения.
Существенный признак прямого измерения — результат выражается в тех же единицах, что и измеряемая величина.
Косвенными измерениями измеряемая величина определяется не непосредственно, а на основании данных прямых измерений величины, связанной с искомой величиной определенным соотношением.
Примеры косвенных измерений — определение плотности по массе и объему или расхода по перепаду давления.
Косвенные измерения широко применяются в практике контроля производственных процессов, когда прямые измерения невозможны.
При совокупных измерениях числовые значения измеряемой величины определяются путем решения ряда уравнений, полученных из совокупности прямых измерений одной или нескольких однородных величин.
Совокупные измерения применяются в лабораторной и исследовательской практике.
§ 1. ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
Измерительными приборами называются устройства, служащие для прямого или косвенного сравнения измеряемой величины с единицей измерения.
При централизованном контроле любой измерительный прибор (измерительная система) состоит из трех основных узлов: первичного преобразователя \ канала связи и вторичного прибора.
Первичный преобразователь — измерительное устройство, установленное на объекте измерения, преобразует контролируемую величину в выходной сигнал, удобный для передачи по каналу связи.
1 В технической литературе встречается и термин датчик, употребленный в том же значении, что и первичный преобразователь.
11
Первичные преобразователи весьма разнообразны как по принципу действия, так и по характеру выходных сигналов; их можно классифицировать по ряду признаков:
а) по виду контролируемой величины (преобразователи температуры, давления, расхода, уровня, плотности и т. и.);
б) по принципу действия (электрические, пневматические и т. и.);
в) по виду и характеру выходного сигнала.
Выходные сигналы преобразователей могут быть непрерывными и прерывными (дискретными).
Важнейшая характеристика первичного преобразователя — вид функциональной зависимости между изменениями контролируемой величины и выходным сигналом преобразователя; предпочтительна линейная зависимость.
Канал связи служит для передачи сигнала от первичного преобразователя к вторичному прибору. Если сигнал электрический, то в качестве канала связи используются электрические провода или кабель. Для пневматических или гидравлических сигналов используются металлические и пластмассовые трубки.
Наибольшее распространение в современных системах централизованного контроля получили электрические и пневматические дистанционные передачи, причем пневматические системы применяются главным образом во взрыво- и пожароопасных производствах, где применение электрических передач затруднено.
Вторичный прибор — устройство, воспринимающее сигнал от первичного преобразователя и выражающее его в численном виде при помощи отсчетного устройства. Во многих случаях один и тот же вторичный прибор может быть использован для измерения различных параметров (разница будет лишь в градуировке шкалы).
Шкалы технических приборов обычно градуируются так, чтобы показания их были численно равны отсчету. Например, отсчету q = 50 по шкале ртутного термометра, градуированного в °C, соответствует показание Q = 50. Единица измерения температуры U = 1°С.
По способу отсчета измерительные приборы подразделяются на следующие группы.
Приборы с ручной наводкой, у которых процесс измерения осуществляется сравнением измеряемой величины с мерами или образцами при непосредственном участии наблюдателя (весы с гирями, оптический пирометр с исчезающей нитью).
Показывающие приборы — указывают значение измеряемой величины в момент измерения на отсчетном устройстве.
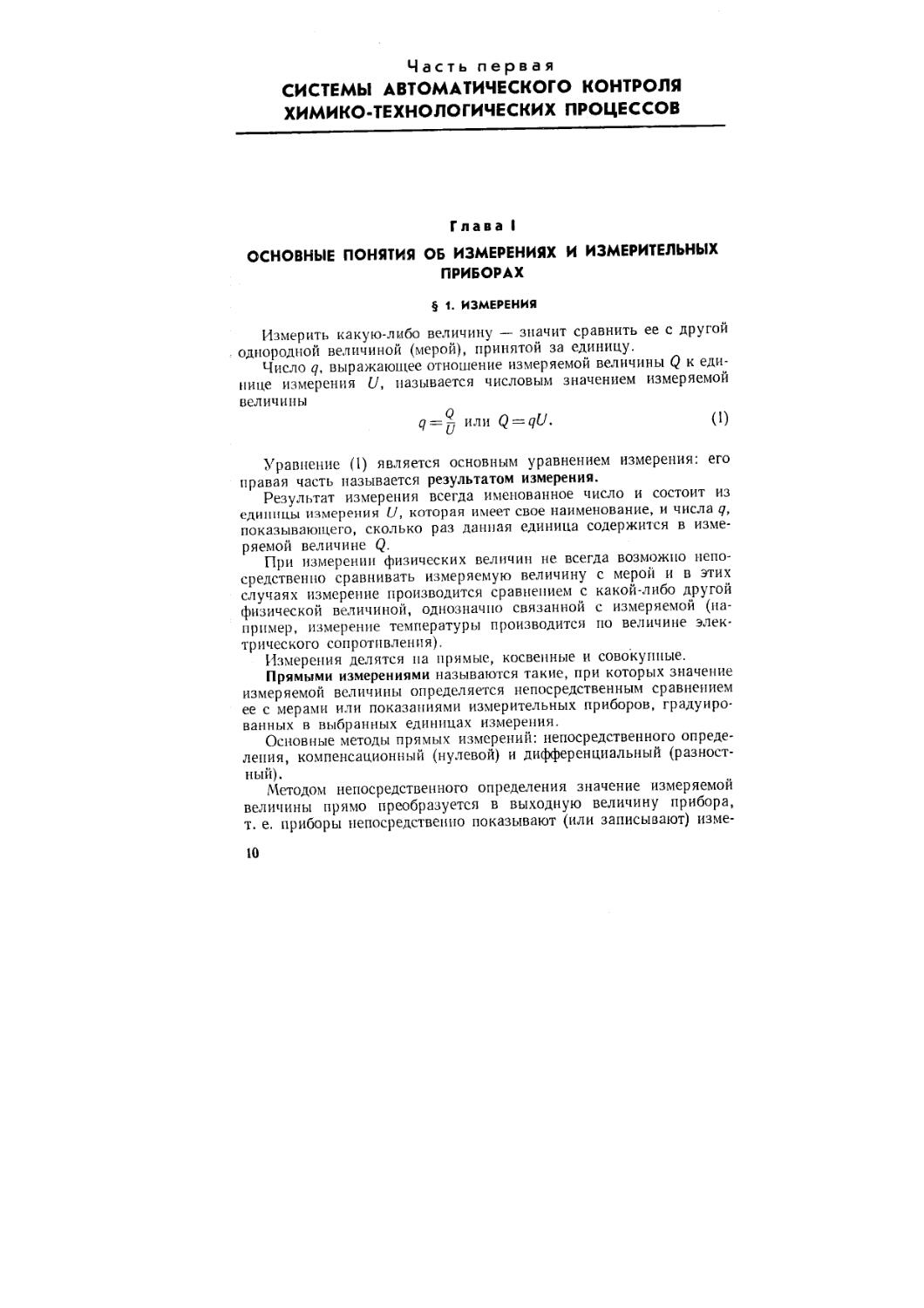
Наибольшее применение имеют шкаловые отсчетные устройства. Шкалы выполняются как неподвижными, так и подвижными; в последнем случае шкала перемещается относительно неподвижного указателя. Отметки на шкалах располагаются вдоль прямой линии или по дуге окружности, иа плоской и цилиндрической поверхности циферблата.
12
На рис. 1 показаны наиболее типичные шкалы измерительных приборов.
Положение указателя определяется углом поворота или линейным его перемещением от нуля или начала шкалы. Зависимость
отсчетом называется характери-
между положением указателя и стикой шкалы.
а — прямолинейная; б — дуговая; в --крутонам равномерная; г — профильная; д — барабанная; с — круговая неравномерная
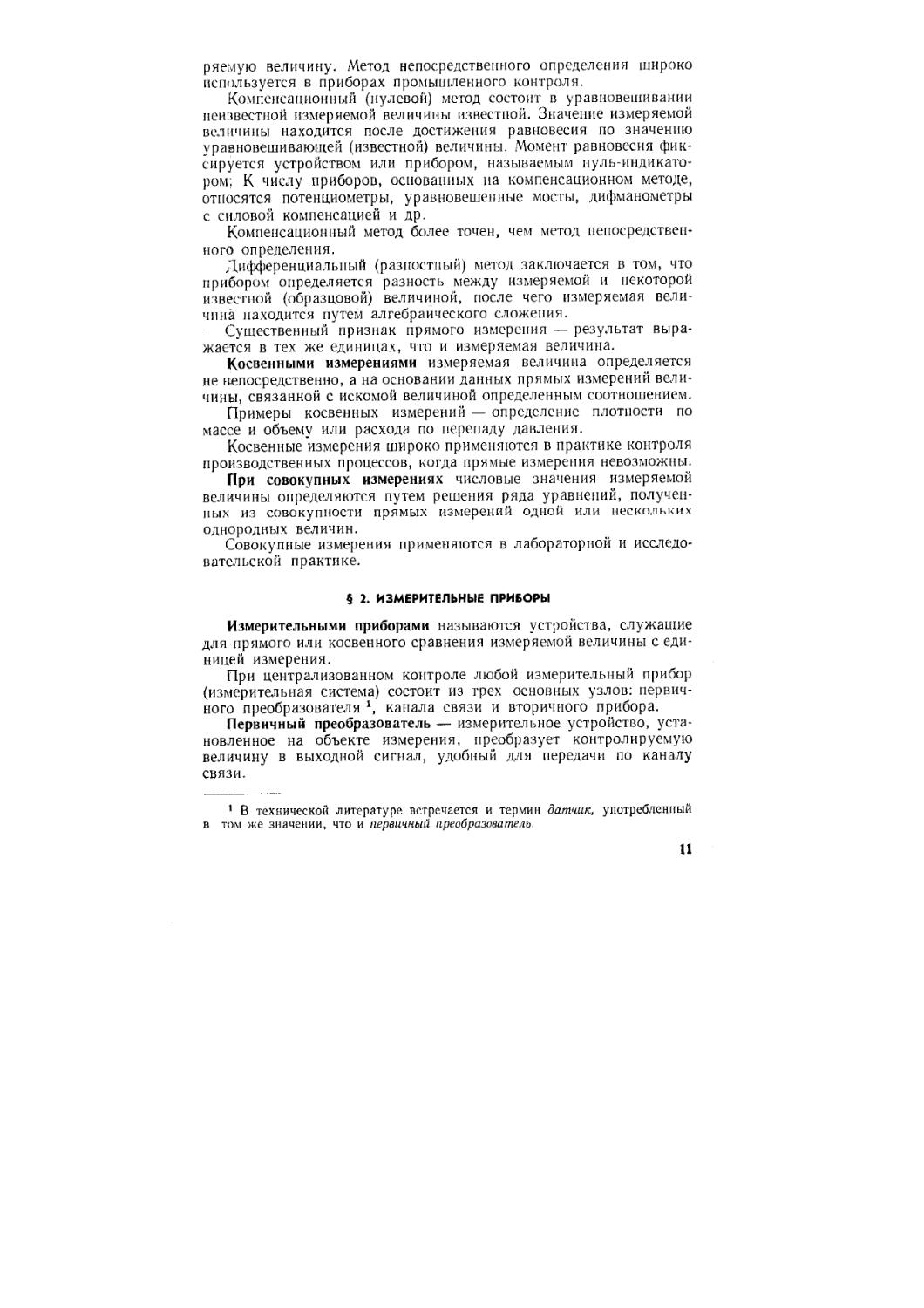
Рис. 2. Шкаловос отсчетное устройство с дугозой шкалой
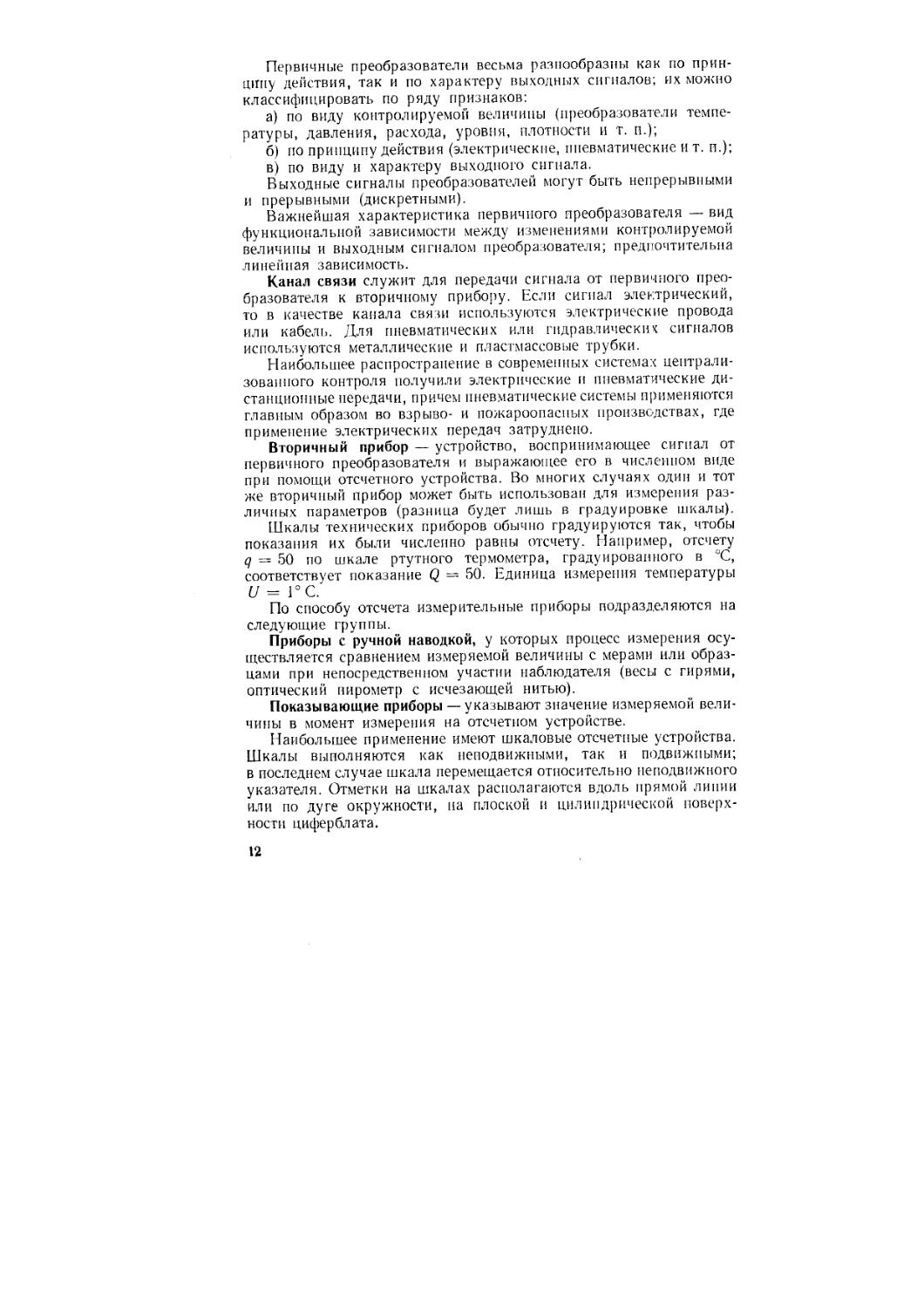
Рис. 3. Шкаловое отсчетное устройство с прямолинейной шкалой
Характеристика шкалы для приборов с угловым перемещением указателя выражается уравнением (рис. 2)
q-=fW<
где <р — угол поворота указателя от нулевой отметки шкалы, а для безнулевых шкал — от начала шкалы;
q — отсчет по шкале.
Для приборов с прямолинейными шкалами (рис. 3)
q=- fi (П
где М — линейное смещение указателя от нуля шкалы (для безнулевых шкал — от начала шкалы).
Множитель 100° С, помещенный па шкале рис. 3, указывает, что при прочтении показания прибора надо величину, отмеченную указателем, умножить на 100.
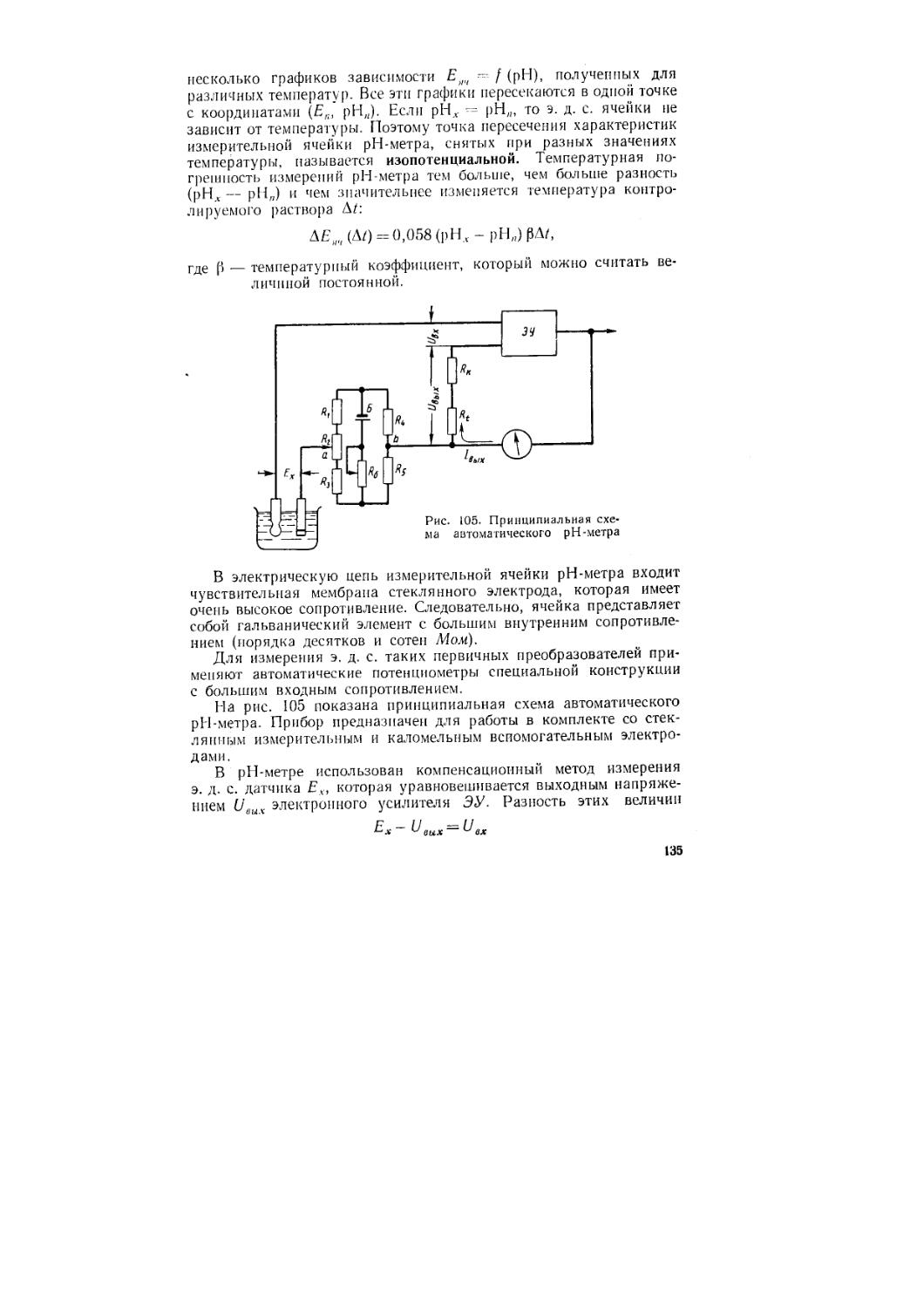
Линейное смещение указателя от нулевой отметки дуговых и круговых шкал
где — радиус шкалы.
13
Равномерные шкалы имеют линейную характеристику вида
q = (q« - Ян) + Ян,
ЧЛпах
или
Д'
Я = -(Я«-~Ян) + Ян,
где qu и qH — отсчеты, соответствующие верхнему (qe) и нижнему (qH) пределам показаний прибора;
«Ртах — размах шкалы;
iVn.ax — длина шкалы.
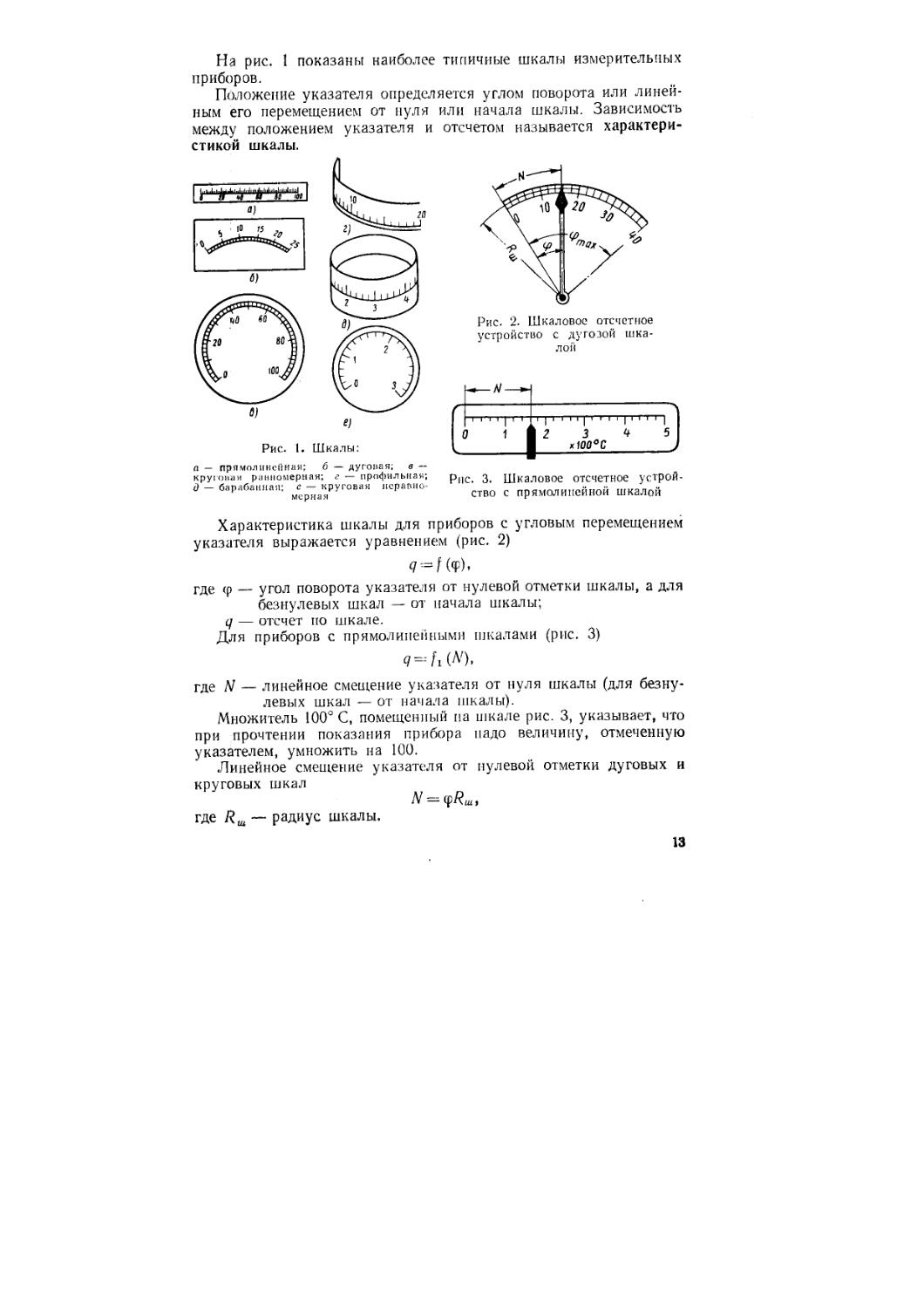
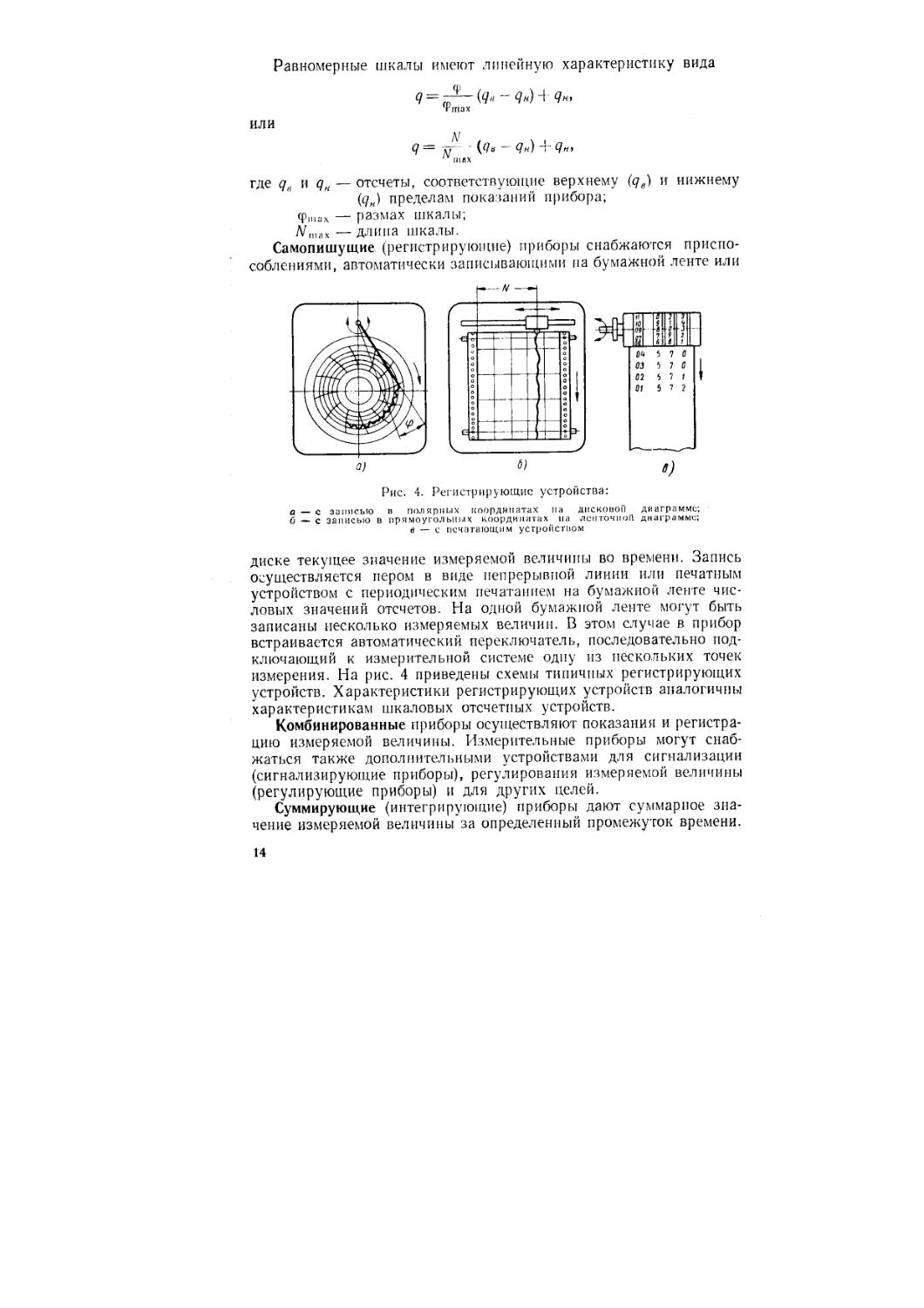
Самопишущие (регистрирующие) приборы снабжаются приспособлениями, автоматически записывающими па бумажной ленте или
Рис. 4. Регистрирующие устройства:
а — с записью в полярных координатах па дисковой
б — с записью в прямоугольник координатах па ленточной в — е печатающим устройством
диаграмме; диаграмме',
диске текущее значение измеряемой величины во времени. Запись осуществляется пером в виде непрерывной линии или печатным устройством с периодическим печатанием на бумажной ленте числовых значений отсчетов. На одной бумажной ленте могут быть записаны несколько измеряемых величин. В этом случае в прибор встраивается автоматический переключатель, последовательно подключающий к измерительной системе одну из нескольких точек измерения. На рис. 4 приведены схемы типичных регистрирующих устройств. Характеристики регистрирующих устройств аналогичны характеристикам шкаловых отсчетных устройств.
Комбинированные приборы осуществляют показания и регистрацию измеряемой величины. Измерительные приборы могут снабжаться также дополнительными устройствами для сигнализации (сигнализирующие приборы), регулирования измеряемой величины (регулирующие приборы) и для других целей.
Суммирующие (интегрирующие) приборы дают суммарное значение измеряемой величины за определенный промежуток времени.
14
Эти приборы снабжаются счетчиками, которые часто встраиваются в один корпус с показывающим или самопишущим прибором, имея с ним одну измерительную систему.
Чувствительностью измерительного прибора называется отношение линейного или углового перемещения указателя к изменению измеряемой величины, вызвавшему это перемещение.
п : с AM о dN
Линейная чувствительность плн
е Аср с d(p
угловая чувствительность А,,= или =
для приборов с дуговыми и круговыми шкалами чувствительность’
S =
где AJV и А<р — перемещение указателя;
AQ — изменение измеряемой величины;
RIU — радиус шкалы (см. рис. 2).
Чем больше чувствительность прибора, тем меньшую долю измеряемой величины можно измерить. Величина чувствительности является мерой, при помощи которой сравниваются однотипные приборы.
Величина, обратная чувствительности (С), называется ценой деления шкалы прибора, т. е.
С=^.
Дер
§ 3. ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
Погрешностью измерительного прибора называется разность между его показанием и истинным значением измеряемой величины. Так как величину истинного значения измеряемой величины установить нельзя, в измерительной технике используется так называемое действительное значение, полученное с помощью образцового прибора.
Абсолютная погрешность а = Q — Qu;
относительная погрешность Ь-= % • 100%,
где Q — отсчитанное значение измеряемой величины;
Qo — действительное значение измеряемой величины.
' /-л / О- ci а а
Ооычно = —~ =—т. е. при
Чо х a Q (1______- )
вычислении относительной погрешности абсолютную погрешность можно относить к показанию прибора.
Для определения действительного значения измеряемой величины в показания прибора вводится поправка (г/), численно равная абсолютной погрешности, взятой с обратным знаком:
15
В технике применяются приборы, с помощью которых проводят измерения лишь с определенной заранее заданной точностью — допустимой основной погрешностью.
Величины допустимых основных погрешностей, соответствующие нормальным условиям работы приборов, устанавливаются стандартами и выражаются в относительных величинах.
По величине допустимой основной погрешности измерительные приборы подразделяются на классы точности.
Условное обозначение класса точности соответствует наибольшей основной допустимой абсолютной погрешности а, отнесенной к диапазону шкалы N и выраженной в процентах, т. е. 100%. Класс точности обычно обозначается на циферблате прибора.
Если прибор работает в условиях, отличных от нормальных, то возникает дополнительная погрешность, увеличивающая общую погрешность прибора.
К дополнительным погрешностям относятся: температурная погрешность, вызванная отклонением температуры окружающей среды от нормальной, позиционная погрешность, обусловленная отклонением положения прибора от нормального рабочего положения и т. п. За нормальную температуру окружающего воздуха принимают обычно 20° С, а за нормальное атмосферное давление 101325 hIm1 (760 мм рт. ст.).
Для нахождения погрешности в различных точках шкалы прибора он через определенные сроки подвергается поверке.
Поверкой называется операция сравнения показаний измерительных приборов с образцовыми приборами для определения их погрешностей или поправок к их показаниям.
Вариацией технических измерительных приборов называется полученная экспериментально наибольшая разность между показаниями прибора при поверке для прямого и обратного хода, при одном и том же действительном значении измеряемой величины в одинаковых условиях измерения.
Появление вариации вызывается трением в механизме прибора, зазорами (люфтами) в кинематических парах, гистерезисом, упругим последействием чувствительных элементов прибора и т. п.
Вариация (е) выражается в процентах от максимального значения шкалы прибора и должна быть меньше основной допустимой погрешности прибора
е
АЛ/
N — N шах 4 пип
• 100%,
где
ДМ — максимальная разность показаний прибора;
Л^тах и iVmin — соответственно верхнее и нижнее предельное значение шкалы прибора.
16
/Мин. 2ЫСШ.
спец, ебр, 'Г-> \
Глава II
ИЗМЕРЕНИЕ ТЕМПЕРАТУР
§ 4. ОСНОВНЫЕ ПОНЯТИЯ ПРИ ИЗМЕРЕНИИ ТЕМПЕРАТУР
По современным представлениям температура — это условная статистическая величина, прямо пропорциональная средней кинетической энергии частиц вещества (молекул или атомов).
Чтобы перейти к количественному определению температуры, необходимо установить шкалу температур, т. е. выбрать начало отсчета (нуль температурной шкалы) и единицу измерения температурного интервала (градус).
В температурных шкалах Ц,ельсия, Реомюра, Фаренгейта для разметки шкалы принималась линейная зависимость между расширением жидкости в стеклянной оболочке и температурой, а за единицу измерения принимался градус температуры, представляющий собой определенную долю температурного интервала.
Следовательно,
1град=!^_±
где
f и t" — две постоянные, легко воспроизводимые температуры (соответственно точка плавления льда и точка кипения воды);
п — целое число, на которое разбивается температурный интервал t" — t'.
Уравнение шкал
где
t' и f' — температуры соответственно таяния льда и кипения воды при нормальном давлении и ускорении силы тяжести 9,80665 м/сск1',
V и V" — объемы жидкости, отвечающие соответственно температурам и t"\
V — объем жидкости, соответствующий температуре I.
Так как в природе не существует тел с линейной зависимостью между объемным расширением жидкости и температурой, то пока-
332848
зания термометров зависят от природы термометрического вещества (ртути, спирта и т. д.).
С развитием науки и техники возникла необходимость в создании единой температурной шкалы, не связанной с какими-либо частными свойствами термометрического вещества и пригодной в широком интервале температур.
Еще Кельвин показал, что если одному какому-либо значению средней кинетической энергии частиц присвоить определенное число градусов (так называемая «основная точка» или «реперная точка»), то ее достаточно для построения линейной бесконечной температурной шкалы от абсолютного нуля. Прямая, изображающая такую шкалу в системе координат «температура — энергия», проходит через начало координат, так как абсолютному нулю температур соответствует нулевая скорость частиц и нулевая средняя кинетическая энергия.
Количественная связь предложенной Кельвиным шкалы температур со средней кинетической энергией частиц выражается уравнением
где
Т — абсолютная температура;
m и v — соответственно средняя масса и скорость частиц; k — постоянная Больцмана.
В термодинамической шкале Кельвина нижней точкой является точка абсолютного нуля (°К), а единственной экспериментальной основной точкой — тройная точка воды. Этой точке присвоено числовое значение 273,16° К- Тройная точка воды—точка равновесия воды в твердой, жидкой и газообразной фазах.
Термодинамическую температуру обозначают через Т, а числовые значения сопровождают знаком "К-
Решением XI Генеральной конференции по мерам и весам и ГОСТом 8550—61 предусматривается применение двух температурных шкал — термодинамической и международной практической.
Международная практическая шкала, употребляемая для практических целей и являющаяся практическим воспроизведением термодинамической шкалы, основана па ряде постоянных, легко воспроизводимых точек плавления и кипения химически чистых веществ, численные значения которых определены с помощью газовых термометров.
Температура, измеряемая по международной практической шкале, обозначается буквой t, а числовое обозначение сопровождается знаком °C.
Температура по обеим шкалам (термодинамической и международной практической) может быть выражена как в °К, так ив °C в зависимости от начала отсчета (положения нуля) по шкале.
18
Абсолютная температура связана с температурой по международной шкале соотношением
ГК = / С И- 273,15.
Стоградусная международная практическая шкала была названа шкалой Цельсия. Общими между прежней шкалой Цельсия и международной стоградусной шкалой температур являются одинаковые постоянные точки температуры (таяния льда и кипения воды), а во всех остальных точках эти шкалы существенно отличаются одна от другой, особенно при высоких температурах.
Для построения международной температурной шкалы приняты следующие постоянные точки, для которых установлены числовые значения в “С (при нормальном давлении, кроме тройной точки
воды):
Точка кипения кислорода....................................... —182,97
Тройная точка воды — основная точка ....................... -J—OjOl
Точка кипения воды — основная точка........................ -(-100,00
Точка кипения серы............................................ —f-444,80
Точка затвердевания серебра................................... -(-960,80
Точка затвердевания золота.................................... —|—106.3,00
Числовые значения температур кипения и затвердевания химически чистых веществ определены с некоторой величиной погрешности, присущей газовым термометрам. В результате международного соглашения для каждой температуры равновесия было принято одно наиболее вероятное числовое значение, единое для всех стран.
С помощью газовых термометров определены только перечисленные выше постоянные точки международной практической температурной шкалы. Для определения температур в промежуточных точках положением о международной температурной шкале предусмотрены другие эталонные приборы и специальные интерполяционные формулы.
В зависимости от принципа действия промышленные приборы для измерения температуры делятся на следующие группы *:
1. Манометрические термометры, основанные на использовании зависимости давления вещества при постоянном объеме от изменения температуры.
2. Термометры сопротивления, основанные па изменении электрического сопротивления проводников и полупроводников при изменении их температуры.
3. Термоэлектрические термометры, основанные на зависимости термоэлектродвижущей силы термопары от температуры.
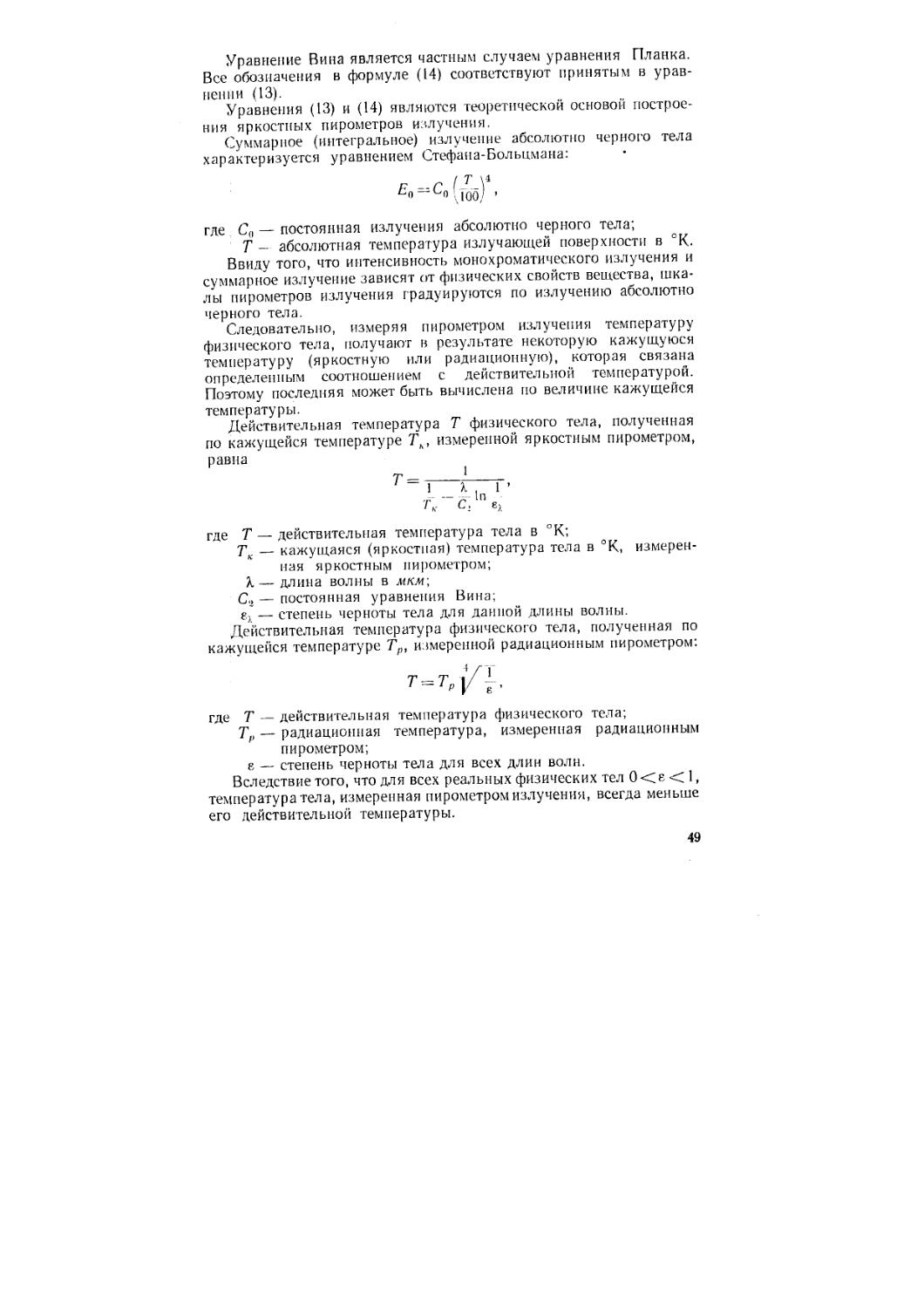
4. Пирометры излучения, из которых наибольшее распространение получили:
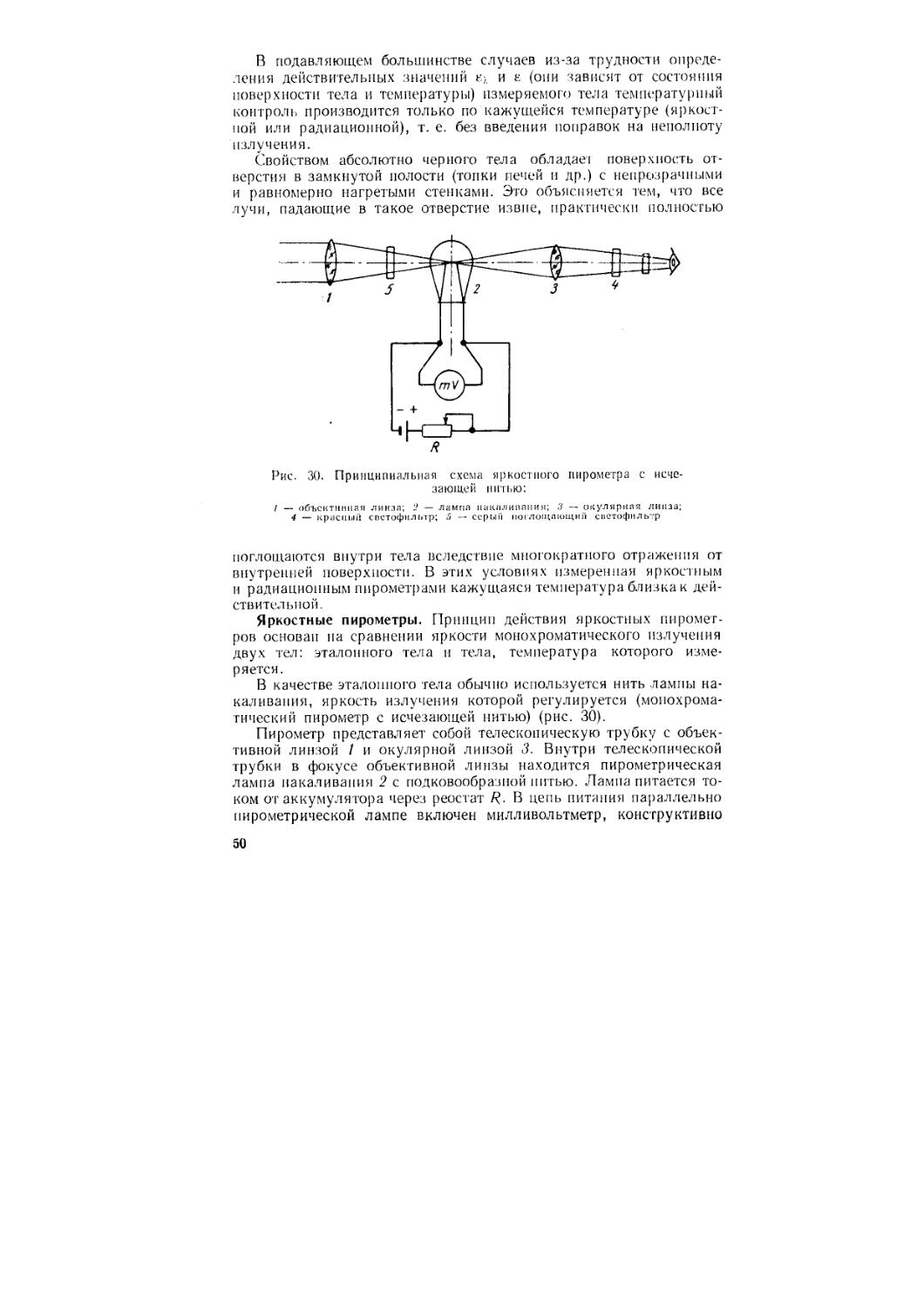
а) яркостные (оптические), основанные на измерении яркости нагретого тела;
1 Классификация дана по ГОСТу 13417—67.
19
б) цветовые (пирометры спектрального отношения), основанные на измерении распределения энергии в спектре теплового излучения тела;
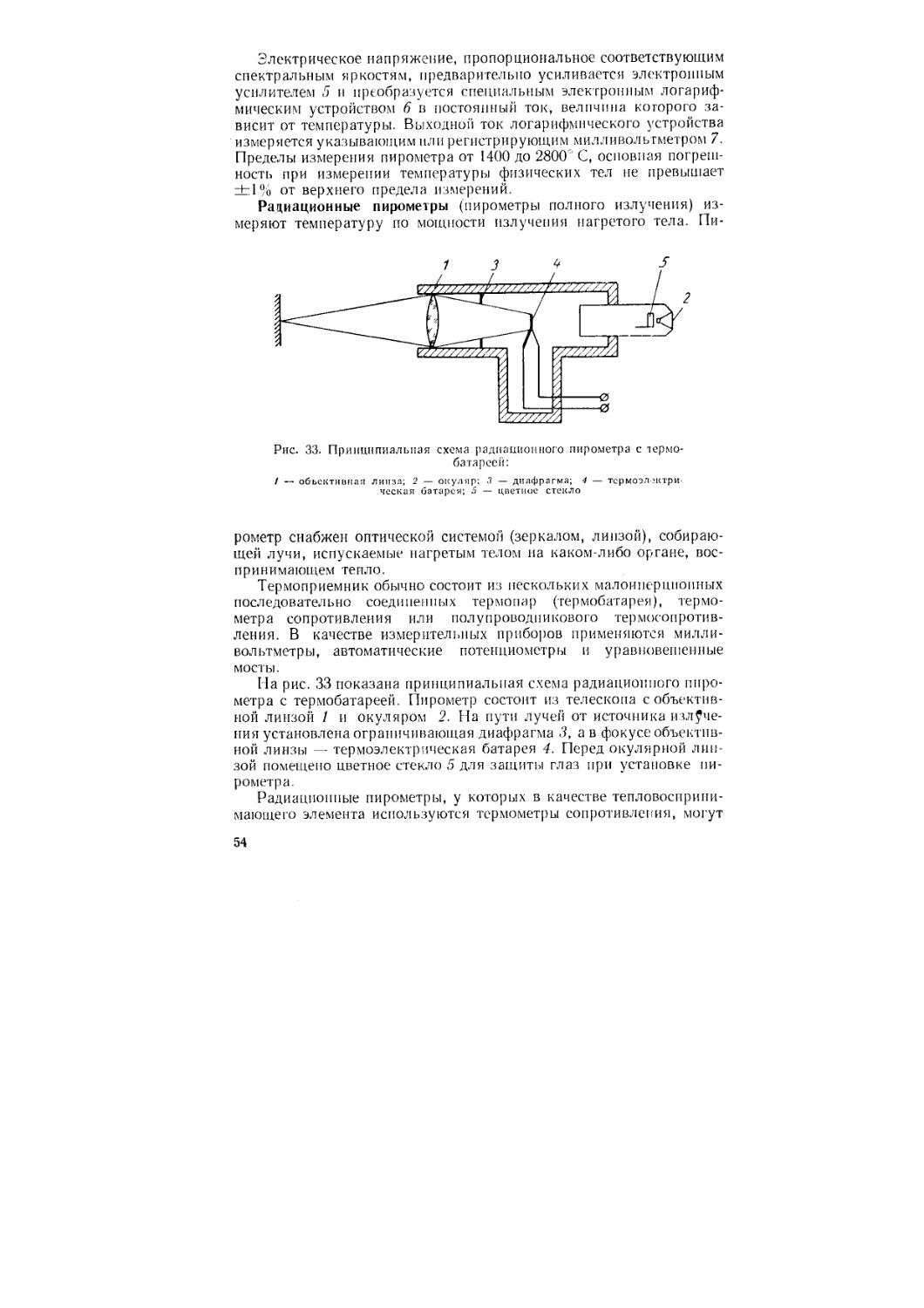
в) радиационные, основанные на измерении мощности излучения нагретого тела.
В настоящей книге эта классификация положена в основу при рассмотрении методов и приборов для измерения температуры.
§ 5. МАНОМЕТРИЧЕСКИЕ ТЕРМОМЕТРЫ
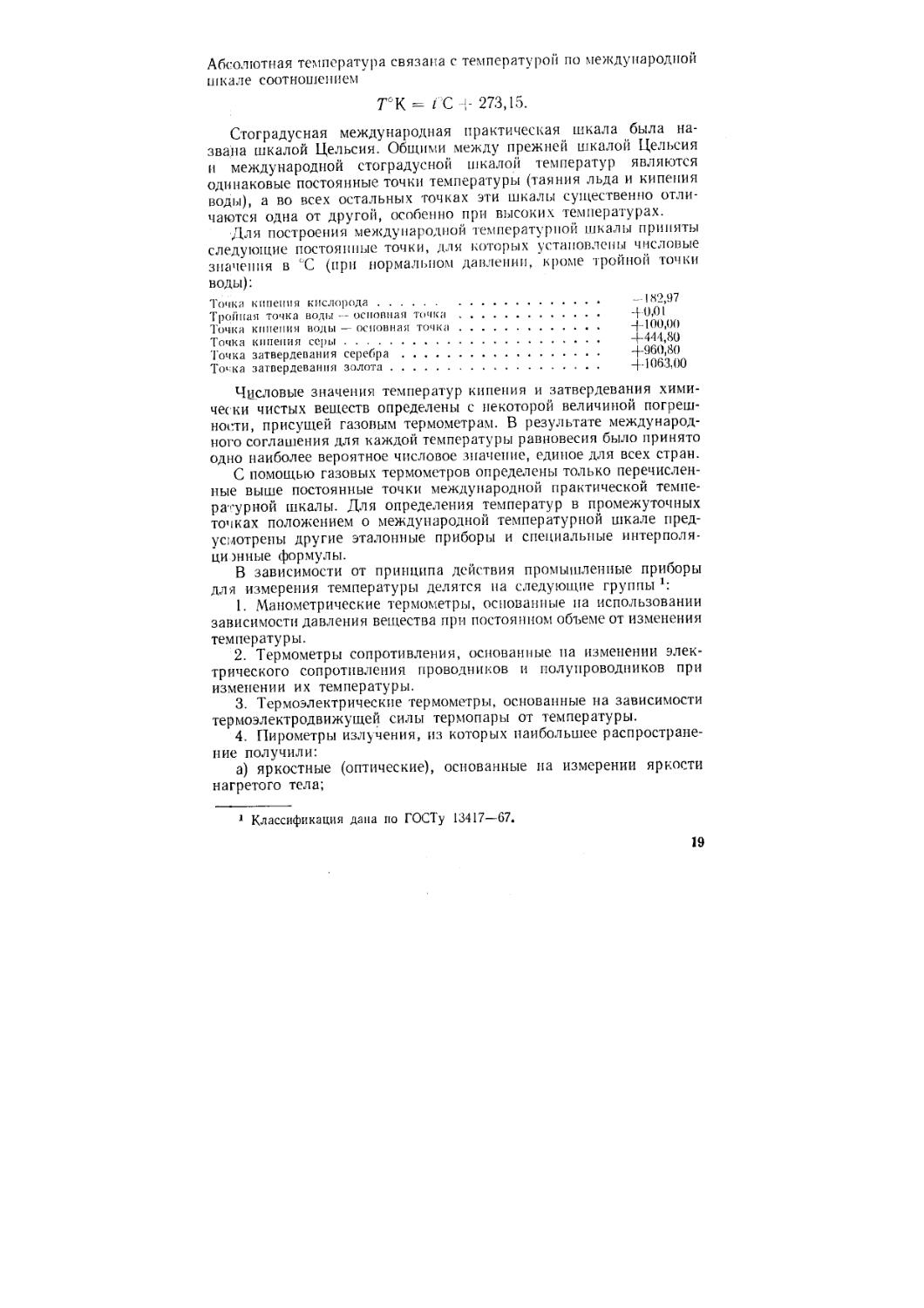
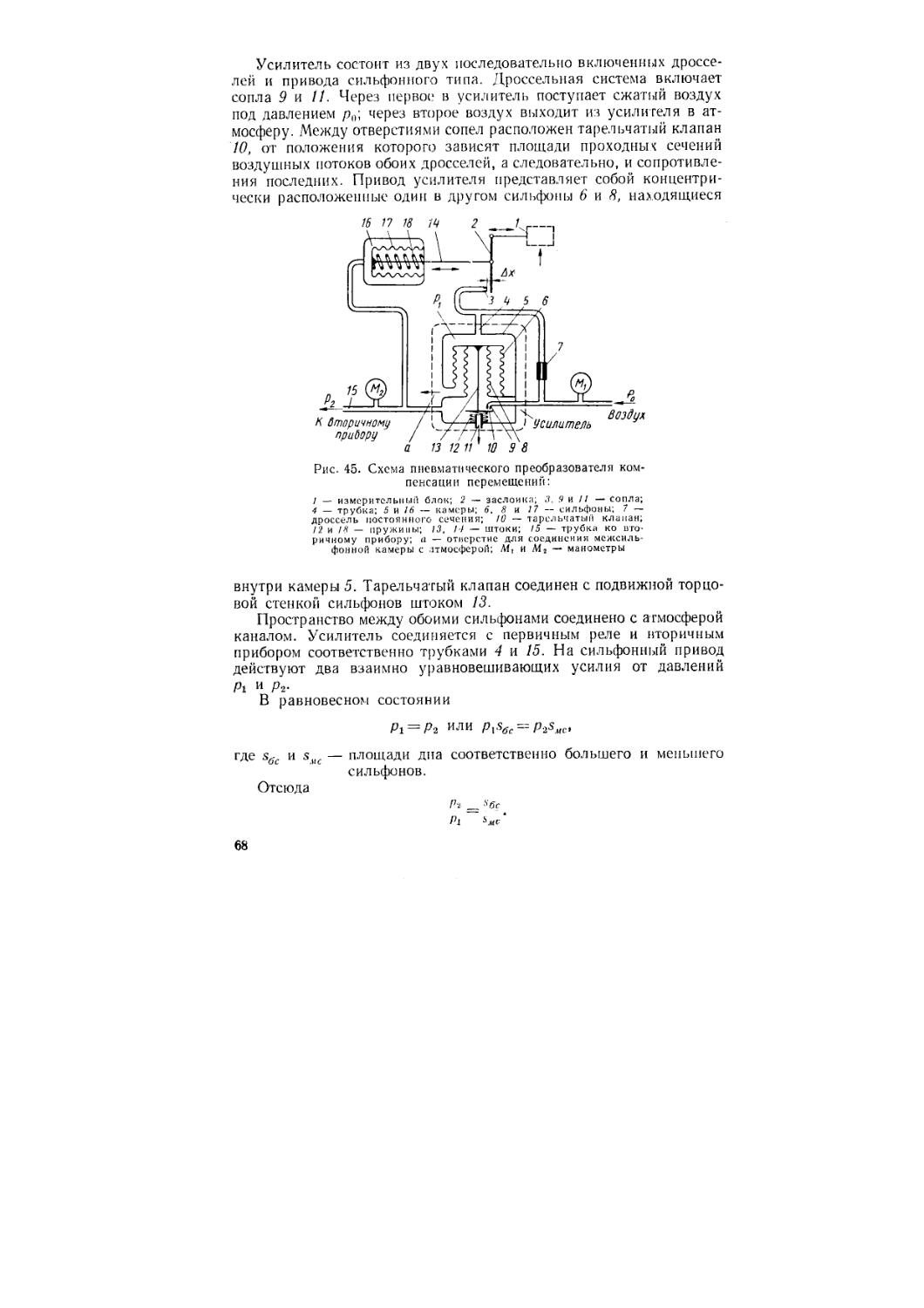
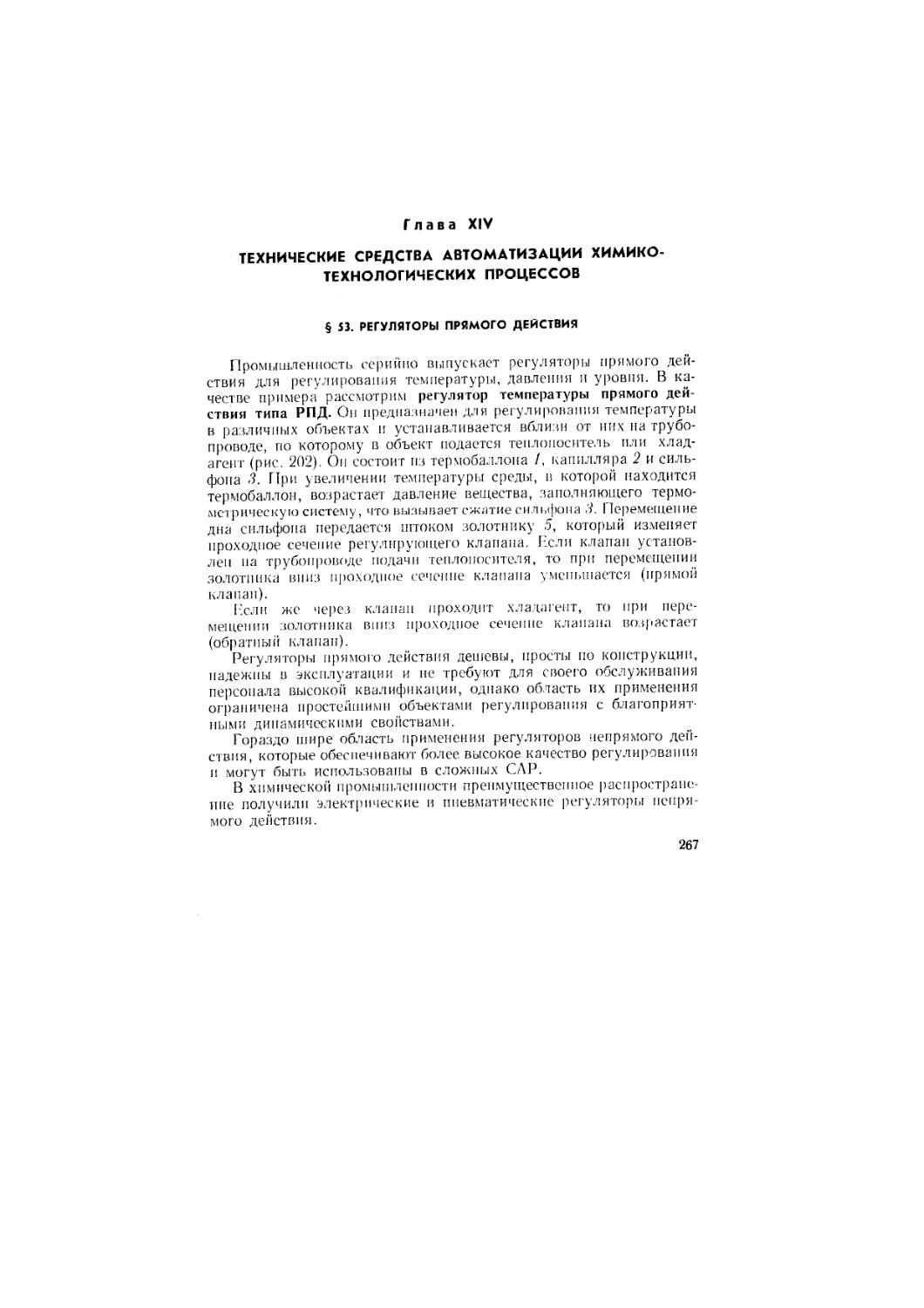
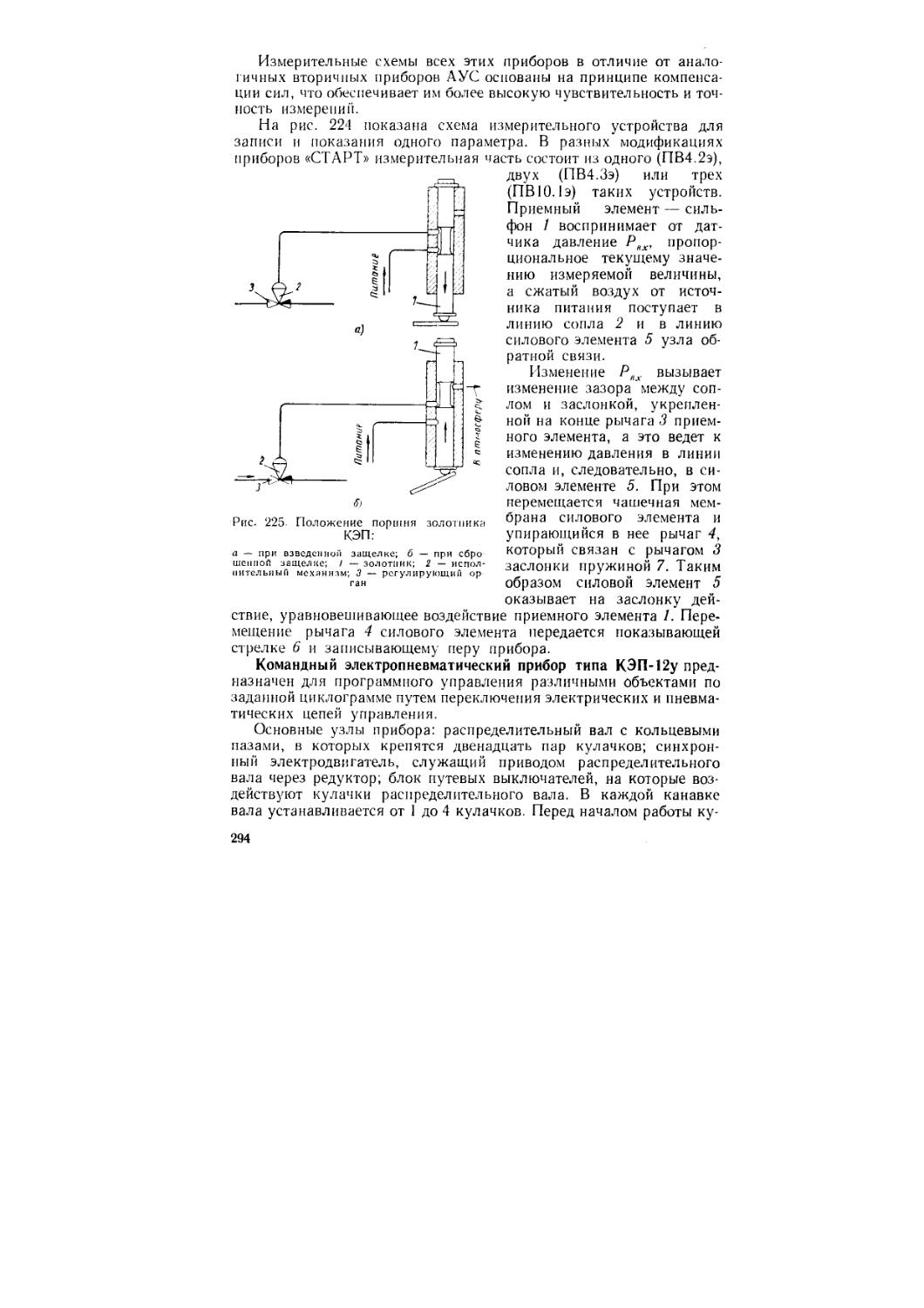
Схема манометрического термометра показана на рис. 5. Прибор состоит из термобаллона /, капиллярной трубки 2 и манометрической части 3—6.
Вся система прибора (термобаллон, капилляр, манометрическая пружина) заполняется рабочим веществом, обычно газом (газовые
Рис. 5. Манометрический термометр -зубчатой пр. :
/ — термобалл ; 2 — ка-
пиллярная трубка; <5 — трубчатая пружина; 4 — держатель; 5 — поводок; 6 — зубчатый сектор
термометры) или жидкостью (жидкостные термометры). Устройство обоих этих типов манометрических термометров аналогично. При нагревании термобаллона давление рабочего вещества внутри замкнутой системы увеличивается. Увеличение давления воспринимается манометрической трубкой (пружиной), которая воздействует через передаточный механизм па стрелку или перо прибора. Термобаллон обычно изготовляют из нержавеющей стали, а капилляр — из медной или стальной трубки с внутренним диаметром от 0,15 до 0,5 мм. В зависимости от назначения прибора длина капиллярной трубки может быть различна (до 60 м).
В манометрических термометрах применяют одповитковые, мпоговитковые — с числом витков от 6 до 9 — и спиральные манометрические трубки.
Манометрические термометры довольно широко применяются в химических производствах. Они просты по устройству, на
дежны и при отсутствии электропривода взрыво- и пожаробезопасны.
Газовые манометрические термометры основаны на использовании зависимости инертного газа, заключенного в герметически замкнутой термосистеме, от температуры. Начальное давле
ние в газовых термометрах зависит от пределов измерения температуры и составляет обычно от 0,98 до 4,9 Мн!м? (10—50 кПсм2).
20
Величина изменения давления
Ар = Р/ -Ро = РоР (*~Q.
где
Р = (б — термический коэффициент расширения газа; t — конечная температура в °C;
t0 — начальная температура в °C;
Ро — давление рабочего вещества при температуре tg.
Начальное давление рп = р-?.^ Для заполнения газовых р (/ fti)
манометрических термометров обычно применяется азот. Термометры, заполненные азотом, обеспечивают измерение температур до 4-600° С.
Так как система газового термометра имеет относительно большое начальное давление, то влияние колебания атмосферного давления на показания прибора невелико и его практически можно не учитывать. Отклонение температуры окружающей среды от -(-20° С вызывает погрешность в показаниях.
Погрешность от нагревания манометрической части можно приближенно подсчитать по формуле
где
Д/и — погрешность манометрической части в СС;
VM — объем манометрической пружины;
V6 — объем термобаллона;
t' — температура среды, окружающей манометрическую часть, в °C;
tn — температура градуировки прибора (20° С).
Погрешность от нагревания капиллярной трубки
где
VK — объем капиллярной трубки;
tt. — температура среды, окружающей капиллярную трубку, в °C.
Объем термобаллона обычно составляет 90% общего объема термометра.
При правильно выбранном соотношении объема термобаллона, капилляра и трубчатой пружины термометры с достаточной точностью могут работать без температурной компенсации при длине капилляра до 40—60 м.
К специфическим недостаткам газовых манометрических термометров относятся их сравнительно большая тепловая инерция, обусловленная низким коэффициентом теплообмена между стенками термобаллона и наполняющим его газом и малой теплопро-
21
водностью газа, большие размеры термобаллона, затрудняющие его установку па трубопроводах небольшого диаметра.
В жидкостных манометрических термометрах вся система заполняется под некоторым начальным давлением жидкостью. Для заполнения обычно применяется ртуть (для температуры —30 4-600° С) и ксилол (для темпера-
туры —40 4- 4-200° С).
Изменение давления в зависимости от температуры для жидкости можно представить уравнением
Лр=Лд/, (2)
где
Др — изменение давления в н/лг;
р — коэффициент объемного расширения жидкости в i/град-,
ц — коэффициент сжимаемости жидкости В М2/н',
— изменение температуры в ”С.
Как следует из уравнения (2), изменение давления жидкости при нагревании является линейной функцией температуры и поэтому жидкостные термометры так же, как и газовые, имеют равномерную шкалу..
Для предохранения жидкости от закипания в термометре обеспечивается начальное давление порядка 1,47—1,96 Мн/м2 (15—20 кГ!см2).
Погрешности от колебания температуры окружающей среды у жидкостных термометров бэльше, чем у газовых. СЬобенно значительные погрешности получаются при колебании температуры среды, окружающей капилляр. Температурные погрешности подсчитываются по тем же формулам, что и для газовых термометров.
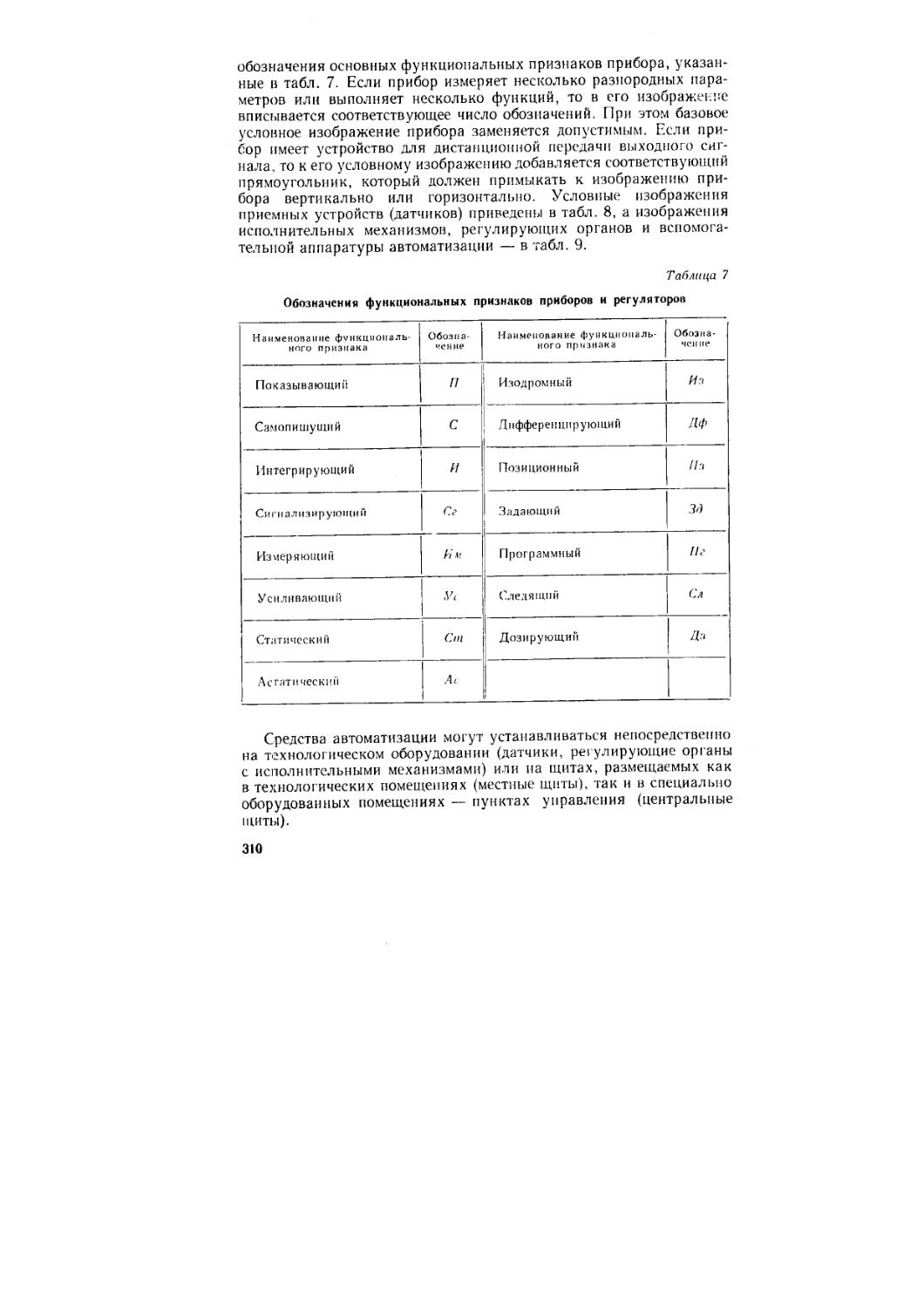
Для жидкостных термометров следует учитывать погрешность, вызванную несоответствием расположения термобаллона относительно манометра по высоте. Эту погрешность можно скомпенсировать, установив стрелку или перо
прибора с помощью механического корректора на нуль шкалы после монтажа термометра на месте.
Жидкость практически несжимаема, поэтому изменение атмосферного давления не влияет на показания прибора.
Основная допустимая погрешность манометрических термометров от ±0,5 до ±2,5% в зависимости от длины капиллярной трубки.
Капилляры манометрических термометров для защиты от кор-
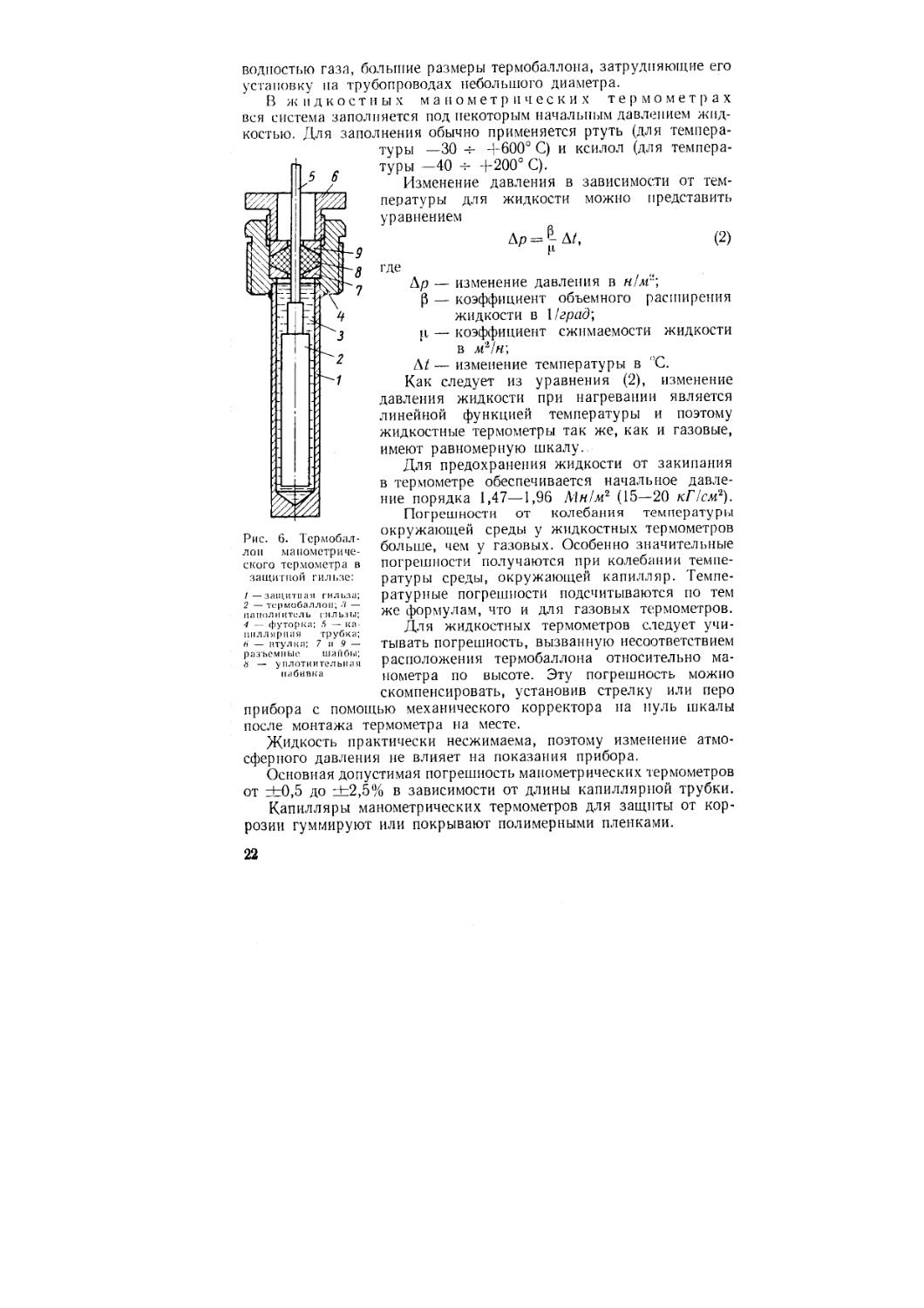
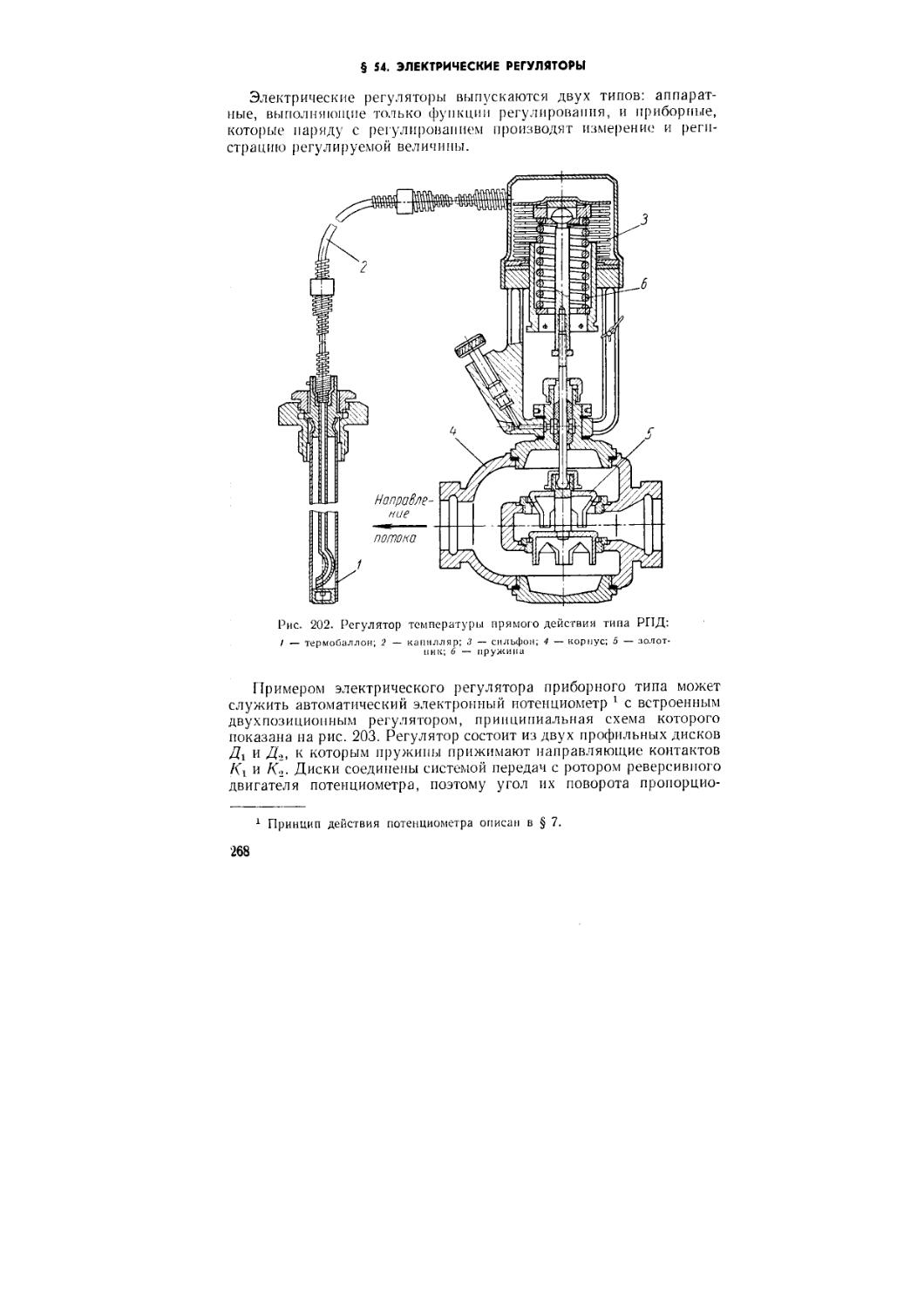
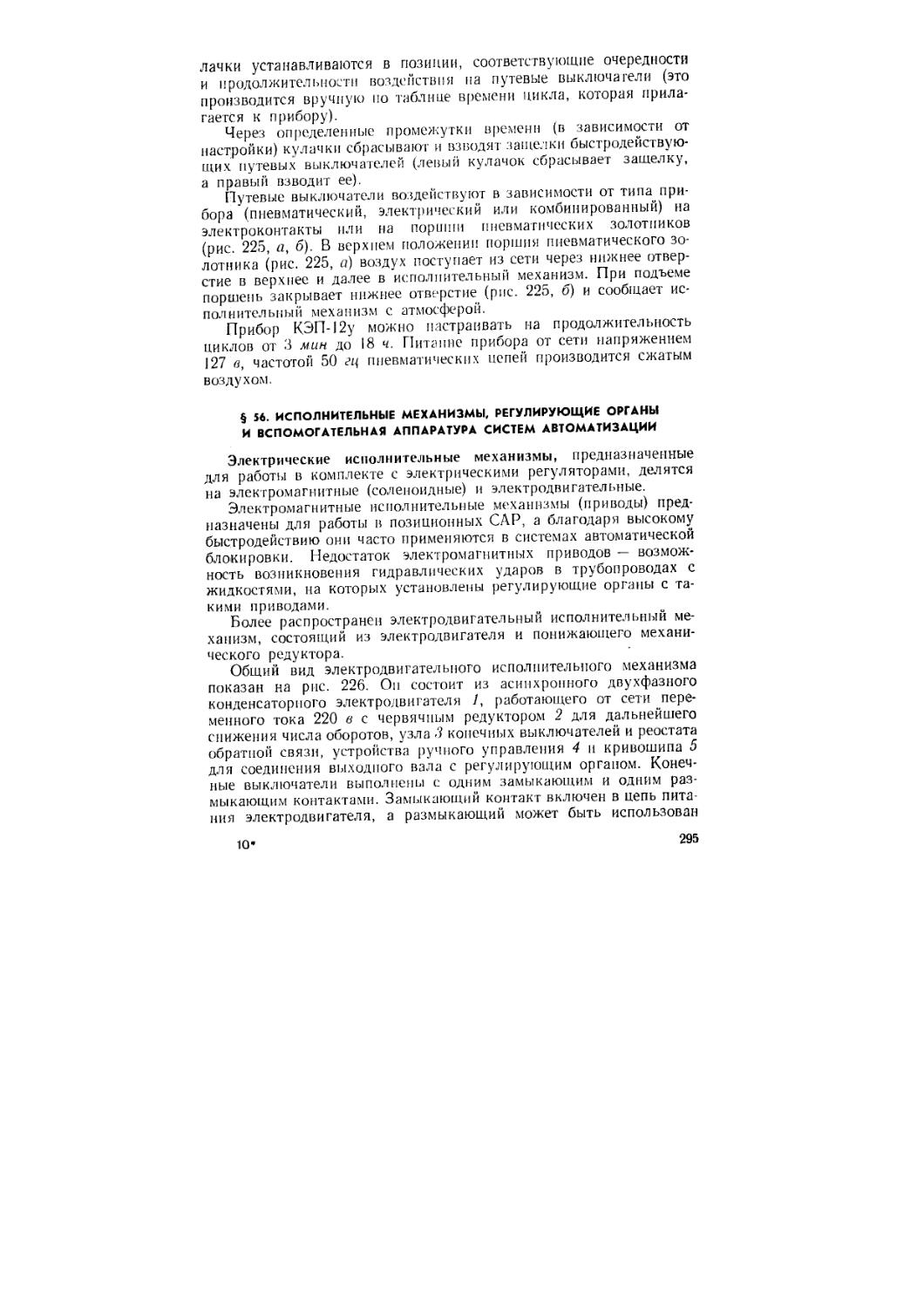
Рис. 6. Тсрмобал-лоп манометрического термометра в защитной гильзе:
1 — защитная гильза; 2 — термобаллон; Л — наполни тс ль гильзы;
4 — футорка; .5 — капиллярная трубка; 6 — втулка; 7 и 9 — разъемные ш а и бы; а — уплотнительная набивка
розни гуммируют или покрывают полимерными пленками.
Изготовляются манометрические термометры с преобразованием давления в электрический и пневматический унифицированные сигналы. Принципиальные схемы электрических и пневматических преобразователей будут рассмотрены ниже.
При измерении температуры агрессивных сред или продуктов в аппаратах, работающих при высоких давлениях, термобаллоп манометрического термометра устанавливается в защитной гильзе (рис. 6). Для уменьшения тепловой инерции защитная гильза должна иметь минимальную толщину, определяемую величиной давления измеряемой среды, а пространство между термобаллоиом и гильзой должно быть заполнено жидкостью с точкой кипения выше измеряемой температуры, или металлическими опилками.
§ 6. ТЕРМОМЕТРЫ СОПРОТИВЛЕНИЯ
Омическое сопротивление проводников и полупроводников представляет некоторую функцию их температуры, т. е. R = [ (/). Вид этой функции зависит от природы материала. Измеряя сопротивление нагретого проводника или полупроводника одним из известных методов и зная вид функции R == f (t) для данного материала, можно определить его температуру, а следовательно, и температуру пространства или среды, в которую он помещен.
Термометры сопротивления по сравнению с манометрическими термометрами обладают рядом преимуществ: более высокой точностью измерения, возможностью передачи показаний на большие расстояния, возможностью централизации контроля температуры путем присоединения нескольких термометров к одному измерительному прибору (через переключатель), меньшим запаздыванием в показаниях.
Недостаток термометров сопротивления — необходимость в постороннем источнике тока.
Для изготовления термометров сопротивления применяются чистые металлы (платина, медь) и полупроводники.
Платина наиболее полно отвечает всем основным требованиям, предъявляемым к материалу для термометров сопротивления. В окислительной среде она химически инертна даже при очень высоких температурах, но значительно хуже работает в восстановительной среде. В условиях восстановительной среды чувствительный элемент платинового термометра должен быть герметизирован.
Удельное сопротивление платины р =0,1 ом-мм2/м, а температурный коэффициент сопротивления а = [Qiy' =3,9 • 10'3 \/град, где /?„ и /?100 — сопротивление термометра соответственно при 0 и 100°С.
Изменение сопротивления платины в пределах температур от 0 до +650° С выражается трехчленом
Rt — Ro (1 + й/ bt2).
23
В пределах температур от —200 до 0°
Rt = Rn[\ + at Ы* + с (I - 100) q, где
R(l и R, — сопротивления материала термометра соответственно при 0° и температуре /;
а, b и с — постоянные коэффициенты, значения которых определяются при градуировке термометра по точкам кипения кислорода, воды и серы.
Медь. К достоинству меди, как материала для термометров сопротивления, следует отнести ее дешевизну, легкость получения в чистом виде, сравнительно высокий температурный коэффициент сопротивления а 4,26-10 :! Мград и линейную зависимость сопротивления от температуры \R, Ra (1 at)I.
К недостаткам меди относится малое удельное сопротивление (р = 0,017 ом-ммЧм) и легкая окисляемость при температуре выше 100° С.
Существенным преимуществом полупроводников является их большой температурный коэффициент сопротивления, равный 3 10-2 — 4-10-2. Кроме того, вследствие малой проводимости полупроводников из них можно изготовлять термометры малых размеров с большим начальным сопротивлением, что позволяет не учитывать сопротивление соединительных проводов и других элементов электрической схемы термометра.
В узком температурном интервале зависимость сопротивления полупроводников от температуры выражается уравнением
в
R = Aer или
1п7? = 1пЛ + ^, (3)
где А и В — постоянные коэффициенты, зависящие от физических свойств материала полупроводника;
Т — абсолютная температура термосопротивлеиия.
Коэффициенты А и В могут быть определены из выражения (3), если подставить в него соответственно значения сопротивлений R, и R2 и температуры 7\ и Т2.
После подстановки и решения системы уравнений получим
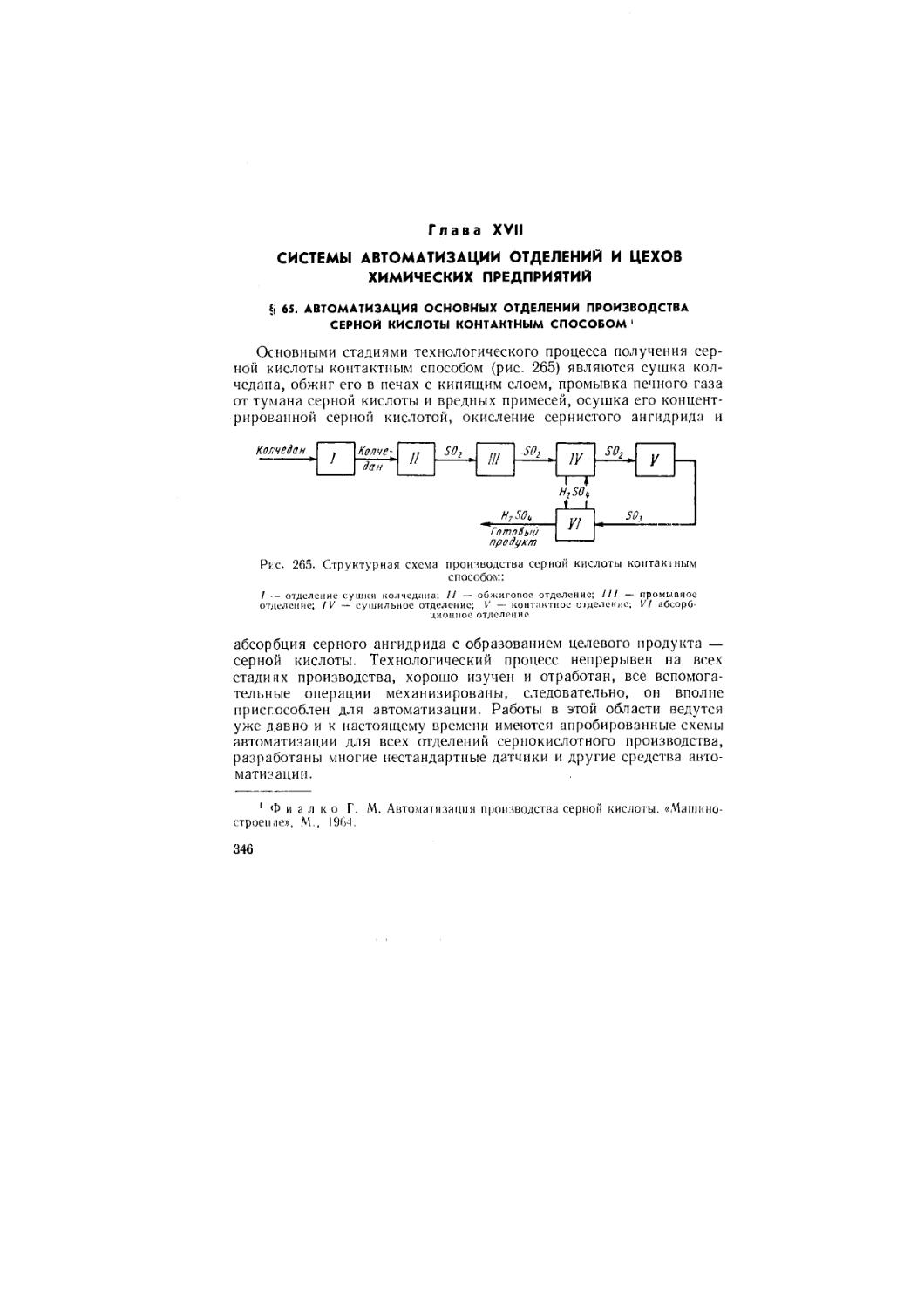
_ в A=R,e г,
В T2—TiR.2’
Для изготовления термосопротивлений применяют окислы титана, магния, железа, марганца, кобальта, никеля, меди и др. или кристаллы некоторых металлов (например, германия) с различными примесями. Для измерения температуры наиболее часто применяют
24
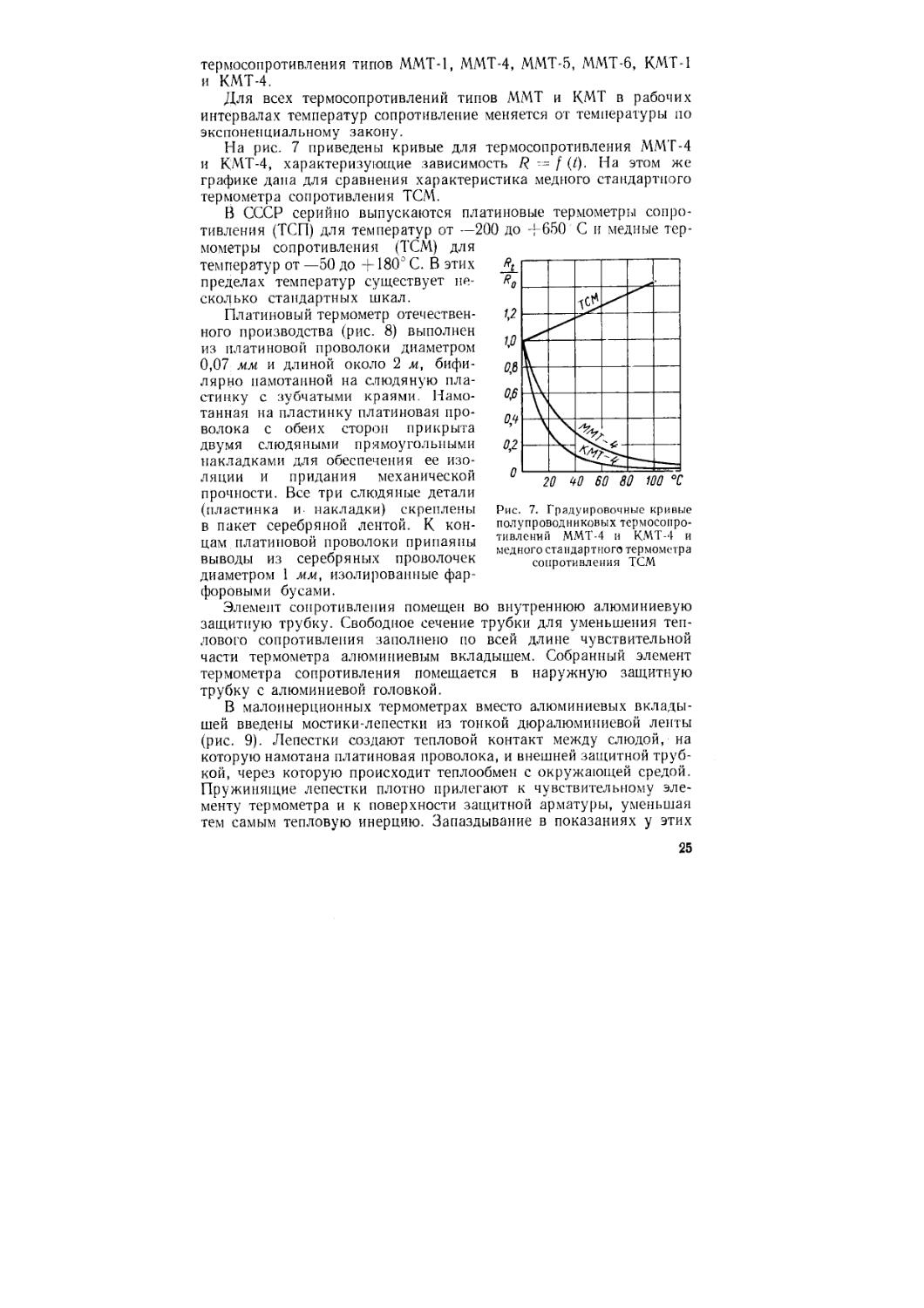
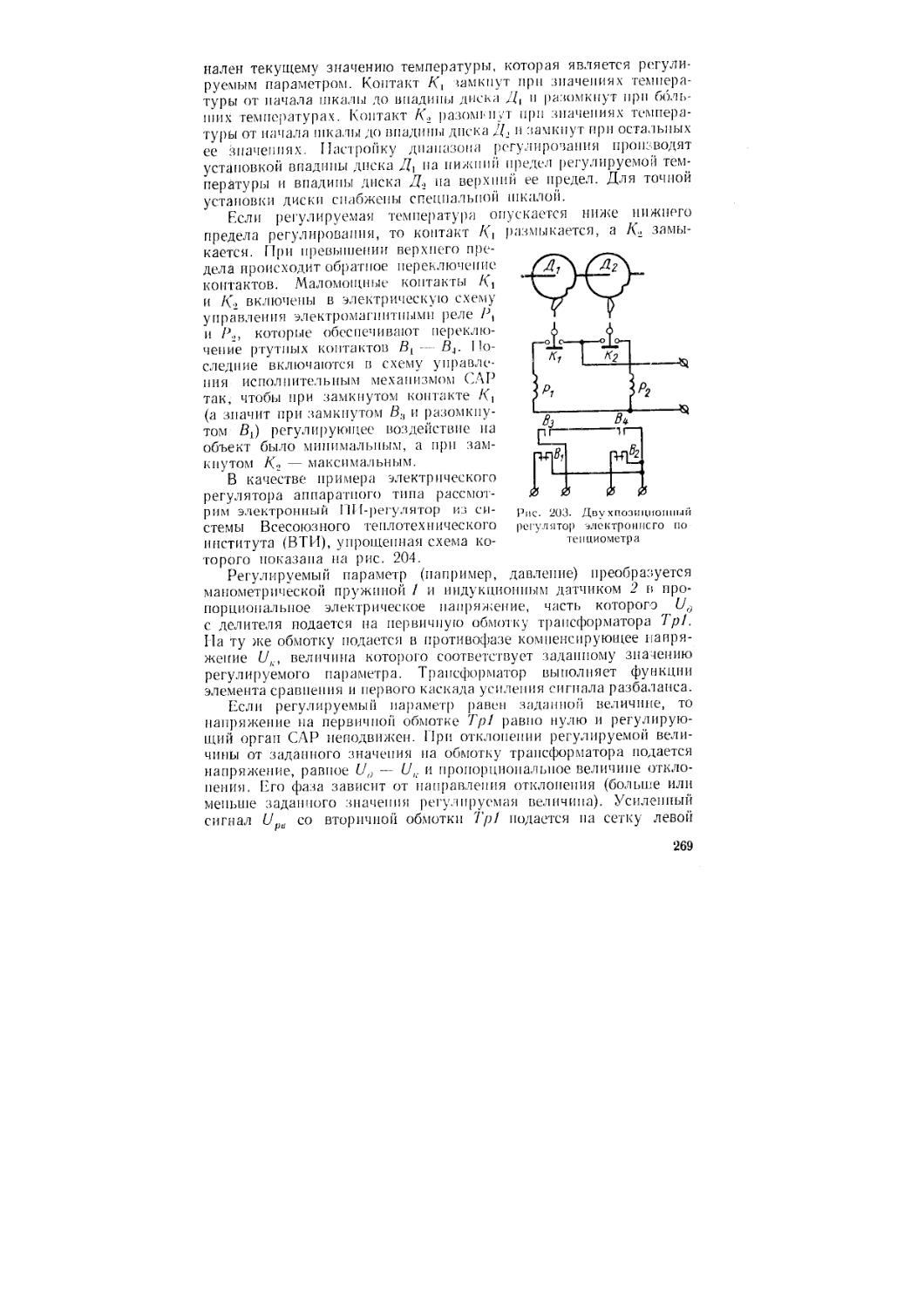
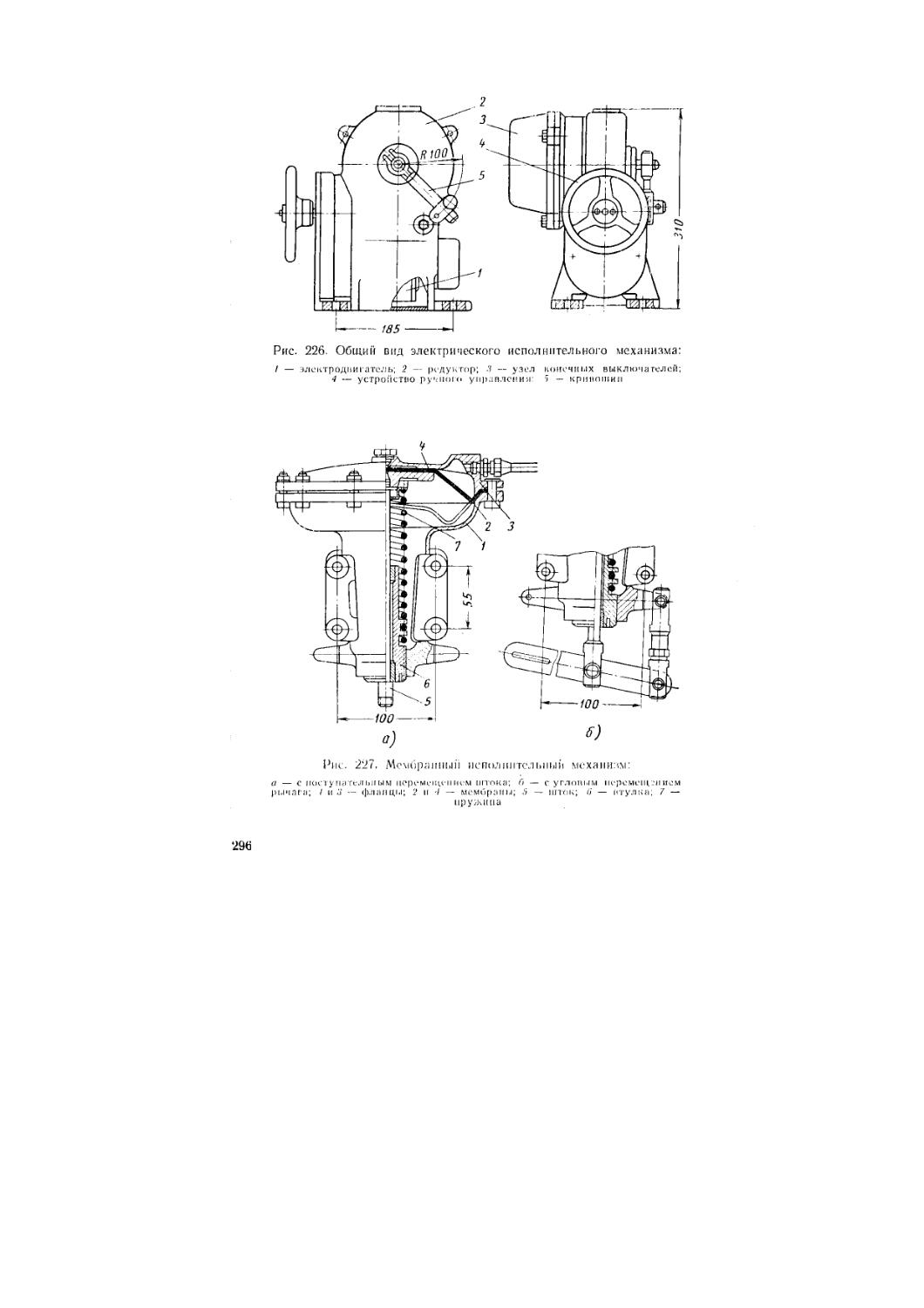
Рис. 7. Градуировочные кривые полупроводниковых термосопротивлений ММТ-4 и КМТ-4 и медного стандартного термометра сопротивления ТСМ
термосопротивления типов ММТ-1, ММТ-4, ММТ-5, ММТ-6, КМТ-1 и КМТ-4.
Для всех термосопротивлений типов ММТ и КМТ в рабочих интервалах температур сопротивление меняется от температуры по экспоненциальному закону.
На рис. 7 приведены кривые для термосопротивления ММТ-4 и КМТ-4, характеризующие зависимость /? --- f (/). На этом же графике дана для сравнения характеристика медного стандартного термометра сопротивления ТСМ.
В СССР серийно выпускаются платиновые термометры сопротивления (ТСП) для температур от —200 до ->-650 С и медные термометры сопротивления (ТСМ) для температур от —50 до +180° С. В этих пределах температур существует несколько стандартных шкал.
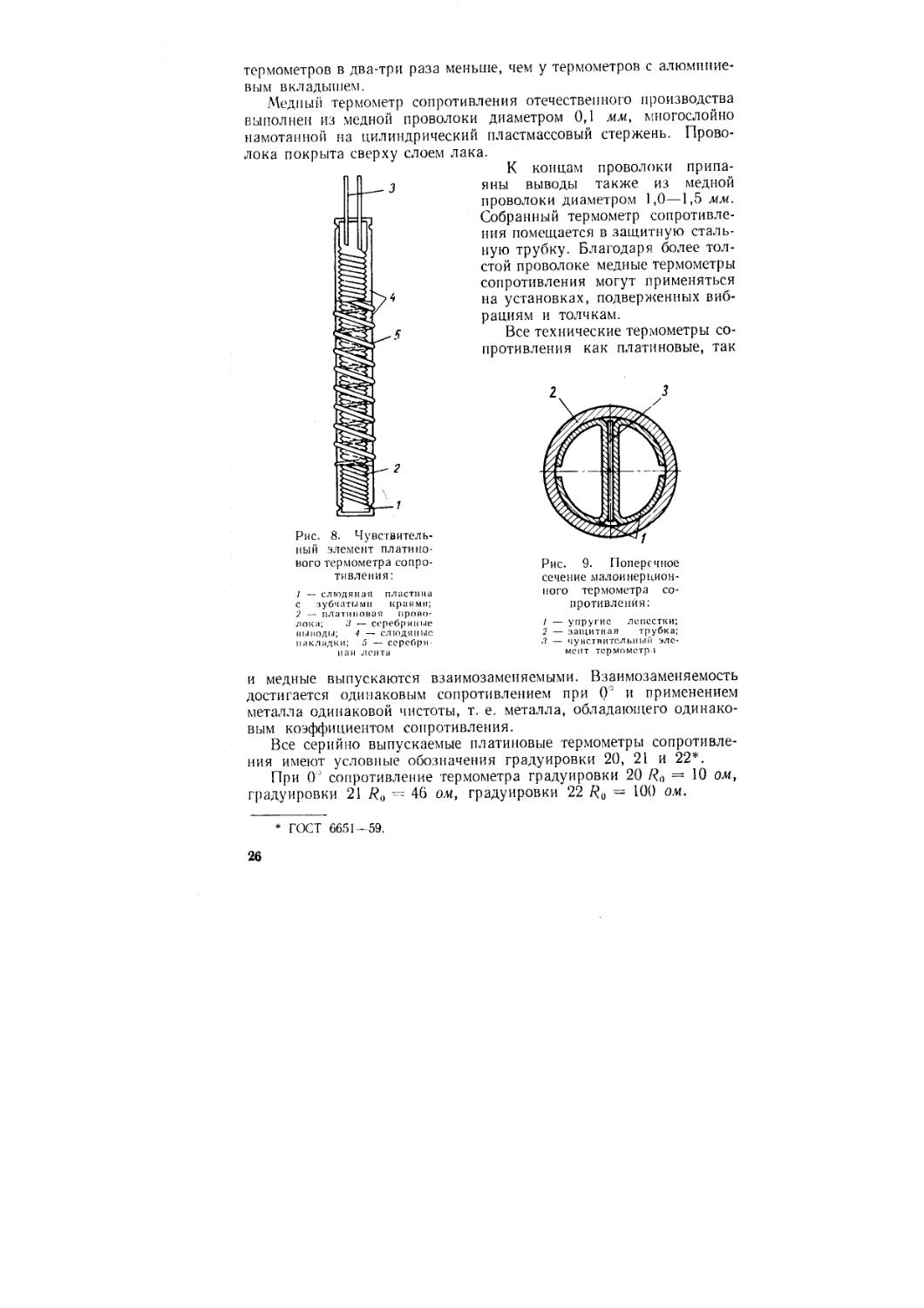
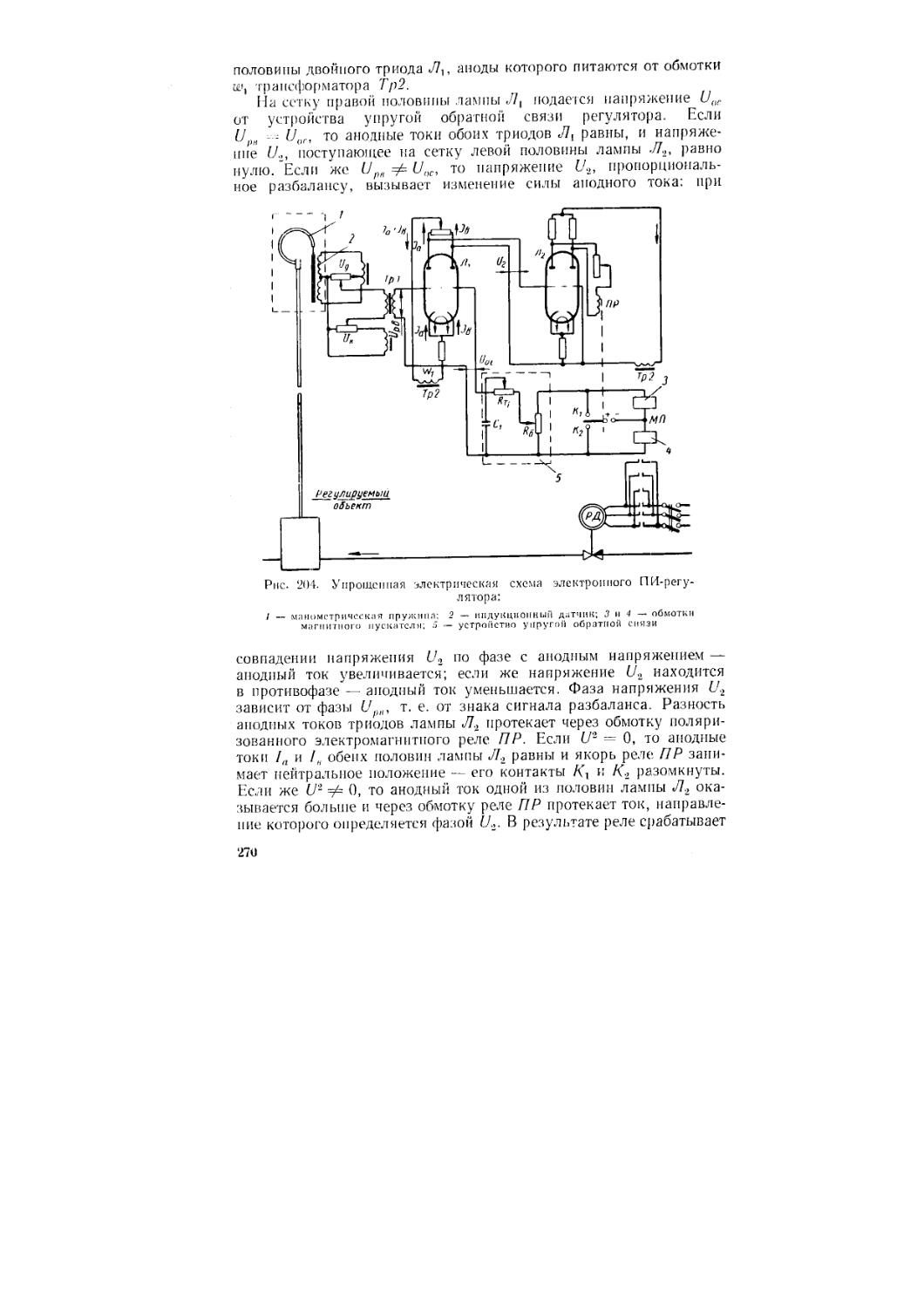
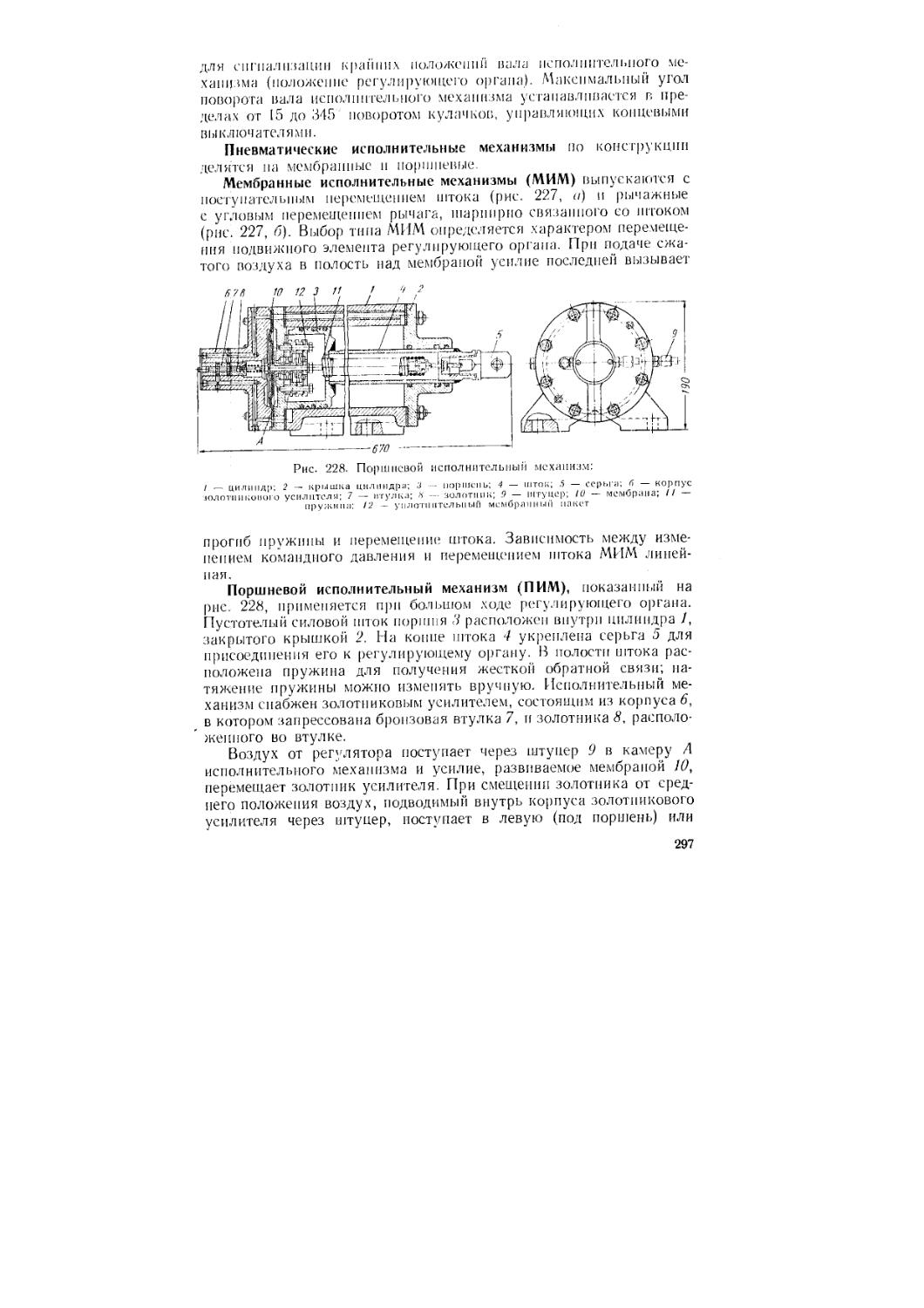
Платиновый термометр отечественного производства (рис. 8) выполнен из платиновой проволоки диаметром 0,07 мм и длиной около 2 м, бифи-лярно намотанной на слюдяную пластинку с зубчатыми краями. Намотанная на пластинку платиновая проволока с обеих сторон прикрыта двумя слюдяными прямоугольными накладками для обеспечения ее изоляции и придания механической прочности. Все три слюдяные детали (пластинка и- накладки) скреплены в пакет серебряной лентой. К концам платиновой проволоки припаяны выводы из серебряных проволочек диаметром 1 мм, изолированные фарфоровыми бусами.
Элемент сопротивления помещен во защитную трубку. Свободное сечение трубки для уменьшения теплового сопротивления заполнено по всей длине чувствительной части термометра алюминиевым вкладышем. Собранный элемент термометра сопротивления помещается в наружную защитную трубку с алюминиевой головкой.
В малоинерционных термометрах вместо алюминиевых вкладышей введены мостики-лепестки из тонкой дюралюминиевой ленты (рис. 9). Лепестки создают тепловой контакт между слюдой, на которую намотана платиновая проволока, и внешней защитной трубкой, через которую происходит теплообмен с окружающей средой. Пружинящие лепестки плотно прилегают к чувствительному элементу термометра и к поверхности защитной арматуры, уменьшая тем самым тепловую инерцию. Запаздывание в показаниях у этих
25
термометров в два-три раза меньше, чем у термометров с алюминие
вым вкладышем.
Медный термометр сопротивления отечественного производства выполнен из медной проволоки диаметром 0,1 мм, многослойно намотанной на цилиндрический пластмассовый стержень. Прово
лока покрыта сверху слоем
лака.
К концам проволоки припаяны выводы также из медной проволоки диаметром 1,0—1,5 мм. Собранный термометр сопротивления помещается в защитную стальную трубку. Благодаря более толстой проволоке медные термометры сопротивления могут применяться на установках, подверженных вибрациям и толчкам.
Все технические термометры сопротивления как платиновые, так
Рис. 8. Чувствительный элемент платинового термометра сопротивления:
I — слюдяная пластина с зубчатыми краями;
2 — платиновая проволока; 3 — серебряные выводы; 4 — слюдяные накладки; 5 — серебряная лента
Рис. 9. Поперечное сечение малоинерцион-иого термометра сопротивления:
/ — упругие лепестки; 2 — защитная трубка; .? — чувствительный элемент термометр.)
и медные выпускаются взаимозаменяемыми. Взаимозаменяемость достигается одинаковым сопротивлением при 0° и применением металла одинаковой чистоты, т. е. металла, обладающего одинаковым коэффициентом сопротивления.
Все серийно выпускаемые платиновые термометры сопротивления имеют условные обозначения градуировки 20, 21 и 22*.
При 0J сопротивление термометра градуировки 20 Rn — 10 ом, градуировки 21 /?„ = 46 ом, градуировки 22 Ra = 100 ом.
* ГОСТ 6651—59.
26
Медные термометры сопротивления выпускаются с сопротивлением /?(| -- 53,00 ом (градуировка 23) и R„ = 100 ом (градуировка 24).
Основным препятствием, ограничивающим возможность широкого внедрения полупроводниковых термосопротивлений в промышленность, является слабая воспроизводимость свойств полу-
проводников, что исключает их невысокая максимальная рабочая температура и большой разброс по величине температурного коэффициента даже в пределах партии чувствительных элементов с одинаковыми номинальными характеристиками.
Конструкции термосопротивлений могут быть различны в зависимости от условий их применения.
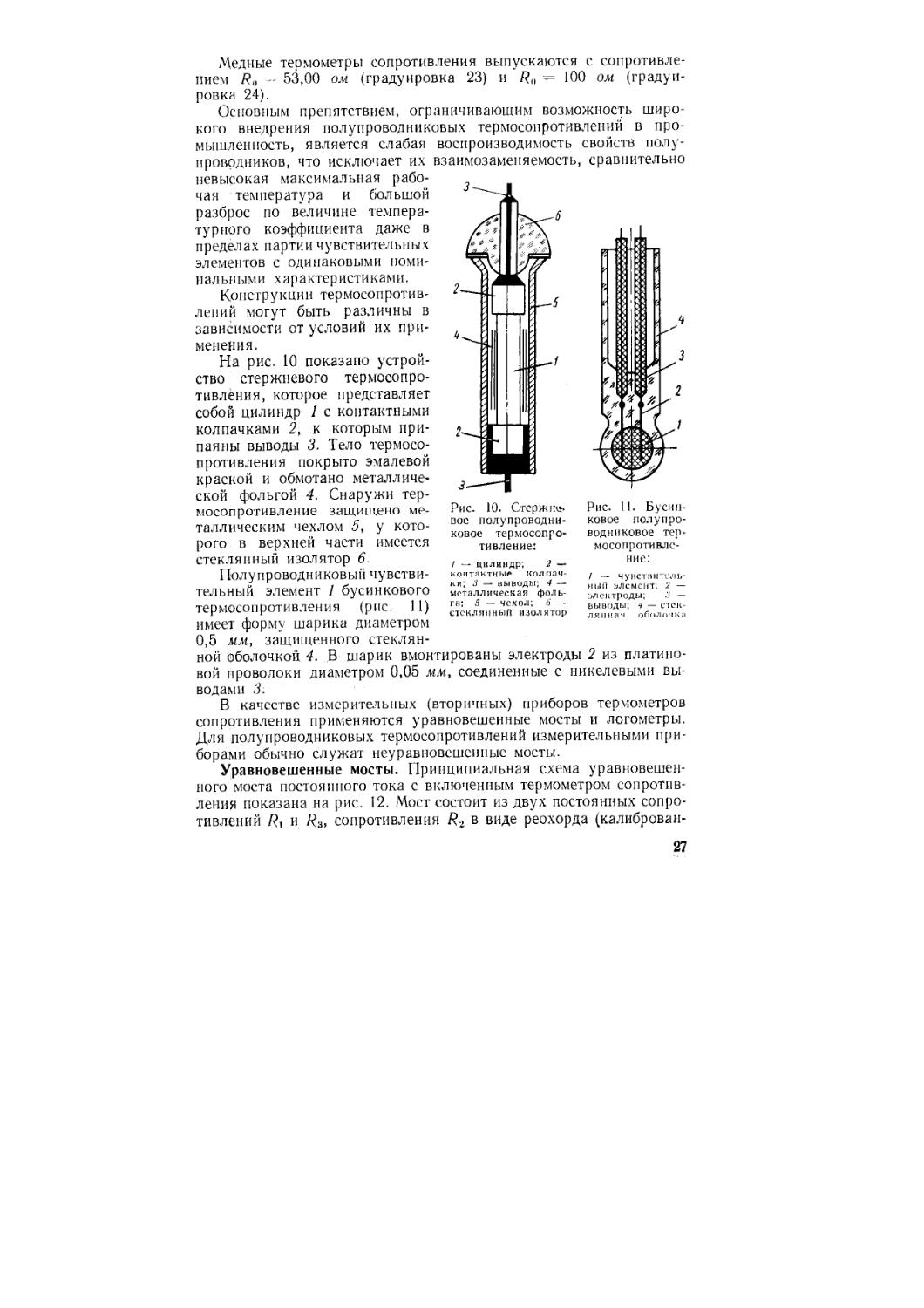
На рис. 10 показано устройство стержневого термосопро-тивлёния, которое представляет собой цилиндр 1 с контактными колпачками 2, к которым припаяны выводы <3. Тело термосопротивления покрыто эмалевой краской и обмотано металлической фольгой 4. Снаружи тер-мосопротивление защищено металлическим чехлом 5, у которого в верхней части имеется стеклянный изолятор 6.
Полупроводниковый чувствительный элемент 1 бусинкового термосопротивления (рис. 11) имеет форму шарика диаметром 0,5 мм, защищенного стеклян-
взаимозамепяемость, сравнительно
Рис. 10. Стержни, вое полупроводниковое термосопротивление:
/ — цилиндр; 2 — контактные колпачки; 3 — выводы; 4 — металлическая фольга; 5 — чехол; 6’ — стеклянный изолятор
Рис. И. Бусинковое полупроводниковое тер-мосопротивлс-ние:
/ — чувствительный элемент; 2 — электроды; 3 — выводы; 4 — стеклянная оболочка
ной оболочкой 4. В шарик вмонтированы электроды 2 из платиновой проволоки диаметром 0,05 мм, соединенные с никелевыми выводами 3.
В качестве измерительных (вторичных) приборов термометров
сопротивления применяются уравновешенные мосты и логометры. Для полупроводниковых термосопротивлений измерительными приборами обычно служат неуравновешенные мосты.
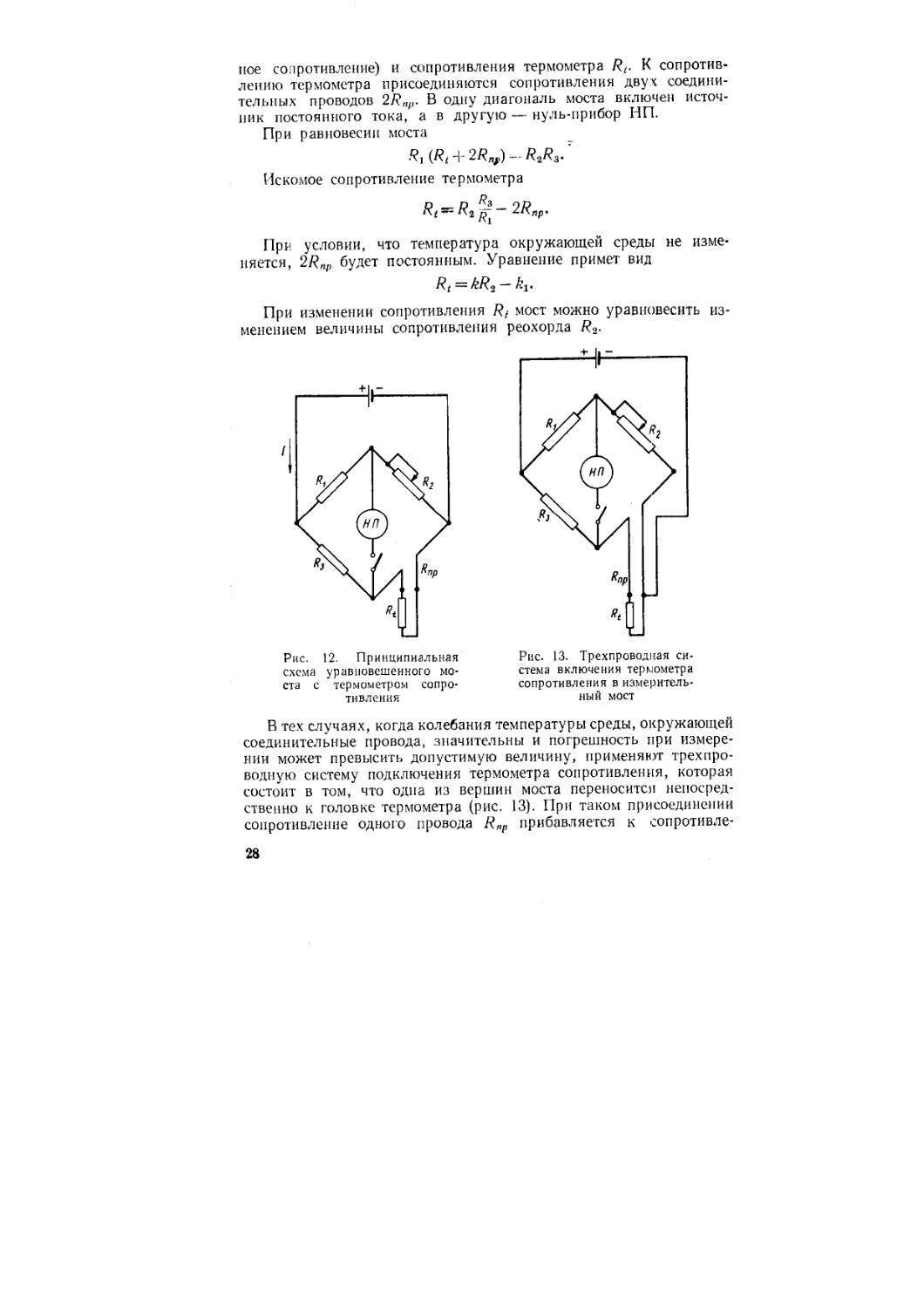
Уравновешенные мосты. Принципиальная схема уравновешенного моста постоянного тока с включенным термометром сопротивления показана на рис. 12. Мост состоит из двух постоянных сопротивлений R1 и R3, сопротивления R, в виде реохорда (калиброваи-
27
пое сопротивление) и сопротивления термометра Rt. К сопротивлению термометра присоединяются сопротивления двух соединительных проводов 2Rnp. В одну диагональ моста включен источник постоянного тока, а в другую — нуль-прибор НП.
При равновесии моста
R. {Rt + 2Rn,) -R2Ra/
Искомое сопротивление термометра
Rt~R2%-2Rnp.
При условии, что температура окружающей среды не изме. няется, 2Rnp будет постоянным. Уравнение примет вид
Rt = &R2 — k±.
При изменении сопротивления Rf мост можно уравновесить изменением величины сопротивления реохорда R2.
Рис. 12. Принципиальная схема уравновешенного моста с термометром сопротивления
сопротивления в измерительный мост
В тех случаях, когда колебания температуры среды, окружающей соединительные провода, значительны и погрешность при измерении может превысить допустимую величину, применяют трехпроводную систему подключения термометра сопротивления, которая состоит в том, что одна из вершин моста переносится непосредственно к головке термометра (рис. 13). При таком присоединении сопротивление одного провода Rnp прибавляется к сопротивле-
28
ник Rt, а сопротивление второго провода — к переменному сопротивлению R2-
Уравнение равновесия моста
Rt 4- В пр = (fi? У ^пр) •
При изменении сопротивления проводов уравнение равновесия примет вид
Rt + R'np^(R2+Rnp)^.
В случае симметричного моста, когда Rt == R3, получим
Rt У R/ip = R* + Rnp,
т. e. изменение сопротивлений соединительных проводов не повлияет на результаты измерения.
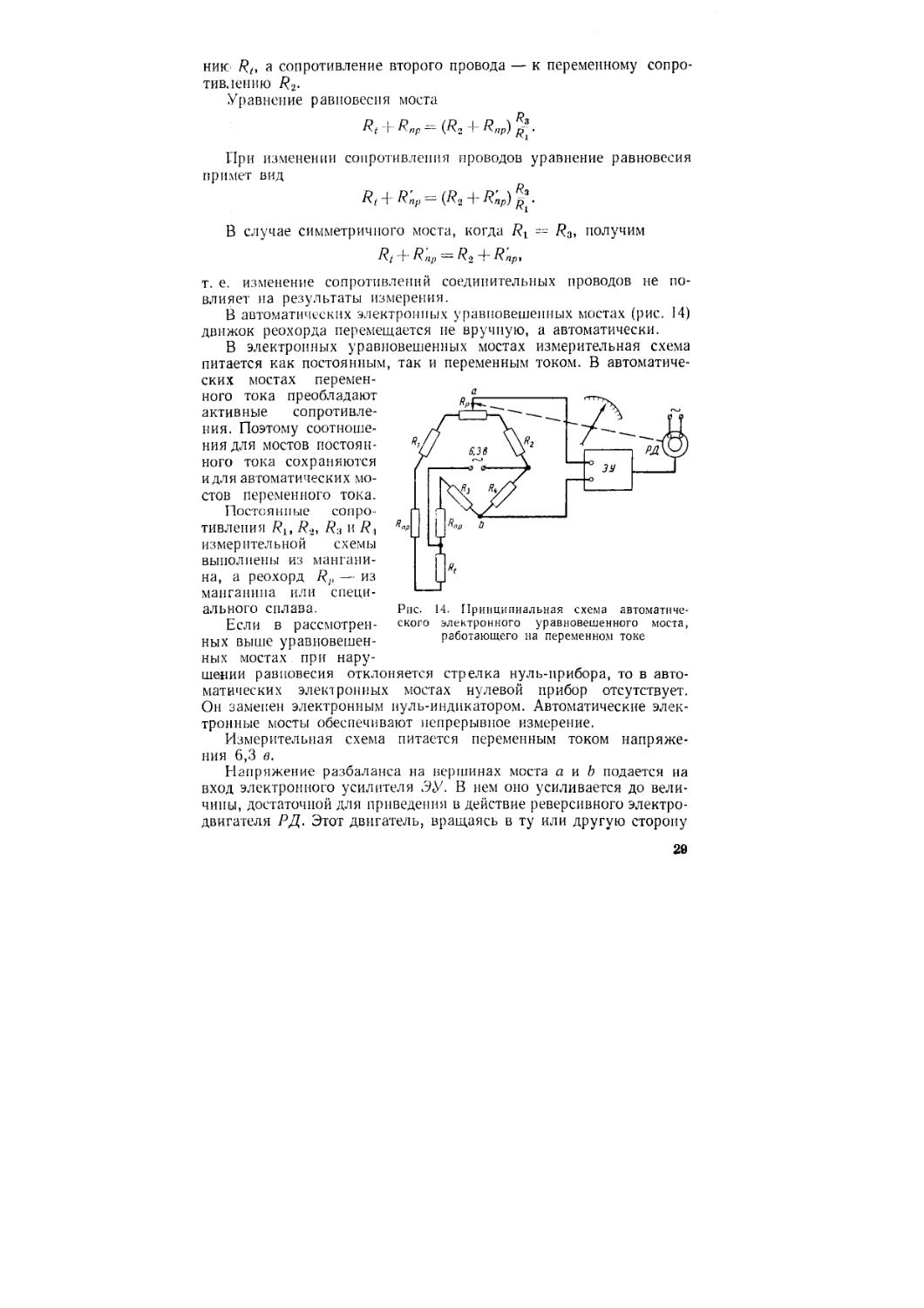
В автоматических электронных уравновешенных мостах (рис. 14) движок реохорда перемещается не вручную, а автоматически.
В электронных уравновешенных мостах измерительная схема питается как постоянным, так и переменным током. В автоматиче
а
Рис. 14. Принципиальная схема автоматического электронного уравновешенного моста, работающего на переменном токе
ских мостах переменного тока преобладают активные сопротивления. Поэтому соотношения для мостов постоянного тока сохраняются и для автоматических мостов переменного тока.
Постоянные сопро-
тивления R2, R3 и измерительной схемы выполнены из манганина, а реохорд Rt, — из манганина или специального сплава.
Если в рассмотренных выше уравновешенных мостах при нару
шении равновесия отклоняется стрелка нуль-прибора, то в автоматических электронных мостах нулевой прибор отсутствует. Он заменен электронным нуль-индикатором. Автоматические электронные мосты обеспечивают непрерывное измерение.
Измерительная схема питается переменным током напряжения 6,3 в.
Напряжение разбаланса на вершинах моста а и b подается на вход электронного усилителя ЗУ. В нем оно усиливается до величины, достаточной для приведения в действие реверсивного электродвигателя РД. Этот двигатель, вращаясь в ту или другую сторону
29
(в зависимости от знака разбаланса), через систему передач перемещает движок реохорда, уравновешивая измерительную схему моста, а также перемещает показывающую стрелку.
Аналогичную схему имеет и уравновешенный автоматический мост на постоянном токе.
В электронных мостах для усиления напряжения разбаланса применяются ламповые или полупроводниковые усилители переменного тока, которые значительно проще, дешевле и надежнее усилителей постоянного тока. В уравновешенных мостах на постоянном токе для преобразования постоянного напряжения разбаланса измерительной схемы в переменное напряжение частотой
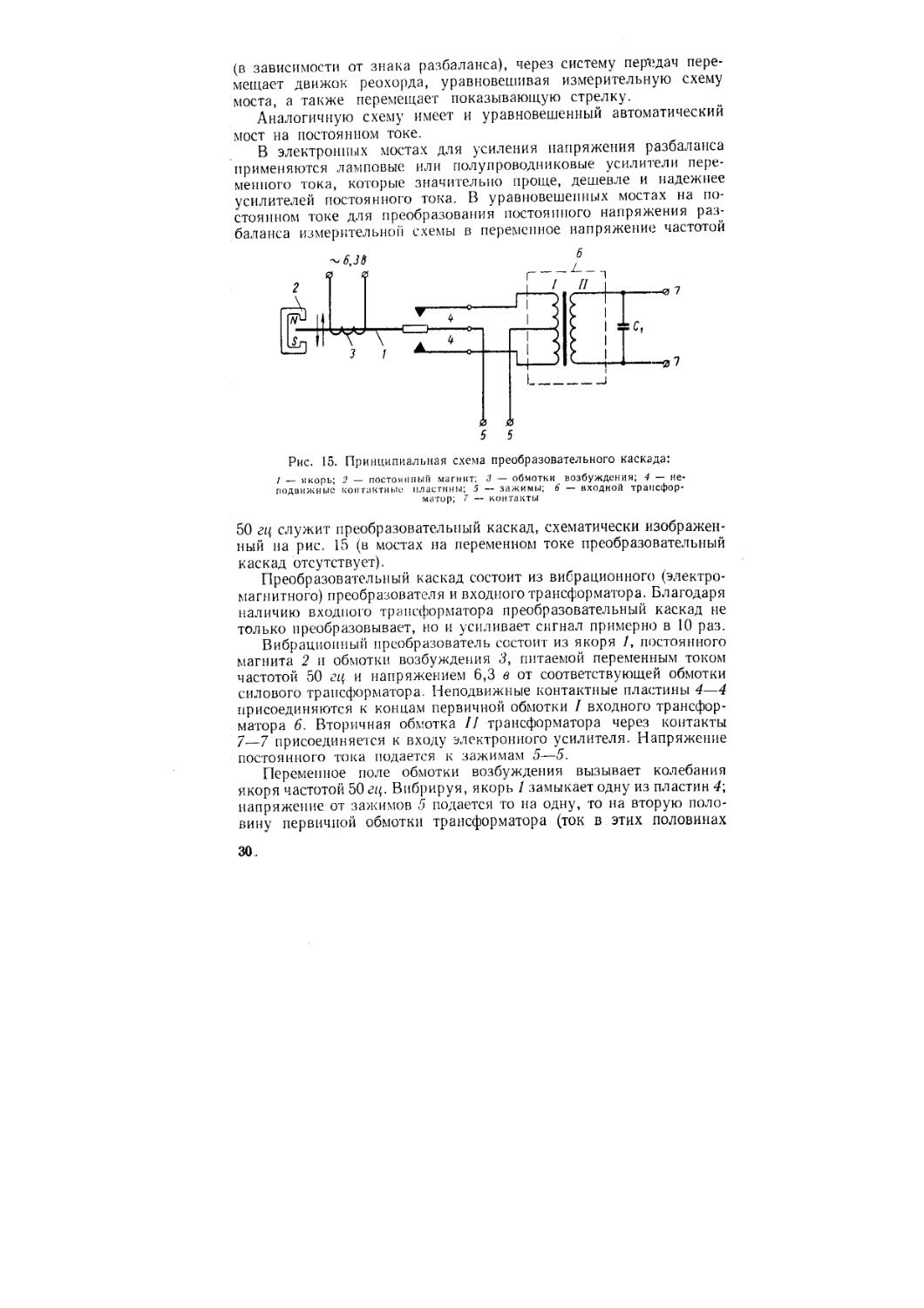
Рис. 15. Принципиальная схема преобразовательного каскада:
/ — якорь; 2 — постоянный магнит; 3 — обмотки возбуждения; 4 — неподвижные контактные пластины, 5 — зажимы; 6' — входной трансформатор; 7 — контакты
50 гц служит преобразовательный каскад, схематически изображенный на рис. 15 (в мостах на переменном токе преобразовательный каскад отсутствует).
Преобразовательный каскад состоит из вибрационного (электромагнитного) преобразователя и входного трансформатора. Благодаря наличию входного трансформатора преобразовательный каскад не только преобразовывает, но и усиливает сигнал примерно в 10 раз.
Вибрационный преобразователь состоит из якоря 1, постоянного магнита 2 и обмотки возбуждения 3, питаемой переменным током частотой 50 гц и напряжением 6,3 в от соответствующей обмотки силового трансформатора. Неподвижные контактные пластины 4—4 присоединяются к концам первичной обмотки / входного трансформатора 6. Вторичная обмотка II трансформатора через контакты 7—7 присоединяется к входу электронного усилителя. Напряжение постоянного тока подается к зажимам 5—5.
Переменное поле обмотки возбуждения вызывает колебания якоря частотой 50 гц. Вибрируя, якорь 1 замыкает одну из пластин 4; напряжение от зажимов 5 подается то на одну, то на вторую половину первичной обмотки трансформатора (ток в этих половинах
30
течет то в одном, то в другом направлении). Эти токи создают на вторичной обмотке II трансформатора 6 переменную э. д. с. пропорциональную по величине пескомпепсированному напряжению.
Изменение магнитного потока в сердечнике трансформатора протекает не по синусоиде. Поэтому и э. д. с., индуктируемая во вторичной обмотке, также не имеет синусоидальной формы. В составе э. д. с. появляются гармоники высших порядков, которые отфильтровываются конденсатором (?г.
Входной трансформатор преобразовательного каскада одновременно выполняет функцию согласования низкоомной измерительной схемы с высокоомным входом электронного усилителя.
С этой целью применяется повышающий трансформатор с коэффициентом трансформации 1 : 10.
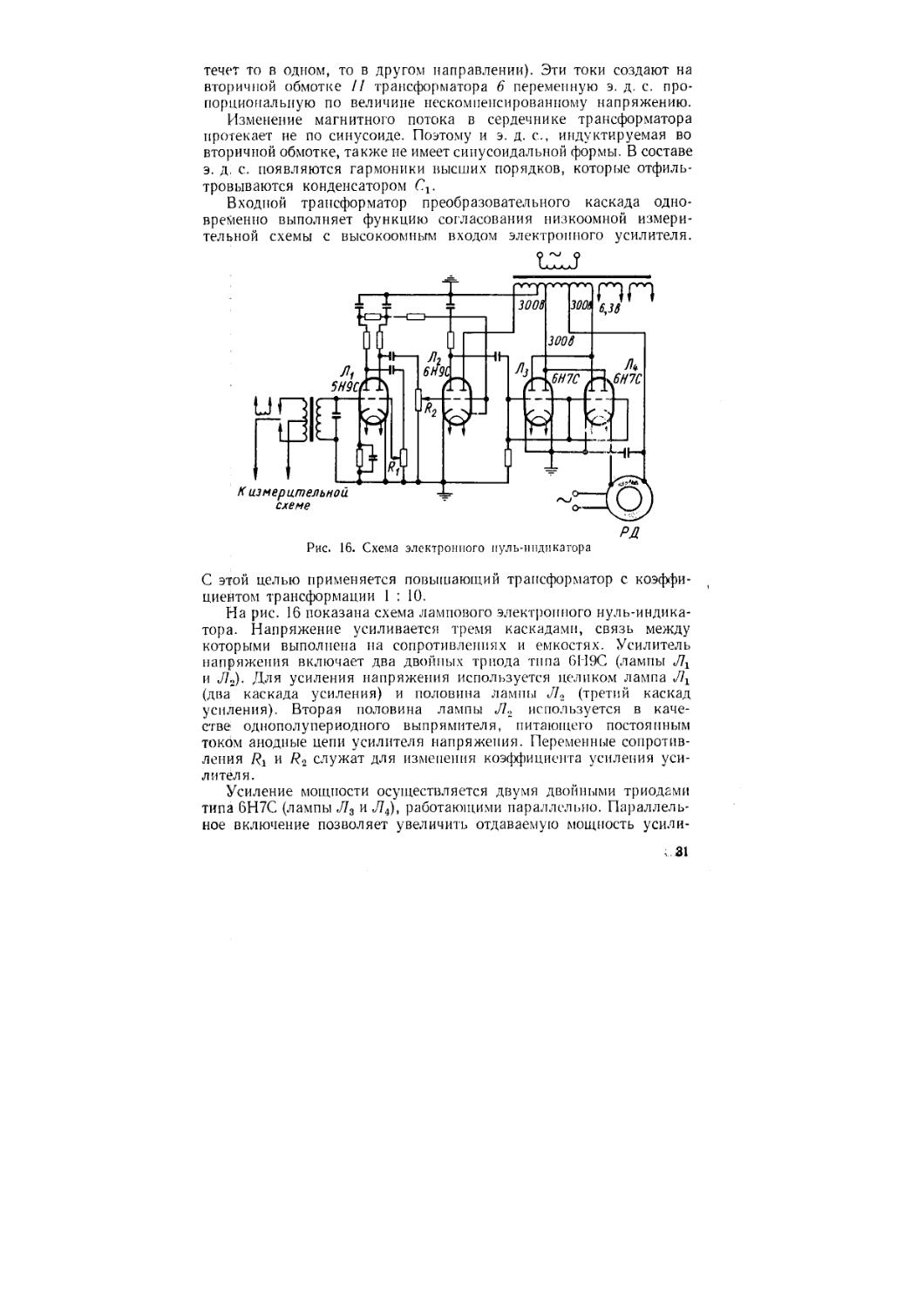
На рис. 16 показана схема лампового электронного нуль-индика-тора. Напряжение усиливается тремя каскадами, связь между которыми выполнена на сопротивлениях и емкостях. Усилитель напряжения включает два двойных триода типа 6Н9С (лампы Лх и Л2). Для усиления напряжения используется целиком лампа (два каскада усиления) и половина лампы Л2 (третий каскад усиления). Вторая половина лампы Л., используется в качестве однополупериодного выпрямителя, питающего постоянным током анодные цепи усилителя напряжения. Переменные сопротивления 7?! и R2 служат для изменения коэффициента усиления усилителя.
Усиление мощности осуществляется двумя двойными триодами типа 6Н7С (лампы Л3 и Л4), работающими параллельно. Параллельное включение позволяет увеличить отдаваемую мощность усили
31
теля и повысить надежность его работы. Если одна нз ламп 6Н7С выйдет из строя, схема продолжает работать, ио с пониженной чувствительностью.
При работе усилителя мощности на сетки ламп с7:| и Л4 поступает переменное напряжение от усилителя напряжения. Аноды этих ламп питаются от специальной обмотки силового трансформатора. В зависимости от фазы этого напряжения (т. е. от того, совпадает ли оно с фазой напряжения па сетках одной или другой половины ламп Лл и Л4) проводимость каждой половины ламп различна.
В результате через обмотку реверсивного электродвигателя РД протекает пульсирующий ток частотой 50 гц. Переменная составляющая этого тока создает магнитное поле, взаимодействующее с магнитным полем второй обмотки двигателя (сетевой), которое сдвинуто по фазе относительно первого на 90J.
При взаимодействии указанных полей образуется вращающееся магнитное поле, увлекающее за собой ротор электродвигателя. Ротор, вращаясь в определенную сторону, приводит измерительную схему моста к равновесию.
В случае изменения знака разбаланса измерительной схемы фазы напряжения на сетках ламп Л3 и Л4 меняются, вследствие чего меняется и фаза напряжений в обмотке управления реверсивного двигателя. При этом ротор двигателя вращается в противоположную сторону.
В момент равновесия измерительной схемы моста через управляющую обмотку реверсивного двигателя протекает пульсирующий ток с частотой 100 гц, поэтому ротор двигателя не вращается.
Реверсивный электродвигатель представляет собой однофазный асинхронный двигатель конденсаторного типа. Ротор двигателя короткозамкнутый, типа «беличье колесо».
Логометры. Логометры — магнитоэлектрические приборы, подвижная система которых состоит из двух рамок, расположенных под некоторым углом одна к другой (в предельном случае в одной плоскости) и жестко скрепленных между собой.
Угол поворота такой подвижной системы является функцией отношения силы токов в обеих рамках:
'М V
где Д и /2 — токи, протекающие по рамкам.
В известных пределах колебания напряжения источника питания не влияют на показания прибора.
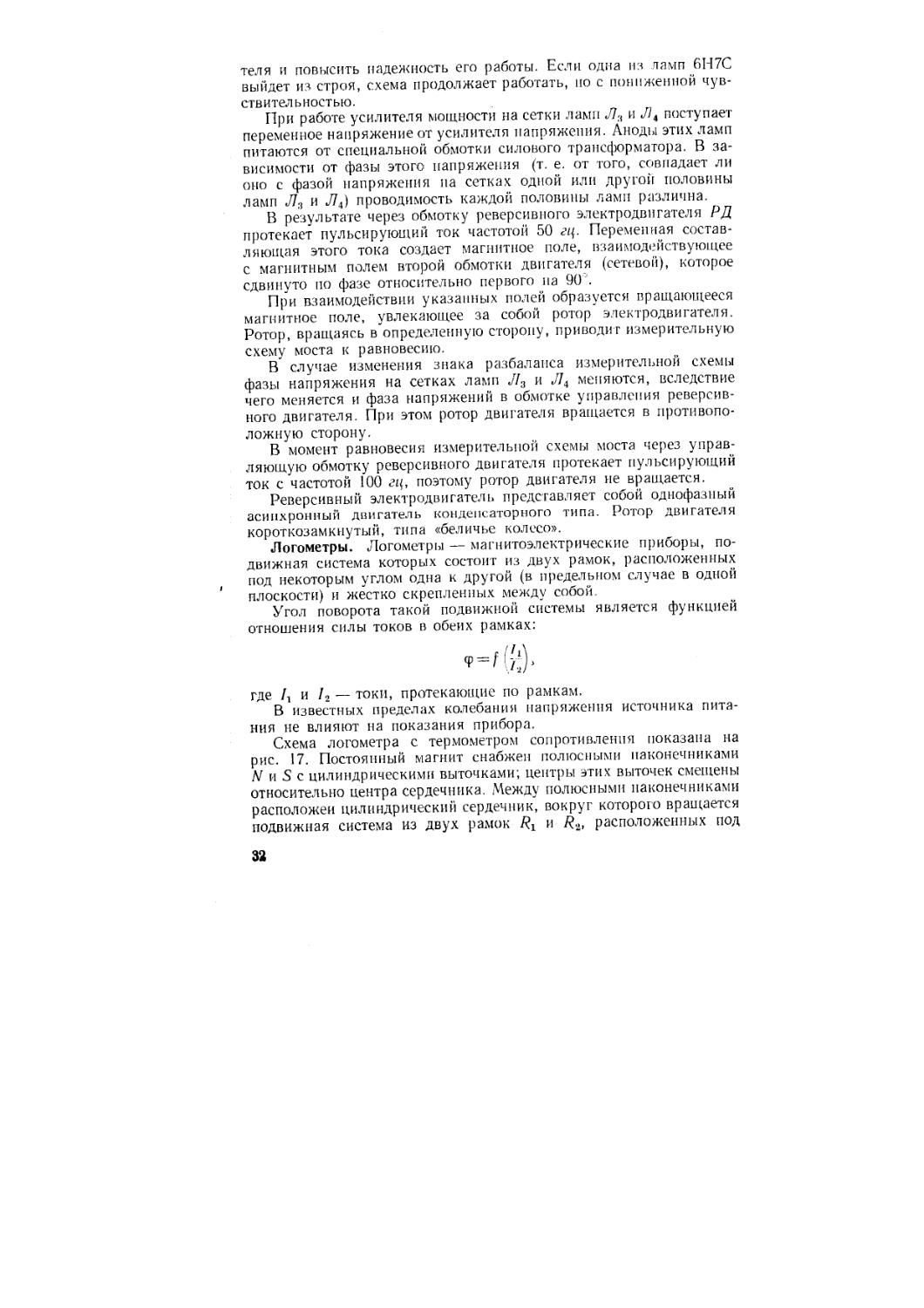
Схема логометра с термометром сопротивления показана на рис. 17. Постоянный магнит снабжен полюсными наконечниками У и S с цилиндрическими выточками; центры этих выточек смещены относительно центра сердечника. Между полюсными наконечниками расположен цилиндрический сердечник, вокруг которого вращается подвижная система из двух рамок R± и R3, расположенных под
32
углом одна к другой и жестко связанных в одну систему. К рамкам прикреплена стрелка, перемещающаяся вдоль шкалы.
Воздушный зазор между полюсными наконечниками и сердечником неравномерен. Поэтому магнитная индукция меняется, являясь функцией угла поворота от среднего положения.
К рамкам подводится ток от общего источника питания. В рамку Aj ток поступает через постоянное сопротивление /?, в рамку R2 — через сопротивление термометра R,. Направление токов R и /2 таково, что вращающие моменты рамок оказываются направленными навстречу один к другому.
Вращающие моменты рамок соответственно равны
= kyBJМ2 = к2В212,
где kt и k2 — постоянные, зависящие от геометрических размеров
и числа витков рамок;
и В2 — магнитные индукции в
Если рамки имеют одинаковое сопротивление и R Rlt то /, - /2 и — М2. При этом подвижная система находится в среднем положении.
При изменении сопротивления термометра вследствие нагрева (или охлаждения) через одну из рамок потечет ток большей величины, равенство моментов нарушится и подвижная система начнет поворачиваться в сторону большего момента.
При вращении подвижной системы рамка, по которой течет ток большей величины, попадает в зазор с меньшей магнитной индукцией, вследствие чего момент, действующий па эту рамку, уменьшается. Наоборот,
зоне расположения рамок.
другая рамка входит в зазор с большей магнитной индукцией и
ее момент увеличивается.
Вращение рамок продолжается до тех пор, пока их вращающие
моменты снова станут равными.
В момент равновесия kiBJi = к2В212 или
Л __ Л -. Л, , я,
/2 /г, Bi k Bi
(4)
Подставляя в уравнение (4) и /2, выраженные через напряжение источника питания U и сопротивления цепей, получим
U . U Ri+
R + Ri ' Rt + R-2 R + Ri /A ‘ '
2 Казаков u др.
33
Так как В f (ср), то и отношение f (<р) -Тогда уравнение (5) можно преобразовать к виду
R/ + R- г / ч fAM
т+^,=н<р) илн ф = Ч/?~мл)-
Так как величины R, R< и R2 постоянны, то угол поворота подвижной системы зависит только от величины сопротивления термометра, т. е.
ф = НЯ,).
(6)
К рамкам ток подводится тонкими спиральными волосками, служащими одновременно для возвращения стрелки прибора к началу шкалы при прекращении питания прибора током. Для увеличения чувствительности прибора рамки логометра включают в мостовую схему, позволяющую осуществить температурную компенсацию.
§ 7. ТЕРМОЭЛЕКТРИЧЕСКИЕ ТЕРМОМЕТРЫ
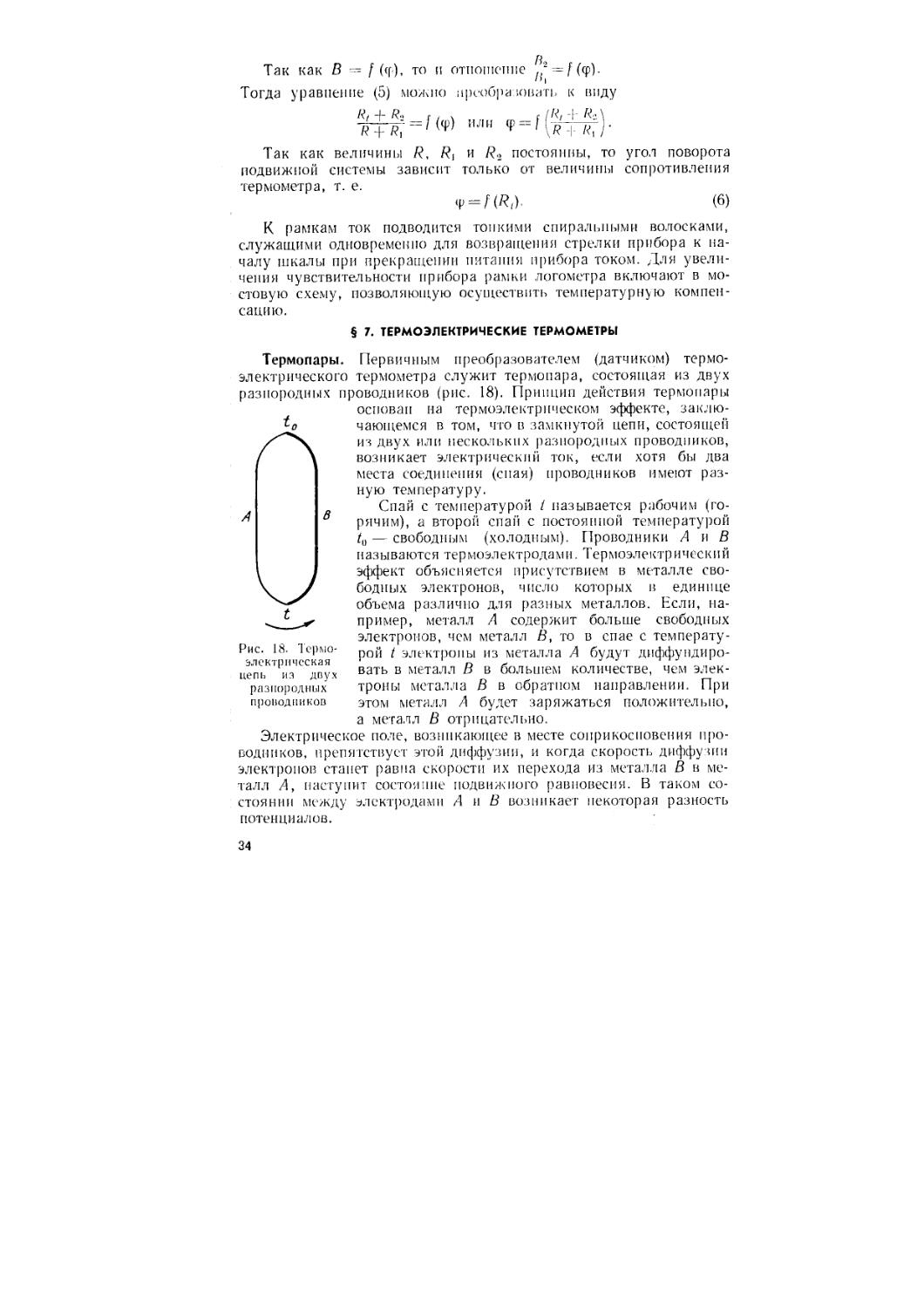
Термопары. Первичным преобразователем (датчиком) термоэлектрического термометра служит термопара, состоящая из двух разнородных проводников (рис. 18). Принцип действия термопары
основан на термоэлектрическом эффекте, заключающемся в том, что в замкнутой цепи, состоящей из двух или нескольких разнородных проводников, возникает электрический ток, если хотя бы два места соединения (спая) проводников имеют разную температуру.
Спай с температурой t называется рабочим (горячим), а второй спай с постоянной температурой — свободным (холодным). Проводники А и В называются термоэлектродами. Термоэлектрический эффект объясняется присутствием в металле свободных электронов, число которых в единице объема различно для разных металлов. Если, например, металл А содержит больше свободных электронов, чем металл В, то в спае с температу-
Рис. 18. 1срмо- рой t электроны из металла А будут диффундиро-электрике ' п.|т, п п Л? о п тл I itv-rii а aqav.
разнородных троны металла В в обратном направлении. При проводников этом металл А будет заряжаться положительно,
а металл В отрицательно.
Электрическое поле, возникающее в месте соприкосновения проводников, препятствует этой диффузии, и когда скорость диффузии электронов станет равна скорости их перехода из металла В в металл А, наступит состояние подвижного равновесия. В таком состоянии между электродами А и В возникает некоторая разность потенциалов.
34
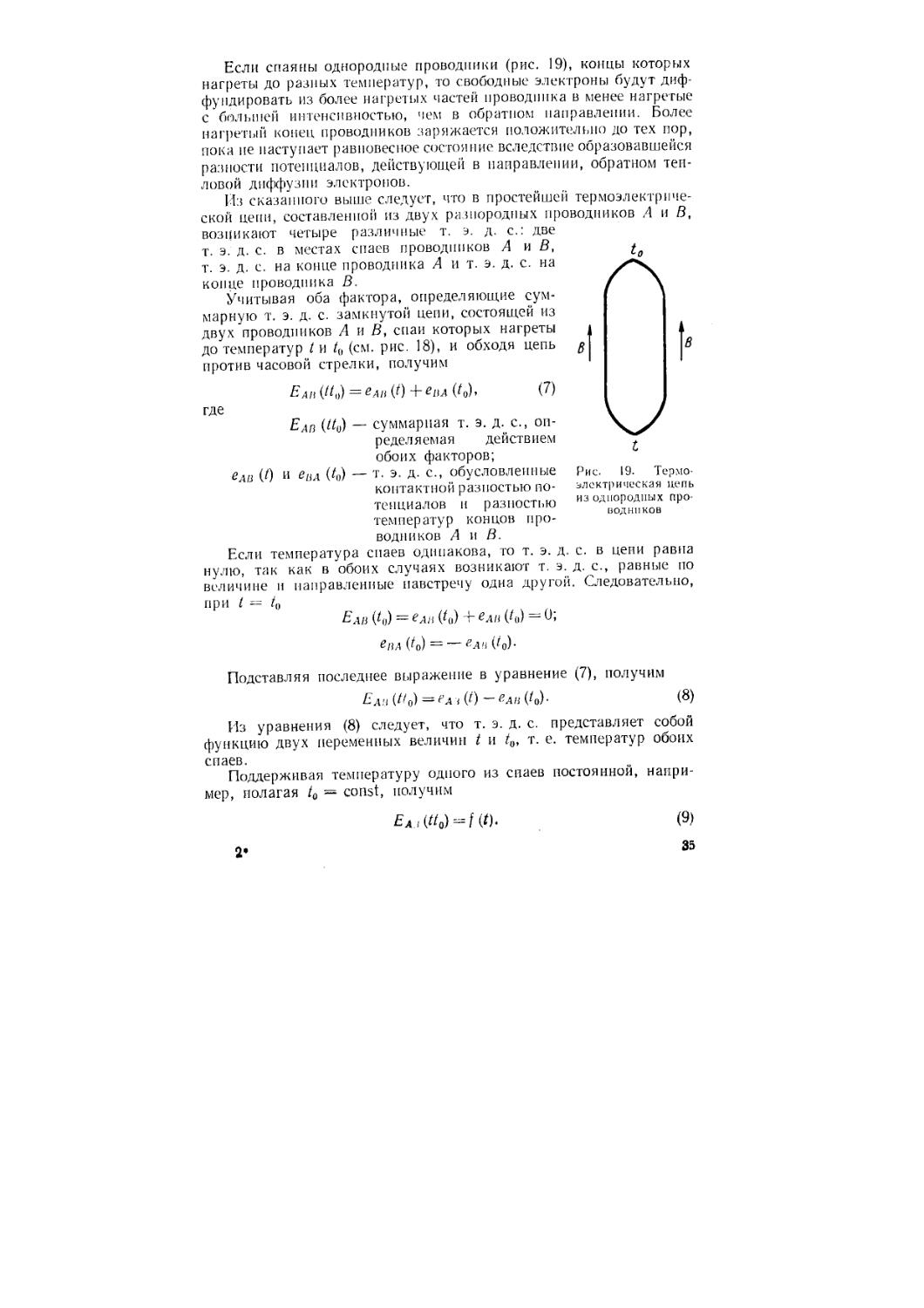
Если спаяны однородные проводники (рис. 19), концы которых нагреты до разных температур, то свободные электроны будут диффундировать из более нагретых частей проводника в менее нагретые с большей интенсивностью, чем в обратном направлении. Более нагретый конец проводников заряжается положительно до тех пор, пока не наступает равновесное состояние вследствие образовавшейся разности потенциалов, действующей в направлении, обратном тепловой диффузии электронов.
Из сказанного выше следует, что в простейшей термоэлектрической цепи, составленной из двух разнородных проводников А и В,
возникают четыре различные т. э. д. с.: две т. э. д. с. в местах спаев проводников А и В, т. э. д. с. на конце проводника А и т. э. д. с. на конце проводника В.
Учитывая оба фактора, определяющие суммарную т. э. д. с. замкнутой цепи, состоящей из двух проводников А и В, спаи которых нагреты до температур / и 4 (см. рис. 18), и обходя цепь против часовой стрелки, получим
В Al! (^4) = 6 АН (0 + еНА (4)’ (7)
где
EA!i (4о) — суммарная т. э. д. с., определяемая действием обоих факторов;
(/) и вил (4) — т. э. д. с., обусловленные контактной разностью потенциалов и разностью температур концов проводников А и В.
Рис. 19. Термоэлектрическая цепь из однородных проводников
Если температура спаев одинакова, то т. э. д. с. в цепи равна нулю, так как в обоих случаях возникают т. э. д. с., равные по величине и направленные навстречу одна другой. Следовательно, при t = 4
ВАц (4) = еАи (4) + елн (4) — 9;
й/м (4) = — е-ли (4)-
Подставляя последнее выражение в уравнение (7), получим BAAB0)=eA I(t) -e.AiS(t0). (8)
Из уравнения (8) следует, что т. э. д. с. представляет собой функцию двух переменных величин t и t0, т. е. температур обоих спаев.
Поддерживая температуру одного из спаев постоянной, например, полагая 4 = const, получим *
Ba.i (,Е0)— f
(9)
а*
35
Если для данной термопары экспериментально, т. е. путем градуировки, найдена зависимость (9), то измерение неизвестной температуры сводится к определению т. э. д. с. термопары.
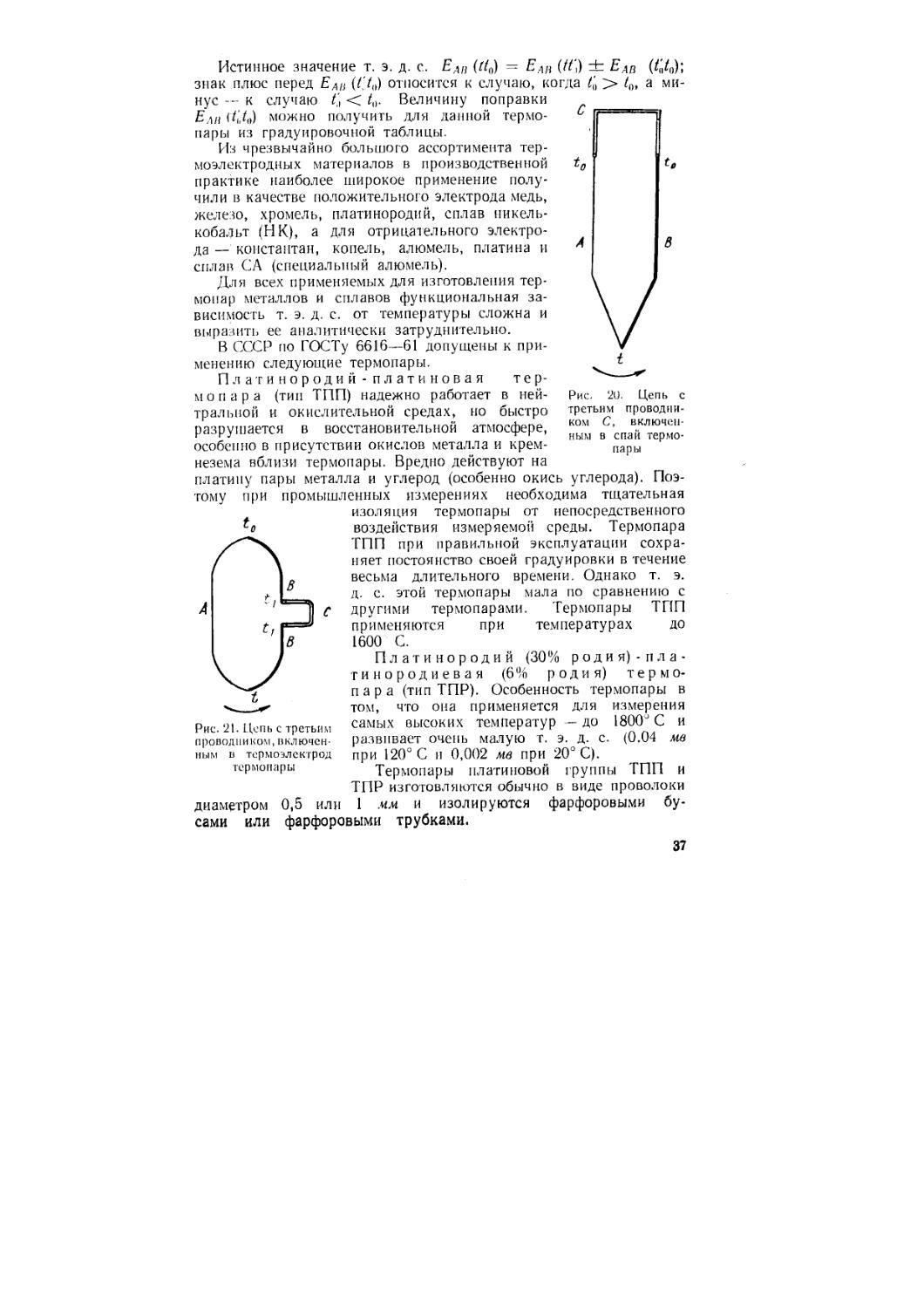
Для включения измерительного прибора необходимо разорвать электрическую цепь термопары. Разрыв можно произвести или в спае с t„ (рис. 20), или в одном из термоэлектродов (рис. 21).
Для случая, показанного на рис. 20,
Ел/ic (^о) — еАП (0 + (Т„) 4- вед 0о). (Ю)
Если t = t0, т. е. температуры спаев равны, то
Е arc (Q — елп (Q + бас (U 4 есл (Q = 0-
Из последнего уравнения очевидно, что
евс (/о) + есл (Q = — елп (/0) •
Подставляя это значение в уравнение (10), получим уравнение (8).
Для случая, показанного на рис. 21,
Еапс (^4 о) =бДВ (0 +бдс (^i) 4-бед (^1) +е/м (/0). (11)
Если учесть далее, что евс (/J = — еСц (/,) и e!iA (ta) = = — eAii (Ai)> т0 правая часть уравнения (11) получается такой же, что и уравнения (8).
Из этого следует, что введение третьего проводника в контур термопары не изменяет величины результирующей т. э. д. с. при условии, что места подключения концов третьего проводника имеют одинаковую температуру.
На этом основании включаются в цепь термопары соединительные провода, измерительные приборы и подгоночные сопротивления. Чаще всего третий проводник включается по схеме, показанной на рис. 20.
При неравенстве температур концов третьего проводника т. э. д. с. термопары уменьшится на величину т. э. д. с. паразитной термопары АС (рис. 20) или ВС (рис. 21) при температурах концов проводника tr и или t„ и /(1. Поэтому в цепи термопары желательно применять проводники, незначительно отличающиеся по термоэлектрическим свойствам от термоэлектродов термопары.
Термопара градуируется при определенной постоянной температуре холодного спая (обычно при/0 = 0°). При измерениях температура холодного спая может быть иной (Q, не равной температуре градуировки. Несовпадение температуры /0 и /(, вызывает необходимость внесения поправки.
Допустим, что t'a >• tQ, тогда
Сап (Д,) <С Ear (Но)-
Разность Ear (tt0) — Ear (iQ и представляет собой поправку.
36
to
л
Б
Рис. 20. Цепь с третьим проводником С, включенным в спай термопары
Истииное значение т. э. д. с. ЕАп (tt0) = ЕАН (//',) ± ЕАВ (44); знак плюс перед ЕАВ (t'ta) относится к случаю, когда t'№ > Zo, а минус --- к случаю 4 < 4- Величину поправки Елн (44) можно получить для данной термопары из градуировочной таблицы.
Из чрезвычайно большого ассортимента термоэлектродных материалов в производственной практике наиболее широкое применение получили в качестве положительного электрода медь, железо, хромель, платинородий, сплав никель-кобальт (НК), а для отрицательного электрода— константан, копель, алюмель, платина и сплав СА (специальный алюмель).
Для всех применяемых для изготовления термопар металлов и сплавов функциональная зависимость т. э. д. с. от температуры сложна и выразить ее аналитически затруднительно.
В СССР по ГОСТу 6616—61 допущены к применению следующие термопары.
Платинородий-платиновая термопара (тип ТПП) надежно работает в нейтральной и окислительной средах, но быстро разрушается в восстановительной атмосфере, особенно в присутствии окислов металла и кремнезема вблизи термопары. Вредно действуют на платину пары металла и углерод (особенно окись углерода). Поэтому при
промышленных измерениях необходима тщательная изоляция термопары от непосредственного воздействия измеряемой среды. Термопара ТПП при правильной эксплуатации сохраняет постоянство своей градуировки в течение весьма длительного времени. Однако т. э. д. с. этой термопары мала по сравнению с другими термопарами. Термопары применяются при температурах 1600 С.
Платинородий (30% родия)-т и н о р о д и е в а я (6 % родия) пара (тип ТПР). Особенность термопары в том, что она применяется для измерения самых высоких температур — до 1800° С и развивает очень малую т. э. д. с. (0,04 при 120° С и 0,002 мв при 20° С).
Термопары платиновой группы ТПП и ТПР изготовляются обычно в виде проволоки 1 мм и изолируются фарфоровыми бу-
Рис. 21. Цепь с третьим проводником, включенным в термоэлектрод термопары
ТПП
до
п л а -термо-
мв
диаметром 0,5 или сами или фарфоровыми трубками.
37
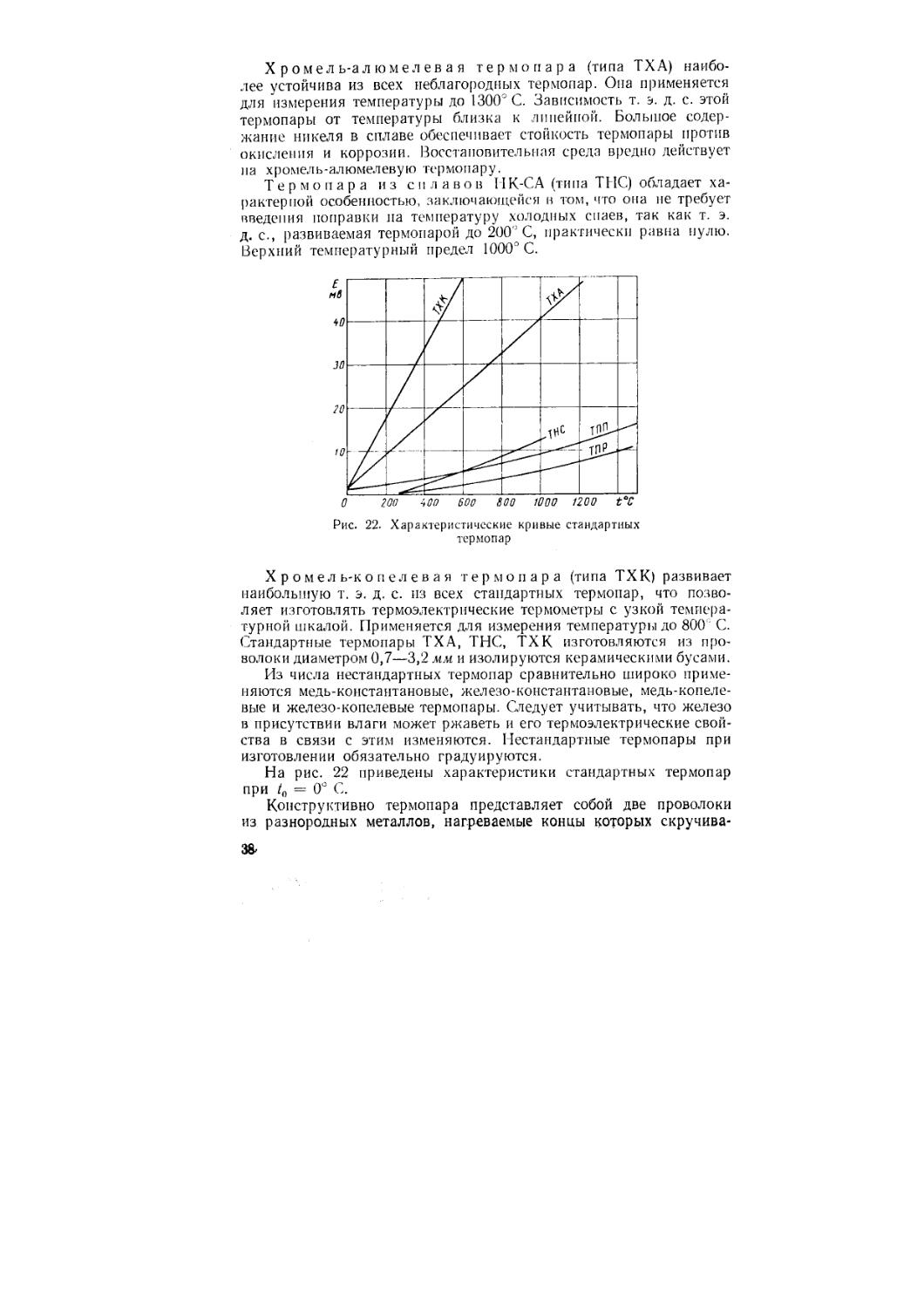
X ромел ь-ал юмел ев а я термопара (типа ТХА) наиболее устойчива из всех неблагородных термопар. Она применяется для измерения температуры до 1300° С. Зависимость т. э. д. с. этой термопары от температуры близка к линейной. Большое содержание никеля в сплаве обеспечивает стойкость термопары против окисления и коррозии. Восстановительная среда вредно действует на хромель-алюмелевую термопару.
Термопара из сплавов НК-СА (типа ТЫС) обладает характерной особенностью, заключающейся н том, что она не требует введения поправки па температуру холодных спаев, так как т. э. д. с., развиваемая термопарой до 200° С, практически равна пулю. Верхний температурный предел 1000° С.
Рис. 22. Характеристические кривые стандартных термопар
X р о м е л ь-к о п е л е в а я термопара (типа ТХК) развивает наибольшую т. э. д. с. из всех стандартных термопар, что позволяет изготовлять термоэлектрические термометры с узкой температурной шкалой. Применяется для измерения температуры до 800 С. Стандартные термопары ТХА, ТНС, ТХК изготовляются из проволоки диаметром 0,7—3,2 мм и изолируются керамическими бусами.
Из числа нестандартных термопар сравнительно широко применяются медь-константановые, железо-константановые, медь-копеле-вые и железо-копелевые термопары. Следует учитывать, что железо в присутствии влаги может ржаветь и его термоэлектрические свойства в связи с этим изменяются. Нестандартные термопары при изготовлении обязательно градуируются.
На рис. 22 приведены характеристики стандартных термопар при /п = 0° С.
Конструктивно термопара представляет собой две проволоки из разнородных металлов, нагреваемые концы которых скручива-38
ются, а затем свариваются или спаиваются. Как правило, горячий спай промышленных термопар изготовляется сваркой в пламени вольтовой дуги. Пайка применяется редко и только при изготовлении нестандартных лабораторных термопар из очень тонких проволок.
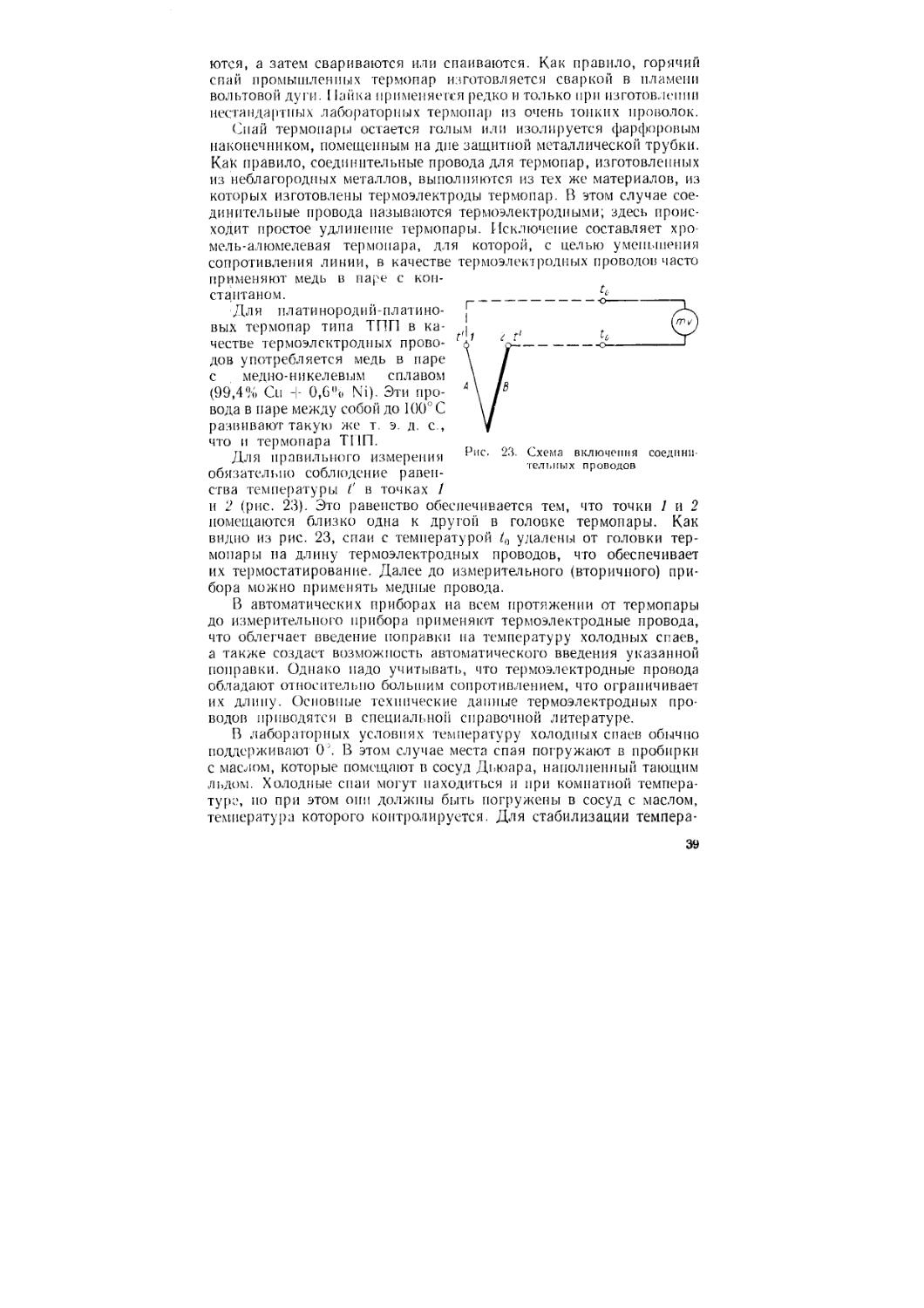
Спай термопары остается голым или изолируется фарфоровым наконечником, помещенным на дне защитной металлической трубки. Как правило, соединительные провода для термопар, изготовленных из неблагородных металлов, выполняются из тех же материалов, из которых изготовлены термоэлектроды термопар. В этом случае соединительные провода называются термоэлектродными; здесь происходит простое удлинение термопары. Исключение составляет хро-мель-алюмелевая термопара, для которой, с целью уменьшения сопротивления линии, в качестве термоэлектродных проводов часто применяют медь в паре с константаном. __________________________
Для платинородий-платино-
вых термопар типа ТПП в ка- j ( ( (Ду
честве термоэлсктродных прово- fл’ ’Д.----------о--------Г
дов употребляется медь в паре \ /
с медно-никелевым сплавом \ /
(99,4% Си -|- 0,G% Ni). Эти про- \ Г
вода в паре между собой до 100° С \ /
развивают такую же т. э. д. с., у что и термопара ТПП.
Для правильного измерения Рнс’ 2,i- Схема включения соедини-обязательно соблюдение равен-ства температуры f в точках I
и 2 (рис. 23). Это равенство обеспечивается тем, что точки 1 и 2 помещаются близко одна к другой в головке термопары. Как видно из рис. 23, спаи с температурой 10 удалены от головки термопары на длину термоэлектродных проводов, что обеспечивает их термостатирование. Далее до измерительного (вторичного) прибора можно применять медные провода.
В автоматических приборах на всем протяжении от термопары до измерительного прибора применяют термоэлектродные провода, что облегчает введение поправки на температуру холодных спаев, а также создает возможность автоматического введения указанной поправки. Однако надо учитывать, что термоэлектродные провода обладают относительно большим сопротивлением, что ограничивает их длину. Основные технические данные термоэлектродных проводов приводятся в специальной’ справочной' литературе.
В лабораторных условиях температуру холодных спаев обычно поддерживают (Г. В этом случае места спая погружают в пробирки с маслом, которые помещают в сосуд Дьюара, наполненный тающим льдом. Холодные спаи могут находиться и при комнатной температур;1, по при этом они должны быть погружены в сосуд с маслом, температура которого контролируется. Для стабилизации темпера-
39
127/2206.
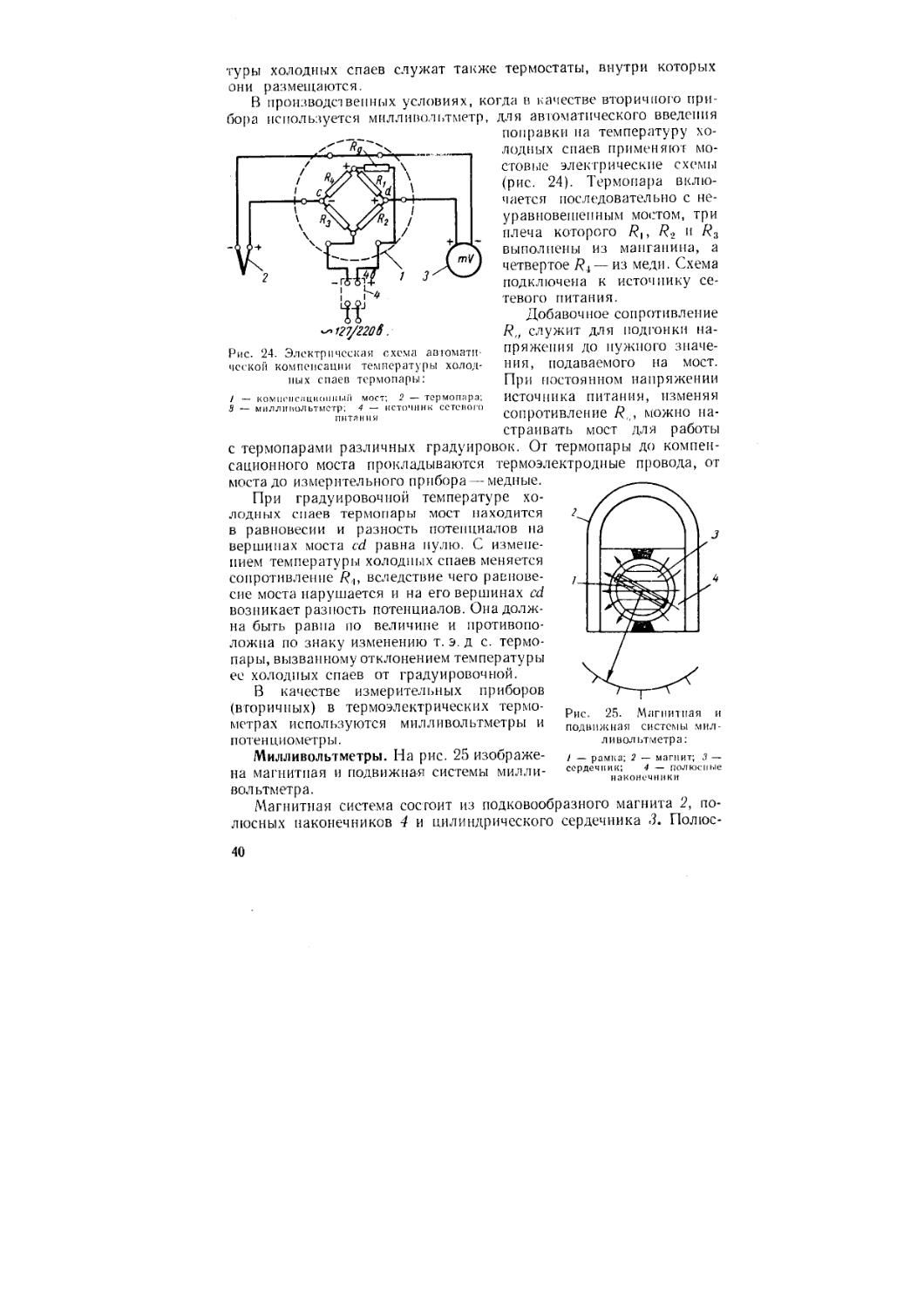
Рис. 24. Электрическая схема автоматической компенсации температуры холодных спаев термопары:
/ — комиеисацн0нны|| мост; 2 — термопара;
3 — милливольтметр; 4 — источник сетевого питания
туры холодных спаев служат также термостаты, внутри которых они разметаются.
В производственных условиях, когда в качестве вторичного прибора используется милливольтметр, для автоматического введения поправки на температуру холодных спаев применяют мостовые электрические схемы (рис. 24). Термопара включается последовательно с неуравновешенным мостом, три плеча которого /?,, /?2 и /?3 выполнены из манганина, а четвертое — из меди. Схема подключена к источнику сетевого питания.
Добавочное сопротивление R„ служит для подгонки напряжения до нужного значения, подаваемого на мост. При постоянном напряжении источника питания, изменяя сопротивление /?„, можно настраивать мост для работы
с термопарами различных градуировок. От термопары до компенсационного моста прокладываются термоэлектродные провода, от моста до измерительного прибора — медные.
При градуировочной температуре холодных спаев термопары мост находится в равновесии и разность потенциалов на вершинах моста cd равна нулю. С изменением температуры холодных спаев меняется сопротивление R:i, вследствие чего равновесие моста нарушается и на его вершинах cd возникает разность потенциалов. Она должна быть равна по величине и противоположна по знаку изменению т. э. д с. термопары, вызванному отклонением температуры ее холодных спаев от градуировочной.
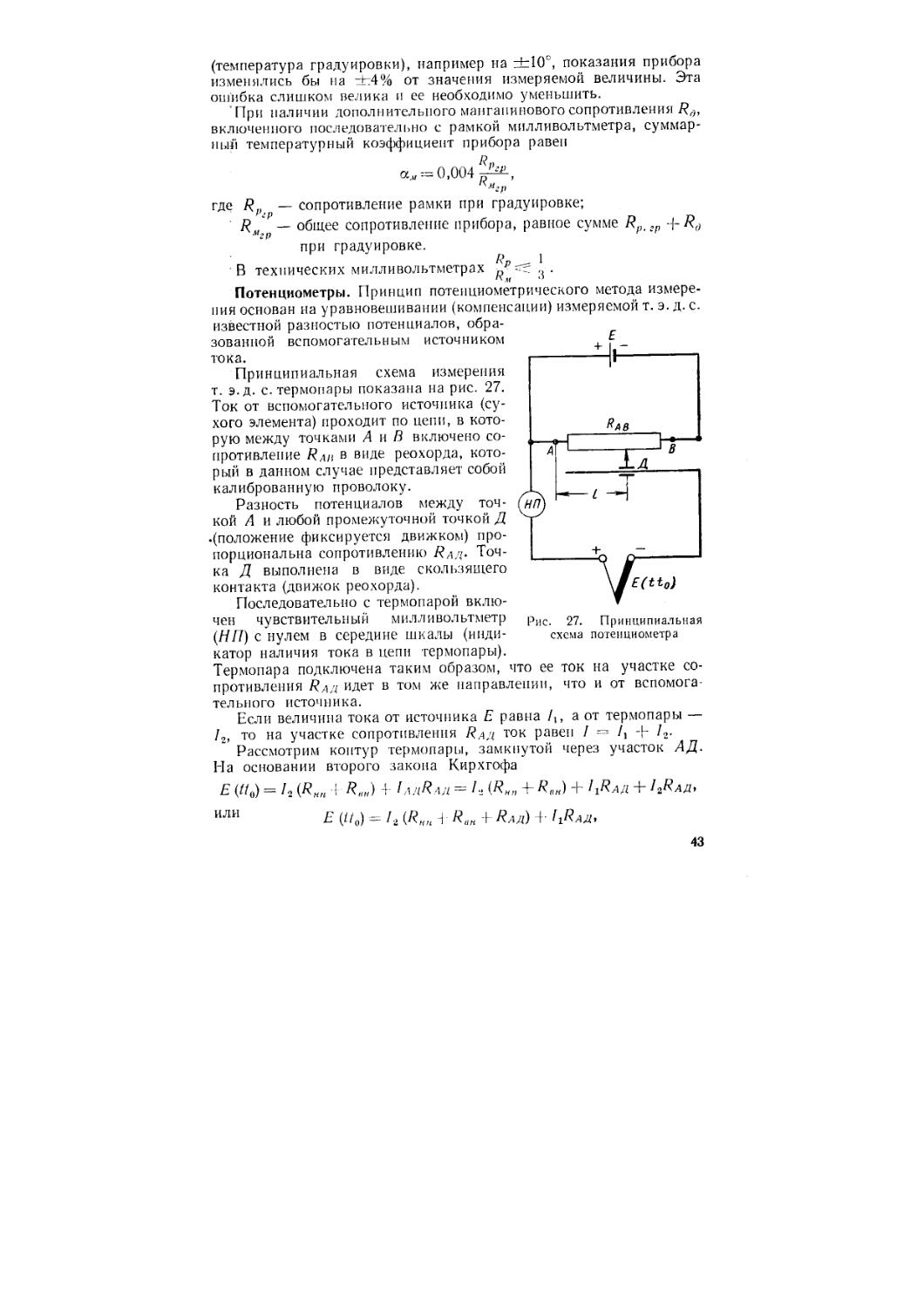
В качестве измерительных приборов (вторичных) в термоэлектрических термометрах используются милливольтметры и потенциометры.
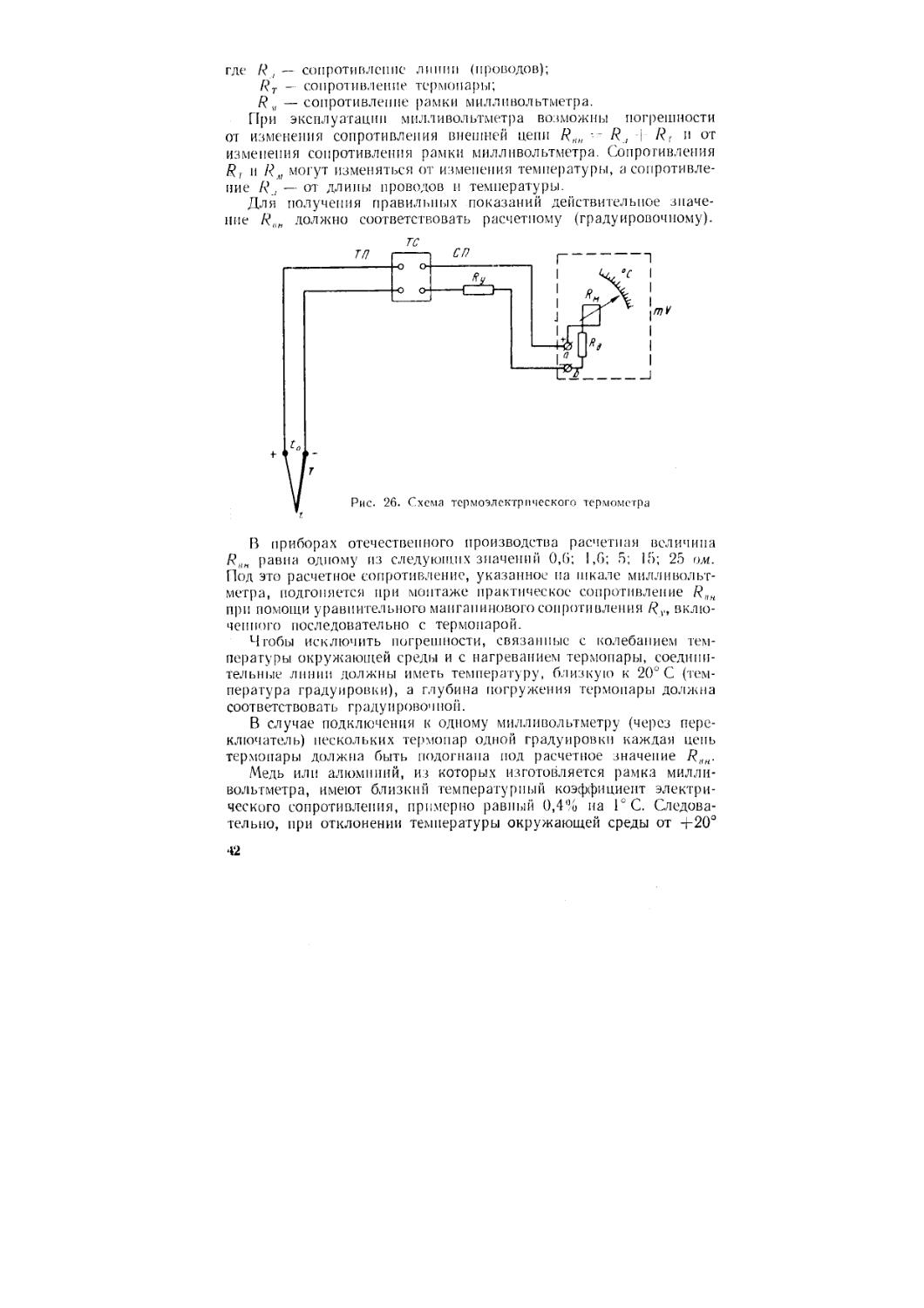
Милливольтметры. На рис. 25 изображена магнитная и подвижная системы милли-вол ьтметра.
Магнитная система состоит из подковообразного магнита 2, полюсных наконечников 4 и цилиндрического сердечника 3. Полюс
Рис. 25. Магнитная и подвижная системы милливольтметра:
/ — рамка; 2 — магнит; 3 — сердечник; 4 — полюсные наконечники
40
ные наконечники имеют цилиндрические выточки. В кольцевом воздушном зазоре между полюсными наконечниками и сердечником вращается рамка /, изготовленная из изолированного медного (реже алюминиевого) провода.
Момент, противодействующий вращению рамки, создается спиральными пружинками, которые одновременно служат и для подвода тока к рамке.
В регистрирующих приборах рамка обычно подвешивается на металлических лентах, которые создают противодействующий момент и одновременно служат для подвода тока.
Ток, протекая через рамку, вызывает появление двух одинаковых сил, направленных в разные стороны и стремящихся повернуть рамку.
Вращающий момент, стремящийся повернуть рамку при прохождении тока через нее,
Mi=kABl,
где /г, — коэффициент, зависящий от ширины рамки, активной длины (высоты) рамки и числа ее витков;
В — магнитная индукция;
/ — сила тока.
Величина противодействующего упругого момента для спиральных пружин
М? = 1г2Е(р,
где — постоянный множитель, зависящий от геометрических размеров спиральной пружины;
Е — модуль продольной упругости;
Ф — угол поворота подвижной системы.
В момент равновесия /И; = Л41? или ^BI = k2E(p.
Отсюда угол поворота подвижной системы
Изменения В и Е при изменении температуры окружающей среды не влияют на показания милливольтметра, так как обе величины изменяются почти одинаково. Тогда зависимость угла поворота рамки от величины тока можно выразить приближенной формулой
<р г/, (12)
из которой следует, что шкала милливольтметра равномерна и чувствительность прибора одна и та же в любом месте шкалы.
На рис. 26 приведена схема термоэлектрического термометра, состоящая из термопары (Т), термоэлектродных проводов (ТП), термостатирующего устройства (ТС), соединительных проводов (СП) и милливольтметра (mV).
Показания милливольтметра
<р = с___W_______
<₽ Rjl + Rr + Rm >
41
где А?, — сопротивление линии (проводов);
RT - сопротивление термопары;
R„ —сопротивление рамки милливольтметра.
При эксплуатации милливольтметра возможны погрешности от изменения сопротивления внешней цени RIIH R, i /?, и от изменения сопротивления рамки милливольтметра. Сопротивления R, и RM могут изменяться от изменения температуры, а сопротивление R, — от длины проводов и температуры.
Для получения правильных показаний действительное значение RIIH должно соответствовать расчетному (градуировочному).
В приборах отечественного производства расчетная величина равна одному из следующих значений 0,6; 1,6; 5; 15; 25 ом. Под это расчетное сопротивление, указанное па шкале милливольтметра, подгоняется при монтаже практическое сопротивление R,IH при помощи уравнительного манганинового сопротивления Ry, включенного последовательно с термопарой.
Чтобы исключить погрешности, связанные с колебанием температуры окружающей среды и с нагреванием термопары, соединительные линии должны иметь температуру, близкую к 20° С (температура градуировки), а глубина погружения термопары должна соответствовать градуировочной.
В случае подключения к одному милливольтметру (через переключатель) нескольких термопар одной градуировки каждая цепь термопары должна быть подогнана под расчетное значение RHH.
Медь или алюминий, из которых изготовляется рамка милливольтметра, имеют близкий температурный коэффициент электрического сопротивления, примерно равный 0,4% на ГС. Следовательно, при отклонении температуры окружающей среды от +20°
42
Е
Рис. 27. Принципиальная схема потенциометра
(температура градуировки), например на ±10°, показания прибора изменялись бы на ~±А% от значения измеряемой величины. Эта ошибка слишком велика и ее необходимо уменьшить.
При наличии дополнительного манганинового сопротивления Rd, включенного последовательно с рамкой милливольтметра, суммарный температурный коэффициент прибора равен
= 0,004^-, "-«г/»
где Rp — сопротивление рамки при градуировке;
RM — общее сопротивление прибора, равное сумме Rp.!p +R() при градуировке.
В технических милливольтметрах '
К .1/ *
Потенциометры. Принцип потенциометрического метода измерения основан на уравновешивании (компенсации)измеряемой т. э.д.с. известной разностью потенциалов, образованной вспомогательным источником тока.
Принципиальная схема измерения т. э.д. с. термопары показана на рис. 27. Ток от вспомогательного источника (сухого элемента) проходит по цепи, в которую между точками А и В включено сопротивление Raii в виде реохорда, который в данном случае представляет собой калиброванную проволоку.
Разность потенциалов между точкой А и любой промежуточной точкой Д .(положение фиксируется движком) пропорциональна сопротивлению Ra/i- Точка Д выполнена в виде скользящего контакта (движок реохорда).
Последовательно с термопарой включен чувствительный милливольтметр (НП) с нулем в середине шкалы (индикатор наличия тока в цепи термопары). Термопара подключена таким образом, противления RA/i идет в том же паправ; тельного источника.
Если величина тока от источника Е равна Л, а от термопары — /2, то на участке сопротивления Rah ток равен / = Д + /2.
Рассмотрим контур термопары, замкнутой через участок АД. На основании второго закона Кирхгофа
В (^о) = h4 R„H) 4 Ia.'iRaji = I, (RH„ +-/?„„) + IтДад 4- 12Кад< или Е (tt0) = /2 (RHH -] RaH A Ram) 4- 1^ад,
ее ток на участке со-п, что и от вспомога-
43
откуда
Рис. 28. Принципиальная схема потенциометра с постоянной силой тока в компенсационной цепи
. _ Е (tt0) — 11Рдд
2 Run + Кен 4" ^АД
Передвигая точку Д по сопротивлению RA/1 при условии < <С Е, можно найти ее положение, при котором ток в цепи термопары равен нулю, т. е. /2 = 0. При этом стрелка НП будет стоять на нулевом делении шкалы.
В этом случае E(tt^ — I^Raji = 0 или E(tt0) — IiRa/i-
Следовательно, т. э. д. с. термопары £(//0) определяется величиной падения напряжения на участке сопротивления Над, т. е. т. э. д. с. не зависит от сопротивления НП и внешнего сопротивления цепи RIIH. Сопротивление RAri может быть снабжено шкалой, градуированной в единицах напряжения (милливольтах) или в градусах. В последнем случае для каждого типа термопары необходима своя шкала.
Измерение т. э. д. с. компенсационным методом зависит от постоянства тока в цепи реохорда. Практически установление нужной величины тока / и контроль его постоянства производится также компенсационным методом. Простейшая схема такого потенциометра показана на рис. 28. В этой схеме к цепи источника и цепи термо
пары добавляется цепь нормального элемента, в которую входит нормальный элемент НО, сопротивление и нулевой прибор НП.
Применяемый обычно ртутно-кадмиевый гальванический элемент Вестона при температуре20° развивает э. д. с. равную 1,01830а, и сохраняет ее при малых и кратковременных нагрузках в течение длительного времени. Пользуясь нормальным элементом, можно довольно точно установить постоянство разности потенциалов на концах реохорда.
Для этой цели переключатель П переводят на контакт К, включая НП в цепь НО и одновременно разрывая цепь термопары. Нормальный элемент присоединяется к концам сопротивления RHjl так, что его э. д. с. оказывается направленной навстречу э. д. с. источника тока Е. Регулируя ток в компенсационной цепи реостатом Rb, добиваются такого положения, при котором разность потенциалов на концах сопротивления равна э. д. с. НО. При этом ток в цепи нормального элемента будет равен нулю и стрелка НП устанавливается на нуле шкалы.
44
В этом случае ток в компенсационной цепи
I _
' 1 Р •
Для измерения т. э. д. с. термопары переключатель П переводят на контакт И, подключая тем самым термопару последовательно с НП к измерительному сопротивлению в точке b и к скользящему контакту Д. Т. э. д. с. термопары тогда будет действовать в сторону, противоположную э. д. с. источника тока Е.
Рис. 29. Принципиальная схема автоматического потенциометра
Перемещая контакт Д, находят такое его положение, при котором разность потенциалов между точками b и Д измерительного сопротивления равна т. э. д. с. термопары; при этом ток в цепи термопары равен нулю (стрелка НП устанавливается на нуль шкалы); тогда
Е(И„) ==ItRM=^RIV!.
Так как Енч и RH,, постоянны, то определение т. э. д. с. термопары сводится к определению участка измерительного сопротивления Rt/д. Измерение т. э. д. с. компенсационным методом осуществляется при отсутствии тока в цепи термопары, поэтому сопротивление цепи (термопары, соединительных проводов, НП), а следовательно, и его зависимость от температуры не влияет па точность измерения. Это свойство одно из существенных преимуществ компенсационного метода измерения.
В автоматических электронных потенциометрах (рис. 29) роль нуль-индикатора выполняет электронный усилитель ЗУ. Цепь
45
источника тока представляет собой неуравновешенный мост и состоит из двух ветвей: рабочей, в которую включен реохорд Rp, и вспомогательной, состоящей из двух постоянных сопротивлении” /< , и /<*.
Измеряемая т. э. д. с. термопары компенсируется падением напряжения па сопротивлении Rr, зависящего от положения движка реохорда, и на сопротивлениях и R,..
Если т.э.д.с. термопары E(ltt!) неравна падению напряжения на указанных сопротивлениях, то напряжение разбаланса Е (ttn)— —Uba, появляющееся на вершинах измерительного моста b и d, подается па зажимы вибропреобразователя, входящего в электронный усилитель (электронный нуль-индикатор такой же, как в уравновешенном мосте постоянного тока).
При равновесии измерительной схемы, когда Е (ltb) = Ubti, реверсивный двигатель не вращается, так как на вход преобразовательного каскада напряжение не подается.
Для установки рабочего тока R переключатель П, нормально находящийся в положении И (измерение), автоматически переводится в положение К (контроль). При этом одновременно устанавливается кинематическая связь реверсивного двигателя с движками реостата Rb и подключается электронный усилитель к цепи нормального элемента НО.
Если падение напряжения Ц RH:i не равно э. д. с. нормального элемента, то электронный усилитель так же, как и при измерении т. э. д. с. термопары, получаетсигнал, равный разности между э. д. с. нормального элемента и падением напряжения на сопротивлении RHfl. Реверсивный двигатель РД, вращаясь по часовой стрелке или против нее в зависимости от знака разбаланса, передвигает движки реостата Rb, меняя величину питающего напряжения.
/7
В момент равновесия, когда /L = „"Д на электронный усилитель 1'Н.Э
сигнал не подается и реверсивный двигатель останавливается. В этот момент устанавливается вполне определенное значение рабочего тока /2.
Наличие вспомогательной ветви позволяет автоматически ввести поправку на температуру свободных спаев термопары. В приборе сопротивление Rb располагается близко от места подключения термопары, чем и обеспечивается их одинаковая температура.
Измеряемая т. э. д. с. термопары
Е (//„) = I..R, + /2/?1 -
Повышение температуры свободных спаев вызывает уменьшение т.э.д.с. на величину Е(/'/0). При этом падение напряжения на сопро-
* В некоторых автоматических потенциометрах ИЗ отсутствует, а в диагональ моста включается источник стабилизированного напряжения, обеспечивающий постоянство рабочего тока в измерительной схеме.
46
тивлешш Rf, одновременно возрастает на величину А/?Л., тогда по лучим равенство
Е - £ (#0) = + /2^1 - Л
Для того чтобы движок реохорда сохранил свое прежнее положение и потенциометр показал измеряемую температуру, необходимо обеспечить равенство
Е = I^Rk.
При контактных методах измерение температуры почти всегда сопровождается теплообменом между термоприемником и окружающими его телами. Это приводит к погрешностям измерения, которые можно уменьшить правильной установкой термоприемника. Особенно это относится к измерению температур газовых потоков.
Интенсивное омывание чувствительной части термоприемника потоком измеряемой среды повышает точность измерения.
Можно в среднем считать, что для скоростей примерно до 70/</te/c коэффициент теплоотдачи от измеряемой среды к термоприемнику
а = 1г \ и,
где k — коэффициент пропорциональности;
v — скорость среды.
В установившемся состоянии
Q=4>iaS«.-0 и =
где Q — количество тепла, отведенного от термоприемника во внешнюю среду;
/г, — коэффициент пропорциональности;
s — поверхность погруженной части термоприемпика’, — температура измеряемой среды;
t—температура термоприемника (показание прибора).
Поскольку величина Q в данных условиях измерения может быть принята постоянной (установившееся состояние), то при увеличении ос разность te - - t (погрешность) уменьшается.
С целью увеличения а при измерении температуры газов или паров, протекающих по трубопроводу, все виды термоприемников (манометрические термометры, термометры сопротивления, термопары) следует располагать против направления потока в его центре, где скорости максимальны. ГЗ этом случае коэффициент теплоотдачи в месте со пр и кос новен и я потока с термоприемником возрастает вследствие разрушения пограничного слоя. Если термоприемник невозможно установить против потока, то следует устанавливать его наклонно к оси трубопровода.
В тех случаях, когда скорость газовых потоков мала (измерение температуры газа в газоходах) и передача тепла термоприемпику
47
незначительна вследствие малой величины коэффициента теплоотдачи, прибегают к искусственному повышению скорости газа путем местного сужения потока с помощью диафрагмы, создающего повышенную скорость в месте установки термоприемника.
С целью уменьшения погрешностей, вызванных утечкой тепла через защитную трубку термоприемника и арматуру, следует увеличивать длину погружения термоприемника в измеряемую среду.
При измерении температуры жидкостей необходимо соблюдать те же правила установки, что и при измерении температуры газов и паров. Однако при измерении температуры жидкостей условия значительно благоприятнее, так как коэффициент теплоотдачи для жидкостей сравнительно высок.
§ 8. ПИРОМЕТРЫ ИЗЛУЧЕНИЯ
Принцип действия пирометров излучения основан на использовании теплового излучения нагретых тел. Основное преимущество пирометров излучения по сравнению с рассмотренными выше способами — бесконтактность измерения, что устраняет искажение температурного поля, вызванное введением чувствительного элемента прибора в измеряемую среду.
Одновременно с повышением температуры нагретого тела и изменением его цвета быстро возрастает интенсивность (яркость) монохроматического (одноцветного) излучения, т. е. излучение волны определенной длины, а также заметно увеличивается суммарное (интегральное) излучение (радиация). Эти два свойства нагретых тел используются для измерения их температуры. Соответственно этим двум свойствам пирометры излучения делятся на яркостные (оптические), цветовые и радиационные.
Согласно уравнению Планка интенсивность монохроматического излучения абсолютно черного тела в зависимости от длины волны и температуры
-1) , (13)
где Еох— интенсивность излучения абсолютно черного тела для волны длиной X;
С, и С.2 — константы излучения, численные значения которых зависят от принятой системы единиц;
Т — абсолютная температура тела в °К. е — основание натуральных логарифмов.
В тех случаях, когда Х7" < 0,002 м-град, что соответствует температуре ниже 3000° К при А, = 0,66 мкм, уравнение Планка может быть заменено уравнением Вина:
с.
‘(8
Уравнение Вина является частным случаем уравнения Планка. Все обозначения в формуле (14) соответствуют принятым в уравнении (13).
Уравнения (13) и (14) являются теоретической основой построения яркостных пирометров излучения.
Суммарное (интегральное) излучение абсолютно черного тела характеризуется уравнением Стефана-Больцмана:
Л / Т \4 р --Г -со —со!.1ОО,/ ’
где Со — постоянная излучения абсолютно черного тела;
Т — абсолютная температура излучающей поверхности в °К.
Ввиду того, что интенсивность монохроматического излучения и суммарное излучение зависят от физических свойств вещества, шкалы пирометров излучения градуируются по излучению абсолютно черного тела.
Следовательно, измеряя пирометром излучения температуру физического тела, получают в результате некоторую кажущуюся температуру (яркостную или радиационную), которая связана определенным соотношением с действительной температурой. Поэтому последняя может быть вычислена по величине кажущейся температуры.
Действительная температура Т физического тела, полученная по кажущейся температуре Тк, измеренной яркостным пирометром, равна
где Т — действительная температура тела в °К;
Тк — кажущаяся (яркостная) температура тела в °К, измеренная яркостным пирометром;
А — длина волны в мкм;
С,, — постоянная уравнения Вина;
— степень черноты тела для данной длины волны.
Действительная температура физического тела, полученная по кажущейся температуре Тр, измеренной радиационным пирометром:
где Т — действительная температура физического тела;
Тр — радиационная температура, измеренная радиационным пирометром;
е — степень черноты тела для всех длин волн.
Вследствие того, что для всех реальных физических тел 0<е < 1, температура тела, измеренная пирометром излучения, всегда меньше его действительной температуры.
49
В подавляющем большинстве случаев из-за трудности определения действительных значений щ и г (они зависят от состояния поверхности тела и температуры) измеряемого тела температурный контроль производится только по кажущейся температуре (яркостной или радиационной), т. е. без введения поправок на неполноту излучения.
Свойством абсолютно черного тела обладает поверхность отверстия в замкнутой полости (топки печей и др.) с непрозрачными и равномерно нагретыми стенками. Это объясняется тем, что все лучи, падающие в такое отверстие извне, практически полностью
Рис. 30. Принципиальная схема яркостного пирометра с исчезающей питью:
/ — объективная линза; 2 — лампа накаливания; 3 — окулярная линза; 4 — красный светофильтр; .5 — серый поглощающий светофильтр
поглощаются внутри тела вследствие многократного отражения от внутренней поверхности. В этих условиях измеренная яркостным и радиационным пирометрами кажущаяся температура близка к действительной.
Яркостные пирометры. Принцип действия яркостных пирометров основан на сравнении яркости монохроматического излучения двух тел: эталонного тела и тела, температура которого измеряется.
В качестве эталонного тела обычно используется нить лампы накаливания, яркость излучения которой регулируется (монохроматический пирометр с исчезающей нитью) (рис. 30).
Пирометр представляет собой телескопическую трубку с объективной линзой / и окулярной линзой 3. Внутри телескопической трубки в фокусе объективной линзы находится пирометрическая лампа накаливания 2 с подковообразной нитью. Лампа питается током от аккумулятора через реостат R. В цепь питания параллельно пирометрической лампе включен милливольтметр, конструктивно
50
объединенный с трубкой телескопа. Шкала милливольтметра градуирована в градусах температуры.
Для получения монохроматического света окулярная часть телескопа снабжена красным светофильтром 4, пропускающим только лучи определенной длины. В объективной части телескопа находится серый поглощающий светофильтр 5, служащий для расширения пределов измерения. Оба светофильтра могут быть выведены из поля зрения глаза.
Для получения резкого изображения раскаленного тела и нити объектив и окуляр прибора могут перемещаться вдоль оси в телескопической трубке.
Стабильность показаний яркостного пирометра с исчезающей нитью зависит главным образом от постоянства характеристик измерительного прибора и пирометрической лампы. Пирометрическая лампа с вольфрамовой нитью в течение очень длительного периода сохраняет присущую ей зависимость яркости нити от величины протекающего через нее тока, если предел яркостных температур не превышает 1400° С. Нагрев нити лампы выше температуры 1400° С приводит к распылению вольфрамовой нити и к изменению еа сопротивления.
С другой стороны, возгоняющийся вольфрам оседает на стенках колбы лампы и образует темный налет. По этим причинам яркостная характеристика лампы изменяется.
Пределы измерения повышают введением серого светофильтра, который в одинаковой степени поглощает энергию волн всех длин. Стекло серого светофильтра выбирают такой оптической плотности, чтобы при яркостной температуре излучателя выше 1400° С нить пирометрической лампы нагревалась до яркостных температур не выше 1400° С.
В соответствии с этим милливольтметр снабжают двумя шкалами: верхней для измерения температур от 800 до 1400° С с выведенным серым светофильтром и нижней для температур от 1300° С и выше с введенным серым светофильтром.
Приборостроительная промышленность выпускает переносные яркостные пирометры с исчезающей нитью в различных конструктивных решениях для температур от 800 до нескольких тысяч градусов. Пирометры работают с эффективной длиной волны 0,65 или 0,66 мкм.
Имеются яркостные пирометры, у которых оценка яркости производится не глазом наблюдателя, а с помощью фотоприемников (фотоэлементы и фотоумножители).
На рис. 31 показана принципиальная схема фотоэлектрического яркостного пирометра. Световой поток от излучающего тела 1 концентрируется линзой 2 и через красный светофильтр 4 попадает на фотоприемник 6. Поглощающий светофильтр 3 служит для изменения пределов измерения прибора. На фотоприемник через линзу 2 и красный светофильтр 4 попадает также световой поток от лампы
51
накаливания Г. Попеременное освещение фотоприемника 6 то от излучающего тела, то от лампы накаливания обеспечивается модулятором 5, вибрирующим с частотой 50 гц.
Если яркостные температуры излучающего тела и лампы накаливания различны, то на выходе фотоприемника возникает переменная составляющая сигнала с частотой, равной частоте модуляции. После усиления и детектирования переменный сигнал поступает на измерительный потенциометр. Этот же сигнал может быть использован для управления накалом лампы /' (обратная связь) или приведения в действие устройства для ослабления излучения, попадающего на фотоприемник от излучающего тела.
Рис. 31. Принципиальная схема фотоэлектрического яркостного пирометра:
/ — излучающее тело; 2 — линза; 3 — поглощающий светофильтр; 4 — красный светофильтр; 5 — модулятор; 6 — фотоприемник
В отличие от яркостных пирометров с исчезающей нитью фотоэлектрические пирометры позволяют записывать показания и передавать их на расстояние. Предел измерения (ФЭП-3 и ФЭП-4) температуры 800—4000° С.
Цветовые пирометры. Если продифференцировать уравнение Вина по X и производную приравнять нулю, то получим
Х,пахТ = 0,2884 см-град,
где Хтах — длина волны, соответствующая максимальному излучению при данной температуре Т.
Пользуясь этим уравнением, по положению максимума можно определить абсолютную температуру тела. Этот метод и используется в цветовых пирометрах.
В применяемых для промышленных измерений цветовых пирометрах определяется отношение интенсивностей излучения реального тела в лучах двух заранее выбранных длин волн, т. е. показа-
52
/Еь\
ния пирометра являются функцией Это отношение для
\<-Л2'
каждой температуры различно, ио вполне однозначно.
В большинстве случаев для реальных те 1 кривые £-^/(1) при различных температурах совершенно подобны кривым для абсолютно черного тела. Поэтому практически не требуется вводить поправки на неполноту излучения, что является основным преимуществом цветового пирометра.
Так как в цветовом пирометре измеряется отношение интенсивностей, то показания его принципиально не'зависят от расстояния и размеров излучающего тела. Уменьшается также влияние неселективного поглощения промежуточной среды на результат измерения. Большинство конструкций цветовых пирометров основано на опре-
Рис. 32. Схема цветового пирометра с фотоэлементом:
/ — защитное стекло; 2 — объектив; .3 — обтюратор; 4 — фотоэлемент; 5 — электронный усилитель; 6 — электронное логарифмическое устройство; 7 — милли-пол ьтметр
делении цвета измеряемого тела по отношению интенсивностей из-лучения для двух длин волн, лежащих не очень близко одна к другой в видимой части спектра.
Чтобы избежать зависимости результатов измерения от субъективных особенностей наблюдателя (цветочувствительность и утомляемость глаза), разработаны цветовые пирометры, у которых для измерения отношения монохроматических яркостей используются фотоприемники.
Принципиальная схема цветового пирометра (ЦЭП-3) с фотоэлементом показана па рис. 32. Измеряемое излучение через защитное стекло / и объектив 2 попадает на фотоэлемент4. Между объективом и фотоэлементом установлен обтюратор 3, вращаемый синхронным двигателем. Обтюратор выполнен в виде диска с двумя отверстиями, одно из которых закрыто красным светофильтром К, другое — сипим С. Таким образом, при вращении обтюратора на фотоэлемент попеременно попадают излучения красной и синей спектральных яркостей. Так как спектральная характеристика фотоэлемента зависит от температуры, фотоэлемент в пирометре заключен в термостат с автоматическим регулированием.
53
Электрическое напряжение, пропорциональное соответствующим спектральным яркостям, предварительно усиливается электронным усилителем 5 и преобразуется специальным электронным логарифмическим устройством 6 в постоянный ток, величина которого зависит от температуры. Выходной ток логарифмического устройства измеряется указывающим пли регистрирующим милливольтметром 7. Пределы измерения пирометра от 1400 до 2800° С, основная погрешность при измерении температуры физических тел не превышает ±1% от верхнего предела измерений.
Радиационные пирометры (пирометры полного излучения) измеряют температуру по мощности излучения нагретого тела. Пи-
Рис. 33. Принципиальная схема радиационного пирометра с термобатареей:
/ — объективная линза; 2 — окуляр; 3 — диафрагма; 4 — термоэлектрическая батарея; 5 — цветное стекло
рометр снабжен оптической системой (зеркалом, линзой), собирающей лучи, испускаемые нагретым телом на каком-либо органе, воспринимающем теило.
Термоприемник обычно состоит из нескольких малоинерционных последовательно соединенных термопар (термобатарея), термометра сопротивления или полупроводникового термосопротивления. В качестве измерительных приборов применяются милливольтметры, автоматические потенциометры и уравновешенные мосты.
На рис. 33 показана принципиальная схема радиационного пирометра с термобатареей. Пирометр состоит из телескопа с объективной линзой 1 и окуляром 2. На пути лучей от источника излучения установлена ограничивающая диафрагма 3, а в фокусе объективной линзы — термоэлектрическая батарея 4. Перед окулярной линзой помещено цветное стекло 5 для защиты глаз при установке пирометра.
Радиационные пирометры, у которых в качестве тепловосприпи-мающего элемента используются термометры сопротивления, могут 54
измерять сравнительно низкие температуры, например, от 20 до 100J С..
Для работы с различными измерительными приборами (вторичными) пирометры излучения снабжаются панелью с эквивалентными и уравнительными сопротивлениями.
Радиационные пирометры широко применяются в производственной практике, так как они действуют без наблюдателя, могут быть установлены стационарно и позволяют применять дистанционную передачу , автоматическую запись н регулирование температуры.
Г лава III
ПРЕОБРАЗОВАТЕЛИ СИГНАЛОВ И СИСТЕМЫ ПЕРЕДАЧИ ПОКАЗАНИЙ НА РАССТОЯНИЕ
§ 9. ОБЩИЕ СВЕДЕНИЯ
Выходными сигналами первичных преобразователей могут быть т. э. д. с. термопары, электрическое сопротивление термометра, напряжение переменного тока, давление манометрического термометра, прогиб мембраны манометра и т. п.
Большое разнообразие первичных преобразователей с физически разнородными выходными сигналами требует значительной номенклатуры контрольно-измерительных и регулирующих устройств, что затрудняет их эксплуатацию и ремонт. Кроме того, при использовании машин централизованного контроля и управления требуется большое количество различных вторичных преобразователей, преобразующих разнородные физические величины в единую величину.
Поэтому в целях рационализации проводятся работы по объединению отдельных систем и приборов в рамках Государственной системы приборов (ГСП).
ГСП представляет собой совокупность нормализованных рядов унифицированных блоков, приборов и узлов, составленных из минимального количества модулей, на основе которых собирается любое устройство, входящее в ГСП.
Структурно ГСП состоит из электрической, пневматической и гидравлической ветвей, которые связаны между собой через соответствующие преобразователи.
Применение блочного принципа повышает степень универсальности приборов, т. е. позволяет использовать их для измерения наибольшего числа параметров при замене минимального количества унифицированных узлов.
ГСП предусматривает преобразование различных измеряемых параметров (температуры, давления и т. п.) в единую форму информации, удобную для передачи на расстояние. Взаимозаменяемость приборов, которая достигается унификацией входных и выходных параметров, обеспечит совместную работу первичных нреобразо-56
вателей с. различными приборами и устройствами, входящими в данную ветвь ГСП, а при использовании специальных преобразователей позволит сочетать первичные преобразователи одной ветви с приборами других ветвей.
Для теплоэнергетических параметров (температура, давление, расход, уровень) ГСП состоит из трех ветвей, объединяющих приборы с электрическим токовым (аналоговым), электрическим частотным (дискретным) и пневматическим выходными сигналами.
Установлены следующие унифицированные выходные сигналы: для;электрической аналоговой ветви (ГОСТ 9685—61) —величина постоянного тока с пределами измерения 0—5 и 0—20 ма; напряжение постоянного токаО—10в и напряжение переменного тока 0— 2в, для электрической частотной (дискретно-цифровой) ветви — частота 1500—2500 гц\ для пневматической ветви (ГОСТ 9468—60) — давление сжатого воздуха с пределами измерения 0,2—1,0 кГ1см\
§ 10. ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКОЙ АНАЛОГОВОЙ ВЕТВИ
Преобразователи с унифицированным выходным сигналом выполняются по схеме силовой компенсации и по схеме компенсации перемещений.
Преобразователи, выполненные по схеме силовой компенсации
На рис. 34 показан преобразователь электрической аналоговой ветви с силовой компенсацией. Измеряемый параметр воздействует на чувствительный элемент измерительного блока 1 (например, мембрану манометра) и преобразуется в пропорциональное усилие F, которое передается на рычаг 2. Поворот этого рычага через ролик 3, промежуточный рычаг 4 и ленточную тягу 5 передается компенсационному рычагу 6. На компенсационном рычаге укреплены сердечник 7 дифференциально-трансформаторного индикатора равновесия и катушка 8 магнитоэлектрического силового механизма. При отклонении сердечника 7 от равновесного (среднего) положения в цепи, составленной из двух включенных навстречу вторичных обмоток ярма 9, возникает сигнал переменного тока промышленной частоты.
Этот сигнал поступает на вход электронного усилителя 10. Усиленный и выпрямленный сигнал поступает в линию дистанционной передачи и одновременно в последовательно соединенную с ней катушку 8 индикатора равновесия. Взаимодействие магнитного поля, создаваемого током в катушке 8, с полем постоянного магнита 11 создает усилие на рычаге 6, которое уравновешивает измеряемое (входное) усилие (вызванное, например, изменением давления). Нулевая точка прибора настраивается с помощью пружины 12. Настройка преобразователя на заданный диапазон измерения производится перемещением рычага 3 и подвижной ленточной тяги 5.
57
В зависимости от тина усилителя пределы изменения выходного сигнала: 0-5 ма или 0- 20 ма. Дистанционная передача сигнала может достигать К) км.
Подключаемые к преобразователю вторичные приборы можно разделить на две группы: работающие от унифицированного сигнала постоянного тока (миллиамперметры, приборы магнитоэлектрической и электромагнитной систем) и работающие от сигнала постоянного напряжения (вольтметры, промышленные потенциометры, электрические машины централизованного контроля и управления).
Приборы первой группы (токовые) подключаются к электронному усилителю преобразователя в разрыв электрической цепи двухпроводной линии связи (приборы этой группы соединяются последовательно).
Приборы второй группы (приборы постоянного напряжения) подключаются параллельно нагрузочному сопротивлению, включенному в электрическую цепь двухпроводной липин связи.
Преобразователи, выполненные по схеме компенсации перемещений
Из электрических аналоговых преобразователей, выполняемых по схеме компенсации перемещений для преобразования линейных и угловых перемещений в электрический выходной сигнал, применяются дифференциально-трансформаторные и ферродииампческие преобразователи.
58
S
Рис. 35. Схема дифференциально-трансформаторного преобразователя:
/ — первичный прибор; 2 — вторичный прибор
В дифференциально-трансформаторных преобразователях перемещение сердечника первичного прибора уравновешивается известным перемещением сердечника вторичного прибора. Дифференциально-трансформаторные преобразователи используются при измерении расхода, давления, уровня и других параметров, значения которых могут быть преобразованы в перемещение сердечника катушки преобра.зовател я.
Схема (рис. 35) состоит из двух одинаковых катушек, одна из которых находится в первичном приборе /, а другая — во вторичном приборе 2. Первичные обмотки катушек вкпючепы последовательно и питаются напряжением переменного тока от обмотки силового трансформатора электронного усилителя. Вторичные обмотки включены навстречу одна другой с выходом на электронный усилитель. Внутри катушек находятся сердечники (магнитопроводы).
Если сердечники обеих катушек находятся в среднем положении, то А£, =~- (\—е2=-- О и А£2 =--- <’;i—е4 = 0; А£ = — !\EV—&Е2 на входе усилителя также равно нулю.
При рассогласовании положений сердечников в катушках возникает напряжение разбаланса, величина и фаза которого зависят от величины и напряжения смещения сердечника в катушке первичного прибора. Напряжение разбаланса усиливается в электронном усилителе до величины, необходимой для управления реверсивным двигателем, который с помощью профилированного диска перемещает сердечник в катушке вторичного прибора в положение, координированное с сердечником в катушке первичного прибора, что приводит к равенству э. д. с., наводимых в обеих катушках, а следовательно, к новому состоянию равновесия. При этом результирующая э. д. с. вторичных обмоток будет снова равна нулю и реверсивный двигатель остановится. Одновременно реверсивный двигатель связан со стрелкой и пером вторичного прибора.
При перемещении сердечника первичного прибора до 5 мм зависимость индуктированной э.д.с. практически линейна. Вторичные приборы дифференциально-трансформаторной системы построены па базе автоматических потенциометров.
В ферродинамических преобразователях угловые перемещения преобразуются в пропорциональные значения э. д. с. переменного
59
провод, состоящий из ярма /,
1 2 5
Рис. 36. Ферродинамический преобразователь:
/ — ярмо; 2 — сердечник; 3 — нсподниж-ный плунжер; 4 — подвижный плунжер;
5 — рамка; 6 — катушка; 7 — клеммная колодка
тока. Схемы с ферродинамическим преобразователем (так же, как и дифференциально-трансформаторные) применяются при измерении давления, расхода, уровня и других величин, значения которых могут быть преобразованы в угол поворота рамки ферродинамичес-кого преобразователя.
Ферродинамический преобразователь (рис. 36) имеет магнито->деч»ика 2, неподвижного плунжера 3 и подвижного плунжера 4 с контргайкой. В сердечнике укреплены агатовые подпятники, в которых на кернах установлена рамка 5. Концы обмотки рамки выведены спиральными пружинами. На магнитопроводе помещена катушка 6 с обмотками возбуждения wY и смещения ал2. Концы обмоток возбуждения, смещения и рамки 5 подключены к клеммной колодке 7. При питании обмотки возбуждения ayj переменным током в магпитопроводе возникает магнитный поток, индуктирующий в рамке 5 и обмотке w2 э. д. с. Величина магнитного потока зависит от воздушного зазора между плунжерами 3 и 4. Изменяя этот зазор перемещением плунжера 4, можно изменять величину магнитного потока, а следовательно, и э. д. с. рамки и обмотки возбуждения и>2.
Рамка 5 связана с чувствительным элементом первичного прибора. Когда плоскость рамки совпадает с линией NN, магнитный поток не пересекает рамку и э. д. с. в ней не индуктируется. При отклонении рамки от нейтрального положения в ней индуктируется э. д. с., равная
Blr ср, ' /2 т
где со — угловая частота тока;
В — магнитная индукция;
I = 2bwp — длина провода рамки, пересекаемого магнитным полем;
b — ширина ярма;
wp — число витков рамки;
г — средний радиус рамки;
Ф — угол поворота рамки.
60
При неизменных ю и В выходная величина ферродинамического преобразователя ЕР пропорциональна углу поворота ф или величине измеряемого параметра.
На рис. 37 приведена принципиальная измерительная схема на ферродинамических преобразователя х.
В схему передачи входят: входной преобразователь ДФ1 пер-
вичного измерительного прибора, компенсирующий преобразователь ДФ2 вторичного прибора, электронный усилитель .9У и реверсивный двигатель РД.
Рамка ДФ1 связана с измерительной системой первичного прибора; ее угол поворота <р* и э. д. с. Ех определяются значением измеряемой величины. Рамка ДФ2 связана с РД, а через него с отсчетным устройством вторичного прибора. Обмотки возбуждения преобразователей первичного и вторичного приборов включены последовательно. Рамки ДФ1 и ДФ‘2 включены навстречу друг другу и на вход электронного усилителя подается разность э. д. с. А£ ---=
- £2.
Если А£ =7^0, то РД поворачивает рамку ДФ2 до наступления равновесия, когда А£ = 0. Одновременно РД поворачивает стрелку вторичного прибора.
На рис. 38 показана принципиальная схема, в которой выходным преобразователем первичного прибора является дифференциально-трансформаторный преобразователь (ДИ).
Обмотки возбуждения преобразователей ДИ и ДФ также соединены последовательно и питаются напряжением со стороны вторичного прибора.
61
Сердечник преобразователя ДИ связан с измерительной системой первичного прибора и его перемещение преобразуется в э. д. с.,
пропорциональную измеряемому
Рис. 38. Схема дистанционной передачи с дифференциально-трансформаторным выходным преобразователем первичного прибора:
/ — первичный прибор; 2 — вторичный прибор
параметру. Выходная обмотка преобразователя ДИ и рамка преобразователя ДФ включены так, что па вход электронного усилителя подается разность э. д. с. ДЕ Ej— Е2. Если ЛЕ =^0, то РД поворачивает рамку ДФ до момента, когда ЛЕ = 0.
В ферродинамических преобразователях линейность зависимости индуктируемой э. д. с. от угла поворота рамки имеет большие границы, чем у днф-
ференцналыю - трансформаторных преобразователей. Это является преимуществом ферродинамических преобразователей.
Сельсинные передающие системы
Описанные выше системы передачи показаний приборов на расстояние пригодны в тех случаях, когда линейное или угловое перемещение, созданное первичным преобразователем, сравнительно невелико. Однако в ряде случаев возникает необходимость передавать на расстояние сигналы первичных преобразователей в виде нескольких оборотов выходной оси преобразователя или линейное перемещение в несколько метров. В частности, такая задача ставится при передаче показаний уровнемеров. Решение подобных задач возможно путем применения сельсинной передачи.
Сельсин представляет собой миниатюрную трехфазную электрическую машину, сходную с синхронным генератором или двигателем (рис. 39). Чаще всего ротор сельсина имеет одну обмотку (обмотка возбуждения), а статор три обмотки (обмотки синхронизации), оси которых сдвинуты на 120° одна относительно другой.
Такой вариант осуществляется в случае, если ротор имеет явно выраженные полюса, а статор не явно выраженные полюса.
Обмотки возбуждения питаются переменным током, а концы трехфазной обмотки соединяются между собой. Так как обмотка ротора сельсина-датчика (Д) питается переменным напряжением, то переменный магнитный поток, создаваемый ею, будет индукти-
62
Рис. 39. Сельсинная телепередача:
ровать в обмотках статора э. д. с., величины которых определяются выражениями:
Ej.7 — ЕШ1П. cosa;
£>.7 — Е।пх cos i/z -| 120 ), ЕзЛ = E„ias cos (а 4- 240°), где а — угол поворота ротора датчика;
Е,|1ах — значение э. д. с. в случае совпадения осей обмоток ротора и статора.
Аналогичная картина происходит и в сельсине-приемнике (П):
Еуп ~ Ерик cos р,
E2// = £,„axcos (р + 120°); £:Ш = £,„ах cos (0 4-240°), где р — угол поворота ротора приемника.
Если положение обоих роторов относительно обмоток статоров будет одинаково, т. е. а — р, то токи, создаваемые в этих обмотках, будут также равны вследствие равенства наводимых э. д. с. При этом синхронизирующий момент Мг„н равен нулю.
При отклонении ротора сельсина-датчика от согласованного положения, т. е. при р у=а, наводимые в соответствующих обмотках э. д. с. будут различны по величине: Ед Следовательно, токи. возникающие во встречно включенных обмотках статора, не будут уравновешиваться. Возникающий при этом синхронизирующий момент Мс„н = Afnuix sill О, где 0 ; а — Р;
А1П1ах — наибольший момент при 0
Следовательно, при постоянном значении магнитного потока однофазной обмотки ротора выходная э.д. с., наводимая в трехфазной обмотке, пропорциональна углу поворота ротора.
Ротор сельсина-датчика связан с чувствительным элементом измерительного прибора, а ротор сельсина-приемника — с отсчетной' частью вторичного прибора.
Наша промышленность выпускает несколько типов сельсинов на различные частоты питающего напряжения, обычно от 50 до 500 щ. Наиболее существенные недостатки описанных выше контактных сельсинов — трение в контактных щетках, что приводи!' к погрешностям в работе сельсина и снижает ее надежность.
/ — ротор', 2 — статор1,
63
Бесконтактные сельсины лишены этих недостатков. Бесконтактный сельсин (рис. 40, а) состоит из стального кольца /, внутри которого вмонтированы статорные обмотки 2. Обмотка 3 ротора 4 неподвижна, но магнитный поток, возбуждаемый ею, может направляться поворотом оси ротора 4 и фасонным ферромагнитным лепестком 5. Обмотки ротора сельсина-датчика Д и сельсина-приемника П (рис. 40, б) питаются от общего источника переменным током. Статорные обмотки соединены встречно.
и
-<z
Рис. 40. Бесконтактная сельсинная телепередача:
а — устройство сельсина: / — стальное кольцо; 2 — обмотка статора, з — обмотка ротора1, 4 — ротор; .5 — ферромагнитный Лепесток; б — схема включения сельсинов
Если углы поворота датчика ротора и ротора приемника равны (что соответствует определенному положению лепестка 5), то э. д. с., индуктированные в статорных обмотках датчика (£\д и £'2д), равны э. д. с., индуктированным в статорных обмотках приемника, {Ellt и Е2ц), и синхронизирующий момент равен нулю.
При повороте ротора сельсина-датчика на некоторый угол, отличный от угла поворота ротора сельсина-приемника, возникнут токи, которые создадут синхронизирующий момент. Последний повернет ротор сельсина-приемиика на тот же угол, па который повернулся ротор сельсина-датчика.
§ 11. ПРЕОБРАЗОВАТЕЛИ ЭЛЕКТРИЧЕСКОЙ ДИСКРЕТНО-ЦИФРОВОЙ ВЕТВИ (ЧАСТОТНЫЕ)
Из частотных преобразователей наибольшее распространение получили струнные. Частотный струнный преобразователь (рис. 41) представляет собой электрически изолированную металлическую струну ], расположенную между полюсными наконечниками 2
64
постоянного магнита. Один конец струны жестко закреплен, а второй конец связан с подвижным рычагом 3.
Измеряемый параметр воздействует на чувствительный элемент измерительного блока и преобразуется в пропорциональное усилие F, воспринимаемое рычагом 3 и связанной с ним струной 1. Если по струне преобразователя пропускать ток, то вследствие взаимодействия тока с магнитным полем постоянного магнита возникают поперечные колебания струны. Частота этих колебаний зависит от натяжения струны под действием усилия F, создаваемого изменением параметра.
Рис. 41. Преобразователь электрической дискретно-цифровой ветви (частотный):
/ — струна; 2 — полюсы постоянного магнита; 3 — рычаг; 4 — усилитель; 5 — опора; 6 — пружина
Собственная частота поперечных колебаний струны преобразуется усилительным устройством 4 в частоту переменного тока (выходной сигнал преобразователя). Собственная частота поперечных колебаний струны в зависимости от усилия F (величина измеряемого параметра)
<'5) где I — длина струны;
р — плотность материала струны;
а — поперечное сечение струны.
Струна обычно выполняется из вольфрамовой проволоки диаметром 0,05 мм и длиной около 20 мм.
Нелинейность преобразователя |см. формулу (15)| может быть скомпенсирована нелинейностью чувствительного элемента измерительного блока. Для повышения линейности преобразователя иногда применяют две струны, которые под действием чувствительного элемента измерительного блока подвергаются натяжению в противоположных направлениях.
Амплитуда выходного сигнала преобразователя при нагрузке 1 ком равна 0,4 в. Настройка преобразователя производится изме-
3 Казаков и др.
65
нением активной длины рычага 3, закрепленного в опоре 5. Начальное значение выходного сигнала (1500 г/{) устанавливается при помощи пружины 6 (корректор пуля). Дальность передачи сигнала до 10 км.
§ 12. ПРЕОБРАЗОВАТЕЛИ ПНЕВМАТИЧЕСКОЙ ВЕТВИ
В пневматических преобразователях основным элементом является преобразователь типа «сопло—заслонка» (рис. 42). В трубку 1 небольшого диаметра непрерывно поступает воздух поддавлением
Рис. 42. Ппсвмопреобразователь типа «сопло — заслонка»:
/ — трубка; 2 — дроссель постоянного сечения; 3 — сопло; 4 — заслонка; 5 — манометр
рп и, пройдя через дроссель постоянного сечения 3, выходит в атмосферу через сопло 3. Перед соплом 3 находится заслонка 4. Если изменять зазор Ах между соплом и заслонкой, то давление воздуха
Ни/Мг
Рис. 43. Зависимость давления воздуха pi в междроссельноы пространстве системы сопло — заслонка от величины зазора Лх между соплом и заслонкой
Pi в междроссельном пространстве будет также изменяться: увеличиваться с приближением заслонки к соплу и уменьшаться при удалении заслонки от сопла. Изменение давления р\ контролируется манометром 5.
Зависимость между зазором Ах и давлением р2 показана на рис. 43. Как видно из графика рис. 43, весьма небольшие перемещения заслонки (до 0,08 мм) вызывают значительные — от 0,0098 до 0,1078 MhIm2- (0,1—1,1 кГ хм1) — изменения давления воздуха pv.
Принципиальная схема пневматического преобразователя силовой компенсации показана на рис. 44.
66
Измерительный параметр воздействует на чувствительный элемент измерительного блока и преобразуется в пропорциональное усилие F. Под действием усилия F посредством рычага / заслонка 2 перемещается по отношению сопла 3. Изменение зазора между соплом и заслонкой вызывает изменение давления воздуха, поступающего к соплу через дроссель 7 постоянного сечения. Одновременно
изменяются давление в камере а усилительного
гиб мембран 8 и 9 и положение впускного 10 и выпускного 11 шариковых клапанов. Это вызывает изменение давления в камерах б и в. Давление в камерах бив будет изменяться до тех пор, пока заслонка2под действием сильфона 4 не займет такого положения относительно сопла, когда усилие на сильфоне не
пневмореле,
про-
Рис. 44. Схема пневматического преобразователя силовой компенсации: / и 5 — рычаги; 2 — заслонка; .? — сопло; 4 — сильфон; 6 t— пружина; 7 — дроссель постоянного сечения; 8 и 9 — мембраны; 10 — нпускной клапан; // — выпускной клапан; м — манометры
станет равным усилию F измерительного блока. Настройка преобразователя на заданный диапазон измерения производится перемещением сильфона вдоль рычага 5. Точная установка начального значения выходного сигнала преобразователя 0,02 Мн/м2 (0,2 кПсм2) производится при помощи пружины 6 (корректор нуля). Предельное расстояние передачи пневматического сигнала 300 м.
На рис. 45 показана принципиальная схема пневматического преобразователя, выполненного по схеме компенсации перемещений. Первичное реле включает в себя дроссель 7 постоянного сечения, сопло 3 и заслонку 2, связанную с чувствительным элементом первичного прибора 1.
3* 67
Усилитель состоит из двух последовательно включенных дросселей и привода сильфонного типа. Дроссельная система включает сопла 9 и 11. Через первое в усилитель поступает сжатый воздух под давлением р0; через второе воздух выходит из усилителя в атмосферу. Между отверстиями сопел расположен тарельчатый клапан 10, от положения которого зависят площади проходных сечений воздушных потоков обоих дросселей, а следовательно, и сопротивления последних. Привод усилителя представляет собой концентрически расположенные один в другом сильфоны 6 и 8, находящиеся
Рис. 45. Схема пневматического преобразователя компенсации перемещений:
/ — измерительный: блок; 2 — заслонка; .'Л 9 и // — сопла; 4 — трубка; 5 и 16 — камеры; 6, 8 и 17 — сильфоны; 7 — дроссель постоянного сечения; 10 — тарельчатый клапан; 12 и 18 — пружины; 13, II — штоки; 15 ~ трубка ко вторичному прибору; а — отверстие для соединения межсильфонной камеры с атмосферой; ЛЬ и М 2 — манометры
внутри камеры 5. Тарельчатый клапан соединен с подвижной торцовой стенкой сильфонов штоком 13.
Пространство между обоими сильфонами соединено с атмосферой каналом. Усилитель соединяется с первичным реле и вторичным прибором соответственно трубками 4 и 15. На сильфонный привод действуют два взаимно уравновешивающих усилия от давлений Pi и р2.
В равновесном состоянии
Pi = P2 или PiS6c = p2sM,.,
где s6c и sllc — площади диа соответственно большего и меньшего сильфонов.
Отсюда
__*бс
Pl -mi
68
Из конструктивных соображений величину s~~, называемую коэффициентом усиления давления, принимают равной 4.
Перемещение заслонки зависит от положения чувствительного элемента первичного прибора или от величины контролируемого параметра.
Когда заслонка прикроет сопло, давление над сильфоном возрастет, сильфоны сожмутся, тарельчатый клапан 10 приоткроет отверстие сопла 9 и прикроет отверстие сопла 11. Давление р2 увеличится и при полностью закрытом сопле 11 достигнет максимального значения.
При отходе заслонки от сопла происходит обратное явление: отверстие сопла 9 прикрывается, а отверстие сопла И открывается. Сопротивление выходу воздуха в атмосферу уменьшается, поэтому давление р2 падает и при полностью открытом сопле 11 доходит до пуля.
Пропорциональность между изменением давления воздуха и изменением измеряемого параметра осуществляется следующим образом. При увеличении давления р2 сжимается сильфон 17, который через шток 14 отводит заслонку от сопла 3, препятствуя полному прикрытию сопла.
Давление питающего воздуха контролируется манометром Mlt а давление воздуха на выходе прибора — манометром Al-j. В качестве вторичных приборов могут применяться любые измерители давления, а также вторичные приборы АУС и «Старт» (см. вторую часть этой книги).
Глава IV ИЗМЕРЕНИЕ ДАВЛЕНИЯ
§ 13. ОБЩИЕ СВЕДЕНИЯ
Под давлением в общем случае понимают предел отношения нормального составляющего усилия к площади, на которую действует усилие. При равномерном распределении усилий давление р равно частному от деления нормального составляющего усилия давления р
F на площадь s, на которую это усилие действует, т. е. р = Величина единицы давления зависит от выбранной системы единиц.
В международной системе единиц (СИ) за единицу давления принято давление в один ньютоп на один квадратный метр (н/м2).
В практике измерений получил распространение ряд внесистемных единиц давления, а именно:
а) килограмм на квадратный сантиметр (кПсм2) или техническая атмосфера:
1 кГ^см2 =-- 98066,5 н/л2;
б) миллиметр ртутного столба (мм рт. ст.) — давление столба ртути высотой в 1 мм на свое основание при температуре ОС и ускорении силы тяжести 980,665 см!сек-.
1 мм рт. ст. = 133,322 н/м2-,
в) миллиметр водяного столба (мм вод. ст.) — давление водяного столба высотой в 1 мм на свое основание при температуре 4°С и ускорении силы тяжести 980,665 см/сек-.
1 мм вод. ст. = 1 кГ!м2 = 9,80665 н)м2.
Различают давление абсолютное ра и избыточное ри. Абсолютное давление ра — параметр состояния вещества (жидкостей, газов и паров). Избыточное давление представляет собой разность между абсолютным ра и барометрическим рб давлением.
Если абсолютное давление ниже барометрического, то
Р^Рб-Ра, где рв — давление (разрежение), измеренное вакуумметром. 70
Приборы для измерения давления обычно классифицируются по принципу действия и по роду измеряемой величины.
По принципу действия промышленные приборы для измерения давления делятся на следующие основные группы:
1) жидкостные, основанные на уравновешивании измеряемого давления гидростатическим давлением столба жидкости;
2) пружинные, измеряющие давление по величине деформации упругого элемента.
По роду измеряемой величины приборы для измерения давления и разрежения делятся на следующие типы:
1) манометры—приборы для измерения избыточного давления; 2) вакуумметры — приборы для измерения разрежения (вакуума);
3) мановакуумметры — приборы для измерения избыточного давления и вакуума;
4) напоромеры — приборы для измерения малых избыточных давлений;
5) тягомеры — приборы для измерения малых разрежений;
6) тяго-напоромеры — приборы для измерения малых давлений и разрежений;
7) дифференциальные манометры — приборы для измерения разности давлений;
8) барометры — приборы для измерения барометрического давления.
§ 14. ЖИДКОСТНЫЕ ПРИБОРЫ
Жидкостные приборы отличаются простотой устройства и обращения, невысокой стоимостью и относительно высокой точностью измерения. Благодаря этим достоинствам жидкостные приборы широка применяются для лабораторных и технических измерений. В качестве рабочей жидкости в зависимости от величины измеряемого давления или разрежения, также от химических свойств измеряемого вещества применяютс i вода, спирт, ртуть и минеральные масла.
Жидкостные приборы служат ддя измерения небольших избыточных давлений, разрежений, разности давлений, а также атмосферного давления. Для технических измерений жидкостные приборы выполняются в виде комбинированных жидкостно-механических приборов. К ним относятся поплавковые, кольцевые и колокольные.
Поплавковые приборы представляют собой U-образные жидкостные манометры, у которых одно из колен расширено и в нем помещен поплавок. Поплавок связан со стрелкой, движущейся по шкале. Поплавковые приборы чаще всего используются как дифференциальные, т. е. для измерения перепада давления между двумя точками.
Па рис. 46 показана схема поплавкового дифференциального манометра (дифманометра). При подаче давления щ в правый сосуд и давления р2 в левый, когда р, >• рг, уровень жидкости в правом
71
сосуде понизится на высоту h2, а в левом повысится на Е;ысоту hl. Разность давлений pj — р.2 уравновешивается весом столба жидкости высотой
/l = /Zj+/!2. (16)
Условие равновесия выражается формулой
Pi ~ Р2 = Л (Р “ Pi) (17)
где
р — плотность рабочей жидкости в дифманометре;
Pj — плотность среды, находящейся над жидкостью в дифманометре;
g — ускорение силы тяжести.
„ „ , , л£)'- , nd2
В сосудах цилиндрической формы h2 — =Л1 -4-, откуда hi = h2^ (18)
тогда
*=0+5).
где D — диаметр широкого сосуда; d — диаметр узкого сосуда.
Заменяя в уравнении (17) h его выражением, получим р, - р2== Л2 (1 (р - Pj)g-
Так как для данного прибора величина 1 + постоянна, а ть плотностей р — рг, то, выражая эти величины постоянными коэффициентами k и klt получим pj — p2 = kklh2, т. е. разность давлений может быть выражена величиной перемещения поплавка.
При неизменных размерах широкого сосуда можно, изменяя диаметр и высоту узкого сосуда, в известных границах изменять предел измерения разности давлений. Из совместного решения уравнений (16) и (18) имеем
= С9)
По уравнению (19) определяется необходимый диаметр узкого сосуда при заданных значениях h, h2 и D.
Поплавковые дифманометры-расходомеры имеют различные пределы изме-
рения перепада давления от 392 н/м2 (40 мм вод. ст.) до 5,88 104 н/м2 (1,6 кГ/см2) и рассчитаны на различные статические
72
Рис.
47. Схема кольцевого прибора:
кольцо; 2 — перегородка; 3 — опора; 4 и 5 — подводящие (соединительные) трубки; 6 — груз
давления. Приборы с различными пределами измерения отличаются только по внутреннему диаметру минусового сосуда и его высоте.
Кольцевые приборы. Кольцевыми приборами можно измерять малые давления, разрежения и разности давлений.
На рис. 47 показана схема кольцевого дифманометра. Он состоит из полого замкнутого кольца /, разделенного вверху перегородкой 2. Кольцо подвешено при помощи ножевой опоры 3 в геометрическом центре О. С обеих сторон перегородки 2 в кольцо входят трубки 4 и 5, служащие для соединения полостей кольца с измеряемым давлением или разрежением. К нижней части кольца прикреплен груз 6. Полость кольца до половины заполнена жидкостью (водой, маслом, ртутью).
При соединении обеих полостей кольца с пространствами, в которых имеются давления р и pY (причем р > Pi), разность уровней будет пропорциональна разности давлений
Р~Р1=/ф£, где р — плотность затворной жидкости.
В то же время разность давлений р — plt действующая па перегородку 2, создает вращающий момент
М/, = (Г Pi) яг.
где
s — площадь перегородки;
г — средний радиус кольца.
Под действием этого момента точки опоры по часовой стрелке. Поворот кольца создает противодействующий момент
кольцо поворачивается вокруг
Ма = Ga sin q>,
оси вращения до центра тяжести груза G; кольца.
где а — расстояние от Ф — угол поворота
При уравновешивании обоих моментов * 1 кольцо остановится в новом положении равновесия:
Л4р = Л40; (р — pj sr = Ga sin <p
или
P~Pi = ~s- sniqj. (20)
Так как вес груза и геометрические размеры кольца — величины постоянные, то уравнение (20) можно представить в форме
р- p1 = /2sinq). (21)
1 Без учета противодействующего момента от спиральных подводящих трубок.
73
Наибольшая возможная величина верхнего предела измерения разности давлений определяется главным образом размерами кольца и плотностью затворной жидкости и обычно составляет 33325 н/лг'2 (250 мм рт. ст.) для приборов с ртутным заполнением и 2452,5 н!м2 (250 мм вод. ст.) для приборов с водяным или масляным заполнением. Изменение пределов измерения осуществляется сменой уравновеши-
вающего груза.
Приборы с водяным и масляным заполнением предназначаются для работы при избыточном давлении до 0,049 Мн/м2 (0,5 кГ/см2)',
Рис. 48. Схема колокольного прибора:
/ — сосуд: 2 — колокол; 3 —
трубка
приборы с ртутным заполнением до (0,98 4- 9,8) Мн/м2 (10—100юГ/ел2).
Основная допустимая погрешность кольцевых приборов не превышает 1,1—1,5% от верхнего предела измерения.
В приборах низкого давления подводящие трубки выполняются из резины; они создают очень небольшой противодействующий момент, которым можно пренебречь. В приборах среднего давления применяют спиральные подводящие трубки из бронзы или стали; витки трубок на
виты в противоположных направле-в спиралях возникают усилия, дейст-
циях. При повороте кольца
вующие в разные стороны и взаимно уравновешивающиеся.
Преимуществом кольцевых приборов перед поплавковыми является отсутствие уплотнительных устройств в передаточном механизме, что особенно важно для приборов, рассчитанных на высокие давления. Недостаток — давление подводится через трубки, которые могут вносить погрешность в измерения.
Передача показаний на расстояние производится с помощью фер-родинамической системы.
Колокольные приборы используются для измерения малых давлений и разрежений (тягомеры и напоромеры) и в качестве дифференциальных манометров.
Принципиальная схема колокольного прибора показана на рис. 48. Прибор состоит из сосуда /, содержащего жидкость, в которую погружен колокол 2. Под колокол введена трубка 3, служащая для подачи под колокол давления или разрежения. При подаче под колокол давления он поднимается, так как на него действует дополнительное усилие, направленное вверх и равное Дрз, где Ар = ~ Pi — Pz — избыточное давление под колоколом, аз — площадь
дна колокола.
Чтобы превратить эту систему в измерительный прибор, необходимо обеспечить однозначность величины перемещения колокола и изменения давления. Для этого в систему должно быть введено
74
Рис. 49. Схема колокольного прибора с уравновешивающим грузом
переменное противодействующее усилие, функционально зависящее от перемещения колокола. В существующих колокольных приборах используют для создания противодействующего усилия архимедову силу, груз или пружину. Наиболее простой случай — использование колокола с толстыми стенками (уравновешивание архимедовой силой). При этом колокол будет подниматься до тех пор, пока усилие, действующее на колокол, не уравновесится изменением выталкивающей силы.
Условие равновесия
kps = Hg(pt -- p2)sc или
= (Р1 - р2),
где
Н — высота подъема колокола под действием Ар;
g — ускорение силы тяжести;
зс — площадь кольцевого сечения стенок колокола;
Pj — плотность жидкости в сосуде / (рис. 48);
р2 — плотность среды над колоколом.
На рис. 49 показана принципиальная схема колокольного прибора с уравновешивающим грузом. В этом случае колокол подвешивается к коромыслу, к которому крепится груз G. При изменении давления или разрежения колокол опустится на некоторую величину Н. При этом коромысло и шток груза G повернутся на некоторый угол ф.
Условие равновесия
Ap.s/ cos ф = Ga sin ф,
или
Др = tg ф =/г tg ф, (22)
где
а — расстояние центра тяжести груза G от точки опоры коромысла;
s — площадь сечения колокола;
I — длина плеча коромысла АВ (рис. 49).
Сила тяжести колокола не входит в уравнение (22), так как она уравновешена силой тяжести контргруза q.
Уравновешивание пружиной применяется в дифференциальных манометрах. Чувствительным элементом дифманометра (рис. 50) является тонкостенный колокол 1, частично погруженный в жидкость и подвешенный на пружине 2. Так как плотность материала коло
75
кола обычно больше плотности рабочей жидкости, то в начальном положении (при = р2 = 0) пружина будет несколько растянута, уравновешивая разность между силой тя-
Рис. 50. Схема колокольного дифманометра с пружинным и роти воде й ст
внем:
жести колокола и гидростатическим давлением жидкости на его стенки. По мере нарастания перепада давления начинается подъем колокола, вызывающий вначале ликвидацию растянутого положения пружины, а затем перевод ее в сжатое состояние.
Е'.сли считать площадь кольцевого сечения стенок колокола s, = 0, т. е. пренебречь влиянием гидростатического давления на стенки колокола, то
где
Н — величина подъема колокола;
s — площадь дна колокола;
/ — колокол; 2 — пружина
z— жесткость пружины.
§ 15. ПРУЖИННЫЕ ПРИБОРЫ
Пружинные манометры, вакуумметры, мановакуумметэы, тягомеры, напоромеры, дифференциальные манометры и барометры составляют обширную группу приборов для технических измерений.
Принцип действия пружинных приборов основан на уравновешивании измеряемой величины усилиями деформации различного вида упругих элементов. Величина деформации упругого элемента с помощью различных устройств преобразуется в угловое или линейное перемещение указателя по шкале прибора.
Ценными свойствами пружинных приборов являются простота устройства и эксплуатации, универсальность, портативность и большой диапазон измеряемых величин.
По виду пружины приборы можно разделить на следующие группы.
1. Приборы с трубчатой пружиной (рис. 51, а и б). Приборы этого типа часто называются пружинными в отличие от мембранных и сильфонных приборов.
2. Мембранные приборы, в которых преобразование давления в перемещение осуществляется упругой мембраной (рис 51, в), анероидной или мембранной коробкой (рис. 51, г, д), блоком анероидных или мембранных коробок (рис. 51, е, ж).
3. Приборы, в которых измеряемое давление предварительно преобразуется в усилие, действующее на пружину. К этой группе приборов относятся;
76
а) пружинно-мембранные с гибкой мембраной (рис. 51, з);
б) пружинно-сильфонные (рис. 51, и).
4. Приборы, у которых упомянутое преобразование осуществляется гармониковой мембраной (сильфоном) (рис. 51, к).
Рис. 51. Типы пружинных приборов
Приборы с трубчатыми пружинами. Наибольшее применение имеют приборы с одновитковой трубчатой пружиной. Такие пружины
применяются в манометрах, вакуумметрах, мановакуумметрах и дифманометрах.
Пределы измерения, классы точности, допустимая температурная погрешность и некоторые другие параметры на отдельные виды приборов устанавливаются стандартами. Основная деталь прибора с одновитковой трубчатой пружиной — согнутая по дуге окружности трубка 1 эллиптического или плоскоовалыюго сечения (рис. 52). Одним концом трубка заделана в держатель 2, оканчивающийся ниппелем с резьбой для присоединения к источнику давления.
Рис. 52. Приборы с одновитковой трубчатой пружиной:
а — схема трубчатой пружины: 1 — трубка; 2 — держатель; б — эллиптическое поперечное сечение трубки; в — плоско-овальное поперечное сечение трубки
Внутри держателя проходит канал, который соединяется с внутренней полостью трубки 1.
77
Принцип действия приборов с трубчатой пружиной основан на свойстве трубчатой криволинейной пружины с некруглым поперечным сечением изменять свою кривизну при изменении избыточного давления или разрежения внутри трубки. Если в трубку подать избыточное давление, то кривизна трубки уменьшится и она распрямится; при создании разрежения внутри трубки кривизна ее возрастает и она скручивается.
Перемещение свободного конца трубки (например, из положения / в положение //) посредством передаточного механизма преобразуется в поворот стрелки показывающего прибора или во входное перемещение электрического или пневматического вторичного преобразователя.
Свойство изогнутой трубки некруглого сечения изменять величину изгиба при изменении давления в ее полости является следствием изменения формы сечения. Под действием давления внутри
трубки эллиптическое или плоскоовальное сечение, деформируясь, приближается к круглому сечению. При этом малая ось эллипса или овала (Ь) увеличивается, а большая ось (а) — уменьшается.
Рис. 53. Схема манометра с миоговитко-вой трубчатой пружиной
Устройство вакуумметра и мановакуумметра с одновит-ковой трубчатой пружиной ничем не отличается от устройства манометра.
Рабочие приборы с круговой шкалой изготовляются показывающими, а также с электрическими (аналоговыми и частотными) или пневматическими (с силовой компенсацией) преобразователями для передачи на расстояние.
Электрические и пневматические преобразователи давления для передачи показаний на расстояния аналогичны показанным на рис. 34, 41 и 44.
Манометр с многовитковой (геликоидальной) трубчатой пружиной (рис. 53) отличается от одновитковых формой рабочего органа, имеющего вид цилиндрической (винтовой) спирали с 6—9 витками, свернутой из плоской трубки. Геликоидальную трубку можно рассматривать как ряд одновитковых трубок, соединенных последовательно.
Вследствие этого перемещение свободного конца трубки значительно больше, чем у манометра с одновитковой пружиной. Маномет} ы с геликоидальной трубчатой пружиной применяются главным образом как самопишущие.
Мембранные приборы. Приборы с чувствительным элементом в виде гофрированных мембран, мембранных коробок и мембранных блоков широко применяются для измерения небольших избы
78
Рис. 54. Сильфонный чувствительный элемент
точных давлений и разрежений (манометры, напоромеры н тягомеры), а также перепадов давления (дифманометры-расходомеры).
Зависимость прогиба от давления в общем случае нелинейна. Величина прогиба мембраны является сложной функцией действующего на нее давления, геометрических параметров ее (диаметра, толщины, числа, формы и размеров гофров), а также модуля упругости материала мембраны.
Гофрировка мембраны увеличивает ее жесткость, т. е. уменьшает прогиб при одинаковом давлении, по одновременно она преобразует характеристику мембраны в линейную.
Ввиду сложности расчета в большинстве случаев характеристика мембраны подбирается опытным путем.
С целью увеличения прогиба в приборах для малых давлений (разрежений) мембраны попарно соединяют (сваркой или спайкой) в мембранные коробки, а коробки — в мембранные блоки. Мембранные коробки могут быть анероидными (рис. 51, г) и манометрические (рис. 51, <Э). Анероидные коробки, применяющиеся в барометрах и барографах, герметизированы и заполнены воздухом или каким-либо газом при очень малом давлении, обычно около 1,33 н!м2 (0,01 мм рт. ст.). Деформация анероидной коробки происходит под действием разности давления окружающей ее среды и давления в полости коробки.
Так как давление в полости коробки очень мало, то можно считать, что ее деформация определяется атмосферным давлением. Величина деформации анероидной или манометрической коробки равна ставляющих ее мембран.
Манометрические мембранные коробки применяются в тягомерах и напоромерах для измерения небольших давлений и разрежений — до 15 680 н/м2 (1600 мм вод. ст.).
Пружинно-мембранные приборы отличаются от описанных выше
сумме деформаций со-
тем, что в них мембрана, воспринимающая давление, выполнена из гибкого материала (вялая мембрана) и давление уравновешивается вследствие упругости цилиндрической винтовой пружины. Гибкие мембраны обычно изготовляются из резины с тканевой основой, из ткани с газонепроницаемой пропиткой или из гибких пластмасс. Вялые мембраны применяются в тягомерах, напоромерах, тяго-папоромерах и дифманометрах.
К недостаткам мембранных приборов относятся небольшой ход
подвижного центра чувствительного элемента, значительные отклонения жесткости мембран от рас четной и трудпост» регулирования жесткости мембран. Эти недостатки мембранных чувствительных
79
элементов устраняются в приборах, построенных по схеме силовой электрической или пневматической компенсации.
Сильфонные приборы. Чувствительным элементом сильфонных приборов является цилиндрический тонкостенный сосуд с кольцевыми складками (гофрами), называемый сильфоном (рис. 54).
При действии осевой нагрузки (внешнего или внутреннего давления) длина сильфона изменяется, увеличиваясь или уменьшаясь в зависимости от направления приложенной силы. В пределах рабочего диапазона давлений деформация сильфона приблизительно пропорциональна действующему усилию, т. е. характеристика сильфона близка к линейной.
Существенные недостатки сильфонов — значительный гистерезис и некоторая нелинейность характеристики. Для увеличения жесткости, уменьшения влияния гистерезиса и нелинейности часто внутрь сильфона помещают винтовую цилиндрическую пружину (см. рис. 51, и). Жесткость пружины обычно в несколько раз превышает жесткость сильфона, благодаря чему резко уменьшается влияние гистерезиса сильфона и нелинейности его характеристики.
Относительно большая величина рабочего хода сильфона позволяет применять их в регистрирующих приборах.
Сильфонные приборы применяются также в качестве дифференциальных манометров. В дифманометрах, предназначенных для измерения перепада при высоких статических давлениях, для защиты от перегрузки применяют сдвоенные сильфоны, полости которых заполнены жидкостью.
§ 16. ОСНОВНЫЕ СВЕДЕНИЯ О ВЫБОРЕ, УСТАНОВКЕ И ЭКСПЛУАТАЦИИ ПРИБОРОВ ДАВЛЕНИЯ
Большое разнообразие измерений давления (разрежения) и специфических условий,.в которых производятся измерения на химических заводах, не позволяет давать исчерпывающие указания о выборе, установке и эксплуатации приборов в производственных условиях. Однако из многообразия случаев измерения можно выделить некоторые общие требования, выполнение которых может обеспечить правильность измерений в любых условиях.
До начала измерения давления необходимо узнать примерную его величину, пределы колебаний, если оно переменное или пульсирующее, физико-механические свойства среды, требуемую точность измерения. Зная эти условия, можно выбрать надлежащий тип прибора.
Чтобы избежать снижения точности измерения и обеспечить достаточно продолжительный срок службы пружинных приборов, допустимое рабочее давление не должно превышать 3/4 верхнего предела шкалы. Для иепружиппых приборов допустимое1 рабочее давление должно быть возможно ближе к верхнему предельному значению шкалы прибора.
80
Место отбора давления на объектах измерения необходимо выбирать так, чтобы результаты измерения не искажались динамическим воздействием потока и завихрениями, которые образуются вблизи местных сопротивлений (колена, тройники, вентили, регулирующие органы).
В случае измерения давления газа или пара в горизонтальных и наклонных трубопроводах давление следует отбирать из области, лежащей выше оси трубопровода, а при измерении давления жидкостей — ниже оси трубопровода.
Импульсные линии, соединяющие места отбора давления с манометрами, должны прокладываться с уклоном в сторону места отбора, если измеряемая среда представляет собой газ или иар (этим исключаются жидкостные пробки внутри трубок), или в сторону манометра, если измеряемая среда — жидкость (исключаются газовые пробки). Длина импульсных линий не должна превышать 30 м, если измеряемое давление не более 9,8-102н/зи2 (100мм вод, ст.), а при измерении более высоких давлений длина линий не должна быть больше 50 м.
Рекомендуется применять соединительные трубки с внутренним диаметром 10 —12 мм, но не менее 8 мм.
Перед пружинным манометром о
трехходовой крап, с помощью которого манометр плавно включается в работу; производится поверка нулевой точки шкалы, ио-верка показания манометра в рабочей точке (с помощью подключения контрольного прибора), а также продувка импульсных линий.
В химической промышленности манометры часто устанавливаются на теплообменниках, выпарных, экстракционных и дистилляционных аппаратах, автоклавах, сушилках и т. и. В таких случаях необходима защита воспринимающей части манометра (пружины, мембраны) от действия высокой температуры газа или пара. Для этого перед манометром устанавливают так называемую сифонную трубку в виде буквы U (рис. 55, а) или кольцевой петли (рис. 55, б). При измерении давления нагретого газа сифонную трубку заполняют водой.
Если жидкость, газ, пар или его конденсат химически активны ио отношению к материалу воспринимающей части прибора, то перед манометром устанавливают разделительное устройство в виде
ы
мембраны или защитного сосуда, заполненного разделительной (инертной) жидкостью (рис. 56).
Давление измеряемой среды через разделительную мембрану или разделительную жидкость передается манометру. Разделительная жидкость не должна химически взаимодействовать с измеряемой
средой и смешиваться с пей; разделительная жидкость должна быть
нейтральной по отношению материала соединительных трубок, раз-
делительных устройств
и манометра.
Рис. 56. Разделительные устройства:
В зависимости от свойств измеряемой среды и условий эксплуатации в качестве разделительных жидкостей применяются: вода, технические масла, глицерин, водные растворы глицерина, этиленгликоль, четыреххлористый углерод, керосин и др.
Для защиты от нагревания лучеиспусканием манометр должен быть либо удален от аппарата на достаточное расстояние, либо закрыт
экраном, поглощающим теп-
а — мембранное устройства; б — защитный
сосуд
ловые лучи.
Сотрясения, толчки и виб-
рации сокращают срок службы прибора, ускоряют изнашивание деталей узла передачи манометра. Поэтому при измерении давления в аппарате, подверженном
сотрясениям, манометр следует устанавливать на отдельном щитке. Перед манометром необходимо устанавливать приспособление (буфер), сглаживающее колебания. Такое приспособление чаще всего представляет собой дроссель в форме игольчатого вентиля или диафрагмы с очень маленьким отверстием.
Жидкостные приборы устанавливают строго по отвесу или уров-
ню.
Глава V ИЗМЕРЕНИЕ РАСХОДА
§ 17. ВИДЫ РАСХОДОМЕРОВ
Расходом вещества в данный момент или мгновенным расходом называется отношение количества вещества, протекающего за некоторый промежуток времени, к этому промежутку времени при условии, что величина последнего стремится к нулю. Объемный расход выражается в м:Чсек (Q), а массовый — в кг/сек (Q„).
Приборы, измеряющие расход, называются расходомерами. Они могут быть снабжены приспособлением — интегратором, позволяющим суммировать мгновенные расходы. В этом случае расходомер позволяет измерять количество вещества за любой промежуток времени.
В производстве чаще всего применяются следующие виды расходомеров:
1) расходомеры переменного перепада давления, измеряющие расход путем дросселирования потока сужающим устройством постоянного сечения, устанавливаемым в трубопроводе;
2) расходомеры переменного уровня, измеряющие высоту уровня жидкости, протекающей через сосуд,
3) расходомеры постоянного перепада давления, измеряющие расход путем дросселирования потока сужающим устройством переменного сечения;
4) электромагнитные (индукционные) расходомеры.
§ 18. РАСХОДОМЕРЫ ПЕРЕМЕННОГО ПЕРЕПАДА ДАВЛЕНИЯ
Наиболее распространенным и изученным методом измерения расхода жидкости, пара и газа является метод переменного перепада давления. Измерение расхода этим методом основано на изменении потенциальной энергии (статического давления) вещества, протекающего через местное сужение в трубопроводе. В измерительной технике сужающими устройствами служат нормальные диафрагмы и сопла.
83
Диафрагма (рис. 57) представляет собой тонкий диск А, установленный в трубопроводе так, чтобы его отверстие диаметром d было концентрично внутренним стенкам трубопроводе. Сужение потока начинается до диафрагмы, затем на некотором расстоянии за
Рис. 57. Характер потока и график распределения статического давления р по длине трубопровода I при установке диафрагмы в трубопроводе
ней благодаря действию сил инерции поток сужается до минимального сечения d„, а далее постепенно расширяется до полного сечения трубопровода (внутренний диаметр D). Перед диафрагмой и за
Рис. 58. Нормальное сопло
ней образуются зоны с вихревым движением, причем зона вихрей за диафрагмой больше, чем перед ней.
Давление струи около стенки трубопровода несколько возрастав'.' из-за подпора перед диафрагмой и понижается до минимума за диафрагмой в наиболее узком сечении струи II—II. Далее по мере
расширения струи давление потока около стенки снова повышается, но не достигает прежнего значения. Остаточная потеря части давления р„ объясняется главным образом потерями энергии на трение и завихрения. Разность давлений р\ — р% является перепадом, зависящим от расхода среды, протекающей через трубопровод.
Нормальное сопло (рис. 58) представляет собой короткую воронкообразную насадку, вставленную концентрично в трубопровод.
Сопло Вентури (рис. 59) состоит из профильной входной, цилиндрической средней и конической выходной частей. Профильная
84
часть сопла Вентури выполняется такой же, как у нормального
сопла.
Характер потока и распределение давления одинаково во всех типах сужающих устройств. Вследствие того, что струя, протекающая через сопло, почти не отрывается от его профилированной части, потери на завихрения возникают в основном за соплом, поэтому остаточная потеря давления рп по сравнению с диафрагмой
в нем меньше.
Еще меньше потери давления р„ в сопле Вентури, профиль которого близок к сечению потока, проходящего через сужение.
Из трех типов сужающих устройств наиболее часто применяется диафрагма.
При измерении расхода по методу переменного перепада давления протекающее вещество должно целиком заполнять все сечение трубопровода и сужающего устройства; поток в трубопроводе должен быть прак
тически установившимся, фазовое состояние вещества не должно изменяться при прохождении через сужающее устройство (т. е. жидкость не должна испаряться, пар должен оста-
ваться перегретым и т. п.).
Теория и основные уравнения метода переменного перепада одинаковы для всех видов сужающих устройств, различны лишь некоторые коэффициенты в этих уравнениях, определяемые опыт
ным путем.
Выведем уравнение расхода для случая, когда в трубопроводе установлена диафрагма и по трубопроводу протекает несжимаемая жидкость, плотность которой до и после сужения остается неизменной.
Выделим в трубопроводе два сечения (см. рис. 57): !, где еще не ощущается влияния сужающего устройства па характер потока в трубопроводе, и // — в месте наибольшего сжатия струи, которое находится на некотором расстоянии за диафрагмой.
Обозначим через s(, s0, s., соответственно площади поперечного сечения трубопровода, отверстия диафрагмы и наиболее суженного места струи в м2; ръ ра, р2 — абсолютные давления жидкости в соответствующих сечениях потока в н/м1; щ, v2 — средние скорости в тех же сечениях потока в м!сек.
Из условия неразрывности струи следует
или
— SnV0 — S2V2
so _ ц s2_________
S1 Va So V2
85
Назовем Sn = m модулем сужающего устройства, а - = р st s0
коэффициентом сжатия струи; тогда
= т и г’о
Из этих отношений находим
= и u0 = |W2.
(23)
Для несжимаемой жидкости при постоянной плотности, отсутствии потерь на трение и на обмен энергии с окружающей средой составим для сечений / и // горизонтального трубопровода уравнение Бернулли:
где -Р и — статический напор, выражающий значение потенциальной энергии;
и'! v'i
2 и - — скоростной напор, выражающий значение кинетической энергии;
р — плотность жидкости в кг!мл.
Подставляя в уравнение (24) значение v1 из уравнения (23) и решая уравнение (24) относительно и2, получим
= j7f==^ '|/” (Pi - Р2) м!сек. (25)
При выводе этого уравнения абсолютные давления р\ и р2 соответствуют сечениям st и s2, в действительности же их замеряют непосредственно у стенки трубопровода до и после сужающего устройства и они соответствуют давлениям pt и р.,.
Кроме того, при выводе уравнения (25) не учитывалось влияние вязкости, потери энергии на трение. Поэтому при переходе к действительным условиям в правую часть уравнения (25) вводится поправочный коэффициент
Тогда уравнение (25) для реальной жидкости в сечении s„_ примет вид
|/ 2 (Pi — р2) м!сек.
Jz 1 — У р 1 f
Учитывая уравнение объемного расхода для несжимаемой жидкости
Q = v2s2 = u2ps0, получим
п 1,2 1 2
| р(Р1 Р^>
86
Безразмерное выражение 1 —-. — а называется коэффи-) 1 /a-ji2 циентом расхода.
Коэффициент расхода учитывает неравномерное распределение скоростей по сечению потока, обусловленное вязкостью жидкости и трением ее о стенки трубопровода, измерение давления не в центре потока, а у стенок трубопровода и использование в уравнении объемного расхода сечения s0 вместо неопределенного наименьшего сечения струи s2.
Следовательно, уравнения расхода для несжимаемой жидкости в объемных и массовых единицах имеют вид
Л 9
Q = as0 1/ n (Pi - Рг) м3<сек\ (26)
Qм = «s(> V 2р (pt - р2) кг)сек. (27)
При измерении расхода сжимаемых сред (газов и паров) необходимо учитывать уменьшение плотности р вследствие понижения давления ври проходе сред через сужающее устройство, в результате чего массовый расход (а также объемный, отнесенный к начальному значению плотности р) несколько уменьшается.
Уравнения расхода для газов и паров:
Q = aes() |/ (р; --р2) м3!еек; (28)
<?.„ = l/Z 2Pi (Pl - Рг) кг: сек, (29)
где е — поправочный множитель па расширение измеряемой среды, называемый коэффициентом расширения;
р , — плотность среды перед входом потока в отверстие диафрагмы.
Уравнения расхода для газов и паров отличаются от уравнений расхода для несжимаемой! жидкости только поправочным множителем е. Следовательно, уравнения (28) и (29) имеют общий характер и пригодны также для несжимаемой жидкости, если положить 8=1.
Коэффициент расширения
e = f ! , "i, Х],
\ Pi /
где % — показатель адиабаты.
Значения коэффициента к для различных сужающих устройств и разных случаев измерения определяются по номограммам.
Для сопел наиболее суженная часть струи практически может быть принята равной сечению ниш-лирической части сопла .
1
1юэтому ц = 1 на —
J 1 | 1 — т2
87
Для упрощения расчета в уравнениях расхода (26) и (27) площадь отверстия сужающего устройства su заменяют диаметром этого отверстия d, выраженным в м.
В практике удобнее пользоваться часовым, а не секундным рас-„ nd-
ходом. Если заменить s() = 4 , то уравнение расхода принимает вид
Q = 31и"л4|/2.<хвг/2 | . 10:*at-d2 ] м3 г-, (28а)
Qu 4 • 103 aerf2 I' р (pt — р_) кгч. (29а)
Обозначив внутренний диаметр трубопровода через D и зная, что ^- = щ, уравнения (28а) и (29а) можно представить в следующем виде: ______
Q 4 103 ae/nO2 м3^ (30)
Q„ 4 103asmD2 [ р (Pi - р2) кг 'ч. (31)
Если правые части этих уравнений разделить на 106, то диаметр будет выражен в милллиметрах.
Выражения (30) и (31) являются основными расчетными формулами.
Из уравнений (30) и (31) следует, что для однозначной зависимости расхода от переменного перепада давления на сужающем устройстве необходимо постоянство всех остальных величин, входящих в эти уравнения. Величина s(l — постоянная для всех случаев.
Коэффициент расхода а зависит от геометрической формы сужающего устройства п физических свойств потока измеряемой среды.
Коэффициент расхода определяется опытным путем. Так как для всего многообразия потоков и сужающих устройств экспериментально определить коэффициент расхода практически невозможно, то используют теорию подобия, из которой следует, что если потоки геометрически подобны, то при равных значениях числа Рейнольдса коэффициенты расхода для этих потоков равны. Для перенесения результатов измерения одного иотока на другой должно быть соблюдено геометрическое и гидродинамическое подобие. Для одноименных сужающих устройств геометрическое подобие достигается равенством величины т и одинаковым соотношением размеров поверхностей, ограничивающих рассматриваемые потоки.
Гидродинамическое подобие потоков достигается равенством значений чисел Рейнольдса. В общем случае коэффициент расхода для сужающих устройств выражается зависимостью
a = f (Re, tri). (32)
Экспериментально установлено, что коэффициент расхода зависит от характера движения только до определенного значения
88
числа Рейнольдса, выше которого он определяется только величиной т.
На рис. 60 и 61 приведены диаграммы для определения исходных коэффициентов расхода а„ диафрагм и сопел при различных значениях т в зависимости от числа Рейнольдса.
На рис. 62 и 63 приведены значения исходного коэффициента расхода для сужающих устройств в зависимости от величины т для гладких труб. Для шероховатых труб исходный коэффициент расхода обычно увеличивается и в значение а„ необходимо вносить
Рис. 60. Зависимость исходного коэффи- Рис. 61. Зависимость исход-циента расхода для диафрагм от числа Рей- ного коэффициента расхода нольдса нормального сопла и сопла
Вентури от числа Рейнольдса
поправку. Если входная кромка диафрагмы закруглена или скошена, то коэффициент расхода также увеличивается.
В общем случае к исходному коэффициенту расхода вносят две поправки: на шероховатость трубы и на затупление входной кромки.
Для диафрагм коэффициент расхода
а = а„/<2/<3, (33)
где /<2 — поправочный множитель, учитывающий влияние шероховатости внутренней поверхности трубопровода;
К3 — поправочный множитель на затупление входной кромки диафрагмы.
Для нормальных сопел и сопел Вентури
а = а„К2- (34)
В общем случае шероховатость повышает коэффициент расхода, влияние поправки на шероховатость возрастает с уменьшением диаметра трубы.
89
На рис. 64 и 65 приведены значения поправочного множителя К., па шероховатость стенок трубопровода для диафрагм, нормальных сопел и сопел Вентури. Как видно из графиков, влияние шероховатости следует учитывать только для труб диаметром D < 300 мм.
Рис. 62. Зависимость исходного коэффициента расхода диафрагм от т
Рис. 63. Зависимость исходного коэффициента расхода нормальных сопел и сопел Вентури от величины т
Рис. 64. Зависимость поправочного множителя Кч на шероховатость трубопровода для диафрагм от величины т
Рис. 65. Зависимость поправочного множителя /<2 на шероховатость трубопровода для нормальных сопел и сопел Вентури от величины т
Поправочный множитель К.д на затупление входной кромки диафрагмы определяется по графику, приведенному па рис. 66 . Для нормальных сопел и сопел Вентури /<3 1, так как их входные от-
верстия имеют обтекаемую форму.
Поправочный множитель г, учитывающий расширение газов и пара, определяется по номограммам, приведенным на рис. 67 90
и 68. Для определенного вещества и сужающего устройства величины т и % постоянны н коэффициент в будет изменяться с изменением перепада давления Ар, характеризующим степень изменения плотности среды при прохождении через сужающее устройство.
Чем больше -, тем больше изменение плотности и тем больше
множитель к отличается от единицы. В большинстве случаев для диафрагм в >0/37, а для нормальных сопел и сопел Вентури в >0,9.
Пунктирные ломаные липин тод нахождения в в зависимости Показатель адиабаты реальных газов зависит от температуры и давления. Значения показателя адиабаты в зависимости от температуры и давления приводятся в справочной литературе.
Для всех стандартных сужающих устройств величины коэффициента расхода в широком диапазоне достаточно достоверны и воспроизводимы. Поэтому эти сужающие устройства можно применять без индивидуальной градуировки.
Стандартная диафрагма — наиболее простое и распространенное сужающее устройство.
от
на номограммах показывают ме-
Рис. 66. Зависимость поправочного множителя К.!, учитывающего затупление входной кромки диафрагмы от величины т
Она применяется без индивидуальной градуировки для трубопроводов диаметром D л. = 50мм при условии, что 0,05 > m > 0,7.
Диафрагму можно изготовлять из любых материалов, при выборе которых следует учитывать свойства измеряемой среды. Разъедание острой кромки диафрагмы резко изменяет коэффициент расхода а, измерения становятся неточными. Поэтому для рабочей части диафрагмы необходимо выбирать материал, химически устойчивый к среде и стойкий против механического износа. Наиболее подходящие материалы — сталь марки Х17 (для среды с температурой до 400° С) и сталь марки Х18Н9Т (для среды с температурой свыше 400° С).
Нормальные сопла могут применяться без индивидуальной градуировки в трубопроводах диаметром D > 50 мм при условии, что 0,05 > т - ' 0,65. Сопла особенно удобны при измерении расхода газов и перегретого пара, если — >0,1, а также при измерении
расхода пара высокого давления в трубопроводах диаметром D > 200 лии. По сравнению с диафрагмами они менее чувствитель-
на
ны к коррозии, загрязнениям и обеспечивают несколько большую точность измерения.
Сопла Вентури могут применяться без индивидуальной градуировки для диаметров трубопроводов D лэ 50 мм при одновременном соблюдении условия 0,05 sc; т 0,6.
Связь между дифманометром-расходомером и сужающим устройством осуществляется двумя соединительными трубками. Обыч-
но применяются медные, алюминиевые, стальные и пластмассовые (из винипласта или полиэтилена) трубки. В трубках не должно быть горизонтальных участков, где могут накапливаться воздух, газы или влага. Поэтому трубки прокладываются с уклоном.
Существенное значение имеют диаметр и длина соединительных трубок. При малых диаметрах трубки легко засоряются, в них образуются водяные пробки или воздушные пузыри. Вследствие повышенного сопротивления в трубках увеличивается время запаздывания дифманометра. Слишком большие диаметры нежелательны из-за громоздкости проводки и увеличения расхода металла, а в случае измерения расхода газа также из-за вредного влияния объ
92
ема на время запаздывания дифманометра. Рекомендуется применять трубки с внутренним диаметром 10—12 мм, но не менее 8 мм.
Длина соединительных трубок зависит от расстояния между сужающим устройством и дифманометром. С увеличением длины соединительных трубок увеличивается запаздывание в передаче импульсов, затрудняются поддержание герметичности и удаление
Рис. 68. Поправочный множитель а на расширение среды для нормальных сопел
воздуха или влаги из трубок. Поэтому всегда надо стремиться к коротким соединительным линиям, применяя в необходимых случаях дифманометры с дистанционной передачей па вторичный прибор. Длина соединительных трубок не должна превышать 50 м.
В процессе работы соединительные трубки необходимо периодически продувать с целью их очистки и удаления из них воздуха (в случае измерения расхода пара) или влаги (при измерении расхода газа). Для этой цели у дифманометров рекомендуется устанавливать продувочные отводы с запирающими кранами. Соединительные трубки должны быть защищены от действия источников тепла и от возможного замерзания.
Трубки соединяются накидными гайками, резьбовыми муфтами и фланцами. Такие соединения допускают быструю разборку при
93
чистке трубок. В длинных линиях необходимо иметь несколько разборных соединений, желательно вблизи мест изгибов, где скорее может возникнуть необходимость в чистке. Соединения пайкой трубок из цветных металлов и сваркой — стальных трубок можно применять только в том случае, если нет опасности засорения.
В частных случаях для обеспечения правильного измерения перепада давления и для создания условий, гарантирующих надежную и бесперебойную работу дифманометра, приходится вводить некоторые вспомогательные устройства, устанавливаемые обычно в сое-
Рис. 69. Схема трубных соединений сужающего устройства с дифманометром при измерении расхода воды и неагрессивных жидкостей (дифманометр ниже сужающего устройства):
а — чистая жидкость; б — жидкость, содержащая взвешенные частицы; / — дифманометр: 2 — сужающее устройство;. 3 — запорные вентили; 4 — соединительные трубки;
5 — отстойные сосуды
динительных трубках между сужающим устройством и дифманометром. Тип этих устройств зависит от рода измеряемой среды (жидкость, газ, пар), ее свойств и характеристик (агрессивность, загрязненность и т. н.).
При измерении расхода воды и неагрессивных, невязких жидкостей дифманометр рекомендуется устанавливать ниже сужающего устройства (рис. 69). Такой способ установки исключает возможность попадания воздуха или газа из протекающей по трубопроводу жидкости в соединительные трубки и дифманометр.
Если из измеряемой жидкости легко выпадают осадки, то перед дифманометром необходимо устанавливать отстойные сосуды.
Если необходимо располагать дифманометр выше сужающего устройства, то рекомендуется вначале направить трубки вниз
94
В дренаж а)
(рис. 70), а затем уже вести их вверх. Направленные вниз Н-образ-иые вертикальные участки трубок предохраняют от попадания воздуха или газа в соединительные линии. Горизонтальные ветви обеих линий должны иметь уклон и обязательно лежать в одной плоскости, чтобы отрицательное давление, создаваемое столбами жидкости в вертикальных ветвях, было равно для обеих ветвей. В верхних точках системы необходимо устанавливать газосборппки с вентилями для продувки.
При измерении расхода горячих жидкостей (/>120 С) необходимо включать в соединительные линии уравнительные сосуды, заполненные водой .Оба сосуда и боковые отверстия в них должны находиться па одной высоте. Уравнительные сосуды должны иметь достаточный объем, чтобы температура воды в них изменялась незначительно.
При измерении расхода агрессивных жидкостей с целью защиты дифманометра и соединительных трубок применяют мембранные устройства, разделительные сосуды и иодачу защитного газа через соединительные трубки. Такие же
схемы установки применяют и при измерении расхода вязких жидкостей, загрязненных сред и т. и. Схема установки дифманометра с применением разделительных сосудов показана па рис. 71.
Схема трубных соединений при непрерывной продувке газом показана на рис. 72. Продуваемый газ (воздух, азот) должен иметь большее давление, чем в производ
ственном трубопроводе. Через обе соединительные трубки должно проходить одинаковое количество газа. Контроль скорости про
Рис. 70. Схема трубных соединений сужающего устройства с дифманометром при измерении расхода воды и неагрессивных жидкостей (дифманометр выше сужающего устройства):
а — чистая жидкость; б — жидкость, содержащая извещенные частицы; / — дифманометр; 2 — сужающее устройства1 'Ч — запорные вентили; 4 — соединительные трубки; 5 — отстойные сосуды; б — ловушки конденсата; 7 — газосборникн
дувки газа осуществляется по количеству пузырьков газа с помощью контрольных стеклянных стаканчиков (установленных в линиях соединительных трубок) или ротаметров. Оптимальный расход газа па продувку каждой трубки составляет 50—200.и! ч, причем большие значения берут для дифманометров большего измерительного объема.
95
При измерении расхода воздуха или неагрессивного газа дифманометр рекомендуется устанавливать выше сужающего устройства. При такой установке конденсат, образовавшийся в соединительных трубках, стекает в трубопровод.
Если дифманометр приходится устанавливать ниже сужающего устройства (рис. 73), то в соединительных трубках накапливается конденсат, который может закупорить трубки и исказить результаты измерений. Чтобы избежать этого, необходимо в низших точ-
Рис. 71. Схема трубных соединений сужающего устройства с дифманометром при измерении расхода агрессивных жидкостей:
а — дифманометр установлен ниже сужающего устройства; б — дифманометр установлен выше сужающего устройства; 7 — дифманометр; 2 — сужающее устройство; 3 — запорные вентили; 4 — соединительные трубки-, ,5 — разделительные сосуды; 6 — газосборпики
ках соединительных линий устанавливать ловушки конденсата (рис. 73, б). Соединительные линии на всем протяжении должны иметь односторонний уклон, причем при установке дифманометра ниже сужающего устройства должен быть обеспечен уклон трубок к ловушкам как со стороны сужающего устройства, так й со стороны дифманометра. В случае необходимости (при очень длинной трассе) устанавливается несколько ловушек. Изготовляются ловушки из отрезка трубы диаметром 50—100 мм, емкостью примерно 1000 смл', для периодического выпуска конденсата ловушки снабжаются сливным отверстием, закрываемым пробкой или вентилем.
96
При измерении расхода агрессивных, загрязненных или запыленных газов необходимы также мембранные устройства или разделительные сосуды.
При измерении расхода пара для защиты дифманометра от действия высокой температуры соединительные трубки заполняют водой, что достигается установкой в непосредственной близости от сужающего устройства конденсационных (уравнительных) сосудов,
Рис. 72. Схема трубных соединений сужающего устройства с дифманометром при измерении расхода агрессивной жидкости методом непрерывной продувки воздухом или газом:
а — дифманометр установлен ниже сужающего устройства; б — дифманометр установлен выше с.ужаюи;о.го устройства; / — дифманометр*, 2 — сужающее устройство; 3 — запор -ные вентили; 4 — соединительные трубки; 5 — ротаметры или контрольные стаканчики:
6 — редуктор; 7 — показывающие манометры
которые вместе с участками соединительных линий между сосудами и дифманометром заполняются конденсатом (водой).
Схемы соединительных линий при измерении расхода пара, когда дифманометр расположен ниже и выше сужающего устройства, показаны па рис. 74 и 75.
Всегда, когда это возможно, дифманометр следует устанавливать ниже сужающего устройства, так как в этом случае отпадает необходимость в установке газосборников для удаления из трубок воздуха, выделившегося из паропровода или случайно попавшего в них.
4 Казаков и др.
97
К диафрагме
К прибору
S'-'
Рис. 73. Схема трубных соединений сужающего устройства с дифманометром, установленным ниже сужающего устройства при измерении расхода воздуха или неагрессивного газа:
а — измерение расхода сухого газа; б — измерение расхода влажного газа; / — дифманометр; 2 — сужающее устройство; 3 — запорные вентили: 4 — соединительные трубки; 5 — ловушки конденсата
Рис. 74. Схема трубных соединений сужающего устройства с дифманометром при измерении расхода пара (дифманометр ниже сужающего устройства):
а — без отстойных сосудов; б — с отстойными сосудами; / — дифманометр; 2 — сужающее устройство; 3 — запорные вентили; 4 — соединительные трубки; 5 — конденсационные сосуды; 6 — отстойные сосуды
f)
Рис. 75. Схема трубных соединений сужающего устройства с дифманометром при измерении расхода пара (дифманометр выше сужающего устройства):
а — с продувкой в верхних и нижних том-ках; б — с продувкой в верхних точках; / — дифманометр; 2 — сужающее устройство; 3 — запорные вентили; 4 — соединительные трубки; 5— конденсационные сосуды; 6 — отстойные сосуды; 7 — газо-сборники
Оба конденсационных сосуда, а также боковые отверстия в них должны находиться на одной высоте. Давление у сужающего устройства целесообразно отбирать по среднему диаметру трубопровода. В этом случае обеспечивается постоянство и равенство высот столбов конденсата в соединительных трубках до сужающего устройства и после него. Трубки, соединяющие сужающее устройство с конденсационными сосудами, на участках вблизи сосудов нужно располагать горизонтально и на одном уровне. Конденсационные сосуды должны иметь достаточный объем для того, чтобы при любом колебании расхода уровень конденсата всегда находился в пределах сосудов.
При необходимости установки дифманометра выше сужающего устройства в высших точках системы устанавливают газосборники с продувочными вентилями для сбора и удаления воздуха, выделив шегося в импульсных трубках.
При наличии взвешенных частиц в паре в нижних точках соединительных линий устанавливают отстойные сосуды.
§ 19. РАСХОДОМЕРЫ ПЕРЕМЕННОГО УРОВНЯ
Принцип работы расходомеров переменного уровня основан на измерении высоты уровня жидкости в сосуде при свободном истечении ее через отверстие в боковой стенке сосуда. Эти приборы применяются в химической промышленности для измерения расхода особо активных жидкостей. Они могут также применяться для измерения расхода пульсирующих потоков и жидкостей, смешанных с га юм.
Во всех случаях измерение расхода жидкости расходомерами переменного уровня производится при атмосферном давлении, что значительно ограничивает их применение.
Расходомер переменного уровня включает в себя приемную емкость (сосуд) с отверстием истечения той или иной формы и измеритель уровня жидкости. В качестве измерителей уровня могут применяться любые стандартные приборы. Приемными емкостями служат обычно цилиндрические или прямоугольные сосуды со щелевым отверстием истечения. В таких сосудах расход определяется по высоте уровня жидкости над нижней кромкой отверстия.
Расходомер, показанный на рис. 76, представляет собой прямоугольный корпус 2 с двумя штуцерами: боковым — для ввода измеряемой жидкости и нижним — для слива жидкости в открытый приемник. Внутри корпус разделен глухой перегородкой, к которой герметично прикреплен щит с профилированной щелью. В зависимости от измеряемой жидкости корпус расходомера изготовляется из различных материалов: из стали марки Х18Н9Т, из стали, футерованной свинцом, из фаолита. Уровень жидкости измеряется пьезометрическим методом (см. гл. VI).
7*
99
В сосуд перед сливной щелью погружена в защитном чехле пьезометрическая трубка 1, через которую непрерывно продувается воздух. Количество подаваемого воздуха контролируется с помощью контрольного стаканчика 4, а давление воздуха поддерживается постоянным посредством редуктора 6. Для очистки воздуха служит фильтр 7.
Давление в пьезометрической трубке однозначно связано с плотностью и высотой столба жидкости перед щелью, а следовательно, и с массовым расходом жидкости. Величина гидростатического напора в пьезометрической трубке измеряется дифманометром 3.
Рис. 76. Схема расходомера с щелевым отверстием истечения:
/ — пьезометрическая трубка; 2 — корпус; 3 — дифманометр;
4 — контрольный стаканчик; 5 — манометр; 6 — редуктор; 7 — фильтр
Характерная особенность расходомера, показанного на рис. 76,— равномерная шкала вторичного прибора.
Если разбить поперечное сечение сливной части в плоскости отверстия истечения на элементарные горизонтальные площадки ds, каждая из которых имеет бесконечно малую высоту dh,, то можно применить основное уравнение расхода (26), взятое в дифференциальной форме:
dQ — ads р72gh = axdh р42gh, (35)
где х — ширина элементарной площадки;
pg
100
Интегрируя это уравнение в пределах от h = 0 до h, получим величину расхода Q при данной высоте уровня жидкости h:
h
Q = а 2g\ х |/ hdh. о
(36)
Для решения уравнения (36) необходимо знать зависимость между х и h. Чтобы получить равномерную шкалу прибора, между Величиной расхода Q и высотой уровня п должна быть линейная зависимость
Q — kh, (37)
где k — коэффициент пропорциональности, определяемый из усло-, Qlliax
вия: 1г = --.
%iax
Продифференцировав уравнение (37) и приравняв правые части уравнений (37) и (35), найдем зависимость между шириной щеле
вого отверстия х и его высотой h:
axdh V 2gh = kdh, откуда
_ ____k______ Qmax 1_______
~ ai'2g)'h ~«l'2g Ainax Vh
(38)
При заданном максимальном расходе Qmax и при выбранном /г11|ах, задаваясь текущим значением h, можно найти значение х.
Форма отверстия истечения, построенная по уравнению (38), показана на рис. 77. Как следует из уравнения (38), при h -> 0 ширина отверстия х стремится к бесконечности. Следо
Рис. 77. Форма отверстия истечения, обеспечивающая пропорционал ь ность между расходом и высотой уровня жидкости в приемном сосуде:
а — симметричного отверстия; б — несимметричного отверстия
вательно, нельзя получить равномерную шкалу на всем диапазоне высоты от 0 до /imax- Поэтому практически начальная часть отверстия истечения выполняется прямоугольной формы с шириной Xj (рис. 77). Этот начальный участок с неравномерной шкалой составляет небольшую величину, составляющую 5—10% Qmax-
Коэффициент расхода щелевого расходомера зависит от геометрической формы щели и особенно от остроты входной кромки щелевого отверстия. При ориентировочных расчетах коэффициент расхода а принимается равным 0,6. Точное значение коэффициента расхода определяется индивидуальной градуировкой прибора.
101
§ 20. РАСХОДОМЕРЫ ПОСТОЯННОГО ПЕРЕПАДА ДАВЛЕНИЯ
Наиболее распространенными приборами группы расходомеров постоянного перепада давления являются ротаметры. Шкалы ротаметров практически равномерны, ими можно измерять небольшие расходы, потерн давления в них незначительны и не зависят от величины расхода.
Схема ротаметра показана на рис. 78. Проходящий через ротаметр снизу поток жидкости или газа поднимает поплавок до тех пор, пока расширяющаяся кольцевая щель между телом поплавка и стенками конусной трубки не достигнет величины, при которой действующие на поплавок силы уравновешиваются и он устанавливается на той или иной высоте в зависимости
Рис. 78. Схема ротаметра с конусной трубкой
от величины расхода.
На поплавок ротаметра действуют осевые силы, направленные в противоположные стороны.
Сверху вниз действуют:
1) сила тяжести VI: png, где \'„ — объем поплавка;
р,, — плотность материала поплавка;
g — ускорение силы тяжести;
2) гила от давления потока на верхнюю плоскость поплавка p2s, где р2 — среднее давление потока на единицу верхней поверхности поплавка;
s — площадь наибольшего поперечного
сечения поплавка.
Снизу вверх на поплавок действуют также две силы:
1) сила от давления потока на нижнюю поверхность поплавка Pis;
2) сила трения потока о поплавок kv^s#, где k — коэффициент сопротивления, зависящий от числа Рейнольд-
са и степени шероховатости поверхности;
vK — средняя скорость потока в кольцевом канале, охватывающем боковую поверхность поплавка;
s6 — боковая поверхность поплавка;
п — показатеть степени, зависящий от величины скорости потока.
Поплавок уравновешен в том случае, когда
Vnpng + p'lS = kv“s6 + pis
или
^nPng — kvnKS6
P\-P2 =--------;------
(39)
Если допустить, что vK при всех расходах остается постоянной (с увеличением расхода увеличивается площадь кольцевого канала),
102
то правая часть уравнения (39) будет постоянной, так как остальные величины являются для данного прибора постоянными.
Следовательно, разность давлений на поплавок р, — р., = const, т. е. ротаметр является прибором постоянного перепада давления. Разность статических давлений р, — р.2 не будет постоянной, так как на нее влияет величина динамического давления потока.
Разность статических давлений, действующих на поплавок:
Pi - Рч = 7 ~ ФР g15 > (40)
где (р — коэффициент сопротивления поплавка, зависящий от его формы;
р — плотность вещества, протекающего через ротаметр;
Vi — средняя скорость потока в сечении /—/.
С увеличением расхода увеличивается скорость vlt а следовательно, и величина динамического давления.
Если составить уравнение Бернулли для сечений /—/ и II—II (рис. 78) и уравнение неразрывности струи, то из совместного решения этих уравнений можно получить уравнение расхода
Q = ask |/"isVn^s" — м^/сек и
Q =as, 1/ кг!сек,
где sK — площадь кольцевого отверстия, образованного конусной трубкой и верхней частью поплавка.
Так как величины под корнем практически можно считать постоянными, то их можно заменить коэффициентом k. Тогда
Q = asKk.
Эта зависимость линейна и поэтому шкала ротаметра будет равномерной.
Коэффициент расхода а для ротаметров зависит от большого числа величин, которые, как правило, не поддаются аналитическому определению. Поэтому каждый ротаметр подвергается экспериментальной градуировке. Такая градуировка шкалы ротаметра точна лишь в тех случаях, если при эксплуатации значения всех величин, входящих в уравнение расхода, соответствуют градуировочным условиям.
Ротаметры выполняются со стеклянной или металлической трубкой. Шкала в ротаметрах со стеклянной трубкой вытравлена на самой трубке и отсчет ведется по верхней горизонтальной плоскости поплавка.
В верхней части поплавка часто делают косые прорези (рис. 78), благодаря чему поплавок вращается вокруг вертикальной оси. При
103
Рис. 79. Схема ро-таметра с электрической дистанционной передачей:
/ — корпус; 2 — диа фрагма; 3 — поплавок; 4 — шток; 5 — сердечник; 6 — раздел и тел ьн а я тр убк а: 7 — катушка
вращении поплавок центрируется внутри трубки, не соприкасаясь со стенками; его чувствительность повышается
Ротаметры со стеклянной трубкой изготовляются на давления жидкости или газа, не превышающие 0,58 Мн/м2 (6 кГ/см2). При более высоких давлениях жидкости или газа и для измерения расхода пара применяют ротаметры с металлической трубкой. Эти ротаметры выполняются с электрической и пневматической дистанционной передачей.
На рис. 79 приведена принципиальная схема ротаметра с электрической дифференциальнотрансформаторной передачей показаний на расстояние. Измерительная часть ротаметра состоит из цилиндрического металлического корпуса 1 (сталь Х18Н9Т) с диафрагмой 2, в отверстии которой перемещается конусный поплавок 3, жестко насаженный на шток 4. На верхнем конце штока укреплен сердечник 5 дифференциально-трансформаторного преобразователя. Сердечник помещается внутри разделительной трубки 6, снаружи которой находится катушка 7 преобразователя.
В другой модели ротаметра поплавок перемещается внутри конической трубки. Бесшкаль-ные ротаметры работают в комплекте с показывающим или регистрирующим вторичным дифференциально-трансформаторным прибором.
Ротаметры рассчитаны на рабочее давление до 6,27 Мн!м2 (64 кПсм2). Пределы измерения (в расчете на воду) от 0,7 -10 s до 0,44-10 2 мя!сек.
Для измерения расхода во взрывоопасных и пожароопасных условиях применяют ротаметры с пневматической дистанционной передачей.
Принципиальная схема показывающего ротаметра приведена на рис. 80.
Прибор состоит из двух основных частей: собственно ротаметра и механизма пневматической дистанционной передачи. Собственно ротаметр состоит из конического поплавка /, диафрагмы 2 и цилиндрической металлической трубки <3 из стали Х18Н9Т (имеются модели ротаметров с поплавком, перемещающимся внутри конусной трубки). На штоке 4 закреплены два цилиндрических постоянных магнита, обращенные друг к другу . одноименными полюсами.
Внутренние магниты 5 перемещаются вместе с поплавком внутри трубки 6, выполненной из немагнитного материала. Снаружи трубку 6 охватывает вилка, составленная из двух плоских, укрепленных на рычаге 8, наружных магнитов 7. Перемещение поплавка с помо-
104
щыо магнитной муфты, образованной внутренними магнитами 5 и наружными магнитами 7, передается через рычаг 8 стрелке 9, показывающей величину расхода на шкале 10.
Следовательно, ротаметр без пневматического преобразователя представляет собой показывающий прибор со шкаловым отсчетным устройством, предназначенным для местного измерения.
Рис. 80. Схема ротаметра с пневматической дистанционной передачей:
I — поплавок; 2 — диафрагма; 3 — цилиндрическая металлическая трубка; 4 и 24 — штоки; 5 — внутренние магниты;
6 — трубка из немагнитного материала; 7*— наружные магниты; 8 и 25 — рычаги; 9
— стрелка; 10 — шка-
ла; // — тяга; /2 — угловой рычаг; 13 — заслонка- !4 — сопло;
15 — дроссель постоянного сечения; 16, 17 (наружный и внутренний) и 23 — сильфоны; 18 — заслонка; 19 — входное сопло; 20 — камера; 21 — выходное сопло; 22 — кожух; 26 и 27 — манометры; 28 — демпфер
Механизм пневматической дистанционной передачи состоит из пневмопреобразователя, работающего по схеме компенсации перемещений и вторичного усилительного пневмореле (см. рис. 45). Вторичный прибор устанавливается на расстоянии до 250 м.
Серийно изготовляемые модели ротаметров с пневмопередачей рассчитаны на рабочее давление до 6,27 Мн/я? (64 к.Г!см2) и на различные расходы по воде: от 0,44- 10 * до 0,44-10 2 мЛ1сек..
Имеются аналогичные пневматические индикаторы расхода (ПИР), предназначенные для измерения расхода агрессивных, горючих и токсичных жидкостей.
105
§ 21. РАСХОДОМЕРЫ ЭЛЕКТРОМАГНИТНЫЕ (ИНДУКЦИОННЫЕ)
элек-
Рис. 81. Схема тромагнитного расходомера:
/ — трубопровод; 2 и 3 — полюсы магнита; 4 — измерительный прибор
Принцип действия электромагнитных расходомеров основан на измерении э. д. с., индуктируемой в потоке электропроводной жидкости под действием внешнего магнитного поля.
Принципиальная схема электромагнитного расходомера показана на рис. 81. Трубопровод / с перемещающейся в нем жидкостью расположен между полюсами 2 и 3 магнита перпендикулярно направлению силовых линий магнитного поля. Трубопровод изготовляется из немагнитного материала (фторопласт, эбонит и др.). В стенки трубопровода диаметрально противоположно (заподлицо с внутренним диаметром трубы) заделаны измерительные электроды.
Под действием магнитного поля ионы, находящиеся в жидкости, перемещаются и отдают свои заряды измерительным электродам, создавая в них э. д. с. Е, пропорциональную скорости течения жидкости. К электродам подключается измерительный прибор 4, шкала которого градуируется в единицах расхода.
Величина этой э. д. с. в случае постоянного магнитного поля, определяется уравнением электромагнитной индукции
Е = — Bdv,
где В — магнитная индукция в зазоре между полюсами магнита;
диаметр трубопровода (длина проводника);
d — внутренний v — средняя скорость потока жидкости.
Выражая скорость через объемный расход Q, получим
Е == — Ц Q, па
откуда следует, что при однородном магнитном поле величина э. д. с. пропорциональна объемному расходу.
В настоящее время электромагнитные расходомеры применяются лишь для жидкостей, проводимость которых не ниже 10'5 сим!м.
Существенные недостатки электромагнитных расходомеров с постоянным магнитом — возникновение на электродах э. д. с. поляризации, гальванической э. д. с. и трудности усиления малых э. д. с. постоянного тока. Эти недостатки затрудняют или делают невозможным правильное измерение э. д. с., индуктируемой магнитным полем в движущейся жидкости.
Расходомеры с постоянным магнитным полем находят применение для измерения расхода пульсирующих потоков. В настоящее время в подавляющем большинстве электромагнитных расходомеров 106
применяется переменное магнитное поле. Если магнитное поле изменяется во времени т с частотой f, то величина э. д. с. определяется уравнением
„ 4QS . о f
Е ------1— sin 2лгт.
ал '
При переменном магнитном поле электрохимические процессы оказывают меньшее влияние на показания прибора, чем при постоянном.
Электромагнитные расходомеры имеют ряд преимуществ. Прежде всего, они практически безынерционны, что очень важно при измерении быстроменяющихся расходов и при использовании их в системах автоматического регулирования. На результат измерения не влияет присутствие в жидкости взвешенных частиц и пузырьков газа. Показания расходомера не зависят от свойств измеряемой жидкости (вязкость, плотность) и от характера потока (ламинарный, турбулентный).
При соответствующем подборе материала или применении антикоррозийных покрытий электромагнитные расходомеры можно применять для измерения расхода агрессивных жидкостей, а также жидкостей и паст, обладающих абразивными свойствами. Вследствие линейной зависимости возникающей э. д. с. от расхода шкала вторичного прибора линейна. Погрешность электромагнитных расходомеров ±0,5—1%.
Глава VI ИЗМЕРЕНИЕ УРОВНЯ ЖИДКОСТЕЙ
§ 22. ПОПЛАВКОВЫЕ УРОВНЕМЕРЫ
Целью измерения уровня жидкостей может быть определение количества жидкости в емкости или контроль за положением уровня в производственном аппарате при осуществлении технологического
процесса.
По характеру работы уровнемеры могут быть непрерывного и прерывистого (релейного) действия. Релейные уровнемеры срабаты-
вают при достижении определенного уровня; они используются для сигнализации и поэтому называются сигнализаторами уровня.
В ряде химических производств пока не найдено вполне удовлетворительных решений для измерения уровня. Объясняется это тем, что производственная аппаратура часто работает в условиях высоких температур и давлений, а также особыми свой-
Рис. 82. Схема поплавке- ствами контролируемых сред (агрессивного уровнемера ность, токсичность, большая вязкость
и т. п.).
Поплавковые уровнемеры относятся к наиболее распространенным автоматическим приборам для измерения уровня жидкости на-
ряду с гидростатическими, электрическими и радиоизотопными.
В поплавковом уровнемере за уровнем жидкости следит поплавок, перемещение которого передается на показывающее устройство или преобразователь перемещения (усилия) в выходной сигнал.
Подъемная сила поплавка (рис. 82) в общем случае по закону Архимеда равна
F (х) = tW + (Р - Pn) g s (х) dx,
О
где V — объем поплавка;
р0 — плотность среды над жидкостью;
108
g — ускорение силы тяжести;
р — плотность жидкости, в которую погружена нижняя часть поплавка;
s (х) — площадь сечения поплавка;
х — глубина погружения поплавка.
Для поплавка постоянного сечения
F = sh^g + (р - р0) gsx,
где h — высота поплавка.
Если над жидкостью находится газ (воздух), то р0 = 0. Тогда
в общем случае
F == pg s (х) dx.
(I
Для поплавка постоянного сечения F = pgsx. Возможны два принципа построения поплавковых уровнеме-
й I
— = const
поплавка
Рис. 83. Простейший поплавковый измеритель уровня:
1 — поплавок; 2 — ролики; J — груз
ров.
В первом случае противодействующая сила создается силой тяжести поплавка G, т. е. F = G = const.
Соответственно уровень погружения и поплавок следует изменению уровня жидкости.
Во втором случае противодействующая сила создается пружиной и изменяется при перемещении поплавка. При этом поплавок имеет форму длинного цилиндра (буйка) переменного погружения.
На рис. 83 показано простейшее устройство с поплавком постоянного погружения. Поплавок подвешен на гибком тросе, перекинутом через ролики. На другом конце троса укреплен груз для поддержания постоянного натяжения троса. На грузе закреплена стрелка, показывающая на шкале уровень жидкости. Таким простым
устройством можно измерять уровень с достаточной для боль
шинства случаев точностью.
Недостатками простого поплавкового уровнемера являются перевернутая шкала (с нулем у верхнего края бака), трудность отсчета в начале шкалы у высокого резервуара, погрешность из-за изменения силы, натягивающей трос (при подъеме уровня к силе тяжести противовеса прибавляется сила тяжести троса).
109
Недостатки простого поплавкового уровнемера устранены в поплавковом уровнемере, схема которого показана на рис. 84. При перемещении поплавка 1 барабаны ,3, на которые наматывается трос, поворачиваются и заставляют поворачиваться ротор сельсина-датчика 4. С датчиком электрически связан сельсин-приемник, ротор которого повернется на такой же угол, как у сельсина-датчика 4.
Натяжение троса обеспечивается грузом 2, подвешенным на тросе.
Сельсин-приемник (вторичный прибор) связан со счетным механизмом. При вращении ротора сельсина поворачиваются барабаны счетного механизма и в окошечках появляются цифры, показываю-
Рис. 85. Схема перемещения цилиндрического поплавка переменного погружения
Рис. 84. Поплавковый уровнемер с сельсинным датчиком:
/ — поплавок; 2 — груз; 3 — барабаны; 4 — сельсин-датчик
шие положение уровня. Во вторичном приборе имеются два контакта для сигнализации предельных положений уровня. Контакты могут быть настроены на любые точки в пределах шкалы прибора. Диапазон измерения уровня до 10 м.
При измерении уровня агрессивных жидкостей поплавок (цилиндрический или шаровой) изготовляется из корроизионностой-кого материала.
На рис. 85 показана схема перемещения цилиндрического поплавка переменного погружения.
В положении, показанном на рис. 85, а, условие равновесия поплавка (буйка) определяется выражением
slgp = LZ, (41)
где s — площадь поперечного сечения поплавка;
р — плотность материала поплавка;
g -- ускорение силы тяжести;
Z — жесткость пружины.
ПО
В положении на рис. 85, б условие равновесия определяется уравнением
s/pg - (Н х) spjg = (L-x) Z, (42)
где И — высота погружения поплавка;
Pt — плотность жидкости.
Вычитая из уравнения (41) уравнение (42), получим
откуда
(И — х) sptg = LZ — (А - х) Z,
х = И-------.
1 «Pig
(43)
Из выражения (43) следует, что перемещение поплавка пропорционально изменению уровня жидкости; коэффициент пропорцио
нальности меньше единицы (равен единице при Z = 0) и зависит от жесткости пружины. С увеличением жесткости пружины относительное перемещение поплавка снижается:
На рис. 86 показана схема уровнемера с поплавком переменного погружения (Я — высота погружения) и с пневматической передачей показаний на расстояние. Цилиндрический поплавок (высотой L) подвешен к рычагу 2,
| Воздух
Рис. 86. Принципиальная схема уровнемера с поплавком переменного погружения (буй кового уровнемера) и с пневматической пе редачей показаний на расстояние:
I — цилиндрические! поплавок; 2 — рычаг; 3 — торсионная трубка; 4 — стержень; 5 — заслонка; 6 — сопло; 7 — пневмоустройство; 8 — вторичный прибор (манометр)
укрепленному на конце
упругой торсионной трубки 3. Поплавок своей тяжестью закручивает торсионную трубку и стальной стержень 4, который находится внутри трубки 3 и одним концом плотно связан с ней;
угол закручивания пропорционален силе тяжести поплавка, изменяющейся при изменении уровня жидкости из-за изменения выталкивающей силы погруженной части поплавка.
Собственная сила тяжести (вес) поплавка выбрана так, чтобы
при полном его погружении в жидкость поплавок не всплывал.
На свободном конце стержня 4 укреплена заслонка 5 пневмоустройства 7. При повороте стержня торсионной трубки на некоторый угол заслонка отклоняется относительно сопла 6 на такой
111
же угол. Тем самым изменяется давление воздуха в линии соила и угловое перемещение заслонки преобразуется в пропорциональное изменение давления воздуха, измеряемого манометром 8, шкала которого градуирована в единицах уровня.
§ 23. ГИДРОСТАТИЧЕСКИЕ УРОВНЕМЕРЫ
В этих приборах измерение уровня жидкости постоянной плотности сводится к измерению давления, создаваемого столбом жидкости, т. е. р = И pg.
Существуют гидростатические уровнемеры с непрерывным продуванием воздуха или газа (пьезометрические уровнемеры) и с непосредственным измерением столба жидкости. Пьезометрические
Рис. 87. Пьезометрический уровнемер с продуванием воздуха:
/ — дроссель; 2 — ротаметр; 3 — пьезометрическая трубка; 4 — манометр;
5 — сосуд
уровнемеры (рис. 87) применяются для измерения уровня самых разнообразных, в том числе агрессивных и вязких жидкостей в открытых резервуарах и в сосудах под давлением .
Сжатый воздух или газ, пройдя регулируемый дроссель и ротаметр 2, понадает в пьезометрическую трубку 3, находящуюся в резервуаре. Давление воздуха (газа), измеряемое манометром 4 любой системы, характеризует положение уровня жидкости в сосуде 5.
С начала подачи воздуха давление будет повышаться до тех пор, пока не станет равным давлению столба жидкости высотой Н. В момент выравнивания этих давлений из трубки в жидкость нач
нет выходить воздух, расход которого регулируют так, чтобы он только барботировал отдельными пузырьками (примерно один пузырек в секунду).
Величина расхода воздуха устанавливается дросселем 1, а контроль осуществляется при помощи ротаметра 2.
При измерении уровня жидкостей следует учитывать возможность образования при определенных условиях статического электричества. Поэтому при контроле легковоспламеняющихся и взрывоопасных жидкостей (сероуглерод, бензол, масла и пр.) в качестве
сжатого газа применяют двуокись углерода, азот, дымовые газы или специальные пьезометрические уровнемеры.
Другим видом гидростатических уровнемеров является дифманометр любой системы, измеряющий давление столба жидкости в сосуде. Дифманометрами можно измерять уровень в открытых
112
и закрытых сосудах, т. е. в сосудах, находящихся под давлением и разрежением. На рис. 88, а показана схема трубных соединений при измерении уровня в открытом резервуаре и установке дифма-
нометра ниже дна резервуара.
При использовании дифманометров для измерения уровня обязательно устанавливается уравнительный сосуд, наполненный до определенного уровня той же жидкостью, что и в резервуаре. Назначение уравнительного сосуда — обеспечение столба жидкости
постоянной высоты в одном из колен дифманометра. Высота столба жидкости во втором колене дифманометра изменяется с изменением уровня жидкости в резервуаре. Каждому значению уровня в резервуаре соответствует определенное значение перепада давления, что позволяет по величине перепада, показываемого дифманометром, судить о положении уровня жидкости в резервуаре.
На рис. 88, б показана схема соединения дифманометра при изме-
Рис. 88. Гидростатические уровнемеры с непосредственным измерением столба жидкости:
а — при измерении уровня жидкости э открытом резервуаре; б — при измерении уровня жидкости в резервуаре, находящемся под давлением
рении уровня жидкости
в сосуде, находящемся под давлением, и при установке дифманометра ниже дна сосуда. В этом случае уравнительный сосуд
устанавливается на высоте максимального уровня и соединяется
с контролируемым сосудом.
При измерении уровня агрессивной жидкости дифманометр должен быть защищен от действия агрессивной среды.
§ 24. ЭЛЕКТРИЧЕСКИЕ УРОВНЕМЕРЫ
В электрических уровнемерах положение уровня жидкости преобразуется в какой-либо электрический сигнал. Из электрических уровнемеров наибольшее распространение получили емкостные и омические. В емкостных уровнемерах используются диэлектрические свойства контролируемых сред; в омических — свойство контролируемой среды проводить электрический ток.
Емкостный уровнемер обычно состоит из емкостного цилиндрического преобразователя и вторичного прибора.
113
Рис. 89. Схема измерения емкостным уровнемером: / — сосуд с жидкостью; 2 — электрод; 3 — электронный блок; 4 — измерительный прибор
При измерениях высоты уровня агрессивных, но не электропроводных жидкостей, обкладки преобразователя выполняют из химически стойких сплавов или же каждую из обкладок покрывают тонкой антикоррозионной пленкой (винипласт или фторопласт), диэлектрические свойства которой учитываются при расчете. Покрытие обкладок тонкими пленками, обладающими высокими изолирующими свойствами, применяется и при измерениях уровня электропроводной жидкости.
Принципиальная схема измерения уровня жидкостей с помощью емкостного уровнемера показана па рис. 89. В сосуд с жидкостью /, уровень которой необходимо измерять, опущен электрод 2, покрытый изоляционным материалом. Электрод вместе со стенками сосуда образует цилиндрический конденсатор, емкость которого меняется при колебаниях уровня жидкости. Величина емкости измеряется электронным блоком 3, который затем дает сигнал в измерительный прибор 4, представляющий собой релейный элемент в схемах сигнализации достижения определенного уровня или показывающий прибор в схемах измерения уровня.
Измерение электрической емкости обычно производится с помощью резонансных и мостовых схем. При резонансном методе контролируемая емкость, включенная параллельно с контуром индуктивности, образует резонансный контур, настроенный частоты при определенной начальной ем-
на резонанс питающей
кости преобразователя, которая соответствует наличию или отсутствию контролируемого вещества на заданном уровне. Изменение емкости преобразователя приводит к изменению собственной частоты контура и срыву резонанса. Этот метод используется в большинстве емкостных сигнализаторов уровня.
При мостовом методе контролируемая емкость включается в одно из плеч моста.
При измерении уровня изменяется емкость, что вызывает разбаланс моста. Сигнал разбаланса через усилитель подается на показывающий электрический прибор, градуированный в единицах контролируемого уровня. Мостовой метод используется в большинстве емкостных уровнемеров.
Омические уровнемеры используются главным образом в качестве сигнализаторов уровня. Принцип действия омических сигнализаторов основан па замыкании электрической цепи источника питания через контролируемую среду, представляющую собой участок электрической цепи, обладающий определенным омическим сопротивлением.
114
Рис. 90. Сигнализатор уровня электропроводных жидкостей:
/ — преобразователь; 2 — трансформатор; 3 — реле; 4 — сигнальная лампа; 5 — контакты реле; о — электроды
Практически омические сигнализаторы уровня могут быть применены для сред с проводимостью от 2-10“3 сим!м и выше. Сигнализатор (рис. 90) состоит из двух узлов: преобразователя 1 и блока питания.
Преобразователь включает два изолированных друг от друга электрода 6 с клеммами для присоединения проводов. Блок питания состоит из понижающего трансформатора 2 и реле 3 (типа МКУ-48). Если уровень жидкости ниже электродов, электрическая цепь между электродами разомкнута. Когда уровень жидкости повысится (как показано на рисунке), электроды замкнутся и по цепи потечет ток. Во вторичной обмотке трансформатора будет индуктироваться напряжение, по катушке реле 3 потечет ток и контакты 5 замкнут цепь сигналь.ной лампы 4.
Питание прибора может быть осуществлено постоянным напряжением до 24 в или переменным напряжением до 36 в. Величина напряжения зависит от проводимости контролируемой среды, а род тока — от свойств контролируемой среды.
Основной недостаток электрических уровнемеров — невозможность их применения в средах вязких, кристаллизующихся, дающих твердые осадки и налипающих на электроды преобразователей.
§ 25. РАДИОИЗОТОПНЫЕ УРОВНЕМЕРЫ
Положение уровня жидкостей в закрытых емкостях можно контролировать при помощи проникающих у-излучений. Измерение уровня основано на поглощении у-лучей при их прохождении через слой вещества. Общее поглощение у-излучения веществом выражается экспоненциальной зависимостью
Jx--=Joe~^, (44)
где Jх — интенсивность лучей после прохождения слоя вещества толщиной х;
J(i — начальная интенсивность излучения;
р. — коэффициент ослабления у-излучения, зависящий от природы вещества и толщины его слоя.
115
Зависимость (44) справедлива для узкого и параллельного пучка монохроматического излучения и однородного поглотителя. Если спектр у-излучения состоит из нескольких линий, то ослабление выражается завися мость ю
Jx =• Jlxч J2X4 •••--= t4X> + + ,
где Pi, p-2 — коэффициенты поглощения для соответствующих групп у-лучей.
В случае сложного химического состава поглотителя выражение для коэффициента ослабления у-излучеиия имеет вид
!< - Р. ^ + Р^+-..,
где р2 — относительные весовые количества составных частей вещества;
Pi, Р-2 — плотность этих составных частей.
f)
Рис. 91. Принципиальные схемы радиоизотопных уровнемеров:
1 — излуча"ель; 2 — приемник излучения
Наиболее употребительные изотопы, испускающие у-лучи, — Со60 и Cs13’.
Возможны, три принципиальные схемы радиоизотопных уровнемеров (рис. 91). Схемы, показанные на рис. 91, а и б, применяются в тех случаях, когда нет доступа в сосуд. Схему, приведенную на рис. 91, а, можно применять как сигнализатор максимального или минимального уровня (при неподвижном излучателе и приемнике излучения) или для непрерывного измерения уровня (уровнемеры со следящей системой).
При небольшом столбе жидкости (до 1 м для легких жидкостей) можно применять схему, показанную на рис. 91, б. Схему, показанную на рис. 91, в, целесообразно применять в тех случаях, когда в сосуд можно поместить поплавок.
Радиоизотопный уровнемер со следящей системой (типа УР-8) выполнен по схеме, показанной на рис. 91, а. Он предназначен для 116
непрерывного бесконтактного измерения границы раздела двух сред различной плотности: газ — жидкость, жидкость — жидкость, газ — твердое или сыпучее тело, жидкость — твердое или сыпучее тело, условный уровень кипящей жидкости.
Действие прибора основано на сравнении интенсивности потоков у-лучей, проходящих выше пли ниже уровня раздела двух сред разной плотности.
Рис. 92. Схема радиоизотопного уровнемера со сле-д я ще й с и с тем о и:
1 — источник излучения; 2 — трубки; 3 — стальная лента; 4 — фланцы; 5 — свинцовый контейнер; 6 — реверсивный двигатель; 7 — червячная пара; х — барабан; 9 — зубчатый ролик; 10 — сельсин-датчик; // — гибкий кабель; 12— показывающий прибор; /<? — приемник излучения; 14 — ролик; 15 — свинцовая пробка
Комплект прибора состоит из трех блоков (рис. 92): а) первичного преобразователя, включающего в себя источник и приемник излучения и устройство для перемещения системы источник — приемник; б) электронного блока; в) показывающего прибора.
Датчик с помощью фланцев 4 присоединяется к вертикальным трубкам 2, установленным внутри объекта измерения. Расположенный в герметичном корпусе датчика реверсивный двигатель 6 через червячную передачу 7 вращает барабан 8, на котором укреплена стальная лента 3. На концах ленты свободно висят источник излучения 1 и приемник излучения 13. Электрический сигнал с приемника излучения через гибкий кабель 11, который при перемещении приемника фиксируется в определенном положении при помощи ролика 14 с грузом, передается на электронный блок. Лента 3 про
117
ходит через зубчатый ролик 9, па оси которого расположен сельсин-датчик 10.
Сельсин-приемник находится в показывающем приборе. Ось сельсина-приемника через редуктор связана со стрелками показывающего прибора 12, который имеет две шкалы, градуированные в метрах и сантиметрах. В показывающем приборе имеется устройство, преобразующее угловые перемещения оси сельсина-приемника, пропорциональные положению уровня, в стандартный пневматический сигнал. Стандартная индукционная катушка служит для связи с вторичными приборами дифференциально-трансформаторной системы.
Для обеспечения защиты персонала против радиации при транспортировке, монтаже, ремонтных работах внутри объекта измерения, источник излучения перемещается автоматически в свинцовый контейнер 5. Отверстие в контейнере при этом закрывается свинцовой пробкой 15, жестко связанной с источником. Диапазон измерения уровня прибором — до 10 м, основная погрешность измерения не превышает 1 см.
Глава VII
МЕТОДЫ И ПРИБОРЫ ДЛЯ АВТОМАТИЧЕСКОГО АНАЛИЗА СОСТАВА МАТЕРИАЛОВ
§ 26. КЛАССИФИКАЦИЯ МЕТОДОВ АВТОМАТИЧЕСКОГО АНАЛИЗА СОСТАВА МАТЕРИАЛОВ
Важнейший технологический параметр химической промышленности — состав перерабатываемых материалов, поэтому аналитический контроль является обязательным элементом любой системы управления химическим производством.
До настоящего времени аналитический контроль в промышленности в основном производится вручную, путем лабораторного анализа периодически отбираемых проб анализируемых материалов. Однако развитие автоматизации и в особенности переход к комплексной автоматизации химической промышленности потребовали разработки методов и приборов, пригодных для автоматического выполнения анализов непосредственно в технологическом потоке. В связи с этим наблюдается бурный рост аналитического приборостроения, выпускающего приборы для автоматического анализа состава материалов.
Задачи анализа состава материалов делятся на две группы:
1) определение содержания одного компонента в анализируемом веществе \
2) определение содержания двух и более компонентов в анализируемом веществе.
Автоматические приборы, предназначенные для определения содержания одного компонента, называются автоматическими концент-ратомерами, а предназначенные для определения содержания двух и более компонентов — автоматическими анализаторами состава.
Концентрацией С называется количество определяемого компонента т, которое содержится в известном количестве М анализируемого вещества:
С=1- <45>
В общем случае вещество — это многокомпонентная смесь.
119
Следовательно, прямой метод измерения концентрации заключается в измерении величин т и М и вычислении величины С по формуле (45). Прямые методы измерения концентрации, известные под названием методов объемного анализа, получили широкое распространение в лабораторной аналитической практике. Некоторые из этих методов — титрование и метод химического поглощения — применяются в автоматических концентратомерах.
В производственной практике наибольшее распространение получили так называемые косвенные методы измерения концентрации. Они основаны на использовании однозначной функциональной зависимости между каким-либо косвенным физическим параметром у анализируемого вещества, доступным непосредственному измерению, и составом этого вещества:
y = f(CA, С1Т С2...С;...С„), (46)
где Сд — концентрация определяемого компонента анализируемого вещества;
С, — концентрация z-ro неопределяемого компонента анализируемого вещества;
п — общее число неопределяемых компонентов.
В качестве косвенного параметра у могут быть выбраны плотность, удельная электропроводность, показатель преломления, теплопроводность и другие 4изи'1еские параметры анализируемого вещества, зависящие от его состава. В большинстве случаев влияние отдельных компонентов на величину у является аддитивным, поэтому зависимость (46) можно преобразовать к виду
Е f,:(C;). (47)
i = 1
Если содержание отдельных компонентов в анализируемом веществе изменяется незначительно, то в пределах этих изменений функции /д и fi с достаточной для практики точностью можно считать линейными, следовательно,
п
\у /глАСл-|- У, ki-\Ci, (48)
, А , Г i .
где кл = = const, Ki = -—=const,
Л dC А dGi
при Сл = СЛо; при С; = С,0;
Сло — среднее содержание определяемого компонента в анализируемом веществе;
С,0 — среднее содержание i-го неопределяемого компонента анализируемого вещества;
АС — максимально возможные отклонения содержания соответствующего компонента от среднего значения;
Az/ — изменения величины измеряемого косвенного параметра, вызванное изменениями АС.
120
Решая уравнение (48) относительно искомой величины ДСЛ, получим уравнение шкалы косвенного концентратомера
п
k.ACi. (49)
kA 1гА
Отсюда следует, что показания косвенного концентратомера зависят в определенной степени от изменения содержания неопределяемых компонентов анализируемого вещества ЛСг. Чем слабее выражена эта зависимость (т. е. чем меньше величина члена п
AL ДС;), тем выше избирательность данного косвенного метода ‘ = 1 Л анализа и тем, следовательно, выше точность измерении соответствующего автоматического концентратомера. Таким образом, избирательность косвенного метода анализа является важнейшей характеристикой автоматического концентратомера.
Задача автоматического анализа состава, т. е. одновременного измерения содержания двух или более компонентов в анализируемом веществе, гораздо сложнее, чем задача измерения концентрации. В настоящее время для этих целей используются, в основном, косвенные методы анализа в сочетании с разделением анализируемой смеси на отдельные компоненты (хроматография и масс-спектрометрия).
Наиболее распространены следующие методы анализа, применяемые при автоматическом контроле концентрации и состава.
1) Косвенные методы измерения концентрации: а) электрокондуктометрически й; б) потенциометрический; в) абсорбционный спектральный; г) рефрактометрический; д) термокондуктометрический; е) термохимический; ж) термомагнитный; з) по температурной депрессии; и) по давлению насыщенных паров.
2) Хроматографический метод измерения состава.
Размерность единиц измерения концентрации зависит от выбора размерностей величин т и М в формуле (45). Наибольшее распространение получили следующие единицы: мг/ма и г/м3 для газов, мг/см3 и г/см3 для жидкостей, объемный процент (% об.) для газов и жидкостей и весовой процент (% вес.) для жидкостей.
Состав обычно измеряется в весовых или объемных процентах.
§ 27. ЭЛЕКТРОКОНДУКТОМЕТРИЧЕСКИЙ МЕТОД АНАЛИЗА
Электрокондуктометрический метод анализа применяется для измерения концентрации растворов электролитов по величине их удельной электропроводности. Как известно, проводимость растворов электролитов обусловлена присутствием в них заряженных частиц — ионов, образующихся вследствие диссоциации части молекул электролита при его растворении. Свойство раствора прово
121
дить электрический ток количественно характеризуется величиной удельной электропроводности о сим/см, которая по закону Коль-рауша зависит от природы электролита и его концентрации:
ст = aCF {ук + va),
где а — степень электролитической диссоциации электролита;
С — концентрация электролита в г-экв/л;
vK, va — абсолютная подвижность соответственно катионов и анионов;
F — число Фарадея (F = 96500 к/г-же).
Степень электролитической диссоциации зависит от природы электролита и растворителя. По величине а электролиты условно делятся на «сильные» и «слабые». Удельная электропроводность
Рис. 93. Зависимость удельной электропроводности растворов некоторых электролитов от их концентрации
растворов сильных электролитов большр чел у эквивалентных им по концентрации растворов слабых электролитов. Степень электролитической диссоциации уменьшается при увеличении концентрации раствора.
Абсолютная подвижность катионов и анионов зависит от их природы и температуры раствора. С увеличением температуры подвижность ионов увели
чивается, а значит, возрастает и удельная электропроводность раствора. У большинства растворов электролитов температурный коэффициент электропроводности находится в пределах 1,5— 2,5%/°C, т. е. он примерно в десять раз больше, чем у металлических проводников, и имеет противоположный знак.
Уравнение для величины удельной электропроводности о является теоретической основой электрокондуктометрического метода анализа, однако для практических расчетов оно малопригодно, так как а является сложной функцией С. Поэтому обычно используются графики зависимости о = / (С), полученные экспериментально.
На рис. 93 показаны графики зависимости удельной электропроводности растворов некоторых распространенных электролитов от их концентрации. Как видно, эти зависимости существенно нелинейны и даже неоднозначны. Следовательно, электрокондуктометри-ческий метод можно использовать для измерения концентрации только в пределах однозначной зависимости о = f (С), т. е. только
слева или справа от максимума.
122
Анализ графиков рис. 93 показывает, что в пределах довольно значительных изменений концентрации зависимость а — / (С) близка
к линейной, т. е.
До == k3\C,
где ——тангенс угла наклона касательной к графику о ==f (С) в средней точке рабочего участка (Omax Ciiiin)'
В дальнейшем будем считать, что удельная электропроводность пропорциональна концентрации раствора в пределах диапазона измерения электрокондуктометрического концентратомера.
Если в растворе одновременно находятся несколько электролитов, между которыми не происходят химические реакции, то удельная электропроводность смеси определяется зависимостью
Рис. 94. Двухэлектродная измерительная ячейка электрокондуктометри-ческого концентратомера
i = ।
где о(.п — удельная электропроводность раствора, содержащего п компонентов;
о» — удельная электропроводность г-го компонента смеси;
С; — относительное содержание г-го компонента в смеси.
Следовател ь но, электрокондуктометри-ческий метод анализа относится к числу неизбирательных и пригоден в основном
для измерения концентрации однокомпонентных растворов. Кроме того, его можно применять в тех случаях, когда удельная электропроводность определяемого компонента гораздо больше, чем у не определяемых компонентов, и когда концентрация последних в процессе измерений практически не изменяется.
Концентрация технологических растворов по величине их удельной электропроводности измеряется с помощью автоматических электрокондуктометрических концентратомеров следующих основных типов:
1) контактных с двухэлектродной измерительной ячейкой;
2) контактных с четырехэлектродной измерительной ячейкой;
3) бесконтактных низкочастотных;
4) бесконтактных высокочастотных.
Наиболее распространены электрокондуктометрические концент-ратомеры с двухэлектродной измерительной ячейкой (рис. 94). Определение удельной электропроводности с помощью такой ячейки производится путем измерения сопротивления Rx столба раствора, заключенного между электродами;
123
где s — площадь поперечного сечения проводящего столба раствора;
I — расстояние между электродами.
Отношение которое зависит от конструкции первичного
преобразователя и в процессе измерений остается постоянным, на-
Рис. 95. Последовательная схема включения
компенсационного термометра сопротивления и двухэлектродной измерительной ячейки
зывается константой измерительной ячейки. Чем меньше удельная электропроводность контролируемого раствора, тем меньше должна быть величина !гяч. У первичного преобразователя промышленных кон-центратомеров константа ячейки обычно находится в пределах от 0,1 до 10 см'1.
Измерительная ячейка питается переменным напряжением, чтобы избежать загрязнения электродов продуктами электролиза.
Уменьшение поляризации электродов достигается снижением плотности тока на их поверхности, поэтому электроды из-
готовляют из материалов с развитой поверхностью (губчатая платина, графит).
Для компенсации температурной по-
грешности измерения концентрации при использовании двухэлектродных ячеек обычно применяются металлические термометры сопротивления, включенные последовательно с ячейкой (рис. 95). Принцип
компенсации основан на том, что при увеличении температуры контролируемого раствора сопротивление измерительной ячейки Rx уменьшается (удельная электропроводность раствора возрастает), а сопротивление металлического термометра Rt возрастает. Ком
пенсация достигается в том случае, когда приращения этих сопротивлений при одном и том же изменении температуры равны.
Для согласования температурных коэффициентов сопротивления раствора и металла, которые различаются почти на порядок, параллельно сопротивлению ячейки включается шунтирующее сопротивление из манганина Rtu, величина которого практически не зависит от температуры.
Измерение сопротивления ячейки Rx производится в большинстве случаев с помощью уравновешенных мостовых схем, три плеча которых образованы постоянными сопротивлениями Rlt R% и Ra, изготовленными из манганина, а в четвертое плечо включена ячейка (рис. 96). При изменении концентрации контролируемого раствора меняется величина Rx, равновесие моста нарушается и в его диагонали cd появляется напряжение Ucii. Оно усиливается электронным
124
усилителем ЭУ, выполняющим функции индикатора разбаланса моста, и поступает на реверсивный двигатель РД. Последний через систему передач изменяет положение движка реохорда Rp до тех пор, пока мост вновь не вернется в состояние равновесия. Положение движка реохорда и связанной с ним стрелки прибора соответствует новому значению концентрации контролируемого рас
твора.
Раствор в измерительной ячейке обладает не только активным
сопротивлением, но и некоторой емкостью, которая зависит от его
диэлектрической проницаемости. Для компенсации емкостного сопротивления измерительной ячейки, которое в процессе измерений остается практически постоянным, применяется конденсатор С. Он включается в мостовую схему, в плечо, смежное с тем, в которое включается измерительная ячейка Rx.
Электрокондуктомет-рические концентрато-меры с двухэлектродной
Рис. 96. Уравновешенная мостовая измерительная схема электрокондуктометрического кон-центратомера с двухэлектродной измерительной ячейкой
измерительной ячейкой
имеют относительно низкую точность. Основной источник их по-
грешностей — поляризация электродов, через которые в процессе
измерения протекает ток.
Этого недостатка лишены электрокондуктометрические концент-ратомеры с четырехэлектродной измерительной ячейкой (рис. 97). При использовании таких ячеек ток в растворе протекает между двумя внешними электродами 1 и 4, подключенными к источнику напряжения U. Благодаря использованию большого ограничивающего сопротивления Ry сила тока в цепи ячейки остается постоянной независимо от изменения сопротивления раствора R (/?г ;> /?). Два внутренних электрода 2 и 3 выполняют функции потенциометрических — с их помощью измеряется падение напряжения в растворе:
где ряч = — сопротивление раствора, заключенного между элек-
тродами 2 и 5;
— константа четырехэлектродной измерительной ячейки, зависящая от расстояния между электродами 2 и 3 и от площади их поверхности.
125
Подставляя в выражение для UVi значение Rm, получаем
у -£Л о о ’ где
k' = кич1 = const.
Таким образом, разность потенциалов между электродами 2 и 3 однозначно определяется концентрацией контролируемого раствора.
Рис. 97. Электрокондуктометрический концентратомер с четырехэлектродной измерительной ячейкой:
1,4 — внешние электроды; 2, 3 — внутренние (потенциометрические) электроды
Измерение величины t/2:i производится компенсационным методом: измеряемая разность потенциалов сравнивается с разностью потенциалов UаЬ на вершинах а и b компенсационного моста. Если U„h ¥= Ut-s, то на вход электронного усилителя ЭУ поступает сигнал разбаланса = Uab — U23. Усиленный сигнал приводит во вращение реверсивный двигатель РД, который перемещает движок реохорда Rp до уравновешивания схемы. В момент равновесия Uab == U.13, следовательно, ток в цепи электродов 2 и 3 отсутствует и они не поляризуются. Положение стрелки, которая перемещается реверсивным двигателем одновременно с движком реохорда, указывает значение концентрации контролируемого раствора.
Таким образом, разделение функций между токовыми и потенциометрическими электродами позволяет устранить влияние поляризации на результаты измерения электропроводности.
Автоматическая компенсация температурных погрешностей измерения в приборе, схема которого показана на рис. 97, осуществляется металлическим термометром сопротивления Rt, который
126
включен в одно из плеч компенсационного моста и находится в контролируемом растворе.
При изменении температуры контролируемого раствора изменяется и величина сопротивления R„ в результате чего разность потенциалов Uao также меняется. Приращение AUab (А/) от изменения Rt должно быть равно по величине и обратно по знаку приращению величины А(У2Я (Л/), вызванному изменением температуры контролируемого раствора А/. Это равенство достигается подбором параметров компенсационного моста (величин постоянных сопротивлений R2, R3 и /?4) и напряжения Ut.
Рис. 98. Принципиальная схема низкочастотного бесконтактного электрокондуктометрического кон-центратомера
Общим недостатком рассмотренных типов электрокондуктомет-рических концентратомеров является необходимость гальванического контакта электродов измерительной ячейки с контролируемым: раствором.
В результате такого контакта электроды подвергаются коррозии и появляются погрешности измерений. Поэтому в последние годы большое внимание уделяется развитию бесконтактных методов измерения электропроводности растворов.
Бесконтактный метод измерения электропроводности с использованием напряжения промышленной частоты называется методом низкочастотной бесконтактной электрокондуктометрии. Этот метод основан на индуктировании э. д. с. в замкнутом витке электропроводной жидкости (жидкостный виток), который является вторичной обмоткой трансформатора Тр1 (рис. 98). Величина э. д. с., наводимая в растворе, равна
127
где I?7! — число витков первичной обмотки трансформатора Тр1\ — число витков жидкости (обычно 1У2 1);
U — напряжение, питающее первичную обмотку Тр1.
Сила тока, протекающего в жидкости под действием э. д. с. Ер: Ер IV'it/a
/р== w;
ен
Рис. 99. Измерительные ячейки высокочастотных бесконтактных конце.н-тратомеров:
а — емкостная; б — индуктивная
где kp — константа низкочастотного бесконтактного кондуктомет рического датчика, равная отношению длины жидкостного витка к площади его проводящего сечения.
Обычно величина kp определяется экспериментально.
В правой части уравнения (50) все сомножители, кроме о — постоянные величины. Поэтому сила тока 1Р пропорциональна концентрации контролируемого раствора.
Измерение величины 1р производится вторым трансформатором Тр2, для которого жидкостный виток служит первичной обмоткой («73 — вторичная обмотка). Величина э. д. с. Епзи, наводимая во вторичной обмотке измерительного трансформатора Тр2, пропорциональна концентрации. В большинстве случаев измерение Еизм производится компенсационным методом, для чего используется дополнительная обмотка Wt/ трансформатора Тр2, ампер-витки которой вычитаются из ампер-витков раствора. Условие компенсации
lhWk = lpW2.
Поскольку W2 = 1
/ = !Р-k Wk-
Изменение силы тока, протекающего через компенсационную
обмотку, осуществляется реверсивным двигателем РД, который перемещает движок реохорда Rp. Положение движка реохорда и связанной с ним стрелки прибора пропорционально концентрации контролируемого раствора. Температурная погрешность измерений компенсируется металлическим термометром сопротивления Rt, который включен в мостовую корректирующую цепь Rt — Rt — — R2—Ra и находится в контролируемом растворе.
В высокочастотных бесконтактных концентратомерах измерения производятся с использованием переменного напряжения высокой частоты (от нескольких Мгц до сотен Мгц). Измерительная ячейка такого коицеитратомера представляет собой либо конденсатор (рис. 99, а), либо катушку индуктивности (рис. 99, б). Комплекс-
128
ное сопротивление ячейки складывается из активной и реактивной
составляющих, каждая из которых зависит от электрохимических свойств контролируемого раствора (т. е, от его удельной электропроводности и диэлектрической проницаемости). Установлено, что измерительные ячейки конденсаторного тина обладают наибольшей чувствительностью при измерении концентрации растворов с малой электропроводностью. Измерительные ячейки индуктивного типа, наоборот, имеют наибольшую чувствительность при контроле концентрации растворов с большой электропроводностью.
На рис. 100 показана блок-схема автоматического высокочастотного концентратомера, который состоит из трех основных узлов: генератора высокой частоты /, первичного преобразователя 2
конденсаторного или индуктивного типа и измерительной схемы 3. В большинстве конструкций приборов генератор 1 выполняет функции только источника напряжения высокой частоты, которое питает преобразователь 2. Измерительная схема 3 контролирует какой-либо параметр преобразователя, который функционально связан с концентрацией контролируемого раствора.
При использовании индуктивных первичных преобразователей измерительная схема обычно контролирует
Рис. 100. Блок-схема автоматического высокочастотного конце нтратомера:
/ — генератор высокой частоты;
2 — нсрвичн Nil преобразователь;
3 — измерительная схема
изменение потерь высокочастотной энергии, которые характери-зуют изменение активной проводимости преобразователя.
Если же в концеитратомере использован конденсаторный преобразователь, то контролируемым параметром может быть как активная составляющая его проводимости (при измерении концентрации электропроводных сред), так и величина эквивалентной емкости,
если контролируемая среда неэлектропроводна. В последнем случае
коицентратомер называется диэлкометром, так как измерение концентрации производится по величине диэлектрической проницаемости контролируемого раствора.
Диэлектрическая проницаемость смеси различных веществ приближенно подчиняется закону смешения:
где п — число компонентов смеси;
е; — диэлектрическая проницаемость Его компонента смеси;
С; — относительная концентрация t-го компонента в смеси.
Следовательно, по величине е(.я можно измерить концентрацию только того компонента смеси, диэлектрическая проницаемость
f> Казаков и др.
129
которого значительно больше, чем у остальных компонентов. Среди жидкостей наибольшей диэлектрической проницаемостью обладает вода. Поэтому автоматические диэлкометры чаще всего используются для измерения концентрации воды в смесях с органическими жидкостями (т. е. для измерения их влажности).
§ 28. ПОТЕНЦИОМЕТРИЧЕСКИЙ МЕТОД АНАЛИЗА
Потенциометрический метод анализа растворов электролитов основан на измерении электродных потенциалов.
При погружении металлического электрода в раствор, содержащий ионы этого металла, между раствором и электродом образуется разность потенциалов, которая в электрохимии получила название электродного потенциала. Величина электродного потенциала определяется законом Нернста:
Е = £0 + ^1п«, (51)
где Еа — нормальный электродный потенциал (Еп = Е при а = 1);
R — универсальная газовая постоянная;
Т — абсолютная температура раствора;
п — валентность ионов металла в растворе;
F — число Фарадея (заряд 1 г-экв ионов);
а — активность ионов металла в растворе, равная произведению его концентрации С на коэффициент активности f *.
Нормальный электродный потенциал Ёо имеет постоянную величину, характерную для каждого металла. Такой потенциал приобретает электрод в однонормальном растворе своих ионов.
После подстановки численных значений /?, F и Т (при t = 18° С) с учетом коэффициента перевода натуральных логарифмов в десятичные уравнение (51) преобразуется к виду
E = Eo + -°^-|ga. (52)
Практически измерить потенциал одного электрода (т. е. разность потенциалов между электродом и раствором) невозможно. Поэтому электрохимическая измерительная ячейка потенциометрического концентратомера состоит из двух электродов. Потенциал одного из этих электродов, называемого измерительным, изменяется в зависимости от изменения активности контролируемого иона в соответствии с уравнением (52). Потенциал второго электрода, называемого вспомогательным, не зависит от активности контролируемых ионов и в процессе измерений остается постоянным.
* У идеальных растворов / == 1 и а = С; у реальных растворов/ < 1 и а < С, т. е. активность всегда меньше истинной концентрации ионов в растворе.
130
7
5
4
?— ____
Э. д. с. измерительной ячейки Ет равна алгебраической сумме потенциалов обоих электродов:
Ея.. = Е,13Л1 Н Експ = 1g а, (53)
где Е'и Еа + Евсп - const;
Е1Г11, и Е„сп — потенциалы соответственно измерительного и вспомогательного электродов.
Из уравнения (53) следует, что э. д. с. измерительной ячейки потенциометрического кс-нцентратомера является логарифмической функцией активности контролируемых ионов в растворе. Наиболее распространенным вспомогател ь-ным электродом является каломельный (рис. 101). Он состоит из двух полостей, разделенных пористой перегородкой. В верхней части электрода находится металлическая ртуть, покрытая слоем малорастворимой соли Hg.,Cl2, которая называется каломелью. В нижней полости электрода находится раствор KCI определенной концентрации.
Потенциометрический метод анализа получил основное распространение для измерения активности водородных ионов, которая обобщенно характеризует кислотные или щелочные свойства водных растворов.
Чистая вода является нейтральным веществом. Она очень слабо диссоциирует согласно уравнению
Н2О- Н1 +он .
Константа ее диссоциации определяется зависимостью
„ _ [И ] [ОН] _ ,
Лн2°-“ [Н2оГ — const-
Поскольку вода диссоциирует очень слабо, концентрацию ее недиссоциировавших молекул [Н.,О1 можно считать постоянной. Следовательно,
[Н | [ОН ] = Лн,о[Н2О] = Кн„о = const, (54) где Кн2о — ионное произведение воды, величина которого зависит только от температуры; Кн2о == КГ14 при t = 20° С.
В чистой воде ионы водорода и гидроксила со
держатся в равном количестве, поэтому концентрация каждого из них равна
[HJ = [ОН ] = 10 7 (мг • ион) /см3.
При растворении в воде кислоты возрастает концентрация ионов водорода, образующихся в результате диссоциации молекул ки
Рис. J0I. Каломельный вспомогательный электрод:
/ — полупроницаемая перегородка; 2 — стеклянный корпус; 3 — раствор KCI; 4 — слои каломели; 5 — слой ртути; 6 — выходной контакт; 7 — пробка из изоляционного материала
5*
131
слоты. Одновременно, в соответствии с формулой (54), уменьшается концентрация ионов гидроксила. При растворении в воде щелочи, наоборот, возрастает концентрация ионов гидроксила и уменьшается концентрация ионов водорода.
Таким образом, в кислых растворах [Н+| > 10'’, а в щелочных [Н+| <; 10 т, следовательно, активность ионов водорода может обобщенно характеризовать кислотные или щелочные свойства раствора.
Для измерения активности ионов водорода можно использовать «водородный» измерительный электрод. Он представляет собой пластинку с пористой поверхностью (обычно для этого используется губчатая платина), к которой подводится газообразный водород при атмосферном давлении. Водород адсорбируется поверхностью электрода, который благодаря этому приобретает свойства водородного, т. е. его потенциал определяется активностью ионов водорода в растворе в соответствии с уравнением Нериста:
£н = £он +0,058 1g [анД, (55)
где Еон — нормальный потенциал водородного электрода, т. е. его потенциал в растворе с активностью ионов водорода, равной единице.
Условились считать величину нормального потенциала водородного электрода равной нулю при всех значениях температур:
£оп=0. (56)
Потенциалы всех других электродов выражаются по отношению к нормальному потенциалу водородного электрода.
С целью более удобного выражения концентрации ионов водорода было введено понятие водородный показатель pH, который равен отрицательному десятичному логарифму концентрации ионов водорода:
Рн= ~ 1g [НП-
У нейтральных растворов pH = 7, так как в них концентрация ионов водорода [Н+] = 101. У кислых растворов, в которых [Н+] > 10“’, величина pH < 7; у щелочных растворов pH >7.
В настоящее время применяется другое определение показателя pH — логарифм активности ионов водорода, взятый с обратным знаком:
pH = -lg[H‘lfH‘ = lgaH’, (57)
где /н+ — коэффициент активности иона водорода.
После подстановки (56) и (57) в уравнение (55) последнее преобразуется к виду
Ец= - 0,058 1g <2Н+— -0,058 pH. (58)
132
Следовательно, потенциал водородного электрода изменяется на 58 мв при изменении pH контролируемого раствора на единицу. Применение водородного электрода при автоматическом измерении pH неудобно. В современных автоматических pH-метрах в качестве измерительных преимущественно применяются стеклянные электроды, которые по своим свойствам близки к водородным.
Стеклянный электрод (рис. 102) представляет собой цилиндрическую трубку, к нижнему концу которой припаяна сферическая часть, называемая мембраной, которая изготовляется из специального сорта стекла и является чувствительным элементом электрода. При соприкосновении с раствором на поверхности чувствительной мембраны возникает потенциал, величина которого описывается уравнениемЦ58).
Для замыкания электрической цепи между наружной поверхностью электрода и измерительным прибором в полый электрод (трубку) заливается раствор кислоты и внутри трубки устанавливается контактный электрод (обычно хлорсеребряный). На внутренней поверхности чувствительной мембраны возникает потенциал Евн, величина которого пропорциональна pH раствора, залитого внутрь электрода. Потенциал контактного электрода зависит си-природы раствора и его концентрации.
Таким образом, потенциал стеклянного электрода Ест равен алгебраической сумме трех потенциалов:
Ecni 4 Евн Екон.
Э. д. с. измерительной ячейки рН-метра (рис. 103) складывается из потенциалов стек
лянного измерительного и вспомогательного электродов:
р — р I р __ р ! р I р I р
В процессе измерений состав раствора, налитого внутрь стеклянного электрода, остается неизменным. Следовательно, Екон = = const, Еян = const и э. д. с. измерительной ячейки рН-метра можно представить в виде
^ = ^0 + 0,058 pH,
где
Еячц вн Екан 4“ Еесп const.
Согласно закону Нерпста электродный потенциал зависит от температуры контролируемого раствора (/р). На рис. 104 показано
Рис. 102. Стеклян ный электрод:
I — чувствительная мембрана; 2 — раствор СОЛЯНОЙ кислоты (НО); J — вспомога те л ь н ы 11 к о п та к тн ы й электрод; 4 — стеклянный корпус; 5 — пробка из изоляцион-кого материала; 6 — контактный провод; 7 — кабельный нако печник
133
Рис. 104. Зависимость э. д. с. измерительной ячейки pH-метра от pH при разных температурах
134
несколько графиков зависимости Ет — f (pH), полученных для различных температур. Все эти графики пересекаются в одной точке с координатами \Е,., рН„). Если pHv = pH,,, то э. д. с. ячейки не зависит от температуры. Поэтому точка пересечения характеристик измерительной ячейки pH-метра, снятых при разных значениях температуры, называется изопотенциальной. Температурная погрешность измерений pH-метра тем больше, чем больше разность (рНл — рН„) и чем значительнее изменяется температура контролируемого раствора А/:
ДЕ,,,, (Д/) =0,058 (рН.( - pH,,) рД/,
где р — температурный коэффициент, который можно считать величиной постоянной.
В электрическую цепь измерительной ячейки pH-метра входит чувствительная мембрана стеклянного электрода, которая имеет очень высокое сопротивление. Следовательно, ячейка представляет собой гальванический элемент с большим внутренним сопротивлением (порядка десятков и сотен Мом).
Для измерения э. д. с. таких первичных преобразователей применяют автоматические потенциометры специальной конструкции с большим входным сопротивлением.
На рис. 105 показана принципиальная схема автоматического pH-метра. Прибор предназначен для работы в комплекте со стеклянным измерительным и катомельным вспомогательным электродами.
В pH-метре использован компенсационный метод измерения э. д. с. датчика Е\, которая уравновешивается выходным напряжением С/аы, электронного усилителя ЗУ. Разность этих величин
^Х ~ вых ~ Uвх
135
подается на вход электронного усилителя ЭУ с большим коэффициентом усиления Поскольку то Ех = U „х + U иих =
U их
= U+-т~~] и при достаточно большой величине kvt. э. д. с.
' \ кус I
Ех U„,iX. Следовательно, измеряемая э. д. с. практически полностью уравновешивается выходным напряжением усилителя. Такой метод уравновешивания называется методом статической компенсации, так как при его использовании отпадает необходимость в применении подвижных элементов (реверсивного двигателя и реохорда).
Напряжение Uкнх образуется от протекания выходного тока усилителя 1ЬЫХ по калиброванному сопротивлению R,. и термометру сопротивления Rt. Последний служит для автоматической компенсации температурной погрешности измерений рН-метра.
Выходной ток усилителя 111ЫХ, пропорциональный измеряемой величине рНх, измеряется показывающим прибором, шкала которого градуирована в единицах pH. Показания pH-метра могут передаваться на вторичный измерительный прибор — стандартный электронный потенциометр.
В цепь измерительной ячейки pH-метра последовательно с каломельным электродом включена мостовая схема на сопротивлениях /?, — R:, питаемая батареей Б. Переменное сопротивление Rfi служит для установки рабочего тока батареи. Величина разности потенциалов на вершинах моста ab устанавливается изменением положения движка переменного сопротивления /?2. Изменение величины UHt, позволяет смещать начало шкалы при градуировке рН-метра.
Потенциометрический метод анализа применяется также для измерения окислительно-восстановительных потенциалов с использованием платинового электрода в качестве измерительного. Если в растворе одновременно находятся окисленная и восстановленная форма какого-нибудь вещества (например, /,2 и /), то платиновый электрод приобретает в нем потенциал, величина которого равна
Еов = Еов0 + 1п ~ -
где Е()вп — нормальный окислительно-восстановительный потенциал данного вещества (£о/!0 = Еои приа(, = а/();
п — число электронов, участвующих в окислительно-восстановительном процессе (разность валентностей окисленной и восстановленной форм вещества);
ай и ац — активности соответственно окисленной и восстановленной форм вещества в растворе.
По величине окислительно-восстановительного потенциала можно контролировать ход технологического процесса, если он сопровож
136
дается окислением или восстановлением перерабатываемого вещества. Приборы для измерения окислительно-восстановительных потенциалов аналогичны рН-метрам.
§ 29. АБСОРБЦИОННЫЕ МЕТОДЫ СПЕКТРАЛЬНОГО АНАЛИЗА
Абсорбционные методы спектрального анализа основаны на использовании свойства газов и жидкостей избирательно поглощать излучение с определенной длиной волны в зависимости от химического состава этих веществ. Согласно закону Ламберта — Бера, интенсивность монохроматического параллельного потока излучения с длиной волны к, прошедшего через слой анализируемого вещества толщиной I и концентрацией Сх, связана с интенсивностью исходного потока излучения J> следующей зависимостью:
= е~^1С^
'• л|) ’
где = const — коэффициент поглощения анализируемым веществом излучения с длиной волны к.
Отсюда следует, что если J-, == const и I — const, то J, является однозначной функцией концентрации просвечиваемого вещества.
Для характеристики степени поглощения обычно применяется термин оптическая плотность (D), которая определяется следующей зависимостью:
D = In
Как видно, оптическая плотность пропорциональна концентрации определяемого вещества.
Если анализируемое вещество является смесью нескольких компонентов, то зависимость для Д, приобретает вид
п
-1 2 Ъ.;с<
-h = 1 “1
где п — число компонентов анализируемого вещества.
Для избирательного измерения концентрации одного компонента смеси необходимо использовать излучение с такой длиной волны, на которой определяемый компонент обладает наибольшим по отношению к другим компонентам коэффициентом поглощения.
Всякий концентратомер, действие которого основано на использовании абсорбционных методов спектрального анализа, состоит из трех основных элементов: источника излучения, кюветы, в которой находится слой анализируемого вещества определенной толщины, и устройства, измеряющего интенсивность излучения на выходе из кюветы и преобразующего его в выходной сигнал (показание) прибора.
137
Наибольшее распространение получили приборы компенсационного типа с дифференциальной (двухкапальной) измерительной схемой.
На рис. 106 показана принципиальная схема такого прибора. От источника 1 излучение распространяется по двум аналогичным оптическим каналам — измерительному и сравнительному. В каждом из них имеется коллиматор 2, диафрагма 3, зеркало 4 и светофильтр 5. В сравнительном канале кювета 6 заполнена эталонным веществом постоянного состава и потому имеет постоянную оптическую плотность. В измерительном канале расположена рабочая
Рис. 106. Принципиальная схема двухканального абсорбционного спектрального концентратомера компенсационного типа:
/ — источник излучения; 2 — коллиматор; 3 — диафрагма; 4 — зеркало; 5 — светофильтр; 6 — сравнительная кювета; 7 — компенсатор (оптический клин); 8 — фотоприемпик; 9 — электронный усилитель; 10 — отсчетное устройство; II — рабочая кювета
кювета 11, через которую непрерывно проходит анализируемое вещество, а также компенсатор 7. На выходе из обоих каналов потоки излучения регистрируются фотоприемниками 8, включенными в дифференциальную измерительную схему. Сигнал, пропорциональный разности выходных сигналов приемников, после усиления в электронном усилителе 9 воздействует на компенсатор 7 (оптический клин) в сторону уравновешивания схемы. Отсчетное устройство 10 регистрирует перемещение компенсатора, которое служит мерой концентрации определяемого компонента.
В абсорбционных спектральных кон центр атомер ах используются главным образом излучения с длинами волн инфракрасного (0,76 мкм =gX), видимого (0,4 мкм A.sS.0,76 мкм) и ультрафиолетового (% -g 0,4 мкм) участков спектра.
Газоанализаторы инфракрасного поглощения в настоящее время являются наиболее распространенными абсорбционными спектраль-
138
ними концентраТомерами, в которых применяются длины волн инфракрасного диапазона. Они предназначены для измерения концентрации газов и паров веществ, молекулы которых состоят из двух и более различных атомов или ионов.
В качестве приемников-преобразователей интенсивности инфракрасного излучения чаще всего применяются оптико-акустические преобразователи, действие которых основано на свойстве газов поглощать инфракрасную радиацию. При облучении потоком инфракрасной радиации газа, заключенного в замкнутый объем, его давление возрастает. Увеличение давления вызвано поглощением молекулами газа квантов радиации, энергия которых переходит в энергию теплового движения молекул, т. е. увеличивает температуру газа. Увеличение температуры газа, занимающего постоянный объем, вызывает увеличение его давления. Если периодически прерывать поток радиации, падающий на оптико-акустический преобразователь, то давление газа в нем будет периодически изменяться, Амплитуда колебаний давления пропорциональна интенсивности потока радиации, а его частота совпадает с частотой прерывания потока излучения. Обычно камера оптико-акустического преобразователя заполняется тем компонентом анализируемой газовой смеси, концентрация которого измеряется. Благодаря этому преобразователь избирательно поглощает участок спектра падающего на него излучения, который соответствует максимуму поглощения определяемого компонента.
Преобразование колебаний давления газа в электрический сигнал осуществляется конденсаторными или электродинамическими микрофонами. Конденсаторный микрофон представляет собой конденсатор, одна из обкладок которого неподвижна, а вторая связана с упругой мембраной, воспринимающей колебания давления газа в камере преобразователя. При изменении давления изменяется деформация мембраны и расстояние между обкладками конденсатора, т. е. изменяется его емкость. Изменение емкости конденсатора преобразуется электронной измерительной схемой прибора в пропорциональное напряжение.
На рис. 107 показана принципиальная схема газоанализатора инфракрасного поглощения. Потоки излучения от нихромовых проволочных излучателей 1 отражаются параболическими отражателями 2 и поступают в два оптических канала, на входе которых расположен обтюратор 3. Он представляет собой диск с отверстиями, которые равномерно распределены по окружности. При вращении диска отверстия поочередно проходят над оптическими каналами, Злагодаря чему потоки излучения в них периодически прерываются.
За обтюратором расположены кюветы: рабочая 4, через которую проходит анализируемая газовая смесь, и сравнительная 5, заполненная эталонной смесью. В кюветах происходит частичное поглощение излучения всеми компонентами в соответствии с их концентрацией и коэффициентом поглощения. На выходе сравнительной
139
кюветы интенсивность излучения постоянна, а на выходе рабочей кюветы она изменяется в зависимости от изменения состава анализируемой смеси.
Далее потоки радиации поступают в соответствующие камеры дифференциального оптико-акустического преобразователя 6, заполненные определяемым компонентом анализируемой смеси. В них полностью поглощается та часть спектра падающих потоков излу
Рис. 107. Принципиальная схема газоанализатора инфракрасного поглощения:
I — нихромовые излучатели; 2 — па раболическис отражатели; 3 — обтюратор; 4 — рабочая кювета; 5 — сравнительная кювета; 6 — оптико-акустический преобразователь; 7 — конденсаторный микрофон; 8 — электронный усилитель; .9 — реверсивный двигатель; 10 — компенсационная заслонка: // — отсчетное устройство
щего через него тока. Такой ческой компенсации.
чения, которая соответствует максимуму поглощения определяемого компонента, т. е. зависит от концентрации этого компонента в соответствующей кювете. Поэтому перепад давления между камерами зависит от концентрации определяемого компонента. Этот перепад преобразуется в электрический сигнал конденсаторным микрофоном 7, усиливается электронным усилителем 8 и приводит во вращение реверсивный двигатель 9 привода компенсационной заслонки 10. Последняя перемещается, изменяя степень поглощения излучения в рабочем канале до тех пор, пока эта степень не станет равна степени поглощения в сравнительном канале. Перемещение заслонки регистрируется отсчетным устройством 11.
В некоторых газоанализаторах инфракрасного поглощения измерительная схема уравновешивается вследствие изменения степени излучения одного из излучателей путем изменения силы протекаю-метод называется методом электри-
Разработаны конструкции газоанализаторов инфракрасного поглощения, в которых измерительная схема уравновешивается путем изменения длины пути луча в компенсационной клювете специальной конструкции. Такой метод уравновешивания схемы называется методом газовой компенсации.
Фотоколориметрами называются абсорбционные спектральные копцентратомеры, в которых используется излучение видимого диапазона спектра. В этом случае концентрация измеряется по интенсивности окраски анализируемого вещества. Фотоколориметры применяются для измерения концентрации газов и жидкостей. Обычно
140
они работают в широкой области спектра, поэтому в качестве источников излучения в них используются лампы накаливания.
В большинстве случаев устройство фотоколориметров основано на компенсационном методе измерения. На рис. 108 показана принципиальная схема фотоколориметра, предназначенного для измерения концентрации окрашенных растворов.
Свет от источника 1 распространяется двумя потоками. Отразившись от зеркал 2, они попадают в конденсорные линзы 3, которые создают параллельные потоки, и далее проходят через рабочую 4 и сравнительную 5 кюветы. На выходе из кювет установлены
Рис. 108. Принципиальная схема автоматического фото кол ор и метрического копцеитратомера:
1 — источник света; 2 — зеркало; 3 — конденсорные линзы; 4 — рабочая кювета; 5 — сравнительная кювета; 6 — светофильтры; 7 — объективы; а — оптический клип
светофильтры 6, которые выделяют диапазон длин волн, соответствующий максимуму поглощения контролируемого компонента. Затем потоки света фокусируются объективами 7 на светочувствительную поверхность двух фотосопротивлений Фх и Ф2, включенных в мостовую уравновешенную схему с сопротивлениями Rx — Rx и питаемую батареей Б.
При равенстве освещенностей фотосопротивлений мост находится в равновесии и разность потенциалов на его вершинах ab равна нулю. Если концентрация контролируемого раствора отличается от концентрации эталонного, то равенство освещенностей фотосопротивлений нарушается, мост выходит из состояния равновесия и на входе электронного усилителя ЭУ появляется сигнал разбаланса. Усиленный сигнал приводит во вращение реверсивный двигатель РД, который через систему передач перемещает оптический клин (компенсатор) 8 в измерительном канале прибора до уравновешивания схемы. В момент компенсации стрелка отсчетного устройства показывает новое значение концентрации.
141
Для измерения концентрации газов 1 обычно используют характерную цветную реакцию газа со специальным индикаторным раствором. Анализируемый газ барботирует через раствор индикатора, заполняющий измерительную кювету, окрашивая его в соответствующий цвет. Интенсивность окраски, которая зависит от концентрации газа, контролируется фотоколориметром. Сравнительная кювета заполняется чистым индикаторным раствором. Измерение производится компенсационным методом с уравновешиванием оптической измерительной
Рис. 109. Принципиальная схема ленточного фотоколориметрического газоанализатора:
/ — лампа; 2, 3 — фотоэлементы; 4 — реверсивный двигатель', 5 — компенсатор
схемы компенсационным клином. В качестве фотоэлектрических преобразователей используются фотоэлементы и фотосопротивления.
В некоторых случаях индикаторное вещество наносится на поверхность ленты, окраска которой изменяется при соприкосновении с анализируемым газом. Степень изменения окраски, которая зависит от концентрации газа, контролируется фотоэлектрической измерительной схемой.
На рис. 109 показана принципиальная схема ленточного фотоколориметрического газоанализатора. Лента, пропитанная индикаторным раствором, равномерно протягивается через рабочую камеру газоанализатора, через которую проходит анализируемый газ. Определяемый компонент взаимодействует с индикатором, в результате чего образуется окрашенное соединение и поверхность ленты темнеет. Степень окраски пропорциональна концентрации определяемого компонента. Измерение степени окраски производится по интенсивности отраженного от ленты светового потока.
В приборе использована двухканальная схема с оптической компенсацией. Свет от лампы 1 одновременно поступает в сравнительный канал, через который проходит неокрашенная лента, и в измерительный канал, в котором лента уже приобрела окраску в результате взаимодействия с анализируемым газом. Отраженные световые потоки фиксируются двумя фотоэлементами 2 и 3, включенными в дифференциальную измерительную схему. Усиленный сигнал разбаланса приводит во вращение реверсивный электродви
1 Концентрацию окрашенных газов, например NO2, можно измерять фотоколориметром без применения индикаторов.
142
гатель 4, который перемещает оптический клин (компенсатор) 5 в сравнительном канале, уравновешивая освещенности фотоэлементов. Перемещение клина передается на отсчетное устройство газоанализатора.
Газоанализаторы ультрафиолетового поглощения применяются для измерения концентрации паров ртути, хлора, бензола и других веществ, имеющих характерные линии или полосы поглощения в ультрафиолетовой части спектра.
На рис. 110 показана принципиальная схема газоанализатора ультрафиолетового поглощения, предназначенного для измерения концентрации паров ртути в воздухе. Источником излучения служит ртутная лампа 1, у которой около 70% энергии излучения имеет
Рис. НО. Принципиальная схема газоанализатора ультрафиолетового поглощения:
/ — ртутная лампа; 2 — компенсатор (оптический клин);
3 — рабочая кювета; 4 — сравнительная кювета; 5 — обтюратор
длину волны, соответствующую максимуму поглощения паров ртути. Поэтому в данном случае нет необходимости в применении светофильтров.
Концентрация измеряется компенсационным методом с уравновешиванием оптической измерительной схемы компенсационным оптическим клином (компенсатором) 2. Особенностью данного прибора является применение одного приемника — преобразователя интенсивности излучения в электрический сигнал. В качестве преобразователя использован фотоэлемент ФЭ, на который поочередно попадают потоки радиации с выхода измерительного и сравнительного оптических каналов; в измерительном канале находится рабочая кювета 3, а в сравнительном — кювета 4. Прерывание потоков радиации осуществляется обтюратором 5 в противофазе, т. е. если поток измерительного канала перекрыт, то поток сравнительного канала открыт.
При равенстве интенсивности излучения на выходе каналов освещенность фотоэлемента в последовательные полупериоды остается постоянной. Электронный усилитель ЭУ чувствителен только к переменному напряжению, поэтому сигнал на его выходе равен нулю.
143
Если же оптическая плотность рабочего канала изменяется, то равенство освещенности фотоэлемента в последовательные полупериоды нарушается. При этом на вход усилителя подается переменное напряжение, амплитуда которого пропорциональна разности интенсивностей потоков излучения в рабочем и сравнительном каналах. Усиленный сигнал приводит во вращение реверсивный двигатель РД, который через систему передач перемещает компенсационный клип и стрелку отсчетного устройства газоанализатора.
Автоматические фотонефелометры предназначены для измерения концентрации твердых взвешенных частиц в газах и жидкостях по изменению интенсивности светового потока, проходящего через слой контролируемой среды. Ослабление светового потока в этом случае объясняется рассеиванием света взвешенными частицами. В качестве источников излучения в фотонефелометрах применяются главным образом лампы накаливания, а приемниками служат фотоэлементы и фотосопротивления. Измерительные схемы фотонефелометров аналогичны схемам фотоколориметров.
§ 30. ПРОЧИЕ КОСВЕННЫЕ МЕТОДЫ АНАЛИЗА
Рефрактометрический метод анализа основан на использовании зависимости показателя преломления анализируемого раствора от его концентрации.
Показателем преломления п называется отношение синусов угла падения а и угла преломления 0 светового луча, проходящего из воздуха в анализируемое вещество (рис. 111):
Для растворов одного и того же вещества различной концентрации Сх и Са справедлива зависимость
£ _ £ пх па Х " Па — Па ’
где пп — показатель преломления растворителя;
пх и пи — показатель преломления раствора с концентрацией соответственно Сх и С„.
Поскольку Са = const, па == const и па = const, формулу для Сх можно привести к виду
Сх == k:i (пх — пД = kn\n,
где kn = const — коэффициент пропорциональности;
Д/г = пх — п„ — изменение показателя преломления, вызванное изменением концентрации (Сг — Сп).
В автоматических рефрактометрах применяются два основных метода измерения показателя преломления: по углу отклонения светового луча в стеклянной призме, наполненной анализируемым раствором, и метод полного внутреннего отражения.
144
При использовании первого метода обычно применяются кюветы
дифференциального типа, состоящие из двух частей (рис. 112). Одна из них заполняется сравнительным раствором постоянной кон
центрации Са, а через вторую проходит анализируемый раствор
Рис. 111. Преломление светового луча на границе раздела двух сред: а — угол падения; fl—угол преломления; /V — /V — нормаль к поверхности раздела сред
неизвестной концентрации Сх. Если Са — Сх, то луч света проходит через кювету без отклонения. Если же
Рис. 112. Кювета дифференциального типа:
nt — показатель преломления сравнительного раствора; п2 — показатель преломления анализируемого раствора; ср — угол отклонения луча
Са Сх, то угол отклонения 1 луча <р пропорционален разности концентраций анализируемого и сравнительного растворов. Такая конструкция кюветы обеспечивает также автоматическую температурную компенсацию результатов измерений, так как сравнительный
Рис. 113. Принципиальная схема автоматического рефрактометра с кюветой дифференциального типа:
/ — источник света; 2 — конденсорпая линза; 3 — диафрагма; 4 — кювета; 5 — компенсационная пластина; 6 — отсчетная система
и анализируемый раствор имеют очень близкие температурные коэффициенты изменения показателя преломления и практически одинаковую температуру.
На рис. 113 приведена принципиальная схема автоматического рефрактометра, в котором использована кювета дифференциального
1 При малых величинах угла отклонения sin ср =» <р.
145
типа. Луч света от источника I проходит через конденсорную линзу 2 и диафрагму 3 и попадает в кювету 4. Если концентрация контролируемого раствора равна концентрации сравнительного раствора, то луч проходит через кювету без отклонения и «I равномерно освещает оба фото
N
Рис. 114. Полное внутреннее отражение луча: к — предельный угол падения
сопротивления <1\ и Ф,2.
При изменении концентрации анализируемого раствора луч света отклоняется в ту или иную сторону и равенство освещенностей фотосопротивлений нарушается. В результате на вход электронного усилителя 3<У подается сигнал, знак и величина которого определяются отклонением концентрации контролируемого раствора от сравнительного.
пока равенство освещен-
РД
Рис. 115. Принципиальная схема автоматического рефрактометра, основанная на полном внутреннем отражении луча:
/ — источник света; 2 — призма: .3 — фотоэлектрический приемник;
4 — отсчетное устройство
Этот сигнал усиливается в ЭУ и приводит во вращение реверсивный двигатель РД, который через систему передач поворачивает компенсационную пластину 5 до тех пор, ностей не восстановится. При этом угол поворота пластины и связанной с ней отсчетной системы прибора 6 пропорционален изменению концентрации контролируемого раствора.
Второй метод измерения показателя преломления основан на использовании явления полного внутреннего отражения, которое заключается в следующем (рис. 114). При переходе луча из среды с большим показателем преломления в среду с меньшим показателем преломления можно подобрать такой предельный угол падения апр, при котором угол преломления (3 будет равен 90э. В этом случае луч не попадает в оптически менее плотную среду, а проходит по границе раздела сред. При всяком другом угле падения, большем пре
дельного, луч будет полностью отражаться на границе раздела. Угол отражения в этом случае определяется отношением показателей преломления сред. Если у одной из них показатель преломления постоянный, то угол отражения будет зависеть только от показателя преломления второй(контролируемой)среды.
На рис. 115 показана принципиальная схема автоматического
146
рефрактометра, в котором используется явление полного внутреннего отражения.
.Луч света от источника 1, попадая на очерченный по радиусу участок поверхности стеклянной призмы специальной формы 2, проходит через призму, причем угол падения луча на граничную поверхность соприкосновения призмы 2 с контролируемым раствором больше предельного, поэтому луч полностью отражается. Угол отражения контролируется фотоэлектрической следящей системой, состоящей из фотоэлектрического приемника 3, электронного усилителя ЗУ и реверсивного двигателя РД. При отклонении луча появляется выходной сигнал фотоприемника, который усиливается и приводит в действие РД. Последний перемещает фотоприемник к границе раздела света и тени. Перемещение фотоприемника, пропорциональное изменению концентрации контролируемого раствора, регистрируется отсчетным устройством 4.
Преимущество автоматических рефрактометров, в основе которых лежит метод полного внутреннего отражения, заключается в возможности контроля концентрации непрозрачных сред, например, нефтепродуктов.
Термокондуктометрический метод анализа, применяемый для измерения концентрации газов, основан на использовании различия теплопроводности отдельных компонентов газовых смесей.
Теплопроводность газовой смеси аддитивно зависит от теплопроводности отдельных компонентов:
ед,, ‘=1
где — удельная теплопроводность газовой смеси из п компонентов;
С, — относительное содержание (концентрация) i-ro компонента в смеси;
kt — удельная теплопроводность i-ro компонента.
Если теплопроводность контролируемого компонента существенно отличается от теплопроводности остальных, то по теплопроводности смеси можно определить концентрацию этого компонента. Относительная теплопроводность наиболее распространенных га-зов у- приведена в табл. 1.
Вследствие малых абсолютных значений Хг непосредственное измерение теплопроводности газов затруднительно. В термокондуктометрических газоанализаторах теплопроводность контролируется по изменению условий теплоотдачи нагретой током металлической нити, которые зависят от теплопроводности окружающего ее газа.
При конструировании первичного преобразователя газоанализатора создаются такие условия теплообмена, при которых основная теплоотдача нити происходит путем теплопередачи через окру-
147
Таблица 1
Относительная теплопроводность некоторых газов
Газы Газы X* К,
Азот Аммиак Водород Воздух Двуокись азота Кислород Метан Окись углерода 0,996 0,897 7,130 1,000 1,796 1,016 1,320 0,965 Сернистый ангидрид .... Сероводород У глекислый газ X лор Водяной пар (при 100'С) 0,341 0,538 0,014 0,322 0,973
* л,— теплопроводность газа; — теплопроводность воздуха.
жающий ее газ к стенкам камеры преобразователя. Если теплопро-
водность газа увеличивается, то увеличивается и теплоотдача, вследствие чего температура нити уменьшается Е Снижение темпе
Рис. 116. Принципиальная измерительная схема термокондуктометрического газоанализатора:
/ — измерительные камеры; 2 — сравнительные камеры
других элемента R2 и Ry
ратуры сопровождается уменьшением сопротивления нити. Соответственно при уменьшении теплопроводности газа, окружающего нить, ее сопротивление возрастает.
Принципиальная измерительная схема термокондуктометрического газоанализатора (рис. 116) представляет собой неуравновешенный мост, плечи которого образованы четырьмя одинаковыми нагретыми элементами (нитями) Ry — Ry. Температура нитей регулируется изменением силы тока,
рах 2, заполненных
для чего используется переменное сопротивление R.
Два элемента Ry и R3 помещены в измерительные камеры 1 первичного преобразователя, через которые проходит анализируемый газ. Два находятся в изолированных каме-
воздухом. Все четыре камеры объединены
в монолитном металлическом корпусе датчика и имеют благодаря этому одинаковую температуру. Если теплопроводность анализи-
руемого газа отличается от теплопроводности воздуха, то условия
1 При постоянной величине тока, проходящего по нити и нагревающего ее.
148
теплоотдачи для элементов /?, — и R-, — R, различны, а следовательно, различны и их сопротивления. Напряжение в измерительной диагонали моста ab тем выше, чем больше разница в теплопроводности воздуха и анализируемого газа, т. е. чем больше концентрация в последнем определяемого компонента. Таким образом, шкалу милливольтметра mV, измеряющего напряжение в диагонали моста Uub, можно градуировать непосредственно в единицах кон
центрации.
Термокондуктометрический метод анализа является неизбирательным, так как теплопроводность газовой смеси зависит от теп
лопроводности всех ее компонентов. Поэтому для получения точ-
ных результатов измерений недопустимо присутствие в анализируемом газе компонентов, теплопроводность которых сильно отличается от теплопроводности определяемого компонента. Например, при измерении концентрации СО2 в топочных газах предварительно выжигают содержащийся в них водород, теплопроводность которого почти в 10 раз выше, чем у С.О2. В противном случае незначительные примеси Н2 существенно исказили бы результат измерений.
Другим источником погрешностей термокондуктометрических газоанализаторов является изменение температуры газа, так как коэффициент теплопровод-
Рис. 117. Схема первичного преобразователя термохими-
ческого газоанализатора
пости зависит от температуры и эави-
симость эта у различных газов раз-
лична. Для уменьшения указанной погрешности поддерживают постоянной величину тока, нагревающего элементы Rt—/?4, и уравнивают температуру во всех камерах. В некоторых конструкциях газоанализаторов первичный преобразователь термостатирован.
Термокондуктометрические газоа нал изоторы в основном применяются для измерения концентрации Н2, СО2, SO2, NH3. Погрешность измерений современных приборов этого типа не превышает 1,5 -г 2,5%. Термокондуктометрические газоанализаторы широко применяются для автоматического контроля в химической
промышленности.
Термохимический метод анализа применяется в основном для измерения небольших концентраций — кислорода в электролитическом водороде или водорода в электролитическом кислороде. Метод основан на измерении возникающего в результате каталитической реакции между кислородом и водородом теплового эффекта, который пропорционален концентрации определяемого компонента и контролируется по температуре в зоне реакции (рис. 117) термометром сопротивления Rlt, установленным в слое катализатора.
149
Для компенсации влияния изменений температуры анализируемого газа на результаты измерений используется второй термометр сопротивления Rt2, который измеряет температуру газа, поступающего в зону реакции.
Термометры включены в смежные плечи мостовой уравновешенной схемы. Сопротивление термометра /?,, пропорционально температуре в зоне катализатора, которая складывается из температуры исходной газовой смеси и температуры химической реакции. Сопротивление термометра Rtl пропорционально температуре газа, поступающего на анализ. Разность показаний термометров, пропорциональная концентрации определяемого компонента, регистрируется измерительным прибором.
Применение катализатора требует предварительной очистки анализируемого газа от веществ, которые могут вызвать его отравление (Cl2, H2S и др.).
Термомагнитный метод анализа, применяемый для измерения концентрации кислорода в различных газовых смесях, основан на различии магнитных свойств кислорода и других газов. Большинство газов немагнитны, или обладают слабо выраженными диамагнитными свойствами (т. е. они отталкиваются магнитным полем). Кислород же обладает ярко выраженными парамагнитными свойствами. Магнитные свойства газов характеризуются величиной относительной магнитной восприимчивости (знак «плюс» показывает, что газ обладает парамагнитными свойствами, а «минус» — диамагнитными):
Кислород
4-1,000
Воздух (при 21% О2) 4-0,210
Окись азота (NO)
-|-0,362
Двуокись азота (NO2) 4-0,061
Водород Азот
—0,001 -0,004
Следовательно, контролировать содержание кислорода в газовой смеси можно по величине ее магнитной восприимчивости, так как последняя, в основном, будет зависеть от количества кислорода.
Непосредственно измерить магнитную восприимчивость газа чрезвычайно трудно, так как ее абсолютная величина очень мала. Поэтому для измерений в основном применяется метод термомагнитной конвекции, в котором используется способность кислорода быстро терять парамагнитные свойства при нагревании. Термомагнитной конвекцией называется движение содержащего кислород газа под действием магнитного и температурного полей.
На рис. 118 показан один из наиболее распространенных вариантов первичного преобразователя термомагнитного газоанализатора. Датчик представляет собой кольцевую камеру с горизонтальной перемычкой из немагнитного материала, один из концов которой расположен между полюсами постоянного магнита. Снаружи па пе
ремычку намотана нагревательная металлическая спираль, состоящая из двух одинаковых секций г, и г2, нагреваемых проходящим по ним током до определенной температуры.
150
Анализируемый газ поступает в кольцевую камеру снизу и,
разделяясь на два потока, проходит к верхнему выходному отверстию. Если в газе нет кислорода, то эти потоки одинаковы и в перемычке движения газа не происходит. При появлении в газе кисло-
рода он втягивается магнитным полем в перемычку и попадает в зону высокой температуры, создаваемую нагревателями. При нагревании кислород утрачивает парамагнитные свойства и выталки-
вается из магнитного поля следующими холодными порциями газа.
В результате в перемычке возникает термомагнитная конвекция,
скорость которой зависит от концентрации кислорода в анализируемом газе.
Скорость термомагнитной конвекции измеряется по степени охлаждения нагревательного элемента потоком газа в перемычке. Секция /•], омываемая более холодным газом, охлаждается сильнее секции г2. В результате охлаждения изменяется величина сопротивления секций нагревательного элемента, которые включены в схему неуравновешенного моста. Таким образом, напряжение в измерительной диагонали моста пропорционально скорости термомагнитной конвекции, т. е. пропорционально концентрации кислорода в анализируемом газе.
Точность измерения концентрации тер-
момагнитного газоанали-
затора с кольцевой измерительной камерой
стабилизируются с по-
момагнитным газоанализатором зависит от постоянства расхода газа, поступающего на анализ, и от стабильности его температуры. Поэтому оба указанных параметра
мощью регулятора расхода и системы термостатирования первичного преобразователя.
Метод измерения концентрации растворов по величине температурной депрессии применяется для контроля процессов выпа-
ривания.
Температурной депрессией называется разность температур кипящего раствора и насыщенного пара при одном давлении. Функциональная зависимость величины температурной депрессии от концентрации кипящего раствора близка к линейной.
Для измерения температурной депрессии используются два термометра сопротивления, один из которых Rlt контролирует температуру кипящего раствора, а второй — температуру конденсирующего пара. При изменении давления в выпарном аппарате температура кипения раствора и температура конденсации пара изменяется приблизительно на одинаковую величину. Следовательно разность этих температур характеризует концентрацию раствора независимо от колебаний давления в выпарной установке.
151
Для измерения разности температур (г, —4) термометры включены в смежные плечи автоматического уравновешенного моста. Чтобы можно было получить достаточную точность измерений концентрации, термометры должны быть правильно установлены: Rt, устанавливается в защитном чехле в нижней части выпарного аппарата, a Rt, — в специальном конденсационном бачке, к которому подводится соковый пар. Расход подаваемого в датчик пара должен быть таким, чтобы, проходя через слой находящегося в бачке
Рис. 119. Принципиальная схема первичного преобразователя для измерения концентрации жидкости по упругости ее насыщенных паров:
I — сильфон; 2 — рычаг; 3 — заслонка; 4 — сопло; 5 — дроссель постоянного сечения; 6 — иненмоусилитель; 7 — сильфон обратной связи; 8 — вторичный прибор
конденсата, пар принимал тем-пературу конденсации1, соответствующую давлению в выпарном аппарате.
Метод измерения концентрации растворов по упругости насыщенных паров основан на зависимости упругости паров бинарной жидкости от соотношения ее компонентов. При постоянной температуре упругость паров р над идеальным бинарным раствором определяется уравнением
Р = + -сА),
где рл и pls — упругости паров чистых компонентов Л и В; сА — молярная доля компонета А в растворе.
В автоматическом анализаторе измеряется разность Ар
между упругостью паров контролируемого и эталонного растворов. При одинаковой температуре
Др = kpcA - k0, где kp и kn — постоянные.
Таким образом, величина Др однозначно определяется содержанием компонента А в анализируемом растворе.
На рис. 119 приведена принципиальная схема первичного преобразователя автоматического анализатора, основанного на этом методе анализа.
Чувствительным элементом датчика служит сильфон /, частично заполненный эталонным раствором. Сильфон помещается в пары кон-
! Соковый пар в выпарных аппаратах, как правило, перегрет, поэтому его температура не может служить падежным импульсом для измерения температурной депрессии.
152
тролируемой среды так, что температуры паров внутри и снаружи сильфона одинаковы. Разность упругости паров контролируемой и эталонной жидкости преобразуется сильфоном в пропорциональное усилие, для измерения которого используется специальное устройство, работающее по принципу компенсации сил. Усилие, развиваемое сильфоном, передается через рычаг 2 заслонке 3, которая изменяет свое положение относительно сопла 4.
В результате изменяется давление сжатого воздуха в линии между соплом и дросселем постоянного сечения 5. ГЬсле усиления этого сигнала пневмоусилителем 6 он поступает па выход первичного преобразователя к вторичному прибору 8 и в сильфон обратной связи 7. Изменение усилия сильфона обратной связи компенсирует воздействие чувствительного элемента па рычажный механизм, вызванное изменением состава контролируемого раствора. Таким образом, изменение состава раствора преобразуется этим датчиком в пропорциональное изменение давления сжатого воздуха.
Автоматические анализаторы этого типа применяются при контроле чистоты легкокипящего продукта, получаемого на ректификационных установках.
§ 31. ХРОМАТОГРАФИЧЕСКИЙ МЕТОД АНАЛИЗА СОСТАВА ГАЗОВЫХ СМЕСЕЙ
Хроматографический метод применяется для анализа состава сложных газовых смесей. Он основан па различной скорости сорбции отдельных компонентов анализируемой смеси специально выбранным сорбентом. Анализ по этому методу выполняется следующим образом.
Проба Qnt. анализируемого вещества увлекается потоком инертного вещества-носителя и проходит через слой сорбента, заполняющего хроматографическую колонку. Скорость движения отдельных компонентов анализируемой смеси вдоль колонки зависит от интенсивности процессов сорбции: наибольшую скорость движения имеют компоненты, которые сорбируются слабее других и наоборот. Если условия для проведения анализа выбраны правильно, то за время движения через слой сорбента проба успеет полностью разделиться на отдельные компоненты, которые будут выделяться на выходе хроматографической колонки в определенной последовательности. Содержание С, отдельных компонентов исходной анализируемой смеси определяется путем измерения количества q-t каждого из них па выходе из колонки и деления этого количества на величину пробы
Таким образом, всякий автоматический хроматограф состоит из трех основных функциональных блоков: дозатора пробы, хрома-
153
тографической колонки и детектора, который служит для регистрации выделяющихся из колонки компонентов анализируемой смеси и определения величин 7,- и С,-. Кроме того, в конструкцию прибора входит ряд вспомогательных систем: пробоприготовительная, система подачи вещества-носи-
Рис. 120. Блок-схема автоматического газового хроматографа:
/ — дозатор; 2 — хроматографическая колонка; 3 — детектор; 4 — вторичный прибор;
5 — баллон
теля и др.
По виду применяемого сорбента различают адсорбционную и распределительную (абсорбционную) хроматографию. При адсорбционной хроматографии используются твердые сорбенты, в качестве которых применяются вещества с развитой пористой поверхностью (активированный уголь, силика-
гель, окись алюминия, специальные сорта глин и т. д.). При распределительной хроматографии сорбентом служит слой жидкости, нанесенный на поверхность инертной твердой насадки. В качестве жидких сорбентов применяются вазелиновое масло, дибутилфталат, нитробензол и дру
Рис.
121. Дифференциальная хроматограмма
гие вещества.
На рис. 120 показана принципиальная схема автоматического хроматографа, который работает следующим образом. Из пробоотборной системы прибора (на схеме не показана) анализируемая смесь поступает в дозатор /, который периодически отбирает пробы и подает их на анализ. Поток вещества-носителя (газа-носителя), поступающего из баллона 5, переносит пробу из дозатора в хроматографическую колонку 2, где происходит разделение анализируемой смеси. Измерение количества отдельных компонентов, выделяющихся из колонки, осуществляется детектором 3 и регистрируется вторичным прибором 4 в виде так
По принципу действия детекторы, фах, разделяются па два типа: дифференциальные и интегральные.
Дифференциальные детекторы измеряют концентрацию компонента, выходящего из колонки в данный момент, в потоке вещества-носителя. Наиболее распространенными типами дифференциальных детекторов для газа являются термокондуктометрический и термохимический (они аналогичны термокондуктометрическим и термохимическим газоанализаторам). На рис. 121 показана тшшч-
называемых хроматограмм, используемые в хроматогра-
154
пая хроматограмма, т. е. зависимость выходного сигнала хроматографа от времени т, полученная с помощью дифференциального тер-мокопдуктометрического детектора. Отдельные пики на графике
соответствуют выделению различных компонентов смеси, а проме-
жутки между ними соответствуют выходу из колонки чистого вещества-носителя. Концентрации отдельных компонентов в анализируемой смеси определяются путем специальной обработки (расшифровки) хроматограмм.
Для термокондуктометрического детектора количество каждого компонента определяется площадью S; соответствующего пика на хроматограмме, деленной на относительную теплопроводность ЛД
хромато-
неразмы-
этого компонента:
В тех случаях, когда грамма состоит из узких
тых пиков, величину р,- может с достаточной точностью характеризовать не площадь пика, а его высота:
грамма
величину пробы. В ав-
на
Qnp = const, концентрация величине qit найденной при
hi
Для определения концентрации компонентов в анализируемой смеси необходимо величину разделить тематических хроматографах, когда каждого компонента пропорциональна обработке хроматограммы. При расшифровке хроматограмм, полученных на лабораторных хроматографах, величину Qnp находят как п
сумму Qnp = У q-t.
i=i
Интегральные детекторы измеряют общее количество всех ком
понентов, выделившихся из колонки к данному моменту времени. Наиболее распространенный интегральный детектор для газов — поглотительный. Принцип действия такого детектора заключается в поглощении газа-носителя из газовой смеси на выходе колонки и измерении объема чистых выделяющихся компонентов анализируемой смеси. Обычно газом-носителем в этом случае служит СО2, который поглощается раствором КОН. В случае применения интегрального детектора хроматограмма имеет вид ступенчатой кривой (рис. 122). Высота каждой ступени Hi пропорциональна количеству соответствующего компонента в пробе.
* При использовании других типов дифференциальных детекторов, каждый из которых фактически является косвенным концентратомером, площади пиков необходимо делить на удельные значения того физического параметра данного компонента, который измеряется детектором.
155
На рис. 123 приведена принципиальная схема автоматического газового хроматографа с дифференциальным детектором, который работает следующим образом. Анализируемый газ из пробоотборной линии поступает через редуктор 1 и фильтр 2 в крап-дозатор 3 пробы, проходит дозировочный объем 4 и далее через ротаметр 5
выходит в атмосферу. Давление анализируемого газа поддерживается редуктором в пределах 0,196—0,294 Мн/м2 (2—3 кГ/см1'). Газ-
носитель из баллона 10 поступает в сравнительную камеру термокондуктометрического детектора 8 и далее в хроматографическую колонку 7. На выходе колонки газ попадает в измерительную камеру детектора, откуда он через ротаметр 6 сбрасывается в атмосферу. В положении крана-дозатора, изображенном па схеме, производится забор пробы и очистка (продувка) колонки от предыдущей порции газа. По окончании этого такта пробка крана-дозатора поворачивается на угол 60 (соответствующее положение каналов крана показано пунктиром). При этом газ-носитель выдувает пробу в колонку, где происходит ее разделение. Выходной
Рис. 123. Принципиальная схема ав тематического газового хроматографа с дифференциальным детектором:
1 — редуктор; 2 — фильтр; 3 — кран-дозатор; 4 — дозировочный объем; 5 и 6 — ротаметры; 7 — хроматографическая колонка; 6 — термокондуктометрический детектор; 0 — вторичный прибор; Ю — бал
сигнал детектора регистрируется вторичным прибором 9.
Автоматический хроматограф с интегральным детектором (рис. 124) работает следующим образом 1. Дозатор отбирает пробу
лон анализируемого газа, которая
потоком газа-носителя (СО2) переносится в хроматографическую колонку. После разделения отдельные компоненты анализируемой смеси из хроматографической колонки перекосятся газом-носителем в поглотительную колонку 8, частично заполненную раствором КОН. Здесь СО, поглощается, а отделившиеся компоненты анализируемой смеси собираются в верхней полости колонки, имеющей постоянный объем. Изменение
давления от выделившихся компонентов преобразуется дифманометром 9 в пропорциональный пневматический сигнал, который регистрируется вторичным прибором 10. Перед каждым новым цик-
1 Поз. I—7 на рис. 123 и 124 совпадают.
156
лом анализа обе полости дифманометра сообщаются с вакуумной линией. При этом происходит удаление продуктов анализа из колонки и выравнивание давления в обеих полостях дифманометра. Одновременно обновляется раствор щелочи в поглотительной ко-
лонке.
Несколько лет назад в СССР был разработан модифицированный метод хроматографического анализа, называемый хроматермогра-фией. При использовании хроматермографического метода анализа разделение контролируемой смеси осуществляется так же, как и при обычном хроматографическом анализе. Отличие состоит в том, что температура хроматографической колонки не остается в процессе анализа постоянной, как при обычной хроматографии, а изменяется по определенной заданной программе. При нагревании интенсифицируется процесс десорбции компонентов анализируемой смеси с поверхности сорбента, благодаря чему сокращается продолжительность анализа и улучшается качество разделения компонентов.
Конструкция хроматермографического ана
лизатора отличается от конструкции обычного хроматографа только наличием устройства для изменения температуры колонки по заданной программе.
Для использования автоматического хроматографа в качестве датчика систем автоматического регулирования необходима автоматическая расшифровка хроматограмм. В настоящее время разработаны хроматографы, в которых выходной сигнал, пропорциональный содержанию интересующего компонента смеси, запоминается специальным устройством до следующего цикла измерений. Благодаря этому хроматограф может быть использован в системах
Рис. 124. Принципиальная схема автоматического газового хроматографа с интегральным детектором:
/ — редуктор; 2 — фильтр; 3 — крап-дозатор; 4 — допнроночный объем; !> и 6 — ротаметры; 7 — хроматографическая колонка; 8 — поглотительная колонка; 9 — дифманометр; 10 — вторичный прибор;
1/ — баллов
автоматического регулирования.
Глава VIII
ПРИБОРЫ ДЛЯ ОПРЕДЕЛЕНИЯ ФИЗИЧЕСКИХ СВОЙСТВ ВЕЩЕСТВА (ПЛОТНОМЕРЫ, ВИСКОЗИМЕТРЫ, ВЛАГОМЕРЫ]
§ 32. ПЛОТНОМЕРЫ ДЛЯ ЖИДКОСТЕЙ
Во многих случаях для обеспечения правильного хода технологического процесса в химическом производстве необходимо определять какой-либо физический пли физико-химический параметр, характеризующий свойство или качество исходного материала, полупродукта или готового продукта.
Плотность характеризует качество и однородность вещества. Приборы для автоматического измерения плотности — плотномеры — составляют весьма важный элемент в комплексной автоматизации ряда процессов в химической промышленности. Так, например, контроль и управление работой выпарных установок, абсорберов, дистилляционных и ректификационных аппаратов и т. п. требуют непрерывного измерения плотности. Иногда плотность производственных жидкостей измеряют, чтобы определить концентрацию растворенного вещества.
Плотность жидкостей зависит от температуры. Принято указывать плотность жидкостей при нормальной температуре (20° С). Единица плотности в системе СИ — кг/ж3. Плотность при нормальной температуре (р.2О), подсчитывается по формуле
Р20 = Р/ [1 - Р (2°-- Cl-
где pf — плотность жидкости при рабочей температуре;
|i — средний коэффициент объемного теплового расширения жидкости;
t — температура жидкости в ° С.
Наибольшее применение для измерения плотности жидкостей получили плотномеры весовые, поплавковые, гидростатические и радиоизотопные.
Весовые плотномеры
В весовых плотномерах плотность определяется непрерывно по изменению массы постоянного объема контролируемой жидкости.
158
На рис. 125 приведена принципиальная схема весового плотномера с пневматическим преобразователем. Наследуемая жидгость непрерывно протекает по петлеобразной трубке/, имеющей гибкие резиновые патрубки или металлические сильфоны. Петлеобразная трубка соединена с заслонкой 2 пневмопреобразователя (см. рис. 42).
При увеличении плотности жидкости вес петлеобразной трубки увеличивается, она опускается, зазор между соплом 3 и заслонкой 2
уменьшается, давление воздуха Пневматический унифицированный сигнал через усилитель 4 передается на сильфон 5 (обратная связь, см. рис. 45). Давление воздуха в сильфоне, изменяющееся пропорционально изменению плотности жидкости, измеряется вторичным иргбо-ром, шкала которого градуирована в единицах плотности.
в преобразователе увеличивается.
Питание
Прибор измеряет плотность при фактической температуре жидкости, заполняющей в данный момент петлеобразную трубку.
Достоинства этих плотномеров — постоянное сечение трубки, по
Рис. 125. Схема весового плотномера с пневматическим преобразователем:
/ — петлеобразная трубка; 2 — заслонка; 3 — сопло; 4 — ппснматическин усилитель; 5 —сильфон
которой протекает жидкость и достаточно большая скорость
движения жидкости, что исключает осаждение на стенках петлеобразной трубки взвешенных твердых частиц.
Промышленность выпускает весовые плотномеры (ДУВ и ПЖК) па пределы измерения от 0,5 до 2,5 г/см3.
Поплавковые плотномеры
Поплавковые плотномеры изготовляются двух типов — с плавающим поплавком и с полностью погруженным поплавком.
В приборах первого типа мерой плотности жидкости служит глубина погружения поплавка определенной формы и постоянного веса (ареометры постоянного веса).
В плотномерах второго типа глубина погружения поплавка остается постоянной и изменяется действующая на него выталкивающая сила, пропорциональная плотности жидкости (ареометры постоянного объема).
На рис. 126 показана принципиальная схема плотномера с плавающим поплавком. Плотномер состоит из измерительного сосуда /, в котором плавает металлический поплавок 2. Жидкость в прибор поступает через патрубок 3 и выходит из прибора через патрубок 4. Скорость потока устанавливается при помощи дросселя постоянного сечения 5. Отражательные пластины 6 предохраняют поплавок от
159
завихрений. Изменение плотности жидкости вызывает перемещение поплавка и связанного с ним сердечника 7, который переме-
Рис. 126. Схема плотномера с плавающим поплавком:
1 — измерительный сосуд; 2 — поплавок; 3 и 4 — патрубки-, 5 — дроссель; 6 — отражательные пластины; 7 — сердечник
щается в катушках дифференциально-трансформаторного преобразователя. Вторичный прибор (показывающий или регистрирующий) градуируется в единицах плотности. Температурная компенсация может быть произведена с помощью термометра сопротивления, включенного в измерительную схему вторичного прибора.
Плотномер может быть изготовлен из коррозионностойких материалов и применен для измерения плотности агрессивных жидкостей.
На рис. 127 показана принципиальная схема плотномера с пол ностью погруженным поплавком, в котором применен пневматический преобразователь. Жидкость из трубопровода поступает через кольцевой распределитель в измерительную камеру 1 и по отводному патрубку обратно в трубопровод. Такое направление движения жидкости устраняет действие потока па поплавок 2. Поплавок насажен на конце коромысла 3, которое проходит через уплотнительный сильфон 4. Коромысло уравновешивается противовесом 5.
При увеличении плотности жидкости поплавок под действием уве-
личивающейся выталкивающей силы поднимается и равновесие
системы нарушается.
Рис. 127. Схема плотномера с полностью погруженным поплавком и пневматическим преобразователем:
1 — измерительная камера; 2 — поплавок; 3 — коромысло; 4 — уплотнительный сильфон; 5 — противовес; 6 — заслонка; 7 — сопло; 8 — дроссель; 9 — мембранная коробка; 10 — рычаг; II — ролик; 12 — толкатель мембраны
Восстановление равновесия производится при помощи пневматического преобразователя.
160
При поднятии поплавка заслонка 6 опускается, давление воздуха на выходе из сопла 7 н в мембранной коробке 9 повышается, толкатель 1'2 мембраны через рычаг 10 и ролик 11 перемещает правый конец коромысла вверх и заслонка отводится от сопла.
Плотность жидкости определяется по давлению воздуха на мембрану, пропорциональному действующей на поплавок выталкизаю-щей силе. Шкала вторичного прибора градуирована в единицах плотности. Нижний предел измерений регулируется перемещением противовеса 5; верхний предел и диапазон измерений можно менять изменением размеров поплавка и мембраны. Расход воздуха устанавливается с помощью дросселя постоянного сечения 8.
Гидростатические плотномеры
Принцип действия гидростатических плотномеров основан на том, что давление р в жидкости на некоторой глубине Н от поверхности равно весу столба жидкости высотой Н (при площади основания 1 см1):
p = Hpg, (59)
где р — плотность жидкости;
g — ускорение силы тяжести.
Из формулы (59) следует, что давление столба жидкости постоянной высоты Н является мерой плотности жидкости.
В плотномерах этого типа давление столба жидкости обычно измеряется косвенно, путем непрерывного продувания через жидкость инертного газа (воздуха), давление которого пропорционально давлению столба жидкости (пьезометрические плотномеры). Такой метод измерения давления столба жидкости позволяет легко осуществить передачу показаний на расстояние. Характер продуваемого инертного газа выбирается, в зависимости от свойств жидкости, плотность которой измеряется. Расход продуваемого инертного газа должен быть небольшим и постоянным, так как колебание расхода может вызвать дополнительную погрешность измерения.
Обычно измеряют разность давлений двух столбов жидкости разной высоты (дифференциальный метод). Это дает возможность исключить влияние на точность измерения колебаний уровня исследуемой жидкости и автоматически осуществить температурную компенсацию.
Из формулы (59)
рх - р.,-- {Н} - H>)pg или Др == i\Hpg, (60)
где pt и р, — давление столбов жидкости;
и Н., — соответственно высота столбов жидкости.
В пьезометрическом дифференциальном двух жидкостном плотномере с непрерывной продувкой инертного газа (рис. 128) исследуемая жидкость непрерывно протекает через сосуд /, в котором
ft Казаков п др.
161
поддерживается постоянный уровень, (.ссуд 2 постоянного уровня заполнен эталонной (сравнительной) жидкостью с известной мот-ностыо.
Инертный газ по трубке 3 проходит через слон исследуемой жидкости постоянной высоты и далее выходит из прибора. Тот же инертный газ по трубке 4 проходит через слой постоянной высоты эталонной жидкости, затем по дополнительной трубке 5 газ проходит через небольшой слой исследуемой жидкости и далее уходит из прибора.
Рис. 128. Схема пьезометрического дифференциального плотномера с непрерывной продувкой газа:
Прохождение газа из дополнительной трубки через небольшой слой исследуемой жидкости обеспечивает независимость показаний плотномера от колебания уровня жидкости в сосуде 1.
При известных глубинах погружения пьезометрических трубок и известной плотности эталонной жидкости р0 показание дифференциального манометра 6 является мерой плотности исследуемой жидкости.
Согласно формуле (60) показание дифманометра
= (й2р + йор«) =
= (йр - Л()р„) g.
/ — сосуд для исследуемо» жидкости;
2 — сосуд с эталон noii жидкостью; (3—5 — трубки; 6 — дифманометр
Эталонная жидкость подбирается с плотностью, равной наимень-
шей плотности исследуемой жидко-сти. При этом условии и при условии, что h0 == й, разность давлений Др = 0; тогда плотность исследуемой жидкости будет мини
мальной. Разность давлений достигнет максимального значения
при максимально возможной плотности исследуемой жидкости.
В существующих приборах сосуд 2 с эталонной жидкостью находится в сосуде 1 (в исследуемой жидкости). При одинаковых температурных коэффициентах эталонной и исследуемой жидкости и равенстве их температур автоматически обеспечивается темпера
турная компенсация.
Радиоизотопные плотномеры
Основное преимущество радиоизотопных плотномеров — бескоь-тактность измерения. Это облегчает измерение плотности агрессивных или весьма вязких жидкостей, а также жидкостей, находящихся при высоких температурах и давлениях. В этих плотномерах используется преимущественно у-излучение.
162
Измерение плотности основано на определении изменении” в интенсивности прямого пучка у-лучей после прохождения их через измеряемую среду.
Интенсивность узкого пучка у-лучей J, прошедшего через слой вещества толщиной х и плотностью р, определяется соотношением
где Jn — интенсивность первичного пучка у-лучей при лр = 0; — массовый коэффициент ослабления узкого пучка у-лучей. Для веществ сложного атомного состава р. определяется выражением
|1 -= 2 С;Р;,
где [I,- — массовый коэффициент ослабления узкого пучка у-лучей в различных компонентах вещества;
Ci — массовые концентрации компонентов вещества.
Рис. 129. Блок-схема радиоизотопного плотномера компенсационного типа:
1 и 6 — источники излучения; 2 — ольокт измерения; 3 и 8 — приемники излучения; 4 и .9 — формирующие блоки; 5 — электронный преобразователь; 7 — компенсационный клин1, 10 — реверсивный двигатель; II —диф-ферен циал ьно-тр а нсфор ма торный преобразователь; 12 — вторичный прибор
На рис. 129 приведена принципиальная блок-схема радиоизотопного плотномера компенсационного типа.
В технологическом трубопроводе установлен источник радиоактивного излучения / (Со1!°, Cs13d) и приемник излучения 3.
у-лучи от источника проходят через стенки объекта измерения, слой жидкости и попадают в приемник излучения. Электрический сигнал приемника, являющийся функцией измеряемой плотности, формируется блоком 4 и далее передается на вход электронного преобразователя 5, куда поступает также сигнал от дополнительного устройства. Последнее включает в себя радиоактивный источник излучения 6, металлический компенсационный клин 7, приемник излучения 8 и формирующий блок 9. Источник и приемник излучения дополнительного устройства такие же, как / и 3.
6* 163
Разность сигналов усиливается в электронном преобразователе и подается на реверсивный электродвигатель 10, который связан с компенсационным металлическим клином 7 и плунжером дифференциально-трансформаторного преобразователя 11. В зависимости от величины и знака сигнала в электронном преобразователе реверсивный двигатель перемещает металлический клин до тех пор, пока разность сигналов станет равной нулю. Величина перемещения клипа, с которым связана стрелка показывающего прибора, пропорциональна изменению плотности жидкости.
Плотномер включает в себя еще показывающий прибор (электронный блок) и вторичный дифференциально-трансформаторный прибор 12.
§ 33. ВИСКОЗИМЕТРЫ
Для многих продуктов вязкость представляет собой'величину, определяющую качество и состав (искусственное волокно, синтетические смолы, растворы каучука, краски, смазочные масла и др.).
Вязкостью называется свойство жидкостей и газов, характеризующее их сопротивляемость скольжению или сдвигу.
При сдвиге двух слоев жидкости при установившемся течении возникает тангенциальная сила, которая согласно закону Ньютона определяется соотношением
dv r dn ’ где F — сила сдвига;
р — размерный коэффициент, называемый динамической вязкостью или просто вязкостью;
X — площадь внутреннего трения (площадь сдвига);
dv
— градиент скорости движения по толщине движущегося слоя (скорость сдвига);
v — скорость течения слоя;
п — толщина движущегося слоя.
dv
если Li не зависит от , , то жидкости называются ньютонов-1 ап.
скими; все остальные жидкости относятся к группе «неньютоновских».
За единицу динамической вязкости в Международной системе единиц принимается вязкость потока жидкости, в которой линейная скорость под воздействием давления сдвига 1 н!м* имеет градиент 1 м!сек на 1 м расстояния, перпендикулярного к плотности сдвига. Эта единица динамической вязкости имеет размерность н сек!м\
На практике часто пользуются кинематической вязкостью, которая представляет собой отношение динамической вязкости к плотности жидкости р , т. е. . Кинематическая вязкость в Международной системе единиц имеет размерность м21сек.
164
Для измерения вязкости жидкостей применяются вискозиметры, работа которых основывается на следующих методах: истечения; падающего тела; крутящего момента; вибрационном (измерение скорости затухания упругих колебаний пластины в вязкой жидкости).
При любом методе измерения вязкости нужно иметь в виду, что вязкость в значительной степени зависит от температуры и, как правило, с увеличением температуры падает. Поэтому температуру, при которой определяется вязкость вещества, необходимо всегда точно знать и поддерживать постоянной во время измерений.
Рис. 130. Принципиальная схема автоматического капиллярного вискозиметра:
I — капиллярная трубка; 2 — дифманометр; .3 — шестеренный насос; 4 — синхронный двигатель; 5 — редуктор; 6 — масляный термостат
Визкозиметры истечения (капиллярные вискозиметры)
Для ламинарного движения ньютоновской жидкости через капилляр справедливо уравнение Пуазейля:
р = Л Др,
где р. — коэффициент динамической вязкости;
г — радиус капилляра;
Q — количество жидкости, вытекающей из капилляра;
I—длина капилляра;
Др — перепад давления в капилляре;
k — постоянный числовой коэффициент, зависящий от принятой размерности.
При постоянных значениях k, г, Q, I: ц = k^p.
Подавляющее большинство капиллярных вискозиметров — лабораторные приборы.
165
На рис. 130 показана принципиальная схема автоматического капиллярного вискозиметра, принцип действия которого основан па уравнении Пуазейля.
Вязкость определяется по перепаду давления на концах капиллярной трубки 1, через которую прокачивается контролируемая жидкость. Перепад давления замеряется чувствительным дифманометром 2, шкала которого градуирована в единицах динамической вязкости. Диаметр и длина капиллярной трубки выбираются в зависимости от желаемых пределов измерения вязкости. Строго постоянное количество жидкости подается шестеренным насосом 3, который приводится во вращение синхронным двигателем 4 с редуктором 5. Вискозиметр установлен в масляном термостате 6, имеющем постоянную температуру.
Погрешность капиллярных вискозиметров составляет ±2% от верхнего предела шкалы и определяется в основном точностью поддержания температуры измеряемой среды и расхода.
Вискозиметры с падающим телом
В случае падения строго сферического твердого шарика в однородной жидкости при ламинарном движении ее относительно шарика справедлив закон Стокса, по которому
г v >
где рх и р., — плотность материала соответственно шарика в жидкости;
г — радиус шарика;
g — ускорение силы тяжести;
v — скорость равномерного движения шарика;
k — постоянный числовой коэффициент, зависящий от принятой раз мер ноет и.
На рис. 131 показана принципиальная схема автоматического вискозиметра дискретного действия. Автоматический подъем шарика 1 в исходное положение производится восходящим потоком исследуемой жидкости, создаваемым шестеренным насосом 2. Одновременно с подъемом шарика шестеренный насос отбирает пробу жидкости из резервуара 3 в мерную трубу 4. Шарик, находясь в нерабочем положении у нижней ограничивающей сетки 5, при включении насоса поднимается и останавливается у верхней ограничивающей сетки 6. В момент касания шарика с сеткой 6 насос автоматически отключается и шарик падает в неподвижной среде.
Измерение вязкости сводится к отсчету времени, в течение которого шарик проходит фиксированный участок пути. Следовательно вязкость
(г — kt, где k — постоянная прибора;
т — время, за которое шарик проходит расстояние /.
166
на выходе измерительной с?;емы
На мерную трубу 4, выполненную и.з немагнитного материала, надеты катушки 10 и //, первичные и вторичные обмотки которых соединены по днфферс11цналы1о-трансформаторной схеме. При прохождении шарика через катушки возникает сигнал разбаланса, который усиливается электронным усилителем /.
Автоматическое включение шестеренного насоса и автоматический отсчет времени падения шарика производят релейным блоком 8 и вторичным прибором 9. Вторичный прибор может быть автоматическим с дифференциально-трансформаторной схемой или им может служить электрический секундомер.
Пределы измерения вискозиметра можно менять в широком диапазоне установкой различных расстояний между катушками и подбором размера шарика. Вискозиметр позволяет производить измерения петолько в емкостях, по и в трубопроводах.
Разработаны также вискозиметры, в которых измерения производятся в двух одинаковых цилиндрах методом сравнения времени падения шарика в исследуемой и эталонной жидкостях, с автоматическим измерением движения шарика.
Вискозиметры с падающим шариком в конструктивном отношении совершенствуются по линии повышения точности измерения благодаря применению электромагнитных, оптических и радиоизотопных методов фиксации времени движения шарика в испытываемой жидкости.
Рис. 1'31. Принципиальная схема автоматического вискозиметра дискретного действия с падающим шариком:
/ — шарик; 2 — шестеренный насос; 3 — резервуар; 4 — мерная труба; 5 и 6 — ограничивающие сетки; 7 — электрон-iri.iii усилитель; 8 — релейный блок; 9 — вторичный прибор; 10 и // — катушки
Вискозиметры, основанные на измерении крутящего момента (ротационные]
При вращении тела в вязкой жидкости возникает противодействующий момент, обусловленный вязкостным сопротивлением. Если тело вращается с постоянной скоростью, то этот момент равен крутящему моменту Л1, передаваемому жидкостью, и пропорционален динамической вязкости
М — /<щы,
167
где k — постоянная прибора;
р — динамическая вязкость;
<о — постоянная угловая скорость вращающегося тела.
Ротационные вискозиметры различаются про признаку формы вращающегося тела и способу измерения крутящего момента. В качестве вращающегося тела применяются пластины, лопасти, цилиндры, наборы дисков и др. (рис. 132).
Крутящий момент измеряется различными способами, например:
1) Определение силы тока, потребляемой электродвигателем привода вращающегося тела.
Обычно используются однофазные синхронные двигатели или двигатели постоянного тока с автоматическим регулированием числа
Рис. 132. Вращающиеся тела, применяемые в ротационных вискозиметрах:
/ _ рабочим KJMcpn вискозиметра; 2 — вращающееся тело; 3 — патрубок для входа исследуемой жидкости; 4 — патрубок для выхода исследуемой жидкостя
оборотов. Ток, потребляемый приводом электродвигателя, изменяется в зависимости от вязкости жидкости, причем для различных вращающихся тел эта зависимость различна (при постоянной скорости вращения двигателя). В качестве измерительного (вторичного) прибора используется обычно автоматический потенциометр.
2) Определение угла поворота упругой подвески или уравновешивающей пружины.
В этих приборах момент вязкостного сопротивления уравновешивается упругим моментом подвески пли пружины, угол поворота которых пропорционален моменту. Иногда дая передачи движения применяется магнитная муфта , смещение которой является мерой вязкости. Приводом вращающегося тела служит синхронный’ двигатель.
Особую группу ротационных вискозиметров составляют приборы с двумя коаксиальными цилиндрами, пространство между которыми заполняется исследуемой жидкостью. При вращении одного из цилиндров с постоянной угловой скоростью жидкость стремится сообщить вращение второму цилиндру. Для сохранения второго цилиндра в покое к нему должен быть приложен момент, равный и противоположный по знаку моменту, передаваемому жидкостью.
168
Из гидродинамики известно, что момент, действующий па цилиндры, при установившемся течении жидкости в кольцевом за-
Рис. 133- Схема вискозиметра с коаксиальными цилиндрами
где М — момент, действующий на цилиндр (внутренний или наружный) на определенном отрезке длиною /;
R и,г — радиусы соответственно наружного и внутреннего цилиндров;
Q и <о — угловые скорости вращения соответственно наружного и внутреннего цилиндров.
Формула (61) выведена в предположении, что цилиндры имеют теоретически бесконечную длину. Вискозиметры бывают с неподвижным наружным (й --- 0) или с неподвижным внутренним (со 0) цилиндром.
Существует ряд способов измерения крутя -щего момента.
В приборе, показанном на рис. 133, наружный цилиндр, заполненный исследуемой жидкостью, равномерно вращается. Внутренний цилиндр удерживается грузом на весовой платформе. Вращающий момент равен произведению силы тяжести уравновешивающего груза на радиус шкива, к которому прикреплена поддерживающая весовую платформу нить.
Могут быть использованы и другие методы измерения момента на оси ведомого цилиндра (по силе тока, питающего двигатель, приводящий во вращение цилиндр; но углу сдвига между полюсами статора и ротора синхронного двигателя, вращающего цилиндр; по углу закручивания гибкой нити или пружины н т. п.).
Постоянные величины ротационных вискозиметров определяются либо аналитически, либо экспериментально по эталонным жидкостям. Характерная особенность ротационных вискозиметров — весьма широкий диапазон измерений от 0,01 до 1000 н сек/м2.
Ротационные вискозиметры применяются не только для измерения вязкости, но и для исследования реологических свойств веществ.
Вибрационные вискозиметры
Вибрационные вискозиметры позволяют оценивать вязкость по изменению амплитуды колебаний пластины. Это изменение амплитуды фиксируется и по ее величине судят об изменении вязкости.
Чаще всего используются колебания ультразвуковой частоты 23—28 кгц (ультразвуковые вискозиметры).
Существуют приборы, в которых ультразвуковые колебания пластины возбуждаются пьезоэлектрическим вибратором, однако
169
Рис. 134. Ьлок-схела ультразвукового вискозиметра, измеряющего интенсивность затухания ультразвуковых колебаний:
/ — пластина; .2 — возбуждаю щам катушка; 3 — гильзег; 4 — генератор импульсов; 5 — усилитель; fi — детектор с триггером па выходе: 7 — измерительный прибор
точность таких приборов невелика. Значительно большее распространение получили вискозиметры, основанные па измерении интенсивности (скорости) затухания ультразвуковых колебаний в пластине из магнитострикционного материала. Такая пластина меняет размеры в зависимости от напряженности магнитного поля (магннтострикцнонiiwii эсрфскт).
На рис. 134 показана блок-схема ультразвукового вискозиметра, измеряющего интенсивность затухания ультразвуковых колебаний.
Пластина 1 пз магш.тхтрикцион-пого материала закреплена в торце гильзы 3. Нижняя половина пластины помещена в жидкость, вязкость которой измеряется. В гильзе имеется возбуждающая катушка 2, питаемая от генератора импульсов 4. На катушку подастся импульс тока длительностью около 20 мксек, в результате чего в пластине возникают продольные колебания (магнитоуиругая деформация), затем возбуждение снимается и пластина совершает затухающие колебания. Частота колебаний определяется геометрией пластины, а амплитуда затухания — вязкостью жидкости.
В момент иодачи импульса, возбуждающего катушку, одновременно осуществляется его усиление и детектирование. В результате триггер запирает генератор.
При гюаебании пластины благодаря обратному магнитострикционному эф
фекту в катушке наводится некоторая э. д. с., имеющая частоту колебаний пластины. Эта э. д. с обеспечивает запирание генератора импульсов до момента окончания затухания колебаний пластины (уменьшение амплитуды до 0,002 первоначальной величины), после чего генератор импульсов снова возбуждается. Таким образом мерой интенсивности затухания является величина интервалов времени между последовательным возбуждением генератора импульсов. Чем больше вязкость жидкости, тем меньше интервалы между импульсами.
Измерительный прибор, градуированный в единицах вязкости, измеряет среднюю величину интервала импульсов. Погрешность прибора порядка -I"..,
Ультразвуковые вискозиметры могут быть использованы для непрерывного контроля различных жидкостей в технологических потоках. Диапазон измерения этих вискозиметров от 0,0001 до 100 н сек/м-.
170
§ 34. ВЛАГОМЕРЫ ДЛЯ ГАЗОВ И ТВЕРДЫХ ТЕЛ
Для автоматического определения влажности газов чаще всего используются психрометрический метод и метод точки росы.
Для определения влажности твердых тел обычно применяют косвенные методы, позволяющие определять влажность путем измерения функционально связанной с пей физической величины. Из косвенных методов для автоматического непрерывного измерения влажности наибольшее распространение получили кондуктометрический метод и метод диэлектрической проницаемости.
Психрометрический метод
Психрометр имеет два одинаковых термометра, из которых у одного, называемого мокрым, тепловоспринимающая часть все время остается влажной, соприкасаясь с гигроскопическим телом, всасывающим воду из сосуда.
При испарении влаги с увлажненной поверхности мокрого термометра температура его понижается. В результате создается разность температур мокрого (/„) и сухого (/,.) термометров, называемая психрометрической разностью
Относительная влажность <[> в зависимости от психрометрической разности выражается зависимостью
_ Р„ - A (tc - /„)
Ре
где р„ — упругость паров, насыщающих испытуемую среду при температуре влажного термометра;
р,. — упругость паров, насыщающих испытуемую среду при температуре tc сухого термометра;
А - психрометрический коэффициент, зависящий от конструкции психрометра, скорости обдувания влажного термометра газом и давления газа.
Коэффициент А определяется ио психрометрическим таблицам, составленным для определенных конструкций психрометров. Наибольшее влияние на величину А оказывает скорость обдувания влажного термометра газом. С возрастанием скорости газового потока коэффициент А быстро убывает и при скоростях больше 2,5—3 м/сек практически остается постоянным. В преобразователях промышленных психрометров предусматриваются устройства, обеспечивающие постоянную скорость газового потока не ниже 3—4 м/сек.
В преобразователях электрических психрометров для определения температур обычно применяются металлические термометры сопротивления. На рис. 135 показана принципиальная схема электрического психрометра. Измерительная часть прибора состоит из двух мостов / и II. Оба моста питаются переменным током от обмотки
171
силового трансформатора электронного усилителя ЭУ и имеют два общих плеча R{ и плечо (мост /) и Rt (мост //). Сухой термометр сопротивления R,nc включен в плечо моста /, мокрый Rmtl — в плечо моста !1.
Разность потенциалов па вершинах а и Ь диагонали моста /
пропорциональна температуре сухого термометра сопротивления,
Рис. 135. Схема электрического психрометра
а разность потенциалов на вершинах а и с — температуре мокрого термометра сопротивления.
Падение напряжения между точками b и с диагонали двойного моста пропорционально разности температур сухого и мокрого термометров сопротивления. Равновесие измерительной схемы устанавливается автоматически изменением положения движка реохорда Rp, приводимого
в движение реверсивным двигателем РД. Одновременно двигатель переставляет стрелку прибора.
Преимущества психрометрического метода — вполне удовлетво-
рительная точность при положительных температурах и незначительная инерционность. Недостатки — зависимость результатов измерения от скорости движения газов и колебаний атмосферного
давления, а также понижение чувствительности и рост погрешности измерений с понижением температуры.
Метод точки росы
При этом методе испытуемый газ охлаждают до наступления насыщения, т. е. до точки росы. Методом точки росы можно измерять влажность газа при любых давлениях.
При неизменном давлении точка росы не зависит от температуры исследуемого газа. Для определения момента наступления точки росы обычно используют охлаждаемое металлические зеркало, температуру которого в момент выпадения конденсата на нем фиксируют как точку росы. Рабочая поверхность зеркала должна быть обезжирена. При наличии в исследуемом газе пыли, масел, тяжелых углеводородов и других загрязнений, необходимо предусматривать автоматическую очистку поверхности зеркала перед каждым измерением.
172
В автоматических приборах появление точки росы на зеркальной поверхности определяется по ослаблению светового потока, отраженного от зеркала и воспринимаемого приемником.
На рис. 136 показана принципиальная схема автоматического гигрометра по точке росы с использованием зеркала и фотоэлемента. Зеркалом является отполированная торцовая поверхность полого цилиндра 1 из нержавеющей стали, помещенного в среде газа, влажность которого измеряется. Внутренняя полость цилиндра охлаждается непрерывно протекающей жидкостью. Температура охлаждающей жидкости регулируется электрическим нагревателем 2, управляемым электромагнитным реле 3, по обмотке ко-
Рис. 136. Схема автоматического гигрометра по точке
росы:
/ — полый цилиндр; 2 — электрический нагреватель: и 5 — реле; 4 — лампа накаливания
торого протекает фототок фотоэлемента Ф. Фотоэлемент освещается отраженным от зеркальной поверхности цилиндра световым потоком лампы накаливания 4.
Температура поверхности цилиндра (точка росы) измеряется термометром сопротивления Т. Вторичным прибором служит записывающий логометр или милливольтметр с падающей дужкой. Реле 5, управляющее работой падающей дужки, управляется другим электромагнитным реле 3. Работа обоих реле синхронизирована таким образом, что стрелка вторичного прибора прижимается падающей дужкой в те моменты времени, когда па стенках цилиндра (зеркале) появляется туман, т. е. когда стенки цилиндра (зеркала) охлаждаются до точки росы.
При этом вследствие осаждения па поверхности зеркала тумана световой поток, падающий на фотоэлемент, уменьшается и благодаря уменьшению фототока срабатывает реле 3, замыкая цепь электронагревателя 2. Охлаждающая жидкость принимает температуру выше точки росы, туман на зеркале исчезает, фототок возра
173
стает, и реле /? снова включает электронагреватель. Таким образом, температура зеркальной поверхности цилиндра все время колеблется около точки росы.
Кондуктометрический метод
Обычно твердые материалы представляют собой капиллярнопористые тела, в порах которых находится влага. Для таких материалов характерна зависимость их электрических свойств от вла-госодержания. В сухом виде эти материалы обычно являются диэлектриками с удельным объемным сопротивлением р т == 10й'ом-ем и выше. В результате увлажнения капиллярно-пористые тела ста-
новятся проводниками, причем их электрическое сопротивление
/-Д участок 2-й участок
Рис. 137. Зависимость электрического сопротивления от влажности материала
очень резко снижается—до р я = ~ 1()~2 ом-см.
Зависимость электрического сопротивления от влажности для капиллярно-пористых материалов выражается показательной функцией вида р ________________ 71
'Хх де/и >
где Rx — сопротивление;
А — постоянная, зависящая от исследуемого материала;
— влажность материала в процентах по массе сухого ве-
щества;
п — показатель степени, зависящий от структуры и природы исследуемого материала (для различных материалов величина п колеблется в широких пределах).
График показательной функции представлен на рис. 137. Зависимость 1g Rx -- f (U7) имеет два характерных участка. Начальный (1-й) участок, соответствующий низкой и средней влажности, характерен высокой крутизной и может быть аппроксимировал прямой вида
1g Rx = a-bW,
где а и b — постоянные, зависящие от исследуемого материала и условий измерения.
На этом участке влагомер очень чувствителен к изменению влажности материала и влияние других факторов на величину сопротивления незначительно.
Участок повышенной влажности (2-й участок) характерен снижением крутизны характеристики; чувствительность влагомера резко падает, начинают оказывать влияние побочные факторы.
174
Основная область применения кондуктометрического метода ограничена первым участком кривой (до 117 — 30%). Но и на этом участке имеется область (W7 =--= 0 ~ 2%), где практически невозможно измерить влагосодержапие ввиду резкого возрастания электросопротивления материала (сопротивление материала становится соизмеримым с сопротивлением изоляции подводящих проводов или больше его).
Степенная зависимость сопротивления от влажности материала определяет высокую чувствительность кондуктометрического метода определения влажности капиллярно-пористых материалов. Однако сложная зависимость сопротивления от ряда других факторов (температура, структура материала, плотность насыпки, химический состав, наличие электролитов и т. и.) делает этот метод малопригодным для автоматического непрерывного определения влажности. Приборы этого типа в настоящее время применяются в основном в качестве лабораторных.
Преобразователи кондуктометрических влагомеров представляют собой два электрода, конструктивно выполненных в виде плоских пластин, цилиндрических трубок, роликов и т. п.
Из измерительных схем наибольшее распространение получили мостовые схемы.
Метод диэлектрической проницаемости
Большинство капиллярно-пористых тел имеют диэлектрическую проницаемость е =-= 1 ч- 6 (у воды е — 81). Присутствие влаги в твердом материале значительно влияет па величину диэлектрической проницаемости.
Определение величины диэлектрической проницаемости обычно сводится к измерению емкости конденсатора. Преобразователи емкостных влагомеров выполняются в виде двух плоских пластин или двух концентрических цилиндров, пространство между которыми заполняется исследуемым материалом.
Для большинства материалов абсолютная величина емкости составляет несколько пикофарад. Для измерения такой небольшой емкости с достаточной точностью обычно применяют высокочастотные резонансные измерительные схемы.
Часть вторая ЭЛЕМЕНТЫ ТЕОРИИ И ТЕХНИКИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Глава IX
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
§ 35. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Регулирование - наиболее распространенная разновидность управления непрерывными технологическими процессами. Как и всякая система управления, система автоматического регулирования (САР) состоит из объекта регулирования и соответствующих технических средств автоматизации. Технологические параметры, которые характеризуют состояние объекта регулирования и в процессе его работы должны соответствовать определенным значениям, называются регулируемыми параметрами. Действительные значения регулируемых параметров в каждый момент времени называются текущими значениями. Если текущее значение регулируемого параметра не равно заданному, то их разность составляет погрешность регулирования.
На состояние объекта регулирования и, следовательно, на значения регулируемых параметров влияют факторы, которые называются воздействиями. Существуют возмущающие воздействия, названные так потому, что они действуют произвольно, вызывая нежелательные отклонения регулируемых параметров от заданных значений. Задача системы регулирования заключается в компенсации влияния возмущающих воздействий на объект регулирования, что достигается целенаправленным изменением других регулирующих воздействий. Возмущающие и регулирующие воздействия можно рассматривать как входные сигналы для объектов регулирования; величины регулируемых параметров, изменения которых являются следствием указанных воздействий — как выходные сигналы.
Текущее значение регулируемого параметра измеряется датчиком САР, в качестве которого используется автоматический контрольно-измерительный прибор. Датчик преобразует текущее значение регулируемого параметра в пропорциональный сигнал (электрический, пневматический, перемещение и т. д.), который подается па вход основного элемента САР — автоматического регулятора. Регулятор представляет собой устройство, которое осуществляет сравнение текущего значения регулируемого параметра
176
с заданным его значением п в зависимости от погрешности регулирования вырабатывает по определенному закону сигнал регулирующего воздействия. Обычно регулирующим воздействием является какой-нибудь материальный или энергетический поток, вводимый в объект регулирования. Элемент CAP, который непосредственно изменяет этот поток и тем самым изменяет регулирующее воздействие па объект, называется регулирующим органом.
Для перемещения регулирующего органа обычно требуются значительные усилия, поэтому в СЛР входит специальное устройство, называемое исполнительным механизмом, которое служит приводом регулирующего органа.
Таким образом, всякая САР состоит из объекта регулирования, датчика, автоматического регулятора и исполнительного механизма с регулирующим органом.
По принципу действия САР делятся па две группы:
1) САР по возмущению;
2) САР по отклонению.
Кроме того, существуют комбинированные СЛР, сочетающие оба эти принципа регулирования.
Рассмотрим основные свойства систем, реализующих каждый из указанных принципов регулирования, на примере СЛР кожухотрубчатого противоточного теплообменника (рис. 138). Он предназначен для охлаждения технологического раствора до определенной заданной температуры * при выполнении следующих
условий: расход раствора постоянен, его температура на входе в теплообменник может колебаться в определенных пределах от до 0„Ж|, ; температура хладагента па входе в теплообменник постоянна.
При изменении температуры раствора, поступающего на охлаждение, нарушается тепловой баланс теплообменника, в результате чего температура выходящего раствора также изменяется, отклоняясь от заданного значения. Для компенсации возникающего отклонения необходимо изменить в соответствующую сторону расход хладагента. Таким образом, каждому значению температуры раствора на входе в теплообменник должен соответствовать определенный расход Q,, хладагента, который обеспечивает получение заданной температуры раствора на выходе из теплообменника (рис. 139):
Qp = /(C,J (62)
при = = const.
Пользуясь приведенными выше определениями, можно сказать, что теплообменник в данном случае есть объект регулирования, колебания температуры раствора на его входе — главное возмущающее воздействие, изменения расхода хладагента — регулнрую-
♦ Во второй части этой книги символом I обозначается время.
177
щее воздействие, а температура раствора на выходе из теплообменника — регулируемый параметр.
Пользуясь зависимостью (62), можно создать СЛР для теплообменника, которая будет автоматически менять расход хладагента в зависимости от изменения температуры раствора па его входе, т. е. в зависимости от величины возмущающего воздействия. Поэтому такой принцип построения системы регулирования называется принципом регулирования по возмущению.
Рис. 138- Система автоматического регулирования кожухогрубчатого противоточного теплообменинка:
a — технологическая схема теплообменника; б — САР теплообменника по возмущению; a — САР теплообмеипик-а по отклонению; а — комбинировавшая САР теплообменника; / — датчик температуры исходного раствора; 2 — основной регулятор; 3 — регулирующий клапан; 4 — объект регулирования (теплообменник); 5 — датчик температуры выходящего раствора; 6 — корректнрукшнн регу -л я тор
САР ио возмущению в данном случае состоит (рис. 138, б) из датчика / температуры исходного раствора \ регулятора 2, регулирующего клапана 3 с пневмоприводом 1 2, установленного на линии подачи хладагента, и объекта 4.
Важнейшей особенностью подобных систем является отсутствие связи от регулируемого параметра к регулятору, т. е. САР по возмущению оказывается разомкнутой 3.
1 Здесь и везде, если тип . датчика температуры не оговорен, то па схемах СЛР дается условное обозначение одинарной термопары (см. ГОСТ .492f—J9)
2 Пневмопривод является псполп nrcvi иным чехапизмоч, гюторпй конструктивно составляет единое целое с регулирующим каапаиом.
3 По отношению к регулируемому параметру.
178
Использование принципа регулирования по возмущению позволяет устранять влияние возмущающего воздействия на объект до того, как регулируемый параметр успевает измениться. Следовательно, в принципе такая САР обеспечивает высокую точность
действует множество возмуще-хотя действие каждого из них быть менее сильным, чем дей-главпого возмущения, но это
Рис. 139. График зависимости расхода хладагента Q/f от температуры жидкости 6„х на входе теплообменника при постоянной температуре на выходе
регулирования.
Однако па практике точность САР по возмущению оказывается недостаточной и главная причина этого заключается в отсутствии связи между работой регулятора и результатом его работы, т. е. фактическим значением регулируемого параметра. Действительно, при регулировании по возмущению регулятор компенсирует влияние только одного главного воздействия. Однако па реальную систему всегда ний, и может ствие
менее сильное действие накапливается с течением времени и в результате приводит к недопустимо большим погрешностям регулирования.
В примере с теплообменником такими «неглавными» возмущающими воздействиями могут оказаться незначительные изменения расхода охлаждаемого раствора или изменения температуры хладагента. Поэтому принцип регулирования по возмущению практически почти не применяется самостоятельно в промышленных САР.
Регулировать работу описанного выше теплообменника можно и другим способом: путем изменения расхода хладагента в зависи
мости от отклонения температуры раствора на его выходе от заданного значения. В этом случае САР (рис. 138, в) состоит из датчика 1 температуры отходящего раствора, регулятора 2, регулирующего клапана 3 на линии подачи хладагента и объекта 4.
Сигнал от датчика, пропорциональный текущему значению
регулируемого параметра, подается на вход автоматического регулятора, где сравнивается с сигналом, пропорциональным заданному значению регулируемого параметра, — в данном случае — ,
Сигнал регулирующего воздействия формируется регулятором в зависимости от величины и знака отклонения текущего значения регулируемого параметра от заданного его значения, поэтому такая система называется САР по отклонению. В отличие от САР по возмущению она является замкнутой, поскольку сигнал с выхода объекта поступает на вход регулятора, а с выхода регулятора он вновь подается на вход объекта.
179
Такое соединение двух элементов САР называется соединением но принципу обратной связи. Выходной сигнал регулятора (регулирующее воздействие) должен компенсировать влияние возмущающего воздействия, т. е. должен действовать на объект в обратном направлении (со знаком «минус») по сравнению с возмущающим воздействием. Такой вид обратной связи, когда сигнал с выхода объекта возвращается регулятором на его вход с обратным (по отношению к возмущающему воздействию) знаком, называется отрицательной обратной связью.
Подключение регулятора к объекту по принципу отрицательной обратной связи придает СЛР по отклонению цепное свойство: регулятор воздействует на объект таким образом, чтобы устранить погрешность регулирования независимо оттого, какими возмущающими воздействиями опа вызвана.
В рассматриваемом примере отклонение температуры раствора па выходе теплообменника может быть вызвано изменением температуры или расхода раствора па сто входе, изменением температуры хладагента, изменением условий теплопередачи из-за образования осадка па стенках и т. д. Однако какая бы причина ни вызвала отклонение температуры от заданной, при появлении такого отклонения регулятор изменит соответствующим образом расход хладагента, компенсируя этим действие любого из возможных возмущающих воздействий и устраняя возникшую погрешность регулирования. Это свойство САР по отклонению особенно ценно в условиях регулирования промышленных объектов, на которые, как правило, действует значительное число возмущающих воздействий.
Вместе с тем САР по отклонению свойственны некоторые недостатки, которые вытекают из характера взаимодействия объекта и регулятора в замкнутом контуре САР и создают определенные трудности при проектировании таких систем. Дело в том, что возмущающие и регулирующие воздействия проявляются в виде изменения регулируемого параметра не сразу с момента их приложения к объекту регулирования, а по истечении некоторого промежутка времени, который зависит от свойств объекта.
Поэтому, например, после приложения к объекту возмущающего воздействия регулятор изменяет регулирующее воздействие не сразу, а с некоторым опозданием, из-за чего регулируемый параметр может успеть значительно отклониться от заданного значения.
Для компенсации своего отставания регулятор должен форсировать регулирующее воздействие, в результате чего через некоторое время оно может не только полностью компенсировать действие возмущения, по и превысить его, вызвав отклонение регулируемого параметра в противоположном направлении.
Из-за этого для многих СЛР по отклонению характерны режимы работы, при которых регулируемый параметр совершает колеба-180
ния относительно своего заданного значения. Если колебания являются затухающими, то это значит, что погрешность регулирования со временем уменьшается и, следовательно, такая САР сохраняет работоспособность. Однако при определенном сочетании свойств объекта и регулятора в замкнутой САР могут возникнуть незатухающие колебания регулируемого параметра с возрастающей амплитудой.
В такой САР, которая называется неустойчивой, возникшая по каким-либо причинам погрешность регулирования будет с течением времени возрастать, следовательно, неустойчивая САР является неработоспособной. Склонность САР по отклонению к колебательным процессам регулирования и даже к неустойчивости, возможность возникновения значительных и длительных отклонений регулируемого параметра от заданного значении требуют применения специальных методов расчета и проектирования таких систем.
В настоящее время имеются хорошо разработанные, относительно простые и надежные методы расчета, которые позволяют проектировать САР по отклонению, обеспечивающие в большинстве случаев требуемое качество регулирования промышленных объектов.
В некоторых случаях для повышения точности регулирования в условиях действия на объект значительных возмущений применяют комбинированные САР, в которых используются оба описанных принципа регулирования.
На примере того же теплообменника комбинированная САР выглядит следующим образом (рис. 138, г). Для компенсации главного возмущающего воздействия — изменения температуры раствора на входе — используется САР по возмущению, аналогичная изображенной на рис. 138, б. Действие ее описано выше. Если этим ограничиться, то окажутся нескомпенснрованными все остальные возмущающие воздействия. Поэтому в дополнение к САР по возмущению используется еще один контур регулирования — по отклонению. В него входит датчик 5 температуры выходящего раствора и корректирующий регулятор 6.
Выходной сигнал этого регулятора поступает в виде задания на вход основного регулятора 2. Если по каким-либо причинам: изменение расхода раствора, изменение температуры хладагента или изменение характеристики (62) теплообменника (вследствие, например, образования осадка на его стенках), основной регулятор не обеспечивает нужной точности и появляется погрешность регулирования, в работу включается корректирующий контур.
Корректирующий регулятор 6 вырабатывает сигнал в зависимости от возникшей погрешности регулирования и изменяет задание регулятору 2. Например, если температура выходящего раствора оказалась выше нормы, то заданное значение расхода хладагента, которое в данный момент поддерживает регулятор 2, должно увеличиться. Такая САР обеспечивает быструю компенсацию главного возмущающего воздействия, а также компенсацию всех остальных
181
возмущении, которые могут вызывать отклонение регулируемого параметра от заданного значения.
Сочетая положительные свойства обоих принципов регулирования, комбинированные СЛР являются наиболее совершенными. Однако из-за относительной сложности они применяются только в тех случаях, когда обычная СЛР по отклонению не может обеспечить заданной точности регулирования.
В дальнейшем рассматриваются преимущественно САР по отклонению, поэтому, если не указан тип системы, то имеется в виду именно СЛР по отклонению.
§ 36. КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И ИХ ОСНОВНЫЕ СВОЙСТВА
САР по отклонению классифицируются иа несколько видов по следующим основным признакам:
I) количество замкнутых контуров регулирования и их взаимосвязь;
2) принцип действия элементов САР;
3) закон изменения заданного значения регулируемого параметра.
По количеству регулируемых параметров САР делятся на простые и сложные. В простой САР состояние объекта характеризуется значением одного регулируемого параметра, поэтому задача САР состоит в поддержании заданного его значения.
Простая САР может быть одноконтурной, если она состоит из одного контура регулирования, или многоконтурной. Пример одноконтурной системы — САР теплообменника но отклонению (рис. 138, в), а примером многокоптурпои может служить ком биш-рованная САР теплообменника (рис. 138, г) с двумя контурами регулирования — основным и корректирующим.
Большинство промышленных САР являются сложными и состоят из многих простых систем, каждая из которых обеспечивает регулирование какого-либо одного параметра. Если отдельные простые САР не связаны между собой ничем, кроме общего объекта регулирования, то такая сложная система называется системой несвязанного регулирования. К их числу относится большинство промышленных САР.
Однако в некоторых объектах с несколькими регулируемыми параметрами изменение одного из входных сигналов (регулирующего или возмущающего воздействия) вызывает изменение нескольких регулируемых параметров. В подобных случаях сложная САР уже не является суммой независимых простых систем, так как их регуляторы должны работать в определенной связи друг с другом с учетом взаимной зависимости регулируемых параметров. Такие сложные САР называются системами связанного регулирования. В практике автоматизации производственных процессов ио-
182
добные САР встречаются относительно редко, методы их исследования весьма сложны, поэтому в настоящей книге они не рассматриваются.
По принципу действия составляющих их элементов САР делятся на системы непрерывного и дискретного (прерывистого) действия.
САР непрерывного действия состоит только из элементов непрерывного действия, поэтому все сигналы, распространяющиеся по ее контурам регулирования, являются непрерывными функциями времени.
['ели в состав САР входит хотя бы один элемент дискретного действия, то она называется системой дискретного действия. Наиболее простым в распространенным элементом дискретного действия, применяемым в промышленных САР, является релейный элемент, а соответствующие СЛР называются релейными или позиционными.
У идеального релейного элемента выходной сигнал изменяется скачкообразно, переходя из одного фиксированного положения в другое в те моменты времени, когда входной сигнал переходит через определенное значение (на рис. 140 через значение x„v х, ). В зависимости от числа фиксированных значений (позиций) выходного сигнала релейного элемента разли
чают двух позиционные и многопозиционные САР. В данной книге рассматриваются только двухпозиционные САР.
В зависимости от закона изменения заданного значения регулируемого параметра различают:
1) системы автоматической стабилизации-,
2) системы программного регулирования;
3) системы следящего регулирования.
Системой автоматической стабилизации называется такая САР , в которой заданное значение регулируемого параметра — постоянная величина. Примером подобной системы может быть описанная выше САР теплообменника по отклонению. Подавляющее большинство промышленных САР являются системами автоматической стабилизации.
Системой программного регулирования называется такая САР, в которой заданное значение регулируемого параметра является заранее известной функцией времени.
Многие процессы в реакторах периодического действия протекают следующим образом: в реактор загружается полупродукт, реагент и катализатор, включается мешалка и после этого реакционная масса нагревается до определенной заданной температуры,
Хбых ml.
XSxt
Хвх
Рис. 140. Зависимость выходного сигнала x,llix от входного хех и идеального двухпозициопиого релейного элемента
183
при которой начинается реакция. Часто па скорость изменения температуры накладывается ограничение по требованиям технологии, что равносильно требованию доведения температуры от исходного до заданного значения за определенный промежуток времени.
Зависимость изменения температуры реакционной массы от времени является программой изменения регулируемого пара
метра.
Задача САР заключается в том, чтобы температура реакционной массы в период разогрева в каждый момент времени соответствовала значению, задаваемому программой.
Устройство, которое изменяет заданное значение регулируемого параметра в соответствии с программой, называется програм-
мным задатчиком. Обычно оно
Рис. 141. Система программного регулирования температуры реактора периодического действия:
/ — датчик темпе ратур).) реакционной масс).):
2 — регулятор; 3 — iipoi риммиый задатчик;
4 — регулирующий клапан; 5 — реактор
состоит из часового механизма или синхронного электродвигателя, который через систему передач перемещаете постоянной скоростью шаблон. Профиль шаблона соответствует заданной программе изменения регулируемого параметра.
Рассмотрим в качестве примера систему программного регулирования температуры реакционной массы реактора периодического действия.
Рассматриваемая САР (рис. 141) состоит из датчика температуры 0 реакционной массы /, регулятора 2 с программным задатчиком 3, регулирующего клапана 4 на линии подачи теплоносителя в рубашку реак-
тора 5. Входным сигналом для регулятора служит разность между текущим значением температуры реакционной массы и ее заданным значением в данный момент времени О.й,„, вырабатываемым программным задатчиком. Если эта разность равна нулю, то количество тепла, вводимое в рубашку за единицу времени, обеспечивает увеличение температуры реакционной массы с заданной скоростью. В противном случае регулятор подает сигнал клапану
па увеличение или уменьшение расхода теплоносителя.
Для систем программного регулирования главным возмущающим воздействием является изменение заданного значения регулируемого параметра, в то время как для систем автоматической стабилизации главными являются внешние возмущающие воздействия, приложенные обычно к объекту регулирования.
Системой следящего регулирования илн следящей системой называется такая САР но отклонению, в которой заданное значение
184
регулируемого параметра является случайной функцией времени. Задача следящей системы состоит в воспроизведении этой случайной функции с заданной точностью. С этой точки зрения все автоматические контрольно-измерительные приборы компенсационного типа
можно рассматривать как следящие системы, воспроизводящие функцию изменения контролируемого параметра во времени.
В качестве примера рассмотрим автоматический потенциометр, упрощенная схема которого показана на рис. 142. Принцип действия потенциометра1 заключается в том, что измеряемая э. д. с. Ех
(в данном случае это т. э. д. с. термопары) автоматически уравновешивается разностью потенциалов Uп/ на вершинах cd неуравновешенного моста. Измерительная диагональ cd моста и источник
измеряемой э. д. с. включены последовательно в цепь фазо-чувствителыюго индикатора разбаланса измерительной схемы, функции которого выполняют электронный усилитель .УУ и реверсивный двигатель РД. Если измеряемая э. д. с. уравновешивается напряжением Urd, то сигнал разбаланса измерительной схемы
MJ = Ех + Ucd = 0.
При ЭТОМ следящая система Рис. 142. Автоматический иотепцио-находится В СОСТОЯНИИ равнове- МСР|) как следящая система сия, которому соответствует
определенное положение движка d на реохорде R и стрелки отсчетного устройства на шкале прибора.
Если состояние равновесия нарушается из-за изменения величины измеряемой э. д. с. Ех, то на входе фазочувствителыюго индикатора появляется сигнал разбаланса измерительной схемы Д(7, величина и знак которого зависят от изменения величины Ех.
Усиленный сигнал разбаланса включает реверсивный двигатель, который перемещает движок реохорда до нового состояния равновесия. Таким образом, каждому значению измеряемой величины Е, соответствует определенное положение движка реохорда и,
следовательно, определенное показание потенциометра.
В схеме потенциометра разность потенциалов в измерительной диагонали Ucd моста «следит» за случайным изменением измеряемого параметра Ех. Следовательно, в данном случае: Ех — «заданное» значение, Uril — регулируемый параметр, фазочувствительпая схема— автоматический регулятор, реверсивный двигатель—исиол-
1 Принцип действия автомэтнческого потенциометра изложен в § 7 (стр 45, 46) этой книги.
185
расходов различных веществ.
Рис. 143. Схема автоматического регулирования соотношения расходов двух потоков:
1,2 — датчики расхода; < 3— регулятор соотношения; ! — регулирующий клапан
пительпый механизм, а реохорд — регулирующий орган следящей системы.
В схемах автоматизации многих химических производств следящие системы применяются в виде схем регулирования соотношения качестве примера рассмотрим систему автоматического регулирования соотношения расходов двух технологических потоков (рис. 143). Один из потоков считается «ведущим», т. е. его расход является независимой' переменной для САР соотношения. Второй поток — «ведомый». Задача САР — поддерживать расход второго потока в определенном соотношении с расходом первого.
САР соотношения состоит из двух датчиков расхода 1 и 2, регулятора соотношения 3 и регулирующего клапана 4 на липни подачи второго потока. Сиг
нал от датчика расхода /, проиорциональпый расходу «ведущего» потока, служит заданием для регулятора соотношения. Сигнал от датчика 2, пропорциональный расходу «ведомого» потока, поступает в регулятор как регулируемая переменная. Регулятор соотношения вырабатывает сигнал, по которому регулирующий орган — клапан 4 — изменяет расход второго потока так, чтобы его отношение к расходу первого потока оказалось равным заданной величине.
§ 37. ЗАДАЧИ АНАЛИЗА И СИНТЕЗА СИСТЕМ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ
Наиболее распространенными САР производственных процессов в настоящее время являются системы автоматической стабилизации, рассмотрению кагоры,х уделено в дальнейшем основное внимание. Отметим их основные особенности.
Будучи разновидностью систем регулирования по отклонению, системы автоматической стабилизации являются замкнутыми: объект регулирования и регулятор образуют замкнутый контур регулирования.
Большинство элементов, которые входят в контур САР, обладают свойством пропускать сигнал только в одном направлении — от входа элемента к его выходу, т. е. является детектирующими. К их числу относятся, например, датчик, регулирующий орган, исполнительный механизм и т. д. Из-за наличия в САР детектирующих элементов сигналы в контуре регулирования всегда распростра-
186
няюгся в одном направлении — от выхода предшествующего элемента к входу последующего, а в самом элементе—от его входа к выходу. Благодаря этому оказывается возможным исследовать свойства отдельных элементов САР (например, регулирующего органа с исполнительным механизмом совместно с объектом регулирования и датчиком) вне замкнутой системы, что сделать относительно просто. А полученные результаты будут справедливы также п для условий работы соответствующих элементов или соединений в замкнутой САР.
В системах автоматической стабилизации регулятор подключается к объему по принципу отрицательной обратной связи, что позволяет компенсировать действие любых возмущений, вызывающих отклонение регулируемого параметра от заданного значения. Вместе с тем, при таком соединении регулятора и объекта САР приобретает склонность к колебательным процессам регулирования, что может ухудшить качество регулирования или даже привести к потере системой устойчивости (а значит, и работоспособности). Поэтому для обеспечения высокого качества регулирования при проектировании систем автоматической стабилизации необходимо применять специальные методы расчета. Обычно проектирование САР производится в такой последовательности.
I) Определяются свойства объекта регулирования и других заранее известных элементов будущей САР (датчика, исполнительного механизма и регулирующего органа); при определении цепь контура регулирования разорвана, поэтому данная стадия в разработке САР получила название анализ разомкнутой САР (или отдельных ее частей). Описанию свойств типовых промышленных объектов регулирования и методов их исследования посвящена гл. X этой книги, а методы анализа разомкнутых САР описаны в гл. XI.
2) Исходя из свойств объекта регулирования и других заданных элементов САР, а также требований к качеству регулирования, выбирается тип автоматического регулятора и производится его настройка. Эта стадия проектирования называется синтезом САР. Для обоснованного выбора регулятора нужно знать свойства типовых автоматических регуляторов. Кроме того, необходимо представлять, какие свойства придает замкнутой САР применение того или иного типа регулятора.
Свойства типовых автоматических регуляторов описаны в гл. XII, а в гл. XIЛ изложены вопросы взаимодействия объектов и регуляторов различных типов.
3) Проверяется работоспособность и качество полученной САР, соответствие ее заданным требованиям. Эта стадия в разработке САР называется анализом замкнутой САР. Описание методов анализа замкнутых САР приведено в гл. XIII.
Чтобы завершить проектирование и создать технический проект САР, необходимо на основании проведенных расчетов выбрать аппаратуру, серийно выпускаемую для автоматизации производственных процессов.
и
Глава X
ОБЪЕКТЫ РЕГУЛИРОВАНИЯ И ИХ ОСНОВНЫЕ СВОЙСТВА
§ 38. ИСПОЛЬЗОВАНИЕ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ ДЛЯ АНАЛИЗА ИХ СВОЙСТВ
Объекты регулирования, с которыми приходится иметь дело при автоматизации химической промышленности, весьма разнообразны. Это могут быть отдельные аппараты, в которых выполняется какая-либо технологическая операция: теплообменник смешения, на выходе из которого поток вещества должен иметь постоянную температуру; напорный бак, в котором необходимо поддерживать постоянный уровень жидкости; химический реактор, в котором должен быть получен продукт заданного состава и т. д.
Объектом регулирования может быть также отдельная часть сложного технологического аппарата. Примером подобного объекта может служить сборник ректификационной колонны, называемый обычно кубом, в котором необходимо поддерживать постоянный уровень высококипящего компонента смеси (кубового остатка).
С другой стороны, объект может состоять из нескольких технологических аппаратов. В качестве примера можно привести цепочку последовательно работающих химических реакторов, на выходе которой необходимо поддерживать заданный состав продукта.
Один и тот же аппарат с происходящим в нем технологическим процессом может быть объектом нескольких САР. Например, выпарной аппарат одновременно является объектом регулирования уровня упариваемого раствора, давления в аппарате и концентрации выходящего раствора.
Как видно из приведенных примеров, объекты регулирования отличаются один от другого физико-химической природой протекающих в них технологических процессов, принципом действия, конструкцией и размерами применяемого технологического оборудования, режимом работы и многими другими факторами. Поэтому, если исследовать каждый объект отдельно, не сопоставляя его с другими уже исследованными объектами по наиболее существенным 188
(для элементов САР) свойствам, то это значительно затруднило бы анализ САР и задержало развитие автоматизации производственных процессов.
Однако, несмотря на отмеченное разнообразие, многие объекты, как элементы САР, обладают одинаковыми или достаточно близкими свойствами. Эго позволяет классифицировать их по типам. Детальное изучение свойств типовых объектов значительно упрощает анализ конкретных промышленных объектов регулирования благодаря использованию метода подобия. В этом случае задача анализа сводится в основном к определению типа исследуемого объекта, свойства которого отождествляются со свойствами соответствующего типового объекта.
Наиболее плодотворным методом описания свойств объектов регулирования (как и других элементов САР) является метод математического моделирования. Его суть заключается в том, что объект формально рассматривается как преобразователь поступающих на его вход сигналов в выходной сигнал. Математическая зависимость, связывающая выходной сигнал объекта с входным, называется математической моделью или характеристикой объекта регулирования.
При математическом моделировании полностью абстрагируются от физической природы сигналов и самого процесса, происходящего в объекте. Поэтому одинаковые уравнения могут описывать поведение теплообменника, напорного бака или химического реактора при условии, что, как объекты регулирования, они обладают одинаковыми характеристиками.
Переход от физического прототипа к математической модели дает ряд преимуществ. Во-первых, анализировать свойства модели1 проще и быстрее, особенно при использовании современных средств вычислительной техники, чем экспериментально определять поведение реального объекта регулирования при различных возможных режимах его работы в САР.
Во-вторых, математическая модель иногда может быть составлена еще до создания реального объекта. В этих случаях результаты ее анализа могут быть использованы при проектировании для корректирования режима технологического процесса или конструкции оборудования объекта регулирования.
В-третьих, анализ математических моделей позволяет выделить свойства объектов, наиболее существенные для процессов регулирования, и сгруппировать их по этим свойствам независимо от физической природы.
Работа большинства объектов регулирования заключается в преобразовании ио определенному закону материальных или энергетических потоков. При этом возможны два принципиально различных режима работы: статический и динамический.
1 Т. с. решать уравнения, составляющие математическую модель.
189
В статическом (установившемся) режиме приток вещества или энергии в объект равен стоку, так что объект находится в состоянии равновесия. Признаком статического режима работы является сохранение постоянного во времени значения выходного сигнала объекта
Х„ых (/) = const-
У многих промышленных объектов регулирования в статическом режиме каждому значению сигнала на входе соответствует определенное значение выходного сигнала
XUUX f (Хнх)'
а
называются статическими, а приведенная которая связывает значения выходного и входного параметров объекта в установившемся режиме, называется их статической характеристикой.
Простейшим примером статического объекта регулирования может служить напорной бак (рис. 144). Жидкость поступает в него по трубе 1 через клапан 2 и свободно вытекает по сливной трубе 3. Входным сигналом для этого объекта, очевидно, является изменение расхода Q жидкости через клапан 2, а выходным — изменение уровня И.
Если приток и сток равны, то количество находящейся в баке жидкости остается постоянным и ее уровень не изменяется. Это статический режим работы объекта, который описывается уравнением материального баланса:
Такие объекты выше зависимость,
Рис. 144. Напорный бак как объект регулирования уровня:
/ — входная труба; 2 — клапан;
3 — сливная труба
3
(63)
где Q„ux — расход жидкости через сливную трубу 3.
Известно, что расход жидкости при свободном истечении зависит от уровня и с достаточной точностью описывается уравнением
= (64)
где kuc — коэффициент пропорциональности, который зависит от размеров и формы отверстия истечения.
Подставим значение Qeux в (63) и после выполнения необходимых преобразований получим уравнение статической характеристики бака в виде
H = ko6Q\x, (65)
где ko6= (-Д- )2 — коэффициент пропорциональности.
190
Это нелинейное уравнение и график статической характеристики такого объекта (рис. 145; также нелинеен. Если в состав САР входит хотя бы одни нелинейный элемент, то такая С2ЛР так
же называется нелинейной. Анализ подобных систем чрезвычаи-но трудоемок, а во многих случаях он вообще невозможен. Поэтому всегда, когда это возможно, стремятся заменить нелинейную математическую модель линейной, которая, хотя и менее точна, но поддается анализу стандартными, хорошо разработанными и относительно простыми методами. Замена нелинейной математической модели более грубой линейной с целью упрощения анализа и синтеза САР называется линеаризацией модели.
Наиболее, простым является мет который применяется в тех случаях стика имеет вид плавной кривой. Линеаризация заключается в замене линейного участка характеристики в пределах возможного изменен ня входного и выходного параметров объекта прямой , касательной к статической характеристике в точке заданного режима работы. Рассмотрим применение этого метода на примере линеаризации характеристики напорного бака (рис. 145).
Предположим , что в баке долж-
од графической линеаризации, , когда статическая характери-
ИО поддерживаться заданное зпа- Рис. 145. Статическая характери-чепие уровня На с точностью ±А/У. стика напорного бака
Следовательно, рабочим участком
статической характеристики с тужит криволинейный отрезок CAD , в середине которого находится рабочая точка А. Заменим его отрезком CAD' прямой, касательной к статической характеристике в рабочей точке, который и будет линеаризованной статической характеристикой данного объекта регулирования. Погрешность такой аппроксимации будет тем больше, чем больше отрезки СС и DD', которые зависят от кривизны истинной статической характеристики в окрестностях точки А и допустимого диапазона изменения регулируемого параметра (т. е. величины рабочего участка характеристики).
Следует отметить, что если в процессе работы САР регулируемый параметр по каким-либо причинам выйдет за пределы рабочего участка статической характеристики, принятые при линеаризации,
то это может привести к существенному ухудшению качества регулирования.
Математической основой данного метода линеаризации является разложение функции, описывающей статическую характеристику, в ряд Тейлора по малым приращениям входного сигнала Axat и
191
ограничением ряда линейным членом. Проиллюстрируем возможности этого метода па том же примере напорного бака.
Разложение функции (65) в ряд Тейлора но малым приращениям параметра AQ;< в окрестностях рабочей точки (т. е. при Qex — Qo)
имеет вид
// Н | (
1 d-Н ,\г\ \* 1
..o’ l4'
АО -
(66)
Пренебрегая членами ряда, в которые входит сомножитель AQrtA. но второй и более высокой степени, и обозначая Н — На А//,
Рис. 146. Астатический объект регулирования:
/ — рсгулирукшип"! клапан; 2 — бак;
.? - нгспе iiocKy.-uiinii'i прои^поджгсэhkictd
у которых при работе в стати1
получим линеаризованное уравнение статической характеристики бака
АЯ = ^„ИА<?„Л„ (67)
где
k не _____х
Графически это уравнение соответствует отрезку прямой САГ)’ на рис. 145
Кроме статических , существую!' объекты регулирования, .ком режиме отсутствует одно-
значная зависимость между входным и выходным сигналами. Такие объекты называются астатическими.
Примером простейшего астатического объекта регулирования может служить бак, из которого жидкость откачивается насосом постоянной производительности (рис. 146). У такого объекта состояние равновесия возможно только в одном случае — когда приток жидкости в бак равен производительности насоса. Это состояние равновесия может наступить при любом значении выходного сигнала (уровня), следовательно., однозначной зависимости между Н п Q, v не существует.
Статический режим работы , который рассматривался выше, не характерен для промышленных объектов регулирования. Гораздо чаще приходится иметь дело с динамическим режимом1, который возникает всякий раз при нарушении равновесия между притоком и стоком вещества или энергии в объекте. В реальных условиях эксплуатации, когда па объект регулирования все время воздействуют различные возмущения, динамический’ режим яв.чяется
1 Этот режим назыпика также iieycTaiiumiBiiiiiMcii ic'iu переходным.
192
характерным режимом работы. Поэтому изучение динамических свойств объекта, т. е. определение его динамической характеристики, составляет главную задачу при анализе САР.
Существуют два метода определения характеристик промышленных объектов регулирования.
I. Аналитический, когда на основании главных физико-химических закономерностей, определяющих ход технологического процесса в данном объекте, составляется уравнение математической модели объекта. Этот метод удобен тем, что при его использовании получаются уравнения, в которые входят основные параметры технологического процесса и применяемого оборудования. Поэтому наглядно видна связь этих параметров с характеристикой объекта и пути улучшения последней в случае необходимости.
Математическую модель, полученную аналитическим методом, можно распространить на объекты с аналогичными технологическим процессом и конструкцией оборудования (с учетом их индивидуальных особенностей).
Недостатки аналитического метода -- его сложность и трудоемкость, из-за чего в широкой практике автоматизации он применяется сравнительно редко. Однако в последнее время интерес к этому методу увеличился в связи со все более широким распространением вычислительных машин, использование которых позволяет резко повысить производительность труда при выполнении расчетов.
2. Экспериментально-аналитический, когда статическая и динамическая характеристики объекта регулирования определяются путем механической обработки результатов экспериментов, поставленных на исследуемом объекте по определенной методике.
Этот метод менее трудоемок, не требует детального изучения физико-химических закономерностей, определяющих работу объекта, и может быть осуществлен персоналом относительно невысокой квалификации. Полученные при этом результаты достаточно точны для большинства практических случаев, поэтому экспериментально-аналитический метод широко используется на практике. Его недостаток заключается в том, что математическая модель, полученная экспериментально, справедлива только для обследованного объекта и не может быть использована при изучении других объектов, даже близких к нему по технологии и аппаратурному оформлению.
§ 39. АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
При использовании аналитического метода определения характеристик объектов регулирования за основу берут уравнения материального и энергетического баланса объекта. Если необходимо определить статическую характеристику, то уравнение баланса составляют для статического (установившегося) режима работы
7 Казаков н др.
193
объекта. Типичным примером является вывод уравнения статической характеристики напорного бака (см. § 38) на основе уравнения его материального баланса.
При определении аналитическим методом динамической характеристики объекта регулирования также составляют уравнения баланса, но для динамического (неустаиовившегося) режима работы объекта. Эти уравнения выражают связь скорости изменения регулируемого параметра с величиной материального или энергетического разбаланса, который является причиной возникновения динамического режима работы объекта
Рассмотрим применение аналитического метода на ряде примеров.
Пример I.
Определить характеристики участка трубопровода как объекта регулирования расхода жидкости (рис. 147). Объектом регулирования в данном случае является участок трубопровода /, заключенный между диафрагмой 2 и клапаном 4. Регули
Рис. 147. Участок трубопровода как объект регулирования расхода:
руемый параметр — величина (ф расхода жидкости, которая измеряется диафрагмой и регистрируется расходомером 3, а регулирующее воздействие — перемещение I штока клапана, которое вызывает изменение расхода Q.2 через него.
В состоянии равновесия уравнение материального баланса трубопровода
Qi - Q2 = 0, (68)
откуда
Q, -
Если клапан имеет линейную расходную характеристику, то
Q., = (69)
/ — трубопровод; 2 — диафрагма; J — расходомер; 4 — клапан
Подставив значение Q2 из (69) в (68), теристики рассматриваемого объекта
где kKl — коэффициент пронорцио палыюсти;
I — перемещение штока клапана получим уравнение статической харак-
Qi —
(70)
Поскольку трубопровод целиком заполнен жидкостью, любое изменение ее расхода, вызванное изменением проходного сечения клапана, происходит одновременно по всей длине. Сюдователию, при нанесении возмущения AQ2 расход на диафрагме изменится на такую же величину А(ф — AQ2; откуда получаем уравнение., описывающее динамические свойства данного объекта;
AQ, kKJ&l, (71)
совпадающее с уравнением (70) статической характеристики, только абсолютные значения параметров заменены их приращениями.
В теории автоматического регулирования принято приводить уравнения математической модели к безразмерной форме, заменяя абсолютные значения
194
входящих в них параметров или их приращения относительными значениями. Введем следующие обозначения:
н =------------относительная величина изменения регулирующего
(Х"*рРг)о
воздействия;
Y
—относительная величина изменения возмущающего (Хнхаозм)о
воздействия;
а — _ относительная величина изменения регулируемого
параметра;
Ln (х„ )(1 — номинальная величина соответственно регулирующего
' ,А/»гУ" пхнозм- . .
и возмущающего воздействия при заданном (среднем) режиме работы объекта;
At . и Дд- . —отклонение величин соответственно регулирующего ,,хрег вхвозм
и возмущающего воздействии от их номинальных значений;
хНЫХ() — заданное значение регулируемого параметра; отклонение регулируемого параметра от заданного значения.
Определить характеристики дозатора сыпучего материала (рис. 148) как объекта регулирования расхода. Ленточный доза-
Рис. 148. Ленточный дозатор сыпучего материала как объект регу-
лирования расхода:
I — ленточный дозатор; 2 — бункер-, -7 — технологический аппарат; 4 — затвор
тор / служит для поддержания заданного расхода сыпучего материала из бункера 2 в технологический аппарат 3. flo-затор имеет постоянную скорость v движения ленты. При равномерной загрузке
ленты расход Q2 материала на выходе дозатора равен
Q-2
(73)
где Г — объем дозируемого материала, равномерно распределенного по длине I рабочего участка ленты дозатора.
Степень загрузки ленточного дозатора регулируется затвором 4, установленным па выходе бункера.
В состоянии равновесия уравнение материального баланса дозатора имеет вид
<21 - <2а = О,
где Qi — расход материала через затвор бункера.
Отсюда получаем уравнение статической характеристики дозатора
<2-2 = <21. (74)
195
Рис. 149. Изменение расхода сыпучего материала в зависимости от времени /:
Qi — на входе дозатора; Q2 — на его выходе
Как и следовало ожидать, в установившемся режиме работы сигнал (расход материала) проходит с входа дозатора на его выход без всяких изменений.
Если в момент /0 нарушить условие равновесия (74), что можно сделать, например, изменив проходное сечение затвора 4 и изменив тем самым расход Qld то количество дозируемого материала на ленте начнет изменяться. За время А/ с момента /0 на ленте окажется следующее дополнительное количество ДЕ материала:
ДУ = AQ, • А/- AQ2A/, (75) где Лбф и AQ2 — изменение расхода материала соответственно на входе и выходе дозатора. Однако расход материала на выходе дозатора фактически не будет изменяться до тех пор, пока участок ленты, находившийся под затвором в момент /0, достигает точки сброса. Этот отрезок времени т7. равен
гт = -у • (76)
Следовательно, в промежутке времени от /0 до /0 + тт = величина AQ, = 0 и уравнение (75) имеет вид
ДУ = AQ,AZ при Д/<;тт. (77)
С момента расход Q2 получает приращение AQ2, величина которого, согласно уравнениям (73) и (76), равна
Таким образом, динамические свойства рассмотренного объекта регулирования описываются уравнением
Q, (/) = Q, (I - тт) (78)
или в безразмерной форме
а (/) = р (t — тт), (79)
Qo — номинальный заданный расход.
Уравнение (78) означает (рис. 149), что выходной параметр дозатора точно повторяет изменения входного, но с запаздыванием на время тт.
Пример 3.
Определить характеристики теплообменника смешения (рис. 150) как объекта регулирования температуры. Теплообменник является смесителем непрерывного действия, в который поступают два потока одинаковой по физическим свойствам жидкости (т. е. с одинаковой теплоемкостью ср и плотностью р).
Первый поток имеет постоянный расход Q,o и переменную температуру О, =-= fl1(j -|- A6j. Второй поток жидкости имеет постоянную температуру fl2(), а расход его Q2 поддерживается на таком уровне, чтобы температура в жидкости, выходящей из смесителя, была равна постоянной заданной величине 6 п. Следовательно, для данного объекта возмущающим воздействием служит изменение температуры ДО j первого потока, регулирующим воздействием является изменение
196
расхода AQ2 второго потока, а регулируемым параметром — отклонение температуры А0 выходящего потока от заданного значения.
Чтобы упростить вывод уравнений статической и динамической характеристики, примем следующие допущения: смеситель снабжен теплоизоляцией, так что тепловыми потерями в окружающую среду можно пренебречь; температура жидкости во всем объеме смесителя одинакова ния) и равна температуре выходящего потока; расход
(80)
Для определения статической характеристики составим уравнение теплового баланса смесителя в установившемся режиме
рс() [0t<2io + 02О^2О — 6 (Qi0 + Q2o)] — 0, откуда с учетом условия (80) получим линеаризованное уравнение статической характеристики в виде
6 = St + 02 (81)
410 пия температуры
(смеситель идеального перемешива-
ние. 150. Теплообменник смещения как объект регулирова-
При нарушении равновесия между притоком и стоком тепла в смеситель за малый промежуток времени А/ поступает некоторое дополнительное количество тепла А<?. В результате изменяется температура жидкости в смесителе и температура выходящего потока на величину ДО. Величина теплового разбаланса определяется зависимостью
Д<? = pc;j (ДО^ц, + б2|)Д<?2 - ДО (Ql0 + + Д&)1 АЛ
где рсуД 6 А/—дополнительное количество тепла, внесенное
в смеситель первым потоком при изменении его температуры на Дщд
рср02()Д<22Д/ — дополнительное количество тепла, внесенное в смеситель вторым потоком при изменении его расхода на Д()2;
рсрЛб (<2|(1 + <?2 + ЛфДД/ — дополнительное количество тепла, вынесенное из смесителя выходящим потоком при изменении температуры жидкости в смесителе на величину А6.
Учитывая условие (80), выражение для \q можно упростить:
Sq рср (ДО, Qlft + 02о AQ, - ДО Q,n) Д(2. (82)
Изменение температуры жидкости в смесителе, вызванное разбалансом Д<?, равно
где V’o — рабочий объем смесителя (l/n = const).
Подставим значение Ду из (82) в (83) и после очевидных преобразований, переходя к пределу при Д/— 0, получим уравнение, описывающее динамическую характеристику данного объекта:
Vo + <?,оде = <?1(,Де, + 02пД<32. (84)
Выведенное ранее уравнение статической характеристики (81) может быть
ЛЛ0 получено из (84) при выполнении условия равновесия, т. е. когда ~ 0.
197
Для приведения уравнения (84) к безразмерной форме введем следующие к ДО , ЛО, bQ.,
обозначения: о = -—; К = -т— • ц = •
S" 6'о ’
(85)
(86)
во Qi„
(87)
После подстановки их в уравнение (84) и проведения необходимых преобразований получим в окончательном виде
ц Т -г ‘ -г -11’
‘ об 1 об * оо
(88)
Пример 4.
Рис. 151. Куб ректификационной колонны как объект регулирования уровня кубового остатка:
! — ректификационная колонна; 2 — клапан
Определить характеристики куба ректификационной колонны (рис. 151) как объекта регулирования уровня кубового остатка. Как известно, в нижней части ректификационной коло; пы I. называемой кубом, собирается высококипящий компонент разделяемой жидкостной смеси. Отбор части кубового остатка, который осуществляется через клапан 2, обеспечивает поддержание общего материального баланса колонны. Вместе с тем для нормального протекания процесса ректификации необходимо поддерживать постоянный уровень кубового остатка. При нарушении материального баланса колонны, что может быть вызвано изменением ее нагрузки или изменением отбора низко-кипящего продукта, количество кубового остатки изменяется, что приводит к изменению его уровня. Таким образом, куб ректификационной колонны можно рассматривать как объект регулирования уровня.
Основным возмущающим воздействием, которое вызывает изменение уровня
в кубе, является изменение притока Q, кубового остатка; регулирующее воздействие — изменение расхода Q2 отбираемого из куба продукта, а регулируемый параметр — уровень И кубового остатка.
Уравнение материального баланса рассматриваемого объекта в установившемся режиме работы имеет вид
Qi-Q., = 0,
(89)
где Qj — количество высококипящих компонентов, поступающих в куб колонны в единицу времени;
Q2 — расход отбираемого из колонны продукта через клапан 2.
Величина расхода Q2 определяется нелинейной зависимостью вида Q2 -=
Ar. .S\ . [2 Н. Однако при небольших изменениях уровня &Н относительно заданного значения Н» и небольших изменениях площади проходного сечения регулирующего клапана Д8\_, се можно линеаризовать, разложив в ряд Тейлора и ограничил) разложение линейными членами ряд? (см . § 38) . В результате получим линеаризованную расходную характеристику клапана в следующем виде:
AQ2 = MS,„ +k„Mi. (90)
98
ks = Cj У Hn = const;
—
= const.
При нарушении условия равновесия (89) изменяется количество жидкости в кубе колонны и, следовательно, изменяется ее уровень. За малый промежуток времени А/ изменение количества жидкости ДУ, вызванное изменением ее притока AQj, а также изменением стока Дф.2, равно
ДУ = (AQ, — ДС?2) М. (91)
Изменение Д<32 количества стока, вызванное изменением проходного сечения клапана и изменением Д/У уровня кубового остатка, определяется уравнением (91). Подставим значение Д<?.2 из (90) в уравнение (91) и после очевидных преобразований получим
Лду = ДО. - ~ А’Л/АЛЛ (92)
Изменение объема кубового остатка ДУ вызывает изменение уровня Д/У, которое для куба цилиндрической формы с площадью поперечного сечения SK
равно
Д/У
ДУ
Следовательно, уравнение (92) можно преобразовать к виду
-ЬА'„Д// = AQ.
Переходя к пределу при Д/ —- 0, получим дифференциальное уравнение рассматриваемого объекта
^A/y==_2_/AQj__|y_AS,t2, (93)
из которого можно получить уравнение линеаризованной статической характе-ристики, положив ———' — 0:
Д/У = ‘ AQ, - Д5,сл. (94)
,сн кн
В безразмерной форме уравнения (93) и (94) имеют вид
+ т~ ° = k - tl <95) 1 Об { об ' об
И о — 1г-, Л -- к., р, (96)
где Wo’ ' Q.,,’ М Тов^; 07) Ч-2(, ь 2Q’o = • ^0 kn = 2.
199
Пример 5.
Определить характеристики напорного промежуточного бака (см. рис. 146) как объекта регулирования уровня. Бак 2 является буферной емкое, ью, в которой должно находиться определенное количество жидкости для обеспечения бесперебойной подачи ее в производство. Для этого в баке должен поддерживаться некоторый определенный уровень Но независимо от нагрузки, т. е. количества Q„hix жидкости, отбираемой насосом 3. Поддержание постоянного уровня в баке осуществляется с помощью регулирующего клапана /, который изменяет приток Q„x жидкости в бак. Таким образом, возмущающим воздействием для этого объекта является изменение AQ„WX производительности иасоса, регулирующим воздействием — изменение AQ(IV притока жидкости через клапан, а регулируемым параметром — изменение АЛ/ уровня.
Состояние равновесия бака описывается уравнением материального баланса
Qhx Qui>ix — из которого, однако, нельзя получить уравнение статической характеристики, так как ни Qllv, пи Q„ux не зависят от регулируемого параметра И. Следовательно, данный объект является астатическим.
При нарушении равновесия изменяется количество жидкости, находящейся в баке, и, следовательно, изменяется ее уровень. 3 а малый промежуток времени А/ изменение количества жидкости равно
АС = (AQ„.( - \(2„ых) А/.
Соответствующее изменение уровня
л г г АС (AQ/?x ~ ^Qeu x) Sg " Sg ~ ’
где Sg — площадь поперечного сечения бака.
Производя необходимые преобразования и переходя к пределу при А/ — О, получим дифференциальное уравнение рассматриваемого объекта в виде
= Sg ^вх ~ s6 ^Q,,bLX- (98)
Если клапан имеет линейную расходную характеристику на рабочем участке, то
где
AQa.v —
kKj! = const;
А/ — перемещение штока клапана.
Подставив значение AQ„v в (98), получим в окончательном виде
(ЧАЛ/) _ k,^ 1
dt ~ Sg М SgQ“№X
В безразмерной форме то же уравнение имеет вид
da 1 ,
dt <99)
1 og
где
Т об = = const. (100)
Qa
Пример б.
Определить характеристики химического реактора периодического действия (рис. 152) как объекта регулирования концентрации перерабатываемого вещества.
’00
Технологический процесс в таком объекте осуществляется следующим образом. Сначала в реактор / заливается некоторый объем Ц, раствора перерабатываемого вещества А с начальной концентрацией Сд. После этого включается мешалка 5 и через клапан 2 начинает подаваться раствор реагента В с постоянной концентрацией Cfl . Расход реагента Q/( изменяется в зависимости от перемещения штока клапана 2. Реагент В вступает в реакцию с веществом А, в результате которой образуется вещество С — целевой продукт процесса
Л + й — С. (101)
По мере поступления реагента В количество вещества А в реакторе и его концентрация С4 уменьшаются. Текущее значение величины Сл измеряется конщштратомером 4, снабженным погружным датчиком 3.
Таким образом для рассматриваемого объекта расход Qlt раствора реагента В является регулирующим воздействием, а изменение концентрации АСл перерабатываемого вещества А — регулируемым параметром.
Составим уравнение реактора , приняв еле -дующие допущения'.
I) реакция (101) — нулевого порядка, т. е. ее скорость не зависит от концентрации реагирующих веществ Л и В;
2) скорость реакции (101) настолько велика, что ее можно считать мгновенной;
3) в реакторе осуществляется настолько хорошее перемешивание, что концентрация веществ во всем объеме реактора одинакова
4) общее количество раствора реагента В, поступающее в реактор за время полного протекания процесса, гораздо меньше рабочего объема реактора Vo, благодаря чему можно пренебречь изменениями концентрации из-за разбавления (увеличения объема содержимого реактора).
При выполнении этих условий количество
в реактор за время А/, вступает в реакцию с эквивалентным количеством А/1 вещества А и, следовательно, уравнение материального баланса рсакторз имеет вид
Д/1 = ДВ. (102)
Величина АВ определяется выражением
AB = Q;JC/J(A1. (ЮЗ)
Соответствующее изменение концентрации АС?1, вызванное уменьшением на величину АЛ количества вещества А, находящегося в реакторе объемом Ио, равно
ЛСл = АЛ. (104)
v о
Преобразуем уравнение (102) е учетом (103) и (104) и, переходя к пределу при Д/0, получим дифференциальное уравнение, описывающее динамическую характеристику реактора периодического действия в виде
d (АСД _ СД» Q
____________ di ' Г,
1 Такой реактор называется реактором идеального (или совершенного) перемешивания.
Рис. 152. Реактор периодического действия как объект регулирования концентрации:
/ — реактор; 2 — клапан; 3 — погружной датчик-, 4 —гонцен -тратомер; .5 — мешалка
\В реагента В, поступающее
201
То же уравнение, приведенное к безразмерной форме, имеет вид
(105)
где
АСЛ
° — — относительная величина изменения регулируемого параметра;
ло
u = Tj---- — относительная величина регулирующего воздействия;
Чч,||;1х
Q — максимально возможный расход раствора реагента В через
'’max
клапан 2.
§ 40. ОСНОВНЫЕ СВОЙСТВА ТИПОВЫХ ПРОМЫШЛЕННЫХ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
Все объекты регулирования могут быть классифицированы как Статические, астатические и неустойчивые.
Статические объекты составляют наиболее многочисленную группу промышленных объектов регулирования. К их числу относятся объекты, рассмотренные в примерах 1, .3 и 4 предыдущего параграфа. Характерное свойство статических объектов — существование однозначной зависимости между входным и выходным сигналом в установившемся режиме. В общем виде эта зависимость — статическая характеристика — описывается уравнением (96):
о = /у. — Ayr.
Физический смысл постоянных коэффициентов k.L nk-, становится ясен, если учесть, что
/г^ = ° при /. = 0 и kx = ° при и = 0;
и /гА — коэффициенты пропорциональности между относительными изменениями регулируемого параметра и регулирующего или возмущающего воздействия. Поэтому klk и /г, называются коэффициентами передачи или коэффициентами усиления объекта по каналу распространения регулирующего и возмущающего воздействия соответственно. Чем больше их величины, тем более чувствителен объект к внешним воздействиям. Если величина коэффициента kx мала, то во многих случаях такой объект может удовлетворительно работать без регулятора, так как даже существенные возмущающие воздействия будут вызывать лишь небольшие отклонения регулируемого параметра.
202
xSbix
t
153. Преобразование сиг-статпчсским объектом нулевого порядка: изменение сигнала х на ниходе объекта; изменение сигнала х вых на входе объекта
Для регулирования более благоприятны объекты, у которых k-t <у k,L, так как они более чувствительны к изменению регулирующего воздействия, чем к изменению возмущающего воздействия. Поскольку численные значения коэффициентов усиления определяются конструкцией и режимом работы объекта, их можно изменять в соответствующем направлении с целью создания объектов, наиболее благоприятных для регулирования. Например, у теплообменника смешения (пример 3) желательно иметь достаточно боль-шую величину отношения Л=й—°7>—, а у куба ректификационной
Q., колонны (пример 4) — величину отношения . v'n
По динамическим свойствам рассмотренные статические объекты также различны. Участок трубопровода (пример 1) является статическим объектом нулевого порядка, так как его динамическая характеристика описывается линейным алгебраическим уравнением (или дифференциальным уравнением нулевого порядка). Такие объекты называются также безынерционными, так как в динамическом режиме они передают входной сигнал х11Х на выход без искажения его формы (рис.
153). Статические объекты нулевого порядка наиболее благоприятны для регулирования, однако в производственной практике они встречаются довольно редко.
Теплообменник смешения (пример 3) и куб ректификационной колонны (пример 4) являются статическими объектами первого порядка, так
как их динамические характеристики описываются дифференциальным уравнением первого порядка (95). В постоянные коэффициенты этого уравнения входят уже знакомые нам величины /г,, и/гЛ, а также величина Т11б, которая имеет иной физический смысл. У теплообменника смешения эта величина определяется зависимостью (85):
Рис.
нала
Т ____ VОрСрбр
"б - Qpc„6„ •
Как нетрудно убедиться, числитель этой дроби равен теплосодержанию жидкости, заполняющей рабочий объем смесителя, а ее знаменатель равен количеству тепла, отводимого из смесителя в единицу времени с выходящим потоком жидкости. Последняя величина обычно называется тепловой нагрузкой смесителя.
203
У куба ректификационной колонны величина Т„6 определяется уравнением (97), т. е.
т _ 25„Ли
1 Q-, '
В числителе этой дроби стоит объем жидкости, заполняющей куб при заданном значении регулируемого параметра На, т. е. номинальная рабочая емкость куба колонны, В знаменателе стоит расход отбираемого из колонны кубового остатка при номинальном режиме работы, т. е. заданная нагрузка куба.
Как видно, в обоих случаях числитель выражения, описывающего величину ТпП, характеризует емкость объекта, т. е. количество вещества или энергии, которое находится в нем при заданном значении регулируемого параметра. В знаменателе обоих выражений стоит величина нагрузки объекта при заданном режиме его работы. Эта нагрузка равна количеству вещества или энергии, которое может пройти через объект в единицу времени. В рассмотренных примерах нагрузка характеризует сопротивление, которое оказывает объект регулирования истечению из него вещества или энергии. Сочетание емкости и сопротивления на выходе является характерной особенностью статических объектов первого порядка, которые называются также одноемкостными.
Величина То/- имеет размерность времени и называется постоянной времени одноемкостного объекта. Она характеризует среднее время, в течение которого каждый элементарный объем из потока обрабатываемого вещества удерживается в объекте регулирования. Чем больше величина Т,)Л, тем более инерционным является объект и тем, следовательно, труднее его регулировать1.
Поэтому при конструировании технологического оборудования и выборе режима его работы следует стремиться к уменьшению величины То6 путем уменьшения емкости и увеличения нагрузки объекта. В рассмотренных примерах это может быть достигнуто, например, уменьшением величины По (емкости смесителя) и SK (площади поперечного сечения куба колонны) и (или) увеличением Qo (смеситель) и Q2q (колонна).
Для того чтобы судить о поведении статического объекта первого порядка в динамическом режиме работы, необходимо найти решение уравнения (95) для заданной функции воздействия р (/) или Л (/) с учетом начальных условий (т. е. с учетом состояния объекта до нанесения возмущений). Обычно при подобных расчетах принимают нулевые начальные условия, считая, что до момента нанесения возмущения относительное отклонение регулируемого параметра было равно пулю.
1 Однако слишком малые значения Т,(,- тоже затрудняют регулирование, так как такой объект излишне чувствителен ко всяким изменениям входных воздействий.
204
Что касается функции возмущающего воздействия, то в теории автоматического регулирования используется несколько типовых воздействий (рис. 154): скачкообразное, когда функция р (/) скачком изменяется на конечную величину Др в момент нанесения воздействия и в дальнейшем величина ее не меняется; импульсное, когда функция р (/) в момент нанесения возмущения скачком изменяется на величину Др, а по истечении некоторого промежутка времени Д/также скачком вновь возвращается к нулевому значению; гармоническое (синусоидальное), когда функция р (/) является гармонической функцией времени и ряд др.
Наибольшее распространение получило скачкообразное возмущающее воздействие по двум причинам; во-первых, возмущения такой формы наиболее неблагоприятны для САР, и если она удовлетворяет поставленным требованиям при таком воздействии, то
Рис. 154. Типовые функции входных сигналов:
a — скачкообразная; 6 — импульсная; в — гармоническая синусоидальная
будет удовлетворительно работать при воздействии другой формы; во-вторых, при такой форме возмущающего воздействия проще искать решение дифференциальных уравнений, описывающих свойства САР.
Скачкообразная функция описывается уравнением
Х^^) = х„Хо-1 (t), где
л — амплитуда скачкообразного воздействия;
I (/) — функция, которая равна нулю при I <с 1п и равна единице при Z >: /0.
Итак, ищем решение уравнения (95) при нулевых начальных условиях и скачкообразном возмущении по каналу распространения регулирующего воздействия с амплитудой Ац0. В этом случае исходное уравнение преобразуется к виду
Й7‘ + ст = Л,Хо 1 (106)
а‘ ‘об об
Как известно \ общее решение неоднородного дифференциального уравнения складывается из его частного решения и общего решения однородного уравнения,
1 См., например, Эльсгольц Л. Э. Обыкновенные дифференциальные уравнения. ТИТТЛ, 1954
205
получаемого из неоднородного приравниванием пулю его праной части. В данном случае однородное уравнение имеет вид
(107)
(Ю8)
Следовательно, о (0 = в1 + <4, где щ — частное решение неоднородного уравнения (106);
<т2 — общее решение однородного уравнения (107).
Частное решение неоднородного дифференциального уравнения с постоянной правой частью может быть постоянной величиной, т. е.
я, = const, следовательно, ---1 = 0. аг
Подставляя значения Oj и из последнего выражения в уравнение (106), находим его частное решение в виде
О! = k,Lby.o.
Общее решение однородного дифференциального уравнения ищется в виде п г t аг = S ci'ei • i= 1
где п — порядок дифференциального уравнения; (в данном случае п — 1); С/ — постоянные интегрирования;
г,- — корни так называемого характеристического уравнения, получаемого заменой производных — величиной г в степени, равной их порядку, а также заменой неизвестной функции — единицей.
В данном случае характеристическое уравнение, получанное из (107), имеет вид
следовательно, _______________________________________/_
<т2 = otf.
Подставляя значения щ и <т2 в (108), находим решение уравнения в виде
о (t) = + С,е V (109)
Согласно заданным начальным условиям, а = 0 при t — 0. Следовательно, из (109) при t — 0 получаем Сх = — й^Ацо и окончательно
а(О = МИо(1 —е М. (ПО)
Аналогично при возмущении по каналу распространения возмущающего воздействия
а (/) = /гхАХ0 (1 — е (110 а)
Уравнение, описывающее переходный процесс в элементе САР при скачкообразном входном воздействии, называется уравнением кривой разгона, а его график называется кривой разгона данного элемента. На рис. 155 показаны кривые разгона одноемкостного объекта, описываемые уравнениями (НО) и (110а). Анализ этих
206
уравнений показывает, что по кривым разгона можно определить численные значения постоянных коэффициентов дифференциального уравнения объектов данного типа, т. е. значения А; И k,L.
Действительно, из (110) следует, что о (Г) = /^Др,, при t со, изменение регулирующего кривая разгона.
величин Тоб,
где Др,, — относительное для которого рассчитана Отсюда
воздействия,
Из (110а) аналогично
где ДХ0 — относительное
. о (0 It.
Ац„
(Н1)
(11 1а)
воздействия,
на статический объект последний
Рис. 155. Кривые разгона одноемкостного объекта:
/ — по каналу распространения возмущающего воздействия; 2 — по каналу распространения регулирующего воздействия
получаем
изменение возмущающего
для которого рассчитана кривая разгона.
Как указывалось раньше и как видно из уравнений (111) и (111а), при действии возмущения по окончании переходного процесса вновь приходит в состояние равновесия. Последнее характеризуется новым установившимся значением регулируемого параметра, которое отличается от заданного на величину, называемую остаточным отклонением.
Свойства объекта устранять несоответствие между притоком и стоком путем происходящих в объекте процессов наполнения (или расходования) вещества и энергии называется самовыравниванием. Поэтому статические объекты называются также объектами с самовыравниванием. Для количественной оценки способности объекта к самовыравниванию часто используется коэффициент самовыравнивания р, который равен обратной величине сматриваемому каналу
коэффициента усиления объекта по рас-распространения входного сигнала:
•°' Д. 11 =
меньше величина остаточного отклонения
Чем больше р, тем регулируемого параметра при одном и том же внешнем воздействии.
207
Для обоснования методики определения величины Тс6 продифференцируем уравнение (110) при / = 0:
da _ /СрДро dt t = 0 об
(Н2)
Вместе с тем производная —------- равна тангенсу угла наклона
t =- (1
касательной к кривой разгона в точке t 0 (рис. 155), следователь-
но,
da , СО k,,Au.,
<-, = tga = /lC = J/7r
(113)
Приравняем правые части (112) и (113) и после очевидных преобразований получим
То6=АС.
(114)
Таким образом, постоянная времени статического объекта первого порядка численно равна отрезку АС, отсекаемому касательной к кривой разгона, проведенной в точке / = 0, от асимптоты кривой разгона.
Статические объекты первого порядка, как и объекты нулевого порядка, встречаются в промышленной практике сравнительно редко. Обычно промышленные статические объекты регулирования являются многоемкостными, а их динамические характеристики описываются дифференциальными уравнениями второго и более высоких порядков.
Кривые разгона таких объектов (рис. 156) отличаются от кривой разгона одпоемкостного объекта наличием начального участка медленного изменения регулируемого параметра. В дальнейшем форма кривых достаточно близка, чтобы можно было предположить сходство динамических свойств таких объектов. Установлено, что сходство действительно существует, во всяком случае, настолько, что его можно использовать при упрощенном анализе, который применяется в настоящей книге.
Поэтому, если отбросить начальный участок, кривую разгона многоемкостного объекта можно рассматривать как кривую разгона одноемкостного объекта с соответствующими параметрами динамической характеристики (коэффициентом усиления и постоянной времени), по сдвинутую на отрезок времени т,.. Величина т,. отсекается на оси абсцисс касательной к кривой разгона многоемкост-ного объекта в точке ее перегиба (рис. 156). Такая аппроксимация
208
эквивалентна замене многоемкостного объекта одноемкостным и звеном запаздывания.
Динамическая характеристика звена запаздывания описывается уравнением (79). Это уравнение, выведенное для случая, когда объектом регулирования является ленточный дозатор (транспортер), имеет общий характер.
В статическом режиме работы выходной сигнал звена запаздывания равен входному, а в динамическом — он точно повторяет входной сигнал, но с запаздыванием во времени на некоторую величину.
Запаздывание т,., которое вводится в дифференциальное уравнение одиоемкостного объекта при аппроксимации им динамической характеристики многоемкостного объекта называется емкостным. Это условное понятие, которое вводится для того, чтобы упростить анализ САР реальных промышленных объектов.
Транспортное запаздывание тг, как видно из приведенного выше примера 2, возникает при наличии участков объекта, требующих определенного времени для распространения по ним изменения входного сигнала (типичный объект с транспортным запаздыванием— ленточный дозатор, описанный в упомянутом примере).
Транспортное и емкостное запаздывание составляют полное запаздывание объекта регулирования
Т = Т(, + Ту.
Таким образом, динамическая характеристика типового статического объекта регулирования аппроксимируется дифференциальным уравнением вида
(115)
При такой аппроксимации предполагается, что динамические свойства объекта по каналам распространения возмущающего и регулирующего воздействия совпадают.
Астатические объекты составляют вторую группу промышленных объектов регулирования. Простейшими из них являются объекты первого порядка, в частности, описанные в примерах 5 и 6 § 39. Свойства астатических объектов первого порядка описываются линейным дифференциальным уравнением (99):
Если заданы функции р (/) и X (Z), то, проинтегрировав его, можно найти уравнение переходного процесса такого объекта:
t
|%(/) -ц(/)]Л. (116)
06 к
209
Поскольку изменение выходного сигнала астатического объекта первого порядка пропорционально интегралу от изменения входных сигналов, такие объекты иногда называют интегрирующими.
Уравнение кривой разгона астатического объекта получается путем подстановки скачкообразной функции изменения входного сигнала в (116) и интегрирования этого уравнения при пулевых начальных условиях:
= (117)
и l,tf
ст(/) = £4ч (И7а)
где Др0 и Алп — относительные величины амплитуды скачкообразного изменения соответственно регулирующего и возмущающего воздействия.
На рис. 157 показаны кривые разгона, описываемые уравнениями (117) и (117а). Это-—прямые линии, выходящие из точки t О под углом
а2 = arctg и а2 = arc tg^.
' 0g 1 Og
Следовательно, при воздействии скачкообразного возмущения
на вход астатического
Рис. 157. Кривые разгона астатичсского объекта первого порядка:
I — по каналу распростри нсиня позмущающего воздействия; 2 — по каналу распространения регул црукмце-го воздсйствия
объекта первого порядка его выходной сигнал изменяется с постоянной скоростью и не стремится к какому-либо новому установившемуся значению. Поэтому такие объекты называются объектами без само-выравнивания или объектами с нулевым самовыравниванием (р-0). При снятии возмущающего воздействия астатический объект первого порядка приходит в состояние равновесия. Однако его регулируемый параметр при этом сохраняет значение, которого он достиг к моменту окончания переходного процесса. Следовательно, состояние равновесия астатического объекта может наступить при любом значении регулируемого параметра, поэтому такие объекты называются нейтральными в отличие от устойчивых статических объектов.
Скорость изменения регулируемого параметра у астатического объекта первого порядка под действием скачкообразного возмущения пропорциональна амплитуде скачка и обратно пропорциональна коэффициенту Т„-,. Последний по аналогии с Тс,- можно назвать «постоянная времени» астатического объекта; он имеет раз
мерность времени.
210
Простейшие астатические объекты первого порядка встречаются
редко. Обычно промышленные астатические объекты обладают запаздыванием и инерционностью, что проявляется на кривой разго-
на (рис. 158) в виде участка чистого (транспортного) запаздывания т.г и участка пониженной скорости изменения регулируемого параметра т(„ Для целей приближенного анализа свойства реальных астатических объектов аппроксимируются свойствами астатического объекта первого порядка с эквивалентным запаздыванием т = хт т(„ Величина т равна длине отрезка, отсекаемого на оси абсцисс под углом а асимптотой кривой разгона. В соответствии с принятой аппроксимацией динамиче
Рис. 158. Типичная кривая разгона промышленного астатического объекта
ская характеристика типового аста-
тического объекта регулирования описывается следующим диффе
ренциальным уравнением:
da ).(t — т) и (i — т)
Л ТД Т~
(И8)
Третью группу составляют неустойчивые объекты регулирования. Простейший неустойчивый объект первого порядка описы-
Рнс. 159. Кривая разгона неустойчивого объекта
вается следующим дифференциальным уравнением:
da 1 /<•,. .
-jr — о = -Jr- ц — Л.
at I об I об 1 об
Его решение при скачкообразном изменении входного сигнала Др0 описывается выражением
о (/) = - /г^Аро \ет«б - 1
График этой функции изображен на рис. 159. Из него видно, что отклонение регулируемого параметра неустойчивого объекта при скачкообразном из
менении входного сигнала с течением времени увеличивается с возрастающей скоростью. Подобными свойствами может обладать реактор-смеситель непрерывного действия, в котором происходит экзотермическая реакция. При определенном
сочетании параметров технологического процесса нарушение теплового баланса реактора может привести к увеличению в нем темпе
211
ратуры с возрастающей скоростью и, если не принять необходимых мер, то может произойти аварийное нарушение технологического процесса.
§ 41. ЭКСПЕРИМЕНТАЛЬНЫЙ МЕТОД ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ПРОМЫШЛЕННЫХ ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
Экспериментальные методы определения характеристик промышленных объектов регулирования делятся на активные и пассивные.
При использовании активных методов на объект в процессе эксперимента наносятся специальные возмущения п регистрируются вызванные ими изменения регулируемого параметра. Полученные таким образом экспериментальные данные затем обрабатываются по определенной методике. Активные методы экспериментального определения характеристик промышленных объектов регулирования относительно просты, доступны персоналу средней квалификации н обеспечивают достаточную точность, поэтому они широко применяются в производственной практике.
Пассивные методы основаны на использовании информации об изменениях входного и выходного параметров объекта в процессе нормальной эксплуатации. Эти сигналы (изменения во времени входного воздействия и регулируемого параметра) являются взаимозависимыми случайными функциями времени, и между их статистическими характеристиками и характеристиками объекта существуют определенные зависимости. Поэтому статическую и динамическую характеристики объекта можно определить путем специальной математической обработки графиков изменения входного воздействия и регулируемого параметра во времени.
Пассивные методы можно применять при исследовании объектов, не допускающих даже кратковременных отклонений от заданного режима работы, неизбежных при использовании активных методов. Однако пассивные методы более сложны, трудоемки и требуют более тщательной постановки эксперимента, из-за чего применяются относительно редко. В данном курсе пассивные методы не рассматриваются.
Определение статической характеристики объекта. Как показано в § 40, статическая характеристика линейного объекта регулирования описывается уравнением
а = АД А,р.
Следовательно, задача определения статической характеристики сводится к определению численных значений коэффициентов усиления объекта kx и k[k.
Поскольку о линейности объекта заранее судить невозможно, то фактически определяют неизвестную зависимость
o = f(X, р), которая в общем случае может быть и нелинейной.
212
Практически определяют статические характеристики объекта по двум каналам: по каналу распространения возмущающего действия в виде
a = f\ (X) при р. = О
и по каналу распространения регулирующего воздействия
ст = [2 (р) при X = 0.
Поскольку в замкнутый контур САР входит только канал распространения регулирующего воздействия, наиболее ответственным является определение второй зависимости, а первую во многих случаях вообще не определяют.
Экспериментальная часть работы выполняется следующим образом: устанавливается определенное значение возмущающего воздействия (обычно соответствующее номинальной нагрузке объекта), после чего объект приводится в состояние равновесия. Затем последовательно изменяют величину регулирующего воздействия относительно равновесного значения, подавая на вход объекта ряд значений рь р2, ..., цх,„ ..., р„ и регистрируя на его выходе соответствующие установившиеся значения относительных отклонений регулируемого параметра от заданной величины сг2, ..., ст(, ..., ап. В результате получается таблица соответствий вида ст1 -* Ць ст2 -► Иг. •••, °; —> Рс, .... -► рп, по которой строится график функ-
ции ст = f (р) при X = Хо = const. Анализ полученного графика позволяет оценить линейность объекта на рабочем участке характеристики и в случае необходимости произвести ее графическую линеаризацию. Тангенс угла наклона линеаризованной статической характеристики равен величине klL.
Если в процессе работы объекта возможны значительные изменения главного возмущающего воздействия, то аналогичные эксперименты желательно провести для нескольких возможных Ху., а полученные при этом значения если они не сильно отличаются друг от друга, усреднить. Если же значения k-^, полученные при разных значениях нагрузки, значительно различаются, то это свидетельствует о нелинейности исследуемого объекта.
Экспериментальные методы определения динамических характеристик объектов регулирования заключаются в том, что на объект, находящийся в состоянии равновесия, наносится возмущающее воздействие определенной формы. Переходный процесс, возникающий в объекте, регистрируется как функция о (/) изменения регулируемого параметра во времени. Эту функцию можно рассматривать как графическое выражение решения дифференциального уравнения объекта при заданной функции возмущающего воздействия.
Если известен тип объекта и, следовательно, сбщее выражение его дифференциального уравнения, то известна и функция, описывающая решение этого уравнения для заданной функции возмущаю
213
щего воздействия. Численные значения постоянных коэффициентов функции, описывающей решение, связанные известными соотношениями с коэффициентами дифференциального уравнения, могут быть определены с помощью графо-аналитической обработки кривой переходного процесса. После этого можно рассчитать численные значения постоянных коэффициентов дифференциального уравнения объекта.
В большинстве случаев в качестве возмущающей функции используется скачкообразное изменение входного сигнала. График переходного процесса при таком возмущении является кривой разгона объекта.
Для целей упрощенного анализа САР динамические характеристики большинства промышленных объектов регулирования можно аппроксимировать дифференциальными уравнениями (115) для статических объектов и (118) для объектов астатических. Возможность такой аппроксимации при упрощенном анализе отмечалась в § 40. Как и при определении статической характеристики, наибольшее значение имеет динамическая характеристика объекта по каналу распространения регулирующего воздействия, поскольку она входит в замкнутый контур САР. Поэтому в большинстве случаев при экспериментальном определении динамической характеристики объекта ограничиваются определением характеристики по каналу распространения регулирующего воздействия.
Таким образом, аппроксимированная динамическая характеристика статического объекта ищется в виде
? + (119)
и по результатам эксперимента подлежат определению численные значения параметров Тп6, /г;1 и т. Уравнение кривой разгона, соответствующее объекту с такой характеристикой, имеет вид
da _^А|х0 Z Л
По его графику, изображенному на рис. 160, могут быть найдены численные значения всех трех искомых величин — /г.,, Тпб и т, как показано в § 40.
Аналогично для астатического объекта аппроксимированная динамическая характеристика ищется в виде
J = ~-P(/-t). (120)
По графику кривой разгона такого объекта (кривая 2 на рис. 161), описываемой уравнением
<т(С = ^(/-т),
«б
214
определяются и численные значения величин Т„,-, и т, как показано в § 40.
Методика экспериментального определения аппроксимированных динамических характеристик промышленных объектов регулирования заключается в следующем. Стабилизируются значения всех входных сигналов с тем, чтобы объект пришел в состояние равновесия и установилось постоянное заданное значение его регулируемого параметра. Затем на объект наносится возмущение путем скачкообразного изменения регулирующего воздействия. Амплитуда возмущающего воздействия должна быть такова, чтобы отклонение регулируемого параметра в переходном режиме работы объекта не превысило допустимой величины.
! — многоемкостного объекта с транспортным запаздыванием; 2 — типового статического объекта с ааиаздыыаннем. аппроксимирующего свойства многоемкостного объекта; ОА — касательная к кривой / в точке ес перегиба
/ — промышленного астатического объекта с транспортным запаздыванием; 2 — типового астатического объекта с запаздыванием, аппроксимирующего свойства промышленного объекта
С момента нанесения возмущающего воздействия регистрируется функция изменения регулируемого параметра во времени. Для статического объекта регистрация продолжается до стабилизации регулируемого параметра на новом значении. При исследовании астатических объектов регистрация кривой разгона продолжается до установления постоянной скорости изменения регулируемого параметра, после чего объект необходимо вернуть к исходному состоянию равновесия изменением регулирующего воздействия в обратном направлении.
Полученные графики кривых разгона обрабатываются в такой последовательности:
1) приводятся к безразмерному виду, для чего абсолютные значения отклонений регулируемого параметра заменяются относительными;
2) для статических объектов (рис. 160) определяется величина т, для чего проводится касательная к кривой разгона в точке пере
215
гиба. Величина т отсчитывается по оси абсцисс (времени) в принятых при построении графика единицах времени от момента нанесения возмущения до точки пересечения касательной с осью абсцисс. Затем определяется числовое значение постоянной времени Тг6, равное длине отрезка ОВ асимптоты в принятом масштабе времени, а также значение коэффициента усиления /г,х = —.—, где величина о (со) равна отрезку АО в принятом масштабе измерения по оси ординат, a A|i0 — Ах^ег.— относительное изменение регулирую-*/><•2(1
щего воздействия при снятии кривой разгона;
3) для астатических объектов (рис. 161) определяется величина т, для чего проводится асимптота кривой разгона. Численное ее значение равно величине отрезка т в принятом при построении графика _ о tea ....
масштабе времени. Затем определяются величины е = ^— и I<>б=-= 1-, для чего измеряется тангенс угла наклона к оси абсцисс и делится на величину относительного изменения регулирующего воздействия, для которого снята кривая разгона.
Глава XI
ЭЛЕМЕНТЫ АНАЛИЗА РАЗОМКНУТЫХ ЛИНЕЙНЫХ САР
§ 42. ОПРЕДЕЛЕНИЕ РЕАКЦИИ ЛИНЕЙНОГО ЭЛЕМЕНТА НА ВХОДНОЙ СИГНАЛ ПРОИЗВОЛЬНОЙ ЗАДАННОЙ ФОРМЫ
В § 40 было показано, как рассчитать реакцию линейного элемента САР (т. е. функцию изменения его выходного сигнала от времени) для заданной, например, скачкообразной функции входного сигнала. Чтобы проанализировать в общем виде поведение исследуемого элемента в динамическом режиме работы, необходимо уметь рассчитать его реакцию на заданную функцию входного сигнала любой произвольной формы. Эту задачу можно решить, если известна реакция элемента на входной сигнал определенной формы, например, если известна его кривая разгона.
При дальнейшем выводе используется важнейшее свойство линейного элемента САР, которое называется принцип суперпозиции. Оно заключается в том, что реакция линейного элемента на сумму входных сигналов равна сумме его реакции на каждый из этих сигналов в отдельности. Это свойство является необходимым и достаточным признаком линейности элемента САР.
Предположим, например, что известна кривая разгона системы,
вызванная скачкообразным входным сигналом с амплитудой, равной единице. Требуется определить реакцию системы на скачкообразный входной сигнал с амплитудой в К раз больше. Условно представим этот сигнал как сумму К скачков с амплитудой, равной единице (рис. 162). Тогда, согласно принципу суперпозиции, реак-
Рис. 162. Реакция линейного элемента на входные сигналы разной амплитуды.
а — кривые разгона, соответствующие сигналу с амплитудой Дц (кривая /) и КДц (кривая 2)', б — график возму-щающих воздействий
217
ция этой системы на скачкообразный сигнал с амплитудой К вы-
ражается суммой К совпадающих во времени кривых разгона. Иными
словами, эта реакция представляет собой кривую разгона, ординаты
а)
6)
Рис. 163. Определение реакции линейного элемента на входной сигнал хвх произвольной формы:
— кривая разгона элемента на k-i\ элементарный скачок
которой изменены в К раз.
Аналогично определяется реакция элемента на входной сигнал любой произвольной формы. Для этого заданную функцию (/) приближенно представим как сумму элементарных скачков различной амплитуды, сдвинутых на одинаковый малый промежуток времени Ат (рис. 163, а). Определив реакцию системы на каждую элементарную составляющую входного сигнала и присуммиро-вав найденные величины, найдем приближенное выражение искомой реакции системы на этот входной сигнал.
Амплитуда АГ-го скачка равна = х$х (/гДт) Xf>x \(k 1) Ат].
Реакция на этот скачок
Хвыхк —
• tj (I — £Дт)
при t -< /;Лт; при I /гДт,
где y(t) — уравнение кривой разгона исследуемого элемента (рис. 163, б).
Приближенное выражение для реакции элемента на входной сигнал х,1Х(1)-k=‘-
*«ыл-(П«= У, Аку (t — /гДт) -|- х,.х (0) у (/). (121)
ь --=<1
Точность полученного результата зависит от величины интервала времени Дт. Чем он меньше, тем точнее ступенчатая кривая аппроксимирует входной сигнал xllx(t) и тем, очевидно, точнее это уравнение описывает выходной сигнал элемента, являющийся его реакцией на действие сигнала х/п:(^).
Разделив и умножив выражение, стоящее под знаком суммы в (121), на Дт и перейдя к пределу при Дт - 0, получим точное выражение, связывающее выходной сигнал линейной системы с входным:
/
Xeux(f)= \ 1*вл- (01 ' y(t — т) dx + xex (0) у (/). (122)
Это выражение носит название интеграл Дюамеля. Из него, в частности, следует, что состояние любого элемента динамической
218
системы в некоторый момент переходного процесса t зависит не только от воздействия, приложенного к нему в этот момент, но и от прошлого его состояния. Такое последствие, проявляющееся тем сильнее, чем больше инерционность и запаздывание элемента, оказывает большое влияние на процесс регулирования.
Интегральное уравнение (122) называется также интегралом сверки функции и у (().
§ 43. ИСПОЛЬЗОВАНИЕ ОПЕРАЦИОННОГО ИСЧИСЛЕНИЯ ПРИ АНАЛИЗЕ ЛИНЕЙНЫХ САР
Как показано в § 40 и 41, прямой метод анализа линейных элементов САР связан либо с решением дифференциального уравнения, описывающего динамическую характеристику данного элемента, либо с решением интегральных уравнений типа свертки. Оба пути чрезвычайно трудоемки, а для элементов, описываемых уравнениями высоких порядков, решение часто вообще невозможно.
Однако решение таких уравнений значительно облегчается при использовании математического аппарата операционного исчисления, основу которого составляет преобразование Лапласа. Практически все прикладные методы анализа линейных САР основываются на нем.
В задачи настоящей книги не входит сколько-нибудь полное изложение операционного исчисления. Ниже излагается лишь основная идея метода и даются формальные правила его применения в минимальном объеме, необходимом при упрощенном анализе линейных САР.
Для уяснения целей, преследуемых при использовании операционного исчисления, воспользуемся простои аналогией из курса элементарной математики. Известно, что при перемножении многозначных чи сел удобно производить вы числение не над самими числами, а над их логарифмами .
Схема вычислений такова: заданные числа логарифмируются, затем их логарифмы складываются, а полученная сумма подвергается операции потенцирования. По сравнению с перемножением преимущество (в смысле меньшей трудоемкости) имеет только операция сложения. Поэтому, если бы каждый раз действительно приходилось производить операции логарифмирования и потенцирования, то такая методика никогда нс нашла бы применения .Однакофактически эти операции производить не приходится, так как имеющиеся таблицы логарифмов и антилогарифмов охватывают все возможные в вычислительной практике числа.
Таким образом, благодаря использованию свойств логарифмов в сочетании с таблицами логарифмов и антилогарифмов более трудоемкая вычислительная операция — умножение — заменяется менее трудоемкой операцией — сложением.
Решение интегральных и дифференциальных уравнений с использованием аппарата операционного исчисления производится по следующей методике:
1) Все функции f (/), которые входят в решаемое уравнение, подвергаются математической обработке, называемой прямым преобразованием Лапласа:
А(р) = А|/(/)],
219
где L — символ, изображающий операцию прямого преобразования Лапласа;
р — комплексное переменное.
Исходная функция /'(/), подвергаемая преобразованию Лапласа, называется оригиналом. Соответствующая функция F(p), полученная в результате преобразования, называется изображением.
2) Над изображениями по определенным правилам производятся операции, определяемые основными свойствами преобразования Лапласа. После этого составляется и затем решается операторное уравнение, соответствующее исходному уравнению. Полученный результат представляет собой изображение решения исходного интегрального или дифференциального уравнения.
3) Для отыскания оригинала решения, полученного в операторной форме, его подвергают так называемому обратному преобразованию Лапласа:
f(O = L1[F(p)L
где L1 — символ обратного преобразования Лапласа.
Фактически производить операции прямого и обратного преобразования Лапласа не приходится, так как имеются обширные таблицы соответствий между наиболее распространенными оригиналами и изображениями (некоторые из них приведены в табл. 2)*. Поэтому переход от интегральных или дифференциальных уравнений к уравнениям в операторной форме обычно не вызывает трудностей. Остается выяснить, какие преимущества дает такой переход. Для этого необходимо охарактеризовать свойства преобразования Лапласа и правила действий над изображениями. Основные из них следующие.
1) Преобразование по Лапласу является линейной операцией. Поэтому изображение, соответствующее оригиналу, умноженному на постоянную величину, равно изображению оригинала, умноженному на эту величину:
L[kf (Z)] = fef(p), (123)
где
/г= const; F (р) = L |/ (t)].
Изображение суммы нескольких оригиналов равно сумме изображений каждого из них:
Д[/(0-Пф(0] = /?(Р) + Ф(Р). (124)
ГДО F(p) = L[f(/)| и Ф(р) = £[<р(0].
2) Интегрирование оригинала соответствует делению изображе
ния на р:
$/(/)</(/)
*)
(125)
* Подробные таблицы соответствий оригиналов и изображений приводятся например, в книге Д ё ч Г. Руководство к практическому применению преобразования Лапласа. ГИФМЛ, М., 1958.
220
Таблица 2
Преобразование по Лапласу некоторых функций
№ по пор. Оригинал Изображен не
1 ( 0 при / < 0 1(Н 1 при /++ 1 p
2 t ]_ p-
3 Т е 1 1 + 7/7
4 f \ - Г т 1 p (1 + Tp)
5 eTt 1 P-T
6 sin mt
7 |/ r-- T T2 при 7\>~- 1 PJ + 7 iP4-7s
3) Дифференцирование оригинала соответствует умножению изображения на р*:
л[-^|-рЛр). (126)
4) Запаздывание в области оригиналов на время т соответствует умножению изображения на e“pt:
L If (* - т)] = F (р) е р\ (127)
5) Произведению изображений соответствует интеграл свертки их оригиналов:
7
jjx(^ - Т)р(т) di = L 1 fX (р) У (р)]. (128)
и
* Формула (126) справедлива в том случае, если f(t) =0 при t = 0.
221
Из выражений (125)—(128) видно, что выполнение многих математических операций, особенно таких, как интегрирование, дифференцирование и вычисление интегралов типа свертки, значительно облегчается при переходе от оригиналов к изображениям.
В результате преобразования функций по Лапласу дифференциальные и интегральные уравнения обычно преобразуются в гораздо более простые для решения алгебраические уравнения. Кроме того, изображения являются часто более простыми функциями, чем оригиналы. Все это и послужило причиной широкого применения аппарата операционного исчисления в теории автоматического регулирования.
Рассмотрим возможности применении преобразования Лапласа для анализа элементов линейных САР на ряде примеров.
Пример 7,
Преобразовать по Лапласу дифференциальное уравнение (115) типового тического объекта регулирования da 1 dt ' т\,ба ~~ при условии, что ст(0) = 0.
Воспользовавшись правилами
к (L — т) - ц (/ — т)
’ об об
(123), (124), (126) и (127), получаем id [ст (/)]]
L {ЛИ=ро
ста-
L Г ст (/)] = =,- а (р);
L * Об J 'Об
/.ГД Х(/-т)| = А А(р)е /Ч;
U об J 1 об
L ГА р (t - т) 1 = А м (р) е-рт.
I * об J ' об
Следовательно, уравнение (115), преобразованное по Лапласу, имеет вид
ро (р) + ° (р) = I г' Л А ~ т" М Iе ,Jt
'об L1 об 1 об J
ИЛИ
а (р) [1 + Тобр \ = [k) А (р) — /г,, И (р)| е Р\ (129)
Пример
Определить уравнение кривой разгона типового статического объекта регулирования по каналу распространения регулирующего воздействия.
По условию функция Х(7) = 0 и ji(/) = |iol(t), т. е.
(0 при t < 0;
АО = , п
1|10 при t 2; 0.
Изображение функции p(t) найдем в табл. 2 (№ по пор. 1):
М(р)=£[Ио1(/)] = ^.
Подставив его в (129) и решим полученное уравнение относительно о(р):
о (р) = -
Р (1 + Ти6р)
222
Это выражение является изображением искомой кривой разгона. Для того чтобы найти оригинал, вновь воспользуемся табл. 2 (№ по пор. 4):
а (/) = k„p„ \1 — е ‘о6 ) ‘
Пример 9.
Определить уравнение кривой разгона неустойчивого объекта первого порядка по каналу распространения возмущающего воздействия.
Уравнение динамической характеристики такого объекта J, преобразованное по Лапласу, имеет вид
(/’)/’ V-1 А (р). (130)
\ ' об- ‘ об
По условию X(t) -- i(t), следовательно,
л ОТ-У
Подставим значение У-(р) в (130) и после выполнения необходимых преобразований найдем изображение уравнения искомой кривой разгона
'1\>бР ! Р - т j
1 об /
Оригинал этого выражения (табл. 2, № по пор. 5)
о (t)=k^a _ j) •
Интеграл Дюамеля (122) позволяет вычислить реакцию линейного элемента САР на любой входной сигнал во временной области. Однако вследствие трудностей, связанных с вычислением интеграла Дюамеля, практического применения он почти не находит. Вместе с тем интегральные выражения такого типа легко вычисляются при использовании аппарата операционного исчисления.
Преобразуем правую и левую части уравнения (122) по Лапласу, используя правила (126) и (128). Тогда при х„х (0) = 0
Обозначим
Тогда или
X„wx(p) = pX„v (p)-Y (р). pY(p)=W(p).
X.... (р) = W (р) Xlix (р)
(131)
Функция IP (р), равная отношению изображения выходного сигнала линейного элемента САР к изображению вызвавшего его входного сигнала2, называется передаточной функцией этого элемента. Передаточная функция описывает в операторной форме за-
1 См ci р 211.
2 При нулевых начальных условиях, т. е. при л-(1С(0) — 0 и хвыл.(0) = 0.
223
висимость выходного сигнала исследуемого элемента от входного и, следовательно, полностью характеризует его динамические свойства. Поэтому, наряду с дифференциальным уравнением, она является одной из форм динамической характеристики любого линейного элемента САР. Понятие передаточной функции имеет большое прикладное значение, так как анализ и синтез САР осуществляется гораздо легче при его применении.
Рассмотрим преимущества применения понятия передаточной функции на примерах.
Пример 10.
Определить уравнение кривой разгона типового астатического объекта по каналу распространения регулирующего воздействия, пользуясь его передаточной функцией.
Для решения задачи необходимо прежде всего определить передаточную функцию исследумого объекта, для чего преобразуем уравнение (120) по Лапласу:
pa (р) = J, - М (р) е f>T,
* <)')
откуда, пользуясь определением (131), найдем
Изображен не кривой разгона
а (р) = U7 (р) М (р), (132)
где М(р) — изображение скачкообразного изменения регулирующего воздействия, которое описывается уравнением:
М (р) — —О .
р
Подставим значения М(р) и W(p) в уравнение (132):
Оригинал этого выражения находим по табл. 2 (№ по пор. 2) с учетом правила (124):
о W = О' * - Т). 1 об
Это уравнение совпадает с полученным ранее уравнением (120а).
Пример 11.
Определить выражение передаточной функции типового статического объекта регулирования и, пользуясь им, определить уравнение переходного процесса в объекте под действием возмущающей функции /.(/) -= Хо/ (рнс. 164).
Для определения передаточной функции воспользуемся уравнением (129), из которого при р(р) О, согласно (131), получим
fee ”
= ~1 (‘33)
1 "i" J обг
224
Изображение уравнения искомой переходной функции о (/)) W (/>) Л (р), А.
где А(;>) --= /.(Ло/) -'„определяем по табл. 2,
Рис. 164. График к примеру 11: а — возмущающее воздействие; б — переходная функция
откуда
eW“7irra-
Оригинал полученного выражения также находим но табл. 2 (№№ по пор. 2 и 3) с учетом правила (127):
I - -
а (/) == (Г,,^ '"б -\- I - т- Тоб).
На рис. 164, б показан график этой функции.
Частотные характеристики
В теории автоматического регулирования большое прикладное значение имеют частотные характеристики, которые наряду с дифференциальными уравнениями и передаточными функциями характеризуют динамические свойства линейных элементов и систем регулирования.
Частотными характеристиками называются функции частоты со, описывающие изменение амплитуды и фазы гармонических колебаний, проходящих через линейный элемент.
Если на вход элемента подать гармонический сигнал с амплитудой Alt:
х„х (t) = Аи sin ait
то через некоторое время па выходе этого элемента также установится гармонический сигнал с амплитудой' 4, А который' (удет оиис’ыится уравнением
хвих (О = А„А sin (со/ — ф).
Следовательно, в общем случае у гармонического сигнала, которыи’проходит через линейный динамический элемент, изменяются амплитуда и фаза.
Амплитудной частотной характеристикой <4(и>) называется зависимость отношения амплитуды гармонических колебаний па выходе элемента к амплитуде колебаний на его входе от частоты.
Фазовой частотной характеристикой q(со) называется зависимость изменения фазы выходного гармонического колебания по отношению к фазе входного колебания от частоты.
Сочетание амплитудной и фазовой частотных характеристик позволяет полностью описать динамические свойства линейного элемента, т. е.. определить его реакцию на любой входной сигнал f(t), так к/гк последний всегда можно представить как сумму гармонических составляющих с различной частотой и амплитудой.
(i Казакои и пр. 225
Частотные характеристики элемента можно определить экспериментально, подавая иа его вход синусоидальный сигнал с различной частото! i и регистрируя параметры синусоидального сигнала на выходе. Можно рассчитать частотные характеристики н но другим динамическим характеристикам элемента, в частности, по его передаточной функции.
Как указывалось выше, оператор р, который является аргументом функции W(p), представляет собой комплексное число и может быть представлен в виде
Р — а |- (Ф. (134)
где а — вещественная часть р;
Р — мнимая часть р; символом i обозначен + | в показательной форме
или
где
мой W(P),
р = Л1е'Ф ,
| а2 [ (V — модуль комплексного числа р; ф =
Оператор р может принимать любые значения, т. е. может быть и чисто мпи-велнчиной. Возьмем значение р — /со и, подставив его в внражепис функции получим функцию комплексного переменного /со, которую по аналогии с (134) и (135) представим в виде
IV (Ao) = Р (со) ф Q (со) (, где /-’(со) и Q(co) — соответственно вещественная и мнимая части функции IV(i'co), а также в виде
U2' (/со) = А (со) ,
где
— фаза р.
-0.5
02 8.4 0.6 0.6 1 Р(и)
1 Q(u)
-0.6
-0.2
и=0.2
--О.6
--0.6
и=0.5
—0.8
Лео = • W (/со)
(135)
Рис. 165. ристика
Амплитудно-фазовая статического объекта порядка с запаздыванием
характе-первого
/И =--
= ]/Р- (со) <22 (со) — модуль функции IV (/со)
q>(w) — arcty 44т----(раза IV (/со).
1 (ш)
Функция IV(ico) называется амплитудно-фазовой частотной характеристикой; ее модуль является амплитудной частотной характеристикой элемента , фаза—фазовой частотной характеристикой'.
Амплитудно-фазовую частотную характеристику можно представить графически па комплексной плоскости (рис. 165), откладывая ио оси абсцисс вещественную часть /’(со), а по оси ординат— .мнимую часть Q(u>). Каждому значению со будет соответствовать определенная точка в комплексной’ плоскости, а совокупность этих точек для всех значений —егта со • / - сс * будет гр'1фиком амплитуднофазовой частотной характеристики.
В качестве примера рассчитаем функцию IV(ico) для статического объекта , передаточная функция которого описывается уравнением (133). Подставим в него значение р = /со:
IV (/од) = т - е
1 -I
Умножим числитель и знаменатель на (1 — i^To6) п, учитывая, что г — I, получим
V = k>[ -Т7 Lrs-----------------е: • (136)
\ 1 4- о>2/ оо 1 4- 2ог;У
Ирак/пческин интерес представляет ни rc-piia.'i значений -j- со.
226
Правую часть выражения можно рассматривать как произведение двух комплексных чисел: первое включает члены, заключенные в скобки, а второе равно /<;е
По аналогии с (1'35) представим комплексное число, заключенное в скобках, в показательной форме
J но ________________; J I аг.'Ц ш7о6
1 1 ! <n27’2(,r; ( 1 <№ог;
Теперь подставим эго значение в (136) и получим в окончательном виде
h i lardy <w Г -- -1 tvT)
IV (Йо) = <- * o* ' .
I- 1 + <ii'iT2o6
На рис. 165 показан график амплитудно-фазовой частотной характеристики, соответствующий полученному уравнению при k-K — 1; 7‘(ю- = т = 60 сек.
1\ настоящему времени разработаны и широко применяют» i на практике методы аналим и синтеза промышленных САР , основанные на использовании частотных характеристик. Они обеспечивают наиболее высокую точность, особенно при разработке СЛР для сложных объектов. Однако усвоение этих методов невозможно без соответствующей математической подготовки, поэтому в данной книге они не рассматриваются.
§ 44. СТРУКТУРНЫЕ СХЕМЫ САР И ИХ ПРЕОБРАЗОВАНИЕ
Опыт анализа большого числа различных элементов САР — объектов регулирования, автоматических регуляторов, исполнительных механизмов и т. д. показал, что их свойства можно достаточно точно промоделировать, пользуясь небольшим числом типовых элементов в определенном сочетании их. Эти простейшие элементы системы регулирования называются звеньями.
Звенья могут соответствовать реальным физическим элементам САР в тех случаях, когда свойства таких элементов совпадают со свойствами какого-либо типового звена. С^нако в большинстве случаев для аппроксимации свойств реальных элементов САР (объектов и регуляторов) необходимо несколько типовых звеньев, которые, будучи соединены в определенном сочетании могут рассматриваться как эквивалент исследуемого элемента САР.
Схема соединения типовых элементов, эквивалентная по своим свойствам элементу САР, называется структурной схемой этого элемента.
Типовые звенья, составляющие структурную схему, изображаются в виде прямоугольников, в которые вписаны их передаточные функции. Звенья соединяются условными линиями связи, а направления распространения сигналов между звеньями в структурной схеме обозначается стрелками.
В настоящей книге используются следующие типовые элементарные звенья: усилительное, статическое первого иорядка, астатическое первого порядка, дифференцирующее и звено чистого запаздывания. Рассмотрим свойства перечисленных звеньев.
Статическое звено нулевого порядка или усилительное звено.
227
Его динамическая характеристика описывается линейным дифференциальным уравнением пулевого порядка:
хймл:(/)=^Л,(/), (137)
где kv = const — передаточный коэффициент или коэффициент усиления звена.
Передаточная функция усилительного звена
W7(p)=At.. (138)
Усилительное звено изменяет только масштаб проходящего сигнала, не искажая его форму в динамическом режиме. Примерами усилительных звеньев могут служить рычажные передаточные механизмы приборов, зубчатые редукторы, электронные усилители и другие элементы САР. К этому же типу относится ряд объектов регулирования, например, рассмотренный в § 39 участок трубопровода, в котором регулируется расход жидкости.
Статическое звено первого порядка, называемое также апериодическим или инерционным. Его динамическая характеристика описывается линейным дифференциальным уравнением первого порядка:
+ (139)
где
То = const — постоянная времени звена;
Ку — const — передаточный коэффициент или коэффициент усиления звена.
Передаточная функция такого звена описывается уравнением
Kv
= <14°) а его кривая разгона
^Ых(О = ^Лхо(1 - е ’»), (141)
где хвХа—амплитуда скачкообразного изменения входного сигнала. Статическое звено первого порядка ие только изменяет в Ку раз масштаб проходящего сигнала, но и искажает его форму в динамическом режиме работы вследствие присущей этому звену инерционности.
К числу статических звеньев первого порядка относятся одноемкостные объекты, например, теплообменник смешения и куб ректификационной колонны, свойства которых рассмотрены выше в примерах 3 и 4 § 39. Из других примеров можно привести R — С-цепь (рис. 166, а) и проточную газовую емкость (рис. 166, б) как объект регулирования давления.
228
Астатическое звено первого порядка или интегрирующее звено. Динамическая характеристика этого звена описывается дифференциальным уравнением вида
/7 у I
г (149}
где 7',', =- const — постоянная
Рис. 166. Примеры статических звеньев первого порядка: а — R — С — цепь: б — проточная газовая емкость
Передаточная функция этого звена
U7(p) = J^, (143)
а уравнение кривой разгона
xeux(t) = ^t. (144)
Примером интегрирующих звеньев являются астатические объекты первого порядка, например, напорный бак свободного истечения и реактор периодического действия, описанные в примерах
Рис. 167. Примеры астатических звеньев первого порядка:
а — электропривод с регулируемой скоростью вращения; й — непроточная газовая емкость; в — поршневой гидропривод
5 и 6 § 39. Из других элементов, применяемых в САР, к интегрирующим звеньям относятся электропривод с регулируемой скоростью вращения двигателя (рис. 167, а), непроточная газовая емкость как объект регулирования давления (рис. 163, б), поршневой гидропривод (рис. 167, в).
229
Дифференцирующее звено. Его динамическая характеристика описывается дифференциальным уравнением вида
(145)
Передаточная функция такого звена
lE(/>) = /Q. (146)
Кривая разгона дифференцирующего звена (рис. 168) имеет форму импульса бесконечно большой амплитуды. Практически реализовать такое звено невозможно, а все реальные дифференцирующие звенья можно рассматривать как состоящие из звена с передаточной функцией (146) и включенного с ним последовательно статического звена первого порядка. Эквивалентная передаточная функция реального дифференцирующего звена описывается уравнением
Кг1Р
1 + Тор
Рис. 168. Кривая разгона дифференцирующего звена:
/ — идеального; 2 — реального
С
<z—Ц
0.
а его кривая пением
1Е(р)
(О
UbLX \ ’
, (147)
разгона — урав-
-f2Le Т„
Рис. 169. Примеры реальных дифференцирующих звеньев:
а — R — С — цепь; б — поршневой гидроцилиндр / с перетоком жидкости через дроссель 2, с пружиной 3
График этого уравнения показан на рис. 168 (кривая 2). Реальное дифференцирующее звено приближается по свойствам к идеальному при
уменьшении постоянной времени Ти. На рис. 169 показаны примеры реальных дифференцирующих звеньев: R — С-цепь и поршневой цилиндр с перетоком жидкости через дроссель.
Звено чистого запаздывания. Его свойства описываются уравнением
(148)
хвых (/) = А-„Л. (/ - т), где т = const — чистое запаздывание.
Передаточная функция такого звена, согласно (127), описывается уравнением
W {р) = е-р--.
(149)
Примером звена чистого запаздывания является ленточный дозатор, описанный в примере 2 § 39.
23Q
Сочетание типовых звеньев позволяет аппроксимировать свойства всех описываемых в данной книге элементов САР и самих рассматриваемых систем регулирования. Использование типовых звеньев и составленных из них структурных схем значительно облегчает анализ и синтез САР.
Структурные схемы составляются па основе изучения реальных элементов САР. Например, если известно, что передаточные функции регулирующего органа 117,, 0 (р), объекта регулирования WlllS (р) и датчика регулируемого параметра (р) соответствуют передаточным функциям каких-либо типовых звеньев, то структурная схема такой цепи будет состоять из трех соединенных последовательно типовых звеньев (рис. 170)*. Для дальнейшего анализа исследуемой цепи необходимо преобразовать эту структурную схему к более простому виду. Обычно преобразование структурных схем сводится к замене цепочки из нескольких типовых звеньев одним звеном, эквивалентным по свойствам всей цепи. Основная задача такого преобразования — определение передаточной функции эквивалентного звена. Однако иногда приходится решать обратную задачу, т. е. выбирать структурную схему (тип звеньев и способ их соединения) по заданной передаточной функции
б)
Рис. 170. Схема заданной часта САР:
а — функциональная; 6 — структурная
эквивалентного звена.
Для решения обеих этих задач необходимо знать следующие правила преобразования структурных схем.
При последовательном соединении звеньев (рис. 170), когда выходной сигнал предыдущего в цепи звена служит входным сигналом для последующего, передаточная функция эквивалентного звена равна произведению передаточных функций отдельных звеньев:
П ^(р)- (150)
i =-- I
Например, передаточная функция цепи, структурная схема которой изображена на рис. 170, равна
(р) = ^Р.о (рЖ,Лр) WW
Из этого, в частности, следует вывод, что при экспериментальном определении динамической характеристики объекта регулирования фактически определяется эквивалентная передаточная функция всей цепи, включая регулирующий орган и датчик регулируемого параметра.
Знак «минус» па рис. 170, б показывает, что сигналы р и А вычитаются.
231
В гл. X приводятся уравнения (119) и (120), которыми аппроксимируются динамические характеристики типовых промышленных объектов регулирования. Соответствующие им передаточные функции имеют вид
lv '/’> И
* I ‘ (J(>i ‘ ОО "
Эти функции можно рассматривать как эквивалентные передаточные функции двух последовательно соединенных звеньев. Для ти-
Рис. 171. Параллельное включение звеньев СЛР
нового статического объекта такими звеньями являются звено чистого запаздывания с временем чистого запаздывания т и инерционное звено с постоянной времени Т,.б\ для типового астатического объекта — это то же звено чистого запаздывания и интегрирующее звено с постоянной времени Гий.
При параллельном включении звеньев (рис. 171), когда входной сигнал является общим для всех звеньев,
а их выходные сигналы суммируются, передаточная функция эквивалентного звена равна сумме передаточных функций отдельных звеньев Wlt W,,, ..., W„;
Ч (Р) = . 2 U7/ (Р)
(151)
Рис. 172. Включение звеньев но схеме обратной связи: / — звено основной цепи распространения входного сигнала; 2 — звено обратной связи
Кроме параллельного и последовательного включения звеньев, в практике автоматического регулирования широко применяется включение звеньев по принципу обратной связи.
Вернемся к понятию обратной связи, которое кратко дано выше — при описании свойств САР по отклонению. Цепью обратной связи (рис. 172) называется звено или совокупность звеньев, которые передают сигнал с выхода данного звена на его вход (или вход одного из предшествующих звеньев последовательной цепи).
Обратные связи бывают положительные и отрицательные. Сигнал положительной обратной связи складывается с
лом звена, охватываемого цепью обратной связи. Сигнал отрицательной обратной связи вычитается из основного входного сигнала. В практике автоматического регулирования преимущественное распространение получили отрицательные обратные связи.
232
основным входным сигна-
Найдем передаточную функцию эквивалентного звена при включении звеньев по принципу отрицательной обратной связи (рис. 172). Выходной сигнал звена основной цепи равен
Аяи.(р) = ^1(р)|А„Л(р) -X,,(/’)!• (152)
Выходной сигнал обратной связи А'(Ъ[. определяется выражением
2G, (р) = Х,ШЛ(р) Г2 (р). (153)
Подставив (153) в (152) и произведя несложные преобразования, получим
жЛР) = T-у (р) ’ (154)
Рассмотрим частный случай. Пусть звено, охватываемое отри
цательной обратной связью, является усилительным:
«Мр) = *т
Тогда выражение (154) можно преобразовать к виду
WSKt, (Р) = -------- (155)
Если коэффициент усиления ky достаточно велик, то членом ---
A’v в знаменателе выражения (155’) можно пренебречь:
а)
в)
173. Пример преобразования структурной схемы:
(156)
Следовательно, при охвате цепью отрицательной обратной связи звена с большим коэффициентом усиления передаточная функция эк-
а — исходная структурная схема-, б — ВИВаЛСПГНОГО звена 011 ИСЫ В 36 ГС Я экви вал сити а я последовательная схе
функцией, обратной передаточной ма; в - эквивалентное звено функции звена обратной связи.
Это свойство широко используется при синтезе структурных схем элементов САР с заданными динамическими свойствами.
Пользуясь правилами (150), (151) и (154), можно производить преобразование любых структурных элементов САР и систем ре-
гулирования в целом.
Проиллюстрируем возможности их применения на примере.
Пример 12.
Найти передаточную функцию звена, эквивалентного структурной схеме, изображенной на рис. 173, а.
233
Преобразуем исходную параллельно-последовательную схему в последовательную, для чего определим передаточные функции звеньев, эквивалентных параллельной цепи W7i — И";1 и цепи обратной связи ПТ — IV'li (рис. 173). Согласно правилу (151),
(Р)- ^.(Р)-Г ^2(РИ- ^3(Р)-
ЫН 1 2 d
На основании правила (154):
_______^Up)______
"-«Г 1 F UMP) Wn (p)-
Теперь, пользуясь правилом (150), найдем передаточную функцию звена, эквивалентного исходной структурной схеме (рис. 173):
= l^i W - ^(7’) 4 ^3(P)I Wt<P) »Мр) МИМрГИМр)
Глава XII
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ ПРОИЗВОДСТВЕННЫХ ПРОЦЕССОВ
§ 45. КЛАССИФИКАЦИЯ АВТОМАТИЧЕСКИХ РЕГУЛЯТОРОВ
Многочисленные типы автоматических регуляторов классифицируются по ряду признаков.
По виду регулируемого параметра регуляторы делятся на регуляторы температуры, давления, расхода, уровня и т.п. Некоторые регуляторы предназначаются специально для регулирования определенных параметров (давления, уровня и т. д.). Однако большинство серийно выпускаемых регуляторов могут быть использованы для регулирования любых технологических параметров, поэтому они называются регуляторами общепромышленного назначения.
По виду регулирующего воздействия регуляторы делятся на регуляторы непрерывного действия и регуляторы прерывистого (дискретного) действия.
Регуляторы непрерывного действия в процессе регулирования непрерывно изменяют воздействие на объект.
Регуляторы прерывистого действия изменяют воздействие на объект в процессе регулирования либо в определенные моменты времени, либо при достижении регулируемым параметром определенных значений. Простейшим и наиболее распространенным типом регуляторов прерывистого действия являются позиционные регуляторы.
В зависимости от источника энергии, используемой для перемещения регулирующего органа., различают регуляторы прямого и непрямого (косвенного) действия.
В регуляторах прямого действия для перемещения регулирующего органа используется энергия самого объекта регулирования.
В регуляторах непрямого действия энергия для перемещения регулирующего органа подводится от внешнего источника.
По виду используемой энергии регуляторы непрямого действия делятся па электрические, пневматические и гидравлические.
Наиболее существенным признаком для классификации регуляторов является их характеристика, т. е. функциональная зави
235
симость между перемещением регулирующего органа и отклонением регулируемого параметра. Как и любой другой элемент САР, регулятор может иметь линейную и нелинейную характеристику. В настоящей книге в основном рассматриваются линейные регуляторы. Из нелинейных регуляторов приводятся сведения только о позиционных регуляторах.
По виду характеристики линейные регуляторы делятся на 14-регуляторы (астатические), П-регуляторы (статические), ПИ — регуляторы (изодромвые), а также регуляторы с предварением: ПД-ре-гуляторы и ПИД — регуляторы. Регуляторы с предварением в настоящей книге не рассматриваются.
§ 46. ПОЗИЦИОННЫЕ РЕГУЛЯТОРЫ
Позиционными называются регуляторы, у которых перемещение регулирующего органа происходит только при определенных значениях отклонения регулируемого параметра от заданной величины. Регулирующий орган позиционного регулятора может занимать ограниченное количество определенных положений (позиций), одного положения в другое происходит с такой высокой скоростью, что может считаться мгновенным.
Позиционные регуляторы делятся на несколько разновидностей в зависимости от количества возможных положений регулирующего органа. Рассмотрим основные их свойства на примере наиболее простых и распространенных двухпозиционпых регуляторов.
Как показывает название, регулирующий орган двухпозициопного регулятора может занимать только два положения (рис. 174). Если параметра превышает значение оП1ах,
соответствующее верхней настройке регулятора, то регулирующий орган переключается в положение ртах, при котором регулирующее воздействие на объект максимально. Регулятор настраивается так, чтобы при переключении регулирующего органа в положение рП1ах регулирующее воздействие заведомо превышало действие возмущения. В результате отклонение регулируемого параметра начинает уменьшаться, однако регулирующий орган остается в том же положении, пока отклонение регулируемого параметра не достигает нижнего значения настройки регулятора Опп,,. В этот момент регулирующий орган переключается в положение pmifl, и регулирующее воздействие на объект уменьшается до минимальной величины. В результате преобладающего действия воз
причем его перемещение из
6 mar
Рис. 174. Статическая характеристика двухпозициопного регулятора
отклонение регулируемого
236
мущения отклонение регулируемого параметра вновь начнет возрастать.
Таким образом в САР с двухиозициопным регулятором регулируемый параметр совершает незатухающие колебания (рис. 175).
Рис. 175. Переходный процесс (а) и изменение регулирующего воздействия (б) в двухпозициоипой САР:
I — астатический объект 1-го порядка; 2 — статический объект 1-го порядка; — статический объект сзапазды-нанисм
Амплитуда и период Т этих колебаний возрастает с увеличением инерционности и запаздывания объекта и при увеличении диапазона настройки регулятора <т1Нах — ar„j„.
§ 47. ИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ
Астатическим или интегральным (сокращенно И-регулятором) называется такой регулятор, у которого скорость перемещения регулирующего органа пропорциональна отклонению регулируемого параметра от заданного значения;
^=-S0.a, (157)
где
S(l = const.
Передаточная функция астатического регулятора
(158)
Проинтегрировав уравнение (157), получим t
Г = - 5(, $ odt 4 р(),
(I
237
где — регулирующее воздействие при исходном положении регулирующего органа.
Следовательно, перемещение регулирующего органа астатичес
кого регулятора пропорционально интегралу отклонения регулируемого параметра. Отсюда название — интегральный или сокращенно И-регулятор.
Для иллюстрации свойств астатических регуляторов рассмотрим два простых примера. На рис. 176 изображен астатический регулятор давления прямого действия, который работает следующим образом. Давление среды, являющееся регулируемым параметром, передается но трубке 1 и воздействует на мембрану 2, которая является чувствительным элементом регулятора. Давление среды создает на активной поверхности мембраны некоторое усилие, которое нсре-
Рпс. 176. Астатический регулятор давления прямого действия:
дается штоком 3 золотнику клапана 4. Одновременно па шток действует усилие, создаваемое противовесом 5 на большем плече рычага 1 6. Если эти усилия, направленные в противоположные стороны, взаимно уравновешиваются, то золотник остается неподвижным.
Давление регулируемой среды, при котором усилие мембраны уравновешивается усилием груза, задано. Установка заданного зна-
/ - трубка; 2 — мембрана, я — шток; чения регулируемого параметра
4 - клапан; 5 - противовес; 6 ~ ры- 0СущестВЛЯеТСЯ ПереМСЩСПИСМ Гру-
за по рычагу (изменением плеча).
Если давление среды изменилось (например, увеличилось по сравнению с заданным значением), то нарушается равновесие сил, действующих па шток. Он перемещается вниз и золотник прикрывает отверстие клапана, уменьшая давление в линии после регулятора. Скорость перемещения золотника пропорциональна действующему на шток усилию, т. е. пропорциональна отклонению регулируемого параметра (давленая).
Золотник перемещается в одну сторону до тех пор, пока регулируемое давление вновь станет равно заданному значению, и усилия, действующие на шток, уравновесятся. Это состояние равновесия может наступить при любом положении .золотника. Следовательно, у рассматриваемого регулятора нет жесткой зависимости между положением регулирующего органа ^значением регулируемого параметра.
Теперь рассмотрим работу астатического регулятора давления непрямого действия. В качестве примера удобно использовать гидравлический регулятор (рис. 177).
1 Можно принять, что при повороте pi,тага длина плеча не меняется, г. е. усилие, передаваемое грузом на шток, постоянно.
238
от среднего (нейтрального) в соответствующую полость
Давление протекающей по трубопроводу среды, являющееся регулируемым параметром, передается по трубке / сильфону 2, который служит чувствительным элементом регулятора. Прогиб сильфона, пропорциональный отклонению давления от заданной величины, передается штоком 4 сильфона па рычаг АВС, вызывая его поворот вокруг точки А (заданное давление устанавливается соответствующим натяжением пружины 3). Точка В рычага связана с золотником 5, который управляет подачей масла от специального насоса в полости гидравлического исполнительного механизма (сервомотора). При отклонении золотника положения масло начинает поступать сервомотора, перемещая поршень 6 и связанный с ним регулирующий орган 7. Одновременно из другой полости гндроцилиндра масло сливается через дроссель 8. Скорость перемещения поршня сервомотора определяется гидравлическим сопротивлением дросселя, которое можно считать постоянным, и степенью открытия золотника, т. е. величиной отклонения регулируемого параметра от заданного значения.
Перемещение регузнрующего органа прекращается, когда золотник вновь занимает нейтральное положение. Это возможно только в том случае, если отклонение регулируемого параметра равно пулю (рычаг АВС вернулся в исходное положение).
На основании рассмотренных примеров можно сделать некоторые выводы о свойствах статических регуяя
зависимости между отклонением регулируемого параметра и положением регулирующего органа. При скачкообразном изменении регулируемого параметра регулирующий орган перемещается в направлении уменьшения отклонения. Переключение регулирующего воздействия И-регулятора происходит при изменении знака отклонения, а его отключение — при устранении отклонения. В момент отключения регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений.
Основное достоинство астатических регуляторов — отсутствие остаточного отклонения регулируемого параметра по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие астатического регулятора па объект прекращается только в тот момент, когда отклонение регулируемого параметра от заданного значения становится равным нулю.
Рис. 177. Гидравлический регу-л я тор да вл с 11 и я астатн ческого типа:
/ — трубка; 2 — сильфон; 3 — пружина; 4 — шток; 5 — золотник; /) — поршень; 7 — регулирующий орган; я — дроссель
онов. Y них пет жесткой
239
Недостатком астатических регуляторов является относительно низкая скорость регулирования, которая характеризуется значением параметра настройки регулятора S(l. Чем больше это значение, гем выше скорость регулирования. В гидравлическом регуляторе, изображенном на рис. 177, необходимая величина S(l устанавливается изменением проходного сечения переменного дросселя 8.
§ 48. ПРОПОРЦИОНАЛЬНЫЕ РЕГУЛЯТОРЫ
Рис. 178 Статический регулятор уровня прямого действия:
/ — бак (объект регулирования); 2 — регулирующий клапан; ,3 — насос: 4 — поплавок;
5 — рычаг
Статическим или пропорциональным (сокращенно П-регулято-ром) называется такой регулятор, у которого перемещение регулирующего органа пропорционально отклонению регулируемого параметра от заданного значения:
р = - SjC, (159) где
St — const.
Передаточпая фу 11к ци я
статического регулятора
Г(р)= St. (160)
Как и астатические, П-ре-гуляторы бывают прямого и непрямого действия.
Па рис. 178 показан статический регулятор уровня прямого действия. Измерительным элементом регулятора служит поплавок, пре образующий изменения уров
ня в линейные перемещения, которые вызывают поворот рычага АВС относительно точки В. Ко второму концу рычага прикреплен регулирующий орган, изменяющий регулирующее воздействие (приток жидкости в бак).
Если приток равен стоку, а уровень в баке — заданному значению, то поплавок неподвижен и регулятор не воздействует на процесс (заданное значение уровня устанавливается длиной тяги СД). При изменении, например, увеличении стока равновесие системы нарушается и уровень начинает уменьшаться. Отклонение уровня, воспринимаемое поплавком, передается регулирующему органу, который воздействует на приток в сторону уравнивания его со стоком (увеличения).
Скорость н величина перемещения регулирующего органа у данного регулятора пропорциональны, соответственно, скорости и величине отклонения регулируемого параметра. В данном случае
240
коэффициент пропорциональности равен отношению длины плеч рычага
<? __ вс
ЛИ'
Рис. 179. Гидравлический регулятор давления с жесткой сП -ратной связью
Таким обратом, каждому значению регулируемого параметра соответствует определенное положение регулирующего органа. .Э'о свойство статических регуляторов является причиной возникновения остаточного отклонения регулируемого параметра при изменении нагрузки объекта.
Денствитез! ио , ття восстановления состояния равновесия объекта при новом значении нагрузки приток (т. е. регулирующее воздействие) должен измениться по отношению к его исходному значению при номинальной нагрузке. Однако это возможно только при новом положении поплавка, а значит, при другом значении репетируемого пара метра, которое уже не будет равно заданному. Остаточное отклонение ре гулируемого параметра, называемое обычно остаточной неравномерностью регулирования, тем больше, чем меньше величина S,.
Изменение знака регулирующего воздействия (реверс регулирующего органа) происходит одновременно с переменой направления изменения регулируемого параметра независимо от знака его отклонения. В рассматриваемом примере направление перемещения задвижки определяется только
поплавка, которое совпадает с направлением изменения регулируемого параметра.
Для ноиучепия пропорционального закона регулирования в регуляторах прямого воздействия используются обычные усилительные устройства с регулируемым коэффициентом усиления. П ослед-пий является параметром настройки регулятора S,.
Для получения пропорционального закона регулирования в регуляторах непрямого действия в большинстве случаев используются устройства жесткой обратной связи. Поэтому статические регуляторы непрямого действия называются также регуляторами с жесткой обратной связью. В качестве примера рассмотрим гидравлический регулятор давления (рис. 179). Основные его элементы — сильфонное измерительное устройство, золотник и гидравлический’ сервомотор с регулирующим органом — те же, что у астатического регулятора, изображенного на рис. 177. Отличие заключается в том,
направлением перемещения
241
что левый конец рычага ЛВС связан ео штоком сервомотора, поэтому перемещение точки А, равное перемещению регулирующего органа, передается рычагом АВС золотнику. Дополнительное перемещение золотника, вызванное действием обратной связи, пропорционально положению регулирующего органа. Поэтому такая обратная связь называется жесткой.
Регулятор работает следующим образом. При отклонении регулируемого параметра от заданного значения изменяется прогиб сильфона, который передается золотнику рычагом АВС. При этом золотник выходит из среднего положения, открывает доступ маслу от насоса в соответствующую полость сервомотора и сообщает другую его полость со сливной трубкой. Поршень сервомотора и связанный с ним регулирующий орган начинают перемещаться, изменяя регулирующее воздействие в сторону восстановления равновесия в объекте.
Одновременно с перемещением регулирующего органа сервомотор перемещает левый конец рычага АВС в сторону, противоположную перемещению от сильфона, так что золотник постепенно возвращается в среднее положение. Таким образом, положение золотника, а следовательно, и перемещение регулирующего органа у данного регулятора определяется не только отклонением регулируемого параметра, по и положением регулирующего органа. Регулирующий орган останавливается в тот момент, когда оба эти сигнала, приведенные к перемещению золотника, взаимно уравновесятся. Благодаря этому у регулятора с жесткой обратной связью положение регулирующего органа однозначно определяется величиной регулируемого параметра. Следовательно, введение жесткой обратной связи, которая охватывает астатический исполнительный механизм, придает регулятору свойства статического.
Степень воздействия обратной связи, т. е. относительное влияние сигнала обратной связи на перемещение регулирующего органа, зависит от коэффициента усиления устройства жесткой обратной связи. В рассматриваемом примере устройством жесткой обратной связи служит рычаг второго рода АВС. Его коэффициент усиления равен отношению длины плеч, следовательно, перемещение золотника под действием сигнала обратной связи равно
л вс А
= ЛС -В = £|И-
Воздействие па золотник со стороны регулируемого параметра л АВ ,
Полное перемещение золотинка под действием обоих сигналов Л = А;, „ - А„— k.,o — /^р. (161)
Перемещение регулирующего органа, жестко связанного с астатическим исполнительным механизмом, определяется зависи-242
мостью -J^ = SnA. Подставляя в нее значение А из (161), получим уравнение регулятора с жесткой обратной связью
Л = 5(1
откуда после преобразования получим
Если величина S(l достаточно велика, то первым членом левой части данного уравнения можно пренебречь. В этом случае характе-
рнстпка регулятора описывается зависимостью (159):
где S, = -= const — параметр на-
стройки статического регулятора.
Эта зависимость тем точнее описывает свойства регулятора с жесткой обратной связью, чем больше величина So — коэффициент передачи астатического звена, охватываемого обратной связью.
Этот же результат можно получить, используя понятие передаточной функции
1
Рис. 180. Структурная схема регулятора с жесткой обратной связью:
I — астатически!! исполнитель шяй механизм; 2 — устройство жесткой обратном связи
и правила преобразова-
ния структурных схем.
Структурная схема регулятора с жесткой обратной связью показана на рис. 180. Звено 1 является астатическим исполнительным механизмом с передаточной функцией
(р)=4°.
Звено 2 является устройством жесткой обратной связи, т. е. усилительным звеном. Его передаточная функция
ie2 (p) = p = -L.
Передаточная функция эквивалентного звена в соответствии с (154) равна
, w(162)
WtpT1 2(р)
г- 1
Если величина члена Ть7 в знаменателе значительно меньше,
«Мр)
243
чем IF2 (р), то им можно пренебречь. Тогда получим передаточную функцию эквивалентного звена
___'___— s
Г2(Р) г
(163)
Этой передаточной функции соответствует уравнение (159).
Итак, сформулируем основные свойства статических регуляторов.
Прежде всего, для них характерна пропорциональная зависимость между отклонением регулируемого параметра и положением регулирующего органа. Эта зависимость выражается статической характеристикой регулятора (рис. 181). Коэффициент пропорциональности S,, как уже сказано, является параметром настройки и называется коэффициентом передачи или коэффициентом усиле-
А %
100
ния статического регулятора. Ои характеризует перемещение, регулирующего органа при изменении регулируемого параметра на единицу.
£
Однако для характеристики статического регулятора чаще применяется величина, обратная S, и называемая пределом пропорциональности или степенью неравномерности:
100 б %
Рис. 181. Статическая характеристика П-регу лятора
Обычно р выражается в процентах и показывает, какому отклонению регулируемого параметра (в "о от максимально
возможного в данной САР) соответствует перемещение регулирующего органа из одного крайнего положения в другое. Чем меньше р, тем круче график статической характеристики (рис. 181) и тем выше скорость перемещения регулирующего органа. В пределе при р -О статический регулятор приобретает свойства астатического. Поэтому, чем меньше предел пропорциональности статического регулятора, тем ближе он по своим свойствам к астатическому. Основным преимуществом статического регулятора по сравнению с астатическим является более высокая скорость регулирования, которая пропорциональна скорости изменения регулируемого параметра. Благодаря этому П-регулятор быстрее приводит объект к новому состоянию равновесия.
Главный недостаток П-регуляторов — наличие остаточного отклонения регулируемого параметра. Величина остаточного отклонения тем больше, чем больше предел пропорциональности регулятора р.
Настройка П-регулятора заключается в установлении необходимой величины р. В регуляторах прямого действия настройка
244
производится изменением коэффициента усиления передаточного механизма; в регуляторах непрямого действия — изменением коэффициента усиления звена жесткой отрицательной обратной связи.
§ 49 ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЕ РЕГУЛЯТОРЫ
Пропорционально-интегральным или изодромным* (сокращенно ПИ-регулятором) называется регулятор, у которого скорость перемещения регулирующего органа пропорциональна отклонению регулируемого параметра и скорости изменения отклонения:
' (164)
где Si — const и 5() = const — параметры настройки ПИ-регуля-тора.
Передаточная функция изодромного регулятора
117(77)=-^+^). (165)
Из выражений (164) и (165) следует, что изодромный регулятор
можно рассматривать как параллельное соединение астатического По-
и статического регуляторов, этому в его свойствах сочетаются свойства обоих этих регуляторов. Изодромные регуляторы бывают только непрямого действия.
Рассмотрим работу изодромного регулятора и его свойства на примере гидравлического регулятора давления, изображенного на рис. 182. Он отличается от рассмотренного выше П-регулятора (рис. 179), а также от гидравлического регулятора давления, показанного на рис. 177, наличием двух новых
элементов: дополнительного гидроцилиндра 9 с перепускным регулируемым дросселем 11 и пружины 12. Эти элементы и рычаг АВС составляют устройство упругой (или гибкой) обратной связи,
Рис. 182. Гидравлический регулятор давления с упругой обратной связью:
9 — дополнительный гидроцилиндр: 10 — поршень; // — регулируемый дроссель; 12 — пружина (поз. 1—8 см. на рис. 177)
которое передает перемещение ре-
гулирующего органа золотнику. Поэтому ПИ-регуляторы называют также регуляторами с упругой обратной связью.
Работа регулятора протекает следующим образом. При скачкообразном отклонении (увеличении) регулируемого параметра прогиб
* В переводе с греческого «изодромный» значит «равнобегущий».
245
сильфона передается рычагом АВС золотнику, который открывает доступ маслу от насоса в нижнюю полость гидравлического исполнительного механизма. Последний начинает с большой скоростью перемещать регулирующий орган вверх, уменьшая отклонение регулируемого параметра. Шток исполнительного механизма соединен с поршнем 10 дополнительного гидроцилиндра 9, который также начнет быстро перемещаться вверх.
Поскольку дроссель 11 препятствует быстрому перетеканию масла из верхней полости гидроцилиндра 9 в его нижнюю полость, цилиндр будет t еремещаться с поршнем 10 как одно целое. В результате перемещение регулирующего органа передается точке А, вызывая поворот рычага АВС и прогиб пружины 12. При этом золотник получает дополнительное перемещение, направление которого обратно направлению его перемещения под действием отклонения регулируемого параметра. В результате действия обратной связи золотник быстро возвращается в нейтральное положение, и перемещение регулирующего органа прекращается.
Таким образом, в начале процесса регулирования действие ПИ-регулятора аналогично действию П-регулятора: он быстро реагирует на возникшее отклонение регулируемого параметра и с большой скоростью изменяет регулирующее воздействие на объект. На этом этапе действие упругой обратной связи совпадает с действием жесткой обратной связи.
Если па этом действие регулятора закончится, то, как показано выше, регулируемый параметр по окончании процесса регулирования будет отличаться от заданного значения. Однако в ПИ-регуля-торе регулирующий орган получает дополнительное перемещение, которое устраняет остаточную неравномерность регулирования. Дополнительное перемещение регулирующего органа обеспечивает гак называемый механизм изодрома, который состоит из пружины 12 и гидроцилиндра 9 с дросселем 11.
По окончании первого периода процесса регулирования пружина 12 оказывается деформированной и ее усилие действует на гидро-цилнидр 9 сверху вниз, создавая в его верхней полости повышенное давление. Под действием этого давления масло перетекает из верхней полости в нижнюю через дроссель 11, сопротивление которого определяет скорость перетока. При этом гидроцилиндр 9 опускается (поскольку поршни 6 и 10 остаются неподвижными), поворачивает рычаг АВС, опускает золотник 5* и этим вызывает дополнительное перемещение регулирующего органа. Действие регулятора может окончиться только после того, как исчезнет деформация пружины 12 и рычаг вернется в исходное положение.
Таким образом, охват астатического исполнительного механизма устройством упругой обратной связи позволяет получить регулятор, сочетающий свойства астатического и статического регуляторов:
См. рис. 177; на рис. 177 и 182 единая нумерация позиций.
246
регулирование без остаточного отклонения, ио с большой скоростью. Используемая в ПИ-регуляторе обратная связь называется упругой или гибкой, так как сигнал па выходе устройства обратной связи и его производная пропорциональны скорости изменения сигнала на входе:
где Т,, const — время
изодрома н
6 = const — коэффициент обратной связи — параметры звена упругой обратной связи.
Найдем передаточную функцию ПИ-регулятора на основании его структурной схемы (рис. 183). Передаточная функция звена / — исполнительного механизма (гидравлического) — определяется формулой (158). Передаточная функция звена упругой обратной связи 2 равна
№2(Р)~ - Г^Р
Г I гп
* И
I 1-^р
Рис. 183. Структурная схема ропияторл с упругой обратной связью:
механизм; 2 — устройство гиб-ной обратной связи
Следователыю, устройство упругой обратной связи представляет собой реальное дифференцирующее звено (см. стр. 230). Кривая разгона такого звена показана рис. 168. При скачко-
образном изменении входного сигнала, сигнал па возрастает также скачком, а затем уменьшается Скорость уменьшения сигнала характеризуется (временем изодрома). Чем меньше Т„, тем больше дрома.
Согласно формуле (162), коэффициента астатического функция регулятора
выходе звена по экспоненте, величиной Тп
скорость изо-
ирп большом значении звена / эквивалентная
передаточного передагочпая
б
(Р) (р)
L 4__L_. 1
Р 7’«Р Р
(166)
Обозначив и получим передаточную функцию
ПИ-регултора (165). Таким образом, параметрами настройки ПИ-ре-
гулятора являются предел пропорциональности р*, который характеризует статическую составляющую регулирующего воздействия, и время изодрома Т„, характеризующее астатическую со
* То же значение имеют термины*, степень неравномерности, степень обраг ной связи, статизм и др.
247
ставляющую регулирующего воздействия. Сравнивая (165) и (166),
получим
Чем больше величина Т„, тем ближе свойства ПИ-регулятора к свойствам П-регулягора. В пределе при 7',, /j изодромный регулятор приобретает свойства статического. В регуляторе, изображенном на рис. 182, Т„ •-а при полностью закрытом дросселе.
Связь предела пропорциональности с характеристикой регулятора рассмотрена на стр. 244.
Глава XIII
ЭЛЕМЕНТЫ АНАЛИЗА И СИНТЕЗА ЗАМКНУТЫХ САР
§ 50. ВЛИЯНИЕ ХАРАКТЕРИСТИК ОБЪЕКТА И РЕГУЛЯТОРА НА СВОЙСТВА ЗАМКНУТОЙ САР
В гл. X и XII рассмотрены свойства типовых промышленных объектов регулирования и автоматических регуляторов. Однако знания этих свойств еще недостаточно для синтеза САР, так как
неизвестно, какое влияние они оказывают на свойства замкнутой САР. Чтобы ответить на этот вопрос, рассмотрим взаимодействие объекта и регулятора в замкнутой САР на примерах регулирования простейших объектов 1-го порядка регуляторами различных типов. Для пояснения физической сущности процессов регулирования в первых двух описанных ниже случаях производится качественный анализ взаимодействия объекта и регулятора, который дополняется анализом математической модели исследуемой САР с помощью методов, изложенных в гл. XI. В остальных случаях производится только анализ математической модели САР.
Рис. 184. Система автоматического регулирования уровня в баке гидравлическим И-регулятором:
/ — бак; 2 — трубопровод; .7 — насос; 4 — регулирующий клапан; 5 — труба уровнемера; <> — труба литания; 7 —сильфон; 8 — |шч л-( 9 — -ю сотник1, К) --- поршень
Регулирование астатического объекта 1 го порядка И регулятором. Проанализируем свойства САР, состоящей из астатического объекта 1-го порядка и И-регулятора с передаточной функцией (158) на примере регулирования уровня в баке с помощью гидравлического регулятора (рис. 184).
249
среза трупы д через жидкость, А Л
Рис. 185. Изменение параметров СЛР уровня, изображенной на рис. 184, в переходном процессе:
/ — изменение возмущающего воздействия (стока); 2 — пзмснснпс регулирующего воздействия (притока); 3 — изменение регулируемого параметра (уровня); 4 — кривая разгона объекта
Жидкость поступает в бак / по трубопроводу 2 через регулирующий клапан 4 н откачивается из пего насосом 3.
Возмущающим воздействием для рассматриваемой САР является изменение производительности насоса, т. е. изменение нагрузки объекта. Регулируемый параметр — уровень h в баке —• измеряется барботажным уровнемером, основным элементом которого является труба 5. Питание уровнемера сжатым воздухом осуществляется по трубе 6. Давление сжатого воздуха, барботирующего из нижнего равно гидростатическому давлению столба жидкости, т. е. пропорционально уровню /г. Это давление воспринимается сильфоном 7, прогиб которого рычагом 8 передается золотнику 9. Положение золотника определяет направление и скорость перемещения поршня 10 гидравлического сервомотора, с которым жестко связан плунжер регулирующего клапана 4.
В исходном состоянии равновесия САР, когда уровень соответствует заданному значению /г0, поршень золотникового распределительного устройства регулятора занимает среднее положение и регулирующий орган неподвижен. При скачкообразном изменении соотношения между притоком и стоком жидкости в баке положение уровня начинает изменяться в соответствии с кривой разгона объек
та (рис. 185). Изменение уровня вызывает прогиб сильфона, который передается на золотник. Последний смещается из нейтрального положения и открывает доступ маслу в соответствующую полость гидроцилиндра сервомотора. При этом плунжер регулирующего клапана начинает перемещаться, изменяя приток жидкости в бак в сторону восстановления равенства его со стоком. В результате действия регулятора скорость отклонения регулируемого параметра уменьшается.
В момент /], когда равновесие между притоком и стоком восстанавливается, скорость изменения регулируемого параметра становится равной нулю. Поскольку при этом значение регулируемого параметра отличается от заданного па величину ст,,|ах, действие регулятора продолжается в том же направлении до момента когда отклонение регулируемого параметра становится равным нулю.
Однако на этом процесс регулирования окончиться не может, так как за промежуток времени (/2 — / J регулятор чрезмерно из-250
менял величину регулирующего воздействия, вызвав перерегулирование и создав тем самым новое возмущение для САР. В результате регулируемый параметр будет изменяться в сторону, противоположную первоначальному отклонению, и процесс регулирования полностью повторится. Следова-
тельно, изменения регулируемого параметра в рассматриваемой САР в переходном процессе представляют собой колебания с постоянным периодом и амплитудой.
Рассчитаем основные параметры про-
Рис. 186. Структурная схема САР астатического объекта первого порядка И-регуля-
цесса регулирования для такой САР, пользуясь методом преобразования структурных схем САР и аппаратом опе-
рационного исчисления. тором
Структурная схема рассматриваемой
САР изображена на рис. 186. Пользуясь формулой (154), найдем эквивалентную передаточную функцию этой системы по каналу распространения возмущающего воздействия
ну __________об (Р)_______________
' 1 -I- ^об? (р) Ц7ргг (р) So + Г, бр-- ’
где
Wo6(p) — ~--------передаточная функция объекта;
1 ОбР
(р) •— передаточная функция И-регулятора.
Изображение функции, описывающей отклонение регулируемого параметра в переходном процессе, вызванное скачкообразным изменением возмущающего воздействия с амплитудой Хо, имеет вид
о (р) = (р) X (р) = v =------•
Оригинал находим ио табл. 2 (№ по пор. 6). После выполнения необходимых преобразований получаем искомую функцию в виде
о(0
Следовательно, в замкнутой САР, состоящей из астатического объекта 1-го порядка и И-регулятора, при скачкообразном изменении возмущающего воздействия возникают незатухающие колебания регулируемого параметра, амплитуда которых равна
а частота
®кал
251
Если объект регулирования обладает запаздыванием, то амплитуда колебаний регулируемого параметра в рассматриваемой САР с течением времени возрастает (рис. 187). Очевидно, такая система регулирования неработоспособна.
Регулирование астатического объекта П-регулятором (регулятором с жесткой обратной связью). На рис. 188 показана САР уровня \ состоящая из статического объекта первого порядка и регулятора с жесткой обратной связью, которая работает следующим образом. При скачкообразном изменении нагрузки начинает
ся изменение регулируемого параметра — уровня в соответствии с кривой разгона объекта. Измене-
Рис. 188. Система автоматического регулирования уровня в баке гидравлическим регулятором с жесткой обратной связью
Рис. 187. Графики переходных процессов в САР астатического объекта И-регу-лятором:
! — объект первого порядка; 2 — объект первого порядка с запаздыванием
ние уровня в баке вызывает изменение давления сжатого воздуха в пьезометрическом уровнемере и соответствующий прогиб сильфона.
Перемещение дна сильфона, пропорциональное отклонение регулируемого параметра от заданного значения, передается рычагом золотнику, который открывает доступ маслу в соответствующую полость гидравлического сервомеханизма. В результате перемещения поршня плунжер регулирующего клапана изменяет приток жидкости, уравнивая его со стоком и уменьшая скорость нарастания отклонения регулируемого параметра.
До этого момента работа САР не отличается от рассмотренной выше. Однако в данном регуляторе золотник получает дополнительное обратное перемещение от поршня гидроцилиндра, уменьшая регулирующее воздействие на объект еще до того, как восстановится
1 Обозначения те же, что на рис. 184.
252
для
равенство притока и стока. Благодаря этому ходит к новому состоянию равновесия, определенное положение плунжера регулирующего клапана (т. е. определенная величина р.) и новое установившееся значение регулируемого параметра, отличающееся от заданного.
Рассчитаем параметры переходного процесса в такой САР для скачкообразного возмущающего воздействия с амплитудой Ло. Эквивалентная передаточная функция рассматриваемой системы (рис. 189) равна
система плавно под-которого характерно
Рис. 189. Структурная схема САР астатического объекта первого порядка П-регулято-ром
№ж„ (р) -
Изображение функции изменения регулируемого параметра в переходном процессе
а (р) = (р) у," =--.
а ее оригинал
/ _ А.
/ Ло I Т' „
° (О = у 11 - е ой
Диализ полученного выражения показывает, что переходный процесс в САР, состоящей из астатического объекта первого по-
рядка и П-регулятора, является
Рис. 190. Графики переходных процессов в CAP астатического объекта
П-регулятором:
/ — объект первого порядка (аперивдн-чески)') процесс); 2 — объект первого порядка с запаздыванием (колебательный сходящийся процесс); 3 — объект первого порядка с заиаздыванисм (колебательный расходящийся процесс)
апериодическим при любых значениях параметров объекта и регулятора (рис. 190).
Время установления нового значения регулируемого параметра возрастает с увеличением параметра настройки П-регулятора (величины Sp и с уменьшением постоянной времени объекта 7’0Й.
По окончании переходного процесса значение регулируемого параметра отличается от заданного на величину остаточного отклонения
^ = ^(0 = ^-. (167)
Для уменьшения остаточного отклонения необходимо увеличить значение
253
Таким образом, при использовании П-регулятора для регулирования астатического объекта 1-го порядка следует использовать максимально возможное значение параметра настройки
Если объект обладает запаздыванием, то форма графиков переходного процесса в рассматриваемой САР изменяется по мере увеличения SL (рис.. 190). Из апериодического при малых значениях .S’, он становится колебательным, а при определенном сочетании параметров динамической характеристики объекта (т и и параметра настройки регулятора (А,) переходный процесс становится колебательным расходящимся. Следовательно, при регулировании с помощью П-регулятора реальных астатических объектов, которые обычно
Рис. 191. Структурная схема САР астатического объекта первого порядка ПИ-регулятором
обладают чистым запаздыванием, необходимо выбирать компромиссное значение параметра настройки Аф достаточно большое, чтобы САР обла-
дала высоким быстродействием и давала малые остаточные отклонения регулируемого параметра, по не настолько большое, чтобы переходный процесс мог стать колебательным расходящимся.
Регулирование астатического объекта 1-го порядка ПИ-регуля-
тором. Эквивалентная передаточная функция рассматриваемой САР (рис. 191) после выполнения промежуточных преобразований
имеет вид
(Р) = Тфф : .S„ •
Изображение функции изменения отклонения регулируемого параметра в переходном процессе
Соответствующий этому выражению оригинал находим в табл. 2 (№ по пор. 7):
-тт:1 . / ।_______________\
= ,ы SI1’ky-k i.V,. а,/
при
4S,i7’;5>S(.
Анализ полученного выражения показывает, что в рассматриваемой САР при выполнении условия 4А(|7фг-, >3, возникает колебательный затухающий переходный процесс (кривая / па рис. 192). Изменение амплитуды колебаний описывается выражением
A (t) =
- .S,
(168)
254
Затухание колебаний происходит значение параметра настройки S,. Но
цесса регулируемый параметр возвращается к заданному значению без остаточного отклонения, так как из (168)
А (/) = 0. (фП t —
Частота колебаний определяется выражением
тем быстрее, чем больше окончании переходного про-
откуда видно,что увеличение So (при А, const) приводит к увеличению частоты, а увеличение S, (при const)—к ее уменьшению.
Если значения параметров настройки ПИ-регулятора удов-
S-
летворяют условию T'm-jSv <ф -; ,
Рис. 192. Графики переходных процессов в САР астатического объекта
ПИ -регулятором'.
/ — объект первого порядка (колебательны (’[ сходящийся процесс); 2 — объект черного порядка (апериодический процесс); 3 — объект с запаздыванием (колебательный расходящийся процесс)
то в рассматриваемой САР возни-
кает апериодический переходный процесс (кривая 2 на рис. 192).
Явление запаздывания у реальных объектов регулирования ухудшает форму переходного процесса, увеличивает максимальное
Рис. 193. Структурная схема САР статического объекта первого порядка И-регулятором
отклонение регулируемого параметра и затягивает переходный процесс. При определенном сочетании параметров динамической характеристики объекта (т и 7’(,й) и регулятора (S, и Sn) возможно возникновение расходящегося колебательного переходного процесса (кривая 3 на рис. 192).
Регулирование статического объекта 1-го порядка И-регулятора. При использовании И-регулятора для ре-
гулирования статического объекта l-ro порядка эквивалентная передаточная функция замкнутой САР (рис. 193) описывается вы-
ражением
W,,;e (.Р)
При скачкообразном изменении возмущающего воздействия с амплитудой изображение переходного процесса
тибрг -I- 4- р б 4-s» ’ * об •* об
255
откуда функция, описывающая переходный процесс при
S' х._ 1..-
1 ’
XS,n(l/ V^s"“ J
Следовательно, при выполнении условия S„> ^т~оГ~ “рассматриваемой САР существует затухающий колебательный пере-
Рис. 194. Графики переходных про цессов в САР статического объекта
И-регулятором:
Рис. 196. Графики переходных процессов в САР статического объекта П-рсгулято-ром:
а — объект первого порядка: / — колебательный сходящийся; 2 — апериодический; б — объект с запаздыванием: / — колебательный сходящийся; 2—
колебательный расходящимся
/ — объект первого порядка; 2 — объект второго порядка с запаздыванием (анирнодпче-скип процесс); :i, 4 — объект первого порядка с запаздыванием (ко. х-батсл ь н не соответственно СХОДЯЩИМСЯ И р '14 ХОДЧ/'Ц 1П1С11 процессы)
ходный процесс (рис. 194). Скорость затухания колебаний зависит только от величины постоянной времени объекта Т„,, и возрастает с ее уменьшением. Остаточная неравномерность регулирования равна пулю. При увеличении параметра настройки Su регулятора возрастает частота колебаний и уменьшается их амплитуда.
Если Sfl -дуДт—, то переходный процесс в рассматриваемой
СЛР имеет неколебательную форму (рис. 194).
Наличие у объекта чистого запаздывания ухудшат форму переходного процесса в САР и при определенном сочетании параметров 256
Динамических характеристик объекта и регулятора может возникнуть колебательный расходящийся переходный процесс (рис. 1.94).
Регулирование статического объекта 1-го порядка П-регуля-тором. Эквивалентная передаточная функция рассматриваемой САР (рис. 195)
1 I | 1 •* O(J'
Изображение функции переходного процесса в этой САР при скачкообразном изменении возмущающего воз,действия с амплитудой"
Оригинал этой функции
I
Следовательно, в САР статического объекта 1-го порядка с П-регу-
лятором переходный процесс имеет неколебательную форму
(рис. 196). Время регулирования уменьшается при увеличении пара-
метра настройки Sj. По окончании переходного процесса величина остаточного отклонения равна
о =— - (169)
v ост I । /> с • \1 J '
1 Г
Для уменьшения остаточного отклонения следует увеличивать значение 3,.
Рис. 197. Структурная схема САР статического объекта первого порядка ПИ-регуля-тором
Если объект обладает запаздыванием, то при определенном сочетании параметров объекта и регулятора переходный процесс становится колебательным
и даже может оказаться расходящимся.
Поэтому при выборе величины 5, следует стремиться к максимально возможному ее значению, однако такому, при котором колебательный процесс является затухающим.
Регулирование статического объекта 1-го порядка ПИ-регу-
лятора. Передаточная функция замкнутой САР (рис. 197) равна
IV/ —________________________
V ......’ Л, А2 1(1 Wi)/’ ' '
Изображение функции переходного процесса при скачкообразном возмущающем воздействии с амплитудой
А,Л,
”,/’1 Т । алд
* OU \ I I zp / ' . /м "I
9 Казиков и др.
257
Оригинал этой функции
при
Ее график показан на рис. 198, а (кривая /). Если
<Z -—4^—— , то переходный про-цесс является апериодическим (кривая 2 на рис. 198, а).
Если объект обладает запаздыванием, то при определенном сочетании параметров объекта и регулятора колебательный переходный процесс оказывается расходящимся (кривая 2 иа рис. 198, б). Влияние величии .8’, и S(| иа форму переходного процесса такое же, как при регулировании астатического объекта ПИ-регулятором.
§ 51. УСТОЙЧИВОСТЬ ЗАМКНУТЫХ САР
«I
Рис. 198. Графики переходных про псссон в САР статического объекта ПИ-регулятором:
a — объект первого порядка; / — колебательны]') сходящийся; 2 — аперлодп-чсскн/r, б—оСпекг с кнгиздывлнпем; / — апериодический; 2 — колебательный сходящийся; .7 — колебательный расходащннся
Любая САР отвечает своему назначению, если опа обеспечивает поддержание заданного значения регулируемого параметра в допустимых пределах при действии из нее различных возмущений .Для систем автоматической стабилизации наиболее характерными возмущающими воздействиями являются изменения нагрузки объекта
регулирования, а наиболее неблагоприятными по форме —скачкообразные изменения возмущения. Поэтому если регулируемый параметр при нанесении скачкообразного возмущения на вход объекта возвращается к заданному значению, такая САР работоспособна.
Как видно из § 50, переходный процесс в замкнутой линейной САР, вызванный скачкообразным изменением возмущающего воздействия, может быть неколебательным (апериоцичетким), колеба
258
тельным затухающим, колебательным незатухающим с постоянной амплитудой колебаний и колебательным расходящимся с возрастающей амплитудой. Очевидно, что линейные САР, в которых возможен колебательный переходный процесс с возрастающей амплитудой колебаний, неработоспособны, так как с течением времени отклонение регулируемого параметра от заданного значения не уменьшается, а наоборот, возрастает. Такие САР называются неустойчивыми.
Если в системе возможен колебательный переходный процесс с постоянной амплитудой колебаний, то такая СЛР находится на границе устойчивости. Практически опа тоже неработоспособна, так как любые незначительные изменения параметров объекта или регулятора могут стать причиной превращения ее в неустойчивую СЛР.
Устойчивыми являются линейные САР, в которых возможны только апериодические или колебательные затухающие переходные процессы.
Устойчивость САР зависит от сочетания динамических характеристик объекта и регулятора. В некоторых случаях, например, при регулировании астатического объекта с запаздыванием с помощью И-регулятора САР неустойчива при любых сочетаниях значений параметров динамической характеристики объекта и регулятора. Такие системы называются структурно неустойчивыми.
Подавляющее большинство САР структурно устойчиво, однако они становятся неустойчивыми при определенном сочетании численных значений параметров динамической характеристики объекта регулирования и параметров настройки регулятора.
Хнализировать простейшие САР на устойчивость можно путем расчета переходного процесса, как это сделано в § 50.
В общем виде задача анализа устойчивости динамических систем была решена А. М. Ляпуновым, который определил необходимые и достаточные условия устойчивости. Полученные нм результаты лежат в основе прикладных методов анализа замкнутых линейных САР на устойчивость.
Динамические свойства линейной СЛР в общем случае описываются линейным дифференциальным уравнением вида
d'lxHbLX . dn }х„мх dx„UJC _
dtn ' Un 1 dtn~* л • • ui з u<r4«
= bm + bm x . -) b, + fe(Ai.. (170)
Решение этого уравнения для. заданной функции входного сигнала х„х it] и т ее производных описывает переходный процесс в САР, вызванный действием этой функции. В § 50 были получены уравнения переходных процессов для простейших САР и скачкообразного входного сигнала (возмущающего воздействия). Однако использование этого же метода для анализа устойчивости более
9’ 259
сложных САР оказывается затруднительным или вообще невозможным вследствие трудностей при решении уравнения (170).
Ляпунов показал, что судить об устойчивости линейной динамической системы можно па основании анализа ее свободного движения, т. е. изменения выходного сигнала системы после снятия возмущающего воздействия. Если выходной сигнал системы при свободном движении возвращается к заданной величине, то такая система устойчива.
Свободное движение линейной САР описывается решением ее дифференциального уравнения (170) с правой частью, равной пулю:
ап + ап j 4- • • • 4 а. 4- <V„„,v== 0.
Это уравнение в преобразованном по Лапласу виде называется характеристическим уравнением САР:
а„р” 4- а„ [ р" 1 4 • + я, р 4 а0 = 0. (171)
Как показано выше (§ 40), решение дифференциального уравнения (171) в общем случае представляет собой сумму экспонент, показатели степени которых равны произведению корней характеристического уравнения на время:
0(/)=£с,^, (172)
ы= |
где
п — иорядок характеристического уравнения;
С,- — постоянные интегрирования.
Анализ этого выражения показывает, что
о (/)->() при /->с>з, если все р,- 0. (173)
В этом случае все экспоненты, описывающие апериодический переходный процесс, являются убывающими. Если решение характеристического уравнения САР содержит комплексные сопряженные корпи, то переходный процесс в пей является колебательным. Закон изменения амплитуды колебаний описывается выражением, аналогичным (172), причем в показателях степени экспонент стоят действительные части а,- комплексных корней характеристического уравнения системы (171). Условие затухания колебаний аналогично (173) с заменой ц,- па к,-.
Таким образом, для устойчивости линейной САР необходимо и достаточно, чтобы все действительные корни рг характеристического уравнения системы или действительные части а, всех его комплексных корней были отрицательными.
Если хотя бы один корень характеристического уравнения равен нулю, а все остальные отрицательны или имеют отрицательную действительную часть, то такая система является нейтральной или астатической. Характерной особенностью таких систем яв
260
ляется установление состояния равновесия после снятия возмущения при любом значении регулируемого параметра.
Действительно, если ph = 0 (1 k п), то выражение (172) примет вид
о (/) = С;, Qe1’’' >
i 1 откуда
<т (/) ~ Ск -ф- 0.
/ — С’Э
Следовательно, по окончании переходного процесса в нейтральной САР остается некоторое отклонение регулируемого параметра, величина которого равна Ск.
Если хотя бы один корень характеристического уравнения положителен или имеет положительную действительную часть, то такая САР неустойчива, так как регулируемый параметр при свободном движении системы неограниченно возрастает.
Таким образом, анализ устойчивости линейной САР сводится к вычислению корней ее характеристического уравнения. Для систем первого и второго порядка вычисление корней не вызывает трудностей. Однако с дальнейшим увеличением порядка п дифференциального уравнения САР вычисление корней ее характеристического уравнения чрезвычайно усложняется. Поэтому практически для анализа устойчивости применяют ряд косвенных оценок, называемых критериями устойчивости. Эти оценки получены па основании необходимого и достаточного условия устойчивости, однако они позволяют судить об устойчивости системы без вычисления корней ее характеристического уравнения.
Необходимым, но в общем случае недостаточным условием устойчивости системы является положительность коэффициентов ее характеристического уравнения
Щ>0, (174)
(п Ss i >~0).
Для систем первого и второго порядка это условие является достаточным.
Для систем третьего порядка, у которых характеристическое уравнение в общем случае имеет вид
аяр3 ф а2р2 + ахр 4 а„ = 0, необходимое условие устойчивости (174) дополняется следующим условием:
а,а у - ааап4>0 или
ata2 аяап.
Аналогичные условия устойчивости получены для систем более высокого порядка.
261
§ 52. СИНТЕЗ САР ЗАДАННОГО КАЧЕСТВА
Устойчивость является необходимым, по не единственным требованием, которому должна удовлетворять СЛР. Кроме этого, в зависимости от особенностей автоматизируемого технологического процесса к СЛР предъявляются определенные требования по качеству регулирования.
Качество САР принято оценивать по форме переходного процесса, возникающего в системе при скачкообразном изменении входного воздействия. Для систем автоматической стабилизации обычно анализируется переходный процесс в системе при скачкообразном изменении регулирующего воздействия ц. Для следящих систем н систем программного регулирования рассматривается переходный процесс, вызванный скачкообразным изменением заданного значения регул и р уемого и ар аметра, так как этот вид возмущений является для них более характерным и особенно неблагоприятным .
Как показано в § 50, переходный процесс и устойчивой линейной СЛР в зависимости от типа объекта и регулятора, а также от сочетания их параметров может быть апериодическим или затухающим ко-а р а ктер из у ющ и е а и е р и од и -
ческий переходный процесс в замкнутой САР (рис. 199):
1) максимальное динамическое отклонение регулируемого параметра о||1ах;
2) остаточное отклонение регулируемого параметра после окончания переходного процесса о„г,„ (остаточная неравномерность регулирования);
3) время переходного процесса в течение которого отклонение регулируемого параметра от установившегося значения становится меньше заданной величины Ло.
Колебательный затухающий переходный процесс (рис. 199),
Рис- 199. Показатели качества переходного процесса:
а •— апериодического; б — колебательного сходя-щсгося
лебательным. Основные показатели, х
262
кроме перечисленных показатетей, характеризуется степенью затухания
Для устойчивых САР ()< гр ; 1, причем чем ближе гр к единице, тем болы из запас устойчивости системы.
Задание требуемого качества регулирования равносильно наложению ограничений на тс или иные показатели переходного процесса, перечисленные выше, или на другие величины, связанные с ними определенными зависимостями. Выбор ограничений определяется требованиями автоматизируемого объекта. Например, при регулировании уровня жидкости в буферной емкости ограничение обычно накладывается только па величину максимального динамического отклонения атах, так как единственным требованием, предъявляемым к такому объекту, является поддержание уровня в заданных пределах.
Однако для большинства объектов одного этого ограничения оказывается недостаточно. Так, при регулировании состава выходящего из объекта продукта важны не только величина omas, но и время регулирования и величина остаточной неравномерности Это вызвано тем, что отклонение состава от заданной величины означает потерю продукта, которая характеризуется i величиной интеграла от погрешности регулирования [о (/) dt, нри-б
чем величина интеграла зависит не только от а111ак, но также от И .
Хотя формулирование точных требований к качеству САР возможно только па основании анализа конкретного автоматизируемого процесса, накопленный опыт регулирования промышленных объектов позволил сделать некоторые обобщения.
Установлено, что для большинства САР наилучшим является переходный процесс со степенью затухания зр 0,7 0,8. В этом
случае достигается заметное уменьшение макс имального динамического отклонения по сравнению с апериодическим переходным процессом при незначительном увеличении времени Поэтому в дальнейшем под оптимальными будем подразумевать такие значения параметров настройки регулятора, которые обеспечивают в замкнутой САР переходный процесс со степенью затухания гр 0,75 и минимальном времени t„„ при скачкообразном изменении регулирующего воздействия.
В настоящее время разработаны методы расчета, обеспечивающие весьма высокую точность определения оптимальных настроек регуляторов. В настоящей книге эти методы не рассматриваются. Здесь излагается приближенный метод определения оптимальных настроек, гораздо более, простой и доступный. Он основ.ан на обобщении результатов аналитического и экспериментального изучения
263
САР, состоящих из типового объекта регулирования (статического или астатического) и типовых линейных регуляторов. Для различных сочетаний параметров передаточных функций объектов были определены оптимальные настройки регуляторов разных типов. Полученные результаты обобщены в виде эмпирических формул, которые приведены в табл. 3.
Таблица 3
Оптимальные значения параметров настройки регуляторов
Характеристика объекта ррт = 0 0,2 Cl,2 -; < 1,5 г fi г '• 1,5
Параметр настройки Тип регулятора
П ПИ п ПИ п пи
S', £Т 1 1, 1st р (ерт Щ 0,7) р (ерт + 0,6) 2,6 (грт - (1,08) 0,5р 0,5р
2,6 (ерт — 0,03)
S’,, — 1 3,()£Т~ - I.EA^P.S, - 0,83 А
При использовании упрощенной методики синтеза САР 1 надо придерживаться такой последовательности действий:
1) путем графо-аналитической обработки экспериментально снятой кривой разгона определяются параметры аппроксимированной динамической характеристики объекта регулирования — величины Тп6, т, е и (> (рис. 200), а также величина произведения ерт;
2) выбирается тип автоматического регулятора;
3) по табл. 3 для полученного значения грт и выбранного типа регулятора определяются оптимальные значения параметров настройки регулятора.
Более подробного рассмотрения требует вопрос о выборе типа автоматического регулятора. Приводимые ниже рекомендации являются весьма общими, так как нет точных критериев для выбора типа регулятора и каждый проектировщик производит выбор интуитивно на основании личного опыта.
В каждом конкретном случае следует применять регулятор возможно более простого тииа и переходить к более сложным типам лишь в тех случаях, когда простые по тем или иным причинам не могут обеспечить требуемого качества регулирования.
Поэтому прежде всего следует оценить возможность применения наиболее простого двухпозициопного регулятора. Как показано выше (см. § 46), для позиционных САР характерны незатухающие колебания регулируемого параметра относительно заданного значения. Амплитуда колебаний зависит от параметров динамической характеристики объекта, амплитуды регулирующего воздействия
1 См. Стефан и Е. П. Основы расчета настройки регуляторов теплоэнергетических процессов. ГЭИ, 1960, стр. 281.
264
разгона для расчета параметров настройки регулятора приближенным методом:
а — статический объект; б — аста тический объект
регулятора и диапазона его настройки. Установлено, что достаточно высокое качество регулирования может быть достигнуто для статических объектов с величиной отношения .^—-<0,2. Поэтому в тех ' с. о
случаях, когда динамическая характеристика объекта удовлетворяет этому условию, а по режиму технологического процесса допустимы незатухающие колебания регулируемого параметра, следует применять двухпозиционные регуляторы.
Выбор типа регулятора непрерывного действия зависит от свойств и требуемого качества регулирования.
В САР статических объектов могут применяться И-регуляторы, 11-регуляторы и ПИ-регуляторы. Для регулирования астатических объектов можно применять только П- и ПИ-регуляторы, так как в сочетании с И-регулятором они образуют структурно неустойчивую САР.
При работе с одним и тем же объектом П и ПИ-регуляторы обеспечивают более высокое качество регулирования (меньше <т,11ах и /„„), чем И-регуляторы, поэтому последние применяются относительно редко.
П-регулятор обладает большим быстродействием, чем ПИ-регулятор, поэтому величина в САР с использованием 11-регулятора меньше. Величины о|11;,х в САР с П- и ПИ-ре-гулятором различаются незначительно.
Наиболее существенный недостаток П-регулятора — остаточное отклонение регулируемого параметра
при изменении нагрузки объекта, которое особенно возрастает при увеличении отношения Это объясняется тем, что при боль-шой величине этого отношения приходится использовать отиоситель-но малые значения параметра настройки S, П-регулятора, чтобы придать САР необходимый запас устойчивости. А величина остаточного отклонения, как видно из (167) и (169), возрастает обратно пропорционально величине St. Поэтому П-регуляторы рекомендуется применять при регулировании объектов, у которых величина отношения -=Д— 0,3.
1 об
265
Наиболее универсальным является ПН-регулятор, который дает несколько более затянутый переходный процесс по сравнению с П-регулятором, однако обеспечивает регулирование без остаточной
'mat
неравномерности и пользован при величинах
может быть ис-отношения
Рис. 201. Графики переходных процессов в замкнутой САР при разных значениях параметров настройки регулятора:
а — П-регулятор: -- А’шах’ П-рссулчтор; — 0Л S] (Пах- в — ПИ-регулятор: S, =--- О Л 5 S, r]l.t|X.
0,54 S',
т<!Г~, -
Наряду с расчетными определения оптимальны?; автоматических регуляторов для замкнутых САР, получили распространение и чисто экспериментальные методы. Один из них 1 основан на определении максимально возможного (в конкретной ПАР) значения параметра настройки 5j - 511||;|Х П-регу-при котором в системе1 возни-колебания ре-
методами настроек
лятора, кают незатухающие гулируемого параметра. Определив экспериментально величину 5]|||:|к измеряют период Тп/, возникающих колебаний (рис. 201), а затем рассчитывают оптимальные значения параметров настройки и So по
следую!цим формулам:
1) для П-регулятора
5, = 0,55, ;
I.’ 1 i n я v’
. =0,455
1 опт
"опт
2) для ПИ-регулятора * 0-5^1 Т пр
Обычно форма переходного процесса относительно мало зависит от если они остаются значениям, поэтому результаты, полу-
помощью приближенных методов, дают, как правило,
изменения параметров настройки регулятора, близкими к оптимальным ченные с удовлетворительную точность.
В тех случаях, когда рассчитанные значения параметров настройки не обеспечивают требуемого качества регулирования, необходимо их откорректировать в
процессе наладки САР.
1 См. Э р р и о т П. Регулирование производственных процессов. Изд-во Энергия, 1967, стр. 236.
* При эксиеримеиталвпом определении величии S |1к и 7’,г/, для САР е ПИ-рсгулятором устанавливают значения 3(| =-. 0, (7'„
Глава XIV
ТЕХНИЧЕСКИЕ СРЕДСТВА АВТОМАТИЗАЦИИ ХИМИКОТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
§ S3. РЕГУЛЯТОРЫ ПРЯМОГО ДЕЙСТВИЯ
Промышленность серийно выпускает регуляторы прямого действия для регулирования температуры, давления и уровня. В качестве примера рассмотрим регулятор температуры прямого действия типа РПД. Он предназначен для регулирования температуры в различных объектах и устанавливается вблизи от них на трубопроводе, по которому в объект подастся теплоноситель пли хладагент (рис. 202). Он состоит из термобаллона /, капилляра 2 и сильфона 3. При увеличении температуры среды, в которой находится термобаллон, возрастает давление вещества, заполняющего термометрическую систему, что вызывает сжатие сильфона,3. Перемещение дна сильфона передается штоком золотнику 5, который изменяет проходное сечение регулирующего клапана. Если клапан установлен па трубопроводе подачи теплоносителя, то при перемещении золотника вниз проходное сечение клапана умечи шается (прямой клапан).
Если же через клапан проходит хладагент, то при перемещении золотника вниз проходное сечение клапана возрастает (обратный клапан).
Регуляторы прямого действия дешевы, просты по конструкции, надежны в эксплуатации и не требуют для своего обслуживания персонала высокой квалификации, однако область их применения ограничена простейшими объектами регулирования с благоприятными динамическими свойствами.
Гораздо шире область применения регуляторов непрямого действия, которые обеспечивают более высокое качество регулирования и могут быть использованы в сложных СЛР.
В химической промышленности преимущественное распространение получили электрические и пневматические регуляторы непрямого действия.
267
§ 54. ЭЛЕКТРИЧЕСКИЕ РЕГУЛЯТОРЫ
Электрические регуляторы выпускаются двух типов: аппаратные, выполняющие только функции регулирования, и приборные, которые наряду с регулированием производят измерение и регистрацию регулируемой величины.
Рис. 202. Регулятор температуры прямого действия типа РПД:
I — термобаллон; 2 — капилляр; 3 — сильфон; 4 — корпус; 5 — золотник; 6 — пружина
Примером электрического регулятора приборного типа может служить автоматический электронный потенциометр 1 с встроенным двухпозициопным регулятором, принципиальная схема которого показана на рис. 203. Регулятор состоит из двух профильных дисков Д1 и Д2, к которым пружины прижимают направляющие контактов /<! и К2. Диски соединены системой передач с ротором реверсивного двигателя потенциометра, поэтому угол их поворота пропорцио-
Принцип действия потенциометра описан в § 7.
268
нален текущему значению температуры, которая является регулируемым параметром. Контакт К, замкнут при значениях температуры от начала шкалы до впадины д кчиД/ н разомкнут при 66w ших температурах. Контакт К., разомкнут при значениях температуры от начала шкапы до впадины диска Д, и замкнут при остальных ее значениях. Настройку диапазона регулирования производят установкой впадины диска Д1 па нижний предел регулируемой температуры и впадины диска Д.,_ па верхний ее предел. Для точной установки диски снабжены специальной шкалой.
Если регулируемая температура опускается ниже нижнего предела регулирования, то контакт /(, кается. При превышении верхнего предела происходит обратное переключение, контактов. Маломощные- коптакпь К , и К2 включены в электрическую схему управления электромагнитными реле /\ и Р.,, которые обеспечивают переключение ртутных контактов BL— В4. Последние включаются в схему управления исполнительным механизмом САР так, чтобы при замкнутом контакте /<, (а значит при замкнутом В:) и разомкнутом регулирующее воздействие па объект было минимальным, а при замкнутом /(., — максимальным.
В качестве примера электрического регулятора аппаратного типа рассмотрим электронный ПИ-регулятор из системы Всесоюзного теплотехнического института (ВТИ), упрощенная схема которого показана на рис. 204.
Регулируемый параметр (например , давление) преобразуется манометрической пружиной 1 и индукционным датчиком 2 в пропорциональное электрическое напряжение, часть которого Ud с делителя подается на первичную обмотку трансформатора Тр1. Иа ту же обмотку подается в противофазе компенсирующее напряжение UK, величина которого соответствует заданному значению регулируемого параметра. Трансформатор выполняет функции элемента сравнения и первого каскада усиления сигнала разбаланса.
Если регулируемый параметр равен заданной величине, то напряжение на первичной обмотке Тр1 равно нулю и регулирующий орган САР неподвижен. При отклонении регулируемой величины от заданного значения на обмотку трансформатора подается напряжение, равное U— Uи пропорциональное величине отклонения. Его фаза зависит от направления отклонения (больше или меньше заданного 'значения регулируемая величина). Усиленный сигнал Uрв со вторичной обмотки 7’р/ подается па сетку левой
269
половины двойного триода Лу, аноды которого питаются от обмотки трансформатора Тр2.
На сетку правой половины лампы J7, подается напряжение Unr от устройства упругой обратной связи регулятора. Если U Ul>r, то анодные токи обоих триодов JIf равны, и напряжение U.,, поступающее на сетку левой половины лампы Л2, равно нулю. Если же U 1>н Ul)C, то напряжение U2, пропорциональное разбалансу, вызывает изменение силы анодного тока: при
Рис. 204. Упрощенная электрическая схема электронного ПИ-регу-лятора:
I — манометрическая пружина: 2 — индукционный датчик; 3 и 4 — обмотки магнитного пускателя; .5 — устройстно упругой обратной связи
совпадении напряжения U2 по фазе с анодным напряжением — анодный ток увеличивается; если же напряжение (72 находится в противофазе — анодный ток уменьшается. Фаза напряжения U2 зависит от фазы Up„, т. е. от знака сигнала разбаланса. Разность анодных токов триодов лампы Л2 протекает через обмотку поляризованного электромагнитного реле ПР. Если U2 = 0, то анодные токи 1а и I„ обеих половин лампы Л2 равны и якорь реле ПР занимает нейтральное положение — его контакты К.х и разомкнуты. Если же U2 #= 0, то анодный ток одной из половин лампы Л2 оказывается больше и через обмотку реле ПР протекает ток, направление которого определяется фазой М. В результате реле срабатывает
270
и замыкает один из своих контактов, который подключает к цепи питания постоянного тока соответствующую обмотку (J или 4) магнитного пускателя МП. Последний включает реверсивный двигатель РД исполнительного механизма ИМ, который перемещает регулирующий орган в сторону открытия или закрытия.
При включении роте ПР от того же источника постоянного тока, который питает магнитный пускатель, подается напряжение па потенциометр Rrl устройства упругой обратной связи 5, которое представляет собой апериодическое звено, образованное сопротивлением /?7. и конденсатором Ср Сигнал с его выхода U,,,. поступает на правую сетку лампы Л} и всегда действует так, что уменьшает разность анодных токов ее половин. Когда эта разность становится равной нулю, реле ПР обесточивается и его контакт размыкается, отключая двигатель РД.
В момент размыкания контакта конденсатор С, начинает разряжаться со скоростью, которая зависит от величины /?7.: чем она больше, тем медленнее происходит разряд. При разряде конденсатора потенциал U„,. правой сетки Д уменьшается и как только нарушится равенство U„r = J pt,, реле ПР вновь включается и процесс регулирования продолжается.
Равновесие регулятора может наступить только в том случае, если U11Н =0 и U 0; следовательно, он обеспечивает регулирование без остаточной неравномерности.
Органами настройки данного регулятора являются: потенциометр Ro, которым устанавливается требуемое значение предела пропорциональности, и переменное сопротивление Rt., которым устанавливается величина времени изодрома.
§ 55. ПНЕВМАТИЧЕСКИЕ РЕГУЛЯТОРЫ
Пневматические регуляторы получили в настоящее время наибольшее распространение в химической промышленности. Это объясняется следующими их преимуществами: пожаро- и взрыво-безопасность; относительная простота конструкции и низкая стоимость; надежность при работе в тяжелых производственных условиях; простота обслуживания; возможность реализации из них сложных САР.
К недостаткам пневматических регуляторов относится сравнительно низкое быстродействие; ограниченное расстояние до исполнительного механизма из-за значительного запаздывания в передаче сигнала; необходимость в специальных источниках питания (очищенный и осушенный сжатый воздух).
Однако преимущества пневматики в бочипипстве случаев перекрывают ее недостатки. Серийно выпускаются средства пневмоавтоматики приборного, аппаратного (блочного) и элементного типов.
271
Примером приборного пневматического регулятора служит регулятор типа 04, который встраивается в корпуса многих измерительных приборов — электронных потенциометров, мостов, манометров и т. д. На рис. 205 показана его упрощенная схема. Основные узлы регулятора 04: суммирующее рычажное устройство, в которое входят рычаги 9, 13, 17, 21; первичный преобразователь типа
«сопло-заслонка», который состоит из сопла 6, заслонки 7 и дросселя постоянного сечения 2 (1 — линия питапня); пневматический усилитель 3 и сильфонное устройство упругой отрицательной обратной связи, которое состоит из сильфонов 18, 19, 23, 24, пружины 25, штока 16 и игольчатого вентиля 14.
Рычажное суммирующее устройство выполняет в регуляторе 04 функции элемента сравнения. Перемещение задатчика приложено к концу 22 рычага 21; перемещение <р, пропорциональное текущему значению регулируемого параметра, приложено к концу 20 того же рычага. Поэтому перемещение точки присоединения тяги к рычагу 21 определяется разностью текущего и заданного значении" регулируемого параметра, т. е. оно пропорционально отклоне
нию параметра. Это перемещение передается тягой трехплечевому рычагу 9, который воздействует штифтом 8 па заслонку 7, приближая ее к соплу или удаляя от пего. В результате изменяется давление в линии между дросселем 2 и соплом 6. Это изменение усиливается пневматическим усилителем 3, принцип действия которого аналогичен описанному выше в § 12, и подается по линии 4 к исполнительному механизму и по линии 5 к устройству отрицательной обратной связи.
Действие обратной связи зависит от игольчатого вентиля 14: если он закрыт, обратная связь является жесткой и регулятор работает как пропорциональный; если вентиль открыт, то обратная
272
связь действует как упругая, придавая регулятору свойства изо-дромпого.
Рассмотрим действие обратной связи, когда вентиль 14 закрыт. Изменение давления с выхода усилителя 3 поступает в камеру над сильфоном 18, вызывая его деформацию (сжатие или растяжение). При этом изменяется давление жидкости, заполняющей пространство между сильфонами 18 и 19, что приводит к деформации внутреннего сильфона. Перемещение дна сильфона 19 передается штоком 16 сильфону 23 и через жидкость сильфону 24 и пружине 25. Перемещение штока прекращается в тот момент, когда усилие, созданное изменением выходного давления усилителя 3 па активной поверхности сильфона 18, уравновесится изменением силы сжатия пружины 25. Следовательно, каждому значению давления в линиях 4 и 5 соответствует определенная деформация пружины 515и опр е деленное положение штока 16. Последний своим штифтом 15 воздействует через рычаги 17, 13 и 9 па заслонку 7, причем его действие всегда направлено в сторону, противоположную направлению действия сигнала отклонения регулируемого параметра.
Таким образом, структурная схема регулятора типа 04 при закрытом вентиле 14 состоит из двухкаскадного усилителя (первичный преобразователь «сопло-заслонка» и пневматический усилитель) с большим коэффициентом усиления, охваченного жесткой отрицательной обратной связью, т. е. соответствует схеме, изображенной на рис. 180.
Регулятор с такой структурной схемой согласно (162) и (163) является пропорциональным. Степень воздействия жесткой обратной связи (предел пропорциональности о) зависит от положения подвижного штифта 10, которое регулируется настроечным винтом 12. Кинематическая связь 11 между штифтом и настроечным винтом на рис. 205 условно показана пунктиром.
Теперь рассмотрим действие регулятора при открытом вентиле 14 с момента перемещения штока 16 (до этого его работа протекает так же, как описано выше). Под действием изменения давления жидкости между сильфонами 18 и 19 начинается ее переток в пространство между сильфонами 23 и 24, так что давление с обеих сторон постепенно выравнивается. По мере выравнивания давлений вспомогательные пружины, расположенные внутри сильфонов 1S1 и 23, возвращают шток 16 в исходное положение, уменьшая первоначальное действие обратной связи па заслонку 7. В результате ее отклонение от сопла вновь возрастает, что приводит к изменению давления на выходе регулятора и вызывает дополнительное перемещение регулирующего органа.
При скачкообразном изменении давления в липни 5 шток 16 также скачкообразно перемещается, а затем постепенно возвращается в исходное положение. Следовательно, по своим свойствам устройство обратной связи регутятора 04 при открытом вентиле 14 является реальным дифференцирующим звеном. Регулятор с такой
273
струм урной схемой (усилитель, охваченный упругой отрицательной обратной связью), согласно (166), работает как ПИ-регулятор. Скорость перетока жидкости зависит от степени открытия вентиля 14, которым настраивается время изодрома.
Питание регулятора производится сжатым воздухом давлением 0,1 Мн/м* (1,1 кГгем"-)', его выходной сигнал изменяется в пределах 0,098 Мн/м1 (0—1 кГ/см1)-, настройка предела пропорциональности допускается от 1 до 150% шкалы измерительного прибора, в корпус которого встроен регулятор; настройка времени изодрома от 30 сек ДО
Регуляторы пневматической агрегатной унифицированной системы являются в настоящее время одним из наиболее распространенных средств автоматизации химико-технологических процессов, так как позволяют реализовать САР большой сложности, надежны и удобны в эксплуатации и обеспечивают дальность передачи сигнала (до 300 м).
Агрегатная унифицированная система (АУС) построена по агрегатному (блочному) принципу, т. е. состоит' из нескольких унифицированных блоков, каждый из которых предназначен для выполнения определенных функций в САР. Сочетание типовых функциональных блоков позволяет создать из них схемы САР со сложной структурой. /Для связи между блоками в АУС применяется унифицированный пневматический сигнал 0,02—0,098 Мн/м1 (0,2—1 кГ/см*). Регуляторы АУС могут работать в комплекте с датчиками, выходной сигнал которых соответствует этому диапазону. Все блоки АУС работают по принципу силовой компенсации, который обеспечивает высокую точность измерения и преобразования сигналов.
Ниже приводится описание блоков и вторичных приборов АУС, которые чаще всего употребляются в простых САР.
Реле сигнализации типа ПС-37А предназначено для позиционного регулирования или сигнализации отклонения регулируемого параметра от заданного значения. Реле состоит (рис. 206) из мембранного измерительного устройства, преобразователя «сопло-заслонка» и пневмоусилителя мощности. Измерительное устройство сос тоит из мембран 4 и 5, в камеру А между которыми подается давление отдатчика, пропорциональное величине регулируемого параметра. Мембрана 4 имеет большую площадь, чем мембрана 5, поэтому результирующее усилие, создаваемое давлением в камере А, всегда направлено вверх. Заданное значение регулируемого параметра настраивается изменением степени сжатия пружины 2 с помощью настроечной головки /.
Сели требуется регулировать максимальное значение параметра, то давление сжатого воздуха из липин питания поступает через дроссель 7 к верхнему соплу 8. Пока текущее значение регулируемого параметра остается меньше заданного, усилие пружины 2 оказывается больше результирующего усилия мембран и сопло 8
274
полностью открыто. При этом давление в камере Б и над мембраной 10 минимально и пружина 12 закрывает шариковый клапан 11, тогда давление па выходе сигнализатора равно нулю. Как только регулируемый параметр превысит заданное значение, шток 6 переместит заслонку 3 вверх и закроет сопло 8. В результате скачком увеличится давление в камере Б, мембрана 10 прогнется н полый стержень откроет шариковый клапан, соединяя линию питания с выходом реле. При этом давление на его выходе скачком достигнет максимального значения 0,098 Мн!м1 (1 кГ/слг).
Рис. 206. Схема устройства реле сигнализации ПС-37А:
I — настроечная головка; 2 — пружина; 3 — заслонка; 4 и 5 — мембраны; 6' — шток; 7 — дроссель; и 9 — cotni/i; 10 — мембрана; // — шариковый кд-diiair, 12 — пружина
Когда требуется регулировать минимальное значение параметра, то давление питания подается к соплу 9 и сигнализатор срабатывает в том случае, если усилие мембран 4 и 5 окажется меньше усилия пружины 2. При этом заслонка закроет сопло 9 и в дальнейшем последовательность работы элементов сигнализатора будет такая же, как описано выше. Переключение каналов сопел 8 и 9 производится специальной пластиной, укрепленной на корпусе реле. Настройка заданного значения возможна в диапазоне изменения унифицированного пневматического сигнала.
Для двухпозиционного регулирования используются два реле, одно из которых настраивается на минимальное, а другое — па максимальное допустимое значение регулируемого параметра.
Регулирующий блок 4РБ-32А является ПИ-регулятором и предназначен для работы в системах стабилизирующего и программного регулирования. Конструктивно блок 4РБ-32Х выполнен в виде
275
цилиндра, набираемого из отдельных шайб, между которыми закреплены резиновые мембраны (рис. 207). Он может устанавливаться на вторичных приборах АУС типа ЗРЛ-29В или 2МП-30В, описанных ниже, или па отдельном кронштейне. Конструкция крепления регулятора с помощью специальных шариковых разъемов позволяет при необходимости быстро снимать и заменять его. Регулирующий блок состоит из следующих узлов: усилительного реле (камера А, Б, В, Г); узла сравнения (камеры Ё и 7/\) и обратных связей (ка-
дрома (камеры Л и М) и выключающего реле (камеры И, О н /7).
Сжатый воздух давлением Q 14 Мн /м2 (1,4 кГ/см2) поступает из липни питания в камеру А и через постоянные дроссели 1 и 2 в камеры Г и Л. При открытом шариковом клапане 3 воздух из камеры А проходит в камеру Б, линию обратных связей Р и через сопло 4 в камеру Н и на выход регулятора. В камеру Е подается давление, пропорциональное текущему значению регулируемого параметра, а в камеру Ж — давление от дистанционного задатчика. С выхода регулятора воздух давлением
Рпс. 207. Схема устройства регулятора 4РБ-32Л: /, 2 и 10 — дроссели постоянного сечения; .7 — инь рикопын клапан; 4, 7 и /! — сопла; .5 п 9 — регулируемые дроссели; 6 — стержень (заслонка); Ь' — полый стержень
0,02—0,098 Мн/м2 (0,2—1 кГ/см2) подается в исполнительный механизм.
При переходе с автоматического на ручное управление в камеру П подается сжатый воздух под давлением 0,14 Мн/м2 (1,4 кГ/см2), который прижимает мембрану к соплу 4, отключая выход регулятора от исполнительного механизма. Особенность данного регулятора — наличие двух камер обратных связей: отрицательной Д и положительной К. Однако влияние отрицательной обратной связи всегда сильнее, поэтому в целом обратную связь можно считать отрицательной.
Рассмотрим работу регулятора в режиме пропорционального регулирования, который осуществляется при отключении камеры изодрома М регулируемым дросселем 5. Предположим, что регули
276
руемая величина увеличилась, превысив заданное значение. Тогда давление в камере Е окажется выше, чем в камере Ж, мембранный блок опустится и стержень 6 прикроет сопло 7. В результате возрастет давление в камере Г усилителя н полый стержень 8откроет шариковый клапан 8, пропуская воздух из липин питания в линию обратных связей и через сопло 4 па выход регулятора. Под действием изменения давления в камерах обратной связи Д и К мембранный блок вернется примерно в прежнее положение, а давление на выходе регулятора установится пропорциональным отклонению регулируемого параметра и степени открытия переменного дросселя 9. Если этот дроссель открыт полностью, то давление в камере К мало отличается от давления в камере Д и действие отрицательной обратной связи минимально. При закрытом дросселе 9 давление в камере К близко к нулю, так как опа сообщается с атмосферой через постоянный дроссель 10 и сопло 11. При этом эффективное действие отрицательной обратной связи макснмалтр так как положительная обратная связи совсем ее не уменьшает .Таким образом, при закрытом дросселе 5 усилительное реле охвачено отрицательной обратной связью, что придает регулятору свойства статического.
При открытии дросселя 5 давление с выхода регулятора поступает в глухую камеру изодрома М, обладающую большой емкостью. Поэтому давление в ней постепенно приближается к выходному давлению регулятора. По мере его увеличения возрастает давление в камере Л, так как мембрана прикрывает сопло 11, уменьшая выход воздуха через него в атмосферу. Увеличение давления в камере J1 вызывает увеличение давления в камере положительной обратной связи К, что приводит к опусканию мембранного блока и увеличению выходного давления регулятора. В результате регулирующий орган получит дополнительное перемещение.
Процесс регулирования может закончиться только в том случае, когда сумма сил, действующих на мембранный блок 6, равна нулю. Она складывается из сил, создаваемых на соответствующих мембранах давлением в камерах Д, Е, Ж и /С В установившемся режиме величины давления в камерах Д и К равны между собой и равны выходному давлению регулятора, т. е. они не влияют на состояние равновесия. Следовательно, равновесие мембранного блока и окончание процесса регулирования наступит при равенстве давлений в камерах Е и Ж, т. е. когда текущее значение регулируемого параметра в установившемся режиме будет равно заданному.
Параметрами настройки описанного ПИ-регулятора являются предел пропорциональности, который устанавливается переменным дросселем 9, и время изодрома, устанавливаемое дросселем 5.
Настройка предела пропорциональности регулирующего блока 4РБ-32 возможна в пределах от 10 до 250%, а настройка времени изодрома — от 3 сек до 100 мин.
277
Регулирующий блок соотношения РБС-IM предназначен для автоматического поддержания заданного отношения двух параметров. Он состоит (рис. 208) из пневматической дроссельной приставки I н регулятора II типа 4РБ-32А (см. рис. 207). В приставке размещены два пневматических делителя, которые образованы постоянными дросселями <7 и Л регулируемыми дросселями / и 2 н камерами Ж и Е блока 4РБ-32А.
Рис. 208. Схема устройства регулирующего блока соотношения РБС-1м:
/ — дроссельная приставка; Н — регулятор 1РБ-32А; / и 2 •— регулируемые дроссели; .У и -1 — дроссели постоянного ссчсягя
Давление в камере Ж
Рж^Р.К'И РиК:--РаК\, (175)
где Ра — давление на входе дросселя 3, пропорциональное текущему значению одного из параметров;
А) — коэффициент пропорциональности, зависящий от отношения сопротивлений дросселей / и 3\
Ро — давление после дросселя 3, в данном случае Рп = 0, так как сжатый воздух через дроссель 3 выходит в атмосферу.
Аналогично для давления в камере Е
Р^РоК,
(176)
278
где /О— давление на входе дросселя 4, пропорциональное теку-
щему значению второго параметра;
К'., — коэффициент пропорциональности, зависящий от отношения сопротивлений дросселей 2 н 4.
равновесия подвижного мем-является равенство давлений
бр в
Как отмечалось выше, условием аштого блока регулятора 4РБ-32А камере Е и Ж, следовательно,
регулятор стремится поддерживать
равенство
Рис. 209. Схема устройства вторич-
в это уравнение Р/. из (175) и (176),
А । — к К',
Подставляя значения Рж и получим
Pri _ Р„ ~
где К— заданное отношение регулируемых параметров, которое настраивается дросселями / и 2.
Таким образом, регулирующий блок РБС-1М обеспечивает поддержание постоянного отношения сигналов Р,- и которое может быть установлено в пределах от 1 : 1 до I : 5.
Регуляторы 4РБ-32А и РБС-2м в соответствии с агрегатным принципам выполняют только две функции: сравнение текущего и заданного значений регулируемого параметра и формирование регулирующего сигнала. Поэтому в САР они используются совместно со вторичными приборами АУС
ного прибора агрегатном унифицированной системы (АУС) типа ЗРЛ-29В:
/ — сильфон: 2 — пружина; <7 — шток;
4 — pi 1ччт, 5 — перо1, б — шкала1, 7 — диаграммная бумага; 8 — электродии-гатель; 9 — редуктор
типа ЗРЛ-29В или 2МП-30В, которые выполняют следующие функции:
1) показывают текущее значение регулируемого параметра и регулирующего сигнала (положение регулирующего органа);
2) формируют сигнал заданного значения регулируемого параметра и показывают- его величину;
3) обеспечивают- в случае необходимости возможность ручного дистанционного управления регулирующим органом.
На рис. 209 показана принципиальная схема вторичного прибора 3PJ1-29B. Он состоит из трех измерительных механизмов аналогичной конструкции, лентопротяжного механизма, центрального
279
переключателя (ЦП) и ручного задатчика (РЗ). Один из измерительных механизмов совместно с лентопротяжным служит для регистрации текущего значения регулируемой величины; второй измерительный механизм предназначен для показания заданного значения регулируемой величины, которое устанавливается задатчиком РЗ, а третий — для показания давления в линии исполнительного механизма, которое пропорционально положению регулирующего органа.
Центральный переключатель служит для переключения линии исполнительного механизма с выхода регулятора на выход ручного
задатчика при переходе на ручное дистанционное управление.
Чувствительным элементом каждого из трех измерительных механизмов служит сильфон 1, в который подается пневматический сигнал в соответствии с назначением измерительной системы. Усилие, развиваемое измеряемым давлением на активной поверхности сильфона, уравновешивается упругой силой деформации пружины 2. Перемещение дна сильфона передается штоком 3 шарнирно-рычажному механизму 4, на конце которого укреплена стрелка-перо 5. Показания снимаются по шкале 6 и регистрируются на диаграммной бумаге 7. Основная допустимая погрешность измерений приборов типа РП не превышает ±1 % от диа-опротяжпого механизма осуще-?рез редуктор 9.
Рис. 210. Схема устройства ручного задатчика:
I и 2 — ш<1|)икон]>1е клапаны; 3 — по стояннып дроссель; -/ — рукоятка; 5 -пружина; 6 н 9 — мембрнпы; - - .vicion ка; л — сопло
вазона измерения. Привод лет ствляется электродвигателем 8 ч
Ручной задатчик, схема которого показана на рис. 210, представляет собой регулируемый редуктор давления. Он работает следующим образом.
Питающий воздух с давлением 0,14 Мн/м 2 (1,4 кПсм1) подво-
дится одновременно к шариковому клапану I (через камеру А усилительного пневмореле) и в дополнительное клапанное устройство 2 (через камеру Д). Камера В соединена с атмосферой. Зазор между шариковым клапаном 2 и его седлом обеспечивает прохождение воздуха к постоянному дросселю <3. При вращении рукоятки 4, когда производится установка задания, сжимается пружина 5, что создает усилие па мембране 6, в центре которой (внизу) находится заслонка 7. Когда заслонка приближается к соплу 8, давле
280
Ние воздуха в камерах Ж и Г повышается, что приводит к открытию шариковых клапанов 2 и 1. Сжатый воздух при этом из камеры А поступает в камеру Б, далее на выход ручного задатчика л в камеру отрицательной обратной связи И, где давление будет повышаться до тех пор, пока усилие на мембране 6, вызванное этим давлением, не уравновесит усилия от сжатия пружины 5. Дополнительное клапанное устройство 2 поддерживает постоянный перепад давления воздуха на постоянном дросселе 3 независимо от изменения давления питаю щего воздуха.
Программный задатчик типа ПД-35А, схема которого показана на рис. 211, состоит из программирующего устройства и компенсационного преобразователя. Действие его основано на преобразова-
Рис. 211. Схема устройства программного задатчика ПД-35Л:
/ — ролик; 2 — профилированный куличок; J — синхронный электродвигатель; 4 — редуктор; 5 — пружина; 6 — рычаг; 7 — стержень; Л — заслонка; 9 — сопло; 10 и /6' — шариковые клапаны; 11, 12 и 13 — мембраны; 14 — шток; 15 — мембрана; 17 — постоянный дроссель
нии линейного перемещения ролика /, катящегося по профилированному кулачку 2, приводимому во вращение синхронным электро-двигвт м <3 через редуктор 4, в пропорциональное натяжение пру>: которое затем преобразуется в пропорциональный вы-
ходи : ...нал давления сжатого воздуха.
Я натяжения пружины 5 через рычаг 6 и стержень 7 вызывав • замещение заслонки 8 ближе к соплу 9, что ведет к увеличение , гения в камерах Ж и Г, открытию шарикового клапана 10, увели давления в камерах Б, И, К и, следовательно, к увеличению ‘ (вления на выходе пневмозадатчика. Давление па выходе будег нс ‘ ииаться до тех пор, пока суммарное усилие на мембранах //, 12 и 13 в результате повышения давления в камерах И и К не
281
компенсирует усилия, передаваемого на эти мембраны стержнем 7 и рычагом 6' от пружины .5, после чего заслонка 8 отодвинется от сопла 9 и подвижные элементы нневмонреобразователя окажутся в новом равновесном положении.
Уменьшение натяжения пружины 5 вызовет уменьшение давления в камерах X и Г, что приведет к перемещению полого штока 14 вверх, в результате чего закроется шариковый клапан 10 и сообщится с атмосферой камера Б, а это вызовет уменьшение давления в камерах И, К и на выходе задатчика до нового равновесного состояния. Поскольку усилие, поступающее к мембранам 11 , 12 и Hi от натяжения пружины 5, незначительно, в пневмопреобразователе предусмотрена специальная камера К положительной обратной связи, задачей которой является уравнивание усилий на мембранах И, 12 и 13 благодаря уменьшению усилия, создаваемого камерой отрицательной обратной связи.
Мембрана 15 н шариковый клапан 16 обеспечивают постоянство перепада давления на постоянном дросселе 17, а это исключает влияние колебания давления питающего воздуха на выходное давление п 11 е в м оз а д а т ч и к а.
Программный задатчик ПД-36А отличается от ПД-.35А лишь тем, что в качестве привода кулачка 2 используется не синхронный электродвигатель, а сильфонный механизм с ленточной передачей на ось кулачка. При этом перемещение сильфонного механизма н угол поворота профильного кушачка пропорциональны величине давления, подаваемого в камеру сильфона от датчика того параметра, по которому ведется программа.
Как ПД-35А, так и ПД-36А выполнены в виде отдельных корпусов и монтируются самостоятельно на щите.
Вторичный показывающий прибор 2МП-30В предназначен для показания текущего значения регулируемого параметра (левая шкала) и заданного значения или положения регулирующего органа (правая шкала). Он состоит (рис. 212) из двух аналогичных измерительных механизмов, переключателя шкал правого измерительного механизма, ручного задатчика и центрального переключателя. Два последних узла прибора 2МП-30В аналогичны соответствующим узлам прибора ЗРЛ-29В, описанным выше.
Измерительный механизм прибора 2МП-30В работает следующим образом. Измеряемое давление воздуха подводится к сильфону. 1 и уравновешивается пружиной 2. Перемещение дна сильфона передаточным устройством 3 передастся валику 4, который жестко соединен с вращающейся шкалой 5. Отечет показаний производится по повороту шкалы относительно неподвижного указателя 6. Основная погрешность не превышает Д: 1% от диапазона измерений. Переключатель шкал правого измерительного механизма представляет собой пробковый кран, с помощью которого к измерительному механизму можно подключать выход задатчика или линию нспол-11i пел ы I о го меха и и зм а.
282
Конструкция приборов ЗРЛ-29В и 2МП-30В приспособлена для утопленного монтажа на щитах н позволяет устанавливать на них регулятор 4РБ-32А. Для удобства обслуживания приборов их измерительные механизмы смонтированы на выдвижных кронштейнах.
Дальнейшее развитие пневматических средств автоматизации привело к созданию унифицированной системы элементов промыт лепной пневмоавтоматики — УСЭППА, которая построена на элементном, а не иа агрегатном (как АУС) принципе. УСЭ ППА представляет собой набор элементов, каждый из которых предназначен
для выполнения определенных элементарных функций. Из этих элементов можно компоновать сложные устройства пневмоавтоматики.
Конструктивно элементы выполнены из квадратных секций размером 40X40 мм и снабжены латунными ножками, которые имеют унифицированные размеры и шаг. Элементы крепятся с помощью ножек в платах из органического стекла. Связь между элементами осуществляется через отверстия в ножках и каналы в платах, а платы соединены между собой резиновыми трубками. В качестве входных и выходных сигналов элементов УСЭППА используется упиф1-цпрованпый пневматический сигнал; давление питания должно быть равно 0,14 Мн/м2 (1,4 кГ/см21), Ниже приводится описание нескольких элементов УСЭППА, в основном непрерывного действия, которые широко применяются в устройствах пневмоавтоматики.
Элемент П2ЭС-3 (рис. 213) предназначен для сравнения или суммирования пневматических сигналов Ру, Р-> и Рл. Он состоит
283
из шести камер А, Б, В, Г, Д и Е, которые разделены мембранами из прорезиненной ткани, скрепленными в центре металлическим штоком. Положение мембранного блока, который имеет возможность перемещаться в вертикальном направлении, зависит от соотношения сил, создаваемых действием давлений в разных камерах элемента на площади соответствующих мебран. Торцы металлического стержня выполняют роль заслонок по отношению к верхнему соплу, через которое сжатый воздух из магистрали питания поступает в камеру £, и к нижнему соплу, через которое избыток воздуха сбрасывается в атмосферу. Исли при нарушении равновесия сил мембранный блок поднимается вверх, то поступление воздуха из линии питания уменьшается, а сброс его в атмосферу увеличивается. В результате давление воздуха на выходе элемента уменьшается.
При перемещении мембранного блока вниз давление на выходе элемента, наоборот, возрастает.
На рис. 214 показано несколько вариантов включения элемента П2ЭС-3 в схемы пневмоавтоматики (условные обозначения некоторых элементов, которые используются на принципиальных схемах устройств пневмоавтоматики, приведены в табл. 3). Если П2ЭС-3 используется как элемент сравнения (рис. 214, б), то при нарушении равновесия сравниваемых давлений мембранный блок занимает либо крайнее верхнее положение,
при котором выходной сигнал элемента равен нулю, либо крайнее нижнее положение, при котором он равен 0,018 Мн/м2 (1 к.Г/см2). При этом элемент П2ЭС-3 обладает свойствами двухпозиционного реле. Если же элемент используется для суммирования (рис. 214, в и г), умножения на два (рис. 214, ж) или повторения сигнала (рис. 214, и), то мембранный блок может занимать не только крайнее, по и любое промежуточное положение, которому будет соответствовать и определенное выходное давление. В этих случаях суммарное усилие от входных сигналов, поступающих в камеры В, Г н Д (см. рис. 213), уравновешивается усилием, возникающим от подачи выходного сигнала элемента в камеру Б отрицательной обратной связи.
При использовании элемента П2ЭС-3 для суммирования пневматических сигналов он по своим свойствам эквивалентен последовательно соединенным безынерционному элементу, осуществляющему алгебраическое суммирование, входных сигналов, и усилительному звену е большим коэффициентом усиления.
Элемент П2П.7 (рис. 215) предназначен для усиления пневматического сигнала по мощности. Входной сигнал подается в глухую
Рис. 213. Схема устромсгиа элемента сравнения типа П2ЭС-3
284
камеру Г и действует на мембранный блок вниз. Сжатый воздух из магистрали питания подается в камеру А, из которой он через большой шариковый клапан попадает в проточную камеру Б и далее на выход элемента Р„11Х- Избыток воздуха сбрасывается через
Рис. 214. Включение элемента П2ЭС-3 в
схемы пневмоавтома-
тики:
а — алгебраическое? суммирование четырех сигналов Pt, Р2, P:i, Р4\ Р" — (Pi -|- Р.л) — (Р2 -]- Р4); б — сравнение двух сигналов при Рл Pt, Р -~0, при Р2<" Р\, Р ’ 1>‘ й) — гып'сбраическое cvm-мированис трех сигналов'. Р „ . Р, — !\ Р л, г — сложеппс:
п (И .V
р = р. I- р..; <1 — вычитание Р - Р-, — Ра е — вычитание: вых 1 1 J flux
Р = Р< — Ра, ж — умножение сигнала Р< на ‘2: Р 2Р>; з — вых 1 J ’ выг 1
умножение сигнала Р, на 2 и вычитание сигнале! Ра Р — 2Р. — Ра J 1 - 1'НХ
и — повторение сигнала: Р -- Р,
1 в их 1
второй шариковый клапан в пространство между мембранами, соединенное с атмосферой. Если давления на входе и выходе элемента равны, то мембранный блок находится в равновесии. При нарушении равновесия он перемещается вверх (если Рянх >Рвх) или вниз (если Р„ЫЛ< в первом случае большой шариковый
285
клапан прикрывает поступление воздуха из линии питания в камеру Б, а малый клапан, наоборот, открывается сильнее, увеличивая сброс воздуха в атмосферу. В результате давление па выходе элемента уменьшается. Во втором случае (при P„lls:<. Ptt3) происходят обратные процессы.
Элемент П2П.7 обеспечивает усиление пневматического сигнала по мощности до величины, необходимой для передачи его па расстояние до 300 м при внутреннем диаметре линии связи 6 мм.
Выключающее реле П-1086 (рис. 216) предназначено для отключения или переключения липни связи в системах пневмоавтоматики. Реле состоит из четырех камер, которые разделены мембранами из прорезиненной ткани, соединенными общим металлическим штоком. Торцы штока выполняют функции заслонок по отношению к соплам, через которые пневматические сигналы поступают в г,
проточные камеры А и Г. В ка- - —
б
h.
Рис. 215. Схема устройства усилителя мощности типа П2П.7
а
Рис. 216. Схема устройства выключающего реле типа П-1086
меру Б подается постоянное давление «подпора», которое благодаря разности площадей верхней и нижней мембраны, ограничивающей эту камеру, перемещает мембранный блок в крайнее верхнее положение. При этом верхнее сопло закрыто, а нижнее открыто, так что сигнал, поступающий по каналу а в камеру А, беспрепятственно проходит на выход элемента.
Если в камеру В подать по каналу b командный сигнал Рг, больший по величине, чем давление «подпора», подаваемое по каналу б, то мембранный блок переместится в крайнее нижнее положение и закроет сопло в камере А, открыв одновременно сопло в камере Г. При этом сигнал, поступающий по каналу а в камеру А, будет отключен, а сигнал, поступающий по каналу гу в камеру Г, пройдет на выход элемента (в канал г).
Проходные сечения каналов а и av больше, чем у остальных, ч'|'о обеспечивает прохождение через них пневматических сигналов, усиленных ио мощности.
Элемент П-1086 аналогичен по своим свойствам электромагнитному реле с двумя парами контактов, нормально замкнутых (клапан в камере Л) и нормально разомкнутых (клапан в камере Г).
По аналогии с электрическими системами при разработке систем пневмоавтоматики требуется применение пневматических ем-286
костей и сопротивлений, которые также входят в комплект элементов УСЭПГ1А. Например, элемент ПОГ7.. 50 представляет собой емкость, объемом 50 ем"'. Выпускаются также пневматические емкости объемом 40 см:>.
Постоянный дроссель
П2Д.7 (рис. 217) представляет собой винт 5, ввернутый н корпус 4 с двумя перпендикулярными сообщающимися отверстиями. В отверстии, расположенном на продольной оси винта, помещен капилляр 2 диаметром 0,3 мм с навитой на него шерстяной пряжей .3, которая является дополнительным фильтром. Воздух питания подводится в дроссель через входную ножку (ла рисунке не показана), проходит через второе отверстие винта 5, расположенно? на его боковой поверхности, затем через пряжу в капилляр и далее па выход через ножку 1. Дроссель П2Д.7 сохраняет в процессе эксплуатации постоянное гидравлическое сопротивление, установленное при его настройке.
Регулируемый дроссель П2Д.1 показан па рис. 218. В корпусе 2 помещена втулка 4 с иглой 6 и мембраной 7. Пружина 5 удерживает иглу 6 в крайнем верхнем положении. Ось 13, на которой вращается диск 11 с прикрепленной к нему шкалой 12, запрессована в корпус 2. При вращении диска 11 винт 9, опирающийся па пружинную фасонную шайбу 8, давит па
Рис. 217. Схема устройства постоянного ;'4><)ссгля типа П2Д.7:
/ — ножка; 2 — кагшлл яр; .7 — шерстяная пряжа: 4 -- корпус: 5 — винт
Рис. 218. Схема устройства регулируемого дросселя тина П2Д. 1:
/ — ножка; 2 .. корпус; <7 и 4 -- втулки;
5 — пружина; Л — iij-jih; 7 — мембрану К —-шайба-, 9 — впн'1 , II) - стрелка; // - диск;
12 — шкала; /3 — ось
287
иглу 6, заставляя ее перемещаться в оловянной втулке 3. Отверстие под иглу в этой втулке для каждого дросселя обжимается по профилю иглы 6. При вращении диска 11 изменяется степень открытая дросселя и, следовательно, его гидравлическое сопротивление; стрелка 10 предназначена для отсчета но шкале 12 установленной степени открытия дросселя. Вход и выход сжатого воздуха осуществляется через отверстия в ножках 1.
Элемент П2С. 2 (рис. 219) предназначен для суммирования двух пневматических сигналов, один из эстоянпый дроссель, а второй Р2
проходит через регулируемый дроссель. Выходной сигнал такого элемента, согласно (186), равен
Рис. 219. Схема устройства сумма-реющего
Р;
Рбых
Р2
элемента типа Г12С.2
и
it через
С ч Л':/'| 1
К\ и Ki—коэффициенты, определяемые сопротивлением состзет
ствеино постоянного и регулируемого дросселя.
При этом
Л, /<2 1. (177)
Элемент П23Д предназначен для создания постоянного по величине пневматического сигнала, подаваемого в непроточные камеры различных элементов пневмоавтоматики, и используется в качестве задатчика пневматических САР. Он состоит (рис. 220) из корпуса 1, разделенного мембраной 2 па две камеры А и Б. Камера А соединена с атмосферой, в ней находится пружина 3. натяжение которой можно регулировать с помощью винта 4. Проточная камера Б имеет один вход от линии питания через постоянный дроссель 5 п два выхода:
Рис. 220. Схема устройства задатчика типа П23Д:
/ — корпус; 2 — мембрана; 3 — пруяхпн\j ; 4 — винт; 5 — ностоян-ubiii дроссель; 6 — сопло; 7 — вы-
ход
через сопло 6 избыток воздуха сбрасывается в атмосферу, а через отверстие 7 проходит выходной сигнал Р„„г.
Работа элемента П23Д основана па взаимном уравновешивании сил, действующих на мембрану 2, т. е. давления в камере Б и
288
усилия пружины 3. Если равенство этих сил нарушается, то мембрана перемещается, изменяя выход воздуха в атмосферу через сопло 6. Например, при увеличении давления мембрана прогибается вверх и увеличивает сброс воздуха, благодаря чему его давление в камере Б уменьшается, возвращаясь к первоначальному. Таким образом, давление воздуха в камере Б поддерживается постоянным и является выходным сигналом элемента П23Д. Установка заданной величины давления осуществляется изменением натяжения пружины 3 с помощью регулировочного винта 4.
Рис. 221. Схемы регулятора ПР2.5:
а — принципиальная; 6 — структурная; / и // — элементы сравнения; /// — задатчик; IV — сумматор; V — усилитель; VI — выключающее реле
На основе элементов УСЭППА разработана система автоматических регуляторов завода «Тизприбор» («СТАРТ»), в состав которой входят пропорциональный регулятор ПР2.5, пропорционально-интегральный регулятор ПРЗ-21, пропорционально-интегральный регулятор соотношения ПР3.23 и другие регуляторы и функциональные блоки, а также вторичные приборы модели ПВ нескольких модификаций. Конструкция регуляторов позволяет устанавливать их как на вторичных приборах системы «СТАРТ» и АУС, так и отдел ыю.
Пропорциональный регулятор ПР2.5 (рис. 221, а) состоит из двух элементов / и II типа П2ЭС-3 (см. рис. 213), элемента Ill типа П23Д, элемента IV типа П2С.2, усилителя мощности выходного сигнала V и выключающего реле IV. Он работает следующим образом.
/210 Казаков и др.
289
Давление Р„ от датчика САР, пропорциональное текущему значению регулируемого параметра, подается в камеру Г элемента /, а давление Ря от задатчика, пропорциональное заданному значению регулируемого параметра, в камеру В того же элемента. Кроме того, на вход элемента // подается постоянное давление Рн от элемента П23Д (в камеру Д) и давление Р{ с выхода элемента / (в камеру S).
На структурной схеме регулятора (рис. 221, б) элемент I замещается сумматором / и усилительным звеном 2 с большим коэффициентом усиления, которое охвачено звеном 3 жесткой отрицательной обратной связи с коэффициентом усиления, равным единице (так как сигнал Р, с выхода элемента / непосредственно подается в его «минусную» камеру Б). Передаточная функция этой части регулятора равна
(Р) «= ' •
еде 1Г0. с(р) — 1 — передаточная функция звена 3.
Следовательно, изображение выходного сигнала элемента /
Р1 (Р) = [— Рп (Р) 4 Ря (р) + Рн (P)l = - а (р) + Рн (Р),
где с(р) — рп(р) — Ря(Р) — изображение сигнала, погрешности регулирования.
Сигнал F\ с выхода элемента / подается на один из входов элемента / I/и суммируется в нем с сигналом Р„„„, поступающим с выхода усилителя мощности V В структурной схеме элемент IV замещен двумя усилительными звеньями: звеном 4 с коэффициентом усиления /<’, величина которого зависит от степени открытия регулируемого дросселя Дп, и звеном 7 с коэффициентом усиления Л".',, величина которого зависит от диаметра отверстия постоянного дросселя Д,.
Выходной сигнал элемента / V подается в «минусовую» камеру Б элемента II, а постоянное давление Рн с выхода элемента /// подается в «плюсовую» камеру Д элемента II. Сигнал, равный их разности, усиливается элементом V и поступает через выключающее реле VI на выход регулятора в линию исполнительного механизма, а также на второй вход элемента IV. В структурной схеме регулятора ПР2. 5 элементы I/ и V замещены сумматором 5 и усилительным звеном 6 с большим коэффициентом усиления. При этом усилительное звено 7 оказывается включенным в цепь отрицательной обратной связи звена 6. Поэтому для цепи звеньев 5, б и 7 по аналогии с цепью /, 2 и 3
^6, в, (р) «= >
где VP7(p) = К'., — передаточная функция звена 7.
Тогда изображение выходного сигнала регулятора можно выразить следующим образом:
Р<Ш.Х (Р) = Рн (Р) 6, (Р) - Р. (Р) (р) М76, в1 (р),
где W4(p) = K't — передаточная функция звена 4.
После подстановки в это выражение значений U4,. ч ,7 (р)', Wt(p) и Р^(р)
и выполнения необходимых преобразований получим
Р«Ых (Р) = Рн ( ‘ + (Р)’
откуда, учитывая условие (189), получим в окончательном виде следующую зависимость между выходным сигналом РВЫА. регулятора ПР2.5 и погрешностью регулирования о:
рвых= Рп + (178)
где р = K'JK't — предел пропорциональности.
290
Это уравнение П-регулятора с постоянной составляющей Рн регулирующего воздействия. Настройка регулятора ПР2.5 на заданный предел пропорциональности осуществляется изменением степени открытия регулируемого дросселя D,,, от которой зависит величина 7<;. Пределы настройки — от 5 до 3000% диапазона входного сигнала.
Выключающее реле IV служит для отключения выходного сигнала регулятора при подаче командного давления Рк в камеру Л этого элемента (при переходе с автоматического на ручное управ ление).
Регулятор ПР3.21, упрощенная принципиальная схема которого показана на рис. 222, работает как ПИ регулятор. Он состоит из
Рис. 222. Принципиальная схема регулятора ПРЗ. 21:
/, lil, I' — элементы сравнения; // — пневмоемкость; /V — сумматор: V/ — усилитель; V/// — выключающее реле
интегрирующей части, собранной из элемента 7 типа П2ЭС-3, регулируемого дросселя Ди типа П2Д.1 и пневматической емкости II и пропорциональной части из элементов III и V типа П2ЭС-3 элемента IV типа П2С.2, усилителя мощности выходного сигнала VI и выключающего реле VII. Нетрудно убедиться, что пропорциональ пая часть регулятора ПРЗ.21 совершенно аналогична по устройству регулятору ПР2.5, только постоянный сигнал Рн (рис. 221) заменен выходным сигналом интегрирующей части Ри. Следовательно, для описания пропорциональной части регулятора ПРЗ.21 можно использовать уравнение (190), заменив в нем Рн на Ри. Остается рассмотреть работу интегрирующей части, чтобы найти зависимость между Р„ и о.
На вход элемента 1 подаются четыре сигнала: давление Р,„ пропорциональное текущему значению регулируемого параметра, поступает в плюсовую камеру Д; давление Р3. пропорциональное заданному значению регулируемого параметра, поступает в минусо-
7»Ю’
291
вую камеру Б; давление Рх с выхода элемента / подается в минусовую камеру Г и давление Р„ с выхода интегрирующей части подается
Рис. 223. Структурная схема интегрирующей части регулятора ПРЗ. 21:
I — сумматор; 2 — усилительное звено, 3 — звено жесткой отрицательной обратной связи; 4 — апериодическое звено; 5 — звено жесткой положительной обрат ной связи
в плюсовую камеру В. Структурная схема интегрирующей части регулятора ПРЗ.21 (рис. 223) содержит: сумматор 1 и усилительное звено 2, представляющее свойства элемента /; звено 3 жесткой отрицательной обратной связи (сигнал Р, в камеру Г), апериодическое звено 4 (образованное дросселем Дп и пневмоемкостью //) и звено 5 жесткой положительной обратной связи (сигнал Р„ в камеру В).
Пользуясь правилами преобразования структурных схем, найдем эквивалентную передаточную функцию для этой цепи:
т , , «Л, 2,3 .„(/>) '^(Р) ^Ь(Р)
"^(Р>== 1 _ 2j (р) W, (р) w5(p)-,
W4(p) = у-гт
где IVt, 2,зэгв(р) цу = 1— передаточная функция звена, эквивалентного звеньям /, 2 и 3\
-----передаточная функция звена 3 *;
и Р
Т,, — постоянная времени апериодического звена-/, величина которой определяется степенью открытия регулируемого дросселя Ди и объемом ппевмоемкости //;
=-. 1 — передаточная функция звена 5 положительной обратной связи.
После подстановки значения VC\, 2, -j (р), Wt(p) и IV'’- (р) и выполнения промежуточных преобразований получим в окончательном виде
Это передаточная функция интегрирующего звена, следовательно, выходной сигнал Ри рассмотренной части регулятора пропорционален интегралу от погрешности регулирования
t
Ри = т А ° (0 dl (179)
7 и .1
II
Теперь можно найти зависимость выходного сигнала Р„11Х от погрешности регулирования о для всего регулятора, подставив значение Рт из (191) в (190):
Ряых —
* Коэффициент усиления звена 4 равен единице, так как в установившемся состоянии давление Рп в емкости II равно давлению Pt перед дросселем Д„.
292
Следовательно, регулятор ПР3.21 работает как ПИ-регулятор. На заданный предел пропорциональности он настраивается, как и регулятор ПР2.5, изменением степени открытия регулируемого дросселя Dn. Настройка может быть установлена в пределах от 5 до 3000% входного сигнала; настройка времени изодрома производится изменением степени открытия регулируемого дросселя DH и возможна в пределах от 3 до 100 мин.
Выключающее реле регулятора ПР3.21 выполняет те же. функции, что и в регуляторе ПР2.5 — отключает давление Рпих от линии исполнительного механизма при переходе на ручное управление. При этом открывается сопло С2 выключающего реле и давление
Рис. 224. Принципиальная схема измерительного устройства вторичного прибора системы «СТАРТ»:
/ — спльфои; 2
сопло; 3, 4 — рычаги; 5 — силопой элемент; 6 щая стрелка; 7 — пружина
показываю-
из его камеры Б, равное давлению в линии исполнительного механизма при ручном управлении, подается в камеру В элемента / и в камеры Д элементов III и V. Благодаря этому в перечисленных камерах поддерживается то же давление, что и в линии исполнительного механизма, и при обратном переключении с ручного управления на автоматическое регулятор начинает работу более плавно.
Вторичные приборы системы «СТАРТ» выпускаются в трех модификациях: ПВ4-2э — прибор для непрерывной записи и показания величины одного параметра; ПВ4.3Э — прибор для непрерывной записи на одной диаграмме величин двух параметров и показания их на двух шкалах; ПВ10.1Э—прибор для непрерывной записи и показания величины регулируемого параметра, указания положения контрольной точки и величины давления на исполнительном механизме. В прибор ПВ10.1 э встроена станция управления, обеспечивающая возможность управления исполнительным механизмом вручную и плавного перехода па автоматическое регулирование. Станция управления включает задатчик и переключатель.
10 Казаков и др.
293
Измерительные схемы всех этих приборов в отличие от аналогичных вторичных приборов АУС основаны на принципе компенса-
ции сил, что обеспечивает им более высокую чувствительность и точность измерений.
На рис. 224 показана схема измерительного устройства для записи и показания одного параметра. В разных модификациях приборов «СТАРТ» измерительная часть состоит из одного (ПВ4.2э),
Рис. 225. Положение поршня золотника КЭП:
а — при взведенной защелке; б — при сбро шенной защелке; / — золотник; 2 — исполнительный механизм; 3 — регулирующий ор
ган
двух (ПВ4.3э) или трех (ПВ10.1э) таких устройств. Приемный элемент — сильфон 1 воспринимает от датчика давление Рйх, пропорциональное текущему значению измеряемой величины, а сжатый воздух от источника питания поступает в линию сопла 2 и в линию силового элемента 5 узла обратной связи.
Изменение Рйх вызывает изменение зазора между соплом и заслонкой, укрепленной на конце рычага 3 приемного элемента, а это ведет к изменению давления в линии сопла и, следовательно, в силовом элементе 5. При этом перемещается чашечная мембрана силового элемента и упирающийся в нее рычаг 4, который связан с рычагом 3 заслонки пружиной 7. Таким образом силовой элемент 5
оказывает на заслонку действие, уравновешивающее воздействие приемного элемента 1. Перемещение рычага 4 силового элемента передается показывающей стрелке 6 и записывающему перу прибора.
Командный электропневматический прибор типа КЭП-12у предназначен для программного управления различными объектами по заданной циклограмме путем переключения электрических и пневматических цепей управления.
Основные узлы прибора: распределительный вал с кольцевыми
пазами, в которых крепятся двенадцать пар кулачков; синхронный электродвигатель, служащий приводом распределительного вала через редуктор; блок путевых выключателей, на которые воздействуют кулачки распределительного вала. В каждой канавке вала устанавливается от 1 до 4 кулачков. Перед началом работы ку-
294
Лачки устанавливаются в позиции, соответствующие очередности и продолжительности воздействия на путевые выключатели (это производится вручную ио таблице времени цикла, которая прилагается к прибору).
Через определенные промежутки времени (в зависимости от настройки) кулачки сбрасывают и взводят защелки быстродействующих путевых выключателей (левый кулачок сбрасывает защелку, а правый взводит ее).
Путевые выключатели воздействуют в зависимости от типа прибора (пневматический, электрический или комбинированный) на электроконтакты или на поршни пневматических золотников (рис. 225, а, б). В верхнем положении поршня пневматического золотника (рис. 225, и) воздух поступает из сети через нижнее отверстие в верхнее и далее в исполнительный механизм. При подъеме поршень закрывает нижнее отверстие (рис. 225, б) и сообщает исполнительный механизм с атмосферой.
Прибор КЭП-12у можно настраивать на продолжительность циклов от 3 мин до 18 ч. Питание прибора от сети напряжением 127 в, частотой 50 гц пневматических цепей производится сжатым воздухом.
§ 56. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ, РЕГУЛИРУЮЩИЕ ОРГАНЫ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА СИСТЕМ АВТОМАТИЗАЦИИ
Электрические исполнительные механизмы, предназначенные для работы в комплекте с электрическими регуляторами, делятся на электромагнитные (соленоидные) и электродвигательные.
Электромагнитные исполнительные механизмы (приводы) предназначены для работы в позиционных САР, а благодаря высокому быстродействию они часто применяются в системах автоматической блокировки. Недостаток электромагнитных приводов — возможность возникновения гидравлических ударов в трубопроводах с жидкостями, на которых установлены регулирующие органы с такими приводами.
Более распространен электродвигательный исполнительный механизм, состоящий из электродвигателя и понижающего механического редуктора.
Общий вид электродвигательного исполнительного механизма показан на рис. 226. Он состоит из асинхронного двухфазного конденсаторного электродвигателя J, работающего от сети переменного тока 220 в с червячным редуктором 2 для дальнейшего снижения числа оборотов, узла <3 конечных выключателей и реостата обратной связи, устройства ручного управления 4 и кривошипа 5 для соединения выходного вала с регулирующим органом. Конечные выключатели выполнены с одним замыкающим и одним размыкающим контактами. Замыкающий контакт включен в цепь питания электродвигателя, а размыкающий может быть использован
10’ 295
L------185
Рис. 226. Общий вид электрического исполнительного механизма: / — электродвигатель; 2 — редуктор; 'А — узел конечных выключателей;
4 — устройство ручного управления: 5 — кривошип
Рис. 227, Мембранным исполнительный механизм:
а — с поступательным перемещен нем штока; б — с угловым перемещал исм рычага; / и 3 — фланцы; 2 и -/ — мембраны; .5 — шток; 6 — втулка; 7 — пружина
296
для сигнализации крайних положений вала исполнительного механизма (положение, регулирующего органа). Максимальный угол поворота вала исполнительного механизма устанавливается в пределах от 15 до 345 поворотом кулачков, управляющих концевыми выключателями.
Пневматические исполнительные механизмы по конструкции делятся па мембранные п поршневые.
Мембранные исполнительные механизмы (МИМ) выпускаются с посту нательным перемещением штока (рис. 227, и) п рычажные с угловым перемещением рычага, шарнирно связанного ео штоком (рис. 227, б). Выбор типа МИМ определяется характером перемещения подвижного элемента регулирующего органа. При подаче сжатого воздуха в полость над мембраной усилие последней вызывает
Рис. 228. Поршневой исполнительный механизм:
/ — цилиндр; 2 — крышка цилиндра; 3 - поршень; 4 — шток; 5 — серьга; 6 — корпус золотникового усилителя; 7 — втулка; Л' — золотник,-.9 — штуцер- 10 — мембрана; // — пружина; 12 — уплотнительный мембранный пакет
прогиб пружины и перемещение штока. Зависимость между изменением командного давления и перемещением штока МИМ линейная.
Поршневой исполнительный механизм (ПИМ), показанный на рис. 228, применяется при большом ходе регулирующего органа. Пустотелый силовой шток поршня <7 расположен! внутри цилиндра 1, закрытого крышкой 2. На копне штока 4 укреплена серьга 5 для присоединения его к регулирующему органу. В полости штока расположена пружина для получения жесткой обратной связи; натяжение пружины можно изменять вручную. Исполнительный механизм снабжен золотниковым усилителем, состоящим из корпуса 6, в котором запрессована бронзовая втулка 7, и золотника 8, расположенного во втулке.
Воздух от регулятора поступает через штуцер 9 в камеру А исполнительного механизма и усилие, развиваемое мембраной 10, перемещает золотник усилителя. При смещении золотника от среднего положения воздух, подводимый внутрь корпуса золотникового усилителя через штуцер, поступает в левую (под поршень) или
297
б правую полость цилиндра и перемещает поршень со штоком вправо или влево. Это ведет к перестановке регулирующего органа. Одновременно поршень изменяет натяжение пружины 11, которая возвращает золотник в среднее положение.
Чтобы исключить сообщение камеры А с рабочими полостями цилиндра, установлен уплотнительный мембранный пакет 12.
Регулирующие органы. Наиболее распространенным типом регулирующих органов в промышленных САР являются регулирующие клапаны, которые применяются для регулирования потоков газа, пара и жидкости при статическом давлении свыше 1000 мм вод. ст.
Рис. 229. Клапаны с цилиндрическим (а) и массивным стержневым (б) плунжерами:
1 — корпус; 2 — седла; 3 и 3’ — плунжеры; 4 — шток; 5 — уплотнение; 6 — лубрикатор
В зависимости от конструкции дросселирующего устройства регулирующие клапаны делятся на односедельные и двухседельные. Односедельные клапаны испытывают выталкивающее усилие от перепада давления среды (до и после тарелки клапана). Выталкивающее усилие может достигать больших величин (особенно при больших давлениях среды), что требует дополнительных усилий со стороны исполнительного механизма для закрытия клапана. Поэтому односедельные клапаны изготовляются на небольшие диаметры условного прохода (до 25 мм).
Двухседельные клапаны бывают с пустотелыми цилиндрическими плунжерами и с массивными стержневыми плунжерами обтекаемой формы.
По окружности клапанов с цилиндрическими плунжерами (рис. 229) расположены окна различной формы в зависимости от тре
298
буемой характеристики клапана. Недостаток клапанов с цилиндрическим плунжером — быстрое изнашивание прямоугольных кромок плунжера, что искажает характеристики клапана.
Клапаны с массивными стержневыми плунжерами (рис. 229, б) указанного недостатка не имеют и хорошо работают при больших перепадах давления, на вязких и загрязненных жидкостях.
Работа регулирующих органов определяется рядом ха растери-стик. Одной из основных является конструктивная характеристика, выражающая функциональную зависимость изменения относительного проходного сечения регулирующего органа (/п) от степени его открытия (п):
m — f (п),
Г
где т = ~р----отношение площади проходного сечения регули-
Гр-О „
рующего органа г и площади сечения входного патрубка Fp 0;
п= = —----------степень открытия регулирующего органа (h
Лшах агпах
и а — соответственно величина хода или угол поворота подвижной части регулирующего органа; /i,llax и а,„ах — соответственно максимальная величина хода или угла поворота этой подвижной части).
Как правило, регулирующие клапаны выпускаются с линейными конструктивными характеристиками, но по специальному заказу могут быть изготовлены также клапаны с логарифмическими или параболическими характеристиками.
Конструктивная характеристика не позволяет судить о работе регулирующего клапана в САР, так как зависимость между расходом через клапан и изменением его относительного проходного сечения не линейная. Поэтому, чтобы правильно выбрать и рассчитать дроссельный регулирующий орган, необходимо знать его расходные характеристики для различных гидравлических сопротивлений регулируемой системы. Расходная характеристика выражает зависимость изменения относительного расхода через регулирующий орган от степени его открытия:
F==f (п),
Q G
где — = -7;—-—относительный расход;
Qmax Чпах
Q и G — текущие значения соответственно объемного или весового расхода;
Qmax И О|Пах — максимальные значения соответственно объемного или весового расхода;
п — степень открытия регулирующего органа.
На рис. 230 приведена в качестве примера расходная характеристика двух седельного регулирующего клапана Dv — 20 мм. Из графика видно, что форма расходной характеристики в значительной степени зависит от условного коэффициента сопротивления линии
299
(£,), величиной которого задаются, и значения коэффициента сопротивления регулирующего органа (Е;, который выбирается из специальных графиков или таблиц для различных степеней открытия клапана.
От формы расходных характеристик в .значительной степени зависит качество регулирования. Для нормальной работы CAP необходимо, чтобы расходная характеристика регулирующего органа была
характсри-клапсша с
Рис. 230. Расходная стика двухседсл иного
D,, — 20jm2
возможно ближе к линейной. Нужную форму расходной характеристики регулирующего органа можно получить следующими способами:
1) Подбором соответствующего размера регулирующего органа. Например, если размер регулирующего органа выбран так, что условный коэффициент сопротивления линии (£,), отнесенный к сечению выходного патрубка регулирующего органа (/•'„„), равен единице, то его расходная характеристика близка к линейной. Уменьшая размеры Ftl можно получить характеристики, близкие к логарифмическим.
2) Соответствующей профилировкой плунжера регулирующего органа.
3) Введением промежуточного звена между регулирующим органом и исполнительным механизмом (кривошипа, кулисы, кулачка и т. п.) с. соответствующей нелинейной статической характеристикой.
Подробная методика расчета дроссельных регулирующих органов приводится в специальной литературе *, а здесь приведем лишь приближенные формулы для ориентировочного расчета.
Проходное сечение, полностью открытых дроссельных органов обычно принимают равным
Л А) 7, /^ = 0,55^,
где Dy, — диаметр условного прохода дроссельного органа по фланцу, который можно определить, пользуясь следующими формулами:
* Например, П. И. К у з ь м и н. Выбор и расчет дроссельных регулирующих органов. Госэнергоиздат, М.—Л., 1960.
300
для жидкостей
для пара
для газа
здесь Q,„;1X — максимальный регулируемый расход жидкости, пара и газа;
р — плотность контролируемой среды;
/1 — минимальный перепад давления в дроссельном органе;
Р — абсолютное давление среды на выходе дроссельного органа;
g — ускорение силы тяжести.
Регулирующие органы сочленяются с исполнительными механизмами различными способами. Регулирующие дроссельные клапаны с пневматическими исполнительными механизмами серийно выпускаются как единый блок.
Пневматические регулирующие клапаны выполняются двух типов: ВЗ — «воздух закрывает» (с повышением давления воздуха на мембрану исполнительного механизма клапан закрывается) и ВО — «воздух открывает» (с повышением давления воздуха клапан открывается).
Типичная конструкция регулирующего клапана типа ВЗ приведена на рис. 231. Клапаны типа ВЗ применяются в том случае, когда при аварийном прекращении подачи сжатого воздуха к исполнительному механизму по технологическим условиям безопаснее иметь открытую линию. В противном случае ставят клапаны ВО.
Плунжерные регулирующие клапаны предназначены для регулирования потоков чистых веществ, не агрессивных по отношению к материалу тех узлов и деталей клапана, которые с ними соприкасаются. Однако в условиях химической промышленности часто приходится иметь дело с очень агрессивными веществами, причем во многих случаях они загрязнены и содержат значительное количество взвесей.
Для регулирования потоков сильно агрессивных и загрязненных жидкостей применяются клапаны специальных конструкций; наиболее распространенные из них — диафрагмовые и шланговые клапаны.
На рис. 232 приведен общий вид диафрагмового регулирующего клапана с пневмоприводом. Шток привода клапана, имеющий на конце плунжер грибовидной формы, соприкасается с эластичной мембраной, зажатой между корпусами клапана и привода. При пере-
301
Рис. 231. Регулирующий клапан с пневматическим исполнительным механизмом
мещении шток изменяет прогиб мембраны и проходное сечение клапана. На рис. 232, б показан корпус шлангового клапана, в который вставлен эластичный шланг. Этот шланг пережимается штоком
с наконечником, что ведет к изменению площади проходного сечения, а значит и расхода вещества. Привод шлангового регулирующего клапана существенных отличий от конструкции диафрагмового
клапана не имеет.
Для изготовления мембран и шлангов применяются резина, полиэтилен, фторопласт. Для футеровки внутренней поверхности диафрагмовых клапанов применяются кислотостойкая эмаль, эбонит, винипласт, полиэтилен, фторопласт и другие материалы.
Регулирующие клапаны должны устанавливаться на прямолинейных участках трубопровода и при их монтаже следует предусматривать обводные линии (рис. 233). В случае необходимости вентили с ручным управлением 2 и 2' закрываются, а вается с пневмоприводом 1 отключенным.
Силы трения в уплотнении и силы,
вентиль 3 откры-и регулирующий клапан оказывается
сальниковом создаваемые перепадом давлений на плунжере
Рис. 233. Схема установки регулирующего клапана:
! — регулирующий клапан с пневмоприводом; 2, 2' и 3 — вентили с ручным управлением
перемещения плунжера. Для , действующего через шток на
клапана, могут достигать в отдельных случаях значительной величины (при высоком давлении или при большой вязкости рабочей среды). В подобных случаях сигнал от пнематического регулятора может оказаться недостаточным дг увеличения перестановочного усилг
плунжер клапана, применяются так называемые позиционеры
На рис. 234 показана схема позиционного реле (позиционера), который работает следующим образом. Воздух от регулятора поступает в полость между сильфонами 1 и уравновешивается пружиной 3. Дно сильфонов жестко связано с клапаном 2 пневматического усилителя. Воздух от компрессора через фильтр 4 и редуктор 5 поступает в камеру пневматического усилителя, которая соединена трубкой 6 с головкой 7 мембранного пневматического исполнительного механизма. Если давление воздуха от регулятора повышается, то сильфон пропорционально перемещает клапан 2 вверх. При этом увеличивается приток воздуха в камеру усилителя и уменьшается выход воздуха в атмосферу. Давление воздуха над мембраной в головке 7 исполнительного механизма возрастает, мембрана прогибается и шток 15 исполнительного механизма перемещает плунжер регулирующего органа (на схеме регулирующий орган не показан).
303
Жесткая обратная связь, состоящая на штоке 15 исполнительного механизма
пз рычага 8, укрепленного н рычагов 9 и 10, увеличи-
Рис. 234. Схема устройства позиционного реле (позиционера):
— сильфон (.Г, 2 — клапан; 3 — пружина; 4 — фильтр; 5 — редуктор; 6 — трубка; 7 — головкл; 8, 9 и 10 — рычаги; // — шарнир; 12, 13 и
14 — (ППОМСТр! г, 15 —шток
Рис. 235. Регулирующие органы для сыпучих материалов:
а — весовой дозатор'. / — бункер; 2 — вибрационный питатель;
3 — заслонка; 4 — кожух; 5 — транспортер; 6 — электропривод;
б — шнековый питатель: I — проем; I —шнек-, 3 —корпус., 1 — разгрузочное окно; в — дисковый питатель: I — диск; 2 — нож;
3 — цилиндрические заслонки; 4 — корпус
вает сжатие пружины 3 и восстанавливает равновесие в позиционном реле, перемещая клапан 2 в направлении, обратном первоначальному. ААанометры 12, 13 и 14 служат для контроля давления воздуха
304
в соответствующих линиях. Требуемый коэффициент обратной связи устанавливается подвижным шарниром //.
В производствах, где необходимо регулировать потоки сыпучих материалов, применяются специальные регулирующие органы (рис. 235).
На рис. 235, а изображен весовой дозатор. Из бункера / сыпучее вещество поступает на лоток вибрационного питателя 2. Вибрация вызывает движение дозируемого вещества, которое из бункера сквозь щели лотка под заслонкой 3 попадает па транспортер .5', укрепленный на весах и приводимый в действие электродвигателем. Кожух 4 предотвращает запыление окружающей среды. Транспортер связан с весоизмерительным датчиком (на схеме не показан), сигнал от которого, пропорциональный весу материала на ленте транспортера, сравнивается с сигналом задатчика. Воздействие регулятора изменяет либо подвод энергии к вибратору шпателя, либо величину открытия заслонки 3.
На рис. 235, б показан шнековый питатель. Сыпучий материал иод действием собственного веса поступает в проем 1 корпуса 3 и шнек 2 перемещает его к разгрузочному окну 4. Производительность питателя изменяется числом оборотов шнека, который приводится в действие электродвигателем постоянного тока с регулированием числа оборотов.
Дисковый (тарельчатый) питатель, схема которого показана на рис. 235, в, применяется для подачи кусковых материалов. Дозируемый материал поступает через приемное устройство корпуса 4 па вращающийся диск 1 питателя, а с диска ножом 2 ссыпается в разгрузочное отверстие. Производительность питателя можно регулировать изменением положения ножа 2, числа оборотов диска 1 и положения цилиндрической заслонки 3, устанавливающей толщину слоя материала па диске 1.
Байпасная панель дистанционного управления предназначена для работы в комплекте с пневматическим регулятором и служит для перевода управления пневматическим исполнительным механизмом с автоматического на ручное и наоборот, а также для полного отключения пневматического исполнительного механизма от регулятора. Панель устанавливается на щите в непосредственной близости от регулятора и на расстоянии не более 100 .нот исполнительного механизма.
Редуктор давления воздуха служит для редуцирования и стабилизации давления сжатого воздуха и представляет собой мембранный регулятор прямого действия. Давление воздуха после редуктора в зависимости от его настройки и величины подводимого давления 0,15—0,98 Мн/м2 (1,5—10 кГ/см2) может быть установлено в пределах 0,05—0,25 Мн/м2 (0,5 2,5 кГ/см2). Для очистки сжатого воздуха от пыли, влаги и масла перед редуктором устанавливается воздушный фильтр.
Глава XV
ОСНОВЫ ПРОЕКТИРОВАНИЯ СИСТЕМ АВТОМАТИЗАЦИИ ХИМИКО-ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
§ 57. ПРЕДПОСЫЛКИ АВТОМАТИЗАЦИИ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Основной целью автоматизации технологических процессов обычно является увеличение экономической эффективности производства. Лишь в тех случаях, когда автоматизация вызывается необходимостью обеспечения безопасности труда (устраняя непосредственный контакт обслуживающего персонала с вредными веществами или выводя его из опасной зоны), ее экономическая эффективность не имеет решающего значения.
Рационально спроектированная система автоматизации обеспечивает уменьшение себестоимости продукции благодаря повышению производительности оборудования, более строгому выдерживанию заданного технологического режима, снижению затрат сырья, материалов и энергии на производство единицы продукции, уменьшению количества обслуживающего персонала и т. д. Экономическая эффективность системы автоматизации при заданной производительности процесса зависит от ее стоимости и уменьшения себестоимости выпускаемой продукции.
Как показали исследования, затраты на систему автоматизации резко возрастают при увеличении ее сложности, поэтому первый вопрос, на который должен ответить экономический анализ — каков оптимальный уровень автоматизации для данного производства.
Автоматизация может быть частичной, комплексной или полной. При частичной автоматизации опа охватывает только отдельные агрегаты или производственные участки, технологический процесс которых наиболее приспособлен для автоматизации.
Комплексная автоматизация охватывает весь технологический процесс в пределах отделения, цеха или целого производства. При комплексной автоматизации ручной труд полностью устранен, но управление процессом контролирует и частично осуществляет оператор.
306
Важнейшая предпосылка автоматизации — совершенство и отработанность технологии производства. Главные требования, которые автоматизация предъявляет к технологии, следующие: неразрывность технологической цепи в пределах автоматизируемого участка или цеха и целесообразное расположение оборудования в соответствии с направлением материальных и энергетических потоков; непрерывность технологического процесса; высокая производительность отдельных агрегатов. Чем полнее соответствует технологический процесс этим требованиям, тем выше экономическая эффективность автоматизации.
С технологией процесса тесно переплетается его аппаратурное оформление, которое также оказывает большое влияние на автоматизацию. Применяемое оборудование должно быть рациональным по конструкции, надежным в эксплуатации, обладать благоприятными для регулирования статическими и динамическими характеристиками, поэтому при разработке новых типов машин и аппаратов необходимо учитывать требования автоматизации. Во многих случаях можно уменьшить габариты аппаратуры, в частности, путем интенсификации гидродинамического режима ее работы. Это приведет к уменьшению запаздывания и инерционности и улучшит динамические характеристики объекта.
Наивысшей ступенью развития управления производством является полная его автоматизация.
На основании результатов предварительного анализа принимается решение о целесообразности автоматизации данного производства, ее уровне, последовательности внедрения и конкретных мероприятиях, проведение которых должно предшествовать автоматизации. После этого можно приступить непосредственно к проектированию системы автоматизации.
§ 58. ОСНОВЫ ТЕХНИКИ ПРОЕКТИРОВАНИЯ СИСТЕМ АВТОМАТИЗАЦИИ
Основным документом проекта автоматизации технологического процесса является принципиальная схема автоматизации, обычно совмещенная с технологической схемой установки (отделения, цеха). На ней в условном виде изображаются все основные элементы системы автоматизации, их связи между собой и с технологическим оборудованием. В данном параграфе излагаются основные правила вычерчивания принципиальных схем, которые регламентированы ГОСТом 3925—59 *.
Основную часть поля чертежа занимают условные изображения технологического оборудования и трубопроводов с нанесенными на них изображениями средств автоматизации. Условные изображения технологического оборудования не регламентированы, однако
* ГОСТ 3925—59. «Обозначения основных величин и условные изображения приборов в схемах автоматизации производственных процессов».
307
общепринятыми являются контурные изображения, соответствующие по форме и пропорциям отдельных частей своим реальным прототипам. В некоторых случаях технологическое обору Д) ванне нт прнн ципиалыюй схеме изображается в разрезе, если это необходимо ция пояснения взаимосвязи системы автоматизации с особенностями конструкций применяемого оборудования. Принципиальные схемы вычерчиваются без масштаба, однако при изображении различных аппаратов и машин желательно соблюдать относительные пропорции, соответствующие их габаритам.
Названия технологического оборудования либо вписываются в контуры условных изображений, либо, если размеры контуров для этого недостаточны, указываются рядом с ними.
Таблица 4
Условные обозначения трубопроводов
Содержимое трубопровода Условлие обозначен и я Цистные обозначения
цвет | краска
Жидкости или газы, преобладающие в данном проекте Вода Пар Воздух Азот Кислород Гелий Аммиак Кислота Щелочь Жидкое горючее Водород Ацетилен Метан Противопожарный трубопровод Вакуум Illi 111 Л -ШГ1 1 — - J ТГ со СС — "Г— ~ — — —- СЧ и и Ч ! Н । j j Н s -П X -г LO со _ TI го Ю „ О £ г- III !1т Illi 1 1 : II 1 : | 1 1 1 Красный, черный Зеленый Розовый Г олубой Темно-желтый Синий Фиолетовый Серый Оливковый Серо-коричне-1 вая Желтый | Оранжевый Красный Светл о-еерый Киноварь, сурик, тушь Гуммигут с лазурью Киноварь, кармин Лазурь, кобальт Охра Ультрамарин Кармин с лазурью . Тушь черпая, слабо-разведенная Синяя с охрой Сепия Гуммигут Киноварь с охрой Киноварь, кармин, сурик Тушь черная, разведенная
Условные изображения трубопроводов, применяемые на принципиальных схемах автоматизации, регламентированы ГОСТом 3464— 63 *. Некоторые из них приведены в табл. 4. Расстояние между соседними цифрами в разрывах линий должно быть не менее 50 мм. Направление движения потока в трубопроводе указывается стрел
* ГОСТ 3464—63. Чертежи в машиностроении. Условные обозначения трубопроводов для жидкостей и газов.
308
ками. Для более детального указания характера среды (например, вода чистая, пар перегретый и т. д.) к цифровому обозначению допускается добавление буквенного индекса. Для сред, не предусмотренных в ГОСТе 3464—63, должны быть использованы другие цифры с обязательным пояснением принятых условных обозначений на поле чертежа.
Таблица 5
Условные изображения измерительных и сигнализирующих приборов
Прибор измерительный и регулирующий (сигнализирующий) в одном корпусе
Механическая
Гидравлическая
Таблица 6
Обозначения контролируемых и регулирующих величин
На именование величины Обозначен не Наименование величины Обозначение
Температура 1 Вязкость
Давление, разрежение, ва- р Концентрация с
куум Пыльность, цветность, мут- ф
Расход или количество G КОСТЬ и дымпость
Уровень Н Разность значений двух ве- д
Влажность т личин (приращение)
Плотность р
Условные изображения средств автоматизации для принципиальных схем должны соответствовать требованиям ГОСТа 3925—59. В табл. 5 приводятся условные изображения измерительных при-боров, регуляторов и устройств для дистанционной передачи сигналов в системах автоматизации. Над горизонтальной чертой внутри изображения прибора (круга, квадрата) наносятся буквенные обозначения контролируемых или регулируемых величин, которые должны соответствовать указанным в табл. 6; под чертой наносятся
309
обозначения основных функциональных признаков прибора, указанные в табл. 7. Если прибор измеряет несколько разнородных параметров или выполняет несколько функций, то в его изображение вписывается соответствующее число обозначений. При этом базовое условное изображение прибора заменяется допустимым. Если прибор имеет устройство для дистанционной передачи выходного сигнала, то к его условному изображению добавляется соответствующий прямоугольник, который должен примыкать к изображению прибора вертикально или горизонтально. Условные изображения приемных устройств (датчиков) приведены в табл. 8, а изображения исполнительных механизмов, регулирующих органов и вспомогательной аппаратуры автоматизации — в табл. 9.
Таблица 7
Обозначения функциональных признаков приборов и регуляторов
Наименование функционального признака Обозначение Наименование функционального признака Обозначен не
Показывающи й п Изодромный Из
Самопишущий с Дифференцирующий ДФ
Интегрирующий И Позиционный Из
Сигнализирующий Сг Задающий за
Измеряющий Им Программный Иг
Усиливающий Ус Следящий Сл
Статический Ст Дозирующий Дз
Астатический Ас
Средства автоматизации могут устанавливаться непосредственно на технологическом оборудовании (датчики, регулирующие органы с исполнительными механизмами) или на щитах, размещаемых как в технологических помещениях (местные щиты), так и в специально оборудованных помещениях — пунктах управления (центральные щиты).
310
Таблица 8
Условные изображения приемных устройств
Наименован иг ирном кого И зоб р а- !1 Наименование приемного Нзобра-
устройствт же ни с || устройства же вне
Счетчик жидкости, газа
стек-
Термометр ЛЯВНЫЙ
Термометр сопротивления оди-
Ротаметр
Гермометр двойной
сопротипления
Сужающее устройство
Термопара одинарная
Датчик индукционного расходомера
Термопара поверхностная
Термобаллои манометрического термометра
Приемное устройство пирометра излучения
Отбор ное устройство давления, уровня, состава газон и жидкостей
Поплавковое устройство уровнемеров, плотномеров и т. п.
Приемное устройство емкостное
Приемное устройство для измерения состава и качества вещества
Приемное устройство радиоактивного уровнемера, плотномера и др.
Щитом называется устройство, состоящее из одного или нескольких соединенных между собой шкафов (панелей). Закрытые шкафные щиты обычно устанавливаются в технологических помещениях, где имеется возможность значительного загрязнения приборов. Открытые панельные щиты устанавливаются в специальных помещениях пунктов управления. Наряду со щитами применяются также пульты управления; они имеют форму стола с горизонтальной или наклонной плоскостью, на которой размещается аппаратура управления. Конструкции и размеры щитов и пультов определяются ГОСТом 10985—64.'
На наружной стороне щитов размещаются показывающие и самопишущие приборы, светосигнальная аппаратура, а также мнемоническая схема. Последняя представляет собой упрощенную техно-
311
Таблица 9
Условные изображения исполнительных механизмов регулирующих органов и вспомогательной аппаратуры
механпзм
поршневой
механизм
механизм
Исполнительный
Электродвнгательный
мехаинам
Привод ручной механический
Клапан регулнрующп й проходной
Клапан регулирующий трехходовой
Ш и бер per у ли р у ющий
Сосуд разделительный или уравнительный
Сосуд конденсационный
Переключатель для электрн ческих цепей
Переключатель для газовые линий
Панель дистанционного управления
й
логическую схему автоматизированного процесса, на которой в местах контроля основных параметров размещена светосигнальная аппаратура. При отклонении каких-либо параметров от допустимых пределов на мнемосхеме в соответствующих местах загораются сигнальные лампы. Применение мнемосхемы значительно облегчает оператору контроль за ходом технологического процесса и управление.
Если наряду со щитами применяется пульт, то на нем размещается аппаратура управления (кнопки, переключатели и т. д.).
На принципиальных схемах условные изображения средств автоматизации, устанавливаемых на технологическом оборудовании, наносятся на изображения соответствующих машин, аппаратов или трубопроводов. Щиты изображаются на принципиальных схемах в виде прямоугольников, расположенных в нижней части поля чертежа; местные и центральные щиты изображаются отдельно.
Условные изображения средств автоматизации, устанавливаемых на щитах, размещаются внутри соответствующих прямоугольников.
312
Функциональные связи между отдельными элементами системы автоматизации изображаются линиями связи. Рядом с линиями связи, которые соединяют датчики с измерительными приборами, размещенными па щитах, указываются предельные значения измеряемых параметров.
Каждому элементу системы автоматизации, изображенному на схеме, присваивается номер, который сохраняется за ним во всех остальных документах проекта. Рекомендуется следующая система нумерации: каждому комплекту, который состоит из нескольких функционально связанных элементов, выполняющих в системе одну общую задачу, присваивается определенный помер, а каждому элементу комплекта присваивается, кроме того, свой буквенный индекс.
Примером оформления может служить принципиальная схема автоматизации процесса термоокислительного пиролиза метана, изображенная на рис. 236 *.
Процесс термоокислительного пиролиза метана осуществляется следующим образом. Природный газ и кислород проходят подогреватели / и II, где нагреваются до температуры 650иС, проходят смеситель III и поступают в реактор /I/.
Пиролиз метана происходит в факеле горения метано-кислородной смеси при температуре 1300—1400'С. Основными реакциями являются окисление метана и образование ацетилена. При оптимальных условиях в ацетилен превращается около 30 "и метана, окисляется около 60% и не вступает в реакцию около 10%. Параллельно с реакцией образования ацетилена происходит его разложение (выгорание), поэтому время пребывания реагирующей смеси в зоне рабочих температур должно быть ограничено. Для этого газы пиролиза быстро охлаждаются в нижней части реактора путем впрыска воды. Далее пирогазы охлаждаются в скруббере V, орошаемой водой, после чего они через сажевый фильтр VI поступают в цех разделения и концентрирования ацетилена.
Важнейшими особенностями данного технологического процесса, которые оказывают влияние на выбор системы его автоматизации, являются следующие:
1) наибольший выход ацетилена получается при соотношении «кислород-метаи» около 0,5, максимальной возможной температуре исходной смеси и постоянной температуре в зоне реакции около 1300—1400 JC;
2) кислород и природный газ при оптимальном для реакции соотношении образуют взрывоопасную смесь с температурой воспламенения около 675"С, следовательно, для безопасного проведения технологического процесса температура предварительного подогрева должна быть равна 650°С.
* Приводится упрошенная технологическая схема процесса.
11 Киза кои и др.
313
На основании анализа технологии с учетом отмеченных выше особенностей выбираем для контроля за ходом процесса следующие основные технологические параметры (рис. 236):
1) расход природного газа (поз. 6'п);
2) расход кислорода (поз. .?«);
3) температура природного газа и кислорода ла выходе подогревателей (поз. 4а и 5п);
4) температура в смесителе (поз. 7«);
5) температура газов пиролиза па выходе реактора (поз. 9а);
6) температура газов па выходе скруббера (поз. 11а);
7) концентрация ацетилена, кислорода и природного газа в газах пиролиза (поз. 13а).
Для автоматической стабилизации процесса необходимо регулировать следующие параметры:
1) расход природного газа в соответствии с. заданной нагрузкой реактора (поз. 6а, 66, 6в, 6г);
2) расход кислорода в заданном соотношении с расходом природного газа (поз. За, 36, 6а, Зв, Зг);
3) температуру природного газа на выходе подогревателя изменением расхода газа, подаваемого в его горелку (поз. 5а, 56, 5в);
4) температуру кислорода па выходе подогревателя изменением расхода газа, подаваемого в его горелку (поз. 4а, 46, 4в);
5) температуру газа на выходе реактора изменением расхода воды (поз. 9а, 96, 9в);
6) температуру газа па выходе скруббера изменением расхода воды (поз. 11а, 115, Ив).
Кроме указанных выше основных параметров, необходимо также контролировать и регулировать ряд вспомогательных параметров:
1) давление в коллекторе природного газа (поз. 2а, 26, 2в);
2) давление в коллекторе кислорода (поз. 1а, 15, 1в);
3) уровень воды в сборнике реактора (поз. 8а, 86, 8в);
4) перепад давления в сажевом фильтре (поз. 12а, 126);
5) уровень воды в скруббере (поз. 10а, 106, 10в).
Для расчета технико-экономических показателей работы отделения пиролиза необходимо контролировать количество кислорода (поз. 35) и природного газа (иоз. 65), поступающего на пиролиз.
Контроль состава пирогазов (поз. 13а, 136, 13в, 13г) позволяет определять нарушения оптимального технологического режима, которые могут быть вызваны изменением состава исходного сырья (т. е. изменением примесей в кислороде или содержания метана в природном газе). Признаком нарушения режима является уменьшение концентрации ацетилена и увеличение концентрации метана или кислорода. Для восстановления оптимального режима необходимо изменить задание регулятора соотношения (поз. Зв).
11*
315
Безопасность проведения технологического процесса должна быть обеспечена системой аварийной сигнализации и блокировки но следующим параметрам:
1) температура в смесителе.
2) давление в коллекторах природного газа и кислорода.
Блокировка должна осуществляться отключением подачи кислорода и природного газа и продувкой системы азотом (па рис. 236 схема аварийной сигнализации и блокировки не показана).
а
Глава XVI
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТИПОВЫХ ХИМИКО-ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
§ 59. ТИПОВЫЕ ОБЪЕКТЫ АВТОМАТИЗАЦИИ ХИМИЧЕСКОЙ ТЕХНОЛОГИИ
Несмотря па огромное разнообразие технологических процессов химической промышленности, все они состоят из отдельных технологических операций, каждую из которых можно отнести к одной из следующих групп типовых процессов 1) механические; 2) гидродинамические; 3) тепловые; 4) массообменные; 5) химические (реакторные); 6) термодинамические.
В основе процессов каждой группы лежат общие физико-химические закономерности, что предопределяет значительное сходство их свойств как объектов автоматизации.Благодаря этому оказывается возможной разработка типовых схем автоматизации для объектов каждой группы на основе детального изучения их свойств и обобщения имеющегося опыта автоматизации аналогичных объектов.
Однако одного технологического признака недостаточно для типизации объектов автоматизации, так как процессы одной группы могут иметь различное аппаратурное оформление (например, сушка в барабанной сушилке или в сушилке с кипящим слоем) и, как объекты автоматизации, существенно различаться по своим свойствам. Следовательно, только сочетание двух признаков — тина технологического процесса и типа аппарата, в котором этот процесс осуществляется, полностью определяют типовой объект автоматического регулирования в химическом производстве.
Для каждого типового объекта можно разработать один или несколько вариантов систем автоматизации. В дальнейшем, при разработке принципиальной схемы автоматизации сложного технологического комплекса, как производственное отделение или цех, его следует разделить на элементарные объекты, почти каждый из которых будет иметь типовой аналог. Тогда для них можно исполь-
1 Согласно классификации, принятой в курсе «Процессы и аппараты хими-
ческой технологии».
317
зовать типовые схемы автоматизации, внеся в них необходимые изменения, отражающие индивидуальные особенности технологии или применяемой аппаратуры.
По недостатку места в дайной книге мы ограничимся следующими, получившими наибольшее распространение, типовыми объектами автоматизации химической промышленности и их СЛР: гидродинамическими ((ZAP расхода, уровня и давления); тепловыми (САР теплообменников и выпарных аппаратов); массообмеииыми (САР газовых абсорберов, ректификационных колони и барабанных сушилок) и реакторными (СЛР реакторов непрерывного и периодического действия).
Системы автоматизации большинства рассматриваемых ниже типовых объектов состоят из простых одноконтурных САР, число которых зависит от сложности объекта. Кроме того, приводится несколько примеров систем автоматизации с использованием двухконтурных (каскадных) СЛР. В большинстве случаев использованы пневматические средства автоматизации. Для нескольких САР, описанных первыми, кроме принципиальной, приводится и блок-схема, которая показывает взаимосвязь всех ее элементов в зависимости от конструкции применяемой аппаратуры. На блок-схеме показаны в виде условных изображений все элементы САР, кроме объекта регулирования, и пневматические линии связи между ними. Для отдельных элементов блок-схем приняты следующие условные обозначения:
Ф — фильтр для очистки сжатого воздуха; РЗ — ручной задатчик;
Р — редуктор сжатого воздуха; ИУ — измеритель-
ное устройство
М — манометр; ЦП — центральный
К — пробковый кран; переключа-
тель.
§ 60. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РАСХОДА И УРОВНЯ МАТЕРИАЛА
Одна из главных задач управления большинством объектов химической технологии — поддержание заданной нагрузки, которое обычно заключается в стабилизации материальных потоков на входе и выходе объекта. Поэтому система автоматизации большинства непрерывных производств включает САР расхода газов, жидкостей или сыпучих материалов. Чаще всего возникает задача регулирова-' ния расхода газа, жидкости или пара, транспортируемого по трубопроводу.
На рис. 237 показана принципиальная схема САР расхода газа, жидкости или пара с помощью дроссельного клапана. Она состоит из датчика расхода 1, вторичного измерительного прибора — рас-
318
Ходомера 2, регулятора 3, панели дистанционного управления 4 и регулирующего клапана 5. Регулирование расхода в такой системе производится путем дросселирования потока, которое зависит от степени открытия регулирующего клапана. Объектом регулирования фактически является участок трубопровода между датчиком расхода и регулирующим клапаном, который можно считать безынерционным усилительным звеном. Следовательно, динамическая характеристика заданной части данной САР определяется только динамическими свойствами датчика расхода и регулирующего органа. Для поддержания заданной величины расхода без остаточной неравномерности в САР расхода обычно применяются ПИ-регуляторы.
Рис. 238- Блок-схема САР расхода:
/ — диафрагма; 2 — дифманометр-расходомер; <У — вторичный прибор ЭПИ Д-03; 4 — регулятор типа 04: 5 — клапан дроссельного типа; 6' — мембранный исполнительный механизм; 7 — панель дистанционного управления типа ГЗПДУ1. 'I — позиционер
Рис. 237. Принципиальная схема САР расхода с помощью дроссельного клапана:
/ — датчик расхода; 2 — расходомер; 3 — регулятор; 4 — панель дистанционного управления1, 5 — регулирующий клапан
На рис. 238 показан пример реализации САР расхода жидкости с помощью серийно выпускаемой аппаратуры. Датчиком 1 служит стандартная диафрагма в комплекте с дифферепцальиым манометром-расходомером 2. В качестве вторичного прибора 3 использован прибор типа ЭПИД-03 с встроенным пневматическим регулятором 4 типа 04, а в качестве регулирующего органа — клапан 5 дроссельного типа с пневматическим мембранным исполнительным механизмом 6. Для дистанционного ручного управления работой клапана используется панель дистанционного управления 7 типа БПДУ. Если щитовое помещение, в котором находится прибор ЭПИД с регулятором, расположено па большом расстоянии от места установки регулирующего клапана, или если используется клапан с большим условным проходом, то на нем устанавливается позиционер 8, который улучшает его динамическую характеристику (т. е. уменьшает инерционность и запаздывание в цепи распространения пневматического сигнала от регулятора до регулирующего органа).
319
САР давления жидкости, пара или газа, транспортируемого по трубопроводу (рис. 239), имеет много общего с САР расхода, так
схема САР давления:
I — отборное устройство; 2 — манометр с регулятором; 3 — панель дистанционного управления; 4 — регулирующий клапан
как объекты регулирования в обоих случаях обладают одинаковыми свойствами. Отличие заключается только в аппаратурном оформлении: в качестве датчика используется отборное устройство давления 1, а в качестве измерительного прибора 2 — манометр со встроенным регулятором.
На рис. 240 показана в качестве примера блок-схема САР давления газа в трубопроводе, в которой использован поплавковый самопишущий манометр 1
с встроенным пневматическим регуля-тором 2 типа 04, байпасная панель дистанционного управления 3 и регулирующий клапан с пневмоприводом 4.
Иногда для регулирования давления в трубопроводах пара, сжатого воздуха и других сред применяют П-регуляторы прямого
действия. При отсутствии резких и значительных но амплитуде
Рис. 240. Блок-схема САР давления:
/ — поплавковый самопишущий манометр; 2 — регулятор типа 04; 3 — бай паевая панель дистанционного управления', 4 — регулирующий! кла паи с пневмоприводом
Рис. 241. Принципиальная схема САР расхода сыпучего материала:
/ — весоизмерительный датчик;
2 — измерительный прибор; 3— регулятор; 4 — исполнительный механизм; 5 — регулирующий орган; б — ленточный транспортер
возмущений они обеспечивают хорошее качество регулирования благодаря минимальной инерционности контура регулирования.
САР расхода сыпучего материала (рис. 241) обычно состоит из весоизмерительного датчика расхода 1, совмещенного с ленточным
320
Рис. 242. Принципиальная схема САР соотношения расходов:
/, 2 — датчики расхода; 4 — измерительные приборы; 5 -- регулятор соотпошспия; б — регулятор расхода; 7,8 — регулирующие клапаны
транспортером 6, вторичного измерительного прибора 2, регулятора 3, исполнительного механизма 4 и регулирующего органа 5. Регулирование расхода в такой САР заключается в изменении степени загрузки ленточного транспортера весоизмерительного датчика, которое осуществляется регулирующим органом ио сигналу регулятора.
Объектом регулирования является ленточный транспортер весоизмерительного датчика, на котором в каждый момент времени должно находиться заданное количество (по весу) транспортируемого материала (при постоянной скорости перемещения ленты). Возмущением для этого объекта является изменение расхода материала, поступающего на лепту через регулирующий орган 5, т. е. изменение нагрузки. Состояние равновесия соответствует равенству расходов материала на входе и выходе транспортера. Как объект регулирования расхода ленточный транспортер весоизмерительного датчика является астатическим объектом, поэтому для устойчивого его регулирования без остаточных отклонений следует применять ПИ-регуляторы.
При управлении многими объектами (реакторами, топками и т. д.) возникает задача регулирования в определенном соотношении расходов нескольких потоков. На рис. 242 показана принципиальная схема САР соотношения расходов двух потоков. Датчик расхода 1 измеряет величину расхода заданного (основного) потока, а датчик 2 — величину расхода регулируемого потока. Вторичные измерительные приборы 3 и 4 преобразуют измеряемые значения расходов в унифицированные выходные сигналы, которые поступают в регулятор соотношения 5. Выходной сигнал регулятора соотношения воздействует на регулирующий клапан 7, установленный на трубопроводе регулируемого потока. В некоторых случаях расход задающего потока автоматически стабилизируется, для чего служит регулятор б и регулирующий клапан 8, установленный на трубопроводе задающего потока.
На рис. 243 показана блок-схема САР соотношения расходов, спроектированная с использованием датчиков, измеритель
321
ных приборов и регулятора АУС. Опа работает следующим образом.
Расход регулируемого потока измеряется с помощью диафрагмы (на схеме не показана) и дифманометра ДМ. Расход задающего (основного) потока измеряется ротаметром РП с пневмовыходом. В качестве регулятора соотношения используется блок РБС-1М, который может работать при условии применения датчиков с оди-
Рис. 243. Блок-схема САР соотношения:
I — вторичный прибор липа ЗРЛ-29В; // — вторичный прибор типа 1РЛ-29А; III — регулирующим блок РБС-1М
маковыми характеристиками. Однако у ротаметра характеристика линейная, а у диафрагмы — квадратичная. Поэтому для линеаризации сигнала расхода регулируемого потока, получаемого от диафрагмы, применяется функциональный блок типа БФ-1, который выполняет операцию извлечения квадратного корпя из выходного сигнала дифманометра ДМ. С выхода блока БФ-1 пневматический сигнал поступает к вторичному прибору / типа ЗРЛ-29В и одновременно через центральный переключатель к регулирующему блоку Ill типа РБС-1М в качестве регулируемой переменной.
Пневматический сигнал, пропорциональный расходу задающего потока, с выхода ротаметра РП подается на вторичный прибор //
322
типа 1РЛ-29А и параллельно через трехходовой кран в камеру задания блока РБС-1М.
Выходной сигнал регулятора соотношения подается к пневматическому исполнительному механизму регулирующего клапана, установленного на трубопроводе регулируемого потока. Одновременно он поступает к вторичному прибору ЗРЛ-29В и фиксируется на .одной из его шкал.
Применение крана К позволяет в случае необходимости использовать эту САР как стабилизирующую. Для этого пробка крана поворачивается на 90" и в камеру задания блока РБС-1М подается сигнал от ручного задатчика, встроенного в прибор ЗРЛ-29В. Значение этого сигнала измеряется на соответствующей шкале того же при бора.
Системы регулирования уровня распространены так же широко, как САР расхода и давления. Требования, предъявляемые к САР уровня, различны в зависимости оттого, является уровень основным или вспомогательным регулируемым параметром. Например, уровень раствора в выпарном аппарате является основным параметром в системе автоматизации процесса выпарки, так как от него зависит тепловой и гидродинамический режим работы аппарата. В этом случае САР должна обеспечить максимальную точность регулирования уровня.
Примером объекта, в котором уровень является вспомогательным параметром, может служить расходная (буферная) емкость. Основная ее задача — обеспечение заданного расхода жидкости на выходе независимо от возмущений по расходу на входе или выходе. В этом случае к точности САР уровня не предъявляются высокие требования, так как при постоянном уровне емкость не будет выполнять главной своей функции — сглаживать возмущения по расходу.
В большинстве случаев уровень регулируется путем изменения расхода жидкости на входе или выходе объекта регулирования с помощью дроссельных регулирующих клапанов пли насосов переменной производительности. Второй способ применяется редко, поэтому в дальнейшем он не рассматривается.
Выбор способа регулирования уровня зависит от назначения аппарата: если необходимо обеспечить .заданный расход жидкости на его выходе, то уровень регулируется путем изменения расхода на входе аппарата (рис. 244); если аппарат должен принять весь расход жидкости, поступающей на его вход, то уровень регулируется путем изменения расхода на выходе.
Объект регулирования уровня .изображенный на рис. 244, а, является статическим, а показанный па рис. 244, б — астатическим. Выбор типа регулятора уровня и его настроек зависит от назначения и свойств объекта регулирования и требуемой точности поддержания уровня.
Для регулирования уровня в буферных емкостях широко применяются позиционные САР. На рис. 245 показана принципиальная
323
схема такой системы, которая состоит из объекта 1, электронного сигнала уровня 2 типа ЭСУ-2 с двумя емкостными датчиками 3 и 4, установленными иа заданных отметках верхнего и нижнего уровня, и электромагнитного клапана 5, который установлен на входном
Рис. 244. Принципиальные схемы САР уровня изменением расхода на входе аппарата
трубопроводе. Когда уровень жидкости в емкости 1 достигает верхнего допустимого значения, сигнализатор 2 закрывает клапан 5. При снижении уровня до нижнего допустимого значения клапан открывается.
Рис. 245. Принципиальная схема позиционной СЛР уровня:
/ — объект; 2 — электронный сигнализатор уровня ЭСУ-2; .3, 4 — емкостные датчики; 5 — электромагнитный клапан
] — поплавковый регулятор уровня;
2 — регулирующий клапан; .3 — байпасная панель дистанционного управ-
лени я
В более ответственных случаях применяются П-регуляторы. Если при этом уровень служит основным регулируемым параметром и требуется высокая точность его стабилизации, то регулятор настраивается на возможный меньший предел пропорциональности (большой коэффициент усиления). При этом статическая погрешность регулирования будет незначительной. Если же уровень является вспомогательным параметром, а главная задача аппарата, в котором он регулируется, состоит в сглаживании колебаний расхода,
324
то нужно настраивать регулятор на большой предел пропорциональности.
На рис. 246 показана блок-схема САР уровня с использованием поплавкового пневматического П-регулятора. Датчик, измерительное устройство п регулятор конструктивно объединены в одно устройство 1, которое крепится па аппарате. Пневматический регулирующий клапан 2 установлен на выходном трубопроводе. Для перехода на ручное управление служит байпасная панель 3.
Если при работе объекта возможны значительные изменения нагрузки, а по требованиям технологии остаточная неравномерность регулирования недопустима, то в СЛР уровня применяют ПИ-регуляторы.
В предыдущих примерах были рассмотрены наиболее распространенные варианты аппаратурного оформления простых СЛР, поэтому в дальнейшем будут приводиться только принципиальные схемы систем автоматизации.
§ 61. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕПЛОВЫХ ПРОЦЕССОВ
Из тепловых процессов химической технологии наиболее распространены теплообменные процессы. Передача тепла может осуществляться с помощью радиации, смешивания холодного и нагретого потоков, а также в теплообменниках через стенки. Для химической технологии характерны главным образом два последние метода.
Тепловые объекты регулирования обладают, как правило, значительной инерционностью и запаздыванием. Кроме того, датчики температуры, применяемые в промышленных условиях (манометрические термометры, термопары и термометры сопротивления), также обладают гораздо большей инерционностью, чем датчики расхода, давления и уровня. Особенно ухудшаются динамические характеристики этих датчиков в случае использования защитных чехлов при контроле температуры агрессивных сред. Поэтому САР температуры обладают большой инерционностью, а переходные процессы в них отличаются большой продолжительностью. Для регулирования теплообменных процессов обычно применяют ПИ-регуляторы.
: Из теплообменной аппаратуры наиболее распространены различные типы трубчатых теплообменников. Задача управления теплообменными процессами в таких аппаратах заключается в регулировании величины теплового потока, передаваемого от теплоносителя (или хладагента) к нагреваемому (охлаждаемому) веществу через стенку трубы. Из возможных способов изменения теплового потока наибольшее распространение получил метод регулирования расхода теплоносителя (или хладагента) в зависимости от изменения температуры выходящего из теплообменника нагреваемого (или охлаждаемого) потока (рис. 247).
325
В некоторых случаях применяют другую схему регулирования (рис. 253): часть потока минует теплообменник, проходя по байпасу, на котором установлен регулирующий клапан. В зависимости от температуры смеси на выходе теплообменника регулятор изменяет расход по байпасу с помощью регулирующего клапана.
Рис. 247. Принципиальные схемы САР теплообменников
Весьма распространена задача регулирования температуры в реакторах с перемешиванием. Для этого обычно используются змеевиковые теплообменники (рис. 248, а) или теплообменники типа рубашки (рис. 248, б). Температура регулируется путем изменения
расхода теплоносителя или хладагента в зависимости от темпера-
туры в реакторе (рис. 248). В некоторых случаях, когда установка датчика температуры на аппарате невозможна, регулирование осуществляют по температуре теплоносителя на выходе из теплообменника (рис. 248, б).
Как объекты регулирования температуры, реакторы обладают значительной инерционностью и запаздыванием.
а) *)
Рис. 248. Принципиальные схемы САР темпе-ратуры реакторов, снабженных теплообмен никами
Поэтому удовлетворительное качество регулирования в большинстве случаев может быть достигнуто только с помощью 1114-регуляторов.
Автоматическое регулирование процесса выпаривания. Выпаривание — типичный процесс химической технологии. Его сущность состоит в испарении части растворителя и увеличении благодаря этому концентрации упариваемого раствора. Задача управления выпарной установкой заключается в поддержании ее материального
126
и теплового баланса и получении упаренного раствора заданном концентрации.
Основные элементы простой выпарной установки (рис. 249) — теплообменник I, в котором исходный раствор нагревается до температуры кипения, выпарной аппарат II (или несколько аппаратов, соединенных последовательно) и барометрический конденсатор III.
Материальный баланс установки поддерживается путем сохранения равенства между количеством растворенного вещества, поступающим с исходным раствором, и его количеством, выводимым с отходящим раствором. Обычно в выпарных аппаратах материальный баланс поддерживается регулятором уровня 2, воздействующим
Вторичный, пар
Рис. 249. Принципиальная схема автоматизации простой выпарной установки:
/ — теплообменник; // — ныпарноп аппарат; /// — баромсгри-чесани конденсатор; /, J — регуляторы давления-, 1— регулятор уровня; 4 ~ регулятор концентрации
на расход раствора, посту чающего в аппарат. Такая схема позволяет стабилизировать уровень в каждом из последовательно работающих аппаратов.
При небольших возмущениях по расходу в качестве регулятора уровня можно использовать П-регуляторы, настроенные на малый' предел пропорциональности. Если возможны большие возмущения, то для регулирования уровня следует применять ПИ-регуля-тор.
Наиболее сложной является задача регулирования концентрации упаренного раствора. Обычно регулятор концентрации 4 воздействует на клапан, который изменяет расход упаренного раствора на выходе из аппарата (или на выходе из последнего выпарного аппарата батареи). Если концентрация уменьшается по сравнению с заданным значением, то клапан уменьшает расход готового раствора. При этом возрастает время пребывания раствора в аппарате п, следовательно, концентрация его у величивается. Если концепт-
327
рация превышает заданную величину, то происходят обратные процессы.
Как объект регулирования концентрации, выпарная установка обладает большой инерцией и запаздыванием. Так, по каналу воздействия «давление греющего пара — концентрация» или «давление в аппарате — концентрация» обобщенная постоянная времени в зависимости от типа выпарного аппарата и его нагрузки составляет от 30 до 100 мин *. Поэтому в качестве регуляторов концентрации целесообразно использовать ПИ-регуляторы.
Измерение концентрации упаренного раствора может1 выполняться электрокондуктометрическнм методом, по плотности раствора или пс величине его температурной депрессии.
Для стабилизации процесса выпаривания необходимо поддерживать постоянное давление в линии греющего пара, поступающего в теплообменник / и греющую камеру выпарного аппарата, что осуществляется регулятором давления /. Кроме того, необходимо поддерживать заданное разрежение в аппарате, что достигается регулированием расхода охлаждающей воды, поступающей в барометрический конденсатор ///, с помощью регулятора 3.
§ 62. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАССООБМЕННЫХ ПРОЦЕССОВ
В химической технологии многочисленную группу составляют массообменные процессы, из которых наиболее распространены газовая абсорбция, ректификация (дистилляция) и сушка. Для этих процессов характерны значительная инерционность и запаздывание, так как фактически технологический процесс складывается из гидродинамического процесса перемещения потоков вещества, процессов теплопередачи и массонередачи. Инерционность и запаздывание проявляются особенно сильно в технологических аппаратах больших размеров, которыми преимущественно оснащено современное крупнотоннажное химическое производство.
Важно знать, что условия для протекания массообменного технологического процесса в разных частях аппарата оказываются существенно различными п для получения точной математической' модели эти различия необходимо учитывать. Поэтому динамические характеристики абсорберов, сушилок, ректификационных колонн и тому подобных объектов регулирования описываются дифференциал!.пыми уравнениями в частных производных. Для практических целей автоматизации такую модель обычно сильно упрощают, усредняя условия протекания процесса в разных частях рабочего объема аппарата и переходя, таким образом, к типовым линейным моделям объектов.
* См. К. о л а ч Т. Л., Р а д у и Д. В. Выпарные станции. Машгиз, 1963, стр. 338.
328
Автоматическое регулирование процесса газовой абсорбции. Сущность процесса состоит в поглощении (растворении) одного или нескольких компонентов из исходной газовой смеси специальным растворителем (абсорбентом). Цель этого процесса — утилизация абсорбируемой части газового потока либо очистка от нее исходного потока. При постановке первой задачи конкретной целью процесса абсорбции является получение на выходе абсорбера рабочего раствора заданной концентрации (например, получение соляной кислоты заданной крепости при абсорбции газообразного хлористого водорода водой). При постановке второй задачи главная цель процесса абсорбции заключается в достижении заданной степени очистки газовой смеси от определенного компонента, которая характеризуется допустимой остаточной концентрацией его в газовой смеси па выходе из абсорбера. Условия протекания процесса абсорбции зависят от температуры, давления и соотношения расходов абсорбента и поглощаемого компонента газового потока.
Основными возмущениями для рассматриваемого процесса являются изменение нагрузки абсорбера по поглощаемому компоненту газовой смеси (вследствие изменения его концентрации в исходной' смеси или вследствие изменения ее расхода), а также изменения давления и температуры в аппарате. Изменение нагрузки является главным возмущением; оно приводит к нарушению материального баланса аппарата, в результате чего изменяется
концентрация целевого продукта. Изменения температуры и давления влияют на скорость процесса абсорбции (величину коэффициента массопередачи) и в конечном итоге приводят к тем же последствиям.
Таким образом, задача системы управления процессом абсорбции состоит в поддержании заданных оптимальных значений температуры и давления в аппарате и поддержании его материального баланса по поглощаемому компоненту газовой’ смеси.
Назовем теперь основные регулируемые параметры абсорбера: расход газа и рабочего раствора, температура в рабочей зоне, давление в аппарате, концентрация рабочего раствора или концентрация поглощаемого компонента в газовом потоке на выходе из аппарата.
Для стабилизации давления (рис. 250) используется регулятор /, который воздействует па клапан, установленный на линии отходящего газа. В большинстве случаев изменения давления в
Рис. 250. Принципиальная схема автоматизации г5 сорб ера:
/ — регулятор давления; 2 — регулятор концентрации; ,7 — регулятор уровня
329
аппарате при нормальном режиме работы бывают вызваны утечками газа. Следовательно, возмущения для СЛР давления монотонны и незначительны по амплитуде. Поэтому в качестве регулятора давления можно применять П-регулятор.
Заданная температура в абсорберах насадочного и тарельчатого тина поддерживается посредством стабилизации температуры абсорбента на входе в аппарат. Обычно изменения температуры н рабочей зоне аппарата незначительны п ее автоматическое регулирование не требуется.
Рис. 251. Принципиальная схема автоматизации абсорбера с. использованием двухкоптуриой СЛР концентрации рабочего раствора:
! — регулятор расхода; 2 — регулятор концентрации; 3 -- регулятор уровня
Рис. 252. Принципиальная схема двтом'шгпцпи абсорбера с использованием комбинированной двух-контурион САР концентрации рабочего раствора:
/ — регулятор соотношения', 2 -- регулятор концентрации; 3 — регулятор уровня
При автоматизации абсорберов основной является СЛР концентрации. Ге задача состоит в поддержании материального баланса объекта по поглощаемому компоненту путем изменения расхода абсорбента. На рис. 250 показана схема одноконтурной САР концентрации рабочего раствора, в которой регулятор 2 изменяет расход абсорбента в зависимости от показаний концептратомера рабочего раствора. При этом возникает необходимость в поддержании материального баланса абсорбера по рабочему раствору, что достигается применением регулятора уровня ,3, установленного в нижней части аппарата. При изменении расхода абсорбента в процессе регулирования концентрации регулятор 2 изменяет расход рабочего раствора на выходе из абсорбера, поддерживая уровень постоянным.
Абсорбер, как объект регулирования, по каналу «расход абсорбента —- концентрация» обладает значительной инерционностью и запаздыванием, в особенности у крупногабаритных аппаратов насадочного и тарельчатого типа. Поэтому описанная простая схема
330
регулирования концентрации не всегда обеспечивает требуемое качество регулирования. В этих случаях (рис. 251) расход абсорбента стабилизируется регулятором расхода 1, задание которому устанавливает корректирующий регулятор 2 в зависимости от кон-
центрации рабочего раствора на выходе абсорбера. Назначение ре-
гулятора 3 то же, что п в схеме на рис. 250.
При частых и значительных возмущениях по расходу и составу
исходной газовой смеси может оказаться целесообразным применение комбинированной САР. На рис. 252 показан один из вариан-
тов такой системы, рассчитанной расходу газа. Главный ее элемент— регулятор соотношения /, который устанавливает расход абсорбента в зависимости от расхода газовой смеси. Регулятор концентрации 2 изменяет задание (величину соотношения) регулятору соотношения в зависимости от концентрации готового раствора (регулятор 3 поддерживает уровень рабочего раствора постоянным).
Если целью процесса абсорбции является извлечение определенного компонента из исходной газовой смеси до заданной конечной концентрации (в про-
ча компенсацию возмущений по
1
Pirc. 253. Слема простой ректификационной установки:
цессах газоочистки), то основным регулируемым параметром является остаточная концентра-
/ — емкость исходной смеси; 2 — теплообменник; .3 — рсктпфи кацноипгтя voJionna;
I —- кипятильник; .5 — конденсатор; 6 — флегмовая емкость
ция извлекаемого компонента в
отходящей газовой смеси. Все описанные выше схемы автоматизации газовых абсорберов могут быть использованы и в этом случае, только вместо регулятора концентрации готового раствора используется регулятор концентрации отходящего газа.
Автоматическое регулирование процесса ректификации — одна из наиболее сложных задач, возникающих при автоматизации химических производств. Это объясняется сложным характером технологического процесса, взаимной зависимостью основных регулируемых параметров, а также большой инерционностью и запаздыванием, присущим ректификационным колоннам, как объектам регулирования.
Типовая установка для ректификации двухкомионентпои смеси (рис. 253) состоит из емкости исходной смеси /, теплообменника 2, в котором исходная смесь подогревается до температуры кипения, ректификационной колонны 3 с кипятильником 4 конденсатора 5 н флегмовой емкости 6. Задача управления процессом ректи
331
фикации заключается в получении продуктов разделения (дистил-лата и кубового остатка) определенной чистоты при заданной производительности установки и минимальном расходе греющего пара.
Основными возмущающими воздействиями для колонны являются изменения состава, расхода и температуры питания, давления в колонне и давления в линии греющего пара.
Воздействие некоторых из перечисленных факторов на процесс ректификации можно устранить или значительно уменьшить с помощью локальных систем автоматического регулирования. По отношению к главному объекту регулирования — колонне — эти САР являются «внешними» и не
оказывают влияния на процессы регулирования в колон-не (рис. 254).
Расход исходной смеси, поступающей в колонну, можно стабилизировать при наличии буферной емкости, которая аккумулирует колебания расхода на входе ректификационной установки. Для этого применяется регулятор расхода 1. Если буферная емкость, па входе установки отсутствует, то колебания расхода питания колонны устранить невозможно.
Рис. 254. Схемы САР расхода и температуры исходной смеси:
1 — регулятор расхода; 2 — регулятор температуры; 3 — регулятор давления греющего пара
Температура исходной смеси автоматически стабилизируется регулятором 2, который воздействует па расход пара, подаваемого в теплообменник.
Давление в линии греющего пара регулируется с помощью регулятора давления 3.
Существенно влияет на ход процесса ректификации давление в колонне, поэтому его необходимо стабилизировать. Давление изменяется ио высоте колонны и в разных точках отличается на величину гидравлического сопротивления участка, расположенного между данными точками. В большинстве случаев гидродинамический режим процесса ректификации остается достаточно стабильным и гидравлическое сопротивление можно считать постоянным. Поэтому достаточно стабилизировать давление в одной точке, например, в. верхней части колонны.
Способ регулирования давления в колонне зависит от принятой технологии: если нары пизкокипящего компонента полностью конденсируются, то давление в колонне регулируется изменением подачи охлаждающей воды в конденсатор (рис. 255, а). Если же часть паров отводится нескондепсырованнымп или если из колонны отводятся инертные газы, то регулирование давления осуществляется
332
путем изменения расхода пара или газа на выходе из флегмовой емкости (рис. 255, б).
Для устойчивой работы колонны необходимо поддерживать ее материальный баланс, т. е. равенство питания п суммы расходов дистиллата и кубового продукта. При стабилизированном питании
Рис. 255. Схемы САР давления в ректификационной колонне
это достигается стабилизацией расхода одного из продуктов и регулированием расхода второго так, чтобы их сумма оставалась постоянной. Одновременное регулирование расходов обоих продуктов недопустимо.
В качестве примера на рис. 256 показаны две схемы автоматизации колонны, удовлетворяющие этому условию. В первой схеме
Рис. 256. Принципиальные схемы автоматизации, обеспечивающие поддержание материального баланса ректификационной колонны
(рис. 256, а) расход кубового продукта стабилизирован САР расхода, а расход дистиллата регулируется по уровню во флегмовой емкости. При этом уровень кубового остатка в сборнике колонны регулируется путем изменения расхода пара, подаваемого в кипятильник. Во второй схеме (рис. 256, б) используется САР расхода дистиллата, а расход кубового продукта регулируется по уровню в сборнике колонны. Для поддержания материального баланса
333
флегмовой емкости в эту схему введен регулятор уровня, воздействующий на расход флегмы.
Наиболее сложной задачей является автоматическое регулирование состава готовых продуктов разделения. Трудности обусловлены взаимной зависимостью составов дистиллята и кубового продукта, а также большой инерционностью объекта регулирования (обобщенная постоянная времени по каналу «состав питания — состав продукта» у колони разных типов составляет 60—180 мин).
Как правило, автоматически регулируется состав только одного продукта. Если необходимо обеспечить заданную чистоту дистиллята, то датчик состава устанавливают в верхней части колонны или па линии отбора дистиллята, и регулятор состава / воздействует па клапан, установленный па линии подачи флегмы на ороше
Рис. 257. Принципиальные схемы автоматизации «верха» ректификационной колонны ,обеспечивающие регулирование состава легкокипящего продукта:
/ -- регулятор концентрации; 2 — регулятор уровня
ние колонны (рис. 257, а). Для поддержания материального баланса флегмовой емкости отбор готового продукта из нее поддерживается регулятором уровня 2.
Возможно использование и другой схемы (рис. 257, б): регулятор состава 1 воздействует па отбор дистиллята из флегмовой емкости, а регулятор уровня 2 воздействует на расход флегмы.
Если основным целевым продуктом разделения является высоко-кипящий компонент, то датчик состава устанавливается в нижней части колонны или на линии отбора кубового продукта, а регулятор состава воздействует на отбор готового продукта. При этом расход пара з кипятильник колонны регулируется по уровню в сборнике кубового продукта (рис. 258, а).
При другом варианте схемы (рис. 258, б) регулятор состава воздействует на расход пара в кипятильник, а отбор кубового продукта производится по уровню в сборнике колонны.
Если имеются надежные датчики состава, регулирование качества готовых продуктов можно производить непосредственно по их составу. Для этого могут быть использованы анализаторы, основанные. на измерении упругости паров и температурной депрессии, а
334
также автоматические плотномеры, рефрактометры и хроматографы. Однако надежность и точность этих приборов в ряде случаев еще недостаточны. Поэтому гораздо чаще регулирование состава продуктов ректификации производя гея ио косвенному параметру — температуре в верхней или нижней части колонны. Применение этого метода основано на однозначной зависимости температуры кипения бинарной смеси от ее состава при постоянном давлении. В случае применения этого метода особенно высокие требования предъявляются к точности регулирования давления в колонне. Измерение температуры производится на одной из тарелок (контрольная тарелка), па которой изменение состава жидкости вызывает наибольшее изменение температуры. Контрольную тарелку выбирают по данным анализа статической характеристики колонны.
Рис. 258. Принципиальные схемы анюматшации «низа» ректификационной колонны, обеспечивающие регулирование состава высококп нищего продукта
Схемы САР состава дистиллята и кубового продукта по температуре аналогичны схемам, изображенным на рис. 257 и 258, с заменой датчика состава на датчик температуры.
Необходимо учитывать, что точность измерения, а значит и регулирования, состава по температуре невысока и зависит от многих факторов. Например, присутствие в исходной смеси незначительных примесей компонентов с более низкой температурой кипения, чем дистиллят, может привести к большим погрешностям измерения состава верхнего продукта по температуре в верхней части колонны. Кроме того, поддержание постоянного состава жидкости па контрольной тарелке еще не гарантирует получение готового продукта заданной чистоты, в особенности если контрольная тарелка находится далеко от верхней (или нижней) тарелки. Поэтому наиболее совершенными являются двухконтурные САР состава продуктов, в которых задание регулятору температуры изменяет корректирующий регулятор в зависимости от состава готового продукта, контролируемого автоматическим анализатором.
Такне схемы обладают высокой надежностью, так как датчиком внутреннего контура регулирования служит термометр и при выходе из строя автоматического анализатора состава САР может продолжать функционировать как одноконтурная. С другой сто-
335
роны, наличие корректирующего контура с автоматическим анализатором позволяет увеличить точность регулирования состава готового продукта.
Автоматизация процесса сушки. В химической промышленности широкое распространение получили барабанные сушилки, основные узлы которых (рис. 259): топка /, вращающийся барабан 2, загрузочное устройство, разгрузочный бункер 3 и циклон 4.
Рис. 259. Принципиальная схема автоматического регулирования процесса сушки в барабанной сушилке:
/ -- топка; 2 — вращающийся барабан; 3 — разгрузочный бункер; 4 — циклон; 5 — дымосос
В топке расположена горелка, к которой подводятся топливо и воздух. Топочные газы смешиваются с вторичным воздухом в смесителе топки и поступают в барабан, где отдают свое тепло на испарение влаги из материала. На выходе из печи газы попадают в циклон 4, из которого дымососом выбрасываются в атмосферу. Влажный материал из загрузочного бункера подается в переднюю часть барабана 2, где благодаря вращению последнего перемешивается и перемещается. Из барабана высушенный материал попадает в разгрузочный бункер.
Задача управления данным процессом заключается в получении материала заданного качества (остаточной влажности) при заданной производительности установки. Главными возмущениями для <!36
него являются изменение расхода н влажности материала на входе сушилки, а также изменение начальной температуры и расхода теплоносителя. Из перечисленных возмущений расход материала и начальная температура теплоносителя могут быть относительно просто стабилизированы. Следовательно, основным возмущением будет изменение влажности материала на входе, а в качестве регулирующего воздействия целесообразно использовать изменение рас
хода теплоносителя.
Наиболее сложная задача при автоматизации барабанной сушилки — это выбор основного регулируемого параметра. Существу
Нис. 2G0. Графики распределения влажности (кривая Г) и температуры теплоносителя (кривая 2) по длине барабанной сушилки юактепизует качество готового
процесса в качестве регулируемого'параметра лучше всего соответствует остаточная влажность материала. Однако недостаточная, в ряде случаев, надежность датчиков влажности для большинства сыпучих материалов, наряду с большим запаздыванием объекта, не позволяет вести регулирование по этому прямому показателю качества.
Исследование статической характеристики барабанной сушилки показало, что распределение температуры теплоносителя по длине барабана с достаточной точностью соответствует абсолютной влажности материала (рис. 260). Следователь-нЬ, в качестве регулируемого параметра, который косвенно
продукта, можно выбрать температуру теплоносителя.
; Выбор точки для ее замера можно сделать на основании следующих соображений. Изменения начальной влажности вызывают наибольшее изменение температуры теплоносителя на начальном участке барабана, в пределах которого процесс сушки протекает особенно интенсивно. Следовательно, для повышения чувствительности САР целесообразно измерять температуру теплоносителя в одной из точек начального участка. Кроме того, в этом случае уменьшается запаздывание в цепи регулирования.
! Вернемся к показанной на рис. 259 принципиальной схеме автоматического регулирования процесса сушки в барабанной сушилке, которая работает следующим образом.
! Подача влажного материала в сушилку стабилизируется САР расхода, которая состоит из ленточного весового дозатора 6а, вторичного прибора с регулятором 66 и тарельчатого питателя 6в с регулируемой скоростью вращения, выполняющего функции регулирующего органа.
337
Рис. 261. Схема токосъем-
ного устройства:
! — барабан; 2 — контактное КОЛЫ),О', 3 — изоляторы, 7 — токосъемники; 5 — груз
Разрежение в топке
Начальная температура теплоносителя регулируется САР, которая состоит из термопары 8а, электронного потенциометра 86 с регулятором и клапана 8в на линии подачи вторичного воздуха в смеситель топки 1.
Основной является САР температуры теплоносителя в контрольной точке барабана. Для ее измерения используется термопара 7а, смонтированная па вращающемся барабане. Для передачи ее т. э д. с. к вторичному прибору 76, установленному на щите управления, используется специальное токосъемное устройство, схема которого показана па рис. 261. Оно состоит из двух контактных колец, .закрепленных па внешней поверхности барабана па изоляторах. К каждому кольцу присоединен один термоэлектрод термопары. По поверхности колец скользят щетки-токосъемники, прижимаемые к ним грузами-противовесами. Щетки присоединены к входу электронного потенциометра 76 (рис. 259), регулятор которого воздействует на клапан 7в, установленный на трубопроводе подачи топлива к горелке.
Расход воздуха, поступающего в горелку, регулируется САР соотношения «воздух — топливо», которая состоит из датчиков расхода 9а и 96, регулятора соотношения 9в и регулирующего клапана 9г.
через отборное устройство 10а измеряется
вакуумметром 106 и регулируется регулятором 10в, который воздействует па привод Юг дымососа 5.
Регулирование процесса сушки по косвенному параметру, каким является температура теплоносителя, не может гарантировать высокой точности, поэтому приходится периодически корректировать задание основному регулятору 76 по результатам анализа влажности сухого продукта.
При наличии автоматического влагомера, пригодного для измерения влажности данного продукта, можно усовершенствовать описанную выше систему, введя автоматическую коррекцию задания регулятору 76, по показаниям влагомера (датчик lie, вторыч ный прибор с регулятором 116).
§ 63. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РЕАКТОРНЫХ ПРОЦЕССОВ
Основу большинства химико-технологических процессов составляют реакторные процессы, в ходе которых сырье и реагенты превращаются в новые химические продукты. Главными показателями, которые характеризуют реакторный процесс, являются скорость
338
реакции и степень превращения сырья и готовый продукт. Задала управления заключается в поддержании оптимальных значений этих показателей, обеспечивающих получение продукта заданного качества при максимальной производительности реактора и минимальных затратах.
Скорость реакции зависит от температуры и давления в реакторе, от концентрации реагирующих вещеетн и активности или концентрации катализатора. Следовательно, каждый' из перечис-леч пых факторов может быть использован в качестве управляющего воздействия па реакторный процесс.
^Температура для большинства процессов и наиболее чувствительный индикатор и наиболее сильное возмущение. Поэтому в состав системы автоматизации реактора, как правило, входит САР техпературы. Реализация САР зависит от характера процесса и его аппаратурного оформления. В реакторе с мешалкой и теплообменником температура регулируется путем изменения расхода хладагента (см. § 61). Благодаря хорошему перемешиванию в таких реакторах температура распределяется равномерно, поэтому датчик САР может быть установлен в любой подходящей точке.
При некоторых экзотермических реакциях с большим температурным коэффициентом скорости реакции в случае превышения определенной температуры скорость тепловыделения становится больше максимальной возможности теплоотвода реактора; тогда в нем быстро возрастает температура, что может привести к аварии. В подобных случаях особенно высокие требования предъявляются к точности САР температуры, а безопасность проведения технологического процесса обеспечивается применением системы автоматической блокировки реактора по температуре.
Большинство реакторных процессов, протекающих в газовой фаре, осуществляется в трубчатых реакторах. Температура в них изменяется по длине и достигает максимума в определенной зоне, которая называется горячей точкой. В таких реакторах температуру регулируют по температуре горячей точки. Положение горячей точки определяется по статической характеристике реактора, и вблизи от нее размещается карман для установки датчика САР температуры.
. В трубчатых реакторах, снабженных теплообменником, температура регулируется так же, как и в реакторах с мешалкой — путем изменения расхода хладагента в зависимости от регулируемой температуры.
i Распространенный способ регулирования температуры в газовых реакторах заключается в изменении температуры исходной см|еси посредством регулирования соотношения расходов «горячего» и «холодного» потока (рис. 262). Типичным примером служит САР температуры в колонне синтеза аммиака. Регулирование осуш,еств-
339
Рис. 262. Принципиальная схема САР температуры в трубчатом реакторе изменением расхода «холодного» потока:
/ — колонна; 2 —тенлообменншч
ляется подачей части азото-водороднои смеси в зону реакции колонны 1 но «холодному байпасу», минуя теплообменник 2.
Для многих химических производств основную часть себестоимости получаемых продуктов составляет стоимость сырья и реагентов. Поэтому одним из главным источников повышения рентабельности таких производств является автоматизация дозирования сырья и реагентов с целью приближения расходных коэффициентов к теоретическим или полученным в лабораторных условиях. С этой точки зрения весьма эффективно применение регуляторов соотношения. Такой регулятор при изменениях нагрузки реактора поддерживает заданное соотношение расходов реагирующих веществ, например, близкое к стехиометрическому, и благодаря этому уменьшает их потери.
Если САР обеспечена надежным датчиком состава готового продукта, можно регулировать ход реакторного процесса по этому прямому показателю. Датчик САР состава может быть установлен на выходном трубопроводе или непосредственно в реакторе. Первый способ дает более точную информацию о качестве готового продукта, однако при этом увеличивается запаздывание контура урегулирования. В случае установки датчика непосредственно в реакторе быстродействие САР возрастает, но несколько снижается точность ре
гулирования состава. Погружной датчик должен находиться в зоне интенсивного перемешивания, чтобы его показания возможно точнее характеризовали средний состав среды в реакторе.
При прямом регулировании состава готового продукта чаще всего применяются два варианта САР: в первом варианте регулятор воздействует на изменение расхода одного из реагентов, а во втором — на изменение расхода готового продукта, т. е. на изменение времени пребывания реагентов в зоне реакции.
В тех случаях, когда надежность датчика состава готового продукта недостаточна или если датчик вносит слишком большое запаздывание в контур регулирования, более целесообразно применение двухконтурной САР состава, в которой датчик входит во внешн ий контур.
Например, дозирование реагентов осуществляется САР соотношения, задание которой устанавливает корректирующий регулятор состава.
340
§ 64. СИСТЕМЫ АВТОМАТИЗАЦИИ ПЕРИОДИЧЕСКИХ ПРОЦЕССОВ
В ряде отраслей химической промышленности (анилино-красочной, химико-фармацевтической и др.) широко распространены периодические процессы, так как они экономически более выгодны в условиях мпогоассортимепгпого производства при малом объеме выпуска отдельных продуктов. Поэтому автоматизация периодических процессов является актуальной задачей. Каковы же особенности периодических процессов, как объектов автоматизации, по сравнению с процессами непрерывными?
Главная из них — многостадийность, т. е. последовательное выполнение нескольких технологических операций в одном аппарате. Поэтому первая функция системы автоматизации любого периодического процесса состоит в обеспечении выполнения всех технологических операций в заданной последовательности. Для этого служит командное управляющее устройство, которое входит в состав САР периодического процесса.
Технологические операции, из которых состоит периодический процесс, можно разделить на две группы: продолжительность операций первой группы может быть заранее задана; продолжительность же операций второй группы может изменяться под действием неконтролируемых причин (например, состава сырья).
Управление операциями первой группы осуществляется по жесткой временной программе, для чего находят применение различные типы реле времени и командные приборы типа КЭП (см. § 55). В состав этой группы входят также операции, для которых задается программа изменения одного из параметров во времени . В большинстве случаев регламентируется программа изменения температуры реагирующей смеси (нагрев, выдержка, охлаждение). Для автоматического управления этими операциями применяются программные регуляторы.
Для автоматизации управления операциями второй группы необходимо иметь объективные методы индикации момента их окончания, чтобы по сигналу индикатора включать следующую по ходу процесса технологическую операцию. В качестве командного управляющего устройства для таких операций обычно применяются специальные релейно-контактные схемы.
Всякий реакторный периодический процесс состоит из основных и вспомогательных операций. Основными (или реакторными) называются операции, в ходе которых происходят собственно реакторные процессы. Все остальные операции — дозирование, поддержание заданного температурного режима, перемешивание смеси и эвакуации продуктов реакции из аппарата — являются вспомогательными.
Наибольшие трудности вызывает автоматизация основных (реакторных) операций. Известны два метода их осуществления: периодический и полунепрерывный.
341
При периодическом методе исходные реагенты загружаются в реактор сразу в расчетном количестве. После этого в реакторе создается заданный режим (температура, давление, перемешивание и т. д.) п процесс продолжается определенное заданное время, которое заведомо обеспечивает завершение реакции. По окончании заданной выдержки производится анализ продуктов реакции и если их состав соответствует заданному, то они передаются па следующие стадии производства. Если же состав продуктов не удовлетворяет заданным требованиям, что чаще всего бывает вызвано ошибками дозирования исходных компонентов, то приходится добавлять недостающего по результатам анализа компонента и вновь ожидать окончания реакции. Подобная «доводка» продукта требует больших затрат времени и потому снижает производительность установки. Поэтому при автоматизации периодических реакторных процессов предпочитают, если это допускается технологией, дозировать один из реагентов в избытке. Управление осуществляется по жесткой временной программе.
Гораздо более эффективен полунепрерывный метод осуществления реакторной стадии периодического процесса. Он заключается в том, что один из компонентов дозируется в реактор сразу в расчетном количестве, а второй добавляется постепенно — до тех пор, пока не вступит в реакцию все количество первого компонента. При таком способе реактор имеет максимальную производительность, а удельный расход реагентов па единицу готового продукта сводится к минимуму. Кроме того, улучшается качество продукции и снижаются затраты на последующую ее очистку от избытка реагентов.
Однако для осуществления процесса полунепрерывным методом необходимо располагать объективным методом контроля за его ходом и индикации момента окончания реакции. Чаще всего для этих целей применяются различные типы коицентратомеров — электро-кондуктометрические, потенциометрические и т. д. Автоматическое регулирование полунепрерывных процессов осуществляется с помощью общепромышленных регуляторов, или нестандартных регуляторов, специально разработанных для этих целей.
Дозировать чаще всего приходится жидкости, для которых наибольшее распространение получил объемный метод дозирования. Заданный объем заключается в мернике между двумя фиксированными уровнями, на которых устанавливаются датчики-сигнализаторы уровня. Для дозирования сыпучих компонентов чаще всего применяются весовые дозаторы тех же типов, что и при автоматизации дозирования в непрерывных технологических процессах (см. § 60).
Эвакуация жидких продуктов из реакторов периодического действия производится методом свободного слива или передавливанием сжатым воздухом, паром и т. д.
Контроль за перемешиванием обычно не требуется, исключая некоторые процессы, при которых прекращение перемешивания
142
может привести к аварии (например, нитрование). В подобных случаях осуществляют контроль за работой мешалки по величине мощности, подводимой к ее электродвигателю, или по скорости вращения вала мешалки с помощью специальных тахометрических
датчиков.
Для иллюстрации общих положений, высказанных выше, рассмотрим два типичных примера систем автоматиза ции периодических процессов.
Процесс нейтрализации в производстве (>-окси нафтойной кислоты состоит из следующих стадий: дозирование исходных компонентов (едкого натра и ^-нафтола), нагрев смеси до 125° С, выдерживание при этой температуре в течение 2 ч и выгрузка продуктов реакции.
Система автоматизации процесса состоит из командного управляющего устройства и САР температуры. Часть операций (.заполнение мерников, дозирование компонентов, включение мешалки и регулятора температуры) управляется релейпо-контактным командным устройством РД’У, которое включает оче-
редные операции по сигналу об окончании предыдущей. Оператор включает РКУ, начиная очередной цикл производства. Операциями нагрева и выдерживания заданно йтац пературы, а также выгрузкой управляет КЭП, который лятором САР температуры.
включается
Р1.С- 263. Принципиальная схема автоматизации процесса нейтрализации в произ водстве Р-оксинафтойной кислоты:
7, 77 — меринки; 7/7 —реактор; 1 — 10 — липин связи ме.л\ду цементами систсми авто-матнзаими
РКУ одновременно с рету-
Система автоматизации (рис. 263) работает следующим образом. Оператор нажимом кнопки Кн запускает РКУ, которое открывает краны КЭ) и КЭЛ с электромагнитным приводом. При этом в мерник / подается едкий натр, а в мерник // — р-нафтол. Как только
при заполнении мерников уровень в них достигает верхнего сигна-лищтора, РКУ прекращает подачу вещества в соответствующий
343
А. В. КАЗАКОВ, М. В. КУЛАКОВ, Ю. К. МЕЛЮШЕВ
ОСНОВЫ АВТОМАТИКИ И АВТОМАТИЗАЦИИ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Допущено Министерством высшего и среднего специального образования РСФСР в качестве учебного пособия для химико-технологических специальностей и специальностей химического машиностроения
Й
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
Москва 1970
А. В. КАЗАКОВ, М. В. КУЛАКОВ, Ю. К. МЕЛЮШЕВ
ОСНОВЫ АВТОМАТИКИ И АВТОМАТИЗАЦИИ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Допущено Министерством высшего и среднего специального образования РСФСР в качестве учебного пособия для химико-технологических специальностей и специальностей химического машиностроения
Й
ИЗДАТЕЛЬСТВО «МАШИНОСТРОЕНИЕ»
Москва 1970
Глава XVII
СИСТЕМЫ АВТОМАТИЗАЦИИ ОТДЕЛЕНИИ И ЦЕХОВ ХИМИЧЕСКИХ ПРЕДПРИЯТИИ
$ 65. АВТОМАТИЗАЦИЯ ОСНОВНЫХ ОТДЕЛЕНИЙ ПРОИЗВОДСТВА СЕРНОЙ КИСЛОТЫ КОНТАКТНЫМ СПОСОБОМ 1
Основными стадиями технологического процесса получения серной кислоты контактным способом (рис. 265) являются сушка колчедана, обжиг его в печах с кипящим слоем, промывка печного газа от тумана серной кислоты и вредных примесей, осушка его концентрированной серной кислотой, окисление сернистого ангидрида и
Рис. 265. Структурная схема производства серной кислоты контактным способом:
/ — отделение сушки колчедана; // — обжиговое отделение; /// — промывное отделение; IV — сушильное отделение; V — контактное отделение; VI абсорбционное отделение
абсорбция серного ангидрида с образованием целевого продукта — серной кислоты. Технологический процесс непрерывен на всех стадиях производства, хорошо изучен и отработан, все вспомогательные операции механизированы, следовательно, он вполне приспособлен для автоматизации. Работы в этой области ведутся уже давно и к настоящему времени имеются апробированные схемы автоматизации для всех отделений сернокислотного производства, разработаны многие нестандартные датчики и другие средства автоматизации.
1 <1> и а л к о Г. М. Автоматизация производства серной кислоты. «Машиностроение», М., 1964.
346
Автоматизация отделения сушки колчедана. Основу технологического процесса в этом отделении составляет сушка колчедана в барабанных сушилках до постоянной заданной влажности. Процесс сушки колчедана не имеет никаких особенностей по сравнению с описанным выше (см. § 62) типовым процессом сушки сыпучего материала. Поэтому принципиальная схема автоматизации отделения сушки колчедана практически ничем не отличается от схемы,
Рис. 266 Принципиальная схема автоматизации печи с кипящим слоем для об жига колчедана:
/ — ленточные транспортеры; 2 — бункер; 3 — тарельчатый питатель; 4 — печь обжига;
5 — котел-утилизатор; 6 — циклон; 7— электрофильтр; 8 — воздуходувка; 9 — вентилятор; Ю — секторный затвор
изображенной на рис. 259. Такая система автоматизации обеспечивает поддержание заданной влажности колчедана с точностью ±0,5% вес.
Автоматизация печей с кипящим слоем (рис. 266). Серный колчедан подается в печь 4 тарельчатым питателем 3 из бункера 2 (загрузка колчедана в бункер и его выгрузка осуществляются ленточными транспортерами /) по наклонной течке и попадает в нижнюю зону кипящего слоя. Воздух от воздуходувки 8 подается в нижнюю часть печи под колосниковую решетку с такой! скоростью, которая обеспечивает поддержание частиц колчедана во взвешенном состоянии. При этом происходит интенсивное горение колчедана. Обжиговый газ из печи попадает в котел-утилизатор 5, затем в цвк-
2*
347
лон 5 и электрофильтр 7. Огарок скапливается в нижней части печи и периодически удаляется через секторный затвор 10.
Основная задача управления процессом обжига — получение обжигового газа с постоянной концентрацией в нем сернистого ангидрида (SO2), равной 12%. Регулирование процесса можно вести как по прямому параметру — концентрации SO2 в обжиговом газе, так и по косвенному параметру, каким является температура кипящего слоя. В первом случае подача колчедана в печь регулируется в зависимости от показаний газоанализатора, установленного на выходе газа из печи. Недостатки такой САР — ненадежная работа датчика из-за значительной запыленности обжигового газа, а также большое запаздывание и инерционность, присущие газо а н а л и з атор у.
Поэтому предпочтительно регулировать подачу колчедана в печь ио температуре кипящего слоя (термопара 4а). При постоянной влажности колчедана температура слоя однозначно зависит от количества сернистого ангидрида, образующегося в печи в единицу времени, и, следовательно, от концентрации его в обжиговом газе. Преимущества такой САР — более высокая чувствительность к изменениям технологического режима, высокое быстродействие и надежность датчика. Главный ее недостаток заключается в относительно низкой точности поддержания заданной концентрации сернистого ангидрида в обжиговом газе. Поэтому наиболее совершенной является двухконтурная САР, в которой задание регулятору температуры кипящего слоя (поз. 46 на рис. 266) изменяет корректирующий регулятор (поз. 9в) в зависимости от концентрации SO2 в обжиговом газе (отборное устройство 9а и газоанализатор 96). Регулятор температуры управляет подачей колчедана, изменяя скорость вращения тарельчатого питателя (поз. 4в).
Важнейшее условие нормальной работы печи — поддержание постоянной высоты кипящего слоя. Ее измерение производится манометром 36 по давлению воздуха под колосниковой решеткой (отборное устройство — За), которое, при постоянном расходе воздуха и постоянном разрежении в верхней части печи, пропорционально высоте слоя. Позиционный регулятор высоты кипящего слоя (поз. Зв) управляет работой секторного затвора печи с помощью пневматического мембранного исполнительного механизма (поз. Зг).
Стабилизация технологического режима обжига колчедана обеспечивается также САР расхода дутья (поз. 2а, 26, 2в, 2г) и САР разрежения в верхней части печи (поз. 5а, 55, 5в, 5г), которая управляет положением заслонки на линии обжигового газа перед вентилятором 9.
Кроме основных САР, описанных выше, система автоматизации обжигового отделения включает систему автоматического контроля температуры и разрежения по ходу газового тракта (поз. 7а, 76, 7в, 7 г, 7д, 7е; 6а, 6о; 8а, 86', 10а, 106)', автоматический контроль, 348
сигнализацию и позиционное регулирование уровня колчедана [5 бункере .2 (поз. 1а, 16, 1в, 1г), а также контроль ряда второстепенных параметров, непосредственно не влияющих на ход технологического процесса, и, кроме того, аварийную сигнализацию, блокировку и дистанционное управление отдельными видами оборудования (на схеме не показаны).
Автоматизация промывного отделения. Основными технологическими процессами в промывном отделении являются процессы газовой абсорбции, протекающие в аппаратах 1, 2, 4 и 6 (рис. 267), и процессы очистки газа от взвешенных частиц пыли и жидкости в электрофильтрах 3 и 5 и брызгоуловителе 7.
Обжиговый газ из печного отделения с температурой 350—400° С подается в первую промывную башню 1, орошаемую 60—75%-ной серной кислотой, где частично очищается от примесей и охлаждается до 80—100° С. Затем газ проходит вторую промывную башню 2, заполненную насадкой и орошаемую 25—35%-ной серной кислотой, откуда выходит с температурой 30—40° С. При этом примеси, содержащиеся в газе, переходят в туман, основная часть которого осаждается в первом электрофильтре 3. Затем газ попадает в увлажнительную башню 4, орошаемую 5%-ной серной кислотой, где насыщается влагой для улучшения условий осаждения тумана во втором электрофильтре 5. Осушка газа осуществляется в сушильной башне 6, орошаемой 94%-ной серной кислотой, после чего через брызгоулавливатель 7 он подается в контактное отделение.
Орошающие кислоты циркулируют в контурах аппаратов /, 2, 4 и 6. В первых трех аппаратах концентрация орошаемых кислот возрастает вследствие поглощения из обжигового газа серного ангидрида, поэтому производится непрерывное их разбавление. В сборник 10 башни 4 подается вода, а избыток кислоты из него подается в сборник 9 аппарата 2. Далее избыток кислоты из контура этого аппарата поступает в сборник 8 первой промывной башни /, а избыток кислоты из ее циркуляционного контура подается на склад в виде готовой продукции. Основная задача управления работой промывного отделения — обеспечение постоянной степени очистки газа, а также постоянной заданной концентрации и влажности его на выходе из отделения.
Результаты исследования работы промывного отделения, как объекта управления, показали, что необходимыми условиями выполнения этих требований являются стабилизация концентрации орошающей кислоты первой промывной башни, температуры орошающей кислоты второй промывной башни и содержания SO2 в газе на выходе промывного отделения.
Концентрация орошающей кислоты в цикле аппарата 1 регулируется изменением расхода разбавляющей кислоты из цикла аппарата 2 в сборник 8 аппарата 1 (поз. 2а, 26, 2в и 2г на схеме рис. 267), а также подачи воды в сборник 10 увлажнительной башни (поз. 2д).
349
Рис. 267. Принципиальная схема автоматизации промывного отделения:
промывные башни: 3, 5 — элсктрофильтры; / — увлажнительная башня; о — сушильная башня; 7 — брыэгоулавливатель; 6 —11 — сборники
Температура орошающей кислоты в цикле второй промывной башни 2 регулируется изменением расхода воды, подаваемой в оросительный холодильник 12 (поз. ба, 66, би).
Содержание сернистого ангидрида в rare па выходе промывного отделения регулируется разбавлением его воздухом на входе сушильной башни 6 по показаниям автоматического газоанализатора, пробоотборник которого установлен па выходном трубопроводе газа из промывного отделения (поз. 10а, 106, 10в, Юг).
Кроме этих основных САР, в состав системы автоматизации промывного отделения входят:
1) САР уровня в сборниках 8, 9 и /<9; регулирование осуществляется изменением отбора кислоты из сборников (поз. За, 36, Зв', 4а, 46, 4в\ 7а, 76, 7в);
2) автоматический контроль температуры газа па входе и на выходе башен и электрофильтров (на схеме не показаны);
3) автоматический контроль температуры кислот на входе и выходе башен (на схеме не показаны);
4) автоматический контроль разрежения газа на входе и выходе башен и электрофильтров (на схеме не показаны);
5) автоматический контроль уровня кислоты is циркуляционных сборниках и сигнализация предельных значений;
6) автоматический контроль содержания тумана серной кислоты после второго электрофильтра (поз. 8а, 86, 8в) и сигнализация о превышении допустимой' нормы этого содержания;
7) автоматический контроль и сигнализация попадания кислоты в сточные воды оросительных холодильников (поз. 5а, 56)',
8) автоматический контроль расхода кислоты, отправляемой на склад (поз. 1а, 1С>, 1в);
9) автоматический контроль и сигнализация уровня в сборнике (поз. 9а и 96).
Кроме того, осуществляется контроль п сигнализация других вспомогательных параметров (включения насосов, электрических параметров электрофильтров н т. д.) и блокировка отдельных видов оборудования, которые па рис. 267 не показаны.
В основном схема реализуется на серийной аппаратуре автоматизации. Для контроля содержания тумана серной кислоты применяется автоматический фотоколориметрический туманомер типа АФТ (поз. 8а, 86, 8в). Контроль попадания кислоты в поддон оросительного холодильника осуществляется с помощью электрокондуктометрического сигнализатора типа СК-5 (поз. 5а, 56).
Автоматизация контактного отделения На рис. 268 показана принципиальная схема четырехслонпого контактного аппарата с выносным теплообменником, который является основным видом оборудования в контактных отделениях сернокислотных заводов. Сернистый газ с температурой 50—60 С поступает в межтрубное пространство выносного теплообменника / и затем последовательно
351
проходит три внутренних теплообменника 2, 3 и 4, нагреваясь до температуры 440 450° С.
Далее сернистый газ проходит последовательно через четыре слоя контактной массы, где происходит реакция его окисления
в присутствии ванадиевого катализатора, и по трубам трех промежуточных теплообменников, в которых отбирается часть тепла реакции. После четвертого слоя контактный газ проходит по трубам выносного теплообмен-
Рис. 268. Принципиальная схема автоматизации контактного аппарата:
/ — выносной теплообменник; 2, 3, 4 — ннутрсп н не теплообмен ип ки
ника и поступает в абсорбционное отделение.
Как объект автоматизации, контактный аппарат представляет собой газовый реактор большой емкости. Основным параметром, который определяет ход технологического процесса, является температура, так как от нее зависит скорость реакции окисления и степень контактирования сернистого ангидрида. Оптимальная температура зависит от концентрации SO2 в газе. При работе на колчедане оптимальной является концентрация 7— 7,5% SO2, а оптимальная температура составляет 4503 С; эти значения концентрации и температуры обеспечивают степень контактирования 98%.
Основные возмущающие воздействия для процесса контактирования — колеба
ния концентрации и температуры газа на входе в контактное отделение. Они вызывают отклонения температуры в аппарате от заданной и нарушают опти-
мальные условия процесса окисления.
Концентрация SO., в газе на входе в контактное отделение достаточно постоянна, так как она регулируется в промывном отделении, поэтому ее как возмущающее воздействие можно не принимать во
внимание.
Как объект регулирования температуры, контактный аппарат обладает большой емкостью и запаздыванием и САР по отклонению температуры в зоне реакции от заданного значения не могут обес
352
печить необходимой точности регулирования. Поэтому принята схема автоматического регулирования по температуре сернистого газа на входе нижнего внутреннего теплообменника (поз. За, 36, Зв на рис. 268) и в первый контактный слой (поз. 1а, 16, 1в). Регулирование в обоих случаях осуществляется байпасированием части «холодного» потока, которая минует выносной теплообменник.
Помимо двух описанных САР, схемой автоматизации контактного аппарата предусматривается:
1) контроль температуры газа на входе и выходе каждого контактного слоя;
2) контроль манометрического режима работы основных элементов контактного аппарата;
3) контроль концентрации сернистого ангидрида па входе в отделение и выходе из контактного аппарата.
Для измерения концентрации SO, на входе (поз. 4а, 46, 4в) применяется автоматический газоанализатор типа ТКГ-4, а па выходе (поз. 2а, 26, 2в) — газоанализатор типа ЭХГ-5.
Автоматизация сушильно-абсорбционного отделения. Сушка сернистого газа и абсорбция серного ангидрида являются самостоятельными стадиями производства серной кисяоты контактным способом. Однако сходство технологических процессов и аппаратурного оформления на этих стадиях, а также связь через общие материальные потоки делают целесообразной разработку для них единой системы автоматизации.
Сушильно-абсорбционное отделение (рис. 269) состоит из четырех абсорберов насадочного типа, орошаемых серной кислотой различной концентрации. В первых двух аппаратах 1 и 2 (сушильные башни) из сернистого газа абсорбируется вода, в результате чего концентрация орошающей кислоты уменьшается. Для ее восстановления в сборники подается более концентрированная кислота: в сборник первой сушильной башни — из второй, а в сборник второй — из моногидратного абсорбера. Избыток разбавленной кислоты из первой сушильной башни является целевым продуктом. С выхода второй сушильной башни газ подается в контактное отделение.
Прореагировавший газ из контактного отделения поступает в теплообменник 3. В аппаратах 4 и 5 из контактного газа абсорбируется серный ангидрид, в результате чего концентрации орошающих кислот повышаются. Они разбавляются водой, которая подается в сборник моногидратного абсорбера 5, и моногидратом, подаваемым в сборник олеумного абсорбера 4. Образующийся избыток олеума является готовым продуктом.
Степень абсорбции и, следовательно, экономическая эффективность процесса в сушильно-абсорбционном отделении определяется главным образом концентрацией орошающих кислот. Для каждой банши существует свое оптимальное значение этой концентрации, котовое необходимо поддерживать с высокой точностью. Особенно
353
Рис. 269. Принципиальная схема автоматизации сушильно-абсорбционного отделения: шильные башни; 3 — теплообменник; 4 — олеумный абсорбер; 5 — моногидратный абсорбер; ь — напорные баки ныс холодильники; <$ — сборники
высокие требования предъявляются к точности поддержания концентрации орошающих кислот в первой сушильной башне и олеум-пом абсорбере, так как они одновременно являются готовыми продуктами.
Для регулирования концентраций орошающих кислот применяются одинаковые САР, в которых датчиками служат электрокон-дукгомет рнческпе концентратомеры (поз. 5л, 5(5; 6а, 66; 10а, 106; 13и и 136). Регулятор концентрации (поз. Зв, 6в, 10в, 1 Зв) воздействует на регулирующий клапан (поз. Зг, 6г, Юг или 13г), установленный на липни дозирования кислоты или воды в соответствующий сборник. Объектом регулирования такой САР является сборник 8 циркуляционной кислоты, трубопровод, соединяющий его с напорным баком 6, и сам этот бак.
Динамическая характеристика этого объекта характеризуется запаздыванием порядка 1,2—2 мин и обобщенной постоянной времени около 5 мин. Применение ПИ-регулятора обеспечивает точность поддержания концентрации серной кислоты в пределах 0,1—0,2%.
Перераспределение материальных потоков кислоты по циркуляционным контурам требует поддержания материального баланса каждого из них. В сборниках первой сушильной башни и олеум-иого абсорбера уровень регулируется путем изменения отбора готового продукта (поз. 2а, 26, 2в и 9а, 96, 9в). Уровень в сборнике второй сушильной банши регулируется путем изменения отбора кислоты на ее выходе в сборник первой сушильной башни (поз. 5а, 56, 5в). Уровень в сборнике могогидратиого абсорбера регулируется изменением подачи кислоты из первой сушильной башни в этот сборник (поз. 12а, /26, 12в).
Кроме (ZAP концентрации кислот и уровней в сборниках, система автоматизации сушильно-абсорбционного отделения включает:
1) контроль давления газа па входе и выходе всех абсорбционных колонн (па схеме не показаны);
2) контроль температуры кислот па входе и выходе оросительных .холодильников (на схеме не показаны);
3) контроль расхода и количества продукционной кислоты на выходе первой сушильной башни и олеума на выходе олеумного абсорбера, отбираемых па склад (поз. 1а, 16, 1в и 8а, 86, 8в);
4) контроль концентрации тумана серной кислоты в отходящем газе моногидратпого абсорбера (поз. 15а, 156, 15в), осуществляемый с помощью упоминавшегося ранее тумапомера типа АФТ;
5) контроль и сигнализация кислотности воды в поддоне оросительных холодильников 7 (поз. 4а, 46; 7а, 76; 11а, 116; 14а, 146), осуществляемый с. помощью электрокопдуктометрических сигнализаторов типа СК-5.
Внедрение описанных выше систем на действующих предприятиях по производству серной кислоты дает значительный экономический эффект. Например, срок окупаемости дополнительных ка
355
питаловложений на автоматизацию типового завода производительностью 120 000 т кислоты в год составляет 1,0—1,5 г. Кроме того, автоматизация сернокислотного производства позволяет резко сократит!. количество рабочих в цехах (до 50%) и улучшить санитарно-гшиенпческис условия их работы.
§ 66. АВТОМАТИЗАЦИЯ ЦЕХА ПО ПРОИЗВОДСТВУ АММИАЧНОЙ СЕЛИТРЫ
Технологический процесс производства гранулированной'аммиачной селитры содержит три стадии: нейтрализация азотной кислоты аммиаком; выпаривание полученного раствора аммиачпои селитры; гранулирование и расфасовка готовой продукции.
Исходные продукты —- азотная кислота концентраций 40—50% из сборника / (рис. 270) и аммиак из заводской магистрали подаются в нейтрализатор 2, который представляет собой насадочный скруббер. В слое насадки протекает реакция нейтрализации, которая сопровождается большим выделением тепла и образованием сокового пара. Полученный слабый раствор аммиачной селитры подается па дополнительную нейтрализацию в донейтрализатор 3, куда дозируется аммиак. Раствор селитры (щелок) из донейтрализатора подается на первую ступень выпаривания в аппарат 4, который работает иод разрежением. Выпарной аппарат обогревается соковым паром из нейтрализатора 2, к которому добавляется пар из заводского трубопровода.
Упаренный раствор щелока поступает в сборник 5, куда из бака 9 добавляется раствор апатитовой вытяжки, предотвращающий слеживаемость готовой селитры. Затем щелок подается на вторую ступень выпаривания в аппарат 6, из которого он в виде плава поступает в гранулятор 8.
Экономическая эффективность технологического процесса производства аммиачной селитры определяется, в основном, точностью дозирования аммиака и азотной кислоты на стадии нейтрализации, так как вх стоимость составляет главную часть себестоимости готового продукта. Оптимальным условием для реакции нейтрализации является дозирование аммиака и азотной кислоты в стехиометрическом соотношении в соответствии с уравнением реакции. Однако практически невозможно обеспечить такую точность, поэтому процесс приходится вести с небольшим избытком оцюго из компонентов. Поскольку стоимость аммиака выше, чем азотной кислоты, выгоднее вести процесс при избытке последней, который не должен однако превышать 1,5 г!л.
Необходимым условием разработки САР процесса нейтрализации является наличие датчика для контроля кислотности раствора аммиачной селитры. Такой датчик совместно с регулятором разработан Северодонецким филиалом ОКБА 1 под названием «коррек-
Опытно-конструкторское бюро автоматики.
356
Рис. 270. Принципиальная схема автоматизации производства аммиачной селитры:
1 — сборник азотной кислоты; 2 — нейтрализатор; 3 — донейтрализатор; 4,6 — выпарные аппараты; 5 — сборник упаренного щелока; 7 — барометрический конденсатор; 8 — граняционная башня; 9 — бак апатитовог! вытяжки
тирующий регулятор нейтрализации» (КРН). Принцип его действия основан на измерении окислительно-восстановительного потенциала 1 платинового индикаторного электрода, который в этом диапазоне пропорционален кислотности анализируемого раствора.
Для получения высокой точности регулирования процесса нейтрализации необходимо обеспечить минимальное запаздывание датчика КРН, что достигается установкой его в реакторе в зоне интенсивного обновления раствора.
Нагрузка нейтрализатора 2 стабилизируется САР расхода аммиака (поз. 2а, 26, 2в, 2г, 2д), а дозирование азотной кислоты осуществляется САР кислотности раствора аммиачной селитры, основным элементом которой является корректирующий регулятор КРН (поз. За, 36, Зв). Дозирование аммиака в доней-трализаторе производится также с помощью регулятора КРН (поз. 4а, 45, 4в).
Основная задача регулирования технологического процесса на стадии выпаривания — получение упаренного раствора заданной концентрации. Регулирование ведется по косвенному параметру — температуре кипения раствора, которая при постоянном давлении является однозначной функцией его концентрации. Регулирование производится изменением количества раствора, подаваемого в аппарат (поз. 7а, 76, 7в). Кроме того, автоматически регулируется давление греющего пара в рубашке изменением величины подпитки сокового пара промышленным паром (поз. 5а, 56, 5в, 5г).
Особенностью первой стадии выпаривания в производстве аммиачной селитры является использование сокового пара, в котором содержится относительно большое количество инертных веществ. Они могут накапливаться в паровой рубашке, снижая производительность аппарата, поэтому необходимо непрерывно продувать рубашку. Продувочным клапаном 6а управляет оператор дистанционно с помощью панели дистанционного управления (ПДУ) 66, установленной на центральном щите контроля и управления.
Подача воды в барометрический конденсатор 7 регулируется по температуре отработанной воды (поз. 8а, 86, 8в).
Во втором выпарном аппарате концентрация упаренного раствора также регулируется по его температуре путем изменения подачи в аппарат исходного раствора (поз. Па, 116, Не). Кроме того, автоматически регулируется давление греющего пара в рубашке (поз. 9а, 96, 9в, 9г) и осуществляется дистанционное управление давлением пара на выходе из паровой рубашки с помощью ПДУ, установленной на центральном щите (поз. 10а, 105).
Кроме описанных систем автоматического регулирования основных технологических параметров, система автоматизации цеха
1 См. § 28.
358
аммиачной селитры обеспечивает контроль и сигнализацию отклонения ряда параметров от заданных значений. В частности, измеряется расход азотной кислоты (поз. /а, 16, 1в и 1г). Для наблюдения за работой укупорочного отделения применяется телевизионная установка.
Общий экономический эффект от внедрения этой системы автоматизации в цехе аммиачной селитры Северодонецкого химического комбината обеспечил срок ее окупаемости 1,2 года.
Глава XVIII
СОВРЕМЕННОЕ СОСТОЯНИЕ И ПЕРСПЕКТИВЫ РАЗВИТИЯ АВТОМАТИЗАЦИИ В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
§ 67. СОВРЕМЕННЫЙ УРОВЕНЬ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
К настоящему времени в автоматизации технологических процессов химической промышленности достигнуты значительные успехи. Проделана большая работа по изучению всех распространенных химико-технологических процессов, как объектов автоматизации; разработаны и проверены на практике схемы автоматического регулирования отдельных узлов, агрегатов, производственных участков и цехов с использованием серийной аппаратуры автоматизации; разработаны многочисленные специализированные средства автоматизации (датчики, регулирующие органы и т. д.), приспособленные для работы в условиях эксплуатации химической промышленности. Накопленный в этой области опыт позволяет проектировать системы автоматизации технологических процессов для всех вновь строящихся или модернизируемых предприятий химической промышленности.
Опыт внедрения автоматизации показал ее высокую экономическую эффективность, которая достигается благодаря увеличению производительности оборудования, уменьшению удельных материальных и энергетических затрат, повышению качества выпускаемой продукции и сокращению ее трудоемкости. При этом наибольший эффект достигается в тех случаях, когда внедрение автоматизации сопровождается модернизацией производства, т. е. переходом к более совершенному технологическому процессу и новому оборудованию.
Для химической промышленности особенно важное значение имеет еще одна сторона автоматизации — высвобождение части обслуживающего персонала (особенно в технологических помещениях) и значительное улучшение условий труда рабочих.
Автоматизация дает не только непосредственный экономический эффект; ее успехи оказывают большое влияние па общий технический уровень химической промышленности. Высокая точность под-360
держания заданного режима работы, которая достигается при использовании системы автоматического управления, позволяет значительно интенсифицировать технологические процессы, используя более активные катализаторы, высокие температуры и давление. Многие вновь разрабатываемые технологические процессы оказывается возможным реализовать только как автоматизированные, так как ручное управление не гарантирует безопасного их ведения и получение продукции заданного качества. Применение систем автоматического дистанционного управления позволяет широко практиковать размещение технологического оборудования на открытых площадках.
До настоящего времени основным направлением автоматизации технологических процессов в химической промышленности является применение простых стабилизирующих САР, которые обеспечивают поддержание заданных значений регулируемых параметров и в совокупности составляют системы автоматизации отдельных объектов технологической цепи. Типичные примеры систем автоматизации этого типа описаны в гл. XVII. При их эксплуатации человеку-оператору поручаются ответственные функции. Он должен выбирать и устанавливать заданные значения регулируемых параметров отдельным стабилизирующим САР в зависимости от состояния объекта регулирования, а также от состояния объектов, смежных с ним в технологической цепи. Кроме того, оператор должен управлять процессом в режиме пуска, останова и в аварийных ситуациях. Следовательно, эффективность работы системы автоматизации данного типа в определенной степени зависит от квалификации, опыта и способностей оператора. Эти факторы проявляются особенно сильно при регулировании технологических процессов, для которых характерны частые изменения условий работы, например, состава сырья, нагрузок, активности катализатора и т. д. Все эти изменения требуют внесения тех или иных корректив в работу стабилизирующих САР, которые должен осуществить оператор. Для повышения эффективности управления подобными технологическими процессами необходимо создавать более совершенные САР, в частности, системы автоматической оптимизации.
§ 68. СИСТЕМЫ АВТОМАТИЧЕСКОЙ ОПТИМИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Задачей системы автоматической оптимизации является обеспечение оптимальных условий работы объекта управления. Содержание понятия «оптимальные условия» зависит от выбора цели, которую преследует оптимизация. Для одного и того же технологического процесса оптимальные условия работы могут быть существенно различны, если основной целью управления будет обеспечение максимальной производительности установки или минимальной себестоимости продукции.
361
Главный показатель работы объекта, по которому судят об оптимальности технологического процесса, называется критерием оптимизации. Он выбирается на основании анализа многих факторов — технологических, экономических и др. Например, при выпуске дефицитной продукции критерием оптимизации может быть производительность: чем она выше, тем выше степень оптимизации режима. В настоящее время в условиях действия новой системы планирования и экономического стимулирования все чаще используются экономические критерии, например, себестоимость продукции: чем она ниже, тем ближе к оптимальному режиму про
Рис. 271. Принципиальная схема системы экстремального регулирования темпера туры тонки:
/ -- форсунка; 2,5 — регу.ли pyioiHHt? клапаны; 5 — датчик температуры; 4 — экстремальный регулятор
цесса.
Как видно из приведенных примеров, оптимальному режиму технологического процесса соответствует экстремальное (максимальное или минимальное) значение критерия оптимизации. Следова-теаню, задачей системы автоматической
оптимизации является поддержание экс-
тремального значения критерия оптимизации при изменении усло-
вий проведения технологического процесса путем изменения управляющих воздействий на объект управления. Простейшими явля-
ются системы автоматической оптимизации процессов, у которых
критерий оптимизации непосредственно технологическим параметром. Они называются системами экстремального регулирования. В качестве примера рассмотрим системы экстремального регулирования температуры в топке (рис. 271).
Через форсунку I в топку вводится топливо и воздух. Расход топлива Q.,. автоматически регулируется клапаном 2 в зависимости от нагрузки печи (датчик и регулятор этой САР на схеме не показаны). Расход воздуха Q„ необходимо
является регулируемым
Рис. 272. Зависимость температуры в топке от расхода воздуха
регулировать так, чтобы температура в
топке была максимальной для установившегося расхода топлива. Зависимость температуры Г' от соотношения расходов топлива QT и воздуха Q,, имеет экстремум (рис. 272), который соответствует стех юметричеекому соотношению. При недостатке воздуха часть
топлива не. сгорает, и температура оказывается ниже максимально возможной. При избытке воздуха продукты сгорания разбавляются холодным воздухом и их температура также снижается.
362
Таким образом, оптимальному режиму работы топки соответствует максимум температуры, следовательно, в данном случае температура является критерием оптимизации.
Система экстремального регулирования температуры (рис. 271) состоит из датчика ,7, экстремального регулятора 4 и регулирующего клапана 5, установленного па трубопроводе подачи воздуха. Экстремальный регулятор автоматически поддерживает такой расход воздуха, при котором температура в топке имеет максимальную величину.
В большинстве случаев критерий оптимизации является сложной функцией нескольких технологических параметров и для определения его значений требуется производить определенные вычисления над измеренными значениями этих параметров. Кроме того, значение критерия оптимизации обычно зависит от нескольких управляющих воздействий, а не от одного, как в рассмотренном выше примере. Это значительно усложняет задачу оптимизирующего устройства, которое должно изменять величины нескольких управляющих воздействий.
Сложность большинства практических задач оптимизации приводит к тому, что для реализации системы автоматической оптимизации технологических процессов обычно требуется использование электронной вычислительной машины (ЭВМ). ЭВМ производит расчет значения критерия оптимизации на основании измеренных значений технологических параметров и рассчитывает значения регулирующих воздействий, которые обеспечивают оптимизацию процесса.
В последние годы проводятся многочисленные исследования по применению ЭВМ для оптимизации технологических процессов и к настоящему времени наметилось несколько основных направлений. Наиболее простым является использование ЭВМ для оптимального управления производственным процессом в режиме «советчика» оператора (рис. 273, о). В этом случае регулирование технологических параметров осуществляется обычной системой автоматизации, которая состоит из отдельных стабилизирующих САР. Контроль за работой системы и изменение уставок задатчика стабилизирующих регуляторов ведет оператор. ЭВМ периодически производит расчет оптимального режима работы объекта, т. е. рассчитывает численные значения регулируемых параметров, соответствующих оптимальному режиму. Результаты расчета поступают к оператору в виде рекомендаций и он может ими руководствоваться при управлении процессом.
Такая структура системы управления хорошо соответствует первому этапу внедрения ЭВМ и современному уровню техники автоматизации. Она позволяет полностью использовать опыт оператора и тем самым частично компенсировать недостаточную точность математической модели автоматизируемого процесса. В случае выхода ЭВМ из строя продолжает функционировать стабилизирующая
363
система автоматизации, так что ход технологического процесса не нарушается.
Следующий этап — включение ЭВМ в замкнутую систему автоматической оптимизации (см. рис. 273, б). Здесь, как и в предыдущем случае, регулирование технологических параметров осуществляется стабилизирующими САР. Отличие заключается, во-первых, в том, что значения технологических параметров, которые необходимы
Рис. 273. Структурная схема системы автоматической оптимизации с использованием ЭЩЧ:
а — н режиме «советчика» оператора; б — в замкнутой цепи управления; о — и замкнутой цепи управления н качестве многоканального регулятора; / — объект управления (технологический процесс); 2 — датчики регулируемых параметров; <? — регуляторы;
4 — регулирующие органы; 5 — оператор; 6 — электронная вычислительная машина (ЭВМ); 7 — преобразователи сигналов на входе ЭВМ; 8 — преобразователи сигналов на выходе ЭВМ
для расчета оптимального режима, подаются на вход ЭВМ непосредственное датчиков; а во-вторых, ЭВМ с помощью специальных устройств сама изменяет уставки задатчикам стабилизирующих регуляторов на основании результатов произведенного расчета. При нормальной работе такой системы управления оператор только контролирует ее. Если же ЭВМ выходит из строя, то он выполняет те же функции, что в обычной стабилизирующей системе автоматизации. Для реализации рассмотренной системы управления требуются специальные устройства, которые обеспечивают связь ЭВМ с управляе -мым процессом и стабилизирующими САР.
Кроме того, значительно увеличиваются требования к надежности ЭВМ.
Наиболее совершенной и, соответственно, наиболее сложной для реализации является третий вариант системы автоматической оптимизации, в котором ЭВМ используется в качестве многоканального регулятора, заменяя отдельные стабилизирующие САР, и одновременно в качестве оптимизирующего устройства (рис. 273, в). В этом случае сигналы от датчиков поступают на вход ЭВМ, а па ее выходе вырабатываются управляющие сигналы, непосредственно воздействующие на соответствующие регулирующие органы. Подобные системы пока разрабатываются в основном для экспериментальных целей. Однако в перспективе, по мере совершенствования тех-
364
Ники автоматизации, они должны получить широкое распространение.
Успехи, достигнутые в развитии теории и техники автоматиза ции и особенно в применении ЭВМ, сделали возможным создание автоматизированных систем оптимального управления для целых химических производств. В качестве примера рассмотрим систему автоматизированного оперативного управления аммиачным заводом «КАСКАД», которая разработана в Государственном Всесоюзном центральном научно-исследовательском институте комплексной автоматизации (ЦНИИКА) и находится в опытной эксплуатации 1.
Производство аммиака, для которого была разработана система «КАСКАД», является типичным для химической промышленности. Завод состоит из семи цехов, соединенных последовательно и параллельно материальными и энергетическими потоками.
Каждый цех до установки системы «КАСКАД» имел систему автоматизации, состоящую из стабилизирующих САР, а общее управление работой завода осуществлял диспетчер. Он анализировал производственную ситуацию и давал указания операторам цеховых САР по изменению нагрузки цехов, использованию оборудования и т. д.
Система «КАСКАД» обеспечила оптимальное управление заводом по критерию «минимум технологической составляющей полной себестоимости аммиака» в режиме «советчика оператора». Целью управления является обеспечение минимума себестоимости аммиака при заданном объеме производства.
Система «КАСКАД» работает следующим образом. Информация о состоянии технологического процесса и работе оборудования, необходимая для оперативного управления заводом, собирается с помощью датчиков, выходные сигналы которых унифицируются преобразователями в стандартные электрические сигналы и передаются телеметрической системой в центральный диспетчерский пункт завода. Здесь производится автоматическая переработка информации соответствующей аппаратурой и выдача ее диспетчеру в удобной для использования форме, а также ввод ее в ЭВМ. На основании полученной информации ЭВМ периодически рассчитывает около 100 технико-экономических показателей работы отдельных цехов и завода в целом и вырабатывает рекомендации по оптимальному управлению заводом и цехами. Эти рекомендации поступают на табло пульта оперативно-диспетчерской аппаратуры.
Система «КАСКАД» обеспечивает оптимальную координацию нагрузок цехов, рассчитывает оптимальные значения основных межцеховых показателей (состав конвертированного газа, степень его очистки на разных стадиях и т. д.), обнаруживает аварийные и предаварийныс ситуации и дает рекомендации по их устранению.
1 Система автоматизированного оперативного управления аммиачным заводом «КАСКАД» ОНТИПРИБОР М., 1967.
365
В дальнейшем использование более совершенной ЭВМ позволит применять систему «КАСКАД» не только в режиме «советчика оператора», но и для непосредственного воздействия па задатчики регуляторов цеховых СЛР.
Рассмотренная автоматизированная система управления (АСУ) состоит из двух частей, функции которых различны: первую составляют местные (локальные) САР, задача которых — поддержание заданных оптимальных технологических режимов цехов-, вторую составляет центральная система автоматического управления (САУ), которая рассчитывает и задает оптимальные режимы локальным САР. Следовательно, локальные СЛР являются низшей (подчиненной) системой (подсистемой) по отношению к центральной САУ — высшей подсистеме.
Такой принцип построения автоматических систем управления для сложных промышленных комплексов, когда они разбиваются на несколько подсистем, каждая из которых подчиняется бли жай-шей высшей и осуществляет управление ближайшей низшей подсистемой, называется иерархическим. Он признан в настоящее время наиболее совершенным, так как позволяет внедрять систему по частям, начиная с низших, наиболее простых и быстроокупаю-[цихся подсистем.
§ 69. ПЕРСПЕКТИВЫ РАЗРАБОТКИ И ПРИМЕНЕНИЯ НОВЫХ ПРИБОРОВ И СРЕДСТВ АВТОМАТИЗАЦИИ В ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ
Дальнейшее развитие автоматизации технологических процессов химической промышленности зависит прежде всего от совершенствования ее материальной базы, т. е. технических средств автоматизации. Темпы развития аналитического приборостроения , являющегося главным поставщиком автоматических анализаторов состава и свойств веществ, в значительной степени определяют и темпы развития автоматизации химической промышленности.
Особенно актуальна задача анализа состава многокомпонентных смесей, поэтому в последние годы получают все большее развитие новые методы анализа состава, одним из которых является много-параметрический вычислительный метод 1. Он основан на одновременном измерении нескольких косвенных физико-химических параметров анализируемой смеси (например, удельной электропроводности. плотности и т. д.) и вычислении по ним ее состава .Автоматический анализатор, основанный иа использовании этого метода, состоит из датчиков косвенных параметров, выбранных для контроля, и вычислительного устройства.
Другая важная проблема аналитического приборостроения — измерение микроконцентраций различных веществ в газах и жид
1 Попов Р. 15. Новые методы автоматического анализа многокомпонентных систем. В сб. «Приборы и средства автоматизации», № 2, 1965 , М ., ЦИНИ I ЭЛЕКТРОННОМ.
366
костях. Опа вызвана потребностью промышленности в сверхчистых веществах, использование которых особенно важно в тех случаях, когда примеси вредных веществ порядка даже нескольких долей на миллион могут резко изменить свойства конечного продукта (многие полимеры, полупроводники и т. д.). Решение проблемы автоматического измерения микроконцентрацнп находится в начальной стадии развития.
Наряду с разработкой датчиков для контроля новых технологических параметров, развитие автоматизации требует значительного увеличения точности измерений. Эта проблема приобретает остроту по мере перехода от автоматической стабилизации к оптимизации технологических процессов. При этом требуется с высокой точностью измерять критерий оптимизации, в качестве которого в большинстве случаев используется себестоимость продукта: погрешность измерения основных составляющих себестоимости — расходов и концентраций технологических потоков — не должна превышать 0,1—0,5%, иначе погрешность определения критерия оптимизации может свести к нулю эффект самой оптимизации. Первым шагом на пути решения проблемы повышения точности является разработка датчиков для ГСП, погрешность которых приближается к уровню требований, вызванных развитием автоматизации.
Среди множества различных задач, возникших в связи с развитием систем комплексной автоматизации непрерывных химико-технологических процессов, важнейшей яв.мнется проблема надежности этих систем.
Под надежностью понимается свойство системы (или ее элементов) выполнять заданные функции, сохраняя своп эксплуатационные показатели в заданных пределах в течение требуемого промежутка времени. Надежность системы обусловливается прежде всего ее безотказностью, т. е. свойством сохранять работоспособность в течение некоторой продолжительности (или некоторого объема) работы без вынужденных перерывов Г
Для непрерывных хиКшко-технологнческих процессов характерны длительные сроки непрерывной работы оборудования — от 300 до 1000 суток и более. Если время безотказной работы системы автоматизации меньше срока непрерывной работы производства, то по вине этой системы может произойти аварийная остановка производства. В результате потерь, сопровождающих отказ системы автоматизации, ее экономическая эффективность резко снижается, причем тем значительнее, чем больше производительность оборудования. Установлено, что для создания экономически эффективных высокоавтоматизированных химико-технологических производств необходимо использовать в системе автоматизации элементы, надежность которых характеризуется примерно 3 5 тыс. су-ток безотказной работы. Очевидно, поэтому, что недостаточная надежность
1 См. ГОСТ 13377 -67 «Надежность в технике. Термины».
367
элементов систем, например автоматических анализаторов состава и свойств вещества, может затруднять их внедрение в промышленность.
Не рассматривая все возможные пути увеличения надежности систем автоматизации, поскольку эта тема выходит за рамки дайной книги, необходимо отметить лишь один: создание благоприятных условий для эксплуатации датчиков., регуляторов и других элементов систем. Это достигается размещением их в специальных помещениях — центральных пунктах управления отделением или цехом.
Как отмечалось выше, в ближайшие годы, по-видимому, в основном сохранится современное направление автоматизации непрерывных химико-технологических процессов, выражающееся в создании систем комплексной автоматизации в масштабе производственных отделений и цехов. Поэтому важное значение приобретают работы ио совершенствованию таких систем. Они ведутся в двух направлениях: совершенствование структуры систем путем использования многоконтурных, комбинированных и других типов САР и совершенствование их аппаратурного оформления. Некоторые способы схемного улучшения систем автоматизации приведены в гл. XVI и XVII при описании САР типовых химико-технологических процессов и примеров систем комплексной автоматизации отделений и цехов химических предприятий.
Одним из наиболее эффективных направлений усовершенствования аппаратурного оформления систем комплексной автоматизации непрерывных химико-технологических процессов является создание ушиверсаль,пых систем централизованного контроля, регулирования и дистанционного управления, которые могут заменить применяемые в настоящее время для этой цели центральные щиты управления с многочисленными размещенными на них вторичными приборами, сигнальными устройствами и устройствами для дистанционного управления различным технологическим оборудованием.
В качестве примера рассмотрим разработанную в ЦНИИКА систему централизованного контроля, регулирования и дистанционного управления типа «Пуск», которая предназначена для комплексной автоматизации непрерывных технологических процессов, обладающих значительной инерционностью л запаздыванием. Система компонуется по модульно-блочному принципу из элементов У СЭППА (см. § 55), поэтому ее применение наиболее целесообразно для объектов с преимущественным использованием пневматических датчиков и исполнительных механизмов.
Система «ПУСК» выполняет следующие функции:
1) световая и звуковая сигнализация отклонений контролируемых параметров от технологических норм с указанием места отклонения на мнемосхеме процесса (технологическая сигнализация);
2) аналогичная сигнализация отклонений параметров от аварийных норм (аварийная сигнализация);
368
3) периодическая регистрация в цифровой форме текущих и заданных значений контролируемых параметров, а также их отклонении от заданных значении;
4) измерение с помощью приборов визу а итого контроля любых параметров по вызову оператора и их регистрация;
5) автоматическое регулирование ви-кнейших параметров по любому закону с помощью одноконтурных или многоконтурных САР;
Рис. 274. Система централизованного контроля, регулирования и дистанционного управления «ПУСК»
6) переход с автоматического регулирования на дистанционное управление и обратно ио любому каналу регулирования;
7) автоматизация операций пуска а останова некоторых типов технологического оборудования и автоматическая блокировка оборудования.
Система «ПУСК» рассчитана на работу с датчиками, имеющими унифицированные выходные сигналы. Предусмотрена возможность предварительной обработки сигналов датчиков, например, извлечение квадратного корня, умножение на постоянный коэффициент и т. д.
На рис. 274 показан внешний вид системы «ПУСК», которая состоит из пульта с мнемосхемой технологического процесса и щитов шкафного типа. Пульт управления является единственным
369
рабочим местом оператора и предназначен для выдачи ему информации о ходе технологического процесса, а также для передачи принятых оператором решений в виде заданных значений контролируемых и регулируемых параметров, программ или других сигналов управления. На пульте установлены задатчики номинальных значений и систем дистанционного управления, клеммы вызова параметров для визуального контроля и приборы для визуального контроля, лампы сигнализации места и знака отклонений параметров, а также устройство общей звуковой сигнализации.
Цифровая регистрация параметров производится с помощью электронного блока с электрофицированной пишущей машинкой.
Система построена по секционному принципу; каждая секция рассчитана на 20 параметров. Максимальное рекомендуемое число секций в одной системе — шесть, следовательно, число точек контроля не должно превышать 120,
Как видно из приведенного описания, система «ПУСК» позволяет реализовать все функции, свойственные системам комплексной автоматизации. По сравнению с традиционными щитовыми системами она имеет следующие преимущества:
1) повышается эффективность управления процессом со стороны оператора благодаря улучшению условий его работы, освобождению его от некоторых функций, выполняемых системой автоматически (контроль за показаниями приборов, ведение журнала и т. д.), рациональному представлению информации (сигнализация только отклонений параметров, использование мнемосхемы);
2) отпадает необходимость в многочисленных вторичных реги стрирующих и показывающих приборах;
3) сокращается площадь центральных пунктов управления.
Системы «ПУСК» смонтированы па ряде химических предприятий, в частности, в обжиговом отделении Воскресенского химкомбината. Опыт эксплуатации подтверждает высокую их эффективность и открывает благоприятные перспективы для применения в химической промышленности.
ЛИТЕРАТУРА
к I части
I. А гей кип Д. И., Кос г и и а Е. Н.п К у зиецов а Н. Н. Датчики контроля и регулирования. М. «Машиностроение* 1.96.5
2. Ару т ю и о в О. С. Датчики состав;', и свойств вешества. М.—Л., Изд. «Энергия», 1966.
3. К у л а к о и М. В. Технологические измерения и приборы для химических производств. М., «Машиностроение», 1966.
4. Кулаков М. В., Казано н А. В н Ш е л я с т и и М. В. (под ред. М. В. Кулакова). Технологические измерения и аналитические приборы в химической промышленности. М., «Машиностроение», 1964.
к II части
1. Анисимов И. В. Автоматическое регулирование процесса ректификации. Гостоппздат, 1961.
‘2 . Л о м а к и п И. Л. и др. Автоматизация хлорных производств. Изд. «Химия», М., 1967.
.4 . О б и о в л е и с к и й 11. А . и яр. Основы автоматики и автоматизации химических производств. Изд. «Химия», M.--J1., 1965.
4. О р д ы и ц е в В. М., 1U е и Д л е р К). А. Автоматическое регулирование технологических процессов. М., Машгиз, 1960.
5. И р у с е н к о В. С. Одноконтурные пневматические системы автоматического регулирования тепловых процессов. Госзпергоиздат, М., 11ХТ1.
6. Техника проектирования систем автоматиза'ции. Изд. «Машиностроение», М., 1966.
7. Ф и а л к о Г. М. Автоматизация производства серной кислоты. Машгиз, М., 1964.
8. Э р р и о т П. Регулирование, производственных процессов. Изд. «Энергия», М., 1967.
ОГЛАВЛЕНИЕ
Предисловие.......................................................... 3
Введение............................................................. о
Часть первая
СИСТЕМЫ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИХ
ПРОЦЕССОВ
Глава I. Основные понятия об измерениях и измерительных приборах . 10
§ I. Измерения................................................. 10
2. И змерительные приборы................................... II
§ 3. Погрешности измерительных приборов........................ 15
Глава II. Измерение температур...................................... 17
§ 4. Основные понятия при измерении температур................. 17
5. Манометрические термометры................................ 20
§ 6. Термометры сопротивления ................................. 23
§ 7. Термоэлектрические термометры............................. 34
§ 8. Пирометры излучения....................................... 48
I' лава III. Преобразователи сигналов и системы передачи показаний на расстояние..................................................... . 56
< ; 9. Общие сведения.......................................... 56
< ; 10. Преобразователи электрической аналоговой ветви......... 57
Преобразователи, выполненные по схеме силовой компенсации 57
Преобразователи, выполненные по схеме компенсации перемещений....................................................... 58
Сельсинные передающие системы............................ 62
< ; 11. Преобразователи электрической дискретно-цифровой ветви (частотные).................................................... 64
(j 12. Преобразователи пневматической ветви.................... 66
Глава IV. Измерение давления.................................... 70
§ 13. Общие сведения........................................... 70
§ 14. Жидкостные приборы....................................... 71
§ 15. Пружинные приборы........................................ 76
§ 16. Основные сведения о выборе, установке и эксплуатации приборов давления ................................................. 80
372
Глава V. Измерение расхода........................................... 83
§ 17. Виды расходомеров......................................... 83
§ 18- Расходомеры переменного перепада давления ............... 83
§ 19. Расходомеры переменного уровня .......................... 99
§ 20. Расходомеры постоянного перепада давления............... 102
§ 21. Расходомеры электромагнитные (индукционные)............. 106
Глава VI. Измерение уровня жидкостей................................ 108
§ 22. Поплавковые уровнемеры.................................... Ю8
§23. Гидростатические уровнемеры.............................. 11-
§ 24. Электрические уровнемеры................................. 113
§ 25. Радиоизотопные уровнемеры................................ 115
Глава VII. Методы и приборы для автоматического анализа состава материалов ................................................... 119
§ 26. Классификация методов автоматического анализа состава материалов ......................................................... 49
§ 27. Электрокондуктометрический метод анализа................. 121
§ 28. Потенциометрический метод анализа ................... 130
§ 29. Абсорбционные методы спектрального анализа............... 137
§30. Прочие косвенные, метод, i анализа ...................... 144
§ 31. Хроматографический метод анализа состава газовых смесей . . 153
Глава VIII. Приборы для определения физических свойств вещества (плотномеры, вискозиметры, влагомеры) .............................. 158
§ 32. Плотномеры для жидкое гей ............................... 158
Весовые плотномеры.......................................... 158
Поплавковые плотномеры ..................................... 159
Гидростатические плотномеры................................. 161
Радиоизотопные плотномеры .................................. 162
§ 33. Вискозиметры............................................. 164
Вискозиметры истечения (капиллярные вискозиметры)........... 165
Вискозиметры с падающим телом............................... 166
Вискозиметры, основанные иа измерении крутящего момента (ротационные) ................................................... 167
Вибрационные вискозиметры..........................: . . . . 169
§ 34. Влагомеры для газов и твердых тел ....................... 171
Психрометрический метод..................................... 171
Метод точки росы ........................................... 172
Кондуктометрический метод............. . .................. 174
Метод диэлектрической проницаемости......................... 175
Часть вторая
ЭЛЕМЕНТЫ ТЕОРИИ И ТЕХНИКИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
Глава IX. Системы автоматического регулирования................... 176
§ 35. Основные понятия и определения ........................ 176
§ 36. Классификация систем автоматического регулирования и их основные свойства.............................................. 182
§ 37. Задачи анализа и синтеза систем автоматической стабилизации 186
373
Г л s на X. Объекты регулирования и их основные свойства............ 188
§ 38. Использование математических моделей объектов регулирования для анализа их свойств...................................... 188
§ 39. Аналитическое определение характеристик объектов регулирования .......................................................... 193
§ 40. Основные свойства типовых промышленных объектов регулирования .......................................................... 202
§ 41. Экспериментальный метод определения характеристик промышленных объектов регулирования................................... 212
ГЛ а в а XI. Элементы анализа разомкнутых линейных САР ............. 217
§ 42. Определение реакции линейного элемента па входной сигнал произвольной заданной формы.................................... 217
§ 43. Использование операционного исчисления при анализе линейных САР ........................................................ 219
Частотные характеристики.................................. 225
§ 44. Структурные схемы САР и их преобразование................ 227
Глава ХИ. Автоматические регуляторы производственных процессов 235
§ 45. Классификация автоматических регуляторов................. 235
§ 46. Позиционные регуляторы................................... 236
§ 47. Интегральные регуляторы.................................. 237
§ 48. Пропорциональные регуляторы.............................. 240
§ 49. Пропорционально-интегральные регуляторы ................. 245
Глава XIII. Элементы анализа и синтеза замкнутых САР ............... 249
§ 50. Влияние характеристик объекта и регулятора на свойства замкнутой САР....................................................... 249
§ 51. Устойчивость замкнутых САР............................... 258
§ 52. Синтез САР заданного качества............................ 262
Глава XIV. Технические средства автоматизации химико-технологи-ческих процессов ................................................... 267
§ 53. Регуляторы прямого действия.............................. 267
§ 54. Электрические регуляторы................................. 268
§ 55. Пневматические регуляторы................................ 271
§ 56. Исполнительные механи змы, регулирующие органы и вспомогательная аппаратура систем автоматизации ........................ 295
Глава XV. Основы проектирования систем автоматизации химико-технологических процессов .............................................. 306
§ 57. Предпосылки автоматизации химических производств......... 306
§ 58. Основы техники проектирования систем автоматизации....... 307
Глава XVI. Системы автоматического регулирования типовых химикотехнологических процессов........................................... 317
§ 59. Типовые объекты автоматизации химической технологии ... 317
§ 60. Системы автоматического регулирования расхода и уровня материала ...................................................... 318
§61. Системы автоматического регулирования тепловых процессов . . 325
§ 62. Системы автоматического регулирования массообменных процессов ............................................................ 328
§ 63. Системы автоматического регулирования реакторных процессов 338
§ 64. Системы автоматизации периодических процессов............ 341
374
Г л а в а XVII. Системы автоматизации отделений и цехов химических предприятий................................................... 346
§ 65. Автоматизация основных отделении производства серной кислоты контактным способом...................................... 346
§ 66. Автоматизация цеха по производству аммиачной селитры .... 356
Глава XVIII. Современное состояние и перспективы развития автоматизации в химической промышленности ............................. 360
§ 67. Современный уровень автоматизации технологических процессов в химической промышленности............................... 360
§ 68. Системы автоматической оптимизации технологических процессов ......................................................... 361
§ 69- Перспективы разработки и применения новых приборов и средств автоматизации в химичес-кой промышленности...... 366
Литература............................................... 371
К а з а к о о Александр Владимирович, Кулаков Михаил Васильевич.
Me л юшев Юрии Константинович
ОСНОВЫ АВТОМАТИКИ И АВТОМАТИЗАЦИИ ХИМИЧЕСКИХ ПРОИЗВОДСТВ
Технический редактор А. Ф. Уварова Корректор Г. И. Сурова Переплет художника Л. С. Иендрова
Сдано в производство 6/V 1970 г. Подписано
к печати 15/Х 1970 г. Т-16207. Тираж 29 000 (1-й завод 1—12 000) экз. Печ. л. 23,5.
Бум. л. 11,75. Уч.-изд. л. 23,5.
Формат 60 x 90’/ie- 1 р. Зак. № 1175.
Издательство «МА ШИ ПОСТРОЕН И Е», Москва, В-66, 1-й Басманный пер., 3
Отпечатано с матриц Ордена Трудового Красного Знамени Ленинградской типографии № 1 «Печатный Двор» имени А. М. Горького Главполиграфпрома Комитета по печати при Совете Министров СССР, г. Ленинград, Гатчинская ул., 26 в Ленинградской типографии № 6 Главполиграфпрома
Комитега по печати при Совете Министров СССР Ленинград, С-144, ул. Моисеенко, 10. Заказ 921.