











































































































































































































































































































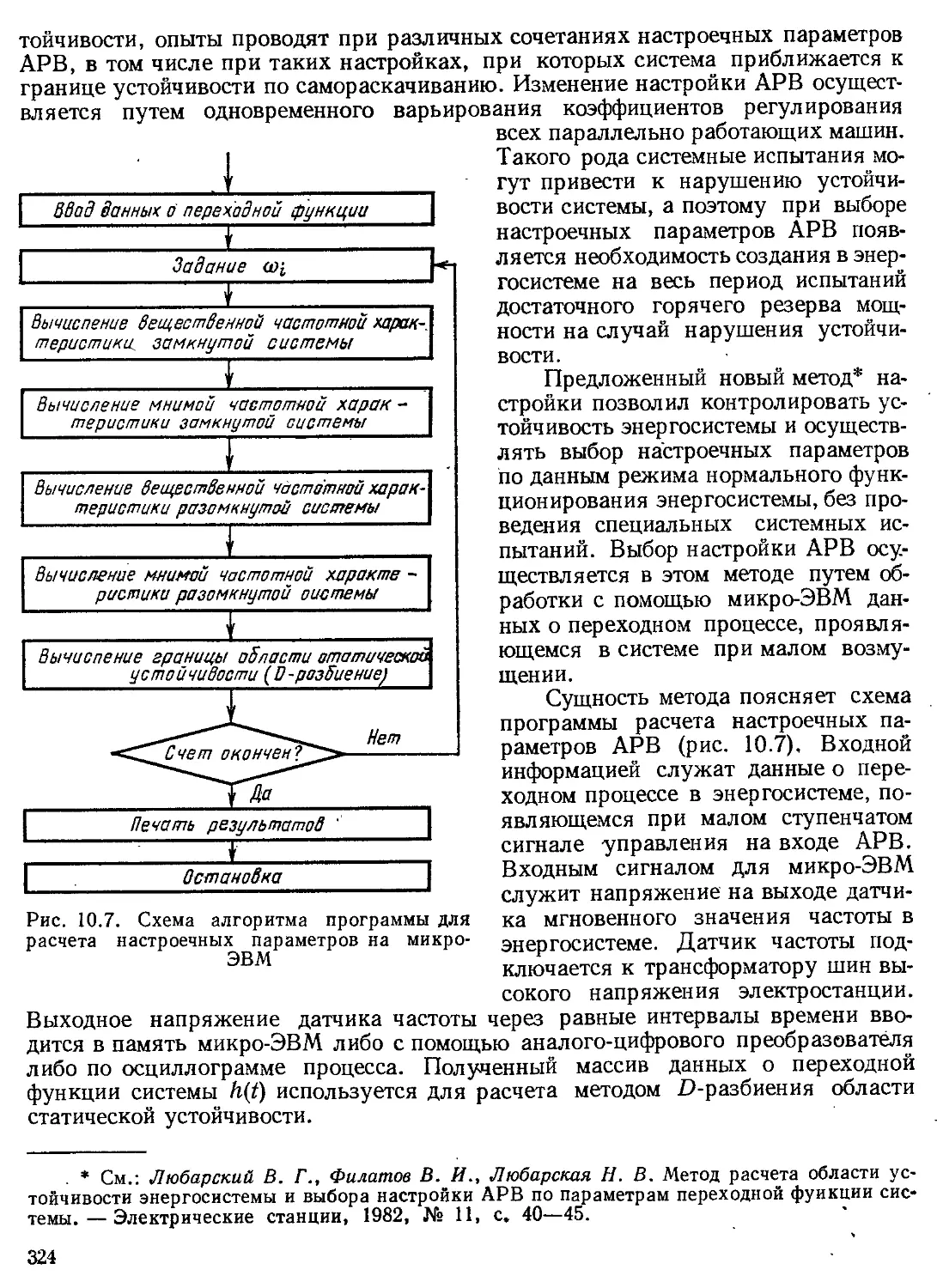







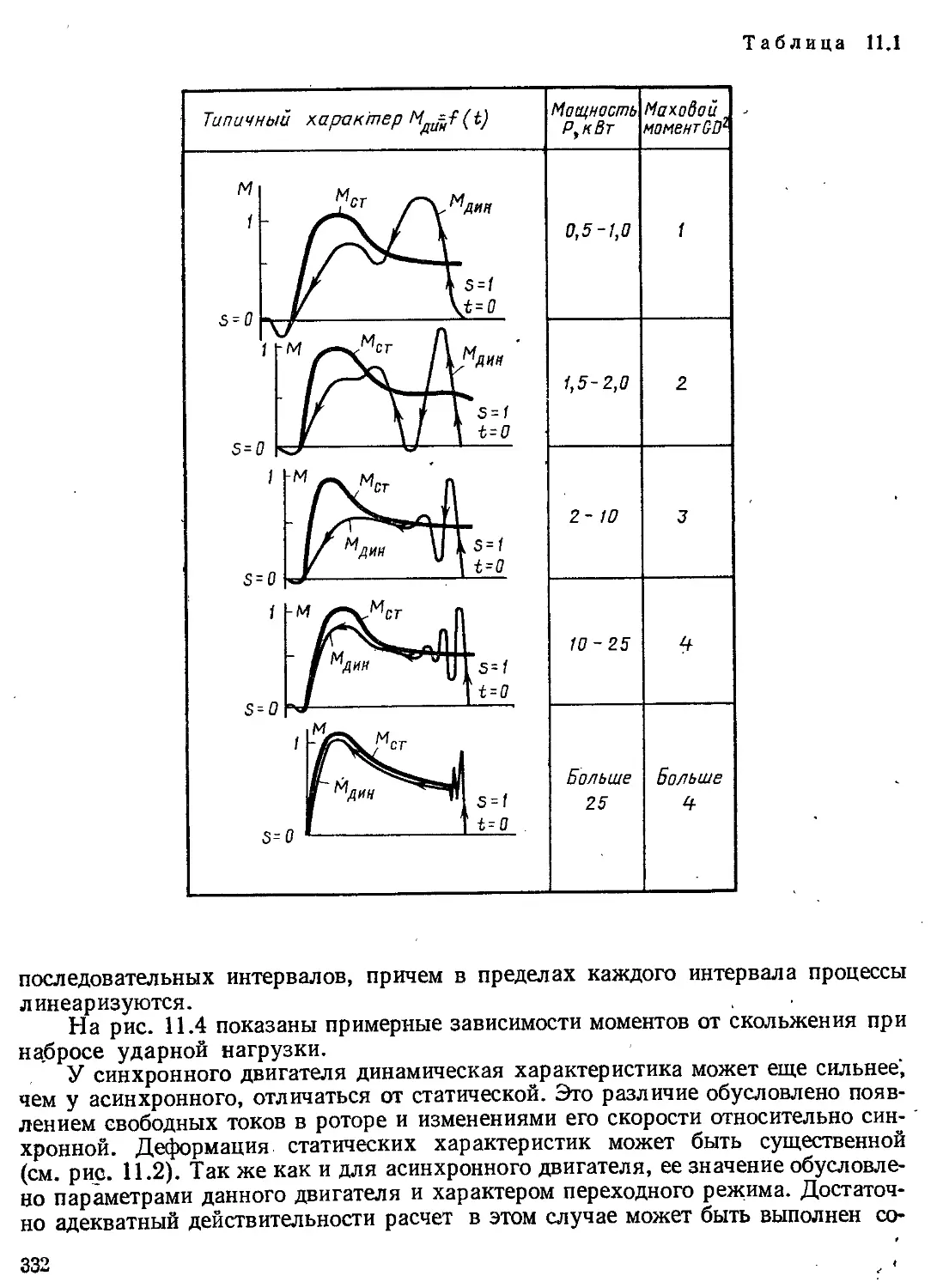





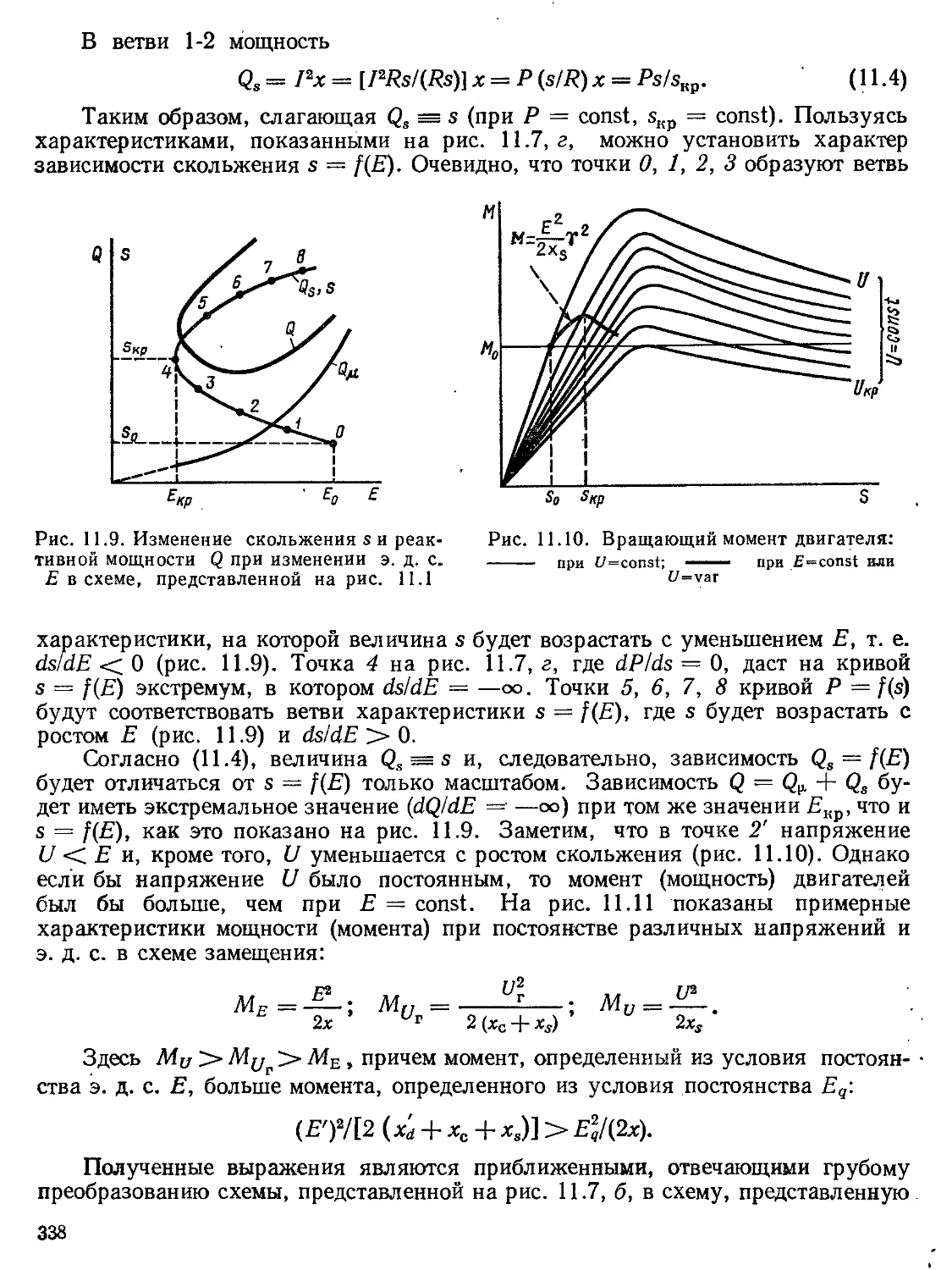






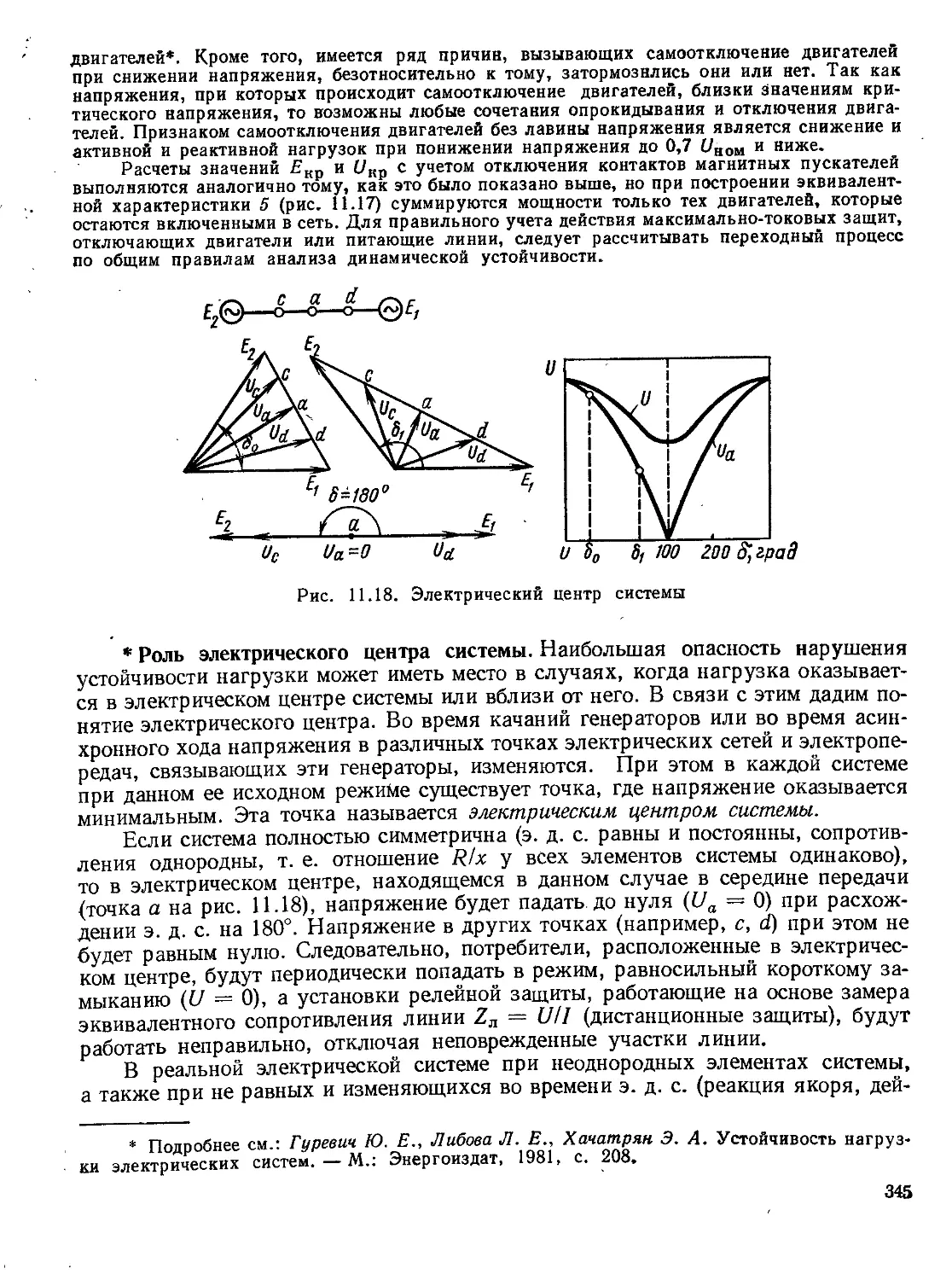























































































































































































Текст
В. А. ВЕНИКОВ
ПЕРЕХОДНЫЕ
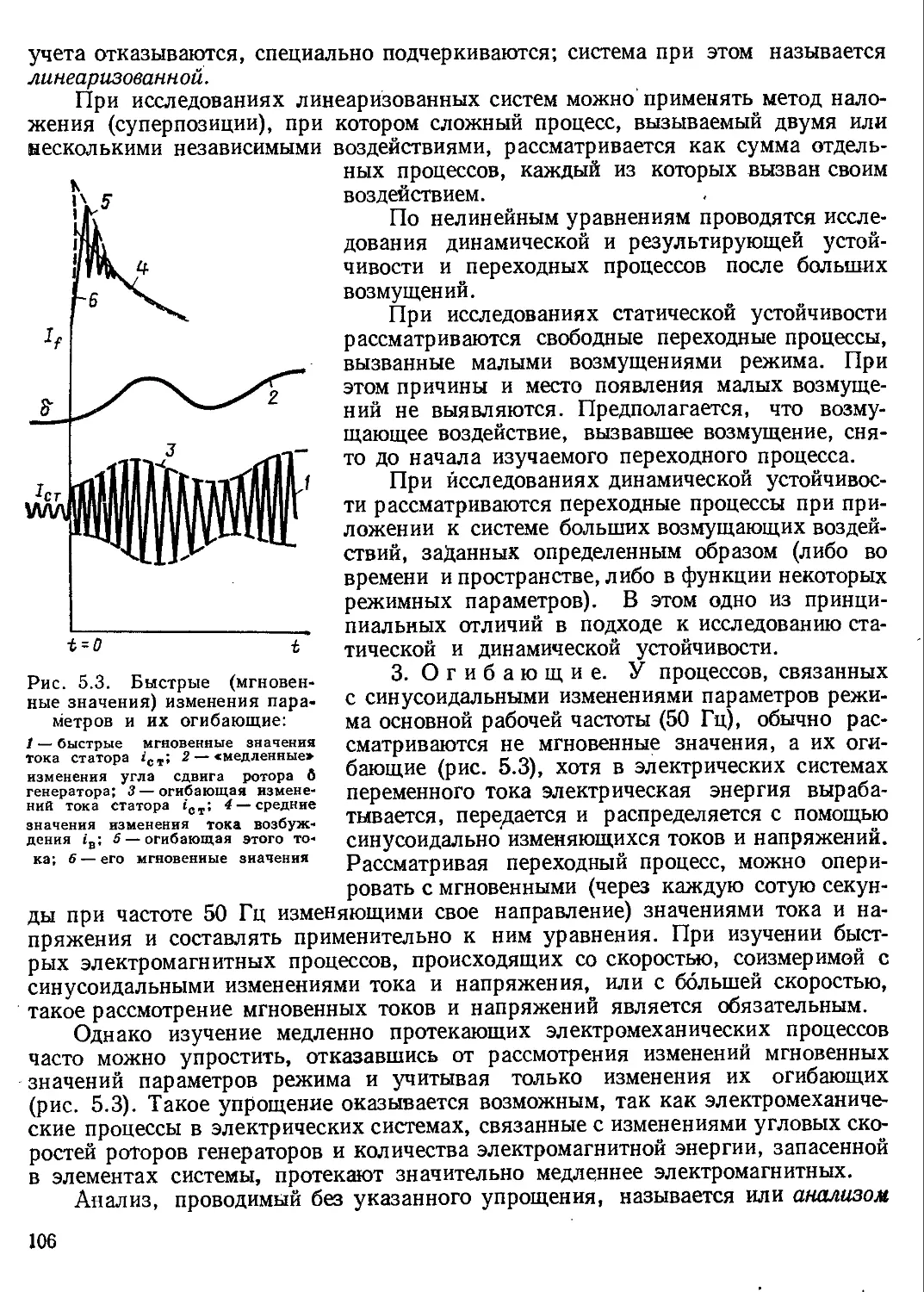
ЭЛЕКТРОМЕХАНИЧЕСКИЕ
ПРОЦЕССЫ
В ЭЛЕКТРИЧЕСКИХ
СИСТЕМАХ
а.А ВЕНИКОВ
ПЕРЕХОДНЫЕ
ЭЛЕКТРОМЕХАНИЧЕСКИЕ
ПРОЦЕССЬf
В ЭЛЕКТРИЧЕСКИХ
СИСТЕМАХ
ИЗДАНИЕ ЧЕТВЕРТОЕ
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
ДОПУЩЕНО
МИНИСТЕРСТВОМ ВЫСШЕЮ И СРЕДНЕrо
СПЕЦИАЛЬНОЮ ОБРАЗОВАНИЯ СССР
В КАЧЕСТВЕ УЧЕБНИКА ДЛЯ СТУДЕНТОВ
ЭЛЕКТРОЭНЕРrЕТИЧЕСКИХ СПЕЦИАЛЬНОСТЕй ВУЗОВ
@)
МОСКВА ,
"ВЫСШАЯ ШКОЛА" .
1985
ББI( 31.27
В29
удк 621.311
За третье издание учебника «ПереХОДНЫе 9лектромеханические
Iфоцессы в злектрических системах
Ва.llевтину АндреевИЧУ 8еникову
ПРНСУЖАена rосударствеинаJl ВреМнИ СССР за 1981 rOA
Рецензент проф, д. А. АРЗQ.чQсцев (зав. кафедрой сАвто-
М8тизированные электрические системы> Уральскorо ПQJJНтехпиче
CKOro института ИМ. с. М. к.ирова)
Веников В. А.
Б29 Переходные элсктромеханнческие процеССhJ в элек
трических системах: Учеб. для ЭJlектроэнерrст. спец. BY
ЗОR. 4 е изд., перераб. и ДOlI. M.: Бысш. шк., 1985.
536 С., ПЛ.
В Пер,: J р. 80 к,
н I(ииrе ]ассмаi'риваЮТСJl псрсходиые реЖИМhI 9Jlсктрn,>нерrстическнх
СИстем. нмеющих автомаТИ\Н Сl(ое рсrулирuваннс. ДilетсЯ описание \IНt: ИI(II
прощ ссов н СС>flременных меТОДl1Н расчета УСТОЙЧИIJОСТИ, ПQведения УЗ,l10Тl Ha
fРУЗКИ, еЛМOIщ:!бужденяя, слабых связей 11 Т. .11. Ос(/бое ВIIИМЗI1JJе УДС'.11Iе'I'СЯ
BO!lpoca-м УСТО'1ЧИВt1СТИ И качеС'\В8.
В 4-е ИЗД;J.Нltе (З-е вышло в 1978 r.) включено MHoro IIOBbIX вопросов,
И:Н.tснена компоновка МllТеризла. даны указаllИИ u меТОД,IХ lLj>рраБОТI(Н ero,
прнвс-ден;,! темы рефераТОIJ.
2ЗО2040000 475
В 120 B5
OOI(OI) 85
ББК 31.27
6П2.ll
@ Издательство «Высшая ШКО..1а», 1978
@ Издательство «I3ысшая ткола», 198;/, с IВ".1с!{епиями
ПРЕДИСЛОВИЕ
НаСТОЯЩ2Я книrа, сначала ВЬ1Пускавшаяся как моноrрафия (1958), а затем
как учебник (1964, 1970 и 1978), в иастоящем, четнертом, издаиии переработаl\а
так, что ее материал отвечает содержанию ДИСЦИПЛИНЫ «Переходные электро"
меха ические процессы в Э 1Jектрических системах», читаемой на всех электро.
энерrетических специа.'lЬНQСПiХ в соответствии с Ilроrраммзми, утвержденными
Мииистерством высшеrо н средиеrо шециальноrо образован ия СССР в 1984 !'.
Кннса в полном объе"е является учебником для спецнапьностей 0301, 0302,
0303а, 0304, 0650; с купюрами она может использоваться для специалыюстей
0307. 0311, 0314, 0315,1510. Построеине учебни!<а частично концентрическое
предусматривает леrКQ реализуемую возмоЖНОСтЬ вы60рочиоrо ИСllользования
ero материала ВО всех тех случаях, коrда данная ДIIСIIИШlина почему-либо И3
лаrается в несколько измененной ИЛИ сокращеНJlОЙ форме. при этом сохраняются
идеи, rлаВИblе для научноrо направления. отражС'нноrо в Кllиrе. Для 31'oro на-
правления наиболее существениым является особое внимание к физике явленИЙ
при llаиб'ОJIЬШСМ приближении трактовки их, ПО возможности проетоrо, мате--
матичсскоrо опиеШIИЯ к практическим задачам I!нженера ЭI-l рrетйR"a Настоящая
ДИСЦJШJ1lша и соответствуюшнй ей учебиии ие ставят задачи дать студенту пo.rL
ное руководство к алrорнтмированию, ПрОI'раМrl.шрованиlO и ПРОi3едению совремеи
ных, ДОСТ,аточно сложных расчетов электромеханнrн: ских нереходиых проuессов.
осуществ.:l яемых Инжtиером. как правило, на ЦВ;\\.. При изучении этой дисцип
лины CT)i..1I:::'HT II.OJlжен НЕ столько получить навыки в технике расчетов, сколько вы-
работать понимание допущений и оrраничениЙ, связаннЫХ с физикоЙ ЯВJlений и
З3,,'lQжеиных в основе расчетных методов, l!<iУЧИТЬСЯ практически подходить к
и н ж е н е р l[ о Й о ц е и к е полученных результатов. Дави о высказанные
КРУПJlейши:м инженером и математиком А. Н, Крыловым соображення о том, что
настоящиЙ инжен р должен не просто ПOJlЬЗ0наться результатами математиче-
ских формул. «персма.rlывающих, как мельница, то, что в них засыпаио», но чув
ствовать и наrлядно воспринимать их содержание, не только остшотся В силе в
иаше время, но и приооретают новыЙ смысд, Он заключается в требовании
физической интерпретации тех формализованных решений сложиыХ задач, KO
торые относитеJIЬНО лсrко разрешаются как ЧИСТо математические с помощью со-
временной вычислительной техн ики с ее колоссальными в этом отношениИ воз
можностями. Однако именно эти возможности стимулируют проБJlему апробации
коррек1'l1OСТИ не только теХ алrорнтмов н проrрамм, с помощью которых BЫ
ПОJ1НПЮТСЯ быстрые «машинные решения», но и ПРООJIему II.остоверности получае
мых результатов, их обозримости и удобства практических применений. H
рационаJIЬНое использование вычислительных машин привело к. продолжению
3
афоризма, высказаниоrо выше и звучащеrо так: .Пусть мельница бездействует
при отсутствии зерна, нежели перемалыаетT сорняки» .-.
Инженер должен понимать, ЧТО вычислитеJIы1яя машина в зависимости от
заложенноrо материала может одинаково быстро и эффектно выдать и оuшбоч-
ные, н правильные ответы. И студентам, и преп.одавателям следует ПОМНИТЬ слова
П, А, Дирака, сказавшеrо, что математика есть орудие, специально приспособ-
леНlIое Д)IЯ овладения всякоrо рода абстрактными понятинмн, н в этОМ отноше-
НИН ее моrущество беспредельно... Но не следует забьшатI.J, ЧТО матеt.штика есть
только орудие и ЧТО нужно уметь ВJIздеть физическими идеями безотносительно
к их математической qюрме. Тоrда и только тоrда вычислli:тельная машина будет,
как назвал ее у, r. Эшби, 'усилителем мозrа». Для этоrо будущему инженеру
необходимо прежде Bcero воспитывать вкус и способноСТИ к ФИЗllЧескои интер
претацин результатов анализа. В связи с этнм прн изучении научно-технической
ДИСJJ.ИПЛИНЫ и В настоящее время полностью сохраняется задача ов.Т1адения про.
стеЙшими, не формализованными методами и приемами исследовании, такими,
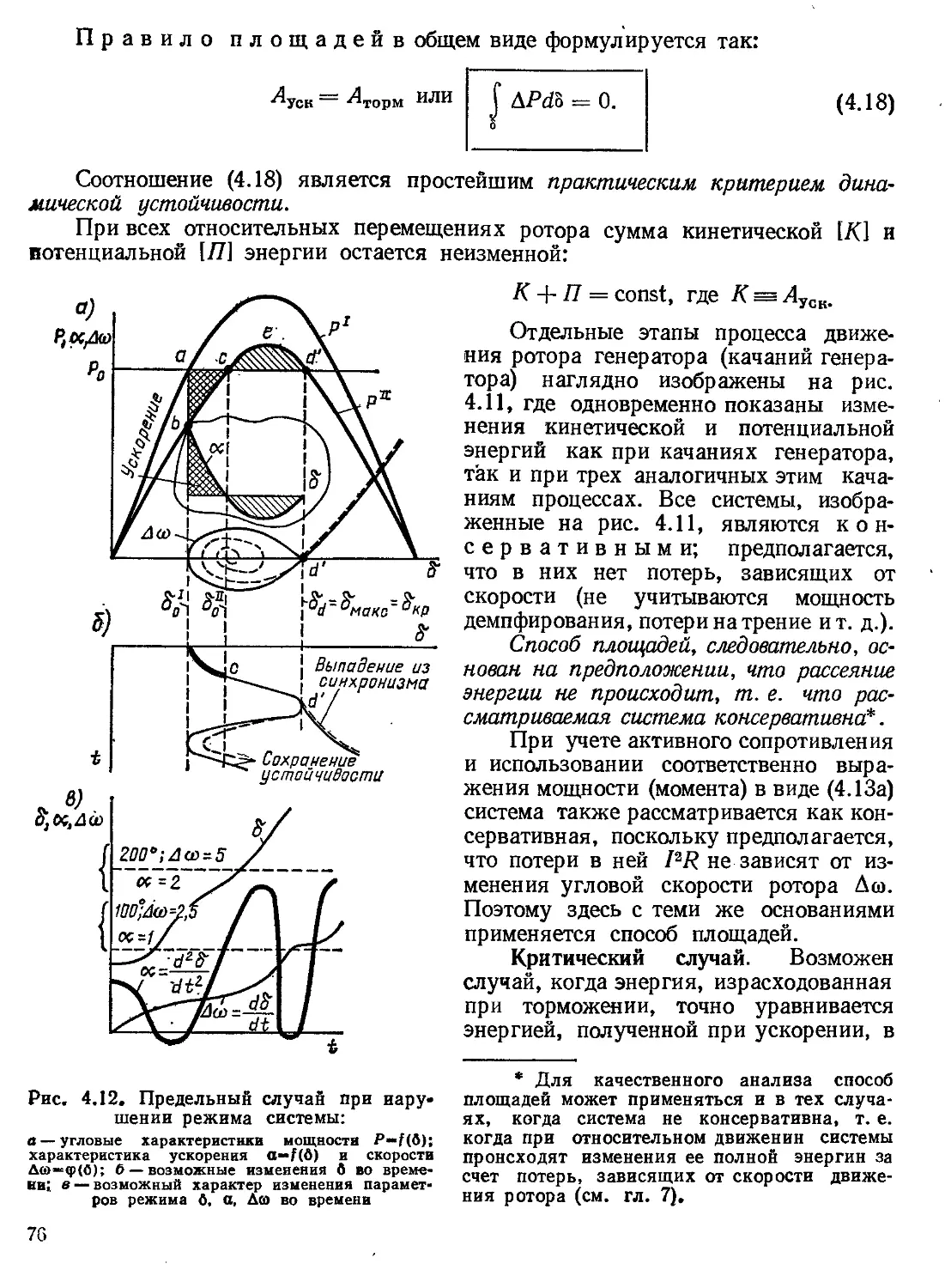
например, как способ площадей при оценке качаний reHep, аторов "рактнческие
критерии статической устойчивости, связанные с понимаиием физики текучестн
режима, и мноrими друrими энерrетическими научиыми представ.пениями. яв..1яю
щимися элементами инженерноrо мышления. Здесь существенна прежде Bcero
ориентация на понимание физики имений, а не иа исследование, ос.нованное
иа формализованном их описании, которое так эффектио проводится на базе
совремеиной выql СЛИТельной техники. uудущий специалист должеи понять,
что инженерное дело это не только наука, дающая возможность пол:учения
формул, и ремесло (вычисление по этнм формулам), но и искусство, JlОЗВОЛ>lющее
выбрать необходимые методы и приемы, которые дают достоверные резу.lьтаты
и наиболее быстро ведут к цели.
Электрически системы все в большей степени становятся и буду'т стаиовиться
автоматически реrулируемыми и управляемыми СЛОЖными системами, lIерерастая
в системы кибернетическоrо типа. Но это не только не измеЮlет ВЫСЮiЗаниые
выше соображения, но, напротив, усиливает их. Так. в частности, мuжно ожидать,
что относящнеся к энерrетике задачи кибернетическоrо характера будут Ha
столько сложны, что и сколь yroAHo совершенноЙ ВЫЧИСЛНТСJIЫЮЙ мате 1Зтике
не удастся сразу без участия человека находить а Д е к в а т н ы е т е х н и.
ч е с к и м а с n е к т а м м е т о Д ы и с с л е Д о в а н и я и ПОJJучать ди<':Ta
Точно полные описаиия систем при действующих в них возмущениях. Вместе с
тем, широко пропаrандируемые как иеоrраннченные, возможности формализо
BaHHoro подхода* подталкивают инженера к все оольшим и оольшим «уточнени
ЯШ, в том числе и в смысле учета второстепенных факторов, практически не влия
ющих, но осложняющих не тo.nЬKO расчеты. но и обозримость' ИХ результатов и в
связи с этим зачастую приводящих в конечном счете к ошибкам. Именно поэтому
для поколений современных и будущих инженеров не меньшее, чсм Д,1Я прошлых,
значение будут иметь физические представления о rJIзвнеиших -свойствах систе.-
мы, факторах" В.lIИЯЮЩНХ в тех или иных режимах, и различных подходах к пр
ектировзиию и ЭКСllлуатации энерrоснстем. Все отмеченное не означает KaKoro
.Обычно, rоворя О мощи ВЫчИслительной математИки. вспоминают Леrкрье, Б 1846 t.
аналитически «ШI. кончике пера» OTKpblBНlero ПЛаНt ТУ Нептун. Однако ЭТО ОТКрl.>l7Ие ПрИобре
.во настоящую цену. котда в 1848 Т. fалле нашел эту планету телескопом. Таково содруже-
ство матема.тических и физических МетодоВ. а не торжество одних наД дру..имu.
4
; f \
либо ,ЩIЖе малейшеro умаления роли вычислителыtой техники: ее место и зна-
чение так же существенны, как и понимание физики явлений. Однако в данном
.учебнике нет возможности ни по уровню nодrотовки .студентов, ни по отведенно-
му времени довести данную учебную дисциплину до подробноrо проrраммиро-
вания расчетов на вычислительных машинах. Но .несмотря на это, лектор должен
все время нметь в виду последующие вычислительные применения, вплотную
подводя через анализ физики процессов к ним студентов. ,
Дисциплина «Переходные процессш и соответствующий ей учебник форми-
руются как фундамент, обеспечивающий дальнейшее построение специальноro
обучения, применяющеrо методы вычислительной теJFНИКИ, средства автомаТIt-
зации, кибернетизации при проектировании и управленииэлектроэнерrетич
скими системами. По существующим учебн м планам она читается раньше дис-
цищин; посвященных автоматизации электрических систем. Это обстоятельство
предопределило введенпе в учебник элементарных сведений по аВ1'оматическому
реryлированию, которые даются в прос йшей форме, поскольку они необходимы
. только для обeciIечения подхода к рассмотрению современной Злектрической
системы как единоro целоrо, включающеrо не только силовые элементы системы,
но ее реrулнрующие и управляющие устройства. .
. Особенность построения четвертоrо издания книrи, вызванная стрем ением
облеrчить ее изучение и Mecтe с тем придать ей известную универсальностр, за-
ключается в ее концентричности и независимости ряда раздело13. С этим же об-
стоя ЬСтВом связано выделение в тексте учебника материала, содержащеrо
обязательный минимум, и ПОЯС1fяющеrо матернала, который набран петитом.
Проработке ero в зависимости от конкретных условий может отводнться разное
время. Он может использоваться и Как дополнительный материал, уrлубляющий
дисциплину и используемый в Yl1Pa.JC и НИРСах. Для двух-трех рефератов, вы-
полняемых студентами при проработке данной дисциплины, может быть исполь-
зован матернал, отмеченный «звездочкой».. Этот материал обязатеЛен только для
специальностей. «Кибернетика электрических систем» (0304), «Электрические
станции» (0301), «Электрические системы и с й» (0302). Однако ero не должны
упускать из внимания ни студенты, ни преподаватели друrих специальностей.
Построение учебника предусматривает ero изучение студентами разных
специальностей по разделам. Так, ero rл. 1 5 составляют вполне законченный
раздел, содержащий общие сведения о теОрии переходных процессов и способах
Д . l
ИХ исследования. ля студентов ряда специальностеи и для неэнерrетических
факультетов этих rлав с дополнениями 7.2, 7.3 уже может быть достаточно.
для изучения. .
Раздел учебника, включающий rл. 7 9, развивает материал первых шести
rлав и дает достаточно подробные сведения о статической и динамической ус-
тойчивости протекании процессов во времени при больших и малых воэму-
щениях. Он касается также актуальноrо вопроса о поддержании частоты в сис-
темах.
Специальный раздел (rл. 1l 12) рассматривает имеющие большое значе-
ние переходные процессы в наrрузках электрических систем; rл. 11 малые
нарушения режима, а rл. 12 , процессы при больших нзменениях мощности и
скорости. .
При оrраниченном числе часов, отводимых на данную дисциплину (напри-
мер, для специальности Р303 и аналоrичных ей), следует сосредоточить внимание
студентов на процессах в наrрузк , как ,наиболее характерных. Обязательными
5
для изучения должны быть rл. 1,2,4,5 и далее rл. 11 и 12, которые в данном
случае следует рассматривать как центральные.
В отличие от предыдущих изданий в данном изложении проблема статической
устойчивости начинается с ра<;смотрения реrулируемой системы, частным слу
чаем котороЙ является нереrулируемая система. Это связано с тем, что COBpeMeH
ное реrулирование является не «дополнением», а орrанической и существенной
частью системы, изменяющей' решающим образом ее свойства в требуемом Ha
правлении. В книrе подчеркивается, что возможен подход к статической устой
. \
чивости как к динамическои, но при таких возмущениях, коrда в силу их малости
место их приложения и значение не влияют на установление характера процесса
и оценку ero устойчивости. На такие новые моменты, возможно не привычные
и для П{>еподаваТЕ;Лей, здесь специально обращается внимание. '
Прииятое концентрическое построение учебника (и соответственно дисцип-
лины) с постепенным наращиванием rлубины рассмоТрения ЯЩlений и учета
их сложности предполаrает и и н Д у к т и в н ,ы й п о Д х о Д к изучению пред
мета. Необходимо. учесть, что заманчивое на первый взrляд ч и с т о Д е Д у к-
т и в н о е п о с т р о е н и е, при котором в' вводной части моrла бы быть пред-
Ставлена общая теория переходных п оцессов и устойчивости с дальнейшим ло-
rическим изложением формально м.атематическоrо аппарата и ero пользования,
не приводит, как показал мноrолетний опыт преподавания, к положительНЫМ
результатам, поскольку лоrика восприятия студентами rлавноrо в дисциплине,
а именно Ф и з и к и я в л е Н и й, и стремление к проблемной постановке лек-
ций неизбежно требуют постепенности в подходе к изложению, в конечном счете
оправдывающей именно индуктивный подход*. Существенно такж , что при этом
подходе облеrчается подкрепление данной дисциплины упражнениями, лабо
раторными занятиями и, что очень важно, реrулярным индивидуальным caMO
контролем,заключающимся в проведении не менее трех раз в процессе изучения
материала репетиционных проверок, осуществляемых с помощью машин-экзаме-
наторов.
В конце каждой лекции студент отвечает на вопросы, мобилизующие ero
внимание на подведение итоrов изложенноrо материала. Бланки для ответов
раздаются в перерыве после первоrо часа и служат одновременно и для контроля
присутствия на лекции, и для оценки качества работы на ней. Параллельно с
лекциями предусматривается проведение лабораторных работ и выполнение
типовоrо расчета. Во время лекции должен проводиться показ слайдов и KOpOТ
ких кинофильмов (5 7 мин), иллюстрирующих проблемы анализа и улучшения
качества переходных процессов.
Трудоемкость ВОСПРОИЗВе'дения rрафическоrо материала на обычной мело-
вой доске в значительной мере снимается применением «динамических плакатов»:
незаконченных рисунков, раздаваемых перед лекцией и завершаемых в процессе
ее студентами вместе с лектором, который при этом пользуется проекцией ри
сун ков через кодоскоп. Все это способствует более быстрому усвоению материала
(ЭКОНОМJiТСЯ 25 30% времени).
* rоворя о подходе к изложению, нельзя забывать о ero утилитарности, и в этой свя-
аи lКочетси вспомнить слова л. Янrа о том, что здравый смысл подсказывает нам; надо из-
naraTb предмет на том языке, который Bcero более подходит для достижения результата;
всякая методика это что-то вроде общественноrо транспорта, чем скорее она nOMOrae1'
аобраться до uели, тем она лучще.
Q
rлавы книrи снабжены контрольными вопросами и темами рефератов, Ко-
торые должны составляться 'всеми студентами и некоторые из них ( ыборочно)
зачитываться (5 7 мин) на лекционном потоке или в rруппе на упражнениях.
Прорабатывать вопросы и примеры, приведенные в конце rлав, необходимо одно-
временно с рассмотрением теории. Для Jiучшеrо усвоения дисциплины рекомен-
дуется обращаться к учебным п<><;об ям, содержащим практические примеры
анализа переходных процессов. Список литературы, приведенный в конце книrи,
напомина т о ранее проработанном материале, а также обеспечивает дальнеЙШ6е
расширение учебной дисциплины, увеличивая возможности выполнения УИР и
СНИР. Однако приведенный список литературы с учетом назначения книrи co
держит только оrраниченное число ссылок на работы, имеющих непосредствен
ное отношение к разделам дисциплины и полезных при проведении типовых pa
счетов курсовых и ДЩlЛомных проектов. Ссылки на литературу в подстрочных
сносках по тексту сделаны так, чтоБPI помочь студентам уrлубить при желании
знания по отдельным вопросам, более подробно обосновывающим некоторые
положения учебника.
Разумеется, I'Iриведенная литература является не полной библиоrрафией
,она не исчерпывает использованных при написанИИ учебника мноrочисленных
отечественных и зарубежных публикаций; в книrе не дано специальных ссылок
на использованные в ней личные научные работы автора и исследования, прове-
денные ero сотрудниками и учениками.
В приложении также сжато дан краткий исторический обзор теории электро-
механических переходных процессов. Желательно, чтобы лектор в заключи-
тельной (именно в заключительной, а не в вводной) беседе коснулся этой проб-
лемы и отметил роль ученых, развивающих ее.
Как отмечалось в предисловиях к предыдущим изданиям, учебник отражает
идеи и методы московской научной школы электрических систем, берущей начало
в работа* П. С. Жданова, С. А. Лебедева. В дальнейшем развитии этой школы,
равно как и в создании настоящеrо учебника, автор пользовался поддержкой и
непосредственной помощью своих учеников и сотрудников. В их числе он блаrо-
дарит kpa техн. наук И. В.Литкенс, канд. техн. наук В. А. Строева, канд.
техн. наук С. Ю. Сыромятникова, канд. техн. наук Ц. В. Путятина, канд. техн.
наук Н. В. Федотову и др. Очень плодотворна была работа с мноrочисленными
аспирантами (В. rолов, т. Поrосян, Ф...оруджев и др.). Они участвовали не i
тольКо в выполнении примеров, экспериментов, расчетов, но и в отработке ряда,
научных положений, способствуя' созданию научной школы афедры. Особую
блаrодарность автор выражае-r рецензенту Д. А. Арзамасцеву,замечания ко-
тoporo были полезны при отработке рукописи данноrо издания.
По предыдущим четырем (включая моноrрафию) изданиям книrи и пяти за-
PY HЫM ее переводам имелись мноrочисленные рецензии, советы и замечания,
которые с блаrодарностыо учел автор. Автор надеется, что и по данному четвертому
изданию учебника, в котором, несомненно, также имеются дискуссионные момен-
ты и неизбежные поrрешности, читатели не менее активно, чем раньше, выскажут
свои замечания и пожелания, за которые он зараН,ее приносит большую блаrо-
Щ1РНОСТЬ.
Замечания и пожелания направляйте в издательство «Высшая школа»:,
101430, Москва, rCп4., Неzлuнная, 29/14.
Автор
список ПРИН. Х СОКРАLЦЕНИЯ
АВМ
КЭС
ЛЭП.
МИСБ
....,. анмотовая вычнслительная
машииа
автоматический ввод резерва
автоматическое повториое
ВJUJючеиие
- автоматический
возбуждения
АРБ с. Д. \автоматический реrул,ЯТОр
сильиоrо действия
АРБ п. д. автоматический реrулятор
пропорциоиальиоrо действия
...;. автоматическое реrУЛирова-
иие напряжения
асинхроиный двиrатель
автоматическая ликвидация
асинхронноrо режима
автоматическое . предотвраще-
ние нарушении устойчивост,,"
автоматическое деление сети
автоматическое реrулирова-
иие (реrулятор) частоты (в
системе)
автоматический реr:yлятор
частоты вращеиии (arperaTa
АРС)
...,. автоматизированная
управлеиия
автоматизированная I система
'управлеиия .,производством
(промышлеииостью, процес-
сом)
автоматизироваииая система
диспетчерскоrо управления
автоматизироваиная частот-
ная разrруSка
атомиая электростаНЦ)lЯ
\ вычислительный комплекс
, большаи система энерrетики
воздушнаи линии
высокое иапряжение
вставка постоиииоrо тока
rидроаккумулирующая элект-
ростанция
rибкая обратная связь
rидроэлектростанция
,/ диффереициальное уравнение
диспетчерский пункт
дивамическая устойчивость
жесткая обратная связь
иСТочник реактивной мощнос-
ти
кабельная линия
коэффициент полезноrо дейст-
вия
комплексиое распределитель-
ное устройство
конденсацнонная электро-
стаиция
лииия электропередачи
механизм измеиеиии скорости
вращения
наrрузка
иизкое иапряжение ,
низкая частота, низкоч.астот-
ный
обратная связь
объединениая энерrосистема
пропорциональное действне
противоаварийное управление
противоа&арийная. автоматика
полупроводник, ,полупровод-
никовый
передача постоянноrо тока
подстанция
полупроводниковый
транзистор
реrулят"р «до себя»
релейная защита
реrулироваиие \ под иаrруз-
кой
распределительное устройство
система автоматическоrо ре-
rулировании
система iвварийиоrо оrраниче-
ния МОщности
сверхвысокое напряжеиие
сильное действие, сиихрои-
ный двиrатель
статическая усТойчивость
сивхрониы rеиератор
синхронный компенсатор
сиихроииая машина
тепловая sдектростаицвя
управляющаи вычислительная
машииа
. устройство продольной ком-
пенсации
устройство резервироваии,ll от-
каза выключателя
ЦВМ и АВМ цифровая и аналоrовая вычи-
слнтельная машина
электронная вычислительиая
машина
электронно.лучевая
дисплей
электростанция
электроэнерrетическая систе-
ма
частотное автоматическое пов-
торное включение
шины' бесконечной мощности
АВР
АПВ
АРБ
Н
НН
НЧ
реrулятор
ОС
ОЭС
ПД 1
ПУ
ПА.
ПП
АРН
АД
АЛАР
АПНУ
ППТ
ПС
пт
;..
АДС
АРЧ
триод,
РДС
Р3
РПН
АРЧВ
РУ
САР
АСУ
АСУП
система
САОМ
СВН
СД
СУ
СР
СК
см
ТЭС
УВМ
АСДу
АЧР
АЭС
ВК
БЭС
ВЛ
ВН
БПТ
.rАЭС
УПК
УРОВ
roc
rэс
ДУ
ДП
ДУ
ЖОС
ИРМ
ЭВМ
элт
:rPубка,
эс
ЭЭС
КЛ
кпд
ЧАПВ
КРУ
ШБМ
8
rпABA f
ХАРАКТЕРИСТИКА КУРСА
t t.1. ОСНОВНЫЕ ПОНSlТИSI 0& ЭЛЕКТРИЧЕСКОА СИСТЕМЕ И ЕЕ РЕЖИМАХ
Энерzетика, имеющая orpoMHoe значение в развитии человеческоrо общест-
ва, превратилась в большую систему к и б е р н е т и ч е с к о r о т и па, т. е.
систему целенаправленную, оптимизируемую при проrнозировании. проекти-
ровании и: эксплуатации.
Большая система энерzети1\,и состоит из отдельных взаимосвязанных, систем
или подсистем: функционирующих как единое целое, но при решении практиче--
ских задач часто рассматриваемых раздельно.
ОдноЙ из таких подсистем являеТся э л е к т р о э н ер r е т и.ч е с к а я
с и с т е м а та часть энерrетическоЙ системы, в котороЙ теплота и различные
виды нерrии преобразуются в электрическую энерrию, передаваемую на рас-
стояние, распределяемую по потребителям, rде она вновь преобразуется. В на-
стоящеЙ дисциплине будет изучаться э л е к т р о м'е х а н и ч е с к а я ч а с т ь
эJIеRiтроэнерrетическоЙ системы, дал.ее называемая электрическоЙ.
Электрическая система представляет собоЙ совокупность взаимодеЙствую-
щих элементов, которые можно разбить на две rруппы:
...:.... С И Л О В Ы е э л е м е н т ы, вырабатывающие (например, reHeRaTopbl,
с их перви,ЧНЫМИ двиrателями), преобразующие (трансформаторы, выпрямители,
инверторы), передающие и распреде- .
ляющие (линии передач, сети) и пот-
реб.ляющие (наrрузки) электрическую
энерrию; .
элементы управле--
и и я, реrулирующиеи изменяющие со-
стояние системы (реrуляторы возбуж-
дения синхронных машин, реrуляторы
частоты, реле, выключатели и т. п.).
Все элементы системы функцио-
пально связаны единством rенериро-
вания, передачи и потребления элект-
рическоЙ э ерrИИ. В нормальном ра-
бочем состоянии, или, как бу,дем на-
,зывать в дальнеЙшем, 1f,ормально ре-
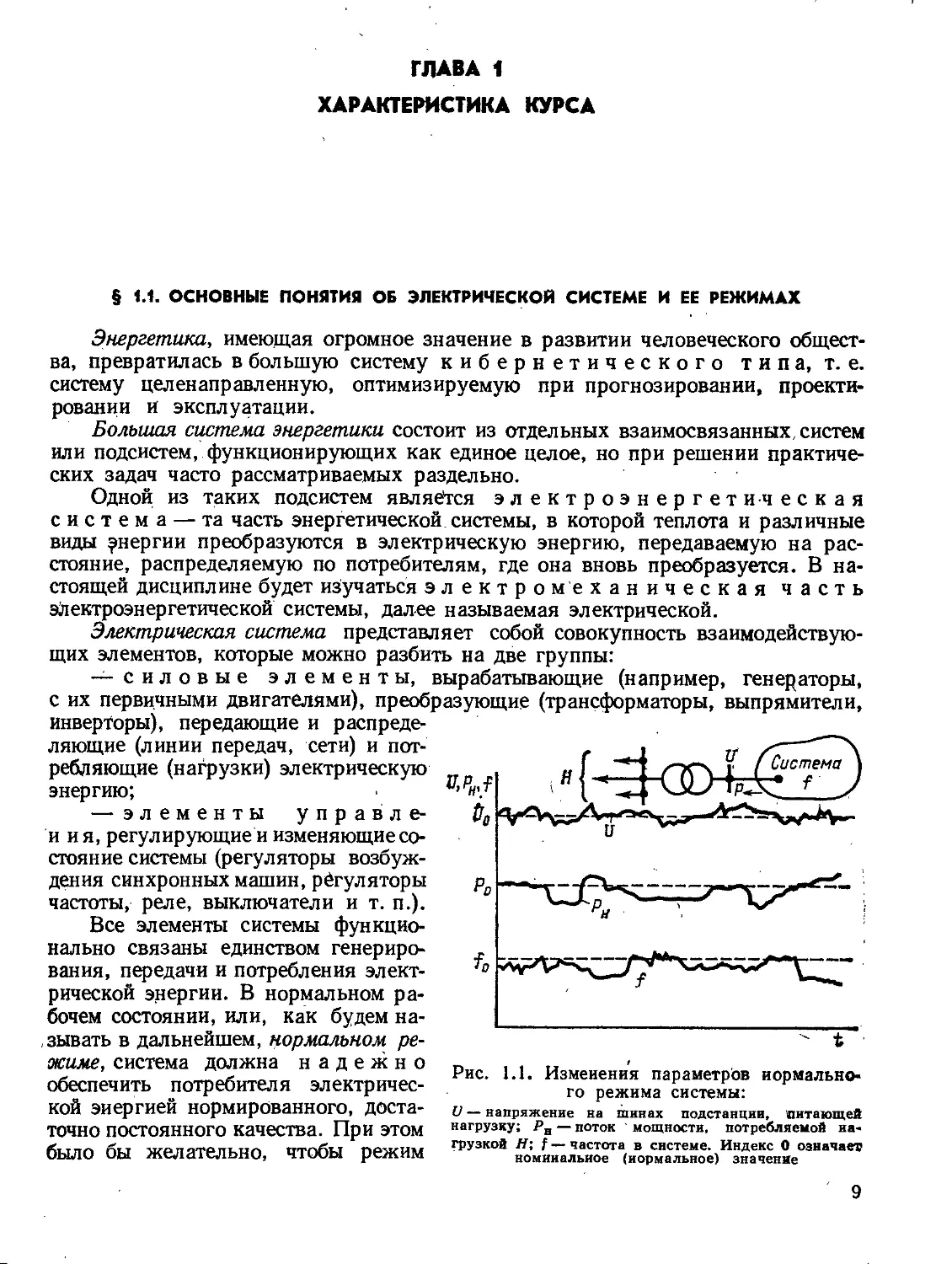
:JfCUJAi!, система должна н а Д е ж н о Рис. 1.1.
обеспечить потребителя электричес-
коЙ эиерrиеЙ нормированноrо, доста-
точно постоянноrо качества. При этом
было бы желательно, чтобы режим
t '
Измеиени'я параметров нормально-
ro режима системы:
и напряжение на шинах подстанции. питающей
наrрузку; Р в ПОТОК' мощности. потребляемой иа-
rpузкой Н; f частота в системе. Индекс О означаn
номииаЛЬИОе (иормальное) значеНИе
9
системы бш совершенно неизменным. Однако TaKoro полностью «установивше-
roся режима» реально существовать не может. HarpY3Ka в системе колерлется:
непрерывно происходят «малые изменения» (флуктуации) числа подключенных
потребителей их мощности и состава, т. е. HarpY3Ka «дышит» (рис. 1.1). Kpo
ме этих малых откщ)нений, реже, но также довольно часто, происходят более
о)
"
p"U"f
РОI
и,о
и 1 QI
fo
ff
В) .
P z ,1)2.f
РО2
t o
t
t o
t
Рис. 1.2. Изменение параметров при нормальных' переходных режимах в системе:
а cxeMjI системы; б отключение линии электропередачи Л" питающей подстанцию П,
ОТ reHepaTopa Т,; и, иапряжение иа шинах подстанции П,; Р, ПОТОК мощности от reHe.
ратора Т,; в включение мощноrо reHepaTopa Т, и набор им наrрузки; и, напряжение
на шинах подстаиции П,; Р, поток мощности от reHepaTopa Т,; индекс О начальное
значение, 1, 2 установившееся
крупные «большие и::шенения», связанные с вариациями значений вырабаты-
ваемых и потребляемых мощностей и конфиrурации системы включением
и отключением reHepaTopOB линий передач, трансформаторов, мощных подстан-
ций (узлов наrрузки). Такие изменения переходы от одноrо режима к дpy
rOMY во время нормальной работы системы называются нормальными переход-
ными режимами (рис. 1.2).
. Электрическая система, как и любая друrая система, может иноrда подвер
rаться аварийным воздействиям. Аварии MorYT быть вызваны:. .
или н а р у ш е н и е м режима системы переrрузками отдельных эле-
ментов и их автоматическим отключением и делением системы на части «раз-
валом системы»;
или р а 3 р У Ш е н и е м отдельных элементов сист мы. Например, из-за
внешних воздействий (ветер, rололед) MorYT разрушиться опоры электропереда-
чи. Из за внутренних воздействий, обусловленных возросшими токами при ко-
ротком замыкании, MorYT разрушиться reHepaTopbI, трансформаторы, реакторы
и подстанции(см. Пl). Состояние системы во время таких аварий и последующий
переход к новому рабочему состоянию называется аварийным переходным. ре-
жимом (рис. 1.3). .
10,
Изучение режимов электрической системы требует рассмотрения не только
электромаrнитных явлений, обусловливающих возможность получен я, переда-
чи и потребления электрической энерrии, но и механических я дений в ее эле-
ментах: в первичных двиrателях" их автоматических реrуляторах, reHepaTopax,
двиrателях наrрузки, rде электрическая энерrия вновь преобразуется в ме-
ханическую. Таким образом, необхо-
димо рассматривать и электрическое,
и механическое состояние системы,
или электромеханические режимы.
Система, объединяющая отдель-
ные элементы, может UMeTt. свойства,
не ВЫЯDляющиеся у этих элементов.
Режимы системы MorYT существенно
отличаться от режимов ее элементов
или даже режимов подсистем*.
Электрическая система, как и
люба искусственная (т. е. созданная
человеком) система, предназначена
для нормальноrо выполнен,ия функ-
ций, т, е. для работы в нормальном
установившемся режиме. Однако обе-
спечение ее качественной,. надежной
работы возможно только в том слу-
чае, если и любой (нормальный, ава-
рийный) переходный режим будет
удовJIетворяrь определенным требо-
ванияМ.
Цель настоящей дисциплины научить будущеrо инженера понимать про-
исходящие физические явления в любом переходном режиме, рассчитывать ero
и управлять им так, чтобы облеrчить возможные последствия и тем более не до-
пустить, чтобы они привели к технической и социально-экономической катастро-
фе, как это было в некоторых «национальных общесистемных» авариях,
например в США Или Франции. А для этоrо необходимо прежде Bcero
о с в е т и т ь Ф и з и к у интересующих инженера режимов, изложить методы
и1С к о л и ч е с т в е н н ы х р а с ч е т о в и описать те приемы, мероприятия и
установки, с помощью которых. можно у п р а в л я т ь пер е х о Д н ы м и
р еж и м а м и, придавая им желательный характер. При этом приводится наи-
более простое м.атематическое' описание переходных режимов, появляющихся
. при изменениях электромеханическоrо состояния системы. Аналитические ме-
тоды исследования излаrаются здесь rлавным образом для Toro, чтобы облеrчить
понимание происходящих явлений и обеспечить дальнейшее овладение теми бо-
лее сложными методами анализа, которые применяют в практике проектирова-
ния и эксплуатации электрических систем.
Студент должен получить представление о мероприятиях, .обеспечивающих
нормальную работу системы при малых возмущениях (статическая устойчивость)
и блаrополучный исход различныХ аварийных режимов (динамическая и ре-
зультирующая устойчивость). Поэтому здесь необходимо изучать установившие-
,U z
Р,
{,
t
Рис. 1.3. Переходный аварийный режим в
системе
Короткое замыкание в точке К на одной нз JIИНИЙ
электропередач вблизи шин питающей подстанции J
и последующее отключение этой линии. Система ос-
тается устойчивой. и,. и, напряжения на шинах
подстанций 1 и 2i Р, ПОТОК мощности от reHepaTo-
ра; '1 частота в системе
· Здесь проявляется свойство CUCmeJtHOCmU, или 8J.iердженmносmu.
11
ся нормальные режимы, при которых начинается переходный режим, и ,выяс
нять условия существовация послеаварийных режимов.
Все элементы электрической системы рассматриваются во в з а и м о Д е й
с т в и Н, которое устанавливается на основе Iюказателеи, определяющих«сис
темные свойства» (параметров режима), статических и динамич.еских xapaKT
ристик (см. ниже). -Вопросы конструктивноrо выполнения элементов системы
здесь не рассматриваются. Электрические системы, изучаемые в данной дисцип
ЛИне, предполаrаются в той ИЛИ иной ,Meptt а g т о м а т и з и р о в а н н ы м и.
Режим автоматизированной системы находится G учетом непрерывноrо действия
автоматических устройств, реаrирующих на все возмущения режима системы,
воздействующих на нее и, в свою очередь, вызывающих ее otветные реакции. ,
Знание поведения системы ,после любых возмущений оказывается, таким
образом, необходимым для оценки действия устройств автоматическоrо реrули
рования, правильноro их выбора и обеспечения работы системы в иориальных
и аварийных условиях.
К числу элементов электрической системы, действие которых подлежит далее
рассмотрению, следовательно, относятся также и устройства автоматическоrо
реrулирования. Но ни вопросы конструирования устройств автоматическоrо p
rулирования, ни вопросы анализа их вну;rренних св,ойств не входят в настоящую
дисциплину. Они изучаются в друrих дИсциплинах на основе сведений, прив
денных здесь. Устройства автоматическоrо реrулирования рассматриваются при
этом только как некоторые элементы, преобразующие параметры режима в Be
личины, которые воздействуют на друrие элементы системы, изменяя ее режим.
t t.1. СИСТЕМАТИЗАЦИЯ OCHOIIHblX ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
В настоящей ДИСЦИlJЛине рассматриваются neреходные режи'м'Ы алектриче
ской систе'м'Ы. .переходы одноrо ее' состояния в друrое. Режи'м' состояние
системы, которо,е характеризуется показателями, КОЛИ1Jесrnенно определяющими
ее работу. Эти показатели называются naра.меmрам.и режи'м'а ПР' К ним OТHO
сятся значения мощности, напряжения, тока, .уrлов сдвиrа векторов э. д. с., на-
пряжеНIfЙ, токов, частоты и т. д. Параметры режима связаны соотношениями,
в которые входят параметры системы.
Лара.меmры систе'м'Ы это показатели Л с, количественно определяющие
физические свойства системы как HeKOТOporo матеРИaJJЬНОrQ сооружения, зави-'
с щие от схемы соединений ее элементов и принимаемых допущений. К оарамет-
, рам.. системы относятся значения полных, активных и реактивных сопро-
тивлений, проводимостей элементов, собственных и взаимных сопротивлений,
коэФРициентов трансформации, постоянных времени, кoэфt>ициентов усиления,
и т. д. Например, ток в сопротивлении
. .
1 == U/R,
rде i и U параметры режима;' R параметр системы.
* 1. Система определяется как целое, представленное из элементов, находящихся, в
отношениях н связях между собой и образующих определенное едннство. 2. Под 9лектри-
ческнмн снстемами ПОННмаются, сястемы nepeMeHHoro тока, в отдельных случаях имеющие
9лементы (звенья, участкн) поСтОянноrо 'l'oKa. З. В .nальнейшем для сокращеиия reрмии
.ЭJlектрическаJP ииоrда опускается.
13
Ток в ветви сложной системы определяется параметраии режима (э. д. С.
Б t , Ё 2 ,' ..., E k ) и параметрами системы (проводимостями У11' Yt2"'" Y tk ): ,
. .. .. ..
11 == Е 1 У 11 + Е, у 12 + ... + Е У а.
Ряд параметров системы в той Или ипой мере з а в . с и т о т р е ж и м а.
Такая система будет нелинейной. Однако во мноrих практических задачах пара
метры этой системы оБычоo можно полаrать неизменяющимися, считая систему
линейной. Случаи,коrда нел, инейность обусловленную изменением параметров
'системы, необходнмо учесть, будут специально оrовариваться.
Нелинейность друrorо вида в изучаемой CJ{cTeMe, обычно учитываемая при
аиализе, обусловлена х а р а к т е р о м со о т п о ш е н и й м е ж Д у Ц а р а-
м е т р а м и е е р е ж а. Например, мощность Р, . связанная квадратичвой'
зависимостью с напряжением U и синусоидальной с уrлом раСХdждення век-
торов напряжений по концам передачи б, будет нелинейной функцией этих ве-
личин: '
Р == U 2 /R; Р == (и 1 и 2 /х) siп а,
rде R, Х параметры снстемы.
Режи электрической системы разделяются на две ,большие rрупы: устано-
вившиеся режимы н nepe oдныe реж lttЫ, которые иноrда называются Нeycmaнo-
вuвшимися или нестационарными.
, Внутрн этих rpупп различают следуtoщие виды режимов:
нормальные уcmaновившueся длительные режимы, применительно к
которым при проектировании электрической системы определяЮтся ее основные
технико экономические характеристики; ,
, нормаль1{,ble neреходные режимы, во время которых система переходи \ '
от одноrо рабочеrо состояния к друroму;
:----- аварийные установившиеся и переходные .ежимы, для которых опреде
ляются технические характеристики устройств, предназначенных для ликви-
дации аварии, и выясняются усп;овия дальнейшей работы системы;
nОСЛеаварuйные' установil8Шuecя режимы, которые, в общем случае
характеризуются изменением нормальной схемы clfcTeMbl, например отключени-
ем какоro-либо элемента или ряда элементов. В поелеаварийном режиме система
может работать с несколько ухудшенными теХник<rэкОНОМИЧ КИМН характе-
ристиками' по сравнению с характеристиками нормальноro режима
В лЮбых режимах реальной электрической системы, в том числе и в YCTaн<r
. "
вившихся, пар а м е т р ы р е ж и м а н е п о с т о я н н ы, они непрерывно
из яются отклоняются от HeKOТOporo среднеrо значения, но эти отклонения
в установившемся режим настолько малЫ, что режим может практически сще-
ниваться как установившийся; в переходных режимах отклонения существенны.
, Для режимов указанных видов устана иваются и БOJiее мелкие, rрадации.
Так, rоворя о режиме TOro или иноro вида, обычно имеют в виду сосТОяние сис
темы на некотором интервале времени. При этЬм указывают значение или друrие
признаки этоrо интервала (например, режим с... пОСЛе отключения KopOТKoro
замыкания», «... до срабатывания релейной защиты от ПОn'ышения напряжения»
и Т. п.). ' , ( '.
Л1(Jбые neреходные режимы возникают в результате изменения nара.метров
системы, вызванных кшсими-либо 'nричинами. Эти причин . называемые, возму ,
13
щающими воздействиями, пр водят к появлению начальных отклонений пара
метров режима возмущении режима.
Процессы. Режим системы не является чем то единым, он состоит из мн о-
Ж е с т в а раз л и ч н ы х про Ц е с с о в, . схематически показанных на
рис. 1.4. Под nроцессом вообще понимается последовательная смена каких-либо
явлений. В электрических системах и их элементах таких процессов, составляющих
",.... r i
// Jлеl<тро л1 ПРО!!.:'С С \\ Ь J Jлектро I
( Мf?75jШf{еСКlIf?' / MOZflllтflbIe :
: '" МехиНlIчеСКlIf? " Волно8ые (8Вол" '. I
I Теl7ЛО ЦЛll', I ' / f/poBoQolJ) I
1 eц8po,.,exиHЦ ', \ . / I #злучеНlIй 1 , .
I чеОКlIf? .." Тепло8ь/е " I (В просmрОl{стf/e) 1
l' 1,' \. "1 \."
L.. f t 8 ; ТО;О8кio ;;;/L \
30llМОtJеllС(п"lfI1 ,. \ .
ротори II crпarп Pd Риспросmра'неНlIЯ ц].....
C{epe/J L \
, 8лцяние
\. !I ни среВ!I
. .., сцлця
8 трОНСформиторе
Рис. 1.4. Переходныи режим блока «reHepaTop трансформатор
линия» при включении ero в работу и процессы, составляющие этот
режим
любой режим, orpoMHoe количество (рис. 1.4). Рассматриваемые здесь электро-
механические процессы это последовательное изменение электромаенитНblХ
явлений в электрических цепях при одновременном ИЗменении механических явле
ний во вращшрщихся машинах.
Выделение только части процессов (в данном случае электромеханических)
не случайно. При решении любых инженерных задач из мноrообразия процессов
выделяют только те, которые непосредственно ОТносятся к изучаемому вопросу.
В данной дисциплине при рассмотрении переходных режимов внимание сосредо-
точивается rлавным образом на нормальных и аварийных переходных электро
механических процессах, а поэтому в название дисциплины входит термин «про-
цессы», а не «режимы».
t 1.3. ПОДХОД К ОПИСАНИЮ ПЕРЕХОДНЫХ ПРОЦЕССОВ
При переходах системы от одноrо установи.вшеrося режима (состояния рав-
новесия) к друrому происходит изменение количества той энерrии, которая была
связаНа с электрической или электромеханической цепью в исходном режиме.
Эrо явление, единое по своей природе, при анализе при,.нимается состоящим из
ряда процессов, каждый из которых отражает изменение определенной rруппы
параметров режима. Выделенная rруппа параметров режима, характеризующая
14
данный процесс, называется nараЖтрами процесса. При более cтporoM подходе
переходные процессы надо было бы рассматривать одновременно во' времени
и пространстве (например, появление тока при коротком замыкании и распро-
странение электромаrнитных волн в пространство вдоль воздушных линий, ка-
белей, обмоток машин и трансформаторов). Однако решение задачи можно
упростить, учитывая только наиболее существенные для конкретной задачи фак-
торы. Такое упрощение принято в настоящей Дисциплине, rде рассмотрение пе-
реходных процессов ведется только во времени, но не в пространстве. Пере-
ходные процессы при этом, так же как и режимы, различаются по ряду приз-
наков:
п о у с л о в и я м про т е к а н и я; так, в нормальных переходнbl.)
режимах можно судить о нормальных переходных процессах, в а арийныХ ре-
жимах об аварийных переходнЫХ процессах. Такое деленIfe несколько услов-
но, так как физическая природа процес.са не зависит от Toro, является он цор-
мальным или аварийным; .'
поп р и ч и н а м в о з н иХ н о в е н и я по видам возмущающих
воздействИй и значениям возмущений. Под возмущением при этом понимаются
отклонения параметров режима, происходящие в начале переходноrо процесеа
в связи с появлением новых, т. е. не проявлявшихся ранее, факторов, изменяю-
щих (возмущающих) режим. Эти факторы, являющиеся причиной возмущений и
наэываемыевозмущающими воздействиями, MOryт быть большими, малыми,
синусоидальными, толчкообразными и т. д. При этом можно рассматривать ре-
альные физические причины переходноrо процесса или независимо от физических
причин вводить в расчет некоторые пробные отклонения (большие или малые)
параметров режима, на какое-то время изменяющие исходный режим;
п о Д о пущ е н и я м, сделанНЫМ при составлении дифференциа4ЬНЫХ
уравнений, т. е. по полноте математическоro описания;
п о с к о р о с т и протек нияпроцессов в системе, причем следует иметь
в виду, что переходный процесс, начавшийся в момент возмущения' режима, в
линейной системе теоретически длится бесконечно долro. Практически считают.,'
что процесс закончился, если параметр, характеризующий ero изменение,
отличается от теоретическоrо установившеrося значения на некоторое конечиое
значение, зависящее от конкретных условий;
п о с т р у к т у р е исследуемой системы, которая может быть или про-
стой, содержащей радиальные передачи, 'или сложной, состоящей из ряда па-
раллельных контуров;
п о Д о пущ е н и я м, сдел1ЩНЫМ при математическом описании; эта
rрадация переходных процессов особенно разнообразна, поэтому ,обычно
приходится оrраничиваться только некоторыми наиболее существенными приз-
наками.
При исследованиях переходных пропессов часто вводится л и н е а риз а-
Ц и я упрощение реальной' нелинейной системы, при котором имеющиеся в
ней нелинейности при исследовании переходных процессов не учитываются.
Нелинейные параметры режима принимаются постоянными или представляются
. линейным , зависимостяМи.
Квазипереходные процессы. Приставка «квази», означающая «как бы», yKa
зывает на то, что при рассмотрении переходных процессов часть их параметров
в течение Bcero процесса или отр.езка ero At вопреки реальности принята посто-
янной (E на рис. 1.5) или изменяюшейся по заранее заданному закону, на-
15
, I .
пример экспоненциальиому ( I{ на рис. 1.5); иноrда часть парамет.ров процесса
может совсем не УЧИТQIваться. НепрерQIВНое изменение параметра процес а инорда
заменяется ступенчаТI!IМ дискретным (см. штриховую линию). Разумеется .. ,
эти допущения справедливы, ес.ри пок&3ано, что они практически оправданы
в данной задаче., .
Полное и ynрощенное описание. Если математическое описание изучаемых
процессов УЧИТЫj3ает все основные в даняой постановке задачи составляющие
процесса, то соответствующие урай'нения
К6азцпеР )(D9Нltlе называются n().ЛН)){,Ми. Если же часть вли-
яющих, НО в данной задаче менее сущест-
венных составляющих Процесса и соответ-
ственно часть ero параметров не учтена или
учтена неполно и с заведомыми искажения-
ми, допустимыми в данном исследовании.
то уравнения называются уnрощеюшми.
Рассмотрим подробн нормальные.пе-
реходные процессы. Такие процессы сопро-
вождают текущую эксплуатацию системы.
Они связаны в основном с изменениями
наrрузки, а также с реакцией на них ре-
rулирующих устройств. Эти процессы воз-
никают при обычных коммутационных опе-
рациях: включении. и отключении reHepa-
I торов, трансформаторов и отдельных ли-
ний электропередач; нормальных эксплуа-
тационных. изменениях схемы коммутации
системы; включении и отключении отдель-
ных Ренераторов и наrрузок или измене-
нии их мощности.
СО При нормальной работе системы всеrда
I имеются некоторые мал е возмущающие
tкtоmкл t воздействия, вызывающие мзл- ые возмуще-
ния режима, например изменения наrруз-
ки. Следовательно, ПРОИСХОдЯт непрерыв-
но и <:Ьответствующие действия' реrулирую-
. щих устройств. Это означает, что cтporo
неизменноrо режима в системе не сущест-
вует и установившийся р им представля-
ет собой ряд переходньrx процессов, выз-
ванных малыми возмущениями. При этом
предполаrают, что отклонения параметров
режима, связанные с возмущениями, про-
ИСХОдЯт рколо HeKoToporo условно принятоro исходноrо paBHoBecHoro состоя-
ния. Orклонения должны быть более или менее (в зависимости от конкретных
требований) постоянными. Разумеется, что эти малые возмущения не должны
вызывать нарушения устойчивости режима. не допуская проrрессивно озрас- .
тающеrо изменения (включая и амплитуду колебаний) параметров режИма. Сш:- ,
тема должна быть устойчива при маЛblX возмущениях, иначе еО8Оря, она долЖ-
на обладать статичес/\'ой устойчuiюстью.
.Перехо9НblВ
Eq
м
1
с
Eq
'M
t I " t;
I .
I
I
.,
11
I
1
8'
t;
Рис. 1.5. Представленве реальноrо пе-
реходноrо процесса квазипереХОДIJЫМ
на 'примере трехфазноrо KopoTKoro за-
мыкании и ero последующеrо отклю-
чения:
1 ТОК в статоре reHepaTopa; 6 уrол пово-
рота reHepaTopa; М Т момент турбнны; Eq
э.о., с. reHepaTopa, являющаяся функцней тока
возбуждення; 1:." э. д. с. за переходным со-
протнвленнем
16\
J
\
. Статическая устойчuвость это способнОСТ1? системы восстанавли-
вать исходный режим посЛе малоrо ero возtdущения или режим, весьма
близкий к исходному (если возмущающее воздейс вие не снято).
Нормальные neреходн.ые nроцесш возникают и при больших возмущениях.
в виде резких и существенных изменен.ий режима системы. Их причиной может
, быть изменение схемы соединения системы, появляющееся, например, при отклю-
чении arperaToB или линий электропередачи, несущих значительные н rрузки;
при нормальном включении или отключении линии с большой зарядной, мощ-
ностью; при включении reHepaTopoB методом самосинхронизации и т. д. При этом
появляются такие значительные отклонения параметров режима от их исходноrо
состояния, что учет наиболее существенных нелинейных зависимостей [напри-
мер, Р == f(б)] становится в большинстве случаев обязательным.
Аварийные neрехйдн.ые nроцессы, вызванные короткими замыканиями и
последующими отключениями аварийных участков, а в некоторых случаях их
повторными включениями, обязательно требуют при анализе учета нелинейнОстей.
-По отношению к большим возмущениям вводится понятие динамической устой- .
чивости системы.
Дин.амическая устойчивость это способность системы восстан.авли-
вать после большоrо возмущения исходное состояние или состояние, прак-
тически близкое к исходному (допустимому по условиям эксплуатации
системы). Если после большоro возмущения синхрониая работа системы
сначала нарушается, а затем после некотороro, допустимоro по условиям
эксплуатации асинхронноrо хода восстанавливается, то считается, что сис-
тема обладает результирующей устойчивостью. 1 ,
Этот. вид устойчивости иноrда считают разновидностью динамичеСкой устой-
чивости, различая синхронную динаМическую устойчивость и динамическую ус-
тойчивость (результирующую).
Иноrда в зарубежной (особенно американскоЙ) литературе различают neреходную !/с-
тойчuвость (Trans.ient Stability), определяемую, при рассмотрен ин процесса на интервале
, нес ольких секунд, н дuнаAluчеС1q!Ю устойчивость (DynamicStability), связанную с процес-
самЙ, нссЛедованне которых ведется на протяженин нескольких минут. В этом случае 'l'ребу.
ется учет динамическнх характернстнк таких. элементов системы, как паровые котлы, атом-
ные реакторы, напорные трубопроводы rНДРОС1ll1НЦИЙ, динамнческие характернстики релей-
ной sащиты и устройств CHcтeMHoro реi'улнрования, напрнмер реrулирования частоты 8
'мощностн.' . ,
в отечестиенной литературе обыч,о пользуются одннм теРМИRОМ сднн'амическая устой-
чивость», а при рассмотренни ее на большом ннтервале времени добавляют: «при длительных
переходных процессах». .
'"
Введенные выше .понятия «малых» и «больших» возмущений условны. Малое
. возмущен.ие в этом понимании это возмущение, влияние KOToporo на характер,
поведения системы проя яется практически н е з а в и с и м о о т м е с т а
появления возмущающеrо 80здействия и ero' значе-
н и я. В связи с этим Сйстема в диапазоне режимов, близких к исходному, может
рассматриваться как линейная. Большое возмуz.цeн.ue э:rо возмущение, влияние
Koтoporo на характер поведения системы существенно з а в и G И Т О Т 8 Р е м е-
н и с у Щ е с т в о в а н и я, з н а ч е н и я и м е с т а п о. я в п е н и я
возмущающеro воздействия, в связи с чем система во всем диапазоне исследования
должна рассматр ваться как нелинеЙная.
17
f /
, I I
I . . Изменении Rarpузок {влеК1рнческие} . Измеие J[ . ИзмеиеИИJ[ режима 1<Отиов
, . От ючеИИJ[ JIJIННЙ . Короткие зaю.tКallИи , частО:rQ
П р llЧllml ПОllВ1lении {. . f роза ,:. . arpу зок ' ,. Изменении 8лектромеханнческoro :
, режнма reиераторов. . Деление cнcтeldы
переходнorо процесса . Работа' . выключателей .Работа зб ,
реryЛJIТоров ВО уждеИИJI . Работа реryЛJIТоров котлов
. , . Изменение злектромarnитноrо режима 1. Рабо:ra pel)'литоров скорости ,
\ : ',. Реryля:оры частоты \
\ 1. Аатоматнческаи paзrpузка \
\ I \
\ I \
, \ \
, . Леренапряжении (резонансные, , \
" самовозбуж.цение, дннамнческие) ....., \
, . Качанни тeнepaTO po B Ресннх р онизации \
. Леренаприженни' \ . I
(ВН,ешние, внутреннне) \ ( .,НарушенИJI синхронизма тенераторов :
I . СверХТОI<И Н уменьшении, А работа
I (нзменении) напряжеННJ[ I . синхроннаи epaтopoB
I . Ланнна наприженни . Ланнна частоты
, I
,/ . Само аскачиванне тонераторов "
, I i
I , I
, .ЭЛel<'lpомarnитные процессы ... _ ... ; I
........... / I · ТеПЛ09нерremчеСl<Ие процессы
. Резонансные влектромarннтные , ЭлеК'lpомехаиичесl<Ие процессы I
процессы...... I
i . Д ннамнческ:.Д ре :::ы . е , устойчивость .Статическаи устойчив
I . Результирующая ,
I 'устоочивость I
{ Расчеты перенаприжений " ", · у' стойчивость нarpузки /
Наиболее. ',' . Расчеты ТОКОВ Короткоro заыъn<aнИJI \ .,Расчеты устойчивости, 1
характерные I \ выбор, АРБ, АЛВ, АРе, АВР' 1 1 .Расчеты режимов н НХ
расчеты I \ ' оптимнзации
I \. /
I '1
В I " " , , 1 . 1. I .',
реми 1O 7 1O , o 5 1O 4 1O 3 10'2 l' " ' 10 i02 , . 10 3
протекВIЩII I ]
шкросекунды I ,мнллнсекунды т ceJ<YВAЫ
: t 1 вл. rpaд. t 1 ериод .
ПрОllВ1lеиии {
переходноrо
процесса .
fруппы {
процессов .
. B01JНoвыe процессы
. Экономическое
pery лирование
. л poцeccы распределении н
перераспределенни нarpузок
I
10'
t,c
I
105
мнвyrы
часы
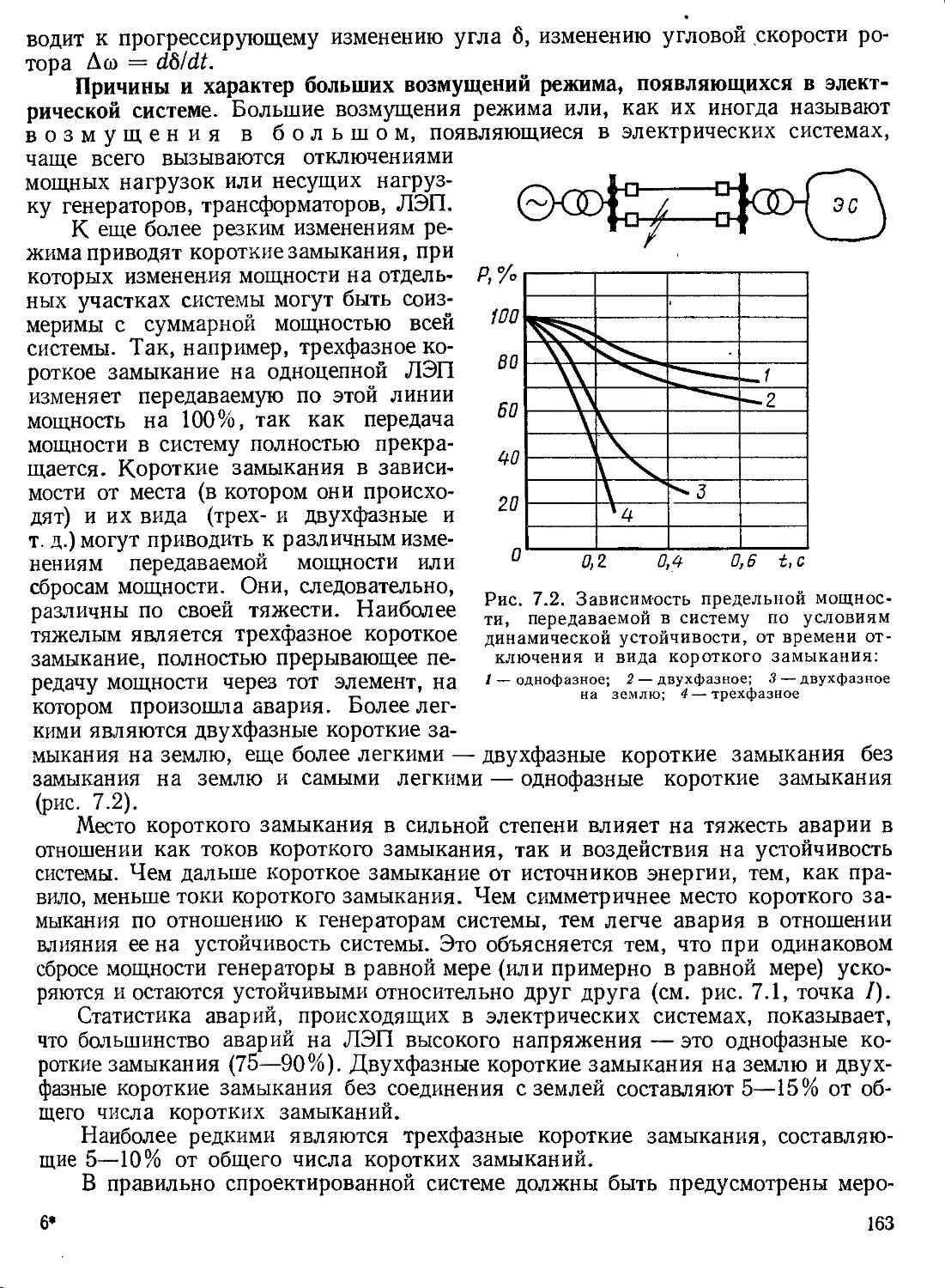
Рис. 1.6. Переходные процессы в электроэнерrетической системе и rруппы их
,: ...:,,, .J ! _ а). ,"C
...............'A; >,
Все процессы, которые происходят или MorYT происходить в электрической
системе, можно разделить п о в р е м е н и их протекания (от микросекунд до
десятков часов), поп р и ч и н а м их появления и с п о с о б а м и с с л е Д o
в а н и я на четыре большие rруппы. Учитывая, что rраницы между этими rруп
пами несколько условны, их можно представить rрафически так, как это сделано
на рис. 1.6. Настоящая дисциплина рассматривает в основном пр щессы TpeTЬ
ей rруппы, хотя в ряде случаев изучаются и проблемы, связанные с влиянием
процессов в смежных rруппах.
f t.4. МЕСТО ДИСЦИПЛИНЫ В 06УЧЕНИИ. ПРЕДМЕ;r ИЗУЧЕНИЯ
Изучение переходных процессов основывается на знаниях, полученных в
предшествовавших общеобразовательных дисциплинах, математике, Teope
тической механике, основах электротехники, и в ряде специальных дис
цип.lIИн, посвященных изучению режимов отдельных элементов системы элек
. трических машин и аппаратов, электрических сетей, переходных электромаr
нитных процессов.
Для настоящей дисциплины существенно прежде Bcero то, что отдельные
процессы, происходящие в элементах электрических систем, изучаются в их
взаимосвязи. Здесь при постановке на.учных проблем и I1рактических задач pea
лизуется системный подход, т. е. учитывается м н о ж е с т в о с в я з е й м е ж
Д у э л е м е н т а м и с и с т е м ы. составляющими в совокупности подсисте
мы, и отдельными процессами, в них происходящими. Прямые и обратные связи
между подсистемами и всей системой в принятой методике изучения получают
отражение как единое целое. Можно, следовательно. сказать, .что в ы Я в л е-
в и ю о с о б е н н о с т е й и к а ч е с т в е н н о н о в ы х с в о й с т в, п o
я в л я ю Щ и х с я при к о л 'и ч е с т в е н н о м и з м е н е н и и (объеди
нении большоrо числа отдельных элементов в единую электрическую систему),
и обучению п о н и м а н и я возникающих явлений посвящена данная дисцип
лина.
Однако только п о н и м а н и я инжен ру еще недостаточно; он должен
пр е Д в и Д е т ь протекание процессов и у п р а в л я т ь ими. Для ;Horo надо
у м е т ь рассчитывать процессы; предсказывая по изменеН!fЯМ параметров систе-
мы количественные изменения ее режима; устанавливать, коrда и какие воздей
ствия должны получать элементы системы от реrулирующих устройств, 'для Toro
чтобы переходный процесс приобретал желательный характер.
Понимание и умение предполаrает наличие определенных з н а н и Й.
Н е о б хо д и м о з н а т' ь исходные математические выражения, описы-
вающие явления; rлавные рзсчетные формулы; теРl'lиН()Лоrию; важнейшие по
нятия. . ,
Н е о б х о д и м о з н а т ь основцые параметры электрических систем и
их элементов, значения физических величин, участвующих в процессах. Хотя
rлавная цель обучения это выработка понимания физики явлений, от уча
щеrося требуется все же запоминание определенноrо, небольшоrо по объему фак-
тическоro материала в виде формул и чИсловых характеристик. .
Изучаемая дисциплина предшествует по. времени и содержанию paCCMOTpe
нию электрических систем, дальних электропередач, автоматизации и защиты
электрических систем и диспетчерскоrо управления. Она является основой для
последующеrо изучения методов и пр»емов, применяемых при практических
19
расчетах переходных процессов. Расчеты эти в дальн.ейше.м noлнОстью фQр.аа-
лuзуются, в первую очередь за счет матричноrо представления всех' вычисли-
тельных оqераций. это обстоящьство и переход к математическим моделям, 'co
держащим проrраммы для расчетов, приводят к тому, что физическая сторона
рассчитываемых процессов неизбежно скрывается. Между тем именно роль фи
зико-технических представлений особенно велика в современных условиях, коrда
управление переходными процессами средствами автоматики, кибернетики и
вычислительной техники становtfТСЯ rлавной задачей специалиста, проектирую-
щеrо и эксплуатирующеrо электроэнерrетические системы. Поэтому при изуче-
нии дисцИПЛ'ины особое вниманпе надо уделить физической стороне проблемы,
имея в виду, что применение вычислительной техники будет ОС13аиваться
позднее.
Следовательно, предм.ето.м изучения ЯВ:'fяются переходные взаимосвязанные
э J,I е к т р о м а r н и т н ы е и м е х а н и ч е с к и е эл,ектром.еханическue
про Ц е с с ы в э л е к т р и ч е с к и х с и с т е м а х и установившиеся ре-
жимы, предшествовавшие переходным процессам' и заканчивающие их.
KOHTponltHble вопросы
'1.1. Что такое электрическая система iI из каки элементов она состоит?
1.2. Дайте определение режимов и процессов. Назовите различные виды режимов и
процессов в электрических системах.
1.3. Что понимается под статической. динамической и результирующей устойчивосТью
системы?
1.4. Предмет изучеиия и цели дисциПлины «Переходные процессы».
1.5. Определите нелинейнос,\!> и ее виды в электрической системе.
1.6. Что иазывается параметрами 'режима, процесса и па,раметрами систем?,
1.7. По каким призиакам различаются переходные процессы?
1.8. Что понимается под квазипереходными пропессами?
1.9. KiiKOBbl причины и последствия системных аварий?
1.10. В чем заключается системный подход к изучению перехо.ll.ных процессов?,
Темы рефератов
1. Систе",иые аварии; особевиости их протекания и пути предотвращения тяжелых
последствий.
2. Разделеиие переходиых процессов в электрических системах на rруппы и особеннос-
ти процессов., изучаемых в данной дисциплине.
rпABA .1
ОСНОВЫ РАСЧЕТОВ УСТ АНОВИВШИХСЯ ИСХОДНЫХ
И КВА3ИПЕРЕХОДНЫХ РЕЖИМОВ
t 2.f. ПОСТАНОВКА ЗАДАЧИ
Задачи, связанные с изучением переходныХ электромехаНИЧе<;КИХ режимов
и составляющих их процессов, сводятся в OCHOBHO К определенщо изменений
токов, мощностей и перемещений роторов во времени. Они требуют прежде Bcero
получения характеристик нормальных режимов. 'Без знания исходноrо нормаль-
HOro режима, при' котором начинаются переходные процессы, и устщювившеrося
послеаварийноrо режима, их заканчивающеrо, нел зя иметь достаточно полноrо
представления о работе изучаемой системы и ее переходных режимах.
Режим (рис; 2.1) характеризуют параметры системы ПО (По == Xd, Xd" r
и т. д.) И параметры процессов.п пр (Ппр ==и, i, Р, Q и т. д.). Параметры системы
как совокупности элементов,' обладающих определенными физическими свойст-
вами, MorYT рассматриваться:
как неизменяющиеся (П е == const) в условиях исследуемоrо процес-
с,а в этом случае их называют линейными;
как нелинейные, если они зависят от параметров процессов
Пе'==f (Ппр {, ..., Ппр n);
MorYT иметь вероятностно-детерминированный характер, т. е. MorYT не
быть постоянными и изменятьця в зависимости отвремени или какоrо-либо пара- .
метра проu.есса по определенному (известному) закону;
MorYT иметь некоторые случайные изменения, не отвечающие какому-либо
вероятностному' закону. В этом случае rоворят о/системе параметров, заданных
с разбросом, иноrД:а называемых 'раз.мы.тpu,tи или н.еоnределенны.ми. '.
При дальнейшем изложении везде, rде это не будет специально oroBopeHo,
параметры системы 80 время исследуемоr процесса будут приниматься постоян-
ными, т. е. сиct ма в этом смысле будет линейной. Все установив иеся режимы
и переходные' процессы описываются системами уравиений алеебраическux и
дuффeренцuaлЬ1:lblХ. СистеМJ:>I ал,rебраических уравнений вида
q>(Ппр, ..., По....)==О (2.1)
связывают между собой пара метры системы и параметры ее установившеrося (ква-
зиустановившеrося) режима. ,
Для изучения nереходных процессов MorYT быть составленЫ системы диффе-
ренциальных уравиений первоrо порядка вида
dПп;/di == Ф(Ппр, ..., ПО>. (2.2)
, При некоторых допущениях, предусматривающих отказ от учета части
з.лектромаrнитныХ переходныХ процессов на уча€тке схемы (рис. 2.1), сеть, со-
.держащая элементы R, L, С, будет характеризоваться только' алrебраическими
уравнениями вида (2.1). Для части схемы. отражающей вращ.ающиеся электриче-
\
ские цепи (reHepaTopbl, двиrатели), будут Справедливы дифференциальные урав
\ пения вида (2.2). . I .
Уравнения (2.2), записанные для вращающихся электрических машин, F.
уравнения сети (2.1) можно объединить в общую систему, ПОЗВОЛяющую получить
8ращающClЯСЯ. п08сuстема
iуР;ОнёН -М--;Й1W , '
, ,Ч8Сlfоео 88ижениЯt-
Ура8ненця r I . ротОРа ,"\
АРС А р '! I '<d=f(A/I1) I I
, T I
T "
...J ,/
Неп088uжная л08сtJстема
I
,
L {yp;O;e -;---и5p -; "1. J
. L :! 3!:!.. .J
ДифференциаПhные уро8неfjUЯ
dПпр/dt = '/J (П пр '" Па")
r7lраiненUя , r YPc;8HeHIl; 1-- .
J!!:.e.3fll..J1!!..fI!!!!.. LЦ Л!.й-....с.!!!ат..g!!..CI--!.. ] ..,
1 !J а8нения f7 еоо. ClзоВония [!lP,:! e I7! J
rY:;a8;'w; 1 I
i1:'!: :. ! ..J . I
r i l
I УраВнения I
'стотичеСКI/Х наеРУЗ0К r
L ..J
Рис. 2.1. Структура электроэнерrетической СИстемы И ее математическоrо ОПИ-
сания
,4пееораические !/ра8нения
r; {П пр .... Па...} =0
(.
решение поставленной выше задачи наХождение параметров процессов ППР ==
== t(t). Для этоrо надо переписать уравнения для вращающихся машин, связав
их с неподвижными цепями сети, Осуществив «приведение параметров» или «пре- I
образование КООрДИНат». Процедура TaKoro пересчета ПDОИЗВОДИТСЯ с помощью
математических соотношений, обычно называемых уравнениями связи ИЛИ мат-
рицами преобразования (рис. 2.1).
i 2.2. ПОСТРОЕН НЕ СХЕМ ЗАМЕЩЕННЯ.
ПРНМЕНЕННЕ СОБСТВЕННЫХ Н ВЗАНМНых ПРОВОДНМОСТЕЯ
После указанных ПРеобразований и «ПрИведения» исследуемая система мо-
жет быть представлена для Изучения установившеrося или квазипереходноrо
режима в ином виде (рис. 2.2). Теперь систему можно рассматривать как п-по-
люсник, содержащий линейную пассивную электрическую схему, у которой в точ-
ках j :!:: 1, 2, о.., п за СОПротивлениями Zj ПОдключены элеКТРОДВИжущие силы
E j (э. д. с.), представляющие элеКтрические машины 1, 2, ..., по
Вместо какоrо-либо reHepaTopa в схему может быть введена наrрузка. Тоrда
ero Эо До Со станет равной Нулю, а СОПРОтивление или будет поJтоянным (Z н ==
== const), или будет функцией реЖима Системы [ZH == cp(U j , то В этом Случае
схема становится н е л и н е й н о Ао Токи, а следовательно, и МОщности в любой
22
\
ветви схемы MorYT быть определены через матрицу проводимостей n-полюсника
У (рис. 2.2). Ток со стороны reHepaTopa будет определяться соотношением I ==
известны, то для определения токов и
. .
== У.Е. Если э. д. с. Е в данной схеме
мощностей надо найти проводимости
У. Матрица У имеет диаrональные
1:' nn и неДиаrональные у jk элементы.
Известно*, что У nn == Yтtn-L.
'Фnn == gnn + jb nn является собст
вен,н,ой проводимостью, т. е. комnлекс
н,ой величин,ой (в общем случае), оп-
ределяющей модуль и фазу тока в кa
кой-либо ветви n схемы о'" действия
д. д. с.. nриложен,н,ой в этой ветви
при отсутствии э. д: с. во всех ос-
тальных ветвях.' Величина у n" ==
== Уn k-L. 'Фn k являет.ся взаимн,ой nро-
еодuмостью между узлами n и k. Это
комплексная величина, определяющая
'модуль и фазу тока в какой либо вeт
ви.п от действия э. д. С., приложен,-
н,ой в друzой ветви k, при отсутст-
вии э. д. с. во всех остальн,ых ветвях.
Любую из этих проводимостей можно
представить как
J
Znn
У'пп
. Вращающиес" ПассцВные
машцwь/ ПассцВна" сеть нацуз/{ц
Zrr I
1
',!,/ I и 1
, ,
'c
'..,- ---T:-- -
* / Ш к
/ .... 2 K =co n s
" I
t"':;1 I
. I ,... I t
, Х J
IZHI = 'P(U,S,S), i ' "1
I ,', I
..--------- --' y I
>< . I \ - I
.......J . * .. I
ZHI71=\II(U'5's)1 - L..! ..:_.... J
I
I
'" . Z . I
. r2 и Т 21
>< Е; '
'" . I
<S;...._ _.._._. I
Z . I
rl1. U rnl
Рис. 2.2. Исходная расчетная схема э.лект-
роэнерrетической системы
у == g + jb == уе:fiФ == ye:fi(90----a) == =F jye,zia,
. См.: Электрические системы: Математические задачи электроэнерrетики/Под ред.
В. А. Веникова. М.: Высшая школа, 1981; Электрические системы: Электрические се-
ти/Под ред. В. А. Веникова. М.: Высшая школа, 1971..
Х пП
+
rде
Ф == arctg (Ь/ g); а ' 90 ф; у == =F jye ia == у (siп а =F j cos а) == у (r/z =F jx/z);
здесь ве р хний ЗЩIК отвечает индуктивной проводимости, а нижний емкостной
\
. (рис. 2.3).
J При определении взаимной проводи-
2 пт У'пт 2 пт мос]и часто получают отрицательные зна.
ч ния ее вещественной составляющей, Т.е.
g, И' соответственно для . уrла а ==
arctg (g/b). Это может вызвать недоуме-
ние, так как у какоrо либо реальноrо эле-
мента отрицательная составляющая прово-
димости может быть только в активной.
схеме (прИ' наличии в этом элементе источ
Рис. 2.3. Структура собственных Znn и ника энерrии). Однако взаимная проводи
взаимных Znт сопротивлений мость характеризует не реальный элемент,
а представляет собой некоторый комплекс
ный коэффициент пропорциональности между током в одной ветви схемы и
напряжением в друrой ветви. Поэтому она может иметь отрицательную вещест
\
Х пт
+
23
веннY\IO составляющую и в пассюJНЫХ схемах. у собстВенных проводимосте
Y n, У kk, определяемых как отношения тока к напряжению в данной точк
схемы, активные составляющие не MorYT быть отрицательными. если отдельны
8е1'ви схемы не содержат отрицательных активных сопротивлений. т. е. некото
рых источников мощности, наличие которых в данном случае из рассмотрения ие
Ключается. Таким образом. уrлы а пп И апп собственных проводимостей и их ве
щественные соСтавляющие всеrда поло ительны; уrол а пт может быть как по
ложителЬНЫМ,так и отрицательным.
Величины, обратные собственным проводимостям, называются собствеННblМI
сопротивлениями, а величины, обратные взаимным проводимостям, взаиМ/tbl
ми сопротивлениями.
Для Toro чтоб,Ы найти активные и реактивные мощности, токи И'напряжениs
в любом элементе,системы при установившемся режиме или очень медленном er<
изменении применяют известный способ наложения (суперпозищии). Для этоr<
необходимо, чтобы все синхронные машины. были представ.лены некоторыми по'
стояНными сопротивлениями с приложенными за ними э. д. С., а аСИНХРОННЫЕ
двиrатели наrрузки пассивными элементами. Рассматриваемая система' пр.
этом должна быть или линейной. или посредством каКих-либо преобразованиЁ
"из нее ДOJIжны б1;dТЬ выделены линe1i:ные части. После преобразований схема сис.
темы может быть положена в основу расЧето установи'вшихся или квазипереход.
ных режимов. Она становится схемой замещения. объединяющей reHepaтopbl (ис-
. .
точники напряжения в виде э. д. с. Е и сопротивления Z r). наrpузки и злементы
сети (см. рис. 2.2.).
Электрическая сеть представлена в схеме замещения линейной пассивной
электрической цепью, режим которой может быть описан узловыми уравнения-
!'t{и. связывающими напряжения в узловых foчках этой сети с токами reHepaтopoB
и наrрузок. Для сети. содержащей n узлов, эти уравнения в матричной форме
записи имеют вид \
[ УН Y12. · . YlJt [ Чl [ l J
Y21 . У 22 . · . Y2n Х и == '2
.: : . " : : 2 : f
Yпl УП2. .. У пn 'й j
п n
(2.3)
rде за Положительное принято направление тока в сеть.
Элементы l\ofатрицы узловых проводимостей сети у с леrко определяются по
схеме замещения сети * :
диаrональный элемент УН (ё == 1. .... n), называемый собственной прово-
дu.м.ocтью узла ё. равен суммепроводимостей ветвей сети. связанных с узлом ё;
недиаroнальный ЭJ,lемент Y iJ (ё. j == 1. .... п; i =1=. i). называемый 83а-
lUCной nроводимосmью узлов i и i. рав'ен .проводимости ветви, соеДиняющей эти
. узлы**.
· См.: Эл:ектрические системы: Математические задачи электроэнерrетики/Под ред.
В. А. Вени1СО8а. М.: Высшая школа, 1981.
. · * В задАчах расчета установившихся режимов электрических систем используется
также форма записи матрицы УС, коrда недиаrональные элементы в (2.3) имеют эпак плюс;
в этом случае они qпределяются как лрово.дНМостн ветвей cxeмьr аВМ'еЩенн.н, ва.нтые с O
рлтньт.Jfl знаКОAl.
24
J, Рассмотрим JlииеАиую схему замещеиии 9J1ектрическОй системы при представлеиии иа-
,rpУЗОJ[ постоииными сопротивлеииями Zи == ,const. Полаrаи. что к первым. узлам сети
. (1 == 1. .... т <, п) подключеиы reHepaTopw. а к остальным узлам (/ == т + 1. ....' п)
ваrpузкн, запишем уравнення наrрузок с учетом положительных направлений токов со-
i'ласно (2.3): ,
i j == т (l/Zпj) i;J== УпJU j . j == т + 1. ... . n.
I
Объ динив (2.3) и (2.4). прлучям
Уn.-- У 1 (т) ! У 1 (т+l) ... У 1n
I : "
Yтl'" У тт i Yт (т+1) 0'0 YтA
I
(т+l; 1 :. -': :'\ : 1) (т+l) 0'0 (т+l) R
: :, : :
YAl '" YAIIt I Yп(т+1)'" У nn
(2.4)
х
.
и 1
'1
и т
.
1т
х
(2.5)
и т +1
:B (т+l) Ь(т+l)
.
.
и n
Y нn и n
мн
УН .0.
Ylт
У 1 (т+1) ...
Yln
:- :. !....... .........!.'!'!!!..:... -= У !.. т+ 1) .. - У тn
У(т+l) 1 н. :(т+l) т (: lт+l),lт+;)+ УН (т+l)] :(т+l)R
.. .
.. .
х
У nl 0.0
Ynт
У.. (т+l) ...
ЙI
IУ nn+Упnl
11
.У.ш
х
и(т+1)
. '
1т
О
'.
(2.6)
и n
о
Приведенне уравненнй (2.3) к виду (2.6) соответствует введенню постоянных сопро-
t'ивленнй наrрузок в схему замещеняя сети. Это привело к нзмененню 'собственных ПрО8ОДИ-
мастей наrрузочных узлов Уи (j == т + 1. .... п) и исключению токов наrрузок как внеш-
.х переменных сети. В СООТВе1'<;твин 'с указанным разделением (2.6) на блокн. эти уравненни
25
можно записать в матричном виде:
\
[ Y rr Yrв ] . [ r ] [ ir ] .
Y вr У НН U и о
Порядок системы уравнений (2.7) равен n, но ero можно понизить до т < n, исключив
из состава переменных напряжения наrрузок.
Способ понижения порядка используется в том случае, коrда в задачу расчета режима
не входит определение U и . Раскроем (2.7):
(2.7)
. .
Y rr U r + УrвU и == 11';
(2.7а)
(2.76)
. .
.. УиrU r + УииU и == О.
Из (2.7б) получим
. l'
U и == У ни У иr ц..
Подставив последнее выражение в (2.7а),. получям
l . .
(Yrr УrиУ нн Y вr ) U r == 11"
или
/
YcU r
11"
(2.8)
rде
Ус == Y rr :""'" Уrиу lУиr'
Элементы матрицы проводимостей в (2.8) в отличие от (2.3) требуют для cBoero опреде.
леняя сложных вычислений, и только диаrональные элементы этой матрицы имеют ясную
физическую трактовку. Действительно, Рассмотрим произвольное (Ё e) уравнение систе-
мы (2.8):
YCl1V rl ... У С! (/ 1)V!, (1 1) + Y llVrl У С1 (/+1) V !' (1+1) ... YClтVrт == i rl .
.. .
Собственная nроводимость узла У си м'ожет быть определена как отношение тока к на-
пряжению узла i при равенстве нулю апряжений 'всех остальных узлов J:r е. при замыка-
нии этих узлов накоротко). иными словами, У cil входная проводимость схемы относи-
'телъно узла i. Так как в рассматриваемой пассивной цепи активные сопротивления ветвей
положительны, то и активная составляющая У Cii будет положительна, а знак реактивной
составляющей будет определяться соотношением индуктивных и емкостных сопротивлений
ветвей С,хемы.
Взаимная проводимость узлов У cij (j =1= i) может быть определена как взятое с обрат-
ным знаком отношение тока в узле i к напряжению в узле j при равенстве нулю напряжений
всех остальных узлов, т. е. является коэффициентом пропорциональности между током в
одном узле схемы и напряжением в друтом и физическоrо аналоrа, в отличие от собственной
проводимости, не имеет. В связи с этим знак активной состаВJ,Iяющей взаимной проводимос-
ти может оказаться отрицательным для пассивной схемы, активные сопротивлеНJlЯ ве'I'вей
которой положите,1lЬНЫ.
Для линейной схемы замещения Э,1lектрической цепи и представления наrрузок пос-
тоянными сопротивлениями схема замещения электрической системы с учетом э. д. с. и
.сопротивлений reHepaTopOB также будет линейной. Уравнения узловых наприжений для
электрической системы можно получить, ДОПОЩIИВ (2.8) уравнениими
"
" .
Erl Vrl==Zrllrl; i==l,..., т,
26
- или в матричной форме,
., .
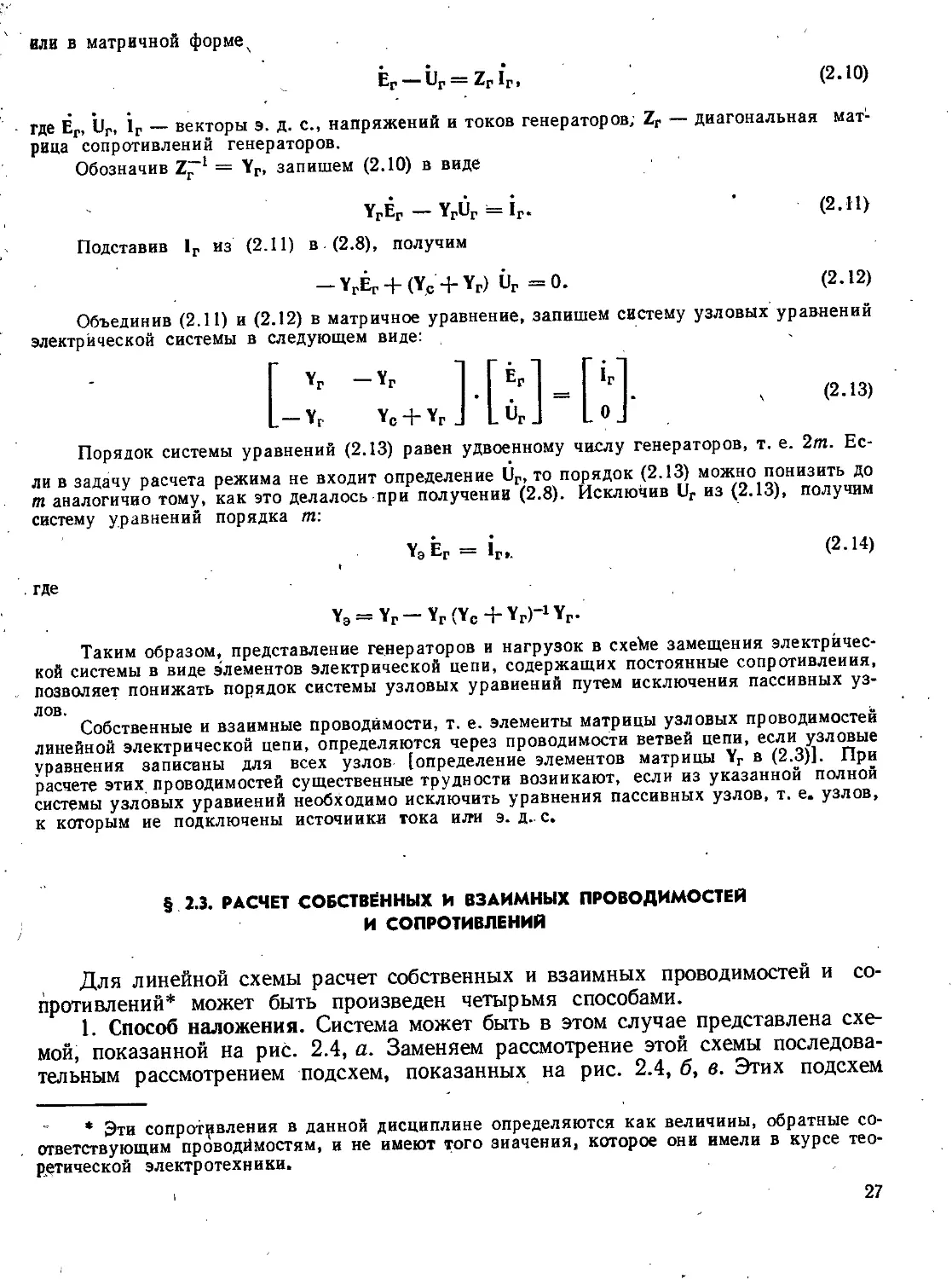
Еr U r == Zr 11" (2.10)
тде Er' UI" 11' векторы э. Д. с., напряжений и токов reHepaTopoB; Zr диаrональная мате
рица сопротивлений reHepaTopoB.
Обозначив Z;l ;: Y r , запишем (2.10) в виде
. .,
YrEr YrU r == 11" (2.11)
Подставив 11' из (2.11) в,(2.8), получим
YrEI' + (У С + Y r ) U r ;: О. (2.12)
Объединив (2.11) и (2.12) в матричное уравнение, запишем систему узловых' уравнений
электрической системы в следующем виде:
[ Уr Yr ] [ Er ] [ ir ]
Y r Ус + У r . U r О .
Порядок системы уравнений (2.13) равен удвоенному чи.слу reHepaTopoB, т. е. 2т. Ec
ли в задачу расчета режима не входит определение U r , то порядок (2.13) можно понизить до
т аналоrичио тому, как зто делалось-при получении (2.8). Исключив U r из (2.13), получим
систему уравнений порядка т: -
(2.13)
Уз Еr == 1I'f,
(2.14)
, rAe
Уз == У r У r (Ус + Yr) l Y r .
Таким образоМ, представление reHepaTopoB и наrрузок в схеме замещения электричес-
кой системы в виде элементов электрической цепи, содержащих постоянные сопротивлеиия.
позволяет понижать порядок системы узловых уравиений путем исключения пасСИВНЫХ уз-
лов.
Собственные и взаимные проводимости, т. е. элемеиты матрицы узловых проводимостеЙ
линейной электрической цепи, определяются через проводимости ветвей цепи, если узловые
уравнения записаны для всех узлов [определение злементов матрицы У !, В (2.3)]. При
расчете этих, проводимостей существенные трудности возиикают, если из указанной полной
системы узловых уравиений необходимо исключить уравнения пассивных узлов, т. е. узлов,
к которым ие подключены источиики тока иJ1l! э. д.- с.
t _ 2.3. РАСЧЕТ СОБСТВЕННЫХ ... ВЗАИМНЫХ ПРОВОДИМОСТЕЙ
И СОПРОТИВЛЕНИЙ
Для линейной схемы расчет собственных и взаимных проводимостей и со-
противлений* может быть произведен четырьмя способами.
1. Способ наложения. Система может быть в этом случае представлена схе--
мой, показанной на рис. 2.4, а. Заменяем рассмотрение этой схемы последова-
тельным рассмотрениемподсхем, показанных на рис. 2.4, б, в. Этих подсхем
* Эти сопроТ вления в данной дисциплине определяются как величииы, обратные со-
ответствующим ПРОВОДilМОСТЯМ, и не имеют 'l'oro зиачения, которое они имели в курсе тео-
р. тической электротехники.
27
должно быть СТОJIЬКО,СКОЛЬКО В схеме (рис. 2.4, а) имеется ветвей, содержащих
э. д. с. Ток в любой ветви будет
i 1 == jll iI2 ilЗ"""':' i 1n ... 11k'
rде il1. собственный ток; )12' i 1з , i 1n , i 1l1 . взаимные токи.
Под со?ствеfUШМ током понимается составляющая тока в любой ветви, вы-
званная деиствием э. д. с., приложенной в данной ветви при отсутствии (равенст-
. ве нулю) э. д. с. в друrих ветвях. Под 8за-
а).!!.. !.!!:.. iE... u.мНЫM током понимается составляющая то-
ка в какой-либо ветви, ВЫ3В1lнная действи-
ем э. д. с. в друrой ветви при равеНСТВе ну-
лю э. д. с. во всех остальных ветвях.
Очевидно, что
Е,
"": I i.
@
-ф-
":"
":" 151
5
P3f
p " '
2I j,
-В)
i 12 -=-
..........
":"
Рис. 2.4. Схема определения собствен-
ных и взаимных сопротивлений спосо-
бом наложения:
. tl исходиый режим расчетиой схемы; б
родсхема uри действии з. д. с. Е,; в Родсхе.
lIа uри действии з. д, С. Е 2
..:..
Рис. 2.5. Схема определения собствен-
ных и . взаимных сопротивлений или
пр оводимостей способом преобразова
ния
. . . .
Inn == Еn У nn ; Inm == ЕтУ nт ,
. . .
rде V па ,собственная проводимость, равная I nn/ Еn; V nт .. взаимная прово-
димость, равная inт/E т .
2. Способ преобразования. Собственные и взаимные проводимости для любой
схемы MorYT находиться путем преобразования. При этqм любая схема привр,.
дится К виду схемы, показанной на рис. 2.5. Исходя из преобразованной схемы,
леrко найти взаимные и собственные проводимости:
У n2 == t; Z n2; V nз == l/Znз и т. д.;
У nn == l/Zno + l/Zn2 + l/Znз +... + l/Znm и т. д.
3. Способ едииичных токов. Для определения У н,т. е. собственной ПрОВо-
димости какой-.IИбо ветви, начинающейся точкой k, и ее взаимной проводимости
с точкойп (п 8t 1.. 2, 3) поступают следующим оба,азом. Предп()лаrают, что l!I
28
ветви k (см. рис. 2.4, а) приложена некая расчетная э. д. С. !!..Е А , значения'и фаза
которой. приняты такими, что в ветви n от действия только э:ой э. д. с. (при рав-
ных цул ю э. д. с. во всех остальных ветвях) протекает ток пА . 1. Зная ток в
ветви n, находим, что падение напряжения в ней !!..U п == InkZn == 1.Zn.
Очевидно, что напряжение, приложенное в, точке присоединения сопротив-
.пения Zn, равно АU n' Производя далее токораспределение, находим токи и на-
пряжения во всех ветвях и в ко ечном счете ток i,, и э. д. . !!..Е А. При TOM B a-
,иМная проводимость У пА == 1/!!..Е ", а с.обственная ПРОВОдИмость У kk == 1 ",,/ *Е ".
4. Способ матричноrо опреДeJIения собственных и взаимных проводимостей. Это опре-
деление может быть проведено соrласно рекомендациям, сделанным в 2.2. В этом случае**
для определення собственных и взаимных проводимостей составляются специальные про-
tpilMMbl и вычисления обычно проводятся на ЦВМ. Иноrдз рекомендуется...собственную
проводимость 'какоrо.либо узла k (точки) сложной схемы определять делением определи-
тел я , М матрицы узловых проводимостей (полинома проводимостей ветвей деревьев) на по-
nИНОМ M ko проводимостей двух соответствующих деревьев (ДЛЯ узлов k и О) или
У"О == УА" =='М/М Ао '
Взаимная ПР'оводимость между узламн n, k будет выражаться как
У п" == М/[ M kn . От Mk'!1' Оп),
rде для определения Mkп,Om И Mkт,Oп необходимо ВЫЯIЩТЬ пути между узлами kn и От. а
затем между узлами km и Оп, rде k, п, т номера узлов.....
Способы матрнчноrо определения оправданы только при сложных схемах. С помощью
,ЦВМ такие расчеты без особых затруднений позволяют находить проводнмости для сетей.
имеюЩИХ до 3000 узлов и более. Однако при проведении расчетов на ЦВМ обычно нет надоб-
иосТи отдельно вычислять собственные и взаимные провЬдимости, с тем чтобы .ztаЛе"е находить
режим, определяя токи, потоки мощностей, напряжения в узлах и т. д. Все эти операции
(ИJl1l та часть из них, которая необходима для конкретных целей исследования) совмещается
в, одиой проrрамме..... или проrрамме с подпроrраммами.
t 2..4. ОПРЕДЕЛЕНИЕ ТОКОВ
В расчетах установившихся режимов и квазипереходных nроцессов электри-
ческих систем reHepaTopbl обычно представляют схемой з-амещения в виде э. д. с.
E Q за сопротивлением Xq. Для неявнополюсных машtшJХd == X q ) в схему заме-
щения будет входить э. д. с. Eq, пропорциональная току возбуждения....... В
общем: случае эти э. д. с. изменяются с изменением режима. В частных случаях
э. д. С. в схеме замещения reHepaTopa может быть постояниой. Это относится,
например, к установиВШимся режимам нереrулируемоrо неявнополюсноrо reHepa-
...
· Эта э. д. с. отсутствует в реальной схеме и является расчетной, «воображаемой».
.* См. также:, Электрические системы: Электрические сети/Под, ред. В. А. Венд-
lW8a. М.: Высшая школа, 1971, 5.9.
, "'*. См.: Сен.дu К. Современные методы анализа электрических систем. М.:
Эверrия, '1971, 4.4. ,
*..., См.: Ан.дерсон. П., Фуад Л. Управление энерrосистемами и устойчивость/Пер.
е анrл. М.: Энерrия, 1980.
" **... См.: Браммеллер А., Алл01t Р., Хэмэм Я. Слабозаполненные матрицы/Пер.
е анrл. М.: Энерrия, 1979.
...... Схемы замещения и э. д. с. reHepaTopa рассматривались в дисциплинах
ектрические -машины» и «Электромаrнитные переХОДН'ые проuессы»; см. также 2.5,
,рвс. 2.7 и rл. 6.
29
тора (E q :=; const). Кроме Toro, при изучении переходных процессов, возникающих
во время каких либо возмущений в системе (см. rл. 1), изменяющуюся э. Д. с.
Eq reHepaTopa, отвечающую изменяющемуся току возбуждения, можно,
хотя и очень приближенно*, заменить э. д. с. Е' == const, приложенной за
-сопрот.ивлением х'. '
Таким образом, схема замещения reHepaTopa включает постоянную или пе
ременную э. д. с., приложенную за тем или иным сопротивлением. Для системы,
-содержащец т reHepaTopoB, 'ток в каждом из них ,может быть определен в COOT
ветствии с (2.14) по выражению
'. .. . .
'; == УНЕ ! ... УЩ 1) Ef l + YjiE f УЩ+I) Ei+l " ' YtmEm, (2.15)
Ej I .
/ Е]
I
I
I
I
I
I
I
I!i
Рвс. 2.6. BeKTOp
ная диаrраММа
э. д. с. системы и ее
представление H
плоскости
g==
или
т
it == Ё Yи EkY tk .
k l
k+i
Представим входящие в (2.15) комплексные величины в
полярной форме. -выделив их модули и aprYMeHTbI.
Э. д. с. reHepaTopoB MorYT быть записаны (рис. 2.6) как
. jB t '
Е , :=; Efe .
Проводимости ветвей представлены в виде
У == 1/Z == 1/(r + jx)== g jb == jyeja.
rде
,
\
tI == arctg (r/ х) == arctg (g/ Ь).
Ь==
х
r 2 +x 2
с учетом принятых обозначений (2.15) запишем как
r 2 + х2
. jOl . ja. U
/ t == Е; е 1 Уа е
jOk . ja.ik
+ Eke 1 Yfk е . .
k !
k1=t
(2.16)
в расчетах удобно представлять выражение для / t В виде двух составляющих
. .
одна из которых (qt) направлена по Et. а друrая (d;) отстает от Е; на 9001
. jOt . '
/l==e (Iqf J/di)' (2.17)
С уч'етом (2.15) выражения для составляющих тока примут вид
т
/ ql == EiYii slП а и + Eir. Yik sin (8 i 8k tIik);
k 1
k+i
(2.18)
* Подробнее об обоснованности TaKoro допущения см. ниже.
30
т
/ di == Е ! Ун COS ан Еk. Yik. COS ( i 011. aik.).
я 1
k+i
(2.19)
t 2.5. ОПРЕДЕЛЕНИЕ МОЩНОСТИ
Комплекс полной мощности S, протекающей через какую-либо точку cx
мы, определяется как произведение комплекса э. д. с. или напряжения в даннОй
точке на сопряженный комплекс тока*. Например, мощность, ВЫДаваемая источ
ником i,
. . л
Si == Е, /,.
Подставив в это выражение (2.17), получим
S, == Е ! (J q' + j / dt> == Е,/ q' + jE, / di'
Определив S, == P i + iQ" можно записать:
т
Р, == Е7Ун siп ан + E i Еk. У'k. sin ( , k. а,k.);
k 1
kфi
т
Q, == У" COS aii Е, Еk. У'k. cos ( , k. а,k.)'
k 1
k1-(
Для сокращения записи обычно используют обозначения взаимных уrлов
бik. б, бk., тоrда
т I
Р, == E Ун siп ан + 'E, Еk. Yik sin ( 'k. a'k);
k l
koeFi
(2.20)
т
Q . == E2, y ..cosa.. E.E kY ' k cos ( 8. a. )
i 11 Н l l Zn. ZA- .
k l
koeFi
(2.21)
Выражения (2.18) (f.21) справе!tЛивы при представлении reHepaTopoB и
синхронных двиrателей, входящих'в схему замещения системы э. д. с. Е
== Eq, Е', Е" и E Q (для явнополюсной машины). Эти э. д. с., показанные на
векторной диаrрамме (рис. 2.7), находятся по формуле
* Как известно, комплекс' мощности можно получить и умноже ием комплекса тока
.на сопряженный комплекс напряжения, что приводит к изменению знака реактивной мощ'
.ности.
31
Е , V (и А + P A rt,.QA X i )2+ ( PAX kr y ;
tg8 ,PkXi QAr
и +P/tr+QAX,
'1
.,]
'
(2.22) ,
Здесь U А напряжение узловой точки k системы, к которой подключен
данный reнepaTop; Р А , QA мощности, поступающие к точке k от эТоrо reHepa-
тора.
В сопротивления (Х,,') в записgнных выше и ниже выражениях входят со-
Аротивления как reHepaTopa, так и внешнейl цепи (от Е дО И). При определении
э. д. с. Е, reHepaтop вводится в Х, реактансом X r , который имеет следующие зна-
чения!
Е;
Е"
Е'
"
Е"
q
EQ.
Х р
Ха Х "
,
Ха
"
Ха
Х " =1= Ха
ВводЯ в расчет явнополюсной машины э. д. с. Eq" нельзя получить простую
схему замещения.. (Ее не существует, так как Ха =1= Xq.) В этом случае внутрен-
няя электромаrнитная мощность reHepaтopa подключенноrо к узловой точке с
напряжением U А, может быть определена как Р EqI q' или
Р E Z Sinaq EqU A z: f . r(xa Xq) ]
, + Zdsш(а аd) + cos(a a,,) +
z Z Zq
\
2 '
U k za Zq (Ха Х,,)
+ cos(a aq)sin(a ad) + . . .. (2.23)
Z:
Здесь
Zc v 'Z+Xq X 4; Zq == V ,2+x ; Zd == V ,2+x tgaq '/Xq;
tg аа == ,! Ха'
..
· ЯВНОПОЛlосная машина (Ха =/= X q ) не имеет обычной схемы замещения в виде" поста-
янных; сопротивления и э. д. с., приложенной за ним.' ,
Схема замешення явнополюсной машины содержит э. д. с. E Q . зависящую от режима,
приложенную за постоянным сопротнвлением Xq. Если не вводить э. д. с. EQ ,а опернровать
э. д. с. Eq, то эта э. д. с. должна быть приложена за зависящим от режнма сопротивлением
ХаЕ. В самом деле, в любой (явно- илн неявнополюсной) машине физнческая величнна Eq.
пропорциональная TQKY возбуждения, .является основной при анализе. При этом для лю-
бой машнны Е" / аХа == U rq н Еа == / qXq' Если Ха =/= х ч ' то падение напряжения в ма-
шине АЕ == Ё " u' r , r,де IAEI == УиаХа)2 + (/qXq)2., Н о, соrласно рис. 2.7, /а == /siп .
/ q == / сosо/.Следовательно, АЕ == / Xa , rде == у sin20/ + (Xq/Xd)2COS2 _ Здесь =:о
== б + '1' характеризует режим машины.
Отсюда очевидно, что сопротивление Xa зависнт от режима, меняясь' от X q до Ха в аа-
висимостн от 0/. При Ха == Х " ХаЕ == сопst == Ха; Е == 1. Подробнее см.: Ива/tов-Смо.де/t.
скuй А. В. Электрнческие машины. М.: Энерrия, 1980, 58 4, Веников В. А. Пере-
ходные электромеханические процессы в электрических системах. м..: ВысшаSi школа,
1970, 4.1. ,
з2
а)
xd:Xq
и' E
q
",
Х "
OJYVV'\.O и
Е'
q
и
Е"
Ч.
Х;
и
lcos'i'=I q
.
1d =1 si{l rp
8)
....,
,....
><
ъ
......
t)
><
б)
t..
Eq\ \
\ , Е
\ Q
\ ' \ .
I j
, ,
I ,
\ .,
I \
I \
I ,
\
\
I
и
. е)
. \- 1 Х" .Js ({l2f)i-1 оS2 t{J' .
\ . r "l .
\ . .
\
,
,Еч
"-1
><
,
.U rq
t).
><
.....ъ
Рис. 2.7. Векторные диаrраммы синхронной машииы:
Q ввд упрощенных ABarpa.... е. д. со в соответсТВУIOЩВJI в.. схе.. sа..ещенВII; 6 ивд уп.
рощенноlI AHarpa....w lIВВоlJОЛIOCИОro reвepaTopa, ОТ8ечаlOщеА искусственной схе..е 8а..еще-
вв.: Во. и првhожевва. аа .1,; е полн.. 8ехторва. ABarp1l"lIa 'свстемы. состо.щel IIЭ свп-
хроиной иеllВИОВOIIIOCПОЙ ..ашввы. CBtsaввoA реактивны.. cOBpoтBueвBell %0 с швва"в иевз-
IЦ!RHOro иапр.женв.; е то же, иекторв" ABarp.....a. а u)"Iae ABBOBOIIIOCBOA ..ашивы.
Эдесь 14' J q ПРОДOllьвые в поперечные .СОСТ8ВЛВlOщие токв: U r паПРllжевие rеиератора;
CJ сопst иапряжевие системы: В, .. JL о., прВложеива. за .1,,: Е' е. д: Со, ПРИ.llожев-
в.. 8' r ,,; Во ФПТIIВВ.. 11.,&...' IUвща. 01 тtхущеro режима с:асте..ы
8--84
Выдаваемая данным reHepaтopoM в точку k мощность при выражении ее че-
рез E q будет записана следующи образом:
.!
Eq Uk 2 r и
Pk== Z sin(8+(% ) Uk +
Z q. q Z 2
Xd x q
sin 28.
(2.24)
3аме дяя в (2 .23) и (2.24) Eq на Е;; Xd на X ; Zc' на i, == v ,2+x X q
Z == V ,2+(x )2и т. д., получим COOTBeTCTBe HO значения Р и P k , выраженные*
через э. д. с. Е; (квазипереходная характерщ:тика).'
Аналоrичную замену можно провести для выражения мощностеЙ Р и P k .
записанноrо черезэ. д. с. E .
Приведем простые выражения мощности,. записаfIные применительно к про-
стейшей двухмашинной системе (рис. 2.8). Для двухмашинной схемы (рис. 2.8, а)
из (2.20), (2.17) с учетом Tor<J, что 6 in == 7"6 n i, получим.. .
E . EIE2.
Р 1 == sш (%11+ sш (812 (%12);
Zll . Zi.2
E EIE2'
Ql == COS (%11 COS (812 (%12)'
Zll , ZI2
(2.25)
Если считать, что потоки мощности направлены** из точки 2 (rенерация), то .
Щ . . .
Р 21'== ......... sш (%22+ sш (821 (%21)
Z22. ZI2
или
\
Р E . EIE2' ( + ) . )
21'== sш (%22 Sln uJ2 . (%12'
Z22 ZI2
E EIE2 .
Q21' == COS (%22 COS(8 12 + (%12)'
Z22 ZI2 '
(2.26)
Если принять, что потоки мощности направлены к точке 2 (наrрузка); т. е.
Р 2 == P ZH PZI'; Q == QZH == QZI" то характеристики Р!! == '(6) и Qz == QJ(6)
будут иметь вид. показанный на рис. 2.8, б. rде (% === (Х а . 8 === 812'
'" Направление выбирается условно и уточняется расчетом.
*'" В дальнейшем мощности в зависимости от Toro, через какую э. д. С. они выражены.
будут обозначаться P Eq . PE'q' Р u . РЕ' и т. д. При этом уrол a l2 может быть, как положи-
тельным, так и отрицательным, что оБУСЛOJзливает сдвиr максимума P 1 . Р 2 К уrлу. QOo а
или уrлу 900 + а (рис. 2.8).
34
Для простейшей схемы (рис. 2.8, в) Z12 == Z == Z11' уrол CL == <;t12 == а 11 ==
== arcsin (r/Z) всеrда положителен и максимумы характеристик Рl и Р н сдвиrа- \
ются соответственно влеВQ и вправо:
Е2 . Еи Е2 Еи
Рl == sin сх: + sin (8 cx:); Ql== СOS сх: cos(8 cx:);
'z z z z
и2 Еи, u2 Еи
р 2Н == sin сх: + sin (8 + сх:); Q2B == cos сх: + cos (8 + сх:).
z z z z
В этих выражениях э. д. с. может быть
принята соrласно (2.22).
Выражение для определения мощ-
ности через Е; (квазипереходная харак-
теристика изображена, на рис. 2.9) за-
писывается аналоrично (2.24) следую-
щим образом:
а)
\ I о)
I Р, Q
"
5
'+
J
2
P',1}1 PZH,I}ZH
PZr' QZr
8) Ppl}, Pz,Qz
@---[IНи
о
Рис. 2.8. Характеристики мощности в
простейшей системе:
Р. характеристика мощиости reHepaTopa,
Е2
сдвииутая вправо на уrол а: Pl 5in "'''+
Zl1
Еи
+ z 2 in «(\ a); P zв характеристика мощ-
12
иости приемноro конца (наrрузка): P2B
Е 2 Е 2 и
... .....! 5in "'1,+ysln (б+а): l1P потери
Zi. 12
мощности, равные P. P. I'r
.
2*
. Е' U . u2
Р1(Е') == sin 8
q x d 2
,
x q x d
sin 28;
,
x q X d
X q + X
Q E и u2
l(E')== cos8
q x d 2
,
x q x d
(2.27)
и 2 х x
q , cos 28.
xqxd
2
,цаВ
о
Рис. 2.9. Влияние учета явно-
полюсности:
1 характеристика при Xd Xq; 2 при
учете XtfFX q ; 3 с.лаrающая, обуслов,
и2 Xd X
леиная явиополюсиостъю ............... х
2 xqxd
к 5tn 28
35
t 2.6. СИСТЕМА, ИМЕЮЩАI НEJlИНЕАНЫЕ ЭЛЕМЕНТЫ
Расчет с использованием способа собственных и' взаимных проводимостей В
системе, имеющей нелинейнI:iIе элемецты, возможен, если вести ero путем после-
довательных приближений (итераций), задаваясь рядом напряжеJIИЙ на нелиней-
ном элементе и отыскивая то, которое удовлетворит балансу мощностей (актив- ,
, а п, .п r , рн п t7< r н
'. п, / 1'(
о) п,' п, '-.../'::
/ "н, I Н I
П r I ,\ \ ПН I I
I '
П, п, П'ji П,'" П,
Рис. 2.10. Расчет режима методом пересечения характеристик, раздель-
ное построение характеристик сrенерации» (n и снаrрузок» (Н), дЛЯ вы-
деленной точки а в системе:
а выделенная точка с парамetром режима П. завнсящнм от П. (напрнмер. реак-
тнвная мощность от напряження); б зсловное разделение снстемы в точке а; в
раздельное построенне характернстнк Пr (fJ(П.) И Пв (fJ(п.1 при неаавнсимом, пере
менном П 1 ; ;: совмещенне характернстик r н Н и определение точек возможноrо
существовання режнмов а н 11 .
ных И реактивных) во всех' узлах исследуемой системы. При таких расчетах ис-
ПoJJЬЗУе1;'Ся метод пересечения характеристик*, которым пользуются rрафически
или аналитически, отыскивая точку возможноrо режима решением, (обычно ите-
ративным) соответствующей системы уравнений.
При использовании метода пересечения характеристик можно задаться рядом
значщшй Какоrо-либо параметра режима П. в У3JIовой точке сети (рис. 2.10, а).
Далее эта точка как БPI разделяется на две и отдельно строятся хщ актеристики
,для левой и правой поЛовины рассматриваемой схемы (рис. 2.10, б) При этом'
под параметром П. MorYT пониматься напряжения, токи, активные,'и реак;rивные
мощности, «подтекаЮЩИе» со стороны источника (П r И П н на рис. 2.10, б). Оче-
видно, что, задаваясь параметром П, можно, как показано на рис. 2.10, в, по-
строить характеристики «rенерации» (п и «наrрузки» (Н), т, е. тех пара-
метров режима, например мощностей и токов, KOТOpЫ MorYT «подтекать» К точ-
ке а или которые MorYT от нее «оттекать». Совмещая эти две хара!<теристики, по-
строенные в функции параметра режима П. (значениями KOToporo сначала про-
извольно задавались), выявляют точки la, I, лежащие на пересечении харак-
терист'ик r и Н и, следовательно, являющиеся рабочими ТОЧК,ами (рис. 2.10,2).
При построении характеристик для ,левой (п и правой (Н) частей схемы
(рис. 2.10) можно применить способ взаимных проводимостей.
t 2.7. ОПРЕДЕЛЕНИЕ МАКСИМАПЬНЫХ И ПРЕДЕПЬНЫХ НАrРУзок
Применяя описанные способы определения токов, мощностей, и напряжений
в любом элементе системPI, можно найти максимал,ьные наrрузки, т. е. те наи-
I , ) . "
· См.: Эле трические системы. Электрические сети/Под ред. В. А. Веникова. М.:
Высшая ШКОJIа, \ 1971, 4.4.
36'
большие значения, которые MoryT иметь токи, мощности и напряжения в' каком- .
либо элементе системы. Так, например, максимаJIl ная мощность линии, имеющей
по. концам напряжения и 1 и и 2 И предстаВJlенной в схеме замещения чисто реак-
тивным СОПРОТИВJlением Х п '
Р т == UР2/ Х п' о
Эта мощность будет достиrнута при максимально возможном УI'ле по пере-
даче 6m == 90°. .
" При представлении той же линии полным СОПРОТИВJlением максимальная
мощность, определенная по reHepaTopHoMY концу.
2. .
Р т == (l./l/Zп) S1П Cl и + u 1 и 2/ Z п.
при этом уrол 6m == 90 0 :::l:::! (%12' ,
Если линия в расчетной схеме предстаВJlеllа ч.етырехполl9CНИКОМ, имеющим
параметры А; В, С, D, то мощность линии оrраничена максимальным значением
Р тп == (сЛD/В) cos ('ФВ 'ФD) + U I UiB при 6m , 90°:f:: 'Ф в ' При данной
постановке задачи наличие .максимума взнач.ении
Р обусловлено толь"о cвoйcmвaми передачи ЭReр-
еии переменн.ы.м то"ом и не связано с фактора-
'ми практическоrо характера, например темпера-
турным режимом оборудования, изменением на-
пряжения у наrрузок и т. д. Оrраничения пос- о
леднеrо вида, ВЫЯВJlеН8ые расчетом ИЛИ экспери-
ментом, соответственно указывают .на пределы
по HarpeBY, потерям, напряжению короны и т. п.
МаКGимальная мощность .системы электро-
передачи (Х п , r п ), включающей reHepaтopbl (x r )
И трансфор аторы (Х т ) , будет
Р т == (E2/ Z ) sin Cl и + Еи 2/Z == (U 2 + Е: п ) .
I
rAe Z== V (Xr+XT+:xп)2+r .
о .
Максимальные мощности системы электро-!.
передачИ (Р т ) И линии (U I U,/zп) можно сделать
равными, если применять такое реrулирование
уждения reHepaTopoB, которое позволило б
при изменениях наrрузки поддерживать посто-
SПlное напряжение U 1 в начале и U'j в конце пе-
о редачи, исклю ив этим ВJlияние реактивных соп-
РОТИВJ.Iений reHepaтopoB, трансформаторов.
В системе электропередачи, имеющей про-
ыежуточные пассивные наrрузки (рис. 2:1 1), максимальная мощность, отдавае-
мая reHepaтopoM,
Р т == Е2 Уll sin 1 + Еи 1 yu.
Практически маkсимальная мощность ЯВJlяется предельной, и при ней сис-
'Тема работать не.!,!ожет: при приближении к этому значению она не ВЫllерживает
I
",1
I
I I
I I
I I
д' jlfQ 1 С
.Е!. I
Z Lп"'''1
"
900
..." R1
,
,
,
\
\
\
\;
\
д-
Рис. 2.11. Система передачи с
промежуточной наrрузкой R:
а схема замещения; б характери-
стика Рп ф(О) при передаче мощност&
через систему. имеlOЩУЮ схему corJlac-
, ио рис. 2.1\: J ха r. актеристика
(ви/х) вln б пр. IXI IZ... .приподия-
тая иа {I:"/Z,,)зIП а; :/ характеристи-
ка 1. сдвииу-,:ая ВJleвo иа уrол а. прев-
ратившаяся в характеристику P2
, (I:"/Z,,)зiп а" + (ВU/Z..)stп(б+а)
37
не только резких толчков, связанных с появлением аварий, но и малых Изменений
режима, непрерывно происходящих в системе, ее режим будет «уползать» от
нормальноro значения.. Если передаваемая мощность Р 1 при Eq == const пред-.
ставляется выражением (2.23), то для определения максимальноro ее значения
необходимо вычисЛить С1 == дР 1 /дб == дРвq/дб. Далее из уСловия С1 == О сЛе-
дует найти* отвечающий этому условию уrол бт. Подставив значение уrла в (2.23),
установим Р 1т . В общем сл ае, соrласно (2.23) (Ха =1= X q ), значение
Е Uz 2 [ r (X X ) . ]
С 1 == q q Zd cos (8 a d ) Zq q sin (8 -----:- а ч ) +
Z
(j2 Zd Zq
+ (x d Х ч ) cos (28 а ч a d ).
Z
В частном случае при Х ч == Ха и r =1= О
С] == (EqU/zc)cos(8 ad)'
При неУчете активноr6 сопротивления при Х ч =1= Ха
Е и. xd Х
C 1 == ....!!......... сos 8 + и 2 q сos 28.
Xd Xd х ч
(2.28)
(2.29)
(2.30)
Если передаваемая мощность представлена квазипереходной характеристи-
кой, полученной из (2.23) заменой Еч на E , Ха на X и т. д., то значение С 2 ==
== дРlдб == дР В / q /дб можеТ быть получено из (2.28) такой же заменой. В част-
HO случае при неучете активноro сопротивления и Ха == X q получим
Е'и . Xd X .(j2(Xd X )
C2== cos8 и2 I cos28==c 1 + / sin 2 8.
xd xd x d Xd X d
Принимая С 2 == О, находим б манс , подставляя значение Koтoporo в Р 1 при
Е; == const находим максимальное значение мощности.
На рис. 2.12, а и б показаны предельные режимы, определенные соrласно
изложенным соображениям.
Предельные наrрузки. Кроме максимальных наrрузок .для основных элемен
тов системы (reHepaTopoB, трансформаторов, синхронных компенсаторов) опре-
деляют предельные наrрузки, т. е. оrраничивают передаваемую мощность зна-
чениями отдельных параметров режима: Тока статора, тоКа возбуждения
и друrими значениями, установленными по условИям работы первичноro arperaTa
(мощности: турбины), по HarpeBY обмоток статора, ротора, а также возбудителя
и подвозбудителя. При этом указывают время, в течение Koтoporo данная пре-
дельная наrрузка может быть допущена.
. Кроме понятий максимальной и предельной наrpузок, не всеrда четко раз-
личаемых, часто вводят еще понятие пропускной способности элемента системы
(линии, трансформатора и т. д.), определяя ее как ту наибольшую мощность,
которую С учетом всех факторов (устойчивости, HarpeBa и т. д.) можно передать
через данный элемент. Иноrда пропускную способность определяют так же, как
· rрафическим построением или ПОДбором.
38
и предельную наrрузку, при этом у&аз вают: «пропускная способность по току»,
«по устойчивости» и т. д.
Предельные наrрузки оrраничиваются не только техническими характе-
ристиками, но и экономическими показателями. Обыч'но расчет режимов исход-
Horo, щ: едшествующеrо переходному , и послеаварийноrо, законtJившеrо пер
ходный, ПРОИЗВОдЯт для работающей или полностью спроектированной системы,
\
а)
Б)
PEiz'c z .
Cz =0
PE ' 01
Рис. 2.12. Характеристики мощности PBq и PB'q при
учете и без учета активноrо сопротивления н цепи
статора и их производные С1 == дРВq/дб и С2 ==
== дРв,qlдб:
' без учета r; при учете r
т
Ра
Рис. 2.13. Соотношения для
определения коэффициента
запаса '
для которой технико экономические показатели уже определены, а технические
оrраничения выявлены.
Поэтому расчеты переходных режимов и участвующих в них процессов, а
также исходноro и послеаварийных режимов обычно ПрОВОдЯтся без учета orpa-
ничений, как экономических, так и технических. Коэффициент запаса Ка устой-
чивости режима при этом определяется по приближению к теоретическому мак-
симуму передаваемой мощносl'И Р т . Ero значение, определенное соrласно
рис. 2.13, будет (Р т Ро)/Роо Разумеется, при необходимости упом нутые выше
соображения и оrранячения MorYT быть. учтены при последующем анализе.
При расчетах переходных процессов на стадии проектирования, ,выборе ме-
роприятий, улучшающих устойчивость и качество переходноrо процесса, выборе
схем системы, установлении треqований к защите, коммутирующим устройствам
и :r. д. учет экономических показателей вариантов возможных решений и сопо-
ставление их между собой обязательны.
Материал этой rлавы является основой для расчетов исхqдных (нормальных)
режимов, предшествующих переходным режимам, а также режимов послеава-
рийных, заканчивающих переходные. Расчеты этих режимов проводЯТСЯ прибли
женно в основном в предположении линейности параметров с использованием
метода надожения ,(собственных и взаимных проводимостей). Этот же метод при
меняется при изучении переходноrо процесса, который рассматривается пол
Ностью (или по некоторым BpeMeHHbIM участкам) как некая rруппа квазипереход-
ных процессов (постоянство тех или иных параметров режима). Расчетные выра-
жения, полученные в настоящей rлаве, будут использованы при анализе в
последующих rлавах.
39
Контрольные вопросы
2.1. Чем отличаются линейные, нелинейные, вероятностные и размытые параметры сис-
темы и режимов? Приведите примеры.
2.2. Какими уравнениями (алrебраическими, дифференциальными) и при каких до-
пущен иях представляются установившиеся и переходные режимы? В чем особенность мате-
матическоrо представления электрических вращающихся машин и как объединяются эти
представления с представления ми статических цепей?
2.3. Что такое собственные и взаимные проводимости и сопротивления?
2.4. Назовите четыре способа определения собственных и взаимных сопротивлений.
2.5. Как определяются токи и мощности через э. д. с., собственные и взаимные сопро-
тивления? Какие допущения и оrраничения при этом делаются?
2.6. Почему явнополюсная машина не имеет схемы замещения?
2.7. Что такое максимальные и предельные наrрузки и как они определяются?
2.8. Чем определяется знак реактивной составляющей в комплексе мощности?
2.9. Как rрафически и аналитически находятся значения э. д. с. Eq, E , Е', EQ?
2.10. Нарисуйте и объясните векторную диаrрамму простейшей системы (э. д. с., ток,
напряжение).
Темы рефератов
1. Физика установившихся и переходных режимов и связанные с ней особенности их
математическоrо описания.
2. Схемы замещения синхронной машины, работающей в системе, и их применение при
изучении переходных процессов.
rЛАВА 3
ТРЕ&ОВАНИЯ к РЕЖИМАМ И ПРОЦЕССАМ
t 3.1. ТРЕ60ВАНИЯ. ПРЕДЪЯВЛЯЕМЫЕ К РЕЖИМАМ
После нормальноrо переходноrо или аварийноrо режима, блаrополучно за-
канчивающеrося, система возвращается к установившемуся режиму, исходному
или практически близкому к нему. Режимы электрических систем, как устано-
вившиеся, так и переходные, должны отвечать определеннЫм требованиям, ко--
торые надо иметь в виду при проведении расчетов (см. П2). Так, в нормальном
рабочем режиме системы, принимаемом, как правило, за исходный, должны быть
обеспечены:
1) качесmво снабжение потребителей энерrией, отвечающей по показа-
телям установленным нормативам*;
2) надежность снабжение потребителей энерrией без длительных пере-
рывов и без снижения ее качества, причем длительность перерыва или вообще
em отсутствие, возможность отклонения от заданноrо качества определяются
соответствующими нормативами для данной системы и данноrо вида потре-
бителей. Надежность системы обеспечивается безотказностью, ремонтоприrод-
ностью, сохраняемостью и долrовечностью ее элементов. Надежная система дол-
жна длительно сохранять эксплуатационные показатели, такие, как произво-
дительность, экономичность, рентабельность;
3) живучесть способность про т и в о с т о я т ь в о з Д е й с т в и ю
в н е ш н и х с и л и Д л и т е л 'ь н о е в р е м я с охр а н я т ь э т о с о-
с т о я н и е. Понятие «живучесть» (или выживаемость), возникшее в эколоrи-
ческих и биолоrических задачах, применяется при рассмотрении взаимодействия
сложных систем между собой и со средой. Таким образом, в понятии живу-
чести MHoro общеrо с устойчивостью. В энерrетике под живучестью nони,м,ается
способность системы так противостоять любым возмущениям, чтобы они не
вызывали каскадНОе О развития аварии с массовым нарушением питания потре-
бителей. В качестве показателей живучести используют отключившуюся на-
rpузку, недоотпуск продукции потребителям и т. д. При пользовании такими,
показателями понятие живучести становится шире аналоrичных понятий без-
отказности, ремонтоприrодности, сохраняемости, устойчивоспособности или ус-
тойчивости;
* Качество энерrии характеризуется rлавным образом значением и частотой иапряже-
ния потребителя. Дополнительными показателями качества энерrии являются симметрия'
напряжений мноrофазной системы, синусоидальность формы кривой напряжения (действую-
'щее значение всех rармоник составляет менее 5% от основной). Соrласно [ОСТ 13109 67.
при нормальной работе отклонения напряжения на зажимах двиrателей и аппаратов до-
пускаются от 5 до + 10% от нормальноrо значения, а отклонения частоты ::'::0,1 [Ц, ино
да разрешается отклонение частоты до ::,::0,2 [Ц сверх допустимой; усредненной за 10 ыин.
41
rr
i
f
4) экономичность""":" надежное снабжение потребителей энерrией удовлет-
ворительноrо качества при возможно меньших затратах средств на ее производ-
ство и передачу (экономия топливно-энерreтических ресурсов и снижение потерь).
Переходные режимы электрических систем практически всеrда должны за.
канчиваться некоторым желательным (по тем или иным соображениям) усmaно-
вившимся режимом. Существенно, чтобы этот режим б ы л о с у Щ е с т в и м
при параметрах, принятых в расчете, и если осуществим, то был бы у с т о й-
ч и в и Д о с т а т о ч н о н а Д е ж е н для Toro, чтобы система моrла длитель.
но работать, не боясь относительно небольших случайных изменений (малых
возмущений), которые не должны приводить к нарушению ее устойчивости.
Переходный режим и входящие в Hero наиболее важные для данной инженерной
задачи процессы также должны отвечать определенным требованиям, которые
фиксируют к а ч е с т в о пер е х о Д н ы х про Ц е с с о в. При оценке ка-
чества переходных процессов необходимо, чтобы мероприятия, предпринимае-
мые для улучшения качества, были экономичны, а также чтобы происходящие
изменения параметр'ов режима не моrли существенно снизить качество энерrо-
снабжения потребителей. Для этоrо прежде Bcero необходимо, чтобы рассматри-
ваемые переходные процессы заканчивались достаточно быстро. Так, например,
если толчок (изменение) наrрузки или какая-либо коммутационная операция
будет вызывать длительные колебания роторов reHepaTopoB системы и соответ-
ственно колебания напряжения у потребителей, то переходный процесс будет
неудовлетворительным по условиям обеспечения потребителей качественной энер-
rией. Неудовлетворительным будет и качество переходноrо процесса, если вслед-
ствие Hero возникнут новые переходные процессы, которые в конечном счете
MorYT привести к неустойчивости системы или недопустимому понижению качест'
ва энерrии, отдаваемой потребителю. Нельзя считать переходный процесс удов-
летворительным, если после ero окончания система будет иметь малый запас ус-
тойчивости. Иначе rоворя, переходные процессы, составляющие в совокупности
переходный режим, должны быть такими, чтобы после их завершения устано-
вился режим, отвечающий определенным требованиям.
Особенно важно их соблюдение для послеаварийноrо режима, устан авл и-
вающеrося после ликвидации аварии. Эти требования включают обеспечение
осуществимости, наблюдаемости и управляемости устанавливающеrося (само-
устанавливающеroся) режима. В случае длительноrо существования этот режим
должен отвечать и тем четырем требованиям, которые были сформулированы
применительно к исходному режиму и прежде Bcero устойчивости, как основной
составляющей живучести. Заметим, что если с а м о у с т а н а в л и в а ю Щ и й-
с я р е ж и м не удовлетворяет каким-либо из предъявляемых требований, то
он должен корректироваться, или, как иноrда rоворят, должен быть в в е Д е н
в Д о п у с т и м у ю о б л а с т ь.
Рассмотрим подробно показатели, относящиеся к данной дисциплине. Ос-
тальные показатели (качество, надежность, экономичность, живучесть) изу-
чаются в друrих дисциплинах.
l
,
l
3.2. КАЧЕСТВО ПЕРЕХОДНЫХ ПРОЦЕССОВ
Качество процессов, возникающих при переходе системы от одноrо режима
к друrому, можно оценить по следующим показателям:
1) время, в течение Koтoporo заканчивается процесс;
42
j
2) характер процесса (апериодический, колебательный);
3) возможное влияние данноrо процесса на режим системы и ее подсистем
(раскачивание друrих машин, входящих в систему, снижение напряжения) и
неустойчивость наrрузки;
4) опасность переходноrо процесса для оборудования системы (переrрев
проводов сети, обмоток электрических машин);
5) потери мощности (и энерrии) во время переходноrо процесса;
б) Х!
8) х.
t
t
А
t
Х 2
t
Рис. 3.1. К определению качества переходноrо проuесса при переходе от
П 1 к П 2
6) стоимость дополнительных мероприятий, улучшающих данный пере
ходный процесс.
Оценка переходноrо процесса по времени протекания и характеру произво
дится прежде Bcero по изменению ero параметров П. Процесс может или быстро
заканчиваться новым установившимся режимом (рис. 3.1, а), или затяrиваться
на довольно длительное время (рис. 3.1, б). Он может быть апериодическим /,
колебательным 2, монотонным 3 или промежуточным между колебательным и
монотонным, коrда П 1 П 2 не меняет знака (процесс 4') или меняет знак толь
ко один раз (процесс 4). Колебательный процесс может иметь большое отклоне
ние выброс (кривая 2') или малое (кривая 2). Этот процесс может протекать
при относительно малом (рис. 3.1, а) или большом (рис. 3.1, б) числе колебаний.
Быстрое затухание переходноrо процесса, апериодичность или хотя бы ero
монотонность в большинстве отраслей, применяющих автоматическое реrули
рование, считаются исчерпывающими показателями хорошеrо качества переход-
Horo процесса. Однако для определения качества переходноrо процесса в энерrо-
системах этих показателей недостаточно. Установившейся методолоrии опреде-
ления их для энерrосистем нет, поэтому приведем сначала показатели качества
процессов в смежных областях, а затем в электроэнерrетике. В теории авто-
матическоrо реrулирования качество переходноrо процесса (апериодическоrо
43
или близкоrо к нему) количественно оценивают площадкой АВС (рис. 3.1, в)
или величиной
t
11== S[Пi(t) Пi(оо)]dt.
О
rде Пj(t) текущее значение; Пj(оо) установившееся значение параметра
переходноrо процесса.
JLля колебательноrо процесса аналоrично вводят величи у
t
12 == S[Пi {t) П(оо)]2dt.
О
Чем меньше 1 i И 12, тем лучше протекание процесса.
Однако минимум 12 не дает полностью правильнон оценки, так как он еще
не rарантирует минимальной колебательности переходноrо процесса, а дли-
тельно повторяющиеся колебания (как, например, процесс 2 на рис. 3.1,6)
MorYT иноrда вызывать раскачивания в друrих частях системы и этим быть опас-
ны. Лучшие результаты для оценки качества переходноro процесса дает крит
рин
t
13 == 5 v (П 1, П 2. ... , П n) dt.
о
rде П i, П 2 , ..., П n параметры режима; V некоторая специально подобран-
ная определенно-положительная квадратичная форма, составленная из парамет-
ров режима рассматриваемой системы; в простейшем случае
(3.1 )
"
V==П +П +...+! п;'.
k 1
Приведенными выше критериями, особенно критерием 1з, можно достаточно
хорошо оценить качество переходных процессов в ряде автоматически реrули-
руемых неэнерrетических объектов. Например, для автоматически управляемоrо
самолета, корабля или ракеты крайне важно, чтобы не было отклонений от кур.
са «рыскания» и переход от одноrо направления к друrому был апериодичен.
В то же время для ЭЛ,ектроэнерrетической системы, как правило, не существенно,
сделают роторы reHepaTopOB какой либо станции во время переходноrо процесса
на несколько колебаний больше или меньше.
Поэтому записанные выше критерии не отвечают на вопрос о качестве nере-
ходносо nроцесса электроэнерсетической системы в целом. JLля этоrо нужно оце-
н ить не столько поведение Toro ее элемента, в котором происходит переходный
процесс, сколько влияние данноrо элемента на режим всей системы. Так, безуслов-
но, нужно потребовать, чтобы во время «хорошеrо» переходноrо процесса в сис-
теме напряжение u(t) , не моrло понижаться до значений, опасных с точ-
ки зрения устойчивости reHepaTopoB и двиrателей системы. Но отклонение напря-
жения во время переходноrо процесса нельзя оценить только MrHOBeHHbIM изме-
нением ero абсолютноrо значения. Важно, какое время существовало это Откло-
нение. Поэтому часто оценку пров'одят, определяя среднеквадратичное откло-
44
пение относ:ительно Toro напряжения U о , которое для данной части системы
оптимально:
/4== S [ U(t) Uo ] 2dt.
" ао
Аналоrичный критерий можно ввести для оценки отклонении частоты. Все
рассмотренные критерии будут иметь различные числовые значения для кон-
кретных систем.
Переходный процесс в какой-либо части системы может оказаться не опасным,
но вЬtзвать неприятные последствия в друсих частях системы. Пусть, например.
в системе, показанной на рис. 3.2,
авария на линии Л 2 и последующее
ее отключение не приведут к наруше-
нию связи по линии Л 1 станции 1 с
системой, но переходный режим стан-
ции 2 (качания, асинхронный ход с
последующей ресинхронизацией и
т.д.) может вызвать понижение напря-
жения U на шинах приемной системы
и ,опрокидывание двиrателей Д, вхо-
дящих в наrрузку Н, т. е. лавину на-
пряжения (см. rл. 11). Примером дру-
roй аварии может быть выход из син-
хронизма станции 1 под влиянием ка-
чаний станции 2.
Таким образом, в критерий качества переходноrо процесса должен войти
показатель, отражающий влияние этоrо процесса на в с ю с и с т е м у или на
с м е ж н ы е п о Д с и с т е м ы; отсюда появляется необходимость характери-
зовать качество переходноrо процесса не одним каким-либо критерием, а комп-
лексом критериев, отражающих rруппу влияющих факторов. При этом влияние
факторов должно указываться не только непосредственно в neреходном nроцессе,
но и в послеаварийном режиме. В общем виде комплекс-критерии MorYT быть запи-
саны в следующей форме:
(3.2)
u
Рис. 3.2. Схема влиянии переходноrо про-
\ цесса в одной части системы на ее друrие
участки
i===n ' п
KJJ == KiKj+ к,Кз,
i 1 1 1
(3.3)
rде КЕ суммарный показатель качества переходноrо процесса; К i весовой
коэффициент, отражающий значимость данноrо параметра в переходном процес-
се; К} показатель качества для какоrо-либо из параметров режима (напря-
жения, частоты, уrла и т. п.) данноrо процесса; К! показатели качества пара-
метров последействующих процессов, развивающихся в результате цепочки со-
бытий, которые MorYT быть вызваны данным переХОДIIЫМ процессом; Кз ве-
совой коэффициент, учитывающий влияние и вероятность появления Toro или
иноrо последействия.
Наиболее неприятными последствиями неправильно рассчитанноrо или не-
верно управляемоrо переходноrо процесса будут нарушение устойчивости парал-
лельной работы Clfдельных станций и подсистем, отделение их друr от друrа с
45
дальнейшей несинхронной работой, а в ряде случаев и с отключением (<<поrашени-
ем») наrрузки. Такой «развал», являющийся тяжелой системной аварией (см. П1),
не может произойти, если качество nереходных режимов и отдельных nроцеССО8
удовлетворяет определенным требованиям.
Соблюдение требований к переходному процессу, вытекающих из условий
работы отдельных элементов системы, также определяет ero качество. Так, ток
роторов и статоров электрических машин (reHepaTopoB, двиrателей) оrраничива-
ется повышением температуры обмоток*, переrрев которых неблаrоприятно
сказывается на механических и электрических свойствах изоляции. Нельзя пре-
вышать по условиям HarpeBa и допуетимые токи в линиях электропередач и се-
тях. Оrраничивается ток механическими усилиями, возникающими в машине
и моrущими вызвать ее разрушение. Имеет предел и несимметрия токов: состав-
ляющая тока обратной последовательности, появляющаяся при несимметрии,
создает в машине маrнитное поле, вращающееся относительно ротора с двойной
уrловой скоростью и наводящее в массе (<<бочке») ротора токи двойной частоты.
Они создают в машине дополнительный HarpeB, механические усилия и вибра-
ции. Процесс перехода синхронных reHepaTopoB в асинхронный режим, работа
в этом режиме иресинхронизация оrраничиваются рядом факторов. Важнейшие
из них: дополнительные пот.ери й вызванный ими HarpeB, механические усилия
между обмотками ротора и статора, большие колебания потребления реактивной
мощности, вызывающие колебания напряжения в системе.
Эти колебания MorYT неблаrоприятно сказаться на качестве и устойчивой
работе друrих частей системы и ее наrрузок. Решая вопрос о допустимости, про-
должительности какоrо-либо аварийноrо режима и необходимости оrраничений
входящих в Hero процессов, следует принять во внимание и потери энерrии, по-
являющиеся во время переходноrо режима, и экономию топлива, которая может
быть получена блаrодаря управлению режимом (например, сокращением числа
пусков arperaTOB). Так, в случаях, коrда допускается асинхронный ход и последую-
щая ресинхронизация (результирующая устойчивость), нет надобности отключать
reHepaTop от сети и снова пускать ero. Для мощноrо турбоаrреrата это будет дли-
тельной и дороrостоящей процедурой. При оценке качества переходноrо процесса
необходимо учесть, что: 1) механические усилия в различной аппаратуре, в част-
ности разрывная мощность выключателей, не позволяют увеличивать аварий-
ные токи сверх некоторых допустимых; 2) работа наrрузок при пониженном или
колеблющемся напряжении неблаrоприятна и в ряде случаев может привестl'I к
нарушениям производственноrо процесса.
Отрицательный эффект переходноrо процесса может проявляться не только
непосредственно во время ero протекания, но и после ero завершения. Примерами
TaKoro последействия при пониженных показателях качества переходноrо про-
цесса MorYT быть:
пониженные уровни напряжения, вызывающие значительную саморазrрузку
потребителей (а иноrда и лавину напряжения);
пониженный уровень частоты, приводящий к снижению производительности
паровых котлов;
термическая переrрузка оборудования (линий, трансформаторов, reHepaTo-
ров).
* Например, ток возбуждения современных турбоrенераторов можно увеличить до
максимальных (потолочных) значений на время, не большее 15 с.
46
Перечисленные (и аналоrичные им) послеаварийные режимы в течение KO
pOTKoro времени (секунды, десятки секунд) MorYT проходить безболезненно, но
затем, если режим не будет введен в область длительно допустимых значений ero
параметров, неминуемо наступает дальнейшее развитие аварии эскалация aBa
рийных событий. Поэтому показатели качества Kj, Kl' входящие в (3.3), должны
быть, как правИЛО, интеrральнымИ (включать время существования опасноrо
отклонения параметров режима). Показатель качества процесса для одноrо из
параметров может представлять собой функционал различноrо вида. Одним из
н аиболее распространенных показателей является критерий
I т q
K i === Т 5 ПidП,
о
(3.4)
r де П i параметр режима.
В критерий вида (3.4) должны войти и некоторые экономические оценки. Так,
если для нейтра.'Iизации возможных последствий переходных режимов осуществ
ляются специальные мероприятия, то их стоимость должна быть сопостамена
с ущербом, который может появиться в резУ.'Iьтате Toro иди иноrо неблаrоприят
но протекающеrо процесса, и это сопоставление ДО.'Iжно получить отражение в
критерии (3.3).
Общепринятоro подхода к определению КОМП.'Iексных критериев вида (3.3),
(3.4) пока нет. Определение их Д.'IЯ энерrосистем сложных структур требует про
ведения больших и трудоемких исследований. Поэтому о них здесь упоминается
только в порядке постановки задачи.
Заметим, что условие максима.'Iьноrо ускорения протекания переходноrо
процесса, хотя и может использоваться при решении ряда задач, не всеrда ЯВ.'IЯ
етея предпочтительным критерием.
3.3. ОСУЩЕСТВЛЯЕМОСТЬ РЕЖИМА
Для осущеСТВ.'Iения исходноrо режима, предшествующеrо\ переходному,
и режима, который должен установиться ПОС.'Iе возмущения и вызванноrо им
переходноrо процесса, необходим ба.'Iанс мощности. Так, передача мощности Р
.от reHepaTopoB, турбины которых развивают мощность Р т , возможна тодько в
том случае, если Р т === Р,rде Р Э.'Iектрическзя мощность электропередачи.
Математически сvществование режима определяется возможностью решения
уравнений Р т === СР(П) И Р т === 1.jJ(П), rде П параметр режима. Например, еслИ
рассматривается простейшая система «станция шины бесконечной мощности»,
представленная в схеме замещения э. д. с. Е, реактивным сопротивлением х и
неизменным напряжением и, то режим может существовать, ес.'IИ характеристики
Р т == ср(б) иР === 1.jJ(б) пересекаются, причем обычно Р т ===сопst, Р === (ЕU/х)siпб.
Также необходимо, чтобы активная мощность, вырабатываемая rенераторами
еистемы Р r, была равна мощности, поr.'Iощаемой в наrрузках Р н И теряемой во
всех элементах системы !!:"Р:
Р т === р в + !!:,.Р === Р.
(3.5)
в цепях переменнOl'О тока ана.'Iоrичное условие существует и для реактивной
МОЩНОСТИ:
47
Ql' == Qп + дQ == Q.
(3.6
Активная и реактивная мощности связаны соотношением
S2 == р2 +Q2,
rде S полная мощность.
Уравнения (3.5) и (3.6) нельзя, следовательно, рассматривать как независи
мые и пользоваться ими без дополнительных условий, отражающих те или ины
связи, В каждом случае, вообще rоворя, необходимо проводить исслеДованш
этих связей. Однако практика работы современных' энерrетических систем, па.
раметры которых изменяются в определенных диапазонах, позволяеТ' устаНОВИТf
закономеРносrи, которыми может и должен пользоваться инженер в своей работе,
Так, известно, что изменение активной мощности, вырабатываемой rенераторами,
rлавным образом Влияет н а и з м е н е ни е ч а с т о т ы в системе, оказывая
сравнительно небольшое влияние на напряжение. Можно приближенно опреде-
лить отклонение частоты в системе от номинальной (/0 == 50 [ц) выражением
М == ( P j Р пi t!.P k )/ P j а, (3.7:
rде P j мощность reHepaTopa 'j, соответствующая частоте fo; Р иi мощ'
ность наrрузки i; ДР k потери мощности на участке сети k; (J средний пс
системе коэффициент неравномерности: (J == 1/(508).
Выражение (3.7) получается из известных приближенных соотношений
P1' } == РПI + дРk; Pl' J ' == р О . ( 1 ) == р О . (1 (J jдt), (3.7а)
1'} БОе] r}
rде 8} коэффициент статизма реrуляторов скорости в рабочей зоне.
Из (3.7) очевидно, что если система не имеет резерва и Jf:.j не может быть
увеличено при возрастании Р Ri. то при Р ,,-t > P j неизбежн'О n'ОН,uжеН,uе час-
тоты.
Из (3.7) следует, что реrулирование частоты и поддержание ее заданноrc
значения обесtИ;чиваеmcя ресулированием активной МОЩности сенераторов. Прll
сделанных выше допущениях кратко сформулируем:
I уровень частоты связан с балансом актuвНQЙ мощности, или Дf ср(ДР).
Реактивная мощность, выдаваемая станциями системы, связана с напрюkе-
нием на шинах наrрузки и и И возбуждением reHepaTopoB: Е = i возб , Для ра-
диальной сети, суммарное сопротивление которой х, справеДлива зависимость
и: == (Е Qи L\Q х У ( Р; у ,
(3.8)
rде Qп реактивная мощность наrрузки; дQ потери в сети и reHepaTope. .
Из (3.8) следует, что реrулирование напряжения на наrрузке и и И поддер-
жание ero задан.ноrо значения обеспечиваются реrулированием возбуждения re-
нераторов u Е = t B , что, в свою очередь, означает реrулирование rенерируемой
реактивнои мощности. Соrласно (2.26),
Е2 Еи
Ql' == Qп + дQ == cos 3,
х х
48
откуда с учетом УПОМЯl;lутоrо условия следует:
уровень напряжения в сети (на наерузке) связан с балансом реактивной мощ-
ности, или /1U 'Ф(/1 Q). .
Следовательно, для осуществляеМQСТИ заданноrо режима или «введения в
режим» необходимо воздействовать на баланс реактивных мощностей (осущест-
вить реrулирование возбуждения) и активных мощностей (осуществить реrули-
рование турбины станций).
Необходимость баланса активной и реактивной мощности приводит к сле-
дующему прав илу. В установившемся режиме rрафические зависимости РС ==
а) &] [T.tЪ ИН
........rv .ч .......... ::П Р
р Р[/ Q /,
о Z=r;(U)
-= Х=СDпst r=rf(U)
8) ОН
t' Q е) (?;
/'
tJQ
rv н
-=- Z='f(U)
и !
u
Рис. 3.3. Условия существования установивше
rося режима в простейшей системе:
а исходные схемы и распределение МОЩНОСТИ; б
зависимость определения установившеrося режима; в.........
баланс реактивной МOJЦНОСТИ как условие существования;
е схема подключения балансирующеrо (реrулирующе.
ro) источиика реактивной мощиости
== ffJ1(П) И Р н == ffJ2(П) всеrда имеют общую точку, пересекаясь между собой или
хотя бы касаясь друr друrа при П == П 1 . При этом зависимости Qr == 'Ф1(П) И
Q == 'Ф2(П) также должны иметь общую точку при том же значении П == П 1 .
Такой rрафоаналитический способ ОПRеделения параметров установившеrося
режима широко применяется на практике. Для пояснения ero приведем несколько
примеров.
1. В схеме, приведенной на рис. 3.3, а, наrрузка нелинейна, так как входящее в нее
активное сопротивление зависит от приложенноrо напряжения: , == ф(U) и соответственно
Z ср(U). Предположим, что значение этоrо сопротивления уменьшилось с '0 дО Т 1 . Какие
параметры будет иметь новый установившийся режим, если активная мощность reHepaTopa
постоянна, а значение сопротивления' х не изменяется?
В качестве xapaKTepHoro параметра П возьмем напряжение в точке Н. Перестроим ха-
рактеристику мощности 1, построенную при сопротивлении '0' увеличив ее ординаты в отно-
шении '0/'1 (рис. 3.3, 6); получим новую характеристику 2. Точка пересечения а характе-
ристики 2 с характеристикой мощности reHepaTopa Ро указывает на значение напряжения,
которое должно установиться, если режим будет существовать. Для ero существования
необходим баланс реактивной мощности. При напряжении U о он соблюдался: характеристи
ки мощности Qr, поступающей от reHepaTopa, и мощности наrрузки Qи пересекались в точ-
ке р. При U 1 мощность Qr1' отдаваемая reHepaTopoM, больше мощности, потребляемой на-
rрузкой. Следовательно, режим при Ро == сопst и , == '1 не может существовать.
Для ero осуществления надо изменить реактивную мощность, отдаваемую reHepaTopoM
49
11 точку подключения наrрузки Н, уменьшив возбуждение reHepaTopa и тем самым снизив
€ro э. д. с. Er. Реrулируя Er' получаем зависимость Q == f(И), при которой (при И == И 1 )
Qr1' == Q!'1' т. е. существование режима обеспечено (рис. 3.3, в).
Осуществить режим можно друrим путем подключением к точке Н (рис. 3.3, е) не.-
которой дополнительной реактивной наrрузки Qп Q1' поrлощающей избыток мощности.
2. Рассмотрим электропередачу (рис. 3.4, а) от станции, связанной трехцепноЙ электро-
передачей с шинами неизменноrо (т. е. постоянноrо по амплитуде и частоте) напряжения.
х
х
х
и'Е eфt,
Р, Q
: и
P,Q
Рис. 3.4. Исходная схема системы и схема после изменения
с) Б)
P тf а
р а1 8)
РО Qz ........ ./
...... ./
Рис. 3.q. Характеристики активной (а) и реактивной (6) мощности системы, показанной на
рис. 3.4:
1 характеристика. соответствующая схеме. представленной на рис. 3,5,а; 2 то же, для рис. 3,5,б; 3
то же, для акти,вlWЙ мощности при отключении двух цепей в схеМе рис. 3.4
Заметим, что шииы, rде приложено такое напряжение, часто называют шинами бесконечной
мощности (ШБМ). Обычио шины системы, мощность которой в пять раз больше мощности
передачи, можно считать ШБМ.
Предположим, что одна цепь линии электропередачи отклю\илась и схема приняла вид,
показанный на рис. 3.4, б. Сопротивлеиие между точками приложения неизменных э. д. с.
Е и напряжения И выросло в отношении т == (х !, + 2хт + х/2)J(х !, + 2х т + х/3). Соответ-
ственно максимальное значение активной мощности Р == Р т2 siп6 (t i уrол между векторами
Е и И) стало в т раз меньше (рис. 3.5, а). Если активная мощность" отдаваемая reHepaTopoM,
не изменилась, то уrол 6, рассматриваемый в качестве xapaKTepHOI'O параметра, увеличился
с 61 до 62' Новое значение реактивной мощности Q2' найденное по характеристике 2
(рис. 3.5, 6) при уrле 62' будет отличаться от прежнеrо значения Q1' Таким образом, после
изменения параметров системы (в данном случае сопротивления в т раз) режим осуществим,
если имеется возможность свободноrо изменения реактивной мощности. Характеристика 2'
(рис. 3.5, а) может касаться линии РО == сопst, тоrда режим, отвечающий точке касания, бу-
дет критическим. Если отключить две цепи электропередачи (рис. 3.5, в), то сопротивление
увеличится в n == (х!, + 2хт + Х)/(Х !, + 2х т + х/3) раз_ Соответствеино в n раз уменьшится
максимум характеристики Р == Р тз siп6, которая в этом случае не пересечется с характерис-
тикой Р!, == РО == const (и не коснется); следовательно, существование режима будет невоз-
можно (рис. 3.5, а, кривая 3).
3. Рассмотрим электрическую систему, показанную на рис. 3.6, а, rде наrрузка Н,
потребляющая при напряжении И О активную Pro И реактивную Qro мощности, покрывается
50
-
4 4
чеТh1рhМЯ станциями, причем Pi == Pro и Qi::::::;: Qro. Режим характеризуется rрафи
1 1
ками, предеТаТшепными на рис. 3.6, б, 8.
ПреДПOJIОЖИМ, что ОДНа ИЗ станции отключилась и новая характеристика реактивной
МОЩНОСТИ QJ'J:-:= r(и) пересекается с X;-JрактерIfСТИКОЙ Qи === !(И) при напряжении и !
(рис_ 3.6, б). Именно это напряжение и установится в послеаварийном режиме, если активная
МОЩНОСТЬ остаВlllИХСЯ в работе треХ станций бу
дет автоматически реrулировзтьсЯ так, чтобы при
и == и 1 наступил баланс актИВНЫХ мощностей
(рис_ 3.6, в). Практически n системах, аналоrич
ных ПОКазаННЫМ на рис. 3.6. а, новыи установин-
шийся режим определяется по пересечению хара-
ктеристик Qп и Qro. .Н, Qr2. а станция, реrУJ[И
рующая частоТУ. обеспе'lнваст баланс активных
мощностеи.
Если бы мощнОСть отключен но" станцИи
была СЛИШКОМ велика, то послеаварииный режим
Mor бы оказаться неосуществимым по двум при-
чинаМ:
«не ХDатило» реактивной мощности
характеристика Qr2 == [(И) rенерацин реактин
ной мощности (кривая Qr2 на рис. 3.6, б) не 1Ie
ресеклась с характеристикои QH;
«не хватило» актИВНОЙ мощности pe
rулирующая частоту станция не обеспечила ба-
ланс актиВНОЙ мощности.
Заметим, что критическим режимом будет
режим в точке k. rде iJQH/aU aQrk/iJU. TaKO
вы простейтис случаи проверки осущеСТ8ляе.
:мости режиМЗ
а)
о)
Q
8)
р
k
Р,
Pro
QrK......-
Q.
111 110 U
и/ и а и
Рис. 3.6. К определению условий суще.
ствования режима и ero параметров ПО
балансу реактивной мощности:
а схема системЫ: 6 характеристики Q...
t(U); 6 характеристики P...f(U)
Понятия «нехватки» «недостачи» активной и реактивной .мощностей
условны. Употребляя их, имеют в виду, что значения часtrШl11bl и наnряже
ний в системе не должны выходить из некотОрО20 задаННО20 нормативами
диапазона. Именно f!PU этом и МОЖНО у С Л О в н о о060рить Q н.ебаЛfJ.нсе
активной мощности (УСЛ06НО, так каК физически в lШЖдый данный момент
аен.ерируемая мощность равна мощности, потреБЛЯЕМОЙ в НG2РУЗке и запа-
саемой в электромеханических элементах).
3.4. УСЛОВИЕ СУЩЕСТВОВАНИЯ РЕЖИМА СИСТЕМЫ
Рассмотрим систему, состоящую из двух станций конечноЙ мощности. Если
иаrрузка представлена ПОСТОЯ ИНЫМИ СОПРОТИВJlеннями, ТО уравнения системы,
соrласно (2.20), будут иметь внд
Рl Е; Ун sm а 11 + Е 1 Е 2 У12 sin (о а 12 ); 1
: 2 Е; у", sin а" Е 1 Е 2 У12 sin (о a 12 ). f
Преобразуем (3.9) к виду
Рl sin (о а 12 ) И Р2 sin (о + а 12 ),
rде
Pi Е7 Yii sin СЧi
E 1 E 2 Y12
p,
(3.9)
(3.10)
i 1,2.
51
На рис. 3.7 представлены соответствующие характеристики.
Тоrда после исключения из (3.10) величины б получим, что в.еличины Pf, Р2
И а:12 связаны соотношением
р1 + p + 2Рl Р2 cos 2а 12 == siп 2 2а 12 ,
которое является уравнением. эллипса*, построенноrо в координатах Рl, Р2
(рис. 3.8). Внутри эллипса режимы MorYT осуществляться.
В более сложной системе (число станций больше двух; учет наrрузки статическими ха-
рактеристиками; учет реrулирования) характеристики р == f({j) уже не будут синусоидаль.
р
I
PI !i
rov A.J
Р н
p' !!.= 2cos IZ
1 2
/
Pz" 5 iп (6' + 0<:12)
Рис. 3.7. Характеристики мощ-
ности Р == '(б) системы «две стан-
ции наrрузка»
Рис. 3.8. Соотношения допустимых мощнос-
тей в системе, показанной на рис. 3.7, по
условиям существования (эллипс мощнос-
тей)
flЫМИ, а эллипсы Рl с== f(P2) и т. д. будут деформированы, как это показано штриховой лини-
-ей на рис. 3.8.
Для системы «две станции шины неизменноrо напряжения и о » (рис. 3.9) режим бу-
дет описываться двумя уравнениями:
Р l == ЕРОУI0 sin 01 + Е I Е 2 У12 siп (01 02) + .., ;
Р 2 == EPOY2J siп 02 + Е 2 Е1.У21 sin (02 01) + .., .
(3.11а)
(3. 11 б)
rде УI0' У20 взаимные проводимости между станциями и шинами; У12 == У21 взаимная
проводимость между rенераторами.
Принимая мощиость Р 2 заданной постоянной величиной, можно из (3.11б) найти уrол
б2 == '(Р2' Е l , Е2' У20' Y21' бl) и, подставив ero в (3.11а), определить и построить (рис. 3.10)
P 1 == 'f'({jд при разных Р 2 . Эти зависимости показывают области возможноrо существования
режимов системы.
В еще более сложных случаях (три станции и более при отсутствии ШБМ) выявление
условиЙ осуществимости требует исследования описывающих режим нелинеЙных алrебраи-
ческих уравневий. Так, уравнеиия сети, отражающие баланс мощности в ее узлах, имеют
вид .
/'. /'."1;1 ( ' . )
Si == Ui U i U k Y ik ,
k
i== 1, ..., n;
k== l,.Н , n+ 1,
(3.12)
* См.: МОрОШКUft Ю. В., Чертова П. И. Метод расчета стаllионарноrо ре'ЖИМа сложных
электрических систем. Электричество, 1974, Ng 3, с, 202 211.
52
тде S., и. соответственно сопряженные комплексы мощности и напряжения в i-M узле,
! ! . . k
У ik комплексные проводимости ветвеи, соединяющ х узлы ! и .
Итерационный процесс решения таких уравнении может или сходиться и давать ре-
шение, или расходиться. Первый случай указывает на существование режима, второй не
дает непосредственноrо указания на ето осуществление, а тре?ует дополнительной !lроверки.
Нелинейные уравнения ви;хз (3.12) имеют несколько решении, что указывает на теоретичес-
Ий
Pz va/"
Рис. 3.9. Исследvемая система из
двух станций, н'аrрузки и ШБМ
Рис. 3.10. Условия существования режима
в системе рис. 3.9:
а деформация эллипса мощностей; 6 возмоЖ-
ные Н8I'РУЗКИ станции 1; 8 возможные наI'РУЗКИ
станции 2
кую* возможность неоднозначности установившихся режимов. Возникает задача построения
при заданных условиях некоторых областей, являющихся функциями параметров режима,
и отыскание в них подобластей, тде будет содержаться не более одното решения, т. е. единст-
венното режима, и областей, в которых решения не будет; иными словами, режим не сможет
установиться и существовать.
Сложная система. Для электрической системы, содер'жащей т электростан
ций, вместо (3.9) необходимо записать
т
P i == E7Yusina.u + EiEkYiksin(Bik a.ik)' i== 1,2,...\,т.
kTi
(З. lЗ)
Исследование этой системы уравнений позволит выявить те соотношения
параметров, при которых режим теоретически будет неоднозначен или вообще
не сможет существовать. Разность между параметрами найденноrо режима, оце-
HeHHoro как существующий, и параметрами режима, отвечающеrо rранице об-
ласти существования, косвенно укажет на 'степень надежности. В частности, оче-
видно, что все устойчивые режимы будут находиться внутри области существо-
вания. Расчеты этоrо рода очень сложны и требуют таких допущений (обычно
Е === const, мощности наrрузок задают Z н == const, частота постоянна), которые
делают результаты условными. Поэтому здесь оrраничимся простейшими расче-
тами, полаrая, что вся система уже функционирует и осуществимость режима
можно проверить, выделив только одно ее сомнительное звено передающее
звено (рис. З.5) или узел (рис. З.6).
* В практике эксплуатации систем не наблюдалось случаев, котда режим был бы не-
однозначен.
53
3.5. УПРАВЛЯЕМОСТЬ И НА6ЛЮДАЕМОСТЬ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
ДЛЯ успешноrо функционирования электрической системы необходимо в
нормальных и переходных режимах осуществлять управление. В Простейших слу-
чаях управление осуществляется человеком оператором; в более Сложных (со-
временных) эрrатически: ,сочетанием человека и автоматических устройств;
в будущем кибернетически, т. е. управляющими машинами, действующими
по замкнутому циклу с обратной связью. Для реализации любоrо из этих трех
вариантов управления необходимо, чтобы система обладала свойством н а б л ю.
д а е м о с т и, при котором можно оценить все параметры ее режима в той их
части, которая непосредственно может быть измерена приборами, записана, а
также сразу (или после преобразований) подана на вычислительную машину.
Оценка может проИзводиться по некоторым функциям параметров режима.
у п р а в л я е м о с т ь прежде Bcero требует устойчивости режима, причем
система должна быть инвариантна к помехам, т. е. обладать способностью про-
Тивостоять возмущениям, возникающим при ее функционировании, и сохранять
при этом свои Свойства. Способность к управляемости в аспекте устойчивости
частично уже заложена непосредственно в характеристики системы, обеспечи-
вающие ей с а м о р е r у л и р о в а н и е, а частично связана с действием pery-
лирующих устройств. rлавное свойство системы, обладающей управляемостью,
это ее способность переходить из HeKoToporo начальноrо (нулевоrо) режима в
требуемый режим и обратно под действием некоторой последовательности уп-
равляющих воздействий.
Н а б л ю д а е м о с т ь, без которой нельзя реализовать управляемость,
связана с тополоrическими* свойствами электрической Системы. В самом деле,
режим электрической системы задается мощностями, векторами э. д. с. reHepaтo-
ров и напряжений в узлах, а также реrулируемыми коэффициентами трансформа-
ции. Для исследования переходноrо режима к этим параметрам добавляются ме-
нические и электрические постоянные инерции, reHepaTopoB, коэффициенты
реrуляторов возбуждения и скорости. Все параметры действуют на режим и не-
посредственно проявляются в определенных точках системы, элементы которой
(reHepaTopbI, трансформаторы, линии, наrрузки) про с т р а н с т в е н н о
(rеометрически) и э л е к т р и ч е с к и (по схеме замещения) размещены на не-
Котором удалении друr от друrа. Следовательно, для Toro чтобы с учетом этоrо
размещения сделать СИQтему наблюдаемой, необходимо определенным образом
раЗМестить измерительные устройства. При этом нельзя не считаться с тем об-
стоятельством, что получаемая информация содержит поrрешности, связанные с
неточностью замеров, неодновременностью измерений, шумами в каналах связи,
ошибками преобразований аналоrовых измерений в цифровые (при вводе их в
ЦВМ) и ошибками персонала. Некоторые наблюдаемые параметры режима яв-
ляются параметрами не детерминированной системы, а стохастической* *, что и
должно быть учтено при обеспечении ее наблюдаемости.
Проблема обеспечения наблюдаемости системы включает в себя вопросы
идентификации отдельных динамических объектов электрических систем, т. е.
* Местоположением отдельных объектов системы (topos место, !ogos понятие).
** Детерминированная система такая, действия которой однозначно определяются
приложенными воздействиями и в этом смысле параметры ее режима cTporo определены.
В стохастической системе действия случайны и параметры режима зависят от вероятностных
соотношений, присущих данной системе.
54
-
построения математических моделей, подобных исследуемым объектам по пове
дению, или моделей, функционально им подобных. Важное значение в этой проб
леме имеет задача распознавания аварийных ситуаций в электрических системах.
Математически эту задачу представляют разделением п MepHoro пространства,
в котором находятся векторы, изображающие режим на две непересекающиеся
области: 1) аварийных ситуаuий; 2) нормальных ситуаций. Для авариЙных си
туаций оказывается необходимо выбрать комплекс наиболее информативных для
заданной задачи параметров, определить наиболее эффективные процессы лик-
видации этих аварий. В рамках изучаемой дисuиплины нет возможности рассмат-
ривать далее общие вопросы управляемости и наблюдаемости* Имея их в виду,
будем считать системы полностью и однозначно определенными детермини-
рованными, наблюдаемыми и управляемыми.
Контрольные вопросы
3.1. Какие четыре основных требования предъявляются к установившемуся иСХодному
и послеаварийному режимам?
3.2. Какими показателями характеризуется качество S)лектроS)нерrии?
3.3. Что такое осуществимость режима?
3.4. Что такое управляемость и наблюдаемость режима?
3.5. Назовите показатели качества переходноrо процесса.
3.6. В чем идея оценки качества переходноrо процесса комплекс-критерием и какова
структура TaKoro КР'tтерия?
3.7. С чем связан уровень частоты в системе?
3.8. С чем связан уровень напряжения в системе?
3.9. В чем заключается rрафоаналитнческий способ определения параметров устано-
вившеrося режима?
3.10. Как понимать часто употребляемое на практике выражение; «не хватило актив-
ной (или реактивной) мощности»?
Темы рефератов
1. Качество
2. Уровень
3. Уровень
режимов и
напряжения
частоты и
качество переходных процессов.
и выработка реактивной мощности.
выработка активной мощности.
* См.: Веников В. А., КеН2ерлин-:кий Т. А. Информация в S)лектроэнерrетике. В сб.
Информация и кибернетика/Под ред. А. Н. Бер2а. М.: Советское радио, 1967, с. 260;
Тамм А. З., Толуб Н. Н., Кесельман Н. Я. Наблюдаемость электроэнерrетических систем.
Электричество, 1975, NQ 1, с. 12; БО2атырев Л. Л., Стихин Т. П. Использование методов
теории распознавания образов для управления режимами сложных энерrетических систем.
Электричество, NQ 12, 1975, с. 6; Не20йце К. Применение теории систем к проблемам уп-
равления. М.: Мир, 1981, с. 179.
r ЛАВА 4
УСТОЙЧИВОСТЬ КАК r ЛАВНОЕ УСЛОВИЕ
СУЩЕСТВОВАНИЯ РЕЖИМА ЭЛЕКТРИЧЕСКОЙ СИСТЕМЫ
t 4.1. устойчивость В ЭЛЕКТРИЧЕСКИХ СИСТЕМАХ
И ПРОСТЕйШИЕ МЕТОДЬ! ЕЕ ИССЛЕДОВАНИЯ
Электрическая система, обеспечивающая своим нормальным Функциониро.
ванием работу промышленности, транспорта, быта населения всю жизненную
деятельность rородов, районов и всей страны, должна работать надежно. OCHOBHЫ
условием надежной работы является ее устойчивость, под которой понимают
способность системы восстанавливать свое исходное состояние нормальный.
рабочий режим или режим, практически близкий к нему, после какоео либо (бо.rIЬ-
шоrо или MaJIOro) нарушения этоеЬ режима, иначе называемоrо возмущением.
РаЗ.rIичают два вида устойчивости:
с т а т и ч е с к у ю у с т о й ч и в о с т ь, рассматриваемую в двух аспек.
тах:
как свойство заданноrо установившеrося режима самовосстанамивать-
ся при ничтожно малых отклонениях параметров ero режима Пр ОТ исходных
зна чений, а не «споозать» ОТ них;
как свойство постепенно ухудшающее ося установившееося режима проти-
востоять мадым ОТК.rIонениям и мадым КО.rIебаниям вплоть до HeKoToporo nредель-
ноео режима. Эти два варианта подхода к устойчивости показаны на простейшем
стилизованном аналоrе на рис. 4.1, а, б;
д и н а м и ч е с к у ю у с т ой ч и в о с т ь, рассматриваемую при боль-
ших (обычно нелинейных) отклонеrшях параметров Пр, часто сопровождаю-
щихся изменениями конфиrурации и параметров электрической системы (числа
работающих элементов) и значений их параметров. Различают два вида динами-
ческой устойчивости:
синхронную устойчивость сохранение режима при больших кооебаниях,
но без проворота (180 3600) ротора reHepaTopa;
результирующую устойчивость восстаномение режима после кратко-
BpeMeHHoro нарушения (например, при работе в течение HeKoToporo времени re-
нераторов электрической системы или ее частей несинхронно), но при восстанов-
лении нормальной синхронной работы после нескольких проворотов ротора. Это
восстановление может происходить самостоятельно в силу внутренних свойств
системы или под действием специальных устройств системной автоматики.
На рис. 4.2, а, б показаны простейшие стилизованные аналоrи двух видов дина-
мической устойчивости.
Для обеспечения устойчивости система должна работать с некоторым запасом,
характеризуемым коэффициентом запаса К з , т. е. при таких параметрах ре има,
которые отличаются в Ка > 1 раз от критических тех, при которых может
произойти нарушение устойчивости. Для определения запаса устойчивости в
данной (работающей или проrнозируемой) системе, параметры которой известны.
56
......J
и для выбора мероприятий, улучшающих устойчивость, необходим анализ (pa
счеты) устойчивости с определением критических параметров. В ряде случаев
необходим переход к задачам синтеза, например к нахождению изменений пара
метров режима во времени: Пр == f(t), т. е. установлению вида переходноrо про
цесса. с выявлением BHOC MЫX с помощью устройств системной автоматики воз
действий, которые придадут переходному процессу желательный по тем или
иным соображениям характер. Выбор устройств и мероприятий, действующих
во время протекания процесса, например таких, которые способствуют BOCCTa
новлению синхронизма после ero нарушения и обеспечивают этим результирую
щую устойчивость, относится к задаче управления переходным процессом.
В . настоящей rлаве будут рассмотрены простейшие случаи устойчивости
режима по условиям сползания и синхронная динамическая устойчивость.
2
Рис. 4.1. Статическая устойчивость (стилизованные аналоrи) положения
(режима):
а устойчивое 1 инеустойчивое 2 положения; б колебательная устойчнвость 1 и
неустойчивость в процессе колебаннй 2 с выход"" из режнма 3
а)
Рис. 4.2. Динамическая устойчивость (стилизованные аналоrи):
а синхроннаи устойчивость: В возмущение; 1 неустойчивый процесс. 2 колебания; б pe
зультирующая устойчнвость; возвращение в нсходное состоянне q нз неустойчивоrо состояння 1
/
57
t 4.2. СТАТИЧЕСКАЯ устойчивость СИСТЕМЫ ПО УСЛОВИЯМ СПОЛЗАНИЯ
(ТЕКУЧЕСТИ) ПАРАМЕТРОВ НОРМАльноrо РЕЖИМА.
ПРАКТИЧЕСКИЕ КРИТЕРИИ УСТОйЧИВОСТИ
Выше было указано, что установившийся режим электрической системы мо-
жет быть неустойчивым. В этом случае малые возмущения приводят к проrресси-
рующему изменению параметров режима, которые в начале процесса происходят
a} PI
I
!-------.- Q 1
I
Е 1
I
I
I
Qz I
...............1
I
Ez
I
I
I
а)
р р
Е ......J'""'"""= rr
...........
Qr Q
Исследуемая система:
а исходная схема; б схема замещения
очень медленно, проявляясь в виде самопроизвольноrо изменения, называемоrо
иноrда сползанием (текучестью) параметров нормальноrо режима системы.
Условия возникновения текучес-
ти выявляются из анализа соот-
ношений, характеризующих
нормальный режим системы.
Рассмотрим характерную
систему (рис. 4.3, а). Установив-
шийся режим такой системы оп-
ределяется общими зависимостя-
ми, которые MorYT быть выраже.-
ны аналитически или представ-
лены rрафически:
Р 1 == 91 (01, и, ш);
Ql == 1 (01, и, ш);
Р 2 == 92 (02' U,ш);
Q2 == 2(02' V,ш);
Р Н == 9 (U,ш); Q н == (и, ш).
дР
p
/:и
s
.>Р. аР
. д
(J
Рис. 4.4. Har лядные стилизованные аналоrи ста-
тических характеристик Р == q;(/j, и, ro)
Здесь Р 1 , Р 2 aKTUBHbIe мощ-
ности, отдаваемые reHepaTopHbI-
ми станциями 1 и 2; Ql и Q2 соответствующие реактивные мощности; Р Н,
QH активная и реактивная мощности в узле наrрузки. Это так называемые
статические характеристики, простейшие аналоrи которых наrлядно представ-
лены на рис. 4.4.
Предположим, что отклонение режима вызывается изменением мощности
одной ИЗ турбин, изменением активной или реактивной мощности наrрузки или
одновременным действием этих факторов. ПреДПО,lIаrая последнее, запишем два
58
уравнения моментов на валах reHepaTopoB*
при откл6нении режима:
для станции 1
QP l a! + о + дР! U + ( дР! дРт! ) oo === P 1;
д3! ди дro дш
станции 2
и два уравнения баланса мощности
для
1
0+ дР2 a + дP2 u+ ( дP2 oPT2 ) oo===t1P'
д3 2 2 ди дш дш 2'
для наrрузки 3
дР! a + дР 2 a + ( дР! + дР 2 дPH ) U+ ( дР! +
дО 1 1 д 0 2 2 ди ди ди дш
.
(4.1)
+ дР 2 дРн ) OO === P н:
дro дro
GQ1H а + GQ2H a + ( дQш + GQ2H O Q H ) U +
до! 1 д0 2 2 ди ди ди
+ ( дQш + GQ2H GQH ) OO === QH'
дш дro дш
Здесь значения дРlд{), дРlдU, дРlдffi, дQlд{) и т. д., являющиеся коэффици
ентами при отклонениях параметров режима ( (), U, ф), характеризуют не
движение системы, а т о л ь к о е е т е н Д е' н ц и ю к э т о м у Д в и ж е
н и ю. ОНИ рассматриваются при малых отклонениях этих параметров как по
стоянные величины, Полаrая, что значения Pl' t1P 2 , PH' t1QH известны, с по
мощью системы уравнений (4.1) леrко найти любое из указанных отклонений па-
раметров режима, т. е. {)1' {)2' U, ш. Например,
al === (М 11/ D) P 1 + (М 1:/ D) P 2 + (М Н / D) P н + (М 14/ D) QH'
Здесь Ми, М12' М 18 , Ml соответствующие миноры; D rлавный опре
делитель системы уравнений (4.1):
I
д;ll О I д:;; :l д: uТ1
'""....____ __M......_..>! -- .. ..- .. _..-.... i ................... ...................... .................... .............................. ....... i. .................... ...... ..-....----_...... .......... ...... ........-........ ..............
О i дР2 1 дР2 ! дР2 д Р Т2
: -. : а ' и :
D == ! д 0 2 ! 1 дю дro
.... ..aP . .....i .. a.P: !.... .iJP:. .. .. .aP:.. .=. .iJf;;. ........ i..... .др.:. .. .. .dj;. . ..=. .дР:.. .......
до! i д'О. ! ди ди ди i дro дю дro
................................-i......... ....................'i-.........."........................_....-....................................................... .................................................. ....................................................
дQ1Н i дQ2Н i дQ!Н + дQ2Н дQН ; дQШ + 2н дQн
до! ! д0 2 i ди ди ди ! дro дro дш
! i
(4.2)
* При очень малых медленных отклонениях режима мощность и момент, выраженные
в относительиых единицах, принимаются равными Р. == РIРб== М/Мб == М., поскольку
р. == (J).oM., rде 00.0 """ 1. Однако влияние зависимости (статическая характеристика) мощ,
ности от частоты учитывается.
59
Аналоrично тому, как определялось д1' MorYT быть найдены значения б2' !
и, ш. Если при не равных нулю минорах М определитель D о к а ж е т с я ')
р а в н ы м н у л ю, то это будет означать, что любое о ч е н ь м а л о е откло.j
нение величин P1' P2' PH' I'1QH. (всех или какой либо одной) может вызвать ,1
н е о r р а н и ч е н н о б о л ь ш и е и з м е н е н и я параметров режима бl'
1'11'32' и, I'1ш, т. е. параметры режима будут самопроизвольно уползать от ис-
ходных значений. Критерием, указывающим на критический режим, будет ус-
ловие
D== О.
Принятый здесь подход к анализу является приближенным уже потому, что
в нем выявляется только т е н Д е н ц и я с и с т е м ы к неустойчивости без
учета характера движения, зависящеrо от инерционных постоянных системы.
Практические критерии, таким образом, выявляют только возможную теку-
честь режима (сползание), или, как называют иначе, апериодическую неустойчu-
вость, не выявляя той неустойчивости, которая может проявляться в виде коле-
баний колебательной неустойчивости (самораскачивания).
Принимая на основе практических соображений ряд дальнейших оrраниче- '
ний, например «закрепляя» (принимая постоянными) те или иные паj?аметры режи-
ма или, как rоворят, «закрепляя сомнительные координаты», из условия D == О
получим частные критерии, т. е. критерии, действующие при тех или иных orpa-
ничениях, так называемые практические критерии устойчивости. Так, при по.
стоянстве частоты в системе ( Ш == О) напряжения в узловой точке ( и == О)
и мощности турбин (Р Т1 == Р Т2 == const) критический по устойчивости режим на-
ступит при
dP/d'В i == О,
(4.3)
rде i == 1, 2 и т. д.
Это очевидно из первоrо и BToporo уравнений (4.1), которые дают
'Вl == ДР1 1'182 == ДР2
дРl/д 1 дР2/д52
При закреплении частоты ( ш == О) исохранении баланса активной мощности
в узле наrрузки (I'1P н == О) условием критическоrо по устойчивости режима
будет
aQH/ ди д (QIH + Q2H)/ ди == О.
Обозначая Q1H + Q2H == Qr и учитывая, что дифференцирование происходит
только по одной переменной, запишем
d (QH Qr)/ dU == О, или d Q/ dU == О.
( 4.4)
Если учесть, что Q , ср(Е э ), rде Е э э. д. с. эквивалентноrо r HepaTopa
системы, то вместо (4.4) можно записать
dЕэ/dU == О, или dU/dЕ э == 00. (4.5)
В справедливости ПОС.1Jеднеrо выражения леrко убедиться, рассмотрев диа-
rpaMMY (рис. 4.5), из которой очевидно U == (Е э Qх/Еэ)/соs д. Следовательно,
при 1'3--+900, т. е. у предела устойчивости, dU/dЕ э == 1/cos 2 д--+00 или dЕэ/dU --+0.
60
Этот критерий иноrда называют критерием устойчивости на2рузки, название,
очевидно из следующИХ соображений. Предположим, что обе станции одина
ковы и, следовательно, MorYT быть замещены одной станцией с мощностями Р l'
И Qr.
При этом
Р 1 ==Р 2 ===Р; Ql==Q2===Q; Д-В 1 ==Д-В 2 ===Д-В; P 1 +P 2 ==P r ;
QIH + Q2H == Qr; Qr.э == Qr + д-Q; д-Р 1 == д-Р 2 == о; д-Р н == о.
Д-ш == О.
Torдa в соответствии с (4.1) имеем
(дР r/ дВ) д-в + (дР r/ дИ) д-и == о; (aQr/ дВ) д-в + [д (Qr QH)/ ди] Д-и == д-Qн'
Из двух последних уравнений находим
д-и == д-Q j[ д (QH Qr) (дРr/дU) (дQr/ до ) ] .
н ди дРr/до
Допустим, что характеристики наrрузки
таковы, что reHepaTopbI работают в режиме, Е.
коrда 6 < 900, и поэтому дР r/a6 =1= о. Кроме
Toro, предположим, что дР r/aU == О. в этих
условиях появление малейшеrо изменения pe Р х
активной мощности наrрузки д-Q н может при и=Е 5 iп fi
вести к соотношению д (QH Qr)/aU == о, а
это при конечном значении д-Q == QH Qr Qx
будет указывать на неоrраниченное измене U=Ecos!) (]
ние напряжений узловой точки д-и. в этом
неустойчивость системы проявляется как He
устойчивость наrрузки. Если предположить
далее, что эквивалентная наrрузка Н питает Рис. 4.5. Векторная диаrрамма про-
ся от шин независимоrо напряжения (Е или стейшей электрической системы
И), которое не зависит от режима, и единст
венноЙ переменной может быть изменение yr
ловой скорости двиrателей наrрузки, то п р а к т и ч е с к и м к р и т е р и е м
Д в и r а т е л е й н а r р у з к й: будет dP/dw == О или в случае асинхронных
двиrателей (ш == dfJIdt == s)
dP/ds == О.
(4.6)
в табл. 4.1 представлены полученные выше практические критерии устой
чивости в определенной форме и указаны типичные случаи их применения.
Однако можно получить друrие формы их, варьируя виды записи системы
уравнений нормальноrо режима, принимая друrие допущения и оrраничения.,
Так, например, если наrрузку в схеме (см. рис. 4.3) представить постоянным
сопротивлением, то мощность, выдаваемая каждым (1, 2) reHepaTopoM, будет за
висеть от их взаимноrо уrла 612 == 61 62 И частотных характеристик Pi I,2 ==
== ср(6 12 , Ш1, (2)' Тоrда вместо (4.1) запишем три уравнения:
61
1. Типич
ная схема и
схема заме
щения
11. Способ
задания Har
рузки
111. Кри-
терий пре
Дельноrо pe
жима
IV. Условие
подхода к
пределу по
пара метру
Простейша.я элект-
рическая система
(rеиератор шииы)
:: 1:
( u 1
..............
p/,Qr P,Q
и
Х п ; :xr+x c
Две СТЮJЦИИ (два эквивалеНТllЫХ
rеиератора), соизмеряемые ПО МОЩ.
иости И работающие на общую
наrрузку
Х I
E 1 T X1 и Х2 Ez
ХН
R H
[енератор от- Zи =: R и :!:: jХ и
дает мощность в
систему несоизме
римо большей
мощности
dP
(j8 =: О
Er, И=: const,
Р =: var
5
У. ОСНОВ- Ес =:
ные расчет- =: V( QXr ) 2+
ные выраже- И+
ния
62
( ) ".
+ и .
Ес И .
Р =: sт5;
Х п :
ЕrИ
Р т =: ;
XrJ:
Р т РО
К зр =: р Х
о
XIOO%
dP
=:O
d5 12
Е 1 , Е 2 =: const, И=: var
512
Р 1 =: EIYllsin (111 + E1E2Y12sin Х
Х (512 (112);
Р т =: EIYll sin(1l1 + Е 1 Е 2 У12;
К зр '=' Р т РО РО 100%
Мноrомашинная система,
имеющая узловую точку
1
1
(.
L
н
Х!
Е/ Xz
Ez Х.
Е i <>- .J'vx
Е п
и к
EQн=ф(U к )
Статические харак-
теристики комплексной
наrрузки:
(И); Qи == <р(И)
d!:.Qr.H
dИ k
=:0
Р =: const, Е == const,
И k (узла)
ЕiИk
Qri =: cos 51
I
И
Xi";
n
};Q . =: Qrl:
r i l
L\Qr == };Qi };Qи;
К Иkо И k иР 100%
ЗU И ko
Станция (эквивалентный сенератор). питающая через лэп
наrрузку соизмеримой мощности
и,
GfGD
: с
ХЭ =Xr+X c
Э и
Р Н =<р (и)
QH =среи}
Статические характеристики
комплексиой наrрузки:
Р н == ср(и); QH == ф(U)
dЕ э dQ
dU == о; dE э == CX)
u == var, Р н == var, QH == var
U
. н
X r
Е э
Эквивалентный асиихронный
двиrатель
dЕ э dP dQ
== о; dS == о; dE == CX)
Е э == ccnst, Р == var (для
dPjds),
Р == const (для : и dJu )
и, s
Е э == V(U+ Qu хэ )\( РuХэ У; Еэ==V(u+ Q э У+( Р э У;
р2 + Q 2
Q == Q н н К
r н. и 2 Хэ; зВ ==
Еэ Еир
100%;
Е э
U и
К зИ == ОИ о ир 100 %
E;Rs
Р==
R2 + (хsэs)2
Е 2 2
э ХsэS .
Ю+(х s э s )2 '
Е 2
Pт==
2х sэ
Q==
R
Sh"p == ;
Х sэ
Таблица 4.1
Асинхронный двиrатель
(эквивалентный), пита-
ющийся от мощной
системы
u=сопst
XS=Xf+XZ
ин
Эквивалентный асин
хронный двиrатель
dP
dS==O
U == const, Р == var
s
U2R 2 S
R + (x s S)2
и2 x s S2
Q==
R + (X,.s)2
u2 R 2
Р т == 2Х"; sир==х ;
s s
Р т P
К зР == Р' 100%;
и о U ир
К зИ == U 100 %
о
Р==
63
Простейшая элект
рнческая снстема
(rен€ратор шины)
Две станции (два эквивалентных re-
нератора), соизмеряемые ПО мощности
и работающие, на общую нarрузку
,,"oru . .. ru"'Q, , " 1
имеющая узловую roчку 1
VI. Пред
СТа вление
критерия и
предела УС-
1'ОЙЧИlЮСТИ
Р Р т
dP =а
d8"
р
Q
IJ
8"
Ojz
(8Аш/81> 12) А1>'2 АШ1 + Аro 2 == о; \
дР дР} А + дР} А А Р I
.........!.. А1> + аШl аШ2 == Ll 1; ( 4
a012 12 aro 1 дro 2 ( ( .7)
дР 2 А'" + дР2 А + 'дР 2 А А Р 1
аО12 L.).OO} аШ2 == Ll 2'
дО 12 aro t a ro 2
Полаrая в (4.7), что расхождение скоростей Аro == Аro! Аro 2 очень мало
(иначе необходимо было бы учитывать несинусоидальность), приближенно при-
мем в (4.7) Aw о. Тоrда определитель D системы (4.7) будет
о 1
- дP} i дР} 'I'. -д-Р: Ш'
D дО 12 i дro, i aro
' ::': ' П П
Условием наступления критическоrо реЖИМfl двух станций при D
соотношение*
(4.8)
о будет
дР} ( дР! + дР 2 ) дР 2 ( дР} + дР ! ) == О. (4.8а)
a0 12 д ro 2 д",! a012 aro1 дro2
Если в системе единая частота ro1 == ro 2 == Ю, то можно считать, что появле-
* в rл. 8 будет показано, что условия (4.8) или (4.9) полиостью соответствуют услови-
ям апериодическоrо иарушения устойчивости при малых колебаииях. Таким образом, про-
верка устойчивости исходиоrо режима (см. Э 4.2) является частным случаем определения
УСТОЙЧИВОСТIII методом малых колебаиий.
64
Продолжение табл. 4.1
Станция (эквивалентный reHepa:rop), питающая через
лэп иаrрузку соизмеримой мощности
Асинхронный двиrатепь
(эквивалеитиый).,
питающийся от
мошноli системы
Е э Q ,.,
dЕЗ о lrf{J J.
dИ I dЕ з ""
иКР и .E1 .
Е э
р
.s
Ей iJ I
d dQ
=o IU K I fJ О и d Е з co
Р dP Ез
I dS=a
I
I Sl<p
s
ние критическоrо режима произойдет, коrда так называемый определитель из
быточных .моментов [1]
дР ! дР !
дО 12 доо
D и . м == == о. ( 4.8б)
дР 2 дР 2
дО 12 доо
4.3. ЭНЕРrЕТИЧЕСКАЯ ТРАКТОВКА ПРАКТИЧЕСКИХ КРИТЕРИЕВ УСТОАЧИВОСТИ
Устойчивость или неустойчивость, как бы они ни раесматривались, неизбеж
но связаны с э н е р r е т и ч е с к и м и а о о т н о ш е н и я м и; исследуемая
система, получив возмущение, или стремится восстановить исходный (близкий
к нему) режим, или уходит от исходноrо состояния. В первом случае она oцe
нивается как устойчивая, во втором неустойчивая.
В установившемся режиме энерrия W 1" поступающая в систему извне, pac
ходуется в наrрузке W п И идет на покрытие потери 11 W в сети:
WI'==W, rде W==W п +I1W.
Предположим, что энерrии, как это и было сделано при определении практи
ческих критериев W l' и W, зависят только от одноrо параметра режима П, Ha
зываемоrо далее определяющим naраметром W l' == ЧJt(П), W == ЧJg(П). Если свой
ства системы таковы, что расход энерrии после возмущения (отклонения 11П)
будет происходить более интенсивно, чем увеличение (<<rенерация») энерrии, KO
торую может дать после возмущения внешний источник 11 W 1" то новый
(возмущенный) режим не может быть обеспечен энерrией и в системе должен
восстанавливаться прежний установившийся режим (или режим, близкий к
нему). Такая система будет оценена как устойчивая (рис. 4.6, а).
Здесь при изменении I1П ПОЯВJIяется изменение расхода энерrии 11 W, кота-
3---84
65
рое будет фактором, задерживающим изменение режима, стимулированное по-
ввлением дополнительной «энерrии rенерации» Д W r. Математически сформули-,
рованным условием сохранения устойчивости при отклонении определяющеrо
llapaMeTpa на ДП будет, очев идно, условие
I дW/дП> дWr/ДП, I
форме
d(W Wr)/dП>О.
ИЛИ В дифференциальной
(4.9)
4.6, б.
Случай неустойчивости, коrда d(W W r)/dП < О, показан* на рис.
Отсюда следует общее правило:
устойчивыми будут режимы, при возмущении которых факторы, стремя-
щuecя нарушить их, изменяются менее интенсивно, чем факторы, nротиво-
ikйсmвующш этому нарушению.
rеометрическая интерпретация этоrо положения, представленная на
рис. 4.7, а, сводится к утверждению, .что в устойчивых режимах характеристика
а)
W
8)
..1 W J I
- I LlW,t
W + ,.
r. ,
I W '
I I
I I
I I
I I
I I
I I 1. I
'L1П' I.1ПI
I I I I
I I
п
Рис. 4.6. Зависимости энерrий В устой.
чивом И неустойчивом режимах:
а соотношение энерrни. поступающей в си...
стему (W r ) И расходуемой (W) в наrрузке в
устойчивом режиме; б то же. ио в иеустой-
чивом режиме; !J. W расхождение между
поступающей в систему энерrией и эиерrией.
расходуемой в системе
а)
F
о)
F
н
1..\\\
i" \ I
\.\\\ :
i" '1. :
-, I
J I
I
I
Ль П кр .П а П
=ч>,(П)
П кр
п
п
РИс. 4.7. Интенсивность изменения факторов,
стремящихся нарушить режим (Р 1 == IJ>l(П)]'
И факторов противодействующих [Р 2 == IJ>2(П)):
а устойчивый (точка а) и неустойчивый (точка Ь)
режимы; б критический режим
Р 1 == <Р1 (п) фактора, стремящеrося нарушить режим, идет более полоrо, чем ха.
рактеристика Р 2 == <jJ2(П) фактора, восстанавливающеrо режим (на рисунке точ-
ка а устойчивый режим, точка Ь неустойчивый).
* Подчеркнем, что при использовании критериев типа (4.9) в технических задачах суж-
дение об устойчивости получают, оперируя, как это было сделано ранее, не с полной энер-
rией системы, а с некоторыми зависящимн от нее величинами, выявляемыми (из практиче-
ских соображений) для каждой конкретной задачи. Отсюда и появляются практические кри-
терии устойчивости.
66
в критических режимах характеристики, rpафически представляющие измене-
ние фактора, стремящеrося нарушить режим, и фактора, восстанавливающеrо ре-
жим, не пересекаются, а только касаются друr друrа (рис. 4.7, б).
Оценка устойчивости системы исходя из соотношения характеристик типа (4.9), пока
зывающих интеисивность внешнеrо воздействия на систему и изменение ее свойств под влия-
нием этоrо воздействия, применяется во мноrих случаях. Так, в статистической физике анало-
rичная оценка осуществляется на осиове известноrо прииципа Ле Шателье*; в теории коле-
а) о) р 6
р
Е и и
G+9i
о s
Рис. 4.8. Примеры устойчивых и неустойчивых режимов:]
а для сенератора. работающеrо на mины нензмеННоrо напряження, 6 для асинхронноrо
двиrателя
Тонкнмн линнями изображены характеристики мощности турбины рт..Т«(,) и характернстики
PMex f(s). Жнрными линнями изображены характеристнки электромаrнитноi! мощности
Р.л f({) и p.lI f(s)
баний применяется энерrетический принцип определения устойчивости режима* *, указыва-
ющий условия возможноrо ухода системы из положения равновесия. В сопротивлении мате-
риалов полаrают, что состояние деформируемой системы будет устойчиво, если энерrия ее
деформации окажется больше работы внешних наrрузок. Если внещние силы являются кон-
сервативными, т. е. работа, обусловленная только начальным и конечным положениями,
не зависит от траекторий перемещения, то устойчивость оценивается по приращению пол-
ной энерrии системы при из енении ее состояиия***. В экономических, биолоrических и дру-
rих задачах существуют критерии устойчивости, аналоrичные (4.9), которые учитывают ин-
тенсивность изменения факторов, изменяющих или задерживающих режим системы.
Энерrетические соотношения в основных практических критериях устой-
чивости. Простейшая электрическая система. Рассмотрим характеристику си-
темы, показанной, на рис. 4.8, а, состоящую из синхронноro reHepатора, рабо--
тающеrо через реактивное сопротивление х на шины неизменноrо напряжения-
Предполаrаем, что в этой системе параметром П, от KOToporo зависит изменение
режима и по которому должна проверяться устойчивость, будет уrол б расхож-
дения векторов э. д. с. Е и напряжения U. От выражения энерrии в (4.9) леrко
перейти к выражению мощности, продифференцировав по времени обе части ero.
Тоrда запишем
I d(Р Рт)/dП>О,
(4.10)
* См.: Ландау Л. Д., Лифшиц Е. М.Статистическая физика. М.: Наука, 1964, с. 84.
** См.: Харкевич А. А. Автоколебания. М.: rиттл, 1953, с. 9 11.
. *** См.: Воль.мир А. С. Устойчивость л;еформируемых систем. М.: Наука, 1967, с. 33,
З9 42.
, '
З.
67
rде Р электромаrнитная мощность reHepaTOpa, тормозящая турбину; Р т
мощность, развиваемая турбиной, стремящаяся увеличить параметр П == 6.
Если мощность турбины, как это обычно полаrают, не зависит от изменений
уrла, то практический критерий устойчивости простейшей (рис. 4.8, а) системы
имеет вид
I dP/da>o. I
(4.11)
Если dРт/dб =1= О, то теоретически возможны показаННБIе на рис. 4.8, а
состояния, коrда система будет устойчива в режимах 1, 2, 3, 4, 5 инеустойчива
в режимах 9, 10, 11, 12. Критическими будут режимы б, 7, 8, при которых ха-
рактеристика Р т == 1(6) окажется касательной к характеристике р м == 1(6).
Критерию dP/d6> О можно дать простую физическую трактовку. В устойчи-
вых режимах (например, режим 2) при случайном малом увеличении уrла 6 на
величину А6 (возмущении режима) появляются избытки электромеханическоrо
(тормозящеro) момента над механическим (вращающим): АМ т == АР/ыо И от-
клонившийся на А6 ротор возвращается в исходное (устойчивое) состояние.
Асинхронный двиrатель. На рис. ,\.8, б показаны характеристики асинхрон
Horo двнrателя, подключенноrо к узловой точке системы, имеющей неизменное
напряжение и. В этом случае устойчивость проверяется по параметру П == s
(скольжение двиrателя) и соотношениям ero механической (увеличивающей s)
Р мех И электрической (вращающей) Р мощности. Критерий (4.9) принимает
здесь вид
I d (Р эл PMex)/ds> О. I
Этот критерий указывает, что на рис. 4.8, б режимы 1, 2, 3 устойчивые,
режимы 4, 5 неустойчивые, б, 7 критические. Физическая трактовка за-
ключается в рассмотрении изменения соотношений моментов ускоряющеrо (элект-
ромаrнитноrо) и тормозящеrо (механическоrо) при возмущении режима. Orличие
от случая, показанноrо на рис. 4.8, а, состоит в том, что возмущением (В) яв-
ляется изменение скольжения на As и электрический момент ускоряет ротор
(уменьшает скольжение), а не тормозит (не уменьшает скорость).
При Р мех == Ро == const критерий устойчивости имеет вид
dP/ds>O.
(4.12)
Узловая точка системы. Узел, в котором обеспечен баланс активной мощ
ности (имеется реrулирующая станция), но может нарушаться баланс реактив
ной мощности, требует для сохранения устойчивости выполнения условия
dAQ/dU> о I ' rде AQ == QH Ql'"
При этом справедливы те же энерrетические соотношения, выявляемые как
функции напряжения, зависящеrо от получения (Qr) И потребления (Qи) реа&-
тивной мощности.
68
о 4.4. ПРИМЕНЕНИЕ ПРАКТИЧЕСКИХ КРИТЕРИЕВ СТАТИЧЕСКОЯ УСТОЯЧИВОСТИ
Задача применения практических критериев статической устойчивости CBO
дится К анализу поведения системы при случайном относительно малом текущем
изменении парамеТР9В режима системы. При этом необходимо прежде Bcero най
ти ответ на, вопрос: не приведут ли малые возмущения режима, неизбежно су-
ществующие в нормальной работе системы, к медленному уходу (сползанию)
режима от начальноrо и переходу от синхронноrо к асинхронному режиму? Про
стейший анализ, дающий rрубый ответ на этот вопрос, приводится С помощью
практических критериев статической устойчивости. Однако эти методы исследо-
вания не дают ответа на вопрос: не вызовут ли возмущения режима в дальнейшем
таких колебаний, которые длительное время не будут затухать или даже, напро
тив, будут нарастать (самораскачивание)? Исследование характера колебаний,
требующее учета инерционных постоянных элементов системы, обычно проводится
без определения изменений параметров режима во времени и позволяет ответить
только на вопрос: не получит ли система установившихся или нарастающих
колебаний после малых толчков? Метод исследования основывается на известной
из механики теории малых колебаний (соrласно этой теории, нелинейная иссле
дуемая система линеаризуется), в аппарат которой вносится ряд специфических
дополнений.
Так как зависимости П i == fP(П 2 ) рассматриваются как с т а т и ч е с к и е,
т. е. характеризующие нормальный режим и ero свойства при о ч е н ь м е k
л е н н ы х изменениях параметра (тенденции к изменению П), то всеrда можно
в приведенных критериях заменить Р на юМ, rде М вращающий момент, и,
следовательно, во все критерии типа (4.9) ввести М вместо Р.
Запас статической устойчивости. Из всякоrо существующеrо устойчивоro
режима можно получить неустойчивый последующим ero утяжелением, напри-
мер увеличением наrрузки. Сопоставляя параметры существующеrо устойчивоrо
режима Па С параметрами HOBoro режима, полученноrо в результате утяжеления
и лежащеrо на rранице между устойчивым и неустойчивым режимами, т. е. lCpи-
mическоео режима Пнр' находим (см. рис. 4.7, а, б)
Ка,ст. == [(Пнр Па)IПа].I00%.
. Например, для синхронноrо reHep атор а и двиrателя соответственно
(рис. 4.8, а, б)
Ка. СТ. == [(Р 7 P2)IP2].100%;
Ка. ст. == [(Р 6 PJIP 1 ] .100%.
Запас устойчивости (по напряжению) для узловой точки системы будет
Ка. ст, == [(и о URP)IU o ] .100%.
о 4.5. СОВМЕЩЕНИЕ РАСЧЕТОВ НОРМАльноrо РЕЖИМА И ОЦЕНКИ
EfO СТАТИЧЕСКОIii у/сТОIiiЧИВОСТИ
Если в процессе расчета нормальноrо режима системы, обычно проводимоrо итератив-
но на каждом ero этапе, вычислять определитель (4.2), то прохождение ero через нуль будет
сразу же указывать на физическую неустойчивость данноrо режима, проявляющеrося в виде
сползания или текучести. Математически D == О должно означать нарушение сходимости
(устойчивости) математическоrо решения. Связь между сходимостью (математической ус-
69
тойчивостью ) И физической устойчивостью заключается в том, что при подходе к предельно-
му режиму ухудшается обусловленность матрицы, что, в свою очередь, ухудшает СХодимость.
Однако такой подход к оценке устойчивости встречает трудности. В принятой практике рас-
четов нормальноrо режима эти расчеты связаны с итеративными решениями системы нели-
lIеЙII Х уравнений, имеющих в векторной записи вид:
W (х, у) == О,
rде W вектор'функция небалансов мощностей в узлах системы; х, у векторы зависи-
мых инезависимых переменных.
Итеративные решения (например, по методу Ньютона) не всеrда обладают вычислитель-
ной устойчивостью Сходимостью в физически устойчивом, установившемся режиме и,
наоборот, MorYT быть вычислительно устойчивыми в режиме физически неустойчивом. По-
этому для выявления устойчивости итеративные расчеты установившихся режимов выпол-
ня ются при дополнительных условиях*, которые рассматриваются в дисциплине «Алrоритмы
знерrетики».
i ".6. ПРОСТЕЙШАЯ ОЦЕНКА УСТОЙЧИВОСТИ ПЕРЕХОДА
ОТ OAHOrO РЕЖИМА К APyrOMY (ДИНАМИЧЕСКАЯ УСТОАчивость
И ЕЕ ПРАКТИЧЕСКИЕ КРИТЕРИИ)
Выше были рассмотрены условия устойчивости системы, которая подверrа-
лась в установившемся режиме случайным, очень малым возмущениям (отклоне-
ниям режима), т. е. условия статической устойчи-
а) х вости** . Для их определения применялись практи-
I U=Cl7пst ческие критерии, основанные на совместном рас-
: смотрении статических характеристик электричес-
о) х ких И механических мощностей (вращающих и тор-
1C Е I и мозящих моментов). Статические характеристики,
..,............ ......, coпsf; полученные при очень медленных изменениях ре-
жима, отражают установившееся ero состояние.
Они не зависят от скоростей изменения параметров
режима и характеризующих эти скорости парамет-
ров системы (постоянные инерции, постоянные вре-
мени контуров ротора вращающихся машин).
При появлении в системе больших возмущений
(резких изменений режима), таких как короткие замыкания, отключения или
включения наrрузок, reHepaTopoB, трансформаторов, линий передач и друrих
элементов системы, вместо статической задачи (статической устойчивости) прихо-
дится рассматривать задачу динамическую (динамическую устойчивость). При
Этом необходимо учитывать нелинейности основных характеристик [Р === (j)(б),
Q === 'Ф(б) и т. д.] и, рассматривая движение системы, учитывать ее инерционные
параметры, определяющие скорости изменения параметров режима.
\
Рис. 4.9. Исследуемая схема
простейшей системы «ста Н'
цИЯ шины»:
а исходная схема /; б схема
после отклюqения //
(х или 2)
* См.: Ндельчик В. Н. Расчеты установившихся режимов электрических систем.
М.: Энерrия, !977; Оценка стаТlfческой устойчивости электрических систем на OC OBe реше-
ния уравиении установившеrося режима/Веников В. А., Строев В. А., НдеЛhчик В. Н., Та-
расов В. Н. Известия АН СССР. Энерrетика и транспорт, 1971, N2 5; Маркович И. М.,
БарШto8 В. А. О критерии статической устойчивости, базирующемся на сходимости итера-
цнонноrо процесса установления исслеДу'емоrо режима. Известия АН СССР. Энерrетика
и транспорт, 1970, N2 5; Баринов В. А. К исследованию апериодической устойчивости слож-
ных электроэнерrетических систем. Электричество, 1976, N2 7.
** Опреде ление понЯтий «статическая устойчивость» и «динамическая устойчивость»
было дано в 1.1 и 4.1.
70
При больших возмущениях, связанных с резкими изменениями режима,
э. д. с. reHepaTopoB не будут неизменными, как это с достаточным основанием
принималось при рассмотрении малых возмущений (статической устойчивости).
Однако уч.ет изменения э. д. с. во времени [Е == f(t)] сильно осложняет расчеты
и в первом приближении их можно упрощенно проводить, учитывая reHepaTO-
ры квазипереходными (квазидинамическими) характеристиками мощности, т. е.
при Е == Е' == сопst.
Torдa для простой системы (рис. 4.9, а) запишем
Р == РУн sin (хн + ЕU У12 sin (8 (Ха)' (4. 13а)
Если активное сопротивление не учитывается, то
Р == ЕU Уа siп 8 или Р == ЕU sin 8,
Ха
( 4.13б)
rде Уа == 1!х 12 . В простейшем случае Х а == X суммарное сопротивление цепи
от точки приложения э. д. с. Е ДО шин U (рис. 4.9, б).
Электромаrнитный момент, действующий на валу reHepaTopa и определяю
щий характер ero движения, находится как М == Р!ш, однако в тех электромеха
нических процессах, которые будут рассматриваться в этом параrрафе, можно
без большой поrрешности принять (fJ == шо + L\(fJ шо. Основанием для этоrо
является то, что скорость в начаJlе процесса L\(fJ вследствие большой инерцион
ностИ ротора изменяется медленно (100 200 rрад!с) и составляет, следова
тельно, не более 1 2% по отношению к синхронной скорости (шо == 360.50 ==
== 18000 rрад!с). в условиях таких малых изменений скорости для прибли
женных расчетов устойчивости обычно принимают, что при записи в относитель
ных единицаХ (при шо == 1) изменения момента* численно равны изменениям
мощности:
L\M == L\P!«(j)o + L\(j)) == L\P/(j)u или L\M* == L\P *,
соответственно М* == Р *. Заметим, что далее на рисунках и в формулах звездоч
ка будет опускаться.
Рассмотрим резкое изменение режима в системе (рис. 4.9, а, б), вызванное
отключением одной из параллельных цепей электропередачи. Предположим CHa
чала, что активное сопротивление не учитывается, и построим соrласно (4.136)
характеристики режима (рис. 4.10, а).
Из рассмотрения этих характеристик следует, что резкое изменение пара
метров системы приводит к переходу ее из режима 1, соответствующеrо схеме /
(рис. 4.9), в режим 11, отвечающий схеме 1/. Это вызывает изменение электромаr
нитноrо момента на валу каждоrо reHepaTopa системы от М6 == м т дО М6 1 *
=1= М Т (рис. 4.10, а). Появившийся небаланс между ускоряющим моментом TYP
бины L\M o и тормозящим электромаrнитным моментом reHepaTopa (L\M o == М Т
МII) приводит К тому, что reHepaTop начинает изменять скорость. Если МII <
< мт, ТО скорость будет увеличиваться сверх синхронной на величину L\(i)
(рис. 4.10, б). Избыточный момент L\M при этом будет уравновешиваться не толь
ко электромаrнитным моментом, соответствующим отдаваемой reHepaTopoM в
* Разумеется, соотношение М == Р/оо справедливо при значении 00, соизмеримом е
ФО- "Бессмыслеино применять это соотношение при 00 == о и Т. д.
71
сеть электроэнерrии, но и моментом, отвечающим накапливаемой ротором кин
тическоЙ энерrии, определяемой как I ДМdо== А. Уравнение движения reHepa-
тора в простейшем случае (без учета демпфирования и действия реrулирующих
устройств) запишется следующим образом*:
а)
м=р
Mg t!2:LJ!!.o
о)
Llw
2)
Llwl
J
I
,a) i О"оН
I о-
I
о
с
t
Рис. 4.10. Характеристики динамическоrо пе-
рехода: схема 1 pI == (ЕU/о,5х)siпб, схема
II рН == (ЕU/х)siпб:
/J характеристики режима P H6) дЛЯ схем 1 и II;
6 зависимость изменений скорости t..ro ro roo f(6)
(на фаЗ0ВОЙ плоскости), здесь ro текущее значение
скорости, 0)0 синхронная скорость; в...... изменение
Ь HO, Ll(O QJ(t), обозначения те же, что и иа рис. б;
е изменение скорости Llro QJ(6) при диссипативной
системе; i::J измеиение уrла 6 f(t) при диссипатив-
ной системе
72
о'
дМ ==.м т МВ == Т J dДIJ)/ dt.
Здесь T J некоторый коэффициент,
характеризующий инерцию ротора re-
нератора;дro изменение уrловой
скорости по отношению к синхронной
roо; dДro/dt == d 2 б/dt 2 == а ускоре-
ние; б уrол СДБиrа э.д. с. reHepa-
тора по отношению к оси, вращаю-
щейся с уrловой скоростью roо. Чис-
ловое значение и размерность коэф
фициента T J зависят также от спосо
ба записи уравнения и размерности
остальных ero членов *. В общем
случае момент М является функцией
скорости и изменяется при изменении
режима системы:
М В == 9(0, ДIJ).
в простейшем случае предполаrается,
что МВ == M sin б.
Тоrда запишем TJ d 2 б/dt 2 == Mo M x
х sin б, или, полаrая М == Р,
d21) 11
TJ == Р P siпо.
dt 2 о т
(4.14)
л ю6ые началЫiые изменения ре-
жима получают отражение в измене-
нии уела 60, значениях МJщности РО,
амплитуды характеристики Р т .
Интеrрируя (4.14), можно опреде-
лить изменение скорости Дro == f(t).
По характеру изменений скорости
.. См.: Иванов-Смоленский А. В. Эле-
ктрические машины. М.: Энерrия, 1980,
с.601.
.. '" См. П3. Здесь и Далее, если ие
будет сделано специальных orOBopOK, урав-
нения записаны в относительных едини-
цах.
A(f)(t) и утл& 6(t, можно судить о том, сохранит ли система синхронную работу
(будет ли динамически устойчива) после резкоrо возмущения и последующеrо
перехода от одноrо режима к друrому (рис. 4.10, в, 2). Однако, к сожалению,
даже в таком простейшем виде интеrрал уравнения (4.14), т. е. зависимость
6 == f(t), не выражается через конечную комбинацию известных трансцендент-
ных величин. Здесь не удается воспользоваться и известными (заранее вычис-
ленными и сведенными в таблицы) функциями. Только при приближенном ре-
шении или в частном случае величину 6 можно выразить через эллиптические
функции. Приближенное решение TaKoro рода довольно rромоздко, а случай,
коrда РО == О, соответствующий отсутствию вращающеrо момента у первично-
ro двиrателя, не представляет практическоrо интереса, поэтому здесь не бу-
дет рассматриваться. Таким образом, и н т е, r р и р о в а н и е у р а в н е -
ния движения (4.14) или аналоrичноrо ему пред-
с т а в л я е т з н а ч и т е л ь н ы е т р у д н о с т и. В большинстве случаев
ero удается провести только применяя приближенные методы. Иноrда динами-
ческую устойчивость системы можно проверить (rрубо) без выявления харак-
тера движения по времени из соотношения возможных изменений энерrии
в разных фазах движения с помощью так называемоrо способа площадей.
Чтобы пояснить этот способ, рассмотрим рис. 4.10.
Изменение характеристик электрической мощности Р == 1(6) с 1 на 11, свя-
занное с изменением схемы (см. рис. 4.9), приводит к появлению небаланса мо-
мента LlM. Под действием ero происходит относительное перемещение ротора
reHepaTopa*. Величина LlM в общем случае зависит от положения ротора в про-
странстве, т. е. от значения уrла 6.
Будем считать, что движение ротора происходит только под действием сил
(вращающих моментов), зависящих от положения ротора в пространстве (пози-
ционная система), хотя в действительности на ero движение влияют друrие
факторы, в частности изменение скорости, ,которое далее будет приближенно
учтено.
Из теоретической механики известно, что при движении со скоростью v ма-
териальной точки х массой т под действием силы Р, зависящей от положения этой
точки, происходит работа, определяемая как приращение кинетической энерrии
на пройденном пути. Так, при движении от Ь 1 дО Ь 2 С начальной скоростью, рав-
ной нулю, можно записать
Ь.
mv S
""2 == Fdx == А.
ь.
(4.15)
ВеличинаА на rрафике F == ср(х) представляется п л о Щ а Д ь ю, про п о Jr
ц и о н а л ь н о й к и н е т и ч е с к о й э н ер r и и, запасенной движущимся
телом при изменении скорости (см. П3).
Переходя к соотношениям, отвечающим электрической системе (см. рис. 4.9),
и рассматривая изменения скорости по отношению к неизменной синхронной
скорости фо. можно по аналоrии с (4.15) записать (рис. 4.10, а)
* При этом предполаrается, что в случае несимметричных режимов движение ротора
определяется только составляющей момента прямой последовательностн.
73
/)11
О
А] == 5 LlMdo ==
/)1
О
т J L\",2
2
(4.16)
При сделанных допущениях, считая М == Р, можно определить кинетиче-
скую энерrию при перемещении ротора от уrла б до уrла 051:
/)11
о
А] == 5 (Pv P sin o)do == РО (8бl об) +P (cos 8б l cos 8 ).
/)1
О
На рис. 4.10, а величина А 1 определяется площадкой аЬса.
Определение размаха колебани и проверка устойчивости при внезапном из
менении элекТрической наrpузки reHepaTopa. Изменение режима reHepaTopa (OT
раженное в изменении или сопротивления связи [енератора и шин наrрузки,
или напряжения на шинах наrрузки, или ero э. д. с.) приводит К перемещению
точки, определяющей режим системы, с. характеристики 1 на характеристику 11
при б == . Возникающий небаланс LlPo между электрической и механической
мощностями (моментами) приводит к появлению ускорения ct == LlPIT J И отно-
сительному перемещению ротора (рис. 4.1 О, а, б, в) со скоростью Ll@, определя-
емой, соrласно (4.16), выражением
Llw == 1 / SLlPdo. (4.17)
V TJ /)
Изменение Ll@ == f(б) показано на рис. 4.10, б, изменение уrла б == f(t) и
скорости Ll@ == <p(t) на рис. 4.10, в.
Во время движения рото[.-а (рис. 4.10, a в) при б бб l электрическая и механическая
мощности оказываются равными. Однако наличие кинетической энерrии А], запасенной' ро-
тором в процессе ero ускорения и пропорциональной площадке аЬса, приводит к тому, что
ротор движется далее, проходя точку с и увеличивая уrол б. При движении от точки с к точ-
ке d ротор испытывает торможение под действием электрической мощности, которая при этом
становится больше механической. Кинетическая энерrия, запасенная' при ускорении, иноr-
да называется !1нереией ускорения. При rрафической интерпретации энерrия А 1 А уск ,
равная площадке аЬса, «расходуется» (переходит в потенциальную) во время движения ро-
тора от точки с к точке d. В точке d вся кинетическая энерrия, полученная при ускорении,
оказывается «израсходованной», при этом скорость L\w становится равной нулю. Однако дви-
жение не может прекратиться, так как потенциальная энерrия достиrла максимума и иа ро-
тор действует избыточный электрический момент L\M 2 == L\P 2 . Под действием ero ротор сно-
ва подходит к точке с со скоростью L\w c L\w мзкс И кинетической энерrией А 2 == А торм
(полученной при торможении на участке cd). Эта энерrия пропорциоиальна площади cdec
В точке Ь скорость L\w и кинетическая энерrия равны иулю и процесс начинается сначала
(под действием L\P o == L\M o ; см. рис. 4.10,6).
Итак, энерrия, запасенная ротором в процессе ускорения, математически
/)11
о
выражается как интеrрал 5 LlPd8 и представляется rрафически в виде ма-
/)1
о
74
щадки аЬса. Энерrия торможения математичес и выражается как интеrрал
.макс
S l1Pd8 и представляется rрафически в виде площадки cdec. Эти площадки, со-
.П
о
ответствующие энерrии, запасенной при торможении и ускорении, в дальней-
шем будем называть соответственно площадками ускорения и торможения.
,, reHepamop Аналоеllll качаНllй еенератора
Дllаераммы -' Энер
I"' уело8ая 8екторная МаятНIIК пr;ff 'u o Цепь l.c. еllЯ
М. /"' "'\1 +8=0 к п
'/""..' "", L
, I М , /1' и f4J
/1 .[\ о ,. I
. \
_:..{) т f}=-f}o 1=0
. ot ( о т 8=0 If=-}(f '11'=0
М /'J + ;;"" " " 1
J(/ 1\0 i\
2 & lWN.i . .
I \
1 r. ", т - ..
I "' .
О. I . т +8 С
М " 1
rr Т\ +8 = :\( 1 I
J I \
I \
OJ\ ,...( )..,
lOJ ...J- ....t.... т
I О т . .
, 8=8 макс х = О V=l1 нoKC 1)=0 1=1",акс
М 11 1
,: Ко " ' twwi
ц. +0 6\ I QJ . .
I ,
041 4 \ . ,
\ +8......- т т
С.
l
м ' т L
5 ,. Ti\ Об=8-,с 8=0 I
05= 0""",1 О е о Ц&J
..
т х=х о 11=0 Q=1I0" =I=()
м N" " 1
/ I !\ -В!)
6 -fJ , . .
106 О 06 \ .. -
, т
: т С
М I -t ..JL 1
. ........."
Ii 'r\ -0= 0%: I 1 I
7 ,
. ,
107 I О \ 07\ ..1)
! в=-в,.,акс х=О l1 VНa. Q=O 1= 1"aKc
М ,! 6' \ ..l!..... 1
'{I !\
J' t
8 , Q;J . .
\
1108 >-,
""';" - ..
о т 8 С
Рис. 4.11. Движеиие консервативных систем (rеиератора, маятни-
ка, массы с пружиной, цепи LC) и изменение их кииетической и
потенциальной энерrий на различиых стаДИЯХ движения
75
п р а в и л о п л о Щ а Д е й в общем виде формул'ируется так:
Соотношение (4.18) является простейшим nрактическим критерием дина-
мической устойчивости.
При всех относительных перемещениях ротора сумма кинетической [К] и
потенциальной [П] энерrии остается неизменной:
К + п === const, rде К == А уск .
Отдельные этапы процесса движе-
ния ротора reHepaTopa (качаний reHepa-
тора) наrлядно изображены на рис.
4.11, rде одновременно показаны изме-
нения кинетической и потенциальной
энерrий как при качаниях reHepaTopa,
так и при трех аналоrичных этим кача-
ниям процессах. Все системы, изобра-
женные на рис. 4.11, являются к о н-
С е р в а т и в н ы м и; предполаrается,
что в них нет потерь, зависящих от
скорости (не учитываются мощность
демпфирован ия, потери на трение и т. д.).
Способ площадей, следовательно, ос-
нован на предположении, что рассеяние
энереии не происходит, т. е. что рас-
сматриваемая система консервативна* .
При учете активноrо сопротивления
и использовании соответственно выра-
жения мощности (момента) в виде (4.13а)
система также рассматривается как кон-
сервативная, поскольку предполаrается,
что потери в ней J2R не зависят от из-
менения уrловой скорости ротора Дю.
Поэтому здесь с теми же основаниями
применяется способ площадей.
Критический случай. Возможен
случай, коrда энерrия, израсходованная
при торможении, точно уравнивается
энерrией, полученной при ускорении, в
А уск === А торм или
а)
P,
РО
о)
J
J
jd' о'
I
8d" MaI(C = 8'к.о
I а
: 861па8еНI1Е 113
I СI1НХРОНl1зна
d'
J
t
Рис. 4.12. Предельный с.лучай при иару.
шении режима системы:
а уr.ловые характеристики мощности P (6);
характеристика ускорения II (6) и скорости
ro ср(О); 6 возможные изменения 6 во време-
ни; в возможный характер изменении парамет-
ров режима 6. 11, t.m во времени
76
J дРd8 === о.
( 4.18)
* Для качественноrо анализа способ
площадей может применяться и в тех случа-
ях, коrда система не консервативна, т. е.
коrда при относительном движенин системы
пронсходят изменения ее полной энерrин за
счет потерь, зависящих от скорости движе-
ния ротора (см. rл. 7).
точке d' при /1Р == о. Эту точку можно назвать критической, так как при малей-
шем увеличении уrла {j сверх значения {jd == бllР на ротор будут действовать ус-
коряющие силы. На рис. 4.12 представлен такой случай: площадки ускорения
и торможения уравнялись как раз тоrда, коrда ротор дошел до то ки d'. В точке
d' кинетическая энерrия и скорость /1(0 стали равны нулю; силы, действующие
на ротор (ускорение а), также равны нулю. Теоретически это положение пред-
а)
цaa
120
по
100
96
во
70 .
БО .
50 О o,ff
40
Рис. 4.13. Переходный пропесс в устойчивой системе:
а измененне l\ f(t); б изменение Аш чr(а)
ставляет собой положение равновесия. Однако оно неустойчиво, так как малейшее
отклонение ротора приводит к появлению тормрзящеrо или ускоряющеrо MOMeH
та. Начинается либо торможение ротора с последующим возвращением ero к yc
тойчивой точке равновесия с, либо проrрессирующее нарастание уrла и выпадение
из синхронизма. Выпадение из синхронизма при достижении критической точки
d' характеризуется постепенным нарастанием уrла. Такой вид нарушения yc
тойчивости иноrда называют апериодическим нарушением устойчивости. В KOH
cepвaтUВHЫX системах нарушение устойчивости все2да происходит как anepиoди
ческое. Случаи колебательноrо нарушения устойчивости, или самораскачивания,
которые также возможны. в электрических системах, будут рассмотрены далее.
Случай, коrда система находится на rранице устойчивости (точка d'), кри-
тический, в котором равновероятно как сохранение устойчивости при переходе
от режима 1 к режиму N, так и ее нарушение.
Большинство иллюстраций в этой rлаве, показывающих характер пере-
ходных процессов, относится к к о н с е р в а т и в н ы м с и с т е м а м. Как
меняется характер этих процессов при у ч е т е п о т ерь, з а в и с я Щ и х
о т с к о р о с т и (диссипативная система), видно из рис. 4.10, 2, д, 4.13.
Запас устойчивости. Уверенность в устойчивости перехода будет, очевидно,
в случаях, коrда при колебаниях ротор не достиrнет критическоrо положения
(точка d'), в котором может начаться проrрессирующее увеличение уrла. Такой
заведомо устойчивый переход был показан на рис. 4.10. Вся энерrия, полученная
при ускорении ротора (площадка АУСII == аЬса), уравновешивал ась энерrией
77
торможения (площадка А торм == смс) до подхода к критической точке d'. П л о-
Щ а Д к а в о з м о ж н о r о т о р м о ж е н и я А возм . торм == cdd' ее здесь
больше, чем площадка ускорения, на дА == Авозм.торм А уск , По знаку дА
можно определить, устойчив или нет даный переход.
Величина дА служит ко.'1ичественным показателем запаса устойчивости:
К == А возм . торм/ А уск == (А уск + ДА)/ А усн == 1 + дА/ А уск .
Таким образом, при К> 1 переход устойчив; при К == 1 имеет место кри-
тический случай; при К < 1 переход неустойчив.
а)
P, ,L1(J)
РО
о)
8'
t
t
о(приП')
.................. ..L........
..... .....
о- (при П)
Рис. 4.14. Характеристики системы при измене-
нии режима, приводящем к неустойчивости:
а уrловые характеристики мощиости P H ). характе-
ристики ускорения a f(M и скорости A@ QJ( ) (штри-
ХОIi Й линиеЙ показаи характер изменеНИЯ А@ при
Р т <Р.); б изменение уrла во времени (штриховой
линией показан характер изменения уrла для кривой J/')
Рис. 4.15. Определение предельноrо уrла отк-
лючения к. з. 6 0ткл . пр :
а уrловые характеристики мощности P H ) для. си-
creмы. имеющей активное сопротивление: abcda..... пло
щадка ускорения (Ауск); ded'd площадка торможения
А-торм; () то же, при ОТСУТСТВИИ аКТИВНОrо СОПрОТИВ
пения. В случаях а и б значения Аусн==Аторм:; 8 ха.
рактеристики P H() при трехфазном к. з. в иачале пе-
редачи (схема 1) и при полном разрыве передачи (схе-
ма 2); IJ/ трехфазное к. з. у шии станции для схемы
или разрыв одноцепиой передачи; J/ послеаварийный
режим (для схемы а) ПОсле к. з. при отключениой цепи;
Н' послеаварийный режим (для схемы б) после об-
ратното ВКJIючения (послеаварийиый режим совпадает с
исходиым), площадка торможения в этом случае ие по-
казаиа; / нормальиый режим
78
PI
Б)
р
I
I
I
r
I
I
I
.н: .!!о 90
и й иоткдпр (J
J;
2
р
(f
РО
Установленные соотношения нетрудно выразить математически. Соrласно
рис. 4.10, имеем
кр П Rp
dA === А возм . торм А уск === 5 Р т sin ada 5 Р oda;
I I
О О
1 . '
ПРО Р т S1П 80
ак р === 1800 а " === 1800 arcsin === 180" arcsin
рП р"
т т
Очевидно, что
P /P === (Po dPo)IPo === 1 ?O'
rде o === dPolPo показывает изменение мощности в долях наrрузки, имеющей
место в исходном режиме.
С учетом последнеrо соотношения величина 6 кр запишется так:
акр === 180. arcsin [sin a /(l ?о»)'
На рис. 4.14 представлено изменение электрических характеристик систе
мы, приводящее к выпадению из синхронизма, т. е. к нарушению динамической
устойчы:вости. Площадка торможения cedc слишком мала, и, хотя рост скорости
на участке cd приостанавливается, уrол продолжает увеличиваться. Если бы
амплитуда характеристики!! была меньше, чем РО (кривая!!'), то рост скорости
происходил бы непрерывно, как это показано на рис. 4.14, а штриховой линией.
Изменение уrла в этом случае показано на рис. 4.14, б также штриховой ли
нией. На рис. 4.14, а изменение ускорения ж === f(6) выделено отдельной xapaK
теристикой.
Определение предельноrо уrла отключения KopOTKoro замыкания. На
рис. 4.15, а представлены три характеристики режимов: нормальноrо 1, aBa
рийноrо !! 1, в котором сопротивление связи z: изменено с учетом условий
аварии, послеаварийноrо !!, т. е. режима, в котором участок системы, потерпев
ший аварию, отключен.
Все характеристики построены с учетом активноrо сопротивления цепи CTa
тора, т. е. по формуле (4.13а). .
За счет наличия активных сопротивлений синусоидальные характеристики (рис. 4.15, а)
Р Е 2 11 . Р IIl Е 2 111 .
при п о д н и м а ю т с я на 11 унsша11 и соответственно иа Н УН sшGtrl И
С Д В И r а ю т с я в л е в о иа аз и . Система при этом остается консервативной, посколь-
ку предполаrается, что активные сопротивления не зависят от частоты.
Приравняв записанные соrласно рис. 4.15, а выражения для площадоК
ускорения (во время аварии) и торможения (в послеаварийном режиме), полу
чим соотношение
ОТКЛ. пр K
S {Р Р III Р III. ( '" ) .. r р Р Р П 11.
o [ 11 + т SlП О аэ») dO===J I U [ Il+РтSlП(а а2)]}dа.
5 откл . пр
После интеrрирования и решения полученноrо уравнения найдем
79
COS [8 0ткл . пр 0,5 (1X2 + IX З )]
(po рп) Онр (po рП 1 ) O + p COs(oHP a2) p lcos (о аз)+(Р{ рП1)( O OHP )
.
рIl рIlI
т т
( 4.19а)
Здесь
ро рП
8 ир == 7t arcsin 1X 2 "
p
Пренебреrая активным сопротивлением и, следовательно, полаrая РП
== о, р{:' == О, аl == а 2 == О, получим сотношения, показанные rрафически на
рис. 4.15, б. Формула (4.19а) примет вид
8 ро (OHP O ) + p cos ОНР p ' cos Об
cos ОТИЛ. пр == 11 111 "
, Р т p т
( 4.19б)
При трехфазном коротком замыкании или полном разрыве передачи харак-
теристики примут вид, показанный на рис. 4.15, в. В формуле (4.19б) при опре-
делении предельноrо уrла следует принять p ' == О.
Проверка устойчивости при наличии трехфазноrо или пофазноrо автомати-
ческоrо повторноrо включения (АПВ) линий электропередачи. Значительная
Рис. 4.16. Схемы (а) и режи-
мы (6) при АПВ на двухцеп-
ной линии или пофазном
АПВ:
а) Б)
I P
Ш РО
'П,
l
I"
[ нормальны!! (исходны!!) режим;
11 режим отключення авари!!ноrо
участка (параллельно!! линии илн
фазы); площадка торможення до
Повторното включения c"c'jkc"; 1//.......
режим К. 3.; Ауск==пл.(аЬСС"а);
[' режим после включення уча-
стка в случае успешноrо АПВ;
Аторм пл.(tf'dkf+С"С'fkС"); ["
режим После повторното включения
участка в случае неуспешноrо АПВ
(к. 3. осталось); площадка ускоре-
ния не оrраничена, н уrол непре-
рывно увеличивается соrлаСНQ ха'"
рактернстнке f" е
часть однофазных коротких замыканий, появляющихся на линиях электропере-
дачи, может исчезнуть, если отключить поврежденный участок от источника
напряжения. Таковы, например, аварии, связанные с появлением дуrи на изоля-
торах одноrо из проводов, или, сокращенно, «на одной из фаз» высоковольтной
линии; при отключении фазы дуrа может поrаснуть и фаза, на которой была
авария, может быть снова включена в нормальную работу.
Автоматическое повторное включение м о ж е т б ы т ь т р е х фаз н ы м,
если при аварии на линии отключаются и вновь включаются три провода или три
фазы линии; либо п о фаз н ы м, если отключается только поврежденная фаза
или соответственно две фазы. АПВ считается успешным, если за время отключения
80
линии (фазы) короткое замыкание ликвидируется, и после ее включения CMO
жет восстановиться нормальная работа; АПВ считается неуспешным, если пtr
вторное включение производится на сохранившееся короткое замыкание. При
менение АПВ оrраничивается возможным появлением неусто,Ичивости системы.
При трехфазном АПВ на одноцепной линии характеристика аварийноrо режима
2
Л f
Е I
Ez
ez !.t
ЛZ
Т: п
T;;Z
Рис. 4.17. Схема исследуемой системы из двух станций и иаrрузок
имеет такой же вид, как и при трехфазном коротком замыкании (при разрыве
передачи P l == О), а послеаварийный режим (после повторноrо включения)
характеризуется той же зависимостью р == f(6), что и исходный.
Примерные характеристики при коротком замыкании и последующем по-
фазном АПВ или АПВ на двухцепной линии представлены на рис. 4.16.
Способ площадей при исследовании устойчивости двух станций. Систему,
состоящую из двух станций и промежуточных наrрузок, путем несложных пре-
образований можно свести к простейшей системе* «станция шины неизменноrо
напряжения». Покажем, как это сделать, на примере системы, представленной
на рис. 4.17. Пусть в этой схеме происходят изменения каких либо наrрузок, чис-
ла работающих reHepaTopoB или включенных в работу линий. Изменения элект-
рической мощности, отдаваемой rенераторами станnий, или их механической
мощности приводят к небалансу активной мощности (возмущению) на каждой
из станций, т. е. на станции 1 и 2 соответственно:
ДР == Р М(;Х 1 E Ун sin ан Е I Е 2 У12 sin «()12 а I2 );
I1P2 == PMeX2 Е У22siп а 22 + Е I Е 2 У12 siп «()12 + а 12 ).
Приведенные здесь величины соответствуют изменившемуся режиму.
Возмущения I1P 1 И I1P 2 вызовут перемещения роторов станций, создав уско-
рения
или
01:1 == I1P I/Т J1 и 01:2 == I1P 2/ Т .12 ,
d 2 ()1/ dt 2 == I1P I/Т J1 и d20 2 / dt 2 == I1P 2/TJ2 .
Вычитая почленно второе равенство из первоrо, получим
d 2 (OI 02)/dt 2 == 01:1 01:2 == I1P l /T.1l I1P 2 /T.12 == 01:,
(4.20)
rде 61 62 == 612 взаимный уroл; 01: относительное ускорение, создающее
перемещение станции 1 относительно станции 2.
. При большем числе станций способ площадей непримеиим как основной; но может
применяться как вспомоrательиый (см. ииже).
81
Уравнение (4.20) можно переписать в виде
Т Jэ d 2 '8 a /dt 2 == (!!P 1 T J2 !!P 2Т Jl )/(Т Jl+ Т и ) == Т Jэ а,
rдe Т JЭ == Т п T J2 /(T J1 + T J2 ).
Далее ero можно представить следующим образом:
Т JЭ d 2 '8 a /dt 2 == Р мех . э Рэл.э,
(4.21 )
I'де
Р эл.э ==
Р мех . э == (Т л Р мех 1 Т п Р мех 2 )f(T Jl + T J2 );
(Т ИРll Т J1 Р 22 ) Р m э [Т J2 sin (812 а12) + Т J1 sin (812 + а 12 »)
+ +...,
TJl+TJ2 T J1 +T J2
причем
Р m э == Е]Е 2 Уа; Р 11 == Ei Ун siп а'l!: р 22== Eg У22 sin 1l 22 .
а)
р
о)
8)
(х
IX
0,2
AтOPMZ
А торн
Рис. 4.18. Характеристики системы, состоящей из двух станций, и эквива-
лентной системы «станция шины»:
а уrловые характеристики мощностей; б изменение относительноrо ускорения а при
устойчнвом переходе от одиоrо режима к друrому: А торм >lI)'ск: IITOPM IITOPMI +
+ АТОРМ2: A)'CK ATOPMI: коэффициент запаСа k ATOPM/A)'CK"1+ATOPM2/A)'CK: в из-
менение относительноrо ускореиия а при иеустойчивом переходе
Применительно к уравнению (4.21) MorYT быть щ:>строены характеристика
мощности Р == ср(<'>12) (рис. 4.18, а) и соответствующая характеристика относи-
тельноrо ускорения == Н<'>12) (рис. 4.18, б), аналоrичная характеристике сис-
темы «станция шины неизменноrо напряжения».
Для определения характера перехода (т. е. установления тoro, будет ли он
устойчивым), запаса устойчивости и размаха колебаний достаточно построить
характеристику относительноrо ускорения == f (<'>12)' пользуясь выражениями
(4.20) и (4.21). Характеристики == '(<'>12), показанные на рис. 4.18, б, в, от-
носятся к устойчивой й неустойчивой системам. Отношение A'I'OPM к А уск харак-
теризует запас устойчивости.
При определении предельноrо уrла отключения KopOТKoro замыкания зна.
чения !!Р 1 и !!Р 2 вычисляются дважды: для режима KopoTKoro замыкания и ре-
жима, наступающеrо после отключения KopoTKoro замыкания. Соответственно два
раза строятся характеристики == '(<'>12)' На рис. 4.19 показаны такие характе-
ристики и проведено определение предельноro уrла ОТКJ1ючения <'>оrкл.пр ан'а-
82
Рис. 4.19. Определение предельноrо уrла отключения к. з. «
(рассматривается к. З. в точке k на рис. 4.17):
1 характеристика IЖ I N f(бl2) при к. з.. вычислеиная соrласно вы.
ражеиию
L18" макс
IЖIIl АрlII / т рlII / Т
12 1 J, 2 J..
r
pIlI р . Е2 уlIl 5tn a lIl Е Е Y IIl 51п (о, a IIl );
1 мех 1 t 11 11 ,. 12 · 12
рlIl Р Е2 yIIl 51n "Iii + Е Е yIIl 5in(0 + a HI ).
2 мех 2 2 22 22 1. 12 .. 12'
2 характеристика r;tI I I <р (о..) после отключеиия к. з.. вычислен.
2
иая соrласно выражению
r;t: 6.РР 1 т JI 6.p I I Т J2 .
rAe
pIl р Е2 У Н 5tn аН Е, Е уП 51н (о, aII).
1 мех 1 1 1 11 · 12 · 12 .
p I . Рмех 2 E уЦ 51п a + E,E.Y: 51п (о.. + a: )
лоrично тому, как это было сделано для одной станции, работающей на 8IIlHbl
неизменноro напряжения.
Представление процесса на фазовой плоскости. Изображение скорости
I1ro в зависимости от уrла б оказывается полезны для качественноrо, а иноrда
и количественноro анализа. Для устойчивой консервативной системы xapaKt'e
ристика скорости I1ro == f(б) должна была бы иметь вид замкнутой кривой (ем.
рис. 4.10, б). Процесс во времени характеризовался бы при этом кривой, ПОКа
занной на рис. 4.10, в. Характеристики, построенные без учета рассеяния энер-
rии, отличаются от действительных (диссипативных), rде качания с каждым ЦИК-
лом становятся все меньше по амплитуде. Характеристика скорости I1ro == f(б)
представляется при этом в виде спирали, колебания уrла б == f (t) также постепенно
затухаlOТ и уrол стремится к установившемуся значению ' (см. рис. 4.10, е, д).
Следует обратить внимание на то обстоятельство, что учет постоянных активных
сопротивлений (Р 11 =F О) не меняет характера движения б == ,Щ оно остается
незатухающим. Затухание вызюаютт только потери, зависящие от скорости.
Пусть переходныЙ процесс, как и раньше, описывается уравнением (4.14).
Преобразуем ero к виду
d 2 'aJ d't 2 == Р * siп 8, (4.22)
rде 1: == t V P{,{/T J ; Р * == М* ==Мт/М{,{,
причем в относительных единицах
М Т == Р О ; М;; == Р;;.
Обозначим Р * sin б через fj)(б). Представим движение ротора reHepaTopa
во время этоro процесса на фазовой плоскости (I1ro, б), rде скорость изменяется
относит льно синхронной как I1ro == dбld1:, тоrДа
ср(8) == d(w)/d't == [d(w)/d8][d8/d't] == [d(w)/d8]w.
При этом исходное уравнение примет вид
d(w)/d8==cp(8)/w, нли wd(w)==cp(8)
83
Решая ero, запишем
Ат 3
S (Od«(O) == S (Р * sin 8) d8
(j о.
rде при t == О значение «'51 == (см. рис. 4.20).
Интеrрируя, получим
L\(O == Ф (8) == V 2Р * (8 (1) + 2 (cos 8 cos (1) (4.23)
(d«'5/dt)t o == О. Это решение представляет собой так называемое семейство фа-
зовых траекторий, каждая из которых соответ-
ствует определенному значению начальноrо yr-
ла «'51.
Соrласно теории колебаний, для суждения
об устойчивости режима необходимо рассмот-
реть особые точки исследуемоrо уравнения, т. е.
точки, в которых величина d(L\ffi)/d«'5 неопреде-
ленна (через эти точки либо проходит несколь-
ко фазовых траекторий, либо не проходит ни од-
ной). Эти точки соответствуют условиям
<р(<<'5) == О и L\ffi == О, т. е. состояниям равнове-
сия системы (точки а и Ь на рис. 4.20).
В рассматриваемой консервативной системе
особые точки MorYT быть двух типов:
Ц е н т р, в котором система устойчива и ма-
лое отклонение от состояния равновесия приво-
дит к малым колебаниям вблизи начальной точ-
ки; такова точка а на рис. 4.20;
с е Д л о, в котором система неустойчива и
малое отклонение от состояния равновесия при-
водит к уходу от начальной точки; такова точка Ь на рис. 4.20.
Особой точке типа «центр» соответствует минимум потенциальной энерrии
системы, для нее dq>/d«'5 < О. ДЛЯ особой точки типа «седло» dq>/d«'5 > О. Так как
<р(<<'5) == Р* sin «'5, то dq>/d«'5 == cos «'5.
Из рис. 4.20, видно, что фазовые траектории L\ffi == 'Ф(<<'5), представленные
кривыми 1, 2 и 3, соответствуют устойчивому режиму, кривая 4 предельному,
5 неустойчивому.
Нахождение максима.льноrо yrла отключения и проверка устойчивости. Не
прибеrая к способу площадей, по рис. 4.20 можно выяснить, будет ли дан-
ная система устойчива. Если да, то она в своем движении раньше, чем достиrнет
седла, пройдет точку максимальноrо отклонения «'5 м8нс ' в которой dб/dt == L\ffi ==
== о (рис. 4.20). Такой точке, соrласно (4.23), отвечает условие cos «'5 манс +
+ Р*«'5 манс == Р*«'5 1 + COS «'51' Обозначив правую часть С известными величина-
ми через А, получим
P,.dw
Рис. 4.20. Характеристика мощ-
ности и зависимости (O == О/(б)
при различных отклонениях от
установившеrося режима б маRс
с)
COS 8 махс == А Р *8 махс .
( 4.24)
rрафическое решение (4.24) для случая, коrда «'5 == б маRс , показано на
рис. 4.21.
84
Представление процесса во времени. Предельное время отключения.
а) Численное интеrpирование. Определив с помощью способа площадей,
соrласно (4.19), предельнЫЙ уrол отключения боткл.пр, следует далее для прак
тических применений найти соответствующее этому уrлу время tоткл.пр, решив
уравнение (4.14) или (4.22) и получив зависимость б == f(t) или б == cp("t). Однако
это уравнение не имеет непосредственноrо решения (не интеrрируется в квадрату-
рах). Наиболее простое приближенное решение получается численно-rрафичес-
А
а)
..1cv
i1cv cp i
5)
r;;
Омакс
а-
()
Рис. 4.21. rрафическое на-
ождение уrла максимальноrо
отклонения
Рис. 4.22. Построение кривой 't" == {(6) по задан-
ной кривой (O ==о <Н6)
ким интеrрированием выражения (4.22). Для этоrо соответствующая кривая ш ==
== 'Ф(б) (рис. 4.22, а) разбивается по оси б на интервалы. На каждом интервале
участок кривой заменяется rоризонтальным отрезком с ординатой, равной сред-
нему значению ю на этом интервале Юср. Для i-ro интервала
ФСР i == ( (Oi + (Oi+J/2 == S8/ 'ti'
откуда
d"ti == S8/ (Ocp i'
Проводя такие вычисления по всем интервалам, получим искомую зависи
мость 1i == f(б), пр едставлен ную на рис. 4.22, 6, от которой можно перейти к за-
висимости t == "t V Т J / Р т == f 1 (8), соrласно которой находится t откл . пр ' Постро-
ение ее будет тем точнее, чем меньше принят* интервал б.
б) Аппроксимация синусоиды. Друrая возможность аналитическоrо опр
деления tоткл.пр это представление синусоидальной зависимости Р == f(б)
отрезком прямой (1-2 на рис. 4.23). Соrласно этому рисунку, rде приведены ха-
рактеристики [, J J, J J J режима и показаны площадки ускорения и торможения,
получим вместо (4.14)
T J tP8/dt 2 == P. (4.24а)
Соrласно рис. 4.23, а, при любом б значение P == Ро p I sin d,
/ Р/пи (sin а ОТRЛ sin a )
rде d == f(б) или d == о (8 80), 0== d/b == tge == .
а оТRл а'
Torдa АР == В об, rде В == Ро p I sin б& + сб .
· о величине расчетноrо интервала см. П2.
85
с учетом этих соотношений уравнение (4.24) примет вид
T J d 2 'O/dt 2 + с'О В == О.
Решение этоrо уравнения (линейноrо 2-ro порядка) хорошо известно. При
начальных условиях бt о == б , dбldtt о == О оно определяется выражением
'о == f (t) == ('O в/с) cos V c/TJ t + В/с,
откуда время откл ючения, отвечающее б оТilл , будет
V т J (5 0тRл 5 ) ( ро/ p J1 sin 5 0тRл )
t == arccos .
ОТКЛ plIl ( sin5 sin 51 ) Р / plll sin51
т ОТRЛ О От О
Поrрешность М (рис. 4.23, б) при таком определении t ОТ1Ш . будет тем мень-
ше, чем ближе б_ткл.пр к б .
в) Полный сброс мощности. В некоторых случаях (трехфазное короткое за
мыкание на шинах передающей станции или в любой точке одноцепной линии,
разрыв передачи электричес-
кой мощности) мощность Р ==
== ЕИУ12 становится равной
нулю, так как У12 == О или
Х12 == 00. Движение ротора re-
нератора происходит только
под действием механическоrо
момента турбины без отдачи
reHepaTopoM мощности в сеть.
При этом прекращается связь
reHepaTopa с наrрузкой и вся
мощность турбины (Р мех ==
== РО) идет на ускорение ро-
тора reHepaTopa. Это, следо-
вательно, наиболее опасные
случаи в смысле разrона re-
нератора и нарушения устой-
чивости.
Дифференциальное урав-
нение (4.14) (предполаrается отсутствие потерь) принимает вид
а'
I
о)
8'
Р
Рт Ш
РО
Р;:
1
О
Q ОlТlкп. пр -t откл 1;
Рис. 4.23. Определение уrла отключеНf!Я по равен-
ству площадок (пл. abdea == пл. се' ее) и соответст-
вующеrо Времени отключения по спрямленной
(1-2) уrловой характеристике мощности Р == 11'(6) :
а характеристика иормальиоrо 1, послеаварийиоrо Н, ава-
рийиоrо I/I режимов; 6 изменеиие уrла IIJ(О в аварий-
ном режиме: ] при сииусоидальной характеристике; 2
при аппроксимации сииусоиды прямой ]-2
T J d 2 'O/dt 2 == РО'
( 4.25)
(4.26)
Уравнение (4.26) интеrрируется весьма просто. В самом деле, движение
происходит при постоянном ускорении «, причем « == d(j)/dt == Po/T J . Интеrрал
этоrо уравнения хорошо известен:
(!) == «t;
соответственно
'о '00 == [Р о/(2Т; )] t 2 .
86
( 4.27)
Рост скорости происходит линейно, а уrла - по квадратичноЙ параболе; ,
время t, отвечающее како му-либо значению б, наход ится* из (4.27):
I t == V 2Т J (8 80) /Р о . I
(4.28)
Если бы в начальный момент (t == О) ротор имел некоторую скорость L\roo =1=
=1= О, то решение имело бы вид ,
8 80 == L\(J)ot + Р ot 2 /(2T J ).
Пример 4.1. Система, показанная на рис. 4.24, имеет схему замещения (рис. 4.25),
rде станции 1 и 2 представлены в виде неизменных э. д. с., приложенных за некоторыми (оп-
1
z
E, 1 Н Xz Е1.
....... .........
51 Sz
SH
Рис. 4.24. Схема системы к примеру 4.1
Рис. 4.25. Схема замещения
ределенными видаl\1И реrулироваиия) сопротивлениями. Параметры схемы замещения и исход-
Horo режима (в относительных единнцах) следующие: Хl == 0,735; Х 2 == 0,0606; 81 == 1+
+ jO,485; 52 == 4,5 + j2,93; Е 1 == 1,54 < 28,50; Е 2 == 1,21 < 13,10; SH == 5,5 + jз,415;
COS!PH == 0,85; sin!PH == 0,527.
О п Р е Д е л и т ь:
а) минимальные значения ЕмиЦ!. U миlI , при которых сохраняется устойчивая работа
передающей станции с мощиостью' 1'1 == 1;
б) максимальное значение передаваемой мощности Р т ;
в) запасы устойчивости системы при различиых допущениях.
Решение. 1. Приближенно приняв, что в точке Н имеются шины неизменноrо напряже-
ния U == 1 == сопst (j == сопst), разделим систему на две независимые части:
а) будем считать, что Р Т1 == сопst, тоrда
dI'J.P/d&l == dPJd&l == (E1Ulxl) cos&.
Следовательно, предельному по устойчивости режиму соответствует 6 ==900. МинимаJlЬ.
но допустимые значения' при Р 1 == Р 10 == 1
U мШI == РJЛXl/Е 1 == 1 .0,735/1 ,54 == 0,477;
Е мин == P 1 oXL/U == 1.0,73511 == 0,735;
б) при Е == const, U == const находим
Р т == 1,54.1/0,735==2,1.
Коэффициенты запаса статической устойчивости:
Е 1 Е 1 мин
К зЕ ==
Е 1
К == и 1 Uмин
зU и 1
1,54 0,735
100 == 100 == 52,3%;
1,54
1 0.477
100== 1 100;::;52,3%;
* в отиосительных е,liииицах (см. П3.).
tr1
К 2,I I
зР 1 100==110%.
2. Определение предельноrо по устойчивости режима моrло быть проведено и цо друrим
критериям, при друrих допущениях. Например, возможны критерии dЕ 1 /dб 1 .;;;;; о; dб/dИ ==
==00; dИ/dб == О и др., связь которых с основным критерием следует из рис. 4.26. .
Найдем предельный по устойчивости режим с помощью критерия dАQ/dИ .;;;;; О. в этом
случае для не которой (произвольно выбранной) промежуточной точки электропередачи k
lj Ero{!l o } Рис. 4.26. Определение Е миц и
ИМ ин
. I , .........
'E.,<fto (о '.(.0,01
Е,мцн ((Jиuн) Рис. 4.27. Применение критерия
dАQ/dИ < О
а;
Ef,U
[10
Er:f{ )
(о о )[/
[П1UН'
о'
и мин
0'1.
б)
о.
1
а)
Е. (x, X) /JK)( и
М Jf o;;r
о
8jt
lJа
1
о
и к
(рис. 4.27, а) необходимо построить зависимостн Ql == А(И k ) и Q2 == f 2 (И k ) при Еl == const.
И == const и Р == Р 1 == Р 2 == const. Точка пересечения этих характеристик соответствует
установивщемуся режиму системы, а характер изменения AQ == Ql Q2 В окрестности этой
точки позволяет судить об устойчивости системы.
Для определения предельноrо режима необходимо построить серию характеристик
Ql == fl(И k ) при различных значениях Еl и методом подбора определить такое значение Е н
при. котором Ql == !I(Иk) будет касаться характеристики Q2 == f 2 (И k ). Полученное таким об-
разом Еl будет равно Е 1мин ,
Для расчета Ql == fl( И k ) и Q2 == МИ k ) воспользуемся формулам и
Еl == У(И k + Q l (Хl Х)/И II J 2 + [Р (Хl x)IU"J 2
И == У (И k Q2xlUk)2 + (Рх/И,,)2,
откуда
v( ЕIИ" ) 2 И
.... p2 .
. Xl X «l X'
88
Q2== И; V (И k У p2 .
Выберем точку k таким образом. чтобы х == 0,2. Тоrда с учетом Toro, что Р == 1 и U ==
1, получим:
хl х== 0,735 0,2 == 0,535; Ql == V (E1UIiJO,5 35)2 1 И;/О,535;
Q2 == 5и% V (5и в)2 1 .
Результаты расчетов представлены на рис. 4.27, б и сведены в таблицу:
U/i.
Q. I I I I I I
1,2 1,1 1,0 8,9 0,8 0,7 0,6
Ql при Е 1 == 1.54 0.62 0,74 0.83 0.875 0.88 0.835 0.74
Ql при Е 1 == 1.0; 0.69 0.46 0.285 0.16 0.08 0.073 0.163
Ql при Е 1 == 0.735 1,38 1.13 .........(),928 .........Q.785 0,74 ::::: 0.9 ::::: 1.05
Q2 1.29 0.65 0.1 0,34 0.67 0.9 1.03
На рис. 4.27, в показано изменение !1Q. Очевидно, что критическое зиачение э. д. С.
Е 1 == 0,735.
3. Определим предельный по устойчивости режим системы, предполаrая, что в точке 2
имеются шины неизменной э. д. с. (Е 2 == сопst), а напряжение в точке Н изменяется, при-
чем наrрузка представлена постоянным сопротивлением ZH == const. Частота в системе
предполаrается постоянной. В этом случае, так же как и в предыдущем, целесообразно при-
менить критерий dP/d6 > О или dP/d6 12 > О, rде 612 == уrол между Е 1 и Е 2 .
Мощность, выдаваемая от станций в систему,
Р 1 == E Yll sin <Хн + Е 1 Е 2 У12 siп (012 <Х 12 ).
Определим сопротивлеиие наrрузки в схеме замещения и рассчитаем собственные и
взаимные проводимости:
и2 1
ZH== (cos СРН + j siп СРн) == 6 4 6 (0.85 + j О .527) == 0,1315 + j О .0815 == 0.1545 ..<: 31°8'
SH '
0,0606 < 90" . 0,1545 < 31 С 8'
Zll == j О ,735 + 0.782 ..<: 890
0.1315 + jO.0815 + j 0.0606
Ун == 1 .28; <Хн == 1 о;
0,735.0,0606
Z12==jO.735+jO,0606 ==0.98..<: 104°5'; У12== 1.02; <X12== 1405'.
0.1545 < 31°8'
с учетом проведенных расчетов
Р 1 == О ,0224Ei + 1 ,235Е 1 siп (012 + 14°5').
Предельный по устойчивости режим соответствует условию
dP 1 / d0 12 == 1 ,235Е 1 cos (012 + 14°5') == О.
т. е. наступает при 612 == 75,5 О . Тоrда минимально допустимое значение Е 1 определится из
выражения для Р 1 при Р 10 == 1:
Е 1мин == 0.8;
коэффициент запаса устойчивости
89
КэЕ == [(1,54 0,8)/1,54] 100 == 48%.
Меньшее значение КЭЕ (чем при U == const) подтверждает то обстоятельство, что с
уменьшением Е 1 напряжение на наrрузке U снижается.
4. Определим запас устойчивости в случае, коrда передающая станция и эквивалент-
иый reHepaTop приемной системы соизмеримы по мощности (шин неизменноrо напряжения
нет, но частота в системе принимается неизменной: f == const).
Параметры схемы замещения и исходноrо режима системы 'для этоrо случая будут
следующие: U == 1; Х1 == 0,735; Х 2 == 0,694; 81 == 1 + jO,485; 82 == 1,3 + jO,615; Sи ==
== 2,3 + jl,l; Е 1 == 1,54 L 2lf5'; Е 2 == 1,69 L 32°15'. .
Пусть активная мощность, потребляемая наrрузкой, не зависит от напряжения, а
зависимость от напряжения реактивной мощности характеризуется следующей таблицей:
Применительно к рассматриваемой схеме задача состоит в том, чтобы определить ми
lIимальное напряжение на наrрузке U мии , при котором система сохраняет устойчивость. Для
этоrо целесообразно использовать критерий dE/dU> О
или критерий dtJ.Q/dU < О.
Так как применение критерия dtJ.Q/dU < О был(}
рассмотрено, воспользуемся критерием dE/dU > о,
найдя с ero помощью предельный по устойчивости pe "
жим исследуемой системы. Критерий dE/dU > О с рав-
ным успехом может применяться в одной из трех форм:
dE 1 /dU> о, dE 2 /dU> О или dЕэ/dU > о, rде Е э
эквивалентная э. д. с. станции, замещающей станции
1 и 2.
Рассмотрим ход расчета при использовании кри-
терия dE 1 /dU > о:
а) зададимся рядом значений и;
б) для каждоrо значения U рассчитаем
u .
Qи
0,95
0,94
Е.
1,8
6
\...... f'l
v
f,/I
q8 .0,86 0,9
1,0 у'
Рис. 4.28. Применение крите-
рия dE/dU == О
r) рассчитаем
0,90
0,895
0,80
0,865
0,775
0,90
0,85
0,86
Q2== V (EP/X2)2 P и2/X2'
rде значения Р2 и Е 2 соответствуют исходному режи
му;
в) по характеристике QH == '(И)
Q1 == QH Q2;
определим
Е 1 == у(и + Q1Xl/U)2 + (РIХl/И)2,
rде Р 1 соответствует исходному режиму.
При использовании критерия dE 2 /dU > О расчеты проводятся аналоrично, но обычно
предварительно проводится эквивалентирование, для чеrо применяются известные соот-
ношения:
. .
х 2 Е 1 + ХI Е2 0,694. 1,54.с:.28°5'+О,735. 1,69.с:.32°15' 1 5 О
Е э == == == 61 .с:. 30 15"
Х 1 +Х 2 0,735+0,694."
Хэ == Х1Х2/(Хl + Х 2 ) == 0,735 ' 0,694/(0,735 + о ,694) == 0,356.
Зависимость Е э == '(И) рассч итаем по формуле
Е э == У (и + QихэlU)2 + (Р н х э IU)2 .
90
Результаты расчетов rрафически представим на рис. 4.28 и сведем в таблицу:
и 1,0 0,95 0,90 0,85 0,80 0,775
Критерии
Qп 1,1 1,035 0,984 0,945 0,95 0,989
dE 1 Q2 0,615 0,610 0,595 0,570 0,532 0,505
>O Ql 0,485 0,425 0,389 0,375 0,418 0,484
dU
Е 1 1,54 1,495 1,44 . 1,45 1,50 1,56
dE 2 О Ql ' 0,485 0,49 0,50 0,497 0,48 0,463
> Q2 0,615 ,0,545 0,484 0,448 0,47 0,526
dU
Е 2 1,69 1,65 1,62 1,615 1,65 1,735
dE 9
>O
dU
Е9
1,615 11,58
1,57 l' 1,565 11,585 11,61
в результате расчетов по различным критериям получаем одинаковый результат
и мнн == 0,86.
Коэффициент запаса по напряжению
К зи == [(UО UМИlj/Uо] 100% == [(1 O,86)т 100% == 14%,
,
Пример 4.2. В системе,' схема которой изображена на рис. 4.29, а, включается наrрузка
р н ' Параметры системы в относительных единицах представлены на схеме замещения
и
'/J р;;;
Р!{
о)
X ' d
Е;
О,27ч
\
Х т , и, ХЛ
0,118 f. 0,216
JlR/l
Х Т 2.
0,086
и
Рис. 4.29. Исследуемая система:
а схема; б схема замещения
(рис. 4.29,6). Исходный режим характеризуется следующими параметрами: и == 1; Ро ==
== 1; Qo == 0,485; E == 1 ,50; o == 27,50, rде о' уrол э. д. с. Е'.
Оп р е Д е л и т ь максимальный размах качаний уrла reHepaTopa после включения
наrрузки, принимая коэффициент мощности ее равным единице.
Решен.uе. Для определения искомоrо размаха качаний уrла reHepaTopa воспользуемся
методом площадей, представив в схеме замещения наrрузку постоянным сопротивлением
R H . Напряжение и 1 в начале линии, rде включается наrрузка, в исходном режиме
и 10 ==У (1 +0,485.0,302)2+(0,302)2 == 1,18.
'Сопротивление наrрузки
R п == и O/ Р п == 1,182/ р н '
в исходном режиме уrловая характеристика мощности 1, показанная на рис, 4.30,
<Jпределится выражением
Р == (1,5 . 1/0,694) siп 11' == 2,16 siп 11' .
91
Уrловая характеристика мощности 2 показана для частноrо случая, коrда
Р == 0,51 +2,16 sin (а' + 1,2°).
В первый момент после включения наrрузки на валу reHepaTopa будет действовать из.
быточная мощность тормозящеrо характера, что приведет к уменьшению скорости и уrла
б'. Уrол будет изменяться от 15' == 3,70 до 15' == 27,5° в соответствии с равенством Площа.
дей торможения и ускорения (рис. 4.30), если не учитывать затухание этих колебаний.
р
Рис. 4.31. Три случая трехфаз.
ных коротких замыканий (к. з.) на
линии передачи
ХН
Е' Xd+ X 7f 7+ x /Z IJ
Ха
Хк=о Ха
Рис. 4.30. Характеристики системы при
подключении наrрузки
Рис. 4.32. Схема замещения при
к. з. В начале линии
После затухания колебаний установившийся режим при включенной наrрузке определится
уrлом 15' == 11,9°.
Пример 4.3. Для системы, показанной на рис. 4.31, оп Р е Д е л и т ь, в каком месте
линии (начале, середине или конце) неблаrоприятнее Bcero трехфазное короткое замыкание,
отключаемое через I1f, с точки зрения возможности сохранения динамической устойчивости.,
Решение. 1. При трехфазном коротком замыкании в начале линии (рис. 4.32) взаимное
сопротивление между точками приложения э. д. с. Е' и напряжения U
X1 2 == Ха + ХЬ + ХаХЬ/ Xk == 00, rде Xk == о; . УН == о"
следовательно,
Р m1 == E'UY12 == о.
2. При трехфазном коротком замыкании в конце линии (рис. 4.33)
Ха == Ха + ХЬ + XaXb/Xk == 00,
Р m2 == E'UY12 == о.
3. При трехфазном коротком замыкании в середине линии сопротивление
X1240 00.
Сопротивления отдельных участков линии на схеме (рис. 4.34) образовали треуrольник.
Преобразуя (как это показано штриховой линией) треуrольник в звезду (рис. 4.35), получим
схему замещения-, соrласно которой находят сопротивление Y12 и мощность В аварийном ре-
жиме:
Р:'; 1 == Е'ИУа 40 о.
Характеристики мощности рассматриваемых режимов, ПJIощадки ускореиия и тормо-
жения показаны на рис. 4.36.
Из сравнения ПЛощадок ускорения и торможения можно заключить, что наиболее не-
блаrоприятными короткими замыканиями будут те, которые происходят в начале и конце
линии и сопровождаются полным сбросом мощности reHepaTopa.
92
Пример 4.4. П о с т р о и т ь площадки ускорения и торможения для случая двухфаЗ--
Horo к. з. на землю в иачале линии (см. рис. 4.32), которое через неко;-орое .время переходит
в трехфазное а затем отключается. При этом система остается устоичивои.
Решенu;. Построив для нормальноrо 1, послеаварийноrо II и аварийиоrо 1 II режимов
(при двухфазном коротком замыкании на землю) характеристики р == <р(б), найдем площад-
хи ускорения и торможениЯ, показанные иа рис. 4.37.
р
и
-=-
Рис. 4.33. Схема замещения при к. з. В
"онце лнниИ
Хн
,
[' 4ii+ X 7i
ХТ2
Рис. 4.36. Площадка ускорения при к. з. В на-
чале линии (1-3-4-6-1), середине (1-2-5-6-1) и
площадка торможения (6-7-8-6)
"':'"
l/
1.1Ро
о
Рис. 4.34. Схема замещения при к. з. В
середине линии
Хн
":"
":'
Рис. 4.35. Преобразование схемы рис.
4.34.
Рис. 4.37. Применение способа площадей:
1-2-3 процесс при двухфазиом к. з. иа землю.
3-4-5 то же, при переходе ero в трехфазное к. з.;
5-7 отключенне; 6-7-8-9-6 площадка торможения
Пример 4.5. Для увеличения пропускной способности электропередачи, показанной
на рис. 4.38, в послеаварийном режиме включается последовательная компеисация. Возмож-
ны три варианта включения:
1) последовательная компенсация (УПК) включается одновременно с отключеиием
поврежденноrо участка;
2) УПК нключается в момент KopoTKoro замыкания;
3) УПК включается до KopoTKoro замыкания в нормальном режиме.
Решенuе. Построив характеристики нормальноrо 1, послеаварийноrо II и аварийноrо
//1 режимов, найдем соответствущщие площадки ускорения и торможения, показаииые на
рис. 4.39, а, б.
Пример 4.6. В схеме, показанной на рис. 4.40, внезапно отключаются и затем вновь
'включаются обе линии, связывающие rенераторную станцию с шинами неизменноrо напря-
жения.
Параметры схемы и режима приведены на рисунке.
93
о п р е Д е л и т ь наибольшее допустимое время перерыва в подаче энерrии, при ко-
тором динамическая устойчивость системы не нарушается. .
Решение. Максимальная мощность в нормальном режиме, определеиная приближенио
по Е' == 1,55,
Pfn == Р:: == Е'ИI X1 2 == 1,55. 1/1 ,15 == 1,35.
При отключении линий
plIl == о.
т
Рис. 4.38. Схема исследуемой системы
А вск
aJ
р
а)
f1.
8"
Рис. 4.39. Процессы при включеНИ}l. УПК:
а случай 1 и 3; б случай 2. Кривые 1, 11. 111 имеют индексы. отно.
сящнеся к соответствующим l;Лучаям
r
X IZ = f,f5'
р
Рис. 4.40. Схема системы
Рис. 4.41. Характеристики мощности и площад-
ки ускорения Ауск и торможения (А торм )
94
Применяя правило площадей, найдем соrласно рис. 4.41 предельный уrол включения
.электроnередачн:
( ' ' ) 11'
I Ро Окр 00 1&/180 + Р т С05 Окр
С050 Вlш == pII
т
0,584 (154,4 25,6) 1&/180 + 1 ,35С05 154,40 06
1,35 == О, 65; О R.П == 86,20.
rде б: р == 180 arc5in(Po/Pfп) == 180 arc5in(0,584/1,35) == 154,40.
Определим предельиое время включения с помощью выражения (4.28):
t вил == Y7(86,2 25,6)/(o,584. 180.50) == 0,284 с.
Пример 4.7. В электропередаче, показанной на рис. 4.42, происходит внезапное ОТК.7Iю
чение одной из двух параллельных линий. Параметры элементов электропередачн и парамет
ры режима до отключения линии указаны на схеме.
О n р е Д е л и т ь (приближенно) характер изменения уrла во времени.
Решение. Расчет произведем упрощенно, заменив восходящую ветвь характеристики
мощности 11 послеаварийноrо режима (рис. 4.43) отрезком прямой линии, проходя щей через
иачало координат и точку пересечения характеристики 11 с прямой рт == Ро' Дифференци-
альное уравнение движения ротора в этом случае будет иметь вид
TJ d 2 0' /dt 2 == Ро ао'.
rде
а == tg а..
Решение этоrо уравнения можно представить в виде
' == Ро/а Д ' cos -v а/Т J t .
Уа
Ус=!
[':::1,41
Рис. 4.42. Схема (а) и ее схема замеще
ния (6)
Рис. 4.43. Характеристики мощности
Рис. 4.44. Изменение уrла б' == I(t)
;
6:pall
о 50 1QD 150 200 250 ЗООt,ра8
!15
Чтобы определить дб' и а, входящие в последнее выражение, найдем амплитуды харак-
теристик мощности 1 и 11: .
Р:Л == Е'и с / Х.Е == 1,41 . 1/(0,295 +0,138 +0,244 + 0,122) == 1,765;
р;: == 1,41.1/(0,295+0,138+0,488+0,122)== 1,35.
Тоrда
sino'l ==Po/P == 111,765==0,567; 0'1==34,530==0,602 рад;
, /l '/J
sin о == 111,35 == 0,741; о == 47,850 == 0,835 рад;
, 11 ' 1 '11 '
А8' == о о == 0,835 0,602 == 0,233 рад; а == tg а == ро! о == 1/0,835 == 1,2.
Изменение уrла показано на рис. 4.44:
0'== 1/I,2 O,233cosY 1,2/(314.10) t==o,835 o,233coso,OI95t.
Контрольные вопросы
4.1. Назовите особенности статической' и динамической устойчивости.
4.2. Что такое статические характеристики?
4.3. Почему появился термии «практические критерии устойчивости»?
4.4. ПереЧИCJIите основные практические критерии устойчивости.
4.5. В чем состоит основное условие устойчивости простейшей электрической системы
(синхрониый reHepaTop, работающий на шины неизменноrо напряжения)?
4.6. Как с помощью OCHoBHoro практическоrо критерия Выявляются устойчивость про-
стейшей системы, критический режим и условия устойчивости?
4.7. Каковы признаки самопроизвольноrо изменения режима, проявляющеrося в виде
сползания, или текучести, параметров 1l0рмальноrо режима?
4.8. Какие допущения, принимаемые при анализе системы, позволяют оценивать ее
устойчивость по практическим критериям?
4.9. В чем особенности различных практических критериев и каконы наиболее целесо-
образные условия использования Toro или иноrо критерия на практике?
4.10. Укажите общее основное свойство любых устойчивых режимов, запасы статичес-
кой устойчивости, определенные по разным параметрам.
4.11. Что такое возмущающие воздействия и большие возмущения? Приведите примеры.
4.12. Как записывается уравиение относительноrо движения для простейшеrо случая?
Какие при этом сделаны допущения?
4.13. В чем заключается способ площадей? Какие допущения положены в ero основу?
4.14. Как н общем виде формулируется правило площадей?
4.15. Как определяется предельный уrол отключения KopoTKoro замыкаиии?
4.16. Определите запас динамической устойчивости.
4.17. Как проверяется устойчивость при АПВ на линиях передачи?
4.18. Как применяется способ площадей при проверке устойчивости системы «две
стаиции наrрузка»?
4.19. Как представить процесс изменения уrла б во времени, в чем трудности и как
оии разрешаются?
4.20. Как проводится численное интеrрирование уравнения дro == <р(б)?
4.21. Как интеrрируется уравнение при полном сбросе мощности?
Темы рефератов
1. Запасы статической устойчивости.
2. Совмещение расчеrов нормальноrо режима и ero статической устойчивости.
3. Различные' способы численноrо интеrрировании.
4. АПВ различноrо вида и ero анализ.
96
rЛАВА 5
ОСНОВНЫЕ ПОЛОЖЕНИЯ, ПРИНИМАЕМЫЕ ПРИ ИССЛЕДОВАНИЯХ
ПЕРЕХОДНЫХ РЕЖИМОВ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
! 5.1. ЗАДАЧИ И СРЕДСТВА ИССЛЕДОВАНИЯ
Переходный режим электрической системы, как это указывал ось в rл. 1,
состоит из большоrо числа переходных процессов различной физической природы
(см. рис. 1.6). Из них в настоящей дисциплине для исследования выбрана rруппа
электромеханических переходных процессов, выделенных на рис. 1.6 жирной
штриховой линией. В результате исследования должно быть получено аналити-
ческое или rрафическое описание изменения во времени параметров Л ПР процес-
са, rде Л ПР == 1, и, Р, б, ... . Параметры Л ПР должны быть определены от мо-
мента появления возмущения (приложения воздействия) до перехода к устан 0-
вившемуся режиму.
Параметры процесса состоят из вынужденных составляющих и свободных
составляющих, которые в устойчивой системе с течением времени стремятся к
нулю. Однако в линейной системе этот процесс длится бесконечно долrо. Поэтому
вводится условное время ero оконча-
ния t oo , после KOToporo t > t oo значе-
ния параметров процесса отличаются
от установившеrося не более чем на
некоторую малую (выбранную из
практических соображений) величи-
ну. Обычно можно принять t oo == 5Т,
rде Т наименьшая постоянная вре-
мени затухания наиболее существен-
Horo для данноrо исследования пара-
метра переходноrо процесса (рис. 5.1).
Эти значения, близкие к установив-
шемуся, иноrда называют квазuуста-
1iовuвшuмuся.
Для получения зависимостей
П j == cp(t) MorYT быть использованы
методы трех rрупп.
1. Э к с пер и м е н т а л ь н ы е
м е т о Д Ы, т. е.. непосредственные
опыты, проводимые:
а) в системе, подлежащей изуче-
нию (если она уже существует), или
в друrой системе, в том или ином
отношении п о Д о б н о й и явля-
. ющейся н а т у р н о й м о Д е лью;
4 84
Исхо8ныц
"*;'1
1\
1 "-
1 \
. 1<8азиустано8и8
1..0< шийся режим
: 1} ст-ино8и8
I щиися режим
r
I
I
I
I
t
1;
Рис. 5.1. Изменение параметров П 1 и П 2 во
время переходноrо процесса:
1 начальный режим (исходный); 2 установивший-
ся режим; 3 полное значение параметра ВО вре'1Н
переходноrо процесса; 4 свободная составляющая
параметра. Т ПОСТОЯНН ая вреN'l :НИ
97
б) на физической или динамической модели, изображающей изучаемую сис
тему с той ИЛИ иной степенью подобия.
2. М а т е м а т и ч е с к и е м е т о Д ы и м о Д е л и:
а) чисто аналитические, сводящиеся к прямому интеrрированию COCTaB
ленных уравнений и получению расчетных формул;
б) численные, реализуемые обычно с помощью ЦВМ, иначе называемые циф
ровым математиЧЕСКИМ моделированием;
в) аналоrовые, реализуемые с помощью аналоroвых устройств, иначе назы
ваемые аналоzовы,М математиЧЕСКИМ моделированием.
3. И н т у и т и в н ы е м е т о Д ы и л и м е т о Д ы э к с пер т н ы х
о Ц е н о к.
Все эти средства исследования требуют применения Toro или иноrо MaTe
матическоrо аппарата.
о 5.2. МАТЕМАТИКА В ТЕХНИЧЕСКИХ ЗАДАЧАХ
В инженерных' задачах вообще и в электроэнерrетических в частности роль
математическоrо аппарата за последние десятилетия резко возросла. Бесспорно,
оrромная роль математики в решении 'технических задач все же не должна ис
кажаться, как это иноrда делается. Здесь преувеличения, ведущие к потере пра-
вильной ориентировки инженера, очень опасны. В самом деле, ЦВМ непрерывно
совершенствуются. Если 30 35 лет тому назад на выполнение одной вычислитель-
ной операции тратилось в среднем 30 с, то теперь' с помощью ЦВМ за секунду
выполняются миллионы операций. Наряду с увеличением быстродействия про
исходит увеличение и их памяти. Однако остается в силе положение о том, что
каждая вычислительная машина, как и вообще методы прикладной математики,
перерабатывает лишь то, ЧТО в них заложено. В связи с этим остается также в
силе и соображение о том, что при колоссальной быстроте вычислений COBpeMeH
ные и тем более будущие ЦВМ MorYT сделать не только такое количество вычис-
лений, какое делают миллионы вычислителей, но MorYT сделать, а иноrда уже и
делают, MHoro ошибок. Поэтому не случайно, что наряду с работами и выступле-
ниями, в которых инженера призывают к переходу ко все более сложным и rpo
моздким вычислениям, учитывающим максимально возможное число влияющих
факторов, независимо от их практической роли в изучаемом явлении (это якобы
повышает «cTporocTb» подхода) в научной литературе появляются и работы дpy
roro характера. Среди них можно упомянуть статьи, rде подчеркивается: излиш
няя вера в математические формулировки и описания приводит к тому, что «лю
бая нелепость, облеченная в этот математический импозантный мундир, BЫ
rляДИТ очень научно»*. Математическими соотношениями, в частности дифферен
циальными уравнениями, можно описать все что уrодно, если только принять
определенные постулаты. Можно при этом получать соответствующим расчетом
математически абсолютно строrие результаты, не имеющие в то же время ника-
Koro реальноrо смысла для инженера. это перекликается со словами Эйнштейна
о том, что понятия, которые оказались полезными в упорядочении вещей, леrко
приобретают над нами такую власть, что мы забываем об их человеческом проис-
хождении. С этими соображениями связано следующее положение: прежде чем ма-
* См., напрнмер: Шварц д. Лоrика. методолоrия и философия науки. Паrубное ВJlИЯ
и"е математики на науку. США. Стенфорд. 1960.
98
7ематический апдарат может быть использован для изучения реальноrо и во всех
ro проявлениях бесконечно сложноrо явления, необходимо это явление подверr
нуть предварительному анализу, выделив ту ero «rлавную часть», которая пред
ставляет интерес в дсщной задаче. это и будет ero математическое описание или
основная ero модель. Создание таких моделей, отвечающих экспериментально
проверенным условиям целей исследования, всеrда останется центральной задачей
математика и математики. ОтступлеlШЯ от этой идеи «основной модели», OTCYTCT
вие проверки ее опытом MorYT приводить инженера к ошибкам, а теоретика
к нелепым выводам и обобщениям, якобы «строrим»*.
Однако требование критерия практики нельзя понимать буквально как He
обходимость немедлеНН<ilЙ проверки любой формулы, любоrо вывода прямым экс
периментом. Полученные результаты должны соrласовываться с предшествующим
опытом, должны отвечать требованиям практики, помоrая достиrнуть поставлен
ной цели. Необходимо при этом помнить, что математическое описание реальноrо
объекта это ТО.пько ero упрощенное отражение. [армонически сочетая анализ
и эксперимент (практику), можно установить пределы действия этоrо описания.
Это подчеркивает недопустимость фетишизации математики и математических
формул. Любой формулой, любым математическим соотношением надо пользо
ваться с учетом тех физических явлений, на основе которых они получены. Об
разно rоворя, инженер должен приучаться смотреть на формулы сверху вниз,
а не снизу вверх, со слепой верой. Инженер должен уметь перейти от реальной
{;ложной ситуации к разумно упрощенной основной (или общей) модели, которая
может не содержать математическоrо описания, появляющеrося после ряда дo
лущен ий, а затем уже к модели математической, дающей описание явления в
функционалы!ыx связях и формулах. Инженер «не имеет права забывать о rpa
ницах применимости модели, определяемых характером сделанных допущений.
До Bcero этоrо математике нет дела. Сила и слабость математики заключается
в том, что любой вопрос она понимаетбуквально»**. Инженер, используя всю мощь
современной вычислительной техники, должен уметь прикинуть «на пальцах»
и представить мысленно происходящие процессы, трезво оценить результаты,
выданные ЦВМ. Поэтому изложение дисциплины и входящих в нее аналитиче
ских методов будет проходить под влиянием двух*** положений:
«Цель расчетов понимание, а не числа».
«Прежде чем начинать решать задачу, подумай, ка" лучше ее решать и что
делать далее с полученным решением». '
5.3. МОДЕЛИ ПЕРЕХОДНЫХ ПРОЦЕССОВ В СЛОЖНОЯ ЭЛЕКТРИЧЕСКОЯ
СиСТЕМЕ И opr АНИЭАЦИЯ ИССЛЕДОВАНИЯ
Переходные процессы в отдельных элементах электрических систем (reHepa
торах, линиях передач и т. д.) уже изучались ранее в курсах ТОЭ, электрических
машин и т. д. Цель настоящей дисциплины изучение переходных процессов не
в одном элементе, а в совокупности элементов, н.аходящихся в отношениях и связях
* См.: Электрические системы: Математические задачи элек:rроэнерrетики/Под ред.
В. А. Веникова. М.: Высшая школа, 1981, с. 288. .
** Фабрикант В. А. Новое в инженерном образовании: Физика и ее роль. Современ,
'IIая школа, 1974, .N'2 1 (5), с. 109. .
*** См.: Хэммине Р. В. Численные методы. М.: Наука, 1968, с. 398.
4*
99
между собой и образующих таким образом определенную целостность, единство,
т. е. систему*. Электроэнерrетическая система состоит из большоro числа
элементов, например в ЕЭС СССР входит примерно 2000 крупных станций, около
миллиона подстанций и трансформаторных пунктов, множество линий электро-
передачи, составляющих в общей сложности более миллиона километров, и т. д.
Если принять, что каждый элемент n, входящий в электрическую систему, может
находиться тольк-о в двух состояниях в нормальном (включенном) или в ава-
рийном (короткое замыкание или отключение), то в системе может существовать
2 n состояний и, следовательно, появляться orpoMHoe число процессов, обус-
ловленных переходом от одноrо состояния к друrому. Энереетика вообще и элект-
роэнереетика в частности, являясь большой системой кибернетическосо типа,
обладает той особенностью, что nроцессы в ее элементах (теоретически во всех)
взаимно связаны.
Разумеется, переход от одноrо состояния к друrому не может происходить сра-
зу у всех элементов, входящих в систему. Процессы в этих элементах, теоретиче-
ски взаимосвязанные, будут практически сколько-нибудь существенно проявляться
только в части элементов. Однако эта часть может быть настолько велика, что
система в условиях данноrо исследования может потерять н а б л ю д а е-
м о с т ь**.
С И С Т е м н ы й п о Д х о Д к исследованиям, требующий учета всех пря-
мых и обратных связей между элементами системы, нуждается здесь в коррек-
тировке сложная большая система кибернетическосо типа должна разбиваться
на подсистемы, но так, чтобы при этом сохранялись основные для данноrо ис-
следования свойства большой системы. При исследованиях приходится опери-
ровать именно с этими подсистемами, которые rрубо отражают свойства системы.
Кроме укрупнения системы «по элементам» необходимо 9аrрубить ее изучение
и по числу рассматриваемых процессов. Из бесконечной raMMbI процессов, сос-
тавляющих любой переходный режим, следует выбрать именно тот процесс (или
процессы), изучение KOToporo необходимо для решения поставленной в данном
исследовании задачи. Отбор наиболее значимых процессов, которыми можно
отразить «суть явления», не осложняя ero изучение излишними деталями, и есть
искусство создателя модели. Это специально подчеркивается, так как некоторые
инженеры рассматривают возрастание мощности вычислительных машин как
возможность «не думая» проrраммировать «все подряд» на ЦВМ, учитывая ты-
сячи элементов и тысячи факторов, и якобы «сверхточно» решать задачи, а в
действительности получать от ЦВМ излишне rромоздкий ответ, который, будучи
формально правИЛЬНЫМ, может оказаться «ненаблюдаемым», «необозримым» и
даже бесполезным при практическом ero освоении. Необходимость оrраниче-
ний в постановке научных исследований давно была остроумно сформулирована
Дж. Д. Вильямсом: «Любой дурак сможет в любой заданной ситуации перечис-
лить больше факторов, чем сам боr сможет разобрать. Например, Ньютон дол-
жен был бы принять во внимание тот факт, что планеты несколько сплющены у
* Подробное определение системы см.: Философский словарь. М.: Изд-во полит.
литературы, 1981, с. 329.
** Под наблюдаемостью понимается свойство системы давать в любой момент вре-
мени информацию о режиме, сообщая наблюдателю (человеку или автоматическому устрой-
ству) достаточно быстро существенные (в условия данноrо исследования) параметры про-
цессов. Подробнее см. 3.5, а также: Воронов А. А. Устойчивость, управляемость, наблю-
даемость. ,'\{.: Наука, 1979.
100
полюсов, что на них есть ropbl, что по крайней мере одна из них покрыта деревь.
ями и что на ней имеются термиты и прочие неприятные вещи. Требуется здра.
вый смысл, чтобы решить, в каком месте прервать перечисление этих факторов.
На практике Вы должны прервать перечисление, как только эдравыи смысл
8нереетIJческсlЯ СlJстема
......
\
,
......
ООра50тонное
I
\
,
"
I
I
АПРООСlЦия рещения опыlТ7 8 натуре /
иПI/ на .мооеПI/ (физической)
Рис. 5.2. Описания, модели и уровни допущений при исследовании пере-
ходных процессов
подскажет Вам, что в модель введено достаточно факторов, чтобы Вы моrли с
ее помощью что-нибудь узнать об интересующей Вао проблеме»* .
Моделирование переходных процессов в электрических системах. Во время
переходных процессов в системе происходят изменения э. д. с., токов, напряже-
ний, уrловых скоростей роторов и механических моментов вращающихся машин.
Одновременно изменяются уровни энерrии, запасенной во всех электрических
и механических элементах системы. Для проведения исследований этих процес-
сов, которые протекают в натуре, и необходимо создать модели.
Модель это некоторый мысленный (описательный) или физический (ма-
териальный) вспомоrательный объект, заменяющий при определенных допуще-
ниях исследуемый ориrинал**. Построение моделей (рис. 5.2) какоrо-либо про-
* Цитировано по кн.: Федоре1UСО Н. П. Экономика и математика. М.: Знание, 1967,
с. 85.
** См.: Вендков В. А., Веников r. в. Теория подобия в МОАелвровання. М.; Выс-
шая школа, 1984, с. 4З .
101
Ilесса (или rруппы процессов) начинается с о б щ е и м о Д е л и процесса, соо-
дающеися в результате прямоrо наблюдения этоrо процесса и ero осмысливания.
Такие модели, иноrда называемые фено-менолоеически-ми, MorYT при определенных
допущениях (1 уровень допущениИ) давать какое-либо словесное или подкреп-
ленное количественными соотношениями описание процессов, отобранных для
изучения. Затем на основе этои общеи модели составляется м а т е м а т и ч е-
е к о е о п и с а н и е*, причем делаются допущения, отвечающие II уровню.
Если это почему-либо затруднительно или даже невозможно, применяется экс-
периментальное изучение, использующее методы планирования опытов или ана-
.11 иза размерности. Далее создаются к о н к р е т н ы е мо Д е л и: физические,
аналоrовые или математические (III уровень допущении). Мате-матическая -мо-
оель представляется систе-мой дифференциальных уравнений, обычно упрощенных
по сравнению с те-ми" которые входили или должны были бы входить в об-
щую. -модель. Математическая модель содержит алrоритмы и проrраммы для ре-
шения, а также набор начальных и rраничных условии. На основе ее получается
решение в квадратурах или числовое решение на ЦВМ либо воспроизводится про-
текание процесса, отвечающеrо полученнои модели на АВМ. При этом любая
орrанизация процедуры изучения сопровождается допущениями. Так, при чис-
ловом решении ускорение может приниматься постоянным на протяжении ра-
ечетноrо интервала, расиределенныи параметр сосредоточенным, вращающий
момент числеыно равным мощности и т. д. Все эти допущения относятся к III
уровню; они MorYT быть различными в зависимости от конкретных условий
проведения исследования, например от Toro, реализуется ли решение уравне-
ний непосредственно (в квадратурах), составляется ли проrрамма для решения
на ЦВМ или АВМ либо изучается на физической модели. Далее при любом
исследовании необходима проверка полученных результатов, предусматриваиr
щая апробацию их с помощью опытов (в натуре или на физических моделях,
в свою очередь корректируемых натурными экспериментами).
При обработке данных модели, трактовке полученных решений, их обобще-
нии и интерпретации также делаются допущения (IV уровень), которые должны
обеспечить наблюдаемость и обозримость сопоставляемых результатов. Получен-
ные данные должны быть обработаны и представлены в форме, удобной для сопо-
ставления и выводов. Обычно это критериальная фор-ма, представляющая про-
цессы в виде зависи-мостей -между безраз-мерны-ми ко-мбинациями физических вели-
чин, участвующих в nроцессе.
t 5.4. ТОЧНОСТЬ И CTPOrOCTb в ИНЖЕНЕРНЫХ ИССЛЕДОВАНИЯХ
Для правильной постановки инженерных исследований необходимо опреде-
ление строеости и точности их исходя из постановки конкретной инженерной
задачи и соответствия полученных результатов реально существующему изу-
чаемому объекту.
В инженерных задачах понятие точности часто смешивается с поиятием
строrости, причем вносится дополнительная путаница тем, что точность резуль-
татов оценивается только по точности решения уравнений иноrда исходя из числа
знаков, получаемых в результате расчета. Между тем cTporocTb и точность опи-
* Такое описание в виде системы уравнений ииоrда называют математической моделью,
что неправильно. так как ее создание это последуюший этап исследований.
102
сания явлеlШЯ, точность и CТpOFOCTb расчетов результатов должны оцениваться
по их сооmeетсmeию реальной физической природе исследуемых явлений, рш;с),(ат-
ршзае),(ых в разрезе aaiтou конкретной технической задачи.
Как правило, при изучении технических задач и физических явлений точ-
ные (в смысле процедуры решения) результаты, полученные от какоrо-либо
расчетноrо устройства, не rарантируют совпадения с действительными. Инже-
нер-исследователь должен сопоставить результаты аналитическоrо исследова-
ния с результатами опыта. Однако и здесь при современных сложных, имеющих
MHoro влияющих факторов системах прямое сопоставление единичноrо расчета
с единичным опытом зачастую может дать совершенно не характерные результаты.
Необходимо учесть, что в технической системе, как правило, подверженной вли-
янию мноrих факторов, интенсивно влияющих на характер поведения системы,
в зависимости от сочетаний этих факторов и друrих случайных условий MorYT
получаться существенно различные результаты. Поэтому несовпадение резуль-
татов единичноrо расчета и единичноrо опыта только в отдельных случаях может
с уверенностью характеризовать неправильность теории или ошибочность расче-
тов. Соответственно, конечно, не дает уверенности и единичное совпадение. ЯВ-
ляющееся практическим критерием реальной строrости техническоrо исследо-
вания сопоставление расчета и опыта для любой сложной, искусственной или
естественной (т. е. созданной человеком или природой), системы должно произ-
водиться с учетом возможных случайных вариаций в параметрах, тем более за-
метных, чем ближе к какому-либо экстремальному состоянию, например к пре-
делу устойчивости, находится система. Такое сопоставление должно проводиться
по специально разработанной методике, учитывающей вариацию параметров
в опытах с реальной системой или вариацию. соответствующих параметров при
расчетах, причем результаты как расчетов, так и опытов должны представляться
и сопоставляться в критериальной форме, полученной в соответствии с теорией
подобия * .
Понятия инженерной строrости постановки задачи и точности расчета
это не одно и то же.
Паняmие стРОбости в любом случае вытекает из nоставлеННblХ при ис-
следовании целей и только этой постановкой задачи и необходи.мостью полу-
чения после ее решения НУЖНblХ для nрактики результатов и определяется.
Абсолютное, безОтносительное к этой постановке задачи понятие строrости
даже в «чистой» математике, как отвлеченной науке, не имеет смысла. В самом
деле, что значит cтporocTb в математике? CTPorocTb в математических посылках
Эвклида, cTporocTb в построениях Лобачевскоrо, cTporocTb математических идей
Вейерштрасса и, наконец, cTporocTb современной математики это, очевидно,
разные понятия, определяющиеся в конечном счете только nриняты.ми nостула-
тами, которые, в свою очередь, обязательно зависят от поставленной задачи.
CTpOroCTb в инженерно-технических задачах тем более не может и не должна
определяться вне опыта, вне данной практической проблемы сформулированными
постулатами. Не может она определяться и характером дифференциальных урав-
нений, которые, как иноrда кажется некоторым инженерам, тем более строrи,
чем большее число возможных факторов они учитывают независимо от реальной
* См.: Веников В. А. , Веников r. В. Теория подобия и моделирования. М.: Высшая
школа, 1984, с. 439. .
103
роли их. В ряде случаев оказывается, что более полное дифференциальное уравне-
ние дает худшие результаты в условиях неточности задания исходных данных.
Более полное уравнение может быть более чувствительно к вариациям nОереш-
ностей исходных данных, которые в конечном счете исказят решение более полноrо
уравнения сильнее, чем менее полноrо. Таким образом, адекватность решения
той действительности, для описания которой создано уравнение, неоднозначно'
связана с ero полнотой.
Точность оnределжтся реальной степенью совпадения расчетНОеО и действи-
теЛЬНОеО nроцесса. Нельзя также считать, чmо точность получеННОе о ре-
зультата тем выше, чем «точнее», т. е. с большим числом знаков, nроведен
расчет таеО или UHOZO явления. .
Нельзя rоворить о строrости и точности в инженерной задаче только на ос-
новании уравнений, отражающих процесс, и математическоrо аппарата, обеспе-
чивающеrо определенную точность вычислений, которая вовсе не тождественна
точности результата исследования. Вопрос о точности следует рассматривать,
поставив задачу, выявив существенные в этой конкретной задаче процессы и
факторы, отбросив несущес-rвенные. При этом вновь следует рассматривать
уровни допущений, в свою очередь определяющиеся поставленной задачей. На
рис. 5.2 была показана иерархия этих уровней допущений, устанавливаемых при
рассмотрении изучаемоrо явления как совокупности orpoMHoro числа процессов
(П oo). В самом деле, явления в любом инженерном сооружении содержат
именно такое множество процессов. Например, работа линии передачИ связана
со мноrими процессами: распространением электромаrнитных волн вдоль прово-
доВ, их HarpeBoM, излучением энерrии в пространство, интерференцией с волнами
радио-- и телевизионных устройств, излучением теплоты и света, ионизацией воз-
духа ОКОЛО проводов, процессами эколоrических, в том числе биолоrических, вли-
яний и т. д. Строrая постановка исследования прежде Bcero означает отбор тех и
только тех процессов и факторов, которые представляют интерес для данной
задачи, в данной конкретной ее постановке. Строrий подход требует отбросить
те процессы, влияние которых второстепенно* . Этот отбор подлежащих изучению
процессов и вместе с этим отбор необходимых для учета влияющих факторов про--
исходит уже при установлении допущений 1 уровня (рис. 5.2).
Далее, коrда в соответствии с полученным математическим описанием, пред-
ставляющим отобранные процессы, уточняется постановка задачи и выбирается
способ исследования, вводят допущения, которые связаны с поставленной за-
дачей, определяют cTporocTb решения системы дифференциальных уравнений
и устанавливают техниkУ их последующero решения. Возможно, однако, про-
водить исследования и без полноrо математическоrо описания и без составления
математической модели, применяя анализ размерностей величин, участвующих
в процессах, или планирование экспериментов. На этой стадии исследования вновь
вводят допущения (II уровня), касающиеся уже способов отображения процес-
сов при формулировке задачи, т. е. решается вопрос о строrости последующеrо
исследования. Например, в процессе записи и преобразований уравнений может
отбрасываться часть членов ряда разложения, приниматься посто нными заве-
домо мало меняющиеся величины и т. п.
* Например, далее будет показано, что R большинстве случаев правомерен отказ от
учета периодической слаrающей тока ротора и соответственно апериодической слаrающей
тока статора при определении вращающеrо момента reHepaTopa.
104
t 5.5. ПРОСТРАНСТВО И УРАВНЕНИЯ СОСТОЯНИЯ (РЕЖИМА).
ДОПУЩЕНИЯ И УПРОЩЕНИЯ
Очень заманчиво математически представить все мноrообразие режимов
электроэнерrетической системы внекотором MHoroMepHoM пространстве. Каж-
ДОЙ точке TaKoro пространства однозначно соответствовало бы определенное со-
стояние системы* пространство состояний, которое отображало бы и пере-
ходные процессы, так как каждое изменение режима имело бы однозначно опре-
деленную траекторию движения изображающей точки в пространстве и отража-
лось бы соответствующими у р а в н е н и я м и с о с т о я н и я. Однако такие
всеобъемлющие математические представления или математические универсаль-
ные модели, теоретически мыслимые, слишком сложны, а поэтому практически
невозможны, даже для сравнительно простых систем и не очень сложных ситу-
аций. Для Toro чтобы модель была работоспособна, необходимо упростить ее,
не теряя при этом существенных черт реальной системы (ориrинала). НО ДЛЯ
TaKoro упрощения приходится делить сложную систему на подсистемы и, выде-
ляя из больших комплексных задач подзадачи, применительно к ним проводить
исследования. При этом целесообразно принять некоторые положения, которых
необходимо далее придерживаться при преобразованиях и упрощениях.
1. В ы д е л е н и е п о Д про Ц е с с о в. Для упрощения решения еди-
ный процесс целесообразно разбить на подпроцессы, считая, что они не действуют
непрерывно внутри OCHoBHoro процесса, а появляются только в некотором диапа-
зоне изменения параметров. Так, например, действие асинхронных моментов
учитывается только после достижения некоторой скорости, до условноrо зна-
чения которой ими пренебреrают. Хотя введение TaKoro рода rраниц и условно,
оно весьма облеrчает анализ.
К важным допущениям, принимаемым при анализе электромеханических
процессов, относится учет изменений уrловой скорости роторов синхронных
машин, реакции ЯКОрЯ в них и электромаrнитных процессов в асинхронных ма-
шинах. Не менее существенное значение имеют различные допущения, учитываю-
щие влияние реrуляторов возбуждения и реrуляторов скорости первичных дви-
rателей.
Длительность переходных электромеханических процессов, как правило,
значительно превосходит время распространения в пространстве изменяющиХСЯ
физических величин (напряжения, тока и т. д.), характеризующих эти процессы.
Следовательно, их в подавляющем большинстве случаев можно рассматривать
как процессы в цепях с сосредоточенными постоянными.
2. У ч е т н е л и н е й н о с т и. Электрические системы, режимы которых
изучаются в настоящей дисциплине, нелинейны. Нелинейность их в основном
определяется двумя причинами: а) зависимостью параметров системы (активных
и реактивных сопротивлений, коэффициентов намаrничивания, коэффициентов
усиления реrуляторов и т. д.) от параметров режима; б) нелинейностью связи
параметров режима между собой.
Н е л и н е й н о с т ь пар а м е т р о в с и с т е м ы обычно не учитыва-
ется, исключения особо оrовариваются. Н е л и н е й н о с т и с в я з е й п а-
р а м е т р о в р е ж и м а, как правило, учитываются. Случаи, коrда от TaKoro
,
* в электроэнерrетике понятия «состояния» и «режим» тождественны.
105
учета отказываются, специально подчеркиваются; система при этом называется
лuнеарuзованной.
При исследованиях линеаризованных систем можно' примеFlЯТЬ метод нал<r
жения (суперпозиции), при котором сложный процесс, вызываемый двумя или
несколькими независимыми воздействиями, рассматривается как сумма отдель
ных процессов, каждый из которых вызван своим
воздействием.
По нелинейным уравнениям проводятся иссле-
дования динамической и результирующей устой
чивости и переходных процессов после больших
возмущений.
При исследованиях статической устойчивости
рассматриваются свободные переходные процессы,
вызванные малыми возмущениями режима. При
этом причины и место появления малых возмуще-
ний не выявляются. Предполаrается, что возму-
щающее воздействие, вызвавшее возмущение, сня-
то до начала изучаемоrо переходноrо процесса.
При исследованиях динамической устойчивос-
ти рассматриваются переходные процессы при при-
ложении к системе больших возмущающих воздей-
ствий, заданных определенным образом (либо во
времени и пространстве, либо в функции некоторых
режимных параметров). В этом одно из принци-
пиальных отличий в подходе к исследованию ста-
тической и динамической устойчивости.
3. О r и б а ю Щ и е. У процессов, связанных
с синусоидальными изменениями параметров режи-
ма основной рабочей частоты (50 rц), обычно рас-
сматриваются не MrHoвeHHble значения, а их оrи-
бающие (рис. 5.3), хотя в электрических системах
переменноrо тока электрическая энерrия выраба-
тывается, пер дается и распределяется с помощью
синусоидально измеияющихся токов и напряжений.
Рассматривая переходный процесс, можно опери-
ровать с мrновенными (через каждую сотую секун-
ды при частоте 50 rц изменяющими свое направление) значениями тока и на-
пряжения и составлять применительно к ним уравнения. При изучении быст-
рых электромаrнитных процессов, происходящих со скоростью, соизмеримой с
синусоидальными изменениями тока и напряжения, или с БОльшей скоростью,
. такое рассмотрение MrHoBeHHblx токов и напряжений является обязательным.
Однако изучение медленно протекающих электромеханических процессов
часто можно упростить, отказавшись от рассмотрения изменений MrHoBeHHblx
. значений параметров режима и учитывая только изменеlШЯ их оrибающих
(рис. 5.3). Такое упрощение оказывается возможным, так как электромеханиче.-
ские процессы в электрических системах, связанные с изменениями уrловых ско-
ростей potopOB reHepaTopoB и количества электромаrнитной энерrии, запасенной
в элементах системы, протекают значительно медленнее электромаrнитных.
Анализ, проводимый без указанноrо упрощения, называется или аналUЗОAt
..
1\ 5
I
If
'/;=0
Рис. 5.3. Быстрые (MrHOBeH-
ные значения) изменения пара-
метров и их оrибающие:
1 быстрые мrповеиные значении
тока статора ic т; 2........ «медленные»-
измеиения yrпa сдвиrа ротора б
reHepaTopa; 3 оrибающая измене-
ний тока статора ic т; 4...... средние
значения изменения тока возбуж-
дення i я : 5 оrнбающая этоrо то.
ка; 6........ ero :мrновениые значения
106
t
по полным уравнениям с учетом влияния изменения MrHoBeHHblx значений, или
анализом в мzновеняых зnaчениях, или анализом по уравнениям Парка rорева.
Существенно, что при расчете по оrибающим изменения электрической мощностИ
принимаются происходящими MrHOBeHHo, хотя в действительности мощность не
может меняться скачком.
4. В ы д е л е н и е r л а в н о r о. Все упрощения анализа переходныХ
процессов заключаются в в ы Д е л е н и и r л а в н о r о, п р а к т и ч е с к и
с у Щ е с т в е н н о r о для решения поставленных задач. Здесь, как и в друrих
инженерных задачах, из сложных явлений для рассмотрения выделяют отдель-
ные процессы, Х1J.рактеризуемые возможно меньшим числом параметров и более
простыми соотношениямИ. При таком подходе не отражаются детали, но дается
достаточно надежная для инженерных задач характеристика явления.
Упрощения при рассмотрении поставленных в данной дисциплине за-
дач необходимы и для mozo, чтобы сделать все расчеты и представления о
работе систем паиболее наzлядными u достаточно леzко nроверяемыми.
Инженеру очень важно понимать физическую сущность исследуемоzо явления
и уметь наzлядно nредставлять полученные результаты, nользуясь упро-
щенными схемами замещения и моделями.
5. P a с ч е т н а о с н о в е с х е м з а м е Щ е н и я. Широкое исполь-
зование вычислительной техники при анализе режимов вовсе не указывает на
необходимость отказа от простых расчетов, проводимых на основе схем замеще-
ния. Являясь математическими моделями, схемы замещения упрощенно отра-
жают сложный процесс и приближенно формируют ero характеристики (подроб-
нее см. rл. 6), свойства, которые являются rлавнейшими при решении постав-
ленной задачи.
6. Поз и ц и о н н а я и Д е а л и за Ц и я. Под nозициоfi. НОЙ системой
понимается . система, параметры режима которой зависят только от данноrо
состояния системы, взаимноrо положения ее элементов (например, роторов reHe-
раторов) независимо от Toro, как было достиrнуто это состояние, как система при-
шла к данному положению и как она движется дальше. В позиционной системе
не учитываются факторы, зависящие от скорости, в частности демпферные мо-
менты синхронных машин.
7. П о с т р о е н и е с т а т и ч е с к и х и Д и н а м и ч е с к и х х а-
р а к т е р и с т и к. Под статическими характеристиками понимаются rpa-
фически или аналитически hредставленные зависимосТИ параметров режима от
каких-либо друrих ero параметров и параметров системы [например, Q == f(U)
при разных х с ]. Эти зависимости выявляются в условиях настолько медленных
изменений режима, что можно считать их не зависящими от времени (квазиуста-
новившийся режим) и вычислять отдельные точки этих характеристик соrласно
соотношениям установившеrося режима.
Под динамическими характеристиками понимаются взаимосвязи парамет-
ров, полученные в условиях, коrда указанные параметры или чаСТЬ их зависят
от времени, т. е. скорости изменения параметров. Динамические характеристики
Moryт учитывать не только первые производные параметров, но и их высшие про-
изводные.
Таким образом, статическая хараJ<теристика представлепа зависимостыot
П == q:>(Yt, У2, 'н' Уп), а динамическая зависимостью П == q:>(Yt, У2' ..., Уп, t.
dYt/ dt . dY2/ dt , ..., dy,,/dt)... .
101
Статические характеристики достаточно полно описывают позиционную си-
стему, динамические характеристики динамическую систему.
Промежуточной между этими двумя характеристиками будет квазИдинами-
ческая характеристика, rде изменение параметров во время переходноrо процесса
учтено частично (рис. 5.4). Примеры этих характеристик показаны на рис. 5.5.
J
а)
М
OJ
м
2
t
Sa
5
Рис. 5.4. Три вида характеристик
параметра П == rp(t);
J статическая; 2 квазидинамическая;
3 динамическая
Рис. 5.5. Примерный вид характеристик П 1 ==
== rp(П 2 );
а M t(G) синхронноrо reHepaTopa; б M (jJ(s) аснн-
xpoHHoro двиrателя; 1 статическая; 2...... квазидннами"
ческая; 3 динамическая
Разница между ними обусловлена тем, что в статических характеристиках не
учтены быстрые электромаrнитные процессы и их влияние на вращающий мо-
мент, в динамических они учтены полностью [например, Eq == I(t), E == qJ(t)J, а
[Е " J
в квазидинамических характеристиках частично q Е == const .
Применительно к задачам электромеханических переходных процессов ди-
намические характеристики отражаются при расчетах по полны'м уравнения'м,
иначе называемых уравнениями Парка rорева (см. rл.6). Квазидинамические
характеристики получаются при расчетах по упрощенны,М уравнения'м, образуе-
мых из полных при отбрасывании в них части членов. Чаще Bcero квазидинами-
ческая характеристика при исследовании процессов в синхронных машинах и
сетях строится при E == const, в простейшем случае при Е' == const (рис. 5.6).
В ряде случаев вместо динамической характеристики 4 для приближенных
расчетов может успешно применяться квазидинамическая (5, б) и даже квази-
статическая характеристика (E ()"== const).
8. у ч е т р а с п р е Д е л е н н о с т и пар а м е т ров. Б ы с т р ы е и
м е Д л е н н ы е про Ц е с с ы. Диапазон изменения длительности и скорости
протекания переходных электромеханических процессов очень велик (см. rл. 1,
рис. 1.6). В любом из процессов можно выделить такие, которые по отношению
к основному (изучаемому) процессу или переходному режиму в целом можно счи-
тать б ы с т р ы м и. Электромаrнитные переходные процессы в reHepaTopax
и трансформаторах, равно как и изменения (мrновенные значения) с частотой
50 [ц тока и напряжения, будут быстрыми по сравнению с электромеханически-
ми процессами (1 3 [ц). Эти процессы будут, в свою очередь, быстрыми по от-
ношению к процессам, учитывающим влияние турбин и котлов. Разделение на
быстрые и медленные процессы иноrда используется при исследовании систем,
Имеющих дифференциальные уравнения, содержащие коэффициенты при произ-
108
водных (<<постоянные времени»), порядок которых различен. В этих случаях быст-
рые и медленные движения MorYT исследоваться раздельно соrласно специальной
процедуре*), описание которой выходит за рамки данной дисциплины. Заметим,
что хотя малость постоянных времени обычно указывает на малое влияние соот-
ветствующих параметров и уравнений на исследуемые процессы, все же нельзя
всеrда пренебречь ими без специальной
проверки влияния так называемоrо м а л 0-
r о пар а м е т р а.
Выше было указано, что, как правило,
электромеханические переf,одные процессы
MorYT исследоваться при введении в схему Рис.
замещения исследуемой системы всех элек-
трических элементов сосредоточенными па-
раметрами. В некоторых случаях, напри-
мер при использовании быстродействую-
щих устройств (реrуляторов возбуждения,
, действующих в зависимости от изменения
первой и второй производных реrулируе-
мых величин) в протяженных передачах (более 1000 км). может появиться не-
обходимость в одновременном рассмотрении электромеханических и волновых
процессов. Применение быстроrо реrулирования rидротурбин может привести
к необходимости учета водновых процессов в трубопроводах одновременно с
рассмотрением переходных электромеханических процессов. Однако практичес-
кой необходимости в таких точных решениях, учитывающих электрические и
механические распределенные параметры и волновые процессы, не возникало.
При расчете сверхдальних электропередач или новых способов реrулирования
должны специально выявляться случаи, коrда учет распределенности парамет-
ров подлежит дополнительному рассмотрению.
9. Про с т ы е и с л о ж н ы е с и с т е м ы. Переходные электромеха-
нические процессы можно также различать в зависимости от сложности системы,
в которой они происходят. В системе любой сложности может быть учтено дейст-
вие реrуляторов возбуждения или скорости, что делает расчеты, проводимые для
простой системы, более rромоздкИми, чем расчеты, проводимые для сложной систе-
Метод малоrо параметра предусматривает
приближенное нахождение решений систем He
линейных дифференциальных уравнений. Основу
метода составляет предположение о том, что в
правых частях этих уравнений появляются не-
которые малые члены, не оказывающие решаю-
щеrо влияния на поведение исследуемой систе-
мы. Решение производится сначала для упро-
щенной (с отброшенными «малыми») системы, за-
тем уточняется в соответствии с рекомендация-
ми, вытекающими из существа метода**.
5.ft 4 "
"
I
Е' о I
I
I
I
I
It = О
I
t;
5.6. Характеристики переходноrо
процесса:
1 изменение 6 f(t) при задании э. д. с Eq.
Ь' q квазидииамическими характеристиками
(5 или 5); 2 то Же, при задании квазиста-
тической характеристикой. при Е' Q"""'const;
3 ТО же, при задании динамической харак.
теристикой. при изменении э. д. с. соrласНо 4
* См.: Картвелuщвuлu Н. А., rалакmuонов Ю. И. Идеализация сложных динамичес-
ких систем. М.: Наука, 1976, с. 268; Ваэов В. Асимптотические разложения обыкновенных
дифференциальных уравнений. М.: Мир, 1968, с. 220.
** См.: Мееров М. В. Синтез структур автоматическоrо реrулирования высокой точнос
ТИ. М.: Физматrиз, 1959, с. 284; Булсаков Б. В. Колебания. М.: Физматrиз, 1954, с. 240.
109
мы. Особые вопросы возникают при учете длинных линий как цепей с распределен
ными постоянными. Сложность расчета зависит также и от Toro, проводится он
с учетом MrHoBeHHbIx изменений параметров режима или ведется по их оrибаю
щим. Таким образом, само по себе разделение систем на простые и сложные яв
ляется в известной мере условным, не характеризующим в полной мере сложность
проведения расчетов. Обычно систему, содержащую одну станцию, работающую
через линию с наrрузками на шины бесконечной мощности, считают простейшей
системой. Две станции конечной мощности, питающие общую наrрузку или Ha
rрузки, при условии, что э. д. с. этих станций постоянны, оценивают как простую
систему. Система, rде число. станций больше двух, оценивается как сложная cи
стема. Деление это условно, так как в зависимости от способа учета переходных
процессов в reHepaTopax, реrулирующих устройствах и наrрузках про с т е й-
ш а я с и с т е м а может иметь rромоздкое математическое описание, содержащее
дифференциальные уравнения высоких порядков, и таким образом, несмотря на
тополоrическую простоту, превратиться в сложную.
10. П о r реш н о с т и л и н е а риз а Ц и и. Лод линеаризацией по
нимается приближенный анализ нелинейных систем, при котором их нелинейные
свойства учитываются с тем или иным приближением. При изучении электро-
энерrетических систем приходится учИ'rывать два вида нелинейностей.
Нелинейность пар а м е т р о в с и с т е м ы Л с, т. е. их зависимость от
параметров режима: Л с === 'Ф(Л р), например х === f(f), с === ср(и) и т. д.
Нелинейность пар а м е т р о в р е ж и м а Л р, например I':1P === ср(Р),
Р === Е U у sin б и т. д.
Нелинейности параметров системы Л с обычно не учитываются в исследо-
ваниях переходных процессов или учитываются приближенно введением в схему
замещения значений Л с' различных для разных интервалов пропесса. Для не-
которых случаев разработаны специальные способы учета некоторых нелиней-
ностей, например связанных с влиянием насыщения маrнитныx цепей синхрон
ных машин и изменением реактивностей {Xd, Xd' и т. д.) И э. д. с. (Eq, Eq').
От нелинейностей параметров режима чаще Bcero стремятся избавиться, за
менив сложную зависимость разложением в ряд Тейлора и представив f(xo +
+ х) === а о + а1Х + а 2 х 2 + а з .х3 + .... Разложение считается удовлетворитель
ным, если ряд сходится в некоторой окрестности точки Хо, что, разумеется, за-
висит от существенноrо для данноrо исследования диапазона. Например, для си-
нусоидальной функции даже при большом числе членов приближенное пред-
ставление очень хорошо вблизи начала координат и плохо вдали от Hero (рис. 5.7).
Часто при изучении переходных процессов после разложения в ряд Тейлора не-
линейной зависимости учитывают только линейные члены ряда. Все нелинейные
члены ряда, пропорциональные ПрОИзводным, квадратам и высшим степеням от-
клонений, не учитывают вследствие малости их отклонений. ПО.'1учаемая после
преобразований система уравнений называется линеаризованной по первому приб-
лижению. Коэффициент линеаризации соответствует первому члену ряда Тейлора
и представляет собой частную производную нелинейной функции по режимному
параметру, вычислецную в исходном режиме. Зависимость коэффициента ли-
неаризации от исходноrо режима отличает линеаризованную систему от линей-
ной и является характерным свойством нелинейной системы.
В линеаризованной системе в отличие от линейной независимость характера
переходныx процессов от их интенсивности сохраняется только до некоторых Ma
лых отклонений параметров режима от установившихся значений, или, как час
110
"то rОБОрЯТ, в пределах справедливocrи линеаризации по первому приближению.
Проиллюстрируем простейшим примером линеаризацию нелинейной за-
висимости электромаrнитной мощности от уrла: Р == Р т siп 6. Дадим малое при-
ращение уrлу 6 от установившеrося значения 60 и разложим эту нелинейную
о)
rp
Jj Ha/(C,epl1fJ
40
зо
о
з 7 11 15 /9 23 27 ЗI
Рис. 5.7. Аппроксимация синусоидальной зависимости:
4:1 представленне ф(6) рядом с разиым ЧИСIlОМ Чllеиов разложении
(от 1 до 41); б представление ф(6. в пределах от О до п сочетаиием
прямолинейной и параболических зависимостеil
Рис. 5.8. Зависимость
Llб макс == !(б о ) при линеари-
зации по первому прибли-
жению с заданной поrреш-
ностью е == 10%
функцию в ряд Тейлора, но в отличие от предыдущеrо случая в малом диапазоне
в окрестности 60: - .
siп (ао + o) siп 00 == o cos Oo М2 siп 00 М' cos 00 + ... .
2 31
Отбрасывая члены, пропорциональные 1!J2, 6З и т. д., вносим поrрешность,
которую можно оценить как отношение отбрасываемых членов к первому (остав-
ляемому) члену ряда:
е == l' ( ...!....М2SiПОо+...!.... 03cos80 ) == Ll tgo o + М2 .
- М СО3 o 2 31 2 6
Задаваясь допустимой поrрешностью, можно построить зависимость 6MaKC ==
== '(60) (рис. 5.8). Она показывает, что максимальное отклонение L\6 MaKc уrла
после В03мущения, при котором поrрешность от линеаризации по первому приб-
лижению рассматриваемой нелинейности не превышает 10%, зависит от исход-
80rO уrла б о . При малыХ исходных уrлах (режимах малых наrрузок синхронной
машины) линеаризация по первому приближению справедлива при достаточно
больших возмущениях; при больших уrлах, 60 заданная поrрешность сохраняется
только при малых возмущениях. В общем случае значения возмущения, при ко-
торых исследование переходных процессов по линеаризованным уравнениям не
вносит недопустимой поrрешности, зависят от вида нелинейностей и исходноrо
режима. При исследованиях статической устойчивости значение возмущений мо-
жет быть принято сколь уrодно малым. Как показал Ляпунов, условия стати-
ческой устойчивости линеаризованной системы и исходной нелинейной системы
при определенных, практически удовлетворяющихся условиях совпадают. Суж-
дение о переходных процессах, развиваемых после нарушении статической устой-
чивости, возможно только в пределах отклонений, при которых с заданной поr-
решностью справедливы линеаризованные уравнения. При большиХ отклонениях
ш
следует учитывать отброшенные члены ряда Тейлора или решать исходную не-
линейную систему дифференциальных уравнений.
Таким образом, выявляются две существенно различные по постановкам и
исходным допущениям задачи: исследование переходных процессов в линеари-
зованных системах и исследование переходных процессов с учетом нелинейнос-
тей. По линеаризованным уравнениям проводятся как исследования статической
устойчивости, так и исследования, связанные с оценкой показателей качества
переходноrо процесса, синтезом устройств автоматическоrо реrулирования.
В последнем случае иноrда рассматри аются линеаризованные системы под дей-
ствием возмущающих воздействий, заданных во времени.
11. 3 а д а ч и а н а л и з а и с и н т е з а. При изучении любых переход-
ных процессов возникают задачи анализа; они сводятся к определению изменений
параметров режима Пр при заданных начальных условиях и возмущениях (от-
клонениях параметров системы П с или параметров режима от нормальных), при
заданных схемах и характеристиках оборудования, в том числе реrулирующих
устройств. В рез у л ь т а т е а н а л и з а MorYT быть получены: качественные
(устойчиво, неустойчиво) либо количественные данные об изменениях пара-
метров режима во времени Пр == f(t), или данные о связи параметров режима
и параметров системы Пр == q;(П с), или.сведения об изменениях одноrо параметра
режима в зависимости от изменений друrоrо, или данные о скорости изменения
П pj == (dП pj/dt).
3 а д а ч и с и н т е з а* сводятся к отысканию схем, характеристик обору-
дования, в том числе и реrулирующих устройств, нахождению тех начальных ус-
ловий, при которых изменения параметров режима при переходном режиме будут
иметь желательный (заданный заранее) характер. В рез у л ь т а т е с и н т е--
з а выявляются схемы и параметры систем в их силовой части, структуры ре-
rулирующих устройств, а в некоторых случаях и их настройки. Между задачами
анализа и синтеза не существует резко выраженной rраницы: так, перебором раз-
личных вариантов при анализе решаются задачи, относящиеся к синтезу, и т. д.
Большое значение имеет управление переходными процессами в действующих
электрических системах. При решении задач управления в отличие от задач
анализа параметры режима системы рассматриваются не как заданные, а как
изменяющиеся под действием реrулирующих устройств, которые при необходи-
мости MorYT менять структуру и настройку.
Представленные задачи требуют математическоrо аппарата, обеспечиваю-
щеrо решения уравнений движения системы. Число этих уравнений, как из-
вестно, равно числу степеней свободы. В зависимости от сделанных допущений.
продиктованных, в свою очередь, постановкой задачи, ПрИХодится оперировать
с линейными или нелинейными уравнениями. При больших возмущениях иссле-
дование поведения системы (ее динамической устойчивости) требует решения сис-
тем нелинейных дифференциальных уравнений, число которых на каждый rенери-
рующий arperaT может состаВJ1ЯТЬ от 2 до 40. В зависимости от сделанных допу-
щений эти уравнения объединяются с системой алrебраических уравнений, опи-
сывающих сеть (два уравнения на узел). Для практических расчетов процессов,
определяющих переходный режим сложной системы (500 800 reHepaTopoB, IOO{}..-..
* ПОД синтезом, дословно означающим «соединение, сочетание», здесь понимается соз-
дание (проектирование) структур и алrоритмов управления, обеспечивающих о п т и м а л ь.
н о с т ь переходных проuессов в автоматически реrулируемых электрических системах.
112
3000 узлов), приходится оперировать с rроМоздкими системами уравнении, что
не только вызывает трудности, связанные со сложностью решения, но и ставит
проблему обозримости результатов, так как большое число функциональных
связей, выявленных в результате расчетов, требует для их практическоrо исполь
зования систематизации и упрощений. Упрощения обычно целесообразно про
вести до начала расчетов, осущеc:rвляя так называемое эквивалентирование:
замену rрупп одинаковых reHepaTopoB или таких, поведение которых во время
переходноrо процесса можно считать одинаковым, одним эквивалентным reHepa
тором (см. П2). Таким образом, решение rруппы задач, относящихся к изучению
динамических 'процессов (динамическая устойчивость), требует применения Me
тодов, дающих количественные зависимости ПР == f(t). Зависимости эти, как пра-
вило, получаются в результате решения систем дифференциальных уравнений.
Нелинейные уравнения, характеризующие процессы при анализе больших
возмущений, справедливы и при малых возмущениях. Однако при малых возму
щениях удобнее пользоваться линеаризованными уравнениями, позволяющими
судить о процессах по виду корней характеристическоrо уравнения, YCTaHaB
ливая, каков будет вид малых отклонений параметров !'!J.П Р (апериодические или
периодические, затухающие или нарастающие).
Возможно применение практических критериев устойчивости, которые дают
качественную оценку процесса устойчиво, неустойчиво. Задачи синтеза MO
rYT решаться как общие исходя из получения желательных динамических и CTa
тических свойств системы или же только как частные.
Задача управления переходными процессами математически формулируется
в виде уравнения
dП р i/ dt == f (Пр i У в д + Ч" (t),
rде П pi == 1, 2, ..., n параметры режима системы; Y Bi == 1, 2, ..., k управ
ляющие воздействия; Ч" возмущения режима.
В установившемся послеаварийном режиме возмущения и управляющие
воздействия принимаются равными нулю, и тorдa этот режим описывается ypaB
нениями
f (Пр i (О)) == о.
Начиная с момента t == О на систему действуют возмущения Ч"(t). Задача OTЫ
скания метода управления состоит в том, чтобы найти такое значение Y Bi , при
котором система из режима, характеризуемоrо параметрами П pi(O), перешла бы
в новый режим (Пр;), допустимый по условиям эксплуатации, причем переход
этот (переходный процесс) должен быть оптимальным. П о н я т и е о п т и-
.м а л ь н о с т и пер е х о Д н о r о про Ц е с с а (и тем более режима, т. е.
rруппы процессов) и м е е т с м ы с л тол ь к о п о о т н о ш е н ию
к к о н к р е т н ы м у с л о в и я м.
Методы и способы управления переходныМИ процессами, следовательно,
также должны отрабатываться применительно к конкретным условиям исходя
из ряда показателей (критериев) оптимальности. При отыскании способов оп
тимальноrо управления инженеру также приходится решать задачи, аналоrич
ные анализу и синтезу, но в несколько измененной постановке. При этом стре-
мятся получить не столько структуры реrулирующих устройств или расчетные
зависимости Пр == f(t) (при заданных начальных, rраничных условиях и неиз-
менных параметрах системы: П с == сопst), сколько такие воздействия, при
113
которых в переходнЫХ процессах изменения параметров режима происходил и
'в области заранее определенных (допустимых) отклонений от значений, найден
ных для данных конкретных условий как оптимальные.
ТаКI:IМ образом, при управлении переходными процессами на первое место
ВЫдВиrается не математическая cTporoCТb и арифметическая точность расчета и
даже не физическая (техническая) точность, оцениваемая возможным совпадени-
ем ero результатов с действительным (натура) протеканием процесса, а вероят-
ность отклонения параметров управляемоro режима от тех, которые признаны
оптимальными. Задачи управления переходными процессами должны, следова-
тельно, решаться как вероятностные (стохастические).
Контроnьные вопросы
5.1. В чем разница между режимом и процессами? Назовите три rруппы методов ис-
с.педования процессов в електрических системах. .
5.2. Определите понятия «cTporOCTb» и «точность» В технических задачах.
5.3. Что пони мается под системой вообще и електрической системой в частности?
5.4. Определите наблюдаемость КIIК системное свойство.
5.5. Что такое модели феноменолоrическая, физическая, математическая и схе-
мы замещения?
5.6. Назовите четыре уровня допущениh при составлении моделей (объяснить, пользу-
ясь рис. 5.2).
5.7. Определите пространство состояний, уравнения состояния и математические оп и-
-сания режимов и процессов.
5.8. Сформулируйте особенностн учета нелинейиостей параметров системы (матери-
.альных) и параметров режима или процесса (текущих). Поrрешности линеаризации.
5.9. Что такое позиционная идеализация и позиционная система?
5.10. Сравните между !;обой статические и динамические характеристики.
Темы рефератов
1. Методика построения МО,/J;елей и схем замещении, применяемых при решении тех-
вических задач.
2. Особенности решения нелинейных задач.
3. CTporocTb в математике как науке и ее приложениях в технических задачах.
r ЛАВА 6
МОДЕЛИ, УРАВНЕНИЯ И СХЕМЫ ЗАМЕЩЕНИЯ ДЛЯ ИССЛЕДОВАНИЯ
ПЕРЕХОДНЫХ РЕЖИМОВ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
! 6.1. ПОСТАНОВКА ЗАДАЧИ
При рассмотрении переходных процессов, как и любых друrих, сначала co
ставляется Ф е н о м е н о л о r и ч е с к а я м о Д е л ь, дающая общее описание
явлений. С ее помощью далее производится м а т е м а т и ч е с к о е о п и с a
н и е, на основе KOToporo после ряда упрощений, отработки методов решения
и установления масштабных соотношений создается м о Д е л ь м а т' е м a
т и ч е с к а я или фи з и ч е с к а я (см. rл. 5). Разновидность математической
модели с х е м ы з а м е Щ е н и я, позволяющие свести сложные явления к
простым и облеrчить получение представлений об изучаемых процессах. Схема
замещения сложной системы составляется из схем замещения отдельных ее эле
ментов: индуктивности, емкости, активноrо сопротивления. Элементы схемы
'замещения MorYT быть как линейными, так и нелинейными. Иноrда элемент сис
темы представляется активным либо пассивным двухполюсником или четырех
полюсником. В простейших, часто встречающихся случаях схема замещения эле
мента сводится к полному или реакl'ИВНОМУ сопротивлению, к которому подклю
чается та или иная э. д. с.
Разумеется, происходящие в схеме замещения процессы или установивший
ся в ней режим MorYT соответствовать только какой либо одной стороне сложноrо
явления в натуре, или, как будем называть в дальнейшем, в о р и r и н а л е.
При этом схема замещения может быть справедлива или для любоrо момента Bpe
мени (например, цепочечная схема замещения электропередачи при исследовании
установившеrося или квазиустановившеrося режима), или может отражать связь
между параметрами системы и параметрами режима только в какой либо один
характерныЙ момент времени исследуемоrо процесса (например, замещение reHe
ратора сопротивлением x ). Задачей настоящей rлавы является составление
полных описаний изучаемых явлений, получения на их базе упрощенных расчет
ных уравнений и схем замещения.
Выше схемы замещения использовались без специальных обоснований. ' Ис
ходя из поЛных уравнений такие обоснования MorYT быть получены. К упроще
нию изучаемой схемы, так же как и к составлению схем замещения, необходимо
подходить весьма осторожно. Неудачный выбор схем замещения может привести
к неточным или даже ошибочным результатам.
! 6.1. МАТЕМАТИЧЕСКМЕ ОnИСАНИSI и МОДЕЛИ
ДЛЯ математическоrо оПисания электромеханических переХодных процессов
нужно иметь:
описание движения ротора reHepaTopa, работающеrо в системе;
l15
описание электромаrнитнь:х процессов, происходящих во время этоrо
движения. .
Уравнение движения (см. rл. 4) будем считать известным и рассмотрим опи-
сание электромаrнитных пр оцессов , получив из Hero выражения для токов, по-
токосцеплений, вращающих моментов.
Общее математическое описание электромаrнитных явлений, происходящих
в электрической системе, моrло бы быть составлено на основе феноменолоrической
модели Фарадея Максвелла, с использованием вектора Пойнтинrа Умова,
потоком Koтoporo энерrия передается через воздушные зазоры электрических
машин и по электропередачам направляется в пространство вдоль проводов.
Однако такое общее и Фl1зически точное описание не может быть использовано
непосредственно в инженерных задачах. Упрощая это описание и приспосабливая
ero к конкретным условиям (например, в ряде задач пренебреrая токами
смещения, процессами распространения энерrии в пространстве и т. д.), можно
прийти к практическим и н ж е н е р н ы м методам. Электрическая система
в упрощенном виде (если идти от общетеоретических концепций), но достаточном
для поставленных здесь инженерных задач была показана на рис. 2.1 и 2.2. Она
состоит из основных элементов: вращающихся машин (reHepaTopoB и двиrателей),
статических наrрузок (представленных обычно сопротивлениями Z н), элементов
связи (трансформаторов, линий передач).
Если все эти элементы электрической системы, статические наrрузки и ста-
торные цепи электрических машин трехфазные, то наиболее естественным с
физической точки зрения было бы составление уравнений переходных процессов
для этих элементов, а следовательно, и системы для каждой из фаз, т. е. запись
уравнений в так называемой непод-
вижной трехфазной системе коор-
динат*. Это был бы весьма наrляд-
ный и физически ясный подход, но
он приводит, однако, к rромоздким
уравнениям, неудобным для прак-
ос тических расчетов. Действительно,
токи и напряжения в фазах эле-
ментов электрической системы бу-
дут синусоидальными функциями
времени, а в переходных процессах
синусоиды будут искажаться сво-
бодными составляющими, опреде-
ляемыми динамическими СВОЙства-
ми системы. Особенно важным, ос-
ложняющим анализ. фактором яв-
ляется взаимосвязь между уравне-
ниями фаз элементов системы. Эта
взаимосвязь обусловлена взаимо-
индукцией фазных проводов JIЭП,
обмоток машин и трансформато-
ров, междуфазной емкостью про-
f3
Рис. 6.1. Соотношение между координатами
трехфазной неподвижной (А, В, С) системы,
двухфазной неподвижной системы а, fЗ и вращаю-
щимися со скоростью ротора координатами d, q:
а соотношение между токами iA i B . ic И токами ia ,
i ; б общие соотношения между координатами
* Термин «система координат» здесь не вполне удачен. Лучше было бы «система осей
отсчета» или просто «осей». Но употребление первоrо термина стало более принятым.
Jl6
водов И т. д. Коэффициенты самоиндукции и взаимоиндукции обмоток фаз ста-
тора синхронных машин (индуктивности) являются при этом периодическими
функциями времени. Так, уравнения потокосцеплений Ч!' для трехфазных об-
моток (А, В, С), обмотки возбуждения (f), продольной (D) и поперечной (Q)
записываются следующим образом:
Ч!'А LAA L AB L Ac I LAf L AD L AQ iA
'Ув L BA L BB L BC ! LВf L BD L BQ tB
Ч!'с L CA L CB Lcc i Lcf L CD L CQ ic
..............................................................................:...........................................................,................................ (6.1)
Ч!'f L fA LfB L fc i L ff LfD LfQ if
Ч!'D L DA L DB L DC ! LDf L DD L DQ i D
Ч!'Q LQA L QB L Qc ! LQf L QD LQQ iQ
I
Здесь индуктивности L jk с разными индексами зависят от времени, являясь
функцией '\', т. е. уrла поворота ротора (рис. 6.1). Исключение составляют
только взаимные индуктивности обмоток ротора:
LfD == LDf == const; L fQ == LQf == о; L QD == L DQ == О.
Уравнения электромаrнитных переходных процессов в обмотках статора синхронной
машины, записанные в матричной форме через фазные переменные, имеют вид
d .
ф u+rl (6.2)
dt
p
WAI
W Б 1
W c
и в +т
!в
иА
i A
иС
iC
ЧJ Li + MaJij.
(6.3)
rде ЧJ, u, i вектор столбцы соответствующих фазных переменных; r диаrональная
матрица активных сопротивлений обмоток фаз статора; L квадратная маТРИllа TpeTbero
порядка собственных и взаимных индуктивностей обмоток фаз статора; М а! BeKTOp
столбец взаимных индуктивностей обмоток фаз (симметричных) статора и обмотки возбужде
НИ!1; if ток в обмотке возбуждения (для упрощения полarаем отсутствие демпферных KOH
туров).
При обычно принимаемых допущениях, в частности в предположении, что фазные об-
мотки статора одинаковы, получим следующие выражения для входящих в уравнения (6.2)
и (6.3) матриц параметров:
, [:
r
О ] [ L А М АВ М АС ]
О ; L М АВ L B М ВС ;
r М АС М ВС Lc
, [ MAf ]
Maf M Bf .
М С!
(6.4)
о
о
117
rде
LA==L+L'cos21; LB==L+L'COS2(1 2; ); LC==L+L'COS2(r+ 2; );
MAB== M+L,'coS2 (1+ 23 7t ); MAe== M+L'cos2 (1 23 7t );
М ве == м + L' cos 21;
М А1 == MjcOS 1;
. ( 27t )
M Bf ,== Mjcos "1 3 ;
M ef == м j cos (1 + 2; ).
Как видно, собственные и взаимные индуктивности, входящие в (6.4), являются функ.
циями У == (f)t, т. е. представляют собой переменные во времени коэффициенты уравнений.
Все эти осложняющие обстоятельства привели к широкому использованию
в расчетах установившихся режимов, особенно электромаrнитных и электроме-
ханических переходных процессов различных систем, специально вводимых
«обобщенных параметров режима» или «обобщенных координат», которые поз-
воляют избавиться от указанных сложностей математическоrо описания* и, в
частности, оперировать с постоянными индуктивностями.
6.3. ОБОБЩЕННЫЕ УРАВНЕНИЯ
Трехфазную электрическую машину с тремя обмотками на статоре и соот-
ветственно тремя токами, потокосцеплениями, напряжениями можно предста-
вить машиной с двумя обмотками. При этом результирующие поля, создаваемые
двумя токами в этих двух обмотках, должны быть эквивалентны полям трехфаз.
ной машины. Это означает что должно быть соблюдено соотношение, вытекающее
из рис. 6.1. Так, от системы трех токов (А, В, С), протекающих в трех одноимен-
ных обмотках, можно переЙти к системе двух токов (а, ). Переход к токам i a , i
осуществляется с помощью преобразования, вьшолненноrо с учетом Toro, что
cos 600 == 1/2 И cos 300 . V3/2 (рис. 6.1, а):
. . 1. 1.. УЗ . + Vз . (6.5а)
La ==LA LB Lc; L == LB Le.
2 2 2 2
Такие же соотношения MorYT быть записаны для напряжений и длfl потоко-
сцеплений. Применяя систему относительных единиц при базисном значении тока
io == 3/2/, записанные выше уравнения можно представить в следующем виде:
. 2. 1 1.. 1. + 1. (6 5б)
La ==з LА зLв зLС; L == уз /в V 3 Lc. .
Эти уравнения определяют переход от трехфазной системы А, В, С, назы-
ваемой системой координат, жестко связанной с н еподвижным статором, к ДBYX
фазной системе а, , также неподвижной и также связанной со статором. Система
координат а, применяется в особых случаях, и на ней останавливаться не бу-
* Возможно, однако, что вычислительные трудности, связанные с необходимостью
решения уравнеиий, содержащих периодические функции, будут сняты совершенствованием
вычислительных машин и упрощением проrраммирования. Тоrда, вероятно, будет разум-
ным возвращение к естественной системе трехфазных координат.
118
дем. rораздо большее применение имеет система координат d, q, жестко связанная
с ротором и вращающаяся отМосительно статора с той же уrловой скоростью 0),
с какой вращается ротор. Переход к этой системе от трехфазной системы удобно
осуществить, используя уже введенную двухфазную систему координат. В каждый
данный момент времени ось d вращающейся двухфазной системы координат об
разует с осью а. неподвижной двухфазной системы уrол "У == 1'0 + O)t; такой же
уrол образуется и с осью А (рис. 6.1, б). Следовательно, / d == i.. cos "У
it! COS (900 "У). Записывая величины i.. и i через токи i A , i B , i e , получим
/ 2. 1. 1. + 1.. 1..
d==з'АСОS1' з'вСОS1' з'еСОSУ Vз 'вSШ"У Vз 'еSШУ,
ИЛИ после некоторых преобразований
/d==+[iACOS"Y+iBCOS("Y 2; )+ieCOS("Y )]. (6.6)
Совершенно таким же путем получается выражение* для тока / q.
Из рис. 6.1, б имеем
/ q == ia; sin у + i ll cos У,
или, выражая ia; и it! через i A , i B : ic.
/ q == + [iA sin l' + i в siп (1' 2; ) + ie sin (1' 4;) ] . (6.7)
Если нулевая точка системы заземлена и сумма токов i A . i B . ic не равна нулю,
то необходимо учест дополнительные соотношения, известные из теории симмет-
ричных составляющих, указывающие на возникновение тока нулевой последова
тельности:
/0 == иА + i B + iе)/З.
(6.8)
Соотношение (6.8) справедливо как для системы координат, жестко связанной
со статором (неподвижной), так и для системы, жестко связанной с ротором (под
вижной). Следовательно, окончательно переход от системы координат А, В, С
к системе d, q, О определяется ДЛЯ токов системой уравнений (6.6), (6.7), (6.8).
Матричные преобразования. Уравнения режима и уравнения преобразования удобно
записывать в матричной форме, так как в матричной моделц определенным обраЗ0М отража
ются физические и математические связи, прнсущие рассматриваемому явлению. Преиму-
щества матриц заключаются в том, что в системе линейных дифференциальных уравнений
все переменные одноrо и Toro же типа M0rYT быть представлены одним с.имволом. То же самое
относится и ко всем параметрам уравнений. Поэтому система уравнений может быть пред-
ставлена одним уравне ием. Решение может быть выражено в тех же символах, а мат-ричная
алrебра позволяет удобными способами найти решение. Если задача усложняется, то труд-
ности уменьшаются рядом приемов, которыми удобно пользоваться в матричной форме. По
этому линейные преобразованИЯ и разбиение на подматрицы являются необходимыми в pa
боте. Умножение матриц может быть проведено с помощью простых нравил вручную или
иа вычислительных машинах. Все это дает идеальный инструмент для проведения лннейных
преобразований, а также для нахождення любых эффективных преобразований. Для пред-
ставления данных счетным машинам цифровоrо или аналоrовоrо типа удобна не только MaT
ричная форма записи, но и сами матричные преобразования, так как в машинах они MoryT
быть представлены в действительном виде для набора моделн.
. Иноrда вместо (1 4Я/3) записывают (1 + 2я/З), что одно и то же (см. рис. 6.1,6).
119
Записанные выше уравнения (6.5а) и (6.5б) в координатах а, i3 MorYT быть в матриq..
оой форме представлены следующим образом:
1 '
i ' А
" 2 2
2 vз vз
о х ' в
' 3 2 2
1 1
'с
'о 2 2 2
Обратное соотношение будет иметь вид
' А О '"
' в 1 vз х '
2 2
I vз
'с 2 2 'о
Токи, записанные в координатах d, q, О, определяются выражением
[/. ] [ " siп"( О] [,.]
: == Si "( cos "( х :: .
о
Обратное соотношение имеет вид
[ '. ] [<00' siп"( :] [].
:: == iП "( cos"( Х
О
в матричной
ld
2
lq 3
10
форме система уравнений (6.6), (6.7), (6.8)
. . :. .1. . . ..=. ..: ..!. ..i.:: .. .= .?1 ..
! ( 2т.: ) i ( 4т.: )
siп"(! siп "( з i siп "( з Х
"i""j""' """I"' ""T""""""'i"""' .....
21 2 i 2
= j
будет иметь следующий ВIIД1
' А
' А
' в == п х ' в
'с
'с
Здесь матрица
(1 2; ) ( 4т.: )
cos "( cos cos "(
З
2 ("( ) ("( 4; )
п== siп "( siп siп
3
I 1 1
2 2 2
Обратное соотношение для токов в фазах может быть получено преобразованием запи-
санной выше матрицы, определявшей значения токов. Она будет иметь следующий вид:
i A COS1 sin 1 l Id ld
i B cos (-r 2 3 1t ) sin (1 2; ) 1'1 1'1
Х == П l Х
ic cos (1 4; ) siп (1 :1t ) 10 10
rде
cos1 siп 1 1
cos (1 2; ) sin (1 2; )
П l ==
( 41t ) (1 )
cos 1 sin
3
Используя матрицу преобразования П, можно в сжатом виде записать выражения для
токов, напряжений и потокосцеплений:
Е}п[:;]: [ ;] п[:;]: [::) п[!;].
Общее уравнение связи между .параметрами в осях A В, С и осях d, q О, записанное
через обобщенную символическую переменную , будет
==щ .
d. '1, О А, В. С
Уравнение (6:2) в такой записи для напряжений примет вид
d'P А в С
U d 0== Щ == n ., RПi .
. '1' А, в. С dt А. в. с
Представив 'Р АВС и i Aвc в осях d, q, О.. получим
d'P d ( dn l )
u == ПП l ,'1.0 n 'Р RПП li
d, q. О dt dt d. q. О d, '1, О
rдe сопротивление фазы статора 'А == 'в == 'с == R.
В соответствии с теорией матриц
ПП l == 1;
( dn l ) d1 [ О 1 О ]
П == l а о
& & а о о
При этих соотношениях, учитывая, что dy/dt == ю, получим из предыдуIЦИХ соотноше-
ний уравнение Парка rорева, записанное в матричной форме:
LJ 1 d'Pd, q. О
d,q.(I dt
[ о 1 О ]
00 1 О О 'Р d '1 О 1Rid " 6.
а о о ,. ...
(6.9а)
При этом
Ч' d, q. О == Ld. ". О Id, '1, О + M d , '1, tif.
12]
rде Ч' d,q.O' Ud,q,O' Id.q,o вектор-столбцы переменных величин в системе координат d, q, О.
Здесь значения индуктивности и взаимной индуктивности будут определяться следующими
выражениями:
r (L+M++ и) О О J "
Ld,q,o== О (L+M +L') о ;
о о (L 2M)
M,.,." r v;+ м'}
Таким образом, переход к параметрам процессов в системе координат d, q, Оприводит
К У Р а в н е н и я м с п о с т о я н н ы м и к о э Ф Ф и ц и е н т а м и. При этом матрицы
выражений индуктивности и взаимоиндуктивности з н а ч и т е л ь н о у про щ а ю т с я.
Из рассмотрения записанных уравнений следует, что при рав@нстве параметров фазных об.
моток в симметричных процессах параметры нулевой последовательности можно исключить,
перейдя к уравнениям в координатах d, q и записав основные уравнения переходных про-
цессов следующим образом:
rде Ч' == LI + м i f.
или
d [ О
Ч' ro
dt 1
] Ч' RI == U,
(6.96)
Ч' == [ Ч! d ] ; u == [ и d ] ; 1 == [ 1 d ] ; L == [ Ld О ] ;
\]т q U q 1 q О Lq
+ 3 L 3, .. ;3
Ld==L+M T L '; Lq== +M T L; M ad == V 2"" М/.
м == [M;d ] ;
Аналоrично преобразуются уравнения переходных процессов в статических симмет-
ричных элементах электрической сети. Так, например, для схемы замещения ЛЭП в виде
активно-индуктивноrо сопротивления, включенноrо между узлами 1 и 2 сети, уравнения
в фазных переменных имеют вид
[ : ] :t [ ; ] == [ ::: ] [ ::; ] + [ ] х ( i; ] ,
м м L tc и 2С и 1С О О r t c
а в обобщенных переменных d, q
[<L M) (L M)] ( [ :] ro [ ] х [ :]) == [ ::] [ ::] + [ ] х [ :] .
Матричные записи и преобразования особое значение имеют при построе-
нии проrрамм дЛЯ ЦВМ и составлении схем. Однако при выводе уравнений воз
можен друrой физически очевидный путь их получения. Он заключается в следую-
щем. Напряжение, появляющееся на выводах reHepaTopa при наличии потоко-
сцепления 'Ф и протекании по обмотке статора тока ё* I определяется соотноше-
нием
dф/dt == u + ir.
Например, для фазы А можно записать
и А == dtjJA /dt iA r
· Ниже токи и друrие параметры приводятся в относительных единицах.
122
или
и А + iA , + d А /dt == о.
Подставляя в последнее выражение значения токов, напряжений и потоко
сцеплений, выраженных соrласно (6.6), (6.7), (6.8) в системе координат d, q, о,
получим .
и о + U d COS 1+ и q sin 1+'/0+'1 dCOS 1+,1 qsiщ + (Ч'о+ Ч' d cos 1+ Ч' q Si Щ ) == О,.
или после преобразований
U о + Ч' + ,10 + (и d + Ч' + 1'Ч' q + ,1 d) cos 1 + (и q + Ч' q' 1'Ч' d +
+,1 q) sin 1 == О, (6.10а)
rде через Ч", у' обозначены производные d/dt. Выражение (6.lОа) представляет
собой\ ура нение следующеrо вида:
А + в cos 1. + с sin 1 == о.
Оно может удовлетворяться при условии, что А == В == С == О. Тorда из
(6.10а) получаются уравнения, аналоrичные (6.9а) и (6.9б):
и d == dW d Ч'q(J) RI d;
dt
dW q
И q == "dt + Ч' d(J) RI q:
и == dW o RI
о dt о'
(6.106)
rде R =='А =='в == 'с.
Эти уравнения называют уравнениями Парка rорева.
Связь токов статора и ротора с параметрами цепи возбуждения можно ПOJlу
чить, воспользовавшись выражениями (6.3), (6.4). Подставив в них значения т<r
ков i A . i B И ic и перейдя к системе координат d, q, О, нетрудно получить после пре
образований .
Ч' f == 3/2 МI d + L/ t == М (3) 1 d + Ljl f' (6.9 в)
rде М(3) == 3/2 М результирующая взаимная индуктивность между обмотками
ротора и трех фаз статора.
Уравнение для обмотКи возбуждения может быть выражено и в друrой форме:
dЧ'f/dt + IjR fd == U td .
откуда с учетом (6.9в)
м(3) рl d + (R jd + pLt) 1 t == U jd'
rДе р == d/dt.
123
Последнее уравнение может быть записано иначе:
U jd == (R jd + pLj)l j +Mp[i A cos r + iBCOS(r 2 з 7t ) + iccOS(r ) ].
Выражение для мощности запишем в виде Р == iA и А + iBu B + icuc.
Применяя преобразования Пар ка, получим
Р == [i А i B icI Х [ :: J == [ : J х [ :: J == [ :: J П lП [ :: J .
и с t c t иа ta t ис
Окончательно имеем
Р == 3 (J d U d + 1 qU q + 21 оu 0)/2.
Выражая в относительных единицах все параметры режима и принимая за
базисную мощность 3/2 Р, получим*
Р * == U d*1 d* + 1 q*U q* + 2/0* U 0*'
Это выражение с учетом (6.10б) можно переписать следующим образом:
Р == U dl d + 1 qU q + 21 оU о == ( 1 d dW' d + 1 q dW' q + 210 dIV o ) +
dt dt dt
+ ('1' d l q '1' ql d) (j) R (/ + I +21Ъ ),
rде R == '" == 'ь == 'с сопротивления фазных обмоток статора.
Вращающий момент, передаваемый с ротора на статор, М ==::1::.Р/ro. В YCTa
новившемся или квазиустановившемся режиме
М == Ч!dlq '1'/d'
С.ложная система. При составлении уравнений переходных процессов для
системы, содержащей большое число синхронных машин и узлов наrрузки, свя-
занных электрической сетью произвольной конфиrурации, переход от фазных к .
обобщенным переменным требует применения нескольких различных систем Ко-
ординат. Действительно, уравнения переХОДНБIХ процессов в каждом из reHepaтo-
ров следует записывать в осях d, q, вращающихся с уrловой скоростью ротора
этоrо reHepaTopa, так как только в этом случае в уравнениях (6.3), (6.4) и т. п.
не будет изменяющихся во времени коэффициентов. Уравнения переходных про
цессов в статических симметричных элементах электрической сети по форме будут
одинаковы для системы Координат, вращающейся со скоростью любой из машин
или вращающейся с постоянной сКоростью roо, соответствующей частоте устано-
вившеrося режима ээс. Последнее обычно принимается для сложных, MHorOMa-
шинных схем ээс.
Уравнения переходных процессов в трехфазных элементах ээс, записанные
в координатах d, q, объединяются в единую систему с использованием законов
* Далее звездочку будем опускать, полаrая. что Р, и, 1 выражены в относительных
единицах.
124
Кирхrофа. Большое распространение получила узловая форма записи уравнений,
при которой неизвестными являются напряжения узлов и токи ветвей схемы за-
мещения ээс.в этом случае уравнения I;\етвей дополняются уравнениями первorо
закона Кирхrофа: алrебраическая сумма токов ветвей для каждоrо узла схемы
равна нулю.
Если в узле связано несколько ветвей сети, уравнения для которых записа-
ны в одной системе координат d, q, вращающейся с уrловой скоростью <00, то урав-
нения первоrо закона Кирхrофа образуются непосредственным суммированием
составляю!Дих токов по осям d и q соответственно:
1 di == О;
1
1 qi == О.
i
Если жек узлу кроме элементов сети подключен синхронный reHepaTop,
уравнения для цепи статора KOToporo записаны в системе координат d, q, вра-
щающейся с уrловой скоростью ротора <о, то для суммирования токов необходимо
перейти к единой системе координат, например принятой для элементов сети.
В этом случае токи reHepaтopa преобразуются по выражению
[ Id ] [ cose
1 q "'о == sin е
sin е ] [ 1 d ]
cos е х 1 q '" '
rде е == (<00 <o)t.
Для получения полной системы уравнений электромеханических переХОk
ных процессов в ээс уравнения переходных процессов в трехфазных элементах
схемы замещения и уравнения законов Кирхrофа следует дополнить уравнения-
ми электромаrнитных переходных процессов в обмотках роторов электрических
машин и уравнениями механическоrо движения роторов машин, связывающими
уrловые скорости роторов с параметрами электрическоrо режима ээс. Порядок
составления таких уравнений показан выше.
Таким образом, переход к обобщенным координатам d, q позволил значитель-
но упростить уравнения переходных процессов в трехфазных элементах ЭЭС.
Это позволяет составлять эффективные вычислительные алrоритмы для иссле-
дования переходных процессов и устойчивости. В то же время применение обоб-
щенных переменных в некоторых случаях затруднено или даже невозможно.
Это, например, будет для режимов ЭЭС, характеризующихся несимметрией ста-
торных цепей электрических машин и несинусоидальностью, обусловленной ста-
тическими вентильными преобразователями (выпрямительная наrрузка, электро-
передачи постоянноrо тока). В тех случаях, коrда пренебрежение несимметрией
и несинусоидальностью может приводить к большим поrрешностям, оперируют
мrновенными фазными значениями переменных, решая более сложные уравнения
с переменными коэффициентами.
6.4. ФИЗИЧЕСКАЯ ИНТЕРПРЕТАЦИЯ УРАВНЕНИЙ В КООРДИНАТАХ d, q.
МОДЕЛЬ ПАРКА rОРЕВА
Получим математическую модель Парка rорева, исходя из соображений,
соrласованных с приведенными выше формальными выкладками. Запишем урав-
нения для системы (рис. 6.2), содержащей i ветвей с включенными в них элект-
125
рическими (синхронными) машинами и n узлов, в каждом из которых может быть
наrрузка Н, питаемая напряжением узла Ин *. Для наrлядности проведем запись
применительно к выделенной на рис. 6.2 подсистеме.
Взаимное расположение осей фазовых с обмоток и координат показано на
рис. 6.3, а. Уравнения каждоrо синхронноrо reHepaтopa (С[) соответственно
Система
/' ,
I Ccr lJ ст. \
I '?:::- ""' ffoд -e,
/./ ст;] е ;;( 'h .', cri. \
/ , I::::J C'i. \
// 8ыоеленная z \
// поfJcистема л \
/ \
/ I
I ,
I С ,
I f1 I
\ I
\ I
\ I
\ /
\ /
, /
, /
, /
............ ""'/
............
............
...................... .................. ..--.--""------
Рис. 6.2. Система и выделенная для исследования подсисте-
ма
QTHeceHbI к осям (связанным с ero ротором), вращающимся с произвольной ско-
ростью. Ветвь, присоединенная к каждому reHepaTopy, будет отнесена к осям,
жестко прикрепленным к ротору этоrо reHepaтopa* . Ветвь наrрузки должна быть
отнесена к системе координат какоrо-либо (в данном случае первоrо) синхрон-
Horo reHepaтopa. Здесь учитываются переходные процессы в цепях ротора и. ста-
тора синхронных машин и в цепях наrрузки. Асинхронные машины при том же
подходе требуют некоторых видоизменений в записи уравнений. Переходные
электромаrнитные процессы в ЛЭП, как правило, не учитываются, так как из-
вестно, что при длине ЛЭП дО 1000 км они не оказывают сколь-нибудь заметноrо
влияния на электромеханический режим системы. Все обозначения здесь и далее
общепринятые, причем р символ дифференцирования. Система уравнений свя-
зывает параметры режима ПрИ их производные по времени с параметрами элект-
рической системы П с, принимаемыми в пределах расчетноrо интервала времени
постоянными.
Уравнения движения- роторов:
* Уравнения Парка rорева известны из дисциплин «Электрические машины», «Элект'
рическне снстемы», «Переходные электромаrнитные процессbl'O и имеются в учебниках по
этим дисциплинам [2, 4, 11].
* Токи в ветвях будем обозначать букваМI1 1 с соответствуюшими индексами
а. о. 1. н и т. д.
,
(Т п /OOO)(dOOi/dt) == M Ti Mi' i == 1,2;
М i == чr d U / qf 'l" q1Ji /4i; 'l' d1Ji == 'l' 4i + Xf/4f; 'l' q1Ji == 'l' qi + Xf/ qi.
Уравнения статорных цепей (в предположении линеаризации):
(р/ (00) 'l' d1Ji + (00,1000) 'l' q1Ji + r 1Jl/ 4' == и di }
(р / (00) 'l' q1Ji + (OOl/ (00) 'l' d1Jl r 1Jl / qi U qi.
При этом соrласно рис. 6.3
U d2 == U dl cos 012 + U ql siп 012;
U q2 == U ql cos 012 U dl siп 012'
rде 612 == 61 62'
Уравнения ветви наrрузки:
(р/ооо) / dH ХН + (001/000) / qH ХН +
+ / dH , Н == U dН;
(001/000)/ 4НХН + (р/ооо) / qH ХН + (6.14)
+ / qH' Н == U qH'
причем U dH == U d1; U qH == U q1 .
Уравнения балансов токов:
/ ql + / q2 cos (01 02) +
+ /42 sin (01 02) / qH == о;
1 dl + /42 cos (01 02)
/ q2 sin (01 02) J dH == о.
(6.15)
Рис. 6.3. Интерпретация изучаемых процессов:
а взаимиое расположение и перемещенне фазовых об-
МОТОК статора и а9 отдельных составляющих в координа-
тах (а, q), rде ось d j опережает ось qj; 6 представле-
Ние процессов воображаемым <наблюдателем:>, находя-
Щимся на вращающемся роторе; 1 апериодическая
(постоянная) составляющая тока ротора, видимая <наб-
людателем:> как постоянная (соответствует id и оо'У);
2 периодическая составляющая тока ротора, видимая
КаК периодическая (соответствует рЧ"); 3 оrибающая
MrHOBeHHJ,lX синусоидальных значений тока статора, ви-
димая как постоянная (соответствует ооЧ"); 4 аперио-
дическая (постоянная) составляющая тока статора, ВJIOI
днмая как СИНУCQвдально изменяющаяся (соответствует
.. рЧ")
(6.11)
(6.12)
(6.13)
i
127
Уравнения переходных процессов в цепях роторов reHepaTopoB:
(р/ооо) Ч'f + lfi r fi ==: U fi ,
(6. 16а)
или
T dOi (р/ооо) [E qi + 1 di (X di X i)] ==: E qei Eqi'
(6.166)
rде Eqei ==: fP(Ufi) и, В свою очередь, и н ==: 'Ф(П ) (П; параметры режима, на
которые реаrирует система автоматическоrо реrулирования возбуждения).
Связь между уrлами и скоростями представим . как
ooi ООн === p8 i ; 001 002 === Р (81 82) ==: 812'
(6.17)
Полученные полные уравнения, описывающие поведение сложной системы,
т. е. изменение 'всех параметров режима П i р ==: f(t), MorYT быть решены путем
численноrо интеrрирования.
Алrоритм решения. Алrоритм, l! результате реализации KOToporo находятся
параметры процесса П lр === f(t), требует преобразования уравнений и разрешения
их относительно производных от токов по времени с разделением на rруппы диф-
ференциальных и алrебраических уравнений (балансы токов в статорных цепях).
Решение, проводимое путем численноrо интеrрирования, обычно требующее так-
же и последовательных приближений, уже для системы из двух-трех станций и
наrрузок получается весьма rромоздким. .
При исследовании динамической устойчивости по уравнениям Парка ro-
рева рекомендуется пользоваться операторной формой записи уравнений, по-
средством которой все преобразования переменных к осям d, q выполняются с
помощью обобщенной матрицы. Расположения осей d, q относительно оси отсчета
(фаза а статора или синхронно вращающаяся ось) MorYT быть различными. Удоб-
нее записывать уравнения для каждоrо reHepaTopa отнесеннымИ: к вращающимся
осям, связанным с ротором этоrо же reHepaTopa. Наrрузку удобнее относить к
ротору наиболее близко расположенноrо (электрически) reHepaTopa [см. (6.14)].
Уравнения линии передачи, связывающей точки k, т сети, будут иметь вид
U kd === U тd cos 8 kт U тq siп 8 kт r л! л.d х л рl Лd/ооо + Х л ! лq ook/ooO;
U kq === Uтdsiп 8 kт + U тq cos 8km r л.! л.q Хл.Р! л.q10О0 Х,/ JIdook/ooO'
rде ш k ==: dб k/dt + Шо.
В этих уравнениях для статических элементов цепи (ЛЭП и наrрузки) появ-
ляются нелинейности типа произведений U d cos б, U q siл б и члены типа !ddб/dt,
!qdб/dt, обусловленные дополнительной э. д. с. вращения. Это объясняется
тем, что с точки зрения наблюдателя, жестко связанноrо с ротором (рис. 6.3, б),
все цепи статора и в том числеЛЭП, реакторы и т. д., представляются э л е м е н-
т а м и, в р а Щ а ю Щ и м и с я с уrловой скоростью ш ==: Шо + dб/dt. Уравне-
ния для напряжения reHepaTopa в матричной форме можно записать в виде (здесь
знаки перед отдельными переменными отвечают положению осей системе коор-
128
динат, принятой на рис. 6.1 *)
C ; J r : ,
r О О
][ ;;: ] + ; [ ::: J + и ] : .
Уравнения асинхронноrо двиrателя аналоrичны уравнениям reHepатора,
но также различаются в зависимости от Toro, как выбраны направление осей и
их уrловая скорость. В табл. 6.1 сопоставляются три варианта записи уравнений
асинхронноrо двиrателя.
Напомним, что потокосцепления, входящие в уравнения reHepaтopa, имеют
вид
'I' d == / j X ajd + /ld Х аМ + / dXd; 'I' ld == /1d X ld + X j1 d 1 j + X a1d 1 d;
'I' q == /lq X a1q + / qX q ; 'I' lq == / IqX 1q + Хаl/ q; 'I' j == / jXj + lld x /ld + / dXajdt
Здесь в отличие от рис. 6.3 приняты друrие обозначения: d для продоль-
ной оси, q для поперечной, f обмотки возбуждения, 1 демпферной об-
мотки.
Уравнения потокосцепления для двиrателя будут иметь вид
'I' id == х/ di + Х т / rd; 'I' iq == х/ qi + хтl rq'
Здесь индекс r указывает на обмотку ротора, j == 1 или 2 в зависимости от
принятоrо расположения осей (табл. 6.1). В этой таблице сведены уравнения re
нератора (А) и двиrателя в различной записи. При этом принято 000 == 000* == 1.
Записанные уравнения предполаrают ряд допущений, важнейшими из KOTO
рых являются:
1) линейность всех параметров системы, т. е. отсутствие rистерезиса, насы-
щения, потерь в стали, вихревых токов;
2) синусоидальность всех параметров режима системы (цепей статора), т. е.
пренебрежение всеми, кроме основной, rармониками;
3) симметрия фаз всех вращающихся машин;
4) приведение несимметричных режимов к симметричным (с помощью метода
симметричных составляющих);
5) предпол, аrается что переходные процессы (свободные токи) возникают в
результате MrHoBeHHoro изменения состояния системы, например короткое за
мыкание представляется как MrHoBeHHoe приложение напряжения, противопо
ложное тому, Kotopoe было в данной точке до KopoTKoro замыкания.
Сделанные допущения позволяют применить для решения о пер а т о p
н ы й м е т о д, представив уравнения в ВИДе
'I'd == G(p) И ! + Xd(P) / d; 'I'q == Xq(p) lq.
... Это обстоятельство специально подчеркивается, так как в литературе существует
128 вариантов записи уравнений, отвечающей разным комбинациям направлений d, q, 00, "(.
5---84
129
Т а б л и ц а 6. r
А. СиНХРОННЫЙ I'EHeparop (СР)
Б. Асннхронный двнrатель (АД)
1.1.
1. Исходные уравнения
Уравне/ШЯ статора в фазных величинах
1.1, А
и А == d\l1' А / dt i А r
ив == dWB / dt iBr
и с == 1J1'c / dt ic '
1.1, Б
и А == d W A /dt+iAr
и в == dWB/dt+iBr]
и с == dWc/dt+ iC't
1.2. Уравнения контуров ротора
1.2, А обмотка возбуждения и продоль
вая, поперечная демпферная обмотка
и! == dЧ!f/dt + ifrf
О == d W 1 d/dt + i1drld
О == dW 1q /dt + i 1q 'lq
1.2, Б эквивалентные обмотки короткозамк-
HYToro ротора в продольной и поперечной оси
О == dW d/dt +i d ,
о == dЧ! q/ dt +i;q <
11. Полные уравнения статора
жестко свяэа нных 11 . 1 , Б в осях d, q, жестко связаниых
с ротором АД
U 1d == dW1d/dt + "'д W 1q i 1d r1
U 1q == "'ДW1d + d W 1q /dt + iIq'l
11.2, Б в осях d, q, жестко связанных
с ротором cr, к выводам KOToporo подклю-
чен АД
U 1d == d'.J!ld/dt + "'rWlq + i 1d 'l
U 1Q == U)r W 1d + d'.J!Iq/dt + i 1fi .'1
11.3. Уравнения контуров ротора
11 .3, Б в осях d, q, жестко связанных
с ротором cr
0== dW;d/dt + ("'r "'д) чr Q + i;d ,
о == dЧ!;q / dt ("'r "'д) W;d + i;q ,
11. 1, А в осях d, q,
с ротором cr
и d == dW d / dt "'r W Q id'
U q == "'rWd dWq/dt iqr
То же, что 1.2, А
111. Уравнения
cr
в о с я х d , q, жестко связанных с ротором
в частных случаях
111.1. Уравнения статора
Ш.l, Б
Ш.l, А
а) , =f= о:
U d == W Q idr; U Q == W d i Q ,
б) , == о:
Ud== Ч!Q; U q == W d
130
U 1d == W 1q + i 1d 'l;
U 1q == W 1d + i 1q 'l
Продолжепuе табл. 6.1
А. СИНХрОННЫЙ reHepa110p (СП Б. Асинхронный двнrатель (АД)
III.2. Уравпепuя коптуров роmoра
То же, что 1.2, А
III.2, А без демпферных
туров
и l dlJl'l/dt + il'l
к он-
То же, что II.3, Б
1 II.2. Б б е з у ч е т а пер е х о Д н ы JIi
процессов в контурах ротора
о yr;q + i d ';/(W r "'Д)
О lJ!" d + i;q ,;/(w v Юд)
или
TdodE /dt Eqe Eq, rде T do XI/'I'
E lJI'fXaldlxl;
Eqe (и 11(1) Xald; Eq (l Xafd
Значения о пер а т о р н о й про в о Д и м о с т и О(р) и о пер а т о р-
н ы х с о про т и в л е н ий Xd(P). Хч(р) зависят от типа рассматриваемой ма-
шины*. В простейшем случае для машины с одной обмоткой (возбуждения) на
роторе
. X Т doP+Xd
x d (р) == ; x q (p)==X q ,
т doP + 1
1 . Xafd
G (р) == т doР + 1 ';
rде Т do == x,Ir l ; X == Xd X fd/Xf.
Искомые параметры режима П == <p(t) можно
уравнение вида** Р(р) == М(р)/А(Р), являющееся
cp(t).
Применяя Известную теорему разложения, можно найти корни А(р) == О и
выражение П == <p(t), в случае необходимости используя методы*** последова-
тельных приближений.
найти, составив операторное
изображением функции П ==
i 6.5. УПРОЩЕННblЕ УРАВНЕниg
Практически ,для текущих инженерных исследований применяют упрощен-
ные уравнения (см. ниже) или определяют характер переходноrо процесса (в том
числе динамической устойчивости) сложной электрической системы с помощью
прямоro метода Ляпунова (без интеrрирования полной системы уравнений), что
также требует существенных упрощений* *** .
· Подробное рассмотрение различных типов синхронных и асинхронных машин см.:
Вепuков В. А. Переходные электромеханические процессы в электрических системах.
М.: Высшая школа, 1970, с. 472, Страхов С. В. Переходные процессы в электрических це-
пях, содержащих машины переменноrо тока. М.: rосэнерrоиздат, 1960, с. 247; Веретеппи-
ков Л. п. Теория и методы исследования процессов в судовых электроэнерrетических систе-
МаХ. л.: Судостроеиие, 1975, с. 375.
.. См. предыдущую сноску.
... Эти методы применяют, так как часто приходится предварительно задаваться поведе-
нием какоrо либо параметра режима, затем уточняя ero действительное изменеиие.
..." Попытки применения этоrо MeTO.!la успешно делаютси, ио пока в ивженерную прак-
тику он еще не вошел.
5*
*
131
Упрощенные уравнения получаются из полных уравнений (6.12) (6.16), каж-
дый член которых определенным образом связан с физикой процессов, происходя-
щих в машине. Так, Члены 'Р' d(O)/O)O) и 'P'q(O)/O)o) характеризуют составляющие
э. д. с., обусловленной перемещением в пространстве потокосцеплений 'Р' d И 'Р' Q'
Поэтому их иноrда называют составлЯlOЩИМИ э. д. с. ераш,ения.
Скорость (J) == 0)0 + dб/dt и соответственно э. д. с. вращения имеют две
составляющие: основные ооо'Р' d, 0)0'1' q, обусловленные перемещением потокосцеп-
пения в пространстве с синхронной скоростью, и дополнительные 'Р' ddб/dt, '1' qdб/dt,
проявляющиеся в переходном процессе, коrда уrол б отклоняется от установив-
шеroся значения. Члены типа р'Р' (т. е. d'P' d/dt и d'1' q/dt) отражают трансформа-
торную э. д. с., обусловленную пульсацией потокосцеплений '1' d И 'Р' q во время
переходных процессов (рис. 6.4). Мощность на шинах машины
р == (W d iq idW q) W + dWCT/dt I1Р ст == Моо + dW CT/ dt I1Рст, (6.18)
Здесь О) == 0)0 + dб/dt уrловая скорость ротора; Мro == М 0)0 + Мdб/dt
электромаrнитная мощность reHepaTopa, передаваемая с ротора на статор;
dW cT/dt дополнительная мощность, появляющаяся за счет изменения электро-
маrнитной энерrии, запасенной в индуктивности цепей статора; I1Р ст == (i +
+ 11 + i )r потери в активном сопротивлении обмоток статора.
Вращающий момент, приложенный к валу reHepaTopa, должен уравновеши-
вать момент, связаннЫЙ с электрической мощностью, отдаваемой в переходном
процессе в сеть и расходуемой на покрытие потерь в статоре; появление мощ-
ности dW CT/dt может вызвать дополнительный вращающий момент, тормозящий
или ускоряющий ротор. Например, при коротком замыкании взаимодействие
апериодической составляющей тока ротора приводит к торможению ротора, а
при отключении KopoTKoro замыкания к ускорению.
При этом уравнение относительноrо движения ротора, вызванное моментом
Ммех == М т , запишется следующим образом:
т d 2 8 == Т dro == М р + /1Рст dW cT/dt
J dt 2 J dt мех то +d8/dt t
rде TJ постоянная, характеризующая механическую инерцию машины.
Соотношения (6.18),. (6.19) справедливы в любых nереходных электромеха-
нических nроцессах, в том числе и при асинхронном ходе синхронноrо reHepaTopa.
Они справедливы и для рассмотрения режимов асинхронных машин при соответ-
ствующем учете изменений параметров, характеризующих машины.
Упрощения полных дифференциальных уравнений заключаются в отказе
от учета* дополнительной уrловой скорости ротора (рб == dб/dt) при определе-
нии э. д. с. и соответственно напряжений, в пренебрежении трансформаторными
э. д. с. пульсациями маrнитноrо потока (d'P' q/dt, d'1' d/dt) и обычно потерями
в статоре (I1Р ст):
I dВ/ dt == о; dW k/ dt == о; I1Р ст == 0, 1
(6.19)
rде k == d, q, О.
... Следует иметь ввиду, что при упрощении нельзя отбрасывать только рчr, оставляя
рб, поскольку их влияние противоположно. Необходимо или оперировать с полными урав-
нениями, или упрощать их, опуская как трансформаторные э. д. С. (рЧ'), так и дополнитель-
ную скорость. (рб).
132
(/) It.ло!нан
, .
f} .
. ......
II',
q,
....
---
....
{J1Мtl(ЛКС! d
е)
1, Эамороженные OOMOfТ7/(и ,.
} O!MOo/ : J ОомоткС! d
6)
TOI(
Д!I/Жt'Нl/е
.
п0fТ70K
ЛР(J81/1I0 лри!оц ри/(I/
'f
. '&
I I I 11
J I I I ПРfJ!I/ЛО прfJ!UЛО Пр(!//JЛО lJfJи6ш/о
про80и Pf!S!!.... !//!!!"икО' пfJf180ii Pи !f!!.811I/K(]
иd. ]Qr (,)Vq.' Plfd и 9 ". 191'+ (,)lfId Pfq,
По ЛрfJ9UЛl/ .ле/о/J Р/I/(I/: Мq8+И=]d'lq, По ЛрfJ6UЛ!j ле60V P!J/(I/: M,8- M :*!fj.{lr/
Рис. 6.4. Условная модель синхронной машины:
а представление машииы в виде двух d q ВИТКОВ (обмоток) и двух составляющих потокосцеПllения 'l! d' V q: о раздеllьное рассмотрение
каждой из обмоток при «заморожеииом:, вращении; в примененне праВИllа lIевоl и правоl руки; , .. А. с., вращающие моменты и нх со-
стаВllяющие, опреДellяемые в снстеме d-q сост!'вляющих
Пото!(
,..............
....
\!j\Oe", J
\ otl'
ПРIl!.UIlО ле!оiJ риКI/
91t
lJI .
t!lJ!d di .
lJ d · II,, Е.,!' J
dt Ij. dt ..
_ d; dl/Jq .
j lJl d dt dt [tp"l
Применительно К рис. 6.3, б два первых допущения означают пренебреже-
ние составляющими: 2 в роторе и 4 в статоре. В этом случае при выраже-
нии скорости в относительных единицах Ю* == ю*о == 1 уравнения (6.13) прини
мают вид
\1 и d == W q; и q == W а' \
Вращающий момеит пр и симметричном режим е
I м == и ql q + и а l d == Р . \
При этом: уравнение движения ротора
I TJ d28/dt2==РмеХ Р9Л, 1
(6.20а)
(6.20б)
(6.20в)
rде P'llIieX механическая мощность на валу турбины; Р зл электрическая
мощность, отдаваемая в сеть, равная. внутренней мощности reHepaTopa.
Основное дифференциальное уравнение переходноrо электромаrнитноrо
процесса в обмотке рото ра запишется как
I dЕ /dt==(Еq., Еq)/Тdо. 1 (6.20r)
Основанную на этих допущениях систему уравнений (6.20) обычно назы
вают уnрощенны.мu* уравнениями. ОНИ применяются при проектных и эксплуа
тационных расчетах' устойчивости. При расчетах переходных процессов упро
щенные уравнения позволяют пользоваться соотношениями, вытекающими из
векторной диаrраммы, Которая строится для отдельных значений (t 1 , ..., t n ) Bpe
мени. Переходный процесс рассматривается как установившийся, <<застывшИЙ»
в моменты времени t 1 , ..., t n . Расчеты по упрощенным уравнениям, как это пока
зано далее в примерах, дают по сравнению с полными (Парка rорева) некоторую
поrрешность. Она может быть значительной и даже недопустимой при расчетах
динамической устойчивости таких систем, у которых на участке цепи
«reHepaTop место KopOTKoro замыкания» оказывается большое значение r/ х
(больше 0,03), а следовательно, и быстрое затухание апериодической состав-
ляющей. При этом имеется зависящее от схемы системы влияние на поrрешность
продолжительности KopOTKoro замыкания и числа полупериодов пульсирующеrо
момента (четное, нечетное). Однако практически влияние это сильно умеIiьшается
неизбежным возникновением дуrи при отключении аварийноrо участка системы.
Сопоставляя расчеты по полным и упрощенным уравнениям, необходимо учесть
и то обстоятельство, что решения полных уравнений, более чувствительные к
поrрешностям исходных данных и накапливанию ошибок, при числовом решении
MorYT давать иноrда более далекие от действительности результаты. Выбор метода
* в литературе иноrда называют их уравневиями Лонrлея, или уравнениями Лебеде-
ва, нли Лебедева )Кданова. Это веправильно, так как их появление в научном обиходе не
связано явно с приорнтетными предложениями \Упомянутых авторов.
134
расчета, являющийся инженерным искусством, должен учесть все указанные
обстоятельства.
Построение векторной диаrpаммы простейшей системы. На основе упро
щенных уравнений леrко выполнить это построение, рассмотрев установившийся
режим. Связь между параметрами режима определяется в этом случае уравнениями
Ud== Wq rld; Uq==Wd rlqo (6.21)
Как известно [1, 2, 4],
W d == Eq + 1 dXd; W q == 1 qXqo (6.22)
Подставив (6.22) в (6.21), получим
U d =>= IqXq rl d ; U q == Eq + Idx d rlq. (6.23)
Введем фиктивную э. д. с. EQ ::::::: Eq + 1 d (Xd X q ). тоrда систему ур aBHe
ний (6.23) можно представить в виде
Ud== Iqxq rld; U q ==EQ +Idxq rlq' (6.24)
Запишем систему уравнений (6.24) в век-
торной форме, приняв ось q за действитель-
ную, а ось d за мнимую. Для этоrо сложим
уравнения системы (6.24) предварительно ум-
ножив первое уравнение на j:
U q + jU d == E Q (r + jXq) (I q + )/ d)
Соотношение (6.25) есть выражение обоб
щенноrо закона Ома для участка цепи, обла-
дающеrо полным сопротивлением Z.
Следовательно, синхронную машину в ус-
тановившемся режиме можно рассматривать
как источник напряжения EQ за сопротивле
нием Z. rрафически это можно представить в
виде векторной диаrраммы (рис. 6.5). Заме
тим, что в случае неявнополюсной машины
фиктивная э. д. с. EQ равна э. д. с. Холостоrо
хода Eq при Xd == Xq'
Следовательно, векторная дuaсрамма, co
оmветствующая упрощенным уравнениям П ар-
1Ш rорева, может быть использована при
анализе переходных режимов в той мере, в Ka Рис. 6.5. Векториая диаrрамма син.
кой справедливы упрощенные уравнения. Из хронн?й машины
диаrраммы следует, что при Е' == const reHe-
ратор может быть представлен в схеме системы величиной X , при EQ == const
величиной X q , при Eq == EQ == const величиной X q == Xd. Этой величиной
reHepaтop может быть введен в схему системы.
или
и == E Q iz.
(6.25)
d
Id
135
C'I
со
'"
::f
=:
'"
'" о-
f-<
i
::€
136
11.,
s
i
I ' 1
. . r:Q .
щ
.;
::)
11
!
3
g
1 I
..
I I
1 I
I
11
;. :fJ
1 1
?
.. I
еО
'" е.
8 '"
о
I u
"" '" I
щ "" '"
I щ
I
"'I >!
щ '"
о
u
11 6' "'I
"" 11 щ '"
<!: .. 11
=: ""
а,
8 щ
СУ
. .
't!
.. I 6'
Q
I а., е.
э <:1 t:: 11
"! I 'щ ..
s. о.... Э I =:
'" ";s а,
....... t::
.... ";s '" щ .......
I ....
+ '" + еО
"" .. t::
....
"<; Q + >! 'щ
а., t::
<:1 "" ';;;
11 I ..... I
"" . "" '"
"" ""I щ
.,; 11 щ 11
а.,
.,. 11 ""
а.,"; щ
"" а.,
щ
о..
+
. r:Q
:
+
.,:;
;:s
"
t,,)
ai I
+
-.: I , ""
....
11 ,:;<'" ,:;<"" " I
.
I I ..
.;::- I
... I э
I 11 I
""
i I ':;< ,:;<'"
'" "" I I
I 1
11 I I +
....
;:s
'""
. '" '"
"" .....
I S. ....
'" э э 11 + '""
..... I I .... '"
,:;<"" щ"" .. 'i::
r '" "" I
'i:: .... 11 I
.. '"
I I '" '" ""
..... ':;< '"
'" 6<"" .. ..... ""
' I "" + .....
.... I
I I "" .. ""
':;< I щ 11
I 11 11 I "" 11 '"
'" "" 11 ""
11 ::::>
'"
""
t>:
'"
:I:
:I:
о) '\) .
go
g. . t.ц"'"
»"""
.
";s
"
:s
:
а
t>:
'"
:I:
'"
t,,)
11:) .
a,t:tI
..... .
-.:
I
";s
""
"=>
'"
1:1
ci
,;
:Е
I I IC :>:
1:'1 о;:
ее v) :>:
v) '" 8
о - ""
а u :.( '" ::--
- "" -""
;'! + :.( !i '" IC
- "" I
u I '" '" I :.(
о 'щ'" ' '" '"
'" '" :.( '"
s" :.( "" :.('" е.
о :.( v)
:;; 11 о
II:'I 11:'1 и,","
-'" .. '
щ щ '"
о' I I '" :z::
:z::
"'"
, '"
щ .
'"
'"
:>: -
'" Щ
::Е
«s
со '"
:>: :z::
о.. ""
1:: Щ
I IC О
1:'1 :>:
>:>:
ее .5 о
.5 v) "'" :z::
о.. '"
v) - "" I:i ::Е
од :.( '" gj
... - ""
() 1- I :.(
о '" IQ t)
'" 'щ'" :.(
s" ""
о :.( :>: о
:;; 11 :z::
о
I Е-
'" ::r ('t)
" о..Щ "," I:i
I :Е IQ ,
О :>:
r-< о
Е-
::r
Щ
'." 'J
щ ";: 11
I . ""' ;с
";: ;с
::) -"" I 'R,J"" I S
:.(
"" е. - ""
о: .... ""
'" + v) R,J
'" "" '" о 'J
'" .... ..
Е - '" f=< .. U \
О R,J I 11
'" 11
... 11 11 m
8 Iц
"" "'" , '" ""
.R,J R,J
\J
11
ее
1:'1
D:: D::
.. '" .. ь
:z:: '"
::s :z:: . ,/
'"
'"
00 \:)0
о.. " '... "" о
: щ E r::....
<о:
Е:
Различные варианты основанных на этих соображениях математических
моделей показаны в табл. 6.2.
t 6.6. СХЕМЫ ЗАМЕЩЕНИЯ ЭЛЕМЕНТОВ СИСТЕМЫ
Разумеется, что полученные на основе векторной диаrраммы схемы замеще-
ния reHepaTopoB совпадают с теми схемами, которые известны из дисциплин «Элек-
трические машины» и «Электромаrнитные переходные процессы». Напомним схе-
мы замещения основных элементов электрической системы (табл. 6.3).
т а б л и u а 6.3
РаопреоеЛf!IIIIЫЕ 'Iеть'рехпо, '! оа р озная
парамr:тры ЛЮОI/ЦК '"
T oapa3Haa Упрощенная простейuiоя
Z и, z Uz U, Z,' ZZ Uz R ХП Хл
АВС п л/
yi 1" ХЛ Q r;(f S) OJ. Хr+!5.п 8 E X' н, Х н' 'J
Хд.а "'"""""5"'" ( Xд. X.и.o+X, r/5 Хд. 1"/5 ']" Е= Т {'/з
( /"..и.о r.и. У'д.о+r,
СопротиВление
поперечное iJ
синхронное перехоВное с8ерхперехо ное
1. Линци [fJ лэп lU z
злеК1Тlро
переtJ'!'/Ц
а); х,
'2.Ас.инхрон '","
/(ые fl811
zотеЛll
aJ ';', "
:.. Xi r r х][ Z
3. Tpqf/c ' , " .
p и , Хд.о
ры ' r}1.Q
о) , ,
1 ХТ+Х lI Y'z
............ 2
Хд. =Хд.о+Х,
[ I".и.=f};.о+rf
-::=-
4.Сцнхрон
I/ые
МашиНЫ
C):rнxpoHHoe
, , ,,'
u
r. XL+Xl1f'l1
{X<t . .,
Х , Х,
EEJ
4,1 при
СИНХРОННoi
раооте
ц.2
Ijп.рощеl/НО
Xd
а) Х , Х.1.:
:X! If/
z'
d X d Х
f1fd
' ;1 l'
Ц.З
при ох 0116
ЖШUШ
8}
е) Х Т
1 2
х'
L
поперечное
с8ерхперехоВное
х , ХI1,!
Еа
XHd
х"
d
Ха" Xf"
02 Х, X l1 d v) 8 х,1... ХН
:Т 1 Х , 1 lflп/S
1 Х, Z" L , \.
z Z Xafd q X q Xqfq
"/5
Xz,
z" Xd
,d (J liJd/5
XJ
z" IJa /f /S
q Х q
q
а J з 5) Xz I 8 J з
4.4 т.= 3 т.=З т., =.!.L
Ijпрощенно, 'f/5 I r f z r,ld 1ftq/ S J r/f'l
138
Линии электропередачи. При исследовании переходных процессов линии
электропередачи MorYT замещаться Т или П образными схемами замещения:
ZЛ == 'л + jх л ; 'л == '01; х.. == хоl; Ул == Ь о l,
rде 1 длина линии, км; 'о И Хо удельные активное и индуктивное сопротив-
ления линии, Ом/км; Ь о удельная емкостная проводимость линии, См/км
Ш(Ом. KM)J.
При длинах линии более 300 км В указанные соотношения должны вводиться
поправочные коэффициенты, принимаемые комплексными при длинах линии
более 1000 км.
При упрощенном рассмотрении электромеханических переходных процессов
воздушные линии MorYT заменяться полными ZЛ или чисто реактивными х л
сопротивлениями. Основанием к этому MorYT быть или небольшая длина линии,
или наличие компенсирующих устройств (шунтирующих реакторов), унич-
тожающих в схеме замещения составляющую емкостной проводимости.
Активное сопротивление в упрощенных расчетах часто может не учитываться,
Ta как в мощных электропередачах, имеющих провода большоrо сечения, оно
во MHoro раз меньше реактивноrо. При изучении переходных процессов в системах,
имеющих малую мощность или содержащих кабельные линии, активное сопро-
тивление следует учитывать.
Асинхронные двиrатели. Асинхронные' двиrатели при исследовании пере
ходных процессов представляются (см. табл. 6.3) известной схемой 2, а, OTO
бражающей основные контуры машины с учетом потерь.
Для расчетов, выявляющих количественные соотношения, рекомендуется
пользоваться более точными схемами замещения.
В практических расчетах часто применяют упрощенные в той или иной сте-
пени схемы замещения двиrателя. Степень упрощения зависит от поставленных
в каждом конкретном случае задач и точности расчета. Во мноrих случаях при-
емлемую точность обеспечивает r-образная схема замещения 2, 6. Для анализа
общих соотношений и оценки влияния процессов, происходящих в двиrателе, на
систему можно воспользоваться rрубо приближенной схемой 2, в, дающей за-
вышение вращающеrо момента двиrателя на 10 15%, или даже схемой 2, е.
Трансформаторы. При составлении схемы замещения для исследования пере
ходных электромеханических процессов в системах трансформаторы можно
представить r-образными схемами 3, в, объединяя сопротивления ХI и Х;! обмо-
ток, а также относя сопротивление ветви намаrничивания Хр. к стороне высшеrо
":IIИ низшеrо напряжения в зависимости от удобства преобразования схемы сис-
темы в дальнейших расчетах. В ряде случаев ветвь намаrничивания опускается
(схема 3, е).
Синхронные машины (reHepaTop ). Комплексная схема замещения машины
показана на рис. 6.6. Соответствующие частные схемы для определения ре-
активных сопротивлений, представляющих rehepaTop в некоторых характерных
режимах, приведены в rрафах 4.1 4.4 табл. 6.3. Эти схемы предполаrают, что
синхронно работающий reHepaTop находится или в начальной стадии переХОk
HOro процесса (x , X , х;), или в установившемся режиме (Xd, x q ). При асин-
хронном режиме (работа при скольжении s =1= о) приближенные r-образные
частные схемы для определения сопротивлений Z , Z , z; получаются на ос-
нове схем, изображенных на рис. 6.6. Они принимают вид схем, показанных в
\39
rрафе 4.3 табл. 6.3. Эти схемы аналоrичны упрощенной r-образной схеме заме-
щения 2, в асинхронноrо двиrателя.
Дальнейшее упрощение заключается в отбрасывании ветви намаrничива-
пия аналоrично тому, как это было сделано для асинхронноro двиrателя. После
этоrо схемы приобретают вид схем 4.4, а, б, в табл. 6.3. Входящие в них сопро-
тивления Xi, Хв, Ха леrко представить через основные каталожные параметры
а)
'i
Х1.
Zad
.
о)
Ii
Х!
Xaff: Х"9:
rllt!
s
:!!ll
s
Рис. 6.6. Комплексная схема замещения явнополюсной синхрон-
ной машииы с учетом демпферной обмотки:
. ПО продольной оси; б по поперечной оси: "afd' "afQ сопротнвления
взаимоиидукции между контурами стат?ра и ротора по осям а и 4; "у, "\1а'
"I1Q сопротивлеиия обмотки возбуждения и успокоительиой обмотки с уче<
II'ОМ DOверхностиоrо аффекта; "1 сопротивление обмотки статора. '" r 1l d'
'1111 активиые сопротивления обмотки возбуждения и успоконтельной об-
котки С учеток поверхностноrо эффекта
синхронноro reHepaTopa. Так, рассматривая ехему 4.3, а в предположении, что
" == О, а также учитывая, что Хl + Ха/а == Xd И Хl + Х! == Xi, получим
X == XdXt/(Xa + х 1 ),
откуда
Хl == Ха X / (Ха x ).
Аналоrично из схем рис. 4.3, б, в будем иметь соответственно
Х! == x x /(x X ); Хз == XqX;/(X q х;).
Заметим, что схемы замещения 4.4, а, 6 в основном только качественно от-
ражают происходящие явления. В самом деле, схема 4.4, а предполаrает, что на
роторе машины действует только одна короткозамкнутая обмотка возбуждения.
Схема 4.4, б соответствует такому же предположению относительно продольной
демпферной обмотки, а схема 4.4, в относительно поперечной. Однако, не-
смотря на rрубость этих предположений, получаемые на их основе приближенные
r-образные схемы замещения часто MorYT быть полезны не только для опенки
характера процесса, но и для выявления важных количественных соотношений.
s 6.7. СТРУКТУРНЫЕ СХЕМЫ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
В ряде случаев при изучении переходных процессов и устойчивости целе-
сообразно представлять изучаемую электрическую систему в виде Ф у н к Ц и о-
н а л ь н О й с т р у к т у р н о й с х е м ы, на ко орой показаны основные фи-
зические элементы и связи между ними (рис. 6.7). Такая реrулируемая система
140
включает как механич кие элементы первичныи двиrатель, автоматический
реrулятор скорости и т. д., так и электрические элементы -'--- reHepaTop, ero авто.
матический реrУ ЛЯТ 9Р возбуждения и систему возбуждения, передающую систему,
наrрузку и т. д.
Здесь основное внимание обращено на связи между элементами. Это прежде
Bcero п р я м ы е с в я з и между основными элементами, передающими рабочий
Рис. 6.7. Функциональная схема электрической системы
, поток энерrии системы, и о б Р а т н ы е с в я з и, дающие на входе элемента
некоторую дополнительную энерrию. Обратные связи подают сиrнал с выхода
охватываемых ими элементов на их вход. Различают rибкую и жесткую, отри-
цательную и положительную обратную связь. Обратная связь положительна, если
ее действие увеличивает параметр режима на выходе охватываемых ею элементов.
Обратная связь отрицательна, если ее действие уменьшает параметр режима ноВ.
выходе охватываемых ею элементов. Жесткая обратная связь действует как в
установившихся, так и в переходныХ режимах, rибкая только в пер,еходнЫХ
режимах.
Заметим, что показанные на рис. 6.7 обратные связи имеют три разновид-
ности.
Основная силовая обратная связь (цепь AD) проявляется внепосредственном
влиянии наrpузки на элементы, rенерирующие и потребляющие электроэнерrию
(реакция якоря в reHepaTopax), во влиянии изменений скорости на вращающий
момент первичных двиrателей (турбин и т. д.) И двиrателей, потребляющих элект-
рическую энерrию.
Обратная связь (цепь АРС) осуществляется реrулирующими устройствами.
Всnомоеameльная обратная связь (цепь 1-2) действует только внутри реrули-
рующих устройств и служит для стабилизации их работы.
В каждом функциональном элементе фиксируются вход и выход, представ-
пяющие определенную физическую величину. Выходной параметр каждоrо пре-
дыдущеro элемента в прямой связи является входным параметром последующеro.
141
Обратная связь подает сиrнал на вход oXBaTblBaeMoro ею элемента. Эти обстоя
тельства отмечаются на структурной схеме соответствующими стрелками.
Если на вход функциональноrо элемента подать сиrнал, являющийся не-
которой функцией времени X1(t), то на выходе будет получаться друrая функция
времени X 2 (t) , зависящая от свойств этоrо элемента.
Если, используя операторный метод, перейти от ориrинала к изображению,
то для линейной системы при нулевых начальных условиях отношение изобра-
жения выходной величины к изображению входной величины называется nepe
даточной функцией звена:
W(p) === Х 2 (р)/Х 1 (р).
Если за Х 1 (Р) принять, например, изображение напряжения U(р) , подавае-
Moro в цепь, которая содержит активное сопротивление R и индуктивность L,
а за Х 2 (р) изображение тока !(р) в цепи, то можно записать уравнение пере-
ходноrо процесса в операторной форме
И (р) === R! (р) + Lp! (р) === R! (р) (1 + рТ),
откуда получим п редаточную функцию элемента, отображающеrо цепь LR:
W (р) === /(р)1U (р) == k/( 1 + рТ).
Здесь k === l/R коэффициент усиления инерционноrо звена, Т === L/R ero
постоянная времени.
Коэффициент k иноrда называют статическим коэффициентом усиления,
подчеркивая этим, что он определяет соотношение между выходной и входной
физическими величинами в установившемся режиме (р === О). Он может быть
как размерным, так и безразмерным в зависимости от физических величин на
входе и на выходе звена.
Существуют правила получения передаточной функции системы, представ-
ленной структурной схемой, состоящей из различным образом соединенных эле-
ментов. Зная структурную схему и передаточную функцию каждоrо элемента,
можно получить передаточную функцию всей системы. Все эти представления
будут использоваться при получении передаточных функций систем реrулиро-
вания.
s 6.8. СТРУКТУРНЫЕ СХЕМЫ И УРАВН!:НИЯ
.СИСТЕМ РErУЛИРОВАНИЯ
ArperaTbl электрических систем, т. е. reHepaTopbl и вращающие их турбины,
должны работать, обеспечивая определенное к а ч е с т в о в ы Д а в а е м о й
э н е р r и и. Это достиrается с помощью реrуляторов.
Ре r у л я т о рыв о з б У ж д е н и я (АРВ) воздействуют на ток возбуж .
дения reHepaTopoB, обеспечивают качество напряжения, улучшают устойчивость
и делают более блаrоприятным характер переходных процессов (уменьшают ко-
лебательность, ускоряют затухание и т. д.). Реrуляторы реаrируют на напря-
жение и частоту, ток и мощность, замеряемые обычно на данном reHepaтope или
станции.
Р е r у л я т о р ы ч а с т о т ы в р а Щ е н и я (АРЧВ) воздействуют на
впуск в турбины энерrоносителя (воды, пара, rаза) и поддерживают частоту вра-
142
щения reHepaTopoB. Реrуляторы стабилизируют частоту вращения, реаrируя на
ее отклонение*.
Р е r у л я т о р ы ч а с т о т ы (АРЧ) реаrируют на общее изменение час
ТО ты в с И с т е м е, поэтому их называют р е r у л я т о р а м и о б щ е с и c
т е м н о r о параметра в отличие от первых двух, реаrирующих на локальные
параметры. Реrуляторы частоты дей
ствуют на первичный двиrатель с п<r
мощью промежуточноrо воздействия
на реrулятор скорости (изменение ero
уставки). Любой реrулятор, представ
ленный в виде с т р у к т у р н о й
с х е м ы, состоит из четырех OCHOB
ных элементов, показанных на рис.
6.8, а.
Реrуляторы возбуждения и час-
тоты, применяемые в настоящее Bpe
мя, являются в основном реrулятора-
ми без зоны нечувствительности* * ,
осуществляющими н е п р еры в-
Н О е реrулирование.
При этом воздействие реrулятора на Рис.
исполнительный элемент Л вых пропор-
ционально отклонению подлежащеrо
р'еrулированию параметра Лвх' как
это показано на рис. 6.8, б.
Разновидностью пропорциональ
Horo АРВ являются два вида компаундирования синхронных reHepaTopoB:
токовое компаундирование, осуществляющее с помощью специальных
устройств непрерывную функциональную зависимость тока возбуждения reHepa-
тора от тока наrрузки;
фазовое компаундирование, осуществляющее непрерывную функциональ-
ную зависимоСТЬ тока возбуждения от тока наrрузки и ero фазовоrо сдвиrа от-
носительно напряжения reHepaTopa.
Реrуляторы, применяемые для реrулирования тока возбуждения (АРВ), раз
деляются на реrуляторы с зоной нечувствительности, осуществляющие преры-
вистое реrулирование, и реrуляторы без зоны нечувствительности, осуществляю
щие непрерывное пропорциональное реrулирование.
На крупных reHepaTop x, работающих в энерrосистемах, в настоящее время
применяются реrуляторы непрерывноrо реrулирования. Они подразделяются
на реrуляторы: а) пропорциональноrо действия (АРВ п. д. пропорцио-
нальные), изменяющие ток возбуждения пропорционально отклонению KaKoro-
либо параметра режима (например, отклонению напряжения i1U), б) сильноrо
действия (АРВ с. д.). Эти реrуляторы реаrируют не только на отклонение пара
метров режима, но также на скорость и ускорение их изменений, причем в систе-
а)
П Вх
5)
ПреаоразаВатеЛ6
ныи элемент
,
ПО6/Х
ИзмеРllт Л6Н6fii
элемент
ПВх
!1СllЛll телыtыii
элемент
ИспаЛНlIтеЛЬН61iJ
. элемент
I
I
I
J
,/'
"
2 /
/
/
,/
Объект
рееуЛllра8аНlI1t
ПВЫХ
6.8. Функциональная схема реrулятора
и ero действие:
а структура реrулятора; б измененне выходноrо
аараметра П8ых 'fi(lJвх) ари пропорцнональном ре-
ryлнровании без зоны иечувствнтельности (1) и с
зоноil нечувствительности !;.П ВХ (2)
... Раньше они назывались реrуляторами скорости АРС.
...... Напомним, что зоной нечувствительности называется тот интервал изменения пара-
метра (t!п в ..), подлежащеrо реrулированию, в котором реrулятор не иачинаеl' действовать
JI ие изменяет выходиоrо параметра П вых.
143
ме возбуждения, в которую как составляющая входит АРВ с. д., элементы долж-
ны обладать малой инерционностью, что позволяет получить быстро изменяю-
щийся ток возбуждения.
Система возбуждения* синхронноrо reHepaTopa, как правило, состоит из
возбудителя, подвозбудителя и реrулирующих устройств (рис. 6.9). Различные
ИСПОЛllЦтельныv элемент
r ..., ...,
lпоо8оз5у I 80ЗОуои I
I оитвль I твль I
I I .,
I
(мератор-ооьект
реzyлираВания
r ...,
I
I
Ооратная сВязь
I
I
I
I
L
I I
L ...J L
Рееулятор-АРВ
I
.J
I
I
I
I
Рис. 6.9. Система возбуждения синхронноrо reHepaTopa
пропорциональные схемы систем возбуждения в основном разделяются по кон-
структивному исполнению (электромашинные и выпрямительные) и по виду
возбудителя (с самовозбуждением или независимым возбуждением). Приме-
няются бесщеточные системы возбуждения, в которых подвозбудителем служит
машина переменноrо тока, питающая обмотку возбуждения через выпрямители
(кремниевые вентили), расположенные на роторе reHepaTopa (рис. 6.10).
Упрощенная структурная схема системы реrулирования возбуждения по-
казана на рис. 6.11, а системы реrулирования скорости на рис. 6.12. При
этом предполаrается, что реrулирование скорости можно приближенно свести
к форме, одинаковой для всех типов турбин.
В поставленной задаче обращено внимание на зависимость вращающеrо мо-
· Под системами вовбуждения и системами реёулuрованuя возбуждения понимают ма-
шнны и аппараты для создания тока возбуждения н управл ння им с помощью реrулирую-
щих устройств. Иноrда rоворят о реrулируемых системах возбуждення или просто о снсте-
мах возбуждення, рассматрнвая устройства для создания тока возбуждення и управления
им как еднное целое.
Влияние систем возбуждения на характер переходных процессов в электрических
снстемах может быть существенно. Поэтому важно рассмотреть свойства систем возбуждения
и требования к ним в связи с анализом переходных процессов, не касаясь, однако, деталей
выполнения, что является предметом дисциплины «Автоматика энерrетических снстем».
Мощность н стоимость систем возбуждення, ВКЛючая автоматическне реrуляторы воз-
буждения, невелика: мощность составляет не более O,2 O,8%, а стоимость 5 12% от
общей мощностн и соответственно стонмости arperaTa. Поэтому в ответственных случаях
системы возбуждения. крупных arperaToB конструнруются индИВидуально и MorYT сравнн-
тельно леrко видоизменяться в связн с требованнямн, вытекающими из анализа переходных
процессов, условий эксплуатации и т. Д.' .
144
мента от уrловой скорости турбины и зависимость этоrо момента от количества
поступающей в турбину воды или пара. В дальнейшем, не различая паровую и
rидравлическую турбины, будем называть их просто турбuн,ой, а воду или пар
эн,ерzон,осuтелем. При сделанных допущениях обе системы имеют аналоrию
(рис. 6.13), позволяющую осуществлять одинаковую запись уравнений дЛЯ АРВ
и АРЧВ. При этом, однако, необходимо помнить, что в действии механических
(рис. 6.13) и электрических элементов схемы (рис. 6.13, а) есть принципиальная
r
I
I
I
I
I
I
I
I
r ....J
I
4-
'+
'+
Рис. 6.10. Бесщеточная система возбуждения:
1 турбоrенератор; 2 возбудитель; 3 подвозбудитель; 4 выпрямительные '10'
сты; 5 автоматический реrулятор иапряжения
Штриховой линией обведена Часть схемы, элементы которой вращаются вместе с
ротором
разница: все механические элементы обладают зоной нечувствительности, т. е.
не реаrируют на некоторые малые изменения воздействующеrо на них параметра
режима. . Электрические же элементы не имеют зоны нечувствительности.
В некоторых случаях (при определении устойчивости, анализе малых коле
баний и т. д.) эта разница может быть существенна. Однако пока пренебрежем
ею, делая далее в соответствующих случаях надлежащие оrоворки. Тоrда между
одноименными элементами схем а и б и схемами в целом будет полная аналоrия не
только в смысле их функций, но и в смысле соотношений между параметрами pe
жима на входе и выходе. Учитывая эту аналоrию, представим обе изображенные
на рис. 6.13, а, б схемы в виде одной упрощенной электрической схемы (рис.
6.13, в), в которой для простоты рассмотрения объединим преобразователь-
ный, измерительный и усилительный элементы в один элемент с постоянной вре-
мени Т 1 == Т ПР + Т изм + Ту' Тоrда при подаче импульса !1ао на зажимы а1
а 2 элемента 1 будем иметь
i == !1и о ![( 1 + Т 1 Р) R 1 ].
Записывая далее последовательно выражения для напряжений и связанных
145
с ними токов в каждом элементе схемы замещения (рис. 6.13, в), найдем* напря
жение:
А kз&и о
u з == R 2 (1 + TIP) ( + То Р) ,
илц!
Аu з
k; &и о
R 2 (1 + TIP) (l + T Р)
}
J
(6.26)
r
: ш
I
I
I
I
I I
11
L / J
!Jсилительный
элемент
Исполнителыrыii Объект реzулиро8ан//я
r 3 I '
I IJl Ь I Щ //
I 7 9 /21
I I 10
I I
I
L
де
"-
>
'"
'"
'"
,,'
/
/
'"
/
Х -
'" ИзмеритеЛЬНЫIJ
'",'" элемент
Рис. 6.11. Упрощенная наrлядная схема АРВ пропорцио-
нальноrо действия
Преобразовательный элемент: 1 трансформатор напряжения; 2, 3
выпрямляющие вентили. Измерительный элемент: R., R" Rз три оди-
наковых постоянных линейных сопротивления; 4 нелинейное сопро.
тнвленне (лампа накаливаиия). Усилительный эле,uент: 5 батарея
накала; 6 анодная батарея; У усилительный триод. Исполн,uтель
пblй элемент: 7 обмотка возбуждения возбудителя; 8 коллектор
возбудителя; й, tJ ТОЧКИ подключения обратной СВЯЗИ. Элемент об
ратной связи; оОъект реzулирования ze"epaTop: 9 кольца (выводы)
обмотки возбуждения тенератора; 10 обмотка возбуждения; 11 об-
мотка стз:rора; 12 ШИНЫ rеиератора
* Подробные преобразования имеются в rл. 8, а также в кн.: Веников В. А. Переходные
электромеханические процессы в электрических системах. М.: Высшая школа, 1970,
с. 95 97.
146
rде k; == kз/ , T == T) . ( коэффициент обратной связи"', ТВ эквивалент-
ная постоянная времени, k3 коэффициент усиления звена 3; причем
== 1 + ;:2 k ж . о . е , Т э ==Т 2 :f: ;: Tr.o.c..
(k ж '. о . с . коэффициент жесткой обратной связи; TF.O.c. постоянная времени
rибкой обратной связи).
'D
'"
13
а
5
2
4-
}L
/2
-----=.r
Рис. 6.12. Принципиальная схема реrулирующеrо устройства rидро- и турбо-
reHepaTopoB:
1 напорный резервуар (или паровой котел); 2 трубопровод (ил н паропровод); 3 тур-
бина; 4 reHepaTop; 5 передача скорости от вала турбнны к маятнику реrулятора; б
вал маятннка; 7 муфта реrулятора; 8 пружина муфты; 9 двиrатель для смещения
муфты (задающее воздействие); 10 серводвиrатель; 11 золотннк; 12 задвнжка; 13 ав-
томатический реrулЯТОр частоты и обменной мощностн; А поршень серводвнrателя; В
поршень золотника. IJ. смещение поршня серводвиrателя. Р смещение DОрШНЯ золоТ-
иика. 1) смещение муфты реryлятора
Таким образом, введение обратной связи (или «охват» звена 2 рассматривае-
мой системы возбуждения обратной связью)привело к изменению выражения для
тока этоrо звена (рис. 6.13, а).
Охват инерционноrо (в данном случае содержащеrо L и R) звена жесткой
обратной связью приводит к появлению коэффициента или, что то же самое,
замене Т в на T и k3 на k;; охват rибкой обратной связью к изменению по-
стоянной времени соответствующеrо звена на величину + (k з /R 2 ) Troc'
* Процессом обратной связи (о. с.), или обратной связью, называется воздействие 8Ы-
ходной величины какой-либо системы на вход этой же системы, или в более широком смысле
воздействие результатов функционирования на характер функционирования. Отрица-
тельная о. с. уменьшает отклонение системы от первоначальноrо значения, положитель-
ная увеличивает. Жесткая о. с. (ж. о. с.) осуществляется с помощью усилительноrо зве-
на, rибкая (r. о. с.) с помощью дифференцирующеrо (действует, следовательно, только
при переходных процессах). В механических реrуляторах скорости r. о. с. называют изо-
дромом. Интенсивность действия о. с. характеризуется коэффициентами k ж . о . с .; k r . o . c '
147
Обмотка 3 обладает сопротивлением R3 и индуктивностью L з , и, очевидно,
что аналоrично тому, как это было сделано выше, можно записать
i3 == L\u з /[R з (1 + Т з р)J, L\u 4 == k 4 i з == k 4 L\u з /[R з (1 + Тзр)].
Заменяя L\u з соrласно (6.26), имеем
L\u 4 == k 4 k; L\U о /[R 2 R з (1 + т ф)( 1 + т зР)(I + T р)].
Вводя эквивалентный коэффициент усиления
k == k4 k /(R2 R з ).
(6.27)
дЛя L\u(r, получим
L\u, == kL\u o /[( 1 + т ф) (1 + т ЗР) (1 + T р)].
а)
05
OCz
б)
Об
I
I
I
I
t
I
I
I
rr;Oc LJ l
rL.;"' --1r r"'"
... ..J
r ,
I жос R жос .
I .
"' ....J
.......
ос,
,
I
Не. I
I
I
.
Исп
r L ,
I I rос,ЖОС I
! t==-=--=.---..::. I
T "
Изfof
fX,
,1Цо
В)
R I
IiE'l
I R I
I L.. O I
I r .., I
t-- -t {ОО----i
I I I I
L. .., :iЖОСr ..J
L ...
Z) ОС. ос
rc::h
, , ....... l' l11.l
JUk '
Рис. 6.13. Системы реrулирования возбуждения и скорости и аналоrия между иими:
11 система реrулирования возбуждеиия, приведеиная оа рос. 6.11; б состема реryлироваиия ско-
рости, прнведенная иа' рис. 6.12; 8 схема реryлороваиоя. усповио отражающая все соотиошеция, име-
ющиеся в схемах 11 и б;. 11 структурная схема системы реryлирования, состоящая из ииерциоиных
элемеитов (1, 2, .... k); 1, п, ... !lлемеиты, охвачениые обратиой связью. Обозиачеиищ Пр преоб.
разовательный !lлемент; ИэAt измерительный !lлемент; JI усилительиый !lлемеит; Исп испопии-
lI'ельныЙ !lлемент; Об объект реrулирования (в схеме а reHepaTop, в схеме. б турбина); roc.
ЖОС rнбкая О Жесткая обратиые связи
Разумеется, что аналоrично (рис. 6.13,,8, z) можно было учесть любое число
чисто инерционных n или охваченныХ обратной связью N звеньев. На любом k M
звене схемы в этом случае будем иметь
А ' М.ио
I..1.UI1. ==
(I+TIP) О+Т 2 Р) ... О+ТпР)( I+T IP)(1 + Т IIР) ... (1 + T NP)
Предполаrается, что в выражении (6.28) звенья 1, 2, ..., n'не имеют обратной
связи, а 1, П, ..., N охвачены жесткой и rибкой обратными связями OДHOBpe
менно (рис. 6.13, z).
Рассмотрим вновь схему reHepaTopa с реrулятором возбуждения (рис. 6.13, а).
Найдем на основе полученноrо общеrо выражения (6.28) изменение э. д. с. Ече
в статоре reHepaTopa под действием реrулятора возбуждения. Пусть реrулятор
получил на входе импульс /).ио. Предположим, что в реrуляторе имеется только
rибкая обратная связь, а постоянная времени настолько мала по сравнению с
Те' что можно принять Ty О, и, учитывая, что Т п + Т и «Т еЭ , rдe Т еЭ
эквивалентная постоянная времени обмотки возбуждения, определенная с учетом
действия обратной связи, получим* для определения значения /),Е ч
(6.28)
/).E,q == Кои /).и о /[(1 + ТеэР) (1 + TdOP)],
(6.29)
Коэффициент Кои характеризует изменения э. д. с. reHepaTopa в зависимос-
ти от изменения напряжения на ero шинах, т. е. параметр, по которому произво
дится реrулирование. При холостом ходе reHepaTopa
Кои::::::: Eqo/u o .
:Для реrулятора частоты вращения (АРЧБ) запишем по аналоrии соотноше-
ние между изменением скорости /).<0* (аналоr /).и о ) и открытием впуска энерrо-
носителя /).11* (аналоr /),E q ) , т. е. смещением поршня серводвиrателя
(см. рис. 6.12):
КО> ro* КО> (()*
/).tJO* == (6.30)
( +Tsp)(I+Typ) +Tsp
rдe Ко> Мо/<Оо; Тв постоянная времени, характеризующая время действия
серводвиr ателя , реrулирующеrо впуск энерrоносителя в турбину (приближенно
частопринимают, что постоянная времени равна nремени закрытия энерrоносителя
при полном сбросе мощности: Тв == Ы з )'
Предположим, что изменение открытия впуска энерrоносителя под действием
реrулирования (Р per) пропорционально изменению мощности турбины, выра-
женной в долях от номинальноЙ (Р т . НОМ )' т. е.
/).11* == Р per/ Р т.ном ,
тоrда вместо (6.30) запишем
/).Р ре!' == Р per/ P т.ном == Ко> /).OO*/( + Т 8 р).
Учитывая, что Ко> == Мо/<оо == l/а, rде а коэффициент неравномерности,
· См. сноску на с. 147,
Н9
характеризующий наклон характеристики М == {(ro), или приближенно dM/dro :::::;
== dP/dro == а, и принимая == 1, получим вместо (6.30)
Ppev(I + т ЭР) == l1ю*Р т . ном /а
или
(6.31)
Р L\",*P T . HOM
Р per== Т
а s
Р ре)}
Ts
Это же уравнение может быть приближенно переписано в виде
а) о) I
Eq 1) " :. : Eqt
Eql I
О/ . Ut'''U o I
Eq2 2) < :. i E q2=Eqt
I
I
I I
I
U z <:: И О I I
Ии з) :, "и, : i Еqз>Е qt
I
.LJUo И
В)
р
Ц,Е
Eqo J
I
Е' I 1
'1 . . . ['
I q
И I Л
t I
И О И О --+--.",. 1
, q . I . и
I л
I
I
t o f;
Рис. 6.14. Физические процессы при реrулировании возбуждения
а нзмененне э. Д. с. Eq прн Нзмененин напряжения И: 1 при Кои!' 11 прн КОИ2<КОИl;
6 нзмененне напряження при росте наrрузкн: 1) и и о ; 6 6,: 2) и.<и,: 6.>6,; 3) 6,>6,;
и,,,,,и о . Случан 1) н 2) без реrулнрования. 3) при реrулнровании; в зависимости P qJ(6)
прн различных значениях Eq (1:'q const) характеристикн Pper (j)(U): 1 при К ОИ \: 11 прн
КОИ2<КОИl; измеиение напряжеиня U t(lJ) при росте наrрузкн: 1 при /(ОИ\; 11 при
КОИ2<КОИ\; е изменение и. Е' q и Eq Во времени (аналоrично измеиениям в зависимости от
уrла 6, показаиным на рис. 6.14, в)
150
дР == Дш*
Р т.ном
aT s
Р
M M.
Ts
(б.31а)
Заметим, что уравнениям (6.29), (6.30), (6.31) аналоrичны ДRфференциаль
ные уравнения в друrой форме записи:
Eq d Eq
Т еЭ T do + (Т еЭ + T dO ) + /),E q == Кои /).и О ; (6.29а)
dt 2 dt
r- (Т Р Т i1 r- К
TsTy + 8 + t" у) + /).!-t == ro /).00*;
dt 2 dt
Т 8 dL\r- + /).!'- == КО) /).00 *.
dt
(6.30а)
(6.31б)
Физическая трактовка полученных зависимостей для reHepaTopa с реrули
руемым возбуждением. В соответствии с (6.29) всякое изменение напряжения
U на /).и О на шинах reHepaTopa ведет к изменению э. д. с. E q (рис. 6.14, а). При
росте наrрузки Р и увеличении уrла б, сопровождающемся снижением U
(рис. 6.14, б, в), E q будет увеличиваться (действие АРВ) и восстанавливать Ha
. пряжение и (рис. 6.14, б). Следовательно, рабочая точка, характеризующая
режим, будет перемещаться в плоскости Р б, переходя с характеристик, имею
щих меньшие значения Eq, на характеристики с б6льшими значениями E q
(рис. 6.14, в). При этом в зависимости от коэффициента усиления Ко,:} измене-
ние Eq и вместе с тем степень поддержания и будут различны. Различна будет и
степень изменения э. д. с. E (рис. 6.14, с). Обычно по условиям устойчивости
системы (см. rл. 8) у реrуляторов пропорционаЛЬНJrо типа выбирают такой коэф
фициент усиления Кои, что E const (рис. 6.14, с). Поскольку при резких из-
менениях режима э. д. с. E , как известно*, в начальный момент не изменя
ется, а далее меняется медленно, можно считать, что реrулирование возбужде-
ния дополнительно способствует постоянству E и поэтому можно принять, что
у еен.ераторов, имеющих nроnорцuон.альн.ое рееулирован.ие возбужден.ия,
электромехан.ический nереходн.ый процесс определяется соеласн.о xapaK
, ,
теристике Р == <р(б) при E q Е == const,
, ,
соответственно замещать reHepaTopbI э. д. с. Eq ли E и в последнем случае
вводить в схему замещения сопротивлением Xd.
Физическая трактовка полученных зависимостей для реrулируемой турбины.
В сослветствии с (6.30) и (6.31) можно принять, что в практически существенном
для рассматриваемой задачи диапазоне dM/dQ == const, т. е. что при любом по-
стоянном открытии f..I. == const зависимость М == f(Q) представляется прямой
линией (рис. 6.15, а, в). На этом рисунке каждая линейная зависимость 1,2, ...,7
отвечая медленному изменению режима, показывает, как при этом будет менять
ся момент турбины в зависимости от скорости. Эти линейные зависимостИ пред-
.. Дисциплины «Электрические машины», «Переходиые электромаrнитные процессы»
[2, 4, 6].
151
ставляют собой статические характеристики. При быстром изменении реЖИМI
процесс, происходящий в реrулируемой турбине, будет определяться линейноi
характеристикой до тех пор, пока реrуляторы скорости не придут в действие*
На характеристике 1. (рис. 6.15, а, в) это будет участок 001. Запаздывание М 1
по времени, от ечающее этому участку, показано на характеристиках механиче
а)
И Т
M D
8)
М Т
М I
М й
М I
.20 021
о)
.Q
t
е)
52
.Q
t
Рис. 6.15. Изменение вращающеrо момента и скорости в реrулируемой
(АРЧВ) турбине: "
а зависимость момента от скорости при апериодическом процессе: MT f(Q); б тот
же (что и а) процесс, представлениый во времени: Q q>(t); 8 зависимость момента
от скорости при колебательном процессе; MT t(Q); е тот же (что и в) процесс, пред
ставленный во времени: Q q>(t)
ской скорости Q == f(t) на рис. 6.15, б, е. Оно зависит от нечувствительности ре-
rулятора и запаздывания серводвиrателя. При этом скорость изменится на ве.
личину дQ, т. е. от Qo ДО Q1' Далее наступит вторая стадия процесса, коrда ре-
rулятор придет в действие и будет перемещать задвижку, что на характеристика]!
(рис. 6.15, а) будет отражено перемещением рабочей точки а из положения а!
на характеристике 1. в а 2 , аз, а4, ... на характеристиках 2, 3, 4, ... .
в результате действия реrулятора в конце второй стадии процесса при умень.
шившейся электрической наrрузке восстановится прежняя скорость Qo или уста.
новится некоторая новая скорость Q , обычно близкая к прежней Qo.
Если после изменения наrрузки и окончания переходноrо процесса, проте.
* Напомним, что в отличие от реrулятора возбуждения пропорциональноrо действия
обычный реrулятор частоты вращения имеет зону нечувствительности и приходит в дейст-
вие только по истечении времени t1t з . Появившиеся в последние rоды АРЧВ специальноrо
тнпа и так иазываемые «приставки» позволяют осуществлять АРЧВ без зоны нечувствитель.
ности при t1t з ::::: О.
152
кавшеrо соrласно характеристике аЬ (рис. 6.15, а), реrулятор восстанавливает
прежнюю скорость турбины, то реrулирование называется астатическим. Если
при изменении наrрузки и окончании переходноrо процесса устанавливается
новая, отличная от прежней скорость Q , то такая система реrулирования на-
зывается статической. Чем больше будет изменение скорости при изменении на-
rрузки, тем больше будет статизм реrулятора, определяемый как
(.00 Q )/Qo == а.
Характер процесса во времени в случаях астатическоrо (сплошная линия)
и статическоrо (штриховая линия) реrулирования показан на рис. 6.15, б.
Если после изменения скорость, плавно подходит к своему новому Q или
прежнему Qo значению, то процесс называется апериодическим (или апериодиче-
ским переходом) (рис. 6.15, б). Возможны случаи колебательноrо перехода, изо-
браженные на рис. 6.15, в, 2.
Из приведенноrо рассмотрения следует вывод, что турбина может быть пред-
crавлена:
с т а т и ч е с к и м и ха р а к т е ри с т и к а м и при о т с у т с т-
в и и р е r у л и р о в а н и я, определяющими процесс во время дt з , т. е. во
время запаздывания действия реrулятора (участок 001 на характеристике 1.
рис. 6.15, а):
статическими характеристиками реrулируе-
м о й т у р б и н ы, получЗ'емыми как линии, соединяющие крайние точки за-
висимостей М т == qJ(Q), например аЬ 1 (рис. 6.15, а);
динамическими характеристиками реrулируе-
м о й т у р б и н ы, получаемыми как зависимости ОО1а2Ь1 (рис. 6.15, а) и Q ==
==' (t) (рис. 6.15, в, 2).
Так как кратковременные переходные электромеханические процессы про-
текают за время, соизмеримое с дt з , то, полаrая, что момент турбины на этом
интервале времени М == l/Q, получим, что МОЩНОСТЬ турбины Р т == ма == const.
Следовательно,
при раСсмотрении крamковремеюшх nереходных электромеханических
nроцессов в первом приближении можно принимать мощность турБИНbl
постоянной: р т == const. '
При более длительных переходных процессах, коrда реrуляторы скорости
приходят в действие или Korдa специальным ускоренным воздействием дости-
rается быстрое изменение момента турбины, допущение р т == const становится
несправедливым и расчеты проводятся с учетом (6.30) или более приближенно
(6.31).
Реrулятор частоты. В первом приближении ero действие можно принять
аналоrичным действию реrулятора частоты вращения. Однако он будет отличать-
ся тем, что воздействует на впуск энерrоносителя путем смещения муфты реrуля-
тора скорости 7 с помощью МИО-механизма изменения оборотов 9 (см. рис. 6.12).
Уравнение, представляющеедействие реrулятора частоты, будет аналоrично (6.31),
причем LlO)* необходимо заменить на Llf *. Изменения частоты будут происходить
значительно медленнее, чем относительные движения отдельных [енераторов
(ббльшие значения ТВ и БОльшая инерция системы), поэтому только при расче-
тах медленных переходных электромеханических процессов (обычно несколько
153
секунд) нельзя полаrать f == const. Однако отклонения частоты от номинальной,
имеющиеся в исходном нормальном или послеаварийном режиме, должны
учитываться. Для подведения итоrа приведем, не рассматривая деталей, полную
схему реrулирования турбоrенератора, работающеrо в системе (рис. 6.16). Здесь
отражены почти все виды реrулирования, ВКЛючая реrулирование, проводимое
Рис. 6.16. Структурная схема системы реrулирования турбоаrреrата:
дп диспетчерский пункт; ЭВМ электронно вычислительная машина для экоиомичноrо
распределения наrрузок; J( котел; РК реryлятор котла; МУТ механизм управления
ryрбиной; АРЧВ автоматический реrулятор частоты вращения; ДПМ двиrатель привод
иосо мехаиизма; Т турбина; J' сенератор; СВ СИСтема возбуждения; В возбудитель;
ПТВ преобразующий трансформатор и выпрямитель: Р пер моЩНости перетоков по свя
ЗИМ; Ра........ заданная мощность; . и'УСТ заданное напряжение; ,р ПJl плановая иаrрузка;
CJ) ...... частота с'истемы; Р мех ........ механическая МОЩНОСТЬ
J:.c
i
Рис. 6.17.
трехфазной
ИЗ условий экономичности работы систем, что
требует специаЛЬноrо распределения наrрузок
между станциями и arperaTaMM. Вопрос этот
выходит за рамки настоящей дисциплины, а
поэтому о реrулировании этоrо ВИДа здесь
только упоминается. На схеме не показа-
но реrулирование котла так называемое
реrулирование «до себя», которое обеспечива-
ет заданное значение давления пара на вы-
ходе из котла при различноrо рода переход-
ных процессах (см. rл. 9).
Пример 6.1. По трехфазной обмотке
проходит синусоидальный ток (рис. 6.17).
с т а в и т ь этот ток в осях d и q, жестко
ных с ротором.
Решение. Формулы перехода от фазных вели-
чин к двухфазной системе координат (d, q) имеют
вид
статора
Пр ед-
связан-
Представление тока в
системе координат А,
В, С
Id + r( iAcos'n+iBcos (1 2; )+icCOS (1 :ТС )];,
1 q + [и А sin 1) + i В sin (1 2; ) + i с sin (1 )] .
154
Пусть MrHoBeHHble значения фазных токов i А. ( в , (с в установившемся режиме запи-
шутся как
iA==Imcosrot; iB==/mCOS(rot 2; ) ic==lmcos (rot 4; ).
Подставив значения фазных токов в предыдущие уравнения, будем иметь
1 d == + / т [cos 1 COS rot + cos ( 1 2; ) cos ( rot 2; )+ cos (1 4; ) cos (rot 4; )] ;
1 q == + / т [siп 1 COS rot + siп ( 1 2; ) co . ( rot 2; ) + siп ( 1 4; ) cos ( rot 4; )].
dL r с
1 е .
.. лзп
Ч и" сопst
Id
Рис. 6.19. Схема исследуемой системЫ
Iq
Рис. 6.18. Представление тока в ко-
О t ординатах d и q
После ряда триrонометрических преобразований получим
/d== /mCOS (rot 1); /q == lm siп (wt 1).
Учитывая, что в синхронном режиме у == rot + б, наЙдем
/d== /mCOS O ; /q== /т siпо .
Таким образом, синусоидально изменяюшиеся фазные токи i А. i в. (с при переходе к
координатным осям d и q становятся постоянными величинами (рис. 6.18).
Пример 6.2. В ы я в и т ь влияние относительноrо активноrо сопротивления rидроrе-
иератора '/Xd на характер зависимости б == f(t) в случае, коrда применяются полные уравне-
ния Парка rорева и уравнения упрошенные. Схема электропередачи, в начале которой
происходит трехфазное короткое замыкание продолжительностью 0,1 с, изображена на
рис. 6.19.
Параметры исходноrо режима: Ре == 0,91; Qe == 0,273; и е == 1.
Параметры электропередачи в относительных единиuах: Xd == 0,639; x q == 0,44; X ==
== 0,29; Т do == 5,2 с; Т J == 13,8 с; Х л == 0,564; 'л == 0,04; 1) , == 0,0096; 2) r == 0,032. Здесь
xd == xdr + Х т ; x q == x qr + Х т ; X == x r + Х т ; , == 'r + 'т'
Решение. Расчетом установившеrося режима определяются следующие параметры:
Eqo, E QO ' Е;, /d, /q, W d , W q , М т , U rd , U1'q' Ued, и ец , б, s.
Расчет проводится для двух режимов при:
1) '/Xd == 0,015;
2) ,/ Xd == 0,05.
При этом короткое замыкание задается условием и е == О и zл == О. Отключение ко-
pOTKoro замыкания осуществляется восстановлением ZЛ и и е (и е == 1).
1. Расчет по полным уравнениям Парка rорева проводится решением уравнений,
приведенныХ к виду, удобному для решения на ЦВМ:
155
РЧ!d Ч!q (1 +s) ldr U[>d; РЧ!q == 'Fd (1 +s) /qr U r q;
ТdоРЧ!d Т dOX P/ d == E QO Ч! d + / dXq;' Т doPw.q Т doXqP/ q == Ч!q + / qX q ;
U rd Ucsin!J rл
Р/Лd == /лd /лq (1 +s);
Х л Х л Хл
U rn Uccos!J rл
р/ л q == / л q + / лd (1 + s)
Х л Х л Х л
TJ ps== MT (Ч!d/q Ч!q/d); р!) == s.
Третье и четвертое уравнения приведенноii
системы получаются заменой уравнений переход-
Horo процесса в обмотке возбуждения по про-
дольной и поперечной осям на уравнения, запи-
санные через э. д. С. с учетом (6.20r) и (6.21)
(6.24). Подставив з ачения U rd -и U rq из пятоrо
и шестоrо уравнении в первое и второе уравне-
ния снстемы, получим систему дифференциа.ць-
ных уравнений шестоrо порядка:
О,ца8
90
80
70
60
50
iIO
JO
ZO
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 t,c
Рис. 6.20. Изменение уrла reHepa-
тора:
1 и l' расчет по упрощенным и полНым
уравненням при rlxd O.015; 2 н :r прн
r IXd O.05
рЧ! d + Р/dХл== W q (1 + s) ldr и с sin!J /л drл /л qХ л (1 +'s);
рЧ! q + р/ qХл == Ч! d (1 + s) / qr U с cos !J / л qrл + / л dХл (1 + s),
т dоРЧ! d Т dOX P/ d == E QO Ч! d + / dXq; Т dОРЧ! q т doXqP/ q == W q + / qX q ;
TJ PS==МТ (Ч!d/q Wq/d); p!J==s.
При этом в нормальном и послеаварийном режимах /лd == / d, /лq == / q' РешеН'ие дан-
ной системы дифференциальных уравнений численными методами требует нахождения при-
ращения переменных Ч! d, Ч! q' / d' и / q в явном виде, т. е. решения системы линейных ал-
rебраических уравнений вида
П.. о Х л О J [PW'J
1 о Хл РЧ!q
О Т dOX О P/d
Tdo О TdoXq plq
[ W' (1 +,) l,, и, ,in' 1,'. I,x.(I +,) J
W d (1 + s) / qr U с cos !J / qrл + / qХ л (1 + s)
E Qo Ч!d + /dXq
Ч! q + / qX q
Получив приращения всех переменных в явном виде, можно применить для расчета
любой чнсленный метод интеrри-рования и определить неизвестные Ч! d, Ч! q' / d' / q' 6, s. Про-
ведя расчеты по шаrам, получим изменение всех параметров во времени, а следовательно,
зависимость 6 == t(t) для обоих вариантов (рис. 6.20): 1) rlxd == 0,015; 2) rlxd == 0,05.
2. Для описания Переходных процессов в reHepaTope по упрощенным уравнениям вве.
156
дем следующие упрощения: рЧ! d == рЧf q == о; р{) + 1 == 1. Тоrда с учетом ,",ro, что [лd ==
== [а, [лq == [q' получим систему уравнений
т aoPE == Ече Еч; TJps == М Т W аI q + W q1d; р'6 == s.
Для нормальноrо и послеаварийноrо режимов имеем:
(E и с cos '6) (Х ч + ХЛ) и с sin '6 (' + rJJ
[a== ,
(r + rл)2 + ( Ха + Хл) (Х ч + хл)
и с (Х +Хл) sin '6 + (E Uccos'6) (r + rл) .
== '
, (r + rл)2 + ( X + ХЛ) (Х ч + хл)
E IdX ==Eq [dxd; 'Еч==Е +'а(ха х ); Wd==Eq+ldxa; Wq==Iqxq.
Для аварийноrо режима (при трехфазиом коротком замыкании на шинах стаиции)
прииимаем и с == о, ZЛ == о, тоrда получим:
E-ЧХq
'а == ,
r + ХаХч
E ' , ,
[ч == , Е q + [ аХа == Е q + [аХа == о;
, 2 + ХаХч
E-ЧХd + [dX Xd == Е ЧХ + [ax Xa
lI.1IВ
Еч == E-ЧХdl Х ' а;
W d == Еч + [аХа; Чf ч == [ЧХЧ.
Проведя расчет «шаr за шаrО J), получим из-
менение уrла () во времени (рис. 6.20) для rlXd ==
== 0,015 и rlxa == 0,05, при применении упрощен-
ных уравнений Парка rорева.
Как видио из рис. 6.20, при rlxd == 0,015 раз-
ннца между расчетами по полным и упрощенным
ас,
-=-
Рис. 6.21. Схема исследуемой энерrосисте-
мы с учетом rорения дуrи в выключателе
Яд'о.е
100
75
50
о
Рис. 6.22. Изменение сопротивлении
дуrи R д
уравнениим практически иезаметна. При увеличении же относительноrо активноrо соп-
ротивления rlXd == 0,05 эта разница оказывается ощутимой. Большое число аналоrич-
ных расчетов приводит к выводу: при малом относительном активном сопротивлении
(r/Xa < 0,03) нет необходимости в применении ПОЛНЫХ уравнений. Если же относительное
активиое сопротивлеиие велико (r/x 0,03), то для получении достоверных результатов
необходимо пользоваться п о л н ы м и у р а в н е н и я м и.
Пример 6.3. В ы я в и т ь влиянне момента отключения KopoTKoro замыкании на мак-
симальное значеиие уrла reHepaTopa при учете и без учета rорения дуrи в выключателе, Kor-'
jl.а расчет ведетси IJО полным уравнениям, и п о к а з а т ь зависимости б маис == !(tотил) и
м == q>(t).
157
Исследуемая система состоит из двух станций, работающих на щины неизменноrо на-
пряжения (рис. 6.21). При этом 'I/Xd, :::::: '2/ X d, :::::; 0,015.
Даны параметры исходноrо режима Рl" Р2' ,и с , U r И параметры электропередачи в от-
носительных еДИницах: Xd" Xd,' X q " X q ,' Ха" Ха,' Х щJ ,' X ad ., X aq " X aq .' '1, '2, ",.' '". 'ldl,
'1а2, 'lql. 'lq2. Xa/d == Х а lа == Х/ l а == Хаа. X alq == Xaq. Т JI' Т J2' Т аОl, Т аО2'
Примем упрощенно, что СОПротивление дуrи R д изменяется только как функция време.
ни., имея характер квадратичной зависимости (рис. 6.22).
Решение. Расчетом установившеrося режима определяются следующие параметры:
E q01 , E qo2 . E;I' E 2' l dl , l а2 , 'ql, l q2 , чr аl , чr а2 . W ql , W q2 , М Т1 , М Т2 , Urd(l), U rd (2), Urq(I),
U rq (2), l лd (l), l м (2), l Лq (l), l Лq (2), 111, 112, 1/1. 1/2' l 1аl , l 1d2 , l 1ql , l 1q2 . Здесь цифра в
скобках покаЗывает номер reHepaTopa, на оси KOToporo проецируется данная величина.
Система уравнений, ПОДrотовленная для решения на ЦВМ иссо едуемоrо процесса,
имеет вид
pW d , == W q , (1 + 51) I d ,'1 U r d (1); pW q , == чr а ! (l + 51) I q ,'1 Ur q (1);
рЧJ' d2 == W q2 (1 + 52) 'а2'2 и.. d (2); рЧJ' q2 == W а2 (1 + 52) 'q2'2 и.. q (2) ;
рУ! /1 == U /1 1/1'/1; рУ! /2 == U /2 1/2'/2; p'J!ldl == 1 1 аl'1аl; pW lql == 11 I'lql;
pТf'la2 == 'ld2'ld2; РЧ!lq2 == 1 1q2 'lq2; TJI р51 == М Тl W аl1 ql + 'J! ql1 аl; p1l 1 == 51;
T J2 р52 == М Т :! W d21q2 + W q2 1 а2: p1l 2 == 52;
Р'Лd (1) Urd(l) и с siп1\1 'Лd(l) 'л lлq(l) (1 +51);
х л х л х л
рl лq (1) U.. q (J) и с cos 111 'лq (I)'Л + 1м (1) (l + 51):
Х л Хл хл
рl лd (2) == U.. d (2) и с siп 1\2 I лd (2) 'л l лq (2) (1 +52);
Хл Хл х л
р/ лq (2) == U rq (2) U с COS 1\2 I лq (2) 'л + /лd (2) (1 +52)'
Х л Х л ХЛ
Токи reHepaTopoB определяются из уравнений потокосцеплениii цепей статора, обмоток
возбуждения и демпферных обмоток:
W d == I/Xa/d + 1 1 а Х аlа + I аХа; W q == 'l q X alq + I qX q ; W / == '/Х / + 1 1d X /1а + 'dЖа/d;
чr lа == 1 1 а Х lа + I/Xfld + 'dXald; W lq == 11qXlq + 1 qX a lqo
Для данноrо примера, УЧИтывая, что Xafd == Х а lа == Xfld == Хаа И X alq == X aq , будем иметь
W /1Хlаl W ldl X a dl + I аl ( X al X a dl X ldl)
1/1 ==
Х/I Х lаl X dl
W /2 X ld2 W ld2 X a d2 + / а2 ( X d2 Xad2Xld2 )
2 '
Х /2 X ld2 Х ad2
1/2 ==
* Такой учет дуrи, отражая ее эффект в смысле влияния потерь мощности на электро-
механические процессы. разумеется, не дает полноrо представления о физике ПРОИСходящих
процессов.
158
l(I"ldlXjl W fl X a dl + Idl (X;dl XadlXfl)
Xfl X ldl X dl
1J!'ld2 X /2 W f2 X ad2 + 1 d2 ( X;d2 Xad2Xf2)
Xf2 X ld2 X d2
1 1 dl ==
1 1 d2 ==
I]J" lql 1 qlXaql
1 1ql ==
I]J"1q2 1 q2Xaq2
X lq2
1 1q2 ==
Xlql
'dl E I
1 dl == .
Xdl
l(I" d2 E 2
1 d2 ==
I]J" ql + E I
1 ql == "
X ql
\{I' q2 + E 2
1 q2 == " '
X q2
Xd2
rде
l(I" fl (Xldl X adl adl ) + \{I'ldl (Xjl X adl X;dl) .
.
2
Xfl X ldl Xadl
Е
ql
" W f2 (Xld2 X ad2 X;d2) + I]J" ld2 (Xj2 X ad2 X;d2 ) .
E q 2== 2 .
Xf2 X ld2 X ad2
E I == \{I'ldl X aql!Xlql;
E 2 == l(I"ld2Xaq2!XIQ2'
Напряжение на шинах reHepaTopa определяется по следующим выражениям:
U rd (1) == Rд [Idl + Id2COS (02 01) + I Q2 siп (02 од I Лd (1)]; U r q (1) == Rд [Iql +
+ 1 Q2 COS (02 (1) + 1 d2 siп (02 01) 1 л q (\)]; U r d (2) == Rд [ 1 d2 + 1 dl COS (01 02) +
+ 1 Ql sin (01 (2) I л d (2)]; U r q (2) == Rд [1 Q2 + 1 Ql COS (01 (2) + 1 dl sin (01 02) 1 л q (2)].
[де Rд активное сопротивление дуrи.
Проведя таким образом ряд расчетов с
учетом и без учета дуrи, пол.учим для разных
t отRл (0,1; О, 11; 0,12; 0,13; 0,14 с) зиачение
уrла бмаRСl (рис. 6.23). Как видно из рисун-
ка, при расчете по полным уравнениям Пар-
Ka ropeBa кривая бмаRСl == !(tОТRЛ) имеет
колебательный характер(1). При учете дуrи
зависимость бмаRСl == !(tОТRЛ) приобретает мо-
нотонно нарастающий характер (4) и резуль-
тат приближается к полученному расчетом по
упрощенным уравиениям (2) и эксперимен-
тальным данным (3).
На рис. 6.24, а, б показано изменение
электромаrнитноrо момента первоrо rеиерато-
ра при отключении KopoTKoro замыкания в
моменты [ ОТЮl == 0,1 с и t отRл == 0,11 с. Как
видно из рис. 6.24, а, характер изменения
среднеrо Мср электромаrнитноrо момента re-
нератора, рассчитанноrо по полным уравне-
ииям (Мп), после отключения к. з. практиче-
ски ие отличается от характера изменения
электромаrнитноrо момента, рассчитанноrо по
упрощенным 'уравнениям (М у ). Это объясня-
ется тем, что при t отRл == 0,1 с число полу-
периодов в процессе к. з. оказывается чет-
OMaxc,zpaiJ
lJO
120
110
J'O..
tIJO
95
I
I
I
DL
0,1 q.
tоткл,1!
Рис. 6.23. Изменение максимальной вели-
чины уrла reHepaTopa от момента отключе-
ния к. З.:
1 расчет по полным уравнениям без уче'l'.а ro-
рения дуrи; 2 расчет по упрощенным уравненн-
ям; J экспериментальиая кривая; 4 расчет по
полным уравнени ", с учетом rорения дуrи
159
ным, следовательно, число положительных и отрицательных импульсов момента при ero
колебаннях равно. Вследствие этоrо амплитуда колебаний после к. з. оказывается неболь.
шой и влияние BToporo reHepaTopa на первый не ощущается. При этом после отклю-
чения к. з. скачки в положительную и отрицательную стороны оказываются практи,
чески одинаковыми, а изменение Мср соответствует изменению Му' Поэтому значении
бмаксн рассчитанные o полным и упрощенным уравнениям, практически ра)3ны, разница
составляет примерно 3. (см. рис. 6.23). Если же t отRл == 0,11 с, то после отключения к. э.
о)
м
М п
J
а)
м
2
,
..
М п
"'/1 n Л
"'пд
\j 1-
U
0,5 0,10 0,15 0,20t,
';;\
2
М п I'.!' Мер
Mп ..
Мер
с О, 5 010 0,1 t,a
1
Мср
Рис. 6.24. Измеиение электромаrнитноrо момента:
a toTK.II O.1 с; б tОТКJI О.1I с
Мср имеет апериодический характер и сильно отличается от Му' Вследствие этоrо мак'
симальные значения вылетов уrла, рассчитанноrо по полным и упрощенным уравнениям,
заметно отличаются [примерно на 70 (см. рис. 6.23)]. Это объясняется тем, что число импуль-
сов момента при ero колебаниях соrласно расчету по полным уравнениям впроцессе к. З.
нечетно и число положительных импульсов оказывается больше отрицательных. Это приво-
дит К сильным колебаниям момента М п после отключения к. з. В этом случае влияние вто-
poro reHepaTopa на первый может оказаться довольно сильным и привести к появлению до-
полнительноrо момента, который резко увеличивает значение Мср' Таким образом, в мо-
менты времени t отRл == 0,1 ; 0,12; 0,14 с значения максимальноrо уrла, рассчитанноrо по
lIОЛНЫМ и упрошенным уравнениям, мало отличаются. Для моментов же отключения t отRл ==
== 0,11 с и t отRл == 0,13 с эта разность резко увеличивается. Однако в действительности (экс-
перимент) колебаний б маRс В зависимости от t отRл не наблюдается, так как появление дуrи
при отключении сrлаживает .колебания электромаrнитноrо момента МПд reHepaTopa после
отключения к. з. (рис. 6.24). Это приводит к сrлаживанию характеристики бмаRСl== !(tОТRЛ)'
Таким образом, при расчете электромеханических переходных процессов, коrда ,/х < 0,03,
необходимо либо учитывать еорение дуеи в выключателе, либо применять упрощенные уравне-
ния, что является более целесообравным с точки зрения объема вычислений.
. I
160
Контрольные вопросы
6.1. Каковы особенности математических описаний, моделей и схем замещения?
6.2. В чем особенность уравнений Парка rорева по отIiошению к обычной системе
уравнений маrнитно связанных цепей, перемещающихся относительно друr друrа?
6.3. Какой смысл имеют члены вида pW, ро в уравнениях Парка rорева?
6.4. Что понимается под упрощенными уравнениями Парка rорева? Как они учиты-
вают связь потока и напряжения, момента и мощности?
6.5. Какова разница в характере кривых переходноrо процесса Р == f(t), Еч == f(t)
E == f(t), 1 f == f(t), 1 СТ == f(t), рассчитанных по полным и упрощенным уравнениям? '
6.6. Как влияют случайные факторы на результаты анализа переходных процессов в
электрической системе?
6.7. Как влияет насыщение маrнитной цепи еинхронной машины на амплитуду уrла
при качаниях и период качания?
6.8. В чем особенности записи уравнений электромаrнитных процессов в контурах
синхронной и асинхронной машины? Рассказать, пользуясь табл. 6.1.
6.9. Важнейшие допущения при составлении и решении полных и упрощенных ypaBHe
нии, описывающих переходные процессы в электрической системе.
6.10. Как составляются и как примеНЯIQТСЯ структурные схемы электрической систе-
мы и ее устройств реrулирования?
6.11. В чем особенности Реrуляторов возбуждения (АРБ п. д.) пропорциональноrо дей-
ствия и сильноrо действия (АРВ с. д.)?
6.12. Что такое жесткая и rибкая обратные связи?
6.13. Как составляется передат()чная функция, связывающая отклонение и реrулирую-
шее' воздействие? Пояснить на примере уравнения (6.28).
6.14. На примере рис. 6.14 и 6.15 поясните действие АРВ и АРС.
6.15. Почему мощность турбины в некоторых случаях расчета (каких) можно приним ать
постоянной?
Темы рефератов
1. Уравнения Парка rорева и их применение при расчетах несимметричных режимов
2. Современные реrуляторы в()збуждения и системы реrулирования (АРВ).
3. Современные реrуляторы частоты вращения турбин (АРЧВ).
84
rЛАВА 7
&ОЛЬШИЕ КОЛЕ&АНИЯ. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
t 7.f. ПОСТАНОВКА ЗАДАЧИ
Для Toro чтобы уметь обеспечить способность системы восстанавливать ис-
ходный или близкий к исходному режим при большом ero возмущении (сохранять
)l.инамическую УСТОЙЧIfВОСТЬ), инженеру необходимо иметь представление о физике
происходящих процессов и уметь рассчитывать их. Для больших возмущений
6.
B
I
I
/ 61
...,,;' 'Z I
:...........___,. ........... 6:
t
Рис. 7'.1. Влияние места аварии на характер переходноrо про
цесса в системе
Короткое замыкание в точке 1(, одинаковое ускорение левой и правой
частей системы система устойчива; короткое замыкание в точке К 2 ......
система неустойчива
(см. rл. 4) существенно резкое нарушение режима, сопровождающееся измене-
нием конфиrурации системы; характер процесса зависит от значения возмуще-
ний и места их возникновения (рис. 7.1, 7.2).
В rл. 4 и 6 указывалось, что исследование способом площадей не дает пол-
Horo представления о происходящих процессах, поскольку остаются невыяс-
ненными зависимости уrла б == f(t) и электрической мощности Р == cp(t). Опре
деление этих зависимостей существенно для уяснения физики явлений и решения
задач управления и реrулирования (определение времени срабатывания реле,
времени действия отключающих устройств, скорости действия реrулирующих
устройств, скорости подъема возбуждения, настройки реле сброса мощности
и т. д.). Для Toro чтобы найти соответствие между значениями уrла и времени,
прошедшеrо с начала процесса, необходимо решить (проинтеrрировать) диффе
ренциальное уравнение относительноrо движения ротора reHepaTopa.
В настоящей rлаве после некоторых общих соображений о динамической
устойчивости будут рассматриваться способы решения уравнений, которые опи-
сывают rруппу явлений, наступающих при больших отклонениях параметров
режима и резких изменениях мощности, отдаваемой rенераторами в сеть. Для
этих случаев особенно характерны такие короткие замыкания, при которых вза
имное сопротивление между reHepaTopoM и наrрузкой резко возрастает, что при-
162
водит к проrрессирующему изменению уrла д, изменению уrловой ,скорости ро-
тора Дro == dc5/dt.
Причины и характер больших возмущений режима, появляющихся в элект-
рической системе. Большие возмущения режима или, как их иноrда называют
в о з м у Щ е н и я в б о ль ш о м, появляющиеся в электрических системах,
чаще Bcero вызываются отключениями
мощных наrрузок или несущих наrруз-
ку reHepaTopoB, трансформаторов, ЛЭП.
К еще более резким изменениям ре-
жима приводят короткие замыкания, при
которых изменения мощности на отдель- Р, %
ных участках системы MorYT быть соиз-
меримы с суммарной мощностью всей
системы. Так, например, трехфазное ко-
роткое замыкание на одноцепной лэп
изменяет передаваемую по этой линии
мощность на 100%, так как передача
мощности в систему полностью прекра-
щается. Короткие замыкания в зависи-
мости от места (в котором они происхо-
дят) и их вида (трех- и двухфазные и
т, д.) MorYT приводить к различным изме-
нениям передаваемой мощности или
сбросам мощности. Они, следовательно,
различны по своей тяжести. Наиболее
тяжелым является трехфазное короткое
замыкание, полностью прерывающее пе-
редачу мощности через тот элемент, на
котором произошла авария. Более леr-
кими являются двухфазные короткие за-
мыкания на землю, еще более леrкими двухфазные короткие замыкания без
замыкания на землю и самыми леrкими однофазные короткие замыкания
(рис. 7.2).
Место KOpOTKOro замыкания в сильной степени влияет на тяжесть аварии в
отношении как токов KOpOTKOro замыкания, так и воздействия на устойчивость
системы. Чем дальше короткое замыкание от источников энерrии, тем, как пра-
вило, меньше токи KopoTKoro замыкания. Чем симметричнее место KopoTKoro за-
мыкания по отношению к reHepaTopaM системы, тем леrче авария в отношении
влияния ее на устойчивость системы. Это объясняется тем, что при одинаковом
сбросе мощности reHepaTopbI в равной мере (или примерно в равной мере) уско-
ряются и остаются устойчивыми относительно друr друrа (см. рис. 7.1, точка 1).
Статистика аварий, происходящих в электрических системах, показывает,
что большинство аварий на ЛЭП BbIcoKoro напряжения это однофазные ко-
роткие замыкания (75 90%). Двухфазные короткие замыкания на землю и двух-
фазные короткие замыкания без соединения с землей составляют 5 15% от об-
щеrо числа коротких замыканий.
Наиболее редкими являются трехфазные короткие замыкания, составляю-
щие 5 10% от общеrо числа коротких замыканий.
В правильно спроектированной системе должны быть предусмотрены меро-
б*
80
1
2
100
ба
40
20
о
0,4
0,6 t,c
0,2
Рис. 7.2. Зависим'ость предельной мощнос-
ти, передаваемой в систему по уСJlОВИЯМ
динамической устойчивости, от времени от-
ключения и вида KopoTKoro замыкания:
1 однофазное; 2 двухфазное; 3 двухфазное
на землю; 4 трехфазное
163
приятия, позволяющие иметь наименьший ущерб от аварий с учетом вероятности
их появления и тяжести. При расчетах коротких замыканий и динамической ус-
тойчивости, так же как и при расчетах друrих аварийных режимов, часто воз-
никает вопрос, наскольКо правильно (точно) эти расчеты отражают то, что про-
изойдет в действительности в электрической системе. В пояснение этой постанов-
ки вопроса заметим, что неоднокрацю бывали случаи, коrда на основании ра-
счетов коротких замыканий или ус-
тойчивости предполаrались необходи-
мыми те или иные довольно дороrие
мероприятия по усилению системы.
Например, в одной системе требова-
лась смена выключателей, так как
расчеты указывали на опасность их
взрыва при трехфазном коротком за-
мыкании, в друrой системе требова-
лась установка последовательной ком-
пенсации, без которой система по рас-
четам оказывал ась неустойчивой, и Т.д.
Между тем опыт эксплуатации этих
систем без проведения требовавших-
ся мероприятий показал, что ряд ава-
рий, рассмотренных в расчетах, не
привел ни к взрыву выключателей,
ни к нарушению устойчивости.
Однако ряд специально постав-
ленных исследований, в которых эк-
спериментально определялись пара-
метры системы, делались расчеты, а
затем опыты, показал достаточно хо-
рошее совпадение полученных результатов. Следовательно, дело здесь не в
ошибочности расчетов или неточности принятых методов анализа. Результаты
расчета и опыта мо,ут совпасть, если расчет проводить при правильном учете
в с е х и с х о Д н ы х Ф а к т о р о в, влияющих на результат опыта. Это
всеrда затруднительно, так как степень влияния Toro или иноrо фактора в каж-
дом конкретном случае имеет случайный характер. Режим, принятый за расчет-
ный, может при естественных (а не специальных, как в опыте) условиях не поя-
виться за довольно длительный период эксплуатации.
Обычно при проверке устойчивости системы выявляют точку, в которой
короткое замыкание наиболее опасно, и для нее проводят расчеты. Однако ве-
роятность Toro, что короткое замыкание данноrо вида произойдет именно в этой
точке, разумеется, значительно ниже, чем общая вероятность появления рассмат-
риваемоrо вида KopoTKoro замыкания в системе. Если короткие замыкания будут
ПРОИСХОДИТЬ в некотором (даже не очень большом) отдалении от опасной точки, то
они уже будут более леrкими. Именно поэтому оценка устойчивости передачи
или системы, проводимая для KopoTKoro замыкания в наиболее опасной точке,
дает практически нескольКо завышенные (в пользу надежности) результаты. Весь-
ма вероятно также, что при аварии будут появляться некоторые не учтенные в
расчетах, обычно облеrчающие аварию факторы (такие, например, как влияние
дуrи в месте KopOTKoro замыкания).
Наll50л е тяж - l/=220-f-f+оокВ;Р=Р нат
лая тОчка корот- =200-БОО 11М
коео :а ыанцяя
I ",U=COпst
ft A .
I .........
I 3 -,..?
/ - ''''''''''''._'-<2. .
l J O . ,,-/
/.
5/
95
t * DТКЛ
1,5
о 5 о
) 90
10
100
4-
15
105
20 { fOO;!!J100
l Xtz.
110 { E iJE I00i
. X'c!:tLJX tOa
Х"С!
Рис. 7.3. Влияние случайных изменений ис-
ходных параметров режима и параметров сис-
темы на предельное время отключения корот-
Koro замыкания:
1 сопротивления дуrи в месте KopOTKoro замыка
ния (l<д/Х12) .100; 2 начальноrо возбуждения
[(E:!:L\.E)/E]'IOO; 3 удаления KopoTKoro замыкания
(Ll.l/l) .100; 4 переходноrо реактивноrо сопротивле-
ния rel!epaTOpa [(х' d:!:L\.x)/x' d].IOO
164
в качестве примера на рис. 7.3 показана схема системы, устойчивость ко-
торой определяется исходя из трехфа;зноrо KopoTKoro замыкания в наиболее
тяжелой точке на шинах BblcoKoro напряжения станции.
Для Toro чтобы при коротком замыкании сохранить устойчивую работу сис-
темы по возможности в большем числе случаев, нужно быстро отключить ава-
рийный участок. Предположим, что расчет устойчивости" проведенный при не-
которых исходных параметрах режима станции, требует, чтобы время отключе-
ния t откл было не более чем t o . Эту величину t o назовем предельным временем
отключения и примем далее за единицу.
Рассмотрим влияние различных факторов на изменение предельноrо времени
отключения. При нахождении предельноrо времени отключения t откл предпола-
rалось, что короткое замыкание сразу же становится rлухим (<<металлическим»).
В действительности же оно в большинстве случаев или происходит через заrо-
рающуюся при замыкании фаз reHepaTopa дуrу, или возникает как развитие
однофазноrо KopoTKoro замыкания. В этих случаях условия устойчивости сис-
темы облеrчаются и предельное время отключения растет. К увеличению пре-
дельноrо времени отключения приводят также удаление KopoTKoro замыкания
от опасной точки и изменение режима reHepaTopoB, предшествовавшеrо аварии.
Существенным может быть ОТ.'Iичие фактических параметров reHepaTopa от
расчетных, которые обычно даются заводом только ориентировочно (расхожде-
НИя до + 15%).
Таким образом, определение поведения системы при больших аварийных
возмущениях, так же как и при малых возмущениях, всеrда имеет несколько
условный, вероятностный характер.
Задача динамической устойчивости. В эту задачу входят анализ характера
процесса и расчет всех или части параметров режима при переходе системы от
одноrо режима к друrому; собственно расчет динамическоrо перехода от одноrо
начальноrо установившеrося режима к друrому новому установившемуся
режиму, наступающему при случайном отключении части элементов системы
(отключении rруппы reHepaTopoB, линии передачи, наrрузки и т. д.) или отклю-
чении их после аварии (обычно KopoTKoro замыкания в каком-либо из этих эле-
ментов); определение изменений тока, частоты и друrих параметров режима.
Расчеты во всех указанных случаях проводятся с учетом основных нелинейнос-
тей и существенных для данной задачи динамических характеристик. Наиболее
общим м'!тодом количествеf/.НОZО исследования nереходных nроцессов является
метод численноzо интеzpирования системы дифференциальных уравнений.
В зависимости от постановки задачи эти уравнения MorYT быть различными: пол-
ными (Парка rорева), упрощенньши, общими (второй метод Ляпунова). Урав-
нения и способ их решения должны быть выбраны так, чтобы с их помощью мож-
но было рассчитать все существенные в данной задаче изменения параметров ре-
жима во времени и по их виду сделать заключение об устойчивости перехода сис-
темы от ОДноrо режима к друrому или о динамической устойчивости системы.
Основные допущения. Предполаrается, что если Э.1ектромеханические пере-
ХОДные процессы, вызванные резкими изменениями режима электрических сис-
тем, протекают при изменениях скорости ю, не превышающих 2 3% от син-
хронной,- то вращающий момент в относительных единицах может быть принят
равным мощности:
(0*0 == 1; ro* - 0,02; М* Р*
"'*0 + ,1"'*
Р* "'"'р
1+0,02 "'"' *.
165
Кроме сделанных допущений относительно малости отклонений скорости
от синхронной можно при решении поставленной задачи сделать и ряд допол-
нительных допущений, предполаrая, что в рассматриваемом процессе не учиты-
вается изменение во времени свободных токов, появляющихся в обмотках reHe-
ратора, и принимается неизменным значение э. д. с. Е; Е'. В большинстве
случаев действие реrуляторов скорости может не учитываться, а действие pery-
ляторов возбуждения учитывается только введением условной неизменной э. д. с.
Разумеется, что при стремлении к наиболее точному решению можно отказаться от
упрощающих допущений и учитывать электромаrнитные переходные процессы в
reHepaTopax и переходные процессы в системе возбуждения. При необходимости
можно учесть переходные процессы в первичных двиrателях и их реrулирующих
устройствах, переходные процессы в наrрузках электрических систем, волновые
переходные процессы в дальних электропередачах. Однако с точки зрения ин.
женера далеко не всесда более полное математически и учиты8ющееe наибольшее
количество факторов решение 01ШЗьюаеmcя наилучшим. Для получения четких
представлений оценки поведения системы при тех или иных явлениях часто
целесообразно применять уравнения, более rрубо описывающие процесс, но да-
ющие наиболее быстрое и наrлядное решение. Друrими словами, математический
аппарат (включая и точность решения) должен соответствовать поставленной
технической задаче. Именно эта адекватность практических целей проводимоrо
исследования, сделанных допущений и сложности описания явления при поста-
новке задачи и рассмотрении ее решения определяет т е х н и ч е с к у ю с т р 0-
r о с т ь з а Д а ч и.
Упрощенные уравнения при расчетах динамической устойчивости. Эти ypaB
нения, как указывал ось выше, целесообразно применять для ориентировочных
эксплуатационных расчетов, для проектных расчетов и проrнозов развития сис-
тем. Преимуществом упрощенных уравнений будет не только большая леrкость
в вычислительных операциях, но и БОльшая наrляДНОСТЬ, облеrчающая пони-
мание происходящих явлений. Однако необходимо иметь в виду то обстоятель-
ство, что при переходе от полных уравнений к упрощенным физика происходя-
щих .явлений отражается с определенными искажениями. Необходимо выбрать
упрощения так, чтобы они не моrли существенно повлиять на количественную
и содержательную сторону получаемоrо результата. Так, основной причиной
динамической неустойчивости являются резкие изменения режима или большие
возмущения. Они означают существенные изменения состояния системы, т. е.
такие изменения в ее схеме, числе работающих элементов или их режиме, кото-
рые приводят к быстрому и значите.'1ЬНОМУ изменению мощности, отдаваемой
rенераторами, получаемой потребителями или передаваемой по отдельным эле-
ментам системы.
Изменения мощности при всех процессах, происходящих в электрической
системе, не MorYT совершаться MrHoBeHHo, так как они связаны с изменением
запаса механической и электромаrнитной энерrии в отдельных элементах системы.
Однако при рассмотрении электромеханических процессов с помощью упрощен-
ных уравнений обычно пр ин имают, что электромаrнитные и тем более механи-
ческие процессы, появляющиеся при изменении схемы системы, отключении ка-
коrо-нибудь элемента, включении наrрузки или коротком замыкании, не
препятствуют MrHoBeHHoMY изменению активной электрической мощности.
Допущение о мсновенном изменении электрической мощности означает отказ
от учета так называемых апериодических сласающих тока и напряжения во всех
166
элементах, в том числе в синхронных еенераторах электрической системы. Это,
в частности, означает переход от выражения (2) в табл. 6.2 для определения
мощности синхронноrо reHepaTopa к выражению (3), а при определении токов в
сетях, связывающих reHepaTopbI, переход от дифференциальных уравнений к
алrебраическим.
Таким образом, изменения мощности reHepaTopa, ero тока статора, свободноrо
о)
а) U ro U r 8" Eqo
РО Р
t тP
8)
1
\ I '"
I.. M Мер=Й
Нf;
I'1 Nep . L1 а.....
L1O' a
t t
i
'"
II "
11 11 ,,'" t
11"
"Ira
Рис. 7.4. Пример резкоrо изменения режима (при коротком замыкании):
а схема системы; 6 характер изменений мощности Р. уrла О, напряжения U r , то&а возбуждеиия
If<=Eq и тока статора Ir (все величииы отиесеиы к системе осей, связаииых с ротором, поэтому rap-
моническне величины представлены в виде монОТОННО изменяющихся оrибающих., напротив, МОИОТОННО из..
меняющаяся апериодическая составляющая /r.a' показанная штриховой линией, изображена в виде rap..
моннческой составляющей); 8 изменения моментов вращения: М,..., момент, связанныЙ С действием
периодических составляющих тока статора, М то же, ио апериодических; е измеиеиия уrла 6,6 и 6, О а'
вызванные неЭ8ВИСИМЫМ действием этих моментов
тока возбуждения рассматривают как происходящие MrHoBeHHo при резком воз-
мущении (рис. 7.4).
Пренебрежение апериодической слаrающей тока статора (и соответственно
периодической слаrающей ротора) означает отказ от учета дополнительноrо пуль-
сирующеrо вращающеrо момента, связанноrо с уменьшением электромаrнитной
энерrии, запасенной ротором до KopOТKoro замыкания. Пульсирующий вращаю-
щий момент, обусловленный взаимодействием поля, связанноrо с апериодической
слаrающей тока статора, и поля, вызванноrо током возбуждения, создает пуль-
сации скольжения, влияющие на среднее скольжение ротора и, следовательно,
на характер изменения уrла во времени. При ускорении ротора пульсирующий
момент несколько задерживает ero движение (рис. 7.4).
Определенный эффект, также не отраженный в упрощенных уравнениях, да-
ют дополнительные потери, появляющиеся в стали reHepaTopa при переходных
процессах. Эти потери в схемах замещения приближенно отражаются увеличе-
нием активных сопротивлений статора и ротора. Эквивалентное активное сопро-
тивление статора из-за появления дополнительных потерь может увеличиваться
на 15 20%, а в отдельных случаях и на 50 100%.
Пульсирующий момент, обусловленный влиянием апериодической С.1Jаrаю-
щей, и дополнительные потери качественно одинаково влияют на характер от-
носительноrо движения ротора, замедляя изменение уrла, оказывая некоторое
тормозящее действие при сбросах наrрузки. При упрощенных расчетах, не учи-
тывающих указанных факторов, изменение уrла будет получаться более быст
рым, чем в действительности.
161
На рис. 7.5 показан характер изменений уrла, полученный при упрощенных
расчетах без учета влияния апериодической слаrающей и дополнительных потерь.
Приближенно влияние этих факторов можно отразить, полаrая, что на время
происходящих вблизи reHepaTopa трехфазных коротких замыканий к ротору re--
нератора прикладывается дополнительный тормозящий момент, равный 10 15%
от номинальноrо момента reHepaTopa. Иначе rоворя, в ПРGцессе KOpOTKoro за-
мыкания принимается несколько уменьшенная мощность турбины.
а)
БI
о)
Б
t
Рис. 7.5. Влияние момента, созданноrо
дополнительными факторами (аперио-
дической слаrающей тока статора и до-
бавочными активными потерями в цепи
статора и ротора), на характер измене-
ния уrла б:
а характер изменения уrла 6 f(t) при вы-
падении reHepaTopa из синхроннзмц; б то
же, но в случае более удаленноrо к.lз. (более
леrкой аварни) ; 1 и 2 без учета и при учете
дополнительных факторов соответственно
t
Влияние отмеченных факторов проявляется заметно только при коротких
замыканиях. При изменениях наrрузки и друrих явлениях, не приводящих к
резкому изменению тока, это влияние оказывается rораздо меньшим.
При рассмотрении переходных процессов можно не учитывать влияния указанных
факторов, создавая этим дополнительиый запас, компенсирующий возможные поrрешности
расчетов. Однако с наличием этоrо дополнительноrо запаса необходимо считаться при опре-
делении устойчивости системы и опенке ее режимов.
Резкие изменения режима, расс.матриваемые в настоящей славе, мощт
быть весьма разнообразны, но все они при сделанных выше допущениях от-
ражаются изменениями э. д. С., взаимнЫх и собственных nроводимостей
между nараллельно работающими станциями.
Например, при отключении линий электропередачи, включении (отключении) между па-
раллельно работающими станциями наrрузок и т. д. изменяются взаимная проводимость
(У12 == l1Z 12 ) и собственная проводимость (У11 == 1/Z11)' При подключении reHepaTopoB
(к ранее работавшим) меняются эквивалентная э. д. с. станпии и сопротивление эквивалент-
Boro reHepaTopa.
При расчетах несимметричных режимов составляется комплексная схема
замещения рассматриваемой системы (рис. 7.6, а), содержащая аварийный шунт*
(x ) (рис. 7.6, б). При различных коротких .замыканиях в системе схема заме-
щения приобретает вид, показанный на рис. 7.6, в. При этом предполаrается,
что на сенератор действуют только вращающие моменты, обусловленные токами
* Напомним, что соrласно этой схеме замещения несимметричное короткое замыкание
рассматривается как симметричное, далениое иа иекоторое дополнительное сопротивление
X иазываемое аварийным шунтом. Ero значеиие при различных несимметриях равно:
. при одиофазных коротких замыканиях X -== Х 2Е + XOjj' -
при двухфазных коротких замыканиях X -== X 2jj ;
при двухфазиых коротких замыканиях на 'землю X -== Х 2 !) XOjj/(X 2 jj + XOjj)' rде Х 2 !) и
Х О!) результирующие сопротивлеиия обратной и иулевой последовательностей относитель'
но места KopOТKoro вамыканИя (см. рис. 7.6).
168
прямой nоследовате.льносmи, протекающими по статору еенератора. ТОКИ ну-
левоЙ последовательности через reHepaTOp не протекают, замыкаясь в повышаю-
щем трансформаторе, имеющем заземленную нейтраль*.
Токи обратной последовательности создают вращающееся, поле, направ-
ленное навстречу созданному вращаl()..
щимся ротором полю. Взаимодействие
этих полей создает пульсирующий мо-
мент (рис. 7.7), изменяющий свой знак
с частотой, в два раза большей нормалъ-
ной частоты reHepaTopa. Обычно полаrа-
ют, что значение этоrо момента равно
нулю. Пульсирующий момент создает
некоторое дополнительное скольжение
ротора. Однако влияние этоrо скольже-
ния невелико и им, как правило, пре-
небреrают.
Таким образом, при обычных инже-
нерных исследованиях больших возму-
щений принимаются слеДующие общие
положения:
[f
CШJ
р
4fP T
g A
iP
f.--
tEJ
CffiJ
q
4w
.t
H .
2 112 ср",О
Рис. 7.7. Примерный характер из-
менений вращающеrо MOMeHTa
M , Мер основной момент, M2ep O
среднее значение момента, созданноrо TO
ками обратной последовательности
+--
Рис. 7.6. Замещение системы прн не-
симметричном коротком замыкании:
Х ЛР Хл.2 сопротивления участков до ТОЧ"
КИ К. 3.; Х 6. сопротивление эквивалент
Horo ШУНТа. составленное Н3 суммарных
результнрующнх сопротнвленнй ХОЕ и
Х2Е ; а исходная схема; б схеМа За"
мещення прямой последовательности; в.......
определение схем замещения при разлнч"
ных КОРОТКИХ замыканиях. Здесь обозна
чено: схема замещения прямой последо..
вательностн «+:., Но обратной c :',
то же, нулевой сО:.
* Если бы токи нулевой последовательности протекали через reHepaTop, то они все
равно не создали бы вращающеrо момента, так как они не образуют вращэющеrо поля, спо-
собноrо взаимодействовать с полем ротора.
'
1. Все изменения режима системы отражаются в изменении ее схемы, в ко-
торую вводятся новые значения собственных и взаимных сопротивлений, э. д. с. .i
rеиераторов, а в некоторых случаях и их механических мощностей.
2. Электрические мощности, отдаваемые rенераторами как в переходном,
так и в установившемся режимах, определяются исходя из значений э. д. с. и со-
противлений; при этом приближенно принимается, что при изменении схемы
системы или значений сопротивлений MfHo-
венно изменяется электрическая мощность.
3. Влияние апериодической составля-
ющей тока статора на характер изменения
уrла б учитывается только в некоторых
случаях, каждый раз особо оrовариваемых,
например таких тяжелых авариях, как
двух- и трехфазные короткие замыкания на
землю. При этом учет дополнительноro
момента, обусловленноrо апериодической
5 t, с составляющей, осуществляется или приб-
лиженно уменьшением мощности турбинь:
на 10 15%, или более точно расчетом по
полным уравнениям (см. rл. 6).
4. Несимметричные режимы, в том чис-
ле короткие замыкания, при всех расчетах
приводятся с помощью комплексной схемы
замещения к симметричным. Предполаrа-
ется, что изменения движения ротора выз-
ваны моментами, создаваемыми только токами прямой последовательности. При
этом, пренебреrая влияниями момента, обусловленноrо токами обратной после.-
довательности, учитывают потери, связанные с протеканием этих токов, вводя в
комплексную схему замещения активные сопротивления обратной и нулевой.
последовательностей.
5. Изменения сопротивлений reHepaTopoB и трансформаторов, обусловлен-
ные насыщением стали, в расчетах не учитываются или учитываются прибли-
женно уменьшением замещающеrо сопротивления, и в этом смысле система пред-
полаrается ненасыщенной линейной.
Исследования влияния насыщения в расчетах электромеханических пере.-
ходных процессов показали, что неучет насыщения, т. е. нелинейности харак-
теристик холостоrо хода и непостоянства реактивных сопротивлений, в некоторых
случаях может вызвать довольно заметные поrрешности: токи и напряжения мо-
rYT получиться несколько преувеличенными, а периоды качаний ротора пре-
уменьшенными. Значения уrла, очень близкие к истинным в первых циклах ко-
лебаний, затем стремятся к несколько меньшему установившемуся знa<teHию.
Кривые, изображенные на рис. 7.8, показывают изменение указанных величин
в действительности и при упрощенном расчете, т. е. без учета насыщения, и при
приближенном учете апериодической слаrающей.
Из рассмотрения соотношения рис. 7.8 следует, что для выяснения изме-
нений уrла б в первом цикле качаний нет надобности учитывать насыщение.
Специальные исследования показали, что даже при значительной и продолжи-
тельной форсировке возбуждения reHepaTopa насыщение не оказывает заметнorо
влияния на общий характер изменения уrла, тока или напряжения. В тех случаях,
2
J
4
Рис. 7.8. Влияние насыщения на ха-
рактер изменения уrла при аварии
(к. з. при длительной форсировке в пос-
леаварийиом режиме):
1 действительное изменение; 2 расчетное
измененне без учета насыщения при приблн-
женном учqте влияния апернодической слаrа-
ющеil
170
коrда при значительной и продолжительной форсировке возбуждения рассмат-
ривается процесс, состоящий из нескольких циклов изменений уrла б, учет на-
сыщения необходим. В приближенных расчетах учет насыщения можно отражать
некоторым уменьшением реактивноrо 'Сопротивления, замещающеrо reHepaTop.
Ориентировочно сопротивление X Hac' замещающее reHepaTop, должно при-
ииматься равным (0,6 -+- 0,8)x , если расчет ведется по постоянству Э. д. с.,
приложенной за xdHac. При расчетах по постоянству продольной слаrающей
этой э. д. с. можно принять X Hac == (0,8-+-0,9)x .
t=O t=[O] "ь=со
И:JМ8неНlJе. потокосцеплеНlJU Изменеiще э.8.с. и JlClпряженця .2eHepClmoptt
Рис. 7.9. Изменение потокосцеплений и соответствующее им изменение
э. д. с. и напряжения reHepaTopa:
t O нормальный режим; t [O] момент коммутации; t oo установивШИЙСЯ ре-
жим; чr 1[0] потокосцепление, отвечающее полному возбуждению; чr ad потоко-
сцепление реакции якоря; чr рез потокосцепление, результирующее по продольной
оси; 'F рас потокосцепление рассеяния
Вопросы учета насыщения подробно в настоящей книrе рассматриваться не
будут. В тех случаях, коrда из расчетов переходноrо процесса требуется опреде-
лить ток в обмотке возбуждения, учет насыщения обязателен.
6. Пренебрежение апериодическим током статора и периодическим током
ротора позволяет принять, что при коммутации в цепи статора (например, при
уменьшении напряжения и r на рис. 7.9) MrHOBeHHO (при f == ио]) изменяются
потокосцепления ч' ad И Ч' == {[О] и соответственно э. д. с. Eq(O]. При этом
в соответствии с известным законом инерционности потокосцепления KOpOTKO
замкнутоrо контура в момент t == ио] сохраняются неизменными потокосцепле-
иие 'l'рез и создаваемая им э. д. с. E (рис. 7.9, 7.10). Далее эти э. д. с. изме-
ияются, как это показано на рис. 7.10, 7.11.
7. Простейшие расчеты переходных процессов ведутся исходя из условия не-
изменности результирующеrо потокосцепления обмотки возбуждения в продоль-
ной оси во время Bcero процесса, т. е. исходя из постоянства э. д. с. E . Осно-
ванием к этому допущению служит упомянутый выше закон электромаrнитной
инерции*, соrласно которому E == Ч' рез остается в момент возмущения (t ==
* Закон электромаrнитной инерции и объяснение характера изменения э. Д. с. Eq,
Еч' приводились ранее [2].
171
== [О]) неизменным ('1' рез == const)" а далее медленно изменяется, переходя к
значению '1'резоо при t ==00 (см. рис. .9, 7.10).
Величина E , пропорциональная результирующему потокосцеплению '1' рез
с обмоткой возбуждения, оставаясь неизменной в момент любой коммутации
(например, KopoTKoro замыкания в сети), изменяется далее относительно медлен-
но. Электродвижущая сила Eq пропорциональна полному току возбуждения, ко-
Еч Т EqCOJ
[q[o1 E
LJ.Eq -'
,-'
- Eqo ....' E e
Eqa ----'-( I I
Е' Е qo Е'
Ечо ...................... Е:" q
Е' Е'
'l Ч",
t=D t t=O t
Рис. 7.10. Изменение э. д. с. Рис. 7.11. Изменение э. д. с.
(без реrулирования воз- (при реrулировании воз-
буждения) буждения)
торый протекает по ротору. В полный ток входят вынужденные /te и свободные
I1/ ! токи. Э. д. с. Eq меняется в момент коммутации скачком (р»с. 7.11). Pery-
а)
Е,б
5)
Б
В)
Б
1;
t
t
. Рис. 7.12. Сопоставление результатов расчетов, проведенных при
Е' ==const и Е' == const, с осциллоrраммами процесса:
q
а тяжелая авария, сопровождющаяся непрерывным ростом уrла выпадением
из синхроннзма; б качания; в случай переходноro процесса в системе, нахо-
дящейся Иа пределе устойчивости; Е' и Е' Q действительное измененИе э. д. с.;
Ь' измененне уrла, определенное расчетом при E' const (спл,ошная линня);,
6 то же, прв Е' q const (штриховой линией показано изменение уrла 6, нмею.
щее место в действительности, т. е. определениое из опыта)
лятор возбуждения после аварийноrо возмущения, обычно сопровождающеrося
понижением напряжения на шинах reHepaTopa U r, увеличивает ток возбуждения
/te' стремясь поддержать напряжение U r неизменным. Это приводит к стабили-
зации E на еще большем интервале времени' (рис. 7.12). Так как все reHepa-
торы энерrосистем, как правило, снабжены реrуляторами возбуждения, то при
172
предварительном анализе характера БGЛЬШИХ возмущений и rрубых расчетах
динамической устойчивости с полным основанием можно считать E == const.
8. Качественный анализ переходных процессов можно проводить при еще
более rрубом допущении, принимая изменяющуюся в момент коммутации
(см. рис. 7.9 и 7.12, а) э. д. с. Е' за постоянную величину: Е' const.
На рис. 7.12, б показаны типичные изменения уrла при качаниях, прибли
жающихся к пределу устойчивости. Изменение 6' дает при этом достаточное пред
ставление о поведении исследуемой системы. Однако вблизИ предела устойчивости
(рис. 7.12, в) расчет 61 исходя из условия Е' == const обычно дает качественно
неверный результат (устоЙчивость вместо неустойчивости), впрочем в этом слу
чае и более точные расчеты стаiЮВЯТСЯ не вполне определенными, давая различ
ные результаты даже при небольшой вариации исходных параметров (кривые 61
и 62 на рис. 7.12, в).
При рассмотрении переходных процессов в большинстве случаев прини-
мается допущение, что мощность и вращающий момент, выраженные в относи-
тельных единицах, равны между собой. Это означает предположение, что из
менение скорости на протяжении всесо времени рассматриваемоzо nроцесса зна-
чительно меньше, чем синхронная скорость, но оно в то же время настолько зна-
чительно, что reHepaTop может выпасть из синхронизма. Разумеется, что это
облеrчающее анализ допущение не обязательно и расчет можно вести, определяя
вращающий момент как М == Р/(ШО + dб!dt). Так как dб!dt заранее не известно,
то необходимо применять последовательные приближения и вести расчет после-
довательными интервалами. .
К рассматриваемой выше rруппе явлений:
относятся процессы, связанные с большими качаниями reHepaTopoB или
их выпадениями из синхронизма, но при этом составленные уравнения будут
справедливы только для Toro времени, пока reHepaTop явно не выпал из синхро-
низма и ero относительная скорость dffi не стала соизмеримой с синхронноЙ ско-
ростью;
не относятся процессы, происходящие после выпадения из синхронизма
(при асинхронном ходе), при разrоне reHepaTopa от неподвижноrо состояния до
синхронной скорости, процессы в останавливающемся reHepaTope или выбеrаю
щем под действием избыточноrо вращающеrо момента. Они рассматриваются
. с помощью друrих методов, полаrающИХ, что избытки мощности И вращающеrо
момента численно не равны.
7.1. ЧИСЛОВОЕ РЕШЕНИЕ УРАВНЕНИЯ ОТНОСИТЕльноrо ДВИЖЕНИЯ
МЕТОДОМ ПОСЛЕДОВАТЕЛЬНЫХ ИНТfРВАЛОВ
В rл. 6 было указано, что общим методом решения любых задач, требующих
выявления характера относительноrо движения ротора одноrо или нескольких
[енераторов, являются хорошо разработанные в математике методы численноrо
интеrрировани дифференциальных уравнений. В практике инженерных расче.-
тов часто пользуются упрощенными их модификациями, например методом по-
следовательных интервалов*. Этот метод, вполне удовлетворительный при обыч-
* Метод последовательных интервалов, применяемый в электроэнерrетических задачах,
дает для первых циклов качаний практически ту же точность вычислений, что и метод чис
ленноrо интеrрирования по PYHre Kyny (подробнее о точности численноrо интеrрирова
ния см. П2).
173
ных инженерных задачах, в которых можно оrраничиться общей характеристи-
кой процесса, имеет ряд недостатков, снимаемых при использовании современных
вычислительных машин. Так, можно предусматривать контроль поrрешности
и автоматическое изменение шаrа интеrрирования при понижении точности ниже
заданной. Овладев простым методом, инженер может ОСВОИ1Ь и более совершен-
ные методы расчета.
Элементарное обоснование метода последовательных интервалов. ЭтОТ
метод применяется непосредственно для исследования простейшей электриче-
о)
р
8)
IX
IX(J)
()
L1t L1t
Рис. 7.13. Изменение параметров режима re-
нератора после возмущения в системе (К. з.):
а зависимость моментов от уrла и времени: 1 ха-
рактеристика электромаrнитноrо момеита reHepaTopa,
полученная при изменяющейся ВО времени э. д. С. и
выраженная поверхностью M 1jJ(6, t); 2 характери-
стика механическоrо момента MMex <P(t); б при-
ращение МОЩНОСТИ при изменении уrла; 8 измене..
ние ускорения a f(t); а{о) ускорен не В начале пер-
Boro иитервала; а(1) то же, в конце nepBOro и иача-
ле BToporo интервалов; а(2) то же. В конце BToporo
в начале TpeTbero интервалов; 2 изменение уrла
6 f(t); ОАА' изменение уrла при a ao const;
ОА то же, за первый интервал приращение 6,6{l)
t
ской системы. Уравнение относительноrо движения синхронной машины при
небалансе момента турбины и электромаrнитноrо момента можно записать в сле-
дующем виде (rл. 4):
а: == 360fоДМ/ТJ === d 2 '8/dt 2 ,
rде дМ === Ммех М.
При этом не делается каких-либо оrpаничений в отношении выражения
моментов Ммех И М, которые MorYT зависеть не только от изменений уrла б
(рис. 7.13). Таким образом, имеется возможность распространения получаемых
расчетных формул на любые сколь уrодно сложные системы. Решение записанноrо
выше дифференциальноrо уравнения означает определение зависимости б == t(t).
При расчетах относительноrо движения, происходящеrо со скоростью, MHoro
меньшей синхронной, упрощенно принимаем, что мощность численно равна мо-
менту* :
а: == 360 fодР/Т J .
(7.1 )
* в этом уравнении время и уrол выражены в именованных единицах: [t] == [TJ] ==
== с; [б] == rрад, тоrда [а] == rрад/с 2 , [{о] == [ц. Значение момента (или мощности) под-
ставляется в это уравнение в относительных единицах.
174
Обычно такое допущение вызывает лишь незначительную поrрешность. Од-
нако если
Ll(J)* == ....!.... 100 => 2,0 -;. 3,0 %.
000 dt
ТО В некоторых случаях (при исследовании систем вблизи rраницы устойчивости,
малых инерциях машин и т. д.), Коrда поrрешность может оказаться сущест-
венной, вместо (7.1) надо решать уравнение
d 2 'Q ( АР )/
01: == == 360 f о dB 1 Т J .
dt 2 1+
dt 000
Обосновывая метод последовательных ин-
тервалов, предполаrаем, что поставленная за-
дача уже решена и подлежащие определению
зависимости построены на рис. 7.13,6, в, 2.
Разобьем весь процесс на малые интервалы 165
времени Llt и будем рассматривать ero после- 150
Довате.'1ЬНО от интервала к интервалу. Выби-
рая одинаковые интервалы по времени (рис.
7.13, в), очевидно, будем иметь неодинаковые
интервалы по уrлу (рис. 7.13, б). КаждЫЙ
интервал может характеризоваться некоторы-
ми нача.'lЬНЫМИ и конечными значениями yr- 90
да, скорости, ускорения и средними значения-
ми скорости и ускорения, действующими в
данном интервале. Начальные значения этих
величин в последующих интервалах будут
равны конечным в предыдущих. Выберем ин- '+5
тервал настолько малым, чтобы на протяже-
нии ero можно было ускорение считать неиз-
менным. Практически при расчетах современ-
ных мощных систем выбирается интервал
!1t 0,02 --:--- 0,05 с. Наиболее точные резуль-
таты, разумеется, получаются при меньшем интервале (рис. 7.14), который дол-
жен выбираться тем меньше, чем меньше посТоянные времени. При меньшем
интервале поrрешность расчета на каждом интервале будет меньше, но, так как
число интервалов, необходимое для решения, возрастет, увеличится также дли-
тельность расчета и поrрешность окруrления (см. П2).
В первом интервале начальная скорость равна нулю и при постоянном уско-
рении 01:0 (см. рис. 7.13, в) изменение уrла будет происходить по закону равномер-
но YCKopeHHoro движения. Приращение уrла к концу интервала составит
М(1) == 0,501:(0) М2== 0,5.360fo(LlP(0) /TJ )М 2 . (7.3)
Мощность и ее приращение t1P изменяются при изменениях уrла и времени.
Зная, что время изменилось на Llt, а уrол на б(1}, можно определить t1P(I),
т. е. небаланс мощности в конце первоrо интервала, или, что одно к то же, в на-
чале BToporo. По приращению мощности можно определить и ускорение:
01:(1) == (t1P (1) /TJ ) 360 fo.
(7.2)
О, йра8
200
8'иакс
180
148
/38
/З5
О,/
0,3
0,5
0,7 t,c
Рис. 7.14. Влияние расчетноrо интер-
вала на максимальное значение уrла
б в первом качании
175
Во втором интервале изменение уrла зависит от уrловой скорости (i)(1),
которую получил ротор в первом интервале, и ускорения 1%(1), действующеrо
в начале BToporo интервала, обусловленноrо избыточной мощностью Р(I). При.
ращение уrла во втором. интервале
8(2) == (J)(1) м + 0,51%(1) М2. (7.4)
Значение скорости на протяжении первоrо интервала не постоянно. Опреде.
лим ее приращение по среднему ускорению:
(J)(1) == 0,5 (1%(0) + 1%(1) ) М.
Подставив это значение в (7.4), будем иметь
8(2) == 0,51%(0) t2 + 1%(1) М2,
8(1) == к 0,5 P (О); 8(2) == 8т + к P (1) ;
8(n) + 8(n l) + KAP(n l),
rде К == (360 fo/T J ) М2.
При дальнейшем изменении режима системы, например отключении части
reHepaTopoB, повреждении линии и т. п., Коrда избыток мощности, составляю-
щей Pn 1' внезапно изменяется до значения P;n l) (рис. 7.15), приращение
уrла в п'м интервале
8(n) == 8(n 1) + к 0,5 ( P (n 1) + P;n l) .
или с учетом (7.3)
8(2) == 8(1) + 1%(1) М2.
а)
р
о)
р.
Р т
'о
Рис. 7.15. Изменение режима системы скачком:
а, б увеличение и уменьшение мощности соотВетственно
Аналоrично Можно полу-
чить. выражение для прира-
щения уrла в третьем, чет-
вертом и любом последующем
интервале. Выражая ускоре-
ния через мощности и перехо-
дя к выражению времени (и
ПОстоянной инерции) в секун-
дах, а уrла в rрадусах, бу-
дем иметь
}
(7.5)
(7.6)
Изменен не интервала. В процессе расчета переходноrо процесса иноrда удобно изме.
нить расчетный интервал At. Например, на тех участках процесса, rде происходят резкие
изменения каких-либо параметров режима, целесообразно выбрать меньший интервал;
там же, rде изменение заведомо имеет монотонный характер, перейти на больший интер-
вал. Приращение уrла на изменнвшемся интервале
ДО(n) == AO(n l) Kt. + К [АР (n 2) (1 К Ь ) + дp(n 1) (1 + 3к ь )]/(4К",), (7.7)
rде К ь == М (новое)/ М (старое).
В случае изменения расчетноrо ннтервала одновременно с изменением режима (что
иноrда целесообразно) формула (7.7) видоизменяется:
Ао(n) == AO(n l) к. ь + К [АР (n 2) (1 к./:;) + AP(R 1.) (1 + КЬ) +2AP п I)Kb]/(4K",].
. .
176
Значения мощностей Р и f't.P, фиrурирующие в методе последовательных интервалов:
определяются в соответствии со схемой замещения рассматриваемой системы и допущениями
относительно протекания переходных 9лектромаrнитных процессов. При упрощенном под
ходе, коrда ни 9лектромаrнитные переходные процессы, ни действие реrуляторов возбужде-
ния не учитываются, мощность определяется при E == const.
При учете переходнЫХ электромаrнитных процессов. возникающих из за
изменения параметров системы или действия устройств автоматическоrо реrули
рования возбуждения [енераторов, к дифференциальному уравнению электро
механическоrо состояния каждой станции рассматриваемой системы добавляются
дифференциальные уравнения ее электромаrнитноrо состояния, дающие COOTHO
шения между переходной э. д. с. E и э. д. с. Eq или EQ и смещением векторов
этих э. д. с. по отношению к э. д. с. друrих станций системы (уrлы 812, .., 8 1n ).
Расчеты при учете переходных электромаrнитных процессов. Пусть станция
связана сетью с шинами неизменноrо напряжения. В отношении сложности сети,
связывающей [енератор и приемную систему, не будем делать оrраничений, пола-
rая, что в ней может быть любое число наrрузок, представленных постоянными
полными сопротивлениями Zиl, ..., Zиn, И любое число линий электропередачи
и трансформаторов, представленных соответствующими схемами замещения.
Действие реrуляторов возбуждения отразим упрощенно, полаrая, что изме-
нение тока возбуждения, обусловленное действием ресулятора, происходит по
экспоненте и проявляется с некоторым запаздыванием во времени после короткоео
замыкания. В расчетах изменения режима, связанные с возникновением корот-
Koro замыкания и ero отключением, будут характеризоваться изменением соб
ственных и взаимных сопротивлений, вызывающим изменения тока статора и
э. д. с. Eq. Соrласно сделанным ранее допущениям, эти величины изменяются
скачком.
На основании векторной диаrраммы для машины с rладким ротором (см.
rл. 4) запишем:
Eq == E + 1 d(X d X );
1 d == Eq Ун cos ан U У12 COS (8 а I2 ).
Подставив (7.10) в (7.9), получим
Eq == [E ИУ12 (X d X ) cos (о ( 12 )]/[ 1 Ун (X d X ) COS ан]. (7.11)
Уравнение (7.11), связывающееэ. д. с. Eq, E и уrол 8, справедливо в любой
момент процесса. Дифференциальное уравнение*, связывающее изменения э. д. с.
E , Eq и Eqe' вызванную действием возбудителя (э. д. с. установившеrося ре-
жима), записывается в виде
Eqe == Eq + T do d E/dt. (7.12)
Решенное в конечных разностях уравнение (7.12) позволяет найти измене-
ние э. д. с. E за интервал времени!J.t при расчете методом последовательных
интервалов:
(7.9)
(7. 1 О)
!J.E == (Eqe Еq)ЫIТ dо .
(7.13)
* Это дифференциальное уравнение известно [2,41.
177
При этом значения Eqe берутся средним'и в заданном интервале времени и
определяются по кривым, соответствующим заданному изменению напряжения
возбудителя.
За рассматриваемый интервал времени !1t изменяются также э. д. с. Eq и
уrол б. Изменения уrла подсчитываются способом, описанным ранее.
Э. д. с. Eq в течение интервала !1t изменяется в связи с затуханием свобод.
ных токов, возникших В момент нарушения режима, и появлением токов, наве-
денных при изменении уrла. Значение Eq в начале следующеrо интервала вре-
мени определяется соrласно (7.11). При этом значения э. д. с. E и уrла б, вхо-
дящие в это уравнение, должны быть взяты соответствующими началу интервала.
Алrоритм расчета переходноrо процесса. Рассмотрим алrоритм расчета пере--
ходноrо процесса для н е я в н о п о л ю с н о й м а ш и н ы с про с т е й.
шим учетом автоматическоrо реrулирования BO
б у ж д е н и я. Расчет проводится в следующем порядке:
1. В исходном режиме определяются значения мощности Р о , уrла б о , пере.
ходной э. д. с. E o, э. д. с. Eqo и соответствующее ей напряжение возбудителя
И/. .
2. Определяются собственные и ,взаимные проводимости для аварийноrо
и послеаварийноrо режимов, причем для reHepaTopoB в схеме замещения берется
синхронное сопротивление.
3. Соrласно характеристикам реrуляторов и возбудителей строятся зави,
симости изменения напряжения на зажимах возбудителя И j и соответствующие
значения э. д. с. Eqe (кривые различаются лишь масштабами). Эти кривые
должны быть построены двух видов: для условий, коrда напряжение на шинах
reHepaTopa И I' (или В друrой точке системы, в которой подключен реrулятор воз.
буждения) меньше нормальноrо (Eqe возрастает по экспоненте), и для условий,
коrда напряжение ИI' равно или больше нормальноrо (Eqe падает). Таким об.
разом, для определения И j и Eqe необходимо знать напряжение И {', которое вы-
числяется в процессе расчета. Если интересуются только первым вылетом уrла,
проверяя наличие устойчивости системы, то часто не контролируют И {', полаrая,
что все время при коротком замыкании и после ero отключения происходит уве-
личение Eqe' Разумеется, такие расчеты имеют несколько условный характер.
4. Из уравнения (7.11) определяются значения э. д. с. Eq для первоrо мо-
мента нарушения режима работы. При этом значения E и б принимают теми же,
что и в исходном (нормальном) режиме (E == E o; б == б о ), а значения собст-
венных и взаимных проводимостей соответствующими схеме аварийноrо ре-
жима:
Eq(o) == [E o -'---.. И У12 (x d X ) cOS (130 а 12 )]/[ 1 Ун (Xd Х ) COS ан].
5. Соrласно (7.13) находится изменение переходной э. д. с. в течение пер-
Boro расчетноrо интервала:
!1E (1) == (Eqe(l) Eq(o»M/TdO'
rде Eqe(1) среднее значение Eqe в данном интервале времени.
При отсутствии реrулирования возбуждения для всех интервалов берется
Eqe == Eqo.
6. Определяется значение E в конце данноrо и начале следующеrо интер-
вала:
178
E (\) == E (o) + E (1) .
7. Определяется активная мощность reHepaTopa в начале данноrо интер-
ВЗJI а:
р (О) == E (o) Ун sin ан + Eq(o) и У12 sin (80 а а )'
8. Находится небаланс между механической и электрической мощнОСТЯМИ
reHepaTopa p(o). При этом можно не учитывать действия реrуляторов скорости,
полаrая, что при малыХ изменениях скорости действие их несущеетвенно. Од-
нако при заметном изменении скорости (больше 1 ,5 2 %) и длительном переход-
ном процессе необходимо учесть изменения мощности под действием реrулятора
скорости:
Р !f.HOM Ао(n) (1 А О(п» ) At Р 1 + АО(п) /(M(J)o)
pp(п)== + p(n l) (7.14)
aT s 3 Ofo Мro о Ts I+Ao(n l) /(Мro о ) .
Уравнение (7.14) определяет изменение (приращение) мощности турбины*
в n-м интервале времени под действием системы реrулирования в зависимостИ
от мощности на предыдущем интервале**:
АРр(п)
At Р+Ао(n) /,(M(J)o)]
== Р Т.ном АО(п)
aT s 360 'оМ
P р(п ер)
,
Ts Р+АО(пср)/ (At(J)oH
(7.15)
rде
Рр(пер) Р p(п l) + АРр(п) (7.16)
I+Ao(nep) / (А t (J)o) I+AO(n l) /(Мro о ) 2Р+Ао<n) /(МroоН
При достаточно малыХ значениях интервалов времени уточнения, вносимые
при расчете по (7.16), невелики.
Отметим, что и при более полном учете механических процессов, отражении
большеrо числа влияющих факторов, чем в приближенных формулах (7.14) и
(7.16), метод расчета остается прежним.
9. Определяется приращение уrла в данном интервале в соответствии с (7.5):
для первоrо интервала
М(1) == K P 0/2;
для последующих интервалов
8(п) == 8(n l) + K P (п l) ,
rде К == 360 fо Ы2 / Т J ;
для интервала, в начале KOToporo отключается авария, соrласно (7.6),
М(n) == 8(n 1) + к 0,5 ( P (n 1) + P;п I)'
* При вычислении приращения мощности турбины можно учитывать не только из-
менение режима за предыдущий интервал, но также и среднее изменение мощности в рас-
сматриваемом n-м интервале времени, уточнив этим расчет по уравнению (7.14).
** В уравнении (7.14) Ts эквивалентная постоянная; отражающая эффект инерции
эиерrоносителя (учет пароВЫХ объемов и т. д.), численно ее значения MorYT быть различ'
ными в зависимости от конструкции arperaTa, реrулятора; условий реrулирования (от 0,5
.110 5 8 с). .
179
rде /1P(n I) избыток мощности до отключения аварии; /1Р;п-----I) то же, после
отключения аварии.
10. Находится уrол в начале следующеrо интервала времени:
0(1) == 00 + /10(1) .
Таким образом, получают значения э. д. с. за переходным реактивным со-
противлением E и уrла cs в начале следующеrо интервала. По этим значениям
можно вновь найти э. д. с. Eq (см. выше) и повторить расчет для HOBoro интер-
вала. Все формулы, за исключеиием формулы изменения уrла, остаются неиз-
менными, меняется лишь индекс интервала. Уравнения Изменения уrла в после-
дующих интервалах (за исключением первоrо) несколько отличны от указанных.
Вид остальных уравнений при отключении аварии остается неизменным, меня-
Ются лишь собственные и взаимные сопротивления.
Таблица 7.1
1
2
3
4
5
6
7
8
I Проrрамма Номер Расчетные Проrрамма
Расчетные выражения ОСНОВНЫХ опе- выражения ОСНОВНЫХ
вычислений рации - вычислений
I
Номер интервала 1пр+ 1 10 Eqe по характеристике ер (t) Eqe
t время, 2 пр + дt или по дополнительной про-
с rpaMMe
о уrол, rрад 3пр+ 19пр 1l Eqe Eq «10» «9»
E 4 пр 12 пр 12 tlE == Kt (Eqe Eq) KtX«II»
о ан «3» a12 13 sin (о a 12 ) siп «5»
cos (о а 12 ) cos «5» 14 Eq С siп (о a 12 ) Сх «9» х «13»
А cos (о a 1 2) Ах«6» 15 Е 2 D [«9»J2xD
Е' А cos (о а12) «4» «7» q
q 16 Р 1 == Eq С siп (о a1 2 ) + «14» + «15»
Eq==rE ВХ«8» + E 2 D
А cos (о a 1 2)] В q
17 tlP==PT P1J PT «16»
18 KtlP К х «17»
19 tlO «19» пр+« 18»
Номер
опера-
ции
9
Прuмечанuя: 1. l(оэффиииенты имеют следУЮЩие выражению
А И (xd X ) У'2' B 1/[1 у" (xd X ) cos ""J.
Kt MlТ do ' С Иу,,;
К 18000,н'/т J I D ун sin "";
Р Т Р,. по характеристике 0/ (d'O/dt) нли по дополнительной под"роrрамме.
2. Я в н о п о л ю с и а я м а ш и н а с про с т е й ш и м а в т о м а т и ч е с к и м р е r у..
л и р о в а н и е м в о 3 б у ж Д е н н Я. При неодииаковых C IНXpoHHЫX СОПроти лениях в ПРОДОЛЬНОЙ
и поперечной осях расчет усложняется. В данном случае машину нельзя представить эквивалентной схемой
замещения. ОБЫЧНО вместо действительной машииы рассматривают фиктивиую С одинаковыми в nродольиой
и поперечной 6>СЯХ с()иротивлениями, равиыми поперечному сопротивлеиию Xq. э. д. с. такой фиктивной
машнны будет представлена вектором EQ . который совпадает с иаправлением Е q" Тосда можно определить
собственные и Взаимные сопротивлеиия и зависимости между токами и иапряжениями так Же, как это было
сдеЛано для неявнополюсной машины.
18О
Расчеты по выявлению характера переходноrо процесса очень трудоемки
и содержат большое число одинаковых операций. Поэтому для их типизации
записанный выше словесный порядок расчета обычно излаrается в виде алrорит
ма (проrраммы), содержащеrо расчетные выражения и порядок операций, пре
дусматривающих автоматизацию расчета (табл. 7.1). Так, в таблице указано,
над числами каких строк должны быть проведены те или иные операции. Буквы
«пр» указывают, что число должно быть взято из соответствующей строки пред
шествующеrо интервала. Коэффициенты, не изменяющиеся в расчете данноrо
режима (например, аварийный, послеаварийный), подсчитываются по приведен
ным формулам в ходе расчета. Заметим, что таблица является исходной при co
<:тавлении проrраммы для ЦВМ.
Уточнение. учета переходных процессов в pery-
,IЯторах скорости и возбуждения. Постоянные вре-
менн отдельных элементов реrулятора HaMHoro мень.
ше постоянных времени основных элементов, участ-
вующих в переходном процессе (Тао, Ts и др.). Ма-
дые значения постоянных времени реrулирующих
устройств требуют уменьшения расчетноrо интерва.
ла времени. Расчет переходныХ процессов в слож-
ной системе, проводимый с учетом действия реrуля-
торов, установленных на каждой. станции, очень
трудоемок. Чтобы упростить ero, не допуская пони.
жеиия точности и не переходя к слишком мелким
IIвтерва.пам, участки характерис'l'ИК реrулятора
можно заменить линейными.
Система уравнения переходноrо процесса в ре-
rуляторе обычно может быть записана в виде
D (р) у == F (р) х,
F(p)x
Lla 2
Llan l{
Lla n {
дt 2.dt JJ1t (n-I).dt n.dt t
Рис. 7.16. Аппроксимация функции
Р(р)х ступенчатой характеристикой
(7.17)
а) о) ;++= 8) e)
1 ::Т-- ь I
I с 450
. l'
Мl{
D (р) у == 1.
Здесь g(t) отображает во времени операторное соотношение
rде D(p) и Р(р) функиии. оператора р; у, х
операторные величины на выходе и входе соответственно.
Считая Р(р)х == а постоянным в каждом расчетном интервале, представим правую часть
(7.17) ступенчатой функиией так, как это показано на рис. 7.16. Тоrда для временн6й функ
пии U(t) на выходе реrулятора в каждом интервале будем иметь
И п == и о + t.a1g (t)t пЫ + t.a 2 g (t)t 2At + ... + t.an (t)t (п l) At + t.ang (t)t пU.
д)
Рис. 7.17. Нелинейные характеристики:
а линейная с оrраничением: 6 нелинейная типа насыщения; в иелннейная С линейным (Ь. с) уча-
стком; е люфт; д линейная с оrраничениями
(7.18)
Характеристика g(t), вычисленная предварительно, позволяет далее определить коор-
динату Уn В каждом интервале.
При D(P) == Тр + 1 решение уравнения (7.18) имеет вид
181
g (t) == (1 e tJТ).
В 9Том случае для определения выходной величины реrулятора вместо выражения
(7.J7) можно записать выражение
и п == и1/, 1 + (а п ип 1) (1 е ЫIТ),
(7.18) справедливы лишь для линейных участков характерис-
системах реrулирования MorYT быть различные нелинейности
(характеристики возбудителя, or-
раничения открытия окон золот-
ника, люфты и т. д.). Некоторые
из них показаны на рис. 7.17.
Иноrда, чтобы отразить нелиней-
ность в управлении переходноrо
процесса, вводят коэффициент
усиления, определенный по ли-
нейной части характеристики_
Однако получаемые на выходе ве-
личины корректируют с учетом
нелинейности. В большинстве
случаев для учета нелинейности
приходится изменять уравнения
переходноrо процесса.
I(онтроль расчета, проведен-
Horo последовательными интер-
валами, способом площадей. При-
менение способа площадей во
мноrих практически важных
случаях оrраничено. Так, на-
пример, при расчетах простых
систем (<<станция шины»), про-
водимых С учетом изменения ре-
акции якоря (E переменное) и
действия реrулирующих устройств
или с учетом демпфирования, а
также при расчетах сложных сис-
тем, состоящих более чем из двух
станций, способ площадей как са-
мостоятельный расчетный прием
неприменим, так как э. д. с. или
механические мощности непосто-
янны и изменения их заранее не
известны. Однако способ площа-
дей и в этих случаях может ис-
пользоваться как вспомоrатель-
ный для анализа или проверки
произведенных расчетов.
Применение способа площадей для контроля расчетов. В каждом полу цикле изменений
отиосительноrо уrла {j == f(t), т. е. в процессе изменения уrла от минимума до максимума,
если система рассматривается как консервативная, то
п
а п == и о + 1J dai'
i l
Выражения ТИпа (7.17) И
тик ..лемеитов реrуляторов. В
..де
о)
Ар
ТJ
,........,
/,/ \
;APl. \
/ 1J
/.
1+ /
I1
tt)
Ар
'т
t
f;
Рис. 7.18. Применение способа площадей для проверки
расчетов, устанавливающих зависимость {j == f(t):
f,J площадки ускорения и торможеиия в первом полуцикле ко-
.nебаний при к. з. И ero отключении; 6 площадки ускорения и
торможения. построенные для проверки правильности расчета
относительноrо ускорения первой и третьей станций в сложной
CllCтеме; представлеи случай изменения уrла от минимальноrо
ДО максимальноrо значения
s dPdo == О
или
s дРусиdо == J dPTOpMdo.
'182
(7.19)
На рис. 7.18 представлены зависимоСТИ для двух случаев. Случай, изображенный на
рис. 7.18, а, относится к системе, состоящей из двlх станций, в КОТОРОЙ произошло короткое
замыкание. После отключения ero, при 612 == 40, ускорение сменяется торможением. На
рис. 7.18, б показаны аналоrичные зависимости, построенные для полуцикла качаний pOTO
ра первой станции относительно ротора третьей станции в системе трех станцИЙ.
В обоих случаях проведенное построение является проверкой расчета, подтверждаю-
щей в случае равенства А 1 и А 2 ero правильноСТЬ. Разумеется, в случае диссипативной сис-
темы это равенство будет приближенным и значение А 2 будет несколько меньше А 1 .
t 7.3. ОЦЕНКА НЕКОТОРЫХ НАИБОЛЕЕ ХАРАКТЕРНЫХ
ДИНАМИЧЕСКИХ ПЕРЕХОДОВ (ИЗМЕНЕНИЙ РЕЖИМА)
Методика расчета переходноrо процесса, основанная на численном интеrри-
ровании уравнений относительноrо движения (см. 7.2), с теми или иными
модификациями практически применимая ко всем инженерным задачам динамики
электрических систем, не обладает наrлядностью. Поэтому далее некоторые ти
пичные динамические переходы рассмотрены стилизованно, с тем чтобы, coxpa
няя общую картину явления, получить основные характеристики процессов,
конкретизируя их при необходимости численным интеrрированием.
Влияние демпфирован ия на переходные процессы. При возникновении OT
носительноrо движения ротора reHepaTopa, скорость KOToporo, оставаясь малой,
становится отличной от синхронной «(00 + dбldt), в reHepaTope появляются допол-
нительные потери мощности, связанные с потерями на трение, rистерезис и вих-
ревые токи. Скольжение поля ротора относительно поля статора приводит к
появлению асинхронноrо момента. В первом приближении в начале процесса (пер-
вый цикл качаний) можно принять, что эти дополнительные потери пропорцио
нальны скольжению и их можно определить как Р dlS. Коэффициент Р dl, OTpa
жающий эти потери, будет всеrда положителен и мощность Р dlS при S> О, т. е.
при росте скорости ротора выше сиНХрОfl1-lOЙ, будет положитеЛЬflа*. Эта мощ-
ность, дополнительно наrружая reHepaTop, осуществляет положительное демп-
фирование, способствующее затуханию качаний (см. П4). Реrуляторы возбужде-
ния, частоты, реаrирующие на изменение скорости, MorYT создавать как поло-
жительное (+ Р d2)' так и (при неправильной настройке) отрицательное ( P d2)
раскачивающее демпфирование. Наличие больших активных сопротивлений в
цепи статора также приводит к отрицательному демпфированию ( P dЗ)' Это
очень приближенно** можно пояснить уменьшением на I1Рз потребления мощ-
ности в системе при росте (о на 11(0 == dб/dt и соответствующем росте реактивных
сопротивлений. Это явление особенно заметно для rидроrенераторов, у которых
значение Р dз при малых наrрузках может оказаться больше Р dl' Следователь-
но, результирующее демпфирование будет определяться коэффициентом Р d ==
== Р dl + Р d2 Р dЗ, Он чаще Bcero положителен, так как Р d2 обычно положи
тельно, а Р dз < Р dl' Исходя из этих соображений, можно было бы дополнить ме-
тодику расчета последовательными интервалами, добавляя в каждом из них к
величине I1P(n l) значение Р dl1бn l/f1t. При качественном анализе эффекта
демпфирования воспользуемся упрощенной характеристикой мощности
Р == P ll + (ЕU /х) sin 'о + Р d S , (7.20)
* в предшествующих изданиях книrи (и в ряде друrих книr) скорость выше синхрон-
нои принималась отрицательной.
** Более полное объяснение sr.вления отрицательноrо демпфирования при большом
активном сопротивлении цепи статора см. в rл. 14, а также в 8.4.
183
Рассмотрим случай, коrда Р dS > О. Предположим, что движение ротора
начинается в соответствии с характеристиками мощности, показанными на
рис.. 7.19, в точке а. Движение возникнет под действием избыточноrо момента
др о . Точка, характеризующая положение ротора, будет перемещаться не по
штриховой кривой akcet, представляющей зависимость Р! == р н + (EU/x)sin б,
а по сплошной кривой Р 1 + Pds, т. е. по кривой аЬе. Эта кривая будет проходить
8
р
Рис. 7.19. Движение при положи-
тельном демпфировании
Рис. 7.20. Движение при отрицатель-
ном демпфировании
выше кривой Р 1 при положительном (скорость больше синхронной) скольженltИ,
т. е. при рос.те уrла б, и ниже при отрицательном скольжении, т. е. уменьше-
нии уrла б. Такое изменение движения под действием Дополнительноrо момента,
обусловленноrо скольжением, приведет к тому, что площадка ускорения умень-
шится от значения аа1са до значения аа1Ьа. Площадка торможения, ранее orpa-
ниченная кривой cet и прямой Cett1 и уравновешивавшая площадку ускорения
ааl са только при больших уrлах бмаКС2, будет уравновешивать площадку ус-
Корения аа[Ьа при уrле бмаксl (причем ОмаКСI < ОмаКС2) З8 счет демпферною
момента Р d S ' Площадка ускорения, 'следовательно, уменьшил ась на величину
аЬса, что и привело к сокращению размаха колебаний до б макс !. Изображение
движения на фазовой плоскости имеет вид спирали S == <р(б), скручивающейся
к точке с, т. е. к точке установившеrося режима при Р 1 == Ро.
Рассмотрим теперь случай, коrда Р d < О (рис. 7.20). При положительном
скольжении будет появляться момент, уменьшающий Pt. Кривая Р! Р d S ,
(сплошная линия) будет располаrа'Я>ся ниже кривой Р 1 (штриховая). Площадка
ускорения увеличилась на величину aCtba и стала площадкой аЬСlсаlа. Это при--
водит к увеличению размаха колебаний уrла до б макс ! > бмакс2. Площадку
торможения CCtbtelec, начинающую второй цикл качаний, должна уравновесить
площадка ускорения cald1dc. Уrол при этом Достиrнет значения б макс 3' Таким
образом, если в первом случае (Pd> О, рис. 7.19) демпфирование уменьшило
184
размах колебаний и вызвало их затухание (рис. 7.21, а), то во втором случае
(Р d < О, рис. 7.21, б) происходит nарастание колебаний самораскачивание.
Возможен час'l'НЫЙ случай так называемоrо п р е Д е л ь н о r о Ц и к л а
(рис. 7.21, в), коrда ПОЯВЛЯl()ТСЯ незатухающие качания ротора. Физически
это означает компенсацию эффекта демпфирования действием реrулятора, pe
аrирующеrо на значение скольжения. Желательно, чтобы действие реrуляторов
а)
с
с)
а
8)
а
SI
.S
t
t
t
Рис. 7.21. Характер процесса во времени:
а для случая, показанноrо на рис. 7.19; б для случая, показанноrо на рнс. 7.20; в для предельноrо
. цикл а (критический случай)
способствовало не поддержанию колебаний, а возможно более быстрому их за-
туханию, улучшая качество переходноrо процесса.
Влияние демпфирования и уменьшения момента турбины при полном сбросе
мощности. Демпфирование, препятствующее движению и уменьшению вращаю
щеrо момента турбины с ростом скорости (уменьшение «естественное», вызванное
трением, потерями на rистерезис, действием реrуляторов скорости), в этом слу
чае заметно изменяет характер движения. При учете демпфирования основное
уравнение для случаев, показанных на схеме (рис. 7.22, а), имеет вид
T J (tf''Oldt 2 ) +Pd(d'O/dt) ==Р мех .
t), то в общем слуЧае необходимо применять численное
Если Р мех == <р(ro,
интеrрирование.
Если же принять, что Р мех == (1 a(j)Po, то
T J (dw/dt) + Kdw == Ро..
(7.21 )
rде Kd == P d + Роа.
Решение (7.21) получаем в виде*
tKdtr J
d'O/dt == w == Po(I e )!Kd.
(7.22)
Следовательно, скорость не возрастает непрерывно, а экспоненциально
стремится к некоторому установившемуся значению:
* Интеrрал уравнения (7.21) можно ваписать по аналоrии с IYравнением изменения то-
ка при включении постоянноrо напряжения к цепи, содержащей RL.
185
РО/ Kd == 00"".
из (7.22) можно найти изменение уrла:
РО [ TJ ( tKdITJ )] .
3 == 80 + t 1 е
Kd Kd
Таким образом, демпфирование, пропорциональное скорости, и уменьшение
мощности турбины при увеличении скорости задерживают рост уrла при сбросе
мощности (рис. 7.22, б).
Влияние автоматическоrо реrулирования на переходные процессы. Общее
решение, устанавливающее это Влияние, может быть получено численным ин-
(7.23)
а)
EюLv и
и
Б)
f, t а
р
о.II
о
t,I
а '! макс
о"
РО
00
fa
t
Рис. 7.22. Полный сброс мощ'
ности:
а ........ схемы системы; 6 изменение
уrла и частоты
Рис. 7.23. Эффект снижения мощности пер.
ВИчноrо двиrателя Р(6) М(оо, t) в отно-
шении улучшения динамической устойчи-
вости:
А, уменьшенная площадка ускорения; А 2 уае.
диченная площадка торможения
теrрированием (см. 7.2), но полезные качественные соотношения выявляются
на основе способа площадей.
Р е r у л и р о в а н и е пер в и ч н о r о Д в и r а т е л я, если оно осу-
ществляется достаточно быстро, позволяет снизить механический вращающий
момент Ммех вслед за уменьшением электрическоrо момента М эл (рис. 7.23).
Если бы (что практически невозможно) можно было сделать так, чтобы Ммех ==
== q:J(U), t) == М эл == q:J(U); t), то проблемы динамической устойчивости вообще не
было бы. Однако увеличение rлубины снижения механическоrо момента и ско-
рости ero изменения может дать существенное улучшение динамической устойчи-
вости.
Р е r у л и р о в а н и е в о 3 б У ж д е н и я r е н е р а т о р а в смысле
ero эффекта на динамическую устойчивость можно также рассмотреть качествен-
но. На рис. 7.24, а жирной линией по казаны площадки в случае нарушения
устойчивости при работе без реrулирования возбуждения. Здесь при построе-
нии характеристик мощности принято, что Е' Е; == const, причем э. д. с. Eq
меняется скачком и далее затухает по экспоненте (рис. 7.24, б).
Рассмотрим эти характеристики. Если бы ток возбуждения оставался по-
стоянным, равным начальному значению, то в случае KopOТKoro замыкания и ero
186
отключения энерrия при ускорении ротора определял ась бы площадкой 1-2-3 3'-
-4 5.a 5' -1. Энерrия при торможении ротора, определяющаяся площадкой аЬс.
была бы HaMHoro меньше площадки ускорения, что означало бы неустойчивость
системы.
Если после HeKoToporo запаздывания, определяющеrося участком 2--3, ток
возбуждения начинает увеличиваться, как это показано на рис.. 7.24, то ПJIG-
а)
р
с)
Е:
f Z
,
Eqo
E
I _, ,
I E'l':(,E CfJ"'t.
o t
.......... Без А р В
....: При АР8
Пл ускорения и Е
торможеНIJЯ при АРВ
. f 2<3 Lf 5 5' б 7-5'
1 111111 1 1111 Пп. ускорения и
I тормо еНIJЯ оез Ajl8 Eqo
. H-J-J 5-С1.ь'с-5-1 E
)
lt
t Q
t
Рис. 7.24. Эффект форсирования возбуждения:
(1 характеристика P T(I'J); 1 характеристика нормальноrо (исходноrо) режима; [1' харакrеристlПtа
послеаварИЙНОl'О режима (без форсировки); Jl rруппа характернстик послеаварийиоrо режима, построен-
ных для разных значений тока возбуждения; 111 характеристики режима к. з. (участок 2-3 sапаЗJI:Ы-
вание форснрования; 2.4 форснрование возбуждения во время к. З.; 5.5'.6 форсирование возбуждени.
Е послеаварийном режиме; 6.7 процесс при постоянном значении тока возбуждения); 6 ИЗJIевен.е
э. д. с. при отсутствии реrулирования возбуждения; 8 то ж€!. при реrулировавии
щадка ускорения 1 2 3 4-5 5' -1 оказывается меньше, на величину 3 3' -4-3 и 5-а-5' -5.
Площадка торможения, напротив, возрастает, приобретая значение 5'.5"-6-7-5'.
Участок 5"-6 соответствует продолжающемуся форсированию тока возбуждения,
достиrшему потолочноrо (наибольшеrо допустимоrо) значения (точка 6).
Из приведенных характеристик очевидно, что при сбросе наrрузки, вызван-
ном коротким замыканием или друrим нарушением режима, необходимо стре.-
миться как можно скорее и значительнее увеличить ток возбуждения reHepaтopa.
Однако увеличение тока возбуждения полезно только пока возрастает уrол. При
этом увеличивающийся ток возбуждения создает дополнительный тормозящий
момент, способствующий сохранению устойчивости. после Toro как уrол достиr
максимальноrо значения и начал уменьшаться, уже нет необходимости продол-
жать увеличивать или поддерживать ток возбуждения. Напротив, при уменьше-
нии уrла ero следует снижать. Если ток ротора не будет снижаться, то возникнут
большие колебания уrла и reHepaTop может выпасть из синхронизма во втором
цикле качаний.
187
Проиллюстрируем сказанное характеристиками, приведенными на
рис. 7.25, а. Хараl\т<=ристика 1 отвечает нормальному режиму; характеристика
111 короткому замыканию, причем ее участок 2 3 соответствует режиму, коrда
форсирование возбуждения еще не началось; на участке 3 4 действует форси.
ровка возбуждения. Участок 5 б соответствует режиму, наступающему после от-
ключения KopoTKoro замыкания, но при увеличивающемся ДО потолочноrо зна-
5)
р
РО "
G
/'.
I
\
"
"
t
Рис. 7.25. Влияние управления током возбуждения на качания reHepaTopa:
а ошибочное управление раскачивание во втором цикле; б правильное управление
затухание качаннй (кривая 7" 8 соответствует «расфорснровке с у!"еньшеннеы тока J,
до значений, меньших 1(0)
чения (точка 6) токе возбуждения. Участок б 7 это та же характеристика
послеавариЙноrо режима, но построенная при потолочном токе возбуждения, т. е.
при постоянном значении Eqoo === Eq пот' Ускорение при коротком замыкании
определяется площадкой 1 2 3 4 4/ 1, равной площадке торможения 4/ 5 б 7 7' 4/.
Из построенных характеристик следует, что вследствие форсирования воз-
буждения устойчивость при первом вылете уrла сохранилась. Изменения тока
возбуждения, показанные на рис. 7.25, б, и, следовательно, зависимости мощнос
ти на уrловых характеристиках одинаковы до точки 7, rде скорость, изменения
уrла проходит через нуль и уrол начинает уменьшаться. Далее, в первом случае
(рис. 7.25, а) предполаrается, что ток возбуждения, достиrший потолочноrо зна
чения, сохранил ero и остается неизменным до точки 8. Во втором случае
188
(рис. 7.25, 6) предполаrается, 'что немедленно по достижении точки 7 ток воз-
буждения начал уменьшаться.
Характер процесса в одном и друrом случаях очевиден из приведенных ха-
рактеристик. Действующая во втором цикле качаний площадка торможения
7 -б-8-8' 4 -7' -7 (рис. 7.25, а) оказывается весьма большой. На рис. 7.25, 6 со-
ответствующая площадка торможения меньше, а следовательно, меньше и размах
качаний. Если по достижении точки 8 при втором переходе через нуль ско-
рости (рис. 7.25,6) вновь начинает увеличиваться ток возбуждения, то площад-
ка ускорения 8-7'''-8'-8 вновь уменьшится и размах качаний уrла во втором цик-
ле определится точкой 9. Если ток возбуждения (рис. 7.25, а) уменьшавшийся
в интервале от точки 8 до 9, останется неизменным, то площадка ускорения
10'-10-9-11-10' будет HaMHoro больше возможной площадки торможения 11-12-
13-11 и reHepaTop выпадет из синхронизма.
Из paccMoTpeHHoro примера видно, как способ площадей позволяет выяс-.
нить наиболее блаrоприятное управление током возбуждения, позволяющее
увеличить устойчивость и уменьшить размах колебаний в последующих циклах
качаний. .
Анализ полученных зависимостей показывает, что форсирование э. д. с. от
E qo до E qoo должно длиться до тех пор, пока уrол б не достиrнет максимальноrо
значения и скольжение в первыЙ раз не пройдет через нуль. Далее форсирование
должно сниматься и все время, пока знак скольжения отрицательный, э. д. с.
Eq должна уменьшаться. после новой перемены знака скольжения, т. е. с началом
BToporo цикла увеличения уrла, э. д. с. Eq (ток возбуждения) снова должна
увеличиваться. При непрерывном реrулировании возбуждения напряжение воз-
будителя должно изменяться с некоторым опережением по отношению к сколь-
жению s === dб!dt.
Колебания (качания) ротора синхронной машины, возникающие под дейст
вием rармонической внешней силы. В электрической системе возможны ре---
жимы, которые в некоторой идеализации можно представить как вынужденные
колебания под действием rармонических, синусоидально изменяющихся внешних
сил. Это, например, колебания синхронных двиrателей с периодически меняющей-
ся в процессе нормальной эксплуатащш наrрузкой; приводов прокатных станов;
компрессорных установок и др. Это MoryT быть также колебания синхронных
машин при наличии длительноrо асинхронноrо хода в послеаварийном режиме
электрической системы. Такие режимы характеризуются колебаниями напряже-
ния, тока, вращающих моментов и роторов синхронных машин*.
Математически процесс может быть представлен уравнением
d 2 0 do .
T J + Pd === РО РтSlП а + (j'B(t), (7.24)
dt 2 dt
rде CPB(t) вынуждающая сила, имеющая периодический характер.
Если величина CPB(t) задана, то универсальным методом решения будет чис-
ленное интеrрироваfIие. Однако, как и в предыдущих случаях, получаемые ре-
зультаты не будут иметь общности, которая желательна для оценки происходя-
щихфизических процессов. Поэтому, имея в виду возможность решения численным
интеrрировhнием, проведем общий анализ явления. Заметим, что если внешние,
* Здесь преДПОJlаrается, что рассматриваемый исходный. режим статически устойчив,
иначе вынужденные колебания не MorYT существовать.
189
вынуждающие силы QJB(t) периодические (неrармонические), то их можно раз-
ложить в ряд Фурье и выделить основную rармонику, наиболее существенную
с точки зрения возникновения вынужденных электромеханических колебаний
роторов. Если значение внешней силы таково, что приводит к относительно ма-
лым (в пределах справедливости линеаризации siп б по первому приближению)
колебаниям уrла Дб, то вынужденные колебания можно изучать с помощью
линеаризованноrо уравнения движения, записанноrо для синхронной машины
в операторной форме:
T J р2 д8 + Р dРД8 + Сlд8 == Р вsiп vt == р в '
Здесь Р В амплитуда; v частота вынуждающей силы р в '
Разделив последНее уравнение на T J и обозначив: D == Р a/TJ коэффи-
циент демпфирования (затухания);.. == V c}/T J собственная частота свобод-
ных колебаний; Ав == PB/T J приведенная амплитуда внешней силы, запишем
р2д8 + DрД8 + 12Д8 . Ав siп vt. (7.25)
Переходный процесс, возникающий при приложении синусоидальной выну-
ждающей силы к валу синхронной машины [см. (7.25)], аналоrичен процессу в
электрической цепи RLC при подключении к ней синусоидальноrо напряжения*.
При нулевых начальных условиях, т. е. при условии, что в момент t == О значения
Дб == ДБ О == О, рДб == О, будем иметь
д8 == д8 св + МВ'
На рис. 7.26 показано изменение вынуждающей силы р в ' Там же показана
свободная составляющая изменений уrла дб св (кривая 2), определяющаяся вы-
ражением
д8 == д8 { е t [ SiП t cos (1) t + ( .!2. sin .:!.... os s ) sin (1)1 t ]} . (7.26)
св } 2"'1 "'1
rде (1)1 == V 12 + 0,25 D2 собственная частота свободНЫХ колебаний синхрон-
ной машины с учетом демпфирования. .
Вынужденная составляющая (рис. 7.26, кривая 3)
д8 в == M sin (vt s).
(7.27)
Здесь д8 ;::::::; Ав /v (T .,,2)2 D 2 v 2 амплитуда вынужденных колебаний
синхронной машины; S == arctg [Dv/(y2 )/2)] сдвиr фаз вынужденных колеба-
ний уrла по отношению к фазе вынуждающей силы.
Заметим, что в большей части электрических систем соблюдается соотношение
0,25 D2 « 1'2, вследствие чеrо часто принимается (01 == у.
Процесс установления вынужденных колебаний зависит от соотношенйя
между частотой )/ внешней силы и собственной частотой у колебаний синхронной
машины, от начальных условий и коэффициента демпфирования D. На рис. 7.26
* См. любой учебник теоретической электротехн:IКИ для вузов, например: ruн.збуре С. r.
Методы решения задач по переходным процессам в электрических цепях. М.: Высшая шко-
ла, 1967. с. 83.
190
показан процесс установления вынужденных колебаний (кривая 4) при "1 > "; И
относительно большом коэффициенте демпфирования. Здесь амплитуды в процес
се установления колебаний больше, чем амплитуда установившихся вынужден
ных колебаний. Коrда частота внешней силы близка к собственной частоте
колебаний, то происходит более плавное нарастание амплитуды вынужденных
колебаний.
Вынужденные колебания уrла происходят со сдвиrом фазы по отношению
к фазе вынуждающей си
лы. Сдвиr фазы является
функцией частоты и опре-
деляется уравнением
S == arctg [DV/(1 2 "12)].
[рафическая завиСи
мость ;("1) или S(V/";) назы
вается фазочастотной xa
рактерuстuкой (рис. 7.27).
При увеличении частоты
вынужденныХ колебаний
фаза меняется от О до n,
переходя через n/2 при
"1 == ";.
Амплитуда установив
шихся вынужденных коле
баний зависит от частоты и
амплитуды внешней силы.
Зависимость амплитуды
вынужденных колебаний
от частоты при фиксиро
ванной амплитуде внешней
силы называется амплu
тудно частотной характе-
ристикой. На рис. 7.27
приведена так называемая
нормированная аМПЛИТУk
но частотная характеристи
ка вынужденныХ колеба
ний уrла А(\. По оси абсцисс отложена безразмерная частота "1/,,;, а по оси
ординат безразмерная амплитуда колебаний уrла
F,ло 8,
A8'Q
t=O
-/;:-/;,
t.
Рис. 7.26. rармонические вынужденные колебания:
1 вынуждающая сила PB AB sin vt. приложенная к валу синхрон-
ной машины в момент t o; 2 свободные колебания Аб ев . возник-
шие в момент приложения возмущающей силы и затухающие за
время Т; 3 вынужденная составляющая rармонических колеба
ний Аб в . имеющая амплитуду Аб ; 4 процесс установления вы-
нужденных колебаний (Аб Абев+Абв), заканчивающийся к момен-
ту времен н t t,
Ао* == (Ao / Ав) ,,;2 == 1 / V [1 ("1/1)2]2 + 0'2 / ("1 / ,,;)2 .
Здесь значение относительноrо коэффициента затухания
O'==D/I . PAT J 1).
При v == О значениеАб* == 1, т. е. независимо от коэффициента демпфиро--
вания и внешней силы все нормированные характеристики начинаются с едини
цы. На кривых нанесены значения относительноrо коэффициента затухания О'.
С увеличением частоты внешней силы при постоянном и достаточно малом
(7.28)
191
коэффициенте затухания (<1« 1) амплитуда колебаний резко возрастает
вблизи значения v/y == 1. Это возрастание называется электромеханическим
резонансом. При больших частотах амплитуда колебаний уrла резко уменьшает-
ся и при v/y ----+00 величина б* ----+ о. Физически это означает, что массивный ро-
тор синхронной машины не реаrирует (иноrда rоворят не пропускает высоких
а)
t.
1i
-2
I
1i
о) (]) v=-O,5r
".....;-, F6 ".........
..;'8;'"
o -J=-r
'..... /
..,.., ,*" ,"'" "
"i61t V " '"."
4
o ,)=2r
F, .
,\,i " ", f\ 'i " (';
,1 11 l' " 1.l \! \) '
Ъ*" '.1 у
з
Q
'v
у'
2
Рис. 7.27. Характер колебаний в зависимости от соотношения
частоты вынуждающей силы и собственной частоты системы:
а фазочастотная характернстика; б амплитуды колебаний
частот) на внешние силы, частота которых HaMHoro больше собственной частоты
колебаний.
В системах с большим коэффициентом затухания максимум амплитудно-
частотной характеристики перемещается в сторону меньших относительных час-
тот. Максимум б*маRC определяется из условия
dL\1i*
d ('1/"02
и наступает при частоте
d ('1 1)2 {[ 1 (7 )Т+ <12 (7 )2} == О
(V/I)MaKc== Vl 2<12 .
Подставив это значение в выражение дл я б*, получим
(\ макс == 1 / (2<1 V 1 <12 ),
192
откуда следует, что нормированная амплитудно-частотная характеристика име-
ет маКGИМУМ больше единицы только при (J < V"2/ 2, что для электричес-
ких систем, как правило, выполняется.
Существование больших резонансных пиков при малых относительных ко-
эффициентах затухания указывает' на то, что даже малые по значению БОЗМУ-
t
8)
Р
t
а}
р
t
о)
р
I
pI
...
i
. .......
t=o
t
t
Рис. 7.28. Два характерных случая устойчивоrо перехода от ьдноrо
режима к друrому (а, б) и три вида (в) неустойчивости (А, В. С)
1---в4
100
щающие силы при периодическом изменении их с частотой, близкой к собствен-
н ой частоте системы, JdorYT вызвать большие колебания роторов синхронных
машин, а следовательно, напряжений, токов и всех друrих параметров режима,
зависящих от уrлов и определяющих качество электрической энерrии.
Собственная частота свободных колебаний реальной электрической системы
завИсит от ее параметров и режима работы, параметров синхронной машины,
ее системы реrулирования и настройки АРВ и обычно изменяется от 0,5 до 2 [ц.
Относительный коэффициент затухания зависит также от параметров эле-
ментов электрической системы и в значительной мере определяется типом' АРВ.
Так, если в случае нереrулируемоrо синхронноrо reHepaTopa (] 0,2/3 === 0,06,
то при АРВ п. д. значение (] 0,03, а при АРВ с. д. (] 0,3.
Расчет собственной частоты малых колебаний и коэффициентов затухания
для нереrулируемой и реrулируемой электрических систем достаточно точно
ПРОВОДИТСЯ по аналитическим выражениям.
Большие вынужденные колебания. 'Эти колебания MoryT быть близки к сину
сондальным, возникающим на почти линейных частях характеристик Р === q>(б),
как это показано на рис. 7.28, а. В С.тIучае, коrда колебания происходят на cy
щественно нелинейной части характеРИСТl::IКИ р === q>(б) , они оказываются явно не
синусоидальными (рис. 7.28, б). В первом же ЦИК.тIе колебаний система может
стать неустойчивой (рис. 7.28, в). Кроме расчета численным интеrрированием,
позволяющеrо ПО.тIучить характеристики процесса для конкретных случаев, по-
лезно провести качественныЙ анализ и оценить условия возникновения и проте-
кания интересующих инженера явлений. Рассмотрим сначала леrкий случай
нарушения режима в простейшей схеме «станция шины», приняв Е' === const
(рис. 7.28, а), коrда изменение мощности при изменении уrла б ПРОИСХОДИТ на
части характеристики Р === q>(б), которую можно считать почти линейной. Про-
цесс протекает при равенстве площадок ускорения аЬса и торможения cdec. Ко-
лебания мощности и уrла во времени почти синусоида.тIЬНЫ, так же как при .тIю-
бых малых нарушениях режима, которые характеризуются линеаризованной за-
висимостью Р === q>(б).
На рис. 7.28, б представлено изменение режима, при котором система на-
ходится у предела устойчивости. При этом площадка ускорения аЬса оказывается
уравновешенной П.тIощадкои торможения cfdec, частично лежащей за максимумом
характеристик Р === q>(б). Участок характеристики р === q>(б), соответствующий
рассмотренному процессу (рабочий участок), оказывается, таким образом, He
линейным. Изменения уrла б === f(t) несинусоидальны, так же как и изменения
мощности. Характерный <<двуrорбый» вид кривой Р === q>(t) объясняется тем, что
в каждом полуцикле колебаний вблизи максима.тIьноrо уrла б маRс ротор дваж,J,Ы
проходит точку " отвечающую наибольшему значению характеристики Р === q>(б).
На рис. 7.28, в показаны три вида неустойчивоrо процесса: А, В, С.
Процесс А происходит соrласно характеристике bcd при площадке тормо-
жения cfdc, меньшей площадки ускорения, которая снача.тIа имеет значение аЬса,
а затем (после точки d) определяется площадкой, оrраниченной линией Ро И синусо
идальной характеристикой р=== 'Р(8) (сплошная). Изменения уrла б === f(t) на
участке б о 1800 имеют характерный' переrиб, отвечающий участку cfd кривой
Р === q>(б), что соответствует переrибу на кривой Ь" а1. Дa.тIee кривая б === f(t) имеет
монотонное изменение (кривая а2аз). В соответствии с этим кривая Р === q>(t)
в первом полуцикле КО.тIебаний имеет переrиб fd, а затем, со BToporo цикла, при-
обретает синусоидальный характер с постепенно уменьшающимся периодом.
194
"
В процессе В зависимость Р == qJ(б) уже со BTOpOro полуцикла приобретает
синусоидальный характер, а изменение уrла во времени происходит монотонно
по кривым b"b i И Ь 2 Ь З , приближающимся к параболическим.
В пр6цессе С, т. е. при так называемом полном сбросе мощности (из-за раз-
рыва передачи или трехфазноrо KopoTKoro замыкания), reHepaTopbl данной стан-
ции перестают отдавать мощность в систему. Под действием постоянноrо вращаю-
J
Б)
р
а)
р
о
i
Рис. 7.29. Нелинейные коле-
бания в простой электрической
системе:
а...... в координатах Р, 6, rде ПЛО"
щадки 1 1'-2-1 и 2-3-4 4'-2 равны
между собой; б изменение мощ-
ности во времени; в rармоннче-
скве составляющие нелинейпых ко..
.пебаний уr.па во времени
щеro механическоrо момента (мощности), ускоряющеrо турбину (РО) , которому
в этом случае не оказывает противодействия какой-либо электромаrнитный мо-
мент, уrол б непрерывно возрастает. По аналоrии с механическим движением,
при постоянном ускорении можно ожидать, что это возрастание будет происхо-
дить при б == f(t), являющейся квадратичной параболой, показанной на
рис. 7.28, в (кривые Ь" Ci, С2' Сз).
Все указанные процессы рассматривались при РО == const, но возможен слу-
чай, коrда в системе дополнительно действует вынуждающая сила, изменяю-
щаяся во времени.
Если в случае, рассмотренном выше [см. (7.25)], амплитуда Ав внешней силы
велика, а демпфирование колебаний слабое, то в системе будут развиваться вы-
нужденные колебания настолько большие, что MorYT привести к нарушению
синхронной динамической устойчивости. Линеаризация по первому приближе-
нию соответствующих нелинейных зависимостей становится несправедливой и
пользование линеаризованными уравнениями приводит к качественно и коли-
чественно неправильным результатам. В этом случае задачи определения пара-
метров больших колебаний, максимально допустимых по условиям устойчивости
в зависимости от амплитуды внешней rармонической силы, имеющей частоты,
7*
195
близкие к резонансным, решаются успешно методом rармоническоrо баланса.
Суть метода заключается в следующем* .
При больших вынужденных колебаниях, коrда максимальные отклонения
уrла прибли.ж.аются к точке неустойчивоrо равновесия на моментно уrловой ха-
рактеристике (точка 5 на рис. 7.29, а), но не доходят до неена 5 100, изменение
уела во времени имеет вид периодической, но не еармонической функции
(pIlC. 7.29, в). В этом случае периодическую функцию уrла б можно разложить
в ряд Фурье:
8 == а о + А 1 + Az + ... ==а о + аisiп (vt + 'Рд + azcos(2vt + 'Pz) + ...,
rде ао, at, a z амплитуды соответствующих rармоник.
При решении уравнения движения основная нелинейность представляется
первыми членами ряда Фурье:
sin 8 == siп (а о + А 1 ).
Теоретические и экспериментальные исследования показали, что при б макс .
HeMHoro (примерно 100) не доходящих до точки неустойчивоrо равновесия, ВТQрая,
третья и более высокие rармоники, как правило, имеют по сравнению с первой
rармоникой очень малые амплитуды. это послужило основанием для учета в
больших колебаниях только нулевой и первой rармоник, т. е. позволило решать
задачу в одночастотном приближении (или методом rармонической линеариза-
ции).
В этом случае решение уравнения движения
TJ (i28/dt 2 + P d d8/dt == РО Р т sin 8 + Р В
отыскиваем в комплексной форме, представив
1
siп 8 == 8n/'nt.
1
ния:
Здесь 8" коэффициеиты первых членов ряда Фурье, имею'n{ие следующие выраже
80 == J o (аl) siп а о ; 81 == jJ 1 (аl) ei'Pi cos йо; 8 1 == JJ 1 (a 1 ) e i'Pi cos а о . (7.29)
rде JO(a 1 ), J1(a 1 ) функции Бесселя.
Коэффициеиты 80' 810 8 1 получены следующим образом. Используя известные приемы
разложения в ряд Фурье функций sin[alsin(vt + «Рl)] и соs[а 1 siп(vt + qJi.»), можно записать
siп (а о + Аи == siп а о [J o (аl) + И 2 (аl) cos2 (vt + Ч'1) + 2J 4 (аl) cos4 (vt + Ч'l) +... J +
1
+ cos ао (2/1 ,а 1 ) siп (vt + Ч'v + 2/з (aJ siп 3 ('1t + CPJ + ... j
n 1
f.n t
8n е .
Приравнивая коэффициенты при одинаковых rармоииках, получаем уравнения (7.29).
Разделим уравнение движеиия на T J . представив все переменные в комплексиой форме
(в том числе и периодическую виешнюю силу) и приравняв коэффициенты при иулевой и Пер-
вой rармоииках в левой и правой частях уравнений. Тоrда
· См.! Лwntcен.с И. В. Нелииейиые колебанвя в реrУJlируеМЫ:lll электрическИJl СИСТеМЗJl.
М. мэи, 1974
196
80 == sin 00; ( 'УЗ + jD.) ; 1 е l'f. + "(281 == A .
2]
р.ЗО)
Уравнение (7.30) определяет среднюю точку а о колебаний уrла б в зависимости or амп-
/IИТУДЫ а 1 и исходноrо режима 60:
sin au == sin 00/10 (01)' (1.31)
При а 1 == О ураннение (7.31) определяет положения равновесия иа момеитио-уrJlовоА
характеристике: а о == 60 устойчивое, а о == л: 60 иеустойчивое.
При увеличении а 1 средняя точка колебаний растет до значеиия а о == nt2. Амплитуда
ан соответствующая а о == л:/2, называется критической амплитудой I(олебооий. При а 1 >
> а 1ир действительноrо решения урав-
иения ( .30) не существует. Для эле кт- а) X'I
рическои системы это означает, что пе- . О. и/
риодические движения перестают суще-. SЩ о aOI
ствовать, что соответствует нарушению 1 (кр
синхронной динамической устойчивос-
ти.
Так как величина Ооир == л:/2 ие
зависит от исходноrо режима, а в урав-
нение (7.30) не входит внешняя сила,
то зависимость а 1ир от исходноrо режи-
ма как для свободных, так и для вы-
нужденных колебаний определяется из
выражения
10 (а 1 ир) == sin 1\0. .
rрафически эта зависимость при-
ведена на рис. 7.30, а. Она показывает,
что чем ближе исходиый режим к мак-
симуму моментно-уrловой характерис-
тики, тем меньше критическая- амплитуда колебаний. Неравенство 01 :s;;;; 01Нр иазываета
условием существования больших вынуЖденных колебаний. При несоблюдении ero больших
синхронных колебаний в системе быть не может, так как происходит иарушеиие синхрон-
нон работы машины.
Рис. 7.30. Характеристики колебаний:
а зависимость критической амплитуды колебаиий о;.,
от исходноrо режима (slп 6.); б зависимость собствен-
ной частоты от амплитуды иелинейных колебаний yr:н у
Резонансные кривые. Уравнение (7.30) устанавливает связь между частотой
и амплитудой первой rармоники. Подставив в ero развернутое выражение зна-
чение Sl из (7.29) и разделив обе части на [a 1 /(2j)] e i \ получим
у2 + jDv + 12 cosa o 2J 1 (а 1 )/а 1 == (Ав/ а l) e i'fl. (7.32)
При отсутствии внешней rармонической силы (Ав == О) большие свобоJUfЫе
колебания MorYT устанавливаться лишь в консервативной системе (D == О) после
больших начальных отклонений.
Собственная частота. Полученные выше уравйения определяют зависимости
(рис. 7.30, б) эквивалентной собственной частоты (здесь у2 == '\';) от амПJIитуды
колебаний:
2 2 2/1 (а 1 ) 2 2/1(°1) {1 [ sinoo ] 2
I з == '1 CoS а о == i .
Уменьшение эквивалентной собствеиной частоты уа с увеличением амплитуды аl яв-
ляется характерной особенностью иелинейных колебаний синхронной машины в простой
электрической системе.
Приравняв модуль левон и правой частей уравнения (7.30), запишем
(7.33)
197
(T; '12)2+('1D)2== (А в /аl)2.
Решив ero относительно '12, получим уравнение резонансной кривой, устанавлинающей
зависимость амплитуды а 1 вынужденныХ колебаний от частоты ннешней силы заданной амп-
литуды Ав:
'12 == '1 (аl) ::!:: V(A B /aJ 2 (тэD)2 + D4f4 ,
(7.34)
rде '1 (al) == У; O,5D2 функция, называемая скелетной кривой. Так как обычно
O,5D2 « У;, то она практически совпадает с rэ. Характер резонансной кривой зависит от
амплитуды внешней силы (рис. 7.31, а).
При малых амплитудах она соответствует амплитудно-частотной характеристике (кри-
ная 1). С увеличением Ав резонансная кривая деформируется и верхняя часть ее изrибается
а) .
ОЙI
Б)
siп ба
v 2
Ав. макс
Рис. 7.31. Резонансные колебания:
а деформация резонансной кривой (1 4) в завИСимости от внешней силы
АВI<АВ2<Авз Ав.макс. АВ4>Авомакс' Стрелками показано иаправление измеиения
частоты РВСЕР петля rистерезиса нелииейиых выиуждеииых колебаиий; б rpa-
ИИЦЫ областей устойчивости больших вынужденных колебаний в зависимости от ре..
rулирования возбуждеиия сиихронноrо reHepaTopa: 1 без АРБ; 2 с АРБ с. д.
в сторону меньших частот (кривые 2,3). При превышении HeKoToporo значения Ав> Ав.макс
(условно называемоrо максимальным кривая 3) резонансная кривая Терпнт разрыв (кри-
Ba 4) и e правая ветвь кончается при а 1 ==ашр. что сопровождается нарушением синхрон-
нои устоичивости.
Нелинейные колебания. Для них характерно появление rистерезисных явлений, т. е.
неоднозначность параметров колебаний при медленном увеличении и уменьшении час-
тоты нынуждающей силы. Участок СЕ сущестнует только при уменьшении частоты колеба-
ний, а участок F В только при увеличении ее. В точке Е происходит срыв амплитуды, а в
точке В ее скачок.
При Ав Ав.макс вынужденные колебания MorYT сущестновать при всех частотах
внешней силы. При Ав> Ав.макс существует диапазон частот, при котором может про-
изойти нарушение синхронной устойчивости. Велнчина Ав. маке зависит от исходноrо режи-
ма и демпферноrо коэффициента D.
На рис. 7.31, б приведены характерные зависимости sin6 0 (определяющий исходный ре-
жим) и Ав.мака' называемые ераnицей области устойчивости больших вынужденнЫХ колеба-
ний. Совокупность значений Ав.макс И siп 60' лежащих внутри rраницы, образует область ус-
\ тойчивости больших нынужденныХ колебаний, в которой внешние rармонические силы лю-
, бой частоты не приведут к нарушению синхронной устойчивости. Сопоставление кривых 2 и 1
! показывает эффективность АРВ с. д. в повышении уровня устойчивости при наличии перио-
дических возмущающих сил в электрической системе.
198
t 7.4. ПРИБЛИЖЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЯ
ОТНОСИТЕльноrо ДВИЖЕНИЯ РОТОРА rEHEPATOPA
ПРИ ОТКЛОНЕНИЯХ ВХОДЯЩИХ В HErO ПАРАМЕТРОВ
При однозначно заданных параметрах и начальных условиях дифференци-
альное уравнение
T J d 2 'O/dt 2 === Р о Р т sin 'о
(7.35)
характеризует относительное движение ротора [енератора. Часто возникает
необходимость в определении переходноrо процесса при изменении исходных ус-
ловии. Это происходит вследствие Toro, что во время работы электрической
системы изменяются активные мощности [енераторов и наrрузок, меняется схема
системы, выводится в ремонт оборудование. Большие возмущения, при возник-
новении которых совершаются переходные процессы, также MorYT быть различ-
ными по значению, виду и MorYT происходить в различных точках электрической
системы. Следовательно, начальные условия и параметры, входящие в уравне.-
ние движения, в общем случае MorYT быть представлены не в виде однозначных
величин, а в виде множеств возможных значений, которым соответствует мно-
жество характеристик переходных процессов. При этом приближенный простой
пересчет характеристик переходных процессов для исходных условий выполня-
ется при изображении множества переходныХ процессов в виде суммы о п о р-
н о r о и Ц е н т р и р о в а н н о r о про Ц е с с о в.
Под опорным понимается nереходный процесс, протекающий при выбранных
однозначных параметрах, также называемых опорными, обычно равных средним
значениям ожидаемоrо диапазона изменений. Опорный процесс описывается не-
линейными уравнениями движения. .
Центрированным называется процесс, отклоняющийся от ОnОРНОсО в связи
с отклонениями от опорных исходных параметров. Центрированные процессы
описываются линейными дифференциальными уравнениями с переменными ко-
эффициентами. Эти уравнения позволяют установить аналитические зависимос-
ти между исходными, варьируемыми параметрами и искомыми параметрами,
определяющими протекание переходноrо процесса. По таким зависИмостям быст-
ро, без численноrо интеrрированИЯ, MOFYT быть рассчитаны множества харак-
теристик переходных процессов. Кроме Toro, аналитические зависимости дают
вщможность использовать методы функциональных преобразований случайных
величин для определения вероятностных характеристик перехоДНЫХ процессов.
Рассмотрим составление и приближенное решение уравнений движения
ротора [енератора в простейшей системе при вариациях удаления KopoTKoro за-
мыкания от начала ЛЭП. Предположим, что в простейшей электрической системе
(рис. 7.32) на одной из ЛЭП произошло короткое замыкание, удаленное от на-
чала линии на расстояние 1. После возникновения KopoTKoro замыкания повреж-
денная линия отключается и затем вновь успешно включается в работу. Значе-
ния взаимных проводимостей в аварийном режиме обозначим через Ь"', а в после-
аварийном и исходном нормальном режимах через Ь" и Ь' соответственно.
Удаление KopoTKoro замыкания на линии, оцененное в относительных
еДИНИцах: 1* === l/L, [де L длина линии, может изменяться от О до 1. при этом
., '" '" I
взаимная проводимость в авариином режиме будет изменяться от Ь 1 дО Ь 2 . ВьН
берем такое расстояние 1, которому соответствует среднее значение взаимной про-
БОДИМQCТИ. ЭТО расстояние назовем опорным и будем обозначать аналоrичным
199
I
символом <1>. в качестве опорноrо не обязательно выбирать среднее значение
взаимной проводимости, можно выбрать любое друrое из области возможных
значений.
Уравнение движения ротора reHepaTopa при подстановке в Hero (в режиме
KopoTKoro замыкания) опорной взаимной проводимости определит опорное от-
носительное движение ротора reHер атора:
T J d2<а>/dj2 Ро ЕU<Ь>siп<а>. (7.36)
е) При интеrрировании уравне-
д;ера ния (7.36) получим зависимость
175 <6(t». Если удаление KopOТKoro
замыкания будет отличаться от
принятоrо в качестве опорноrо, то
относительное движение ротора re-
нератора определится друrим урав-
HeImeM:
T J d 2 8/dt 2 РО Еи ь siп 8. (7.37)
В послеаварийном и исходном
режимах взаимные ПрОБОДИМОСТИ в
уравнениях (7.36), (7.37) одинако-
вы по значению.
Относительные движения ро-
тора reHepaTopa при различных
удален иях KopoTKoro замыкания
от начала линии MorYT быть опре-
делены при MHoroKpaTHoM интеrри-
ровании уравнения (7.37). Такое
определение переходных процессов
при отклонениях взаимной прово-
ДИМ ости от опорноrо значения тре-
бует проведения большой вычисли-
тельной работы, поскольку урав-
нения в общем случае интеrриру-
ются численными методами.
В этих условиях целесообраз-
но использовать более простые и
менее трудоемкие методы аналити-
ческоrо определения относительных движении ротора reHepaTopa (при отклоне-
ниях параметров), располаrая предварительно рассчитанным или полученным
эксперимеытально некоторым опорным движением.
Использование уравнений в вариациях для расчета характеристик переход-
ных процессов. Аналитические зависимости между варьируемыми параметрами,
отражающими появление в системах больших возмущений или каких-либо дру-
rих аварийных явлений, и параметрами, определяющими протекание пер е-
ходных процессов, MorYT быть приближенно представлены в виде мноrочленов.
Для общности рассуждений предположим, что переходный процесс внелинеиной
системе описывается уравнением
dx/dt f(t, х, р.),
80
60
'+0
20
О)ьм
ьпr "
<bfu:>
Ь Ш I I
t <l,> </)1 L*
8)
epa/J
U=l f50
125
100
75
0,2
Рис. 7.32. К расчету процесса с помощью опор-
ных значений:
а схема системы; 6 зависимость проводимости ОТ
удаления KOpOTKOro замыкання; <1> опорное удал,,""
ние; <Ь"'> опоризя проводимость; в характеристики
переходиых процессов при PT O,6; кривые. по-
пученные методом посл довательных интервалов;
кривые. получеиные с помощью степеннь'Х
рядов С перемениыми коэффициеитами; 1, 2, 3, 4 с уче-
ТОМ ОДНоrо. двух, трех и четырех членов разложения
соответственно; ;! характеристики переходных процес-
сов при Р т O.7; д решения уравнений в вариациях
при PT O.6
200
(7.38)
rде /1 ИСХОДНЫЙ параметр, изменение Koтoporo приводит к появлению пере-
ходноrо процесса x(t).
При некотором опорном значении параметра </1> решение уравнения (7.38)
также будет опорным <x(t». Необходимость в отыскании способов аналитиче
cKoro представления связи между решением и исходной функциональной зависи<-
мостью х == fjJ(t, /1) появляется вследствие Toro, что решение уравнения (7.38)
не может быть получено в виде элементарных функций и их комбинаций. Произ-
вольное значение параметра /1 можно представить в виде
f.1 == <р.> + Llf.1. (7.39)
Решение уравнения (7.38), соответствующее этому параметру, также можно
рассматривать в виде суммы:
х (/) == < х (/) > + Llx (/), (7.40)
rде Llx(/) == fjJ(t, /1) fjJ(t, </1».
Если функция х == fjJ(t, /1) в окрестности <х> == fjJ(t, </1» разложима
в ряд Тейлора по параметру f.1, то для приращения решения справедливо Bыpa
жение
Llx (/) == L 1 (/) Llf.1 + L 2 (/) Ll ",,2 + ....!... L з (/) Llp.3 +... t
21 . . 31
(7.41 )
rде
L 1 (/) == d9 (1, !:t)/ ФI 110==<110> ; L 2 (/) == d29 (t, !:t)/ Ф 2 Iр.==<р.>.
(7.41 а)
Увеличивая число членов разложения, можно уменьшить поrрешности в
определении приращений решения Llx(t) при заданном отклонеющ параметра Ll/1.
Можно также, сохраняя поrрешность, расширять диапазон изменений Ll/1, YBe
личивая число членов разложения.
Представление решений в виде разложен ий (7.41) имеет важное практиче-
ское значение. Оно дает возможность просто пересчитывать характеристики
переходных процессов в нелинейНblХ системах и представлять решения в сжатой
форме. Коэффициенты Li(t) MorYT быть определены в виде решений уравнений в
вариациях, получаемых в результате дифференцирования по параметру ypaB
Бения (7.38), после формальной подстановки в Hero решения х == fjJ(t, /1). Так,
nOCJle однократноro дифференцирования уравнения (7.38) по параметру /1 и ero
дальнейшеrо преобразования с учетом (7.41 а) получается уравнение вида
dLld ' ",) ==a(t, х, p.)Ll(/, ) + gl(/, х, ), (7.42)
rде
a(/,x,/1)== a f (t,X,fL) ; gl(t,X,!:t)== af(l,x,p.) .
дх д",
При подстановке опорных значений параметров </1> и <x(t» в (7.42), у
которых <x(/» определяется чиеленным интеrрированием onopHoro уравнения
(7.38), получим
d /dt ;::=; a(/) Ll + gl (1).
(7.43)
201
Уравнение (7.43) удобно также решать численными методами и затем при
необходимости аппроксимировать аналитическими выражениями полученную
зависимость.
Уравнение, описывающее изменение во времени коэффициента L 2 (t, х, ",,),
можно найти дифференцированием по варьируемому параметру "" уравнения
(7.42). При этом получается уравнение следующеro вида:
дL 2 (t, !J.) == a(t, х, ",,)L 2 (t, ",,) + g2(t, х, ",,), (7.44)
дt
rде
<
g2(t, х, 11) == h(t, х, ",,) L 1 + ag 1 L 1 (t, ",,) + ag 1 ;
дх д/l-
[ д 2 ' д2' ]
h(t,x,,,,,)== ------:--Ll(t."")+ .
дх2 дхд/l-
Если параметрам х и t придать опорные значения, то уравнение (7.44) пре-
образуется к виду
di 2 /dt == а (t) L 2 + g2 (t).
(7.45)
Аналоrично можно получить уравнения и для друrих коэффициентов L i .
В общем случае коэффициент L i представляется уравнением
aL f (t, ",,)1 at == а и, х, ",,) L f (t, ",,) + gf и, х, ""),
(7.46)
rде
gf(t,X, ",,)==h(t,x, "")Li 1(t,,,,,) + дgi 1 L 1 (t, ",,)+ дgн .
дх a/l-
Рассмотрим получение уравнений в вариациях и приближенное аналитиче.
ское представление характеристик переходных процессов в простейшей электри-
ческой системе. Предположим, каким-либо методом, например последователь-
ных интервалов, найдено решение опорноrо уравнения движения:
TJ d 2 <13>ldt 2 ==F«b>,<13»,
(7.47)
rде
F «Ь>, <а» == PT EU <b>sin<13>.
Уравнение (7.47) описывает переходнЫй процесс в системе, показанной на
рис. 7.32, а. Для произвольноro удаления KopoTKoro замыкания от начала ли-
нии и соответственно произвольноrо значения взаимной проводимости относи-
тельное движение ротора reHepaTopa можно представить в виде ряда с перемен-
ными коэффициентами:
13(t, Ь) == <13и, < ь:»> +
д'8
дЬ 'b <b>
ь + ..!. д2'8 Ь 2 ,
2! дЬ 2 Ib <b>
(7.48)
о
rде <б> опорный переходный процесс; Ь == Ь <Ь> отклонение вза-
. ямной проводимости от опорноrо значения.
Частные производные в (7.48) зависят от времени и отклоняющеrося пара-
метра взаимной проводимости
202
д8/ дЬ == Ll (t, Ь); д 2 '8/ аЬ 2 == L 2 (t, Ь).
(7.49)
При подстановке в (7.49) опорноrо значения взаимной проводимости Ь == .
== <Ь> коэффициенты L; можно рассматривать зависящими только от времени.
Таким образом,
о "
8 (t) == < 8 > + Ll (t) Ь + L 2 (t) Ь 2 /2. (7.50)
Переменные коэффициенты в (7.50) определяются уравнениями в вариациях,
которые получаются дифференцированием (7.47) по отклоняющемуся параметру
Ь после формальной подстановки в Hero решения б(t, Ь):
[ T d20(t,b) ] == Flb 8 ( ! Ь » ).
db J dt 2 db"
Дифференцируя (7.51) получим
T J d 2 Ll (t, b)/dt 2 == а (t: 8, Ь) Ll (t, Ь) + gl (t, а, Ь),
(7.51)
(7.52)
rде
a(t, 8, Ь)== aFla8== EUbcos8; gl(t, 8, b)==aF!ab== EUsin8.
При подстановке в (7.52) опорных параметров <Ь> и <б> получим урав-
нение в вариациях, определяющее первый переменный коэффициент L 1 (t):
т J d2 L 1 /dt 2 == а (t) L 1 + gl (t). (7.53)
Далее, дифференцируя (7.52) по отклоняющемуся параметру и осуществляя
аналоrичные преобразования, получим
T J d2L :, Ь) ==a(t, 8, b)L 2 (t, Ь) + g2(t, 8, Ь), (7.54)
rде
g2(t, 8, Ь) == h(t, 8, b)L1(t, Ь) + a g 1 (t-д.o 8 , Ь) Ll (t, Ь) + ag 1 (t, 8, Ь)
дЬ
h (t, 8, Ь)== [ a 2 F Ll (t, Ь) + J .
до 2 додЬ
Подставляя в g2(t, б, Ь) выражения для g1(t, б, Ь) и Р[Ь, б(t, Ь)] и осуществляя
несложные преобразования, запишем
g2(t, 8, Ь)== EUbsin8LI(t, b) 2EUcos8Ll(t, Ь).
При подстановке в (7.54) опорных параметров <Ь> и <б> получим урав-
нение в вариациях, определяющее второй переменный коэффициент L 2 (t):
T J d 2 L 2 /dt 2 == а (t) L 2 + g2 (t). (7.55)
При необходимости можно увеличить число учитываемых членов разложе
ния в (7.48) и получить для них уравнения в вариациях, аналоrичные (7.53) и
(7.55). Уравнения (7.53) и (7.55) линейные с переменными коэффициентами
a(t) и g;(t). Эти уравнения можно интеrрировать параллельно с опорным уравне-
203
вием (7.47), сразу определяя аналитическое представление множества характе-
ристик переходных процессов при отклонениях значений взаимной проводимос-
ти. ПО формулам (7.48), учитывающим два члена разложения, можно практи-
чески для всех встречающихся отклонении параметров определять протекание
переходных процессов и их устойчивость в пределах 1 ,0 1 ,5 с, т. е. в первом
цикле качаний роторов reHepaTopoB.
Покажем применение метода опорных значений (вариаций) для схемы элект-
рической системы, приведенной на рис. 7.32, а. Расчеты переходных процессов
ПРОВOAWlись при вариациях удаления трехфазноrо KopOТKoro замыкания от на-
чала линии. Продолжительность KopoTKoro замыкания принималась равной
0,15 С, после чеrо предполаrалось отключение повреждений цепи на 0,4 с и за-
тем успешное автоматическое повторное включение. Опорное значение взаимной
проводимости (рис. 7.32, б) в аварийном режиме равно в относительных едини-
цах 0,425. Отклонение от опорной проводимости принималось равным 100%
от ее значения, т. е. рассматривался процесс при коротком замыкании в начале
или конце линии, при котором взаимная проводимость равна нулю.
Опорный процесс рассчитывался обычным способом пЬ методу последова-
тельных интервалов. Процесс при нулевом значении проводимости определялся
аналитически с помощью степенных рядов с учетом первоrо, BToporo, третьею
и четвертоrо членов разложения. Этот же процесс для оценки поrрешности рас-
считывался методом последовательных интервалов.
На рис. 7.32, в приведены характеристики устойчивых процессов при пере-
даче относительной мощности в систему, равной 0,6, а на рис. 7.32, z 0,7, при
которой процесс оказывается н еустойчивым. Изменения во времени первых двух
коэффициентов степенн6rо ряда показано на рис. 7.32, д.
Анализ результатов расчета показывает, что на рассматриваемых интерва-
лах времени, т. е. в пределах lс, достаточно оrраничиться учетом двух членов
разложения. При учете четырех членов разложения кривые, полученные мето-
дом последовательных интервалов и с помощью степенных рядов, практически
совпадают как для устойчивых, так и для неустойчивых процессов.
Изложенный подход к анализу переходных процессов применим и при одно-
временном учете нескольких отклоняющихся параметров. Использован ие этоrо
подходэ. к пересчету характеристик переходных процессов при вариациях пара-
метров должно предусматривать оценку поrрешностей результатов. Одним из
возможных способов определения поrрешности может быть сравнение результатов
расчетов, полученных обычным способом и с помощью уравнений в вариациях.
Если uorрешность окажется недопустимо большой, то ее можно уменьшить либо
увелИЧивая число членов разложения, либо уменьшая диапазон отклонений
мощности от опорной.
Располаrая достаточно простыми аналитическими зависимостями (7.48),
можио, используя методы функциональных преобразований случайных величин,
получать необходимые вероятностные характеристики переходных процессов,
которые Moryт служить основой для расчета показателей надежности пеl'еходных
электромеханических 'процессов в электроэнерrетических системах.
t 7.5. ПРИМЕНЕНИЕ МЕТОДОВ ТЕОРИИ ВЕРОЯТНОСТЕJiI ПРМ РАСЧЕТАХ
ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЭЛЕКТРИЧЕСКИХ СИСТЕМАХ
Рассмотрение электроэнерrетической системы как сложной системы требует
учета большоrо числа взаимосвязанных элементов. Такими элементами являются
reHepaTopbl, реrуляторы возбуждения, трансформаторы, ЛЭП, двиrатели произ-
водственных механизмов, компенсирующие устройства и т. д. Во время работы
электрической системы происходят непрерывные изменения параметров режима
и связей между элемеитами системы, меняются схема электрической системы,
состав включенноrо оборудования. Все мноrообразие процессов, происходящих
в электрической системе, и сочетание условий, при которых эти процессы воз-
никают, невозможно однозначно определить.
Режим работы электрической системы, следовательно, во MHorOM определя-
ется с л у чай н ы м и я в л е н и я м и, особенно ощутимыми при рассмотре-
нии переходных процессов, вызванных большими аварийными возмущениями.
К случайным относятся такие явления, как обрывы проводов, падения опор, сбро-
сы и набросы мощностей элементов электрической системы, вызванные измене-
ниями наrрузок, появление коротких замыканий. Вид KopoTKoro замыкания,
ero продолжительность и место возникновения также имеют случайную природу.
, Переходные электромеханические п:роцессы при б о л ь ш и х с л у ч а й-
н ы х в о з м у Щ е н и я х в системе описываются вероятностными закономер-'
ностями, что вносит специфические особенности в их расчет по сравнению с ра-
счетом процессов в детерминированной системе.
Здесь можно различить в е р о я т н о с т н о о п р е Д е л е н н ы й характер про-
цессов, коrда для определяющих их случайных величин точно известны вероятностные xa
рактернстики. I(оrда для случайных величин вероятностноrо описании нет или оно заведомо
не точно, процессы будут описанными н е о п р е Д е л е н н о. Исходная информация в
этом случае задается некоторыми интервалами или отрезками возможных значений. Послед-
нее время получает развитие теория расплывчатой информации.
Обычное допущение о том, что параметры и возмущения MorYT быть заданы
однозначно, является идеализацией процессов, происходящих в реальной элект-
рической системе. Этот подход, во мноrих случаях вполне приемлемый, позволя-
ет с достаточной точностью (с точки зрения поставленной задачи) отразить наи-
более существеные свойства электрической системы. Однако решение таких за
дач, как определение показателей надежности электрической системы, невоз
можно без применения методов теории вероятностей и математической статистики.
В ы б о Р м е Р о при я т и й по улучшению устойчивости электрической
системы, основанный на детерминированном подходе, содержит опасность He
достаточной обоснованности их. Так, ориентируясь на наиболее тяжелый режим,
можно допустить неоправданно большой расход средств на улучшение устой-
чивости из за малой вероятности появления этоrо режима.
При случайных возмущениях и случайных исходных параметрах резуль-
таты расчетов переходных процессов также будут случайными. Например, слу
чайными будут значения относительных уrлов роторов reHepaTopoB и коэффициен-
ты запасов устойчивости.
Вероятностные значения отдельных исходных
пар а м е т р о в и возмущений определяются путем сбора в энерrетических
системах с т а т и с l' И Ч е с к и х Д а н н ы х и последующей их обработки мето-
дами математической статистики. Чтобы получить вероятностные характеристики
205
параметров, определяющих протекание переходных процессов (например, отно-
сительных уrлов роторов reHepaTopoB), необходимо применять специальные ме-
тоды расчета. Вероятностные характеристики таких «выходных» параметров MorYT
рассматриваться как результат преобразования вероятностных характеристик
исходных «входных» параметров и возмущений.
В е р о я т н о с т н ы е о ц е н к и переходных процессов получаются с
помощью экспериментов, позволяющих собрать статистические данные и опре-
делить вероятностные характеристики <<вы-
ходных» параметров в реальной системе.
Возможен путь расчетно-эксперименталь-
ный, коrда различ;ными численными мето-
дами проводятся мноrократные расчеты
(каждый по своему. детерминированному
алrоритму).
Например, при расчетах по методу ста-
тистическоro моделирования (метод Мон-
те ..Карло) используется комплекс проr-
PSlMM, в который входят проrpамма расче-
та устойчивости и специальная проrрамма
статистической вариации исходных данных. \
Случайная вариация исходных данных осу-
ществляется с помощью устройства для re-
нерирования последовательности случай.
ных чисел с равномерным (нормальным) за-
коном распределения вероятностей. Для
каждоrо случайноrо сочетания значений
исходных данных про изводится расчет ус-
тойчивости. При MHoroKpaTHoM повторении
таких расчетов собираются статистические
данные об искомых параметрах, характери-
зующих переходный процесс. Последующая
обработка этих данных дает возможность
получить эмпирические плотности вероят-
ностей и функции распределения.
Метод статистическоrо моделирования
позволяет одновременно учитывать относительно большое число случайно за-
данных параметров и рассматривать достаточно сложные электрические систе-
мы*.
На рис. 7.33 приведены rистоrраммы распределений максимальных значений
относительных уrлов роторов reHepaTopoB в первом цикле качания, полученные
для сложной электрической системы, содержащей 17 reHepaTopoB. При построении
rистоrраммы весь диапазон значений максимальных вылетов относительных yr-
лов разбивается на интервалы, которые (6;, 6;+1) показаны на том же рисунке.
На каждом интервале, как на основании, строится прямоуrолы ик, площадь ко-
Toporo равна отношению числа значений максимальных уrлов, оказавшихся внут-
MOi J)l
0,16
0,08
о
З5
fjt(QN)
0,15
55
Оf.ЗlцаiJ
о
Z-J,Zра9
0,08
в
16
Рис. 7.33. rистоrраммы распределений
максимальных значений относительных
уrлов роторов reHepaTopoB
* См.: Веников F. В., FоловUЦblН Б. Н., Строев В. А. Применение метода статистических
испытаний к анализу устойчивости электрических систем. Электричество, 1969, N2 1.
с. 13 18.
206
ри данноrо интервала тi при статистических испытаниях, к общем числу испьt
таний п:
р; == тtln "'= [; (8 i +1 8д.
Сумма площадей всех прямоуrольнИКов, или полная площадь rистоrраммы,
k k
т: == '; (8 i + 1 8д == 1,
i l i l
k
так как тi == п, rде k число интервалов. Рассматривалосьтрехфазное KO
i l
роткое замыкание на шинах одной из станций в предположении, что параметры
reHepaTopoB, трансформаторов, ЛЭП и наrрузок известны с поrрешностями, зна-
чения которых распределены по нормальному закону*.
В е р о я т н о с т н ы е х а р а к т е р и с т и к и у с т о й ч и в о с т и мо-
rYT быть определены также при рассмотрении различных аварийных ситуаций,
т. е. сложных случайных событий (например, возмущения, вызывающеrо из-
менения уrлов б, действия в некоторые моменты времени устройства ащиты и
автоматики и т. д.). Все мноrообразие случайных аварийных ситуаций можно
разбить на два непересекающихся устойчивое ,и неустойчивое подмно-
жества, определяя вероятность нарушения устойчивости системы как вероят-
ность появления аварийной ситуации в неустойчивом подмножестве.
Численные методы определения вероятностных характеристик (статистиче
ское моделирование) переходныхпроцессов требуют TaKoro большоrо количества
вычислений, что расчеты сложных электрических систем, содержащих множест-
во станций, наrрузок и разветвленную сеть, становятся затруднительны..м:и даже
при использовании вычислительных машин. Эти методы используются для част-
ных случаев, т. е. справедливы только для конкретных условий, принятых в
расчете. Поэтому их можно применять в тех случаях, коrда либо отсутствуют
аналитические методы, либо их применение затруднено.
Методы аналитическоrо получения вероятностных характеристик переход-
ных электромеханических процессов, успешно используются при решении задач
анализа и синтеза. Так, задаваясь желаемыми вероятностными характеристи-
ками переходныХ процессов, вытекающими, например, из требований, предъ-
являемых к надежности электрических систем, можно целенаправленно выбирать
мероприятия по улучшению устойчивости.
Вероятностные характеристики предельноrо времени отключения KopOTKoro
замыкания. В реальных условиях работы электрических систем параметры, опре
деляющие протекание процесса, MorYT принимать различные значения из об-
ласти возможных изменений. Влияние каждоrо из этих параметров в отдельности
на предельное время отключения KopoTKoro замыкания было показано на рис. 7.3.
Предельное время отключения KopoTKoro замыкания, полученное при условии,
что сопротивление дуrи в точке KopoTKoro Замыкания равно нулю, удаление ero
от начала линии равно нулю, а также отклонения э. д. с. и сопротивления reHe-
"' См.: Цукерник Л. В., Дерзкий В. П. Комплекс проrрамм для анализа на ЦВМ ус-
тойчивости с учетом поrрешности исходной информации и реализации расчетных режимов.
Проблемы Технической Электродинамики. Киев: Наукова думка, 1970, вып. 25.
flQ7
ратора от значений, называемых расчетными, равно нулю, было принято за еди-
ницу. Действительные значения параметров зависят от большоrо числа факторов,
которые практически не MorYT быть учтены в расчетах. Например, точка возник-
новения KopoTKoro замыкания зависит от атмосферных условий, состоянии изо-
ляции на различных участках JIЭП и т. д. Сопротивление дуrи в месте KopoTKoro
замыкания зависит также от ряда факторов, учесть которые практически невоз-
а)
p
ДJ I Ar\ я
(хр R.
Рис. 7.34. Вероятностные
характеристики дуrи:
а примерные rистоrраММbl со-
противления; 6....... вероятность
появления дуrи. имеющей со-
противление R
5r
о,ц. .
О,З
,...
0,2 I
I
I
,
0,1 ,
I
О 10
З(]
2 0 { . 100; !!2...... /(](]
Х '2
110 { EtM . 10 (]; x'c!tLJX .fOU
Е xd
Рис. 7.35. Плотности вероятностей W параметров режима
и параметров системы:
R д
1 W( 100),
Х'2
J!-:t:.IlЕ
2 W( IOO); 3
Е
1,....... то же. при 01<0:2=
Il[
W(lIOO); 4 W(
Х :t:.IlX
100)
,
"а
можно. При мноrократной реrистрации сопротивления дуrи случайные ее значе-
ния получаются различными; .их можно разбить на ряд равных интервалов и на
каждом, как на основании, построить прямоуrольники с высотами, равными час-
тотам Р *' появления значений сопротивлений (рис. 7.34, а). Полученная сту-
пенчатая кривая представляет собой вистоврамму распределения сопротивления
дуви: ,
Р *; == ер (R).
Частота, соответствующая i-MY интервалу,
n n
Р*; == mi/п, причем P*i== (mi/п) == 1,
{ I { I
rде т, число появлений данноrо сопротивления дуrи в i-M интервале значений;
п общее число наблюдений сопротивления дуrи.
При увеличении числа наблюдений и выборе более мелких интервалов rисто-
rpaMMa превратится в кривую, оrраничивающую площадь, равную единице, и
называемую плотностью вероятностей сопротивления дуви. На рис. 7.34, б
G
приведена плотность распределения нормальноrо закона распределения, т. е.
значения f(R*) == q>(R), отвечающеrо rистоrрамме, показанной на рис. 7.34" а.
Плотность верояцlOСТИ (или плотность распределения) является одной и
форм закона распределения случайной величины, устанавливающеrо связь
между возможными значениями случайной величины и соответствующими им
вероятностями.
Если выделить некоторый интервал значений сопротивления дуrи от а до ,
то вероятность случайноrо события, состоящеrо в том, что при появлении корот-
Koro замыкания сопротивление дуrи окажется в этом интервале, равна заштри
хованной на рис. 7.34, 6 площадке:
\ f(R) dR == р (а. < R < ).
Зная плотность вероятности f(R), МОЖНG 'Найти теоретическую функцию pac
пределения случайнoi: величИНЫ
R
F(R) == f (R) dR,
oo
которая определяет вероятность случайноrо события, состоящеrо в том, что со-
противление дуrи будет меньше R. Эта функция является наиболее универсаль-
ной и наиболее полной, с вероятностной точки зрения, характеристикой случай-
ной величины. .
Плотности вероятностей случайных параметров, влияющих на предельное вре-
мя отключения KopoTKoro замыкания, имеют вид, показанный на рис. 7.35. При
этом предполаrается, что сопротивление дуrи, э. д. с. и переходное сопротивление
[енератора распределены по усеченному нормальному закону, а удаление корот-
Koro замыкания от начала линии по равномерному закону.
Усеченные законы распределения случайных величин применяются в тех
случаях, коrда необходимо оrраничить область изменения этих величин. Слу-
чайная величина, распределенная по нормальному закону, изменяется от oo
до +00. При рассмотрении сопротивления дуrи целесообразно оrраничить об-
ласть изменения ero значения практически возможными пределами, например
не рассматривать отрицательное значение сопротивления дуrи.
Вероятностные характеристики параметров, заданные здесь априорно, долж-
ны определяться путем наблюдений, число которых обычно оrраничено и которые
содержат элементы случайности. Для уменьшения влияния случайных поrреш-
ностей в математической статистике разработаны методы выравнивания статисти-
ческих рядов с последующей их проверкой по критериям соrласия с теоретиче-
скими распределениями. ,
Априорные характеристики, применяемые при отсутствии статистических
данных на основе сведений о физических свойствах рассматриваемых явлений,
MorYT успешно применяться в расчетах первоrо приближения. Например, пред-
положение о том, что сопротивление дуrи подчинено усеченному нормальному
закону распределения и может быть представлено в виде неизменной во времени
величины, является условным. В действительноСти сопротивление дуrи меняется
во времени, так как меняются длина дуrи и ток, протекающий через нее. Длина
дуrи определяется направлением пути перекрытия, на ее изменение оказывают
20
влияние восходящие потоки воздуха, обусловленные выделением энерrии стол-
бом дуrи, и атмосферные условия. Из анализа экспериментальных данных мож-
но установить эмпирическую формулу для определения сопротивления дуrи в
зависимости от ее длины и тока, которые изменяются во времени. Эти изменения
приближенно MorYT быть учтены уравнениями первой степени.
Влияние случайных вариаций значений сопротивления дуrи и различных
<:пособов представления ее в расчетах на относительное движение ротора reHepa-
тора показано в виде rистоrрамм
(рис. 7.36).
При учете изменения во вре-
мени сопротивления дуrи получа-
ются более леrкие условия проте-
кания переходноrо процесса. Так,
среднее вероятностное значение
максимальноrо вылета уrла ротора
reHepaTopa без учета изменения во
времени сопротивления дуrи
б манс == 92,270, а при учете измене-
ния во времени сопротивления
б макс == 81,590.
Предполаrая, что принятые ве-
роятностные характеристики пара-
метров реальны, рассмотрим веро-
ятностные характеристики пре-
дельноrо времени отключения ко-
pOTKoro замыкания t*отнл, Пре-
дельное время, как было указано
выше, является случайной величи-
ной, функционально зависящей от
случайных параметров. Функция
ero распределения позволяет оце-
нивать вероятности появления лю-
бых возможных значений.
Плотность вероятности предельноrо времени f(t*ОТRЛ) можно определить
по известной плотности вероятности сопротивления дуrи f(R*д) и функциональ.-
ной зависимости t*отнл == (R*д) в предположении, что остальные параметры
заданы в виде детерминированных величин.
Функция s(R*д) дифференцируема, ей отвечает однозначно обратная функ-
ция R*д == qJ(t*отнл), Величины t*отнл и R*д связаны между собой взаимно
однозначным соответствием и из неравенства
R*д < R*д R*дО + dR*д
ома/((!
r1
r.J L
r.J
, r J
11
I1
I
11
I1
..., ,.,
11 1 I I
I I I I I
I 1 I I 1
'-., ,..., I 1
1 I f I I 1
I Lf '-., I I
l.J I
1
I
L.,
I
l'
I
I
L,
1
I
1
1
'1
i
..,
I
I
I
11. I
55
Рис. 7.36. rистоrраммы <'I манс :
с учетом изменения сопротивления дуrи
во времени; ..... без учета ЭТОI"О изменения
(7.56)
следует неравенство
t*ОТХЛ о < t*ОТХЛ t*ОТХЛ 0+ dt*откл,
(7.57)
rде t*оТRЛО == (R*дО)' и наоборот. Следовательно, вероятность выполнения ус-
ловия (7.56) равна вероятности выполнения условия (7.57). Эти вероятности
равны заштрихованным площадкам Sn И St, приведенным на рис. 7.37, а, в.
С точностью до малых высшеrо порядка можно записать
210
f (R*д) dR*д == f (t * отхл) dt * отхл'
(7.58)
Искомая плотность вероятности определится из (7.58):
f (t * отхл) == f (R *д) I dR*д/ dt * отхл 1.
Производная берется по модулю, так как плотности вероятностей неотри-
цательные функц и*.
Подставляя в f(t*ОТIШ) вместо случайной величины R *д ее выражение R *д ==
== qJ(t*откл), получим
f (! * отхл) == f[ ер (t * отхл)] 1 dep (! * отхл)/dt * отхл 1.
В рассмотренном случае обратная функция однозначна (рис. 7.37, б).
а)
f(R.jlД)
о)
В)
f(t*DTK
R,*O
Рис. 7.37. Определение плотности вероятности предельноrо времени отключе-
ния:
а плотность вероятностн сопротнвления дуrи; б связь времени отключения с вероят-
ностнымн факторами; в плотиость вероятностн предельноrо времени
При общих предположениях функциональная зависимоСТЬ между случай
ными величинами У == (x) может быть такой, что обратная функция х ==
== qJj(y) (j == 1, 2, ..., k) будет мноrозначной. Тоща плотность вероятносТИ функ
ции случайной величины
k
'(у) == fx[epj(x)]ldCPj(x)/dxl.
j l
Зависимости предельноrо времени отключения KopoTKoro замыкания от
влияющих факторов можно приближенно представить линейными функциями
вида
(7.59)
t* откл == а + ЬR*д'
(7.6 )
с учетом (7.60) плотность вероятности предельноrо времени отключения KO
pOТKoro замыкания
f(t*отхл) ==f[(t*откл а)/Ь]11/ЬI.
(7.61 )
* См.: Левин Б. Р. Теоретические основы статистической радиотехники. М.: Co
ветское радио, 1969, с. 104.
211
Интеrрируя (7.61), получим функцию распределения предельноrо времени
O'l'ключения KopoTKoro замыкания:
t* ОТRЛ
F(t* ОТIlЛ) == S f(t* ОТllл)dt* ОТIlЛ'
oo
На рис. 7.38 отражены результаты расчетов, отвечающие вероятностным
характеристикам параметров, приведенным на рис. 7.35. Эти функции дают воз-
:можность определять вероятность нарушения устойчивости при различных фак-
тических значениях времени отключе-
ния KOpOТKOro замыкания. В системе
произойдет нарушение устойчивости,
если предельное время отключения
KOpOTKOro замыкания будет меньше
фактическоro. Вероятности таких со-
бытий определяются кривыми, пр иве-
денными на рис. 7.38. Если предполо-
жить, что фактическое время отключе-
ния KopoTKoro замыкания t*оТRЛ ==
== 1,2, то при случайном изменении
t,б 1,8 t.итК/Т сопротивления дуrи с вероятностью
0,15 (кривая 1') произойдет наруше-
ние устойчивости. При увеличении
значения фактическоrо времени отк-
лючения KopoTKoro замыкания, на-
пример до 1,6, вероятность наруше-
ния устойчивости возрастает до 0,7.
Рассмотрим влияние среднеквад-
ратическоrо значения отклонения сопротивления дуrи на вероятностные харак-
теристики устойчивости системы. это влияние зависит от соотношения между
фактическим временем отКлючения KopoTKoro замыкания t*ф и математическим
-ожиданием предельноro времени отключения М{t*откл},
Если фактическое время отключения t*ф больше математическоrо ожидания
(t*ф> М{t*ОТRЛ})' то с увеличением рассеяния случайных значений сопротив-
.пения дуrи (с увеличением среднеквадратическоrо отклонения O"R) вероятность
нарушения устойчивости уменьшается (рис. 7.38, кривые 1 и 1'). Действитель-
но, при t*ф == 1,6 и O"R == 0,8 устойчивость нарушается с вероятностью 0,84, а
при O"R == 1 ,5 с вероятностью 0,7. В предельном случае, Коrда O"R == О И t*ф >
> М{t*ОТRЛ}' при коротком замыкании устойчивость нарушается с вероят-
ностью, равной единице. Если же фактическое время отключения KopoTKoro за-
мыкания меньше математическоrо ожидания (t*ф < М{t'*ОТRЛ})' то с увеличе-
нием O"R вероятность нарушения устойчивости увеличивается.
Располаrая вероятностными характеристиками t*ОТRЛ' можно обоснованно
выбрать целесообразные значеюlя t*ф и мероприятия по улучшению устойчи-
вости. Предположим, что в результате расчетов получена такая функция распре-
деления предельноrо времени отключения KopoTKoro замыкания, при которой ве-
роятности нарушения устойчивости в системе оказываются недопустимо боль-
шими. Эту функцию распределения можно изменить в желательном направлении,
проведя мероприятия по улучшению устойчивости.
F(tttBT/U/)
0,8
0,6
о,ч.
0,2
о
0,5
./'
./
.
0,8
Рис. 7.38. Функции распределения:
J при усеченном нормальном распределении сопро-
тивлення дуrи в меСте KopOТKoro замыкания; }' то
Же, при <Т'>0'2; 2, 4 при усечеином иормальиом рас-
аределевии переходноrо реактивноro сопротивлення
f'eиератора; 3 при равномерном распределении ме-
ста KopOTKoro замыкания
.212
Вер о я т н о с т н ы й п о Д х о Д к определению влияния вариаций пара
метров на предельное время отключения KopOТKoro замыкания позволяет оценить
не только диапазон возможных значений предельноrо времени, но и. случайные
распределения этих значений внутри диапазона. Например, определяя вероят
ностные характеристики предельноrо времени отключения KopoTKoro замыкания
при последовательном учете влияния каждоrо параметра, надо учесть, что не все
из перечисленных параметров MorYT изменяться одновременно и в этих условиях
't*отнл может рассматриваться в виде rипеРI10верхности, построенной в коорди
натах влияющих параметров.
Вероятностные характеристики t*отнл MorYT быть определены и при OДHO
временном учете случайноro характера совокупности параметров. Для этоrо
необходимо выразить предельное время как функцию от всех случайных парамет
ров.
Вероятностные характеристики относительных движений роторов reHepaTOpoв*.
Приближенное решение дифференциальных уравнений относитеЛьноro движе-
ния ротора при вариациях исходных параметров позволяет на каждом шаrе ин-
теrрирования устанавливать функциональные зависимости между относител'ь
выми уrлами и варьируемыми параметрами. При неоднозначно заданной вза
имной проводимости соотношения имеют вид
а; === L; Ь, rде i === 1, 2, .... (7.62)
Отклонение взаимной проводимости от ее опорноrо значения вызвано изме
нением точки возникновения KopoTKoro замыкания. В общем случае точка B03
никновеНI:IЯ KopoTKoro замыкания является случайной. Следовательно, случай
ная природа свойственна также взаимной проводимости и относительным уrлам
роторов reHepaTopa. .
Относительное движение ротора reHepaTopa при учете взаимной проводи
мости в виде CJIучайной величины может быть представлено неслучайным изме
нением во времени случайноrо относительноrо уrла reHepaTopa. В соответствии
с (7.62) для любоrо момента времени t i уrол б; является величиной случайной,
а изменение во времени уrла б происходит неслучайным образом. Если зафикси
ровать некоторое значение взаимной проводимости Ь, то ей будет соответствовать
детерминированная функция времени б(t).
Неслучайное изменение во времени случайноrо относительноrо уrла ротора
reHepaTopa называется КВа3uдетеРМU1iuроваНЯblМ процессом. Наиболее полной
вероятностной характеристикой квазидетерминированноrо процесса является
ero одномерная функция распределения. Определим плотность вероятнос
'l'И и функцию распределения относительноrо уrла ротора reHepaTopa в момент
времени t; при удалении на случайное расстояние от начала линии трехфазноrо
KopOТKoro замыкания.
Взаимная проводимость в режиме KopoTKoro замыкания функционально
зависит от случайноrо расстояния 1. Эту зависимость можно получить из комп
лексной схемы замещения системы, преобразовав ее к виду, показанному на
* Подробнее СМ.: Вендков В. А., Путятин Е. В. Вероятностный подход к определению
динамической устойчивости электрических систем. Известия АН СССР. Энерrетика и
1Ранспорт, 1972, 5.
213
рис. 7.39, откуда и определяется значение взаимной проводимости в аварийном
режиме 111. Связь значения взаимной проводимости b 111 (1) длины участка 1
линии передачи, за которым происходит короткое замыкание, показана на
рис. 7.40.
Для более сложных систем зависимость взаимной проводимости от удаления
KopoTKoro замыкания может быть определена приближенно путем мноrократных
расчетов значений проводи-
мости при перемещении точки
KopoTKoro замыкания вдоль
лэп. По результатам таких
расчетов может быть опреде-
лено аналитическое выраже-
ние зависимости b(l). В боль-
шинстве случаев как для
сложных, так и для простых
систем зависимости взаимной
проводимости от удаления ко-
pOTKoro замыкания (от нача-
ла линии) хорошо аппрокси-
мируются мноrочленами вто-
рой степени
X 12 (L)
ы lll
u
Рис. 7.39. Эквивалент-
ная схема замещения
передачи
Рис. 7.40. Примерный
характер зависимости
проводимости от места
KopOTKoro -замыкания
L
ь (1) == ао + Q11 + а2Р'
Коэффициенты а; (i == О, 1, 2) обычно определяются по методу наименьших
квадратов.
Отклонение взаимной проводимости от опорноrо значения (см. 7.4)
Ь (l) == ао < Ь> + Q1l + а 2 Р.
Отклонение относительноrо уrла ротора reHepaTopa от опорноrо значения
в момент времени, соответствующий i-MY интервалу интеrрирования, вызванное
отклонением проводимости /';(1),
а ; == T O) + т?)! + т[2) Р,
rде
Т (О) L ( Ь ) . Т (I) L . Т (2) L
i == ; а о < > , i == i a 1 , i == ia2'
Примерный характер зависимости ai(l) показан на рис. 7.41.
Значение относительноrо уrла ротора reHepaTopa с учетом
(7.63) представим в виде
rде
a i == T O) + T 1) l + т: 2 ) f
. . .
(7.63)
соотношения
(O) (О)
Т; == < а; > + Т; .
Изменение во времени относительноrо уrла ротора reHepaтopa может быть
определено по формуле
\214
о (t) == 1'(0) (t) + тт (t) 1 + т(2) (t) 12.
(7.64)
Вероятностные характеристики изменения относительноrо уrла ротора re
нератора MorYT быть определены методами функциональных преобразований слу
чайных величин в соответствии с (7.64). Обратная функция 1 == ср(бд однозначна
(рис. 7-.41).
ЗависимостИ плотности вероятности F(бд и функции распределения f(б i )
относительно уrла б i ротора reHepaTopa можно оценить кривыми, приведенными
F(Oi), f(oiJ
.1,0
О'
8".
L
,
!
L
Рис. 7.41. rрафик зависи
мости значения уrла б i от
места аварии
Рис. 7.42. Плотность вероятности
и распределение относительноrо
уrла б i
на рис. 7.42. Они построены в предположении, что случайное удаление корот-
Koro замыкания от начала линии подчинено закону равномерной плотности. По
виду плотности вероятности и функции распределения относительноro уrла ро--
тора reHepaTopa можно заключить, что значения относительныХ уrлов будут с
большими вероятностями располаrаться вблизи нижней rраницы возможных
значений.
При вероятностной оценке устойчивости электрических систем представ
ляют интерес случаи, коrда при некоторых значениях удаления KopoTKoro за-
мыкания от начала линии возможны нарушения устойчивости. При этом область
возможных реализаций переходноrо процесса б(t), показанная на рис. 7.43,
содержит критическую кривую 1, разде-ляющую рассматриваемую область на
устойчивую (кривые 2) и неустойчивую (кривые 3) подобласти.. Вероятность со-
хранения устойчивости определяется соrласно функции распределения относи-
тельноrо уrла ротора reHepaTopa, для чеrо в соответствии с рис. 7.44 делается
подстановка критическоrо уrла б кр в исследуемую функцию. Вероятность наруше-
ния устойчивости равна 1 F(б кр )' В ряде случаев, не проводя MHoroKpaTHbIx
расчетов, можно выделить критическое значение исходноrо случайноrо парамет
ра, соответствующеrо критической кривой переходноrо процесса бкр(t).
Так, предположим, что уrол отключения б откл KopOTKoro замыкания извес
тен. Так как взаимная проводимость в аварийном режиме является величиной
случайной, то и уrловые характеристики мощности, показанные на рис. 7.44,
будут для условий аварийноrо режима 111 иметь случайные значения (штрихо
вые кривые).
Максимальное значение уrловоИ: характеристики мощности Р;; 1 В рассмат-
риваемом режиме также будет случайным. При постепенном уменьшении зна-
215
Р lll
чения m может наступить такое положение, при котором уrол отключения
станет равным предельному, т. е. площадка ускорения будет равна площадке
возможноrо торможения (рис. 7.44). Значение максимума уrловой характерис-
тики аварийноro режима называется предельным p{1I p и определяется по
формуле
р/ll == po(aнp a ) +Р{1 ( СОSОRР СОSОоткл,пр)
mlIp 1
cos 0fl cos Ооткл.пр
,Располаrая функцией раСI1ределения величины p /, можно найти вероят-
ность нарушения устойчивости. При этом оценивается вероятность события,
о
J
д кр
р
о
РО
t Kp
t
Рис. 7.43. Разделение
lJ == t{t) на .Устойчивые и
неустойчивые области
Рис. 7.44. Уrловые характеристики
мощности при учете веРОЯТИОСТНЫJli ,
факторов
состоящеrо в том, что при коротком замыкании должно выполняться соотно-
Р /lI Р /lI
шение m < mпр'
Полученные ранее функции распределения относительноrо уrла ротора re-
нератора и соответствующая ей вероятность нарушения устойчивости являются
условными, поскольку они найденьi в предположении, что в системе произошло
короткое замыкание определенноrо вида. Появление KopoTKoro замыкания яв-
ляется событием случайным.
Если рассматривать некоторый промежуток времени, например один rод,
то число появлений KopoTKoro замыкания будет случайным, а следовательно, слу-
чайным будет и число нарушений усто,йчивости.
Для решения пр а к т и ч е с к и х в о пр р с о в проектирования и экс-
плуатации электрических систем важно знать вероятностные характеристики на-
рушений устойчивости в течение про Д о л ж и т е л ь н ы х и н т е р в а л о в
времени, вызванных действием на электрическую систему больших возму-
щений определенноro вида. Характеристики нарушений устойчивости MorYT
быть найдены, если известны вероятностные характеристики возмущений опре-
деленноrо вида, например коротких замыканий, и характеристики устойчивости
при возникновении одноrо возмущения.
Сложность получения вероятностных характеристик нарушений устойчи-
вости вызывается тем, что с течением времени меняются условия работы эл ктри-
216
ческой системы и ее свойства, всле ствие чеrо вероятностные характеристики
потока больших возмущ ний и устоичивости при возникновении одноrо возму
щения также не остаются стабильными. При рассмотрении продолжительных
интервалов времени исходные вероятностные характеристики больших возму
щений и устойчивости при одном возмущении должны определяться с исполь
зованием разлИЧНЫХ методов проrнозирования.
ПОТОК больших возмущений в энерrетических системах можно рассматри
вать как поток редких событий, подчиненных закону распределения Пуассона.
Вероятность события, состоящеrо в том, что за время <t произойдет т возмущений,
I...
Pm('t) == [(At)m/ml] е ,
(7.65)
rде л. плотность потока; <t приведенное вреt\1я, равное суммарной продол
жительности работы системы в рассматриваемом режиме в течение реальноrо
промежутка времени М.
Соотношение (7.65) справедливо для простейшеrо потока, удовлетворяюще-
ro условиям стационарности, отсутствия последействия и ординарности*. В дей
ствительности условие стационарности может быть справедливым только для or-
раниченноrо отрезка времени, так как плотность п ока (число возмущений,
приходящихся на единицу времени) в течение продолжительноrо периода не
остается постоянной. С течением времени совершенствуются устройства rрозоза-
щиты, повышаются уровни изоляции, улучшаются параметры элементов электри
ческих систем и т. д. При дОЛ20срОЧНbtх nрО2НОЗах необходимо учитываtnb неста-
ционарность потока больших возмущений, т. е. необходимо вводить в расчеты
мrновенную плотность 1..(t), зависящую от времени. Тоrда вероятность появле-
ния т возмущений за время 't, отсчитанное от HeKoToporo момента t B ,
Р т ('t, t o ) == (aт/т!)e a, (7.66)
(.+..
rде а ==.\ л (t) dt математическое ожидание числа возмущений на участке
(.
времени [t o , t o +'Т)].
Зависимость 1..(t) должна определяться современными методами проrнози
рования с учетом тенденций в изменении характеристик параметров системы и
режима, а также с учетом изменения структуры системы, совершенствования
средств защиты и автоматики и т. д. При этом должны использоваться возмож
ности всех методов научно-техническоrо проrнозирования экстраполяции,
экспертных оценок и моделирования. Экстраполяционные оценю!: основываются
на предположениях о неизменности или об относительной стабильности тен-
денций в развитии. В экстраполяционные зависимости с течением времени должны
вноситься корректировки, учи:rывающие опыт эксплуатации. Продолжител-ь-
ность таких оценок обычно оrраничивается lO 15 rодами.
В первом приближении можно ВОСJ;Iользоваться данными о среднестатистиче
ских значениях (математических ожиданиях) числа возмущений за выбранный
промежуток времени. Если математическое ожидание числа однофазных коротких
замыканий в течение rода обозначить через n, а вероятность нарушения устойчи-
вости при появлении KopOТKoro замыкания через р, то вероятность числа k
нарушений за т лет определится по формуле биноминальноrо распределения:
* СМ.: Вен,тцель Е. С. Теория вероя ностей. М.: Наука, 1969, с. 524 527.
217
, k n k
Р C k k q n k п. р q
k,n пР (п k)!k!
[де п == пт; q == 1 р вероятность сохранения устойчивости при коротком
замыкании.
Вероятность, Toro, что за т лет не произойдет ни одноrо нарушения ус-
тойчивости, определяется при k == о:
(7.67)
Po,/l == qn.
(7.68)
7.6. ОСОБЕННОСТИ РАСЧЕТА ПЕРЕходноrо ПРОЦЕСС А
[ДИНАМИЧЕСКОй УСТОЙЧИВОСТИ) СЛОЖНОй СИСТЕМЫ,
СОДЕРЖАЩЕй ПРОИЗВОЛЬНОЕ ЧИСЛО СТАНЦИй СОИЗМЕРИМОй МОЩНОСТИ
И НАrрузок
Электрическая система может быть оценена как сложная по ряду различ-
ных признаков. Если сложность системы оценивать только по ее схеме, полаrая
принятые расчетные модели одинаковыми (например" E == const или Е' ==
== const и т. п.), то систему «станция шины бесконечной мощности» следует
считать простейшей, систему «две станции наrрузка» простой и три стан-
ции и более, Связанные сетями, имеющими наrрузки, сложной. Сложность
системы в расчетном смысле зависит также от Toro, какие расчетные уравнения
(математическая модель) положены в основу исследования. Так, например, если
анализ проводится по упрощенным уравнениям простой системы, содержащей
различные реrуляторы с учетом ряда влияющих факторов, вероятностных и ста-
тических свойств, то такая система рассматривается Kт сложная. Таким обра-
зом, понятие сложности системы условно и пользоваться им следует, имея в виду
сделанные выше замечания.
Существенным для проведения расчетов является наличие в системе шин
бесконечной мощности. При отсутствии их в системе исследование динамиче-
Ской устойчивости обычно сводится к рассмотрению относительноrо движения
reHepaTopoB сложной системы. Предполаrается, что одинаковое изменение всех
уrлов указывает на изменение частоты в системе и свидетельствует о ее динами-
ческой устойчивости, т. е. устойчивости в той стадии переходноrо процесса, rде
изменение частоты еще не стало решающим*. При расчете устойчивости сложной
Системы по полным уравнениям Парка rорева можно было бы воспользоваться
методом последовательных приближений или общими аналитическими методами.
Однако трудности их применения в сложной системе настолько велики, что прак-
тически приемлемым является только метод численноrо интеrрирования (после-
довательных интервалов) упрощенных уравнений (рЧ! == о; рб == о) переходных
процессов, составленных для всех элементов системы.
Обычно все синхронные машины вводятся в расчет э. д. с. E Q и сопротивле-
ниями X q , при этом для неявнополюсных машин EQ == Eq и X q == Ха. Механи-
ческая мощность"турбин в п[юстейших расчетах принимается постоянной; в бо-
лее точных учитываются уравнения турбины и соrласно им находится изменение
мощности от интервала к интервалу. Действие реrуляторов возбуждения про-
порциональноrо типа может быть приближенно учтено исходя из предположения,
* у стончивость В этон стадии называют синхронной динамической устойчивостью.
218
что E == const, или учтено изменением э. д. с. Eqe в каждом интервале. В наи
более простых расчетах это изменение находится соrласно заданной xapaKтe
ристике Eqe == f (и r), rде и r напряжение на шинах reHepaTopa.
В более сложных расчетах в каждоМ интервале времени решается ypaBH
иие, описывающее действие системы возбуждения. Все наrрузки системы пред-
ставляются полными сопротивлениями Z ю Koтopbie или постоянны во всех рас-
<:матриваемых режимах, или изменяются от интервала к интервалу, причем co
противления (проводимости) наrрузок MorYT определяться в соответствии с их
динамическими характеристиками.
О с н о в н ы е р а с ч е т н ы е в ы р а ж е н и я получаются следующим
образом. Токи, протекающие в каждом [енераторе, выражаются через э. д. с.
и проводимости:
т
i j == E Qj УИ EQпY jn .
п l
пi=j
(7.69)
rде j номер машины (j == 1, 2, ..., т).
Из (7.69) находятся продольные составляющие токов отдельных машин:
т
1 dj == E Qj YjjCOS аи E Qп Yjn COS (8 jn ajn),
.п l
n1 0 j
(7.70)
rде б jn == бj б n уrлы между роторами машин.
Продольные составляющие токов можно выразить иначе:
1 dj == (E Qj E j) /(xqj X j)' (7.71)
Приравнивая токи, найденные соrласно (7.70), найденным соrласно (7.71),
получим систему уравнений, в которой содержится столько уравнений, сколько
имеетсЯ станций, т. е. э. д. с. E или Eq:
т
А j E j == ajjEQj + ajn E Qп ,
n 1
n10j
(7.72)
rде коэффициенты
А! == l/(Xqj X;j); aJj == А! YjjCOS а jj; ajn == У jn COS (8jn ajn)'
Полученная система уравнений (7.72) связывает переходные э. д. с. E и
э. д. с. E q (или расчетные э. д. с. E Q при явнополюсных машинах) с параметрами
данной системы. При любом резком нарушении режима все переходные э. д. с.
в первый момент времени остаются неизменными, а все э. д. с. EQ и Eq изменяются
скачком.
Нарушение режима можно свести 1с М2новенному изменению параметров сис-
темы, т. е. изменению всех коэффициентов а и А в уравнениях (7.72). Подстав-
ляя в уравнения (7.72) значения э. д. с. E (O) == E o, т. е. оставлЯЯ их такими же
как в исходном режиме, и значения коэффициентов а и А, отвечающих аварий
ному режиму, можно найти значения т э. д. с. E Q и E q при t == О. ДЛЯ этоrо надо
219
репшть систему из т уравнений с т неизвестными. При расчетах методом после-
довательных интервалов эти уравнения должны быть разрешаемы в каждом ин
тервале дt, так как их коэффициенты изменяются с течением времени. В каждом
интервале значения э. д. с. E и коэффициентов а должны изменяться соrласно
соответствующим формулам. Однако такое решение, требующее больших затрат
времени, возможно только на ЦВМ. При расчетах, выполняемых вручную на
расчетных столах, оrраничиваются решением системы уравнений лишь в первых
интервалах после нарущения режима, например при появлении KopoTKoro за-
мыкания и ero устранении. В остальных же интервалах времени, Коrда изменения
э. д. с. невелики, проводят расчет приближенно, решая первое из уравнений (7.72)
относительно EQf, второе относительно E Q2 и т. д. Уравнения при этом получа-
ют вид
А}, 1 . 1
== Eqj ...-;;. ajn E Qn , J == ,2,
ajj ajj n 1
n*j
В правой части уравнений (7.73) преобладающее значение имеют первые
члены, пропорциональные переходнblм э. д. с. E . Все остальные члены
обычно невелики сравнительно с первыми. Поэтому э. д. с. EQI С достаточной
степенью точности можно вычислить непосредственно из первоrо уравнения
(7.73), принимая для всех остальных э. д. с. (EQ2' EQ3 и т. д.), кроме переходных
э. д. с. их значения из предыдущеrо интервала времени. При этом значения
э. д. с. E и коэффициентов а12' а 1з и т. д. (зависящих от уrлов) должны быть при-
няты соответствующими данному (но не предыдущему) интервалу времени.
Аналоrично, э. д. с. E Q2 можно найти из BToporo уравнения системы (7.73),
принимая значения дЛЯ E QJ , EQ3 И т. д. из предыдущеrо интервала времени; э. д. с.
EQ3 из TpeTbero уравнения и т. д.
Если разница между первыми и остальными членами в правой части урав-
нений (7.73) незначительна, то вычисленные щачения э. д. с. EQ следует рассмат-
ривать как первое приближение. Подставив их в правые части, можно найти но-
вые, уже более точные значения э. д. с. E Q . Таким образом, расчет ведется путем
последовательных приближений, что проще, чем решение системы уравнений.
Если по каким-либо соображениям часть станций системы можно предста-
вить постоянной э. д. с. (обычно это э. д. с. E , приложенная за x ), то числа
неизвестных и уравнений соответственно уменьшаются. Число уравнений полу
чается равным числу машин, для которых желательно учитывать изменение во
времени реакции якоря и характеристики возбудителей. Число же членов в пра
вой части каждоrо уравнения всеrда равно общему числу машин в системе. При
этом вместо EQ вводят э. д. с. E в те уравнения, которые соответствуют маши-
нам с ПОСтоянной э. д. с.
Для остальных машин изменение переходных э. д. с. E в течение данноrо
интервала ВJilемени определяется для каждой станции в отдельности с помощью
выражений вида
EQj
... , m.
(7.73)
ДЕ j(i) == (Eqej(i) E qj (i 1) ) М/Т doj,
rде j == 1, 2, ..., т номер станции; i номер интервала.
(7.74)
220
о т Д е л ь н ы е э т а п ы р а с q т а переходноrо процесса сложной сис
темы сводятся к следующему: ·
а) находятэ. д. c.E I,E 2' ...,E т и Eq1' Eq2' ...,Eqт, а такжеуrлы6 1 . 62''''
... , 6 т , определяющие положения роторов станций системы в условиях ее HOp
мальноrо режи а;
б) вычисляют сопротивления обратной и нулевой последовательностей экви
валентноrо pIYHTa в точке KopOТKoro замыкания; составляют схему замещении
системы в аварийном режиме;
в) вычисляют для схемы замещения аварийноrо режима собственные и вза
имные проводимости;
r) строят кривые изменения э. д. с. Eqe в функции времени, приближенно.
отражая этим действие реrуляторов возбуждения;
д) составляют схему помеаварийно
ro режима, т. е. схему системы с отклю
ченным аварийным участком, и для этой
схемы определяют собственные и взаим
ные проводимости сисТемы.
Далее проводят численное интеrри
рование и расчет методом последователь-
ных интервалов.
f4.
":"
Рис. 7.45. Исследуемая система
Пример 7.1. В электропередаче, показан
ной на рис. 7.45, на ОДIlОЙ нз цепей происходит двухфазное короткое замыкание на зем ,
лю. Электропередача передает в систему мощнqcть Ре == 225 МВт, cos <Ре == 0,9. Напряже-
ние нз шинах системы и е == 118 кВ поддерживается неизменным. Нейтралн повышающе-
ro и понижающеrо трансформаторов rлухо заземлены.
Элементы электропередачи имеют следующие параметры: reHepaTop SПОМ ==
==400 МВ.А;U пом == 10,5 кВ; сos <Рпом ==0,85; X == 0,235; Х 2 == 0,164; TJ == 7 с; трансформа-
тор Т 1 SПОМ == 360 МВ. А; е н == 12%; К 1 == 10,5/248; трансформатор Т 2 SпЬм ==
== 340 МВ.А; е н == 12%; К 2 == 220/121; лнния ЭJlектропередачи (две цепи) l == 225 км;
Хl == 0,4 Ом/км; хо == 3Хl == 1,2 Ом/км; наrрузка Р п == 50 МВт; cos <Рп == 0,85.
О п р е д е л и т ь предельное время отключения KopoTKoro замыкания, проведя рас-
чет приближенно, без учета активных сопротивленнй н зарядной мощностн линий. Принять..
что переходная э. д. с. пря нарушеиии режима остается нензменной.
Решение. Расчет' проведем в относительных единипах. За базисные мощности и напря-
жение примем Sб == 255 МВ.А и Uб == 215 кВ на ступени 220 кВ. Тоrда напряжение на
шинах системы в относительны){ единицах составит
и*е == (Uе/Uб) К 2 == (118/215) (220/121) == 1.
Мощность, передаваемая в систему,
Р*е == Ре/S б == 225/255 == 0,882: Q*e == Ре tg 'Ре == 0,882.0,483 == 0,427.
rде 'Ре == зrcсos 0,9 == 25,8°.
Мощность, потребляемая иаrрузкой,
Р*п == Рп/Sб == 50/255 == 0,196: Q*п == р*н tg 'Рн == 0,196 . 0,62 == 0,122,
rlte <Рп == арссos 0,85 == 31,8 Q .
Приведем параметры всех элементов электропередачи к базисным условиям:
, , ОМSб ( 1 ) 11 10,52.255 ( 248 ) 2
X.d == xd 2 К == 0,235 400.2152 т5 == 0,199.
SпомU, ! О,
221.
Аналоrично,
х. 2 ==О,164
10,52.255
400 . 2152
( 248 ) 2
ют ==0,139;
е к Sб и .H 12 255 2482 12 255 2202
Х. Т l == 100 == 100 360 2152 == 0,113; Х. Т2 == 100340 2152 == 0,094;
/ ном б
1 Sб 1 255 SHOM 400
t.л == 2 Xl l """'"2""" == 2 .0,4.225. 21 '" == 0,281; Т == т J == 7 == 10,98 с.
ш
1
jo,tgg
Е;
...,....,..
РО
в дальнейших расчетах используются па-
раметры, приведенные к базисным условиям,
звездочки у символов для краткости опускают-
ся. На рис. 7.46 показана схема замещения для
нормальноrо режима. Определим э. д. с. reHepa-
тора за переходным реактивным сопротивлением.
Суммарное сопротивление между шинами reHepa-
тора и шинами бесконечной мощности
";"
ХС == Х.+ Хз + Х4 == 0,113 + 0,281 + 0,094 ==
== 0,488.
Напряжение на шинах reHepaTopa
Рис. 7.46. Схема замещения
U ro == У(1 + 0,427.0,488/1)2 + (0,882.0,488/1)2== Уl,209 2 +0,4312 == 1,284;
tg 00 == 0,431/1 ,209 == 0,356; 00 == 19,60.
Сопротивление наrрузки
и 1 2842
ZH == """"""2 (Р Н + iQн> == О 1962 О 1222 (0,196 + jO, 122) == 6,07 + j3,78.
Sп "
Потери реактивной
мощности в сети до шин reHepaTopHoro напряжЕ'НИЯ
p + Q 0,8822 + 0,427"
ХС ==> 12 0,488 == 0,469.
Мощность, отдаваемая rенераторной станпией,
I).Qc ==
80 == SH + Sc + jl).Qo == 0,196 + jO, 122 + 0,882 + jO,427 + jO,469 == 1,078 + }1.018.
Э. д. с. за переходным реаКТИВН/>IМ сопротивлением reHepaTopa
,..I ( 1,018'0,199 ) 2 ( 1.078.0,199 ) 2
Ео == V 1,284 + 1,284 + 1,284 == У 1,4422 + 0,1672 == 1,452;
tg (o 00)==0,167/1,442==0,116; 0 00==6,60.
YroJ1 между It. Д. с. E и напряжением и й
O == 19,6+6,6==26,2°.
Ме""Д<;»)l n сбраЗ0вания определим собственные
1о1:ещеН!lЯ [Д8 HOpMaJJbHOrO режима (рис. 7.46):
1 ZcZo
Ztr == Z] +
Zc + Z"
и взаимные про водим ости схемы за-
== - О 199 + jO,488 (6,07 + ;3,78) == О 027 +1 .0 669 == О 670 < 877°'
1, 10,488 +6,07+ j3,78 ' , '. ,.
222
причем дополнительный уrол afl == 2,3;
Yf} == 1/ Zfl == 1/0,67 L 87,7° == 1,49 L 87,7°,
== 0,012 + jO ,694 == 0,694 L 91 о;
zfz == Zl + Zc + ZlZC/Z5 == jO, 199 + jO ,488 + jO ,199 . jO ,488/(6 ,07 + j3, 78) ==
Y{z 1/0,694 L 91° == 1,44 L 91°,
причем дополнительный уrол а{2 == 1°.
Схема замещения электропередачи для прямой последовательности в режиме двухфаз-
Horo KopoTKoro замыкания на землю отличается от схемы замещения в нормальном режиме
включением в точку KopoTKoro замыкания ава-
рийноrо шунта, сопротивление KOToporo равно
сложенным параллельно результирующим con
ротивлениям (относител'ьно точки KopoTKoro за
мыкания) схем обратной и нулевой последова.
тельностей.
Значения сопротивлений элементов электро-
передачи для токов обратной последовательности
приведены на рис. 7.47. Сопротивление наrрузки
принято равным 0,35 от сопротивления прямой
последовательности.
Результирующне сопротивления схемы для
токов обратной последовательности относитель-
но точки KopoTKoro замыкания .
1.
jO,139
if
jO,09Lf
-;
":'
Рис. 7.47. Схема замещения обрат
ной последовательности
Z2 == [Z2 + Zl Z 5/(Zl + Z5)] 11 (Zз + Z4)'
+ ZlZ5 'O 113 + jO,139(2,12+jl,32) O 006 + '0248'
rде Z2 Zl+Z5 ] , jO,139+2,12+jl,32 , J"
+ jO,094 == jO,375.
Z3 + Z4 == jO,281 +
При этом
Zz == (0,006+ jO,248) jO,375/(0,006+ jO,248 + jO,375) == О ,003 + jO,149.
Результирующие сопротивления схемы для токов нулевой последовательности относи
тельно точки KopoTKoro замыкания (рис. 7.48)
ZO == Z2 11 (Zз + Z4) ,
rде Z3 + Z4 == jO,843 + jO,094 == jO,937; ZO == jО,llз.jо,937/(j0,113 + jO,937) == jO,101.
Результнрующее сопротивленне аварийноrо шунта в точке KopoTKoro замыкания\
Z2 ZO
Zk == Z6 ==
Z2 + ZO
(0,003+jO,149)jO,101 . 6
JO,O .
0,003 + jO, 149 + jO, 101
Эквивалентная схема замещения электрической системы для двухфазноrо KopOTKOr()
замыкання на землю приведена на рис. 7.49.
Методом единичных токов найдем собственные и взаимные проводимости.
Пусть ток в сопротивлении Z4 равен единице:
14 == 13 == 1 + jO.
Напряжение в точке Ь
и ь == (1 + jO) jO ,375 == jO ,375.
Ток, протекающнй по аварийному шунту,
223-
i6 Uь/Z в /0,375/;0 ,06 6,25.
ТОК 11 падение напряжения на сопротивлении ветви 2
j2 j4+j6 1+6,25 7,25; t1U 2 i2Z2 7,25. jO,113 ;O,819.
Напряжение в точке а
иa и ь + t1U2 iO,375+;O,819 ;I,194.
2
jO/13
"-
jO,094
jo,19g
['
о
Ut:
":"
Рис. 7.48. Схема замещения
нулевой последовательности
Рис. 7.49. Эквивалентная схема ава-
рийноrо режима
Ток в ветвях 5 и 1 соответственно
i5 Uа/Z5 j1,194/(6,07+;З,78) О,О88+;О,141;
. . .
I! 12 + 15 == 7,25 + 0,088 + /0,141 == 7,338 + ;0,141.
Падение напряжения на сопротивлении в ветви 1
t1U 1 == ;IZl == (7,338 + ;0,141) /0,199== 0,028+ ;1,460.
Э. д. с. в точке подключения передающей станции
Е == и а + t1U! jI ,194 + ( O,028 + /1,460) == 0,028 + /2,654.
Собственная проводимость схемы короткото замыкания относительно передающей стан-
'Ц ии ylll == l / z lll Т д е
\1 \\ '
ZIlI Е / i 1 == ( o ,028 + /2 ,654)/(7 ,338 + ;0,141) == 0,003 + ;0,362 == 0,362 < 89,50.
11
Дополнительный УТ'.Jл а[{1 0,5°.
Взаимная проводимость схемы короткото замыкания
Yf 1 == 1jz[t l , тде Z[t/ == Еп 4 == ( O,028 + j2,654)/(I + /0) ==
== О ,028 + /2,654 == 2,654 < 90,6°_
Дополнительный утол afJI == 0,60.
В схеме замещения электрической цепи для послеаварийното режима аварийный щунт
.отключен, СОПРOlfивление линии электропередачи увеличено вдвое (рис. 7.50). Собственные
и взаимные проводимости для нее определяются так же, как и для схемы нормальното ре-
жима:
Y ll 1 083 < 86 1 0. "/ \ / \ 3 ,9 °' ,
11==' ,,
Y1f 1,021 < 91,1°; аИ == 1,10.
.224
Характеристики электрической мощности reHepaTopoB передающей станции для раз-
личных режимов найдем из следующих выражений:
. Н о р м а л ь н ы й р еж и м
рI == 1,4522. 1,49 siп 2,3° + 1,452 . 1 . 1,44 siп (о' + 1°) == 0,126 + 2,09 siп (о' + 1°);
p == 0,126 + 2,09 == 2,216.
А в а р и й н ы й р е ж и м (двухфазное короткое замыкание на землю)
pIlI == 1,4522. 2,763siпО,50 + 1,452.1. О,З77siп (о' +o,6 ) == 0,051 +О,547siп (0'+0,6°);
р[,{I ==0,051 +0,547==0,598.
.....L
, jO,fU9
Ео УС
Рис. 7.50. Схема замещения послеава-
рийноrо режима
..
Послеаварийный режим
plI == 1,4522.1,083 sin3,9° + 1,452.1. 1,021 siп (о' + 1,1°) == 0,155 + 1,483sin (о' + 1,1°):
Р[,{ == 0,155 + 1,483 == 1,638.
Из условия равенства площадок ускорения и торможения* (рис. 7.51) определим пре-
дельный уrол отключения KopoTKoro замыкания. В соответствии с выражением б р ==
== 180 ""7"'" аrСSiп(РоIР ) == 180 arcsin (1,078/1,638) == 138,8" получим
, 1,078 (138,8 26,2) 71:/180 + 1,638 cos 138 ,8° О ,598 cos 26,2°
СОSО откл == O,341;
1 ,638 О ,598
Рис. 7.51. Уrловые характерис-
тики и площадки ускорения
А уск и торможения А торм
o TКJI == 70°.
Чтобы найти предельное время отключения ко-
pOTKQrO замыкания, необходимо построить зависимость
б' == t(t), которая может быть определена из уравне-
ния движения ротора. Решим это уравнение методом
последовательных интервалов (численное интеrриро-
вание).
Длительность расчетных интервалов !1! примем
равной 0,05 с. При этом в уравнении (7.47)
К == З60fЫ 2 fТ J == 360.50.0,052/10,98 == 4,1.
Пер вый и н т е р в а л (O O;05 с)
Электрическая мощность, отдаваемая reHepaTopa-
ми в первый момент после возникновения KopoTKoro
замыкания,
* Пренебреrаем при этом сдвиrом карактеристик относительно начала координат.
225
8---84
Р(О) == 1,4522.2,763 sin 0,5° + 1,452. 1 .0,377 sin (26,20 + 0,60) ==
== 0,051 + 0,547 . 0,451 == 0,297.
Избыток мощности в начале интервала
p(o) == РО Р(О) == 1,078 0,297 == 0,781.
Приращение уrла за интервал
M == K P(o)/2 == 4,1 . 0,781/2 == 1,6°.
Уrол к концу nepBoro интервала
0;1) == о;и) + M r) == 26,2 + 1,6 == 27,8°.
В т о рой и н т е р в а л (0,05 0, 1 с)
Р(1) == 0,051 + 0,547 sin (27,80 + 0,6°) == 0,311; P(1) == 1,078 О ,311 == 0,767;
М;2) == 1,6+ 4,1.0,767 == 1,6+ 3,14== 4,74°; 0;2) == 27,8 + 4,74 == 32,540.
Проведем расчет для TpeTbero и последующих интервалов. По результатам расчета,
приведенным в таблице, построим кривую р' == f(t) (рис. 7.52). Зная, что lJ ТКЛ == 70°, по
кривой найдем t ОТRЛ == 0,27 с:
t, с I о', rрад 'р, 0111. ед.1 oT 'eд.1 АО', rpaд 11 , с I о' rpад I ОТ:" ед.
I /!Р, I "
ОТН. ед. /!о, rрад
0,00 26,20 0,297 0,781 1,60 0,20 50,73 0,47 0,600 12,93
0,05 27,80 0,311 0,767 4,74 0,25 63,66 0,543 0,535 15,12
0,10 32,54 0,350 0,728 7,72 0,30 78,78
0,15 40,26 0,409 0,669 10,47
о
t откл =о,27
0.2 о.з t,c
0/
Рис. 7.52. Изменение уrла
и определение времени от-
ключения
Пример 7.2. На одНой из линнй электропередачи, пока-
занной на рис. 7.53, а, рассматриваются трехфазные замы-
кания, удаленные от начала линии на [*1 == [11 L == 0,5 и /
[*2 == [21 L == 0,75. Продолжительность коротких замыканий
0,25 с. Схема замещения электропередачи и ее параметры
показаны на рис. 7.53, б.
Пользуясь центрированным уравнением, р а с с ч и-
т а т ь относительное движение ротора reHepaTopa и постро-
ить уrловые характеристики мощности при коротком замыка.
нии в точке k 2 , при этом выбрать в качестве опорноrо пере-
ходный процесс при коротком замыкании в точке k 1 .
Решение. Определим взаимное сопротивление в исход-
ном режиме:
X1j == Х1 + О,5Х 2 +Х в == 0,385 + 0,5.0,68+ 0,15 == 0,875.
Взаимная проводимость
ь] == 1/ Х!) == 1,14.
Э. Д. с. за переХОДНЫМ реактивным сопротивлением
reHepaTopa
у( QoX!J ) 2 ( РоХ!) ) 2 у( 0,1'0,875 ) 2 ( 0,6'0,875 ) 2
Е'== иc+ + == 1+ 1 + 1 ==1,2,
и с , и с
226
Уrол между э. д. с. Е' и напряжением и с
. РоХЕ . 0,6.0,875 о
а о == аrсsш == аrсs1П 26 .
Е'и с 1,2'1
Опорный переходный процесс при коротком замыкании в точке k r рассчитаем методом
последовательных интервалов. Взаимная проводимость в аварийном режиме определяется
в соответствии со схемой замещения:
(bMl) == 0,34.
а)
L
о)
f
О,З85
Е
L
0,58
3 lf
О,ЗЦ. - 0,17
5
ал
6
0,15
и с
Zz
Рис. 7.53. Электропередача (а) и ее схема замещения (6)
Максимум электрической мощности передающей станции
(Р;,{,.{)==ЕUс(ЬИ 1 )== 1,2.1.0,34==0,41.
Длительность расчетных интервалов Лt примем равной 0,05 с. При этом
К == 360fМ 2 /Т J == 360.50.0,05/7 == 6,43.
Пер вый и н т е р в а л (0 0,05 с)
Избыточная мощность иа валу reHepaTopa в первый момент после возникновения ко
pOTKoro замыкания
(ЛР(О» == Ро (P;':fl) sin а(6) == О, 6 0,41 sin 260 == 0,42.
Приращение уrла за первый интервал
(Л0(l) == К (ЛР (6»/2 == 6,43 . 0,42/2 == 1,350.
Значение уrла к концу nepBoro интервала
(a(l) == а(о) + (ЛО(1) == 260 + 1,350 == 27,350.
В т о р о йи н т е р в а л (0,05 0, 1 с)
(ЛР(I» == 0,6 0,41 sin 27,350 == 0,412;
(М т ) == (М(1) + l( (ЛР (1) == 1,35 + 6,43.0,412 == 40;
(а(2» == 27,35 + 4 == 31,350.
Результаты расчетов для последующих интервалов приведены в таблице:
8*
227
*
<о>, rрад I
t, с L ,rрад o <o> + о,..рад t, С' <о>, rpaд /:. 8, rрад o <o>+ о, rрад
о + Е, rрад
I + о, rрад
0,05 27,35 1,69 0,21 27,56 27,56 0,35 76,63 73,61 9,00 85,63 87,27
0,10 31,35 6,84 0,83 32,19 32,20 0,40 82,99 83,68 10,20 93,19 9fi,74
0,15 37,84 15,71 1,92 39,76 39.80 0,45 86,99 92,39 11,30 98,29 101,77
0,20 46,58 28,68 3,50 50,08 50,18 0,50 88,49 100,82 12,30 100,79 105,48
0,25 57,25 46,39 5,67 62,92 63,13 0,55 87,49 109,61 13,30 100,79 106,94
0,30 67,95 61,32 7,50 75,45 76,36 0,60 83,99 116,18 14,20 98,19 106,15
Далее рассчитаем переходный процесс в точке k 2 . который представим как сумму опор-
Horo и центрированноrо процессов:
о (t) == (о (t» + (1).
Центрированный процесс может быть записан в виде
(t) L (t) Ь*,
rде значения коэффициентов L(t) берутся в моменты времени, соответствующие интервалам
численноrо интеrрирования.
Взаимная проводимость при коротком замыкании в точке k 2
b l == 0,218.
Следовательно,
ь == O,218 0,34 == 0,122.
Определим значения коэффициентов L.
Пер вый и н т е р в а л (0 0,05 с).
То == КЕи sin 0(0) == 6,43 . 1,2. 1 . sin 260 == 3,38;
Отклонение уrла от опорноrо
L 1 == О,5То == 1,69.
а(1)== ц; == 1 ,69 ( O,122) == 0,206.
В т о рой и н т е р в а л (0,05 0, 1 с)
о
81 == 2 l80 КЕи (Ь) cos(o(1) == 2 180 6,43. 1,2. 0,34 cos27 ,35 == 1,96;
Т 1 == КЕи siп (0(1) == 6,43 . 1,2. 1 sin 27,350 == 3,54;
L 2 == 8 1 L 1 Т 1 == 1,96( 1 ,69) 3,54 == 6,84; а(2) == L/) == 6,84 ( O,122) == 0,8350.
Результаты расчетов функции L(t) и отклонений уrлов б(t) приведены вышl" в таблице.
В этой же таблице приведены результаты расчетов переходноrо процесса 6(t) при корот-
* Выражения для б(t) можно получить и в зависимости от удаления KopOТK(,ro замыка-
ния [*.
228
ком замыкании в точке k 2 , полученные при решении метqдом последовательных интервалов
уравнения движения. Ра хождения между уrлами 6 и б (рис. 7.54) определяют поrрешность
метода. На рис. 7.55 показан rрафик функции L(t).
8, араи
100
. 90
80
70
60
50
40
30
20
10
D
0.2 0.3 О.Ч .0.5 t.I:
80
20
40
БО
/OO
О,' 0,2 0,3 0,4 0,5 t, с
Рис. 7.54. Движение ротора reHepaTopa:
l <i\(t»; 2 6(t) <6(t»+6(t); 3 6(t)
Для построения уrловых характеристик мощности используются формулы:
Нормальный режим
L, zpa(]
Рис. 7.55. Изменение коэффи,
циента L во времени
р! ЕИЬ! sin а.
А в а р и й н ы й р е ж и м (короткое замыкание в точке k 2 )
рII! ЕИЬ! II siп а.
Электрическая мощность reHepaTopa при представлении движения ротора в виде сум-
мы опорноrо и центрированноrо движений
р
Рис. 7.56. Характеристики мощности Р == 11'(6)
229
рlll ==EU(blll)sin(o)+EU(b IIl ) cos (о) S+EUsin(o)b.
. 180
о
Заметим, что каждому значению <б> соответствует единственное значение б, опреде-
ляемое отклонением взаимной проводимости от опорной Ь.
Послеаварийный режим
II Il II п. 1t 11 2
Р ==ЕИЬ sino; Р ==ЕИ(Ь )Stn(0)+l8O ЕИ(Ь )cos(o)o.
Уrловые характеристики, площадки ускорения и торможения показаиы на рис. 7.56.
Контрольные вопросы
7.1. Назовите причины больших возмущений (возмущающих воздействий) в электри-
ческих системах.
7.2. Что является задачей исследования динамической устойчивости?
7.3. Каковы основные допущения при исследовании динамической устойчивости?
7.4. Каковы основные предпосылки при численном интеrрировании уравнений отио-
сительноrо движения системы?
7.5. Как влияет демпфирование (::!:) на. характер переходноrо пропесса?
7.6. Как влияет реrулирование возбуждения иа характер переходноrо пропесса (по-
яснить на рис. 7.24 и 7.25)? .
7.7. Как возникают и развиваются колебания ротора reHepaTopa под действием внешней
возмущающей силы?
7.8. Определите большие вынуждеииые колебаиия и назовите их виды.
7.9. Какую можно ожидать разнипу в расчетах динамической устойчивости, проведен-
ных при Eq == var, Е; == const, Е' == const? Каков (примерно) характер изменения этих
э. д. с. в момент KopoTKoro замыкаиия и в момент ero отключения?
7.10. Какие допущения делаются в отношении изменения электрической мощности в
системе пр и изменениях ее режима?
, 7.11. Каков порядок учета вероятностноrо характера сопротивления дуrи в месте КО-
pOTKoro замыкания при расчетах устойчивости?
7.12. Что такое rистоrрамма параметров переходноrо пропесса?
7.13. Перечислите особенности получения расчетных выражений для анализа системы
методом последовательных интервалов.
7.14. Как влияет учет реrуляторов скорости и возбуждения на выбор расчетноrо ин-
тервала? .
7.15. Перечислите особенности учета реrулирования скорости на rидроrенераторах.
Какие оrраничения необходимо учитывать?
7.16. Каковы изменения расчетных выражений при учете реrуляторов возбуждения
с. д. по сравнению с реrуляторами п. д.?
7.17. Что изменяется в оценке устойчивости нормальноrо и переходноrо режимов сис-
темы при повышении ее сложности?
7.18. Назовите два способа учета Нilrрузок электрических систем и определите влияние
способа учета наrрузки на методику исследования сложной системы.
7.19. В чем состоит особенность анализа устойчнвости системы пр и отсутствии в ней
шин неизменноrо напряжения и частоты?
7.20. Что дает способ приближенноrо решения дифференциальных уравнений движения
ротора при отклонении параметров?
7.21. Какие вероятностные характеристики переходных пропессов учитываются при
анализе?
Темы рефератов
1. Природа демпфирования и ero влияние на переходные пропессы.
2. Вероятностная опенка переходных пропессов.
3. Применение уравнений в вариациях для исследования переходных пропессов.
230
rЛАВА 8
СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ ЭЛЕКТРИЧЕСКОЙ СИСТЕМЫ.
ПРОЦЕССЫ ПРИ МАЛЫХ СВО&ОДНЫХ ВОЗМУЩЕНИЯХ
f 8.1. ПОСТАНОВКА ЗАДАЧИ
Статическая устойчивость, или устойчивость исходноrо установившеroся
режима, это способность электрической системы возвращаться в исходное сос-
тояние (исходный режим) после малО20 е20 возмущения (отклонения режимных
параметров).
В любой электрической системе установившийся режим не означает неиз-
менность всех ero параметров. Электрическая система имеет orpoMHoe количество
наrрузок, непрерывно меняющихся, причем эти изменения появляются и исче-
зают, происходя стохастически. В связи с этим на reHepaTopax системы появ-
ляются некоторые дополнительные незначительные моменты M, также сто-
хастические, уменьшающие или увеличивающие моменты, действующие на валах
reHepaTopOB и смещающие их роторы на некоторые небольшие уrлы б. Так как
изменения скорости (O == cp( P) относительно синхронной очень малы, то во
всех рассуждениях и расчетах можно принять, что M == P.
Таким образом, в электрической системе постоянно происходят малые воз-
мущения, причина которых и место возникновения не фиксированы. Это некие
свободные возмущения, вызывающие соответственно свободные движения, которые
MorYT быть нарастающими или затухающими, колебательными или апериодиче-
скими. Их характер и определяет статическую устойчивость, являющуюся не-
обходимым условием работоспособности системы. Статическая устойчивость про-
веряется при перспективном и рабочем проектировании, разработке специаль-
ных устройств автоматическоrо реrулирования (расчеты и эксперименты), вводе
в эксплуатацию новых элементов системы, изменении условий эксплуатации
(объединении систем, вводе новых электростанций, промежуточных подстанций
ЛЭП и т. д.). ,
Исследования статической устойчивости MorYT проводиться в плане решения
задач либо а н а л и з а, либо с и н т е 3 а.
При решении з а Д а ч а н а л и з а проверяется устойчивость заданноrо
установившеrося режима, определяется предельно устойчивый режим элект-
рической системы, заданной всеми параметрами, оцениваются некоторые пока-
затели качеств? переходноrо процесса.
При решении з а Д а ч с и н т е з а определяются тип системы возбуждения
и ero реrулирования, закон реrулирования, параметры системы возбуждения и
реrуляторов. При этом исходят из заданных требований к предельно устойчивому
ре..жиму или качеству электроэнерrии в установившемся режиме (точность под-
держания напряжения и друrих параметров режима).
Физика переходных процессов, определяющих статическую устойчивость.
В отличие от переходных процессов, рассматривавшихся при исследовании ди-
231
намической устойчивости, непрерывно появляющиеся в системе возмущения, BЫ
зывающие малые отклонения (статическая устойчивость), не определяются ни по
месту их возникновения, ни по значению. Таким образом, заранее предполаrает
ся, что происхождение возмущений таково, что установить абсолютные значения
изменений nара.метров режима при их откло-
нениях от установившихся (начальных) значе-
ний невозможно. Задача исследования стати
ческой устойчивости сводится, следовательно,
к задаче определения только характера изме
нения параметров режима.
При установлении простейших условий
статической устойчивости (практических кри
териев) ответ получается только в форме «да
нет», «уйдет не уйдет» режим из начально
ro ero состояния при малом возмущении сис-
темы. При установлении критериев устойчи-
вости, основанных на исследовании уравне-
ний движения уравнений малых колебаний
(малых - отклонений), физическая природа
происходящих явлений выясняется более пол-
но: устанавливается в любом случае (устойчи-
вость, неустойчивость) характер движения
(апериодическое, колебательное затухаю
щее или нарастающее).
Рис. 8.1, рассматривающий влияние на
характер переходноrо процесса разных значе-
ний возмущения, приложенноrо в разных точ-
ках системы, показывает, что влияния эти при
малых возмущениях исчезающе малы, а при
больших существенны.
* Математическая формулировка' задачи.
Электрическая система при изучеНИlf переход
ных процессов описывает(::я системой нели-
нейных дифференциальных уравнений вида
( Ал ;: + В л d i + слх i ) == F j(t).
j.i 1
Коэффициенты А ji, В ji, С ji действи-
тельные. ОНИ определяются параметрами сис
темы и нелинейными функциями Ф(х;) от пе
ременных Xi, характеризующих состояние
системы в каждый момент времени; F j(t)
внешние (или иначе называемые возмуща-
ющими) силы, переменные во времени, отра-
жающие изменение внешних условий систе
мы.
При F j(t) == F jo система имеет решение
Х; и) == XiO; dxJdt == о; d2Xi/dt2 == о;
а)
4
о)
n
1,2,3,4,5
п
ш
t
Рис. 8.1. Сравнительиый характер
процессов при малых и больших B03
мущеииях:
а схема исследуем"й системы. в точках
I 1, 2, 3, 4, 5 которой происходят возмуще-
иия; б примериый характер изменеиия
параметра П. определяющеrо устойчивость
При малых возмущеннях в разных точках:
J при апериоднчески устойчнвом процес-
се; J/ прн апериоднчески неустоЙЧИВОМ
ароцессе; JJJ при периодически устойчи-
вом процессе
При больших различиых по зиачению воз-
мущениях в разиых точках:
JV при апериодических устойчивых и
иеустойчивых процессах; V при колеба-
тельных устойчивых инеустойчивых про-
цессах
232
j[
°r c
т
с jj Xjfi == Fjoo
j.j l
Это решение соответствует состоянию равновесия, т. е. определяет пара-
метры установившеrося режима электрической системы. При изучении статич
'ской устойчивости рассматриваются переходные процессы при условии малости
отклонения всех переменных и внешних сил от состояния равновесия. Матема-
тически это условие записывается так:
F j и) F jo == fj (t); Xj (t) X jO == L\Xj; dXj/dt == dL\xj/dt; d 2 xj/dt 2 ==
== d 2 L\xJdt 2 o
Метод изучения статической устойчивости называется устойчивостью в ма-
лом или методом малых отклонений (малых колебаний). Нелинейные функции
Ф (Хд, входящие в коэффициенты исходной системы уравнений, линеаризуют в
точке, соответствующей состоянию равновесия. Эта процедура состоит из разло
жения нелинейной фукции в ряд Тейлора и оставления только линейных членов
этоrо ряда. Заметим. что часто Ф(Хд является функцией нескольких переменных,
тоrда
ф (Xj) == Ф (Xjo) + (дФ/дх 1 ) Х,. L\x 1 + (дФ/дх 2 ) х.. L\x 2 + 0.0.
Проведя линеаризацию по первому приближению. перейдем от системы не-
линейных дифференциальных уравнений к системе линеаризованной линей-
ной. Решение таких систем уравнений с помощью так называемоrо характерис-
тическоzо уравнения (иноrда называемоrо характеристическим мноrочленом) из-
ве-стно из математики*. Будем далее пользоваться им, изучая процессы при дей-
ствии внешних сил, меняющихся во времени:
т ( '. )
d 2 x. dx.
a..............!..+b.. +c..L\x. == f . ( t ) o
11 dt 2 11 dt 11 I 1
j.i l '
Коэффициенты ал, Ьл, Cjj включают в себя частные производные (дФ /дхдХjо,
* См.: Пон.тряzин. Л. С. Обыкновенные дифференциальные уравнения. М.: rиФмл,
1970. с. 311.
Напомним некоторые определения. Система дифференциальных уравнений называет-
ся лин.ейн.ой. если все неизвестные функции и их производные, вместе взятые. входят в ypaB
нение системы линейно. ТаКИм образом. система линейных уравнений общеrо вида может
быть записана в форме
aiik(t)(x.i)(k) + bj(t) О; i 1..... n. (а)
j.k
Здесь x 1 . ..., х n неизвестные функции независимоrо переменноrо t. а коэффициенты ajJk(t)
и свободные члены bj(t) уравнений являются функциями t. Если все свободные члены сис-
темы (а) тождественно равны нулю. то системы' называется одн.ородн.ой. Каждой линейной
системе соответствует однородная линейная система, получающаяся из иее отбрасыванием
свободных членов. Таким образом, линейной системе (а) соответствует линейная однород-
ная система
aiik(t)(yj) (k) == О. i 1. ..., n.
j,k
(6)
233
взятые в tочке исходноrо режима. Таким образом, эти коэффициенты зависят
от исходноrо режима, что и отражает свойства действитe.fJЬной нелинейной си
стемы, подлежащей исследованию. .
С помощью линеаризованных уравнений изучаются переходные процессы:
1) вынужденные при действии внешней возмущающей силы; 2) свободные пос
ле возникновения начальных отклонений и исчезновении внешней силы, вызвав
шей эти отклонения. В первом случае при f j(t) =1= О ротор под действием заданной
например малой синусоидальной, возмущающей, постоянно действующей силы
совершает малые колебания (см. 7.3).
Во втором случае ротор reHepaTopa, получивший под действием какой то
(не фиксированной) внешней (возмущающей) силы отклонение от положения paB
новесия, т. е. от уrла 60 на 6, будучи предоставлен действию только BHYTpeH
них сил, будет совершать те или иные движения, «возвращаясь» ИЛИ «уходя» от
положения равновесия 60' При заданной внешней возмущающей силе f j(t) =1= О
условия устойчивости отличаются от условий динамической устойчивости только
малостью f j(t), которая настолько мала, что процесс практически не зависит от
ее значения и м-еста nриложения (рис. 8.1). Это обстоятельство отражено в ре.-
шенИИ линеаризованноrо уравнения, иЗ,харакmeрucтичеСКОGО уравнения кomopOGO
влияния значения возм-ущения и места приложения ero, реалЬНО существую
щие, в силу сделанных допущений исчезли.
Теорема Ляпунова. При этих исследованиях возникал вопрос: насколько
правомерно суждение об устойчивости нелинейной системы по виду Корней ли
неаризованных уравнений? Ответ был дан знаменитым русским математиком,
А. М. Ляпуновым. Им был предложен (1893) так называемый метод первоrо при
ближения, предназначенный для обоснованноrо исследования тех линейных
(линеаризованных) уравнений движения системы, KOTopple получаются после
разложения в ряд нелинейной функции*, находящейся в правой части исход
иоrо уравнения.
При использовании линеаризации (что делалось и до Ляпунова) всеrда воз
никали сомнения в правомерности получаемых результатов. Две теоремы Ляпу
нова дали cTporoe обоснование уравнений первоrо приближения.
Т е о р е м а 1 утверждает, что при характеристическом уравнении первоrо
приближения, имеющем корни только с отрицательными вещественными частя
МИ, озмущенное движение** устойчиво и притом асимптотически, каковы бы
ни БЫЛи нелинейные функции в. правой части исходноrо уравнения..
Т е о р е м а II утверждает, что если в числе корней характеристическоrо
уравнения первоrо приближения имеются корни, вещественные части которых
положительны, то невозмущенное движение неустойчиво, каковы бы ни были
нелинейные функции в правой части исходноrо уравнения.
* Предполаrается, что эта нелинейная функция имеет производные.
** Напомним, что невозмущенным называется движение системы, обусловленное дейст-
внем внешних сил и происходящее соrласно заданному закону движения. Например, ротор
reHepaTopa движется по закону Х! Asin(J}t под действием определенноrо вращающеrо мо-
мента турбины и противодействующеrо ему электромаrнитноrо момента. Если на систему кро-
ме заданных подействуют дополнительные внешние силы, которые затем перестанут действо
вать, то под их влиянием система перейдет в новое, возмущенное движение. Заданное неВОЗ Q.
мущенное движение называется устойчивым в том случае, если возмущенное движение со
временем войдет в некоторую заданную область, определяемую величинами Е! Xi(i)
Xio(t) (см.: Воронов А. А. Основы теории автоматическоrо управления. М.: Энерrия,
1965, ч. 1, rл. VI, то же, ч. III, 1970).
234
Случай, коrда характеристическое уравнение не имеет корней с положитель-
ной вещественной частью, но имеет хотя бы один корень с нулевой вещественной
частью, является особым случаем. В о с о б ы х с л у ч а я х по корням харак-
теристическоrо уравнения линеаризованной сйстемы нельзя сделать заключения
об 'устойчивости или неустойчивости реальной (исходной) системы. Для получе-
ния TaKoro заключения необходимы дополнительные исследования вида не-
линейной функции (исследование членов, отброшенных при ее разложении) ил и
привлечение К анализу физических соображений.
В более сложных случаях требуется специальное исследование поведения
системы на rранице области устойчивости. rраница может быть опасной в том
смысле, что при переходе ее в системе возникнут нарастающие колебания, прак-
тически означающие нарушение устойчивости. rраница будет безопасной, если
при переходе ее возникают незатухающие и ненарастающие колебания, которые
не выводят полностью систему из рабочеrо состояния.
Про в е р к у r р а н и Ц о б л а с т и у с т о й ч и в о с т и и выявление
ее опасных и безопасных частей можно проводить, определяя знак так называе-
мой ляпуновской величины g. При g < О rраница устойчивости безопасна. Для
построения этой величины применительно к различным критическим случаям
(один нулевой корень, пара чисто мнимых корней, две пары чисто мнимых кор-
ней и т. д.) существуют правила, которые, однако, пока не нашли эффективноrо
применения в практике исследований работы электрических систем. В этих ис-
следованиях разделение rраниц области устойчивости на опасные и безопасные
сравнительно просто ВЫПОЛЩlется по способу, основанному на построении так на-
зываемых кривых равных амплитуд авто колебаний [3].
Исследование переходных процессов при малых отклонениях от состояния
равновесия. Запишем линеаризованную систему уравнений в изображениях:
т
] (ал р2 + Ьлр + сл) Xi (р) === W j(p),'
j,i 1' ,
rде Ч' Ар) изображения внешней (возмущающей) силы.
В общем случае изображение переменных
т
X. ( ) === DJi (р) W j (р)
1 Р D (р) ,
i 1
rде D(P) rлавный определитель системы, называемый характеристическим;
D п(Р) алrебраическое дополнение элемента, стоящеrо на j-й строке в i-M столб-
це rлавноrо определителя.
Если внешняя возмущающая сила Ч' j(P) исчезла (Ч' j(P) === О) и движение рас-
сматривается как свободное, то
т
Xi (р) === D P) ,
j 1
т. е. никаких сведений о конкретном движении Xi(P) получить невозможно.
Если принять D(p) === О и исследовать ero корни, то по их значениям можно су'
дить О характере изменений (движении) Xi(t).
23s
Таблица 8.1
Корни Вид переходноrо процесса
Слу- Расположение корней
чай
а ;ш /\х f (t) описание
(J)
а + о Возрастающая экспо
нента с постоянной
"- 1
t Т==
а
со
б + =!::: . Экспоненциально Ha
i. растающее rармониче
сксе колебание
.
(.(j
в О Затухающая экспо
нента с постоянной
OL 1
T==
t а
е =!::: +
t Затухающие rapMo
нические колебания
со
д О О Сохранение постояи-
Horo отклонения д.хо
cl
t
е о =!::: CO rармонические коле
бания с постоянной
. амплитудой Llx o и час
tl. t тотой "(
О О (u
'JtC
Двукрат- Линейно нарастаю-
ный корень щая зависимость
системы 2-ro tJ. Llx == f (t)
порядка t
п родолжепuе табл. 8.1
корнн
Вид переходноro процесса
-с Слу-
чай
Ii!
I jш
о I ::1=
Двукрат-
ный корень
системы 2n-ro
порядка
Расположенне корней
Ах f (t)
опнсание
!.
Линейно нарастаю-
щие КOJIебания
ш
Можно вести рассуждения, переходя от изображений к ориrиналам. Так,
полаrая корни Pk характеристическоro уравнения D(P) == О простыми И приме-
няя теорему разложения, известную из электротехники, получаем ориrинал:
n т
!!:.Х. (t ) == DJi (Pk) W) (Pk)
D' (Pk)
k l j l
Изучение статической устойчивости исходноrо режима способности сис-
темы возвращаться в исходное (или близкое к нему) состояние после малоrо воз-
мущения предполаrает следующее. Напромежуток времени t( oo, t o ). rде
в качестве t o обычно берут t o == О, внешние силы f j(t) вызывают отклонения сис-
темы от положения равновесия. В момент t o действие внешней силы f j(to) прекра-
щается и под действием начальноrо отклонения !!:.Xi(t O )' x;(t o ) начинается сво-
бодный переходный процесс, характер KOToporo полностью определяется корня-
ми характеристическоrо уравнения (табл. 8.1):
!!:.Xi и) == C li f/,t + G.1.i еРе! + ... + C ni e pnt .
Так как коэффициенты' характеристическоrо уравнения, определяемые ре-
альными параметрами системы, действительные числа, то ero корни MorYT
быть либо действительными, либо комплексно-сопряженными.
Действительному корню в решении соответствует чл н C ki e kt . Паре комп-
лексно-сопряженных корней соответствуют два члена в решении
C si e( s + jш s ) t + C s + I,i e('1. s jшs)t, rде C 8i и С8+Щ всеrда комплексно-сопря-
женные: C 8i == A 8i jB si ; C s + 1 , i == A8i + jBsi' поэтому
(C si еjшi + C s + 1.; e j(J)/ ) е;/ == [ A 8i (ej"'i + e j"'st ) +
( :"'i j",/ )] t t
В е e э 2 А В . t э
+ , е == [8i cos юsf + 8i S1П 008 ] е ==
== 21 С 8 , I е а / sin (юJ + rp8д,
Pk t
е .
237
rде
I C si 1== V A i + Н:l
Ч1si == arctg (A si / Взд.
Таким образом, как TO следует из теорем Ляпунова, если все действитель"
ные корни и действительные части всех комплексных корней отрицательны. то
все составляющие переходноro процесса по модулю экспоненциально затухают
(у колебательных составляющих экспоненциально затухает оrибающая). Рас-
сматриваемый режим системы статически устойчив.
Если среди действительных корней появляется хотя бы один корень ak > О,
то составляющая решения, определяемая этим корнем, неоrраниченно возрас
тает (по модулю). Исходный режим системы статически неустойчив (апериодиче
ское нарушение устойчивости, или «сползание»).
Если среди комплексных корней появляется пара, имеющая а з > О, то со-
ставляющая решения, определяемая этой парой, имеет вид экспоненциально
нарастающих во времени колебаний. Исходный режим системы статически He
устойчив (колебательное нарушение устойчивости, или самораскачивание).
Таким образом; необходимым и достаточным условием статической устой
чивости проверяемоrо режима электриqеской системы является требование от-
рицательности вещественной части всех корней характеристическоrо уравнения.
Сформулируем кратко пор я Д о к о пер а Ц и й, необходимых для ис-
следования статической устойчивости:
1) составить математическое описание переходных процессов в изучаемой
системе в виде нелинейных дифференциальных уравнений;
2) провести линеаризацию уравнений по первому приближению и получить
систему линеаризованных уравнений;
3) составить характеристический определитель;
4) вычислить aCTHыe производные для исследуемоrо режима;
5) определить устойчивость с помощью методов, выявляющих знак действи-
тельных корней и действительных частей комплексных корней характеристич е -
cKoro уравнения.
При высокой степени характеристическоrо уравнения отыскание ero корней
является трудоемкой операцией, поэтому ее обычно заменяют операцией отыс-
кания закономерностей, связывающих корни с коэффициентами характеристи-
ческоrо уравнения или с некоторыми функциями от коэффициентов. Такие зако-
номерности называют критериями устойчивости. Математически критерии (или
условия) устойчивости означают отсутствие корней в правой полуплоскости (см.
табл. 8.1).
Критерии устойчивости, подробно описанные в [3], классифицируются как
п р я м ы е, требующие нахождения корней характеристическоrо уравнения,
и как к о с в е н н ы е, не требующие вычислени корней. Это критерии алrебра-
ические (методы Рауса и rурвица) и частотные (методы D-разбиения, Михайлова,
Найквиста). Критерии устойчивости формулируют необходимые и достаточные
условия устойчивости, основанные на анализе корней характеристическоrо урав-
нения, но не требующие их вычисления.
Для анализа статической устойчивости электрических систем наиболее часто
применяются критерий rурвица и метод D-разбиения. В обоих случаях предва-
рительно составляется характеристическое уравнение и определяются выраже-
ния ero коэффициентов.
2з8
Критерий rурвица устанавливает соотношения .между коэффициентами
хараюперucтическоео уравнения в виде неравенств (положительность всех опре
делителей rурвица), соблюдение которых является необходимым и достаточным
условием статической устойчивости системы любой сложности. Для предвари
тельной оценки устойчивости в первую очередь используется необходимое yc
ловие положительность всех коэффициентов характеристическоrо уравнения.
Критерий rурвица дает возможность определить характер нарушения устойчи
вости. Так, изменению знака свободноr:о члена характеристическоrо уравнения
при утяжелении режима устойчивой системы соответствует апериодическое Ha
рушение устойчивости, а предпоследнеrо определителя колебательное (см.
рис. 8.2 и 8.5, 8.6).
Критерий rурвица позволяет для простых случаев (порядок характеристи
ческоrо уравнения n 4) леrко получить аналитические выражения для rpa
ничных условий устойчивости, например минимально необходимые и максималь
но допустимые значения коэффициента реrулирования по отклонению напряже
'ния в АРВ п. д.
Метод D разбиения устанавливает область статической устойчивости в
координатах выделенных nара.метров. В качестве таких параметров наиболее
часто выбираются коэффициенты усиления и постоянные времени АРВ. Кроме TO
ro, метод D разбиения определяет характер rраницы области статической устой
чивости (апериодическая или колебательная, в последнем случае определяет
частоту колебаНI:IЙ). Забеrая вперед, дадим на рис. 8.2 сводку и характеристику
наиболее часто применяемых критериев при оценке устойчивости электрических
<:истем.
Прямые критерии СУС
нахож8енце KOPHBiil1 проОерха на отсутстОцв их О
праОоц полуплосхости
КосВенные Kpumepuu С!/С по спал
занию и раска'{иОонию-
Критерци С!/Р только по сползанию
(текучести)
Не трвбующие Оь чцсления корней Х!/
рахожiJвНlIВ "врВ3
нуль сОооаоноеа .
члена ХУ ра{}носцль
- но примвне/fЦЮ
практuчвскuх
критврцв{}
Практцческце крцтерlШ C!lP-"'Оп>'О
дР;. >0 д<10 н >0 ВЕз а dP >0
дд'Lj дик дик > dS
СиСТеНЬ
с8аль
_ нимц
ЛЭП
Узеп
комплек-
сной ное
РУЗКЦ,пц
оющей-
ся отl1//О
Оl10шин,
ной сис-
темы
08иночноя
станция,
питаю...,--
щая KOM
екснgю
иерузку
'Оuзме -
римой
M0::J OC-
Рис. 8.2. Критерии статической устойчивости:
С.УС статическая устойчивость системы; сур статиче<;кая устойчивость режима; ху Ха-
рактеристическое уравнен не
239
f 8.2. СТАТИЧЕСКАЯ УСТОАЧИвость ПРОСТЕАШЕА СИСТЕМЫ
ПРИ РЕrУЛИРОВАНИИ ВОЗБУЖДЕНИЯ ЕЕ rEHEPA ТОРОВ
РЕrУлятоРом ПРОПОРЦИОНАльноrо ДЕА:Ствия
Бсе rенераторы современных систем снабжены автоматическими реrулято-
рами возбуждения пропорциональноrо действия (АРБ п. д.) или сильноrо дей-
ствия (АРБ с. д.). Поэто-
му рассматривать статиче-
скую устойчивость элект-
рической системы следует
только при применении
этих реrуляторов озбуж-
дения.
Схема простейшей
электрической системы,
применительно к которой
будет изучаться статичес-
кая устойчивость, показа-
на на рис. 8.3. Система
имеет автоматическое pery-
лирование возбуждения,
составленное из трех эле-
ментов, параметры которых
представлены на схеме.
Изменение тока возбужде-
ния reHepaTopa, т. е. изме-
нение Eq, осуществляется
реrул ятором , вводящим в
обмотку возбуждения Э.Д.с.
в свою очередь, дё в . в == l1е или дЕ qе ==
Re(l+TeP)
Из аналоrичных соображений можно записать
IJE q =fJE qe +.1E qc 8
fJE qc 8. U r
Сеть
Те 0
iJсиЛllтельный
элемент
Ту, ky
l!
ит
ШОРОЭО!JатеЛЬН31
11 I1змерllтеЛЬНЫII
элемент LJ ит
Ти,k и
Рис. 8.3. Схема простейшей электрической системы, име-
ющей реrулятор возбуждения пропорциональноrо дейст-
вия, представленный тремя элементами (1. 2, 3);
обратная связь, в результате действия которой Te TB::!:::T О.С
ДЕ qе == kвДi в . в ;
ke l1е
1 + Те Р
Де == ky I1v
I+ТуР
Очевидно, что
ДV == k и ( I1U r )
I+Т и р
дЕ qе == Ко (...:.... I1U r )
(1 + ТиР) (1 + ТуР) (1 + ТеР)
Ко == kеkykи;
l' (р) ==
Здесь
== l' (р) ДU r .
Ko
(1 + Т иР) (1 + ТуР) (1 + ТеР)
При переходном процессе в reHepaTope появится свободная э. д. с. (см. rл. 6)
дЕ q св == т dO pIJ.E или дЕ q св == (р) ДE .
Таким образом, переходный электромаrнитный процесс может быть отражен
уравнением, имеющим две слаrающие вынужденную и свободную:
240
t!.Eq == /1E qe + /1E q св == у (р) /1U r + (р) /1E .
(8.1)
Уравнение переходноrо электромеханическоrо процесса при малых откло
нениях /16 имеет вид
d 2 (j dO
T J +Pd == Ро Рэл == Po Pт siп8.
dt 2 dt
Раскладывая Ртsiп 6 в ряд Тейлора по малой величине /16 в окрестности 6()
(т. е. полаrая 6 == 60 + /16) и оставляя только нулевой и первый (линейный)
член разложения, запишем
TJ p2/18+P d P/18 . Ртsiп80 Ртsiп80 dP /18== /1P,
d(j
rде /1Р изменение мощности при отклонении уrла на +/16.
Следовате.'1ЬНО, уравнение электромеханическоrо процесса можно предста
вить как
/1Р == Т J р2/18 Р d р/18.
(8.2)
в результате для описания переходноro процесса получено два уравнения
с пятью неизвестными (6, E , Eq, U r, /1Р). Очевидно, что для решения задачи
об устойчивости необходимы еще три уравнения. Эти уравнения MorYT быть
получены, если одно и то же изменение мощности /1Р представить как функции
э. д. с. Eq, Eq' и напряжения U r:
. дР Е дР Е
/1Р} == (jI (Eq,8)== /18 + /1E q ;
до aE q
(8.3)
дР , дР ,
, Eq Eq,
/1Р 2 == (jI (Е , 8)== /18 + /1E q ;
q до дЕ'
q
дР u дР u
/1Р з == (jI (U r , 8)== /18 + /1Ur' (8.5)
до aU r
Подставив в (8.2) значение /1Р из (8.3), (8.4), (8.5), а из (8.i) значение /1E q в
(8.3), после элементарных преобразований получим три основных уравнения:
(8.4)
[Т J р2 + С 1 (р)] /18 + b}s (р) /1E + ы1 (р) /1и r == о;
[Т J р2 + с; (р)] /18 + b2/1E + о == о;
[T J р2 + С з (р]] /18 + о + Ь з /1и r == О.
(8.3а)
(8.4а)
(8.5а)
Здесь обозначено:
дР Е
С} (р) == С 1 + Р dP; С} == до q ; Ь} == 8P Eq /8E q ;
241
дР ,
Eq ,
С 2 (Р) == С 2 + Pdp; С 2 == ; Ь 2 == дРЕ' laE q ;
да. q
Р дР и"
Сз(Р) == с з + dP; с з == ; Ь з == дРurlдU р .
д
Все коэффициенты С являются, следовательно, частными производными от
мощностей, выраженных через Eq, Е;, U r по уrлу: коэффициенты Ь част-
ными производными от тех же Мощностей по тем э. д. с., через которые выражены
P fq
а .2ра8
8)
Ь
J
2
а 6090 1208;2ра9
Рис. 8.4. Природа и примерный характер изменения коэффициентов с и Ь:
а пример определения lJ 1 и С 1 как частных производпых от Р Eq; б зависимости
от режима [c I(O)] для KOHKpeTHoro случая при TCT O; в TO же, завясимости
b f(6)
эти мощности. Коэффициенты Ct, С2' Сз, b t , Ь 2 , Ь з это величины, постоянные
при данном (исследуемом) режиме в окрестности (\, но переменные при изменении
режИма. Их смысл наrлядно иллюстрирует рис. 8.4.
Расчетные значения этих и друrих вспомоrательных коэффициентов приве-
дены в табл. 8.2, при этом активное сопротивление статора принималось нич-
тожно малым: r С т;:::::: О. Система однородных уравнений (8.За), (8.4а) и (8.5а) не
имеет определенноrо решения, что соответствует постановке задачи о статической
устойчивости (значение и место возмущений не заданы). Любой отыскиваемый
параметр режима (например, L1б) можно представить в виде L1б == O!Dt(p), при-
чем определитель системы (8.За), (8.4а) , (8.5а) Dt(P) == О дает полином, являю
щийся характеристическим уравнением, по корням KOToporo можно судить о
факте устойчивости системы и о виде происходящих процессов:
T J p 2 +C 1 (p) b1s(p) b1T(P)
Dl (р) == T J р2 + С 2 (р) Ь 2 о == (T J р2 + C 1 (р» Ь 2 Ь З (T J р2+
T J р2 + С З (р) о Ь З
+ С 2 (р) ) Ь1Ь З S (р) (T J р2 + с з (р» b 1 b 2 у (р).
242
Таб лица 8.2
ОБОзначения
Аналюmческие выраження частных производных для простейшеll системы
при ненвноПОЛlOCНОЙ синхронной машине
дР Е
== С 1
до
дР Е ,
q
да == С2
дР и
r
,== СЗ
EqU
COSa
X dJJ
Е ' и
q Xd Xd
COSO и2 cos20
XdJJ X dJJ X dJJ
ии Х' ( д cos or )
COS ар COS о + sin о
хс до
U2Xd
хс XdJJ
. СOS 20 ==
== С1 + u2
Xd
XdJJXC
(sin о tg 0r cos о) sin о
дРЕ
== b
aE q
дРЕ'
== Ь 2
дE
дР и
== Ь з
aU r
дE
до
дE .
aE q
aU r
до
ди Х'
aE q
д/
до
д/
aE q
до
до
до
aE q
U
sino
x dJJ
U
sino
xdJJ
U
sino
ХС СOS or
и
Xd xd
sin о
Xd
,
xdJJ
x dJJ
U
U r
U rq
и Х'
U
....5L.
(U rd СOS о U rq sin о)
x dJJ
x dJJ
XdJJ
Iq U
COSO +
/ XdJJ
Id
sino
1
/x dJJ
о
243
Продолжение табл. 8.2
Обозначення
Аналнтнческне выраження частных пронзводных для простейшей снстемы
прн неявнополюсной синхронной машине
д5
д5 с
5Eq
1 2.!L (Urd sin 5 + U rq cos5)
и xdJJ
U rd Хс
и XdJJ
Лрuмечанuе. Здесь < (Ё .
р q
== 'arctg Urd/U rq .
. ) V ( UXdSln 0 ) 2
и 'COS == 1 I
р r и р xdJJ
3с == 3 3r
После подстановки передаточных функций (p) и ,\,(р) будем иметь
D 1 (р) == D (p)/W (р),
rде W(p):/= О и, следовательно, D(P) == о.
Приведя полученное выражение к общему знаменателю, раскрывая зна!lе--
ния Ct(P), С 2 (р), Сз(Р) и вводя T == (b t /b 2 )T do, получим в развернутом виде xa
рактеристическое уравнение шестоrо порядка:
D(Р)==ТиТУТеТ J T p6+[TJ Т (ТиТу+ТиТе+ТУТе)+ТНТУТе(ТJ +
+P d T )]р" + [TJ Т (Ти + Ту + Те) + (Т и Ту + ТнТе + ТУТе)(Ту + PdT )+
+ ТИТУТ е (P d + С 2 T )] р4 + [Т; T + (Т и + Ту + Te)(TJ + PdT ) + (ТнТу +
+ТиТе+ТУТе)(Рd+С2т )+tиТуТеСl]р3+[ТJ(1 + :: Kou)+PdT +
+ (Т и + Ту + Te)(Pd + C2T ) + (ТиТу + ТиТе + ТуТе) С 1 ] р2 +
+ [Р d (1 + :: Кои) + C2T + (Т и + Ту + Те) С 1 ] Р + ( С 1 + с з :: Кои) == о,
или*
D (р) == а о р6 + aJP5 + а2р4 + азР З + а}' р2 + аl р + а! == о. (8.6)
Проверка на устойчивость может быть выполнена (см. 8.1) по методу ryp
* Здесь и далее через а'" будет обозначаться коэффициент, отражающий получаемое
воздействие от реrулятора возбуждении: а'" == а + .6. а, rде .6.а «добавка», обусловленная
действием А)В.
244
вица. Напомним, что критерий rурвица формулируется следующим образом:
для тое о чтобы система, содержащая автоматическое 1>'е2улирование, была ус-
тойчива, необходимо и достаточно, чтобы все определители 1' 2' .., , cocтaв
ленные по коэффициентам характеристическое о уравнения системы до n-20 по-
рядка включительно, были положительны, при этом должно быть ао> О.
При соблюдении критерия положительности коэффициентов характеристи-
ческоrо уравнения проверка последнеrо определителя (матрицы) rурвица n не
обязательна, так как из равенства n === an n 1 при ' n 1 > О всеrда следует,
что n > О.
Определители rурвица будут:
l === a 1 ; I а 1 аз 1;
2 ===
а о а 2
з === I a 1 аз а 5 а 1 llз а Б О
а о а 2 а 4 а о а 2 а 4 О
n
I О a 1 аз О a 1 аз О
О а о а 2 О
О . .а n
При составлении определителя rурвица n-ro порядка руководствуются сле-
дующими правилами:
1) выписывают по rлавной диаrонали все коэффициенты от аl до а-п в поряд-
ке возрастания индексов;
2) дополняют все столбцы определителя вверх от диаrонали коэффициента-
M с последовательно возрастающими, а вниз с последовательно убывающими
индексами;
3) устанавливают, находя наибольшиЙ порядок определителя rурвица, сте-
пень характеристическоrо уравнения;
4) на места коэффициентов, индексы которых должны БЫJIИ бы быть больше
n и меньше нуля, ставят нули;
5) находят последний определитель n === an n 1 (и предпоследний n 1)'
Применительно к задачам исследования электрических систем важны не-
которые условия, вытекающие из общих свойств метода rурвица.
1. Необходимым и достаточным
условием отсутствия anериодиче- а
ской неустойчивости является nо- А
а,и
ложительность всех коэффициентов
характеристическоrо уравнения.
2. Необходимым и достаточным
условием отсутствия колебатель-
ной неустойчuвости является поло-
жительность диazональных мино-
ров матрицы n rурвица (или Рис.
предпоследнеrо, n 1' определит
ля).
Введем понятие утяжеления
" \1\ п о ,
а п I
I
Пар n
k O)+j' . "
.00 .
{
+ I
t=O ."ь'
8.5. Появление апериодической неустой-
чивости:
а переход а п через ноль при Aп 1 >0; (j переход
корня в правую полуплоскость; в () f(t); Ппр пре-
дельное значенне утяжеляемоrо параметра
245
режима, т. е. увеличения HeKoтoporo параметра П (мощность, уrол и т. д.), рост
KOToporo у х у Д ш а е т устойчивость. При этом существенно обратить внимание
на следующее (рис. 8.5):
. При утяжелении режима прохождение через нуль коэффициента а п при
Дп 1 > О (рис. 8.5, а) означает переход Действительноrо Корня из левой полу
а)
о)
a,LI
a+jb
a j ь
п
+j
8)
в-
+а +Л
+
+a jb
t=o
t
Рис. 8.6. Появление колебательной неустойчивости:
а переход 8п 1 через нуль при ап>О; б переход комплексных корней в правую
полуплоскость; в б 1(t); Пир предельное значение утяжеляемоrо параметра
плоскости в правую (рис. 8.5, б) , что указывает на а пер и о Д и ч е с к о е
н а р у ш е н и е устойчивости (рис. 8.5, в).
При утяжелении режима прохождение через нуль Дп 1 при а п > О
(рис. 8.6, а) будет означать переход пары комплексных корней с отрицательной
вещественной частью из левой полуплоскости в правую (рис. 8.6, б), что у ажет
на к о л е б а т е л ь н о е н а-
р у ш е н и е устойчивости (рис.
8.6, в).
В обоих случаях прохождение
изображающей (рабочей) точки че
рез ось j укажет на rраницу ус-
тойчивости, на которой возникают
н е з а т у хаю Щ и е к о л е б a
н и я (рис. 8.7).
В соответствии с отмеченным
выше проверка устойчивости режи
мов производится в двух направле-
ниях:
1) проверяется у с т о й ч и-
вость заданноrо нор-
м а л ь н о r о р е ж и м а. У стой
чивость ero может нарушаться при
невыполнении условий устойчивос
ти В связи С появлением отрица-
тельных значений T , Р d, опреде-
ленных 'соотношений коэффициен-
тов С1, С 2 , С З И др., входящих в КОМ-
Лебая ПОЛУПЛ[JСК[Jсть
Лро8011 П[JЛУПЛ[JСК[Jсть
8 j .
1 I \A' с/ В ,
в' I
: I
, I
"...... А ...... с //
+
Рис. 8.7. Переход рабочей точки из левой в
правую полуплоскость и изменение корней
характеристическоrо уравнения:
А апериодический устойчивый процесс; С то же.
иеустойчивый; А', А" колебательный уст йчивый
процесс; С'. С" то же, неустойчнвый; В', В про-
цесс .на rранице (ось j)
246
бинацию с ними. Работа по определению коэффициентов lZO, ..., а6 характерис
тическоrо уравнения и определителей rурвица 2' ..., Б' проводимая таким об
разом, очень трудоемка;
2) проверяется у с т о й ч и в о с т ь з а в е Д о м о у с т о й ч и в о r о
р е ж и м а при у т я ж е л е н и и е r о. Для этоrо в соответствии с рис. 8.5,
'8.6, увеличивая передаваемую мощность, необходимо установить предельное
значение Р == П, при котором пройдет через нуль а п или п 1' Очевидно, что pa
бота эта весьма трудоемкая и дает ответ только дЛя KOHKpeTHoro случая, не поз
воляя получить достаточно наrлядныХ результатов. Чтобы получить некоторые
общие представления, упростим уравнение (8.6), приняв в нем Т и == Ту == о,
т. е. пренебрежем электромаrнитной инерцией измерительноrо и усилительноrо
элементов, что можно сделать, так как эти постоянные на порядок меньше Те'
T . после этоrо упрощения получим характеристическое уравнение четвертоrо
порядка, имеющее вид
а о р4 + alP3 + (а 2 + a2) р2 + (аз + аз) р + а 4 + a4 == О. . (8.7)
Здесь обозltачено:
а о == TJ T Те; a l == T ТеР d + TJ (T + Т е );а 2 + a2 == T J + T Те С 2 +
+ Р d(T + Те) + T J Кои ыl/з ; ; аз + аз == P d + Tecl +T C2 + PdKou ыl/з ; ;
а 4 + a4 == Cl + сзКои ыl/з . .
Условия устойчивости сводятся к требованиям:
1) ао> О при Р d > о;
2) а1 > О при T > О и Р d > о; при Р d < О необходимо, чтобы
I Р I т J ( T + т е)
d < I
TdTe
3) а2 > О при Р d > о, С 2 > о, Кои > о;
4) аз + аз > О при Р d > о, С2> о, С1 > о;
при С1 < О необходимо, чтобы
I Pd(I +Кои Ь 1 1 ь з ) + T C2
cll== Те ;
5)a + Lla > О означает требование установки Кои> Кои МИН, rде
значение Кои МИН == ( I С1 I /с з ) (Ь з /Ь 1 ).
Определим далее коэффициент Кои макс' Чтобы получить максимально дo
пустимое значение коэффициента усиления по отклонению напряжения Кои,
необходимо, приравняв определитель rурвица нулю (Ll ryp == о), раскрыть зна
чения коэффициеытов а; и Lla;, rде i == 1, 2, 3, 4, в соответствии с полученными
для них выражениями:
a l аз + Llа з О О
Ll ryp п == а о а 2 + Lla 2 а 4 + a4 О
О a l аз + Llа з О
О lZO а 2 + a2 а 4 + Lla 4
247
a l аз + L\а з О
:=: (а 4 + L\a 4 ) а о а 2 + L\a 2 а 4 + L\a 4 :=: О.
О a l а з + L\ а з
Или, так как (a + L\a ) > О, запишем
a l а з + L\а з О
L\ryp II I === а о а 2 + L\a 2 а 4 + L\a 4 == О. (8.8}
О а 1 а з + L\а з
Развертывая запись определителя (8.8) и подставляя значения параметров
в выражения коэффициентов ai, L\ai, i === О, 1, 2, 3, 4, получим уравнение вида
АК6и + ВКои + с == О.
ДЛЯ спределения коэффициента Кои необходимо решить записанное выше
квадратное уравнение.
Введем обозначения:
Kl==Pd+TeCl+T C2; K 2 ==T J (T +Te)+T TePd; кз==т J +Pd(T +
+ Те) + T TeC2;
2 2 1, I 2
А==(ыьз){[тJ J (Td+Te) + TdTePd]PdTJ TJ TdTePd)==
2 2 ' 22 2 '
== (bjPdTJ /ЬЗ)(К2 ТdТеРd)== (Ь J /Ь з ) P d T J (Td+Te);
, , 2 ' I
В == (ыl/з ) ) IIPdTJ (Td + Te)+TdTePd] [T J +PdTd + PdTe + T d T e c 2 ] +
2 I 1 , I
+[TJ(T d + Те) + TJ TdTePd]{Pd + т eCl + TdC2) 2TJ TdTePd(Pd+TeCl +
+T C2) С 3 [TJ ( T + Те) + T TePd]2} === (ы l /з ) (рp dK2K3 + T J K2Kl
'2 '
2TJ TdTePdKl СЗК2) === (ыl/з)[к2(рdкз3 СЗК2 + T J K l ) 2KlTJ TdTePd];
С:=: [T TePd+TJ (T +Te)][TJ +T TeC2+Pd(T +Te)][Pd+TA+
+ T C2] TJ T Te(Pd + TeCl + T C 2 )(P d + TeCl + T C2) [T TePd +
+ TJ (T + Te)]2C l == KlK2K3 TJ T TeKT K cl'
Таким образом, максимально допустимое значение коэффициента усиления
Кои макс === ( B + V B2 4АС)/(2А).
(8.9)
к сожалению, получить какие либо общие закономерности из ураlЗнений
(8.9) не представляется возможным, но для конкретных случаев может быть yc
,ановлен ряд важных закономерностей, показанных, например, на рис. 8.8.
Положительность критериев rурвица для исходноrо режима указывает на
устойчивость этоrо режима. Дальнейшая проверка на утяжеление по параметру
Л позволяет установить ero предельное значение (см. рис. 8.5, 8.6), одновременно
выявив характер нарушения устойчивости.
248
альнеишие упрощения. Некоторые обобщения. Для возможности некоторых
обобщений упростим полученное уравнение (8.7), пренебреrая в нем демпферным
эффектом (Р d == О). Torдa характеристическое уравнение примет вид
, 4' ,
TeTdTJ р +TJ (T d + Те)Р3 +(TJ +TdTeC2+KouTJ Ь 1 /Ь з )р2+
+ (T С 2 + Т е С 1 )Р + Сl + КОUСЗЬ1/ЬЗ == О (8.10)
или
а о р4 + а1р3 + (а 2 + 8а 2 ) р2 + а з р + (а 4 + 8а 4 ) == О.
Рассмотрим, чем обеспечивается с точки зрения физических соотношении и
шiраметров положительность коэффициентов этоrо уравнения. Очевидно, что:
всеrда а о > О, если T > о;
а1 > О, если T > О или T < Те при T < о;
a2 == а2 + 8а 2 > О, если С 2 > О или при С2 < О
(1 + KIМJ Ь 1 /Ь з ) T J > T Те С 2 .
Рабочий режим всеrда будет существовать при С2> О (рис. 8.9), и данное
условие всеrда соблюдается.
Значение аз будет> О, если T C2 > Те С1 или С 2 > (TiT )1 С1\ (положи
тельное значение С2 больше отрицательноrо С1, умноженноrо на Te/T ). Из этоrо
условия следует, что предельным режимом при реrулировании данноrо типа,
не оказывающеrо вqздействия на
аз, будет режим при С2 ;;;: О.
Получить предельный режим,
очевидно, можно при увеличении
Те' что, как указывалось выше,
е8. tJоз8.хх
'Коимакс еа. напр
220
200
180
lБО
140
120
{ОО
80
Ба
40
20
а
0,5 {,а {,5 2,0 2,5 J,O 3,5 Lf,O Те,.С
Рис. 8.8. Влияние демпфирования на макси-
мальный коэффициент усиления:
J(оимаRс f(Те); Рd О'З; T/ 7,O; 8,0; 9,0 с;
Pd O; T/ 6,O; 7,0; 8,0; 9,0 с
р
Рис. 8.9. Предельные значения мощности
по условиям устойчивости при поддержа-
нии постоянства U r . Eq или E (без ре-
rулирования)
249
достиrается введением rибкой отрицательной обратной связи. Все полученные
соотношения, обеспечивающие положительность коэффициентов (Ц" ..., аз, свя
заны только с режимными оrраничениями (рис. 8.9).
Эффект любоrо автоматическоrо реrулирования возбуждения математиче-
ски отражается в добавках /).а к коэффициентам а характеристическоrо уравне-
ния. При реrулировании пропорциональноrо действия появляются две добавки:
/).а 2 и /).а(о. Первая добавка открывает
возможность (теоретическую) «продви-
нуться» по характеристике мощности
РЕ' дО ее максимума, т. е. до точки С 2 ==
q
== О. Вторая добавка позволяет YCTaH
вить требования к коэффициенту усиле-
ния Кои. В самом деле, ai' == а(о + /).а(о==
== С1 + Кои (Ь 1 /Ь з )С з , или, так как С1 OT
рицательно (рис. 8.10), Кои (Ь 1 /Ь з ) с з
=> 1c11. это означает, что коэффициент
усиления, обеспечивающий большие зна
чения мощности Р Е' (при С1 < о, с 2 >0),
q
должен быть больше (или равен) некото-
poro Кои мин, rде Кои мин == IС1IЬз/ Ь 1 С З .
Чем меньше будет Кои, тем меньше
удастся продвинуться по характеристике
E == const в сторону точки С 2 == о. В
пределе при Kf;JU == О система будет ра-
ботать как нереrулируемая соrласно ха-
рактеристике РЕ == const (рис. 8.10, а),
q
а напряжение будет уменьшаться с
ростом наrрузки (рис. 8.10, 6). При
Кои мако ==0 из уравнения (8.10) следует,
что апериодическое нарушение устойчи-
вости будет наступать при С1 == О. Если взять друroй крайний случай, приняв
Кои мако== 00, то уравнение (8.9) принимает вид TJ р2 + С З == о, rде корни );'paB
нения
а)
р
РО
lI т при Кои=О
Рис. 8.10. Предельные мощности без pery
лирования возбуждения (Сl == О) при под-
держании U r == const (сз == О):
а движение рабочеJl точки а. d. .... с, при уве.
личении тока возбуждения [Ечl при Kou oo; б
изменение напряжения U r
Р\,2 == v СЗ/ТJ == + j V СЗ/Т J .
Это означает, что система устойчива при с з == О (формально, так как не учте
но затухание, находится на rранице УСТQЙЧИВОСТИ). При с з == О наступает пре-
дельный режим. При Кои == 00 напряжение reHepaTopa и r при всех изменениях
режима поддерживается постоянным (рис. 8.10, б). Это, разумеется, очень при-
влекательно в условиях эксплуатации. Однако и теоретические соображения,
и опыт создания реrуляторов пропорциональноro действия показывают, что pea
лизовать работу системы при Кои == 00 невозможно и что для каждой системы есть
некоторое предельное значение Кои макс < Коиоо. KaKqBo же это значение?
Соrласно рис. 8.6, прохождение через нуль предпоследнеro определителя
rурвица [в данном случае это определитель (8.8)] вызывает колебательную не-
устойчивость. Из (8.8) с учетом демпфирован ия было найдено значение макси-
250
мально возможноrо коэффициента усиления в виде выражения (8.9). Если в (8.9)
принять Р d == О, Те == О, то можно получить простое выражение*
К ои маке == [(С 2 Сl)/( с з С 2 )] (Ь з / Ь 1 ). (8.11)
Если Те =1= О, то
Кои макС == Ко и макс Te O '
(8.12)
уде поправочный (учет Те) коэффициент:
s == ( 1 + T T C2+ T Cl ) 1 ( 1 + T ) .
TJ Те+ Td /1 Td C;r----C 2
I<оимахс
Кои \). l' е
ц'l"v. ,
50 .::., 'I,, Кои aKC \
(" \
40 ' ,
, ,
( '"
за I ' ,
, ,
а50ЧС1Я ',',
20 '5 '
о ласт ......
10
2'
а .20 40 60 80 100 120
Те
Рис. 8.11. Влияние эквивалент-
ной постоянной времеии сис-
темы возбуждения Т е на мак-
симальный коэффициент уси-
ления Кои макс
Рис. 8.12. Предельиые значеиия коэффициента
усиления:
KOUMIlliC f(6); KOUMBH Ip(6); 1-1' переход из рабочей
области в область колебательиой неустойЧИВОСТИ; 2-2'
то же. в область апериодической неустойчивоСТИ
Значение Кои макс зависит от режима системы и параметра Те' увеличе-
ние KOToporo приводит к росту возможноrо Кои макс (рис. 8.11). Значение коэ
фициента усиления должно находиться между Кои мии И Кои макс, причем за-
висимости, эти имеют вид, примерно показанный на рис. 8.12.
Практически приемлемое значение коэффициента усиления Кои должно,
следовательно, отвечать неравенству Кои мин < Кои < Кои макс' Выбор той
или иной величины, как это показано на рис. 8.13, влияет на режим системы и ее
предельно передаваемые мощности:
при Koи О система будет нереrулируемой. В этой системе предел пере-
даваемой мощности определяется точкой С1 (рис. 8.13, а), а напряжение сущест-
венно падает с ростом наrрузки (рис. 8.13, б); .
при О < Кои < Кои макс существует некоторое значение коэффициен-
та, при котором предельная мощность определяется точкой С 2 (рис. 8.13, в), а
.. Разумеется. вместо Toro чтобы упрощать (8.9), полаrая Р d == О, можно было подста-
вить в (8.8) значеиия коэффициентов из (8.10) и раскрыв (8.8), получить тот же результат.
251
напряжение уменьшается (но сравнительно медленно) с ростом наrрузки
(рис. 8.13, е);
при Кои < Кои макс, но значении большем, чем в случае, показанном
на рис. 8.13, в, напряжение поддерживалось бы лучше, но раскачивание прои-
зошло бы несколько раньше;
при Koи oo (рис. 8.13, д) поддержание напряжения будет очень хо-
рошим (рис. 8.13, е), но при росте наrрузки (еще до достижения предела с з ) по-
е)
Е,и
о)
Е,и
Еч'
Eq
Of=O
а-
Кои
I
I
I
I
P='f(Koи,O) :
I
I
I ""
"".....
.,..,..,..,..,..,...... I . ,
..................... I Коа= Кои
.....
,
J I
, I
)-,1
р = If(Koи,OJ" "" ' 1 : Kod=«>
"" I
"",,"" I I I
........ . J J Омоке
......... J I (теоретuЧ)
I I
I I
tMOKGI
Кои =0
Рис. 8.13. Режим простейшей реrулируемой системы в зависимости С'" коэффициента
усиления Кои..
а. б без реrулирования Kou O. Eq const; в, е реrулирование при поддержании flЕ' q const
(Kou Kou'). при движении рабочей точки р по возрастающим характеристикам 1:q const; раска.
чивание при с,'" о; д реrулирование при поддержании 'Ur"'const (Kou ""); е раскачивание ири
аиалоrичном случаю б движении р при Р и 6 меньших, чем в случае в; теоретический предел.
при сз о
явится колебательная неустойчивость (рис. 8.13, е), что сделает работу системы
невозможной.
Приведенный анализ показывает, что практически реrулятор пропорцио-
нальноrо действия должен работать при таком коэффициенте усиления Ко и ,
который nриблизительно отвечает передаваемой мощности при э. д. с. E ==:;
==:; сопst, приложенной в схеме замещения reHepaTopa за сопротивлением Kx ,
.rде К> 1 имеет значение, зависящее от конкретных условий (см. ниже).
252
Таким образом, еенераmоры, имеющие реzулироваnue nроnорциоnальnоzо дeй
сmвия, представляются в схеме замещения Е;, nриложеnnой за Kx (rрубо E
E/). Хотя это представление и является весьма приближенным, оно при
п р а в и л ь н о м в ы б о р е К (см. Э 8.5) дает поrрешность, не превышающую
5 10% по предельной мощности.
s 8.3. НЕРЕrУЛИРУЕМАЯ СИСТЕМА, РАССМОТРЕННАЯ 6ЕЗ УЧЕТА
ЭЛЕКТРОМАrнитных ПЕРЕХОДНЫХ ПРОЦЕССОВ
Частный случай, коrда в системе предполаrается отсутствие реrулирования
возбуждения и не учитываются переходные процессьi, представляет интерес для
выяснения влияния этих факторов на пре
дел передаваемой мощности, M более что
рассмотренный ранее (см. rл. 4) способ Б) Р
площадей предполаrал именно этот случай
(Е == сопst). Частный случай позволяет Р о +4Р
также выявить зависимость характера про
цесса от начальноrо режима. Пусть систе
ма представлена схемой на рис. 8.14, а.
Учтем демпферный момент упрощенно: BBe
дем в уравнение движения член, пропор
циональный производной уrла с постоян
. ным коэффициентом Р d' В этой идеализа
ции переходные процессы в электрической
системе будут описываться одним нелиней
ным дифференциальным уравнением BTO
poro порядка
T J р2'О+РdР'О==Рт Рэл' (8.13)
Здесь Р т == Ро == Р т siп бо мощность
турбины, определяющая исходный установившийся режим электрической систе
мы (Р о , б о ) (рис. 8.14), статическая устойчивость KOToporo подлежит проверке;
Р эл == Р т sin б электромаrнитная мощность синхронноrо I'eHepaTopa, являю
щаяся нелинейной функцией одной переменной уrла б.
Раскладывая Р т sin б в ряд Тейлора по малой величине б в окрестности
б о (т. е. полаrая б == б о + б) и оставляя только два (нулевой и линейный) члена
разложения или, что то же самое, заменяя участок синусоиды в окрестности б о
касательной, получим [вместо (8.13)] ,
T J р2 'O + PdP 'O == Р msin'Oo P т siп '00 (dРэл/d'О) 'O. (8.14)
Введя обозначение* СI == dP эл/dб == (EqoU / XdJ:) cos б о , получим линеари
зованное по первому приближению дифференциальное уравнение (8.13):
(8.15)
dP
fJ t=c,=(lO
f
хс
a)
Е а
I{
о
а
Рис. 8.14. Основные соотношения при
малых колебаниях простейшей системы:
а схема; б характеристика
т J р2 'O + Р d Р 'O + Cl 'O == О
* Величину Сl иноrда называют синхронизирующей мощностью и обозначают через
SEq' rде индекс Eq означает, что производная взята при Eq == сопst. Здесь не будет приме-
няться это обозначение, так как через S обозначена полная мощность, а через s скольже
ине.
253,
Величина Сl зависит от исходноrо режима (рис. 8.14) и становится равной
нулю в режиме, соответствующем Рт(б о == 900). Уравнение (8.14) имеет решение
.1.11 == А 1 еР ,t + A 2 e pJ (8.15а)
Характеристическое уравнение для (8.15)
T J р2 + РаР + С 1 == О
имеет два корня:
Pa:!::Y P 4TJ С!
Рl.2 == 2TJ
( 8.16)
==:i: V [ ;: '( 2 : )2]
+ Pa .
==:i:JY +а,
2TJ
(8. 17)
тде l' == V Cl/TJ cx. собственная частота колебаний ротора синхронной ма-
шины. а == P d/(2T J ) декремент за-
тухания.
При Сl > О система всеrДа будет ус-
тойчива. При Cl/TJ < сх. 2 оба корня бу-
дут действительные отрицательные и
процесс будет иметь характер, изобра-
женный на рис. 8.1 5, а. При Cl/ T J > сх. 2
оба корня будут комплексными с отри-
цательными вещественными частями; ха-
рактер процесса при этом показан на
рис. 8.15,6. При Сl < О соотношение
между Cl/TJ и сх. не влИяет на характер
процесса. Один корень всеrда будет
дейс твительны м и положительным
(Vcl/TJ +а 2 +а), адру rой отрица-
тельным ( y c 1 /T J + а 2 + а ). Проте-
кание процесса соответствует рис. 8.15,
в. При Сl == О появляется один нулевой
корень и один корень, равный Pd/TJ.
Наличие нулевоro корня указывает на
так называемый критический случай.
(рис. 8.15, 2), Коrда для выяснения действительноrо поведения системы нельзя
пользоваться линеаризованным по первому приближению уравнением (8.15)
и нужно или провести дополнительные исследования с учетом уточняющих
факторов*, или rрубо считать, что у системы, подошедшей к rранице устойчи-
вости, после единИчноrо толчка вероятно как нарушение устойчивости (при
сколь уrодно малом Сl < О), так и ее сохранение (при малом С{ > О). Однако
практически система может получить такой толчок, который приведет к нару-
шению устойчивости. -
Рассмотрим устойчивость б е з у ч е т а э л е к т р о м а r н и т н ы х п е-
с,=о
Рис. 8.15. Протекание процесса в простей-
шей системе Ы\ t(t) после отклонения
на ы\о:
с:, б, 8, е характеристики P cp( ) в соответ-
ствующих точках
о
* Специальные исследования, указывающие неточность, которую внесла линеариза- .
ция, имеют смысл для систем более сложных, чем рассматриваемая.
254
реходных процессов 13 контурах ротора и без учета
д е м п Ф е р н о r о . м о м е н т а (Р d == О). Этот частный случай, соответст-
вующий исследованию простейшей системы как консервативной, приводит к ха-
рактеристическому уравнению TJ р2 + С 1 == О, которое имеет два корня, опре-
деляющих решение упрощенноrо уравнения (8.15).
Характер- движения зависит от знака Сl' Если Сl > О, то два корня мнимые
Рl.2 == + j V c 1 /T J
И всякое возмущение в системе будет приводить к незатухающим колебаниям
с собственной частотой
у == V с 1 /Т J .
Если уrлы выражены в радианах, время t и постоянная инерция T J В
. секундах, мощности в относительных единицах, то значения собственной час-
тоты (рад/с) колебаний ротора синхронной машины вычисляются как
у == V c 1 2 7C fo/T J
(8.18)
или в [ц
f == 1/(27С).
(8.19)
Значение периода свободных колебаний (с]
Т== 2п/"( (рад/с] == {1/! [rц]}
(8.20)
зависит от исходноrо режима системы и от параметров системы TJ, Xd Хю Eqo, и. Так, ес-
ли цсходный режим и параметры -системы определены значениями 60 == 600, Eqo == 1,2,
U == 1,10 == 50 rц, TJ == 10 с, XdB == 1,2, то
Сl == 1,2 . 1 . 0,5/1,2 == 0,5; "( == УО,5 . 314/10 == 3,96 рад/с; t == 3,96/(2 . 3,14) == 0,63 rц;
т == 1/0,63 == 1,59 с.
При сl < О оба корня характеристическоrо уравнения (8.16) действитель-
ные и один из них всеrда положительный; при всяком малом ВОЗМУ!lJ/eНИИ в сис-
теме будет происходить апериодическое нарастание уrла (рис. 8.15, в).
Уrол б о == 900 является пределом статической устойчивости rраницей,
разделяющей два вида движения: колебательное при б о < 900 и апериодическое,
нарастающее при б о > 900. При б о > 900 в системе происходит апериодическое
нарушение статической устойчивости (иноrда такое нарушение устойчивости
называют сползанием).
Область, rде сl> О, считают практически устойчивой, предполаrая, что не-
избежное, хотя и не учтенное в упрощенном уравнении, демпфирование превратит
незатухающие колебания в затухающие. Условие сl> О отвечает r.lOлученному
ранее практическому критерию dР/dб > о.
i 8.4. САМОРАСКАЧИВАНИЕ И САМОВОЗБУЖДЕНИЕ
Проведенное исследование устойчивости, однако, еще не было достаточно
полным, так как в нем не рассматривались нарушения устойчивости, имеющие
специфический характер самораскачивания и самовозбуждения. Такие наруше-
25&
ния MorYT наступать при наличии в сети, связывающей исследуемую станцию
(эквивалентный reHepaTop) с системой (в частности, с шинами бесконечной мощ-
ности), или заметноrо активноrо сопротивления (r/x > 0,05), или значительной
емкости( Т ). В первом случаеВ03никаютустановившиеся или нарастающие ко-
лебания самораскачuваfluе, во втором происходят самопроизвольный рост
тока и увеличение напряжения reHepaTopoB, потребляющих емкостную ( Q)
реактивную мощность, самовозбуждеfluе*. Анализ происходящих явлений
мажно было бы провести исходя из уравнения (8.7). Но это уравнение даже после
упрощения (8.10) будет затемнять физическую картину изучаемых явлений, от-
ражая влияние реrулирования и процессов в возбудителе. Поэтому пренебре-жем
ими, приняв в (8.7) Кои == О и Те == О, но учтем демпфирование (Р d =1= О) и
переходные.процессы (T =1= О). Тоrда получим следующее уравнение TpeTbero
ПОрЯДКа:
Т ! T p3+(T! +PaT )p2+(C2T +Pa)P+Cl==0
(8.21 )
или
а о р3 + а1р2 + а 2 р + аз == о.
Самораскачивание. Если T > О, то при Р d < О И условии, что '1 P d I >
> т J /T , (что обычно не удовлетворяется) и ' P dl > C2T , MorYT появиться от-
рицательные коэффициенты (а1 или а 2 ), что укажет на нарушение устойчивости
в связи с отрицательным демпфированием, которое в данном случае предполо-
жительно не связано с активным сопротивлением в цепи статора и обусловлено
эффектом неправильноrо реrулирования. Однако более вероятно колебательное
нарушение устойчивости самораскачивание (связанное с r в цепи статора),
возможность Koтoporo выявляется из анализа определителя fурвица. Предста-
вим ero в виде
L\rYD == I
а 1 а з
а о а 2
I I т J + Р aT С 1 . [
== Т } T C2T +Pa'
или
L\ryp == (T J + Р aT )(C2T + Р а) с 1 Т! T :;;.. О. (8.22)
Очевидно, что условие (8.22) может нарушаться в двух случаях:
1) при отрицательном Р а;
2) при заметном активном сопротивлении в цепи статора, что в конечном сче-
'l'e будет равносильно отрицательному Р а.
В первом случае, учитывая, что С 2 :;;.. С1, перепишем (8.22) в виде
L\ryp== С 2 ( 1 + ) ( 1 + Р а T ) Cl==O, (8.23)
С 2 Т а Т)
Получим условия нарушения устойчивости; I P d\ > C2T и I P dl >
> T J IT .
* Самовозбуждение может происходить при подключеиии reHepaTopa к ненаrруженной
(отключенной от системы) линии электропередачи. .
256
Во втором случае, чтобы получить БОльшую ясность в физике процессов,
примем Р d == О, тоrда (8.23) пр мет вид С 2 С{ == О, но соrласно (2.30) при r СТ ==
== о значение С2 С{ == , и 2 siп 2 б, т. е. в любых режимах, кроме u == О,
Х а !:; ХаТ;
значение С 2 С{ > О. Наличие активноrо сопротивления в цепи статора резко
меняет соотношение между С 2 и с{. Соответствующие зависимости, построенные
на рис. 8.16, на основании (2.28) показывают, что в этом случае в диапазоне от
р L10 Т
М e8 p
/ t ,
/ '
/ '
<./ rr;.
А Т=УС;
I '.
/ С , =РmCOSО
I
.,
с
0,8 ............
0,6
О
Рис. 8.16. Примерные зави
симости С] == f(б), С 2 == Q;(б)
при учете активноrо сопро-
тивления цепи статора (см.
рис. 8.4)
О
00
t
б о
Рис. 8.17. Характер про-
цесса в области С2 < С]
(рис. 8.16)
Рис. 8.18. Изменение пе-
риода колебаний в зависи
мости от начальноrо режи-
ма (б о ) системы
о до 20 350 значение С2 < С{ и условие (8.22) нарушается, указывая на воз-
можность самораскачивания, процесс Koтoporo теоретически выrлядит так, как
это показано на рис. 8.17.
Про с т е й ш а я т р а к т о D К а с а м о р а с к а ч и в а н и я. Не учи
тывая переходных электромаrнитных процессов и не рассматривая причины по
явления отрицательноrо демпферноrо момента, которыЙ, изменив знак, стано-
вится отрицатеЛЬНЬfМ, дополнительно ускоряющим reHepaTop, запишем урав-
нение переходноrо процесса в следующем виде:
т J p 2 t:1"O Р а9 pt:18 + С]М == О.'
При этом корни соответствующеrо характеристи ческоrо уравнения (рис. 8.18)
РI.2 == + V (с 1 IТJ a2)+ а, (8.24)
rдe' а == Pd9/(2T J ) декремент затухания.
При С1> О И с{ / T J > а 2 уrол будет нарастать колебательно (рис. 8.19, а)
на участке 1 2 характеристики Р == <р(б). При С1 / T J < а 2 (точка 2) коле-
бания переходят в апериодическое нарастание (рис. 8.19, бj. Далее на
участке 3 4 при С{ < О происходит апериодическое увеличение уrла (рис. 8.19, в).
9 84 251
Процесс проходит так же, как и при отсутствии демпфирования (см. рис. 8.5, в),
но нарастание уrла происходит медленнее.
Ф и з и к а с а м о р а с к а ч и в а н и я. Физические процессы при само-
раскачивании были рассмотрены на основе способа площадей. Напомним, TO
самораскачивание возникает Torдa, коrда вследствие тех или иных причин (боль-
шоrо активноrо сопротивления в цепи, неправильноrо выбора параметров авто-
матических реrуляторов скорости или
реrуляторов возбуждения, прямо или
косвенно реаrирующих на изменение
скорости) в системе при увеличении ско-
рости появляется дополнительный, ус-
коряющий ротор вращающий момент.
Эrот момент может быть обусловлен по-
ступлением добавочной энерrии от пер-
вичноrо двиrателя. В ряде случаев та-
кой дополнительный момент может по-
явиться за счет запасенноrо HeKoToporo
значения электромаrнитной энерrии,
освобождающейся во время переходно-
ro процесса.
Перераспределение эл eKTpoMarHит-
ной энерrии будет отражено в колеба-
тельном «раскачивающемся» движении
ротора, аналоrичном самораскачиванию,
которое возникает под действием pery-
ляторов скорости или реrуляторов воз-
буждения, изменяющих подачу энерrии
в систему. Самораскачивание особенно
заметно проявляется при малых наrрузках и большом возбуждении reHepaTopoB
и при заметном активном сопротивлении в цепи статора, которое тем больше,
чем меньше мощность reHepaTopa.
Самовозбуждение. Если T < 6, то аО в (8.21) станет отрицательным, что
укажет на нарушение устойчивости. Если I T I > T J / Р d И I T I > Р d/ C 2'
то аl и аО будут также отрицательными, что, однако, при аО < О не существенно,
и, следовательно, величиной Р d при рассмотрении в первом приближении явле-
ния самовозбуждения можно пренебречь.
Определитель rурвица (8.21) не дает новых соdтношений, а при Р d == О
условие С 2 СI О будет всеrда соблюдаться' . Следовательно, для нарушения
статической устойчивости в форме самовозбуждения необходимо и достаточно
выполнения условия
р
0)6 з
а} t:o./ t I .
6 #/ 1
" I
I
I t 1.
/to I
I 8Р I
, c'=80>O
I
=o
1"
Рис. 8.19. Неустойчивость системы:
а процесс на участке 1-2 при с.>О, с,/т]>а 2 ;
б процесс на участке 2-3 при с,>О, с,/Т]<а 2 ;
в процесс на участке 3-4 при С,<О, с,/Т] a2
T <O.
Величина T в общем случае, как известно [4], определяется соотношением
, ( X ХС ) (Xq XC ) + , 2
Td == TdO' (8.25)
(Xd XC)(Xq XC )+r 2
* Имеется в виду случай, коrда активное сопрqrивление статора мало.
258
Здесь все реактивные сопротивления и активное суммарные сопротив
ления всей цепи. Величина T будет отрицательной, если числитель или зна
менатель (не одновременно) дроби, стоящей сомножителем [... Т dO В (8.25)], будет
, отрицателен.
Запишем предельные условия, при которых появятся отрицательные значе
ния, для числителя и знаменателя соответственно:
( , ) 2 ( ,
Xq+Xd Xq Xd
(X ХС )(X q ХС ) + ,2 === ХС 2 + ,2 2
( ХС Xd; x q у +,2 ( Xd X q ) 2 === о:
) 2 == о; (8.26)
(8.27)
Уравнение окружности представим в виде
( o)2 + у2 == р2,
откуда видно, что уравнение (8.26)
представляется в осях координат
ХС (аналоr ) и , (аналоr у) полу
окружностью, проведенной радиу-
сом PII === (X q x )/2, а соотноше-
)Iие (8.27) радиусом Р! == (Xd
x q )/2.
На рис. 8.20, а показаны rpa-
ничные значения и зоны 1, 11 из-
менения параметров, при которых
значение T может становиться от-
рицательным и, следовательно, са-
мовозбуждение возможно. Физика
процесса самовозбуждения объяс-
няется в основном тем, что емкост-
ный ток подмаrничивает цепи воз-
буждения reHep атор а, что приво-
дит, В свою очередь, к дальнейше-
му увеличению тока статора ит. д.
Самовозбуждение может возникать при синхронной скорости ротора без
изменений уrла, т. е. при дб === О. В самом деле, предположив, что в уравнении
(8.1) величина у(р) == о, Дб == о, будем иметь для анализа вместо (8.1) и (8.За),
(8.4а), (8.5а) только одно уравнение
ДЕ q + т dорДЕ == о,
8)
'
t
Рис. 8.20. Кривые самовозбуждения в осях Хс, r:
а зоны самовозбуждения: 1 зона СИlIхронноrо само-
возбуждения; JI зона асинхронноrо самовозбуждения;
б самовозбуждение в зоне 1 (сннхронное); в само-
возбуждение в зоне Il (асинхронное)
но так как в этом случае вследствие отрицательности Ха
Xd'l; == Xd XC; X ); == X Xc,
то, следовательно,
ДВ'
q
, ,
Xd XC Xd XC
Д Eq, T dO == T
Xd XC Xd XC
9*
259
*
и исхаднае уравнение будет иметь вид
t:,.E q + T pt:,.E q == О.
Решение TaKara уравнения известна:
,
tlTd
!1Eq == t:,.E qo е .
Если пастаянная времени T отрицательна, та
Л Е Л Е tllT 1
l.). q l.). qo е
II, .очеВИДНа, ток далжен эКспаненциальна нарастать:
,
t/ITdl
!1/ 4 == t:,. /40 е .
В действительнасти нарастание тока будет аrраничена Насыщением Mar-
нитных цепей reHepaTapaB и трансфарматарав. Краме Tara, при анализе харак-
тера самавазбуждения необхадима было бы учесть асабеннасти перехаднаrа элект-
рамаrнитнаrа працесса при разных саотнашениях Xd' X q , Х;. Эти асабеннасти
приведут, в частнасти, к таму, чта в зоне / ток будет нарастать манатанна (син-
храннае самавозбуждение), а в зане J J это нарастание будет саправаждаться
биениями (асинхраннае самавазбуждение). На рис. 8.20, б, в паказан примерный
характер працесса в занах J и JJ (см. подрабна [171).
s 8.5. УПРОЩЕННЫЕ СООТНОШЕНИЯ для ОПРЕДЕЛЕНИЯ
СТАТИЧЕСКОА УСТОАЧИВОсти, ВЫТЕКАЮЩИЕ ИЗ МЕТОДА
МАЛЫХ КОЛЕ6АНИА
Рассматренный метад малых колебаний является универсальным меТОДОAJ
исследавания статическай устайчивасти. Метад применим как для прастых, так
и для слажных систем и пазваляет учесть все перехадные працессы и действие
любых устрайств автаматическаrа реrулиравания.
Недастатками метада малых калебаний являются слажнасть и трудаемкость
расчетав. Последний недастатак в значительной мере снимается при испальзо-
вании вычислительных машин непрерывнаrа действия или цифравых машин дИс-
KpeтHara счета. Однака вапрас а разумных упращениях при праведении прак-
тических расчетав и эксплуатацианнай .оценке устайчивасти системы аСТ2СТСЯ
существенным.
В СВ,ете этаrа представляется целесаабразным .отыскать такие п р а с т е Й-
ш и е с х е м ы з а м е Щ е н и я, катарые пазволили бы реrулируемый reHepa-
тар представлять в расчетах перехадных працессав так же, как и нереrулируе-
мый (Xd, X q , x ). Эта .оказывается вазмажным, если считать, чта настраЙка сис-
темы вазбуждения reHepaтopa идеальна в там смысле, чта самараскачивание пал-
настью устранена и нарушение устайчивасти мажет быть талька апериадическим.
Наибалее блаrаприятные уславия устайчивасти любая электрическая система
при паддержании заданнаrа напряжения будет иметь таrда, каrда самараскачи-
тзание будет каким-та путем палнастью устранена и предел мащнасти савпадет
с пределом устойчивасти. Нарушение устайчивасти в этам случае будет насить
260
апериодический характер и в зависимости от степени поддержания напряжения
определяться по одному из условий: С{ == о; С 2 == о; СЗ == О (табл. 8.3).
В самом деле, характеристическое уравнение (8.10) простейшей реrулируе-
мой электрической системы имеет вид (при Те == о)
T J T рЗ + (T J + T j Кои Ь 1 /Ь З ) р2 + C2T р + С 1 + сзКои Ь 1 /Ь З == О.
Предположим, что коэффициент усиления Кои очень велик (Кои --+00) и,
следовательно, U р == const, что возможно при исключении самораскачивания.
Тоrда уравнение системы после деления всех членов на значение Кои, которое
стремится к бесконечности, запишется как
р2Т.! + Са == О.
Корни этоrо уравнения
Р1,2 == v Ca/ TJ .
Условием устойчивости будет
С з > О или aP ur /до > О.
Если постоянная времени T очень великn (T --+oo) и в силу этоrо э. д. с.
E == const, то уравнение системы примет вид
p(T JP 2 + С 2 ) == о, rде Pl,2 == V C2/TJ .
Условием устойчивости будет
С 2 >0 или aPE'q/ao>O.
Если возбуждение не реrулируется (Кои == о) и задано от TaKoro мощноrо
источника, что ток возбуждения всеrда постоянен и в обмотках reHepaTopa не
может происходить никаких переходных процессов, способных стимулировать
изменение тока возбуждения, то (принимая Eq == const), следует предположить
т do == о, T == О. в этом случае Уliавнение сис темы пр едставим в виде
T J р2 + С 1 == о, P t ,2 == V cl/TJ .
Условием устойчивости при этом будет
с 1 > О или aPEq/ao > О.
Из приведенноrо анализа видно, что, сняв lшким-либо образом опасность само-
раскачивания, можно получить методически одинаковый подход к определению
мощности, при которой произойдет нарушение устойчивости. Нарушение это
всеrда будет а пер и о Д и ч е с к и м, а мощность будет тем большей, чем луч-
ше поддерживается напряжение. Здесь не учитывается то обстоятельство, что в
действительности стремление обеспечить постоянство напряжения за счет увели-
чения коэффициента усиления (уменьшения статизма) ПРИВОДИТ к возможности
самораскачивания, которое, если не принято специальных мер, возникает до
TOro, как будет достиrнут предел по условию апериодической устойчивости.
Если считать, что нарушение устойчивости из за самораскачивания исклю-
261
с':)
а::
'"
::r
:s:
J:;:
'"
'"
Е--<
262
u
"
::(
о
"-
"
'"
..
"
'"
'"
"
...
о
"-
"
"-
1:
'"
'"
"-
'"
х
I
I
.,
""
'"
...
u
'"
'"
-+>
"
..
"
"
..
"
..
....
'15 1
<:;>.<>
'"
'"
-1-
с:::.
с:::.
4::;з1;-
.",I
]j<.>
..,
i:
'"
<:
...
>,
s
i;J
iij
:Е
'"
"
ц:)
:Е
..
:Е
"
""
ci> aJ S
'" 0.0
I:::.
o...
:
G" СЕ
:;;
;... gj
0.0'"
:I: g ::g са
t:i: ооЕ:
'" ;...
а = :;; =
..CI C\I :а
а 0.'" =
t.Qg t;
'" '" о
o. '"
""
:о
"
g
"
u
..
""
:о
"
u
'"
1::
О
Q.
'"
:Е
"
"
u
'"
'"
'"
""
"
...
'"
'"
""
'"
х
.:::,.
<1il
ф
"
..
'"
'"
..
'"
'"
::с
I I Ф I I
S 5.
a'" '"
I:: а,=
и o"""""
б
:s:а: ф"
I1:g
:t: C):s:a:s
Q) .. i: С" t:J"
g! a
:2::I:иblO
",:t",
..".,
p
",""'"
С>:<.>'"
g=cb'-
::;::...--...tI:::
:: =
v о::Е
:a
s :a
ca "':iТ
::I:e !--o
[; Cl.9g
,.... ::s; ....
о lJ t--<
K @и
d:
:s: d5
" =
=
g;j
;>,
0.'"
. с;
,=O. ='O"':Ь
:i;o"'o ",o... о "':<:
"':=0'""'",:='""'0=0. ><;...
.д:="';...="''""' >< '"
gjt;o." iiТ "=!;; V 8
;(ь; ю ><и ua:l
"''''''''0:,''' ...><", ",
Ej ::I '" '"
&5 o: a V V u
U = '8 ". '" = 5 '-' '"
",g li.i;:; g; 8
а &@ :<: З(:QV 5.5;
'5 1:5.'36: . ",1:: 8-
() i: &..s.. t:: цs fl)
t.QU:;;1:: =:="" = 5S
82.:З 8- @":=
'"
пН"
I .
.
t;'
"' h :::::'
::,:::r
"' <.>
J?= ><
":t
t::J о
::,.,>:: х><
t::i;'W
.
'"
"1:
:Е
;...
'"
'"
о
""
о
:;;
'"
U[';!
:1:
'"
'"
с::>
"'-
><
'"
::,
<>
"<1:
о:.
со
-1->
'"
""
о
t:j ...
Е: ..
...
"
'" '"
::1 '" :.:
"
"
" "
::f .,
О '"
<:> '" "
<t:> '"
<:> "
'" :OJ
., '"
'" '"
'" ...,
:.:
"
...
о
'"
'" -+>
"
...
:.:
'"
'"
'" '"
х "
....
»
"
.,
.,
"
'"
"
:OJ
'"
'"
"'" со>
t)
;;}
4:5
:OJ
'"
'"
"
'"
'"
;о
'"
><
"
'"
;s;
;о
'"
"
'"
<5
6 со .ь ch
о< :I: = :Z: '"
::;s........ ь
00< 0.=
t; Qg
;;;,;>.uv;;:
оо.Е! "'
;< Q:;:g-iJ
=:I:",:a:;::I:
о. "'
t:: ;< t;: =U :I:
'8 .
О '" "':;:;>:
>О:;:. "'",
o: a :д
з '8
= .,
=
:I:
;< '"
","'1:
:Z::!iJ
=;;..,
3>0
",О>
о< :;:
:а 0
:I: 3
U .о
Q3
а>О
t:: =
00.
:Z: t::
"'. ::::.
::Е
"
1)
'"
'"
'"
...
:.:
'"
х
'"
=
:I:
" '"
., '"
'" =
'" '"
gj '"
:.::
'" U
:t '"
о-
О
U
чено, ТО В этом случае для любой (реrулируемой и нереrулируемой) системы мож-
но принять постоянство некоторой э. д. с. Е х' приложенной за сопротивлением
Ах == K1K2Xd, И на основе этоrо допущения вести расчеты по определению пре-
делов мощности и устойчивости. Для нереrулируемой системы коэффициент К1,
отражающий способ реrулирования, равен единице, при АРВ п. д. коэффициент
К 1 == (X /Xd) К з , rде К з == 0,8..;-.0,95 при длинных линиях и К з == 1,05....;-. 1,2
. при коротких. При сильном реrУЛI;Iровании K1 0, т. е. можно исходить из по-
стоянства напряжения на зажимах reHepaTopa или в начале линии. В случае ре-
rулирования с зоной нечувствительности при большом коэффициенте усиления
предел будет определяться по величине и r == const, но при условии С1 == о.
Коэффициент К2' отражающий влияние явнополюсности и насыщения, может
быть принят равным 0,85 0,95 в зависимости от типа машины и режима, в кото-
ром она работает.
Таким образом, на основе сделанных (достаточно rрубых) допущений об
отсутствии самораскачивания можно утверждать, что анализ переходных про-
цессов в любой электрической системе, имеющей машины при любом реzулируе-
мом возбуждении, мож:ет быть nроведен так Же, как и для нереzулируемой систе-
мы. При этом reHepaTopbI вводятся в схему замещения некоторыми фиктивными
(обычно уменьшенными) сопротивлениями и соответствующими э. д. с., прило-
женными за этими сопротивлениями. Такой подход в дальнейшем будет riриме-
няться и при расчете устойчивости сложных систем, rде будет предполаrаться,
что все reHepaTopbI MorYT быть представлены постоянными сопротивлениями и
приложенными за этими сопротивлениями э. д. с.
i 8.6. ОСНОВЫ УСТОЙЧИВОСТИ СЛОЖНЫХ CIIICTEM.
КРИТЕРИИ МЕТОДА МАЛЫХ КОЛЕБАНИЙ И ПРАКТИЧЕСКИ Е крИТЕРИИ
Рис. 8.21. Векторная дн-
arpaMMa Э. д. с. двух
станций конечной мощ-
ности
Ez
у СJlОВИЯ устойчивости системы «две станции об-
щая наrрузка» . Этой схемой начнем рассмотрение слож-
ных систем, не имеющих в своем составе ШБМ и, следо-
вательно, фиксированной частоты. На дИаrрамме (рис.
8.21) изображены э. д. с. Е каждой из станций и движе-
ние по отношению к вектору, вращающемуся с постоян-
ной скоростью ffio. Уравнения движения при малых от-
клонениях от синхронной скорости запишутся следую-
щим образом: .
р (01 (2) == р О 12 или РДО12 ДШ ] + ДШ 2 === о;
i\M 1 i\ P l Т Л л м
РШ 1 == или JI PtiW 1 == ti 1;
TJ, TJ,
i\M 2 i\P 2 Т Л л м
РФ 2 == или J 2PtiW2 == '"'"""'7 ti 2'
T J2 T J2
(8.28)
264
В уравнениях (8.28) принципиально более правильно выражать ускорения
через M. Одцако практически в силу малости изменений скоростей замена M
на p не приводит к сколь нибудь существеННQЙ поrрешности*.
Примем момент каждой станции М == ср(б 12 , 0)1, 0)2), тоrда нет необходимости
отдельно записывать уравнения отклонений режима наrрузки и достаточно ввести
в (8.28) значения
Ml == дМ} a12 + дМ} д Ш1 + дМ} Ш2 == С; a12 + dll (J)l + d12 (J)2; (8.29)
д }2 дш} дш 2
M2 == дМ 2 \д а 12 + дМ 2 д (J)i + дМ 2 ДШ2 == С; да 12 + d2l (J)1 + d22 (J)2. (8.30)
дО}2 affiJ дШ 2
Любое малое изменение параметра режима нахоДИТСЯ из (8.28), (8.29), (8.30)
в виде
a12 == 0/ D (р); Ш1 == 0/ D (р); Ш:! == O/D (р),
rде
р 1
D (р) == , ТпР+ d ll d 12 (8.31)
С 1
С; d 21 TI2P+ 2
Раскрывая определитель D(p) и приравнивая ero нулю, получим, характе-
ристическое уравнение
р3 + а1р2 + (Q!;12 + а;) р + аз == О. (8.32)
Здесь
а 1 == дМ 1 + дМ 2 1 .
дШI T J1 дШ 2 Т '2 '
дМ} дМ 2 1 .
Q!;12== ,
д О }2 Т /1 дО}2 Т '2
, ( дМ} дМ2 дМ} дМ 2 ) 1
а 2 == affiJ дШ2 дШ 2 дш} Т J 1 Т '2
а [ дМ} ( дМ2 + дМ 2 ) дМ 2 ( дМ} + дМ] )1 1
З . д }2 дш} дШ2 дО12 дш} дШ 2 т- Jl Т 12
Характеристическое уравнение (8.32) дает возможность, применяя метод ryp-
вица, установить условия устойчивости. Однако из-за сложной структуры коэф
. Необходимо учесть, что с изменением уrловой скорости reHepaTopa изменяются зна-
чения э. д. с., частота ее и обусловленный ею ток, изменяются также вращающие моменты и
мощности турбин синхронных машин. С изменением частоты изменяются все реактивные со-
противления системы, в том числе и сопротивления наrрузок, а следовательно, и их мощнос-
ти, меняется режим асинхронНых двиrателей, хотя в отношении их обычно предпола-
rают, что вследствие малоrо значения постоянных инерций уrловая скорость всех .!lвиrате-
лей следует за изменениями скорости reHepaTopoB. .
Таким образом, при учете изменения скорости reHepaTopoB необходимо было бы учесть
большое число связанных процессов. Однако в большинстве случаев оrраничиваются уче-
том 'l'олько тех процессов, которые в дaHHЫJ, условиях практически наиболее существенны.
265
фициентов лучше это делать для частных случаев применительно к конкретным
числовым значениям.
Заметим, что прохождение через нуль свободноrо члена аз, зависящеro от
частоты каждой станции, не зависит от их инерций (постоянные T J сокращаются
при аз == О).
Практические критерии. Рассмотрение. определителя (8.31) позволяет сделать
важные выводы. Если вместо устойчивости медленных движений при малых
колебаниях вновь (см. rл. 4) выявить устойчивость установившеrося режима,
То, положив в (8.31) р == О, получим для установившеroся режима
О 1 1 О 1 1
Рис. 8.22. Решение характеристическоrо уравнения
(8.32):
а при учете трех корней; при отражении изменений ча-
стоты (+Рз) снстемы; 6 при учете только комплексных
корней; прн пренебрежении изменением частоты
дМ! дМ! дМ!
дО!2 доо ! дЫ 2
дМ 2 дМ 2 дМ 2
дО!2 доо ! дЫ 2
+ дМ 2 ) дМ 2 ( дМ! + дМj ) .
дЫ 2 . дО!2 доо! дЫ 2
Выражение (8.33) определя-
ет те же условия, которые были
получены в rл. 4 [см. (4.8а),
(4.8б)] при нахождении устойчи-
вости нормальноro режима* (ero
текучести или сползания); усло-
вия эти были названы nракти-
ческими критериями, но, кроме
Toro, уравнение (8.33) является
свободным членом аз характе-
ристическоrо уравнения малых
колебаний (8.32). Это означает,
что свободный член аз и любой
практический критерий, пос-
кольку он получен на основе ра-
венства Dy,p . аз, пройдут че-
рез нуль одновременно; следо-
вательно,
все практические критерии при равенстве их нулю определяют только ера-
ницу апериодической устойчивости и в этом смысле любой из них равносилен
условию а п == 0* * .
Влияние изменений скорости. Уравнение (8.32), имеющее третий порядок,
учитывает изменение скорости каждоrо эквивалентноrо reHepaTopa. Это уравне-
ние имеет три корня, один ИЗ которых (Рз) характеризует общее апериодическое
движение системы, а два друrих обычно бывают комплексными и указывают на
Dy.p ==
с;
d ll
d 12
c
d 2 !
d 22
дМ! ( дМ 2
== дОа доо!
(8.33)
а)
1;
1;
* При этом в силу малости отклонениЙ ro можно принять Р с=: М.
** При выводе этоrо положения была испмьзована упрощенная система уравнений
(8.28), отвечающая уравнениям (4.7). ТакоЙ же результат, но только После более rромоздких
nреобразованиЙ, Mor бы быть получен на основании !Уравнений (4.1}.
,.,t::
,"Vv
наличие колебате.'1ЬНЫХ затухающих ( cx + j'V) или нарастающих (+сх + j'V) co
ставляющих. Характер процесса показан на рис. 8.22, а. Если определяется
только устойчивость станций 1, 2, а не абсолютная устойчивость каждой станции,
то их общим движением (корень Рз) можно пренебречь и рассмотреть только дви-
жение (рис. 8.22, б) одной станции относительно друrой. При этом задачу можно
упростить, приближенно оперируя только с относительной скоростью р б12 ==
== ш. Torдa уравнение третьей степени перейдет в квадратное, так как O) ==
== dб!dt == дШl == дШ2' С учетом этоrо в (8.32)
аз == aM l ( дМ 2 dt дМ 2 dt ) дМ 2 ( aM l dt дМ, dt ) == о;
aOl2 aOl2 дои aO l2 a O l2 д О 12
а; == о; а 2 == !Z12'
Уравнение (8.32) при этом примет вид рЗ + а1р2 + 17.12Р == О. Сокращая да-
лее р, что означает потерю корня, определявшеrо общее движение, получим xa
рактеристическое уравнение только относительноrо движения системы:
р2 + ра 1 + С%12 == о,
[де
oM l дМ 2
17.12 ==
a 0 12 Т J 1 aO l2 Т J2
Прохождение 17.12 через ноль определяет нарушение апериодической устой
чивости. При этом следует обратить внимание на то, что предел устойчивости
оказался зависящим от постоянных инерции, что обусловлено рассмотрением
относительноrо движения вместо абсолютноrо (см. 8.7).
8.7. устойчивость позиционной СИСТЕМЫ ПРИ ПРЕДСТАВЛЕНИИ
НArРУЗОК ПОСТОЯННЫМИ СОПРОТИВЛЕНИЯМИ
Задача об устойчивости системы «две станции наrрузка» решал ась ранее
с учетом . изменений частоты на каждом [енераторе. При этом косвенно учиты-
вался эффект демпфирования. Исследуем теперь чисто позиционную систему,
все режимы которой зависят только от положения (<<позиций») ее элементов. Рас-
смотрим задачу применительно к системе, изображенной на рис. 8.23. В данной
системе станция 1 передает мощность в приемную систему. Предположим, что при
увеличении мощности станции 1 мощность станции 2 уменьшается. Запишем со-
отношения мощностей аналитически:
1 Рl == Е! YlJ S n а н + E 1 E 2 Y12 Si «)12 C( 12 );
Р 2 == Е 2 У22 SlП а 22 Еl Е 2 У12 SlП «)12 + C( 12 )
и представим их r афически (рис. 8.24).
В системах, аналоrичных изображенной на рис. 8.23, дополнительный уrол
взаимноrо сопротивления СХ12 обычно отрицателен. В уравнении (8.34) значение
СХ12 отрицательно, а следовательно, максимум характеристики Рl наступает при
уrле (900 'СХ121), минимум характеристики Р 2 наступает при уrле (900 + ICXI21).
Таким образом, расхождение между экстремальными значениями характеристик
(8.34)
(8.35)
267
составляет величину 2СХ12' На эту же величину расходятся и значения уrлов, при .
которых синхронизирующие мощности дРl/д612 и дР2/д612 равны нулю.
Пользуясь упрощенными уравнениями и полаrая вращающие моменты чис-
ленно равными мощностям, для малых отклонений можно запи;сать
т d 2 0 1 + dP1 8 == О. т d 2 0 2 + dP 2 8 == О. ( 8.36 )
J! dt 2 d 0 12 12 , J2 dt2 d0 12 12
Вычитая из первоrо уравнения (8.36) второе, получим
d2 812/ dt 2 + 1%12 L18 12 == О.
Здесь
А dP 1 dP 2
L.lU 12 == иl и 2 ; 1%12 ==
Т J! d0 12 Т J2 d0 12
Характеристическое уравнение име- р
ет вид
Е I PI f1.,
z Р'и,f}IН _ilZ H Z Pz,Oz f. Z
,- ........... . 2.......
t Ри.fl н
ZH
p
dp
О(,2 } do
12
812.
р2 + 1%12 == О.
Из рис. 8.24 следует, что характе-
ристика относительноrо ускорения СХ12 ==
== f (612) будет находиться между харак-
теристиками синхронизирующих мощ-
ностей. Точка на оси 612 [де относитель-
ное ускорение проходит через нуль, бу-
дет, очевидно, сдвинута при 'СХ12! < о по
отношению к максимуму кривой Рl ==
== f6 12 В сторону больших уrлов.
8;2
Рис. 8.23. Схема системы
Рис. 8.24. Характеристики мощности
Р == q:>(I\12)' относительноrо ускорения
а12 == {(I\12) И синхронизирующих мощ-
ностей дР/д1\12 == {(I\12)
Значение предельноrо уrла находится из условия
( cos а12 1 + т )
812 пр == arctg l .
SlП а12 т
(8.37)
[де т == Тл/Тп.
Таким образоht, nредельн.ый режим при nозицион.н.ой идеализации за-
висит от отн.ошен.ия r/x == sin CX12/COS СХ12 == tg СХ12 и соотн.ошен.uя nосто-
ян.н.ых ин.ерции т.
На рис. 8.25 показано изменение предела статическОЙ устойчивости 612 ==
=== '(т, (/х).
268
Следовательно, предел устойчивости системы, состоящей из двух станций,
лежит при большиХ уrлах, чем предел мощности станции, работающей на шинах
бесконечной мощности. Выявленное обстоятельство моrло бы иметь практическое
значение, указывая на то, что система, состоящая из двух станций, может рабо
тать у предела мощности без потери устойчивости при малых толчках. Но обычно
уrлы а12 невелики* и расхождение по уrлу пределов мощности и устойчивости
012' zpalJ
т=О,О
0,1
О,З 0,2
050,4-
О.Б'
080,7
t.a О..в '
120
т=о,О
о.з0. 2 ,1
0,50,4- '
0.70,5 ,
0,90.8 '
1,0 J
Ба
I
50
I I
4-0 зо
I
20
1
fO
40
Т
О
I
10
I
20
I
30
r I
4-0 f2' zpaiJ
Рис. 8.25. Предельный уrол б 12 апериодически устойчивых режимов по.
зиционной системы В зависимости от уrла a12
редко составляет уrол больше 5 15°, а наличие ряда не учтенных в анализе cy
щественных факторов заставляет осторожно отнестись к выводам, касающимся
возможности работы у предела мощности.
Заметим, что при рассмотрении относительноrо движения станций возник-
шие колебания б удут незатуха ющими, если только не учитывать то обстоятель-
ство, что 'ZH == V R + (оох н )2 будет зависеть от измененай (о == (00 + dЫdt.
Расчет сложной позиционной системы методом малых отклонений (колеба
ний). Приведенное в 8.5 рассмотрение системы как консервативной позиционной
является идеализацией, при которой любые возмущения режима приводят к He
затухающим колебаниям. В этих системах автоматическое реrулирование учи-
тывается идеализированно: reHepaTop замещается неизменной э. д. с. Ех, при-
ложенной за сопротивлением X, меньшим Xd или Xq. Реrулирование скорости
первичных двиrателей при этом отражается тем, что вращающие моменты (мощ-
ности) и частота в установившемся режиме принимаются неизменными незави-
симо от наличия шин бесконечной мощности. I
Рассмотрение статической устойчивости в отличие от динамической и резуль-
* Относится к маrистральным передачам. При передачах с промежуточными отбора-
ми' и слабых связях уrлы а 12 MHoro больше и соответственно заметнее упомянутый эффект.
.
269
тирующей* предполаrает определение условий возникновения относительное о
двu:жения роторов еенераторов системы и выявление еео характера только в на-
чальной стадии движения машин (возможность возникновения монотонно ИЛИ
кодебательна развивающеrося выпадения их из синхронизма). Подробноrо ана-
лиза дальнейшеrо протекания процесса при этом не производится, хотя на ос-
нове методов анализа статической устойчивости в некоторых случаях моrло бы
выявиться и протекание процесса во времени.
При таких допущениях обычно выямяется характер изменения электриче-
cKoro режима: возможность появления монотонно развивающеrося снижения на-
пряжения так называемой давины напряжения (см. rл. 11), монотонно или
колебательно развивающеrося самовозбуждения иди колебательно развивающе-
rося саМ8раскачивания, переходящеrо иноrда в устойчивые автоколебания.
8.8. СТАТИЧЕСКАЯ УСТОIiIЧИВОСТЬ СИСТЕМЫ
С АВТОМАТИЧЕСКИМ РЕrУлятоРом ВОЗБУЖДЕНИЯ сильноrо ДЕIiIСТВИЯ
Одна из rлавных задач анализа выбор стабилизирующих параметров АРВ
с. д., обеспечивающих статическую устойчивость электрической системы при за.
дании C.JIедуlOщих величин: а) параметров системы;
б) ее режимов и диапазонов их изменения; в) точности
поддержания напряжения (что обеспечивается предва-
рительным выбором коэффициентов усиления по от-
клонению режимных параметров). Эту задачу можно
решать методом, примененным в 8.2, или методом
D-разбиения по двум параметрам, т. е. построением
серии областей статической устойчивости в координа-
тах коэффициентов усиления по двум производным.'
В первом случае систему динеаризованных уравнений
простой системы (рис. 8.26) при установке на reHepaTopax станции АРВ с. д. за-
пишем следующим образом. Вместо (8.1), соrласно структурной схеме (рис. 8.27),
получим
r Ут Хс
I"'-.J. , U=СDПs:t
;4РВс.
Рис. 8.26. Упрощенная схе.
ма системы при рассмотре-
нии АРБ с. д.
[ 1 +1 т 1+ l т (Коп) + КШi р + К 2щр 2) I'1П j ] +
р е Р рПj
1
+ ( TdoPI'1E ), (8.38)
rде П j параметр режима, выбранный для реrулирования, Кт и т рпi
коэффициенты усиления и постоянные времени соответствующих каналов pery-
лирования (рис. 8.27).
Остальные уравнения будут такие же, как в (8.1). Параметры ,режима П j
связаны со значениями коэффициентов характеристическоrо уравнения, и имеNЯО
эта связь отражает влияние рееулятора на устойчuвость.
I'1Eq == I'1Eq е + I'1Eq св ==
* Можно было бы предложить методы анализа, одинаковые для всех трех видов устой"
чивости, например в любом случае количественно задавать возмущение и численным интеr-
рированием находить изменение всех параметров режима во времени. Можно было бы также
применить методы, выявляющие в любом случае характер движения, без численноrо интеr-
рирования, например прямой метод Ляпунова. Однако в принятом делении есть
практические удобства, а методы, исключающие это деление, пока разработаны неДостаточно.
270
Выбор параметров режима П j часто определяе/Жя удобством измерения пa
pa/rtempoe и удобством эксплуатации (надежностью, простотой переКЛIOЧeния
схемы коммутации и т. д.). Суммирование по j вводится в тех случаях, коrда АРБ
реrулирует одновременно по нескольким параметрам режима, что часто выпол-
няеТС5i в современных АРБ с. д. (например, используются напряжение и ток, на-
пряжение и частота, напряжение и уrол и т. д.).
Рис. 8.27. Общая структуриая схема АРБ с. Д. при
введении в реrулятор j отклонений параметров (ко-
эффициент усиления Коп/, постоянная времеии по
каналам усиления ТрПj) и первых и вторых произ-
водных по любым параметрам при коэффициентах
усиления Кт! по первой производной, К2Пj по
второй, при постоянных времени по каналам усиле.'
ния TJПj и соответственно Т2Пj
Рис. 8.28. Упрощенная струк-
турная схема замещения АРБ
с. Д., принятая для анализа
Предположим, что реrулирование происходит по отклонению напряжения
-rенератора I1и l' и первой и второй производным уrла б (рб == М; р 2 б == рМ),
тоrда значение I1Eqe в (8.38) при Т рПj == О примет вид
/),E qe == I [ КОи /).иl' + (КО! + РКlj) М ] . (8.39)
I + РТе
Соответственно упростится структурная схема (рис. 8.27). Проводя точно
такие же выкладКИ, что и в 8.1, но учитывая в (8.38) значение EqE' соrласно
(8.39) получим характеристическое уравнение системы, имеющей реrулятор силь-
Horo действия со структурной схемой, приведенной на рис. 8.28. Оно имеет вид
D (р) == а о р4 + а1р3 + (а 2 + /).а 2 ) р2 + (аа + l1а з ) р + (а 4 + l1а 4 ) == О, (8.40)
rде
!!.а 2 == Кои T J Ь 1 /Ь З + Кlj Ь 1 ;
ао == т J Т е T ;
!!.аз == Ко! Ь 1 ; /).а 4 == Кои с з Ь 1 /Ь з ;
== T J (Те + T );
а 2 == T J + T Те с 2 ; аз == Т е С 1 + T C2; а 4 == с 1 ;
дР E E и и2 (Xd X )
С 2 == == coso.....,... cos20;
д!\' '
Xd'iJ Xd Xd
дР EqU
С 1 == == coso;
до Xd
Св =:;:: С 1 + и2 . (sin О tg 01' cos о) siп О,
Х(Д) ХС
aP Eq U .
Ь 1 == == slПО;
aE q Xd
271
дР иr U
Ь з == == sino
дU r Ха cos 5r
При T > О все коэффициенты характеристическоrо уравнения положитель-
ны. Неустойчивость может возникнуть только в связи с переходом через нуль оп-
ределителя fурвица, который для данной системы имеет вид
Дrур == (ав + дав) [а 1 (а 2 + Да 2 ) а О (аз + дав)] ai (а 4 + Да 4 ) О,
или после подстановки конкретных значений параметров
(Т е С 1 + T C2 + КО! Ьд [TJ (Те + T )"(TJ + T Те С 2 + Кои T J Ь 1 /Ь З + Кц Ь 1 )
T; TeT (TeCl+T C2+Kofbl)] [TJ (те+т )]2(сl+коисзы1ьз) 0;; (8.41)
Из (8.41) после простых, хотя и rромоздких, преобразований находится
коэффициент усиления по напряжению, в выражении KOToporo жирным выдел
ны коэффициенты, обусловливающие э Ф Ф е к т с и л ь Н О r о р е r у л и р 0-
в а н и я:
К Ьз(ТеСl+Т С2 + l5ofb 1 )[TJ +T TeC2+Klfbl
ОИмакс == , .
TJ ыlте(сз сl)+тd(сз с2) коfьl]]
Те T ( , ) ( ' )
, T e C t+ T d c 2 + KOfb t ] ьз Te+Td сIт;
(Те+ T d )
Т) ы1те(с3 сl)+т (сз с2)) KOfbt]
Заметим, что при KOf ==
==K1f == О выражение (8.42) при:
обретает вид уравнения (8.12),
полученноrо для АРБ п. д. Мак-
симальный коэффициент усиле-
ний, найденный соrласно (8.42),
для АРБ с. д. оказывается зна-
чительно больше определенною
по (8.12) и позволяет хорошо
поддерживать напряжение (см.
. рис. 8.13).
Зависимость Кои макс == {(о)
для АРБ с. д., построенная по
выражению (8.42), представлена
на рис. 8.29, rде для сравнения
приведена зависимость Кои макс
для АРБ п. д.
еВ fJозо. х х
Кои макс' еВ напр
/" '"
",. "
" /
I
I
KOf=KIf=J
I K of =K ff =2
I
I КOf=Кн=/
200
АРВп.В.
150
АРВ с.в.
Комплексное
ресулцро8анце
JOO
50
о
20 40 БО 80
Рис. 8.29. Максимальный коэффициеит усилеиия
при различных способах реrулирования возбужде-
ния для схемы системы рис. 8.26
с и с т е м а Ха == 1,0; T d ; == 1,94 с;
и с х о Д н ы й р е ж и м U r == 1,0; U == 1,0; Р == var.
272
(8.42)
8"
Расчет проводился для схемы,
имеющей следующие параметры:
r е н е р а т о р Xd == 2,5; X ==
==0,36; T dO == 5 с; Т J == 5 с; Т е==5с.
Метод D разбиения. Несколько усложним рассмотренную задачу, предполо
жив, что в (8.39) !J.E qe является функцией отклонений напряжения ди r и тока
д! r reHepaTopa, а также функцией первой и второй производных HeKoToporo
параметра П, который пока выбирать не будем.
Положим при этом, что ТрИ == Тр! == Т рП == Тр' После преобразований,
аналоrичныХ сделанным в 8.1, получим характеристический определитель си
. стемы уравнения в виде суммы трех определителей:
Т J р2 + С] Ь]
Xd д Е'
(1 + РТе) (1 +pTp)T p до q (1 +pT )(l +pTe)(1+pTp) +
Xd
Т J р2 + С]
+ дЛ
К]пР да
Ь]
дЛ
КшР
дЕ q
( Кои дUr +Ко! !!... )
дЕ q дЕ q
T J р2 + С] Ь]
+ К2пр2 дЛ К2П Р дЛ
до дЕ q
(8.43)
( дUr д! )
Кои +Ко!
до до
== Do (р) + Кш D] (р) + К2П D 2 (р).
Здесь Do(P) мноrочлен пятоrо порядка, коэффициенты KOToporo получа
ются раскрытием первоrо определителя (8.43), имеющеrо вид
Do (р) == а о р5 + а]р4 + а2Р З + (аз + !J.а з ) р2 + а 4 р + а 5 + да 5 == О,
rде
Go==TJ T TeTp; а] == T J (T Te+T Tp+TeTp);
а 2 == T J (T + Те + Т р ) + T Т е Т р С 2 ; аз == T J + ТеТрС] + T (Te + Т р )С 2 ;
а 4 == (Те + Тр)С] + T C2; а 5 == С];
!J.а з == КОИ !J.2И + Ко! Д 21 ; да 5 == Кои !J. ои + Ко! Д О !.
Определители Df(p) == р(!J. 2п р2 + !J. оп ) и D 2 (p) == р2(!J. 2П р2 + !J. оп ), ВХО-.
дящие в (8.43), зависят от коэффициентов !J. оп и !J. 2п , аналитические выражения
которых для разных параметров режима (различных П j) приведены в табл. 8.4.
В соответствии с методом D-разбиения [3] подставим в характерисТ-ическое
уравнение р == jro и запишем
D (j (0) == Do (j (0) + КшD] иоо) + К 2п D 2 (joo) == О.
Каждый из мноrочленов можно представить в виде мнимых и действитель-
ных составляющих:
Do(joo) == R 1 (oo) + jR 2 (oo);
Здесь
R](oo) == а 1 004 (аз + !J.а з ) 002 + а 5 + да 5 ;
Q] (00) == о: Q2(OO) == !J.2П ооз + !J.опоо;
Рl (00) == !J.2П 004 !J. оп 002; Р 2 (00) == о.
D 1 (joo) == Q] (00) + jQ2 (00); D 2 (joo) == Р](оо) + jP 2 ( (0).
R 2 (00) == а о оо5 а 2 ооЗ + а 4 оо;
} (8.44)
273.
Т а б л и ц а 8.4
Пj
11 2 п
11 0 п
8
о
Ь 1
l:.U == Uo Ur
aU r .!2....
TJ == TJ
aE q Ь З
aU r aU r b 1
сl ыl=сз
aE q д8 Ь З
1
д/
T
J дЕ
q
д/ д/
дЕ Cl+ bl
q
8с == 8 8r
a8 r
TJ
aE q
a8 r ( a8 r )
aE q Cl+ l Ь 1
Запишем систему двух уравнений для комплексных и действительных MHoro-
членов таким образом, чтобы в первом столбце Стоял параметр, который при
построении области статической устойчивости откладывается по rоризонтальной
'оси (в данном случае это обычно коэффициент усиления по второй производной):
К 2 П Р l(Ш) + КшQl(Ш) == Rl(Ш);
К'Ю Р 2(Ш) + К ш Q2(Ш) == R2(Ш)'
Решив систему уравнений (8.45) относительно Кш и К 2П , получим
Кш == L1 ш ( ш)/ L1 (ш); К 2 п == L1 2п (ш)/ L1 (ш);
}
(8.45)
(8.46 )
rде rлавный определитель
L1(ш) == I Рl(Ш) Ql(Ш) 1 == Рl(ш)Q2(Ш);
Р 2 (ш) Q2(Ш)
так как Р2(Ш) == Qt(m) == О, миноры запишутся как
L1 ш (ш) == I Рt(Ш) Rl(Ш) 1 == Рl(Ш)R2(Ш);
Р 2 (ш) R2(Ш)
L1 2п (ш) == I Rl(Ш) Ql(Ш) I ;=:::; R 1 (ш)Q2(Ш)'
R2(Ш) Q2(Ш)
Подставляя выражения определителей в (8.46), получим
Кш == R 2 (ш)/Q2 (ш); К 2 п == Rl(Ш)/Рl (ш).
Подставив выражения мноrочленов (8.44), окончательно запишем:
КШ ;;:= (а о ш 4 а 2 ш 2 + а 4 )/(L1 2п ш 2 L1 0П ); } (8.47)
К 2п == r а 1 ш 4 (аз + L1а з ) ш 2 + а" + L1a"J/[ ш 2 (L1 2 п ш 2 L10 П )].
274
Меняя ffi от О ДО + ОО и рассчитывая значения Кш и К2П по уравнениям
(8.47), прочертим кривую D разбиения. Применив правила штриховки [3], най-
дем области статической устойчивости. Эти области определяют соотношения
коэффициентов усиления по производным (параметрам устройства стабилизации),
обеспечивающим статическую устойчивость исходноrо режима электрической
системы, заданной всеми парамет-
. рами. Построив области устойчи- а)
вости для серии расчетных режи-- К 11
мов, можно найти общий участок
этих областей, определяющий та-
кую совокупность коэффициентов
усиления по производным, которая
обеспечивает статическую устойчи-
вость во всем диапазоне расчетных
режимов. .
Приведем примеры построения об-
ластей схатической устойчивости с АРБ
с. д. для серии режимов с выделением
общеrо участка. Предположим, что в
качестве параметров, по которым в
АРБ вводятся производные, выбран ток:
Кш == K lI ; К 2П == К 2 / .
о 5)
II\.IW К 10
t
в
t
t
А
/1u
/120
Соrласно табл. 8.4, находим Д П
и.доп и строим области устойчивости
(8.47). На рис. 8.30, а показаны получающиеся при этом rраницы областей для различ-
ных режимов (д == 30, 60, 100°). Здесь следует обратить внимание на изменение характера
процесса 8 == 'и). При продвижении вдоль rраницы области от А в направлении В и Далее
в направлении С частота колебаний на rранице непрерывно возрастает. При этом амплитуда
колебаний при соответствующей настройке АРБ и малых возмущениях может оставаться orpa-
ниченной, сохраняя устойчивость на rранице [5, 8.2]. Выбором параметров реrулирования
иноrда можно расширить область устойчивости. Так, при реrулировании по уrлу К1П == К 10,
К2П == К20 получим области (рис: 8.30, б), более целесообразные в эксплуатации.
Рис. 8.30. Области устойчивости при сильном
реrулировании:
а при введении в реrулятор первой К и и второй К21
производных тока; б то же. уrла KjO' К 20 . Заштри-
хована общая область, отвечающая режимам при {)==-
30+100°
Комплексное сильное реrулирование. Реrулирован.ие по отклонению пара-
метров режима и l1РОИЗВОДНЫМ этих параметров может осуществляться не только
при возд йствии на возбуждение; но и при воздействии на первичный двиrатель*
(турбину или установки, поrлощающие избыточную мощность в переходном pe
жиме, накопители, ИРМ и т. д.). При одновременном воздействии на возбу
дители и первичный двиrатель уравнение (8.1) примет вид
ДЕ ч == (р) дE + 1 (р) дU r + 11 (р) рДП + 12 (р) р2ДП. (8.48)
Уравнение (8.2) при Р d == О представим как
др == TJ р2Д'8 Рl(Р)РДП Р2(р)р2ДП. (8.49)
Уравнение (8.48) предполаrает воздействие по производным, осуществляе-
мое через реrулятор возбуждения, а уравнение (8.49) через реrулятор скорос-
ти турбины.
* Разумеется, воздействие на турбину возможно только при современных турбинах;
имеющих малоинерционное реrулирование.
275
Очевидно, что, как и в рассмотренном случае реrулирования только воз-
буждения [енератора, в характеристическом уравнении появляются «добавки»
к ero коэффициентам. Пуст:'> воздействие на !!.Р и !!,Eqe записывается соответст-
венно в виде рЫ) == !!.{ и р2!!.б.== р!!.{, Torдa уравнения (8.48) и (8.49) можно пред-
ставить так:
!!.E q === s (р) !!.E + l' (р) !!.и r + [1'1 (р) Р + 1'2 (р) р2] !!.о;
дР == ([Т J + Р2 (р)] р2 + Р1 (р) Р I !!.О.
Примем обозначения:
(8.50)
(8.51)
s(p) == Tdop;
Р1 (р) ==
К 1
1 +рТ р
Коu
l' (р) ==
(1 + РТе) (1 + рТ и) (1 + рТу)
К 2
Р2(Р) == 1 + рТ р
( Ко!
1'1 р) ==
(1 + РТе) (1 + рТу) (1 + pT 1 )
K 1 !
1'2 (р) ==-
(1 + РТе) (1 + рТу) (1 + рТ 2 )
1'0 (р) == 1'1 (р) Р + 1'2 (р) р2; Т и (р) == TiJ (р) + b1,\'o (р).
T (р) == TJ + Р2 (р);
T;J (р) == T (р) р2 + Р1 (р) р;
Тоrда после преобразований (см. 8.1) получим определитель исследуемой
системы;
T;J (р) + С 1 b1 (P) Ь 1 1' (р)
D 1 (р) == T;J (р) + С 2 Ь 2 О (8.52)
T J (р) + с з о Ь з
Исследование ero для конкретных случаев можно провести аналоrично тому.
как это было сделано для реrулятора пропорциональноrо действия. Получив до-
вольно rромоздкие выражения (см. 8.2), их следует свести к квадратному урав-
нению. Решение этоrо уравнения, проведенное для конкретных числовых данных
АРВ п. д., позволяет определить зависимости максимальноrо коэффициента
усиления (на рис. 8.29 штриховая линия) при различных способах реrулиро-
вания.
Таким образом, дополнительное реrулирование турбины расширяет возмож-
ности автоматическоrо реrулирования и пропорциональноrо, и сильноrо дейст-
вия. Похожий эффект дает реrулирование ИРМ, подключенных к шинам reHepa-
тора. Возможности комплексноrо реrулирования очень широки, но пока они еще
не используются.
8.9. СИНТЕЗ СТРУКТУР СИСТЕМ АВТОМАТИЧЕскоrо
РЕrУЛИРОВАНИЯ ВЫСОКОЙ ТОЧНОСТИ
При проектировании АРВ с. д. синхронных машин часто ставится задача синтеза'
такой структуры, в которой не существовало бы противоречия между точностью поддержания
напряжения на шинах reHepaTopa и устойчивостью. Возникает задача создать систему,
276
устойчивую при сколь уrодно большом коэффициенте усиления. Как правило, такая струк-
тура позволяет также получить большие размеры областей статической устойчивости во всех
режимах и повысить качество переходноrо процесса при постоянной настройке. Под синте-
вом структуры АРВ понимается выбор стабилизирующеrо устройства и параметров реrули-
рования, или, иначе, выбор закона реrулирования.
Синтез структур систем автоматическоrо реrулирования высокой точности математически
решает следующую задачу.
Пусть имеется характеристическое уравнение n-Й степени
аорп + alpп l + ... + aп lpп + а п о.
Запишем ero в виде уравнения
(8.53)
D (р) Do (р) + D 1 (р),
(8.54)
описывающеrо переходные процессы в электрической системе при автоматическом реrулиро-
в 1НИИ возбуждения. Требуется обеспечить условия статической устойчивости при неоrрани-
'1енном увеличении КОЭффИI!,иента усиления по отклонению напряжения, т. е. при поддер-
жаниИ напряжения синхронной машинЫ с высокой точностью.
Для решения этой задачи необходимо сформулировать математические условия стати-
ческой устойчивости и провести синтез структуры АРБ, обеспечивающей их выполнение.
Условия статической устойчивости при иеоrраниченном увеличении коэффициентов
усиления АРВ. Рассмотрим увеличение коэффициента усиления КО одноrо звена, входящеrо
последовательно в структурную схему АРБ с. д. Передаточная функция АРБ с. д.
W п (р) KoW* (р),
rде
1
W* (р) К*()и + К*шр'; K*oи K()и / Ко; К*п Кш/Ко.
' 1
Задачей синтеза структуры АРБ с. д. является выбор числа производных 1 и парамет-
ра реrулирования П (либо одной, либо комбинации несколькиХ режимных параметров).
Характеристическое уравнение (8.54) представИМ как
D (р) Do (р) + KoD*1 (р) о.
ЗдесЬ Do(p) аорп + alpп l + ... + а п ;
(8.55)
1
DI* (р) К*ои( ,1. шр 2 + ,1.JИ) + (,1.2П р2 + ,1.()п) К*iП рi .
' 1
Быражения для ,1.2П и ,1.0П приведены в табл. 8.4.
При Ko oo часть коэффициентов характеристическоrо мноrочлена D(p)-+oo, что воз-
можно только при условии, коrда часть корней характеристическоrо уравнения D(p) О
уходит в бесконечность. Для устойчивости системы при Ko oo необходимо и достаточно,
чтобы все корни уравнения D(p) О лежали в левой полуплоскости корней. Для выполне-
ния этоrо требования поступим следующим образом. Разделим (8.55) на Ко и обозначим
1/ КО т. Здесь т является малым параметром, так как при Ko oo значение т о. Сис-
тема будет устойчива при сколь уrодно большом коэффициенте КО, если уравнение
mD o (р) + D*l (р) О
(8.56)
удовлетворяет условию устойчивости.
При т О уравнение (8.56) вырождается в уравнение ПеЙ степени:
п, п, 1
D*l (р) == ЬоР + Ь 1 р + . . . + Ь пI о.
(8.57)
Уравнение (8.57), характеризующее систему при Ko oo, называется вырождеННblМ.
Вследствие непрерывной зависимости корней алrебраическоrо уравнения от ero коэффици-
ентов можно утверждать, что коrда т О, то n корней уравнения D(p) == О стремятся к
nl корням уравнения D*l(P) == О. Остальные n n 1 корней уравнения D(p) О стремятся
к бесконечности.
271
Если уходящие в бесконечность корни при т----+- О располаrаются слева от мнимой оси,
то устойчивость будет определяться вырожденным уравнением. Число корней, уходящих при
т----+- О в бесконечность, зависит от разности порядков n n 1 . Практический интерес пред-
ставляет случай, коrда n 1 < n.
Рассмотрим случай, коrда вырожденное уравнение удовлетворяет условиям устойчи-
вости, т. е. все ero n 1 корней лежат в левой полуплоскости корней. Если т----+- О, то n 1 корней
уравнения D(P) О будут стремиться к n 1 корням уравнения D*l(P) о, которые в этом
случае будут расположены слева от мнимой оси комплексной плоскости корней. Остальные
n n 1 корней D(p) О будут уходить в бесконечность.
Сформулируем условия, при выполнении которых n n 1 корней будут уходить в бес-
конечность слева от мнимой оси плоскости корней.
Пусть n n 1 1. В этом случае уравнение (8.56) запишется как
m (аорп + a1pп 1 + . .. + ап) + bopп l + b]pп 2 + ... + bп 2 О.
Произведем замену переменных р q/m:
qп qп 1 qп l qп 2
а о тп 1 + а] тп 2 + . . . + Ь О тп I + Ь 1 тп 2 +... + bп l О.
Умножив на тп 1, получим
aoqп + aImqп l + ... +boqп l + blmqn 2 + ... + bп 1тп 1 == о.
При т----+- О это уравнение стремится к виду
aoqn + boqп l ==qп l (aoq + Ь о ) == О.
Уравнение, коэффициентами KOToporo являются старшие члены полиномов Do(p) и D 1 (p),
записывается как ,
aoq + Ь О О
(8.58)
и называется вспомоrательным уравнением первоrо рода.
Решением уравнения (8.58) будет
q bo/ao или p== bo/(тao).
При т----+- О значение Р----+- oo, если Ьо/а о > О. Таким образом, коrда n n 1 == 1, един-
ственный корень, уходящий в бесконечность при т----+- О, будет расположен слева от мнимой
оси на плоскости корней, если Ьо/а о > О.
Рассмотрим случай, коrда n n 1 2. Уравнение (8.56) в этом случае запишем как
m (аорп + alpп l + ... + ап) + bopп 2 + Ь1рп з + ... + bп 2 == о.
Произведя замену переменных р m I/., получим
qп
ао + а1
1
т 2
qп l
}
m 2
qп 2
+ ... + а п + Ь О + Ь 1
т 2
qп з
+ ... +bп 2'==O.
т 2
n 2
"""2
Умножим на m
aoqп + a1qп Iml/2 + ... + boqп 2 + b1qп 3ml/2 + ... == О.
При т----+- О это уравнение стремится к виду
anqп + boqп 2 qп 2 (a o q2 + Ь о ) == О.
УравнеlШе
a o q2 + Ь" == О
называется всnомоzаmельным уравнением emopozo рода.
(8.59)
278
Решением уравнения (8.59 ) будет
q== Y bo/ao или p== Y (bo/ao)/т.
При Ьо!а о > О значение PI.2 ==::!:: iV bo/(тa o ) .
При т О ко\Эни PI.2 стремятся к =!::joo, что соответствует условию, при котором сис
тема находится на rранице устойчивости.
Устойчивость или неустойчивость системы зависит от Toro, с какоЙ стороны от мнимой
ОСИ плоскости корней движутся корни к мнимой оси при т О. ДЛЯ Toro чтобы это YCTaHO
вить.И найти условия, при которых корни подходят к мнимой оси слева, учтем первое приб
лижение к малой величине т:
aoqn + alqn lтl12 + boqn 2 + ы1n зтl122 == О.
Разделим на qn З, получим
аоqЗ + alтl12q2 + boq + Ь 1 т) 12 == АоqЗ + A 1q 2 + A 2 q + Аз == о.
Запишем условие устойчивости по rурвицу:
А 1 Аз О
ryp == Ао А 2 О == Аз (А 1 А 2 АоАз) > О
ОА 1 А з
или
al тl / 2b O ao b )т l / 2 == т l / 2 (аlЬО а о Ь 1 ) > о.
Поделим последнее уравнение на аоЬо, в результате получим
аl/а о Ь 1 /Ь О > О.
Таким образом, при п пl == 2 два корня будут уходить в бесконечность слева от мни-
мой оси плоскости корней, если выполняется условие
аl/а о Ь 1 /Ь О > О.
РассмотрИМ <;лучай, коrда п пl == 3 . Поступая так же, как в предЫДУЩИХ двух слу-
чаях, получим вспомоrательное уравнение аорЗ + Ь О == о, корни KOToporo
3/
PI. 2. 3 == V Ьо/а о .
Заметим, что при извлечении кубическоrо корня из минус единицы, которую можно
представить вектором l == e i (1t+21t+2 1t ), на комплексной плоскости корней получается еди-
ничная звезда с компонентами Рl == e i1t / 3 , Р2 == e i1t , Р3 == е i5 1t/з. При извлечении куби
ческоrо корня из плюс единицы, которую можно представить совокупностью трех векторов
1 == ei(O+21t+21t), на комплексной плоскости корней образуется единичная звезда с компо
нентами Рl == e io , Р2 == e i21t / 3 , РЗ == е/ 41t / З .
Движение корней при т О определяется уравнением PI. 2. 3 == У Ь,,/(та о ). При
holao > О три корня исходноrо уравнения при т О стремятся к асимптоте звезды -V 1 .
а при Ьоl ао < о к асимптоте звезды -V-+Т .
Таким образом, при n nl == 3 независимо от знака Ьо/ао всеrда найдутся корни (два
комплексных или один действительный), которые при т О стремятся в илюс бесконечность,
т. е. подходят к мнимой оси справа.
Следовательно, в случае вспомоrательноrо уравнения третьей сreпени исходная систе-
ма при Ko oo будет всеrда неустойчива.
Проведенный анализ позволяет сформулировать н е о б х о Д и м ы е и Д о с т а т о ч-
279
н ы е у с л о в и я у с т ой ч'и в о с т и с и с т е м ы, описываемой уравнением D(P) '==
== о при иеоrраничеином увеличеиии Ко:
1) вырожденное уравнение должно указывать на устойчивость;
2) n n 1 2;
З) кории вспомоrательноrо уравнения должны лежать в левой полуплоскости либо на
мнимой оси комплексной плоскости корней уравнения D(p) == О.
Выбор структуры АРВ по необходимому условию n nl 2. 1. АРВ п. д. ПО от-
клонению напряжения. Характеристическое уравнение
D (р) == Do (р) + Кои (112U p2 + 11 0u ),
(8.60)
rде п == 5, nl == 2, п пl == З.
Невыполнение необходимоrо условия n п 1 2 показывает, что система, сиабженная
АРВ п. д., прииципиально не может обладать статической устойчивостью при неоrраничен
ном увеличении коэффициента усиления по отклонению напряжения.
Таким образом, структура АРВ п. д. ие удовлетворяет требованиям систем автомати-
ческоrо реrулирования высокой точности.
Решение вспомоrательноrо уравнения mаорЗ: + 11 2u == О
ТfJ == Д2и I (тао), р 1, 2, 3 == -V 11 2U / (mа о )
при Д2U1аО > О показывает, что с увеличени м Кои два комплексных корня стремятся в пра-
вую полуплоскость, т. е. нарушение устойчивости в этом случае имеет характер самораска-
чивания.
2. АРВ с. д. с реrулированием по отклонению напряжения и стабилизацией по произ-
водным уrла 6. В этом случае выорp структуры заключается в определении числа производ-
ных уrла 6. Характеристическое уравнение простой реrулируемой системы имеет вид
D (р) == Dg(p) + Кои (Дzи р2 + Дои) + 110'0 (К 10Р + К 26# + К зо тfJ) == О.
Условие n nl :;;;;; 2 выполняется только при структуре стабилизирующеrо устройства,
АРВ с. д., содержащеrо первую, вторую и третью производные уrла 6.
З. АРВ с. д. с реrулированием по отклонению напряжения и производными режимноrо
параметра П. Характеристическое уравнение простой системы с реrулированием по откло-
неиию напряжения и производными режимных параметров П имеет вид
D (р) == Do (р) + Кои (112U p2 + Дои) + (Кшр + К 2пр 2 + КзптfJ)( Д2Пр2 + 11 011 ) == о.
Так как для всех рассматриваемых режимных параметров, кроме уrла 6, 11 2п =1= О, то
условие п пl == 2 выполияется при осуществлении стабилизации как по одной первой
производной параметра П, так и по первой и второй производным.
Выбор параметров режима для устройства стабилизации АРВ с. д. Условие n nl <:
2 позволило сформулировать требования относительно числа производных в зависимос-
ти от параметров режима. Это условие лишь необходимое условие устойчивости системы
при Ko 00.
Следующей задачей синтеза является выбор параметров режима, которые необходимо
ввести в стабилизирующее устройство АРВ с. д. Это задача решается С помощью условия ус-
тойчивости вырожденноrо уравнения. Рассмотрим вырожденное уравнеиие для случая pery-
лирования по отклонению напряжения, первой и второй производным параметра режима п
(при условии 11 2п =1= О, 11 011 =1= О):
D 1 (р) == К*ои (11 2U p2 + Дои) + (РК*Ш + р2К*211 ) (11 2п р2 + 11 0П ) ==
== К*2П Д2П Р + К*Ш 11211тfJ + (К*оu 11 2U + К*2П ДОl1) ТfJ + К*J.П 11 011 p + К*оиДои ==
== l1 a1P 4 + l1a 2 тfJ + l1азр2 + l1a4f) + l1a5==0.
Здесь
l1 a l == К*2П 11 211 ; l1a 2 == К*Ш 11 2п ; l1аз == К*ои 112U + К*2П 11 0П ;
l1a4 == К*Ш 11 011 ; l1a5 == К*ои l1ou.
2дО
Необходимое условие устойчивости вырожденноrо уравнения положительность KO
эффициентов формулирует требования к знакам едИНИЧНЫХ добавок (при условии поло-
жительности всех коэффициентов реrулирования) во всех режимах от начальноrо (60) до
предельноrо (6пр) , статическая устойчивость которых должна быть обеспечена (О 60
6 : .
1) 11 2п > о; 2) 11 0П > О, 110u > О.
Выражения для этих добавокприведены в табл. 8.4. Качественные зависимости еди-
ничных добавок от режима (рис. 8.31, а) показывают, что первому условию необходи-
мому условию устойчивости вырожденноrо уравнения удовлетворяет только напряжение
(П == и о U r ). Все остальные параметры режима не удовлетворяют этому условию;
1120 == О,
1120 l < О,
112/ < О.
l1a 2 l1a4 О О
l1al 11 аз l1 a s О
Н 4 == О l1a 2 l1a4 О == l1а s Н з .
О l1a 1 11 аз l1 a 5
При l1as > О требуется, чтобы Нз > О,
rде
о)
й п
Второму необходимому условию удов- а)
летворяют все рассмотренные параметры ре-
жима. Нз
Необходимые и достаточные условия ус-
тойчивостн вырожденноrо уравнения опреде
лим по критерию rурвица. Запишем опреде-
литель для вырожденноrо уравнения четвер
Toro порядка:
й пмин
I
I
I
O p д'
Опр о"
Рис. 8.31. Характеристики вспомоrатель-
Horo уравнения:
а связь определителя Нз с пара метрами на-
чалыюrо режима; б изменеИИе долевых коэф-
фициентов
l1a 2 l1a4 О
.,
Н з == l1al 11 аз l1as == l1a4H2 l1а; l1а Б'
О l1a 2 l1a4
Получим выражение для определителя:
l1a4 1 == l1а211аз all1a4 <== К*1П 11 2П (K*Ou l1 2U + к *2п А оп)
l1аз
К*2П 11 2П К*1П 11 0П -== /(*ои К*1П 11 2п l1 2U .
При К*ои> О, К*1П> О, 11 2u > О, 11 2п > О выполняется требование Н 2 > О. Подста-
вив выражение Н 2 в Нз, получим
I I1a2
Н 2 ==
l1a 1
Нз == К !ПК*оuI12П (11 0п l1 2U 11 0u I1 2п ).
Анализ зависимостей Нз от режима, приведенных на рис. 8.31, показывает, что условне
Нз > О выполняется для всех параметров, кроме напряжения (при П == I1U r Нз == 110U112U
110Ul12U == О).
. Выполнение трех условий устойчивости вырожденноrо уравнения для разных режим-
ных параметровиллюстрируется табл. 8.5, rде знаком «+» отмечено выполнение, а знаком
« » неВЬ1Полнение соответствующеrо условия.
Как видно из табл. 8.5, все условия устойчнвости одновременно выполняются только
при введении в закон реrулирования комбинированноrо параметра П К' представляющеrо
собой линейную комбинацию параметров режима:
Пк== Ur+апП,
281
Таблица 8.5
Параметры
Условие I1И r 1 00 I Опр I п и Иr+а n П
8 2п > О + +
Доп > о + + + + +
Нз> О + + + + при условии
О < а п < апмакс
rде а п коэффициент долевоrо участия BToporo параметра, П ..,.... любой режимный параметр.
кроме напряжения.
Условие 8 2пк == 8ш+ а п 8 2п > О вследствие неравенств 8 2и > О. 8 2п > О приводит К
требованию
а п < 8 2и /1 8 zп I .
Так как Н зи == О. то условие Н ЗПК == Н зп > О выполняется при любом а п > О. По-
этому требования к а п формулируются в виде иеравенства
0< а п < а п манс == 8 zи /1 8 2п 1.
Так как 8 zи и 8 2п зависят от режима. то и а п зависит от режима (рис. 8.31,6). Для
Toro чтобы комбииированный параметр П н удовлетворял всем расчетным режимам (О 1'10 <з
< I'I пр ), он должен быть найден из условия
0< а п < (а п манс)мин == (8 2и /1 8 z п 11мип.
После выбора структуры стабилизации (числа производных. вида комбинированноrо
режимноrо параметра, долевоrо участия каждоrо из параметров режима в выбранном комби-
I Х2 = Хт. Х,
... I r .JI'>O..
I
I
й\ , Ь \, с /d /е 'f
" : J j
и= coпst
Рис. 8.32. Схема исследуемой системы
нированном параметре) следует рассчитать области статической устойчиво ти для определе-
ния рабочей настройки. Опыт показал, что АРБ с. д. с синтезированным законом реrулиро-
вания обеспечивает не только статическую устойчивость при высокой точности поддержания
напряжения, но и большой, общий для всех режимов участок области устойчивости, что 06-
леrчает выбор рабочей настройки и улучшает качество переходных процессов.
Пример 8.1. На ЛЭП, связывающей станцию с системой неоrраниченной мощности
(рис. 8.32), происходят короткие замыкания в точках а, Ь. .... е, j.
У с т а н о в и т ь, как будет меняться характер переходноrо процесса 1'1 == j(t) в за-
висимости от места KopoTKoro замыкания (точки а, Ь. .... е. f) и значения реактивноrо сопро-
тивления Хз. за которым происходят короткие замыкания.
Решение. Переходный .процесс будет определяться начальнымц условиями и соотноше-
нием характеристик мощности в нормальном рI и аварийном рIII режимах:
282
рl == ЕU sin 1); рlIl == ЕU sin 1)
Х» Ха ав
ЕU
ksin1i.
j1
rде
k == 1/[1 + Хl (Х» Xl)/( Х» Хз )].
Предположим, что Хз меняется, прииимая зиачения о; О.1х» ; О.25х» ; О.5х» ; Х» ; 5х» ;
10х» ; 100х» . Построим зависимости k от Хз и места ero подключения 1 (рис. 8.33) Соответст-
вующие характеристики мощности Р == qJ(б) показаиы на рис. 8.3. . а зависимостИ б == f(f)
на рис. 8.35.
J ft.
р
к
1
ХЗ = 100 Хт.
а
ь
с
d
е
f "1
д'
Рис. 8.34. Характеристики Р == rp(l)
при больших (l IV) и малых'(1 4)
возмущениях в различиыJCi точках
Рис. 8.33. Влияние удаленности (хз)
и места (а, Ь. .... е, f) KopoTKoro за-
мыканИЯ на лииии длиной 1
Рассмотрение получецных соотношений показывает. что при уменьшении возмущения
(больших Хз) влияние места приложения на характер возмущения уменьшается и при малых
возмущениях практически исчезает.
Пример 8.2. Стаиция работает через ЛЭП на приемную систему неоrраничеиной мощ-
ности (рис. 8.36). Параметры станции и лэп следующие (в относительных единицах): Xd!1 ==
== 1.5; Еч == 1.07; U == 1; TJ == 15 с.
1. Про в е р и т ь устойчивость сис-
С темы, найти частоту и период собственных
колебаний в различных режимах без уче-
та и с учетом демпферноrо момеита.
2. П о с т р о и т ь зависимость изменеиия
О. уrла во времени при отклоиении ротора иа
02 1° от положеиия установившеrося режима
и ба == О. 60. 90 и l00 Q .
Решение. Выяснить характер пере-
ходиоrо процесса, установив. устойчива
или неустойчива система при малом возму-
E =t,07 11='
001
1;
Рис. 8.35. Характеристики б == !(t) для cпo-
8ИЙ, отвечающИХ рис. 8.33 и 8.34
Рис. 8.36. Схема системы
283
щении, а также построить кривые переходноrо процесса можно, поль:::уясь методом малых
колебаний.
Рассмотрим сначала протекание процесса б е з у ч е т а Д е м пф е р н о r о м о.
м е н т а [P d == О]. Чтобы определить изменение уrла во времени, вайдем корни уравнения
(8.15), которые будут (при С] > О)
Pl,2 == =!= i V c 1 fT J :== =!= i1.
М= <10,
IJO:' *
о I
о
t, с
1
Рис. 8.37. Изменение уrла 1'1«'>* == ,и) без уче. .
та демпферной обмотки:
J для бо О; 2 бо 600; з' бо 900; 4 6,, 100.
Рис. 8.38. Изменение корней Pl.2 == а:!:: i1
х/о 1
CI.,{J
0,8
,0,4
О 30
0,4
o,8
Произвольные постоянные Al и А 2 В уравнении (8.15а) определяются из начальных
условий: t.«'>t o== 1'1«'>0, (dб/dt)t О == О. Первое 11 второе условия соответственно позволяют оп-
ределить
А] + А 2 == Мо; PIA] + Р2А2 == О.
Рещим их совместно: А 1 == А 2 == 1'1«'>0/2. При этом получим, что
М == Мо ( e jTt + e jTt)/2 == .::\00 cos 1t,
т. е. система устойчива.
Прн о > 900, С] < О и Р1,2 == :!:: 1
М == Мо (е ,t + e lt)/2,
т. е. система неустойчива; «'> == 900 критический случай, т. е. rраница находится между
УСТОЙЧИRЫМ и неустойчивым режимами.
Рассмотрим конкретные режнмы. Пусть уrол «'>0 == О. Синхронизирующая мощность
EqU 1 ,07 . 1
Cl== COS0r. == cosO"== 0,713.
xdE 1,5
В соответствии с (8.18) уrловая частота колебаний
1==УО,713.314/15 == 3,86 рад/с, прн этом t == 0,614 ru.
Er соотвеТt'ТВИП с (8.20) период колебаний
Т== 1/0,614== 1,63 с.
Уравненш движения ротора reHepaTopa
М == Мосоs3.Ьбt.
rде t выражено в секундах.
284
fрафик L\6* == I(t) для 60 == О представлен на рис. 8.37 (кривая 1). При 60 == 600 имеем
следующие значения: Сl == 0,356, У == 2,73 рад/с, 1 == 0,435 [ц, Т == 2,3 с, L\6 == L\60cos2,73t,
rде t выражено в секундах. fрафик ЫЗ* == l(t) также показан на рис. 8.37 (кривая 2).
При 60 == 900 рассмотрение режима практически не имеет смысла, так как он является
rраничным и малейшее возмущение уводит систему к уrлам 6> 900 или 6 < 900.
Рассмотрим режим при 60 910. В этом режиме синхронизирующая мощность близка
к нулю и, следовательно, у о, PI,2 о, Т 00. Подставив Рl.2 == О в уравнение движения,
получим
L\O L\Oо (eO t + e ot )/2.
Таким образ:)м, при 6{) 900 уrол 6 меняется настолько медленно, что первое время
можно считать ero сохраняющим начальное значение (рис. 8.37, кривая 3).
Сопоставляя кривые L\6*(t) при различных начальных уrлах 60' можно видеть, что с
увеличением 60' т. е. передаваемой мощности, период собственных колебаний растет, дости-
rая бесконечно большоrо значения при 60 900.
При 60 == 1000 синхронизирующая мощность
Сl == (l ,07/1 ,5) cos 1000 == 0,124.
Корни характеристическоrо уравнения
P1,2==::I::V 0,124.314/15 ==::1:: 1,61.
Изменение уrла L\6(t) в этом случае описывается уравнением
М* L\Oс ( e\,E!t + e I,61t)/2,
rде t выражено в секундах. fрафик {)
М* == I(t) нанесен также на рис: 8.37 й, =ДО*
(кривая 4). Уrол непрерывно возраста- О
ет, что определяется первым слаrаемым 2
уравнения движения. Второе слаrаемое
экспоненциально затухает с постоянной
времени Т 1/1,61 == 0,62 с, оказывая
заметное влияние лишь в начальный
период процесса.
Рассмотрим процесс с у ч е т о м
Д е м п Ф е р н о r о м о м е н т а. При
P d =1= о корни ур'авнения (8.15) опреде-
ляются выражением (8.17). Характер
изменения вещественной и мнимой час-
тей корней для данноrо KOHKpeTHoro
случая показан на рис. 8.38. Мнимая
часть становится равной нулю в режиме,
коrда подкоренные выражения в (8.17)
меняют свой знак, т. е. при
1
t1c
Q
1)
Рис. 8.39. Изменение уrла L\6* [(t) при рас-
чете с учетом демпферной обмотки:
l для бо О; 2 бо 600; 3 бо 800; 4 б. 900; 6
бо 1000
Сl/Т J == P /( 4Tj) илн 00 == arccos [( P /4T J)( Xcn:! EqU)] .
в рассматриваемом случае 'мнимая часть становится равной нулю при 60 == 74,4 О .
При уrлах 60' меньших 74,40, характер затухания L\6* периодический, так как у =1= о; при
уrлах, больших 74,40, апериодический, так как у == О.
Для периодическоrо процесса уравнение (8.15а) можно привести к виду, более удобно-
му для проведения расчетов:
L\,o* (L\Oо/"'() e "t у-;; sin (l t + Фо)'
rде
Фо == arcfg ("'(/а); а о Сl/ Т J .
Кривые переходиоrо процесса, построенные для режимов при различныХ 80, приведе-
ны на рис. 8.39. В режимах при 60 == О и б!} == 600 характер процесса периоднческнй, однако
281)
период колебаний больше, чем в тех же режимах, но рассмотренных без учета демпферноrо
момента. При 60 == 800 процесс апериодический. При 60 900 уrол также остается почти не.
изменным на протяжении рассматриваемоrо времени, как и при отсутствии демпферноrо
момента. При 60 == 1000 уrол непрерывно возрастает, однако действие демпферноrо момента
пр иводит к замедлению роста уrла.
Пример 8.3. На станции, работающей через электропередачу на систему неоrраничен,
ной мощности, установлены реrуляторы возбуждения пропорциональноrо типа с реrулирова.
ни ем по отклонению напряжения. Параметры системы и исходноrо режима следующие:
xd == 1,486; X == 0,848; Хс == 0,504; TJ == 7,5 с; T == 2,85 с; Те== 2 с; Кои == 30; Ро == 1;
Eqo == 1,972; и с == 1; 60 == 490.
Н а й т и предел статической устойчивости.
Решение. Упростим задачу, заменив полное напряжение ero поперечной составляющей
(U ro :::::; U rqo ):
Хс xd xC 0,504 1,486 0,504
U r qo == Eqo + иссosо о == 1 1,972+ .1.0,656== 1,102.
Х& Х& ,486 1,486
Далее запишем [после преобразования (8.12)]
X& X I+T;(J)0(c2T + cITe)/[TJ(T +Te)]
xd хс 1 + Те (xd Хс) x /[T ( x Хс) xd ]
Кои макс ==
Приравнивая это значение заданному (К ОИ == 30), раскрывая выражения сl, и под-
ставляя в них
Eqo + Кои rUrqo [( х& Хс)/ xd ] и с coso}
Eq == Eqo -;----- Кои (U rq U rqo ) == .,
1 + КоиХс/ х&
получаем квадратное уравнение относительно cos6, откуда находим предельно допустимый
(по условиям самораскачивания) уrол 6 пр ' Подставим значения параметров системы и задан-
Horo режима:
(1 ,486 О ,505) . }2 . (2,85 + 2)
(1,486 + 0,504 - 30) . 1,486
1 (1,972 + 30. 1,102) (2,85 + 2)
1 ,486 + О ,504 - 30
[ ( 2 1,486 0,5()4
30 1 .
+ + 2,85 0,848 0,504
(30
1 ,486 0,848 ]
+ 12 1,486.0,848 . 2,85 cos2onp
1 ,486 0,848
сos Оnp }2. 1,486. 0,848 . 2,85 +
. 0,848 ) 0,848 0,504 1 ] 7,5(2,85+2)
1,486 1 ,486 0,848 22. . 314
== О;
или
cos 2 Опр 1,41 cos Опр 0,0176 == О,
откуда cos6 np == 0,046 и 6 пр == 92,60.
Характеристика р == 1(6) определяется выражением
Р == (EqU c / XdE) siп 0== (Eq/l ,486) sin о.
Далее получим
Eq==
( 1 486 О 504
1,972+30 1,102 ' 1,486'
1 + (0,504/1,486) 30
'I'COSo)
35,03 19,8coso
11 ,2
Изменяя Зllзчения 15, найдем серию значений Eq и построим зависимость Р == 'Р(6),
соrласно которой прелельному значению уrла I'Inp == 92,60 отвечает мощность Рnp ::::: 2,18.
286
Пример 8.4. На станции, работающей через дальнюю электропередачу на систему
иеоrраниченной мощиости по условию обеспечения статической устойчивости, проводится
настройка АРВ п. д., которые реаrируют на отклонение напряжения и имеют для стабилиза
пии rибкую отрипательную обратную связь, охватывающую возбудитель.
Н а й т и область настроечных параметров Те == Тео + Kroe, Кои' которые обеспе
чивают статическую устойчивость реrулируемой электрической системы, работающей в pe
жиме <'>0 == 900, U r == U == 1 и имеющей следующие параметры (синхронная машина неявн
полюсная): Xd == 0,7; xd' == 0,3; T dO == 5 с; Т J == 17 с; Хе == 1,5.
Решение. Применим' метод D разбиения, подробно изложенный выше. Примем форму
запиСИ исходных уравнений, в которой время выражается в секундах, уrлы в радианах,
мощность, напряжение, сопротивления вотносител ьных единицах. В этом случае числ
вое значение Т J (с), входящее в расчетные уравнения, определяется как
1
TJ== 2п! TJ == 17/314==0,054.
Расчеты кривой D разбиения будем проводить по параметрическим уравнениям. Част-
пые производные, входящие в эти уравнения, вычисляются по упрощенным выражениям при
U r == U == 1, <'>0 == 900:
Cl == Q; С 2 == (Xd X )/( xtDJ x:rn) == (О ,7 О ,3)/(2 ,2 . 1,8) == 0,101;
С3 == Xd/( xd xc) == 0,7/(2,2 . 1 ,5) == 0,212; Ь 1 / Ь З == (Хс/ xd ) cos 01' ==
== (l ,5/2,2) 0,943== 0,647; cos0l' == -v 1 (Xd/ xd )2 == -v 1 (0,7/2,2)2 == 0,948;
T == TdOX / xd == 5 . 1,8/2,2 == 4,1.
Подставляя эти значения, получим расчетные выражения:
Кои ==
Те == 4, 1 [1 о, 101/(0 ,О54( 2 )];
0,0542(04 + 4У(О2 (О ,054(02 0,101)2 0,0834(02 + 482 (О ,О54ш 2 0,101)2
0,647. 0,054(O2(0,054(O2 0,212) 0,054ш2 0,212
Построим кривую D разбиения при изменении (о от О до :1:00 по следующим характер.
ным точкам:
а) (о == О; Те --+ 00; Кои == 23,2;
б) (o == 0,101/0,054 == 1,87 «(01 == 1,37); Те == О; Кои == 0,0834.1,87/(0 ,054.1 ,87
О ,212) == 1,4;
в) точка разрыва (o == 0,212/0,054 == 3,93 (Ю 2 == 1,98);
Те == 4,1 [1 0,101 /(0,054.3,93)] == 2,15;
Кои --+ :::!= со;
r)
ro oo; Te=== 4,1;
Кои --+ 00;
д) частоты, соответствующие экстремумам кривой D'разбиения, при 0<0)<0)2 и 0)2<00<00
находятся из условия d 2 K ou (ro)/dro 2 == о:
(o == 1,77 «(03 == 1,33);
(O ==6,08 «(04 == 2,46).
Найдем координаты 10чек кривой D.разбиения при 0)з и 0)4:
при (03==1,33 Te== 4,1[1 0,101/(0,054.1,77)]==0,226; Koи== [0,0834.1,77+
+482(0,054. 1,77 0,101)2] /(0,054. 1,65 0,212)== 1,4;
при (04 == 2,46 Те == 4,1 [1 О ,101 /(0,054. 6,08» == 2,84; Кои == [0,0834 . 6,08 +
+482(0,054. 6,08 0,i01)2]1(o,054. 6,08 0,212) == 21g.
287
Найдем особые прямые в точках (j) == О и (j}---+oo И нанесем их на плоскость настроечных
параметров совместно с характерными точками:
а) (j}==0, ап==О, коu== (сl/сз)(ьз/ы1==о;; б) (j) ---+ 00, ао==О, Те==О.
Штриховка кривой D разбиения проводится в соответствии справилами [3] в зависи,
мости от знака rлавноrо определителя:
Д == (Ь 1 /Ь з ) (j}(TJ (j}2 Сl) (Т] UfJ Сз) == 0,0347(j}3 (0,054(j}2 0,212).
Так как при 0< (j) < 002 величина Д > О, то при возрастании (j) от О до (j}2 кривая D.
разбиения штрихуется слева. При (j) > (j}2 знак rлавноrО определителя меняется и часть кри,
вой D разбиения при (j}2 < (j) <00 штрихуется справа*. Особые прямыe штрихуются в соот.
ветствии с правил.ами так, как пока.
зано на рис. 8.40. Разметка областей
D-разбиения (число в скобках озна.
чает число корней в правой полупло-
скости корней характеристическоrо
'уравнения) выделяет область D(O),
представляющую собой область ста.
тической устойчивости, внутри кото-
рой должны лежать значения наст.
роечных параметров реrулятора.
Заметим, что rраница области
статической устойчивости проведена
на участке О < 00 < (j}2 очень rрубо ,
и при необходимости ее уточнения
следует провести дополнительные
расчеты, взяв несколько промежу.
точных значений в этом диапазоне
(на рис. 8.40 на кривой D-разбиения
нанесены точки с частотами (j) == 0,7;
0,8; 0,9; 1,0; 1,1; 1,2; 1,5; 1,6).
Пример 8.5. Станция работает
через электрическую передачу на
систему неоrраниченной мощности.
В ы б Р а т ь настройку АРВ
с. д., реаrирующеrо на. отклонение,
первую и вторую производные тока
линии.
Решение. Предположим, что ха-
рактеристическое :'fавнение системы
и ero коэффициенты известны:
D (р) == а о р5 + а1р4 + а2р3 + а 3 р 2 +
+ а4Р + а 5 + (Д2/ р2 + ДО/) (КО! +
+ KII Р + К21 р2 ) == О.
I
I
I
I
I
I
I
:. I
I
I
I
I
I
:::>,
I
1
<t>
'"
".', ЩЗ)
"'1
1 20
31
1 IБ
I
t.r, I,Б
;;:;, 12.
,', I
I
I
",1
115
I '
i:J ID(1)
'" iJJ,
Осооая ПРЯМС1я Кои =0
<:>
11
прц ш=о асцмптотС1 К ои =2З.2
от w=D
0,7
8
<:::
'"
])(2)
--41
I
I
I
I
I
I
I
I
1
Lf
б
в
10
12
-4DO
D('+)
""
'"
-50
8'"
t а
э +
э
БО
Рис. 8.40. Построение области
устойчивости
Те,а
Допусти , что значения коэффициентов заданы в зависимости от режима, т. е. ai ==
== ЧJj(б л ), rде t == 1, ...., 5; Д2/ == ЧJ2/(бл) и ДО/ == ЧJo/ (б л ), rде б л уrол между векторами
напряжений в начале линии' и приемной .системы.
Минимальный коэффициент усиления по отклонению тока выбнрается из условия обес-
печения положительности свободноrо члена характеристическоrо уравнения:
а5 + ко! ДО/ :;;.. О или КО! мин == a5/ДO! == '1'5 (Ол)/ '1'0/ (ол).
* Так как rлавный определитель является нечетной функцией Д«(j}) == Д( (j}), то
при изменении знака (j) (от oo дО О) направление штриховки меняется и кривая D-разбие-
ния окаЗЫВается заштрихованной Дважды. _
288
Для любоrо значения б л можно подсчитать значение К о /, При заданных параметрах
системы для уrла б л == 900 значение КО! мин == 0,5.
Если КО/ известно, то BD(p) имеется только две неизвестные: К 2 / и К1I' После подста-
новки р == jro и преобразований, аналоrичнЦ'Х приведенным в примере (8.4), получим:
К1I == (aoы4 a2ы2 + a,J/(Ll 2 / oo2 l!!o/); К 2 / == (аlro4 азro2+ аБ)/[ro2(1!!2/ro2
Ll G / )] + К ф / ;002.
Вl;>lчисленные rраницы D разбиения представлены на рис. К/!
8.41. Проверка по критерию Рауса показала, что зона, orpa J
ниченная кривой D-разбиения, является областью устойчивос-
ти. Настройка реrулятора должна быть выбрана внутри общей
для всех режимов области (на рис. 8.41 она защтрихована).
Пример 8.6. Дальняя электропередача имеет промежуточ-
ную подстанцию, на которой установлены синхронные компен-
саторы (рис. 8.42). Схема замещения имеет следующие пара-
метры (рис. 8.43): Х л == 0,552; Хс == 4; Y12 == У23 == 1,81; У22 ==
== Y 2 == 1,56; 'Х т == 0,40.
При /).Х == xd == 7,93 значения УIЗ == 1,01; Y14 == 0,067.
При /).Х == xd' == 1,20 значения УIЗ == 0,880: Уы == 0,304. 1
При I!!x == О значения УIЗ == 0.585; Y14 == 0,805.
Параметры исходноrо режима: РО == 1,1; И 1 == И 2 == ИЗ ==
== 1; б о == 37,40. 2
О п р е Д е л и т ь пределы передаваемой мощности по ус-
ловию статической устойчивости при различных способах pery-
лирования возбуждения синхронноrо компенсатора: а) при от-
сутствии реrулирования, б) при АРВ п. д., в) при АРВ с. д.,
обеспечивающем постоянство напряжения на выходах синхрон
Horo компенсатора, r) то же, что и в п. в), но с учетом действия корректора напряжения,
поддерживающеrо неизменным уровень напряжения в точке присоединения синхронноrо
компенсатора к линии.
Напряжение в начале и конце линии принять постоянным.
Решение. Предельная по условию статической устойчивости передаваемая мощность при
реrулировании возбуждения, соответствующем п. а) и в) условия задачи, может быть
найдеl!а как максимум характеристики мощности:
2
6 л =6d
Dл:: 90D
о
К2Т.
Рис. 8.41. Области ус-
тойчивости
Р == УlзИРз siп 013 + У14 И I Е х sin 014'
При отсутствии реrулирования возбуждения Ех == Еч и при определении взаимных
проводимостей УIЗ и Уа синхронный компенсатор замещается сиихронным сопротивлением,
т. е. /).Х == xd'
Величина Еч определяется из условия баланса реактивных мощностей в узловой точке:
QC'R == 2Qл == 2 (У22И УIРР 2 cos 00) .
Определим э. д. с.:
Eq == И 2 +(Х Т + Xd) QС.R/ И 2.
Построим характеристику мощности Рl на рис. 8.44. Предел передаваемой мощности
при отсутствии АРВ на синхроином компенсаторе равен 1,16.
Проведя аналоrичные расчеты при АРВ п. д. (Е х == Е'; I!!x == X ) и АРВ с. д. без кор-
ректора напряжения (Е х == И С . К ; /).Х == О), найдем пределы мощности Р2 и Рз, соответственно
равные 1,20 и 1,28.
При АРВ с. д. с корректором напряжения, поддерживающим неизменным уровень
напряжения в точке присоединения синхроиноrо компенсатора к линии, характеристика
мощности может быть построена по формуле
р == У12ИIИ! sin о.
10 84
289
Максимум характеристики Р4 имеет место при уrле б == 900.
Предел устойчивости найдем по критерию устойчивости dР/dб > О. Дифференцируя
выражение мощности по уrлу б при постоянстве э. д с. Ех, в данном случае равной и с . к ,
получаем
dP /d8 == 2УlзИРз cos 28 + У14иIис.и cos 11, rде и с . н == и 2 + XTQC.",/U2.
Построив характеристику синхронизирующей мощности, найдем предельный по усло.
вию статической устойчивости уrол, отвечающий dР/dб == О, и соответствующую ему мощ-
ность Р 4 == 1,56. Эта мощность и есть пре.1lельная по условиям статической устойчивости пе.
If 1;
i
l и з
!:f ,z ., !:f Z2
r "
l' ,
и ! I
! IXC
I "";"1
..J
U J
J
Рис. 8.42. Рассматриваемая система
Рис. 8.43. Схема замещения
редаваемая мощность при установке на синхронных компенсаторах АРВ с. д., которые обес-
печивают предел статической устойчивости, определяющийся постоянством напряжения на
выводах синхронноrо компенсатора. Предполаrается при этом, что с помощью корректора
напряжения поддерживается неизменный уровень напряжения на линии в точке присоедине-
ния синхроннorо компенсатора.
Сопоставляя пределы передаваемой мощности при различных АРВ, можно видеть, что
эффективным реrулированием возбуждения промежуточных синхронных компенсаторов яв-
дяется АРВ с. д. с корректором.
Пример 8.7. Станция работает через электропередачу на снстему неоrраниченной мощ-
вости. Схема системы показана на рис. 8.45. Параметры reHepaTopa и трансформаторов:
Ха == 1 ,8; X == 0,461; Х Т l == 0,197; Х Т2 == 0,142; Q02 == Qo == 0,362.
О n р е Д е л и т ь запас статической устойчивости системы в следующих случаях:
а) при отсутствии АРВ, б) при АРВ п. д., в) при АРВ с. д.
Решение. а) При отсутствии АРВ предел передаваемой мощности определяется исходя
из усповия постоянства синхронной э. д. с.: Eq == сопst; и о == 1.
Суммарное сопротивление электропередачи
Xd :=о Ха + Х Т l + х л /2 + Х т2 ,
Подставляя значения сопротивлений, найдем Xd == 2,49.
Синхронная э. д. с.
Eq:=o V (и о + QOxd /и о )2 + (POxd /Uo)2 == 2,39.
Предел переда ваемой мощности
Р лр == EqU o / xd == 0,96.
Коэффициент запаса статической устойчивости
К з == (Р лр Ро)/Р о == 0,65.
б) При установке на reHepaTopax АРВ п. д. предел передаваемой мощности и устойчи-
вости можно приближенно определить, исходя из постоянства э. Д. с. за переходным сопро-
тивлением: Е' == const. В этом случае
290
x X + х т l + х л !2 + Х Т2 1,15;
Е' V(U o + QoX /и о )2 + (рох /ио)2 1,57; Рпр Е'и, I xd 1,365;
Кз (Рпр Ро)!Ро 1,34.
в) АРБ с. д. в зависимости от настройки обеспечивают постоянство напряжения либо на
!!ыводах reHepaTopoB, либо в начале линии. Определим предел устойчивости, принимая U r
const.
Р, dP/do
1,5
1,2 РО
0,8
0,4
а
Р,+
rv . } Х л =0,7/Z . .У О
P;;g, 8J лап 220/(В, 220/(/о1
Рис. 8.45. Схема системы
Рис. 8.44. Характеристики мощности
при различных способах реrулирова
ния:
,8роо Р, без АРБ; Р, АРБ п. Д.; р, АРБ без
корректора; р, то же. с корректором нап'рЯ
жения
Суммарное сопротивление системы
хс Х Т1 + х л !2 + Х Т2 0,689.
Напряжение на выводах reHepaTopoB
U r v (и о + QoXc/Uo)2 + (Рохс!Ио)2 1,31.
Предел передаваемой мощности
Р пр ИrИо!Х с 1,90.
Коэффициент запаса статической устойчивости
Кз (Рпр Ро)!Ро 2,26.
Сопоставляя результаты расчетов, можно видеть, что при АРБ п. д. обеспечивается за
пас статической устойчивости на 0,69 больше, чем без АРБ. При АРБ с. д. запас увеличива
ется еще на 0,92. Повышение предела передаваемой мощности обусловлено тем, что АРБ
полностью (АРБ с.д.) или частично (АРБ п. д.) исключает влияние собственных сопротив
лений reHepaTopoB на предел передаваемой мощности и (при сделанных допущениях) на
статическую устойчивость.
Пример 8.8. П о к а з а т ь, что в системе «две станциИ наrрузка» при рассмотрении
взаимной устойчивости двух станций без анализа их движения относительно синхронной оси
опускается часть корней характеристическоrо уравнения.
Решение. Представим Аа 12 как разность А(\ А62' тоrда
TJ!p2Ml + аlМl alM2 О; TJ2P2M2+ а 2 М 1 а 2 М 2 О.
Подставив в первое уравнение А62' найденное из BToporo уравнения, получим
М 1 [(Т J! Т 12/аl) р4 + T J2p 2 Т J! (а 2 !аl) р2] О.
откуда М 1 OID(P), rде D(p) р2[р2 + (al/T J1 aJTJ2)] o.
10*
291
Характеристическое уравиеиие имеет вид
р2 (р2 + «) о.
Переход к учету взаимиоrо движения (от учета движения относителыю синхронной оси)
озиачает, что два корня р2 == О опущены.
Пример 8.9. Н а й т и условия устойчивости системы, состоящей из четырех станций,
представленных неизменными э. д. с., приложенными за сопротивлениями 6.х.
Решение. Составим систему из четырех дифференциальных уравнений для малых коле-
баний:
d 2 6.0j дР} дР} дР}
TJj + дО 12 6.012 + д0 1З 6.013 + дО 14 6.014 == о, j == 1,2,3,4.
Вычитая из первоrо уравнения (j == 1) поочередно остальные три уравнения, получим:
d2M12/dt2 + 012 + «: M13 + «: A014 == о; «: M12 + d2М 1 з/ dt2 + «:gм 1з + «: M14 == о;
« ;M12 + « M13 + d2M 14 /dt 2 + «::6.014 == о,
rде _ отиосительные ускорения.
Характер изменения относительных уrлов может быть установлен на основании иссле-
доваиий корней определителя:
р2 + « «12 «12
13 14
«13 р2 + ж:g «13 == о.
12 14
«14 «14 р2 + «:1
12 13
Эrот определитель раскрывается в виде характеристическоrо уравнения
р6 + а2Р 4 + а4Р 2 + а 6 == о,
rде
12 + 13 + 14.
а 2 == «12 «13 «14'
«12 12- «12
a4 I «13 «13\ I «12 «121 I «12 «121 12 «13 14
13 14 + 12 14 + 12 13 . ]3 «13 «13
«14 «Н « 14 «14 «13 13 ' а 6 == «12 13 Н
13 14 12 14 12 «13 «14 «14 «14
12 13 14
Для Toro чтобы характеристическое уравнение, имеющее только четные степени опера-
тора р, привести к нормальному виду, сделаем подстановку р2 == р, тоrда будем иметь вспо-
моrательное уравнение
р8 + а2р2 + а4Р + а 6 == О,
которое можно исследовать любым известным методом. Если корни вспомоrательноrо урав-
нения будут вещественны и отрицательны, то корни характеристическоrо уравнения будут
мнимые (р ==ур>, а взаимные уrлы 6.6 jn после возмущения будут совершать незатухающие
колебания. Любые друrие (кроме отрицательных) корни приведут к появлению нарастающих
слаrающих уrлов 6.{jjn' Следовательно, для устойчивости системы необходимо и достаточно,
чтобы корни вспомоrательноrо уравнения были вещественными, отрицательными. Для Toro
чтобы в системе, состоящей из- четырех станций, это условие выполнялось, необходимы сле-
дующие соотношения между коэффициентами уравнения: > о; а 4 > о; а 6 > о; . a4
а 6 > О.
Более подробно рассмотрение этой задачи можно найти в литературе [1, с. 37б 3831.
292
Контрольные вопросы
8.1. Какие существуют подходы к определению статической устойчивости? Что в них
общеrо?
8.2. Перечислите особенности задач анализа и синтеза при рассмотрении устойчивости.
8.3. Каковы физические особенности переходных процессов, обусловливающих статк-
ческую устойчивость?
8,.4. Что такое линеаризацня по первому приближению и при изучеиии каких процес-
сов оиа применяется? '
8.5. Чем отличается характер изучаемых движений при рассмотрении статической и
динамической устойчивости?
8.6. В чем суть двух основных теорем Ляпунова?
8.7. С помощью табл. 8.1 дайте анализ расположения корней характеристическоro
уравнения на комплексной плоскости и отиоситеЛЬИQrо движения ротора reHepaTopa.
8.8. Что такое критерии устойчивости? Какие из них являются прямыми, какие кос-
венными? (критерий rурвица? критерий Михайлова? метод D-разбиения?)
8.9. Как составляется характеристическое уравнение?
8.10. Как определяются максимальные и минимальные значеиия коэффициента усиле-
ния?
8.11. Как математически в характеристическом уравнении отражается эффект автомати-
ческоrо реrулирования?
8.12. Как влияет положительное и отрицательное демпфирование иа характер переход-
иоrо процесса и на предел устойчивости?
8.13. Почему предел статической устойчивости иереrулируемой системы определяется
при Сl ==0 (E q == сопst), а не при С 2 == О (Е; == const)? Казалось бы, в связн С появлением
свободных токов при движении ротора определеиие при E == const более лоrично.
8.14. Каков примериый порядок значеиий частоты и периода собствеиных колебаний
(при движении «в малом»)?
8.15. Каковы природа и математические признаки самораскачивания?
8.16. Каковы природа и математические признаки самовозбуждения?
8.17. Прокомментируйте табл. 8.1, указав условия каждоrо ВИда неустойчивости.
8.18. Покажите, "то все практические критерки равносильны условию прохождекия
через нуль свободноrо "лена характеристическоrо уравиения.
8.19. В каких случаях при анализе статической устойчивости методом малых колебаJiиi
учитывается только относительпое движение и соответственио относительная устойчивость?
8.20. Почему в критерий устойчивости двух станций 2 == О входят постои иные инер-
ции, хотя обычно «устойчивость В малом» от инерций не зависит?
8.21. В чем особенности расчета методом малых колебанкй сложной системы, рассмат-
риваемой как позиционная?
Темы рефератов
1. Совмещение расчетов статической устойчивости с расчетами нормальноrо режима.
2. Ляпунов и ero теория устойчивости, ее приложение к техническим и электроэнерr
тическим задачам.
3. Оценка статической устойчивости по практическим критериям и методам малых ко.
лебаний.
4. Влияние демпфироваиия и переходных электромаrнитных процессов на предел ста-
тической устойчивости.
.
rЛАВА 9
ИЗМЕНЕНИЯ ЧАСТОТЫ И МОЩНОСТИ В ЭНЕРrОСИСТЕМАХ
9.1. ОБЩАЯ ХАРАКТЕРИСТИКА ЗАДАЧИ
В электрической системе, состоящей из ряда станций и наrрузок, можно раз-
личать изменения частоты:
а) быстрые и средние (MrHoBeHHbIe или текущие), происходящие во время
переходноrо процесса, связанные с изменением скорости reHepaTopoB, возникаю
щие под влиянием небалансов вращающих моментов на валах reHepaTopoB;
б) относительно медленные (средние значения), характерные для системы
в целом, определяющиеся эквивалентной инерцией всех машин системы и дей
ствием автоматических реrуляторов частоты вращения (АРЧВ) и автоматиче-
ских реrуляторов частоты (АРЧ)*.
Быстрые изменения. При балансе момента (мошности) на валу каждоrо reH
ратора электрической системы, т. е. при M k == Ммех k' rде k == 1, 2, ..., n, и
вращении ротора каждоrо k-ro reHepaTopa со скоростью UJ k == ШО все э. д. с.,
напряжения и токи изменяются с частотой fo == UJо/(2л).
Однако во время работы системы появляется расхождение в изменениях
мощности, потребляемой наrрузкой, и мощности, отдаваемой rенераторами: по-
является небаланс момента M == Ммех М на валу каждоrо reHepaTopa,
изменение ero скорости UJk == UJk ШО == dбk/dt и соответственно мrновенной
частоты Mk == fk f о.
На этой первой стадии переходноrо электромеханическоrо пропесса ни ре-
rуляторы частоты вращения, ни реrуляторы частоты еще не действуют. Pac
пределение между станциями системы дополнительной наrрузки, появившеися
в результате возмущения, происходит в первый момент в соответствии с э. д. с.
и относительной удаленностью станции от места возмущения (т. е. взаимной про
водимости между э. д. с. станции и точкой приложения возмущения). Затем ce
нераторы начинают замедляться в соответствии со значениями полученных Ha
бросов мощности и инерционностью асресатов, причем машины, получившие
наибольший относительный наброс, замедляются более интенсивно, что приводит
к увеличению взаимных уrлов и перераспределению дополнительной наrрузки
между станциями.
Таким образом, на первой стадии процесса происходит снижение (или по.
вышение) средней частоты в системе, при этом возникают качания reHepaTopoB
относительно друr друrа и одновременно за счет синхронных связей происходит
* в предыдущих изданиях книrи в отношении первичноrо реrулятора турбины упот-
реблялся термин «реrулятор скорости», измененный в настоящем издании в соответствии с
rOCTOM на «реrулятор частоты вращения». При этом имеется в виду частота вращения ar.
peraTa, которая может отличаться от электрической частоты в системе, реrулируемой «pery-
JIяторами частоты»,
294
выравнивание MrHoBeHHbIx значений частоты отдельных станций. Именно эта пер
вая стадия процесса, как правило, определяет далее устойчивость или неустой
чивость системы. Обычные реzyляторы, воздействующие на первичный двиеатель,
здесь неэффектuвны, если только они не снабжены специалЬНЫ'м'и быстродейсmвую
щими устройствами, и в этом случае MoryT влиять на устойчивость системы.
Медленные изменения. При достижении частотой значения, выходящеrо за
пределы зоны нечувствительности реrуляторов частоты вращения (первичные p
rуляторы), последние вступают в действие, перераспределяя дополнительную
наrрузку в соответствии с величинами, обратными статизму реrуляторов. В за
висимости от возмущения реrуляторы вступают в работу через O,3 2 G после
наброса мощности.
На последующей стадии процесса влияние оказывают более медленно дей
ствующие реrуляторы частоты (вторичные реrуляторы), которые изменяют устав-
ки первичных реrуляторов одной или rруппы станций, реrулирующих частоту,
в результате чеrо последние принимают на себя небаланс мощности, возник
ший В системе. При этом частота в системе при наличии достаточноrо резерва мощ
ности восстанавливается до нормальноrо значения.
Время действия применяемых реrуляторов частоты составляет несколько
десятков секунд. Поэтому процесс реrулирования частоты можно считать очень
медленным по отношению к электромеханическому процессу и действию реrуля-
торов скорости, на основании чеrо эти процессы в ряде случаев можно paCCMaT
ривать раздельно.
Таким образом, при математическом описании процесса изменения частоты
в системе после появления в ней какorо-либо небаланса мощности !J.P прихо
дится выдел ить:
1) о т н о с и т е л ь н О б ы с т р ы е электромаrнитные и электромехани-
ческие процессы, при которых ни реrуляторы частоты вращения, ни реrуляторы
частоты не действуют;
2) электромеханические процессы с р е Д н е й с к о р о с т и, происходя-
щие при действии реrуляторов частоты вращения;
3) м е Д л е н н ы е про Ц е с с ы, про исходящие при действии реrулято
ров частоты.
Однако выделение трех стадий и раздельное рассмотрение процессов с уче
том только наиболее характерных для данной стадии факторов можно проводить
лишь У с л о в н о.
При рассмотрении второй и третьей стадий переходноrо процесса можно ис
ходить из предположения, что установившееся отклонение частоты в системе
зависит от баланса мощности [см. (3.7а) и (3.7)] и что оно связано с отклонением
мощности соотношением
M/i == !J.M/k/i::::: !J.P/k/i,
(9.1 )
rде коэффициент пропорциональности k/i имеет размерность МВт/rц. Иноrда
ero называют энерrией реrулирования. Чем больше k/i, тем меньше отклонение
частоты при данном изменении мощности. Величину, обратную k/i, называют
статиз,М,о,М, аерееата: 1/k/i == б/i. Появляющиеся при измененияХ наrрузки MrHo
венные изменения частоты сначала различны для каждоrо reHepaTopa. После
переходноrо процесса они становятся одинаковыми: !J.f 1 == М 2 == !J.f /i == !J.f.
Суммарное изменение мощности в системе можно представить как !J.P == kr. !J.t,
rде kr. суммарная энерrия реrулирования.
295
Распространение изменения частоты по системе от одной ее узловой точки
к друrой происходит по сложному закону, математическое выражение KOТOpOro
здесь рассматриваться не будет*.
Характер «выравнивания» частоты, изменение ее значений в отдельных точ-
ках системы после возмущения зависят rлавным образом от параметров элемен-
тов, входящих в систему. Представление о процессе выравнивания можно полу-
Рис. 9.1. Характер изменения частоты в системе при набросе мощности I1Рс в точке О схемы:
а схема системы; б векторная диаrрамма; в зависимость f <p(t); 10 нсходное значение частоты;
f '" установнвшееся значение частоты (после наброса); 1., 1., 1з частоты, замеренные в точках /, 2, 3
системы
чить, рассматривая рис. 9.1, rде показаны значения частоты, замеренные в раз-
ных точках системы после возмущения. Очевидно, что в начале процесса и в
конце ero частота (/0' f 00) одинакова и постоянна во всех точках системы. В дей-
ствительности это постоянство только условное допущение. В системе, в ее
установившемся режиме, непрерывно происходят малые возмущения (изменя-
ются наrрузки, мощности reHepaTopoB под действием случайных толчков и ре-
rуляторов скорости или ручноrо реrулирования) и непрерывно изменяется час-
тота. Примурный характер таКих изменений частоты показан на рис. 9.2.
КолебаlIИЯ суммарной наrрузки СИс1'емы Pr.H' вызывающие изменения Час-
тоты электрических систем, можно разделить на три rруппы.
Б ы с r р ы е к о л е б а н и я имеют период 1 3 с и амплитуду меньше
0,001 Pr.H системы. Эти колебания в основном зависят от малых перемещений
роторов reHep, аторов т. е. от электромеханических процессов в reHepaTopax сис-
темы. Колебания частоты, вызванные колебаниями наrрузки, обычно составляют
сотые доли rерц (0,01 0,02 [ц).
· Заметим только, что здесь происходит сложение нескольких (k) синусоидально изме-
няющихся величин, имеющих разные частоты. Это приводит во время перехода от 'о до 'оо к
появлению rармонических слаrающих в токах и напряжениях системы, Однако это обычно
не учитывается (см. rл. 14).
296
ере Д н и е к о л е б а н и я суммарной наrрузки имеют период колеба-
ннЙ .порядка десятков секунд (10 30 с) и амплитуду 0,01 P JJH . Эти колебания
вызываются нереrулярными изменениями мощности, процсходящими в процессе
работы потребителей электрической системы (тяrа, печи и др.). Колебания час-
тоты, вызваНI ые этими колебаниями наrрузки, достиrают десятых долей rерц
(0,1 0,2 [ц).
М е Д л е н н ы к о л е б а н и я происходят с периодом порядка минут
и десятков минут. Они вызваны изменениями суммарной наrрузки, связанными
f f
50,1 :;; lВ"5 1в50 .1255 1300 1305 t
50,0 J " V'V"'y'ff yv"""/\ \;''''VA.I\IJII'''''"""""v;''./V'v " Vv'\"v"Y
+9,$ .
8 7 . I"1WM "'v".J f1
7"). 2 " "'-'v/' . ,,, v
Рис. 9.2. Осциллоrраммы частоты в установившемся режиме системы:
1. 2 при автоматическом и ручном реrудировании частоты соответственно
с BpeMe eM суток, атмосферными явлениями, технолоrией производства и измене-
ниями условий быта (включение плиток, печей и т. д.).
Качество частоты. Частота общесистемный (единый во всей системе в
установившемся режиме) параметр. Частота не должна длительно изменяться
более чем на + 0, 1 [ц, хотя кратковременно разрешается работа с отклонением
до 0,2 [ц. Отклонение частоты происходит при нарушении баланса потребляе-
мой и вырабатываемой активной мощности при отсутствии резерва (см. rл. 3).
Если в энерrосистеме не соблюдается постоянство частоты, то это ведет кБОЛЬШflМ
убыткам:
с уменьшением частоты возрастаer требуемая мощность промышленных
потребителей (или снижается их производительность). Для двиrателей в уrоль-
ной промышленности, электрической тяrе и т. д. 'значение k == 3 +- 10. Иссле-
дования, проведенные во Франции, показали, что снижение частоты на 0,5 [ц
1'1 длительная работа системы при этой частоте равносильна (rрубо) уменьшению
на 5 мин рабочеrо дня при соответствующем уменьшении продукции. При 6 7-
часовом рабочем дне это означает уменьшение выпуска продукции по стране в
целом не менее чем на 1 1,4%;
растут потери в энерrосистеме, особенно связанные с потерями в стали;
изменение частоты влияет на режим станций и систем, вызывая перераспре-
деление мощностей с отклонением их от оптимальных. Это особенно неприятно,
если энерrосистема страны продает мощность системам друrих стран, так как
отклонения частоты будут вызывать изменения перетоков мощности, что приве-
дет к нарушению соответствующих контрактов на поставку электроэнерrии. По-
этому, например, французская энерrосистема (EdF), работающая параллельно
со всеми системами соседних стран, жестко держит номинальную частоту*;
* Альтернативой хорошеrо поддержания частоты в этом случае является создание
«вставок» постоянноrо тока, т. е. линий постоянноrо тока с «нулевой длиной». Это дороrо и.
очевидно, может быть только нецелесообразным вынужденным решением. Особенно если
в разделенных частях системы допускается раЗJIИчная частота, приводящая к убыткам.
297
значительные отклонения частоты неблаrоприятно сказываются на работе
первичных двиrателей (турбин) и при rлубоких изменениях MorYT привести к их
повреждениям* .
Все отмеченное требует внимания к поддержанию частоты.
s 9.2. ВИДЫ РЕrУЛИРОВАНИJI И ИХ ВЗАИМОДЕйСТВИЕ
СущеСТВУЮЩfIе в электроэнерrетических системах виды реrулирования,
о которых упоминалось выше, обладают свойствами, дополняющими друr друrа.
Времена их действия обычно различаются не меньше чем на порядок.
Пер в и ч н ы й ре r у л я т о р АРЧВ (автоматический реrулятор час-
тоты вращения) в течение нескольких секунд устраняет малые отклонения
наrрузки (от 1 до 4 %) с периодом меньше 1 мин. Он, воздействуя на мощность
турбины, компенсирует возмущение в соответствии со своей статической харак-
теристикой.
В т о р и ч н ы й р е r у л я т о р АРЧ (автоматический реrулятор час-
тоты), реrулируя частоту в системе, обычно осуществляет ее астатическое ре-
rулирование, производя ero за счет параллельноrо смещения статической ха-
рактеристики АРЧВ, проводимоrо механизмом изменения частоты. Вторичное
реrулирование в отличие от первичноrо, которое использует только оrраничен- .
ные аккумулирующие способности котла и промежуточноrо переrревателя, долж-
но быть более мощным и должно перекрывать более значительные колебания на-
rрузки (большие 4% по амплитуде при периоде более 1 мин). Это достиrается
одновременным воздействием на паропроизводительность котлоаrреrата и pery-
лирующие клапаны турбины. При этом необходимо учитывать реальные воз-
можности arperaTa: состояние ero оборудования, допустимую скорость наrруже-
ния, которая определяется температурными напряжениями турбины, давлением
пара и т. д. Учет указанных параметров и функций может выполнять обыч-
ная вычислительная машина или специальное командное устройство, участвую-
щее таким образом в процессе реrулирования частоты. Для этоrо процесса сущест-
венно также то обстоятельство, что постоянные времени котлоаrреrата и турбины
значительно различаются. Поэтому, коrда при быстрых значительных открытиях
клапанов расход пара увеличивается, перед турбиной падает давление. Чтобы
при этом не нарушилась нормальная работа котлоаrреrата и турбины, к сущест-
вующим реrуляторам добавляется еще один «р е r у л я т о р Д а в л е н и я
Д о с е б я» (РДС). Он оrраничивает снижение давления пара перед турбиной,
препятствуя росту скорости и увеличению открытия реrулирующих клапанов
турбины**. Функция Р де, следовательно, заключается в поддержании постоянст-
ва давления пара перед турбиной при воздействии, если это необходимо, на ре-
.. Так, ряд фирм, изrотовляющих турбины, считают допустимым длительное снижение
частоты на 1 % и на 90 мин на 2% (по отношению к номинальной). Возможная длительность
работы зависит от конструкции турбины, в частности длины лопаток. В СССР принята авто-
матика, снижающая наrрузку турбин при понижении частоты (при 47 ru она срабатывает
через ЗО с). Для большинства турбин, изrотовленных в Советском Союзе, диапазон допусти-
мых длительных изменений частоты лежит в пределах 4Q,0 50,5 ru.
** В настоящее время применение реrуляторов «до себя» резко оrраНИ',Jивается из-за
недостатков, оказываемых на работу arperaTa в системе. Они запрещены для использования
при непрерывной работе и разрешены только для работы в «ждущем режиме». Включение
их при аварии иа энерrоблоке определяется системными требованиями.
298
* f 9.3. СТАТИЧ1:СКИЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
(МЕДЛЕННЫЕ ИЗМЕНЕНИЯ ЧАСТОТЫ В УСТАНОВИВШЕМСЯ РЕЖИМЕ)
Установившееся значение частоты при изменении наrрузки турбины, не име-
ющей реrулирования скорости, можно найти способом пересечений характерис-
тик Р == rp(f) и p == ЧJ(п так, как это показано на рис. 9.4.
При реrулировании скорости arperaTa реrуляторами скорости характерис-
тика активной мощности, отдаваемой reHepaTopOM, будет получена в результате
Dлавноrо перехода с одной
характеристики Р == rp(f), по-
строенной при постоянном
впуске энерrоносителя (пос-
тоянном открытии), надруrую
APB
Т i"OJ Р н
М
Ur=U H = coпst
Р
РО
р
f
Рис. 9.4. Изменение часто-
ты Аf при изменении Har
рузки от РО до P 1 :
Р' в (f) И Р н (У) частотные
[Р B CPт] характеристнки на-
rрузки при UH const; Рт
характеристика нереryлируемой
турбины
а)
Р
1,2
1,0
Б)
:. : ] / }р,
L1PI/ А/
РО P A :) ' '\
11
II
0,8
"0,6
f, fo
f
В)
Р
Р,
8)
а'
\ I
\ \i; \ \1
\ \ I \1\ \
\) ,
\ 1 " 1\ \
) \ \
\ \ \
\ \ \
I \ \ \ \
f3 r (АРЧ)?: \ \ \ \
I f$ f a .
Рис. 9.5. Анализ действия реrуляторов скорости и
частоты:
а семейство частотных характеристик наrрузки PH CP(п
и частотных характернстнк нереrулнруемой турбины P CP(п;
штрнхпунктирной линией нзображена характернстика pery-
лируемой турбииы; б работа АРЧВ при иабросе иаrрузки;
в работа АРЧ, иастроеииоrо астаТически при иабросе Иа-
rрузки !:J.p в; 2 то же, ио при статической иастройке pery-
лятора частоты
РО
рис. 9.5, а). На участке 1-2 этой характеристики по мере уменьшения частоты
мощность растет. Начиная с точки 2 после полноrо открытия направляющеrо
аппарата* реrулирование уже не может влиять на изменение мощности турби-
ны, и в соответствии с ее естественной характеристикой происходит уменьшение
мощности со снижением частоты. Участок 2-3 приближенно можно заменить
прямой 2-3', считая, что при постоянном максимальном открытии направляющеrо
аппарата мощность турбины не изменяется.
При аварийных режимах, коrда частота в системе снижается настолько, что
реrуляторы полностью открывают устройства впуска энерrоносителя, процессы
считаются протекающими соrласно характеристике 2-3 или 2-3'. На участке 2-1
* в случае турбоrенератора после полноrо открытия клапана,
300
характеристику Р == qJ(f) можно заменить прямой 2 1', считая, что Р == Ро +
+ /)"Р. Характеристики наrрузки также приближенно можно заменить прямыми.
полаrая Р н == Р но + /)"Р н'
Построенные характеристики относятся к одиночному arperaTY, имеющему
реrулятор скорости, действие KOToporo отражено в данном анализе переходом
рабочей точки с одной характеристики Р == qJ(f) на друrую. В результате получи-
лась характеристика реrулируемой турбины (1-2 на рис. 9.5, а). Если происходит
изменение мощности наrрузки на /),.Р н , то, как это показано на рис. 9.5, б, в сис-
теме «reHepaTop наrрузка» установится новая частота {1, которая будет соот-
ветствовать пересечению новой характеристики наrрузки и характеристики rehe--
рации (точка Ь). Процесс перехода от а к Ь и соответственно от 'О к '. начинается
после Toro, как отклонение частоты превысит зону нечувствительности реrулятора
частоты вращения. Происходит он в течение 5 20 с.
Реrулирование при обычных механических реrуляторах частоты вращения
начинается с запаздыванием O,2 O,5 с. Однако инерционность сервомоторов, а
также явления rидроудара (у rидротурбин) и расширения пара в паровых объе-
мах паровых турбин приводят к тому, что эффект реrулирования проявляется че-
рез большой промежуток времени (1 3 с). Зона нечувствительности реrуляторов
составляет o,o5 O,3 %.
После окончания действия реrуляторов частоты вращения (АРЧВ) или в
процессе их работы в действие вступают реrуляторы частоты. Зона нечувствuтель-
ности автоматическ.оzо реzулятора частоты (АРЧ) значителЬно J>tеньше, чем ре-
zулятора частоты вращения (АРЧВ), но действует он значительно медленнее.
Действие ero отражается в смещении характеристик Р == qJ(f) из положения 1 2
к положению l' 2'. Это смещение занимает lO 40 с; оно может быть быстрее (ха-
рактеристика аЬ'а') или медленнее (аЬ"а'). В зависимости от быстроты вмешатель
ства АРЧ отклонение частоты при данном набросе мощности может достиrать зна
чений ,;, { или значения, определенноrо действием только реrулятора частоты
{1 (рис. 9.5, в).
Показанная на рис. 9.5, в .настройка АРЧ, Korдa он восстанавливает частоту
до начальноrо значения {о, является астатической. При параллельной работе не-
скольких энерrетических систем, снабженных АРЧ, астатическая настройка
невозможна (она привела бы к неопределенности в перераспределении мощностей
по линиям связи). .
При статической настройке* характеристики принимают вид, показанный на
рис. 9.5, с. Действие АРЧ в этом случае не изменяет вида зависимости Р ==
== qJ({), а меняет только ее наклон.
Таким образом, все рассуждения и математические соотношения, полученные
длn системы с АРЧВ, будут справедливы для системы с АРЧ, но при условии,
что уrлы наклона Рr(АРЧВ) И Рr(АРЧ) (рис. 9.5, с) будут разными.
Построенные характеристики относятся к единичной турбине и единичной
HarpYSKe. Однако они приближенно MoryT быть распространены на всю систему.
Для этоrо под характеристикой Р н == qJ(f) надо понимать суммарную наrрузку
системы рит" а под характеристикой Р r == qJ(f) суммарную rенерирующую
мощность всех arperaToB PrYJ.
При изменениях частоты около номинальноrо значения наrрузка будет из
· Обычно астатическую настройку частоты в системах не применяют.
301
меняться соrласно характеристике РнЕ == ЧJт, которая имеет наклон касатель-
ной или крутизну k:
tg H == (. PH'fJ / М) ио/рно 'fJ) == k H == l/а н .
Соответственно характеристика rенерации имеет вид
tg !' == ( P 1''fJ / f) (f 0/ Р 1'0 'fJ) == k r ==. 1/ a r ,
[де PHO'fJ суммарная наrрузка системы при номинальной частоте; (J н == 1/Ь f и
0'1' статизм наrрузки и arperaToB системы; b f реrулирующий эффект наrруз-
ки по частоте.
Суммарные характеристики наrрузок и [енераторов системы, полученные
при медленных изменениях частоты (статические характеристики), MorYT сущест-
венно отличаться от динамических характеристик системы, получаемых в услови-.
ях быстроrо изменения частоты, хотя общий характер зависимостей и влияющих
факторов обычно не изменяется.
Для системы изменение мощности при изменении частоты составляет
PE == PF.'fJ PH Е,
[де
P1''fJ == (P1'O'fJ!cJ r)(M/fo); PH'fJ == (PHO'fJ/ a H)(M/fo):
С учетом последних соотношений будем иметь
P'fJ ==..м... ( P1'O 'fJ Р но 'fJ ) === м
'О а !, ан 'О
или ДРЕ == ..м... k'fJ.
р нО 'fJ f о
Здесь ар == PHOM'fJ /P1''fJ коэффициент резерва, показывающий, во сколько
раз номинальная мощность всех работающих arperaToB превышает фактическую
мощность системы; k'fJ крутизна результирующей характеристики, причем
k'fJ === (а н ll р + ar)/(agUr)'
Р нЕ (ана р + a r )
a wr
Значение результирующеrо статизма системы, определяемое как
а === lIk'fJ === aHari(aHll p + (Jr) == 1/(ll p k r + k H ),
(9.2)
зависит от резерва и ero распределения между аrреrатами, от характеристик ar-
peraToB системы и ее наrрузки. Значение (J характеризует установившееся значе-
ние частоты через некоторое время после возникновения небаланса мощности.
На этом этапе процесса частота устанавливается через ыесколько секунд за счет
действия cYMMapHoro реrулирующеrо эффекта по частоте, а далее изменяется за
счет действия автоматических реrуляторов частоты и реакции котлоаrреrатов
на ее изменения. Для отдельных реrулируемых arperaToB статизм а r == 0,04 -7-
-7- 0,05; для наrрузки он примерно в 10 раз больше. Поэтому при повышении час-
тоты результирующий коэффициент крутизны k'fJ определяется в основном
крутизной характеристик arperaToB (k'fJ k r ). . Статизм системы а будет
изменяться в зависимости от значения резерва. Он будет тем меньше, чем больше
резерв. В разное время суток статизм будет различен. Так, например. экспери-
302
ментально определенные и рассчитанные значения статизма для объединения,
состоящеrо из четырех энерrосистем, приведены в табл. 9.1.
Таблица 9.1
Средний статизм энерrосистемы СредиИЙ статизм
объединения
Режимы сис"емы I I I расчетный I опытныЙ
1 " IП 'У
Утренний максимум 0,19 0,165 0,080 0,258 0,170 0,170
Дневиой провал 0,04 0,246 0,072 0,060 0,126 0,109
Вечерний максимум 0,19 0,216 0,156 0,125 0,194 0,184
Ночиой про вал 0,14 0,150 0,189 0,310 0,158 0,160
Усреднеиное значение 0,14 0,197 0,124 0,187 0,162 0,155
Эквивалентная механическая постоянная времени также зависит от режима
системы или объединения. Так, в одной системе эта постоянная изменял ась в те-
чение суток от 15 до 18 с зимой и от 13 до 15 с летом.
Весьма существенна зависимость kr. (и соответственно а)] ) от резерва системы
ар. При ар --+00 значение kr. --+00 и уrол, характеризующий наклон результирую-
щей характеристики, --+900. Это означает, что при очень большом резерве час-
тота после переходноrо процесса восстановит свое прежнее значение.
При снижении частоты и отсутствии резерва (ар === 1) величина kr. определя-
ется характеристиками наrрузки: kr. k и === 2 --;.- 2,5. При резерве мощности
kr. === 5 --;.- 10 результирующий статизм различен в разное время rода и суток,
как это видно из табл. 9.1.
* t 9.4. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
ПРИ ИЗМЕНЕНИИ ЧАСТОТЫ
Изменения частоты, происходящие в электрической системе в переходном
процессе, следовало бы определять с учетом действия АРЧВ и АРЧ, вступающИХ
в работу с некоторым запаздыванием. Структурная схема замещения после неко-
торых упрощений должна была бы выrлядеть так, как это показано на рис. 9.6,
т. е. иметь передаточную функцию и соответственно характеристическое уравне.-
ние четвертоrо порядка. Пренебреrая точностью описания процесса, упростим
задачу, объединив действие звеньев 2 6 и отразив их эффект одной постоянной
времени Тв, которая при этом будет относиться к системе. Тоrда изменение час-
тоты в системе будет определяться теми же дифференциальными уравнениями,
которые были получены (см. rл. 6) для определения изменений частоты вращения
arperaTa под действием только АРЧВ. Смысл параметров, входящих в уравнения,
при этом изменится: их надо относить не к arperaTY, а ко всей системе*.
Изменения частоты Лf * === Лf/fо в системе, имеющей суммарную инерцию
т J, запишем как
ТJРЛf*+Ри Рт===О,
(9.3)
· Далее индекс ; прннятый В 9.3, будет опускаться.
303
rде Р п мощность наrрузки системы в процессе изменения частоты; Р т то же,
эквивалентных турбин системы, причем Р т == Р то Ppel" Р то соответствует Ha
чальному (t == О) моменту, в который появляется наброс мощности tJ.Po == Р но
Р то, связанный с изменением наrрузки Р но'
Под действием реrулирования (АРЧВ, АРЧ) мощность турбин изменяется
Рис. 9.6. Структурная схема реrулирования час
тоты (АРЧ) н частоты вращения (АРЧВ):
1 атретат. постоянная ищ:рцнн Т/; 2 блок саморету-
IIнрования атретата; 3 турбнна (паровой объем); 4
rидропривод клапанов. реryлирующих впуск пара; 5
обратная связь; 6 АРЧ; 7 элемент измереиня частотЫ
на величину Р per' Для ее определения воспользуемся уравнением (6.31), обозна-
чив в нем
Рт.пом/(аТв) == ktt 1/Т в == k 2 .
Torдa вместо (6.31) запишем
рР per + k 2 P ре!' + k]tJ.f * == О. (9.4а)
Предположим, что мощность наrрузки, имеющей реrулирующий эффект
Ь/, изменяется соrласно известному (см. rл. 6) соотношению
Р п == Р но (l + Ь,М *)"
с учетом последнеrо Соотношения уравнение (9.3) при изменении мощностей
на АРе примет вид
T J рМ * + Р н о (1 + bftJ.f *) == Р т О Р ре!' == О,
(9.46)
или
T J рМ * + Р н оЬ,М * Р ре!' + tJ.Po == О.
Из уравнения (9.4а) следует, что
Р ре!' == k 1 tJ.f */(р + k 2 ),
откуда
TJ рМ * (р + k 2 ) + РпоЬftJ.f * (р + k 2 ) + k 1 tJ.f * + li.Po (р + k 2 ) == о;
204
м * (р) === !J.P o (р + k 2 )
Т [ 2 + k + ..!:l.. + Рн ОЬ! (р + k 2 ) ]
JP 2Р Т Т
J J
rде Р(р) === р2 + p(k 2 + k' /T J ) + (k. + k 2 k')/T J === О. Здесь k' === bjP но.
Корни Р(р) имеют значения
=== ( k + ) + V ( k + ) 2 k 1 +k 2 k' ==
р, 2 . 2 2 Т 4 2 Т Т
. J J J
I ( k' ) V I ( k' ) 2 kl .
=== k 2 + + k2 == a + jQсОб'
2 TJ 4 TJ TJ
а===О,5(1!Т s + 1/ТJэ); ТJЭ==ТJ/(Ь,Рно);
!1'ро (Р + k 2 ) 9
. ( .5)
т J F (р)
(9.6)
rде
Q "1 / Р Т ' НОМ ( ) 2.
соб V aTsTJ 4 Ts Т Jэ
Переходя к временной зависимости, получим
дf * (t) == I1p o a [ (А + jB) е( а+jQсОб) t +
Р Т . НОМ + k'a
+ (А jB) е(.......q. jQсОб) t)] o .
rде А , aTJ . В === ..........!.... [ а (Т J + k'T s ) 1 ] .
2 (Р Т.НОМ + k ' а) , 2Qсоб 2Т s (Р Т.НОМ + k' а)
Заменив А + jB === V А2 + EfJ ei<P; А jB == V А2 + EfJ e j'P.
rде ер === arctg(EIA), получим
I1P o a at V А 2 D2 T I1Po [ ei (Qсобt+q» + e j ( QСОбt+Ч') ] .
дf*(t)== p +k'a e +D J
Т.НОМ
или
дf * (t) === I1P o a 2е o;t V А2 + В2 I1Po COS (оЦ:об t + Ч1). (9.7)
Р т . НОМ + PHobja TJ
Значение !:!! ранее фиrурировало в относительных единицах. Окончательное
выражение может быть записано в виде
I(t)===fo [ l I1Poa 2e at УА2+В2 I1РО СОS(QСОбt+ер) ] . (9.8)
Р Т . НОМ + Pнobja Т J
Результаты расчетов соrласно (9.8) при различных значениях резерва
(ар == var) и реrулирующеrо эффекта наrрузки Ь, показаны в виде rруппы кри
вых 1 на рис. 9.7.
С помощью полученных выражений может быть проанализировано влияние
реrулирующеrо эффекта наrрузки (рис. 9.7). Очевидно, что расчеты без учета
005
реrулирующеrо эффекта наrрузки будут давать завышенные отклонения частоты
от установившеrося значения. При этом надо иметь в виду, что реальные частот
ные характеристики суммарной наrрузки энерrосистем MorYT иметь нелинейную
зависимость от частоты. Однако для диапазона практически важных изменений
величин ДР и Д! ее с достаточной степенью точности можно считать линейной.
Поэтому учет характеристик Har-
рузки в виде зависимости Р н ==
==PHO(l + bjN*) может считаться
вполне приемлемым для практиче-
ских расчетов изменений частоты
в системах.
В установившемся режиме
значение частоты
fco == fo[l ДРоа/(Рт.ном +
+ РноЬр)],
при Ь ! == О отклонение частоты
Д! == ДР оа! 0/ Р Т.НОМ .
Работа без резерва (полное
открытие). Выше предполаrалось,
что при набросе наrрузки (измене-
нии на ДР О ) турбина* под действи-
ем реrулятора изменяет МОЩНОСТЬ
на Р per- Однако это изменение
невозможно, если вся мощность турбины уже использована, т. е. п о л н о с т ь ю
О Т К рыт н а п р а в л я ю Щ и й а п пар а т (полный впуск). В этом случае про-
текание переходноrо процесса характеризуется уравнением (9.4б) при P per == 0**:
f.[ц
50,0
48,8
48,4
'-18,0
20
2ч t, с
4
8
12
15
Рис_ 9.7. Характер изменения частоты при раз
11 ичных реrулирующих эффектах наrрузки
(Ь ! == 1 + 2)
откуда
Т ; рМ * + Р н ob f /1f * + ДР О == О.
(9.9)
М* == [ дРо/(РНОЬf)1 (1 е t/ТJЭ),
(9.10а)
rде Т Jэ == T J /(РиоЬ f ).
3ДeI;Ь момент инерции для системы определяется как
T J == "L..T Ja + "L..T JH .
rде сумма моментов всех reHepaTopoB и турбин (с)
· Напомним, что уравнения (9.4а) и (9.46) и все последующие относились как к arpe-
тату, так и ко всей системе в целом. В зависимости от Toro, что понимал ось под Т s и друrими
параметрами, эти уравнения моrли характеризовать изменения частоты под действием
АРЧВ и АРЧ (вторичный реrулятор) совместно или только АРЧВ-аrреrата.
.. Процесс в этом случае соответствует участку характеристики 2-3 на рис. 9.10,
в то время как уравнеиия (9.4,6) и (9.8) участку 1 2.
306
т 2, 74[ (GD + GD )] п 2 . 1O 1
Ja p
r
2,74TJ$H PHni' 1O "
Т JH == ,
PH
(9. 1 Об)
(9. 1 Ов)
rдe T J . H удельная постоянная инерции наrрузки, отнесенная к единице ее
мощности при усредненной частоте вращения двиrателей n ц '
Изменение частоты l1f* имеет, соrласно (9.10), экспоненциальный характер,
показанный на рис. 9.7 в виде rруппы кривых 11. Пример 9.1 иллюстрирует да-
лее расчет для реальной системы. Если при этом наrрузка системы не будет зави-
.р
.tЗР а
Рн5
..J.. .L.
...,...-
Lf
- -
I Рт при Р рее = а
I
I
1
I
1 1
l.tЗfl
I I
ft f a
f
Рис. 9.8. Влияние реrулирующеrо эффекта
наrрузки на изменение частоты при набро-
се наrрузки l1Po:
1 мощность турбины прн PT const и Pper O;
2 характеристика наrрузки PH QJ(f) при bfo#J;
3 то же, при набросе мощности !J.Po; 4 то же.
что и 2. НО прн bf O; 5 то же, что и 3. но при
bf O
. f,rц
50
с
Itg
о
.
10
.
lO
4 'о! 1200
,
t,c
,
30
Рис. 9.9. Изменение частоты в энер-
rосистеме после наброса мощиости
сеть от частоты (Ь ! == О), то режим установиться не сможет (!1! * oo). Физически
это означает, что при отсутствии реrулирования (или самореrулирования) систе-
ма не моrла бы работать, так как появление малейшеrо небаланса /).р приводило
бы к полному нарушению режима системы (рис. 9.8).
Учет влияния АРЧ уравнениями более высоких порядков, меняя количест-
венные соотношения, обычно не изменяет общей качественной картины. Для при-
мера на рис. 9.9 представлен rрафик изменения частоты после наброса наrрузки
при отдельном учете действия АРЧ (кривая 1). Там же для сравнения приведен
rpафик изменения частоты без учета АРЧ (кривая 2). Расчет производился при
следующих значениях параметров: Т ) == 8 с; Ts == 5 с; Т 2 == 60 с; а1 == 0,1;
а2 == 0,05; l1Po == 0,1.
Из рисунка видно, что в интервале времени от О до 5 10 с АРЧ оказывает
еще малое влияние и характер' процесса определяется в основном влиянием АРЧВ.
В интервале 15 20 с и далее процесс изменения частоты определяется действием
АРЧ. Приведенный пример показывает, что в ряде случаев действия АРЧВ и
АРЧ MOryT рассматриваться независимо и накладываться друr на друrа.
307
.. ! 9.5. НЕУСТОИЧВОСТь ЧАСТОТЫ (ЛАВИНА ЧАСТОТЫ)
Явление неустойчивости (лавины) частоты может возникать при неблаrопрн-
ятном сочетании характеристик arperaToB и вспомоrательных устройств (собствен-
ных нужд), определяющих выработку rенераторами мощности, с одной стороны,
и потребление мощности наrрУ'ЗКОЙ с друrои. В этих случаях небольшое нa
чальное снижение частоты может далее как бы усиливаться и приобретать лави-
нообразный характер. Причина этоrо явления заключается в снижении мощности,
Р
РиlfО
Р ИЗО
РиZО
РИ10
/10
/
з'/ I
1
I
I I
dJ.Р и 0 1 J
< I
df I J.f,
i iз! I I
1-< 1 I
11 {о
а)
Котлоое
рееот
.э
н
д
f, и
80
f
Рис. 9.10. Развитие лавины час-
тоты:
1 2 характеристика reHepaTopa при
. действии АРЧВ, АРЧ; 2-3 характери-
сТика rеиератора при полиом открытии
(естественная); 2-3' характеристика
reHepaTopa при полном открытнн И
снижении МОЩНОСТИ с уменьшением
частоты Из за снижения МОЩНОСТИ ДВИ"
rателей собственноrо расхода вспомо"
rателъноrо оборудования станции;
2-3" то же, что и 2-3', но при более
резком влиянии 8спомоrателъноrо обо..
рудования; Р и l' РИ\О характеристика
мощности и мощиосТь иаrрузки В нор-
мальном режиме; Р и2 , Р и20 , Риз, Р изо ,
Р Н4' Р 840 то же. при иабросах на..
rрузки; l' t 1", 2 точки устойчивоrо
режима I1(Ри Рr)/l1f>О; А, В точки
критнческоrо режима, приводящеrо к
лавине частоты I1(Ри Рr)/df О; o
точка неустойчивоrо режима d (Р и
Pr)/df<O
f
в)
Pr
-fi 2
J ,..// I
,.. / I
/ -/ I
d J " :
f, f
t
Рис. 9.11, ArperaT эквивалентной системы при полном впуске знерrоносителя:
а схема аrреrзтз: Э впуск энерrоносителя при ПОЛНОМ открытии (J.1 '" =-= 1); т турбнна .
Д ..1ВИI'атели собственных нужд; Н НасосЫ; r reHcpaTop, выдающий МОЩНОСТЬ Р; оо.....
уrловая СКОРОСТЬ вала (прнведенная к электрической); t чаСТоТа в системе; 6 завнси-
мости: 1 давления 11: 2 расхода питательной воды q; 3 напора h в зависимости от ча:
стоты f двиrателей Д, Питающнх собственные нужды станцин (примерные характеристики),
в изменение мощности reHepaTopa Pr: 2-3 при питании собственных нужд двиrателями,
не зависимыми от частоты; 2 З' при налични з висимостей типа показанных на рис. 9.11,6;
2 3" то же, при друrом характере d, q, h <p(f); z изменение частоты: 1 и системе без
резерва (участок характеристики 2-3); 2 при появлении лавины частоты (участ и харак-
теристик 2-3', 2-3")
зоя
выдаваемой' rенераторами при снижении частоты. Это происходит при отсутствии
резерва rеJfерирующей мощности в системе в связи с тем, что механизмы собствен-
ных нужд тепловых станций снижают производительность со снижением частоты* .
Нарушение устойчивости может быть связано также с неправильным действием
АРЧ, характеристики и параметры которых MorYT быть неблаrоприятно выбраны
в отношении устойчивости их параллельной работы. При учете влияния измене-
ния частоТЫ на работу [енераторов характеристики мощности, rенерируемой в
системе, будут иметь вид, показанный на рис. 9.10.
Не стремясь к выявлению точных количественных соотношений, можно конс-
татировать, что снижение частоты на !1f приводит к деформации характеристики
PI" блаrодаря чему точка О (рис. 9.10)**, в которой балансируются мощности [ене-
'рации и наrрузки, оказывается неустойчивой, на что указывает практический
критерий d(P н Р I')/df < О. Снижение частоты развивается далее лавинообраз-
но и приводит К полному нарушению устойчивости системы.
Математическая интерпретация процесса лавины частоты может быть сделана на осно-
ве уравнения (9.9), отвечающеrо полному (рис. 9.11) впуску энерrоносителя. На рис. 9.10 этот
случай соответствует характеристике 2-3. Изменение частоты М == qJ(t) здесь будет проис-
ходить соrласно (9.10) в виде экспоненциальных зависимостей (rруппа кривых I на рис.
9.11,e).
Если при достижении полноrо впуска энерrоносителя (точка 2 характеристики 1-2
на рис. 9.10) в связи со снижением частоты (j < 10) и возможным одновременным уменьшением
напряжения двиrатели собственных нужд ста-нций будут уменьшать мощность (рис. 9.11),
то характеристика 2-3 превратится в характеристику 2-3' или 2-3", что, как указывалось
ранее, приведет к критическому (точки В, А) или неустойчивому (точка О) режиму (см. риt,
9.10), показанному также иа рис. 9.11, б.
Уравнение (9.10) в этом случае будет записано как
M*== [ I PHo 'f(f, u) 1 (l е t/ТJЭ),
PHob f
(9. 11)
rде rp(j, И) соответствует значению мощности турбины системы, снижающейся в связи с по-
нижением частоты и напряжения двиrателей собственных нужд. Характер изменения 1 ==
== 10 М*/ о , который может быть опенен путем итеративных приближений [см. (9.11)],
показан на рис. 9.11, е. Постепенное уменьшение f (кривые 2), переходящее далее в резкий
спад, и привело к «лавине частоты».
f 9.6. МЕРЫ ПРЕДОТВРАЩЕНИЯ НЕУСТОIiIЧИВОСТИ ЧАСТОТЫ.
АВТОМАТИЧЕСКАЯ РАзrРУЗКА ПО ЧАСТОТЕ
,
Из приведенноrо анализа можно сделать следующие выводы. Снижение час-
тоты в электрической СИСтеме в некоторых случаях приводит к уменьшению ак-
тивной мощности, выдаваемой rенераторами, что может привести к неустойчивос-
ти их режима (лавине частоты).
* Об этом подробно см. rл. 11, 12.
** Приведенные на рис. 9.10 характеристики строились в предположении постоянства
напряжения (значеиие напряжения поддерживается, например, реrулируемым синхронным
компенсатором). В действительности одновремеино со снижеиием частоты будет происходить
и уменьшение иапряжения. Уменьшение iYrловой скорости reHepaTopoB будет приводить к
снижеиию их э. д. с. (Е == ооп). Реактивная моЩность reHepaTopoB будет уменьшаться, а
наrрузки увеличиваться. .
Хотя в условиях сниженной частоты критическое напряжение (при котором наступает
опрокидывание двиrателей) уменьшается, все же при значительном снижении частоты MorYT
создаваться условия для возникновения и развитии лавины напряжении.
3w
ПОНUJlCение частоты вызывает уменьшение выdачи реактивной .мощности и в
то же время увеличение потребления реактивной .мощности наzрузкой, что при-
водит к понижению напряжения в узлах наzрузки системы. При снижении часто-
ты до 43 45 [ц напряжение может снизиться до критическоrо значения, при ко-
тором возникает' лавина напряжения. Лавины частоты и напряжения вызывают
массовое отключение потребителей от действия их защит и стимулируют наруше-
ние параллельной работы электрических станций. Ликвидация аварий и восста-
цовление нормальноrо режима системы MorYT длиться несколько часов.
Явление лавины частоты и, возможно, одновременной лавины напряжения
протекает в течение несколькиХ десятков секунд или секунд. В такое короткое
время дежурному персоналу трудно правильно оценить создавшееся положение и
провести необходимые мероприятия в системе. Понижение частоты до опасных
пределов практически может быть предотвращено в двух случаях: 1) если в систе-
ме имеется достаточно большой вращающийся резерв; 2) если с понижением часто-
ты автоматически отключается некоторая часть наrрузки, т. е. производится так
называемая автоматическая частотная разzрузка (А ЧР).
Наиболее быстро дополнительную мощность можно получить в том случае,
если вращающийся резерв составляют, rидроrенераторы, однако инерционность
реrулирования rидротурбин позволяет выдать arperaTaM резерва всю мощность
только через 15 20 с; Это не всеrда может предотвратить аварию. Эффективность
rидроrенераторноrо резерва значительно повышается при уменьшении времени
реrулирования путем выдерrивания иrлы катаракта, что практически, однако,
не всеrда используется. Резерв на тепловых электрических станциях может быть
эффективен только при достаточной мощности котлов и оборудования arperaToB
совершенными автоматическими устройствами. Запуск резервных arperaToB при
понижении частоты во мноrих случаях не может предотвратить развития аварии,
так как даже rидроrенераторам требуется не менее 1 2 мин для набора мощнос-
ти . Эффективными в этом отношении MorYT быть резервные arperaTbI со специаль-
ными rазовыми или авиационными турбинами (обычно у<;танавливаются отрабо-
тавшие свой срок на самолетах двиrатели). Однако установка специальных arpe-
raToB пока не получила широкоrо распространения. Суммарная мощность обыч-
Horo вращающеrося резерва, выбранноrо по условиям экономичности, должна
составлять 10 20%, но часто оказывается меньше. В часы максимума наrрузки
системы вращающийся резерв может полностью отсутствовать. Однако при ава-
риях, связанных с отключением reHepaTopoB и станций или с разделением систе-
мы на отдельные части, может появляться дефицит мощности, достиrающий 30%
и более. Поэтому в T8.KOro рода аварийных условиях наиболее надежным решени-
ем является а в т о м а т и ч е с к о е о т к л ю ч е н и е с о о т в е т с т в у ю-
щей ч а с т и н а r ру з к и. Эту задачу и выполняют устройства АЧР.
Роль А ЧР особенно велика в энерrетических системах небольшой и средней
мощности с малым числом электрических станций и слабо развитыми электриче-'
скими сетями. По мере укрупнения энерrетических систем относительное (а не аб-
солютное) значение возможноrо аварИЙноrо небаланса мощности снижается. Од-
нако даже в мощных объединенных энерrосистемах отказываться от А ЧР было
бы нецелесообразно. Так, если при объединении систем уменьшается вероятность
rлубокоrо понижения частоты в объединенной системе, то остается опасноёть воз-
никновения подобных аварий при отделении каких-либо частей или более мелких
систем, а также при разделении объединенной системы на несинхронно работаю-
310
щие части. Таким образом, в объединенных системах большое значение имеет
разrрузка по частоте.
При мер 9.1. В энерrосистеме работают следующие arperaTbl:
Номер Тип Момент инер Турбина Момеит инер Частота вращеНИЯ t
reHepaTopa сенератора иИН, T-Mz ции, т,м 2 об/мин
1 T 2-100 2 23 BK-100-2 18,71 3000
2 T-2-100-2 23 BK-100 2 18,71 3000
3 Т 50 2 12 АК-50-2 9,28 3000
,4 Т -2 25-2 4 АТ-25-2 3,52 3000
Вращающиеся резервы мощности отсутствуют. HarpY3Ka энерrорайона Р но ==
== 275 МВт. При / == /0 реrулирующий эффект наrрузки Ь ! == 1,9. Момент инерции наrруз-
ки в 1 кВт при частоте вращения 1500 об/мин составляет 0,3 т,м 2 .
О П Р е Д е л и т ь минимальное (установившееся) значение частоты /мин при отключе-
нии reHepaTopa Ng 4 и последующем отключении наrрузки 20 МВт, приводя ее к разлИЧНЫМ
значениям мощности.
Решение. Расчеты первоиачально выполним, приводя все величины к l\Ющности на-
rрузки в исходном режиме: Р но == Р то == 275 МВт. Тоrда, соrласно (9.10б),
2,74.2 (23 + 18,71) + (4,0 + 3,52) + (12 +9,28) .30002. 10 6
'f.T Ja == 275 == 10,1 с.
Далее, соrласно (9.10в),
2 74 . О 3. 275. 15002 . 10 6
'f.T == ' ,
JH 275
1,88 с; Т J == 'f.T Ja + 'f.T JH == 10,1+1,88:== 11 ,98 с.
ПОСТQянная инерции в исходном нормальном режиме при Р но == Р *то == 1
ТJэ==ТJ/Ьf== 11,98/1,9==6,3 с.
При отключении rеиератора Ng 4 мощностью 25 МВт отклонение частоты, соrласно
(9.10), составит
м == (25/275) . (50/1,9) == 2,5 [ц,
а минимальное значение частоты будет
fмин == 50 2,5 == 47,5.
Соrласно (9.IOa), после отключения наrрузки I1P H == 20 МВт, значение I1Po == 25
20 == 5 МВт, Р ио == 275 20 == 255 МВ т, а отклонение частоты
М == 5 . 50/(255 . 1,9) == 0,515 [ц.
Следовательно, / == 50 0,515 49,5 [ц.
Таким обраЗ0М, отключение примерно 7% наrрузки уменьшило снижение частоты в
системе с 49,5 до 47,5 [ц, т. е. на 2 [ц. Следовательно, отключение части наi!.рузки является
мощным средством поддержания частоты.
Контрольные вопросы
9.1. Какие три стадии имеет процесс изменении частоты после появления в системе
какоrо-либо небаланса мощиости?
311
9.2. От чеrо. зависит время выравнивания часто.ты во. всех То.чках СЕа:теыы при сбро.се
пли набро.се мо.щно.сти в это.й системе?
9.3. На какие rруппы мо.жно. раздеJ!ИТЬ ко.лебания суммарно.й наrрузки системы? Ка-
ко.ва аМПЛИТуда ко.лебаний и их перио.д в каждо.й из этих rрупп?
9.4. Как Mo.rYT быть по.стро.ены динамические характеристики системы при изменении
частоты?
9.5. Какой характер имеет динамика изменения частоты при наличии резерва и ero. от-
сутствии?
9.6. В чем причина возмо.жно.й неустойчиво.сти часто.ты и како.вы меры ее предо.твраще-
ния?
9.7. Как измеНяется часто.та в системе при набро.се МОЩно.сти в случае о.;rсутствия pery-
лирующеrо. эффекта наrрузки (Ь ! == О)? Как влияет реrУJIИРУЮЩИЙ эффект наrрузки на Ха-
рактер про.цесса?
9.8. Како.е назначение устро.йства А ЧР и какава (примерно.) ero. схема?
9.9. Определите лавину часто.ты как физическо.е ивление и дайте ero. математическую
интерпретацию.
9.10. Назо.вите о.сно.вные пути по.ддержания но.рмально.й часто.ты в энерrо.системах.
Темы рефератов
1. Анализ аварий, связанных с по.нижением частаты.
2. Характеристика взаимо.действия пе вичноrо. вто.рично.rо и третично.rо. реrулирова-
ния.
rЛАВА 10
IJEPEXOAHbIE ПРОЦЕССЫ И УСТОЯЧИВОСТЬ ЭЛЕКТРИЧЕСКИХ СИСТЕМ.
О&ЪЕДИНЕННЫХ ЭЛЕКТРОПЕРЕДАЧАМИ. ЯВЛЯЮЩИМИСЯ СЛА&ЫМИ
СВЯЗЯМИ
fO.f. ПОСТАНОВКА ЗАДАЧИ
При связи двух электрических систем ЛЭП, имеющей пропускную способ
ность и 1 и 2 /х, HaMHoro меньшую (на lO 15%) мощности меньшей системы, возни
кают задачи проверки устойчивости «слабой связи», обеспечения неизменных
потоков мощности на «слабых» соединительных линиях и cOBMecTHoro реrулиро
вания частоты в объединенных системах.
На режим работы слабых связей заметно влияют нереrулярные колебания
наrрузки, происходящие в соединяемых системах. Таким образом, амплитуда
колебаний межсистемной мощности все время изменяется и имеет случайный xa
рактер. Режим работы самых слабых связей сравнительно мало Б.'lияет на режим
работы систем. Реrулирование межсистемноrо перетока производится на основе
телеизмерений ero и соответствующих измерений наrрузки [енераторов.
Обеспечение достаточных запасов устойчивости необходимо для надежной
работы связанных систем. Колебания частоты (если они выходят ИЗ допустимых
пределов) означают снижение качества энерrии, отдаваемой потребителям, а KO
лебания потоков мощности на линиях связи приводят К колебаниям напряжения.
Кроме Toro, при обмене энерrией между системами различных фирм в Капиталисти
ческих странах колебания отдаваемой или принимаемой мощности оказываются
недопустимыми, так как приводят к осложнениям взаиморасчетов (приходится
учитывать случайные колебания мощности). Обменные потоки мощности во всех
случаях должны быть соrласованными и по возможности поддерживаться задан
ными.
Если бы каждая из объединенных систем моrла MrHoBeHHo реrулировать свою
мощность таким образом, чтобы rенерация точно соответствовала наrрузке систе-
мы при частоте 50 rц (учитывая запланированные обмены), то частота в системах
оставалась бы постоянной, а взаимный обмен происходил бы по установленной
проrрамме. Любое изменение наrрузки в каждой системе немедленно компенси
ровалось бы соответствующим изменением rенерации. К сожалению, на праКТИКе
такое реrулирование осуществить нельзя. Фактически невозможно даже опреде-
лить мrновенную наrрузку как сумму замеренной мощности потреблеНИ\J, так же
как невозможно MrHoBeHHo изменить мощность, выдаваемую rенераторами. Вся
кое различие между выходной мощностью и наrрузкой приводит к изменению
частоты, которое, в свою очередь, вызывает действие первичных реryляторов,
постепенно изменяющих rенерируемую мощность. Действительное различие меж
ду выходной мощностью и наrрузкой можно определить только косвенным путем.
В случае присоединения системы К друrой крупной энерrетической системе,
в которой частоту можно считать неизменной, разность между выходной мощно-
стью и наrрузкой в присоединяемой системе почти немедленно проявляется в из-
313
менениях потоков мощности на JIИНИЯХ связи. Она может опредеJIЯТЬСЯ как раз-
ность J1.P12 между деЙСТВИТeJIЬНЫМ и заПJIанированным обменом мощности.
В ЭJIектрической системе расхождение между мощностью rенерации и наrруз-
кой приводит к изменению частоты и действию АРЧВ машин, снова устанаВJIИ-
вающих равновесие между мощностью reHepaTopoB и наrрузкой.
1очности реrУJIирования частоты и обменной мощности связаны между собой.
Применение БОJIее точной и БОJIее быстродействующей системы реrУJIирования
одновременно обеспечивает УJIучшение реrУJIирования обеих указанных ве-
личИИ.
Для крупных объединенных энерrетических систем ОТКJIонения обменной
мощности от запланированной достиrают максимаJIЬНОЙ rраницы до Toro, как из-
менения частоты станут заметными. Поэтому требуемая точность реrУJIирования
обменной мощности в линиях обмена опреДeJIяет характеристики реrулирующих
устройств.
Анализ изменений обмена мощности в линиях межсистемной связи показы-
вает, что на заПJIанированные величины обмена наКJIадываются колебания мощнос-
ти. Эти КОJIебания можно приБJIизитеJIЬНО разделить. на два типа:
1) КОJIебания с периодом менее 1 мин, состоящие в основном из отдедьных
колебаний с периодом в нескодько секунд. Их аМПJIитуда возрастает при объеди-
нении систем. Эти быстрые колебания обычно не уrрожают устойчивости объеди-
нений, поэтому уничтожение их с помощью соответствующеrо реl'улятора было бы
неоправданным, даже есJIИ бы оказалось возможным;
2) КОJIебания с периодом более 1 мин, связанные с деЙСТВИТeJIЬНЫМИ компен-
сирующими обменами мощности между системами. Амплитуда этих колебаний
зависит от характера наrрузок объединенных систем, значений их реrулирующих
мощностей, скорости действия и точности оборудования, применяемоrо ДJIЯ под-
держания З3ПJIанированных обменных мощностей. С увеличением точности и
ЧУВСТВИТeJIЬНОСТИ реrулятора КОJIебания обмена мощности постепенно снижаются.
Эксплуатация JIИНИЙ межсистемных связей показала, что обмен мощностыо
можно с достаточной точностью отреrулировать в соответствии с проrраммой.
Практически требующаяся точность реrулирования зависит от параметров связан-
ных систем и передач, осущеСТВJIЯЮЩИХ обмен мощностью между системами.
10.2. ПРОСТЕIiIШАЯ ОБЪЕДИНЕННАЯ СИСТЕМА.
СОСТОЯЩАЯ ИЗ ДВУХ ОТДЕЛЬНЫХ СИСТЕМ.
СВЯЗАННЫХ СЛАБОЙ СОЕДИНИТЕЛЬНОй ЛИНИЕй
Рассмотрим объединенную систему, схематически показанную на рис. 10.1, а.
Предположим сначаJIа, что частота в отдедьных системах одинакова и в них
имеются реrуляторы возбуждения, обеспечивающие на всех reHepaTopax постоян-
Е ' , .
ство э. д. с. q Е . Изменения rенерирующей мощности Р l' или мощности на- ,
rрузки Р н связанных систем, даже сравнитеJIЬНО неБОJIьшие по отношению к мощ-
ности системы, MorYT привести к нарушениlO устойчивости передачи.
Применим для анализа устойчивости системы (рис. 10.1) методику, рассмот-
ренную ранее. Для этоrо, пренебреrая активным СОПРОТИВJIением передачи, пре-
образуем схему системы так, как это показано на рис. 10.1,6, в.
При изменении мощности любоrо reHepaTopa (1 ИJIИ 2) или соответствующих
наrрузок справедливы с.педующие соотношения приращений мощностей каждой
из станций:
314
I1Р 1 == Р!"1 Р Н1 P т s1П 012; I1Р 2 == Р l"2 Р Н2 + Р т sin 012' (10.1)
rде Р!"1 и Р!"2 МОЩНОСТИ первичных двиrателей систем 1 и 2, равные мощностям
reHepaTopOB; Р н1 И Р Н2 мощности наrрузок, включенных в приемных и переда
ющих частяХ системы, а в схеме замещения (рис. 10.1, в) подключенных не-
посредственно к э. д. с. в; и в;; Р тsiпб12 == В;Е;У12siпб12 мощность, пере-
Рис. 10.1. Слабая связь передающей и
приемной частей системы:
а прuнципиальная схема снстемы; 6 схе.
ма замещения; в упрощенная схема заме.
Щ6НИЯ (наrрузкн разнесены); 2 эквивалент.
иая схема условной системы «станция ши"
НЫ», з мещающей исследуемую систему
Pf2,=.P т siп О
2
..
Е) I
. Е,
-;-
";"
Е'
2
Н!
8) Роз '.
Т.rз u=сопst
";"
Н 2
";'"
даваемая по связи (Р т максимум этой мощности, б 12 уrол между э. д. с.
в; и В;).
Дифференциальное уравнение относительноrо движения, соответствующее эк
вивалентной схеме (рис. 10.1,2) системы, запишется как
d 2 0 12 /dt 2 == I1P 1 /T J1 I1Р 2 /Тп == 01:1 01:2 == 01:
или
rде
ТJэ d 2 0 12 /dt 2 == Р э Р т slП 012'
(10.2)
ТJэ == T J1 Ти /(TJ\ + т 12); (10.3)
Р Э == (TJ2P!"l. T J1 P!"2)/(T J1 + T J2 ) (TJ2PHl TJ1PH2)/(TJ1 + Тп). (10.4)
Любое изменение наrрузки или
мощности reHepaTopOB приводит к
изменению Р э' Отключение части
reHepaTopOB вызывает еще и изме-
нение Р т' так как меняется взаим-
ная проводимость У12'
Предположим, что в приемной
части системы отключилось нес-
колько [енераторов, т. е. Р!"2
уменьшилось на I1Р 1"2' Это означа-
ет, что Р Э увеличится на величину
ITJ1/(TJ1 + T J2 )]I1P!"2' Установив
шийся режим будет определяться
пересечением характеристик p l и
.Ртsiпб.
Из рассмотрения рис. 10.2, а
видно, что устойчивость сохранит-
ь с е d
а; a O II fJ MOKC
Рис. 10.2. Уrловые характеристики для схемы,
изображенной на рис. 10.1:
а устойчивый режим после отключения части rенера-
торов; р; и 'р ;1 эквнвалентные мощности до и после
отключения; 6 неустойчивый режим после отключеиия
части rеиераторов (при увеличении Р 8 от Р до Р I) и
переход к устойчивому режиму после отключеиия части
иаrрузки
315
ся только в том случае, если площадка ускорения аЬса будет меньше (или рав-
на) площадки возможноrо торможения cdekc. При этом будут происходить кача-
ния, размах которых определяется равенством площадок ооса и cdd 1 c. Если
наброс наrрузки (например, мощность отключившихся reHepaTopoB I1Р 12 ) слиш-
ком ве.'lИК и система становится неустойчивой, то надо произвести автоматичес-
кую разrрузку системы, отключив часть потребителей приемноrо конца (Р Н2).
Уменьшение наrрузки на I1Р Н2 приводит К уменьшению Р э на величину
[Т л /(Т п + T J2 )]I1P H2 . Соответствующим подбором отключаемой наrрузки
можно обеспечить устойчивость системы. Такой случай показан на рис. 10.2, 6,
rде предположено, что автоматическая разrрузка (отключение части наrрузки)
происходит одновременно с отключением reHepaTopoB. Требование равенства пло-
щадок ускорения аЬ1С1а и торможения C1ed1cl может быть записано следующим
образом:
MaHC
S Р т (sin8 1 sin 8)do == О.
f/
11
откуда
(Оманс 8 ) sln 8 l + cos Оманс сos ot == о.
Так как б манс == 11: J, получаем уравнение для определения б&/:
(7t (J 1 8 )sino&1 COS l ==coso .
Здесь б& == arcsin(P /Pm); б l == arcsin(p;l/ pm ).
З $1.11 ' u
ная Uo , нетРУДНО определить, какую часть наrрузки приемнои системы
I1Р Н2 нужно отключить при изменении мощности reHepaTopoB этой системы и
том или ином уrле б . Очевидно, что при сделанных допущениях I1Р Н2/I1Р r2 ===
== qJ[P /Pт' (t.P r2 /P т ). (Т п /(Т п + T J2 ))]. На рис. 10.3 показаны соответствую-
'щие зависимости.
При слабой связи MorYT возникать колебания. Так, если одна из с:истем,
передающая мощность Р 12 на шины бесконечной мощности по слабой связи,
имеет Н2.rрузку I1Р, мощность которой изменяется с частотой 'А, то дифферен-
циальное уравнение колебаний уrла будет иметь вид
T J d20/dt 2 + Р adO/dt + Р 12 siп 8 == I1Р siп лt + Р О '
( 10.5)
rде Ро среднее значение передаваемой мощности.
При линейном приближении из (10.5) можно найти отклонения уrла от сред-
Hero значения:
118 == I1Р I V (TJ).2 Р 12 COS 80)2 + P f,2 .
Очевидно, что для каждой системы есть некоторые значения 'А, отвечающие
максимальным отклонениям уrла (рис. 10.4).
При слабой связи MorYT появляться нереrулярные колебания обменной мощ-
ности; они вызываются колебаниями наrрузки и частоты в связываемых систе-
мах и реакций реrуляторов вращения турбин на колебания частоты. Средне-
316
квадратичные отклонения наrрузки I1P cp . KB от среднеrо уровня суммарной на-
rрузки Р находятся из соотношения
. I1PCP.KB:IY P1 === I1PCP'KB2IV P2 '
При этом влияние реr ляторов, частоты'. вращения на колебания межсистем-
ной мощности меньше, чем влияние колебаний наrрузки.
Опыт и исследования показыва-
ют, что можно оценивать нереrуляр-
ные колебания межсистемноrо пере-
тока мощности, учитывая лишь мень-
шую из соединяемыХ энерrосистем.
LI РН2
LlPr2
0,9
f.:;:jli'"
. / //.
,. .- "
1// / I
/
j I
'('С/ I
-'0/ I I
./ ,,,- I
H I I
J
I 1 ,
/ ,
1 I I
11
1
1
111
10 20 30 40 50 60 70 80 о,
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0.1
О
о' zpaa
Рис. 10.3. Соотношение отключаемых мощ-
ностей reHepaTopa и наrрузки:
АРВ2 МОЩIiОСТЬ иаrрузки, которую необходимо
отключить дл!! сохранения устойчивости при от-
ключеиии мощиости rеиераторов !!.Pr2; y
(!!.р "2/ Р т)[Т II/(T 11 +Т 12)]
IJ 'О' цо!]
50
40
ЗО
20
10
О
0,1 0,2 0,3 0,4 0,5 0,6 л
Рис. ]0.4. Максимальные
отклонения уrла в зависи-
мости от частоты колебани й
наrрузки
* * 10.3. ДИНАМИЧЕСКАЯ УСТОАЧИВОСТЬ СЛА&ЫХ СВЯЗЕА
Нарушение синхронизма слабых связей часто вызывается отключением одной
из параллельных линий или возникновением небаланса мощности в ОДНОЙ из
связываемых энерrосистем. Короткие замыкания, даже наиболее тяжелые, ес-
ли ОfIИ отключаются основными защитами, как правило, не вызывают нарушения
синхронной динамической устойчивости. Обусловлено это тем, что отключение
слабой связи или короткое замыкание на ней создает сравнительно небольшой
небаланс мощности в соединяемых энерrосистемах.
Определим завИСимость предельноrо времени отключения трехфазноrо корот-
,Koro замыкания t пр от передаваемой мощности РО. П редельное время отключения
пр === У2ТJэ(а 1 ао)/Ро. (10.6)
rде
81 === arccos [(Р 0/ Р 12)( 2t 2а о ) + cos ('It ао)]. (10.7)
Используя (10.6) и пренебреrая активным сопротивлением межсистемной
слабой связи, считаем, что на ней нет промежуточных наrрузок и что наrрузка в
317
соединяемых энерrосистемах при рассматриваемом коротком замыкании не изме
няется. Принимая относительные инерuии энерrосистем равными и учитывая,
что 60 == arcsin(PoIP 1z ), получим
Y 2T J P Нl IP 12 [ РО ( . Р ) '
t пр == arccos 'It 2 аrсslП
P O IP12 P 12 Р 12
--+
У(1 РО ) 2 ] . РО ·
аrсsш ,
Р 12 P 12
[де значения t пр и T J даны в радианах.
По этой формуле на рис. 10.5 построены за-
висимости t пр == f(P o IP12) для различных значений
Р 12 1Р Н1 при Т } == 15 с. Как видно из кривых,
предельное время отключения KopoTKoro замыка
ния достаточно для действия основных защит.
(10.8)
'i;RPI С
5
4
J
2
t
О
0,1 0,2 О,З 0,4 0,5 PO/P1Z
* ! tO.4. СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ
СЛАБblХ СВЯЗЕЙ
Рис. 10.5. Предельное время
отключения трехфазноrо коро-
TKoro замыкания в зависимости
от соотношения P o IP12 при
передаче различной мощности
Анализ опыта эксплуатации электропередач,
являющихся слабыми межсистемными связями, по-
казывает, что причиной нарушения их устойчивос-
ти чаще Bcero является превышение предела CTa
тической устойчивости из-за отключения одной из
параллельных линий или сравнительно медленно-
[о повышения потока мощности, обусловленноrо изменением ero среднеrо значе-
ния или нереrулярными колебаниями.. Поэтому определение области статически
устойчивых режимов для межсистемных связей электропередач является важ-
ной задачей.
На предельную по условиям статической устойчивости мощность влияет ряд
факторов: напряжение по конпам электропередачи, активные и реактивные со-
противления линий электропередачи, промежуточные наrрузки и значени ста-
тизма соединяемых энерrетических систем. Прежде Bcero оuеним, насколько пре-
дельный уrол электропередачи может отличаться от 900 за счет влияния активных
сопротивлений электропередачи и значений статизма соединяемых систем. При
этом анализе будем считать постоянными Эквивалентные э. д. с. энерrетических
систем. Тоrда предельныЙ по условиям устойчивости уrол будет определяться из
соотношения
cz ==..J..... dP 1 ..J..... dP 2 > О. (10.9)
т Jl d'O Т J2 d'O
Для слабой связи можно принять, что*
P 1 == (Р.>:I PHд + btaS*P H1 + P 12 siп(3 a) == P 01 + b/1*s*P H1 +
+ P 1Z siп (3 а); (10. LO)
* Здесь Р Т мощность турбины; bJ* == (dPldf)(foIPo) коэффициент, характеризую-
щий оТ!:осительную крутизну статических характеристик наrрузок, rде fo и РО номиналь-
ные значения частоты и мощности; S* изменение частоты, вызывающее соответствующее из-
менение мощности наrрузки (АРп == b/s*P). .
318
Р 2 == (Р Н2 PT2) + Ь/2 S*РИ2 P 12 sin (8 + а) - Р О2 + Ь/ 2 *S*Р И2 Pl2sin (8 + а).
. (10.11)
Суммируя эти выражения и переходя к приращениям, в предположении,
что мощности энерrосистем балансируются при б бо, получим
S* == 2PI2sinacos8o/(b/l*PHl + Ь/ 2 *Р и2 ). (10.12:
Подставляя (10.12), (10.10), (10.11) внеравенство (10.9), после преобразова
ний Н:;lйдем следующее условие:
А cos о + в sin 8 == V А2 + в2 cos (8 л) > о,
откуда б ир == 900 + Л, rде
А == Pl (TJl + Т J2)cosa; В == Р 12 [(Т J2 T J1 ) +
т Jlb/ 2 *PH2 Т J2b!2*PН1 ] ' Р (Т Jl + т J2) (b j2 *P H2 b/ 1 *P Н1 ) . .
sш а 12 sш а,
Ь/ 1 *Р ю b f2 *P ru Ь/ 1 ",Р ю + Ь/ 2 *Р Н2
tg Л == == b f2 *P H2 bfl*P Н1 ; Л == arctg ( bf2* bfl$ tg а )
А Ь/ 2 *Р И2 + Ь/ 1 *Р И1 b f2 * + Ь/ 1 *р ,
+2
причем == Р Н1 /Р Н2 при Р Н1 > Р Н2 .
Из приведенных выражений видно, что чем меньше отношение активноrо со-
противления электропередачи к реактивному, т. е. чем меньше а и Л, тем ближе
б пр к 900. При равных относительных значениях статизма энерrосистем макси
мальное знач.ение Л манс == а получается при == о, а при == 1 значение
Л == о. Если статизмы различны, то Л манс не изменяется, а изменяется лишь вели
чина , при которой Л ==0. постоянные инерции энерrосистемы не влияют на
величину Л, если не учитывается статизм энерrосистем. Если же считать, что
мощность энерrосистем не зависит от частоты, то уrол Л зависит от постоянных
инерции. Объясняется это положение [16] тем, что в первом случае при появле
нии !1Р частота в энерrосистеме изменяется на оrраниченную величину S*, а во
втором неоrраниченно. Хотя второй случай дает физически неверную картину
явления, конечный результат получается одинаковым, если
T Jl * == TJ И Ь/ 1 * == b j2 *.
* 10.5. НАСТРОЙКА РErУЛЯТОРОВ ВОЗ&УЖДЕНИЯ
Реrуляторы возбуждения (РВ), которыми снабжены все мощные reHepaTopbI,
являясь средством повышения надежности для выполнения своих функций, тре-
буют тщательной настройки. Это особенно относится к АРВ с. д., которые при
плохой настройке MorYT давать результаты даже худшие, чем АРВ п. д., т. е.
вызывать раскачивание системы.
При реrуляторах любоrо типа размер областей статической устойчивости
электроэнерrетической системы (ЭЭС) и их расположение относительно настроеч-
ных параметров зависят от режима системы. В пространстве настроечных пара-
метров выбранным их величинам соответствует рабочая точка. Возможно больший
диапазон режимов обеспечивается, если эта точка выбирается в общей для HeKOТO-
319
poro множества областей устойчивости системе пространства параметров. Ра-
бочая точка при э'Юм в большинстве случаев оказывается вблизи rраниц областей
устойчивости какоrо-либо режима, что в плоскости корней соответствует корням,
близким к мнимой оси. Области устойчивости, соответствующие различным ре-
жимам, должны накладываться друr на друrа, иначе для устойчивой работы по-
требуется различная настройка реrуляторов, что недопустимо.
При обобщении решения задачи обеспечения устойчивости ЭЭС важен синтез
законов рeryлирования АРВ r HepaTopoB электростанций, включающий в себя
выбор системы стабилизации АРВ. Законы реrулирования и значения параметров
АРВ синхронных reHepaTopoB электростанций должны обеспечивать одновремен-
ное выполнение следующих условий:
а) обеспечение больших общих участков областей статической устойчивости
для заданноrо множества характерных режимов работы электростанции в систе-
ме, т. е. минимальные требования к остроте настройки;
б) непротиворечивость условий статической устойчивости в наrрузочных ре-
жимах и в режиме холостоrо хода reHepaTopoB, отключенных от сети;
в) хорошее демпфирование малых колебаний;
r) максимально возможное совпадение областей статической и динамичеr;кой
устойчивости (с учетом действия форсировки), УДОБ.1етворительное демпфирова-
иие больших колебаний.
Все указанные условия важны в равной мере и ни одно из них нельзя считать
доминирующим.
Обобщенным показателем качества переходныХ процессов может быть сте-
пень устойчивости, или коэффициент демпфирования, малых колебаний. Обеспе-
чение высоких значений этих показателей задача выбора закона реrулирова-
ния АРВ. Трудности этоrо выбора обусловлены тем, что в современных ЭЭС все
чаще появляются объединения на параллельную работу с помощью межсистем
ных связей. Это вызывает изменение динамических свойств Bcero объединения,
что может приводить к ухудшению качества перехоДНЫХ процессов, а иноrда и к
нарушению устойчивости. При этом возникает низкочастотное самораскачивание
(с частотой в диапазоне O,1 O,5 [ц). Это особенно важно при объединении ЭЭС
с помощью слабых связей и создании энерrообъединений «протяженной структу-
ры». В этих условиях для улучшения статической устойчивости необходимы
хорошие сис)'емы стабилизации существующих АРВ электростанций (например,
замена АРВ п. д. на АРВ с. д.). Изменения в АРВ, выполняемые для различных
электростанций, по-разному влияют на устойчивость эн ер rообъедин ен ий. От-
сюда появляется общая постановка задачи выбора АРВ, которая может быть
сформулирована следующим образом: выявить те электростанции системы,
на сенераторах которых наиболее целесообразна установка АРВ с. д. , и опреде-
лить системы стабилизации этих АРВ, позволяющие повысить устойчивость
ЭЭС в целом и, в частности, демпфировать низкочастотные колебания*.
Одним из приближенных способов выбора стабилизирующих параметров
АРВ с. д., приrоДНЫМ для простых электрических систем, яВляется способ, при-
нимающий во внимание лишь о Д н у ч а с т о т у э л е к. т р О М е х а н и ч е с-
к и х к о л е б а н и й; он основывается на соображении о том, что выбор обрат-
.. СМ.: Броссманн Э., Венuков В. А., Строев В. А. Обобщение подхода к выбору АРБ
в сложных электрических системах. Известия АН СССР. Энерrетнка н транспорт, 1982,
.N!! 3.
З2О
ных связей и коэффициентов усиления каналов напрsrжения во MHoroM определя-
ется условиями устойчивости системы реrулирования возбуждения отключенноrо
от системы reHepaTopa. Для определения необходимых значений коэффициен-
тов усиления по каналам производных тока или частоты (стабилизирующих пара-
метров) при этом строятся области статической устойчивости для всех характер-
ных режимов работы системы.
. С точки зрения статической устойчивости вся совокупность значений
коэффициентов усиления стабилизирующих параметров, НдХодящихся внут-
ри общеzо участка областей устойчивости, равнозначна. ДЛR выбора рабочей
настройки АРЕ необходимо произвести дополнительную оценку возможных
настроек АРЕ с помощью тех или иных критериев качесmва.
При малых возмущениях это может осуществляться построением кривых
paBHoro затухания. Для оценки поведения системы при конечных возмущениях
предложено рассматривать дополнительные области различных динамических
свойств системы и определять эквивалентный коэффициент затухания с учетом
нслинейностей уrловой характеристики мощности и возбудителя.
Перед вводом в работу новой электростанций рекомендуется проводить ана-
литические расчеты и эксперименты на моделях, в процессе которых выбирается
необходимый закон реrулирования и определяются ориентировочные значения Ко-
эффициентов усиления по отдельным каналам реrулирования. Окончательный
выбор настройки АРБ производится после проведения натурных испытаний.
Обычно принимается следующий порядок настройки: 1) определяется взаим-
ное положение осей параметров реrулирования; 2) в этих осях строятся ампли-
тудно-частотные характеристики разомкнутой системы реrулирования по отдель-
ным каналам реrулирования; 3) находится диапазон частот электромеханичес-
ких колебаний системы; 4) выполняются rрафические построения и выбираются
уставки стабилизирующих параметров.
Таким образом осуществлял ась настройка АРБ на ряде мощных rэс.
Например, на Братской rэс* для определения частоты собственных колебаний системы
и оценки влияния закона реrулирования и настройки АРВ на rашение электромеханических
колебаний в систему подавались ступенчатые и rармонические возмущения, допустимые по
условиям работы потребителей (дб макс == 3 ...;-- 50). Возмущения подавались в систему воз-
буждения reHepaTopa (на сумматор АРВ). Подача возмущений на вал турбины (непосредст-
венное изменение момента reHepaTopa) из-за большой инерционности системы управления rид-
ротурбиной может производиться лишь с очень малой частотой (00 < 2 ...;-- 3 c 1), что для дан-
ных опытов неприемлемо.
Из сравнения результатов, полученных при подаче различных возмущающих воздейст-
вий, видно, что такие переходные характеристики позволяют определить собственную час-
тоту колебаний системы, качественно оценить действие АРВ (демпфирование, раскачивание)
и найтИ приближенные абсолютные значения коэффициента затухания.
rармонические возмущения позволяют оценить характер действия АРВ в ВИде макси-
мальных отклонений уrла на резонансной частоте при разных настройках, показанных на
рис. 10.6. Данные MorYT использоваться для сравнительной количественной оценки действия
различных параметров реrулирования (/, " U и др.) на rашение колебаний уrла.
* СМ.: Тессе Б. А., Лumкен.с И. В. Практический способ выбора стабилизирующих
параметров АРВ сильноrо действия. Известия АН СССР. Энерrетика и транспорт, 1970,
.N2 6.
Il 4
321
Данный способ настройки и выбора стабилизирующих параметров АРВ с. д. достаточно
прост и доступен в условиях иаладочных испытаний на электростанции. Выбранные с помо-
щью этоrо способа коэффициенты усиления АРВ обеспечивают интенсивное демпфирование
электромеханических колебаний синхронных машин. Однако для сложных систем рассмот,
ренный способ может применяться как часть известной методики последовательной коорди,
нации настроек реrуляторов сильноro действия. Иноrда в такой методике для оценки качест-
ва используlO'l' понятие степени устойчивости, характеризуемой модулем вещественной час.
ти сопряженных комплексных корней характеристическоrо уравнения, ближайших к мнимой
оси. Оптимальные комбинации коэффицнентов стабилизации определяются с помощью ме.
тода D-разбиения. Методика предусматривает нахождение коэффициентов стабилизации од.
ной из станций, обеспечивающих наибольшую степень ус.
тойчивости. Далее настраивается АРВ следующей стан-
ции, наХОДИТСЯ еще пара коэффициентов и затем опреде.
ляется следующая пара.
Последовательная координация настроек АРВ с. д. в
очень сложной системе для повышения ее демпфирующих
свойств оказывается малоэффективной, так как рост сте.
пени устойчивости уменьшается после настройки реrуля.
торов на одной.двух станциях.
Это объясняется тем, что за счет вариации лишь двух
коэффициентов обеспечить одновременное соrласованное
изменеНИt; вещественных частей rруппы доминирующих
корней в сторону ббльших значений степени устойчивости
невозможно. Вариации этих коэффициентов часто приво.
дят к противоположному характеру изменения действи-
тельных частей корней относительно ранее достиrнутых,
т. е. появлиется неуправляемость степенью устойчивости*.
В результате этоrо методика не дает возможности оценить
и полностью реализовать преимущества пропорционально'
ro или сильноrо реrулирования в нескольких точках сис-
темы. Очевидно, что желательна одновременная коорди,
нация настройки ряда реrуляторов возбуждения, которая
должна обеспечивать существенно л учшие результаты,
чем последовательная координация.
Кт Вел
8
6
2
4
z
5,0.
О
'+
б Ки, ел
2
Рис. 10.6. Области статиче-
ской устойчивости системы
Р О,б9 ОТН. ед. (1) в P 1,I ОТН.
ед. (2) (KlI o,21 ед. 80з6. с 2 /ед.
тока дел. К21 О,Об ед. 80з6.
с 2 /ед. тока дел)
Была предложена методика, позволяющая
аналитически определять наибольшую степень ус-
тойчивости системы, достижимую на' первом этапе последовательной КОDрдина-
ции настроек АРС с. д. При этом была выявлена существенная зависимость
управляемости степенью устойчивости системы за счет сильноrо реrу.ТlИрования
возбуждения [енератора от принятоrо режимноrо параметра стабилизации.
В результате показано, что в зависимоСТИ от сложности системы, параметров
режима и закона реrулирования характеристическое уравнение на отдельных
этапах оптимизации приобретает либо кратные корни, либо две пары корней
с одинаковыми вещественными и разными мнимыми частяМи. При разночастотных
корнЯХ следующий этап оптимизации, как правило, повышает степень устойчи-
вости и приводит К появлению кратных корней характеристическоrо.уравнения.
В итоrе было установлено, что одновременная координация АРВ на нескольких
. СМ.: rОрЮR08 Ю. П., Левuнштеilн М. Л., Щербачев О. В. Методика определения
оптимальных параметров реrулировании в сложных линеаризованных истемах снескольки,
ми реrулируемыми объектами. ТРУДIiI ЛПИ, 1968, Ng 293, с. 67 70; rруздев И. А.,
Туруспекова r. х. Исследование последовательной оптимизации настроек реrуляторов воз-
буждения по критерию степени ..-стойчивости снстемы. Труды ЛПИ, I 82,. NQ 385;
c.32 37.
322
станциях обеспечивает существенно лучшие результаты, чем последовательный
поиск настроек АРБ с. д. Например, на основе метода D разбиения при равенст-
ве чш;ла одновременно варьируемых коэффициентов стабилизации числу состав-
ляющи{С движения достиrается лучшая. управляемость степенью устойчивости.
В ряде случаев возникает острая необходимость в специальной настройке АРВ п. д.,
у которых отсутствне стабилизнрующих сиrналов по производным режимных параметров
не позволяет выбнрать произвольно высокий коэффнциент усиления канала реrулнровання
по отклоненню напряження. Прн этом возникали трудности с выдачей обоснованных колн
чественных рекомендацнй для выбора настроечных параметров АРВ, учитывающих реальные
режимы энерrосистемы и станцин. Запас статической устойчивости reHepaTopoB в режнмах
недовозбуждення практнчески Нензвестен. Вследствие этоrо в о з м о ж н о н е д о n у с т и-
мое приближенне к rраннце статической устойчивостн и
е,е н а ру ш е н н е. Подтвержденнем этому явились наблюдаемые в 1975 1976 П. на
reHepaTopax некоторых ЭС в режнмах мннимальных их иаrрузок явлення автоколебаний,
охватывающие всю энерrоснстему.
Опасность нарушения статнческой устойчивости системы в указанных случаях была
устранена после настройки АРВ reHepaTopoB в соответствии с предложенной методикой,
которая может быть успешно нспользована при введении в эксплуатацию в концентрирован-
ных энерrоснстемах новых тепловых и атомных электростанций, настройке систем возбужде-
ния с АРВ п. д. при высокочастотной системе возбуждения. Оказалось, что при высокочастот-
ной системе возбуждення, примененной в обычном заводском исполнении, можно обеспечить
статнческую устойчивость при правильной настройке АРВ п. д. Однако еслн на ряде АЭС
в силу специфических особенностей reHepaTopbl работают в наиболее неблаrоприятных усло-
виях с точкн зрения периоднческой статнческой устойчивости, то, проводя испытания, сле-
дует получать параметры функциональной модеЛjl, необходимые для расчетных исследованнй
статической устойчивости. Прн этом надо учнтывать существенное влиянне коэффициента
компаундирования на общий коэффициент усиления системы возбуждения и область периоди-
ческой статической устойчивостн. Следует иметь в виду, что условия возникновения и xapaK
тера переходныХ процессов прн установлении и устраненин колебаний таковы, что нмеет
место мяское возбуждение автоколебаний при нарушении безопасной периодической zраницы
статической устойчивости. Автоколебання имеют частоту порядка 1 rц и амплитуду режнм
ных параметров, увеличивающуюся при удалении от rраницы устойчивостн. Предлаrаемый*
метод перенастройки АРВ п. д. обеспечнвает достаточный запас статической устойчивости н
исключает возннкновение автоколебаннй во всем диапазоне рабочих режнмов. Метод не Tpe
бует вмешательства в работу ЭС н не влияет на работу АЭС в ЭС. ОПЫТНЫе результаты без до-
полнительных расчетов дают ответ на вопрос о правильности выбранной настройки АРВ.
Предложенные методы настройки, описанные выше, в ряде с.пучаев дают
положительные результаты. Однако рост сложности современных энерrосистем
предъявляет все более высокие требования к качеству и быстроте настройки уст-
ройств автоматическоrо управления и реrулирования, в особенности АРБ с. д.
Анализ итоrов эксплуатации этих реrуляторов показывает, что в энерrосисте-
мах часто не проводят выбор настройки АРБ применительно к конкретным ус-
ловиям работы электростанций. Это ведет к снижению запаса устойчивости сис
темы и в ряде случаев является причиноц возникновения аварийных ситуаций,
начинающихся в результате самораскачивания.
Одной из причин некачественной настройки АРБ является сложность сущест-
вующих методик выбора настроечных параметров. Для выбора коэффициентов
реrулирования выявляются динамические свойства системы при ступенчатом ли-
бо rармоническом сиrнале управления, подключаемом одновременно на контроль-
ные входы АРБ-параллельно работающих reHepaTopOB. Чтобы найти область ус-
* См.: Ковачева Л. и.. Лирин В. Н., Литкене и. В. Экспериментальное W:Cледование
статической устойчивости турбоrенераторов АЭС в режиме недовозбуждения. Электрн-
ческие станцни, 1983, 2 4.
11*
323
тойчивости, опыты проводят при различных сочетаниях настроечных параметров
АРВ, в том числе при таких настройках, при которых система приближается к
rранице устойчивости по самораскачиванию. Изменение настройки АРВ осущест-
вляется путем одновременноro варьирования коэффициентов реrулирования
всех параллельно работающих машин.
TaKoro рода систем:ные испытания мо-
rYT привести к нарушению устойчи-
вости системы, а поэтому при выборе
настроечных параметров АРВ появ-
ляется необходимость создания в энер-
rосистеме на весь период испытаний
достаточноrо rорячеrо резерва мощ-
ности на случай нарушения устойчи-
вости.
Предложенный новый метод* на-
стройки позволил контролировать ус-
тойчивость энерrосистемы и осуществ-
лять выбор настроечных параметров
по данным режима нормальноrо функ-
ционирования энерrосистемы, без про-
ведения специальных системных ис-
пытаний. Выбор настройки АРВ осу:-
ществляется в этом методе путем об-
работки с помощью микро-ЭВМ дан-
ных о переходном процессе, проявля-
ющемся в системе при малом возму-
щении.
Сущность метода поясняет схема
проrраммы расчета настроечных па-
раметров АРВ (рис. 10.7). Входной
информацией служат данные о пере-
ходном процессе в энерrосистеме, по-
являющем:ся при малом ступенчатом
сиrнале управления на входе АРВ.
Входным сиrналом для микро-ЭВМ
служит напряжение на выходе датчи-
ка MrHoBeHHoro значения частоты в
энерrосистеме. Датчик частоты под-
ключается к трансформатору шин вы-
cOKoro напряжения электростанции.
Выходное напряжение датчика частоты через равные интервалы времени вво-
дится в память микро-ЭВМ либо с помощью аналоrо-цифровоrо преобразователя
либо по осциллоrрамме процесса. Полу.ченный массив данных опереходной
функции системы h(t) используется для расчета методом D-разбиения области
статической устойчивости.
8ВаВ оанных о первхоВнои функции
3а8ание Wi
Вычиспение 8ещвст8енноi1 частотноii Xl1pI1J(-.
теристикц заМКНУfТ70и системь,
Вычисление мнимоц частОЛ7#оii харик
теристики замкнутой CиCтBМ1J!
Вычисление 8еЩВС/718В"'lOiJ чiJстоfпнoi} ХОРОК-
теристики P030MK!lymaIJ cvcтeИbl
ВЫЧlJсление мнимои частотноi1 хорокте
pVCff1IJKlf розомкнутоi1 ощ;темы
Вычиспение ераницы оолости отатUf/е.
устойчи80сти (О-розоиение
Нет
Печать результато/J
Остано8ка
Рис. 10.7. Схема алrоритма проrраммы для
расчета настроечных параметров на микро-
ЭВМ
. * См.: Любарский В. r., Филатов В. Н., Любарская Н. В. Метод расчета области ус-
тойчивости энерrосистемы и выбора настройки АРВ по параметрам переходной фуикции сис.
темы. Электрические станции, 1982, N2 11, с. 40 45. .
324
Алrоритм проrраммы предусматривает выполнение вычислений в такой' по
следовательности:
7""'"' исходя из переходной функции системы h(t) по формулам прямоrо преоб
раЗОВllНИЯ Фурье вычисляется частотная характеристика замкнутой системы pe
rулирования W(jo»;
выполняется расчет частотной характеристики Wf(jo» операционных
цепей АРБ при данной настройке реrуляторов возбуждения. установленных в
эксплуатации;
. вычисляется частотная характеристика разомкнутой системы реrулирова
ния W po(jo»; .
------; по частотной характеристике W po(jo» методом D разбиения вычисляются
,rраницы области статической у,стойчивости системы в плоскости коэффициентов
реrул ирован ия. АРБ по изменению о> и коэффици
ентов по производной частоты (Ко!. К ц ).
На рис. 10.8 представлена область устойчивости
(кривая 1). В даииом режиме для проверки точности при
меняемой методики были определены близкие к rраничным
(по устойчивости) зиачения коэффициентов АРВ путем
одиовременноrо ваРЬИРО!lания коэффициентов KOf. К 1 !
реrуляторов параллельно работающих reHepaтopoB.
Для определения верхией rраницы коэффициентов
реrулирования по производной частоты максимальное зна-
чение коэффициента по этому каналу было увеличено
вдвое. На рис. 10.8 rраница значений настроечных пара
метров, в пределах которой производилось варьирование
коэффициентов KOf' Klf' показана штриховой линией. Ми-
нимальные значения коэффициента Klf' установка кото-
рых производилась в процессе опытов. соответствуют
кривой 2, максимальные кривой 3. Обеим кривым со-
ответствуют переходные процессы с малым декрементом
затухания, что свидетельствует о близости к rранице об
ласти статической устойчивости.
На рис. 10.8 точкой А отмечена настройка, при которой по переходной функции рассчи-
тана с помощью микро.ЭВМ кривая 1 области статической устойчивости. Сопоставление pe
зультатов экспериментов (кривые 2 и 3) с расчетной кривой по данной автором методике n<r
казывает, что в данном случае обеспечивается достаточная точность вычисления предель-
ных по устойчивости коэффициентов реrулирования. Данная методика позволяет найти рас-
положение rраницы области устойчивости во всех четырех квадрантах плоскости коэффици-
ентов KOf' Klf' причем вне зависимости от Toro, располаrается эта rраница в пределах COOT
ветствующих шкал АРВ либо находится за пределами максимальных значений коэффициен-
тов, предусмотренных в АРВ. Дальнейшее совершенствование способов настройки должно
привести к появлению автоматических устройств, подбирающих для данных конкретвых
условий параметры АРВ п. д. и АРВ с. д.
Контроnьные вопросы
20 -10
Рис. 10.8. Области устойчивос
ти в зависимости от производ-
ных по частоте K1f и Кб!
10.1. Что следует понимать под «слабыми» связями энерrосистем?
10.2. Назовите особенности работы электрических систем, соединенных линиями CJlа
бой связи.
10.3. Как влияют колебания мощности и частоты в связанных системах на запас устой-
чивости соединяющей их линии передачи?
10.4. Что такое обменная мощность, в чем заключаются задачи реrулирования обмен-
ной мощности? Какие колебания входят в состав обменной мощности?
325
10.5. Как можно применить способ площадей для исследования устойчивости передачи,
связывающей две системы, в одной из которых происходит отключение части наrрузки или
rеиераторов?
10.6. Какое соотношение частоты и обменной мощности принимается за основу при ре-
rулировании?
10.7. Каков примерный характер изменений частоты в связанных системах при набросе
мощности в одной из них и как при этом меняется обменная мощность?
10.8. Назовите основные причины нарушения устойчивости энерrосистем, соединенных
слабыми связями.
10.9. Какие колебания обмениой мощности опасны с точки зрения устойчивости объе-
диненных систем?
10.10. Какие факторы наиболее сильно влияют на устойчивость слабосвязанных энер-
rосиетем?
Темы рефератов
1. Примененне реrуляторов частоты и обменной мощности для реrулирования межсис-
темных перетоков мощности и улучшения устойчивости.
2. Влияние вероятностных факторов на перетоки мощности между системами и их ус-
тойчивость.
rЛАВА 11
ПЕРЕХОДНЫЕ ПРОЦЕССЫ В СИСТЕМАХ ЭЛЕКТРОСНА&ЖЕНИЯ
(УЗЛАХ НАrРУзки) ЭЛЕКТРИЧЕСКИХ СИСТЕМ
ПРИ МАЛЫХ ИЗМЕНЕНИЯХ РЕЖИМА
t 11.1. ОБЩАЯ ХАРАКТЕРИСТИКА ПРОБЛЕМЫ
Часть электроэнерrетической системы, непосредственно осуществляющая
снабжение электрической энерrией потребителей, называется системой электро-
снабжения. Она содержит питающие и распределительные сети, трансформаторы,
компенсирующие устройства (конденсаторы, синхронные компенсаторы) и уст-
ройства, в которых электрическая энерrия используется в производственных или
бытовых целях. Эти устройства обычно называются nриемникам.и электрической
энерrии, нazрузками, потребителями. Места подключения отдельных систем
электроснабжения к высоковольтным сетям электрических систем называются
узлами нazрузок.
При нормальной работе систем электроснабжения и во время различных
пусков и остановок оборудования происходят н о р м а л ь н ы е пер е х о д-
н ы е про Ц е с с ы. Отключения отдельных элементов, короткие замыкания
в них приводят К а в а р и й н ы м пер е х о Д н ы м про Ц е с с а м. У ста-
новившиеся режимы и переходные процессы в системах электроснабжения долж-
ны удовлетворять тем общим требованиям, которые в rл. 1 4 были сформулиро-
ваны применительно к электрической системе в целом.
Переходные процессы в системах электроснабжения можно различать п о
в и Д у в о з м у Щ е н и й (малое, большое, длительное и т. д.), так же как это
дел ал ось для системы в целом. Так, в нормальном режиме системы при малых ero
возмущениях возникает необходимость проверки статической устойчивости син-
хронных двиrателей, синхронных компенсаторов и больших rрупп асинхронных
двиrателей, которые, имея мощность, соизмеримую с мощностью питающих их
reHep, аторов MorYT оказаться неустойчивыми, причем эта неустойчивость прояв-
ляется в виде специфическоrо явления, называемоrо лавиной напряжения. Пуски
двиrателей, резкие колебания момента на их валу и т. д. приводят К изме-
нениям зна:ц:ения и фазы напряжения в узлах наrрузки. Отклонения величин
не должны превышать допустимых пределов. Влияние резких изменений }1ежима
двиrателей обычно заметно проявляется в распределительных сетях в виде ко-
лебаний напряжения. Более медленные изменения режима двиrателей, связанные
с технолоrическими процессами, в которых двиrатели участвуют, преимуществен-
но отражаются на уровнях напряжения в питающих сетях (на отклонении напря-
жения). Такие нарушения режима, как короткие замыкания в элементах пита-
тельных сетей, отключения и повторные включения синхронных двиrателей,
самозапуск асинхронных двиrателей после перерывов питания, самовозбуждение
и самораскачивание двиrателей при работе на емкостное сопротивление и т. д.,
MorYT существенно сказываться на режиме всей системы электроснабжения, по-
этому переходные процессы в ее элементах рассматриваются не только с точки
. 327
зрения обеспечения их надежности и устойчивости, но и с точки зрения обеспече
ния надежности всей системы электроснабжения.
Переходные процессы в узлах наrрузки MorYT рассматриваться с двух точек
зрения:
1) п о в е Д е н и я с о б с т в е н н о н а r р у з к и при переходных про
цессах и влияния этих процессов на работу потребителей (например, миrанl1е
ламп при колебаниях напряжения в сети, порча продукции при изменении ско-
рости двиrателей во время изменений напряжения или частоты при переходных
процессах и т. п.);
2) в л и я н и я пер е х о Д н ы х про Ц е с с о в в наrрузке на режим
системы (например, самозапуск двиrателей может привести к недопустимому
понижению напряжения в системе, а в неправильно спроектированной системе
даже к нарушению ее устойчивости).
Кроме TOro, процессы, непрерывно происходящие в какой либо наrрузке,
MorYT оказывать неблаrоприятное влияние на работу остальныХ потребителей
системы (например, толчки в наrрузке, содержащей мощные двиrатели прокатных
станов, MorYT приводить к колебаниям напряжения и частоты в системе, понижая
качество выдаваемой потребителям энерrии). .
1t.2. СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
двиrАТЕЛЬНОА НАrРУзки
Основную часть наrрузки (обычно от 50 до 80%) составляют асинхронные
двиrатели, свойства которых существенно проявляются в характере переходных
процессов Bcero узла системы. Для них, Так же как и для синхронных двиrателей,
различают с т а т и ч е с к и е х а р а к т е р и с т и к и, т. е. зависимости TO
ка 1/\ или вращающеrо момента IMI двиrателя от медленно меняющеrося сколь-
жения ero ротора Isl, и д и н а м и ч е с к и е ха р а к т е р и с т и к и зави-
симости быстро меняющеrося скольжения, напряжения и скорости их изменения
(ускорения Gt) от тока. Так, для асинхронноrо двиrателя
М СТ == (и, s); М дин == ff' (и, dU/dt, s, ds!dt).
Для синхронноrо двиrателя аналоrичная зависимость, определяющая CTa
тическую характеристику, будет иметь вид
М СТ == НЕ, и, о); М дин == ff'(E, dE!dt, и, dU/dt, о, do/dt).
Эти характеристики rрафически представлены на рис. 11.1 и 1 [2.
Прёщессы при медленных отклонениях от установившеrося состояния MorYT
всеrда рассматриваться на основе только статических характеристик. Для изуче-
ния процессов при быстрых изменениях, т. е. «в динамике», должны применяться
динамические характеристики*. Однако в ряде случаев и при рассмотрении ди
намических процессов можно пользоваться квазидинамическими, а иноrда и ста-
тическими характеристиками. Например, при относительно медленных ускорениях
асинхронноro двиrателя н несоизмеримости электромаrнитных и электромеха-
нических постоянных времени разница в использовании статических и динами- .
* Подробно СМ.: Постников И. М. Обобщ€нная теория и переходные процессы электри-
ческих машин. М.: Высшая школа, 1975, с. 319; Казовскuй Е. Я. Переходные процессы
в электрических машинах nepeMeHHOI'O тока. М.-Л.: АН СССР, 1962, с. 624. .
328
,ч ских характеристик будет невелика (рис. 11.3). Как видно из рисунка, чем MeHЬ
-ше коэффициент К I и чем больше так называемая условная скорость изменения
скольжения Syел == I/K == Мном/(JФо), тем сильнее искажаются статические
механические характеристик и, становясь динамическими*. Здесь
К 1 == V 160/[(/ НОМ/ 1 uSнOM)2 4,8] Sуел ,
rде 1 НОМ И 1 п номинальный и пусковой токи.
При изучении ряда переходных процессов асинхронных двиrателей прибли-
. женно можно считать, что фазовая траектория или динамическая механическая
о)
м
4
2
s
Рис. 11.1. Статические и динамические характеристики асинхронноrо двиrате-
ля:
а при разrоие: 1 статическая; 2 динамическая при малом ускоренни а; 3 дииаМИче-
екая при б6льшем (чем 2) ускореиии; б при торможеиии: 1 статическая; 2. 3. 4 дииа.
мичеСкие при ускореиии
характеристика процесса определяется следующим образом. Принимают, что ди-
намический момент, возникающий при любом нестационарном режиме, состоит
из двух составляющих: М ДИН == М I + М 2 , rде М I составляющая момента,
определяемая переходными процессами, связанными с протеканием в обмотках
двиrателя переходных токов; М 2 составляющая момента, определяемая как
М 2 == К 2 М ет . Здесь Мет ==' (Ф) статическая механическая характеристика
рассчитанная по известной формуле момента асинхронноrо двиrателя: '
Мет == 2М ир (1 + а)
(Oo (O + (Oo OOнp +2а
(1)0 ООНР (Оп (о
rде Мир критический (максимальный) момент; Фир соответствующая ему
скорость; а поправочный коэффициент.
Таким образом, при расчете моментов применяется принцип наложения пред
полаrающий пренебрежение нелинеиным характером ряда процессов и па'рамет-
* Здесь М НОМ номинальный момент). J момент инерции: СВ ном НОМинальная
скорость.
329
pon*. Практика показывает, что в большинстве случаев это справедливо и полу
чающаяся ошибка невелика.
Коэффициент, учитывающий отличие динамической характеристики от CTa
тическои, определяется по формуле
к == 1 1,8 . IO [ 1 .. / 1 4Т э5кр М ] ,
,2 2T 8 sнp V 1 ,8.1O ир
rде Т э электромеханическая постоянная времени; М кр максимальный (кри
тический) момент.
Обычно К 2 == 0,7 7 1.
Природа динамическоrо момента в значительной мере определяется тем,
что при достаточно быстром изменении скорости двиrателя момент ero не успевает
принять значения, соотвеmсtnвующеz() статической механической xapaKтepиcтu
ке, статическая характеристика искажается.
Коэффициент К 2 может быть определен как отношение времен разrона (или
торможения К 2 == tст/tдии' определенных один раз по статической иСТ), а друrой
раз по динамической (t 2 ) характеристикам.
60
f5 30 45 50' 75 9в tIJ5 12О 135 о, ;paa
м
200
180
150
140
120
100
80
Рие. 11.2. Статическая (1), динамическая (2) и КВа-
зидинамические (3) характернстики сиихронноrо
двиrатeJIЯ щ}и увеличении наrрузки (момента М)
от M 1 дО M
* СМ.: Петров и. И., Мейстель А. М. Специальные режимы работы аСlJИХРОННor.о
электропривода. М.: Энерrия, 1968, с. 264.
330
Сопоставить динамические и статические характеристики* при разrоне асии
xpoHHoro двиrателя можно по данным табл. 11.1, при составлении которой при-
нято, что статический момент на валу пускаемоrо двиrателя равен нулю. Из таб
.лицы следует, что при больших маховых массах GD2 и больших мощностях ди
1«= ,о{ ,ХА &:5 м ,3 1,5
'\ s.: 'У
JV 0;6 /1 \- 2.0
I I I I ' , 2,5
. ,5
I 41!" 0,5 [
1.
б, 0,4 I V
"
<J ..... 0,3 п .\
А"\ j 0,2- /"'
J L....IIIC 1\) , rv \\\
...... ...., \
" . ......,
u \ 8,/ ""
S 9 8 7 . б L[. J 2 t О } .;z lr .{f . .6 .7 8 -9
{J" ... .......
1,5 ..........
--О,.. Ч ,,-
o, O .11,2 1,3 f....
6,5
O/.j. '1,
ч,о
,5 2,11 35
2,25 2.5 3,0
I
f,2. 1, ц. .
8765432
а
"-0,6
Рис. 11.3. Влияние скорости ,изменения скольжения а: на значения моментов асинх-
pOHHoro двиrателя М == f(K, s)
Здесь М представлено в долях от максимальноrо момента; К див может быть определено как 1)7.
ношение максимальноrо момента М кр ' полученноrо ИЗ rрафика. к рассчитаиному по cr.>тичеек04
характеристике
намические характеристики ближе к статическим, т. е. эта разница тем меньше,
чем больше мощность двиrателя и чем тяжелее ero ротор.
Процессы при ударных наrрузках асинхронных двиrателей можно раздели1Ъ,
разумеется, несколько условно, на две rруппы: 1 процессы при скольжениях,
меньшиХ номинальных или незначительно их превышающих; такие процессы,
вызванные ударной наrрузкой, сопровождают большинство реальных nepexoд
ных режимов работы асинхронноrо двиrателя. При этом колебательные llрОЦес
сы обычно не проявляются; 2 процессы с достижением и даже преВЫIIJeооем
критическоrо скольжения. В этих случаях ударная наrрузка может привести к
остановке двиrателей и колебательные процессы оказываются существенны»и.
Для обеих rрупп процессов характер движения можно определять методом
* См. сноску на с. 330.
З nl
,j.
Таблица 11.1
Тuпuчныii характер I'1 Дll 'f/ (t)
Мощность Маходой
Р.кВт МОМЕНТСО
м
f
0,5 1,0
f,5 2,0 2
S=f
t=o
2 10 J
s=f
t=O
10 25 'f
s=f
t=O
Больше Больше
s=t 25 4-
s= О t=O
последовательных интервалов, причем в пределах каждоro интервала процессы
линеаризуются. .
На рис. 11.4 показаны примерные зависимости моментов от скольжения при
н бросе ударной наrрузки.
у синхронноrо двиrателя динамическая характеристика может еще сильнее:
чем у асинхронноrо, отличаться от статической. Эrо различие обусловлено появ
лением свободных токов в роторе и изменениями ero скорости относительно син -
хронной. Деформация статических характеристик может быть существенной
(см. ри . 11.2). Так же как и для асинхронноrо двиrателя, ее значение обусловл
80 параметрами данноrо двиrателя и характером переходноrо режима. Достаточ-
но адекватный действительности расчет в этом случае может быть выполнен со-
332
. rласно полным уравнениям*. Однако слож-
. ность применения полных уравнений и соот-
ветственно пользования динамическими xa
рактеристиками заставляют обращаться к ква-
зидинамическим характеристикам, построен-
ным при E == сопst.
Процессы, рассчитанные при упрощенном
и полном представлении асинхронноrо двиrа-
теля соrласно уравнениям Парка rорева,
для сопоставления показаны на рис. 11.5.
'На рис. 11.6 показаны аналоrичные процессы
для СЩIхронноrо двиrателя. На рис. 11.5
представлены также процессы пуска асинх"
РЩlНоrо двиrателя. Осциллоrраммы получены
в результате расчета, проведенноrо наАВМ**.
й}
б)
с:::.
......
"
..,
I
о
0,'
5
м
0.8 S
,,0
0,2
0,4-
0,6
Рис. 11.4. Поведение асинхронноrо
двиrателя при ударной наrрузке:
I статическая характеристика; 2 Myд
O.5; 3 Myд"1.0; 4 Myд 1.5; 5
Myд 2.0
Набросы момента М иаб в долях от номи
нальиоrо Миом: Муд Миаб/Миом
2,6
1,0
1,5
t,C'
Рис. 11.5. Расчетные осциллоrраммы, полученные на аналоrовой модели пуска
асинхронноrо двиrатели:
а расчет по полным уравнеиИ'Ям при представлении момента динамической характеристи-
кой; (j расчет по упрощеиным уравнеииям. но при представлении момеита статической
характеристикой
* Уравнения Парка rорева. См. rл. 6.
** См.: rруздев А. А., Кучумов Л. А., Подоксu" В. Я. Математическое моделирование
асинхронной наrрузки. Труды лпи им. М. и. Калинина, 1965, N2 242.
333
При расчете по полным уравнениям* (рис. 11.5, а) получаются динамиче-
ские характеристики, в которых rармонические токи основной частоты в статоре
и роторе представлены оrибающими, а апериодические (постоянные) составляю-
щие в виде rармонических токов. На
рис. 11.5, б показано протекание Toro же
процесса, но полученное по упрощенным
уравнениям. На рис. 11.6 показаны про-
цессы качаний синхронноrо двиrателя
после наброса механической наrрузки
на вал. Осциллоrраммы, снятые, так же
как и в предыдущем случае, на АВМ,
t показывают влияние перехода от полных
уравнений к упрощенным. Из этих и
друrих мноrочисленных исследований
можно заключить, что для приближен-
ных расчетов замена динамической ха-
рактеристики квазидинамической допус-
тима и ведет 1с тем меньшим nоерешнос-
mям, чем больше мощность аерееama, .меньше r/x в цепи статора и меньше
продолжительность изучаемоео nроцесса. .
Высказанные здесь соображения о возможных упрощениях будут исполь-
зованы при изложении rл. 11 и 12.
"$
Рис. 11.6. Сопоставление apaKтepa пере-
ходных процессов в синхронном двиrателе
при расчетах по полным и упрощенным
равнениям:
1 упрощенные. rlx O; 2 полные, rlx O,02: 3
полные, rlx O.05
t Н.3. ЛАВИНА НАПРЯЖЕНИЯ (СТАТИЧЕСКАЯ УСТОАчивость НArРУЗКИ,
ОПРОКИДЫВАНИЕ ДВИr А ТЕЛЕ А)
В дисциплинах электрических машин и электропривода обычно отмечают.
что асинхронные двиrатели имеют большие запасы устойчивости и поэтому обес-
печение статической устойчивости отдельных двиrателей, входящих в наrрузку.
не вызывает затруднений. Если запаG устойчивости характеризовать отношением
максимальноrо вращающеro момента к рабочему, то коэффициент запаса составит
1,5 1,7. Следовательно, даже значительные снижения напряжения на шинах
двиrателей не Moryт привести к нарушению их устойчивости. Однако это относит-
ся к единичному двиrателю или rруппе двиrателей, питаемых от шин напряже-
ния, значение KOТOpOro не зависит от режима двиrателя.
Если двиrатель или rруппа двиrателей питается от reHepaTopa или rруппы
reHepaTopoB, замененных эквивалентным reHepaTopoM соизмеримой мощности,
то напряжение на шинах двиrателя зависит от режима двиrателя (от ero Сколь-
жения). Условия нарушения устойчивости (опрокидывания) двиrателя получают-
ся при этом существенно иными. В этом случае качественные изменения условий
устойчивости обусловлены изменением количества двиrателей, подключенных к
узлу наrрузки. В принятой постановке задачи должна рассматриваться как е Д и:
н о е ц е л о е вся масса двиrателей (эквивалентный двиrатель), входящих в на-
rрузку, причем и параметры этих двиrателей, и их рабочие режимы известны
о ч е н ь при б л и ж е н н о. Так, характеризующие наrрузку параметры име-
ют обычно разброс в CJIедующих пределах (табл. 11.2).
* о полных и ifпрощенных уравнениях (Парка rорева) см. rл. 6.
334
Таблица 11.2
Пара метр
СреДнее значе-
ние
rраницы ПЗlИене-
нни. %
2.0----2'5
::1=30
::1=25
::1=10
::1=40
::1=50
Кратность пусковоrо тока К п
Коэффициент мощиости при пуске cos ерп
Коэффициент мощности при р боте cos ер
Удельный иачальный момеит сопротивления при-
. водных механизмов Ммех О
Степеиной показатель момеита сопротивления n
O,2 .3
O,80 ,82
O.90 0.95
в комплексную наrрузку MorYT также входить и синхронные двиrатели. и
различноrо рода статические устройства (печи, установки электролиза и т. д.),
что еще более осложняет задачу в отношении точности. Пытаться оперировать с
параметрами отдельных двиrателей и по ним отыскивать «эквивалентный», в та-
ких условиях, очевидно, безнадежно, и решение поставленной задачи будет пр<r
водиться в два этапа.
1. Получение к а ч е с т в е н н ы х характеристик и основных математи-
ческих соотношений в предположении, что для эквивалентноrо (всей наrрузке)
асинхронноrо двиrателя известны параметры схемы замещения. При этом, так
как речь идет о качественных физических характеристиках, необходимых
для обоснования рабочей методики, rрубость схемы замещения не может быть
существенна.
2. Получение на основе характеристик наrpузки расчетной практической
методики для выявления возможности появления лавины напряжения и оценки
имеющеrося запаса.
i 11.4. ОСНОВНЫЕ РАСЧЕТНЫЕ СООТНОШЕНИЯ
Представим приближенно всю наrрузку эквивалентным асинхронным дви-
rателем. При этом используем статические характеристики асинхронных двиrа-
телей и соответственно упрощенные уравнения. Это оправдано, во-первых, тем,
что начальные отклонения, обусловливающие появления н еустойч ивости , пред-
положены малыми, и, во-вторых, тем, что Коrда в процессе опрокидьmания дви-
rатели приобретают значительную скорость, характер процесса (быстрее, медлен-
нее) не имеет практическоrо значения. В отдельных случаях необходимо перехо-
дить к полным уравнениям, т. е. динамическим характеристикам.
Рассмотрим с учетом отмеченноrо схему системы (рис. 11.7, а), rде сопротив--
ление reHepaTopa X r , сети ХС и эквивалентноrо двиrателя, заменяющеrо все дви-
rатели наrрузки Xs' соизмеримы по величине. Представим схему замещения так,
как это показано на рис. 11.7, б. Затем приближенно упростим ее, перенеся Хр. в
точку 1, к месту приложения э. д. с. Е (рис. 11.7, ).
Ток, обусловленный э . д. с. в цеп и 1-2 (рис. 11'.7, в),
1 == El У х2 + (R/s)2, rде Х == Хl' + хс + Ха'
Предположим, что механический момент двиrателя Ммех (момент сопротивле-
s35
ния) не зависит от уrловой скорости и ЧТО в относитедьных единицах он численно
(приближенно) равен потребляемой из сети мощности Р:
Ммех == М P/(ro o + dro), [де ro o == 1, dro«ro o '
Далее запишем
М Р == J2R/s == E2Rs/[(XS)2 + R2] == const.
(11.1 )
е)
м
кр
s
!и
о) д
Х , u r ХС и Xs
E o/,
д) . .
f X r Хс и Xs 2
E
...tX !l,.R/S
Рис. 11.7. Схема замещения сястемы:
а схема системы; О схема замещения; в упрощенная схема замеще.
!,ия; е характеристики М P t(Er' в)
Характеристики Р == {(Е, 5) построены на рис. 11.7,2, [де значение критичес
Koro скольжения двиrателя определяется из условия dP/ds == О. Дифференцируя
и приравнивая нулю (11.1), получаем
E2R ( .x2.lкp}/[R 2 + (XSKp)2] == О,
откуда SкP ="" R/x. Подставив значение SKP в (11.1), найдем* значение Р т . отвечаю
щее SKp:
Р т == Е2/(2х).
(11.2)
· Выражение для момеята эквивалеН1'ноrо двиrателя может быть записано в виде
М == Р == 2Pт/(sкp/s + S/SKp)'
Для единичноrо асинхронноrо двиrателя иноrД8 пользуются уточненной характерис- .
тикой
м == 2М т О + sкp)/(sкp/s + s/Sкp + 2sкp).
Для определения скольжения в этом VlYQae пряменяю'F формулу
1 / 2
М, + / (M m S HOM )2 P 2sHoM(Mm I)]s
sкp == т"НОМ ном ,
1 2s HOM (М т 1)
rAe SUOM номинальное скольжение двиrателя.
з36
.'
Напряжение на шинах наrрузки рассматриваемой rруппы асинхронных дви
rателей (точка 2' на ри с. 11.7, в)
U === 1 V + (R/S)2 === Е V (xss) + R2/ V (XS)2 + R
или
U * === U / Е === у, rде '1 === V ((12 + S2)/[(12 + (1 + )2 S2]
(1 === R/ Хв; === (x r + Хс)/ ХВ.
( 11.3)
а)
и
=0 о)
Ui/-
0,2
0/1
о.в
0.8
1
2
3
s
о
s
Рис. 11.8. Характер изменения напряжеиия И * на шинах двиrателя при Е =:а
== сопst:
а при а Щх О.I; б при a Rlx O.5
Момент двиrателя
ИЗ
М т === Р т ===
2хв
т. е. он будет зависеть от скольжения.
Напряжение на шинах наrрузки не остается постоянным при изменении ре-
жима двиrателей. Зависимость U * === f(s), показанная на рис. 11.8, подтверждает
соображения о том, что условия работы двиrателей в системе иные, чем те, ко-
торые были бы при питании от шин неизменноrо (и === const) напряжения. Реак-
тивная мощность, поступающая из точки 1 (см. рис. 11.7, в), потребляемая дви-
rателями и сетью, состоит из двух слаrающих:
вз
1'2,
2х в
Q === Q", + Qs,
rде Q", === Е2/х", мощность, потребляемая ветвью намаrничивания* Х'" (см. рис.
11.7, в).
* Сопротивление X IL нелинейное, оно i1ВИСИТ от величины Е уменьшается с ее рос-
том.
337
в ветви 1 2 МОЩНОСТЬ
Qs == Рх == [J2R5/(R5)] Х == Р (5/R)x == Р5/5 ир . (11.4)
Таким образом, слаrающая Qs == 5 (при Р == const, SИР == const). Пользуясь
характеристиками, показанныIии на рис. 11.7, 2, можно установить характер
зависимости скольжения 5 == {(Е). Очевидно, что точки О, 1, 2, 3 образуют ветвь
м
Е
и
Q s
'2
......
11
::::.
и"р
...
s
Рис. 11.9. Изменение скольжения s и реак-
тивной мощности Q при изменении э. д. с.
Е в схеме, представленной на рис. 11.1
Рис. 11.10. Вращающий момент двиrателя:
при U сопst; при Б сопst или
U var
характеристики, на которой величина 5 будет возрастать с уменьшением Е, т. е.
ds/dE < О (рис. 11.9). Точка 4 на рис. 11.7,2, rде dP/ds == О, даст на кривой
5 == f(E) экстремум, в котором ds/dE == oo. Точки 5, б, 7, 8 кривой Р == f(5)
будут соответствовать ветви характеристики 5 == f(E), rде 5 будет возрастать с
ростом Е (рис. 11.9) и ds/dE > О.
Соrласно (11.4), величина Qs == 5 и, следовательно, зависимость Qs == {(Е)
будет отличаться от s == f(E) только масштабом. Зависимость Q == Q", + Qs бу-
дет иметь экстремальное значение (dQ/dE ==' oo) при 10М же значении Е ир , что и
s == f(E), как это показано на рис. 11.9. Заметим, что в точке 2' напряжение
и < Е и, кроме Toro, и уменьшается с ростом скольжения (рис. 11.10). Однако
есЛ-и бы напряжение и было постоянным, то момент (мощность) двиrатe.тrей
был бы больше, чем при Е == const. На рис. II.Ilпоказаны примерные
характеристики мощности (момента) при постоянстве различных напряжений и
э. д. с. в схеме замещения:
Е2 . и . lJ2
МБ , MUl'== , Mu .
2х 2 (хс + xs) 2x s
дecь Ми> MUl' > М Е . причем момент, определенный из условия постоян- .
ства э. Д. с. Е, больше момента, определенноrо из условия .постоянства E q :
(Е')2/[2 (x + хс + хв)] > E /(2x).
Полученные выражения являются приближенными, отвечающими rрубому
преобразованию схемы, представленной на рис. 11.7, б, в схему, представленн:ую
338
на рис. 11.7, в. Однако это обстоятельство не меняет общих к а ч е с т в е н н ы х
з а к о н о м е р н о с т е й.
Здесь существенно, что критическое скольжение
ВИР == Юх == R/(X r + Хс + ХВ)
оказывается HaMHoro меньше, чем критическое скольжение, которое имел бы еди
ничный двиrатель, подключенный к шинам неизменноrо напряжения, т. е. если
бы было U == сопst. В этом случае SИР == R/x s ' Из соображений, высказанных
относительно характеристик (см. рис. 11.7), следует, что опрокидывание д-виrа
теля* (или rруппы двиrателей), ПИТaIOщеrося от reHepaTopa соизмеримой мощнос
р
Q,и
II Е ,'
I I Е t =col1st
I 1 п=coпs
l' '> '
,1
"
,1
,1
,1
50 sIfP
YY?t;
'- . 1{.
U=f(П)
Q=f(П)
,
1 Eq
, Е'
, Ur
s
п
Рис. 11.11. Характеристи
ка мощности при поддержа
нии постоянным напряже-
ния и Э. д. с. в раЗЛИЧНЫJ!l
точках схемы замещения
Рис. 11.12. Зависимость peaKТIIB-
ной мощности Q и напряжения U
от независимо изменяемоrо пара-
метра (П == U r , Е', Eq)
ти, может произойти при сравнительно не6ольших изменениях скольжения и сни-
жения'Х э. д. с., питающей эквивалентный двиrатель, и тем более при небольших
измененияХ напряжения и. зависящеrо' от режима двиrателя (см. рис. 11.8 и
11.11).
Определение критических условий нельзя в этом случае проводить исходя из
напряжения на зажимах двиrателя, которое не является независимой переменной.
Эти условия должны определяться исходя из той э. д. с. reHepaTopa Е, которую
в данной схеме можно считать не зависящей от изменений режима. Э. д. с. Е при
различных способах реrулирования reHepaTopa выбирается различной. В случае
нереrулируемоrо reaepaTopa это будет э. д. с. Eq; при АРВ п. д. E Е'; при'
АРВ с. д. E U r' Характеристики U == f(П) и Q == f(П) , rде П принятая
за независиМуЮ переменную величина (E q , Е', U r или И), показаны на
рис. 11.12. Из характеристик видно, что сниж ние П, особенно в зоне, rде
dQ/dE отрицательно, приводит к росту реактивнои мощности, соответственному
увеличению токов, потребляемых двиrателями наrрузки, и увеЛИЧ'ению потерь
* НапомниМ, что под опрокидыванием понимается достижение Двиrате.'Iем критическоrо
скольжения Sир (см. рис. 11.7, е) и переход ero рабочей точки в неУСТОЙЧf!ВУЮ область при
dP/d-s <.. О.
3з9
напряжения в питающей сети, а следовательно, способствует дальнейшему сни
жению напряжения. ,
Таким образом, вблизи режима опрокидывания двиrателей процесс проrрес
сирующеrо снижения напряжения оказывается очень заметным. Персонал стан-
ции и системы не может судить непосредственно о росте токов роторов, статоров и
скольжениях двиrателей, входящих в состав комплексной наrрузки в то время,
коrда они приближаются к опрокидыванию. Пер,сонал наблюдает только резкое,
л а в и н о о б раз н о е с н и ж е l;I и е н а пр я ж е н и я. Процесс этот по
этому и получил название лмины напряжения. Появлению лавины напряже-
ния обычно предшествуют режимы при недостаточно высоком возбужде
нии reHepaTopoB или увеJIичении реактивных сопротивлений связи. Наблюдае
мое при этом снижение реактивной мощности, приходящей к потребителю, pOKa
зывает, что причиной лавины напряжения является так называемый дефицит
реактивной мощности (rенерируемая реактивная мощность в системе меньше той,
которая соответствует желательному уровню напряжения).
Схема, изображенная на рис. 11 :7, а, моrла бы отвечать и сложной системе с
несколькими rенераторамии наrрузками, если только в этой системе все reHepa-
торы можно заменить одним эквивалентным reHepaTopoM с постоянной э. д. с.
и объединить все наrрузки в один эквивалентный двиrатель. Однако, так как Ha
rрузка электрических систем обычно состоит из потребителей электрической энер
rии различноrо рода и асинхронные двиrатели составляют в ней только некоторую
(хотя и значительную) долю, определить сколько нибудь надежно параметры эк
вивалентноrо двиrателя невозможно.
f tt.5. ПРАКТИЧЕСКИЙ КРИТЕРИА УСТОАЧИВОСТИ
КОМПЛЕКСНОА НАrРузки dEjdU
Целесообразно вместо критерия устойчивости dP/ds == О или полученноrо
выше (рис. 11.13) эквивалентноrо ему критерия dQ/dЕ э == oo пользоваться
практическим критерием устойчивости наrрузкц* dЕэ/dИ == о, который не тpe
6ует эквивалентирования двИ2аmeлей 1la2рузки; при этом оперируют только с ее
внешними характеристиками Р н == f(И); QH == q>(И). Смысл этоrо критерия пояс
нен на рис. 11.13, rде в соответствии с )J.анными rл. 4 и 6 показано, что при сниже
нии напряжения на шинах двиrателя до значения Икр, отвечающеrо rранице ус-
тойчивоrо режима, производная от эквивалентной э. д. с. Е э по напряжению
проходит через нуль. Таким образом, нарушение устойчивости связано с тремя
соотношениями:
dQ/dЕ э == 00; dP/ds == о; dЕэ/dИ == О.
(11.5)
в справедливости последнеrо критерия можно убедиться исходя из эквива"
лентной схемы замещения (см. рис. 11.7, а), если напряжение на шинах комп-',
лексной наrрузки рассматривать как величину, зависящую от режима двиrателя;
а эквивалентную э. д. с. Е == Е э как независимую переменную. При этом yc .
ловии между напряжением на шинах двиrателя и эквивалентной э. д. с. существу-
ет очевидное соотношение
* Критерий dE/dU == О для определения устойчивости комплексной наrрузки был впер.
вые преДJlожен П. С. Ждановым (1938), поэтому ero следовало бы называть критерием Жда-
нова.
340
.-
( 11.6)
и == V(Е э Q.)СэIЕэ)2 + (Рх э /Е э )2 Е э Qэхэ/ Е э .
Здесь значения Qэ являются значениями внутренней реактивной мощности
reHepaTopa. Продифференцируем выражение (11.6) по Е э:
. 2
dlJ /dЕ э == 1 (ЕэdQэ/dЕэ Qэ) х э / Е э . (11.7)
Из соотношения (11.7) очевидно, что при ........-dQэ/dЕэ оо величина dU/dЕэ
+00 или dEJdU О.
. Таким образом, подтверждается равноценность критерия dQэ /dЕ == oo кри-
1'ерию dE/dU == О, а так как известно, что условие dQэ1dЕ == oo равноценно
Б)
а) Еэ хэ
и
PH=f(UJ
l1н=rp(U)
иКР
8) Q I
!Ш L
. Ез I
. I
е)
Р.
Е э
dP O
ds
и о и
S=SKP
s
Рис. 11.13. Критерии устойчивости наrрузки:
а схема замещения. б зависимость E. cp(и); в зависи-
мость Q cp(E.); 11 завиСИМОСТЬ P cp(s)
dPlds == О, то можно считать доказанной равноценность всех трех критериев,
nоказанных на рис. 11.13. .
Проверка устойчивости наrpузки по критерию dEldU. Она начинается с
построения зависимости Ев == f(U). Предварительно задаются рядом значений
напряжения и, для каждоrо из которых по характеристикам наrрузки находят
соответствующие значения Рн> Qп, а затем строят зависимость Ев == f(U). Запас
устойчивости наrрузки определяется как отношение [(и о иир)lи о ] 100%, rде
и о рабочее напряжение, а икр значение критическоrо напряжения, при
котором dEldU == О (рис. 11.13).
reHepaTopbI без АРВ замещаются Э. д. с. Eq, а reHepaTopbI при АРВ Э. д. с.
Ех, приложенной за сопротивлением !1х, причем при АРВ с. д. !1х == О и Э. д. с.
Ех == и 1" .
Проверка устойчивости наrpузки по критерию d!1QldU > О. При расчетах
устойчивости наrрузки в системе, имеющей наrрузку, сосредоточенную в узловой
точке (например, точка 4 на рис. 11.14), удобно воспользоваться практическим
критерием: d!1QldU > О, тоrда
!1Q == Qп :l:Q".
Задаваясь напряжением на шинах и, можно построить характеристику мощ-
341
ности QI' == '(И), притекающей в узло-
вую точку, и характеристику суммарной
мощности наrрузки Qи == '(И).
Разумеется, для схемы, представ-
ленной на рис. 11.7, а, также можно
применить критерий d/).Q/dU > О, рас-
сматривая любую точку схемы как уз-
ловую и строя зависимость подходящеrо
к ней потока мощности QI' И потока
мощности, отходящеrо от нее в наrруз-
ку. Именно построением характеристик
/).Q == '(И) можно наиболее просто и
наrлядно выявить факторы, блаrоприят-
но или отрицательно влияющие на ус-
тойчивость наrрузки.
Влияние реrуляторов возбуждения;
YCTaHOВJIeHHЫX на reHepaTopax. Преk
ставляя rруппу reHepaTopoB станции од-
ним эквивалентным (рис. 11.15, а), от-
ражаем эффект реrулирования в харак-
теристике
Qp == f (И) == (ЕИ/х ) cos 3 и2/x
уменьшением x и э. д. с. Е. Эта харак-
теристика при АРВ идет так (рис. 11.15,
б), что коэффициент запаса УСтойчивос-
коэффициент запаса k 1 в нереrулируемой сис-
Il.
Adapl/i/Hoc СНI1ЖСНl/е напряжеНl1R
(операЦI/Я Zl/Лtl3)
КритичеСКI/Й реЖI/М
Сл!lчайны I АСI/НХрОННЫЙ xoiJ
I малый
I таток'
I ,
I I
I I
I I
I I
8)
iJ
r
I
8 1 /б 20 fч28 JZ J(j
l-1aB":
.t,c
t;
ти k 2 оказывается больше, чем
теме:
Рис. 11.14. Пример протекания процесса на-
рушения устойчивости наrрузки, подключен-
ной в точке 4 схемы (лавины напряжения):
а ..... схема системы и изменения, вызывающие лавину
напряжения: отключение цепи 1 t включеНие значи..
тельноlI реактивноii наrрузки 2, отключение ЧастИ
['енераторов 3; 6 возннкновение и характер проте.
кания процесса при отсутствии АРБ; 8 ТО же. но
при форсировании возбуждения реrуляторами
k 2 ==- I иHP2 и() I /U O >k 1 == I иHP] иo I/U o , (11.8)
rде иK l' и 2 определены соrласно характеристикам критичеСкоrо режима
(рис. 11.15, о).
Влияние включения в наrрузку конденсаторов (рис. 11.15, в). КонденсаторJ>I
УЛУЧШaIОТ сos<р и обеспечивaIOТ поддержание напряжения при flзменении реЖима,
что может резко ухудшать устойчивость (рис. 11.15, е, д, rде иc напряжение
на конденсаторах, хс их сопротивление). В этом случае в cocfaBe мощности
наrрузки появилась отрицательная составляющая lfa/x c и суммарная Rривая
Q и == t (И) оказалась полоrой. В свою очередь, э. д. с. эквивалентноrо reHepa-
тора при включении конденсаторов уменьшается, что приводит к деформации
характеристики QI" В результате запас устойчивости наrрузки при включении
конденсаторов уменьшается от значений k 1 , ..., k з . rде k] == IU RP ] Uol/U Ot
М2
ДО k4 == IU RP4 ио\lU о или наrрузка становится неустойчивой (кривая 5 на
рис. 11.15,6). Исправить это положение можно, применяя одновременно с улуч-
шением coscp статичеС1Шми конденсаторами рееулированue возбуждения на ее-
нераторах и увеличивая в составе наерузки число синхронных двиеameлей с peey
лированием возбуждения. При этом характеристики наrрузки становятся более
о)
Q
00
Qo
IIP
у2 -
1(
икр
Рис. 11.15. Устойчивость комплексной наrрузки:
а схема системы; 6 влиииие АРБ на работу системы; в схема
системы при улучшении cos qJ наrрузки; е влииние коиденсаторов
на устойчивость наrрузки; д влияние изменений cos qJ на крити-
ческое напряжение
блаrоприятными в отношении устой- а)
чивости.
Возникновение и характер про- и
текания процесса нарушения устой-
чивости наrрузки показаны на рис.
11.16, а, б, rде видно влияние откл
чения части reHepaTopoB и форсиров-
ки возбуждения.
При уменьшении сопротивления
между reHepaTopoM и двиrателем, прц-
менении реrуляторов БозбуждещlЯ,
обеспечивающих постоянство э. д. с.
80знuкноIJенuе
ладUНЬI
о)
и
8азнuкнаIJеНtlе
Лl18иНЬ l
ФарсироlJСlНtlе
I I f3аЗО!Jж8енця
I 1-
1 r
I I
I I
1 -1.0 ! t,
Отключение
части наzруз-
I ки
I
, :
'to 't,
t t
Рис. 11.16. Борьба с лавиной напряжения:
а отключение части наrрузки при возникновении
лавины; 6 форсирование возбуждения reHepa7opoB
и синхронных компенсаторов
343
E или постоянство напряжения на зажимах reHepaTopa, критическое напряже
ние и КР будет уменьшаться, стремясь 1( значению I(ритиЧ8СI(О20 напряжения,
определенному непосредственно на шинах элеl(тродви2ameля.
Слежует иметь в виду, что влияние конденсаторов на устойчивость асинхронных дви
rателей может быть различным н зависимости от ТО1'О, изменяется или нет при включении
кондеисаторов коэффициент трансформации понижающих трансформаторов. В ряде случаев
целесообразно, раз1'РУЗИВ пи-
тающую сеть от потока реак-
тивной мощности, уменьшить
потери энерrии, но нет надоб-
ности повышать напряжение
потребителей. В этих случаях
при включении конденсаторов
исходное значение напряжения
восстанавливают, изменяя ко-
эффициент трансформации, что
ведет обычно к снижению за.
паса по статической устойчн-
вости. Однако запас по устой-
чивости снижается не всеrда.
MorYT быть случаи, Korдa с по-
мощью ре1'улирования пони-
жающих трансформаторов на-
пряжение увеличивается. Но
даже и торда, КО1'да напряже-
ние на шинах потребителей
и сохраняется неизменным, в за-
висимости от соотиошений ре-
активных сопротивлений сети
и конденсатор он запас у'стой-
чивости может быть сохранен.
Для конкретных случаев не-
обходимо Проводить отдель-
иый анализ.
Q-/f
.4,0
3,0
з,5
2,5
J
,1
4:
" I
I I 5
A,\
I J ,
/ I I 2. \-1
// ..3 \ '....
/ , ............... .:::::
"," .............................-
2,0
(,5
1,0
0,5
о
P-jt
5'
1,0
I
I
.;
) /lf.
r r 1
, /
....+7.c:.. 2
....V -- J
;......
",,'
0,8
0,6
0,4
0,2
и
О
Рис. 11.17. Статические характеристики Q.(U) и Р.(И)
для на1'РУЗКИ, состоящей из трех двиrателей, при lвш == о:
1---3 -- характеристики каждоro ИЗ двиt"аТeJIей; 4 то же, ДЛЯ за-
ropможеииых двиrаТeJIей; 6 характеристики суммарной иаrр 'зки
(отрезки, показаииые штриховыми линиями, соответствуют процес-
су торможения)
а
Ранее Эквивалентные
наrрузки иих характеристики рассматривались как еДИНЫе. При нескольких
rpynnax различных двиrателей эквивалентные характеристики Q и р в процессе
опрокидывания двиrателей наrрузки будут состоять ИЗ суммы соответствующих
характеристик отдельных rpynn двиrателей.
На рис. 11.11 показаны статические характеристики трех rрупп двиrателеи
различающихся коэффициентами заrрузки: Ка 1 == 1, К а2 == 0,15; К зз == 0,5; ос:
тальные параметры одинаковы: COSIpHOM == 0,85; т макс == 2,2; т п == 1,2; I п == 1;
тет == 1. Напряжения UI<Pl' и КР2 и U крз являются Критическими: при каждом
из этих значений происходят опрокидывание соответствующеrо двиrателя, рост
реактивной наrрузки и снижение активной. При U < и кра , коrда .все двиrатели
заторможены, суммарная мощность пропорциональна и2.
Лавина напряжения с отключениями двиrателей. При рассмотрении лавины напряже-
ния предполаrавосъ, что тормозящиеся двиrатели остаются подключенными к сети. Это воз.
можно, ec.IIи рассматривается небольшой промежуток времени, В зависимости от времени
(быстроты) протекания пропесса лавины напряжения, темпа ero снижения, уставок макси-
мавьио--токовых защит ;;виrателей возможны случаи отключения двиrателей от сети в про--
пессе опрокидывания до их остановки или сразу же после остановки (при пониженном на-
пряжении двиrатель может быть сильно переrружен по току).
Эти факторы MorYT существенно миять на процесс нарушения устойчивости rруппы
344
двиrателей*. Кроме TOro, имеется ряд причин, вызывающих самоотключение двиrателей
при снижении напряжения, безотносительно к тому, затормознлись они или нет. Так как
напряжения, при которых происходит самоотключение двиrателей, близки значениям кри-
тическоrо напряжения, то возможны любые сочетания опрокидывания и отключения двиrа-
телей. Признаком самоотключения двиrателей без лавины напряжения является снижение и
активной и реактивной наrрузок при понижении напряжения до 0,7 Ином и ниже.
. Расчеты значений Е кр и Икр С учетом отключения контактов маrнитных пускателей
выполняются аналоrично тому, как это было показано выше, но при построении эквивалент-
ной характеристики 5 (рис. 11.17) суммируются мощности только тех двиrателей, которые
остаются включенными в сеть. Для правильноrо учета действия максимально-токовых защит,
отключающих двиrатели или питающие линии, следует рассчитывать переходный процесс
по общим правилам анализа динамической устойчивости.
E2 E,
Ez Е
и
200 о; цаО
Е 2
1&:
Е, 8=1800
п\
Оа=О
)r
О а
Е,
3r'
'€
О С
Рис. 11.18. Электрический центр системы
* Роль электрическоrо центра системы. Наибольшая опасность нарушения
устойчивости наrрузки может иметь место в случаях, коrда наrрузка оказывает-
ся в электрическом центре системы или вблизи от Hero. В связи с этим дадим по-
нятие электрическоrо центра. Во время качаний reHepaTopoB или во время асин-
xpoHHoro хода напряжения в различных точках электрических сетей и электропе.-
редач, связывающих эти reHepaTopbI, изменяются. При этом в каждой системе
при данном ее исходном режиме существует точка, rде напряжение оказывается
минимальным. Эта точка называется электрическим центром системы.
Если система полностью симметрична (э. д. с. равны и постоянны, сопротив-
ления однородны, т. е. отношение R/x у всех элементов системы одинаково),
то в электрическом центре, находящемся в данном случае в середине передачи
(точка а на рис. 11.18), напряжение будет падать до нуля (и а == О) при расхож-
дении э. д. с. на 1800. Напряжение в друrих точках (например, с, d) при этом не
будет равным нулю. Следовательно, потребители, расположенные в электричес-
ком центре, будут периодически попадать в режим, равносильный короткому за-
мыканию (и == О), а установки релейной защитЫ, работающие на основе замера
эквивалентноrо сопротивления линии ZЛ == ип (дистанционные защиты), будут
работать неправильно, отключая неповрежденные участки линии.
В реальной электрической системе при неоднороднЫХ элементах системы,
а также при не равнЫХ и изменяющихся во времени э. д. с. (реакция якоря, дей-
* Подробнее см.: rуревuч ю. Е., Лuбова Л. Е., Хачаmрян Э. А. Устойчивость наrруз-
1m электрических систем. М.: Энерrоиздат, 1981, с. 208.
345
ствие реrуляторов возбуждения), наличии э. д. с. в промежуточных точках и
сопротивлений наrрузки, зависящих от подведенноrо напряжения (асинхронные
двиrатели), понятие электрическоrо центра менее определенно, чем в симметрич
ной схеме (рис. 11.18). Электрический центр может быть расположен ближе к
началу или концу линии либо может находиться вне ее (в reHepaTopax, наrруз
ках и т. п.); место ero может изме,НЯТЬСЯ В процессе качаний (см. rл. 14).
t Н.6. МЕДЛЕННЫЕ ПОНИЖЕНИЯ НАПРЯЖЕНИЯ
Длительные медленные понижения напряжения в распределительных и пи
тающих сетях привоДЯТ к ряду явлений, с которыми приходится считаться при
анализе перехоДНЫХ процессов в системах электроснабжения. Так, понижение
напряжения от U о ДО U 1 ведет к снижению запаса статической устойчивости дви-
rателей.
у синхронных и асинхронных двиrателей запас снижается
от K81eH==(Eиo/x Po)/Po до КЗ2сн==(ЕUl/Х РО)/РО'
от к з1ас == (Р т1 Po)/P.o дО К З28С == (Р т2 РОl)/РOlJ
rде РО не меняется при снижении напряжения.
Здесь, полаrая, что Р == М, примем
Р u 2. Р u 2
тl === 1) , т2 === 1 .
Механический момент наrрузки Мо == РО изменяется с изменением скольже-
ния, которое, в свою очередь, зависит от напряжения. Значение РО может опр
деляться соrласно известному выражению
р о ==: С (1 so)q ; р Ql ==: С (1 SI)q ,
rде с постоянный коэффициент; 80 и 81 скольжения в нормальном режиме и
режиме сниженноrо напряжения; q показатель, характеризующий вид стати-
ческой характеристики.
Для любоrо режима двиrателя существует соотношение
U 2 Rs/[R 2 + (Х8)2] ==: 2Р тSирS/[ + 8 p] ==: 0(1 8)Q,
rде 8 ир критическое скольжение.
СЛедовательно, скольжение 81 может быть найдено из соотношения
UVsJ[(1 so)q ( p + в2)] ==: U'sзf[(1 sl)Q (s p + sI)]. (11.9)
Для определения 81 преобразуем (11.9), тоrда при q == 1 получим уравнение
вида
s s + Аэ 1 В == о.
( 11. 1 О)
Пусть, например. при напряжении и о имеются следующие данные: 80 == 4%; q == 1:
8 ир == 0,2; и) == О,7и о . Из (ll.9) получаем А == 0,53, В == 0,04. Решая (11.10), получаем "
81 == 0,1, т. е. 10%. Зная 81' можно найти РО1! == (0,9IО,96)Ро и далее опре.!lелИ'I'Ь коэффици-
ент запаса К з2 .
Рассматривая процессы в двиrателях наrрузки при снижении напряжения,
необходимо заметить, что происходящий при этом рост тока приводит к более ин-
346
тенсивному снижению напряжения в питающей сети, что, с одной стороны, H
блаrоприятно сказывается на работе всей системы, а с друrой приводит к YB
личению HarpeBa оборудования. Особенно это относится к асинхронным двиrате-
лям, у которых токи статора 1 t И ротора 12 резко возрастают со снижением напря-
жения. На рис. 11.19 показан характер этоrо возрастания, а на рис. 11.20
0)1,8
11
1,6 /Q1
0,8
0,648 . 49 O
0,40,5 0.7 D,9 1,
,. 1,з u=.и.
'* Ц о
В) l,
l2
и
J
)1.
Hz '
s
Рис. 11.19. Влияние понижения напряжения на ток асинх-
pOHHoro двиrателя при нормальной частоте и номинальнОЙ
наrрузке:
а относительный ток статора 1,1101 в зависимости от иапряжения а.
при различных значениях намаrничивающеrо тока 11. } Р. ро,; 6 от-
носительный ток ротора 1,1/02 в зависимостИ от иапряження и.;
8 схема замещения ДВИI"ателя
приведены примерные зависимостИ относительных длительных преВБШIений теМ-
пературы Э*, показывающие влияние понижения на-
пряжения на HarpeB двиrателей. Вопросы тепловоrо 8*
расчета двиrателей не относятся к настоящей дисцип
дине, и кривые, изображенные на рис. 11.20, приво- 5
дятся только для иллюстрации.
t3
1
Рис. 11.20. Зона изменений относительнorо превышения тем- 0,9
пературы обмотки статора двиrателей единой серии А при
номинальной частоте и номинальной наrрузке в зависимос-
ти от напряжеиия V. == VооIИо: 4 75 0.85 11,85
..==6..../6. (6 теыпераТура при изменившеыся напряжеиии а....;
е о температура при иоыинальных условнях раб оты l
VJ5 и !:!....
'I и о
347
s 11.7. ПРОЦЕСС ОПРОКИДЫВАНИЯ двиrАТЕЛЕ'"
у асинхронноrо двиrателя имеется только одна область устойчивой работы
область, лежащая между синхронной скоростью и скоростью, отвечающей кри-
тическому скольжению. Область между критическим скольжением и скольжени-
ем, равным единице, оказывается неустойчивой.
б)
Q.%
а) ЗОО
Р т
1'0, 'Уа
200
SKp
В)
АЮ, Llr, Lll
о
2
J
q.
ttf-:' t/ TJ
Рис. 11.21. Характеристики асинхронноrо двиrателя при раз-
личных значениях питающеrо напряжения, не зависящеrо ОТ
режима:
а характеристика Po t(S) при Po IOO% и Po 50%. коrда иапряжение
не зависит от режима двиrателя; б характеристики Q QJ(U) при Po
lOO% и Po 50%. соответствующие характеристикам P t(s); в проте-
канне процесtа опрокидывания во времени; 1....... изменения частоты вра.
щення n/no f(t); 2 изменение сопротивления; 3 измеиение тока
в нормальных условиях . двиrатель работает на устойчивои части xapaKтe
ристики (участок O SRP на рис. 11.21; а) при скольжении меньше критическоrо.
Однако при снижении напряжения или увеличении механическоrо вращающеrо
момента двиrатель может оказаться в критическом режиме (точка а 2 ). При даль-
нейшем снижении напряжения точка, характеризующая режим, перейдет на спа-
. дающую часть характеристики (участок азаlo); двиrатель будет ТОРМ03иться, ток и
реактивная мощность (рис. 11.21, б) будут резко расти, а затем двиrатель OCTa
новится «опрокинется» (точка а5)' При неизменном напряжении, равном крити-
ческому, процесс остановки идет так, как это показано на рис. 11.21, б, в. Обычно
двиrатели, подключенные к шинам напряжения, независящеrо от их режима,
работают с большим запасом устойчивости" Их рабочее скольжение значитеЛьно
меньше критическоrо, а максимальный вращающий момент HaMHoro больше ра-
бочеrо: (1,5 7 1,7)Мо. В этих условиях отклонения напряжения на шинах еди-
348
ничноr6 двиrателя не опасны с точки зрения устойчивости двиrателей и только
очень большие снижения напряжения на их шинах (порядка 20 30%) приводят
к опрокидыванию. При питании rруппы двиrателей от источника соизмеримой
мощности в результате лавины' напряжения может произойти опрокидывание и
при малых (2 3%) отклонениях напряжения.
Изменение частоты системы. Изменение активной и реактивной мощностей
при изменениях частоты подведенноrо напряжения влияет на условия опрокиды
вания двиrателей. При неизменных напряже
нии и механическом моменте Ммех на валу
двиrателя активная мощность, потребляемая
двиrателем, меняется пропорционально часто
те соrласно выражению Р == О)М. Снижение
частоты приводит к уменьшению скольжения,
которое можно найти качественно из выраже-
ния
М == U2R2S/{[R + (x so (l)S/(I)O)2) (I)} ,
(11.11)
Q
Qo
f
Рис. 11.22. Изменение мощности,
потребляемой двиrателем, при из-
менении, частоты:
1, 2 составляющие реактивной мощ'
иости [l Q", l(f); 2 Qs Ч'2(f)];
3 полная реактивиая мощность Q
Qs+Q",
rде ХвО == Хв при о) == 0)0'
При М == сопst можно I'рубо заменить
зависимость S == {(О)) прямой, т. е. принять
S == {. Однако критическое скольжение при
снижении частоты оказывается больше, так
как SИР == R 2 (1)o/(O)X s O)' Это является блаrопри-
ятным в смысле устойчивости фактором, тем более что и максимальное значение
М несколько увелИч'Ивается. '
Потребляемая двиrателем реактивная мощность зависит от изменений час
,тоты: Q == СР(О)). Чтобы установить характер этоrо изменения, необходимо рас-
а) IS Kp а)
м 11 I I Снижение чi1CfТlоты Q
I "
Нормальные
частота 11
напряжеНllе
5
и
Рис. 11.23. Изменение вращающеrо момента, критическоrо
скольжения и реактивной мощности при изменении, частоты:
а M f(s): б Q I(U) при ' '. (кривая 1); 1<'. (кривая 2) и [«:1.
, (кривая 3)
смотреть в отдельности влияние частоты на составляющие Qs и Q",. Если S ==
== J2R 2 /(O)M), то /2 == O)S; при этом
Qs == J2 (XsO / (1)0) (1), или Qs == (l) 2 s.
Таким образом, составляющая Qs уменьшается со снижением частоты и B03
растает с ее увеличением. Составляющая Q", == и 2 0)0/(Х",00)) == l/t, напротив,
возрастает с уменьшением частоты. Соотношение между этими составляющими
349-
(рис. 11.22) в обычных асинхронных ДВиrателях таково, что характер изменения
результирующей мощности Q == Q(J. + Qs определяется первой слаrающей при
малых отклонениях частоты и второй при значительном ее росте.
Изменение потребления реактивной мощности при медленных отклонениях
частоты от ее номинальноrо fo значения показано на рис. 11.22, 11.23. Положи-
тельное влияние снижения частоты на устойчивость двиrателей наrрузки при уме-
ренном ее снижении (см. рис. 11.23) может смениться на отрицательное (при боль-
ших снижениях), так как рост потребления реактивной мощности может приво-
дить к уменьшению напряжения в сети, питающей наrрузку*, и стимулировать
развитие лавИНЫ напряжения. Поэтому, учитывая указанные общие закономер-
ности, необходимо проводить проверку и давать оценку в конкретных случаях.
11.8. РАБОТА АСИНХРОННЫХ двиrАТЕЛЕА НАrРУзки ПРИ НЕСИММЕТРИИ
И НЕСИНУСОИДАЛЬНОСТИ ПРИЛОЖЕнноrо НАПРЯЖЕНИЯ
При несимметрии и несинусоидальности можно заменить несколько асинхронных дви-
rателей или эквнвалентный им двиrатель rруппой двиrателей, расположенных на общем валу
(рис. 11.24). Каждый из этих двиrателей должен быть включен на напряжение, отвечающее
частоте f к и чередованию фаз k. Параметры каждоrо двиrателя должны соответствовать опре-
деленным частотам. Скольжение ротора каждqrо (1, 2, ..., т) двиrателя, СИдящеrо на общем
валу «объединенноrо двиrателя» будет
а) определяться выражением
5 0 б == (kп o += nоб) / (kno) ,
liц '! .
im...tl....
1<=/,2, к, ..., т
Рис. 11.24. Питание двиrателя искажен-
ным напряжением ИА. Ив, ИС:
а неснмметрия. несинусоидальность напря...
Жения в фазах; б асинхронный двиrатель.
представленный как сумма двиrателей 1. 2. ...
.... k. .... т. питаемых напряженнями (rapMO-
никами) f.. f2. ..., kt.. .... mf. и сидящнх на
ОДНОМ валу с частотой вращения Поб
[де kno синхронн:ая частота Вращения
какой-либо rармоники; по синхронная час-
тота вращения вектора э. д. с. системы (ос-
новной rармоники).
Частота вращения объединенноrо асинх-
pOHHoro двиrателя, обозначенная здесь как
nоб, может быть определена из выражения
51 == (по nоб)/nо.
[де 51 скольжение вала объединенно-
[о двиrателя по отношению к синхронной час-
тоте, т. е. частоте, обусловленной l-й [армо-
никон; по синхронная частота вращения.
Скольженне объединенноrо вала по от-
ношению к k-й rармони.ке, выраженное через
скольжение l-й rармоники, будет
5k == 1 += (1 51)/k.
В приведенных выше выражениях знак
«+» соответствует симметричным составляю-
щнм rармоник, создающим поля вращения,
встречные полю основной rармоники; знак « »
соответствует симметричным составляющим,
создающнм поля, вращающиеся в ту же сто-
рону, что и основное поле статора.
Ток в каждом k-M двиrателе приближен-
но может быть определен соrласно схеме, при-
* Обычно считают, что опрокидывающий М т момент двиrателя остается постоянным,
если И!t == сопst при одновременном изменении частоты и напряжения, а также при усло-
вии, что эти параметры не зависят от режима двиrателя. При этом Мт! == М т (И/j)2, 5 ир ! ==
== 5 ир !t.
350
веденной на рис. 11.25, rде и п напряжение соответствующей k й rармонНКИ. Полное со-
противление двиrателя определяется как
Zk == rk + jXk == r1k + r /Sk + j (Хи + X2k).
Входящие в схему замещения параметры MorYT быть выражены через известные пара-
метры асинхронноrо двиrателя
Zk == KzkZk; 1k == Krkrk; Xk == KxkXk'
rде Zk' r"" Х", параметры асинхронноrо двиrателя при коротком замыкании на 50- ,
периодном токе; Krk' Kxk коэффициенты вытеснения, показывающие увеличение соответ-
ствующих сопротивлений для токов высших rармоник по
сравнению с сопротивлением току при 50 периодах.
Для рассмотрения электромеханических переходных
процессов существенно, что наличие высших rармоник и
составляющей обратной последовательности в напряжении
приводит к понижению максимальноrо и пусковоrо MOMeH
тов асинхронноrо двиrателя. При этом снижение основ НО-
ro вращающеrо момента от встречноrо действия отдель'ных
высших rармоник, даже если в напряжении их содержит
ся более 1 0 20%, не имеет значения, так как составляет
доли процента. Встречный момент от действия слаrающей
напряжения обратной последовательности даже при не.,
симметрии напряжения 20% обычно не превышает 5% от
максимальноrо. Таким образом, казалось бы, эти влия
иия 'не велики.Однако необходимо учесть следующее.
Обычные вольтметры реаrируют на сумму эффективных з начений U ос новной частоты и ее
rармонических, т. е. измеряемое напряжение U изм == V и + :Eи . При таком опре
делении может оказаться, что иапряжение прямой последовательности уменьшил ось, хотя
измеряемое напряжение и равно номинальному (за счет :Eи ). При этом вращающий момент
будет ваметно уменьшаться.
Так, на рис. 11.26 зависимость 1 показывает характер уменьшения напряжения прямой
последовательности и 1 *, а зависимость 2 пусковоrо момента М* от присутствия в напря-
м
и*, М ном
0,97 2,'
.fJ,95 1,9
О,9З 1,7
0,91 1,5
О. 89 1,3
о,б7 1,1
0,05 0,9
r--- ......
........f..... 1
';-. J
"'- 3 (
2 "
" '"
-..;.
: .....
.:L
Та
Б
5
'+
J
2-
1
а
5 10 1520 25 ЗА З5 4u ...t!.u ,' y.
Рис. 11.26. ЗависимоСть напряжения прямой
последовательностИ U *1 пусковоrо вращающе
ro момента асинхронноrо двиrателя М*П и
времени ero пуска t/TJ, rде TJ постоянная
инерции от V ::Е и при постоянном номина-
льном моменте сопротивлени я на валу и и
:=1 V ui + ::Е и; == U НОМ
У'IК
Х2К
и к
lfk=-I zк
r{K
sк
Рис. 11.25. Схема замещении
асинхронноrо двиrателя для
токов высших rармоник
IJискаж
fJ nop l1
3,0
2,6
2,2
1,8
(,4
1,0
О
Рис. 11.27. Увеличение теплоты приие-
каженной кривой напряжения, выде-
лившейся в обмотках статора асинхрон-
Horo двиrателя при пуске, в зависимос-
ти от величин ы 11 ::Е и при U :=1
== V и + :Е и и при постояином мо-
менте сопротивления
351
жении высших rармонических. Из этих соотношений следует, что при V };и ==55 -7- 60%
двиrатель ие сможет развернуться из неподвижноrо состояния, если ero вал будет сопряжен
с валом механизма, обладающеrо достаточно большим моментом сопротивления. Зависи-
мость 3 показывает характер увеличения времени пуска двиrателя при моменте сопротивле-
иия на валу, постоянном и' равном номинальному. Увеличение нремени пуска сопровож-
дается дополнительным HarpeBoM двиrателя, что на рис. 11.27 примерно показывает увеличе-
ние тепловыделения при росте rармонических составляющих.
Несимметрия и несинусоидальность напряжений вызынает, следовательно, Д о п о л-
11 И Т е JI ь н Ы е п о т е р и в обмотках статора и ротора. Общие дополнительные потери при
P,*,Q*.
1,1
{8 ш;zf
Q
O
Е э
Хс=М
0.0
........
Fft
Qэ=D. и +L1Q
0,7
р"
ан
0,7 0/1 о; 1,0 1,1 и*
Рис. 11.28. Схема
замещения узла
наrрузки
Рис. 11.29. Статические ха-
рактеристики наrрузки
анализе работы rруппы двиrателей, замененных эквивалентным, при несинусоидальном на-
.пряжении MorYT быть оценены следующим выражением:
'" Р "' [ 2 К 2 '
-WД k -w k'eCT rCT+};[k'epOTKrpoT'
rде K rcT н K'rpOT определены экспериментально*. Коэффициент полезноrо действия двиrате-
ля при этом, разумеется, снижается.
Таким образо м, влияние несимметрии и несинусоидальности напряжения на вращающий
момент и, следовательно, на электромеханические переходные процессы будет невелико, ес-
.ли результирующее значение напряжения будет сохранено. В противном случае с этим влня-
нием надо считаться. Допустимость несимметрии и несинусоидальности напряжения, пи-
тающеrо двиrатель, зависнт rлавным образом от дополнительноrо ero HarpeBa.
Пример 11.1. Мощный узел наrрузки, представленный схемой замещения, содержит од-
ну эквнвалентную станцию и комплексную наrрузку, состоящую нз асинхронных двиrателей
(60%) и осветительной наrрузки (40%) (рис. 11.28). При напряжении на шииах наrрузки,
равном номинальному, активная мощность наrрузки Р но == 0,9; реактивная мощность Qno==
== 0,7. Реактивное сопротивление системы ХС == 0,8.
Про в е р и т ь устойчивость наrрузки указанной системы, построив зависимости
Е э == f(U) и Qэ == f(Е э ) и воспользовавшись критериями устойчивости комплексной наrруз-
ки
dЕэ/dU == О;
dQэ/dЕэ == 00,
* Этот вопрос и рассмотренные выше более подробно изложены в кн. Церазов А. Л.
Я1tuменко Н. И. Информационные материалы N2 70. Исследование влияния несимметрин и
1'I€синусоидальности напряжения на работу асинхронных двиrателей. М.: rосэнерrоиздат,
1963, с. 115; Петров И. И., Мейстель А. М. Специальные режимы работы аСИНХрОНlюrо
электропривода. М.: Энерrия, 1968, с. 264.
352
Статические характеристики комплексной наrрузки Р., == f(U), Q* == f(U) приведены
на рис. 11.29 и в таблице:
и. Р. Q. и. Р. Q.
1,0 1,0 1,0 0,8 0,893 0,844
0,9 0,941 0,885 0,7 0,855 0,880
Решение. Для схемы замещения, изображенной на рис. 11.16,
Е э == U + QHXC/U + jPHxc/U,
,
или
Ео == 11 (и + QHXC/U)2 + (р н х с /и)2 .
Реактивная мощность, выдаваемая эквивалеитной станцией,
Q == QH + ().Q == QH + (P + Q ) хс/ и2 ,
rде Р н == Р*.0,9 и QH == Q*.0,7 . соответствующие различным напряжением на' щинах
активная и реактивная мощности наrрузки.
Пользуясь таблицей и приведенными выще напряжениями, найдем Е э и Qэ в зависимос-
ти от И:
! . 1,0 I 0,95 0,90 0,80 0,75 0,70
U
Р н ==О,9Р* 0,9 0,874 0,848 0,804 0,785 0,77
QH==0,7Q* 0,7 0,653 0,62 0,591 0,596 0,616
Qихс/ U 0,56 0,55 0,551 0,591 0,635 0,704
U+Qихс/ U 1,56 1,50 1,451 1,391 1,385 1,404
РНХС/и 0,72 0,736 0,755 0,804 0,838 0,88
Е э 1,72 1,67 1,634 1,61 1,62 1,66
P + Q 1,3 1,188 1,104 0,997 0,972 0,97
P + Q 1,4 1,05 1,09 1,25 1,382 1,588
и2 Хс
Qэ == QH + AQ I 1,74 1,703 1,71 1,841 1,98 2,204
На рис. 11.30 и 11.31 построены зависимости Е э == f(U) и Qэ == f(Е э ) и найдено крити.
ческоt значение Е э . ир == 1,61.
Пример 11.2. Мощный узел наrрузки (рис. 11.32, а) представлен в виде эквИвалентноrо
асинхронноrо двиrателя, схема замещения KOToporo показана на рис. 11.32, б.
Б ы я с н и т ь влияние компенсации реактивной МОЩНОСТИ наrрузки с помощью ста-
ТИЧt:СКИХ конденсаторов на устойчивость наrрузки системы, рассмотрев три варианта:
а) компенсщ1ИЯ отсутствует (COS!jJ == 0,89);
б) компенсация соответствует COS!jJ == 0,95;
в) реактивная мощность наrрузки скомпенсирована полностью (coscp == 1).
Принять, что потребляемая эквива.llентным двиrателем при напряжении на ero щинах
U == i активная мощность Р == 1. При решении ИСПO.llЬЗ0вать критерии dЕэ/dU и dQэ/dЕ.
Решение. Находим скольжение s для различных значений напряжения U на шинах дви-
rателя при пострянной мощности Р == 1. Далее определяем реактивную мощность Qs по
СООТЕетствующим значениям U и s. Результаты вычислений сводим в таБJШЦУ:
12 -84
353
Е,
8
Езо
1,7
1)i1
fuJff.l
,
1ft 0.7
0.9
O и
Рис. 11.30. Определение критическоrо
напряжения и критической е. Д..с.
а)
E3 H
Б) кс=0.5 Xs=0,25
Р;Р;
Ез
P,Q
........
n.
R
"1= ::;
Х}J.=ч, 1
ap R z =0,011ч
: Рис. 11.32. Узел наrрузки (а) и
ero схема Замещения (6)
а)
и=1
o.s =0, 268
Х)J.=ч,1
t IIp =0, 244
Б) и= 1
0.=0329. 0$=0,268
'Qхэ х э
Qэ
2,2
.,
I
I
I
I
1,70 Е зо =1,72 Е э
2,0
1,8
1,6
Рис. 11.31. Зависимость Qз ==
== rp(E 3 )
и fJэ
1,0 3 И =а9
'2SL. .!..
48
01
2
8,ч
42
о 1
1,12
1,11 1,2 1,5' 1,6 Е э
J
Рис. 11.33. Изменение и и Qэ
Кривые 1, l' при cos <р 0,89; 2, 2' пра
cos <р 0.95; З, З' при cos <р 1
8) и=1
Q =O t l O$= 2 68
.LC.... хэ
"",
Рис. 11.34. Схема замещения при улучшении коэффициента
мощности наrрузки
u
5, %
Qs
1,00
1,34
0,27
0,90
1,71
0,34
Определяем критические значения:
0,80
2,40
0,48
0,75
3,03
0,61
0,71
4,97
1,00
UllP Y 2Poxs У 2.1. 0,25 0,707; 511P== 2/xs==0,0124/0,25==0,0496.
Результаты расчета режима для варианта «а» (6ез компенсации) приведены ниже:
u 1,000 0,900 0,800 0,750 0,707
Qp. 0,244 0,197 0,156 0,137 0,122
Qs 0,268 0,344 0,485 0,611 1,000
Q Qp. + Qs 0,512 0,541 0,641 0,748 1,120
I:1Q . 0,631 0,799 1,100 1,390 2,260
Qэ == Q + I:1Q 1,140 1,340 1,740 2,140 3,380
Е э 1,350 1,320 1,350 1,410 1,660
По приведенным в таблице числовым значениям построеиы кривые [ и [' на рис. 11.33.
Мощность конденсаторной батареи, необходимая для доведения путем компенсации
(вариант «6») коэффициента мощности до 0,95, находится следующим образом (рис. 11.34, а):
Qc == Qp. + Qs Q == 0,244 + 0,268 0,329 == 0,183,
rде Q == р tg arccos 0,95 1.0,329 == 0,329.
Сопротивление батареи
xc==U2fQc== 1/0,183== 5,47.
Соrласно рис. 11.34, б, сопротивление эквивалентноrо шунта
jXa == jx,," ( jXlI)I(jXp. jxc ) == j 4, 1 ( j 5,47) /(j 4 ,1 j 5,47) == i 16,4.
После Toro как определено сопротивление экви-
валентноrо шунта (рис. 11.34, в), находим Qa и Е э ан а- Еа
.лоrично тому, как это было сделано ранее. По резуль-
татам вычислений построены кривые 2 и 2' на рис. 1.6
11.33.
При COSqJ == 1 полной компенсации реактивной tj
мошности наrрузки (вариант «в») сопротивление эк-
вивалентноrо шунта
Ха == 1/0,268 == 3,74
и соответствует емкостному сопротивлению.
Результаты расчетов для этоrо случая представ-
лены кривыми 3 и 3' на рис. 11.33.
Во всех трех случаях критическое напряжение
оказыв"ается одинаковым (рис. 11.35). Оно составляет
U lIp == 0,9 вместо U lIp == 0,707, полученноrо для усло-
вия включения эквивалентноrо двиrателя на шины
мощной системы (х == О). Однако в рассматриваемых ус-
ловиях (соизмеримая мощность reHepaTopoB и наrруз-
ки) изменение напряжения на зажимах двиrателя при
соответствующем ему изменении Е э не характеризует
устойчивости и не может выявить влияния статических
конденсаторов на устойчивость. Влияние включения
конденсаторов, улучшающих коэффициенt' мощности
12*
I
'и =01
0,7 0,8 0/1 f/J и
Рис. 11.35. Изменение Е э и вы-
явление условий неустойчивости
наrрузки
l(ривые 1 при eos QJ O.89; 2 при
cos QJ...o.95; 3 при cos QJ 1
355
асинхронных двиrателей на устойчивость, можно найти, определив запасы устойчивости на-
rрузки по исходному и критическому значениям э. д. с. эквивалентноrо reHepaTopa:
КЗ (Еэо Еэ,кр)' 100%/Е эо .
Для рассматриваемых вариантов в соответствии с рис. 11.35 находим:
а) cos 'f О sq.
б) cos 'f 0', 5';
в) cos 'f 1,0;
К з (l,35 1,32) 100/1,35 2,22%;
К З (l,27 1,25) 100/1,27 1,57%;
К З (l,12 1,12) 100/1,12 0%.
Компенсация реактивной мощности наrрузки бата-
реями статических конденсаторов может иноrда приводить
к существенному снижению запасов устойчивости асинх-
ронных двиrателей, а при высокой степени компенса-
ции к «лавине напряжения».
Как следует из приведенных расчетов, в данном слу-
чае улучшение cos<p до 0,95 снижает коэффициент запаса
устойчивости наrрузки примерно в 1,5 раза; улучшение
cos<p до единицы в данной системе практически приведет к
неустсйчивости узла наrрузки.
Пример 11.3. Асинхронный двиrатель, схема замеще-
ния и параметры KOToporo представлены на рис. 11 ;36,
подключен 'к шинам, напряжение которых медленно сни-
жается.
П о с т р о и т ь зависимость потребляемой реактивной мощности от напряжения при
работе двиrателя и ero остановке; Р мех сопst 1.
Решение. Находим скольжение двиrателя при изменениях напряжения, решая уравне-
ние (11.1) относительно S и полаrая Е И:
a*
x s *,=o,22
P>i= 1
R.
r, 2
Xft:l(.=f.B 2 T
R 2 *=O,05
и
Рис. 11.36. Упрощенная схема
ЗЮlещеНЕЯ асинхронноrо дви.
rателя
и 1,0 0,9 0,8 0,7
S 0,0525 0,069 0,091 0,142
0,98 0,766 0,571 0,364
Критическое значение скольжения
На основании (11.2)
SKp 0,05/0 ,22 0,227.
Икр -,12.0,22. 1 0,662.
Для получения значений скольжения S при Р мех 1 и соответствующих напряжениях
И по выражению (11.4) определяем потребляемую двиrателем реактивную мощность:
и 1,0 0,9 0,8 0,7 0,662
S 0,0525 0,98 0,069 0,766 0;091 0,571 0,142 0,364 0,227
Q", 0,555 0,450 0,356 0,272 0,243
Qs 0,231 4,40 0,310 3,30 0,403 2,50 0,625 1,59 0,995
Q== Q", + Qs 0,786 4.,95 0,760 3,75 0,759 2,86 0,.897 1,86 1,24
856
Полученные результаты представлены rрафически на рис. 11.37 на участках 1 1' и
1'-3.
При остановленном двиrателе, т. е. при s 1 , имеем:
и 1.0 0,9 0,8 (;,7 ',,6 0,5 [\,4
QI'- 0,555 0,450 0,356 0,272 0,200 0,139 0,089
Q, 4,32 3,50 2,76 2,11 1,560 1,08 0,69
Q QI'- + Qs 4,88 3,95 3,12 2,38 1,76 1,22 0,779
Характеристика Q
ср(и) при s == 1 показана на рис. 11.37 на участке 0-2-4.
Q
Рис. 11.37. Характеристики
реактивной мощности
Участок 1-1' работа "а устойчи-
вой части при понижении наПрЯ N
жениЯ от U 1 до u иHP; 1'-3 TO
Же. при повышении и>и нр на He
устойчивой части; 1' 2 процесс
опрокидывания при U UHP o,622;
2 O изменение МОЩНОСТИ при oc
тановлениом двиrателе (s 1) при
и<и нр ; 2-4 то же, при и>и нр
ч,D
3,О
2,01
r
1
Ион.рОЛЫiь!е BOl'!pOCbl
11.1. Как можно получить расчетом и экспериментом статические характеристики ком-
плексной наrрузки? .
11.2. Сравните условия устойчивости rруппы асинхронных двиrателей, соизмерп:v;нх
по мощности с питающей их системой, и устойчивости одиночноrо двиrателя, питающеrося
от шин неизменноrо напряжения. Почему в первом случае критическое напряжение ока.'Ы-
вается значительно больше, чем во втором?
11.3. Как влияет наличие реактивноrо сопротивления между источником питания и
асинхронным двиrателем наrрузки на устойчивость этой системы?
11.4. Что такое лавина напряжения и каковы наиболее существенные причины ее воз-
никновения?
11.5. Какие наиболее эффективные средства и мероприятия режимноrо характера MorYT
быть применены для борьбы с лавиной напряжения?
11.6. Всеrда ли конденсаторы, улучщающие коэффициент мощности наrрузки и ее на-
пряжение в нормальном режиме, оказывают блаrоприятное действие на устойчивость КОМ:1-
лексной наrрузки? Почему?
11.7. Каковы причины опрокидывания асинхронных двиrателей наrрузки? Как разви-
вается этот пропесс и как он влияет на режим системы?
357
11.8. Как MorYT повлиять отклонения напряжения на устойчивость двиrателей наrруз-
ки?
11.9. Как MorYT повлиять повышения (понижения) частоты в системе на устойчивость
двиrателей наrрузки?
11.10. Что такое электрический центр системы?
Темы рефератов
1. Влияние активноrо сопротивления сети системы на развитие лавины напряжения.
2. Особенности лавины напряжения в условиях повышенной или пониженной частоты.
системы.
3. Влияние изменений механическоrо момента на валу двиrателя на развитие лавины
напряжения.
4. Влияние несинусоидальности и несимметрии напряження на устойчивость двиrате-
.пей наrрузки.
rл,А,В,А, 11
ПЕРЕХОДНЫЕ ПРОЦЕССЫ в УЗЛ,А,Х Н,А,rРУз.ки
ЭЛЕКТРИЧЕСКИХ СИСТЕМ ПРИ БОЛЬШИХ ВОЗМУЩЕНИЯХ
t 12.1. ВЛИЯНИЕ БОЛЬШИХ ОТКЛОНЕНИЯ ПАРА МЕТРОВ РЕЖИМА
НА ПОВЕДЕНИЕ НArРУЗКИ
к наиболее характерным переходным процессам, влияющим на режимы уз
лов наrрузок, преЖде Bcero относятся процессы, происходящие пр и пуске двиrате
лей. Современные мощные двиrатели, особенно асинхронные двиrатели с KOpOTKO
замкнутым ротором, имеют большие пусковые токи, поэтому их пусковой режим
существенно влияет на режим электрической системы. О Д н о в рем' е н н ы й
п у с к значительноrо количества двиrателей, соизмеримых по суммарной мощ
ности с мощностью остальной системы, может оказать существенное влияние на
ее режим. При соизмеримой мощности двиrателей и [енераторов системы проверка
влияния пуска двиrателей на режим системы должна производиться в обязатель
ном порядке.
При осуществлении а в т о м а т и ч е с к о r о п о в т о р н о r о в к л ю
ч е н и я (АПВ) и переключения источников питания возникают переходные
процессы, требующие специальноrо рассмотрения. На ЛЭП, питающих ту или
иную наrрузку, так же как на мощных высоковольтных линиях, MorYT происхо-
дить так называемые преходящие короткие замыкания. Появившись вследствие
какой-нибудь случайной причины, такое короткое замыкание самоликвидируется
при отключении аварийноrо участка, который может быть снова включен в HOp
мальную работу. При выходе из строя какоrо либо источника питания, например
трансформатора, питающиеся от Hero двиrатели и друrие потребители MorYT быть
переключены на резервное питание, т. е. подключены к друrому трансформатору.
Так как электродвиrатели и друrие виды наrрузки одновременно подключаются
к источнику напряжения, то в узле электрической системы появляется ток, зна-
чительно больший нормальноrо. Это ведет к понижению напряжения в электри-
ческой системе и, в свою очередь, вызывает уменьшение момента вращения. двиrа-
тел ей , как тех, которые переключались, так и друrих, работавших до этоrо в
нормальных условиях. Если не провести соответствующих мероприятий на осно-
ве расчета и не оценить возможное понижение напряжения на зажимах двиrателей,
то может получиться, что при переключении электродвиrатели не cMorYT рабо-
тать устойчивость наrрузки нарушится.
Необходимость в аналоrичных расчетах возникает при с а м о з а п у с к е
Д в и r а т е л е й, коrда по какой либо причине происходит кратковременное
отключение всей наrрузки, подключенной к данному узлу, а затем напряжение
в этом узле восстанавливается. Если двиrатели и друrие потребите.чи не были
при этом отключены, то все они одновременно оказываются подключенными к
восстановившемуся напряжению и значительно затормозившиеся или даже оста-
новившиеся двиrатели снова самозаПУСI\аются. Условия самозапуска опять таки
должны быть рассчитаны так, чтобы сюлозапус:к д-виrателей Mor быть осущест-
359
влен и в процессе самозапуска вся остальная система не испытывала бы TaKoro
снижения напряжения или частоты, которое моrло бы привести к нарушению
нормальной работы.
В электрических системах имеются мощные т о л ч к о о б раз н ы е Ha
rрузки, вызывающие рез к и е т о л ч к и тока. К ним, например, относится
электрическая тяrа, вызывающая не периодические, но реrулярные изменения
наrрузки и соответственно толчки тока и напряжения в электрической системе.
Еще более сильные, обычно периодические, толчки вызывают двиrатели прокат
ных станов и друrие наrрузки с периодически изменяющимся моментом. При
таких наrрузках в расчетах режимов систем возникают две задачи:
1) определение условий, при которых работа толчкообразных наrрузок не
приводит к недопустимым колебаниям напряжения на остальных наrрузках,
т. е. не вызывает колебаний скорости друrих асинхронных двиrателей и таких
колебаний напряжения, при которых осветительные приборы будут изменять свой
световой поток, вызывая недопустимые Д.1Я rлаза человека раздражения;
2) определение устойчивости двиrателей при толчкообразных наrрузках,
работающих с переменным моментом. Так возникает специальная задач'а провер
ки устойчивости 'синхронных или асиюсронных двиrателей, ПРИI\ОДЯЩИХ в дейст
вие прокатные станы или аналоrичные установки. Все эти задачи требуют рассмот-
рения большиХ возмущений режима или динамических явлений.
Двиrатели, входящие в состав наrрузки, большая часть которых (90 95%)
асинхронные, создают в узлах наrрузки сложные э л е к т р о м е х а н и ч е с-
к и е про Ц е с с ы. Эти процессы связаны с технолоrической необходимостью,
колебаниями механической наrрузки, особенностями кинематической системы
механизма и системы ero электропривода, особенностями переходных режимов в
отдельных arperaTax, непостоянством напряжения питающей сети и т. д.
Всякое изменение скорости механизма, который часто является сложной мно-
rоэлементной электромеханической системой, сопровождается изменениями кине-
тической энерrии. Это обстоятельство существенно и вызывает изменение момента,
мощности и уrловой скорости электродвиrателя. При этом уравнение движения
системы, или уравнение моментов, отнесенное к валу двиrателя, имеет вид
М M == J d(f) + ш2 dJ ( 12.1 )
д с dt 2 da'
rде М д момент, развиваемый движущими силами; МС момент сИл сопротив
ления; J момент инерции системы, который в общем случае является функцией
уrла поворота а рабочеrо opraHa, т. е. J === f(a); (f) уrловая скорость двиrателя.
Правая часть уравнения (12.1) представляет собой динамический момент сис-
темы М дин ' При J === const уравнение (12.1) принимает вид
М д + МС == Jdш/dt.
Момент сопротивления М с' приведенный к валу двиrаТЕ.J1Я, обусловлен си-,
лами сопротивлений. Он может и препятствовать и способствовать движению
механизма. В первом случае ero знак отрицателен, во втором положителен.
В процессе работы Toro или иноrо механизма -момент может остав-аться постоян
ным или изменяться.
Моменты М с MorYT быть разбиты на две катеrории: р е а к т и в н ы е и
а к т и в н ы е. К катеrории реактивных моментов относятся статические моменты,
препятствую!Дие движению и I,;;еняющие знак при реверсе двиrателя, например
,360
силы трения. Активные моменты сохраняют направление действия при реверсе
двиrателя; следовательно, в одном направлении вращения будут противодейст-
вовать, а в противоположном способствовать движению. К этой катеrории от-
носится, например, момент, создаваемый rрузом на барабане подъемноrо механиз-
ма крана. Активные моменты, противодействующие движению, входят в уравне-
ние со знаком минус, а способствующие со знаком плюс.
На момент механизмов оказывают влияние особенности технолоrическоrо
процесса и электромеханической и кинематическоЙ системы механизма и т. д.
В соответствии с этим исполнительные механизмы подразделяются на классы*.
К пер в о м у к л а с с у относятся механизмы, у которых момент от ско-
рости практически не изменяется: М с сопst. Примерами MorYT служить меха-
низмы подъема, передвижения тележки и моста MocToBoro крана, пассажирский
подъемник, транспортные ленты, роликовый транспортер, шахтный подъемник
с уравновешенным канатом и друrие механизмы.
Механизмы в т о р о r о к л а с с а характеризуются тем, что их момент яв-
ляется функцией скорости. Эта зависимость может быть выражена формулой
Мс МО + (М с . ном Мо) (шjшном)n,
rде МО момент холостоrо хода; М С.ном момент сопротивления при номиналь-
ноЙ наrрузке; о) уrловая скорость двиrателя; О)ном номинальная уrловая
скорость; n показатель, зависящий от Конструкции механизма; n (1 -7-
-7- 2) и может иметь нулевые и дробные значения. Примерами таких механизмов
являются вентилятор, компрессор, rребной винт. .
у механизмов т р е т ь е r о к л а с с а момент зависит от усла поворота
вала двиrателя: М С f(a). К таким механизмам относятся подъемники, устройст-
ва для создания напора, тяrи, экскаваторные установки.
К ч е т в е р т о м у кл а с с у механизмов относятся механизмы, момент
которых одновременно за исит от скорости и услов поворота. Это, например,
электровоз, рулевое устроиство.
П я Т ы й к л а с с характеризуется тем, что момент механизма зависит от
времени, изменяясь по некоторому закону. Это например, пила, механизм враща
тельноrо бурения.
Электроприводы при функционировании и соответственно переходные про-
цессы, ими обуuювленные, связаны с двумя основными режимами:
1) продолжительным, медленно меняющимся (здесь возникают задачи стати-
ческоЙ устоЙчивости); .
2) кратковременным и повторно-кратковременныI,, быстро меняющимся
(они вызывают необходимость в решении задач динамической устойчивости).
, Моменты сопротивления механизма, так же как и электромеханичеСК!1е мо-
менты двиrателя, MorYT разделяться на статические и динамические. В rл. 11 были
пояснены общие особенности этих характеристик применительно к двиrателям.
В настоящей rлаве характеристик двиrателей и их особенности будут рас-
сматриваться комплексно с учетом своиств как ДВИrателя, так и механизма си-
дящеrо на ero валу. В дальнейшем при установлении ПРИнципиальных соотн ше-
ний будет предполаrаться, что динамическая характеристика может заменяться
* СМ.: Тайдукевич В. Н.; Титов В. С. Случайные наrрузки силовых электроприводов
М.: Энерrоатомиздат, 1983. .
301
квазидинамической, а момент сопротивления механизма на валу приниматься
постоянным.
Динамические и квазидинамические характеристики. Зависимость парамет
ров режима от времени и изменения друrих параметров, определенная при столь
быстрых изменениях режима, что скорость обязательно должна быть учтена, Ha
зывается динамической характеристикой. Она представляется в виде функцио
нальной связи какоrо либо параметра режима, а также ряда друrих параметров
режима и их производных, например
р == ер (и, " dU/dt; d2U/dt 2 ; d2f/dt 2 ; ... )..
Здесь динамическая характеристика представлена rиперповерхностью, про-
ходящей в фазовом пространстве.
Простейшим случаем динамической характеристики будет поверхность в
пространстве трех измерений, например
р == ер (и, dU /dt) или Р == ер (8, d8/dt)o
При заданном характере изменения напряжения, скольжения и т. д. во вре-
мени может быть получена квазидин мическая характеристика и представлена
в виде серии кривых на плоскости:
р == ер (Ut O, Ut l, 00" Ut n), или Р == ер и)о
Представление динамических характеристик комплексной наrрузки и поль-
зование ими оказываются сложными, а поэтому в практических расчетах обычно
применяют квазидинамичес"ие характеристики. Комплексные характеристики на-
rрузки состоят из характеристик отдельных ее элементов, к которым относятся:
1. Характеристики осветительной наrрузки. Активная мощность, потребляе-
мая осветительной установкой, содержащей лампы накаливания, не зависит от
частоты и примерно пропорциональна напряжению в степени 1,6. Реактивную
мощность осветительная наrрузка не потребляет. Активная мощность освеtитеJIЬ
ной наrрузки, состоящей из люмин.есцентных ламп, заметно зависит от частоты,
уменьшаясь на 0,5 0;8% с изменением частоты на 1 %, но мало зависит от напря-
жения.
Динамические характеристики осветительных установок при анализе боль-
шинства электромеханических переходных процессов (расчеты устойчивости,
больших качаний) обычно можно принимать совпадающими со статическими. На
рис. 12.1 яредставлены статические характеристики осветительной наrрузки
Р == f (и) состоящей из ламп накаливания, и соответствующее изменение сопро
тивления наrрузки' R н == f (И). Однако, как показано на рис. 12.2, изменение
потребления этой наrрузкой активной мощности при быстром изменении 'напря-
жения будет существенно отличным от приведенноrо на рис. 12.1.
2. Характеристика двиrательной наrрузки. О статических и динамических
характеристиках асинхронных и синхронных двиrателей было сказано в rл. 4 и
11.2. Характеристики этоrо вида наrрузки весьма разнообразны, что обуслов-
лено прежде Bcero появлением свободных токов, вызванных резкими толчками
режима и быстрыми изменениями скольжения (d8/dt =1= О). На рис. 12.3 в качест-
ве примера ПQказаны динамические характеристики М == ep(s, ds/dt) асинхронноrо
двиrателя, а на рис. 12.4 характеристики двиrателя в различных режимах.
Асинхронная машина в переходных процессах может работать не только двиrате-
лем, но и тормозом (при 8 > 1) или [енератором (8) О). Эти три различных ре-
Зф2
жима асинхронной машины, соотношения мощностей и моментов, а также скорос-
тей вращающеrося поля и ротора и .показаны на рис. 12.4.
Если скорость изменения уrла (или скольжения) не очень велика, то при ана-
лизе различных изменений режима работы синхронноrо или асинхронноrо дви-
тателя, например изменений напряжения на ero шинах, можно приближенно
и
Р, R H
Р,и
.tJt=O,02+0,07c
Рис. 12.1. Зависимость aK
тивной мощности от напря
жения для осветительной
наrрузки (при изменении
напряжения Ije быстрее чем
за O.2 O,3 с):
1 характеристика P. U2/R B
при RB const; 2 характери-
стика P U2/RB при RB <P(U)
(лампы накаливания); 3 ха-
рактеристика RB <P(U)
t,
Рис. 12.2. Потребление ак-
тивной мощности освети
тельной наrрузкой при
быстром изменении на.пря
жения
М*
1,0
0,8
/
/
I
I
/
/
I
I
I
I
\
0,6
.0,4-
0,01 0,02 О,ОЗ S
Рис. 12.3. Зависимость момен-
та асинхронноrо двиrателя М
от скольжения s и ускорения
ds/dt
lUтриховой линией показаны ха-
рактеристики при ds/dt const
получать динамические характеристики на основе серии статических характерис-
тик (рис. 12.5). Для этоrо, применяя известную формулу мощности асинхронноrо
двиrателя [см. (11.1)] и проводя линеаризацию, заменим характеристики М ==
== cp(s) прямыми И предположим, что Ммех == МО == const. Не будем учитывать
при этом электромаrнитные проuессы, происходящие в обмотках двиrателя, и
заменим характеристики М == cp(s) прямыми 0-1-1, 0 2-2 (рис. 12.6). Тоrда урав-
нение движения будет иметь вид
TJ ds/di == МО Ks,
[де коэффиuиент пропорuиональности К == tga (рис. 12.6, а) или
S ds S dt 1 t
== т' откуда ln(Ks Мо) + С 1 == T .
. Мо Ks J К . J
Здесь С ! постоянная интеrрирования, при t == О
С 1 == lп (Ks o Мо)/ К.
Раскрывая значение C t , получим
1 Ks М п
ln
к Kso M
== T.
.1
з63 I
Лоле l<J
fi(.( й (д
WФ Рот17Р
{енеротор
'" :;,0
'" "
.
'" '"
'" '"
::}
'"
'"
р
s
.J
ДБЦ80тель
Рис. 12.4. Характеристики режимов асинхронной машИны:
Р! ПОТребляемая ИЗ сети моШНОСХь при сопротивлении статора i(l::;i=O;
м==р враща.ющий момент: Р мех меХаническая мощНОСТЬ на валу .1ВИ"
rотеля; 1 пусковой момент; JJ мощность, потребляемая при пуске
о)
JVI эл
... ...
/';.,.t"" ...... ......,
/ /......-1 .....................'
/ / / .....+......... ..... ",
I I / / ...1.............. " ",
11 I /y/ ..., ',;, ',',',
I / ...""',... " ., '.....
t,.} /l ,', "" ,
. t / / '/
2Н/б/l/
1//'f/!rtJ
It 'i/!i t
'1//111 Ц.
11 / tп
"r/
//1
s
5)
s
/
/
1/
11
v
;
l",t l1
J\ , 3
I',' ' 2
t " "
JT.'''.......... ......
. ft ::,.....,::-... :::= .:::,
1 2. ........... ............... ......-=-а--::..:::::;:::..... f
I t f
икр U
Рис. 12.5. Статические ( ) и ди-
намические ( ) характеРlfСТИКИ
аСИНlrронноrо двиrателя;
а Mon f(s); б S QJ(U)
SKP
о)
М
s
U 2 R$'
М f
/ f R2+(X5)2
UlRS
M 2
2 R 2 +(X5)Z
JVI"
1'117
t91X::: =K
5
о
Б)
': v
З<о 'ЗКР
i
50
Рис. 12.6. Изменение режима асинхронно-
ro двиrателя при уменьшении напряжения
от и 1 до и 2 :
а статические характеристики момеита M
QJ(S); о динамическая характеристика s f(t)
Проведя ряд преобразований, найдем скольжение в любой момент времени
t (рис. 12.6, б):
=== [(К8 0 Mo)e Кt/T; + М о ]/ к.
в начале процесса при t === О и в конце процесса при t === 00 имеем соответст-
венно
8 === 80;
8 === 800 === Мо/ К.
б)
эа
а)
м
5
Ммвх
М
М
50 SKP 5 t n t n + 1
t
,Рис. 12.7. Характеристики изменения скольжения двиrателя при изменении напряже-
ния:
а М 1jJ(s) при нормальном и ,поннженном напряжении; б изменение s f(t) при изменениях напря-
жения
Кроме Toro, при 8 === $00
М 2 === Мо === U R2800/[R + (Х800)2].
Следовательно, при известных R2' Х, и 2 И Мо можно найти 800 и далее опреде-
лить К === Мо/$оо.
При учете электромаrнитных переходных процессов в обмотках двиrателя
решение было бы значительно более сложным.
Еще один подход заключается в следующем. Представляя двиrатель форму-
лоЙ (11.1), найдем появляющийся при изменении скольжения избыточный тормо-
зящий момент*: дм === м мех М. Под ero воздействием скольжение двиrателя
возрастает и в точке с (рис. 12.7, а) устанавливается новый стационарный режим
(либо двиrатель опрокидывается и останавливается, если М т < Ммех)' Уравне-
ние движения ротора двиrателя в переходном режиме может быть получено сле-
дующим образом.
Избыточный момент дМ создает ускорение дМ/Т J. rде Т ; постоянная
инерции двиrателя вместе с вращаемым им механизмом. Это ускорение представ-
ляет собой производную от скорости по времени: d(J)/dt === ds/dt при 8::: 1
Ф,- rде (J) уrловая скорость, а 8 скольжение. Следовательно,
tlMITJ == dsldt
или
tlM == Ммех M == Т; d8ldt,
* Предполаrается, что в силу допущения о малости dW можно считать dP =-= dM.
365
откуда
dt == T J ds == TJ
MMex M
Ммех
Решение этоrо уравнения
Р т 2М т
S/SИР ир/S
дает зависимость t == {(8), что позволяет построить кривую изменения скольжения
двиrателя во времени при пониженном напряжении на ero шинах. На ри;с. 12.7, б
показано семейство таких кривых при различных напряжениях на шинах дви-
rателя (за 100% принято напряжение в нормальном режиме).
Если, например, в некоторый момент времени скольжение двиrателя равно
8 п при напряжении на шинах двиrателя и == 60% (точка а на рис. 12.7), то, до-
пуская: что в течение небольшоrо интервала времени I1t напряжение сохраняет
свою величину, с помощью кривых можно найти изменение скольженияl18 п для
этоrо интервала. Обычно кривые (рис. 12.7) перестраивают в виде зависимостей
и == f(8) для различных t.
Характеристики асинх-
ронной активной мощности.
Характеристики ЭТОй мощнос-
ти, потребляемой двиrатель-
ной наrрузкой, и соответст-
венно вращающий электро-
маrнитный момент двиrателя
в переходных процессах в
значительной мере будут оп-
ределяться мощностью (тор-
мозящим моментом) машин,
приводимых во вращение
(т. е. рабочих машин), и их ха-
рактеристиками Ммех == f((J)).
Изменения Р, М будут зави-
сеть не только от режима пи-
UJ/Ш/fОИ тающей сети, но и от механи-
ческих характеристик приво--
димых машин, т. е. зависи-
мостей механическоrо момен-
та от уrловой скорости.
Разнообразные механиче-
ские характеристики рабочих
машин, показанные на рис.
12.8, MorYT быть сведены к
трем основным видам зависи-
мостей Ммех == f((j}):
ой)
М,1й
'{20
100
Ба
40
20 ,
о
20
40
Ба 80 W/Wнои,''/о
s
t == T J S
50
ds
о)
MI(-
Рис. 12.8. Механические характеРИСТljКИ рабочих Ma
шин;
а тцповые характерИСТIiКИ М==НОО/ОО ном ): 'ООНОМ иоминаль
ная рабочая уrловая скорость машины. Машины с тяжелыми
условнями пуска: 1 подъемные краны и т. П. при малом MO
менте трения (постоянный момент); 2 подъемные краны и
транспортные ме:ханизмы с трением; 3 нереверсивные прокаТе
ные станы; 4 поршневые компрессоры (пуск под иаrpузкой),
дробилки, вальцы в резиновой промышлеНRОСТИ. Машины с леr
КИМ И условиями пуска; 5 каландры (В текстильной ПрОМЫШ
ленности); б...... центробежные насосы н вентиляторы (пуск прн
открытой задвижке); 7 то же, при закрытой; 8 поршиевые
компрессоры, турбокомпрессоры, двиrатели-rенераторы (во всех
случаях пуск вхолостую); б три типа обобщенных характе.
ристик
366
ds
2М т
S/SИР Sир/S .
а) постоянный ил.и мало зависящий от скорости момейт:
Ммех === const; Р мех == ООМ мех'
К этому виду характеристик относятся зависимости 1, 2, 3, 4, 8;
б) момент, примерно пропорциональный скорости (зависимость 5):
Ммех == 00; Р мех == 002;
в) момент, примерно пропорциональный квадрату скорости (характеристики
6, 7):
М мех == 002; Р мех === 003, [де 00 === 000 + oo.
В общем с.'1учае можно считать, что М мех === Мо(Оn . Принимая (00 === 1, можно
записать, что Мал == Мо(1 + 5)n== f(5). Однако характеристики, представленные
на ри . 12.8, и, следовательно, характеристика Мал == f(5) зависят не только от
00, но в общем случае и от d(O/dt. Все это и приводит К сложным зависимостям.
Из схемы замещения двиrателя следует, что реактивная мощность Q, потреб
ляемая им, имеет две составляющие: намаrничивающую мощность Q",. связанную
с намаrничивающим током, и мощность рассеяния Q8' связанную с созданием
полей рассеяния в статоре и роторе:
Q == 9", + Qs.
При сделанных допущениях мощность рассеяния становится сложной функ
цией скольжения:
Qs == J2xs,
rде I V M o (1+s)ns/R.
Iv\ощность намаrничивания
Q", == и2/ х ", === /р. и,
rде J '" ток холостоrо хода. .
Значения тока холостоrо хода при U == и о зависяТ от мощности двиrателя
(чем больше мощность двиrателя, тем меньше намаrНИЧlJвающий ток по отноше
нию к номинальному) и от скорости (у тихоходных двиrателей намаrничивающий
ток больше). Примерные значения составляют 20...:......60% от номинальноrо тока.
При учете уменьшения Х!-, С насыщени м зависимость Q", от напряжения за
метно отклоняется от квадратичной параболы, а динамические процессы искажают
её еще заметнее в самый начаJIЬНЫЙ период возникновения переходноrо процесса.
Простейшая динамическая характеристика синхронной наrрузки (синхрон
ных двиrателей). На основании выражений для момента и мощности синхронной
машины можно получить различноrо рода динамические характеристики. Так,
при изменении напряжения, подведенноrо к двиrателю, ero мощность и вращаю
щий момент изменяются (если не учитывать потери в статоре) прямо пропорЦИ<r
нально напряжению:
Р == (и Eq/Xd) sin 8; М == Р/оо о .
Изменение частоты подведенноrо напряжения изменяет вращающий момент:
М == (и Eqo ооn ч xdO) sin 8,
з67
тде XdO значение сопротивления при (j) == (1)0; Ю* == ю/юо относительная
частота; n показатель, характеризующий систему возбуждения двиrателя.
Момент (если не учитывать насыщение) пропорционален току ротора. Син
хронный двиrатель обычно работает при уrле б о == 25 --7- 300 и обладает значитель-
ной переrрузочной способностью К п === Ммакс/ МО === 2,0 --7- 2,5; У некоторых спе-
циальных машин К п === 3 --7- 4.
У явнополюСных двиrателей имеется еще момент явнополюсности (иноrда
неудачно называемый реактивным)
М явн === и2 xd X q sin2a.
2ш* Xd X q
Этот момент пропорционален квадрату подведенноrо напряжения и обратно
Пропорционален частоте.
Реактивная мощность на шинах двиrаrеля, определенная упрощенно без уче
та потерь в статоре,
Eqo (J)п i .u 2
При cos а > двиrатель выдает реактивную мощность.
Xdo Xdo
Зависимости р и Q от характера переходноrо процесса, например от скорости
изменения напряжения на шинах двиrателя, будут СJIедующими:
при очень медленном
изменении напряжения зави
симости Q === f( И) и Р === f ( И)
определяются статическими
характеристиками D, пока
занными на рис. 12.9. Эти ха-
рактеристики построены при
Eq === const;
при резком изменении
напряжения динамические ха-
рактеристики А, т. е. Q ===
=== '( u), Р == f( И), строятся
при х' == const и приложенной
за ним Е' q === const; .
при изменении напря-
жения с конечной скоростью
rрафики Q === f( И), Р === f (И)
располаrаются между D и А
(т. е. ВиС).
Характеристики преобра-
зова тельной (выпрямительной
и инверторной) наrРУЗIШ. ЭТIl
характеристики, дающие за-
висимость активной и реак-
тивной мощностей (потреб-
ляемых или выдаваемых пре
ИЕ фп l и2
Q== чО cosa .
Xdo Xdo
а)
Р
8)
Q
А
B
i=
C I
n/t=oo I
I
I
I
I
I
I
A.... =o
В t =t'
=<-
t '-'? ""
c...... I
I
D t=oo i
I
I
I
I
,
У<и О
I
I
Lb (J
5)
Р
У<и О
У О U
а)
и
И а
РО
" ",.........
I1 '" ....,
А11 в сп...............
.1.1.
IL
1
I
Е
t
00'
д'
t 1 '
t=O
t z
Рнс. 12.9. Изменение активной и реактивной Мощ
ности асинхронноrо двиrателя при понижении нап
ряжения:
А очень быстрое (почти мrновеиное) понижение напряже
ния (или момент иачальноrо изменения, t===O), D очень
медленное понижение напряжения (или окончание процесса,
("",оо); В, (; ПОIlижение напряжения со средней скоростью
(промежуточные точки процесс а t==t l . t==t 2 ); а изменение
активной мощности при снижении напряжения [P f(U)] с
равными скоростЯми (А. В. С, D) или на равных стадиях
процесса. Покаванноrо на рис. 2; б то же. Р ср(I\); в
изменеНИе реактивной мощности при тех же условиях; е......
характер измененИЯ напряжения
368
образователем) от подведенноrо к нему напряжения, обусловлены реrулирова
нием преобразователя. Подобное реrулирование является быстрым, поэтому s
первом приближении можно считать совпадающими статические и динамические
характеристики. Не проводя здесь подробноrо анализа работы преобразовате
лей и не выводя соответствующих аналитических выражений*, приведем при
мерные характеристики выпрямителя и инвертора.
Ivl0ЩНОСТЬ выпрямителя и инвертора зависит от подведенноrо напряжения,
параметров системы постоянноrо тока, уrлов зажиrания выпрямителя и инвертора
(рис. 12.10). В электропередачах постоянноrо тока обычно производится совмест-
ное реrулирование уrлов зажиrания на обеих преобразовательных подстанциях.
На рис. 12.10, а, б показаны типичные характеристики мощных преобразова
телей. Различие этих характеристик прежде Bcero обусловлено действием реrуля
тора тока и реrулятора минимальноrо тока. Реrулятор тока (РТ) изменяет уrол
зажиrания вь!прямителя 'соответственно значению тока. Если уrол зажиrания
1,0
Без РТ
б) 8)
Pz,Qz Р, Q
112. 1,2
1,0 \
\ .
0,8 I \а
/ \
I
О,б /Q
f ftU
0,4- '"
0,9 0,8 1,0 u*z 0,8 0,9 1,0 и*
а)
PI,QI
1,2
0,8
.0,6
0,4-
0,8
Рис. 12.10. Характеристики выпрямительной и инверторной наrрузок;
активная мощность; реактивная МОЩНОСТЬ;
а выпрямительный конец:
1 P, fJ!(U *,); }
2 Q, fJ!(U *,);
3 P, fJ!(U *,); }
4 Q, fJ!(U *,);
6 инверторный конец:
5 P2 fJ!(U *2); }
б Q2 fJ!(U *2);
7 P2 fJ!(U *2); }
8 Q2 fJ!(U *2);
в установки электролиза и печи:
9 P (и *2); } для ртутно.выпрямитсльноrо асресата;
10 Q fJ!(U *2);
11 P fJ!(U *);
J2 Q fJ!(U);
без реrулятора минимаЛЬНОfО тока;
то Же, с реrулятором:;
без реrулятора минимзльноrо тока;
то же, с рсrУJ1ЯТОРОМ;
электропечь сопротивления;
карборундовая печь.
* Подробный анализ и получение соответствующих выражений производятся в кур-
сах промышленной электроники и передачи энерrии постоянным токоы. См., например:
Электрические системы: Передача энерrии переменным и постоянным током. jПод ред.
В. А. Веникова М.: Высшая школа, 1972.
3с9
выпрямителя становится равным нулю, то реrулятор тока не может далее поддер-
живать заданное значение тока при уменьшении тока. В этом случае ток наrруз-
ки поддерживается реrулятором минимальноrо тока на инверторе, который умень-
шает уrол зажиrания при снижении тока. Обычно реrулятор минимальноrо тока
вступает в работу тоrда, коrда реrулятор тока не в состоянии предотвратить сни-
жение тока наrрузки на выпрямителе. В реrуляторах тока ток наrрузки сравнива-
ется с заданным током уставки. Р rулятор тока осуществляет реrулирование то-
K:J на выпрямителе только тоrда, коrда ток в наrрузке больше заданноrо тока ус- .
тавки. Реrулятор минимальноrо тока осуществляет реrулирование тока тоrда,
коrда ток становится меньше заданноrо тока уставки.
На рис. 12.10, в приведены характеристики печных и ртутно преобразова-
тельных установок, питающих электролизную наrрузку. Их характеристики
сходны с характеристиками асинхронноrо двиrателя. Печная наrрузка имеет раз-
личные характеристики в зависимости от типа печи. Дуrовые печи и печи сопро-
тiшленИя вёеХ тИпов (от МоЩНЫХ До Малых, бытовых) потребляют чисто активную
мощность, примерно пропорциональную квадрату напряжения. Таким образом,
характеристика печных установок Р == f( И) близка к характеристике осветитель-
ной наrрузки. Характеристики реактивной мощности карборундовых печей име-
ют специфический характер (см. рис. 12.10, кривые 11, 12).
Динамические характеристики комплексной наrрузки электрических систем.
Комплексная наrрузка состоит из осветительной и бытовой наrрузок, наrрузки
ДЕиrателей, инверторов и выпрямителей, а также потерь в трансформаторах и
кабелях. Ее динамические характеристики MorYT быть приближенно получены
из серии статических характеристик (аналоrично тому, как это делалось при По-
лучении простейших динамических характеристик асинхронных двиrателей).
Изменения мощности, потребляемой наrрузкой, с изменением напряжения
и частоты MorYT быть при небольших медленных и быстрых их отклонениях пред
ставлены выражениями
!1Р == (дР/дИ)!1и + (дР/дп !1f;
!1Q == (aQ/ дИ)!1и + (aQ/ дп М.
При изменении только U цли только f величины dP/dU == аи; dQ!dU == Ь и ;
dP/df == a t ; dQjdf== b f , взятые от статических или динамических характеристик
соответственно, называются ресулирующими эффектами активной u реактивной
.мощностей наё.рузки по напряжению и частоте. Реrулирующйй эффект комплекс-
ноЙ наrрузки имеет следующие значения (отн. ед.):
при медленном изменении (статическая характеристика) напряжения
вблизи ero нормальноrо значения обычно составляет 1 ,5 3,5 для реактивной
мо'дности и 0,3 O,95 для активной мощности;
при изменении частоты вблизи ее нормальноrо значения составляет 1 ,5
3,O дЛЯ активной мощности и 1 6 для реактивной (статическая характеристика);
при быстрых изменениях меняется . (и весьма значительно) в зависимости
от скорости изменения напряжения или частоты.
Обычно для отдельных слаrающих наrрузки диапазон изменения реrулирую-
щеrо эффекта больше, чем для комплексной' наrрузки.
Комплексная наrpузка при значительном изменении частоты и напряжения.
Выше предполаrалось, что изменения частоты и напряжения настолько невелики,
что можно линеаризовать характеристики наrрузки и применять их для определе-
370
.ния I1Р и I1Q. Однако в электрических системах бывают значительные изменения
частоты и напряжения. Обычно изменения частоты обусловлены появлением He
баланса между электрической мощностью, отдаваемой rенераторами в сеть, и
механической. мощностью их первичных двиrателей. Эти изменения приводят ,
как было показано в rл. 11, к отклонениям потребления реактивной мощности,
напряжения и потерь активной мощности- При быстрых изменениях все расчеты
должны проводиться с помощью динамических характеристик. .
s 1.1..1. ПУСК двиr А ТЕЛЕЙ
Общая характеристика условий пуска синхронных и асинхронных двиrателей.
Пуск двиrателей в ход, ИЛИ пусковой режим электропривода, входящеrо в состав
комплексной наrрузки, это процесс перехода двиrателей и соответственно ра-
бочих механизмов из неподвижноrо состояния (ш == О) в состояние вращения с
нормальной скоростью (ш == шо). Пуск двиrателей, являющийся существенной
частью режима работы двиrателей, относится к числу н о р м а л ь н ы х пер е-
х о Д н ы х про Ц е с с о в.
При проектировании электропривода и выборе соответствующеrо двиrателя
устанавливают, сможет ли данный двиrатель «развернуть» (от ffi == О до ffi == шо)
присоединенный К нему механизм, для чеrо:
выясняют время пуска двиrателя:
устанавливают, насколько допустима данная продолжительность процес-
са пуска;
проверяют плавность пуска (что особенно важно, например, для подъем
ных'- кранов и печатных машин);
определяют HarpeB двиrателя при пуске;
находят ускорение и условия ero постоянства при пуске (что желательно
для ряда механизмов, например для пассажирских лифтов).
Перечисленные вопросы решаются при проектировании электропривода и
поэтому не рассматриваются при изучении переходных процессов в узле наrруз
КЛ, rдевниманиесосредоточивается на с и с т е м н ы х з а Д а чах, в число KO
торых входит определение тока двиrателей при пуске, допустимость пусковых
токов с точки зрения р а б о т ы с и с т е м ы и с е т и.
Большие токи iоr)Т/вызвать понижение напряжения, создать неблаrоприят
ное влияние на друrие двиrатели и друrие виды наrрузки и привести к тому, что
данный двиrатель будет фактически разrоняться медленнее, чем это предполаrа-
лось при неизменном напряжении на ero зажимах. В -этих условиях требуется
определение времени пуска двиrателей и зависимости пусковоrо тока от времени.
Вследствие снижения напряжения в сети вращающий момент двиrателя может
оказаться либо меньше момента сопротивления механической наrрузКИ, либо He
HaMHoro больше и разrон двиrателя будет соответственно или невозможен,ИЛИ He
допустимо затянут.
Во время пуска двиrатель должен развивать вращающий момент, необходи-
мый, во-первых, для преодоления момента сопротивления механизма, и, во-вто-
рых, для создания определенной кинетической энерrии вращающихся масс arpe-
[ата. При пуске двиrатель потребляет от источника повышенное количество энер-
rии, что и отражается в увеличении пусковоrо тока. Кратность пусковоrо тока по
отношению к номинальному составляет у асинхронных двиrателей 1 ,5 2 при рео-
371
статном пуске (ДЛЯ двиrателей с фазным ротором) и 5 8 при пуске двиrателя
с короткозамкнутым ротором.
Повышенный HarpeB при пуске накладывает определенные оrраничения на
электроприводы, примеНflющиеся там, [де требуются частые пуски в ход. В этих
условиях используют двиrатели специальных конструкций, а также проводят
различные мероприятия, облеrчающие пуск.
у с л о в и я п у с к а обычно разделяют на леrкие, норма.пьные и тяжелые.
При леrких условиях требуемый момент в начале вращения двит.ателя состав-
ляет 10 40% от номинальноrо.
К нормальным условиям пуска относятся такие, при которых механизм Tpe
бует пусковоrо момента, paBHoro 50 75% от номинальноrо.
К тяжелым условиям относятся такие, при которых требуемый начальный
момент составляет 100% номинаЛЪноrо и выше. К последним относятся условия
пуска таких механизмов, как компрессоры, дробильные барабаны, различные YCT
роЙства для перемешивания, а также насосы с открытой задвижкой, приводы
со значительным моментом инерции. В некоторых специальных случаях, напри
мер при использовании однофазных двиrателей и синхронных двиrателей, у KO
торых не предусмотрен самозапуск, электрический пуск асресата в .ход заменя-
ется механическим с помощью разrонных устройств. Такие случаи, однаКо,ста-
новятся все более и более редкими и не будут рассматриваться в данной книrе.
Для облеrчения тяжелых условий пуска в некоторых приводах применяются
специальные механические средства: центробежные, сцепные ферромаrнитные или
rидравлические муфты, с помощью которых двиrатель принимает наrрузку лишь
ПОС.'lе Toro, как он достиr нужной скорости и стал развивать надлежащий Bpa
щающий момент.
Схемы пуска. Для управления пуском и оrраничения пусковоrо тока MorYT
ПРIIменяться пускореrулирующая аппаратура и специальные схемы пуска. Boc
НОВНОМ используются три схемы пуска, которые рассмотрены применительно к
синхронным двиrателям; пуск асинхронных двиrателей отличается лишь тем, что
в нем отсутствует последняя стадия подача возбуждения и втяrивание в СИf,iХ-
ронизм.
А в т о т р а н с фор м а. т о р н ы й п у с к осуществляется по схеме,
показанной на рис. 12.11, а. При пуске сначала включается нулевой выключатель
1, затем выключатель 2, присоединяющий автотрансформатор к сети. Так как дви-
rатель подключен к пониженному (через автотрансформатор) напряжению, то
он разrоняется, потребляя сравнительно небольшой ток. После Toro как двиrатель
достиrает подсинхронной скорости, включается возбуждение и двиrатель входит
в синхронизм; выюпочатель 1 отключается и включается шунтирующий выключа
тель 3, который подает на двиrатель нормальное напряжение.
у синхронных двиrателей при леrком пуске возбуждение на двиrатель ПОДа-
еТС5} до включения выключателя 3; при тяжелом пуске возбуждение подключается
после включения шунтирующеrо ВЫЮ1ючателя, т. е. после подачи на двиrатель
nолноrо напряжения сети.
Если напряжение сети снижается с помощью автотрансформатора в k раз,
ТО ТОК, потребляемый из сети при пуске, снижается пропорционально квадрату
напряжения в k 2 раз. Однако автотрансформатор довольно дороr и обладает He
достатками в эксплуатации, так как создает толчки тока .при переключении и
ИНОI'да служит причиной аварий. Все это привело к тому, что от автотрансформа-
TOPJ-U)t'O пуска отказываются и в настоящее время он применяется краЙне редко.
з,l
р е а к т о р н ъl й п у с к осуществляется соrласно схеме, приведенной на
рис. 12.11, б. Пусковой реактор оrраничивает пусковой ток и снижаer напряже
ниена двиrателе при пуске за счет падения напряжения в реакторе. В начале пус
ка шунтирующий выключатель 2 отключен. С помощью выключателя 1 двиrатель
подключается к сетИ через реактор. По мере разrона двиrателя ток снижается,
что приводит к уменьшению падения напряжения в реакторе и, следовательно, к
3
1
2
Рис. 12.11. Схемы пуска двиrателей:
а аВТQтрансформаторноrо; б peaKтopHoro: ...... прямоro
увеличению напряжения на двиrателе. При подсинхронной скорости двиrатель
получает возбуждение и входит в синхронизм, после чеrо включается шунтирую--
щий выключатель 2, выключая пусковой реактор. При этом двиrатель оказывает-
ся подключенным непосредственно к сети.
Сопротивление реактора обычно определяется соrласно выражению*
Х р == ИНОМ (1/ J пуск. МиН 11 J пуск. макс)'
rде lпуск.мин величина, до которой необходимо оrраничить пусковой ток с п<r
мощью реактора; 1 ПУСК.макс пусковой ток двиrателя при номинальном напряже.-
нии ИНОМ на ero шинах.
При напряжении сети И с, отличном в общем случае от ИНОМ, напряжение,
подводимое к дви,ателю при пуске.
ИД==И е .
1 + (/пуек.макс/UИОМ)ХР
При ЭТОМ пусковой ток двиrателя
J И
пуек.д с ( и /1 ) +
ноМ ПУск макс Х р
* Данная формула и три. последующие получены при допущении; что сопротивление
двиrателя чисто реактивное. Для неподвижноrо двиrателя такое упрощеиие не вносит боль-
шой поrрешностИ, поскольку при s == 1
(, + 'l)/X 1/.3"';-' 1/6.
373
Пусковой момент при реакторном пуске снижается:
М П У СИ == МП У СИU (иц/ином)2.
НОМ
Пуск через реактор имеет недостаток необходимость .ДОПOJIнительноrо обо
рудования (пусковоrо реактора и шунтирующеrо выключателя).
Рассмотренную схему обычно применяют при необходимости значительноrо
снижения тока в сети и достаточности для пуска небольшоrо превышения пусково-
[о момента над статическим моментом механизма.
П р я м о й п у с к осуществляется соrласно схеме, приведенной н'а рис.
12.11, в. Двиrатель включается на полное напряжение сети с помощью выключате
ля. С помощью вращающеrо асинхронноrо момента двиrатель достиrает подсин
хронной скорости, после чеrо подается возбуждение и он входит в синхронизм.
)
1}
't
000 1;
3
2
0,6
0,7
0,8 о 0,9
1,0
Рис. 12.12. Осциллоrраммы пуска синхронноrо двиrателя:
а прямой ПУСК с присоединенным насосом; 6 пуск через реактор иди автотрансформатор с отсое-
днненным насосом; в время разrона "f tlt. сиихро'!ноro двнrателя в зависимости от напряження
и * и/и., t. t при и и.; 1 ток ротора; 2 тоК статора; J иапряжение сети и двиrателя, 4 на-
пряжение возбудителя; 5 скорость двиrателя
374
Значительные преимущества прямоrо пуска отсутствие сложных пусковых
устройств, простота схемы и большое сокращение времени пуска.
Для иллюстрации характера переходных процессов при пуске на рис. 12.12
приведены осциллоrраммы прямоrо и peaKTopHoro пуска синхронноrо двиrателя.
Уравнение движения при пуске и ero интеrрирование. Процесс движения
двиrателя описывается уравнением (12.1)
M == М MMex== TJ ds/dt,
rде М электромаrнитный момент двиrателя; Ммех момент сопротивления
рабочеrо механизма; TJ постоянная инерции arperaTa.
. При. синхронном двиrателе s == (ffio ffi)/ffio == (1/ffio)(dMdt]. Постоянна>f
инерции T J определяется суммой маховых моментов двиrателя и механизма (Ha
rрузки):
GD ==GD +GL1..ex'
Определение времени разбеrа при пуске или остановке тр.ебует выяснения завИсимости
вращающеrо момента двиrателя М и момента сопротивления механизма Ммех ОТ скольжения,
п'ричем при определении зависимости М =:: I(s) необходимо учитывать влияние сопротивле-
ния, через которое двиrатеДi> подключается к сети.
Для упрощения анализа переходных режимов часто при определении зависимости М ==
== I(s} пользуются только статическими характеристиками, хотя при резком изменении На-
пряжения питания двиrателя (включении двиrателя в сеть, переключении на резервный
источник питания, понижении напряжения в случае KopoTKoro замыкания в сети и т. д.)
следовало бы пользоваться динамическими характеристиками. Переходные слаrающие токов
в цепях статора и ротора двиrателя, которые создают дополнительные динамические состав-
ляющие момента, изменяющиеся во времени даже при постоянном скольжении, не учитывают.
Обычно влияние дополнительных моментов на время пуска или выбеrа невелико и им пре-
небреrают (учитывая только при определении наибольщиХ механических усилий).
При решении уравнения (12.1) необходи
мо учитывать характер зависимостей М == [(s) М
и Ммех == [(s). Здесь MorYT быть применены
аналитические методы решения уравнения
движения синхронных reHepaTopoB и способ
последовательных интервалов. Возможны уп-
рощенные решения при аппроксимации зави-
симостей М == [(s) и Ммех == [(s) прямыми
или некоторымИ кривыми, при которых ин
теrрирование (12.1) оказывается возможным.
Не останавливаясь на упрощенных прие-
мах, рассмотрим непосредственно способ по Рис. 12.13. К rрафоаналитическому
следовательных интервалов как универсалЬ- рещению уравнения двнжения
ный, обеспечивающий решение при любых за-
висимостях моментов М. Техника расчета пус-
ковых режимов двиrателей при этом несколько отличается от техники расчета
устойчивости. Однако о б Щ и е п'о л о ж е н и я в с е х с п о с о б о в, изло
женнЫХ в rл. 7 не изменяются и ниже приводятся только некоторые особен-
ности.
Пуск асинхронных двиrателей. Здесь можно рассмотреть два случая об-
щий и частный.
Общий случай: Ммех== [(s). Предполаrая, что М и Ммех не зависят ни от вре-
мени, ни от ускорения и полностью определяются скольжением s, построим ста-
о
375
тические характеристики М == <р(5) и, как разность их, зависимость L1M == <Р(5).
Разобьем ДМ(Б) на ряд равных интервалов (рис. 12.13) по скольжению:
Sl == S2 == ... == 5i.
Тоrда уравнение движения (12.1) на любом интервале будет иметь вид
M; == Т ; 5;1M; или. Si == ( M;lTJ ) M i .
Аналоrично можно выразить и приращение частоты вращения (оборотов):
п; == К ( M;lT I ) ti' (12.2а)
rде M; среднее значение избыточноrо момента на данном интервале.
Время от момента пуска до конца любоrо i-ro интервала
n
t == T J ,, !\Si .
8M;
i J
(12.2б)
Точность решения возрастает с уменьшением величины 5 и соответственно с
увеличением числа интервалов (см. П2).
Частный случай: Ммех == сопst. Аналитическое решение уравнения (12.1)
можно получить, если принять, что Ммех == сопst в течение Bcero процесса раз-
беrа (или выбеrа); пусть при этом М определяется выражением, соответствую-
щим упрощенной схеме замещения двиrателя:
(J2 Rs 2Ь
," + (Х5)2 S/5 ир +S Rр /S
rде Ь == МтU2t6/(мпомu6t2); 5 кр == (/х.
В этом случае избыточный момент определится из выражения (12.1) с учетом
(12.3): :
М==
(12.3)
M == М Мех /[ 2Ьс Sир S 1 ] , (12.4)
2b c s Rp s ( 52+ p)
причем Ь с == Ь/М мех '
В общем случае, соrласно (12.1), время разбеrа (или выбеrа) от 51 До 52
t== S
d5 Т
дМ J,
$,
или после подстановки (12.4)
T' S S' (
t== 1+
M'lex
S,
2Ь('. SRP 5 ) ds ==
52 2 Ь С SRP 5 + 5 p
== [ (52 sд + 2Ь с 5 хр S "
Ммех
8.
Sd5 ]
52 2 Ь С 5 нр S + P .
(12.5)
316
Время разбеrа t p от уrловои скорости Ф1 ==: (1 sдФо дО Ф2 ==: (1 8 2 )Фо >
> Ф1 определяется решением
(12.5) при Ь с > 1:
т J . [ ЬС (
t p == М Sф In
меХ V Ь 1
5ф 52 51 5 уст ) ]
+ sYCT1n + (S2 sд , (12.6)
5ф 51 52 SYCT
rде 5ф == 5"р (ь с + V b I ); 5 уст ==: 5"р/(Ь с +V b I)
скольжение' по окончании' разбеrа.
, При разбеrе без наrрузки (Ммех == О)
TJ ( 1 52 5 p
t p == + ln
Ь 45"р 2
Из (12.6) для полноrо времени пуска (51 == 1, S2 == 5 уст ) получаем t == 00.
Это означает асимптотическое приближение скорости к ее установившемуся зна-
чению.
При б л и ж е н н о время пуска t пус " можно найти, принимая (на ос-
новании расчетов или опытов) 52 ==: 5 уст + 0,01:
Т.! l ЬС ( 5Ф 5уст О'ОI )
t пус " == Sф ln + 5 уст ln 100(1 SYCT) +
Ммех V Ь 1 5ф 1
+ (52 51) ] .
установившееся
+).
(12.6а)
Время выбеrа от уrловой скорости Ф1 == (1 51)ШО до @2 == (1 S2)ФО <
< СЙl определяется решением (12.5) при Ь с < 1:
Т.! [
t
в lИ мех
rде
( 2Ь с 5"р 52 + S p 2Ь с ('1'2 '1'1)'
52 Sl + Ь С 5"р ln + V
5I 2Ь с 5!\р 51 + 5 p 1 Ь
51/ 5"р Ь С 5 / 5 ир Ь
СР1 == arctg 92 == arctg с .
V 1 Ь . Vl Ь
)] ,
(12.6б)
Время выбеrа от предшествующеrо установившеrося режима до полной ос-
тановки определяется подстановкой величин 52 == 1; 51 == 5 уст В равенство (12.6б).
В частном случае при отключении одиночноrо двиrателя от сети время выбеrа
tB==TJ (5 SYCT)/MMex' (12.7)
откуда скольжение двиrателя в любой момент времени и уrловая скорость будут
5==MMei/TJ +5 уст ; (12.8)
Ш* == ш/ш о == Ш* УСТ М Mext/T.r , (12.9)
rде скорость до отключения двиrателя Ф*УСТ == 1 5 уст '
В соответствиИ с равенством (12.9) можно заключить, что кривая выбеrа (зависимость
уrловой скорости arperaTa от времени) отключенноrо от сети двиrате.т.я с постоянным момен-
377
том сопротивления на валу представляет со60Й прямую линию. На основанни (12.7) время
полной остаиоики arperaTa
t == (1 SyCT) т J /Ммех.
(l2.10а)
При моменте сопротивления иа валу, раином номинальному, время остановки пример-
ио равно постоянной инерпии:
а)
w
t == (1 SYCT) т J .
(12.106)
5)
1
S""
Рис. 12.14. Характер процесса при асинх-
ронном пуске сиихронноrо двиrателя:
а при..ериа.. ос:циЛЛоrра....а (J) f(t) и I f(t);
б изменение М ф(s); 1 "0мент включения;
кривые 1-' злектромаrнитиые процессы ао вре-
м.. пуска; 1-3 асинхрониый режи.. (прн КОРОТ-
козамкнутой обмотке возбуждения); 8.4' на-
чальиый период появлеиия синхронноrо момента
после включения в момент 8 тока возбуждения,
характер кривой (участок 8-4-4', или 4'-6) зави-
сит от мо..еита пОдачи тока возбуждения;
4-5-6-7-3 подтяrивание ротора к синхрониз"у-
(з о, под действием синхрониоrо момеНТа М
tlsln(st+1/1)]; 9 синхронная работа
ПОДСИНХРОННОЙ скорости. Начальный
статора
По времени остановки arperaTa с не
зависящим от скорости моментом сопро-
rивления на валу экспериментально опре-
деляется постоянная инерции:
т j == MMext (1 SYCT)'
(12.IOB)
Пуск синхронных двиrателей.
Синхронные двиrатели при пуске под-
ключаются сначала к сети невозбуж
денными. Их обмотки возбуждения
при этом короткозамкнуты или замк-
нуты на сопротивление !1R == (5--;.-
--;.- 10)R f , [де Rf сопротивление об-
мотки возбуждения. Разrоняясь как
асинхронные, они достиrают скорос-
ти, близкой к синхронной (подсинх-
ронная скорость). После этоrо двиrа-
телям подается возбуждение и они,
приобретая с в о и с т в а с и н х-
р о н н о r о Д в и r а т е л я, входят
в синхронизм. Таким образом, пр
песс пуска синхронноrо двиrателя
можно разбить условно на Два этапа
(рис. 12.14): 1) разroн до подсинхрон-
ной скорости (s 0,1) под действием
среднеrо асинхронноrо момента; 2)
вхождение в синхронизм под влияни-
ем моментов, обусловленных возбуж:
дением и зависящих от уrла между
осью ротора и вектором вращающеrО-:
ся поля статора.
На пер в о м э т а п е пуска
существенны начальный толчок тока
статора и длительность разrона до
толчок периодической слаrающей тока'
I lJ / X ,
rде U напряжение сети в той точке, [де оно может быть принято не зависящим
от режима двиrателя; x:ru == х; + Х ст , причем Х ст внешнее сопротивление
uепи статора между точкой с напряжением U и выводами статора данноrо двиrа-
теля.
378
Длительность разrона до подсинхронной скорости можно определять так же,
как и для асинхронных двиrателей. Однако при проектировании эту скорость
обычно находят rрафоаналитическими методами. Более точно изменение токов
статора и ротора в процессе разrона двиrателя может быть получено с помощь
уравнений Пар к а r о р е в а.
На в т о р о м э т а п е пуска на несинхронно вращающийся ротор синхрон
Horo двиrателя кроме асинхронн'оrо момента действует синхронный момент, зави
сящий от уrла б и обусловленный возбуждением, а также момент сопротивления
механизма.
Практически вхождение в синхронизм может ПРОИЗQЙТИ только после подачи
, возбуждения, за счет KOToporo у двиrателя будет создан дополнительный момент,
меняющийся по знаку (знакопеременный). Уrловая скорость двиrателя под воз
'действием знакопеременноrо момента будет колебаться около среднеrо значения с
двойной частотой скольжения. Заметим, что так как на ротор действуют и дpy
rие знакопеременные моменты, а именно момент явнополюсности
М ЯНН == (ИЦ2) [(X d X )/(XdX )]
'и переменная составляющая асинхронноrо момента, то иноrда втяrивание в син-
хронизм может про изойти и без подачи возбуждения. Для этоrо, однако, необхо
ДИМО, чтобы втяrивающий момент был больше механическоrо: Мини> М Мех'
что можно получить сравнительно редко. Характер процесса вхождения в синх
ронизм зависит от взаиморасположения ротора и маrнитноrо потока статора в
момент подачи возбуждения. Но положение ротора в момент подачи возбуждения
обычно оказывает сравнительно малое влияние, поэтому можно не предусматри-
13ать специальных устройств для подачи возбуждения в наивыrоднейший момент.
Успешность синхронизации можно приближенно оценить по значению критическоrо
'скольжения установившеrося асинхронноrо режима без возбуждения, при котором возможио
вхождение в синхронизм*:
SKp == v (MeH О,БМ мех )/ TJ ,
(12.11)
rде Мен максимальный электромаrнитный синхронный момент при номинальном возбуж-
дении.
Если скольжение SyCT синхронноrо двиrателя, определенное точкой пересечения кри-
вых среднеrо асинхронноrо момента и момента сопротивления, будет равно или меньше SKP'
то втяrивание в синхронизм обеспечено.
Однако при изменении скольжения во время втяrиваиия в синхронизм динамические
характеристики асинхронноrо момента MorYT отличаться от статических. Средний дииами-
ческий асинхронный момент при S == О ие равен нулю, вследствие чеrо уrловая скорость мо-
жет оказаться выше синхронной и вхождение двиrателей в синхронизм облеrчится. Сиихрон
ные двиrатели часто втяrиваются в синхронизм при скольжениих, б6льших SKP' Поэтому при
SyCT > SRP следует или вводить корректировку скольжении (иайденноrо по (12.11)] иа осно-
вании экспериментальных данных, получениых для аналоrичиых устаиовок, или проводить
точные расчеты.
Чтобы получить экспериментальиые данные, следует проводить испытания, определяя
условия сиихронизации. За BpeMiI испытаний, которые проводятся при различных наrрузках,
возбуждение снимается и вновь восстанавливается. Возбуждеиие подается после, Toro, как
* Предполаrается, что вхождение в синхронизм происходит ие более чем через два
цикла после подачи возбуждения, электромаrиитный момент прииимается ДJlя устаиовивше-
rося скольжения, включение возбуждения происходит в наиболее неблаrоприятвый момент,
и нарастание ero происходит практически MrHoBeHHo (быстрее, чем' переходиlilЙ меХ'аничес
кий процесс).
379
двиrатель будет иметь установившееся значение скольжения. Скольжение проще Bcero мож-
но определить IЮ частоте колебаний стрелки амперметра в цепи возбуждения. При этом если
удвоенное число полных колебаний n тока возбуждения за некоторое время разделить на
t(c), то получится значение скольжения (%):
s == 2n/t.
Учитывая, что ток статора при асинхронном режиме обычно выше номинальноrо в
',5 3,O раза, следует сразу же после установления скольжения про изводить отсчет по при.
борам во избежание переrрева обмоток. Для измерения обычно требуется время порядка 10 с.
.. 12.3. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ПУСКЕ АСИНХРОННЫХ двиrАТЕЛЕЙ,
ИМЕЮЩИХ МОЩНОСТЬ, СОИЗМЕРИМУЮ С МОЩНОСТЬЮ ИСТОЧНИКА
В мощных электрических системах нарушения устойчивости наиболее веро-
ятны в аварийных или послеаварийных режимах. В системах, у которых мощности
отдельных наrрузок соизмеримы с мощностью системы*, устойчивость может
а) и б) (3) Ur/U ro
О,В
U О,б
0,4
L I 0,2 0,7
О
f Z J . 4 5 пyc кjSq
I
t=O t t=O t
Рис. 12.15. Пуск двиrателя от источника соизмеримой с ним мощности:
а пуск от системы большой мощности; б пуск ОТ источника соизмеримой мощности; в за.
ВИСНМОСТЬ ОТносительноrо напряжения rеиератсра в установнвшемся режиме Ur/U ro ОТ УСЛОВ
ной ПУСКовой мощности Sпуск/Sо и тока возбуждения 11/110' rде индекс О означает условия
пуска при такой МОЩНОСТИ rеиератора. коrда напряжение U r уменьшается иа 5 7%
(Sпуси/Sо== 1). Здесь SПУСК полная МОЩНОСТЬ> потребляемая двнrателем в момент включения
нарушаться и при нормальных (с точки зрения эксплуатации) режимах. Наибо-
лее опасным в этом смысле является прямой пуск короткозамкнутых асинхронных
двиrателей, обычно составляющих основную часть наrрузки. Большой пусковой
ток этих двиrателей вызывает резкое снижение напряжения в системе, что приво-
дит К увеличению скольжения остальных работающих двиrателей. Соотношение
заrрузки двиrателей и снижения напряжения в сети обычно бывает таково, что
реактивная мощность, потребляемая двиrателями, возрастает. Это вызывает даль
нейшее понижение напряжения и может привести к опрокидыванию работающих
двиrателей и возникновению лавины напряжения. Происходящее нарушение ус-
тойчивости параллельно работающих станций ведет к длительному перерыву.
электроснабжения потребителеЙ. Поэтому устоЙчивость таких систем должна
особо проверяться по условиям пуска короткозамкнутых двиrателей. Весьма опас-
* Примерами таких систем MorYT служить электрические системы для сельскоrо Хо-
зяйства, передвижные электростанции для снабжения строительства, лесозаrотовок и т. п...
КОрабельные и сюлолетные системы.
380
ным является неудачный пуск двиrателей, мощность которых соизмерима с мощ
ностью reHepaTopa (см. пример 12.1 и рис. 12.15).
Анализ процессов пуска двиrателей и устойчивости узлов наrрузки довольно
сложен, и в инженерной практике часто пользуются упрощенными методами. Pac
смотрим сначала процессы при пуске асинхронноrо двиrателя, питаемоrо от reHe
ратора соизмеримой мощности. Изменение напряжения во время пуска двиrателя
в этом случае происходит примерно следующим образом: в первый момент после
включения двиrателя напряжение на шинах reHepaTopa уменьшается вследствие
hадения напряжения в переходном реактивном сопротивлении reHepaTopa при
протекании в нем пусковоrо тока двиrателя. Далее (см. пример 12.1) при отсутст-
вии на reHepaTope автоматическоrо реrулирования возбуждения напряжение на
шинах reHepaTopa. начнет уменьшаться, поскольку пусковые токи, являясь прак
тически реактивными до s;::;:; 0,1, будут размаrничивать reHepaTop. Если время
пуска больше времени электромаrнитноrо переходноrо процесса в reHepaTope, то
к окончанию переходноrо процесса на reHepaTope значение напряжения будет ни-
же, чем начальное значение напряжения в момент пуска двиrателя. На Пос.ТIед
нем этапе разrона пусковой ток резко уменьшится и одновременно повысится KO
эффициент мощности. Все это приведет к увеличению напряжения reHepaTopa.
. Понижение напряжения на шинах reHepaTopa в процессе пуска резко изме-
няет пусковые характеристики двиrателя (рис. 12.15), увеличивает длительность
пуска, уменьшает момент двиrателя, что может привести к невозможности осу-
ществления пуска (рис. 12.15, б). Условия пуска MorYT быть облеrчены либо BЫ
бором двиrателя с меньшим пусковым током, либо автоматическим реrулировани-
ем возбуждения reHepaTopa. Во втором случае напряжение reHepaTopa после за-
тухания переходноrо электромаrнитноrо процесса может быть выше, чем началь
ное напряжение reHepaTopa в момент пуска двиrателя; при определенном токе
. возбуждения напряжение может быть равно номинальному напряжению reHepaTo
ра (см. пример 12.1).
Запуск одиночноrо (эквива.,'lентноrо) двиrателя. Если пренебречь переход
ными процессами возбудителя и считать, что э. д. с. Eqe при снижении напря-
жения меняется скачком до HOBoro установившеroся значения или при отсутствии
реrулирования остается постоянной, то изменение напряжения на reHepaTope от
начальноrо значения и о до установившеrося U будет происходить практически
по экспоненциальному закону:
OT'
U t == U (и иo)e d.
(12.12)
Начальное значение напряжения в момент включения двиrателя и о опреде
ляется переходной э. д. с., которая при холостом ходе принимается равной E ==
== 1.
В момент пуска двиrатель можно заменить постоянной наrрузкой, преДСТJI3-
ленной сопротивлением z н == r н + jx н, rде
z ==z == СОS,/,ДР; ( ИД ) 2==1/ 2 2
н ;:х К Р И f Хн + r H .
i COS '/'r д r
(12.13)
Здесь 1')д к. п. д. двиrателя; К ; кратность пусковоrо тока; COsq;r' СОЩJд
номинальное значение коэффициента мощности reHepaTopa и пусковое зна Iсние
коэффициента мощности двиrателя соответственно; Pr' Р д НIJМИНaJfьные ак-
3Бl
тивные мощности COOТB TCTBeHHO на шинах reHepaTopa и на валу двиrателя; И r'
Ид напряжение на шинах [енератора и двиrателя.
Примем, что E == E o == const. При сделанных допущениях, соrласно век-
торной диаrрамме, можно определ ить напряжение на [енераторе:
И О == [ZH V Х;!:+ r I (X r !: X !: + r ) ]E o == l( E o. (12.14)
Здесь .;'r!: полное сопротивление цепи (X r !: == X r + ХН); аналоrично находятся
r и X r !:, причем сопротивление сети Ха, связывающей [енератор и двиrатель,
введено в ХН (соответственно сопротивление ra в r H ). В случае явнополюсноrо re-
нератора Хо == Х ч , в случае неявнополюсноrо X r == Ха,
При более упрощенном подходе установнвшееся значение напряжения может быть
определено по формуле
и о XHE /(XH + X )
при подстановке в нее установившеrося значения э. д. с. E и сопротивления х;. Однако
практически проще найти напряжение с помощью заранее рассчитанных кривых типа
показанных на рис. 12.15, в. Зная допусти ое снижение напряжения на шинах наrрузки при
пуске (U доп ), можно определить предельно допустимую мощность пускаемых двиrателей,
при которой иапряжение' в первый момент* пуска имеет допустимое значение (и о U нач
U доп ):
р д.доп Sr.HOM 'lJ ll . HOM cos '!'д.ном/[Х ПУСК (и r.HOM/ U д.ном)2 k з ],
rде 1'J д . НОМ к. п. д. двиrателя; СОSqJд,ном коэффициент мощности; k3 коэффициент
заrрузки; Хпуак пусковое сопротивление, определиемое при и о U доп :
Хnyск x /(E о/U доп 1).
Зная допустимый уровень напряжения на шинах reHepaTopa, можно найти ток возбуж-
дения, необходимый для поддержания установившеrося значения напряжения не меньше
U доп ' Для этоrо, полаrая Ur1UI'O Uпоп/Ur.ном и Sпуск/Sо l/х пуск , определяем по кривым
(рис. 12.15, в). соответствующую величину I в/ I В.НОМ I в/ I во' Если ток возбуждения будет
меиьше найденноrо значения, то напряжение на reHepaTope после включення двиrателей
будет меньше допустимоrо и запуск двиrателей недопустимо затянется. _
Если reHepaTop, от KOToporo пускается двиrатель, работает с наrрузкой, то в этом слу-
чае допустимое снижение напряжения при пуске двиrателя будет определяться не только
с учетом условия возможности пуска двиrателя, но и с учетом допустимоrо снижения на дру-
rих приемииках электроэиерrии, подключенных к reHepaTopy. Существенное влияние на
процесс пуска может оказать изменение уrловой скорости arperaTa (reHepaTopa и первичноrо
двиrателя), которую во время переходноrо проц сса можно представить выражением**
* Под установившимся напряжением в данном случае подразумевается значение' на-
. пряжения в процессе пуска после затухания электромаrнитноrо переходноrэ процесса.
Если сопротивление сети Ха введено в Xr, то на двиrателе будет напряжение и о . Ана-
JIоrично, для установившеrося режима
и о ,== [ZH V X !: + rU(x r !: Xdr!: + r )) EQ/ KoEq,
rде X r !: сопротивление цепи, включающее Х ч в случае явнополюсноrо reHepaTopa и Ха
в случае неявнополюсноrо. Разумеется, справедливо и обратное соотношение Еч и о / КО'
а также Е /Еч == Ko/K .
* * ПреДПOJJаrается, что в arperaT входит двиrатель BHYTpeHHero сrорания (дизель).
См.: Мелешкuн r. А. Перех6дные режимы судовых электроэнерrетических систем. п.:
Судостроение. 1971.
З82
' ( OT )
(J) == 1 QMaKc 1 е '".
Здесь QMaKc максимальное отклонение скорости:
(12.15)
[ (..2:. ф+ф.) ]
Qмакс==РКлК о е 2 'sin<jJo+cos<\1;
постоянная времени первичноrо двиrателя с учетом реrулирования (с)
Т Ф == 0.4('It/2 ф+фо)/ ,
причем
р == -v [(1 aao)/( ao)J2 + 1 (rAe ао == Ко TJ);
Кл коэффициент наброса наrрузки;
и OM cos <Рн
Р д * / P r * ==
ZH '1r cos <i'r
Pr .
,
Р н . д
Ко степень неравномерности реrулятора (статизм);
а==КО TJ(I 't)/(2TMexTJ); ==-V1/(j'мехТJ) а2
Т; постояцная времени arperaTa (reHepaTopa и двиrателя); .. время запаздывания ре-
rУЛ,ирующеrо импульса; Т мех постоянная времени реrулятора скорости;
Ф == arctg [(1 aao)/( ao)]; <\10 == arctg ( /a).
Чтобы определить изменение напряжения во времени U == t(t), необходимо объединить
эффект электромаrнитных процессов в reHepaTope [см. (12.12)] и влияние изменения уrловой
скорости [см. (12.15)], которое существенно в случае, если QMaHG > 0,05. Опуская промежу-
точные преобразования, получим
[ K QMaKcT Ф ]
U (t) == (1 QMaHc) + и о (1 QMaHc) + , е
KoTdo КОТ ф
t
Т do Ко! K
K QMaKcT Ф
КоТ do K T Ф
Применение выражений (12.14) и (12.15) проиллюстрировано примерами 12.2, 12.3.
t /т Ф
е
(12.16)
Запуск нескольких двиrателей. В узле наrрузки может быть несколько
(п) двиrателей, часть которых (k) будет запускаться одновременно в течение за-
данноrо времени I1t; эти двиrатели MorYT быть заменены одним эквивалентным
двиrателем.
Наиболее вероятное число включений определяется формулой математичес-
Koro ожидания (среднеrо значения) случайной величины:
q
N == ХiР(хд,
i l
(12.17)
rде Xi число включении на данном (i-M) интервале времени; Р(х) вероятность
числа включений Х на этом интервале.
383
Вероятное число включений за I'1.t числа k двиrателей из всех (n) находящихся
в работе вычисляется по формуле математическоrо ожидания числа появления
события при n независимых испытаниях, в каждом из которых вероятность по
явления одноrо события равна р:
k == рn.
Здесь р определяется по rрафику закона распределения включений.
Число совместно включаемых двиrателей, при котором значение вероятнос
ти будет максимальным,
k o ==(п+1)p.
(12.18)
При общем числе работающих электродвиrателей n у числа ko из них повто
рится одно включение в течение I'1.t с вероятностью
Р . п' k
( n k ) == . Р ( 1 p) п k.
, О k!(п k)!
(12,19)
Вероятность, с которой будет происходить включение большеrо (k") или MeHЬ
шеrо (k'), чем k n , числа двиrателей, находится соrласно интеrральной теореме
Лапласа:
z" V 2
Р (k' ko k") I S е 2" dV == Ф (z") Ф (z'),
V2", ,
Z
( 12.20)
[де
z
Ф (z) == I S e O.5V2 dV
V 2", О
функция Лапласа, числовые значения которой табулированы в зависимости от
значения z. Для конкретных расчетов значения z принимаются равными
Vp(l p)п Vp(l p)п
Значения Ф(z') и Ф(z") определяются значениями z' и z" по таблицам Ф(z),
z' ==
k' pп
z" ==
k" pп
i 12.4, РЕЗКИЕ ИЗМЕНЕНИЯ РЕЖИМА В СИСТЕМАХ ЭЛЕКТРОСНАБЖЕНИЯ
Резкие изменения режима оСычно происходят В трех случаях:
1) авария (короткое замыкание) или переrрузка в распределительной или пи
тающей сети и последующее ее устранение. Напряжение в момент t == О уменьша
ется от значения и о до и 1 , а затем, по истечении времени t 1 , вновь восстанавлива
ется до и о , причем режим двиrателей наrрузки не Rпияет на характер изменеНIIЯ
И;
2) отключение двиrателей (узла наrрузки) от напряжения (перерыв пита-
ния) и подключение ero через время t 1 . в этом случае U 1 == о;
3) изменение момента сопротивления в связи с увеличением наrрузки на '.
приводим:ом двиrателем механизме (М 1> Мо) или уменьшением ее (М 1 < Мо) с
последуюшим восстановлением (через t 1 ) прежнеrо момента Мо. "
384
Рассмотрим все эти случаи сначала уцрощенно, с тем чтобы выяснить ос-
новную физическую картину процесса и особенности поведения синхронных и
асинхронных двиrателей.В соответствии с этим будем считать, что механический
момент наrрузки двиrателей Ммех изменяется скачком только в моменты времени
t == О, t == t 1 , что электромеханический момент М может быть определен соrлас-
но статической характеристике, а электромаrнитные переходные процессы в дви-
.rателях не учитываются, так как они
в большинстве случаев сравнительно а)
мало влияют на изучаемые процессы. iт
Предположим, что или напряже-
. ние изменяется так, как это представ-
лено на рис. 12.16, а, или момент соп-
ротивления Ммех как на рис.
12.16, б. В любом случае происходит
н а б р о с н а r р у з к и, который
может вызвать неустойчивость.
. Наброс наrpузки на синхронный
двиrатель. Рассмотрим два характер-
H X случая, показанных на рис. 12.17.
Предположим, что произошло
снижение напряжений* от и о до и 1 И соответственно изменение характеристик
от МО == f(б) дО М 1 == f(б) (рис. 12.17, а). Процесс будет определяться характе-
ристиками, приведенными на рис. 12.17. При снижении напряжения до U t смсте-
а) иfiJ
'I
Мт
6 0ткл
У О
по
Б)
м
Н,
IJU
I Ннехо
I
I
t o
t,
t
t;
Рис. 12.16. Изменения режима иаброо
рузки:
а снижение (<<посадка:.) напряжения на
U"",UI; () увеличение момеита AM MI M
нar-
Aи
118ХО
щи
Mg J {:,
е, f
Ь 1
1
е
lJ откл
Рис. 12.17. Наброс наrрузки на синхронный двиrатель:
а уменьшение напряжения от и о ДО U 1 И изменение момента от МО дО М.
илн сннженне напряжения до и, (момеит М 2 ); б увеличение механическоrо
момента от Мме>: О до Мме>: 1 или Мм,к 2" В начальном режиме I! I!.
* При исследовании устойчивости синхроиных двиrателей напряжение на их шинах
можно принимать в качестве независимой переменной только при условии 'у.. Р[' » 'у.. Рд .
соответственно Хс« Хд. При построении lCарактеристик М == [(о), представленных на
рис. 12.17, в общем случае необходимо оперировать с той Э. д. С., которую в даиных усло-
виях (при принятом способе реrулирования возбуждения) можно считать постоянной (см.
также rл. 11). Для нереrулируемоrо rеиератора следует принимать квазидинамическую ха-
рактеристику М == [(E , о).
13 84
385
ма остается устойчивой, как бы долrо ни продолжал ось это снижение. Новый
установившийся режим (точка с) наступает после цикла качаний. Аналоrично
происходит процесс при увеличении момента наrрузки от МмехО до Мма 1 (рис.
12.17, б). Такое увеличение может продолжаться сколь уrодно долrо. В обоих
(а, б) случаях площадка ускорения аЬса меньше площадкИ торможения cdec. При
снижении напряжения до U 2 (рис. 12.17, а) или увеличении механическоrо MO
мента до Ммех 2 (рис. 12.17, б) система оказывается неустойчивой. В обоих случа
ях площадка ускорения аЬ1С1а больше площадки торможения C1 de 1 C 1'
Чтобы сохранить устойчивость, при уrле С\ТНЛ (точка k 1 ) надо восстановить
исходные условия (поднять напряжение до и О в случае а, снизить слишком боль
шой механический момент Ммех' В данном случае Ммех2, до МмехО в.случае б).
Уrол С\ТЕЛ надо подобрать так, чтобы сумма площадок ускорения и торможения
была равна нулю. Например, в случае а (nл. аЬ1С1а + пл. e1fk 1 e 1) (пл. C1 d 1 e t C 1+
+ пл. k 1 mпk 1 ) == О.
Определение уrла БОТЕЛ' при котором (или меньшем) надо восстановить Ha
пряжение (случай, показанный на рис. 12.17, а), производится с помощью извест
ной приближенной формулы (4.19 б), [де надо принять P == M J, p Il == M ,
Ро == Ммехо' Тоrда
(Онр 00 ) MMexo+M ]cos OHP M cos 00
cos 8 0тЕл == .
м[О] м 1
т т
Для случая, приводящеrо к неустойчивости наброса момента от Ммехо до
HeKoToporo Ммех при неизменном напряжении, соrласно рис. 12.17, б, имеем
О ОТЕЛ O
S (М Mex M ] siп 8) d8 == s (Ммехо M ] sin 8)d8,
00 ООТRЛ
откуда, обозначив Ммех О == Мо, получим
8 0т1ш == (Ммех 80 М 0 8нр M ] (cos 8HP cos80)]/(M мех Мо). (12.21)
Время соответствующеrо наброса, т. е. время, в течение KOToporo допустимо
понижение напряжения или увеличение механическоrо момента, опредеЛf!ется
методом последовательных интервалов или упрощенно (см. rл. 7) при аппроксима
ции синусоиды прямой, проходящей через точки, соответствующие уrлам б и
б отнл , Torдa время
f т J (Оотнл ОЬ) ( мо/ M sin О ОТЕЛ )
t 1 == V arccos .
M I( sin О ОТЕЛ sin O ) мо/ M sin оь
(12.22)
в частном случае при периодически меняющейся наrрузке, rрафик которой
изображен на рис. 12.18, а, и при б о == О будем иметь МО == о, МЬ == РО == Р т -
Предельный уrол (при котором сохраняется устойчивость) снятия наброса, най
денный соrласно (12.21),
81 == 2M ]/ M == 2.
Следовательно, при РО == Р т предельный уrол б 1
1140, а при Ро== 2Р т
386
(рис. 12.18, б) уrол 61 == 1, т. е. 570. Время, на которое может быть разрешен
наброс наrрузки на двиrателЬ, работавший до этоrо вхолостую, может быть опре-
делено или способом последовательных интервалов, или опять-таки упрощенно,
например соrласно выражению (12.22), надлежащим образом модифицированному.
о) р
Po=ZPт
Мо
, цаО
о)
р
Рис. 12.18. Периодические набросы наrрузки на синхронный HeHarpy-
женный двиrатель и определение предельноrо уrла снятия наrрузки
Если учесть, что в действительности э. д. с., принятая постоянной при построении ква-
злдинамической характеристики, в действительности будет изменяться, то необходимо иметь
в виду, что определение предельноrо уrла (и соответственно времени) может давать, соrласно
рис. 12.18, б и формулам (12.21), (12.22), завышениые значения.
При учете динамических характеристик синхронноrо двиrателя наиболее характерно
то обстоятельство, что резкие изменения режима вызывают свободные токи, поддерживающие
результирующее потокосцепление обмотки возбуждения неизменным, и развиваемый двиrа-
телем максимальный момент (мощность) определяется при t == О характеристикой 1, -постро-
енной при E == сопst (рис. 12.19). Эта характеристика, правильно отражающая динамику
в начале процесса, далее переходит в статическую (11 при E oo). Поскольку по мере затуха-
ния свободных токов величина Eq изменяется, стремясь к Eqo, вращающий момент дв rате-
ля приближается к моменту, определенному при Eq == Eqo или соответственно при EqOO <
< E o. При этом двиrатель может оказаться неустойчивым, хотя при E o == const он оце-
нивался как устойчивый. Происходящий переходный электромаrнитный процесс меняет ха-
рактер качаний и задерживает выпадение из синхронизма до момента времени t 2 . коrда
(рис. 12.19, а, а, д) характеристика I изменяется на 11, построенную при Е; :::::Е;l' rде
E l значение, предельное по условиям устойчивости.
Рассмотрим процессы, изображенные на рис. 12.19, подробнее. Пусть при <\ пронсхо-
дит мrновенный наброс мощности (рассуждения справедлнвы и при снижении напряжения)
от РО дО P (рис. 12.19, а). Если принять Е ш == const (рис. 12.19,6), то процесс будет идти
соrласно характеристнке 1 (рис. 12.19, а); качания машины будут определяться участком ха-
рактеристики ad и соответствующими (заштрихованными) площадками ускорения и тормо-
жения. Процесс во времени в этом случае изображается кривой, представленной на
рис. 12.19, в.
При налични затухания э. д. с. E процесс будет определЯ1ЪСЯ не характеристикой ad.,
а характеристикой ad 1 (рис. 12.19, а), которая соответствует завнсимости E == f(t), нзоб-
раженной на рис. 12.19, а.
Процесс изменения уrла во времени будет иметь характер, покаваиный на рис., 12.19, $.
Таким образом, следует иметь в, виду, что допущение Eq == сопst справедливо тощ КО в тече-
ние KopoTKoro времени (,it < T do ' ,it < TJ) и может привести к ошибкам в оценке характера
13*
38]
процесса. Ес.пи э. д. с. Е; в процессе затухания уменьшится так, что при E I максимальное
8В8чевие Р:! (характернстика 11, точка е на рис. 12.19, а, д) будет меньше P , то устойчи
васть двиrателя черезвремя 12 Аарушится.
Наброс наrpузки на асинхронный двиrатель. Изменение напряжения питаю--
щей сети или механической наrрузки на валу двиrателя одинаково вызывает из-
менение скольжения. С уменьшением напряжения или ростом момента скольжение
а)
р
6}
d
d
t
I
,
E <o
I
I
P,
а)
J
t;
l
I
Efo=coпst
а
t;
-{;
Рис. 12.19. Влияние динаlllичеСКИJl свойств синхронноrо
А8иrатеЛII
увеличивается. Если при этом механический момент Ммех окажется больше MaK
симальноrо (М мех > М т ), то двиrатель будет увеличивать скольжение до s
== 1, т. е. до остановки. Во избежание этоrо надо своевременно восстановить Ha
пряжение (или уменьшить механический момент на валу).
Рассмотрим сначала устойчивость асинхронноrо двиrателя, работающеrо при
наrрузке, создающей на валу момент Ммех Ммех О == сопst (рис. 12.20). Пусть
при этом моменте двиrатель находится в установившемся состоянии (точка а
на рис. 12.20, а) и работает ео скольжением So. Предположим, что по каким либо
причинам напряжение на зажимах двиrателя уменьшилось от и о до U t . При этом
электромаrнитный момент двиrателя СНИЗИNЯ в (Ur/U t )2 раз:
М M ( и 1 ) 2 2М т ( и 1 ) 2 (12.23а)
1 о О О s/sкp + sкp/s и о .
Более точное решение при Ммехо == f(s) может быть получено численным ин
теrрированием.
Разумеется, допустимость тех или иных набросов мощности или понижений
напряжения будет определяться не только устойчивостью двиrателя, но и знач
388
.нием тока, возрастающим при резком толчке, так как увеличение тока ведет J: ие-
,допустимому HarpeBY двиrателя.
Уравнение движения при этом будет иметь вид
MMexo Ml==TJ ds/dt. (12.23б) а)
При снижении электромаrнит- м
Horo момента с Мо до М 1 двиrатель
будет тормозиться и остановится.
Время, в течение KOToporo двиrа-
тель будет останавливаться, и из-
менение скольжения во времени
можно найти, интеrрируя уравне-
ни е движения. Обычно возникает 50
задача: найти наибольшее время, 8)
на которое можно понизить напря-
жение с и о ДО и 1 , С тем чтобы пос-
ле восстановления напряжения
двиrатель, 'не останавливаясь, Mor
продолжать нормальную работу.
При этом скольжение (точка Ь на
рис. 12.20, а) не должно увеличи- Рис. 12.20.
ваться до значения, большеrо 51,
так как при 5 > 51 двиrатель попа-
дает на неустойчивую часть харак-
теристики и восстановление напря-
жения уже не сможет прекратить
ero торможения и остановки.
из (12.23а) и (12.23б) получим
dt == TJ
М т
а)
м
SKp 5z 5, 5J 5
2)
М
5,
5кр 5%S, .
B
5J.
5,
,1
о t2. t J t
s
Наброс наrрузки на асинхронный
двиrатель:
а понижение напряжения от и. ДО и, и соответственно
умеиьшение момента от М. ДО М,. Скольжение, при ка-
тором возможно восстановление исходноrо режима ар.
восстановлении напряжения (от и, до и.). 8<8,. ПР.
82<S, восстанавливается ИСХОДНЫЙ режим, при 8з>8, AIUI-
rатель «опрокидывается:. останавливается; б увели-
чение (<<наброс:» механическоro момента от М...х О ДО
М мех 1; в зависимость 8 f(t); е сопоставление стаТII-
ческой и динамической характеристик, 1 статическаа
характеристика; 2 характеристика при набросе иа.-
rрузки (динамическая); 3 то же, что 2, ио при сброс.
(S/SRp + SRp/S) ds
(МмеХ О/М т ) (S/SRp + SRp/s) 2(Ul/UO)2
т J SRp (s. + l/s.) ds.
М т «ММеХ о/М т ) (s. + l/s.) 2(UlIUO>2)
После интеrрирования левой части от t == О до t == 11, а правой от B ==
== 5о!5 кр Д05*1 == 51/ 5 кр найдем время, при котором двиrатель достиrает СКOJIьж&о
ния 5*1:
==
SRP Т J [ 2k2 В. k ] ' / S.1
t 1 == 5.+klП(5: 2k5.+1)+ arctg . (12.24)
Ммехо Уl k 2 Уl k 2 "о
rде k == (М т /Ммех о )(и 1 /и о )2.
. Выражением (12.24) лучше Bcero пользоваться в числовом виде, раскрывая
ero при значениях 5*0 и 5*1' которые находятся из выражения
М мех о:;:::: 2М т /(5. + 1/5. ).
откуда
389
S* == Мт/Ммехо + V (Mт/MMexo)2 1.
(12.25)
'16
Знак плюс в последнем соотношении соответствует 8*1, а знак минус 8*0'
Поведение двиrателя при толчке наrрузки будет полностью аналоrично ero
поведению при понижении напряжения. Это достаточно очевидно из рис. 12.20, б,
показывающеrо также, что при расчете по формуле (12.24) Ммех О надо заменить
на Ммех 1 '
Уравнение (12.24) можно представить в обобщенной форме, леrко поддающей
ся номоrрафированию:
't 1 == [t 1 /(TJ 8 I1р )] Ммехо == 'Р(Мо/М т ; и 1 /и о ). (12.26)
Мо/I1т Примерные значения времени 1, вы-
раженноrо в относительных единицах пре
дельноrо по устойчивости времени, т. е.
времени.. в течение KOTOporO можно допус-
тить понижение напряжения или наброс
ваrрузки, показаны на рис. 12.21.
При рассмотрении набросав на син
хронный двиrатель использовал ась стати-
ческая характеристика М == f(8), которая
110 принималась за квазидинамическую. Меж-
11т
ду тем известно, что для асинхронноrо дви-
rателя изменение скорости (скольжения)
приводит к резкому изменению ero экви-
валентноrо сопротивления. Это вызывает
изменение токов статора и ротора, а так-
же соответственно перераспределение той
части электромаrнитной энерrии, которая
при установившемся скольжении преобра-
зовывалась в механическую. Часть ее пой-
дет на изменение запаса энерrии в индук
тивностях двиrателя, что приведет к запаздыванию в изменениях моментных
характеристик (динамических) по отношению к характеристикам при медлен-
ных изменениях режима (статических). Примерный вид динамической характе:
ристики асинхронноrо двиrателя показан на рис. 12.20, в. Из приведенных за
висимостей следует, что электромаrнитный момент в динамике изменяется с не-
которым запаздыванием по отношению к статической характеристике. СООТВ,етст-
венно величины, характеризующие скольжение двиrателя, изменение ero тока,
условия ero устойчивости, будут отличаться от величин, определенных примени-
тельно к статической характеристике.
Поrрешность в изменении скольжения можно rрубо оценить как величину,
обратно пропорциональную механической постоянной инерции двиrателя TJ и
пропорциональную квадрату сброса (или наброса) напряжения (или момента)
!'1и (!'1Р). Поrрешность возрастает с течением времени.' Так, например, при леrких
двиrателях (T J == 0,5 ...;-. 1 с) поrрешность в определении 8 достиrает 10 30%
через 0,1 0,3 с. При тяжелых двиrателях (T J == 8 ...;-. 10 с) поrрешность находит-
ся в пределах точности расчетов. Расчет электромеханических и электромаrнит-
ных переходных процессов при учете их взаимноrо влияния должен вестись, по
12
О'
2
О,Ч
0.6
0,8
1 [J
"lf
20
Рис. 12.21. Характер изменения 1:1 прп
изменении Мо/М т , U == и 1 /и о и
Ммехо == const
390
полным дифференциальным уравнениям (уравнениям Парка rорева) переход-
'ных процессов. Сопоставление результатов расчетов по полным и упрощенным
уравнениям приводилось в rл. 7, 9 7.2 и далее на рис. 12.31, 12.33.
* t 12.5. ТОЛЧКООБРАЗНЫЕ НАrРУзки .
Влияние толчкообразной наrpузки на работу системы электроснабжения.
Толчкообразные электрические наrрузки, иначе называемые набросамu, сущест
венно влияют на функционирование систем электроснабжения В основном они
вызываются резкопеременными наrрузками на валах синхронных и асинхронных
двиrателей (прокатные станы, подъемные краны, дуrовые плавильные печи).
Толчок (наброс) наrрузки, сказываясь на всей системе электроснабжения и на
питающей системе, приводит к снижению напряжения в узле наrрузки и измене.-
нию фазы этоrо напряжения по отношению к источнику питания. Достаточно
большая (по сравнению с мощностью системы) толчкообразная наrрузка будет
вызывать в системе изменения напряжения и более или менее длительные коле-
бания частоты. Поэтому при такой наrрузке оказывается необходимой провер.ка
колебаний напряжения и частоты в системе и их влияния на работу остальных
(не толчкообразных) потребителей системы. В тех случаях, коrда изменения па-
раметров реЖИма, х рактеризующие качество энерrии, отдаваемой потребителю.
оказываются заметными, необходимо на основе анализа характера переходных
процессов разработать специальные мероприятия, позволяющие избежать не-
блаrоприятноrо влияния толчкообразной наrрузки на работу системы. Особенно
остро, разумеется, стоит вопрос о влиянии периодически изменяющейся (толчко-
образной) наrрузки при питании электродвиrателя от reHepaTopa соизмеримой
с ним мощности. В этом случае особое значение имеют специальные мероприя-
тия, одним ИЗ которых может быть применение реrуляторов возбуждения, уста-
навливаемых на reHepaTopax, синхронных компенсаторах и двиrателях. Весьма
эффективны, в частности, реrулирование сильноrо действия, специальное ре-
rулирование скорости, позволяющее уменьшать колебания частоты, и ряд
друrих мероприятий.
Методика анализа. Переходные процессы системы, содержащей синхронные
и асинхронные дВиrатели с переменной наrрузкой на валу, можно исследовать
различными методами. В любом случае исследование сводится к решению системы
нелинейных дифференциальных уравнений, описывающих колебания роторов дви-
rателей и reHepaтopoB, изменений токов и напряжений как в двиrателях, получив
ших наброс, так и на тех шинах, от которых питается ряд наrрузок.
Универсальным способом решения нелинейных дифференциальных уравне-
ний может быть ч и с л е н н о е и н т е r р и р о в а н и е. При толчках наrруз
ки, коrДа изменения относительных уrлов синхронных машин сравнительно He
велики, можно упростить расчеты, применив л и н е а риз а Ц и Ю, т. е. заменив
нелинейную зависимость момента (мощности) от 'уrла или скольжения линейной.
Обычно методика расчета режима системы основывается на дополнительных
упрощающих предположениях:
1) изменение наrрузки на валу двиrателей известно (рис. 12.22, а, б, в): оно
происходит или cTporo периодически, или циклически, или в наиболее сложном
случае каким либо случайным образом соответственно;
2) переходный процесс обычно рассматривается при представлении reHepaтo
ров постоянной Э. д. с. за переходным сопротивлением (E; Е' ;:= const);
391
3) сопротивление асинхронных двиrателей и остальных наrрузок принимает
ся в момент коммутации постоянным;
4) действие демпферноrо момента синхронноrо двиrателя и реrуляторов CK<r
рости первичных двиrателей (турбин на электрических станциях) обычно не учи
тывается, ИСКJIючение составляют случаи, коrда запуск производится от reHepa-
тора, вращаемоrо первичным двиrателем, по мощности соизмеримым с мощнос-
тью набрасываемой наrрузки.
Анализ влияния толчков на асинхронных двиrателях. Любые набросы Ha
rpузки по физике происходящих явлений и эффекту, который они оказывают на
о)
8)
а)
а)
и
fJ HOH
t
W1fV
I 1, I I I I 1 I
1 I I I I I I I I
О t 1 t z О t l tz О t{ t z t'
t
Рис. 12.22. rрафики изменения наrрузки двиrателя и подведенноrо на-
пряжения:
а CTporo периодическое изменение наrрузки; б цикличиое измеиеиие иаrрузки;
в то же. случайное; z примериый характер изменения напряжения при питании
от reHepaTopa соизмеримой мощности
питающую их систему (или отдельный reHepaTOp), аналоrичны запуску асинхрон
80ro двиrателя. В методике расчетов изменения напряжения на двиrателе и ши
RЗх, питающих наrрузку системы, необходимо учитывать, что запуски (в данном
случае набросы) непрерывно повторяются и что следующая коммутация (запуск,
наброс) может произойти до Toro, как закончится переходный процесс, обуслов
ленный предшествующей коммутацией. Допустим, что при следующих друr за
друrом включениях и отключениях наrрузки Р н напряжение U на питающих ши..
нах reHepaTopa (Pr» Р н ) будет изменяться в соответствии с соотношением
Е' 1 н X d == и, rде I н ток наrpузки, X d суммарное эквивалентное сопро
тивление участка «reHepaTop шины». В случае питания наrрузки от reHepa-
тора соизмеримой с ней мощности последовательные коммутации приводят к T<r
му, что напряжение reHepaTopa изменяется по возрастающему и убывающему
экспоненциальным законам. [рафик изменения напряжения на reHepaTope при-
обретает вид пилообразной кривой (рис. 12.22, с), которая выявляется рядом
последовательных расчетов. Определение начальных условий коммутации всеrда
основывается на предположении постоянства э. д. с. E , которая, однако, в
случае учета действия реrулятора может изменяться по закону, определяемому
условиями реrулирования*.
При анализе процессов методом численноrо интеrрирования, который, как
правИJIО, проводится с помощью ЦВМ, в алrоритме расчета может быть учтено
.. СМ.: Мелешкuft r. А. Переходные режимы судовых электроэнерrетических систем.
А.: Судостроение. 1971.
392
большое количество п р е Д п о л о ж и т е л ь н о влияющих факторов [напри-
мер, !Зходящих в уравнения Парка rорева моментов от переходной (быстро зату-
хающей) слаrающей тока статора, влияния насыщения и т. д.]. Однако, выявив
TaKoro рода факторы, следует в процессе исследовании отбросить факторы мало
влияющие, чтобы не затемнять общей картины явления, нужной инженеру ДJlЯ
ero практических действий (см. rл. 3). Для примера рассмотрим без детализации
общий алторитм анализа переходных про-
цессов в системе, питаемой одним [енера-
тором '(рис. 12.23). Этот алrоритм позволя-
. ет рассчитать переходные процессы, выз-
ванные переключениями, набросами и сбро-
сами (отключениями) наrрузки, короткими
замыканиями и их отключениями*. При этом
расчеты MorYT проводиться в любой после-
довательности коммутации как с учетом,
так и без учета различноrо рода факторов: 2.
насыщения, свободных составляющих то-
ков и Э. д. с., изменения скоростей [енера-
тора, двиrателя и т. д. В табл. 12.1 пере-
чисдены TaKoro рода факторы и даны их
обозначения, принятые в структурной схе-
ме алrоритма (рис. 12.24).
r
,.,
х,
r,
Хl
Ik
Порядок расчета сводится к следующ;;му.
Выбирается вариант, которому соответствует оп- Рис. 12.23. Схема системы
ределенная последовательность расчета отдель-
ных пропессов. После этоrо назначаются момен-
ты времени /1> /2' ..., /п. определяющие концы расчетов каких-либо процессов и начаJlО
следующих расчетов. Каждый из вариантов имеет свой признак, запись KOToporo н исход.iюй
Та б л и ц а 12.1
Наимеиование факторов
О6оэна- Учет
чение факторов
Неучет
факторов
Насыщение маrнитопроводов машин
Перех.одные колебания
Измененне скорости reHepaTopa
Изменение скорости k-ro acliHxpOHHoro дви-
rателя
Реrулирование возбуждения reHepaTopa
Изменение частоты тока в роторе асинхрон-
Horo двиrателя
11 11+ 1,0
р р+О
51 51 =/;0
s/t 51< =/; 51<В
и! и/+ consf
{, {, + const .
'1/==1
р==О
51==0
51< == 51<и
"! == сопsu
f, == const
информации вместе с момеитами времени /, (! == 1,2, ...) является основанием дЛЯ ПО,lU'О-
товки проrраммы к расчету именно этоrо варианта. В схеме алrоритма подrОТовка опреде-
лениоrо варианта условно показана связанными между собой операторами РlJ ..., Р 1 .. После
выбора последовательности расчета решается вопрос о числе элементов наrрузки на каQОЙ
* См.: Вереmен,н,иков Л. П. и Яковлев В. П. Вопросы алrоритмизации переХОДНЫJII вро-
цессов в автономных электроэнерrетических системах. Электричество, 1967, N9 12; Ве-
ретен,н,иков Л. П. Исследование процессов в СУДОВЫJII электроэнерrетичеСКИ)ll системах.
Л.: Судостроение, 1975. .
393
ступени (п, т, k) и их составе (статическая наrрузка, асинхронные двиrатели). Оператором
Р 2 задаются признаки присутствия тех или иных элементов в схеме, а оператором Р, произ-
водится анализ заданных признаков, на основе KOToporo и принимается решение об устране-
нии из расчета Toro или иноrо фактора. Оператором Рз задается учет отдельных факторов, а
оператором Р 4 учет признаков распределения элементов в схеме. Оператором Р 16 задаются
номера конкретиых элементов наrрузки, которые будут участвовать в коммутациях выбран-
Horo варианта (включение, отключение, повторное включение и т. д.). Оператором Р 5 зада-
Az
. с учетом р
t<tt
f r f:.солst
Без учета ..'p
t<t;,.
fr =салst
t<t m
ПоiJ20то8ка к расчету
очереilНО20 пои8арианта
Конец ,росчетt1
Рис. 12.24. Алrоритм расчета пуска двиrателеii:
394
ются признаки типа возмущений: наброс наrрузки, короткое замыкание, отключение ero
и т. д. КаЖДЫЙ из задан х признаков анализируется соответствующим оператором, в резуль-
тате чеrо принимается решение о том или ином порядке расчета. В соответствии с заданием
рассчитываются коэффициенты (операторы А 1 или А 2 ) и напряжения в узловых точках (Аз
или А 4 ). Далее на основе метода PYHre ;----- Кутта (А Б ) вычисляются значения параметров ре-
жима (потокосцепления в машине и т. д.) на конец интервала. Задание признака учета насы-
щения (Р 12 ) приводит к тому, что внутри' каждоrо интервала методом последовательных
приближений вычисляются насыщенные
значения потокосцеплений в машине. По
значениям потокосцеплений на каждом
шаrе интеrрирования находятся токи, Ha
пряжения (в осях d, q и фазные величи
ны), а также скольжения асинхронных
двиrателей и друrие параметры режима.
При достижении времени t i (i 1,2, ..., п)
происходит переход к расчету очередноrо
процесса в соответствии с заданным опера
тором Pt. По достижении времени t m pac
чет заканчивается.
Реализация ,алrоритма в виде проr
раммы оказывается довольно простой. На
рис. 12.25 для иллюстрации показаны
процессы (изменение и, 1 r' S1' S2) при по-
СЛЕ!довательном пуске двух асинхронных
двиrателей от reHepaTopa соизмеримой
мощности (см. рис. 12.23).
Таким образом, алrоритм рассмотрен-
Horo типа позволяет рассчитывать любые
переходные процессы при набросах наrрузок. При этом параметры режима определяются
не только для сети, подключенной к rеиератору, но и для части системы, отключенной от
Hero в результате срабатывания автомата при коротком замыкании, и т. д.
Реализация алrоритма свидетельствует о возможности не только производить с доста.
точной достоверностью расчеты параметров режима (токи к. з., провалы напряжения и т. д.)
при любых коммутациях, но и выполнять анализ процессов, выявляя влияющие факторы.
lr u,S
10 1,0
9 0,9
8 0,8
7 0,7
6 0,6
5 0,5
4 О,Ц
;з 0,3
2 0,2
1 0,1
Пуск f1Вцеателя *! пуск /lВuеuтеля 3
Р =7 кВт P:/f,SKBm
l/
'tO
120 200 280 JБО 4lfO 520 t*>pa8
Рис. 12.25. Результаты расчета на ЦВМ двух
последовательных запусков асинхронных дви-
rателей
Анализ влияния толчков в системе «две станции наrрузка». Необходи
мость в расчетах режимов при толчках наrрузки обычно возникает в системах, в
которых мощность наrрузки соизмерима с мощностью электрических станций.
При этом в большинстве случаев оказывается возможным преобразовать расчетную
схему системы к схеме, состоящей из двух станций и наrрузки (рис. 12.26). Одна
из станций представляет собой эквивалентный синхронный reHepaTop, друrая
синхронный двиrатель.
Уравнения движения роторов станций MorYT быть записаны в таком виде:
'Z ,2 Е' Е'
Т а 01 Е,. + 1 2 . ( , ) F (t)
Jl Т sш ан Slп 012 a12 == 1 ;
dt 2 211 . 212
(12.27)
d2'б Е,2 Е' Е'
Т J2 ........2. + .2....... sin a22 sin «()12 + 0;12) == F '},(t),
dt 2 222 212
(12.28)
rде F 1 (t), F 2 (t) механические мощности на валу синхронноrо reHepaTopa и дви
rателя (рис. 12.27).
Далее решение проводится с помощью цвм или каких-либо приближенных
методов, требующих дальнейших упрощений.
Сrлаживание колебаний напряжения. Для этой цели может служить YCTaHOB
ка синхронных компенсаторов вблизи места присоединения быстропеременной
395
наrрузки. Чем больше установленная мощность синхронных компенсаторов по
отношению к мощности системы, тем больший может быть получен эффект сrла
живания колебаний напряжения.
Чтобы увеличить эффективность синхронноrо компенсатора, предназначенно
ro для сrлаживания колебаний напряжения, иноrда целесообразно включать
последовательно с ним емкость, в той или иной степени компенсирующую ero pe
Х 1
о
';'
и2
Т
i
Рис. 12.26. Схема исследуемой
системы
Рис. 12.27. Типичный прямоуrоль
ный rрафик наrрузки
активное сопротивление. Эффект сrлажl!вания колебаний напряжения можно по-
лучить и без установки дополнительных синхронных компенсаторов, включая eM
кость последовательно в цепь синхронных двиrателей (рис. 12.28). Применение
реrулирования возбуждения сильноrо действия дает еще больший эффект.
Можно до некоторой степени сrладить колебания напряжения специальным
проrраммированным подъемом возбуждения синхронных двиrателей, синхронных
компенсаторов или [енераторов. Однако, как показали теоретические и экспери-
ментальные исследования, наибольший эффект сrлаживания колебаний напряже-
.
зо I ,
о) p t 2 J
\
О ; О ед 2
cxeMal
.
4 5 .6 t , с
5\
I I I
.3 4 и сд 6 t,c
Юсхемал
Рис. 12.28. Изменение напряжения на шинах синхронноrо
двиrателя (а) и наrрузки (6) во времени:
1 в схеме 1 без сильиоro реrулироваиия; 2 в схеме /[ без сильноrо
реrулирования возбуждення; 3 в схеме [ при силЬном реryлировании
возбуждения
ния может быть получен при ИСПОЛЬЗ0вании в системах, содержащих ударную Ha
rpY3KY, реrуляторов возбуж ения сильноrо действия, т. е. реrуляторов, реаrи-
рующих не только на отклонение заданноro режимноrо параметра, но и на ero
производные. При правильно выбранном законе реrулирования и надлежащей
396
настройке реrулятора возможно практически совершенно устранить колебания
напряжения (рис. 12.29).
Реrулирование возбуждениясильноrо действия эффективно устраняет коле-
бания напряжения. Однако ТОЛЬКО,реrулирования возбуждения часто недостаточ-
но и целесообразным может оказаться одновременное реrулирование возбуждения
и первичноrо двиrателя reHepатора, например реrулирование момента турбин
одной из станций системы. Такое
реrулирование можно осуществить
по значению и знаку относительно
1'0 скольжения, учитывающеrо из
менение скорости турбины по oт
ношению к скорости предшествую-
щеrо режима.
Для устранения влияния толч-
ко05разной наrруЗКИ на режим сис
темы можно применять новые ис-
. точники реактивной мощности, за
меняющие' синхронные компенсато-
ры. К таким источникам относятся
статические конденсаторы, ВКЛю-
чаемые в сочетании с реакторами,
имеющими автоматическое управ
ление. При этом управление долж
но быть плавным, быстродействующим, без зоны нечувствительности. Установки
для получения быстрореrулируемой реактивной мощности MoryT выполняться С
помощью вьш:рямительно инверторных схем так называемых ИРМ источ-
ников реактивной мощности (рис. 12.30).
tIJ
1
зоо о '0 '.6
ЦР ,
о 0,6
:.}
1,2 1,8
--
'1,4- t, с
,
2ft t,D
,
',8
' ,' 2
Рис. 12.29. Влияни сильноrо p-еrулироваНИ!l
возбуждения на колебания нцпряжения в систе
ме:
а изменение напряжения: 1 без автоматическоrо ре-
ryлироваиия возбуждеиия; Z с пропорциоиальиым ав-
rоматическим реrулированием возбуждения; 3 с силь-
ным автоматическим реrулированием возбуждеиия; б
измеиение наrрузкw
U= t б)
D)
r Щ /ll1llll('YIII/I'"
. ,. ....
f
.
2
ХС
Рис. 12.30. ИРМ МЭИ:
(J cxej\{a ИРМ; 6 общнй вид опытно-промышленноrо ИРМ н питающих ero трансформаторов; в из-
мененне выходноrо тока (2) ИРМ под управляющим воздействием (1) реrулятора
Схема и принцип действия ИРМ. Быстродействие и возможность управления моментом
включения и выключения конденсаторов (хс на рис. 12.30, а) делают тиристорный выклюqа
тель надежным коммутационным аппаратом ие только при ступенчатом, но и при плавном
реrулнровании реактивной мощности конденсаторной батареи:
397
Q == l /((j)C).
(l2.29}
Изменяя ток, протекающий через конденсатор, можно изменять и мощность, rенерируе-
мую им. Изменение тока конденсаторов, управляемых тиристорным выключателем, осу-
ществляется измен'ением уrла проводимости тиристоров Т 1 И Т 2 . Уrол проводимости, или
время, в течение KOToporo тиристор остается открытым и пропускает ток, очевидно, не может
быть больше половины периода. При этом конденсатор rенерирует максимальную реактив
ную мощность. Допустим, что уrол проводимости уменьшился и стал равным четверти пери-
ода. Это означает, что станет меньше и эффективнее значение первой rармоники тока, проте-
кающеrо через конденсатор, а следовательно, и мощность, отдаваемая в сеть.
При таком реrулировании ток в конденсаторе содержит кроме первой rармоники опре-
деленную часть и rармоник более BblcoKoro порядка. Доля этих rармоник растет с уменьше-
нием уrла проводимости тиристоров, т. е. с уменьшением реактивной мощности, отдаваемой
в сеть. Поэтому при создании ИРМ* с плавным реrулированием одновременно предусматри-
вают меры, направленные на компенсацию высших rармоник.
Основным достоинством рассматриваемоrо ИРМ (общий вид показан на рис. 12.30, б)
и друrих аналоrичных устройств с вентильным управлением является их быстродействие.
Экспериментами (рис. 12.30, в) установлено, что время, необходимое для изменения режима
ИРМ, не превышает одноrо двух периодов промышленной частоты (O,02 0,04 с).
Потери активной мощности в ИРМ определяются потерями в конденсаторах, трансфор-
маторе, источнике управляющих импульсов тока и системе управления тиристорами. В про-
цессе реrулирования с изменением rенерируемой ИРМ реактивной мощности измещ!ются и
потери активной" мощности.
f 12.6. САМОЗАПУСК двиrАТЕЛЕЙ
Самозапуском называют процес восстановления нормальной работы двиrа-
телей после ее KpaTKoBpeMeHHoro нарушения, вызванноrо исчезновением питания
(отключением источника напряжения и последующим переключением на друrой
источник) или корarким замыканием, приводящим к временному понижению или
исчезновению напряжения на шинах наrрузки. Очевидно, что задача исследова-
ния процесса самозапуска имеет MHoro общеrо с задачей исследования процессов
при сбросах набросах наrрузки или понижении напряжения. Практическая зада-
ча самозапуска состоит в том, чтобы не допустить MaccoBoro отключения элект-
родвиrателей и обеспечить бесперебойную работу потребителей. Без автомати-
чески осуществляемоrо самозапуска возможно массовое отключение электродви-
rателей и соответствующее нарушение производственноrо процесса.
Электромеханический переходный процесс при перерывхx питания двиrа-
телей. Этот процесс может быть вызван как эксплуатационными переключениями
на резервный источник, так и аварийными процессами, требующйми таких пере--
ключений. Рассматриваемый переходный процесс может быть разбит на три пе--
риода:
1 r р у п п о в о й в ы б е r, характеризующийся тем, что между затор-
маживающимися двиrателями, подключенными к общим шинам, за счет запасенной
кинетической и электромаrнитной энерrии происходит переток мощностей. В ре-
зультате этоrо вращение двиrателей становится совместным и они MorYT быть при-
ближенно заменены одним двиrателем;
II и н Д и в и Д у а л ь н ы й в ы б е r, наступающий после Toro, как на-
пряжение на общих шинах снизится до 50 60% от номинальноrо или даже ста-
нет равным нулю. Двиrатели при этом затормаживаются в соответствии с ИНДИЕИ-
* ИРМ является отечественным изобретением (кафедра электрических систем МЭИ),
одиако ero в настоящее время широко применяют за ,рубежом (Швеция, США и др.), не делая.
надлежащих ссылок. .
39Э
дуальными механическими характеристиками. Однако если токи в контурах дви-
rателей полностью не затухли, то они будут оказывать влияние на параллельно
включенные двиrатели и выравнивать их движение;
III с а м о з а п ус к период, наступающий после восстановления на-
пряжения на общих шинах. '
0/
1, (J)
.Н 1
f
(i)
J ..,......
2.
\
1- \ /
t
8)
1,00 2
!u)
r
2-
1
t бкл
i
Рис. 12.31. Процессы при переключении питания асинхронно-
ro двиrателя:
а схема питания (1. 3 включены. 2 отключен); б процесс при отклю-
чении 1 (t O) и включении 2 через /';.1. Здесь I!ключение в про-
тивофазу; то же. в фазу; 1 ток, 2 скорость; 8 процесс при
удаленном коротком замыкании на линии (1). отключении через A.t и
одновременном включении (2); ток (1). скорость (2) по полным
уравнениям; то же, по упрощенным
Для анализа переходныХ процессов, наступающих при перерывхx питания
(rрупповоrо выбеrа), в качестве расчетноrо метода следует применять метод чис-
ленноrо интеrрирования. В зависимоСТИ от параметров исследуемой схемы и тя-
жести аварии MorYT быть использованы как полные, так и упрощенные уравне-
ния. Разница в результатах может быть иноrда в тяжелых случаях очень
значительной. На рис. 12.31, а показана система, при изменениях которой ис-
следуются параметры режима*. Так, при отключении линии 1 происходит отклю-
* См.: Кеmнер К. К., Козлова И. А., Сендюрев В. М. Алrоритмизация расчетов пере-
lXодных процессов автономных электроэнерrетических систеll'l. Риrа: Зинатне, 1981, с. 166.
<ЩQ
чение выключателя 1 и последующее восстановление напряжения включением
выключателя 2, бросок тока i достиrнет 5 8 KpaTHoro значения в случае включе.-
ния в противофазу (рис. 12.31. б, кривая 1). Включение при совпадении фаз дает
бросок тока HaMHoro меньше (кривая 2). Соответственно для этоrо случая и изме
нения уrловой скорости (!) будут значительн'о меньше. На рис. 12.31, в показаны
процессы в случае удаленноrо KopoTKoro замыкания на линии 1. В этом случае
ток i и уrловая скорость (!) меняются, разумеется, меньше.
На этом же рисунке дано сопоставление расчета по полным уравнениям (кри-
вые 1) и уравнениям упрощенным (2), применение которых, очевидно, вполне до-
пустимо.
Оценивая точность расчетов, необходимо иметь в виду, что при отключенияХ
и переключениях на происходящие процессы сильно влияет дуrа, возникающая
между разрываемыми контактами. Дуrа может быть учтена только очень прибли-
женно, и в связи с этим и расчеты при включенияХ переключениях имеют в ос-
новном ориентировочный характер.
При расчетах по полным или упрощенным уравнениям переходноrо процесса
на каждом шаrе интеrрирования скорость принимается обычно постоянной. При
расчете самозапуска асинхронных двиrателей соrласно упрощенным уравнениям
можно пользоваться статической характеристикой, приближенно определяя MO
мент в зависимости от ск<mьжения. Для нахождения напряжения на каждом рас-
четном шаrе асинхронные двиrатели MorYT быть представлены активными и peaK
тивными проводимостями, определяемыми из обычной схемы 'замещения асинх
pOHHoro двиrателя.
При известных сопротивлениях системы и напряжении источника питания
можно вычислить остаточное напряжение на шинах и далее по значению остаточ
Horo напряжения найти электромаrнитный момент двиrателя, опредеЛяя вращаю-
щий момент механизма в зависимости от скольжения. Далее расчет скольжения и
остаточноrо напряжения в начале следующеrо интервала позволяет последова
тельными шаrами определить время самозапуска эквивалентноrо двиrателя.
Физика процессов при перерывах питания и переключениях. Приведенные
выше соображения о выборе метода расчета процесса переключений при переры-
вах питания подчеркивают неоднократно высказывавшееся обстоятельство, что
выбор этот должен производиться на основании физических и практических сооб-
ражений. При изучаемых процессах MorYT возникнуть большие всплески токов
и кратковременные механические усилия ударноrо характера. Эти явления можно
объяснить тем, что после отключения асИнХронноrо двиrателя от сети ток в стато-
ре исчезнет, но маrнитный .поток машины сохранится за счет изменения тока в
замкнутой обмотке ротора* . Маrнитный поток, неподвижный относительно ротора
и вращающийся вместе с ним, будет индуцировать э. д. с. в обмотке статора. Пе-
ред отключением двиrателя от сети э. д. С. Е 1 , индуцируемая ПОТОi<ОМ взаимоин-
дукции ФМ' и напряжение сети и находились почти в противофазе, были близки
друr к друrу по значению (рис. 12.32) и вращались в пространстве с синхронной
скоростью, а в синхронной системе координат неподвижны.
В течение перерыва питания вектор э. д. с. вращается в пространстве со ско-
ростью ротора, т. е. в режиме двиrателя со скоростью ниже синхронной на зна-
· СМ.: Трещев И. И. Методы ИСCJIедования М Ш . ин переменноrо тока. Л.: ЭнерrИЯj
1969, се 234.
wo
чение скольжения s. В СIЩХРОННО вращающейся системе координат вектор Е 1 вра-
щается при том же скольжении в отрицательном направлении и уменьшается по
мере затухания маrНИТНО,rо потока.' Поэтому при включении двиrателя на тот же
источник электроэнерrии, но через друrое распределительное устройство, вектор
Э. д. с. будет сдвинут по фазе относительно вектора напряжения сети на уrол.
определяемый временем перерыва питания и скольжением двиrателя; этот yroJl
прежде Bcero и определяет характер процесса. Если сдвиr
по фазе между векторами и и Е 1 равен нулю, то векторы
следует сложить, что равносильно подключению двиrателя
к сети с почти удвоенным напряжением. При сдвиrе по фа-
зе на 1800 напряжение и э. д. с. будут вычитаться, что со-
ответствует подключению двиrателя к сети с напряжением,
близким к нулю. Соответственно в первом случае следует
ожидать наибольших всплесков токов, а во втором слу-
чае незначительных.
Если Пljтание переключается на друrой источник, не синхро-
низированный с первым, то кроме продолжительности перерыва
важны будут и соотношения между напряжениями обоих источни-
ков по значению и разности фаз между ними. Момент вращения
при быстром переключении питания может быть определен следу-
ющим выражением;
х и 2 '
М [sin (а о + st) + siп (t ao st) siп (t st)),
xrx s
[,
Ф Ч
",'"
v"'E t Е
". .,
S
,.
Рис. 12.32. Вектор-
иая диаrрамма двиrа-
теля при отключении
питания
rде а о уrол перемещения вектора э. д. с. Е! относительно пер-
воначальноrо положения (рис, 12.32).
Если питание переключается на тот же источник, то
а о st п .
При переключении питания на друrой источник, не связанный с первым, фаза напря-
жения может быть принята любой. При этом вместо а о следует подставить значение
а о + 'Ро ,
тде <Ро разность фаз между напряжениями первоrо и BToporo источников питания, которая
в общем случае является величиной случайной и может быть выбрана произвольно. Уrол
также случайная величина, и соответственно время перерыва питания t o выбирается тоже
пронзвольно, например равным времени срабатывания контактора переключения пнтания.
При быстром переключенни питания на тот же источник момент М является функцией
двух независимых переменных; времени t и уrла а о . НаХОДИМ условия максимума М, пола-
rая s """ о:
дМ/дt == о,
дМ/да о о,
откуда
t 1 21t/3;
t 2 == 41t!3;
аО1 == 41t /3; }
а 02 == 21t/3.
Следовательно, максимальное значение М наступает при условии, что при подключении
питания напряжение U и остаточная 9. Д. с. Е 1 оказываются сдвинутыми 110 фазе прк-
мерно на ::1::60°; при этом
М мзRс == 2.60и21 x .
401
Например, для двиrателя мощностью 5 40 кВт момент
Мманс == =+= 2,6.1/0,23 == =+= 11 ,3.
Более точный расчет показывает, что для этоrо двиrателя
Мманс == =+= 13,3М ном .
Самозапуск, при котором одновременно пускается rруппа электродвиrателей
характерен тем, что в момент восстановления электроснабжения и начала самоза
пуска часть двиrателей или все двиrатели вращаются с некоторой скоростью, т. е.
происходит он, как правило, под наrрузкои.
Самозапуск можно считать обеспеченным, если при пониженном напряжении
избыточный момент элеКтродвиrателей достаточен для доведения механизмов до
номинальной скорости и если за это время HarpeB обмоток электродвиrателей не
достиrнет недопустимоrо значения.
По условиям самозапуска рабочие механизмы делятся на две rруппы.
К пер в о й r р у п п е относятся шаровые мельницы, транспортеры, проКат
ные станы и друrие механизмы, которые имеют постоянный момент сопротивле
ния, вследствие чеrо при кратковременном перерыве электроснабжения быстро
теряют скорость и меДJl.енно разrоняются. Для обеспечения самозапуска этой
rруппы приводов необходимо, чтобы эJiектродвиrатель имел при восстановлении
напряжения момент, равный примерно номинальному [или с учетом фактической
наrрузки электродвиrателя равный (O,8...;.-.О,9)М ном l. Кроме Toro, следует по воз
можности сокращать время перерыва электроснабжения, с тем чтобы электродви-
rатели не успевали значительно снизить скорость.
Механизмы, относящиеся ко в т о рой r ру п п e, центробежные насосы,
вентиляторы, дымососы, rазодувки, центрифуrи и ряд друrих имеют вентиля
торные моментные характеристики. Самозапуск для этой rруппы обеспечивается
леrче, чем для меХ;;lНИЗМОВ первой rруппы, так как момент сопротивления для них
снижается с уменьшением скорости.
Самозапуск иноrда бывает трудноосуществим. Так, например, при сравни
тельно небо.'1ЬШОЙ резервной мощности трансформаторов или линий самозапуск
удается осуществить только для ответственных механизмов. При этом механизмы
менее ответственные, т. е. такие, остановка которых не вызывает повреждения
оборудования и не связана со значительной недовыработкой или браком основной
продукции, отключаются. .
Самозапуск большоrо числа асинхронных двиrателей может быть облеrчен,
если в узле наrрузки имеются и синхронные двиrатели. Реrулирование или фор
сировка возбуждения этих двиrателей позволяет иметь более высокое напряжение
при самозапуск . Секционирование распределительных устройств и уменьшение
мощности двиrателей, участвующих в самозапуске, также облеrчают ero.
Приближенный расчет самозапуска асинхронных двиrателей. Для выявления
возможности самозапуска асинхронных двиrателей необходимо проверить, дoc
таточен ли момент вращения электродвиrателя для самозапуска (при пониженном
напряжении), и установить значение дополнительноrо HarpeBa двиrателя, вы-
званноrо удлиненкем времени разrона. При расчете самозапуска необходимо оп-
ределять: выбеr за время нарушения электроснабжения; напряжение и избыточ
ный момент электродвиrателей; время самозапуска и дополнительный HarpeB.
Допустимое время и скольжение к моменту самозапуска может быть найдено по
(12.24) или путем численноrо интеrрирования. Определение напряжения на дви-
rателях производится на основании схем замещения.
402
Самозапуск двиrателей может осуществляться либо от источника питания
соизмеримой с самозапускающимися двиrателями мощности, либо от источника,
мощность KOToporo во MHoro раз больше мощности двиrателей. В этом случае
можно считать, что напряжение на шинах или питающей подстанции постоянно
во время процесса самозапуска.
Наиболее характерные схемы питания наrрузки, при которых осуществляет
ся самозапуск, показаны на рис. 12.33.
о) CxeMl1 CXeMl1 в)
пцтl1НIIЯ 3l1мещеНI/Я 1
rv и !
/'
fiтyxoe К.3.
и к =0
Cl1M03l1пYCK АД после К.3.
Убое = 1,0 Ин
ХС
J
(iJo.E
1,0 2
Х Т ',
D
<'-J
""
':"'-
!:?
t>.i
t. с
Рис. 12.33. Самозапуск двиrателей после KopoTKoro замыкания:
а схема питания наrрузки при самозапуске; б схема самозапуска после КО"
pOTKoro замыкания; в сопоставления характера изменения тока статора i (1, }'),
уrловой скорости (i) (2, 2') и электромаrнитноrо момента М ЭМ на зажимах АД
в режиме к. з. продолжительностью 0,15 с: 1, 2, 3 по полным уравнениям;
1', 2'. ;у....... по упрощенным уравнениям для случая самозапуска соrласно схеме б
о) д
CxeUl/ CxeUl1 0,5 '1
пцтания Зl1мещенШl
ХС
хл,r'/f
1
f"H
ХI(
Для схемы, изображенной на рис. 12.33, а, напряжение на зажимах электро
двиrателей при самозапуске
U == U1Z д / V(r,jJ + r д )2+(Х+Х д )2,
( 12.30)
rде Zд == V ri + xi ; х == Хс + Х ТР + ХЛ; r д и Х д соответственно эквива-
леnтные активное и реактивное сопротивления двиrателей, определенные при
значении скольжения, соответствующем началу самозапуска, по схемам заме
щ ния двиrателей.
Для схемы питания (рис. 12.33, 6), в которой Nаrрузка представлена двиrа
телями и постоянным сопротивлением ZIl' наПрЯЖ НlIе при самозапуске
403
и == и l Z Д.н I V (r;л + r д.н)2+(Х+Х д . н )2 ,
(12.31)
тде
ZД.Н == ZдZн/(Zд + ZH) == Zд.н е/ Ф ;, r д.н == Zд.н COS ф; Х д . н == zд.н sin ф.
Приближенно можно считать, что напряжение при самозапуске должно быть
и:> и 1 z д /(zд + х).
( 12.32)
При известном минимально допустимом напряжении самозапуска можно OII
ределить допустимое значение неотключаемой мощности двиrателей.
Сопротивление двиrателя в момент самозапуска
Zд == 56 U OM/(SCP ),
rде Sб базисная мощность; ином номинальное напряжение электродвиrате
ля; SСЗ расчетная мощность электродвиrателя при номинальном напряжении и
.скольжении, соответствующем моменту самозапуска; и б базисное напряжение.
Подставляя значение Zд в (12.32).. найдем мощность:
SСЗ == (И; М У б C 1). (12.33)
Величина SСЗ связана с номинальной мощностью двиrателя соотношением
SСЗ == Р ном ksl('YJHOMCOS СРном), (12.34)
rде ks кратность тока двиrателя при скольжении Sсз, соответствующем началу
еамозапуска: '
ks == [V 1 + 5 p I V 1 + (5 кр /5 сз )2 ] k.
Здес ь k кратность. пусковоrо тока.
ПрираВНf!В правые ч'асти выражений (12.33) и (12.34), после преобразования
получим приближенное выражение для определения допустимоrо значения неот-
ключаемой мощности двиrателей. Для схемы, изображенной на рис. 12.33, а,.
Р но== ( И ном ) 2 Sб COS 'Рном 1)ном ( И 1 1 ) .
и б xks И
Для схемы, представленной на рис. 12.33, б,
Р но == COS'f'HOM"",HOM [( Ином ) 2 ( Иl 1 ) И2 ] ,
ks Иб х И ZH
( 12.35)
тде COS<PHOM и 'YJHOM номинальные ко ффициенты мощности и к. п. д. двиrателя.
Минимально допустимое напряжение на зажимах двиrателей определяется из
условия возможности осуществления самозапуска следующим образом:
для механизмов с постоянным моментом сопротивления
и2Мд.мин:> 1,IМ мех ;
для механизмов с вентиляторной характеристикои момента сопротивле-
ния
404
и2Мд.макс> 1,lМ мех ,
rде М д . мин и Мд.макс минимальный и максимальный моменты вращения дви--
rателя* соответственно. .
Самозапуск синхронных двиrателей. Если при понижении напряжения или
ero полном кратковременном исчезновении двиrатели не были отключены и не
выпали из синхронизма, то при воtстановлении напряжения происходит п р cr
Ц е с с с а м о з а п у с к а. Если двиrатель выпадает из синхронизма и к момен-
ту восстановления напряжения работает как
асинхронный со скольжением 51, то процесс са-
мозапуска надо рассматривать как пуск асинх-
pOHHoro двиrателя, но осуществляемый от той
промежуточной скорости, до которой успели за-
тормозиться двиrатели за время перерыва пита-
ния. Самозд.пуск отличается от пуска еще и тем,
что возбужденный двиrатель включается прямо
на шины наrрузки без дополнительных сопрcr
тивлений в цепи статора.
В задачу расчета самозапуска входит:
1) проверка влияния самозапуска на Нор-
мальную работу потребителей, подсоединенных
к шинам наrрузки, и на пер rрузку элементов
сети;
2) определение необходимоrо для разворачи-
вания arperaTQB значения остаточноrо напряже-
ния на выводах двиrателей;
3) установление момента двиrателя, необхcr
димоrо для надежноrо втяrивания в синхронизм;
4) определение времени пуска и переrрева
двиrателя.
Во время перерыва питания напряжение на выводах двиrателя зависит от
ero э. д. с., которая уменьшается по мере выбеrа. Уменьшение скорости до 80%
от синхронной приводит К значительному (ДQ 60 70%) понижению напряжения.
При форсировке возбуждения, которая обычно включается при снижении напря-
жения на 20 25 %, этоrо не происходит и напряжение остается в пределах нор-
мальноrо.
Сопротивление двиrателя в зависимости от скольжения можно rрубо оценить
кривыми, представленными на рис. 12.34. При значительной остаточной э. д. с.
двиrателя напряжение на шинах наrрузки будет пульсировать с частотой сколь-
жения. Допустимое снижение напряжения на шинах наrрузки во время самоз&-
пуска приближенно определяется следующими требованиями:
1) при совместном питании двиrателей и освещения и > 0,9 при частых и
длительных пусках; и > 0,8 ...;-- 0,85 при редких и кратковременных пусках и
самозапусках;
z 7,0
z= 6. "
Itl пyc Р
5,0
4,0
3,0
2,0
1,5
s ,8 0.4,2
Рис. 12.34. Измененяе сопротив-
ления синхронных двиrателей.
процессе пуска Z* == tp(s):
1 ДВ\lrатели с явно выраженными по-
люсамн; 2 3 двиrатели с rладким ро..
ropOM соответственно со специальнОЙ
демпферной системой н без нее
01,0
* Для двиrателей, параметры схемы замещения которых можио считать не зависящим.
от скольжения, М Д.мин р.авен пусковому моменту. Для двиrателей, имеющих ротор с rлубо-
кими пазами, моментная характеристика которых может иметь провал, М д.мин )l.ОЛЖНО
.определяться по этой характеристике.
40S
2) при раздельном питании двиrателей и освещения U 0,75 -7 О,8"незави-
симо от частоты и длительности пусков и самозапусков;
3) при люминесцентном освещении U 0,9;
4) при питании двиrателей через блок трансформаторы напряжение U оrрани
чивается минимальным значением момента, требуемоrо для разrона arperaTa.
Для проверки возможности самозапуска необходимо сопоставить средний
асинхронный момент с моментом сопротивления механизма. Характеристику
асинхронноrо момента рекомендуют рассчитывать с помощью известноrо ДЛЯ
электрических машин выражения
и 2 [( I 1 ) sT ( 1 I )
Мае == +
2cos 'fHOM1JHOM X Xd 1 +( sT y X X
Обычно заводом 'зада.
ется кривая' асинхронноrо
момента двиrателя для ус-
ловий пуска при включе-
нии в цепь ротора разряд-
Horo сопротивления уазр'
на которое замкнута обмот-
ка ротора до тех пор, пока
не подключен возбудитель.
Однако в условиях самоза-
пуска обмотка ротора, име-
ющая сопротивление 'f'
обычно присоединена непо-
средственно к возбудител19.
Это меняет величину T
обратно пропорционально
величине'раЗ/'f+ 1. При
непосредственном присое-
динении возбудителя асин-
хронный момент уменьша-
ется на величину
0,09 sT ST ]
1 +0,0081 (sT )2 1 + (sT )2. ..
+ ( + ,J... )
xd x q
sT
1 + (ST )2
'r '2023 213.13.1J6'4U455.0H6J7.17.8sr(
. . , , , , , , , , , . . , ,
10.2.\ "1'" ........ T , 1! 11 r; I
+ 1\ J
f '" ,, 1\ 1\ . 11 j I V/ V
о!.!? ........ 15'
0,'j2 ........ .\ '. , \ I V
.... jo..,
#е !........ ........: "'- .\ \' \ 1\ I
,1/0 " 1,0
......... " j .\ 11
. ........ \ \ I
0,5 1
Т l'
,. i
1. X t ' f----- , И+ 1 +.:З{11
О
2,0 1,5
1,0
0,5
0,4 0,2 О 0,2 0,4 0,6 0,11
Рис. 12.35. HOMorpaMMa для определения дт == P(Xd.
X , sT ):
l!J.т изменение асинхронноrо момента синхронноrо двиrателя при
пуске с непосредтвенно прнсоеднненныM возбудителем; 'Y
O.5(1/X' 1fXd); s скольжение; Т' d постоянная времени (по
, данным завода)
, и 2 ( 1 I )[
Ma{J==
2cos 'fHOM1JHOM X Xd
sT
+
1 + (sT )2
] .
Для определения изменения момента при непосредственном присоединении
возбудителя можно пользоваться номоrраммой (рис. 12.35). С ее помощью по вели-
чине T и значению СКQЛьжеНlIЯ 5, при котором определяется момент, находится
величина 11т. При непосредственном присоединении возбудителя асинхронный
момент
406
Мае == и 2 [Мае О I1m/(cos 'Рном '1JHOM)]'
(12.36)
тде М асО момент, определяемый по заданной заводом кривой асинхронноrо
момента (при номинальном напряжении).
Наиболее тяжелыми оказываются условия. самозапуска при скольжении
O,02 0,08. Если в этой зоне самозапуск обеспечивается, то в большинстве случе
ев он будет обеспечен по условию необходимоrо момента и при друrих скольже
ниях.
Момент, необходимыu для подведения двиrателя к критическому скольжению
с учетом пониженноrо при самозапуске напряжения, можно приближенно опре
делить выражением
М >- 0,055 Ммех/(U 2 s ир ). (12.37)
Момент М задается заводом с учетом включения в цепь ротора разрядноrо
сопротивления. При расчете самозапуска с rлухо подсоединенным возбудителем в
(12.37) следует подставить момент, подсчитанный соrласно формуле (12.36).
Время перерыва питания, при котором двиrатель после восстановления питания
сразу же втяrивается в синхронизм, можн о оценить прибл иженно, упрощая (12.7):
t 1 T J St(plMMexo == 0,06 V TJ (M 0,6MMexo) /,Ммехо. (12.38)
Такие расчеты дают примерно двукратный запас и должны быть уточнены
аналитически или экспериментально. В тех случаях, коrда самозапуск неосущест
вим, можно применять автоматическую ресинхронизацию двиrателя. Вхождение
в синхронизм должно обеспечиваться действием форсировки возбуждения, повы
ШaIOщей максимальный синхронный момент. Облеrчение синхронизации двиrате
ля может быть достиrнуто отключением обмотки возбуждения и кратковременным
замыкан.ием ее на разрядное сопротивление с последующим (через 2 3 с) включе
нием форсированноrо возбуждения (на 1 с). Обеспечить ресинхронизацию иноrда
помоrает разrрузка привода (механизма).
i 12.7. АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ
И ПЕРЕКЛЮЧЕНИЕ ПИТАНИЯ
Короткие замыкания, про исходящие в линиях, на шинах трансформаторов и
в друrих точках системы, MorYT быть неустойчивыми преходящими. В этих слу
чаях включение устройств а в т о м а т и ч е с к о r о п.о в т о р н о r о в к л ю
ч е н и я АПВ (OДHO , ДBYX и MHoroKpaTHoro действия) может сохранить pa
боту узла наrрузки.
Для обеспечения самозапуска электродвиrателей и сохранения устойчивости
[енераторов время действия АПВ должно быть минимальным. В зависимости от
схем электроснабжения и коммутационной аппаратуры выдержка времени при
действии АПВ принимается различной. Выдержка времени необходима для Toro,
чтобы выключатель Mor возвратиться в исходное положение, и для Toro, чтобы .cpe
да в месте KopoTKoro замыкания успела деионизироваться. Практически в сети
с напряжением до 35 кВ выдержка АПВ принимается равной 0,2 0,5 с. Собствен
ное время отключения у выключателей иноrда больше времени деионизации (на-
пример, в сетях напряжением 6 10 кВ время деионизации составляет 0,07
0,09 с, а собственное время выключателей 0,25 0,3 с). Поэтому в сетях Ha
пряжением 6 10 кВ обычно допустимо АЛ В без дополнительной выдержк.и вpe
мени.
401
Рассмотрим характер переходных процессов при .различных автоматических
повторных включениях и пер ключениях.
Автоматическое повторное включение линий. Применение АПВ на воздуш
ных и кабельно воздушных линиях позволяет восстановить электроснабжение
в 6O 90 % всех аварийных отключений воздушных линий. Проверка возможнос
тей АПВ линий передачи требует расчета режима системы: проверки ее устой
ЧИВОGТИ и у<:тойчивости асинхронных двиrателей при перерыве электроснабже-
ния, выяснения возможности самозапуска двиrателей. .
Автоматическое повторное включение трансформаторов и шин. Для TpaHC
форматоров, подключенных к сетям напряжением 10 35 и 110 кВ, питающим
сети напряжением 10 и 6,3 кВ, целесообразно применять АПВ. При этом АПВ дей-
ствует при отключении выключателя низшеrо напряжения от максимальной защи-
ты трансформатора. Защита в этом случае содержит два реле времени, из которых
первое, с меньшей выдержкой времени, осуществляет АПВ, а второе, с большей
выдержкой времени, осуществляет отключение трансформатора без последующеrо
АПВ. В схеме ЛПВ трансформатора обычно предусматривается блокировка, за-
прещающая работу АПВ, если отключение выключателя произошло от действия
защиты, реаrирующей на неисправнос'{ь внутри трансформатора (обычно rазовой
или дифференциальной).
Устройство АПВ шин выполняется на подстанциях, rде имеется специальная
защита шин; ero осуществляют обычно простейшим способом в виде автоматичес-
Koro опробования состояния сети.
Автоматическое повторное включение элеКТродвиrателей. АПВ предусмат
ривается для ответственных электродвиrателей после их автоматическоrо от-
ключения. АПВ электродвиrателей в сетях 3 10 кВ обеспечивает самозапуск
тех электродвиrателей. у которых из за плохих пусковых характеристик HOp
мальный еамозапуск не осуществляется.
Эффективным средством предотвращения развития аварий типа лавины напряження
(см. и.II. 11) при поиижении иапряжения оказывается применение аварийной разrрузки узла
путем отключеиия части потребителей. Расчеты, проведенные при аварнйных разrрузках
УЗ.llа, показывают, что при уменьшении э. д. с., которой представлена эквивалентная систе.
ма, обычно происходит устойчивый переход от одноrо состояния к друrому, если э. д. с. Е
сиижается не более чем до 0.75 или соответственно увеличнвается сопротивленне. Далее
осуществляется самозапуск отключенных двиrателей.
Разумеется, иеобходимая мощность отключаемых потребителей для предотвращения
развития аварии зависит от промежутка времени между ее ВОЗиикновением н началом пр()о.
цесса разrрузки, а также от внешнеrо сопротивления сети.
Автоматическое включение реэервноrо питания. АВР является эффективным
мероприятием. повышающим надежно€Ть электроснабжения и позволяющим
практичееки MrHoBeHHo восстановить элеКТРОGнабжение. Устройства АВР, CHa
чала применявшиеея только для еобственных нужд электрических станций, ши.
роко внедряются и в «ивтемах электроснабжения промышленных предприятий.
Схемы питания G устройством АВР показаны на рис: 12.36. Они имеют одно-
стороннее (рис. 12.36. а) или двустороннее действие (рис. 12.36, 6). АВР двусто-
pOHHero действия часто устанавливается на перемычках между двумя (1 и 2) под-
станциями. взаимно резервирующими друr друrа (рис. 12.36, в). Резервирование
четырехеекционной Подстанции осуществляется по схеме, изображенной на
рис. 12.36, 2. Трансформатор резервируется так же, как и линия, ХОТЯ в системе
электроснабжения промышленных предприятий чисто резервные трансформаторы
408
обычно не предусматриваются и устройства АВР дЛЯ трансформаторов в боль-
шинстве случаев выполняются на секционном выключателе.
Действие устройств АВР должно осуществляться при исчезновении напряже-
ния на резервном участке, вызванном любой причиной, включая и короткое замы-
кание на нем. Время действия устройств АВР зависит от схемы электроснабжения,
для ero определения необходимо знать условия самозапуска электродвиrателей и
8)
Б
А8Р
ТН 2
а) 1
p
е)
и,I
и
1
.Н
тн
t=o
t A8P
t
Рис. 12.36. Схемы питания с устройством
АВР:
а АВР на вводе; б АВР на секционном вы-
кпючателе; в АВР перемыки;; е АВР на че.
тырехсекционной подстанцин; запитый квадрат
выключатель. отключенный при нормальном pe
жиме; светлый квадрат выключатель, включен-
ный прн HOpMaJl.bHOM режиме; тн трансформа-
тор напряжения
Рис. 12.37. Нарушение элект
роснабжения наrрузки и IIОС-
становление ero АВР:
t o момент нарушеиня; t АВ Р
момент восстановпення; М время
о(jесточивання наrрузки; и напря-
жение на шинах; J........ ток пита IIЯ
время срабатывания релейной защиты при коротких замыканиях на отходящих
линиях. По условию самозапуска время действия АВР, как правило, должно быть
минимальным. Устройства АВР не должны действовать при коротких замыкани-
ях на отходящих линиях резервируемоrо участка. Это обеспечивается дополни-
тельной выдержкой времени или специальной блокировкой.
При проектировании и эксплуатации АВР обычно нет необходимости в специ-
альных расчетах переходных процессов, так как эти процессы быстро затухают,
и, как праВИЛО, не MorYT привести к каким-либо неприятным последствиям.
Примерный характер процесса (при отключении питания и последующем АВР) показан
на рис. 12.37. При отключении от питающеrо источника наrрузки, содержащей rруппу асин-
хронных и синхронных двиrателей, происходит постепенная остаиовка этих двиrателей.
В процессе уменьшения скорости (ro--+ О, s--+ 1) напряжение на rруппе двиrателей не исче-
зает сразу; оно поддерживается за счет энерrии, vзапасенной В двиrателях, и уменьшается в
некотором соответствии с изменением их yr ловои скорости (рис. 12.37). Значение этоrо на-
пряжения находится из условия
409
n
Qk О;
k l
n
P k О.
k l
rде Qk и P k реактивная и соответственно активная мощности синхронноrо или асинхрон-
Horo двиrателя, входящеrо в состав rруппы.
Численное интеrрирование уравнения электромеханическоrо переходноrо процесса,
проведенное применительно к каждому двиrателю, позволяет найти изменения ero уrловой
скорости Ы О === 1(/). Однако обычно большая часть наиболее мощных двиrателей (k, п) имеют
примерно одинаковую инерцию и заrрузку (МИОМk/SИОМk М ИОМi / Sиомi)' В этих условиях
выбеr всех двиrателей наrрузки происходит с одинаковой скоростью, определяемой соrласно
выражению
n
т JkSkUJl
k l
UJэ (/) === n
TJkS k '
k l
здесь т Jk постоянная инерции k-ro двиrателя; SHOM.k ero номинальная мощность.
Значение "'э' показывающее среднюю скорость, к которой «подтяrиваются» все двиrате-
ли rруппы, взаимодействующие между собой в пропессе выбеrа, можно считать скоростью
HeKoToporo эквивалентноrо двиrателя. Для' существования TaKoro двиrателя (т. е. выбеr
всех двиrателей rруппы происходил бы с единой скоростью UJ э ) необходимо, чтобы момент,
развиваемый каждым (достаточно мощным) двиrателем при частоте UJ э ' не превосходил мак-
симальноrо возможноrо момеНта этоrо двиrателя.
АВР с фазовым управлеиием. Повышение устойчивости синхронных двиrателей и умень-
шение тока самозапуска достиrаются изменением фазы напряжения питания с помощью
циклическоrо переключения фаз (в сторону отставания), осуществляемоrо во время паузы
АВР. Изменение фазы (до 240°) производится с помощью дополнительноrо выключателя и
специальной кабельной вставки. Это мероприятие пока еще не получило широкоrо приме-
иения.
i 12.8. ВЛИЯНИЕ РErУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННblХ двиrАТЕЛЕJiI
НА РЕЖИМ И УСТОJilЧИВОСТЬ УЗЛОВ НАrРУзок
Влияние автоматическоrо реrулирования возбуждения (АРВ) синхронных
двиrателей на процессы в узлах наrрузок рассматривается с учетом особенностей'
работы наrрузок, находящихся в этих узлах. Узлы наrрузки MorYT характеризо-
ваться следующими условиями:
равномерным rрафиком наrрузки;
работой при дефиците реактивной мощности;
неравномерным rрафиком заrрузки электропотребителей;
большой удаленностью оТ источника питания.
Синхронные электроприводы MorYT иметь наrрузки, разделяющиеся на два
основных вида:
1) медленно меняющиеся (насосные и вентиляторные установки, компрессор-
ные турбомашины и др.);
2) пульсирующие (мощные поршневые компрессоры) и резкопеременные (про-
катные станы, дробильные машины, резино месители).
Анализ переходных процессов и устойчивости узлов наrрузок обычно ведется.
соrласно упрощенному представлению системы в виде дВух синхронных машин,
одна из которых эквивалентна системе, а друrая узлу наrрузки.
На АРВ синхронных двиrателей возлаrается ряд функций, к rлавнейшим из
которых относятся;
410
повышение статической и динамической устойчивости узлов наrрузок за
счет поддержания заданноrо уровня напряжения при росте наrрузок;
экономия электроэнерrии в периоды максимумов наrрузки за счет сниже
ния потерь в сетях и уменьшение необходимой полной мощности трансформаторов;
повышение экономичности режимов работы синхронных электроприводов
и друrих потребителей, присоединенных к шинам подстанций с синхронными дви
rателями, за счет снижения активных потерь в синхронных двиrателях и лучшеrо
поддержания уровня напряжения;
повышение статической и динамической устойчивости электроприводов
при снижении напряжения в сети и резких изменениях наrрузки на валу;
улучшение демпфирования электрических и механических колебаний,
возникающих при пульсирующей наrрузке.
В зависимости от схемы системы, схемы узла наrрузки и режимов работы син
хронных двиrателей реrулирование их возбуждения может осуществляться
в функции изменения: ,
, напряжения в узле наrрузки (U уз == const);
тока статора или BHYTpeHHero уrла б и их производных;
нескольких параметров при одновременном (или селективном по времени)
воздействии сиrналов управления на обмотку возбуждения двиrателей;
реактивной мощности Qд, отдаваемой двиrателем, с поддержанием Qд
сопst (постоянство отдачи Qд);
коэффициента мощности (cos ер == const).
Рекомендации* относительно выбора закона АРВ синхронных двиrателей мотут быть
даны на основе тщаmeльноео технико экономическоео сопоставления режимов работы не толь
ко одноеЬ двиеателя и еео привода, но и узла наерузки в целом с учетом питающей еео системы.
АРВ синхронных двиrателей совместно со статическими реrулируемыми компенсирующи-
ми устройст.вами может обеспечить наиболее надежную и экономичную эксплуатацию двиrа
телей и блаrоприятные режимы узлов наrрузок. При предварительном выборе АРВ синхрон-
ных двиrателей часто исходят из следующих соображений:
1. Для узлов с равномерной наrрузкой и устойчивым уровнем напряжения в HeKOТO
рых случаях целесообразно, чтобы синхронные двиrатели работали с неизменным током воз
буждения, выбранНЫм по условиям оптимальноrо режима электропотребления и устойчивоС-.
ти электропр иводов. Необходимо при этом пре дусматривать форсировку возбуждения при
аварийном снижении напряжения ниже установленноrо значения для данното узла Ha
rрузки.
2. В некоторых системах с равномерной наrрузкой и изменяющимся уровнем напряже
ния вследствие дефицита реактивной мощности, оrраниченной пропускной способностью
питающих линий и т. д., иноrда целесообразно реrулировать возбуждение синхронных
двиrателей так, чтобы обеспечивать постоянство напряжения на шинах питающей подстан-
ции с оrраничением по максимальному и минимальному значениям тока ротора. Такое рету-
лирование дает эффект у синхронных двиrателей большой мощности. Рекомендация не явля-
ется общей, напротив, во мноrих случаях реrулирование по условию и == сопst нерацио-
нально.
3. В системах снеравномерной наrрузкой в качестве закона АРВ синхронных двиrа-
телей может быть принято реrулирование на поддержание оптимальноrо напряжения узла
наrрузки. Это напряжение зависит от значения и характера суммарной наrрузки узла и ус-
ловий работы системы.
4. Для синхронных электроприводов большой мощности (несколько тысяч и десятков
тысяч киловатт), работающих на резкопеременную наrрузку, иноrда рекомендуют осущест-
влять реrулирование, сохраняя постоянство отдачи реактивной мощности. Однако рацио
нальная область такото реrулирования оrраничена и должна выявляться расчетами, ШlПри-
* Единых рекомендаций, подтвержденных анализом и опытом, пока нет. В литературе
приводятся данные, к которым след.ует относиться весьма осторожно.
411
мер реrулирование возбуждения на постоянство отдачи реактивной мощности явно неблаrо-
I'риятно для двиrателей с высоким ОК3 (больше единицы), так как при этом не используется
их компенсирующая способиость.
5. Для синхронных двиrателей при резкопереме\IИОЙ наrрузке может быть целесообраз-
ным реrулирование возбуждения по току статора и ero составляющим, внутреннему уrлу б
и их производным С выявлением в каждом конкретном случае наилучших комбинаций.
6. Синхронные двиrатели средней мощности, работающие с медленно меняющейся на-
l'рУЗКОЙ, MorYT реrулироваться исходя из условия поддержания постоянства их коэффици-
еита мощности, выбранноrо на основе технико-экономическоrо анализа раБQТЫ электроснаб-
жающей системы.
В большинстве случаев целесообразно осуществлять реrулирование возбуждения по
сложным законам, включающим в управление два параметра режима и бол е. Например,
для некоторых металлурrических синхронных электроприводов целесообразно реrулирова-
кие по активной составляющей тока статора и заданному коэффициенту мощности, для син-
хронных приводов переменной наrрузки по напряжению, току статора (фазовое компа-
ундирование), реактивной мощности и напряжению.
* 12.9. САМОВОЗ6УЖДЕНИЕ АСИНХРОННblХ двиrАТЕЛЕА ВО ВРЕМЯ ПУСКА
ПРИ ПРИМЕНЕНИИ ПОСЛЕДОВА ТЕЛЬНОА ЕМКОСТНОА КОМПЕНСАЦИИ В СЕТИ
Одним из эффективных средств уменьшения потерь напряжения в сети, пи
тающей двиrатели, является применение последовательной емкостной компенса-
ции реактивноrо сопротивления сети. При вклю-
чении конденсаторов С последовательной ком-
пенсации MorYT возникнуть некоторые необыч
ные с точки зрения нормальной эксплуатации
явления: качания синхронных машин, «застре
вание)} асинхронных двиrателей на скоростях,
меньших нормальной, самовозбуждение при пус-
ке асинхронноrо двиrателя или при асинхронном
пуске синхронноrо двиrателя, появление субrар-
монических токов * . Последние для местных се-
тей существенноrо значения не имеют и поэтому
в настоящем разделе не рассматриваются. Усло-.
вия самовозбуждения асинхронноrо двиrателя
dJHQ:o=t..JCH при пуске можно физически оценить на основе
тех же соотношений, которые .были получены
при исследовании самовозбуждения синхронных,
машин. Не претендуя на CTporoCTb анализа и
точность количественных соотношений, будем
считать, что асинхронный двиrатель, так же как
и турбоrенератор, характеризуется реактивными
сопротивлениями X . При изменении уrловой
скорости ю (частоты вращения) двиrателя ero
индуктивные сопротивления изменяются (кривые
1 и 2 на рис. 12.38). Емкостное сопротивление хс == lI(юС) также изменяется,
причем зависимости ХС == (j)(Ю) (кривые 3, 4, 5) различно располаrаются отно--
сительно области X , Xd, показанной на рис. 12.38. В случае, соответствующем
кривой 3, самовозбуждения во время пуска н е б у д е т; в случае, соответству-
Рис. 12.38. Качественная харак-
теристика условий самовозбужде-
ния:
1, J изменение X d н х' d COOTBeTCTBeH
110; 3. 4. 5 нзменение хс Y(ro); 00,.
(1)2 уrловые скорости, отвечающие
rраннце зоны самовозбуждения; (()з
уrловая скорость lIачала возбуждения
· Возиикновение резонанса на частотах ииже нормальной приводит к появлению токов
н напряжений, называемых су6еармоltuческuмu.
412
ющем кривой 4, оно д о л ж н о б ы т ь вплоть до нормальноrо режима; в слу
чае, соответствующем кривой 5, во время пуска на интервале скорости от 0)1 до 0)1'
появится самовозбуждение, которое м о ж е т и с ч е з н у т ь, н е раз в и в-
ш И С Ь П о л н о с т ь ю, если двиrатель быстро «проскочит» зону самовоз-
буждения.
Напомним, что количественное рассмотрение требует более полноrо и слож-
Horo анализа*.
Самовозбуждение является нежелательным явлением по следующИМ причи-
нам:
1) ток статора и мощность, потребляемая от сети, MorYT при этом В несколько
раз превышать номинальные значения, вследствие чеrо появляется сильный пере-
rpeB двиrателя, снижение напряжения на ero шинах, уменьшение вращающеrо
момента;
2) двиrатель во время пуска может «застревать», не достиrнув нормальной
скорости (в связи с уменьшением вращающеrо момента в процессе разrона);
3) при «застревании» двиrателя появляются биения тока и момента и, как
,следствие, качания ротора машины.
Выявив условия, указывающие на возможность возникновения самовозбуж
дения, необходимо принять меры для ero устранения. Эти меры и их эффектив-
ность устанавливаются из анализа основных факторов, влияющих на процесс
. самовозбуждения. Так, необходимо учесть, что во время разбеrа двиrателя заме-
щающее ero сопротивление по -мере увеличения У2ловой скорости возрастает от
минимальноrо значения до максимальноrо. Во время разбеrа двиrателя при H
котором значении скольжения ротора индуктивность двиrателя может резониро-
вать с емкостЬЮ последовательной компенсации, т. е. создать контур самовозбуж-
дения с собственной частотой, которая. будет ниже промышленной. Двиrатель
при этом вращается с частотой, соответствующей собственной частоте колебатель-
Horo контура, т. е. с числом оборотов ниже нормальноrо. Длительная работа дви-
rателя с такой частотой при наличии активных потерь (которые неизбежны)
возможна при источнике энерrии достаточной мощности, поддерживающем колеба-
тельный процесс контура самовозбуждения. Таким источником и является асин-
хронный двиrатель. Во время разrона двиrателя частота вращения ротора дости-
raeT значения, соответствующеrо частоте собственных колебаний контура, и пре-
вышает ero. При этом создается отрицательное скольжение ротора по отношению
к резонансной частоте и, таким образом, асинхронный двиrатель переходит в ре-
жим reHepaTopa по отношению к контуру самовозбуждения. Частота вращения
зависит от потерь в контуре ротора, определенных с учетом насыщения стали дви-
rателя; при равенстве потерь и rенерируемой мощности создается возможность
устойчивой работы двиrателей в этом режиме. Если потери превышают rенериру
мую мощность асинхронноrо reHepaTopa, то самовозбуждение либо не возникает,
либо становится неустойчивым, позволяя, однако, двиrателю разворачиваться
до нормальной скорости.
,Частота резонирующеrо контура зависит от параметров сети, eMKOCTHOro
сопротивления устройства последовательной компенсации и сопротивлений дви-
rателя.
Самовозбуждение -может быть устранено либо выборо-м соответствующей
* См.: С,амовозбуждение и самораскачивание в электрических системах/А HUCUJCO-
ва Н. д., Веников В. А., Долеинов А. И., Федоров д. А. М.: Высшая школа, 1964.
413
емкости продОЛЫ-lОЙ компенсации, либо последовательным или параллельным вклю-
чением с емкостью aKтUВHocO сопротивления.
Аиализ процесса пуска асиихроииоrо двиrателя. При последовательиой компеисации
в зависимости от соотношения сопротивления Хс и параметрои двиrателя MorYT быть три
характерных режима, приближенно определяемых следующими условиями.
1. Режим, при котором Хс;;;;' Хр.О' rде Хр.О реактивное сопротивление ветии иамаrни-
чивания.
Из схемы замещения следует, что при этих услоииях вся зона самовозбуждения лежит
а) м
[t(f)
Q(t)
Рис. 12.39. Самовозбуждение асиихронноrо двиrателя:
а M t(s); б пуск при включенном Хс. в включение Хс'
'в диапазоне скорости больше синхронной, причем в пределах изменения скорости от нуля до
синхроиной самоиозбуждения не происходит. .
2. Режим, при котором Xs/(l + r;/r1)2 Хс Хр.О' rде Xs сопротииление рассеяния
обмотки статора; r1 и r; активные сопротивления обмоток статора и ротора дииrателя.
Одиа часть зоны самовозбуждения лежит в диапазоие изменения скорости от нуля до
синхронной, а друrая выходит за пределы синхрониой скорости (кривая 2 на рис. 12.38).
Зависимость вращающеrо момента двиrателя от скольжения и этом случае имеет вид, '
показанный иа рис. 12.39, а. Как следует из рассмотре-
Н . ния этой характеристики, самовозбуждение дииrателя
иаступает как при пуске двиrателя с включенной ем.
костью (рис. 12.39, 6), так и при включеиии емкости в
цепь вращающеrося двиrателя (рис. 12.39, в). Эффект
самовозбуждеиия здесь сказывается и уменьшении ско-
рости двиrателя на величину 6.Q, которая может со-
ставить 0,35 0,40 от иоминальной (рис. 12.39, б, в).
3. Если включенная емкость настолько велика,
что удовлетворяется условие
Хс < Xs/( 1 + r;/r 1 )2,
Рис. 12.40. Зависимость вращаю.
щеrо момента асинхронноrо дви-
rателя от скольженин при разбе-
re (случай б, рис. 12.39)
414
s
то самовозбуждение иачииается при небольшой скорос-
ти (001 О) И зона ero находится и диапазоне измене-
ния скорости от нуля до синхронной. При этом меха-
нические характеристики принимают вид представлен'
ных на рис. 12.40. Если в этом случае двиrатель после подключения к сети разrоняетсSl
настолько медленно, что процесс самовозбуждения успевает закончиться за время про.
хождения зоны самовозбуждения, то двиrатель «застревает» на пониженной скорости (рис.
12.41), испытывая при этом качания. В этом же случае, но при малых моменте инерции и
моменте сопротивления механизма, а также большом подводимом напряжении двиrатель мо-
жет разrоняться настолько быстро, что самовозбуждение не сможет полностью развиться.
Тоrда, быстро пройдя (<<проскочив»)зону самовозбуждения, двиrатель разrонится до нор-
мальной скорости (рис. 12.42).
1IIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIIII1I1I1I1IJJtll1lllllllllllllllllllll1111IIIIttЮПIIIIIIllIlIlIlIl1flttl'Пlntl
Q(t)
Рис. 12.41. Осциллоrрамма пуска асинхронноrо двиrателя
На представленных характеристиках Хс 1(00), Xd Х; <р(оо). Этому случаю от.
вечает кривая 3 на рис. 12.38.
В рассматриваемом случае при включении емкости ПОСJlедовательно с двиrателем, име.
юшим иормальную скорость, самовозбуждение практически не проявляется, так как не наблю-
дается изменений ни скорости
двиrателя (биений), ни тока и
напряжения в сети, питаюшей
двиrатеJlь.
Расчет условий самовоз-
буждения. При пуске двиrа-
телей MorYT быть рассчитаны
условия самовозбуждения с
помощью характеристическоrо
уравнения, получаемоrо из ос-
HOBHoro уравнения системы
(источник напряжения U
сопst" емкость Хс включена
последовательно с асинхрон-
ным двиrателем). Предпола-
rая, что цепь линейна, а на-
чальные условия нулевые,
можно записать простейшее
уравнение эквивалентной це-
пи, имеюшей кроме упомяну-
тых элементов активное сопро-
тивление R:
1ft) ключен.
Пуr:кr: Хс Выключение ХС Х"I
U1llllllllllllrrrrrrllllllll1fтIШПllllllllllтIIIIШШПШIIПШIШUЛIII 1IIfllllllllШlпшшmШШПllШlПШШПfllJUl\Шllll1ПШ
Рис. 12.42. Осциллоrрамма пуска асинхронноrо двш'ате-
ля при прохождении зоны самовозбуждения
u R/ + хс (р) / + qr (р) (р + jоод).
Здесь W(p) потокосцепление в асинхронноМ двиrателе, одинаковое как в продольной, так
и поперечной осях: W(P) == /(х + рТх')/(рТ+l); Хс (р) == хс /(р + jоод), rде ooд уrловая
скорость двиrателя.
Характеристическое уравнение имеет вид
D (р) == Тх'р3 + (TR + х) р2 + j 2оодТхс р2 + (R + тхс
TOO х,) Р + jоод (TR + 2х) р + хс oo x + jООдR == О.
415
rраница возникиовения колебаний. В соответствии с методом D разбиения, разделяя
уравнение на два и заменяя р на jw, rде w частота свободных колебаний, будем иметь
уравиение rраницы самовозбуждении:
[хс'/(юд ш)2 (х+ %')/2]2 + [R/(wд ю)]2 == [(x x')/2p.
Пример 12.1. Асинхронный
двиrатель мощностью 35 кВт, Haxo
дящийся внеподвижном (8 == 1) coc
тоянии, запускается от reHepaTopa
мощностью 40 кВт.
Выяснить, как при соизмери-
мой (k соиз == Р д / Р r == 0,88) мощности
двиrателя и reHepaTopa будет, изме-
няться характер переходноrо пре
цесса в зависимости от момента со-
противления на валу двиrателя и
способа реrулирования возбужде-
ния reHepaTopa.
Решение. Проведем серию эк-
спериментов: 1) при иенаrруженном
двиrателе и наrрузке (момент сопро
тивления М с ), составляющей при-
мерно 50% от номинальной, коrда
reHepaTop работает без АРВ (рис.
12.43); 2) при пуске от шин неизмен-
Horo напряжения (рис. 12.44); 3) при
трех различных типах АРВ (рис.
12.45, 12.46, 12.47).'В каждом случае
найдем время пуска iп"ск и харак-
терные значения напряжения reHe
ратора (И макс ' Имин). Результаты
опытов сведем в таблицу:
SA=f
s=f
ВА=О,99
Ur:,.,оис= f
1,= (,5
Ur, "'цн= од [/НО'"
If= 1,5
Мд=О
IA=O,57
О,'
t
0,2
,
0,3
Рис. 12.43. Неудачный пуск двиrателя от reHe-
ратора соизмеримой мощности
,
0//0(;
Номер рисуика t пуск , С U*r.мин U. r . макс М.макс
IM.c ol M.c Источник и закон
реrулироваиия Мс I Мс Мс I Мс Mc O I Мс Мс ol Мс
O.54 О 0,54 o 0,54 0.54 0,54
12.43 cr без АРВ 0,11
12.44 а (j Шины, И r == const 0,20 0,23 3,63 3,63
12.45 а (j cr с APВI 0,54 2,93 0,24 0,24 1,19 1,19 2,14 2,14
12.46 а (j cr с APBII 0,48 1,62 0,50 0,50 1,03 1,03 2,05 2,05
12.47 а (j cr с АРЮII i 0,37 0,68 0,50 0,50 1,08 1,03 2,51 2,59
в таблице приняты следующие обозначения: М*, И* величины, выраженные в до-
лях от номинальНых значений, отн. ед.; tпуск время пуска, с; АРВ! по отклонению на-
пряжения пропорциональное реrулирование; APBII по отклонению напряжения и
первой производной тока reHepaTopa; APBIII по отклоиению напряжения, первой про-
изводной тока reHepaTopa и увеличенному в 1,4 раза потолочному значению тока возбуждения.
ИЗ рассмотрения таблицы и осциллоrрамм (рис. 12.43 12.47) можно сделать следую-
щие выводы.
При пуске асинхронноrо двиrателя напряжение reHepaTopa 'соизмеримой мощности в
первый момент после включения двиrателя резко уменьшается вследствие падения напря
жения в переходном реактивном сопротивлении reHepaTopa и последующем ero размаrничи
вании. Далее, как видно из осциллоrраммы, приведенной на рис. 12.43, при тяжелом пуске
двиrатель не может быть пущен. Условия пуска MorYT быть облеrчены выбором двиrателя с
416
меньшим пусковым током, повышением мощности reHepaTopa или установкой реrУЛЯТОРОБl '
возбуждения с оптимальным для данных условнй законом реrулирования возбуждения. .
Наличие на reHepaTope АРВ пропорциональноrо типа (APBI) позволяет произвести
запуск ненаrруженноrо двнrателя (см. рис. 12.45, а). Пуск наrруженноrо ДВИl'ателя (М С ==
== 0,54 М) происходит за более длнтельное время tпуеR (см. рис. 12.45, 6).
0,1
I д = 0,6
o,z 0,3 с
IA=O
Mд=o,'5
. I д :о,'75
8д:О,оZ5
,
r
Il/
o,z 0,3,
Рис. 12.44. пуск двиrателя 0'1 шин (и II == const)
Введение в закон реrулирования возбуждения первой производной по току reHepaTopa
(APBII) позволяет снизить провал напряжения н максимальный выброс напряжения (ин.макс)
в момент резкоrо уменьшения пусковоrо тока на последнем этапе разrона двиrателя
(см. рис. 12.46}..
Время пуска можно уменьшить за счет лучшеrо поддержания напряження rеиератора
в процессе пуска после затухания электромаrнитноrо переходноrо процесса. Это достиraет--
ся при APBIII, превышающем потолочное значение тока возбуждения (рис. 12.47).
Для сравнения на осциллоrраммах (см. рнс. 12.44, а, 6) показан процесс пуска Harpy-
женноrо (М е == 0,54) и ненаrруженноrо (М е == О) асинхронноrо двиrателя от шин бесконеч-
нои мощности (Ир == сопst).
Пример 12.2. .К явнополюсному reHepaTopy, нмеющему параметры Ха == 0,96; x q ==
== 0,575; X == 0,2; , == 0,014, подключается наrрузка Zп == 1, cos<p == 0,8.
Оп Р е Д е л и т ь сннжение напряжения в момент включення.
Решение. Полное сопротивление reHepaTopa и н аrрузки xa'jJ == 1,56; xq'jJ == 1,175,
x 'jJ == 0,8,,'jJ == 0,81. Соrласно (12.14), находим и о == Уl,175 2 + 0,812/(1,56.1,175+0,812)==
== 0,57.
Пример 12.3. От явнополюсноrо reHepaTopa пускается асинхронный двиrатель. Пара-
метры reHepaTopa : Р р == 100 кВт; Ир == 230 В; cos<PP == 0,8; 'I1 p == 0,907; Ха == 1 ,25; X ==
== 0,1; x q == 0,701;, == 0,02; Тао == 1,63 с; GD == 19 Kr'M 2 . Возбуждение электромашннное.
Сопротивление сети: Хе == 0,05, 'е == 0,04. reHepaTop вращается первичным двиrателем
(дизель) мощностью Р Н.Д == 121 кВт с частотой вращения п == 1500 об/мин. Параметры pery-
лирования: Т к== 0,0175 с; (х о == 0,436 рад; К.. == 0,02; 1: == 0,186. Параметры двиrателя:
14 84
417
Р д 41 кВт; Ид 220 В; cos!p 0,875; GD 25,2 Kr'M 2 ; 80 0,02; Т}Д 0,87; kt ==
== 6,5; при пуске COS!p 0,32; сопротивление сети 'с == 0,03.
а п р е Д е л и т ь изменение уrловой скорости (частоты вращения) reHepaTopa и изме-
нения напряжения при прямом пуске двиrателя.
Решение. Соrласно (12.13), находим:
0,87 - 0,875. 100 ( 220 ) 2
2 == о 33-
н 6,5'0,8-41 230 "
ХН == 2 н ЮП 'i'п + хс О ,36; 'н == 2 н COS 'i'п + 'с == О, 145; xd == xd + ХН == 1,61;
x X +XH 0,46; Xq Xq+XH 1,06; , 0,165; ZH -V X2+,2 ==0,39;
11) .SJ ='
Ur=f
U,.=f
IF=1,71(.
t '/(=o,5lic
Мд=о
1,=0,75
SA"o,005
r= ...
,
0.1
,
o,z
0, з
.
D,1f
.
815
. I
4Ii О, 7
1,=3,96
и,'"
, 5) . Sл:: f
1r=2.98
.J.F f,85
M A =o,5/i.
I,= 75
SA=o,025
В,! o.Z 0,3
3,0 t,a
. J
Рис. 12.45. Пуск от реrулируемоrо reHepaTopa (APEI)
И8
\<)
<::s
11
:z:
i i>I:
:s .
" . . - .:i t::
, !"'3 "to со
.... с:> "ч'
-u-
:n
....
11
(/)
со
14"
....
,.
C:I
ta 1<> ....
IIQ <::O . IIQ ",
...:- 11 с::,
" "- <::s
11
(1) . ""
...:'
<i:>
....
q
...:::
.::J-
..:-
..., 103
с::,
c\i ..:-
,.
'" ""
.., ...:'
...:-
),'
'" ....
.. .... .
t:
"i.>
с::,
....
"',.,
О>\<)
1'")<::0
JI fI
"
::s-
<::><N
11 <::>
C:>
11
....
"
"'>
<::о'
11
..,.
:s -
Т-iП-ПТ
......
....
....
а.
CQ
..,.
<::s
'"
g.
fo
'"
а,
ou
==
ou
....
<N
<::s"
о
а
;:;J
ou
»
а,
==
о::
»
....
ou
а,
.р
!)
.::t-
<::s
u
=:
а.
1'3
<::s
<'.1
с:>
COS'I'H == rH/ZH == 0,425;
K == о ,81; Ко == 0,24.
Напряжение reHepaTopa в момент включения двиrателя [соrласно (12.14)] и о == K E ==
0== 0,81.1 == 0,81. Коэффициеит наrрузки, набрасываемой на arperaT,
и OM COS 'I'н
КА ==
ZH'lJ1' cos '1'1'
Постоянная инерции
Рl' 1. 0,425. 100
Р н . д == 0,39.0,907.0,8. 121
== 1 ,25.
2 . 74 . 25,2 150 2 4
0==22 с
121 . 10002 "
2 74GD 2 n 2
т == '
J Р . 10002
п.д
Для вычисления по формуле (12.15) наХОДИМ: р == 4,47; f\ == 5; а == 0,465; а о == 0.0448;
, 5 д =1
'E/r=f
. 1.,=0,735
Мд=О
1r=0
U r ={
11':::. 1,.77
Мд=о
1 r =0,6
sA O,OOLi
o.Z 0,5 о,ч. 45 0,5 0,7 t, IJ
о) 5 = {. О 0,1
Ur=f
U r =0,583
Ur.И/JJ{=О,5
t;, ск::0,б8С
lт= {, 84'
М д =0,54
1r=0,75
5A=o,OZ5
I I .1
0;1 0,2.: 0,3
t , ,. I .
О,Ч 0,5' 0,5' 0,7 t, с .
t
Рис. 12.47. Пу.ск от реrулируемоrо feиератора (APBIII)
420
w== 1,35 рад; Tw == 1,5 рад; Tw== 0,135. Подставляя найденные значения, получим
. -
n == О 12' о) == 1 0 12 + 0 12 e t/O.l35 == 088 + 0 12 e 7.4t
MaHC " " ".
Измененне о) == f(t) показано на рис. 12.48 (кривая 1).
Найдем далее изменен не напряжения соrласно (12.16), т. е. с учетом влияния изменения
скорости, что необходнмо, так как QМЗRС == 0,12> 0,05:
( 0,81 .0,12.0,135 ) 1.63'/24/0.81
и==(1 0,12)+ 0,81 0,88+0,24.1,6з о,135.0,81 е
t
0,81.0,12. 0,135 e 0.135 == 0,88 O,2e 2,lt O,05e 7,4t
0,24. 1,63 O,135. 0.81
lIJ* У*,
t
0,9
0,3
0,4
0;5 t,G
Рис. 12.48. Изменение скорости и напря-
жения в относнтельных единнцах
По данным этоrо расчета построена кривая 2 на рис. 12.48.
Пример 12.4. В узлаJ!! наrрузки имеется 20 двиrателей. Закон распределения Р(х)
включеннй х в теченне 10 с можно представить следующим образом:
х
Р(х)
О
0,06
1
0,39
2
0,39
3
0,14
4
0,02
Н а й т и наиболее вероятное число двиrателей, включаемых одновременно.
Решение. Из прнведенных данных вндно, что вероятность одноrо или двух включений
р == 0,39. Соrласно (12.17), наиболее вероятное число включеннй за 10 с
N == 0.0,06+ 1.0.39+2.0,39 +3.0,14+4.0,02== 1,67.
Одно включение будет наступать с вероятностью
р == О ,39 за tJ.t == 10/1,67 == 6 с.
Максимальное вероятное количество наибольшеrо числа совместно включаемых двиrа-
телей ko можно найтн соrласно (12.18):
ko == (20 + 1) 0,39 == 21.0,39 == 8,19, нлн ko 8.
При общем числе работающих двиrателей n == 20 и вероятности ОДНоrо включения
Р F 0,39 найдем, соrласно (12.19), вероятность Toro, что у 8 двиrателей из 20 повторится в
течение 6 с одно включение:
201
Р ( 20 8 ) == . 0398 ( 1 o 39 ) 12 == О 178
, 81 121' , "
Вероятность Toro, что произойдет одновременное включение меньшеrо (k') или больше.
1'0 (k") числа электродвиrателей (чем ko == 8), находнтся СОl'ласно (12.20).
При k' == 7 имеем
z' == (7 О ,39 . 2О)/уо ,39 (l 0-,39) 20 == О ,367.
Аналоrично при k" == 9 имеем z" == 0,55. По найденным значениям z' и z" помощью
таблнц, имеющих вид
421
z"
Ф(z)
0,36
0,1406
0,37
0,1443
0,55
0,2088
находим после экстраполяции р(7 < 8 < 9) == Ф(z") Ф(z') == 0,2088 0,1443 == 0,0645,
откуда следует, что включение числа двиrателей, меньшеrо 9 и большеrо 7, наиболее веро-
ятно.
Пример 12.5. Узел наrрузки, представлениый эквивалентным асинхронным дциrате-
лем, получает питание от шин мощной системы и с через компенсированную емкостью одно-
цепную линию передачи (рис. 12.49).
Параметры линии (и == 110 кВ; Х lI == 0,30; 'п == 0,1;
(кт == 110/11 кВ; Х Т == 0,1; 'т == О); двиrателя (8 == 0,5; Хд ==
Хс == 0,15;) трансформатора
1,9; X == 0,6; Т == 200 рад)
ХС
Рие. 12.49. Схема включения эк-
вивалентиоrо асинхронноrо дви-
rателя
а с
выражены в относитеЛЬJilЫХ единицах. Напряжение на шинах системы и с == 1. За базисные
веЛИЧИIIЫ приияты 8б == 121 МВ.А и Uб == 110 кВ.
Про в е р и т ь, возможно ли самовозбуждение асинхрон-
Horo двиrателя при уrловой скорости о)д == 0,97.
Решение. У)1авнение rраницы самовозбуждения асинхрон-
Horo двиrателя имеет вид
1
q 1;6 R
ША OtI
Рис.. 12.5(). Зоны само-
возбуждения:
z.,.J<8/("--{J) 1ИR/(fI)д '
fl)д ф
R вп . .
("'д " )2
Хе. ВН " .
[Хс/(Фд 0»2 (х + х')/2)2 + (R/(О)д 0»]2 == [(X х')/2]2.
Здесь ООд уrловая CKOP CTЬ ротора, отн. ед.; о) частота
свободных колебаний; Х == Хд + Х т + Х п == 1,9 + 0,1 + 0,3 ==
== 2,3; х' == X + Х т + Х п == 0,6 + 0,1 + 0,3 == 1.
В координатах R/(О)д 0»; хс/(оо д 0»2 rраница зоны
представляет собой полуокружность радиусом, равным (х
х')/2 == (2,з 1)/2 == 0,65, с центром на оси орд-инат на рас-
стоянии от начала координат, равном (х + х')/2 == (2,3 +
+ 1)/2 == 1,65. Зона самовозбуждения асинхронноrо двиrателя
построена на рис. 12.50 (кривая 1).
Для определеиия возможности самовозбуждения асинх-
pOHHoro двиrателя нанесем на рис. 12.50 характеристику внеш-
ией сети, которой соответствуют уравнения
Хс.вн == ХС/(О)Д 0»2 == О,15/(оо д 0»2;
R вп == 'п/(О)д (0) == 0,1 (о)д 0».
Изменяя (Юд (1) от О до 1, получим следующие резуль-
таты:
1
0,1
1
0,15
0,9
0,11
0,81
0,185
0,8
0,13
0,64
0,23
0,7
0,14
0,49
0,36
0,6
0,17
0,36
0,42
0,5
0,20
0,25
0,60
0,3
0,33
0,09
1,67
0,25
0,40
0,06
2,40
0,4
0,25
0,16
0,94
На рис. 12.50 нанесена характеристика внешней сети (кривая 2). Пересечение характе-
ристики виешией сети и rраницы зоны самовозбуждения возможно при о)д о) == 0,377
(точка а; ХС == 1,06) и Юд о) == 0,263 (точка Ь; ХС == 2,17). .
Чтобы решить вопрос о возможности самовозбуждения асинхронноrо двиrателя, Надо
найти частоту свободных колебаний Ф. Это можно сделать, рассмотрев условия резонанса в
схеме (см. рис. 12.49), при представлении двиrателя ero частотными характеристиками.
У СЛОБИЯМ резонанса соответствует уравнение
Хс/(ООд 0»2 == (х + 0)2Т2х')/(1 + 0)2Т2).
422
Для точки Ь имеем:
2,17 == (2,3 + ы2. 2002.1)1(1 + ы2. 2002);
1,17. 200 2 ы2 == 0,13;
2,17 + 2,17 . 200 2 ы2 == 2,3 + 20()S(J)2;
(J) == ::J:: 0,005 YO,I3/l,I7 == ::J:: 0,00167.
в точке а частота свободных колебаний равна 0,072.
Так как уrловая скорость двиrателя Ыд == 0,97, то действитель-
ное значение Ыд (J) в рассматриваемых условиях больше, чем раз-
ность частот (0,377 и 0,263), при которых возможно возникновение
самовозбуждения асиихронноrо двиrателя.
Пример 12.6. Рассматривается схема и условия применения пре-
дыдущеrо примера. .
Про в е р и т ь возможность возникновения самовозбуждения
асинхронноrо двиrателя в условиях пуска.
Решение. Уравнение rраницы самовозбуждения, приведенное в
предЫдущем примере, можно упростить так, что rран ца явится по-
ЛУЭЛЛИПСОМ, описываемым уравнением
(хс (J)i х) (хс /I) X') + (J) R2 == О.
Каждо му принятому значению Ыд соответствует зона самовоз-
буждения.
Мак симальное значение активноrо сопротивления, при котором
ВОЗможно самовозбуждение двиrателя, работающеrо со скоростью Ыд,
R MaRc == Юд (х х')/2.
Для определения условий самовозбуждения асиихроиноrо дви-
rателя во время nycIVa построим параболу, оrраничивающую все зо-
иы самовозбуждения ero:
хс == 2 [(х + х')/(х х')2) R aKc'
ХС
2,5 ..(
2,0 \
2 .
1.5 . ,
> .
ч.
0,8 1,0 R
Рис. 12.51. Зоны
самовозбуждения
при переменной
уrловой скорости
дВиrателя
Принимаем Ыд == 1. fраница зоны самовозбуждения определяется уравнением
(х с 1 . 2,3) (х с 1 . 1) + R2 == О.
. Определим координаты rраничных точек при Ыд == 1:
R MaRc == 1 (2 ,3 1) /2 == 0,65;
хс == 2 (2,3 + 1) . 0,652/(2,3 1)2 == 1,65.
Результаты расчетов для друrих значений Ы.д приведены ниже:
"'д .
R MaRc
хс
1
0,65
1,65
0,4
0.26
0,25
0,9
0,59
1,33
0,8
0,52
1,05
0,7
0,46
0,81
0,6
0,39
0,59
0,5
0,33
0,41
0,3
0,20
0,148
0,2
0,13
0,066
0,1
0,07
0,011
На рис. 12.51 показаны зоны самовозбуждения при скорости двиrателя Юд == 1,0 (кри-
вая 1); 0,9 (кривая 2); 0,5 (кривая 3), а также кривая 4, оrраничивающая зоны в процессе
пуска. Из рисунка видно, что в процессе пуска при изменении скорости от О до::::::О,4 возмож-
но возникновение самовозбуждения.
Контрольные вопросы
12.1. Что такое узлы наrрузки и в каких двух наиболее существенных аспектах MorYT
рассматриваться происходящие в них переходные процессы?
12.2. Какие переходные процессы представляют наибольший интерес при исследова-
нии режимов узл ов наrрузки?
12.3. В чем особенность пуска синхронных и асинхронных двиrателей? В каких слу-
чаях необходимо применять специальные пусковые устройства?
12.4. Каковы причины появлеиия резких изменений режима в СИGтемах электроснаб-
423
ження. Каковы УСЛОВ1I:Я устойчивости при набросе наrрузки на синхронный двиrатель? на
асинхронный двнrатель?
12.5. Чем отличаются процессы в узле наrрузки по условиям их протекания при Ha
бросе иаrрузки на валу двиrателя (увелнчения механическоrо момента на валу)? при пони
жении напряжения на шинах?
12.6. Перечислите особенности учета динамических характеристик синхронных и
асинхронных двиrателей при изменении напряжения в узлах наrрузки.
12.7. Для чеrо применяется самозапуск? Что нужно определить для установления дo
иустимости самозапуска н оrраничения ero возможностей?
12.8. В каких случаях и при каких условиях может применяться АПВ отдельных
,лементов системы электроснабжения линий, трансформаторов н шин резервноrо питания
отдельных двиrателей и их rрупп? Нарисуйте примерные схемы АПВ дЛЯ различных под
станцнй.
12.9. Каково влияние толчкообразных изменений наrрузки на работу систем различ
ной мощности? Какими мерами ero можно уменьшить? .
12.10. Как составляются основные уравнения для исследования режима системы при
толчкообразной наrрузке и какие пути решения этих уравнений известны?
12.11. Как НаДО проводить реrулирование возбуждения синхронных двиrателей в раз
личных условиях работы?
12.12. Как определить вероятность одновременноrо запуска нескольких двиrателей и
как подойти к определению влияния их запуска на напряжение в узле наrрузки, питаемоrо
от rеператора?
12.13. Какие характеристики [Р == <р(и)-, Q == <р(и)] имеют основные элементы наrруз-
ки 90IIектрических систем? В чем разница между статическими и динамическими характерис-
тиками наrрузки?
12.14. Как представить асинхронный двиrатель упрощенной схемой замещения при
анализе происходящих в узле наrрузки динамических процессов?
12.15. Как влияет намаrничивающий ток трансформаторов и'асинхронных двиrателей
на зависимость реактивной мощности, потребляемой наrрузкой, от напряжения?
12.16. Что такое критическое скольжение, как ero определить и как сказывается ero
знаoreние на характере переходноrо процесса?
12.17. Как изменяется ток асинхронноrо двиrателя при снижении напряжения? при
остановке двиrателя?
12.18. Как влияет понижение частоты в системе на устойчивость асинхронноrо двиrа
тел я?
12.19. Что тахое переrрузочная способность синхронноrо и асинхроННОro двиrателей?
12.20. При каком напряжении на шинах двиrателя наступает ero неусто,ЙЧИВОСТЬ?
от каких факторов зависит это значение?
12.21. Как ВJlияет на устойчивость синхронных' и асинхронных двиrателей, входящих в
t«Т&В наrРУЗК1I, OДHOBpeMe Hoe снижение напряжения и частоты?
Темы рефератов
1. Порядок подключения к сети мощных синхронных и асинхронных двиrателеii..
2. Толчкообразные иаrрузки и борьба с их влиянием на систему.
З. Автоматическое включение резерва.
4. Самовозбуждени синхронных н асИНХрОННЫХ двиrателей наrрузки.
424
rЛАВА 13
ПЕРЕХОДНblЕ ПРОЦЕССbl ПРИ ВКЛЮЧ'ЕНИИ СИНХРОННblХ
rEHEPA ТОРОВ
f3.f. ОБЩИЕ ПОЛОЖЕНИЯ
Существует два способа включения в сеть синхронных reHepaTopoB син.-
хрон.uзация и са,м,осин.хрон.изация, разновидностью которой является повmорн.ое
вКЛlOчен.ие с са.мосин.хрон.изацuей. Эти способы MorYT быть, вообще rоворя, как ав-
томатическими, так и ручными, хотя практически в последнее время широко
применяются автоматические, а не ручные операции.
При с и н х р о н и з а Ц и и для подключаемоrо reHepaTopa и сети требуется
соблюдение следующих условий:
а) равенства амплитуд напряжений;
б) равенства частот;
в) совпадения фаз.
При этом подключение reHepaTopa к сети не вызывает уравнительных токов,
толчков мощности и изменения напряжения в системе.
Синхронизация (ее иноrда называют «точной») требует времени для уравни-
вания напряжений и частот reHepaTopa и сети, аппаратура для синхронизации бы-
вает довольно сложна. В аварийных условиях, коrда напряжение и частота сети
MorYT значительно отклоняться от нормальных значений и быстро изменяться,
аппаратура точной автоматической синхронизации, как правило, задерЖИВает
(до 5 мин и более) процесс синхронизации.
При повреждении устройств точной автоматической синхронизации или по.
rрешностях во время ручной синхронизации возможно несинхронное включение
reHepaTopa в сеть с опасными для Hero толчками уравнительноrо тока и активной
мощности. При несовпадении векторов напряжений синхронизируемоrо reHepaTo-
ра и сети по фазе ударный ток включения приближенно определяется выражениеh>1
i A == V2.1,8.1E/(x +xc), (13.1)
rде .1Е rеометрическая разность между э. д. с. reHepaTopa Е; за сверхпереход-
H!'IM индуктивным сопротивлением в продольной оси и напряжением сети и с;
Xd, ХС сопротивление reHepaTopa и эквивалентное сопротивление системы.
При б == n и ХС == О ударный ток несинхронноrо включения, имея наиболь-
шее значение iYA.M8KC == 2i A.КO может вызвать повреждение обмоток reHepaтopa.
Нарушение условия равенства частот reHepaTopa и сети может также повлечь за
собой нежелательные последствия: reHepaTop будет втяrиваться медленно, испы-
тывая качания, создавая толчки тока и активной мощности в системе. Если расхож-
дение частот при этом большое (3 5%), то reHepaTop при нежесткой связи может
перейти в асинхронный режим.
425
Пропесс синхронизации может бы", рассчитан способом площадей или по пол
НЫМ ур:шнениям.
С а м о с и н х р о н и З а Ц и я r е н е р а т о р о в обладает рядом сущест
венных преимуществ. К ним относятся: простота схемы и аппаратуры; надежность
работы устройств; быстрота включения reHepaTopa в сеть, что особенно важно
при появлении дефицита мощности в энерrосистеме в аварийных условиях. При'
н
4,0
12,0
2,0
4;0 ист иHOM ист =О,ЭU НОМ з=+ 5%
Рис. 13.1. Переходный момент reHepa Рис. 13.2. Изменения тока статора, напряжения и
торов с успокоительными обмотками при тока ротора rидроrенератора прн самосинхрониза-
различных режимах: ции
J при самосинхроннзацнн (з о. 60 1350);
2 при коротком замыкании; 3 прн несин.
хроииом включеиии (з о. 60 135°)
10,0
8,0
6,0
4,0
2,0
О
самосинхронизации включение в сеть reHepaTopoB происходит при снятом возбуж-
дении. При этом в момент включения значительных толчков активной мощности
и опасных механических усилий не возникает. В самом деле, как видно из рис.
13.1, момент при самосинхронизации меньше, чем при коротком замыкании.
Свободный ток в обмотке статора и периодические токи во всех контурах reHepa-
тора затухают С большой скоростью (практически за 2 3 периода качания
ротора). .
Максимальные значения апериодической и ll риодической составляющих то-
ка статора при самосинхронизации всеrда меньше Toro тока KopoTKoro замыкания
(на выводах reHepaTopa) , на который рассчитывают reHepaTopbI.
На рис. 13.2 приведена осциллоrрамма, показывающая характер изменения
тОКа статора, тока ротора и напряжения на шинаХ rидроrенератора при самосИНХ-
ронизации. Напряжение на шинах невозбужденноrоrенератора при включении
ero в сеть может быть приближенно найдено соrласно выражению
Ир == И а [1 Ха/(Х р + Ха)]' (13.2)
,
rде Х р == Xd для начала процесса синхронизации и Х р == Ха при подходе к синх
ронизму.
Если от шии станции питается особо ответственный потребитель, требующий постоян-
ства напряжения, то необходимо проверить допустимость самосинхронизации. Если по усло-
виям понижения напряжения в сети самосинхронизация оказывается неприеМJ1СМОЙ, то при-
426
Inт тпчнvln антоматическvю СИНХDонизапию. НеСМОТDЯ на недостатки точиая автомати
\.\t\\w\Ul. l. rt.\\.hm \)l. 'A. l.\\.\t \t.k \\\\ .'bb'\\'\\ "d\\\b. "C':;c.vH),1.b'd И'i:I п "dас.3.. 3..'К.u\ 3..ad"'Q '9n3...0у.1.',П..u.
МеПRЩТ rQ пrw a,QTQttHlr«YJ;CKYlO c««zrPQtfllJl1IIHro. ПССМОТР1I Нд .неЛОСТдТКИ.. ТОЧИ.!fЯ .!fRTnlif.AT.и
ческая СИНХРОНИзация должна применяться также в тех случаях, Коrда rеиераторы MorYT вре-
менно работать на выделенную наrрузку. Синхронизация таких reHepaTopoB с остальной ча-
стью энерrосистемы производится без перерыва энерrоснабжения потребителей, что возмож
но только при точной синхронизации.
Надежность и успешность осуществления самосинхронизации повышается в тех слу
чаях, коrда после включения reHepaTopa в сеть асинхр(}нный момент, создаваемый reHepaTo-
ром, больше момента турбины. Практически для надежноrо втяrивания в синхроиизм вклю-
чение, как правило, производится при уrловой скорости, меньшей синхронной и избыточ-
ный момент сообщает вращающимся массам ротора ускорение, необходимое для' Toro, чтобы
Itдотянуть» ротор до синхронной скорости. Можно связать избыточный момент с сообщаемым
ротору ускорением и полУ'IИТЬ простой критерий самосинхронизации. Так, для конкретных
условий можно экспериментально установить, что в момент включения зиачение ускорения,
обеспечивающее успешную синхронизацию,
rк === woLJ./J'r/T./ ,
rде TJ выражеио в секундах, АМ в относительиых единицах, /% В радианах в секунду
квадрате.
Если принять АМ 0,8М ае и выразить /% в repIIax в секуиду (rwc) , то
Q; O,8M ac f/ TJ,
rде f == 50 rII.
При определении Мае должно учитываться наличие включениоl'О в обмотку ротора ra-
сительноrо сопротивления, так что фактическое
T ер КТ d oX /Xd,
rде к == rfl(rj + ([') (rj сопротивление обмотки возбуждения; 'р rасительное сопротив-
леиие).
Для rидроrенераторов с успокоительными обмотками и турбоrеиераторов с массивным
ротором требования в отношении допустимоrо значения ускорения обычно не имеют практи
ческоrо значения в связи с большим асинхронным моментом.
Выше указывалось, что rидроrенераторы входят в синхроиизм И при отсутствии тока
возбуждения за счет момента явнополюсности. Но при этом возможио вхождение reHepaTopoB
в синхронизм с неправильной полярностью, т. е. полярностью, не соответствующей той, ко-
торая будет после включения возбуждения. В этом случае после включения возбуждения po
тор reHepaTopa провора,чивается на 180°. Этот процесс сопровождается довольно значитель-
ными качаниями и ииоrда может привести к нарушению синхронизма. Поэтому в случае
включения ,машины в сеть с относительно малой скоростью следует подавать возбуждение
немедленно после включения reHep'aTopa.,
При включении reHepaTopa в сеть с большим скольжением, например при автоматичес-
ком повторном включении с самосинхронизацией (АПВС), напротив, желательно задержи
вать включение возбуждения, так как при слишком быстром включении ток возбуждения
может возрасти до номинальноrо значения еще тоrда, коrда скольжение не успело умень-
шиться.
В асиихронном режиме возбуждеиной машины MorYT быть большие токи, значитель-
иые колебания напряжения в системе и связаиные с этим явления, опасные и для системы,
'и для синхронизируемоrо reHepaTopa. При установлении вЬзможиости самосинхронизации
необходимо убедиться, что защита, установленная на двиrателях и отдельных линиях, будет
работать правильно и не отключит их при кратковременном понижении напряжения во вре-
мя самосинхронизации. Необходимо,также проверить работу АРЧВ турбин, которые при не-
правильной настройке MorYT вызвать качания машин после самосинхронизации.
13.2. ПРОЦЕССЫ ПРИ САМОСИНХРОНИЗАЦИИ
Введение в синхронизм синхронной машины имеет несколько этапов. Сначала
. невозбужденная машина первичным двиrателем приводится во вращение и дово-
дится до скорости, близкой к синхронной, после чеrо подключается к сети. Под-
ключение к сети обычно проводится при скольжении ::I::(2 3) %, хотя и включение
427
при больших скольжениях не представляет какой либо опасности. Иноrда даже
оказывается целесообразным подключать машину к сети при неподвижном рото-
ре и одновременно начинать разrонятЬ ее первичным двиrателем (так называемый
электромеханический пуск). ВО время пуска и подключения машины к сети об-
мотка возбуждения замкнута на rасительное сопротивление, или автомат rашения
поля (Аrп), или якорь невозбужденноrо возбудителя. Если машина подключает-
ся к сети со скольжением, меньшим 3 5%, то возбуждение подается одновремен-
но с включением выключателя. Если подключение к сети производится при б6ль
ших скольжениях, то машина некоторое время работает без возбуждения. Только
после Toro, как она «подтянется», к скорости, близкой к синхронной [до s ==
== + (2 3)%], подается возбуждение. Появляющийся синхронный момент уве-
личивает колебания скольжения и обеспечивает вхождение в синхронизм обычно
независимо от уrла включения, хотя ero значение иrрает определенную роль.
Вхождение в синхронизм может происходить только за счет синхронноrо
(знакопеременноrо) момента, создающеrо пульсации скорости, в процессе которых
ротор достиrает синхронной скорости (s == О). Асинхронные и механические MO
менты, действующие встречно или соrласно (табл. 13.1), не моrли бы обеспечить
вхождения в синхронизм. Они или только подводили бы ротор к синхронной CKO
рости, или заставляли бы ero «проскакиВать» синхронизм и вновь переходить на
синхронную работу при скольжении друrоrо знака.
Таб л и ца 13.1
А. Одииаковое иаправление момеитов
Б. Разное направленне моментов
Пуск и самосиихронизация сиихронных re-
нераторов: ш < О)в
Пуск синхронных Двиrателей: о) < 0)0
м
м
(J»(J)fI
Автоматическое повторное включение с са-
мосинхронизацией: о) > 0)0
м
При проведении самосинхронизации существенное значение имеют характе-
ристики первичныХ двиrателей. ОНИ должны способствовать быстрому разrону
af'peraTa. Механи кий MOMeHT развиваемый в процессе синхронизации, должен
находиться в определенном соотношении с асинхронным моментом и не должен
быть слишком большим по сравнению с ним. Соотношения эти таковы: механичес-
428
кии момент должен быть меньше максимальноrо значения ср днеrо асинхронноrо
момента, если в процессе самосинхронизации асинхронный и механический момен-
ты направлены одинаково. Если же эти моменты имеют разные знаки, то необхо-
димо, чтобы результирующий механический момент был меньше минимальноrо
значения среднеrо асинхронноrо момента. Математически это формулируется сле-
дующим образом:
Ммех < КIМас.маие3
Ммех < К2Мае.мии,
rде К1 и К 2 коэффициенты запаса, меньшие единицы"'.
Для иллюстрации приведенных соотношений рассмотрим табл. 13.1. rде по-
казаны случаи, коrда знаки асинхронноrо и механическоrо моментов оказываются
(13.3)
(13.4)
а) б)
М,з о-
оо+L;Л
:1 т
МаСI S 0'0 °cнl O Э"о+JЛ
I
, I З"о 2r.
I
I
I
1
1 f ,
о- 2 Lf Б t,c
Рис. 13.3. Самосинхронизация машины, работающей при ск(}о
рости, большей синхронной:
а измененне момента и скольжения ири изменении тока возбуждения,
t) изменение yrJla 6<=t(t) в процессе самосиихроиизации
одинаковыми (А) или различными (Б). Очевидно, что несоблюдение требования
(13.3) в случае А приведет к «проскакиванию» ротора через возможный установив-
шиися асинхронный режим (при SYCT) и через синхронный режим. Это, в свою
очередь, приведет к выпадению из синхронизма со скольжением друrоrо знака.
Несоблюдение требования (13.4) в случае Б приведет к «застреванию» ротора при
большом скольжении (при Мас == Ммии) и к невозможности осуществления син-
хронизации.
На рис. 13.3, а показаны изменения тока возбуждения [/ и получающееся
при этом соотношение площадок ускорения и торможения, определяющих харак-
тер процесса самосинхронизации машины, работавшей при скорости, большей
синхронной, а на рис. 13.3, б протекание процесса во времени. Как следует
из рисунков, после подачи возбуждения в момент t == О ротор под действием
появившеrося синхронноro момента затормаживается, при этом скольжение S
и асинхронный момент Мае == P wP уменьшаются, достиrая нуля при б == б сп .
Далее уrол с5 начинает уменьшаться уже в синхронном режиме (пptl среднем
* у коэффициентов K1J имеется uекоторая зависимость от уrла включения.
429
значении скольжения, равном нулю) и процесс качаний определяется соотноше-
нием площадок ускорения' и торможения (рис. 13.3, 6). Призначительных вращаю
щем моменте турбины и начальном скольжении процесс вхождения в синхронизм
затяrивается, сопровождаясь большими качаниями, причем установившийся
уrол может оказаться равным 2п, 4п, '6п, т. е. ротор может, как это покэзано
на рис. 13.4, 2 3 раза провернуться, прежде чем войдет в синхронизм.
6
б о +67f
Оо+51С
Б о +41f
Бо+;т
Во+1С
2 t,a
а) о-
4
о
О'
3п
S'10
2П
3
2 r.
1
о
о)
м Еч
1,5 1,0
1,0
0,5
Eq
0,5
0'5
1,O I
Рис. 13.4. Влияние начальноrо скольже
ния 80 на условии вхождения в синхронизм
[-енератора, имеющеrо Т J 6 с и М Т ==
== 0,2 при 1'10 == О и подаче возбуждения
одновременно с включением reHepaTopa в
сеть:
1 B. 2,5%; 2 Bo 6%; 3 Bo 8%; 4
B. 1l %
-Ь,С
8)
Б'''/о О
2 п
1 2 Lf t, G
2 л о
3 .
2)
, м Eq Е
1,0
0,5 М СН
0,5
D
t,c
Рис. 13.5. Характер процесса самосинхронизации reHepaTopa Т J == 15 с:
М Т == 0,25):
а измененне уr.ла и ско.льжения прн вк.лючении со скоростью. бо.льшей сиихронной
(s. з%. 60""450); б изменения Мае' М Т ' М еи ' Eq в с.лучае а; 8 изменения уrла и
скольження при включении со скоростью. меньшей синхронной (8"'+3%. l\0 0); z нз-
менения Мас' МТ' Мен' Eq
430
Более полны!{ анализ процесса втяrивания в синхронизм, а также определение усло
вий успешной синхронизации можно провести путем решения уравнений Пар ка ropeBa.
Это решение при тех или иных начальных условиях позволяет найти изменение уrла э. д. с.
вращающеrо момента и тока при вхождении машины в синхронизм при самосинхронизации
или ресинхронизации.
На рис. 13.5 приведены результаты решения указанных уравнений при исследовании
процесса вхождения в синхронизм мощноrо синхронноrо reHepaTopa. Кривые, изображенные
на рис.' 13.5, а б, относятся к случаю включения в сеть rеиератора при скольжении 50
3%, б о 450 и подаче возбуждения одновременно с подключением машины к сети.
51f \ 5=7'10
S= 5
.1ш>О
1,,.0
!J.ш<О
Рис. 13.7. Фазовый портрет синхронизации reHepa<r<r
ра с сетью
Рис. 13.6. Влияние знака и значения начальноrо
скольжения на процесс ресинхронизации reHepaтopa
имеющеrо Т J == 16 с, М Т == 0,2, 60 == О
Асинхронный момент при включении оказывается несколько больше механическоrо, но ро-
тор продолжает движение за счет избытка кинетической энерrии, накопленной при вращении
со скольжением 50' При аиализе вхождения в сиихронизм предполаrалось, что после про-
хождения скольжения через нуль наступает синхронный режим и дальнейший анализ мож-
но производить способом площадей. Аналитическое исследование вхождения в синхронизм
показывает допустимость TaKoro предположения, так как после прохождения скольжения
через нуль асинхронный момент, не учитываемый в методе площадей, способствует удержа-
ЩIЮ' машины в синхронизме, увеличивая затухание колебаний.
Обычно М Т > О И процесс при включении машины с положительным скольжением
(скорость меньше синхронной) и одинаковыми по знаку механическим и асинхронным момен-
тах имеет вид, показанный на рис. 13:5, в, с. Влияние начальноrо скольжения иллюстри-
руется приведенными на рис. 13.6 характеристиками.
. Сопоставление процесса синхронизации при включении с отрицательными и положи-
тельными скольжениями показывает, что более спокойное вхождение в синхронизм, сопро-
вождающееся меньшим числом проворотов ротора, имеет место при включении со скоростью,
меньшей синхронной.
Анализ вхождеиия в синхронизм можно также проводить с помощью рассыоренияя
процесса иа фазовой поверхности (цилиндре) или на фазовой плоскости (6, Дro). Рассмотрим
случай синхронизации reHepaTopa, подключаемоrо к сети бесконечной мощности через со-
противление сети ХС. Если через Дro обозначить отиосительную уrловую скорость ротора re-
нератора, то TaHreHc уrла иаклона траектории движеиия ротора на фазовой плоскости опре-
делится выражением
d/J.fu 1
tga == d6 Дro
1 ( E U и 2 (Xq X ) )
. siпВ+ 2 ' siп2В
dt 2 '1 J Дro Ха xqxd
Мас
т J ДШ
(13.5)
431
(/20
Таким образом, выражение (13.5) представляет собой уравнение касательной к фазовой
Кривой, построенной на фазовой плоскости. В (13.5) к реактивностям reHepaTopa должно
добавляться иидуктивное сопротивление сети.
СОFласно принятой методике, расчет координат точек фазовых траекторий (рис. 13.7)
ведется в определенной последовательности:
1) выбирается какая-либо точка с координатами б о , Аоо о и по формуле (13.5) определя-
етея tga o ;
2) путь. проходимый ротором, разбивается на отрезки Аб == 0,1; тоrда для следующей
!'Очки в верхней фазовой полуплоскости, в которой движение происходит только вправо,
получаем
01 == 110 + АII: Aoo 1 == Аоо о + м tg (%0;
З) по б 1 И A находится tga 1 , после чеrо определяются б 2 и АОО 2 дЛЯ следующей точки:
112 == 111 + АII: АОО 2 == ДООl + До tg (%1>
R 1'. А.
АиаЛОFИЧИО ведется расчет и для нижней фазовой полуплоскости, причем имеется в
виАУ. что движеиие в ней происходит только влево.
s 13.3. ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПУСК СИНХРОННЫХ rEHEPATOPOB
Разновидностью способа самосин.хронизации является так называемый
8лекmромеханuческuй пуск, при котором reHepaTop в неподвижном состоянии под-
ключают к сети, одновременно пуская первичный Двиrатель. При этом возбуди-
тель reHepaTopa может быть
наrлухо присоединен к ро-
тору, а устройства р ули-
рования возбуждения дол-
жны находиться в таком
состоянии, чтобы при ско-
рости,близкой К синхрон-
ной, reHepaTop был возбуж-
ден и cMor войти в синх-
ронизм. В этом случае весь
arperaT (турбина, reHepa-
тор, возбудитель) развер-
нется быстрее, так как на
Hero кроме момента турби-
ны будет действовать еще
ускоряющий асинхронный
момент reHepaTopa.
Ускорение пуска будет
особенно заметным у reHe-
раторов, имеющих успок<;>-.
ительные контуры на рота-
7 8 9 t, а ре. Схема автоматики arpe-
raTa при таком пуске 'уп-
пуске рощается.
Явления, происходя-
щие в reHepaTope при элек-
тромеханич ком пуске,
аналоrичны явлениям при
II . ист 1,
рот Ином [r.HO
100 1,0 2,
' и с / ... \ ,, --, iMa"
..."
5
1"'" ...- " "'" 1
а Ic ' ми{
"
1; VП\
L 1.-----"
, Включение IV
о 8ыключателя
1 2 J 4 5 Б 7 8 9 t,c
.. V
о V 1,...-
/ ."..,.
о
/ ".... ,...... 5
О ,......
а ./
......... 1""
80 О,б 2.
60 0,5 f,
40 D,{J " О
20 0,2 О,
О о
п
ii;ii;;;'
8
6
4
2
о
Lf
5
5
2
J
РиG. 13.8. Процее6@ при электромехаиическом
rидроreиератора:
. ... в.ар.жевве сет. и.; ,... ток статор. '.. В orв6ающве еro
II.КСВII...IoII... '....... в IIВВВII8.1IЬВ"Х '.....в 8в.чеuй. (штрв,
&OIIIIIe)o ,... в.вражевве porOp. иро,; 4... ч.стота вр.щевв. а/"во.
врв NектромехаввчесkOlI &yCltel fj...!I'O же. вра ВОРII"'ЬВОII пУс&е
432
I'lсинхронном пуске синхронных двиrателей с подключенным возбудителем. Элек
тромеханический пуск пока применялся только на неБОЛl)ШИХ необслуживаемых
rидростанциях, так как быстрый пуск паротурбинных arperaToB не может быть
допущен по режиму работы турбины. На рис. 13.8 приведены результаты обра-
ботки осциллоrраммы пуска rидравлическоrо reHepaTopa мощностью 3,5 МВ .А.
13.4. АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ С САМОСИНХРОНИЗАЦИЕЙ
При АПВ reHepaTop отключался от сети на такое время, при котором измене.-
ния уrла и скорости не моrли быть настолько большими, чтобы произошло выпа-
дение из синхронизма после обратноrо включе
ния reHepaTopa в сеть. Это условие аналитически
проверялось с помощью способа площадей. Кро-
ме этоrо вида АПВ в эксплуатации вполне ус-
пешно применяются и друrие. К ним относятся
АПВ с самосинхронизацией (АПВС) и АПВ без
контроля синхронизма (АПВБС), или несинхрон
ное АПВ.
ДЛЯ повторноrо включения отключившейся
линии или части системы (рис. 13.9) обычно про-
изводится АПВс. Осуществляется оно в следую-
щем порядке. При отключении ЛЭП на reHepa-
торах rасится поле; при этом reHepaTopbI MorYT
отключаться от шин станции или оставаться
присоединенными к ним. Спустя некоторое вре-
мя, определяемое условиями работы системы,
линия автоматически включается. Если за вре-
мя, коrда reHepaTopbI были отключены, повреж-
дение самоликвидирова.'IОСЬ, то начинается про-
цесс восстановления нормальной работы: на ши-
нах станции появляется напряжение, включа-
ются выключатели reHepaTopoB, если они ОТКЛю-
чались, и после автоматичесКоrо восстановления
возбуждения (действия АrП) reHepaTopbI входят
в синхронизм, т. е. после АПВ осуществляется
самосинхронизация. В тех случаях, коrда у
станции, отделяющейся от сети, имеется местная
наrрузка, перерыв питания которой недопустим,
необходимо часть reHepaTopoB станции выделить
для питания наrрузки, а на друrой части reHe.-
ратора провести восстановление связи а систе.-
мой.
Порядок проведения АПВС уста авливается в зависимости от условий рабо-
ты, наличия или отсутствия местнои наrрузки, ее характера, схемы станции и
т. п.
Возможны друrие, не рассматриваемые здесь, более сложные операции по
проведению АПВС, связанные о автоматическим переключением наrрузки, и т. д.
Анализ процесса может приближенно-качественно проводиться способом пло-
щаДей, распространенным на случай больших изменений скорости.
a
+
5)
8
e-<JDL
ЕЮ2{
B) '
е--Ф+>
aJ m "
= '\ &<JD+---
Rr
Рис. 13.9. Осуществление АПВС:
а режим при аварийном отключении
ЛЭП при разомкнутом rасительном со-
противлеиии Rr; б rашение поля re-
иератора, автоматически производяще.
еся замыканием Rr при отключении
линии; в то же, что и б, ио при вы-
делении части reHepaTopOB ДJJ:Я пита..
вия местиой иаrрузки; е повторное
включение reHepaтopa с поrашенным
полем, т. е. при Eq"'O (без синхронно-
ro момеита), и асиихронный ход: д
подача возбуждения (размыкаиие ra-
сительиоrо сопротивления) и вхожде-
ние в синхронизм
433
Связь станции с системой при АПВС проверяется на время, в течение Которо--
ro уrловая скорость reHepaTopOB, пройдя после сброса наrрузки через максималь-
ное значение, снизится в связи с действием реrулятора скорости до значения.
близкоrо к первоначальному (точка 1 на рис. 13.10). Для rидростанций это вре-
мя обычно составляет 15 30 с. Однако восстановление нормальноrо режима мож
но ускорить повторным включением, проводимым при снижении напряжения на
reHepaTopax до 2 25 % от номинальноrо. [енера-
торы включаются при этом в сеть при довольно
большом скольжении, иноrда еще до достижения
максимальноrо значения скорости (точка 2 на
рис. 13.10).
При вращении со скоростью выше синхронной
reHepaTopbl, отдавая асинхронную мощность, будут
тормозиться быстрее, особенно если они имеют ус-
t покоительные обмотки. Время восстановления нор-
мальноrо режима, таким образом, резко сокраща-
ется.
Возбуждение на rидроrенераторах восстанав-
ливают при небольшом скольжении (l 2%), коrда
скорость подходит к синхронной. Включать Воз-
буждение раньше, например одновременно с вклю-
чением reHepaTopa в сеть, не рекомендуется: ток
возбуждения успеет увеличиться до большоrо. или
даже установившеrося значения быстрее, чем скольжение уменьшится до значе-
ний, при которых будет происходить вхождение reHepaTopa в синхронизм; меж-
ду тем асинхронный ход reHepaTopa при включенном возбуждении допускать без
надобности нежелательно по
указанным ранее причинам. (1)
АПВС проводится исходя Р. , ,
из допускаемой длительности ' \
перерыва связи rидростанции .'
С системой, при этом учитыва-
ются местные условия, схема
автоматизации, конструкции
reHepaTopoB, наличие в них
успокоительных контуров и
Т. д.
Для турбоrенераторов
АПВ без контроля скольже-
ыия обычно рекомендуется
проводить сразу же, как толь-
ко под действием rашения по--
ля напряжение reHepaTopa
уменьшится до значения, при
котором токи в момент вклю-
чения не будут опасны.
Обычно изменения ско-
ро ти !урбоrенераторов быва-
ют неБЬльшими, а асинхрон-
(f)
о
Рис. 13.10. Изменение уrловои
скорости rидроrенератора при
сбросе наrрузки в результате
воздействия реrулятора ско-
рости (сплошная кривая), ре-
rулятора и асинхронноrо мо-
мента (штриховая кривая)
434
f
р,.
:iв
"'--'" I
r1P
СuнхронuзаЦIl1f
I
I
Рен \
, \
, \
, \
5) '/ ,
8 \ / I
h , /
/ Р,.
/ Р аС
Асинхронный ХОО
1
I
: Режин
1 СIJНХРОННЫ}(
ка/(ании'
к.3' Отклю/(ение
Рис. 13.11. Характер протекаиия процесса АПВС:
а изменение мощности в зависимости от изменения уrЛа1
P H(»; б изменение напряження на обмотке возбужденни;
иf t«(»; в взмененне тока статора во времен н; 11 f(t)
. ныи момент достаточно велик. При этом после включения турбоrенераторов в
большинстве случаев не требуется вводить задержку включения возбуждения, хо-
тя иноrда и вводят небольшую выдержку времени (1 1,5 с).
Протекание процесса при АПВС показано на рис. 13.11. После KopoTKoro
замыкания станция отключается и происходит выбеr под действием мощности
турбины р." постепенно уменьшающейся реrуляторами скорости. В это время
поле rасится, напряжение на reHepaTope уменьшается до малых значений. Затем
reHepaTop подключается к сети и работает как асинхронный. Рост асинхронной
, мощности и уменьшение мощности турбины приводят к тому, что скольжение па-
дает и после подачи возбуждения (точка А) reHepaTop входит в синхронизм.
13.5. АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ВКЛЮЧЕНИЕ
БЕЗ КОНТРОЛЯ 'СИНХРОНИЗМА
Дальнейшим упрощением повторноrо включения является пр именение
АПВ без контроля синхронизма (АПВБС), которое в отличие от АПВС осуществля-
ется без предварительноro rашения поля. Блаrодаря этому АПВБС обладает рядом
преимуществ: 1) дает возможность упростить устройства автоматики; 2) ,может
применяться на станциях с местной наrрузкой, rдe rашение поля недопустимо по
условиям работы наrрузки; 3) позволяет сократить время перерыва связи, так
как во мноrих случаях по условиям вхождения в синхронизм нет необходимости
дожидаться снижения уrловой скорости выпавших reHepaTopoB до подсинхрон-
ной. этот вид повторноrо включения появился на основе изучения опыта эксплуа-
тации энерrосистем и специальных аналитических и экспериментальных исследо-
ваний, показавших, что включения неси хронно работающих станций или частей
энерrосистем не вызывают каких-либо аварий.
Применение несинхронных включений допускается, если возникающие мак-
симальные моменты не превышают моментов, которые MorYT быть в машине при
внезапном трехфазном коротком замыкании на ее зажимах и напряжении на 5%
выше номинальноro. Такие моменты машина заведомо должна выдерживать. Воз-
можность несинхронноrо включения можно проверить не только по значению
возникающеrо вращающеrо момента. В качестве показателя допустимости этоrо
включения можно принять возникающий при этом несинхронный ток / не' Для
турбоreнераторов допустимым является ток / не == (0,625/X )/HOM' а для rидро-
[енераторов 1 не == 3/ НОМ' [де 1 НОМ номинальное значение. Определение / не
про изводится по сверхпереходному реактивн?му сопротивлению для случая вклю-
чения при э. д. с. Е == 1,05; / не.маке 2, 1/Xd .
В сложной системе кроме тока, протекающеrо через лИнию при несинхрон-
ном включении, необходимо определить распределение тока между станциями.
Допустимость включения по приведенным выше условиям проверяется для каж-
дой из станций.
Соотношение между моментами при несинхронном включении и коротком
замыкании сильно зависит от соотношения между сопротивлением [енератора
X и сопротивлением сети Хе, К которой подключается reHepaTop (внешнее со-
противление). Максимальные электромаrнитные моменты о обычно возникают у
rидроrенераторов при включении с уrлом б;:::;; 120 --;-. 135, У турбоrенераторов
при включении с уrлом б;:::;; 110 --;-. 120°. Несинхронные включения MorYT вызвать
ложные действия некоторых видов защит, поэтому следует принимать меры для
435
предотвращения ложныХ отключений. Однако ложные действия защиты часто не
вносят каких-либо расстройств в работу системы, если их поrрешности MorYT уст-
раняться действием АПВ на отключенных участках сети.
Пример 13.1. reHepaTop включается на параллельную работу с мощной электрической
системой методом точной синхронизации. I
Н а й т и допустимые значения уrловой скорости reHepaTopa при ero включении из
условий сиихронизации в первом цикле качаний. Потери мощности холостоrо хода принять
равными нулю.
Решенuе. Воспользуемся способом площадей. Так как синхронная мащина возбуждена,
то в момент включения она начинает или выдавать (rенераторный режим), или Потреблять
180
18
Рис. 13.12. Характеристики мощности синхронной мащины
(двиrательный режим) активную мощность. Характеристики мощности включаемой синхрон-
ной мащины показаны на рис. 13.12. Для определения зависимости между уrловой скоро-
стью сенератора и уrлом ero включения рассмотрим четыре возможных случая:
1. Llro> о; 00 < о кл < 1800
(рис. 13.12, а).
При уrлах включения от О до 1800 синхронная мащина в момент включения начинает
работать в режиме reHepaTopa. Для успещноrо включения необходимо, чтобы энерrия тормо-
жения, пропорциоиальная площадке А торм ' была больще кинетической энерrии, накоплен-
Ной ротором в относительном движе ии, т. е. А торм :;;;" TJ 1::..002/2;
1800
А торм S Р т siп o'do' Pm (1 + cos о:кл)
б кл
или
Р т (1 + cos о'вкл) :;;.. т J Llr02 /2
откуда
Llro v 2Р т (1 + cos О кл)/ т, .
2. Llro > о; 180Q < б кл < 00 (рис. 13.12, б).
436
При уrлах включения от 180° до 00 синхронная машина в момент включения начина-
ет работать двиrателем с потребляемой мощностью Р == Р т siп 6 : кл , Мощность, потребляемая
синхронной машиной, расходуется на ускорение ротора. Таким образом, для успешной син.
хронизации энерrия торможения, определяемая площадкой торможения Аторм> должна
Быьь больше суммы кинетической энерrии ротора синхронной машины перед включеиием и
энерrии, определяемой площадкой ускорения А уск .
Связь между уrлом включения и предельной уrловой скоростью ротора может быть по-
лучена из выражения
TJ 002/2+ А усll ...;! Атормо
3. m < о; 00 < 6: кл < 1800 (рис. 13.12, в).
При уrлах включения от О до 1800 сиихронная машина в момеит 'включения начинает
работать reHepaTopoM и выдавать активную мощность Р == Pтsin6 кп' Связь между уrлом
включения и предельной уrловой скоростью ротора может быть получена из выражеиия
TJ ю2/2 + Аторм <: А уск '
4. m < о; 180° < 6: кп < о (рис. 13.12, е).
При уrлах включения от 180° до 00 синхронная машина в момент включения начина-
ет работать двиrателем и потреблять активиую мощность Р == Ртsiп6 кл, Связь между yr-
лом включения и предельной уrловой скоростью ротора может быть получена из выражения
TJ 002/2 <: А уск '
< В качестве примера рассмотрим включение синхронной машины при OO > О. Уrол
включения меня'ется от О дО 180 Q (случай 1). Параметры электропередачи:
Хс == 2,49; и с == 1; Е' == 1; TJ == 10 с. Максимум уrловой характеристики синхронной ма-
шины
Рт==Е'ис/хс== 1.1/2,49==0,402.
П р и 6' '== OQ
вкл
OO == У2 . 0,402 (1 + cos 0°)/(10 . 314) == 0,023.
Допустимое скольжение синхронной машины s == +2,3%. Для друrих уrлов включе-
ния имеем:
о кл' rрад 45 90 135
5, % 2,1 1,6 1,0
На рис. 13.13 приведена кривая допустимых сколь-
жений в функции уrлов включения.
Исследуем процессы синхронизации по полным урав-
нениям. Расчеты, проведенные с начальными условиями,
соответствующими моменту синхронизации, с учетом дей-
ствия реrулятора скорости дают следующий результат:
при включении reHepaTopa в сеть со скольжением, состав-
ляющим 5% (рис. 13.14, а), происходят изменения кри-
вых cTaTopHoro тока Ic.r, электромаrнитноrо момента Мам'
уrла рассоrласования 6, скольжения s == 000 ooc.r, мо-
мента М т , развиваемоrо турбиной. Анализ характера из-
менения уrла рассоrласования 6 показывает, что процесс
синхронизации будет успешным, хотя после включения
синхронноrо reHepaTopa в сеть из-за наличия скольжения
уrол 6 растет до значения 2,47 рад, но далее убывает, что и
приводит В дальнейшем к втяrиванию reHepaTopa в синхро-
низм. Так Ka в момент включения 6 == О, а напряжения
сети и reHepaTopa равны по модулю, то после включеиия
броска тока ие возникает.
180
0,0
s,%
8
l/f
V.2 6Jюr, ера9
40 ВО 120 'lIШ 200
Рис. 13.13. Кривая допусти-
мых скольжений в функпии
frлов включения
437
На рисуике приведеИEl реЗУ.lьтаты расчета синхронизации при включении в сеть ['ене-
ратора С УF.пом раССОF.пасования 1,57 рад при равенстве скоростей. (00 И (Ос.l'. Такое ВКЛюче-
ние приводнт в возиикновению электромаFНИТНЫХ переходных процессов, что сказывается
иа характере изменеиия тока 1 и электромаrнитноrо момента А1 эм ,
Приб.пижеиную оценку опасности процесса синхронизацин можно дать, предполаrая,
а)
В;раIJ 5,0;. I,M
2 10 1,0
I
',0,5 t,c
'+ >,
Мт .......
10
5
.......................
о
0,7 0,8 01
. t (]
1.
5
IO
Рнс. 13.14. Характер изменения кривых cтaTopHoro тока
1,. (1 ), электромаrнитноrо момента М эм (2), уrла раССОI.Лi1
сования б (3) и скольжения s (4) при включении cr в сеть
бесконечной мощности:
Q оpll 6 O, . 5'IЬ; б ори 6 1.57 рад. в O
что включение происходит при расхождении векторов напряження сети и ['енератора на ве.
личину I!J.U. Торда ток в момент включения опредеЛится как
1 == I!J.Ulz,
rде z сопротивление машииы.
Учитывая, что активное сопротивление обычно мало, в зиаменатель приведенноrо BЫ
ше выражения вместо z подставим X (сверхпереходное сопротивление). При отсутствии
демпферно ОС)моткн сепротивление машины следует счнтать равным переходному сопро-
тивлению X d . Из такей приближенной опенкн можно сделать заключение, что при внезапном
коротком замыкании
I == U I X .
ИСПО.llьзуя систему относительиых единиц и полаFИЯ, что U 1 для ['енератора с Па-
раметрами X == 0,131, будем иметь 1== 110,131 == 7,637. В предельном случае ошибочный'
синхронизации при I!J.U == 2и ток в два раза будет превышать полученное значение. Элект-
родииамические силы в обмотке, пропорпиональные квадрату тока, будут в четыре раза
больше, чем при внезапном коротком sамыкании, что может прнвестн к разрушению обмот-
ки статора.
438
Пример 13.2. ЛЭП напряжением 110 кВ связывает станuию с приемной системой боль.
шой мощности (рис. 13.15, а). На шинах 110 кВ с;rанuии включена наrрузка Н. Парамет-
ры reHepaTopa F 1 :S 15 МВ.А, X 0,125; reHepaTopa F 2 :S 7,5 МВ. А, X 0,125;
трансформатора T 1 :S 15 МВ. А, и н 10,5%; трансформатора T2 S 7,5 МВ. А,
И К 7,5%; ЛЭП:l 200 км, ХО 0,4 Ом/км; наrрузки Н:Р Н 35 МВт, COSqJH == 0,85.
О п Р е Д е л и т ь возможность применения несинхронноrо АПВ на выключателе В.
а)
и с
tJ)
8)
Е э =0,97 0,068
в
0,1
и с =1,05
0,105
I НG
[=1.05 0,25 0,15
Рис. 13.15. Система и ее схемы замещения:
а исходная схема; б. 8 схемы преобраэования; е расчетная
Решенuе. На рис. 13.15, 6 изображена схема замещения системы с указанием парамет-
ров отдельных элементов, приведенных к одной ступени по номинальным напряжениям и
отнесенных к базисной мощности Sб == 15 МВ.А. При этом наrрузка введена сопротивлени-
ем ХН == 0,128 и э. д. с. E == 0,9.
Первоначально определим ток несинхронноrо включения без учета наrрузки. Макси-
маЛЬНОе значение периодической слаrающей тока несинхронноrо включения (рис. 13.15, в)
' нс == (Е + и)/ Х)) 2,1/0,246 8,55,
rде
ХЕ
(0,125 + 0,105) (0,25 +0,15)
+0,1 0,146+0,1 0,246.
0,125 +0,105 + 0,25 + 0,15
Токи несинхронноrо включения н reHepaTopax F 1 и F 2 :
/НСl == 8,55 (О ,4/0 ,63) /НОМ == 5,451 ном ; /НС2 == 8,55 (О ,23 ,/0 ,63) (15/7 ,5) /НОМ == 6,З/ ном <
Токи несинхронноrо включения в трансформаторах Т 1 и Т 2 имеют те же значении, что
и для reHepaTopoB F 1 и F 2 . Допускаемые токи в reHepaTopax и трансформаторах:
/r.доп == (0,625/0,125) /НОМ == 51 ном ; /Тl дои (100/10,5) /НОМ == 9,51 ном ;
/т 2 дои == (100/7 ,5) /ном IЗ ,3/ ном '
Таким образом, токи несинхронноrо включения в reHepaTopax F 1 и F 2 пренышают до-
пустимые. Уточним решение, проведя дополнительный расчет с учетом наrрузкх, Найдем
эквивалентное сопротивление ветвей reHepaTopoB и наrрузки, а также соответствуlOlЦVЮ
э. д. с. (рис, 13.15, е):
хэ 0,128. 0,146/0,274 0,068; Е э 1,05. 0,068/0,146 + 0,9.0,068/0,128 == 0,97.
439
Суммарное сопротивление
Х Е ==0,068+0,1 ==0,168.
Ток несинхронноrо включения
/не == (О ,97 + 1,05)/0,168 == 12.
Ток в цепи иенераторов при I1E == Е Е: == 0,15
'r == (/неХн + I1E)f(x H + x;r) == (12 . 0,128 + 0,15) /(0, 128 + о ,146) == 6,15.
Распределение тока /не в ветвях иeHepaTOpo
I вс Ji'l == 6,15 (0,4/0,63) /НОМ == 3,91 ном ; / Не r2 == 6,15 (О ,23/0 ,63) (15/7 ,5) /ном == 4,5I HOM '
Таким образом, уточнеиный расчет с учетом влияния наrрузки показывает, что несин-
:кронное АП8 в даниом случае допустимо.
Пример 13.3*. rеиератор включается иа мощиую сеть несинхроино.
О п р e.l1 е л и т ь зиачеиия моментов.
Решение. 8ыражение элеитромаrнитноrо момеита при несинхрониом включении
имеет [4, 6, 17] следующий вид:
Мне == и 2
. .
X q Xd
X q X d
{ '1 1
sin (200 + t) "2 sin2 (00 + t) "2 sin 20 0 } +
+EI ( siпt
х
q
1
2
. "
x q Xd
X q Ха
sin 2t ) + u Е ( {sin 00 sin (00 + t)]
. "
X q fDd
XqX d
fsin (00 + () siп (а о + 2t)j ).
(13.6)
Дпв оценки моментов и опредепения влияния различных факторов на характер изме-
иеиии моментов при иесинхронных включениях ПО выражению (13.6) Проведем расчеты для
rидроrеиераторов с успокоительными и без успокоительных контуров. Результаты расчетов
для РИ.l1роrенераторов с успокоительиыми контурами при включениях с различными началь-
иыми уrлами (б о == 90, 135 и 180°) и при Х вн == О, U == 1,0 и Е == 1,5 представлены на
рис. 13.16. 0чевидно, что наибольшеrо значения момент достиrает при несинхрониом
включении с уrлом б о == 135° и составляет для ;ассмотренноро rидроrенератора М нс / М НОМ ==
== 23. При включении с yи OM б о == 180 максимальиая кратность момента составлиет
Мне/Миои == 20. !
Наличие внешнеrо сопротивления в цепи статора резко снижает момеит. Рис. 13.17
показывает изменения электромаrнитиоrо момента торо же rидроrенератора с успокоитель-
ными .онтурами при наиболее неблаrоприятных условиях несиихронноrо включения (б о ==
== 1350, и == 1; Е == 1,5) и при различных значениях внешнеrо реактивноrо сопротивлеиия
(Х ви '" 0,2, 0,4, 0,6). Как видио из рис. 13.17, при Хвн == 0,2 маКсимальная кратность момен-
та при несинхронном включении снижается более чем на 50%, т. е. с величины Мне/ М нои ==
== 23 при Квн == О до Мнс/Мном == 11 при Х вн == 0,2. При дальнейшем увеличении х вн крат-
ность момента также снижаетси, ио не так резко. Так, например, при Х вн == 0,4 зиачение
Мне' ..иОIl == 7,5.
t1a рис. 13.18 приведены результаты расчетов максимальиых MOMeHToB J Возиикающих в
rИ.llроrеиераторах, при включениях с различными начальными уrлами от 00 == 30° до б о ==
== 3600 и при различных внешних сопротнвлениях связи с системой, выполненных по выра-
жеиию (13.6). Рис. 13.19 представляет результаты аналоrичных расчетов для rидроr нера-
* См.: Хачатуров А. А. Неоиихронное АП8, асинхронный-режим иресинхронизация
. эиерrетических системах. М.: 83ПИ, 1966, с, 147.
440
тора и турбоrенератора при включениях с малыми уrлами от б о == О до 1\0 == 400. Как видно
из рис. 13.19, даже при включениях с б о == О моменты в reHepaTope MorYT достиrать БОльших
значений, чем номинальный момент. Последнее вызвано тем, что включение rеиерато-
ров происходит при зиачениях Е> 1. .
Штриховой линией на рис. 13.18 и 13.19 показаны максимальные зиачения момеитов
при коротком замыкании иа шинах reHepaTopoB (М и! М ном ), определенные на основании Из-
а)
Мне/Мном
11+
12
10
8
б
4
2
D
2
4-
б
8
о)
Мне/Мном
18
16
11+
12
10
8
б
4-
2.
О
2.
Б
8
10
14
12
10
8
б
4-
2
О
2
4-
Б
8
10
IZ
14
16
1 В
Рис. 13.16. Электромаrнитные момен-
ты при несинхронном включении в
сеть с различными начальными yr-
ламИ rидроrенератора с успокоитель-
ными контурами (X == 0,2; X ==
==0,21) при U == 1; Е == 1 ,5; ХВН == о:
а бо 900; б БО 135.. в БО 180.
BecTHoro выражения электромаrнитноrо момента, возникающеrо при трехфазном коротком
замыкании на шинах reHepaTopa с успокоительными коитурами, без учета затухания свобод-
ных токов:
SiП2t) .
.2 ( 1. 1 X xd
М == E d SIПt
R п 2
xd x q X d
Расчеты электромаrнитных момеитов выполиялись без учета затухания апериодичес-
кой слаrающей тока статора. Исследования показали, что при иесинхронном включении на
момент существенно влияет учет затухания апериодической слаrаюшей тока в статоре [17].
При учете активноrо сопротивления внешней цепи reHepaTopa , == '1' + 'вн постоянная вре-
мени затухания апериодической слаrающей тока в статоре Та уменьшается примерно в 10
441
а) о)
Мне Мне
М НОМ ИНОМ
10 б
8 4
6 2
4- О
2. 2
О '+
2 8)
Мне
б М ном
If
2
О
2
4
Mc a
Mc a
Рис. 13.17. Электромаrнитные моменты при несинхронном включении в сеть с Ha
чальиым уrлом б о == 1350 rидроrенератора с успокоительными контурами (x
== 0,2; х; == 0,21) при U == 1, Е == 1,5:
a XBB O,2; б хвв о,4; B XBB O,6
а)
Мне
М НОМ
2.0
15
12
в
4
б)
м 111:
М ном
20
15
о
0..
Рис. 13.18. Изменение максимальных электромаrнитных моментов rидроrенера
торов при включеннях с различными начальными уrлами и внешними реактив
ными СОПI10тивлениями (И == 1,0; Е == 1,5):.
а rидроrенератор с успоконтельными контурами хН d O.2; хН q o,21; б rидроrенератор без
успокоительных контуров x'd o,282; Xq O,585
20 раз. В связи с этим заметно уменьшается максимальное значение электромаrнитноrо MO
мента reHepaTopa.
Прuмечанuе. В настоящем примере кроме обшепринятых употребляются обозначения:
Мне электромаrнитный момент несинхронноrо включения: Мс электромаrнитный MO
мент, возникающий при включении в сеть ненозбужденноrо reHepaTopa; Ми электромаr-
нитиый момент, возиикающий при коротком замыкании; МИЕ электромаrиитный момент,
442
а) 5)
.М не Мне ХО н = О
МНОМ t1 HOM
12 12
10 М К /0
!i!!!:!.
8 8
6 б
4-
2
О 10 20 ЗО 40 00. О 10 20 ЗО '+0
Рис. 13.19. Максимальные электромаrнитные моменты, возникающие
при включениях с малыми уrлами при различнЫХ ХВВ:
а rидроrекератор с успокоительными контурами х" d O.2; х" q 0.21; и 1,0: E 1,5:
б турбоrенератор x"d 0.125; x"q 0.18; и I,O;. E I,2
обусловлениый напряжением сети и и возбуждением rеиератора Е; Та постоянная вре-
менн затухаиия апериодической слаrающей тока статора.
Контрольные вопросы
13.1. Назовите основные способы подключения reHepaTopa к сети.
13.2. В чем заключаются общие требования при подключении reHepaTopa?
13.3. Перечислите особенности точной синхронизации и самосинхронизации. Условия
их проведения.
13.4. В чем преимущестна самосинхронизации?
13.5. Каковы физические процессы при самосинхронизации?
Как устранить возможность неудачной самосинхронизации?
13.6. Назовите методы расчета и исследования условий самосинхронизации.
13.7. Как производится электромеханический пуск синхронных reHepaTopOB и двиrате-
лей?
13.8. В каких случаях самосинхронизация нежелательна и предпочтительнее точная
синхронизация?
13.9. Каково назначение несинхронноro автоматическоrо повторноrо включения?
13.10. Каков порядок проведения операций при автоматическом повторном включении
самосинхронизацией?
13.11. Характер процесса автоматическоrо повторноrо включения самосинхрониз.а-
цией.
13.12. Назовите возможности и условия целесообразноrо применення автоматическоrо
повторноrо включения без контроля синхронизма.
Темы рефератов
1. Исследование синхронизации по полным уравнеииям.
2. Исследование самосинхронизации.
3. Опасность процессов синхронизации и самосинхронизации.
rЛАВА 14
УЛУЧШЕНИЕ РЕЖИМОВ. АСИНХРОННЫЕ РЕЖИМЫ,
РЕСИНХРОНИЗАЦИЯ И РЕЗУЛЬТИРУЮЩАЯ УСТОйЧИВОСТЬ
f t4.t. ОБЩАЯ ХАРАКТЕРIIIСТИКА АСИНХРОННЫХ РЕЖИМОВ
В ЭЛЕКТРИЧЕСКИХ СИСТЕМАХ
Практически важное значение имеют режимы работы электрических систем
при больших отклонениях уrловой €корооти роторов reHepaTopOB или двиrателей
от еИНХf>ОННОЙ. К таким режимам, например, относятея: работа синхронной ма-
шины на шины, rде @корость 0)0 ФТлична от коро€ти (j) этой машины; ресинхро--
низация после нарушения устойчивости; самосинхронизация reHepaTopoB, авто-
матическое повторное включение е самосинхронизацией (АПВС) или без контроля
синхронизма (АПВБС); асинхронный пуск двиrателей и компенсаторов; самоза-
ПУGК двиrателей. Все эти режимы, по различным причинам возникающие в систе-
ме, называются асинхронными. Для а<!инхронных режимов характерно периоди-
ческое изменение вектора э. д. е. хотя бы ОДНОЙ €Танции системы* на yroJi, боль-
ший 3600. Эта Gтанция называет я работающей или идущей асинхронно (асинхрон-
ный ход или асинхронный режим).
На РИG. 14.1, а показано, как меняется положение вектора э. д. с. Е одной
из станций системы при больших качаниях, коrда вектор перемещается из поло-
жения 1 в положение 2, и при асинхронном ходе этой станции, коrда из положения
1 вектор перемещается в положение 3, «060rHaB» вектор напряжения U. На рис.
14.1, б, в показано, что мощность еинхронной машины, обусловленная ее воз-
буждением (синхронная мощность), меняется в зависимости от уrла б и времени
примерно по синусоидальному закону. Для больших качаний (в отличие от асин-
f }ly [ и-.
а) / Е \
" 'о-
I О. о
2 \". .
Б)
р
t
Рис. 14.1. К определению асинхронноrо хода
· в СЛОЖНЫХ системах, содержаЩИJa несколько стаНЦИЙj признаком асинхронноrо хо-
да будет изменение уrла какой-либо станцин (k) по отношению и любой друrой станции (п)
на уrол б kn > :i: 360'".
444
xPQHHoro хода) характерен провал в зависимости Р == f(t), появляющийся при
переходе уrла б за 900. Для асинхронноrо хода характерно именно периодичес-
,кое изменение знака синхронной мощности (рис. 14.1, в).
При асинхронном ходе и скорости больше синхронной reHepaTop, работая
как асинхронный, выдает активную мощность, называемую асUНХРОfUЮЙ.
Если бы reHepaTop был идеально симметричен, то асинхронная мощность
при данном скольжении была бы постоянной. Наличие несимметрии (явнополюс-
а)
p
. -/;
о)
"
t
6)
и =
....... ...... .......
и ср Ий
i;
Рис. 14.2. Изменение активной (а) и реактивной (6) асинхронной мощности и напря-
жения (6) при постоянном среднем скольжении
ность, одноосная обмотка возбуждения и т. д.) приводит К тому, что асинхронная
мощность пульсирует около HeKOToporo среднеrо значения средней асинхрон-
ной мощности (рис. 14.2). Средняя асинхронная мощность* (средний асинхронный
момент) зависит от типа, конструкции rеиератора и от среднеrо скольжения.
Типовые зависимости среднеrо момента от скольжения показаны на рис. 14.3.
Во время асинхронноrо хода изменяется не только мощность Р, но и токи статора
I и ротора I ! == Eq, а также результирующее потокосuепление обмотки возбужде
ния э. д. с. Е;. э. д. с. Eq и E пульсируют около HeKoToporo среднеrо значе-
ния (рис. 14.4).
В первом приближении можно считать, что в начале установившеrося асин-
xpoHHoro режима ток, активная и реактивная мощности определяются значением
э. д. с. Eq исходноrо режима, если выпадение из синхронизма reHepaTopa, не
имеющеrо реrулятора возбуждения, происходило медленно. Если reHepaTOp име
ет реrулятор возбуждения, поддерЖИвающий постоянство результирующеrо по-
токосцепления с обмоткой возбуждения, или выпадение произошло в результате
резкOf'О возмущения (например, KopoTKoro замыкания), то можно r р у б о пола-
raTb, что параметры установившеrося асинхронноrо режима определяются
э. д. с. Е;о. отвечающей исходному режиму. Указанные рекомендации очень при-
ближенны, и с их помощью можно получить только ориентировочные результаты.
Достаточно простой, обоснованной и точной в смысле совпадения с экспериментом
методики пока нет.
Все рассуждения относились к асинхронному режиму о Д н о r о reHepaTopa.
Однако в с л о ж н ы х э л е к т р и ч е с к и х с и с т е м а х MorYT быть два
случая, КоrДа из синхронизма на станции одновременно выходят несколько [eHe
раторов или несколько станций. При анализе эта rруппа reHepaTopoB заменяется
одним эквивалентным. Разумеется, такая замена может быть сделана довольно
приближенно при соблюдении ряда условий и прежде Bcero при условии, что пара-
· Асинхронные моменты и мощность принимаются равными. если частота сети ю
ю о . Внутренняя мощность и момент асинхронно работающеrо синхронноrо reHepaTopa
различаются.
445
метры всех объединяемых reHepaTopoB и их удаленность от узловой точки пример
НО одинаковы. Постоянная инерции эквивалентноrо reHepaTopa в этом случае на-
ходится, как обычно, суммированием приведенных к базисной мощности постоян
Ных инерции отдельных reHepaTopoB (Т Jэ == 2: TJ). Момент эквивалентноrо re
нератора принимается равным сумме моментов объединяемых reHepaTopoB (М э ==
:ос: 2: М). Существенное влияние на асинхронный ход оказывает реrулятор CKO
2
1f. Е, и Р. 1
3,5
3,0
2,5
2,0
1,5
1.a
0,5
О
0,5
1,0
1,5
2,0
2,5
Рис. 14.3. Средние асинхронные моменты
синхронных reHepaTopoB различных типов:
J турбоrенератора; 2 rидроrенератора без успоко-
ительных обмоток; 3 rидроrенератора с успокои-
тельнымн обмотками
'" 5,'10.
Рис. 14.4. Изменение параметров режима re-
нератора при асинхронном ходе:
Eq э. д. с., пропорциональная току возбуждения;
Е' q переходная э. д. с.; p, активная мощность;
J оrибающие тока статора; и . напряженне на
шинах reHepaTopa
(, r, ,
L....... [" If':E Q ,,' ,
/ 1\ / '1.
,.--., ,... ",.
I / 1 \ 1 i '.
ТiE 1 ,
'.' q .' rn
. р 7 Ш
Ur; , 2tQ 2ЧО 270 з'зо з::;
90 /20 /50 О /20 /50 /8' 2/0 2ЧО27(}JОО
....... д',ерос
l!! /
J )
I j 11
, ...... I '+1'
ростк. Для реrулятора скорости эквивалентноrо 'reHepaTopa рекомендуется при-
нять средневзвешенное значение соответствующих параметров серводвиrателей и
реrуляторов, установленных на эквивалентируемых reHepaTopax:
эквивалентная постоянная серводвиrателей
Т sэ == (Т З1 Р 1 + Т З2 Р 2 + ТsзР з +... + ТзпР п ) I p;
(14.1 )
эквивалентный к ициент неравномерности
О"э == (О"l Р l + 0"2 Р 2 + ... + О"п Р n) I Р.
446
( 14.2)
Причины появления асинхронно
ro режима reHepaTopa или части сис
темы (rруппы reHepaTopoB) MorYT быть
различными. Ero может вызвать ис-
чезновение (потеря) возбуждения (рис.
14.6), нарушение динамической устой
чивости после резкоrо возмущения
толчка (рис. 14.7) или нарушение CTa
тической устойчивости сильно переrруженной системы при малом возмущ
нии (рис. 14.8).
В сложной системе MorYT быть случаи, коrда асинхронный ход, B03
никший В 9ДНОЙ части системы, может привести к выпадению из синхронизма
какоrо либо reHepaTopa или rруппы reHepaTopoB (рис. 14.9). В первом случае
reHepaтop работает только как асинхронный, во втором, третьем и четвертом
случаях при возбуждении reHepaTop наряду с асинхронной мощностью выдает
также пульсирующую асинхронную мощность.
Ряд проведенных исследований
показал, что эквивалентирование для
расчетов первоrо приближения дает
практически удовлетворительные pe
зультаты. Так, например, для двух
reHepaTopoB, замененных одним экви
валентным, на рис. 14.5 показано,
что поrрешность, получающаяся
из-за эквивалентирования, невелика
даже при довольно большом несовпа
дении параметров (Т В и а) объединяе
мых reHepaTopoB.
14.1. ВОЗНИКНОВЕНИЕ
инхРонноrо РЕЖИМА
А5} 10
5
t
O
I
Ор
о
5
0.5
Рис. 14.5. Поrрешность (по абсолютному зна-
чению) в скольжении при эквивалентирова-
нии двух асинхронно работающих reHepaTIr
ров с одинаковыми параметами, отличающи-
мися значениями (] (кривая 1) или Ts (кри-
вая 2)
р
Р Т
1'0
If
-f) &@f.
о;1;
1 fo
в
00
Рис. 14.6. Потеря возбуждения и переход на
асинхронный режим:
1 8 постепенно уменьшающаяся характеристика
IIOщности с уменьшением тока возбуждения J f при
отключен ин возбудителя
t
р
t
fJ 1
If,
00 Оот.кп
Рис. 14.7. Переход на несинхронный pe
жим в результате нарушения динамической
устойчивости (площадка ускорения боль-
ше площадки торможения)
447
Для большинства синхронных машин асинхронный ход не представляет опас-
ности. Турбоrенераторы в асинхронном режиме MorYT развивать мощность, со-
измеримую с номинальной. При скольжениях порядка десятых долей процента,
при которых устанавливается асинхронный режим турбоrенераторов, токи, как
u б *
правило, не представляют какои ли о опасности для машины
Допустимость асинхронноrо режима может вызывать сомнения в связи с
опасностью нарушения устойчивости остальНой части системы, в которой мощ
б о t
Рис. 14.8. Переход на асинхронный режим в
результате нарушения статической устойчи.
вости при РО == Р мвке .
t
JБD
50
610
Dzo
i
Рис. 14.9. Выпадение из синхронизма стан-
ции 1 и последующее раскачивание станции
2 с выпадением ее из синХронизма
о
ный reHepaTOp или rруппа reHepaTopoB работает асинхронно. В этом режиме
reHepaTop обычно поrлощает из системы значительную реактивную мощность,
что может приводить к снижению напряжения во всей системе, создавая опасность
нарушения устойчивости остальных reHepaTopoB и двиrателей. Однако правиль-
ным выбором источников реактивной мощности и реrулирующих устройств можно
добиться Taкoro положения.. Коrда опасность аварии TaKoro рОДа станет малове-
роятной..
Можно восстанавливать нормальную работу системы, не отключая от сети
выпавший из синхрон.изма reнepaTop, но оставляя ero на некоторое время в асин-
хронном режиме и затем заставляя снова войти в синхронизм. При этом система
сохраняет рез у Jl Ь Т И Р У ю щ У ю У с т о й ч и в о с т ь, так как в к о н е q..
н о м с q е т е нормальный синхронный режим восстанавливается и нарушения
энерrоснабжения потребителей не происходит. Однако асинхронный режим, не
являющийся для системы нормальным, не должен осуществляться без проверки.
В сущности, все инженерные исследования асинхронноrо' режима и направ-
лены на выяснение еУо допустимости, ero длительности и путей ликвИдации., т. е_
ускорения вхождения в синхронизм. Исходная схема системы, применительно к
которой будет рассматриваться асинхронный режим, показана на рис. 14.10, а,
векторная диаrрамма на рис. 14.10, б. Здесь предполаrается, что при некото--
ром значении уrла 6 === 60 уrловая скорость вектора Е изменяется и становится
* Имеется в виду работа турбоrенератора через малое сопротивление Хан на шины не-
изменноrо напряжения. При больших Хан и больших скольжениях требуется дополнител!Уо
иая проверка.
448
равной ю (вместо ю о )' Модуль вектора Е", == Е(ю), уrол 6 == 60 + М. Здесь
д6 == st, rде s скольжение:
s == (l/(I)o)(do/dt) == «(1) (1)0)/(1)0 == 00* 1. (14.3)
в возникающем при нарушении устойчивости переходном процессе можно
выделить три этапа: 1) выпадение из синхронизма; сиН,хронные качания; 2) пере
ход к асинхронному режиму; 3) установившийся асинхронный режим и набор
наrрузки с восстановлением HopMa.JIb
Horo режима.
Последний этап определяется в
основном тем, как турбина принимает
наrрузку, или, иначе, «приемистостью
турбины». При этом давление пара
после промежуточноrо переrрева MO .
жет быть либо близким к исходному,
лпбо пониженным в зависимости от
характера протекания двух предыду
щих этапов, их длительности и pery
лирования турбины.
Длительность асинхронноrо pe
жима зависит от ряда факторов:
скольжения к концу аварийноrо процесса, обусловившеrо нарушение устойчи
вости; характера изменения момента турбины на первой и последующих стадиях
асинхронноrо режима, асинхронноrо момента [енератора и мощности местной Ha
rрузки в послеаварийном режиме.
Обычно при выпадении крупноrо [енератора из синхронизма ero электро
маrнитный момент становится меньше вращающеrо момента турбины. Это пр иводит
К повышению скорости, т. е. работе с положительным скольжением. При увели
чении скорости под действием реrуляторов турбины происходит уменьшение
впуска энерrоносителя в турбину и мощность, отда,ваемая в сеть при асинхрон
ном ходе, всеrда будет меньше, чем мощность до выпадения.
Реактивная мощность, необходимая для создания электромаrнитных полей
в асинхронно работающей машине, поступает из сети. Ток статора, возрастающий
в связи с увеличившейся реактивной мощностью, во время асинхронноrо режима
колеблется Щ<ОЛО среднеrо значения с частотой, приблизительно равной 2(f
{о)' в условиях эксплуатации асинхронный ход леrко заметить по колебаниям
стрелки амперметра. Число ее отклонений а (в одну сторону) в секунду численно
равно скольжению (%):
а) Z в)
и W>Wo
& jM.......... I ,w Q S,W reHepamop
Ew.W Еоо w=wo w a
,О) W
S=D
s
Рис. 14.10. Асинхронный ход в системе:
а схема системы; б векторная диаrрамма систе-
мы; в характер изменения уrловоil скорости (j)
и скольжеиия (s) ,
I sl== I (I) (i)0 I IOO== l f fo I IOO== аl00 ==а',
(i)o fo 2.50
rде {о. ю о частота и уrловая скорость в синхронном режиме.
Режим несинхронно работающей машины определяет знак скольжения:
с+» rенераторный режим (ю> ю о ); « » двиrательный режим (ю < <ио).
Амплитуда колебаний тока статора будет минимальной при разомх
нутой обмотке возбуждения, а скольжение при за.мхнуmой обмотке ооэ-
буждения.
ч. 16 84
449
В асинхронном режиме предельная активная мощность, которую может
отдавать турбоrенератор, обычно оrраничивается 50 70% от номинальной мощ
ности из за возрастаний тока статора, а мощность, которую может отдавать COBp
менный крупный rидроrенератор, 30 50%. Кратковременно ее можно повы
сить, допустив переrрузку по току статора. Возможность асинхронноrо хода и
ero длительность зависят от типа reHepaTopa и условий работы системы. Турбоrе
нератору при потере возбуждения разрешается работать в асинхронном режиме
до 15 30 мин, без потери возбуждения несколько меньше. Если за это время
восстановить синхронную работу не удается, то турбоrенератор должен быть от-
ключен от сети. Немедленное отключение от сети турбоrенератора, выпавшеro
из синхронизма, должно производиться только В случаях появления опасности
повреждения машины. Длительность работы rидроrенераторов в асинхронном
режиме, разрешаемая только при возбуждении, более кратковременна (3 4 мин).
Асинхронный ход, как правило, недопустим в тех случаях, коrда при ero появл
нии потери в роторе оказываются больше номинальных, а ток статора больше
1,lI пом .
t 14.3. ЗАДАЧИ. ВОЗНИКАЮЩИЕ ПРИ ИССЛЕДОВАНИИ АСИНХРОННЫХ РЕЖИМОВ
Допуская в системе асинхронные режимы, инженер прежде Bcero должен про-
верить поведение машин, работающих асинхронно. Здесь важно выяснить те Mexa
нические усилия, которые возникнут при асинхроННом ходе, проверить HarpeB
ротора и статора. Кроме Toro, надо вычислить активные и реактивные мощности
машины. Асинхронный' ход одной или несколь их машин может оказать влияние
на поведение всей системы. В связи с этим необходимо проверить режим части сис-
темы, продолжающей нормальную синхронную работу: выяснить, не переrрузят-
ся ли reHepaTopbI, не будет ли недопустимо большоrо снижения напряжения
и не окажут ли ero пульсации вредноrо действия на работу наrрузки. Существен
ным 2 ряде случаев является вопрос о поведении устройств автоматики и релей
ной защиты, иноrда моrущих при наличии асинхронноrо хода работать непра-
вильно.
Для анализа их работы необходимо тщательное рассмотрение асинхронных
режимов. При этом выделяют процесс выпадения из синхронизма, заканчиваю-
щийся установившимся асинхронным ходом. Отдельно рассматриваются режимы
обратноrо вхождения в синхронизм машины: а) подключенной к сети, несущей
наrрузку, временно перешедшей на асинхронный режим ресинхронизации;
б) ненаrруженной и подключаемой к сети (вновь или после BpeMeHHoro отключе-
ния) самосинхронизации.
Эти два режима применяются на практике и в различных комбинациях с
друrими режимами: автоматическое повторное вкЛючение с одновременной само-
синхронизацией (АПВС), несинхронные включения частей системы и т. д.
Кратковременный асинхронныЙ режим в энерrосистеме допустим при выпол
нении следующиХ условий: нет опасности повреждения асинхронно работающих
reHepaTopoB; в результате действия автоматики возможна синхронизация;
возмущение, создаваемое асинхронным режимом в энерrосистеме, не приводит к
дальнейшему развитию аварии. Однако в ряде случаев инженеры, не имея воз-
можности качественно и количественно оценить допустимость асинхронноrо ре-
жима в конкретной системе, опасаются развития аварии при асинхронном ходе.
450
"ОНИ устанавливают делительную автоматику MrHoBeHHoro действия, разделяющую
систему на несинхронно работающие подсистемы. При этом возникает необходи-
мость действия А ЧР и отключения в дефицитной подсистеме части потребителей,
а в избыточной reHepaTopoB. Таким образом, проблема выбора асинхронный
режим или разделение системы на части представляется актуальной задачей,
особенно для слабых межсистемных связей, rде вероятность возникновения асин
xpoHHoro хода очень высока.
При определении допустимости KpaTKoBpeMeHHoro хода по межсистемной свя
зи возникает ряд задач. Асинхронный ход по передаче представляет собой перио
дическое возмущение для reHepaTopoB синхронно работающих частей системы.
Это может вызвать нарушение устойчивости работы reHepaTopoB в связанных
подсистемах.
Пер в а я з а Д а ч а (з а д а ч а и с с л е д о в а н и я) оценка амп
литуды возмущения, создаваемоrо асинхронным ходом по передаче, и частот свя
зываемых передачей подсистем, которые MorYT привести к развитию аварии.
В т о р а я з а Д а ч а расчет квазиустановившихся послеаварийных pe
жимов, коrда после изменения частоты в одной или в обеих подсистемах на меж-
системной передаче появится установившийся асинхронный режим. При этом
нужно определить баланс мощностей, уровни напряжений и частоты связывае
мых подсистем.
Т р е т ь я з а д а ч а оценка устойчивости узлов наrрузки, подсоединен-
ных к межсистемной связи, работающей асинхронно. Опасное развитие аварии в
виде нарушения устойчивости узлов наrрузки здесь может возникать при пони
жении уровня напряжения в ра<lЛИЧНЫХ точках передачи, к которым подсоедине
ны промежуточные узлы наrрузки; опасность для узлов комплексной наrрузки
MorYT создавать также периодические колебания напряжения в узле, подключен
ном к передаче, по которой осуществляется связь между двумя несинхронно раб
тающимИ частями системы.
* !i {4.4. ПАРА МЕТРЫ ОСНОВНЫХ ЭЛЕМЕНТОВ ЭЛЕКТРИЧЕСКИХ СИСТЕМ
ПРИ АСИНХРОННЫХ РЕЖИМАХ
reнepaTopbl. При больших изменениях скорости электромаrнитный вращаю
щий момент и мощность, отд ваемая синхронными машинами в reHepaTopHoM ре-
жиме и соответственно получаемая в двиrательном режиме, будут зависеть не
только от уrла, но и от скорости ero изменения. В этом случае упрощенно пред
ставляют полный электромаrнитный момент М синхронной машины двумя COCTaB
ляющими: синхронной Мен И асинхронной Мае' причем Мен + Мае == М. Co
ответственно мощность Рен + Рае == Р. При этом приближенно можно считать,
что наличие возбуждения не оказывает влияния на составляющую Рас' т. е. что
при расчетах можно провести наложение синхронных и асинхронных моментов и
соотве.тственно мощностей. Составляющая М е н зависит от параметров машины,
1'ока возбуждения, приложенноrо напряжения и уrла б, а составляющая Мае
от параметров машины, приложенноrо напряжения, уrла б и скорости ero изме-
нения, т. е. скольжения (8 == dб/dt).
Природу синхронной составляющей момента М е н И соответственно мощнос
1'и Рею а также их определение при различных условиях работы рассмотрим да-
лее (см. 14.5). Здесь подчеркнем то обстоятельство, что при больших скольж
ЕИЯХ выраженный в относительных единицах синхронный вращающий момент на
1/216"
451
валу reHepaTopa не будет равен ero внутренней мощности и должен определяться
как Мен == PCH/(l + s). Кроме Toro, необходимо учесть, что при непрерывном
изменении уrла б значения М е н И Р е н не будут постоянными, как при синхрон-
ном режиме, а будут изменяться, меняя и знак, поэтому их иноrда называют зна-
коперемеыными составляющими.
Асинхронную составляющую момента Мае И соответственно мощности можно
определить при упрощающих предположениях, принимая, что машина симмет-
рична в электрическом и маrнитном отношениях и ее параметры по продольнои и
поперечной осям одинаковы: .
Т . Т , .,
q == d; x q == Xd; x q == x d .
При отрицательных з/Шчениях скольжения s синхронный еенератор, работая
как асинхронный двиеатель, потребляет .мощность, а при положительных, рабо-
тая как асинхронный еенератор, выдает ее в сеть.
Существенные затруднения возникают при осуществлении асинхронных режимов у
современных турбоrенераторов с непосредственным охлаждением обмоток, характеризующих-
ся повышенным удельным использованием активных материалов, большим объемом тока в
пазу, существенным уменьшением инерционНlSlХ постоянных и т. п. Переход в асинхронный
режим TaKoro высокоиспользованноrо турбоrенератора при потере возбуждения сопровожда-
ется большими колебаниями ero активной мощности. Амплитуда колебаний ее может пре-
восходить амплитуду мощности турбоrенератора. Возможны значительное понижение на-
пряжения на шинах собственных нужд энерrоблока инедопустимая переrрузка по току об-
моток турбоrенератора при быстром нарастании температуры пакетов сердечника статора и
металлических конструктивных элементов.
Асинхронные характеристики высокоиспользованных мощных турбоrенераторов, как
правило, хуже характеристик машин меньшей мощности. Максимальное значение среднеrа
асинхронноrо момента у них ниже. Хотя при одних и тех же скольжениях они потребляют
относительно меньшую реактивную мощность, фактиче ски потребляемая реактивная мощ-
ность на единицу активной мощности у высокоиспользованных выше из-за больших сколь-
жений.
Длительность работы высокоиспользованных. турбоrенераторов при потере возбужде-
ния, определяемая из условия сохранения устойчивости электрически близко расположен-
иых турбоrенераторов, оrраничивается допустимой длительностью форсировки возбуждения,
составляя около 20 с. Даже такой кратковременный асинхронный режим требует разrрузки
турбины через электроrидравлический преобразователь (эrп) или механизм изменения час-
тоты вращения (МИЧВ).
ДЛЯ ручноrо перевада на резервное возбуждение время порядка 20 с недостаточно, по-
этому в современной практике блоки 200 МВт И выше при потере возбуждения отключаются
с минимальной выдержкой времени, необходимой для выявления асинхронноrо режима и
отстройки от синхронных качаний.
Асинхронный режим при включении АРВ. В связи с участившейся необходи
мостью длительной работы турбоrенераторов с недовозбуждением увеличилась
вероятность выпадения отдельных турбоrенераторов из синхронизма с большой
наrрузкой при сохранении возбуждения на определенном уровне и включенном
автоматическом реrуляторе возбуждения. В этом случае в возбудитме кроме ин-
дуцированноrо тока протекает и вынужденный ток возбудителя, значение кото-
poro не остается неизменным, а зависит от характера изменения параметров, на
которые реаrирует АРВ.
. Если составляющая тока возбуждения недостаточна для удержания машины
в синхронизме при данной наrрузке, то при возникновении асинхронных прово-
ротов ротора относительно поля статора ток возбуждения обязательно проходит
через нуль. Асинхронный режим турбоrенератора с включенным АРВ при боль-
452
той наrрузке оказывается чрезвычайно тяжелым и не должен допускаться. Пер-
соналу нельзя пытаться ресинхронизировать турбоrенератор без снижения на-
rрузки по меньшей мере до 60% от номинальной. Однако при разrрузке турбоrе-
нератора до этоrо уровня указанных выше явлений не происходит и машина ус-
пешно ресинхронизируется без опасности ее повреждения.
В связи со значительным уменьшением переrрузоч,НОЙ способности высокоиспользо-
ванныХ турбоrенераторов по сравнению с машинами обычноrо исполнения неОбходимы меро-
приятия для предотвращения повреждения мощных турбоrенераторов и сохранения их в ра-
боте в случае потери возбуждения, коrда это допустимо по условиям энерrосистемы.
Специальная защита от асинхронноrо режима для обычных турбоrенераторов с косвен-
ным охлаждением, как правило, не требовалась, и при переходе TaKoro турбоrенератора в
асиихронный режим персонал Mor разrружать ero, сохраняя 60 70% номинальной наrруз-
ки. При этом не появлялось опасиости ни для турбоrенератора, ни для энерrосистемы.
А с и н х р о н н ы й р е ж и м м о щ н о r о в ы с о к о и с п о л ь з о в а и н о r о т у р-
б о r е н е р а т о р а т р е б у е т с п е ц и а л ь н ы х м е р о при я т и й и в том числе
защиТы для немедленной ero разrрузки до допустимоrо уровня или отключения от сети.
В противном случае турбоrенератор может быть поврежден. Кроме Toro, может быть нару-
шена работа механизмов собственных нужд энерrоблока. Большие периодические колеба-
ния мощности в условиях пониженноrо напряжения н сети Из-за потребления перешедшим
в асинхронный режим турбоrенератором БОЛЬШQЙ реактивной мощности вызывают качания
соседних машин и создают опасность их выпадения из синхронизма, особенно при слабых
связях или работе у предела устойчивости. '
Перенапряжения на роторе в асинхронных ре-
жимах. В выпрямительных системах возбуждения
(ионных, полупроводниковых) возм жно появление
перенапряжений, опасных для целости оборудова- (
ния. ПеренаПР'яжения на роторе MorYT возникать
при внезапном обрыве тока возбуждения, асинх-
ронном ходе reHepaTopa, коротких замыканиях и
друrих неисправностях или нарушениях режима.
При асинхронных режимах rидроrенераторов
MorYT возникать значительные напряжения на вып-
рямителе, которые превышают (с учетом экран иру-
ющеrо действия успокоительной обмотки) в 8 1 О раз номинальное значение
напряжения возбуждения. Поэтому необходимо в цепях возбуждения приме-
нять з а Щ и т н ы е у с т рой с т в а (нелинейные сопротивления, разрядники
MHoroKpaTHoro действия и т. п.).
В связи с большой механической инерцией ротор rидроrенератора, замкну-
тый на выпрямитель, движется в асинхронном режиме так, что р8 ;:::: О, и прак-
тически дополнительной э. д. с. в обмотке ротора за счет увеличения скольжения
не возникает. Это позволяет упростить расчетные методы. Общепринято, что для
снижения перенапряжений ротор reHepaTopa (обмотка) замыкается на аКТивное
сопротивление. В схемах возбуждения малых reHepaTopoB и синхронных двиrате-
лей используются постоянно включенные параллельно ротору нелинейные со-
проти ения. Для крупных reHepaTopoB применяется постоянное активное со-
противление, которое подключается к ротору через разрядник по схеме, приведен-
ной на рис. 14.11. Напряжение пробоя раЗрЯДника определяется классом изоляции
ротора. В нормальных режимах работы сопротивление отключено. При ВОзникно-
вении перенапряжений разрядник пробивается и ротор оказывается замкнутым
на сопротивление.
*
Рис. 14.11. Схема включения
добавочноrо сопротивления и
разрядника ротора
15 84
453
Максимальные (амплитудные) значения напряжений*, которые возникают в асинхрон-
ном режиме на роторе полностью разrруженноrо по активной мощности и развозбужденноrо
reHepaTopa, работающеrо через индуктивное сопротивление (трансформатор, линию) на ши-
ны бесконечно большой мощности, определяются без учета процессов в поперечной оси re-
нератора. Тоrда упрощенные уравнения Пар ка [орена будут иметь вид
Uq==W d ;
И! == dWj/dt 1 j'j;
dlJl"j/dt == dlJl"j/dt + IJI"jdo/dt.
Их решение позволяет найти напряжения на роторе.
Основными направлениями в разработке необходимых по обеспечению м{?
роприятий, улучшающих работу системы при появлении асинхронноrо хода, яв-
ляются:
1) совершенствование и установка специальных устройств, выявляющих
возникновение асинхронноrо режима турбоrенератора и надежно отличающих
этот режим от друrих аварийных режимов в энерrосистеме (коротких замыкани-
ях, синхронных качаниях, асинхронноrо хода в системе и т. д.);
2) осуществление быстрой автоматической разrрузкИ arperaTa до заданноrо
уровня, допустимоro по условиям работы турбоrенератора без возбуждения, а в
случае необходимости автоматическоrо отключения ero от сети;
3) осуществление автоматическоrо переключения обмотки возбуждения 08
(при потере возбуждения по любой причине) на 5 10-KpaTHoe rасительное соп-
ротивление;
4) обеспечение сохранения в работе механизмов собственных нужд энерrо-
блока; .,
5) осуществление мероприятий, сокращающих случаи потери возбуждения
или позволяющих ускорить ero востановление;
6) быстрая разrрузка reHepaTopa до 40% от номинальной мощности.
Быстрая разrрузка турбоаrреrата не до 40%, а до 60% от номинальной оказа-
лась бы леrче и практически исключила бы вероятность аварийноrо отключения
энерrоблока. Однако работа высокоиспользованных турбоrенераторов в течение
15 мин с наrрузкой 60% от номинальной не может быть разрешен из-за недопус-
тимоrо увеличения температуры стали сердечника и металлических конструктив-
ных элементов.
В настоящее время, как правило, в цепях возбуждения турбоrенераторов ус-
танавливаются дистанционно управляемые автоматы, что дает возможность
выполнить схему, осуществляющую все операции по переводу турбоrенератора
на возбуждение от резервноrо возбудителя (включая ero пуск в аварийных ус-
ловиях), за 2 3 мин. При этом появляется целесообразность разрешения работы
высокоиспользованных турбоrенераторов в асинхронном режиме с наrрузкой не
выше 60% от номинальной в течение 3 4 мин. За это время температура статора
турбоrенератора не превысит допустимую. Работа мощноrо турбоrенератора с
такой наrрузкой целесообразнее и для энерrосистемы, а ресинхронизация проис-
ходит безболезненно. Устройства автоматизации разrрузки турбоrенератора при
. Излаrается по исследованиям [ессе Б. А. См., напрнмер: recce Б. А. Защита ротора
от перенапряжений. Сб. рефератов, доклаДОВ конференцни «Системы возбуждення и реrули-
рования мощных электрнческих машин переменноrо и постоянноrо тока», Л.: Ин-т электро-
механики, 1967, с. 10 16.
454
ero переходе в асинхронный режим дополняются реле времени, обеспечивающим
отключение турбоrенератора от сети, если через 3 4 мин он не был ресинхрони
зирован.
Асинхронный режим синхронных машин * изучается не только с целью ero
практическоrо использования, но и д.1IЯ анализа сложных явлений при асинхрон
ном ходе в энерrосистеме.
Первичные двиrатели. Характеристики и параметры первичноrо двиrателя
имеют существенное значение при анализе асинхронных режимов. При этом важ
но знать зависимость момента (или мощности) ОТ скорости и ускорения arperaTa.
Под моментом (или мощностью) первuчноео двuеаmeля при рассмотрении асинх
ронных режимов следует понимать результирующий момент, т. е. собственно мо-
мент (или мощность), развиваемый турбиной и уменьшенный на потери, имеющие-
ся как в механической части турбины, так и непосредственно в reHepaTope. В от-
дельных случаях момент, соответствующий потерям в турбине и reHepaTope, ока-
зываясь больше момента, развиваемоrо турбиной, иrрает существенное значение
в движении arperaTa. В этих случаях результирующий вращающий момент пер
вичноrо двиrат ля окажется тормозящим, хотя турбина и будет давать ускоряю-
щий момент. Следует иметь в виду, что в процессах, протекающих при уrловой ско-
рости ротора, отличной от синхронной, результирующий момент, создаваемый
первичным двиrателем, может быть направлен как соrласно с асинхронным момен-
том, например при разrоне СО скоростью ф < Фо, так и встречно с ним при
разrоне со скоростью ф > Фо. ,.
При полном закрытии направляющеrо аппарата или клапанов турбины pe
зультирующий момент первичноrо двиrателя может существенно отличаться от
нуля за счет'наличия момента, 06условленноrо потерями. При замене нескольких
arperaToB, reHepaTopbI которых работают асинхронно, одним эквивалентным боль
шое значение имеют параметры, сист м реrулирования Т., а. При асинхронном
ходе приходится оперировать с динамическими характеристиками первичных дви
rателей, рассматривая их в больших диапазонах времени и изменений скорости,
при учете переходных rидравлических процессов и автоматическоrо изменения
уrла разворота лопастей рабочеrо колеса у rидравлических турбин, при учете
возможности реrулирования на различных ступенях давления и учете pereHepa-
тивных и сетевых подоrревателей пара у паровых турбин. В связи с этим Дина
мические характеристики будут отличны от приведенных в rл. 6.
Для иллюстрации влияния факторов, делающих динамическую характеристику весь-
ма причудливой, рассмотрим рис. 14.12. Здесь показаны** экспериментально полученные
статическая 1 и динамическая 2 характеристики турбин (arperaToB) Волжской rэс имени
Ленина, т. е. зависимости момента М Т от хода поршня сервомотора: М Т == '(т). На том же
рисунке приведены изменение уrла разворота рабочеrо колеса <р и относительное изменение
частоты вращения reHepaTopa !'!.п/п ном в переходном процессе. Из сопоставления видно зна-
чительное различие между статической характеристикой и динамической характеристикой,
зависящей не только от свойств системы реrулирования, но и от сбрасываемой мощности.
Из рис. 14.12 видио влияние изменения частоты вращения ротора в начале процесса,
проявляющееся в уменьшении момента турбины при неизменном положении направляющеrо
аппарата (участок аЬ), а также влияние rидравлическоrо удара, приводящеrо к задержке
умеиьшения момеита турбины при начавшемся закрытии направляющеrо аппарата. Момент
* См.: Косан Ф. Л., Мамuконянц Л. Т. Асинхронный режим мощных турбоrенерато
ров. Электричество. 1977, N2 4.
** См.: Совалов С. А. Режимы электропередачи 400 500 KB. М.: Энерrия, 1967.
с. 268.
lЬ*
455
турбины достиrает нулевоrо значения примерно через 6 с после начала процесса, далее начи-
нается торможение турбины, а еще через 6 с при минимальном открытии направляющеrо
аппарата тормозной момент достиrает максимальноrо значения, paBHoro 45% от номиналь-
Horo момента турбины. В рассматриваемом процессе направляющий аппарат турбины не за-
крылся полностью. Свертывание лопастей рабочеrо колеса от максимальноrо (+ 16°) до ми-
нимальноrо ( 12°) значения длится около 1 мин, и при моменте тмин лопасти свернулись
только до 9°. Резкое торможение турбины, являющееся следствием не учитываемых в расче-
М Т
н,.мйкс MТoMa/(C.nt!fI
0,8
0,7
0,5
0,5
О,ц.
0,3
0,2
0,1
О
=0
ь
то т мак !:
1000 1/011 12.00 т,ММ
Рис. 14.12. Зависимость момеита турбины от открытия направляюще-
ro аппарата:
1 в статическом режиме; 2 в переходиом процессе
NX особениостей процесса изменения момента, проявилось внешне как «перереrулировани
турбины. На ход процесса ресинхронизации блаrоприятное влияние должно оказывать так-
ие уменьшеиие скоростн изменения положения направляющеrо аппарата в зоне малоrо QT-
крытия; такое замедление приводит к уменьшению мини-
мальноrо скольжения и снижению скорости увеличения мо-
мента турбины.
Как видно из рис. 14.12, влияние рассматриваемых фак-
торов приближенно может быть оценено заменой действи-
тельной статической характеристики 1 при расчетах процес-
са ре синхронизации условной переходной характеристикой
2, показанной штриховой линией. Более крутой иаклон пе.
реходной характеристики (по сравнению со статической)
приводит к уменьшению максимальноrо и минимальноrо
скольжения и сокращению длительности асинхронноrо хо-
да, облеrчая условия ресинхронизации.
Рис. 14.13. Схема подклю-
чения (а) и rрафик измене-
ния напряжения в узле на-
rрузки (6):
1 при %, <%.; 2 при %,> %.
456
HarpY3Ka. Поведение наrрузки в системе (рис.
14.13) имеет большое значение для определения до-
пустимости асинхронноrо хода. Понижение напряже-
ния при асинхронных режимах может вызвать опро-
кидывание двиrателей наrрузКи (лавину напряже-
ния). Колебания напряжения на шинах наrрузки, про-
исходящие во время асинхронноrо хода крупноrо re-
нератора или rруппы reHepaTopoB, MorYT привести к колебаниям cBeToBoro пото-
ка осветительных установок. ,
При асинхронном режиме в составе напряжения, подведенноrо к наrрузке,
будет неско.'1ЬКО (по меньшей мере две) различных частот переменноrо тока, от-
личных от нормальной частоты f О,, Асинхронные двиrатели наrрузки будут реаrи-
ровать на это изменение частоты, так же как и на изменение напряжения (кото-
рое, как правИЛО, будет пониженным), и, следовательно, будут изменять свою
мощность и скорость. Однако расчеты по определению мощности двиrателей и их
поведения при асинхронном ходе части reHepaTopoB системы MorYT в первом при-
ближении производиться без учета появления нескольких составляющих в MrHo-
венных значениях частоты. Эти расчеты можно проводить исходя только из пони-
жения напряжения и изменений ero оrибающих с частотой асинхронных колеба-
ний, принимая, что частота MrHoBeHHblx изменений тока и напряжения равна fo.
Рассмотрим, как изменяется напряжение в узле наrрузки при асинхронном режвме .
системе со скольженнем в:
s == «(02 (01)1 (01'
Принимая
. . 1st
Е 1 == Е 1 , Е 2 == Е 2 е
'и применяя принцип наложения к схеме, изображенной на рис. 14.13, а, получаем (15]
. ( jst
и == Е 2 е Х1 + E1X2)/(Xl + Х 2 ).
rде Х1 и Х 2 сопротивления от точки подключевия узла наrрузки до всточников Э. д. С.
Е 1 И Е 2 (рис. 14.13,6).
Обозначая
81 == Е 1 Х 2 /(Х1 + Х 2 ); == E 2 X 1/(XI + Х 2 ),
получаем закон изменения напряжения в узле наrрузки:
и . + ' jst + t + . . t
=="1 "2 е . =="1 "2 cos S j"2 sms .
(14.4)
Построенные rодоrрафы изменения э. д. с. и напряжения за один цикл асинхронноrо
хода для различных удалений узла наrрузки от источников э. д. с. показаны на рис. 14.14, а.
Построение выполнено при Е 1 . == Е 2 дЛЯ случаев: А) XI < Х 2 ; Б) Х1 > Х2' Как видно из рис.
14.13, rодоrрафами вектора и ЯВЛЯЮ'Fся окружности и' в случае А и ин в случае Б, причем
в случае А, т. е. коrда узел наrруз,КИ ближ к э. д. с. Е 1 , напряжение и изменяется по фазе
от О до б < 90°. В случае Б фаза напряжения и (уrол б ) непрерывно возрастает и вектор
и совершает проворот относительно вектора Е 1 .
ДЛЯ исследования влияния на устойчивость модуля и фазы напряжения и двиrателей
выразим закон изменения их во времени, а также зависимость от параметров схемы. Соrлас-
но (14.4), выражения для модуля
и == Jf ("1 +"2 cosst)2 + ("2 sin St)2 == V "i + 281"2 cosst +"
(14.4а)
"2 siп st
00 == arg и == arctg
"1 + "2 cos 5t
rрафик изменения этих величин, построенный по выражениям (14.4 а), показан иа
. рис. 14.14, б. Напряжение в узле изменяется по периодическому закону, близкому к сину-
соиде. Минимум напряжения имеет место при 5t == 180°. При Х1 == Х 2 (узел наrрузки в цеит-
ре качаний) и 5t == 180° напряжение становится равным нулю.
Зависимость и мин от места подключения двиrателя получим из (14.4), приняв 5t == 180°:
457
При Е 1 == Е 2 ==
получим
и мин == V "1 2"1"2 +" =="1 "2.
И МИН (Х 2 XJ/(X 2 + Xj).
'Фаза напряжения, как видно из рис. 14.14, а, также изменяется нелинейно. С уменьше-
нием 81 от 1,0 до 0,5 узел наrрузки перемещается от reHepaTopa 1 в сторону reHepaTopa 2,
приближаясь к центру качаний. Фаза напряжения при
этом колеблется около нуля. После перехода за центр
качаний и при приближении узла наrрузки к reHepaTO-
ру 2, что соответствует уменьшению 81 от 0,5 дО О,
средняя уrловая скорость в узле наrрузки становится
равной ro 2 и колебания' фазы происходят относитель-
но st.
а) 00
180
о
180
о)
а
90
!ВО
Рис. 14.14. Изменение фазы (а) и
модуля (6) напряжения в узле на-
rрузки в зависимости от текуще-
ro уrла б st
а) f
ОТ.. Ta
с) 1
В) --=- --=-
1 Z;]
rv Ез
ZЗ ':><jx:}
.,458
st
ЛИНИИ электропередачи, сеть. Схемы заме-
щения ЛЭП, трансформаторов и друrих неПОk
вижных элементов системы при асинхронном
ходе одноrо reHepaTopa или части ее reHepaTO
ров, не влияющих на систему настолько силь-
но, ЧТQбы вызвать в ней заметное отклонение
частоты, не изменяются.
При выявлении в процессе анализа значи-
тельных изменений уrловой скорости следует
уточнять расчеты, изменяя индуктивные сопро-
тивления в ro/ro o раз и емкостные сопротивления
в шо/ш раз. Расчеты при этом усложняются, так
как при использован'ии способа последователь-
ных интервалов изменяются все сопротивления
в каждом интервале.
Расчеты асинхронных режимов систем в свя-
зи с некоторой неопределенностью параметров,
входящих в расчетные уравнения, целесообразно
выполнять приближенно при вариации пара-
метров. . Сложная система при асинхронном ходе
одноrо из ее reHepaTopoB (или станции) обычно
приводится к более простой схеме, как это пока-
зано на рис. 14.15, причем учитываются сообра-
жения, высказанные в 14.1.
st
,... ;::\ 2
\ I
,, / !,
" t "./ rv
, I
, ,
Рис. 14.15. Схема замещения системы при
асинхронном ходе одной из ее станций (1):
а упрощенная схема; станция 1 шины неИзмен
Horo напряжения И; б схема системы, в которой
станция 1 имеет СВЯЗЬ с шинами HeH3MeHHoro Ha
"ряжения и через сложную сеть; 8 схема системы.
В которой напряжение и не считается неизменным
и Все наrрузкн И станцин (кроме станции J). «свер-
нуты» И заменены эквивалентным сопротивлением Za
и эквивалентной Э.Д.с. Ба
! 14.5. ХАРАКТЕристики РЕЖИМА ПРОСТЕАШЕА СИСТЕМЫ
ПРИ НЕСИНХРОННОА СКОРОСТИ СИНХРОННОй МАШИНЫ
(rEHEPATOPA, двиrАТЕЛЯ, синхРонноrо КОМПЕНСАТОРА)
Рассмотрим OCHoBHbfe соотношения между параметрами режима системы;
которая состоит из синхронной машины, вращающейся с постоянной уrловой ско-
ростью (i)o' отличной от синхронной, и шин неизменноrо по значению и частоте
(i)o напряжения. Особенности этоrо несинхронноrо режима приходится учитывать
при рассмотрении ряда переходНЫХ процессов:
а) резких изменениях режима системы, вызывающих выпадение из синхро-
низма, во время которых скорость отклоняется от синхронной «(i) =1= шо);
б) длительной взаимно несинхронной работе отдельных систем, связанных
ЛЭП;
в) работе синхронной машины в режиме установившеrося асинхронноrо хода
после окончания процессов, связанных непосредственно с выпадением из син-
хронизма.
Сложные явления, происходящие при несинхронной работе, в настоящем
разделе будут описаны упрощенно, преимущественно качественно, и в дальней-
шем будут уточняться по мере рассмотрения тех или иных практических задач.
Рассмотрение направлено в основном на физику про исходящих процессов, а
количественные оценки даются приближенными.
Отметим основные особенности процессов, происходящих при несинхронной
работе:
1. В машине и линии передачи циркулирует ток, имеющий слаrающие двух
частот: постоянную. ш о и изменяющуюся (i)1 == t(t). CTporo rоворя, следовало бы
учитывать, что MrHoBe!fHbIe значения результирующеrо тока будут давать биения.
Однако не будем их учитывать, полаrая, что (i)1 мало отличается от (i)o.
Применительно к схеме, приведенной на рис. 14.16, а, можно для MrHoBeHHblx значе-
ний записать
1 == 111 sin (w 1 t + <рд + 112 sin (wot + <Ро)'
Приняв для простоты рассуждений, что 111 == 112 == 1 и (j)1 == (j)o == О, получим
1 == 2 sin шl + ш о cos шl Ш О
2 2
пли, если Ш 1 ш о ,
1 2 sin wt ,
шl +ш о
rде ш== 2 wo+st.
Таким образом, оперируем только с действующими значениями напряжениf,
н токов при скорости (i)o И несколько отличной от нее скорости (i).
2. Синхронная машина одновременно приобретает свойства асинхронной, так
как во всех короткозамкнутых обмотках ротора и эквивалентных' им цепях появ-
лются токи, обусловленные наличием скольжения.
3. Параметры режима синхронной машины изменяются; э. д. с. Е", зависит
от скольжения; созданные ею составляющие токов со скоростью (i) проходят через
реактивные сопротивления, изменяющиеся для этих токов в отношении (i)/(i)o И
приобретающие новые значения Х. ш "='= ХШ/WО'
459
Задача получения статических характеристик .мощности при несинхронной
работе [енератора, сводящаяся к определению токов, мощностей и эл eKTpoMarHит-
ных моментов, может быть решена тремя способами.
Пер вый с п о с о б основывается на предположении о возможности при
менения принципа суперпозиции при разделении рассматриваемой машины на две
синхроННую 1 и асинхронную 2 (рис. 14.16, а). Синхронная машина, связанная
а)
U;(J)o 1
Е,Ыо . 6\и и
о) ' [ 2
11
(J) Z
1 8" Ею
нt U,wo
Z U
2
:!:,S М: -;' I,Z
Рис. 14.16. К ВЫВОДУ упрощенноrо выражения вращающеrо момента при
постоянном скольжении:
а исходная схема; О разделение несинхронно работающей машины на две механи-
чески связанные синхронную 1 и асннхронную 2: 8 зависимость момеита и ero со-
ставляющих от СКОJlьжения при n::::l:2; z определение ТОКОВ методом наложения в
uесинхронно работающей синхронной машиие
z)
M
с напряжением и, работает со скоростью ro, имеет э. д. с. ВО) и развивает элект
ромаrнитнblЙ момент Мм. Асинхронная машина присоединена к шинам напря-
жения и, работает со скольжением s и является в зависимости от ero знака асин-
хронным двиrателем или асинхронным [енератором, как это показано на рис.
14.16, б. При этом иараметры машины 2, как асинхронной, будут определяться
всеми короткозамкнутыми обмотками ее ротора; сопротивление сети Zвя в простей-
шем случае будет введено в цепь статора каждой машины. Это, конечно, возмож
но только при rрубых расчетах первоrо приближения.
При первом способе можно получить выражения мощностей с помощью схем
замещения, пользуясь методом наложения и определяя токи в каждой ветвИ.
В т о рой с п о с об* нахождения параметров режима (токов, мощностей)
при работе с несинхронной частотой сводится к определению дополнительных
э. Д.с., наводимых в каждой обмотке статора, и некоторой Новой э. д. с. (B q или
В;), действующей в схеме замещения машины.
т р е т и й с п о с о б** заключается в применении полных уравнений асин
х:ронной машины (уравнения Парка rорева), позволяющих учесть все измене-
ния скорости и обусловленные ими изменения э. д. с. и моментов.
Рассмотрим первый простейший способ определения электромаrнитных мо-
ментов соrласно схеме, показанной на рис. 14.16, а. Д.тIя синхронной машины 1,
связанной с шинами и, схема замещения имеет вид, показанный на рис. 14.16, б,
[де, COr.тIaCHO методу нможения,
* См.: Веников В. А. Переходные электромеханические процессы в электрических
системах. М.: Высшая школа, 1970, rл. IV.
** Там же, rл. ХХII.
. . .. .
1 == 111 112 ==Е", /Z", U/Z,
rде Z'" == r + j(J). Х == r + j(1 5)Х; Z == r + jx.
Мощности в начале и конце переда и будут найдены как
. . л . л
S1 == Р 1 + jQ1 == Е", 1; S2 == Р 2 + jQ2 == u/.
При определении э. д. с. Е", пр едпол аrается , что появившиеся при незави-
симом возбуждении и возникающие в результате скольжения дополнительные
(наведенные) токи учтены в услрвной асинхронной машине 2; тоrда Е ф == ю*Е.
Если ток возбуждения получается от возбудителя и подвозбудителя, сидящих на
одном валу с reHepaTopoM, то Е", == ф Е. В общем случае ЕО) == ю:Е. с учетом
этоro
. . л j Л л . j Л
S1 == ЕЕф п Z'" U Еф: Z.
После преобразования получим
. Е 2 ro 2 '",
P i ==Re(S1)== *
Z2
иЕro п
+ sin(oo st a),
Z
(14.5)
rде
r (r 2 + х 2 ) r 2п 2
a==arctg ; (", == ф*.
х r2 + (ro*х)2
При этом электромаrнитный момент синхронной машины 1
Мен == М 1 == Р 1 /Ф*,
ми
Е2 (1 + s) Еи (1 + S)п l
М 1 == (", + siп (00 st а) ==
1.2 1.
== М 11 + М 12 sin (00 5! а).
(14.5а)
Здесь первое слаrаемое момента, иноrда называемое собственны.J/l .J/lоменто.J/l
М 11 , получается при взаимодействии обмотки ротора, питаемой э. д. с. Е, и ro-
мотки статора, замкнутой на сопротивление '",. Ero зависимость от скольженИJil
при n == 2 показана на рис. 14.16, б (характеристика 1).
В простейшем случае при n == 1 собственный момент
М 11 == Р r(J)*/[r 2 + (ф*х)2), (14.5б)
rде ю* == 1 + 5.
Формула (14.5б) по структуре аналоrична известной формуле момента (мощ-
ности) асинхронноrо двиrателя. При 5 ==0 член М 11 превращается в так называе-
мую собственную 'мощность Р Н == (E2/z)sina. .
Второе слаrаемое в выражении (14.5а) называется взаu,Мны.J/l ,Мо,Менто.J/l;
при 5 == О он превращается во взаимную мощность P 12 . Зависимость амплитудЫ
взаимноrо момента от скольжениSI при n == 2 изображается характеристикой 2
(рис. 14.16, б).
461
Мнимая часть комплекса S1, т. е. Im(S1)' определяет реактивную мощность:
Е 2002 Еиооп
Ql== Xo) cos(ao st a).
Z2 Z
(14.6)
rде
(r 2 + х2) 00* Х 2п 2
Х ОО == Ш*.
r 2 + (оо*х)2
В конце передачи значения активной и реактивной мощностей записываются
как
. Еи V 1 + р2 N. и2 .
Re(S2)==P2== ОО*SIП(80 st +а,о) SlПа; (14.7)
z (1 + 5)2 + р2 Z
. Еи .. / 1 + р" n и2
Im(S2)==Q2== V (1+S)2+p2 oo*cos(8o st+aO» 7cosa, (14.8)
('де р == r/x; ао) == arctg [rl(ш*х)].
Разность активных мощностей в начале и конце передачи при непрерывном изменении
положения и величины вектора Ео) оказывается не равной потерям мощности в активном со-
противлении r:
Р 1 Р 2 == /2r::!:: A'f'(S),
rде Acp(s) дополнительные потери, связанные со скольжением.
В частном случае, Korha активным сопротивлением цепи статора можно пренебреЧh
ввиду ero малости, природа Acp(s) становится более ясной. Так, принимая 60 == О, r == О,
а. == О, из (14.5) и (14.7) будем иметь:
Еи n
Р 1 == 00 sin st;
Х *
Еи n l
P2== (J) sinst.
х *
При этом дополнительные потери
Еооп U
8 .
A'f'(s)==AP==Pl P2== sinst.
, _ 1 +s х
, '
(14.9)
При отсутствии активноrо сопротивления приращение АР может быть израсходовано
только на изменение энерrии W L, запасенной в индуктивности, связывающей точки прилс:;-
жения э. д. с. Е и напряжения и. Запас энерrии W L == L/2/2 можно выразить через потери
реактивной мощности и среднюю уrловую скорость ОО*ер == (1 + 00*)/2 == (2 + s)/2:
W L == Loo* ер /2/(200* ер) == AQ/(2 + s).
Определяя AQ как разность (14.6) и (14.8), при r == О получим
Ql Q2
W L == 2+8
1 Еооп U и2 Е2оо:п
cosst+ + .
1+5 х (2+5)Х (l+s)x(2+s)
Очевидно, что в рассмотренном случае
dWJdt==[5/(1 +5)] (Eoo:Ujx) sin5t == АР
или
462
Р2== Рl dWL /dt.
(14.10)
При учете активноrо сопротивления передачи имеем
P2==Pl 12r dWL/dt. (14.1Оа l
Асинхронный момент. Найдем электромаrнитный момент М 2 , развиваемый
условно выделенной машиной 2 (рис. 14.16. а), которую при отрицательно-м.
скольжении считае-м. двиzателе-м., а при nоложительно-м. zeHepamopoM.
Если предположить, что на роторе reHepaTopa r имеется только одна обмотка
возбуждения, выполнеl:lная как равномерно распределенная, то электромаrнит
ный момент
U 2 rs U2 sx1 / r
М ас === М 2 === (14. 11 )
r 2 + (X 1 S)2 Xl [1 + (x 1 s/r)2j
Здесь Хl и r параметры схемы замещения асинхронноrо двиrателя, включающие
внешнее сопротивление ZB Н'
Переходя от параметров асинхронноrо двиrателя к параметрам синхронноrо
reHepaTopa и заменяя Хl === X Xd/(Xd X ); Х/' === T , соrласно табл. 6.3,
получаем
М u2 (Xd X ) T s
2 ,
Xd x d 1 + ( T s)2
Зависимость момента М 2 от скольжения s преk
ставлена на рис. 14.16, б характеристикой 3.
Уточнение формул асинхронноrо момента. У синх
pOHHoro reHepaTopa обмотка возбуждения расположе
на не равномерно по всему ротору, как это было при
нято при выводе (14.12), а только по продольной оси
d. Кроме обмотки возбуждения по оси d действует
продольная демпферная обмотка, а по оси q попе
речная. Аналоrично тому, как это делалось при BЫBO
де (14.12), определим момент, развиваемый в резуль-
тате действия трех одноосных обмоток, как половину
от суммы моментов трех асинхронных машин, у каж-
дой из которых имеются соответствующие распреде
ленные обмотки (рис. 14.17):
М 2 === 0,5 (М; + М; + М;")
или
(14.12)
/1."
2
ЛроiJольная
iJеnПlpернаn
ооnотка
X3,R]
Поперечная
iJеNПlpерная
оомотка
,.,'"
2
Рис. 14.17. Представление
машины с тремя обмотками
тремя машинами
и2 [
М 2 === 2 s
Xl / r 1
Xl [1 + (Xl s / r l)2j
X2/ r 2
Х 2 [1 + (х 2s/r2)2j
+
x3/ r 3
Х э [1 + (хз s / r з)2]
].\ ( l4.lЗ)
+
Заменяя значения Хl, Х 2 , Х3 двиrателя через параметры reHepaTopoB и вводя
вместо х/, соответствующие постоянные времени, получим
463
[ Xd : T , . T
и 2 Xd Xd
М 2 S 1 + (sT )2 + 1 + (sT )2 +
2 Xdxd xd x d
. T J- (14.14)
+ X q x q
. ( ")2
XqX q 1 + sT q ,
Выражение (14.14) получено для случая просrейшей связи (через х) reHepa-
тора и шин неизменноrо напряжения u. При этом в сопротивлении Xd, X , X
вво итсЯ сопротивление связи, т. е. Xd':: Xdr + Хс и т. д. При сложной связи
[енератора и шин неизменноrо напряжения (через Z12) момент М 2 [о, определенный
при вепосредственном включении reHepaTopa на шины неизменноrо напряжения,
может 6ъrrb при б л и ж е н н опересчитан соrла сно выраженшо
I M2 M2r(X Xd/Z12)2. 1 (14.15)
Взаимное сопротивление Zi2 определено при замещении reHepaTopa сопротив-
I
пением Xd.
При отсутствии продольной демпферной обмотки (x X ) и наличии
такой же поперечной демпферной обмотки, как и обмотка возбуждения (X ::::;
----: ж..;, X q == Xd' T ::::; T ), формула (14.14) переходит в (14.12).
Выражение (14.14) определяет среднее значение асинхронноrо момента.
Однако, как было показано ранее (см. рис. 14.2), в отличие от момента асинхронноro
двиrателя момент синхронноrо reHepaTopa при асинхронном ходе изменяется ока-
ло cpeднero значения с частотой скольжения (rлавная причина этоrо неравно-
мерное распределение обмоток в машине). Не приводя здесь вывода, запишем
выражение для MrHoBeHHoro значения момента в асинхронном режиме (при по-
стоянном или медленно меняющемся скольжении):
2st)] +
I .
xd xd
sT , [ 1 + V 1 + (ST )2 siп ( 200 arctg
1 + (sTd)2 sT d
ST . [ 1 + V 1 + (ST )2 SiП ( 200 аrсtg 2St )] +
1+ (STd)2 sT d
М М { Xd X
' ac ,
2 Xdxd
XdXd
Х x.
+
XqX q
sT; , [ I Jll+(ST;)2 siп ( 200 arctg sT l q " 2St )]} ,
1 + (sT;)2
( 14. 16)
rде 60 уrол начала отсчета.
Реактивная мощность, соответствующая ,эквивалентной выделенной асин-
хронной машине для простейших условий [тех же, что были приняты при выводе
(14.11)], находится соrласно схеме замещения двиrателя:
U2XlS2 ( U2rs ) s
Q ac J2X
r 2 + (SXl)2 r 2 + (X 1 S)2 r / Хl ' I
Сомножитель в скобках представляет собой М 2 Рас' а '/Хl SI\P кри-
тическое скольжение, Torдa
(14.17)
464
I Qac' р ас 8 ! 8 ир . !
(14.18)
Здесь не принимается во внимание намаrничивающая мощность асинхронной
машины, уже учтенная при определении реактивной мощности машины, как син
хронной в (14.8). . ,
Учитывая действие на роторе трех обмоток [при предпосылках и допущениях,
принятых при выводе предыдущиХ формул (14.14) и (14.16)], выражение для асин-
хронной реактивной мощности имеет вид (также при 8 == const или медленно Me
няющемся) .
и2 {( 1 1 ) [ (sT )2 sT (
Qac == 2"" :;; 1 + (sT )2 + V 1+ (sT )2 cos 280
. arctg 28t )] + ( ...!... ...!... ) [ (sT )2 + sT Х
sT X X 1+(sT )2 Vl+(sT )2
х cos ( 280 arctg 28t )] + ( ...!... ) [ (ST ):
sT d x q x q 1 + (sTq)2
sT cos ( 2а о arctg ST l q . 2st )J} . (14.19)
У 1 + (sT;)2 .
Общий среJJ.НИЙ момент. Этот момент, действующий на роТор синхронной
машины, работающей со скоростью, отличной от синхронной (@ =i= @о' rде @о ===
== 2Jtto, to частота на шинах приемной системы),
М == М 1 +М2'
rде Mt определено соrласно (14.5а), а М 2 соrласно (14.14).
Статические и динамические характеристики асинхронноrо режима. Если
приведенные выше характеристики получены при постоянном токе возбуждения
исходноrо режима в предположении, что э. д. с. Е ===Eq, то их можно назвать
статическими. Эти же характеристики MoryT быть получены как динамические,
если учитывать изменения э. д. с. по времени: Е== f(t). При э ом э. д. с. Е долж-
на находиться из дополнительных дифференциальных уравнений, отражающих
также начальные условия толчок, изменение схемы, изменение скорости.
В простейшемслучае динамической МОЖНО считать характеристику при Е== E .
При асинхронном режиме можно различать:
у с т а н о в и в ш и й с я а с и н х р о н н ы й х о Д при пос-
тоянном скольжении достаточно большом, таком, что М:! имеет решающее
значение в выявлении характера режима (было рассмотрено выше);
и з м е н я ю Щ и й с я а с и н х р о н н ы й х о Д также при
большом, но переменном скольжении, коrда идет процесс выпадения из
синхронизма или, напротив, втяrивания в синхронизм.
В этих двух случаях пользуются полученными выражениями момента,
рассматривая их как статические или динамические. ....
Синхронная машина иноrда может работать со скольжением, создаю-
щим демпферный момент М2' влияющий на процесс, но тем не менее не
465
считается аходящейся в асинхронном режиме. Здесь можно различать два
основных случая:
м а л ы х к а ч а н и й вблизи синхронной скорости (s < 0,05%)
(см. rл. 7,8);
б о л ь ш и х к а ч а н ий (s> 0,05%), при которых влияние
демпферноrо момента М 2 имеет решающее значение, но машина, качаясь,
остается в синхронном режиме, причем уrол {j меняется в широких преде
лах, оставаясь меньше 3600 относительно любой друrой синхронной машины
системы.
Рассмотрим подробнее некоторые случаи изменяющеrося асинхронноrо хода. При этом
дополнительный момент (мощность), вызванный наличием скольжения и обусловленный свя
занными с ним токами, появляющимися в обмотках рртора, включая и демпферные обмотки,
будет
А М А Р U z., Xd Xd (р) ( ' ' ) + и . ,X q X q (р) ,
Ll Ll S1Пu COSuo COSu "COSu (siп1\ siпоо).
XdXd (Р) XqX q (Р)
Уравнение это, содержащее оператор Р, может быть раскрыто во времени с помощью
интеrрала Дюамеля:
O t
У (Р) S dA (6)
) А (t) А (О) ер (t) + ер (t 6) d6,
Z
в O
rде для первоrо члена I'1M
У 1 (Р) Xd Xd (р); Z1 (р) Xd (р) А 1 (t) cos 00 cos 1\ (t).
Аналоrичио, для BToporo
Yz (р) X q X q (р);
ZZ (р) X q (р) Az (t) siп 1\ (t) siп 00'
Вместо весьма сложных, ио общих динамических характеристик, получающихся в
этом случае, можно применить упрощенные выражения, полученные в предположении об
определенном (заданном) изменении скольжения.
С к а ч к о о б Р а 3 н о е и з м е н е н и е с к о л ь ж е н и я. Предположим, что
скольжение изменяется не плавно, а скачками, по интер.валам от HeKoToporo 80 до 81' Тоrда.
добавочный момент для машины без демпферных обмоток будет
( Xd X q T X q
I'1M"= Ks , , +
т d Т dO xd Xd
, :; )
siп о
[ . ]
(1 + 55 т;) (1 + 5i T 2) ,
[де
Ks uzх?зfd T /(rfXdXq),
Для машины с демпферной обмоткой выражение дЛЯ I'1M усложняется, но расчеты oco
бых трудностей не представляют.
С и н у с о и Д а л ь н о е и з м е н е н и е с к о л ь ж е н и я, Предположим, что
уrол измеияется следующим образом:
1'11\ М т cos"(t,
rде у ..,... частота колебаиий и соответственно 1'15 1'18 siп yt. Тоrда будем считать, что
I'1M UZ ( D q ) cos21\O + ( Dd ) siпZ1\о,
X q 1 2 xdl
466
rде
1
Dd
Ха
T ( т;о T ) 1 1 T ( T o T ) .
1 + (..T )2 ""Ха + 1 + (..T )2 '
1 T (T o T )
Dq .
Х Ч 1 + (..T )2 ..2хч
Для расчетов, проводимых упрощеино в условиях, коrда частота колебаний у неизвест-
на, можно воспользоваться выражением
( Xa Xa, Хч Х . )
АМ Р а и 2 sin 2 о ' . т + COS2 о т
,,, d " Q"
Х а Ха ХчХ ч
В этом случае мощность демпфирования при синусоидальных колебаниях уrла & с
малой амплитудой и малой частОТОЙ, в предположении отсутствия сопротивления в обмотке
возбуждения
АР Pdd&ldt.
Несинхронное автоматическое повторное вклю-
ч е н и е (НАПВ). В этом случае в reнepaTope возникает электромаrнитный мо--
мент, который создает механическое воздействие на вал reHepaTopa, на крепления
корпуса статора, на фундаментные болты и т. п. Электромаrнитный момент в re-:
нераторе при НАПВ определяется э. д. с. reнepaTopa, напряжением сети,
уrЛОМ llХ сдвиrа по фазе относительно друr друrа и сопротивлением связи между
reHepaTopoM и системой.
Как будет показано далее, наибольшую опасность для reHepaTopoB при не-
синхронном включении представляет не ток, а электромаrнитный момент и именно
момент является фактором, оrраничивающим допустимость применения НАПВ,
поэтому рассмотрим более подробно моменты, возникающие в reHepaTopaX при
несинхронных включениях. Выражение электромаrнитноrо момента в общем виде
достаточно сложно. Анализ моментов может быть проведен по более простой фор-
муле, полученной из общеrо выражения (151 при условии пренебрежения затуха-
нием всех с ободных токов, наведенных в контурах ротора, за исключением за-
тухания апериодической слаrающей тока статора:
м == U 2
. .
Х Ха { t1T 1 2t1T
ч.. siп [280 + (l 2s)t]e а siп 2 [80+(l s)t] е а
. 2
siп 2 (80 st) + Е 2 [ siп (1 s) te tJTa
2 Ха
. . . ]
Х X 2t1T
q. .а siп2(1 s)te а
ХчХа
2
+ и Е ( : {siп (80 st)
{ tJT
sin [80 + (l 2s) t] е а
tlT }
sin[oo+(l s)t]e а
. .
Xq Х а
ХчХа
467
2tIT }
sin[ o + 2 (1 s)t]e а.
MaJlbIe качания. При скольжении s О (в окрестности очень малых измене-
НИЙ) можно соrласно (14.5) принять, что
M ll == р н + K ll s, rДе Р 11 == (E2/ Z ) sin IZ.
s a в соответС1ВИИ с рис. 14.18
значение
К ll == tge} == I dM ll /ds I .
в простейшем случае на oc
новании (14.56) можем записать
К Il == l E2r (х 2 r 2 )/z4 I ,
или при r« Х
Kl1 (Е/х)2 r.
'. '
05ласть r-..
маЛblХ S /
/ 1'"""'0 / 1'12 '"
М п) " /
-..ь
I [;1 lL
Р II
l/ А
О" 7' [2
1'12
О
I
J
......... .....м" V I
........... 5=0
Д8IJzательныи режим ПJllерат0рныи режцм
""1,'
5=+1
в величинах р в и КВ В за-
ВИСимости от конкретных усл<r
вий* можно ввести Eq или Е'
E и соответственно поНимать
под z и Х суммарное сопротив-
ление цепи, в которое reHepaTop
введен или си хронным Xq, или
переходным Xd Сопротивлением.
Соrласно рис. 14.18, при ма-
лых скольжениях (s < 0,05 %)
можно представить
М 2 == K 22 s, rде К 22 == tge 2 == I dM 2 /ds I .
При этом в случае удаленности reHepaTopa от шин значение М 2 (или К 22 )
должно быть пересчитано в соответствии с (14.15). Исследуя качания, при опре-
делении К 22 необходимо воспользоваться выражением (14.16) для MfHOBeHHoro
значения момента. Учитывая только первый член в (14.16), получим
I xd X d 2'. 2 I
'К 22 == ,1 и Td sш .
XdXd
ПСПНВlЙ момент, действующий на ротор reHepaTopa в этих условиях, при
5>0
Рис. 14.18. Изменение вращающеrо момента и ero
слаrаЮЩИJl при изменении скольжения
м == Р 1l + P 12 + (К 22 K ll )s.
Обозначив К 22 Кн через Р d, получим
М == Р 1l +P 12 +Pds.
. (14.20)
468
· При испоп.зовании статической или динамической характеристики.
При п === 1 момент
М === (E2/z) sin а + (Еи /z) sin (8 а) + Р dS,
rде Р d Д е м пф е р н ы й к о э Ф фи ц и е н т, не зависящий от скольжения.
При К 22 > Кв, что обычно бывает в крупных электрических системах, зна-
чение Р d П О Л О Ж И Т е л ь н О, что означает положительное де.мпфирование (с
ростом скольжения +5 увеличивается мощность, отдаваемая в reHepaTopHoM ре-
жиме) (см. рис. 14.18). Если К 22 < Кв, то Р d О Т Р И ц а т е л ь н О, что означает
отрицательное демпфированue (с ростом скольжения уменьшается мощность,
отдаваемая в reHepaTopHoM режиме). Последнее приводит не к затуханию колеба-
ний, как в предыдущем случае, а к раскачиванию, т. е. превращению малых ко-
лебаний в большие нарастающие, в процессе развития которых выражение
(14..20) уже потеряет силу (5)> 0,05%).
Большие качания. При больших качаниях пользование полученным коэqr
фициентом Р d уже становится не вполне корректным. ИзвесТны приrодные при
достаточно больших s расчетные выражения*.
! 14.6. ВЫПАДЕНИЕ из СИНХРОНИЗМА,
АСИНХРОННЫй ХОД ИРЕСИНХРОНИЗАЦИЯ
ДО сих пор рассматривалась машина, работающая несинхронно с некоторым
скольжением 5 относительно шин неизменноro напряжения или друrой машины.
Проанализируем процесс выпадения из синхронизма. При этом в исследуемом про
цессе будем различать три стадии**: режим синхронных колебаний и переход от
синхронноrо к асинхронному режиму; установившийся асинхронный ход; режим
ресинхронизации. Рассмотрим эти процессы применительно к простейшей системе,
схема которой показана на рис. 14.19, а. Предположим, что в этой системе отклю
чилась одна из цепей лэп. Повторное включение отключившейся линии восстано-
вило условия нормальной работы передачи. Однако полученный ротором reHepa-
тора толчок оказался настолько велик, что reHepaTop, ускоряясь, выпал из син-
хронизма. Исходя из предположения, что скольжение мало, и пренебреrая асинх-
ронной мощностью, можно провести анализ методом площадей, приняв М === Р.
В переходном процессе площадка торможения 3' 4 5 3' оказывается мень-
ше площадки ускорения 1 2 3 3'-1 (рис. 14.19,6). Ротор проходит участок 4-5,
rде на Hero действуют тормозящие силы; пройдя положение, отвечающее точке 5,
он вновь получает ускорение, непрерывно увеличивающееся и становящееся зна-
чительным при достижении уrла сдвиrа в 200 3000. Скольжение обусловливает
появление асинхронноro момента. Среднее значение асинхронноrо момента Мае
определяется соrласно выражению (14.14). Пренебрежем пульсацией асинхронно-
ro момента (которая происходит с двойной частотой скольжения. В начальной
части кривой Рае === Мае=== <p(s).
Асинхронная мощность (момент) непрерывно возрастает с ростом скольжения.
Эта зависимость представлена кривой 7 7 ' на рис. 14.19, б. Далее с ростом сколь-
жения зависимость Рае== <р(5) приобретает вид, показанный на рис.14.20. Вместе
* Литкене П. В. Нелинейные колебания в реrулируемых электрических системах.
М.: МЭИ, 1974.
** Эти три стадии не обязательно свойственны любому процессу; может быть переход
от синхронноrо к асинхронному режиму минуя стадию синхронных колебаний и т. д.
4
с ростом скорости (увеличением скольжения) мощность турбины Р т (кривая 5' 6
на рис. 14.19) уменьшается под действием реrулятора скорости турбины. Синхрон
ная мощность во время рассматриваемоrо проuесса будет пульсирующей: '
р СВ == (Еи /х) siп 8t.
Являясь функцией скольжения, она, в свою очередь, будет влиять на проuесс,
вызывая пульсаuии. При некотором значении скольжения 800 момент турбины
a
lU
. '
P,s
1
I
I
I
I
I
. 1
..............Т--
I
I
I
5' I
I
РТ б I
........... I
I
.....-.-...J.......
ас "'""7' I
I
7 I
360 10, ераа
I
I
I
t
pI: .
I
I
I
I Ш
I Ус';'оно8и8
Л пepexof}HbIv реЖLJI'f.fJlТ1 СУНХPlJl{ I ШLJVСЯ llCLJH
.. 1.. .
ново j( llCIIHXPOHHOM!/ хронныи хоа
Рас 1-0; Рт>Р ас Pac Р т
о)
Рис. 14.19. Выпадение из синхронизма и переход на асинх
ронный ХОД синхронноrо reHepa тора:
Q; схема системы; 6 процесс вышщения нз синхронизма
уравновесится средНИМ асинхронным моментом reHepaTopa М Т == Мас' Прибли,-
женно эro значение скольжения $00 моЖНО найти следующим образом.
Представим: rрафически зависимость асинхронноrо момента (мощности) от
скольжения так, как это сделано на рис. 14.20. Зная характеристику Мас== q>(s) и
коэффиu иент неравномерности турбины.., а также полаrая, что зависимость М Т """
== ЧJ( JIИнeifна. найдем среднее скольжение 800 (рис. 14.20)
У становившийся асинхронный ход при отсутствии пульсаuий будет xapaKTe
ризоваться скольжением soo и асинхронным моментом Маеоо, отвечающим значению
скольжения 80<><' Однако если выпавшая из синхронизма машина возбуждена, то
кроме взаИМН;Q уравновешивающих друr друrа асинхронноrо момента и момента
турбины па валу arperaTa при асинхронном ходе будет действовать также син
хронный пульсирующий вращающий момент (рис. 14.21), создавая пульсаuии
470
скольжения, изменяющеrося от SMaKc до Sмин . Пульсации скольжения тем больше,
чем больше синхронный момент; значение скольжения проходит через минимум
при уrле, БJ1ИЗКОМ к 180°, если асинхронный момент и момент турбины малы; далее
процесс повторяется периодически. Это обстоятельство особо существенно при
определении условий ресинхронизации.
/vi /А
/
fVl т /
S""
+$
Рис. 14.20. Изменение асинхрон
Horo момента синхронноrо reHe-
ратора и момента турбины при
изменении скольжения
Рис. 14.21. Изменения синхрон-
Horo момента (а) н вызываемые
ими изменения КOJIьжения (6, в)
м"
1\ fVl Т "'l'7ас/\. r
V Vo '
о)
"
Зм",
$ицн
о
в)
s
K ' $""
"
I
I
: I
01;
/}
Критерий ресинхронизации. Относительное движение ротора [енератора опи
сывается уравнением
т J d2'O/dt 2 == М Т Мен Мае == M
и после преобразований левой части
T J sds/d'O M. (14.21)
Предположим, что М Т == f(roo + s); Мае == ср(roо + s) заданы как функции
уrла б. Torдa, соrласно (14.21), получим энерrию при колебаниях уrла от б макс
ДО б:
1J
Т Т s2 макс
J 2 макс т S MdO, [де M == f('O).
1J .
Значение скольжения в любой момент времени
S у з;", :, j"" Md3.
Если ПРОИСХОдЯщее в процессе пульсации в установившемCS1 асинхронном
режиме скольжение пройдет через нуль (s == О), то появится возможность ресинх-
ронизации.
(14.22)
471
Соrласно (14.22), эта возможность появится, коrда
2 1)маке
52 == 5 Md8.
макс т
J 1)
(14.23)
Значения $мЭКС, определенные в соответствии с (14.23), не позволяют получить
количественные результаты для установления надежных условий ресинхрониза
ИИ по двум причинам:
а)
Н Т
о)
В)
s
М э
В/
,/
i
.<
S
S
е)
м
д)
м
I
Sd 5 <со S
Рис. 14.22. Поведение reHepaTopa и турбины при установлении асинхронноrо хода
1) выражение (14.23) указывает только на возможность ресинхронизаци
т. е. дает необходимые, но не необходимые и досmaтоЧJШe УС/ЮВИЯ p€синхронuзациu;
2) зависимость М == <р(б), входящая в (14.23), зар а н е е н е и з в е с т н а,
и получение количественных результатов требует предположений о ее характере.
Принимая М == Мтsiпб, r де б == О --;-- п, буд ем иметь
5 макс == 2 VMm/T J ; scp == VMm/T J . (14.24)
В общем случае при друrих предпо ложениях о изменении уrла б получим
5 ср == К V Mm/T J ,
rде К меняется от 1 до V Выражая TJ в секундах, а М т в относитель
единицах, иноrда записыва
47i
Вер == (0,06 ...;-.0,08) V MтIТJ .
При получении (14.24) были сделаны и друrие допущения. Так, существенно,
что установившийся асинхронный режим и условия синхронизации определялись
соrласно статической характеристике момента первичноrо двиrателя. В действи
тельности этот режим наступает не сразу и процесс ero установления идет в соот-
ветствии с динамической характеристикой, отличающейся от статической тем силь-
нее, чем больше ускорение reHepaTopa, инерция perY-lIятора скорости и серводви-
rателя направляющеrо аппарата.,
Характер процесса при учете динамических характеристик. Протекание
процесса ресинхронизации, показанное на рис. 14.22, как и любых быстрых про
цессов, определяется динамическими характеристиками, являющимися деформи-
рованными статическими и иноrда существенно отличающимися от них. Пример-
ный вид динамических характеристик турбин М Т == ср(в) при разных ds/dt (кривые
1, 2, 3) и статической характеристики (зависимость 4) показан на рис. 14.22, а.
На рис. 14.22, б приводится асинхронная динамическая характеристика мощнос-
ти reHepaTopa с наложенной на нее пульсирующей синхронной составляющей
мощности: М э == cp(s, ds/dt). Изменение скольжения (пульсации) s == f(t) в слу
чаях А и Б показано на рис. 14.22, в. Здесь в случае А процесс ресинхронизации
невозможен, так как минимальное скольжение (точка т) не проходит через нуле-
вое значение (точка k). В случае В, напротив, создаются условия возможной син-
хронизации (s == О, k и т со падают). На рис. 14.22, е даны те же соотношения,
что и на рис. 14.18, в, но применительно к изменениям динамических моментов.
Опять-таки условием возможности синхронизации будет равенство нулю отрезка
k m.
Установившийся асинхронный ход показан на рис. 14.22, д, коrда соответст-
вующее ему значание скольжения s"" определяется пересечением статических ха-
рактеристик М э == CP1(S) и М Т == CP2(S).
t 14.7. ПРАКТИКА ВХОЖДЕНИЯ В СИНХРОНИЗМ
АСИНХРОННО РАБОТАЮЩИХ rEHEPATOPOB
(РЕСИНХРОНИЗАЦИЯ И РЕЗУЛЬТИРУЮЩАЯ УСТОЙЧИВОСТЬ)
Асинхронный ход reHepaTopa или части системы, появившийся в результате
нарушения устойчивости, должен быть ликвидирован, и синхронная р ботадолж-
на быть восстановлена. При этом удобнее Bcero восстановить синхронизм путем
ресинхронизации выпавшеrо [енератора без отключения ero от сети. Такое вос-
становление HOpMa.i1bHOrO режима обладает рядом преимуществ, [давное из кото-
рых быстрота восстановления. Так, в случае отключения [енератора от сети
и последующей ero синхронизации набор наrрузки будет происходить не менее
нескольких минут. Все это время выпавший из синхронизма [енератор не будет
выдавать энерrию в систему. Ес.i1И же выпавший из синхронизма reHepaTop не
отключается от сети, то, даже работая в асинхронном режиме, он выдает в сеть
некоторую мощность, а входя в синхронизм путем ресинхронизации, он быстро
увеличивает эту мощность. Если [енератор или станция, выпавшая из синхрониз-
ма и некоторое время At ac проработавшая в асинхронном режиме, затем восстанав-
.i1ивает свою синхронную работу при условиях, близких к условиям исходноrо
режима, то такую систему практически нельзя считать неустойчивой, ее сле-
дует рассматривать как систему, обладающую резУ.i1ьтирующей устойчивостью.
17 84
473
Способность системы восстанавливать синхронную работу после KpaTKOBpeMeH
Horo асинхронноrо хода и будет, следовательно, называться результирующей
устойчивостью.
Результирующая устойчивость широко реализуется в практике эксплуата
ции энерrосистем, и для ее улучшения (уменьшения установившеrося скольжения
500, сокращения времени асинхронноrо хода /'),.t ac и повышения надежности ресин-
хронизации) разработаны специальные устройства.
При нарушениях синхронизма, вызванных статической неустойчивостью,
которая обусловлена изменением схемы системы или переrрузкой reHepaTopoB,
ресинхронизация оказывается возможной только после вмешательства персонала,
который должен установить причины неустойчивости. Вхождение в синхронизм
после нарушения динамической устойчивости может происходить и без вмешатель-
о}
р $, :уо
2,0 {(J Р
1,5 8
1,0 е
Р=0,9
0,5 2
270
D
о
-2
5
-1,0
-6
б)
В. ца8
J60
180
90
00
о
O
е
б
t,c
0з
Рис. 14.23. Примерный характер протекания процесса при выпадении из синхро,
низма и последующей ресинхронизации:
а измеиение полной электрической мощности reHepaTopa Р, мощности турбины р т ' асннхроиной
мощности Рас' входящей в ПОJlНУЮ мощность Р, среднеrо 8 ер и MrHoBeHHoro 8 скольженнЯ, б
I\ f(t), а" а. а.. 11" 11, /]. большие качання; в большие качания, зависимоСТь P f(II); е про-
цесс установления асинхронноrо хода; завнснмостн PT q>(Sep)' Pae q>(Sep)' Точкн 1, 2. 3, 4 иа
рнс, а соответствуют тем же точкам на рнс. е; точки а" а, а., точки Ь" Ь, Ь. и тоqки С, а. /1
на рис. а соответствуют тем же точкам иа рис. б и 8
474
ства персонала, автоматически, под действием реryляторов скорости или специ-
альных приборов-ресинхронизаторов.
Опыт эксплуатации показал, что вполне возможна удачная ресинхронизация
lj: результирующая устойчивость не только отдельных reHepaTopoB, но и rрупп
reHepaTopoB или rрупп станций частей системы, связанных линиями передачи.
Ресинхронизация успешно проводится на мощных электростанциях, как rидрав-
лических, так и тепловых. Возможность ресинхронизации и специальные меропри-
ятия по ее проведению должны предусматриваться при проектировании
электрических станций и систем.
Происходящие процессы показаны на рис. 14.23. Этот рисунок является об-
работанной осциллоrраммой ресинхронизации reHepaTopa мощностью 50 МВт.
Про исходящие проuессы можно условно разбить на три характерных этапа. П е р-
вый э т а п это трехфазное короткое замыкание, продолжающееся в данном
конкретном случае около 0,55 с. В это время arperaT не отдает мощность в сеть.
Небольшая часть ее расходуется на покрытие потерь в reHepaTope и трансформа-
торе, а основная ее часть идет на СОббщение ротору кинетической энерrии уве-
личение ero скорости сверх синхронной. Из рисунка видно, что значение cpeдHero
скольжения довольно быстро растет.
После отключения KopoTKoro замыкания начинается в т о рой э т а п про-
цесса. Наличие возбуждения и динамической явнополюсности reHepaTopa во вре-
мя устанавливающеrося и установившеrося асинхронноrо хода вызывает колеба-
ния активной мощности. Под действием реrулятора скорости впуск энерrоноси-
теля и мощность турбины начинают уменьшаться, наступает кратковременный
асинхронный ход при скольжении Soo. Этот кратковременный асинхронный режим
продолжается только в течение !!:.t ac и вскоре нарушается в результате действия
реrулятора или вмешательства персонала, уменьшающих мощность первичноrо
двиrателя. Скольжение начинает интенсивно уменьшаться. На 4-й секунде, после
девяти полных ПРОВQРОТОВ ротора, скольжение проходит через нуль.
Наступает т р е т и й э т а п процесса, во время KOToporo reHepaTop входит
в сиНхронизм, показателем чеrо служат характерные «двуrорбые» характеристи-
ки мощности, отражающие процесс больших качаний, во время которых MrHoBeH-
ное скольжение периодически изменяет знак при среднем скольжении, равном ну-
лю. На б-й секунде качания прекращаются и наступает нормальная работа ре-
синхронизировавшеrося reHepaTopa, причем за счет снижения мощности, н еоб-
ХОДимоrо для осуществления ресинхронизации, мощность в установившемся
режиме оказывается примерно на 10% меньше мощности исходноrо режима (45
МВт вместо 50 МВт). Применительно к последнему случаю этот процесс можно ви-
деть на рис. 14.23, е, rде показано, что запаздывание изменения механической
мощности турбины под действием инерционных opraHoB, реаrирующих на возрас-
тание скорости, приводит к запаздыванию мощности турбины и «забросу» сколь-
жения до Scp.MaKc (точка 1). В дальнейшем в процессе изменения мощности турби-
ны скольжение падает до Sср.мии и после HOBoro увеличения достиrает установивше-
rося значения S;':;. Установившийся асинхронный ход, продолжающийся в течение
!!:.t, прекращается дополнительным воздействием на турбину и уменьшением ее
мощности, что приводит К снижению скольжения иресинхронизации.
Процесс вхождения в синхронизм существенно зависит от параметров ре-
rулятора скорости. Эти параметры MorYT быть таковы, что среднее скольжение
будет монотонно приближаться к установившемуся значению, определяемому
статизмом реrулятора, средним асинхронным моментом и собственным моментом
17*
*
475
reHepaTopa. Для этоrо случая характер процесса показан на рис. 14.24 (характе-
ристика 1). [енератор входит в синхронизм при измен иях MrHoBeHHoro сколь-
жения. '
Однако часто реrулятор скорости имеет такую настройку и такие параметры,
что при приближении к синхронизму происходит перереrУ.'Iирование и скольже-
ние приближается к установившемуся значенИ!{' колебательно или даже с переме-
ной знака (характеристики 2 и 3). В тех слу-
Sc p чаях коrда реrулятор настроен так, что cpek
нее скольжение при подходе к нулевому зна-
чению меняет знак (характеристика 3 на рис.
14.24), может наблюдаться явление срыва ре-
синхронизации. Ресинхронизировавшийся re-
нератор снова переходит в асинхронный ре-
жим. Это явление иноrда называют nроскаки-
ранием синхронизма. После проскакивания
синхронизма может снова произойти ресинх-
ронизация или переход в новый асинхронный
режим. Это зависит от вида кривой среднеrо
скольжения. Во всяком случае, при любой
настройке реrулятора, а также любых пара-
метрах reHepaTOpa и I.:щ:темы можно за Счет
специальноrо воздействия на реrулирующее'
уверенной и достаточно быстрой ero ресинхро-
Рис. 14.24. Зависимости Scp== Ю)
при ресинхронизации, построенные
для трех случаев настройки реrуля-
тора скорости
t
устройство reHepaTopa добиться
низации. .
Я:мения, происходящие при ресинхронизации reHepaTopoB, в настоящее вре-
мя еще не полностью изучены, и совершенно надежной методики расчета, отража-
ющей детали протекания процесса, особенно в сложной системе, пока не существу-
ет. Однако общая инженерная характеристика процесса может быть получена с
помощью ЦВМ и АВМ. .
Рассмотрение процесса ресинхронизации можно провести, применяя способ
П.'Iощадей, который в этом случае может дать хотя и rрубое, но все же удовлетво-
рительное описание происходящих явлений. Далее будут рассмотрены основные
уравнения, позволяющие производить расчеты и получать с их помощью ориен-
тировочную оценку условий ресинхронизации reHepaTopoB или асинхронно ра-
ботающих частей системы для тех И.'IИ иных конкретных случаев.
Процесс ресинхронизации сиихронных reHepaTopoB, работающих в асинхронном режи-
ме при скорости, большей синхрониой. В асинхронно работающей машине наличие возбуж-
дения приводит, как было показано выше, к пульсациям скольжения от SMaRC до Sмин' При
некотором значении тока возбуждения MrHoBeHHoe скольжение может пройти через нуль_
Уменьшая мощность первичноrо двиrателя, можно снизить скольжение. Прохождение сколь-
жения через нуль означает, что дополнительная кинетическая энерrия ротора стала равна
нулю, а асинхронная мощность исчезла, так как reHepaTop вошел в синхронизм.
Останется или нет reHepaTop далее в режиме синхронной работы, зависит от протекания
процесса и соотношений между qJлектрической мощностью Р СЮ действующей после вхо-
да reHepaTopa в синхронизм, и мощностью турбины Р т , а также от уrла б, при котором
скольжение прошло через нуль. Условие S == О есть необходимое, но в большинстве случаев
недостаточное для ресинхронизации.
Рассмотрим процесс ресинхронизаuии, пользуясь основным соотношением, вытекаю-
щим из метода площадей. Из соотношения (14.23) следует, что значение S == О может насту-
пить при условии
476
Это условие может осуществляться при различных значеииях уrла б и различных соот-
ношениях синхронноrо момента М СН и момента турбины М т , '
Предположим, что увеличение тока возбуждени!'!, как это показано на рис. 14.25, а,
увеличивает синхронный вращающий момент и вызывает такое увеличение пульсаций
скольжения, что скольжение SМИН пройдет через нуль (dOldt == О). Этот момент будем считать
наступлением синхронноео режима ресинхронивацией, которая, однако, может быть и
неуспешной, если reHepaTop
вновь выпадет из синхрониз- а)
ма. н,s
у словия вхождения в
синхронизм MorYT быть приб-
лиженно выявлены из следу-
ющих простых соотношений.
Предположим, что вплоть до
момента синхронизации на ва-
лу reHepaTopa действовал тор-
мозящий избыточный момент
(если reHepaTop шел со скоро-
стью выше синхронной). Бла-
rодаря этому моменту сколь-
жение уменьшается. Избыточ-
ный момент, определяющий
движение reHepaTopa в асинх-
ронном режиме, состоит из
трех составляющих момента
турбины, синхронноrо и асин-
xpoHHoro моментов:
&М == М Т М СН М аС .
Так как при s == О асинх-
ронный момент равен нулю
(при неучете динамических
составляющих), то необходи-
мым условием вхождения в
синхронизм при t == t CH будет
М СН ;;;;. М т ,
Вср== V T J Mda .
М Т
-- Scp
()
Б)
/'f,s
6)
Рис. 14.25. Ресинхронизация reHepaTopa при подведе-
нии к синхронизму увеличением возбуждения
При :МСН > М Т ресинх-
ронизация будет успешной (ес-
ли не учитывать возможности
повторноrо нарушения синхронизма в процессе последующих качаний, что будет рассмотре-
но далее). В этом случае в процессе колебаний, вызванных знакопеременным синхронным
моментом, скольжение достиrает нуля при налнчии нескомпенсированноrо тормозноrо мо-
мента &М < О, вследствие чеrо скольжение меняет знак и уrол а начинает уменьшаться. Этот
случай показан на рис. 14.25, а.
Соотношение М СН == М Т соответствует критическому случаю. коrДа при вхождении в
синхронизм reHepaTop оказывается в положении неустойчивоrо равновесия. Любое малое воз-
мущение в зависимости от направления ero воздействия приводит либо к уменьшению уrла
и успешной ресинхронизации, либо к увеличению уrла и выпадению из синхронизма. Этот
случай показан на рис. 14.25, б.
Если условне М СН ;;;;' М Т не выполняется, то ресинхронизация не может произойти,
хотя скольжение может настолько близко подойти к нулю, что практически режим можно
считать синхронным. При неудачной синхронизации уrол б будет продолжать изменяться и
reHepaTop в конечном счете останется в асинхронном режиме (рис. 14.25, в). Итак, синхро-
низация возможна при уrлах б, которые обеспечивают М СН ;;;;. М т ,
Значение уrла Осн' при котором появлиется возможность втяrивания в синхронизм,
477
будет тем ближе к 180°, чем меиьше момент турбины по отиошению к максимальному синхро-
ииому. В пределе, при М Т О, ресинхронизация будет происходить при уrлах, близких к
180°. При этом, как уже указывалось, чем ближе уrол синхронизации к 180°, тем больше раз-
мах и период качаний, которые наступают после вхождения в синхроиизм. Но так как после
вхождения в синхронизм средиее скольжеиие уменьшается до нуля, то реrулятор скорости
турбины начинает увеличивать впуск энерrоиосителя, вследствие чеrо возрастает момент
турбины. Это приводит к увеличению площадок ускорения и уменьшению площадок тормо-
1 \ Р 2 2
rv
РНI PI1Z
Рис. 14.26. Схема слабой свя-
зи без промежуточных Harpy-
зок
Рис. 14.27. Схема слабой связи с пр оме-
жуточными наrрузками
жения в процессе качаний, в результате чеrо возможно выпадение из синхронизма в одиом
из последующих циклов качаний.
Подобные случаи называю'тея неуспешной ресинхронизацией. Часто можно избежать
неуспешной ресинхронизации, надлежащим образом реrулируя в процессе качаний ток воз-
буждения. Рост амплитуды синхронноrо момента приводит к умеиьшеиию амплитуды кача-
Ний, что сводит опасность повторноrо выпадеиия из синхронизма к минимуму. Процесс вхо-
ждения в синхронизм, рассмотренный ранее с помощью метода площадей, может быть рассчи-
тан посредством метода последовательных интервалов при обязательном учете характеристик
турбин и установленных иа них реrуляторов скорости.
Практически важные выводы сводятся к следующему:
1) коrда асинхронный момент мал, иапример при работе [енератора через длинную
линию, асинхронный ход и втяrивание в синхронизм будут осуществляться при малом мо-
меите турбины. При этом во избежание больших качаний и возможности неуспешной ресинх-
ронизации ее лучше проводить при меиьшем или снятом возбуждеиии. Только после подхо-
да reHepaTopa к скольжению (8 == О) целесообразно увеличивать возбуждение, с тем чтобы
обеспечить спокойное вхождение в синхронизм с уменьшением размаха качаний;
2) коrда асинхронный момент достаточно велик (иапример, при работе [енератора через
короткую линию, ресинхронизапии турбоrенераторов, двиrателей и т. д.) , процесс ресинх-
ронизации в большинстве случаев лучше осуществлять при значительном токе возбуждения;
3) цосле ресинхронизацин обычно целесообразно дальнейшее увеличение тока возбуж-
дения, уменьшающее размах качаний;
4) сильное реrулирование возбуждения эффективно облеrчает процесс ресинхрониза-
ции.
Ресинхроиизация частей систем, объединенных слабой связью. Ранее указывалось
что и слабосвязанные части системы или отдельные системы MorYT выйти из синхронизма и
после асинхронноrо хода ресинхронизироваться. Напомним, что слабосвязаННblми системами
называются системы, соединеиные между собой такой ЛЭП, по которой можно передавать
из одиой системы в друrую по условиям статической устойчивости мощиость, не превышаю-
щую 15 25% от мощности меньшей из систем. Слабой связью между системами может яв-
ляться ЛЭП, связывающая системы (рис. 14.26), а также ЛЭП, имеющая ряд промежуточ-
ных иаrрузок (рис. 14.27).
При анализе ресинхронизации энерrосистем, соединенных слабыми связями, в качест-
ве rрубоrо допущения ,обычно принимают, что: а) напряжение на основных наrрузках энер-
rосистем (но не на иаrрузках, подключенных к линии) постоянно и потребляемая мощность
неизменна; б) реrуляторы скорости турбии настроеиы так, что скольжеиие, соответствующее
статизму системы, устанавливается без перереrулирования.
Рассмотрим условия ресинхронизации для случая слабой связи по схеме объединенных
систем, соответствующей рис. 14.26, при допущении, что лэп имеет только реактивное со-
противление. Более сложные случаи, например случай, коrда к ЛЭП подключены наrрузки
или коrда слабой связью служит лэп с промежуточными электрическими станциями, здесь
ие рассматриваются.
478
При исследовании ресинхронизации двух концентрированных снетем, соединенных
слабой связью, можно каждую из них заменнть одним эквнвалентным reHepaTopoM и восполь-
зоваться соотношениями, выведенными для двух reHepaTopoB соизмеримой мощиости. При
этом предположим, что при асинхронном ходе между снетемами не возникает больших кача-
ний и нарушеннй устойчивости внутри каждой из этих систем не может быть. Предположим
также, что мощность в предаварийном режнме передавал ась нз системы 1 в систему 2
(рис. 14.27). При отключении линии, соединяющей системы, частота в системе 1 повышается,
а частота в снетеме 2 понижается в соответствни со статическнмн характеристиками систем.
После несинхронноr,О включения среднее установившееся скольжение будет незначительно
отличаться от скольжения перед включением, так как собственные моменты систем, опреде-
ляемые мощностью наrрузки, остаются при асиихронном ходе практически теми же, что и
при раздельной работе, а асинхронные моменты при слабой связи незначительны. При сде-
ланных допущениях ресинхронизация обеспечивается в случае несинхронноro включения
с любым уrлом, если выполняется условие*
6 ер .доп == V М 121 т Jэ ::> о ер. уст == (М Т 10 М 11 Мае J а 1 + (М 22 М Т 20 Мае 2) а 2 .
(14.25)
Примем, что в (14.25) индекс 1 имеет та система, в которой частота выше; за базисную
мощность примем мощность меньшей системы. Величины М Н и М 22 учитывают иаrрузку и
потери в сети. Статизмы частей системы (а 1 и a должиы быть взяты е учетом имеющеrося
в системе резерва мощиости.
Эквивалентиая мехаиическая постояииая
Т Jэ == Т л Тл I( т Л + T J2 ).
Имеется иекоторая вероятиость ресиихроиизации при скольжеиии, превосходящем
Sер.доп' но меиьшем 2sср.доп, В том случае, коrда слабая связь между системами щ:уществля-
ется с помощью ЛЭП без промежуточиых иаrрузок, можио упростить расчет условий ресинх-
роиизации. При определеиии среднеrо устаиовившеrося скольжеиия при слабой связи меж-
ду системами можио пренебречь влияиием асиихронноrо момеита, так как иаибольшее зна-
чение асиихроииоrо момеита здесь составляет около 2% от взаимиоrо момеита.
В ряде случаев можно ие учитывать измеиеиия собствеииоrо момеита вследствие появ-
леиия потерь мощиости в активном сопротивлеиии линий. Для выявления этих случаев
сравним собственный и взаимный моменты. Собственный момент
M ll == Ми + (E /Zl1) sin (111 == М и + М п .
Сопоставим взаимный момент и момент потерь:
М п lМ 12 == E Z12 sin (111/(Zl1EIE2) == E 1 z 12 sin (1.11/(E 2 z l1 ).
(14.26)
Как это видно из рис. 14.22, здесь ZH ==, Z12' а н == (Х 12 . Примем также, что Е 1 Е 2 .
С учетом указанных равенств СООТ,ношение (14.26) примет внд
М п lМ 12 == sin (112' (14.27)
Следовательно, при передаче в предаварийном режиме мощности, близкой к предель-
иой, поrрешность в определении установившеrося скольжения, вызванная пренебрежением
активным сопротивлением линии, может быть иайдена соrласно (14.27). Например, для ли-
ний 500 220 кВ с расщепленными проводами а 1 2 60 и поrрешиость в определении s
ер. уст
пр инеучете активноrо сопротивления ие будет превосходить 10%.
Рассмотрим условия ресинхронизации для тех случаев, коrда можно пренебречь поте-
рями в активном сопротивлении линии. Как следует из рис. 14.27, в предаварийном режиме
баланс мощностей определяется соотиошением
* Расчет ресинхронизации рекомендуется проводить с большим запасом, т. е. прини-
мать К == 1. При расчетах уставок делительной защиты MorYT быть взяты меньшие запасы.
так как если ресинхронизация не произошла, то установившийся асинхронный режим бу-
дет происходить со скольжением, большим Sер.доп'
479
р == Р12 sinб 12 == РТ10 Рl1 == Р 22 Р Т20 .
Уравнение моментов может быть записано как
М == М 12 siпб 12 == М Т10 М l1 == М 22 М Т20 ,
(14.28)
rде М < М 12 .
ПодстаВЛJilJil (14.28) в (14.25) и пренеб реrая асинхронными моментами, получим
V М I2 /Т Jэ :;;" М (0'1 + 0'2) j
откуда
М/М I2 < 1/[(0'1 + 0'2) -v М 12 Т Jэ J.
(14.29)
из (14.29) следует, что уменьшение взаимноrо момента позволяет обеспечивать ресинх
ронизацию при меньших запасах статической устойчивости в предаварийном режиме. Кроме
Toro, при достаточно малом М 12 ресинхронизация будет происходить даже после нарушения
статичеСКQ" устойчивости. Однако в последнем случае после ресинхронизации вновь про-- '
изойдет нарушение статической устойчивости, если не оrраничить мощность, передаваемую
по линии. Это положение проверялось с помощью математическоrо моделирования, ПрИ'Iем
при исследовании учитывались динамические характеристики реrуляторов скорости и час-
тотный эффект наrрузки. Полученные результаты показали, что (14.29) дает условия ресинх-
ронизации с запасом, что объясняется в осноВ'Ном неучетом динамических свойств реrулято-
ров скорости. Во время исследований при достаточно малых М 12 наблюдалось также времен-
ное восстановление синхронизма после нарушения статической устойчивости.
* t f4.8. УПРАВЛЕНИЕ ПЕРЕДАЧАМИ постоянноrо ТОКА
ДЛЯ ПОВЫШЕНИЯ ДИНАМИЧЕСКОй И РЕЗУЛЬТИРУЮЩЕй УСТОЙЧИВОСТИ
Очевидно, что реrулирование потока моiцности вентилей передачи постоян-
Horo тока (ППТ) может более быстро, чем при реrулировании reHepaTopoB пере..
MeHHoro тока, устранять небаланс мощности в энерrосистеме. Мощность ППТ
обычно изменяется в функции скольжения reHepaTopoB, получающаяся быстро-
действующая система реrулирования повышает динамическую устойчивость сис-
тем nepeмeHHoro тока, предотвращает аварийный выбеr reHepaTopoB. Общая за-
кономерность примерно такова: чем больше мощность ППТ в исходном режиме,
тем больше повышается уровень динамической устойчивости. В случае аварии в
передающей энерrосистеме переменноrо тока форсировка ППТ поможет торможе-
нию reHepaTopoB при сбросе мощности. Для увеличения динамической устойчивос-
ти приемной энерrосистемы при необходимости компенсации энерrии ускорения
reHepaTopoB приемноrо конца осуществляется реверс мощности ППТ.
Реrулирование при увеличении мощности ППТ. На рис. 14.28 показан при-
мер системы с параллельными передачами переменноrо и постоянноrо тока. Сис-
тема реrулирования, используемая для увеличения мощности ППТ, показана
штриховыми ЛИНиями. Она реаrирует на сиrнал от снижения напряжения при
авариях в энерrосистеме переменноrо тока. Ток в ППТ увеличивается с ростом
тока уставки 1 do реrулятором тока.
Обозначения, принятые на рис. 14.29, rде показаны уrловые характеристики
мощности для системы, приведенной на рис. 14.28, следующие: РО мощность,
протекающая по ЛЭП переменноrо тока в нормальном режиме; В{ площадка
торможения за счет изменения мощности reHepaTopoB; Р d мощность ППТ в
нормальном режиме; бо уrол расхождения э. д. с. в нормальном режиме; боткл
уrол расхождения э. д. с. в момент отключения KopOTKoro замыкания; б макс
максимальный уrол, соответствующий пределу динамичеСКОII устойчивости; Al
480
уменьшение энерrии системы переменноrо тока вследствие KopOТKoro замыкания
(площадка ускорения); А 2 то же, системы постоянноrо тока (Р d); В 2 TOpMO-
жение за счет увеличения мощности ппт.
. Если реrулирование не обеспечивает быстроrо увеличения мощностиппт,
т. е. В 2 == О, то на рис. 14.29 видно, что площадки ускорения А ! + Az становят
ся больше площадки торможения В 1 и reHepaTop r будет ускоряться. Для увели-
чения динамической устойчивости мощНость
ппт надо увеличить так, чтобы
82 == (А 1 + А 2 ) Bl'
(14.30)
J
I
I
I
I
J
I
I
I
L
Рис. 14.28. Электрическая система; содержа-
щая передачу переменноrо тока и управляе-
мую постоинноrо тока:
Pr МОЩНОСТЬ rеператора: Р d МОЩНОСТЬ ппт; р
lfОШnОl?ft Ш @ЛiIfП И:р :': iiiiоrо тока; а у;о.;; за
Жиrания (управление мощностью ППТ)
Р
/.........,
/ ' р l
/ V
1 '
I \ Po=PMex Pd
I \ \ 1
: \"'У" рЛ :р'
' А РШ
I \ \
-!. \ \
1.... \ \
I ...., \\
I , \\
I '"
РО
1
1
I
'1
'1
'1
/1
11 ,,/
,1,'
",
D
р
1ВО о-
Pd
Рис. 14.29. Уrловые характеристики
reHepaTopHoro конца передачи, со-
. держащей reHepaTop и линию пере-
дачи постоянноrо ТОКа
Обозначим через Р' характеристики мощности при переходном режиме
рII, рIII reHepaTopa, соответственно через Pd переходную характеристику
ППТ.
Уравнение (14.30) может быть представлено как .
Б манс Б от IO.I 11 Б маRс 1
i (P Pd)do == S [(Po pI )+(Pd P )]do 5 (Р I Po)do.
I
(14.31 )
Взаимосвязь между механической мощностью на входе Р мех И электрической
мощностью на выходе Р., reнepaTopa установим следующим образом. Введем сим-
волическое обозначение мощности в начале лэп переменноrо тока Р'. Тоrда в
нормальном и переходном режимах:
РМех==Р.,; P;==P'+P ,
rде Р; == рll + P в послеаварийном режиме (аналоrично, P == рш + P
во время аварии), т. е. в общем случае Р' == рII ИЛИ рш.
481
При использовании этих взаимосвязей (14.31) запишется так:
MaIlC MaIlC ОТ"Л ОмаllС
P d8 == 5 Р Mexd8 5 P d8 5 Р' d8.
ОТIIЛ О ОТIIЛ О О ОТIIЛ
(14.32)
Изменение P , т. е. мощности ППТ, показано на рис. 14.30, [де t откл == t s и
t d продолжительность KopoTKoro замыкания и время послеаварийноrо процес
р'
d
P dO
I
ts I
I
1
,\
11
11 ,\ {....
1\ 1" .
1 -
I ts=O,f8; td=D,Z5
td : is=O,f8; id=O,50
I
,
Рис. 14.30. Изменение мощности передачи
постоянноrо тока при АПВ на линии пе-
редачи переменноrо тока
о
t,G
са соот.ветственно. При t d > 0,45 с в исследуемой реrулируемой системе увеличе-
ние мощности ППТ в дальнейшем может считаться почти постоянным.
Если P в (14.32) постоянно, то (14.32) превращается в выражение
( ОТIIЛ MaIlC p, d ) .
Р' ,..., Р 8 маllс 80 1 5 Р' d8 + u
d"'" мех r
1iмакс 80ТIIЛ 8маllс !iОТIIЛ О
о ОТIIЛ
Приращение мощности !1Р d == (P Р d) находится из (14.33). Необходимо
подчеркнуть, что условные значения Р; и Р' изменяются в функции уrла и вре-
мени. Из (14.33) видно, что если P и Р' имеют большие значения во время ава-
рии, т. е. уменьшение мощности на выходе reHepaTopa мало, то и увеличение Р d
может быть незначительным.
Реверс мощности ППТ. Динамическая устойчивость приемной энерrосистемы
(рис. 14.31) определяется соrласно уrловым характеристикам мощности, показан-
ным на рис. 14.32. В нормальном режиме механическая мощность, выдаваемая
reHepaTopoM, Р мех == PJ! == Р Р d' При коротком замыкании в системе перемен-
Horo тока электрическая мощность, отдаваемая reHepaTopoM, уменьшается: PJ! <
< Р мех . Вследствие этоrо reHepaTop, ускоряясь, может выйти из синхронизма.
Ero устойчивость можно повысить уменьшением мощности ППТ или реверсом ее
потока мощности. На рис. 14.32 показаны П.ТIOщадки: энерrии ускорения reHepa-
тора (Ад, уменьшения мощностиППТ, создающей энерrию, эквивалентную тормо-
жению (А 2 ). При реверсе ППТ появляется площадка В2' отвечающая дополни-
тельной энерrии торможения. Соrласно способу площадей,
В 2 == А 1 A2 Bl'
( 14.33)
(14.34)
Пусть Р;, Р', P мощности во время переходныХ процессов в reHepaTope.
ЛЭП переменноrо тока и ППТ соответственно. Тоrда (14.34) можно записать в
виде
482
маис
S (P + P d ) d8 ==
б отил
отнл
S [(РО Р') (Pd P )] d8
00
Оманс
S (Po p')da. (14.35)
б отRл
. , ,
И<:.пользуя <:.ООТRошеюш Р т == РТ! == Р Р d P r :;:;; Р Pd И (14.35),
можно записать (14.35) аналоrично (14.32), имея в виду, что P при изменении
б от б откл до быакс означает реверсивную мощность ППТ. ДЛЯ Toro чтобы повысить
t P df
Выпрямцтель
р
д"
Каоель п.т
РО
о
P d
Рис. 14.31. Схема системы, содержа-
щей передачи постоянноrо и пере-
мениоrо тока, совмести о питающие
иаrрузку
Рис. 14.32. Уrловые характеристики
мощиости при управлеиии ППТ в
системе, показанной на схеме рис.
14.31
динамическую устойчивость приемной системы, ПОЮji.ванной на рис. 14.31, долж-
НЫ быть приняты во внимание следующие соображения:
а) при коротком замыкании в приемной ЭС уменьщение мощности ППТ пред-
отвращает ускорение reнepaTopa и обеспечивает динамическ устойчивость;
б) в случае значительноrо уменьшения мощности на выходе reнepaTopa при
Коротком замыкании необходимо про извести реверс потока мощности ППТ дЛЯ
предотвращения ускорения reнepaтopa.
Связь между изменением уrла б reHepaтopa и временем отключения аварии в
случае отСутствия реryлирования ППТ показана На рис. 14.33, а в случае реrули-
рования ППТ на рис. 14.34, из которых следует, что реryлирование ППТ рез-
ко улучшаe:r n.инаМRЦе.с.к'!IO ':fс. Q\rtqR. QC-ТЬ.
Расчеты изменений мощности ППТ ПРОВОДИТСЯ соrласно выражению
rде ТОВ:
Р d::= (K 1 E 1 CQS а. RiJid) 'd.
(14.36)
483
ld == KIEl COS (1. E d2 /Z.
(14.37)
Здесь Kl коэффициеит, зависящий от схемы выпрямителя; El == и ! фазовое на-
пряжение переменноrо тока отправноrо коица; (J, уrол реrулирования выпрямителя;
Rl == 'в эквивалентиое сопротивление выпрямителя; E d2 выпрямлеииое напряжение
а
о-
СО
t,G
Рис. 14.33. Изменение уrла при
коротком замыкаиии в системе;
показанной на схеме рис. 14.31,
без упранления ППТ
t,C
Рис. 14.34. Изменение уrла
при коротком замыканИИ (рис.
14.31) при управлеиии ППТ
инвертора при холостом ходе; Z == Zэ сопротивлеиие цепи тока, включающеrо эквивалент-
ное сопротивление выпрямителя и иивертора.
Подставин (14.37) в (14.36), получим
P d == [(Z R 1 ) К.. E + (2R 1 Z) E d2 К.. El RIE 2]/Z2; }
2 . 2 2 (14.38)
Р ппт == [(Z 'в) кви 1 + (2r B Z2) и 2 KBU 1 ( в и 2 ]! Zэ,
rде Ка. == Kl COS (1.. Очевидно, что К.. функция (1., так же как и К в, зависящая от cos (1. и
с:хемы выпрямителя.
Так как Z> R H то (Z R 1 ) > (2R 1 Z). Из (14.38) видно, что при отсутствии pery-
,nирования выпрямленноrо напряжения иивертора E d2 моЩНОСТЬ P d может стать равной иу-
лю при rлуБОК\fХ снижениях напряжения в системе переменноrо тока.
* 14.9. ДОПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА ДЛЯ УЛУЧШЕНИЯ уСТОЙЧИВОСТИ
Сопротивление, 3аземляющее нейтраль трансформатора. В высоковольтных
сетях электрических систем CCCI? нейтрали трансформаторов rлухо заземля
ются. Если нейтрали трансформаторов заземлить через небольшое сопротивле-
ние, не повышающее заметно напряжения на нейтрали, то условия работы изо
ляции не меНЯIQТСЯ, а устойчивость систем при несимметричных коротких за-
мыканиях сущес венно увеличивается.
Увеличение сопротивления аварийноrо шунта, вводимоrо в комплексную
схему, приводит к уменьшению сброса мощности во время KopoTKoro замыкания
и, следовательно, к улучшению динамической устойчивости (рис. 14.35, а, 6).
Если в нормаЛЬНОl\l режиме максимальиая передаваемаи мощиость составляет Pin ==
Еи/Х{2' то при аварии без заземления нейтрали
p 1 == Еи! x l,
rде
484
xr I == Ха + ХЬ + ХаХЬ/ ХА (здесь ХА == X2 + xc ),
В случае заземления нейтрали через активное сопротивление R To
Р ПI Е2 у IIl sin а lII + ЕИ у IIl sin ( О а IlI )
11 11 12 12 12'
'('де yllI и y ' проводимости, содержащие активное сопротивление Ro; определяются со-
l'ласно схеме замещения, показаииой на рис. 14.35, 6.
Построив характеристики Р 1 . рII, pIIl с помощью способа площадей, можно устано-
вить, что система, неустойчивая в результате однофазноl'О KOpOTKOl'O замыкания и отключе-
ния цепи при l'лухом заземлении нейтрали, мо-
жет стать устойчивой при заземлении нейтрали
через активное сопротивление, выбранное над-
лежащим образом. Включение активноl'О сопро-
тивления положительно сказывается иа устой.
чивости, увеличивая амплитуду p 1 .
Если при некотором значении Ro == R 1 ха-
рактеристика pIII пройдет достаточно близко к
характеристике рIl, то запас устойчивости сис-
темы почти не будет зависеть от продолжитель-
ности аварии. Он будет такой же, как и при от-
ключении цепи без 'аварии (рис. 14.36).
При активном сопротивлении в нейтралИ
трансформатора Ro > R 1 характеристика рIlI
пройдет выше характеристики рIl. Снижение
мощности во время KopoTKoro замыкания будет
меньше, чем при MrHoBeHHoM отключении. Ана-
лизируя соотношения площадок торможения и
последующеrо (после окончания KopoTKoro замы-
кания) ускорения, можно убедиться в том, что
при большой длительности KopoTKoro замыкания
система будет более устойчивой. Такое улучше-
ние устойчивости будет про исходить до тех пор,
пока сопротивление в нейтрали не достиrнет не-
KOToporo значения Ro == R 2 . Дальнейшее увели-
чение активноrо сопротивления в нейтрали бу-
дет приводить к снижению амплитуды характе-
ристики pIIl из-за уменьшения Ун и соответст-
венно к ухудшению устойчивости.
При зиачении Ro == R3 характеристика рlII
опять сблизится с характеристикой рII. Вновь,
как и при R == Rl> усtойчивость не будет зави-
сеть от времени отключения KopoTKoro замыка-
ния. Дальнейшее увеличение сопротивления в
нейтрали сиачала ухудшает устойчивость, а за-
'тем при больших сопротивлениях, равноцениых
разземлению нейтрали, вновь улучшает ее, приб-
лижаясь к случаю, коrда нейтрал ь трансформа-
тора разземлена.
При решении вопроса о заземлении нейтрали повышающих и понижающих трансформа-
торов необходимо иметь в виду, что вследствие большоrо реактивиоrо сопротивления нуле-
вой последовательности лэп характер заземления нейтрали повышающих трансформаторов
почти не влияет на устойчивость при замыканиях на землю в конце ЛЭП, и, наоборот, силь-
но влияет при замыканиях в начале. Точно так же заземление нейтрали понижающих транс-
форматоров существенно лишь при замыканиях на землю в коице линии.
При этом потери мощности в заземляющем сопротивлении приходится в значительной
мере на местные ['енераторные станции приемной системы. Прй небольшой постоянной
а)
E ;
f:::,. RT"
и
lRT
Б)
Х Т
Х ло
Х Т
б) Ха
ХТ Х Т
ХЬ
".............
ХЛ Х Т
и
Xzr
ХОI }
, Zqr.=Ror.+jX I1l
RO[
Рис. 14.35. Заземление нейтрали тран-
сформаторов через активное сопротив-,
ление:
а схема замещения системы; б схема за...
мещення нулевой последовательности; 8
комплексная СХема замещення снстемЫ при
однофазном коротком замыкании
485
инерции станций это может привести иноrда не к улучшению, а к ухудшению устойчивости
системы.
Заземление иейтрали через активные соцротивления цриводит к повышению устойчи
вости и при двухфазных замыканиях на землю, хотя и значительно меньшему, чем цри одно-
фазных. Оптимальное значение активных сопротивлений при двухфазных замыканиях на
землю значительно выше, чем при однофазных. Заземление нейтралей трансформаторов
10
9
8
7
Б
5
it
J
2
"1
I<з 111\
11\
I
!
1\
1\
I
1""'- r I/o. c
..!....
I :-----. 1L 41c
I ............ ..........
::%: I 1 ...... o,2
I 1
./' 1 1 чс
! I 1 I I
)
,
0,1 0,2
10.
16 18 ZD
30.0.
чОо. R 0,''/0
о.
2\ 41
RI R 2
6 I В
R з
12 14
20.0.
Рис. 14.36. Влияние активноrо сопротивления в нейтрали трансформа-
торов на запас динамической устойчивости электропередачи с различ-
иыми временами отключения при однофазном коротком замыкании
через реактивные сопротивления, как правило, менее эффективно, чем заземление через ак-
тивные сопротивления.
Установка для электрическоrо торможения [енераторов во время аварии.
Для повышения устойчивости при симметричных коротких замыканиях, как из-
вестно, MorYT быть использованы активные сопротивления, включаемые или после-
довательно с каким либо звеном передачи, или параллельно ему (рис. 14.37).
Наиболее эффективно включение активных сопротивлений параллельно reHepa-
торам или трансформаторам передающей станции. В этом случае действие Harpy-
З0чноrо сопротивления продолжается и после отключения KopOTKoro замыкания,
а 8 ряде случаев может только начинаться после отключения KopoTKoro замыка-
ния.
Если мощность приемной системы велика сравнительно с мощностью переда-
ющей станции, то с помощью наrрузочных сопротивлений можно достичь блаrо-
приятных результатов.
Специальные устройства реrулирования турбин. Выше было рассмотрено
улучшение устойчивости путем поrлощения избыточной мощности, развиваемой.
п рвичным двиrателем в дополнительных наrрузочных сопротивлениях, включае-
мых в сбросе мощности во время аварии или после нее. Однако небаланс мощнос-
ти I1Р может быть скомпенсирован и друrим путем, а именно уменьшением мощ-
ности первичноrо двиrателя,
486
Если бы реrуляторы турбин были безынерционными и вся система реrулиро--
Jlания турбины моrла следить за изменениями электрической мощности, соответст-
. венно меняя механическую мощность, то избыточные моменты всеrда были бы УСТ-
ранены и возможность нарушения устойчивости исключена.
Обычные реrуляторы турбин не MorYT решить такую задачу. Наличие инер-
ции, люфтов и трения во всех opraHax системы реrулирования приводит к тому.
что реrулирование происходит с запаздыванием
и нечувствительностью. При качаниях реrулято
ры практически не реаrируют на изменения ско-
рости и клапаны турбины (паровая турбина) или
направляющий аппарат (rидротурбина) остают
ся почти неподвижными. Кроме Toro, если бы
система. реrулирования и позволяла. осуществ
лять быстрое закрытие впуска энерrоносителя,
то уменьшение мощности все равно не было бы
столь быстрым. При быстром уменьшении впус-
ка энерrоНосителя в rидравлической турбине
происходит явление rидравлическоrо удара, а в Рис. 14.37.
паровой турбине расширения пара в паровых включения
объемах между реrулирующим клапаном и пер
вым рядом сопл.
Несмотря на трудности воздействия на первичный двиrатель, уже созданы
промышленно-экспериментальные устройства, позволяющие осуществить надле-
жащее воздействие и привести мощность первичноrо двиrателя в соответствие с
изменяющейся электрической мощностью. Эта задача решается в двух направлени-
ях: разрабатываются новые реrуляторы скорости, позволяющие осуществлять
необходимое реrулирование, которое улучшает статическую и динамическую yc
тойчивость системы; создаются системы аварийноrо реrулирования, улучшающие
только динамическую устойчивость.
Совершенствование систем реrулирования современных мощных паровых
турбин с промежуточным переrревом пара позволяет использовать управление
вращающим моментом турбины в аварийных и послеаварийных режимах энерrо-
системы для существенноrо увеличения пределов передаваемой по линиям мощ-
ности. При этом в функции аварийноrQ реrулирования турбины входят:
кратковременная быстрая разrрузка в момент сброса мощности reHepaTO-
ра из-за KopoTKoro замыкания на ЛЭП, позволяющая предотвратить выпадение
arperaTa из синхронизма;
оrраничение мощности arperaToB в послеаварийном режиме на уровне,
не превышающем предела статической устойчивости электропередачи;
обеспечение перехода к новому стационарному режиму без толчков и дo
полнитe.hьных колебаний.
В ряде случаев аварийное снижение мощности блоков позволяет предотвра-
тить необходимость их отключения от сети. Реrулирование мощности паровой
турбины позволяет демпфировать колебания ротора arperaTa в переходных про
цессах, что может иметь в будущем важное практическое значение при исполь-
зовании в энерrосистемах турбоrенераторов со сверхпроводящими обмотками
возбуждения.
Аварийное реrулирование паровых турбин дает существенный эффект лишь
в том случае, если оно осуществляется в тесной взаимосвязи с реrулированием
I I
C Q
ППП
l' U ...
. у ...
L.......
Rараллельнаfl
{JключеНUfl
Простейшие
иаrрузочных
тивлеиий
схемы
сопро.
487
возбуждения турбоrенератора (форсирование возбуждения, развозбуждение, де-
мпфирование качаний). Поэтому необходимо одновременное соrласованное управ-
ление возбуждением турбоrенератора и механической мощностью ero турбины
от одноrо комплексноrо управляющеrо устройства. ..
При м е н е н и е про м е ж у т о ч н ы х (подпорных) с и н х р о н н ы х
компенсаторов и управляемых конденсатЬров для
обеспечения высокой прьпускной способности
С в е р х Д а л ь н и х Л Э П. Дальние электропередачи должны рассматривать-
U z =СDП5t ся не только как ЛИНИИ,. служа-
щие для передачИ мощности от
удаленной станции к приемной
системе, но одновременно и как
элементы единой высоковольт-
ной сети. Электропередачи в этом
случае должны выполняться с
устройствами поперечной ком-
пенсации. СК или ИРМ, приме-
няемые в качестве рассматривае-
мых устройств, оказываются
относительно дешевыми, так как
одновременно обеспечивают вы-
соКую пропускную способность электропередачи, связь местных систем и улуч-
шают качество электроснабжения прилеrающих районов.
Промежуточные СК или ИРМ, которые устанавливаются на подстанuи
ях, должны обеспечивать поддержание напряжения на линии при изменениях
режима электропередачи и тем самым повышать ее устойчивость. Промежуточные
синхронные компенсаторы MorYT быть особенно эффективны при установке на
них автоматических реrуляторов возбуждения без зоны нечувствительности.
В этом случае мощность синхронных компенсаторов может быть равной O)6 O,8
от передаваемой мощности, что делает применение подобных схем экономически
оправданным и конкурентоспособным по отношению к применению друrих
средств повышения устойчивости, например с продольной компенсацией индук-
тивноrо сопротивления линии с помощью статических конденсаторов. Дальней-
шее уменьшение установленной мощности промежуточных синхронных компенса-
торов можно получить при подборе реrулирующих устройств, наиболее эффек-
тивных в каждом конкретном случае.
Различные компенсаторы, устанавливаемые на промежуточных подстанциях,
делят линию на самостоятельные участки, поддерживая напряжения постоянными
в начале и конце каждоrо участка. Если мощность синхронных компенсаторов
достаточна для Toro, чтобы обеспечить постоянство напряжения в точке их при-
соединения, :ro предел передаваемой мощности всей электропередачи будет опре-
деляться пределом мощности участка, имеющеrо наименьшую пропускную спо-
собность (рис. 14.38), причем последняя находитСя как произведение напряжений
по кониам участка, разделенное на ero сопротивление.
При резких нарушениях режима, вызванных короткими замыканиями, pery-
ляторы возбуждения не MorYT достаточно быстро обеспечить постоянство напря-:
жения, что ПрИБОДИТ к оrраничению передаваемой мощности. В этом отношении
ПРОДОJ):ьная компенсация имеет определенные преимущества перед обычными
синхронными компенсаторами, даже снабженными реrуляторами возбуждения
и ь
o) a Uz
02 Оз
Е 01
Рис. 14.38. Электропередача с промежуточными
синхронными компенсаторами: (СК) или источниками
реактивной мощности (ИРМ) .
а схема; 6 векторная диаrрамма
488
сильноrо деЙствия, поскольку ее эффективность проявляется MrнoBeHHo, влияя
на повышение как статической, так и динамической устойчивости.
Вставки постоянноrо тока (ВПТ). Вставки являются электропередачами
постоянноrо тока (ППТ), имеющими выпрямительное УСТРQЙСТВО, инверторное
устройство и линию постоянноrо тока, длина которой 1 может быть любой. При
1 > О вставка передает энерrию на расстояние и выполняет ряд друrих функций.
Эти же функции выполняются и при 1 :== О. К ним относятся: 1) возможность свя-
зи систем (подсистем частей системы), имеющих разные частоты; 2) быстрое
реrулирование потока мощности, включая изменение ero направления; 3) сни-
жение уровня токов KopOTKoro замыкания в подсистемах, имеющих ВПТ; 4) умень-
шение взаимноrо влияния связываемых подсистем и в этом смысле обеспечение
электромеханических процессов (устойчивости) вО всей системе. Недостат-
ками ВПТ являются потери энерrии (более 5% от проходящей через вставку),
появление rармонических составляющих в напряжении и соответственно в токе,
необходимость в дополнительных источниках реактивной мощности, значитель-
ныестоимостьсооружения* (0,Об 0,10 млн. руб/МВт) и расходы по ero эксплуа-
тации. Упомянутые достоинства 'функций ППТ имеют соответственно такие аль-
тернативы:
1. Жесткое поддержание частоты в связываемых системах (подсистемах). Так,
французская и друrие европейские энерrосистемы, не имея ВПТ, успешно рабо-
тают параллельно при условии, что отклонения частоты не превосходят 0,01 rц.
Следует сопостаВJIЯТЬ эти альтернативы, учитывая убытки от некачественной
частоты у потребителя. Однако MorYT быть случаи, коrда ВПТ не имеет альтер-
нативы. Это случаи, коrда надо связать между собой системы, заведомо работаю.
щие или моrущие в определенное время работать с разными частотами. Например
в Японии (частота 50 и 60 rц), в США удаленные, несинхронно работающие
системы, вставка между энерrосистемой СССР и Финляндией в [. Выборrе и т. д.
2. РеrулироваJ{ие источников энерrии и применение реrулируемых под на-
rрузкой трансформаторов, в частности ПОl"lеречно-реrулируемых.
3. Оrраничение токов к. з. или усиление выключателей.
4. Усиление устойчивости за счет ряда мероприятий.
В соответствии с отмеченным вставку (ВПТ) надо считать при 1 :== О
или 1> О средством управления режимом, nрименяеМblМ в исключительных,
специально обосноваННblХ случаях.
В обычных случаях система переменноrо тока лю.
б о й с л о ж н о с т и м о ж е т б ы т ь п о л н о с т ь ю у п р а в л я е м а.
Широко применять вставки, создавая подсистемы с разными частотами внутри
единой системы, неправильно. Однако возможно, что в будущем на развитую сеть
cBepxBbICOKoro напряжения системы переменноrо тока с фиксированной неизмен-
ной частотой будет наложена сеть постоянноrо тока и в этом сочетании ВПТ най-
дут свое место. Вопрос этот пока еще не проработан.
* 14.10. МЕРОПРИЯТИЯ РЕжимноrо ХАРАКТЕРА
Влияние схемы системы. При оценке схемы системы часто оперируют поня
тием «жесткости» схемы, как одним из важнейших ее свойств. Жесткость в какой-
либо узловой точке характеризуется изменением наrрузки, при которой измене-
* По aHHЫM зарубежной печатн.
, 489
ние значения и Ф&ТЫ наПРЯЖ ШfЯ будет происходить на некоторую определенную
величину, принимаемую за единицу. Жесткость зависит от относительных сопро-
тивлений, связывающих узловые точки системы. Чем сильнее зафиксированы на-
пряжения по значению и фазе в узловых точках системы и чем теснее эти точки
связаны между собой, тем больше жесткость системы в целом. Разумеется,
узловые точки, расположенные вблизи шин бесконечной мощности, обладают наи-
большей жесткостью. Жесткая схема имеет преимущества с точки зрения улучше-
ния статической устойчивости и облеrчения работы системы в послеаварийном ре-
жиме.
К недостаткам жесткой схемы относится увеличение тока KopoTKoro замыка-
ния, в связи с чем мощность системы может стать больше разрывной мощности
выключателей, что недопустимо. В этих случаях электрические системы прихо-
дится секционировать или применять выключатели с большей отключающей спо-
собностью. Жесткая схема может приводить к определенным трудностям в обес-
печении динамической устойчивости, например при включении на параллельную
работу сильно переrруженных ЛЭП; может вызывать Зf}ачительные трудности в
работе релейной защиты и требовать применения более совершенных видов релей-
ной защиты.
Таким образом, выбор исходноrо режима работы системы и схемы ее соедине.-
ний может существенно влиять на устойчивость.
Схемы работы электрических систем. Схема соединений электрических
систем и их отдельных элементов существенным образом влияет на переходные
процессы и устойчивость систем.
Схемы дальних электропередач. Эти схемы существенным образом влияют н'а
характер переходных процессов и устойчивость. ИХ можно разделить на два
вида: ,
т р а н з и т н ы е м о Щ н ы е э л е к т р о пер е Д а ч и, передающие'
электрическую энерrию от какой-либо удаленной станции к потребляющей сис-
теме:
м е ж с и с т е м н ы е с в я з и, в которых потоки мощности Moryi' идти как
в одном, так и друrом направлении, а значения их HaMHoro меньше мощности
объединяемых систем.
Схемы дальних электропередач можно разделить на ч и с т о т р а н з и т-
Н ы е линии, не имеющие промежуточных отборов и связей с местными энерrо-
системами, паходящимися в тех районах, по которым проходит данная электро-
передача (рис. 14.39, а), и на линии с про м е ж у т о ч н ы м и п о Д с т а н-
Ц И Я М и, связанными с местными энерrосистемами, которые или потребляют
мощность от электропередачи, или выдают в нее часть избыточной мощности (рис.
14.39, б).
Линии электропередачи с промежуточными отборами. имеют определенные
преимущества в отношении обеспечения устойчивости, так как на промежуточных
подстанциях MorYT устанавливаться синхронные компенсаторы, обеспечивающие
поддержание напряжения в некоторых «опорных» точках вдоль линии и этим
улучшающие ее устойчивость.
Линии электропередачи MorYT выполняться б л о ч н ы м и (рис. 14.'39, в)
или с в я з а н н ы м и (рис. 14.39, 2).
При блочной передаче авария на линии касается как самой линии, так и всех
присоединенных к ней reHepaTopoB, т. е. Bcero блока. Мощность одноrо блока
лэп не должна быть больше резервной мощности системы, так каК иначе в после-
490
аварийном режиме (после выхода блока) нормальная работа системы станет не.-
возможной: в ней начнется снижение частоты, появится опасность нарушения
статической устойчивости, после чеrо придется осуществлять отключение части
потребителей и, возможно, деление системы на несинхронно работающие части.
При связанной передаче авария на какой-либо из параллельных линий ccr
провождается отключением только поврежденноrо участка, а по осталЬным участ-
кам линии может передаваться вся мощность удаленной станции.
а)
. &1
Б)
I Система I
8)
t:>
=<:
'"
Е:
t.>
:::.
<.;,
Рис. 14.39. Схемы выполнения маrистральных электропередач:
. а без промежуточных отборов; б с промежуточными отборами; в блочная;
2 связанная
Преимуществом блочной схемы является то, что решение вопросов динаМ!lчес-
кой устойчивости при использовании ее значительно упрощается. Короткое замы-
кание в наиболее.тяжелой точке, т. е. у шин передающей станции (в начале ли-
нии одноrо блока), не будет восприниматься вторым блоком передающей станции,
и, следовательно, никаких специальных мероприятий для сохранения динамичес-
кой устойчивости этоrо блока в этом случае применять не надо. reHepaTopbI же
первоrо блока все равно отключаются, и, следовательно, вопроса об их динами-
ческой устойчивости также не возникает. В случае коротких замыканий у шин
приемной системы условия динамической устойчивости reHepaTopoB BToporo бло-
ка оказываются более леrкими. Однако улучшение динамической устойчивости
достиrается потерей части reHepaTopoB на передающей станции. Применение блоч-
ной схемы встречает также определенные трудности и в связи с присоединением
независимых блочныХ линий к приемной системе.
При анализе схем соединений линий электропередач определенное значение
имеет вопрос о точках присоединения наrрузки с той или иной характеристикой
Присоединение наrрузки к шинам удаленной станции, передающей ббльшую долю
мощности в систему, может существенным образом повлиять на устойчивость
электропередачи. Так, при сильном реrулировании возбуждение reHepaTopoB пе.-
редающей станции накладывает определенное требование на включение транс-
форматоров тока, от которых осуществляется питание измерительных opra-
нов АРВ.
Следовательно, наличие наrрузки в тех или иных местах, ее значение и воз-
можность изменений накладывают определенные треБOl'lания на условия реrули-
рования и влияют на характер переходных процессов.
491
Разделение электрических систем как средство сохранения динамической
устойчивости. Деление электрических систем на несинхронно работающие части
может рассматриваться как мероприятие, предотвращающее нарушение динами-
ческой устоЙчивости системы. Однако делить системы на части даже в аварийных
условиях крайне нежелательно, так как деление приводит к ослаблению всей
системы и, кроме Toro, может привести к тому, что в отдельных частях системы
появится дефицит мощности, снизятся частота и напряжение. Деление системы
можно рекомендовать только в т-ом случае, коrда оно является единственным спо-
собом сохранения динамической устойчивости. При этом в каждой электрической
системе должны быть заранее установлены те точки, в которых разделение систе-
мы может быть произведено более или менее безболезненно.
В качестве способа восстановления нормальноrо режима и объединения раз-
деленных частей системы в последнее время начинает все шире применяться
АПВбс.
Влияние резерва мощности и ее распределения в системе на переходные про-
цессы и устойчивость. Условия надежности работы энерrосистем требуют опр
деленноrо резерва как на электростанциях, так и в различных устройствах элек-
трических сетей. .
На характер переходноrо процесса в первую очередь влияет наличие стан-
ционноrо резерва, значение KOToporo сказывается на уровне устойчивости систе-
мы и значениях токов KopoTKoro замыкания. Станционный резерв состоит из ре-
зервов а в а р и й н о r о, н а r р у з о ч н о r о (ч а с т о т н о r о), р е м о н 1'-
Н О r о (н а р о Д н о х о з я й с т в е н н о r о). С точки зрения влияния на пере-
ходные процессы интерес может представлять только вращающийся аварийный
резерв, необходимый для избежания распада системы при внезапных выпадени-
ях из работы отдельных arperaToB или мощных элекrропередач.
М и н и м а л ь н о н е о б х о д и м ы й рез е р в определяется вероят-
ностью наиболее тяжелых аварий и зависит от схемы системы, способа реrулиро-
вания возбуждения и имеющейся автоматической разrрузки системы. Так, на-
пример, автоматические реrуляторы возбуждения увеличивают резерв. реактив-
ной мощности, позволяя за счет форсирования возбуждения создать переrрузоч-
ный режим, допустимый в течение HeKoToporo времени.
Наличие резерва по активной мощности в reHepaTopax улучшает как стати-
ческую, так и динамическую устойчивость системы, обеспечивая работу reHepa- .
торов при малыХ уrлах сдвиrа б. Напротив, получение резерва реактивной мощ-
ности за счет недоrрузки reHepaTopoB в исходном режиме реактивной мощностью
прИВОДИТ к ухудшению устойчивости, так как при этом работа осуществляется с
пониженным током возбуждения и, следовательно, с оольшими начальными yr-
лами.
р а с п р е Д е л е н и е рез е р в а и обменных потоков активной мощнос-
ти имеет большое значение в современных энерrосистемах при автоматическом
реrулировании их частоты. На rидростанциях применяется 9лектроrидравличес-
кий реrулятор частоты и мощности, в котором каналы отработки воздействЦй по
частоте и мощности разделены, а функции информапионной обработки входных
сиrналов и усиления реrулирующих воздействий раЗl'раничены. Этим повышают-
ся чувствительность и быстродействие реrулятора, хорошо приспособленноrо к
участию в системном реrулировании активной мощности.
Эффективное участие rидроrенераторов в системном реrулировании частоты и
мощности обеспечивается второй ступенью иерархической структуры. Она пред-.
492
ставляет собой систему rрупповоrо управления аrреrатами rэс, которая воспри
. нимает плановое задание по мощности (rрафик наrрузки), внеплановые и опера-
тивные коррективы наrрузки, сиrналы от системных устройств и реrуляторов,
колебания частоты в энерrосистеме и в соответствии с принятым алrоритмом
изменяет задания первичным электроrидравлическим реrулятором rидроаr-
peraToB.
Управляющие системы развиваются «по вертикали», совершенствуя реrули-
рование отдельных процессов, и одновременно «по rоризонтали», улучшая связи
между различными устройствами И реrуляторами. Это приводит к появлению
о б ъ е Д и н е н н ы х к о м п л е к с н ы х у п р а в л я ю Щ и х у с T
рой с т в, применяющих ЦВМ, использующих переменную структуру, фУНКЦИ/r
нальные зависимости и т. д. Совмещение реrуляторов дает конструктивные Bblro-
ды. обусловленные использованием общих измерительных преобразователей,
uепей питания и защиты, и позволяет повысить эффективность и качество процес
сов управления, используя перекрестные связи между контурами реrулирования
при взаимной соrласованности управляющих воздействий.
Единые конструктивные и аппаратные решения при комплексном построении
аrреrатной автоматики и увеличении rоризонтальных связей между контурами
обеспечивает современная радиоэлектроника, в первую очередь лоrические и
аналоrовые интеrральные схемы.
Отключение части reHepaTopOB или реакторов как средсТВО повышения ус-
тойчивости системы. Уменьшение отдаваемой reHepaTopoM активной мощности
при заданном токе возбуждения может быть в известном смысле аналоrичным по
явлению резерва по активной мощности. Так, если во время динамическоrо пере-
хода в процессе аварИИ или в послеаварийном режиме отключить часть reHepaTO-
. ров, то условия устойчивости остальной части reHepaTopoB улучшатся. Отключе
ние части [енераторов может быть средством для синхронизации выпавших из
синхронизма станций (ресинхронизация).
в качестве мероприятия, улучшающеrо динамическую устойчивость, может
применяться отключение части или всех шунтирующих реакторов. Шунтирующие
реакторы разrружают reHepaTopbl от емкостной реактивной мощности и дают им
возможность работать с высокой э. д. с. В то же время наличие шунтирующих ре-
акторов приводит к увеличению взаимноrо сопротивления между станцией и
приемной системой, что отрицательно сказывается на устойчивости. Обычно по-
ложительное влияние увеличение э. д. с. при наличии реакторов значи-
тельно выше, чем отрицательное влияние увеличение взаимноrо сопротив-
ления.
Если в нормальном режиме отключить шунтирующие реакторы, то необходи-
мо немедленно снизить э. д. с., так как на ЛЭП и повышающих трансформаторах
появится недопустимо высокое напряжение. В аварийном или послеаварийном
режиме, коrда напряжение на электропередаче понижено, отключение реакторов
заметно улучшит устойчивость, так как оно приведет к снижению взаимноrо co
противления системы до нормальноrо.
Отмечая возможность улучшения устойчивости отключением части [енераторов
или реакторов, необходимо заметить, что все же применение этоro мероприятия
менее желательно, чем друrих мероприятий. Отключение reHepaTopoB приводит к
понижению передаваемой мощности и необходимости синхронизировать и наби
рать мощНость на включенных машинах. Отключение реакторов обычно ЩIияет
сравнительно мало, но в то же время известная опасность увеличения напряже
493
ния И необходимость достаточно быстроrо обратноrо их включения при восста-
новлении нормальноrо режима заставляют считать это мероприятие вспомоrа-
тельным.
Управление наrрузкой. Автоматическая разrpузка. Отключение части по
треб ителей , т. е. автоматическая разrрузка системы, проводимая в зависимости
от уровня частоты и напряжения в системе с учетом динамики изменения часто-
ты, является весьма эффективным средством улучшения устойчивости при тяже-
лых авариях. Все устройства, управляющие наrрузкой, входят в общую rруппу
устройств автоматическоrо предотвращения нарушений устойчивости (АПНУ).
Способы предотвращения нарушений весьма разнообразны. Так, при понижении
уровня статической устойчивости может быть на некоторое время снижена наrруз-
ка или MrHoBeHHo дистанционно отключена ее часть; второй способ применяется
как эффективное средство борьбы с возникающей лавиной напряжения. Автома-
тическое отключение части наrрузки (А ЧР) широко применяется (в ЕЭС СССР к
ней подключено 60%) для оrраничений аварийноrо снижения частоты и устране-
ния опасности ее лавины (см. rл. 11). АЧР подразделяются на следующие основ-
ные катеrории:
А ЧР 1 действует при 46,5 48,5 }'Ц через О, 1 0,3 с, со ступенями дейст-
вия через 0,1 ru, предотвращает rлубокое снижение частоты;
А ЧР 11 восстанавливает частоту до нормальноrо значения, если она оста-
ется длительно пониженной, а также следует резервным устройством при появ-
лении дополнительноrо дефицита активной мощности, что особенно существенно
при каскадном развитии аварии;
ЧАПВ (частотное автоматическое включение) восстанавливает питание
потребителей, отключенных действием А ЧР.
Одновременно может применяться автоматическая разrрузка «по напряже-
нию» (при снижении напряжения). Вместо отключения потребителей может при-
меняться снижение питающеrо их напряжения, что достиrается переключением
ответвлений на трансформаторах. Потребители, имеющие вентильные установки,
так же как и передачи постоянноrо тока (ППТ), MorYT практически MrHoBeHHO
управляться уrлами их зажиrания и за счет увеличений или уменьшений мощНос-
ти, так же как и мощности ППТ, улучшать режим электрической системы.
Результирующая устойчивость. Работа машин в электрических системах
при больших скольжениях. Синхронный reHepaтop, выпавший из синхронизма,
обычно начинает работать как асинхронный со скоростью, несколько большей
синхронной. При этом он может выдавать до 60% от своей номинальной мощнос-
ти. Воздействием на первичный двиrатель и возбуждение выпавшие из синхро-
низма reHepaTopbI MorYT быть введены в синхронизм через несколько (5 20) про-
воротов ротора. Эrи режимы широко применялись в 40 50-x rодах. позволяя из-
бежать перерыва в еыдаче электро нерrии на время набора мощности и осущест-
вляя включение в сеть турбоrенератора. Такая реализация результирующей
устойчивости являл ась мощным средством повышения надежности работы сис-
темы.
Однако рост протяженности сетей, усложнение их и опасные влияния асин-
xpoHHoro режима на reHepaTopbI, особенно ВЫСОКОИСПОЛЬЗ0ванные, и, что очень
важно, на друrие части системы привели к осторожному отношению к этому ре-
жиму, рекомендуемому только пос,ле тщательной проверки допустимости ero.
Альтернативой ему явил ось применение на всех межсистемных и внутренних
связях автоматических устройств (АЛАР), выявляющих часть системы, работаю-
494
щую асинхронно, и отделяющих ее. АЛАР, характеризуемый высоким (93 94 %)
показателем правильных действий, применяется теперь в качестве резерва при
реализации результирующей устойчивости.
Допустим.ость асИНХРОННОZО режим.а должна быть проверена как по
условиям работы ZeHepamopa, так и по условия.'tt баланса реактивной м.ощнос-
ти, колебаниям. напряжения и условиям. работы защиты.
Контропьные вопросы
14.1. Что такое асинхронный режим, или асинхронный ход?
14.2. Как меняется уrол б при асинхронном ходе reHepaTopa по отношению к шинам
неизменноrо напряжения?
14.3. В чем заключаются основные допущения, принимаемые при определении харак-
теристики режима простейшей системы с несинхронной скоростью вращения ее reHepaTopoB?
14.4. Какие составляющие имеет вращающий момент синхронной машины, работаю-
щей при скорости, отличной от синхронной, параллельно с системой неоrраничениой МQЩ-
иости?
14.5. Может ли активная мощность в начале передачи, имеющей только реактивное со-
противленне, отличаты;я от мощности в конце передачи?
14.6. Как одним reHepaTopoM заменяется rpynna reHepaTopoB при исследоваиии асин-
хронных режимов?
14.7. Каковы причины возникновения асинхронных режимов?
14.8. При какой скорости и каком скольжении синхронный reHepaTop работает как
асинхронный reHepaTop или двиrатель?
14.9. Как изменяется вращающий (электромеханический) момент синхронной машииы
при асинхронном ходе?
14.10. Объясните смысл каждоrо члена в формулах (14.13) и (14.14).
14.11. Как определить асинхронный момент синхронной машины, электрически удален-
ной от шин напряжения (принимаемоrо за неизменное) на сопротивление Z12' если известен
момент при ее непосредственном подключении к шинам этоrо напряжения?
14.12. Что понимать под статическими ,и динамическими характеристиками при асинх-
ронном ходе?
14.13. От чеrо может произойти появление иарастающих колебаний у rеиератора, ра-
ботающеrо иа сеть, имеющую значительное активное сопротивление?
14.14. Что такое отрицательное демпфирование? В каких случаях оно возникает и к
чему приводит? В чем ero отличие от положительноrо демпфирования?
14.15. В чем состоит критерий ресинхронизации и прн каких допущениях он получа-
ется?
14.16. Как протекает втяrивание в синхронизм асинхронно работающеrо reHepaTopa?
14.17. Объясните процесс втяrивания в синхронизм, изображенный на рис. 14.22.
14 18. В чем особенности ресинхронизации частей системы, объединенных слабой
связью?-
14.19. Что такое вторичное нарушение устойчивости и от чеrо оно может произойти?
14.20. Объясните протекание процесса, показанноrо на рис. 14.23, а, б, сопоставив их
между собой. То же, на рис. 14.25, а, б.
14.21. Что такое результирующая устойчивость? Каковы практические пути ее реали-
зации? Как проверить ее допустимость? Каков примерный порядок расчета и ero особеннос-
ти?
14.22. По каким признакам, находясь на щите управления или в машинном зале, мож-
ио узнать, что данный reHepaTop находится в асинхронном режиме?
14.23. Как изменяются активная мощность и иапряжение иа шинах асинхронио рабо-
тающеrо reHepaTopa?
14.24. В чем опасность асинхронноrо режима для асинхронно работающих reHepaTopoB
и для системы, в которой эти reHepaTopbl работают?
14.25. Как изменяются характеристики и параметры элементов системы при асинхрои-
ном режиме (reHepaTopoB, первичных двиrателей, наrрузки, линий электропередач)?
14.26. При каких основных допущениях рассчитываются асинхронный режим и ре-
синхронизация работающеrо асинхронно reHepaTopa или части системы?
495
14.27. Как изменится режим синхронноrо reHepaTopa после потери возбуждения (от-
ключение возбудителя)?
14.28. Как происходит процесс выпадения синхронноrо reHepaTopa из синхронизма
при нарушении статической устойчивости (переrрузке)?
14.29. Как происходит процесс выпадения из синхронизма СИНХрОЩlOrо reHepaTopa
при нарушении динамической устойчивости?
Темы рефератов
1. Поведение паровой турбины при асинхронном ходе.
2. Поведение rидравлической турбины при асинхронном ходе.
3. Наrрузка системы при асинхронном ходе.
4. Полные (необходимые и достаточные) условия ресинхронизации.
5. Результирующая устойчивость и ее пр именение.
ПРИЛОЖЕНИЯ
П1. АВАРИИ В ЭЛЕКТРИЧЕСКИХ СИСТЕМАХ
Как и' всякое техническое сооружение, электроэнерrетическая система из за каких
либо причин может прийти в ненормальное а в а р и й н о е состояние (режим). Это
состояние, называемое в дальнейшем аварией, для энерrосистемы характеризуется изменени
ем параметров режима, причем в ряде случаев допустимым только на очень краткое время.
Так, меняются в недопустимых пределах потоки мощности, напряжения, токи, частота, по
является асинхронная работа reHepaTopoB. Авария может затронуть только один или He
сколько элементов системы, которые, будучи отключены, позволяют оrраничиться л о
к а л ь н о й а в а р и е й. Однако авария может захватить и всю (или б6льшую часть) сис-
тему, т. е. превратиться в с и с т е м н у ю а в а р и ю, оказывающую отрицательное влия
иие на жизнь части или даже всей страны.
Такие системные аварии были, например, в США в 1965 r., коrда на 14 часов были OT
ключены потребители мощностью 40 50 млн. кВт, в Италии в 1978 r., коrда в течение часа
было недодаио потребителям 25 млн. кВт, в 1978 r. во Франции, rде мощность потребителей,
потерявших питание, превзошла 30 млн. кВт, Т.е. примерно 75% от всей наrрузки ЕЭС Фран
ции. Недоотпуск энерrии более чем за Н? часов аварии составил примерно 100 млн. кВт.ч.
Основной причиной последовательноrо тяжелоrо развития аварии была недостаточная
иерархичность управления и несоrласованность действий как А ЧР и автоматики (в том чис-
ле устройств минимальноrо напряжения), так и оперативноrо персонала, который не пред-
принял ряда действий, облеrчающих аварию, в частности не дал команду на отключение на-
rрузки в ряде районов. В Юrос'Л8ВИИ в 1980 r. произошла системная авария, во время кото-
рой 70% (по мощности) потребителей остались без электроэнерrии некоторые на несколь-
ко часов. Для восстановления работы энерrосистемы потребовалось получение мощности от
соседних стран в размере 900 МВт. В 1981 r. в энерrосистеме Мексики произошла системная
авария, охватившая r. Мехико и всю центральную и южную часть страны. Причиной аварии
явилось повреждение оборудования на двух электростанциях на одной rэс и почти oд
новременно на одной ТЭС. Полное поrашение длилось около 3 часов.
Системных аварий в разных странах за последние 10 15 лет было MHoro. Особенно
. тяжелая системная авария произошла в США в районе Нью Йорка в 1977 r., коrда весь рай
он почти 25 часов находился без электроэнерrии.
Системные аварии это не просто некоторые технические неполадки, это полное pac
стройство производственных, транспортных, социальных (бытовых) функций мноrомилли
oHHoro населения, обслуживаемоrо данной энерrосистемой. Аварии с поrашением системы
Блекли за собой аварии в лифтах, метро, железнодорожном транспорте, перестали работать
аэропорты. Аварии не только расстраивали обслуживание населения, но и вызывали MHoro
численные жертвы.
Системная авария это катастрофа в жизни страны. Системные аварии всеrда воз
никают как небольшие, местные аварии. В большой энерrосистеме их ежеrодно происходит
несколько сотен*, но только несколько процентов из них переходят в системные аварии,
остальные локализуются или ликвидируются средствами автоматики.
* в ЕЭС СССР ежеrодно реrистрируется около 300 таких иарушений, которые вызыва-
ют работу разrрузочной и делительной автоматики и работу А ЧР: См.: Управление мощны-
ми энерrообъединениями/Вороnай Н. И., Ершевич В. В., Луеинский Я. Н. и др.. Под ред.
С.А. Совалова, М.: Энерrоатомиздат. 1984.
497
Аварии с осиовным электротехиическим оборудованием (приблизительиые данные)
произошли из-за повреждения или неисправности следующих элементов (в % от общеrо чис-
.IIа, т. е. 100%); reHepaTopoB 8; синхронных компенсаторов 5; трансформаторов 12;
выключателей 6; разъединителей 3; измерительных трансформаторов 1; кру
6; опор 7; линейных проводов 36; линейной изоляции 8, а также: вследствие не.
правильной работы устройств защиты и автоматики 3; ошибочных действий персонала
5.
rш
z
1J[
IZ IЧ 16
1\ . ь
о IU
[\. I.s::
1\ ;
DтключеНII11
- иэ- 3u иЗМIЩutl
(зuzряsненvе)
J
,
, 1..( .
. 10'1
. . . . l' ·
. . I .IН . .. . .)
. ..1\' .L'I .. . [" .
. . . 1: . .
::> . . . . . Отключенvя
.
. . . .. . . . :. . из- 3Il оmщ
.
. 1/. . . OJ .' '!.. : ,;' , . .
. . . . 01 . . , ,., · It
.
. . [".:\
. / . "
. о . .
.
. r
'с . j оР=
I'\. . ( \:: _J .
h .. о . о
. с .
. о о 1" О Отключения
. .. О 1 C . . ЦЭ-ЭJ mринспорто
( .
О IJ 1<'0
IQ <, . " о
o()ll t о ("
. .
1o',4...1 ( ..("\ (
.t' ,!:'.. .. о
,
* . . I ..,
. .
, tб
Отключениl1
из -:щ !етри
[/ .
\
[ 1'"
.1- I ".
. .
1820222"2 'f
Часы суток
6
8
10
12
1
/'l
II
Y1lI
Х
III
Л
1l
YJ
УШ
,Х
...
",.
III
Л
1l
И
'fJ[[
Х
П
][
"J.r
rr
Рис. Пl.1. Распределение отключений с точно установленной при-
чиной по времени rода и суток:
... отключенне с успешным АПВ; О ОтКJIюченне с неуспешныи АПВ,
восход солнца ; заход солнца
498
Аварии с rенераторами происходил и из-за заводских дефектов изrотовлеиия 65%,
ЭI{сплуатационных нарушений (перенапряжения и др.) 36%; у трансформаторов пример-
но такое же соотношение аварий из-за старения изоляции и дефектов эксплуатации.
Аварии иа воздушиых линиях электропередачи были вызваны следующими причииами
(в % от общеrо числа, т. е. 100%):
п о в р е ж Д е н и я о пор: из-за дефектов монтажа 9,0; стихийных явлений
(сильноrо ветра, rололеда) 14,5;
п о в р е ж Д е н и я л и н е й н ы х про в о Д о в: из-за старения 5,0; повреж-
дения автокраном 10,5; стихийных явлеиий (сильноrо ветра, сиеrа. rололеда) 43;
Сложное п08flеж ение
Потеря еенерllрgю
МQЩНОС/Щ/ или линиtl
l7ереZРijЗХ(]
линии
HerrP..a$aAЫlOe
Deitm19ue
релetiНfli
3l1щиты
fI Cl!JтОМIZЛ1It/(ц
JначцтельныiJ не/аланс межиу наzpузкоц ц zeнерациеlJ
80 8сец эн еосистеме илц ее части
Из5ыток
еенераЦIlll
ПеререzgлироиClние zенерuцци АРС
или ируецми сре8ст8ами gлри!Jпенця
!lостClточное или неоостtlЛ1Q'IНl!e
откЛЮчение HClep!f3l((/
Не80JМqжнtJсть сохранцть
mpеоуем!Jю мощность станццц
ПОZClшение системы иЛll сто!fцлцзация.
с резко СНЦЖQННОIМ !lp08HeM n{Jf77ре!fления
Рис. Пl.2. Обобщенная схема развития аварии в большом 9нерrообъединении
п о в р е ж Д е н и я л и н е й н ы х и з о л я т о р о в: из-за дефектов монтажа
5; rрозы 5; rололеда 3.
Все эти данные т о л ь к о о р и е н т и р о в о ч н ы е, средние за некоторый период
(rод) и их значения изменяются в разные rоды, месяцы, часы суток. Так, на рис. Пl.l пока-
заны характерные распределения причин отключения для линий 110 220 кВ, полученные
для одной из энерrосистем на территории ссср*. Развитие локальной аварии и ее возмож-
ное превращение в системную аварию в обобщенном виде показано на рис. Пl.2, rде в ка-
честве первоначальных аварий указаны три: про с т о е п о If, р е ж Д е н и е это обыч-
* См.: Буссель А. Т., Жирников Т. А., Обухова Е. п., Шараi!ородский В. Л. Причины
отключений воздушных линий 110 220 кВ. Электричество, 1975, N2 2.
499
во короткое замыкание, с л о ж н о е коrда происходит несколько .одновременных пов-
реждений (например, одновременные короткие замыкания в результате -rололеда, yparaHa и
т. п.) И п о т е р я r е н е р и р у ю щей м о щ н о с т и. Например, крупная системная
авария в Южной системе США н<\чалась со взрыва двух бочек с rорючим, что вызвало пожар
и отключение трех линий напряжением 345 кВ. Вследствие этоrо система с наrрузкой более
2 rBT распалась на подсистемы, и были полностью обесточены 450 000 абонентов, в том чис-
ле 7300 промыщленных предприятий. Электроснабжение было восстановлено через 7 часов
после начала аварии. Разумеется, можно
проследить все причины, рассмотрев ава-
рию в обобщенном виде (рис. Пl.2). В раз-
витие приведенной схемы на рис. П1.3 по-
казан r раф пер е х о Д о в от одной
стадии аварии к друrой. На линиях rpa-
фов показана частота данноrо перехода
(применительно к ЕЭС СССР). Необходимо
учесть два характерных пути развития
аварий. В системах со с л а б ы м и с в я-
з я м и относительно быстро происходит
переrрузка связей и различных видов на-
рушений устойчивости с последующим от-
делением подсистем. В системах с с и л ь-
н ы м и с в я 3 Я М И возникает небаланс
мощности, изменяется частота ВСj!Й энер-
rосистемы с последующим отключением
reHepaTopoB или наrрузки с помощью
АЧР. При этом в энерrосистемах со сла-
быми связями потребители отключаются
чаще, чем в энерrосистемах с сильными
связями.
Если системная авария уже произош-
ла, то необходимо в послеаварийном режи-
ме провести операции по восстановлению
нормальноrо режима работы системы. По-
рядок этих операций показан на рис. Пl.4,
rде рассмотрен наиболее тяжелый слу-
чай система полностью «поrашена» (или
«развалилась» или «на нуле»), т. е. коrда
произошло полное исчезновение напряже-
ния на шинах всех или почти всех объектов отделившейся системы. Для ускорения и об-
леrчения восстановления нормальноrо режима проводится временное секционирование час-
тей системы. HarpY3Ka при этом подключается частями (блоками) по нескольку десятков
MeraBan. После восстановления наrрузки и стабилизации частоты устанавливается эконо-
мическое распределение мощности между станциями и аrреrатами системы.
В обеспечении успешной ликвидации аварии и перехода от послеаварийноrо режима к
новому нормальному очень большое, если не решающее, значение имеет и е р а р х и-
ч е с к о е у п р а в л е н и е, принятое в энерrосистемах СССР и стран членов СЭВ.
Система противоаварийной автоматики на всех уровнях полностью координированная и
блаrодаря этому особенно эффективная. Отсутствие или неполная реализация этих мероприя-
тий в подавляющем большинстве зарубежных энерrосистем снижало их ж и в у ч е с т ь,
приводило И приводит К тяжелым с и с т е м н ы м а в а р и я м*. Классической системной
аварией, по праву называемой «аварией века», считается авария, происшедшая в США
9 ноября 1965 r. Авария, продолжавшаяся 14 часов, охватила район с 30 млн. жителей,
площадью 20000 км 2 . Общая потерянная мощность составила более 44000 МВт.
Рассмотрим основные причины Toro, как небольшая местная авария (неправильная
работа реле) развилась в столь крупную системную.
6З,5
9,5
lJ
3,5
Рис.
П1.3. Обобщенный rраф процесса раз-
вития аварий
на стрелках..... статистические данные в про-
центах от общеrо числа аварий
Цифры
* Подробнее см.: Пелuсье Р. Электрические системы. М.: Высшая школа; Управле-
ние мощными энерrообъединениями/Воропай Н. Н., Ершевuч В. В., Луеuнскuй Н. Н.. и др.;
Под ред. С. А. Совалова. М.: Энерrоатомиздат, 1984; Ершевuч В. В. Надежность энерrо-
систем в США. Энерrохозяйство за рубежом, 1980, N2 1; Fершенеорн А. Н. Крупное на-
рушение электроснабжения r. Нью-йорка. Энерrохозяйство за рубежом, 1978, N2 2.
500
], Электроснабжение данноrо района производилось 42 различными частными энерrе-
тическими компаниями, которые хотя и делили район на 15 зон с диспетчерскими пунктами
в каждом, но не имели управления, даже похожеrо на единое иерархическое. Действия дис
петчеров были во время аварии не только не соrласованы, но даже противоречивы.
2. Были не соrласованы между собой, недостаточны, а часто вообще отсутствовали уст-
ройства системной противоаварийной автоматики, что вместе с отсутствием единоrо автоиа-
Обеспечение
питония 000-
ст8енны)(
яуж8 эле кт.
pOCтaHЦl/Ц
П08еот08ка
электрос
-та нций оля
80сстана8
ления еене-
а ии
80сстаllо8
ление
еенериf!УЮ
щеи
мощности
ВосстаноВление paoo
тослосооности KOM
мутационных аллара-
т08 оста8шихся 8
раооте участкоВ
системы
Восстоноолени9 чClС-
тоты и нолряжениii
80 3НClЧ8ниlJ. близких
к номиНdЛЫfЫМ, 80
8сех изолироВанных
рацонах или 800сеи
. сети
П08еот08ка оleс-
точенных учостк08
сет[/ Оля лроиз -
80ОстВа НОМЩjтCl
ЦilОНIIЫХ ле,.реклю
. чении
ОleспечеНlle
Питания
соостоенных
" нужО
п08станциu
80ССfП/1IIоlJление
осно8ных
электРОЛ8ре!Jач
Восстан08ление
наер!/зки по мере
lIеоохооимости и
8qзмажности
ВосстаноВлеиие
остальных :мектрр-
переоач
Рис. Пl.4. Структурная схема, отражающая стратеrию деятельности оператив-
Horo персонала по восстановлению полностью поrашениой энерrосистемы
тическоrо и диспетчерскоrо управления привело к тому, что система во время аварии оказа-
лась фактически неуправляемой.
3. Особенно существенным было отсутствие аварийной разrрузки потребителей по ча-
ctoTe (А ЧР) и напряжению.
4. Отсутствовало, как правило, rарантированное питание собственных нужд ТЭС дан-
Horo района.
5. Система не моrла делиться так, чтобы в разделившихся частях производство и по-
требление энерrии было сбалансировано.
6. Жизненно необходимые или очень важные потребители не имели источников rаранти-
pOBaHHoro питания (аэропорты, больницы, службы безопасности и т. д.).
Восстановление электроснабжения испытывало также трудности, связанные с отсутст-
вием иерархическоrо управления. Так, на разных участках системы восстановление шло
разными темпами: относительно быстрым оно было в провинции Онтарио, которая имела в
северной части мноrочисленные rэс, не охваченные аварией (некоторые из них не имели в
этот момент межсистемных связей с юrом). Оно моrло бы быть еще более быстрым, если бы
на ТЭС питание собственных нужд не отключалось защитой от понижения частоты.
Линии, связывающие станции севера Канады с районом Торонто, хотя и мноrочислен-
ные, имели оrраниченную пропускную способность. Отключения этих лнний из-за переrруз-
ки задержали восстановление электроснабжения.
501
Причины медленноrо восстановления электроснабжения в штатах Нью Иорк, Коннек-
тикут и Массачусетс различны:
разделение межсистемной связи на мноrочисленные отдельные системы ПРОИСХОДR
ло зачастую случайно, так что имелось несоответствие между структурой этих сетей и pac
пределением мощности имеюшихся источников;
большое число потребителей (в частности, освещение большинства жилых зданий
Нью Иорка) оставалось подключенным к системе, что вызывало значительное потребление
электроэнерrии; попытки восстановления электроснабжения оказались безуспешными из за
недостатка rенерируемой мощности;
источник аварии стал известен только спустя пять дней, а во ВРЕ?МЯ аварии персо-
нал боялся включать под напряжение линии, опасаясь их неисправности;
попытки возможно быстроrо восстановления электроснабжения на некоторых участ
ках линий потребовали большоrо количества последовательных включений и отключений
вплоть до исчерпания Bcero резерва сжатоrо воздуха на воздушных ВЫКJIючателях, попол-
нить который было невозможно из за, отсутствия электроснабжения. Очевидно, что наличие
единоrо иерархическоrо управления и центральноrо диспетчерскоrо пункта, координирую
щеrо переключения всей системы, моrло бы если не исключить, то по крайней мере уменьшить
перечисленные трудности;
остановленные ТЭС были пущены в ход только после восстановления питания соб-
ственных нужд станций от удаленных источников. При этом восстановление электроснабже-
ния затруднялось тем, что значительные наrрузки оставались подключенными к системе,
вызывая новые местные аварии.
Выводы, сделанные после анализа aвapu.и. Федеральной энерrетической комиссией бы
ла выявлена необходимость:
единоrо управления объединенной электроэнерrетической системой, с одной сторо-
ны, oTBeTcTBeHHoro за ее концепцию, а с друrой контролирующеrо надежность работы сис-
темы;
улучшения устойчивости, реrулирования, защиты;
снабжения аппаратурой измерения, связи и автоматики;
усиления межсистемных связей;
распределения вращающихся резервов по всей объединенной системе;
контроля за действием реле и всех автоматических устройств;
разработки устройств для разrрузки системы;
оснащения вспомоrательными источниками всех потребителей, для которых Heдo
пустим перерыв в питании (больнипы, средства связи всех видов);
совершенствования законодательства, переносящеrо контроль за надежностью
электрических систем с opraHoB штатов на федеральные opraHbl.
Для устранения причины, вызывающей аварии, требовались прежде Bcero н а п и о н а-
л и з а ц и я э н е р r е т и к и и с о з Д а н и е Е Э С с е Д и н ы м и е р а р х и
ч е с к и м у п р а в л е н и е м и централизованной противоаварийной автоматикой. Это
в последующие rоды было сделаио т о л ь К О Ч а с т и ч н о в виде создания больших, мощ
ных (частных) объединений пулов, которые улучшили положение, но не смоrли полностью
решить задачу устранения системных аварий.
rлавное, что было необходимо, это национализация энерrетики и создаиие ЕЭС
не было сделано, так как в соответствии с решениями правительства США и KOHrpecca энер-
rетика должна оставаться сферой частных владений. Создание мощных объединений ,(пулов
и сверхпулов) хотя и улучшило положение, но не исключило основных причин возникнове-
ния и развития системных аварий.
После 1965 r. таких аварий в США было MHoro, ио особое место занимает крупнейшая
системная авария, происшедшая 13 июля 1977 r. в Нью Йорке, уступающая по масштабам
лишь аварии 9 ноября 1965 r. в северо восточной части США, однакО превосходящая ее по
длительности восстановления электроснабжения. Во время этой аварии было полностью нару-
шено электроснабжение Нью Йорка и ero приrородов, что привело к прекращению работы
rородскоrо транспорта, телевидения, водоснабжения и друrих rородских служб, питаемых
электроэнерrией от энерrосистемы. Из-за отсутствия напряжения были выключены светофо-
ры, что усложнило работу rородскоrо автомобильноrо транспорта. Прекращение работы
радаров и аэродромной сиrнализации вызвало необходимость отмены рейсов самолетов в
Нью Иоркском аэропорту.
Восстановление работы энерrосистемы и подачу электроэнерrии оказалось возможным
осуществить л ишь ч е рез 25 ч а с о в п о с л е п о л н о r о п о r а ш е н и я. По
этому мноrие жители прИrороДОВ 14 июля 1977 r. не смоrли попасть на работу и большая
502
oIJacTb предприятий была закрыта. В rороде поrас свет и остановились лифты, поезда метро,
водяиые насосы в общем все, приводимое в движение электричеством. Шок поразил ие
только rОРОkrиrант, но и всю страну. Прекратились передачи телевидения, замолкли теле-
тайпы информационных areHTcTB, закрылись на целый день банки, фондовая и товарная бир-
жи иа Уолл-стрите. В течение ночи 13 14 июля происходил и Мllоrочисленные пожары,
поджоrи и rрабежи маrазинов. Все вместе привело к убыткам в размере более миллиарда
долларов.
ВО8пикповепие и раавитие аварии. В Нью-Йорке стояла жаркая поrода. Из-за степ-
.lЮвой волны» электрическая наrрузка от кондиционеров была очень большой и максимум
наrрузки системы превысил 8000 МВт. К вечеру наrрузка стала снижаться и перед началом
аварии составляла 6090 МВт. В связи С этим пиковые [ТУ были остановлены и в 20 часов их
персонал был отпущен домой. Электроэнерrетическая система «Консолидейтед Эдисои», сос-
тоящая из отдельных частных предприятий, в это время вырабатывала 3890 МВт (в том числе
внутриrородские reHepaTopbI около 3000 МВт). Извне в систему импортировалось
2200 МВт.
Резерв был достаточно велик. Так, мобильный резерв был равен 2734 МВт (в том числе
вводимый в течение 10 мин 1446 МВт, вводимый в течение 30 мин 1288 МВт). Мощность
резерва в черте rорода составляла 1998 МВт, в том числе мощность быстро запускаемых
[ТУ 790 МВт.
Авария развивалась быстро, поскольку сформулированиые выше условия упраВ,1ения
аварийным режимом были нарушены. Так, решающее значение в развитии аварии имела
неудовлетворительная структура А ЧР. В энерrокомпаниях США применяется только одиа
система АЧР, состоящая из нескольких ступеней с разными уставками по частоте и одинако-
выми небольшими выдержками времени (аналоrично АЧРI в энерrосистемах СССР). Приме-
няемая в СССР вторая система АЧРII, состоящая из нескольких ступеней с одинаковыми
уставками по частоте и разными, большими выдержками времени, в энерrокомпаниях США
не предусматривается. Если бы в системе «Консолидейтед Эдисон» име.лась А ЧРII, она, по-
действовав после nOBTopHoro сиижения частоты, вызваиноrо ложным отключением блока
мощной стаициИ Рейвенсвуд, моrла бы предотвратить дальнейшее развитие аварии. Не имея
возможности подробио разбирать ход аварии, заметим, что каскадному развитию аварии в
значительиой мере способствовали ошибки диспетчерскоrо персонала, который не принял
всех возможных мер по разrрузке оставшихся в работе линий электропередачи: недостаточ-
но быстро и не полиостью реализовал резерв мощности иа электростщщиях в Нью-Йорке,
не попытался замкнуть в транзит находившиеся под напряжением линии, не отключил часть
ваrрузки в Нью-йорке. Развитие аварии привело к тому, что система «Консолидейтед Эди-
сон» с наrрузкой 5750 МВт и включениыми rенераторами мощностью 4250 МВт осталась изо-
.IIированной от внешних энерrосистем. Возникновение дефицита мощности в 1500 МВт вы-
звало снижение частоты со скоростью 4,5 [ц/с и срабатывание устройств АЧР.
Вследствие быстроrо снижения частоты устройства А ЧР сработали несколькими сту"
пенями и в 22 районах распределительной сети отключили мощность 1833 МВт. Отключение
столь значительиой мощности явилось причиной повышеиия напряжеиия в системе, в кото-
рой ОКОЛО.50% протяжеиности сетей составляют кабели. В 21 ч 29 мин 47 с защита от поте-
ри возбуждеиия отключила ряд reHepaTopoB. В итоrе произошло полное поrашеиие системы,
Jl,лившееся, как указано выше, 25 часов.
Авария заставила вновь поднять вопрос, достаточна ли надежность энерrосистем для
Toro, чтобы предотвратить возможность возиикиовения подобноrо рода аварий. В ответ на
зтот вопрос руководители мноrих эиерrообъедииений Западной Европы и США заявили,
IJТО в условиях полиостью интеrрированной энерrосистемы, обеспечениой достаточной резерв--
вой мощностью rеиераторов и пропускиой способностью виутри- и межсистемных связей, и
ври иаличии разрабоrанноrо плаиа ликвидации неполадок и применеиия АЧР возможность
возникиовеиия крупной системной аварии, связанной с длительным иарушеиием электросна-
бжения большоrо числа -потребителей, маловероятна, но для этоrо необходимо соблюдение
определенных требований к ПйJt(>оевию систем и ходу ликвидации возникших аварий.
"1. КРАТКИЕ СВЕДЕНИЯ О РУКОВОДЯЩИХ УКАЗАНИЯХ
И НЕКОТОРЫЕ РЕКОМЕНДАЦИИ "О "РОВЕДЕНИЮ РАСЧЕТОВ
t "1.1. Требования устойчивости зnектрознерrетических систем
Требования устойчивости электроэнерrетических систем формулируются в руководя-
щих указаниях, которые периодически выпускаются МИНЭ!lерrо СССР и являются обязатель-
ными.
Прежде Bcero руководящие указания требуют, чтобы иормальный установившийся
режим имел запас устойчивости. Послеаварийный режим возникает после переходноrо ре-
жима и характеризуется снижением запасов устоичивости не ниже некоторых значений.
Длительность послеаварийноrо режима определяется временем, необходимым диспетчеру
для изменения режима, как правило, не более 20 мин.
В руководящих указаниях и друrих документах часто вводится понятие перетоков в
сечениях, т. е. таких отключаеыых элементах, которые соединяют (связывают) две какие-
.пибо части системы. Разрыв таких связей рассекает систему на две изолированные части.
Перетоки в сечениях при установившихся режимах подразделяют на нормальные, утяже-
.пенные, вынужденные.
, у т я ж е л 'е н н ы е пер е т о к и допускаются при отсутствни необходимых ре-
зервов мощности, недостаточной маневренности оборудования тепловых и атомных электро-
станций или неблаrоприятном наложении rrлановых и аварийных ремонтов OCHoBHoro обо-
рудования электростанций и сетей.
В ы н у ж Д е н н ы е пер е т о к и допускаются при предотвращении оrраничений
потребителей, потерях rидроресурсов, экономии энерrоресурсов, а также при невозыожнос-
ти уменьшения перетока из-за недостаточной маневренности АЭС.
ДЛЯ определения динамической устойчивости принимаются расчетные возмущения,
разделяемые на три rруппы.
r р у п п а 1. Отключение элемента сети напряжением 500 кВ и ниже. Однофазное
короткое замыкание при работе основной защиты с успешным инеуспешным ОАПВ.
r р у п п а II. Отключение любоrо элемеита сети напряжением выше 500 кВ (для схе-
мы связи АЭС с энерrосистемой выше 750 кВ). Однофазное короткое замыкание на линии
електропередачи выше 500 кВ (для схемы связи АЭС с энерrосистемой выше 750 кВ) при
работе основной защиты снеуспешным ОАПВ. Мноrофазные короткне замыкания на линии
электропередачи любоrо класса напряжения при работе основной защиты с успешным и не-
успешным АПВ. Отключение reHepaTopa или блока reHepaTopoB, наибольших по мощвости
в данной ОЭС.
r р у п па III. Одновременное отключение двух цепей или двух линий, идущих по
одной трассе более чем на половине длины более короткой лннии.
Возмущения rрупп 1 и II с отключением элемента сети или "енератора (блока reHepaTO-
.ров) , которые вследствие ремонта одноrо из выключателей приводят к отключению,второrо
э.пемента сети, подключенноrо к этому же распределительному устройству.
Одиофазное короткое замыкание на линии электропередачи или шинах .пюбоr();,хласса
напряжения при отказе одноrо из выключателей. "
Отключение части reHepaTopoB электростанции, связанное с полным отключением од-
ной секции (системы) шин суммарной мощностью до 50% мощности электростанции или воз-
никновение TaKoro же или большеrо аварнйноrо небаланса мощности по любым причинам.
Руководящие указания 1984 r. не дают рекомендаций по определению коэффициентов
запаса по динамической устойчивости, оrраничиваясь ответом: «устойчиво», «неустоЯчиво».
Коэффициенты Запаса можно найти, рассмотрев серию последовательно утяжеленных (изме-
иением какоro-либо параметра или rрупп параметров режимов) режнмов, как это делается
при определении запаса по статической устойчивости. В этом случае запас может находиться
по времени К (t 1 tир)/t lt rде t 1 время отключения при исходном режиме, коrда сис-
тема остается устойчивои; t ир время отключения в критическом режиме, коrда система
находится на пределе устойчивости, или по соответствующим уrлам б.
Запас статнческой устойчивости данноrо режима качественно определяется близостью
к режиму, лежащему на rранице области, в которой ПОЯВ.1яется апериодическое или колеба-
тельное нарушение устойчивости. Запас количественно характеризуется коэффициентами
запаса К р по потокам активной мощности в сечениях Р системы и коэффициентами запаса
по напряжению в узлах наrрузки К U.
504
Для определения запаса устойчивости последовательнымн утяжелениями режима (pac
смотрением ряда установившихся режимов, которые при изменении HeKoToporo параметра
или rруппы параметров приведут к предельному режиму) находится пvедельный режим
(Р пр rраница области устойчивости). Частота при этом обычио прииимается постоянной
(нормальной или сниженной)' или указывается на принятые условия изменения частоты.
С учетом принятых обозначений коэффициент запаса
Кр == (Рпр Р !J.Р)/Р.
(П2.1.\
Здесь !J.p амплитуда нереrулярных колебаний активной мощности в этом сечении.
Утяжеление рещима и определение предельноrо перетока в сечении проводится в пред
положении отключения любых устройств, препятствующих достижению предельноrо перето
ка в данном сечении (автоматическое оrраничение перетока, противоаварийная автоматика
и т. п.). Предельные перетоки определяются с учетом переrрузок Bcero оборудования, ДО-
пустимых в течеНИе 20 мии.
При возрастании перетока рекомендуется считать заrруженными reHepaTopbl с одной
стороны сечения и разrруженными с друrой. После достижения максимаЛЬ1l0Й мощиости
reHepaTopa можно увеличивать переток, увеличивая одиу и соответственно уменьшая друrую
активную и реактивную наrрузки и далее переrружая reHepaTopbl (сняв для этоrо соответст-
вующие оrраничеиия, в том числе оrраничения по току ротора).
Для конкретных условий MorYT быть рассмотрены и друrие факторы, вызывающие уве-
личение перетока.
При определении предельиоrо по условиям статической устойчивости перетока актив
ной мощности и утяжелении режима MorYT измеияться перетоки в друrих сечениях. В этих
случаях следует определять Р пр в соответственно запас по значеиию Рпр, определенному в
сечении, дающем наименьшую предельиую мощность.
Амплитуда нереrулярных колебаний активной мощности !J.p устанавливается по даи-
ным измерений и может быть определеиа по выражению
!J.P == К У PН1PH /(PHl + Р Н2 ) .
(П2.2)
rде P HI , Р Н2 суммарные мощности иаrрузки с каждой из сторон рассматриваемоrо сече
ния, МВт; коэффициент К принимается равным 1,5 при ручном реrулировании мощности и
0,75 при автоматнческом реrулировании частоты и мощиости с периодом остающихся коле-
баний около 10 мии, МВт.
Коэффициент запаса по иапряжению в узле иаrрузки
К и == (И Иир)!U.
(П2.3)
rде И напряжение узла наrрузки в исходном режиме; Иир ero критическое напряжение
на rранице, прииимаемое не меньшим 0,7 Ином и 0,75 И норм , Fде И норм напряжение в
узле при нормальном режиме. ,
Критическое напряжение может определяться расчетиым путем (см. rл. 11) и построе
нием Е == f(И) с учетом реrулировании иапряжеиия трансформаторов и статических харак-
теристик наrрузки.
Показатели устойчивости должны иметь значении не меиее указанных в табл. П2.1.
В нормальной схеме при нормальных перетоках динамическ'ая устойчивость при воз
мущениях rруппы должна обеспечиваться без. примеиения противоаварийной автоматики,
т а б л и ц а П2. 1
Переток
в сечении
Минимальные
коэффициеи п..
запаса по
активиой мощвос<nl
Мииимальиые I
коэффициенп.. запа
са по напряжению
I
'"руплы ""зм ущений. при KOropblX должна
04 печива ься динамическая УСТОЙЧИВОСТЬ
при иормалы"OIЙ I
схеме
1, Il. III I
1, 11
при ремонтной
схеме
Нормальный
Утяжелеиный
Вынужденный
0,20
0.15
0,08
0,15
0,15
0,10
1, 11.
1
'8 84
505
При этом для связей АЭС с энерrосистемами динамическая устойчивость должна обеспечи
ваться без воздействия противоаварийной автоматики на разrрузку АЭС (на всех этапах раз-
вития).
При отключении линии высшеrо для данноrо сечения класса напряжения устойчивость
может не сохраняться, если:
предел статической устойчивости уменьшается более чем на 70%;
предел статической устойчиности по оставшимСЯ связям не превышает утрое нной
расчетной амплитуды нереrулярных колебаний мощности в этом сечении.
Вынужденные перетоки не допускаются, если нарушение устойчивости при возмущени-
ях rрупп 1 и Il и правильном функционировании противоаварийной автоматики может при
вести к отключению потребителей суммарной мощностью, превышающей больше чем в 10
раз мощность Toro оrраничения потребителей, которое требуется для обеспечения нормаль
Horo перетока.
Работа с вынужденным перетоком в сечениях, непосредственно примыкающих к АЭС,
не допускается.
Если фактические схемы и режимы системы требуют применения противоаварийной
антоматики, отличной от имеющейся, то временно (до ее ввода) допускается работа с перето-
ками, при которых возможны нарушения устойчивости для возмущений rрупп II и III при
условии, что суммарная мощность автоматически отключаемых потребителей при нарушении
устойчнвости не более чем в 10 раз превышает величину оrраничения потребителей, требуе-
мую для обеспечения нормативных показателей нормальноrо режима.
Должно предусматриваться автоматическое прекращение асинхронных режимов, как
правило, делением систем на несинхронно работающие части. Результирующая устойчивость
(ресинхронизапия как с примеНЕ!нием автоматических устройств, так и самопроизвольная)
обязательно резервируется делением системы. Во всех случаях допустимая длительность
асинхронноrо режима и способ ero прекращения устанавливаются для каждой системы и
каждоrо ее сечения с учетом предотвращения повреждений оборудования энерrосистемы,
возможиых дополнительных нарушений синхронизма и иарушений электроснабжения по-
треБИТeJJей. При этом особое внимание следует уделять устойчивости электростанций и
крупных узлов наrрузки, вблизи которых может оказаться центр качаний (см. rл. 14).
t П2.2. Соображения о выборе метода и шаrа расчета
механических переходных процессов в эпектрических системах *
Точность и быстрота расчета устанавливаются в зависимости от поставленной задачи.
Выбираемый метод и шар прежде Bcero связаны с выбором математической модели, описыва-
ющей переходные пропессы в электрической системе, и зависит от длительности исследуемоrо
. процесса и точвости задания исходной информации. Ниже приведена степень описания Moдe
ли в зависимости от класса точности, которой будем дацее пользонаться для различных пере-
ходных процессов,
1 . й к л 11 С С. Процессы в reHepaTopax описываются полными уравнениями Парка
ropeBa. Учитывается влияние демпферных обмоток. Учитываются системы реrулирования
мощности турбины и возбуждения reHepaтopa АРВ с. д.
2 - й к J! а с с. Процессы в reHepaTopax описываютси упрощеиными уравнениями Па!)-
Ka ropeBa. Учитывается влияние демпферных обмоток. Учитываются системы реrулирона-
ния мощности турбины и возбуждеиия reHepaTopa АРВ с. д.
3 . й к л а с с. Процессы в ренераторах описынаются упрощенными уравнениями Пар
Ka ropeBa. Влиянне демпферных обмоток и систем реrулирования мощности и возбуждения
учитываются упрощенно.
4 . й к л а с с. Допускается постоянство э. Д. с. (Е' == const) в течение Bcero переход-
Horo проиесса. Влияние демпферных коитуров и системы реrулирования не учитывается.
Расчет кратковременных переходных процессов длительностью O,8 1,o с.
1. Прн определении характера изменения уrла reHepaTopa или reHepaTopoB без деталь-
Horo аиализа проuессов, пронсходящих в ренераторах, реrуляторах, линиях и друrих эле-
меитах 9лектрической системы, следует пользоваться моделями 3-ro и 4 ro классов точности
независиме от ОТliосительноrо актинноrо сопротивления "енераторов и сети.
* См.: ВеНИК06 В. А., ПоеОСЯfl Т. А. Автоматическое изменение шаrа интеrриронания
при расчетах длительных переходныХ процессов в электроэнерrетических системах,
Известия вузов СССР. Энерrетика, 1984, N9 3, с. 3 7.
б06
Для решения системы дифференциальных уравнений в этом случае рекомендуется при-
менять наиболее простые методы интеrрирования, в частности прииятый в энерrетике метод
последовательных интервалов и метод PYHre KYTTa 11 порядка (модифицированный и ис-
правленный методы Эйлера) с шаrом интеrрироваиия, равным 0,05 с. Хотя эти методы ие
относятся к высокоустойчивым методам, они позволяют при шаrе 0,015 с получить достаточио
точный, отвечающий поставленной задаче результат, так как постоянные времени дифферен-
циальных уравнений во MHoro раз больше шаrа расчета, а длительность исследуемоrо про-
цесса невелика.
2. Более полный анализ влияния демпферных контуров и систем реrулирования воз-
буждения reHepaTopoB и мощности турбин требует независимо от относительноrо активноrо
сопротивления reHepaTopoB и сети применения моделей 2-,ro класса точности. Системы pery-
лирования возбуждения reHepaTopoB и мощности турбин будут при этом описаны жесткой
системой дифференциальных уравнений, в которых постоянные времени отличаются на 1 2
порядка, а асинхронная мощность опреде. яется по более точным выражениям (см. rл. 14).
Для решения такой системы также следует применять метод последовательиых интер-
валов или метод PYHre KYTTa 11 порядка с шаrом интеrрирования 0,05 с при условии, что
самая малая постоянная времени не менее 0,025 с. При меньших значеииях постоянной вре-
мени в связи с ухудшением устойчивости числениоrо решения будет иакапливаться поrреш-
. ность в процессе расчета. В этом случае для получения устойчивоrо числовоrо решения не-
обходима проверка выбранноrо метода и шаrа расчета по областям устойчивости числеиных
методов*. При нарушении условия устойчивости числовоrо решения следует уменьшить шаr
до 0,01 с. Более эффективным для решения рассматриваемых задач оказывается метод трапе-
ции (неявный метод 11 порядка с шаrом, равным от 0,05 до 0,1 с), являющийся наиболее
устойчивым и не допускающим накапливания поrрешности в процессе расчета. Применение
этоrо метода с шаrом 0,1 с приводит к сокращению времени расчета в 1,2 1,5 раза и увели-
чению точности вычислений примерно на 10% по сравнению с методом Рунrе Кутта 11
порядка. Методы PYHre KYTTa и методы проrноза и коррекции BblcoKoro порядка ие эффек-
тивны, так как приводят к увеличению времени расчета на ЦВМ по сравнению со временем
расчета методом трапеции примерно в 1,5 2 раза.
3. Более детальное исследование переходных процессов в reHepaTopax требует приме-
нения моделей l-ro класса точности. Следует иметь в виду, что не всеrда полное описаиие
процессов в системе приводит к повышению достоверности результатов. Это зависит от отно-
сительноrо активноrо сопротивления цепи статора reHepaTopa и сети (r/x). При r/x 0,03
для получения точных результатов необходимо описывать переходные процессы в reHepaTO-
рах полными уравнениями Парка rорева. При Этом так же точно требуется описывать и
переходные процессы в остальных элементах электрической системы. Результаты расчета
по полным уравнениям всеrда более достоверны, чем результаты расчета по упрощенным
уравнениям. При относительном активном сопротивлении r/x < 0,03 для получения точных
и достоверных результатов рекомендуется применять упрощенные уравнения Парка rоре-
ва, так как при этом расчеты по полным и упрощенным уравнениям практически полностью
совпадают, а порядок системы дифференциальиых уравнений, описывающих n"ереходный
процесс, резко уменьшается, что приводит к сокращению времени расчета. Кроме Toro, пол-
ные уравнения более чувствительны к поrрешности исходных данных (см. rл. 6). Следует
также иметь в виду, что применение полных уравнений при малых r/x может привести к не-
правильному результату, если не учитывать появление дуrи при отключеиии KopoTKoro за-
мыкания. Учет же дуrи, которая обычно моделируется активным сопротивлением, приводит к
усложнению решаемой задачи и увеличению жесткости системы дифференциальных уравне-
ний. Следовательно, при r/x <:: 0,03 следует применять УПрощенные уравнения Парка ro-
рева, приводящие к резкому сокращению времени счета на ЦВМ и не ухудшающие прн этом
достоверности получаемых результатов.
Дифференциальные уравнения, описывающие процессы в reHepaTopax полными уравне-
ниями Парка rорева, должны решаться наиболее устойчивыми методами численноrо Интеr-
рирования. В данном случае следует применять метод PYHre KYTTa IV порядка и метод
проrноза и коррекции 11 порядка с шаrом, равным 0,001 с. Для ускорения вычислений,
без ухудшения при этом точности расчета, рекомендуется применять метод трапеции с
шаrом, равным 0,01 с. В этом случае скорость расчета на ЦВМ по сравиению с методом
* См.: Поеосяft Т. А. Устойчивость методов числениоrо интеrрироваиия при расчете
электромеханических переходных процессов в электрических системах. Извеетия АН
СССР. Энерrетика и транспорт, 1984, N2 4, С. 32 39.
18*
Ql
PYHre Kyna IV порядка сокращается в 2 2,Б раза. Оценку поrрешности во всех случаях
надлежит проводить, вычисляя максимально возможную ошибку, возникшую при решении
на ЦВМ конкретной задачи численными методами интеrрирования по формуле*
п А;Ы
Rп е (d; +ад.
i 1
rде Лi собственные значения матрицы Якоби системы дифференциальных уравнений;
А! шаr интеrрирования; d i поrpешность метода на шаrе, а; поrрешность окруrления
ЦВМ на шаrе.
Расчет электромеханических переходиых процессов длительиостью 1,5 2 с
1. Для случая, коrда требуется выявить характер изменения уrлов роторов reHepaTopoB
без детальноrо аналнза процессов, происходяших в reHepaTopax, реrуляторах, линиях и дpy
rих элементах электрической системы, необходимо пользоваться моделями 3 ro класса точ
ности. Применение в этом случае моделей 4 ro класса точности недопустимо с точки зрения
достоверности результатов.
Расчеты переходных процессов при этом должны проводиться С помошью явных мето-
дов интеrрирования BblcoKoro порядка, которые являются более устойчивыми и не допуска
ют значительноrо накапливания поrрешности !! процессе вычислений. Рекомендуется приме
нять метод PYHre KYTTa IV порядка и метод проrноза и коррекции II порядка с шаrом,
равным 0,05 с. Для ускорения расчетов целесообразнее применять метод трапеции с ш'аrом,
равным 0,1 с. При этом время счета сократится примерно в два раза, а точность результатов
не ухудшится.
2. Более точный анализ влняния демпферных контуров и систем реrулироваиия мощнос
ти и возбуждения на переходный процесс длительностью I,Б 2 с требует применения моде-
лей 2 ro класса точности. Для решения таких задач следует применять методы PYHre KYTTa
IV порядка, метод проrноза и коррекции II порядка с шаrом, равным 0,ОБ 0,02Б с, и метод
трапецин с шаrом, равным 0,1 с. Чтобы не допустить накапливания поrрешности в процессе
расчета, следует в начале и в пропессе расчета по областям и условиям устойчивостн перио-
дически проверять устойчивость числовоrо решения и подправлять шаr расчета. Для опенки
накопленной поrрешиости необходимо в процессе расчета определять максимально возмож
ную поrрешность вычислений. Это позволит получить наиболее точный результат и до мини-
мума сократить время расчетов.
3. Детальное описание переходных процессов длительностью дО I,Б 2 с возможно при
использовании моделей 1-ro класса точности. Однако, так же как и при расчете KpaTKOBpe
менных переходных процессов, применение моделей 1-ro класса точности оказывается оправ-
данным лишь при относительном активном сопротивлении [енераторов и сети r/x:;;::::' 0,03.
Это объясняется теми же причинами, что и при расчете кратковременных переходных про
цессов.
В этом случае для обеспечения устойчивоrо числовоrо решения необходимо уменьшить
шаr (см. предыдущий случай) вследствие большой жесткости решаемой задачи (постоянные
времени отличаются друr от друrа на 2 3 порядка). Здесь следует применять метод PYHre
Кутта IV или V порядка и методы проrно;за и коррекции II или III порядка (см. rл. 7) с
шаrом, равным 0,001 с. Лрименение методов проrноза и коррекции сокращает время расчета
примерно в 1 ,2 I,Б раза по сравнению с методами PYHre KYTTa. Для большеrо сокращения
временн расчета, но при сохранении желаемой точности вычислений рекомендуется приме
нять метод трапеции с шаrом, равным О,ООБ с. Это позволит сократить время счета на ЦВМ
примерно в 2 2,Б раза, не допуская при этом накапливания nоrрешности.
Расчет длительных электромеханических переходиых процессов (длительиостью более
3 с).
1. Анализ изменения уrлов reHepaTopoB после возмущения длительностью более 3 с,
без детальноrо исследования процессов,' происходящих в reHepaTopax, линиях и друrих эле
* см.: Поеося1t Т. А. Поrрешность расчетов электромеханических. переходных процес
сов в электрических системах. Электричество, 1984, .N1! 3, с. 54 56.
5tlfI
Таблица П2.2
Допустимая длитель- I(ласс точиости
eтoд интеrрнрования НОС ть исследуем oro решаемоlI аадачи Шаr расче та, с
процесса, с
Метод последова тель- O,8 1,0 3 и 4 0,05
ных интервале<В 2 O,025 O,O10
PYHTe KYTTa II поряд- 0,8 I,O 3 и 4 I 0,05
ка 2 0,01
PYHTe KYTTa IУ по- 0,8 I,O 1 0,001
рядка I,5 2,O 3 0,05
2 0,05 O,025
1 0,001
Более 3,0 3 Переменный с точно-
стью 0,05
2 Переменный с точно-
стью 0,01
1 Переменный с точно-
стью 0,001
KYTTa MepCOHa 1 ,5 2,0 3 0,05
2 0,05 0,025
1 0,001
Более 3,0 3 Переменный с точ-
ностью 0,05
2 Переменный с точно-
стью 0,01
1 Переменный с ТОЧНQ-
стью 0,001
Проrноза и коррекции 0,8 I,O 1 0,001
II порядка
1,5 2,0 3 0,05
2 0,05 0,025
1 0,001
51./'9
Продолже1Ше табл. П2.2
!\\етод интеrрирования
Допустимая длнтель
НОСТЬ нсследуемоrо
процесса l' с
Класс точности pe
шаемой задачи
Шаr расчета, с
Проrноза и КО;-Jрекции
II порядка
Более 3,0
3
Переменный с точно-
стью 0,05
2
Переменный с точно-
стью 0,01
Переменный с Точно-
стью 0,001
рекции 1,5 2,O 3 0,05
2 0,05 O,025
1 0,001
Более 3,0 3 Переменный с точио-
стью 0,05
2 Переменный с точно-
стью 0,01
1 Переменный с точно-
стью 0,001
ый ме- O,8 I,O I 2 I 0,10 O,05
1 0,01
1,5 2,0 3 0,1
2 0,05
1 0,01
Более 3,0 3 0,10 0,05
2 0,05
1 0,01 ,005
Проrноза и кор
II 1 порядка
Трапеции (не шн
тод II порядка)
ментах электрической системы, проводится моделямИ 3-ro класса точности.В этом случае
точность результатов расчета сильно зависит от точности задания исходной информации,
ПOl'решности которой вследствие большой длительности исследуемоrо процесса приводят к
заметному разбросу результатов расчета. Поrрешность в конце расчета зависит от характера
переходноrо процесса. Если исследуемый переходный процесс устанавливается, то поrреш-
ность расчета, возникшая вследствие неточноrо задания исходной информации, убывает и в
иределе стремится к нулю. Если же параметры переходноrо процесса колеблются на rранице
о/Sластн устойчивости, то поrрешность возрастает и приводит к неправильному результату.
Например, при применении моделей 3-ro класса точности, при значении активноrо сопротив-
J!('ПИЯ == 10%, разброс уrла иа четвертой секунде дос1'иrает примерно 4 10° в зависимости
01' сх('мы И параметров ее.
510
Для решения задач данното класса необходимо применять явные методы интетрирова-
ния с переменным шатом расчета и задаваемой точностью 0,05.При этом начальный шат рас-
чета необходимо проверять по областям устойчивости методов интетрирования и в процессе
расчета по условиям этой уст{)йчивости подправлять ее. Оценка полной потрешности расчета
производится вычислением максимально возможной потрешности при числовом решении.
В данном случае рекомендуется применять метод трапеции с шатом. равным 0,05 с. который в
отличие от явных методов вследствие высокой устойчивости не допускает сильното накапли-
вания потрешности впроцессе расчета. При применении этото метода разброс утла тенератора.
возникший вследствие неточното задания исходной информации, после 4 6 колебаний сос-
тавляет всето 2 50. что примерно в два раза меньше, чем при применении явных методов.
2. Более полный анализ переходных процессов в электрических системах иеобходимо
производить по модели 2 TO класса точности. Для решения задач данното типа. как и в пре
дыдущем случае. необходимо ПрИМенять явные методы численното интетрирования с aBTOMa
тическим изменением шата расчета. При этом задаваемая точность должна составлять 0.01.
Начальный шат необходимо определять по областям устойчивости методов интетрирования и
подправлять в процессе расчета по условиям устойчивости числовоrо решения.
3. Для детальното описания переходных процессов в тенераторах применяются Модели
I TO класса точности. Здесь также модели I-TO класса целесообразно применять при rlx
0,03. причем для уменьшения накапливаемой потрешности в процессе расчета рекомендует-
ется использовать комбинированный способ расчета по полным и упрощенным уравнениям.
В начальные моменты возмущения и последействия противоаварийной автоматики расчеты
необходимо проводить по полным уравнениям. а после затухания колебаний по упрощен
иым уравнениям. При этом время счета на ЦВМ уменьшается примерно в два раза.
В табл. П2.2 приведены методы и шати расчета электромеханических переходных про-
цессов в электрических системах, которые рекомендуется выбирать в заВИСИ,\lОСТИ от класса и
длительности решаемой задачи.
т. СИСТЕМА ОТНОСИТЕЛЬНЫХ ЕДИНИЦ
Все величины, характеризующие режим работы энертосистемы в системе относитель-
ных единиц, выражаются в долях некоторых величин (той же размерности), принятых за
единицы величин, называемых 6аЗUСflblМU.
Система относительных единиц в ее простейшем виде применяется при изучении токов
коротких замыканий. В качестве базисных величин выбираются ток. напряжение. МОЩНОСТЬ
или сопротивление. Две из этих величин выбираются произвольно. а остальные две опреде-
ляются исходя из соотношений
Sб, уз И б / б ; Zб И /Sб'
Часто принимают Sб == Иб/б. предполаrая при этом, что значение уз введено в ток
т. е. что ток завышен ПРОТ!fВ действительноrо в уз раз. В настоящей книrе используето;
этот прием. П()этому значения токов в относительных единицах / * переводятся в абсолютны,=,
(амперы) сотласно соотношению
, 'б/*Iуз,
тде / б выражено .в амперах.
Если в рассматриваемой схеме имеются трансформатор ые связи, то напряжение, при-
нимаемое за базисное, должно быть вы брано на определеннои ступени трансформацни и все
сопротивления, находящиеся на разных ступенях трансформации, должны быть сначала
«приведены» К этой ступени трансформации. а затем уже вычислены в относите,1ЫIЫХ едини-
пах.
Для перевода сопротивлений, выраженных в омах. в относительные единицы применя-
ют выражение
Z* (ZSБIИ )( k . k , 000 ,k ).
тде k 1 . k 2 . .... k!) коэффициенты трансформации трансформа.торов, размещенных межлу
цепью. в которои находится сопротивление, и цепью. к которои ПРиводятся сопроти ""HJH
системы.
511
Соотношение между сопротивлениями, выраженными в процентах нли долевых едини
цах, отнесенных к номинальной мощности, записывается как
Z* == Z(Sб/Sном) (U OM/U )( k , k , ... , k )
rде Z == Zпом:/1ОО.
При исследованиях электромеханических процессов система относительных единиц
расширяется: она содержит время, уrол, скорость, ускоренне и т. д.
Время. В системе именованных единиц еднницей времени является секунда. Разумеет-
ся, для исследовання вращения ротора reHepaTopa более естественно выбрать единицу вре-
мени, связанную с уrлом поворота ротора reHepaTopa. За базисное время tб принимают вре-
мя, в течение KOToporo ротор, вращающийся с синхронной уrловой скоростью 0)0' повернется
на 1 рад. Из этоrо определения следует, что юоtб == 1 или tб == 11 Ю о . Время в относительных
единицах выражается произведением времени (в секундах) н синхронной уrловой скорости
ротора:
t* == t/tб == tю о ,
При частоте 50 [ц время t* == 314t.
Таким образом, время, выраженное в относительных единицах, или, как иноrда rOBo-
psrr, в радианах, выражается числом, в 314 раз большим, чем время, выраженное в секундах.
Например, постоянная времени обмотки возбуждения reHepaTopa, равная 5 с , в относитель-
иых единицах равна 1570 рад.
Уrол. }'rол поворота ротора обычно определяется в электрических радианах, но иноrда
при записи всех величин в относительных единицах уrол выражается в rрадусах.
Выражения электрическоrо уrла в rрадусах или. радианах связаны с выражениями
rеометрическоrо уrла в rрадусах соотношением
Оэл:Оrеом == 180: 360/2 т р ,
откуда l5э. == I5reOMтp' причем т р число пар полюсов рассматрива моrо reHepaTopa.
Соотношения между уrлами, выраженными в радианах и rрадусах, MorYT быть записа-
ны как
о [рад] /0 [rрад] == 2'Т'f/360f; о [рад] == (314/18000) о [rpаД] == о [rрад] /57 ,3.
Скорость. При исследовании процессов, связанных с вращением ротора, различают ero
абсолютную механическую скорость Q, определяемую как производную rеометрическоrо
смещения (выраженноrо в rеометрических уrлах) ротора по времени dO/dt, и абсолютную
9лектрическую скорость Ю == dб!dt (уrлы О и 15 отсчитываются от неподвижной оси).
Электрическая и механическая скорости связаны выражением 0)0 == тpQo' Скорость
ротора dЮ по отношению к синхронно вращающейся оси (относительная <;корость) определя-
ется как разность фактической электрической скорости о) и синхронной скорости 0)", или,
ЧТО то как производн я относительноrо уrла по времени:
do/dt == dЮ == Ю Ю о ,
откуда
Ю == Ю О + d8/dt.
Относитель.пая механическая скорость
Ы2 == dю/т р ,
Относительная скорость, выраженная в долях от базисной (в относительных единицах),
АЮ* == Аro!Юб == Ю/Юб roe/Юб == (1/Юб) (doldt).
Так как обычно за базисное значение скорости принимают синхронную скорость Ю о .
ТО выражение относИтeJIЫЮЙ скорости приобретзет вид
Ю* == ю* 1 =='(1/314) (do/dt) ,
512
rде величина б выражена в радианах, а t в секундах. При выражении электрическоrо yr-
ла в rрадусах, а времени в секундах имеем
O)* == оо* 1 == (1/18000) (d'б/dt).
Относительная механическая скорость, выраженная в долях от синхронной, численно
равна электрической относительной скорости:
Q* == Q/Qo == mp Q/mpQo == ОО/ООо == ОО*-
Мощность и момент. Электромаrнитная мощность в относительных единицах записыва-
ется так же, как и в именованных, но через э. д. с;., напряжения и сопротнвления, выражен-
ные в относительных единицах.
Мощность связана с моментом и скоростью известным соотношением
Р == QM,
или в' относительных единицах
Р* == ОО*М*.
Подставив 00* == 1 + [(dбldt)/18 000], получим Р* == [1 + (dбldt)/18 ООО]М*.
Если изменение относительной скорости ротора dбldt невелико, то (dбldt)/18 rюо «
«1; следовательно, даже прн отклонении скорости от синхронной на 200 400 эл. rpa11ic
можно принять Р* == М*, так как поrрешность при таком допушенин составит не более
1 2%.
Таким образом, при малых изменениях скорости (качаниях, начальной стадии выпаде-
ния из синхронизма и т. д.) часто принимают, что Р* == М*.
Ускореиие. Ускорение ротора (c 2) характеризуется соотношением
а: == d Q/dt == Mиo, (П3.1)
rде Q относительная уrловая скорость: Q* == Q/Qo с 1 (или рад/с); ЛМ избытон
врашаюшеrо момента*, M2'Kr,c 2, Н'м; J o момент инерции, Kr'M 2 .
Умножив числитель и знаменатель правой части выражения (П3.1) иа Qg и несколько
преобразовав ero, получим
dЛQ
dt
MQ
2 (JoQ /2 )
ЛМ 2
Q
TJ о'
(П3.2)
Здесь JoQ /2 кинетическая энерrия, запасенная ротором при движении с синхрокной
скоростью Qo.
Величина TJ равная удвоенному значенню кинетической энерrии ротора, вращающеrо-
ся с синхронной с оростью, называется постоянной инерции. Она имеет размерность Kr....X "
хс 2 , или, что то же, Вт,с (или кВт. с).
Выражение (П3.2) нетрудно еше раз преобразовать, перейдя от rеометрической (меха-
нической) скорости к электрической и от момента к мощности. Подставив Б (П3.1) 000.,-
ношения
Q == оо/тр; Qo == ооо/т р ; M == P/Qo;
запишем
а: == d (jJ/dt == ( P/TJ) 000'
(П3.з)
или
а: == 000 ( Р!ТJ) == 314( Р!ТJ).
Здесь 000 == 314, т. е. имеет размерность раД/с.
(П3.4)
* См.: Олейникова Л. Д. Единицы физических величин в энерrетике. Справочное посо-
бие. М.: Энерrоатомиздат, 1983.
5lЗ
Если I1Р выражено в тыс. кВт, то Т,{ в тыс. кВт. с, а в рад/с 2 .
Если синхронную скорость выразить в rрадусах, т. е. подставить в (П3.4) (0)0 == 360,
/о"'" 18000, то получим ускорение (rрад/с 2 ):
"== 18 ОООI1Р /Т,{ .
(П3.4а)
Разделив числитель и знаменатель (П3.4) на базисную мощность, запишем ускорение
rрад/с 2 ):
"== d 2 a/dt 2 == 314 P./T,{ ,
rJle 8 выражено в рад; / в секундах; Т J в секундах.
Аналоrично, из (П3.4) получим
"== d 2 a/d/ 2 18000I1P./T J ,
rде а [rрад/с 2 ]; 8 [rрад]; / [с]; Т,{ [с], причем
Т,{ (с) == TJ (кВт. с)/sб (кВт) == JоQUSб.
(П3.4б)
(ПЗ.4в)
Последнее соотношение может быть получено из известноrо выр жения для определе
ния постоянной инерuии машины (с)
Т,{ НОМ == 2,74GD2n2!(1900SHOM)
путем пересчета к базисной мощности:
TJ == TJ номSном/Sб == 2,74GD2п2/(1000Sб) ,
rде GD2 маховой момент, Kr'M 2 ; п частота вращения, об/мин; Sб базисная мощность,
кВ.А.
Таким образом, в выражении относительноrо движения всеrда должна входить посто-
янная инерuии вращающихся машин, отнесенная к базисной мощности.
Если в (П3.4б) время выразить в относительных единиuах, введя вместо Т J (с) величи-
ну Т J / (0)0' вместо / величину /./(0)0' то получим ускорение в относительных, единиuах:
". == I1Р./Т J.
Иноrда ускорение, ,выраженное в [ц/с 2 , записывают как
"1 == "/(211:) == 11М., о/Т J .
(П3.5)
Рассматриваи (П3.2), леrко установить, что постоянная инерции Т J (с) численно рав-
на времени разrона t раз !' ротора reHepaTopa от неподвижноrо состоянии до синхронной ско-
рости (при условии, что на ротор действует постоянный вращающий момент, равный номи
нальному, и что момент сопротивления постоянен) или времени торможения от синхронной
скорости до неподвижноrо состояния при постоянном тормозящем моменте, равном номи-
нальному. В этом леrко убедитьси, проинтеrрировав выражение (П3.2), rде при разrоне
АМ. == 1, Qo == 1:
2. Ы1 I
5
I'/. o
t tРаз!'
т J dl1Q. == S
t o
dt,
откуда Т,{ == t раз !"
АналоrllЧНО, при торможении Т J == /ТОРМ'
В действительности, коrда вращающий момент, равно как и момент сопротивления,
зависиТ от скорости, время торможения или ускорения оказываетси больше Т,{. В этих слу
чаях Т I можно опреДeJfИТЬ по экспериментально снятой кривой Q == t(/) при М. == 1:
TJ == (dt./dQ.) 11М..
514
, Практические методы определения постоянной инерции основываются на этом соотно-
шении. .
I(ииетическая эиерrия. Чтобы выразить в относительных еДиницах приращения энер-
rии ротора при изменении ero скорости, запишем сначала основное выражение:
S Q2 Q5 J oQ5 [ Q2 Q6 ] Т J
A == Pdt == J J == == ( Q2 1 ) .
о 2 о 2 2 {)2 2'
>.0
Подставив в Hero Q*== ю* == 1 + l'1w*!w o , получим
s l'1Pdt == (Т J /2) ( ф: + 2 ф*).
(Пз.6)
Рассматривая это выражение как квадратное уравнение, найдем
ф* == v 1 + : J s Pdt
Продифференцируем (ПЗ.6) по t:
Т J d w*
P == (1 + ф* i или M ==
dt
1.
(ПЗ.6а)
P d w*
== TJ .
1 + IJ)* dt
Представим d w*!dt в виде
d w* d w* do
== ==дю
dt dt do *
d w*
.
do
тоrда
d w*
M == Т ! ф* или Mdo == T J w*d w*.
. do
Проинтеrрировав последнее выражение, получим уравнение кинетической энерrии от-
носительноrо движения*:
т J ф2'
.
2
==s
i\
т J w: == S 1.Pdo .
Mdo или ==
2 (1 + IJ}*)
(ПЗ.6б)
Так как ф* « 1, то
S ф2
М == Pdo Т, .
(ПЗ.6в)
откуда
ф* . 1 / J PdO
V J i\
Аналоrичное выражение можно найти из (ПЗ.6а) при условии, что O)* « 1.
Полученные выражения применяются обычно без специальных oroBopOK об их услов-
ности и приближенности.
Отметим, что аналоrично выражению (ПЗ.6а) можно записать выражение для относи-
тельноrо изменения уrловой скорости турбины:
* Различные формы уравнений движения представлены в табл. П3.1.
515
dQ" == -V 1 + 2А/ TJ 1,
t
rде А == S Pdt КО.'JичеСТ!J') энерrии, выработанное турбиной за время перемещения pery.
r
лирующеrо opraHa, про исходящеrо в связи с изменением наrрузки reHepaTopa.
Таблица П3.I
Pa3M pHOCTH ВеЛИЧИН
" , Форма , I \
t= I1xICIl уравнения уrол /) I поста янная мощностн
время t ннерции Т J Р. Р т
d 2 0
1 TJ == I'T P рад рад рад отн. ед.
d 2 0
2 TJ"'O ==PT P рад рад с отн. ед.
d 2 0 кВт
3 TJ "'оРб --ё[j2" Р Т Р J,iJ;! рад r
TJ d 2 0 кВт
4 Рб ==PT P PR.'! С С
"'о dt 2
5 P ==P P эл. rрад с , с кВт
360 f о б dt2 Т
6 ==P P эл. rрад с с отн. ед.
360f o dt 2 т
7 d20 == Р Р рад с с отн. ед.
Ш О dt 2 т
8 Т J"'o d20 кВт.с
==PT P рад рад отн. ед.
Рб dt 2
9 d 2 0
Т J == "'о(Р т Р) рад с с отн. ед.
. П4. ДЕМПФИРОВАНИЕ И ДЕМПФЕРНblй КОЭФФИЦИЕНТ
,И;емпферный коэффициент P d вводится в уравнение движения синхронной машины в
случаях, KorJIa целесообразно упрощенно, без записи дифференциальных уравнений элект.
ромаrнитных переходиых процессов в коитурах ротора, отразить влияние этих контуров
в режимах асинхрС!>нной работы или синхронных электромеханических качаний СМ.
Демпферный коэффипиент связаи с механическими (трение и т. д.) И электрическими
(появление асинхронной мощности) явлениями. В сложной системе, содержащей несколько
несинхронно работающих reHepaTopoB, в статоре каждоrо из них появляются токи и напря-
жения, содержащие слаrающие разных частот. Интенсивность слаrающей той или иной час-
тоты зависит от конструкций всех машин, значений э. д. с., абсолютных скоростей их рото-
ров, конфиrурации связывающих сетей и их сопротивлений. С определенным приближением
можно полаrать, что на статоре создается вращающееrя поле, имеющее скорость, отличную
от синхронной.
Эквивалентная мощность демпфирования, отражаемая значением коэффипиента P d
(см. rл. 14), в каждой машине является суммой ряда мощностей:
1) обу(:ловленных трением (М тр ) и пропорциональных абсолютной скорости ротора дан-
ной машины (P dTp );
516
2) связанных с действием «собственноrо MOMeHTa:t (М l1 ), пропорциональноrо активно-
му сопротивлению цепей статора, квадрату э. д. с. данной машины и значению (1 5), rде
s скольжение результирующеrо маrнитноrо потока статора, определенноrо как сумма
всех маrнитных полей, имеющих разные частоты (P dl1 );
3) вызванных асинхронным эффектом, проявляющимся в связи С взаимодействием то-
ков в короткозамкнутых обмотках ротора, и упомянутоrо результирующеrо маrнитноrо по-
тока, имеющеrо скольжение 5 относительно ротора (P d2 ).
Для упрощения задачи обычно исключают из рассмотрения мноrочастотность, полаrая,
что на статоре каждой машины создается синусоидальное поле, имеющее скорость, отличную
от синхронной.
В случае нескольких станций, пренебреrая разными частотами MrHoBeHHblx значений,
определяют P d по относительному движению роторов машин системы. Даже при TaKoro рода
упрощениях решение задачи по определению P d и расчету относительноrо движения вызыва-
ет затруднения. Система из трех-четырех станций обычно заменяется двумя станциями или,
.еще чаще, станцией, работающей на шины иеизменноrо напряжения. Так как P d » Р тр ;
то принимают P dTp == дМтрlдs О, тоrда для простейшеrо случая
P d == Pdl1 + P d2 == дМ п /д5 + дМ 2 /д5.
При возбуждении, отвечающем нормальному режиму, значительном сопротивлении ста-
тора и малых скольжениях (5 < 0,0005) производная от моментов принимает значения
дМll/дs == (1 + 3);
дМ 2 /дs == 0,5 + 4.
Следовательно, P d может стать положительным, что укажет на возможность саморас-
качивания. При установившемся асинхронном ходе и 500< 5 ир ' определяя P d как tg8 0 , rде
80 уrол наклона секущей, проведенной из точки 5 == О В точку кривой М == /(5), при 5 ==
== Sир обычно получаем значение P d в диапазоне 100 600. При 800> 5 ир обычно P d ==3+
+ 30. При удалении шин неизменноrо напряжения от рассматриваемой машины на Z12 мож-
НО В е с ь м а r р у б о найти новое значение:
Р dэ == PdX 2/( Z 2 +х;/).
Размерность [P d ] == IР)[f]/[б]. В полученных выше зиачениях величина P d определена
в относительных единицах. При представлении в уравнении относительноrо движения уrла
в радианах, времени в секундах, мощности в относительных единицах приведенные значения
P d должны быть разделены на 314 (рад/с).
Демпферный коэффициент синхронных качаний, включающий влияние обмотки воз-
буждения, зависит как от конструктивных параметров СМ, так и (в отличие от асинхронных
режимов) от исходноrо режима и параметрс;>в устройств реrулирования возбуждения. Так,
для крупноrо турбоrенератора без АРВ, работающеrо в простейшей электрической системе
(станция-шины) и имеющей собственную частоту электромеханических колебаний порядка
1 [ц, значение P d == 2+4 отн. ед. При оснащении этоrо турбоrенератора АРВ с. д. и специ-
альном выборе ero настроечных параметров P d ==40 + 60 отн. ед. Заметим, что если в урав-
нении движения все постоянные времени записаны в секундах, а уrлы в радианах, то и
P d нужно выражать в секундах:
t'd (с! == P d ]0. е.]/со о [рад/с].
Аналитические выражения для определения P d через конструктивные параметры СМ,
режимные параметры простой системы и АРВ даны в литературе*.
Для мноrомашинных электрических систем определение демпферноrо коэффициента
синхронных качаний выделенной СМ .является более сложной задачей. Это связано с тем,
что в этом случае каждая СМ качается с N 1 qастотами (rде N число СМ) электромеха-
1fических колебаний. На каждой частоте имеется составляющая демпфирования.
Разработанная методика** рекомендует выделять доминирующую частотную состав-
* См.: Веников В. А., Литкенс Н. В., Пуао В. Н. Демпферные коэффициенты. Учебное
пособие по курсу «Переходные процессы в электрических системах». М.: МЭИ, lЭ79.
** См.: Литкенс Н. В., Пуао В. Н., А6дул Заде В. М. Демпферные коэффициенты син-
хронных reHepaTopoB в мноrомашииных электрическнх системах. Электричество, 1984,
J:-J'g 3.'
517
щую сложноrо переходноrо процесса и для нее определять эквивалентный демпферный KO
эффициент.
Оример 04.1. rэс передает энерrию в мощную систему. Напряжение на шинах прием-
ной подстанции неизменно. Принципиальная схема и ее параметры приведены на рис. П4.1.
Реактивные сопротивления эквивалентноrо reHepaTopa rэс при тех же базисных условиях
(Sб == 600 МВ. А; Uб == 115 кВ) равны: Xdr == 3,72; x qr == 2,42; x r == 1,13; x;r == 0,778;
х' == 0,906. Постоянные времени контуров rидроrенераторов составляют: T do == 5 с;
q .
т;о == 0,08 с; T o == 0,13 с. Скоростные реrуляторы rидротурбин имеют идентичные ха-
рактеристики; коэффициент неравномерности реrуляторов всех турбин (J == 1,2%.
р а с с ч и т а т ь режим электропередачи при
U=coпst асинхронном ходе reHepaTopoB, возбуждение которых
в этом режиме снимается для уменьшения колебаний
мощности.
Решение. Мощности и напряжения в системе при
асинхронном ходе одной из reHepaTopHblx станций оп-
ределяются скольжением, с которым работают reHepa-
торы этой станции. Среднее скольжение установивше-
rося асинхронноrо режима зависит от соотношения ха-
рактеристик средней асинхронной мощности reHepaTo-
ра и статической характеристики мощности реrули-
руемой турбины. .
Значения средней асинхронной мощности rидро-
reHepaTopoB при чисто реактивной связи с шинами неизменноrо напряжения MorYT быть
вычислены по формуле [соrласно (14.14)]
Р == и 2 s [ xd x d
ас.ср 2 xd x d
&GD1
х X8H=I,59
., ::: : и=1
s O,lt""61jo,'5
Рис. П4.1. Схема системы
T
+
1 + (sT )2
T ]
1+(sT )Z
, .
x d x d
т;
+
1 + (sT )2
XdX d
X q x q
+
XqX Q
По условиям задачи в приведенном выше выражении
T == т do
X r + Х нн
Xdr + Х вн
1,13 + 1,594
== 5 == 2 56 с'
3,72 + 1 ,594 ' ,
T == T o
X;r + Х нн
О 08
X r+XBH '
0,778 + 1,594
== О ,0695 с;
1,13+ 1,594
T == T o
X;r + Х вн
x qr + Х вн
== 0,13
0,906 + 1,594
== 0,081 с.
2,42 + 1,594
Реактивные сопротивления в формуле асинхронной мощности включают внешнее сопро-
тивление ХВИ' При выражении постоянных времени в относительных еДИницах (радианах)
имеем '
I2 [ 3,72 1,13 2,56.3,14
Pac,cP== 2s (3,72+1,594)(1,13+1,594) 1+(2,56.314)2s2 +
1,13 0,778 0,0695.314
+ (1,13 + 1,594) (0,778' + 1,594) 1 + (0,0695 . 314)2 S2 +
2 ,42 О ,906 0,081 . 314 ] 71 ,6s
+ (2,42 + 1,594) (О ,906 + 1,594) 1 + (О ,081 . 314)2 s2 == 1 + 64,5 . 10 4 s2
518
0,628 1,915s
1+ ,0475. 1()4s2 1 +0,0645.10 4 s 2
Pac {P acfCP [1 +Jll+(ST )2sin (2& arctg s; )] +
+ Рас d ср [1 + V 1 + (sT )2 sin (2& arctg ; )] +
+ Pac<lCP [1 V 1 + (sT )2 sin (2& arctg ;; )]).
Здесь
sT 1 ,15. 2,56 . 314 . 10 2 9,25; sT 1,15. 6,95.314 . 1O 4 == 0,251;
sТ; 1.15.8,1.314.1О---4== 0,292;
1
arctg == 104,1°;
О ,251
!
arctg == 173,8°;
9,25
1
arctg == 106,3.
О ,292
Следовательно,
Рас == 0,0095 [1 + УI + 9.252 sin (2& .,...... 173,8°)] .,...... 0.0065 Х
Х [1 + V 1+ 0,251" sin (2& 104, 1°)] 0,020 [1 УI + о .292° sin (2& 106.3°)]
== 0,036 0.0882 sin (20 173,8°) 0,0067 sin (20 104,1°) +0,0208 sin (20 106,3°).
Характеристики Р == f(s) по казаны на рис. П4.2.
Рис. П4.2. Характерис 'Рас
тики асинхронной МОЩ'
ности:
р т статическая характери
стика мощиости реrулируе
мой турбины, коэффициент
неравномерности реryлятора
которой ()' 1,2%. Точка пе
ресечения характеристик
турбины и reHepaTopa опре
деляет значение средиеrо
скольжения устаНОВИБшеrося
асиНХрОННОro хода s оо::=:>
O,OI15. Из рисунка сле
дует; что Р ac.cp o,036;
Pacfcp O,0095; Pacdcp
O,0065; р aCqcp O.020.
Значение активной асинхрон
Ной МОЩНОСТИ. учитывающее
как среднюю, так и пере
менную слаrающие. может
быть вычислено соrласно
видоизмененной формуле
(14.16)
0,08
Рас. ср
0,08
Р т
0.04
...... .,.. .... .......-
""....... Pacticp
,
0.02
P ac dCf1
__ ... ..J. ... --...... -- -
.... --
1
2
3
If
lfТ
s
в асинхронном режиме rидроrенераторы отдают в сеть также обусловленную явноп<r
люсностью активную мощность, иноrда называемую реакционной:
И 2
Р р == 2""
Xd Xq 1
siп 20 ==
XdXq 2
3 , 72 2 .42
(3,72+ 1,594) (2.42+ 1,594)
siп 2& == 0,0304 sin 2&.
Соrласно (14. 19), реактивная мощность Qr в системе при асинхронном ходе rидроrене-
519
ратор,а складывается из асиихроииой мощности Qac и мощности намаrничивания Qp., причем
и2 [ 1 1 ( 1 1 ) ]
Qp. == + cos23 ;
2 Xd x q x q xd
{( ) [ ( ' ) 2 '
и2 1 1 . sT d sT d 1
Qac== ,+ cos 23 arctg..,....,.- +
2 x d xd 1 + (sTd)2 Vl+(sT )2 ( ST d )]
( " ) 2" ]
sT d sT d 1
"? + . cos 23 arc tg +
1 + (sTd) -v 1 + (sTd)2 ( sT )
[ (sT;)2
1 + (sT;)2
+ ( )[
x d x d
+ ( )
x q x q
sT;
V 1 + (sT;)2
cos (23 arctg s;; )]).
в этих формулах реактивные сопротивления включают также и реактивные сопротив
ления внешнеЙ цепи. Следовательно, .
1 [ 1 1 ( 1
Qp. == 2" 3,72 + 1,594 + 2,42 + 1,594 2,42 + 1,594
== 0,2188 + 0,0304 cos 23;
Qac== + { С,13:1,594 З,72:1, 94 ) [ 1 ( 5:;5)2 +
( 9,25) COS(23--'....173,8 0 ) ] + ( l' I ) [ ( 0,2Бl)2 +
+Yl+( 9,25)2 0,778+1,594 1,13+1,594 1+( 0,251)2
+ ( 0,251) cos(23 104 10) ] + ( 1 1 ) х
УI + ( 0,2Бl)2 ' 0,906 + 1,594 2,42 + 1,594
( 0,292)2 ( 0,292) ]}
Х cos (28 106,3°) ,
1 + ( o,292)2 у 1 + ( 0,292)2
1 ) ]
с s23
3,72 + 1,594 о
или
Qac == [0,0961 0,089cos(23 173,8°) 0,00667cos (23 104,1°) +
+0,0211 cos(23 106,3°)].
Изменения параметров режима, полученные в соответствии с приведенными формулами
показаны на рис. П4.3. Вычислим напряжение на шинах rенераторной станции, воспользо
вавшись выражением
U r == U + Q хвн/и + jP хви/U,
При () == о
U r == 1 + ( 0,2008) .1,594/1 + i .0,03. 1,594/1 == 0,€82 < 4,0°.
Изменение U r == 1(6) также приведено на рис. П4.3.
Оример 04.2. . В системе, представленной на рис. П4.4, а, произошло отклонение CK
рости от синхронной.
Н а й т и для системы, схема которой представлена на рис. П4.4, а, зависимость Bpa
щающеrо момента от скольжения при (J) (J)o, t t o .
t'i2Q
Параметры системы: 1) турбоrенератор малой мощности с независимым возбуждением.
работающий без реrулятора возбуждения: Eq 2,02; xd 0,893; . X 0,063; кабель:
Х 0,0235; r 0,4; трансформатор: х т 0,055. Схема замещения представлена на рис.
П4.4, б.
Решение. Находим xdJJ 0,971; X )] 0,142; T 50;
z УО,972 2 + 0,42 1,05; а arcsin (r/z) 22,3°; z' УО,142 2 + О ,42 0,425.
I/r р,11
0,4
0,2
ах
0,6
Ц2
Рис. П4.3. Изменение параметров режима при асинхрон-
ном режиме
Для данных условиЙ можно принять п 1. Тоrда, соrласно 14.5, при W Ш О 1
М l1 2,022 . 0,4/1 ,052 1,47.
Далее находим:
КВ + 2,022. 0,4 (О ,9712 О ,42)/1 ,054 + 1,05;
К 22 == 1 (О ,893 О ,065) 50 . sin 2 0/(0,971 . О, 142) 300 sin 2 о.
a) r т Кабель
t"'OJ U=coпst
l=20KM
Рис. П4:4. Схема системы:
а исходная схема; б схема замещеllИЯ
о)
Е .II"l:COпst
q Xd .
(.u 1'. . r K ЫО
Xd.r
Поскольку связь между reHepaTopoM ищинами н€изменноro напряжения не чисто poe
активная, пересчитаем К'22 соrласно О4.15):
, ( , , ) 2 [ 0,89з,0,063 ] .
K22 XdXd/212 К 2 9 == 300 sш 2 О 39,7 sin 2 о.
0,425
Зависимость моментов от скорости построим, исходя из (14.12):
Ми 2,022 . О ,4ш/(О,4 2 + о ,95( 2 ) == 1 ,632ш/(О, 16 + О ,95( 2 ).
521
и из (14.16), rде упрощенно учтен только первый член:
М 2 16,8Бs [+ + ; А sin (20 arctg 5 5 )].
Здесь А 1 + (505)2.
Из соответствующих rрафиков, представленных на рис. П4.5, следует, что К22<Кll
при малых уrлах /)0, что должно привести к раскачиванию машины (отрицательному дем-
пфированию).
м
2
I
I ( 1/ ......
P i
f\ U:t, 1';,
t.,=K n
;;;, , tg'I'----- ....... r--..
......
0,00'1 00=100 \ ...... ......
1 0,003
0=50 1\
0,002 \ '\,М2...
" - "",
. ( \ \
о t о,оо!) ;- 1\ ......1-00...
5 0,5 \...LJ 0,5 5
Рис. П4.5. Влияние установившеrося асинхронноrо хода
ПS. НЕКОТОРЫЕ СВЕДЕНИЯ ПО ИСТОРИИ ПЕРЕХОДНЫХ ПРОЦЕССОВ
Впервые необходимость изучения электромеханических переходных процессов в элект-
рических системах возникла в начале 20 x rодов в США, rде и были проведены первые иссле-
дования по переходным процессам, результаты которых публиковались В. Бушем и Р. Бут-
цем, Б. Робертсоном, Р. Доrерти, Э. Кларком, К. Найклом, Р. Рюденберrом, Ф. Лонrлеем и
особенно Р. Парком , предложившим (1928) дифференциальные уравнения синхронной элект-
рической машины, которые получили далее широкую известность. I
Несколько позже интерес к этой проблеме появился в ряде европейских стран. В на-
шей стране работы в этой области начали в 1926 1930 rr. Л. И. Сиротинский, В. П. Ха-
щинский, Н. Н. Щедрин и А. А. Смуров, выпустивший моноrрафию, содержащую раздел
устойчивости. Одновременно с зарубежными публикациями в отечественных журналах
(<<Электричество» и др.) рассматривались теория и основные методы анализа динамической
устойчивости (метод площадей. метод шаr за шаrом и т. д.).
В 1932 r. была опубликована работа Н. М. Крылова и Н. Н. Боrолюбова, проанализи-
ровавшая устойчивость нереrулирумых синхронных машин. В 1933 1934 rr. появились
книrи П. С. Жданова и С. А. Лебедева, rде наряду с ориrинальными исследованиями авторов
концентрировался мировой опыт анализа переходных режимов электрических систем.
В 1930 1935 rr. А. А. I'opeB в ряде статей и моноrрафий опубликовал полученные им урав-
нения, аналоrичные уравнениям Парка (позже их стали называть Парка I'орева), вывел
критерии устойчивости, ориентируясь на метод малых колебаниЙ, и постро ил исследовацие
в духе всемирно известной работы А. А. Ляпунова, рассмотревшеrо еще в 1892 r. общую за
дачу об устойчивости движения. Одновременно в столь же строrой концепции вел работы
П. С. Жданов. Он исследовал статическую устойчивость простой и сложной систем, рассмат-
ривая ее сначала как неспособную к самораска,:иванию, позиционную, и затем уточнил
22
получаемые результаты, учитывая влияние электромаrнитных переходных процессов, демп
фированИЯ и изменений частоты и получая при этом удобную для расчетов методолоrию.
К концу ЗО-х rодов в СССР и за рубежом появились мноrочисленные полезные, но CTpO
ro не обоснованные предложения оценивать статическую устойчивость по различным «прак-
тическим критериям», представленным .производными от какоrо-либо одноrо параметра ре-
жима по друrому (dП]/dП 2 , например dР/dб, dE/dU и т. д.). И. М. Маркович, предложивший
в 1937 1938 П. вместе сИ. С. Бруком еще один важный критерий dIJ.Q/dU, далее совместно с
с С. А. Соваловым дал исчерпывающее обоснование ero и друrих практических критериев,
выявляя условия соответствия получаемых по ним результатов и результатов более cTporo-
ro опреде.ления устойчивости методом малых колебаний и проверки ее по знаку свободноrо
члена характеристическоrо уравнения (П. С. Жданов). Этими работами в методику анализа
устойчивости нереrулируемых систем, как простых, так и сложных с большим числом стан-
ций, была внесена достаточная ясность. В ЭТQ же время выявил ась природа лавины напряже-
ния (К. А. Смирнов, П. С. Жданов), уточнились методы анализа устойчивости наrрузки
(П. С. Жданов) и построения ее статических и динамических характеристик, определились
типовые характеристики иаrрузок (Д. И. Азарьев) и т. д.
Начиная с 1938 1940 П. внимание инженеров привлекли возможности автоматичес-
Koro (пропорциональноrо) реrулирования возбуждения, далее эффективно внедрившеrося в
электрические системы. Так, в 1940 1941 П. в системе «Азэнерrо» И. А. Сыромятниковым
была улучшена устойчивость применением средств автоматики, в первую очередь реrулято-
ров возбуждения, оказавшихся особенно действенными средствами борьбы с лавиной напря-
жения. В ряде систем (Московской, Ленинrрадской, Уральской и др.) также широко исполь-
зовались средства режимной автоматики. К этому времени реrулирование возбуждения дос-
таточно широко применялось и в зарубежных энерrосистемах для поддержания напряжения,
одиако ему еще не уделялось большоrо внимания как средству улучшения устойчивости.
Относящиеся в 1937 1938 П. работы С. А. Лебедева показали теоретическую и практичес-
кую возможность режима искусственной (обусловленной действием реrулятора) устойчивос-
ти и были большим шаrом именно в этом направлении, интерес к которому за рубежом
(В. Фрей, К. Лаванши, Ч. Конкордия, [. Крон) появился значительно позже.
Как продолжение этих исследований можно рассматривать работу Л. В. Цукерника,
разработавшеrо систему компаундирования reHepaTopoB, и ряда специалистов (r. Р. [ер-
ценберr, М. М. Ботвинник, М. В. Мееров, И. А. fлебов и др.), предложивших (I950 1955)
так называемое «сильное реrулирование» возбуждения. В улучшении устойчивости электри-
ческих систем, содержащих дальние передачи (Куйбышев Москва и др.), сильное реrули-
рование сыrрало большую роль наряду с друrими мероприятиями (проектными и режимны-
ми), такими, как автоматическая разrрузка, реализация результирующей устойчивости,
автоматическое повторное включение и т. д. (И. А. Сыромятников, Л. [. Мамиконянц,
И. М. Маркович, С. А. Совалов, С. С. Рокотян, Д. И. Азарьев, С. В. Усов, Е. Д. Зейл идзон
и др.).
Применение пропорциональноrо и в особенности сильноrо реrулирования потребовало
разработки методов расчета, учитывающих возможность самораскачивания, обусловленноrо
как неправильной настройкой реrуляторов, так и спецификой поведения «сильно реrулируе-
мой» системы у предела устойчивости. В связи с этим был опубликован ряд работ, основан-
ных на методе малых колебаний, способствовавших отработке и внедрению сильноrо реrули-
рования (И. В. Литкенс, [. В. Михневич, И. Д. Урусов, О. В. Щербачев, М. Л. Левинштейн
и др.). Эти работы содержали разработку тех или иных удобных для данных конкретных за-
дач приемов изучения характеристических уравнений достаточно высоких порядков, осно-
ванных на методах rурвица, Рауса, Михайлова, D-разбиения и т. д. Вопросы настройки pery-
ляторов возбуждения рассматривались И. В. Литкенс, В. А. Строевым, И. А. rруздевым,
В. [. Любарским. Для определения порядка характеристическоrо уравнения, являющеrося
функцией состава системы и структуры, и ее реrулирующих устройств Л. В. Цукерником
была получена формула на основании предложенных им (1956) уравнений для анализа ус-
тойчивости сложных реrулируемых систем. Все упомянут.ые методы оказались весьма эф-
фективными, практичными как дJJя сравнительно простых систем (две-три станции),так и
для более сложных (при использовании ЦВМ). Начатые еще в 30-е rоды работы по быстрому
реrулированию паровых турбин для улучшения устойчивости получили свое развитие в
работах Я. Н. Луrинскоrо, Б. П. MypraHoBa и друrих и привели к важным практическим
результатам.
Теория устойчивости и переходных процессов в системах, содержащих дальние переда-
чи, рассмотрены рядом специалистов, в том числе А. А. [оревым, П. С. Ждановым,
А. А. Вульфом, Н. Н. Щедриным, Р. Н. Рюденберrом, Э. В. Кимбарком. Э. Л. Кларком.
523
Позже внимание этим вопросам удслялось в работах В. К. Щербакова и ero сотрудников,
в работах ЭНИНа, МЭИ, ЛПИ и друrих орrанизаций.
Однако создание инженерной методики анализа устойчивости сколь уrодно сложных
автоматически реrулируемых систем все еще составляет не решенную полностью пРоблему.
Попытки решения ее на основе методов фазовоrо пространства, тензора Римана Кристо-
фелля (r. Крон), прямоrо метода Ляпунова и друrих возможных новых подходов начали да-
ВАТЬ результаты. Хотя эти методы не общепринятые, но при решении некоторых задач удов-
летворяют инженера (М. Я. Вайман, С. В. Страхов, д. А. Арззмаспев, И. Н. Рудннцкий И
др.). Методы анализа динамической устойчивости, не изменившись принципиально, подверr-
лись за последнее время совершенствованию, с одной стороны, продиктованному необходи-
мостью учета действия реrулирующих устройств, убыстрения отключений коротких замыка-
иий, учета большоrо числа факторов, ранее рассматривавшихся как второстепенные, но все
же влияющих на протекание проuессов, а с друrой стороны, обеспеченному возможностями
современиой вычислительной техники. Так, для расчетов динамики переходных процессов
в ряде случgев стали применять так называемые уравнения для MrHoBeHHblx значений, пред-
ложенные Р. Пар ком, А. ropeBblM, рассматривавшиеся r. Кроном и др. Использование их
п"и решении практических задач проводилось С. В. Страховым, Е. Я. Казовским, Л. П. Ве-
ретенниковым, С. Крери, Ч. Конкордия, Б. Адкинсом, r. CTerroM, А. Элабидом и др. По-
явился ряд работ, развивающих теорию катастроф применительно к задачам энерrетики.
Теория переходиых режимов электрических систем в последнее десятилетие была вы-
нуждена рассмотреть и ряд специальных задач. К ним относится методика проведения экви-
валентирования участков сложных систем* (работы Ф. r. rусейнова, Л. А. Жукова,
Н. И. Воропай). Было проведено миоrо исследований асинхронноrо хода синхронных машин в
системах и их ресинхронизапии. В СССР в этой области были проведены мноrочисленные
исследования П. С. Ждановым, И. А. Сыромятниковым, Л. r. Мамиконянцем, А. А. Хачату-
ровым и др. Исследованию этих режимов за рубежом уделялось несколько меньшее внима-
ние. При рассмотрении проблем устойчивости в историческо'м аспекте следует подчеркнуть,
что вследствие ряда особенностей развития энерrетики внимание к тем или иным проблемам
теории и тем или иным путям улучшения устЬйчивости в СССР и за рубежом было различно.
В отечественных энерrосистемах улучшение устойчивости и качества переходных процессов
достиrалось не только повышеНИем напряжения электропередач и конструктивными ИЗме-
нениями их параметров и параметров reHepaTopoB, но и режимными мероприятиями, к кото-
рым относились автоматическая разrрузка электрических систем, синхронное и несинхрон-
ное автоматическое повторное включение, автоматическое реrулирование возбуждения и
спеUИЗJjьная ero форсировка, применение асинхронноrо хода, обеспечение условий результи-
рующей устойчивости, делеНИе сист€мы на несинхронно работающие ЧастИ и т. д. Большое
внимание уделялось вопросам надежности и живучести (Д. А. Арзамасuев, С. А. Совалов,
Ю. Н. Руденко, М. r. Портной и др.).
В зарубежных системах (США и др.) большее внимание обращалось на усиление свя-
зей, резервирование и проведение друrих, требующих вложения значительных средств, ме-
роприятий. при меньшем, чем в СССР, внимании к режимным мероприятиям. Недостаrочное
их примеиение было одной из наиболее существенных причин появления в системах США
ряда тяжелых аварий.
Вопросы переходнЫХ процессов и устойчивости электрических систем получили начн-
ная с конца 20-х rодов отражение в СССР и за рубежом не только в статьях, но и во мноrих
KHKrax, ряд которых содержит ориrинальные результаты.
Несмотря на обширные исследования, позволяющие решать все текущие инженерные
задачи, создание единой стройной теории режимов сложных электрических автоматически
реrУJlируемых и кибернетических систем является делом будущеrо.
, Сообщая краткие, только основные и, разумеется, Иеполные исторические сведения,
,следует одновременно рекомендовать учащимся расширить их, ознакомившись с книrами:
«История энерrетической техники СССР» (rэи, 1957, т: 11, rл. IV VII); «Сильное реrулиро-
вание возбуждения» (rэи, 1963, с. 15 16).
* Обзор можно найти в КН.: ryceUfioe Ф. r. ЭквиваJlентирование сложных систем.
,М.: Энерrия, 1977.
Ив
е, Ив.в
U
U
U d
U q
Е
Е
Eq
Eq[O]
Eqo
Eq
Eqe
Е;
Е'
Ех
1
1
ld
lq
lа
lр
Ф
Ф dрсз
Р
Р т
Р т
РО
напряжение обмотки возбуж
дения синхронной машины
напряжение обмотки возбуж
дения возбудителя
напряжение, действующее зна-
чение, лииейное напряжение
комплекс напряжения
продольная <;оставляющая Ha
пряжеиия
поперечная составляющая Ha
пряжения
э. д. с., действующее значение
комплекс э. д. с.
синхронная э. д. с. (пропор-
циональна току обмотки воз-
буждениЯ синхронной маши-
ны)
э. д. с. в момент изменения
режима
начальное значение э. д. с.
фиктивная синхронная э. J{. С.
явнополюсной машины
выиужденная э. д. с. (пропор
циональна напряжению об-
мотки возбуждения синхрон-
ной машины)
переходная э. д. с. (пропор-
циональна продольному по-
току обмотки возбуждения
синхронной машины)
переходная э. д. С., пропор-
циональная полному потоку
ротора
расчетная э. д. с. синхронной
машины, приложенная за co
противлением .1.Х
ток, действующее значение
комплекс тока
продольная составляющая TO
ка синхронной машины
поперечная составляющая то-
ка синхронной машины
активная составляющая тока
реактивная составляющая
тока
потокосцепление
результирующее потокосцеп-
ление, обмотки возбуждения
синхронной машины по про
дольной оси
активная мощность
амплитуда уrловой характе-
ристики мощности
мощность турбины
мощность первичноrо двиrа-
теля (постоянная)
Рен
Рае
Q
Qs
QfJ.
QCH
Qae
s
ар
a Q
Э, А,
P d
Р dэ
М
М Т
М сн
Мае
J o
Zmп
Zпп
R, ,
'0
синхронная активная мощ
ность
асинхронная активная мощ-
ность
реактивная мощность
реактивная мощность рассея
ния
реактивная мощность HaMar-
ничивания
синхронная реактивная мощ-
ность
асинхронная реактивная мощ-
ность
полная мощность, комплекс
полной мощности, синхрони-
зирующая мощность
реrулирующий эффект на-
rрузки по реактивной мощ-
ности
реrулирующий эффект на-
rрузки по реактивной мощ-
ности
W энерrия
коэффициент демпфирования
эквивалентный ,коэффициент
демпфирования
вращающий момент
вращающий момент турбины
синхронный момент
асинхронный момент
момент инерции
взаимные сопротивления
(т =1= п)
собственные сопротивления
активное сопротивление
активное сопротивление на
единицу длины
активное сопротивление об
мотки возбуждения синхрон-
ной машины
RB.B, Re активное сопротивление об-
мотки возбуждения возбуди-
теля
реактивное сопротивление
реактивное сопротивление на
единицу длины
синхронное реактивное со-
противление синхронной ма-
шины по продольной оси
синхронное реактивное со-
противление синхронной ма-
шины по поперечной ОС\{
переходное реактивное со-
противление синхронной ма-
шины по продольной оси
переходное реактивное сопро-
R B
Х, Х
ХО
Xd
X q
X d
X q
525
тивление синхрониой машины
по поперечной оси
сверхпереходиое реактивное
сопротивление синхронной Ma
шины по продольной оси'
сверхпереходиое реактивное
сопротивление сиихроиной ма-
шииы по поперечиой оси
реактивное сопротивлеиие
рассеяния
реактивное сопротивлеиие на-
маrничивания
реактивное сопротивление сис-
темы
. расчетное сопротивление сии
хронной машины
X jJ' XdjJ' XqjJ суммарные сопротивления
системы
взаимная проводимость (m=f=п)
собствениая проводимость
активная проводимость
активная проводимость иа
единицу длины
реактивная проводимость
реактивная проводимость на
единицу длины
индуктивность обмотки воз
буждения синхронной маши-
ны
Le, L 8 . 8 индуктивность обмотки воз-
буждения возбудителя
уrол сдвиrа фаз э. д. с. и на-
пряжений
уrол сдвиrа фаз между напря
жением и током
уrол сдвиrа фаз между э. д. с.
и током, фазный уrол (apry-
мент) комплексноrо сопротив-
ления
дополнительный уrол комп-
лексноrо сопротивления
коэффициент распространения
(комплексный)
коэффициент
время
интервал времени
частота
круrовая (циклическая) час
ТОТа
X d
Х<)
Xs
Хр.
ХС
x
У тn
У пп
g
go
ь
Ь о
[ в
;s
'f
'IJ
а.
у
а о
t
М
t
о)
0)0
Q
s
'\'
ос
р
W(p)
Т, (о)
T dO
T (o )
T ('t )
T (o )
Т;(о ;)
Те (ое)
Тр
Т J (t J )
А торм
Аусн
П
К, k
}:;
с
сн
ас
О
[О]
синхронная уrловая частота
уrловая скорость (rеометри-
ческа я)
скольжение
частота качаний
уrловое ускорение
оператор дифференцирования
по времеии
передаточная функция
постоянная времени
пОстоянная времени обмотки
возбуждения синхронной ма-
шины при разомкнутой об-
мотке статора
переходная постоянная вре-
мени синхронной машины по
продольиой оси
переходная постояиная времени
СИнхронной машииы по попе
речной оси
сверхпереходная постоянная
времени синхронной машины
по продольной оси
сверхпереходная постоянная
времени синхроиной машины
по поперечной оси
постоянная времени обмотки
возбуждения возбудителя
постоянная времени реrулято-
ра
посТоянная инерции
плошадка торможеиия
плошадки ускорения
параметр (обобшеиный)
коэффициент, коэффициент
усиления
Индексы
знак, обозначающий суммар-
ное сопротивление
система
. синхронное
асинхронное
исходное значеНИt:
значение в момент изменения
режима
ЗАКЛЮЧЕНИЕ
в данной книrе представлены основные сведения по современной теории переходных
электромеханических процессов в электрических системах.
Следует обратить внимание читателей, что изложение материала сделан!:! в
упором на физико-техническую' сторону про исходящих явлений, с рассмотрением
расчетов rлавным образом в разрезе связи этих явлений с теми представлениями,
необходимы. инженеру при сознательном использовании цифровой вычислительной
([{B ) в практике проектирования и эксплуатации электрических систем.
Именно этот новый подход, направленный на проникновение во взаимосвязь расчетно-
ro алrоритма (выбор метода числовых решений, расчетноrо шаrа и т. д.) И физики явле-
ний, пронизывает всю книrу. Освоение этоrо подхода должно являться пер в ы м у з л 0-
в ы м в о про с о м, на который надо обратить внимание при изучении материала книrи.
Далее таких узловых вопросов, отражающих новые тенденции, будет еще пять. Так, изуча-
ющему книrу неизбежно придется считаться с тем, что в современной и тем более будущей
инженерной практике при меняемые вычислительные методы, алrоритмы и проrраммы будут
несравненно более сложными, чем это моrло быть описано в данной Книrе, предназначен-.
ной в качестве учебника. Поэтому, получив представления об основах физики явлений и их
злrоритмировании, студент должен быть rOToB к тому, чтобы далее самостоятельно осваи-
вать мноrочисленные алrоритмы и проrраммы, в большом количестве уже имеющиеся в тех
различных орrанизациях, в которых далее придется работать. Они должны, однако, при
этом помнить, что с какими бы специфическими проrраммами они ни имели дело, как бы ни
усложнялись И ни совершенствовались алrоритмы, какими бы быстродействующими и эф-
фективными ни становились [{B , основные соображения о том, как техническую задачу
перевести на язык математики (формула, алrоритм, проrрамма), как оценить сделанные
при этом допущения и как трактовать полученный результат, может и должен дать толыIo
инженер. При этом останутся существенными изложенные в книrе элементарные алrоритмы,
связанные с физикой явления, инженерной оценкой этоrо явления. Они всеrда останутся
в силе и забывать о них не следует.
Ко в т о р о м у у з л о в о м у в о про с у можно отнести то обстоятельство, что мате-
риалы настоящей книrи тесно увязаны с такими специальными дисциплинами *, как «Осно-
вы проrраммирования», «Численные методы», «Вычислительная техника в инженерных и
экономических расчетах», «Вычислительная техника в энерrетике», «Энерrетические расче-
ты и их проrраммирование». Поэтому полное освоение расчетной техники и задач, возни-
кающих при проектировании и эксплуатации электрических систем, требует освоения и все-
ro комплекса упомянутых дисциплин при достаточно хорошем знании общей математики.
Т р е т ь и м у з л о в ы м в о про с о м являются требования, предъявляемые к CTyдeH
ту в отношении не только овладения всей суммой научных и практических знаний по спе.-
циальности, но и умения творчески мыслить, самостоятельно ставить и решать новые зада-
чи как научноrо, так и производственноrо характера. Этот третий узловой вопрос может
и должен рассматриваться в разрезе работ, проводимых студентами в порядке ВЫПО.'IнеНИII
УИР, НИРС, написания рефератов, примерные темы которых приведены в каждой rлане Ha
стоящей книrи.
книrе с
техники
которые
машины
* В различных учебных планах эти дисциплины варьируются по своим названиям,
но существо их не изменяется.
527
Не менее важен, чем предыдущие три, ч е т в е рты й у з л о в о й в о про с это си-
стемный подход ко всем тем задачам, которые непосредственно поставлены в изучаемом ма-
териале или вытекают из Hero. Так, иапример, нельзя рассматривать работу двиrателей, co
измеримых по мощности с питающей системой, не учитывая процессов в reHepaTopax этой
системы. Такие сложные явления, как лавина напряжения, колебательные процессы, само-
возбуждение и др., выделяются только' в системном аспекте.
П я т ы й у з л о в о й в о про с это выявление .общеrо реальноrо хода процессов,
наиболее важных для установления условий проектирования и эксплуатации электрических
систем. При этом важен подход не в духе абсолютной точности вычислений хода HeKoero
абстрактноrо процесса, для KOToporo абсолютно точно заданы ero пара метры и параметры
системы. Здесь необходима практическая точность, учитывающая размытость параметров
и обеспечивающая такое управление процессом, при котором до.'!жен быть получен нужный
практический результат. Эта задача подчеркивается на протяжении всей книrи, но она,
разумеется, не может быть просто рещена и требует от инженера творческоrо подхода.
III е с т о й у з л о в о й в о про с это вопрос о сложности и мноrомерности электри
ческой системы, изученню процессов в которой посвящена настоящая книrа. В соответствии
с методами кибернетики можно утверждать, что система любой сложности как в устано-
вившемся, так и в переходном режиме может . быть сделана управляемой, если для этоrо
управления будет применено соответствующее реrулирование в книrе, посвященной толь
ко основам науки о переходных процессах, было бы неуместно остановиться на теории
TaKoro управления, ero практике и имеющихся возможностях, но иметь их в виду для буду-
щеrо изучения следует. .
Конечно, в кииrе в силу ее специфики, направленной на изучение основ и т о л ь к о
основ теории переходных процессов, ие удалось остановиться на. ряде друrих методов, при-
менение которых только еще иачииается. Так, будет все шире находить в практике расче
тов переходных режимов метод кибернетическоrо моделирования., будет развиваться тео-
рия электроэнерreтических расчетов на основе прямоrо (BToporo) метода Ляпунова **, ве-
дутся поиски по примеиению метода теории катастроф к энерrетическим задачам ***. Все
это потребует от изучающеrо эту кииrу далее иа базе имеющихся в ней положений прово
дить самостоятельиое творческое изучение новых подходов и возможно новых бо.'1ее совер-
шеиНЫх теорий и их практических приложений.
В современной практике создаиия электрических систем и систем управления ими уже
появляются иовые элементы, которые моrли быть только упомянуты в книrе. Это статиче-
скяе компенсаторы реактивиой мощиости (ИРМ, СТК), влияние которых на переходные
процессы вообще, и в частиости на устойчивость очень велико. Существенно, что в системах
появляются вставки постояниоrо тока (ВПТ), изменяющие характер ряда переходных
пропессов и подлежащие в будущем более обстоятельному рассмотрению.
Заметное влияние на происходящие в системе процессы окажут накопители различных
видов, применение которых иачинает вырисовываться уже не только теоретически, но и
практически. Накоиец, реrулироваиие передач постоянноrо тока (ППТ), ка" это показано в
книrе, может оказать существенное влияние на работу всей объединенной . системы. Ряд
В2ЖНЫХ особенностей методическоrо и практическоrо плана следует ожидать в связи с
примеиением в АСУ микропроцессорной техники. Таким образом, настоящая книrа яв
ляется тем фуидаментом, на котором далее будут изучаться' развивающаяся теория переХОk
ных электромеханических процессов и ее мноrочисленные приложения в практике инже-
неров-электроэнерrетиков, причем эти приложения уже Moryт получать свою реализацию и
развитие на той теоретической базе, .КОТОРУЮ дает настоящая книrа.
· Веников В. А., Суханов О. А. Кибериетические модели электрических систем. М.:
Энерrоиздат, 1982, с. 328.
.. Baй.JIaн. М. Я. Устойчивость нелинейных механических и электромеханических си-
стем. М.: Машиностроение, 1981, с. 126.
*** Веников В. А. Электроэнерrетика как большая система кибернетическоrо типа.
Известия АН СССР. Энерrетика и транспорт, 1985, NQ 4, с. 12 16.
СПИСОК ЛИТЕРАТУРЫ
Основная
t Ждан,оо П. С. о статической устойчивости СЛОЖНЫХ электрических систем. В сб.:
УСТОЙЧИВОСТЬ электрических систеМ и динамические перенапря:жения. Труды В3И,
рыл. 40. М.: rэи, 1940, с, 100 194.
2. Jlльян-оо С. А. ЭлеКl'ромаrнитные перхеодпые процессы. М.: Энерrия, 1970,
518 с.
3. Электрические системы: Математические задачи 9лектроэнерrетики/Под ред.
В. А Веншажа. М.: ВЫСПlая школа, 1981, 287 с.
4_ Иеан.ов,Смоленс"ай А. В. Электрические машины. М.: Эперrия, 1980. 926 с..
5. Электроэнерrетические системы в примерах и иллюстраuиях/Под ред. В. А. BeflU.
"аВа. М.: Энерrоатомиздат, 1983, 456 с.
6. Электрические системы: Управление переходпыми режимами эле:ктроэнерrетнчес.
ких систеМ/ПОД ред. В. А. Beн.aКOtJa М.: Высшая школа. 1982.244 с.
Дополнительная
7. Маркович И. И. Режимы знерrетических систеМ. М.: Энерrия, 1969, 350 е.
8. Электрические системы: Электрические сети/Под ред. В. А. Веникоаа. М.: Вые.
шая школа, 1971; Электрические системы: Автоматизированные системч управления режи
мам и энерrосистем/Под ред. В. А. Венщwва. М.: Высшая школа, 1979, 417 с.
9. Автоматизация УПраRлення энерrообъединениями/Под ред. С. А. СоваЛ08а. М.:
Энерrпя, 1979, 430 с,
10. лцкщ.ueв Э. С. Rведение в теорию Э.lектрических систем. Новосибирск: Наука.
1981, 172 'с.
11. Вереmeн.н.иК1Jб Л. П. Теория и методы ИССЛf!ДОRания процессов в суДоВЫХ электро-
&нерrетических системах. Л.: Сvдостроение, 1975. 375 c
12. МеАешкuн r. А. Переходньrе режимы судовых 9лектроэнерrетических систем.
л.: Судостроение, 1971, 342 с.
13. rусейnов Ф. r. Упрощение расчетных схем электрических систем. М.: Энерrия.
1978, 182 с, ,
14. Тuмченко В. Ф. Колебания наrрузок и обменной мощности энерrосистем М.:
Эперrпя, 1975, 208 с.
15. Хачаmуров А. А. НеСИНХРОlfные включении и реСИIlхронизация в энерrосистемах
М.: Энt":рrия, 1969, 215 С. .
16. Портной М. Т.. РаБШlоаич Р. С. Управление энерrосистемами для обеспечения
устойчивости. М.: Энерrия, 1978, 352 с.
17. Методика расчетов vстойчивости RвтомаТИЗИРQВЗПIIБIХ электри'rеских систем/Под
ред. В. А. Веникана. М.: Высшая "'кола, 1966, 247 с.
18. Иванов В. А. Реrулирование эперrоблоков. л.: Машиностроение, 1982,308 с.
19. Применение ЭВМ ,для автоматизации техrrолоrиче-ских пронессон в энерrетике/Под
ред. В. А. Семенава. М.: Энерrоатомиздат, 1983, 314 с.
20. Автоматика электроэrтсрrстических систем/ ПОД ред. В. л. Козuса, Н. Н. Оачаренкл.
М.: Энерrоиздат, 1981, 478 с.
21. РапUНОfШfl Р. С. Автоматическая частотная разrрузка эrrерrосистсм. М.: Энер.
rия, 1980" 343 с. .
22. Сmерн.инсон л. Д. Переходные процессы при реrулировании частоты МОЩНОСТИ В
эиерrосистемах. М.: Эиерrия, 1975, 215 с.
529
ПРЕДМЕТНЫй УКАЗАТЕЛЬ
Авария, место, характер 162, 164, 497
несимметричиая 168, 169
системная 497
, причина 499
Алrоритм расчета процесса 180
Аналоr, устойчивости стилизованный 57, 58
Анализ, задачи 112
Аппроксимация СИНУСОИДЫ 86
Включение автоматическое, повторное 359,
407, 433
reHepaTopOB синхронных 425
Возбуждение, реrулирование 146, 187
Воздействие 14
Возмущение 14, 16
малое, большое 17
reHepaTop синхронный, ЯВНОПОЛЮСНЫЙ 32,
33
Двиrатель, ОПрОКидываиие 334, 348, 349
Движения возмущенное, невозмущенное
234
Демпфирование 184, 320, 516
Диаrрамма векторная 135
Диссипативность 77
Добавка 244
Допущения, уровни 102
D разбиение 239, 273
Едииицы отиосительиые 511
Жесткость обратной связи 141, 147
схемы 425, 490
ЖивучеС'fЬ 41
Запас 56
устойчивости 505
динамической 77, 506
статической 69, 505
Идеализация, позициоиная 107, 268
Интеrрирование числеиное 85
Иитервалы последовательные 173
История переходных процессов 522
Источник реактивноii мощности (ИРМ,
СТК) 397
Ка чес тв О 41
Колебания 327
530
Колебания большие, вынужденные 194
неJ1Инейные м ноrочастотные 193. 195,
198
, частота собственная 254
Компенсаторы СК (ИРМ, СТК) промежу
точные 488
Конденсаторы, включение в наrрузку 342
Консервативность 75
Координаты системы 116
Кории характеристическоrо уравнения 236
Коэффициент запаса 56
по статической устойчивости 39
динамической устойчивости 77; 82
режима 241, 243
усиления (максимальный) 247, 251
Критерий rурвица 238, 265
динамической устойчивости практичес-
кий 76
Жданова 340
статической устойчивости практичес
кий 60, 65, 266
Матрица УЗ,ловых проводимостей 24, 29
Машина сиихронная, явнополюсная 32
l\'lecTo KopoTKoro замыкания 163
Метод rурвица 245
D разбиения 239, 273
Ляпунова 11, 111, 131, 234
малых колебаний 264
пересечения характеристик 36
Момент при асинхронном режиме 461, 463
Модель 98, 100
М()щность, определение потоков 31
предельная при АРВ 249
, потоки простейшей схемы 34
синхронизирующаи 253
Лавина напряжения 327, 334, 344
Линеаризация 106
Наблюдаемость 54, 100
Наrрузка 1 О, 22
максимальная, предельная 36
толчкообразная 360, 391
, характеристики динамические 329
статические 329
Надежность 41
Напряжение, лавина 327, 334, 344
, поддержание 49
Нелинейность 13
Нехватка (небалане) мощности 51
Область, допустимая, введение 42
Оrибающая 106
Описание, уравнения полные, упрощ нные
16,22
Определитель [урвица 245
Оси 116
Осуществляемость 47, 51
Отключение 327
Параметр асинхро ных режимов 451
малый 109 '
размытый 21
распределенные 108
режима 12
СИС1емы 12
Предмет изучения дисциплины 20
I1ер дача постояннorо тока 480
Перетоки вынужденные 504
утяжеленные 504
Питание, включение резерва 408
, переключение 400, 407
Право дим ость собственная, взаимная
23,27
Лравило (способ) площадей 76
Процесс в вариациях 200
опрокидывания 348
переходный, опорный 199
сложной системы 53
электромеханический 14
Пуск двиrателей асинхронных 371, 378
синхронных 374, 375
от соизмеримых источников 380
одновременный 359, 383
Плоскость фазовая 72, 77, 83, 84
Принцип энерrетический 67
Разrрузка автоматическая 494
Расчет на ЦБМ, численное интеrрирование
506, 509
Реrулятор возбуждения настройка 319,
324
высокой точности 276
комплексный 275
пропорциональноrо действия (АРБ п. д.)
143, 146, 240
сильноrо действия (АРБ с. д.) 271
Режим 9, 12, 13
асинхронный 444
изменяющийся 466
малых качаний 468
установившийся 463
больших качаний 469
резких изменений в системах электро-о
снабжения 384
, утяжеление 245, 503
электромеханический 11, 14
Резерв 492
Резонанс 197
Ресинхронизация 470, 472, 476
, критерий 473
слабой связи 478
Самовозбуждение 258, 412
Самозапуск 338, 359, 402
Самораскачивание 256
Самосинхронизация 421
Связь обратная 147
слабая 315
, устойчивость 317, 318
Седло 84
Сила внешняя rармоническая 189
Синтез 112
Система 12
двух станций 395
. диссипативная 78
консервативная 76
, разделения на подсистемt.I 492
сложная, динамическая устойчивость
218
электрическая 9
электроэнерrетическая, структура 9, 22
Скорость реrулирования 147, 486
Сопротивление в нейтрали 484
Состояние пространства 105
Сползание 60
Способ единичных токов 29
наложения (суперпозиция) 21
(правило) площадей 76
для станпий 81
преобразования 28
CTporocTb 104
Схема замещения 24, 32, 260
реrулируемоrо reHepaTopa 260, 264
структурная 141
Текучесть 60
Теория вероятности в задачах переходных
процессов 205
Ляпунова, теоремы 234
Тополоrия 54
Торможение электрическое 486
Точность 103
Турбины, 'реrулирование аварийное 186, 487
/
Уrол максимальный 38
отключения предельный 79, '84
Узлы наrрузки, устойчивость 410
Управление током возбуждения 187
Управляемость 54
Упрощение 263
Уравнение движения, формы записи 516
Парка [орева 123
упрощенное 131, 134
характеристическое 234, 237, 265
Условия нарушения статической устойчиво-
сти 245, 246
Усиление 247
Устойчивость динамическая 17, 56, 163
наrрузкн 410
531
Устойчивость результирующая 56, 448, 473,
494
статическая 16, 56, 231, 239
иереrулируемой демпфируемой сис-
темы 253
Утяжеление 245, 503
Феномен 102
Флуктуация 10
Характеристика аМПЛИТУДllO частотная 191
динамическая 108, 362
квазидинамическая 362
механическая 366
преобразовательной наrрузки 368
статическая 107
Центр фазовой плоскости 84
электрический, качаний 345, 456
Частота, [ОСТ 41, 294
. влияние на устойчивость 266
, динамические характеристики 303
, качество 297
, лавина 308
, поддержание 48, 294
; реrулирование 298, 301
Шины независимоrо напряжения, бесконеч-
ной мощности 50, 61
Шунт аварийный 168
Электродвижущая сила 32
вращения 132
трансформации 132
Е', Е'о, Е . 171, 135
Элемент силовой, управляющий 9
системы, схема замещения 138
Эмержентность 11
Энерrетика 9
Эффект реrулирующий 304, 370
Явление 14, 99
or ЛАВЛЕНИЕ
Предисловие . . . . . . . .
Список принятых сокращений
rлава 1. Характеристика курса
3
8
9
9
12
14
19
21
21
22
27
29
31
36
36
41
41
42
47
51
54
1.1. Основные понятия об электрической снетеме и ее режимах
1.2. Систематизация основных понятий и определений
'1.3. Подход к описанию переходных процессов ..
1.4. Место дисциплины в обучении. Предмет изучения
rлава 2. Основы расчетов установившихея исходных и квазипереходных режимов
2.1. Постановка задачи ...... .. .
2.2. Построение схем замещения. Применение собственных и взаимных проводимостей
2.3. Расчет собственных и взаимных проводимостей и сопротивлений
2.4. Определение токов
2.5. ,Определение мощности
2.6. Система, имеющая нелинейные элементы
2.7. Определение максимальных и предельных наrрузок
rлава' 3. Требования к режимам и процессам
3.1. Требования, предъявляемые к режимам
3.2. Качество переходных процессов
3.3. Осуществляемость режима .
3.4. Условия существования режима системы
3.5. Управляемость и наблюдаемость электрических систем
rлава 4. Устойчивость как rлавиое условие существования режима электрической
системы
4.1.
4.2.
4.3.
4.4.
4.5.
4.6.
Устойчивость в электрических снстемах н простейшие методы ее исСледования
Статическая устойчивость системы по условиям сползания (текучести) пара-
метров нормальноrо режима. Практические критерии устойчивости
Энерrетическая трактовка практических критернев устойчивости
Применение практических критериев Статической устойчивости
Совмещение расчетов нормальноrо режима и оценки ero статической устойчи-
вости . .
Простейшая оценка устойчивости перехода от ОДноrо режима к друrому (дина-
мическая устойчивость и ее практические критерии)
56
56
58
66
69
69
70
rлава
5. Основные положении, принимаемые при исследованиях переходных режимов
9лектрических систем
Задачи и средства исследования
Математика в технических задачах
Модели переходных процессов в сложной электрической системе и орrаниза-
ция исследований
Точность и cTporocTb в инженерных исследованиях . .
Пространство и уравнения состояния (режима): Допущения и упрощения
97
97
98
99
102
105
533
5.1.
5.2.
5.3.
5.4.
5.5.
rлава 6. Модели, уравнения и схемы замещения для исслеДОВi\НИЯ переходных режи
мов электрических систем 115
6.1. Постановка задачн 115
6.2. Математические описания и модели 115
6.3. Обобщенные уравнения 118
6.4. Физическая интерпретация уравнений в координатах d, q. Модель Парка rо
рева 125
6.5. Упрощенные уравнения 131
Э 6.6. Схемы замещения элементов системы 138
6.7. Структурные схемы электрических систем ... 140
6.8. Структурные схемы и уравнения систем реrулирования 142
rлава 7. Большие колебания. Динамическая УСТОНЧИ80СТЬ
162
7.1.
7.2.
7.3.
7.4.
7.5.
7.6.
Постановка задачи
Числовое решение уравнения относительноrо движения методом последователь-
ных интервалов . . . . . . . . .
Оценка некоторых наиболее характерных динамических переходов (изменений
режима) ,.....,.........'.......'
Приближенное решение дифференциальных уравнений относительноrо движе-
ния ротора reHepaTopa при отклонениях входящих в Hero параметров
Применение методов теории вероятноС-тей при расчетах переходных процессов
в электрических системах . . . . . . . .
Особенности расчета переходноrо процесса (динамической устойчивости) слож-
ной системы, содержащей произвольное число станций соизмеримой мощности и
наrрузок
162
173
183
199
205
218
rлава
8. Статическая устойчивость электрической системы. Процессы при малых
свободных возмущеииях
Постановка задачи
Статическая устойчивость простейшей системы при реrулировании возбуж-
дения ее reHepaTopoB реrулятором пропорциональноrо действия ..
Нереrулируемая система, рассмотренная без учета электромаrнитных переход-
ных процессов
Самораскачивание и самовозбуждение
Упрощенные соотношения для определения статической устойчивости, вытекаю-
щие из метода маЛЫJ!i колебаний ....
Основы устойчивости сложных систем. Критерии метода малых колебаний и
практические критерии ....
Устойчивость позиционной системы при представлении наrрузок постоянными
сопротивлеииями
Статическая устойчивость системы с автоматическим реrулятором возбуждения
сильноrо дейстВИЯ
Синтез структур систем автоматическоrо реrулирования высокой точности
9. Измеиеиия частоты мощности в энерrосистемах
Общая характеристика задачи
Виды реrулирования и их взаимодействие
Статические характеристики системы (медленные изменения частоты в уста-
новившемся режиме)
Динамические характеристики системы п,)и изменении частоты
Неустойчивость частоты (лавина частоты) .......
Меры предотвращения неустойчивости частоты. Автоматическая разrрузка по
частоте
10. Переходные процессы и устойчивость электрических систем, объедииенных
электропередачами, являющимися слабыми связями
Постановка задачи
Простейшая объединенная система, состоящая из двух отдельных систем,
связанных слабой соединительной линией
231
231
240
253
255
260
264
267
270
276
294
294
298
300
303
308
309
8.1.
8.2.
8.3.
8.4.
8.5.
8.6.
8.7.
8.8.
9 8.9.
rлава
9.1.
9.2.
9.3.
9.4.
9.5.
9.6.
rлава
10. 1.
10.2.
313
313
314
534
10.3. Динамическая устойчивость слабых связей
10.4. Статическая устойчивость слабых связей
10.5. Настройка реrуляторов возбуждения
fлава 11. Переходные процессы в системах электроснабжения (узлах наrрузки) элект-
рических систем при малых изменениях режима
11.1. Общая характеристика проблемы
. 11.2. Статические и динамические характеристики двиrательной наrрузки
11.3. Лавина напряжения (статическая устойчивость наrрузки, опрокидывание
двиrателей)
11.4. Основные расчетные соотношения
11.5. Практический критерий устойчивости комплексной наrрузки dE/dU
11.6. Медленные понижения напряжения
11.7. Процесс опрокидывания двиrателей
11.8. Работа асинхронных двиrателей наrрузки при несимметрии и несинусоидаль-
ности приложенноrо напряжения
317
318
319
327
327
328
334
335
340
346
348
350
fлава 12. Переходные процессы в узлах наrрузки электрических систем при больших
возмущениях
12.1.
12.2.
12.3.
12.4.
12.5.
12.6.
12.7.
12.8.
12.9.
Влияние больших отклонений параметров режима на поведенне наrрузки
Пуск двиrателей
Переходные процессы при пуске асинхронных двиrателей, имеющих мощность,
соизмеримую с мощностью источника
Резкие изменения режима в системах электроснабжения
Толчкообразные наrрузки
Самозапуск двиrателей
Автоматическое повторно включение и переключение питания
Влияние реrулирования возбуждения синхронных двиrателей на режим и
устойчивость узлов наrрузок
Самовозбуждение асинхроиных двиrателей во время пуска при применении
последовательной емкостной компенсации в сети
359
359
371
380
384
391
398
407
fлава 13. Переходные процессы при включении синхронных rеиераторов
13.1. Общие положения
13.2. Процессы при самосинхронизации
13.3. Электромеханический пуск синхронных reHepaTopoB
13.4. Автоматическое повторное включение с самосинхронизацией
13.5. Автоматическое повторное включение без контроля синхроннзма
410
412
425
425
427
432
433
435
fлава 14. Улучшение режимов. Асинхронные режимы, ресинхронизация и резуль-
тирующая устойчивость . . . . . . . . . . . . . . . . . 444
14.1. Общая характеристика асинхронных режимов в электрических системах 444
14.2. Возникновение асинхронноrо режима ....... ... 447
14.3. Задачи, возникающие при исследовании асинхронных режимов 450
14.4. Параметры основных элементов электрических систем при асинхронных ре-
жимах . ...... 451
14.5. Характеристики режима простейшей системы при несинхронной скорости
синхронной машины (reHepaTopa, двиrателя, синхронноrо компенсатора) 459
14.6. Выпадение из синхронизма, асинхронный ход иресинхронизация .. 469
14.7. Практика вхождения в синхронизм асинхронно работающих reHepaTopoB
(ресинхронизация и результирующая устойчивость) ....... 473
14.8. Управление передачами постоянноrо тока для повышения динамической и
результирующей устойчивости . . . 430
14.9. Дополнительные устройства для улучшения устойчивости 484
14.10. Мероприятия режимноrо характера .. 489
Приложения. П1. Аварии в электрических системах . . . . . . . .. 497
П2. Краткие сведения о рУКОВОДЯЩИ1i указаниях и некоторые рекомендации по про-
ведению расчетов . . . . . . . . . . . 504
П2.1. Требования устойчивости электроэнерrетических систем 504
З5
П2.2. Соображения о выборе метода и шаrа расчета электромеханических переход-
иых процессов в электрических системах 50б
П3. Система относительных единиц ... 511
П4. Демпфнрование и демпферный коэффициент 51б
П5. Некоторые сведения по нстории переходиых процессов 522
Основные обозначення 525
Заключение . . . . . 527
Список литературы 529
Предметный указатель 530
ВАЛЕНТИН АНДРЕЕВИЧ ВЕНИКОв
ПЕРЕХОДНЫЕ
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПРОЦЕССЫ
В ЭЛЕКТРИЧЕСКИХ СИСТЕМАХ
Заведующая редакцией Н. И. Хрусталева. Редактор С. М. Оводава. Художник
А. А. Акимов. Художественный редактор В. И. Мешалкин. Техиически!\
,редакТОр 3. А. Мусдимова. Корректор r. И. Кострикова.
ИБ N. 4867
Изд. N. СТД-424. Сдано в набор 23.01.85. Подn. в печать 21.11.85. Т-19953.
Формат 70Х90'/". Бум. офс. .N'!! z. rарнитура литературная. Печать высокая.
Объем 39,19 усл. печ. д. + форзац 0,29 усл. печ. л. 39,48 уел. кр"отт. 40,98 уч.-
изд. л. + форзац 0,25 уч.-изд. л. Тираж 15000 экз. Зак. N. 84. Цена 1 р. 80 к.
,Издательство «Высшая школа.. 101430, Москва, rСП.4, Неrлиниая уд., д. 29/14.
ЯрослаВСКlIЙ lIOOиrрафкомбинат Союзполиrрафпрома при rосударстзенном
комитете СССР по делам издательстз. полиrрафии и книжио!\ торrовди.
150014, Ярослазль. ул. Сзободы, 97.