/
















Текст
МИНИСТЕРСТВО АВИАЦИОННОЙ ПРОМЫШЛЕННОСТИ СССР
Я. Т. ИЛЬИЧЕВ
ТРУДЫ № 153
РАСЧЕТ
ВРАЩАЮЩИХСЯ ЛОПАСТЕЙ
НА ИЗГИБ
ОБОРОНГИЗ
1 9 4 8 •
/
РАСЧЕТ ВРАЩАЮЩИХСЯ ЛОПАСТЕЙ КА ИЗГИБ
л Ossi^k
ВВЕДЕНИЕ
Вращающиеся лопасти различного вида имеют
широкое применение во многих областях техники.
За последнее время значение вращающихся лопа-
стей сильно возросло в связи с применением в
авиации турбинных двигателей. Обычно, вращаю-
щиеся лопасти, как, например, лопасти воздушных
винтов, лопатки центробежных и осевых компрес-
соров, лопатки паровых и газовых турбин и др.
работают с большими окружными скоростями.
Так как задача повышения эффективности вра-
щающихся лопастей может быть в. основном ре-
шена путем еще большего повышения окружных
скоростей, то определение напряжений во вращаю-
щихся лопастях и их деформаций требует макси-
мально возможной точности.
Вращающиеся лопасти во время работы подвер
раются одновременному воздействию поперечных
сил от протекающего воздуха или газа и центро-
бежных сил самих лопастей. Изгибу лопастей от
поперечных сил противодействует обратный изгиб
от центробежных сил, причем противодействую-
щий изгибающий момент центробежных сил зави-
сит от получающихся деформаций изгиба. Эта
зависимость изгибающего момента от деформаций
сильно усложняет задачу определения деформации
и напряжений при изгибе вращающихся лопастей.
Расчет на изгиб является одной из наиболее
важных и сложных и наименее разработанных за-
дач, связанных с расчетом на прочность вращаю-
щихся лопастей. Существующие методы расчета,
как правило, разработаны для воздушных винтов, и
в большинстве случаев расчетные формулы выве-
дены при некоторых предположениях, характерных
для воздушных винтов, но не всегда отражающих
условия изгиба лопаток компрессоров и турбин.
Так, например, предполагают, что лопасть в каж-
дом сечении изгибается вокруг оси, параллельной
геометрической хорде сечения, и что изгибом ло-
пасти относительно главной оси инерции сечения с
наибольшим моментом инерции можно- пренебречь.
При расчетах также допускается упрощение, что
винт имеет постоянный шаг.
iB общем случае расчета на прочность, кроме из-
гиба и растяжения лопасти, нужно учитывать еще
и кручение. Обычно достаточно считать, что круче-
ние влияет на изгиб лопасти тем, что оно повора-
чивает сечения лопасти на некоторые углы. Если
эти углы поворота малы, то расчет на изгиб мож-
но проводить независимо от кручения; если же эти
углы значительны, то расчет на изгиб и на круче-
ние следует проводить независимо друг от друга
путем нескольких просчетов, причем в каждом по-
следующем! просчете учитывать изменения, вноси-
мые предыдущим просчетом. Можно также рассчи-
тывать на изгиб одновременно с расчетом на кру-
чение.
В данной работе приводится новый обобщаю-
щий метод расчета, при помощи которого можно
определить деформации изгиба вращающихся ло-
пастей (лопастей воздушных винтов, лопаток ком-
прессоров и турбин) до любой степени приближе-
ния к истинным значениям. При этом предпола-
гается, что- при изгибе лопасти формы ее сечений
не изменяются и поворота сечений относительно
оси центров тяжести сечений не происходит. Ло-
пасть может иметь переменные сечения по длине и
переменные углы между осями инерции сечений и
осью вращения, а также небольшое отклонение оси
центров тяжести сечений от радиального направ-
ления.
1. ОБЗОР СУЩЕСТВУЮЩИХ МЕТОДОВ
РАСЧЕТА ВРАЩАЮЩИХСЯ ЛОПАСТЕЙ
НА ИЗГИБ
В журнале «Тепло и сила» № 5 за 1929 г. по-
мещена статья Н. В. Алмазова [1], в которой при-
водится метод расчета деформаций изгиба лопаток
паровых турбин с учетом разгружающего действия
центробежных сил. В статье при выводе уравнений
изгиба автор учитывает изгиб только в направле-
нии оси турбины, а в плоскости вращения не
учитывает. Искомая деформация приближенно вы-
ражена в виде трехчлена, постоянны© коэффициен-
ты которого определяются из уравнений изгиба при
подстановке исходной деформации и приравнива-
нии на нескольких радиусах значений исходной
деформации получаемым значениям из уравнений
изгиба. Кроме того, автор предлагает задаваться
какой-либо исходной кривой деформации и срав-
нивать ее с кривой, получаемой из уравнения из-
гиба. В исходную кривую вносятся исправления до
удовлетворительного совпадения обеих кривых. Так
как исправления вносятся на-глаз, то быстрота по-
лучения удовлетворительного результата почти це-
ликом зависит от случайности при выборе метода
исправлений исходной кривой.
1
В работе Г. И. Кузьмина и Д. Ю. Панова [2]
описаны два метода расчета лопасти воздушного
винта на изгиб: метод Ралли и метод авторов, осно-
ванный на использовании идеи метода Ритца, при-
меняемого в вариационном исчислении. В обоих ме-
тодах принимаются предположения, что лопасть в
каждом сечении изгибается вокруг оси, параллель-
ной геометрической хорде сечения, и что винт имеет
постоянный шаг.
Метод Ралли заключается в таком преобразо-
вании уравнения изгиба лопасти винта постоянно-
го шага, что становится возможным! определять
деформацию изгиба путем двукратного численного
интегрирования.
При использовании идеи метода Ритца авторы
заменяют бесконечный ряд для выражения дефор-
мации конечным рядом, ограничиваясь двумя чле-
нами ряда. Коэффициенты ряда находятся из усло-
вия минимума разности работы внешних сил и по-
тенциальной энергии изгиба, выражаемых через
принятую деформацию изгиба. Выражение для де-
формации изгиба в примере расчета авторы при-
нимают на основании результатов расчета лопасти
по методу Ралли. Все расчетные величины приб-
лиженно выражены в виде степенных функций.
При расчете по указанным методам следует поль-
зоваться числами ДО' четвертого десятичного знака,
так как в расчетных формулах встречаются раз-
ности чисел близкого порядка.
В работе Д. 10. Панова [3] описаны три метода
определения деформаций изгиба и кручения ло-
пасти воздушного винта: метод простой итерации,
метод итерации в группах и комбинированный ме-
тод, при котором первое приближение выполняется
по методу итерации в группах, а последующие
приближения — по методу простой итерации. Все
эти методы представляют собой разновидности ме-
тода последовательных приближений.
Как и в работе |[2], в указанных методах при
выводе уравнений равновесия лопасти принимается
предположение, что лопасть в каждом сечении
изгибается вокруг оси, параллельной геометриче-
ской хорде сечения, а при расчете на изгиб, — что
лопасть винта имеет постоянный шаг.
При методе простой итерации задаются какими-
нибудь исходными деформациями и подставляют
их в уравнения равновесия лопасти; полученные
решением уравнений результаты опять подставляют
в уравнения равновесия и такую операцию произ-
водят несколько раз до удовлетворительного схож-
дения двух последовательно получаемых значений
деформаций.
(Пользуясь методом! итерации в группах, при про-
ведении очередной операции расчета в уравнения
равновесия лопасти подставляют из результатов
предыдущей операции расчета только значения
углов между осями сечений лопасти и осью вра-
щения. Деформации изгиба получаются в резуль-
тате совместного решения двух уравнений равно-
весия лопасти.
Наилучшую сходимость дает метод итерации в
группах, но, как уже указывалось, при этом тре-
• буегся совместное решение первых двух уравнений
(равновесия лопасти. Быстрота сходимости при
расчете по этим методам в основном зависит от
2
удачного выбора первого приближения. Автор до-
казывает сходимость последовательных приближе-
ний в случае применения метода простой итерации
при достаточно малой скорости вращения. При
увеличении скорости вращения лопасти выше опре-
деленного значения метод простой итерации дает
расходящиеся результаты.
В книге В. П. Ветчинкина и Н. Н. Полякова [4]
приведен метод определения деформаций изгиба
лопасти воздушного винта, называемый «методом
обобщенной итерации». В расчете предполагается,
что нейтральная ось сечения лопасти совпадает с
главной осью инерции, которая принимается про-
ходящей параллельно хорде сечения лопасти.
Метод обобщенной итерации заключается в сле-
дующем. Вначале определяют стрелку прогиба кон-
ца лопасти при исходной деформации без учета
влияния на изгиб момента центробежных сил, вы-
званного самой деформацией, и стрелку прогибает
разгибающих моментов центробежных сил при
исходной деформации. Затем определяют проекцию
стрелки прогиба при исходной деформации и про-
екцию стрелки прогиба от разгибающих моментов
на биссектрису угла, образованного направлениями
этих стрелок прогиба. В зависимости от отношения
проекции стрелки прогиба от разгибающих момен-
тов к стрелке прогиба при исходной деформации
угловые скорости вращения лопасти разделяют на
малые, средние и большие. Если это отношение
меньше двух, то скорости считают малыми, если
же оно больше двух и меньше десяти, то — сред-
ними. Стрелки прогиба конца лопасти второго и
последующего' приближений определяют из усло-
вия равенства стрелок прогиба двух последователь-
ных приближений. Упругую линию первого при-
ближения берут разную в зависимости от скорости
вращения лопасти. Упругие кривые остальных
приближений определяют, как и в случае ма-
лых скоростей, путем пропорционального измене-
ния соответствующих исходных деформаций.
В отдельных статьях С. А. Тумаркин приводит
разработанный им метод последовательных при-
ближений для определения деформаций изгиба ло-
пасти воздушного винта, сходящихся при любых
скоростях вращения. Этот метод основан на тео-
реме о решении неоднородного интегрального урав-
нения, выводимой при решении задачи совместного
изгиба и растяжения балки (cml книгу Г. Виарда
«Интегральные уравнения», 1933 г., стр. 134 [5]).
Автор преобразует уравнение изгиба лопасти пу-
тем интегрирования и введения в него некоторого
постоянного положительного' числа, меньшего еди-
ницы. Предельное значение этого числа опреде-
ляется при скорости вращения, когда лопасть те-
ряет устойчивость от центробежных сил, действую-
щих на сжатие.
Последовательные приближения, вычисляемые
по преобразованным таким путем уравнениям, схо-
дятся при любых скоростях вращения. В целях со-
кращения вычислений автор предлагает брать в
качестве первого приближения первый член пра-
вой части уравнения, умноженный на постоянный,
но вначале неизвестный коэффициент; по первому
приближению находить второе приближение и
после введения указанного выше постоянного числа
определить значение коэффициента из условия ра-
венства деформаций первого и второго приближе-
ний на конце лопасти или в другой ее точке.
В английском журнале «The Journal of the Royal
Aeronautical Society» № 406, 1944 г. была помещена
статья Ходсона, в которой дается описание трех
методов определения напряжений изгиба, в лопа-
стях воздушных винтов. Первые два метода осно-
ваны на гипотезе о том, что разгружающий изги-
бающий момент от центробежных сил в каком-
либо сечении лопасти пропорционален результи-
рующему моменту в этом сечении. Сам автор ука-
зывает на то, что действительные соотношения при
изгибе лопасти не подтверждают правильности
указанной гипотезы. Третий метод, называемый
автором статьи «американским», применим только
к незакрученным лопастям и заключается в посте-
пенном определении моментов по участкам ло-
пасти при некоторых упрощающих расчеты пред-
положениях.
2. ВЫВОД ОСНОВНЫХ УРАВНЕНИЙ
Предварительно введем следующие обозначения:
R—максимальный радиус лопасти, см;
гй — расстояние от оси вращения до начала
лопасти, см;
х — удаление центра тяжести сечения лопасти
от начала координат по оси х, причем ось х
пересекает ось вращения лопасти под пря-
мым углом, и начало координат совпадает
с началом лопасти, см;
у — удаление центра тяжести сечения лопасти
в месте изгиба от координатной плоскости
xz, проходящей через ось вращения ло-
пасти, см;
z — удаление центра тяжести сечения лопасти
в месте изгиба от координатной плоско-
сти ху, см;
т) — деформация изгиба лопасти в направлении
оси у, см;
С —деформация изгиба лопасти в направлении
оси z, см;
<? — угол между координатной плоскостью ху
и главной осью инерции сечения лопасти
а—а, соответствующей наименьшему мо-
менту инерции сечения;
•S’— площадь сечения лопасти, см2;
1а — наименьший главный момент инерции сече-
ния лопасти, см^;
1Ь — наибольший главный момент инерции се-
чения лопасти, сэи4;
7 — удельный вес материала лопасти, г1см3;
~— 8-10~1 г сек2/м для стали с удельным ве-
сом 7,85 г/см3; для другого материала эту
величину надо умножить на отношение
удельного веса этого материала к удель-
ному весу указанной стали, т. е. 7,85;
<о —угловая скорость вращения лопасти, сек-1;
dC— центробежная сила элемента лопасти дли-
ной dx, расположенной на расстоянии х от
начала лопасти;
dPv — поперечная сила от протекающего йоздуха
или газа, действующая на элемент лопасти
в направлении оси у;
dP, — поперечная сила, действующая на элемент
лопасти в направлении оси z.
Обозначения остальных не указанных выше ве-
личин приведены в тексте. Величины со звездоч-
ками относятся к сечениям лопасти, относительно
которых определяются изгибающие моменты.
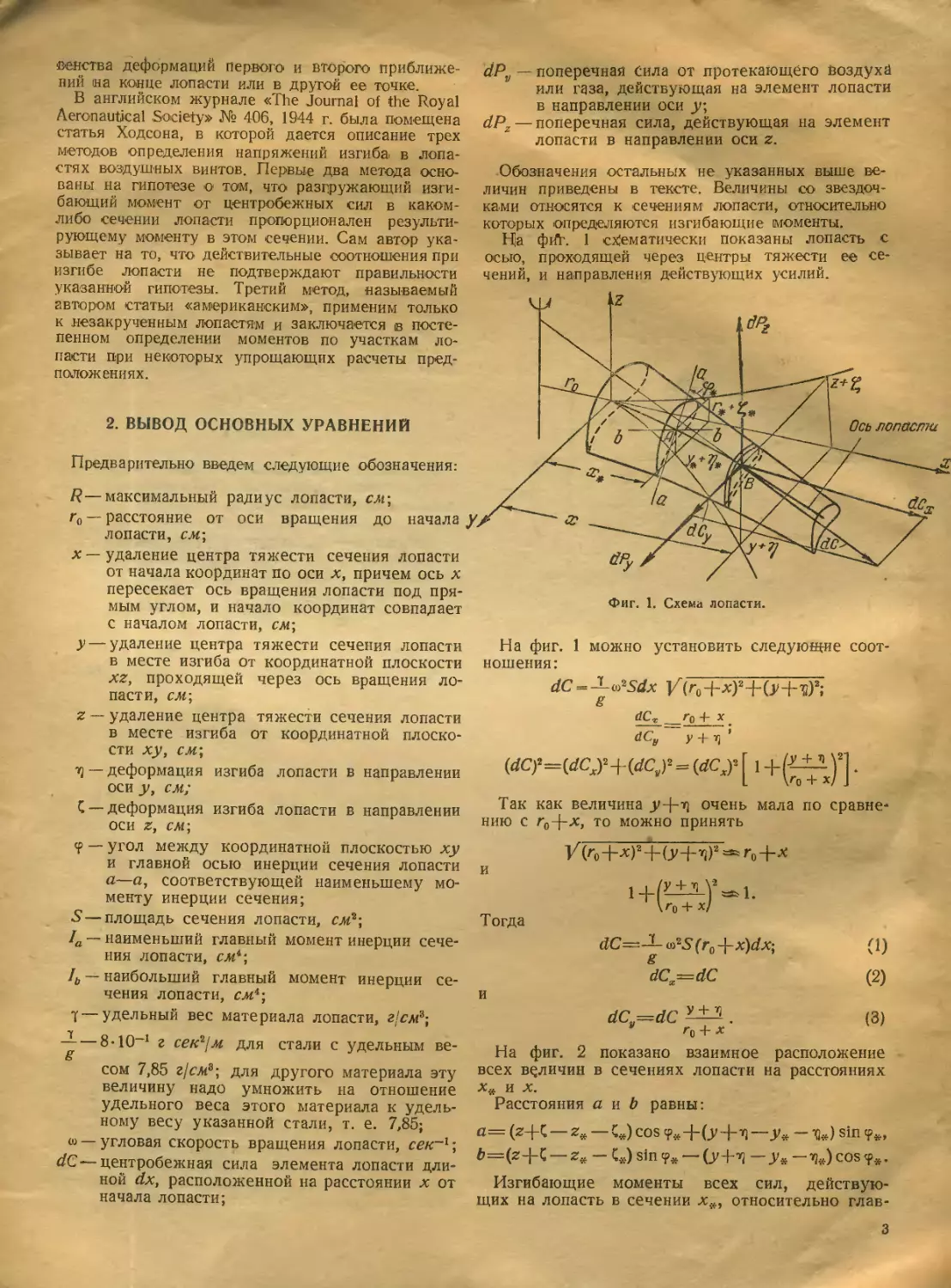
На фгГг. 1 схематически показаны лопасть с
осью, проходящей через центры тяжести ее се-
чений, и направления действующих усилий.
Фиг. 1. Схема лопасти.
На фиг. 1 можно установить следующие соот-
ношения:
dc=^2sdx /(r0+*)2+Cy-H)2;
g
dCy __r0 + x _
dCy У + Tl ’
L vо + х/ J
Так как величина у4-т] очень мала по сравне-
нию с Гр-Н*, то можно принять
V('o+*)s+0'-H)2“= То+ *
и
1+/y±2LY2^l.
\Тр+ х)
Тогда
dC=^-a2S(r0+x)dX; (1)
g
dCx=dC (2)
и
dC=dC У . (3)
v тр + л
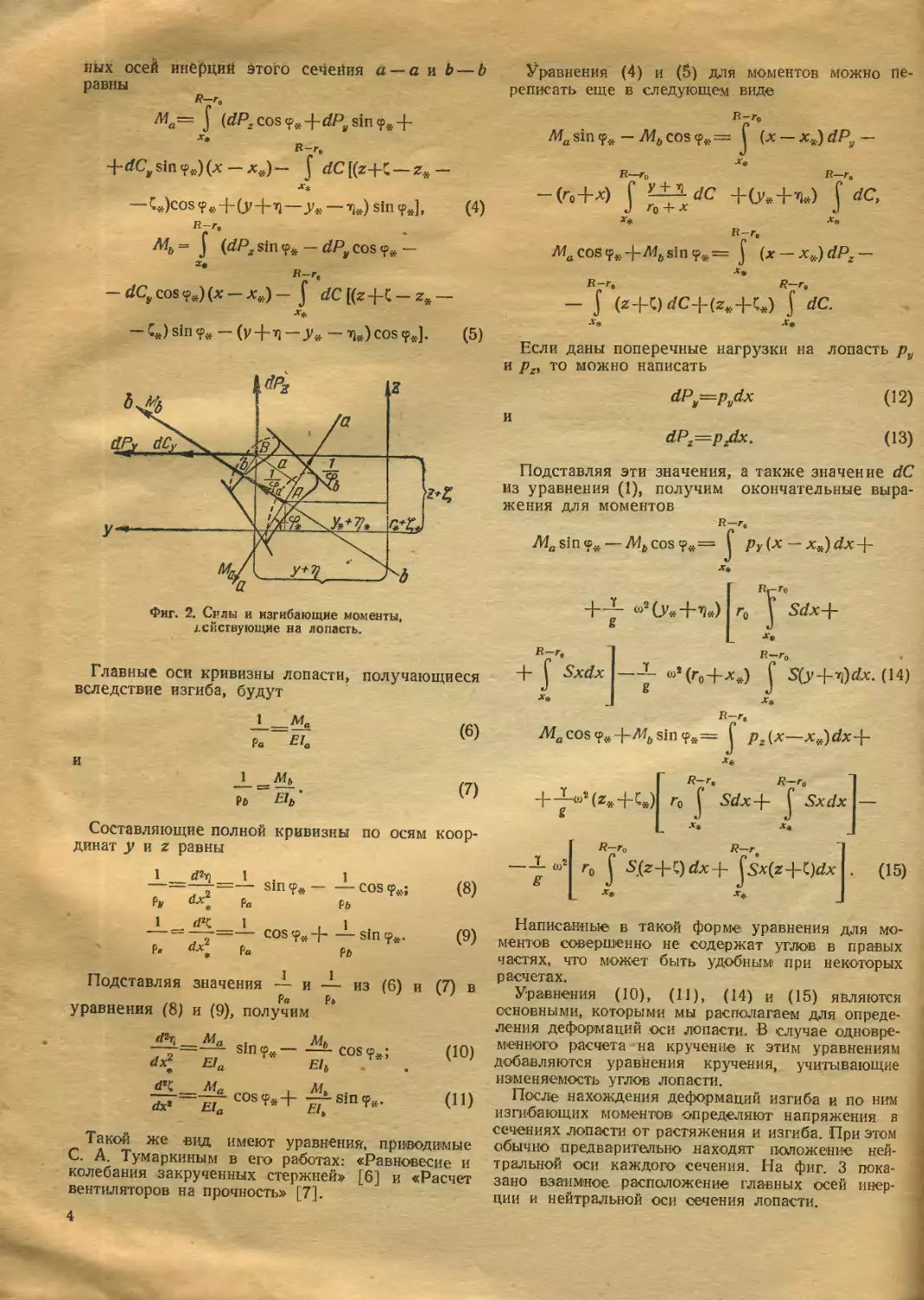
На фиг. 2 показано взаимное расположение
всех величин в сечениях лопасти на расстояниях
х* и х.
Расстояния а и b равны:
а= (z-фС — z* — Q cos Ч-7! — — И J sin
fr=(z-|-C — z,, - Q sin — СУ-Н — J* -%) cos <f>s.
Изгибающие моменты всех сил, действую-
щих на лопасть в сечении относительно глав-
3
ных осей инерций этого сечейия а —а и b — b
равны
Ма~ J (rfP,cos<p..<.+iZ/JJ/sirio;.4-
R-r»
+rfCJ/sinc?,:.)(x — хй)- J rfC[(z+C —zs —
— Ce)cos<f>#+(y-H—y* — iJe) sincpj, (4)
V’
M.= J (dP2 sin <p* — dPy cos <f>* —
*• R ,
KP ’
— dCv cos <?*) (x — x.,) — J dC [(z 4-C — z... —
— C#) sin <f>« — (y + TQ — y* — 7)w)cos (5)
Фиг. 2. Силы и изгибающие моменты,
действующие на лопасть.
Уравнения (4) и (5) для моментов можно пе-
реписать еще в следующем виде
R—Го
Ма sin COS ?«• = J (% — *«) dPu —
х* R
-(Го+*) Гш-dc +(^+^) VdC,
J Го + х J
i* •*»
R-r,
TWoC0Scp*-|-Af6sincpw= J (x — x*)dPz —
B-r„ R-r,
- f (2+C)JC4-(zs.+C#) f de.
Если даны поперечные нагрузки на лопасть pv
и pzi то можно написать
dPy=Pvdx (12)
и
dPz=Pjdx. (13)
Подставляя эти значения, а также значение dC
из уравнения (1), получим окончательные выра-
жения для моментов
J4zsin'?w — 7ИйСО8срй= i
X*
R.- Го
2
g
Главные оси кривизны лопасти, получающиеся
вследствие изгиба, будут
х»
R—r0
J S(J-HW(14)
X*
Н-г.
и
Ра Е1а
1 _М„
Pi EIb’
Macos cp*+/tf6sin cps
R-r,
g
R—ra
I Sxdx
Составляющие полной кривизны по осям коор-
динат у и z равны
Л*
1 1 . 1 ...
sm<?*-------cos ср(8)
Р» Ра Pb
1 d2C 1 . 1 ,
---=-у = — cosep,-}------sin ср#. (9)
Р» ^х* Р° Pi
Подставляя значения — и — из (6) и (7) в
Ра Рь
уравнения (8) и (9), получим
-Л-о?
g
R-r,
ro f
(15)
dZ7j __ Мд
dx?
*
dx*
E'a
Ma
Ela
sin ср.
COS ср*4-
Mb
~ eoscp#;
Elt
Mb .
—L Sin cp....
EL
(Ю)
(11)
Такой же .вид имеют уравнения, приводимые
С. А. Тумаркиным в его работах: «Равновесие и
колебания закрученных стержней» [6] и «Расчет
вентиляторов на прочность» [7].
Написанные в такой форме уравнения для мо-
ментов совершенно не содержат углов в правых
частях, что может быть удобным! при некоторых
расчетах.
Уравнения (10), (И), (14) и (15) являются
основными, которыми мы располагаем для опреде-
ления деформаций оси лопасти. В случае одновре-
менного расчета на кручение к этим уравнениям
добавляются уравнения кручения, учитывающие
изменяемость углов лопасти.
После нахождения деформаций изгиба и по ним
изгибающих моментов определяют напряжения в
сечениях лопасти от растяжения и изгиба. При этом
обычно предварительно находят положение ней-
тральной оси каждого сечения. На фиг. 3 пока-
зано взаимное расположение главных осей инер-
ции и нейтральной оси сечения лопасти.
4
Угол 0 между направлением полного момента М
и осью наименьшей жесткости а—а опоеделяется
из выражения
tg©-^ (16)
и угол й между нейтральной осью п—п и осью
наименьшей жесткости определится по формуле
Фиг. 3. Взаимное расположение осей сечения
лопасти.
Полная центробежная сила лопасти рассматри-
ваемого сечения равна
(18)
Напряжения от растяжения и изгиба в точках,
находящихся в различных квадрантах I, II, III
и IV на расстоянии а от оси а—а и b от оси b—Ъ,
определяются по следующим формулам:
о =
в квадранте I
б__С____Маа МьЬ.
8 1Ь
в квадранте II
а£.маа м*ь
S 1а ц
в квадранте III
С , маа мьь
s^ia 1„
в квадранте IV
а : __ С ,Мад. МЬЬ
8^ 1а "Г 1Ь
(19)
При использовании нейтральной оси напряжения
в точках сечения лопасти, находящихся на рас-
стоянии с от нейтральной оси, определяются по
формуле
а= — + Л4д-— . (20)
S Ia cos
Для определения максимальных напряжений
нужно в- эти формулы подставить значения рас-
стояний а и b для точек, наиболее удаленных от
осей а—а и b—Ь, и значение расстояния с для
точек, наиболее удаленных от оси п—п.
3. ОПИСАНИЕ ОСНОВНОГО МЕТОДА
ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ ИЗГИБА
ВРАЩАЮЩЕЙСЯ ЛОПАСТИ
Вначале сделаем некоторые преобразования урав-
нений (10), (11) и (14), (15). Введем следующие
обозначения:
При этих обозначениях с учетом формулы (18)
уравнения (14) и (15) примут вид —
Ма sin M6cos <р*=М^+С11*—
R-r0
—L (U2(ro-j-x*) С Sfidx-, (23)
g J
-г»
Ma COS <f>* 4-Mb Sin <рй = Mz, -f-C£?—
/ R—Г 0 /? г о \
—L о?/ r0 j J SxWx .. (24)
Из уравнений (23) и (24) определяются мо-
менты:
Sin + С Sin
---^-<о2(Г04-Хй) Sln<ps I
е
х*
4-7И,<, COS <р*4-С cos <рХ~
/ В-г0 Р—Г„
—X- w2cos<₽* | r0 ( SCdx-j- f SxZax'), (25)
g \ J г
\ Xfj.
Мъ= sin ?* + С sin
(R-Го Я-Го \
rQ С SCrfx-f- С Sxtdx —
—Afy, cos <рй—С cos + у 0)2 (го +
R—гв
-j-xs) cos J St]dx. (26)
*»
5
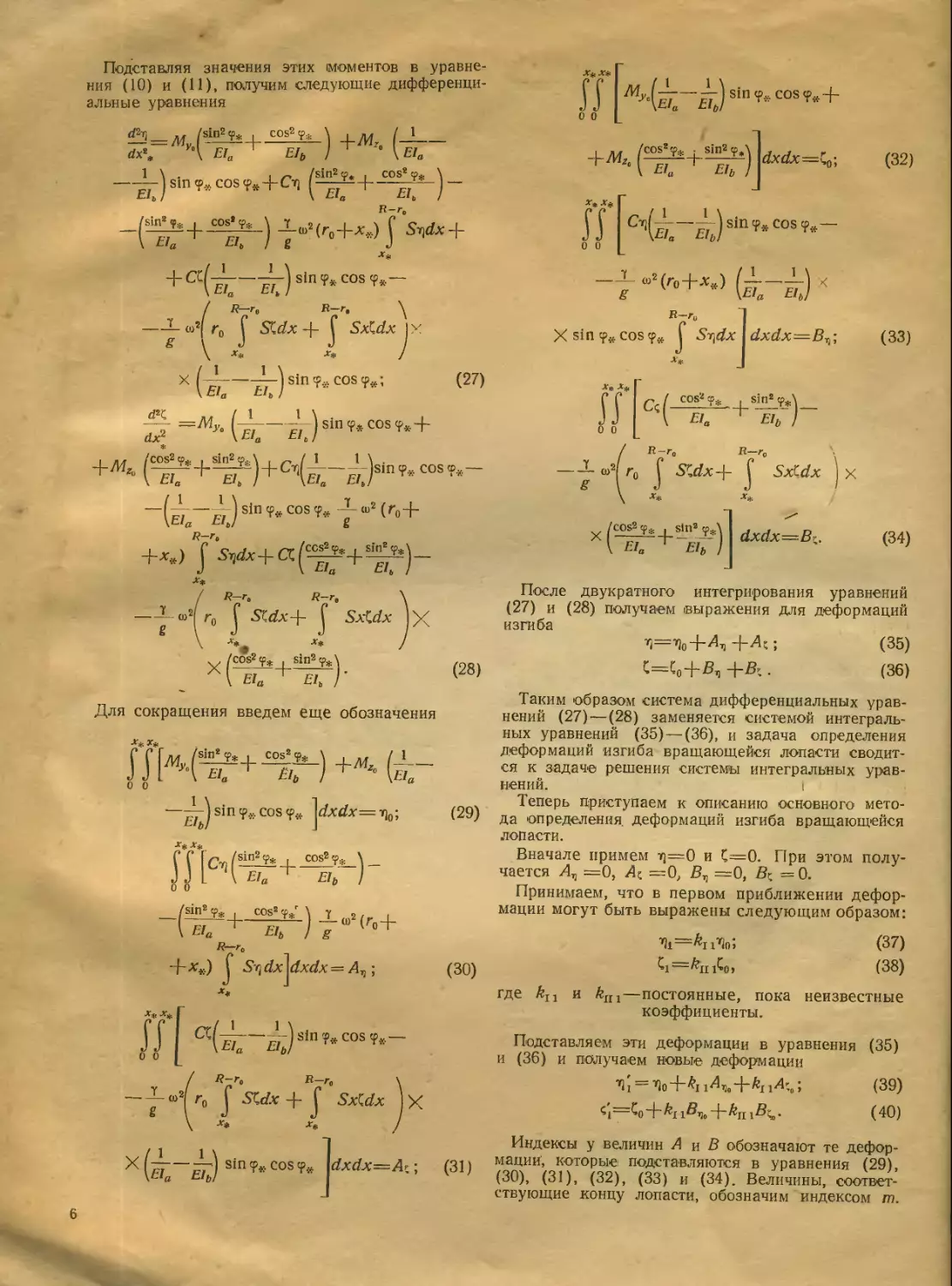
Подставляя значения этих моментов в уравне-
ния (10) и (11), получим следующие дифференци-
альные уравнения
sin cos <p* -f-
/sin2?* । cos2?* ) д_/иг _______
dx\ Ч Е1а ' Е1Ь ) + ” \Е1а
1 \ . I (sin2?* I cos8?* \
— sm^cos^+Ciq —-—I-----------------— -
tLIb / \ ^la ^1ь I
R-r0
_/sm^ + cos«^\ JL(u2(ro_[_%s) C S7]d% +
\ EIa Elb / £ J
dxdx=t0;
(32)
+M2b
'cos8?* sin2 ?*\
, EIa “T" Elb J
(27)
Sln^COS Cf>s —
B-r0
X sin cos i S^dx
dxdx=Bri;
(33)
Для сокращения введем еще обозначения
sin8?* cos8?*
Ela
£/ь
cos?.x dxdx—f]0-,
(29)
0 0
sin2?* cos2 ?*
. Ela Elb
sin8 ?*
Ela
R-r<
cos8 ?*
Elb
— 0)2 (ro +
g
dxdx — ;
(30)
И I ctf—-------------) sin cos t₽y.—
\EJa Elb •*
0 0 L
/ R-r„ R-r„ X
—<w2l rQ j Stdx 4- J Sxt.dx j X
sin COS q>#
dxdx=A?;
(31)
После двукратного интегрирования уравнений
(27) и (28) получаем выражения для деформаций
изгиба
71=,»1о4-А; (35)
С=С04А 4-В; . (36)
Таким образом система дифференциальных урав-
нений (27)—(28) заменяется системой интеграль-
ных уравнений (35)—(36), и задача определения
деформаций изгиба вращающейся лопасти сводит-
ся к задаче решения системы интегральных урав-
нений. I
Теперь приступаем к описанию основного мето-
да определения, деформаций изгиба вращающейся
лопасти.
Вначале примем iq=0 и С=0. При этом полу-
чается Д =0, Ац --О, ВГ1 =0, Вг =0.
Принимаем, что в первом приближении дефор-
мации могут быть выражены следующим образом:
(37)
(38)
где и йП1—постоянные, пока неизвестные
коэффициенты.
Подставляем эти деформации в уравнения (35)
и (36) и получаем новые деформации
’ll=''lo+^i 1^ч<, 4*^ (39)
Ч:=^о4-^ Ао+^П1^- (40)
Индексы у величин А и В обозначают те дефор-
мации, которые подставляются в уравнения (29),
(30), (31), (32), (33) и (34). Величины, соответ-
ствующие концу лопасти, обозначим индексом т.
6
Приравнивая соответствующие деформации кон-
ца лопасти, получаем два уравнения для опреде-
ления неизвестных коэффициентов ktl и &п1:
kl 1ЧОш==Чопг+^1 1Л^‘> (41)
&II — ДяТ^П l^w»’ (4^)
После нахождения коэффициентов k1T и &П1
определяем исходные деформации vjj и Cj и соот-
ветствующие им деформации и q. На фиг. 4
показан примерный вид этих деформаций.
Площадь, ограниченная кривыми т(1 и или Сг
и Ср определяет степень приближения к точ-
ному решению. При точных значениях деформаций
эта площадь будет равна нулю.
Для уменьшения площади между кривыми
и -rjj (Cj и Ц) можно определить новые исходные
деформации т]3 и по формулам
713=^3 ’ii)]; (43)
(44)
где ац и аП1—произвольные постоянные коэф-
фициенты.
Кривые, определяемые выражениями в квад-
ратных скобках, полностью проходят соответст-
венно между кривыми и iqj или и Cj.
С исходными деформациями ri2 и С2 поступаем
так же, как и с исходными деформациями тд и q
и получаем
ч^чо+Дг [лъ +а11Л(Ч;_Ч1)] +
4~^п 2[Дс, +“пИ (/—с,)]’ (43)
-j-Оц (46)
Вообще для очередной операции расчета при
исходных деформациях vtn и получаются сле-
дующие формулы:
71л==4о+лчй + л':и; (47)
(48)
чп+1 =ki „+1 hn+йх „ (ч'„—чЛ; (49)
Сп+1 =£ц„+1 [С„+«п л;-сл)]; (50)
ч'„+1=Чо+^»+1 [Лч»+«1„^_Чв)] +
-j-^Iln+l ^Л'»4-аПпЛ(с'_гя)| » (81)
c;+I =Co+Ai п+1 +«! „в(^_чв) ] +
+ЙПВ+1 ГВ?и-|-а11пВ{|.^_Св) j. (52)
Постоянные коэффициенты ki2, kII2 и
^пл+i определяются из уравнений, получающихся
при приравнивании деформаций конца лопасти ?]2
и Чг, С2 и С2, Чп+1 и С„+] и Сл+1. Постоянные
коэффициенты аг и ац вообще произвольны и ими
можно или задаваться в начале операции расчета
(обычно в пределах 0—0,3), или подбирать их в
конце операции расчета из условия наилучшего
совпадения деформаций tq и С и С. В последнем
случае опеоация расчета по формулам (43), (44),
(45) и (46) несколько усложняется, но практи-
чески всегда получаются удовлетворительные
результаты.
4. ДОКАЗАТЕЛЬСТВО СХОДИМОСТИ
РЕЗУЛЬТАТОВ ПОСЛЕДОВАТЕЛЬНЫХ
ОПЕРАЦИЙ ПРИ ПРИМЕНЕНИИ ОСНОВНОГО
МЕТОДА ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИЙ
ИЗГИБА ВРАЩАЮЩЕЙСЯ ЛОПАСТИ
Вначале рассмотрим лопасть, изгибающуюся
только в направлении оси у. При исходной дефор-
мации ?]„ получается соответствующая ей дефор-
мация
ч;=Чо+Л»- (53)
Для конца лопасти имеем
Чп?» Чпщ Чо "Чп‘ (54)
Исходная для следующей операции деформация
равна
4«+i =^„+1 [ч„+я1„(ч;—Ч„)]- (55)
Из уравнения (51) получается следующая де-
формация, соответствующая исходной:
Ч п+1 — Чо+^i «4-1 p4>iB +«i • (56)
Коэффициент ki n+i получается равным
Ь. . _____
Kl п+1--------------------------
ЧОт “I ,
т (Ч„—Чя)
(57)
Для удобства сравнения будем рассматривать не
сами деформации, а их отношения к значениям
деформаций у конца лопасти.
Из уравнений (53), (54), (55), (56) и (57) по-
лучаются следующие разности отношений дефор-
маций:
Ч„+1 Чп “in(4«—Чп) ,_.о.
, (и о)
W) т rinm гтт
Чп Ч»+1
Чпт Ч(п+1) т
«1п-4 - Г А , '
vjo (ч„-чя)
=----------------- ——---------------- . (59)
Чп т ЧОт А '
т (Ч;,—Чв)
При положительном значении деформации ве-
личины ATin и А • всегда отрицательны, так как
’п
они выражают влияние центробежных сил, про-
тиводействующих изгибу лопасти от поперечных
7
сил. Величина -4 ' , также будет отрицательна
при положительной разности тф—-%. Эта разность
равна нулю в начале и в конце лопасти, во всех
других точках она имеет положительное значение,
увеличивающееся по направлению к средней части
лопасти. Поэтому отрицательная величина
от начала лопасти до средней ее части возрастает
по абсолютному значению быстро, а затем—к кон-
цу лопасти замедленно. Величина тф от начала
лопасти до конца непрерывно возрастает, причем
скорость этого возрастания не снижается к кон-
цу лопасти.
Из уравнения (58) следует, что разность ——-----
,l(n+l)m
——- представляет положительную величину.
Чпт
Из уравнения (59) и из протекания входящих в
это уравнение величин следует, что разность в
квадратных скобках уравнения (59) будет всегда
отрицательна, и вследствие этого разность ——
Чпт
----— будет положительна.
*1(77+1) т
На фиг. 5 для сравнения дано изображение
примерного вида отношений деформаций
Vnm
, > и
Т‘пт ’1(п+1)т *1(77+ 1) 771
соответствующая величина ) будет положи-
тельной; она быстро увеличивается от начала
рассматриваемой части к середине, а затем замед-
ленно к концу этой части.
Из уравнения (58) следует, что при отрицатель-
Фиг. 6. Относительные деформации лопасти
для случая пересечения кривых ti'„ и т(„.
По кривым фиг. 5 видна сходимость результа-
тов последовательных операций расчета при доста-
точно малом значении коэффициента а1п.
Может случиться, что кривая i\n будет пересе-
каться с кривой ц'п. Для той части лопасти, где
больше »)„, полностью действительны приведенные
выше соображения о сближении тф+1 и т)„+1 по
сравнению с и iq„. В той части лопасти, где
разность имеет отрицательное значение,
последняя уменьшается по абсолютной величие
по направлению к началу и концу этой части, и
и характера изменения входящих в это уравнение
величин, видно, что как и раньше, разность в
квадратных скобках уравнения (59) будет всегда
т;„ к; , ,
отрицательной и поэтому разность —---------—
г‘пт г‘(п -р 1) т
также будет отрицательной.
Для случая пересечения кривых t\n и на
фиг. 6 дано изображение примерного вида отно-
шений деформаций
*)« *1л-ц и *1я+1
гтт *1пт *)(тг+1)т ^(п+Цт
По кривым фиг. 6 видна сходимость результа-
тов последовательных операций расчета при
достаточно малых значениях коэффициента а1п
также в случае пересечения кривых тф и ?]„.
Таким же образом можно доказать сходимость
результатов последовательных операций расчета, в
случае изгиба лопасти только в направлении
оси г.
Теперь можно рассмотреть общий случай изгиба
лопасти.
Сравнивая уравнения (49) и (50) с уравнением
(55), видно, что при положительных значениях ко-
эффициентов k I п+1 uk ип+1 эти уравнения имеют оди-
наковую форму. Сравнивая уравнения (47) и (48)
с уравнением (53) и уравнения (51) и (52) с урав-
нением (56), видно, что эти уравнения также имеют
одинаковую форму.
Дополнительные третьи члены в уравнениях
(49), (50) и (51), (52) имеют соответственно
одинаковое строение со вторыми членами и по-
этому они не изменяют общий характер этих вы-
8
ражений по сравнению с соответствующими им
уравнениями (55) и (56).
Отсюда следует, что можно считать доказанной
сходимость результатов последовательных опера-
ций расчета в общем случае изгиба вращающейся
лопасти при достаточно малых значениях коэффи-
циентов а1я и а]1п.
При больших значениях коэффициентов а1п и
I
«п„ кривые ——— и ——— настолько близко
^(п+Ц т '’(л-1-1) т
могут подойти к соответствующим им кривым
—------ и —;-----, что на некоторых участках
^n+l) т ^(л+1) т
^лТ1 ^л+1 ^л4-1
лопасти разности ------------—---- и — —
т ^(«+1) т ^(п+\)т
£
-----——- могут изменить свой знак, и абсолют-
^(л+1) m
пая их величина после изменения знака может
стать очень большой. Для предотвращения по-
следнего случая значения коэффициентов а1л и
аЛп должны быть соответственно ограничены.
Из практики расчетов можно установить, что
коэффициенты а1п и ап„ всегда удовлетворяют
условиям приведенных выше ограничений, если
их значения выбрать в пределах 0—0,3, а во
многих случаях—еще выше. Кроме того, коэф-
фициенты а1п и аПп можно подбирать в конце
операции расчета, как указано ниже.
В связи с настоящей работой проф. В. П. Вет-
чинкин указал на зависимость предельных значе-
ний коэффициентов а от скорости вращения ло-
пасти, причем последнюю он делит на малую, сред-
нюю и большую' (см. раздел 1). При малых скоро-
стях можно брать любую величину а от 0 до 1,
т. е. можно применять только коэффициенты к;
при средних скоростях необходимо применять ко-
эффициенты а. и к\ при больших скоростях схо-
димость ухудшается, а при очень больших скоро-
стях, выходящих далеко за пределы возможных
скоростей, практически невозможно будет приме-
нять те очень м1алые коэффициенты а, при кото-
рых можно получать сходимость результатов по-
следовательных операций.
5. ПРИМЕРЫ ПРИМЕНЕНИЯ МЕТОДА
РАСЧЕТА
Пример 1. В качестве первого примера расче-
та взята лопасть в самом общем ее виде, т. е.
закрученная лопасть переменного сечения, ось
центров тяжести сечений которой отклоняется от
радиального направления. Такая лопасть примерно
соответствует лопатке осевого компрессора.
Весь расчет сведен в табл. 1, в которую внесены
также все расчетные величины. Результаты трех
последовательных операций расчета показаны на
фиг. 7, 8 и 9. На фиг. 10 показаны результаты вто-
рой операции расчета при подборе коэффициен-
тов «ц и а1Г1- в конце операции.
На фиг. 11 изображены результаты трех после-
довательных операций расчета той же лопасти
обычным) методом последовательных приближений.
По кривым фиг. 11 видно, что при применении
обычного метода последовательных приближений
получаются расходящиеся результаты.
Фиг. 9. Деформации лопасти (третья операция расчета).
2 Зак. 183
9
Таблица 1
X 0 1 2 3 4 5 6 7 8 9 10
Полуось а 2 2 2 2 2 2 2 2 2 2 2
Полуось b 0,2 0,19 0,18 0,17 0,16 0,15 0,14 0,13 0,12 0,11 0,1
S 1,256 1,194 1,132 1,069 1,006 0,913 0,88 0,817 0,755 0,692 0,628
1а 0,01258 0,01079 0,00917 0,00771 0,00644 0,0053 0,004304 0,00346 0,002717 0,00209 0,00157
h 1,256 1,194 1,132 1,069 1,006 0,943 0,88 0,817 0,755 0,692 0,628
Р* 60° 58°30' 57° 55°30’ 54° 52°30' 51° 49°30' 48° 46°30' 45°
У 0 0,005 0,01 0,015 0,02 0,025 0,03 0,035 0,04 0,045 0,05
Z 0 0,01 0,02 0,03 0,04 0,05 0,06 0,07 0,08 0,09 0,1
Ру 6 5,8 5,6 5,4 5,2 5 4,8 4,6 4,4 4,2 4
р, 5 4,9 4,8 4.7 . 4,6 4,5 4,4 4,3 4,2 4,1 4
у “2 = Ю; г0 = 20; 7?-го=10
Чо 0 0,0036 -0,0136 0,0296 0,0509 0,077 0,1067 0,1391 0,1736 0,2091 0,2449
^0 0 о’002 0,0081 0,0181 0,0318 0,0486 0,0683 0,0903 0,114 0,1384 0,1632
0 -0,0022 -0,0092 —0,0211 -0,0378 —0,0588 -0,0836 -0,1113 -0,1411 -0,1719 -0,2029
0 -0,0011 —0,0046 -0,0107 -0,0196 —0,0311 -0,045 —0,0608 —0,078 —0,0961 —0,1145
въ 0 —0,0013 -0,0052 -0,0124 —0,0227 —0,0365 -0,053 -0,0719 -0,0902 —0,1135 —0,1352
’О 0 -0,0007 —0,00293 —0,00688 -0,01276 -0,02054 -0,03019 -0,04149 -0,05412 -0,06745 —0,08105
0,2449 кп = 0,2449-0,2029 к1г - 0,1145 Лн;0,1632 кП1 = 0,1632-0,1352 Лц-0,08105 /спГ, fcn = 0,438; ЛП1 =0,425
41 0 0,001576 0,00596 0,01296 0,02227 0,0337 0,0467 0,061 0,076 0,0916 0,10725
Ч,' 0 0,002169 0,00762 0,0158 0,02601 0,03803 0,05097 0,06345 0,07855 0,09293 0,10725
ti 0 0,000876 0,003547 0,007937 0,01391 0,02127 0,02988 0,0395 0,04985 0,0606 0,0715
0 0,001141 0,00461 0,009825 0,01656 0,0241 0,0326 0,0416 0,05092 0,06062 0,0715
0 -0,001 —0,00418 —0,00953 -0,01703 —0,02643 -0,03733 —0,04943 -0,06233 -0,7565 —0,08911
лс, 0 —0,00032 —0,00137 -0,0032 —0,00588 -0,00988 -0,01366 -0,01863 -0,02408 -0,02984 —0,03571
Въ 0 -0,00064 — 0,00254 —0,00588 -0,01065 -0,01675 -0,024 —0,03222 -0,04113 -0,05043 -0,05985
0 -0,0005 —0,00212 -0,00497 -0,009 —0,014.15 —0,0203 -0,0273 -0,03482 -0,04269 -0,05069
0,10725 *t2 = 0,2449— [0,438(1 —«! j) 0,2029-4-0,08911ап1 Л12 — [0,425(1—а1Г1)0,1145-J-0,03571aTI j] /сЫ2; 0,0715 feU2 = 0,1632 —
- [0,438 (1 — aT1) 0,1352 + 0,05985aj] fc[2—[0,425(1 — ап1) 0,08105 + 0,05069 аИ1[ /сП2; аГ1 = “ш = 0,3; Л12=1,04; /гпг—0,919
42 0 0,001823 0,006715 0,01458 0,02432 0,0364 0,0499 0,0642 0,07985 0,0956 0,1116
ч 0 0,00124 0,007727 0,0461 0,02658 0,03894 0,0521 0,06654 0,0812 0,09638 0,1116
^2 0 0,000877 0,00355 0,007812 0,01361 0,02032 0,0282 0,03688 0,0461 0,05565 0,0657
с' я 0 0,0010577 0,0042096 0,00908 0,015305 0,028255 0,030125 0,038565 0,04726 0,05643 0,0657
“12 = 0,3; ац 2 — 0,3
А1)а 0 —0,001 —0,0042 —0,00963 -0,01733 -0,02698 -0,03826 -0,05089 -0,06437 -0,07831 -0,09241
0 -0,00045 -0,00191 -0,00443 —0,00808 -0,01275 —0,01837 -0,02477 -0,03175 -0,03905 —0,04645
Вч. 0 -0,00063 -0,00253 -0,00593 -0,01083 -0,01713 -0,02468 -0,03328 —0,04263 -0,0 —0,06274
0 -0,00028 —0,0012 -0,00284 —0,00524 -0,00844 -0,01234 —0,0169 -0,02192 -0,02725 —0,03268
0,1116 fcI3 = 0,2449 -0,09241 й13 — 0,04645fcU3; 0,0657 ЛПз = 0,1632 —0,06224/г13 — -0,03268; fcj 3 = 0,961; кц з — 1,0575
% 0 0,00173 0,00676 0,0143 0,024 0,0367 0,0486 0,06235 0,0771 0,092 0,1071
ч' 0 0,002164 0,00754 0,01567 0,02569 0,03762 0,05057 0,064 0,07825 0,0926 0,1071
Сз 0 0,000984 0,00398 0,00865 0,01464 0,02208 0,0304 0,03945 0,04902 0,059 0,0695
с' Я 0 0,001099 0,0044 0,0094 0,01585 0,02322 0,03156 0,04042 0,04961 0,0593 0,0695
10
Фиг. 11. Деформации лопасти, определенные по обычному
методу последовательных приближений.
Пример 2. Для второго примера расчета взя-
та радиальная лопатка переменного сечения. В этом
случае имеем одно уравнение, получающееся из
выражений (10), (11), (14) и (15) при
<р*=90°, рг—0, z4-C=0 и у=0;
dx2,
*
В целях удобства расчета полную деформацию
представляем в виде д==Др+Дс» гДе Ър получается
в результате двукратного интегрирования выра-
R-r0
жения ---- f ру(х—x^dx, а щс—в результате
3^
двукратного интегрирования выражения —
Нг„
—В J St]dx.
х*
Принимаем для расчета ру=3 кг/см2,~ и2=80.
Размеры лопатки указаны на фиг. 12.
Фиг. 12. Схема лопатки.
Кроме деформаций в этом примере определены
также напряжения в лопатке. Результаты расчета
сведены в табл. 2.
На фиг. 13, 14, 15 и 16 показаны деформации
лопатки, определенные в результате четырех по-
следовательных операций расчета, причем во всех
четырех операциях коэффициент а был принят
равным 0,2. На фиг. 17 показан результат второй
операции расчета при подборе коэффициента ах в
конце операции.
На фиг. 18 показаны напряжения в различных
сечениях лопатки, причем ашах означает полное
максимальное, a om!n минимальное напряжение,
аь и аьр—соответственно изгибающие напряжения
с учетом и без учета действия центробежных
сил, Oj—растягивающее напряжение.
2*
и
Таблица 2
Л 0 1 2 3 4 5 6 7 8 9 10 И 12
S 1,04 0,912 0,792 0,68 0,576 0,48 0,392 0,312 0,24 0,176 0,12 0,072 0,032
Е1а 11717 8755,2 6388,8 4533,3 3110,4 2048 1280,53 748,8 400 187,73 72 19,2 2,133
А 0,3486 0,409 0,4812 0,5695 0,676 0,811 0,987 1,223 1,548 2,018 2,74 3,734 0
В 0,04095 0,064 0,1001 0,179 0,2572 0,43 0,749 1,39 2,8 • 6,395 17,78 70,85 675
\р 0 0,009 0,0405 0,0945 0,1755 0,2865 0,4315 0,6245 0,8634 1,1638 1,5363 1,9908 2,516
--Ч. К1 0 0,03 0,15 0,4 0,83 1,5 2,46 3,79 5,59 7,97 11,04 14,82 19,2
2,516/q = 2,516 — 19,2 /<t = 0,116; ^ = 0,2
0 0,001042 0,00469 0,(11094 0,02034 0,0332 0,05035 0,0723 0,1 0,1349 0,1779 0,2306 0,2911
4* 0 0,006025 0,02312 0,0482 0,0794 0,1128 0,1485 0,1855 0,2159 0,2406 0,2563 0,2734 0,2911
V 0 0,001427 0,005999 0,01691 0,03216 0,04911 0,06998 0,09493 0,12318 0,15521 0,19359 0,23915 0,2911
0 0,006 0,025 0,06 । 0,12 0,21 0,333 0,497 0,707 0,97 1,3 1,7 2,165
0,2911 к2 = 2,516 — 2,165*2; к2= 1,023; = 0,2
42 0 0,00146 0,00614 0,01732 0,03291 0,0503 0,0716 0,0972 0,1261 0,159 0,1983 0,2448 0,298
0 0,00285 0,0149 0,033 0,0525 0,0745 0,0935 0,1155 0,1394 0,1698 0,2053 0,2498 0,298
1 кз 0 0,001738 0,007892 0,020456 -0,03683 0,055 0,07598 0,0998 0,1284 0,16116 0,1997 0,2458 0,298
1 “Г 71с’ лв 0 0,006 0,026 0,064 0,126 0,216 0,339 0,502 0,712 0,975 1,304 1,702 2,167
0,298 /<3 = 2,516 — 2,167 ks; k3 = 1,02; а8 = 0,2
4з 0 0,001773 0,00804 0,02087 0,03759 0,0561 0,0775 0,1019 0,131 0,1643 0,2038 0,2505 0,301
0 0,00288 0,01398 0,02925 0,0471 0,0665 0,0887 0,1125 0,1374 0,1698 0,2063 0,2558 0,301
0 0,0019942 0,009027 0,022546 0,039492 0,05819 0,07974 0,10402 0,13228 0,1654 0,2043 0,25156 0,304
1 0 0,006 0,027 0,066 0,13 0,222 0,347 0,511 0,721 0,986 1,319 1,719 2,167
0,304 /<4 = 2,516 —2,167 *4=1,02
44 0 0,00203 0,00919 0,02293 0,0402 0,0592 0,0812 0,106 0,1347 0,1683 0,208 0,256 0,3093
4' 0 0,0029 0,01302 0,02737 0,0432 0,0605 0,0815 0,1045 0,1294 0,1608 0,1963 0,2418 0,3093
М 0,00817 0,00561 0,0036 0,00281 0,00262 0,0025 0,0025 0,00277 0,004 0,00585 0,0117 0,0247
0
0» 2123 1346 792 562 472 410 350 332 400 468 702 988 0
3930 3926 3880 3798 3645 3463 3226 2938 2583 2148 1642 995 0
°шах 6053 5272 4672 4360 4117 3863 3576 3270 2983 2616 2344 1983 0
°min 1807 2580 3088 3236 3173 3063 2876 2606 2183 1680 940 7 0
°ьр 4800 49S0 5170 5360 5560 5750 5900 6010 60С0 5750 5000 3123 0
12
Фиг. 15. Деформации лопатки (третья операция расчета).
6. ОПИСАНИЕ МЕТОДА РАСЧЕТА
С ПОМОЩЬЮ ИНТЕРПОЛЯЦИОННОЙ
ФОРМУЛЫ ЛАГРАНЖА
Кроме существующих методов расчета возможны
также другие пути определения напряжений и де-
формаций во вращающихся лопастях. Ниже при-
водится описание метода расчета, разработанного
автором на основе использования интерпотяцп^н-
ной формулы Лагранжа.
Если на какой-нибудь кривой взять несколько
точек на небольшом расстоянии друг от друга, то
промежуточные координаты приближенно можно
выразить через ординаты и абсциссы выбранных
точек по интерполяционной формуле Лагранжа
(Х-хЛ^-Х2, - (х—хи) ,
У Уо, ., , . —,
(х0—Xj) (х0-х2). .(х0—хп)
(х--хи)(х-х2)...(х-х,:) . ,
1 (*1—-Ко) (*i - *2) - (jq ~хп)
(х-х0) V -XQ „.(х-х^)
(хп—Х0) (Хи-Х1) ... (Хп-Х^ )
Задаваясь несколькими точками с неизвестными
вначале ординатами, можно ординаты промежуточ-
ных точек выразить через эти неизвестные ордина-
нг/смг
ты. Подставляя ординаты точек в уравнения (35)
и (36), можно получйть, новые ординаты, выра-
женные через принятые неизвестные ординаты.
Приравнивая первоначальные ординаты и получен-
ные из уравнений (35) и (36), можно получить
столько уравнений, сколько было принято неизве-
стных, и из них определить неизвестные вначале
ординаты.
На фиг. 19 представлены результаты расчетов,
проведенных по этому методу. Рассчитывалась ло-
патка, выбранная для расчета во втором примере,
причем было принято1 четыре неизвестных вначале
ординаты.
В книге В. П. Ветчинкина и Н. Н. Полякова [4]
приведено точное решение задачи определения
прогиба вращающегося невесомого упругого стерж-
ня с грузами на концах. Ниже даны окончателЕ
ные формулы расчета прогиба такого' стержня, по-
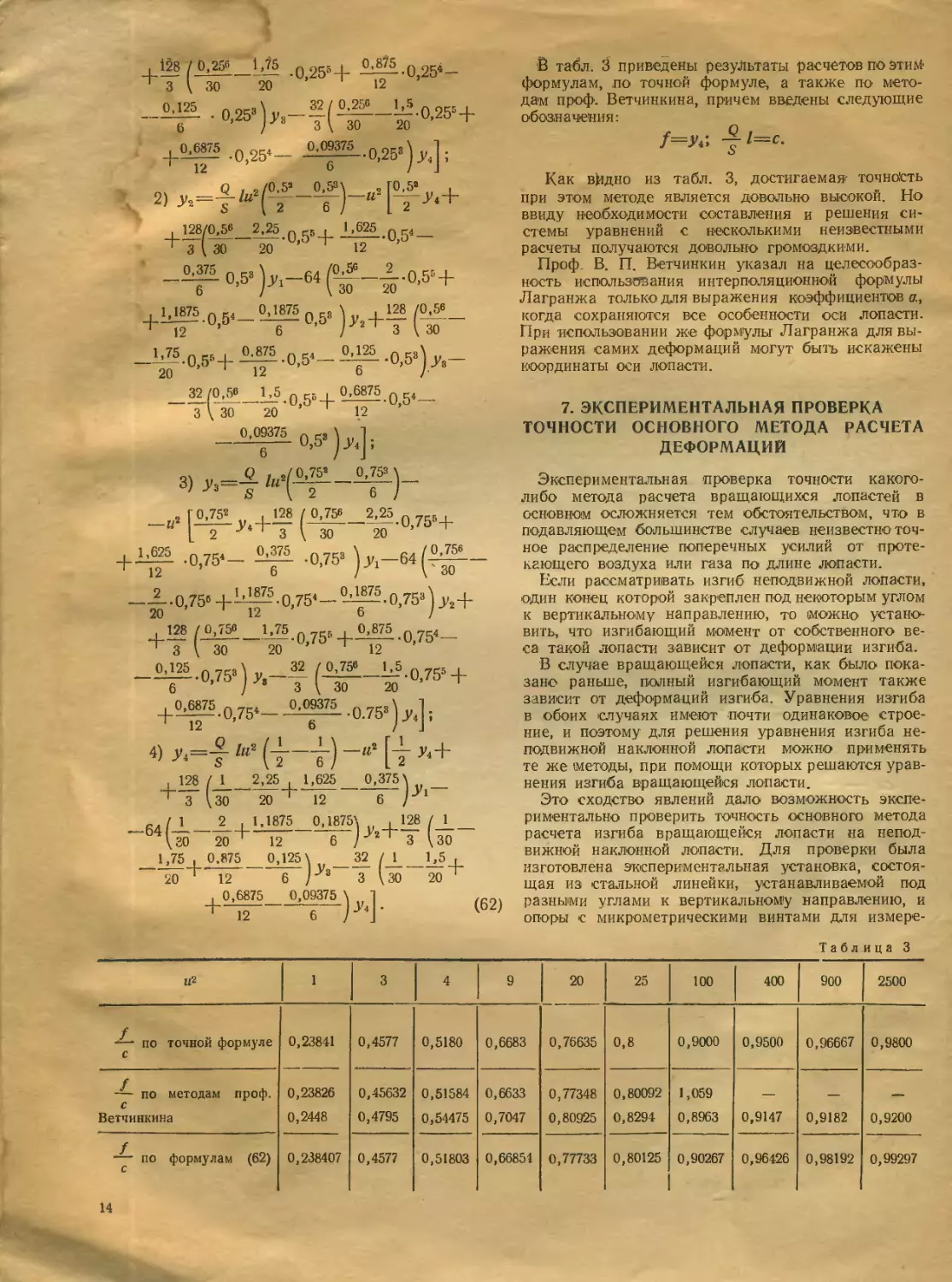
лученные при использовании формулы (61).
Q , „ /0.252 0,25з \ , Г 0,252 , ।
(“I-----Т)-“ I —у<+
J_28/0_i25«__2225 . 0 25s 4- —С-5- 0 254 —
1 3 \ 30 20 12
0.375 л ос, \ сл/0,25е 2 пО1-5|
- -0,25' ^1-64(----.0.25' +
4 .0,25*— — — .0,25’) L+
13
.128 / 0,25е
3 I 30
• 0,25s + AA-0,254-
20 12
. o,253
6
32 I 0,256
"з’\ 30
0,25s +
, 0JB875 ,0 254_ °’09375- 0,25s K.
1 12 6 )
. 128/0,36_2^25<0 5b . 11^1.0,54 —
‘ 3 к 30 20 1 12
_0 58 \ 64 /0,56----2_.o 5s_|_
6 ’ / \ 30 20
_M^.0,54-°-^0,53 W“
12 6 / 3 \ 30
b75.Q,5s +
20
32 /0,56
" 3
®1875 .0,54— £Д25 0 58\
12 6 /
_L_5.o,55+ —-0,54-
30 20 12
- °-093A 0,5s
6 /
„ Q . ,/0,752
3) y„ — — lu? —--------------
1 -У3 S V 2
0,75» \
6 /
r»^. V.+™ / W—2-^.o,75-+
[ 2 7 T 3 \ 30 20
1A3 ,0754_ .0753 А 54
12 ’ 6 } \ 30
—A.0,75s 4-Чж • 0,754— • 0,753) уг-
20 12 6 /
/ ?.’7A_ -’A.q 756_lA?I£.c,754—
1 3 \ 30 20 12
32 I 0,756 1,5 „ —=
y.-----—-----------0,75aH
‘ 3 ( 30 2G
0,09375 n„c»\
-------0.75s ,y4 ;
6 } J
1 1 \ r 1 I
_0J25
6
1 0^6875 0,754
12
4) V,=— 7wz 1 1-1
’ •X4 S V 2 6 ) L ‘
,128 / 1 2,25 , 1,625 0,375
\30 20 * 12 6
„„ / 1 2 . 1,1875 C,1875\ „ ,
J4fe-»+—- - - )л+
1,75 0.875 0,125 \ _32
2(T ' 12 6 Г3 3 (30
. 0,6875 0,09375 \ 1
+-b-------6-H
(62)
Ь табл. 3 приведены результаты расчетов по этил!
формулам, ,по точной формуле, а также по мето-
дам проф. Ветчинкина, причем введены следующие
обозначения:
f=yit
О
Как видно из табл. 3, достигаемая- точность
при этом методе является довольно высокой. Но
ввиду необходимости составления и решения си-
стемы уравнений с несколькими неизвестными
расчеты получаются довольно громоздкими.
Проф. В П. Ветчинкин указал на целесообраз-
ность использования интерполяционной формулы
Лагранжа только для выражения коэффициентов д,
когда сохраняются все особенности оси лопасти.
При использовании же формулы1 Лагранжа для вы-
ражения самих деформаций могут быть искажены
координаты оси лопасти.
7. ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА
ТОЧНОСТИ ОСНОВНОГО МЕТОДА РАСЧЕТА
ДЕФОРМАЦИЙ
Экспериментальная проверка точности какого-
либо метода расчета вращающихся лопастей в
основном осложняется тем обстоятельством, что в
подавляющем большинстве случаев неизвестно точ-
ное распределение поперечных усилий от проте-
кающего воздуха или газа по длине лопасти.
Если рассматривать изгиб неподвижной лопасти,
один конец которой закреплен под некоторым углом
к вертикальному направлению, то (можно устано-
вить, что изгибающий момент от собственного ве-
са такой лопасти зависит от деформации изгиба.
В случае вращающейся лопасти, как было пока-
зано, раньше, полный изгибающий момент также
зависит от деформаций изгиба. Уравнения изгиба
в обоих случаях имеют почти одинаковое строе-
ние, и поэтому для решения уравнения изгиба не-
подвижной наклонной лопасти можно применять
те же методы, при помощи которых решаются урав-
нения изгиба вращающейся лопасти.
Это сходство явлений дало возможность экспе-
риментально проверить точность основного метода
расчета изгиба вращающейся лопасти на непод-
вижной наклонной лопасти. Для проверки была
изготовлена экспериментальная установка, состоя-
щая из стальной линейки, устанавливаемой под
разными углами к вертикальному направлению, и
опоры с микрометрическими винтами для измере-
Таблица 3
U2 1 3 4 9 20 25 100 400 900 2500
“ по точной формуле с 0,23841 0,4577 0,5180 0,6683 0,76635 0,8 0,9000 0,9500 0,96667 0,9800
~ по методам проф. с Ветчинкина 0,23826 0,2448 0,45632 0,4795 0,51584 0,54475 0,6633 0,7047 0,77348 0,80925 0,80092 0.8294 1,059 0,8963 0,9147 0,9182 0,9200
по формулам (62) 0,238*07 0.4577 0,51803 0,66854 0,77733 0,80125 0,90267 0,96426 0,98192 0,99297
14
йия прогибов линейки. I [роведенные эксперименты
показали, что расхождения между расчетными и
экспериментальными величинами получаются очень
небольшие, что подтверждает вполне удовлетвори-
тельную точность разработанного метода расчета.
8. ЗАКЛЮЧЕНИЕ
Проведенные практические расчеты и экспери-
ментальная провеока дают основание считать, что
приводимый в настоящей работе новый общий ме-
тод расчета на изгиб вращающихся лопастей при-
меним к любого вида лопастям воздушных вин-
тов и лопаткам турбин и компрессоров. Практи-
чески вполне удовлетворительное приближение к
истинному решению можно получить в результате
нескольких операций расчета.
Автор выражает глубокую благодарность про-
фессорам: Уварову В. В., Тумаркину С. А., Вет-
чинкину В. П. и Штаерману И. Я. за ценные кри-
тические замечания при выполнении данной ра-
боты.
ПИТЕРАТУРА
1. Н. В. Алмазов, К расчету лопаток паровых турбин
на прочность, Журнал „Тепло и сила", № 5, стр. 1 —8, 1929.
2. Г. И. К у з ь м и н и Д. Ю. Панов, Расчет воздуш-
ного винта на прочность с учетом разгрузки центробежными
силами. Труды ЦАГИ, выпуск 160, 1934.
3. Д. Ю. Панов, Расчет воздушного винта на проч-
ность, Труды ЦАГИ, выпуск 288, 1937.
4. В. П. Ветчинкин и Н. Н. Поляков, Теория и
расчет воздушного гребного винта, Оборонгиз, 1940.
5. Г. Виарда, Интегральные уравнения, Гостехтеорет-
издат, 1933.
6. С. А. Тумаркин, „Равновесие и колебания закру-
ченных стержней". Труды ЦАГИ, вып. 341. 1937.
7. С. А. Тумаркин. Расчет вентиляторов на проч-
ность. Труды ЦАГИ, вып. 496, 1940.
СОДЕРЖАНИЕ
Стр.
Стр.
Введение.............................. • ... 1
1. Обзор существующих методов расчета вращающихся
лопастей на изгиб ................................ 1
2. Вывод основных уравнений....................... 3
3. Описание основного метода определения деформаций
изгиба вращающейся лопасти........................ 5
4. Доказательство сходимости результатов последова-
тельных операций при применении основного метода
определения деформаций изгиба вращающейся
лопасти ......................................... 7
5. Примеры применения метода расчета ........ 9
6. Описание метода расчета с помощью интерполяцион-
ной формулы Лагранжа . ....................... 13
7. Экспериментальная проверка точности основного
метода расчета деформаций....................... 14
8. Заключение.................................... 15
Литература...................................... 15
Редактор Л. М. Согалов
Г76928. Подп. в печать 18,'V 1948 г.
Формат 60Х921 /8.
Техн. ред. В. Ф: Перепелкин
Печ. л. 2. Уч.-изд. л. 1,95. Тип. зн. в печ. л. 48200.
Бесплатно. Зак. 183/9113
Типография Оборонгиза