/

































































































































































































































































Автор: Сафонов А.С. Верескун В.И.
Теги: техника средств транспорта водный транспорт электроника электротехника морские судна
Год: 1987




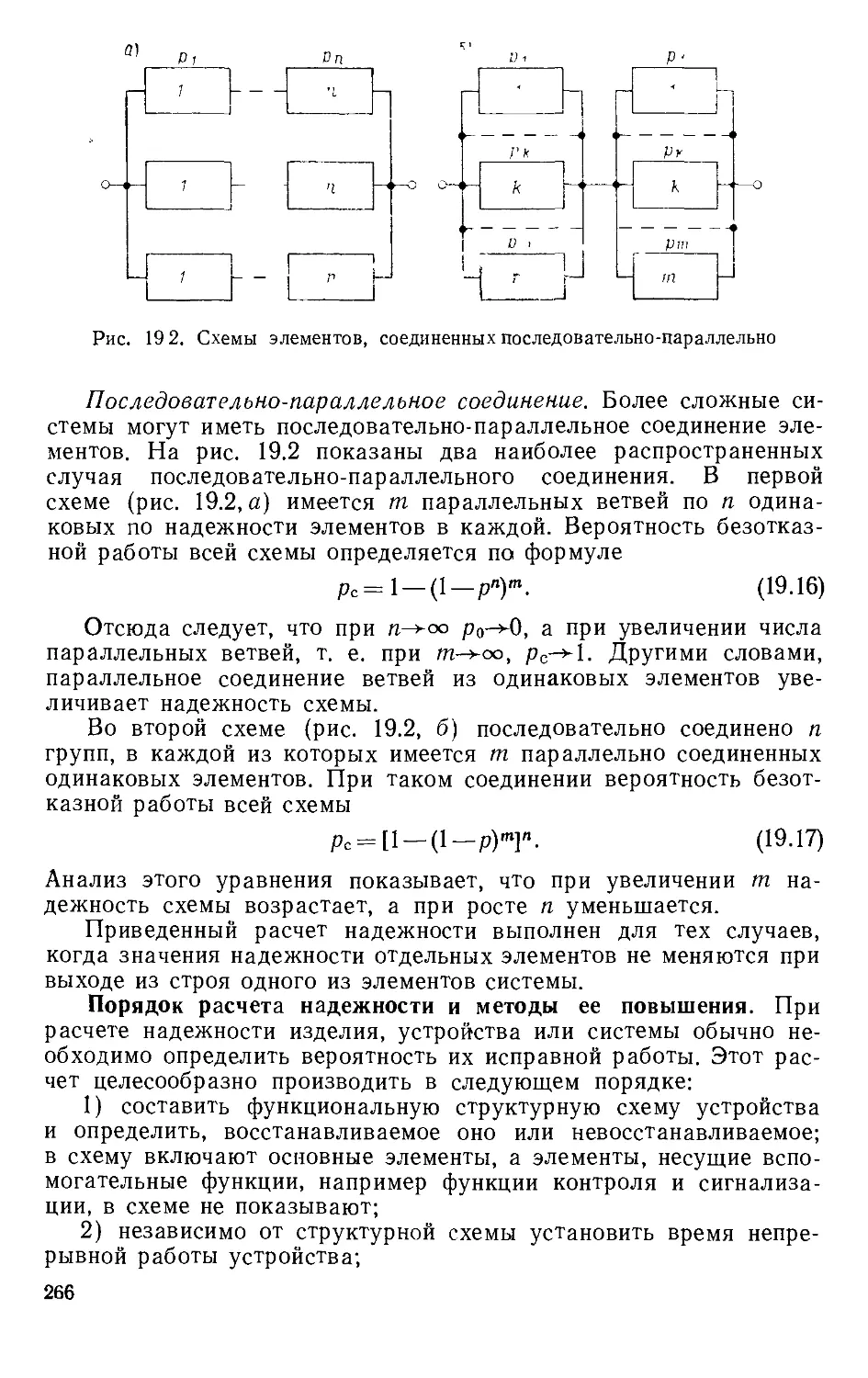
Текст
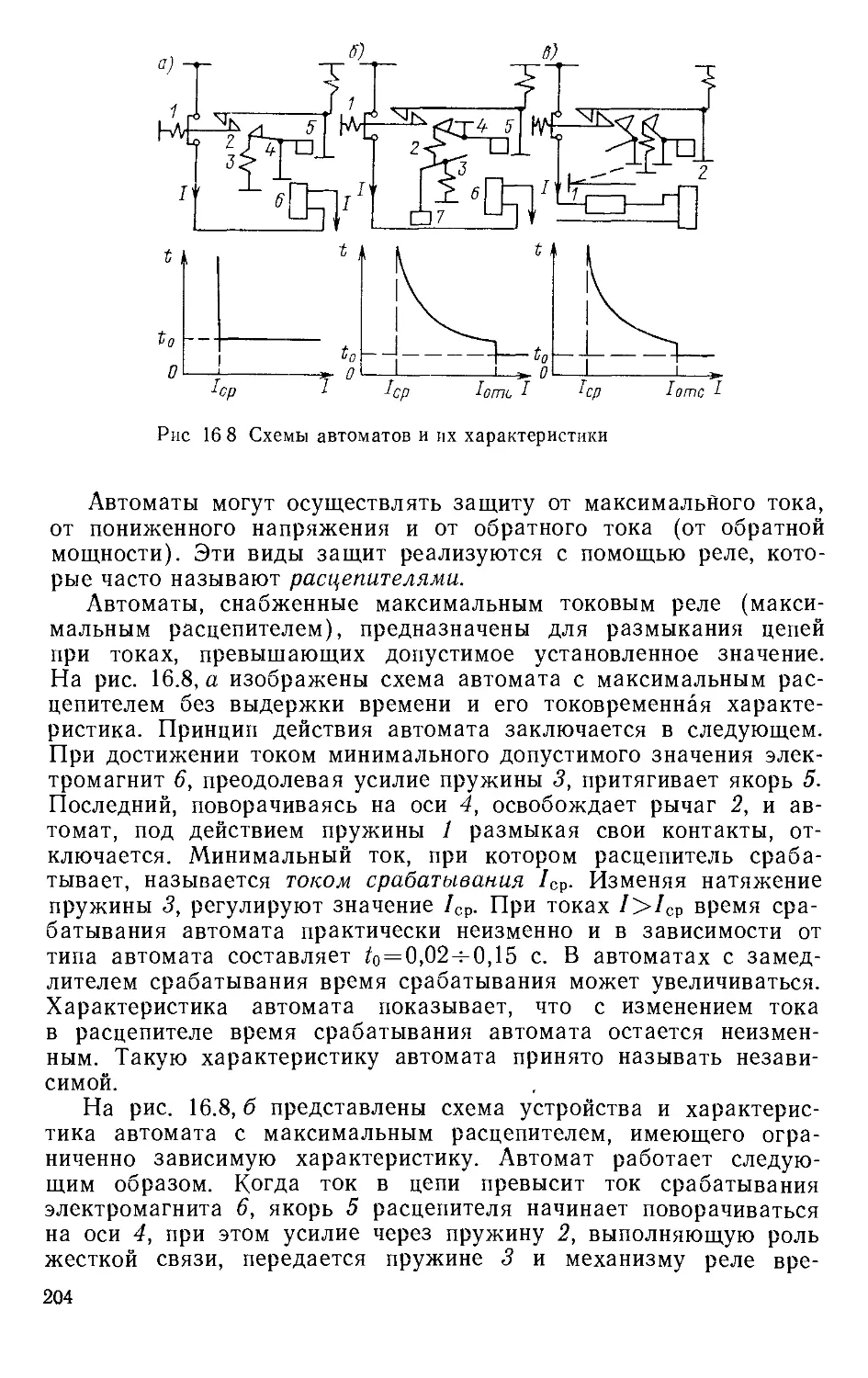
и I ; • :
I
■
I
I
ББК 39.46
В31
УДК 629.12.066(075.8)
Рецензенты: кафедра электротехники и электрооборудования судов ЛКИ (д-р
техн. наук Ю. Н. Киреев), канд. техн. паук Л. П. Проскуряков
Верескун В. И., Сафонов А. С.
В31 Электротехника и электрооборудование судов:
Учебник.— Л.: Судостроение, 1987.— 280 с; ил
ИСБН
В соответствии с программой рассмотрены основы теории электрических
и магнитных Цепей, электромагнитных устройств и электрических измерений.
Приведены схемы судового электрооборудования — автоматизированных
электростанций и электроприводов.
Предназначен для студентов неэлектротехнических специальностей, а
также инженерно-технических работников, занимающихся проектированием и
эксплуатацией судового оборудования.
„3605030000-076
В 23-87 ББК 39.46
048(01 )-87
© Издательство «Судостроение», 1987
ПРЕДИСЛОВИЕ
В нашей стране уделяется большое внимание развитию
электрификации и энерговооруженности всех отраслей народного
хозяйства. Линия на дальнейшее развитие энергетики и
автоматизации производства на базе электрификации нашла отражение
в программных установках КПСС, в решениях съездов, пленумов
ЦК КПСС и других партийных документах.
Энергетические системы современных судов — это сложные
автономные комплексы, объединяющие разнообразные
электромашинные, статические и полупроводниковые технические
устройства, которые связаны электрически, магнитно и информационно.
Они предназначены для обеспечения эффективного и
экономичного функционирования потребителей в различных режимах
работы судна.
Изучение основ электротехники, принципов действия
электрических машин и аппаратов, работы схем электроприводов,
устройств судовой автоматики необходимо для будущих инженеров,
готовящих себя к решению задач проектирования, постройки
судовых силовых устройств и систем и их эксплуатации. Создание
технических средств освоения шельфа, плавкраностроения в
нашей стране требует развития соответствующих узких
специализаций, повышения уровня электротехнической подготовки
инженерно-технических работников.
Учебник написан для студентов вузов в соответствии с
программой курса «Электротехника и электрооборудование судов»для
специальностей 0525 «Судовые силовые установки», 1612
«Эксплуатация судовых силовых установок» и 0514 «Судостроение и
судоремонт». Особое внимание в книге уделено режимам работы,
характеристикам генераторов и электродвигателей, системам
стабилизации напряжения, коммутационной, измерительной и
защитной аппаратуре, построению схем автоматизированных
электростанций и электроприводов. Рассмотрены также вопросы,
связанные с развитием электрооборудования плавкранов, плавучих
буровых установок. Для выработки практических навыков у
студентов приводятся примеры расчетов электрических цепей, схем
судовых электротехнических устройств.
Замечания и пожелания авторы просят направлять по адресу:
191065, Ленинград, ул. Гоголя, 8, издательство «Судостроение».
Электротехника как наука является областью знаний, в
которой рассматриваются электрические и магнитные явления и их
практическое применение.
Одна из задач экономического и социального развития СССР
на период до 2000 г. — это реализация энергетической программы.
В соответствии с решениями XXVII съезда КПСС в 12-й и
последующей пятилетках намечено дальнейшее развитие
электрификации страны Выработка электроэнергии возрастет в 1990 г. до
1840—1880 млрд кВт-ч в год. Электроэнергетика должна
развиваться опережающими темпами по сравнению с ростом добычи и
производства первичных энергетических ресурсов.
Ведущая роль в современном судостроении принадлежит
электроэнергетике. Электроэнергетическая система судна
представляет собой комплекс взаимосвязанных устройств, соединенных
электрически и магнитно и предназначенных для генерирования,
передачи, распределения энергии и преобразования ее в другие
виды В состав электроэнергетической системы входят
электростанция, судовые сети, а также электроприводы — устройства для
приведения судовых механизмов во вращение или другие виды
движения. Наибольшее распространение на судах получили
электроприводы рулевых устройств, грузовых и траловых лебедок,
якорно-швартовных механизмов, различных насосов,
вентиляторов и воздуходувок.
Внедрение высокоавтоматизированных экономичных судовых
приводов и новых технологий обработки сырья и грузов
способствует улучшению использования сырьевых,
топливно-энергетических и других материальных ресурсов
Первый электродвигатель постоянного тока с вращательным
движением был создан русским академиком Б. С. Якоби (1804—
1865 гг ). Этот первый двигатель в 1834—1838 гг. Б. С. Якоби
использовал для приведения в движение катера по реке Неве. Таким
образом, родиной первого электродвигателя, а вместе с тем и
первого судового электропривода была Россия
Однако несовершенство первого электродвигателя, а главное —
неэкономичность источника электроэнергии того времени —
гальванической батарей — явились причиной того, что ни эта работа
Б С Якоби, ни ряд аналогичных работ его последователей не
получили немедленного практического применения. Лишь через
продолжительное время был создан электромагнитный генератор,
4
""^ii-jer' J ni«* »
^ьяж чЬ^Аък. ** ,«* ^.^АйлйийЙ^й, * .dKatfi^
.^;.*к*Ш.>-.-: ..
в котором был использован принцип обратимости электрических
машин, открытый академиком Э. X. Ленцем в 1833 г. и
объединивший пути развития двигателей и генераторов. К середине
второй половины XIX в. конструкции генераторов и двигателей
постоянного тока получили формы, близкие к современным.
Среди практических работ того времени отмечают работы
выдающегося русского электротехника В. Н. Чиколева (1845—
1898 гг.) — сервопривод постоянного тока и др. Крупнейший
русский электротехник Д. А. Лачинов (1842—1903 гг.) убедительно
доказал главное преимущество электричества — электрическое
распределение механической энергии. Результатом этих и других
работ наших соотечественников явилось распространение
одиночных электроприводов постоянного тока на морских судах. Из их
числа можно отметить электропривод зарядников для подъема
боезарядов, установленный на эскадренном броненосце «Сисой
Великий» (1890—1894 гг.), первый рулевой электропривод на
броненосце «12 Апостолов» (1892 г.) и др. В тот же период времени
В. А. Шубин разработал первый в России электропривод с
индивидуальным управляющим генератором (система генератор —
двигатель) для рулевого устройства, установленный в дальнейшем
(1899—1905 гг.) на броненосцах «Князь Суворов», «Слава» и др.
С 1908 г. на судах отечественного флота начали внедрять
двигатели переменного тока как наиболее простые и надежные, что
в судовых условиях имеет особое значение. С 1960 по 1970 гг. был
осуществлен интенсивный переход к использованию на судах
электроэнергии преимущественно переменного тока.
В настоящее время наряду с развитием промышленных
электроустановок разрабатываются новые и более совершенные
системы судового электропривода. Для регулируемых судовых элек-
топриводов создаются и внедряются асинхронные двигатели серии
МАП. Широкое распространение получила полупроводниковая
техника. Наблюдается переход от автоматизации отдельных
процессов и операций к комплексной автоматизации судовых
энергетических систем
Общие теоретические вопросы, характеристики и схемы
электроэнергетического оборудования и приборов управления
приведены в учебнике в краткой и сжатой форме. Рассмотренные
положения находят применение при эксплуатации транспортных и
промысловых судов, а также плавучих кранов и буровых установок
Раздел I ОСНОВЫ ЭЛЕКТРОТЕХНИКИ
Глава 1. ОСНОВНЫЕ ЭЛЕКТРОТЕХНИЧЕСКИЕ
понятия
§ 1.1. Электромагнитное поле
Элементарные электрически заряженные частицы (электрон и
протон) согласно современным воззрениям являются
структурными элементами вещества. Они обладают электрическими
зарядами, действие которых можно наблюдать в природе в виде
электрических и магнитных явлений.
Материальные заряженные частицы создают в окружающем
пространстве электромагнитное поле, воздействующее на другие
заряженные частицы. Заряженные частицы и их
электромагнитное поле представляют собой единое целое. Однако если
заряженные частицы неотделимы от своего электромагнитного поля, то
последнее может существовать в свободном состоянии, независимо
от частиц (т. е. в виде фотонов, а также электромагнитных волн,
излучаемых антенной). Электромагнитное поле в свободном
состоянии распространяется в пустоте * в отсутствии сильных
гравитационных полей со скоростью, близкой к 3-Ю8 м/с. В
веществе, а также при наличии сильных гравитационных полей
скорость распространения электромагнитного поля снижается.
Электромагнитное поле — это один из видов материи,
характеризующейся непрерывным распределением в пространстве
(электромагнитные волны), дискретностью структуры (фотоны),
способностью распространения в пустоте и силовым воздействием на
заряженные частицы.
Электромагнитное поле имеет две формы проявления —
электрическое поле и магнитное поле. Электрическое поле создается
заряженными частицами, а также изменяющимся магнитным
полем. Магнитное поле создается движущимися заряженными
частицами, а также изменяющимся электрическим полем. Иными
словами, электрическое и магнитное поля взаимосвязаны и
представляют собой две стороны единого электромагнитного поля. На
практике обычно одна из сторон электромагнитного поля бывает
выражена больше другой. Поэтому удобнее раздельно
рассматривать электрическое и магнитное поля и основные законы,
свойственные каждому из полей.
Электротехника изучает способы производства и
использования электроэнергии, а также электромагнитные процессы в
электротехнических устройствах. Полная картина этих процессов до-
* Под пустотой условимся понимать пространство, в котором материя
существует только в виде поля.
6
статочно сложна. Однако если рассматривать только основные
стороны электромагнитного процесса, то в большинстве случаев
его можно характеризовать достаточно простыми соотношениями
между электродвижущей силой, напряжением, силой тока,
магнитодвижущей силой и магнитным потоком. Поэтому общую теорию
электромагнитных явлений разделяют на два самостоятельных
раздела — теорию электрических и магнитных цепей и теорию
электромагнитного поля.
§ 1.2. Электрический ток
Электрическим током называют направленное движение
заряженных частиц. Различают три основных вида электрического
тока: ток проводимости, ток переноса и ток смещения.
Электрический ток проводимости представляет собой
упорядоченное движение заряженных частиц в проводящих средах под
действием электрического поля. В металлических проводниках
свободно перемещаются электроны, а в проводящих растворах
подвижными заряженными частицами являются ионы.
Током переноса (конвекции) называют перенос электрических
зарядов в свободном пространстве движущимися заряженными
частицами или телами. Ток переноса создается в газе или пустоте
также под действием электрического поля.
Электрический ток смещения представляет собой движение
связанных заряженных частиц в диэлектрике при изменении
поляризации диэлектрика, а также явление, возникающее при изменении
во времени электрического поля в пустоте. Ток смещения как в
диэлектрике, так и в пустоте возникает только при изменении
электрического поля.
Интенсивность электрического тока оценивается силой
электрического тока. Она характеризует скорость изменения заряда и
в математической форме может быть представлена уравнениями
I=q/t; i=dqldt, (1.1)
где /, i — сила тока, соответственно не изменяющаяся во времени
и изменяющаяся; q, dq — количество электричества, проходящее
через некоторую площадь среды; t, dt — время прохождения
данного количества электричества.
Единица силы тока — ампер (А) — определяется по
электродинамическому взаимодействию проводников с токами. На
практике применяют и более мелкие единицы — миллиампер (I мА=
= 10~3 А) и микроампер (1 мкА= 10~6 А).
Положительным направлением электрического тока
условились считать направление движения положительно заряженных
частиц под действием электрического поля.
§ 1.3. Электрическое напряжение. Электродвижущая сила
Основными характеристиками электрического поля являются
напряженность, электрическое напряжение, потенциал и
электродвижущая сила.
Под напряженностью электрического поля понимают
отношение силы, действующей на заряд в данной точке поля, к количе-
—>
ству электричества. Если на заряд q действует сила G, то напря-
женность Е в данной точке поля определится отношением
E = Glq. (1.2)
Таким образом, напряженность электрического поля есть
векторная величина, характеризующая силовое действие поля на
электрические заряды. Графически электрическое поле
изображают линиями вектора напряженности поля, которые проводят
так, чтобы касательные к ним в каждой точке совпадали по на-
—>
правлению с вектором Е. Совокупность линий образует картину
электрического поля. Поле считается однородным, если вектор
напряженности во всех его точках одинаков по величине и
направлению, и неоднородным в противном случае.
Если в электрическом поле происходит перенос заряженной
частицы, то силы поля совершают определенную работу. При
переносе частицы с зарядом q вдоль пути АВ в однородном (рис. 1.1, а)
и неоднородном (рис. 1,1, б) полях совершаемую работу А соот-
ветствено можно записать
Л =27 =<?£?; A=q$ Ed~l. (1.3)
А
Величину, численно равную отношению работы, затрачиваемой
на перемещение заряда из одной точки поля в другую, к
количеству электричества, называют электрическим напряжением между
этими точками и обозначают буквой U. Для однородного и
неоднородного полей (см. рис. 1.1, а, б) напряжение между точками А
и В соответственно равно
UAB = Alq = qEllq = El\
в.
UAB=Alq=\Edl.
А
(1.4)
Таким образом, электрическое напряжение есть физическая
величина, характеризующая электрическое поле вдоль
рассматриваемого пути и равная работе, совершаемой силами поля при
перемещении заряда из одной его точки в другую
Единица электрического напряжения — вольт (В).
Применяются также производные от вольта — киловольт (1 кВ=103 В),
милливольт (1 мВ=10~3 В) и микровольт (1 мкВ=10~6 В).
8
Рис 1 1 К определению напряжения между точками поля: а-
однородного, б — неоднородного
Электрическое напряжение часто выражают через разность
потенциалов двух точек поля. Потенциал каждой точки поля
(например, электростатического) представляет собой физическую
величину, характеризующую электрическое поле в какой-либо точке
и равную работе, которую совершают силы поля при перемещении
частицы с зарядом, равным единице, из данной точки поля за его
пределы (где поле отсутствует и потенциал его равен нулю).
Потенциал обозначается буквой U и определяется отношением
U=Ajq. Единицей измерения потенциала, как и напряжения,
является вольт. Потенциал отдельной точки поля измеряется
относительно поверхности Земли, потенциал которой принято считать
равным нулю. Если потенциалы двух точек поля различны, то
перемещение заряда под действием поля из точки высшего к точке
низшего потенциала будет подобно падению груза с большей
высоты на меньшую. При перемещении заряда q из точки А в точку В
(см. рис. 1.1, а) совершается работа, равная A = qU^A—qU_B =
= q(UA—UB)- Эта работа может быть определена и через
напряжение между точками: A = qUAB- Следовательно,
U
АВ-
иА-ив,
(1.5)
т. е. напряжение между двумя точками поля есть разность
потенциалов этих точек поля.
Опыты показывают, что потенциалы разноименно заряженных
тел при соединении их проводником выравниваются и по
истечении некоторого времени ток в проводнике прекращается.
Следовательно, для получения электрического тока необходимы
специальные устройства, которые непрерывно поддерживали бы
разность потенциалов на концах проводника. Эти устройства обычно
называются источниками электрической энергии или источниками
электрического тока. Такими источниками служат, например,
электрические генераторы, гальванические элементы,
аккумуляторы, термоэлементы.
В каждом источнике электрической энергии независимо от
принципа его работы происходят процессы разделения электриче-
9
Рис 12 К определению
электродвижущей силы
ских зарядов физических тел и
преобразования одного из видов энергии в
электрическую.
Уясним сущность процесса разделения
зарядов физических тел. Для этого
рассмотрим замкнутый контур с источником
электрической энергии (рис. 1.2). Во
внешней части контура действует поле с на-
->■
пряженностью Ев, которое создается
зарядами на зажимах источника. Под
влиянием этого поля положительные заряды
движутся от высшего потенциала UA
источника к низшему UB- Внутри источника помимо поля с напря-
->■
женностью Ев, создаваемого зарядами, возникает поле с напря-
—>■
женностью £Ст неэлектростатического происхождения. Под
действием сил этого поля, называемого сторонним, внутри источника
происходит разделение зарядов.
Действительно, внутри источника напряженность определяется
->■->■ -*■
суммой Е = Ев+ЕСт, и если движения зарядов нет, то линейный
интеграл суммарной напряженности поля внутри источника по пути
АпВ от положительного зажима к отрицательному равен нулю:
J Edl
АпВ
I
АпВ
EBdl
I EcM
АпВ
:0,
где dl — вектор, равный по модулю dl и направленный по
касательной к контуру проводника с током.
Из последнего выражения получаем
J
АпВ
EBdl
J Ecldl
АпВ
= I E„dt
ВпА
и+-и^,
т. е. внутри источника напряженность стороннего поля направлена
от отрицательного зажима к положительному. Следовательно,
внутри источника под влиянием разности потенциалов
J Edd I
ВпА
U+- U_
происходит разделение зарядов, так что на одном конце
получается избыток положительных, а на другом — отрицательных
зарядов. В противном случае переход положительных зарядов во
внешней части контура к зажиму с отрицательными зарядами
привел бы к выравниванию потенциалов на зажимах источника и
прекращению тока.
Таким образом, в источнике электрической энергии под
действием сторонних сил непрерывно происходит разделение
электрических зарядов. В результате на зажимах источника создается
разность потенциалов и в контуре возникает электрический ток.
Эти процессы происходят вследствие преобразования какого-либо
вида энергии в электрическую внутри источника.
10
Разделение зарядов внутри источника и появление разности
i отенциалов на его зажимах вызывается так называемой
электродвижущей силой источника (ЭДС). Она обозначается буквой Е
или е и численно равна работе, совершаемой силами стороннего
поля при переносе заряда по пути / действия сторонних сил:
E = A/q=-JEad7. (1.6)
С другой стороны, под действием ЭДС происходит
перемещение этого же заряда по всему замкнутому контуру.
Следовательно, ЭДС равна сумме напряжений на всех участках контура
Е = £ик. (1.7)
В частном случае отсутствия тока в контуре (внешний контур
разомкнут) ЭДС источника равна разности потенциалов или
напряжению на его зажимах:
E = U_a-U_b = U. (1.8)
ЭДС измеряется в тех же единицах, что и напряжение.
Практически ЭДС измеряют при разомкнутом внешнем контуре
вольтметром. Следует иметь в виду, что ЭДС внутри источника
электроэнергии направлена от отрицательного зажима к
положительному, а напряжение на зажимах источника, наоборот, — от
положительного зажима к отрицательному.
Природа возникновения ЭДС может быть электромагнитной,
электрохимической и др. В частности, в электрических
генераторах ЭДС обусловливается электромагнитной индукцией, в
гальванических элементах и аккумуляторах — соприкосновением
проводников различного химического состава.
§ 1.4. Магнитный поток. Магнитодвижущая сила
Магнитное поле наблюдается около проводников с
электрическими токами и постоянных магнитов, в которых движутся
электрически заряженные частицы. Магнитное поле характеризуется
магнитной индукцией, магнитным потоком, напряженностью и
магнитодвижущей силой.
Под магнитной индукцией понимают отношение силы,
действующей на элемент проводника с электрическим током, к
произведению силы тока и длины элемента проводника. Если на эле-
->■
мент проводника длиной dl, по которому течет ток силой i и
который расположен перпендикулярно направлению магнитного
—>
поля, действует сила dG, то магнитная индукция определится
выражением
Ъ=<Ю1(ии). (1.9)
И
Рис. 1.3. К определению потокосцепления
Магнитная индукция есть векторная величина,
характеризующая силовое действие магнитного поля на ток и соответственно на
движущиеся заряженные частицы.
Магнитная индукция в единицах СИ измеряется в
теслах (Тл).
Графически магнитное поле изображают линиями вектора
магнитной индукции, которые проводят так, чтобы касательные к ним
->■
в каждой их точке совпадали по направлению с вектором В.
Совокупность указанных линий образует картину магнитного поля.
Поле называется однородным, если магнитная индукция во всех
его точках одинакова и постоянна по направлению.
Магнитным потоком называют поток вектора магнитной
индукции через некоторую поверхность S:
<S = $BdS, (1.10)
—>■
где В — вектор магнитной индукции; dS— элементарная
поверхность.
Если магнитное поле равномерно во всех точках поверхности
S и элементы этой поверхности перпендикулярны вектору
магнитной индукции, то
o> = bs. (l.ii)
Магнитный поток в единицах СИ измеряется в веберах (Вб).
Отметим, что магнитный поток непрерывен, так как линии
вектора магнитной индукции всегда замкнуты. Поэтому магнитный
поток, входящий в любую замкнутую поверхность S, равен
потоку, выходящему из нее, т. е. магнитный поток через замкнутую
поверхность равен нулю:
§BdS=0.
При расчетах широко применяют понятие потокосцепления.
В общем случае потокосцепление W равно алгебраической сумме
магнитных потоков через отдельные витки контура (рис. 1.3, а)
¥=ф1+ф2+.. .+ф„=£ф*. (112)
fc=l
12
Рис 1 4 К определению магнитодвижущей силы
В частном случае, когда с каждым витком контура сцеплен
один и тот же магнитный поток Ф (рис. 1.3, б), потокосцепление
равно
¥ = Фдо, (1.13)
где до — число витков контура. Потокосцепление, как и магнитный
поток, измеряется в веберах.
Магнитную индукцию также можно представить в виде
произведения
В = цаЯ = ц^оЯ, (1.14)
где ц,а — магнитная проницаемость среды, зависящая от ее
физических свойств; \ir — относительная магнитная проницаемость
среды; \i0—магнитная проницаемость пустоты (вакуума), равная
4я-10~7 В-с/(А-м), называемая магнитной постоянной; Н —
напряженность магнитного поля, зависящая от силы и
расположения электрических токов, создающих магнитное поле.
Напряженность магнитного поля подобно магнитной индукции
является векторной величиной. Единица измерения
напряженности магнитного поля — ампер на метр (А/м).
Основным законом магнитного поля является закон полного
тока. Он устанавливает количественную связь между
напряженностью магнитного поля и электрическими токами, создающими
это поле:
§яЛ=£/*. 0-15)
Алгебраическая сумма сил токов, охватываемых замкнутым
контуром (рис. 1.4, а), называется полным током. Выражение
в левой части уравнения (1.15) представляет собой линейный
интеграл вектора напряженности магнитного потока вдоль данного
замкнутого контура и называется магнитодвижущей или
намагничивающей силой.
В частном случае замкнутого однородного контура длиной /
(рис. 1.4, б), равномерно охваченного витками до, по которым
течет ток /, закон полного тока примет следующий вид:
Hl = lw. ■ (1.16)
13
Следовательно, закон полного тока можно сформулировать
так. магнитодвижущая сила замкнутого контура равна полному
току, охватываемому этим контуром.
Единица магнитодвижущей силы — ампер (А).
§ 1.5. Законы электромагнитных явлений
К наиболее важным электромагнитным явлениям в
электротехнике относят электромагнитную индукцию и взаимодействие
электрического тока с магнитным полем. Основные положения этил
явлений сформулированы в виде законов.
Закон электромагнитной индукции. Возникновение
электромагнитной индукции связано с наведением ЭДС в проводнике при
изменении магнитного потока, пронизывающего проводник. Это
явление лежит в основе преобразования механической энергии
в электрическую.
Основной закон электромагнитной индукции гласит:
электродвижущая сила, индуцируемая в контуре, равна скорости
изменения пот о ко сцепления с этим контуром, т. е.
e = dW/dt.
Если потокосцепление х¥ = и)Ф, то ЭДС контура будет равна
е= -wdOldt. (1.17)
Знак минус в последних уравнениях введен для согласования
направления ЭДС индукции с направлением магнитного потока
в соответствии с принципом Ленца.
На использовании закона электромагнитной индукции
основано действие электромеханического генератора.
Закон электромагнитных сил. Магнитное поле оказывает
силовое воздействие на помещенный в него проводник с
электрическим током. Возникают эти силы в результате взаимодействия
между проводником с током и магнитным полем, созданным
другим проводником с током или постоянным магнитом, и
называются электромагнитными силами. Эти силы имеют и другое
название — электродинамические силы.
Основным законом, выражающим взаимодействие
электрических токов с магнитным полем и взаимодействие электрических
токов между собой, является закон электромагнитных сил
Ампера.
В общем случае, когда проводник конечной длины /, по кото-
-*■
рому течет ток /, находится в магнитном поле с индукцией В, сила
-*■
взаимодействия G между полем и током определяется формулой
G = ll[d~lB]. (1.18)
Если прямой провод длиной /, по которому протекает ток /,
находится в равномерном магнитном поле и образует угол а-с на-
14
правлением поля (рис. 1.5), то
электромагнитная сила будет равна
G = Bls\na. (1.19)
Сила взаимодействия между
параллельными проводниками, по которым проходят
токи /j и /2, при условии, что расстояние
между ними а мало по сравнению с их длиной /,
определится следующей формулой:
G = jia/1/aZ/(2jra). (1.20)
Явление взаимодействия магнитного поля
с электрическим током лежит в основе преобразования
электрической энергии в механическую.
Принцип Ленца. Электрические контуры обладают
электромагнитной инерцией, сущность которой в том, что в ответ на
вносимые возмущения контуры стремятся сохранить неизменными свои
потокосцепления.
Положение об электромагнитной инерции Ленц
сформулировал следующим образом: при всяком изменении магнитных
потоков, сцепляющихся с контурами, в последних наводятся ЭДС
такого направления, что токи, вызванные этими ЭДС, стремятся
воспрепятствовать изменению потокосцепления.
Действительно, если магнитный поток, связанный с контуром,
возрастает, то электрический ток, вызванный ЭДС контура,
стремится воспрепятствовать увеличению магнитного потока. При
убывании магнитного потока электрический ток, вызванный ЭДС
контура, стремится воспрепятствовать убыванию магнитного
потока.
Глава 2. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ,
ИХ ЭЛЕМЕНТЫ И ПАРАМЕТРЫ
§ 2.1. Основные понятия и определения
Совокупность устройств, предназначенных для прохождения
электрического тока, электромагнитные процессы в которых могут
быть описаны с помощью ЭДС, силы тока и напряжения,
называют электрической цепью.
Основными элементами электрических цепей являются
источники и приемники электрической энергии, а также связывающие
их провода. Нередко к основным элементам цепей относят
устройства, в которых не происходит изменения электрической энергии,
а преобразуются только ее параметры.
Источниками электрической энергии служат электрические
генераторы, гальванические элементы, аккумуляторы,
термоэлементы и другие устройства. В источниках происходит процесс
преобразования механической, химической, тепловой или другого
Рис. 1.5. Сила,
действующая на
проводник с током
15
вида энергии в электрическую. В настоящее время
разрабатываются и исследуются новые источники для прямого преобразования
тепловой, химической и ядерной энергии в электрическую, в
частности такие, как магнитогидродинамические генераторы и
топливные элементы.
Приемниками электрической энергии, или так называемой
нагрузкой, являются электрические лампы, электронагревательные
приборы, электрические двигатели и другие устройства. В них
электрическая энергия преобразуется, в частности, в световую,
тепловую, механическую. Приемники электрической энергии
получили и третье название •— потребители.
Для преобразования электрической энергии используют
трансформаторы, преобразователи частоты, выпрямители, ионные и
полупроводниковые инверторы.
Под элементами в теории электрических цепей понимают
обычно не физические существующие электротехнические
устройства, а их идеализированные модели, которым теоретически
приписываются определенные электромагнитные свойства, так что они
в совокупности с достаточной полнотой отображают процессы,
происходящие в реальных устройствах. Каждый
идеализированный элемент обладает каким-либо одним свойством: или вносить
энергию в электрическую цепь, или рассеивать ее, или только
запасать ее в магнитном либо электрическом поле. Соответственно
различают активные и пассивные элементы электрических цепей.
К активным элементам электрических цепей относят источники
электрической энергии, к пассивным — резисторы, индуктивности
и емкости. Часть электрической цепи, в которой находится
источник, называется активной или внутренней цепью, другая часть
цепи (вне пределов источника) — пассивной или внешней цепью.
§ 2.2. Резистор
Резистор — это идеализированный элемент цепи, в котором
происходит необратимый процесс преобразования электрической
энергии в тепловую. Параметр резистора называют
сопротивлением, которое определяют как отношение напряжения на зажимах
элемента (рис. 2.1, а) к силе тока, проходящего по нему:
R = W1. (2.1)
Резисторы в электрических цепях, схемах могут иметь вид
реостатов пусковых, регулировочных и разрядных, а также являться
составной частью многих других электрических устройств.
Сопротивление как свойство резисторов зависит от геометрических
размеров проводников, характеристик их материала и определяется
по формуле
R = pl/S, (2.2)
где р — удельное сопротивление (характеризует свойство
материала проводника); / — длина проводника, м; S — площадь
поперечного сечения проводника, мм2.
16
Рис 2 1 Обозначение резистора (а) и его линейная (б) и
нелинейная (в) вольт-амперные характеристики
Величина у— 1/р, обратная удельному сопротивлению,
называется удельной проводимостью.
Единицей сопротивления является ом (обозначается Ом)
удельного сопротивления — Ом-м, проводимости — сименс (См),
удельной проводимости—1/(Ом-м). Поскольку длина проводов
значительно превосходит их площадь поперечного сечения, то
в справочниках удельное сопротивление приводится в Ом • мм2/м,
а удельная проводимость — в м/(Ом• мм2).
Зависимость напряжения от силы тока, протекающего по
проводнику с некоторым сопротивлением, принято называть вольт-
амперной характеристикой. В случае если на сопротивление
материала не влияют изменения силы тока и напряжения, то вольт-
амперная характеристика представляет собой прямую линию; если
сопротивление материала зависит от них, — некоторую кривую
линию. Элементы, вольт-амперные характеристики которых имеют
вид прямых линий, называют линейными элементами,
соответственно кривых — нелинейными элементами электрических цепей.
Величина G=l/R, обратная сопротивлению, называется
проводимостью.
Для характеристики нелинейных элементов вводят понятия
статического и динамического сопротивлений. Статическим
сопротивлением называют отношение напряжения в данной точке вольт-
амперной характеристики (рис. 2.1, б) к силе тока, а
динамическим сопротивлением — отношение приращения напряжения dU
к приращению силы тока dl:
Rcr^U/I = ktga; RK = dU/dI = ktgfi,
(2.3)
где k = mulmI—масштабный коэффициент; а и р—соответственно
углы наклона секущей и касательной.
Статическое сопротивление для любого нелинейного элемента
(рис. 2.1, в) всегда имеет положительное значение (tg a>0,
tg ai>0), a динамическое может иметь как положительное, так и
отрицательное значения в зависимости от вольт-амперной
характеристики элемента (tg |5>0, tg ^i<0^t
ifaa»Sj*-»Jfc<fa*.-"-■"»»>**- •>»«*■-
17
§ 2.3. Индуктивность
Индуктивность — это идеализированный элемент цепи,
обладающий свойством накапливать энергию магнитного поля и
создавать ЭДС индукции при изменении потокоскопления. Параметр
индуктивного элемента называют индуктивностью, которая равна
отношению потокосцепления к силе тока, протекающего по
элементу цепи:
L = 4V/. (2.4)
Единицей измерения индуктивности является генри (Гн).
Применяются и производные — миллигенри (1 мГн=10~3 Гн) и
микрогенри (1 мкГн=10-6 Гн).
Условное обозначение элемента индуктивности показано на
рис. 2.2, а.
Индуктивный элемент приближенно является моделью
катушки индуктивности. Значение индуктивности катушек зависит
от их геометрических размеров, числа витков и магнитной
проницаемости среды. Например, индуктивность кольцевой и
цилиндрической катушек, если их длина больше диаметра, определяется
выражением
L^olM^S//, (2-5)
где ц,0 = 4я-10~7 Гн/м — магнитная постоянная; цг —
относительная магнитная проницаемость среды; w — число витков катушки;
S — площадь поперечного сечения катушки, м2; / — длина
катушки, м.
Магнитная проницаемость \i = \ir\io неферромагнитных
материалов практически постоянна и не зависит от напряженности поля,
а у ферромагнитных материалов магнитная проницаемость ц,^>ц,о
и зависит от напряженности поля. Поэтому для катушек с
неферромагнитным сердечником характеристика y¥ = f(l) линейна
(рис. 2.2, б), а для катушек с ферромагнитным сердечником —
нелинейна (рис. 2.2, в). В первом случае индуктивность постоянна,
а во втором — переменна. Соответственно этому различают
линейные и нелинейные индуктивные элементы.
Рис 2 2 Обозначение индуктивности (а) и ее линейная (б) н
нелинейная (в) характеристики
18
Для нелинейных индуктивных элементов вводят понятия
статической и динамической индуктивностей
LCT-V/I^ktga; La-dmi=ktg$. (2.6)
§ 2.4. Емкость
Емкость — это идеализированный элемент цепи, обладающий
свойством накапливать энергию электрического поля и создавать
разность потенциалов при изменении поля. Параметр емкостного
элемента называют емкостью, которая равна отношению заряда
к напряжению на его зажимах
C = q/U. (2.7)
Единицей измерения емкости является фарад (Ф).
Применяются производные от фарада — микрофарад (1 мкФ=10~6 Ф) и
пикофарад (1 пФ = 10-12 Ф).
Условное обозначение элемента емкости показано на рис. 2.3, а.
Емкостный элемент является моделью конденсатора. Численное
значение емкости конденсатора зависит от его геометрических
размеров и диэлектрической проницаемости среды. Например,
емкость плоского конденсатора, если расстояние между пластинами
(толщина диэлектрика) достаточно мало, определяется по
формуле
C = e0e,S/d, (2.8)
где е0 = 8,855- 10~12 Ф/м — диэлектрическая постоянная: ег —
относительная диэлектрическая проницаемость диэлектрика; S —
площадь поверхности каждой пластины, м2; d—расстояние между
пластинами, м.
Основной характеристикой конденсаторов является
зависимость заряда q от напряжения U, называемая кулонвольтной
характеристикой. В соответствии с используемым диэлектриком
конденсаторы по виду кулонвольтных характеристик делятся на
линейные (рис. 2.3, б) и нелинейные (рис. 2.3, в). У первых емкость
постоянна, а у вторых переменна, поскольку у линейных диэлек-
А
о
Рис. 2.3. Обозначение емкости (а) и ее лииейиая (б) и
нелинейная (е) характеристики
19
триков еа не зависит от напряженности поля, а у нелинейных
диэлектриков еа>>&о и зависит от напряженности поля.
Для нелинейных конденсаторов вводят понятия статической и
динамической емкостей
C„ = q/U = ktga; Cn = dq/dU = /stgP, (2.9)
где аир — соответственно углы наклона секущей и касательной.
§ 2.5. Источники напряжения и тока
При расчетах электрических цепей реальные источники
электрической энергии обычно заменяют идеализированными
активными элементами — источником напряжения или источником тока.
Источником напряжения считается такой источник, у которого
напряжение на выходных зажимах практически не зависит от силы
тока, так как его внутреннее сопротивление R0 незначительно по
сравнению с сопротивлением R потребителя, подключенного к
источнику U. Источником тока считается такой источник, ток
которого не зависит от напряжения на его зажимах, так как его
внутренняя проводимость G0 неизмеримо меньше проводимости G
потребителя. Внутренние сопротивление и проводимость R0 и Go
выносят из источников и включают: первое — последовательно
с источником, а второе — параллельно источнику. На рис. 2.4
показаны схемы их замещения.
Таким образом, источники напряжения работают в режиме,
близком к так называемому режиму холостого хода, при которых
UX_X = E. К подобным источникам относят электрические
генераторы и аккумуляторы, внутренние сопротивления которых малы.
Источники тока обычно работают в режиме, близком к так
называемому режиму короткого замыкания, при котором / = /к. з-
Такими источниками являются в частности ламповые генераторы,
внутреннее сопротивление которых велико.
Очевидно, если Ro<€.R, то сопротивлением источника можно
пренебречь, а если Ro^>R (G0<.G), то не учитывать
сопротивление потребителя нельзя. Если R0 источника и R потребителя
соизмеримы, то необходимо выносимые из источника энергии R0 или
G0 объединять с R или G потреби-
о) л Ь) f з теля.
Источник напряжения
обозначается кружком со стрелкой внутри
и буквой Е (рис. 2.4, а), а источ-
и ник тока — кружком с двойной
стрелкой внутри и буквой /
(рис. 2.4, б). Направление ЭДС и
тока внутри источника принима-
3 ется от низшего потенциала к выс-
Рис 2.4 Источники иапряже- шему.
ния (а) и тока (б) Источники напряжения и тока
С
£Ф
20
могут быть линейными и нелинейными. Если так называемые
внешние характеристики, т. е. зависимости £/ = /(/) у источника
напряжения и /=/({/) у источника тока, представляют собой
прямые линии, то источники считаются линейными. В случае когда
внешние характеристики имеют вид кривых, источники нелинейны.
§ 2.6. Схемы электрических цепей
Электрические цепи бывают постоянного и переменного тока.
Их, в свою очередь, разделяют на линейные и нелинейные, нераз-
ветвленные и разветвленные, простые и сложные. Линейными
называют цепи, содержащие линейные элементы, а нелинейными —
содержащие один или более нелинейных элементов. Неразветвлен-
ными называют цепи с последовательным соединением элементов,
а разветвленными — с параллельным или сложным соединением
элементов. Простыми называют цепи, в которых элементы
соединены последовательно, параллельно или смешанно. Сложными —
цепи, в которых соединение элементов отличается от
последовательно-параллельного соединения.
Для расчетов электрические цепи изображают графически
в виде так называемых эквивалентных электрических схем
замещения, показывающих соединения элементов и отображающих
свойства цепей (рис. 2.5). В этих схемах потребители
изображаются в виде идеализированных элементов Ri, R2, R$...,
сосредоточенных на отдельных участках цепи и приближенно
эквивалентных действительным, а источники электрической энергии — в виде
источников напряжения или источников тока с внутренним
сопротивлением Rq. Каждую такую схему принято называть
идеализированной цепью или просто цепью.
Электрические цепи и соответственно их схемы имеют ветви,
узлы и контуры. Ветвью называется часть цепи, образованная
одним или несколькими последовательно соединенными элементами,
по которым протекает ток одинаковой силы. Узлом называется
место соединения трех и большего числа ветвей. На схемах узел
а) Узел 5) узел R$ . Узел
Рис. 2 5 Схемы электрических цепей- а — простая; б —
сложная
изображается точкой. Контуром называется любой замкнутый
путь, проходящий по нескольким ветвям. Различают
одноконтурные и многоконтурные цепи и схемы. На рис. 2.5 показаны ветви,
узлы и контуры.
При расчете электрических цепей и анализе процессов,
происходящих в них, задаются условными положительными
направлениями ЭДС и токов в элементах цепи и напряжений на их
зажимах, обозначая их на схемах стрелками. Такие направления
можно выбирать произвольно. Если условно выбранные и
действительные направления ЭДС, токов и напряжений
соответственно совпадают, то условные направления указанных величин
выбраны правильно.
Иногда условные положительные направления выражают не
стрелками, а двойными индексами у их буквенного обозначения,
например Е\ч, 1аь, U\z. Эти индексы должны соответствовать
обозначениям точек на схеме цепи, причем положительным считается
направление от точки цепи, отвечающей первому индексу, к точке
цепи, отвечающей второму индексу.
§ 2.7. Энергия и мощность электрических цепей
При прохождении электрического тока в цепи под
воздействием ЭДС источника энергии выполняется определенная работа
по переносу электрических зарядов. Совершаемая при этом
работа или, что то же самое, вырабатываемая электрическая
энергия при постоянных ЭДС Е и токе / и изменяющихся ЭДС е и
токе i за время t соответственно определяется по формулам
W = Elt; W = $eidi. (2.10)
о
Электроэнергия, вырабатываемая источником энергии,
расходуется на всех участках цепи. Некоторая ее часть теряется в самом
источнике, выделяясь обычно в виде тепла, а остальная часть
поступает во внешнюю цепь, где она преобразуется в другие виды.
Электрическая энергия, поступающая во внешнюю цепь за время I,
при неизменяющихся и переменных параметрах соответственно
равна
Wn = Ult; Wn=[uidt, (2.11)
о
где U, и — напряжения на зажимах внешней цепи; /, i — токи,
протекающие по внешней цепи.
Единицей энергии является джоуль (Дж) —это работа,
совершаемая силой тока в 1 А при напряжении в 1 В в течение 1 с.
Кратные единицы электроэнергии — киловатт-час (1 кВт-ч =
= 3600 Дж) к мегаватт-час (1 МВт- ч= 1000 кВт- ч).
Мощность источника электрической энергии и мощность,
потребляемая внешней цепью, характеризующие соответственно
скорости выработки и поступления электроэнергии во внешнюю цепь,
22
в случае неизменяющихся ЭДС, напряжения и тока
определяются так:
P = Eltlt = El\ P„ = Ult/t = Ul. (2.12)
В случае изменяющихся напряжения и тока получим так
называемую мгновенную мощность
p = dWldt = ui. (2.13)
Единицей мощности является ватт (Вт) — это мощность тока
силой в 1 А при напряжении в 1 В. Кратные единицы мощности:
киловатт (1 кВт=1000 Вт) и мегаватт (1 МВт=106 Вт).
В соответствии с законом сохранения энергии количество
электричества, вырабатываемого источником, равно энергии,
потребляемой всеми участками цепи. Это условие справедливо и для
баланса мощностей.
Глава 3. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
ПОСТОЯННОГО ТОКА
§ 3.1. Основные понятия и определения
Электрические цепи, в которых протекает постоянный ток,
называются цепями постоянного тока. Электромагнитное состояние
таких цепей в установившихся режимах определяется значениями
ЭДС и сопротивлением или проводимостью элементов. При этих
условиях в цепях не возникает ЭДС самоиндукции и отсутствуют
токи смещения. Следовательно, сопротивление индуктивности
практически равно нулю, а сопротивление емкости настолько
велико, что цепь фактически разрывается.
Основная задача расчета электрических цепей постоянного
тока — это определить силы тока при известных ЭДС
(напряжение) и параметрах цепей или параметры цепей при известных
ЭДС и силе тока. Все остальные величины однозначно
определяются через силу тока и параметры цепей. В основу этих расчетов
положены законы цепей.
§ 3.2. Основные законы электрических цепей
Основными законами цепей постоянного тока являются закон
Ома и два закона Кирхгофа, установленные на основании
эксперимента.
Закон Ома. Закон Ома для замкнутой цепи, состоящей из
последовательно соединенных п сопротивлений и источника
напряжения (рис. 3.1), имеет вид
l = E/£iRk = E/R„ (3.1)
ft,
R,
Rk
V
i
i
I
c=>-J
Рис 3 1 К определению закона Ома
где R3 — эквивалентное
сопротивление цепи.
Следовательно, ток прямо
пропорционален ЭДС и обратно
пропорционален сумме
сопротивлений всей цепи.
Для участка цепи закон
Ома записывается следующим
образом:
/ = UIR = UG, (3.2)
т. е. гок прямо
пропорционален напряжению на зажимах
участка и обратно пропорционален его сопротивлению.
Из формулы закона Ома вытекает важное соотношение:
напряжение на зажимах источника равно разности между ЭДС и
падением напряжения внутри источника, т. е.
U = E-1R0,
(3.3)
где Ro — внутреннее сопротивление источника.
Законы Кирхгофа. Первый закон Кирхгофа устанавливает
зависимость между силами токов, сходящихся в узлах
разветвленной электрической цепи, и для п ветвей в узле записывается в виде
уравнения
£7* = °-
(3.4)
т. е. алгебраическая сумма сил токов, сходящихся в любом узле
электрической цепи, равна нулю
При суммировании сил токов следует учитывать их
направления: все токи, текущие к узлу, берутся с одинаковым знаком,
например положительным, и все токи, текущие от узла, — с
отрицательным. Для узла схемы, представленной на рис. 3.2, а,
уравнение (3.4) принимает вид
/i-/.-/» + /« = 0.
Первый закон выражает принцип непрерывности
электрического тока. В узле электрической цепи электрические заряды
не накапливаются. Поэтому сумма зарядов, приходящих к узлу,
в любой момент времени равна сумме зарядов, уходящих
от узла.
Второй закон Кирхгофа устанавливает зависимость между
ЭДС, действующими в замкнутом контуре, и падениями
напряжения на элементах этого контура. Математически эта зависимость
Рис 3 2 К определению первого (а) и второго (б) законов
Кирхгофа
для контура, имеющего т источников ЭДС и п пассивных
элементов, записывается формулой
£ Ек= £ IkRk,
(3.5)
т. е. алгебраическая сумма ЭДС, действующих в любом
замкнутом контуре, равна алгебраической сумме падений напряжений на
всех участках этого контура.
Для определения знаков слагаемых необходимо обойти
замкнутый контур в каком-либо направлении. Силы токов и ЭДС,
совпадающие с направлением обхода, взять с одним знаком
(например, « + »), а токи и ЭДС, имеющие направление,
противоположное направлению обхода, взять с противоположным знаком («—-»).
Например, для контура abed сложной цепи (рис. 3.2, б),
производя обход в направлении стрелки, показанной внутри контура,
получим равенство
£1-£2 + £8 = /1«1+/8JR8-/2JR2. (3.6)
Левая часть этого равенства представляет собой
алгебраическую сумму ЭДС, действующих в контуре, а правая часть —
алгебраическую сумму произведений сил токов на соответствующие
сопротивления, т. е. падений напряжений.
§ 3.3. Простые цепи и методы их расчета
Простыми цепями постоянного тока называют цепи с
последовательным, параллельным или смешанным соединением их
параметров. Для расчета таких цепей используют закон Ома и так
называемые эквивалентные преобразования. Суть последних
заключается в том, что на отдельных участках цепи ряд элементов
заменяется одним эквивалентным при условии неизменности тока
и напряжения в непреобразованных участках цепи. В результате
упрощается исходная цепь и, следовательно, процесс ее расчета.
25
(&*Ч^*Чь1л4§^^Э(*5»&&*'.^' ZsJ'-x, «л*
i. А- А. -чА* jf
a)
+ o—
<?z
XT
UZ
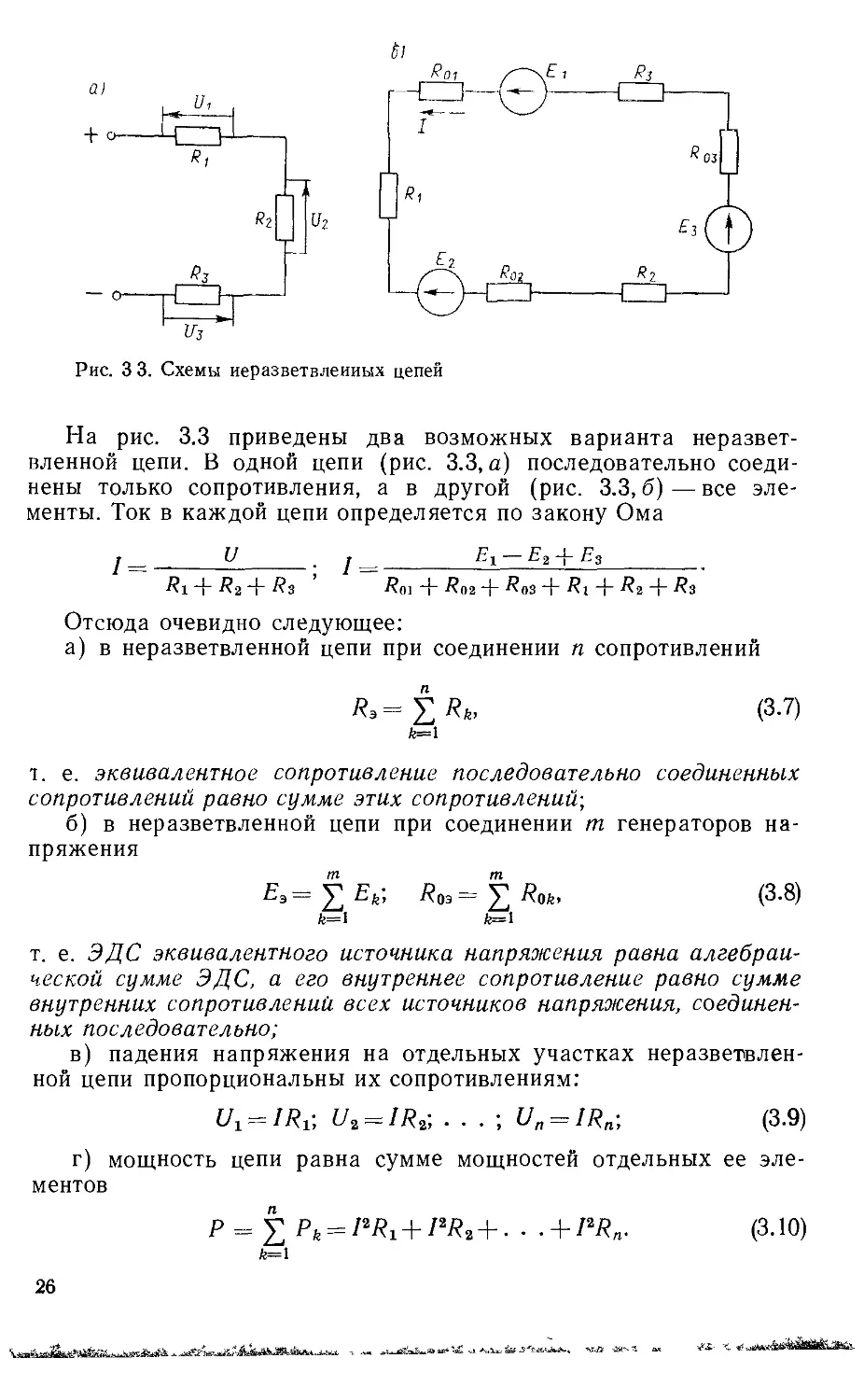
Рис. З З. Схемы иеразветвлеииых цепей
На рис. 3.3 приведены два возможных варианта неразвет-
вленной цепи. В одной цепи (рис. 3.3,а) последовательно
соединены только сопротивления, а в другой (рис. 3.3,6)—все
элементы. Ток в каждой цепи определяется по закону Ома
U
Ei — E2 + E3
R1 + R2+R3 ' R01 + R02 + R03 + R1 + R2 + R3
Отсюда очевидно следующее:
а) в неразветвленной цепи при соединении п сопротивлений
^э= Yj Rk'
(3.7)
1. е. эквивалентное сопротивление последовательно соединенных
сопротивлений равно сумме этих сопротивлений;
б) в неразветвленной цепи при соединении m генераторов
напряжения
m m
£э=££*; Яоэ=£Яоь (3-8)
k=\
fe=i
т. е. ЭДС эквивалентного источника напряжения равна
алгебраической сумме ЭДС, а его внутреннее сопротивление равно сумме
внутренних сопротивлений всех источников напряжения,
соединенных последовательно;
в) падения напряжения на отдельных участках
неразветвленной цепи пропорциональны их сопротивлениям:
U^lRi, t/, = //?,; . . . ; Un = lRn;
(3.9)
г) мощность цепи равна сумме мощностей отдельных ее
элементов
Р = £Рк = /V?! + /»/?, +. . . + PRn. (3.10)
26
^^яйа^Шй?Чй&2^а^^э5^*з^ ^^^Wifl&iiStSS^abLj,
,;-. % , ...ow-/i^'kidiliK^i--u:
Рис 3 4 Схемы разветвленных цепей потребителей
(а) и источников напряжения (б)
Особенность
последовательного
соединения
источников напряжения и
элементов
сопротивлений в том, что их
режимы работы
зависимы. В
частности, при
выключении одного из
элементов вся цепь
обесточивается.
Изменение параметра
одного из элементов вызывает изменение силы тока в цепи и
напряжения на других элементах. Поэтому последовательное
соединение применяется для регулирования силы тока или
напряжения.
На рис 3.4, а приведена типовая схема соединения судовых
потребителей. Напряжение на зажимах всех ветвей одинаково
и равно
1/^1^ = 1,^ = 1^.
Сила тока / в неразветвленной части цепи в соответствии
с первым законом Кирхгофа равна
/ -= h + h + h = £///?i + t///?s + U/Ra = U (d + G, + G8).
Отсюда следует, что при параллельном соединении
потребителей, содержащих только сопротивление, имеют место следующие
соотношения:
а) эквивалентная проводимость цепи равна
G3=£G*' (З.П)
ft=l
где п — число потребителей;
б) сила тока каждой ветви потребителя определяется
выражениями
/i=f/A; /, = t/G2; . . . ; In = UGn;
в) мощность цепи равна сумме мощностей отдельных noipe-
бителей
fe=l fe=l fe=l
Особенность параллельного соединения в том, что все ветви
цепи находятся под одинаковым напряжением и режим работы
каждой не зависит от остальных. Поэтому на судах потребители
включаются параллельно.
Практический интерес представляет параллельное соединение
источников напряжения, работающих на общую нагрузку. На
27
рис. 3.4,6 представлена схема параллельного соединения двух
источников напряжения. Для этой цепи в соответствии со вторым
законом Кирхгофа получаем
E1 — 11R01=U = IRW;
E2—I2Ro2=U = IRwr.
(3.12)
Уравнения (3.12) называются уравнениями параллельной
работы источников напряжения. Анализируя их, можно сделать
следующие выводы:
1) если ЭДС одного источника напряжения будет меньше
напряжения U, то он перейдет в режим потребителя;
2) если ЭДС и внутренние сопротивления параллельно
работающих источников равны, то любой ток нагрузки распределится
между источниками равномерно;
3) если ЭДС параллельно работающих источников
напряжения равны, а внутренние сопротивления различны или, наоборот,
ЭДС не равны, а внутренние сопротивления одинаковы, то через
источник с меньшим внутренним сопротивлением и источник
с большей ЭДС будет проходить больший ток, т. е. они будут
испытывать большую нагрузку.
§ 3.4. Сложные цепи и методы их расчета
Сложные соединения имеют различные электрические цепи,
например цепи систем автоматики, цепи электронных устройств и
цепи электроснабжения. В таких цепях, как правило, известны
сопротивления и ЭДС, а требуется определить силы токов,
напряжения и мощности отдельных ветвей. Наиболее сложная задача —
это расчет распределения сил токов в ветвях цепей.
Расчет сложных цепей, как правило, производят методами
контурных токов, наложения, узловых напряжений или
эквивалентного генератора. Суть этих методов заключается в решении
системы независимых уравнений, составленных по законам
Кирхгофа. Однако необходимо установить, сколько уравнений следует
написать по первому закону Кирхгофа и сколько по второму,
чтобы получить систему независимых уравнений.
Если сложная цепь (рис. 3.5) состоит из р ветвей и q узлов,
то в ней имеется только q—1 независимых узлов и п=р—q+\
независимых контуров. Поэтому можно составить по первому за-
Рис. 3.5. Принципиальные схемы сложных цепей
V >
I i
J'
Y
Rs
A
Рис. 3 6 Схема цепи к расчету
методом контурных токов
кону Кирхгофа q—1 и по второму
п = р—q+l независимых
уравнений.
Метод контурных токов. Метод
сводится к решению системы п =
= р—q+l уравнений,
составленных по второму закону Кирхгофа
для независимых контуров цепи.
В результате решения
определяются силы токов, протекающих по
независимым контурам,
называемые контурными силами токов.
Действительные же силы токов
в ветвях находятся как
алгебраическая сумма соответствующих
контурных сил токов. На рис. 3.6 изображена сложная цепь,
имеющая шесть ветвей и четыре узла. Для нахождения сил токов
в ветвях цепи определяем число независимых контуров: п =
= р—q+\ = 6—4+1 = 3. Выбрав эти контуры и задав в них
направления контурных сил токов & I, &2 и Ьъ, как указано на
рисунке стрелками, составим уравнения для них по второму закону
Кирхгофа:
3fiR3 + V,(R, + Rs+ Re)-VsRe = Е2+ Е3; (3.13)
SfxRb— ЛДв + ЗЪ (Rt + Rb + Re) = Et. J
В этих уравнениях принято называть и обозначать:
а) сумму всех сопротивлений каждого контура — собственным
сопротивлением контура
aV = АЧ + А'з + aV> ^22= ^2+^3+ aV,
а'зЗ = ^4+ ^5+ aV,
б) сопротивление смешанной ветви двух контуров — взаимным
сопротивлением контуров; оно считается положительным, если
контурные токи в нем совпадают по направлению, и
отрицательным, если контурные токи в этом сопротивлении противоположны
по направлению:
А12 = Аз = А2Ъ Al3-= A5 = А31-, А'гЗ = Re = R32',
в) алгебраическую сумму ЭДС в контуре — контурной ЭДС:
С,ц = t,1-f- Ь3; С22 = ^2+ С-З' Е33 = Е^.
С учетом введенных обозначений уравнения (3.13)
перепишутся следующим образом:
УиЯи + 3^iRi2 + Sf^Rw = Е1г;
>^iA2i +"З^гАггМ 2^sRis ^ Ew;
Z/iRai + 3f 2A32 + 2>zRzz = E3S.
Для сложной цепи, имеющей п независимых контуров, может
быть составлена в общем виде система п уравнений:
^1^11+^2^12+- • +^fe^lfe+- • • + 3^nRln = £ll',
3^lRil + 3^iR22 + • • -+^fe^2ft+- • • + ^n °2rt — ^2
<2ri^nl + <9V?n2+ . . - + ^^пй+- ■ •Jr3^nRnn — E,
nrf
(3.14)
Решая эту систему уравнений относительно любой контурной
силы тока 2>k, получим
«^k — —:— спi — с22 + • • • Н — tLkk^r • • • 4- —-— см,
д д д д
(3.15)
где А — главный определитель системы уравнений, Amh —
алгебраическое дополнение, получаемое путем вычеркивания в
главном определителе т-й строки и &-го столбца и умножения
полученного определителя на (—1)»м-\
Таким образом, контурная сила тока в любом контуре равна
алгебраической сумме сил токов, создаваемых в нем каждой ЭДС,
действующей в цепи.
После нахождения контурных сил токов определяются
действительные силы токов, напряжения и мощности ветвей. В § 3 5
приведен пример расчета.
Метод наложения. Его можно сформулировать следующим
образом: сила тока в любой ветви линейной цепи равна
алгебраической сумме сил токов, вызванных в этой ветви каждой ЭДС
Математически это можно записать так:
/»-£С (з.1б)
fe=i
где /в— сила тока в любой ветви линейной цепи; /B<h> — сила тока
в ветви, созданная одной ЭДС.
Метод наложения позволяет расчленить сложную задачу на
ряд более простых. Сначала полагают, что в цепи действует
только одна ЭДС. При этом все сопротивления цепи остаются
неизменными, включая и внутренние сопротивления источников
напряжения. Сами же источники, кроме одного, исключают. Затем
поочередно повторяют расчет для всех других источников
напряжения.
Напряжение в любой ветви линейной цепи
£/B^f £/<*>=£ /<,г)Яв, (3.17)
fc=i ft=i
т. е. падение напряжения в любой ветви линейной цепи равно
алгебраической сумме падений напряжений, созданных в этой ветви
каждой ЭДС.
Рис 3 7 Схема цепи к расчету
методом узловых напряжений
Общая мощность, расходуемая
в линейной цепи, может быть
определена по формуле
р=£/в2Яв=££/в/в-х;рв,
(3.18)
где /в и UB — сила тока и
напряжение, созданные в ветвях действием
ЭДС в цепи; RB — сопротивление
ветви; PB — мощность,
потребляемая ветвью.
Метод узловых напряжений.
Метод сводится к определению
напряжения между узлами сложной электрической цепи путем
решения системы уравнений, составленных по первому закону
Кирхгофа. При написании уравнений один из узлов принимают за
опорный и потенциал его считают равным нулю, а напряжения
между всеми узлами и опорным называют узловыми
напряжениями. После нахождения узловых напряжений силы токов в
ветвях определяют по закону Ома. Рассмотрим применение метода
к расчету сложных цепей.
Пусть некоторая линейная цепь (рис. 3.7) имеет три узла и
пять ветвей. Выберем произвольно опорный узел и обозначим его
через 0, а остальные узлы — цифрами 1 и 2. Приняв
положительные направления токов, как указано на рисунке стрелками,
составим систему уравнений по первому закону Кирхгофа
соответственно для узлов 1 и 2
/i-/,--/e = 0;
/8+/«-/я = 0.
Силы токов в ветвях, если учитывать узловые напряжения,
определяются по закону Ома:
1Х = (Ех + U10) Gi; /2 = (Е,- U10) G2;
h = (£3— ^20) G3; /4 = — ^2oG4;
h = (U10-UM)G6,
где Gb G2, G3, G4, G5—проводимости соответствующих ветвей.
При составлении уравнений по второму закону Кирхгофа
следует пользоваться правилом: если ЭДС и узловое напряжение,
действующие в ветви, направлены к одному узлу, то в уравнении
закона Ома берется их разность, а если они направлены к
противоположным узлам, то берется их сумма.
Подставляя полученные выражения для силы токов в систему
уравнений (3.19) и произведя группировку членов, получим
^ю (Gi + G2 + G5) — f/20G5 = — ^iGi + £2G2;
^20 (G3 + G4 + G5) — f/i0G5 = ESGS.
(3.19)
31
В этих уравнениях сумма проводимостей ветвей, сходящихся
к одному узлу, называется собственной проводимостью узла и
соответственно обозначается Gn, G22, ..., Ghk, •.., Gqq, т. е. в
рассматриваемой системе Gii = Gi + G2 + G5; G22 = G3+G4 + G5.
Взятая с обратным знаком сумма проводимостей ветвей,
соединяющих два любых узла кроме опорного, называется
взаимной проводимостью узлов и соответственно обозначается G\2, G2\,
■.., Ghm, т. е. в нашем случае Gi2=G2i =—G5.
Алгебраическая сумма произведений E^Gh ветвей, сходящихся
ь узле, называется силой тока узла и соответственно обозначается
/и, ^22, ..., hh, ..., Iqq, т. е. в нашем примере
/и — —fiiGi + EiG2;
/22 = C3G3.
При нахождении узловых сил токов необходимо пользоваться
следующим правилом: если ЭДС направлены к
рассматриваемому узлу, то они считаются отрицательными, и если направлены
от узла, то — положительными.
Таким образом, с учетом введенных обозначений система
уравнений, составляемая по первому закону Кирхгофа, запишется так:
k\oGu + ^2oGi2 = In.;
U ioGu + l'20G22 = '22-
(3.20)
В общем случае, если цепь имеет q + \ узел, то может быть
составлена система из q линейных уравнений
^loGn + f/2oGi2 + ■ ■ • + UkoGlk + • • • + UquG-Lq = In,
^ioG2i 4- ^2oG22 4- • • • 4- U^G^ 4- ■ • • 4- UqoG?,q = /22;
k\oG„i 4- ^20^,2 4- • ■ • 4- UkOpgk + • • ■ 4" UquGqq = 1 qq-
Решая эту систему уравнений относительно любого узлового
напряжения U^o, получим
£/*0=/ц-^-=/»-^-4-. • -Л-lqq^f-- (3.21)
д д д
Таким образом, любое узловое напряжение равно
алгебраической сумме напряжений, создаваемых на данных узлах каждой
ЭДС, действующей в цепи.
В случае двух узлов А и В в цепи узловое напряжение Uab
определится по выражению
п
ij __ fe=i EXGX -(- EjGj + • • • 4- EnGn _ ,л go')
JL Gi + Gi + . . . + G„
32
Рис 3 8 Схема цепи и ее двухполюсники
В уравнении (3.22) произведения EkGu берутся со знаком плюс,
если ЭДС направлены от узла В к узлу А, и со знаком минус при
обратном направлении. Пример расчета приведен в § 3.5.
Метод эквивалентного генератора. Сущность его сводится к
замещению любой сложной цепи, воздействующей на какую-либо
ее ветвь, эквивалентным генератором, или, что то же самое,
активным двухполюсником.
Двухполюсником называется часть сложной цепи, выделенная
относительно определенной ветви и имеющая два зажима
(полюса). Условно двухполюсник изображается прямоугольником.
Если двухполюсник имеет источник ЭДС или тока, то он
называется активным, а при отсутствии источника — пассивным. Схема
сложной цепи, изображенная на рис. 3.8, а, может быть
преобразована в активный двухполюсник А относительно зажимов аЬ
(рис. 3.8,6) или в пассивный двухполюсник Я относительно
зажимов ей (рис. 3.8,в), если ЭДС Е2 будет скомпенсирована или
равна нулю.
Активный двухполюсник можно заменить эквивалентным
генератором, ЭДС которого равна напряжению холостого хода на его
зажимах, а внутреннее сопротивление равно входному
сопротивлению двухполюсника. Поэтому в соответствии с принципом
наложения сила тока ветви аЬ может быть определена по уравнению
/ = E/(R0+ Rvr) = Ux х/(До + Лиг), (3.23)
где £={/хх— ЭДС двухполюсника или напряжение на зажимах
его при разомкнутой ветви; R0 — входное сопротивление
двухполюсника.
Отсюда следует, что для замены любой части сложной цепи
эквивалентным генератором необходимо знать напряжение
холостого хода и внутреннее сопротивление двухполюсника. Эти
параметры могут быть определены двумя способами: расчетным путем,
если известны ЭДС и сопротивления заменяемой части цепи, или
экспериментально методом холостого хода и короткого
замыкания. Пример расчета приведен в § 3.5.
2 Заказ № 1104 _ 33
^й?*^|^ы{^^я^^^***ьЬ&™йк^^'^^^1^я^\-1& ^risjCtA. i*-da.-fe ^W ^s^s лл- ^«^lj^.--1*^ ^<}S*Ss*ru
§ 3.5. Примеры расчета сложных цепей
Пример 3.1. Электрическая цепь, представленная на рис. 3 9, а, имеет три
ветви, два узла и два независимых контура. Значения параметров цепи
следующие: £, = 50 В; £2=Ю В; £3=90 В; Ri = 5 Ом; #2=3 Ом; /?3=9 Ом. Найти
значения токов в ветвях.
Решение. Принимаем направления токов в ветвях и обходов контуров,
указанные на рисунке стрелками, за положительные. Составляем уравнения
по второму закону Кирхгофа для независимых контуров
■9i"n|+ 3%R\2 = Ехъ 3^1^21 + 32R22 = Е22-
Необходимо определить все исходные величины и подставить их в
уравнения контурных токов. Собственные и взаимные сопротивления контуров
соответственно равны
Ru = Ri + R3 =
= 14 Ом; R22 = R2 +■ Rs = 12 Ом; R12 = Я21 = R3 = 9 Ом.
Алгебраические суммы ЭДС независимых контуров равны
£ц = Ег + £3 = 140 В; £22 = £2 + £3 = 100 В.
Подставляя полученные данные в уравнения контурных токов, находим
3v-
[E\\R\2 "I
E22R22 J
[R11R12 1
R21R22 J
140-12-
E11R2
■ E22R1
R11R2
100-9
1412 —9-9
R21R1
■■ 8,97 A;
3V
Г RnEn I
L R21E2I J
Г R11R12 I
L #21^22 J
E22R11 — EuRi
RllR22 R21R1
< 21^22
100-14—140-9
1412 —9-9
1,61 A.
Имея направления действительных токов в ветвях, определяем их зна
чения ,
/х = г/х « 8,97 A; h = У2 « — 1,61 А;
/3 = ^ + 3f2 «7,36 А.
Рис. 3.9. Схемы цепей к примерам расчета методами
контурных токов (а) и узловых напряжений (б)
В)
(
R0
T
a
T
Ь Г
Рис. 3.10. Схемы цепей к примеру расчета методом эквивалентного
генератора
Пример 3 2. Сложная цепь, изображенная на рис 3 9, С имеет следующие
значения параметров: /?i=/?4 = 5,0 Ом; /?2=/?5 = 1,25 Ом; /?з=/?в=2,0 Ом; £i=
= 15,0 В; £2 = 5,0 В; £3 = 4,0 В; £4 = £5=Ю,0 В Определить токи во всех
ветвях методом узловых напряжений.
Решение. Произвольно выбрав опорный узел, находим собственные и
взаимные проводимости узлов и узловые токи
Gii = Gi + G2 + G3 + Ge = 2,0 См;
G12 = G2i = —G3 — Ge = — 1,0 Cm;
G22 ^G3 + Gi + G5 + G6 = 2,0 Cm;
ffu = £iGi + £2G2 — £3G3 = 5,0 A;
#22 = E3G3 + £5G5 — £4G4 = 8,0 A.
Узловые напряжения находим по методу определителей:
t/oi =
t/02 =
r^nGi2"| Г Б —1 -I
L &WG22 I L 8 2 J
[-ГП
Г GUG12 "I
L G2lG22 J
Г Gu3fu "J
L ^22*^22 J
Г GuGl2 "I Г 2-1-1
L G21G22 J L - 1 2 J
= 6,0 B;
= 7,0 B.
Токи в ветвях определяем по закону Ома:
/1=(£1-t/„1)IG1=l,8 А; /2=(£2
ип
•0,8 А;
/з = (Е3 + Un - U02) G3 = 1,5 V, /4 = (£4 + U«) G4 = 3,4 А;
(£5
2,4 А; /6 = (t/„2 - г/01) G„ = 0,5 А.
Пример 3.3 Сложная электрическая цепь, представленная на рис. 3.10, а,
имеет следующие значения параметров- £'1=75,0 В; £2=50,0 В; /?!=5,0 Ом;
/?2=4,0 Ом; /?з=19,0 Ом; Rl=25,Q Ом. Определить ток /5 потребителя
методом эквивалентного генератора.
Решение Сначала определим напряжение холостого хода согласно
рис 3 10, б. Для этого отключим сопротивление Rt и, пользуясь методом
узлового напряжения, найдем значение напряжения между точками / и 2, т. е.
напряжение холостого хода
г/*
= г/ E1G1 + E2G2 ^ 75 (1/5)+ 50(1/4)
12 Gj + G-j + Gg 1/5+1/4+1/19
54,7 В.
35
. &Г~ £•/.- «^ -*ъ^*£"-
Для определения внутреннего сопротивления двухполюсника положим,
что ЭДС Ei и Еч равны нулю (рис 3.10, в), следовательно, сопротивление
относительно точек 1 к 2 будет равно
*<0 — ^?12 —
1
1,99 Ом.
Ш?1+Ш?2+1/Дз 1/5+1/4+1/19
Сила тока в ветви Ri определится равенством
h = Vx J(R0 + Д4) = 54,7/(1,99 + 25) » 2,03 А.
Если сопротивление Ri будет переменным, то сила тока в ветви этого
сопротивления при известном напряжении холостого хода определяется по
приведенному выше уравнению (3 23).
Глава 4. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
ОДНОФАЗНОГО ПЕРЕМЕННОГО ТОКА
§ 4.1. Основные понятия и определения
Переменным током называется всякий ток, изменяющийся во
времени, В технике переменным током принято называть ток,
периодически изменяющий свои значение и направление.
Закономерности периодического изменения тока достаточно
разнообразны. Для наглядного представления об изменениях переменного
тока его изображают графически в виде кривых, которые
строятся так, чтобы было видно направление тока в каждый данный
момент времени. Кривые переменного тока, имеющего различные
характеристики изменения, представлены на рис, 4.1, Если ток
изменяется по закону синуса (рис, 4,1,6), то он называется
синусоидальным. Синусоидальный ток, изменяющийся периодически
в течение длительного промежутка времени, называется
установившимся переменным током.
Для характеристики переменного тока вводят понятия:
мгновенного и максимального значения, периода и частоты.
Мгновенными значениями переменных токов, ЭДС и
напряжения называют соответствующие их значения в рассматриваемый
момент времени, а наибольшие из мгновенных значений этих
величин называются максимальными значениями или
амплитудными (см. рис. 4.1,6).
Мгновенные значения
1)
1
Л
t
5)
Рис. 4.1. Кривые периодических переменных
токов
тока, ЭДС и
напряжения обозначаются
соответственно I, е, и,
а их амплитуды — /т,
£т, Urn*
Периодом Т
называется промежуток
времени, по истечению
которого процесс
изменения переменной
36
lh! 1 nl
li !
1! 1
il
\
I
11
\V In' i
1 !, , ■' ,,l
Рис. 4.2. Схема устройства синхронного генератора
СССР и
величины
повторяется. Величина,
обратная периоду,
называется частотой:
/=1/7\ (4.1)
За единицу
частоты принят герц
(Гц), который
равен одному периоду
в секунду. Промышленная частота переменного тока в
в большинстве стран Европы принята равной 50 Гц, в США —
60 Гц. В преобразовательной технике распространены частоты от
400 до 1000 Гц, а в радиотехнике от 105 до 3 • 10'2 Гц. Токи,
изменяющиеся с большой частотой, обычно называют токами высокой
частоты.
В качестве источника синусоидальных токов применяют
генераторы разных типов. Основными источниками тока
промышленной частоты служат электромеханические синхронные
генераторы. Для генерирования токов промышленной и повышенной
частоты используют также ионные и полупроводниковые инверторы,
преобразующие постоянный ток в переменный. Токи повышенной
и высокой частоты получают с помощью электронных
преобразователей, например ламповых генераторов. Для генерирования
сверхвысоких колебаний с частотами светового диапазона
применяют квантовые генераторы, в частности мазеры и лазеры.
Переменный ток в замкнутой цепи может возникнуть при
действии в ней переменной ЭДС, получение которой рассмотрим на
простейшей модели синхронного генератора (рис. 4.2). Виток
вращается в магнитном поле двух полюсов. Концы витка
присоединены к медным кольцам К, насаженным на вал и изолированным
один от другого. По поверхности крлец скользят неподвижные
щетки, соединяющие виток с внешней цепью. Генератор обычно
имеет катушку, состоящую из до витков, соединенных
последовательно.
Пусть виток вращается в однородном магнитном поле (Вт =
— const и, следовательно, Фш = const) с постоянной угловой
скоростью и. Виток за время t повернется на угол а = Ы. Магнитный
поток, пронизывающий виток, изменяется по закону cD=<I>mcoso)/.
В соответствии с законом электромагнитной индукции в витке
будет наводиться ЭДС
е= —d<&/dt = —d (Фтсс& (ot)/dt = (oOms\n at.
Если генератор имеет до витков, соединенных последовательно,
то ЭДС будет в до раз больше:
е= —wdQ)ldt = t№>Q>ms\ntat.
37
Очевидно, что при sinco/=l ЭДС будет иметь максимальное
значение ьт~ шшФш. Следовательно, можно выразить
мгновенную ЭДС через ее амплитуду
e = Emsin(ot, (4.2)
т. е. в генераторе индуцируется переменная синусоидальная ЭДС.
Если генератор замкнуть на нагрузку, например на лампу
накаливания, то в цепи потечет переменный синусоидальный ток,
напряжение на зажимах цепи также будет синусоидальным.
Угол at, пропорционально синусу которого изменяются
переменные величины, называется электрическим или фазовым углом.
Он измеряется в электрических градусах. У генераторов с одной
парой полюсов, когда одному обороту витка (ротора)
соответствует один период изменения ЭДС, электрические градусы равны
геометрическим. У генераторов с двумя парами полюсов, когда
на один оборот ротора приходится два периода изменения ЭДС,
180° геометрических соответствуют 360° электрическим. Поэтому
в общем случае аЭл = раге0м, где р — число пар полюсов
генератора.
Фазовый угол в течение одного периода Т изменяется на 2я,
следовательно, юГ = 2я, откуда
ю=2я/Т = 2я/. (4.3)
Величина ш, пропорциональная частоте f, называется угловой
частотой Она измеряется в радианах в секунду (рад/с). При
числе пар полюсов р и частоте вращения ротора п, об/мин,
со = 2лл/60;7 = Р»/60 (4.4)
В общем случае синусоидальные электрические величины,
например напряжение и сила тока, определяются выражениями
u = Umsm(&t + %); i = ImsinИ + %); (4.5)
В этих уравнениях угол Ы + ty называется фазой, а угол if—
начальной фазой Фаза определяет значение величины в данный
момент времени t, а начальная фаза — в момент t = 0. Начальная
фаза может быть -ф = 0 или if^O, ijxO. На рис. 4.3 изображены
графики синусоидальных напряжений и токов с различными
начальными фазами
Рис 4 3 К определению фазы и сдвига фаз
Разность фаз двух синусоидальных величин одинаковой
частоты называется углом сдвига фаз, или сдвигом фаз. Сдвиг фаз
между напряжением и током обозначается <р и согласно
определению равен
Ф = (ев^ + Фи)—И + фО^Фв—ф|. (4-6)
т. е. сдвиг фаз есть алгебраическая разность начальных фаз
синусоидальных величин одинаковой частоты.
Если синусоидальные величины имеют одинаковые фазы, то
они совпадают по фазе (рис. 4.3, а), т. е. достигают своих
нулевых и амплитудных значений одновременно. Наоборот, если
изменение одной из величин наступает раньше или позже
соответствующих изменений другой (рис. 4.3,6, в), то фазы этих величин
различны и между ними существует сдвиг. Если разность фаз
равна ±я, то говорят, что переменные величины имеют
противоположные фазы.
§ 4.2. Действующие и средние значения переменных тока
и напряжения
При рассмотрении синусоидальных величин помимо
мгновенных и амплитудных значений применяют еще действующие и
средние значения.
Действующим значением силы переменного тока называют его
среднее квадратичное значение за период. Это такая сила
постоянного тока, которая по тепловому действию эквивалентна
рассматриваемой силе переменного тока.
Согласно закону Джоуля — Ленца количество теплоты,
выделяемое постоянным током силой / и переменным током силой i
в элементе с сопротивлением г за период переменного тока Г,
соответственно равно
Q^ = kPrT; Q„=kfi*rdt.
о
Приравнивая Q= = Q~ и производя преобразования, получим
действующее значение силы переменного тока
1 = у1гЬш- (4J)
Соотношение между действующим значением силы
синусоидального тока и его амплитудой, если i=Imsma>t, определится
выражением
Аналогично находят действующие значения синусоидальных
ЭДС и напряжения
Е =л — Гe4t= -£ш- • и = л /— f «W= -^--
V r Jo V2" V т о уг
Средним значением силы переменного тока называют среднее
арифметическое всех мгновенных значений за положительный
полупериод. Соотношения между средними значениями переменных
тока и напряжения и их амплитудами следующие:
'сР = -%г7 idt = — /m; Ucp = -|- 7 «<tf = — t/m.
T 5 я 'о я
Отношение действующего значения к среднему называется
коэффициентом формы переменной величины. Так, для
синусоидального тока получим
Йф=///ср = (/Я|/Л/Ю/(2/т/я) = я/(2Л/2")«1,11. (4.8)
§ 4.3. Векторные и временные диаграммы
Синусоидальные величины изображают вращающимися
векторами. При этом длина вектора в определенном масштабе
представляет собой амплитуду (рис. 4.4,а), угол, образованный
вектором с осью абсцисс,— фазовый угол Ы + ty, а проекции
вращающегося вектора на ось ординат — мгновенные значения переменной
величины.
Совокупность нескольких векторов, изображающих
синусоидальные величины одинаковой частоты и построенных с
соблюдением правильной их ориентировки друг относительно друга,
называется векторной диаграммой. На рис. 4.4, б приведена
векторная диаграмма сил токов, определяемых следующими
уравнениями:
г'з = ^3mSino)^; i2 = l%msin (m>t—25°);
ii = Ilmsm((ot + 70°),
Векторные диаграммы позволяют быстро и просто
производить графическое сложение и вычитание однородных синусоидаль-
Рис. 4.4. Векторные диаграммы
ных величин одинаковой частоты, имеющих как различные
начальные фазы, так и различные амплитуды. Векторной
диаграммой пользуются также для наглядного изображения сдвига фаз
между двумя неоднородными переменными величинами
(рис. 4,4, в) одинаковой частоты.
Наряду с векторными диаграммами широко применяются
временные диаграммы, которые представляют собой совокупность
кривых (см. рис. 4.3), показывающих изменения во времени
синусоидальных величин. Используя эти диаграммы, можно также
производить графическое сложение однородных переменных
величин путем алгебраического суммирования их ординатных
отрезков.
§ 4.4. Параметры и законы цепей переменного тока
Основными параметрами электрических цепей переменного
тока, как отмечалось ранее, являются сопротивление г,
индуктивность L и емкость С. При переменном токе непрерывно
изменяются магнитное и электрическое поля. Первое наводит в
элементах цепей ЭДС индукции, а второе поддерживает циклический
перезаряд элемента емкости. В результате все параметры в той
или иной форме оказывают влияние на силу переменного тока.
Сопротивление г переменному току называется активным. Оно
больше сопротивления постоянному току, называемого обычно
омическим. Различие между активным и омическим
сопротивлениями объясняется в основном явлением поверхностного эффекта.
Сущность этого явления состоит в том, что при прохождении
переменного тока по проводнику как внутри, так и вокруг его
создается переменное неравномерное магнитное поле. Под влиянием
этого поля внутри проводника наводится ЭДС самоиндукции,
которая согласно закону Ленца препятствует прохождению тока.
В центре проводника потокосцепление больше, чем у его
поверхности, поэтому ЭДС самоиндукции по сечению проводника не
одинакова: в центре она имеет наибольшее значение, а на
поверхности — наименьшее. Вследствие этого ток по сечению проводника
распределяется неравномерно: в центре проводника его плотность
мала, а по мере приближения к поверхности увеличивается, т. е.
переменный ток проходит главным образом по поверхности
проводника. Следовательно, полезное сечение проводника
уменьшается, что приводит к увеличению его сопротивления.
Активное сопротивление определяется выражением
r = R0(R/2)^tfyJ, (4.9)
где R0— омическое сопротивление; R— радиус проводника; / —
частота тока; у — удельная проводимость и ц — магнитная
проницаемость проводника.
Активное сопротивление тонких медных и алюминиевых
проводов (диаметром до 10 мм) при частоте до 500 Гц практически
равно омическому. При высоких частотах активное сопротивление
41
растет, так как только поверхностный слой проводника остается
проводящим.
Поскольку магнитное и электрическое поля являются
носителями определенного количества электромагнитной энергии, то
накопление и преобразование ее в другие виды происходит во всех
участках цепи. Однако в большинстве реальных цепей
электрическое и магнитное поля распределены вдоль цепи неравномерно,
т. е. на одних участках цепи преобладает электрическое поле,
а на других — магнитное. Поэтому в целях упрощения при
рассмотрении физических процессов в цепях переменного тока
возможны некоторые допущения, а именно: можно считать, что на
одном участке имеется только элемент активного сопротивления,
на другом — элемент индуктивности, на третьем — элемент
емкости. Такие допущения справедливы для всех электрических цепей,
размеры которых много меньше длины распространяющейся вдоль
них электромагнитной волны. Подобные электрические цепи
называются цепями с сосредоточенными параметрами В основе
расчета этих цепей лежат те же законы, что и для цепей постоянного
тока. Поэтому остановимся только на формулировках законов
Кирхгофа для мгновенных значений токов, ЭДС и напряжений:
а) алгебраическая сумма мгновенных значений сил токов
в узле электрической цепи равна нулю:
£»'а = 0; (4.10)
k=i
б) алгебраическая сумма мгновенных значений ЭДС,
действующих в любом замкнутом контуре, равна алгебраической сумме
мгновенных значений падений напряжений на участках этого кон-
iypa:
m n
£** =£""'• (4.11)
где г, — активное сопротивление i-ro участка контура.
Для действующих значений синусоидальных величин законы
Кирхгофа формулируются следующим образом:
а) геометрическая сумма векторов действующих значений сил
токов в узле электрической цепи равна нулю:
£7* = 0; (4.12)
fc=i
б) геометрическая сумма векторов действующих значений ЭДС
в любом замкнутом контуре равна геометрической сумме векторов
падений напряжений на участках данного контура:
m _>. п -+
Х^=Х/Г'- (4-13)
k=l <=1
42
Левая часть уравнения включает в себя все ЭДС, которые
находятся в цепи. Это относится и к уравнению второго закона
Кирхгофа для мгновенных значений. Правила знаков для
мгновенных и действующих значений те же, что и для значений
постоянного тока (см. § 3.2).
§ 4.5. Неразветвленные цепи переменного тока
Цепь переменного тока называют неразветвленной, если она
содержит только один элемент активного сопротивления или
индуктивности, или емкости либо последовательное соединение этих
элементов.
Цепь с активным сопротивлением. Цепь переменного тока с
активным сопротивлением изображена на рис. 4.5, а. При
синусоидальном напряжении в цепи u=Umsm(ot сила тока в ней
определится по закону Ома:
i = u/r = (UJr) sin Ы — Im sin a>t, (4.14)
где Im= Uт/г — амплитуда силы тока.
Действующие значения силы тока и напряжения
соответственно равны
I = U/r, U = Ir. (4.15)
Из выражений u=Ums\na>t и i=Imsina>t видно, что в цепи,
имеющей только активное сопротивление, напряжение и ток
совпадают по фазе. Это наглядно показывают временная (рис. 4,5 6)
и векторная (рис. 4.5, в) диаграммы.
Силу тока в цепи с активным сопротивлением г принято
называть активным током, а произведение Ir=Ur — активным
падением напряжения.
Цепь с индуктивностью. Переменный ток в цепи с индуктив
ностью L (рис. 4.6, а) вызывает в ней ЭДС самоиндукции eL,
которая согласно закону Ленца противодействует изменению тока.
Если в цепи синусоидальный ток i = Ims'm(ot, то ЭДС
самоиндукции будет равна
eL = —Ldi/dt= —Ld(Imsina)t)/dt~ —o)L/mcoso^.
Обозначив (oLIm = ELm и переходя от косинуса к синусу,
получим
eL = EIms\n((ot— я/2) (4.16)
Очевидно, что для уравновешивания ЭДС самоиндукции к
зажимам цепи должно быть приложено напряжение, численно
равное ЭДС и противоположное ей по знаку, так как в противном
случае в цепи не будет равновесия. Это напряжение называется
43
«I Й
Рис 4 5 Цепь с элементом г и ее диаграммы
индуктивным напряжением, обозначается щ. и определяется
уравнением
uL = — eL = — ©L/m sin (oof— я/2) — f/7 m sin (oof + я/2), (4.17)
где ULm = (dLIm — амплитуда индуктивного напряжения.
Для действующих значений индуктивного напряжения и силы
тока можно написать следующие выражения-
UL = IwL = /*t; / = UJ(wL) ■= UJxL
(4.18)
Величина xL = (aL = 2niL, имеющая размерность сопротивления,
называется индуктивным сопротивлением, а обратная ей величина
6i.= l/((oL)—индуктивной проводимостью. Индуктивное
сопротивление является расчетной величиной, с помощью которой
учитывается влияние ЭДС самоиндукции на силу тока в цепи.
Соотношения (4.18) выражают закон Ома для цепи с индуктивностью.
Из выражений (4.16) и (4.17) и t = /msinco^ видно, что в цепи,
имеющей индуктивность, индуктивное напряжение опережает ток
на четверть периода, ЭДС самоиндукции отстает от тока на
четверть периода, а индуктивное напряжение и ЭДС самоиндукции
находятся в противофазе. Это наглядно показывают временная
(рис. 4.6,6) и векторная (рис. 4.6, в) диаграммы.
Цепь с активным сопротивлением и индуктивностью. Цепь
переменного тока с элементами активного сопротивления г и
индуктивности L, соединенными последовательно, изображена на
рис. 4.7, а Сила тока i в такой цепи зависит от приложенного
напряжения и, ЭДС самоиндукции eL, которая возникает в цепи, и
активного сопротивления г. Поэтому уравнение электрического
равновесия цепи, на-
по второму
Кирхгофа,
писанное
закону
имеет вид
и = ur + (—eL) =
= ir + Ldildt = ur + uL.
(4.19)
Рис 4 6 Цепь с элементом i и ее диаграммы
44
Если
текает
по цепи про-
синусоидаль-
*&&£&,-#' &%ktob*J? <ЮГ V
&&^&ё^ШеёШш&М> ^ъ^ь&№!&Ь£Ъ*-ъ*&^^
a)
S) L.U
/i
/ 1
1 1
\
,1
4>u=V
a
//v\
Ul
Uy
\
1 I A
tot
Ur=Tr
UL=lxb
4
Рис 4 7 Неразветвленная цепь с элементами г и L и ее диаграммы
ный ток t=/msinco^, то, как установлено выше, напряжение иг на
сопротивлении г совпадает по фазе с током, а напряжение uL на
индуктивности L опережает ток на я/2. Следовательно,
напряжение на зажимах всей цепи будет равно
и = г I m sin at + a LI ms'm (at -\- л/2) = Urms'm at 4- ULmsin(at-\-n/2).
Для сложения этих синусоидальных величин воспользуемся
графическим методом Принимая кривую силы тока (рис. 4.7,6)
за'исходную и производя сложение ординат кривых иг и uL,
получим
u = Umsin(at4rtyu) = Umsm(at-\ q>), (4.20)
так как начальная фаза t|7( = 0 и, следовательно, г|5м = ф.
Таким образом, падения напряжения на участках цепи и
напряжение на зажимах всей цепи изменяются по закону синуса.
Уравнение для векторов действующих значений напряжений
можно записать в виде
U = Ur + UL=lr+lxL. (4.21)
Геометрическое суммирование векторов показано на векторной
—>
диаграмме (рис. 4.7, в). Принимая вектор силы тока / за исход-
->- ->-
ный, откладываем вектор Ur=Ir по направлению вектора тока,
->- ->■
а вектор Ll = Ixl под углом я/2 в сторону опережения вектора
тока Геометрическая сумма этих векторов равна вектору прило-
->
женного напряжения U. Такую диаграмму часто называют
треугольником напряжений, из которого получаем
£/» =/Vе+/»*!■
Решение уравнения относительно силы тока / выражает закон
Ома для действующих значений
/ = U/ У'2 + х\ = U/Z, (4.22)
где ^___
' ~ (4.23)
45
z = V^2+ (w^)2 = V^+*£
ы^^аЫ&з^^а^^е^к-Яш' &лшШ*&я*&^^мЬь&и& &#&•■> чкк-w j&sp- .jAshs^
< •ш.а^^Ь .^Sa^^^j^i^fe^-ii&s&i&^aafei^sSutfk.
называется полным
сопротивлением не-
разветвленнной цепи
с активным
сопротивлением и
индуктивностью.
Если все стороны
треугольника
напряжений уменьшить в /
раз, то получим
треугольник
сопротивлений (рис. 4.7, г).Угол
сдвига между током и напряжением можно найти из
треугольника напряжений или треугольника сопротивлений по формуле
а)
с
г
и z
Sh,ui
f "
Рис. 4.8. Цепь с элементом С и ее диаграммы
Ф = arctg (U[ /U r) = arctg (xjr).
(4.24)
Сдвиг по фазе между напряжением и током, обусловленный
индуктивностью, всегда положительный.
Цепь с емкостью. Цепь переменного тока с емкостью С
показана на рис. 4.8, а. Если на зажимы такой цепи подать
синусоидальное напряжение M=f/msinco^, то при его увеличении элемент
емкости (конденсатор) будет заряжаться, а при уменьшении —
разряжаться. В результате на обкладках конденсатора будет
происходить изменение заряда со скоростью
i = dqldt = Cduc/dt,
(4.25)
где ис — напряжение на зажимах конденсатора, называемое
емкостным напряжением.
Во внешней по отношению к конденсатору части цепи
происходит движение электронов (ток проводимости), а в конденсаторе
вследствие поляризации и деполяризации диэлектрика возникает
ток смещения, равный току проводимости. Электрическая цепь
оказывается непрерывной.
Поскольку напряжение на зажимах конденсатора изменяется
по синусоидальному закону и= f/msin at = Uc = Ucms'm at, то сила
тока в цепи, содержащей емкость, будет
I = Cdujdt = &CUCm cos at = Im sin (coM я/2),
(4.26)
где Im=aCUcm— амплитуда силы тока.
Действующие значения силы тока и напряжения связаны
между собой уравнением закона Ома
/ = <aCUc = Uc/[ 1/(соС)] = Uc/xc = bcUc.
(4.27)
Величина хс= 1/(соС) = 1/(2я/С), имеющая размерность
сопротивления, называется емкостным сопротивлением, а величина,
обратная ей, Ьс~аС называется емкостной проводимостью.
Емкостное сопротивление является расчетной величиной, с
помощью которой учитывается влияние изменения электрического
46
V \UC = IXC
Рис. 4 9. Неразветвленная цепь с элементами г и С и ее
диаграммы
поля конденсатора на ток цепи. Соотношения (4.27) выражают
закон Ома для цепи с емкостью.
Сопоставление уравнений Uc=Ucmsmat и t=/msin(co^+tt/2)
показывает, что в цепи с емкостью напряжение отстает от тока на
четверть периода. Это наглядно показывают временная (рис.
4.8, б) и векторная (рис. 4.8, в) диаграммы.
Цепь с активным сопротивлением и емкостью. Цепь
переменного тока с элементами активного сопротивления г и емкости С,
соединенными последовательно, изображена на рис. 4.9, а. Сила
тока i в такой цепи зависит от приложенного напряжения и,
напряжения uc={l/C) f idt, создаваемого на емкости С, и
сопротивления г. Поэтому уравнение электрического равновесия цепи
согласно второму закону Кирхгофа имеет вид
и = иг + ис = ir + (11С) j" idt.
(4.28)
Если по цепи проходит синусоидальный ток, то напряжение иг
на сопротивлении г совпадает по фазе с током, а напряжение ис
на емкости С отстает от тока на четверть периода и уравнение
принимает вид
ur = Imr sin at + 1т [1/(соС)] sin (at—л/2) =
= f/rmsinco^+ UCms'm((at—я/2).
Сложив ординаты мгновенных значений напряжений (рис. 4.9,6),
находим
u = Umsln(e>t—ф), (4.29)
так как начальная фаза г|7г = 0 и, следовательно, T|7„ = cp.
Таким образом, падения напряжения на участках цепи и
напряжение на зажимах всей цепи изменяются по синусоидальному
закону. Уравнение электрического равновесия для векторов
действующих значений напряжений имеет вид
U=Ur+Uc = Ir+Ixc.
(4.30)
47
^bz&*t~&fc*xj!L^ *4M-*4fa&*^xdikjaaffit:* ir
. 3&^^^г*^^^-ъЪ*гЛл£Ё1£$1&Ь&а*&*
<y i
Рис. 4.10. Неразветвленная цепь с элементами г, L и С
и ее векторные диаграммы
Геометрическое суммирование векторов показано на
диаграмме напряжений (рис. 4.9, в), из которой имеем
£/» = /V»+/»[l/((oC)l*. (4.31)
Решение уравнения относительно силы тока в цепи выражает
закон Ома для цепи с активным сопротивлением и емкостью:
/ = f//Vr2 + [l/coC)]2 = VIZ, (4.32)
где
Z = V''2+[l/(wC)]2=-V''2 + 4 (4.33)
называется полным сопротивлением, неразветвленной цепи с
активным сопротивлением и емкостью.
Уменьшив все стороны треугольника напряжений в / раз,
получим треугольник сопротивлений (рис. 4.9, г), из которого
находится угол сдвига между напряжением и током
Ф = arcsin (— xcIZ) — arctg (—xc/r). (4.34)
Сдвиг по фазе между напряжением и током, обусловленный
емкостью, всегда отрицательный.
Цепь с активным сопротивлением, индуктивностью и емкостью.
Цепь переменного тока с элементами активного сопротивления г,
индуктивности L и емкости С, соединенными последовательно,
изображена на рис. 4.10, а. Уравнение электрического равновесия
действующих значений напряжения на зажимах цепи в
соответствии со вторым законом Кирхгофа определится геометрической
суммой векторов
U = Ur+UL+Uc.
На рис. 4.10,6, в изображены векторные диаграммы при
UL>UC и UL-<Uc соответственно. При UL=UC векторы
напряжения и тока совпадают по фазе.
48
Действующее реактивное напряжение £/р определится
алгебраической суммой векторов
Up = t/L — Uс = /coL — //(соС) = / [coL — 1/(соС)] = 1х,
где coL—1/(соС) = xL—хс = х называется реактивным
сопротивлением; х>0 при xL>xc, х<0 при xL<Xc, х = 0 при xL = Xc.
Из векторных диаграмм напряжений (см. рис. 4.10, б, в)
находим составляющие напряжения Ur=Ucosq> и {/p = {/sincp, а также
силу тока в цепи
/ = сУ/д/г2 + (xL — xcf = U/^r2 + x2 = VIZ, (4.35)
которая представляет собой закон Ома, а величина
Z = ^r* + (xL-xcr (4.36)
является полным сопротивлением цепи.
Сдвиг по фазе между током и напряжением определится (см.
рис. 4.10,6, в) выражением
Ф = arctg l(UL — Uc)/Ur] = arctg l(xL — xc)/r]. (4.37)
В зависимости от соотношения индуктивного и емкостного
сопротивлений разность фаз напряжения и тока может быть
положительной, отрицательной или равной нулю.
§ 4.6. Цепи с параллельным соединением элементов
Цепь, состоящая из элементов активного сопротивления г,
индуктивности L и емкости С, соединенных параллельно,
изображена на рис. 4.11, а. Если такую цепь включить под
синусоидальное напряжение u = Ums'ma)t, то сила тока в неразветвленной
части цепи будет определяться по первому закону Кирхгофа:
1 = {г + ^ + 1с=Л-+±[иаЧ = С^- (4.38)
г L J dt
ИЛИ
i = (Mr) Um sin co^ + [l/(coL)] Um sin (со?— я/2) + u>CUm sin (со? + я/2) =
= lrm s'm a>t-\- lLm sin (соt — я/2) + lCm sin (соt-f- я/2),
где 1/r, l/(coL), coC соответственно называются активной,
индуктивной и емкостной проводимостями ветвей и обозначаются g,
bL и bc.
Токи iL и ic сдвинуты друг относительно друга на угол я,
поэтому их сумма, называемая реактивной силой тока, определится
равенством
tp = lLm sin (u>t-— я/2) + Icm s'n (°^ + я/2) =
= (ILm—I a») s'm (at—л/2) = lpmsm (at—л/2).
49
a)
FT
ulr
ь
If.
ю
tp>0 Ъ
Tr
и
-Tr
8) .
-\U
s\J
•>'
2-*
^
•Zfctf
ОД *c>
Рис. 4.11 Цепь с параллельным соединением
элементов г, L и С и ее векторные диаграммы
Следовательно, сила тока в неразветвленной части цепи
определится суммой активной и реактивной сил токов:
i = lrm sin со£ -f- /Pm sin (со£— я/2) = Im sin(co£—ф). (4.39)
Действующее значение силы тока в неразветвленной части
цепи согласно первому закону Кирхгофа определится
геометрической суммой векторов
7=Tr+7L + Tc, (4.40)
которую находят, используя векторную диаграмму токов,
называемую обычно треугольником токов. На рис. 4.11,6, в изобра-
жены векторные диаграммы сил токов соответственно при lL>Jc
—> —> —> —>
и lL<lc- При 1ь = 1с векторы силы тока и напряжения совпадают
по фазе.
Действующее значение реактивной силы тока /р определится
алгебраической суммой
IP = IL-Ic = bLU-bcU = (bD-bc)U = bU,
(4.41)
где b = bL—be — полная реактивная проводимость; 6>0 при
bL>bc, &<0 при bL<bc, b = 0 при bL = bc.
Из векторных диаграмм токов имеем
/ = V7H/2p =^g2U2 + (bL-bcyU* = U^/gZ + b* =YU. (4.42)
где У= л/ё2 + Ь2 — полная проводимость цепи.
Уменьшив стороны треугольника токов (см. рис. 4.11, в)
в U раз, получим треугольник проводимостей, подобный
треугольнику токов.
Сдвиг по фазе между напряжением и током равен
Ф = arctg [{1L - 1С)ЦГ] = arctg [bL - bc)/g]. (4.43)
В зависимости от того, какая проводимость преобладает
в цепи — индуктивная или емкостная, разность фаз между
напряжением и силой тока будет положительной или отрицательной:
при bL>bc разность фаз ф>0 и напряжение опережает ток; если
bL<bc, то ф<0 и ток опережает напряжение; если 6 = 0, то ф = 0.
50
)
г
Z \
/Л
1Г1
1г
А
чТ
7pi
Ту
„■*
и
Ь
^Ч1
1р2
Рис. 4.12. Разветвленная цепь и ее векторная
диаграмма
Смешанное
соединение приемников.
Любой приемник
электроэнергии
практически может иметь
два или три
параметра одновременно. На
рис. 4.12, а
представлена цепь из двух
параллельных ветвей,
одна из которых
содержит активное
сопротивление и
индуктивность, а другая —
активное сопротивление и емкость. Если в такую цепь подать
синусоидальное напряжение M=J7msinco^, то силы токов в
параллельных ветвях будут соответственно равны
h = hm sin(co^ —фх); t'2 = /2msin(co^—ф2).
Действующие значения сил токов определяются по закону Ома:
l1 = UIZ1 = YiU; 1% = UIZ% = Y%U.
Активные и реактивные составляющие сил токов ветвей
соответственно равны
1п = /, cos Ф, = (1//Z,) (rjZ^ = (rltZ\) U=glU;
lr2 = /2 cos ф2 = (U/Z2) (r2,Z2) = (г21Щ U = g2U;
/pl = /, sin ф, = (UIZX) (*,/Z,) = (*,/Z?) U = 6,17;
/p2 = /2 sin ф2 = (U/Z2) (x2/Z2) = (*2/Z|) t/ = 62t/.
Следовательно, проводимости любой ветви разветвленной цепи
переменного тока в общем случае определяются следующими
соотношениями:
g = rlZ\ b = x/Z*; Y = l/Z.
Составляющие и полная сила тока неразветвленной части цепи
соответственно запишутся следующим образом:
Ir = In+Ir2 = giU + g2U = (& + &) U =gU;
/Р = /pi + /р2 = hU + bJU = (h + h)U = bU;
I = ^/l? + Il =^/(g* + b*)U* = YU.
Векторная диаграмма сил токов (рис. 4.12,6)
рассматриваемой цепи построена для частного случая, когда 6i>62- Из
диаграммы находим
Ф = arccos (/,-//) = arcsin (/p//) = arctg (lp/Ir).
51
§ 4.7. Мощность цепей переменного тока
Периодические изменения напряжения и тока в цепях
вызывают соответствующие изменения ее мощности. Для
характеристики энергетического состояния цепей переменного тока введены
понятия мгновенной, активной, реактивной и полной мощностей.
Мгновенная мощность цепи. Под мгновенной мощностью
понимают произведение мгновенных значений напряжения и силы тока
p = ui. (4.44)
В цепи с активным сопротивлением при синусоидальных
значениях ur = Ums'm(ut и t = /msino>^ мгновенная мощность
определяется уравнением
pr = uri = U ms'm at ■ I ms'm at = 2U1 sin2 at =
2U1 (I —cos2fat)/2 = Ul — Ul cos2at.
Отсюда видно, что мгновенная мощность в цепи с
сопротивлением г, имея независимую от времени постоянную составляющую
UI и переменную составляющую UIcos2co^, изменяется с двойной
частотой (рис. 4.13, а) около среднего значения, равного UI,
оставаясь все время положительной. С физической точки зрения
это означает, что при прохождении тока в цепи независимо от
его направления энергия поступает от источника в цепь и в ней
рассеивается, т. е. имеет место необратимый процесс
преобразования электрической энергии в тепловую.
В цепях с индуктивностью и емкостью при синусоидальных
значениях напряжения и тока мгновенные мощности
соответственно равны
pL = uLi = Um sin (co^ + я/2) lmsin co^ = 2U1 cos co^ sin co^ — UI sin 2u>t;
pc = uci = Um sin (co^ — я/2) lm sin со t = — 2U1 cos со t sin со t =
= — Ul s'm2a>t.
Из приведенных уравнений видно, что мгновенная реактивная
мощность в обеих цепях изменяется с двойной угловой частотой
(рис. 4.13, б, в), дважды достигая в течение периода
положительного и отрицательного максимумов UI. Это означает, что
энергетический процесс в цепи как с индуктивностью, так и с
емкостью заключается в обмене энергией между источником и цепью,
т. е. в течение периода энергия два раза поступает от источника
в цепь и оба раза возвращается из цепи обратно к источнику.
Мгновенная мощность в цепях, содержащих активные и
реактивные элементы, при синусоидальных значениях тока и
напряжения является характеристикой необратимого преобразования
электрической энергии и процесса периодического обмена энергией
между источником и цепью.
Таким образом, энергия, получаемая активным сопротивлением
цепи, расходуется в нем, а энергия, получаемая реактивным со-
52
Рис, 4.13, Графики мгновенных мощностей в цепях
переменного тока
противлением цепи, не расходуется, а вновь возвращается в
источник, т. е, только колеблется с двойной частотой между
источником и цепью.
Активная, реактивная и полная мощности цепи. Под активной
мощностью понимают среднее значение мгновенной мощности за
период
т т
P = —[pdt= — \uidt. (4.45)
о о
Если напряжение w=f/msinco^ и сила тока t = /msin (at—ф), то
активная мощность будет равна
1
Р = — I f// cos ydt = UI cos ф,
(4.46)
где cos ф — коэффициент мощности. Значение cos ф изменяется от
1 (при ф = 0) до 0 (при ф = я/2), поэтому мощность будет
изменяться от P=UI до Р = 0. С энергетической точки зрения соэф
характеризует степень использования энергетической установки:
чем меньше cos ф, тем меньше производительность энергетической
установки. Основной единицей измерения активной мощности
является ватт (Вт), а кратными — киловатт (кВт) и мегаватт (МВт).
Реактивная мощность характеризует скорость взаимного
обмена энергией между источником и цепью и определяется
выражением
Q = — [ UIcos(2a>t—y)dt = Ulsm<p. (4.47)
Среднее значение этой мощности за период равно нулю.
Основной единицей измерения реактивной мощности является вар.
53
Под полной мощностью понимают произведение действующих
значений тока и напряжения
s = f//=Vp2+Q2- (4-48)
Основной единицей измерения полной мощности является вольт-
ампер (В-А), а кратными — киловольт-ампер (кВ-А) и
мегавольт-ампер (MB • А).
§ 4.8. Символический метод расчета электрических цепей
Символический метод расчета цепей переменного тока,
основанный на изображении синусоидальных функций времени
комплексными числами, позволяет уравнения для любой цепи,
составленные на основании законов Кирхгофа, решать алгебраически
аналогично уравнениям для цепей постоянного тока. Это
значительно упрощает расчеты цепей переменного тока, особенно
сложных цепей.
Известно, что комплексное число может быть записано в трех
основных формах—алгебраической, тригонометрической и
показательной:
А =а + jb = A (cosa + js'ma) = Aeia, (4.49)
где /' = ]/—1; A — модуль комплексного числа; a = arctg(&/a) —
аргумент комплексного числа; е'а — оператор вращения.
Комплексы, изображающие синусоидальные величины, принято
обозначать соответствующими прописными буквами с чертой
внизу, например /, Е, U, Ф, W и т. д.
Таким образом, если сила тока и напряжение синусоидальны,
т. е. u=Umsin (at+tyu) и i=lmsm (at+tyi), то соответствующие
им комплексы амплитуд и действующих значений запишутся так:
l_m = lj\ 1 = 1 А.
Отношение комплекса напряжения к комплексу силы тока
называется комплексом полного сопротивления, т. е.
z = ^=U^=V_^u-^=zA. (4.50)
где Z—полное сопротивление, или модуль комплекса полного
сопротивления; 1|зи—^, = ф — угол сдвига между векторами
напряжения и силы тока.
Следовательно, комплекс полного сопротивления может быть
представлен выражением
Z = Zeit> = Z cos ф + jZ sin ф = г + jx, (4.51)
где г и х — соответственно активное и реактивное сопротивления.
54
Отношение комплекса силы тока к комплексу напряжения
называется комплексом полной проводимости, т. е.
Y=-L = -^- = -L е"' (*"-*!) = Ув-»,
- U_ Ue1*» U
где У— полная проводимость цепи, или модуль комплекса полной
проводимости.
Следовательно, комплекс полной проводимости цепи может
быть выражен соотношением
Y = Ye-i(p = Y cosy — /Tsinq>=g—jb, (4.52)
где g и b — соответственно активная и реактивная проводимости
цепи.
В символической форме могут быть представлены также
полная, активная и реактивная мощности. Для этого при известных
комплексах напряжения U = Ue " и силы тока 1 = 1е^'1 надо
умножить комплекс напряжения на сопряженный комплекс силы
тока Г* = 1е 1'-
S = U_1* = Ue^le-1*' = t/Ze'(*«-*<) = £//е/ф' = Ul cos q> +
+ /i/7 sirup = P + jQ. (4.53)
Следовательно, модуль комплекса Ul* определяет полную
мощность, действительная часть—активную, а мнимая — реактивную.
Закон Ома для цепей переменного тока в символической
форме может быть представлен в следующем виде:
U Ue " U I ль„—w\ пь,
/=,-=- = = е ( " ' = le c. (4.54)
Z Zeiv z
Эти соотношения справедливы для всякой линейной цепи и для
любого ее участка.
Первый закон Кирхгофа в символической форме записи
гласит: алгебраическая сумма комплексов сил токов, сходящихся
в узле электрической цепи, равна нулю:
$Цк = 0. (4.55)
Второй закон Кирхгофа в символической форме для любого
замкнутого контура записывается в виде уравнения
m n
££*:=£/{Z„ (4.56)
т. е. алгебраическая сумма комплексов ЭДС, действующих в
контуре, равна алгебраической сумме комплексов падений
напряжений на всех участках этого контура.
55
Рис 4 14 Неразветвленная цепь с элементами г, L и С и ее
векторные диаграммы
При составлении уравнений по законам Кирхгофа правила
знаков для комплексов сил токов, ЭДС и напряжений те же, что
и для векторов.
Рассмотрим теоретический расчет некоторых цепей
переменного тока. Пусть электрическая цепь, изображенная на рис. 4.14, а,
находится под синусоидальным напряжением u = Umsm (at+i^u).
Определим силу тока в цепи, а также построим векторные
диаграммы для индуктивного (ф>0) и емкостного (ф<0) характера
сопротивления, представленные соответственно на рис. 4.14, б, в.
На основании второго закона Кирхгофа уравнение
электрического равновесия цепи для комплексных величин запишется так:
U = lr + jltaL + I/(j(oC) = / {г + j [coL— 1/(соС)]} = /Ze"" = /Z.
Решая это уравнение относительно комплекса действующего
значения силы тока, получим
Uertu
Z
и
ZeW
^(♦в-•"> = /*'*.,
где i|5i = i|5u—ф — начальная фаза силы тока.
Аргумент ф и модуль Z комплекса полного сопротивления
находятся из выражений
9 = arctg{[coL— l/((o C)]/r);
Z=r + /[coL—1/(соС)].
Комплекс мощности определяется формулой
S = UI* = UIe±i4> = UI cos ф ± jUI sin ф.
На рис 4.14, б, в для рассматриваемой цепи построены векторные
диаграммы.
Если неразветвленная цепь состоит из п последовательно
соединенных участков, комплексы полных сопротивлений которых
Zb Z2, . ., Z3 и находится под синусоидальным напряжением
56
ы= UmS'm (со^+г|з„), то по второму закону Кирхгофа можно
записать
t/=_/Zi+/Z,+ ... + /Z„ = /Z, (4.57)
п
где Z=y\Zk т. е. комплекс полного сопротивления неразвет-
~ fc=i~
вленной цепи равен алгебраической сумме комплексов полных
сопротивлений участков цепи
Из уравнения (4.57) находим комплекс действующего
значения силы тока
Комплекс мощности рассматриваемой электрической цепи
можно найти, умножая комплекс напряжения U=Ue^u на
сопряженный комплекс силы тока /*:
S = £//* = Ue*»le~* = Ule1 (*«-*•) = f//e'<p =
= J7/ cos ф + jUl sin ф = P + /Q.
Если цепь состоит из я параллельных ветвей, комплексы
полных проводимостей которых Уь У2, .. , _УП (рис. 4.15), то на
основании первого закона Кирхгофа комплекс силы тока в нераз-
ветвленной части цепи определится выражением
/ = /!+/,+ .. . + /„,
или
L=YiU_+Y*U+-- - + YnU = YU_,
п
где У = У У*, т. е. комплекс эквивалентной проводимости развет-
~ fc=i ~
вленной цепи равен алгебраической сумме комплексов полных
проводимостей ветвей
Следствием первого закона Кирхгофа являются соотношения
h=mYt=i#tizk,
т. е. сила тока в ветвях прямо пропорциональна их комплексам
полных проводимостей и обратно пропорциональна комплексам
полных сопротивлений.
Комплекс мощности разветвленной электрической цепи
определяется выражением
На рис. 4.16 представлена сложная цепь, имеющая три ветви,
два узла и два независимых контура. Найдем значения токов
в ветвях, решая задачу методом контурных токов.
Рис. 4.15. Параллельное соединение
элементов
Z,
№• № |[> * Ш Ф
Ф*
■■/*
г0
Рие. 4.16. Схема сложной
цепи, имеющей два
независимых контура
Приняв направления сил токов и обхода контуров, указанные
на рисунке стрелками, за положительные, составляем уравнения
по второму закону Кирхгофа для независимых контуров:
^lAn + <9^12 = Ец\ SfiZ^i -\- &2£ю — Е2
(4.58)
Собственные и взаимные сопротивления контуров
соответственно равны
£ll = Al ~f~ ^2» ^22=^2 + ^3> ^12=_£21 = £s-
Алгебраические суммы ЭДС независимых контуров равны
£ii=_Ei + £2; _Е22 = ^2 + ^з-
Решая уравнения (4.57) относительно контурных токов, найдем
Эх = (An/А) £ц+ (А21/А) £22;
£. = (Ai2/A)Tn+ (Д22/А) £22.
Теперь имея направления действительных токов в ветвях, находим
их значения
/i = Эу, _/а =^i, £а — Л.+/г-
§ 4.9. Примеры расчета цепей переменного тока
Пример 4.1. Разветвленная электрическая цепь, изображенная на
рис. 4.17, а, включена в сеть с напряжением £/=120 В. Параметры цепи
известны: ri= 12,8 Ом; *i, = 9,6 Ом; г2=7,2 Ом; *с=— 9,6 Ом. Определить токи
/i, h, I и углы сдвига фаз <pi, ф2 и ф, если частота напряжения /=50 Гц.
Решение. Находим полные сопротивления ветвей
Z, = д/rf+4 = д/12,824-9,6а= 16,0 Ом;
Z2 = дД* + 4 = V7>22+9>62 = 12'° 0м-
58
a)
-Ч
ф*' -7ID- -ГгФ
I,
Рис. 4.17. Схемы цепей переменного тока простой (а) и
сложной (б)
Определяем проводимости ветвей и полные проводимости цепи:
gl = rjz\ = 12.8/162 « 0,05 См; 6, = xL/Z? = 9.6/162 = 0,0375 См;
Y1 = \IZX = 1/16 = 0,0625 См; g2 = rJZ% =■ 7.2/122 = 0,05 См;
Ъ2 = xcIZ\ = 9,6/122;« 0,0667 Cm; Y2 =■ 1/Z2 = 1/12 = 0,0833 См;
^=^-(-^ = 0,05 4-0,05 = 0,1 См; 6 = frx—fr2 = 0,0374 — 0,0666 =
= — 0,0292 Cm; Y = л/g2 -f ft2 = Vo,l2 + ( — 0.0292)2 « 0,104 См.
Находим токи в ветвях и в иеразветвлеииой части цепи:
/х = UYl = 120-0,0625 = 7,5А; /2 = i/K2 = 120-0,0833 « 10.0А; / = UY =
= 120-0,104» 12.5А.
Активные и реактивные составляющие токов ветвей и иеразветвленной
части цепи равны:
hi = £-'#! = 120-0,05 = 6,0А; IL = Ubt = 120-0,0374 « 4,5А; Ir2 = Ug2 =
= 120-0,05= 6,0А; 1С = Ub2= 120 0,0666 « 8,0А; /p = /L — /c =
= 4,5 — 8= —3,5 А.
Ток в иеразветвленной части цепи равен
/=V7r + 7P =V122 + (-3'5)2 =12'5 А"
Находим углы сдвига фаз ветви и всей цепи:
фх = arctg (Xl/Zj) = arctg (9,6/12,8) « 37°; ф2 = arctg (xc!Z2) = arctg (— 9,6/7,2) «
« — 53°; ф3 = arctg (/p//r) = arctg (— 3,5/12) « — 16°16'
Пример 4.2. Параметры сложной цепи, изображенной иа рис. 4.17, б,
следующие: Zi = ri + jxl; гг = тг+\хг\ Z^r+jx, где П = 9 Ом, *i=12 Ом, г2 =
= 11 Ом, *2=14 Ом, г=4 Ом, х=3 Ом. ЭДС источников напряжения Ех—Ег =
= 500 В. Определить токи /, /i, /2 и мощности Р и Q, потребляемые цепью.
Решение. Цепь имеет два узла, поэтому ее расчет рационально
произвести методом узловых напряжений. Для расчета произвольно выбираем
опорный узел и положительные направления токов в ветвях, как это показано на
рис. 4.17, б. Определяем проводимости ветвей:
У_х = l/(ri + /*i) = 1/(9 + /• 12) = 0,067с -1-53° См; Y2 = 1/(г2 + jx2) =
= 1/(11+/-14) = 0,056е-'-52° См; Y=V(r+jx) = 1/(4 + /-3) = 0,2е ~!-37° См.
59'
Находим узловое напряжение по формуле
_ Л1- х + Е-2-2 ._ 500-0,067е ~с-53° + 500-0,056е ~'52°
- Х ~ Ii + Ъ + К _ 0,067е -'-530 + 0,056е '-52° + 0,2е '-37° ~~
33,5е -'■53° + 28е ~/"52° 37,1 —/-49,1 _
~ 0,04 — /-0,0535 + 0,0345 — /-0,043 -f 0,16 — /0,12 ~~ 0,235 — /0,217 ~
= 61.7. -!■**> =193е-/.,оРВ.В-
0,32е -'■42°46'
Определяем токи во всех ветвях цепи:
Ij = (Е_х — t/01) *\ = (500 - 193е -/•10°15') 0,067е ~'-53° = 20,9е -/^"зо'д.
h = (E2-U01) Y2 = (500 — 193е -'•,0°,5').0,056е-'-52° = 17,4е --/■51°20'А.
/ = ипу = Ше -Н0°15'.0>2е-/-37° = 38,6е-'-47°,6'А.
Мощности, потребляемые цепью соответственно равны:
Pt = l\rt = 20,92-9 ж 3931 Вт; Я2 = /|г2 = 17,42-11 « 3330 Вт; Р = 14 =
= 38,62-4 ж 6000 Вт; Qt = l\xx = 20,92-12 ж 5242 вар; Q2 = 1%хг =
= 17,42-14 ж 4239 вар; Q = Рх = 38,62-3 я 4500 вар.
Глава 5. РЕЗОНАНСНЫЕ ЯВЛЕНИЯ
В ЦЕПЯХ ПЕРЕМЕННОГО ТОКА
§ 5.1. Основные понятия и определения
Под резонансом понимают явления в цепях переменного тока,
содержащих элементы индуктивности и емкости, при котором
реактивное сопротивление или реактивная проводимость равны
нулю. Резонанс, возникающий при последовательном соединении
элементов индуктивности и емкости, называют резонансом
напряжений, а при параллельном соединении —^ резонансом токов. Эти
явления в цепях обусловлены взаимным преобразованием
энергии электрического и магнитного полей.
Резонансные цепи широко применяются в электротехнике, они
являются неотъемлемой частью ряда радиотехнических устройств
и часто используются в автоматике и телемеханике. Однако в ряде
случаев явления резонанса нежелательны. Возникающие,
например, в электрических цепях и системах, они могут вызвать
перенапряжения в отдельных элементах, пробой изоляции и другие
аномальные явления.
§ 5.2. Резонанс напряжений
Рассмотрим явление резонанса в неразветвленной цепи с
сопротивлением, индуктивностью и емкостью (рис. 5.1, а). Условие
резонанса в такой цени можно записать в виде
x = xL—xc = (oL— 1/(соС) = 0. (5-1)
60
a)
6)
h
--//
г*У~\
/ 1 \
/ /'\\
/ / 1 \\
< / \ \\
I
чЛ
и
--
—_^.
w
Рис. 5 1. Резонансная цепь (а) и ее частотные
характеристики (б)
Для режима резонанса напряжений характерно следующее:
комплекс полного входного сопротивления электрической цепи
Z = r + j(xL — xc) = r
достигает минимального значения, равного активному
сопротивлению;
комплекс силы тока в цепи
/о =U/[r+ / (xL -хс)] = U/г = left
достигает наибольшего значения и совпадает по фазе с
напряжением;
напряжение на индуктивности равно напряжению на емкости
t/t = <oL/o=t/c = /o/(fflC),
а так как их фазы противоположны, то они в любой момент
времени будут компенсировать друг друга;
реактивные напряжения на индуктивности и емкости
UL = lQxL = (U/r) xL = U (xjr);
Uc = 10хс = (U/r) xc=U (xc/r)
при резонансе могут превышать напряжение сети во столько же
раз, во сколько каждое из реактивных сопротивлений больше
активного сопротивления;
напряжение на активном сопротивлении
Ur = lor = (U/r)r=U
равно напряжению на зажимах цепи.
Угловая частота соо и частота /о, при которых наблюдается
явление резонанса, называются собственными резонансными
частотами. Эти частоты, определяемые из условия резонанса co2LC=l,
соответственно равны
(5.2)
61
co0=l/yLC; /0=l/(2nVLC).
Резонанс в цепи может наступить только при равенстве
собственной резонансной частоты цепи и частоты ее источника
питания.
Из выражения для индуктивного и емкостного сопротивления
при резонансе имеем
(o0L = l/((OoD = (l/V^C)L = V^/C"=P- (5-3)
Величина p = ]/L/C, имеющая размерность сопротивления,
называется волновым или характеристическим сопротивлением
резонансного контура. Волновое сопротивление равно также
отношению напряжения Ul или Uc к силе тока /о.
Отношение волнового сопротивления к активному
сопротивлению называется добротностью Q контура, а ее обратная
величина — затуханием й:
Q = p/r; d = r/p. (5.4)
Добротность равна также отношению UL или Uc при резонансе
к полному напряжению U.
Настройку цепи в резонанс можно производить следующими
способами: а) изменением частоты источника питания, резонанс
наступает при со^соо; б) изменением индуктивности цепи при
неизменных со и С, причем резонанс наступает, когда L=l/(co2C);
в) изменением емкости при неизменных со и L, резонанс наступает,
когда С= l/(co2L).
Изменение величин, характеризующих работу цепи, зависит
от частоты источника. Обычно зависимости UL, /, Uc и ср от
угловой частоты со при постоянных U, r, L, С изображаются
графически.
Эти зависимости, представленные на рис. 5.1, б, называются
резонансными кривыми или частотными характеристиками
резонансного контура. Они показывают, что неразветвленная цепь
переменного тока с L и С обладает избирательными свойствами, т. е.
имеет наименьшее сопротивление при частоте, близкой к
резонансной.
§ 5.3. Резонанс токов
Рассмотрим простейший случай параллельного соединения
элементов с г, L и С (рис. 5.2, а). В такой цепи резонанс токов
наступает при условии
b = bL — 6C= l/(co„L)—co0C, (5.5)
где со0=1/У£С—резонансная частота.
Для режима резонанса токов характерно следующее:
комплекс полной входной проводимости электрической цепи
y = g=F](bL—bc) = g
достигает минимального значения, равного активной проводимо-
62
сти, т. е. входное
сопротивление
достигает максимума;
комплекс силы
тока в неразветвленной
части электрической
цепи
=Fi(bL-bc)]U=gU
а),
г
t Y
Рис. 5.2. Разветвленный резонансный контур:
а—схема; б—частотные характеристики
достигает
минимального значения и
совпадает по фазе с напряжением на входе цепи;
сила тока в ветви с индуктивностью равна силе тока в ветви
с емкостью
lL = U/(toL) = lc = ®CU,
а так как их фазы противоположны, то они в любой момент
времени будут компенсировать друг друга;
реактивные силы тока ветвей
■■UbL = (I/g)bL = I(bJg);
Ic=Ubc = (Ilg)bc = I(bc/g)
Jl-
при резонансе могут превышать силу тока в неразветвленной
части цепи во столько раз, во сколько каждая из реактивных про-
водимостей больше активной проводимости;
активная сила тока
lr=Ug = (l/tfg=I,
т. е. она равна силе тока в неразветвленной части цепи.
Из равенства индуктивной и емкостной проводимостей при
резонансе имеем
l/((o„L) = ю0С = (1/yiC) C = ^/C/L=y.
(5.6)
Величина y = yC/L, имеющая размерность проводимости,
называется волновой проводимостью резонансного контура. Она
равна также отношению силы тока в ветви с индуктивностью или
емкостью к напряжению на входе цепи U.
Отношение волновой проводимости резонансной цепи к
активной проводимости называется добротностью Q, а ее обратная
величина — затуханием d цепи, т. е.
Q=y/g; d=g/y. (5.7)
Добротность равна также отношению 1ь или /с при
резонансе к силе тока /. Она показывает, во сколько раз силы токов
в реактивных ветвях превышают силу тока в неразветвленной
части в режиме резонанса.
63
и
r'U
ГЛ
1-1 1
о С
и
,
Настройку цепи в
резонанс токов, как и
в резонанс
напряжений, можно
производить изменением
индуктивности или
емкости, или частоты.
На рис. 5.2,6
изображены частотные
характеристики
разветвленного резонансного
контура. В разветвленной цепи (рис. 5.3), состоящей из двух
параллельных ветвей, в одной из которых имеются г\ и L, а в другой
г2 и С, явление резонанса наступает при условии b=bL—bc = 0,
которое может быть записано так:
co„L 1/(со„С)
о h
Рис. 5.3. Смешанная резонансная цепь и ее
векторная диаграмма
rf + (co0L)2 r|+ 1/(ш0С)2
(5.8)
откуда
co0 = (l/V^c) y/(LIC~ri)/(uC-4).
(5.9)
Из этого выражения можно сделать следующие выводы:
для получения резонанса необходимо, чтобы активные
сопротивления ветвей Г\ и г2 были оба больше или оба меньше
волнового сопротивления p = ]/L/C. Если это условие не соблюдается, то
не существует такой частоты, при которой резонанс имел бы
место;
при равенстве активных сопротивлений ветви и волнового
сопротивления (л=г2=р) резонанс наблюдается при любой частоте,
т. е. при всех частотах ток в неразветвленной части цепи
совпадает по фазе с напряжением на зажимах цепи и вся цепь
выступает как активное сопротивление;
при неизменной частоте источника питания резонанса можно
достичь изменением индуктивности, емкости и активного
сопротивления. Однако варьируя один из параметров (при
произвольных значениях остальных) получить резонанс невозможно;
добротность резонансного контура при условии r^coL и г2^
<:1/(соС) может быть представлена отношением
Q=/1//0 = /2//0.
§ 5.4. Энергетические процессы при явлениях резонанса
(5.10)
С энергетической точки зрения явления резонансов
напряжений и токов в простых цепях (см. рис. 5.1, 5.2) одинаковы.
Сущность их состоит в том, что происходит взаимный обмен энергией
между емкостью и индуктивностью, причем для простых цепей
суммарное значение энергии магнитного и электрического полей
в любой момент времени остается неизменным, т. е. W—WL+Wc-
64
Действительно, мгновенные значения энергии полей
определяются выражениями WL = Li2/2; Wc = Cuc2/2. Если i' = /msinco£, то
WL = Lll,/2=Wc = CUcml2, т. е. в простых резонансных цепях
наблюдается непрерывный переход энергии из магнитного поля
в электрическое и обратно, а вся электрическая энергия,
поступающая от источников в цепь, расходуется в элементе с
сопротивлением г, преобразуясь в тепловую энергию. Следовательно,
в цепи происходит колебание энергии, или наблюдается
колебательный процесс. Цепь, в которой происходит колебательный
процесс, называется колебательным контуром. При этом могут
быть следующие характерные явления:
1. Если колебательный контур, сопротивление которого г=0,
подключить к внешнему источнику напряжения, а затем
отключить его, то в контуре будет незатухающий колебательный
процесс. В таком контуре нет потерь, т. е. он является идеальным.
2. Если колебательный контур, активное сопротивление
которого г=И=0, подключить к источнику напряжения, а затем
отключить его, то в нем будет затухающий колебательный процесс, так
как часть энергии расходуется в активном сопротивлении.
Однако если контур подключить к источнику напряжения, частота
которого совпадает с собственной резонансной частотой контура,
то колебательный процесс в нем будет незатухающим, так как
потери в активном сопротивлении контура будут
компенсироваться источником напряжения. Если колебательный контур
сделать открытым, то он будет излучать электромагнитные волны.
Глава 6. ЭЛЕКТРИЧЕСКИЕ ЦЕПИ
С ВЗАИМОИНДУКТИВНОСТЬЮ
§ 6.1. Основные понятия и определения
Электрические цепи переменного тока, содержащие индуктивно
связанные элементы, называются цепями с взаимоиндуктивностью.
В таких цепях имеют место потокосцепление самоиндукции WL,
обусловливаемое собственным током цепи, и потокосцепление
взаимоиндукции Wm, обусловливаемое токами в других цепях:
VL=wG>L;VM=w(t>M, (6.1)
где Фь, Фм — магнитные потоки соответственно самоиндукции и
взаимоиндукции, сцепленные с одним витком цепи; w — число
витков каждой из индуктивно связанных цепей.
Потокосцеплению Чм часто вместо индекса М приписывают
двойные индексы, например Wu и Ч^ь где первая цифра
указывает, с каким элементом связан поток взаимоиндукции, а
вторая — потоком какого элемента индуктивная связь создана.
Таким образом, в общем случае потокосцепления двух
индуктивно связанных элементов определяются выражениями
^1 = ^11+^12; Ya = YM + Ya. (6.2)
3 Заказ № 1104 АК
Эти суммы — алгебраические: если потоки совпадают по
направлению внутри элемента цепи, то полный магнитный поток
элемента будет равен сумме магнитных потоков, а если они
направлены навстречу друг другу, то — их разности.
Соответственно этому различают согласное включение элементов, когда
потоки самоиндукции и взаимоиндукции совпадают, и встречное
включение, когда потоки самоиндукции и взаимоиндукции
противоположны.
Направления полных магнитных потоков и, следовательно,
характер включения элементов зависят от направления намоток
катушек, их взаимного расположения в пространстве и
направления токов в них. Поэтому для удобства изображения катушек
и определения характера их включения одноименные зажимы
катушек (например, начала) обозначают звездочкой (*) или
другим значком. Если токи идут к одноименным зажимам или от
них, то это означает согласное включение элемента. Если же
в одном элементе ток идет к обозначенному зажиму, а в другом —
от него, то элементы включены встречно.
Связь потокосцепления взаимоиндукции одного элемента с
током другого элемента характеризуется взаимной индуктивностью
М, равной
М = WJk = Чп/ii = и^Фи/tg = ШФ21Я1. (6.3)
Эти равенства всегда справедливы для линейных
электрических цепей, и поэтому индексы у взаимоиндуктивности двух
элементов, как правило, не ставятся.
Интенсивность индуктивной связи между двумя элементами
оценивается коэффициентом связи k, под которым понимают
следующее отношение:
k = М1л/Щ7г, (6.4)
где М — взаимоиндуктивность элементов; Lu L2 — индуктивности
этих элементов.
Следует отметить, что ЭДС самоиндукции и взаимоиндукции
имеют одинаковые положительные направления при согласном
включении и противоположные — при встречном.
§ 6.2. Расчет неразветвленных цепей с взаимоиндуктивностью
Неразветвленная цепь, представленная на рис, 6.1, а,
состоит из двух индуктивно связанных катушек. Полные
потокосцепления этих катушек при согласном и встречном включениях
соответственно будут равны
W1 = L1i—Mi; V, = Lti—Mi.
Отсюда находится эквивалентная индуктивность всей цепи
L = (Yj. + W = U + U ± 2M. (6.5)
66
-jwM£ 1гг
О г, I
Рис, 6.1. Схема неразветвленной цепи с индуктивной связью и
ее векторные диаграммы
В этом выражении знак « + » относится к согласному
включению, а «—» — к встречному.
Напряжения на отдельных катушках определяются
равенствами
Ul = r-Li + L^i/dt ± Mdildt;
и2 = r2i -f- L2di/dt ± Mdildt.
Напряжение на зажимах цепи определится по второму закону
Кирхгофа
u = u1 + u2 = (r1 + r2)i+(L1+L2± 2M) dildt.
В символической форме, если приложенное напряжение и
сила тока синусоидальны, указанные уравнения можно записать
так:
£/ = гг1_ + /coLi/ ± /соМ /;
Ui = г*[ + /coL2/ ± /соШ;
У_ = [ri + гя + /со (Lx + L2 ± 2M)] /.
Отсюда находят комплексы полных сопротивлений для
согласного и встречного включений
Zc = r1+ra + /V(L1+L, + 2M)=Z1 + Za+2ZM;
ZB = rx + г2 + /со (Lx+ U—2M) = Z1 + Zi—2ZM,
где
Z1 = r1 + /coL1; Z2 = r2 + /coL2; ZM=/coM.
Решая совместно эти равенства относительно
взаимоиндуктивности М,найдем
M = (Zc-ZB)/(4/co). (6.6)
3* 67
Комплекс мощности цепи и угол сдвига между напряжением
и силой тока определяются формулами
S = UI*=P+jQ; ep = arctg "> di + L, ± 2M) .
- — r* + r*
Комплекс мощности, вносимой из одной катушки в другую,
определяется выражением
SM = i7M_/* = (/coAl/)/*. (67)
На рис. 6.1, б, в изображены векторные диаграммы
соответственно для согласного (Lj<M) и встречного (L2>M) включений
элементов неразветвленной цепи. Из этих диаграмм видно, что
ток в цепи отстает от напряжения на ее зажимах. Один из
углов сдвига тока относительно напряжения на зажимах каждой
из катушек может быть при встречном включении
отрицательным. Иными словами, наблюдается своеобразный емкостный
эффект в той катушке, индуктивность которой меньше, как это
видно из диаграммы.
§ 6.3. Расчет разветвленных цепей
с взаимоиндуктивностью
На рис. 6.2, а изображена разветвленная цепь, состоящая из
двух индуктивно связанных катушек с согласным (обозначено*)
и встречным (обозначено Л) включением.
В соответствии с выбранными положительными направлениями
токов, как указано на рисунке стрелками, можно записать
уравнения электрического равновесия для катушек
u = i1r1 + L1-^-±M-^-i u = kr2 + L2-^±M dil
dt dt dt dt
или в символической форме
U_= [ri+ /соLi/, ± /coM/2; (У = r2/2 + /coL2/_2 ± /coM/i-
Введя обозначения комплексов сопротивлений отдельных
элементов
Z1 = r1 + jaL1; Z2 = r2 + /coL2; ZM=/coM,
получим
Решая эти уравнения, найдем комплексы сил токов в ветвях:
Z2 =f Zm. Zi4r zm
h. = — c£j £2 = — U_.
Комплекс силы тока в неразветвленной части цепи
определится по первому закону Кирхгофа
Z!Z2=f2Zm U
'_ = h. + (а = — ^ =
68
Рис. 6,2, Схема смешанной цепи с индуктивной связью
и ее векторная диаграмма
Отсюда находится комплекс полного сопротивления всей цепи
Z = и/[ = (Z^-Z^)/^ + Z2+ 2ZM). (6,8)
В приведенных выражениях знак «—» относится к согласному
включению, а « + » — к встречному.
На рис. 6.2, б представлена векторная диаграмма токов для
согласного включения элементов, когда L\<M и Li<.M.. Ток
в неразветвленнои части цепи всегда отстает от напряжения.
Угол сдвига тока на элементах может в зависимости от
соотношения L и М быть как положительным, так и отрицательным.
Комплекс мощности рассматриваемой цепи определяется по
уравнению
S = UI* = P + jQ.
Если Г] = Г2 = 0, то эквивалентная индуктивность цепи, в
которой индуктивно связанные катушки соединены параллельно,
равна
L = (^Ц — МЩи+и =F 2M),
а так как всегда ЦЬ2<М2 и Li+L2<2M, то эквивалентная
индуктивность больше нуля.
Расчет разветвленных сложных цепей с
взаимоиндуктивностью обычно производят методом
контурных токов. Метод узловых
напряжений при расчете таких
цепей не пригоден, а другие методы
ввиду их сложности почти не
применяются.
В качестве примера рассмотрим
сложную цепь, представленную на
рис, 6,3, два элемента которой
индуктивно связаны. Комплексы ЭДС,
действующих В цепи, И комплексы Рис 6i3. Схема сложной цепи
параметров цепи известны. Выбрав с индуктивной связью
69
__М)2
положительные направления токов, как указано на рисунке
стрелками, составим уравнения по методу контурных токов:
3^1^11 -f" 5^2^12 = £ll! 5_1^21 M~y 2^22 = С22-
Для рассматриваемой цепи
41 ==^1 М~_^3'| ^22 =£2Т£з'|
Zu = r1 + r, + /[(oL1+(oL8—1/(шС)];
Z22 = ra + r3 + j [coL2 + coLg— 1/((dC)];
Z12 = Z21 = r3 + / [coL3— l/(coC)-oMu].
Комплекс взаимного сопротивления берут со знаком « + », если
направления контурных токов в этом элементе сопротивления
одинаковы, и со знаком «—», если токи противоположны.
Сопротивление взаимоиндукции имеет знак « + ■», если направления
контурных токов в индуктивно связанных элементах одинаковы
относительно одноименных зажимов, и знак «—», если они
противоположны.
Комплексы контурных сил токов определяются выражениями
E\\Zi2—£22^12 £22^11 — сц'21
^i--
Z11Z2
■ZieZi
ZiiZ»
• Z12Z2
Силы токов ветвей равны алгебраической сумме комплексов
контурных сил токов.
§ 6.4. Примеры расчета цепей с взаимоиндуктивностью
Пример 6.1. На рис. 6.4 представлена схема для экспериментального
определения взаимоиндуктивности М. Катушки соединены последовательно:
сначала согласно, а затем встречно. Показания приборов в цепи соответственно
при согтасном и встречном включениях катушек следующие: £/с = 127 В,
/с=5 А, Рс = 100 Вт; t/B = I27 В, /в = 8,9 А, Рв=320 Вт. Определить
взаимоиндуктивность М, если частота напряжения /=50 Гц.
Р е ш е и и е. При согласном и встречном включениях катушек в
соответствии со вторым законом Кирхгофа электрическое равновесие цепи можно
записать в виде следующих уравнений:
^с - /с ('1 + гг) + /w (U + Ьг + 2М) /с = 1сг + /дгс/с;
иа
/в ('1 + г2) + /'<•> 'М + L2—2M) /в = /вг + jxBIB.
Рис. 6.4. Схема цепи для
определения взаимоиндуктивности
Решая эти уравнения
относительно реактивных сопротивлений,
получим
^c = co(L1 + I2 + 2M) =
xB = a(L1+L2-2M) =
= V(«/»-/2/)//2..
70
Находим активное сопротивление катушек
г = pjl\ = pjl\ = ЮО/52 « 320/8,92 « 4 Ом.
Численные значения реактивных сопротивлений равны
*с = «J{U\-lY)ll\ = У(1272-52.42)/52~ 25 Ом;
*в = л/(и1-'У)1'1 = д/(1272-8'92'42)/8'92^ 13,7_Ом,
Из уравнений реактивных сопротивлений находим
хс— хь = со (1Х + Li + 2Af) — <в (Li + L2 — 2Af) = 4coM,
откуда
М =(хс — хвУ(4(о) = (25 — 13,6)-1Ф/4-2п-50&9,1 мГн.
Пример 6,2. Разветвленная цепь (рис. 6.5, а) подключена к источнику
переменного напряжения (7=127 В. Определить токи h, h и / при согласном
включении индуктивно связанных катушек, если их параметры известны;
ri = 5 Ом, Li =20 мГн, r2= I0 Ом, L2 = 80 мГн, Л/ = 30 мГн. Частота
напряжения / = 50 Гц. Построить векторные диаграммы токов и напряжений.
Решение. Для каждой ветви по второму закону Кирхгофа можно
написать уравнения электрического равновесия
U =УГ\ + /wiiji + /соЛГ/2;
Ч. = LiTi + 1Ю^Ь + 1юМЬ •
Или, введя комплексы полных сопротивлений, перепишем уравнения так;
U = hZ\ -\tJ_2Zm'< V_ = ]jl7ja + hZ2.
Определяем численные значения комплексов полных сопротивлений*
Z1 = r1 + /coL! = 5 + j-2n-50-20- Ю-3 = 5 + /-6,28 = 8е' 51°5' Ом;
Z2 = r2 + /coL2= 10 + /-2я-50-80-10~3= 10 + /-25 = 27е/
Ом;
ZM =jaM = j-2nfM =/-2я-50-50-10-3 = /-9,4 Ом.
Токи в ветвях находим, решая систему уравнений методом определителей:
127
h
Zja
Z2
] [
127
/•9,4
27Й/-68
Zi Zja
Z^M. Zj,
127 (27е''68'
] [
j.51°5'
/ 9,4
/•9,4
27e> 6r
•9,4)
8e;
,1 5Г5'
h
Zm
27e/68— (/-9,4)2
= 12,6e-'"-38° A;
I Г8<"/-51°5' 1271
J L'9,4 127J
Zi Z„-\ Гее''61"6' /9,4 "I
Zm Z2 J L/.9.4 27g'-68°J
Z\ Zm
Zm Z
127 (ве'*51"5
/•9,4)
8e/51°5'.27e/-68°-(/.9,4)2
4e"
-/ 1285
0)
'■ID'- -MP-- vj
Рис. 6.5. Схема разветвленной цепи и ее
векторные диаграммы
Находим ток в нераз-
ветвленной части цепи
_j_ 4g-/-i28°= 10_^.7i8_
— 2,45 —/• 3,15 = 7,55—
= /•10,95= 13,2e_/'56° A.
Таким образом,
действующие значения токов
ветвей равны
/1= 12,6 А; /2 = 4 А;
/ = 13,2 А.
Для построения векторной диаграммы напряжений и токов находим
электрические величины
Url =_/1г1 = 12,6е-'"-38° -5 = 63е-'-38° В;
Ц_ы = /»i-i£i = /-6,28- 12,6е-/,38° = 79е/-62° В;
U_M = jmMlj = j-9A-4e~!-m° = 37,6е-'-38° В;
Un = Iyt = 4е-'-12*• 10 = 40е-'"-128° В;
U_L2 = /wL2/2 = /•25-4e-/-128° = 100е-',38° В.
U_ = jaMJi = /-9,4- 12,6е~'-ж = 118,5е'"62° В.
По этим данным на рис. 6.5, б построены векторные диаграммы
напряжений и токов.
Глава 7. ТРЕХФАЗНЫЕ ЭЛЕКТРИЧЕСКИЕ
ЦЕПИ
§ 7.1. Основные понятия и определения
Трехфазной системой электрических цепей или просто
трехфазной цепью называется совокупность трех электрически
связанных однофазных цепей, в которых действуют синусоидальные
ЭДС одинаковой частоты, взаимно сдвинутые по фазе на одну
треть периода. Каждая отдельная цепь трехфазной системы
сокращенно называется фазой. Трехфазная система цепей
разработана русским электротехником М. О. Доливо-Добровольским
в 1889 г.
Совокупность ЭДС или напряжений, действующих в
трехфазной цепи, называется трехфазной системой ЭДС или
напряжений. Совокупность токов, протекающих в трехфазной цепи,
называется трехфазным током или трехфазной системой токов. Эти
системы могут быть симметричными и несимметричными.
Симметричной называется трехфазная система ЭДС, напряжений или
токов, в которой соответственно ЭДС, напряжения или токи в от-
Рис. 7.1. Схема синхронного генератора
дельных фазах равны по амплитуде и
сдвинуты по фазе друг относительно друга на угол
2п/3. Если эти условия не выполняются, то
система считается несимметричной.
Трехфазный ток можно получить от
трехфазного генератора. Устройство такого
генератора схематически показано на рис. 7.1. Он состоит из двух
основных частей: неподвижной (называемой статором) и
вращающейся (называемой ротором). На статоре уложены три
одинаковые обмотки А, В, С, смещенные относительно друг друга на 120°.
Начала фазных обмоток обозначены А, В, С, а концы X, У, Z.
Ротор представляет собой вращающийся электромагнит, полюса
которого имеют специальную форму, благодаря чему магнитная
индукция в воздушном зазоре распределяется по синусоидальному
закону.
Если ротор генератора вращать с постоянной частотой, то
в обмотках статора будут индуцироваться ЭДС одной частоты,
имеющие одинаковые амплитуды, но в соответствии с
пространственным расположением обмоток сдвинутые друг относительно
друга на угол 2п/3. Если фазные обмотки генераторов замкнуть
на элементы с одинаковыми сопротивлениями, то в цепи будут
протекать три тока, составляющие симметричную систему токов.
ЭДС в фазах генератора называются фазными и
обозначаются в\, е2, е3 или ел, ев, ес. Приняв за начало отсчета времени
момент, при котором ЭДС первой фазы е\ равна нулю, уравнения
фазных ЭДС генератора можно записать в виде
e1 = £msin(oi; е2 = £m sin (coi—2п/3);
е3 = Em sin (at—4п/3) = Em sin (a>t + 2n/3).
ЭДС, индуцируемые в каждой из фазных обмоток, создадут
на концах своих обмоток фазные напряжения. Эти напряжения
можно записать в виде следующих уравнений:
u1=Umsm(ot; иг = Umsin (at—2п/3);
"з= £/msin((of—4я/3)= Umsm((at + 2n/3).
Соответственно уравнения сил токов в фазах можно записать
как
h = An sin ((at—ф); t2 = /msin (coi—2п/3—ф);
h= /msin((of—4n/3—ф) = /msin((oi + 2n/3—ф).
В символической форме действующие значения указанных
величин соответственно имеют вид
l^Ee10; E2 = Ее4'21113; Еъ = Её2п'3-
U^Ue10; и2 = ие-'-2л/3; £/, = Ueh2ll/3;
Л = /е-/ф; /2 = Ie"-211'3-^; /, = /^я/з-ф).
73
Рис. 7.2. Временная и векторная диаграммы ЭДС
трехфазного генератора
На рис. 7.2, а, б представлены соответственно временная и
векторная диаграммы трехфазной симметричной системы ЭДС.
Подобными диаграммами изображаются симметричные системы
токов и напряжений. Из диаграммы видно, что ЭДС в фазах
достигают своих положительных максимальных значений в
последовательности Еш-+Е2т-+Е3т, т. е. в порядке номеров фаз. Такой
порядок чередования называют прямой последовательностью фаз.
При обратном вращении ротора генератора наблюдается
обратная последовательность фаз Eimr+E-im-+E2m- Прямая
последовательность фаз считается нормальной.
Одно из важнейших свойств трехфазных симметричных
систем ЭДС, напряжений и токов заключается в том, что сумма
мгновенных значений ЭДС, напряжений или сил токов в любой
момент времени равна нулю
е1 + е2 + е3 = 0; и1 + иг + и3 = 0; ^ + ^ + ^ = 0. (7.1)
Действительно, производя, например, сложение мгновенных
значений ЭДС всех трех фаз, получим
е1 + е2 + е3 = yj>J« + 2fmEj (й'-2я/3) + ^тЕте' «°<+2я/3) =
= 5'тЯще/С0'(1 + е-/2я/3+е'2я/3)=^£те/и'(1-0,5-/-0,5Л/3"-
— 0,5+/-0,5 д/3") = 0,
где Ут — символ записи мгновенных значений. Аналогичные
выражения получаются и для симметричных систем напряжений
и токов.
Рассмотренное выше свойство симметричных систем ЭДС и
токов позволяет соединять фазные обмотки генераторов звездой
или треугольником. Такими же способами соединяют и фазы
потребителей. В результате создается возможность передавать
энергию трехфазного тока от источника к приемнику по трем
проводам вместо шести. В этом заключается одно из важных
достоинств трехфазных цепей,
74
§ 7.2. Соединение фаз трехфазных цепей
Основные виды соединения фаз трехфазных цепей — это
соединения звездой и треугольником. Фазы генераторов и
потребителей можно соединить звездой или треугольником независимо
один от другого: например, генератор может быть соединен
звездой, а приемник — треугольником или звездой. В этих схемах за
положительное направление ЭДС и тока в каждой фазе
генератора условно принимают направление от конца фазы к ее
началу, а в приемнике, наоборот, от начала к концу.
Соединение звездой. Под соединением звездой понимают
такое соединение фаз генератора или потребителя, при котором
концы всех фаз соединяются в общую узловую точку, а их
начала— с проводами, соединяющими генератор и потребитель.
Узловая точка называется нейтральной или нулевой, а провод,
соединяющий нулевые точки генератора и потребителя,— нулевым
или уравнительным. Провода, соединяющие начала фаз
генератора и потребителя, называются линейными. Схема звезды с
нулевым проводом называется четырехпроводной, а без нулевого
провода — трехпроводной. На рис. 7.3 изображена четырехпровод-
ная схема трехфазной системы.
Напряжения на зажимах фаз генератора или потребителя
называются фазными, а напряжения между линейными
проводами — линейными. Фазные напряжения обозначают UA, Ив, Uc
или U\, U2, U3, а линейные напряжения — Пав, Ubc, Uca или U^,
И2з, ^3i- Токи разделяют также на фазные и линейные. Фазными
называют токи, протекающие по фазам, а линейные — по
линейным проводам. Фазные силы токов обозначают Iab, Ibc, Ica или
/i2, /23, /31, а линейные — 1а, /в, /с или h, h, /3. Применяют также
общие обозначения £/ф, /ф, Us, /л, а в ряде случаев и некоторые
другие.
Установим соотношения между фазными и линейными
величинами при соединении звездой. Из схемы, изображенной на
рис. 7.3, видно, что при выбранных положительных
направлениях токов и напряжений линейные токи равны соотвегствую-
Рис. 7.3. Схема трехфазной системы, соединенной
звездой
щим фазным токам, а линейные Напряжения согласно второму
закону Кирхгофа (иА + Ив—«а = 0) равны разности
соответствующих фазных напряжений. Используя символический метод
записи, получим
Uab = Ua-Ub; Ubc=U_b-Uc; UCA = UC~UA. (7,2)
В частном случае симметричной системы имеем
При этих условиях, решая уравнение (7.2) относительно
комплекса напряжения Uab, найдем
и_Ав = ^А-^в = [иеЧ-2п/3 = иА(1^е-'-2п/3) = иАП--соз(2п/3) +
+ j sin (2я/3)] = UA (1 + 1/2 + j -у/3 12) = U_A (2/3 + / д/з72) =
= л/3"^л (л/3~/2 + //2) = л/ЗЦ^е111'6.
Аналогично получаем
^вс = ^/в-^/с = л/3^ве/я/6;
Таким образом, /гры соединении звездой с равномерной
нагрузкой линейные напряжения в ]/5 раз больше фазных и опережают
соответствующие фазные напряжения на угол 30°, а линейные и
фазные силы токов равны.
На основании соотношений (7.2) на рис. 7.4, а построена
векторная диаграмма напряжений.
Системы фазных и линейных напряжений источников обычно
симметричны. Приемники же могут нагружать все фазы
равномерно или неравномерно. При равномерной нагрузке фаз ток
в нулевом проводе отсутствует и необходимость в таком проводе
отпадает. При неравномерной нагрузке ток в нулевом проводе
есть и комплекс его силы равен сумме /о = /а + /в + /с (рис. 7.4, б).
В этом случае нулевой провод необходим, иначе изменения
нагрузки в одной
фазе будут приводить
к изменениям силы
тока и напряжения
в других фазах, что
на практике
является
нежелательным.
Относит ел ь н ое
преимущество сое-
Рис. 7.4. Векторные диаграммы соединения звездой динения генератор-
Рис. 7.5. Схема трехфазной системы, соединенной
треугольником
ных обмоток звез- _/д_
дой состоит в
возможности иметь
у потребителя
некоторую систему
напряжений. Так, при
соединении фазных
обмоток
генераторов звездой с
заземленной
нейтралью при фазном
напряжении
генератора 220 В у
потребителя получим
систему напряжений
220—380 В. При других фазных напряжениях генератора
создаются иные системы напряжений.
Соединение треугольником. Соединение треугольником — это
такое соединение фаз генератора или потребителя, при котором
конец первой фазы соединяется с началом второй, конец
второй — с началом третьей и конец третьей — с началом первой,
а узловые точки соединяются с линейными проводами. На рис. 7.5
представлена схема такого соединения.
Установим соотношения между фазными и линейными
величинами при соединении треугольником. Из схемы видно, что
линейные напряжения равны соответствующим фазным
напряжениям, а линейные силы токов согласно первому закону Кирхгофа
равны разностям соответствующих фазных сил токов. Оперируя
комплексами, получим
1л = 1
АВ~
I
СА,
/я=/
вс-
I
АВ,
1с = 1сл-1
'АС-
(7.3)
Если система токов симметрична, то
1 _ / n-i 2Я/3 _ г J 2Я/3
1ав=1вФ ='сл?
В этом случае, решая уравнение (7.3) относительно
комплекса силы тока 1а, найдем
1 —1 ~—1 —1 J J2*/3—! (1_^2я/;г)_
£Л — ±АВ'£СА~±АВ ±АВе — i_AB\l к ) —
= 1лв [1 —cos (2я/3) —/ sin (2я/3)] = I_ab (l + 172—/' д/3/2) =
= V3 1_ав (V3/2-//2) = л/31лвечт.
Аналогично получаем
Lb = Lbc—LAB~^^LB^e '
1с=1сл-1вс=Ф1слё-М.
Таким образом, при соединении треугольником с равномерной
нагрузкой линейные силы токов в ~]/3 раза больше фазных и от-
77
стают от соответствующих фазных
сил токов на угол 30°, а линейные
и фазные напряжения равны.
На основании соотношений
(7.3) построены векторные
диаграммы напряжений и сил токов
(рис. 7.6) для симметричной
системы цепей, соединенных
треугольником.
Соединение фазных обмоток
генератора в замкнутый треугольник
возможно, только когда сумма
всех ЭДС в нем равна нулю. Это
требование выполняется лишь
в случае, если система ЭДС
симметрична и обмотки генератора
соединены правильно. Тогда сумма
ЭДС, действующих в контуре, равна нулю и при холостом ходе
генератора (отключена нагрузка) ток в его обмотках отсутствует.
При неправильном соединении обмоток, когда две соседние фазы
соединены концами или началами, сумма ЭДС в контуре равна
удвоенному значению ЭДС фазы. При небольшом сопротивлении
контура это равноценно короткому замыканию.
Относительное преимущество схемы треугольника состоит
в том, что изменение нагрузки одной фазы потребителя,
соединенного треугольником, не отражается на работе двух других
фаз, как это происходит при соединении звездой. В частности,
при выключении одной из фаз приемника нормальный режим
работы в других фазах сохраняется.
Рис. 7.6, Векторные диаграммы
соединения треугольником
§ 7.3. Мощность трехфазных цепей
Мгновенная мощность трехфазной цепи равна сумме
мгновенных мощностей каждой фазы:
Р = р1 + р2 + Рз = "if'i + "2Ч + u3i3.
(7.4)
Активная мощность трехфазной системы также равна сумме
активных мощностей отдельных фаз системы:
Р = UJ1 cos ф! + UJi cos ф2 + U3I3 cos ф3.
(7.5)
Если трехфазная система симметрична, то все фазные
напряжения, токи и углы соответственно равны и, следовательно,
активная мощность трехфазной системы определится формулой
Р = 3£/ф/фС05ф.
(7.6)
78
Переходя к линейным величинам для симметрической
системы при соединении звездой и треугольником, соответственно
получим
\Р = 3£/ф/ф cos ф = 3 (£/л/УЗ) /л cos ф = л/3 UJn cos ф;
Р = З^/ф/фcosф = 3U„ {Ij^/b) cosф = л/3 U„I„ cosф.
Реактивная мощность трехфазной системы представляет собой
алгебраическую сумму реактивных мощностей каждой фазы:
Q = их1х sin фх + U2I2 sin ф2 + USIS sin ф3. (7.7)
При равномерной нагрузке фаз реактивные мощности
отдельных фаз равны и, следовательно,
С> = 3£/ф/ф5тф = УЗ £/л/л5Шф. (7.8)
Полная мощность трехфазной симметричной системы
определяется формулой
S = 3£V4, = V3£/a/a. (7.9)
§ 7.4. Расчет трехфазных цепей
Основная цель расчета трехфазных цепей обычно состоит
в определении сил токов, напряжений и мощностей в фазах
потребителя при известных фазных или линейных напряжениях
источника. Может быть поставлена и обратная задача.
Трехфазные цепи являются цепями синусоидального тока, поэтому для
их расчета можно использовать те же методы, что и для расчета
однофазных цепей.
Расчет симметричных цепей. Сводится к расчету одной из
фаз, поскольку во всех фазах каждой такой цепи напряжения,
токи и фазные углы сдвига одинаковы. Так, для симметричной
системы при соединении потребителя звездой (рис. 7.7, а) можно
записать
/1 = t/12e-^6/(ZV3); /.-Ле-'-*"3; /, = /1/2я/3■
Для симметричной системы при соединении потребителя
треугольником (рис. 7.7, б) выражения сил токов в символической
форме будут следующими:
1 —II 17- 1—1 р-/2я/3- I I Л-2Я/3.
£12—^12'^! £23 — '12С > _"31=£_12С •
ii = V3/i2<T/It/6; /2=^е-'-2я/3; U=lJ^,z.
Комплекс мощности приемника и угол сдвига фаз в обоих
случаях находят из выражений
S = 3 £//ф; ф = arctg (лс/г).
Расчет несимметричных цепей. Сводится к расчету всех фаз
цепей. Такой расчет упрощается, если взаимоиндукцией между
79
ai
It Z
It ^ z
\Чгг
t 1з
3o
l>-
^
i~
Л
1
In—
л
'1
/23
^
il
-^-т--
Рис. 7.7. Схемы симметричных цепей, соединенных звездой
(а) и треугольником (б)
фазами можно пренебречь. При этом условии и рассмотрим
порядок расчета основных несимметричных режимов работы
трехфазных цепей.
Соединение звезда — звезда. На рис. 7.8 изображена
несимметричная трехфазная цепь, генератор и приемник которой
соединены звездой. Известны комплексы фазных ЭДС Ел, Ев, Ее
и комплексы фазных сопротивлений и нулевого провода ZA, ZB,
Zc, Zo. При этом сопротивления линейных проводов и фаз
источника полагают равными нулю. Если указанными
сопротивлениями нельзя пренебречь, то их прибавляют к сопротивлениям
приемника по правилам сложения комплексов. Так как цепь
имеет два узла, то наиболее простым методом ее расчета будет
метод узловых напряжений.
Узловое напряжение между нейтральными точками 0 и О'
генератора и приемника определится формулой
U0 = (EAYA + EBYB+lcYc)/(YA + YB+Yc+Y0). (7.10)
Комплексы напряжений на фазах приемника будут равны
£/л = £л-_£/„; ив = Ев-Ц_0; Uc = Ec-U_9. (7.11)
Комплексы фазных и линейных сил токов находят по закону
Ома:
I_a = UaYa; I_b = UbYb; /с = £/сГс,
а комплекс силы тока в нулевом проводе
Ip=U0Yo=lA+IB+I_c.
В предельном случае, когда Z0 = 0 или У=оо, узловое
напряжение £/0=0 и, следовательно, напряжения на фазах
потребителя будут равны фазным напряжениям источника питания.
В этом случае в схеме образуются три самостоятельных контура,
в которых
i а~ EAIZA; IB = EB,ZB\ IC = ECIZC,
80
Рис. 7.8. Схема несимметричной
трехфазной цепи, соединенной звездой
сила тока в нулевом
проводе определится по
первому закону Кирхгофа.
В случае отсутствия
нулевого провода (Z0=oo,
Y=0) узловое напряжение
равно
U9 = (EaYa + E_bYb +
+ EcY_c)/(YA+Y_B + Yc).
(7.12)
Напряжения на фазах
приемника определяются
по .уравнениям (7.11),
а силы токов в фазах —
по закону Ома. Мощности цепи во всех случаях равны сумме
мощностей фаз системы. Следует отметить, что сопротивление
нулевого провода должно быть минимальным (предохранители
в нем не устанавливаются).
Соединение фаз приемника звездой при известных линейных
напряжениях. Схема соединения, изображенная на рис. 7.9, а,
трехпроводная. Линейные напряжения U^, £/2з, ^31 и комплексы
полных сопротивлений фаз Z\, Z2, Z3 заданы. Необходимо
определить фазные напряжения и токи приемника.
В трехпроводной схеме, соединенной звездой,
/i+ /,+ /3=^+^+^/3 = 0. (7.13)
На основании второго закона Кирхгофа из векторной
диаграммы напряжений (рис. 7.9, б) находим
U^U^Uu, t/3=t/i+t/Si; U1=UZ+U12;
из = и2-и^; U2 = U3+U23; ^ =£/,_£/.
'31-
Подставляя соответствующие значения этих напряжений в
выражение (7.13) и решая каждый раз полученные равенства
относительно фазных напряжений, получим
Ux
Yi + F2 + Y3
T J y_23J_3 — jJ_ 12^1
-2= Y.+ Y. + Ys
us
U_3lY_l f 23*_2
Yt + Y^+Y,
Затем комплексы фазных сил токов определяются по закону
Ома, а мощности — как соответствующие суммы мощностей фаз
системы.
Соединение потребителя треугольником при известных
линейных напряжениях. Если несимметричный потребитель соединен
П
Из;
\Ун
l i
1 1
-I)
Zl
| 1
1 1
~ll
Zi
I i
-7з
Рис. 7 9. Схема несимметричного трехфазного
приемника и его векторная диаграмма напряжений
треугольником (см. рис. 7.7, б), то комплексы сил токов в
отдельных фазах соответственно равны
£12 = ^12/^12; £23=^'23'~23', £31= ^_31'£_31-
Комплексы линейных сил токов находятся как разности
соответствующих комплексов фазных сил токов:
Л = /:
12"
■/.
31,
/.= /■
2 — '23~
■/■
12.
/я— *Я1— '
В случаях когда несимметричный приемник соединен
треугольником и заданы фазные напряжения источника, соединенного
звездой, надо сначала определить линейные напряжения
приемника как разности соответствующих фазных напряжений
источника питания, а затем найти силы токов по указанному выше
способу.
§ 7.5. Вращающееся магнитное поле трехфазного тока
Важной особенностью трехфазного тока является простота
получения вращающегося магнитного поля, т. е. поля, магнитный
поток которого вращается в пространстве с постоянной угловой
скоростью и остается неизменным. На
использовании свойств этого поля
основано устройство асинхронных и
синхронных электродвигателей.
Вращающееся магнитное поле применяется
также для приведения в действие
многих измерительных приборов и
аппаратов регулирования и управления.
Для получения вращающегося
магнитного поля трехфазного тока
необходимо уложить, например, в пазы
статора (рис. 7.10) три фазные обмотки
АХ, BY и CZ, сдвинутые под углом 2п/3
друг относительно друга, и подключить
Рис. 7.10. Схема
получения вращающегося
магнитного поля трехфазного
тока
обмотки к источнику трехфазного симметричного напряжений.
В результате по обмоткам будут проходить токи
i'x = /m sin (at; i2 = Im sin (at — 2л/3);
/3 = Im sin (co^+ 2л/3).
Эти токи создают соответственно фазные магнитные потоки
Фх = ФтsinЫ; 02 = Omsm((ot — 2л/3); ©3 = ©msin((oi + 2n/3). (7.14)
Фазные магнитные потоки, накладываясь один на другой,
образуют результирующий магнитный поток. Последний с учетом
пространственного смещения векторов фазных потоков и
выбранного направления осей (см. рис. 7.10) определится суммой
Ф = ^т(Ф1 + «2Ф* + «Фз), (7-15)
где а2 = е~!,2п/3, а = е''2п/3—фазовые операторы.
Подставляя в это равенство значения фазных потоков из
выражений (7.14), получим
ф = 2?тФт [sin at + а3 sin (at — 2л/3) + о, sin (at -\- 2л/3)] =
= ЗтФт [sin cot -f- a2 sin cot cos (2л/3) — a2 cos cot sin (2я/3) +
-f- a sin coi cos (2л/3) + a cos coi sin (2л/3)] =
= 5^тФт {sin at [ 1 + a2 cos (2л/3) + a cos (2л/3)] 4- cos at [a sin (2л/3) —
—a2 sin (2л/3)]) = 2?тФт [sin <of (1 — a2/2—a/2) 4- cos at (а д/3/2—
—a2 V3/2)J =^т1,5Фт (sin <of+ / cos ©Q =5гда1,5Фте~/в'.
Отсюда следует, что вектор результирующего магнитного
потока остается неизменным (так как величина Ф=1,5Фт
постоянна) и вращается равномерно с угловой скоростью со, равной
угловой частоте тока.
Таким образом, в статоре возникает круговое вращающееся
магнитное поле. При выбранной системе обмоток вращающееся
магнитное поле имеет одну пару полюсов и совершает один
оборот за период тока. При числе пар полюсов р и частоте тока /
частота вращения магнитного поля определится формулой
n = 60f/p. (7.16)
Отметим, что в несимметричных системах возникают не
круговые, а эллиптические вращающиеся магнитные поля. Вектор
потока такого поля изменяется по кривой эллипса. В частности,
эллиптическое поле получается при несимметричности питающих
напряжений.
§ 7.6. Примеры расчета трехфазных цепей
Пример 7.1. В четырехпроводную сеть трехфазного тока с линейным
напряжением (7Л=220 В включены три однофазных потребителя (рис. 7.11, а).
Сопротивления потребителей известны и равны rt=5 Ом, гг=4 Ом и г3 =
= 9 Ом. Определить фазные напряжения и токи при нормальном режиме и при
обрыве нулевого провода.
a)
1 o-
2o-
0 o-
5)
П
r2
3=f
t
r3
i Jo
„
О 1
INI
1 '
чЬ-,
4=^
^n
Рис. 7 11. Схема трехфазных цепей, соединенных
звездой с нулевым проводом (а) и треугольником (б)
Решение. При нормальном режиме работы фазные напряжения и токи
соответственно равны
(У! =127 В; _£/2 = 127e-'-120° В; ^3 = 127е/-12(г В;
/х = (A/Zx = 127/5 = 25,4 А; /2 - £/2/Z2 = 127е-'-120°/4 -= 31,8е_/"120° Л;
/, = (;3/Z3 = 127е''-120°/9 = 14,1е' 120° Л.
При обрыве нулевого провода расчет ведем методом узловых напряжений
Определяем узловое напряжение:
U&! + UjYj + U3Y3 ^ 127/5 + 127е-''-120°/4 + 127е'-130°/9
-° ~ ^1+^2 + ^3 ~ 1/5+1/4+1/9 ~~
= (25,4+ 31,8е-/-120° + 14,1е/-120°)/0,561 =
(25,4 —15,9 —/-27,6 —7,05 + /-12,2)/0,561 = 27,8е_/-81° В.
Находим фазные напряжения при обрыве нулевого провода:
Ч.\ =~ ^i—^o-= 127 — 27,8е_/'-81° = 127 — 4,4 +/-27,2 =
= 125,9е> 12°30' В; U_2 = Ua-U0 =
= 127е-/-120° — 27,8е_/"81° = — 63,5 — /• ПО — 4,4 +
+ /•27,2= Юбе-''-129"30' В; и'3 = U3
Un =
= 127е/,120° — 27,8е_/'81° = — 63,5 + /• 110 —
— 4,4+/-27,2 = 153e/-116<>25' В.
Фазные токи при обрыве нулевого провода находим по закону Ома:
/; = UJZ, = 125,9е/-12°3075 = 25,2е'"-12°30' А;
Г2 = U2/Z_2 = 106е-'-129°3074 = 26,4е-/-129°30' А;
/;={;;/Z3=153e/-116025'/9=, 17e''-116°25' А,
Пример 7.2. В трехфазную сеть с линейным напряжением ил—380 В
включены три приемника, комплексные сопротивления которых Zi=Z2=Z3 =
= 8Н-/ • 4,1 Ом. Определить линейные токи, активную и реактивную мощности,
потребляемые системой, при соединении приемников: а) звездой с нулевым
проводом (см. рис. 7.11, а); б) треугольником (рис. 7.11, б).
Ответ: а) /=24,5 А; Р=14,3 кВт; Q=7,3-10» вар; б) /=72 А; Р=
=72,9 кВт; Q = 21,9-103Bap.
Глава 8. НЕЛИНЕЙНЫЕ ЦЕПИ И МЕТОДЫ
ИХ РАСЧЕТА
§ 8.1. Основные понятия и определения
Электрические цепи, содержащие один или несколько
нелинейных элементов называются нелинейными цепями. Основными
элементами таких цепей являются нелинейные активные
сопротивления, нелинейные индуктивности и емкости. На
использовании свойств нелинейных элементов основано действие
преобразователей и усилителей, передатчиков информации и измерений,
быстродействующих вычислительных машин, систем
автоматического управления и регулирования и другой аппаратуры.
Нелинейные элементы цепей переменного тока могут быть
управляемыми. Сопротивление управляемых элементов можно
варьировать изменением их электромагнитного состояния, что
обычно осуществляют с помощью управляющих обмоток или
управляющих электродов. Управляемыми нелинейными элементами
являются магнитные усилители, трехэлектродные лампы,
транзисторы и тиристоры, а неуправляемыми — диоды, термисторы,
электрическая дуга, лампы накаливания.
Нелинейные элементы делят на инерционные и
безынерционные. Инерционными называют элементы, обладающие
значительной тепловой инерцией своих сопротивлений. Элементы,
нелинейность которых обусловлена не тепловыми процессами, называют
безынерционными.
Типичные инерционные элементы — это лампы накаливания и
термисторы, а безынерционные — электронные лампы,
полупроводниковые диоды и транзисторы. У инерционных элементов
зависимость u=f(i) для мгновенных значений напряжения и тока,
период которых значительно меньше времени изменения
температуры, линейна, а у безынерционных u = f(i) — нелинейна. В
результате синусоидальное напряжение, приложенное к
инерционному элементу, вызывает в нем синусоидальный ток, а в безынер-
ционнных — несинусоидальное изменение тока.
Нелинейные элементы могут иметь симметричные и
несимметричные вольт-амперные характеристики. Если характеристики
удовлетворяют условию f(i)=f(—£)> то называются
симметричными относительно начала координат. Если они не
удовлетворяют этому условию, то называются несимметричными.
Симметричными характеристиками обладает ряд устройств, имеющих
нелинейные индуктивность, емкость и активное сопротивление.
Несимметричные характеристики имеют электронные лампы и
некоторые другие элементы.
В общем случае для нелинейных цепей переменного тока
остаются справедливыми законы Кирхгофа только для мгновенных
значений напряжений и сил токов (2ы = 0; 2/=0). Уравнения,
составленные на основании этих законов, являются нелинейными
дифференциальными уравнениями. Такие уравнения в общем
85
случае не имеют общего метода решения. Поэтому при расчёте
нелинейных цепей переменного тока обычно применяются
приближенные методы расчета. Наибольшее распространение получили
методы: графический, эквивалентных синусоид, аналитической
аппроксимации нелинейной характеристики, кусочно-линейной
аппроксимации характеристики, последовательных интервалов.
Ниже на примерах будут рассмотрены отдельные методы
расчета нелинейных цепей.
§ 8.2. Нелинейные цепи со сталью
Нелинейными цепями со сталью называют цепи,
содержащие катушки индуктивности с сердечниками из ферромагнитных
материалов. К таким цепям относят электромагниты различных
приборов и аппаратов, трансформаторы и электрические
машины. Индуктивные элементы цепи со сталью на схемах принято
изображать в виде сердечника с обмоткой (рис. 8.1, а) или
обмотки с нанесенной около нее чертой, обозначающей сердечник
(рис. 8.1, б).
Нелинейность цепи со сталью объясняется тем, что магнитная
проницаемость |х стали непостоянна. Соответственно
индуктивность катушки со стальным сердечником оказывается
нелинейной. В результате при синусоидальном напряжении на зажимах
цепи со сталью ток в ней имеет несинусоидальную форму.
Явление гистерезиса и вихревые токи, имеющие место в цепи со
сталью, вносят дополнительные изменения в форму кривой
тока.
Определение силы тока в цепи со сталью обычно производят
графическим методом. Рассмотрим сначала определение силы
тока без учета явления гистерезиса. Будем считать, что
активное сопротивление г невелико и влияние вихревых токов
незначительно. При этих допущениях цепь оказывается чисто
индуктивной. Для нахождения силы тока в ней обычно используют
кривую намагничивания B = f(H), которую перестраивают в
зависимость Ф = /(0 Так как для данной цепи магнитный поток
пропорционален В и ток пропорционален напряженности поля,
то кривые ф = /(1)
и B = f(H) подобны
(рис. 8 1, в).
Пусть катушка
с ферромагнитным
сердечником (рис.
8 2, а) находится
под
синусоидальным напряжением
u=Umsin(ut, тогда
Рис 8 1 Цепь со сталью (а), ее схема (б) и гис- переменный ТОК,
терезисный цикл (в) протекающий по ее
5) ±_:
о
Рис 8 2 Схема цепи со сталью и определение силы тока
в ней
обмотке, возбуждает в сердечнике переменный магнитный поток
Ф. Последний индуцирует в обмотке ЭДС, которая
уравновешивает приложенное напряжение
ы = Ums'\n(ut= —e = wdO/dt.
Отсюда находим
Ф = — [udt = JbL. f Sin Ш (at) = Фт sin («of—я/2),
w J aw J
т. е. магнитный поток изменяется по закону синуса с амплитудой
Фт = UJ(ww) = U^2~/(2nfw) = £//(4,44/w).
Следовательно, имея зависимость <D = f(i), представленную на
рис. 8.2, б, и синусоиду Ф=/(£), можно построить кривую тока
i = f(t), как показано на рис. 8.2, в Это построение осуществляют
путем переноса ординат Ф = /(£) на кривую <P=/(i) и
определения соответствующих значений тока. Полученная кривая, как
видно из рисунка, отличается от синусоиды. Она симметрична
относительно оси абсцисс и совпадает по фазе с кривой
магнитного потока.
Действующее значение силы тока в цепи определяется на
основании закона полного тока или с использованием
поправочного коэффициента:
/=£tf**/*W2~); / = /«/(W2"). (8-1)
где Hmk — напряженность поля на участке магнитопровода,
определяемая по кривой намагничивания; 4 — длина £-го участка
сердечника, 1т—амплитуда основной кривой силы тока, kn —
поправочный коэффициент, который для электротехнических сталей
при индукции В<.\ Тл близок к единице, при В=1,2 Тл он
равен 1,1, при В>1,4 Тл коэффициент kn начинает быстро
увеличиваться.
Нахождение силы тока в цепи со сталью с учетом гистерезиса
и указанных выше допущений приведено на рис. 8 3. В таком
случае кривую тока строят по петле гистерезиса <P=f(i) и по
87
£^>»0*«^Л^*л!мв^-&*к^л*м&м^^ $Сьал«аЬ*ААИ**1«в»й1
i
r—- ,
^лШ)
||»Фв
|1(ТЩ1)1|
L
«
L^
1
1
J
Рис. 8.3. Определение тока в цепи со сталью Рис. 8.4. Схема прохожде-
с учетом гистерезиса ния магнитных потоков
в цепи со сталью
кривой магнитного потока ф = /(^), как и в первом случае.
Причем ординаты кривой тока для первой четверти определяют по
абсциссам восходящей ветви петли гистерезиса, а для второй —
по абсциссам нисходящей ветви. Соответственно определяют
ординаты кривой тока для третьей и четвертой четвертей.
Полученная кривая тока несинусоидальна, при этом магнитный поток
отстает по фазе от тока. Фазовый угол а, характеризующий
опережение тока, называют углом магнитных потерь или углом
магнитного запаздывания. Этот угол тем больше, чем сильнее
влияние гистерезиса. Действие вихревых токов приводит к еще
большему увеличению угла магнитного запаздывания.
§ 8.3. Схема замещения цепи со сталью
Магнитный поток в цепи со сталью можно представить в виде
основного магнитного потока Ф, который полностью замыкается
по ферромагнитному сердечнику, и небольшого потока
рассеяния Ф0) проходящего частично или полностью по воздуху
(рис. 8.4). Оба магнитных потока создаются одним током
катушки, но из-за различия сред имеют разные фазы с током.
Основной поток Ф, как отмечалось выше, не совпадает по фазе
с током и связан с ним нелинейной зависимостью. Магнитный
поток рассеяния Ф0 совпадает по фазе с током и пропорционален
ему, так как магнитная проницаемость воздуха постоянна и,
следовательно, индуктивность La постоянна.
Основной магнитный поток Ф и поток рассеяния Ф0 наводят
в обмотке ЭДС, которые соответственно определяются
е = —wdO/dt; еа = —wdOJdt = —L0di/dt.
Следовательно, ток в цепи со сталью будет определяться
совместным действием напряжения и, ЭДС е и ЭДС еа, т. е.
уравнение электрического равновесия цепи выразится так:
u = ri + (—е0) + (—е) = rl + Ladi/dt -f wdO/dt, (8.2)
где г— активное сопротивление обмотки.
Хм
Рис. 8.5. Схема
замещения цепи со сталью
и ее векторная
диаграмма
Ф
Уравнение (8.2) нелинейное, так как ток I несинусоидальный,
даже если приложенное напряжение и будет синусоидальным.
Поэтому на основании уравнения (8.2) невозможно построить
векторную диаграмму. Однако в большинстве случаев допустима
замена несинусоидального тока в цепи со сталью эквивалентным
синусоидальным током. Условиями эквивалентной замены
несинусоидального тока синусоидальным служат равенство
действующих значений этих токов и равенство вызываемых ими потерь.
Выполнение условий позволяет построить векторную диаграмму
для цепи со сталью и принять все методы расчета цепей
синусоидального тока.
Таким образом, произведя замену несинусоидального тока
эквивалентным синусоидальным, можем записать уравнение
электрического равновесия (8.2) в комплексной форме
U = г/ + jwLaI + /солуФ = г/ 4- /wL0/ + (—£)•
(8.3)
Синусоидальный ток /, эквивалентный действительному
несинусоидальному току, можно разложить на две составляющие:
реактивную /„, создающую основной магнитный поток Ф, и
активную /с, обусловленную потерями в стали Рс. Реактивная
составляющая /„, определяемая по формуле (8.1), находится в фазе
с потоком Ф, а активная составляющая /с, равная Pc/U,
совпадает по фазе с вектором Е. Угол магнитных потерь находят из
соотношения a = arctg(/c//n). Следовательно, полный ток в цепи
со сталью может быть записан в символической форме так:
/-/с + У/ц-
(8.4)
В соответствии с уравнениями (8.3) и (8.4) катушку с
ферромагнитным сердечником можно заменить эквивалентной
схемой (рис. 8.5, а), которую называют схемой замещения.
89
На основании уравнений (8.3) и (8.4) на рис. 8.5, б построена
векторная диаграмма цепи со сталью. При построении
диаграммы исходными векторами являются вектор намагничивания
тока /„ и созданный им вектор Ф основного магнитного потока.
ЭДС Е, индуцируемая основным магнитным потоком, по своей
природе является ЭДС самоиндукции и поэтому отстает от
вектора Ф на четверть периода, а вектор напряжения /а)0>Ф=—Е,
уравновешивающий Е, направлен в противоположную сторону.
Вектор активного падения напряжения г/ совпадает по фазе
с током, а вектор реактивного падения напряжения /o)L0/=—Е0,
уравновешивающий ЭДС, индуцируемую потоком рассеяния,
опережает вектор силы тока на угол л/2. Замыкающим вектором
является вектор U приложенного напряжения.
§ 8.4. Феррорезонансы напряжений и токов
В цепях переменного тока, содержащих элементы с
нелинейной индуктивностью и линейной емкостью, так же как и в
линейных цепях с этими элементами, могут быть резонансные
явления. Однако в линейных цепях при неизменной частоте
напряжения источника питания резонансные явления, как отмечалось
ранее, достигаются непосредственным изменением индуктивности
или емкости. В цепях же с нелинейной индуктивностью и
емкостью резонансные явления могут наступить при изменении
силы тока в цепях или приложенного напряжения. Объясняется
это зависимостью нелинейной индуктивности от изменения тока
или напряжения, что влияет на резонансную частоту цепей,
которая может достигать частоты вынужденных колебаний
источника питания.
При последовательном соединении катушки с
ферромагнитным сердечником и конденсатора наблюдается феррорезонанс
напряжений. Если ток в цепи (рис. 8.6, а) синусоидален и потери
в стали равны нулю, то напряжение на катушке UL
пропорционально магнитному потоку Фт, вольт-амперная характеристика
а.)
о-
Рис. 8.6. Схема цепи
с феррорезонансом
напряжений и ее
характеристики
h la
h h
90
* Г
о i-
Рис. 8.7. Схема цепи
с феррорезонансом
токов и ее характеристики
катушки UL = f(I) будет подобна кривой намагничивания (рис.
8.6, б). Вольт-амперные характеристики конденсатора Uc = f(I)
и резистора /г=/(/) будут прямолинейными. Полное реактивное
напряжение равно алгебраической сумме реактивных
напряжений: UV=UL—Не- При UL=Uc, что соответствует точке
пересечения А вольт-амперных характеристик катушки и емкости,
наблюдается феррорезонанс напряжений.
Из графика (см. рис. 8.6, б) видно, что при увеличении тока
напряжение на зажимах цепи U сначала возрастает до И\
(участок da), а затем уменьшается до минимума (участок ас) вблизи
точки резонанса С. После этого напряжение снова возрастает.
Одновременно происходит изменение знака угла сдвига фаз, т.е.
опрокидывание фазы.
Феррорезонанс токов имеет место в цепи при параллельном
соединении катушки L с ферромагнитным сердечником и
линейного конденсатора С (рис. 8.7, а). Характеристика /ь=/(£/) не
линейна, а зависимость Ic = ^CU=f(U) линейна. Полный
реактивный ток в неразветвленной части цепи равен алгебраической
сумме реактивных токов: /р=/ь—/с. При /ь = /с (рис. 8.7, б)
наблюдается феррорезонанс токов (точка А). Если учесть наличие
потерь в цепи и синусоидальность тока, то кривая /=/(£/)
сместится несколько вправо. При изменении тока в цепи
(аналогично предыдущему случаю) наблюдаются скачки
напряжения.
Цепи, содержащие катушки с ферромагнитными
сердечниками и линейные конденсаторы, широко применяются для
стабилизации напряжения. Принцип стабилизации напряжения
состоит в том, что в области магнитного насыщения сердечника
напряжение на катушке UL мало изменяется при изменениях
напряжения UBX на входе цепи. Напряжение на катушке является
выходным стабилизированным напряжением Иь=Иъык-
Стабилизаторы, работающие по такому принципу, называются ферро-
резонансными стабилизаторами напряжения.
Недостатками феррорезонансных стабилизаторов являются
зависимость их работы от частоты питающей сети, а также
отклонение выходного напряжения от синусоидального.
91
Глава 9. ПЕРЕХОДНЫЕ ПРОЦЕССЫ
В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ
§ 9.1. Основные понятия и определения
В электрических цепях различают установившиеся и
неустановившиеся режимы работы. Первые, рассмотренные в
предыдущих главах, характеризуются установившимися значениями
сил токов и напряжений, т. е. неизменными или периодически
изменяющимися по определенному закону, а вторые —
переходными, т. е. значениями, проявляющимися только при переходе от
одного установившегося режима к другому. Неустановившиеся
режимы наблюдаются при включении и выключении цепей,
коротких замыканиях, а также при всяком изменении параметров
цепей. Другими словами, это — режимы перехода от одного
энергетического состояния к другому. Такой переход всегда длится
некоторое время, так как изменение энергии магнитных и
электрических полей, связанных с цепями, всегда происходит с
конечной скоростью.
Процессы, возникающие в электрических цепях при переходе
от одного установившегося режима к другому, называются
переходными процессами. Длительность этих процессов, как
правило, составляет десятые или сотые доли секунды. Однако
изучение переходных процессов очень важно, так как в одних
случаях они могут быть причиной нарушений нормальной работы
цепей и даже аварий, в других, наоборот, они являются
основными режимами работы. В частности, основным состоянием
управляемых радиоцепей и многих систем автоматического
регулирования являются переходные режимы.
Расчет переходных процессов обычно производится
классическим и операторным методами. Сущность классического метода
заключается в интегрировании дифференциальных уравнений,
связывающих токи и напряжения цепи, т. е. уравнений
электрического равновесия. В общем случае уравнения электрического
равновесия линейных цепей, составленные по законам Кирхгофа,
представляют собой обыкновенные линейные дифференциальные
уравнения. Решение каждого такого уравнения, как известно из
математики, состоит из суммы частного решения неоднородного
уравнения и общего решения однородного уравнения. Это
обстоятельство позволяет любой переходный процесс
рассматривать как совокупность двух независимых процессов —
установившегося и свободного.
Установившийся процесс описывается частным решением
неоднородного уравнения и обусловливается источником
напряжения. Такой процесс имеет место, когда на зажимах цепи
действует постоянное или периодически изменяющееся напряжение.
Расчет установившегося процесса производится известными из
предыдущего методами расчета цепей. Свободный процесс
описывается решением однородного уравнения. Он обусловливается
92
только изменениями запаса энергии электрического и магнитного
полей. Отсюда следует, что переходный процесс невозможен в
цепях, содержащих лишь элементы активного сопротивления. В
таких цепях после коммутации мгновенно наступает новый
установившийся режим работы.
Величины, характеризующие установившийся и свободный
процессы,— напряжения, силы токов, заряды — называют
соответственно установившимися и свободными. Первые имеют
индекс «у», вторые — «ев». Действительные переходные значения
равны сумме установившихся и свободных значений
Ы = Ыу + ИсВ; 1 = 1у+1св- (9.1)
Действительные токи и действительные напряжения в цепях
при переходных процессах можно измерить и записать на
осциллограмме. Установившиеся и свободные токи и напряжения
являются расчетными величинами, которые позволяют определить
действительные значения.
§ 9.2. Законы коммутации и начальные условия
Переходные процессы в общем случае возникают при
изменении схемы цепи или ее параметров. Эти изменения принято
называть коммутацией. Можно допустить, что коммутация
производится мгновенно, но электромагнитное состояние цепи, как
отмечалось выше, не может измениться скачком. Объясняется
это тем, что энергия магнитного WL = P¥ и электрического полей
Wc=quc не может изменяться мгновенно. Действительно, если
допустить, что энергия магнитного или электрического поля
изменится мгновенно, т. е. скачком, то для этого потребуется
источник бесконечно большой мощности (p = dW/dt=oo)t что
физически неосуществимо.
Невозможность скачкообразного изменения магнитного и
электрического полей означает, что потокосцепление элемента
индуктивности W и заряд элемента емкости q также не могут
изменяться скачком. В самом деле, для цепей с индуктивностью
(рис. 9.1, а) на основании второго закона Кирхгофа
e = iR + uL = iR + d4r/dt. (9.2)
Если допустить, что W изменяется скачком, то Ub = dW/dt = <x>,
что невозможно и противоречит второму закону Кирхгофа. Для
цепи с емкостью (рис. 9.1, б) по второму закону Кирхгофа
e = iR + uc = Rdqldt + uc. (9.3)
Если допустить, что q изменяется скачком, то i=dq/dt=oo, что
лишено физического смысла.
Отсюда вытекают общие законы коммутации:
потокосцепление элемента индуктивности и электрический заряд элемента ем-
93
кости непрерывны во
времени.
Поскольку W = Li и q =
= Сис, то в частном случае,
когда L и С постоянны,
законы коммутации могут
быть сформулированы
следующим образом:
первый закон
коммутации: сила тока в элементе
и после нее остается неиз-
U0-HM0+); (9-4)
" второй закон коммутации: напряжение на элементе емкости
перед коммутацией и после нее не изменяется:
uc(0_) = uc(0+). (9.5)
Остальные токи и напряжения в ряде случаев могут
изменяться скачком, так как это не требует бесконечно большой
мощности источника питания.
Значения всех величин в момент коммутации £=0,
являющейся началом нового режима, называются начальными. Если
при £=0 £ь(0_)=0 и ыс(0-)=0, то условия называются нулевыми
начальными условиями. Если при £=0 ii,(0_)#0 и ыс(0_)#0, то
условия называются ненулевыми начальными условиями.
Начальные условия характеризуют запас энергии магнитного и
электрического полей в момент коммутации. При расчете
переходных процессов начальные условия должны быть известны.
§ 9.3. Переходные процессы в линейной цепи
с индуктивностью
В реальных условиях любая электрическая цепь,
содержащая элемент индуктивности, имеет и элемент активного
сопротивления. Рассмотрим переходные процессы при включении
такой цепи под постоянное и синусоидальное напряжение, а также
переходные процессы при замыкании ее накоротко.
Включение цепи с элементами R и L под постоянное
напряжение. При включении цепи с R и L (рис. 9.2, а) под постоянное
напряжение U согласно второму закону Кирхгофа можно
записать
iR + Ldi/dt = U. (9.6)
Решая это уравнение относительно силы тока, найдем
i= U/R — (L/R)di/dt = I—xdlfdt, (9.7)
где /= U/R = iy — установившаяся сила тока; x=L/R —
электромагнитная постоянная времени цепи; она характеризует
затухание свободного процесса в цепи и измеряется в секундах (с).
Рис. 9.1. Схемы цепей с индуктивностью
и емкостью
индуктивности перед коммутацией
менной:
94
Рис. 9.2. Включение
цепи с элементами R, L
под постоянное
напряжение: а — схема цепи;
б — кривые тока и
напряжения
Разделяя переменные уравнения (9.7), получим di/(I—£) =
= dt/x, или d(I—i)/(I—i)=dt/x. Интегрируя последнее и затем
потенциируя, соответственно найдем
ln(I — i) = —t/x+lnA; I — i = Ae-*b. (9.8)
Постоянную интегрирования А находим из начальных
условий: £(0_) = i(0-|-) =0 и, следовательно, при £=0 /—0=Ле~0/т,
откуда А = 1. Подставляя значение А в уравнение (9.8) и решая его
относительно силы тока, получим
t = /—/в-*" = /(1 —е-"), (9.9)
где Ie~r'x = £св — сила свободного тока.
Напряжение на индуктивности, уравновешивающее ЭДС
самоиндукции, определяется уравнением
uL = Ldildt = L (U/R) (R/L)e-"VL = Uer"i'L.
(9.10)
На рис. 9.2, б представлены кривые i=f(t) и uL = f(t),
построенные на основании уравнений (9.9) и (9.10). Они
показывают характер изменения электрических величин в цепи с
индуктивностью.
Теоретически сила тока в цепи с индуктивностью при ее
включении под постоянное напряжение достигает установившегося
значения при t=<x>. Действительно, в этом случае £=1(1—е~°°/т) =
= /. Однако принято считать, что переходный процесс
практически заканчивается за время t=4fix, когда £=0,99 /. Таким
образом, практическая длительность переходного процесса
определяется постоянной времени цепи т, которую можно найти как
расчетным путем (x=L/R), так и графически. Для графического
определения надо провести касательную к кривой силы тока в
начальной точке ^ = 0 (см. рис. 9.2, б). Касательная на линии £у = /
отсекает отрезок АВ, равный постоянной т.
Напряжение на индуктивности в момент включения
изменяется скачком от нуля до значения приложенного напряжения
«ь(0) = £Л Объясняется это тем, что в момент включения напря-
Рис. 9.3. Короткое
замыкание цепи с
элементами R, L: а — схема
цепи; б — кривые тока
и напряжения
жения сила тока i, а следовательно, и падение напряжения на
сопротивлении R равны нулю. В результате приложенное
напряжение полностью уравновешивается ЭДС, возникающей в
элементе индуктивности.
Замыкание цепи с элементами R и L накоротко. Если цепь
с R и L, по которой проходит ток (рис. 9.3, а), замкнуть
накоротко, то ток в ней сразу не исчезнет, а вследствие
противодействия ЭДС самоиндукции будет уменьшаться постепенно. При
этом уравнение электрического равновесия примет вид
iR + Ldi/dt=-0,
откуда получаем
i =■ —{LIR)dildt = ^idi/dt, или di/i = —dt/x.
Интегрируя последнее уравнение и потенциируя результат,
соответственно найдем
lh i = — Цх + In A; I = Лег*'*.
Постоянную интегрирования А находят из начальных условий
i(0) = U/R=Ae° = A. Следовательно, сила тока переходного
процесса при замыкании цепи накоротко будет
i = {UIR)e-tl* = Ie-tIUL. (9.11)
Напряжение иь определится по уравнению
uL - Ldildt ^—Ld (— e-t A/dt =- — Ue-'/\
На рис. 9.3, б изображены кривые изменения силы тока и
напряжения.
Энергетические процессы в цепи с элементами R и L. С
энергетической точки зрения переходные процессы в цепи с R и L
происходят за счет преобразования энергии системы.
Действительно, при включении цепи ток, проходя по элементу сопротив-
5),
u'Li
Uo
h
0
-Uo
\ и = 10Не~*(х
ТГ
^ —"""
/-uu=-I0Re-^
...
96
Рис. 9.4. Включение цепи с элементами г, L под синусоидальное
напряжение: а — схема цепи; - б — кривые тока; в — кривые
напряжения
ления R, нагревает его, а проходя по элементу индуктивности L,
создает магнитное поле, в котором накапливается энергия. Оба
вида энергии получаются за счет преобразования энергии
источника питания. В самом деле, обращаясь к уравнению
электрического равновесия цепи (9.6) и умножая обе его части на idt,
получим
Uidt = PRdt + Lidi, (9.12)
где Uidt — энергия, расходуемая источником питания; i2Rdt—
энергия, преобразуемая в теплоту; Lidi—энергия,
накапливаемая в магнитном поле.
Очевидно, энергия накапливаемая в магнитном поле при
нарастании силы тока от нуля до /, т. е. за время переходного
процесса, будет равна
WL=\ Lidi = LP/2.
о
При коротком замыкании цепи с индуктивностью энергия,
накапливаемая в магнитном поле, постепенно преобразуется в
теплоту, т. е.
оо оо
W, = f PRdt = PR [ e-2'«'L dt = LP/2. (9.13)
о о
Таким образом, переходные процессы при коротком
замыкании цепи с индуктивностью происходят за счет энергии
магнитного поля.
Включение цепи с элементами г и L под синусоидальное
напряжение. При включении цепи с г и L (рис. 9.4, а) под
синусоидальное напряжение u=Ums\n(a)t+'^i) уравнение
электрического равновесия для мгновенных значений имеет вид
lr+LdUdt = Uns\n(ett + y). (9.14)
4 Заказ № 1104 97
Сила тока переходного процесса представляет собой сумму
установившейся и свободной составляющих. Эти составляющие
силы тока соответственно равны
h = ^mSin (at + oj)—<p)/Z;
iCB = Ae-{'\
где Z = л/г2+ (coL)2 —полное сопротивление цепи; ср =
= arctg (ft)L/r) — угол сдвига тока относительно напряжения.
Следовательно, сила тока переходного процесса в цепи будет
изменяться по формуле
i = (UJZ) sin (сог + а|)—ф) + Ае-и*.
Постоянная интегрирования А находится из начальных
условий
I (0) = ty (0) + ;св (0) = {UJZ) sin (t|> - ф) + A = 0,
откуда
i4 = -(£/m/Z)sin(4)-9).
Таким образом, закон изменения силы тока выразится
формулой
i = (UJZ) sin (fat + y—<f) — (UJZ) sin (ф—q>) e-^. (9.15)
Отсюда видно, что во время переходного процесса на
синусоидальный установившийся ток £у накладывается свободный ток iCB,
абсолютная величина которого уменьшается по показательному
закону.
На рис. 9.4, б приведены кривые изменения силы тока,
построенные по уравнению (9.15). Эти кривые показывают, что
ток I, имея в начале процесса несинусоидальный характер,
стремится к установившемуся синусоидальному току.
Продолжительность процесса определяется постоянной времени т. Практически
через t = 4fix переходной ток достигает установившегося
синусоидального значения.
Напряжение на индуктивности иь определяется выражением
uL = Ldildt = (oLImsin (tot +
+ t|>—(p + rt/2) + /mrsin(*|>—<f)e-"\ ~
т. е. равно сумме (рис. 9.4, в) установившегося синусоидального
и свободного апериодического напряжений.
Следует иметь в виду, что сила тока при включении цепи с г
и L под синусоидальное напряжение зависит не только от
амплитуды напряжения на зажимах цепи, но и от момента
включения [см. формулу (9.15)]. Наиболее благоприятно протекает
переходный процесс, когда в момент включения £у=0, что может
98
быть при о|э—ср = 0 или при г|з—ф = я. В этом случае, как видно из
выражения
i = (UJZ) sin ((оО + п)—
— (UJZ)smn-<r-°'x = 0,
переходного процесса в цепи не будет и в ней в момент
включения наступает установившийся режим работы.
Наименее благоприятно переходный процесс протекает в
рассматриваемой цепи, если в момент включения iy(0)=Im, что
может быть при условии i|), = aj)—<р = ±я/2. В этом случае, если г=
= 0, то через полупериод после включения цепи сила тока в ней
достигнет значения
t-=_^"Lsin(©—+ —^—^-sin— e-W°° = —2Im.
coL V 2 т 2 / coL 2
Поскольку в цепи всегда имеется определенное активное
сопротивление, что приводит к затуханию свободной составляющей
тока, то сила переходного тока практически никогда не
достигнет двойного значения.
При замыкании цепи накоротко закон изменения
электрических величин не зависит от того, под какое напряжение была
включена цепь, и определяется уравнением (9.11), а
количественная сторона переходного процесса в этом случае определяется
силой тока в цепи в момент ее замыкания.
§ 9.4. Переходные процессы в линейной цепи с емкостью
Рассмотрим переходные процессы в цепи, состоящей из
элементов емкости и активного сопротивления, при включении ее
под постоянное и синусоидальное напряжения, а также при
замыкании накоротко.
Включение цепи с элементами R и С под постоянное
напряжение. При включении цепи с R и С (рис. 9.5, а) под постоянное
напряжение U согласно второму закону Кирхгофа можно
записать
iR+uc = U. (9.16)
Так как сила тока в цепи представляет собой скорость
изменения заряда i=Cduc/dt, то уравнение (9.16) можно переписать
в виде
RCduc/dt + uc=U.
Разделяя переменные, получим
duc/(U—uc)=dt/x, или d(U—uc)/(U—uc) = —dt/x,
где x=RC— электромагнитная постоянная времени цепи.
Интегрируя последнее дифференциальное уравнение и затем
потенциируя результат, найдем
lri(U—uc) = —t/x+lnA; и—ис = Ае-<1\ (9.17)
4* 99
a)
R
Рис 9 5 Включение
цепи с элементами R,
С под постоянное
напряжение а — схема
цепи; б — кривые
напряжения и тока
Постоянная интегрирования А находится из начальных
условий: при £=0 ыс(0)=0 и, следовательно, A = U. Подставляя это
в выражение (9.17) и решая его относительно напряжения ис,
получим
uc=U(l — er-t*), (9.18)
где U=uy — установившееся напряжение; — Ue~t/x = исв —
свободное напряжение.
Сила тока в цепи определится уравнением
i = Cduc/dt = Cd [U (1 _е-</т)]/<# = (UfR) er4\
(9.19)
На рис. 9.5, б построены кривые uc = f(t) и i=f(t).
Напряжение «с плавно возрастает до установившегося значения, а сила
тока i по мере заряда конденсатора постепенно уменьшается,
асимптотически приближаясь к нулю.
Теоретически заряд конденсатора заканчивается при t=oo.
Практически же заряд конденсатора считается законченным,
когда ыс = 0,99 U, что имеет место при £ = 4,6 т.
Замыкание цепи с элементами R и С накоротко. Если цепь
с элементами R и С (рис. 9.6, а) отключить от источника
питания и замкнуть накоротко, то элемент емкости будет
разряжаться. В этом случае уравнение электрического равновесия
с учетом, что i=Cduc/dt, запишется в следующем виде:
RCduc/dt-}-uc = 0, или xduc/dt + uc = 0.
Разделяя переменные, получим
ducluc= —dt/x.
внение и затем
In ис = — t/x + In A ;uc = Ле~"т.
Интегрируя это уравнение и затем потенциируя,
соответственно найдем
100
a)
Рис. 9 6 Короткое
замыкание цепи с элемен
тами R, С а — схема
цепи, б — кривые
напряжения и тока
5).
и>1
Uo
0
1
^uc = U0e't/z
<С_ Vo -t/x
i— Re
t
Постоянную интегрирования А определяют из начальных
условий: при £=0 Uc(0)=U0 и, следовательно, напряжение при
разряде конденсатора будет равно
„c=tV-'t. (9.20)
Сила тока в цепи при разряде конденсатора находится по
выражению
i = — uc/R = - (UJR) е-^ = — 1е~ч^с\
На рис. 9.6, б изображены кривые Uc = f(t) и i=f(t).
Считается, что при £ = 4,6 т, когда ыс = 0,01 U0 и £=0,01 /, разряд
конденсатора практически заканчивается.
Энергетические процессы в цепи с элементами R и С. С
энергетической точки зрения переходные процессы при заряде
конденсатора происходят за счет преобразования энергии системы.
Действительно, при включении цепи ток, проходя по элементу
сопротивления R, нагревает его, а напряжение на элементе
емкости С создает электрическое поле, в котором накапливается
энергия. В самом деле, обращаясь к уравнению (9.16) и
умножая обе его части на Ш, получим
Uidt = i*Rdt + ucidt,
(9.21)
где Uidt — энергия, расходуемая источником питания; i2Rdt —
энергия, преобразуемая в теплоту; ucidt — энергия,
накапливаемая в электрическом поле.
Следовательно, баланс энергии определится выражением
f Uidt = J PRdt + J ucidt =
0
CUZ
CU2
= CU2
101
Рис. 9.7. Включение цепи с элементами г, С под синусоидальное
напряжение- а — схема цепи; б — кривые напряжения; в — кривые
тока
т. е. одна половина энергии, расходуемой источником,
преобразуется в теплоту, а другая накапливается в электрическом поле
конденсатора. Процесс разряда конденсатора с энергетической
точки зрения характеризуется преобразованием энергии,
накопленной в электрическом поле конденсатора, в теплоту.
Включение цепи с элементами г и С под синусоидальное
напряжение. При включении цепи с элементами г и С (рис. 9.7, а)
под синусоидальное напряжение u=Um sin (at+ty) уравнение
электрического равновесия для мгновенных значений примет вид
ir+uc=Umsm((at + ty. (9.22)
Напряжение на конденсаторе будет представлять собой сумму
установившегося иСу и свободного ыСсв напряжений. Эти
составляющие соответственно равны
«CT = [/m/((oC)]sin((u^ + i|j — ф — я/2); иСсВ = Ае-'х,
где
/» = UJjf*+\l(<aCf] Ф = arctg[-1 /(гаС)].
Следовательно, переходное напряжение на конденсаторе
будет равно
uc = [IJ((aQ] sin (ю* + 1|>—ф — я/2) + Аег4*.
Постоянная интегрирования А определяется по начальному
условию: если при £ = 0 ис (0)=0, то
А = — [/m/((oC)]sin(iJj—ф —я/2).
Таким образом, закон изменения напряжения будет
следующий:
"с = UJ(aQ] sin (<°* + "Ф—Ф — п/2) —
- [7m/(coQ] sin (Ч>—ф —я/2) ег«\ (9.23)
Отсюда следует, что во время переходного процесса на
синусоидальное установившееся напряжение накладывается свобод-
102
HOe напряжение, абсолютная величина которого уменьшается по
показательному закону. На рис. 9.7, б приведены кривые их
изменения.
Процесс заряда заканчивается при ^=4,6 т, когда ис
практически достигает установившегося значения. Следует учитывать,
что значение «с зависит не только от амплитуды напряжения на
зажимах цепи, но и от момента включения. Наиболее
благоприятно процесс протекает, когда в момент включения ыСу = 0, что
может быть при условии а|э—ф=±я/2 или а|э—ф = Зя/2. В этом
случае, как видно из уравнения (9.23), переходный процесс
отсутствует, и в цепи сразу наступает установившийся режим
работы.
Наибольшего возможного значения ыс достигает в том
случае, если в момент включения иСу(0) = UCm, что может быть при
условии о|э = ф или oj)—ф = я. В этом случае, если активное
сопротивление равно нулю, то через полупериод после включения
цепи напряжение на конденсаторе может достигнуть значения
1т . ( Т я \
с соС V 2 2 )
- -Ь^ sin ( - -?-) е-(^),~ = _ 2UCm.
ыС \ 2 /
Сила тока в цепи при переходном процессе определяется
выражением
i = Cduc/dt = Im sin (cot + "Ф—ф) +
[/m/((oCr)] sin(oJ)—ф —я/2)е//т.
Отсюда следует, что в начале процесса ток имеет
несинусоидальный характер, а через время £ = 4,6т практически принимает
синусоидальную форму. На рис. 9.7, в изображены'Кривые силы
тока при а|э = ф. В момент £ = 0 установившаяся составляющая
тока проходит через нуль, а свободная составляющая делает
скачок, равный iCB(0) = UCm/r, и затем спадает по
экспоненциальному закону. При малом значении г начальные броски силы тока
могут быть значительными и вызывать в установке
нежелательные динамические усилия.
§ 9.5. Переходные процессы в нелинейных цепях
Переходные процессы в нелинейных цепях, как и в линейных,
возникают при переходе от одного установившегося режима
к другому и при коммутации цепей. Однако переходные процессы
в нелинейных цепях существенно отличаются от переходных
процессов в линейных цепях. Так, при включении нелинейной цепи
под постоянное напряжение могут возникнуть установившиеся
колебательные процессы, а при включении цепи под
синусоидальное напряжение—различные колебательные процессы. В
отдельных случаях могут ускоряться или замедляться процессы, увели-
103
Рис. 9.8. Нелинейная цепь с элементами г,
L и ее характеристика
чййаться или уменьшаться
переходные токи и
напряжения. Сложность и
многообразие явлений в
нелинейных цепях затрудняют их
исследование.
Переходные процессы
в нелинейных цепях
описываются нелинейными
дифференциальными
уравнениями. Эти уравнения не
имеют общего метода
решения. Поэтому для расчета переходных процессов применяют
приближенные графические и аналитические методы. Из последних
наиболее часто используют методы линеаризации и
кусочно-линейной аппроксимации, последовательных интервалов, изоклин и
графического интегрирования.
Рассмотрим один из этих методов — метод условной
линеаризации уравнений. Сущность его состоит в том, что в нелинейном
дифференциальном уравнении, описывающем переходный
процесс в цепи, выбирается нелинейный член, оказывающий
наименьшее влияние на процесс, а коэффициент при нем
принимается постоянным, равным среднему его значению. В результате
нелинейное уравнение становится линейным, решая которое
находят искомую величину.
В качестве примера рассмотрим включение цепи со сталью
(рис. 9.8, а) под синусоидальное напряжение u. = Ums'm((ut+'§).
В этом случае уравнение, составленное по второму закону
Кирхгофа, имеет вид
Н + <Г¥Ш = Um sin (at + о|э). (9.24)
Если г не велико, то величина ri не окажет существенного
влияния на переходной процесс по сравнению с dW/dt. Это
позволяет принять i=x¥(i)/L, a L взять из кривой 4х (0 для
наибольших значений Wm и 1т (рис. 9.8, б), т. е. L = Wm/Im- При замене
силы тока i на W/L уравнение (9.24) превращается в линейное
и принимает вид
r4r/L + d4r/dt = Umsm(<ot + y). (9.25)
Это линейное уравнение (см. § 9.3) имеет следующее
решение:
¥ = Чт sin («о/ + Ч>—Ф)— Чт sin (Ч>—Ф) e~rtlL> (9-26)
где
¥m = LUJi/r* + (<aL)*; <p = arctg(coL/r).
Ранее установлено (§ 9.3), что наименее благоприятно
переходный процесс протекает в такой цепи, когда в момент
включения о|э—ф=±я/2, a x=L/r имеет наибольшее значение. В этом
случае потокосцепление W достигает почти 2vFm (рис. 9,9. а),
104
Рис. 9.9 Кривые ^(t) и i(t) при переходном процессе
а сила тока в цепи (рис. 9.9, б) во много раз превышает
амплитуду 1т установившегося режима. Кривая i(t) строится по
уравнению (9.26) и кривой vF=vF(i) (см. рис. 9.8, б).
В случае когда г относительно большое, можно принять L =
= const во втором члене уравнения (9.24) dW/dt=Ldi/dt, и тогда
уравнение, становясь линейным, принимает вид
ri + Ldildt = Um sin (и t + а|з).
Решая это уравнение относительно силы тока, найдем
i = {UJZ) sin (<of +1|> — q>) — (UJZ) sin (о|з—q>) e~ r"L.
На основании этого уравнения и кривой vF=vF(i) строится
график W(t) (см. рис. 9.9, а). Задача в обоих случаях решена
приближенно.
§ 9.6. Примеры расчета переходных процессов
в электрических цепях
Пример 9 1. Индуктивная катушка, имеющая сопротивление ^=4 Ом,
индуктивность L=500 мГн, включается в сеть постоянного тока (рис. 9 10, а)
с напряжением 1/=110 В Определить значения тока i в цепи и напряжения
uL через время <=0,5 с после включения. Найти запас энергии WL в магнит-
а).
+ <?
5)
1,А
20
10
/
/
/
1 R
"
_'
,
100
80
60
40
20
0,2 0,Ь 0,6 t,c
Рис. 9 10. К примерам расчета переходного процесса в цепи
с элементами г, L
105
ном поле при достижении током практически установившегося значения.
Построить кривые изменения тока и напряжения
Решение. Ток в катушке после включения определяется по формуле
i = / (1 _ е-Щ = (110/4) (1 — е-4-0,5/0,5) = 27,5 (1 — е-*) = 27 А.
Напряжение на индуктивности, уравновешивающее ЭДС самоиндукции,
равно
uL = Ue-Ux = НО е-40.5/0.5 = 2 В.
Энергия, запасенная в магнитном поле при достижении установившегося
значения тока /=lW=110/4=27,5 А, находится по формуле
WL = LP/2 = 0.5-27.5V2 = 189 Дж.
Для построения кривых i=f{t) и uL=f{t) расчет производят по
формулам
i = I (I— е-'/т) = 27,5 (1 — е-«); uL = Ve-th = 1Ю е-Ы
и результаты сводят в таблицу
/, с
0
0,1
0,2
0,3
0,4
1, А'
0
15,2
22,0
24,1
26,4
"V в
ПО
49,5
22,3
10,0
4,53
t, с
0,5
0,6
0,7
0,8
оо
i, A
27,0
27,3
27,4
27,43
27,5
uL,B
2,0
0,915
0,42
0,187
0
На рис. 9.10. б представлены кривые изменения тока и напряжения.
Пример 9 2. Цепь, изображенная на рис. 9.10, а, включается под
синусоидальное напряжение «=310 sin (wH-ф) В. Частота напряжения и параметры
цепи соответственно равны- /=50 Гц, г=10 Ом, L=10 мГн Определить
максимально возможные значения переходного тока i и напряжения иь-
Ответ: imax=29,5 A; uL mllx = 298 В.
Глава 10. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
§ 10.1. Основные понятия и определения
Электрическими измерениями называют процессы сравнения
электрических величин с другими однородными величинами,
принятыми за единицы измерения. Такие сравнения обычно
производят с помощью электроизмерительных приборов и так называемых
мер. Электроизмерительными приборами называют устройства,
позволяющие измерять определенные электрические величины,
а мерами — вещественные воспроизведения единиц измерения.
Электроизмерительные приборы и меры разделяют на
рабочие и образцовые. Первые предназначены для технических и
лабораторных измерений, а вторые — для достаточно точных
измерений и поверки рабочих мер и приборов. Образцовые меры и
приборы, выполненные с наивысшей точностью, называют
эталонами. Последние служат для воспроизведения единиц основных
106
электрических величин: ЭДС, силы тока, индуктивности, емкости
и сопротивления.
Электроизмерительные приборы классифицируют по ряду
основных признаков: по способу сравнения измеряемой величины
с единицей измерения, по роду измеряемой величины, по роду
тока, по степени точности, по характеру применения, по способу
получения отсчета.
По способу сравнения измеряемой величины с единицей
измерения электроизмерительные приборы делят на приборы
непосредственной оценки и приборы сравнения. Приборами
непосредственной оценки называют приборы, дающие численные значения
измеряемых величин непосредственно по их отсчетному
приспособлению. Приборами сравнения называют приборы,
позволяющие сравнивать измеряемые величины с мерами, которые
часто устанавливаются внутри самих приборов. К приборам
сравнения относят различные мосты и компенсационные
измерительные устройства.
По роду измеряемой величины электроизмерительные
приборы делят на амперметры — для измерения силы тока,
вольтметры — для измерения напряжения и ЭДС, омметры — для
измерения сопротивления, ваттметры — для измерения мощности
электрического тока, счетчики — для измерения электрической
энергии, частотомеры — для измерения частоты переменного тока,
фазометры — для измерения угла сдвига фаз, гальванометры —
для измерения малых значений электрических величин,
осциллографы — для записи и наблюдения быстроизменяющихся токов
и напряжений.
По роду тока электроизмерительные приборы делят на
приборы: постоянного тока, применяемые только в цепях
постоянного тока; переменного тока, используемые только в цепях
переменного тока; постоянно-переменного тока, применяемые в
цепях как постоянного, так и переменного тока.
По степени точности электроизмерительные приборы делят на
восемь классов: 0,05; 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4,0. Эти числа
означают наибольшую допустимую погрешность в процентах от
номинального значения шкалы прибора.
По характеру применения электроизмерительные приборы
делят на стационарные, переносные и приборы для подвижных
установок.
По конструкции корпуса электроизмерительные приборы
бывают обыкновенного, брызгозащищенного, водозащищенного,
герметического и взрывозащищенного исполнения.
По способу получения отсчета электроизмерительные
приборы делят на приборы: с непосредственным отсчетом,
показывающие числовое значение измеряемой ими величины;
самопишущие, которые автоматически записывают показания на
движущейся ленте, цилиндре или диске, смонтированных, как правило,
внутри прибора; интегрирующие, позволяющие получать
суммарное значение измеряемой величины за время действия прибора;
107
сравнения, позволяющие сравнивать измеряемую величину
с мерой.
По принципу действия электроизмерительные приборы делят
на приборы магнитоэлектрической, электромагнитной,
электродинамической, индукционной, тепловой, термоэлектрической,
выпрямительной, электронной, электростатической и ферродинами-
ческой систем.
Для определения системы прибора, его назначения,
положения, рода измеряемого тока, класса точности и т. п. на шкалах
приборов ставят условные знаки и обозначения.
Электроизмерительные приборы всех систем должны
удовлетворять следующим основным требованиям: 1) быть достаточно
чувствительными и точными, погрешность не должна превышать
допустимую для данного класса точности прибора; 2) потреблять
минимальную мощность и не вносить в цепь заметных
изменений; 3) иметь малую чувствительность к влиянию внешних
факторов (температура окружающей среды и ее влажность,
внешние магнитные и электрические поля); 4) иметь градуировку
шкалы непосредственно в единицах измеряемой величины и быть
всегда готовыми к действию; 5) иметь шкалы по возможности
с равномерными делениями, быть надежными в работе, простыми
и удобными в установке и эксплуатации, относительно
недорогими и иметь достаточный срок службы.
Кроме общих требований судовые и специальные
электроизмерительные приборы в связи со специфическими условиями их
работы должны удовлетворять дополнительным требованиям,
а именно: а) быть виброустойчивыми; б) надежно работать в
широком диапазоне температур, в условиях высокой относительной
влажности воздуха, длительного крена судна, бортовой качки и
дифферента; в) иметь минимальные габариты и массу, надежные
крепления; г) при наличии визуального контроля деления шкал
приборов должны быть ясно различимы.
На судах, как правило, устанавливаются специальные
электроизмерительные приборы морского исполнения,
удовлетворяющие требованиям и правилам Регистра СССР.
§ 10.2. Приборы магнитоэлектрической системы
Действие приборов магнитоэлектрической системы основано
на взаимодействии магнитных полей постоянного магнита и
подвижной катушки, по которой проходит измеряемый ток.
Устройство приборов этой системы показано на рис. 10.1, а. Прибор
состоит из подковообразного магнита 1 с полюсными
наконечниками 2, между которыми укреплены неподвижный стальной
цилиндр 3 и алюминиевая рамка с катушкой 4, свободно
поворачивающаяся вокруг цилиндра. На оси рамки находится стрелка
прибора, отклоняющаяся вместе с поворотом рамки.
Противодействующий момент создают две спиральные пружины 5, через
которые подводится измеряемая сила тока к обмотке катушки. Ко-
108
Рис. 10 1. Прибор магнитоэлектрической системы а —
схема устройства; б — принцип действия; в — внешний
вид
нец стрелки перемещается над шкалой 6. Все детали прибора
смонтированы в корпусе, который, как правило, изготовлен из
металла или пластмассы.
При прохождении тока по обмотке рамки возникает
магнитное поле, которое, взаимодействуя с полем постоянного магнита,
создает вращающий момент. Под действием этого момента
происходит поворот рамки, а вместе с ней и стрелки прибора.
Вращающий момент, действующий на подвижную часть
прибора (рис. 10.1, б), определится выражением
MBP = 2Fb/2=IBlbw,
где F — сила, действующая на каждую активную сторону
обмотки прибора; / — сила тока, протекающего по обмотке
прибора; В — магнитная индукция в воздушном зазоре; I и b —
длина и ширина рамки; w — число витков обмотки прибора.
Противодействующий момент прибора равен Мщ> = Ка, где
К — удельный противодействующий момент, зависящий от
материала и размеров пружины. Поэтому в установившемся
положении подвижной системы
IBlbw --= Ка.
Решая это уравнение относительно угла поворота, получим
a = BlbwI/K = SI, (10.1)
где S — чувствительность прибора.
Таким образом, угол поворота стрелки прибора прямо
пропорционален силе тока, протекающего по обмотке рамки,
следовательно, приборы магнитоэлектрической системы имеют
равномерную шкалу.
Успокоителем прибора служит сама алюминиевая рамка, в
которой (при ее вращении) индуцируются вихревые токи,
взаимодействующие с полем постоянного магнита.
109
Магнитоэлектрические приборы пригодны только для
постоянного тока, так как при переменном токе средний за период
вращающий момент равен нулю и стрелка не будет отклоняться.
Направление отклонения стрелки зависит от направления тока,
поэтому на зажимах этих приборов ставят знаки «плюс» ( + ) и
«минус» (—), причем положительный зажим расположен, как
правило, справа от шкалы прибора или сверху.
Приборы магнитоэлектрической системы имеют следующие
основные достоинства' равномерную шкалу, высокие
чувствительность и точность, весьма малую чувствительность к внешним
магнитным полям, низкое энергопотребление, хорошую
апериодичность (подвижная система приборов быстро успокаивается).
Основные недостатки приборов этой системы — пригодность
только для измерений постоянного тока, высокие
чувствительность к перегрузкам и тряскам и стоимость прибора.
Приборы манитоэлектрической системы обычно используются
в качестве амперметров и вольтметров. Отличие между ними
состоит в том, что амперметры имеют малые сопротивления,
а вольтметры — большие. Амперметры обычно снабжаются
шунтами, а вольтметры — добавочными резисторами.
Магнитоэлектрические приборы используются также в качестве омметров и
логометров.
В настоящее время выпускаются различные типы как техни
ческих (рис. 10.1, в), так и лабораторных приборов
магнитоэлектрической системы. Почти все лабораторные приборы имеют
зеркальные шкалы. Кроме того, приборы этой системы высших
классов обычно изготовляют многопредельными и
комбинированными, т. е. для измерения силы тока и напряжения.
§ 10.3. Приборы электромагнитной системы
Действие приборов электромагнитной системы основано на
втягивании стального сердечника в неподвижную катушку при
прохождении по ней измеряемого тока. Устройство одной из
наиболее распространенных конструкций этой системы
схематически показано на рис. 10.2, а. Прибор состоит из неподвижной
катушки 2, плоского ферромагнитного сердечника 5, закрепленного
эксцентрично на оси прибора, спиральной пружины 1, магнито-
индукционного успокоителя 3, стрелки, шкалы и корпуса. Экран
4 защищает прибор от внешних магнитных полей.
При прохождении по катушке измеряемого тока создается
магнитное поле, под действием которого сердечник
намагничивается и втягивается внутрь катушки, поворачиваясь вместе
с осью. При повороте закручивается пружина, создавая тем
самым противодействующий момент системы.
Вращающий момент, действующий на сердечник при
неизменной измеряемой силе тока, пропорционален приращению энергии
магнитного поля WM при повороте подвижной системы:
МВР = dWJda =■ d (aP/2)/da = (/2/2) dL/da, (10.2)
110
где / — сила тока в катушке прибора, dL/da—скорость
изменения индуктивности катушки при повороте сердечника.
Поскольку противодействующий момент прибора создается
спиральной пружиной, то при достижении равновесия подвижной
системой получим
(/2/2) dL/da = Ka,
откуда находим угол поворота стрелки прибора
a = [IV(2K)]dUda = SP-
(10.3)
Из уравнения (10.3) следует, что, во-первых, направление
отклонения стрелки не зависит от направления тока. Это означает,
что электромагнитные приборы пригодны для измерений в цепях
как постоянного, так и переменного тока. Причем в цепях
переменного тока приборы измеряют действующие значения силы
тока и напряжения. Во-вторых, угол отклонения стрелки
пропорционален квадрату силы тока при неизменной чувствительности,
т. е. шкала электромагнитных приборов неравномерная. Для
получения более равномерной шкалы форму сердечника выполняют
так, чтобы индуктивность системы при перемещении сердечника
изменялась неравномерно. Однако сделать шкалу полностью
равномерной не удается.
Основные достоинства электромагнитных приборов — простота
конструкции, сравнительно низкая стоимость, малая
чувствительность к перегрузкам, возможность измерения больших сил
токов без применения дополнительных устройств, пригодность
для измерения в цепях постоянных и переменных тока и
напряжения.
К недостаткам электромагнитных приборов относят-
неравномерность шкалы, большое энергопотребление, зависимость
показаний от внешних магнитных полей. Для устранения влияния
внешних магнитных полей электромагнитные приборы
изготовляют с внешним или внутренним магнитным экраном. В качестве
таких экранов используют корпуса из ферромагнитных
материалов, а если корпус пластмассовый, то измерительный механизм
прибора закрывают
ферромагнитным
кожухом (см. рис.
10.2, а) той или иной
формы.
Приборы
электромагнитной системы
используют в
качестве амперметров и
вольтметров. Отличие
между ними состоит
в том, что катушки рис ю2 Прибор электромагнитной системы-
амперметров имеют а —схема устройства, б —внешний вид
Ш
малое число витков из толстой проволоки, а катушки
вольтметров — большое число витков из тонкой проволоки. Шунты для
электромагнитных амперметров не применяют, а при измерениях
в цепях переменного тока используют измерительные
трансформаторы тока. Для расширения пределов измерений
электромагнитных вольтметров устанавливают добавочные резисторы, а в
цепях переменного тока применяют еще измерительные
трансформаторы напряжения.
Современные электромагнитные приборы бывают
стационарными (рис. 10.2, б) и переносными.
§ 10.4. Приборы электродинамической системы
Принцип действия электродинамических приборов основан на
взаимодействии магнитных потоков катушек, по которым
протекает измеряемый ток. Схема устройства приборов
электродинамической системы показана на рис. 10,3, а. Прибор состоит из
неподвижной катушки 3, изготовленной обычно из двух частей,
подвижной катушки 4, двух спиральных пружин 2, воздушного
успокоителя 5, стрелки 1, шкалы и корпуса.
При прохождении измеряемого тока по катушкам,
соединенным последовательно или параллельно, создаются магнитные
потоки и подвижная катушка стремится повернуться и занять
такое положение, при котором магнитные потоки имели бы
одинаковое направление, а энергия магнитного поля была бы
наибольшей. Спиральные пружины, закручиваясь при повороте
подвижной катушки, противодействуют этому вращению.
Вращающий момент, действующий на подвижную катушку
при неизменно измеряемой силе тока, пропорционален
приращению энергии магнитного поля при повороте катушки в пределах
некоторого угла:
Мвр = dWJda = d (L„ /2/2 + Ln/2/2 + MIJn)/da,
где LH, Lu — индуктивности неподвижной и подвижной катушек;
/н, /п — силы токов неподвижной и подвижной катушек; М —
взаимная индуктивность между катушками; da — угол поворота
катушки, при котором запас энергии поля получает приращение.
При повороте подвижной катушки и, следовательно,
изменении взаимного расположения катушек их индуктивности
остаются постоянными, а взаимная индуктивность между ними
изменяется. Следовательно,
Мвр = IJndMlda, (10.4)
где dMfda—постоянная величина, зависящая от формы катушек
и их взаимного расположения.
Поскольку противодействующий момент создается
пружинами, то для установившегося отклонения подвижной системы
можно написать равенство
IJndMlda—Ka,
112
Рис. 10.3. Прибор электродинамической системы: а—схема
устройства; б — схема включения; в—схема ферродинамического устройства
откуда определяется угол поворота стрелки прибора
a = (IvIJK)dM/da = SIJn. (10.5)
Из уравнения (Ю.5) следует: 1) при одновременном
изменении направлений токов в катушках угол отклонения подвижной
системы не меняется, следовательно, приборы
электродинамической системы пригодны для измерений постоянного и
переменного токов; 2) угол отклонения пропорционален произведению
токов и множителю dMjda, т. е. шкала электродинамических
приборов— неравномерная: меняя форму катушек и их
взаимоиндуктивность, удается несколько улучшить шкалу, однако для
амперметров и вольтметров сделать ее полностью равномерной не
удается; 3) если по катушкам проходят токи /н и /п, сдвинутые
по фазе на угол г|з, то угол поворота подвижной системы
пропорционален произведению действующих значений сил токов в
катушках и косинуса фазового угла сдвига
a = S/„/nCost|j. (10.6)
В зависимости от схем включения обмоток подвижной и
неподвижной катушек приборы электродинамической системы
служат амперметрами, вольтметрами или ваттметрами. По точности
и чувствительности они лучше приборов других систем,
применяемых при измерениях в цепях переменного тока.
В вольтметрах и амперметрах на силу тока до 0,5 А катушки
соединяются последовательно, а на силу тока более 0,5 А —
параллельно. В ваттметрах катушки включаются в цепь так:
подвижная, называемая катушкой напряжения, включается в цепь
параллельно нагрузке (рис. 10.3, б), а неподвижная, называемая
токовой катушкой,— последовательно с нагрузкой. В этом
случае силы токов в катушках будут равны
/„ = /; Ia=Ufrb,
где гв — сопротивление цепи катушки напряжения.
ИЗ
В соответствии с полученными выражениями углы
отклонения а подвижной системы прибора для цепей постоянного и
переменного токов будут соответственно равны
а = (S!rb) UI = СР- а = (S/rB) UI cos <p = СР. (10.7)
Из выражений (10.7) следует: 1) электродинамический
ваттметр, включенный в цепь постоянного тока, измеряет мощность
P—UI, а включенный в цепь переменного тока, — активную
мощность P = UIcos<p; 2) ваттметр имеет равномерную шкалу;
3) если поменять знак только у силы тока или у напряжения, то
изменится и направление отклонения стрелки ваттметра, поэтому
чтобы стрелка прибора отклонялась только вправо, один из
зажимов токовой катушки и катушки напряжения обозначают
звездочкой (>(<) и подключают его со стороны генератора, т. е.
источника питания.
Достоинства электродинамических приборов: пригодность для
измерений в цепях переменного и постоянного токов; высокие
чувствительность и точность приборов.
Недостатки электродинамических приборов: неравномерность
шкалы амперметров и вольтметров, большая чувствительность
к перегрузкам; чувствительность к влиянию внешних магнитных
полей. Для уменьшения влияния внешних магнитных полей
электродинамические приборы снабжают ферромагнитными
сердечниками (рис. 10 3, б); в таком случае их называют ферродинамиче-
скими. Ферромагнитный сердечник значительно увеличивает
магнитное поле прибора, благодаря чему показания практически не
зависят от внешних магнитных полей и вращающий момент
прибора значительно возрастает.
Ферродинамические приборы обычно применяют в качестве
ваттметров, частотометров и фазометров низших классов
точности Кроме того, вследствие большого вращающего момента
ферродинамические приборы изготовляют в виде самопишущих
амперметров, вольтметров и ваттметров
§ 10.5. Приборы специального назначения
Для измерения ряда электрических и неэлектрических
параметров, в частности сопротивления, частоты, угла сдвига фаз,
индуктивности, емкости, температуры применяют логометриче-
ские электронные и универсальные приборы. К этому классу
приборов также относят мосты, щитовые мегаомметры, флюксметры,
осциллографы. Рассмотрим некоторые из этих приборов.
Действие логометрических приборов основано на измерении
отношения двух токов, протекающих по отдельным обмоткам
прибора. Отличительная особенность этих приборов в том, что
они не имеют механического устройства для создания
противодействующего момента Логометрические приборы бывают
магнитоэлектрической, электромагнитной и электродинамической
систем.
114
3 В, '82
Рис. 10 4. Схемы устройства магнитоэлектрического (а),
электромагнитного (б) и электродинамического (ej логометров
На рис. 10.4, а показано устройство логометра
магнитоэлектрической системы. Он состоит из сильного постоянного
магнита / с полюсными наконечниками, двух рамок 3 с обмотками,
насаженных на одну ось и жестко скрепленных между собой, и
стрелки 2, перемещающейся над шкалой. Токи к обмоткам
рамок подводятся с помощью безмоментных токоподводов,
выполненных в виде тонких ленточек. Поэтому стрелка логометра при
отсутствии тока в обмотке рамки может занимать любые
положения.
Принципы действия логометра и магнитоэлектрического
прибора практически совпадают. Направления токов в обмотках
выбираются так, чтобы моменты М\ и М2, создаваемые рамками,
были направлены навстречу друг другу. Под действием разности
этих моментов подвижная система поворачивается и занимает
такое положение, при котором моменты будут равны.
Моменты, действующие на рамки, определяются следующими
выражениями:
M1 = te;B1Z/1 = /1/(a);|
M2 = fca>52//2 = /2/2(a)J (Ю-Ь)
где /ь /2 — силы токов в рамках логометра; Ви В2 — магнитная
индукция в зазоре в соответствующих местах расположения
обмоток рамок; /, Ъ — активная длина рамки и ее ширина; a —
угол поворота рамок логометра.
При достижении подвижной системой установившегося
положения моменты М\ и М2 будут равны. Следовательно, решая
уравнения (10 8) относительно угла поворота а, найдем
a = /(V/2), (Ю.9)
т. е. положение подвижной системы определяется отношением
токов, протекающих по отдельным обмоткам логометра.
Подобным образом устроены и логометры других систем:
электромагнитной (рис. 10.4, б) и электродинамической
115
(рис 10.4, в). Первый из них представляет собой два
измерительных механизма А и В, сердечники которых укреплены на
одной оси так, что втягиваясь в катушки, они создают
вращающие моменты [см. формулу (10.2)] противоположного
направления. Причем при повороте подвижной системы один из моментов
увеличивается, а другой — уменьшается. Под действием разности
моментов подвижная система занимает установившееся
положение, когда моменты взаимно уравновешиваются:
Mi=/?/i(a)=M2 = /22/2(a),
откуда
«=/(/?//!), (ю.ю)
т. е. угол поворота подвижной системы определяется отношением
квадратов сил токов, протекающих по катушкам логометра.
Логометр электродинамической системы (см. рис. 10.4, в)
состоит из двух неподвижных катушек А и двух подвижных
катушек Вх и В2, расположенных внутри катушек А и укрепленных
на одной оси с указательной стрелкой прибора. При
прохождении тока по катушкам создаются два противоположно
направленных момента
M1 = ,K//iCosT|Wi(a); 1
где /—сила тока, проходящего по неподвижным катушкам; /ь
h — силы токов, проходящих по подвижным катушкам; г|зь грг —
углы сдвига между силой тока / и соответствующими силами
токов 1\ и h-
Под влиянием разности этих моментов подвижная система
прибора поворачивается до положения, когда вращающие
моменты взаимно уравновешиваются. Учитывая равенство
моментов, из уравнения (10.11) найдем
«=/[/! COS %/(/2COSf2)], (10.12)
т. е. положение подвижной системы логометра определяется
отношением составляющих сил токов в подвижных катушках,
совпадающих по фазе с силой тока в неподвижной катушке
прибора.
Логометры магнитоэлектрической системы широко
применяются в качестве мегаомметров, а логометры электромагнитной и
электродинамической систем — в качестве фазометров, фарадо-
метров, частотомеров и ряда других приборов.
На рис. 10.5 изображены принципиальная схема и общий вид
мегаомметра типа Ml 101. В цепь одной катушки логометра
включен резистор сопротивления rg, в цепь другой резистор,
сопротивление которого гх измеряется. Катушки подключены к
одному источнику питания, поэтому силы токов в них обратно
пропорциональны сопротивлениям резисторов, включенных с
катушками последовательно. Таким образом, при включении из-
116
Рис. 10 5 Схема и общий вид мегаомметра
меряемого резистора в цепь одной из катушек изменится сила
тока в ней, а вместе с тем и угол отклонения стрелки прибора,
которая, перемещаясь над шкалой, покажет значение искомого
сопротивления.
Мегаомметр применяется для измерения больших
сопротивлений, в частности сопротивления изоляции электрических цепей.
Он имеет два предела измерения: 0—100 кОм и 0—500 МОм. На
панели прибора находятся два зажима с надписями «Земля» и
«Линия», а также переключатель пределов измерения с
обозначениями «kQ» и «MQ» В качестве источника питания
мегаомметр имеет небольшой генератор постоянного тока, приводимый
во вращение рукой. При частоте вращения рукоятки не менее
120 об/мин напряжение на зажимах прибора достигает 500 В, и
он дает правильные показания.
На рис. 10.6 приведены схема и общий вид стрелочного
частотомера ферродинамической системы. Частотомер представляет
собой логометр, в цепь одной пары катушек А\ которого включен
резистор г, а в цепь другой Л2 — катушка индуктивности L и
конденсатор С. Цепи катушек соединены между собой параллельно
Рис 10 6. Схема и общий вид ферродииамического частого
мера
117
Рис. 10 7. Самопишущий
ваттметр
и подобно Ёольтметру Ёключаются
непосредственно на напряжение сети,
частота которого измеряется. При
прохождении по катушкам токов 1\
и /2 создаются два противоположно
направленных вращающих момента,
под действием .разности которых
подвижная система прибора
поворачивается. При установившемся положении
подвижной системы моменты
катушек равны Силы токов в
параллельных цепях прибора распределяются
обратно пропорционально их
сопротивлениям, при низких частотах
сопротивление г практически не
зависит от частоты, а индуктивное
сопротивление х зависит. Следовательно, угол отклонения подвижной
системы определится по выражению
a = F1(I*/P2) = F2(Xyr*) = F(f).
Таким образом, угол поворота подвижной системы зависит от
частоты тока, поэтому стрелка прибора, шкала которого про-
градуирована непосредственно в единицах частоты, покажет
значения измеряемой частоты.
Самопишущие приборы представляют собой
электроизмерительные приборы, которые помимо измерительного механизма
имеют дополнительные устройства для записи измеряемой
величины на движущуюся ленту. На рис. 10.7 изображен
самопишущий ваттметр ферродинамической системы. Прибор имеет
стрелку-указатель и перо для записи измеряемой величины на
ленту. Последняя протягивается с помощью специального
механизма. В качестве привода для протягивания ленты, как правило,
применяют небольшой однофазный синхронный
электродвигатель Для движения ленты по ее краям делают перфорацию.
§ 10.6. Измерения электрических величин
В судовых электроэнергетических системах все электрические
величины определяют, как правило, непосредственно по
показанию приборов, шкалы которых градуируют в единицах
измерений величины.
Силу тока измеряют амперметрами, напряжение —
вольтметрами. Амперметры включаются в цепь последовательно с
приемниками электроэнергии, а вольтметры — параллельно. Для
измерения в цепях постоянного тока применяют
магнитоэлектрические и электромагнитные приборы, но преимущество отдают
приборам магнитоэлектрической системы. При измерениях в
цепях переменного тока целесообразно использовать ферродинами-
ческие или электромагнитные приборы.
118
®=@™гЛ
Рис 10.8. Схемы включения и расширения пределов
измерения приборов постоянного (а) и переменного
токов (б)
Для расширения пределов измерения амперметров
постоянного тока применяются шунты, а вольтметров-—добавочные
сопротивления. В цепи переменного тока для расширения пределов
измерения амперметров используют трансформаторы тока (ТА),
вольтметров — трансформаторы напряжения (TV). На рис. 10.8
приведены схемы включения амперметров и вольтметров и их
добавочных элементов.
Сопротивления шунта и добавочное определяются по
выражениям
Rm = R4/(n—l); RA = (m—l)Rv, (10.13)
где RA, Rv — соответственно сопротивления амперметра и
вольтметра; п, т — соответственно коэффициенты шунтирования и
расширения, равные 1/1А и U/Uv и показывающие во сколько раз
увеличиваются пределы измерения данных амперметра и
вольтметра. п
Соотношения между первичными и вторичными токами ТА и
напряжениями TV соответственно выражаются так-
/1 = fcT/2; U1 = lhUit (10.14)
где kt, kH-—коэффициенты трансформации ТА и TV; /2= 5 А —
номинальный ток вторичной обмотки любого ТА; £/г=100 В —
номинальное напряжение вторичной обмотки любого TV.
Активная мощность трехфазного тока независимо от
характера нагрузки и схемы соединения системы определяются фор
мулой
P = U1 ф/х ф COS фх -f- U2 ф/2 ф COS ф2+ U3 ф/3 ф COS ф3.
При симметричной нагрузке фаз эту мощность можно
измерить одним ваттметром (рис 10 9, а), а при несимметричной
нагрузке (рис. 10 9, б)-—двумя ваттметрами или одним
трехфазным ваттметром.
Действительно, при симметричной нагрузке фаз активная
мощность трехфазной системы
Р = ЗРф = 3£/ф/ф cos Ф>
*^Ч
119
(w
-О
ЙН^
т. е. для измерения
активной мощности
трехфазной
симметричной системы
достаточно измерить
мощность одной фазы и
показание ваттметра
утроить.
Активная
мощность трехфазной
Рис. 10.9. Схемы для измерения мощности трех- ТрехпрОВОДНОИ СИ-
фазиых цепей при симметричной (а) и иесим- стемы при несиммет-
метричиой (б) нагрузках ричной нагрузке фаз
для приведенной
схемы включения ваттметров определяется как алгебраическая
сумма показаний Pi и Рг обоих ваттметров:
P = £/12/i cos tfo+[/32/3 cos г|з3, (10.15)
где U\2, U32, /1, /з-—действующие значения линейных
напряжений и сил токов; \р\, г|}3-—углы сдвига между соответствующими
значениями действующих напряжений и сил токов.
Вместо двух ваттметров часто применяют двухэлементный
трехфазный ваттметр, который имеет две подвижные катушки,
действующие на общую подвижную часть прибора и
конструктивно смонтированные в одном корпусе. Элементы трехфазного
ваттметра включаются по схеме двух ваттметров. Трехфазный
ваттметр обычно имеет семь зажимов, из которых четыре
крайних (по два с каждой стороны) служат для включения токовых
катушек, а три средних-—для включения катушек напряжения.
Трехфазный ваттметр показывает всю активную мощность
системы.
Измерение активной мощности трехфазной четырехпроводной
системы при несимметричной нагрузке производится тремя
однофазными ваттметрами, каждый из которых учитывает мощность
одной фазы.
§ 10.7. Измерения пассивных параметров
Пассивные параметры электрических цепей — это
индуктивность, емкость и сопротивление.
Сопротивление в диапазоне значений Ю-6—105 Ом обычно
измеряют косвенным образом амперметром и вольтметром или
непосредственно омметрами и унифицированными приборами —
вольтамперметрами.
На рис. 10.10 приведены схемы для измерения пассивных
параметров электрических цепей косвенным образом. Для
измерения параметров Zx, Lx и Сх цепей переменного тока
используют схему, приведенную на рис. 10.10, а, а для измерения
сопротивления цепей постоянного тока — схему, представленную на
120
/U ?
-Ф-
Zx ix
© **n
Xb-
Рис. 10.10. Схемы измерения пассивных параметров
цепей переменного (а) и постоянного (б) токов
рис. 10.10, б. Включив схемы под напряжение и сняв показания
всех приборов, определяют параметры по выражениям
Zx = U/Ij гх = РП\ хх = ^цР?;
Rx = U11; Lx = 11 /(2nf П ^Wpripi.
Раздел II ЭЛЕКТРООБОРУДОВАНИЕ СУДОВ
Глава П. ОБЩИЕ СВЕДЕНИЯ
ОБ ЭЛЕКТРООБОРУДОВАНИИ СУДОВ
§ 11.1. Основные понятия и определения
Под электрооборудованием судов, или судовым
электрооборудованием, понимают электротехнические устройства и системы,
устанавливаемые на судах. Они включают в себя судовые
электростанции (СЭС), электрические сети и потребителей
электроэнергии.
Судовая электростанция представляет собой совокупность
источников электрической энергии и так называемого главного
электрораспределительного щита, расположенных в одном или
нескольких помещениях судна. В зависимости от назначения
судовые электростанции разделяются на основные, аварийные и
станции гребных электрических установок. Все судовые
электростанции обычно соединены между собой.
Электрической сетью называется система, состоящая из
кабелей и распределительных устройств, с помощью которых
электрическая энергия передается от источника к потребителям.
Электрические сети по функциональному назначению
разделяются на силовые сети, сети электрического освещения, сети
установок слабого тока и сети специального назначения.
Потребителями электроэнергии называются все
электрифицированные механизмы, приборы, машины и аппараты,
потребляющие электроэнергию. По назначению они разделяются на
следующие основные группы: а) электромеханизмы судовой
энергетической установки (СЭУ); б) электромеханизмы судовых систем
и устройств; в) палубные электромеханизмы; г) осветительные
установки и устройства; д) устройства связи, сигнализации и
управления; е) электромеханизмы технологических установок; ж)
бытовые потребители; з) прочие электромеханизмы и приборы.
На рис. 11.1 приведена рассмотренная выше классификация
судового электрооборудования.
По степени важности все потребители электроэнергии
делятся на две группы: 1) ответственные потребители,
обеспечивающие ход судна; 2) неответственные потребители,
обеспечивающие бытовые нужды корабля.
Потребителями первой группы являются электромеханизмы
СЭУ, радиолокационные и гидролокационные установки,
приборы управления судном, радиостанции, водоотливные и
противопожарные средства, сигнальные огни и аварийное освещение,
рулевые устройства и ряд палубных механизмов. Эти
потребители обеспечиваются питанием не менее чем от двух источников
122
I Судовое электрооборудование I
Электрические
станции
1
•я
Основн
В
Авар
1
X
X**
к я о
ю S *
Гре
лектр
уста
т
1
Электрические сети
,1
я
1
в
о
и
S
£
нач
наз
о
Я
Рис. 11.1. Основные системы и элементы судового
электрооборудования
электроэнергии, а в отдельных случаях-—от двух
электрораспределительных щитов, расположенных побортно.
Потребителями второй группы являются вентиляторы
бытовых помещений, бытовые электронагревательные приборы,
электромеханизмы мастерской, камбуза, прачечной и пр. Эти
потребители получают питание, как правило, от одного
электрораспределительного щита отсека.
По характеру работы все электрооборудование делится на
три группы:
1) электрооборудование, предназначенное для длительной
работы, т. е. такой работы, при которой время включенного
состояния какого-либо элемента оборудования достаточно для
достижения установившейся температуры, не превышающей допустимого
предела;
2) электрооборудование, предназначенное для
кратковременной работы, т. е. такой работы, при которой время включенного
состояния какого-либо элемента оборудования недостаточно для
достижения предельно допустимой температуры, а время паузы
(остановки) достаточно для его охлаждения до температуры
окружающей среды;
123
3) электрооборудование, предназначенное для повторно-
кратковременной работы, т. е. такой работы, при которой
элементы оборудования многократно включаются и отключаются,
причем длительность одного периода их включения и паузы
между ними недостаточна для достижения установившейся
температуры или охлаждения до температуры окружающей среды.
По форме исполнения электрооборудование, устанавливаемое
на судне, как правило, делится на электрооборудование
защищенного, брызгозащищенного, водозащищенного, герметического
и взрывозащищенного исполнения.
Защищенным считается электрооборудование, защищенное от
попадания внутрь посторонних предметов и от случайных
прикосновений к токоведущим и вращающимся частям; брызгозащи-
щенным ■— электрооборудование, защищенное от попадания брызг
воды внутрь корпуса; водозащищенным — электрооборудование,
защищенное от попадания воды внутрь корпуса при обливании
его водой; герметическим ■— электрооборудование,
приспособленное для работы под водой в затопленных помещениях судна;
взрывозащищенным ■— электрооборудование, конструкция
которого обеспечивает безопасность его применения в условиях
взрывоопасных помещений и пространств.
§ 11.2. Требования, предъявляемые
к судовому электрооборудованию
Условия работы судового электрооборудования имеют ряд
специфических особенностей. К ним относятся: а) установка
электромеханизмов и прокладка кабелей на металлическом
основании и по металлическим частям судна, которые представляют
собой хороший проводник; б) высокая влажность и воздействие
морской воды; в) сотрясения судна вследствие ударов волн;
г) общая вибрация судна, создаваемая работой гребных винтов,
и местная, вызываемая работой отдельных агрегатов; вибрация
может иметь значительную частоту; д) резкие колебания
температуры, зависящие от района плавания, времени дня и года и
характера судовых помещений; е) длительный крен судна,
дифферент и бортовая качка с большими углами отклонения от
вертикали; ж) наличие взрывчатых веществ, нефтепродуктов и
масел в ряде отсеков судна. Кроме того, судно насыщено
разнообразной техникой, что затрудняет размещение и обслуживание
электрооборудования.
С учетом указанных выше неблагоприятных условий работы
к судовому электрооборудованию предъявляют требования
высокой электрической и механической прочности, влаго-, тепло- и
холодостойкости, ударовибростойкости, пожаро- и взрывобез-
опасности и т. д. Основными же требованиями к
электрооборудованию судов являются следующие:
1. Живучесть и высокая надежность работы. Под живучестью
судового электрооборудования понимают стойкость его к повреж-
дениям и способность к быстрому восстановлению, которое
осуществляется автоматически или экипажем, а под надежностью ■—
свойство электрооборудования выполнять требуемые функции и
сохранять свои эксплуатационные показатели в заданных
пределах в течение установленного срока службы при соблюдении
всех правил эксплуатации и действующих инструкций.
Живучесть и надежность электрооборудования
обеспечиваются следующими мероприятиями: а) резервированием наиболее
важных и ответственных электрических установок и систем;
б) рациональным размещением электростанций и основных трасс
кабелей; в) установкой автоматизированных систем управления
и контроля за работой основных элементов электрооборудования;
г) дублированием подводов питания к важным
электромеханизмам и размещением последних в наиболее защищенных частях
судна; д) применением специальных конструктивных форм
исполнения для наиболее важного электрооборудования,
установкой его на амортизаторах, а также применением по возможности
негорючих и огнестойких материалов; е) обучением экипажа
судна и обеспечением его эффективными средствами устранения
повреждений электрооборудования.
Надежность работы отдельных элементов
электрооборудования обеспечивается: а) конструктивным устройством элементов,
т. е. все элементы должны иметь прочную и достаточно жесткую
конструкцию; б) применением в качестве изоляции тепло-,
холодо-, влаго- и маслостойких материалов; в) усиленным
креплением элементов электрооборудования, их рациональным
размещением, обеспечивающим наименьшее влияние качки, а также
большой уравновешенностью подвижных частей
электромеханизмов.
2. Минимальные масса и габариты всех элементов
электрооборудования при оптимальном КПД. Уменьшение массы и
габаритов достигается использованием высококачественных
материалов и специальных конструкций.
3. Простота эксплуатации электрооборудования и безопасность
его обслуживания, минимальные помехи радиоприему и малая
шумность, а также максимальная унификация
электрооборудования.
Некоторые из рассмотренных требований являются
противоречивыми, поэтому при разработке конструкций обычно
принимается компромиссное решение, в результате чего указанные
тактико-технические требования к электрооборудованию иногда
выполняются не полностью.
§ 11.3. Род тока и стандартные значения напряжения
и частоты
На современных судах в качестве основного рода тока, как
правило, применяется переменный трехфазный ток, и лишь на
тех судах, где преобладающая часть оборудования выполнена
125
на постоянном токе, используется постоянный ток Отдельные же
потребители, которые требуют тока, отличного от основного,
питаются от соответствующих преобразователей.
Основными преимуществами трехфазного тока по сравнению
с постоянным являются: 1) простота устройства электрических
машин, в особенности короткозамкнутых асинхронных
электродвигателей, благодаря чему они имеют высокую надежность
в работе, более простое обслуживание, меньшие массу и
габариты, меньшую стоимость и требуют меньшего количества
запасных частей; 2) простота преобразования тока и напряжения, для
чего применяются надежные полупроводниковые преобразователи
и трансформаторы; 3) простота устройства коммутационных
аппаратов на переменном токе, которые безаварийны, имеют
меньшие массу и габариты.
Основными недостатками трехфазного тока являются
трудность регулирования частоты вращения электродвигателей
переменного тока, их низкий пусковой момент. Электродвигатели
постоянного тока имеют больший пусковой момент и хорошие
характеристики, позволяют легко и в широких пределах
осуществлять регулирование частоты вращения. Следует, однако,
заметить, что современные тиристорные системы управления
электроприводами с частотной модуляцией дают возможность
регулировать в широких пределах и частоту вращения асинхронных
электродвигателей.
В связи с указанными достоинствами элементов
электрооборудования постоянного тока и в связи с тем, что ряд систем и
изделий могут работать только на постоянном токе, суда, имеющие
в качестве основнцх электростанции переменного тока,
оборудуются вспомогательными электроэнергетическими установками
постоянного тока Основными источниками электроэнергии таких
систем, как правило, являются преобразователи, а резервными —
электрические аккумуляторы.
Номинальные значения стандартных напряжений,
допускаемых в судовых электроустановках, приведены в табл. 11.1. Из
указанных напряжений в силовых сетях переменного тока чаще
всего применяют напряжения 220 и 380 В. Напряжения 12 и
Таблица 11.1 Номинальные напряжения источников и приемников
электроэнергии
Род тока
Переменный
Номинальное напряжение,
В
потребителей
12
24
220
380
источников
13,5
28,5
230
400
Род тока
Постоянный
Номинальное напряжение,
В
потребителей
12
24
ПО
220
440
источников
13,5
28,5
115
230
460
126
24 В, как правило, используют в сетях аварийного освещения и
в сетях слабого тока, а также для питания переносного
электрооборудования Напряжения ПО и 220 В постоянного тока
применяют в силовых сетях и в сетях основного освещения.
Напряжения 24 В переменного и постоянного тока часто используют и
в сетях специального назначения.
Значения номинальных напряжений зависят от мощности
СЭС. Напряжения ПО и 220 В целесообразны при мощности
СЭС до 300 кВт, напряжение 380 В — при мощности СЭС свыше
300 кВт. Если мощность СЭС составляет десятки тысяч киловатт,
то целесообразно применять напряжения 660, 1200, 3000, 6000 В
и более.
Номинальные частоты электроэнергетических систем и
электроустановок переменного тока — 50 и 400 Гц. Для отдельных
систем и установок используют и другие частоты
Глава 12. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ПОСТОЯННОГО ТОКА
§ 12.1. Общие сведения и понятия
Электрическими машинами называют машины,
преобразующие механическую энергию в электрическую, или, наоборот,
электрическую в механическую. Первые из них называют
генераторами, вторые — электродвигателями. В зависимости от рода
тока электрические машины делятся на машины постоянного
тока и машины переменного тока.
В основе работы машин постоянного тока лежат закон
электромагнитной индукции и закон взаимодействия проводника
с током и магнитного поля. На рис. 12.1 приведены схемы работы
машины постоянного тока в режиме генератора и режиме
электродвигателя. Машина изображена в простейшем виде и
представляет собой виток, вращающийся с постоянной угловой
скоростью со в равномерном магнитном поле между двумя
полюсами. Концы витка присоединены к двум медным полукольцам,
насаженным на вал и изолированным друг от друга. На
полукольца наложены неподвижные щетки, соединяющие виток
с внешней цепью. Виток обычно укладывается на поверхности
стального цилиндра. Такое устройство получило название якоря.
Если якорь машины привести во вращение (рис. 12.1, а), то
виток будет пересекать магнитный поток и в нем будет
индуцироваться переменная ЭДС е, значение которой определяется по
закону электромагнитной индукции
e = Blv, (12.1)
где В — магнитная индукция, перпендикулярная к направлению
движения витка; /—активная длина витка, т. е. длина двух сто-
t27
рон витка, пересекающих
магнитный поток; v —
скорость движения витка
относительно поля.
Под влиянием
возникшей ЭДС в
замкнутой цепи потечет ток. Он
будет взаимодействовать
с магнитным полем, в
результате чего образуется
электромагнитная пара
сил, которая согласно
закону Ленца будет
противодействовать
движению витка. Машина
в рассматриваемом
случае работает в режиме
генератора, так как при этом механическая энергия первичного
двигателя преобразуется в электрическую.
При прохождении через виток тока i от постороннего
источника питания (рис. 12.1, б) в результате взаимодействия тока и
магнитного поля возникает электромагнитная пара сил,
направление которой определяется по правилу левой руки, а
значение— по формуле
Рис. 12 1. Схемы работы машин постоянного
тока, а — генератора; б — двигателя
f = Bli.
(12.2)
Под влиянием этой пары сил виток придет в движение. Он будет
пересекать магнитное поле, и в нем возникнет ЭДС е, которая
согласно закону Ленца будет препятствовать причине своего
возникновения. Машина в рассматриваемом случае работает в
режиме электродвигателя, так как при этом электрическая энергия
источника питания преобразуется в механическую.
Таким образом, в обоих режимах имеют место ЭДС и
электромагнитные силы. В режиме генератора ЭДС является
причиной возникновения тока, а электромагнитные силы — силами
торможения. В режиме электродвигателя электромагнитные силы
являются причиной движения, а ЭДС — противоэлектродвижу-
щей силой. Следовательно, электрическая машина обратима, т. е.
она может работать как в режиме генератора, так и в режиме
электродвигателя.
При работе машины в режиме генератора в витке
индуцируется переменная ЭДС, под влиянием которой в замкнутой цепи
течет ток — переменный в витке и постоянный по направлению во
внешней цепи.
При работе машины в режиме электродвигателя во внешней
цепи течет также постоянный ток, а в витке — ток, переменный по
направлению. Преобразование переменного тока в постоянный на
зажимах внешней цепи в режиме генератора и изменение направ-
128
L-<H J-o-1
Рис. 12.2. Схема работы коллектора
ления тока в витке в режиме электродвигателя осуществляются
автоматически с помощью коллектора.
Рассмотрим принцип действия коллектора машины в обоих
режимах ее работы. На схемах (рис. 12.2) а и б—коллекторные
пластины; 1 и 2— проводники; А и В — щетки, установленные на
так называемой нейтральной линии, т. е. линии, проходящей
посредине между полюсами. Значение ЭДС витка на нейтральной
линии всегда равно нулю.
Очевидно, когда проводник 1 находится под северным
полюсом магнита, щетка А касается пластины б, а щетка В —
пластины а и во внешней цепи ток течет от щетки А к щетке В, как
указано стрелками. При прохождении же проводников через
нейтральную линию ЭДС равна нулю и, следовательно, в витке и во
внешней цепи тока не будет. Наконец, при переходе
проводника 1 в область южного полюса и соответственно проводника 2
в область северного полюса индуцируемые в них ЭДС меняют
свое направление на обратное. Но в момент изменения
направления ЭДС в проводниках щетка А переходит с пластины б на
пластину а и щетка В — соответственно с пластины а на
пластину б. Тем самым щетки переключают концы витка по
отношению к внешней цепи, в результате чего ток во внешней цепи течет
в прежнем направлении. Другими словами, в витке индуцируется
переменная ЭДС и течет переменный ток, а во внешней цепи —
пульсирующий ток, т. е. ток, переменный по силе и постоянный
по направлению.
Для того чтобы во внешней цепи получить неизменный по
направлению ток, надо создать постоянное напряжение. Для этого
на якоре на одинаковом расстоянии друг от друга укладывают
от 12 до 24 витков-секций и соответственным образом
увеличивают число коллекторных пластин. В результате суммирования
ЭДС секций ЭДС якоря и напряжение на его зажимах
получаются постоянными.
5 Заказ № 1104
129
Рис. 12 3. Устройство машины
постоянного тока:
/ — коллектор; 2 — полюс основной;
3 —полюс добавочный; 4 — станина;
5 — якорь
При работе машины в режиме
электродвигателя коллектор
служит для распределения тока в
обмотке якоря в строго
определенных направлениях (см. рис. 12.1, б),
с тем чтобы сохранялось
неизменным направление вращения
якоря.
§ 12.2. Устройство и основные
элементы машины
Устройство машины
постоянного тока схематически показано
на рис. 12.3. Она состоит из двух
основных частей: неподвижной,
служащей для создания
магнитного потока, и вращающейся, в
которой индуцируется ЭДС. Между
этими частями машины имеется
воздушный зазор, который в машинах небольшой мощности
составляет 1—3 мм, а в больших машинах доходит до 10—12 мм.
Рассмотрим кратко устройство частей машины.
Неподвижная часть машины состоит из станины, основных и
добавочных полюсов. Основные полюса служат для создания
основного магнитного потока. Каждый основной полюс состоит из
сердечника и надетой на него катушки, по которой проходит ток
возбуждения. Катушки основных полюсов, соединенные между
собой тем или иным способом, образуют обмотку возбуждения
машины. Сердечники основных полюсов заканчиваются
полюсными наконечниками, назначение которых — улучшить
распределение магнитного потока. Добавочные полюса установлены
между главными полюсами и служат для улучшения условий
коммутации. Добавочный полюс, как и главный, состоит из
сердечника и насаженной на него катушки. Катушки добавочных
полюсов, соединенные между собой, образуют обмотку, которая
обычно включается последовательно с обмоткой якоря.
Сердечники полюсов часто изготовляют из тонких изолированных
листов электротехнической стали — с целью ограничения вихревых
токов. Станину, как правило, изготовляют из стали и используют
для крепления отдельных частей, а также как магнитопровод
машины.
Машины постоянного тока бывают двухполюсными и
многополюсными. Полюса вместе с ярмом станины и сердечником
якоря составляют магнитную систему машины.
Якорь машины (рис. 12.4, а) состоит из сердечника 3,
укрепленного на валу, обмотки 2 и коллектора 1. Сердечник
набирается из тонких листов электротехнической стали, а для
улучшения охлаждения в нем, как правило, делают вентиляционные
каналы. На поверхности сердечника имеются пазы. Обмотка
130
Рис. 12.4. Якорь (а), секция его обмотки (б) и
пазы (в)
якоря изготовляется из медного изолированного провода в виде
одновитковых или многовитковых секций (рис. 12.4, б), которые
закладывают в пазы сердечника (рис. 12.4, в) и укрепляют в них
с помощью деревянных клиньев и бандажей. Выступающие части
обмотки якоря, называемые лобовыми, также крепят с помощью
бандажей. Концы секций припаивают к коллекторным
пластинам. Иногда секции обмотки соединяют с коллекторными
пластинами с помощью хомутиков. Секции, соединенные
коллекторными пластинами, образуют обмотку якоря.
Коллектор состоит из ряда клиновидных медных пластин,
изолированных друг от Друга миканитовыми прокладками. Он
закрепляется на валу машины и вращается вместе с якорем. Ток
с коллектора снимается с помощью щеток, которые имеют с
коллектором скользящий контакт. Щетки представляют собой
угольные или графитные бруски, размещенные в щеткодержателях.
Последние с помощью хомутиков укрепляются на пальцах
траверсы или рамы, от которой щеткодержатели изолированы.
Перемещением траверсы достигается изменение положения щеток на
коллекторе. Число пальцев на траверсе равно числу полюсов
машины.
§ 12.3. Электродвижущая сила
и электромагнитный момент машины
постоянного тока
При вращении якоря машины в проводниках обмотки якоря,
расположенных под разными полюсами (рис. 12.5),
индуцируются ЭДС различного направления, но благодаря
симметричному расположению проводников эти ЭДС равны по величине.
Из рис. 12.5 видно, что проводники, образующие какую-либо
одну параллельную ветвь, включены между щетками машины
и их ЭДС действуют согласованно. Следовательно, ЭДС
машины в каждый момент времени равна сумме ЭДС этих
проводников,
5*
131
Рис. 12.5. К определению ЭДС (а) и
электромагнитного момента (б) для машин по-
стоянного тока
/, . ,6 — номера секций обмотки якоря и соот
ветствующих коллекторных пластин
Обозначая через N
общее число активных
проводников якоря, а
через а число пар
параллельных ветвей, найдем
с N о N ,
Е = е = Дер IV,
1а 1а
(12.3)
где е — ЭДС,
индуцируемая в одном проводнике
обмотки якоря; Вср —
среднее значение
индукции в воздушном зазоре
машины.
Поскольку линейная
скорость вращения якоря
v и магнитный поток машины Ф соответственно равны
v = -
D
(О
рх
со; Ф = ВСрт/,
где D — диаметр якоря; р—число пар полюсов; x=nD[(2p)
полюсное деление, то с учетом этих соотношений имеем
Ф N1 рх
%1 1а я
(О =
pN
1па
соФ.
(12.4)
В готовой машине р, N и а постоянны, поэтому, заменив все
постоянные величины одним коэффициентом C=pNf(2na),
окончательно получим
£ = СсоФ. (12.5)
Однако в большинстве случаев приходится вместо угловой
скорости и пользоваться частотой вращения п Поскольку
(о = л/г/30, то уравнение ЭДС запишется следующим образом:
Е = СепФ, (12.6)
где Ce = Cnf30 = pNf(&0a)—коэффициент, зависящий от
конструктивных данных машины.
Из уравнения (12.6) следует, что при работе машины ее ЭДС
можно менять путем изменения частоты вращения якоря или
магнитного потока.
При работе машины в режиме генератора ЭДС Е больше
напряжения U на зажимах машины на величину падения
напряжения в цепи якоря. Следовательно, уравнение электрического
равновесия для генератора запишется так:
и = Е-1я1*я, (12.7)
где /я—сила тока в цепи якоря; Ra—сопротивление цепи якоря.
При работе машины в режиме электродвигателя ЭДС Е, на-
132
зываемая обратной или противодействующей, меньше
напряжения U на величину падения напряжения в цепи якоря.
Следовательно, уравнение электрического равновесия для
электродвигателя можно записать в виде
U = E + IaRa. (12 8)
Уравнения электрического равновесия характеризуют первое
основное условие работы машины, которое называют условием
равновесия ЭДС.
При работе машины постоянного тока имеет место
взаимодействие поля полюсов и поля якоря, в результате которого
возникает электромагнитный момент машины, причем при работе
машины в качестве генератора возникает тормозной момент, а при
работе в режиме электродвигателя — вращающий.
Действительно, ток, текущий в обмотке якоря генератора,
взаимодействуя с магнитным потоком полюсов, создает тормозной
момент Мт электромагнитных сил F, направленный
противоположно направлению вращения якоря, а следовательно, и
направлению вращающего момента М первичного двигателя
(см. рис. 12.5, а). В этом нетрудно убедиться, применяя правило
левой руки. Если же через обмотку якоря пропустить ток от
постороннего источника в том же направлении (рис. 12.5, б), то
электромагнитная пара сил создаст вращающий момент М. Этот
момент в двигательном режиме будет преодолевать нагрузку на
валу машины, также называемую обычно тормозным
моментом Мт или моментом сопротивления
Таким образом, при установившемся режиме работы машины
должно иметь место равенство моментов
М-Мт. (12.9)
Это уравнение выражает второе основное условие работы
машины, которое называют условием равновесия моментов.
Установим зависимость электромагнитного момента от
величин, определяющих природу его возникновения. Согласно закону
Ампера среднее значение электромагнитной силы, действующей
на один проводник, равно
F-B^ll, (12.10)
где Вср—среднее значение индукции в воздушном зазоре
машины; /—активная длина проводника; / — сила тока в
проводнике.
Так как плечо силы равно радиусу якоря R, то момент,
развиваемый одним проводником, определится выражением
Mnp = FR = BcpUR. (12.11)
С другой стороны, среднее значение магнитной индукции
равно магнитному потоку полюса, деленному на площадь
полюса:
Вср=-^ = _4— = -^- (12.12)
133
Подставляя полученное значение Вср в уравнение (12 11),
получим
Мпр = рФ1/п. (12.13)
Если якорь имеет N проводников и сила тока в проводнике
I=Inl(2a), то электромагнитный момент машины, создаваемый
всеми проводниками, будет равен
М = МпРЛГ = -^--^ЛГ = -^-Ф/я (12.14)
л 2а 2па
Обозначив постоянные величины изготовленной машины через
CM = pN[(2na), получим
М = СМФ/Я. (12.15)
Таким образом, электромагнитный момент изготовленной
машины меняется только с изменением ее магнитного потока и
силы тока в якоре.
§ 12.4. Реакция якоря и коммутация
При работе машины вхолостую, т е без нагрузки, в ней
существует только основное магнитное поле—поле полюсов При
работе же машины под нагрузкой, т е когда по обмотке якоря
проходит ток, в ней существуют поле полюсов и поле якоря,
создаваемое током якоря Накладываясь друг на друга, эти поля
образуют результирующее магнитное поле машины, которое
отличается от основного поля полюсов не только по величине, но и
по характеру распределения Последнее объясняется тем, что
направления поля якоря и поля полюсов в одних местах
совпадают, отчего результирующее поле в этих местах усиливается,
а в других местах не совпадают, вследствие чего
результирующее поле в этих местах ослабляется Так, в генераторе поле
усиливается у сбегающих краев полюсов и ослабляется у
набегающих краев В электродвигателе имеет место обратная картина
поле ослабляется у сбегающих краев полюсов и усиливается
у набегающих краев.
Воздействие поля якоря на основное поле машины
называется реакцией якоря Реакция якоря приводит к нежелательным
явлениям, в частности ухудшает коммутацию в машинах, у
генераторов изменяет напряжение, а у электродвигателей — момент
и частоту вращения Поэтому в машинах постоянного тока
предусматриваются специальные меры для компенсации вредного
действия реакции якоря
При отсутствии тока в якоре и, следовательно, реакции якоря
(рис 12 6, а) физическая нейтраль ФН — линия,
перпендикулярная к оси результирующего магнитного потока, — совпадает
с геометрической нейтралью XX' — линией, перпендикулярной
к оси полюсов и разделяющей на якоре области северного и юж-
134
Рис 12 6 К пояснению реакции якоря Рис 12 7 Расположение доба-
в машине постоянного тока вочных полюсов
ного полюсов При действии реакции якоря физическая нейтраль
смещается (рис 12 6, б) с геометрической нейтрали У
генераторов (Г) физическая нейтраль смещается по направлению
вращения якоря, а у электродвигателей (Д)—против направления
вращения В этом случае для нормальной работы машины щетки
надо сдвинуть в том же направлении на угол а, на который
сместилась физическая нейтраль, или немного больший
При смещении щеток с геометрической нейтрали поток якоря
Фа также сместится и не будет перпендикулярен к оси полюсов
Поэтому его можно разложить на две составляющие поперечную
Фад, ориентированную перпендикулярно к оси полюсов, и
продольную Фаа, направленную по оси полюсов Воздействие
поперечной составляющей потока якоря на основной поток
машины Фо называется поперечной реакцией якоря, а воздействие
продольной составляющей — продольной реакцией якоря
Для уменьшения вредного влияния реакции якоря в
большинстве машин постоянного тока вместо смещения щеток применяют
специальные устройства — добавочные полюса (рис 12 7) Они
устанавливаются между основными полюсами по нейтральной
линии и создают дополнительный магнитный поток Фд п
направленный навстречу потоку якоря Фа и тем самым ослабляющий
действие последнего Магнитное поле якоря изменяется с
изменением нагрузки машины, поэтому для компенсации действия поля
якоря обмотку добавочных полюсов включают последовательно
с обмоткой якоря, с тем чтобы по ней проходил ток якоря
Под коммутацией понимают процесс переключения секций
обмотки якоря из одной параллельной ветви в другую,
сопровождаемый замыканием секции накоротко и изменением силы и
направления тока в ней Переключение совершается во время
прохождения секции через нейтральную линию Весь процесс
переключения одной секции показан на рис 12 8, а За время
этого переключения сила тока в короткозамкнутай, или, иначе,
коммутируемой, секции изменяется от / до —/, проходя через
135
aK
I'
•
/\
' ,
.
/ \
'7 Г
' I'
/\
' £<
,
/ \
7 Г
/^
, '
1
/
7
Y Y A^ii B\k Y Y
11 11 12
hf 'I
^0
0^
^^^|_
\22ZU
UI
-I
Рис. 12.8. К пояснению процесса коммутации:
а—секции обмотки якоря; б — кривая
изменения тока
нуль. Установим закон
изменения
коммутационного тока,
причины и следствия его
изменения.
Физическая
сущность
коммутационного процесса состоит
в том, что в
коммутируемой секции
обмотки якоря
вследствие быстрого
изменения тока возникают
ЭДС самоиндукции
eL = —Ldi/dt и
взаимоиндукции ем, которые
образуют реактивную ЭДС ер=еь + ем- Эти ЭДС препятствуют
быстрому изменению тока и тем самым ухудшают коммутацию,
вызывая в момент схода щетки с пластины коллектора искру
между сбегающим краем щетки и пластиной коллектора. Кроме
того, на изменение тока в короткозамкнутой секции обмотки
якоря оказывает влияние переходное сопротивление Ящ между
щеткой и пластиной коллектора.
Таким образом, для уменьшения вредного действия
коммутации надо увеличивать сопротивление ^щ и компенсировать
реактивную ЭДС ер. Наиболее эффективно компенсация достигается
путем создания компенсирующей ЭДС ек, равной по величине и
противоположной по направлению реактивной ЭДС: ер=—ек.
В этом случае iK=(ep—ек)/^щ = 0 и процесс коммутации
протекает по линейному закону (рис. 12.8, б). Для создания
компенсирующей ЭДС в машинах постоянного тока устанавливают
добавочные полюса.
Помимо коммутационных процессов причинами искрения на
коллекторе могут быть: а) механические дефекты — неровная
поверхность коллектора, вибрация щеточного аппарата,
неправильное расположение и давление щеток и пр.; б) неравномерное
распределение напряжения на коллекторе, которое может
достигать больших значений, особенно при переменной нагрузке.
§ 12.5. Мощность, потери и КПД машин постоянного тока
При работе машин постоянного тока имеют место следующие
основные виды потерь:
а) механические рм, обусловленные трением вала в
подшипниках, щеток о коллектор, вращающихся частей о воздух;
определяются по эмпирическим формулам или экспериментально;
б) магнитные (потери в стали) рс, обусловленные вихревыми
токами и гистерезисом и вычисляемые по эмпирическим
формулам;
136
в) электрические рэ, обусловленные нагреванием обмотки
якоря, добавочных полюсов, а также потерями на возбуждение
и в щетках; эти потери определяются по формуле
где Ra, /я — полное сопротивление цепи якоря и сила тока в ней;
Uв, /в — напряжение и сила тока в цепи возбуждения; Д£/щ —
переходное падение напряжения на пару щеток, обычно
равное 2 В;
г) добавочные рд, обусловленные вибрацией вращающихся
частей, неравномерным распределением индукции и пульсацией
тока, а также неравномерным распределением плотности тока
в отдельных элементах машины; эти потери определяются
выражением рд=0,01Рн, где Рн— номинальная мощность,
определяемая условиями допустимого нагрева машины.
Таким образом, полные потери в машине постоянного тока
могут быть выражены следующей формулой:
2р = р„-|-рс + Рэ + Рд-
Механические и магнитные потери практически не зависят
от нагрузки машины, поэтому их сумму принято называть
потерями холостого хода. Электрические же потери
пропорциональны квадрату силы тока якоря и вызывают нагрев машины.
Поскольку нагрев возможен до определенной температуры, то
электрические потери регламентируют допустимую силу тока,
а следовательно, и номинальную мощность машины. За
номинальную мощность генераторов принимается электрическая
мощность на зажимах машины, а для электродвигателей —
механическая мощность на валу, выраженная в электрических единицах
измерения.
Мощность и КПД генератора. Мощность, развиваемая
генератором, называется электромагнитной мощностью. Она
характеризует скорость преобразования механической энергии в
электрическую и определяется произведением силы тока якоря
генератора /я и его ЭДС Е:
Рэм = £/„. (12.16)
Мощность, отдаваемая генератором во внешнюю цепь,
называется полезной мощностью. Эта мощность определяется
выражением
Р =.£//, (12.17)
где U — напряжение генератора; / — сила тока во внешней цепи.
Отношение полезной мощности генератора Р к мощности Рь
подводимой к генератору от первичного двигателя, называется
коэффициентом полезного действия генератора г), т. е.
!)=-£— Р =1 ^— (12.18)
1 Pi P + Sp P + Sp V
137
КПД генератора — величина непостоянная. Он меняется при
изменении нагрузки, достигая максимума при нагрузках от 75 до
100 % номинальной. КПД генераторов малой мощности достигает
75—85%, генераторов средней мощности 85—92% и генераторов
большой мощности 92—97 %.
Мощность и КПД электродвигателя. Мощность, потребляемая
электродвигателем из сети, определяется формулой
Pi = UI,
(12.19)
где U—напряжение на зажимах электродвигателя; / — сила
тока, потребляемая электродвигателем из сети.
Полезная мощность Р, развиваемая электродвигателем на
валу, меньше потребляемой мощности на величину потерь в
электродвигателе. Поэтому КПД электродвигателя, представляющий
собой отношение полезной мощности к потребляемой, равен
11 =
Pi P + Zp
1
Sp
Р + Ър
(12.20)
КПД современных электродвигателей постоянного тока
колеблется от 75 до 95 % в зависимости от мощности, причем
с увеличением мощности электродвигателя КПД возрастает.
§ 12.6. Классификация машин постоянного тока
Электрические машины постоянного тока обратимы, т. е. они
могут работать как в качестве генератора, так и в качестве
электродвигателя В зависимости от способа возбуждения машины
делятся на две группы: машины независимого возбуждения и
машины самовозбуждения У первых питание обмоток
возбуждения осуществляется от внешнего источника электроэнергии,
у вторых — от самой машины.
Рис 12 9. Принципиальные схемы машин постоянного тока а —
независимого возбуждения, б — параллельного возбуждения, в — последовательного
возбуждения, г — смешанного возбуждения
138
Машины самовозбуждения по способу соединения обмоток
возбуждения и якорей делятся на машины параллельного,
последовательного и смешанного возбуждения. На рис. 12.9
изображены принципиальные схемы машин постоянного тока.
§ 12.7. Генераторы постоянного тока
Всякий генератор рассчитан на определенный режим работы
характеризующийся номинальными значениями мощности,
напряжения, силы, частоты вращения, которые обычно
указываются на щитке генератора.
Основные величины, определяющие работу генераторов,
зависят друг от друга. Эта зависимость устанавливается с
помощью характеристик, которые обычно изображаются в виде
кривых. Наиболее важные характеристики генераторов
следующие.
1. Характеристика холостого хода, представляющая собой
зависимость ЭДС генератора от силы тока возбуждения /в при
постоянной частоте вращения и разомкнутой внешней цепи, т е. Е =
= f (/в) при n = const и / = 0.
2. Внешняя характеристика, представляющая собой
зависимость напряжения на зажимах генератора от силы тока нагрузки
при постоянной частоте вращения и неизменном сопротивлении
цепи возбуждения ^„, т. е. U=f(I) при n = const и #B = const.
3. Регулировочная характеристика, представляющая собой
зависимость силы тока возбуждения от силы тока нагрузки при
постоянном напряжении и постоянной частоте вращения, т. е.
/в=/(/) при rc=const и t/=const.
Основные характеристики позволяют в наглядной форме
производить анализ свойств генераторов, которые в основном
определяются способом возбуждения машины.
Генератор независимого возбуждения. Принципиальная схема
генератора независимого возбуждения приведена на рис. 12.10, а,
где HI—Н2 — обмотка независимого возбуждения, Rp—
регулировочный реостат, служащий для изменения силы тока
возбуждения. Внешняя цепь представлена в виде нагрузочного
резистора RHr.
Для возбуждения генератора необходимо пустить первичный
двигатель в ход и развить номинальную частоту вращения.
Затем, замкнув цепь возбуждения и изменяя силу тока в ней с
помощью регулировочного реостата, довести напряжение до
значения f/o(1,1-5-1,25) t/H. При этом сила тока возбуждения будет
определяться формулой
/. = */./(Яов + Яр). (12.21)
где Rob — сопротивление обмотки возбуждения (OB); Rob +
+ RP — сопротивление цепи возбуждения.
При разомкнутой внешней цепи генератор работает
вхолостую, поэтому напряжение на его зажимах равно ЭДС, т. е.
139
Рис 12 10. Принципиальная схема генератора независимого возбуждения
и его характеристики
U0 = E. Характеристика холостого хода изображена на рис.
12.10, б. При увеличении силы тока возбуждения получим
восходящую ветвь характеристики, а при уменьшении — нисходящую.
Разница в значениях ординат восходящей и нисходящей ветвей
при одинаковых значениях силы тока возбуждения объясняется
явлением гистерезиса. За практическую характеристику холостого
хода принимается средняя кривая. Значение Е0 соответствует
остаточному намагничиванию.
Характеристика холостого хода имеет начальный
ненасыщенный участок, средненасыщенный участок (колено) и
сильнонасыщенный участок. Генератор при условиях, соответствующих
номинальным, обычно работает на верхней части колена кривой,
так как на ненасыщенном прямолинейном участке напряжение
генератора неустойчиво, а на сильнонасыщенном участке
затруднена регулировка напряжения.
При работе генератора с нагрузкой сила тока якоря и сила
тока нагрузки равны, а напряжение на зажимах генератора
изменяется с изменением нагрузки и определяется по уравнению
электрического равновесия. Таким образом, работа машины
характеризуется следующими уравнениями:
£ = СепФ-, £/ = £—/„/?„; /,= /. (12.22)
Изменение напряжения генератора при изменении нагрузки от
нуля до номинальной устанавливается внешней характеристикой
(рис. 12.10, в). Действительно, если поддерживать постоянными
140
частоту вращения генератора и силу тока возбуждения и
увеличивать нагрузку, т. е. силу тока во внешней цепи от нуля до /н,
напряжение генератора будет уменьшаться. Это уменьшение
напряжения объясняется двумя причинами: 1) увеличением по
мере роста нагрузки падения напряжения IaRa в цепи якоря;
2) усилением действия реакции якоря, которая, размагничивая
генератор, уменьшает его ЭДС, а следовательно, и напряжение
генератора.
Для поддержания постоянства напряжения на зажимах
генератора следует ло мере увеличения нагрузки увеличивать силу
тока возбуждения путем выведения сопротивления
регулировочного реостата. На рис. 12.10, г показана регулировочная
характеристика, устанавливающая закон регулирования силы тока
возбуждения.
Таким образом, генератор независимого возбуждения
обладает следующими свойствами: 1) генератор возбуждается как
при разомкнутой, так и при замкнутой внешней цепи, поскольку
цепь возбуждения независима от цепи якоря; 2) при переходе
от холостого хода к номинальной нагрузке напряжение
генератора изменяется незначительно, т. е. оно достаточно стабильно;
3) для генератора недопустимы короткие замыкания, поскольку
в момент замыкания ЭДС генератора продолжает оставаться
значительной, а сопротивление внешней цепи равно нулю.
Генераторы независимого возбуждения применяются в
качестве генераторов низкого напряжения на 12—24 В и генераторов
высокого напряжения на 600 В и выше, а также в качестве
генераторов большой мощности.
Генератор параллельного возбуждения. Принципиальная схема
генератора параллельного возбуждения приведена на рис. 12.11, а.
Обозначения на схеме те же, что и на схеме генератора
независимого возбуждения.
Самовозбуждение этого генератора основано на явлении
остаточного намагничивания. Действительно, при вращении якоря
в поле остаточного намагничивания в его обмотке индуцируется
небольшая ЭДС Е0, равная 3—5 °/о UA. Эта ЭДС, как только цепь
якоря будет замкнута на обмотку возбуждения, создаст
небольшой магнитный поток. Если этот поток будет совпадать по
направлению с потоком остаточного намагничивания, то магнитное
поле машины усилится, что увеличит индуцируемую в якоре ЭДС,
которая снова увеличит силу тока в обмотке возбуждения и т. д.,
пока не закончится процесс возбуждения. Кроме того, для
надежного самовозбуждения сопротивление цепи возбуждения должно
быть меньше критического, т. е. сопротивления, при котором
генератор не возбудится.
Отметим, что для улучшения процесса самовозбуждения надо
внешнюю цепь оставлять разомкнутой и вращать якорь с
номинальной частотой. Если поле остаточного намагничивания мало,
то необходимо подмагнитить машину от постороннего
источника.
141
Рис 12.11. Принципиальная схема генератора параллельного
возбуждения и его характеристики
Работа генератора параллельного возбуждения определяется
следующими уравнениями:
£ = СвлФ; v = E-IaR„;
/я = / + /в; IB = U/(R0B+RP).
Характеристика холостого хода генератора изображена на
рис. 12.11, б. Регулировочная характеристика имеет такой же
вид, как и у генератора независимого возбуждения (см. рис.
12.10, г), с тем отличием, что она идет несколько выше.
Объясняется это тем, что по мере роста нагрузки сила тока
возбуждения уменьшается.
Внешняя характеристика генератора параллельного
возбуждения (рис. 12.11, в) показывает, что напряжение на его зажимах
при увеличении нагрузки уменьшается. Это уменьшение
напряжения вызывается следующими причинами: 1) увеличением
падения напряжения IaRa в цепи якоря вследствие возрастания
силы тока якоря; 2) уменьшением ЭДС генератора в результате
усиления размагничивающего действия реакции якоря; 3)
уменьшением силы тока возбуждения вследствие уменьшения
напряжения, что также вызывает уменьшение ЭДС, а следовательно,
и напряжения.
Внешняя характеристика генератора показывает также, что
при постепенном уменьшении сопротивления нагрузки RHr сила
тока / увеличивается только до критического значения /кр=(2~-
(12.23)
142
-н2,5) 1„. Дальнейшее же уменьшение сопротивления Rht
приводит не к увеличению силы тока нагрузки, а к ее уменьшению
(штриховая часть кривой), поскольку усиливается
размагничивание генератора (усиливается реакция якоря и уменьшается сила
тока возбуждения) и, когда сила тока достигает критического
значения, машина оказывается в ненасыщенном состоянии. В
результате небольшое уменьшение сопротивления нагрузки
вызывает резкое уменьшение ЭДС машины. При достижении /?Нг=0
генератор сохраняет небольшую ЭДС, обусловленную
остаточным намагничиванием. Эта ЭДС поддерживает в якоре силу
тока /к, называемую силой тока короткого замыкания, которая
обычно меньше номинальной.
Уменьшение напряжения при увеличении нагрузки от нуля до
номинальной у генераторов параллельного возбуждения
составляет 8—15%.
Таким образом, генератор параллельного возбуждения
обладает следующими свойствами: 1) генератор возбуждается при
разомкнутой внешней цепи и не возбуждается, если он замкнут
на малое сопротивление; 2) при изменении нагрузки от нуля
до номинальной напряжение генератора уменьшается в большей
степени, чем у генератора независимого возбуждения; 3) так как
генератор быстрее размагничивается, то короткое замыкание для
него менее опасно, чем для генератора независимого
возбуждения.
Генераторы параллельного возбуждения нашли широкое
применение в качестве возбудителей и зарядных генераторов,
а также небольших источников питания
Генератор последовательного возбуждения. На рис 12.12
представлены принципиальная схема генератора последовательного
■+
Рис 12 12 Принципиальная схема генератора последователь
ного возбуждения и его внешняя характеристика
ИЗ
a)+ —г
1
^~"^NJ
/
/
/
7
2
1
1
1 .
1н I
Рис 12 13 Принципиальная схема генератора смешанного возбуждения
и его характеристики
возбуждения и его внешняя характеристика. При работе
генератора имеют место следующие соотношения:
Е = СепФ; U = E-I„(Ra + Rc); /я = /в=/,
(12.24)
где Rc — сопротивление последовательной обмотки возбуждения
С1—Я1.
Внешняя характеристика генератора показывает, что
напряжение на зажимах генератора сначала повышается по мере
увеличения нагрузки, а затем, достигнув наибольшего значения,
начинает падать вследствие увеличения падения напряжения в цепи
якоря и усиления действия реакции якоря. Следовательно,
напряжение генератора при изменении нагрузки изменяется в
широких пределах и регулирование его трудновыполнимо. Поэтому
генераторы последовательного возбуждения в современных
установках применяются лишь в качестве специальных генераторов.
Генератор смешанного возбуждения. Принципиальная схема
генератора смешанного возбуждения приведена на рис. 12.13, а.
Параллельная обмотка Ш1—Ш2 служит для создания основного
потока машины Фш, а последовательная С1—Я1 — для создания
потока Фс, поддерживающего напряжение на зажимах
генератора при изменении нагрузки. Действительно, при увеличении
нагрузки возрастает сила тока в последовательной обмотке, в
результате чего увеличивается магнитное поле машины и,
следовательно, компенсируется уменьшение напряжения генератора,
вызванное увеличением силы тока якоря Благодаря этому
напряжение на зажимах генератора при изменении нагрузки от нуля до
Ж
номинальной остается почти неизменным (кривая 2 на рис.
12 13, б). В тех же случаях, когда требуется постоянство
напряжения на зажимах потребителя и, следовательно, необходима
компенсация еще и падения напряжения в сети,
последовательную обмотку делают усиленной. Внешняя характеристика для
этого случая изображена кривой /. Таким образом,
последовательная обмотка является как бы автоматическим регулятором
напряжения.
При работе генератора смешанного возбуждения в тех случаях,
когда его обмотки возбуждения соединены согласно (компаундно)
и их потоки Фш и Фс складываются, имеют место следующие
соотношения-
Е = Сеп (Фш + Фс); /„ = / + /.;
U = E-InRn-IRc; I, = UI(ROB+Rp).
В ряде случаев применяется встречное, или противокомпаунд-
ное, соединение обмоток генератора, при котором магнитный
поток последовательной обмотки ослабляет поток, создаваемый
параллельной обмоткой. Внешняя характеристика при этом
становится крутопадающей (кривая 3 на рис. 12 13, б). Такое
соединение применяется при работе генераторов в условиях частых
перегрузок или коротких замыканий (например, у сварочных
генераторов). В этих случаях последовательная обмотка почти
размагничивает машину и понижает силу тока до значения,
безопасного для целости генератора. Регулировочные
характеристики генератора смешанного возбуждения являются зеркальным
отображением внешних характеристик генератора (рис. 12.13, в).
Генератор смешанного возбуждения обладает следующими
свойствами: 1) генератор возбуждается как при разомкнутой, так
и при замкнутой внешней цепи; 2) при изменении нагрузки от
нуля до номинальной напряжение генератора при согласном
включении обмоток практически остается неизменным, а при встречном
резко меняется; 3) при согласном включении обмоток
возбуждения для генератора недопустимы короткие замыкания, так как
последовательная обмотка возбуждения поддерживает
напряжение на зажимах генератора, вследствие чего сила тока короткого
замыкания достигает опасных для целости машины значений
Наоборот, при встречном включении обмоток возбуждения
короткое замыкание допустимо, так как последовательная обмотка
размагничивает машину.
Генераторы смешанного возбуждения, обладая хорошими
свойствами, в частности устойчивостью напряжения, широко
применяются в качестве основных источников постоянного тока.
Параллельная работа генераторов постоянного тока. На судне
обычно устанавливают несколько генераторов и включают их
параллельно для работы на общую нагрузку. Установка
нескольких генераторов вместо одного обеспечивает более рациональное
использование агрегатов и повышает живучесть электроэнергети-
(12.25)
145
>/УУ? Д
Рис. 12.14. Схема параллельной работы генераторов смешанного
возбуждения
ческой системы. В том случае, когда нагрузка невелика, может
работать один генератор, а при большой нагрузке работают
несколько генераторов, включенных параллельно. При выходе из
строя одного из генераторов его нагрузку принимают другие
машины.
Параллельная работа генераторов постоянного тока возможна
при выполнении следующих условий: 1) напряжения генераторов
должны быть одинаковы; 2) зажимы «плюс» и «минус»
включаемого генератора должны быть соединены с одноименными
зажимами работающего генератора; 3) генераторы, включаемые в
параллельную работу, должны иметь одинаковую систему
возбуждения.
В качестве примера на рис. 12.14 приведена схема
параллельного соединения двух генераторов смешанного возбуждения.
Если один из генераторов работает на сеть и требуется
включить параллельно ему второй генератор, то необходимо
произвести следующие операции: 1) пустить в ход подключаемый
генератор и развить напряжение на его зажимах, на 2—3 В
превышающее напряжение сети; 2) замкнуть соответствующий
двухполюсный автоматический выключатель (автомат); 3) перевести
часть нагрузки с работающего генератора на подключенный.
Перевод нагрузки производится обычно с помощью
регулировочных реостатов. При этом необходимо сопротивление реостата
работающего генератора плавно вводить, а сопротивление
реостата подключенного генератора плавно выводить. В результате
сила тока возбуждения первого генератора будет уменьшаться,
а второго —увеличиваться. Соответственно этому будут
изменяться ЭДС генераторов. Силы тока генераторов определяются
из уравнения электрического равновесия:
Ii = (Ei-U)!Rn, /, = (Е,-ВД«. (12-26)
146
где Еи £2 — ЭДС соответствующих генераторов; Яяи ЯЯ2 —
сопротивления якорных цепей генераторов; U—напряжение на
шинах щита.
Следовательно, изменяя сопротивления регулировочных
реостатов, можно распределить нагрузку между генераторами
поровну или полностью перевести с одного генератора на другой.
Уравнительный провод /—2 служит для обеспечения
устойчивости параллельной работы генераторов. Если по каким-либо
причинам ЭДС одного генератора станет меньше, чем второго,
ток от генератора с большей ЭДС по уравнительному проводу
пойдет в последовательную обмотку генератора с меньшей ЭДС
и тем самым усилит возбуждение последнего, а следовательно,
увеличит его ЭДС. При равенстве ЭДС обоих генераторов тока
в уравнительном проводе не будет. Таким образом, с помощью
уравнительного провода ЭДС и напряжения на зажимах
генераторов автоматически регулируются, чем поддерживается
устойчивость параллельной работы генераторов.
Отметим, что в том случае, когда ЭДС одного из генераторов
резко снизится, его необходимо быстро отключить от шин щита,
так как в противном случае он перейдет в режим
электродвигателя. Для такого отключения обычно устанавливают реле или
автомат обратного тока.
§ 12.8. Электродвигатели постоянного тока
Основные условия работы электродвигателей, как указывалось
ранее, выражаются уравнениями равновесия ЭДС и моментов:
U^E + I»R*; M=MT. (12.27)
В общем случае тормозной момент на валу электродвигателя
слагается: а) из момента холостого хода М0, создаваемого
внешними силами трения; б) из момента нагрузки Мнг, создаваемого
внешними силами; в) момента Mj, создаваемого силами инерции
вращающихся частей при неустановившемся режиме работы
электродвигателя.
При пуске, торможении или регулировании частоты
вращения электродвигателя под нагрузкой уравнение равновесия
моментов запишется следующим образом:
M=M0 + MK.+ M,. (12.28)
Если режим работы электродвигателя установившийся, т. е.
п = const, то Mj — Jd(a/dt (/ — момент инерции якоря) и уравнение
равновесия моментов принимает вид
уИ=уИ0 + уИнг. (12.29)
При холостом ходе электродвигателя уравнение равновесия
моментов выражается равенством М — М0.
Электродвигатели при переходе с одного режима на другой
работают устойчиво без помощи каких-либо специальных регу-
147
a)
5) I in
Рис. 12.15. Схема пуска (а) и пусковые характеристики (б)
электродвигателя
ляторов, т. е. они саморегулируются. Действительно, если
нагрузка на валу электродвигателя увеличится, т. е. окажется, что
МТ>М, то частота вращения п электродвигателя уменьшится.
Уменьшение частоты вращения ведет к уменьшению и обратной
ЭДС Е — СепФ, а это, в свою очередь, к возрастанию силы тока
/я и, как следствие, к увеличению вращающего момента М —
= СмФ/я. Таким образом, вновь восстанавливается равновесие
моментов. Наоборот, при уменьшении нагрузки на
электродвигатель частота вращения и обратная ЭДС увеличиваются, а сила
тока якоря и вращающий момент уменьшаются. Другими
словами, с изменением тормозного момента автоматически
изменяется вращающий момент машины.
Сумму моментов М0 и Mvv называют статическим моментом,
а момент М} — динамическим.
Управление электродвигателями. Управление
электродвигателями постоянного тока включает комплекс операций: пуск и
остановку, регулирование частоты вращения, реверс и торможение.
Все эти операции могут выполняться с помощью ручных и
автоматических аппаратов.
Пуск электродвигателей в основном осуществляется с
помощью пускового реостата (рис. 12.15,а). При этом сила
пускового тока определяется формулой
In = U/(Rn + Rn), (12.30)
где Rn— сопротивление пускового реостата, которое
подбирается так, чтобы сила пускового тока не превышала значений
/п=(1,5 + 2,0)/„.
148
При включении электродвигателя в сеть его якорь начинает
вращаться, постепенно увеличивая частоту вращения, в
результате чего обратная ЭДС начинает возрастать. Сопротивление
пускового реостата плавно выводят и в конце пуска совершенно
выключают из цепи якоря. При этом обратная ЭДС достигает
значения, близкого к напряжению сети, а сила тока уменьшается
до номинальной. На рис. 12.15,6 представлен примерный вид
кривых пусковой силы тока и частоты вращения. Поскольку
пусковой реостат имеет несколько ступеней, то и изменение
пусковой силы тока происходит ступенями. Соответственно ступеням
изменения силы тока будет изменяться и частота вращения
якоря, достигая в конце пуска своего установившегося значения.
Пуск электродвигателей значительно улучшается, если он
производится при максимальном магнитном потоке. Для этого
сопротивление реостата в цепи возбуждения перед пуском
полностью выводят.
Для остановки электродвигателя быстро вводят
сопротивление пускового реостата и отключают схему от источника питания.
Частоту вращения электродвигателей, как следует из
уравнения
л = (1/-/яЯя)/(С.Ф), (12.31)
можно регулировать путем изменения или напряжения источника
питания, или падения напряжения в цепи якоря, или магнитного
потока электродвигателя. Первый способ применим только в
специальных установках, позволяющих регулировать U. Второй и
третий способы возможны в обычных установках, имеющих
постоянное напряжение источника питания.
Падение напряжения в цепи якоря изменяют регулировочным
реостатом, включенным последовательно в цепь якоря. Реостат
позволяет регулировать частоту вращения в сторону понижения
от номинальной. Магнитный поток у электродвигателей изменяют
регулировочным реостатом (рис. 12.15,6) в цепи возбуждения.
Этот способ позволяет регулировать частоту вращения в
сторону повышения.
Реверс электродвигателей можно осуществить изменением
направления тока в обмотке возбуждения при неизменном
направлении тока в якоре или изменением направления тока в якоре
при неизменном направлении в обмотке возбуждения. Если же
одновременно изменить направление тока в якоре и в обмотке
возбуждения, то направление вращения якоря останется
прежним.
Торможение электродвигателей может быть: а) механическое
с помощью колодочных или дисковых тормозов; б) реостатное,
когда якорь вращающейся машины отключается от сети и
замыкается на реостат определенного сопротивления; в)
рекуперативное с отдачей энергии в сеть, осуществляемое переводом
машины в режим генератора; г) противовключением, выполняемое
путем изменения направления тока в якоре электродвигателя,
149
т. е. изменения полярности питания обмотки вращающегося
якоря, или с помощью исполнительного механизма,
переводящего машину в режим генератора.
Характеристики электродвигателей. Свойства
электродвигателей постоянного тока оцениваются по так называемым
рабочим и регулировочным характеристикам. Рабочие характеристики
представляют собой зависимости п, М, I и у\ от Р2 при £/=const
и #B = const, где п — частота вращения электродвигателя; М —
вращающий момент на валу электродвигателя; / — сила тока,
потребляемого электродвигателем из сети; ri •— КПД
электродвигателя; Р2— полезная мощность электродвигателя.
Так как P2 = UIr\, т. е. полезная мощность электродвигателя
пропорциональна силе тока, то рабочие характеристики иногда
представляют в виде зависимостей п, М, Р2 и у\ от /я при U=
= const и RB = const.
Характеристику n=f(P2) часто называют внешней
характеристикой электродвигателя.
Под регулировочными характеристиками понимают
зависимости вида n=f(IB) при £/=const. Эти характеристики определяют
возможности регулирования частоты вращения
электродвигателей.
Оценка свойств электродвигателей в общем случае
производится также по механическим характеристикам, которые
представляют собой зависимости n=f(M) при £/=const и /?B = const.
Эти характеристики обычно используются при анализе
электрических приводов.
Электродвигатель параллельного возбуждения.
Принципиальная схема электродвигателя параллельного возбуждения
приведена на рис. 12.16, а.
Для пуска электродвигателя необходимо замкнуть
автоматический выключатель на сеть и плавно вывести сопротивление
пускового реостата Rn. Когда электродвигатель разовьет
номинальную частоту вращения и перейдет в установившийся режим
работы, будут выполняться следующие соотношения:
U = E+IaRa; In = (U-E)/Ra;
IB = U/(ROB + RP); / = /„ + /,;
М = СМФ/Я; n = (U- /ЯДЯ)/(С.Ф). J
(12.32)
Анализ сотношений (12.32) показывает, что сила тока
возбуждения электродвигателя параллельного возбуждения не
зависит от силы тока нагрузки. Это значит, что при неизменном
напряжении источника питания электродвигатель работает
практически с постоянным магнитным потоком. Поэтому сила тока,
потребляемая электродвигателем из сети, и развиваемый им
вращающий момент изменяются прямо пропорционально нагрузке
на валу электродвигателя. Эту пропорциональность
подтверждают рабочие характеристики M=f(P2) и /=/(Р2), приведенные
150
Рис. 12.16. Принципиальная схема электродвигателя параллельного
возбуждения и его характеристики
на рис. 12.16,6. Небольшое их отклонение от прямолинейности
объясняется размагничивающим действием реакции якоря.
При постоянных значениях U и /в частота вращения п
электродвигателя с изменением нагрузки также изменяется
незначительно [характеристика n = f(P2) на рис. 12.16,6]. Это изменение,
как видно из уравнения частоты вращения, вызывается: а)
увеличением падения напряжения в якоре /я#я, что ведет к
уменьшению частоты вращения; б) усилением действия реакции якоря,
которая, размагничивая машину, повышает частоту вращения.
Однако влияние падения напряжения обычно превышает
размагничивающее действие реакции якоря. Поэтому частота вращения
с ростом нагрузки уменьшается.
КПД электродвигателя, определяемый по выражению (12.20),
с ростом Рг сначала повышается, так как при небольшой, но
возрастающей нагрузке суммарные потери (в основном на трение)
практически остаются постоянными. При большой нагрузке резко
возрастают потери в обмотке якоря и рост КПД замедляется,
а при перегрузке КПД начинает уменьшаться.
Механическая характеристика n=f(M) при /в = const, когда
можно считать Ф = const, представляет собой прямую линию,
несколько наклоненную к оси абсцисс (рис. 12.16,в). Эта
характеристика, как и внешняя характеристика электродвигателя,
является жесткой. С введением в цепь якоря добавочного
сопротивления R жесткость характеристики уменьшается.
Механическая характеристика при /? = 0 называется естественной.
Так как механическая характеристика ниспадающая, то
работа электродвигателя является устойчивой,
151
М,л I
I,
ч.
It
In
Мп
1
\ 1
\ 1
/4
:-' 1
ц
' I
^M
,n
Рис 12.17. Принципиальная схема электродвигателя
последовательного возбуждения и его рабочие характеристики
Частоту вращения электродвигателя можно регулировать, как
указывалось ранее, изменением либо магнитного потока, либо
падения напряжения в цепи якоря.
Таким образом, электродвигатель параллельного
возбуждения обладает следующими свойствами: 1) частота вращения
электродвигателя при колебаниях нагрузки от нуля до номинальной
изменяется незначительно; 2) электродвигатель допускает
регулировку частоты вращения в широких пределах и, кроме того,
может работать вхолостую; 3) электродвигатель развивает
вращающий момент, пропорциональный силе тока в якоре (Ф =
= const), и потребляет из сети ток, пропорциональный нагрузке
на валу; 4) для электродвигателя недопустим обрыв цепи
возбуждения, так как в этом случае при работе вхолостую он пойдет
вразнос, а при работе под нагрузкой может сгореть обмотка
якоря.
Электродвигатель последовательного возбуждения.
Принципиальная схема электродвигателя последовательного
возбуждения приведена на рис. 12.17, а.
При работе электродвигателя в установившемся режиме
имеют место следующие соотношения:
U = E + h(R„ + Rc); Е = СепФ; "I
In = (U-E)/(R» + Rc); / = /я = /в; (12.33)
М = СМФ1Я; n^[U-In(Rn+Rc)]/(Ce<$) )
Магнитный поток машины, как следует из схемы и
уравнений, зависит от нагрузки и, значит, от силы тока якоря (/в = /н =
= /я). При малых нагрузках машина не насыщена и магнитный
поток пропорционален силе тока якоря: Ф = Сф/я. В результате
вращающий момент пропорционален квадрату силы тока якоря:
М = С\,Ф1-=С>ЛСЛ = М1. (12 34)
М я
СМСФ1\
к-
152
Поэтому при малых и средних нагрузках характеристика М =
= /(^2) имеет вид параболы (рис. 12.17,6). При больших
нагрузках машина насыщается, вследствие чего поток при увеличении
нагрузки возрастает незначительно, рост вращающего момента
замедляется и его характеристика переходит почти в прямую
линию. Быстрый рост момента по сравнению с ростом силы тока
якоря является ценным свойством электродвигателя
последовательного возбуждения.
Частота вращения электродвигателя изменяется обратно
пропорционально магнитному потоку. Так как поток машины
пропорционален силе тока якоря, то с увеличением нагрузки частота
вращения электродвигателя резко уменьшается, а при
уменьшении нагрузки увеличивается. Реакция якоря и падение
напряжения оказывают незначительное влияние на частоту вращения.
Внешняя характеристика ft = f(P2) имеет вид гиперболы (см.
рис. 12.17,6). Насыщение машины обусловливает некоторое
отклонение характеристики от гиперболы.
Способность электродвигателя последовательного
возбуждения резко изменять частоту вращения при изменении нагрузки
является характерной его особенностью. На холостом ходу и при
малых нагрузках, когда сила тока в якоре и магнитный поток
малы, частота вращения электродвигателя достигает большого
значения, опасного для механической прочности якоря. Поэтому
для электродвигателя последовательного возбуждения
предусматривают такие условия, при которых пуск и работа
вхолостую или при малой нагрузке (менее 25 % номинальной)
исключаются.
Таким образом, электродвигатель последовательного
возбуждения обладает следующими свойствами: 1) при изменениях
нагрузки частота вращения электродвигателя резко меняется, т. е.
он имеет мягкую внешнюю характеристику; 2) электродвигатель
можно пускать в ход только под нагрузкой, так как в противном
случае он пойдет вразнос; работать электродвигатель может
также только под нагрузкой; 3) при пуске под нагрузкой и при
перегрузке электродвигатель развивает большой вращающий
момент и имеет малую частоту вращения.
Благодаря перечисленным свойствам электродвигатели
последовательного возбуждения широко используются в подъемных и
транспортных установках. Их применяют в качестве приводов
лебедок, кранов и лифтов, а также в качестве тяговых
электродвигателей и транспортных средств.
Электродвигатель смешанного возбуждения. Принципиальная
схема электродвигателя смешанного возбуждения приведена на
рис. 12.18, а.
Электродвигатели данного типа обычно имеют основную
обмотку возбуждения — параллельную или последовательную — и
вспомогательную — соответственно последовательную или
параллельную. В большинстве случаев обмотки возбуждения таких
электродвигателей включают согласно, так чтобы их магнитные
153
Рис. 12.18. Принципиальная схема электродвигателя смешанного
возбуждения и его рабочие характеристики
потоки складывались. При таком соединении имеют место
следующие соотношения:
М = См/я(Фш + Фс); п-.
Се(Фш+Фс)
(12.35)
Анализ уравнений (12.35) показывает, что магнитные потоки,
создаваемые вспомогательными обмотками, оказывают влияние
на вращающий момент электродвигателя и частоту его
вращения. Так, в электродвигателях, имеющих в качестве основной
последовательную обмотку, неизменный магнитный поток
параллельной обмотки ограничивает изменение частоты вращения
электродвигателя при изменении нагрузки на валу. Благодаря
наличию параллельной обмотки компаундированный
электродвигатель последовательного возбуждения может работать вхолостую.
В электродвигателях, имеющих основную параллельную
обмотку, небольшая последовательная обмотка применяется для
повышения пускового момента, а также для компенсации реакции
якоря и смягчения скоростной характеристики машины. Такая
обмотка называется стабилизирующей. Стабилизирующая
обмотка имеется в судовых электрических машинах серии П. Все
электродвигатели параллельного возбуждения общего
применения также имеют стабилизирующую обмотку.
На рис. 12.18,6 показаны рабочие характеристики
компаундированных электродвигателей параллельного возбуждения {п\,
Mi) и последовательного возбуждения (п2, М2). Для сравнения
приведены скоростные характеристики (штриховые кривые) при
отсутствии вспомогательных обмоток у электродвигателей.
Реверс электродвигателей смешанного возбуждения следует произ-
154
водить изменением направления тока якоря. Регулировка же их
частоты вращения осуществляется так же, как и у
электродвигателей параллельного возбуждения.
Глава 13. ЭЛЕКТРИЧЕСКИЕ МАШИНЫ
ПЕРЕМЕННОГО ТОКА
§ 13.1. Общие сведения и понятия
Электрические машины переменного тока делятся на две
основные группы: синхронные машины и асинхронные машины.
Синхронными машинами называют электрические машины
переменного тока, для которых отношение частоты вращения ротора
к частоте питающего напряжения — величина постоянная. Это
отношение выражается формулой
f = pn/W, (13.1)
где / — частота электрического напряжения; р — число пар
полюсов машины; п — частота вращения ротора синхронной
машины.
У синхронных машин частота вращения ротора не изменяется
в процессе работы.
Асинхронными машинами называют электрические машины
переменного тока, частота вращения ротора которых отстает от
частоты вращения магнитного поля тока статора. Это
отставание характеризуется скольжением, и частота вращения ротора
машины определяется по выражению
nt = n1{l—s), (13.2)
где п2 — асинхронная частота вращения ротора машины; П\ =
= 60//р — синхронная частота вращения магнитного поля токов;
s= (ri\ — п2)/п1 — скольжение ротора машины.
Следовательно, асинхронные машины — это машины
переменного тока, частота вращения ротора которых изменяется в
процессе работы.
Синхронные и асинхронные машины подобно машинам
постоянного тока обратимы, т. е. могут работать как в режиме
генератора, так и в режиме электродвигателя. Однако чаще всего
синхронные машины используются в качестве трехфазных
генераторов, а асинхронные — в качестве трехфазных
электродвигателей.
Принцип действия синхронных генераторов и асинхронных
электродвигателей, так же как и генераторов и электродвигателей
постоянного тока, основан на явлении электромагнитной
индукции и на взаимодействии магнитных полей токов. Действительно,
если через обмотку ротора пропускать постоянный ток
(рис. 13.1, а) и равномерно вращать ротор, то в трехфазной
155
ai 5)
Рис. 13.1. Схема работы: а — синхронного генератора; б —
асинхронного электродвигателя-
1Н, 2Н, ЗН и IK, 2K, ЗК — начала н концы 1, 2 н 3-й обмоток
соответственно
обмотке наводится ЭДС трехфазной системы. При включении на
зажимы обмотки какого-либо потребителя в цепи потечет
трехфазный ток. При этом происходит преобразование механической
энергии, подводимой к генератору с вала, в электрическую.
Одновременно в машине вследствие взаимодействия полей токов
создаются электромагнитные силы, и следовательно,
электромагнитный момент торможения. Этот момент тем больше, чем больше
нагрузка на машину.
На рис. 13.1,6 изображена схема работы трехфазного
асинхронного электродвигателя. При прохождении трехфазного тока
по обмотке статора создается вращающееся магнитное поле,
частота вращения которого, как указано ранее, равна «i = 60/i/p.
Это поле наводит в обмотке ротора ЭДС, под влиянием которой
в проводниках данной обмотки протекают токи. В результате
взаимодействия токов ротора с вращающимся полем статора
возникают электромагнитные силы G, направления которых могут быть
определены по правилу левой руки. Электромагнитные силы,
приложенные к проводникам обмотки ротора, создают момент, под
действием которого ротор вращается с частотой п2 по
направлению вращения поля.
Частота вращения ротора электродвигателя находится в
пределах 0^n2^tii (l^s^O), так как при /г2 = «1 проводники ротора
будут неподвижны относительно вращающегося поля и в них не
будет наводиться ЭДС, а следовательно, не будет тока в обмотке
ротора. Частоту вращения поля П\ называют синхронной, а
частоту вращения ротора п2 — асинхронной.
Отметим, что промышленностью выпускаются также
однофазные синхронные генераторы, однофазные, двухфазные и
коллекторные асинхронные двигатели. Но эти машины обычно
применяют в унифицированных устройствах, системах
электроавтоматики и т. д.
156
§ 13.2. Устройство трехфазных синхронных генераторов
и асинхронных электродвигателей
Судовые синхронные генераторы могут быть с
самовозбуждением и независимым возбуждением в брызгозащищенном или
водозащищенном исполнении. Трехфазные синхронные
генераторы, как правило, являются основными источниками
переменного тока.
Трехфазные асинхронные электродвигатели по форме
исполнения ротора разделяются на два основных типа: 1)
электродвигатели с короткозамкнутым ротором, или короткозамкнутые
электродвигатели; 2) электродвигатели с фазным ротором, или
фазные электродвигатели. Они изготовляются единичной мощностью
от 0,6 до 200 кВт. Судовые асинхронные двигатели выпускаются
брызгозащищенного или водозащищенного, а в ряде случаев
герметического исполнения.
Трехфазные синхронные генераторы и асинхронные двигатели
состоят из двух основных частей: неподвижной части — статора и
вращающейся части — ротора. Статоры обеих трехфазных машин
по устройству аналогичны, тогда как их роторы существенно
различаются.
Статор трехфазной машины (рис. 13.2, а) состоит из станины
с сердечником, в пазы которого уложены три разные обмотки.
Эти обмотки сдвинуты относительно друг друга на две трети
полюсного деления по окружности (рис. 13.2,6), с тем чтобы
взаимный сдвиг ЭДС в каждой фазе был равен одной трети периода.
Каждая фазная обмотка имеет два вывода — начало и конец. Все
начала (А, В, С) и концы (X, Y, Z) обмоток выводятся на
специальный щиток, укрепленный на наружной поверхности статора.
Обычно на щитке фазные обмотки соединяются звездой или
треугольником.
По устройству ротора синхронные генераторы разделяются на
неявнополюсные (рис. 13.3,а), имеющие цилиндрическую форму
ротора, и явнополюсные (рис. 13.3,6), имеющие выступающие
полюса. Ротор явнополюсного генератора (рис. 13.4) состоит из
укрепленного на валу стального обода, к которому прикреплены
сердечники полюсов с насаженными катушками, образующими
обмотку возбуждения. Концы этой обмотки присоединены к двум
бронзовым кольцам, жестко насаженным на вал ротора. На
кольца наложены неподвижные щетки (на рисунке не показаны),
через которые к обмотке возбуждения подводится постоянный
ток от возбудителя или выпрямителя.
На рис. 13.5 показаны роторы асинхронных
электродвигателей: короткозамкнутый и фазный. Каждый ротор состоит из вала,
сердечника и обмотки. Сердечник набирается из штампованных
листов электротехнической стали толщиной 0,35—0,5 мм. В его
пазы укладывается обмотка.
Обмотку короткозамкнутого ротора делают из медных или
алюминиевых стержней. Торцы стержней соединяют кольцами.
157
Рис 13 2 Статор трехфазной машины (а) и его обмотка (б)
1 — станина, 2 — обмотка
5)
о о о
Рис 13 3 Основные типы синхронных генераторов а — неявнопо
люсный, б — явнополюсный
Рис 13 4 Явнополюсный ротор
Рис 13 5 Роторы асинхронных элек
тродвигателей а — короткозамкну-
тый с алюминиевой литой клеткой,
б — фазный
Такую обмотку называют беличьей клеткой Алюминиевую
обмотку обычно изготовляют путем заливки в пазы расплавленного
алюминия. У торцов ротора располагаются кольца и лопасти вен
тилятора. Для улучшения пусковых характеристик
электродвигателей короткозамкнутые роторы часто изготовляют с глубоким
пазом или с двойной беличьей клеткой.
Обмотка фазного ротора выполняется подобно обмотке
статора в виде трех фазных обмоток, соединенных обычно звездой.
Три свободных конца фазных обмоток присоединяют к трем
контактным кольцам. В собранном электродвигателе к контактным
кольцам прижимаются щетки, через которые к обмотке ротора
подключается пусковой или регулировочный реостат.
Электродвигатели с фазным ротором применяют там, где
требуется плавное регулирование скорости приводимого в движение
механизма, а также при частых пусках электродвигателей под
нагрузкой.
§ 13.3. Синхронные генераторы
ЭДС синхронного генератора характеризуется амплитудой,
частотой и формой кривой. ЭДС генератора определяется ЭДС
фазы, а частота — частотой вращения ротора. По форме кривой
ЭДС должна быть синусоидальной.
ЭДС фазы обмотки статора при 0 = Omsinco^ в соответствии
с законом электромагнитной индукции определяется уравнением
в— Wko m Sin СО) __ _ш£о(0фтС05(0£_£т^п (^—Я/2),
dt
(13.3)
где w — число последовательно соединенных витков обмотки
фазы; &о=0,00ч-0,05 — обмоточный коэффициент; Em=wk0(aOm—
максимальное значение ЭДС фазы, отстающей от потока на
угол л/2.
Учитывая, что co=2jtf и полагая Фт»ф, найдем действующее
значение ЭДС фазы
£=-^ = -^a>feofO = 4,44te>feofO, (13.4)
л/2 Л/2
или, заменяя частоту f ее значением р/г/60, получим
£ = 4,44в>Ао—Ф = *лФ, (13.5)
где k — коэффициент, постоянный для данной машины.
Линейная ЭДС генератора при соединении фаз звездой равна
Еа= д/3£ф, а при соединении фаз треугольником линейные и
фазные ЭДС равны между собой.
Однако при работе генератора под нагрузкой его ЭДС
значительно изменяется. Основной причиной этого является действие
реакции якоря (статора). При активной нагрузке г генератора
159
Рис. 13.6. К пояснению реакции якоря
синхронного генератора при нагрузках- а —
активной, б—индуктивной
поток статора Фач (рис.
13.6, а) направлен
перпендикулярно к потоку
ротора Фо. В результате
основное поле
деформируется и, естественно,
частично ослабляется.
Реакцию, вызванную
потоком Фад, называет
поперечной реакцией якоря
генератора.
При чисто
индуктивной нагрузке L поток
статора Фаа (рис. 13.6,6)
направлен навстречу
потоку ротора Фо, следовательно, он размагничивает генератор,
а значит, уменьшает его ЭДС, причем основное поле не
деформируется. Реакцию, вызванную потоком Фаа, называют продольной
размагничивающей реакцией. При чисто емкостной нагрузке С
генератора поток статора Фа<г совпадает по направлению с потоком
ротора Фо, т. е. намагничивает генератор, а значит, увеличивает
его ЭДС. И в этом случае основное поле не деформируется.
Реакцию, вызванную потоком Фась совпадающим с потоком ротора,
называют продольной намагничивающей.
При смешанной нагрузке (рис. 13.7), очевидно, будут иметь
место как поперечная, так и продольная реакции якоря. В этом
случае ток статора / и, следовательно, его поток Фа могут быть
разложены на две составляющие:
/ = /cos9 + //sirnJ) = /? + //d; |
Oa = kqOacos^ + lk/Dasm^ = Oaq + i^ad, ) (13'6)
где г|з — угол сдвига между ЭДС холостого хода Е0 и током /
статора; Iq, Id — поперечная и продольная составляющие силы
тока статора; kq, ka — поперечный и продольный коэффициенты
формы поля реакции якоря; Фад, Фаа — поперечный и
продольный потоки реакции якоря.
Помимо потока реакции якоря небольшую часть потока
статора, замыкающуюся вокруг проводников его обмотки (см.
рис. 13.7), составляет так называемый поток рассеяния Ф„. Он
также оказывает влияние на изменение ЭДС и напряжение
синхронного генератора.
С целью количественной оценки действия потока статора Фа
допустим, что основной поток ротора Фо и составляющие потока
статора действуют в машине независимо друг от друга, наводя
соответствующие ЭДС в фазных обмотках статора.
Следовательно, в каждой фазе нагруженного синхронного
генератора индуцируются следующие ЭДС:
160
а) под влиянием ^Do—ЭДС холостого хода _£0 и П°Д
влиянием Фа— ЭДС рассеяния Еа, равные
Е0 = £/гФ0; Еа = — /«>La/ = —jxa[,
где La и ха — индуктивность и индуктивное сопротивление
рассеяния;
б) под влиянием поперечной Фао и продольной Фасг
составляющих потока реакции якоря ЭДС — Eaq и Ead, т. е.
E-aq ~Т~ E-ad = 1 * q%aq 1' dXad-
Кроме того, обмотка статора имеет активное сопротивление г,
на преодоление которого тратится некоторая ЭДС Ег= —/г,
обычно не превышающая 1,5 % номинального напряжения
машины.
Сложив геометрически все перечисленные выше ЭДС явно-
полюсного генератора, получим
E0^U+[r + j[dXad + jIqXaq + iJxa, (13.7)
где U — напряжение на зажимах явнополюсного синхронного
генератора.
В неявнополюсных генераторах хаа = хач, поэтому поток
реакции якоря Фа создает ЭДС реакции якоря Еа= —jlxa.
Следовательно, уравнение ЭДС неявнополюсного синхронного генератора
запишется так:
E0 = U^ + [r+j[xa + jI_xa. (13.8)
На основании уравнений (13.7) и (13.8) на рис. 13.8 построены
векторные диаграммы при активно-индуктивной и
активно-емкостной нагрузке генератора.
Индуктивные сопротивления, обусловленные потоками статора
Фа и Фа, могут быть представлены в виде соответствующих
сумм:
X=Xa-f-Xa', Xrf = Ха(( -\- Ха\ -^ ~ %aqi %а> (lo.v)
6 Таказ № 1104 161
Рис. 13.8. Векторные диаграммы явнополюсного генератора:
а — при активно-индуктивной нагрузке; б — при
активно-емкостной нагрузке
где х — синхронное индуктивное сопротивление машины; ха —
продольное синхронное индуктивное сопротивление машины; хч—
поперечное синхронное индуктивное сопротивление машины.
Основными характеристиками синхронного генератора, как и
генератора постоянного тока, являются:
а) характеристика холостого хода, представляющая собой
зависимость E=U0 = f(IB) при 1 = 0 и n = ns;
б) внешняя характеристика, представляющая собой
зависимость U = f{l) при /в = const, cos ф=const и п = пн;
в) регулировочная характеристика, представляющая собой
зависимость /B = f(/) при U=US, coscp = const и п = пи.
Характеристики синхронного генератора показаны на рис. 13.9.
Потери и КПД синхронных генераторов. Потери в синхронном
генераторе, как и в генераторе постоянного тока, слагаются из
механических потерь рк, возникающих вследствие трения в
подшипниках, трения ротора о воздух и вентиляционных потерь;
магнитных потерь рс, представляющих собой потери в стали
статора; электрических потерь в обмотках статора p3=ml2r; потерь
на возбуждение рв и добавочных потерь рД, которые состоят из
потерь в поверхностном слое ротора, вызванных пульсациями
а) 5> В)
Рис. 13.9. Характеристики синхронного генератора-
а — холостого хода; б — внешние; в — регулировочные
162
поля вследствие зубчатости внутренней поверхности статора,
а также из потерь, созданных нолями рассеяния статора.
КПД синхронной машины определяется отношением
_Р^ = Pt~2p = j 2р 3
Р, Pi P,+ Zp V
где Р2 — полезная мощность, которая для трехфазного
синхронного генератора равна P2 = mUI coscp; Pi — мощность,
подводимая к генератору от первичного двигателя.
КПД синхронных машин мощностью до 100 кВ-А обычно ра-
иен 85—90 %, а у синхронных генераторов большей мощности
96—99 %. Максимум КПД соответствует нагрузкам, близким
к номинальным.
§ 13.4. Параллельная работа синхронных генераторов
Как и генераторы постоянного тока, синхронные генераторы
обычно работают параллельно на общую нагрузку. На рис.
13.10,а приведена схема параллельного включения двух
трехфазных генераторов.
Синхронные генераторы можно включать на параллельную
работу методами точной синхронизации, самосинхронизации и
грубой синхронизации. На судах обычно применяются первые два
метода.
Для возможности включения синхронных генераторов на
параллельную работу методом точной синхронизации должны
выполняться следующие условия:
1) напряжения включаемых параллельно генераторов в
любой момент времени должны быть равны по значению, но
противоположны по направлению (рис. 13.10,6), т. е. Ug\——UG2;
2) частоты включаемого и работающего генераторов должны
быть равны, т. е. /"ёi = fег;
3) чередование фаз включаемого генератора должно
соответствовать чередованию фаз работающего генератора, в частности
/41-vBj-vCi у первого и А2-+В2-+С2 у второго генератора.
Генератор, включаемый на параллельную работу,
синхронизируется, т. е. приводится в состояние, удовлетворяющее
вышеуказанным условиям параллельной работы.
Синхронизация к включение генератора производятся
следующим образом. Если генератор G2 работает на внешнюю сеть,
а генератор G1 надо включить параллельно ему, то необходимо
пустить генератор G1 и довести его частоту вращения до
синхронной; одновременно, регулируя ток возбуждения, добиться
равенства напряжений генераторов и обеспечить
противоположность их направления; после этого при условии правильного
чередования фаз включить генератор G1 на параллельную работу.
Выполнение первого условия параллельной работы —
равенства значений напряжений генераторов — устанавливают по
показаниям вольтметров. Для соблюдения остальных условий
6*
163
Шины ГРЩ
6),
Щ44
SA
&1
И
о
G-Z
/ \ / \
t
т т т
Рис. 13.10. К рассмотрению параллельной работы синхронных
генераторов: а — схема включения; б — диаграмма напряжений;
в — схема синхроноскопа
параллельной работы устанавливают специальные приборы —
синхроноскопы. В настоящее время на судах наибольшее
распространение получили стрелочные синхроноскопы, представляющие собой
сельсин PS (рис. 13.10, в) с трехфазной обмоткой на статоре и
однофазной на роторе. Через добавочные резисторы трехфазная
обмотка с помощью переключателя SA присоединяется с
подключаемому генератору, а однофазная — к работающему, т. е. к
шинам ГРЩ. Взаимодействие магнитных полей обмоток вызывает
вращение ротора и стрелки сельсина с угловой скоростью,
пропорциональной разности частот, причем вращение стрелки в
направлении «Быстро», указанном на шкале прибора, означает, что
частота подключаемого генератора выше частоты работающего.
В этом случае необходимо воздействовать на регулятор частоты
вращения с целью уменьшения подачи рабочего тела в первичный
двигатель. При медленном вращении стрелки в момент ее подхода
к нулевой отметке надо замкнуть автоматический выключатель
подключаемого генератора. Для того чтобы принять нагрузку на
подключенный синхронный генератор, необходимо увеличить
мощность первичного двигателя этого генератора, т. е. увеличить его
вращающий момент.
Точная синхронизация — сложный и длительный процесс,
который в аварийных ситуациях может привести к длительному
перерыву в подаче электроэнергии потребителям судна. Поэтому
в настоящее время часто применяют автоматическую точную
синхронизацию. В тех случаях, когда требуются частые и быстрые
включения, используют метод самосинхронизации. Сущность
этого метода заключается в том, что синхронный генератор,
включаемый на параллельную работу, предварительно разгоняется до
164
Рис. 13.11. Угловые характеристики синхронного генератора:
а — неявнополюсного; б — явнополюсного
частоты вращения, близкой к синхронной, и без возбуждения
включается в сеть, после чего в обмотку возбуждения подают
постоянный ток, и генератор автоматически втягивается в
синхронизм.
Способность синхронных генераторов устойчиво работать
параллельно обеспечивается соответствующими изменениями их
электромагнитных моментов. Действительно, если пренебречь
потерями в машинах, то электромагнитные моменты
неявнополюсного и явнополюсного синхронных генераторов определяются
соответственно выражениями
WE0
М^=-
м+ =
Qx
sin 9;
3UE" sine+.3"'
(J L)
V Xq Xd )
sin 20 = M^ + Ml,
Qxj ' 2 V xq хд
(13.11)
где Q = co/p — угловая скорость вращающегося ротора, а ш —
угловая частота тока; 9 — угол сдвига между U и Е0,
определяемый угловым положением ротора относительно вращающегося
поля статора машины.
Зависимости M^, = f(Q) при £/ = const, /B = const называют
угловыми характеристиками синхронных генераторов (рис. 13.11). Они
показывают, что при 9<90° синхронные генераторы работают
устойчиво, так как при увеличении моментов первичных двигателей
пропорционально увеличиваются тормозные моменты генераторов.
Способность генераторов оставаться в синхронизме при
соответствующей нагрузке, устойчиво работать характеризуется
приращением электромагнитных моментов. Величины, равные
Мг
dQ
Qx
cos 9;
dQ
WE0 r, , 3C/2
- cos 9 A
Qxd 2
(—-—>
V x„ xd J
cos 29,
(13.12)
165
называют удельными синхронизирующими моментами неявнопо-
люсного и явнополюсного генераторов соответственно.
Зависимости Mc = f(Q) показаны на рис. 13.11. Очевидно, что
синхронизирующие моменты уменьшаются по мере увеличения 9, т. е. по
мере увеличения нагрузки генераторов. При 9 = 90° они равнУ
нулю. Поэтому синхронные генераторы изготовляют таким
образом, чтобы обеспечить номинальную мощность при 9Н = 20-5-30°.
В этом случае перегрузочная способность генераторов достигает
§ 13.5. Асинхронные электродвигатели
Характеристики и параметры электродвигателей.
Особенностью асинхронного электродвигателя является то, что связь
между обмотками их статора и ротора только магнитная.
Поэтому, если при неподвижном роторе {п2 = 0 и s=l) включить
статор под напряжение 11\ частотой fu то основной магнитный
поток Ф, вращаясь с синхронной частотой П\ будет наводить
в каждой из фаз статора и ротора соответственно ЭДС
£1 = 4,44AoiO»iO, £2=4,44А:02ш2Ф, (13.13)
а потоки рассеяния Ф01 и Ф02 — соответственно ЭДС рассеяния
Еа1 =-- — //jMjLj = —jhxi,
Е02 = —//гсо^г = —]£iX2.
Здесь k0\, ko2 — обмоточные коэффициенты соответственно
статора и ротора; шь w2— число витков обмоток соответственно
статора и ротора; (о\ — угловая скорость вращения магнитного
потока статора; Lx и L2 — индуктивность обмотки статора и ротора
соответственно; х\, х2 — индуктивные сопротивления
соответственно статора и неподвижного ротора.
ЭДС ротора создает в обмотке ротора ток
/2=£2/Z2 = £2/(r2 + /x2), (13.15)
где г2 — активное сопротивление фазы ротора.
При работе электродвигателя частота вращения потока Ф
относительно ротора равна ns = snx, соответственно частота ЭДС и
тока ротора равна f2 = sfu т. е. частота тока ротора f2
пропорциональна частоте тока статора и скольжению.
Соответственно изменению частоты f2, а следовательно, и
скольжения s изменяются ЭДС, индуктивное сопротивление и сила тока
ротора:
£2s = 4,44£02ny2sf1<I) = s£2;
Xis = Zji]<lL<l = Z3isJiL<i = sx<i\ ! /<q ,p\
£2s s^2 E%
-2~ Z2S = r2 + jsx2 ~~ rjs + jx2
(13.14)
166.
Ток ротора, протекая по обмотке, создает свое магнитное поле,
вращающееся относительно самого ротора с частотой ns = sti\
а в пространстве оно вращается с частотой ns + ti2 = nu т. е. с той
же частотой, что и магнитное поле статора. Другими словами,
поле ротора и поле статора вращаются синхронно и, действуя
в одной и той же магнитной системе, создают результирующий
магнитный поток Ф асинхронного электродвигателя.
Соответственно этому магнитодвижущая сила (МДС) машины
как при неподвижном, так и при вращающемся роторе равна
геометрической сумме МДС статора m\W\ko\[\ и МДС ротора
m2w2ko2l2, т. е.
/ЯхШ^/о = /^ш^ох/х + tn2w2koih, (13.17)
где гп\, тч — число фаз соответственно статора и ротора.
Разделив обе части уравнения (13.17) на m\Wxk0\, получим
/0=/,+/;, (13.18)
где h'=kil2 — сила тока ротора, приведенная к обмотке статора;
ki = m2W2ko2/{in\W\ko\ — коэффициент приведения
(трансформации) токов.
Уравнение (13.18) можно записать так:
/,=/0-/;- (13.19)
т. е. ток 1\ имеет две составляющие: /0 — намагничивающую
составляющую, называемую током холостого хода, и 1\ —
составляющую, которая компенсирует размагничивающее действие тока
ротора. Обычно /0 в три-четыре раза меньше номинального тока
статора.
С целью совместного рассмотрения ротора и статора заменим
величины, характеризующие работу ротора, соответствующими
приведенными величинами:
а) ЭДС ротора
Е. к^_Е kE E (1320)
где ke=EJE2 = ko\W]/(ko2W2)—коэффициент приведения
(трансформации) ЭДС и напряжений;
б) сопротивления обмотки ротора
r'2 = kkr2 = kr2; x'2 = kx2, (13.21)
где k = keki — коэффициент приведения сопротивлений.
В соответствии с приведенными величинами обмотки ротора
уравнения электрического равновесия и токов запишутся так:
U_i=— E_1+Iy1 + jIJx1;
^[fft+i1^ b = Lo—!.2-
167
(13.22)
a)\ I \ S)\ | I
0
'AT
о
8)
A
Ш'
f=f=f
n In In
t
XTf
Рис. 13.13. Схемы пуска короткозамкнутых
электродвигателей
участке при увеличении нагрузки скольжение возрастает и вместе
с этим увеличивается вращающий момент, поддерживающий
устойчивую работу двигателя. Наоборот, участок ВА соответствует
неустойчивой работе электродвигателя, так как при увеличении
нагрузки скольжение возрастает, а вращающий момент
уменьшается.
Отношение максимального момента к номинальному km =
= Мт/Мн называется перегрузочной способностью асинхронного
электродвигателя. Обычно кт= 1,8-^-2,5 у электродвигателей
нормального исполнения, &т = 2,8-^-3,5 у электродвигателей
специального исполнения.
Управление электродвигателями. Процесс управления
трехфазными электродвигателями, как и двигателями постоянного тока,
состоит из этапов пуска, реверса, остановки и торможения.
В момент пуска электродвигателя s=l и пусковой момент Мп,
как следует из характеристики M = f(s), относительно небольшой.
В то же время пусковой ток, равный
/n=^/V(',+''2)2+(*1+*;)2.
(13.26)
достигает (5-г-7) /н. В соответствии с этим к пуску асинхронных
электродвигателей предъявляют следующие основные требования:
кратность пускового момента kM = Mn/MH по возможности должна
быть наибольшей, а кратность пускового тока kT = In/IH —
наименьшей. Эти требования в основном и определяют способы пуска
трехфазных асинхронных электродвигателей.
В принципе пуск короткозамкнутых электродвигателей может
быть осуществлен прямым включением в сеть при номинальном
напряжении или пониженном напряжении питания.
Пуск электродвигателей прямым включением в сеть при
номинальном напряжении наиболее распространен и производится
автоматическим выключателем (рис. 13.13, а) или другим пуско-
т
Рис. 13.12. Схема замещения (а) и
механическая характеристика (б) асинхронного
электродвигателя
На основании этих
уравнений,
пренебрегая током /0 как
малой величиной,
можно составить схему
замещения одной
фазы трехфазного
асинхронного
электродвигателя (рис. 13.12, а).
На основании
схемы замещения
мощность, потребляемая двигателем из сети, определится по
выражению
P1=-3f/1/1cos(p, (13.23)
где Uu h — фазные значения соответственно напряжения и силы
тока; cos ф — коэффициент мощности электродвигателя.
Пренебрегая потерями в статоре, можно считать, что мощность
полностью передается от статора к ротору, вращающемуся с
угловой скоростью (in = 2nfi/p. Следовательно, вращающий момент
электродвигателя М определится выражением
М
SpUlIl
2itfi
coscp,
(13.24)
а из схемы замещения имеем
/i
coscp
V('l+'2/S)2 + (*l+4)2
r'js
V('i-b'2/s)2 + (*1+4)2
Таким образом, вращающий момент трехфазного асинхронного
электродвигателя равен
3pU2,r'Js „ _,
М= —L* (13.25)
2Я/1[(71 + г;/*)2 + (х1+*;)2]
Из выражения (13.25) следует, во-первых, что вращающий
момент асинхронного электродвигателя пропорционален квадрату
напряжения. Это означает, что электродвигатель весьма
чувствителен к колебаниям напряжения. Во-вторых, вращающий момент
обратно пропорционален частоте питающего напряжения.
В-третьих, он зависит от скольжения s, т. е. от частоты вращения
двигателя. Механическая характеристика M = f(s) асинхронного
электродвигателя представлена на рис. 13.12, б.
Анализ механической характеристики показывает, что она
имеет два принципиально различных участка. Участок ОВ
соответствует устойчивой работе электродвигателя, так как на этом
168
вым устройством. Этот способ прост и удобен в эксплуатации, но
сопряжен с большой кратностью силы пускового тока kT = 5,04-7,0
и сравнительно малой кратностью пускового момента &М = 1,0-М,8.
Поэтому он применяется в тех случаях, когда мощность
электродвигателя относительно невелика по сравнению с мощностью
источника питания.
Пуск асинхронных электродвигателей при пониженном
напряжении обычно осуществляется переключением обмотки статора
со звезды на треугольник (рис. 13.13, б), включением статора
через автотрансформатор (рис. 13.13, в) и введением в цепь
статора реактора. Во всех этих случаях понижается напряжение на
зажимах электродвигателя и, следовательно, уменьшается сила
пускового тока. Но при этом пусковой момент электродвигателя
уменьшается пропорционально квадрату сниженного напряжения,
вследствие чего такой способ применим только при пуске
электродвигателей вхолостую.
Пуск электродвигателя посредством переключения обмотки
статора производят следующим образом. Переключатель ставят
в положение «Пуск» (у) и замыкают автоматический
выключатель. После того как электродвигатель разовьет номинальную
частоту вращения, переключатель быстро переводят в положение
«Работа» (А). Сила пускового тока при этом уменьшается в три
раза.
При пуске электродвигателя включением статора в сеть через
автотрансформатор Т, после того как электродвигатель разовьет
номинальную частоту вращения, обмотку статора включают на
полное напряжение сети, а автотрансформатор отключают. При
этом сила пускового тока уменьшается в k2 раз, где k —
коэффициент трансформации автотрансформатора.
Пуск фазных электродвигателей, как правило, производится
с помощью пускового реостата, вводимого в цепь ротора.
Реверс асинхронных электродвигателей можно осуществить
путем изменения направления вращения поля машины, что
достигается переключением двух любых проводов, соединяющих
обмотку статора с сетью. Торможение же этих электродвигателей
можно производить: а) с помощью механических тормозов; б) по
способу противовключения, когда изменяют направление
вращения поля путем переключения любой пары проводов, питающих
обмотку статора; в) переводом двигателя в генераторный режим
с возвратом энергии в сеть: г) электродинамическим способом —
путем отключения электродвигателя от сети и включения обмотки
его статора под напряжение постоянного тока или на батарею
конденсаторов.
Регулировать частоту вращения трехфазных асинхронных
электродвигателей, как видно из выражения
ла = п1(1—s) = 60/х(1— s)/p, (13.27)
можно- а) изменением скольжения s, б) изменением числа пар
полюсов р, в) изменением частоты тока статора /j.
17Q
Регулирование частоты вращения изменением скольжения
применяется только для фазных электродвигателей.
Регулирование частоты вращения изменением числа пар
полюсов основано на изменении частоты вращения магнитного поля,
которая определяется из соотношения «i = 60/i/p. Действительно,
при изменении числа пар полюсов р будет изменяться частота
вращения поля статора п\ и, следовательно, частота вращения ротора
п2= {l—s)nu
Для изменения числа пар полюсов на статоре двигателя
укладывают две независимые обмотки на разные числа пар
полюсов или каждую фазную обмотку делают из двух катушек, из
которых комбинируют разные соединения, получая то или иное
число пар полюсов.
Регулирование частоты вращения двигателей изменением
частоты тока также основано на изменении частоты вращения поля
статора щ. В этом случае регулировать частоту вращения можно
плавно и в широких пределах. Однако для такой регулировки
требуется специальный источник питания.
Глава 14. ПРЕОБРАЗОВАТЕЛИ
ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ
§ 14.1. Общие сведения и понятия
На современных судах электроэнергия вырабатывается
в виде трехфазного переменного тока определенных параметров.
Эту электроэнергию получает большинство судовых потребителей.
Но для ряда потребителей необходима электроэнергия других
параметров или другого рода. Для выработки такой электроэнергии
применяют соответствующие типы преобразователей.
Обычно возникает необходимость в следующих видах
преобразования: а) переменного тока одного напряжения в переменный
ток другого напряжения — трансформирование напряжения, б)
переменного тока в постоянный — выпрямление тока, в) постоянного
тока в переменный — инвертирование тока; г) переменного тока
одной частоты в переменный ток другой частоты —
преобразование частоты.
По принципу действия все преобразователи электроэнергии
делятся на две основные группы: статические и вращающиеся.
Рассмотрим основные типы преобразователей, широко применяемые
на судах.
§ 14.2. Электрические трансформаторы
Устройство и физические основы трансформаторов.
Трансформаторы — это статические электомагнитные аппараты,
применяемые для преобразования энергии переменного тока одного
напряжения в энергию переменного тока другого напряжения при
171
сохранении неизменной его частоты. Такой процесс
преобразования электроэнергии называется трансформацией.
Трансформатор, как правило, состоит из стального сердечника,
являющегося магнитопроводом, и двух обмоток. Та из обмоток
трансформатора, к которой подводится энергия переменного тока,
называется первичной, а та, от которой энергия отводится, —
вторичной. Все величины, относящиеся к первичной обмотке,
например напряжение, ток, мощность и т. д., называются первичными,
а относящиеся ко вторичной обмотке — вторичными. Если
вторичное напряжение меньше первичного, то трансформатор
называется понижающим, а если больше, то повышающим. В
соответствии с этим различают обмотки высокого и низкого
напряжений.
По виду переменного тока трансформаторы разделяются на
однофазные, трехфазные и многофазные. По числу обмоток
различают трансформаторы двухобмоточные и многообмоточные,
а также трансформаторы с ответвлениями, т. е. трансформаторы,
обмотки которых имеют специальные ответвления. Различают
также масляные и сухие трансформаторы. Первые с целью
предохранения изоляции от вредного влияния воздуха и улучшения
условий их охлаждения погружают в бак с трансформаторным
маслом, вторые не погружены в масло. Масляные
трансформаторы, как правило, применяют в береговых установках, сухие
трансформаторы — на судах.
По назначению все трансформаторы, применяемые в технике,
можно разделить на две основные группы: 1) силовые
трансформаторы, служащие для передачи и распределения энергии: 2)
специальные трансформаторы, в частности автотрансформаторы,
измерительные трансформаторы, вращающиеся, сварочные,
трансформаторы для выпрямителей, радиотрансформаторы.
Судовые трансформаторы мощностью до 100 кВ-А выпускают
для однофазного и трехфазного тока на напряжение 380, 220 и
127 В на первичной обмотке со ступенчатым регулированием
напряжения и 220, 127 и 26 В на вторичной обмотке. Маркировка
сухих трансформаторов типов ОСЗМ, ОСВМ, ТСЗМ, ТСВМ
обозначает: О — однофазный, Т — трехфазный, 3 — брызгозащищен-
ный, В — водозащищенный, С — сухой, М — морской.
Действие трансформатора основано на явлении
электромагнитной индукции. Если первичную обмотку трансформатора
подключить к сети переменного тока с напряжением U\ (рис. 14.1), то
в ней будет протекать ток 1\, который создаст в сердечнике
переменный магнитный поток Ф. Под влиянием этого потока в обеих
обмотках трансформатора будут индуцироваться ЭДС. Если при
этом вторичная обмотка будет замкнута, то по ней будет течь
переменный ток 1% Таким путем и осуществляется передача энергии
из первичной обмотки во вторичную, а следовательно, и
преобразование энергии переменного тока одного напряжения в энергию
переменного тока другого напряжения.
172
Рис. 14.1. Схема работы трансформатора
Hi—rur
Мгновенные значения ЭДС, индуцируемых в обмотках
трансформатора, при <D = <Dmsin(i)f определяются выражениями
е1 = — wxd (Фт sin (ot)!dt = Elm sin (at— я/2);
е2 = —w^d (Omsin (ot)ldt = E2m sin (at—я/2),
(14-.1)
где w\, W4 — число витков соответственно первичной и вторичной
обмоток трансформатора; Е\т=хю\(лФт, £2™ = ^«Ф»»—
максимальные значения ЭДС обмоток трансформатора.
Переходя к действующим значениям ЭДС, получим
Ег-
Ещ
И)1<0Ф„
V2"
■С 2т
V2"
ш1-2£^.= 4>44/а»1Ф„
ш.шф„
V2-
и>2-2тт/ф„
У2"
v^
v^
4,44/ш2Ф„
(14.2)
Отношение ЭДС обмотки высокого напряжения к ЭДС
обмотки низкого напряжения называется коэффициентом
трансформации. Например, если обмоткой высокого напряжения является
первичная, а обмоткой низкого напряжения — вторичная, то
коэффициент трансформации k определится следующим
соотношением:
, Ег 4,44/ю1Фт и)х
4,44/и>2Ф»
(14.3)
При работе трансформатора вхолостую, т. е. когда во
вторичной обмотке тока нет, а в первичной он имеет небольшую силу,
можно считать, что E\~U\ и E^ — lho, и тогда k = U\fU2o, т. е.
коэффициент трансформации равен отношению напряжений на
зажимах трансформатора.
Соотношение между токами обмоток трансформатора под
нагрузкой определяется выражением
Л//,« f/a/f/i, (14.4)
т. е. токи в обмотках обратно пропорциональны напряжениям
трансформатора.
173
Трансформаторы могут pa6oraib в двух основных режимах:
в режиме холостого хода и под нагрузкой. В эксплуатационных
условиях может иметь место режим внезапного короткого
замыкания.
При работе трансформатора вхолостую на первичную обмотку
подано напряжение U: и по ней проходит ток /0 (см. рис. 14.1),
а вторичная обмотка разомкнута, и ток в ней равен /2 = 0. В этом
случае во вторичной обмотке наводится ЭДС Е2, а напряжение £Л
расходуется на преодоление ЭДС самоиндукции Е\, ЭДС
рассеяния Еа1 =—/(oLal/0 = —jx\Ij>, где Lal, Х\— индуктивность и
индуктивное сопротивление первичной обмотки трансформатора,
а также на падение напряжения /оП на активном сопротивлении г\
первичной обмотки трансформатора. Ток /0 можно представить
в виде двух составляющих: активной 1а и реактивной /^ : /о =
Таким образом, уравнение второго закона Кирхгофа для
первичной обмотки в режиме холостого хода трансформатора
запишется так:
tf1=-£1 + /0r1 + /W (14.5)
При работе трансформатора под нагрузкой, когда к первичной
обмотке подведено напряжение U\ и по ней течет ток 1\, а
вторичная замкнута на внешнее сопротивление ZHr и по ней течет ток /2,
уравнения электрического равновесия для обмоток
трансформатора запишутся так:
Ei = ut+[tri+jjixi, ) (14'6)
где Ич — напряжение на зажимах вторичной обмотки
трансформатора: гг, х2—активное и индуктивное сопротивления вторичной
обмотки трансформатора.
С целью возможного совместного рассмотрения процессов в
обмотках трансформатора приведем, как и для асинхронного
двигателя, параметры вторичной обмотки к первичной:
E'2 = kE2 = El; U'2 = kU2; I'2 = I2lk;
Тп =^ R fn', Х2 =^ R Х2\ 1*2 = I 2 ~т~ ]Х2'
В соответствии с приведенными величинами вторичной обмотки
уравнения токов и ЭДС перепишутся следующим образом:
Ui = — £i -f/л + jhxi,
E2 = U'2 + r/2+jl}pc2.
(14.7)
174
Рис. 14.2. Векторные диаграммы трансформатора
при холостом ходе (а) и под нагрузкой (б) и его
внешние характеристики (в)
На основании уравнений (14.5) и (14.7) на рис. 14.2
приведены векторные диаграммы для случаев холостого хода и
нагруженного трансформатора, а также его внешние характеристики.
Последние показывают характер изменения вторичного
напряжения.
Основной паспортной мощностью трансформатора является
номинальная полная мощность Sn=U2Hl2H, указываемая на щитке
трансформатора и измеряемая в вольт-амперах или киловольт-
амперах.
Отношение активной мощности P2 — U2hcos фг, отдаваемой
вторичной обмоткой, к активной мощности Р\ = U]I\CO$><p\, получаемой
а)
с>А
S
S
_-,
6 а
С В) jf
:z
6b
Mi
Li
a,
be bo
Рис. 14.3. Схемы трансформаторов: а —
трехфазного; б—автотрансформатора
175
первичной обмоткой, называется коэффициентом полезного
действия трансформатора:
Р2 __ UJzcosyz _ Рг — Zp
Т):
Pi
t/i/x cos фх
Pi
(14.8)
где 2Р — суммарные потери трансформатора, слагающиеся из
потерь в меди обмоток и потерь холостого хода.
Трехфазные и специальные трансформаторы. Судовые
трехфазные трансформаторы обычно изготовляются трехстержневого
типа (рис. 14.3, а). На каждом стержне располагаются первичная
и вторичная обмотки одной фазы. Начала обмоток высокого
напряжения обозначаются буквами А, В, С, а их концы — буквами
X, Y, Z. Начала обмоток низкого напряжения соответствующих
фаз обозначаются а, Ь, с, а их концы — х, у, г. Нулевые точки
обозначаются соответственно О и о. Обмотки этих трансформаторов
соединяются звездой или треугольником. В судовых установках
применяются четыре группы соединений: Y/Y. Y/Yo(Yo—
соединив звездой с нулевым проводом) и Y/A. В числителе указано
соединение обмоток высокого напряжения, а в знаменателе —
низкого.
К специальным трансформаторам относятся, в частности,
автотрансформаторы (рис. 14.3, б) и измерительные трансформаторы
(рис. 14.4). В автотрансформаторе обмотка низкого напряжения
является частью обмотки высокого напряжения. Коэффициент
трансформации автотрансформатора, так же как и в однофазном
трансформаторе, равен отношению
k = и11и2 = щ1щ,
где U\, U2, w\, w-i — соответственно напряжения и число витков
первичной и вторичной обмоток автотрансформатора.
Режим холостого хода автотрансформатора аналогичен
режиму холостого хода обычного трансформатора. В работе же
автотрансформатора под
нагрузкой имеется
принципиальная
разница по сравнению
с обычным
трансформатором. Так,
мощность S\ = U\I\,
подводимая к
автотрансформатору,
передается во вторичную
обмотку частью
электромагнитным путем и
частью электрическим
путем, поскольку обе
обмотки электрически
связаны,
Рис. 14.4. Измерительные трансформаторы- а —
трансформатор тока; б — трансформатор
напряжения
176
Измерительные трансформаторы служат для расширения
пределов электроизмерительных приборов по току — трансформаторы
тока (рис. 14.4, а) и по напряжению — трансформаторы
напряжения (рис. 14.4, б). Как трансформатор тока, так и трансформатор
напряжения состоит из ферромагнитного сердечника и двух
обмоток: первичной и вторичной. Первичные обмотки изготовляются
на различные значения соответственно тока и напряжения, а
вторичные обмотки трансформаторов тока — на 5А и
трансформаторов напряжения — на 100 В. Соотношение между первичными
и вторичными соответственно токами и напряжениями
приближенно можно выразить так:
/i = —/2 = *т/г; С/х —?^- £/а = Л„£/а, (14.9)
w1 wa
где kT, ku — коэффициенты трансформации трансформаторов тока
и напряжения соответственно.
Трансформаторы напряжения практически работают в резкиме
холостого хода, а трансформаторы тока — в режиме короткого
замыкания. При работе вторичные обмотки трансформаторов
заземляются, благодаря чему повышается безопасность обслуживания.
§ 14.3. Выпрямители и инверторы
Под выпрямителями понимают устройства, предназначенные
для преобразования переменного тока в постоянный, а под
инверторами—устройства для преобразования постоянного тока в
переменный. Основными элементами этих преобразователей
являются трансформаторы и полупроводниковые приборы. Кроме того,
в их состав могут входить блок управления, блок стабилизации и
блок сигнализации и защиты.
Устройство полупроводниковых преобразователей основано на
односторонней проводимости приборов, а также на возможности
управлять их проводимостью.
Общая схема устройства полупроводникового прибора
представлена на рис. 14.5, а. Прибор состоит из двух металлических
а)
зс /
5 U о-
0 1
Uobp
~1^"6Р
| ^ 1
1 и +,
\1щ>
0
Чобр
J-np
г*
V и
Рис 14.5. Схема устройства (а) и вольт-ампериая
характеристика (б) полупроводникового прибора
177
электродов: анода А и катода К, между которыми заключен
полупроводник. Один из слоев этого полупроводника обладает р-про-
водимостью, а другой «-проводимостью. В месте стыка слоев
полупроводника образуется запирающий слой ЗС В таком
устройстве ток, текущий под действием внешнего электрического поля
чере'з запирающий слой в направлении от анода к катоду, во
много раз больше, чем ток, текущий в обратном направлении.
Поэтому направление от полупроводника с р-проводимостью к
полупроводнику с «-проводимостью называют проводящим, а
обратное — непроводящим. Ток, соответствующий проводящему
направлению, называют прямым /пр, а непроводящему — обратным /0бр-
На рис. 14.5, б представлена вольт-амперная характеристика —
зависимость тока от значения и направления приложенного
напряжения.
Физическая сущность явлений, имеющих место в
полупроводниковом приборе, заключается в следующем. При соединении
слоев полупроводника с р- и «-проводимостями между ними
образуется запирающий слой — электронно-дырочный переход, или
п — р-переход. Электроны начнут перемещаться из области с «-
проводимостью в область с р-проводимостью, а дырки — в
обратном направлении. Будет происходить свободный обмен
электронами и дырками до момента достижения равновесия,
наступающего под действием сил возникшего внутреннего электрического
поля Евнутр При подключении минуса источника напряжения к
области с «-проводимостью электроны и дырки под действием
внешнего электрического поля Евиешн устремятся к р—«-переходу. При
£'внешн>£'внутр внутреннее поле будет полностью уравновешено,
в результате чего увеличится количество основных носителей
электричества в направлении внешнего поля, т. е. в этом направлении
будет протекать ток сравнительно большой силы При изменении
полярности напряжения внутреннее поле запирающего слоя
усилится Поэтому в направлении внешнего поля будет протекать
только обратный ток
небольшой силы.
Полупроводник о в ы е
приборы бывают
селеновые, германиевые и
кремниевые (последние
наиболее распространены).
Основными параметрами
этих приборов,
характеризующими их работу,
являются- /Пр доп —
ДОПУСТИМЫЙ прямой ток,
^обр доп—допустимое
обратное напряжение,
D ,,с г . /обр доп" ДОПУСТИМЫЙ Об-
Рис 14 6 Схемы включения выпрямителей „ » тj
с использованием нулевой точки траисформа ратный ток, 1\и„р пря-
гора а—однофазного, б — трехфазного мое падение напряжения.
J 78
Учитываются также температурный и частотный диапазоны
Самые лучшие параметры имеют кремниевые приборы
В выпрямителях широко применяются две типовые схемы
включения полупроводниковых приборов схема с использованием
нулевой точки трансформатора и мостовая схема. Обе эти схемы
предусматривают использование обеих полуволн переменного
тока.
Схема с использованием нулевой точки однофазного
трансформатора изображена на рис 14.6, а В первую половину периода
ток проходит через диод VI, во вторую половину периода
полярность вторичной обмотки трансформатора меняется и ток
пропускает уже диод V2 Схема подобного типа для выпрямления
трехфазного тока показана на рис. 14 6, б Ток пропускает тот из
диодов, который в данный момент имеет высший потенциал
Рассмотрим основные соотношения между величинами,
используемыми при выборе диодов для нулевых схем выпрямления.
Средние значения выпрямленных напряжений UQ и тока /0 и
амплитуда обратного напряжения на диоде С/0бр т
для однофазной схемы
£/„=—ft/tosinfflftfH)= 2л/2и* = 0,9t/2; |
it о it \ (14.10)
где Ui — действующее значение вторичного напряжения
трансформатора; 1а — действующее значение тока диода, Rm —
сопротивление (нагрузка) потребителя,
для трехфазной схемы
U0=l,l7U2; I0 = 3la = U0!Rm; Uo6pm = 2,09U0,
где £/г — вторичное фазное напряжение трансформатора
Трехфазная нулевая схема выпрямления обладает рядом
преимуществ по сравнению с однофазными меньше коэффициент
пульсации выпрямленного напряжения ku=Um/U, больше среднее
значение выпрямленного тока и несколько лучше использование
трансформатора.
Трехфазная мостовая схема (рис. 14.7) состоит из диодов,
соединенных в две группы- катодную (диоды VI—V3) и анодную
(диоды V4—V6). В течение '/з периода в катодной группе
работает один диод с наиболее высоким потенциалом анода, а в
анодной группе в это время работает диод, у которого катод имее!
наибольший отрицательный потенциал Таким образом, в этой
схеме в любой момент времени работают два диода один из
катодной группы, другой из анодной.
Основные соотношения для трехфазной мостовой схемы:
£/0 -= 1,35С/ал = 2,34С/2; /0 = 3/в- U0!Rnr;
f/oepm=l,045f/0,
(14.11)
179
I лг
Рис 14 7 Трехфазная мо
стовая схема
Рис 14 8 Схема
автономного однофазного
инвертора
где 1/2л, U2 — соответственно линейное и фазное вторичные
напряжения трансформатора.
Трехфазная мостовая схема значительно лучше нулевой.
В частности, в ней меньше пульсации выпрямленного напряжения,
больше их частота, в два раза меньше обратное напряжение на
диоде, так как оно распределяется на два последовательно
соединенных диода, и лучше использование трансформатора.
Инверторы отличаются от выпрямителей тем, что у них вместо
неуправляемых приборов — диодов применены управляемые
приборы— тиристоры. На рис. 14.8 представлена схема автономного
однофазного инвертора.
Сущность работы инвертора состоит в том, что при подаче
в противофазе на тиристоры VS1 и VS2 управляющих импульсов
с частотой f2 происходит поочередное их открытие и, следова-
тельно, поочередное
протекание тока по
полуобмоткам
трансформатора
напряжения TV. В результате
во вторичной обмотке
трансформатора
индуцируется ЭДС,
частота которой равна f2,
а по нагрузке Z„r
течет переменный ток.
Конденсатор С в
схеме выполняет роль
источника
коммутирующей ЭДС тиристоров
VS1 и VS2. При по-
Рис. 14 9 Схема инвертора трехфазного тока даче управляющего
1\ Г\ И
Г\ Г\ Z\
У У У
у у у
__J? У У
у у у
-о А
-о С
180
напряжения, например, на тиристор VS2 конденсатор С
закрывает тиристор VS1, так как к этому моменту последний заряжен
до полного напряжения обмотки трансформатора. После
закрытия тиристора VS1 конденсатор С в течение некоторого времени,
соответствующего углу запирания, удерживает на этом тиристоре
отрицательное напряжение, создавая тем самым условия,
необходимые для восстановления его управляемости (проводимости).
Затем на тиристор VS1 подается управляемое напряжение и
далее процесс циклически повторяется.
Однако при изменении нагрузки ZHr на инвентор резко
изменяется значение выходного напряжения при одновременном
изменении его формы. Для устранения этого явления усложняются
схемы или применяются соответствующие стабилизаторы
напряжения.
В настоящее время выпускаются автономные инверторы
трехфазного тока (рис. 14.9), собранные по принципиально различным
схемам. На всех этих инверторах коммутация диодов и
тиристоров, как правило, производится с помощью конденсаторов.
Конструктивно инверторы, как и выпрямители, выполняются
в виде шкафов, габариты и конфигурации которых зависят от
мощности инверторов, удобства их обслуживания и других
требований.
§ 14.4. Электромашинные преобразователи
Электромашинные преобразователи, применяемые на судах,
представляют собой агрегаты, состоящие из двух машин:
электродвигателя и генератора, которые соединены между собой меха
нически, но электрически не связаны. Их собирают на одной фун
даментной плите или в одном закрытом корпусе. Агрегаты
позволяют производить самые разнообразные преобразования — рода
тока, напряжения, числа фаз, частоты. Но чаще всего они
применяются для преобразования переменного тока в постоянный или
постоянного тока в переменный. На рис. 14.10 изображена схема
двухмашинного агрегата, предназначенного для преобразования
трехфазного тока в постоянный.
К достоинствам электромашинных преобразователей относятся
независимость параметров преобразуемой и получаемой энергии,
а также возможность применять обычные серийные машины.
Недостатками являются относительная громоздкость агрегата и
сравнительно низкий КПД, равный
произведению КПД двигателя iia и КПД
генератора in,-, т. е.
Л = %Лг- (14-12)
На судах из многомашинных
преобразователей широко применяются, в част-
ности, преобразователи переменно-посто- Рис и ш Схема двух
янного тока типа АМ-П мощностью от машинного преобразова-
4,5 кВт (АМ42-2-П32М) до 95 кВт Теля
181
лт/по ш Пуси Стоп им
П О П э
mi -Jm^
шга
А 2308,500 Гц 6
Рис 14 11 Принципиальная схема преобразователя
АТО 20-500
(АМ102-4-П101), преобразователи частоты типов АМГ, АЛА, АТО,
АТТ мощностью от 0,43 кВт (АМГ201А) до 50 кВт (АТТ50-500).
Преобразователи частоты представляют собой однокорпусные
агрегаты, состоящие из асинхронных короткозамкнутых
электродвигателей и синхронных генераторов в комплекте с пускорегулирую-
щей аппаратурой. Агрегаты преобразуют трехфазный ток судовой
сети в однофазный или трехфазный ток повышенной (400—
500 Гц) частоты. На рис. 14.11 приведена принципиальная схема
преобразователя АТО 20-500. Двигательная часть схемы состоит
из асинхронного двигателя, пускателя и кнопочного поста
управления. Генераторная часть схемы включает однофазный
индукторный генератор G, обмотка возбуждения которого L2 питается
ог возбудителя GA, и автоматический регулятор напряжения АРН.
В некоторых случаях в комплект преобразователя входит блок
ручного регулирования напряжения.
Глава 15. ЭЛЕКТРИЧЕСКИЕ АККУМУЛЯТОРЫ
§ 15.1. Общие сведения и понятия
Электрическими аккумуляторами называют приборы для
накопления электрической энергии с целью последующего ее
использования. Процесс накопления электроэнергии в аккумуляторах
называют их зарядом, а процесс отдачи электроэнергии во внешнюю
цепь — разрядом. При заряде аккумуляторов в них происходит
преобразование электрической энергии в химическую, а при
разряде— химической в электрическую.
Процессы взаимного преобразования химической и
электрической энергии в аккумуляторах называют электрохимическими про-
182
цессами, а вещества, участвующие в этих процессах, — активными
веществами. Совокупность активных веществ, находящихся в
аккумуляторе, называют электрохимической системой.
Основными параметрами аккумуляторов являются ЭДС,
внутреннее сопротивление, напряжение, емкость, энергия и отдача.
ЭДС Е аккумулятора практически остается постоянной величиной
и определяется разностью между потенциалами его электродов
при разомкнутой внешней цепи, т. е.
E = U+-jJ_, (15.1)
где U+, £/_—потенциалы соответственно положительного и
отрицательного электродов.
Значения потенциалов для данной электрохимической системы
постоянны и зависят от материала электродов, частично от
состава и плотности электролита.
Внутреннее сопротивление аккумуляторов — величина
переменная и зависит от режима их работы.
Напряжение аккумуляторов различают разрядное и зарядное,
определяемое соответственно по выражениям
UP = E-IPRP; U* = E + I3R3, (15.2)
где /р, /3, RP, R3 — соответственно силы токов и внутренние
сопротивления разряда и заряда аккумулятора.
Емкость аккумуляторов, как и напряжение, различают
разрядную и зарядную. Емкость определяется произведением сил токов
разряда и заряда аккумулятора 1Р, /3 на время разряда Тр и
заряда Тз соответственно:
Ср = /РГР; С3 = 13Т3. (15.3)
Емкость аккумуляторов измеряется в ампер-часах (А-ч).
Различают отдачу аккумуляторов по емкости \\с и отдачу по энергии
y]w, которые определяются соответственно по формулам
т1с = /рГр/(/зГ3); 4W = UPIPTP/(U3I3T3). (15.4)
По роду электролита электрические аккумуляторы
разделяются на две основные группы: кислотные и щелочные.
§ 15.2. Кислотные аккумуляторы
По устройству и назначению кислотные аккумуляторы весьма
разнообразны. Их выпускают одиночными и в виде батарей. На
рис. 15.1 показано устройство одного из типов одиночных
аккумуляторов и общий вид одной из аккумуляторных батарей. Каждый
аккумулятор состоит из трех основных частей: блока пластин,
электролита и бака.
Пластины представляют собой решетки (остов) с вмазанным
в них активным веществом. Остов отливают из свинца, к которому
добавляют небольшое количество сурьмы для механической
прочности и кислотостойкости. Активное же вещество положительных
J83
Рис 15 1 Кислотные
ройство, б—батарея
/ — зажим, 2 — пробка.
аккумуляторы а — уст
вянная прокладка
ншовый бак
3 — серная кислота, 4 — дере
эбонитовая прокладка, 6 — эбо-
пластин в готовых
аккумуляторах — это
двуокись свинца РЬ02
темно - коричневого
цвета, а активное
вещество отрицательных
пластин — чистый
губчатый свинец РЬ
светло-серого цвета.
Активное вещество как
положительных, так
и отрицательных
пластин имеет пористую
(губчатую) структуру,
благодаря чему
хорошо пропитывается
электролитом в
процессе работы
аккумулятора.
Готовые
положительные пластины аккумулятора соединяются между собой
параллельно при помощи мостика с зажимом, называемым
бареткой. Также соединяются отрицательные пластины. Группа
положительных пластин размещается между отрицательными, образуя
блок пластин аккумулятора. Следовательно, крайними в блоке
являются отрицательные пластины, и поэтому их всегда на одну
больше, чем положительных. Для предохранения разноименных
пластин от замыкания между ними помещают изоляционные
прокладки, называемые сепараторами. В качестве сепараторов
применяют микропористые эбонитовые листы или гофрированные
фанерные листы, а также изготовляют их из пористых пластмасс,
стекловойлока и других материалов.
Электролитом кислотных аккумуляторов служит раствор
химически чистой серной кислоты в дистиллированной воде.
Основной характеристикой электролита является плотность. Для
данного типа аккумулятора плотность устанавливается
заводом-изготовителем и практически колеблется в пределах от 1,2 до
1,35 г/см3.
Баки судовых кислотных аккумуляторов обычно изготовляют
из эбонита как одиночными, так и в виде моноблоков, где для
каждого аккумулятора имеется ячейка. На дне баков имеются
призмы для установки блока пластин и предохранения их от
замыкания выпавшим из решетки активным веществом. Баки
закрываются крышками с отверстиями для вывода зажимов и для
заливки и замеров электролита, заливочные отверстия —
резьбовыми пробками, обеспечивающими свободный выход газов при
работе, но не допускающими выливания электролита при
наклонах аккумулятора. Для уплотнения между крышкой и баком
прокладывают резину и стыки заливают кислотостойкой мастикой.
184
Сущность электрохимических процессов при разряде и заряде
кислотных аккумуляторов состоит в следующем.
При разряде аккумулятора двуокись свинца положительных
пластин РЬ02 восстанавливается до сернокислого свинца PbSCU,
а чистый губчатый свинец отрицательных пластин РЬ окисляется
в сернокислый свинец PbS04. При этих реакциях расходуется
серная кислота и образуется вода, отчего плотность электролита
понижается.
При заряде аккумулятора происходит обратный процесс, т. е.
сернокислый свинец положительных пластин окисляется в
двуокись свинца, а сернокислый свинец отрицательных пластин
восстанавливается до чистого свинца. При этих реакциях
расходуется вода и образуется серная кислота, вследствие чего плотность
электролита повышается.
Суммарная электрохимическая реакция имеет следующий вид:
( + ) (-) Разряд ( + ) (-)
Pb02 + 2H2S04 + Pb - PbSQ4 + 2H2Q + PbSCy
(Аккумулятор заряжен) Заряд (Аккумулятор разряжен)
Изменение плотности электролита при заряде и разряде
является важной характеристикой кислотного аккумулятора, которая
используется для контроля за степенью его заряженности
Среднее рабочее напряжение заряженного аккумулятора равно
2 В. Однако при заряде и разряде напряжение изменяется. Так,
при заряде оно повышается от 1,2 до 2,7—2,8 В и далее остается
постоянным. При отключении аккумулятора от зарядного
устройства напряжение снижается до 2,2—2,1 В. При разряде
напряжение падает от 2,2 В до 1,7 В. Напряжение 1,7 В обычно считается
концом нормального разряда, так как при дальнейшем разряде
пластины могут засульфатироваться.
Внутреннее сопротивление аккумулятора весьма мало и
составляет сотые и даже тысячные доли ома. Образующийся при
разряде на пластинах сернокислый свинец имеет плохую
проводимость электрического тока, поэтому внутреннее сопротивление при
разряде увеличивается и соответственно при заряде уменьшается.
Емкость кислотных аккумуляторов зависит от массы активных
веществ — чем больше активных веществ, тем больше емкость; от
силы разрядного тока — чем меньше сила разрядного тока, тем
больше емкость; от температуры и плотности электролита — чем
выше эти параметры, тем больше емкость; от срока службы — по
мере старения аккумулятора емкость его уменьшается.
При нормальных режимах заряда и разряда отдача кислотных
аккумуляторов по емкости составляет 80—90%, а по энергии —
70—80%. Понижение температуры электролита уменьшает
отдачу.
Отменим, что у кислотных аккумуляторов есть естественный
саморазряд, который равен примерно— 1 —1,5% в сутки. При
неправильной эксплуатации он может достигнуть чрезмерных
значений.
185
Габлица 15 1. Характеристики основных типов кислотных аккумуляторных
батарей
Тлп
ба*а|>еи
ЗСТЭ-60
ЗСТЭ-70
ЗСТЭ-80
ЗСТЭ-98
ЗСТЭ-112
ЗСТЭ-126
ЗСТЭ-135
6СТЭ-58
6СТК-180
Номинальное
напряжение,
В
6
6
6
6
6
6
6
12
12
Емкость. А ч
при
10 часовом
режиме
разряда
60'
70
84
98
112
126
135
58
180
при 5
минутном
стартер-
ном
режиме
16,5
19,2
22,8
27,0
30,7
34,8
37,1
18,7
42,7
Разрядный ток, А
при
10-часовом
режиме
6
7
8
9,8
11,2
12,6
13,5
5,8
15,4
при 5
минутном
стартер
ном
режиме
180
210
250
295
335
380
405
205
500
Зарядный ток, А
Первая
ступень
5,5
6,5
8,0
8,5
9,0
10
10
6,0
20
Вторая
ступень
3,5
6,0
6,0
7,0
7,0
7,5
7,5
4,5
10
Аккумуляторы, подобно другим источникам электроэнергии,
соединяют последовательно, параллельно или
параллельно-последовательно. Несколько соединенных тем или иным способом
аккумуляторов образуют батарею.
Батареи кислотных аккумуляторов малой и средней емкости
применяют главным образом для запуска двигателей внутреннего
сгорания и реактивных двигателей, а также для снятия пиковых
нагрузок при работе в качестве резервных источников питания.
Батареи большой емкости применяют на подводных лодках для
питания гребных электродвигателей.
В табл 15.1 приведены основные типы и характеристики
кислотных аккумуляторных батарей, применяемых на судах флота.
Условные обозначения батарей расшифровываются следующим
образом. Цифры, стоящие в обозначении перед буквами,
указывают число элементов батареи, соединенных последовательно,
а цифры после букв—номинальную емкость в ампер-часах. Буквы
в условном обозначении батарей означают: СТ — стартерная, К —
катерная. Материал блоков характеризуют буквы Э — эбонит и
П — пластмасса.
При 20-часовом режиме разряда конечное напряжение всех
типов батерей составляет 1,75 В на элемент, при 10-часовом
режиме— 1,7 В, при одночасовом режиме—1,6 В, а при
5-минутном режиме — 1,5 В.
Существуют три основных способа заряда кислотных
аккумуляторных батарей- заряд при постоянном значении напряжения
(£/3 = const), заряд при постоянной силе тока (/3 = const) и
ступенчатый заряд. Сущность первого способа заключается в том,
что к батарее подводят зарядное напряжение U3, превышающее
ЭДС батареи Е, и не изменяют его до конца заряда. Такой
способ обычно применяют для частичного подзаряда батареи, а также
при заряде стартерных батарей от источников регулируемого
напряжения.
186
Второй способ состоит в том, что в течение всего времени
заряда сила зарядного тока остается неизменной. Данный способ
применяют при продолжительных зарядах малыми токами, в
частности при уничтожении остаточной сульфатации пластин
аккумулятора.
Ступенчатый заряд заключается в том, что заряд начинают
силой тока 1.2/н и поддерживают ее неизменной до достижения
напряжения 2,4 В на элементе. После этого силу тока уменьшают
в два раза и поддерживают ее до тех пор, пока аккумуляторы не
будут полностью заряжены.
Нормальный заряд аккумуляторных батарей, находящихся
в эксплуатации, производится каждый раз после их работы, если
батареи разрядились более чем на 25%. Перерыв между
разрядом и зарядом во избежание вредной сульфатации не должен
превышать 12—24 ч.
При любом способе заряда конец заряда кислотных
аккумуляторных батарей определяется по трем признакам: 1) напряжение
на зажимах большинства элементов достигает 2,7—2,75 В и
остается постоянным в течение 1—2 ч; 2) наблюдается обильное
газовыделение из аккумуляторов; 3) плотность электролита
большинства элементов достигает наибольшего значения и остается
неизменной.
§ 15.3. Щелочные аккумуляторы
Щелочные акукмуляторы по составу активного вещества
пластин разделяются на три основные вида: кадмиево-никелевые, же-
лезоникелевые и серебряно-цинковые. На судах обычно
применяются кадмиево-никелевые аккумуляторы, на рассмотрении
которых мы и остановимся.
На рис. 15.2 показаны общий вид и устройство кадмиево-ни-
келевого аккумулятора ламельной конструкции. Он состоит из
стального гофрированного бака, блока пластин и электролита.
Для предохранения от коррозии бак никелируют. В крышке бака
имеются отверстия для вывода зажимов, заливки электролита и
выхода газов.
Пластины аккумулятора состоят из ряда отдельных пакетов,
внутри которых помещено активное вещество. Оболочку пакетов
делают из тонкой стальной ленты, имеющей большое число
отверстий для проникновения электролита. Пакеты положительных
пластин изготовляют из никелированной ленты, и потому эти
пластины имеют более светлый цвет, чем отрицательные. Длина
пакетов и их число в пластине зависят от типа аккумулятора.
Пакеты впрессовывают в стальные никелированные рамы. В
качестве активного вещества для положительных пластин применяют
гидрат окиси никеля Ni(OH)3 с примесью графита, а для
отрицательных пластин — металлический кадмий Cd с примесью
окислов железа.
Все пластины собирают в блок с общими зажимами на крышке
187
бака. Положительные пластины
почти в два раза толще
отрицательных, их на одну больше, чем
отрицательных, и их всегда
ставят крайними. Для
изолирования отрицательных пластин ог
положительных между ними
прокладывают эбонитовые палочки
или другие сепараторы. Крайние
положительные пластины от
стенок бака обычно не изолируют.
Число пластин в блоке зависит
от емкости аккумулятора.
В качестве электролита для
кадмиево-никелевых
аккумуляторов применяют водный раствор
едкого кали плотностью 1,19—
1.21 г/см3. Для того чтобы
увеличить срок службы щелочного
аккумулятора, в его электролит добавляют небольшое количество
едкого лития.
Электрохимические реакции в кадмиево-никелевых
аккумуляторах в основном сводятся к следующему. При разряде
аккумуляторов гидрат окиси никеля на положительных пластинах
переходит в гидрат закиси никеля, а губчатый кадмий на
отрицательных пластинах — в гидрат закиси кадмия. При заряде
аккумуляторов реакции идут в обратном направлении, т. е. происходит
восстановление активного вещества пластин. Поэтому реакции
разряда и заряда могут быть выражены следующим уравнением:
Рис. 15.2. Щелочные аккумуляторы
а—общий вид; б —устройство
1 — эбонитовые палочки; 2 — пробка- 3 —
отрицательные пластины; 4 —
Положительные пластины; 5 — боковая и
6 — бак
изоляция;
( + ) (-) Разряд ( + ) (-)
2Ni (OH)3+ KOH + Cd "2№ (OH)2 + KOH + Cd (OH)2
(Аккумулятор заряжен) Заряд (Аккумулятор разряжен)
Характерной особенностью данных реакций является то, что
концентрация раствора едкого кали не меняется. Это позволяет
ограничиться небольшим количеством электролита.
Среднее рабочее напряжение на элементе равно 1,25 В.
Однако это напряжение не остается постоянным, а изменяется при
заряде и разряде. Так, при заряде напряжение повышается двумя
ступенями от 1,0 до 1,7—1,8 В. При заряде при низких
температурах окружающей среды напряжение в конце заряда может
достигнуть 2.0—2,2 В.
При разряде напряжение вначале быстро уменьшается до
1,25—1,20 В, затем медленно снижается до 1,1 В, а в конце
разряда начинает снова быстро уменьшаться. Напряжение 1,0 В на
элементе считается концом нормального (8-часового) разряда.
При более коротких режимах разряда кадмиево-никелевые
аккумуляторы можно разряжать до более низкого конечного напряже-
ния, например при 5-часовом разрядном режиме до 0,9 В, при
3-часовом — до 0,8 В, при одночасовом — до 0,5 В.
Внутреннее сопротивление кадмиево-никелевых аккумуляторов
несколько выше, чем кислотных, и составляет сотые доли ома. Оно
зависит от емкости аккумулятора, степени его заряда и
температуры электролита. При заряде внутреннее сопротивление
уменьшается, а при разряде увеличивается в несколько раз. По этой
причине щелочные кадмиево-никелевые аккумуляторы непригодны
для разряда в коротких режимах, т. е. для стартерных целей.
Емкость кадмиево-никелевых аккумуляторов в отличие от
кислотных мало зависит от силы разрядного тока. Объясняется это
тем, что концентрация щелочи при разряде остается практически
постоянной.
Большое влияние на емкость оказывают температура и состав
электролита. Поэтому при нормальных и низких температурах
применяют КОН, а при высоких температурах иногда используют
NaOH.
Номинальная емкость гарантируется при температуре
электролита 25 °С. При повышении температуры от 25 до 45 °С емкость
сначала возрастает, а затем резко уменьшается. При низких
температурах емкость уменьшается, что объясняется как увеличением
сопротивления электролита, так и пассивированием
отрицательного электрода. При этом следует иметь в виду, что падение
емкости при низких температурах — явление временное, а при
повышении температуры свыше 40 °С происходит необратимое
уменьшение емкости из-за структурных изменений активного
вещества положительных пластин.
Отдача кадмиево-никелевых аккумуляторов как по емкости,
так и по энергии из-за большего внутреннего сопротивления
несколько меньше, чем у кислотных аккумуляторов, и
соответственно равна tic = 60-4-70 %: r\w = 50-4-60 %.
Саморазряд этих аккумуляторов особенно интенсивен в первые
дни хранения, а затем постепенно уменьшается. Нормальный
саморазряд при комнатной температуре за месяц хранения
составляет около 18% и в дальнейшем почти не увеличивается. При
загрязнении электролита и самих аккумуляторов, а также при
наличии неисправностей в них саморазряд может значительно
увеличиться.
Срок службы кадмиево-никелевых аккумуляторов зависит от
состава электролита, его температуры, а также от режимов
заряда и разряда. При соблюдении правил эксплуатации срок
службы достигает 750 зарядо-разрядных циклов.
Кадмиево-никелевые аккумуляторы выпускаются
промышленностью, как правило, в виде батарей, собранных в деревянных или
железных ящиках. Батареи имеют обозначения, состоящие из
цифр и букв. Цифры, стоящие перед буквами, указывают число
элементов, соединенных в батарее последовательно, а цифры,
стоящие после букв, — номинальную емкость батареи. Буквы
указывают назначение батареи и электрохимическую систему акку-
189
Таблица 15.2. Основные данные щелочных аккумуляторных батарей
Тип батареи
32НКЗТ
64НКЗТ
64АКН-2.25
10НК28
4НК55
5НК80
10НК80
5НК125
10НК125
17НК28
Напряжение.
В
40
80
80
12,5
5,0
6,25
12,5
6,25
12,5
21,5
Емкость,
А-ч
3,0
3,0
2,25
28
55
80
80
125
125
28
Номинальный
зарядный
ток,
А
0,75
0,75
0,56
7,0
14,0
20,0
20,0
31,0
31,0
7,0
Разрядный ток. Л, при режиме
8-часовом
0,28
0,28
0,28
2,75
4,0
7,5
7,5
12,5
12,5
2,75
5-часовОм
0,5
0,5
0,45
3,5
6,0
8,0
10,0
15,0
15,0
3,5
одночасовом
3,0
3,0
2,25
28,0
55,0
80,0
80,0
125,0
125,0
28,0
муляторов. Например, А—анодная, Н —накальная,
КА-аккумулятор кадмиево-никелевый. Другие цифры и буквы, стоящие
после обозначения емкости, указывают конструктивное
оформление батарей.
В табл. 15.2 приведены основные типы аккумуляторных
батарей, широко применяемых на судах в качестве основных
источников питания, и их параметры.
Значения номинального зарядного тока указаны для
6-часового зарядного режима. Конечное напряжение для всех типов
аккумуляторных батарей зависит от режима разряда и должно быть
не менее 1,0 В (на элементе) при 8-часовом, 0,9 В при 5-часовом
и 0,5 В при одночасовом разрядном режиме.
Отметим, что для щелочных кадмиево-никелевых
аккумуляторов, находящихся в эксплуатации, применяются три вида заряда:
нормальный, усиленный и ускоренный. Нормальный заряд
является основным и производится номинальным зарядным током в
течение 6 ч. Усиленный заряд производится в две ступени: 6 ч
номинальным зарядным током и еще 6 ч током, равным 0,5
номинального. Усиленный заряд производится через каждые 10—12
циклов, но не реже одного раза в 3 мес, а при нерегулярной
эксплуатации — после каждого разряда ниже конечного
разрядного напряжения.
Ускоренный заряд допускается лишь в крайних случаях и
производится током, равным двойному номинальному, в течение 2,5 ч
и еще 2 ч номинальным зарядным током. Во всех случаях после
ускоренного заряда и разряда необходим усиленный заряд
аккумулятора.
Основным признаком конца заряда щелочных аккумуляторов
является количество энергии (в ампер-часах), накопленной
аккумулятором при заряде, и дополнительным — значение
напряжения.
190
Глава 16. СУДОВЫЕ
ЭЛЕКТРОЭНЕРГЕТИЧЕСКИЕ СИСТЕМЫ
§ 16.1. Общие сведения и понятия
Судовая электроэнергетическая система — это совокупность
электрических станций, электрических сетей и потребителей
электрической энергии. Электростанции обеспечивают производство
электроэнергии определенных параметров, а электрические сети —
ее передачу и распределение по потребителям. Потребители
обеспечивают работу многочисленных и разнообразных устройств и
механизмов судна. Принципиальная схема судовой
электроэнергетической системы показана на рис. 16.1.
По роду тока судовые электроэнергетические системы
разделяются на электроэнергетические системы переменного и
постоянного тока, а по назначению — на основные, вспомогательные и
специального назначения. В настоящей главе рассматриваются
основные судовые электроэнергетические системы.
§ 16.2. Судовые электрические станции
Судовая электрическая станция (СЭС) —это комплекс,
состоящий из генераторных агрегатов (ГА) и главного
электрораспределительного щита (ГРЩ), расположенных в одном или
нескольких помещениях судна, но, как правило, в пределах одного
водонепроницаемого отсека.
По роду тока СЭС делятся на электростанции постоянного и
переменного тока промышленной и повышенной частоты.
По типу первичных двигателей, используемых в качестве
привода генераторов, СЭС делятся на дизельные, паро- и газотур-
Рис. 16.1. Принципиальная схема судовой
электроэнергетической системы:
СЭС— судовая электростанция; ГРЩ— главный
электрораспределительный щит; РЩ — электрораспределительный
щит; АЭС—аварийная электростанция
бинные, находят применение также валогенераторы и
утилизационные турбогенераторы.
По назначению различаются СЭС трех видов: 1) основные
СЭС, обеспечивающие электроэнергией собственные нужды и
технологические процессы во всех нормальных эксплуатационных
режимах; 2) аварийные электростанции (АЭС), обеспечивающие
электроэнергией ответственные потребители в случае выхода из
строя основной СЭС и устанавливаемые согласно правилам
Регистра на грузовых судах водоизмещением 5000 т и более, на всех
пассажирских и грузопассажирских судах, самоходных наливных
судах, ледоколах и судах специального назначения; 3) СЭС
гребных электрических установок, обеспечивающие электроэнергией
гребные электродвигатели электроходов. Иногда основную СЭС и
СЭС гребной электрической установки объединяют в единую
электростанцию.
Для обеспечения большей живучести основные СЭС
размещают в наиболее защищенной части судна. ГА этих
электростанций устанавливают в машинных отделениях или вблизи них. АЭС
располагают в помещениях, имеющих непосредственный выход на
открытые палубы.
По установленной мощности СЭС делятся на малые
(мощностью 250—1500 кВт), средние (мощностью 1500—6000 кВт) и
большие (мощностью свыше 6000 кВт).
Во всех режимах работы предусматриваются автономная и
параллельная работа ГА, а также электроснабжение СЭС от
береговых электросетей.
По способу управления СЭС делятся на автоматизированные
с дистанционным управлением (ДАУ) и автоматические
§ 16.3. Источники электроэнергии судовых электростанций
Источники электроэнергии на СЭС принято делить на
основные (первичные), вторичные и вспомогательные. В качестве
основных источников электроэнергии применяются электромашинные
генераторы, вторичных — различные преобразователи,
вспомогательных — электрические аккумуляторы.
Судовые генераторы классифицируют по ряду признаков. Так,
по типу первичных двигателей они делятся на дизель-генераторы
(ДГ), турбогенераторы (ТГ) и валогенераторы, а по
назначению — на основные, резервные, аварийные. В ряде случаев
применяют стояночные генераторы.
ДГ и ТГ представляют собой агрегаты на общей
фундаментной раме, которые состоят из генератора и первичного
двигателя— дизеля или турбины. Машины соединяются эластичными
или жесткими муфтами, а также с помощью редукторов Обычно
ТГ соединяются через редукторы, а ДГ — непосредственно через
муфты.
В качестве основных источников электроэнергии на СЭС
переменного тока устанавливают трехфазные синхронные генераторы
192
Таблица 16.1. Основные данные судовых синхронных генераторов
Серия
генераторов
мсс
гмс
мск
тк
Мощность,
кВт
220—400
200—600
25—1500
2000
Напряжение,
В
400/230
400/230
400/230
400
COS ф
0,8
Частота
вращения.
об/мин
500
500—1000
750—1500
3000
с самовозбуждением серий МСС, ГМС, МСК и независимого
возбуждения типа ТК, где буквы означают: Г—генератор, С —
синхронный, М—морской, вторая буква С — система
самовозбуждения, К — кремнийорганическая изоляция. Основные данные
этих генераторов приведены в табл. 16.1.
Синхронные генераторы серии МСК изготовляют с
самовентиляцией по замкнутому циклу и с водяными воздухоохладителями.
Система самовозбуждения генераторов, включающая в себя
выпрямители и другие устройства, выполняется в виде блока,
который устанавливается на корпусе генератора и имеет общую
с ним систему охлаждения.
Генераторы серии МСС отличаются от генераторов серии
МСК меньшей частотой вращения и наличием небольшого
генератора начального подмагничивания (80 В-А) для получения
надежного возбуждения. Генераторы серии ГМС тоже подобны
генераторам серии МСК, но имеют брызгозащищенное исполнение
с самовентиляцией по разомкнутому циклу. Генераторы серий
МСК и ГМС выпускаются со штатными системами стабилизации
напряжения.
На СЭС постоянного тока обычно устанавливают генераторы
серии П смешанного возбуждения единичной мощностью от 25
до 200 кВт стандартных (115/230 В) напряжений.
§ 16.4. Расчет мощности СЭС и выбор генераторных агрегатов
Определение мощности СЭС при разработке проекта судна
является ответственной задачей. Объясняется это, во-первых, тем,
что мощность СЭС судна любого назначения (транспортное,
промысловое, вспомогательное, специализированное) должна быть
достаточной для питания потребителей во всех режимах работы
судна независимо от времени года, месяца, времени суток,
скорости судна, района плавания, состояния поверхности моря.
Во-вторых, от степени точности определения мощности зависит
рациональный выбор количества и единичной мощности генераторных
агрегатов и, следовательно, экономичность работы
электроэнергетической системы.
Для каждого типа судна по результатам испытаний
составляют рейсовые графики потребляемой мощности, отражающие
изменение нагрузки, создаваемой судовыми потребителями. Это
7 Заказ № 1104
193
изменение носит случайный характер и подчиняется законам
теории вероятностей. В результате обработки графиков методами
математической статистики определяют мощность СЭС. Однако
вероятностный метод расчета мощности СЭС достаточно сложен,
и обычно при проектировании судна графики потребляемой
мощности отсутствуют. Поэтому в инженерной практике расчет
мощности СЭС выполняют табличным или аналитическим методом.
В начальной стадии проектирования, когда не определены весь
комплекс судовых потребителей и режимы их работы, расчет
мощности СЭС судов транспортного флота целесообразно
производить аналитическим методом, который дает приемлемые
результаты. С введением определенной коррекции он может быть
применен и для нахождения мощности СЭС судов других типов.
Практически согласно требованиям правил Регистра мощностью
электростанций судов всех типов определяют табличными
методами. При этом расчеты выполняют для основных режимов
работы судов, которыми являются: ходовой, стоянка без грузовых
операций и с грузовыми операциями, маневренный и аварийный.
Рассматривают также режимы, характерные для определенных
типов судов, в частности для промысловых — ходовой
промысловый, для буксиров и спасательных судов — ходовой
буксировочный, для ледоколов — ход во льдах, для атомоходов — пуск и
расхолаживание ядерной энергетической установки, для плавучих
заводов — технологические режимы.
При использовании аналитического метода среднюю
расчетную мощность СЭС в ходовом режиме определяют (в
киловаттах) по выражению
PX=18 + 0,028JV+P*, '(16Л)
где N — мощность главных двигателей энергетической установки
судна, кВт; Р*— наибольшая из величин Рэ.п и Рб. п {Ра. п —
мощность наиболее мощного эпизодического потребителя, кВт; Р@. п —
мощность бытовых потребителей, кВт).
Расчетную мощность бытовых потребителей находят по
формуле
Рб.п = Рк + Рв+Рк.в, (16.2)
я
где Рк=^Рпл{ — суммарная мощность электроплит камбуза
я
(Рплг — мощность i-й плиты); Рв = (0,4-=-0,8) £Рв1—суммарная
мощность бытовой вентиляции с учетом коэффициента одновре-
«
менности работы вентиляторов; Рк в = 0,7 X Рк, в;— суммарная
мощность установок кондиционирования воздуха с учетом
коэффициента одновременности их работы.
В тех случаях, когда на судах имеются отдельные мощные
установки, например рефрижераторные на транспортных рефри-
194
жераторах и морозильных траулерах, к средней расчетной
мощности добавляют мощности таких установок с учетом
коэффициента одновременности их работы.
Среднюю расчетную мощность СЭС в режиме стоянки без
грузовых операций определяют (в киловаттах) по выражению
PCT=11 + 0,002D+P*, (16.3)
где D — водоизмещение судна, т; Р* — то же, что и в формуле
(16.1).
Среднюю расчетную мощность СЭС в режиме стоянки с
грузовыми операциями находят по формуле
"ст. гр = ' ст т "гр. mi (16.4)
где Ргр м—мощность грузовых электромеханизмов с учетом
коэффициента одновременности их работы ka.
Среднюю расчетную мощность СЭС в маневренном режиме
определяют так:
PM-Px + 0,8(P6pf Ркп), (16.5)
где РбР, Лш — номинальные мощности электродвигателей
брашпиля и компрессора.
Расчетные мощности СЭС в аварийных режимах при работе
основной электростанции Рсэс и при работе аварийной
электростанции Рдэс принимают равными соответственно
Рсэс = (1,3-г-1,35) Рх; Рдэс = (0,3ч-0,35) Рх. (16.6)
Среднюю расчетную мощность СЭС в спецрежиме, например
в режиме траления рыбоморозильного траулера, находят по
формуле
Рср = Рх + РТл, (16.7)
где Рт. л—номинальная мощность электродвигателей траловых
лебедок.
Отметим, что в расчетах мощности СЭС во всех режимах при
наличии мощных потребителей, как и в ходовом режиме, следует
вносить поправку. Кроме того, надо учитывать потери мощности
в электросетях судна, составляющие 5 %■ В отдельных случаях
целесообразно предусматривать мощность на модернизацию
судового оборудования.
Выбор количества и единичной мощности ГА необходимо
производить на основании расчетных данных, полученных для всех
эксплуатационных режимов судна, а также с учетом следующих
требований: 1) с целью повышения живучести
электроэнергетической системы надо устанавливать на СЭС не менее двух ГА; 2)
загрузка ГА во всех длительных режимах должна составлять не
менее 80—85 % номинальной; 3) число типоразмеров ГА должно
быть наименьшим, что обеспечивает взаимозаменяемость ГА,
повышает устойчивость их параллельной работы и облегчает
7* 195
эксплуатацию; 4) следует учитывать капитальные затраты,
рассматривая различные технико-экономические варианты.
При выборе числа и мощности ГА СЭС надо предусматривать
резервный ГА, мощность которого должна быть равна мощности
наибольшего основного ГА, а также рассматривать возможность
применения установок отбора мощности — утилизационных
турбогенераторов и валогенераторов.
После выбора генераторов необходимо выбрать для них
первичные двигатели, причем так, чтобы они отвечали основным
требованиям и соответствовали параметрам генераторов. Обычно
на судах с паросиловыми энергетическими установками в
качестве основных устанавливают турбогенераторы, на судах с
дизельными энергетическими установками — дизель-генераторы. В
качестве аварийных на всех судах применяют дизель-генераторы.
§ 16.5. Схемы судовых электростанций
Схемы СЭС состоят из схем систем генерирования и
первичного распределения электроэнергии и схем управления, защиты и
контроля параметров ГА. Их разрабатывают с учетом количества,
мощности и типов ГА, числа и мощности ответственнных и
малоответственных потребителей, количества и мощности потребителей
и электрораспределительных щитов, подключенных к шинам ГРЩ
непосредственно.
Схемы СЭС должны удовлетворять ряду жестких требований,
основные из них таковы:
1) высокая надежность снабжения потребителей
электроэнергией во всех эксплуатационных режимах судна, что
обеспечивается дроблением и резервированием ГА, делением сборочных шин
ГРЩ на отдельные секции, питанием ответственных потребителей
от двух источников, автоматизацией ряда процессов, в частности
пуска, остановки и включения на параллельную работу ГА,
регулированием напряжения и частоты, установкой надежной защиты
ГА от перегрузок и коротких замыканий;
2) гибкость схем, т. е. возможность автономной и
параллельной работы ГА, маневренность управления, в частности быстрый
ввод в работу и прием нагрузки ГА, минимальное количество
коммутационных операций при переходе с одного режима на другой;
3) простота эксплуатации и возможность обслуживания, для
чего предусматриваются установка высококачественной
коммутационной и защитной аппаратуры, визуальный и автоматический
контроль за состоянием ГА и их параметров, доступность осмотра
ГА и элементов системы управления, надежное заземление всех
элементов системы.
В настоящее время применяется множество схем СЭС. Однако
в основе их, как правило, лежит схема с одной системой
секционированных сборочных шин ГРЩ. Такая основа позволяет
разрабатывать типовые схемы СЭС.
На рис. 16.2 представлена типовая схема СЭС и АЭС,
применяемая на судах транспортного и промыслового флотов. Электро-
196
ГРЩ
■ QF
■ QF
_^-
QF 400 В, 50 Гц
AM Л № то
Щ ® mm
Рис. 16 2 Принципиальная схема СЭС и АЭС
станции связаны между собой кабельной перемычкой с
контактором КГ Схема включает в себя четыре дизель-генератора G1 —
G4 (один из них резервный); аварийный дизель-генератор G5 и
три силовых трансформатора Т; главный
электрораспределительный щит ГРЩ, разделенный автоматами QF с замедлителем
контактного аппарата на четыре секции, к которым подключены
синхронные генераторы; четыре электрораспределительных щита
РЩ, два щита пониженного напряжения РЩПН и четыре щита
освещения ЩО. Аварийный электрораспределительный щит АРЩ
имеет генераторную секцию и две распределительные секции,
разделенные контактором К2. Ряд мощных и ответственных
потребителей получают питание непосредственно от шин ГРЩ. На
некоторых судах имеется станция питания с берега. Управление и
контроль за работой электростанций осуществляется с пульта
управления.
Схема допускает следующие возможные варианты работы
генераторов: 1) длительную параллельную работу двух-трех
генераторов и кратковременную — всех генераторов; 2) раздельную
работу генераторов на свои секции; 3) работу любого генератора
на всю судовую сеть и автономную работу аварийного дизель-
генератора на группу ответственных потребителей.
На рис. 16.3 представлена схема подсистемы генерирования и
первичного распределения электроэнергии на судне. Схема
включает в себя три основных генераторных агрегата Gl—G3 и
аварийный дизель-генератор G4, четыре силовых трансформатора Т,
главный электрораспределительный щит ГРЩ, который имеет
секцию управления, и аварийный щит АРЩ. Каждый генератор
подключается на ГРЩ при помощи автомата. ГРЩ разделен на
секции автоматами QF. От ГРЩ получают питание распредели-
197
Рис. 16 3. Принципиальная схема подсистемы генерирования и
распределения электроэнергии на судне
тельные щиты РЩ и ответственные потребители ОП. Схема
допускает как автономную, так и параллельную работу основных
генераторов.
§ 16.6. Распределительные устройства и их аппаратура
Под распределительными устройствами понимают
металлические изделия, в которых смонтированы шины, коммутационные,
защитные, измерительные, регулировочные и сигнальные
аппараты и приборы, электрически соединенные в соответствии со
схемой.
Распределительные устройства служат для приема и
распределения электроэнергии; регулирования напряжения и других
электрических параметров цепей; защиты установок от
перегрузок, токов короткого замыкания и других ненормальных явлений;
производства электрических измерений; сигнализации о
состоянии электрических цепей и положениях коммутационных
аппаратов.
По своему назначению судовые распределительные устройства
разделяются на главные электрораспределительные щиты,
электрораспределительные щиты, групповые щиты, щиты потребителей,
контрольные щиты, специализированные щиты и пульты
управления.
Главные электрораспределительные щиты (рис. 16.4), как
правило, состоят из отдельных секций: генераторных,
распределите
Рис 16 4 Общий вид ГРЩ (а) и его принципиальная схема (б)
ПА ПВ, ПМ — переключатели амперметра, вольтметра, мегаомметра соответственно
ДУ — дополнительное устройство, ПКИ — прибор контроля изоляции, РОМ — реле обрат
ной мощности АГП — автомат гашения поля, АРЩ — аварийный электрораспределитель
ный щит, ССЯ —система стабилизации напряжения, ФПБ — фидер питания с берега
ТА — трансформатор тока
A
it
^t
fBHHi
l в-©-в J
f 1 Гы (М в h
l в -ф- в J
V
)
1 1
f
\
к
В S
В В В
1
I
^
в в в
л
~W-
Рис 16 5. Общий вид РЩ
гельных и управления.
На генераторных
секциях устанавливают
приборы и аппараты,
которые обеспечивают
контроль и
управление работой
генераторов, на
распределительных секциях —
автоматы и
амперметры с
переключателями на ряд
питающих фидеров, на
секциях управления —
приборы для контроля
включения
генераторов на параллельную
работу и для
измерения сопротивления
изоляции сети,
аппарат питания с берега,
аппарат для разъединения шин и другие аппараты. На одной из
секций управления помещается принципиальная схема щита.
На современных судах применяют ГРЩ, составленные из
типовых унифицированных секций с узловыми схемами. Такие
секции разрабатываются для генераторов определенной мощности
с определенной системой управления и контроля за ГА.
Унифицированные секции могут иметь ширину 600—1200 мм и высоту
2000 мм.
Электрораспределительные щиты служат для распределения
электроэнергии в пределах определенного отсека судна или
небольшой группы потребителей. Такие щиты могут быть с
установочными автоматами или с предохранителями и пакетными
выключателями. Сейчас применяют блочные
электрораспределительные щиты (рис. 16.5). Из блоков можно компоновать
электрораспределительные щиты любых габаритов и для любой схемы.
Групповые щиты предназначены для питания группы
потребителей, причем часто однородных. Щиты потребителей
обеспечивают контроль и управление отдельными потребителями,
имеющими сравнительно сложную схему.
Контрольные щиты представляют собой устройства,
предназначенные для дистанционного контроля за работой генераторов
и сетей.
Специализированные щиты — это устройства, предназначенные
для строго определенных целей, например зарядный щит, щит
питания с берега, щит электродвижения.
Пульты управления — это устройства, служащие для
дистанционного контроля и управления работой отдельных установок
судна.
200
Таблица 16.2. Окраска шии распределительных устройств
Род тока
Постоянный
Трехфазный
Функциональное
назначение шины
Положительная
Отрицательная
Уравнительная
Первая фаза (А)
Вторая фаза (В)
Третья фаза (С)
Нулевая
Цвет
Красный
Синий
Белый
Зеленый
Желтый
Фиолетовый
Серый
Шины распределительных устройств всех типов изготовляют
из электротехнической меди. Все шины окрашивают лаковой
краской в соответствующие цвета (табл. 16.2).
Аппаратура, устанавливаемая на судовых распределительных
щитах, по своему назначению разделяется на коммутационную,
защитную, измерительную, регулирующую и сигнальную.
Основными коммутационными аппаратами являются пакетные
выключатели и переключатели, универсальные переключатели и
автоматы. Последние выполняют и функцию защитных аппаратов.
Судовые пакетные выключатели (рис. 16.6, а) по конструкции
одинаковы и различаются только конфигурацией подвижных
контактов. Их изготовляют на токи от 10 до 400 А постоянного тока
при напряжении 220 В и от 6 до 250 А переменного тока при
напряжении 400 В. Универсальные переключатели типов УП
(рис. 16.6,6), КФ и других предназначаются для переключения
контрольных и измерительных цепей.
В качестве защитной аппаратуры на щитах устанавливают
плавкие предохранители и автоматы, а также реле защиты.
Основные требования, предъявляемые к этим аппаратам,— быстрота
действия, надежность и избирательность. Под избирательностью
защитных аппаратов понимают свойство этих аппаратов реаги-
Рис 16 6 Пакетные коммутационные аппараты
а — выключатель, б — переключатель типа УП
201
Рис. 16.7. Предохранители серий ПР-2 (а) и ПД
(б) и их токовременная характеристика (в)
ровать только на заранее заданный параметр, т. е. каждый
аппарат должен защищать (отключать) только заданный ему элемент
(участок) системы. Избирательность достигается настройкой
аппаратов на определенную уставку тока, напряжения или времени
срабатывания, что обеспечивает требуемую последовательность их
срабатывания в схеме. Они должны также иметь нужную
разрывную способность и быть термически устойчивыми.
Судовые предохранители весьма разнообразны. Но
на щитах обычно применяют предохранители серии ПВ,
трубчатые предохранители серии ПР-2 и пробочные серии ПД, которые
предназначаются для защиты цепей от длительных перегрузок и
коротких замыканий (КЗ). Предохранители серии ПР-2
выпускаются на токи от 15 до 1000 А при напряжении 250 и 500 В,
а предохранители серии ПД — на токи от 6 до 600 А и
номинальное напряжение 380 В.
На рис. 16.7 представлены предохранители серии ПР-2 на
350 А и серии ПД на 15 А, а также их токовременная
характеристика.
Предохранитель серии ПР-2 состоит из патрона, в котором
закреплена плавкая вставка, и двух контактных стоек, в которых
установлен патрон. Последний представляет собой фибровую
трубку 4, концы которой армированы латунными втулками 3
с резьбой. На концы втулок навернуты латунные колпачки 2,
зажимающие контактные ножи /, к которым прикреплена болтами 6
плавкая вставка 5. Она представляет собой цинковую пластину,
имеющую несколько сужений. У предохранителей до 60 А ножи
отсутствуют, а контактными частями служат колпачки 2,
зажимающие плавкую вставку.
Предохранитель серии ПД состоит из плавкой вставки 5,
фарфоровой трубки 4, стеатитовой головки 3, зажима 7 подключения
20!
внешних проводов и резьбового зажима 6, контактной фарфоро-
ьой гильзы 8, пружины указателя 2 и смотрового стекла /.
Плавкая вставка, состоящая из одной или нескольких серебряных
проволок, размещается в сменной фарфоровой трубке с кварцевым
песком. Помимо серебряных проволок в фарфоровой трубке
находится контактная проволока, один конец которой припаян к
нижнему контакту, а второй — к металлическому контактному глазку.
Токовременная характеристика предохранителя представляет
собой зависимость времени плавления вставки предохранителя от
силы протекающего через нее тока /. Ток, при котором
начинается плавление вставки, называется плавящим током /пл.
Особенностью характеристики является то, что она при эксплуатации
предохранителя изменяется, а именно смещается влево. Это
происходит в результате окисления поверхности плавкой вставки, что
уменьшает ее полезное сечение. Поэтому при калибровке плавкой
вставки устанавливают /пл~ (1,2 -ь 1,25)/н. п, где /н п —
номинальный ток плавкой вставки предохранителя.
Предохранители выбирают с таким расчетом, чтобы они не
производили ложных отключений. Поэтому выбор предохранителя
производят:
а) для защиты участков цепи с равномерной нагрузкой — из
условия
/н. п = /д. раб, (16.8)
где /д. раб — длительно допустимый рабочий ток потребителя или
участка сети;
б) для защиты участков сети, питающей короткозамкнутые
асинхронные электродвигатели,— из условия
'и. п = /пуск/а, (16.9)
где /пуск — пусковой ток асинхронного электродвигателя; а —
коэффициент, равный 2,5 для легких условий пуска и 1,6—2—для
тяжелых условий (частые пуски и длительность разгона 40 с).
После выбора предохранитель проверяют на разрывную
способность, т. е. на такой ток' КЗ, который отключается
предохранителем без нарушения его механической прочности. Эту
проверку производят по условию
/Д0П>/УД, (16.10)
где /д0П — допустимый ударный ток КЗ, разрываемого
предохранителем; /Уд— расчетное значение ударного тока КЗ.
Автоматы — это электрические аппараты, предназначенные
для автоматического отключения электрических цепей при
возникновении в них перегрузок, КЗ и других ненормальных
явлений. Автоматы применяются также для нечастых коммутаций
цепей при нормальной работе. Они бывают однополюсные,
двухполюсные и трехполюсные и изготовляются на различные токи и
напряжения.
I,
Io
Рис 16 8 Схемы автоматов и их характеристики
Автоматы могут осуществлять защиту от максимальйого тока,
от пониженного напряжения и от обратного тока (от обратной
мощности). Эти виды защит реализуются с помощью реле,
которые часто называют расцепителями.
Автоматы, снабженные максимальным токовым реле
(максимальным расцепителем), предназначены для размыкания цепей
при токах, превышающих допустимое установленное значение.
На рис. 16.8, а изображены схема автомата с максимальным
расцепителем без выдержки времени и его токовременная
характеристика. Принцип действия автомата заключается в следующем.
При достижении током минимального допустимого значения
электромагнит 6, преодолевая усилие пружины 3, притягивает якорь 5.
Последний, поворачиваясь на оси 4, освобождает рычаг 2, и
автомат, под действием пружины / размыкая свои контакты,
отключается. Минимальный ток, при котором расцепитель
срабатывает, называется током срабатывания /ср. Изменяя натяжение
пружины 3, регулируют значение /ср. При токах />/ср время
срабатывания автомата практически неизменно и в зависимости от
типа автомата составляет ^0 = 0,02-=-0,15 с. В автоматах с
замедлителем срабатывания время срабатывания может увеличиваться.
Характеристика автомата показывает, что с изменением тока
в расцепителе время срабатывания автомата остается
неизменным. Такую характеристику автомата принято называть
независимой.
На рис. 16.8, б представлены схема устройства и
характеристика автомата с максимальным расцепителем, имеющего
ограниченно зависимую характеристику. Автомат работает
следующим образом. Когда ток в цепи превысит ток срабатывания
электромагнита 6, якорь 5 расцепителя начинает поворачиваться
на оси 4, при этом усилие через пружину 2, выполняющую роль
жесткой связи, передается пружине 3 и механизму реле вре-
204
мени 7. В качестве последнего используют часовой механизм и
иногда гидравлический замедлитель. Чем больше ток в обмотке
электромагнита, тем больше его электромагнитная сила и тем
быстрее срабатывае1 автомат. Начиная с момента, когда / =
= /отс>/ср (/ото — ток отсечки автомата при КЗ), пружина 2,
растягиваясь, позволяет якорю расцепителя сбросить защелку
автомата еще до того, как растянется пружина 3 и сработает реле
времени. Часть характеристики автомата, зависящая от тока,
используется для защиты элементов цепи от токов перегрузки,
а независимая часть характеристики—от токов КЗ. Величину /ср
регулируют натяжением пружины 3, 10ТС — натяжением пружины 2.
На рис. 16.8, а изображены схемы устройства и
характеристика автомата с комбинированными расцепителями —
тепловым / и электромагнитным 2. При токах перегрузки в пределах
от /ср до /отс срабатывает только тепловой расцепитель.
Электромагнитный расцепитель срабатывает при / = /0Тс. при этом его
время срабатывания меньше, чем у теплового расцепителя. При
/>/отС время срабатывания автоматов практически не зависит
от силы тока.
Автоматы, предназначенные для защиты от пониженного
напряжения, снабжаются реле минимального напряжения, а
автоматы, осуществляющие защиту от обратной мощности,—
специальными реле, установленными вне автоматов: реле обратного
тока и обратной мощности соответственно в установках
постоянного и переменного тока.
Автоматы, устанавливаемые на щитах, делятся на
установочные и универсальные.
Установочные автоматы предназначены для защиты
электроустановок от перегрузок и КЗ, а также для нечастых
оперативных включений и отключений. На судах чаще всего применяются
установочные автоматы серий АК50 и А3100Р. Первые
выполняются с электромагнитным расцепителем, вторые — с
комбинированным (электромагнитный и тепловой) или только с
электромагнитным расцепителем максимального тока. Автоматы серии АК50
изготовляются на номинальный ток 50 А (номинальный ток
расцепителя /Р ц=0,6ч-50 А), а автоматы серии А3100Р — на
номинальные токи 100, 200 и 600 А (/р н= 15^-600 А). Они рассчитаны
для применения в цепях переменного тока с частотой 50 Гц и
номинальным напряжением до 400 Вив цепях постоянного тока
с номинальным напряжением до 320 В. Автоматы выполняются
грех- и двухполюсными, имеют ручное управление со свободным
расцеплением, моментным замыканием и размыканием контактов.
Автоматы серии АК50 изготовляются с гидравлическим
замедлителем срабатывания (типы АК50-2МГ, АК50-ЗМГ) или без
замедлителей (типы АК50-2М, АК50-ЗМ). Автоматы АК50
выпускаются и для работы в цепях с частотой 400 Гц— типы АК50-ЗМГ,
АК50-400-ЗМП.
Автоматы серии А3100Р выпускаются четырех типов,
различающихся габаритами: А3110, А3120, А3130 и А3140. Обозначения
205
расшифровываются так: А — автомат установочный, цифры 31
указывают серию, третья цифра—-габарит автомата, четвертая —
число полюсов (2 — двухполюсный, 3 — то же в трехполюсном
корпусе, 4— трехполюсный). Например, А3124—-установочный
автомат серии 3100Р, второго габарита, трехполюсный.
Автоматы серий АК50 и А3100Р могут изготовляться без рас-
цепителей (отмечается цифрой 7 в знаменателе обозначения,
например А3324/7) и используются как неавтоматические
коммутационные аппараты.
Судовые автоматы серии А3500 — избирательного действия
переменного тока (50 Гц, 400) с максимальными расцепителями,
осуществляющими защиту от токов перегрузки и КЗ или только
от токов КЗ. Первые имеют уставку на ток срабатывания в зоне
КЗ 21/н, а в зоне перегрузки 1,4/н, вторые в зоне КЗ 21/н.
Автоматы изготовляются четырех типов, различающихся
габаритами: А3510 — на номинальный ток 160 А (/Р н=20ч-160 А, /уд=
= 2,5-4-20 кА), А3520 — на номинальный ток 250 А (/р „=120-4-
4-250 А, /уд=25^-35 кА), А3530 — на номинальный ток 400 А
(/р н = 2504-400 А, /уд=40 кА), А3540 — на номинальный ток
600А (/рн = 250ч-600 А, /уд = 45ч-50 кА). Уставки времени
срабатывания для указанных выше расцепителей 0,15 и 0,33 с.
Универсальные автоматы предназначены для осуществления
различных видов защиты: максимальной, тепловой, минимальной.
На ГРЩ для подключения генераторов чаще всего устанавливают
автоматы с замедлителем контактного аппарата следующих серий:
АМ-8 — на номинальный ток 800 А (/р п= 130ч-800 А, /уд=30ч-
Ч~ 110 кА), АМ-15 — на номинальный ток 1500 A (/pH=1250-f-
4-1500 А, /уд=120 кА), АМ-30 —на номинальный ток 3000 А
(/р „ = 2500-^3000 А, /уд=120 кА), АМ-55 — на номинальный ток
5500 А (/р H=3500-f-5500 А, /уд= 120 кА). Уставки на время
срабатывания для всех указанных автоматов 0,18; 0,38; 0,63; 1,0 с.
Выбор автоматов и их максимальных расцепителей
производится из условий
Ua и sS= Ь'раб; 'з и ^ 'раб> 'р I ^ 'раб>
где Ua н, /а н—номинальные напряжение и ток автомата; £/раб,
/раб — рабочее напряжение сети и длительный ток нагрузки цепи;
/р н — номинальный ток максимального расцепителя.
Автоматы проверяют по токам КЗ на динамическую
устойчивость, разрывную способность и термическую устойчивость.
Установочные автоматы на термическую устойчивость не проверяют,
так как они отключают КЗ очень быстро.
В качестве реле защиты на генераторных секциях ГРЩ
устанавливают реле обратной мощности (РОМ) серии ИМ-149,
реле перегрузки серии ИМ-145 и реле обратного тока серии ДТ,
причем каждое из них применяется, как правило, в комплексе
с тем или иным типом автомата.
Измерительная аппаратура, устанавливаемая на щитах,
служит для контроля за работой электрических установок. К изме-
206
рительной аппаратуре относятся амперметры, вольтметры, мега-
омметры, частотомеры, ваттметры и фазометры.
В качестве регулирующей аппаратуры обычно используют
регулировочные реостаты различного назначения и автоматические
регуляторы напряжения. Эти аппараты, как правило,
устанавливают за щитом с выведенными на лицевую сторону щита
маховиками или рукоятками для управления.
На ГРТТТ и на пультах управления устанавливают также
сигнальные лампы, снабженные арматурой с цветным стеклом,
локальные устройства автоматизации операций управления работой
ГА и контроля. В частности, для автоматической синхронизации
генераторов устанавливают устройство УСГ-35, для
распределения мощности между параллельно работающими синхронными
генераторами — устройство УРМ-35, для включения резервного
генератора—-устройство УВР, для сигнализации о состоянии
аппаратов — устройство мигающего света УС.
§ 16.7. Системы стабилизации напряжения
синхронных генераторов
Нормальная работа потребителей может быть обеспечена
только при высоком качестве электроэнергии, которое в
установках переменного тока определяется постоянством напряжения и
частоты. Во всех режимах работы СЭС их нагрузка часто
изменяется в широком диапазоне. Это вызывает изменение как
напряжения синхронных генераторов, так и других их
параметров.
В установившихся режимах работы генераторов, когда их
нагрузка изменяется от нуля до номинальной, колебания
напряжения должны быть в пределах ±2,5%, а частоты — в пределах
±5 %. В переходных режимах, например при набросе 100 %-ной
нагрузки или ее сбросе, напряжение должно изменяться не более
чем на ±15% и восстанавливаться до номинального значения
за 1,5 с. Выполнение этих жестких требований могут обеспечить
только автоматические системы стабилизации напряжения и
частоты.
Системы стабилизации напряжения (ССН) судовых
синхронных генераторов весьма разнообразны. Но чаще всего
применяются системы фазового компаундирования с коррекцией
напряжения. Сущность такого компаундирования состоит в том, что
изменение напряжения, силы и фазы тока нагрузки генератора
преобразуется в сигнал его тока возбуждения. В результате
напряжение стабилизируется. Корректор повышает точность
стабилизации напряжения.
На рис. 16.9, а представлена принципиальная схема ССН
фазового компаундирования с корректором напряжения. Схема
состоит из универсального трансформатора подмагничивания УТП,
имеющего две токовые обмотки wT, обмотку напряжения wH,
вторичную суммирующую обмотку w2 и две обмотки управления шу1
и wy2- Последовательно с обмоткой wH включены дроссель L и
307
a)
Рис. 16.9. Схема системы стабилизации напряжения (а) и ее векторная
диаграмма (б)
конденсатор С, служащий для улучшения самовозбуждения.
Корректор напряжения состоит из измерительного трансформатора
TV, выполненного в виде насыщенного трансформатора,
вторичная обмотка которого включена на ток тройной частоты, и
трансформатора тока ТА. Вторичные обмотки трансформаторов TV и
ТА через нелинейный и линейный элементы подключены к
обмоткам управления wyi и wy2, которые включены встречно.
Система работает следующим образом. Самовозбуждение
генератора определяется остаточной ЭДС, которая наводится в
статоре при вращении ротора остаточным потоком, и сопротивлением
цепи возбуждения. Остаточная ЭДС через обмотки wH и w2 УТП,
трансформируясь, подается на выпрямитель UZ, благодаря чему
создается ток возбуждения /в. Последний увеличивает магнитный
поток ротора, а значит, и ЭДС статора. В результате ток /в
возрастает, и в конечном счете ЭДС генератора достигнет
номинального значения.
При нагрузке синхронного генератора ЭДС в обмотке
является геометрической суммой двух ЭДС:
E2 = E(IBC) + E(UBC),
где Е(1вс) определяется силой тока 1_Вс=[в—(с ((в и /с — токи
в фазах В и С), a E(Ubc) —напряжением между фазами В и С.
Угол сдвига между этими ЭДС выбирается так, чтобы при
уменьшении cos ф ЭДС выходной обмотки wi увеличивалась. В
результате будут увеличиваться выходной ток трансформатора /ВЫх,
компаундирующий ток возбуждения /в и напряжение генератора.
Для трансформатора УТП можно написать
/вых=_/Н + /ДС (16.11)
где /н — приведенный ток в обмотке шн, который за счет
дросселя L сдвинут относительно напряжения Ubc, подведенного
к этой обмотке, на угол, близкий к 90°.
208
На основании приведенных уравнений на рис. 16.9,6 построена
векторная диаграмма токов для случая 0<coscp<l. В качестве
исходной принята векторная диаграмма фазных напряжений и
токов генератора. Из диаграммы видно, что при уменьшении cos cp
или увеличении токов нагрузки генератора, когда его
напряжение уменьшается, ток 1вс трансформатора УТП возрастает, а это
приводит к увеличению выходного тока трансформатора /ВЫх и,
следовательно, к возрастанию компаундирующего тока /в и
напряжения генератора. При увеличении cos cp или уменьшении
токов нагрузки генератора имеют место обратные явления.
Коррекция напряжения генератора (управление выходным
током трансформатора УТП) осуществляется изменением МДС под-
магничивания F„ — Fi±F2, где F; и F%— МДС соответственно
обмоток шУ1 и шу2. При снижении напряжения генератора МДС
F„ уменьшается, а ток /ВЫх возрастает. Это приводит к
увеличению напряжения до заданного значения. При повышении
напряжения генератора МДС F„ увеличивается, ток /вых уменьшается
и напряжение генератора восстанавливается. Резистор R1
позволяет изменять статизм регулирования напряжения, a R2 —
уставку напряжения синхронного генератора. Гашение поля
генератора производится замыканием автомата 5, шунтирующего
обмотку возбуждения.
Рассматриваемая система имеет достаточную точность
стабилизации напряжения (±1,5%) и высокую форсировочную
способность, обусловленную тем, что при снижении напряжения
генератора резко уменьшается подмагничивание универсального
трансформатора и благодаря малому запаздыванию регулятора
коэффициент компаундирования быстро увеличивается.
На СЭС, где синхронный генератор работает с пониженной
частотой вращения, в частности генератор типа ГМС, широко
применяется ССН прямого фазового компаундирования с
корректором напряжения. ССН поддерживает напряжение генератора
в установившихся режимах с точностью до ±0,025£/н при
плавном изменении нагрузки от 0 до 100 %, изменении cos cp от 0,5 до
0,9 и частоты вращения в пределах ±0,025пн. В переходных
режимах при внезапном включении 100 %-ной нагрузки, сбросах ее
и изменении cos cp более чем до 0,4 отклонение напряжения не
превышает 0,25 с7н, его восстановление до установившегося
значения с точностью 0,025 i7H происходит в течение 0,8 с. В штатной
ССН для генераторов типа ГМС корректор напряжения
предназначен для обеспечения равномерного распределения реактивной
нагрузки и требуемой точности поддержания напряжения.
Система (рис. 16.10) состоит из трансформатора фазового
компаундирования ТФК с управляемым подмагничиванием силовых
выпрямителей UZ2, корректора напряжения КН, генератора
начального возбуждения GA с выпрямителем UZ1, трансформатора
тока ТА, выключателя гашения поля S.
Основной элемент системы ТФК представляет собой трех-
стержневый трансформатор с магнитным шунтом. На стержнях
209
Рис 16 10. Принципиальная схема ССН судовых
генераторов типа ГМС
трансформатора расположены первичные обмотки токов wT и
напряжения дон, вторичная w2, обмотки для питания цепей
управления шу и корректора шк. В цепь обмотки корректора
включены резисторы R1 и R2 для изменения тока. Обмотки wT
трансформатора, включенные последовательно в каждую фазу обмотки
статора генератора, служат для регулирования тока возбуждения
при изменении тока и нагрузки. Обмотка ш2, предназначенная для
питания через выпрямитель UZ2 обмотки возбуждения
генератора, расположена внутри токовых обмоток для улучшения связи
между ними.
Система работает следующим образом. Самовозбуждение
синхронного генератора G, как и в системе с УТП, определяется
остаточной ЭДС, наводимой в обмотке статора, и сопротивлением
цепи возбуждения. Для надежного самовозбуждения
дополнительно применен генератор GA, который увеличивает остаточную
ЭДС и тем самым обеспечивает надежное самовозбуждение
синхронного генератора. После возбуждения синхронного генератора
G и достижения его напряжением номинального значения
генератор GA отключается, а обмотка возбуждения полностью
питается от ТФК- При нагрузке синхронного генератора в обмотке w2
происходит геометрическое суммирование токов обмоток wT и шн,
осуществляемое магнитным путем. В итоге изменяется ток
возбуждения синхронного генератора в полном соответствии с изме-
210
нением его нагрузки и напряжения, и, как следствие, происходит
стабилизация напряжения.
Отметим, что ССН судовых генераторов типа МСК аналогична
ССН генераторов типа ГМС и отличается только отсутствием
генератора GA и наличием дросселя отсоса с блоком
конденсаторов, который повышает эффективность работы системы.
Стабилизация частоты напряжения (тока) осуществляется
с помощью регуляторов частоты вращения первичных двигателей.
На СЭС, как правило, применяются центробежные регуляторы,
которые должны поддерживать частоту вращения в
установившемся и переходном режимах с точностью ±5 и ±10%
соответственно.
§ 16.8. Судовые электрические сети
Под электрической сетью понимают систему, состоящую из
кабелей и распределительных устройств, с помощью которых
электроэнергия подается от источников питания к
потребителям.
Судовые электрические сети по назначению делятся на
силовые, сети освещения, сети слабого тока и сети специального
назначения. Сети освещения, в свою очередь, делятся на сети
основного освещения, служащие для внутреннего и наружного
освещения судов, аварийного освещения и низковольтного
переносного освещения.
В судовых электрических сетях находят применение три
системы распределения электроэнергии: магистральная (рис. 16.11, а),
фидерная, или радиальная, и смешанная (магистрально-фидер-
ная), в которой одна часть потребителей получает
электроэнергию по магистралям, а другая —• по фидерам.
Выбор схемы сети обусловлен мощностью СЭС, количеством
потребителей и расположением их на судне. Например, в сетях
освещения применяют магистральные системы, а в силовых сетях,
как правило, фидерные. В силовых сетях сравнительно небольшой
а)
ГРЩ -
мк
6)
шшш
ГРЩ
.-**^-
:М5
-ш
г-ч.
J
РЩ
МП
Рис 16.11 Схемы систем распределения электроэнергии
а — магистральной, б — фидерной:
МК — магистральная коробка; П — потребитель электроэнергии
211
мощности находят применение магистральные и смешанные
системы.
На судах для передачи электроэнергии от источников к
потребителям используют специальные морские кабели и провода,
рассчитанные на эксплуатацию в морских условиях. В зависимости
от назначения и места прокладки в судовых сетях применяют
кабели следующих марок: 1) в силовых и осветительных сетях при
неподвижной прокладке —КНР, КНРП, СРМ, СРБМ, КБН,
КБНЭ, при подвижной — НРШМ, РШМ, 2) в сетях управления
и связи при неподвижной прокладке — КНРТ, КНРТН, КНРТЭ,
КНЭТЭ, КНРЭТП, КСМ, КСМЭ, КСМТЭ, КСМЭТЭ, при
подвижной—МРШН, КУШТ, НГРШМ и другие марки кабелей
Буквы, входящие в обозначение марок кабелей и проводов,
означают: К — кабель, М — морской, Н — негорючий, Р —
резиновый, П — панцирный, С — свинцовый, судовой для кабелей
второй группы, Т — телефонный, Ш — шланговый, Г — гибкий, У —
усиленный, Б — изоляция на основе бутилкаучука, В — поливи-
нилхлоридная изоляция, Э — экранированный, причем буква Э,
стоящая в середине обозначения, указывает на экранирование
отдельных жил, а в конце — на экранирование всего провода или
кабеля.
В настоящее время в судовых сетях, как правило, применяются
кабели марки КНР с медными токоведущими жилами,
теплостойкой резиновой изоляцией (допускающей нагрев до 65 °С) и
защитной оболочкой из негорючей маслостойкой резины, без
оплетки или со стальной оплеткой.
Кабели марок КБН и КБНЭ по конструкции не отличаются от
кабелей КНР, но у них изоляция токоведущей жилы выполнена
из бутилкаучука, допускающего нагрев до 85 °С Поэтому эти
кабели допускают большую (в 1,3 раза) нагрузку.
В силовых и осветительных сетях постоянного и переменного
однофазного тока обычно применяют одно- и двухжильные
кабели, а в сетях трехфазного тока — трехжильные, но сечением не
более 240 мм2 с целью облегчения монтажа
На судах прокладку кабелей обычно ведут в кассетах и в
некоторых случаях по панелям, где их крепят скобами Проходы
кабеля через водонепроницаемые переборки судна
осуществляются при помощи проходных кабельных коробок, заливаемых уп-
лотнительной массой, или с помощью водонепроницаемых
сальников. Проходы кабелей через палубу выполняются с помощью
проходных кабельных кассет или при помощи труб с сальниками.
На рис. 16.12 в качестве примера показаны прокладка кабелей
в помещениях в кабельных кассетах и проходы кабелей через
водонепроницаемые переборки и палубы.
Сечение проводов и кабелей из условия нагрева обычно не
рассчитывают, а выбирают по специальным таблицам в
соответствии с номинальным (рабочим) током установки таким образом,
чтобы длительно допустимый ток кабеля /доп был всегда больше
номинального расчетного тока /н р или равен ему, т. е. /Доп^/н р.
212
Рис 16 12 Прокладка кабелей с помощью кассет и
проходы кабелей через переборки и палубы
В табл. 16.3 приведены наибольшие допустимые токи в морских
проводах и кабелях с резиновой изоляцией для продолжительной
работы при температуре окружающей среды 40 °С и нагреве до
65 °С.
Номинальный расчетный ток для электродвигателя или
другого потребителя постоянного и трехфазного тока определяют
соответственно по выражениям
/вр = _*Л_У?_; /нр^ /У-1В" , (16.12)
где k3—коэффициент загрузки электродвигателя; Рп —
номинальная мощность электродвигателя, кВт; г\ — КПД
электродвигателя; Un—номинальное напряжение, В; cos ф — коэффициент
мощности электродвигателя при данной нагрузке.
Номинальный расчетный ток фидера /ф, питающего несколько
потребителей постоянного и трехфазного тока, определяют
соответственно по формулам
/ф = Ль2/,; /ф = М2/а + /'2/р), (16.13)
где ko — коэффициент одновременности работы потребителей;
Б/г — сумма токов всех потребителей; 2/а, Е/р— сумма
соответственно активных и реактивных токов всех потребителей.
Кабель, выбранный по условиям нагрева, проверяют на
потерю напряжения. Согласно правилам Регистра относительные
потери напряжения в кабельных сетях не должны превышать:
а) в силовых сетях постоянного тока 10 %, трехфазного тока 7 %;
б) в сетях освещения 5 %.
Проверку на потерю напряжения кабелей, предназначенных
для питания одного потребителя, производят для линии постоян-
213
Таблица 163 Предельные длительные нагрузки, А, на морские кабели
и провода
Сечение
, жил
кабеля,
мм2
0,75
1
1,5
2,5
4
6
10
16
25
35
50
70
95
120
150
185
240
Силовые
кабели всех марок.
кроме КНРП, КНРЭ"
одножильные
10
17
22
29
37
47
64
85
112
137
170
210
256
298
334
380
462
двухжильные
10
15
18
25
32
39
54
71
93
114
141
173
211
244
—
—
—
трех-
жильные
10
12
15
20
26
33
45
60
79
97
122
149
178
209
234
266
310
Кабе/
одножильные
18
24
32
42
54
75
100
135
165
194
250
304
348
405
454
541
и марок КНРП
и КНРЭ
двухжильные
16
20
27
36
45
60
79
100
123
152
183
219
249
283
323
375
трех-
жильные
14
18
24
32
40
55
70
95
118
146
178
214
245
281
316
372
ного (или однофазного) и трехфазного тока соответственно по
формулам
200/ Р KI1 100/P
Д[/=-
ySU22
AU
vsvl»
(16.14)
где АС/ — потери напряжения, %; I — длина линии, м; Р —
мощность потребителя постоянного тока или активная мощность
потребителя переменного тока, Вт; у— удельная проводимость меди
кабеля, равная 48 м/(Ом-мм2); S—сечение кабеля, мм2; [/2—
напряжение в конце линии постоянного или однофазного тока, В;
С/гл — линейное напряжение в конце линии трехфазного тока, В.
Если линия питает ряд параллельно включенных
потребителей, то для ее упрощения сечения кабелей по всей длине берут
одинаковыми, а проверку на потерю напряжения для линий
постоянного и трехфазного тока выполняют соответственно по формулам
AU
200
(/А-
MJ :
173
ySU2
ySU2
-(/i/icosqii-l- .
/Л);
/n/ncoscp„),
где /,
U
, /„—токи соответствующих потребителей, А; 1и
длины участков линии от РЩ до соответствующих
потребителей, м; cos фь ..., cos фп — коэффициенты мощностей
соответствующих потребителей.
§ 16.9. Сопротивление изоляции электросетей
Безопасность и надежность судовых электрических сетей в
значительной «степени зависит от состояния их изоляции от корпуса
судна. Сопротивление изоляции зависит от качества
изоляционного материала, а также от условий эксплуатации электрических
сетей. Большое влияние на состояние изоляции сетей оказывают
влажность, температура, пыль, воздействие масла, механические
повреждения и прочие причины.
Таким образом, изоляция кабелей не является идеальной, т. е.
она обладает некоторой проводимостью, обычно характеризуемой
обратной величиной — сопротивлением, в зависимости от значения
которого через изоляцию проходит ток той или иной силы. Этот
ток называется током утечки. При хорошем состоянии изоляции
токи утечки малы. При повреждении изоляции сопротивление ее
в месте повреждения может настолько снизиться, что ток утечки
сильно увеличится и, проходя через место повреждения, будет
нагревать его, а это приведет к дальнейшему разрушению
изоляции и к аварии. Поэтому ток утечки не должен превышать
некоторого допустимого значения.
Для отдельного участка электрической сети, находящегося
между двумя последовательно включенными коммутационными
аппаратами, допустимая сила тока утечки /у принята равной
0,0005 А. Следовательно, при напряжении сети U сопротивление
изоляции отдельного участка должно быть не ниже
Яиз = — = —-—= 20006?. (16.15)
/у 0,0005 v
Например, при напряжении сети 220 В сопротивление изоляции
отдельного участка должно быть не менее 440 кОм, а при
напряжении 400 В — не менее 800 кОм. Устанавливаются нормы
сопротивления изоляции и для отдельных сетей. Так, сопротивление
изоляции отдельной электрической машины мощностью до 200 кВт,
находящейся в эксплуатации, должно быть не менее 0,5 МОм. Та
же норма устанавливается и для отдельного распредустройства.
Сопротивление изоляции сетей, не находящихся под
напряжением, измеряют при помощи мегаомметра типа Ml 101 или
используют щитовые мегаомметры типов М1503, М1603. На рис. 16.13
дана схема измерения сопротивления изоляции мегаомметром
типа Ml 101. Вращая рукоятку прибора, по его шкале
отсчитывают значение сопротивления изоляции.
Измерение сопротивления изоляции сетей, находящихся под
напряжением, можно производить:
а) способом трех отсчетов вольтметра в сетях постоянного
тока (рис. 16.14, а) и способом трех вольтметров в сетях
трехфазного тока (рис. 16.14,6); значения сопротивлений изоляции
определяются соответственно по формулам
Р - U-U+-U- р . г, _ Rv
*\из — — Ду, 1\и
U+ + U^ 3(1/фД/ш1п-1)
215
Линия + Земля
Рис. 16.13. Схема измерения со- Рис. 16.14. Схема измерения сопро-
противления изоляции мегаом- тивления изоляции: а — с помощью
метром: трех отсчетов вольтметра; б — с по-
/ — защитная оболочка; 2 — изоляция; МОЩЬЮ трех вольтметров
- жила; 4 — оплетка
где U, U+, U-—напряжение сети и напряжения между корпусом
и плюсовым и минусовым проводами сети постоянного тока
соответственно; £/ф, Umm — напряжения фазное и минимальное из
показаний трех вольтметров; Rv — сопротивление одного
вольтметра, причем оно должно быть не менее 50, 100 и 150 кОм при
U= 150, 250 и 500 В соответственно.
б) щитовыми мегаомметрами типов М1503 и М1603, которые
также используются для измерения сопротивления изоляции при
снятом с сетей напряжении.
На судах кроме приборов периодического контроля изоляции
сетей переменного тока устанавливают приборы непрерывного
автоматического контроля, в частности приборы типа ПКИ-1,
устройства УКИ-1 и «Электрон-IP». Эти устройства имеют, как
правило, от трех до пяти уставок по сопротивлению изоляции
контролируемых сетей. Для увеличения числа уставок применяются
приставки. Напряжение сетей — до 400 В частотой 50—500 Гц.
Устройства позволяют контролировать значения сопротивления
изоляции в пределах от 0 до 1 МОм, включая световую и
звуковую сигнализацию при снижении сопротивления уставки. Для
визуального измерения имеются мегаомметры.
§ 16.10. Автоматизация судовых электростанций
Современные СЭС автоматизируются с применением устройств
дистанционного управления. При этом обычно используют
специальный комплекс унифицированной аппаратуры.
Средства автоматизации обеспечивают выполнение наиболее
характерных для любой судовой электростанции операций, таких
как пуск и остановка ГА по команде оператора, синхронизация
генераторов и включение их на параллельную работу,
пропорциональное распределение мощности между параллельно
работающими ГА, стабилизация напряжения и частоты вращения ГА,
частичная разгрузка ГА путем отключения второстепенных
потребителей, включение и отключение резервных ГА при
экстремальном изменении нагрузки или параметров СЭС, включение и от^
216
Рис. 16.15. Структурная схема автоматизации СЭС:
ПКИ — прибор контроля изоляции; УРМ — устройство распределения мощности;
РОМ — реле обратной мощности; УСГ — устройство синхронизации генераторов;
УТЗ — устройство токовой защиты; УВР — устройство включения резерва; УРГ —
устройство разгрузки генератора; ГА — генераторный агрегат; СД —
серводвигатель; ССН — система стабилизации напряжения; Д — первичный двигатель; ДС,
ДТВ, ДТМ, ДД — датчики скорости, температуры воды, температуры масла и
давления соответственно; ГС — генераторная секция; СУ — секция управления;
БУД — блок управления двигателем
ключение коммутационных аппаратов для набора схемы
распределения электроэнергии, обеспечивающей режим работы
электрифицированных средств судна, контроль параметров,
характеризующих работу ГА и состояние изоляции системы. На рис. 16.15
представлена структурная схема автоматизации СЭС,
поясняющая взаимосвязь ГА и автоматических устройств.
§ 16.11. Расчет мощности электростанции
транспортного рефрижератора
Исходные данные. Водоизмещение судна D=19 600 т; мощность главных
двигателей N=2x4310 кВт; мощность наибольшего эпизодически включаемого
электропривода Рэ п=П6 кВт; суммарная мощность бытовых потребителей
с учетом 6о=0,8 Рц п=84 кВт; мощность электроприводов грузовых
механизмов Рт м = 184 кВт; номинальная мощность электропривода компрессора
Ркп=88 кВт; номинальная мощность электропривода брашпиля РбР = 86 кВт,
номинальная мощность рефрижераторной установки с учетом 6о=0,85 РРеф =
-980 кВт.
Ходовой режим. Воспользуемся выражением (16.1) с учетом мощности
рефрижераторной установки. Поскольку мощность наибольшего эпизодического
потребителя Рэ п=П6 кВг превышает суммарную мощность бытовых потре-
217
бителей Рй п=84 кВт, в расчете учитываем эпизодическую нагрузку
Расчетная мощность СЭС в рассматриваемом режиме равна
Рх = 18 + 0,028iV + Рэ. п + к0Рреф = 18 + 0,028 • 8620 +
+ 116 + 0,85 980 — 1208 кВт.
Стоянка без грузовых операций. В соответствии с выражением (16,3)
расчетная мощность СЭС с учетом мощности рефрижераторной установки равна
Рст = 11 + 0.002D + Рэ п + &0Рреф = 11 + [0,002-19 600 +
+ 116 + 0,85 980 = 999 кВт.
Стоянка с грузовыми операциями. В соответствии с выражением (16 4)
расчетная мощность СЭС равна
Рст. гр = Рст + Ргр. м = 999 + 184 = 1183 кВт.
Маневренный режим. В соответствии с выражением (16.5) расчетная
мощность СЭС равна
Рм = Рх + 0,8 (Рбр + Ркп) = 1208 + 0,8.(86 + 88) = 1347 кВт.
Принимая, что потери мощности в сети составляют 5 %, найдем
мощности электростанции в режимах работы судна: Рз: = 1270 кВт, РСТ = Ю50 кВт,
Рст гР = 1250 кВт, Р„ = 1420 кВт.
На основании расчетных данных и требований по надежности и
экономичности работы электростанции транспортного рефрижератора целесообразно
выбрать три дизель-генераторных агрегата мощностью по 500 кВт каждый.
Глава 17. СУДОВЫЕ ЭЛЕКТРОПРИВОДЫ
§ 17.1. Общие сведения и понятия
Электрическим приводом называют систему, состоящую из
электродвигателя, механической передачи и аппаратуры
управления и служащую для приведения в движение того или иного
исполнительного механизма.
Электроприводы, приводящие в действие судовые
исполнительные механизмы, называют судовыми электроприводами. Они
обеспечивают работу всех средств, обусловливающих движение и
маневрирование судов, а также приводят в действие системы и
механизмы специального назначения.
По своему назначению, типу, системе и характеру работы
судовые электроприводы весьма разнообразны. Так, по назначению
различают рулевые и шпилевые, валоповоротные и
грузоподъемные электроприводы, электроприводы насосов и компрессоров,
преобразователей, механизмов специального назначения и др.
По характеру работы бывают электроприводы непрерывного
действия и прерывистого, или кратковременного, действия. По
роду тока различают электроприводы постоянного и переменного
тока. По виду двигателя, преобразующего электрическую энергию
в механическую, электроприводы разделяют на
электродвигательные и электромагнитные. Наибольшее распространение получили
электродвигательные приводы.
218
По числу электродвигателей судовые электроприводы
разделяют на одиночные и многодвигательные. К одиночным
электроприводам относятся электроприводы насосов, вентиляторов,
компрессоров и т. п., к многодвигательным — электроприводы кранов,
лебедок, рулевые и некоторые другие электроприводы.
По способу управления электродвигателем судовые
электроприводы разделяют на электроприводы ручного,
полуавтоматического и автоматического управления.
Основными элементами электроприводов являются:
электродвигатели различных типов и систем возбуждения; системы
передач, включающие в себя различные муфты соединения,
механические преобразователи движений, редукторы и
электромагнитные муфты; аппаратура управления и защиты.
§ 17.2. Основы динамики электропривода
Во всех режимах работы электропривода имеет месю
равновесие моментов, т. е.
М — Мс-Мл, (17.1)
где М — вращающий момент, развиваемый электродвигателем
привода; Мс и Мл — статический и динамический моменты
сопротивления, приведенные к валу электродвигателя.
Статический момент сопротивления создают полезная нагрузка
механизма и силы трения в механизме и передаче. Принято
различать реактивные и активные (потенциальные) статические
моменты. Первые создаются силами трения и другими силами
(реакции сжатия, растяжения и т. п.), возникающими вследствие
действия внешних сил. Поэтому реактивные моменты всегда
противодействуют вращению электропривода, т. е. всегда отрицательны.
Активные моменты создаются силами тяжести и другими силами
(растяжения, скручивания и т. п.), изменяющими запас
потенциальной энергии всей движущей системы. Направление этих
моментов не зависит от направления вращения электропривода. Оно
может быть противоположно направлению вращения
электропривода (например, при подъеме груза) или совпадать с ним
(например, при спуске груза). В первом случае активные моменты
отрицательны, во втором — положительны.
Таким образом, статический момент сопротивления, равный
алгебраической сумме реактивных и активных моментов, в общем
случае может быть как отрицательным, так и положительным.
Первый создает тормозной момент, второй — вращающий.
Естественно, это отрицательно влияет на работу электропривода.
Динамический момент сопротивления, развиваемый силами
инерции масс при изменении скорости движения, при ускоренном
движении направлен против движения, при замедленном — по
направлению движения. Следовательно, динамический момент
сопротивления, как и статический, влияет на работу электропривода.
219
Динамический момент рассчитывают по основному уравнению
динамики вращательного движения
Мд = Jda/dt, (17.2)
где / — момент инерции относительно оси вращения; d<o/dt—
угловое ускорение вращающихся частей электропривода.
Динамический момент сопротивления можно выразить через
другие параметры, в частности через маховой момент GD2:
.. GD2 dn
Мд = ,
375 dt
где GD2 — маховой момент, Н-м2: dn/dt — ускорение
вращающихся частей электропривода.
Теперь уравнение движения электропривода будет иметь вид
GD2 dn
м—м, =■
(17.3)
375 dt
Из этого уравнения следует, что при работе электропривода
возможны три характерных случая: 1) при М>МС электропривод
ускоряется; 2) при М = МС электропривод находится в состоянии
покоя или установившегося движения; 3) при М<МС
электропривод замедляется.
Уравнения движения электропривода (17.2) и (17.3) в
рассмотренном виде справедливы для простейшей системы,
состоящей из элементов, вращающихся вокруг одной оси с одинаковой
частотой. Обычно же электропривод состоит из ряда элементов,
движущихся с различными частотами. В связи с этим при расчете
вращающего момента все моменты как статических, так и
динамических сопротивлений отдельных элементов приводят к какому-
либо определенному элементу привода, обычно к валу
электродвигателя.
Если все элементы электропривода имеют только
вращательное движение (рис. 17.1), то приведенный статический момент
МС=М„^ —= ^, (17.4)
где Мс — приведенный статический момент исполнительного
механизма; Мы— статический момент исполнительного механизма;
(Ом, (Од — угловая скорость исполнительного механизма и
электродвигателя соответственно; цп — КПД промежуточной передачи:
i — передаточное число от
электродвигателя к исполнительному
механизму.
При наличии нескольких
передач приведенный статический момент
исполнительного механизма
А
">аЛ
-£- ИМ
<JJm,Mm
Рис 17.1 Схема приведения
параметров исполнительного
механизма ИМ к валу
электродвигателя Д
Мс = MJ(ixi2
1кЦп\Цпг
Лп ft).
(17.5)
220
Это равенство справедливо для двигательного режима. При
работе же электродвигателя в тормозном режиме потери в передаче
будет компенсировать механизм и тогда приведенный статический
момент механизма будет равен
Мс = (МЛ)Цп. (17.6)
При приведении моментов инерции и маховых моментов к валу
электродвигателя на основании закона сохранения энергии
можно написать
/2пР = h ((Oa/ftH)2 = Л (V^i)2 = A/t2, (17.7)
где /2пр — приведенный момент инерции элемента механизма;/2—
момент инерции элемента механизма; щ и п2 — частоты вращения
электродвигателя и элемента механизма соответственно; i —
передаточное число от двигателя к данному элементу.
При вращающихся с различной частотой элементах механизма
эквивалентный приведенный момент инерции всей системы
/s = /a+ —+ —+ • • • + —. (17.8)
* ' 2 ' ,2 ' ,2 V '
где Jа — момент инерции якоря или ротора электродвигателя; /ь
J2,...Jk — моменты инерции отдельных элементов привода: /ь
t2,. . . ,ik — передаточные числа соответствующих элементов.
В системе СИ между моментами и мощностью нагрузки
привода имеют место следующие соотношения:
М-9,55Р/я; Р = Мл/9,55,
где М — момент, Н-м; Р — мощность, Вт; я — частота
вращения, об/мин.
§ 17.3. Расчет мощности и выбор электродвигателей
Надежная и экономичная работа электропривода возможна
только при правильном выборе типа и мощности
электродвигателя, поэтому выбирать мощность электродвигателя необходимо
в полном соответствии с нагрузкой электропривода и режимом его
работы. Электродвигатель излишней мощности нецелесообразен
и неэкономичен, так как при этом увеличиваются масса,
габаритные размеры и стоимость машины, а также снижается КПД. При
применении электродвигателя заниженной мощности повышается
температура нагрева машины, что вызывает преждевременный
износ машины или выход ее из строя.
При выборе мощности электродвигателя для привода обычно
учитывают следующие основные факторы: 1) мгновенную
перегрузку, т. е. электродвигатель должен быть достаточной мощности
для преодоления сопротивления нагрузки как в установившемся,
так и в неустановившемся режимах работы; 2) нагрев электро-
двигателя, т. е. в процессе работы ни один из его элементов не
должен перегреваться выше допустимой температуры; 3)
соответствие механических характеристик электродвигателя и
исполнительного механизма.
Выбор мощности электродвигателя по перегрузке сводится
к определению момента из соотношения
Мтах < Ш„, (17.9)
где Мтах — максимальный момент нагрузки, взятый из
нагрузочной диаграммы исполнительного механизма и приведенный к валу
электродвигателя; % — коэффициент допустимой перегрузки
электродвигателя по моменту; Мн — номинальный момент
электродвигателя.
Для электродвигателей постоянного тока, перегрузку которых
лимитируют условия коммутации, коэффициент перегрузки
принимают равным Я = 2н-3 для электродвигателей напряжением 110
или 220 В и Я = Зч-4 для специальных двигателей на 27 В. При
этом нижний предел относится к двигателям параллельного
возбуждения, верхний — последовательного.
Для асинхронных двигателей А,= 1,8^-2,5 или л= (0,8-f-
^0,85)Mmax/M„.
Короткозамкнутые асинхронные двигатели и двигатели
постоянного тока малой мощности необходимо проверять как по
перегрузке, так и по пусковому моменту, поскольку у этих двигателей
относительно небольшие пусковые моменты.
Если мощность электродвигателя выбирают из уравнений
нагрева, надо определить установившуюся температуру перегрева
Ту и сравнить ее с допустимой тДОп'. установившаяся температура
не должна превышать допустимую.
Соответствие механических характеристик устанавливают
путем их сравнения. Действительно, если построить в одной системе
координат и в одинаковых масштабах механические
характеристики электродвигателя и приводимого им механизма, не
учитывая при этом знаки моментов, то электропривод будет устойчиво
работать в установившемся режиме при моменте на валу и
частоте вращения, соответствующих координатам точки пересечения
этих характеристик. Если характеристики не пересекаются, то
работа электропривода невозможна. Если же они совпадают
многими точками, то электропривод будет работать неустойчиво. В
переходных режимах, в частности при пуске и приеме нагрузки,
необходимо, чтобы вращающий момент электродвигателя был
больше момента сопротивления исполнительного механизма.
При длительной постоянной нагрузке, если нагрузка
механизма с учетом КПД передачи равна Р, то выбор мощности
электродвигателя сводится к нахождению по каталогу
электродвигателя номинальной мощностью Р„^Р. При этом электродвигатель
будет нагреваться в пределах допустимой температуры. Кроме
того, для исполнительных механизмов с тяжелыми условиями
222
a) />) h)
0 0 0
Рис. 17.2. Нагрузочные диаграммы
электродвигателей при длительном (а), кратковременном (б) и
повторно-кратковременном (в) режимах работы
пуска необходима проверка выбранного электродвигателя по
пусковому моменту.
Необходимую мощность электродвигателей для привода
рабочих машин с длительным режимом работы часто определяютс
помощью расчетных формул, учитывающих производительность
машин, скорость, КПД передачи и другие факторы. Сюда можно
отнести формулы для определения мощности насосов, вентиляторов,
кранов и других механизмов.
Мощность электродвигателя для насоса в киловаттах
Р^ VyH -Ю-3, (17.10)
где V — подача насоса, м3/с; 7 — удельный вес жидкости, Н/м3;
Я—расчетное значение напора, м; цн— КПД насоса (обычно для
центробежных насосов высокого давления равен 0,5—0,8, низкого
давления 0,3—0,6, поршневых насосов 0,8—0,9); rinep — КПД
передачи от электродвигателя к насосу.
Мощность двигателей для центробежных и крыльчатых
вентиляторов в киловаттах
p^_jii—ю_3> (17л1)
т)вт)пер
где V — подача вентилятора, м3/с; h — давление воздуха, Н/м2:
Т1в — КПД вентилятора (для мощных вентиляторов равен 0,5—0,8,
для центробежных вентиляторов средней мощности 0,3—0,5, а для
крыльчатых вентиляторов 0,2—0,35); тппер — КПД передачи от
электродвигателя к вентилятору.
При длительной переменной нагрузке (рис. 17.2, а) расчет
мощности электродвигателя усложняется и его обычно
производят методом эквивалентных величин, в частности эквивалентного
тока, мощности или момента.
Силу эквивалентного тока определяют по формуле
/.=V^i + '&h- • • • +W.+'2+ • • • + '»)•
(17.12)
223
где /j, I2 h — токи, определяемые из графика нагрузки
исполнительного механизма
Эквивалентный ток сравнивают с номинальным током
предварительно выбранного электродвигателя, и если IH^h, то
выбранный электродвигатель при работе по заданному графику будет
иметь допустимую температуру, т. е. он пригоден для приведения
в движение исполнительного механизма; затем электродвигатель
проверяют на перегрузку.
В предварительных расчетах часто исходными данными
служат графики мощности или момента, тогда удобнее использовать
метод эквивалентной мощности или момента. Эквивалентную
мощность и эквивалентный момент определяют по формулам
рэ = л/те + р22'2+ • • • +^Wi + '2+ • • •+'*);
(17.13)
md = V№+^2+ • • • +M\tk)i(tl + t2+ . . .+tk).
(17.14)
Если РН^РЭ или М„>МЭ и расхождения между
сравниваемыми величинами не более 5—10 %, то выбранный
электродвигатель пригоден для работы по заданному графику. Одновременно
электродвигатель следует проверить на перегрузку.
Из трех методов эквивалентных величин наиболее точен метод
эквивалентного тока, и его можно использовать почти во всех
случаях. Методы эквивалентных мощности и момента, являющиеся
производными от метода эквивалентного тока, применимы лишь
в тех случаях, когда мощность или момент пропорциональны току.
В частности, оба эти метода можно применять для выбора
мощности двигателей параллельного и независимого возбуждения,
а также асинхронных двигателей.
При кратковременном режиме работы (рис. 17.2, б) двигатели
можно перегружать больше, чем в длительном режиме, без
опасения их перегрева. Для кратковременного режима выпускают
специальные серии двигателей, рассчитанных на кратковременные
номинальные мощности jPk н и соответствующие стандартные
продолжительности рабочего периода tp „. Такие двигатели имеют
большую перегрузочную способность. Электродвигатели
переменного тока изготовляют с усиленными обмотками статора и ротора,
а двигатели постоянного тока — с усиленными коллекторами и
обмотками возбуждения.
Мощность специальных двигателей для кратковременного
режима работы обычно выбирают по каталогу при условии:
Рк h>jPk и tp H^stp, где Рк. „ и (рн— номинальные параметры,
указанные в каталоге, Рк и tp— мощность и время работы механизма
в кратковременном режиме. Если же нагрузка переменная, то
сначала необходимо найти эквивалентную мощность и по ней из
каталога выбрать мощность и тип двигателя, учитывая также
продолжительность работы. В случае переменной нагрузки выбран-
224
ный двигатель нужно проверить на максимальную перегрузку,
а короткозамкнутые асинхронные двигатели — и по пусковому
моменту.
При повторно-кратковременном режиме работы (рис. 17.2, в)
электродвигатели периодически включаются и отключаются. Это
обстоятельство приводит к тому, что, с одной стороны, двигатели
могут быть нагружены большей мощностью без превышения
допустимой температуры, а с другой стороны, они должны иметь
усиленные пусковые моменты и достаточную прочность в
отношении электродинамических усилий. Поэтому промышленность
выпускает специальные серии двигателей для
повторно-кратковременных режимов работы. Номинальная мощность таких
двигателей указывается для ПВ 15, 25, 40 и 60 °/о при продолжительности
цикла не выше 10 мин (ПВ — относительная продолжительность
включения, равная отношению времени работы ко времени всего
цикла).
Мощность электродвигателей для повторно-кратковременного
режима работы выбирают методом средних потерь или
эквивалентных величин с учетом относительной продолжительности
включения при помощи следующей формулы:
Рн = Рэл/ПБ, (17.15)
где Рэ — эквивалентная мощность без учета остановок,
определяемая по графику нагрузки и называемая обычно
повторно-кратковременной мощностью
В соответствии с исходным графиком
повторно-кратковременной нагрузки можно использовать аналогичную формулу и для
моментов-
М„ = МЭУПВ". (17.16)
Приведенные формулы показывают, что с точки зрения
нагрева электродвигатель будет иметь одну и ту же эквивалентную
мощность при разных нагрузках и различных значениях ПВ. Это
позволяет пересчитывать расчетную мощность на
соответствующую номинальную мощность электродвигателя по каталогу
Р„ = РЭУПВФ/ПВ, (17.17)
где Рн — номинальная мощность электродвигателя, пересчитанная
на ближайшее стандартное значение ПВ по каталогу; ПВ и
ПВф — стандартная и фактическая относительная
продолжительность включения.
Фактическая ПВф в соответствии с графиком нагрузки равна
ПВф = *р/('р + *п), (17.18)
где tp и ta — время работы и паузы.
Отметим, что в тех случаях, когда для работы в
повторно-кратковременном режиме выбирают электродвигатели,
предназначенные для длительного режима работы, их параметры соответ-
1/28 Заказ № 1104
225
ственно исходным графикам нагрузки можно определять по
формулам
/„ = /эУЩг, M„ = M9ynV, Рп = Рэл/ТЩ.
(17.19)
По этим величинам выбирают электродвигатель по каталогу.
§ 17.4. Аппаратура судовых электроприводов
Аппаратами, широко применяемыми в судовых
электроприводах, являются реостаты и резисторы, контроллеры и командоап-
параты, реле защиты и управления, контакторы и магнитные
пускатели, конечные выключатели, регуляторы и другие
коммутационные и защитные аппараты. Рассмотрим некоторые из них.
Судовые контроллеры и командоаппараты — это
многоструктурные, коммутационные аппараты. Первые предназначены для
оперативных коммутаций в цепях главного тока электроприводов,
а вторые — в цепях управления.
Конструктивно контроллеры делятся на барабанные и
кулачковые, последние наиболее распространены. На рис. 17.3, а
показан кулачковый контроллер с контактным устройством,
состоящим из ряда неподвижных контактов, с которыми сближаются до
соприкосновения подвижные контакты, перемещаемые при
повороте вала укрепленными на нем кулачковыми шайбами. При
соприкосновении подвижных контактов с неподвижными в схемах
осуществляются необходимые соединения.
Простейшими командоаппаратами являются кнопочные посты,
а сложными — кулачковые командоконтроллеры. Последние бы-
Рис 17.3 Кулачковые контроллер (а) и командоконтроллер (б):
1 — кулачок. 2 — ролик, 3 — кулачковая шайба; 4 — гибкая связь; 5 — рычаг, 6 —
пружина нажатия, 7 — шток, 8, 9 — контакты; 10 — перегородка камеры, 11 и 12 —
неподвижные и подвижные контакты
226
вают нерегулируемые и регулируемые. На рис. 17.3, б показан
нерегулируемый кулачковый командоконтроллер. При повороте вала
подвижные контакты 12, перемещаемые кулачковыми шайбами 3,
то сближаются до соприкосновения с неподвижными контактами
11, то удаляются от них, осуществляя нужные соединения в
схемах управления. Командоконтроллер в зависимости от
назначения имеет то или иное число шайб и соответствующее число
контактных устройств, а вал командоконтроллера — несколько
фиксированных положений.
Командоконтроллеры бывают реверсивными с поворотом вала
в обе стороны от нулевого положения, причем каждое положение
рукоятки может быть фиксированным и нефиксированным. Они
могут также иметь рукоятку с самовозвратом в нулевое
положение под действием пружины.
Регулируемые кулачковые командоконтроллеры в отличие от
нерегулируемых имеют круглые шайбы с отверстиями по
окружности, в которые ввинчивают болты для крепления кулачков
к шайбам. Благодаря отверстиям продолговатой формы кулачки
могут перемещаться вдоль окружности шайбы в обе стороны от
болтов. Переставляя кулачки по окружности шайбы, можно
изменять порядок замыкания и размыкания контактов
командоконтроллера. Регулируемые командоконтроллеры обеспечивают
большую точность переключений в сложных схемах автоматического
управления.
Для удобства монтажа и управления командоаппарат часто
монтируют в одном корпусе с резисторами и сигнальными
приборами, которые необходимы в схеме управления. Такое устройство
называют постом управления. Кроме того, для автоматического
отключения электродвигателя при достижении приводимым им
в движение механизмом крайнего заданного положения
применяют конечные выключатели, которые действуют независимо от
командоаппарата. Наиболее часто используют шпиндельные и
Рис. 17.4. Магнитные системы реле а—клапанная; б —
соленоидная; в — поворотная
V28* 227
2-6
;~-i
Рис. 17.5. Электромагнитное реле РЭВ-200
кулачковые конечные
выключатели. Каждый такой
аппарат может замыкать и
размыкать несколько цепей
управления, осуществляя
при этом необходимую
последовательность
указанных операций.
Реле защиты и
управления. Реле,
предназначенные для защиты
электрических цепей приводов от
ненормальных режимов
работы, называют реле
защиты, а реле,
предназначенные для автоматического управления электроприводами,—
реле управления.
В качестве реле защиты обычно применяют электромагнитные
реле тока и напряжения, а также тепловые реле. Эти реле
выполняют как на постоянном, так и на переменном токе и в
зависимости от назначения в различном конструктивном оформлении.
Однако принцип устройства электромагнитных и тепловых реле
одинаков.
Основной частью электромагнитного реле любой конструкции
является электромагнит с подвижным якорем, или, иначе,
магнитная система, причем в судовых реле наибольшее распространение
получили магнитные системы трех типов: клапанная (П-образ-
ная), поворотная и соленоидная (Е-образная). Каждое реле
(рис. 17.4) состоит из стального сердечника /, катушки 5,
подвижного якоря 3, пружины 2 и контактной системы 4. Кроме того,
реле имеет регулировочные винты.
Реле работает следующим образом. При протекании тока по
катушке создается магнитный поток, под действием которого
якорь стремится к сердечнику. Но притяжению противодействует
пружина. Когда же ток, протекающий через катушку, достигнет
величины, равной току срабатывания, якорь, преодолевая
противодействие пружины, притянется к сердечнику, и контакты реле
замкнутся, т. е. реле сработает. Для того чтобы отрегулировать
ток срабатывания реле, необходимо изменять натяжение пружины
и воздушный зазор.
В качестве примера на рис. 17.5 показано электромагнитное
реле серии РЭВ-200, которое применяют в схемах управления
судовыми электроприводами переменного тока в качестве реле
максимального тока мгновенного действия. Реле состоит из магнито-
провода /, на сердечнике 3 которого расположена втягивающая
катушка 2, якоря 4, закрепленного на магнитопроводе
пластинами, и отключающей пружины 9, которая отводит якорь от
сердечника и обеспечивает нажатие подвижных контактов 7 мостико-
228
a)
о
^
Ш
Рис. 17.6. Схема теплового реле типа РТ:
а — реле до срабатывания; б — сработавшее
реле
вого типа на
неподвижные контакты 8. При силе
тока в катушке, равной
силе тока уставки реле,
якорь притягивается
к сердечнику, и контакты
размыкаются. Силу тока
уставки реле регулируют
изменением нажатия
отключающей пружины при
помощи гайки 6 и
положения упорного винта 5.
Катушки реле выполняют
на силу тока до 600 А,
а реле — с самовозвратом
или ручным возвратом. Реле обычно имеет один замыкающий и
один размыкающий контакты. Износоустойчивость реле до 1 млн
срабатываний.
Реле подобного типа, в частности реле серии РЭМ-20,
используют в схемах управления электроприводами постоянного тока
в качестве реле напряжения, грузового, промежуточного и обрыва
поля.
Тепловые реле в судовых установках применяют для защиты
электродвигателей постоянного и переменного тока напряжением
до 500 В от перегрузок. Наибольшее распространение получили
реле типа РТ-2. Реле состоит из нагревательного элемента /,
биметаллической пластины 3, рычага 4, контактов 5 и кнопки
возврата 2 (рис. 17.6, а). Нагревательный элемент включается
последовательно в силовую цепь электродвигателя. При перегрузке
пластинка сильно нагревается и изгибается настолько, что
освобождает рычаг 4 (рис. 17.6, б). Последний, поворачиваясь,
размыкает контакты в цепи вспомогательного тока, питающего катушку
контактора, или другого выключателя электродвигателя.
Самовозврат реле в исходное положение происходит в течение не более
3 мин, а ручной возврат при нажатии кнопки— в течение не более
1 мин после срабатывания.
В качестве реле управления обычно используют
электромагнитные реле времени и реле напряжения. Эти реле отличаются от
реле РЭВ-200 тем, что их катушки включают в цепь управления.
Кроме того, для получения выдержки на сердечник реле времени
насаживают медную втулку (рис. 17.7, а). В ней как в коротко-
замкнутом витке при спадании магнитного потока индуцируются
вихревые токи, которые по закону Ленца создают магнитный
поток, поддерживающий основной спадающий магнитный поток
реле, чем и достигается задержка в отпадании якоря, т. е.
соответствующая выдержка времени. При включении реле тоже
создается выдержка времени. В таких реле выдержка времени
обеспечивается также замыканием катушки реле накоротко или
с помощью анкерного механизма (рис. 17.7, б). Подобные реле вре-
8 Заказ № И 04
229
Рис 17 7 Реле времени с
медной втулкой (а) и с
анкерным механизмом (б)
1 — втулка 2 — сердечник, 3 —
якорь 4 — пружина, 5 — зубчатый
сектор 6 — аккерный механизм
мени выпускают на напряжение ПО—500 В с выдержкой времени
от 0,9 до 5 с, а некоторые из них — с выдержкой не менее 1 мин.
Судовые контакторы. Контакторами называют
одноступенчатые электромагнитные аппараты дистанционного управления,
предназначенные для частых замыканий и размыканий
электрических цепей, в частности цепей различных электроприводов. (Для
этого используют выключатели).
Контакторы классифицируют по следующим признакам: а) по
роду тока — контакторы постоянного и переменного тока
стандартной частоты; б) по числу полюсов — одно-, двух- и трехпо-
люсные, в) по положению главных контактов — контакторы
с замыкающими и размыкающими главными контактами или с
различным сочетанием этих контактов; г) по номинальному
напряжению втягивающей катушки и по номинальному току главных
контактов; д) по назначению — линейные, замыкающие и
размыкающие главные цепи двигателей; контакторы ускорения,
шунтирующие секции пускового сопротивления, тормозные,
управляющие процессами торможения.
В судовых электроприводах постоянного тока чаще применяют
контакторы серий КПМ, КН, КМ-2000, а в электроприводах
переменного тока — контакторы переменного тока серий КМ-2000 и
КТФ.
На рис. 17.8 показан контактор постоянного тока серии КМ-
2000, состоящий из электромагнита 2 с Е-образным сердечником 8
и Т-образным якорем /, главных неподвижных 6 и подвижных 7
контактов мостикового типа, отключающей пружины 9 с
противовесом 10, металлического основания 4 и дугогасительной камеры 5.
Контактор имеет и блок вспомогательных контактов 3.
Втягивающую катушку выполняют одно- или двухсекционной. В первом
случае в конце хода магнитной системы последовательно с
катушкой с помощью вспомогательных контактов вводят добавочное
сопротивление для ограничения тока в ней. В двухсекционной
катушке для этого соединяют секции.
Контакторы серии КМ-2000 переменного тока отличаются от
контакторов той же серии постоянного тока только наличием
в магнитной системе на сердечнике короткозамкнутого витка.
В этом витке наводится ток, образующий свой магнитный поток,
который удерживает контактор в замкнутом состоянии тогда,
когда основной магнитный поток приближается к нулю или равен
230
нулю, т. е когда переменный ток
проходит через нуль, контактор не
вибрирует и не открывается.
Контакторы серии КТФ
разделяют на две основные группы:
контакторы серии КТФ-5000 на токи
15, 25, 50 и 100 А с поступательно
движущимся якорем (прямоходо-
вые) и контакторы серии КТФ-5100
на токи 150, 300 и 600 А
поворотного типа с подвижной системой,
вращающейся на валу. Система
контактов имеет от двух до четырех
главных замыкающих контактов
На рис 17.9 показан контактор
серии КТФ-5000. Контактор имеет
три основные части: магнитную
систему, контактно-дугогасительное
устройство и блок вспомогательных
контактов рубящего типа
Магнитная система состоит из переднего
и заднего ярма 9, лапами которого
контактор крепится к плите 8; двух
цилиндрических якорей 6,
снабженных пружинами и упорными
планками 3 и движущихся в
направляющих втягивающей катушки 7 Якоря
связаны между собой
блокировочными рычагами, фиксирующими их
в симметричном положении
относительно оси магнитной системы На
торцах якорей имеются короткозамкнутые витки, устраняющие
вибрацию контактора Контактная система состоит из подвижных
контактов 5, укрепленных на траверсах 4, и неподвижных
контактов 2, укрепленных внутри дугогасительной камеры /. Рабочая
часть контактов выполнена из металлокерамики, а дугогаситель-
ная камера — из специальной пластмассы.
При подаче напряжения на катушку якоря втягиваются в нее
и сближаются, в результате чего главные контакты
замыкаются. При снятии напряжения отключаются вспомогательные
контакты.
Разновидностью рассмотренных контакторов являются
контакторы ускорения с двумя магнитными системами- первая
выполняет роль реле времени, вторая — роль контактора. Контакторы
ускорения применяют в пускателях и системах управления.
Магнитные пускатели. Магнитные пускатели — это
комплектные аппараты, предназначенные в основном для пуска
электродвигателей, их остановки и защиты.
Магнитные пускатели переменного тока, используемые для
Рис 17 8 Контактор постоянного
тока серии КМ 2000
8*
231
Рис. 17.9. Контактор КТФ-5000
управления короткозамкнутыми асинхронными двигателями,
а также для их защиты от перегрузок и исчезновения
напряжения, состоят из одного или двух контакторов переменного тока и
электротепловых реле, смонтированных в общую электрическую
схему. Магнитные пускатели с одним контактором называют
нереверсивными, и они служат только для прямого пуска
двигателей. Магнитные пускатели с двумя контакторами служат для
пуска и реверса двигателей, и их называют реверсивными. В
последних контакторы сблокированы так, что если якорь одного
контактора притянут, то якорь другого контактора не притянется. Это
делается во избежание короткого замыкания, возникающего при
одновременном включении обоих контакторов.
Контакторы магнитных пускателей обычно прямоходовые. На
крышке кожуха, в которой помещают пускатели, часто
устанавливают кнопки управления, кнопки толкателей возврата тепловых
реле и пакетный
переключатель. В кожухе иногда
размещают предохранители цепи
управления.
На рис. 17.10 показана
принципиальная схема
нереверсивного пускателя со
встроенными
предохранителями. При нажатии на кнопку
«Пуск» получает питание
катушка КМ контактора через
"_J контакты тепловых реле КК1
и КК2. Контактор срабаты-
г, ,,.„ гт вает и замыкает свои главные
Рис 17.10.
Принципиальная схема магнитного контакты в цепи статора элек-
пускателя тродвигателя. Одновременно
ш
232
замыкается вспомогательный контакт КМ, шунтирующий кнопку
«Пуск», и она может быть отпущена.
Останавливают электродвигатель нажатием кнопки «Стоп».
При этом обесточивается цепь катушки и контактор размыкает
главные контакты в цепи статора. Защита от перегрузки
осуществляется тепловыми реле, а нулевая защита — контактором.
Последний в обоих случаях отключает двигатель от сети, и он
останавливается.
Магнитные пускатели постоянного тока в общем случае
предназначены для пуска, реверса, остановки и защиты двигателей
постоянного тока. Наибольшее распространение получили пускатели
серий ПП-1000 — ПП-4000 с одно- и двухступенчатым пуском,
нереверсивные и реверсивные, одно- и двухсетевые. Пускатели
рассчитаны на ПО и 220 В, а по номинальному току — на 20, 60, 100
и 200 А. Допустимая сила пускового тока не превышает
четырехкратную силу тока пускателя.
Магнитные пускатели серий ПП-1000 — ПП-4000 изготовляют
в брызго- и водозащищенном исполнении. В корпусе из
алюминиевого сплава размещают основные элементы пускателя: линейный
контактор, контактор ускорения, тепловое и дифференциальное
реле, пусковое сопротивление, сигнальную лампу, предохранители
и кнопки управления.
В качестве линейного контактора используют контактор серии
КН, а для защиты двигателя от перегрузок — тепловое реле серии
ТРТ. В качестве контактора ускорения и дифференциального реле
применяют специальный дифференциальный двухкатушечный
контактор, одна катушка которого является удерживающей, а
другая — рабочей. Первая включается на падение напряжения в
пусковом сопротивлении, а вторая — на противо-ЭДС двигателя.
После пуска двигателя по мере увеличения частоты его вращения
возрастает противо-ЭДС якоря, а падение напряжения на
пусковом сопротивлении уменьшается. В результате усилие рабочей
катушки увеличивается, а усилие удерживающей катушки
понижается. При определенной частоте вращения двигателя срабатывает
контактор ускорения.
На рис. 17.11 показана принципиальная схема односетевого
нереверсивного пускателя серий ПП-1000—ПП-4000. Пуск двигателя
осуществляют следующим образом. При нажатии кнопки «Пуск»
получает питание катушка линейного контактора КМ1, который
срабатывает и подключает двигатель под напряжение сети по
схеме
Г Ru—M I
{ + )_КМ1:1_КК _ уш1_ш2^_Ш1:2-(-).
При этом удерживающие катушки / дифференциальных реле KV1
и KV2 подключены параллельно пусковому сопротивлению R„.
При срабатывании контактора его замыкающий вспомогательный
контакт КМ1:3 шунтирует кнопку «Пуск», и она может быть
отпущена. Одновременно с этим размыкающий контакт кнопки
233
AW: 2
Рис. 17.11. Принципиальная схема пускателя серий ПП-1000—ПП-4000
«Пуск» подключает рабочую катушку // реле KV1 на противо-
ЭДС электродвигателя.
В момент пуска частота вращения двигателя и соответственно
противо-ЭДС равны нулю. По мере разгона двигателя его частота
вращения и противо-ЭДС увеличиваются, а падение напряжения
на пусковом сопротивлении уменьшается. В результате усилие
рабочей катушки // реле KV1 возрастает, а удерживающей
катушки / убывает.
При достижении противо-ЭДС 50 % напряжения сети реле
срабатывает и замыкает цепь катушки контактора ускорения КМ2.
Последний срабатывает и своим замыкающим главным контактом
шунтирует первую ступень пускового сопротивления, а
вспомогательным контактом включает рабочую катушку // реле KV2.
При достижении противо-ЭДС 80 °/о напряжения сети реле KV2
срабатывает и включает катушку контактора ускорения КМЗ.
Последний своими главными контактами КМЗ: 1 полностью
шунтирует пусковое сопротивление R„, а вспомогательными контактами
КМЗ : 2 — контакты KV2 : 1 в цепи катушки КМЗ и отключает
рабочие катушки II реле KV1 и KV2, а также катушку КМ2. На
этом процессе пуск электродвигателя заканчивается.
Для ограничения бросков тока при пуске электродвигателя
в схеме предусмотрена дополнительная блокировка рабочей
катушки // реле KV1 размыкающим контактом кнопки «Пуск». При
нажатии кнопки «Пуск» ее размыкающий контакт отключает
рабочую катушку реле KV1. После отпускания кнопки ток в рабочей
234
катушке изменяется с некоторым запаздыванием относительно
изменения тока в удерживающей катушке. В результате
увеличивается время срабатывания KV1 и уменьшаются броски тока при
шунтировании ступени пускового сопротивления.
Остановку электродвигателя производят нажатием кнопки
«Стоп». Защиту от перегрузки осуществляет тепловое реле К К,
а нулевую — линейный контактор. Последний во всех случаях
отключает электродвигатель от сети, и он останавливается.
Трехфазные синхронные выключатели. Синхронные вакуумные
выключатели — это аппараты высокого напряжения,
предназначенные для оперативной и аварийной коммутации в
электроэнергетических системах высокого напряжения.
Основными узлами синхронного вакуумного выключателя
(рис. 17.12, а) являются: вакуумные дугогасительные камеры ВДК',
электромагнитный привод выключения ЭПВ:
электродинамический привод отключения ЭДО; синхронизирующее
устройство СУ.
Вакуумная дугогасительная камера состоит из изоляционного
корпуса / с помещенными внутри неподвижным 2 и подвижным 3
контактами. Подвижный контакт герметизирован с помощью силь-
фона 4, изоляционный корпус изнутри защищен от паров металла,
образующихся при горении дуги между контактами, с помощью
электростатического экрана 5. Электромагнитный привод
включения представляет собой три отдельных соленоида, которые с
помощью изолированных стержней замыкают контакты ВДК-
Электродинамический привод отключения состоит из
немагнитного диска, соединенного с подвижным контактом, и спиральной
дисковой катушки, при протекании импульса тока по которой за
счет сил электродинамического отбрасывания диска контакты
размыкаются.
Синхронизирующее устройство измеряет ток в цепи, по
результатам измерений вырабатывает сигналы синхронизации с
заданным временем упреждения момента естественного перехода тока
через нулевое значение.
На рис. 17.12, б приведена принципиальная электрическая
схема управления одной из модификаций трехфазного
синхронного выключателя. В каждой фазе выключателя установлена
вакуумная дугогасительная камера, подвижные контакты камер SA,
SB, Sc механически соединены с немагнитным диском Д
электродинамического привода отключения. В состав схемы управления
входят электромагниты привода включения YACa, YACb, YACc
дугогасительной камеры каждой фазы.
Цепи низкого напряжения (управления) отделены от цепей
высокого напряжения разделительными трансформаторами Тл, Тв,
Тс. Синхронизация в фазах осуществляется с помощью
переключающих герметизированных магнитоуправляемых контактов (гер-
конов) S, установленных на магнитопроводах, охватывающих
шину каждой фазы. Резистор г предназначен для ограничения
тока управления тиристора VS, коммутирующего бесконтактно
235
a)
О
L^
те
T
n
й
(XT^
-JCL
IT
J ^
' // // V -H-
7 ЯЛ/Г
Л/г
ЭДО
ЗПВ
Отключить
VB4 H
VB3 71
шРИ
#СЯ
S£7
_SS2j>_
YACa
YACbYACc
_ О О
-2208
Рис. 17.12. Схема устройства (а) и принципиальная схема
управления (б) трехфазного синхронного выключателя
обмотку L
электродинамического привода. Конденсатор Су
при переключении контактов
геркона S обеспечивает
протекание тока управления
тиристоров VS.
При включении
напряжения управления (220 В) через
схему удвоения напряжения
на диодах VD1, VD2 и
конденсаторе С от
высоковольтной вторичной обмотки //
заряжается накопительный
конденсатор С„. Конденсаторы С
и Су разряжены, так как
напряжение вторичных обмоток
/ недостаточно для пробоя Рис 1713 Общий вид синхронного вы-
стабилитрона VD4. Схема ключателя
к работе готова.
Для включения
выключателя нажимают кнопки SB2, обмотки электромагнитов YAC
получают питание и каждый из них замыкает соответствующий
контакт SA, SB или Sc- Нагрузка получает питание. Для отключения
выключателя нажимают кнопку отключения SB1. Реле КСТ
получает питание и, замыкая контакт, шунтирует первичную обмотку
трансформатора Тв- На вторичных обмотках трансформаторов ТА
и Тс напряжение повышается и становится достаточным для
пробоя стабилитронов, конденсаторы С и С, заряжаются, и при
очередном переключении контактов геркона конденсатор Су
разряжается через резистор г на управляющий электрод тиристора VS.
Последний открывается, накопительный конденсатор С
разряжается на обмотку L электродинамического привода, и контакты SA
и Sc размыкаются вблизи нуля тока. После отпускания кнопки
SB1 и размыкания контактов реле КСТ напряжение возрастает до
напряжения пробоя стабилитрона VD4 в фазе В, так как в это
время заряжаются накопительные конденсаторы в фазах А и С и
синхронно размыкается контакт SB.
На рис. 17.13 показан синхронный вакуумный выключатель
СВВ-10-400-31,5 с параметрами: номинальное напряжение 6—■
10 кВ, номинальный ток 400 А; отключаемый ток 31,5 кА; полное
время отключения 0,015 с, время включения 0,01 с; масса 42 кг.
Выключатель реализует принцип синхронного отключения,
заключающийся в разведении контактов непосредственно перед
переходом через нуль отключаемого тока. Это позволило по сравнению
с обычными выключателями сократить время отключения в три —
пять раз, увеличив в пять-шесть раз отключаемую мощность.
§ 17.5. Системы управления судовыми электроприводами
Управление электроприводами, как отмечалось ранее, можег
осуществляться тремя способами, вручную, полуавтоматически и
автоматически. При ручном управлении все необходимые
включения и переключения в схемах электроприводов производит
непосредственно обслуживающий персонал при помощи
соответствующих аппаратов управления. При автоматическом
управлении все основные переключения в схемах осуществляются
автоматически соответствующими аппаратами управления, а роль
обслуживающего персонала сводится к начальному включению схем и
к их отключению. Иногда эти действия персонала также
автоматизированы. При полуавтоматическом управлении, т. е.
управлении с ограниченной степенью автоматизации, часть операций
выполняет обслуживающий персонал вручную, а часть
осуществляется автоматически, аппаратами управления.
В зависимости от типа аппаратов, применяемых для
управления электродвигателями приводов, различают следующие системы
управления электроприводами: безреостатные, реостатные,
контроллерные, релейно-контакторные и специальные.
Выбор той или иной системы зависит от характера и условий
работы электропривода и, следовательно, его электродвигателя.
Включение каждого электропривода осуществляется по вполне
определенной схеме. Почти каждая схема включения состоит из
цепи главного тока, или схемы главного тока, и цепи
вспомогательного тока, или схемы управления. В достаточно развитых
автоматических схемах возможны также следующие цепи- цепь
защиты, цепь блокировки и цепь сигнализации или контроля.
Схемы электроприводов весьма разнообразны, а цепи
управления автоматизированных приводов в ряде случаев, кроме того,
и очень сложны. Поэтому для облегчения исполнения и чтения
принципиальные схемы электроприводов, как правило,
вычерчивают в виде развернутых схем. На этих схемах отдельные
элементы каждого аппарата изображают раздельно в различных
местах схемы, однако все части одного аппарата обозначают
одинаковыми буквами. Если же в схеме имеется несколько одинаковых
аппаратов, то после букв ставят порядковые номера аппаратов
На развернутых схемах все параллельные ветви цепи
управления изображают между двумя питающими линиями в виде
параллельно расположенных линий с включенными в них
соответствующими аппаратами.
Рассмотрим кратко характеристики типовых систем
управления.
Контроллерная система управления — управление
электроприводом с помощью контроллера — позволяет простым поворотом
рукоятки или маховика контроллера пускать двигатель,
регулировать частоту вращения, изменять направление вращения,
тормозить и выполнять другие операции, связанные с управлением
электроприводом.
238
Контакторная система управления — управление
электроприводом при помощи контакторов, реле и командоаппаратов —
относится к числу автоматических, поэтому она находит наиболее
широкое применение из всех систем управления.
Контакторные системы управления электроприводами
постоянного тока по принципу пуска в ход двигателей разделяют на
системы пуска в зависимости от противо-ЭДС, тока двигателя и
времени. Системы пуска в зависимости от времени применяют и
для управления электроприводами переменного тока. Все они
работают по принципу выдержки времени, создаваемой реле
времени или контакторами ускорения.
Систему генератор—двигатель (Г—Д) широко применяют как
в судовых электроприводах, так и в промышленных установках.
Эта система позволяет пускать исполнительный электродвигатель
без пускового реостата; плавно регулировать частоту вращения
исполнительного электродвигателя в широких пределах; изменять
направление его вращения; тормозить исполнительный
электродвигатель и управлять им на расстоянии, причем при всех этих
операциях преобразователь работает с постоянной частотой
вращения.
Тиристорные системы управления по сравнению с другими
системами обладают следующими преимуществами: гибкостью
управления, позволяющей с помощью маломощных сигналов
бесконтактных аппаратов получать любые заданные режимы работы
электродвигателя (коэффициент усиления тиристоров 104—105);
безынерционностью тиристоров, обеспечивающей быстродействие
электроприводов, постоянной готовностью к действию;
бесшумностью работы; незначительными габаритными размерами;
возможностью применения для двигателей как постоянного, так и
переменного тока. Однако перегрузочная способность тиристорных
систем недостаточная, что надо иметь в виду при разработке
проекта системы.
§ 17.6. Рулевые электроприводы
Устройство, предназначенное для изменения курса судна,
а также для удержания его на заданном курсе, называют
рулевым устройством. Оно состоит из руля и, как правило,
электропривода. Руль, в свою очередь, состоит из пера и баллера. Перо
служит для изменения курса судна, а баллер — для крепления
пера в кормовом подзоре судна и поворота пера с помощью
электропривода. Последний же состоит из электродвигателей,
передачи, связывающей электродвигатели с баллером руля, и
аппаратуры управления.
Рулевые устройства по характеру связи электродвигателей
с баллером руля разделяют на электромеханические, т. е. с
механической передачей на руль, и электрогидравлические, т. е. с
гидравлической передачей на руль, причем электромеханические
устройства, в свою очередь, подразделяют на винтовые, секторные и
239
(MRT7IHJD
Рис. 17.14. Схема
электрогидравлического рулевого
устройства
штуртросовые. Наибольшее
распространение на судах получили
электромеханические секторные и
электрогидравлические рулевые
устройства. Рассмотрим принцип действия
одного из этих устройств.
На рис. 17.14 показана схема
электрогидравлического рулевого
устройства. Оно состоит из пера руля,
насаженного на баллер /, который
с помощью траверсы 2 шарнирно
соединен с плунжерами 3,
находящимися в цилиндрах /—IV
гидропривода; электродвигателей 4; насосов
5, которые из цистерны 6 через
клапанную коробку 7 и трубопроводы 8
подают рабочую жидкость в
цилиндры.
Электродвигатели приводят в
действие специальные насосы, нагнетающие рабочую жидкость
попарно в левый — правый (/ и IV) или правый — левый (// и ///)
цилиндры, которые воздействуют на баллер и, следовательно,
перо руля. Управляя работой насосов из ходовой рубки или рум-
пельного отделения, осуществляют перекладку руля.
Для работы рулевых устройств характерны непрерывный или
продолжительный повторно-кратковременный режим с большой
частотой включения и изменение момента на валу электропривода
в широких пределах: почти от нуля до двукратного номинального
значения.
Управляют электромеханическими рулевыми
электроприводами обычно по контакторной системе или по системе Г—Д,
а электрогидравлическими, как правило, — по контакторной или
тиристорной системе. Выбор той или иной системы управления
определяется особенностями каждого судна.
На рис. 17.15 приведена принципиальная схема управления
секторным рулевым электроприводом по системе Г—Д, которая
состоит из исполнительного электродвигателя М2, трехмашиннога
преобразователя с пускорегулирующей аппаратурой и поста
управления.
Предварительная подготовка электропривода к работе
заключается в подаче питания и включении приводного
электродвигателя при помощи магнитного пускателя. Дальнейшее же
управление осуществляется переводом рукоятки поста управления
влево или вправо в зависимости от требуемой перекладки руля.
При нажатии кнопки «Пуск» контактор КМ пускателя
срабатывает и подключает статор асинхронного электродвигателя
в сеть, ротор электродвигателя начинает вращаться, а вместе
с ним вращаются якоря генератора G и возбудителя GE.
Одновременно с замыканием главных контактов контактора КМ замы-
240
Рис. 17.15. Принципиальная схема управления секторным рулевым
электроприводом:
Ml — приводной асинхронный электродвигатель с магнитным пускателем; М2 —
исполнительный электродвигатель постоянного тока с независимой обмоткой возбуждения LM2;
G — генератор преобразователя с обмоткой возбуждения LG: GE — возбудитель, L — про-
тнвокомпаундная обмотка; SQ1—SQ5 — конечные выключатели; КК1, КК2 — тепловые
реле, г,—г,— регулировочные сопротивления; HLO, HLW, HLR — сигнальные лампы
(зеленая, белая, красная); Ft, F2— предохранители
кается его вспомогательный контакт КМ, шунтирующий кнопку
«Пуск», а возбудитель развивает напряжение, которое с помощью
реостата RR доводится до нормального значения.
При нулевом положении рукоятки поста управления все его
контакты разомкнуты и горит белая сигнальная лампа HLW.
Генератор при этом вращается вхолостую, так как цепь его
независимой обмотки возбуждения разомкнута.
При отклонении рукоятки поста управления, например на
первое положение «Право», замкнутся его контакты S2, S4 и S5. В
результате замыкания контакта S5 замыкается цепь обмотки
возбуждения LM2 и электродвигатель получает полное возбуждение,
а контакты S2 и S4 включают обмотку возбуждения LG
генератора на зажимы якоря возбудителя.
Генератор, продолжая вращаться, разовьет небольшое
напряжение, которое создаст ток в якоре электродвигателя. Последний
начнет вращаться с малой скоростью, приведет в движение
секторный привод и переложит перо руля. Одновременно конечный
выключатель, вал которого механически связан с баллером,
разомкнет свой контакт SQ4 и замкнет контакт SQ3, вследствие чего
погаснет белая сигнальная лампа HLW и загорится зеленая
лампа HLG.
241
Для увеличения скорости перекладки руля необходимо
последовательно перевести рукоятку поста управления в положения 2,
3 и 4, благодаря чему поочередно замкнутся контакты S6, S7 и
S8 поста управления и из цепи возбуждения будут выводиться
ступени г{ и Г2 регулировочного реостата. В результате
возбуждение генератора увеличится, а следовательно, увеличится и
напряжение на зажимах якоря исполнительного электродвигателя М2.
Это приведет к увеличению частоты вращения электродвигателя
М2 и скорости перекладки руля. Плавность регулировки
определяется числом секций регулировочного реостата.
Перекладку руля на другой борт осуществляют, изменяя
направление вращения исполнительного двигателя путем изменения
направления тока в обмотке возбуждения генератора переводом
рукоятки поста управления из положения «Право» в положение
«Лево» или наоборот. На первом положении «Лево» замыкаются
контакты SI, S3 и S5 поста управления, вследствие чего
изменяется направление тока в обмотке возбуждения генератора и
загорается красная сигнальная лампа HLR. В остальном схема
работает так же, как и при перекладке руля в положение «Право».
При отклонении пера руля в крайние положения конечный
выключатель SQ1 размыкает цепь питания независимой обмотки
возбуждения LM2 генератора, в результате чего снимается
напряжение с якоря исполнительного электродвигателя и он, продолжая
некоторое время вращаться по инерции, переходит в
генераторный режим и останавливается вследствие динамического
торможения. Устойчивое положение руля после остановки
электродвигателя фиксируется самоторможением передачи рулевой
машины.
От кратковременных перегрузок систему защищает
размагничивающее действие противокомпаундной обмотки L, от коротких
замыканий во вспомогательных цепях — предохранители Fl, F2,
а в цепи приводного электродвигателя — максимальные расцепи-
тели автоматов, установленных на ГРЩ. Кроме того, схема имеет
тепловую и нулевую защиту приводного электродвигателя,
которая осуществляется соответственно тепловыми реле КК1, КК2 и
контактором магнитного пускателя КМ.
Остановку исполнительного электродвигателя производят
постановкой рукоятки поста управления в нулевое положение,
вследствие чего обмотка возбуждения генератора LM2 будет
обесточена, напряжение генератора снизится до напряжения,
вызываемого остаточным намагничиванием, малое значение которого не
оказывает влияния на работу исполнительного электродвигателя.
Последний под влиянием динамического торможения
останавливается. Преобразователь останавливают нажатием кнопки «Стоп»-
магнитного пускателя и выключением пакетного переключателя.
Рис 17 16 Кинематическая схема брашпильного
устройства
§ 17.7. Электроприводы
якорно-швартовных
устройств
Якорно -
швартовные устройства
(ЯШУ)
предназначены для отдачи и
выбирания якорей, а
также для выполнения
швартовных
операций. Они состоят из
якорей, якорных
цепей, якорно-швартов-
ной лебедки, одного
или двух исполнительных электродвигателей, аппаратуры
управления. По конструкции лебедки ЯШУ делят на брашпили и
шпили. Первые обычно применяют на судах малого, а вторые —
на судах большого водоизмещения. На рис. 17.16 приведена
кинематическая схема брашпильного устройства.
Для якорно-швартовных электроприводов характерны
следующие особенности: кратковременный режим работы — обычно не
более получаса; изменение нагрузки в широких пределах — от 30
до 200 % номинального значения; наличие стоянки
электродвигателя под током не менее 1 мин; частые пуски электродвигателей
(до 10—15 в течение 0,5 ч) и возможные реверсы. Кроме того,
скорость электродвигателей должна увеличиваться при уменьшении
момента сопротивления на валу, а при увеличении —
уменьшаться. На рис. 17.17 приведена нагрузочная диаграмма электро-
Рнс. 17.17. Нагрузочная диаграмма снятия судна с якоря
243
S7
1-7
3-f
5-6
7-8
9 10
Выдавай
_B^
X
X
«i
X
X
0
X
TpaSunib
Ъ
fen
Ж
Г?
X
X
Рнс. 17.18. Схема управления электроприводом брашпиля:
М — исполнительный асинхронный двухскоростиой электродвигатель, КМ1, КМ2 —
контакторы направления; КМЗ, КМ4 — контакторы малой и большой скоростей; YB, KM5 —
тормоз с электромагнитным приводом и его контактор; KV — реле напряжения; КК1—
КК4 — тепловые реле; SF—выключатель цепей управления; SA — комаидокоитроллер;
SBC — аварийная кнопка; HLW — сигнальная лампа; Fl, F2 — предохранители в цепях
управления
привода при снятии судна с якоря при нормальной глубине его
залегания.
Управление электроприводами ЯШУ, как правило,
осуществляют по контроллерной или контакторной системе. Первую
обычно применяют при мощности привода 16—23 кВт, вторую —
в пределах от 20 до 150 кВт. Систему Г — Д используют очень
редко и лишь при большой мощности исполнительного
электродвигателя.
На рис. 17.18 показана контакторная схема управления
электроприводом переменного тока брашпиля.
Схема предусматривает три режима работы: режим «0»
(стоянка); режим «Выбирать»; режим «Травить». В последних
режимах схема обеспечивает по две ступени скорости
электродвигателя.
При замыкании выключателя цепей управления SF подается
питание на катушку реле напряжения KV. Последнее
срабатывает и своим замыкающим контактом KV: 1 шунтирует контакты
1—2 командоконтроллера, а контактом KV: 2 замыкает цепь
сигнальной лампы HLW, и она загорается.
Управляют электроприводом в режимах «Выбирать» и
«Травить» поворотом рукоятки командоконтроллера. При постановке
244
рукоятки на первое положение «Выбирать» замыкаются контакты
3—4 и 7—8 командоконтроллера, контакторы КМ1 и КМЗ
получают питание и замыкают свои главные и вспомогательные
контакты. Вследствие этого срабатывает тормозной контактор КМ5
и подается напряжение на статорную обмотку малой скорости и
тормозной электромагнит. Последний оттормаживает
электродвигатель, который начинает вращаться с малой скоростью.
Одновременно с этим размыкаются размыкающие вспомогательные
контакты К.М1 и КМЗ, что не позволяет контакторам КМ2 и КМ4
срабатывать на данном положении командоконтроллера. Если
необходимо увеличить скорость электродвигателя, то надо
поставить рукоятку на второе положение. В результате сработает
контактор КМ4, включающий статорную обмотку большой скорости,
и обесточится контактор КМЗ, отключающий в этом положении
статорную обмотку малой скорости; электродвигатель начнет
вращаться с большей частотой.
Работа схемы в режиме «Травить» аналогична ее работе в
режиме «Выбирать», только вместо контактора КМ1 будет работать
контактор КМ2. Остановка электродвигателя производится
переводом рукоятки командоконтроллера в нулевое положение. При
этом снимается питание с контакторов, которые отключают
электродвигатель от сети, и он под действием электромеханического
тормоза останавливается.
Защита системы от коротких замыканий осуществляется в
силовой цепи установочными автоматами, а в цепи управления —
предохранителями, защита от перегрузки — тепловыми реле, от
снижения или исчезновения напряжения — реле напряжения.
§ 17.8. Электроприводы плавучих буровых установок
Основными потребителями электроэнергии на ППБУ 6000/200
являются электроприводы постоянного тока, как правило,
единичной мощностью 400—500 и 700—860 кВт при напряжении 440—
460 В. Так, мощность исполнительного двигателя бурового насоса
825 кВт, у лебедки два двигателя по 710 кВт каждый, в
комплекс цементирующего оборудования входят один агрегат
мощностью 415 кВт и три по 500 кВт каждый. Суммарная же
мощность спускоподъемного механизма 1420 кВт, буровых насосов
2400 кВт.
Для электропитания указанных потребителей создана мощная
первичная электроэнергетическая система переменного тока и
вторичная электроэнергетическая система постоянного тока.
Источниками первичной системы являются пять синхронных генераторов
типа МСК 1250-750, 400 В, 50 Гц, источниками вторичной
системы — пять тиристорных преобразователей по 1000 кВт
каждый. Для компенсации реактивной мощности и искажения формы
кривой напряжения установлено пять фильтрокомпенсирующих
устройств. На рис. 17.19 показаны принципиальная схема этой
системы и первичная сеть распределения.
245
Рнс 17.19, Принципиальная схема генерирования и распределения
электроэнергии на ППБУ 6000/200:
1 R — реакторы, VS — тиристориые преобразователи
В качестве примера рассмотрим электропривод буровой
лебедки, на которую работают два исполнительных
электродвигателя постоянного тока мощностью по 710 кВт каждый. На рис.
17.20 приведены функциональная схема электропривода и
характеристики его регулирования.
Силовая часть схемы построена по системе тиристорный
преобразователь— двигатель, а система управления предусматривает
двухзонное регулирование: первая зона — регулирование
напряжения на якоре и вторая — тока возбуждения исполнительных
двигателей.
Управление частотой вращения двигателя в зоне /
осуществляют с помощью регуляторов РМ, PC, PT; частота вращения
двигателя задается поворотом рукоятки командоаппарата управления
подъемом СКП, при этом изменяются напряжения на выходе
командоаппарата £/скп и на входе PC. Сигнал на выходе ЗИП
изменяется во времени по заданному закону. Входная цепь PC
настраивается таким образом, что номинальная частота вращения и
номинальная ЭДС двигателя достигаются уже при некотором
промежуточном положении СКП (£/3.с~0,5£Л,стах). Дальнейшее
увеличение задающего сигнала приводит к увеличению частоты за
счет уменьшения тока возбуждения.
Управление частотой вращения двигателя во второй зоне
осуществляется регуляторами РЭ и РТВ. Система действует как
246
13 -J
0
t
»-
Рис. 17.20. Функциональная схема электропривода БУ и характеристики его
регулирования:
ДКС — датчики количества свечей (массы колоииы); НЭ — нелинейный элемент; ПФ —
преобразователь функциональный; УОС, УОТ, УОЭ — узлы ограничения скорости, тока
якоря и ЭДС; ПУ — переключатель; РММ — реле максимального момента лебедки; РМ,
PC, РТ, РЭ, РТВ — регуляторы мощности, скорости, тока якоря, ЭДС, тока возбуждения
исполнительного двигателя; ЗИП — задатчик интенсивности подъема; ДС, ДТ, ДН, ДТВ—
датчики скорости, тока якоря, напряжения, тока возбуждения; СКП — сельсиииый ко-
маидоаппарат подъема, ФИ, ФТВ — фильтры сигналов напряжения и тока
возбуждения; И — иивентор; М — исполнительный двигатель; VS1 — силовой тиристориый
преобразователь, VS2 — тиристориый возбудитель исполнительного двигателя
система регулирования ЭДС. Сигнал, пропорциональный ЭДС,
получают как разность сигналов датчиков напряжения ДН и тока
ДТ (в соответствующем масштабе). На вход РЭ подается сигнал
задания J73.3=const, соответствующий номинальной ЭДС, и
сигнал обратной связи по ЭДС U3 (с противоположным знаком).
При частоте вращения ниже основной сигнал на выходе РЭ
максимальный и находится в зоне насыщения УОЭ, в связи с чем
ток возбуждения остается постоянным и равным номинальному
расчетному.
После того как достигнуто номинальное напряжение на якоре,
при увеличении задающего сигнала в пределах от 0,5t/3.cmax до
U3.c max напряжение на якоре и ЭДС несколько возрастают; при
этом ЭДС превышает заданное значение. Тогда вступает в
действие регулятор РЭ и уменьшает ток возбуждения, в результате
чего частота вращения двигателя возрастает. Увеличение
задающего сигнала на входе PC почти полностью компенсируется
увеличением сигнала обратной связи по скорости Uc, и при
повышении скорости от номинальной до максимальной напряжение якоря
увеличивается лишь на несколько процентов.
Таким образом, управление возбуждением зависит от
управления в цепи якоря, причем сигнал связи по ЭДС является тем
связующим сигналом, который обеспечивает согласованные
действия обоих каналов управления.
Данная схема обеспечивает линейную зависимость частоты
вращения (в обеих зонах) от сигнала задания. Однако в приводе
буровой лебедки максимальная скорость подъема колонны должна
изменяться в зависимости от массы колонны таким образом,
чтобы мощность, развиваемая приводом, оставалась постоянной.
Для обеспечения этого требования установлен регулятор
мощности лебедки РМ и регулируемый автоматически (в зависимости
от массы колонны) узел ограничения скорости УОС. Сигнал
датчика количества свечей ДКС, пропорциональный массе колонны,
воздействует на узел УОС и регулятор мощности РМ таким
образом, что с увеличением массы напряжение выхода РМ
уменьшается. В результате с увеличением момента нагрузки привода
скорость исполнительного двигателя уменьшается, а мощность,
развиваемая приводом лебедки, поддерживается приблизительно
постоянной, т. е. обеспечивается оптимальный режим работы
привода.
В режиме силового спуска, который используют только для
ускорения разгона порожнего талевого блока, при включении
соответствующего реле изменяется полярность сигнала задания тока
возбуждения, одновременно уменьшается ограничение тока якоря
(т. е. выходного сигнала PC); в остальном схема действует так же,
как и в режиме подъема. После разгона талевого блока до
определенной скорости привод отключается.
Ручное управление электроприводом производят при помощи
сельсинного командоаппарата подъема и силового спуска СКП.
В исходном положении напряжение подается на тиристорные пре-
248
образователи питания якоря и обмотки возбуждения, на реле,
сельсинные командоаппараты и датчики системы регулирования.
При этом рукоятка командоаппарата СКП находится на нуле и,
следовательно, во входной цепи задатчика интенсивности ЗИП
напряжение равно нулю. Так как выходное напряжение ЗИП
равно нулю, то выходное напряжение PC и РТ также равны
нулю.
На регулятор РЭ подан задающий сигнал,
соответствующий номинальному току возбуждения. На выходе РТВ "имеется
напряжение, соответствующее заданному току возбуждения,
а в обмотке возбуждения течет заданный ток возбуждения.
Работа схемы при малой нагрузке. Для того чтобы разогнать
двигатель до максимальной частоты вращения, необходимо
повернуть рукоятку СКП в крайнее положение «Вперед» и тем
самым подать напряжение на вход ЗИП. На выходе ЗИП
напряжение нарастает с интенсивностью, определяемой установкой
резистора утечки, находящегося в ячейке ЗИП. Напряжение
ограничения, получаемое с узла УОС, на входе РМ будет
максимальным, так как отсутствует нагрузка.
Задающее напряжение для блока регулятора скорости PC
получается суммированием выходного напряжения ЗИП и сигнала
обратной связи.
Замедление привода происходит следующим образом. При
уменьшении задающего сигнала с помощью СКП несколько
уменьшаются напряжение на якоре и ЭДС двигателя. Регулятор
РЭ сразу же увеличивает ток возбуждения двигателя. Скорость
уменьшается до номинальной, а затем начинает снижаться (уже
более интенсивно) напряжение на якоре. Ток в процессе
замедления уменьшается до некоторого значения или до нуля в
зависимости от интенсивности замедления. В конце переходного
периода наступает установившийся режим, причем скорость будет
равна новой заданной.
Работа двигателя при большой нагрузке. При наличии груза
массой пг благодаря действию ДКС, РМ и УОС напряжение на
входе PC и, следовательно, частота вращения двигателя будут
тем меньше, чем больше груз. Параметры ДКС и УОС выбирают
такими, чтобы статическая характеристика привода была близка
к оптимальной. При резком разгоне двигателя разность между
задающим сигналом и сигналом обратной связи на PC велика и
выходной сигнал его максимален. Максимальное значение
сигнала с выхода PC ограничено узлом УОТ, который осуществляет
также защиту двигателя от перегрузки. Выходное напряжение
блока PC является задающим для блока РТ и определяет
задаваемое значение тока якоря, которое выбирается
переключателями ПУ, расположенными на главном пульте управления. Этот
ток воздействует на реле РММ. Если же переключатель ПУ
установлен в положение «Минимальный момент», то реле РММ
отключено и уровень ограничения выходного сигнала узла УОТ
соответствует току якоря (1,3-4-1,4)/н.
9 Заказ № 1104
249
Такой режим используют при сравнительно легких грузах,
когда желательно, чтобы работал один главный дизель-генератор.
Если переключатель ПУ установлен в положение
«Максимальный момент», то реле максимального момента лебедки РММ
включено и уровень ограничения выходного сигнала узла УОТ
соответствует максимальному току якоря (1,6-^-1,7)/н. Такой режим
используют при подъеме тяжелых грузов, но тогда необходима
уже одновременная работа двух дизель-генераторов.
При максимальном расчетном грузе и больших усилиях на
гаке ток возбуждения двигателя наибольший. Если нагрузка на
гаке (при прихвате колонны и в любых других случаях)
возрастает, ток якоря будет ограничен определенным допустимым
значением, а скорость упадет до нуля. В остальном схема работает
так же, как и при малых нагрузках.
Система управления вторым двигателем электропривода
лебедки полностью аналогична рассмотренной. Двигатели могут
работать раздельно и совместно. При совместной работе вводят узел
выравнивания токов нагрузки двигателей.
§ 17.9. Электроприводы плавучих кранов
Плавкраны представляют собой специальные суда, на которых
устанавливают грузоподъемные краны различного назначения
(грузоподъемностью 20, 50, 100, 125, 150, 250, 400, 1000 и 2000 т)
со специальными комплектами электрооборудования; в частности,
все основные механизмы имеют электроприводы. Последние, как
правило, получают питание от автономных источников
электроэнергии — дизель-генераторов постоянного или переменного тока.
Большинство электроприводов плавкранов выполняют по
системе Г—Д, что объясняется высокими требованиями,
предъявляемыми к ним. Так, минимальная скорость спуска при особо
точной посадке груза составляет 0,006—0,012 м/с, скорость
движения холостого крюка равна 0,135—0,2 м/с. Диапазон
регулирования скорости находится в пределах от 1 : 12 до 1 :20, причем
должна быть обеспечена высокая плавность регулирования.
На рис. 17.21 приведена схема электропривода плавкрана
«Черноморец» с независимым управлением (схема контроллера не
показана). Кран имеет пять механизмов: главного и
вспомогательного подъемов грузоподъемностью соответственно 100 и 25 т,
поворота, изменения вылета стрелы, а также поддерживающую
лебедку грейфера. Каждый из механизмов крана, за исключением
механизма поворота, имеет по одному исполнительному
электродвигателю, получающему питание от одного из двух генераторов
напряжением 230 В. На механизме поворота установлены два
последовательно соединенных электродвигателя.
Управляют электроприводами крана с пульта управления при
помощи командоконтроллеров, поворачивая их рукоятки в
соответствующие положения. Все процессы в схеме протекают так,
как и в обычной системе Г-—Д,— плавно и точно.
250
Рис 17.21. Схема
электропривода плавкрана
«Черноморец»:
Gl, G2 — якоря
генераторов; Ml, М2, МЗ. М4 и
М5 — якоря
электродвигателей механизмов главного
подъема, вспомогательного
подъема, изменения вылета
стрелы и поворота, LG1,
LG2 и LM1—LM5 —
обмотки независимого возбужде
ния генераторов и
двигателей, YB —электромагниты тормозов: КМ1 — КМ12 — линейные контакторы подключения
двигателей, КМ13 — КМ20 — контакторы реверса, КМ21 — КМ24 — контакторы TOpMoja;
КМ25 — КМ28 — контакторы динамического торможения, КМ29, КМЗО — контакторы кон
тура самогашения; КМ31, КМ32 ~ контакторы ослабления поля двигателей Ml и М2;
КМЗЗ ~ КМ42 — контакторы ускорения; КА1, КА2 — реле максимальные с уставкой
срабатывания, равной 180—200 % номинального тока генераторов, КАЗ — реле максимальное
с уставкой срабатывания, равной 180—200 % номинального тока двигателей М4 и М5;
КА4—КА7 — реле обрыва поля двигателей, КА8, КА9 — токовые катушки реле ослабления
поля двигателей; KVl—KV3— реле контроля скорости, KV4, KV5 — реле контроля
напряжения с уставкой срабатывания, равной 130—140% номинального напряжения, КV6 — реле
контроля тормозов, KV7 — реле контроля возбуждения, QS1, QS2— разъединители
главной цепи; QF — автоматический выключатель
9*
251
§ 17.10. Гребные электрические установки
Под гребной электрической установкой (ГЭУ) понимают
систему электрического привода гребных винтов судна. ГЭУ
применяют на надводных судах различного назначения.
Современные ГЭУ могут быть самых различных типов, но в
состав каждой из них входят- первичный двигатель (паровая или
газовая турбина, дизельный или газовый двигатель);
электрический генератор переменного или постоянного тока, приводимый
в движение первичным двигателем; гребные электродвигатели
постоянного или переменного тока различных типов; гидравлические
движители — гребные винты, крыльчатые движители, водометные
насосы. Кроме этих основных элементов в состав ГЭУ входят
щиты электродвижения, посты управления и вспомогательные
механизмы, обслуживающие основные элементы.
По роду тока ГЭУ подразделяют на установки постоянного,
переменного и двойного рода тока. ГЭУ постоянного тока имеют
генераторы и гребные электродвигатели постоянного тока. В ГЭУ
переменного тока в качестве генераторов применяют синхронные
генераторы, а в качестве гребных двигателей — электродвигатели
переменного тока различных типов. В ГЭУ двойного рода тока
в качестве генераторов используют генераторы переменного тока,
а в качестве гребных двигателей—электродвигатели постоянного
тока, получающие электроэнергию от синхронных генераторов
через преобразователи переменного тока в постоянный.
По виду первичного двигателя ГЭУ подразделяют на дизель-
электрические (ДЭГУ), турбоэлектрические (ТЭГУ) и газотурбо-
электрические (ГТЭГУ) В настоящее время на судах используют
ДЭГУ и ТЭГУ, а ГТЭГУ пока не получили широкого
распространения.
По степени полноты электрификации гребных винтов ГЭУ
подразделяют на автономные (или главные), вспомогательные и
комбинированные. В автономных ГЭУ гребные винты приводятся
в движение только от гребных электродвигателей (ГЭД), питание
на которые поступает от главных генераторов.
В зависимости от числа гребных валов ГЭУ подразделяют на
одно-, двух- и трехвальные, а по способу передачи движения от
электродвигателей на гребные винты — на установки с редуктор-
ной и с прямой передачей.
ГЭУ постоянного тока обычно дизельные, причем дизели
нереверсивные. Такие установки, как правило, представляют собой
систему Г—Д со всеми присущими ей положительными
свойствами. Гребные же электродвигатели реверсивные и, как правило,
с малой частотой вращения (100—250 об/мин) и большой
мощностью (1000—10 000 кВт). Наибольшее напряжение ГЭУ 1000—
1500 В. ГЭД переменного тока часто выполняют двухъякорными,
каждый якорь имеет свою магнитную систему.
На рис. 17.22 представлены две типовые схемы автономных
ГЭУ. Управление ГЭУ осуществляют с помощью реостатов, встро-
252
Рис 17 22 Типовые схемы Рис 17 23 Схемы главного тока ДЭГУ
автономных ГЭУ постоянного (а) и ТЭГУ (б) переменного тока
тока
енных в посты управления ПУ и включенных в цепи обмоток
независимого возбуждения LE возбудителей GE. Частоту вращения
ГЭД регулируют изменением напряжения, подводимого к якорю,
что достигается изменением силы тока возбуждения генераторов.
Реверс ГЭД и, следовательно, гребного винта производят
изменением направления тока в обмотке LE. В результате изменяется
направление тока в цепях якорей ГЭД.
ГЭУ переменного тока отличаются от установок постоянного
тока как электрической схемой, так и типом оборудования,
а также методами управления. ГЭУ переменного тока по
сравнению с ГЭУ постоянного тока обладают более низкой
маневренностью, но отличаются и рядом существенных преимуществ. В
частности, электрические машины—генераторы и электродвигатели—
в ГЭУ переменного тока более просты по конструкции, имеют
меньшие массу и габаритные размеры, более надежны и
экономичны. ГЭУ переменного тока применяют в тех случаях, когда
целесообразно электрифицировать гребную установку корабля,
а высокие маневренные качества от него не требуются
Схемы главного тока ГЭУ переменного тока зависят от общей
мощности установки, числа гребных валов и типа первичного
двигателя. Так, в ТЭГУ число генераторов в ряде случаев меньше
числа ГЭД, а в ДЭГУ число генераторов обычно превышает
число ГЭД. Число гребных электродвигателей ГЭУ переменного
тока обычно равно числу гребных валов. На рис. 17 23 показаны
в однолинейном изображении возможные варианты схем 1лавного
тока ДЭГУ и ТЭГУ при наличии на судне одного или двух винтов.
Управление ГЭУ переменного тока по сравнению с
управлением ГЭУ постоянного тока более сложно и состоит из ряда
операций по вклр чению генераторов, пуску, реверсу и
регулированию частоты вращения гребных электродвигателей. Все операции
по включению и отключению главных генераторов, а также по
реверсированию гребных электродвигателей производят
непосредственно в цепи главного тока.
253
Глава 18. СУДОВЫЕ ПРИБОРЫ УПРАВЛЕНИЯ
§ 18.1. Основные понятия и определения
Судовые приборы управления предназначены для
дистанционной передачи приказаний из командных пунктов судов в те
исполнительные посты, откуда управляют главными машинами и
рулевыми устройствами, обеспечивающими ход и маневрирование
судов. Такие приборы позволяют не только передавать
приказания, но и контролировать правильность принятия и исполнения
отданных приказаний.
К судовым приборам управления относятся машинные и
рулевые телеграфы, указатели и электрические тахометры. На
современных судах находят применение и авторулевые, которые
автоматически поддерживают заданный курс судна.
В основу работы приборов управления судном положена
двусторонняя синхронная электрическая связь на расстоянии,
основным звеном которой является синхронная система передачи угла.
Существуют две основные синхронные системы передачи угла:
индукционная самосинхронизирующая система переменного тока и
импульсная синхронная
система постоянного тока.
В судовых приборах
управления наибольшее
распространение получила
индукционная синхронная
система передачи угла
(ССП), обеспечивающая
автоматическое
согласование указательных стрелок
приборов управления во
всех режимах ее работы.
Основными элементами
ССП являются датчики и
приемники, в качестве
которых используют сельсины,
представляющие собой
небольшие индукционные
машины, выполненные по
типу асинхронных машин
с однофазной обмоткой
возбуждения и вторичной
трехфазной обмоткой
синхронизации. По форме
исполнения ротора сельсины
подразделяют на
контактные и бесконтактные
(рис. 18.1).
Принципиальная схема
Рис. 18.1. Общий вид контактного (а) и
бесконтактного (б) сельсинов и
принципиальная схема индукционной синхронной
передачи угла ССП (в)
254
индукционной ССП показана на рис. 18.1, в, где соединены два
сельсина — контактный и бесконтактный, работающие в
индикаторном режиме. Трехфазная обмотка датчика ВС соединена
с трехфазной обмоткой приемника BE, образуя замкнутую
трехфазную синхронную систему. Обмотки же возбуждения датчика
и приемника подключены к общему источнику питания.
При прохождении однофазного неременного тока по обмоткам
возбуждения в сельсинах возникают пульсирующие магнитные
потоки с частотой, равной частоте источника питания. Эти равные
вследствие идентичности сельсинов потоки наводят в трехфазных
обмотках датчика и приемника переменные ЭДС, значения
которых зависят от положения роторов по отношению к обмоткам
возбуждения (угла поворота а):
для датчика
ERl = Emcosa^, £A2 = £mcos(aa—120°); EM = Emcos (ад — 240°)
для приемника
£ni = £mcosan; En2 = Emcos(an—120°); En3 = Emcos(an—240°).
Отсюда видно, что если роторы обоих сельсинов находятся в
одинаковых положениях, то ЭДС, наводимые в соответствующих
фазных обмотках датчика и приемника, одинаковы по значению и
направлены навстречу друг другу, поэтому они уравновешивают
друг друга и тока в соединительных проводах не будет—роторы
обоих сельсинов неподвижны. В этом случае так называемый угол
рассогласования между датчиком и приемником отсутствует, т. е.
6 = ад—ап = 0. При наличии же угла рассогласования, когда
роторы датчика и приемника смещены относительно друг друга на
некоторый угол G, ЭДС их не будут равны и, следовательно,
возникнут уравнительные токи. Последние, проходя через обмотки
роторов датчика и приемника, взаимодействуют с потоками
статоров. В связи с этим в обеих машинах создадутся
синхронизирующиеся вращающие моменты, стремящиеся повернуть роторы
датчика и приемника в противоположном направлении, в
результате чего они займут одинаковые положения, т. е. угол
рассогласования будет равен нулю.
§ 18.2. Машинные телеграфы
Машинные телеграфы — это синхронные приборы передачи
угла, служащие для двусторонней связи между командными
пунктами и машинными отделениями судна. Особенностями машинного
телеграфа являются развитая система сигнализации и совмещение
элементов синхронной связи, работающих на одну шкалу, в
едином приборе. На судах, как правило, устанавливают основной и
резервный машинные телеграфы.
Основной машинный телеграф представляет собой автономную
установку синхронных приборов передачи угла, обеспечивающую
передачу приказаний из постов управления судном (рубка,
255
мостик) в машинные отделения и
передачу из машинных отделений в
командные пункты ответов о приеме
приказаний, а также получение в специальных
постах как переданных приказаний, так
и принятых ответов. На командных
пунктах устанавливают
датчики-приемники, в машинных
отделениях—приемники-датчики машинного
телеграфа, а в специальных постах —
контрольные приемники машинного телеграфа.
В датчике-приемнике и
приемнике-датчике объединены сельсин-датчик и
сельсин-приемник, контрольные же приборы
представляют собой совокупность двух
сельсинов-приемников. На рис. 18.2
показан общий вид приемника-датчика.
На рис. 18.3 приведена схема
установки основного машинного телеграфа
с применением всех приборов и при
наличии на судне двух командных пунктов
управления и двух машинных постов.
Управление машинным телеграфом
можно осуществлять только из одного
командного пункта. Для передачи
приказаний из командного пункта в машинные отделения достаточно
повернуть рукоятку датчика в нужное фиксированное положение,
например «Средний вперед», синхронно на тот же угол откло-
Рис 18 2 Приемник-датчик
машинного телеграфа
НА6
Рис 18 3 Типовая схема установки машинного телеграфа:
МТ 1 — датчики приемники, установленные на командных пунктах, МТ-2 —
приемники передатчики, установленные в машинных отделениях, МТ 3 —
контрольные двухстрелочные приемники, установленные в контрольных постах;
НА1 — НА4 — трещотки НА5, НА6 — ревуны, HL — сигнальная лампа; СК —
соединительные коробки, СЯ — соединительные ящики, ПП — переключатель
постов на два направления
256
нится и сельсин-приемник. Одновременно с этим следящая
система включит звуковые и световые приборы. В машинных
отделениях, получив приказание, передают ответ по телеграфу на
командный пункт. Автоматическое отключение звуковых и
световых приборов укажет на то, что приказание принято
правильно.
§ 18.3. Рулевые телеграфы и указатели
Рулевые телеграфы и указатели предназначены для связи
командных пунктов (рубка, мостик) с румпельным отделением. Они
позволяют передавать приказания о перекладке руля и
осуществлять контроль за правильным выполнением этих приказаний. Оба
типа этих приборов, как правило, изготовляют
самосинхронизирующимися.
В установках рулевых телеграфов и указателей применяют
следующие приборы: датчики-приемники рулевых телеграфов,
датчики рулевых указателей, приемники рулевых телеграфов и
указателей, сигнальные и вспомогательные приборы.
На рис. 18.4 показаны датчик-приемник и приемник рулевых
телеграфов и указателей. Первый состоит из датчика рулевого
телеграфа и приемника рулевого указателя и представляет co6of
металлическую коробку, внутри которой размещены два обычных
сельсина и ряд вспомогательных деталей. На лицевой стороне
прибора размещены двусторонняя шкала «Право руля» и «Лево
руля» с делениями в градусах, две стрелки — командная и
исполнительная и штурвал, с помощью которого отдают приказания.
Кроме того, на приборе есть педаль для замыкания цепи
сигнальных приборов.
Приемник рулевых телеграфов и указателей представляет со
бой металлическую закрытую коробку, в которой размещены
двойной принимающий сельсин, двусторонняя шкала и ряд
вспомогательных деталей. В отверстие в центре шкалы выведены концы
валов сельсина с
укрепленными на них
стрелками,
перемещающимися над шкалой.
Датчик рулевых
указателей,
механически связанный с бал-
лером руля,
представляет собой сельсин,
помещенный в
металлический
герметический корпус. Он
фиксирует истинный угол
перекладки руля и
передает его на датчик- Рис 184 Датчик приемник (а) и приемник (б)
приемник ХОДОВОЙ рулевых телеграфов
257
Рис. 18.5. Типовая схема
установки рулевых телеграфов
и указателей:
Д1, Д2 — датчики-приемники;
ДРУ1, ДРУ2 — датчики рулевых
указателей; РУ—
приемник-указатель, установленный в рулевом
отделении; ШП —
приемник-указатель, установленный в
штурманском посту; Я — приемник-указа*-
тель, установленный в посту
энергетики; СЯ — соединительный
ящик; ПП — переключатель
постов; НА — звонок
рубки или запасного командного пункта (ЗКП), а также на
контрольные приборы.
На рис. 18.5 показана структурная схема установки рулевых
телеграфов и указателей с применением всех приборов и при
наличии двух командных пунктов управления судном.
Рулевые телеграфы и указатели действуют по обычному
принципу командных телеграфов и представляют собой две
самостоятельные системы. Система рулевых указателей отличается от
системы рулевого телеграфа тем, что в ней сельсин-датчик
поворачивают не вручную, как в рулевом телеграфе, а автоматически
при помощи механической передачи от баллера руля на углы,
пропорциональные углам поворота баллера и, следовательно, пера
руля.
Следует отметить, что на современных судах устанавливают
так называемые авторулевые системы управления, которые
позволяют автоматически удерживать судно на заданном курсе.
Рулевой же телеграф в этом случае выполняет роль ручного
управления перекладкой пера руля и является резервным.
§ 18.4. Судовые электрические тахометры
Электрические тахометры, предназначенные для измерения
частоты вращения гребных валов судна, представляют собой
автономную систему приборов. На судах обычно устанавливают
индукционные системы тахометров постоянного и переменного тока.
Основными элементами тахометров постоянного тока являются
датчики — небольшие магнитоэлектрические генераторы
постоянного тока и приемники-указатели — вольтметры
магнитоэлектрической системы, Шкалы вольтметров отградуированы на число
оборотов гребного вала в минуту, Стрелки приемников, называемых
тахометрами вольтметрового типа, отклоняются по шкале от нуля
в обе стороны — «Назад» и «Вперед»,
Датчик приводится во вращение от гребного вала при помощи
цепной передачи или через зубчатую передачу. При вращении
датчика в нем индуцируется ЭДС (Е = Сепф), пропорциональная
частоте вращения якоря генератора, Так как якорь генератора
связан с гребным валом, частота вращения которого измеряется,
то ЭДС и, следовательно, напряжение на зажимах якоря про-
258
3W Jl'3_
0*im'i«-i^
Г Коридор грешного
I Лмд
Рис. 18.6. Схема установки тахометров вольтметрового
типа-
1 — датчики, 2 — фильтры, 3, 4 — приемники-указатели
порциональны частоте вращения гребного вала (Ce=const,
Ф = const). Последнюю фиксируют тахометры. Показания их
будут правильными только в том случае, когда число включенных
тахометров неизменно, При временном отключении тахометра
вместо него подключают резистор, сопротивление которого равно
сопротивлению тахометра.
Для каждого гребного вала, как правило, устанавливают один
датчик и несколько приемников-указателей (рис, 18,6). Датчики
обычно размещают в коридорах гребных валов, а приемники —
в командных постах (ходовая рубка ХР, запасной командный
пункт ЗКП), в исполнительных постах (машинные отделения
МО) и в специальных постах (штурманская рубка ШР). В
установках постоянного тока чаще всего используют датчики типа
МЭТ-8/30 с номинальными выходными параметрами: /н=0,08 А,
UH=3Q В, Тахометры без освещения шкалы устанавливают везде,
кроме рубки и мостика, тахометры с освещением шкалы — в
рубках и на мостике. Для защиты от помех радиоприему в
электрической цепи тахометров устанавливают электрические фильтры,
В установках переменного тока в качестве датчиков
применяют индукционные трехфазные генераторы, а в качестве
приемников— измерители магнитоэлектрической системы. Наибольшее
же распространение на судах получили дистанционные
индукционные тахометры. В состав тахометра типа ТЭ (рис, 18.7) входят
датчик — трехфазный генератор, соединительные провода и
измеритель, состоящий из синхронно-реактивного двигателя и
механизма измерителя,
Ротор 1 датчика, представляющий собой колоколообразный
постоянный электромагнит, механически связан с гребным валом.
При вращении ротор генерирует в обмотке статора 2 токи с
частотой, пропорциональной частоте вращения. Эти токи, проходя
259
через фазные обмотки
4 двигателя, создают
в статоре
вращающееся магнитное поле
той же частоты и,
следовательно,
пропорциональной
измеряемой частоте
вращения. Магнитное поле
увлекает за собой
ротор 5, который
выполнен из листов
электротехнической стали.
В пакете ротора
заложены стержни,
замкнутые накоротко, для
асинхронного пуска
синхронного
двигателя.
В основу работы
измерителя также положен индукционный принцип. Синхронный
двигатель вращает постоянный четырехполюсный магнит 6. Поле
этого магнита, пересекая медный колпачок 3, индуцирует в нем
тока. Последние, взаимодействуя с полем магнита, создают
вращающий момент, под действием которого колпачок стремится
провернуться вокруг своей оси. Поворот колпачка ограничивает
противодействующий момент, создаваемый спиральной пружинкой
7. Угол поворота колпачка пропорционален измеряемой частоте
вращения, поэтому шкала измерителя градуируется, как правило,
в оборотах в минуту.
Рис. 18.7. Схема устройства тахометра типа ТЭ
Глава 19. НАДЕЖНОСТЬ СУДОВОГО
ЭЛЕКТРООБОРУДОВАНИЯ И БЕЗОПАСНОСТЬ ТРУДА
ПРИ ЕГО ЭКСПЛУАТАЦИИ
§ 19.1. Общие сведения
Электрооборудование судна представляет собой совокупность
всех электротехнических устройств и систем, предназначенных
для генерирования электроэнергии и подачи ее многочисленным
потребителям, электрификации всех технических средств,
комплексной автоматизации основных судовых устройств. Естественно,
сложные электрифицированные и автоматизированные устройства
и системы, обычно с большим числом электрических аппаратов и
элементов, должны иметь высокую надежность, так как в судовых
условиях отказ хотя бы одного из функциональных аппаратов
может привести к выходу из строя устройства или всей системы.
260
Недостаточная надежность современных технических устройств
приводит к невыполнению ими заданного назначения и к высокой
стоимости их эксплуатации, гак как в подобном случае
необходимы высококвалифицированный технический персонал и большое
количество запасных деталей. Из-за низкой надежности возможен
длительный простой устройств, поскольку велико время,
требуемое для их ремонта.
Строгое и правильное выполнение всего комплекса
эксплуатационных мероприятий позволяет осуществлять постоянный
контроль за техническим состоянием электрооборудования, содержать
его в постоянной готовности к действию и сохранять тем самым
надежность работы технических средств. Составной частью
эксплуатации является соблюдение правил техники безопасности при
эксплуатации как отдельных электроустановок, так и всего
комплекса электрооборудования.
§ 19.2. Надежность электрооборудования судов
Под надежностью электрооборудования судов понимают
способность судна выполнять свои функции в определенных
условиях эксплуатации в течение заданного времени при сохранении
основных параметров и эксплуатационных показателей. Однако
только качественная характеристика надежности недостаточна.
Она не дает возможности четко сформулировать
тактико-технические требования к проектируемому электрооборудованию,
рассчитать надежность и технический ресурс изготовленных элементов
электрооборудования, затрудняет эксплуатацию, так как не
позволяет с достаточной достоверностью определять сроки
профилактических мероприятий, номенклатуру и необходимое
количество запасных деталей, нормы технического контроля
электрооборудования.
Надежность, подобно напряжению, мощности, скорости
и т. п.,— это технический параметр элементов
электрооборудования. Ее, как и другие параметры, часто необходимо выразить
численно. Однако природа надежности такова, что она зависит от
большого количества объективных и субъективных факторов,
которые часто носят случайный и, как правило, переменный
характер.
Установить взаимосвязь и соотношение между надежностью
элементов электрооборудования и большим числом переменных и
случайных величин достаточно сложно, поэтому для определения
количественных критериев надежности используют статистический
метод, а в качестве математического аппарата — теорию
вероятностей.
Количественные показатели надежности зависят от
определенных факторов: режима работы (непрерывный, периодический или
разовый); возможности или целесообразности восстановления
устройства или системы после наступления отказов
(восстанавливаемые и невосстанавливаемые изделия и устройства); возможности
261
перерывов в работе (устройства однократного и многократного
действия). Восстанавливаемые изделия и системы относят к
обслуживаемым, а невосстанавливаемые — к необслуживаемым.
Исключение составляют самовосстанавливающиеся системы.
Основные показатели надежности. Наиболее полно могут
характеризовать надежность следующие основные показатели:
вероятность безотказной работы, среднее время безотказной работы,
интенсивность (опасность) отказов, частота отказов, коэффициент
готовности, продолжительность вынужденного простоя системы.
Вероятность безотказной работы p(t)—это вероятность того,
что в заданном интервале времени и в данных условиях
эксплуатации не произойдет ни одного отказа. Зависимость р(t)
является убывающей функцией, так как с течением времени
надежность уменьшается.
Иногда используют в качестве критерия надежности
вероятность неисправной работы g(t)—вероятность того, что в
заданном интервале времени произойдет хотя бы один отказ.
Зависимости p(t) и g(t)—события противоположные, для которых
справедливо соотношение
g(t) = l-p(t), (19.1)
где p(t) —вероятность безотказной работы изделия или системы;
g (t) — вероятность отказа изделия или системы.
Среднее время безотказной работы Тср — математическое
ожидание времени исправной работы, т. е. среднее
арифметическое времени безотказной работы ряда образцов изделий или
систем. Этот показатель можно определить при испытании ряда
однотипных элементов или систем по выражению
1 m
Тер =— £ U, (19.2)
m (=i
где пг — число испытуемых однотипных элементов или систем;
/, — время безотказной работы £-го элемента или системы.
С увеличением m точность определения Тср повышается. Этим
показателем пользуются тогда, когда необходимо знать среднее
время между отказами, например для планирования
профилактических или ремонтных работ восстанавливаемых систем и изделий.
Интенсивность отказов K(t)—среднее число отказов в
единицу времени, т. е. отношение числа вышедших из строя
элементов в единицу времени к среднему числу элементов, исправно
работающих в данном интервале времени:
X(t) = n(t)/[N(t)At], (19.3)
где n(t) —число элементов, отказавших за интервал времени А^;
N (t)—среднее число исправно работающих элементов за время
Д*.
262
Частота отказов a(t) —число отказов в единицу времени,
отнесенное к первоначальному числу работающих элементов:
a(t) = n(t)/(NAt), (19.4)
где n(t)—число отказавших элементов за время от t до t + At;
Л' — число работающих (испытуемых) элементов; At— интервал
времени, для которого определена частота отказов.
Коэффициент готовности — это вероятность того, что система
будет пригодна к использованию в любой момент времени. Его
применяют для оценки надежности восстанавливаемых изделий и
систем периодической или разовой работы.
Продолжительность вынужденного простоя — время простоя
изделия или системы. Это время учитывают в том случае, если
длительность простоя имеет существенное значение при
эксплуатации данной системы.
Все указанные показатели надежности однозначно связаны
между собой следующими функциональными соотношениями:
РФ
(19.5)
' i
-l%(t)dt |
a(t)
Эти соотношения показывают, что, зная закон изменения
интенсивности отказов во времени, можно определить любой
показатель надежности, любую ее количественную характеристику.
При нормальном режиме работы, когда Я=const, соотношения
между основными показателями надежности принимают
следующую форму:
p(t)=e'Kt; a(t) = h>-u;
t
-4>\(t)dt
p о • T
t
-$\(t)dt
-K(t)e °
■
=}p(t)dt;
!
1
I
rcp =\ e-vdt=UX.
0
(19.6)
Отсюда видно, что при нормальной эксплуатации (К=const)
надежность изделий и систем убывает по экспоненциальному закону.
Коэффициент готовности определяют через интенсивность
отказов и среднее время восстановления:
kr = Zj-Е = ! , (19.7)
где Тв — время восстановления, которое включает и время
обнаружения неисправности изделия.
Среднее время вынужденного простоя изделия или системы
рассчитывают через интенсивность отказов и время
восстановления по выражению
Tn = tTJTcp,= UTB, (19.8)
где t — время эксплуатации изделия или системы.
263
0)
Pi
2
Pi
1
P7
Pn
Рис. 19.1. Последовательное (а) и
параллельное (б) соединения элементов
5) Оценка структур-
Р' ной надежности си-
? стемы.
Результирующую надежность
системы или изделия
при заданной ихструк-
Рп туре и известных
значениях надежности
всех входящих в них
элементов называют
структурной
надежностью системы или
изделия.
Так как надежность элементов, входящих в состав системы,
зависит от интенсивности их отказов, то при определении
надежности системы необходимо знать интенсивность отказов
элементов, а также режим работы системы. Для расчета надежности
системы или устройства необходимо произвести графическое
описание, в частности с помощью структурной схемы, в которой
изображается логическая взаимосвязь составляющих систему
(устройство) элементов в процессе ее нормального
функционирования. Структурная схема может не совпадать с общепринятыми
в электротехнике способами соединений.
Существуют три способа соединения элементов:
последовательное, параллельное и последовательно-параллельное. Рассмотрим
эти типовые структуры и определим надежность каждой такой
схемы.
Последовательное соединение. На рис. 19.1, а показана
структурная схема, состоящая из я элементов, соединенных
последовательно. При этом соединении отказ любого элемента приводит
к отказу всей схемы. Вероятность рс безотказной работы схемы
в течение времени t определится как произведение значений
вероятностей безотказной работы отдельных элементов:
Рс (f) = Pi (t) p2 (t) ■ . . рп (f) = IT Pi (t). (19.9)
£=1
Так как рг^)=е ' , то выражение (19.9) можно записать
в следующем виде:
Pc$=e-ve-v
„-М
(19.10)
где Ас = 2Я,, — интенсивность отказа системы или изделия.
Если система имеет несколько элементов с одинаковой интен'
сивностью отказов, то интенсивность отказа системы
k ri
K = m1Xi + m2'k2-\- . . . + mkXk = £ m{Kh (19.11)
i=l
где mu ..., trik — число однотипных элементов с одинаковой
интенсивностью отказа.
264
Если элементы имеют одно и то же значение интенсивности
отказов, то
pc(*) = p"(*)=<r"w = e-V, (19.12)
где %с = гй. — интенсивность отказа системы.
Соответствующее среднее время безотказной работы системы
ТсР = 1/|>=1/Ас. (W-13)
Пример 19.1. Структурная схема состоит из четырех элементов,
соединенных последовательно. Интенсивности отказов отдельных элементов
соответственно равны
^ = Ь10-М/ч; Я2=9-10-6 1/ч; Ад = 3-10-* 1/ч; Я4 = 4,5-10~5 1/ч.
Результирующая надежность схемы, т. е. вероятность безотказной работы
всей схемы,
Рс (0 = в- <*"+^+M-W = е-17,5.10-Ч_
Среднее время безотказной работы схемы
Тср =— = ! =5714 ч.
Р Яс 17,5-Ю-5
Следует отметить, что при расчете интенсивности отказов
системы необходимо учитывать, что она зависит от условий
эксплуатации, размера нагрузки, температуры окружающей среды и ряда
других факторов. Учитывают данное влияние пугем выбора
максимальных или средних значений интенсивности отказов
элементов. В ряде случаев этот учет производят с помощью
специальных поправочных коэффициентов.
Параллельное соединение. На рис. 19.1,6 показана
структурная схема, состоящая из я элементов, соединенных параллельно.
Такое соединение элементов обычно имеют судовые системы, в
частности, электроэнергетические, автоматизированные схемы
электроприводов и системы автоматического контроля. Кроме того,
параллельное соединение элементов применяют для резервирования,
когда они могут заменять друг друга при отказе одного из
элементов. Обычно резервируют только часть элементов или узлов
системы, которые менее надежны.
Если вероятности безотказной работы отдельных элементов,
соединенных параллельно, равны plt p2, ..., рп, то вероятность
безотказной работы всей схемы
Рс=1 —<7с= 1 —П(1 -Р*). (19-14)
i=i
Если элементы, соединенные параллельно, имеют одинаковые
надежности р1=р2 = ... = р, то вероятность безотказной работы
всей схемы
рс=1 — (1 — р)»=1 — (1—е-")2. (19.15)
где р — вероятность безотказной работы элемента одной ветви;
п — число параллельных ветвей схемы.
265
0)
01
1-
Рп
Г»
р М
I
ч
~\
Рг
рт
Рис. 19 2. Схемы элементов, соединенных последовательно-параллельно
Последовательно-параллельное соединение. Более сложные
системы могут иметь последовательно-параллельное соединение
элементов. На рис. 19.2 показаны два наиболее распространенных
случая последовательно-параллельного соединения. В первой
схеме (рис. 19.2, а) имеется m параллельных ветвей по я
одинаковых по надежности элементов в каждой. Вероятность
безотказной работы всей схемы определяется по формуле
рс=1_(1_ри)ш. (19.16)
Отсюда следует, что при я->-оо р0-^0, а при увеличении числа
параллельных ветвей, т. е. при т-^оо, рс-+\. Другими словами,
параллельное соединение ветвей из одинаковых элементов
увеличивает надежность схемы.
Во второй схеме (рис. 19.2, б) последовательно соединено я
групп, в каждой из которых имеется т параллельно соединенных
одинаковых элементов. При таком соединении вероятность
безотказной работы всей схемы
Рс = [1 —(1—р)Т
(19.17)
Анализ этого уравнения показывает, что при увеличении т
надежность схемы возрастает, а при росте я уменьшается.
Приведенный расчет надежности выполнен для тех случаев,
когда значения надежности отдельных элементов не меняются при
выходе из строя одного из элементов системы.
Порядок расчета надежности и методы ее повышения. При
расчете надежности изделия, устройства или системы обычно
необходимо определить вероятность их исправной работы. Этот
расчет целесообразно производить в следующем порядке:
1) составить функциональную структурную схему устройства
и определить, восстанавливаемое оно или невосстанавливаемое;
в схему включают основные элементы, а элементы, несущие
вспомогательные функции, например функции контроля и
сигнализации, в схеме не показывают;
2) независимо от структурной схемы установить время
непрерывной работы устройства;
266
3) найти интенсивности отказов всех элементов, входящих
в структурную схему устройства;
4) установив время эксплуатации и интенсивность отказов
элементов, вычислить по приведенным формулам вероятность
безотказной работы устройства и среднее время его исправной
работы;
5) если устройство восстанавливаемое, то при расчете его
надежности необходимо рассчитать коэффициент готовности и
время вынужденного простоя, однако при этом надо знать время
восстановления.
Повысить надежность устройства или системы можно
следующими способами: а) упрощением схемы устройства или системы;
б) повышением качества элементов и применением
унифицированных деталей, узлов, приборов; в) выбором оптимального режима
работы элементов и всего устройства или всей системы; г)
"резервированием отдельных элементов, узлов, блоков; д)
применением контроля режима работы и исправности наиболее важных
элементов, а в сложных системах—автоматического контроля.
Высокая надежность электрооборудования во многом зависит
от правильной его эксплуатации. Обслуживающий персонал
должен изучить устройство или систему и строго выполнять правила
их эксплуатации. Профилактические ремонты и полные проверки
необходимо проводить через промежутки времени, которые
меньше, чем время безотказной работы.
§ 19.3. Безопасность труда
при эксплуатации электрооборудования
Под безопасностью труда понимают состояние условий труда,
при котором исключено воздействие на работающих опасных и
вредных производственных факторов.
Обеспечить безопасность труда при эксплуатации
электрооборудования — значит обезопасить людей, соприкасающихся с
электрическими установками, от поражения током. В связи с этим
технические вопросы эксплуатации электрооборудования и вопросы
безопасности труда всегда решаются одновременно.
Поражение электрическим током обычно происходит при
соприкосновении человека с частями электрической установки,
находящимися в этот момент под напряжением. Практика
показывает, что наиболее часто несчастные случаи происходят при
работе с такими частями электрических установок, как рубильники,
выключатели, предохранители, реостаты, ручные переносные
приборы, штепсельные соединения, электронагревательные приборы,
электрические лампы и т. п., которые обычно находятся под
напряжением. Нередко причиной несчастных случаев является
неисправность изоляции проводов и других частей установки,
вследствие чего ее нетоковедущие части — корпуса машин, аппаратов
и т. п. — оказываются под напряжением и при соприкосновении
с ними человека поражает ток.
267
Соприкосновение может быть двухполюсным, когда человек
касается двух разноименных полюсов или фаз — двух проводов
одновременно, и однополюсным, когда человек одновременно
прикасается к токоведущему проводнику и к земле или, как принято
говорить на судне, к корпусу. В обоих случаях образуется
замкнутая цепь через тело человека. В судовых условиях, где кабели
прокладывают по металлическому корпусу и аппаратуру
устанавливают непосредственно на металлических частях судна, почти
в одинаковой степени опасны как однополюсное касание, так и
одновременное касание двух проводов.
Установлено, что для человека смертелен ток в 0,1 А и выше,
хотя смерть может наступить и при меньшем токе вследствие
паралича дыхательных центров, если своевременно не будет
произведено искусственное дыхание. Продолжительность воздействия
тока на человеческий организм также имеет значение. Чем
дольше это воздействие, тем тяжелее поражение и меньше
вероятность спасения.
Различают два вида поражения током: электрические ожоги и
удары. При электрических ожогах поражаются поверхностные
покровы тела — кожа. Электрические удары оказывают воздействие
на нервную систему, вызывают расстройства работы сердца и
органов дыхания.
Сила тока, проходящего через тело человека, зависит от
приложенного напряжения и сопротивления тела человека. В
обычных условиях сопротивление тела человека бывает от 10 до
100 кОм, однако оно не остается постоянным и может изменяться
в широких пределах. Увлажнение тела, загрязнение веществами,
хорошо проводящими электрический ток, сопровождается резким
уменьшением сопротивления. Так, сопротивление тела человека,
сидящего на мокрой стальной палубе судна, может уменьшиться
до 1000—500 Ом. В таких условиях соприкосновение тела с то-
коведущими частями, находящимися даже под напряжением
50 В, может быть смертельным. По правилам безопасности труда
напряжение свыше 24 В считается опасным в условиях судна.
Опасность поражения переменным электрическим током с
увеличением частоты уменьшается. Наиболее опасен ток частотой
25—75 Гц. При значительных частотах, как показывает практика,
резко сокращается количество электрических ударов и
увеличивается количество ожогов.
В целях предохранения людей от поражения электрическим
током предусмотрен комплекс мероприятий. Эти мероприятия
складываются из ограничения значений напряжения для судового
электрооборудования, применения защищенных и закрытых форм
исполнения электрооборудования, отказа от использования
корпуса судна в качестве токоведущего провода, применения при
обслуживании электрооборудования различных защитных средств,
издания соответствующих инструкций и руководящих указаний,
периодической проверки выполнения и соблюдения правил
безопасности труда.
268
Основные меры предосторожности от поражения током
следующие: защита от случайного прикосновения к токоведущим
частям; защита от соприкосновения с металлическими нетоковеду-
щими частями, которые могут оказаться под напряжением;
предохранение от образования искр или нагрева в помещениях,
опасных в отношении взрыва или пожара.
Существует ряд специальных конструкций приборов и
аппаратов и защитных приспособлений, правильное пользование
которыми уменьшает опасность, связанную с эксплуатацией
электрических установок. К числу таких защитных приспособлений
относятся ограждения и блокировки, средства для изолирования от
корпуса, испытательные приборы для проверки наличия
напряжения и производства измерения, предостерегающие плакаты и
надписи, сигнализация и предохранительные средства.
Ограждения предупреждают возможность случайных
соприкосновений с находящимися под напряжением неизолированными
частями электроустановок. На судне ограждают все без
исключения неизолированные части, находящиеся под напряжением, для
чего применяют решетки, поручни, сплошные щиты, дверцы и т. д.
В ряде случаев части электрооборудования, прикосновение к
которым опасно, размещают в ящиках, коробках, шкафах и т. п.
Все ограждения находятся либо под замком, либо снабжаются
блокировками, которые не позволяют попасть за ограждения при
неснятом напряжении.
К средствам изолирования от корпуса относятся резиновые
коврики, резиновые калоши и боты, резиновые перчатки и
рукавицы. Все эти средства должны применяться в чистом, сухом
состоянии, не иметь повреждений, т. е. должны обладать высокой
электрической прочностью.
В качестве испытательных приборов применяют указатели
напряжения. Указателем напряжения при напряжениях до 500 В
служит вольтметр или ручная переносная лампа с
предохранительной сеткой. Провода, с помощью которых проверяют
напряжение, снабжают твердыми наконечниками с хорошо
изолированными рукоятками. При испытаниях металлические наконечники
прикладывают к частям, находящимся под напряжением.
Для напоминания о недопустимости включения рубильников,
переключателей, автоматов и других аппаратов во время работы
на магистралях или в отключенных частях установок на
рукоятках этих аппаратов вывешивают плакаты с надписью «Не
включать— опасно» или «Не включать — на линии работают». На
распределительных щитах для указания обслуживающему
персоналу о состоянии той или иной установки применяют сигнальные
лампы. Помимо этого корпуса всех электрических машин,
распределительных устройств и аппаратов обязательно заземляют.
Оболочки свинцовых или бронированных кабелей также
заземляют.
При эксплуатации электрооборудования на судне необходимо
соблюдать следующие основные правила:
269
1) для работы с токоведущими частями при снятом
напряжении проверить, осталось ли оно на них, и убедиться в
невозможности случайных включений;
2) работу под напряжением производить лишь с разрешения
старшего; выполнять работу только в резиновых перчатках,
резиновой обуви, на резиновых ковриках и инструментом с
изолированными ручками;
3) следить, чтобы проходы около агрегатов,
электрораспределительных щитов и т. п. были свободны и не загромождены
посторонними предметами;
4) не оставлять открытыми токоведущие части у закрытых
электрораспределительных щитов, приборов, коробок и т. п.;
5) следить, чтобы машины и арматура имели хорошую
изоляцию;
6) следить, чтобы провода переносных электроустановок
(лампы, дрели, вентиляторы и т. п.) были хорошо изолированы,
а корпуса самих приборов—хорошо заземлены,
7) на вахте у распределительных устройств иметь всегда под
руками независимый источник света — ручной электрический
фонарь;
8) следить, чтобы при производстве электромонтажных работ
изоляция всех токоведущих частей, имеющихся в электрофици-
рованном инструменте, была надежной.
Каждый специалист должен быть подготовлен для оказания
первой помощи пострадавшему от электрического тока.
§ 19.4. Периодические осмотры
и ремонт электрооборудования
Целью периодических осмотров и планово-предупредительных
ремонтов являются: контроль за техническим состоянием
электрооборудования и обеспечение надежной его работы; своевременное
выявление и устранение неисправностей как способ
предупреждения поломок и аварий; накопление и анализ эксплуатационных
факторов, характеризующих износ отдельных узлов и элементов
электрооборудования.
В зависимости от объема, характера и срока проведения
различают следующие виды осмотра: осмотр № lt который проводят
ежедневно во время, отводимое на проворачивание механизмов;
его проводят также по окончании рейса судна; осмотр № 2,
который проводят не реже одного раза в 3 мес, как правило, без
разборки электрооборудования. Во время этих осмотров
выполняют профилактические работы в полном соответствии с
правилами эксплуатации электрооборудования судов.
Помимо осмотров производят освидетельствования, которые
выполняют по решению электромеханика в случаях повреждения
или ненормальной работы электрооборудования, а также при
необходимости его замены. Основными видами
планово-предупредительного ремонта электрооборудования являются: текущий, сред-
270
ний и капитальный ремонты, которые проводят для поддержания
электрооборудования в рабочем состоянии в течение нормального
срока службы судна.
Под текущим ремонтом подразумевается мелкий ремонт
электрооборудования, осуществляемый в основном силами и
средствами персонала судна с привлечением в отдельных случаях
судоремонтных предприятий. При текущем ремонте устраняют мелкие
дефекты электрооборудования, производят частичную разборку
и регулировку отдельных узлов, подверженных наибольшему
износу, ремонт и смену мелких, быстро изнашивающихся деталей,
а также выполняют работы профилактического характера.
Под средним ремонтом понимают периодический ремонт
электрооборудования в сроки, устанавливаемые соответствующими
положениями и правилами. При среднем ремонте выполняют все
операции текущего ремонта и дополнительно производят разборку
от 50 до 70 % наиболее важных узлов электрооборудования,
шабровку поверхностей скольжения, ремонт и замену изношенных
основных деталей электрооборудования, проверку и испытание
электрооборудования и отдельных его узлов на точность, а также
окраску электрооборудования. Средний ремонт выполняют на
судоремонтных предприятиях, а в отдельных случаях частично его
может выполнять экипаж судна при соответствующей его
подготовке и при наличии необходимого оборудования.
Под капитальным ремонтом понимают такой ремонт
электрооборудования, при котором восстанавливаются полностью все его
параметры. Капитальный ремонт производят при износе
электрооборудования, близком к предельно допустимым нормам. При
капитальном ремонте полностью разбирают электрооборудование и
все отдельные его узлы, ремонтируют и заменяют не только
крупные детали, но и отдельные части, с тем чтобы
электрооборудование было восстановлено до первоначального состояния согласно
всем техническим требованиям, предъявляемым к нему.
Капитальный ремонт производят судоремонтные предприятия.
Помимо рассмотренных видов планово-предупредительного
ремонта существует еще аварийный ремонт электрооборудования,
который является неплановым и выполняется при устранении
аварийных повреждений.
ПРИЛОЖЕНИЕ
Единицы физических величин
(ГОСТ 19880—74, 1494—77, СТ СЭВ 1052—78)
Наименование величины
Единицы
Наименование
Обозначение
Электромагнитные явления
Электрический заряд (количество электри- Кулон Кл
чества)
Напряженность электрического поля Вольт на метр В/м
Напряженность магнитного поля Ампер на метр А/м
Индукция магнитного поля Тесла Тл
Магнитный поток Вебер Вб
Потокосцепление Вебер Вб
Магнитодвижущая сила Ампер А
Абсолютная магнитная проницаемость Генри на метр Гн/м
Относительная магнитная проницаемость — —
Абсолютная диэлектрическая проницае- Фарад на Ф/м
мость метр
Относительная диэлектрическая проница- — —
емость
Потенциал электрический Вольт В
Сила электрического тока, напряжение, электродвижущая сила
Мгновенное значение силы электрического
тока
Сила постоянного электрического тока;
действующее значение силы переменного
тока
Комплекс силы тока
Мгновенное значение напряжения
Постоянное напряжение; действующее
значение переменного напряжения
Комплекс напряжения
Мгновенное значение ЭДС
Постоянная ЭДС; действующее значение
переменной ЭДС
Ампер
Ампер
Ампер
Вольт
Вольт
Вольт
Вольт
Вольт
А
В
В
В
в
в
Мощность, энергия, сила, момент
Мгновенное значение мощности
Активная мощность
Реактивная мощность
Полная мощность
Комплексная мощность
Коэффициент мощности
Коэффициент мощности при синусоидаль
ных напряжении и токе
Ватт
Ватт
Вар
Вольт-ампер
Вольт-ампер
Вт
Вт
вар
В-А
В-А
272
Продолжение
Обозначение
W
G
М
Наименование величины
Энергия
Сила
Момент
Единицы
Наименование
Джоуль
Ньютон
Ньютон-метр
Обозначение
Дж
Н
Н-м
Параметры электрических цепей
Ом
Сименс
Генри
Фарад
Ом
Сопротивление
Проводимость
Индуктивность
Емкость
Активное, реактивное, полное сопротивле
ния
Комплексная проводимость
Комплексное сопротивление
Активная, реактивная, полная проводи
мость
Сименс
Ом
Сименс
Частоты, фазы, временные характеристики
Частота Герц
Угловая частота Радиан в
кунду
Секунда
Секунда
Радиан в
Период
Постоянная времени
Угловая скорость
Частота вращения
Начальная фаза
Разность фаз между синусоидальными
напряжением и током
кунду
Оборот в
нуту
Радиан
Радиан
ми-
СПИСОК ЛИТЕРАТУРЫ
1. Атабеков Г. И. Основы теории цепей. М.: Энергия, 1969.
2. Важанов А. И. Электрические машины. М.: Энергия, 1969.
3. Костенко М. П., Пиотровский Л. М. Электрические машины. Л.:
Энергия, 1972—1973.
4. Лейкин В. С. Судовые электрические станции и сети. М.: Транспорт,
1982.
5. Мещанинов П. А. Автоматизация судовых электроэнергетических
систем. Л.: Судостроение, 1970.
6. Михайлов В. А. Автоматизированные электроэнергетические системы
судов. Л.: Судостроение, 1977.
7. Нейман Л. Р., Демирчян К. С. Теоретические основы электротехники:
В 2 т. Л.: Энергоиздат, 1981.Т. 1—2.
8. Никифоровский Н. Н., Норневский Б. И. Судовые электрические
станции. М.: Транспорт, 1974.
9. Осокин Б. В., Хайдуков О. П. Электрооборудование судов. М.:
Транспорт, 1982.
10. Правила классификации и постройки морских судов. Л.: Транспорт,
1985.
11. Правила технической эксплуатации судового электрооборудования. М.:
Рекламбюро ММФ, 1985.
12. Самойлов В. Г. Автоматизация судовых электроустановок. Л.:
Судостроение, 1972.
13. Сафонов А. С. Специальная электротехника. М.: Воениздат, 1973.
14. Справочник судового электротехника: В 3 т./Под ред. Г. И. Китаенко.
Л.: Судостроение, 1980. Т. 1—2.
15. Судовые электроприводы: Справочник: В 2 т./А. П. Богословский,
Е. М. Певзнер, И. Р. Фрейдзон, А. Г. Яуре. Л.: Судостроение, 1983. Т. 1—2.
16. Тихонов В. В. Электроприводы органов управления. Л.: Судостроение,
1969.
17. Электрооборудование судов/Под ред. Д. В. Вилесова. Л.:
Судостроение, 1982.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоматы защитные 203, 206
— установочные 205
Автоматизация электростанции 216
Автоматический регулятор
напряжения 207, 210
Агрегат:
генераторный 193, 195
электромашинный 192
Валогенератор 196
Взаимоиндуктивность 66
Вращающееся магнитное поле 62
Время срабатывания 204, 205
Выпрямитель однофазный 178
— трехфазный 179
Генераторы 127
— постоянного тока 139
— синхронные 158, 193
Диаграмма векторная 40, 48, 56, 162
— временная 41, 44, 74
— управления 241, 244
Диод 177
Емкость 19
Живучесть 124
Закон Ампера 14
— Ома 23
— Кирхгофа первый 24
— — второй 25
— Ленца 15
— полного тока 13
Законы коммутации 93
Инвертор 177
— тока 180
Индуктивность 18
Источник напряжения 20
— тока 20
— электрической энергии 9, 192
Кабель морской 212, 214
— магистральный 211
Качество электроэнергии 207
Коллектор 129, 130
Коэффициент мощности 63, 193
— одновременности 194
— приведения 167, 174
— трансформации 173
Магнитопровод 130, 157,
Магнитный пускатель 231, 234
Машины асинхронные 155, 158
— постоянного тока 127, 130
— синхронные 155, 159
Момент вращающий 133, 219
— сопротивления 220
— электромагнитный 131, 133
Мощность активная 53
— реактивная 53
— полная 54
Напряжение 8
■— узловое 31
— стабилизация 207
Нагрузка генератора 134, 145
— электростанции 193
Надежность электрооборудования
судов 261
Обмотка возбуждения ротора 157
— — статора 73, 158
якоря 131, 160
Поток магнитный 11, 12
Потокосцепление 12
Приемник электрической энергии 16
Проводимость 17, 21, 41
Процесс установившийся 92
— переходный 92
Реакция якоря 134
Режим длительный 123, 223
— кратковременный 28, 123
— номинальный 139
— повторно-кратковременный 194
— работы судна 194
— — электростанции 196, 197
Резонанс напряжений 60
— токов 62
Сеть электрическая 122, 211
Синхронизация 163
Система стабилизации напряжения
207, 210
магистральная 219
смешанная 219
трехфазная 72
фидерная 219
электроэнергетическая 192
Сопротивление активное 41
— емкостное 46
— изоляции 215
— индуктивное 44
— комплеканое 54, 59
— полное 48
275
— реактивное 49
Схема главного тока 198, 238
— управления 238
Тахометр 258
Телеграф машинный 255
— рулевой 257
Тиристор 180
Ток безопасности 215
— контурный 29
— пусковой 169
— эквивалентный 223
Трансформатор напряжения 176
— тока 176
Угол электрический 38
— фазовый 38, 88
Фаза генератора 157
— напряжения 38
— тока 38
— начального напряжения и тока 38
Фидер 213
Характеристика внешняя: 21
генератора постоянного тока 139
синхронного генератора 162
— вольт-амперная 17
— кулонвольтная 19
— регулировочная 139, 162
— холостого хода 139, 162
Характеристики рабочие: 150
электродвигателей постоянного
тока 153
асинхронных электродвигателей
168
Цепь неразветвленная 26
— трехфазная 72
— электрическая: 15
ветвь 22
схема 21
узел 21
Частота напряжения 37
— вращения 132, 149, 155
Щит главный распределительный
197, 198
— отсечный распределительный 200
— аварийный распределительный
197, 199
Электрический аккумулятор: 182
отдача 183
срок службы 185
Электродвижущая сила: 11
генератора постоянного тока
131, 132
контурная 31
синхронного генератора 159
Электродвигатель гребной 253
Электрооборудование судов 122
Электростанция 122, 191
— аварийная 192, 198
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 4
Раздел I. ОСНОВЫ ЭЛЕКТРОТЕХНИКИ 6
Глава 1. Основные электротехнические понятия 6
§ 1.1. Электромагнитное поле 6
§ 1.2. Электрический ток 7
§ 1.3. Электрическое напряжение. Электродвижущая сила 8
§ 1.4. Магнитный поток. Магнитодвижущая сила 11
§ 1.5 Законы электромагнитных явлений 14
Глава 2. Электрические цепи, их элементы и параметры 15
§ 2.1. Основные понятия и определения . . 15
§ 2.2. Резистор 16
§ 2.3. Индуктивность 18
§ 2.4. Емкость 19
§ 2.5. Источники напряжения и тока 20
§ 2.6. Схемы электрических цепей 21
§ 2.7. Энергия и мощность электрических цепей 22
Глава 3. Электрические цепи постоянного тока 23
§ 3 1. Основные понятия и определения . . 23
§ 3.2. Основные законы электрических цепей ... 23
§ 3 3. Простые цепи и методы их расчета 25
§ 3.4. Сложные цепи и методы их расчета 28
§ 3.5. Примеры расчета сложных цепей 34
Глава 4. Электрические цепи однофазного переменного тока 36
§ 4.1. Основные понятия и определения .... 36
§ 4 2 Действующие и средние значения переменных тока и напряжения 39
§4 3. Векторные и временные диаграммы .... 40
§ 4 4. Параметры и законы цепей переменного тока 41
§ 4.5 Неразветвленные цепи переменного тока 43
§ 4.6. Цепи с параллельным соединением элементов 49
§ 4.7. Мощность цепей переменного тока 52
§ 4.8. Символический метод расчета электрических цепей 54
§ 4.9. Примеры расчета цепей переменного тока 58
Глава 5. Резонансные явления в цепях переменного тока 60
§ 5.1. Основные понятия и определения 60
§ 5 2. Резонанс напряжений 60
§ 5.3. Резонанс токов 62
§ 5.4. Энергетические процессы при явлениях резонанса 64
Глава 6. Электрические цепи с взаимоиндуктивностью 65
§ 6.1. Основные понятия и определения 65
§ 6.2. Расчет неразветвленных цепей с взаимоиндуктивностью .... 66
§ 6.3. Расчет разветвленных цепей с взаимоиндуктивностью 68
§ 6.4. Примеры расчета цепей с взаимоиндуктивностью 70
277
Глава 7. Трехфазные электрические цепи . . 72
§ 7 1. Основные понятия и определения . . . 72
§ 7.2 Соединение фаз трехфазных цепей . 75
§ 7.3. Мощность трехфазных цепей .78
§ 7.4. Расчет трехфазных цепей 79
§ 7.5. Вращающееся магнитное поле трехфазного тока 82
§ 7.6. Примеры расчета трехфазных цепей 83
Глава 8. Нелинейные цепи и методы их расчета 85
§ 8.1. Основные понятия и определения 85
§ 8.2. Нелинейные цепи со сталью 86
§8 3. Схема замещения цепи со сталью 88
§ 8.4. Феррорезонансы напряжений и токов 90
Глава 9. Переходные процессы в электрических цепях 92
§ 9.1. Основные понятия и определения 92
§ 9.2. Законы коммутации и начальные условия 93
§ 9.3. Переходные процессы в линейной цепи с индуктивностью . . 94
§ 9.4. Переходные процессы в линейной цепи с емкостью 99
§ 9.5. Переходные процессы в нелинейных цепях 103
§ 9.6. Примеры расчета переходных процессов в электрических цепях . 105
Глава 10. Электрические измерения 106
§ 10.1. Основные понятия и определения 106
§ 10.2. Приборы магнитоэлектрической системы 108
§ 10 3. Приборы электромагнитной системы ПО
§ 10.4. Приборы электродинамической системы ... 112
§ 10.5. Приборы специального назначения 114
§ 10.6. Измерения электрических величин 118
§ 10.7. Измерения пассивных параметров 120
Раздел II. ЭЛЕКТРООБОРУДОВАНИЕ СУДОВ 122
Глава 11. Общие сведения об электрооборудовании судов 122
§ 11.1. Основные понятия и определения 122
§ 11.2. Требования, предъявляемые к судовому электрооборудованию 124
§ 11.3. Род тока и стандартные значения напряжения и частоты . . . 125
Глава 12. Электрические машины постоянного тока 127
§ 12.1. Общие сведения и понятия 127
§ 12.2. Устройство и основные элементы машины 130
§ 12 3. Электродвижущая сила и электромагнитный момент машины
постоянного тока . 131
§ 12.4. Реакция якоря и коммутация 134
§ 12.5. Мощность, потери и КПД машин постоянного тока 136
§ 12.6. Классификация машин постоянного тока 138
§ 12.7. Генераторы постоянного тока 139
§ 12.8. Электродвигатели постоянного тока 147
Глава 13. Электрические машины переменного тока . . 155
§ 13.1. Общие сведения и понятия 155
§ 13.2. Устройство трехфазных синхронных генераторов и асинхронных
электродвигателей 157
§ 13.3. Синхронные генераторы 159
§ 13.4. Параллельная работа синхронных генераторов . 163
§ 13.5. Асинхронные электродвигатели 166
Глава 14. Преобразователи электрической энергии 171
§ 14.1. Общие сведения и понятия ' 171
§ 14.2. Электрические трансформаторы 171
§ 14.3. Выпрямители и инверторы 177
§ 14.4. Электромашииные преобразователи 181
278
Глава 15. Электрические аккумуляторы . . 182
§ 15.1. Общие сведения и понятия . 182
§ 15.2. Кислотные аккумуляторы 183
§ 15.3. Щелочные аккумуляторы 187
Глава 16. Судовые электроэнергетические системы 191
§ 16.1. Общие сведения и понятия 191
§ 16.2. Судовые электрические станции 191
§ 16.3. Источники электроэнергии судовых электростанций 192
§ 16.4. Расчет мощности СЭС и выбор генераторных агрегатов .... 193
§ 16.5. Схемы судовых электростанций 196
§ 16.6. Распределительные устройства и их аппаратура 198
§ 16.7. Системы стабилизации напряжения синхронных генераторов . . 207
§ 16.8. Судовые электрические сети 211
§ 16.9. Сопротивление изоляции электросетей 215
§ 16.10. Автоматизация судовых электростанций 216
§ 16.11. Расчет мощности электростанции транспортного рефрижератора 217
Глава 17. Судовые электроприводы 218
§ 17.1. Общие сведения и понятия 218
§ 17.2. Основы динамики электропривода 219
§ 17.3. Расчет мощности и выбор электродвигателей 221
§ 17.4. Аппаратура судовых электроприводов 226
§ 17.5. Системы управления судовыми электроприводами 238
§ 17.6. Рулевые электроприводы 239
§ 17.7 Электроприводы якорно-швартовных устройств 243
§ 17.8. Электроприводы плавучих буровых установок 245
§ 17.9. Электроприводы плавучих jtpanos 250
§ 17.10. Гребные электрические установки 252
Глава 18. Судовые приборы управления 254
§ 18.1. Основные понятия и определения 254
§ 18.2. Машинные телеграфы 255
§ 18.3. Рулевые телеграфы и указатели 257
§ 18.4. Судовые электрические тахометры ... 258
Глава 19. Надежность судового электрооборудования и безопасность труда
при его эксплуатации 260
§ 19.1. Общие сведения 260
§ 19.2. Надежность электрооборудования судов 261
§ 19.3. Безопасность труда при эксплуатации электрооборудования . . 267
§ 19.4. Периодические осмотры и ремонт электрооборудования .... 270
Приложение 272
Список литературы 274
Предметный указатель 275
Владимир Игнатьевич Верескун
Александр Сергеевич Сафонов
ЭЛЕКТРОТЕХНИКА
И ЭЛЕКТРООБОРУДОВАНИЕ СУДОВ
Заведующий редакцией П. К. Зубарев
Редакторы А. А. Ивановская, Н. М. Розенгауз
Художественный редактор В. Е. Корнилов
Технический редактор Т. Н. Павлюк
Корректоры Т. С. Александрова, С. Н. Маковская
Оформление художника А. Н. Васильченко
ИБ № 1293
Сдано в набор 27 04.87. Подписано к печати 25.11.87. М-32427. Формат издания бОХЭО'Ае
Бумага типографская № 2. Гарнитура литературная. Печать высокая. Усл. печ. л. 17,5
Уч-изд. л. 18,5. Уел кр.-отт. 17,5. Тираж 7300 экз. Изд. № 4180—86. Заказ № 1104
Цена 95 коп.
Издательство «Судостроение», 191065, Ленинград, ул. Гоголя, 8.
Ленинградская типография № 4 ордена Трудового Красного Знамени Ленинградского объ
единения «Техническая книга» им. Евгении Соколовой Союзполиграфпрома при Государст
венном комитете СССР по делам издательств, полиграфии и книжной торговли. 191126
Ленинград, Социалистическая ул., 14.