/





























































































































































































































































Текст
В. В. ДОБРОНРАВОВ
ОСНОВЫ
АНАЛИТИЧЕСКОЙ
МЕХАНИКИ
ДОПУЩЕНО
МИНИСТЕРСТВОМ
ВЫСШЕГО И СРЕДНЕГО
СПЕЦИАЛЬНОГО ОБРАЗОВАНИЯ СССР
В КАЧЕСТВЕ УЧЕБНОГО ПОСОБИЯ
ДЛЯ СТУДЕНТОВ ВУЗОВ
МОСКВА
«ВЫСШАЯ ШКОЛА» 1976
531
Д56
УДК 531 @75>
Рецензенты:
Академик Академии наук УССР Я. Л. Кильчевский.
Кафедра теоретической механики горного института (зав. ка-
кафедрой проф. И. М. Воронков)
Добронравов В. В.
Д56 Основы аналитической механики. Учеб. пособие для
вузов. М., «Высш. школа», 1976.
264 с. с ил.
Настоящая книга, являющаяся учебным пособием по курсу аналитической
механики, наряду с традиционными вопросами (вариационные принципы механики,
уравнения движения механических систем, методы их интегрирования и др.) содер-
содержит изложение методов, которые используются в научных исследованиях, но
еще не вошли в учебные руководства. В частности, дается применение метода не-
неполного интеграла к интегрированию уравнений движения неголономных систем,
исследуются основные особенности механики реономных систем, излагаются теоре-
теорема Нетер и метод внешних форм в применении к механике.
Книга предназначается для студентов и аспирантов вузов, а также препода-
преподавателей и научных работников.
20302-320
001@1)—76
© Издательство «Высшая шквла», 1976 г.
ПРЕДИСЛОВИЕ
Значение аналитической механики в ряде
областей современной техники, таких как
теория управления движением, космиче-
космическая механика, автоматическое управле-
управление и др., в настоящее время неизмен-
неизменно возрастает. Этим и определяется со-
содержание настоящей книги. Она рассчи-
рассчитана на читателей, имеющих подготов-
подготовку по теоретической механике и высшей
математике в объеме учебных программ
высших технических учебных заведений.
Некоторые сведения по математике, вы-
выходящие за пределы программ, излагаю-
излагаются в соответствующих главах настоя-
настоящей книги.
Книга состоит из двух частей. В
первой части в объеме университетского
курса излагаются основы аналитичес-
аналитической механики, не затрагивая механики
неголономных систем, которая изложена
в книге автора «Основы механики него-
неголономных систем».
Во второй части дается изложение
современных исследований по некото-
некоторым разделам аналитической механики.
В частности, здесь наряду с традици-
традиционными случаями интегрируемости урав-
уравнения Гамильтона—Якоби — случаями
интегрируемости Лиувилля и Штекке-
ля — проводится обзор исследований
в области интегрирования уравнения
Гамильтона—Якоби разделением пере-
переменных; излагается метод неполного ин-
интеграла как метод построения частных
решений уравнений движения голоном-
ных систем и указывается применение
этого метода к интегрированию урав-
уравнений движения неголономных механи-
механических систем; исследуются основные
— 3 —
особенности механики реономных систем; излагаются теоремы Не-
тер и метод внешних форм в применении к механике и некоторые
другие вопросы.
В создании книги по просьбе автора приняли участие научные
работники, специализирующиеся в данных областях, которыми были
написаны следующие главы: главы X и XI принадлежат М. А. Чуе-
ву, глава XII — Я. А. Болотниковой, глава XIII — Ю. П. Сур-
Суркову, глава XIV — В. Ю. Иванченко, глава XV — А. Ф. Павлову,
глава XVI — В. В. Луневу, глава III — Ю. А. Гартунгу, а § И
главы II — М. Л. Поминову.
Автор выражает глубокую благодарность академику АН УССР
Н. А. Кильчевскому, профессору И. М. Воронкову и сотрудникам
возглавляемой им кафедры теоретической механики МГИ за боль-
большой труд по рецензированию книги и ценные замечания.
Автор
Часть первая
ОБЩИЕ
ВОПРОСЫ
АНАЛИТИЧЕСКОЙ
МЕХАНИКИ
Глава
ОСНОВНЫЕ ПОЛОЖЕНИЯ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
ВВЕДЕНИЕ
Рассмотрим систему из N материальных точек В;, массы
которых ntji декартовы координаты #,-, у]у Zj(j = 1,2,..., iV). Радиус-
вектор каждой точки
7j = XjF+ yjf+ Z&
где i, /, k — единичные векторы выбранной системы координат.
Скорости и ускорения точек:
_ 37/ ~ dvf -l. d27j
3 dt 3 J dt J dt2
r.
J
Силы, действующие на точки системы, обозначим Fj, в случае
необходимости каждую силу можно разложить на две: внешнюю
7уе)и внутреннюю FjW, где Туе> — равнодействующая всех
внешних сил, приложенных к данной точке Bjy a Z7/1') — равнодей-
равнодействующая всех внутренних сил, т. е. сил, выражающих воздействие
на данную точку Bj всех остальных точек.
Если у всех точек системы отсутствуют механические взаимодей-
взаимодействия, то система подчинена одним внешним силам F/e). Могут быть
материальные системы, движущиеся под влиянием одних только
внутренних сил, например системы, изучаемые в небесной механике.
Установим ряд определений.
Заданными силами, приложенными к точкам системы, называются
силы, векторы которых являются известными по своей структу-
структуре функциями от геометрических и кинематических характеристик
точек системы, от масс точек системы, от их скоростей и т. д., от
времени и каких-то других параметров а; т. е.
_ _ / _ J- И. (л) \
Fj = Fj [t, rjt r/, rj9 ..., о, nij, a) .
Связями, наложенными на искомое движение данной материаль-
материальной системы, называются заранее установленные условия, наложен-
наложенные на изменения геометрических и кинематических и динамичес-
динамических характеристик системы при ее движении и выражающиеся за-
заданными уравнениями, в частности и дифференциальными. Если
условия налагаются на кинематические характеристики, то связи
называются кинематическими; в аналитической механике изучаются
только кинематические связи. Связи, налагаемые только на коор-
координаты, назовем геометрическими.
Условия самого общего вида, налагаемые на изменение динами-
динамических характеристик (массы, импульсы, энергия и др.), изучаются
в новой, возникшей в наше время науке, находящейся на стыке
— 7 —
ряда других наук, в частности аналитической механики и вариаци-
вариационного исчисления — в теории управления движениями и процес-
процессами.
§ 1. Классификация кинематических связей
Наиболее общий вид кинематической связи может выра-
выражаться дифференциальным уравнением относительно г7-, их произ-
производных любого порядка и времени:
f VO» O« rh rh — > rjf Ч = О-
В аналитической механике рассматриваются главным образом
только кинематические связи первого порядка и при этом линейные
относительно скоростей, т. е. связи, выражающиеся уравнениями
где aQj9 fcp — некоторые функции от rj или координат Xj, yj> ij\ в
декартовых координатах:
Теория связей высших порядков относительно производных, а
также нелинейной структуры относительно производных по времени
рассматривается в механике неголономных систем [3]. В данной же
книге рассматриваются голономные и неголономные связи первого
порядка, линейные относительно х, у, г.
Голономными связями в механических системах называются свя-
связи, выражающиеся аналитическими или конечными (не дифферен-
дифференциальными) уравнениями относительно координат х\ у\ z и времени
t, т. е. уравнениями вида
/Р(*. У\ z\ t) = 0§
или же дифференциальными, но интегрируемыми уравнениями в об-
общем виде, приводящимися к конечным соотношениям, содержащим
постоянные интеграции.
Например, связь х2 + У2 — 22 =0 при движении одной мате-
материальной точки является голономной. Она показывает, что при та-
такой связи траектория точки располагается на конической поверх-
поверхности с заданным уравнением.
Связь, выражающаяся дифференциальным уравнением хх —
— УУ — z =0, интегрируема. Общее решение этого уравнения име-
имеет вид
2z = х2 — у2 + е.
— 8 —
Оно выражает семейство гиперболических параболоидов, седло-
седлообразные точки которых находятся на оси г.
Таким образом, при голономной связи точка движется по опре-
определенной поверхности.
Неголономными называются связи, выражающиеся неинтегри-
руемыми дифференциальными уравнениями. Например, связь
zex — y = 0 (a)
— это дифференциальное уравнение, которое не нтегрируется в
общем виде. Умножив его на dt, получим ех dz = dy.
Невозможно найти такое семейство поверхностей, чтобы каждая
траектория точки, удовлетворяющая уравнению связи, располага-
располагалась на какой-либо поверхности одного и того же семейства. Но
можно проинтегрировать уравнение частным образом, путем подбора
функций времени, удовлетворяющих уравнению (а), например z =
= t, x ~ \nt, у — /2/2. Траектория точки найдена, но утверждать,
что она располагается на определенной, заранее заданной, поверх-
поверхности, невозможно.
Склерономными называются связи, выражающиеся соотноше-
соотношениями (уравнениями), не содержащими явно времени t. Например,
связь, выражаемая уравнением
х2/а2 + уЩ* + z2/c2 = 1,
является склерономной — уравнение связи не содержит явно
времени t. В случае склерономной связи материальная точка оста-
остается на поверхности, которая во времени не деформируется и не
перемещается.
Если же связь явно зависит от времени, то ее называют реономной.
Например, связь
x2l(a42) + y2lb2 + z2/c2 = 1
— реономная, так как она явно зависит от времени t. Эта связь
выражает следующий факт: точка в процессе движения остается на
поверхности эллипсоида, одна полуось которого изменяет свою
величину, т. е. точка остается на поверхности деформирующегося
эллипсоида.
Связь
тоже является реономной. В данном случае центр сферы перемеща-
перемещается по оси х со скоростью, равной 5 единицам, и сфера увлекает с
собой точку В (%, уу z), находящуюся на сфере.
В свойствах движений склерономных и реономных систем и в
методах их изучения имеются существенные различия.
Двусторонними являются связи, выражающиеся уравнениями
(строгими равенствами). Например, связь f(x, у, z) =0 показывает,
что точка находится в каждый момент времени на определенной по-
о
верхности и не может сойти с нее ни в какую сторону от поверх-
поверхности — ни во внешнюю, ни во внутреннюю. Например, связь
х2 + у2 + z2 = R2 показывает, что материальная точка не может
сойти со сферы ни в наружное пространство, ни во внутреннее. Ма-
Материальная точка находится как бы между двумя бесконечно близ-
близкими сферами, не пускающими точку ни в ту, ни в другую сторону.
Односторонними называются связи, выражающиеся неравенст-
неравенствами. Таким образом, односторонняя связь показывает, что точка
или находится на поверхности, или может покинуть ее, сойдя в ту
или другую сторону. Например, связь х2 + у2 + z2 <С R2 пока-
показывает, что точка может или оставаться на сфере, или покинуть сфе-
сферу во внутреннюю область сферы.
Двусторонние связи называются также удерживающими или
неосвобождающими, односторонние — неудерживающими, осво-
освобождающими.
Реакциями связей считаются силы, приложенные к материальной
точке со стороны тел и поверхностей, реализующих связи. Связями
в настоящее время часто считаются и сами устройства, реализу-
реализующие то или иное уравнение связи. В теории управления движе-
движениями и процессами связи часто называются также программами
движения или процесса.
§ 2. Обобщенные координаты
Одной из отличительных особенностей аналитической меха-
механики является применение для изучения движения механических
систем, так называемых «обобщенных координат». Обобщенными
координатами механической системы называются некоторые целе-
целесообразно выбранные переменные, выражающие длины каких-то
отрезков или величины углов и определяющие положение системы
в пространстве. Такими координатами могут быть, в частности,
криволинейные координаты: полярные на плоскости, цилиндри-
цилиндрические, сферические и др.
Выразив декартовы координаты точек системы через обобщенные
координаты, можно составить уравнения движения. Особенно
полезным и даже необходимым является переход от декартовых ко-
координат к обобщенным координатам в случаях, когда на изучаемую
механическую систему наложены связи.
Допустим, что на данную систему наложены голономные связи,
выражающиеся конечными соотношениями между декартовыми ко-
координатами точек системы. Для упрощения обозначим все 3N коор-
координат точек В. системы одним символом Xj, но с тремя последователь-
последовательными для каждой точки индексами (xj, xJ+u xj+2). Тогда уравнения
голономных связей примут вид
fk(Xj, 0=0 (/ = 1, 2, ..., 3tV; ^ = 1 s). A)
Таким образом, все 3N декартовых координат связаны s конеч-
конечными соотношениями; из них можно выразить s каких-либо коор-
— 10 —
динат, например xl9 x2, ..., xS9 через остальные 3N— s координат
тоже в виде конечных соотношений:
где
Р = 1,2, ...,s; k = s + 1, s + 2, ..., ЗЛА,
причем s < ЗЛЛ
Таким образом, переменные с индексами & считаются независимы-
независимыми в том смысле, что принимаемые ими при движении системы чис-
числовые значения могут задаваться любыми. Число таких независимых
координат равно разности между числом всех декартовых координат
3N и числом s голономных связей; обозначим это число п. Остальные
же s координат следует считать зависимыми координатами в том
смысле, что какие бы ни действовали на систему активные силы Fj,
координаты АГр(Р =1,2, ..., s) должны принимать только значения,
удовлетворяющие условиям связей A).
Если бы не было связей, то все координаты xj были бы незави-
независимыми и на их числовые значения влияли бы только заданные силы
Fj. Отсюда следует, что при осуществлении связей появляются
какие-то дополнительные силы, заставляющие двигаться систему
по программе, выражаемой уравнениями связей. Эти силы, реали-
реализующие вместе с заданными силами движение системы согласно свя-
связям, можно назвать реакциями связей или управляющими воздейст-
воздействиями, если движение системы связано с каким-либо техническим
процессом, например, когда уравнения связей выражают про-
программу движения, в частности полета управляемого объекта.
Движение системы сголономными связями, таким образом, пол-
полностью определяется функциями xt(t), (i = 1, 2, ..., п). Для их на-
нахождения можно применить прямой метод Ньютона, т. е. составить
уравнения движения системы в декартовых координатах.
Обозначим равнодействующую реакций связей, приложенных к
каждой точке |3;- системы Rj (/ = 1, 2,..., N). Тогда для всех точек
системы динамические уравнения примут вид
Щ Ъ = Fix + Rjx (/=1,2,..., 3JV). B)
В систему уравнений входят 6N неизвестных функций: Xj(t) и
Rjx. Для их нахождения следует присоединить s уравнений связей
A),гдез< 3Af. Получим систему из 3N + s уравнений относитель-
относительно 6N искомых функций.
Отметим замечательный факт: система уравнений B) и A) прин-
принципиально разрешима, так как число неизвестных функций больше
числа уравнений. Но задача является в то же время неопределенной,
что даже и необходимо, так как для решения всей системы достаточ-
достаточно задавать некоторые неизвестные в виде произвольных, но опре-
Время / может входить только при реономных связях.
деленных функций ft(t)[i = €>N — CjV + s)], а остальные неиз-
неизвестные функции могут быть найдены после интегрирования системы.
Более того, эта неопределенность позволяет выбрать произволь-
произвольные функции ft(t) таким образом, чтобы движение происходило оп-
оптимальным в каком-либо смысле. Так, полет космического летатель-
летательного аппарата может управляться с различными целями: например,
в смысле быстроты перелета из одной точки пространства в другую,
или с требованием минимума расхода топлива. Все подобные
проблемы входят в новую возникшую недавно науку «Теорию
управления движениями и процессами», базирующуюся на аналити-
аналитической механике и вариационном исчислении. Значение данной
науки для человечества весьма велико.
Решение основной задачи управляемого движения, выражаемого
уравнениями B) в декартовых координатах, в большинстве случаев
мало удобно. Выберем новые наиболее удобные переменные—обоб-
переменные—обобщенные координаты q. так, чтобы их число было равно числу неза-
независимых декартовых координат х и чтобы все xk могли быть выраже-
выражены конечными соотношениями (не дифференциальными) через qv
т. е. посредством некоторых формул:
xh = Xk(qt, t) (i = 1, 2, ..., n, k = 1, ..., я). C)
Но тогда благодаря уравнениям голономных связей A) и все
остальные декартовы координаты х$ выразятся через те же самые
обобщенные координаты, а следовательно, и вообще все декартовы
координаты Xj выразятся через обобщенные координаты qr.
xj = xj(qv t) (/ = 1, ..., ЗЛО D)
Следовательно, и радиус-вектор г7- каждой точки r7- = x3j_2 i +
+ *3j-i / + X3j k выразится через все обобщенные координаты qif
т. е.
§ 3. Пространство конфигураций системы
Положение свободной механической системы N точек
Bj, движущихся в трехмерном пространстве, определяется 3N неза-
независимыми декартовыми координатами. Каждую совокупность 3N
величин условно можно определить декартовыми координатами од-
одной только точки 5*, но в пространстве 3N измерений. Обозначим
это пространство Еам- Точку 5* назовем «изображающей точкой»
для системы точек Bj.
Следовательно, при движении точек свободной механической
системы изменятся координаты точки В* — она будет перемещать-
перемещаться по некоторой своей траектории.
Траектория изображающей точки в эвклидовом пространстве
3./V измерений (?4v) отразит движение данной системы материальных
точек. Каждому положению изображающей точки будет соответст-
— 12 —
вовать некоторое положение системы материальных точек в трех-
трехмерном пространстве. Поэтому пространство Ем можно назвать про-
пространством конфигураций свободной материальной системы N точек.
Если материальная система подчинена голономным связям, т. е.
если все декартовы координаты выразить через q. некоторыми фор-
формулами Kj = Kj(qv t), то изображающая точка Б* будет обладать
только п независимыми координатами q{y но уже не в эвклидовом
пространстве 3iV измерений, а в некотором пространстве п измерений
— пространстве Римана. Обозначим это пространство Vn (от слова
variete — многообразие). При этом можно считать, что уравнения
D) выражают отображение одного пространства в другое.
§ 4. Неголономные связи
Допустим, что вследствие учета одних только голономных
связей геометрическая конфигурация системы точек определяется
обобщенными координатами qt (i = 1 ... п). Допустим далее, что
на систему наложены еще неголономные связи, выражающиеся не-
некоторыми неинтегрируемыми дифференциальными уравнениями от-
относительно обобщенных координат qv Рассматриваем, как указыва-
указывалось выше, только неголономные связи первого порядка, линейные
относительно qv т. е. связи вида
+Лр = О(р= 1,2, ...,/), E)
где коэффициенты Ар. и А9 могут быть функциями обобщенных
координат q. и времени t.
После умножения на дифференциал времени dt уравнения E)
неголономных связей, учитывая, что qtdt = dqv примут вид
^^dqi+Adt = O. p=l,2,/. E')
§ 5. Действительные и возможные
изменения переменных
После того как декартовы координаты точек Xj и векторы г j
выразятся на основании голономных связей через обобщенные коор-
координаты qv изменения данных векторов будут зависеть от изменения
обобщенных переменных qr Но эти переменные могут зависеть не
только от времени /, но и от некоторых параметров. Это может про-
происходить потому, что обобщенные координаты q. могут нахо-
находиться как функции времени, в результате интегрирования диф-
дифференциальных уравнений движения системы.
— .13 —
Но тогда найденные функции q%
будут зависеть не только от вре-
времени /, но и от их начальных дан-
данных, т. е. от qt0 и #0 , которые вой-
войдут в виде параметров в аналитиче-
аналитические выражения функций qv Обоз-
Обозначим один из таких параметров а
(другие параметры не выписываем).
Тогда q = q(t, а). Если изображать
графически зависимость q от t, то
придется строить бесчисленное мно-
множество линий в зависимости от значений параметра а, которым
соответствуют определенные графики; двум близким значениям а
и а + da соответствуют две близкие линии (рис. 1).
Таким образом, необходимо различать два вида изменения пере-
переменного qt: изменение по времени при фиксированном а
Рис. 1
~ dq{t> a)
ot
dt9 или dq=qdt
и другое, мыслимое, изменение по а при фиксированном t. Последнее
обозначим 6 <7Г Оно выражает разность значений q в двух возможных
зависимостях, но, конечно, можно считать, что
да
Такое возможное (мыслимое) изменение переменного q назовем
«вариацией» этого переменного.
Подробнее свойства вариаций рассмотрены в гл. VII.
Радиус-вектор г точки, выраженный через qv является, следова-
следовательно, тоже функцией времени и параметра а:
Изменение г по t выражается дифференциалом dr = rdt\ изменение
по а имеет вид
где
^^ da.
да
(Ь)
Вариацию б г радиуса-вектора точки можно считать также «воз-
«возможным перемещением» точки. Таким образом, возможным переме-
перемещением точки называется всякое мыслимое бесконечно малое переме-
перемещение точки из ее положения в данный момент времени, допускаемое
условиями связей в этот же момент.
— И —
Допустим, что движущаяся материальная точка, согласно склеро-
склерономным связям, должна находиться в каждый момент времени в ка-
какой-то точке этой поверхности. Тогда все возможные перемещения
б г точки из данного положения В представятся расположенными в
плоскости, касательной к поверхности в данной точке, в виде бес-
бесконечно малых векторов с общим началом в данной точке В.
Если же связь, наложенная на точку, будет реономной, т. е.
в уравнение связи войдет явно время t, то возможные перемещения
точки для данного момента времени t расположатся в касательной
плоскости к данной поверхности в том ее виде, в каком она предста-
представится, если в уравнение поверхности вместо t подставить его число-
числовое значение, соответствующее данному моменту времени tx. Напри-
Например, для точки, вынужденной при движении находиться на поверх-
поверхности сферы с уравнением х2 + у2 + г2 = 25/2, возможные пере-
перемещения для момента t = 1 сек расположатся в плоскости, касаю-
касающейся сферы радиусом г = 5, а в момент времени t = 1,1 сек воз-
возможные перемещения будут находиться в плоскости, касающейся
сферы большего радиуса, и т. д. Таким образом, понятие возможных
перемещений есть вспомогательное, но как это показано ниже,
понятие весьма полезное.
Действительным перемещением точки назовем фактическое, фи-
физически происходящее, бесконечно малое перемещение точки за
бесконечно малый промежуток времени dt по ее траектории, выра-
выражающееся дифференциалом радиуса-вектора dr = rdt. Действитель-
Действительное перемещение у точки может быть только одно. Оно происходит
под действием сил, в числе которых должна быть обязательно и
реакция связи. Между возможными и действительными перемещения-
перемещениями существуют простые соотношения, очевидные уже из опреде-
определения данных понятий. При этом могут быть только две возмож-
возможности.
При склерономной связи очевидно, что любое возникающее в
момент t действительное перемещение совпадает с одним из возмож-
возможных перемещений, учтенных заранее. При реономных связях возни-
возникает другое положение: поверхность, на которой согласно условиям
связи должна оставаться материальная точка, будет сама или пере-
перемещаться в пространстве, или деформироваться и при этом увлекать
за собой точку.
Таким образом, у материальной точки в этом случае действитель-
действительное перемещение может состоять из двух одновременных движе-
движений — возможного б/", которое можно считать относительным (по
отношению к связи), и переносного drx — вместе со связью. Все
действительное перемещение dr описывается уравнением
dF= Ь7+ d74. G)
Установлен, следовательно, важный факт: при реономной связи
действительное перемещение точки не совпадает ни с одним из воз-
возможных перемещений.
— 15 —
§ 6. Степени свободы механических систем
Понятие возможных перемещений позволяет установить
весьма полезное для изучения движений понятие числа степеней
свободы материальной системы. Оно характеризует в некоторой мере
ограничения, налагаемые связями на возможные движения.
Число степеней свободы свободной материальной точки равно
трем, так как точка, на которую не наложены никакие связи, может
перемещаться под действием приложенных к ней сил по трем неза-
независимым направлениям (#, у, z), а следовательно, и по любому нап-
направлению в пространстве, так как для любого значения б г имеем
Тогда система из N свободных материальных точек должна счи-
считаться обладающей числом степеней свободы, равным 3N. Но мате-
материальная точка, вынужденная двигаться, например, по абсолютно
твердой поверхности, имеет уже не три, а две степени свободы. Ко-
Колечко малых размеров, надетое на проволоку, или малых размеров
шарик внутри трубки столь же малого диаметра имеет по одной
степени свободы.
Таким образом, следует, что числом степеней свободы материаль-
материальной системы должно называться число независимых вариаций обоб-
обобщенных координат qt данной системы. Применим это понятие сна-
сначала к голономной системе.
Допустим, что на систему наложены только голономные свя-
связи, вследствие чего все декартовы координаты системы могут быть
выражены через п каких-либо обобщенных координат qlf q2, ...
..., qn. Тогда все действительные приращения dqt независимы между
собой и, следовательно, обобщенные координаты также независимы.
Следовательно, число степеней свободы системы с голономными
связями равно числу обобщенных координат системы. Обозначаем
число степеней свободы системы ky а число обобщенных координат
п; для голономных систем (т. е. систем только с голономными свя-
связями) имеем
А|!= п. (8)
Для установления понятия числа степеней свободы при наличии
неголономных связей рассмотрим сначала одно весьма существен-
существенное положение в теории связей, а именно, вывод уравнений связей
в вариациях в обобщенных координатах.
Рассмотрим три случая.
а) На систему дополнительно наложена голономная, склероном-
склерономная связь, выражаемая конечным уравнением относительно обоб-
обобщенных координат, не содержащим времени t:
f(q.) = 0. (9)
Составим полную вариацию (9). Получаем б f(qb) = 0,
— 16 —
так как справа величина постоянная, не зависящая ни от /, ни от
какого-либо параметра. Слева имеем полный дифференциал (по
параметру а). Представим его в раскрытом виде:
dq dq ^ dq
Появляется одно соотношение, связывающее вариации 8qr
Это соотношение уменьшает число независимых вариаций, а следо-
следовательно, и число степеней свободы на единицу.
б) Рассмотрим голономную реономную связь: f(qv t) = О.Соста-
вим сначала полный дифференциал этой функции при действитель-
действительном перемещении:
df 4 lL y = 0. (И)
&7i ^ dq2 n* ' dqn '" ' dt
Составим теперь вариацию функции /, т. е. полный дифферен-
дифференциал в возможном изменении / (при составлении этого дифференциа-
дифференциала время t следует считать фиксированным). Получаем
of ш;, /) == 0 или QQi ~\ ^^2 "~f~ • • • ~f~ *" Qn ^^ 0» A2)
dqi dq2 dqn
Следовательно, в этом случае, как и в случае склерономной свя-
связи, число независимых вариаций уменьшается на единицу. Одно-
Одновременно можно, сравнивая A1) и A2), отметить, что действитель-
действительные изменения dqt не совпадают с вариациями 6 qv Но в обоих слу-
случаях уменьшается не только число степеней свободы системы, но и
число самих независимых координат qv
В случае неголономных связей происходит иное. Положим, что
связь неголономна, линейна относительно обобщенных скоростей и
реономна, т. е.
A (qt t) qt + Ab(qtt)q2+... + An (qt t) qn + An+i (qt t) = 0. A3)
Умножаем обе части уравнения A3) на dt
Axdqx + A2dq2 + ...+ Andqn + An+1 dt = 0. A4)
Чтобы получить соотношение между вариациями, приведем,
следуя Сингу, такое рассуждение: вариации &qt являются мгно-
мгновенными мыслимыми приращениями координат в определенный
фиксированный момент времени t и, следовательно, при dt = 0.
Итак, соотношение A4) приобретает вид
АфЯх + A28q2 + ...+ AnSqn = 0. A5)
Таким образом, неголономная связь тоже уменьшает число не-
независимых вариаций обобщенных координат, но не число обобщен-
обобщенных координат, так как уравнение A4) не интегрируется. Это — су-
существенное обстоя?& jfbcv&6.
_ 17 —
Следовательно, если на систему, геометрическая конфигурация
которой определяется п независимыми обобщенными координатами,
наложены еще и неголономные связи вида
то число степеней свободы системы уменьшается на sv
Следовательно, число степеней свободы системы с неголономны-
ми связями меньше числа обобщенных координат системы на число
неголономных связей:
k = п — sv
Следует также отметить, что возможен случай, когда, например,
уравнение A5), представленное в вариациях, может быть проинтег-
проинтегрировано; но это не будет означать, что неголономная связь делает-
делается голономной.
Кинематическая связь, выражающаяся уравнением в действитель-
действительных перемещениях, только тогда будет голономной, если проинтег-
проинтегрировать уравнение A4) в действительных перемещениях. Напри-
Например, ввязь
<7i<7i — Ш — Ц4 = О A6)
или в дифференциалах
qxdqt — q2dq2 — q3tdt = 0 A7)
выразится уравнением в вариациях
<7i6<7i — ?2S?2 = 0. A8)
Нетрудно заметить, что последнее уравнение интегрируется.
Интеграл A8) есть
A/2)^ - A/2)?22 = в. A9)
Однако соотношение A9), полученное интегрированием уравне-
уравнения в вариациях A8), не эквивалентно уравнению связи A6), в чем
легко убедиться, сравнив дифференциал уравненияA9) с A7), и не
может считаться новой неголономной связью.
Глава II
УРАВНЕНИЯ ЛАГРАНШ
§ 1, Вывод уравнений Лагранжа
Допустим, что на систему, состоящую из iV материальных
точек Bj(j = 1, ..., N) с массами т-р действуют заданные силы Fj.
Положение каждой точки определяется вектором rj(Xj, yjt Zj) в неко-
некоторой инерциальной системе декартовых координат; л;., yjt Zj —
— 18 —
декартовы координаты точек. Кинематическое состояние системы
характеризуем векторами: Vj = r^ (скорость точки) и"а;- = Vj =
= rj (ускорение точки).
Задача ставится следующим образом: при некоторых заданных
силах Fj,t. e. силах, выражающихся известными функциями коор-
координат и скоростей (всех точек системы) и времени t:
а также при заданных связях требуется найти движение системы*
Допустим, что на систему наложены голономные связи, выражен-
выраженные в декартовых координатах, позволяющие выразить все ЗА/ де-
декартовых координат через п каких-либо обобщенных координат qv
не подчиненных никаким связывающим их соотношениям, т. е. сис-
система имеет п степеней свободы. Следовательно, при реономных
связях будет:
О = rTfopO (/ = L 2. -' АО- B)
Требуется составить уравнения движения для нахождения пере-
переменных qv а также для вычисления реакций связи Rj.
Составим сначала систему всех уравнений, выражающих дви-
движение данной материальной системы в декартовых координатах.
Она сложится из системы динамических уравнений движения точек
системы:
ЩЪ = Ъ + Ъ1 (/=1,2, ...,#), C)
где Rj — реакции связей, и системы уравнений голономных свя-
связей /р(о, t) = 0 (р = 1, 2, ..., s) (в декартовых координатах число
уравнений равно 3N + s).
Представляем уравнения C), согласно принципу Даламбера,
в виде
- mjTj + Fj + Rj = 0 (j = 1, 2, ..., N). D)
Затем составим скалярное произведение каждого из уравнений
D) на вектор б rj и просуммируем все уравнения, т. е. применим прин-
принцип Даламбера—Лагранжа. Появится уравнение
2 (- m^i+Ъ + ^)8 Ъ = °> E)
называемое общим уравнением динамики системы и выражающее
принцип Даламбера—Лагранжа, по которому при движении мате-
материальной системы сумма элементарных работ всех сил, приложенных
к точкам системы, включая реакции связей и даламберовы силы инер-
— 19 —
ции, равна нулю на любом возможном перемещении системы из ее
положения в каждый данный момент времени t.
Допустим, теперь, что наложенные связи идеальны, т. е. сумма
элементарных работ сил реакций равна нулю на любом возможном
перемещении системы из положения системы в данный момент вре-
времени ty т.е.
= 0. F)
Тогда общее уравнение динамики упростится и примет вид
Г,)87, = 0. G)
Все дальнейшее будет заключаться в преобразовании левой час-
части уравнения G) к виду, выраженному через обобщенные координаты
системы qv обобщенные скорости qv обобщенные ускорения q. и
обобщенные силы Q..
При этом установим ряд положений, имеющих принципиальное
значение для аналитической динамики. Сначала выразим каждое
возможное перемещение через вариации обобщенных координат
Имеем
Тогда 8о (представляемая возможными дифференциалами по
qt) выразится так:
Подставляя (8) в G) и меняя порядок суммирования по индексам
i и /, представим G) в виде
Вторая сумма в квадратной скобке представляет собой обобщен-
обобщенную силу индекса г.
2
Pi
дЯг
Преобразуем первую сумму внутри квадратной скобки, сначала
представив каждый член этой суммы в виде
Ш) г7 = т7- г/ — т? г — . A0)
3 dqi dt \ J dqt J dt dqt t
— 20 —
Затем выведем два соотношения, которые назовем соотношения-
соотношениями Лагранжа при голономности системы. Для этой цели составим
выражение скорости точки Vj = rj. По правилу вычисления пол-
полной производной по t от rj(q.t) имеем
-1- д Г/ • О Г; • д Г] • д Г;
Составим теперь частную производную по q% от функции т\ , т. е.
от всей правой части A1), учитывая, что аргумент qv по которому
будем дифференцировать правую часть равенства A1), входит в эту
правую часть линейно в виде множителя при —*^. Таким образом,
A2)
Равенство A2) и есть первое соотношение Лагранжа для голо-
номной системы, справедливое только при отсутствии неголономных
связей.
Для вывода второго соотношения составим сначала полную про-
д 7/ -
изводную по t от векторной функции — . Поскольку г3 = Г] {д^),
dqt
дг,
то и — зависит только от qt и от t, но не зависит ни от какого
dqt _
d Qr-
qt. Тогда для вычисления -jr -——следуетдифференцировать по
всем qv умножая на q% (по правилу дифференцирования сложных
функций), и еще по t, т. е.
dt dqi dqfdqx dqidq2 dqidqn dqidt
Теперь составим частную производную по qt от г7-, т. е. от правой
части A1). В этой правой части множители — , — ,
dql dq2
д rj д rj
-•., , 1 зависит от qt. При дифференцировании по qt появ-
dqn dt
ляются вторые частные производные по q.B каждом слагаемому, е.
dq2dq % " dqndqt dt <
— 21 —
Сравнивая равенства A3) и A4), замечаем, что их правые части
тождественно равны между собой. Следовательно, получаем второе
соотношение Лагранжа для голономных систем
dt dqi dqi
Здесь нет перестановочности порядка дифференцирования по q.
и по t—полное дифференцирование и частное дифференцирование
не могут быть переставимы; формула A5) выводится из структуры
функции -~— и rj (для удобства запоминания условно можно счи-
тать якобы переставимость этих операции в данном случае).
Формулы A2) и A5) позволяют провести вывод уравнений дви-
движения для голономных систем. Подставим A2) и A5) в правую часть
уравнения A0), которое примет вид
mr\mr)
Учитывая A6), представим (9), вынося оператор дифференциро-
дифференцирования за знак суммы, в следующем виде:
Выясним теперь смысл каждой из оставшихся сумм в круглых
скобках A7). Для этого рассмотрим кинетическую энергию системы
в ее первоначальном виде:
N п N
т =
тАги
Составим теперь производную от Т сначала по qv Предваритель-
Предварительно вспомним, что скалярное произведение векторов дифференциру-
дифференцируется по скалярному аргументу по обычным правилам дифференци-
дифференцирования. Учитывая перестановочность скалярного произведения
векторов, имеем
)-4{4О + О^)-7,±. A7а)
dqi г \ dqt J * \ dqt д qt J dqt
Таким образом, производная по скалярному аргументу от ска-
скалярного квадрата вектора равна производной по тому же аргументу
от квадрата модуля данного вектора и выражается правой частью
A7а).
То же самое характерно и для слагаемых во второй сумме внут-
— 22 —
ри малых скобок в A7):
dqi 2 dqt }
Подставляя A7а) и A8) в A7) и вынося оператор дифференциро-
дифференцирования за знак суммы, представим равенство A7) в виде
A9)
Каждая сумма по / в левой части является кинетической энерги-
энергией системы материальных точек; соотношение A9) приобретет вид
B0,
По существу равенство B0) представляет собой не что иное, как
общее уравнение динамики G), но выраженное в обобщенных коор-
координатах и обобщенных силах; множители б 9* выражают возможные
перемещения системы. Весь вывод уравнения B6) проводится для
любого возможного перемещения системы, т. е. перемещения, до-
допускаемого связями. Но все6#| между собой независимы, так как
они появляются после учета голономных связей при рассмотрении
системы в декартовых координатах.
Для вывода уравнений движения применим к уравнению B0)
одно принципиальное существенное положение математического ана-
анализа. Для удобства и краткости назовем уравнение B0) уравнением
в независимых вариациях обобщенных координат. Покажем, что это
уравнение в вариациях математически эквивалентно системе урав-
уравнений, получаемой приравниванием нулю каждого из всех множите-
множителей при независимых вариациях.
Действительно, уравнение B0) справедливо для любого переме-
перемещения, характеризуемого любой совокупностью величинб^р являю-
являющихся независимыми, т.е. позволяющими придавать каждому из
них произвольно малое числовое значение, независимо от того, ка-
какие значения будут придаваться вариациям других координат.
Применим уравнение в вариациях B0) к возможным перемещени-
перемещениям системы, соответствующим таким комбинациям значений вариа-
вариаций^.: пусть отличной от нуля вариацией в каждой их совокупнос-
совокупности будет только одна6<7г«, а все остальные вариации равны нулям:
bqt =: 8^2 = ... = Zq^ = bqM - tqn = 0.
Тогда от суммы, находящейся в левой части уравнения B0)
останется только одно слагаемое:
d дТ дТ
Но так как 6д. =^= 0, то, чтобы удовлетворялось это уравнение,
— 23 —
необходимо, чтобы другой множитель был равен нулю, т. е.
±- JL. + -iL + О, = 0. B2)
dt dq. ^ дЯ1
Проводя такое рассуждение п раз (по числу всех независимых
вариаций), увидим, что при движении системы все обобщенные коор-
координаты должны удовлетворять системе из п уравнений, каждое из
которых имеет вид
d дТ дТ г\ /- л п \
dqt
B3)
Уравнения B3) называются уравнениями Лагранжа второго рода
движения механической голономной системы, обладающей п степеня-
степенями свободы. Эти уравнения находятся в основе всей аналитической
механики голономных систем. В случае, когда действующие силы
имеют силовую функцию U = U(ql9 q.l9 ..., qn), обобщенная сила,
как известно, выражается через нее:
Q,= -^ = —§?_, B3а)
где П — потенциальная энергия.
§ 2. Уравнения Лагранжа о неопределенными
множителями для систем о дополнительными
голономными связями
Допустим, что на материальную голономную систему с п
степенями свободы наложены еще некоторые дополнительные голо-
номные связи, выражающиеся т конечными уравнениями относи-
относительно обобщенных координат qt и, возможно, времени t
hDit) = O (a= 1,2, ... ,m). B4)
Из этих уравнений непосредственно вытекают и дополнительные
условия, налагаемые на обобщенные скорости q. и их дифференциа-
дифференциалы dqv а также и на вариации координат 5<7Г Для выявления таких
дополнительных условий составим полную производную по времени
от каждого из уравнений B4). Получим
п
^-^ + Ж-0 (а=1.2,....ш) B5)
или в дифференциалах (после умножения каждого из уравнений
B5) на dt)
— 24 —
Уравнения связей в вариациях имеют вид
^г_^, = 0 (a=l,...,m). B6')
Из этих т уравнений можно выразить т вариаций б qt через ос-
остальные п — т вариаций в виде конечных соотношений. Таким об-
образом, число независимых вариаций уменьшается на число связей и
число степеней свободы равно р = п — т. Но система остается го-
голо номной, так как из уравнений голономных связей B4) тоже можно
выразить т каких-то обобщенных координат в виде конечных соот-
соотношений через остальные п — т координат. Независимые коорди-
координаты обозначим <7^([д, = 1, ..., р — п — т), зависимые —
qh (h = p + 1, ..., я). Между ними существуют зависимости вида
Дальнейшее изучение системы в данном случае можно продол-
продолжить двумя путями. Во-первых, поскольку дополнительные связи
голономны, благодаря уравнениям связей вида B4) можно выразить
кинетическую энергию системы Т только через q^, q^ и составить
уравнения движения Лагранжа B3) относительно только незави-
независимых координат:
4
dt
= 1, 2, ..., р). B8)
Проинтегрировав уравнения B8) и найдя q[X в функциях г, q,x =
= q{x(f), из уравнений B7) найдем и все остальные зависимые коор-
координаты qh(t). Задача будет решена полностью, за исключением воп-
вопроса о нахождении реакций связей.
Реакции связей придется выявлять другим методом: после на-
нахождения всех обобщенных координат q. (I = 1, ..., /i) в функциях
времени, значения Rj вычисляют, воспользовавшись уравнениями
C), выражая их через найденные обобщенные координаты.
Но иногда бывает предпочтительным и другой метод вывода урав-
уравнений движения системы при наличии уравнений связей вида B4),
не требующий выражения уравнений связей относительно перемен-
переменных ^ и qh.
Этот метод базируется на аксиоме классической механики, упот-
употребляемой под термином принцип освобождаемости от связей, ус-
установленным также Лагранжем [8]. Как известно, этот принцип
позволяет считать механическую систему, при наложении на нее
связей, формально остающейся свободной системой, но с приложен-
приложенными к ней дополнительными силами-реакциями связей.
Применение этого принципа при выводе уравнений движения ме-
механической системы при наличии голономных связей, выражаемых
уравнениями B4) или уравнениями тех же связей в вариациях, нач-
— 25 —
нем с того, что из_общего уравнения динамики G) не будем исключать
реакции связей Rj, полагая их идеальными, а используем это усло-
условие в дальнейшем при нахождении реакций связей.
Таким образом, исходим из общего уравнения динамики для ме-
механической системы в самом первоначальном виде:
П = °. B9)
где Rj — реакции от налагаемых связей B4). Затем, заменяем опять
подставляемое в уравнение G). После изменения порядка суммиро-
суммирования вводим обобщенные силы от активных сил Fj и обобщенные
силы от сил реакций связей D. по обычным формулам:
1И к.ЛИ - C0)
Затем, повторяя все вышеизложенное от G) до B0), выведем об-
общее уравнение динамики системы в обобщенных координатах, ко-
которое имеет вид
F1)
Отсюда уже на основании изложенного выше принципа эквива-
эквивалентности общего уравнения динамики в независимых вариациях
системы уравнений движения вытекают уравнения движения Ла-
гранжа второго рода для системы с голономными связями B4).
Следовательно, б qt можно считать независимыми; уравнения дви-
движения приобретут вид
d ciT _JT_ = Qi + Di (*=!,...,„). C2)
dt d' dqi
Система уравнений, состоящих из уравнений связей B4) и урав-
уравнений движения C2), представляет собой систему уравнений для
нахождения неизвестных функций q. (i =1, ..., п) и D. (i = 1, ...,п).
В решении задачи получается динамическая неопределенность:
число искомых функций равно 2/г, а число уравнений, удовлетворяю-
удовлетворяющихся данными функциями, равно п + /тг, где/л <С п. Как уже от-
отмечалось выше, эта неопределенность, допускаемая силами природы,
не только не вредна, но и полезна.
Действительно, реакции связей являются, по существу, управ-
управляющими воздействиями, необходимыми для реализации программы
движения, выражаемой связями B4). Подобная неопределенность
— 26 —
позволяет создавать управляющие воздействия, оптимальные в том
или ином смысле. В частности, если желательны управляющие воз-
воздействия с минимальной затратой энергии, то абсолютная минималь-
минимальность достигается в случае идеальности связей, т. е. при условии,
что сумма элементарных работ всех сил реакций связей равна нулю
на любом возможном перемещении. В декартовых координатах эта
идеальность выражается соотношением N:
N
8 О =
а в обобщенных координатах
C3)
t=l
при любых 6<7г, удовлетворяющихся уравнениями связей B4).
Условие идеальности связей, выражаемое уравнением C3),
позволяет также исключить динамическую неопределенность в уп-
управлении, т.е. выразить управляющие обобщенные силы с помощью
уравнений связей. Действительно, присоединим к уравнению C3)
т уравнений связей B4); представив их в вариациях, получим
систему т + 1 уравнений:
дк
dft
bq2 -f ...
dfx
= О,
df
C4)
Умножая первые т уравнений на множители Лагранжа %k (k =
= 1, ..., m) и вычитая последнее уравнение, имеем
C5)
Получено опять уравнение в независимых вариациях §qv По
принципу эквивалентности эта система равносильна системе уравне-
уравнений
т .
1+ У_,Ьк-гг-=0 A=1,2, ... , л). C6)
Отсюда находим искомое оптимальное управляющее воздействие:
^-Т*- (t=l.-.n)- C7)
— 27 —
Подставляя D. в уравнения движения системы C2), представим их
в окончательном виде:
dqt qi
Теперь имеется система п + m уравнений C8) и B4) для нахож-
нахождения такого же числа неизвестных qt (f =1, ..., п) и ik (k=l, ..., m).
Динамическая неопределенность исключена.
Уравнения с неопределенными множителями называются также
уравнениями Лагранжа первого рода для голономных систем.
§ 3. Уравнения Лагранжа с неопределенными
множителями для систем с линейными неголономными
связями первого порядка
Уравнения движения системы с неголономными связями
первого порядка, линейными относительно обобщенных скоростей
qv можно вывести также, как были выведены уравнения движения
механической системы при дополнительных голономных связях.
Допустим, что на систему наложены неголономные связи вида
lp/ qi + A?=0 (p=l,2, ...,/), C9)
где коэффициенты A9t, A? — суть функции обобщенных коор-
координат q. и времени t
Применим принцип мгновенной склерономизации уравнений свя-
связей. Представим уравнения C9) сначала в дифференциалах
п
dqi + Adt = O (p= 1,2, ...,/), D0)
а затем выводим соответствующие соотношения для мгновенно мыс-
мыслимых возможных перемещений, т. е. полагаем в D0) dt = 0, а все
действительные дифференциалы dqt обобщенных координат заменим
возможными дифференциалами б qi (вариациями координат). Тогда
уравнения связей в вариациях примут вид
Vfc = 0 (P= 1-2, ...,/). D1)
Сравнивая данные уравнения с уравнениями связей B6) в вариа-
вариациях в случае системы с дополнительными голономными связями,
видим, что структура уравнений в вариациях в обоих случаях со-
совершенно одинакова. Следовательно, процесс вывода уравнений
движения из общего уравнения динамики с применением аксиомы
освобождаемости от связей тот же самый.
— 28 —
Таким образом, можно получить уравнения движения системы со
связями C9), т. е. уравнения
JLJL—JJL = Qi + Di (/=1,2 п). D2)
dt dq. dqt
Выражения обобщенных сил реакций связей через множители
Лагранжа в данном случае можно получить по аналогии с выраже-
выражениями обобщенных сил D. в уравнениях C8). Различие будет только
в том, что коэффициенты dfh/(dq.) уравнений голономных связей
следует заменить коэффициентом А9с в уравнениях неголономных
связей C9).
Итак, уравнения движения при линейных неголономных связях
первого порядка имеют вид
i ?л с-1-2....,«). D3)
dqt 4l
Присоединяя к уравнениям D3) уравнения связей C9), имеем
систему дифференциальных уравнений, позволяющих определить
все обобщенные координаты и неопределенные множители Лагранжа
как функции времени.
§ 4. Пример на интегрирование уравнений Лагранжа
второго рода (задача Ленэ)
Рассмотрим движение свободной материальной точки еди-
единичной массы в сферической системе координат (г, 9, ф) в случае,
когда существует силовая функция вида
*<> D4)
U f{r) + + ,
'v - Г2 ^ Г2 sin2 е *
где f,gtth — известные функции, которые должны быть непрерыв-
непрерывными и иметь непрерывные производные.
Применим уравнения Лагранжа:
D5)
d
dt
d
dt
d
dt
Кинетическая энергия
дТ
дг
дТ
аё
дТ
ду
ТОЧКИ
дг П
- — - 0
ае 9'
дТ — 0
ду у
единичной массы
Г = A/2)(л;2 + У2 + 22). D6)
— 29 —
Известно, что
х = г sin б cos ф, у = г sin б sin ф, г = г cos б, D7)
где 9 — широта, отсчитываемая по меридиану от полюса, ф — дол-
долгота.
На основании D7)
х = г sin б cos ф + г cos б cos ф 9 — г sin 9 sin ф • <р,
у = г sin 9 sin ф + г cos б sin ср • 6 + г sin б cos <p • ф,
z = г cos 9 — г sin б • 6.
Подставляя значения х9 у, z в D6), получаем
+/-262 + r2sin2 б ф2).
Обобщенные силы, входящие в уравнения Лагранжа D5), имеют
вид
sin2 9
(у)cose т.
J
р г2 sin2 0 '
где /', g1' и Л' — производные функций /, g, Л соответственно по г,
6 И ф.
Найдем выражения производных, входящих в уравнения Лагран-
жа D5):
= г> = Г2б, =/-251П29ф,
аг ае а®
-j.iL=>-, -^-^:^г29+2.;9,
л д- at д6
— — - г2 sin2 9 ф
^1 = г (92+sina б фа), —-г2 sin 9 cos 9 ф2, — - 0.
дг аб д<р
Подставляя значения обобщенных сил и значения производных
в уравнения D5), получаем следующую систему дифференциальных
уравнений:
;_г (9« + sin2 6 гр2) = /' (г) \\g(9) + ±Щ , D8)
/" [_ Sin w j
— 30 —
-r2sinecose(p2== —|УF) 2/t(cf)cos9 1, D9)
r% L sin8 Э J
r2sin2 9 cp + 2r sin2 6 <p r + r2 sin 29 cp 9 » ^.^ • E0)
Эта система интегрируется следующим образом. Уравнение E0)
можно представить в форме
(г2 sm2 6 ф) = ^—.
d* ' /-2sin29
Интегрируя это уравнение, получаем
C1], E1)
где Сг — постоянная, которая определяется из начальных условий.
Уравнение D9) представим в форме
2ft(^9l E2)
Умножив E1) на cos б//-2 sin3 6, получим
9 • л п ' 9 2 ft (cp) cos 9 , 2Ci cos 9 /rO\
r2 sm 9 cos 9 ф2 = ^ . E3)
Y r2 sin3 9 r2sin3 9 v ;
Учитывая E3), уравнение E2) можно представить следующим
образом:
d , 2 04 _
0
dt К } г2 sin3 9 г2
Умножая обе части этого уравнения на r2Q, получаем
^ V 7 sin3 9 Ь V ;
Это уравнение можно представить в следующей форме:
d/ V ; dt
или
2 dt V ' Л L sin2 9 I
Интегрируя последнее уравнение, получаем
. E4)
Заметим, что кинетическая энергия от/явно не зависит. Следо-
Следовательно, справедлив интеграл энергии
Т — U = A/2)С,
— 31 —
т. е.
Последнее равенство представим иначе:
Подставляя в это равенство значения г482, г4 ф2 sin4 9 из E4)
и E1), получаем
Следовательно,
dr/dt - ± VWAr)- E5)
Интегрируя E5), найдем зависимость между г, tu С3, где С3 —
— постоянная интегрирования. Разрешая получающееся соотно-
соотношение относительно г, получаем
г = F(f).
Равенство E4) представим следующим образом:
г* 92 = 2gl F), где ^(9)= gi(B) -Cj/sin2 9+C2
ИЛИ
Учитывая E5), получаем
dr dQ
Интегрируя это равенство, найдем зависимость между г, 8 и С4
где С4 — постоянная. Разрешая получающееся равенство от
носительно б и учитывая, что г = F(f), получаем
Представим E1) и E4) в форме
г4 sin4 9 ф2 = 2hi (ф), г4 92 = 2^ (9)
или
I V ^ Кг) uyj . -J-
11— о • о г\ * 7", —*—
т sin и
dt ~ — г* sin2 9 ' dt
— 32 —
Из этих равенств получаем
После интегрирования находим зависимость между ф, б и С5,
где С5 — постоянная. Разрешая получающееся равенство относи-
относительно ф и учитывая, что 6 — G(f), получаем
Ф = H(t).
Постоянные Съ С2, С3, С4, С5, С находим из начальных условий.
§ 5, Структура кинетической энергии системы
Для составления уравнений движения Лагранжа необходи-
необходимо знать выражение кинетической энергии системы как функции обоб-
обобщенных скоростей qu q., обобщенных координат и в общем случае
времени t. Вычислим это выражение.
Для удобства записи введем вместо декартовых координат Xj,
yh z.j(j = 1, 2, ..., N) переменные хт (у =1,2,..., 3N) с помощью
следующих соотношений:
П = *з/-2 ^+ ^змТ + *3j k\ mSj-_2 = тзЫ = m3j (/ = 1, 2, ..., N).
Кинетическую энергию системы можно представить следующим
образом:
N N 3N
^тт^- E6)
Выразим теперь все координаты л;т через обобщенные координа-
координаты:
*т = *т('><7*) (Y = l,.-
Дифференцируя по времени, имеем
дх п дх
Тогда
или
2—689 — 33 —
Следует помнить, что каждая частная производная от хт по любо-
любому q% в общем случае является функцией всех обобщенных координат
и времени t.
Рассмотрим первую сумму в E7). Каждое слагаемое в этой сум-
сумме является квадратом многочлена. При возведении многочлена в
квадрат появляются слагаемые вида
Qi Ял-
f
* 2\dql
и вида
Очевидно, что и каждое слагаемое вида E8) можно представить
аналогичным образом, т. е. в виде
2 дщ dqt
Введем обозначение
dqt dqk ik *
Тогда первую сумму в E7) можно переписать в виде квадратич-
квадратичного многочлена относительно обобщенных скоростей, т. е.
i = T 2 а*ьЧ*Чь'
где
Вторая сумма в E7) является линейным многочленом относитель-
относительно обобщенных скоростей qr Эту сумму можно представить в виде
2„ - 2ь* ч»
где
>'=!Л1Г1*г
Наконец, третью сумму в E7), не зависящую от обобщенных
— 34 —
скоростей, обозначим /, т. е.
Итак, кинетическую энергию системы можно представить в виде
Введем такие обозначения: квадратичный относительно обоб-
обобщенных скоростей многочлен
^2^
линейный относительно обобщенных скоростей многочлен
и член, не зависящий от обобщенных скоростей То = L
Следовательно,
Т = Т2 + Тх + То.
Установим классификацию механических систем по признаку рео-
номности и склерономности, имеющую большое значение для всего
дальнейшего.
Из предыдущего видно, что в случае реономности связей, нало-
наложенных на систему, в формулы, выражающие декартовы координаты
хт (у = 1, ..., 3N) через обобщенные координаты qt (i = 1, ..., ri)>
входит явно время t (хотя бы даже только для одного значения y).
В выражение кинетической энергии в обобщенных координатах вхо-
входят все три слагаемые. Затем предположим еще, что зависимость #т
от qt и /такова, что коэффициенты aik, bv I (хотя бы один) будут за-
зависеть явно от времени t.
Тогда выражение кинетической энергии Т в обобщенных коорди-
координатах будет содержать время /явно. Механическую систему'в таком
случае назовем вполне реономной системой, так как она реономна
и в декартовых, и в обобщенных координатах.
Но может случиться, что система, будучи реономной в декартовых
координатах, в обобщенных координатах окажется не зависящей явно
от времени t. Такую систему можно назвать или полу реономной сис-
системой или склерономной системой в обобщенных координатах, хотя
в выражении кинетической энергии Т находятся все три слагаемые.
Если же система в декартовых координатах склерономна, т. е.
в формулы перехода к обобщенным координатам время t явно не
входит, то систему можно назвать вполне склерономной или склеро-
2* - 35 -
помпой системой. В этом случае выражение кинетической энергии Т
содержит только квадратичный однородный многочлен относитель-
относительно обобщенных скоростей qr
Следовательно, выражение кинетической энергии Т в различных
вышеописанных случаях имеет следующие виды:
Реономная система Т = Т2 + Тг + TQ (T зависит
от t явно).
Полуреономная система Т = Т2 + Тг + То
(Т не зависит от t явно).
Вполне склерономная система Т — Т2 (Т не
зависит от t явно).
§ 6. Структура уравнений Лагранжа
Уравнения Лагранжа, приведенные в виде
?-— ?-=*Qi (f= I, 2, ... ,л), E9)
dt d'. dqt
выражают порядок действий, требующийся для составления дина-
динамических дифференциальных уравнений движения материальной
системы в обобщенных координатах, т. е. дифференциальных урав-
уравнений относительно искомых обобщенных координат qt (при задан-
заданных обобщенных силах Q.), или наоборот (обратная задача).
Как следует из E9), для составления дифференциальных уравне-
уравнений предварительно следует составить выражения частных произ-
производных от кинетической энергии по каждой обобщенной скорости q.
и по каждой обобщенной координате q.. При реономности изучаемой
системы кинетическая энергия имеет вид
Т = Т2 + Тг + То, F0)
где
п п п
где коэффициенты aik, Ъ% и / являются функциями всех координат и
времени /. Тогда
дТ дТ2 , дТх
dqt dqi dqt
Для вычисления дТ/dq. представим соотношение F0), заменив
в первой сумме индекс суммирования i на р:
2 i
- 36 -
Тогда
При вычислении полнойГпроизводной по времени dl(dt) dT/(dqt)
появляются вторые производные от обобщенных координат
<7, но они входят линейно. Обобщенные силы Q. — суть некоторые
заданные функции обобщенных координат, времени и, возмож-
возможно, скоростей. Обобщенные скорости q. входят в уравнения через
dT/(dqt) нелинейно (квадратично).
Таким образом, система уравнений Лагранжа представляет со-
собой систему п дифференциальных уравнений второго порядка отно-
относительно qv Каждое уравнение можно представить в виде:
2 ЛД + 22 V цъ \ + 2 5р'- ь+D>=°- F1)
p=i р=1 k=i p=i
Здесь Л р., 5Р. и Bpk. — функции от всех qy, t\ D. — функции
от всех qv, времени t и, возможно, q^
Вследствие линейности уравнений F1) относительно вторых
производных q9 их можно представить в разрешенном относительно
вторых производных виде:
Qt =fi(Qk, qk, t) (i = 1, ..., п). F2)
Как известно, первым интегралом системы уравнений второго
порядка называется соотношение f(qv qv t) = С, связывающее ис-
искомые функции qv их производные q. и, возможно, время t, пол-
полная производная 'по времени от левой части которого должна рав-
равняться нулю тождественно вследствие дифференциальных уравне-
уравнений, т. е.
^(?ь«*-* F3)
если вместо q. подставить их выражения из дифференциальных урав-
уравнений F2).
Для общего решения системы дифференциальных уравнений
необходимо и достаточно найти 2п (независимых) первых интегра-
интегралов этой системы:
Cv (v = lf2f...f2/i).
Тогда общее решение найдется, если из этих уравнений выразить
все qt и qi в виде функций от t и 2п произвольных постоянных, т.е.
Яг = Ф, (t, Ci9 C2, ..., С2л), qt = ф, (/, Clf C2, ..., С2п). F4)
Произвольные постоянные находят по начальным данным систе-
системы, т. е. по начальным значениям координат ql0 и начальным значе-
значениям обобщенных скоростей qi0. Подставляя в F4) q.o и q.o и полагая
t = О, имеем систему уравнений относительно Съ С2, ..., С2п:
lf С2, ..., С2л)=^0^@, Clt С2, ..., С2л)= qi
i0
Из уравнений F5) найдутся все произвольные постоянные:
cj = сЛ9ю> <72о> ••• э <7я0; <7ю» <72о> ... ^о (/ = 1» 2, ..., 2л). F6)
Подставляя F6) в F4), получаем конкретное решение, т. е.
уравнения движения и распределение обобщенных скоростей со-
соответственно начальным данным.
§ 7. Уравнения Лагранжа1вЭслучае
потенциальных сил
Р Интегрирование уравнений движения и разработка методов
нахождения их первых интегралов являются главнейшей задачей
аналитической механики.
Эта задача несколько облегчается, когда непосредственно при-
приложенные к точкам материальной системы силы, заданные в декар-
декартовых координатах, обладают силовой функцией, т. е.
JX~ dxj ; ПУ~ dyj ; Ь~~У
где величины U — функция от координат Xj, y^ Zj, U = U(Xjf
tjj, Zj), т. е. точка движется в стационарном (U не зависит явно от /)
потенциальном силовом поле.
Тогда выражение обобщенной силы, имеющей первоначальное
выражение в виде
N -
д
ИЛИ
Qt -
приобретает вид
N
о У
; .1
N
V (р dxi
?Л\ Jx dqt
/ dU dxj
\ dxj dqt '
at/
ay,-
dqi
dyj
dqi
• +
--f
at/
a2/
a2/
т. e. Q. = dl)ldqv так как вся сумма в предыдущих формулах пред-
представляет собой частную производную от U(xj$ yjt z}) no qv выражен-
выраженную через производные от промежуточных аргументов.
- 38 -
Большую роль в аналитической механике играет и другая функ-
функция, родственная с силовой функцией, — потенциальная энергия
Я, связанная с силовой функцией соотношением П (q.) = —U(qt).
При наличии силовой функции уравнения Лагранжа принимают
вид
JLJ1—JL. = J?_ {i= i,2,...,„). F7)
dt dqi дсН дЯг
Так как силовая функция зависит только от обобщенных коор-
координат (зависимость от обобщенных скоростей в общем случае не уста-
установлена), можно выполнить следующие операции над каждым из
уравнений. Перенесем dUldqi налево с обратным знаком, затем при-
прибавим к Т под знаком dldqt функцию U(q), не зависящую от qv
В результате левая часть каждого уравнения в F7) примет сле-
следующий вид:
( п)р
dt dq. dQi
Введем теперь в рассмотрение функцию L = Т + U, называе-
называемую функцией Лагранжа. Через эту функцию уравнения Лагранжа
в случае потенциальности сил приобретают вид
A-JL d±- = Q (?= 1,2 /г). F8)
dt dq. дЯг
Поскольку Т можно представить в виде суммы трех форм 7\>,
7\, Го, то и L может иметь вид L = L2 + Lx + Lo,
где
L2 =T2 ,LX = Tl9 Lo - Го + U.
§8. Обобщенная силовая функция
В классической механике рассматриваются потенциальные
силовые поля, характеризующиеся силовыми функциями, зависящи-
зависящими от положения точек системы, т. е. от их координат, но силовая
функция U, а следовательно и потенциальная энергия системы,
считается не зависящей явно от времени t. Однако по мере развития
наук об электрических и магнитных явлениях и их приложениях
в технике были открыты силовые поля, характеризуемые силовой
функцией, зависящей не только от координат qiy но и времени t и
от обобщенных скоростей qv
Существуют обобщенные* силы Q., выражающиеся следующим
образом через силовую функцию U(qr qv t):
* Herbert Goldstein. Classical mechanics. Cambridge, 42, 1951.
стр. 19.
— 39 —
Тогда, очевидно, уравнения Лагранжа примут вид
d d(
. „
Функция Лагранжа по-прежнему выразится L = Т + U,
и уравнения Лагранжа сохраняют свою форму:
Следует отметить, что обобщенная силовая функция U(t, q> q)
зависит от qt линейно, т. е. имеет вид
и=
так как в противном случае (т. е. если предположить, что U зависит
от qt нелинейно) в F9) имели бы Q., зависящие от qv
В целях упрощения изложения в дальнейшем рассматриваются
силы, не зависящие от qv т. е. силы в обобщенной силовой функции
которых Л. = 0, хотя формально результаты остаются справедли-
справедливыми и в общем случае, если под Тх понимать Тг + 2Л %qv а под
U — функцию A(t, q). Общий случай (А. Ф 0) отличается от част-
частного (А . =0), который рассматривается ниже, лишь более сложной
интерпретацией получающихся результатов.
§ 9. Циклические координаты
и соответствующие интегралы
Первый, при этом почти очевидный, факт в области интегри-
интегрирования уравнений G1) состоит в том, что если некоторая координата
q. не входит в состав аргументов функции L, т.е. если L не зависит
явно от qv то тогда dL/dq. = 0 и уравнение Лагранжа с индексом
i принимает вид
d dL = 0
dt dki
Отсюда вытекает первый интеграл в таком виде:
= Ci ИЛИ
dqt dqt dqt
Обращаясь к структуре функций L2 и Lx, , циклический интеграл
можно представить в раскрытой форме:
k + Ъг = Cv
— 40 —
Циклический интеграл оказывается весьма простым — линей-
линейным относительно обобщенных скоростей.*
§ 10. Интеграл энергии
Для механической системы с функцией Лагранжа L =
= Т + U при определенных условиях может существовать интег-
интеграл, характеризующий изменение энергии системы при ее движении.
Для вывода этого интеграла применим уравнения Лагранжа:
JJLaLQ A.= 1|2|М1>Л)( G2)
dt 4 dqi
Умножаем каждое уравнение G2) на q% и суммируем все уравне-
уравнения:
Каждое слагаемое под знаком первой суммы представим в виде
d dL \ ' d I dL • \ dL ••
Тогда в уравнении G3) вынесем оператор dldt за знак суммы и
получим
if^iA/JLi + ^iA-O. G5)
Вторую сумму в G5) можно представить в виде
Действительно, при вычислении полной производной по времени
от L, учитывая, что L = L(qv qv t), имеем
dL v / dL : , ai : \ L _aL_ ,?7.
Очевидно, что G6) и G7) представляют одно и то же соотношение.
Соотношение G5) на основании G6) преобразуется следующим.
образом:
G8)
А
* Один из способов использования интегралов, соответствующих цикли-
циклическим координатам, принадлежит английскому ученому Раусу (Routh).
С содержанием метода Рауса можно ознакомиться в курсе теоретической ме-
механики Н. Н. Бухгольца под ред. С. М. Тарга.
— 41 —
Функция Лагранжа L выражается через кинетическую энергию
системы и силовую функцию:
L = Т + U = Т2 + 7\ + То + U. G9)
Все дальнейшие рассуждения и вывод интеграла энергии раз-
разделяются на три случая.
1. Изучаемая механическая система является вполне склероном-
склерономной, т. е. функция L не зависит явно от времени, и, кроме того, ки-
кинетическая энергия системы является однородным квадратичным
многочленом от обобщенных скоростей:
Т = Т2 = — ^ atk 4i Qk>
z i, k
а следовательно,
L =T2+ U.
Тогда соотношение G8) можно представить в виде
Теперь применяем известную теорему Эйлера из классического
математического анализа об однородных функциях нескольких
переменных. Однородной функцией от нескольких переменных g .
называется функция /(?t), удовлетворяющая следующему условию:
при замене переменныхg . переменными Е'г, связанными с g. условия-
условиями g. =а^'.,гдеа — некоторый параметр, функция /(? .) выража-
выражается в переменных ?'. следующим образом:
f(<.) = aft f(%). (81)
Показатель k называется показателем степени однородности
функции /(?¦ .). Теорема Эйлера выражает такое замечательное свой-
свойство однородных функций: сумма произведений частных производ-
производных от однородной функции по всем переменным g . на эти же пере-
переменные равняется произведению данной функции на показатель сте-
степени однородности,т. е. выполняется тождественно соотношение
(81а)
Например, / = х3 + Зу2х + ух2 — ,очевидно, есть однородный
многочлен третьей степени:
ft = 3.
Заменяя х, у, на cut, ay, имеем /(ax, ay) = a3 (x3 +
+ 3z/2x + ух2), что нетрудно проверить.
Проверим теорему Эйлера, т. е. составим выражение
f*+ - У =C^2 +3у2 + 2ух)х +
+ т У ( +у + у) + (/ + )у
= 3jt3 + Зу2х + 2ух2 + 6у2х + ух2 = Зх3 + 9//2;t + Ъух2 = .
= 3 (хъ + Зу2х + ух2).
я-, 42 —
Рассмотрим теперь соотношение (80). Применим к сумме под зна-
знаком производной dldt теорему Эйлера об однородных функциях:
?Ь- qi = 2T2. (82)
Во втором слагаемом заменим L2 = Т2 + U. Тогда (80) перейдет
в следующее выражение:
BТ2)(Тг + и) .
Равенство (80) после упрощения можно представить в виде
iZL_^_ = 0 или -1(Т-1/) = 0,
dt dt dt V ;
откуда появляется первый интеграл уравнений движения систе-
системы
т — и = л,
где h — [постоянная величина;
Т = |t/ |+ -Л или Т + П = Л,
где /7 — потенциальная энергия системы;
? = Л, • ¦
где ? — полная энергия системы.
Таким образом, установлен основополагающий факт в классичес-
классической механике, выражающий закон сохранения полной энергии, ко-
который формулируется в следующем виде: для вполне склерономной
механической системы, движущейся под действием потенциальных
сил, не зависящих от времени, имеется классический интеграл сохра-
сохранения механической энергии, по которому полная энергия системы
остается постоянной величиной в процессе движения, т. е. сохраняет-
сохраняется и не рассеивается. На основании изложенного склерономные ме-
механические системы, движущиеся в поле потенциальных сил, назы-
называются консервативными механическими системами.
2. Положим далее, что частная производная по времени от функ-
функции Лагранжа по-прежнему равна нулю dLldt — 0, т.е. время /
явно не входит в L, но кинетическая энергия системы не является
только квадратической функцией 72, а выражается в общем виде Т =
= Т2 + Т1 + То (но времени явно не содержит). В этом случае L
выражается в виде
L = Т2 + Т± + То + U.
Соотношение G8) можно представить в следующих видах:
— 43 —
Рис. 2
или, применяя теорему Эйлера,
АBГ2 + Г,) - ^{Т2+ Tt + То+ ?/)=0,
±(T2-T0-U) = 0,
откуда окончательно
Т2 — То — U = h* = const. (83)
Соотношение (83) представляет со-
собой тоже первый интеграл уравнений
Лагранжа, но оно не выражает закона
сохранения энергии. Этот интеграл но-
носит название интеграла Ркоби — Пен-
леве.
3. Переходим к последнему случаю,
когда dLldt Ф О, т. е. время входит
явно в Ту может быть и в U. В этом слу-
случае какой-либо интеграл, выражающий
изменение полной энергии во вполне
реономной системе, отсутствует, что не-
нетрудно проверить.
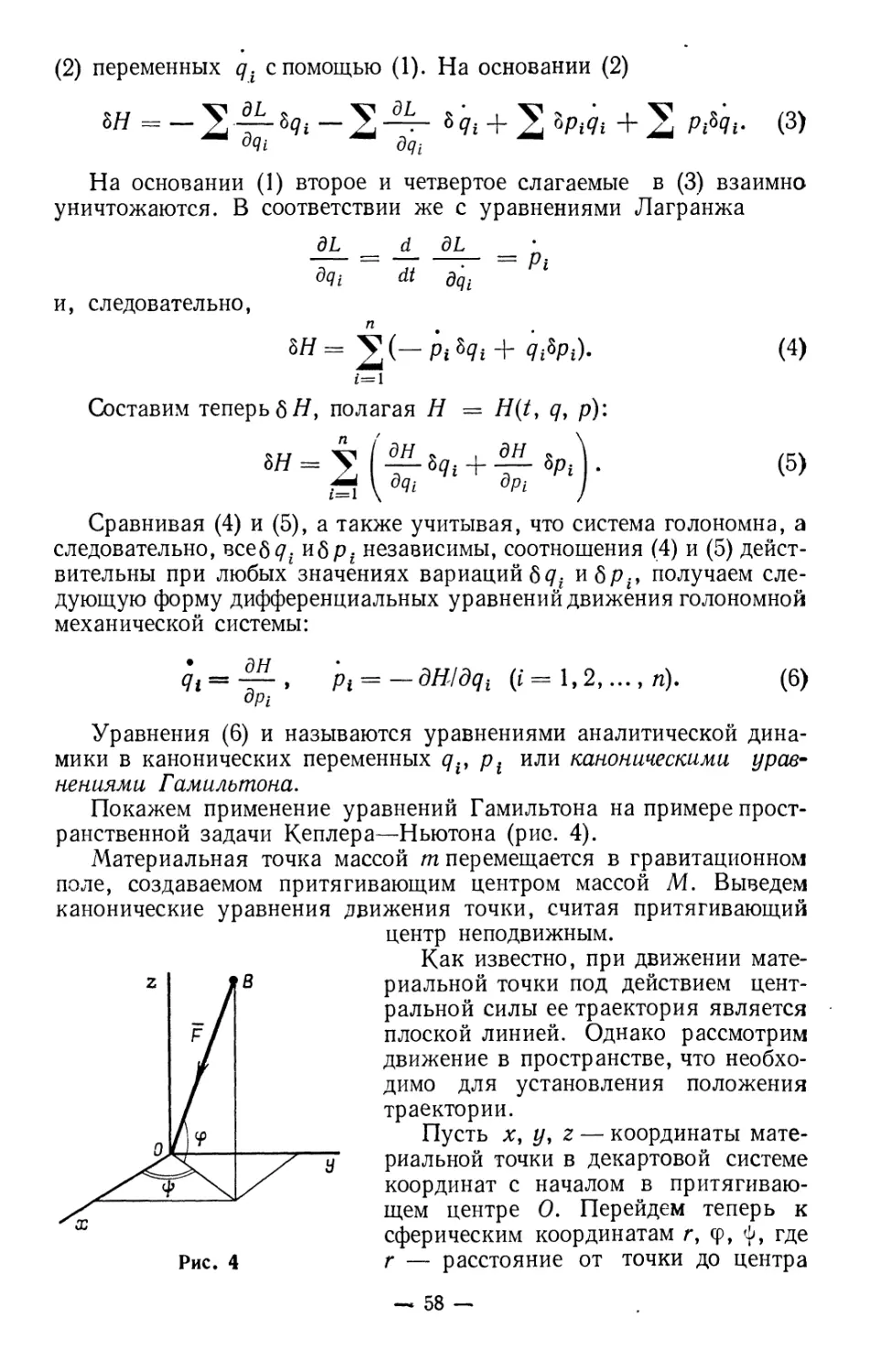
§ 11. Задача Бегена
Тонкая вертикальная пластинка (рис. 2) может без трения
вращаться вокруг вертикальной оси Ог. По прямолинейному каналу
в пластинке без трения может перемещаться частица М. Известны:
момент инерции J пластинки относительно оси Oz, масса частицы т,
угол а = const между каналом и вертикалью @ < а < я/2).
Исследуем движение системы в двух случаях:
1) начальная угловая скорость пластинки фо Ф 0;
2) пластинка вращается с заданной постоянной угловой ско-
скоростью со.
Решение 1. Начальная угловая скорость пластинки фо ф 0.
Система имеет две степени свободы. Связи, наложенные на систему,
являются голономными, стационарными. В качестве обобщенных
координат приняты: расстояние ОМ = г и угол ф поворота пластин-
пластинки относительно неподвижной плоскости хОг.
Кинетическая энергия системы
Т = m(r2/2) + (/ + mr2sin2a)(f/2).
Потенциальная энергия системы
П = mgr cos a.
* В eg h i n H. Cours de mecanique, 1948, Paris, tome I, chapitres XII —
XIV, p. 455—459.
Функция Лагранжа
L = Т — П = m(r2/2) + (J + mr2sin2a)(f/2) — rngr cos a.
Поскольку <J> является циклической координатой, то имеется
циклический интеграл
дТ
Рф = — = (J + /пг2 sin2 a) ф = const = К. (84)
Обобщенный импульс рф в этом случае представляет собой кине-
кинетический момент системы относительно оси Oz.
Так как на систему действуют только потенциальные силы, име-
имеется закон сохранения механической энергии системы:
Т + П = (m/2)V2 + (J + mr2sin2a)D»2/2) + mgrcosa = const = h. (85)
Величины К и h могут принимать любые значения, ограниченные
размерами пластинки и определяемые начальными условиями
г@) = г0, г(О)=го,
К = {J + mr20 sin2 a)ф0,
Л = (m/2) rg + (j + mr| sin2 a)( ф«/2) + m^r0 cos a. (86)
Из (84)
t= —5 J+mr»Si"aa ф, (87)
Знак ф определяется знаком ф0 и, кроме того, <5>=^=0, если
Подставляя (87) в (85), после преобразования получим
= / 2Л _ 2 cos
J m (J + m/-2 sin2 a)
где
y± = 2/i/m — 2grcosa,
7B (j+mrg sin2 aJ
7( (+g ) ]2
m (У + mr2 sin2 a) (У + mr* sin2 a) m T0
или, учитывая (86),
' = [1/+ —^ ^ + 2^ocosa J-
(J + mr? sin2 a
— 2gr cos aLZi
(J+/n/-2sin2a)m
— 45 —
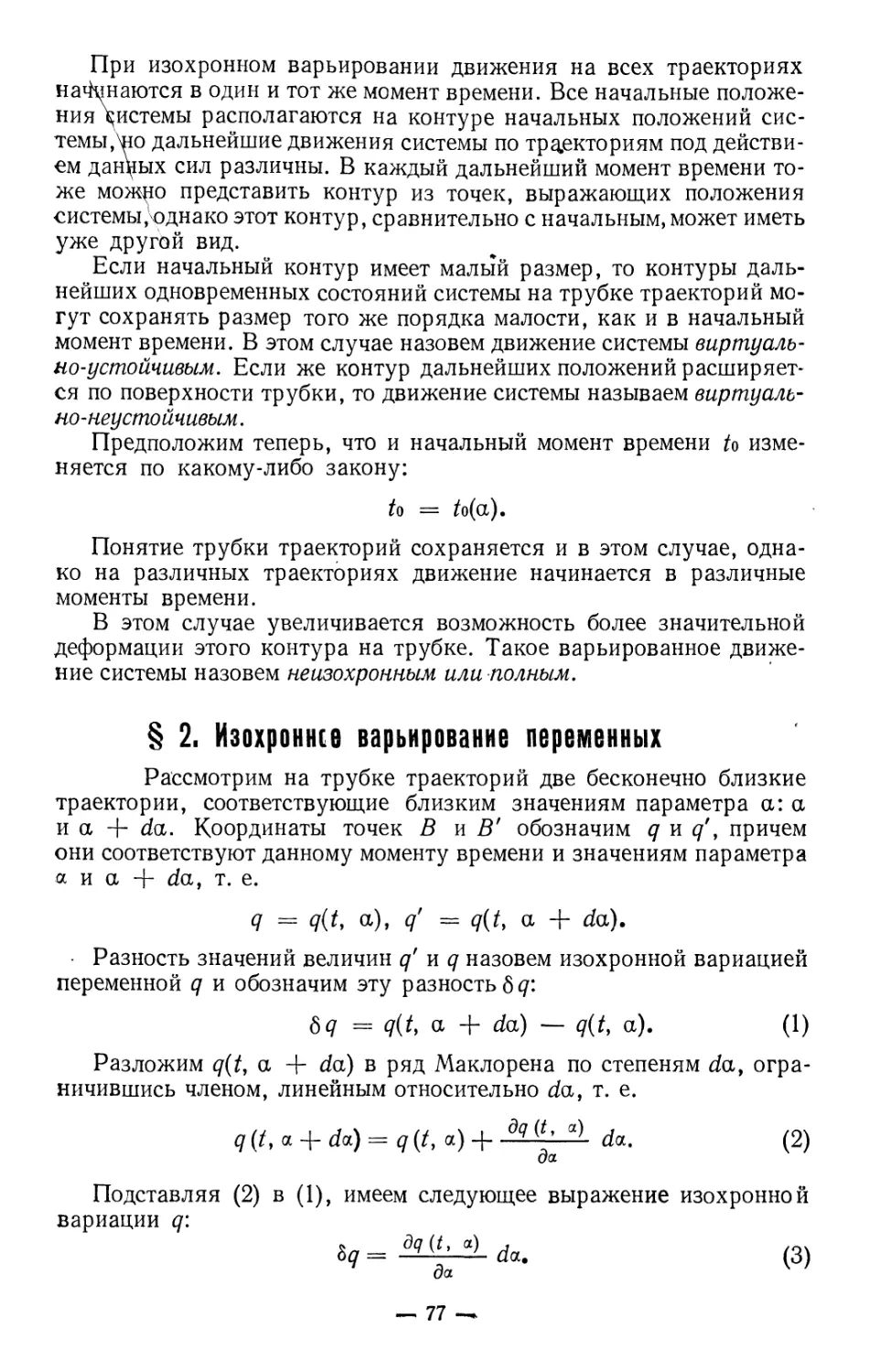
Исследуем на фазовой
плоскости (г, г) движение
частицы относительно
пластинки. Уравнение
(88) является уравнени-
уравнением фазовой траектории,
однако для большей на-
наглядности построим
предварительно кривую
третьего порядка у2 =
= у2(г) и прямую ух =
= У-Sf) на одном графи-
графике (рис. 3). Точки пере-
пересечения прямой и кри-
кривой определяют нулевые
значения обобщенной
скорости г. Поскольку
г2>0, то разность уг—
—Уг> 0, поэтому следу-
следует рассматривать точки
кривой, р асположенные
ниже прямой. Так как
при 0<а<я/2 угло-
угловой коэффициент пря-
прямой
у\ = — 2gcosa = const < 6, (90)
то прямая составляет с осью Or один и тот же тупой угол независи-
независимо отначальных условий. Кроме того, у2 > 0 для всех г и величина
г не зависит от знака фо. Определим
у\ = dy2fdr и у2" = d2y2/dr2;
2
Рис. 3
¦ mr2 sin2 аJ
2 (j+m^sinagJ'b02rsin2a" ^
r sin2 а
(91)
— J) sin2 а
. (9V)
"* (J + mr* sin2 aK (^l + r2N
Полагая у = 0, найдем абсциссу гп точки перегиба кривой в
первом квадранте (у'2'^ =^=0):-
гп = l/sinayy73m = const. (92)
Величина гп не зависит от начальных условий и определяет в
канале характерную для данной системы точку А (гп) (рис. 2).
—. 46 —
Подставив (92) в (91), найдем тангенс угла," наклона касательной
в точке перегиба:
у2п = _ (/з/2 )ьК2пГх12 Г*'2 sin а = - 3K218mJrn.
Возможны следующие случаи взаимного расположения прямой
Ух = 9i(r) и кривой у2 = у2(г) для заданного К = Къ позволяю-
позволяющие определить характер относительного движения частицы при лю-
любых начальных условиях:
Случай 1. \у'2п\ > \у\\ (касательная «круче» прямой),
и прямая пересекает кривую в трех точках ах, а2, а3. На рис. 3 штри-
штриховкой показаны значения г2 = ух — у2. Определяя г = ^ЬУУг—*/2»
можно построить фазовую траекторию (нижняя часть рис. 3). Фазо-
Фазовая траектория представляется двумя кривыми. Например, при на-
начальных условиях, соответствующих точке Ьи частица при t = О
находится ниже плоскости хОу и ей сообщается скорость по каналу
вверх. Как показывает фазовая траектория, частица вначале дви-
движется вверх замедленно, в точке Ь2 ее скорость становится равной
нулю, после чего начинается ускоренное движение вниз. Такую
характеристику можно получить и из физических соображений.
При начальных условиях, соответствующих точке Ь3, частица будет
совершать колебания (нелинейные).
Если величина р = г — го невелика, то колебания можно счи-
считать малыми. Выражая в (89) переменную г через р, получим сле-
следующее линеаризованное дифференциальное уравнение движения
частицы:
р -f k2p = г0 ^l sin2 a — g cos a.
Отсюда можно определить амплитуду колебаний, положение
равновесия и циклическую частоту k колебаний:
Из (93) следует, что малые колебания возможны при го > гп.
Случай 2. \у'2п\ > \у\\, и прямая касается кривой в точке
а4 ниже точки перегиба, пересекая кривую в точке а5. В этом случае
фазовая траектория справа преобразуется в точку 64, являющуюся
точкой устойчивого относительного равновесия частицы (г = const).
Получаем равновесие типа центра.
Случай 3. \у2п\ > \y\\y и прямая касается кривой в точке
щ выше точки перегиба, пересекая кривую в точке а7. В этом случае
фазовая траектория является сепаратрисой, а Ь5 — седловой точ-
точкой (точкой неустойчивого равновесия).
На основании (88), (90), (91) и, учитывая, что
) (94)
— 47 —
получим необходимые и достаточные условия относительного равно-
равновесия (rp = const) частицы (точки fo4 и Ь5):
го = -4^^>0, (95)
sin2
го=О. (96)
При этом ф = ф0 = const.
Из (95) следует, что гр > 0, т. е. равновесие частицы возможно
во всех точках канала, где г > 0, однако на основании (90), (91)
и (9Г) при гр > гп равновесие — устойчиво, а при 0 < гр <^ гп
равновесие — неустойчиво. Это же следует из рассмотрения фазо-
фазовых траекторий.
Случай 4. \у'2п\ > \у\\, и прямая пересекает кривую в од-
одной точке —а8 или а9. Фазовые траектории — расходящиеся.
Случаи 1, 2, 3, 4 охватывают все возможные начальные условия
ПРИ \у\п\ > \у\\ и составляют фазовую характеристику относи-
относительного движения точки при К = Кг-
Случай 5. \у\п\ < \Уг\ (прямая «круче» касательной),
при этом /Сг < Кг- Прямая пересекает кривую в одной точке, равно-
равновесных положений нет.
Случай 6. \у'2п\ = \у\\. Прямая пересекает кривую в одной
точке, неустойчивое равновесие при г = гп.
Интересным является рассмотрение случаев: а = 0, а = п/2>
фо - 0, J = 0.
Решение 2. Пластинка вращается с заданной постоянной уг-
угловой скоростью со. Система имеет одну степень свободы. В качестве
обобщенной координаты принято расстояние ОМ = г.
Кинетическая энергия системы
Т = Т2 + То = m (r2/2) + (mr2 sin2 a + J) (co2/2).
Потенциальная энергия системы
П = mgr cos a.
Функция Лагранжа
L = T — n=*m( г212) + (mr2 sina a + J) (co2/2) — mgr cos а.
Здесь интеграл энергии отсутствует, так как на систему наложе-
наложена нестационарная связь (ф = at), однако, поскольку на систему
действуют только потенциальные силы и функция L явно от времени
t не зависит, то имеется интегоал Якоби — Пенлеве — обобщенный
интеграл энергии:
Н = Г2 — То + П= m (r2/2) — (mr2 sin2 a + J) (co2/2) +
+ mgr cos oi = h = const. (97)
— 48 -
Решение этого уравнения:
г = L ?^_) ch(co/sina) + -it-sh(fi)/sin«) +
\ w2 Sin2 a / со sin a
Отметим, что г не зависит от /.
Для исследования относительного движения частицы на фазовой
плоскости необходимо определить г2 из (97):
г2 = |Д г§ — G)Vj5 sin2 a + 2gr0 cos a) — 2grcos aj —
— [— со V2 sin2 a] = yi — y2.
Рассматривая различные случаи взаимного расположения пря-
прямой у1 = уг(г) и параболы у2 = у2(г)> получим фазовый портрет
системы. Все фазовые траектории — расходящиеся. Возможно не-
неустойчивое равновесие частицы (седловая точка) при
г =-Ji°Lf_>0.
р w2sin2a
Реакции связей, наложенных на частицу, следующие: Nx — сос-
составляющая, перпендикулярная к оси канала в плоскости пластинки;
N2 — составляющая, перпендикулярная к плоскости пластинки.
Их можно найти, составляя уравнения Лагранжа с неопределенными
множителями, которые при отсутствии непотенциальных сил при-
принимают вид
« aki *н Й *« v-
Считаем, что система состоит из пластинки, поворачивающейся
вокруг вертикальной оси, и частицы М> на которую наложены две
голономные стационарные идеальные связи. В качестве обобщенных
координат примем четыре величины: угол ф поворота пластинки и
сферические координаты частицы г, ср, 6. Благодаря первой связи
f± = — 9 +a =0 частица не может выйти за пределы коничес-
конической поверхности, образованной вращением канала вокруг оси Oz.
Благодаря второй связи /2 = ф — ф = 0 частица не может выйти
за пределы плоскости пластинки. Выбор этих связей является удоб-
удобным, так как искомые реакции связей имеют направление внешних
нормалей к поверхностям Д = 0 и /2 =0.
Функция Лагранжа системы имеет вид
L = T — n= {m/2)(r2 + rVsin2 б + г2ё2) + J (ф2/2) — mgrcosЬ.
Приведем уравнения Лагранжа первого рода:
dt дг дг ~ dt аё ^
— 49 —
d_L_} d dL
d 2 dt d{
dt fy dy 2 dt d{ W
С учетом уравнений связей после преобразований получим:
г — г ф2 sin2 a + g cos а = О,
2mrr ф sin2 а + (J + mr2 sin2 а) ф = О,
Xt = mr sin а у гф2 cos а -\- gj = mr ctg а ( г + g sec а) ,
Х2 = — /ф = mr sin2 а ( г ф + 2 г ф ) = 2mKJrr ф2 sin2 а.
Таким образом, первые два уравнения являются дифференциаль-
дифференциальными уравнениями движения системы в независимых обобщенных
координатах, а два последние дают возможность найти неопределен-
неопределенные множители Лагранжа и обобщенные реакции связей.
Искомые реакции связей определяются следующим образом:
Ni = V> N2 = У^1г sin a.
Отметим, что г = 0 (точки на оси абсцисс фазовой плоскости)
является необходимым и достаточным условием равенства нулю N%.
Реакция связи Л^ может быть равна нулю только при г < 0, при-
причем, в зависимости от начальных условий в одной или двух точках
канала, однако встречаются случаи, когда такая точка отсутствует.
При определенных условиях одновременно Nx = N2 = 0. Реакция
связи N± (так же, как и ускорение г) достигает экстремальных зна-
значений при г = ±гп.
Ускорение г становится равным нулю при г = гру что следует
из (94). Этим случаям соответствуют касательные к фазовым траек-
траекториям, параллельные оси абсцисс*
Глава III
УРАВНЕНИЯ НИЛЬСЕНА
Рассмотрим мыслимые (возможные) движения материальной
системы — системы с массами точек nij (/ = 1, ..., N) под дейст-
действием тех же сил и с теми же связями,что ив истинном движении,
но с различными кинематическими состояниями системы в тот или
иной момент времени.
Кинематическое состояние системы выразим совокупностью
векторов
* Задача может иметь прикладное значение, например, в теории враща-
вращающихся антенн.
— 50 -
Проварьируем каждое движение, сравнивая его с бесконечно
близким движением, отличающимся от данного значением только
вектора г;- из совокупности A), т. е. изменим только rjy значение ко-
которого в двух сравниваемых движениях отличается на величину
б Г; (изохронная вариация г3) (вариации же всех остальных векторов
равны нулю). Тогда получаем выражение вариационного дифферен-
дифференциального принципа Журдена, согласно которому во всякий момент
времени истинное движение отличается от кинематически возможного
тем, что в. нем выполняется соотношение
2 (- m/Fj + Fj + Rj) btj = 0, B)
; = 1
где Fj — равнодействующая ^ктивных сил, приложенных к /-й
материальной точке системы; Rj — равнодействующая соответст-
соответствующих сил реакций, приложенных к /-й материальной точке сис-
системы.
Покажем, что из принципа Журдена следуют уравнения Ниль-
Нильсена аналогично тому, как из принципа Даламбера—Лагранжа полу-
получаются уравнения Лагранжа второго рода. Для вывода динами-
динамических дифференциальных уравнений Нильсена из B) следует на-
наложить на связи ограничения, выражающие их идеальность по Жур-
дену:'
"«Ао = о, " C)
т. е. элементарная мощность от сил реакций связей равна нулю.
Таким образом, рассматривается механическая система с реоном-
ными голономными идеальными двусторонними связями.
Других ограничений на связи не налагается. Следовательно, ра-
радиус-вектор каждой точки является функцией обобщенных коорди-
координат и времени t.
Пусть число степеней свободы системы равно п. Тогда
rj=rj(quq2t...9qn\ t). D)
Для вывода уравнений Нильсена используем выражение прин-
принципа Журдена в форме
Oj=0. E)
Выразим вектор 6 о через обобщенные координаты и вариации
обобщенных скоростей. Для этого продифференцируем D) по вре-
времени
— 51 —
и найдем виртуальный дифференциал по скорости от вектора г7-
Подставив G) в E) и изменив порядок суммирования, приведем
E) к виду
м
2 —Лт
-„ дг> , -б дг;
= 0.
(8)
Далее используем особые соотношения, справедливые только
для голономных механических систем. От обеих частей равенства F)
последовательно возьмем частные производные по обобщенным коор-
координатам и обобщенным скоростям. Тогда
дг.
+ -ZT-- (9)
drj
*, •.. <10)
Представим векторное выражение для ускорения точки с индек-
индексом /, т. е. составим полную производную от вектора г7-*:
A1)
От обеих частей равенства A1) возьмем частную производную
по обобщенным скоростям:
дг}
9
= 2
1
Выражение A2) с помощью (9) примет вид
дг,
= 2
дг,
A2)
A3)
—
* Полагая П =
dri
4i +
dri
dt
— 12 —
Выражения A0) и A3) являются искомыми соотношениями.
На\основании соотношения A0) уравнение (8) представим в фор-
форме
Рассмотрим теперь выражение кинетической энергии системы
Полная производная по времени от кинетической энергии:
t ^ ^ mjTjTj. A6)
Составим частные пр оизводные от Т по переменным qt и от Т по
2 W -L + ^ тЛ-^-. A8)
На основании соотношений A0) и A3) выражение A8) примет
вид
Из A9) с помощью A7) получим
Учитывая B0), уравнение A4) изменяется следующим образом:
п (
yBiL_JZL_H
где
Q*=2^ -^- (/=1,2,...,п);
— 53 —
Здесь Q. — обобщенные силы.
Уравнение B1) справедливо для любой совокупности величин
> 8q2, •••> $Уп- Применяя это уравнение к таким их значениям,
когда только одна обобщенная скорость получает приращение,
отличное от нуля, а приращения остальных скоростей равны нулю,
получим п таких уравнений:
дТ _2-!L=:Q* (?=1,2 п). B2)
Уравнения B2) и называются уравнениями Нильсена — по имени
немецкого ученого, впервые получившего их. По существу они
представляют собой наряду с уравнениями Лагранжа второго рода
правила составления динамических дифференциальных уравнений
движения системы в обобщенных координатах.
Уравнения Нильсена представляют собой системы п обыкновен-
обыкновенных дифференциальных уравнений второго порядка относительно
такого же числа обобщенных координат. После интегрирования урав-
уравнений Нильсена находятся обобщенные координаты как функции
времени и 2п произвольных постоянных:
q. = qt(t9 Cl9 C2, ..., C2n). B3)
Произвольные постоянные определяются по начальным данным,
т. е. по заданным значениям обобщенных координат qt° и обобщен-
обобщенных скоростей qt° в начальный момент времени.
Существенное отличие уравнений Нильсена от уравнений Лаг-
Лагранжа второго рода состоит в появлении функции Т. Иногда прихо-
приходится отдавать предпочтение именно уравнениям Нильсена, так как
при составлении уравнений движения в некоторых конкретных за-
задачах операция Нильсена быстрее приводит к цели, чем выполне-
ние операции ~77 д' .
Для примера рассмотрим вывод динамических дифференциаль-
дифференциальных уравнений движения твердого тела с одной неподвижной точ-
точкой с помощью уравнений Нильсена.
За обобщенные координаты выберем углы Эйлера ф, 0, <р.'
Представим кинетическую энергию тела в виде
Т = A/2) (Ар* + Bq* + Сг*),
тле А, В, С — главные моменты инерции тела; р, q> r — проекции
вектора мгновенной угловой скорости ш на оси, связанные с телом;
при этом
р = ф sin 0 sin ф + 0 cos ф;
г = ф cos 0 + ф.
— 54 —
Выполним следующие вспомогательные операции:
—L = ф cos 9 sin ф, —i- = ф cos 9 cos ф, —~- = — ф$т0; .
—— = sin 6 sin ф, —~ = sin 6 cos ф, —^- =
аф dh аф
ajt? ^С7 дг г>
—— = 0;
ае ае ае
р = ф 9 cos 9 sin ф + ф ф sin 9 cos cp — 9 ф sin ф + R{\
q = ф 0 cos 9 cos ф — ф ф sin 9 sin ф — 9 ф cos ф + R2\
'г=== — ф 0 sin 9 + R39
где Rl9 jR2, R3 — суть выражения, не зависящие от обобщенных
скоростей ф, ф 9;
—?- = 9 cos 9 sin ф + ф sin 9 cos ф; —?- = 9 cos 9 cos ф —
аф аф
dp •
-г- = — 9 sin 9; —т- = ф cos 9 sin ф — ф sin ф;
аф ае
JL. = ф cos 9 cos ф — ф cos ф; —— = — Ф sin 9.
ае ае
Составим следующие выражения:
а<р аср ду д^
дТ - dp D a^ s> дг г,
аф аф аф аф
== Лр —^- + Ва —q— + Сг —— = Ар Ф ess 9 ^in ф
ае г дь ^ дъ ае г '
+ fig^ cos 6 cos ф — Сгф sin 9;
— 55 —
Bqq'+Crr, Д- = (A — B)pq + C r,
— = Ap sin Э sin ф-j- Ap(Q cos 9 sin cp +
ф sin 0 cos ф) -f Bq sin 6 cos cp + Bq @ cos]0 cos ф — ф sin 0 sin ф)
— O0 sin Q+Cr cos 0;
= Лр cos ф + Ар (Ф cos 0 — ф) sin ф — Bq sin ф +
+ Б<7 (ф cos 0 — ф) cos ф — Сгф sin 0.
Составим уравнения Нильсена:
2 = Ар sin 0 sin ф + Ар @ cos 0 sin ф -f
-f ф sin 0 cos ф) + Bq sm 0 cos ф + Bq @ cos 0 cos ф —
— Ф sin 0 sin ф) — O0 sin 0 + Cr cos 0 = Q.;
«\m Л71 • • • •
— 2 = Ap cos ф + Ар (ф cos 0 — ф) sin ф — Bq sin <p -f
dh
+ Bq (ф cos 0 — ф) cos ф — Crty sin 0 — 2Лрф cos 0 sin cp —
— 2Bq\ cos 0 cos ф — 2Сгф sin 0 = Q9,
где Q^ , (Эф, Qe — обобщенные силы, вычисляемые обычным образом.
Учитывая зависимости между обобщенными силами Q^ ,BФ, Q9
и моментами внешних сил МХ9 Му, Mz относительно координатных
осей, неизменно связанных с телом
Мх = A/sin 0) (Q sin Ф + Q6 sin 0 cos ф — Q? cos 0 sin ф),
My = A/sin 0)(<Зф cos ф —Q6fsin0 sin ф — Q cos ф cos 0),
дифференциальные уравнения движения твердого тела с одной не-
неподвижной точкой преобразуем к виду
- 56 —
Глава IV
УРАВНЕНИЯ ГАМИЛЬТОНА
Уравнения Лагранжа представляют собой дифференциаль-
дифференциальные уравнения второго порядка относительно п неизвестных функ-
функций q. (i = 1, 2, ..., п). Но, как уже известно, такая система урав-
уравнений эквивалентна системе уравнений первого порядка с числом
неизвестных функций, равным 2п. Для этой цели можно рассмотреть
п новых переменных q'. при помощи соотношений
q. =q't(i = 1,2, ...,я).
Но можно использовать новые дополнительные неизвестные функ-
функции таким образом, чтобы вся система уравнений имела другую,
оригинальную структуру, и явилась основой новых методов изуче-
изучения движений—методов, оказавших большое влияние на развитие не
только аналитической механики и ее приложений, но и математичес-
математического анализа, теоретической физики и других областей науки и тех-
техники. Эти новые переменные получили название обобщенных импуль-
импульсов системы; они обозначаются р. и связаны с обобщенными коорди-
координатами и скоростями следующим образом:
Pi^dLldqi (i = 1,2,..., п). A)
Таким образом, каждый обобщенный импульс выражается линей-
линейной дифференциальной формой относительно обобщенных коорди-
координат. Выведем систему дифференциальных уравнений относительно
переменных q. и р.. Для этой цели используем функцию Гамильтона
Ну имеющую следующую структуру:
H = j±Piqt-L9 B)
где L — функция Лагранжа.
Для склерономных консервативных систем функция Гамильтона
Н имеет простой физический смысл. Действительно, так как
и L = Т + ?/, в соответствии с B) имеем
Н = 2Т — (Т + U) = Т — U = Е =* Т + Л.
Таким образом, функция Гамильтона для консервативных систем
выражает полную энергию механической системы.
Для вывода уравнений, связывающих р. и qv применим метод
варьирования функции Я, рассматривая ее с двух точек зрения:
как функцию переменных t, qv qv p. — на основании B) и как
функцию H(ty qy p) от переменных t,qvpt — после исключения из
— 57 —
B) переменных q. с помощью A). На основании B)
dq-L
На основании A) второе и четвертое слагаемые в C) взаимна
уничтожаются. В соответствии же с уравнениями Лагранжа
dL
dqt
dt
и, следовательно,
dL
dqi
Составим теперь б Я, полагая Н = H(ty qf p):
. дН , \
D)
E)
Сравнивая D) и E), а также учитывая, что система голономна, а
следовательно, всеб?. ^8pt независимы, соотношения D) и E) дейст-
действительны при любых значениях вариаций 8qt nSp.f получаем сле-
следующую форму дифференциальных уравнений движения голономной
механической системы:
Zd да,
opt
F)
Уравнения F) и называются уравнениями аналитической дина-
динамики в канонических переменных qv p. или каноническими урав-
уравнениями Гамильтона.
Покажем применение уравнений Гамильтона на примере прост-
пространственной задачи Кеплера—Ньютона (рио. 4).
Материальная точка массой т перемещается в гравитационном
поле, создаваемом притягивающим центром массой М. Выведем
канонические уравнения движения точки, считая притягивающий
центр неподвижным.
Как известно, при движении мате-
материальной точки под действием цент-
центральной силы ее траектория является
плоской линией. Однако рассмотрим
движение в пространстве, что необхо-
необходимо для установления положения
траектории.
Пусть х, у, z — координаты мате-
материальной точки в декартовой системе
координат с началом в притягиваю-
притягивающем центре О. Перейдем теперь к
сферическим координатам г, <р, ф, где
Рис. 4 г — расстояние от точки до центра
— 58 -
притяжения, ф — широта точки, отсчитываемая от экватора по
меридиану до полюса; ф — ее долгота.
Уравнения, связывающие декартовы координаты точки с ее
сферическими координатами, имеют вид
х = г cos ф cos ф, у = г cos ф sin ф, г = г sin ф.
Составим выражение кинетической энергии точки
или в сферических координатах
7\= A/2) m ( г2 + >-2Ф2 + г2 cos2 фф2 ). G)
Согласно закону Ньютона, сила притяжения
¦р Mm -7|
где у — гравитационная постоянная, г*— единичный вектор ради-
уса-вектораг точки. ^Обозначим М^ через \ь. Найдем силовую
функцию силы F. Так как элементарная работа силы притяжения
отлична от нуля только на радиальном перемещении, то
dAF=Frdr= — m dr,
г2
где FT — проекция силы на направление г°. Следовательно,
Полагая U = 0 при г = оо, получаем С = 0.
Итак, силовая функция имеет вид ?/ = jxm/r, а потенциальная
энергия Я = —[/ = — \imlr.
Вычисляем импульсы, полагая г — ^i» Ф — ?2» Ф = Яг- Имеем
дт дт «• аг - о :
Pi = Г = tnr, рг = г- =ШГ^ф, р3 = г- = tnn СОБ^фф.
^Г ^ср ^ф
Функция Я принимает вид (в переменных q, p)
H
2m
Канонические уравнения движения точки
'r-f., Ф = ^, ф=-^; (9)
дрг др2 др3
п - дН п ~ дН п - дН
Hi — — » иг — ~ > из — ~
or a'f оф
после выполнения дифференцирования в правых частях (9) прини-
— 59 —
мают окончательный вид:
Pl, Pip +
т * тг* 2 mr3 cos2 с
mr2 mr2 cos8
mr2 cos2 cp
Рз> Рз = 0.
A0)
Интегрирование полученной системы уравнений удобнее выпол-
выполнить методом Гамильтона—Якоби, что показано в § 2 гл. VI.
Глава V
ТЕОРЕМА ПУАССОНА И ЕЕ ПРИМЕНЕНИЕ В ИНТЕГРИРОВАНИИ
УРАВНЕНИЙ ДИНАМИКИ В ПЕРЕМЕННЫХ ГАМИЛЬТОНА
§ 1. Условие Пуассона для первого интеграла
Выведем условие, которому должна удовлетворять функция
f(q, p, t) канонических переменных для того, чтобы эта функция
была левой частью первого интеграла
Пя> p,t)=c A)
канонических уравнений Гамильтона
? P (tl2n)
, Pt
B)
Для этой цели составим полную производную по времени от (I),
которая по уравнениям B) тождественно равна:
или на основании B)
+ y()s0. C
dt ,fj \ dqi dPi dpL dqj W
Соотношение (З) назовем условием Пуассона для первого интег-
интеграла /. Очевидно, что оно и необходимо, и достаточно.
§ 2. Скобки Пуассона и их основные свойства
Сумма, находящаяся в левой части условия C), является
частным случаем общего математического выражения, составляе-
составляемого посредством двух функций ф(^, р, t) и ф(д, /?, /) от каноничес-
— 60 —
ких переменных и времени. Назовем это выражение скобками Пуас-
Пуассона от двух данных функций ср и ф и обозначим
Следовательно, условие Пуассона C) для первого интеграла
можно представить в виде
dfldt + (/, Н) = 0. E)
Отметим основные свойства скобок Пуассона, вытекающие из
непосредственного рассмотрения структуры выражения D).
1. Скобки Пуассона, подобно векторному произведению векто-
векторов, не перестановочны, т. е. при перестановке ср и ф в левой части
D) правая часть изменит свой знак на противоположный. Это свой-
свойство следует из того, что порядок расположения функций ф и ф в
левой части показывает, как надо составлять правую часть D):
в слагаемом со знаком плюс первая функция дифференцируется по
qv а вторая — по р.. Поэтому скобка Пуассона с переставленными
членами будет иметь вид
?J \ dqt dpi dpi dqt)
т. е.
(Ф.-Ф) = -(Ф.Ф). G)
2. Очевидно, что скобки Пуассона от двух тождественно одина-
одинаковых функций тождественно равны нулю:
(Ф,Ф)-0. (8)
3. Если одна из функций в скобках Пуассона является тождест-
тождественной постоянной, т. е. ф = С, то скобка Пуассона равняется тож-
тождественно нулю:
(Ф, С)»0. (9)
4. Постоянный множитель перед каждым членом скобки Пуассо-
Пуассона можно выносить за знак скобки, т е.
(&1Ф, МО = kА (Фэ ф).
Следовательно, перемена знака у одного члена скобок Пуассо-
Пуассона влечет за собой изменение знака перед скобками или же переста-
перестановку членов в скобках:
(-Ф,ф) = (Ф, — ф) = —(ф, ф) = (ф,ф). A0)
5. Скобки Пуассона обладают распределительным свойством,
(Ф, Ф + f) = (Ф, Ф) + (Ф, /)• (Н)
— 61 —
6. Выведем формулу для частной производной по времени от ско-
скобок Пуассона. Имеем
Так как скобки (ср, ^) выражаются через частные производные
первого порядка от ер и f^ no q и р, то после дифференцирования
скобок по q и р появляются вторые частные производные от ф и ф по
q и р, т. е. сложные скобки Пуассона содержат как первые, так и
вторые частные производные функций ф и ^ по q и р.
§ 4. Понятие о функциях, находящихся
во взаимной инволюции
Функции Д(?, q, p),/2U, ?, p) называются находящимися во
взаимной инволюции, если скобки Пуассона от них тождественно
равны нулю:
(Л. А) = 0. . A4)
Это означает, что при вычислении скобок все слагаемые взаимно
уничтожаются.
§ 5. Тождество Якоби
Сложные скобки Пуассона подчиняются соотношению, но-
носящему название тождества Якоби, которое можно сформулировать
следующим образом: сумма трех сложных скобок Пуассона, полу-
— 62 —
§ 3. Сложные скобки Пуассона
Сложными скобками Пуассона называются скобки, один из
членов которых в свою очередь выражается скобками Пуассона от
двух функций. Таким образом, сложные скобки Пуассона вычисля-
вычисляются по схеме
ценных из одних сложных скобок от трех функций /, ср, ф путем
циклической перестановки функций, тождественно равна нулю:
(Л (Ф. Ф)) + (Ф> (ф. /)) + (ф, (Л Ф)) = 0. A5)
Доказательство можно провести методом математической ин-
индукции, проверив A5) для системы с одной степенью свободы, т. е.
при двух канонических переменных qlt рг\ затем для двух степеней
свободы, т. е. для четырех канонических переменных qx, q2} px, p2
и т. д.
Проверим тождество A5) для случая одной степени свободы, т. е.
для случая одной координаты и одного импульса.
Составим три сложные скобки Пуассона от трех функций f(q, p)
Ф(<7> Р), Ф(<7, Р).
Подробно вычислим первые сложные скобки:
<'•».»>=1^-1 -*v-. <16)
Но
а (ср, щ а2Ф аф d^> аа<1> д2® аф д® d2i> , 1 «ч
1 = _i j ! ' , A /)
dp dq dp2 dp2 dq dp dpdq
_ _а^_ _аф_ _оср_
д2 а d
dq dpdq dpdq dq dp dq2
Следовательно, подставляя A7) и A8) в A6), имеем
/f /го ^ - ^ Г а2с? ^ 4- ^ д2Ф а*? ^ а2^ ^ 1
а<7 L ^^Р ^Р dq dp2 op2 dq dpdq dp J
dj_ \d^_ _&ь_ j9_
^ L &2 d d
L &Q2 dp dq dpdq dpdq dq dp dq2 J
Следующие две сложные скобки можно составить путем цикли-
циклической перестановки (<р вместо /, if) вместо ср и / вместо я|)). Тогда
д? Г эч а/ аф _а^ d^ df
о<7 L ^^ Ф ^ d2 d2 d
а/ аф а^ d^ df
dp2 dq
I а^ г а2^ _а/_ _аф_
J- ^P L ^2 Ф ^
dpdq dq
1
dp dq2
аф г
dq L
¦ аналогично
dp dq dp2 dp2 do
Eр J ^p [ dq2 dp dq
dpdq
a2/ jty a/_ avi
a^ ap a^2 J"
— 63 —
Нетрудно проверить, что при сложении трех сложных скобок
все члены взаимно уничтожаются. Итак, тождество Якоби для слу-
случая одной степени свободы доказано.
Проверка тождества Якоби в приведенном выше случае выявило
простой метод доказательства тождества A5) в общем случае. Этот
метод не требует громоздких вычислений, а основывается на приво-
приводимом ниже рассуждении.
Очевидно, что каждое слагаемое в сложных скобках Пуассона
должно содержать частную производную второго порядка от одной
из трех функций, входящих в сложные скобки. Но при рассмотре-
рассмотрении каждых двух сложных скобок Пуассона, которые могут со-
содержать вторые производные от одной и той же функции, например
/, выясняется, что эти вторые производные входят в такую комбина-
комбинацию с противоположными знаками так, что сумма соответствующих
слагаемых тождественно равна нулю. Следовательно, сумма трех
скобок, составленных из циклически расположенных трех функций,
тождественно равняется нулю, что и доказывает тождество Якоби.
§ 6. Теорема Пуассона о трех интегралах
канонических уравнений
Переходим к доказательству одного из замечательных поло-
положений'аналитической механики — теоремы, высказанной Пуассо-
Пуассоном и состоящей в следующем утверждении:
Если известны два первых интеграла канонических уравнений
Гамильтона
W, <7, Р) = С19 Ш, q, р) = С2,
не находящихся во взаимной инволюции, то скобки Пуассона от этих
интегралов являются тоже интегралом уравнений Гамильтона.
Для доказательства данной теоремы применим сначала условие
Пуассона для каждого из данных интегралов, т. е.
^-+ (/!,//) = О, i + (/2,fl)=0 A9)
Затем рассмотрим тождество Якоби для трех функций Я, /lf /2:
(Я, (/1Э /2» + (fi, (f2, Я)) + (/2, (Я, Д)) . 0. B0)
Но из7A9)
(h,H) = -dfJdt; B1)
(НУ[,) = ^. B2)
Подставляем B1) и B2) в B0):
(Я, (A, h)) +(f» -&-) + (fc. -f-) - 0. B3)
64 —
Переставляя члены в первых и третьих скобках и изменяя при
этом знаки перед этими сложными скобками, после умножения B3)
на —1 получаем
Так как первые два слагаемых выражают частную производную
по времени от скобок (fl9 /2), последнее тождество можно представить
в следующем виде:
d/dt(flt /2)+ ((Д, h),H)'=0.
Если функции /х и /2 не находятся в инволюции, то выражение
(fiy /2) представляет собой некоторую третью функцию
(Л, /2) = W, q, Р),
которая, таким образом, удовлетворяет условию Пуассона для пер-
первого интеграла
-|2. + (/з,/У) = О. B4)
Это показывает, что /3 = С — тоже первый интеграл канони-
канонических уравнений. Теорема Пуассона доказана.
Теорема Пуассона, казалось бы, представляет важное средство
интегрирования уравнений Гамильтона. Но, к сожалению, ее до
сих пор не удалось применить к решению известных классических
задач механики — задачи о движении твердого тела с одной не-
неподвижной точкой, задачи трех тел в небесной механике и др.
В этих задачах, как и в большинстве других классических задач ме-
механики, все известные интегралы находятся в инволюции и не могут
быть использованы для получения новых интегралов.
Проверку теоремы Пуассона покажем на известных интегралах
пространственной задачи Кеплера—Ньютона, т. е. для движения
материальной точки под действием центральной силы F. В этом слу-
случае, как известно из теоремы о моменте количества движения точки,
траектория точки является плоской линией. Имеем
Mo(mv) = const.
Следовательно,
или в проекциях на оси координат
yz — zy = Ciy zx~xz = C2, xy — yx = C3.
Представим первые интегралы в переменных Гамильтона. Пусть
q± = х, q2 = у, qB = z .
Тогда
pi =*= тх9 рг = ту, р3 = тг,
3—689 — 65 —
где т — масса точки, и, следовательно,
f{ = mCi = у . mz — z • ту= q2p3 — q3p2>
/2 = mC2 = z - mx — x - mz = q3px — qtp3,
fa = тСз = x*my — y-mx= q{p2 — q2pit
Применим теорему Пуассона к двум первым интегралам:
l/i» /2/ —
( dh df* dh dfA-
jbd \ dqt dPi dpi dqt )
dpx dpx dqx ) [ dq2 dp2 dp2 dq2) \ dq3 dp3
+ [(— P2) (— <7i) — qzPi] = ЧФч — bPi-
Следовательно,
(/i, /2) = /з, т. e. (fl9 /a) = const — новый интеграл.
Рассмотрим теперь механическую систему, обладающую интег-
интегралом Якоби—Пенлеве, т. е. рассмотрим случай, когда функция Н
явно не зависит от времени:
— - 0. B5)
Положим, что известен первый интеграл f(t, q,p) = Co,
явно зависящий от времени. Тогда функция / удовлетворяет условию
Пуассона
|- + (ДЯ)^0. B6)
Дифференцируя это тождество по времени, получаем
Щ + (У-9Н) = О. B7)
Но по B5) второе слагаемое в B7) тождественно равно нулю иг
следовательно,
*L + (°L,H)~0. B8)
dt* [dt J 7
Это показывает, что функция ^= Сг удовлетворяет условию
Пуассона для первого интеграла, т. е. является тоже первым ин-
интегралом уравнений движения системы.
- 66 —
Применяя это рассуждение далее, получаем следующие первые
интегралы:
пока не получим интеграла, не зависящего явно от времени или же
являющегося тождественным алгебраическим следствием уже из-
известных интегралов.
Глава VI
МЕТОД ЯКОБИ ИНТЕГРИРОВАНИЯ ДИНАМИЧЕСКИХ УРАВНЕНИЙ
ГАМИЛЬТОНА (ТЕОРЕМА ГАМИЛЬТОНА-ЯНОБИ)
Этот метод состоит в том, что для выявления всех первых
интегралов канонических уравнений Гамильтона достаточно проин-
проинтегрировать уравнение в частных производных первого порядка оп-
определенной структуры, т. е. найти полный интеграл этого уравнения.
Тогда все интегралы уравнений Гамильтона найдем путем дифферен-
дифференцирований полного интеграла по независимым переменным qt и по
постоянным, входящим в выражение полного интеграла.
§ 1. Основные понятия
Рассмотрим некоторую функцию S от обобщенных коорди-
координат <7i, ?2» •••> Яп механической системы и времени ^содержащуюв
своем выражении произвольные постоянные аг, а2, ..., ап+1> число
которых равно числу всех переменных, включая время t:
= S(qi9...,qn; t\
A)
Составим частные производные от функции S по переменным
Яъ Я2> •••» Яп> t. Рассмотрим систему равенств, в левой части каждого
из которых находится обозначение новой переменной величины —
частной производной, а в правой — выражение этой переменной
величины через qx, q2, ..., qn\ t\ аъ а2, ..., an+1:
dS
dt
dS , ,
B)
~\ Q
= Pn
3*
— 67 —
Присоединяя еще равенство A), имеем систему, состоящую [из
п + 2 равенств. Из этой системы можно исключить все произволь-
произвольные постоянные al9 a2, ..., ап+ъ выражая их через
, dS dS /• 1 \
ot oqi
В результате исключения величин а. могут быть две возможнос-
возможности: или появится одно соотношение между
с as ds ,
dqt dt
выражающее зависимость между ними:
или появится несколько зависимостей. В первом случае результат
исключения произвольных постоянных, т. е. соотношение C), на-
называется дифференциальным уравнением первого порядка в частных
производных относительно функции S, как фукции от t, qx, ..., qn;
функция же 5, выражаемая равенством (I), называется полным ин-
интегралом уравнения в частных производных первого порядка C).
Во втором случае, когда в результате исключения всех произ-
произвольных постоянных появляется несколько соотношений между
функцией S и ее частными производными, можно считать, что не
существует такого одного дифференциального уравнения, для
которого заданная функция S могла бы быть полным интегралом.
В качестве примера рассмотрим такое уравнение в частных про-
производных:
dqj [dqj
Полный интеграл этого уравнения имеет вид
S = atft + a2q2 + ]/~ а? + а\ q3 + а3, E)
что нетрудно проверить непосредственно. Действительно,
fLЪ f а f
r 1 + #2 • F)
ицх ul{2 dq3
Подставляя F) в D), получим тождество.
Нетрудно представить и вид дифференциального уравнения и
его полного интеграла, частным случаем которых являются D) и
E), а именно: уравнение
f B!L — —) —
[dqi ' dq2 ' '" * dqn
— 68 —
где / — некоторая произвольная функция от dS/dqt. Полный ин-
интеграл этого уравнения имеет вид
S = aiql + a2q2 + \- ап_^п_{ + Cqn + an+i,
где С определяется из соотношения
f(ai,a2,...9anr.i,C) = 0.
Представляет интерес и уравнение Кдеро:
dS . dS . . dS , ff dS OS \ Q n n.
?i — + ?2— H +qn -—Vf —- »•••» — — S = o.. G)
Полный интеграл этого уравнения имеет вид
S = a1q1 + a2q2 + ...+ anqn + f(al9 ..., an), (8)
где / — та же функция, что и в G)*.
Сравнивая полные интегралы в обоих примерах, можно отметить
следующую особенность: в первом случае одна из произвольных по-
постоянных, входящих в выражение полного интеграла, находится в
нем в аддитивном виде, т. е. не является коэффициентом при какой-
либо функции ф(<7) от аргументов qv
Во втором же случае, в уравнении Клеро, в его полном интеграле
нет ни одной аддитивной постоянной, каждая из них является мно-
множителем при одном из qv Это соответствует тому, что в первом при-
примере в дифференциальном уравнении отсутствует искомая функция
5. В уравнении же Клеро функция S входит в дифференциальное
уравнение. Это характерно и для общего случая, т. е. если уравнение
в частных производных первого порядка имеет вид
'(« ««¦?¦••? ?)-° (9>
(уравнение не зависит явно от функции S), то в его полном интегра-
интеграле одна из постоянных является аддитивной:
S = S(t\ qif...,qn\ ait..., ап) + an+i. (К))
* H. H. Г ю н т е р. Интегрирование уравнений первого порядка в
частных производных. ОНТИ, 1934.
— 69 —
Рассмотрим теперь подробнее, какой вид примет уравнение в
частных производных первого порядка (9) в этом случае. Очевидно,
что из уравнений B) нельзя найти все постоянные alt а2, ..., an+i>
однако п постоянных аъ а2, ..., ап можно найти из п последних урав-
уравнений B). Исключая их из правой части первого из уравнений B),
получим уравнение в частных производных первого порядка вида
dS . ( dS dS
dt \ dqi dqn
Функция S, определенная формулой A0), является полным инте-
интегралом последнего уравнения. Именно уравнения такого типа име-
имеют большое значение в аналитической механике.
§ 2. Теорема Гамильтона —Якоби
Как известно из общей теории дифференциальных уравне-
уравнений в частных производных первого порядка, каждому уравнению
соответствует некоторая система обыкновенных дифференциальных
уравнений и задачи решения уравнения в частных производных, с
одной стороны, и соответствующей системы обыкновенных диффе-
дифференциальных уравнений, с другой — взаимосвязаны.
Для системы канонических дифференциальных уравнений Гамиль-
Гамильтона тоже существует такое уравнение в частных производных и
называется оно уравнением Гамильтона—Якоби. Применение этого
уравнения к интегрированию уравнений аналитической механики в
канонических переменных и составляет содержание так называемо-
называемого метода Якоби (точнее — метода Гамильтона — Якоби).
Пусть H(t> #, р) — функция Гамильтона механической системы.
Рассмотрим теперь функцию
О / J \ |
удовлетворяющую такому уравнению в частных производных
т.е. для составления этого уравнения в выражении функции Гамиль-
Гамильтона все импульсы р. надо заменить частными производными от S
до qt и составить уравнение (Па). Уравнение (Па) и носит название
уравнения Гамильтона—Якоби.
Теорема Гамильтона—Якоби формулируется так: если известен
полный интеграл уравнения A1а) в виде определенной функции
S (q> a, t), то все 2п первых интегралов дифференциальных уравнений
Яь = ^-> Pi = ~ir (*=1.2,..., л) A2)
dpi dqt
— 70 —
имеют следующий вид:
-f^ = Pi (i= 1.2 я% A3)
-^~ = Pi (i=l,2,..., л), A4)
где р. — новые произвольные постоянные.
Для доказательства того, что каждое из соотношений A3) и A4)
является интегралом дифференциальных уравнений A2), достаточ-
достаточно выполнить соответствующую проверку, для чего необходимо
продифференцировать каждое соотношение по времени и убедиться
в том, что на основании уравнений A2) результат дифференцирова-
дифференцирования представляет собой тождественный нуль.
Рассмотрим сначала соотношения A3). Левая часть A3) может за-
зависеть от времени двояким образом. Во-первых, время / может вхо-
dS
дить в выражение ^— явно; во-вторых, от времени t зависят коорди-
координаты qv Следовательно, в результате дифференцирования соотноше-
соотношения A3) получим
Каждое <7? заменим теперь из уравнений A2), но с учетом того,
что все pk надо заменить их выражениями из A4). Следовательно,
A5) представим в виде
/ OS
п дН \t\ q\ -j-
A6)
д*& ?j J 3S
Необходимо доказать, что A6) есть тождество. Для этой цели
подставим в уравнение A1а) вместо S найденный полный интеграл
S. Согласно смыслу полного интеграла, в результате подстановки
появляется тождество.
_^L_i_// U q HL )=0. A7)
dt \ ч dq ) v '
Дифференцирование тождества по любому входящему в его струк-
структуру аргументу приводит тоже к тождеству. Продифференцируем
тождество A7) по а.. Данный аргумент входит и в функцию S, и в
частные производные
dt dqk
— 71 —
После дифференцирования тождества A7) по а^ появляется
такое тождество:
dtdai
Очевидно, что равенство A6) является тождеством, так как оно
совпадает с тождеством A8). Итак, существование интегралов A3)
доказано.
Аналогичным путем проведем доказательство для интегралов A4).
С этой целью продифференцируем каждое соотношение в A4) по
времени, учитывая тот факт, что время входит в правую часть A4)
как явно, так и через переменные qv Следовательно,
v^ k=l
9
Функции qk можно представить следующим образом:
as
Следовательно, равенство A9) примет вид
х Г^-О. B0)
( dS \ K '
dqidt <—* dqidqh l лс
\dqk
Для доказательства тождественности B0) рассмотрим опять тож-
тождество A7). Дифференцируя его по qv получим следующее тождест-
тождество:
dtdqL gd
Но
п дН \t,q, ~^~
^.0. B1)
dq K '
дН
~-— __ — р.,
dqt
Следовательно, соотношение B0) есть тоже тождество, так как оно
совпадает с тождеством B1).
Итак, теорема Гамильтона—Якоби доказана.
— 72 —
Применим теорему Гамильтона—Якоби к интегрированию урав-
уравнений движения в пространственной задаче Кеплера—Ньютона,
рассмотренной в гл. IV, где за обобщенные координаты в ыбраны
сферические координаты точки
<?i = г, q2 = Ф, q3 = Ф-
Функция Гамильтона Н задачи имеет вид
)J^L. B2)
Я ( р + р +
Тогда уравнение Гамильтона—Якоби представим следующим
образом:
-21 + -L 17-21? -1- J- f—V+ 1 (—J] т =0
dt 2т [[ дг ) г* \ д<? ) r2cos2cp [ аФ / J r
B3)
Уравнение B3) не зависит явно от времени t. Во всех таких случаях
уравнение Гамильтона—Якоби упрощается путем следующей заме-
замены искомого полного интеграла S:
S=-ht + W(qu...,qn\ *i9..., *^\ /г), B4)
где h — постоянная, W — функция*, не зависящая явно от вре-
времени t.
Тогда
dS z=:_j% dS = dW
dt ' dqt dqi
и, следовательно, B3) примет вид
dW
Найдем полный интеграл этого уравнения методом разделения
переменных, т. е. в виде
W = R + Ф + Q, B6)
где R — функция от г, ф — функция от ср и Q — функция от ф.
Для нахождения этих функций подставим W из B6) в уравнение
B5). Тогда должно удовлетворяться соотношение
|V + i + q+a.
2m [ T r> r2C0s2(p J r ^
Выделим в этом уравнении члены, зависящие только от г, т. е.
представим его в виде
4 ф'2 +
4 + r
r2 r2 cos2
'2 = 2m (— + h ) -*'* B7)
\ г J
* Функция IF называется характеристической функцией Гамильтона.
— 73 —
или
Ф/2 + —— Q'* = 2mr2 (HHL + h\ — r2R'\ ' B8)
COS2cp \ r J
Последнее соотношение должно удовлетворяться тождественно,
так как оно есть результат проверки решения вида B6) для уравне-
уравнения B5). Но для того чтобы B8) было тождеством, необходимо и
достаточно, чтобы выражения, находящиеся по разные стороны зна-
знака равенства в B8) и выраженные через различные независимые пе-
переменные, были равны одной и той же постоянной величине, которую
обозначим №. Следовательно,
B9)
Q'* = [k% ~ Ф'*) cos2 ф. C0)
Из B9) функция Щг) находится квадратурой
R = J" j/ 2m (JSL + hj - ? dr + С,. C1)
Далее, применим аналогичное рассуждение к уравнению C0).
Оно может удовлетвориться тогда и только тогда, когда левая и
правая части, зависящие от разных аргументов, равняются одной
и той^же постоянной величине, которую обозначим Z2, т. е.
Q'% l* Ф'* к2C2)
t
СО32ср
Из C2)
cos2<p
C3)
Аддитивные постоянные после квадратур можно опустить, так
как функция W входит в уравнение B5) только в виде производных.
Итак, функция W имеет вид
C4)
Подставляя C4) в B4), находим функцию S:
— 74 —
Теперь составляем первую серию интегралов, приравнивая част-
частные Производные от S по постоянным Л, &, / другим постоянным
/о, 6, ^о:
_dS__ , _dS_
dh ' dk
ИЛИ
mdr
COS2Cp
J/ COS2 <
C6)
= b, C7)
= Фо- C8)
Движение системы найдено, так как из C6), C7), C8) все коорди-
координаты г, ф, гр можно выразить в функциях времени t.
Нетрудно составить, используя C5), и вторую серию интегралов:
Pi = -г-" > Рг — -z— > Рз = ~тт~ •
дг аср ду
Исследование траектории по этому решению можно найти в
руководствах по небесной механике.
Глава VII
ВАРИАЦИИ ПЕРЕМЕННЫХ, ФУНКЦИЙ И ИНТЕГРАЛОВ ОТ НИХ
§ 1. Варьирование движений
Обобщенные координаты <7ъ<72>..., qn,скорости qly q2,...,qn,
ускорения qly q2J ..., qnt импульсы ръ р2, ...,рли их производные
по времени рг, р2у ..., рп рассматриваются в механике как функции
времени tn постоянных интегрирования, или как функции времени /
и начальных значений qi0 и qi0 обобщенных координат и скоростей;
эти величины, включая время /, можно считать переменными
аргументами функций.
Под динамическими функциями будем понимать функции, зави-
зависящие от времени t> обобщенных координат и их первых производ-
производных по времени или функции, зависящие от времени t, обобщенных
координат и импульссв, характеризующие движение механической
— 75 ~
системы. К динамическим функциям относятся, например, кинети-
кинетическая энергия Г, функция Лагранжа L, функция Гамильтона Н,
полная энергия системы Е, силовая функция U и др.
Основным методом аналитической механики является анализ
всех возможных движений системы при данных силах и заданных
уравнениях связей. На этом, как видно из всего предыдущего, ба-
базируется вывод динамических дифференциальных уравнений дви-
движения. Когда дифференциальные уравнения движения проинтегри-
проинтегрированы, то необходимо изучить зависимость найденного движения
системы от значений начальных данных.
Для наглядности считаем обобщенные координаты q. и скорости
qt механической системы координатами точки (изображающей точки)
в пространстве 2п измерений (фазовом пространстве). Совокупность
{<?., qt} обобщенных координат и скоростей системы выражает ки-
кинематическое состояние системы в какой-то текущий момент времени.
Все эти состояния зависят от начального состояния {qiOi qi0}.
Обозначим положения системы на условной траектории изобра-
изображающей точки в пространстве 2п измерений точками B(t). Начальное
состояние обозначим Bo(to). Каждому начальному состоянию Во
системы соответствует некоторая определенная траектория дальней-
дальнейших положений движущейся системы.
Применим опять принцип исследования всех возможных дви-
движений этой системы на основе найденных интегралов ее движения.
Мысленно представим все возможные движения данной системы,
т. е. будем изменять начальные значения qiOf q.o по какому-либо за-
закону.
Рассмотрим простейший закон изменения: пусть все qi0 и qi0 изме-
изменяются в зависимости только от некоторого (одного) параметра а,
т. е. положим
> <7го = Ьо (а)> h = h (°0-
Тогда изменятся и траектории системы; они будут начинаться в
разных точках 2/г-мерного пространства и в разные начальные мо-
моменты времени.
Отметим такое существенное обстоятельство: можно изменять
только начальные значения координат qi0 и скоростей q.Qy а время
t0 не изменять. Тогда траектории системы будут иметь различные
начальные точки, но движение по каждой из них начнется в один и
тот же момент t0, т. е. t0 не будет зависеть от параметра а. Такое из-
изменение начальных данных назовем изохронным, а изменение движе-
движения системы в этом случае—изохронным варьированием движения.
Положим, что закон изменения начальных данных таков, что
все начальные точки Во окажутся расположенными на некотором
замкнутом контуре в 2/г-мерном пространстве. Траектории же сис-
системы в этом случае расположатся на некоторой поверхности (на
трубке). Назовем эту поверхность трубкой возможных (мыслимых)
траекторий.
— 76 —
При изохронном варьировании движения на всех траекториях
на^наются в один и тот же момент времени. Все начальные положе-
положения ^истемы располагаются на контуре начальных положений сис-
темы,\но дальнейшие движения системы по траекториям под действи-
действием данных сил различны. В каждый дальнейший момент времени то-
тоже можно представить контур из точек, выражающих положения
системы,однако этот контур, сравнительно с начальным, может иметь
уже другой вид.
Если начальный контур имеет малый размер, то контуры даль-
дальнейших одновременных состояний системы на трубке траекторий мо-
могут сохранять размер того же порядка малости, как и в начальный
момент времени. В этом случае назовем движение системы виртуаль-
виртуально-устойчивым. Если же контур дальнейших положений расширяет-
расширяется по поверхности трубки, то движение системы называем виртуаль-
виртуально-неустойчивым.
Предположим теперь, что и начальный момент времени to изме-
изменяется по какому-либо закону:
^о = to(a).
Понятие трубки траекторий сохраняется и в этом случае, одна-
однако на различных траекториях движение начинается в различные
моменты времени.
В этом случае увеличивается возможность более значительной
деформации этого контура на трубке. Такое варьированное движе-
движение системы назовем неизохронным или полным.
§ 2. Нзохроннсе варьирование переменных
Рассмотрим на трубке траекторий две бесконечно близкие
траектории, соответствующие близким значениям параметра a: a
и а + da. Координаты точек В и В' обозначим q и q'\ причем
они соответствуют данному моменту времени и значениям параметра
а и a + da, т. е.
q = q(t, a), qr = q(t, a + da).
• Разность значений величин qr и q назовем изохронной вариацией
переменной q и обозначим эту разность б q:
8q = q(tt a + da) — q(t, a). A)
Разложим q(t, a + da) в ряд Маклорена по степеням da, огра-
ограничившись членом, линейным относительно da, т. е.
q (t, a + da) = q (/, a) + dq <*' a) da. B)
Подставляя B) в A), имеем следующее выражение изохронной
вариации q:
Sq=mi-±da. C)
да
— 77 —
/
Аналогичные выражения получаем и для изохронных вариаций
переменных q и р:
дd, p
да да
при этом
Изохронное варьирование обладает существенным для дальней-
дальнейшего свойством: переместимостью (коммутативностью) операций
дифференцирования по времени t и варьирования, т.е.
d g <ч I dq\ /n
dt \dt)' ( '
Для доказательства выполним все операции в обеих частях ра-
равенства D). Имеем
s да (t, a) 1
оо = ———- а<хй
4 да
Следовательно,
d * d2q(ty a) - /trv
— OQ =* UOL [О}
. dt Ч dadt K f
и также
6 C7 I = 8? = Т" ( ^ J ^ ) da == ^ l/ da- F)
Сравнивая правые части E) и F), убеждаемся ч справедливос-
справедливости D).
§ 3. Полное варьирование переменных
Рассмотрим опять две точки В и В' двух бесконечно близких
траекторий, вышедшие из разных начальных положений и в различ-
различные моменты времени. В некоторый текущий момент времени их
координаты q(t, a) и q'(t, a), но-время t является тоже функцией
параметра a
t - W*
а q, следовательно, есть сложная функция от a
q = q[t(a), a].
Составим теперь полную вариацию координаты q, которая явля-
является дифференциалом по а, но с учетом того, что q згвксит от а
- 78 -
как\явно, так и через время t. Обозначая полную вариацию через
A q, дрлучаем
А *iV(*).a]da+ ддЦ(а).а] *_ & }
4 да ^ dt да V '
Первое слагаемое в G) равно изохронной вариации б q\ а второе
слагаемо^ можно выразить через A t, где
да
— вариация времени по а. Окончательно имеем
=8q + ?A/. (8)
§ 4, Варьирование функций
Рассмотрим функцию / от аргументов qt и t. Составим снача-
сначала выражение изохронной вариации /. Для этого выражение / бе-
берем в виде
/ = Я<7»(<*, t), t].
Тогда
8/«3? da.
да
Но
df df dqt
да *шк dqt да
и, следовательно,
d
Итак,
п .
of s /r\\
T-^i- (9)
Для полной же вариации функции / получится следующее выра-
выражение:
Д/=У ^L ^Lda+f ?Ldz, A0)
1 JU dqt да ^ ' да V ;
где / — полная производная от / по t, вычисляемая по общим
правилам.
Первое слагаемое в правой части A0) представляет собой изо-
изохронную вариацию б/ функции /, а коэффициент при / есть Д L Сле-
,-79-.
довательно, полная вариация функции / окончательно приме/вид
Д/ =6/ +/Д/. (И)
Из хода предыдущего доказательства нетрудно установить, что
формулу A1) можно обобщить на случай вычисления полной вариа-
вариации функции вида
F[q.(a, t)9 q.(ay t), t].
В этом случае в выражении A0) появятся дополнительно члены
(благодаря присутствию аргументов q.)9 аналогичные членам, отно-
относящимся к q.. Окончательный же результат будет такой, как и в A1).
§ 5. Вариации определенных интегралов
от динамических функций
Рассмотрим интеграл в пределах (tl9 t2) вдоль некоторой
траектории системы, подынтегральная функция которого зависит от
t9qvqv Пусть в свою очередь эти переменные являются функциями
параметра а, от которого зависит положение траектории на трубке
траекторий, т. е. интеграл вида
J = Г F [t (a), qt (t (а), or), q% (t (а), а)] dt. A2)
Величина этого интеграла, таким образом, зависит от значения
параметра а.
Положим, что имеется необходимость сравнить величину этого
интеграла с его величиной по траектории, бесконечно близкой к
данной траектории. Для этого необходимо вычислить приращение
величины интеграла при переходе от одной траектории к другой,
т. е. вычислить вариацию данного интеграла:
WM. A3)
da
Применим правила интегрального исчисления, согласно которым
операция дифференцирования интеграла по параметру выполняется
соответственно тому, зависит или нет переменное t, а следовательно,
и пределы tx и t2 от параметра а.
Рассмотрим сначала случай, когда t± и t2 не зависят от параметра
а. Это означает, что bj является изохронной вариацией интеграла.
Подынтегральная функция представляет собой при заданных
функциях qt(t, a), qt(t9 a) некоторую функцию/(f, а). Следовательно,
J=\f(tta)dt.
— 80 —
Тогда, согласно известной теореме интегрального исчисления,
производная по параметру а от определенного интеграла должна
равняться интегралу в тех же пределах от производной по парамет-
параметру от прдынтегральной функции, т.е. в этом случае A3) примет вид
J
t
да
A4)
В случае, когда пределы интегрирования зависят от параметра а*
при дифференцировании по параметру получаем следующую фор-
формулу:
)
hi*)
-/[/,Н^. 05}
да
На основании A4) и A5) нетрудно составить выражения вариа-
вариаций интеграла / в обоих случаях. Используя первоначальные обоз-
обозначения, имеем
AJ = 8J + \F(qt, t2) & -F(qh Q Щ
L да да
da.
Формулу для полкой вариации интеграла можно преобразовать,
учитывая что
— йа. = Att (i= 1,2).
да
Следовательно,
U U
Fdt + FAt | . A6)
h h
Глава VII!
ВАРИАЦИОННЫЕ ПРИНЦИПЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
§ 1. Общие понятия
Общее фазовое состояние механической системы при ее дви-
движении под действием некоторых сил определяется в каждый момент
времени совокупностью величин: времени t, масс точек системы
— 81 —
m7-, заданных сил Fj9 реакций связей Rj, радиусов-векторов/точек
г/, скоростей точек rjy ускорений точек г;- и производных of r по
времени t до некоторого порядка &, рассмотрение которых при дви-
движении системы вызывается теми или иными причинами. В подобную
совокупность входят некоторые массы и моменты инерции, обобщен-
обобщенные координаты q. и их производные по времени до порядка k: q.9
D) (k)
qiy q., qv ..., qt и время t. В состоянии покоя системы значения
всех производных по времени считаются равными нулю.
Представим совокупность бесконечно близких движений матери-
материальной системы, различающихся между собой тем, что каждое дви-
движение характеризуется каким-то определенным соотношением между
всеми элементами фазового пространства; в частности и соотношения-
соотношениями между силами, массами и кинематическими элементами. Тогда
можно доказать, что фактическое (истинное) движение, удовлетво-
удовлетворяющее второму закону Ньютона
отличается от всех смежных, сравниваемых по некоторому признаку
тем, что в процессе истинного движения некоторая динамическая
функция от всех элементов
,п;Т, 7. .... ^; Л -
достигает стационарного значения, т. е. вариация этой функции,
соответствующая выбранному признаку сравнения движений, для
истинного движения равняется нулю
6G=0. A)
Вариационные принципы разделяются на два основных вида
согласно следующему критерию: если функция G есть непосред-
непосредственно функция всех явно входящих в ее выражение переменных,
то соотношение A) называется дифференциальным вариационным
принципом. Если же G — функционал, т. е. функция G является
определенным интегралом, например по времени ty от некоторой
другой динамической функции
s> Г (k) \
G = \ ф t9 т, г, г, ..., -^- dt,
I \ r
Ь Г феи = О
то соотношение
выражает интегральный вариационный принцип.
^82 —
§ 2. Дифференциальные вариационные принципы
Все известные дифференциальные вариационные принципы
принадлежат к одному виду: сравниваемые движения различаются
только одним элементом из всей совокупности элементов rjy rj} ..-
... , /> Функция жебб имеет структуру следующего вида:
где N — число материальных точек системы, k — порядок произ-
производной от rj по времени.
§ 3. Принцип возможных перемещений Лагранжа
Первым дифференциальным вариационным принципом явля-
является принцип возможных перемещений Лагранжа, выражающий
условие равновесия материальной системы, т. е. состояние, при ко-
котором все производные от г7- по времени имеют нулевые значения.
Как известно, этот принцип формулируется следующим образом:
для равновесия системы в некотором ее положении (т. е. при некото-
рых конкретных значениях rjo и (г;H = 0, ... Д r J = 0) необходи-
необходимо и достаточно, чтобы сумма элементарных работ всех активных
сил (при идеальных связях) равнялась нулю при любом возможном
перемещении системы из предполагаемого положения равновесия:
2 Ffc = 0. C)
Условие идеальности связей в этом случае имеет вид
Таким образом, положение равновесия по C) отличается от смеж_
ных положений, характеризующихся другими векторами г $ (близ-
(близкими к г^ и теми же силами, приложенными в близких точках, и
теми же связями.
Например, для материальной точки, вынужденной оставаться на
гладкой поверхности, равновесие может быть только в тех точках
поверхности, в которых направление нормали к ней, а следователь-
следовательно и направление реакции связи, совпадает с направлением силы
Fj\ во всех других точках поверхности равновесие при тех же самых
силах невозможно*.
* Более подробный вывод принципа Лагранжа можно найти в книгах
по теоретической механике и, в частности, в учебнике В. В. Д о б р он р а-
вова, Н. Н. НикитинаиА. Л. Дворникова «Курс теоретичес-
теоретической механики». Изд. 3-е, «Высшая шкала», 1974.
— 83 —
§ 4, Применение принципа Лагранжа
к теории вириала
Принцип возможных перемещений можно сформулировать
также, применяя понятие вириала системы сил. Вириалом системы
сил назовем выражение
Составим вариацию вириала, изменяя точки приложения силэ
т. е. варьируя только векторы г;- при неизменных силах (б/7; = О),
Тогда из C)
В положении равновесия системы правая часть D) равна нулю.
Следовательно,
S(Vir) = 0.
Итак, в положении равновесия материальной системы вириал
системы приложенных сил принимает стационарное значение. Так
как максимум вириала может быть только при бесконечно больших
силах или радиусах, то, следовательно, вириал системы сил в поло-
положении равновесия достигает локального минимума.
Понятие вириала находит применение в динамике и термодина-
термодинамике.
§ 5. Принцип Даламбера
При изучении движущихся материальных систем удобно
применять некоторые уравнения, получающиеся из уравнений дви-
движения системы путем простой операции, а именно: уравнение дви-
движения каждой материальной точки в форме Ньютона
mJFj = Fj + Rj (j= 1,2,..., N) E)
преобразуем в форме уравнения равновесия точки, т. е. к виду
— mj?j + Fj +Rj = O (/ = 1,2,..., N).
Подобное соотношение, формально напоминающее уравнение
равновесия точки под действием трех сил, получило название прин-
принципа Даламбера, а вектор — m/j, который можно тоже для крат-
краткости обозначить в виде некоторой силы ф;., т. е.
ц. def __
_m/. = ф.,
— 84 —
де й(юзо def над знаком равенства показывает, что это равенство
выражает обозначение согласно определению, а не физическое соот-
соотношение.
Вектор Ф; называется силой инерции Даламбгра. Но, конечно,
даламберова сила инерции не является реальной силой, которая
могла бы физически уравновесить силу F] + Rj и перевести дви-
движущуюся точку в прямолинейное равномерное движение. Во избе-
избежание смешения понятий сил инерции в принципе Даламбера и сил
инерции в динамике относительного движения материальной точки,
рассмотрим этот вопрос более подробно.
Согласно динамической теореме Кориолиса, уравнение движе-
движения материальной точки по отношению к подвижной системе отсче-
отсчета S' выражается (тоже для удобства формулировки) в виде
где аг —относительное ускорение точки, F — равнодействующая
непосредственно приложенных сил, а векторы Fe и Fk, как известно,
называются переносной силой инерции и силой инерции Кориолиса
соответственно и выражаются следующим образом:
где ае— переносное ускорение точки, ак — ускорение Кориолиса.
Представим теперь уравнение относительного движения точки
по принципу Даламбера:
где
ф = — таГ.
В этом случае сила инерции Даламбера равна произведению
массы точки на вектор, противоположный вектору ускорения точки
в данной системе отсчета, т. е. в системе отсчета, в которой состав-
составлены динамические уравнения движения точки.
Переносная и кориолисова силы инерции, следовательно, име-
имеют другое происхождение. Они наблюдаются только в подвижной
системе отсчета и даже кажутся реальными.
Действительно, допустим, что Земля вращалась бы вокруг своей
оси не равномерно, а с некоторым угловым ускорением s. Тогда и
весь наблюдаемый небесный свод казался бы жителям Земли вращаю-
вращающимся с угловым ускорением — 8, т. е. в противоположную сторо-
сторону. Трудно даже представить, какие осложнения появились бы тогда
в нашей жизни. __
Даламберова сила же инерции ф для подвижного наблюдателя
является такой же условной силой, как и даламберова сила инерции
б абсолютном движении.
— 85 —
§ 6. Принцип Даламбера —Лагранжа
Нетрудно объединить оба принципа: Лагранжа (возможных
перемещений) — принцип аналитической статики и принцип Да-
Даламбера, являющийся принципом так называемой кинетостатики.
В соответствии с этим в движущейся материальной системе все
заданные силы, приложенные к ее точкам, силы реакций связей и
силы инерции удовлетворяют условиям равновесия, т. е. главный
вектор всех перечисленных сил и главный их момент относительно
любого центра ргвны нулю:
{Fp Rj, Фу)еэ0.
Но если движущаяся система считается находящейся в равнове-
равновесии (хотя и условном), то, следовательно, применим принцип Лаг-
Лагранжа, при этом в следующей формулировке: при движении систе-
системы в каждый текущий момент времени t все силы (как непосредст-
непосредственно приложенные к точкам системы активные силы Fj и силы
реакций связей Rj, так и даламберовы силы инерцииф j) удовлетво-
удовлетворяют условию равновесия, т. е. сумма элементарных работ всех пере-
перечисленных сил равна нулю на любом возможном перемещении систе-
системы из ее положения в данный момент времени:
где
2(^ + ?; + Фу)«0=0, F)
Ф; = -
или в проекциях на оси декартовой системы координат
l(FJX + Rjx + OJX) bXj + (FJy + Rjy + Ф]
]у
Следует отметить, что из уравнения F), называемого также общим
уравнением динамики, можно вывести все теоремы динамики, изла-
излагаемые в теоретической механике. Оно удобно для решения многих
задач и примеров учебного характера и является одним из основных
уравнений в аналитической механике.
§ 7. Принцип Журдена
Принцип Журдена выражается уравнением, выводимым из
уравнений движения системы, представляемых в виде
^O (/ = 1,2,...,
-86 —
путем умножения каждого уравнения на вариацию скорости бг7- и
*
суммирования*
Положим, что сравниваемые движения различаются только ско-
скоростями точек, при одних и тех же гу, О» *гц, Fи вариации которых
считаем равными нулю: б о = 0, SrJ = 0, б/п7- = 0, 8Fj = 0.
Тогда в каждом слагаемом уравнении G) можно внести скобку под
знак варьирования б , и всю левую часть уравнения G) представить
в виде
[-mf) O=0. (8)
В этом уравнении каждое слагаемое выражает мощность силы,
состоящей из активной силы Fj и силы инерции Даламбера. Всю
сумму под знаком варьирования б можно назвать суммарной мощ-
мощностью всех активных сил и сил инерции Даламбера. Обозначим эту
мощность W. Тогда уравнение (8) можно представить в виде б W =
= 0, а принцип Журдена сформулировать так: из всех движений,
отличающихся только скоростями, функция W достигает стацио-
стационарного значения только в некотором одном, истинном движении,
происходящем по закону Ньютона, согласно которому
Не может быть нескольких истинных движений со скоростями,
изменяющимися в виде различных функций времени, но с одним и
тем же ускорением.
Принцип Журдена имеет практическое применение к изучению
движений, в частности при нелинейных неголономных связях перво-
первого порядка, исходя из его вида G).
§ 8, Принцип Гаусса
Принцип Гаусса выражается уравнением, выводимым из
уравнений движения системы, представляемых в виде
* При этом предполагается, что связи идеальны в смысле Журдена, т. е.
что
— 87 —
путем умножения каждого уравнения на вариацию ускорения б о и
суммирования*:
(9)
В таком виде принцип можно сформулировать следующим обра-
образом. Из всех возможных движений, различающихся ускорениями
(при неварьируемых /*у, r^ Fj, m7-), соотношение (9) удовлетворяется
только в истинном движении.
Соотношение, выражающее принцип Гаусса, допускает весьма
интересную физическую интерпретацию. Заметим, что вектор rj
выражает истинное ускорение точки под действием силы Fj и реак-
реакций связей Rj. Это ускорение обозначим г7- = а у Тогда соотношение
(9) примет вид
A0)
Поскольку приложенные силы Fj и массы rtij заданы и не могут
варьироваться, вариацию бcij можно представить в виде
8 а, = — 8 | — ,
(И)
Вынося множитель rrij за скобку в выражении A0), имеем
— X т
Левую часть под знаком суммы можно представить в виде
«/ (Fj
Соотношение A1) можно представить теперь в виде
= 0.
2^ —
A2)
* В данном случае условие идеальности связей выражается следующим
образом:
N
— 88 —
Содержание каждой малой скобки можно трактовать следующим
образом: величина Fj/m = а/ представляет собой ускорение, ко-
которое имела бы точка под действием активных сил Fj, если бы на нее
не были наложены связи. Тогда выражение в круглой скобке пред-
представляет собой разность между ускорением свободного движения и
ускорением действительного движения.
Поэтому Гаусс назвал «принуждением (Zwang)» величину, на-
находящуюся под знаком вариации в A2):
Zw= 2 mj [п]' ~";'j , A2a)
/=i
точнее мерой принуждения движения и сформулировал содержание
соотношения A2) в виде принципа наименьшего принуждения:
движение, осуществляющееся в действительности, таково, что вели-
величина Zw принимает значение, наименьшее из всех возможных значе-
значений при движениях, совместных с данными кинематическими свя-
связями.
Пример. Два тела массами т1 и /п2 прикреплены к концам нерастяжимой
нити, перекинутой через блок. Найти движение системы. Трением пренебре-
пренебрегаем.
Координаты тел гг и г^ подчинены связям
zi + 22 + nr — const;
2i+z2 = 0; z2 = —гх, г2 = — zlt
т. е.
Если бы не было связи, то оба тела имели бы ускорения
При наличии же связей ускорения имеют вид
гх и — гх.
Составим принуждения Zw по Гауссу, имеем
Щ (g —ер2 т2 (g + агJ
Lw _ !
Ускорения должны быть такими, чтобы вариация принуждения была
равна нулю:
bZw = О,
т. е.
dZw
da-i
Составляем производную от + ' —— по а± и при-
приравняем ее нулю:
— тх (g — ах) + т2 (g + аг) = 0;
— 89 —
отсюда
Следовательно,
§ 9. Принцип прямейшего пути Герца
Из принципа Гаусса непосредственно вытекает следствие,,
являющееся тоже принципом. Приведем его вывод на примере дви-
движения одной материальной точки. Положим, что материальная точ-
точка В массой т движется при отсутствии активных сил, под влиянием
только реакции связи (идеальной). Физически можно представить
материальный шарик, входящий в состав какой-либо системы обору-
оборудования космического корабля и вынужденный двигаться по глад-
гладкой поверхности в условиях невесомости. Таким образом, на точку
действует только сила реакции связи /?, направленная по нормали
к поверхности. Движение происходит вследствие начальной скорос-
скорости vo вдоль поверхности и дальнейшего действия силы R.
Для данного движения применим принцип Гаусса, согласно ко-
которому истинное движение материальной точки проходит по такой
траектории, вдоль которой «принуждение» Гаусса является мини-
минимальным.
Вычислим принуждение Zw = (т/2)(а* — аJ. Вектор а* —
ускорение, которое имелось бы у точки при отсутствии связи. Оче-
Очевидно, что это ускорение надо считать равным нулю, так как, если
бы не было связи, а значит и реакции связи, на точку не действовало
бы никакой силы, и ^следствие начальной скорости точка продолжа-
продолжала бы двигаться равномерно по прямой линии в пространстве. Уско-
Ускорение же точки под влиянием связи в ее истинном движении обозна-
обозначим а. Разложим это ускорение на касательное и нормальное уско-
ускорения:
Так как связь идеальна, то проекция силы R на касательную к
траектории равна нулю, потому что R направлена по нормали к по-
поверхности, и динамическое уравнение движения вдоль касательной
к траектории примет вид
— = 0.
dt
Таким образом, точка обладает только нормальным ускорением
— 90 —
где р — радиус кривизны траектории.
Принуждение имеет вид
2
2
= mm,
так как ах = О или ап = min, т. е.
v4p2 = min. A3)
По теореме сохранения полной энергии имеем
Т + П = h = const.
Но Я =0, так как активных сил нет и, следовательно,
Т = пи? 12 = const, т. е. v = const.
Тогда левая часть в A3) может иметь минимум только в случае,
еслир2 достигает максимума, т. е. еслир достигает максимума срав-
сравнительно с его значениями во всех других смежных движениях.
Таким образом, истинное движение точки происходит по траек-
траектории с наибольшим радиусом кривизны, т. е. точка движется по
прямейшему пути.
Принцип прямейшего пути, выведенный из принципа Гаусса,
был впервые сформулирован Г. Герцем и теперь носит его имя.
§ 10. Интегральные вариационные принципы
Согласно интегральному вариационному принципу, в ис-
истинном движении определенный интеграл от некоторой динамичес-
динамической функции на некотором отрезке времени принимает стационар-
стационарное значение, сравнительно со значениями того же интеграла на
всех близких движениях, различающихся варьированием тех или
иных переменных, входящих в аргументы подынтегральной динами-
динамической функции; в другой формулировке: только для истинного дви-
движения вариация данного интеграла равна нулю.
Наиболее известными интегральными вариационными принци-
принципами в аналитической механике являются следующие:
1) принцип наименьшего действия Гамильтона — Остроградс-
Остроградского;
2) принцип наименьшего действия Лагранжа.
§ 11. Принцип наименьшего действия
Гамильтона — Остроградсного
Действием по Гамильтону, которое обозначим S, называется
определенный интеграл
S= J Ldt, A4)
и
где L — функция Лагранжа.
— 91 —
М. В. Остроградский A802—1862)
В принципе Гамильтона — Остроградского сравниваются близ-
близкие движения, переводящие данную материальную систему из ее
начального положения в момент времени tx в конечное положение в
момент времени t2. При этом указывается, какие условия налагают-
налагаются на все сравниваемые движения, состоящие в том, что некоторые
характеристики всех движений являются общими, а некоторые раз-
различными. Имеются три следующих общих признака движений:
1. Система голономна. в^гСЗ
2. Все сравниваемые движения начинаются в один и тот же мо-
момент времени t± и завершаются в один и тот же момент времени t2.
Следовательно, сравниваемые движения совершаются за один и
тот же промежуток времени t2 — tv Закон изменения времени во
всех движениях один и тот же, т. е. время tne варьируется: Д t = 0.
Следовательно, вариации всех переменных являются изохронными,
обозначаемыми б.
3. Поскольку все сравниваемые движения начинаются из одной
и той же точки В± в один и тот же момент времени t± и оканчиваются
в одной и той же точке В2 в один и тот же момент времени t2, т. е.
значения всех обобщенных координат q. в эти моменты времени рав-
равны между собой, то, следовательно, изохронные вариации обобщен-
— 92 -*
ных координат в этих крайних значениях тождественно равны
нулям:
(bqt)t=tl ^ 0, {ЬЙ1IЫг =а 0 (i = 1, 2,..., п). A5)
Для наглядности рассуждений изобразим движение системы
траекторией некоторой точки в пространстве координат q. (i = l> 2,...
..., п) системы. Таким обарзом, два сравниваемых движения изобра-
изображаются двумя линиями, имеющими общее начало в точке В± и общий
конец в точке В2. Положения системы на них в какой-то момент вре-
времени изображаются точками B'(q) и M'(qf.), причем q'. = q% +
+ 8qr
Так как в сравниваемых движениях система проходит за один
и тот же промежуток времени различные расстояния, то обобщенные
скорости q. и q'. в соответствующие моменты времени различны, а
следовательно, и числовые значения кинетической энергии в этих
движениях в соответствующие моменты времени тоже различны
Т ф V. Значения же потенциальной энергии, зависящей от коор-
координат q. и qr. различны вследствие предполагаемой однозначности
и непрерывности потенциальной энергии.
При всех перечисленных условиях, налагаемых на сравниваемые
движения, принцип Гамильтона — Остроградского формулируется
так: при указанных условиях действие по Гамильтону в истинном
движении достигает стационарного значения сравнительно со зна-
значениями на всех близких движениях, или: только в истинном движе-
движении изохронная вариация действия по Гамильтону равняется нулю:
8S = 0. A6)
Покажем, что из условия б S = 0 и принятых допущениях отно-
относительно вариаций обобщенных координат q% в начальной и конеч-
конечной точках движения можно установить, что движение системы долж-
должно описываться уравнениями Лагранжа второго рода относительно
координат qv
Для вывода этих уравнений составим выражение IS в раскрытой
форме. Имеем
или A7)
Необходимо, следовательно, продифференцировать интеграл го
параметру а. Так как пределы tx и t2 интеграла не зависят от а, то
сравниваемые движения начинаются в одной и той же точке и в один
и тот же момент времени /х; таким же образом они оказываются в
одной и той же точке при t2.
Но в математическом анализе доказывается, что произиодная
по некоторому параметру от определенного интеграла в случае не-
з ависимости пределов интеграла от данного параметра равна интег-
— 93 —
ралу в тех же пределах fx и t2 от производной по параметру от подын-
подынтегральной функции.
Следовательно,
•S-i"(-^-*»)*-f («¦)*• («О
Составим выражение б L. Так как L — функция от q. и qv a
время t не варьируется, то
(^L JL)i. A9)
Применяем перестановочность операций изохронного варьиро-
варьирования и дифференцирования по времени, т. е.
8<7« = -^ Ци B0)
Подставляем B0) в A9):
Второе слагаемое представим в виде
dL d z d I dL * \ I d dL
dt dt u,
Подставляем B2) в B1):
f Г 1f JL
B2)
dqi \ { j
B3)
Второй интеграл в B3) вычисляется и принимает вид
8") fc^'*) ¦ <24»
Но обе суммы в B3) равняются тождественно нулю, так как
каждый множитель б <7г в точках tx и /2 равен нулю по начальным и
конечным условиям A5) движения.
Таким образом, условие б S = 0 приводит к условию
\ \y(jk-± JL) aJ dt = о. B5)
J [Z[dqt dt dqi) ^J
Последнее равенство действительно на любом интервале инте-
интегрирования, т. е. при любых пределах t± и t2.
В математическом анализе доказывается, что равенство нулю оп-
определенного интеграла при любых пределах интегрирования воз-
— 94 —
можно только тогда, когда подынтегральная функция равна нулю.
Следовательно,
= 0. B6)
Но так как движущаяся система голономна и все 8qt, следова-
следовательно, независимы, то каждая скобка в B6) должна равняться ну-
нулю, т. е. получатся уравнения Лагранжа:
— —г- = U (I = 1, Z, ... , П). \?1}
dt dqt dqt
Можно доказать и обратную теорему: на основании B7) доказать
равенство нулю вариации действия по Гамильтону, т. е.
Но соответствующий ход рассуждения будет изложен ниже при
рассмотрении другого интегрального вариационного принципа —
принципа наименьшего действия Лагранжа; там из условия, что
движение системы описывается уравнениями Лагранжа, будет дока-
доказано, что вариация интеграла, выражающего действие по Лагранжу,
должна быть ргвна нулю.
§ 12. Кинетические фокусы динамических систем
и их применение к исследованию действия
по Гамильтону на максимум и минимум
Принцип Гамильтона — Остроградского гласит, что дейст-
действие по Гамильтону принимает в истинном движении стационарное
значение сравнительно со значениями в варьированных движениях,,
сравниваемых с истинным при определенных условиях; но что при
этом достигается — минимум или максимум — данный вопрос
требует дополнительного исследования.
Для выяснения этого установлено понятие взаимно сопряженных
точек в пространстве конфигураций qt(i = 1, ..., п) механической
системы. Такими точками Во и В* называются точки, через каждую
из которых одновременно (в момент to для одной и t% для другой)
проходят траектории двух бесконечно близких движений, у каждого
из которых вариации координат в данных точках равны нулю, т. е.
№ = «, = 0. B8)
Каждая из дьух сопряженных точек называется кинетическим
фокусом системы по отношению к другой точке.
Для нахождения сопряженных точек из уравнений, выражающих
движение системы и являющихся общим решением уравнений Лаг-
Лагранжа, т. е. из уравнений
q. = q.(t, си с2, ..., c2n)(i = 1, 2, ..., /г),
— 95 —
произвольные постоянные ck следует выразить через начальные дан-
данные системы, т. е. найти зависимости
Ck =
*0'> <7lO»
Оу ЙШ ?20» '•• » Я по) (fe = 1,2, ... , 2/1)
и найти такое частное решение, при котором вариации координат
при t = to и t = t# равнялись бы нулю, т. е. удовлетворялись
бы уравнения B8), или в развернутом виде:
2п
Следовательно, уравнения B9) представляют систему линейных
однородных уравнений относительно 2/г неизвестных.
Для существования нетривиального решения этой системы необ-
необходимо и достаточно, чтобы детерминант системы равнялся нулю:
= 0. C0)
Из уравнения C0) можно найти t# при заданной /о, а следова-
следовательно, определить положение точки В*, являющейся кинетическим
•фокусом относительно точки Во. Методами вариационного исчисле-
исчисления доказывается следующая теорема (при этом в качестве критерия
привлекается вторая вариация б25 действия по Гамильтону):
Ъ
Теорема. Если в выражении действия 5=1 Ldt
I
верхний предел t2 численно меньше ^, т. е. конечное положение
достигается системой ранее того момента, который требуется для
системы в варьированном движении, то функция S достигает мини-
минимума на интервале (tl9 t2) (в частности на любом малом интервале).
Если же t2 совпадает с t% или превышает его, то на таком интервале
функции 5 не принимает ни максимума, ни минимума*.
* Доказательство этой теоремы, принадлежащей Гельмгольцу и Д. Бо-
Бобылеву, можно найти в книге А. И. Лурье [9], стр. 649—665.
— 96 —
§ 13. Принцип Гамильтона—Остроградского
(примеры)
1. Рассмотрим одномерное движение материальной точки
единичной массой в потенциальном поле с силовой функцией U(x).
Дифференциальное уравнение движения имеет вид
dU
х —• •——_
dx
Пусть x(t) — действительное движение, для которого x(to) =
= хо, x(tx) = xl9 tx — to > 0. Пусть x'(t) — движение, сравни-
сравниваемое с действительным и удовлетворяющее тем же условиям.
Следовательно,
x'(t) = x(t) + a(tj,
где а — любая функция, для которой a (to) = аGх) = 0.
Обозначив действие по Гамильтону для действительного и срав-
сравниваемого движений S и S', соответственно, кинетическую энергию
7 и Г', силовую функцию U и ?/', имеем
и
Sf~S= f {(Г' + U') — {T + U)}dt =
= f {l!2(x + ay — l/2x2 + U(x + *) — U{x)}dt. C1)
i
Так как
a x dt = X*
то
ti
- j ax dt = - [ a *HM dt,
S'
= f (l/2 a* + U{x + a) — U(x) — a
t
to
Используя формулу Тейлора для силовой функции, имеем
S'-S= 1/2 f(aa + a' ipU{x + 'ia))dtt 0<&<l. C2)
J I а^2 J
J
to
Следовательно, если во всем поле d?U/dx* > 0, то подынтеграль-
подынтегральная функция положительна и действие по Гамильтону для действи-
действительного движения имеет минимум по сравнению со всеми другими
движениями.
* Приводимые примеры заимствованы из статьи О. Bottema.
4—689 — 97 —
Это справедливо, в частности, для прямолинейного движения в
однородном поле силы тяжести (cPU/dx2 — 0) и в поле отталкиваю-
отталкивающей центральной силы, являющейся монотонно неубывающей функ-
функцией расстояния (например, U = а2х2, d2U/dx2 == 2а2 > 0).
Эти рассуждения можно легко распространить и на простые
движения со многими степенями свободы. Пусть, например, ху у —
прямоугольные декартовы координаты в плоском поле силы тя-
тяжести, х == —gyy = 0 —дифференциальные уравнения движения,
х' = х + аи у' = у + а2 — сравниваемое движение. Тогда
dt>0.
2. Исследуем теперь применение принципа Гамильтона — Остро-
Остроградского для гармонического движения. Пусть х = 0 — положе-
положение равновесия, х = —а2х — дифференциальное уравнение дви-
движения (следовательно, V == —A/2)а2х2 — силовая функция).
При этом
d2U/dx2 =: —а2 < 0.
Уравнение C2) принимает вид
S'—S = A/2) J1 (а2 — а2а2) Л.
Введем новую переменную, применяя соотношение т == b(t — to)*
Тогда
J{(±)'$}. C3)
где & = —2— > 0, причем а @) = а (тс) = 0.
tx — to
Если а(—т) = —а(т), то определенную на интервале [—я, л;]
нечетную функцию а можно разложить в ряд Фурье по синусам:
Подставляя в C3), имеем
Следовательно, S' — *S > 0 для любого а только тогда, когда
a2lb2 <С 1, т. е. в случае
h - U < jt/a = (l/2O\
— 95 —
где Т — период колебания. Если же это условие не выполнено, то
достаточно взять с± = 1, с. = О (I ф 1) и тем самым построить
функцию а, для которой S' — S < 0. Действие по Гамильтону для
действительного движения имеет минимум по сравнению со всеми
другими движениями только тогда, когда временной интервал мень-
меньше A/2O.
Теорию кинетических фокусов можно применить к изучению дви-
движения математического маятника в общем (нелинейном) случае.
§ 14. Принцип наименьшего действия Лагранжа
В этом принципе движения сравниваются при следующих
условиях: движения по заданной траектории и траектории сравнения
происходят с одним и тем же числовым значением постоянной энер-
энергии, т. е. вариация постоянной полной энергии h — Т + П долж-
должна равняться нулю. Но тогда сравниваемые движения должны счи-
считаться протекающими за различные промежутки времени t2 — tl9
так как изменения Т и П по отдельности связаны этим усло-
условием.
Например, если в некоторой точке одной из сравниваемых траек-
траекторий потенциальная энергия больше, чем в соответствующей точке
другой траектории, то кинетическая энергия на первой траектории
соответственно уменьшается, т. е. скорости точек системы умень-
уменьшатся, что приведет к замедлению движения и к увеличению общего
времени движения между заданными конечными точками обеих
траекторий.
Таким образом, время при изучении заданных движений варьи-
варьируется, а следовательно, вариации всех переменных и функций,
характеризующих эти движения, должны быть уже не изохронными,
а полными. В частности, и начальные и конечные моменты времени в
одном движении уже не будут совпадать с соответствующими момен-
моментами на другой траектории. При начале движения одной системы
другая система, начавшая движение раньше, может находиться в
точке, не совпадающей с точкой, из которой начинается движение
запоздавшей системы. Поэтому условия на концах сравниваемых тра-
траекторий не могут выражаться равенством нулю изохронных вариа-
вариаций обобщенных координат. Принимается другое условие: полные
вариации координат на концах должны быть равны нулю:
{kq)t=ti = 0 {&q)t==t2 = 0.
К этим условиям присоединяется вышеустановленное условие
неизменности числового значения постоянной энергии в обоих дви-
движениях, т. е. полная вариация полной энергии системы должна быть
равной нулю: ДЛ = 0. Остаются, следовательно, еще уловия по-
потенциальности действующих на систему активных сил, склероном-
ности и идеальности связей, наложенных на систему, и отсутствия
неголономных связей. При всех данных условиях принцип наимень-
4* ~ 99 -
шего действия Лагранжа выражает следующее положение: полная
вариация интеграла
и
А = j 2Tdt C4)
в истинном движении системы равна нулю.
Этот интеграл называется действием по Лагранжу и обозначает-
обозначается А (от слова action —• действие).
Тогда принцип Лагранжа выразится следующим образом:
АЛ = 0. C5)
Для доказательства этого соотношения покажем, что оно выте-
вытекает из уравнений Лагранжа. Для этой цели следует вычислить ле-
левую часть C5). Предварительно представим подынтегральную функ-
функцию C4) в других видах. Вследствие того, что данная механическая
система вполне склерономна, кинетическая энергия Т выражается
однородной относительно обобщенных скоростей q. квадратичной
формой Т = Т2 и, следовательно, можно применить формулу Эйле-
Эйлера для однородных функций, т. е. соотношение (82) (гл. 1, § 10):
Но —r-~Pi> где рг — обобщенный импульс системы, т. е.
d
Рассмотрим функции Лагранжа L и Гамильтона Я. Они связаны
соотношением B) (гл. IV):
—L, откуда y2ipiqi = L+ H.
Тогда действие по Лагранжу представится в виде
L + H)dt.
Но так как на основании интеграла энергии Н = h = const,
а постоянная полной энергии во всех сравниваемых движениях имеет
одно и то же числовое значение, то вариация Д Я = 0.
Теперь вычислим вариацию действия по Лагранжу:
— 100
или
АЛ = Д f'
Но Я — постоянная величина. Следовательно,
и tt
А\ ЯЛ = ЯД J Л = ЯА (t2 — t,) - [ЯА/]^ , C6)
и tt
где скобки означают символ двойной подстановки. Следовательно,
tt
" " ' (ЗЮ
Теперь применяем формулу для полной вариации определенного
интеграла см. A6) гл. VII, § 5]:
A f Ldt - b\Ldt + [Ш}\\. C7)
Затем
Но вследствие переместимости дифференцирования по времени
и изохронного варьирования
Кроме того, из уравнений Лагранжа, которым по предположению
должна удовлетворять qv вытекает, что
_dL_ = jd dL__
dVi dt dq.
и, следовательно,
а
или
ta п t2
t ~ i^i t dt
или
— n
Г rt
— 101 -
Теперь на основании (8) (гл. VII) заменяем8qt = Д<7* — qtAt.
Кроме того, dL/dq. == pv Тогда
C8)
Но по условиям варьирования на концах отрезка траектории
(A<7f)/i = (Aqt)tg, и первая сумма в C8) исчезает. Следовательно,
C9)
D0)
Подставляя C9) в C7), получаем
и / п
Д|
Ldt= {—
Полная вариация всего действия А в C7) на основании C6') и
D0) примет вид
н\м
• »
Заменяем его импульс выражением рг == dT/dq. Тогда
Поскольку L =
и
А Л - (—2Г + Г + U + Г — ?/)д t .
то
D1)
Содержимое в круглых скобках равно тождественно нулю. Сле-
Следовательно, АЛ = 0, что и требовалось доказать.
Таким образом, принцип наименьшего действия Лагранжа дока-
доказан.
Выполняя в обратном порядке все операции, можно доказать и
обратное предположение: для того чтобы движение системы удовлет-
удовлетворяло условиюД Л = 0 на отрезке траектории при всех принятых
допущениях, необходимо, чтобы обобщенные координаты q. удов-
удовлетворяли уравнениям Лагранжа второго рода:
J dLдЬ
— 102 —
Глава IX
КАНОНИЧЕСКИЕ ПРЕОБРАЗОВАНИЯ ГАМИЛЬТОНОВЫХ ПЕРЕМЕННЫХ
§ 1. Понятие о каноническом преобразовании
переменных
Одним из существенных свойств канонических переменных
аналитической механики является также и то, что они допускают пре-
преобразование переменных qv р., связанных с первоначальной функ-
функцией Гамильтона #(g., pv i)y в'другие переменные Q., Р., связанные
с другой функцией Гамильтона К (Q;, Р^ t). При этом ка-
канонические уравнения движения в переменных qv p., т.е. уравнения
дН дН ,. , о v '
Qi=—~> Pi=—T" (^ = Ь2,...|/г)
dPi dqt
переходят в канонические уравнения
в других переменных. Это обстоятельство имеет большое значение,
например, потому, что уравнения в других переменных Q., Р.
могут проще интегрироваться, чем в прежних переменных qv p..
Представляет интерес и способ преобразования, иллюстрирующий
еще раз преимущество методов аналитической механики.
§ 2. Производящая функция
Для вывода канонических преобразований предварительно
заменим подынтегральную функцию L в выражении действия по
Гамильтону S, а именно: выразим функцию L через функцию Га-
Гамильтона (см. B), гл. IV):
^pitt). A)
Найдем формулы перехода от переменных qv p. к переменным
Q., Р., т. е. определим такие соотношения qt = f^Q^ Pv
t), p. = cp.(Q., P., t) и соответственно H(qv pv t) выразим' через
K{QV Pv t)y чтобы канонические уравнения в переменных qv p бы-
были эквивалентны каноническим уравнениям в переменных Q., Pt.
Это означает, что переменные Q., и Рt должны удовлетворять прин-
принципу Гамильтона — Остроградского так же, как и переменные q.
и р.:
и и
Ь j Ldt = 0, 6 Г L*qt = О,
где L и L* — функции Лагранжа соответственно в переменных
(<7i> Pj) и (Qj» Pt). Для дальнейшего удобно выразить функции Лаг-
— 103 —
ранжа через соответствующие функции Гамильтона H(qv p., t) и
K{QV Pv t) на основании соотношения A), т. е.
п
~H(qt, pitt)
L*(Q,,Pt,t)= y,PtQt-K(Qt,Pt,t).
Рассмотрим еще некоторую функцию F от всех аргументов:
Яр Рр Qp Рр t\ F = F(qv p., Qv P., t), а также полную производ-
производную от нее по времени t> учитывая, что переменные qv p., Q., Р%
являются функциями времени, выражающими движение1 данной
механической системы. Следовательно, функция F, ее производная
по времени F = -^.Р{Яр PpQpPp 0 являются в конечном счете не-
некоторыми функциями времени t.
Рассмотрим также определенный интеграл по времени /3 от
функции F в некоторых пределах от tx до t2, т. е.
— dt —
dt ~ X
h
где b — определенное постоянное число, не зависящее ни от вре-
времени, ни от каких-либо параметров.
Рассмотрим также еще два интеграла, выражающие действие по
Гамильтону, в переменных q., p. и Q., Р.:
J\ — \ Ldt = \ ^ pi qt — Н (qti pi9 t) I dt,
j2^ \L*dt^ llyPiQi-KiQuPi, t)] dt.
h и Ш J
Здесь под интегралами находятся функции от t и а, которые
должны удовлетворять принципу Гамильтона — Остроградского,
т. е. соотношениями
bji = 0, B)
a j2 = о. C)
В то же время интеграл J3 удовлетворяет тождественно равенству
8J8 = 0, D)
так как J3 — определенное число Ь, не зависящее от параметра а,
содержащегося в подынтегральных выражениях в J± и J%.
— 104 —
Равенства B)—D) эквивалентны следующему:
или
8 j {[2 Л «I -"(?i. Pi. О]
E)
Для того чтобы удовлетворялось равенство E), необходимо и
достаточно, чтобы подынтегральная функция представляла собой
тоже производную по времени ф(^) от некоторой функции ф(/).
Приравниваем подынтегральное выражение в E) некоторой функ-
функции dyldt\ затем перенесем dyldt налево с обратным знаком, тогда
d / г? \ dQ)
dt ^ dt '
где
ф = F + ф.
Поскольку F, а также и ф являются произвольными функциями
от qv p., Q., Р. и t, то и ф является произвольной функцией от
тех же аргументов:
ф =ф(<74> p., Q.f P., О-
Таким образом, чтобы удовлетворялось соотношение E), необ-
необходимо и достаточно, чтобы удовлетворялось следующее соотноше-
соотношение:
П piqi— у p.Q. + K — H — = 0. F)
Для решения задачи о преобразовании канонических переменных
qv p. следует в общем виде решить уравнение F) относительно
функций ф и К- Задача, таким образом, является неопределенной.
Поэтому считаем одну из функций произвольной. Удобнее за
такую функцию принимать функцию ф. Она называется производя-
производящей функцией (генератриссой), так как при ее посредстве находят
искомые преобразования. Для выявления последних приведем вы-
выражение полной производной от ф в раскрытом виде, считая ее
функцией всех qv p., Q., Р. и t. Тогда уравнение F) примет вид
' р Л дФ • дФ • дФ „ дФ ,
й +Л_«_(. G)
— 105 _
Для того чтобы это уравнение, которое можно назвать разрешаю-
разрешающим, удовлетворялось, достаточно сгруппировать члены, содержа-
содержащие qvQP PVPr Затем, приравнивая нулю коэффициенты при них
и выражая К через остальные слагаемые, найдем при соответствую-
соответствующей структуре функции ф те или иные формулы, выражающие qt и
р. через Q., Р.; также выявится новая функция К Гамильтона.
Функция же ф подбирается соответственно желаемому виду преоб-
преобразований, т. е. зависимостей между qv pv с одной стороны, и
Q., Р. — с другой. Приведем наиболее простые и в то же время име-
имеющие важное значение при изучении свойств движений механичес-
механических систем четыре случая канонических преобразований перемен-
переменных.
§ 3. Основные виды канонических преобразований
Первый вид. Производящая функция, обозначаемая
фх, берется в виде
Oi =<Di(<7*. Q«, t). (8)
После подстановки (8) в разрешающее уравнение G), имеем
или
(9)
Приравнивая нулю коэффициенты при qt и Q., получаем такие
соотношения:
о p
Pi dqi ' Иг dQl *
Приравнивая нулю сумму остальных слагаемых в (9), найдем
искомую новую функцию Гамильтона:
К = Н + ^. A1)
Покажем, что A0) выражают первоначальные координаты qt>
р. через другие Q., Р.. Действительно, из первой группы уравнений
(lb) находим р. в функциях от qv Q., что можно представить в виде
Pi =Р|(9„ Q,)- A2 }
Из второй группы уравнений находим Р. = Pt(qv Qt). Но из
этих уравнений получаем
q. = q.(Q., P.). A3)
— 106 —
Подставляем qt из A3) в A2):
Р, =Р,(<г,, Рг)- A4)
Равенства A3) и A4) выражают все прежние координаты qv р.
через новые Q., Р.; из этих же равенств можно получить и обратные
выражения
Qt = Qttot, pt)> pi = р&1> Pi)-
Канонические преобразования переменных qv p% найдены.
Подставляя выражения qi и р. через Q. и Р. в правую часть равен-
равенства A1), получаем выражение функции Гамильтона К в новых
переменных Q,, Р.. Можно составить уравнения движения в новых
переменных Q., Р..
Второй вид. Возьмем производящую функцию ф2 в
виде
Тогда
дФ2 __ dF2 . дФ2 __ 0. дФ2 _ р.
A5)
Подставляя A5) в G), получаем
= f- Д tl = U
ИЛИ
Отсюда тем же путем, как и в предыдущем случае, имеем
* = -¦?-. Qi—I?-. к = я+^-. A6)
dqt dPt dt
Докажем, что A6) выражают преобразование: из первой группы
все
Из второй группы
Q, = Qifo,. р„ <)• A8)
— 107 —
Из A8) находим^. = qt(QrPv t) и, подставляя его значение A7),
получаем
Pi =р№и Pt> 0.
Существование преобразования доказано.
Третий вид. В третьем случае за производящую функцию
примем.
Составляем
дФ8
Qt dQt ' dPi dPi t^l> dPt
Подставляем это в G):
i
После сокращений имеем
dQt " dPi dt
Четвертый вид. Производящая функция:
Ф4 = F4 (p|f P,, /) + 2 9i P* - 2 Qi ^i.
(=i 1=1
Производные:
Подставляем их в G):
Отсюда
dF, _ dF, K H dF,
§ 4. Примеры канонических преобразований
Рассмотрим некоторые примеры на применение производя-
производящих функций вышеприведенных видов. Предварительно отметим,
что совокупность переменных qv p. механической системы по су-
— 108 —
ществу представляет собой модифицированное состояние системы.
Действительно, пространственно-кинематическое состояние сис-
системы выражается совокупностью 2п переменных — обобщенных
координат q. и обобщенных скоростей qv Совокупность (q., q.)
определяет фазовое пространство системы, а уравнения движения
Qt ^ 4t(f) и Qt = <7*@ выражают траекторию точки в этом 2я-мер-
ном пространстве.
Но обобщенные импульсы системы р. выражаются через q. ли-
линейно, правда, с коэффициентами, зависящими от q.. Следователь-
Следовательно, и совокупность переменных (qv р.) тоже выражает состояние
данной системы в некоторый момент времени, но в фазовом про-
пространстве гамильтоновых переменных qv р.. Это пространство яв-
является отображением пространства (qv д.), так как q. можно выра-
выразить через р.. Когда же производится каноническое преобразование
переменных lqv р. в новые переменные Q., Р., то фазозое простран-
пространство в первоначальных переменных преобразуется в пространстве
новых переменных Q., Р.. Каждой точке прежнего пространства
соответствует некоторая точка другого пространства: (q.f p.) ->
->- (Q., Р.). Может случиться, что это другое пространство будет
более удобным для изучения свойств движения данной механичес-
механической системы.
Рассмотрим пример канонического преобразования первого
вида для системы с одной степенью свободы — для так называе-
называемого гармонического осциллятора, т. е. для системы, совершающей
гармонические колебания (например, математический маятник или
физический маятник). Обобщенная координата одна — q. Потен-
Потенциальная энергия имеет вид П = Cq2/2y кинетическая энергия
Т = A/2) аф\ уравнение Лагранжа
d дТ = дП
dt dq ~ dq
приводит к уравнению движения aq = —Cq.
Введем величину С/а = со2 и обобщенный импульс р = dTldq,
т. е.
P = ai A9)
откуда
q = р/а.
Составляем функцию Н Гамильтона, которая (в данном случае
система консервативна) выражает полную энергию системы:
Н = Т + П=--Е или Н - A/2) aq2 + A/2) Cq\ B0)
Выражаем Я через р на основании A9):
H = pV2a + C/2q\ B1)
— loo —
Но С =0(о2; подставляя это значение в B1), имеем
Применяем каноническое преобразование первого вида, с про-
производящей функцией вида
Oi=F№ Q, О-
В данном случае наиболее простая производящая функция
имеет вид
fx =(a/2)co<72 ctgQ. B2)
Канонические преобразования в этом случае должны выполнять-
выполняться по формулам A0):
Jl B3)
B4)
P .
dQ 2sin2Q
Из них можно получить выражения переменных q и р через дру-
другие Q и Р. Действительно, из B4) имеем
q = }/"BP/aco)sinQ. B5)
Связь между функциями Гамильтона Н и К в первоначальных
координатах q, р и новых координатах Р, Q выражается формулой
A1):
* = * + -*?-. (а)
Функция фх в данном случае не зависит от tявно. Следователь-
Следовательно, К = Н.
После подстановки B5) в B3) получаем
р = l/2acoPcos Q, B6)
что и требовалось найти.
Теперь выразим функцию Гамильтона К через другие перемен-
переменные Q и Р, подставляя B5) и B6) в B1). Тогда
Я - соР cos2 Q + aP sin2 Q ="<oP= К. B7)
Как видно, применение канонического преобразования оправ-
оправдано, так как функция К в других переменных является весьма
простой. Так как функция Гамильтона консервативной системы
выражает полную энергию системы К = Е = Л, то и импульс Р
сохраняет постоянное значение Р — /С/со. Последний результат
показывает значение канонических преобразований и с другой сто-
стороны выявляются другие интегралы уравнений движения.
— по —
Составим уравнения движения системы других обобщенных
координатах Q и Р; они имеют вид
«-?• '—й- <28)
Из второго уравнения B8) следует, что Р = О, так как Н сог-
согласно B7) не зависит от Q; отсюда Р = const.
Отметим, что первое дифференциальное уравнение в B8) тре-
требует учета в математическом анализе. В ряде случаев необходимо
тщательно выполнять порядок последовательных математических
операций. В данном случае казалось бы, что в первом уравнении
B8) берется производная от постоянной величины К = Л, по по-
постоянной величине Р, т. е. операция, не имеющая смысла. В дей-
действительности же дифференцирование /С по Р проводится уже в
фазовом пространстве (Р, Q), в котором движение системы выра-
выражается линией, вдоль которой Р и Q — координаты точки —
изменяются и К — функция от Р и Q; поэтому следует сначала про-
дифференцировать К по Р, потохм уже учитывать все соотношения,
получаемые при рассмотрении всех входящих динамических пере-
переменных как функций времени.
Выполняя дифференцирование в B8), имеем Q =©; интегрируя
по времени, получаем
Q = о/ + а,
где а — постоянная интегрирования, определяемая по началь-
начальным данным, через Qo, Ро, для чего их надо выразить из B3) и B4)
через р и q. Итак, имеем уравнения движения в других переменных:
Р = ft/o) = const, Q = ®t + a. B9)
Следовательно, линия, изображающая движение системы в про-
пространстве (Р, Q), есть прямая, параллельная оси Q, и точка дви-
движется по этой линии равномерно. Траектория же изобргжающей
точки в фазовом пространстве первоначальных координат полу-
получится, если выразить переменные q и р через Q и Р; это сделано в
B5) и в B6). Из B5), заменяя Р и Q из B9), имеем
а из B6) аналогично
р = V2Ea cos (со/ + &)•
Исключая t из полученных выражений дир, имеем фазовую тра-
траекторию в виде эллипса:
— Ill —
Таким образом, канонические преобразования переменных яв-
являются весьма эффективным методом для всестороннего изучения
движения механических систем и часто употребляются, в частнос-
частности при рассмотрении проблем небесной механики.
Рассмотрим еще один пример преобразования первого вида. За
производящую функцию примем
Тогда
Это преобразование переводит импульсы в обобщенные коорди-
координаты с одной переменой знака и наоборот. Так как при этом функ-
функция Гамильтона не изменяется К = Н, то и уравнения движения
в других переменных остаются прежними. Таким образом, если в
уравнениях
" дН * дН /ол\
q% ==s > Pi:=Si (uUi
dpi dqi
q. заменить через p., a p. — через qv то уравнения C0) не изменяют
своего вида. Рассмотрим примеры преобразований II класса.
Положим сначала
п
t(qb ..., qn% t)Pt.
Тогда на основании A6) преобразования примут вид
Отметим, что каждая новая обобщенная координата Q. зависит
только от первоначальных координат qv Такое преобразование про-
пространства конфигураций системы может быть осуществлено и при
отсутствии движения. Такие преобразования фазового простран-
пространства движущейся механической системы, когда обобщенные коорди-
координаты q. и Q. связаны между собой соотношениями, не зависящими
от импульсов р., называются точечными преобразованиями. Кано-
Канонические преобразования общего вида являются расширенными
точечными преобразованиями.
§ 5. Бесконечно малые канонические преобразования
Частный случай точечного преобразования наблюдается >
когда фазовое пространство движущейся механической системы
остается неизменными при движении системы подобно абсолютно
твердому телу. Это может быть только тогда, когда фазовые коорди-
— 112 —•
наты ^. и р. каждой точки равны фазовым координатам преобразо-
преобразованного пространства.
Для этой цели производящая функция должна иметь вид
Действительно, уравнения преобразования в этом случае при-
примут вид
dF — Р dF
dqt dPt
Таким образом, при подобном преобразовании каждая точка
фазового пространства остается неподвижной, и другие фазовые пе-
переменные Q. и Р. тождественны первоначальным переменным qv
р.. Поэтому такое преобразование можно назвать «идентичным»
(тождественным) преобразованием.
Используя идентичное преобразование, можно установить так
называемое бесконечно малое преобразование канонических пере-
переменных, имеющее принципиальное значение в аналитической ме-
механике. Бесконечно малым преобразованием канонических перемен-
переменных называется преобразование, переводящее каждую точку (qv p.)
фазового пространства в бесконечно близкую точку. Иначе говоря,
бесконечно малое преобразование должно выражаться следую-
следующими соотношениями между исходными и преобразованными
координатами:
Qi=<7t + S<7i, Л = Pi + 8ft- C1)
При этом вторые слагаемые в правых частях равенств C1) яв-
являются величинами первого порядка малости*.
Доказательство существования такого преобразования естест-
естественно следует из того факта, что бесконечно малое преобразование
является преобразованием, близким к идентичному преобразова-
преобразованию. Логично вытекает возможность использовать это обстоятель-
обстоятельство, т. е. за производящую функцию искомого преобразования
принять функцию F2'(qv P.), отличающуюся от производящей функ-
функции F2(qv P.) идентичного преобразования на бесконечно малую
величину, выраженную через некоторую дополнительную функцию
G(qv P.), того же вида, т. е.
где е — бесконечно малая величина. Тогда уравнения искомого
преобразования должны иметь вид (согласно второму виду)
п
Pi =
dqt dPt
* Употребив обозначения б q-t ибр/, заметим, что эти величины не явля-
являются виртуальными приращениями, а выражают обычные дифференциалы.
— 113 —
или
pi==p.+s-f-, Qi = qi + sJ?-. C2)
oqi off
Из C1) и C2) находим выражения приращений бpt И6д^ (дей-
(действительных вследствии изменения всех переменных за время t):
C3)
! ,
PiL. C4)
Ho
В правых же частях равенств C3) и C4) пренебрегаем малыми
величинами порядка выше первого. Поскольку там находится ма-
малый множитель е, то, следовательно, под знаком производных можно
отбросить малые величины6р. и заменить Р. через р.. Тогда урав-
уравнения C3) и C4) примут вид
8Р| = -е dG(q^ Pi) , C5)
dgt
Р1) • C6)
Множитель 8 можно принять за дифференциал времени t
s - dt.
Функция G является произвольной функцией от переменных
q. и р.. В частности, за функцию G(qv p.) можно принять функцию
Гамильтона, т.е. положить G(qv p.) = H(q.9 p.). В результате
уравнения C5) и C6) примут вид
Но эти уравнения являются следствием канонических уравнений,
выражающих движение механической системы под действием не-
некоторых потенциальных сил:
4 P
Таким образом, установлен принципиальный факт: каноничес-
канонические уравнения движения системы выражают бесконечно малое не-
непрерывное преобразование фазового пространства системы.
В теории бесконечно малых преобразований показывается, что
точки касания поверхностей в одном пространстве переходят в точ-
точки касания соответствующих поверхностей в другом пространстве.
На этом основании подобные преобразования называются контакт-
контактными (преобразованиями соприкосновения).
— 114 —
J Часть вторая
dpsdq
СПЕЦИАЛЬНЫЕ
ВОПРОСЫ
АНАЛИТИЧЕСКОЙ
МЕХАНИКИ
Глава X
ИНТЕГРИРОВАНИЕ
УРАВНЕНИЯ
ГАМИЛЬТОНА -
ЯКОБИ
Первые работы,
посвященные интегриро-
интегрированию уравнения Га-
Гамильтона—Якоби, были
опубликованы в сере-
середине прошлого столе-
столетия Лиувиллем.
Позже этой проблемой
занимался ряд известных
математиков и механи-
механиков, среди которых сле-
следует отметить В. Г. Им-
шенецкого, Морера, Ле-
ви-Чивиту, Бургатти,
Даль-Акква, Форбата и
М. С. ЯРОВ-ЯРОВОГО.
Благодаря их работам в
решении этой проблемы достигнуты значительные успехи. Однако
в учебной литературе обычно ограничиваются изложением случаев
интегрируемости, полученных в прошлом веке, и почти не затра-
затрагивается история вопроса. Ниже кратко изложена история этого
вопроса.
Р. Гамильтон A805-1865)
§ 1. Случаи Лиувилля и Штеккеля
Наиболее разработанным методом интегрирования урав-
уравнения Гамильтона—Якоби является метод разделения переменных.
Рассмотрим сначала наиболее простой случай, когда функция Га-
Гамильтона склерономной механической системы содержит только
квадраты импульсов:
Тогда соответствующее уравнение Гамильтона—Якоби примет
вид
где ах — произвольная постоянная (константа энергии).
— 117 —
Предположим, что переменные в уравнении A) разделяются, т. е.
Тогда
0=1
Pi
dW
Функции /. и F. введены для краткости. В соответствии с этими
обозначениями A) можно представить в следующем виде:
B)
Последнее уравнение при подстановке в него полного интеграла
W обращается в тождество, имеющееся при произвольных значе-
значениях а. Дифференцируя в этом предположении B) по ak(k = 1, ...
..., я), получим систему п линейных уравнений относительно п
функций gu (i= I, ..., п):
=1,2 п),
C)
где
1, k= 1
О, k>\
дак
и функции Fki введены также для краткости.
Определитель этой системы линейных неоднородных уравнений
отличен от нуля. Действительно,
А = det\\ Fhi II = det
2/,
Ml
2«-hf2 .../„• det
dft
где ни одно из значений f% (i == 1, 2, ..., п) не может быть тождест-
тождественно равно нулю, а
det
dak
А +
; det
О,
так как в противном случае произвольные постоянные aly a2, ..., ап
окажутся зависимыми и, следовательно, W не может быть полным
интегралом. Разрешив C) относительно gu, получим
81
¦и __.
D)
A dFu
Тогда силовая функция {/задачи, если учесть D) и соотношения
1
д
О,
E)
— 118 —
примет вид
Пусть а1 , а°, ..., а?—некоторая система значений произволь-
произвольных постоянных, при которой
А| « + а» ф 0.
Для этих значений а функции Fki и (/.2— агРы) переходят в оп-
определенные функции от переменной qv т. е.
В соответствии с этим D) и F) примут вид
Л д<?ц ?d А
где
Итак, сформулируем теорему Штеккеля: если уравнение Гамиль-
Гамильтона—Якоби A) допускает разделение переменных, то имеется
п(п + 1) функций
Чиг(яд> ЬШ> (*, ?= 1, 2, ...,л),
каждая из которых зависит лишь от одной переменной, обладающих
свойством, что gu и U можно представить при помощи соотно-
соотношений G).
Пусть теперь, наоборот, существуют п произвольных функций
ф.(<7.) и п2 функций ф^ (qt), на выбор которых наложено лишь
одно ограничение
и пусть функции gn и U уравнения Гамильтона—Якоби A) могут
быть представлены соотношениями G). Докажем, что в этом случае
переменные в уравнении Гамильтона—Якоби A) разделяются.
Действительно, на основании соотношения E)
га
где а2, а3, ..., ал — произвольные постоянные. Учитывая G) и
последнее соотношение, A) можно представить в виде
119
К. Якоб и A804—1851)
Последнее уравнение
тождественно удовлетво-
удовлетворяется, если принять
Тогда
2
и полный интеграл урав-
уравнения Гамильтона — Якоби
A) принимает вид
W =
== V
(8)
Рассмотрим частный случай теоремы Штеккеля. Пусть функции
q)jfc таковы, что
Ф* = 0 (i^=fe; fe = 2, 3, ...,n),
т. е. все элементы определителя
A = det||q>lft||,
кроме элементов его главной диагонали и элементов первой "строки
и первого столбца, тождественно равны нулю.
Вычислим алгебраическое дополнение дд/(^срд) элемента t-й
строки первого столбца ф.х.
Последнее получается, как известно, путем вычеркивания в
Д i-й строки и первого столбца с последующим вычислением полу-
получившегося определителя (п — 1)-го порядка иГумножением его
на (—1)ж:
- 120 —
ал
<Pl2 Ф13 Ф14 - Фи-1
ф22 О О ... О
О ф33 О ... О
Фн Фн+1 -•• ф)
0 0 ... О
0 0 ...О
О 0 0 ... ф,_1М 0 0 ... 0
0 0 0 ...0 0 ф1Ч1Ы ... 0
о о о ... о
о о
... ф„
Заметив, что в определителе минора t-й столбец содержит лишь
один отличный от нуля элемент ф1г, разложим определитель минора
по элементам этого столбца*:
Фи
Ф22
0
0
0
Фзг
0
0
¦ о
Ч>44
... 0
... 0
... 0
0
0
0
... 0
... 0
... 0
0 0 0 ... ф*_и_1 0 ... О
о о о ... о Ф|+1|+1 ... о
о о о ... о
0
Рля!
Выберем теперь ненулевые функции ф.;- следующим образом:
Фи = — ЛЫ. Ф« = Л|(<7*) (*'=2, 3, ...,м),
A=1,2, .... л).
Тогда
д^
— i44 Л2 ...
Если функции
также выбрать следующим образом:
Лг, в, = 6,(<7,) (t= 1,2 л).
* В определителе минора нумерация столбцов начинается с 2, поэтому
элемент ц>ц принадлежит (i — 1)-му столбцу, что учтено при выборе знака
определителя (п — 2)-го порядка.
— 121 —
то соотношения G) примут вид
п
^-. (9)
Полный интеграл уравнения Гамильтона—Якоби A) с этими
значениями g" и U, т. е. уравнения
A0)
можно получить из (8), заменив функции <pih и Ф.. Однако найдем его
непосредственно из A0). После очевидных преобразований A0)
примет вид
2-^-26,-2^=0,
где каждое выражение, заключенное в скобки, зависит лишь от
одной переменной. Последнему уравнению можно удовлетворить,
если положить
^Гр2.—2&г — 2а1Ф1^2а1 (i= 1,2,...,я),
причем п постоянных ах, а2, ..., ап подчинены условию
ах + а2 + ... + ап = 0.
Тогда
и полный интеграл (Ю) примет вид
IF- V I V2Ai(Qi + aiOi + ai)dqi. A1)
AA K l l 4l v '
За независимые произвольные постоянные можно выбрать, на-
например, аъ а2, а3, ..., ап. Тогда постоянную аг в полном интеграле
следует заменить ее значением
Этот случай интегрируемости уравнений движения системы с п
степенями свободы был найден Лиувиллем и известен в литера-
литературе как случай Лиувилля.
— 122 —
Как пример применения
приведенных выше резуль-
результатов найдем полный ин-
интеграл задачи движения
материальной точки в одно-
однородном поле силы тяжести
по поверхности гиперболи-
гиперболического параболоида, урав-
уравнение которого в декарто-
декартовых координатах
Вычислим кинетиче-
кинетическую энергию материаль-
материальной точки, принимая за
обобщенные координаты х
к У'. Ф
При сделанном выборе обобщенных координат переменные не
разделяются. Перейдем к другим переменным qx и q2, связанным с
декартовыми координатами соотношениями
— 123 —
а силовая функция
U = —
Найдем обобщенные импульсы:
Яг Яг __ гп (дг
7^7 Р2
Разрешив последние соотношения относительно qx и ^2» выведем
функцию Гамильтона:
и т и 2 ( я\-р2 „2 , 4-р2
Wf+Pi m{qx + q2) \ Яг Я*
i mg (<7а — Яг)
"^ 2
Если принять
L
то функция Гамильтона задачи получит вид A0).
Тогда полный интеграл соответствующего уравнения Гамиль-
Гамильтона—Якоби, т. е. уравнения
) 2
2 Лг (Ф! + Ф2) \дя1 ) 2 >!а (Фх + Ф2) [ dq2 ) Фг + Ф2
в соответствии с A1) представляется так:
где ах + а2 = 0; ах — постоянная энергии.
Итак, искомый полный интеграл найден.
§ 2. Задача Морера. Условия Морера
и их обобщения Леви-Чивитой и Форбатои
Случаи интегрируемости уравнения Гамильтона—Якоби в
квадратурах, изложенные выше, были получены благодаря гени-
гениальной интуиции их авторов и, естественно, не решали пробле-
— 124 —
мм интегрирования уравнения Гамильтона—Якоби в общем слу-
случае. Штеккель отмечал позже, что он дал только один класс диф-
дифференциальных уравнений Гамильтона—Якоби с п переменными,
интегрируемых в квадратурах. Поэтому продолжался поиск дру-
других случаев интегрируемости уравнения Гамильтона — Якоби.
К концу прошлого столетия в теории интегрирования уравнения
Гамильтона—Якоби методом разделения переменных сложились
два направления, основоположниками которых можно считать
итальянского математика Морера и русского математика
В. Г. Имшенецкого.
В 1887 г. Морера (содержание этой его работы можно найти в
статье Н. Салтыковой) установил, что переменные в уравнении
Гамильтона—Якоби склерономной системы с двумя степенями сво-
свободы разделяются, если функция Гамильтона Н удовлетворяет
условию
дН д (дН/(дд2)\ ОН д (dHI(dq2)\_Q (}3)
dpi dqL \дН/(др%)) дЯг дрх \дН/(др,))
или условию, полученному из A3) перестановкой индексов 1 и 2.
Он поставил задачу — проинтегрировать условие A3) и получить
общий вид функции Я, допускающей разделение переменных в со-
соответствующем уравнении Гамильтона—Якоби.
В 1904 г. Леви-Чивита обобщил условия Морера на случай
склерономной системы с произвольным числом степеней свободы п,
а в 1944 г. Форбат распространил условия JMopepa—Леви-Чиви-
ты на случай реономных систем. Получим эти условия.
Предположим, что переменные в уравнении Гамильтона—Якоби
реономной механической системы с п степенями свободы
разделяются, т. е. что полный интеграл уравнения A4) имеет вид
Тогда
dqt dqt dpt
Из A5) находим, предполагая, что dHldpt Ф 0:
dpi дН дИ . ч /.
o 0=1,2.....«). A5,
= ф^'а) <»= 1.2.....»). A6)
— 125 —
Следовательно,
-gi- = 0 (??=/), -^- = 0(t,/=l,2,...,n). A7)
После несложных преобразований условия A7) примут вид
дн ( дн а2 я ___ он з2н \ _ а я / ая а2 я
Pi dqtdqj дщ др{дц-}) dqj \ dqt dptdpj
дН д2Н
dpi
дН д2Н дН д2Н
dpi dqi dt dqi dpi dt
A8)
= 0(i,/=l,2, ...,n; i?=j). A9)
В таком виде их получил Форбат. Если Н явно от времени
не зависит, то A9) тождественно удовлетворяются и имеем условия,
полученные Леви-Чивитой.
Следовательно, задачу Морера (в обобщенном—в соответствии
с обобщением условий — варианте) можно сформулировать сле-
следующим образом: проинтегрировать условия Морера—Леви-
Чивиты—Форбата A8)—A9) и найти общий вид функции Гамиль-
Гамильтона Я, допускающей разделение переменных в уравнении A4).
Задача эта является нелегкой. Действительно, условия A8)
содержат п(п — 1)/2 различных уравнений (перестановка индек-
индексов i и / не изменяет соответствующее условие). Поэтому условия
A8) и A9) содержат
Nx = п(п
различных уравнений в частных производных второго порядка от-
относительно функции Я, зависящей от 2п + 1 переменных ql9 q2, ...
... , qn\ ply p2, ..., рп\ t.
Если функцию Гамильтона
Я==Т II ^PiP^+^g'pi+S0 B0)
/ /i i
подставить в условия Морера—Леви-Чивиты—Форбата A8) и
A9), то они перейдут в полиномы соответственно четвертой и тре-
третьей степени относительно импульсов ри р2, ..., рп. Так как неза-
независимые постоянные в р. произвольны, то условия A8) и A9) удов-
удовлетворяются лишь в том случае, если коэффициенты этих полино-
полиномов равняются нулю. Очевидно, что эти коэффициенты будут функ-
функциями gV, gj, g° и их частных производных первого и второго
порядков.
Таким образом, задача Морера сводится к задаче интегрирова-
интегрирования системы дифференциальных уравнений в частных производных
второго порядка относительно неизвестных функций glJ, gl, g°.
— 126 —
Однако интегрирование этой
системы уравнений оказалось
очень сложной задачей и было
выполнено в случае склеро-
склерономных систем для п = 2 и
п -3*.
Стало очевидным, что ре-
решить задачу Морера для слу-
случая реономных систем и про-
произвольного п указанным вы-
выше путем практически невоз-
невозможно. Необходимо было
найти другой путь решения
этой задачи.
§ 3. Задача
Имшенецкого —
Бургатти
Пусть ft, <72, ••-, Яп~п
независимых переменных, 5—
их неизвестная функция; ри
/?2> •••» Рп — ее частные про-
производные первого порядка,
так что
В. Г. Имшенецкий A832—1892)
dS
При этих обозначениях общий вид уравнений в частных произ-
производных первого порядка представляется так:
Яъ
i» Р2. ••• » Рп)
B1)
Пусть F — некоторая заданная функция; возникает вопрос:
какой должна быть зависимость между переменными qx, q2y ...
...,<7п и их функцией S, чтобы из нее путем дифференцирования
и алгебраических исключений образовать данное уравнение.
Эта задача была поставлена В. Г. Имшенецким [5] еще в 1869 г.
В 1911 г. Бургатти поставил частную по сравнению с зада-
задачей В. Г. Имшенецкого, но вместе с тем более конкретную в смысле
реализации и приложений, проблему: найти все такие виды зависи-
зависимостей полного интеграла S от произвольных постоянных интег-
интегрирования а, при которых исключение этих постоянных из урав-
* Для случая склерономных систем (условия A9) отпадают) задача
Морера была решена в 1912 г. Даль-Акква. Однако это исследование
Даль-Акква выпало из поля зрения исследователей.
— 127 —
нений
позволяет получить уравнение вида
\ 2 8IJPtPj-U = <ia- B2)
Обобщая результаты, полученные Лиувиллем, Штеккелем,
Даль-Акква, Бургатти пришел к выводу, что если из уравнений
, (/= 1, 2, ... э г; 0<г</г), B3)
с=1
Pi = Ь (Яд У 2а„ ~Rt+ V Ф|т (qt) а.( + 2<р,л (</), +
U'= ^+1. г + 2,...,л) B4)
2
а=1
(где R. — однородная квадратичная относительно аь а2, ..., аг
форма с коэффициентами, зависящими от координаты q.) исключить
все произвольные постоянные, кроме ал, то получим уравнение
вида B2). Полный интеграл уравнения B2) находится простой ква-
квадратурой:
5= -ant+
i=i J
Для склерономных систем, допускающих разделение перемен-
переменных, выражения B3) и B4) оказались самыми общими; в этом был
убежден и сам Бургатти, но доказать последнее утверждение ему так
и не удалось.
Заметим, что г в соотношениях B3)—B4) может принимать
п + 1 значений: 0, 1, 2, ..., п. Давая эти значения г, получим п + 1
типов уравнения B2). Следовательно, для склерономной механи-
механической системы с п степенями свободы существует п + 1 типов функ-
функции Гамильтона Я, допускающей разделение переменных в соот-
соответствующем уравнении Гамильтона—Якоби. Это утверждение
назовем теоремой Бургатти.
В 1963 г. М. С. Яров-Яровой [16] нашел общий вид уравнения
Гамильтона—Якоби реономной механической системы, интегрируе-
интегрируемого разделением переменных, и указал все случаи, которые после
рекомендованной им замены переменных допускают разделение
переменных. Из полученных М. С. Яров-Яровым результатов сле-
следует, что действительно результаты Бургатти — суть общие
для случая склерономных систем и что теорема Бургатти справед-
справедлива и для реономных систем.
— 128 —
§ 4. Метод неполного интеграла
При решении ряда задач механики голономных систем
оказывается полезным предложенный Леманом-Филе метод не-
неполного интеграла, суть которого заключается в следующем. Пусть
найдена такая функция VHy которая:
1) зависит от координат (не обязательно всех), некоторого числа
независимых произвольных постоянных а19 а2, ..., аг (г < п)
и, возможно, времени t\
2) удовлетворяет A4).
Тогда функции
дУ» в,, ^-Pj (i=l,2, ...,r; /=1,2,...,л) B5)
да i ' 1 дц-}
являются интегралами уравнений движения. Последние п — г
из 2п искомых интегралов определяются интегрированием системы
уравнений
(v= 1,2, ...,/i-r), B6)
где скобками обозначен результат исключения величин plt р2,...
...,Р*; ЯиЯъ ~->Яг> найденных из B5).
Полученное таким образом решение является частным, так как
оно содержит лишь п + г постоянных интегрирования: а1э а2, ...
..., аг\ Рх, $2> •••» Р/г — последние /г — г постоянных получим при
интегрировании B6).
Заметим, что число независимых постоянных интегрирования,
содержащихся в полученном таким образом частном решении, на
п — г постоянных меньше числа независимых постоянных, при-
присутствующих в общем решении. Такое несоответствие чисел постоян-
постоянных интегрирования в частном и общем решениях назовем переко-
перекосом постоянных.
Глава XI
МЕТОД НЕПОЛНОГО ИНТЕГРАЛА В МЕХАНИКЕ НЕГОЛОНОМНЫХ
СИСТЕМ
Метод Гамильтона—Якоби является мощным средством
решения задач аналитической механики. Поэтому проблема интег-
интегрирования уравнения Гамильтона—Якоби привлекала внимание
выдающихся математиков и механиков; благодаря их работам до-
достигнуты значительные успехи в применении метода Гамильтона—
Якоби к решению задач механики голономных систем.
Первая попытка распространить метод Гамильтона—Якоби на
неголономные системы принадлежит Кюанжелю. У нас к этой
проблеме впервые проявил интерес С. А. Чаплыгин, предложив-
1/26—689 — 129 —
ший оригинальный, но довольно сложный метод ее решения. После
появления работы С. А. Чаплыгина [13] в течение ряда десятилетий
не было опубликовано ни одной статьи по проблеме применимости
метода Гамильтона—Якоби в механике неголономных систем.
К этой проблеме возвратились вновь уже в наше время, в 40-—
50 годы, благодаря исследованиям В. В. Добронравова предло-
предложившего свой метод решения проблемы, отличный от методов
Кюанжеля и Чаплыгина.
Из последних работ по проблеме применимости метода Гамиль-
Гамильтона—Якоби в механике неголономных систем следует отметить
труды В. С. Новоселова [10], предложившего свой метод решения
проблемы, который отличается от ранее известных.
Отметим, что приведенный обзор литературы является далеко
неполным; более подробно с содержанием некоторых работ по меха-
механике неголономных систем можно ознакомиться в работах В. В. Доб-
Добронравова [3], [7] и Б. Н. Фрадлина.
§ 1. Уравнения движения неголономных
механических систем с линейными связями первого
порядка
Пусть п + k — минимальное число параметров — лагран-
жевых координат ql9 q2, .., qn+hf необходимое для задания геомет-
геометрической конфигурации неголономной механической системы;
п — число степеней свободы этой системы; k — число линейных не-
голоиомных связей первого порядка;
n-\-k
Б-?,+^ = 0 (v^l,2, ...,*). A)
Уравнения связей A) можно представить в разрешенном отно-
относительно зависимых обобщенных скоростей виде:
<v= L 2
B)
Уравнения движения неголономных механических систем с ли-
линейными неголономными связями A) можно представить уравне-
уравнениями Воронца:
к
C)
где
А" _ м« ^± , V /_^L ft -^L. ъ \ D)
— 130 —
E)
а функции 0 и 6v представляют результат исключения с помощью
B) из Т° и dT°/(dqn+v) зависимых скоростей; Т°— выражение кине-
кинетической энергии, не преобразованное с учетом B).
Уравнения движения неголономной механической системы C)
совместно с уравнениями связей B) и составляют полную систему
дифференциальных уравнений, описывающих движение неголоном-
неголономной механической системы с линейными связями первого порядка.
Эта полная система дифференциальных уравнений состоит, следо-
следовательно, из двух групп уравнений: п дифференциальных уравне-
уравнений C) второго порядка, линейных относительно независимых обоб-
обобщенных ускорений ft, <72> •••> Яп и k дифференциальных уравнений
B) первого порядка, линейных относительно обобщенных ско-
скоростей.
Таким образом, порядок системы дифференциальных уравнений
C), B), описывающих движение неголономной механической сис-
системы с линейными связями, равен 2/г + &*.
Следует отметить, что уравнения C) всегда можно разрешить
относительно независимых обобщенных ускорений и с учетом B)
представить их в форме
т, /=i т=1
где Rly, R\ , Rl — известные функции координат и времени.
Таким образом, полную систему дифференциальных уравнений,
описывающих движение неголономной механической системы х: ли-
линейными связями первого порядка можно представить системой
уравнений F) и B).
§ 2. Интегрирование полной системы
дифференциальных уравнений
движения неголономной системы методом
неполного интеграла
Непосредственное интегрирование полной системы диффе-
дифференциальных уравнений F), B), описывающих движение неголо-
неголономной механической системы с линейными связями первого
порядка, позволяет получить 2п + k произвольных постоян-
постоянных, т. е. получим характерный для метода неполного интеграла
* С выводом уравнений П. В. Воронца и других уравнений движения
неголономных механических систем с линейными и нелинейными связями
первого порядка можно ознакомиться в монографии В. В. Добронравова
[31.
V26* — 131 —
перекос постоянных. Это на первый взгляд чисто случайное сход-
сходство в действительности имеет логическую и глубокую связь.
Пусть дана неголономная механическая система с кинетической
энергией 7°, непреобразованной с учетом неголономных связей
B), и уравнениями движения, приведенными к форме F). Решим
следующую задачу: данной неголономной механической системе
с п степенями свободы, k уравнениями связей B) и п уравнениями
движения F) поставить в соответствие такую условную механи-
механическую систему с п + k степенями свободы и функцией Лагранжа:
n-\-k _ п
1 ^ Т 2 gv 8чgj + 2 gj gj + go> (?)
для которой бы связи B) были частными первыми интегралами, а
F) — алгебраическим следствием уравнений движения
Ё EL JL = о (/= 1,2 п + Л), (8)
dt dqi dqt
для условной голономной механической системы, преобразован-
преобразованных с помощью этих частных первых интегралов.
Если поставленная задача будет решена, то, как показано ниже,
проблема интегрирования системы дифференциальных уравнений
F), B) сведется к проблеме построения некоторого неполного инте-
интеграла уравнения Гамильтона—Якоби условной голономной меха-
механической системы.
Пример 1. Материальная точка массой т движется в пространстве трех
измерений под действием потенциальных сил, силовая функция которых
имеет вид
U = rq{1 r = const,
причем на движение материальной точки наложены две неголономные связи
первого порядка:
Чг = ri <Ь Чз = Г2 <Ь rt = const (i =1,2) (9)
и за обобщенные координаты приняты величины
q2 = \гт у, q3 — \rm 2,
a x, y, z — декартовы координаты точки.
Назовем механическую систему, полученную из данной неголономной
системы при условии, что неголономные связи игнорируются базисной голо-
голономной, а механическую систему, которая ставится в соответствие данной
неголономной системе, условной голономной механической системой.
Тогда функция Лагранжа базисной голономной механической системы
примет вид
±( )rqi. A0)
Исследуемая неголономная механическая система имеет одну степень
свободы. Следовательно, полная система дифференциальных уравнений,
— 132 —
описывающих движение материальной точки, состоит из одного дифферен-
дифференциального уравнения второго порядка, которое в соответствии с C), (9) и
A0) имеет вид
U-r = 0, A1)
и двух уравнений первого порядка — уравнений связи (9).
Рассмотрим теперь условную голономную механическую систему с функ-
функцией Лагранжа:
1 = -J (Я] + я\ + Й ) + Мз — Мд Яг + rq, +
В соответствии с (8) дифференциальные уравнения движения этой услов-
условной голономной механической системы имеют вид
Qi — г — ri (q2 — r^i) = 0,
Очевидно, что система A2) допускает два частных интеграла:
q3 — ?гЧг == 0» ?2 — ^i?i == О*
Следовательно, для определения соответствующего частного решения
системы A2) получим следующую систему уравнений:
qt — г = 0, q2 — r^i = 0, ^з — ггЦг = 0,
которая совпадает с системой дифференциальных уравнений A1), (9), опи-
описывающих движение материальной точки.
Возвратимся теперь к поставленной задаче и укажем алгоритм
построения условной голономной механической системы и метод
построения соответствующего частного решения уравнений движе-
движения условной голономной механической системы.
Итак, пусть имеется неголономная механическая система с ли-
линейными связями B). Представим ее уравнения движения в форме
F). Дифференцируя B) по времени и исключая qi(i = A,2, ..., п)
с помощью F) и qn+^ (v = 1, 2, ..., k) с помощью B), для <7rt+v(v ^
= 1,2, ...,&) получим выражения, по виду совпадающие с F).
Итак,
= 2
A3)
7. /-1 7=1
где Щ., 7^ , /?а—известные функции координат и времени.
Предположим теперь, что существует такая условная голоном-
ная механическая система, для которой B) — суть линейные пер-
первые интегралы, а система уравнений F) — алгебраическое следст-
5—689 -- 133 -^
вие ее уравнений движения и частных первых интегралов B). Тог-
Тогда дифференциальные уравнения движения условной голономной
механической системы (8) обратятся в тождества при замене в них
<7а (а = 1, 2, ..., n + k) и <7л+у (v = 1,2, ..., k) их значениями сог-
согласно A3) и B). Эти тождества, очевидно, примут вид
где функции S]. , S] , SJ — функции координат, времени, искомых
функций g^., gjy g0 и их частных производных первого порядка
по координатам и времени.
Тождества A4) справедливы лишь в том случае, если
S^Sl^S1 -0@=1,2,..., n+k\ i\./=l,2, ...,л).
Итак, получим
уравнений, линейных относительно искомых функций gv-, gj,
g0 и их частных производных первого порядка. Число N2 искомых
функций gv- , gh g0 равно
2 ""
(n + k + 2)
причем каждая из искомых функций может зависеть от п + k + 1
переменных qlf %,..., qn+k9 t
Таким образом, для определения Af2 функций n + k+l пе-
переменных имеется всего лишь Nx линейных уравнений в частных
производных первого порядка, и, следовательно, поставленная за-
задача не имеет решения лишь в случае несовместности этой системы.
Предположим, что эта система совместна и что она проинтегри-
проинтегрирована, т. е. найдена функция Лагранжа условной голономной сис-
системы. Вычислим функцию Гамильтона Н условной голономной ме-
механической системы и в уравнениях связей B) заменим qa через
5#/(дро), так что уравнения B) примут вид
; pT+4v = 0 (v= 1,2, ...,*). A5)
Найдем теперь неполный интеграл
vh = Vh (ft» <Ь ••• э Яп+ь\ ai» «г» — » V» 0» A6)
— 134 —
удовлетворяющий системе уравнений
A7)
iL + я.о.
n+k
Полную систему интегралов найдем по теореме Лемана-Филе.
Пример 2, Материальная точка массой т перемещается в плоскости
дху под действием потенциальных сил, силовая функция которых имеет вид
U = rqlt где г = const, qx = Y~th х, цг = Ym У*
На движение материальной точки наложена неголономная связь
Проинтегрировать систему дифференциальных уравнений, описываю-
описывающих движение материальной точки, методом Гамильтона—Якоби.
Решение. Функция Лагранжа базисной голономной механической
системы имеет вид
L» = (l/2)mG«+if») + l/=(l/2)( ??+ q\) + rqi. A8)
Следовательно, полная система дифференциальных уравнений, описы-
описывающих движение материальной точки, состоит из уравнения связи
<72 = ri<7i О9)
и уравнения движения
?-г=0. B0)
Из A9) следует
Яш^ъъ. B1)
Предположим, что условная голономная система существует. Пусть
функция Лагранжа L этой системы имеет вид
2 2
L=l/2
Тогда, представив уравнения движения этой условной голономной сис-
системы
в явном виде и исключив из них q2 q\ и qi с помощью A9), B0) и B1), получим
два квадратных относительно qx уравнения. Приравнивая нулю коэффици-
коэффициенты при второй, первой и нулевой степенях qx этих многочленов, получим
систему шести уравнений в частных производных первого порядка относи-
относительно шести искомых функций gn, ^2, ?22, gi, ?2, Ь>, каждая из которых
может быть функцией трех переменных qlf G2, t. Это обстоятельство позво-
позволяет выбрать некоторые из искомых функций произвольно, а остальные
функции найти интегрированием системы уравнений.
Предположим, что все искомые функции не зависят от времени; и далее,
что
gij = Cij = const (/, / = 1, 2).
5* — 135 —
Тогда система уравнений в частных производных примет вид
'iCi2 = 0, B2)
„,,_-!!&. =0. B5)
dq2
Из B2) следует
с12 = 0. B6)
Из B3) — B6) находим
go = С+ rcu<7i +1/2 rfca2<7f ,
где С — произвольная постоянная.
Для завершения интегрирования системы уравнений в частных произ-
производных необходимо выбрать функции gx и g2 так, чтобы они удовлетворяли
B4). Предположим, что
gi^dFKdqJ,
где F — произвольная функция координат. Тогда, интегрируя B4) по qlt
находим
g2 = dF I (dq2) - гг c22 qx + R (q2),
где R — произвольная функция своего аргумента.
Нас, вообще говоря, устраивает любое частное (но не тривиальное!)
решение системы уравнений в частных производных. Поэтому выберем для
произвольных функций и постоянных, чтобы в дальнейшем не усложнять
вычислений, следующие значения:
F = R = 0, С=0, сп = с22=1.
Итак, функция Лагранжа искомой условной голономной механической
системы примет вид
Найдем обобщенные импульсы условной голономной системы:
Pl = fli» P2 = Й2 —
Функция Гамильтона условной голономной системы примет вид
а уравнение связи A9) —
Рч = 0.
Найдем теперь неполный интеграл, удовлетворяющий системе уравнений,
~дГ 2 L \ дЯх / \ dq2 n/J T '
¦¦¦ - •• -¦¦ ¦ ' dv ¦ ¦
— = 0. B8)
dq2
—^ 136 —-
Предположим, что переменные в неполном интеграле разделяются,
т. е. что неполный интеграл имеет вид
VH = Vo (t, в1) + Vx (qi «i) + V2 (q2, ax).
Тогда согласно B8)
dV dV2
dq2 dq2
Следовательно,
= 0.
VH = VQ + V1. B9)
Подставив B9) в B7), после очевидных преобразований получим
dV 1 / dVt
Так как левая часть последнего уравнения зависит от t, а правая — от
<7i> то необходимо, чтобы
dV0
— ai = const.
Тогда
dVx
и, следовательно,
Г dVx = ait+ -^— [2
VH = «
В соответствии с теоремой Лемана-Филе интегралы уравнений движения
имеют вид
— Pi
dqt
или в явном виде
я =й.. «"я _р. (i=l, 2)
t V2(rq1a1) $1,
\ C0)
/2 Их — о1)=р1; Р2=О.
Последний интеграл найдем интегрированием выражения
Разрешая первое из соотношений C0) относительно qlt получим
где вместо постоянных аг и рх введены новые независимые постоянные С± и
Сг, определяемые по формулам
Заменяя в C1) рг и ^ и интегрируя, получаем
Я* = тх (rfl 1 6 + Q<2 7 2 + С2< + Сз).
— 137 -г-
где cz — новая постоянная интегрирования.
Итак, по методу Гамильтона — Якоби получаем следующий вид зависи-
зависимости <7i и q% от времени:
C2)
Очевидно, что метод Гамильтона—Якоби дает тот же результат, что и
непосредственное интегрирование уравнений A9) и B0).
Отметим, что предлагаемый метод интегрирования уравнений
движения неголономных механических систем (метдй неполного
интеграла) достаточно громоздкий. Однако он имеет и существенные
положительные стороны:
1) активные силы, действующие на базисную голономную меха-
механическую систему, могут быть и непотенциальными;
2) его можно применить к интегрированию полной системы диф-
дифференциальных уравнений движения неголономной системы и в
тех случаях, когда связи нелинейны относительно обобщенных ско-
скоростей;
3) его можно применить (после предварительных, чисто алгеб-
алгебраических преобразований — преобразований переобозначения) к
интегрированию уравнений движения механических систем, под-
подчиненных неголономным связям произвольной структуры и поряд-
порядка, т. е. связям
Ы/, я* я>.... я ) = о (v=i,...,/),
вытекающим из ^-принципа Гаусса
8шк = О,
где
j * Г /tx , (*-2)ll
и имеющим вид
где Xv — множители Лагранжа.
— соответственно k — функция Аппеля и обобщенные силы, Fj —
активные силы, а связи принимаются идеальными в следующем
— 138 —
смысле:
N (*--2) (Л)
4) этот метод в ряде случаев позволяет значительно уменьшить
вычислительную работу, если полную систему дифференциальных
уравнений, описывающих движение неголономной системы, можно
разделить на две группы уравнений, одну из которых можно
интегрировать независимо от другой.
Для иллюстрации последнего положения рассмотрим пример 1,
где имеется следующая система уравнений:
qi = r, q2 = riqit qs = r2q2. C3)
Первые два уравнения этой системы можно интегрировать неза-
независимо от третьего уравнения. Система первых двух уравнений
в примере 2 проинтегрирована методом Гамильтона—Якоби. Те-
Теперь для получения полной системы интегралов уравнений, описы-
описывающих движение материальной точки в примере 1, необходимо к
интегралам C2) присоединить еще один, который получаем интег-
интегрированием третьего из уравнений C2), т. е. интеграл
" 9, = г,г2[A/24)Ф + -i-Q/3 + ±Ctt* + C3t + С4] ,
где С4 — независимая постоянная интегрирования.
Эта особенность предлагаемого метода может быть очень полез-
полезной при решении конкретных задач механики неголономных
систем.
Глава XII
ТЕОРЕМА НЕТЕР И ЕЕ ПРИМЕНЕНИЕ В МЕХАНИКЕ
Первые интегралы уравнений движения играют в механике
большую роль. Даже в тех случаях, когда уравнения движения ока-
оказываются неинтегрируемыми, знание некоторых первых интегралов
позволяет отчасти представить физическую картину изучаемого
движения. Известные законы сохранения количества движения,
кинетического момента, механической энергии системы являются
первыми интегралами уравнений движения; они действительны для
различных конкретных механических систем при определенных
условиях, и способы нахождения их различны.
Теорема Эмми Нетер дает единый подход к получению всех
законов сохранения для любой системы, уравнения движения ко-
которой можно получить из принципа Гамильтона—Остро градского.
Она устанавливает связь между динамическими постоянными, т. е.
первыми интегралами уравнений движения и условиями инвари-
инвариантности действия относительно некоторой группы преобразований.
— 139 —
§ 1. Группы преобразований
Рассмотрим механическую систему с п степенями свободы;
ее'положение в каждый момент времени t определяется обобщенными
координатами ql9 ..., qn. Движение системы рассмотрим как движе-
движение изображающей точки вдоль некоторой кривой в расширенном
(п + 1)-мерном координатном пространстве Vn+ly где координатами
являются величины ql9...,qn и время t.
Рассмотрим в этом пространстве преобразования координат
вида
t* = /о С Я» - > Яп> ai> - > аг) = /о (Л 7» а).' 1 A)
<7* =М*><7и ....^tfli» ...,аг) = /,('» ?, а) (t=?.l,2, ..., л), J
где функции /. зависят от координат qt и г независимых парамет-
параметров аа, причем аа являются существенными параметрами, т. е.
t* и G-* не могут быть выражены через меньшее их число. Уравне-
Уравнения A) для каждой системы значений аа определяют преобразова-
преобразование точки Р (ty q) из Vn+1 в точку Р* (?*, <7*)« Предположим, что
функции /. (/ =0, 1, ..., п) непрерывны относительно tf q. и аа
вместе со своими производными первого и второго порядка в неко-
некоторой области определения переменных, а якобиан преобразо-
преобразования / = д ¦ (i, k =0, 1, ..., п) не равняется нулю ни
в одной точке области (здесь qQ = f). В этом случае существует об-
обратное преобразование:
t = f0 (t*, g*, a),
q. = Jt(t*f ?*, а) (i= 1, 2, ..., n),
переводящее точку Р* (^*, д*) в Р (^, ^)-
Если Р* (?*, 9*) — образ точки Р (^, ^), соответствующий опре-
определенной системе значений аа, то при малых изменениях аа получим
точки, принадлежащие окрестности точки Р. Поэтому преобразо-
преобразования непрерывны. Символически преобразования A) и B) при сис-
системе значений а! параметров аа обозначим ТаЩ = q*, T~a\ q* = q>
т. е. Т& является операцией, переводящей точку Р (t, q) в точку
Р* (^*, ^*), зависящую от Р и значений а\.
Применяя сначала преобразование Таг, а затем Та*, получаем
преобразование Та*Тач называемое их произведением. Необяза-
Необязательно, что произведение двух преобразований принадлежит сис-
системе A), т. е., что существуют такие значения параметров а«,
для которых преобразования Ta> TV и Та* одинаковы. Преобра-
Преобразование Та! такое, что
TJt TaX q=q9
называется обратным преобразованию Таи Преобразование Е,
оставляющее неподвижной каждую точку (Eq=q)t называется
тождественным.
— 140 —
Однако сред» преобразойаний A) может не быть преобразова-
преобразования, обратного данному, или тождественного.
Под группой преобразований будем понимать совокупность пре-
преобразований A), подчиненную следующим условиям:
1. Если два преобразования Та1 и Та* принадлежат совокуп-
совокупности, то их произведение Та* Тах принадлежит данной совокуп-
совокупности. Для того чтобы уравнения A) удовлетворяли этому условию,
необходимо, чтобы существовала система функций
определенных для любых систем значений а\ и а«, такая, что
уравнения
U [/ (*, <7, а1), а2] = /, (*, q, а3) (i = 0, 1, ..., п)
являются тождествами по t, q, а1 и а2.
2. Выполняется ассоциативный закон
3. Существует тождественное преобразование Гао, такое, при
котором
4. Для любого преобразования Т1^ существует обратное пре-
преобразование 7V1, такое, при котором
/ТГ1 /7Т" ' /Т*« 1 лр /Тр
1 а*1 а* ~~ l a1 l a1 ~~ l а* •
Если выполнены условия 1—4, то преобразования A) образуют
конечную г-параметрическую группу преобразований Gr, называе-
называемую группой Ли. >i
Пусть набор параметров а°а определяет тождественное преоб-
преобразование группы
Для упрощения положим а°а = 0. * Если^рассматривать значе-
значения aa, достаточно близкие к нулевым, то преобразования A)
можно представить в виде
Разлагая в ряд Тейлора и ограничиваясь членами, линейными
относительно А а, получаем
t* = /0 (/, <7, 0) -1
где
r
<x=l
dfi
ll Ac
(^» <7>
a)
141 —
Обозначая еа = Даа, получаем преобразование
2
а=1
которое бесконечно мало отличается от тождественного преобра-
преобразования.
Формула C) осуществляет бесконечно малое преобразование
группы. Систематическое изучение строения непрерывных групп
при помощи бесконечно малых преобразований впервые предпринял
норвежский математик С. Ли. Можно показать, что любое конечное
преобразование группы можно рассматривать как результат беско-
бесконечного числа повторений бесконечно малых преобразований. Од-
Однако, если задано бесконечно малое преобразование группы, то
не всегда можно получить конечное преобразование в форме A).
Рассмотрим примеры непрерывных групп.
Пример 1. Совокупность всех возможных параллельных переносов
трехмерной системы координат
** = *; x\ = xk + ak (*=1, 2, 3),
где xk — обычные декартовы координаты, образует группу <73 параллельных
переносов.
Пример 2. Совокупность всех вращений декартовой системы коорди-
координат на плоскости
t* = t; ** = .*• cos а — (/sin а; у* = — х sin а + у cos а
образует группу Gt вращений на плоскости; бесконечно малое преобразова-
преобразование группы имеет вид
t* = t\ X* — х—гу\ у* = у — гх.
Пример 3. Совокупность всех возможных переходов от одной произ-
произвольной инерциальной системы координат к другой, движущейся относи-
относительно первой с постоянной скоростью
t* = t; xmk = xk + vkt (k=U 2, 3),
где Xk — обычные декартовы координаты, образует группу Галилея.
§ 2. Вычисление вариации действия
Пусть функция Лагранжа имеет вид
L =L(f, ql9 ..., qn, ft,..., qn) (или сокращенно L = L(t, q> *q)).
Интеграл
/= \L(Uq/q)dt D)
i
принято называть действием за промежуток времени [tx, t2], где
tx и t2 — произвольные моменты времени. Очевидно, каждой кри-
кривой у, заданной уравнениями
142 —
ставится в соответствие определенное значение/. Поэтому обозначим
Рассмотрим группу преобразований Gr более общего вида, чем
A), когда функции /. содержат производные обобщенных коорди-
координат qv
Формулы
** = * + Д*; ql(t*)=qi(t) + &qt (i = 1, 2, ... , п) E)
или в развернутой форме
F)
2
ct=l
а=1
представляют бесконечно малое преобразование группы, еа — бес-
бесконечно малые параметры.
Считаем, что все еа имеют один порядок малости г; ясно, что
Д<7г иД tf величины того же порядка. Преобразование E) переводит
кривую у в близкую кривую у*, определяемую уравнениями
Вдоль каждой кривой у
При этом преобразовании интегралу D) ставится в соответствие
интеграл
= j L(t*, ?,(/*) dt*
где [*!*, f2*] — интервал интегрирования, соответствующий интер-
интервалу [tt9 t2] в прежних переменных.
Теперь задача состоит в том, чтобы вычислить вариацию инте-
интеграла D) А/, т. е. главную линейную относительно s часть разности
*
/ (Y*) - / (Y) = \1 V*. Я*, Я*) dt* - f L (t, q, q) dt.
В первом интеграле перейдем от переменных /*, q* к переменным
t, я-
— 143 —
По E)
dt* = dt + d (At) = d A1 -f -j- (A t) 1 G)
и с точностью до величин первого порядка малости
7(Y*)-/(Y) =
= '^L(t + At, q + Aq, q+ Aq) (l + JL
-L(t,q,q)]dt.
Разлагая в ряд Тейлора и ограничиваясь членами первого поряд-
порядка относительно е, получаем
L(t + At, q + Aq, q + Aq) = L{t, q,q)+-^-At +
ot
Тогда
Приведенные члены представляют собой главную линейную
относительно s часть разности, т. е. вариацию интеграла D) А/.
Преобразуем это выражение, предварительно заметив, что
поскольку формулы E) включают преобразование независимого
переменного t.
Введем новые величины б qv такие, что
I
(t = 1,2 п) (9)
J
Они учитывают изменения функций qt при данном значении t.
Очевидно,
^ (Ю)
Используя разложение
Ц\ (П = 9? С + д0 = 9? @ +
— 144 —
с точностью до членов первого порядка, имеем
Mi = <П (П - 4i @ = <П (t) + q\ (t) Ы -qt (t) = t4i + qt (t)At.
Учитывая G), получим -^г = 1 ~jf (д0 + —
Найдем связь между д^. и bqv С точностью до малых первого
порядка
it [< ^
= -^- (Л?,) - -±- (At) -±- [q] @ + ^ (О Щ = -i- [3<7. + q. {t) M]-
i- (Д*)-?- 9J @ = 8<7г + qi№+-~ (At) [qt (t) - q.(t)] =
Итак,
Mi = ^i + 4% Ы; Aqt = 8^ + q\ At. A1)
Используя A1), представим (8) в виде
или с учетом A0)
, dL
h l *=i qi i=i oqi ~w J
A2)
Преобразуем выражение
dL _? .g \ — JL ( dL j \ fL / aL
a^ л " л ^ а^ ; ^ [ dqt
и, подставив его в A2), получим
dL ъ , d
dqi
d ( dL \ о i 1,
— I — l 8<7г I dt.
at
— 145 —
Окончательно,
lldt
*L-±^) 8«J dt.
Соотношение A3) и есть основная формула для вариации дейст-
действия А/. Подставляя вместо Д^, Aqt их выражения из F), представим
A3) в виде
-y(±JL-JL)x]dt. (И)
Здесь
Таким образом, если даны интеграл D) и группа преобразова-
преобразований Gn причем бесконечно малое преобразование группы имеет
вид F), то вариация интеграла А/ представляется формулой A4).
§ 3. Вывод уравнений движения из принципа
Гамильтона —Остроградского и некоторые
замечания о функции Лагранжа
Как известно, принцип Гамильтона—Остроградского пред-
предполагает вариации переменных специального вида, при которых:
1) область интегрирования не изменяется, т. е. д? =0;
2) вариации координат равняются нулю на границе области
интегрирования:
bqt = 0 при t = ti и t = 4-
Для вариаций подобного вида из A4) следует, что
Принцип Гамильтона Остроградского требует равенства нулю
вариации действия вдоль истинной траектории:
Так как область интегрирования произвольна, а вариации ко-
координат независимы между собой, то из равенства нулю интеграла
— 146 —
подучаются уравнения движения в форме Лагранжа:
?-^_|L = 0(*=l,2,...,n). A5)
Для дальнейшего изложения важно заметить, что выбор функ-
функции Лагранжа L в интеграле D), приводящей к данной системе урав-
уравнений движения, неоднозначен, т. е. существуют различные функ-
функции L(ty qy q)y приводящие к одним и тем же уравнениям движения.
Покажем, что если интегралы
tz
и Д = [ Lj u, q, qjdt
приводят к одной и той же системе уравнений движения, то L и Ьг
должны быть связаны соотношением
l(t> q), A6)
dt
где К (ty q) — произвольная функция переменных t и qr Обозначим
разность функций Лагранжа Lx — L = ср.
Для функции ф уравнения Лагранжа A5)
А 0 <*1.2.....п)
dt dq. dqt
должны тождественно удовлетворяться по всем переменным.
Приведем эти уравнения в развернутой форме:
-faO (i=l,2 п).
Поскольку это — тождества, то коэффициенты при qk равны
нулю, т. е.
а2ср. -О (и ^1,2 я),
dqi dqk
поэтому функция ф должна иметь вид
Тогда уравнения A5) переходят в соотношения
147 —
и поскольку они являются тождествами, то
?-^-0, ^—Т--0 (i,k= 1.2, ...,«).
ад* a?, аг а?*
Из этих условий следует, что выражение ф (t, q, q) dty т. е.
n
A(t, q)dt-\- ^Bftf, q)dqiy является, полным дифференциалом не-
которой функции Х = \(t, </), а поэтому
<t \(t,q).
Соотношение A6) является не только необходимым, но и доста-
достаточным условием того, что функции L и Ьг позволяют получить од-
одни и те же уравнения движения, в чем легко убедиться непосред-
непосредственным вычислением; для этого достаточно показать, что
/ —^0 (i = 1,2,..., п).
dt dqt[ dt ) dqt \dt) K }
Имеем
dqt
dt
a fdk_\ __ _а_
> dt ) ~~ дъ
n
+
n>-— л
и тождество A7) доказано.
§ 4. Преобразования симметрии
Сначала сформулируем определение инвариантности дей-
действия. Назовем действие инвариантом группы преобразований Gr,
если
i
J L (t, q/q)dt= J'L(/*f 9*,G*) dt* A8)
для каждого из преобразований группы. В частности, A8) также
справедливо для бесконечно малого преобразования-E) группы,
конечно с точностью до членов, линейных относительно е.
Пусть теперь Lx — некоторая другая функция Лагранжа, та-
такая, что для преобразования E) с точностью до малых первого
порядка выполняется условие
!,q9q)dt = ^Lt(t*,q*,q*)dt*. A9)
'.
Здесь имеется в виду не обычная инвариантность A8), посколь-
поскольку в левой и правой частях A9) находятся разные функции Лаг-
ранжа (L и Lj.
Назовем преобразование E) преобразованием симметрии, ест
ли функция Лагранжа Ll9 определяемая условием A9), позволяет
получить те же уравнения движения, что и L. Легко видеть, что если
преобразование симметрии применяется к какому-либо решению
системы уравнений движения, то это решение преобразуется в не-
некоторое другое решение той же системы уравнений. Но если для
двух функций L и Ьг получаем одни и те же уравнения движения,
то они, как показано в предыдущем параграфе, должны быть свя-
связаны соотношением A6).
То же соотношение можно представить в переменных /*, q*.
Уравнения A9) и A6) образуют основу законов сохранения, свя-
связанных с преобразованиями симметрии. Рассмотрим бесконечно
малое преобразование группы в форме E). Используя A9) и A6),
выведем условие, позволяющее выяснить, является ли данное пре-
преобразование преобразованием симметрии системы. Для этого пред-
представим A9) с учетом A6):
U <7, q)dt
L» \ в /IT "•" —¦ v \
1
ИЛИ
J L (**, <?*, q*) dt*-) L(t, q, q)dt = - )±i\ (P, q*) df*. B0)
'» Г
Левая часть B0) при преобразовании E) является бесконечно
малой величиной порядка 8, следовательно, и правая часть должна
быть величиной того же порядка. Поэтому будем употреблять Д %
вместо %. Очевидно, с точностью до малых первого порядка отно-
относительно 8 можно считать AX(f*, ^*) = ДХ(/, q, q).
Учитывая это и используя выражение для вариации интеграла
в форме (8), приведем B0) к виду
Но поскольку область интегрирования произвольна, имеем
1L ^Aqt + L— (&) = _-! (АХ). B2)
dt A dqt ? dqi dt dt
Уравнение B2) применяется в качестве критерия для выясне-
выяснения, является ли E) преобразованием симметрии для данной сис-
системы. Функция Лагранжа L и вариации переменных, определяемые
преобразованием E), используются для того, чтобы вычислить ле-
левую часть B2). Если она является полной производной по времени
некоторой функции ДХ, то E) — преобразование симметрии, и
функция ДХ определяется из B2).
Условие B2) можно представить в другом виде, воспользовав-
воспользовавшись выражением для вариаций переменных из соотношений F).
Используя A4), представим B1) в виде
- Z'-i-1' *•
dt
где функция ДХ представлена в виде
ДХ -
а=1
Учитывая произвольность области интегрирования и независи-
независимость еа, получаем г уравнений:
Ф+11*]-|
= -jfx* (^= 1,2,...,г). B3)
Если левая часть каждого из уравнений B3) оказывается пол-
полной производной по времени некоторой функции Ха (а =1, 2, ..., г),
то F) является преобразованием симметрии, и Ха определяется
из B3).
В случае, когда бесконечно малое преобразование таково, что
левая часть B2) [соответственно B3)] равняется нулю, то действие
является инвариантом данного преобразования [в обычном смысле
A8)]. Если к тому же d/dt(hf) = 0, то B2) принимает вид AL =0,
т. е. функция Лагранжа L является инвариантом этого преобразо-
преобразования.
Пример, Рассмотрим малые колебания математического маятника дли-
длиной / и массой т с функцией Лагранжа L == (т/2/2)(ф2 — &2<р2), где k2 = g/l,
<р — угол отклонения маятника от вертикали.
— 150 —
Приведем уравнение движения
" + ?2ср = 0.
а) Рассмотрим преобразование
** = / + s; <p* (*¦) = ? (О • B5)
С помощью уравнения B2) проверим, является ли оно преобразо-
преобразованием симметрии. Здесь Д/=е,Дср = О; левая часть B2) равняется нулю,
поэтому B5) — преобразование симметрии, а функция Лагранжа является
инвариантом преобразования.
б) Преобразование
t* = t; ср* (/*) == ? (?),+г
не является преобразованием симметрии для данной задачи, поскольку
левая часть B2) равна 8ф^2 и, очевидно, не может быть полной производной
по времени какой-либо функции.
Выясним, что произойдет, если применить эти преобразования к реше-
решению уравнения B4):
<р = Л sin (to + а),
где Л и а определяются начальными условиями.
Применив к этому решению преобразование а)
<р* = i4 sin [fc (** — е)+о],
получим другое решение того же уравнения:
<р*== A sin («*+«!>,
гдеах =а — k&.
В случае преобразования б)
<р* = Л sin (kt* + «) + ?,
очевидно, это выражение не является решением уравнения B4).
§ 5. Теорема Нетер
Теорема. Пусть задано бесконечно малое преобразование
B6)
конечной группы Gr. Если функции Лагранжа L и Lt удовлетво-
удовлетворяют условию
, q, q)dt = § Lt(t\ q\ q*) dt*
t*
no отношению к преобразованию B6) и, кроме того, позволяют
получить одни и те же уравнения движения, то существует г
— 151 —
линейно независимых первых интегралов уравнений Лагранжа
вида
^+yiJ^ К + Г ^ (а = 1,2,..., г),
/й дЯ1
где
Доказательство теоремы Нетер вытекает из общей формулы для
вариации действия в форме A4). Действительно, если интеграл D)
инвариантен в смысле A9), то его вариация, отвечающая преоб-
преобразованию B6), согласно B1) удовлетворяет условию
Затем, заменяя А/ его выражением A4), получаем
Так как интервал интегрирования произволен, а га независимы
между собой, то вдоль действительной траектории имеем
d Г ос ?, dL -« Л
— \ Цл + У ^=- t + X = 0 (а = 1, 2,..., г)
или
B7)
Таким образом, получено г линейно независимых первых инте-
интегралов B7) уравнений Лагранжа A5). Теорема Нетер доказана.
В случае г = 1 первый интеграл можно представить в виде
п
Ш + У Д- tqt + M= АС. B8)
Рассмотрим несколько примеров.
Пример 1. Материальная точка массой т движется по прямой в одно-
однородном силовом поле. Функция Лагранжа имеет вид
где k = const.
— 152 —
Бесконечно малое преобразование t* = t\ х* = х + ?
оставляет инвариантным в смысле A9) интеграл D), так как из уравнения B2)
efc = — — (АХ),
dt v
откуда АХ = —е/г/, и по теореме Нетер имеем первый интеграл вида B8), а
именно:
mx — kt = С.
Пример 2. Рассмотрим одномерное движение системы, состоящей из п
свободных материальных точек массами mi (i = 1,2, ..., п) и функцией
Лагранжа
При бесконечно малом преобразовании группы Галилея
*¦ = *; *: = A-; + Attf
вариации скоростей равныб^ =Ди.
Тогда
(п \ п d
( d
2 mixi \ Av = At; У — (m^)
и уравнение B2) принимает вид
т. е.
Здесь интеграл D) также инвариантен в смысле A9). С помощью соотно-
соотношения B8) получаем первый интеграл уравнений движения
Ci- B9)
Кроме того, в этом случае действует закон сохранения количества
движения системы
п
Пусть хс — координата центра масс:
п
2 mkxk
Xr, =
с~ м
п
где М = У\ ть — масса всей системы.
— 153 —
Тогда закон сохранения B9) принимает форму закона движения центра
масс системы:
с М
Пример 3. Свободная материальная точка массой т движется в трех-
трехмерном пространстве. Функция Лагранжа
Здесь х±, Х2у хъ — декартовы координаты.
Рассмотрим полную группу движений в трехмерном евклидовом про-
пространстве:
= Х{
C0)
где b(x>ij являются компонентами антисимметричной матрицы, определяющей
бесконечно малые вращения относительно осей декартовой системы коорди-
координат:
II ^//11 =
0
— 00
о
Ш23
О
C1)
Обозначим 8; =6о&г (i = 1,2,3) параметры, определяющие бесконечно
малые сдвиги вдоль координатных осей; 84 = 6оJз> ?б =$Wi3» Еб =Sco12.
Тогда преобразование C0) с учетом C1) и введенных обозначений при-
примет вид
е1 —
— 4*2
C2)
Преобразование C2), очевидно, является бесконечно малым преобразо-
преобразованием группы движений в трехмерном пространстве, зависящей от шести
параметров. Легко проверить, что при преобразовании C2) левые части
уравнений B3) равняются нулю, следовательно, Xа = 0 (а = 1,2, ...,6).
По теореме Нетер имеем шесть независимых первых интегралов вида
B7), а именно:
= С1,
т
[' ' \ — Г4
V Х2Х$ — Х^Х2) — L. ,
тх2 = С*> ml
тх3 = С8, т
~;л)=с«.
Первые три интеграла представляют закон сохранения количества дви-
движения, а остальные три — закон сохранения кинетического момента.
Пример 4. Колебательная система с одной степенью свободы движется
в среде с сопротивлением; предполагается, что сила сопротивления пропор-
пропорциональна первой степени скорости: F = —fJu, где Р — коэффициент
сопротивления. Уравнение движения системы
А дТ
dt
дх
дТ
дх
дП
дх
дТ
. дх
C3)
¦— 154 —
Кинетическая энергия Т = {}l^mx2% потенциальная энергия Я= (V2) cx2t
с — коэффициент упругости.
В данном случае существует непотенциальная сила сопротивления,
однако можно ввести функцию Лагранжа следующим образом: умножим обе
части C3) на \i(t) = e$t и представим C3) в виде
И- — —— + \fi -^
dt дх дх
Поскольку
d дТ дТ d ( дТ
IX — —— +$ U
Л а
ад- ^ ^ дх ) <Н дх
то, обозначив L =\i(T — Я), из уравнения C3) получим уравнение движения
Лагранжа A5).
Таким образом, в данном случае действие непотенциальной силы учи-
учитывается путем замены функции Лагранжа L = Т — Я другой функцией
I = ^ {Т — Я) = ^ A/2/пл-2 — 1/2 ел-2).
Обозначив
представим L в виде
Уравнение движения системы имеет вид
У + 2/гд- + k2x = 0.
Рассмотрим преобразование
** = / + ?, л-* = дг — s/гл*.
Учитывая, что А/ =е, Дд: == —еллг, Дл: = — епх и подставляя эти
значения в уравнение B2), находим
^(ДХ)=О, т. е. ДХ =
dt
Из формулы B8) получаем первый интеграл
— л-2 +— fc2*2 + nxx e2nt = С.
Он играет ту же роль, что и интеграл энергии для консервативной сис-
системы.
Примечание. Следует иметь в виду, что некоторые авторы в
литературе называют теоремой Нетер менее общую теорему: если задано
бесконечно малое преобразование конечной группы Gr> оставляющее действие
инвариантным в обычном смысле A8), то существует г линейно независимых
первых интегралов.
Очевидно, что класс преобразований, рассматриваемых в этой форму-
формулировке, является частью класса преобразований симметрии.
Теорему, доказанную в этом параграфе, иногда называют обобщен-
обобщенной теоремой Нетер.
— 155 —
§ 6. Вывод основных законов сохранения в механике
Пользуясь видом подынтегральной функции в интеграле
D), с помощью теоремы Нетер можно найти функции, сохраняю-
сохраняющие постоянные значения вдоль каждой траектории системы, т. е.
законы сохранения.
1. Закон сохранения энергии
Рассмотрим, что дает теорема Нетер в случае, когда
функция Лагранжа механической системы не зависит явно от вре-
времени, т. е. L = L(q, q) (система не обязательно склерономна).
Независимость от t означает, что интеграл D) инвариантен в обыч-
обычном смысле относительно бесконечно малого преобразования:
= t + s, )
C4)
Действительно, левая часть B2) равняется нулю, поэтому
= 0. Из B8) получаем первый интеграл уравнений движения
в виде
—г- q% — L = С C5)
Это соотношение, как известно, называется обобщенным интег-
интегралом энергии или интегралом Якоби.
Для склерономной системы C5) является обычным законом со-
сохранения механической энергии.
2, Закон сохранения обобщенного импульса
Пусть L не зависит от координат- qx, q2, ..., qn т. е. они
являются циклическими координатами. В этом случае бесконечно
малое преобразование
4*1 = Яг A = г+ 1» г+2,... ,п)
C6)
оставляет инвариантной функцию Лагранжа, так как при нем
равняются нулю левые части уравнений B3), а Д t = 0.
Используя формулы B7), получаем г первых интегралов:
Д- = Са или ра = Са (а - 1, 2, ..., г), C7)
— 156
т. е. с помощью теоремы Нетер получили известный результат:
обобщенные циклические импульсы при движении системы оста-
остаются постоянными.
Покажем теперь, что законы сохранения количества движения
и кинетического момента системы могут быть получены из равен-
равенства C7) для циклических координат.
3. Закон сохранения количества движения
Пусть обобщенная координата qt такова, что система может
перемещаться в направлении dqh как одно целое. Например, ql
может быть одной из декартовых координат центра масс. Тогда,
очевидно, qt не войдет в выражение кинетической энергии Т, поэ-
поэтому dTI(dqt) = 0. Уравнение Лагранжа для координаты qt имеет
вид
±J*- = -lL C8)
dt fiqt dqi
ИЛИ
d n
dt _ V/
Здесь V — потенциальная энергия системы.
Покажем теперь, что это уравнение выражает теорему об изме-
изменении количества движения, т. е. что обобщенная сила Qt пред-
представляет сумму проекций всех внешних сил на направление dqh
а Р| — проекцию количества движения на то же направление.
Обобщенная сила
где Ft — внешние силы, действующие на систему. В данном случае
— = i 9
где I — единичный вектор направления dqt.
Следовательно,
i=\
т. е. Qt— сумма проекций всех сил на направление /.
Поскольку кинетическая энергия системы имеет вид
— 157 —
то обобщенный импульс р{ можно представить (учитывая, что
в виде
дТ V4 — drt V^ ( ~ ) 7
—— = > m^ —Л = у [mfd I
*яг is? д<ц
Здесь^ /?/ — проекция количества движения системы на напра-
направление I. Предположим теперь, что рассматриваемая координата qt
является циклической. Тогда
Ql - *ц ~" 0>
и получаем закон сохранения количества движения в проекции на
направление /:
Итак, если обобщенная координата qt такова, что допускается
перемещение системы как целого в направлении dqh а сумма проек-
проекций всех внешних сил на это направление равна нулю, то согласно
теореме Нетер из инвариантности L относительно бесконечно мало-
малого преобразования
вытекает закон сохранения количества движения системы в направ-
направлении dqt в форме
4. Закон сохранения кинетического момента
Аналогично можно показать, что если координата qx тако-
такова, что dqt соответствует вращению системы вокруг некоторой
оси, то равенство р( = С выражает закон сохранения кинетичес-
кинетического момента системы относительно этой оси. Рассуждая так же,
дТ
как и выше, делаем вывод, что и в этом случае -j- = 0, и опять
получаем уравнение C8). Но, так как теперь qt является угловой
координатой, то нужно показать, что обобщенная сила Qt является
суммарным моментом всех сил относительно оси вращения, pt—
кинетическим моментом системы относительно той же оси.
Нетрудно показать, что в этом случае
— = / X г„
dqt
— 158 —
где I — единичный вектор оси вращения.
Тогда
Pl = И- = ущ ft _§. = ут^ G
2
1=1
Если угловая координата qt циклическая, то обобщенная сила
Qh являющаяся моментом всех внешних сил относительно оси /,
равна нулю, и из уравнения C8)
Pi =С.
Следовательно, если координата qt такова, что dqt соответству-
соответствует вращению системы вокруг некоторой оси, а сумма моментов внеш-
внешних сил относительно этой оси равна нулю, то на основании теоре-
теоремы Нетер из инвариантности функции Лагранжа относительно
бесконечно малого преобразования
t*=t, q] = qit 1ф1; ^ = 9| + «
следует закон сохранения кинетического момента системы относи-
относительно этой оси в форме
dL с
§ 7. Обратная теорема Нетер
Рассмотрим механическую систему с функцией Лагранжа
L — L(t, q, q). Ее определитель Гесса
Тогда существует матрица Я = ц /i^-1| , обратная матрице
Н = || htj II . Следовательно,
где
f 0
— 159 —
Выясним, можно ли, зная г линейно независимых первых инте-
интегралов уравнений движения, найти соответствующее преобразова-
преобразование симметрии системы.
Если бесконечно малое преобразование
C9)
<х=1
является преобразованием симметрии системы, то, как показано
в § 4, должны выполняться условия B3). С другой стороны, сог-
согласно теореме Нетер, уравнения движения системы допускают г
линейно независимых первых интегралов
Da(t,q, ?) =
где
dL Та
—г- li
D0)
Напомним, что % = \t — q^o-
Представим условия B3) в виде
M\ M do dQi l
или, используя D0),
IF
dt
dL \7а
dqi
Очевидно, эти соотношения тождественно выполняются вдоль
любой траектории. Представим их в развернутой форме:
dt
+ У,^
Ж q
у у (
Ясно, что вдоль любой траектории коэффициенты при всех
равняются нулю, т. е.
dtf
6: = O(/=l,2f...,n; a=lf2,...fr).
l
-S
— 160 —
Для каждого ^значения а получается п линейных уравнений
с п неизвестными ?? (* = 1, 2, ...; п)т Приведем решение этой сис-
системы:
1^У— («.= 1,2 л; а=1,2,...,г). D1)
д
Соотношения D1) выполняются вдоль любой траектории. Но
система уравнений Лагранжа A5) является системой обыкновенных
дифференциальных уравнений второго порядка относительно функ-
функций q.(f), любое решение которой определяется начальными ус-
условиями qi0 =zqt(Q, q.o =qi(to). Очевидно, каждому набору на-
начальных значений to, qi0, qi0 соответствует определенная траектория.
Так как ?/ зависят только от t, q и q, а через любую точку прос-
пространства {t, q, q) (если ее взять за начальную) проходит соответ-
соответствующая траектория, то соотношения D1) выполняются в каждой
точке этого пространства.
Теперь остается найти Ц. Из D0)
? = L (оа- V Д- |а - А (а = 1, 2,..., г). D2)
Если g" определяются формулами D1) однозначно, когда из-
известны функции Da , то величину ?3 можно найти лишь с точностью
до произвольных функций %а = Ха (t, q, q). Это значит, что взяв
конкретные функции %а (а — 1, 2, ..., г), получим определенное
преобразование симметрии. В частности, положив Ка = 0 (а =
= 1, 2, ..., г), получим
п ^т \
(а = 1,2,..., г). D3)
Но в § 4 показано, что, когда Ха =0, преобразование C9)
оставляет действие инвариантным.
Таким образом, доказана обратная теорема Нетер: если известно
г линейно независимых первых интегралов уравнений движения,
то бесконечно малое преобразование, определяемое формулами C9),
D1) и D2), является преобразованием симметрии системы.
Еще раз подчеркнем, что это преобразование неоднозначно.
Частным случаем этой теоремы является следующая теорема:
если известно г линейно независимых первых интегралов уравнений
движения, то существует единственное бесконечно малое преобра-
преобразование, зависящее от г параметров и определяемое формулами
C9), D1) и D3), которое оставляет действие инвариантным.
Как нетрудно увидеть, эта теорема является обратной к «необоб-
«необобщенной» теореме Нетер (см. примечание к § 5).
— 161 —
Рассмотрим два примера применения последней теоремы. Огра-
Ограничимся случаем г = 1 и искомое преобразование представим в виде
t* = t + At, ?;(**) = <?* (О+ Л<7*. D4)
где
Пример 1. Рассмотрим движение материальной точки массой m под дей-
действием центральной силы с функцией Лагранжа вида
Здесь в качестве независимых координат qx и q2 выбраны полярные
координаты г и ф, k = const.
Уравнения движения имеют вид
Jk # JL f а' 1 —
В этом случае существует первый интеграл
Найдем бесконечно малое преобразование, соответствующее этому пер-
первому интегралу и оставляющее действие инвариантным. Из формулы D1)
dD л - 1 3D
Подставляем эти значения в D3):
Учитывая D4), получаем искомое преобразование
Пример 2. Для малых колебаний математического маятника длиной /
и массой т функция Лагранжа имеет вид
L = (l/2)m/2 (<p2 — fe2cp2) •
Здесь в качестве независимой координаты q взят угол отклонения маят-
маятника от вертикали q>, a fe2 = g/l.
Уравнение движения имеет вид
Оно допускает первый интеграл
выражающий закон сохранения механической энергии маятника.
Здесь, очевидно,
D = ml2 ( f» + fev) •
— 162 —
Из формул D1) и D3)
dD
т
г ^ »
ml2 fy
d - -2L1\ = L-imi* (92 + *V —2^2) = — 2.
Тогда, используя D4), находим
Д* = —2е, Дср=еГ
Итак, в данной задаче преобразование /* = / — 2е, ф*(/*) = ф(/) оставляет
действие инвариантным.
Глава XIII
ИНТЕГРАЛЬНЫЕ ИНВАРИАНТЫ МЕХАНИЧЕСКИХ СИСТЕМ
§ 1. Определение интегральных инвариантов
Как известно, законы сохранения (инвариантности) играют
в механике большую роль. Важное значение имеют, в частности,
так называемые интегральные инварианты, введенные впервые Пуан-
Пуанкаре [11].
Пусть имеется система обыкновенных дифференциальных урав-
уравнений
42- = Xi(xi9x2,...,xn,t)(i=l,...,n), A)
которые можно рассматривать как уравнения движения точки с
координатами xlf ..., хп в д-мерном пространстве. Если рассмотреть
такие точки, занимающие в начальный момент ^-мерную область
Do, то и в последующие моменты они будут занимать тоже ^-мерную
область D. Вычисленный по этой области ^-кратный интеграл от
некоторой комбинации решений системы A) называется, согласно
Пуанкаре, интегральным инвариантом порядка /г, если он сохра-
сохраняет свое значение для любого момента времени. Так, например,
если материальная точка движется в плоскости по инерции, то диф-
дифференциальные уравнения ее движения можно представить в виде
*=VX, y = Vr Vx=0, Vy = 0,
а их решение
Vx = a, Vy = by x~ at + с, у = bt + d.
Интеграл
— 163 —
вычисленный по отрезку
кривой четырехмерного
пространства х, у, Vx,Vy9
представляющему собой
геометрическое место то-
точек, занимавших в началь-
начальный момент заданный отре-
отрезок кривой, является ин-
интегральным инвариантом.
Действительно, так как
Ъс,
by =
6У = 8a, &VV = bb,
то
= j (tba + Ъс + tbb + Srf—
Г. Пуанкаре A854-1912) ^ e величина / не зависит
от t (пример заимство-
заимствован с некоторыми изменениями из [4]).
Если, как в рассмотренном примере, интегральный инвариант
обладает свойством инвариантности для любого выбора области на-
начальных условий, то он называется абсолютным. Если же область
интегрирования должна быть замкнутой, то соответствующий ин-
интегральный инвариант называется относительным.
Пуанкаре [11] широко применял интегральные инварианты для
изучения движения небесных тел, в частности для изучения устой-
устойчивости асимптотических и двояко-асимптотических движений в
задаче трех тел. Новые выводы в задаче трех тел с помощью теории
интегральных инвариантов получил Шази. Важные результаты
для изучения движения астероидов и комет дали исследования Виль-
кенса. Интегральные инварианты нашли применение в статисти-
статистической физике, в квантовой механике и в качественной теории диф-
дифференциальных уравнений. В дальнейшем ограничимся лишь ли-
линейными интегральными инвариантами.
§ 2. Линейный относительный интегральный
инвариант Пуанкаре первого порядка
Если интерпретировать движение системы с п степенями
свободы как движение изображающей точки в 2я-мерном простран-
пространстве состояний, то принцип Гамильтона — Остроградского можно
сформулировать следующим образом:
— 164 —
для истинной траектории изображающей точки
и
Ь \ Ldt - 0.
и
При этом сравниваются действительная и возможные траектории,
имеющие те же концы, что и действительная.
Вычислим теперь вариацию действия по Гамильтону, переходя
от одной действительной траектории к другой, тоже действительной.
Каждую траекторию будем определять некоторым параметром а,
от которого зависит начальное положенно изображающей точки, т. е.
начальное состояние системы, задаваемое начальными значениями
обобщенных координат q и импульсов р. Время при вычислении ва-
вариации не варьируется, так как оно не зависит от а. Имеем
dL * * , dL * \ ,.
U L i= 1
Так как вариации изохронны, то для операций варьирования
и дифференцирования справедливы перестановочные соотношения
Тогда
d
dt
dL
dqt
dL
dL
и, следовательно,
U п
dL
JL
t2 п
dt Fin •
bqidt.
Так как эти смежные траектории являются действительными, то
при движении по ним выполняются уравнения Лагранжа, т. е.
d dL dL r . ч
— —— = —- (i=- 1,..., n).
dt d dq
Тогда
*2
^ Г I tit
и
n
V
dL
dqi
или, переходя к обобщенньш
t2
8 f L
h
dt =
n
i=\
Qi
t=t2
n
v
i импульсам,
4i
t=tt
— 165 —
n
i=l
dL
Pihi
B)
Так как оператор варьирования
то B) можно представить в виде
— Ф(/? а)8а-
(la
Вообразим замкнутый контур начальных положений изображаю-
изображающей точки (начальных состояний системы), зависящих от параметра
а, и построим для каждой совокупности начальных условий (для
каждого значения а) траекторию изображающей точки.Тем самым
получим некоторую трубку траекторий (рис. 5). Каждому значению
времени t соответствует некоторое сечение трубки траекторий (не-
(некоторый замкнутый контур положений изображающей точки).
Для того чтобы контур начальных состояний системы был замкнутым,
параметр а должен быть периодической функцией другого парамет-
параметра, т. е. его начальное значение ах и конечное значение а2 должны
совпадать:
где I и II — контуры сечений трубки траекторий в моменты t± и t2
соответственно. Отсюда
D)
для любого момента времени. Полученный интеграл называется ли-
линейным относительным интегральным инвариантом Пуанкаре пер-
первого порядка или интегральным инвариантом Пуанкаре первого
порядка.
§ 3. Интегральные инварианты высших порядков
Преобразуем выражение D):
Но
Следовательно,
п п
С VI * г г 1 VI / <> о \
С) 7 Qi°Pi ~ ~'~М И М — "~ 7 (РгЯг — Qi°Pi)'
Применив к этому интегралу известную теорему Стокса
& я Fx (х, у) dx + Fy (х, у) dy = _[f ( Ц*. - -^
где а — любая поверхность, ограниченная замкнутым контуром С,
имеем
Последний интеграл обозначим /2 и назовем линейным абсолют-
абсолютным интегральным инвариантом второго порядка или интегральным
инвариантом второго порядка.
Картан [6] с помощью созданного им метода внешних форм пока-
показал наличие интегральных инвариантов более высокого порядка,
вплоть до порядка 2лг, имеющих вид
2k
2 &4i
l
Инварианты нечетных порядков являются относительными, ин-
инварианты частных порядков — абсолютными. Кроме того,
167 —
если контур, по которому вычислен 1чт-\, является границей об-
области интегрирования для /2w.
Интегральные инварианты, определенные в этом и предыдущем
параграфах, называют также универсальными интегральными инва-
инвариантами, так как они не зависят от функции Гамильтона H(t, q, р) и,
следовательно, действительны для любой гамильтоновой системы.
Выражение
2п
также является интегральным инвариантом (абсолютным), имеет
большое значение в статистической физике и называется интег-
интегральным инвариантом Лиувилля. Он выражает неизменность объема
фазового пространства для любого момента времени.
§ 4. Канонические преобразования и интегральные
инварианты
Покажем, что интегральный инвариант E) остается инвариант-
инвариантным при каноническом преобразовании координат. Это утвержде-
утверждение составляет теорему Пуанкаре и означает также неизменность
интегрального инварианта первого порядка D) при каноническом
преобразовании. Так как область интегрирования в E) является
произвольной двумерной поверхностью в фазовом пространстве, то
для характеристики положения изображающей точки на ней выбе-
выберем два параметра и и и, так что
q. == q^u, v), p. = pt(u, v).
Имеем &pfiqt - d{Ph qi) Ыи,
д (и, v)
где {ph qi' —якобиан, определяющий связь между элементом
д (и, v)
площади S«<k> и элементом площади op^qt. Равенство
f2J.f
' Ь i ь Ъ к
выражающее теорему Пуанкаре, можно, следовательно, представить
в виде
V d(Ph Qi) а а Г Г V d(pk> Qk) * *
_ T ^(«' y) ^'o^f d(u, v)
Так как область интегрирования D произвольна, то равенство
интегралов возможно лишь при равенстве сумм якобианов:
V d(Pi, дд __ у d(Pk, Qk)
^ F)
V у
~ д{и, v) ^ д(и, v)
— 168 —
Рассмотрим каноническое преобразование, определяемое произ-
производящей функцией Fx(q, Q, t), когда
п _ dFx р _ dFi
dqi dQk
Тогда
dpi __ у д^г dqk [ у a^t aQfe
d
Подставляя полученные выражения в левую часть F), разбивая
каждый определитель на сумму двух и вынося в каждом столбце
общие множители, получаем
2d(Pt, qi) = у Г д^ d{gk, qt) d*Fx д (Qk, q
[
i д{и> V) uk [dqidqk d(u' V) dq^k d(u, v)
Первая сумма в правой части этого равенства равна нулю,' так
как она не зависит от порядка индексов i и k, а в то же время опре-
определители, стоящие в ней, изменяют знак при перемене этих индек-
индексов местами. Итак,
дЧг d(Qk, qt)
д(и, v) 2d dqtdQk d(u, v)
Аналогично
{Ри, Qk) ^ у д^г d{qh Qk)
Z
у
i д(и, v) Zi dQkdqi d(u, v) '
Следовательно,
d(Ph яд = у d(Pk, Qk)
д(и, v) Zd д(и, v)
Таким образом, теорема Пуанкаре доказана. Идея этого доказа-
доказательства заимствована у Голдстейна [4], где оно приведено для про-
производящей функции типа F2(qy P, t). Тем же способом можно рас-
рассмотреть и канонические преобразования, осуществляемые произво-
производящими функциями других типов. Перейдем теперь к примерам
вычисления интегральных инвариантов.
§ 5. Гармонический осциллятор
Движение гармонического осциллятора описывается урав-
уравнением q + <*>2<7 = О,
решая которое, имеем
q =¦¦ Ci sin со/ -f C2 cos со/,
где Сх и С2 — постоянные, зависящие от начальных условий.
7—689 — 169 —
При вычислении интегральных инвариантов можно вводить за*
висимость от параметров не непосредственно начальных условий,
а других величин, определяемых начальными условиями. Возьмем
поэтому
4 = р cos a, )
2 = bp sinorj
где р = р0 при вычислении /х и изменяется от 0 до р0 при вычислении
/2, Ь = const, а изменяется от 0 до 2я.
Рассматривая кинетическую энергию в виде Т = (\l2)cuf,
найдем
р = —__ asfl^o© (Ct cos со/ — G2 sin (o^).
Перейдем к вычислению интегральных инвариантов:
/j = f p — 8x = acopo f (cos a cos о/—6 sin a sin со/) F cos a cos tit—
О и
— sin a sin co?) 8a = afoop^ (8)
где
d(p, a)
Таким образом,
Po 2 тс
'¦-If
О О
В § 4 настоящей главы доказана инвариантность интегральных
инвариантов при канонических преобразованиях координат. Убе-
Убедимся в этом непосредственным вычислением интегральных инвари-
инвариантов для гармонического осциллятора. В качестве производящей
функции возьмем
Fi = {V2)a(uq2ctgQ.
Тогда
Р== dFx __ I _2 1 dFx
аса? , Р
dQ 2 ч sin2Q H dq
— 170 —
Откуда
q = 1 f — sin Q, p = ]/ao)P cos Q.
J/ aco
Представим функцию Гамильтона для гармонического осцилля-
осциллятора:
где с = aco2 — коэффициент восстанавливающей силы, а также
преобразованную функцию Гамильтона:
# = //+ — =# = coPcos2 Q + (oPsin2 Q = соР.
Тогда канонические уравнения Гамильтона примут вид
~~ ар ~~" * ~~ 0Q ~~ '
откуда следует, что Р = const, Q = соГ+ у, причем Р = ?/со,
где Е — полная энергия осциллятора. Постоянные Е иу связаны с
постоянными Сх и С2 зависимостями
Е = A/2)осо2(С!2 + С22); у = arctg CJC2.
Следовательно, соотношения G) следует заменить соотношения-
соотношениями
Е = A/2)оо) 2p2(cos2a +.62sin2a); у = arctg(Mga).
Вычисляем интегральные инварианты:
2A + б2 tg2a) cos2 a ~~
Г 8a = otcop к
и аналогично
О О
Зависимость Е иу от параметровр и a можно взять иначе, напри-
например Е = pcosa, у = fepsina, с такими же, как и в G), значениями
а,р и Ь.
— 171 —
Тогда
о о хг' '
Этот результат, конечно, отличается от (8), так как взят другой
контур начальных условий.
§ 6. Физический маятник
Дифференциальное уравнение движения физического маят-
маятника имеет вид ф + со2 sin ф = 0, где со2 = g/l,
а / — приведенная длина маятника.
Интегрируя это уравнение (или используя теорему об изменении
кинетической энергии), получаем
A/2) ф2— со (cos ф — cos а) = 0, (9)
чение угла отклс
= 1— 2sin2<p/2f
где а — амплитудное значение угла отклонения маятника от верти-
вертикали. Учитывая, что
и обозначая
sin(a/2) = k, sin (ф/2) = ksm и,
представим (9) в следующем виде:
и = со /1—k2sin2u.
Решение этого уравнения найдем с помощью эллиптических
функций:
u = am[(d(t — t0), k].
Откуда
Ф = 2arcsin{&sn[o(/ — /0), &]}, A0)
где to — момент времени, соответствующий прохождению маятни-
маятником положения равновесия, зависящий, как и kf от начальных ус-
условий. Начальные условия, в свою очередь, зависят от k и to. Вычис-
Вычислим обобщенный импульс, соответствующий обобщенной координа-
координате <р:
ОТ 1
Р = —г- = —
где m — масса маятника, Ъ — расстояние от оси подвеса маятника
до его центра масс.
— 172 —
Зависимость начальных условий от параметров г и ф введем соот-
соотношениями
ft = /•cosф, to= т/*A Ч-втф),
где ф изменяется от —я до я, г = го при вычислении /х и изменяет-
изменяется от 0 до го при вычислении /2, y = const. Сначала вычислим
- 0J J J д (Г, ф) Т
О -—я
Но
а (г, ф) a (k, t0) д (г, ф)
dt0 dk
где
Затем
_а_
^У — о '. dfe ' . /jjv
dk dn[o)(/ —/о), k] ' V /
dt0
—2- = 2со |сп [со (/ — /0), ft] — ft sn [со (/ —10), ft] X
dk [
X ±[a>(/-/0),*]|.
Тогда
d (г, ф)
и
Го 1С
/2 == — A^mgb Г f r2 cos ф A + sin ф) 8ф8г = 0.
J J
О —те
Следовательно, и 1Х =0. Но, с другой стороны,
dk дф а/0
— 173 —
Таким образом, для вычисления 1Х необходимо использовать фор-
формулу дифференцирования амплитуды Якоби по модулю. Для вывода
этой формулы рассмотрим эллиптический интеграл первого рода:
dx
— k2sin2x
где k — модуль, и = am(z, k) — амплитуда; не изменяя значения,
сообщим модулю и амплитуде приращения Дй и Да. Тогда
dx
Г f
J ]Л--/г2 sin2 х 51
Ho
rfA-
:~F(u, k + Ak).
Второй из полученных интегралов преобразуем с помощью теоре-
теоремы о среднем:
ы+Ди ,
У — (Л + А/гJ sin2 л: >^1 — (k + AkJ sin2 (и + Ши)
где
О < 9 < 1.
Следовательно, имеем
F {ut k) = F(u,k + Ak) + Ац
У1 —(k + AfeJ sin2 (и + 6Ди)
Отсюда
Аи = — [f (и, k + Ak) — F(и, k)] Vl—{k + AkJsin2(u. +
Разделив наД& и перейдя к пределу приДй -> 0, получим по
определению производной
dk dk
Используем теперь известное (см., например, [5], стр. 921, фор-
формула 8.123.1) соотношение:
Jl ^ Л^ Е(и, k)-- F(u, k) fesin"cos" .
где E(uf k) — эллиптический интеграл второго рода, k'=^Y^—&2—
так называемый дополнительный модуль.
— 174 —
Подставив это соотношение в полученную формулу и учитывая,
что
и = ат (г, ft), sin и = sn (г, ft), cos ы = en (z, ft),
|/ i_jfe»sna(z,*) = ?/п(г, ft),
а также соотношение
z
? [am (z, ft), ft] — f dn2 (yt ft) Л/,
0
получим
Тогда
Г cos ф en [(о (t — *[Г — т sin ф), г cos ф] {со^/* cos 2ф сп [ю (/ — ^г —
1С
— -у/- sin ф), г cos ф] + со (/ — ir) sin ф ел [со (/ — fr —
— ^r sin ф), г cos ф] -}~
. sn [о) (t — у — тг s*n Ф)» r cos Ф] ^ Г03 (t — у — у sin ф), г cos ф] . ,
—-tr—~V Sin Ф)
X Лф = 0.
Отсюда для любых значений со, i, у и г
/—-\г—
f
sm ф cos ф с/г2 [<о (/-—7^ — 7rsinW»
(\
f f sm ф cos ф с/г2 [<о (/-—7^ — 7rsinW» ^cos«{/] , 2/
J J 1 — г2 се?3 ф
г cos ф) Л/д?ф = Г cos ф en [a) (t — у — ^r sin ф),
—п
Г COS ф] | СО^Г COS 2ф СЯ [СО (^ — ЧТ —
+ со (t — у) sin ф сп [со ^ — у — V sin Ф)> r cos
. sn [o)(f—T/- —тгыпф), rcos^]^[co(/ — Tr — 7rsin^),rcos^] sin | ,
1—Г2СОБ2ф W ?'
— 175 —
Таким образом, использование интегральных инвариантов позво-
позволяет не только исследовать движение изучаемой динамической
системы, но и получать новые интегральные соотношения между спе-
специальными функциями, описывающими решение динамических за-
задач.
§ 7. Системы уравнений, имеющие интегральные
инварианты
В § 2 этой главы доказано, что для гамильтоновой системы
уравнений действителен интегральный инвариант Пуанкаре. Дока-
Докажем обратное утверждение: если система уравнений
—~ = Qt (t, Qy р)> —— = Pi (t, Q% p) A2)
dt dt
имеет относительный интегральный инвариант /lf то она обязательно
имеет гамильтонову форму. Действительно, если 1Х постоянен, то
& = °-
Но
dt
вследствие перестановочности операций дифференцирования и варь-
варьирования.
Вычислим интеграл с помощью интегрирования по частям:
. — bPi- A3)
dt ' " dt J dt Hl v ;
Вследствие замкнутости контура интегрирования проинтегри-
проинтегрированный член равняется нулю:
dh
dt J <U\ dt "¦ dt
1=1
или на основании уравнения A2)
t=i
Так как контур интегрирования произволен, то подынтегральное
выражение является вариацией некоторой функции —H(t, q, p).
— 176 —
Откуда
D дН п дН п дН ' дН
Pt = — —-, Qt = —- или Рг = — — , <7* = — ,
что и требовалось доказать.
§ 8. Теорема о единственности универсального
интегрального инварианта
Теорема утверждает, что любой универсальный интегральный
инвариант
7! ¦* § 2 [л* & *
1
отличается от интегрального инварианта Пуанкаре /2 лишь посто-
постоянным множителем, т. е. если I\ = const, то // = clv
Докажем, считая для простоты п = 1. Тогда условия сохране-
ния ~-р = 0 можно представить в виде
-i- |) [Л (/, (/, Р) «7 + В (/, ?, Р) 8р] =0. A4)
При этом в подынтегральное выражение необходимо ввести р
и ?, применив решение канонических уравнений движения:
q=*q(t, qQ, р0), Р= p(t, q0, Po)>
а вместо начальных условий q0 и р0 — функции, определяющие
замкнутый контур начальных условий:
?о = <7о (»), Ро = Ро (а).
Дифференцируя в A4) под знаком интеграла и меняя затем поря-
порядок дифференцирования по t и варьирования, имеем
Затем проинтегрируем по частям и используем замкнутость кон-
контура интегрирования, вследствие которой проинтегрированные чле-
члены равняются нулю:
dt ч dt dt H^ dt \ J \[dt
dq ) dt J 4nr[dt ^{dq dp ) dt
Обозначим
— 177 —
Тогда из уравнений Гамильтона
• дН • дН
р _ — , q = _-
последнее уравнение примет вид
Так как равенство A6) справедливо для любого контура началь-
начальных условий (любого контура интегрирования), то подынтегральное
выражение является вариацией некоторой функции, т. е.
(гЩ Z
dp \ dt dq j dq [ dt dp /
Из A5)
dt dpdt dqdt '
поэтому A7) преобразуем к виду
^^ dp <5G dq dp
Вследствие универсальности инварианта // последнее равенство
должно выполняться при любом//. Следовательно, все частные про-
производные функции z равны нулю, а сама функция постоянна, т. е.
г = с.
Откуда
i!? _ — = с и д (Л "" ср) — —
Из этого условия следует существование такой функции <P(t, ?, р)9
что
, Тогда
Л5<7 + ЛВр = cpbq
поэтому
что и требовалось доказать.
При я > 1 доказательство при сохранении его идеи усложняет-
усложняется. Ли Хуа-Чжун [18, стр. 237—247] доказал единственность как от-
относительных, так и абсолютных универсальных интегральных инва-
инвариантов любых порядков.
— 178 —
§ 9. Интегральный инвариант Пуанкаре —Картана
и
Рассмотрим полную вариацию Д ] Ldt действия по Гамиль-
tx
тону, сравнивая, как в § 2, действительные траектории, отличающие-
отличающиеся начальными условиями, т.е. значением параметра а, от которого
зависят начальные условия. Имеем
и
AJLdt = J ALdt + L
. AU — L
¦At,.
Так как смежные траектории являются действительными, то
получим, повторяя вычисления § 2,
'
A fLdt = J (Pi^i U, - РАЯ1U J + Ц(=и ¦ Д'г -^U,, •
Используя связь между полной и изохронной вариациями
п
а также выражение для функции Гамильтона Н = 2р.^. — L,
представим предыдущее равенство в виде
А \ but ¦— | 7. Уг^Чг I . лл I ^2 I \ 7 V 1^4i f=ft
Рассматривая, наконец, зависимость фазовой траектории от па-
параметра а при условии, что начальное аг и конечное а2 значения его
совпадают, и беря интеграл от полной вариации действия по Гамиль-
Гамильтону в пределах от аг до а2, получаем
или
fiqt ~ HAt) = 0
— HAt) = const. A8)
Полученный интеграл называется интегральным инвариантом
Пуанкаре—Картана. При его вычислении рассматривается трубка
траекторий в расширенном фазовом пространстве, включающем в
качестве координат, кроме обобщенных координат q. и обобщенных
импульсов р., еще время /, а контур, по которому ведется интегриро-
интегрирование, не обязательно является контуром одновременных состояний,
— 179 —
Если же интегрирование вести по контуру одновременных состояний,
то интегральный инвариант Пуанкаре—Картана A8) переходит в ин-
интегральный инвариант Пуанкаре D).
§ 10, Системы дифференциальных уравнений
движения, не имеющие интегральных инвариантов
Из § 2 и 7 этой главы следует, что если движение механичес-
механической системы нельзя описать с помощью канонических уравнений
Гамильтона, т. е. если силы, действующие на нее, не являются кон-
консервативными, то выражение §^pfiqt не является инвариантом и
зависит от времени.
Рассмотрим два примера движений подобного рода.
Пример L Пусть движение механической системы с одной степенью
свободы является затухающим колебанием и описываается, следовательно,
дифференциальным уравнением
Я + ?nq + k*q = 09 A9)
где k > п > 0. Решение этого уравнения имеет вид
t7 = e~AI^(C1sinco^ + C2cos^), где со = Y& — п2 .
Введем те же, что и в § 5, зависимости G) постоянных интегрирования
j и Сг от параметров р и а:
Если по-прежнему рассматривать кинетическую энергию в виде
Г =A/2) О9«,
то обобщенный импульс
р __ _— = ад = ae~fU [Cx (со cos со/ — п sin со/) — С2 (ш sin со/ -f /i cos со/)].
dq
Вычисляя теперь фр б<7, имеем
& pbq = лаЬоу* e'2nt =? const. B0)
Пример 2. Если же движение механической системы описывается урав»
нением
= 0, B1)
где k >> п > 0, с решением
q = ent (Cxslnoit -|-C2 cos со/), где со = У k2 — п2 ,
то легко получить
ф pbq = яа&сорЗ zmt ф const. B2)
Результаты B0) и B2) отличаются от соответствующего результата (8)
§ 5 только множителем е~гЫ или e2nt. Таким образом, при неограниченном
— 180 —
возрастании времени §рЪ q в примере 1 уменьшается до нуля, а в примере 2
неограниченно возрастает. Следовательно, трубка фазовых траекторий,
внутри которой располагаются все возмущенные малыми изменениями на-
начальных условий фазовые траектории, в примере 1 сужается к точке, а в
примере 2 — неограниченно расширяется. Это связано с тем, что затухающее
колебание в природе 1 устойчиво, в то время как колебание с возрастающей
амплитудой в примере 2 представляет собой неустойчивое движение.
§ 11. Последний множитель Якоби
Рассмотрим систему дифференциальных уравнений
dxx dx* __ __ dxn __ dxn+l m.
-^1 Л2 ЛП лП+1
Если
f(xit x2,...,xn,xn+i) = const
является интегралом системы B3), то уравнение
21^^ = 0 B4)
является следствием этой системы. Для выполнения B4) необходимо
и достаточно, чтобы
к(/)^2*'17 = 0- B5)
Если известны п независимых между собой интегралов систе-
системы B3) Д, f2, ..., fn (заметим, что их значение позволяет выразить хг,
х2у ..., хп в виде функций xn+i), то любая функция от них тоже яв-
является интегралом и, наоборот, любой интеграл является функцией
fiy /2» •••> fn- Или, если / — некоторый произвольный интеграл сис-
системы B3), то якобиан
D = dlft fl' /2' '"' fn) = 0, B6)
д(хг, х2, ... t xnt хп+1)
и, наоборот, если этот якобиан является функцией / и равняется ну-
нулю, то / является интегралом.
Таким образом, уравнение B5), если известна система п незави-
независимых интегралов, можно заменить уравнением B6). Обозначим
алгебраическое дополнение элемента —-; через А., заметив при этом,
что А г не зависит от /; представим B6) в виде
|ЧА = 0. B7)
Имея п интегралов Д, /2, ..., fnj можно построить сколь угодно
много новых интегралов, беря различные произвольные функции от
— 181 —
/if /2» •••> /n- При этом уравнения B5) и B7) остаются справедливыми
для любого интеграла /. Следовательно, можно найти такую функ-
функцию М(х1у х2> ..., хпу хп+1), что
или
(i = 1, 2,..., я, п+
d(f,h,f2,... ,fn)
l * Х2 '
B8)
B9)
Определенная соотношением B9) функция М называется множи-
множителем системы уравнений B3). Ясно, что множитель системы зависит
от выбора интегралов Д, /2,..., fn и, следовательно, не является един-
единственным. Для вывода дифференциального уравнения множителя
докажем предварительно, что
2d дХ;
а
Рассмотрим для этой цели определитель
Щ
дх9
я+1
дх2
дхп
/7+1
Легко видеть, что
= а-^ или Ak =
d k
duk
Тогда
d(df)/(dxk)
л+1 , л я+1 л+1
V Mi = "
/=1 aXi i"
= 0,
" dxtd
dxk
так как это выражение представляет собой сумму определителей, в
которой для каждого слагаемого определителя имеется парный
определитель, полученный из него перестановкой двух столбцов и
отличающийся от него, следовательно, только знаком. Отсюда сог-
согласно B8), следует дифференциальное уравнение в частных произ-
производных для множителя
dxt
— 182 —
= 0
C0)
или
л+1 _,. п-\\
Введем в систему B3) новые переменные уъ у2, ..., уп+1. Тогда
J с\ Л j ~ Л
^Л + 1 ^ДГл+1 M 0»^
, л+1
я+1 г= 1
Следовательно, —— = -
K(yk)
и система B3) примет вид
K(yn+i) '
При этом K(f) остается инвариантным. Действительно,
л+1 л, > л+1 \ л+1
У-1 ух, -^-) = V K(yk)
Следовательно, интеграл системы B3) при переходе к новым пере-
переменным остается интегралом системы C2).
Вычислим теперь, зная множитель системы B3), множитель сис-
системы C2). Умножим обе части B9) на якобиан
д(Ух> Угу ••• » Уп> Уп+i)'
Используя равенство
_!(Л к*_ • • -_Jn). _ dtf, flt ... ,fn) _ . д (xl9 ...,хЯ9 хм)
, ..., Уп>Уп+1) д(хг, ... ,хп,хп+г) д(у19 ... ,уп, Уп+i)
являющееся обобщением правила дифференцирования сложной функ-
функции, получаем
М d (*i» "ч^> ^л+i) ^ /гч __ д (f> fit • • - > fn)
д (У1, .... Уп>Уп+1) д (r/i, у2, ... , уп, Уп+г)
^ Таким образом, вследствие инвариантности /((/), множитель сис-
системы C2) имеет вид
(yi, ••• •Уя, Уп+i)
— 183 —
а дифференциальное уравнение C0) заменяется уравнением
у д[Ми К (уk)] = 0> C3)
Якоби [6] показал, что множитель системы B3) можно эффектив-
эффективно использовать для ее интегрирования, если известны интегралы
/i> /2> •-.» /п~1 •
Перейдем к новым переменным:
f = и f = и f = и х = и х = и C4\
Так как /С(#л) = 0 (? = 1,2, ..., п — 1), то систему B3) с уче-
учетом C2) представим в виде
а d ^ /35V
о о о хп_х хп^ *
где Х'п и X/1+i представляют собой Хп иХп+\ после замены в них
всех переменных через уп и уп+\ согласно C4). Для завершения ин-
интегрирования необходимо найти решение уравнения
X'ndyn+i-Xn+l dyn = O.
Эйлеров интегрирующий множитель этого уравнения удовлетво-
удовлетворяет уравнению
д(у.х'я) а(^+ж) =а
дУп дуп+1
Но вследствие C3) этому уравнению удов летворяет и множи-
множитель системы C5):
М = М д (•** * * " ' ^я» -У/гч-!) ==s я| д С*!» ¦ • • *
* Уп+i) d(fl9 ... , fn-i
'd(xl9 ... , дгл-i)"
Таким образом, множитель системы B3) позволяет завершить ее
интегрирование, поэтому он называется последним множителем Яко-
Якоби.
Систему дифференциальных уравнений движения A) можно за-
записать в виде B3), если Хп+\ = t, Х„-н = 1. Дифференциальное
уравнение последнего множителя Якоби системы A) имеет вид
« ¦ а *• ' C6)
или
). C7)
dt T ? dxt
— 184 —
Если известны п — 1 независимых интегралов системы A)
M*i. •••.**. t) = Ct (t= I n—1) C8)
и ее последний множитель М(х1у х2У ..., хп, f), то ее интегрирование
заканчивается квадратурой
а штрихи означают, что в функциях Xn, AI и А посредством C8) х1У
#2, ..., хп-\ заменены через хп и /.
§ 12. Интегральные инварианты и последний
множитель Якоби
Пусть система дифференциальных уравнений A) имеет абсо-
абсолютный интегральный инвариант наивысшего возможного порядка
I = .... МЬх< Ъх2... Ъхп. C9)
п
Выясним условия, которым должна удовлетворять функция Мг
чтобы выражение C9) было интегральным инвариантом. Введем
зависимость начальных условий от параметров аь а2,..., ап и пред-
представим C9) так:
Г* Г* г) tv v v ^
I I -ш m (J Ml . Лп , , . , , И nl ^ <N <>
D0>
ГС СМ «><*,*„..., ^)SaiSa2>,,,>S
JJ J d(alta2 ап)
Так как а1э а2, ..., аЛ не зависят от времени, то условием инва-
инвариантности является равенство
д(х19хш,...,хпI = 0
± \М д(х19хш,...,хпI
что выражает независимость подынтегральной функции в D0) от U
Представим D1) в различных видах:
dxt
dt
д\ v v -и l v
dM a (л-i, ... , *„) , yyj Vi _\ dt L __ q,^
ая,
dM д (Xlt ...,Xn) , Л/Г VI _dXt v а (Л*!, A-2, . . . , ДГЯ) _ n
dt д(ах,...,ап) ' "" ^
— 185
или после сокращения на якобиан в следующем виде:
dt ? dxi
Из сравнения полученного равенства с C9) следует, что JJ-...J М X
п
Х§х v..$xn является интегральным инвариантом системы A)тогдаи
только тогда, когда М(хг, х2, ..., хп, t) — последний множитель
Якоби системы A). Если, в частности, A) представляет собой систе-
систему канонических уравнений Гамильтона, то как следует из C),
М = 1 являтся последним множителем.
Таким образом, если известны 2/г — 1 интегралов ft(q, p, t) =
= Ct системы канонических уравнений Гамильтона
<7Р (fe ln)
то последний интеграл можно найти вычислением такой, например,
квадратуры
/ аи
dt
dqn
А
где Д = d<fi>f*> ••• »/«я-1) и ^? ВЫражены через рп и /.
дGi, ... ,7Л; Pi» •••» Рл-i) ^d
Глава XIVJ
УРАВНЕНИЯ ДВИЖЕНИЯ РЕОНОМНЫХ СИСТЕМ
Механика реономных систем является одним из важнейших
разделов аналитической механики. Существующие уравнения ана-
аналитической механики, которые можно использовать для описания
движения реономных систем, имеют существенный недостаток —
они не инвариантны по отношению к группе преобразований коорди-
координат, содержащей время. Уравнения Лагранжа второго рода по форме,
безусловно, инвариантны по отношению к кинематическим преобра-
преобразованиям координат, однако отдельные части уравнения Лагранжа
не являются инвариантными величинами. Для того чтобы обойти эту
трудность, использована тензорная форма записи уравнений движе-
движения механических систем*. Это позволяет, во-первых, добиться ин-
инвариантности полученных уравнений по отношению к группе преоб-
преобразований координат и, во-вторых, получить наиболее компактный
вид уравнений движения.
* Изложенные в этой главе методы являются развитием идей, основы
которых даны в книге В. В.Добронравова «Основы механики него-
лономных систем», гл. VII. «Высшая школа», 1970.
— 186 —
§ 1. Реономная геометрия
Для решения задачи используем геометрическое представ-
представление реономной системы как точки в деформирующемся пространст-
пространстве, метрика которого определяется зависящей от времени кинети-
кинетической энергией системы, подобно представлению склерономных
систем в римановом пространстве конфигураций. Теорию таких де-
деформирующихся пространств называют реономной геометрией. Все
величины,образующие структуру реономной геометрии, должны быть
инвариантными по отношению к группе преобразований координат,
содержащей время.
Для этого все величины реономной геометрии должны быть силь»
ными тензорами. Назовем сильным (контрвариантным) вектором сис-
систему величин V\ которые при кинематическом преобразовании
преобразуются так же, как обычный тензор при геометрическом пре-
преобразовании
xi = xi(xi')9 B)
Иными словами
V1 = ^L V1'
дх1'
как в случае преобразований A), так и в случае преобразований B).
Полезно отметить, что dxl не является сильным вектором, так как
dxl= dxl -\ dt.
дх> dt
Аналогично могут быть образованы сильные тензоры различного
ранга и вида. Практически сильный тензор может быть образован
следующим построением. Пусть задан сильный тензор V, зависящий
от х\ х1 и t. Тогда производная от сильного тензора V по х1 есть так-
также сильный тензор. Действительно, так как
в/1 *¦
дх* дх* ' '
= и не зависит от х1 . Поскольку V есть сильный
дх1' дх1'
тензор,
yi= дх\ V1' .
дх1'
— 187 —
Дифференцируя это равенство по xk, получаем
дУ1 __ дх1 дУ1'
dxk дх1' dxk
Это свойство используем для построения структуры реономной
геометрии. Метрика реономной геометрии определяется кинетичес-
кинетической энергией системы
ds2 = 2Tdt2 = aikdxldxk + 2atdxldt + Adt\ C)
Поскольку ds2 как величина механическая инвариантна по отно-
отношению к группе преобразований координат A), дифференцируя по
х1 образуем сильный ковариантный вектор
Дифференцируя его еще раз по xk9 получаем ковариантный тен-
тензор
Введение взаимного тензора aiJ'a^ = 5 ^ и величины а1 = а1кпь
позволяет определить сильный контрвариантный вектор
vt = aikVk = xi _|_ ai
ш бесконечно малый сильный контрвариантный вектор
Ъх1 = vldt = dx* + aldt9 D)
«который назовем абсолютным элементарным смещением.
Выражение квадратичной дифференциальной формы в инвари-
инвариантных величинах примет вид
ds2 = aikbxlbxk + (A — ар*) dt2. E)
Подобно тому, как в римановой геометрии можно ввести понятие
абсолютного дифференциала*, в реономной геометрии вводится по-
понятие сильного ковариантного дифференциала:
&/ = dvl + r]kvidxk + rftdt, F)
где
Г/*= alhrht !k\ ГА. jk= -j {dpkh + dkahj — dhajk)\ G)
Г) = а»Гн,,; ГЛ, / = \ (dtahj + d}ah - д&). (8)
* Выражение абсолютного или ковариантного дифференциала в рима-
юовой геометрии имеет вид: Dvl = dvl -f- F^kv^k
— 188 —
Представив выражение сильного дифференциала в инвариант-
инвариантной фэрме, получим
* / dVl * Ь . Г-1 h* h I dV1 J2 ! Г1 h JJ.
ovl = ол:^ -4- Г' jrox* A dt + / ьиЛаг —
^/г ' hk dt h
dxk
Коэффициент при $xk, аналогичный римановой ковариантной
производной*, назовем сильной производной по хк\
Коэффициент при dt
!> + ?-/>
назовем сильной производной по времени
Это позволяет представить дифференциал любого тензора в виде
8У = VkVbxk + VtVdt. (9)
Особенностью реономного пространства является изменение его
линейного элемента с течением времени. Мерой растяжения реоном-
реономного пространства служит так называемый тензор растяжения,
который может быть введен следующим образом. Рассмотрим ска-
скалярную функцию
где dt = 0; Ъх1 = 0; dxl = —aldt, показывающую растяжение
пространственного интервала во времени.
Вычисляя ф, получаем
ф = (dtaik—aJdflik — ачдкШ — ak
Выражение в круглых скобках обозначим
2Wik = (dflik — aJdjuik — ачдка! — ak
* Ковариантная риманоза производная, • обозначаемая уЛ^ или vi%k9
имеет вид
—
— 189 —
и назовем тензором растяжения. Это название оправдывается тем,
что в случае выбора нормальной системы координат (все а% равны
нулю)
Wik = (\/2)dtaik, A0)
и непосредственно определяет растяжение по длине. Тензор растя-
растяжения реономного пространства может быть введен также из усло-
условия перестановочности. Перестановочными в механике называются
два смещения dud, удовлетворяющие условию
ddx = ddx.
Для реономных систем добавляется еще условие:
ddt = ddt.
Преобразуя эти условия в сильно инвариантные, при выборе нор-
нормальной системы координат, получаем
88 xi — lixi = Wi [bxhdt — bx4t ). . A1)
§ 2, Реонеголономная геометрия
Для того чтобы рассматривать более общий случай реоном-
реономных и одновременно неголономных систем, все введенные понятия
должны быть расширены. Рассмотрим голономную механическую
систему с п степенями свободы, на которую дополнительно наложено
г неголономных реономных связей вида
Здесь i = 1, 2, ..., я, где п — число обобщенных координат;
р = 1, 2, ..., г, где г — число неголономных связей.
Такие связи, наложенные на систему, означают, что скорости
всех точек уже не могут быть произвольными; п обобщенных скорос-
скоростей связаны г уравнениями связей, т. е. независимых обобщенных
скоростей будет лишь п — г = т. Если в качестве независимых
параметров принять неголономные координаты х\ ..., ха, где
то все обобщенные скорости можно выразить через них следующим
образом:
A2)
Уравнение A2) задает в каждый момент времени в каждой точке
пространства m-мерную поверхность, имеющую переносную ско-
скорость Ь1. Это движущееся семейство m-плоскостей назовем реонего-
лономной геометрией. Допустимые преобразования координат для
— 190 —
реонеголономных систем имеют вид
^ А | A3)
dx - R dx + ша dt. '
Все величины реонеголономной геометрии должны быть инвари-
инвариантными по отношению к группе преобразований координат A3).
Все свойства реонеголономной геометрии, так же как и реономной
геометрии, определяются кинетической энергией системы:
Виртуальные перемещения (dt = 0) реонеголономных прост-
пространств задаются равенствами:
dxl = b[dx\
Совокупность этих перемещений определяет m-мерное многооб-
многообразие виртуальных перемещений (X). Вектор vl принадлежит это-
этому многообразию, если он изображается в виде: if = bltf- . Выраже-
Выражение v = bv дает проекцию вектора v на подпространство виртуаль-
виртуальных перемещений, где b — связующий тензор виртуального
многообразия (X).
Абсолютное смещение 8 х1 в неголономных координатах имеет вид
¦• Ьх1 = Ьа dxa + [а1 + Ы) dt. A4)
Фундаментальная квадратичная форма реонеголономной геомет-
геометрии, определяемая кинетической энергией системы в неголономных
координатах, имеет вид
ds2 = b^dxdx* + ^jdxdt + §dt\ A5)
Преобразуем это выражение в инвариантную форму. Дифферен-
Дифференцирование выражения A5) по ха позволяет получить сильный
вектор
Вторичное дифференцирование определит сильный фундамен-
тальный тензор ЬаР =.—rj~. Его введение позволяет рассмотреть
векторы:
Л. = К^+ К> К - b*dx* + рвл, |
z? = x*+ f\ J>/ = dx + fdt. )
Штрихи под условными знаками относят эти векторы к под-
подпространству виртуальных перемещений. Назовем их соответствен-
— 191 —
но абсолютной виртуальной скоростью и абсолютным виртуальным
смещением. Тогда выражение A4) можно записать в виде
есть сильный вектор. Назовем его поперечной скоростью, так как,
очевидно, В1 ортогонален к X. Введенные величины используем
для преобразования кинетической энергии системы в инвариантную
форму
Пусть дано некоторое поле vl, лежащее в а. В общем случае
bvl не находится в подпространстве X. Назовем Х-дифференциалом
выражение bv = b&v, которое представляет проекцию обычного
ковариантного дифференциала на подпространство X. Разность
ковариантного дифференциала и Х-дифференциала """
Найденные ранее инвариантные величины реонеголономной
геометрии позволяют образовать сильный вектор Sa, который назо-
назовем центробежным вектором по аналогии с центробежной силой*
инерции. Для этого выберем два перестановочных смещения б и S
следующим образом. Пусть б х1 = б!б ха лежит в X. Очевидно, Ъх1 =
= Bldt ортогонально к X. Рассмотрим выражение
Тензор растяжения реонеголономного пространства можно вве-
ввести из условий перестановочности. Рассмотрим два поля векторов
— 192 —
6xl и 8х\ перестановочных вдоль некоторой кривой, лежащей в
X.
Продифференцировав выражение
Ы =* Ьх* + Bldt,
получим
Ц ykB*lxfcdt + sjtB^dtdt + В1Ш.
Проекция этого равенства на подпространство виртуальных пере-
перемещений имеет вид
b-yfldidt.
Аналогичными вычислениями можно получить
Ь*ЪЪх? = ЬЪх* + baisjh В1 lxkdt + Ь\ sfi'dtdt.
Разность этих выражений равна
(8 Ъх* — 88 х) = Ь\ (ЬЬх1 — ЬЪх1) + Ь^ф1 [bx4t — bxkdt).
Используя условие перестановочности A1), получаем
("|§ха — Ъ~1ха) - bt b\ {Wlk + vfcB0 (8^ — bx4t).
Согласно выражению A9)
Ы b^hBl = - В% blVhb{ = - ВЩЧ,.
Таким образом, окончательно
(ЬЬха — S3/) = (bt b^Wi — Bflfr) (??dt —bx^dt). B3)
Условие B3) определяет тензор растяжения реонеголономного
пространства:
Wat^b'abtWtb—BiHfr! B4)
§ 3. Инвариантные уравнения движения
реономных систем
Введенные инвариантные величины реономной и реонеголо-
номной геометрии позволяют составить уравнения движения меха-
механических реономных систем в инвариантной форме. Для их состав-
составления использован принцип Гамильтона, поскольку он сформулиро-
сформулирован в такой форме, что оказывается инвариантным к любым, в том
числе и зависящим от времени преобразованиям координат.
t = 0. B5)
Здесь 8 — сильная ковариантная изохронная вариация; б —
сильный дифференциал.
— 193 —
Найдем вариацию удвоенного выражения кинетической энергии:
8 B7) = b(v2 + Л) = <5 (vtvl + А) = 2vfivl + ЬА.
Первое слагаемое этого выражения
vtbvldt = vfibx1 = § (vibx1) —bvfix1 — ViWfixfdt.
Для голономных систем б (vfix*) = 0. Тогда
ITdt = — (^- + w'.Vj) bxldt + — Ь Adt\
ЬА = dtAbxl = 2sflbt*.
Интеграл, выражающий принцип Гамильтона, представим в виде
| -|- W. V: 1 -|- S; -|- Q; I bxldt '=:z 0.
Для выполнения этого условия величина, стоящая в квадратных
скобках, должна равняться нулю. Таким образом, уравнения дви-
движения реономных систем с голономными связями в инвариантной
форме имеют вид
^L -f WJ.Vj = st + Qt. B6)
Если на реономную голокомную систему дополнительно нало-
наложены неголономные связи вида
vl = vl + В1, B7)
уравнения движения такой системы представляются в форме
где R1 — реакция, нормальная к виртуальному подпространству
(для идеальных связей).
Вследствие уравнений связей B7)
dt dt dt dt ^ Vft - n Vft ^ v/
Проектируя уравнения B8) на X, получаем
или
194 —
В этом равенстве
где
Согласно выражению B4) тензор растяжения реонеголономных
пространств
Следовательно,
Тогда уравнения движения реономных систем с неголономными
связями окончательно примут вид
*JL + Wa.^=sa + Q\ B9)
dt
§ 4. Применение л+ 1-мерного формализма
к геометризации реономных систем
Сущность этого метода заключается в следующем. Время t
рассматривается как дополнительная п + 1-мерная координата.
Все рассматриваемые объекты принадлежат некоторому л + 1-мер-
1-мерному пространству Хп+1у метрика которого определяется кинетичес-
кинетическим потенциалом системы.
ds2 = Ldt2 = A/2) gi§dxadx^ = -у (gtJdx?dxl + la^dt + Adt2) C0)
a, p = 1, 2,..., n+ 1; t, ; = 1, 2,..., n.
Уравнения движения системы можно получить методом Лагран-
жа и представить в виде
х1 + rljk'xJxk+ 2Г) xJ+ П = 0 C1)
Эти уравнения полностью совпадают с уравнениями геодезичес-
геодезических линий пространства Хп+1, если коэффициенты связности прост-
пространства удовлетворяют условиям
Г°а^0; П, = Г^. C2)
Выполнение этих условий позволяет получить:
C3)
— 195 —
Большой интерес представляет применение п + 1-мерного фор-
формализма к движению неголономных систем. Рассмотрим неголоном-
иую систему координат. Для реономных систем неголономные коор-
координаты определяются соотношениями
(oa=akqk + aa. C4)
Разрешая эти уравнения относительно qk, получаем
qi= Ь1аа + Ы9 C5)
где
Пусть <p(q. t) — функция обобщенных координат и времени.
Выражение ее полного дифференциала имеет вид
dql dt dql dql
+ i?rdi T^d« +4r
dt on ot
Здесь приняты обозначения
dql dt dql dt
C7)
Уравнения движения неголономной системы можно представить
в виде
/' = ql + Г)к qiq* + 2Г) qJ + Л = Q< + /?'. C8)
Обозначим /a обобщенное ускорение в неголономных координа-
координатах
/'=<#'. C9)
По аналогии с C8) представим C9) в виде
f = ша + AahJto + 2Лр J + А\ D0)
где Арт; Aj>; Ла — неизвестные коэффициенты связнссти. Для их
определения подставим значения /а в D0):
соа + ЛрУсот + 2А1 со + Аа = а\
Так как ql = Ы,®* + Ъ\ то
Аа = а]
— 196 —
' dqk " ' dqk "pW ' dt * dqk " r dt
+ a] #6*/>W + 2a] blbkrjkcoa + 2a] Ь{Г^а + а\Г]к bfbk
+ 2а\Г)Ь> + а]П.
Из равенства C5)
да*} л „ dbi да* л
= —а.
dqk ' dt
db* = bi да аа К
dqk dqk dqk
dt
D1)
D2>
С помощью D2) преобразуем выражение D1):
со* + Лр7сорсот+ 2Лр соР + Аа = ша -
da
i В
- — сор —
Л/ F Я/7* ЛаЛ ;W л/ л/ '
dql
dqk dql
2al
dt ~a7
a]bfbkr]k.
+ 2Г]а]Ы+ din. D3)
Отсюда следуют выражения для коэффициентов связности:
2 P
да?
aa?
где
Л' = a] b1 W r]k + 2a] Ь>Г) + Г'a] - b'b* --L
dqk
dhgjl — dlghjy,
— 197 —
представляют собой известные выражения символов Кристоффеля
второго рода; gik\ qt\ A — коэффициенты в выражении кинетичес-
кинетической энергии системы.
Переходя к неголономной системе координат, представим выра-
выражение кинетической энергии в виде
Т = A/2) ?орсоасор + ?асоа + A/2) В. D5)
Коэффициенты rjhl\ Г/\ Л в неголономных координатах примут
вид
После несложных преобразований коэффициенты Fjhl\ Г/\
представим в виде
г>* ,1 Р 1га , 1 av , * х a a ,
C.? 7 а 1/'CTV х а
2
— 198 —
P =- bl Г + bl gX (jL - |^
,1 да"
Найденные соотношения позволяют определить коэффициенты
связности Л.
а а \ ov а \ ov а
К , да°
1 av а 1 av а J а
v a
где т^ • -у? — коэффициенты неголономнссти Риччи.
Так как аг^= —6е
1 I I
— g Tpv +—
iji av г 6 a • 1 av т 8 a av т 8 a I
L 2 ap 2 aT v? ax vpJ
Вследствие симметрии последних слагаемых
— 199 —
Итак, искомые коэффициенты связности Л имеют вид
§ 5. Уравнения Больцмана —Гамеля
для реономных систем
Уравнения движения реономной системы в неголономных
координатах имеют вид
и + A^V + 2Лр соР + Л° = Q° + R°, D7)
где Q" = a;Q(; i?" = a]Rl, коэффициенты связности заданы соот-
соотношениями D6).
Заметим, что выражение Л^сЛо7, вследствие симметрии по
индексам C и f, можно привести к виду
А;У «>ч = />рсоТ + />арТ;со9со^. D8)
Очевидно, полученные уравнения движения реономных систем в
тензорной форме в неголономных координатах можно привести к
уравнениям Больцмана—Гамеля*:
Для доказательства преобразуем уравнения D9). Из выражения
кинетической энергии
находим
дТ Р , дТ
аг 1 ^^7р т р dgT 1 ав
= ii со7 сор -\ L сот Н
дла 2 ала ала 2 дка
* Аналогичный вывод уравнений Больцмана—Гамеля для стационарных
систем дан в книге В. В. Добронравова «Основы механики неголоном-
неголономных систем». М., «Высшая школа», 1970, гл. VII.
— 200 —
Уравнения D9) представим в виде
или
+ Y%1-)col + r. + «s1-=Q- + R.- E0)
, Свернув это выражение с g™, обратным gagy получим уравнения
2 (/^ + -1
4-— "
2 8
эквивалентные уравнениям D7) с учетом D8).
Если в качестве неголономных скоростей взяты линейные фор-
формы, равные нулю согласно уравнениям связей, то вследствие Ro^ =
= 0 (для идеальных связей) для независимых неголономных ско-
скоростей Rz = 0; т = 1, ..., m, что позволяет исключить неизвест-
неизвестные реакции связей из уравнений движения.
= Q*
(о, р, т = 1,2,...,
§ 6. Движение тяжелого однородного шара
во вращающейся сфере
Рассмотрим движение шара в сфере, вращающейся вокруг
вертикального диаметра с постоянной скоростьюQ. Уравнения дви-
движения шара составим в неголономных координатах в форме E0).
В качестве обобщенных координат примем углы а и C, определяю-
определяющие положение центра тяжести шара и углы Эйлера.
9i = a; q2 = $\ q3 = 9; q* - q>; q5 = ф.
Условие качения шара без проскальзывания по поверхности
8—689 — 201 —
сферы можно представить в виде
«у
a sin 8 cos a a sin В sin a a cos 8
Г / k
О О Q = 0.
R sin p cos a R sin p sin а Rcos\
E1)
Это условие равносильно двум независимым уравнениям связей:
со4 = — г sin p sin а а + г cos p cos а р -f аа>у cos p —
— со^а sin p sin а + Ш? sin а sin р = 0,
E2)
+ со^а sin p cos а — QR sin 8 cos а = 0,
где г =7? — а.
В качестве неголономных скоростей выберем проекции угловой
скорости шара на неподвижные оси координат и формы со4 и со5,
равные нулю вследствие уравнений связей:
тг1 = (О/, тт:2 = соу; т:3 = @/, тс4 = СО4; тс5 = ОM.
Выражения квазискоростей через обобщенные скорости имеют
вид
к' = ых = cos ^8 + sin 0 sin ф ф ,
тг2 = соу = sin<j>8 —sin 8 cos фср,
• • •
к3 = со2= ф + cos 0ф,
т.4 = — г sin p sin a a + г cos C cos a p +
+ acospsin60 — (a cos f$ sin 8 cos ф +
+ a sin p sin a cos 8) ф—asinpsina^ +
+ QR sin a sin P;
7-5 = r sin p cos a a + r cos p sin a p — a cos p cos
+ a sin p cos a ф + (a sin p cos a cos 8 —
— a cos p sin 8 sin ф) cp — 2/? sin p cos a.
— 202 —
Матрицу коэффициентов а% представим в виде
О О
О 0 sin^
О 0 0
— г sin a sin p r cos p cos а а sin ф cos p
г sin p cos а г cos p sin а — а cos p cos ф
sin 0 sin ф 0
— sin 0 cos ф 0
COS0 1
(— a sin p sin а cos 0 — \ — a sin p sin а
— а sin 0 cos ф cos p /
/ a sin p cos а cos 0 — \ a sin p cos а
\—a cos p sin ф sin 0)/
Обратную матрицу Ь1а, построим, непосредственно решив урав-
уравнения E3) относительно обобщенных скоростей:
— ctg p cos a -f я2 — ctg p sin а — т.3 —
а =
7Г4 sin а
Г
COS а
sin
г sin
JL sina - ^2 JL cos а +
г cos
+
sin a
E4)
0 = СОЗфтг
sin ф
sin 6
cos Ф
sin 0
ф = —Sin ф Ctg 0 тг1 + COS ф Ctg 0т:2 + тг3.
Коэффициенты при яа определяют матрицу bla:
а , Q а . о . a sin a
— ctg p cos a —ctg p sin а —
b =
COS a
sin а
— cos a
r
sind
г
и
0
0
1
/¦sinj3
COS а
г cos р
0
0
0
/¦sinp
sin а
/¦cos?
0
0
0
sin 6 sin 6
— sin ф ctg 0 cos ф ctg 0
Для составления уравнений движения представим выражение
кинетической энергии системы в неголономных скоростях без учета
8* — 203 —
уравнений связей:
7 = —
2
r2a2sin2
— k* со2 +со2 + со2 =
2 [ х У z]
= — {( к1)* {a2 sin2 а + а2 cos2 а cos2 р + k2) +
+ (ii2J (а2 cos2 а + а2 cos2 p sin2 а + k2) + (т^3J (а2 sin2 р + k2) +
/ ^4\2 / • 2 а , cos2 я \ / ^5\2 /_sin2 а
"*" \ / ' гп^2 ft / ' \ / \ рп<
C0S2
+ 2 7Г V (— a2 sin a cos a sin2 p) -f 2^^ (— a2 cos a cos p sin p) +
+ 2icV (a
COS a sin a sin2
+ 2тг2т:3(—а2 cos p sin 3 sin а) + 2тг2тг4 (— a cos p sin2 а — а
cos [i
о 2 s /
2тг2т:5 / — a
sin2 [J sin a cos а
cos 8
in a sin p —
— 2тг3тг5а sin p cos a — 2тс4тг5 sin a cos a + 2к'а cos a cos p sin p • UR +
+ 2i^2a cos p sin a sin pQ# — 2^3 sin2 paQi? — 2^4 sin a sin рОД +
+ 2*5 cos a sin pQi? + №R2 sin2 p |. E5)
Коэффициенты при квадратах неголономных скоростей в выра-
выражении кинетической энергии образуют матрицу g<$ (см. стр. 205).
Коэффициенты при первой степени неголономных скоростей обра-
образуют столбец:
acosacospsinp?2#
— sinasinpQ/?
cosasinpQi?
Составим выражения коэффициентов Га, входящих в уравнения
движения:
Учитывая, что все ga не зависят от времени явно, bl = QR/r,
все остальные Ъ1 равны нулю, В = Q27?2sin2C, получим следующие
значения коэффициентов Га: fi = — 2 {air) 22R2 sin a sin p cos p;
f2 = 2 {air) №R2 cos a sin p cos P; Г3 = 0.
— 204 —
— 205 —
Выражения коэффициентов ГО1р, входящих в уравнения движе-
движения, имеют вид.
1 (dg, dg? dg'A i (dgx i dg? t
dt I 2 \ dql p dq* a
4- !?iE^+^E),
dql dt J
Учитывая, что все коэффициенты ga? явно от времени не за-
зависят, получаем выражения коэффициентов ГаЭ:
Гм =a2(fl/r)Qsinacosasin2p; Г1Л =a2(i?/r)Q(sin2asinaP—cos2f3);
Г,>3 = a2(#/r)QsinasinpcosP; Г2Л =а2 (Я/г) 2 (cos2|3— cos2 asin2j3);
Г2,2 = — a2(#/r)Ocosasinasin2P; Г2,3 = —2a2(i?/r)Qcosasin^cosp,
Л$,1=0; f3,2=a2(^/r)Qcosasinpcosp; Г3,з = 0.
Трехиндексные коэффициенты Га,^ найдем согласно выраже-
выражению
g
Учитывая симметрию трехиндексных символов по индексам E и
Y, получаем:
Л,и = ^2.22= А,зз = 0; А,12== A.21 = (fPIr) cos a sin p cos P;
Jrltl3=jr>lt31 = —(a3/r) sin a cos a sin2 fi; A,22=(l/2)(a3/r) sin^ gos^ sina;
Л .аз = A .32 = (a3/r) (cos2 p —sin2 a sin2 P);
Г^зз = — A/2) (a3//-) sina sinp cosp; Г2,ц = — A/2) (a3/r) cos a sin p cos P;
Г2,12 == Гг.21 = — (a3/r) sin p cos p sin a;
Лиз - Г2.з1 - (a3/r) (sin2 p cos2 a — cos2 B);
A.23 = Г2,э2=(а*/г) sin acos a sin2 P; А.зз= —A/2) (as/r) cosa sinp cosP;
A.ii = A/2) (a3/r) sin a cos a sin2 P;
f3tl2 = Г3,21= (a3//-) (sin2 a sin2 p — cos2 a sin2 p);
r3fi3 = A.3i = ipPIr) sina cos? sin p; Г3,22 == — A /2) (a3/r) sina cos a sin2p;
A.23 = A.32 = — (a3/>") cos a sin p cos p.
— 206 —
При вычислении трехиндексных символов неголономности Рич-
чи—Больцмана—Гамеля
^ " [1^ dq*
заметим, что
Для определения остальных символов y$z представим их в виде
При составлении уравнений движения необходимы трехиндекс-
ные символы со значениями нижних индексов только 1,2 и 3.
Отличными от нуля оказываются следующие трехиндексные сим-
символы неголономности:
Т2з = — Тзг = 1'»
т?з = — Til = —1; т!2
i3 = — Тз1 = — cos
т! = — tIi =sin Pcos а (а
Т?2 = - T23i = 1; Т25з = - Т532 = - cos р (а + а*1г)\
т{2 = — tIi "= —sin а sin Р (а + а^г)-
Двухиндексные символы неголономности найдем из выражения
Отличными от нуля оказываются следующие двухиндексные сим-
символы:
TJ = _ q^ (alr) cos P; f2 = —QR (air) cos p.
Перейдем к определению входящих в уравнения движения слагае-
слагаемых, содержащих симеолы неголономности.
Слагаемые вида gay? примут вид
ga 75е == &2R2 {air) sin a sin p cos P;
ga ^2 = — Q2R2 (air) cos a sin p cos P;
Найдем члены уравнения вида gay%(o^ :
ga 7jp(op = (a2/r) QR (sin2 pco2 + sin a sin p cos pco3);
ga 7^©P = (a2/r) QR (— sin2 ^co/ — cos a sin p cos pco3);
^a Тз^ == (a^r) Й/? (— sin a sin p cos pco7 + cos a sin p cos Pco2).
— 207 —
Входящие в уравнения движения слагаемые g^T*0^ имеют
вид
S'a? Т\^ = (а2/г) QR [— cos а sin а sin2 pco1 +
+ (cos2 р sin2 а + cos2 а) со2 — sin р cos р sin асо3];
?ар Т2°°' = (а2/г)Q# f— (cos2 а cos2 ? + sin2 а) (°/ +
+ sin2 p sin a cos аса2 + sin p cos p cos асо3];
&p 13^ = 0.
Найдем группу слагаемых вида gaT ^ wC wT'
13 C/) C22 ^ in P cos P — (to3J s^n a s^n P cos P +
-f- (o'co2 cos a sin [i cos p — со1©3 cos a sin a sin2 p + co2co3 (cos2 a cos
+ sin2 a cos2 p — sin2 a sin2 P)];
J (— cos a sin P cos P) +
+ (со3J cos a sin 3 cos p — соЧо2 sin a sin fJ cos p +
+ w2co3 sin a cos a sin2 p + o1©3 (sin2 p cos2 a +
+ cos2 a cos2 p — sin2 a cos2 P);
g Тз?сорсот = (a?/r) [(со1J sin a cos a sin2 p — (со2J sin a cos a sin2 p +
+ to1©2 (sin2 a sin2 p — cos2 a sin2 p) + ©'to3 sin a sin p cos p —
— ©2co3 sin p cos p cos a.
Найденные слагаемые позволяют полностью представить урав-
уравнения движения системы в форме E0):
Р + (А + g ?) «РТ + ?г/ + >p +
Значения обобщенной силы выражены соотношениями:
Q,@; rsinpg; 0; 0; 0);
Q? = a sin a sin Pg;
Q2=—acosasin^g;
— 208 —
Окончательно, уравнения движения шара во вращающейся сфе-
сфере имеют вид
(a2 sin2 а + a2 cos2 а cos2 3 + ^2) со1 + а2 sin а cos а sin2 p со2 —
— а2 cos а cos p sin 3 ю3 + C/2) (а3/г) [(со2J sin а sin |3 cos p —
— (со3J sin а sin $ cos 3 -f 2®1®2 cos a sin [} cos p —
— гаАо3 sin a cos a sin2 [J + 2co?co3 (cos2 p — sin2 a sin2 [J)] +
-f (a2//-) 2# x [со1 sin a cos a sin2 3 + со2 B sin2 3 — cos2 p +
-f sin2 a sin2 P) — со3 sin a sin p cos p] — (a/r) Q2i?2 sin a sin p cos p =
= ag sin a sin 8;
— a2 sin a cos a sin2 ^co1 + (a2 cos2 a + a2 cos2 p sin2 a +
-4_ #&) Ш2 _ a2 cos g sin p Sin а@з + ^3/2) (a3/r) [(со1J х
X (— cos a sin 3 cos P) + (со3J cos a sin p cos 3 —
— 2co1co2 sin a sin 3 cos p + 2co1co3 (sin2 p cos2 a — cos2 P) +
+ 2co2co3 sin a cos a sin2 p] + — QR [со1 (cos2 p — 2 sin2 p —
r
— cos2 a sin23) + со2 (— cos a sin a sin2 p) — со3 4 cos a sin p cos P)] +
+ {air) ?12R2 cos a sin p cos p = — ag cos a sin 3;
— a2 cos a cos p sin pw1 — a2 cos p sin 8 sin aco2 +• (a2 sin2 3 + к2) со3 +
+ C/2) (a3lr) [(со1J sin a cos a sin2 p — (со2J sin a cos a sin2 p +
+ 2<u1(x>2 (sin2 a sin2 p — cos2 a sin2 P) -j- 2(d1&3 sin a sin p cos p —
— 2co2co3 sin 3 cos p cos a] + (a2lr) QR [— со1 sin a sin 3 cos p +
+ 2co2 cos a sin p cos 8] = 0.
Полученные уравнения движения шара во вращающейся сфере
могут иметь практическое применение при рассмотрении движения
различных деталей приборов, имеющих форму шара, движения ба-
батискафов, устройства стабилизаторов космических кораблей.
Глава XVJ
ВНЕШНИЕ ДИФФЕРЕНЦИАЛЬНЫЕ ФОРМЫ В МЕХАНИКЕ
§ 1. Дифференцируемые многообразия
Наиболее общим понятием прсстранства в современной диф-
дифференциальной геометрии можно считать понятие дифференцируемо-
дифференцируемого многообразия. Оно широко применяется и при современ-
современном изложении классической механики. Рассмотрим, например,
— 209 —
механическую систему, имеющую конечное число степеней свободы,
например гироскоп. Положение этой системы можно определить с
помощью конечного числа вещественных параметров gl9 g2, ...,
gn. В действительности эта система параметров весьма произвольна,
и очень редко удается все положения механической системы эффек-
эффективно выразить через значения конечного числа параметров. Так,
например, если положение гироскопа определяется углами Эйлера,
то множество положений гироскопа не имеет параметрического пред-
представления.
В действительности множество положений механической систе-
системы можно определить как абстрактное многообразие, которое в слу-
случае гироскопа является трехмерным многообразием V класса С°°.
Но это многообразие является абстрактным и, естественно, не по-
погружено в аффинное пространство. Если, например, три угла Эйлера
выбирают для определения положения гироскопа, то это означает,
что рассматривается частная карта, представляющая только некото-
некоторое открытое множество многообразия, являющегося множеством
положений гироскопа.
Основные положения теории дифференцируемых многообразий
удобно рассмотреть на примере многообразий, вложенных в евкли-
евклидово пространство. Пусть /х, ..., /s — непрерывные функции в от-
открытом множестве У-евклидового пространства Еп . Эти функции
определяют многообразие SbP, которое складывается из таких
точек x?V, для которых f^x) = О, ..., fs(x) = 0. Оно называется
дифференцируемым многообразием, если функции / являются диф-
дифференцируемыми. Простыми примерами дифференцируемых много-
многообразий являются следующие многообразия, вложенные в евкли-
евклидово пространство: окружность в пространстве ?2, сфера, цилиндр
в пространстве ?3.
Попытаемся изучить простейшее многообразие — окружность.
Опишем, т. е. зададим, или параметризуем, отдельные точки окруж-
окружности. Если окружность определена как множество точек, удовлет-
удовлетворяющих уравнению
х2 + у2 = 1, A)
то каждую точку можно задать указанием ее координат хм у. Однако
такое описание неудовлетворительно по двум причинам. Во-первых,
излишне задавать обе координаты хиу, если х задан, то решая урав-
уравнение A), получаем у\ поэтому окружность есть «одномерный» объект
и для ее описания не требуется два параметра. Во-вторых, эти коор-
координаты зависят от положения окружности на плоскости. Если изу-
изучать окружность саму по себе, то нужно найти ее инвариантное
описание. Однако один-единственный параметр не может удовлетво-
удовлетворительным образом описывать всю окружность. Так, например,
в случае использования полярного угла функция, сопоставляющая
каждой точке соответствующий угол не непрерывна в нуле. Поэто-
Поэтому следует отказаться от попытки построения единого параметра,
описывающего всю окружность и довольствоваться несколькими
параметрами для разных кусков.
— 210 —
Рис. 6
Фактически на любом ?
открытом интервале ок-
окружности можно пользо-
пользоваться вещественным уг-
угловым параметром. Таким
образом, окружность по-
покрывается интервалами, в
каждом из которых имеет-
имеется соответствующий па-
параметр или координата. Любому открытому интервалу окруж-
окружности можно поставить во взаимно однозначное и взаимно
непрерывное соответствие открытый интервал прямой в про-
пространстве. Это соответствие дает параметрическое представление
рассматриваемой части окружности, что позволяет при изучении ее
геометрических свойств использовать теоремы классического анали-
анализа в пространстве.
Рассмотрим теперь более общий случай. Пусть в пространстве Ет
определено многообразие М. Обозначим № открытую область этого
многообразия М с центром в точке х, a U — открытое множество
в пространстве Еп .
Определение 1. Картой назовем область UQEn вместе с
взаимно однозначным отображением ср: W -> U подмножества W
множества М на U (рис. 6).
Назовем ср(х) изображением точки x^W(^M на карте U. Набор
карт на многообразии М называем атласом, если области карт атла-
атласа покрывают все многообразие М; если U1 и U2 — две области
карт атласа и x^.U1[\U2y то координаты точки х в одной из этих карт
являются функциями с ненулевым якобианом от координат точки в
другой карте.
Рассмотрим для примера построение атласа для многообразия
52, заданного уравнением х\ + х22 + х23 = 1 в пространстве ?3.
Возьмем точку Ыг (—1,0,0). Пусть U — плоскость хх = 0,
и — @, ul9 и2) — точка плоскости U и ч\(и) — точка пересечения
прямой, соединяющей точку U с точкой (—1, 0, 0) сферы S2. Если
i\i(u) = ta, *2, *3), то
Хк =
2и9
Полученное дифференцируемое отображение щ отображает об-
область сферы Wx = S2^\N1 на открытую область U^E2 (рис. 7). Та-
Таким образом, получили одну карту (С^ти); но так как область Wx
не охватывает всей сферы, то для ее изучения одной карты недоста-
недостаточно. Взяв точку N2 A, 0, 0), построим аналогичным образом вто-
вторую карту (?/2, тJ). Эти две карты охватывают все точки многообра-
многообразия S2 и составляют атлас, определяющий дифференциальную струк-
структуру на S2.
Слова «карта» и «атлас» взяты, очевидно, из картографии. Зем-
Земная поверхность приближенно представляет собой сферу, и ее мож-
— 211 —
Рис. 7
но рассматривать как некоторая мно-
многообразие 5 размерности два. Глобаль-
Глобального параметрического представления
этого многообразия, заданного в не-
некотором открытом множестве из про-
пространства ?2, не существует. Однако
существует покрытие S системой откры-
открытых множеств, каждое из которых яв-
является образом некоторой карты.
Объединение этих карт составит атлас.
Каждая «страница» атласа является от-
открытым прямоугольником из простран-
пространства ?2, каждой точке прямоугольника
ставится в соответствие некоторая точка
Земли, т. е. определяется отображение
Ф открытого прямоугольника на некото-
некоторое открытое множество многообра-
многообразия S.
§ 2, Внешние дифференциальные формы
Формы, которые здесь рассмотрены, это — выражения,
стоящие под знаком кратного интегрирования, причем в этих выра-
выражениях дифференциалы рассматриваются как переменные [6]. На-
Например, по линейному интегралу \Adx + Bdy + Cdz получаем
1-форму со = Adx + Bdy + Cdz\
по интегралу по поверхности \\Pdydz + Qdzdx + Rdxdy полу-
получаем 2-форму а = Pdydz + Qdzdx + Rdxdy и т. д.
Рассмотрим замену переменных в кратных интегралах, считая,
что интегралы всегда ориентируемы и, следовательно, что Якобиан
никогда не берется по абсолютному значению, а всегда имеет знак;
на таком примере рассмотрим интеграл ЦА{х, y)dxdy с заменой пе-
переменных
имеем
- у (и, v)\
Я А (х, у) dxdy = П A[x(utv)y (и, v)} )Ху у\ dudv,
JJ д(и, v)
откуда
д (и, v)
дх
ди
Ё1
ди
дх
dv
ду
dv
dudv.
— 212 —
Если у = Ху то опреде-
определитель равен нулю, если
переставить местами х и у>
определитель изменит знак.
Это обосновывает правило
умножения дифференциа-
дифференциалов в нашем исчислении
[такое умножение назовем
внешним умножением диф-
дифференциалов и введем для
его обозначения знак л]:
dx/\dx = 0;
dx/\dy = —dy/\dx.
Сложение внешних
дифференциальных
форм, умножение
на функцию
Пусть U — произ-
произвольное открытое множе-
множество в пространстве Еп .
В общем, внешней диффе-
дифференциальной формой степени k (^-формой) на множестве U назы-
называется выражение, формально представляемое в виде
Э. Картан A869—1951)
(О(х) =
<%... и {x) dx1 [\dx*[\ ...Д dx k ,
где о).^ f2, ..., ik (x) —вещественные функции, определенные в об-
области U, индексы iu i2i ..., ih имеют все возможные значения, удов-
удовлетворяющие неравенствам под знаком 2. Возможен и другой вид
А-формы:
Степень формы со (я) обозначается символом degco. Функции
^ . (х) называют коэффициентами формы. Форму со(х), для
которой со. . . (х) ^ I, 1 <*/*!<;••• <//г < л, а остальные
коэффициенты равны нулю, обозначаем символом dxh/\dx*/\... Д
/\dxlk. Формы dx1/\dxh/\...[\dxlk называют базисными внешни-
внешними формами степени k.
Форму, все коэффициенты которой равны нулю, называют
нулевой и обозначают символом 0. Формой нулевой степени назовем
— 213 —
любую функцию и: U ->¦ i?. Из определения, очевидно, следует, что
любая форма со степени п имеет вид
Каждая форма первой степени представляет собой выражение
вида
t=l
Пусть дана функция /: U -> Rm, m > 1. Тогда считаем, что
/6СГ, где г >- 0 — целое число, если функция / в случае г > О име-
имеет в ?/ все частные производные порядка г, причем эти производные
непрерывны в пространстве U. В случае г = 0 условие /6СГ означает,
что / непрерывна в ?/. Вместо С0 в этом случае употребляем С. Пусть
со — внешняя дифференциальная форма степени k, определенная в
U. Тогда считаем, что со принадлежит классу Сг, когда каждый из
ее коэффициентов принадлежит классу Сг.
Пусть даны две внешние формы со (х) и ф(х) степени k:
©(*)= ^ © f (x)dxxhdx*l\...l\dxik\
Kit< ... < ik<n ^' *» ••• f Л
Kit < ... <tk< n n
Суммой их называем внешнюю форму
Произведением внешней формы со (х) на вещественную функцию
f(x) является внешняя форма
2 ^./....*
1 < /1 < ... < ik < п
Отметим некоторые свойства введенных операций над внешними
формами, непосредственно следующие из определения:
1. Множество всех внешних форм степени k образуют абелеву
группу относительно операции сложения.
2. Пусть со, со 1, со2 — произвольные формы, причем deg coi =
= degco2, /, /lf /2 — произвольные вещественные функции. Тогда
выполняются следующие равенства: •
(/i + /2) ю = /1е0 + />". / (wi + ©2) = hi + /®2-
— 214 —
Операция умножения внешних форм
Обозначим Nr отрезок {1, 2, ..., г} натурального ряда. Пе-
Перестановкой ранга г называют любое взаимно однозначное отобра-
отображение a: Nr ->- Nr. Любой перестановке а, можно сопоставить
число су (а) таким образом, что:
1) а(а) = ±1 для любой перестановки а;
2) для любых а и C
3) если а — такая перестановка, что существует пара индексов
t\ /, где i < /, для которой a(i) = /, а(/) = i, a(k) = k при k =?
Ф i, k Ф /, то а(а) = —1 (перестановки вида, указанного в усло-
условии 3, называют транспозициями).
Число а(а) называют сигнатурой перестановки а. Перестановку а
называют четной, если сг(а) = +1, и нечетной, если сг(а) = —1.
Любая перестановка может быть получена как суперпозиция ко-
конечного числа транспозиций. Если т — число транспозиций, ко-
которые необходимы для того, чтобы получить перестановку а, то
аг(а) = (-1)-.
Каждой паре внешних дифференциальных форм со (х) и cp(x) сте-
степеней k и /, соответственно, можно сопоставить некоторую третью
дифференциальную форму ф = со Дф> называемую внешним произ-
произведением форм со (х) и ф(л). Определим сначала внешнее произведение
для базисных форм.
Пусть il9 i2, ..., ih — любая последовательность индексов, та-
таких, что 1 <С h <С пх, 1 <С i2 <^ %...1 <; ik <; п. Тогда симво-
символом dx'1 A dxl* A ••• A dxlk обозначим внешнюю дифференциальную
форму степени k, определенную следующим образом. Если среди
чисел ily /2, ..., ih есть два одинаковых, то полагаем dxix A dxl*
А ••• A dxlk =0; если же числа ix, i2, ..., ik — попарно различны, то
справедливо равенство
dx1 /\dx% /\...hdxik == a(a)dxlf\dx* /\...f\dxlk,
где a:Nk-*Nk произвольная перестановка индексов faE) = /s.
Пусть со и ф обозначают базисные формы:
xil/\dxii/\\dxt*\
со = dxil/\dxii/\...t\dxt*\ ф = dxh/\dx2/\.../\dxlk.
Внешним произведением базисных форм назовем выражение
д
Пусть теперь© (х) и ф(х) — произвольные внешние формы deg © =
— 215 —
= k, deg ф = /:
<•>(*)= 2 <">/,.!. l(x)dxt/\dxt'/\...Adxi»; (a)
Ф(x) = 2 Ф/1в/if..../, W dxJ1hdxis/\.../\dxil. F)
K/i< ... </z< л
Произведением форм со (я) и ср(я) называют форму
Форма со(#)Дф(л;) получается, если формально перемножить вы-
выражения (а) и (б) как обычные многочлены, вычисляя произведения
базисных внешних форм в соответствии с указанным выше правилом.
Пример •
ш (л-) = adx1 Л dxs Д dx2 + bdx* Д dx* Д dx1; ф (х) = cdx2 Л dx3;
ш (х) Л ^ (^) = (ad*1 Л d*3 Л d-v2 + bdx* Л d^5 Л dx1) Л cd*2 Л dx3 =
= acdx1 Л ^А'3 Л dx2 Д dx2 Л dx3 -f- Ьс^л*4 Л d^5 Л dx1 Л dx2 Д dx3 =
= 0 + 6с (— IN dx1 Д d*2 Д с/л Д d.v4 Д dA*5 = bcdx1 Д d*2 Д dx3 Д dx* Д dxb.
Из определения произведения внешних форм непосредственно вы-
вытекают следующие его свойства:
1. Умножение внешних форм дистрибутивно относительно сложе-
сложения
©Л(Ф1 + Фг) = ^ЛФ! + <°Дф2; (©i + 0J)Дф = ^ЛФ + w2 Л ф,
каковы бы ни были формы со, ф1э ф2, со i, со 2; так что deg фх = deg ф2=
= deg coi = deg ш2.
2. Внешнее умножение дистрибутивно относительно умножения
внешней дифференциальной формы на функцию
/(соДф) = (/со)Дф = соД (/Ф).
3. Внешнее умножение ассоциативно, т. е. для любых форм
со, Ф, Э
4. Для любых форм о и ф выполняется равенство
л / 1 \de?ш deg cp
соДф = (— I) фДсо.
Отметим некоторые следствия, которые вытекают из этих свойств.
Следствие I. Пусть ф^, фг, ..., ф& — формы ; первой степени, cl-
-> Nk — произвольная перестановка.
Тогда ?аA) Л?аB) Л...Л ?а(Л)=а(
— 216 —
Действительно, из свойства 4 следует, что для любых двух форм со и q>
степени 1, <оДф = —фЛсо. Поэтому при перестановке любых двух со-
соседних сомножителей произведение Ф1ЛФ2Л ... Лф& умножается на —1.
По известным свойствам перестановок из этого следует, что рассматрива-
рассматриваемое равенство верно, если а — транспозиция, и, значит, оно верно для
любой перестановки.
Следствие 2. Пусть coj, со2, ..., w/e — внешние формы первой сте-
степени, где &<: п, Ц)г = "V а^соу — их линейные комбинации. Тогда
где
Л = det |
Действительно, из определения произведения внешних форм следует
2 U Лш/, Л... Aw.
/1=1 /,=1 /y=i
Если последовательность {Д, /2, ..., /#}, где 1 < js <^, s = 1,2, ..., &не
является перестановкой последовательности {1, 2, ...,/г}, то среди индексов
/it /2, ..., /л есть одинаковые, откуда следует, что со^ Л^ Л ... A^/k = 0.
Если же индексы /1} /г, ..., /ft — попарно различны, то они образуют пере-
перестановку последовательности {1,2, ..., k) и
w Л">. Л ... Л w/ =(т. . . ^Л^Л ... A^ft,
/l /» « /l» /2» '•• ' /ft
где cr — сигнатура указанной перестановки. Отсюда
/if/а. ••• >/Л
?iA?2A ..-A?ft = 2ai-/ia2;2 ••• алУла/ ,- •• (^i Л о>2 Л ... Л <«>*).
/1» /2» •" ' 7/j
Очевидно, сумма справа есть определитель det || а^-1| =Л, что и требовалось
доказать.
Операция внешнего дифференцирования
Пусть f(x) — внешняя форма нулевой степени на множестве
Uу принадлежащая классу Схф), т. е. f(x) — вещественная функ-
функция класса С1, определенная в U. Дифференциалом формы f(x) назы-
называют внешнюю дифференциальную форму co(x) первой степени,
определенную равенством
df (х) = ©(*)=•?- (х) dx* +JL(x)dx*+.--+-jjL (x) dx\
Предположим теперь, что со (я) — произвольная внешняя диф-
дифференциальная форма класса С1 степени k > 0:
... <ik<n
-, 217 —
Дифференциалом формы со (х) называется внешняя форма Deo (x)
степени k + 1, определенная равенством
Справа имеется внешняя форма, получаемая из формы со (х)
заменой каждого из ее коэффициентов ®iltit, ... ,ik его дифферен-
дифференциалом йщи tt,..., tk ; слагаемые ©/lf ... f ^ (x) dx^... f\dxlfi заменя-
заменяются произведением внешних форм первой степени dco^, ...,ik(x)
на базисные формы dxH/\...f\dxk степени k.
Пусть ф — произвольная базисная форма. Тогда все ее коэффи-
коэффициенты постоянны в (/, следовательно, Dcp = 0. Пустьоз (х) — форма
первой степени:
со (х) — at (x) dxl\
тогда
2
1=1 i
Свойства внешнего дифференцирования:
1. Для любых форм (Oi и.со 2 класса С1
D (©4 + оJ) ¦¦= D(x)i + ?>со2.
Форму со назовем мономом, если она имеет вид со (х) =
= u(x)dxll/\ ... f\dx(b.
Каждая внешняя форма есть сумма конечного числа мономов.
2. Пусть со — форма класса С1, / — вещественная функция
класса С1. Тогда
D(/©) =Df Д со + /До.
3„ Для любых двух форм со и ф класса С
D (соДф) - ЯсоДф + (- l)dega>
4. Первая теорема Пуанкаре.
Для всякой формы со класса С2
D(D(d(jc) = 0.
Пример. Найти внешний дифференциал внешней дифференциальной фор-
формы первой степени
xdy — ydx
-- 218 —
— 2xdx — 2ydy
, . , ,49 Л {xdy — */d*) + •
Дифференциальную форму ф(х) называют замкнутой, если Dcp =
= 0. Дифференциальную форму <р(я) называют точной, если сущест-
существует дифференциальная форма 1|)(л;), такая, что ф = Dip. Если диф-
дифференциальная форма ф на открытом множестве U является точной,
то она замкнута.
Обратное утверждение верно только при некоторых ограничени-
ограничениях, которые даются во второй теореме Пуанкаре. Прежде чем приве-
привести ее, введем некоторые понятия, Пусть U — открытое множество
в Rh. Отображение / : U ->- Rn называют диффеоморфным или диф-
диффеоморфизмом класса С, г ^> 1, если / взаимно однозначно, при-
принадлежит классу С и в каждой точке x?U якобиан отображения /
отличен от нуля. Если / диффеоморфизм класса Сг, то множество
V= f(U) открытое, и обратное отображение f'1 : V -> U также
есть диффеоморфизм того же класса.
Открытые множества UczRn и Vcz:Rh называют диффеоморфными
класса С, если существует диффеоморфное отображение класса С*
одного из этих множеств на другое.
Пример. Открытый шар В @, 1) = {л* ? Rn \ . . Л диффеоморфен
пространству Rn. Отображение » '
fix-*
осуществляет диффеоморфизм Б@, 1) и Rn.
Вторая теорема Пуанкаре: пусть U открытое множество в Rh,
со — дифференциальная форма степени г fg п. Тогда, если со при-
принадлежит классу С*, где к = п — г + 1, область U диффеоморф-
на, класса С*, пространству Rh и Dco(x) = 0 в (/, то существует
форма фбС1, такая, что со = Dtp.
Операция внутреннего умножения
Пусть со (х) — произвольная внешняя дифференциальная
форма степени k > 0:
\<Н< ... < ik< n 2 k
и пусть Z — векторное поле на многообразии U.
— 219 —
Внутренним произведением формы ш по векторному полю Z
назовем выражение
\<h<
hi
х 2(-1)в|в)г4й
где а — перестановка; 'индексов in, ii9 i2i..., /д> ••• > *У, знак Д над
п
индексом означает, что соответствующий член пропущен.
Рассмотрим внешние дифференциальные формы второй степени:
\<it<i2<n
Для форм второй степени выражение для внутреннего произ-
произведения примет вид
Kit < fa < л
to = cos хЧх1 Д djc2 + sin хЧх1 Д ^л:3 — д;1 sin хЧх2 Д (i^:4;
i B) (о =
+
g
2 z) + 24 B — z4dx2)
= cos л;4 (Zirfjc2 — гз^х1) + sin л:4 (.г^л;3 — гд^д:1) —
— x1 sin .v4 (z2cfo:4 — z±dx2) — Г — (г2 cos л:4 + z<z sin л:4) dx1 +
+ Bi cos л'4 + ^4^i sin л:4) dx2 + i *d3 i М4
Если z — dx1, то
/ (Z) to = i (dx1) со == cos A'4^v2 + sin x*dx3.
Если взять внутреннее произведение формы со на Z =-^т»
то из определения внутреннего произведения следует, что можно
рассматривать внутреннее умножение формы о на Z = тр^ во
внешней алгебре как аналог частного дифференцирования по
dx\ причем последовательные частные производные зависят от
порядка дифференцирования.
Обозначим частные производные внешней дифференциальной
формы со на dx1 обычными символами:
д (dx1) ' a (dx*) д (dxj)
и введем формальное правило для их нахождения.
Производной от формы о на dx1 назовем результат двух операций:
1) перенесение dx1 на первое место в мономах формы;
2) замена dx1 единицей.
Из этого определения сразу следует, что производная от монома,
не содержащего dx\ равна нулю.
— 220 —
Пример.
со = cos хЫх1 Л dx2 + sin л4 dx1 Л dx3 — х1 sin л-4 dx2 Д dx4;
sin *4cf*3; о/Гач= ~~cos x*dxl — xl sin *4^'4;
д (dx2) '
д2о>
— ___ pqc у^* -_————————— — COS A
§ 3. Понятие касательного пространства
и векторного поля на многообразии
В классическом векторном анализе понятие касательного
вектора к кривой определяется непосредственным образом. Если
<p(f) = (ф'(/)...фп (t))—кривая в пространстве Еп , причем ф@) = р,
то касательный вектор к кривой ф в точке Р имеет вид (фг@), ...,
<рЛ'@)). Две кривые ф и ф имеют один и тот же касательный вектор,
если ф1"' @) = Фг@) для всех i. Однако на многообразии нельзя
представить любую кривую как набор п функций одной переменной,
пока не выбрана локальная система координат. Тем не менее можно
определить касательный вектор в точке Р более абстрактным об-
образом — как класс эквивалентности кривых, проходящих через
точку Ру причем две кривые считаются эквивалентными, если в
точке Р они имеют одинаковые производные в -одной, а значит и
во всех системах координат, заданных вблизи Р.
Определение 1. Кривой на многообразии М, проходящей
через точку Ро, называют дифференцируемое отображение
такое, что ф(?о) = Ро.
Пусть F(M) — множество всех пар (Р, ф), т. е. пространство
всех кривых на многообразии М. Введем в пространстве F(M)
следующее отношение эквивалентности:
(Р, ф) - (Р\ ф1), если Р = Р1 и d(xto(?)
dt
dt
t=0
где (я1, ...,хп)—некоторая локальная система координат вблизи
точки Р.
Заметим, что если функции yl= у[(хг...у хп ) определяют другую
систему координат вблизи Р, то
d(yLo<?) _ ^ dt/ d (xi о у)
dt ** dxJ dt
Поэтому введенное отношение эквивалентности не зависит от
системы координат.
Обозначим Т(М) пространство классов эквивалентности прост-
пространства F(M). Элемент X из Т(М) (т. е. класс эквивалентности про-
пространства F(M)) называют касательным вектором.
— 221 —
Множество векторов, касательных к многообразию М в точке Ру
имеет структуру линейного пространства. Это пространство назы-
называют касательным пространством к многообразию М в точке Р и
обозначают ТМр.
Рассмотрим объединение касательных пространств к многооб-
многообразию М во всех его точках: ТМ == UTMn. Множество ТМ имеет
рем р
естественную структуру гладкого многообразия.
Определение 2. Многообразие ТМ называют касатель-
касательным расслоением многообразия М.
Существует отображение g : ТМ -> Му называемое проекцией,
которое сопоставляет каждому касательному вектору его начало.
Прообразы точек Р ? М при отображении q : ТМ -> М называют
слоями расслоения ТМ.
Определение 3. Векторное поле v (класса ст) на мно-
многообразии М есть гладкое (класса сг) отображение v : М ->- ТМ>
такое, что отображение g-v : М -> М тождественное, диаграмма
v ТМ
м( I g
Е М
коммутативна.
Пусть X и Y — два векторных поля на многообразии М. Про-
Производной Ли поля Y по направлению поля X назовем величину
Lx(Y)=i(X)DY — D(i(X)Y),
выражение для которой в локальной системе координат имеет вид
где
X = 2 X* —j \ —выражения векторных полей в локальных ко-
д*1 \ ординатах (л:1,..., хп).
2r
/ ох
Примечание. 1. Если вместо векторного поля Y взять дифферен-
дифференцируемую на М функцию Uf то производная Ли от функции U по направле-
направлению векторного поля X в локальных координатах имеет вид
'j^. (б)
Если вместо векторного поля Y взять дифференциальную форму со на
М, то производная Ли от дифференциальной формы со по направлению век-
векторного поля*Х примет вид Lx (ш) = i (X) Do + D {i (X) (о)
или в локальных координатах
где со = 2 аь&х1 .
— 222 —
Из формул (а) — (в) следует, что если X — векторное поле клас-
класса Сг, то производная Ли дифференцируемой функции, дифферен-
дифференциальной формы или векторного поля класса С есть функция,
форма или векторное поле класса С.
Следуя общепринятым обозначениям, положим [У, X] = Lx(Y).
Левая часть называется скобкой Ли (или коммутатором) векторных
полей Y и X.
Определение 4. Пусть X — векторное поле на многооб-
многообразии Мт. Интегральной кривой поля X называют дифференцируе-
дифференцируемую кривую с : / -> Мт> такую, что для всех ^6/, c'(f) =
= X(c(f)).
Пусть (ylf ..., ут) — система локальных координат на открытой
области U6Mm. Если 2а.j~ — локальное выражение поля X
в этой карте, то интегральные кривые поля X являются решениями
дифференциальных уравнений х.' =a.(x), i =l,...,m.
Обозначим Т*(М) пространство, сопряженное с касательным про-
пространством Т(М). Пусть со — внешняя дифференциальная форма,
элемент внешней алгебры на векторном пространстве Т*(М). Обоз-
Обозначим Q* наименьшее подпространство векторного пространства
Г*(Л1), такое, что со —элемент внешней алгебры этого простран-
пространства. Пространство Q* назовем ассоциированным пространством
к внешней форме со, а его размерность определит ранг этой формы.
Обозначим Q множество векторов X 6 Т(М), таких, что i(X) 9 =0,
V06Q*.
Теорема. [10]. Условие, необходимое и достаточное для того,
чтобы X 6 Q, есть i(X)® = 0.
Уравнения i(X)a) == 0 называют ассоциированными к форме со.
Приведенная теорема дает метод построения векторного прост-
пространства Q*, ассоциированного к данной внешней форме со .
Пусть {ф*}, 1=1,..., п — базис пространства Г* (М), тогда
<о = 11р\ • 2яi\, •.., iPФ 1Л • • • /\$1р — выражение формы со в этом
базисе. Если X1 — компоненты вектора X в сопряженном к
|фг'} базисе, то условие теоремы можно представить в виде
Следовательно, компоненты вектора X1 должны удовлетворять
однородной системе уравнений ^Х а. . . =0. Ассоцииро-
Ассоциированное векторное пространство Q* образовано, следовательно,
внешними формами первой степени (формами Пфаффа)
Пример. 2-форма F = A/2J ?ц ty дф/ , i, j =1, .., п имеет ассоцииро-
ассоциированное пространство, образованное формами Пфаффа2ф*" F-ф ранг системы
— 223 -
линейных форм равен рангу матрицы ||.Р/у||; так как ранг квадратной анти-
антисимметричной (Fij =з — F(j) матрицы — всегда четное число, то и ранг внеш-
внешней формы второй степени всегда равен четному числу; в частности, определи-
определитель матрицы (Fij) в пространстве нечетной размерности п равен нулю, сле-
следовательно, в этом случае 2-форма всегда имеет ранг меньше п.
Рассматривая внешние дифференциальные формы deg 2, ино-
иногда удобнее пользоваться определением ассоциированной системы
через частные производные формы со. Ассоциированной системой к
внешней форме со степени р назовем систему, которая получается
приравниванием нулю всех частных производных порядка (р = 1)
от этой формы.
Примечание. В дальнейшем знак суммы часто не применяется и
суммирование обозначается повторяющимися индексами (правило суммиро-
суммирования Эйнштейна).
§ 4. Интегральные отношения инвариантности
Пусть дана система обыкновенных дифференциальных урав-
уравнений первого порядка от т переменных:
dxx __ dx2 _ _ dxm n,v
——— ... * *
Л1 Л2 лт
где функции Х.(х19 ..., хт) не равняются одновременно нулю и при-
принадлежат классу С2 в некоторой области R пространства т-изме-
рений. Рассмотрим произвольную область С^р < т -измерений
в пространстве R. Через каждую точку области С(о* проходит одна
интегральная кривая системы A). Перемещая точки области С%}
вдоль соответствующих интегральных кривых, можно получить
другую область р-измерений С(?\ Обозначим cyj область (р + 1)-
измерений, которая образована трубкой интегральных кривых
системы A), заключенной между областями С(о* и С(^. Обозначим
символом Q внешнюю дифференциальную форму степени (р + 1),
определенную в области R, класса С2.
Определение 1. Внешняя дифференциальная форма Q
образует для системы A) абсолютное интегральное отношение инва-
инвариантности, если, какова бы ни была область С{$ и, следовательно,
порождаемая ею область оЪ, справедливо равенство
зП = О. B)
Форма Q образует относительное интегральное отношение инва-
инвариантности, если для выполнения равенства B) область С(^ зам-
замкнута.
Дифференциальные системы типа A) можно классифицировать
по тому, какие они допускают интегральные отношения инвариант-
инвариантности. Ниже рассмотрены только те системы, которые удовлетво-
удовлетворяют следующей теореме:
— 224 —
Теорема 1. Существует дифференциальная система Bп + 1)
переменных, допускающая квадратичное интегральное отношение
инвариантности максимального ранга.
Действительно, пусть Q — квадратичная внешняя форма
Bп + 1) переменных. Ранг г у этой формы четный, максимальное
его значение равно г = 2п. В этом случае форму Q можно предста-
представить в канонической форме:
2 = о)!Дсо2 + со3ДоL Н Ь ©2«-iA<°2«t
где формы Пфаффа со t — линейно независимы. Система, ассоцииро-
ассоциированная к форме Q, состоит, следовательно, из системы Пфаффа:
©1 = оJ = • • • = ю2л == 0»
которая эквивалентна дифференциальной системе A) и только одна.
Связь между понятием интегрального инварианта и интеграль-
интегрального отношения инвариантности можно выразить с помощью сле-
следующих предложений:
Предложение!. Если форма DQ порождает интегральное
отношение инвариантности для системы A), форма Q определяет
относительный интегральный инвариант, и наоборот.
Предложение 2. Если формы Q и DQ порождают интег-
интегральные отношения инвариантности для системы A), форма Q оп-
определяет абсолютный интегральный инвариант системы A), и нао-
наоборот.
Рассмотрим механическую систему, положение которой опре-
определяется п независимыми координатами ql9 q2, ..., qn. Уравнения
движения такой системы можно представить в виде
d dL dL ^ da; ,. r f1 1Ч /оч
где Q. = Qi(Qit qtj f) — непотенциальные обобщенные силы.
Интеграл
W = \LdU D)
как известно, называют действием по Гамильтону — Остроград-
Остроградскому.
Найдем вариацию действия 6 W в общем случае, когда началь-
начальные и конечные координаты не фиксированы, а являются функ-
функциями параметра а:
to = to(a), ^? = 9?(а)э *i = *i(a), q\= q\(a).
Выполняя стандартные вычисления, получаем следующую
формулу для вариации действия б W в общем случае:
W = [со (8)It - [со (8)]0 - § ^ (JL JL - jL.) 8gt dt, E)
— 225 —
где
P
В случае, когда для любого а соответствующий путь является
прямым, т. е. когда qi = qJtf, a) i 6 {1, ..., п) — семейство прямых
путей, интеграл в правой части равенства E) заменяем его значе-
значением согласно C). Тогда формула E) примет вид
W = [со (8I, - [со (8)]0 - j1 2 Qi Цг dt. F)
Рассмотрим расширенное фазовое Bп + 1)-мерное пространство,
в котором координатами изображающей точки являются величины
qv qv t. В этом пространстве возьмем произвольную замкнутую
кривую Со. Из каждой точки кривой Со, как из начальной, проведем
соответствующий прямой путь. Такой путь однозначно определяет-
определяется (после задания начальной точки) из уравнений C). Получим зам-
замкнутую трубку прямых путей. На этой трубке произвольно выберем
вторую замкнутую кривую С19 охватывающую трубку и имеющую
с каждой образующей лишь одну общую точку. Интегрируя равен-
равенство F) вдоль замкнутых кривых Со и Съ получаем
Ci Co a'
0
Применяя теорему Стокса к левой части равенства G), полу-
получаем
j J 2 dp* Л rf?« - (dH + 2 Qirfft) ЛЛ-0.
(8)
о
Таким образом, согласно определению 1 настоящего параграфа,
можно считать, что система C) уравнений динамики допускает ин-
интегральное отношение инвариантности, образуемое внешней диффе-
дифференциальной формой Q:
G = 2 dp г Л Л7, - (dH + 2 Qi d<7f) Л Л. (9)
Квадратичная внешняя дифференциальная форма Q от Bп + 1)
переменных допускает максимальный ранг 2п. Следовательно, су-
существует единственная дифференциальная система B/г + 1) пере-
переменных, допускающая соответствующее интегральное отношение
инвариантности. Для получения этой системы составим ассоцииро-
ассоциированную систему к форме Q:
A0а)
dQ =dqt — —dt = Q\ A06)
d(dPi) dPi
— 226 —
Легко видеть, что ассоциированная система позволяет получить
систему дифференциальных уравнений
Итак, обобщая известный принцип Э. Картана [6], сформули-
руем его в следующем виде:
Движение материальной системы с голономными связями уп-
управляется дифференциальными уравнениями первого порядка,
связывающими время, координаты, скорости; эти дифференциаль-
дифференциальные уравнения характеризуются тем свойством, что они допускают
интегральное отношение инвариантности, образованное внешней
дифференциальной квадратичной формой Q (9).
Исследуя форму Q, Ф. Галисо показал [19], что формуй (9),
образующую интегральное отношение инвариантности, можно пред-
представить в виде суммы двух внешних формй =QC+Qd, которые вы-
вычисляются следующим образом:
а) Qc—кинетическая часть внешней дифференциальной формы
определяется как внешняя производная от кинетического потен-
потенциала L, который равен
L = 2ptdqt-Hdt A2)
или, если движение описывается в декартовых координатах,
L = Г (Vt drd Ы — -I- dt Г (VQ2 Ьт. A2а)
Если в качестве модели материальной системы можно принять
совокупность равномерно распределенных материальных точек
одинаковой массой, то
?=? (FjdrDm, —A/2) Л 2 m,V*. A26)
б) Qd—динамическая часть внешней дифференциальной формы
вычисляется по следующим формулам:
AdtJ A3)
лл. A3а)
Применяя преобразования Лежандра, можно в форме Q (9) пе-
перейти от канонических переменных к переменным Лагранжа. Тогда
она примет вид
Ч A4)
— 227 —
или
A5)
где
dq*
Рис. 8
С =¦
a =
Пример 1. Составить форму Q для случая движения однородного диска
массой М, радиусом /? в вертикальной плоскости под действием силы веса
Р (рис. 8).
Решение. Положение диска на плоскости определяется координата-
координатами его центра масст]0, г о и углом поворота 6. Представим радиус-вектор /-й
точки в подвижной системе координат r>t — xi + yj* Тогда
Из формул Пуассона
d~f = (Т
и окончательно
~f)dt= —QdtT = —
Скорость i-й точки выразим в проекциях на подвижные оси:
Vt = (т]0 cos 0 + е0 sin в — В «/) / + ( е0 cos 9 — yj0 sin 0 + 0
Координаты i-й точки в неподвижной системе координат:
где
Tjj = xt cos 0 — t/j sin 0; e; = xt sin 0 + уi cos 0.
Находим кинетический потенциал:
L = S(vid^)mf-(d//2) S (i^Jmf= S K^o cos0 + s0 sin 0-
— 0 yd ~? + (so cos 0 — ^ sin 0+ 0 Xi) ~f } (— yiddT + .v^ d 0^ ) m? —
+ 80 S d Ч ть—{м 'nl+M*l+MK*№)(dt/2) = Л!/(а 0 d0 + M tJ0 dijo + M 80ds0—
?2/2.
A/2)
i = (Af/2) ( ч g
— 228 —
— кинетическая энергия диска, определенная по теореме Кёнига.
Кинетическая часть
Qc==DL = МК2 dd Л d9 + Mdri0 Л dq0 + Mds0 Л ds0 — М (т^0 + о
+ /с2 ede) л л.
Динамическая часть
Qd=(P dj) Л dt = Xidfio Л Л + Yideo Л Л = Mgsin Мт]0 Л Л —
— Mg cos ide0 /\ dt = Mg (sin idir}0 — cos ide0) Д d/,
где X/, Yi — проекции всех приложенных к системе сил на оси неподвижной
системы координат.
Суммируя Qc и Q^ получим форму Q:
Q = Qc + Qd = MW'dQ Л dQ + Md 7]0 Л dvi0 + Mde0 Л de0 — М
_|- sodso -+- /С2 9de) Л dt + Mg(smiduo —costd*0) l\dt.
Форма Q получена в декартовой системе координат. Рассмотрим теперь
порядок получения формы Q в обобщенных координатах.
Согласно формуле D.15) для этого сначала надо найти кинетическую
энергию системы и обобщенные силы, а затем вычислить коэффициенты, вхо-
входящие в выражение A5).
Если в качестве обобщенных координат взяты qx =т|о, #2 =ео, q3 = В,
кинетическая энергия диска
Т=(М/2)
Вычислим коэффициенты:
kxl = М, k22 = М, &зз = М/С2, k12 = k21 = ^13 = &3i = ^зг = ^гз — 0;
^11 = ^12 — ^22 = ^21 = ^33 = ^31 = ^32 = ^23 = О*,
Со = М^2, с3
ах = — Qi = —Psint = — Mgsinf;
а2 = — Q2 = + Р cos / = + Mg cos i;
a3=-Q3 = 0.
Подставляя полученные коэффициенты в A5), находим
Q = Mdg*! Л dqx + Md^ Л d^2 + МК2 d'qz Л dg3 — Mq^ /\ dt—
— Mq2dq2 К dt — MK2q3dq3 Л ctf + Mq sin i d^ Л dt — Mq cos i7ty2 Л ^.
§ 5. Общие вопросы изучения движения
Как показано в предыдущем параграфе, дифференциальные
уравнения движения механической системы принадлежат ассо-
ассоциированной системе внешней формы Q, образующей интегральное
отношение инвариантности. Следовательно, исследование диффе-
дифференциальных уравнений движения механической системы сводится
к изучению ассоциированной системы внешней формы Q.
— 229 —
Для удобства последующих выкладок введем другие переменные:
и представим в них форму Q A5):
^ = *•_„, fc ^ д dy* + b^dtf Л W-c^ 2n+1 ^ Л Ф2/Ж-
- 06)
Прежде чем перейти к непосредственному изучению ассоцииро-
ассоциированной системы, дадим некоторые определения [1]:
Определение 1. Назовем характеристическим вектор-
векторным полем формы Q такое векторное поле Е, компоненты которого
удовлетворяют уравнениям
i(?)Q = 0. A7)
Так как форма Q имеет ранг 2/г, то характеристическое вектор-
векторное поле Е определяется уравнением A7) с точностью до числового
множителя, который выберем так, чтобы i(E)dt = 1.
Определение 2. Назовем первым интегралом ассоцииро-
ассоциированной системы к внешней форме Q любую форму Пфаффа, которая
равняется нулю на интегральных кривых характеристической
системы.
Определение 3. Произвольная внешняя форма Q, сте-
степени р допускает инфинитезимальные преобразования, порождае-
порождаемые векторным полем X ? Т(М), если производная Ли от формы
Q по отношению этого векторного поля равна нулю, т. е.
Lxu=i (X) DQ + D (i (X) Q) = 0. A8)
Определение 4. Считаем, что г элементов Х\ ..., Хгв
€ Т(М)У образующих инфинитезимальные преобразования для
формы Q, образуют полную систему, если
[Хр, Xй] = Yf *Z>
где^Г — числовая функция, р, а, т, ? A, ..., г).
Любой замкнутой форме Пфаффа я, равной нулю на интеграль-
интегральных кривых ассоциированной системы к форме Q, соответствует
векторное поле X 6 Т(М)9 компоненты которого — решение сис-
системы уравнений
0. A9)
Теорема 1. Любому векторному полю X 6 Т(М) соответствует
форма Пфаффа тс, равная нулю на интегральных кривых ассоцииро-
ассоциированной системы к форме Q, обратно, любой форме Пфаффа, равной
— 230 —
нулю на интегральных
кривых ассоциированной
системы, соответствует
векторное поле X 6 Т(М).
Действительно,
i(X)i(E)Q= — i(E
Так как i (E)Q = 0, то
i(E)n = 0. Это показыва-
показывает, что я принадлежит
подпространству ассоции-
ассоциированных форм к Q , сле-
следовательно, форма я равна
нулю на интегральных
кривых ассоциированной
системы.
Изучение ассоцииро-
ассоциированной системы к форме Q
разбивается на два слу-
случая:
Случай первый харак-
характеризуется тем, что DQ=#=0.
Теорема 2. Если
х 6 т(м) и хе т(м)
соответствуют инфинитезимальному преобразованию и первому
интегралу ассоциированной к форме Q системы, то скобки Ли
[X, X] Ф 0 соответствуют другому первому интегралу ассоци-
ассоциированной системы, который имеет вид
С. Ли A842-1899)
Для доказательства воспользуемся формулой
i([X, X])Q = Lx i(x)Q — i(X)Lx 2.
Согласно определению 3, LXQ = 0, так как векторное поле X
образует инфинитезимальное преобразование. Согласно определе-
определению i(X)Q ==я Dn = О, так как векторное поле X создает первый
интеграл.
Следовательно i([X, X])Q = D(i) XДX) 2.
Скобки Ли, элемент касательного пространства, не равны нулю.
Оператор 1([Х9 X]), приложенный к форме Q, дает, следовательно,
дифференциал функции переменных qv qv t. Он вычисляется не-
непосредственно
X,
i(X/\X)Q =
для Q = ktj dql Д dyU
— 231 —
Полученный дифференциал, равный нулю на интегральных кри-
кривых ассоциированной системы, есть новый первый интеграл.
Дальнейшее изучение производим, считая, что известна одна
из полных систем векторных полей X', образующих инфинитези-
инфинитезимальные преобразования для формы Q.
В качестве известной системы векторных полей, образующих
инфинитезимальные преобразования, возьмем поля, предложенные
С. Ли:
1 2**1), гб{1,...п, 2л+1},
Ассоциированная система к форме Q при использовании век-
векторных полей Ли имеет вид
t'(Xi) fl= kt_ni , dyi + bA W - blh dyh -al>2n+l dy2n+1 = 0;
i (X*) Q = k._nt 2 dyt + bv2 dy* ~ bVl dy" - a2< 2n+l dy2"+l = 0.
' (Xn)Q = **-. n W + К dy' ~ bnh dy" - aHt 2n+l dy2n+1 = 0;
t (X2"+') Q = c^t 2n+l dy> - aK 2n+l dy* = 0.
Подставляя значения коэффициентов в полученную систему,
получаем систему п уравнений Лагранжа второго рода, последнее
уравнение является следствием остальных.
С помощью векторных полей Ли можно найти другие векторные
поля, образующие инфинитезимальные преобразования для формы
Q. Сначала рассмотрим метод, предложенный Ф. Галисо 1].
Лемма Галисо. Можно выбрать бесконечным числом спо-
способов 2/г векторных полей х1, ..., х2пу таких, что
i{X*)i(XJ)Q = 1{К Д X*)Q=> — 8'Л
Подставляя в B1) выражение для формы Q A6), получаем урав-
уравнения для нахождения векторных полей X3, |3 ? [1, ..., 2 п):
+ с{-п, г К *1 + «игК К -а„ 2п+1 К Xl+l = -8^ B2)
(по повторяющемуся индексу г нет суммирования).
Так как для определения 2/г + 1 компонент векторных полей
X'3 имеем лг -f- 1 уравнение, то п компонент можно задать произ-
произвольно. Сообщим им следующие значения:
Y6{1, ...,n, 2n — 1, ..., 2/г+1}.
— 232 —
Тогда уравнения B2) представим в виде
t (хг л v) Q = - а, . г К К+1 +<*,* - bhr) К XI + ct_nt, К х] +
+ ahrXrrXl^ar>2n+1-^. B3)
Решая полученную систему линейных уравнений по правилу
Крамера, находим искомые компоненты векторных полей:
где дт — определитель системы; ДI — определитель, получаемый
из определителя системы Д? заменой i-ro столбца столбцом из
свободных членов. Определитель системы имеет вид
0 (ft12 - 621) F18 - b9i) ... (bin - bni) -
hi — bi2 0 F2з — 632) • • • {bin — Ы —
(bni~bin)(bn2-b2n) 0 -fe
I/I
пп+2п Cl, 2/1+1
B4)
Для нахождения остальных п — 2 векторных полей Ха ,a ?
?{/z + 1, ..., 2/i — 2}, сообщим произвольным компонентам Х/ =
= —б*/ следующие значения /г:
/€{п+1,..., 2/г}.
В этом случае система уравнений B2) примет вид
i (х- л г) = (ьгЛ - ftj х; х; + c{_ni r х; х; + ahr x; х; -
-5;^.г-. B5)
искомые компоненты векторных полей определят из формул
гдеДа — определитель системы B5), равный
О F12 — 621) F18 — 63i) — Фт — bm) ~ai
2i — &i2 0 (fe23 — &32) ... F2Л — bn2) — a2
(Ki-bin)(bn2-b2n) О -ап>2п+]
а1, 2/1+1 a2, 2/1+1 an, 2/z+l ^
Полученные векторные поля Хт , Xa позволяют получить сле-
9—689 — 233 —
дующую систему, ассоциированную к форме Q:
2л
= о,
B6)
Примером получения явного вида дифференциальных уравнений
движения является составление уравнений B6) для системы с дву-
двумя степенями свободы. Определитель системы имеет вид
0
— b2i) — kn
(b21 — bi2) 0 — k12
^15 ^25 ^15
где а = bi2 — b2i.
Уравнения B6) для системы с двумя степенями свободы имеют
вид
A? l / f
г B7)
25 —
*- 234
Вычисляем определители Aj и Д2 :
А =
ai5 — 1 a — feljt
a25 0 — ki2
0 a25 ci5
Q # J ?
a15 0 c15
= [— fen а25 — а25 ас15 + а25 /г12 (а15 — 1)];
[—(«is—I) &12а15 + aiba2bkn + а(а15—1)с15].
Подставим полученные значения А| и А{2 в первое уравнение
системы B7):
du1 А- аСи ~~
4-
+ g»(^i-*«*») ] ^ = o.
a (ac15 — ^12 alb ~\~ ^11 °2б) /
Вычисляя определители Aj , A^, Aj , A^ , A^ , A2 и подставляя
их в B7), получаем остальные уравнения:
&У Л Д{г +
,
(aci5
a25)
3 !
= 0.
a (aci5
^12^15 +
— (c25a
dy* = 0;
йод — k9?a
22a15
- 0.
Переходя от переменных ур к обобщенным координатам (у1 =
= ?i> У2 = ?2» У3 = Яи У4 = Ч'г» У5 = t к преобразуя полученную
систему, ее можно представить в следующем виде:
dqx
dqx
— kl2ax —
ac2 —
dq2
— k12c2
«21 —
B8)
Пример. Два однородных сплошных цилиндра общим весом Ръ жестко
закрепленные на оси, толщиной и массой которой можно пренебречь, обра-
образуют скат, опирающийся на горизонтальные опоры. На той же оси свобод-
свободно насажен тонкий стержень длиной /, несущий на конце точечный груз А
весом Р2. Определить движение системы, пренебрегая массой стержня и
9* — 235 —
Рис. 9
Находим обобщенные силы:
предполагая, что трение в узле С
отсутствует и цилиндры катятгя по
опорам без скольжения (рис. 9').
Решение. Рассматриваемая
система имеет две степени сво-
свободы. В качестве обобщенных коор-
координат выбираем абсциссу qx = х точ-
точки С и угол ?2 = Ф отклонения
стержня СА от вертикали. Обозна-
Обозначив тг общую массу цилиндров, а
т2 массу груза Л, приведем выраже-
выражение для кинетической энергии си-
системы:
Т = A /2) [A,5m1 + т2) > +
-\-m2l \1 ср2 + 2л" ср cos cp] .
= — m2gl slny.
Вычисляем коэффициенты, входящие в уравнения B8):
+m2); k22 =
-:— = m2/ cos cp;
dT .
i = —:— =A,5 m1 + m2) x + m2l cos cp cp;
== —:— == т2/2 ср 4- т2/ cos cp х;
д2Т
д2Т
ct = ¦
dq2
= — m2/sincp<p,
dT
¦ Qi = 0;
-Q2 = -/
Подставляя полученные значения коэффициентов в уравнения B8), по-
получаем
<2ср dx
in cp [— m2l cos cp <p2 4- (l,5mx + m2)
sin
sin cp [— m2/2 cp2 + m2lg cos <p]
—m2cos2cp] lx [A,
— m2cos2 cp]
m2l cos2 cp — A,5 mx + m2) /
Случай второй характеризуется тем, что D Q =0.
— 236 —
Сравнение формул A8) и A9) показывает, что если DQ = О,
то системы дифференциальных уравнений в частных производных,
определяющих инфинитезимальные преобразования и векторные
поля X, соответствующие первым интегралам, одинаковы. Отсюда
следует теорема:
Теорема 3. Любому векторному полю X, образующему инфини-
инфинитезимальные преобразования для формы Q, соответствует первый
интеграл, и наоборот.
Например, пусть Q =йр.-Д^—dH/\dt. Инфинитезимальные
преобразования для формы Q образуются векторным полем т с
компонентами
(^ л 0 (ft (п+,...2/1)).
О i = (l, ..., п)
Тогда из формулы A8) получаем
- D
d/] = o. Это показывает, что величина
dt I
dHldt должна быть функцией одной переменной /; обозначим ее
V'(f) и тогда получим интеграл Пенлеве: Н — V(t) = h. В случае,
когда dHldt = 0, получаем классический интеграл Н = h.
Теорема 3 дает возможность по известным векторным полям,
образующим инфинитезимальные преобразования для формы Q,
находить первые интегралы движения механических систем.
§ 6. Движение несвободных систем
В предыдущем параграфе рассмотрено применение метода
внешних форм к исследованию движения свободных механических
систем, т. е. систем, движение которых характеризуется только
заданными силами F и начальными условиями /. Однако очень
часто, кроме заданных сил, на систему накладываются еще допол-
дополнительные условия, ограничивающие свободу ее движения, которые
называются связями, наложенными на механическую систему.
Для применения результатов, полученных для свободного дви-
движения, воспользуемся принципом освобождаемости от связей, ко-
который наиболее отчетливо впервые изложен у Лагранжа: каждое
условное уравнение (т. е. уравнение связи) эквивалентно одной
или нескольким силам, приложенным к системе по заданным на-
направлениям. Лагранж подчеркивает, что эти силы могут за-
заменить связи. Следует отметить, что принцип освобождаемости от
связей в формулировке Лагранжа для однозначного решения за-
задачи требует задания направления реакций связей, т. е. принцип
— 237 —
освобождаемости от связей неявно дополняется условием реализуе-
реализуемости связей, так как в зависимости от вида реализации связи вы-
выбирается заменяющая связь реакция. Для голономных систем об-
общепринятым условием реализации является условие идеальности
связей. Для неголономных систем условие реализации выбирается
в зависимости от конкретных условий задачи.
Согласно принципу освобождаемости от связей, действие связи
эквивалентно действию силы, приложенной к системе. Следова-
Следовательно, освобожденная от связей система отличается от свободной
(из которой она получена путем наложения связей) наличием допол-
дополнительной (по сравнению с исходной) системой сил. Значит форма
Q, соответствующая свободной системе, и формам*, соответствую-
соответствующая несвободной системе, отличаются друг от друга только нали-
наличием дополнительных членов в динамической части, а именно:
q* .= а + Q/,
где Qi = ^Qidql Д dt, a Qt — обобщенные силы реакций связей.
Форме ?2* соответствует характеристическое векторное поле Е*.
Так какО * = Q + Q и то и ?* можно также представить как сумму
Е* =Е + Eh где Ег — характеристическое векторное поле, соот-
соответствующее реакциям связей.
Связи, наложенные на систему, определены посредством функ-
функций fk=0 на многообразии расширенного фазового пространства
V2n+l. Формы Пфаффа dfh на интегральных кривых уравнений
движения тождественно равны нулю. Следовательно, они принад-
принадлежат подпространству ассоциированных к форме Q * форм. Необ-
Необходимым и достаточным условием для этого является i(E*)dfk=^ О
или
i(E)dfk+i(El)dfh = O. B9)
Уравнение B9) можно интерпретировать с двух точек зрения:
1. Если известны характеристические векторные поля Е и Eh
то B9) можно рассматривать как уравнение в частных производных
первого порядка, определяющее fk. Оно выражает необходимое и
достаточное условие для того, чтобы fk= const были первыми ин-
интегралами ассоциированных к форме Q* уравнений. Уравнение
связи нельзя выбрать произвольно, оно есть частный интеграл урав-
уравнения в частных производных.
2. Задано подмногообразие fk= О многообразия V2n+V Условие
B9) линейно по отношению поля Et. Существует бесконечное число
полей Eh удовлетворяющих B9). Единственность решения опреде-
определяется выбором определенной схемы реализации связей.
Большинство связей, используемых в механике, такие, что в
качестве условия реализации можно принять их идеальность, т. е.
условие равенства нулю элементарной работы реакций связей на
возможных перемещениях механической системы, допускаемых
связями.
Можно считать, что известно apriori направление силы реакции
связи, т. е., что поле связи Е{ имеет форму 1е поля известных на-
— 238 —
правлений, где е — известное векторгов поле направлений реакций
связей, %1— определяемая числовая функция. В этом случае урав-
уравнение B9) можно представить в виде
IiKi(eh)dfh + i(E)dfk = O, C0)
Если i(E)df = 0, то это означает, что df принадлежит подпро-
подпространству ассоциированных к форме Q* форм, т. е., что / = 0 —
первый частный интеграл ассоциированной системы к форме Q*.
Такую, связь можно реализовать без присоединения новых сил к
механической системе, так как условие C0) в этом случае удовлет-
удовлетворяется при Х = 0. Поэтому, если это особо не отмечается, будем
считать, что на механическую систему наложена связь, когда / = 0
не есть первый частный интеграл уравнений движения, т. е., когда
i{E)df =^= 0. Поэтому уравнение C0) при i{e)dfk=^ 0 определяет для
множителей Xh конечные значения.
Если i(E)dfk=^= 0, то это означает, что df принадлежит подпро-
подпространству ассоциированных к форме Q* форм, т. е., что / =0 —
первый частный интеграл ассоциированной системы к форме Q.
Такую связь можно реализовать без присоединения новых сил к
механической системе, так как условие C0) в этом случае удовлет-
удовлетворяется при X = 0. Поэтому, если это особо не отмечается, будем
считать, что на механическую систему наложена связь, когда / = 0
не есть первый частный интеграл уравнений движения, т. е. когда
i(E)df Ф 0. Поэтому уравнение C0) при i{e)dfk-=? 0 определяет для
множителей %h конечные значения.
Если i(E)dfk=? 0, a i(eh)dfk= 0, то как следует из C0), множители
%k принимают бесконечно большое значение, что связано уже с де-
деформацией связей, т. е. с выходом за пределы аналитической меха-
механики. Это приводит к необходимости введения понятия о совмес-
совместимости связей с рассматриваемой механической системой.
Определение. Связи, наложенные на механическую сис-
систему, называют совместимыми с ней, если выполнено условие
det/i(eh)dfk/^O. C1)
Дадим геометрическую интерпретацию условия совместимости
связей. Рассмотрим на многообразии V2n+i расширенного фазового
пространства векторное поле порядка, р, е1 /\е2Д .../\ер, образо-
образованное из р векторных полей е1, ... ,ер касательного пространства
Т к V2n+\j a также рассмотрим внешнюю форму степени р
d>hf\dfif\ ... Л dfp, образованную из р форм dfl9 ... , dfp простран-
пространства Г*, дуального к Г. В точке М многообразия векторное поле
и форма степени р создают соответственно р-вектор и р-форму,
внутреннее произведение которых равно det / / (eh) dfk I.
Условие совместимости det/i(eh)dfk/'^ 0, следовательно, влечет
за собой неравенство нулю этих р-вектор а и р-формы.
Из неравенства нулю р-вектора следует, что направления реак-
реакций связей в точке М многообразия V2n+i образуют независимую
р систему. Из неравенства нулю р-формы следует, что р функций,
определяющих уравнения связей, независимы.
— 239 —
Если обозначить А матрицу, р строк которой составлены из ком-
компонент р-форм dflf ..., d/p относительно базиса dp., dq1, t> a Q —
матрицу, р столбцов которой составлены из компонент р полей
е1, ...,ер, то произведение А на Q определяет квадратную матрицу
порядка р, определитель которой равен внутреннему произведению
р-вектора и р-формы.
df
dpi
dq1
dqn
dh
dt
Компоненты Qt
3l
dPn
dfp
dqn
dt
о.... о
0....0
. р-вектора образуются с помощью опреде-
извлекаемого из матрицы Q. Компоненты
лителя порядка
А и '" f p р-формы образуются с помощью определителя порядка р,
извлекаемого из матрицы Л. И, следовательно,
ht
Qit
Существование р-вектора
Q. . и р-формы А
отлично
н'
внутреннее произведение которых отлично от нуля, позволяет
построить приведенную внешнюю форму Qr. Положим lh. dq1 ~
= ял(Л6{1, ..., р}). Существование р-вектора Qu . позволяет
вычислить р дифференциалов dq*, как функций Л Положим
dfh
dqt
dt
Существование р-формы A lf'" ' p позволяет вычислить р диф-
дифференциалов dpv как функций <зн.
Так как внутреннее произведение р-вектора и р-формы отлично
от нуля, то можно выбрать систему дифференциалов dq1, dpv ко-
которые выражаются как функции форм ял, зн произвольным обра-
образом. Для определенности будем считать, что через формы я/г, ан
выражены первые р пар дифференциалов dq1, dpv т. е.
Внешнюю формуй можно выразить с помощью 2п форм Пфаффа:
«\ о*, Л6{1 р}, соаа6{2р+1,...,2п};
= К (о1 Л ^л) + Кх (соа Л а1) + kah (ша Д ^л) + К% («>* Л ^) -
- (?аО<оа + ki0 о< + kfl0 тЛ - %h тс*) Д Л.
Уравнения движения и множителей связей определяются ас-
— 240 —
социированной к форме Q системой:
dQ ^ __
dnh
dQ
. '"in at *u '
к которой присоединяются уравнения связей fk = 0.
Приведенной формой Qr назовем форму, которая получается из
формы Q, когда ah приравнивается нулю:
Bл—р) первых уравнений, ассоциированных к Qr, примут вид
dnh
C2)
Заметим, что полученная система Bп — р) уравнений совпадает
с первыми двумя системами уравнений, ассоциированных к форме
Q, если положить в них ah = 0. Для полноты системы C2) необхо-
необходимо присоединить к уравнениям C2) р уравнений, подобных урав-
нениям
г и.
да1
Если форма Q выражена в переменных ри ql, т. е. если
Q = dp, Л dql-dH Adt + Qt dq* /\ dt + V- dql Д Л,
то можно составить п ассоциированных к форме Q уравнений:
= dql dt = 0.
a (dPi) dPi
dQ dQ
Так как dpi = aihah, где det/aM/#Of то 7^ FE^)
Поэтому р уравнений = 0 имеют следствием —т = 0.
^ (dp) д/г
(pj)
Для получения полной системы достаточно присоединить к C2) р
уравнений dql dt = 0, в которых р величин р. заменены
их значениями, вычисленными с помощью р уравнений связей
/л(р4, </S 0 = 0. На основании вышеизложенного можно сформули-
сформулировать следующее предложение:
Предложение 1. Пусть дана механическая система п
переменных, на которую наложены р связей типа /Л(р., ql , t) = 0.
— 241 ~
Можно получить дифференциальные уравнения движения и р
множителей связей %kJ присоединяя к Bп — р) ассоциированным
к форме Qr уравнениям, с одной стороны, р уравнений dqt —
dt = O, с другой стороны, р уравнений t dql = тсЛ; р пе-
dpt l
ременных pt вычисляются с помощью р уравнений связей
/Л (Л» Ч*> 0 = 0.
Приведенная форма 2Г зависит, как ясно из приведенного вы-
выше, от 2 (п — р)-форм со*, р-форм тсЛ и dt. Так как Tzh~P^dt
(Ph —.-мощность сил, необходимых для реализации Л-связи Ph =
= khPhu ), то каждое V* можно заменить на Phu dt в Q и получить,
таким образом, форму
о, = К, (®в Л ^ *) + ^.(«" Л «р) -**,«" Л л.
в которой не фигурируют множители связей Xh.
Полученную таким образом форму Q s назовем дважды приве-
приведенной формой. Ассоциированная к ней система имеет вид
Полученные уравнения не содержат множителей связей после-
последовательно, форма Qs может применяться для составления урав-
уравнений движения, не зависящих от множителей связи.
Для получения дважды приведенной формы % необходимо в
форме Q заменить р пар дифференциалов dpv dql на их значения,
вычисленные с помощью двух систем:
М dPi + Лл- dqi + ^L Л = о,
Mi dql Ч dt
dPi + dq +
dPi Mi dql Ч dt
На основании вышеизложенного можно сформулировать сле-
следующее предложение:
Предложение 2. Пусть дана механическая система п
переменных, на которую наложено р совместимых связей fh{pir
q\ f) == 0. Можно получить дифференциальные уравнения движе-
движения, как ассоциированные к форме Qs ранга 2 (п — р), выводимой
из формы Q заменой р пар дифференциалов dp., dp1 их значениями,
вычисленными для dql с помощью р дифференциальных уравнений
связей, для dql — с помощью р уравнений lh. dql— Phu dt = 0; если р
переменных pt вычисляются с помощью р уравнений связей /Л= 0,
то необходимо присоединить к ассоциированной системе к форме ?ls
р-форм dql dt = 0.
dpi
Следовательно, для того чтобы применять результаты, приве-
приведенные в § 5, для исследования движения несвободных механичес-
— 242 —
ких систем, надо в качестве внешней
формы Q, используемой в § 5, взять
дважды приведенную внешнюю форму
25. Получаемые при этом уравнения
B6) не зависят от множителей связей и
позволяют найти уравнения движения
механических систем без определения
реакций связей.
В случае, если форма Q выражается
с помощью лагранжевых переменных q9
q, t и их дифференциалов, предложе-
предложение 2 можно представить так:
Предложение 2а. Для полу-
получения дважды приведенной формы Qs
заменяем р пар дифференциалов dqv dq
Рис. 10
их значениями,
вычисленными для dqt с помощью р дифференциальных уравнений
связей, для dq.— с помощью р уравнений lhdqi — Phudt = Х), и
заменой р переменных q. их значениями, вычисленными с помощью
р уравнений связей. Для полноты ассоциированной системы при-
присоединяем к ней р форм dq. — ijt dt — 0.
Таким образом, можно предложить следующий метод изучения
движения механических систем:
1. Множители связей % определяются независимо от движения
комбинированным использованием формы Q и оператора Картана.
Для этого достаточно определить для свободной от этих связей
системы:
а) характеристическое поле ?, соответствующее форме Q;
б) поля еъ ...,ер направлений реакций связей уравнений C0)
вполне определяют систему реакций хвязей.
2. Дифференциальные уравнения движения всегда можно по-
получить независимо от множителей связей с помощью ассоцииро-
ассоциированных уравнений к форме Q s.
Пример 3. Кольцо М массой т, надетое на гладкую проволоку, изог-
изогнутую по винтовой линии, соскальзывает под действием силы тяжести. Опре-
Определить уравнения движения кольца и реакцию проволоки. Винтовая линия
является пересечением двух поверхностей, заданных уравнениями
х = a cos kz, у = a sin kz.
В начальный момент кольцо М находилось в покое в положении МОу
указанном на рис. 10.
Решение. В соответствии с предложенной выше методикой, рассмо-
грим сначала свободную материальную точку. Кинетическая энергия ее
По формуле A5) находим внешнюю форму Q:
Q = mdx/\dx. + tndy Kdy + mdzAdz— mxdxhdt —
— mydyt\dt—tn z dzhdi +PdzAdt.
— 243 —
Для определения компонент характеристического векторного поля сос-
составляем уравнение, согласно A7):
i (E) Q = (EAdx — Exdx ) + (Ebdy — E2dy ) + (e^z — Ebdz ) +
+ (— x ) (E^dt — E^x ) + (—*/) (Esdt — Ezdy ) +
откуда, полагая Ei = 1, находим
Связи, наложенные на точку, представляем в виде
f± == х + zak sin fez = 0, fb~ У — zafe cos kz = O.
После направлений реакция связей определяется уравнениями связей,
при принятой системе реализации связей; реакции связей должны быть
направлены перпендикулярно к поверхностям, определяемым уравнения-
уравнениями связей. Следовательно, поля направлений реакций связей имеют следую-
следующие компоненты:
ег(\, 0, afesinfez, 0, 0, 0, 0); е2@, 1, — afecosfez, 0, 0, 0, 0).
Уравнения C0) для определения множителей связей имеют вид
ХХ1 (ех) dfx + X2i (e2) dfx + i (E) dfx = 0,
\г1 (вх) df2 + \2i (e2) df2 + i (E) df2 = 0.
Вычисляем:
i (ex) dfx = 1 + a2fe2 sin2 fez;
i (e2) dfx ~ — a2fe2 cos fez sin fez;
t (e2) d/8 = 1 + a2fe2 cos2 kz\
i (E) dfx = m*22afe2 cos fez + P ak sin fez;
i (E) df2 = mz2ak2 sin kz — Pak cos fez.
Тогда из (a) находим множители связей
Pafe sin fez
X
Pak cos fez • a . t
I = — mz2ak2 sin fez.
1 + a2fe2
Для нахождения уравнений движения найдем дважды приведенную
форму Q. Для этого, согласно предложению 2, выразим dx к dy из урав-
уравнений связей:
dx = — ak sin kzdz — zak sin kzdz;
dy = ak cosfezdz — zafe sin kzdz.
Дифференциалы dx и dy находим из уравнений:
— 244 —
dx +[ak sin kzdz —
v( x + zafe sin kz) cft = O;
cff/ — ak cos &zdz +
-r zak cos
= 0.
Подставляя в них значения х==
=—zaksin kz, у = zakcos kz, получен-
нью из уравнений связей, имеем
dx — — ak sin kzdz,
dy — ak cos fczdz.
. Заменяя в форме Q, x, у, dx,
dyy dx, dy полученными значениями,
находим дважды приведенную фор-
форму Qs:
Рис. 11
Qs = т (ak sin kzJ dz/\dz + m (ak cos kzJ dzЛ dz f mdz/\dz —
— mz a2k2 sin2 kzdz Adt — mza2&2 cos2 /гг^г Л Л — mzdz [\dt + PJ2 Л Л.
Для получения дифференциальных уравнений движения составим ассо-
ассоциированную систему к дважды приведенной форме Q^:
d(dz)
= — m (i + a2k2)
= 0;
dQ,
д{ dz)
A + a?k?) dz—zm A + a?k2) dt = O.
Пример 4. Исследовать движение однородного твердого тела, имеющего
форму конуса вращения, вершина которого закреплена на неподвижной
плоскости, наклоненной под углом а к горизонту. Угол Р составляет поло-
половину угла при вершине конуса; масса его М, высота h (рис. 11).
Пусть Оетг]0 — неподвижная система координат, а Ох, yz — система
координат, неизменно связанных с телом (подвижная система).
Решение. Так как в данной задаче не требуется нахождение реак-
реакций связей, то будем вычислять сразу дважды приведенную форму Qs. Форма
Qs состоит из двух частей:
кинетическая часть
динамическая часть
При использовании подвижных осей необходимо вычислить по отноше-
отношению к этим осям абсолютные дифференциалы параметров позиции и скорости.
Пусть х, у, z — координаты произвольной i-й точки конуса, неподвижной
относительно подвижных осей, t, /, k — единичные векторы подвижных
осей. Тогда
rt = х i + yj + zk , drt — xd i + yd j + zdk.
Из формул Пуассона находим:
di = (cos бс(ф + d<p) / — (sin 6 cosydb + sincpd0) k ;
— 245 —
&']-=¦ — (cos Ы^ + dcp) i + (sin 6 sin cpcfy + cos cpcffi) k ;
d fc = (sin 0 cos yd<\> — sin cpd0) i — (sin 0 sin ср^ф + cos cpd6) /
и окончательно
d ri= (z sin 0 cos ydty— г sin cpd0 — i/ cos Ы^ — ydy) i + (x cos bdy -j- xdy —
— z sin 0 sin cpcty — z cos cpd0) / -f- (y sin 0 sin cpcfy -j- # cos cpd6 —
— * sin 0 cos <рс?ф + * sin <pd6) k .
Обозначим со ж, <&y , со г проекции угловой скорости тела на оси подвижной
системы координат; тогда скорость произвольной i'-й точки в проекциях на
подвижные оси
V = (соу2 — со^) i + ((о^ДГ— (OjfZ) / + («>ху—«)ух) k .
Вычислим кинетический потенциал:
где
^ (m/ v^ гч ~ ^j ^m/ (^у2 — ^^ ^2 s^n ^cos ^^ —
— г/ cos 0^ — yd^) + /л/ (со2д- — о)д.г) X (х cos 0^ф + хс^ср — г sin 0 sin cpdcp —
— z cos cpd0) + mt (<Axy — u>yx) (y sin 0 sin cpcfy + У C0S ?^ —
-— x sin 0 cos <pcfy + x sin cpd0)] = 2 mi (У2 + 22) x
X ( ф sin2 0 sin2 cpfity + 4» sin 0 sin cp cos cpd0 + 0 cos у sin 0 sin ^ф -f 0 cos2 cp<i0)
-f- 2 mi (г2 ~f ^2) X ( ф sin2 0 cos2 <рс(ф — 0 sin cp sin 0 cos <pd<p —
— \ sin в cos <p sin cp x db + 0 sin2 cpd0) + 2 mi (*2 + ^2) ( Ф cos2 6^ +
Выбирая в качестве подвижных осей координат главные оси инерции
конуса в точке О, получаем
*х = 2 ту ^ +z2) = Jy ^ 2 mi (z2 + *) = л»
==^т1Ух== Jxz = 2 miX2 = 0;
= А ( Ф sin2 Ы^ + 0d0 j + С (if cos2 0^ + cp cos Щ +
+ ф COS 0 Jcp -f- cpdcp J .
— 246 —
ВтЬрая сумма в выражении кинетического потенциала есть выражение
кинетической энергии в подвижной системе координат, которая для твердого
тела, вращающегося вокруг неподвижной точки, для главных осей инерции
имеет вид
2
%1 V.J =
или, воспользовавшись кинематическими формулами Эйлера,
юх = ф sin 6 sin <p + 0 cos cp;
(оу = ф sin 0 cos cp — 0 sin cp;
a)z = ф COS 0 + cp ,
получим
Окончательное выражение для кинетического потенциала получаем в
виде
I = А ( ф sin2 8я!ф + 8d6 ) 4- С ( i cos2 8<fy + V cos 0^ + ф cos 0Жр + ^ ) —
— [Л ( i2 sin2 0 + ё2) + С ( ф2 cos2 0 + 2 ф <р cos 0 +Т2)] •
Тогда кинетическую часть формы Qs найдем как внешний дифферен-
дифференциал от кинетического потенциала:
Qsc = DL = (A sin2 0 + С cos2 b)d<\>/\dty + Adb hdb
+ С cos Щ Л ^Ф + С cos Ы ф Л Жр — С ф sin 0d0 Л с?Т + BЛф sin 0 cos 0 —
— 2С i cos 0 sin 0 — С *<р sin 0) cffi Л ^ф — [А (ф sin2 0d ф + ф2 sin 0 cos 0^0 +
+ 0 d 0) + С ( i> cos2 6d ф — ф2 sin 0 cos 0d0 + ? cos 6d ф + ф cos 0rf у —
— ф ^> sin 6<i6 -f- cp
Вычислим теперь динамическую часть формы Qs. Внешние силы опреде-
определены их мощностью:
р = Мхи>х + Му(лу + Mza>z = М^гс sin 0 cos ср ( ф sin 0 sin cp -f 0 cos cp) —
— -/И^гс sin 0 sin cp (ф sin 0 cos cp — 0 sin cp),
откуда
где zc — апликата центра масс конуса в подвижной системе координат.
Форма Qs равна сумме форм QSc и Qsd:
Qs = (A sin2 0 + С cos2 0) dty Л dty + Ad'b Adti + Cd\l\dy +
+ С cos 0dcp Л # + С cos 0d 4» Л dy — Сф sin 0d0 Л dy + BЛф sin 0 cos 0 —
— 2C ф cos 0 sin 0 — Ccp sin б) d0 Л *ty — [ Лф sin2 0 + С ( ф cos2 0 +
— 247 —
— ci2sin0 cos8 —
— Mgzcsinti] X dbhdt — Cydyhdt—A 6 d 8ЛЛ — Сф
Известны четыре поля X1, X2, X3, X4, образующих инфинитезимальные
преобразования для формы Q. Если переменные на многообразии V2"+1 обоз-
обозначить уг = ф, г/2 = ф, г/з = в, #4 = *, #5 = ф, #в = Ф> #7 = U, то компонен-
компоненты полей X1, X2, X3, X4, в данном базисе будут равны:
Х\ = 1 Х^ = О Х^ = 0 Xj = О Х\ = 0 Х16 = 0 Х^ = О
Х2 = 0 X|=l Xf = O Х|==0 Х| = 0 Х| = 0 Х|=0
х\ = о х| = о х^ = 1 х^ = о х| = о х| = о х^ = о
х\ = о х^ = о х| = о х\=\ xl = o х| = о х^ = о.
Из непосредственного вычисления внешнего дифференциала формы Qs
получаем DQS = 0. Следовательно, согласно теореме 3, § 5, полям X1, X2,
X8, X4, образующим инфинитезимальные преобразования формы Qs, соот-
соответствуют первые интегралы. Найдем их:
для поля X1
= — Cdy--C cos U\> + С ф sin ЫЬ.
Подставляя это в формулу A7), имеем
D (i (Xi) Q8) = D[—C(d cp"+ cos 8^ — ф sin ЫЩ = 0;
откуда, соответствующий первый интеграл равен
Сер + С cos 0 ф = а.
Аналогично для поля X2
D (i (X2) Qs) = D{—(A sin2 0 + С cos2 0) d\> — С cos Ы ^ —
— BЛф sin 0 cos 0 —• 2C ф cos 0 sin 0 — Cz cp sin 0) d0} = 0.
Следовательно, первый интеграл имеет вид
Л sin2 0 ф + С cos 0 ( ф cos 0 + <р ) = Ь.
Для поля X4
D (/(X4) Q,) =D {[А ф sin2 0 + С ( ф cos2 0 + с^ cos 0)] d ф +
+ [Лф2 sin 0 cos 0 — G ф2 sin 0 cos 0 — С ф ср* sin 0 — Mgzc sin 0] /Ю
=0
и соответствующий первый интеграл
Л (ф2 sin2 0 + б2) + С (ф2 cos2 0 + 2ф с^ cos 0 + <?а) + 2М^2С cos 0 =>.
Получено три классических первых интеграла для задачи^Лагранжа
движения твердого тела около неподвижной точки, которые представим в
— 243 —
виде
<P + o>sG4; = a, A)
6, B)
Л ( ф2 sin* 8 + 62) + 2Mgzc cos 6 = hx, C)
где"д = aJC, ht = Л — Ca2,
Из B) и (З)
6— Се cos 6 .
Л sin2 в
c cos 8 F — Ca cos 6J
6 = A Л2 sin2 в
Дальнейшее исследование движения конуса можно произвести обычным
методом (см., например, Бухгольц Н. Н. Основной курс теоретической
механики, ч. 2, стр. 203—206), только необходимо учесть, что функция S =
= cos9 в данном случае изменяется в пределах sin(a +*a) <*S < 1.
Глава* XVI
ИНТЕГРАЛЫ УРАВНЕНИЙ ДВИЖЕНИЯ КАК УРАВНЕНИЯ СВЯЗЕЙ
Как известно, уравнения Лагранжа с неопределенными мно-
множителями применяют к решению задач механики, если на движение
механической системы наложены ограничения в виде голономных
связей или неголономных линейных связей первого порядка. От-
Отличительной особенностью этих уравнений является наличие реак-
реакций связей в явном виде. После решения задачи о движении системы
и вычисления неопределенных множителей Лагранжа как функции
времени, можно найти выражение реакции связи как функции вре-
времени. Уравнения Лагранжа имеют вид
Ниже рассмотрены только движения механических систем, на
которые налагаются связи вида
<7Р = ФР (Ям* Ям* - >Яп) (Р = Ь .-. > О- B)
В этом случае уравнения A) примут вид
d ( дТ \ дТ Л , 4i^ д?Р /•_ 1 о
*W ^ р-1 - C)
/р = ?Р — Фр (9^1. ^+2. - » 9я) = 0.
Присоединив к системе C) уравнения связей B), получим пол-
полную систему уравнений, в процессе решения которой находятся
неизвестные qly q2, ...,qn и %ly ..., Xz. Компоненты реакции связей
— 249 —
найдем по формулам
Рассмотрим теперь множество голономных связей вида B),
налагаемых на движение системы. Среди них, очевидно, найдутся
и такие, которые являются интегралами в задаче о движении той
же механической системы с теми же активными силами, но без на-
наложенных голономных связей B). Движение системы без наложен-
наложенных голономных связей B) дается обычными уравнениями Лагран-
Лагранжа второго рода:
~п 11Л-~^Г = Cг> E)
Если на движение системы наложить связи B), среди которых
все являются интегралами системы E), то такие связи не дадут ре-
реакций.
Теорема*. Для того чтобы все дополнительные голономные связи
B), наложенные на движение механической системы, оказались ин-
интегралами системы E), необходимо и достаточно, чтобы при ре-
решении системы C) все неопределенные множители Лагранжа ХР
равнялись нулю. Теорема содержит две теоремы — прямую и
обратную.
Прямая теорема. Если все связи B) являются инте-
интегралами E), то все Хр равны нулю.
Обратная теорема. Если все Хр равны нулю, то все
связи B) являются интегралами E*).
Приведем нестрогое доказательство обратной теоремы. Пусть
при решении системы уравнений найдены такие величины <7i@»
q2(t), ..., qn(f), что все %р становятся равными нулю; тогда qx, q2, ...
..., qn удовлетворяют, очевидно, системе E) и одновременно урав-
уравнениям связей B); но тогда B) являются интегралами E).
Приведем ряд примеров, которые подтверждают теорему.
Пример 1. Рассмотрим известную задачу Ньютона-Кеплера. Заданы две
массы; одна М, другая /п, причем М > т. Массы взаимодействуют по за-
закону Ньютона. Силовая функция имеет вид
F)
Требуется определить движение массы т относительно М.
Решение. Поместим в начало координат массу М и рассмотрим дви-
движение т относительно М. Составим уравнения движения массы т в поляр-
полярных координатах. Представим выражение кинетической энергии
Т = A/2) [х* + у2) = A/2) [г* + г*<?*) . G)
Система уравнений Лагранжа примет вид
JL (— \ JL -ML' JL ( дТ ^ дТ dU
dt I д'г ) дг дг dt
* Из-за сложности доказательство прямой теоремы не приведено.
— 250 --
или в явном виде
(^гО = 0. (9)
Из второго уравнения системы (9)
^/-2 = С A0)
Система (9) имеет интеграл энергии
'r*+r4* = 2k/r + h, A1)
де k =yM.
Интегрируя A0) и (И), находим зависимость между гиф:
или г = •
1 + /1 + c2/i/fc2 cos cp 1 + Zcoscp
где
Выражение A2) является интегралом системы (9). Возьмем теперь
уравнение A2) за связь; тогда согласно прямой теореме неопределенный
множитель должен равняться нулю. Составим уравнения движения массы со
связью A3). Система примет вид
дФ
— (' а) —х —
dt дц>
где Ф=г — ——f -0.
1 + / cos ср
Система уравнений A3) тоже имеет интеграл энергии A1).
Найдем частные производные -— и -— и подставим их в A3):
or df
Из уравнения связи A2) определим г и подставим в интеграл энергии (И)
Г p2/2sin2cp P2 I 2/C(l + /cosy)
[A + / COS срL A + / COS срJ J * - р +k> A5)
откуда
• k/pB + 2lcosy + hp/k)
2 A6)
Умножим A6) на г4 и учитывая, что 1 + ph/k = l2, имеем
гУ = С1в A7)
Подставляя A7) во второе уравнение A4), получим
— 251 —
^^ pi sin cp ^Q
(l + /COSCpJ
откуда следует, что А, = 0.
Пример 2. Рассмотрим движение твердого тела с одной закрепленной
точкой в случае Лагранжа, т. е. случай, когда А — В, С — произвольная,
а также Хс = ус = 0, Zc ф 0.
Потенциальную и кинетическую энергии представим следующим образом:
A8)
В качестве обобщенных координат выберем углы Эйлера
<71 = Ф. <72 = 0> <?3 = <Р-
Зададим закон движения твердого тела в виде
0. A9)
Задана регулярная прецессия гироскопа Лагранжа. Рассмотрим реак-
реакции связей. Система уравнений Лагранжа имеет вид
d дТ дТ дП
\K B0)
dt dq. dqt dqt
Составим уравнения, найдя все необходимые производные:
—г- = А ( ^о sin2 80 sin2 ср + <?0 sin2 60 cos2 <р) + С ( ф0 cos 60 + cpe) cos 0O;
г- = — ( Л фо sin2 0О + С ф0 cos2 0О + Су0 cos 0О ) =0,
аг (^ at
откуда Хх = 0;
дТ
т— = Д [ фо sin 0O sin ср cos ср — ф0 sin 0O cos cp sin cpj = 0;
ао
дТ -о
—- = (А — В) ^0 sin 0O cos 0О — Ссро'% sin 0е,
ая
— — = Mgzc smb0.
Отсюда
Х2 = (А — С) ф 2 sin 0О cos 0О — С срофо sin 0О — Mgzc sin 0O;
4^О 0 Х
Итак, имеем три реакции:
= (^— С)Ф2 sin 0О cos 0О— C^oVosin6e — Mgzc sin Ъо. B1)
о
— 252 —
По теореме закон движения твердого тела в виде уравнений A9) имеет
место в случае Лагранжа, когда Х2 = 0. Поэтому имеем одно уравнение:
(Л — С) ф02 sin 0O cos 60 — с'срофо sin 0о — Mgzc sin 80 = 0. B2)
Уравнение B2) является соотношением между начальными данными,
при соблюдении которого имеется регулярная прецессия в случае Лагранжа.
Упростим выражение B2):
{(Л — С) ф3 cos60 — С?оФо — Mgzc} sin60 = 0. B3)
Выражение в фигурных скобках получено Ж. Шази другим способом.
Из теоремы получаем метод понижения порядка системы, в том
случае, если система уравнений E) имеет первые интегралы. Пока-
Покажем на примере задачи, каким образом это можно сделать?
Пример 3. Рассмотрим плоский случай круговой ограниченной задачи
трех тел. Заданы две массы Мо и М1у которые вращаются вокруг общего
центра масс по окружности с угловой скоростью п в плоскости tjO?; третья
масса т значительно меньше Мо и Mi, и взаимодействует с Мо и Мх по за-
закону Ньютона. Требуется определить закон движения т.
Решение. Составим уравнения движения массы т. В неподвижной
системе координат Юу\ уравнения имеют вид
3W •• dW , (Мот Мгт \
dS дт\ \ г0 гх 1
/^ = <е — W2 + tn- ^oJ, rf = F - w2 + (т, - т)«.
Перейдем к вращающейся системе координат хОу, выполнив преобразо-
преобразование координат:
т) = л- sin v — ycosv.
Найдем выражение кинетической энергии и силовой функции W:
Так как
? = х cos v — х v sin v — у sin v — у v cos v,
7j = x sin v + x у cos v -\~ у cosv — yv sin v,
имеем
T = (m/2) [>+#2 + 2n(A-#-^) + rt2(*2 + t/2)L '
0 = w ro5=(Jf-- л'оJ + «/2» B6)
Уравнения Лагранжа имеют вид
а дТ дТ dW d дТ дТ dW
^ дх ^х ^х ^ ду ду ду
или в явном виде
х — 2пу — /г2х = у + 2пл- — n2t/ = • B8)
дх ду
око
¦ Система уравнений B8) имеет интеграл Якоби
х*+'у* = п* (х* + У2) + 2т (Mo/ro + MJrJ + 2ft. B9)
Положим, что на движение массы т наложено ограничение в виде голо-
номной связи у = ф(дс). В этом случае система B8) примет вид
dW ... dW
х — 2пу —¦ п2х = -— + Ц' (х) у + 2пх — п2у = X,
д* ду { C0
J
Из уравнения связи
У=У(х)'х. C1)
Подставляя C1) в B9), имеем
( )
C2)
Интегрируя C3), получаем
их
J
> )+2н
]
J
Ц
144'
= ^ + С. C3)
Найдем К, используя C2) и первое уравнение системы B8):
— — х — 2п у — п2х — •
VI дх J
*=Т7 \х-2пу-п*х-— • C4)
Исключив из C4) хну, получим
г2 (х + W) ^ (
V [
+
•" -. г-. г^—:—7-z I /1 l ,l/2\2 1 i .1/2 I _3_ ~"
[(^~ -^oJ + ^2]2
Х
C5)
- 554 -
По теореме, если А, = 0, то функция у = ф(х) — интеграл, но в этом слу-
случае интеграл C3) окончательно доводит задачу до конца. Из условия X —О
имеем уравнение относительно ф(х). Таким образом получено одно уравне-
уравнение второго порядка относительно ф вида
Пример. Рассмотрим движение твердого тела с одной закрепленной точ-
точкой в случае Л = В = С.
Кинетическая энергия и силовая функция в этом случае имеют вид
Г = A/2) [ Лф2+Л82 + Л^р2 + 2Лч><р cos8], . Cб)
U = -{- Mg (sin 8 sin ухс + sin 8 cos yyc + cos 8zc).
Уравнения движения твердого тела
А\> + А <р cos 8 = Сг,
Л*8 + A sin 8 \> ср = Mg (гс sin 8 — cos 8 sin yxc — cos 8 cos yyc), C7)
Л<р + Лф cos 8 — Л sin вер 8 —M g sin 8 (sin yyc — <
Система C7) имеет интеграл энергии,
^4ф2 _|_ д 02 _|_ Ду2 _|_ 2ЛФ ср cos в = 2Mg (sin 8 sin cpxc -]~ sin в cos cpr/c +
+ zcoosb)+2h. ¦ C8)
Наложим на движение тела голономную связь:
ср = ср0. C9)
Уравнения движения тела со связью C9) примут вид
1ф + Лср cos 8 = Сх
18 + Л sin 8 ф ср = Mg (zc sin 8 — cos 8 sin <рл> — cos 8 cos yyc),
lep -f- Л ср cos 8 — Л sin 8Ф 8 = Mg sin 8 (sin yyc — cos срл>) + X, ср = cp0.
Из интеграла энергии с учетом C9) найдем 0.
sin 8 (sin срол"с -f cos ЧоУс) + z6- cos '
D0)
"х- А
Преобразуем третье уравнение системы D0):
— Л sin 6/x х
/2Я 2 2Mg 2Mg
— — Сг + —j- sin 8 (sin cpojc + cos ^yc) + —— zc cos 8 —
— Mgsin 8 (smyoyc—cos yoxc) = \. D2)
Получена А, как функция 6. По теореме связь ф = фо есть интеграл,
если X = 0. Очевидно, что это возможно лишь при следующих соотношениях
— 255 —
между начальными данными:
h 2\ 2 (Mg\2
— — С± 1 Сг = I — 1 (sin <?оус — <
d\ (sin yQxc -f cos cpot/c) = 0, C\zc = 0. D3)
Из D3) вытекает два частных случая, когда Сх = 0 и Сг Ф 0.
При Сх = 0 имеем движение
=t + h
2h 2Mg 2Mg
i sjn Q /sjn « v _|_ cos cpowc) -U 2C COS 0
A A A
sin cpot/c — cos cporc = 0. D4)
При Q чь О
(т-
(sin Wc ~cos Wc)i • г
ПРИЛОЖЕНИЕ
О присоединенных интегралах дифференциальных уравнении дина-
динамических систем
Присоединенным (или условным по Д. Биркгоффу) называем интеграл,
являющийся следствием других интегралов, но не тождественный им. При-
Приведем пример: в задаче о движении твердого тела с неподвижной точкой под
действием силы собственного веса движение тела описывается уравнениями
Эйлера и уравнениями Пуассона относительно шести неизвестных функций:
W,v, (Oy , 0J, Yl» Y2, 73-
Jx*x + (h — Jy) wy<^ = Щ fazc " ЪУс)»
Jy^y + (Jx — h) <»z<*x = M8 (We — lizc) f
Jzo>z + (Jy — Jx) со vcoy = Mg (We ™ We) •
Тз
Система A) — B) имеет первые интегралы:
(/^ + ^усо
= - Mg
C)
Отсюда 7iTi + T2T2 + ТзТз = °-
Для получения четвертого интеграла применим тождество:
/О О О\ /
( Ti + 72 + Тз) Wj
— «V°yY27i +
TiTi+ 7272 + 7з7з
7з 7i
TaTiTa —
+ 7г 71) = 0. F)
Для проверки тождества F) раскрываем в нем скобки, умножая слева
направо, и получаем тождественный ноль. Действительно, все слагаемые
попарно взаимно уничтожаются. Каждую пару таких слагаемых обозначаем
одним номером ( со штрихом и без штриха):
\у7з 7з ~
7i7s
— 257 —
2 2 2 2
7i + ^дгТз ШЛ2 72 + J>*7s7i Ti — Jx^xlil3 7i
11 12 2' 13
/7i 7г 7i — ^xb)xlii2 7i i •Аг(°.г727з71 7г JxOixl2ls 7г"
* 2* 3*
72 + Jz^zb 7i 7з — Jx^xb 7з
2 2 2 2
f <fywy7s727i 7з — ^Лз72 7з + ^л^Лг7з 7i~ Jx<*x1\ ТзТз — ^awv7i 7г72+
14 5> 13/ [/
* 2
7з — Jy^yl2 7i72
7i — ^щг7з 7i73— ^
Ii = 0' G)
Следовательно,
F) = G) = 0.
С другой стороны, в левой части равенства F), можно принять с учетом
интегралов D) и E):
72 + Т2 + 72 = 1; Tl*Tl + ъъ + ТзТ; = о,
12 3
Лз = Са . (8)
Тогда равенство F) перейдет в соотношение
JxMz 7i — Jy wy727i +^a-w^7272 + C2 ( 7 2 7i — 7з717з —
- 727172 + 7j7i) = 0. (9)
После замены в (9) производных Yi» Y2» Y3 их выражениями из уравне-
уравнений Пуассона B) уравнение (9) перейдет в соотношение между только иско-
искомыми функциями Yi> Y2, Y3> сод:, tOf/ , со2 . Это соотношение и будет четвертым
интегралом систем A) и B); оно имеет вид
у^ 71==0- (Щ
Пользуясь найденными четырьмя интегралами, сможем выразить четы-
четыре искомых переменных из шести cd^,g)co ,со2 , Yi» Y2» Y3 через другие два. Тогда
система шести уравнений A) и B) преобразуется в систему двух уравнений,
для которых обязательно найдется интегрирующий множитель. Тогда полу-
получится пятый интеграл. Благодаря этому из системы основных шести уравне-
уравнений, не содержащих явно времени/, найдутся все искомые со х, со у , со г, Yi» Y2»
Y3 в функциях времени, т. е. вся задача будет доведена до конца в виде квад-
квадратур. Здесь могут иметь место как эллиптические интегралы, так и Абе-
левы интегралы.
— 258 —
Рассмотрим сначала наиболее простой случай, когда Сг = 0, т. е.
рассмотрим движение тела с горизонтальным кинетическим моментом.
Характерной особенностью интеграла A0) является отсутствие у него
произвольной постоянной, как и в интеграле E). Но соотношение A0) может
быть присоединено к трем интегралам C), D), E).
Затем для окончательного решения задачи при наличии четырех интегра-
интегралов следует поступить так, как это описано в § 11 о теории последнего мно-
множителя в гл. XIII; а также в книге Н. Н. Бухгольца «Основной курс теоре-
теоретической механики», ч. II, стр. 117—119.
Можно рекомендовать выполнить все решение в два приема: систем при
нулевых значениях постоянных Сх и Сг в интегралах энергии C) и кинети-
кинетического момента D), а затем уже и в общем случае.
Примеры на теорему Пуассона
¦ 1. Известно, что функция Гамильтона имеет вид
Я = qxpx — q2p2 — aq\ + bq\.
Проверить по условию Пуассона, является ли функция / вида
f __ Рг — Ьд2
первым интегралом канонических уравнений, соответствующих данной функ-
функции Н. Применяем условие Пуассона, согласно которому первый интеграл
должен удовлетворять условию
В данном случае
It ^
Составляем скобку Пуассона:
\ dqt dpi dpx dqi ) \ dq2 dp2 dp2 dq2
Имеем
q\ ' dpx ' dq2 qx ' dp
2
dH „ dH_ _ dH
dpi dq2
dH
B)
Подставляем B) в A), имеем
/ p2—bg2 0\,Г b / )_JL/ +2bq)] C)
или
bq2 bq2 2bq2
_l_ — ¦=== и.
Таким образом, функция / есть первый интеграл .
2. Проверить это же условие Пауссона для функций
/г == ЯхУъ и /з ~ q\e~l •
Если данные функции будут интегралами, то проверить теорему Пуас-
Пуассона о трех интегралах.
— 259 —
ЛИТЕРАТУРА
1. Бухгольц Н. Н. Основной курс теоретической механики, ч*
II «Наука», 1966.
2. Добронравов В. В., Никитин Н. Н. Дворни-
Дворников А. Л. Курс теоретической механики. Изд. 3-е «Высшая школа», 1974.
З.Добронравов В. В. Основы механики неголономных си-
систем. «Высшая школа», 1970.
4. Голдстейн Г. Классическая механика. Пер. с англ. Гостех-
издат, 1957.
5. ИмшенецкийВ. Г. Интегрирование дифференциальных урав-
уравнений с частными производными и порядков. Издание Московского матема-
математического общества, М., 1916.
6. КартанЭ. Интегральные инварианты. М.— Л., ОГИЗ, 1940.
7. КильчевскийН. А. Курс теоретической механики, т. I. «На-
«Наука», 1972.
8. Лагранж Ж« Л. Аналитическая механика, т. I, II. Гостех-
издат, 1950.
9. Лурье А. И. Аналитическая механика. Физматгиз, 1961.
10. Новоселов В. С. Сведение задачи неголономной механики к
условной задаче механики голономных систем. Ученые записки Ленинград-
Ленинградского университета, вып. 31 1957, № 217, стр. 28—49.
11. Пуанкаре А. Избранные труды, т. 2. М., «Наука», 1972.
12. Ф и н и к о в С. П. Метод внешних форм Картана. ОГИЗ, М.—Л.,
1948.
13. Ч а п л ы г и н С. А. К теории движения неголономных систем. Те-
Теорема о производящем множителе. В кн.: С. А. Чаплыгин. Исследования
по динамике неголономных систем. М.—Л., 1949, стр. 28—38.
14. Чу ев М. А. К вопросу аналитического метода синтеза механиз-
механизмов. «Известия вузов». «Машиностроение», 1974, № 8.
15. У и т т е к е р Е. Т. Аналитическая динамика. Пер. с англ. ОНТИ,
1937.
16. Яро в-Я р о в о й М. С. Об интегрировании уравнения Гамиль-
Гамильтона—Якоби методом разделения переменных. «Прикладная математика и
механика» т. 27, вып. 6. 1963, стр. 973—987.
17. Noether E. Invariante Variationsprobleme, Nachr. kgl. Ges.
Wiss. Gotlingen, 1918.
Русский перевод: Н е т е р Э. Инвариантные вариационные задачи
Сборник статей «Вариационные принципы механики». Под ред. Л. С. Полака.
Физматгиз, 1959.
18. Lee Hwa — Chung. Jnvariants of Hamilton systems and
applications to the theory of- canonical transformations. Proceedings of the
Rog. soe. of Edinbourgh. Seet. A. v. 62. 1947.
19. G a 1 1 i s s о t F. Les formes exterieures en mecanique Ann. Jnst.
Fourier, 1954 A952) 4, 145—297.
20. Аппель П. Теоретическая механика. Т. 2. Государственное изда-
издательство физико-математической литературы, М., 1960.
21. М а к-М и л л а н В. Д. Динамика твердого тела М., ИЛ, 1951.
22. Березкин Е. Н. Лекции по теоретической механике. Ч. 2. Из-
Издательство Московского университета, 1968.
23. Беленький И. М. Введение в аналитическую механику. М.,
«Высшая школа», 1964.
24. Б е л е н ь к и й И. М. К теории Гамильтоновых систем. «Приклад-
«Прикладная математика и механика». Т. 34, № 4, 1970.
25. Гантмахер Ф. Р. Лекции по аналитической механике. Физмат-
Физматгиз. 1960.
— 260 —
ОГЛАВЛЕНИЕ
Предисловие 3
Часть первая. Общие вопросы аналитической механики .... 5
Глава I. Основные положения аналитической механики . . 7
Введение 7
§ 1. Классификация кинематических связей 8
§ 2. Обобщенные координаты 10
§ 3. Пространство конфигураций системы 12
§ 4. Неголономные связи 13
§ 5. Действительные и возможные изменения переменных 13
§ 6. Степени свободы механических систем 16
Глава II. Уравнения Лагранжа 18
§ 1. Вывод уравнений Лагранжа 18
§ 2. Уравнения Лагранжа с неопределенными множителями для систем
с дополнительными голономными связями 24
§ 3. Уравнения Лагранжа с неопределенными множителями для сис-
систем с линейными неголономными связями первого порядка. . . 28
§ 4. Пример на интегрирование уравнений Лагранжа второго рода
(задача Ленэ) 29
§ 5. Структура кинетической энергии системы 33
§ 6. Структура уравнений Лагранжа 36
§ 7. Уравнения Лагранжа в случае потенциальных сил 38
§ 8. Обобщенная силовая функция 39
§ 9. Циклические координаты и соответствующие интегралы . 40
§ 10. Интеграл энергии 41
§11. Задача Бегена 44
Глава III. Уравнения Нильсена 50
Глава IV. Уравнения Гамильтона 57
Глава V. Теорема Пуассона и ее применение в интегрировании
уравнений динамики в переменных Гамильтона 60
§ 1. Условие Пуассона для первого интеграла 60
§ 2. Скобки Пуассона и их основные свойства 60
§ 3. Сложные скобки Пуассона 62
§ 4. Понятие о функциях, находящихся во взаимной инволюции 62
§ 5. Тождество Якоби 62
§ 6. Теорема Пуассона о трех интегралах канонических уравнений 64
Глава VI. Метод Якоби интегрирования динамических уравне-
уравнений Гамильтона (теорема Гамильтона—Якоби) 67
§ 1. Основные понятия 67
§ 2. Теорема Гамильтона—Якоби 70
Глава VII. Вариации переменных, функций и интегралов от них 75
§ 1. Варьирование движений 75
§ 2. Изохронное варьирование переменных 77
— 261 —
§ 3. Полное варьирование переменных 78
§ 4. Варьирование функций 79
§ 5. Вариации определенных интегралов от динамических функций 80
Глава VIII. Вариационные принципы аналитической механики 81
§ 1. Общие понятия 81
§ 2. Дифференциальные вариационные принципы 83
§ 3. Принцип возможных перемещений Лагранжа 83
§ 4. Применение принципа Лагранжа к теории вириала ... 84
§ 5. Принцип Даламбера . 84
§ 6. Принцип Даламбера—Лагранжа 86
§ 7. Принцип Журдена 86
§ 8. Принцип Гаусса .в ..... 87
§ 9. Принцип прямейшего пути Герца 90
§ 10. Интегральные вариационные принципы ....... 91
§ 11. Принцип наименьшего действия Гамильтона—Остроградского 91
§ 12. Кинетические фокусы динамических систем и их применение
к исследованию действия по Гамильтону на максимум и минимум 95
§ 13. Принцип Гамильтона—Остроградского (примеры) ... 97
§ 14. Принцип наименьшего действия Лагранжа ...... 99
Глава IX. Канонические преобразования гамильтоновых переменных 103
§ 1. Понятие о каноническом преобразовании переменных . . 103
§ 2. Производящая функция ЮЗ
§ 3. Основные виды канонических преобразований .... 106
§ 4. Примеры канонических преобразований . . . . . . . 108
§ 5. Бесконечно малые канонические преобразования . . . . 112
Часть вторая. Специальные вопросы аналитической механики ... 115
Глава X. Интегрирование уравнения Гамильтона—Якоби . 117
§ 1. Случаи Лиувилля и Штеккеля . 117
§ 2. Задача Морера. Условия Морера и их обобщения Леви—Чивитой
и Форбатом 124
§ 3. Задача Имшенецкого—Бургатти. 127
§ 4. Метод неполного интеграла 129
Глава XI. Метод неполного интеграла в механике неголономных
систем 129
§ 1. Уравнения движения неголономных механических систем с
линейными связями первого порядка 130
§ 2. Интегрирование полной системы дифференциальных уравнений
движения неголономной системы методом неполного интеграла 131
Глава XII. Теорема Нетер и ее применение в механике . . 139
§ 1. Группы преобразований 140
§ 2. Вычисление вариации действия 142
§ 3. Вывод уравнений движения из принципа Гамильтона—Остроград-
Гамильтона—Остроградского и некоторые замечания о функции Лагранжа 146
§ 4. Преобразования симметрии 148
§ 5. Теорема Нетер 151
§ 6. Вывод основных законов сохранения в механике .... 156
§ 7. Обратная теорема Нетер 159
Глава XIII. Интегральные инварианты механических систем . 163
§ 1. Определение интегральных инвариантов 163
§ 2. Линейный относительный интегральный инвариант Пуанкаре
первого порядка 164
§ 3. Интегральные инварианты высших порядков ..... 167
§ 4. Канонические преобразования и интегральные инварианты . 168
§ 5. Гармонический осциллятор 169
— 262 —
§ 6. Физический маятник 172
§ 7. Системы уравнений, имеющие интегральные инварианты ' 176
§ 8. Теорема о единственности универсального интегрального инва-
инварианта 177
§ 9. Интегральный инвариант Пуанкаре—Картана .'.'.'.'. 179
§ 10. Системы дифференциальных уравнений движения, не имеющие
интегральных инвариантов # 180
§ 11. Последний множитель Якоби '.'.'. 181
§ 12. Интегральные инварианты и последний множитель Якоби '. \ 185
Глава XIV. Уравнения движения реономных систем ... 186
§ 1. Реономная геометрия 187
§ 2. Реонеголономная геометрия 190
§ 3. Инвариантные уравнения движения реономных систем . . 193
§ 4. Применение п + 1-мерного формализма к геометризации реоном-
реономных систем 195
§ 5. Уравнения Больцмана—Гамеля для реономных систем . . 200
§ 6. Движение тяжелого однородного шара во вращающейся сфере 201
Глава XV. Внешние дифференциальные формы в механике . . 209
§ 1. Дифференцируемые многообразия 209
§ 2. Внешние дифференциальные формы 212
§ 3. Понятие касательного пространства и векторного поля на мно-
многообразии 221
§ 4. Интегральное отношение инвариантности 224
§ 5. Общие вопросы изучения движения 229
§ 6. Движение несвободных систем 237
Глава XVI. Интегралы уравнений движения как уравнения связей 249
Приложение 257
Литература 260
Владимир Васильевич Добронравов
Основы аналитической механики
Редактор 3. Г. Овсянникова
Художник В. 3. Казакевич
Художественный редактор Я. /С. Гуторов
Технический редактор Я. Я. Баранова
Корректор Г. Я. Буханова
Сдано в набор 17/Х-75 г. Подп. к печати 21/VI-76 г. Бум. тип. № 1. формат 60x90Vie
Объем 16,5 печ. л. (Усл. п. л. 16,5). Уч.-изд. л. 14,44. Изд. № ОТ—219/73. Тираж 12 000 экз.
Цена 56 коп.
План выпуска литературы издательства
«Высшая школа» (вузы и техникумы) на 1976 г. Позиция № 96.
Москва, К-51, Неглинная ул., д. 29/14,
Издательство «Высшая школа»
Ярославский полиграфкомбинат Союзполиграфпрома при Государственном комитете Совета
Министров СССР по делам издательств, полиграфин и книжной торговли.
150014, Ярославль, ул. Свободы, 97. Зак. 689.