/













































































































































































































































































Текст
М. Н. ШУЛЬЖЕНКО и А. С. МОСТОВОЙ
КУРС
КОНСТРУКЦИЙ
САМОЛЕТОВ
f
2-е издание дополненное и переработанное
Допущено Министерством
высшего и среднего специального образования СССР
в качестве учебника для авиационных техникумо'в
ИЗДАТЕЛЬСТВО
<МАШИНОСТРОЕНЙЕ>
Москва 1965
УДК 629.13(075)
Книга «Курс конструкций самолетов» является учебником
для учащихся авиационных техникумов по специальности «Са-
молетостроение». Она написана в соответствии с учебной про-
граммой и состоит из трех разделов:
I. Основы строительной механики самолета,
II. Основы проектирования самолетов;
III. Конструкция и расчет агрегатов самолета на проч-
ность.
Как и в первом издании курс конструкций самолетов изла-
гается авторами комплексно с привлечением необходимых све-
дении из аэродинамики, строительной механики и теории
прочности самолета.
Книга будет полезна для среднего технического состава
работников авиационной промышленности
Рецензент инж. В. Л. Григорьев
Редактор инж. А. И. Спехов
ПРЕДИСЛОВИЕ
Настоящая книга «Курс конструкций самолетов» является вто-
рым, переработанным изданием и 'написана в соответствии с про-
граммой этого курса для авиационных техникумов.
Книга состоит из трех разделов.
В первом разделе изложены основы строительной .механики
в объеме, необходимом для приближенного расчета самолетных
конструкций на прочность. Практические приемы расчета иллюст-
рированы примерами. Для самостоятельных упражнений учащих-
ся даны задачи.
Во втором разделе изложены основы проектирования самоле-
тов. В этом же разделе приведены общие сведения о самолетах:
классификация, общие требования, наименование и назначение
частей самолета, нагрузки, действующие на самолет, и основные
материалы, применяемые в самолетостроении.
В третьем разделе рассматриваются агрегаты самолетов:
крылья, оперение, фюзеляж, силовые установки (включая системы
питания и смазки), управление, шасси. Каждый агрегат рассмат-
ривается в следующей последовательности; назначение; требова-
ния, предъявляемые к агрегату; типы и внешние формы; нагрузки,
действующие на агрегат; классификация конструкций агрегата
и их сравнительный анализ; примеры выполненных конструкций;
конструкция элементов агрегата (узлов, деталей); расчет агрегата
на прочность.
В связи с многообразием современных конструкции самолетов
и их агрегатов были отобраны и систематизированы наиболее ха-
рактерные конструктивные решения.
В книге приведены краткие исторические сведения о развитии
внешних форм и конструкции агрегатов самолета. Они изложены
в различных главах курса в непосредственной связи с изучаемым
материалом.
1563 з
Иллюстративный материал и конкретные цифровые данные,
приведенные в книге, заимствованы из открытой отечественной
и зарубежной литературы.
Все размерности в книге даны как в системе единиц МКГСС,
так и в международной системе единиц СИ (последние даны
в скобках).
Книга, естественно, не свободна от недостатков и не претендует
на исчерпывающую полноту изложения.
Все пожелания и замечания по книге просьба направлять в из-
дательство по ацресу: Москва, И-51, Петровка, 24, издательство
^Машиностроение».
РАЗДЕЛ I
ОСНОВЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ САМОЛЕТА
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ К РАЗД. I
3 — усилие в стержнях фермы;
Y —подъемная сила крыла;
М —момент;
А1ИЗг — изгибающий момент;
•АДр — крутящий момент,
Q —поперечная сила;
f
Рк<> —критическая сила,
Р — внешняя сила;
R — равнодействующая сила;
О—полетный вес самолета,
i — длина стержня,
л — число узлов, *
т — число стержней;
&о, — прогибы балки;
А—модуль упругости перво: о рода;
Anin —момент инерции сечения стержня относительно оси меньшей жесткости,
Г — площадь поперечного сечения,
с — коэффициент заделки;
i — минимальный радиус инерции сечения стержня;
акр —критическое нормальное напряжение;
апц—предел пропорциональности;
ов—предел прочности материала;
8 — толщина стенки; толщина обшивки;
W — экваториальный момент сопротивления сечения стержня;
Ушах — максимальный прогиб сжато-изогнутого стержня;
? — редукционный коэффициент;
Thp — критическое касательное напряжение;
q—погонная нагрузка.
Глава I
ОСНОВНЫЕ ПОНЯТИЯ СТРОИТЕЛЬНОЙ МЕХАНИКИ
1. ПРЕДМЕТ СТРОИТЕЛЬНОЙ МЕХАНИКИ. ЭЛЕМЕНТЫ СООРУЖЕНИЙ
Строительная механика самолета является наукой, позволяю-
щей определять усилия и напряжения в элементах конструкции,
нагруженной аэродинамическими и другими силами. Иными сло-
вами, строительная механика дает возможность оценить элементы
конструкции самолетов с точки зрения их прочности, жесткости
и устойчивости.
Конструкции самолетов представляют собой сооружения, со-
стоящие из стержней, балок, ферм, рам и тонкостенных панелей
(фиг. 1).
Стержнем (фиг. 1,а) называется элемент конструкции, ра-
ботающий на растяжение или сжатие, длина которого значитель-
но превосходит два других его измерения.
Балкой (фиг, 1,6) называют элемент конструкции, работаю-
щий на изгиб от действия поперечных сил.
Ферм а (фиг. 1, а) — геометрически неизменяемое сооруже-
ние, состоящее из стержней, соединенных в узлах шарнирами.
Рама (фиг. 1,в) —геометрически неизменяемая система, со-
стоящая из стержней или балок, соединенных жесткими узлами,
вследствие чего углы между стержнями (балками) после дефор-
мации не меняются, теряет неизменяемость, если жесткие узлы
предположить шарнирными.
Тонкостенная панель (фиг. 1, г) — конструкция, основ-
ным элементом которой является тонкая стенка (обшивка), под-
крепленная профилями.
Характерной особенностью современного самолетостроения
является применение тонкостенных конструкций с обшивкой, рабо-
тающей при изгибе и кручении.
Это позволяет создать прочные и жесткие конструкции, обла-
дающие малым весом.
2. ПОНЯТИЕ О РАСЧЕТНОЙ СХЕМЕ. ОСНОВНОЙ МЕТОД
СТРОИТЕЛЬНОЙ МЕХАНИКИ
При решении задач, связанных с расчетом конструкций само-
лета на прочность, для упрощения расчетов часто прибегают к схе-
матизации конструкций, т. е. к различным допущениям, позволяю-
щим создать так называемые расчетные схемы.
Так, например, в ферменной конструкции нагрузка считается
приложенной только в узлах фермы и соединения стержней пола-
гаются шарнирными. Такое допущение значительно облегчает
определение усилий в стержнях и не вносит большой погрешности,
так как на практике деформации ферм весьма малы. Благодаря
6
р
1
I
I
Фиг.
|акому допущению считается, что усилия в стержнях фермы дей-
ствуют лишь по оси стержня.
Действительно, если предположить, что усилие S направлено
не по оси стержня (фиг. 2, а), то возникнет момент составляю-
щей S" относительно шарнира О. Так как момент относительно
шарнира должен быть равен нулю, то следовательно, S" = 0
и
а) б)
Фиг 2
При рассмотрении условий работы сечения крыла пренебре-
гают влиянием хвостовой, а иногда носовой частей профиля крыла
Кроме того, среднюю часть профиля abed с криволинейными кон-
турами заменяют близким по площади прямоугольником с некото-
рой средней высотой (фиг, 2,6). Крыло рассматривается как кон-
сольная балка, защемленная в фюзеляже. Защемление принимает-
ся абсолютно жестким, хотя в действительности фюзеляж также
несколько деформируется в месте соединения с крылом, что не-
сколько уменьшает нагрузки в корневой части крыла.
Основным методом, применяемым в строительной механике,
является метод сечений, известный учащимся из курса сопротив-
ления материалов. Сущность его сводится к сечению конструкции
Фиг. 3.
плоскостью (или несколькими плоскостями), к отбрасыванию
одной части конструкции и замене действия отброшенной части на
оставшуюся часть неизвестными пока усилиями. Затем рассматри-
вается равновесие оставшейся части конструкции, из которого оп-
ределяются неизвестные усилия. Применение этого метода ясно из
следующего примера.
Рассмотрим крыло, нагруженное аэродинамической нагрузкой.
Заменим нагрузку равнодействующей аэродинамических сил У
(фиг. 3). Найдем изгибающий момент ЛГМЗг и поперечную силу Q
8
в сечении а—а. Для этого через а—а проводим плоскость, отсекаю-
щую правую часть крыла, отбрасываем левую часть крыла и заме-
няем действие ее на правую часть неизвестными Л4ИЗг и Q. Из рав-
новесия отсеченной правой части имеем
Л1ИЗГ=П;
Q = K
Глава II
ОБРАЗОВАНИЕ И РАСЧЕТ ПЛОСКИХ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ ФЕРМ
I. ОБРАЗОВАНИЕ ПЛОСКИХ ФЕРМ
Условия закрепления плоских ферм
Геометрически неизменяемая система, образованная из прямо-
линейных стержней, шарнирно соединенных между собой, назы-
вается фермой. При этом внешние силы считаем приложенными
в узлах фермы.
Под неизменяемостью фермы подразумевается отсутствие пере-
мещений узлов при отсутствии деформаций стержней.
Допущение шарнирности соединений стержней является удоб-
ной схемой, близко отражающей действительность.
Допускаемая при таком предположении степень погрешности
невелика, а вносимые им упрощения большие.
Как было показано выше на стр. 7—8, это предположение поз-
воляет считать, что стержни фермы работают только па растяже-
ние или сжатие.
Фермы бывают плоские и пространственные.
Рассмотрим опорные устройства плоских ферм (фиг. 4). Опор-
ные устройства бывают:
1. Шарнирные (неподвижные). В этом случае опорная ре-
акция проходит через ось шарнира, может иметь любое направле-
ние и, следовательно, имеет два неизвестных —величину и направ-
ление (или две составляющие по осям X, У). Такая опора может
быть заменена двумя непараллельными стержнями, содержащими
также два неизвестных усилия — S2 (фиг. 4,а). Усилия в опор-
ных стержнях в этом случае таковы, что их равнодействующая
• равна опорной реакции.
2. Катковые (подвижные). В этом случае опорная реакция
проходит через центр катка и всегда перпендикулярна опорной
поверхности, так как каток не воспринимает сил, параллельных
опорной поверхности. Такая опора эквивалентна одной неизвест-
ной (направление реакции известно) и может быть заменена одним
стержнем, перпендикулярным опорной поверхности, усилие в ко-
0
тором равно опорной реакции (фиг. 4,6). Так как для определения
опорных реакций плоской системы имеются три уравнения стати*
ки, то опорные устройства плоской системы должны содержать
Фиг. 4.
з сумме три неизвестных — тогда система будет статически опре-
делима в отношении опорных реакций. Этому условию удовлетво-
ряет закрепление системы с помощью одного шарнира и одного
катка или с помощью трех катков (фиг. 5).
При этом необходимо, чтобы:
а) три опорные реакции не пересекались в одной точке. В про-
тивном случае момент внешней силы, не проходящей через эту
точку (точка О на фиг. 6,а), не может быть уравновешен и усло-
вие 2?И=0 не удовлетворяется;
Фиг 6.
б) три опорные реакции не были параллельны между собой.
В противном случае внешняя сила, не параллельная им, не может
быть уравновешена и условие не удовлетворяется
(фиг. 6,6).
Классификация ферм
Рассмотрим классификацию плоских ферм по отношению к ос-
нованию. По этому признаку фермы подразделяются на: 1) сво-
бодные,— которые остаются неизменяемыми, будучи снятыми
с опор (фиг. 7, а), и 2) прикреплении е,— которые являются
неизменяемыми только тогда, когда находятся на опорах
Фиг. 7.
(фиг. 7,6). Прикрепленные фермы получают удалением стержней
ab, cd, ef свободных ферм (фиг. 7, а) и введением шарнирной опо-
ры вместо катка.
Рассмотрим также классификацию плоских ферм по способу
их образования. В этом случае фермы подразделяются на-
1) п р ост ы е,—образованные путем последовательного присоеди-
нения к основному треугольнику I, II, III (фиг. 8, а) или к двум
неподвижным точкам А, В (фиг. 8,6) каждого узла двумя стерж-
нями, не расположенными на одной ’Прямой. Если узел образован
I
б) в)
Фиг. 8.
двумя стержнями, лежащими на одной прямой (фиг 8, а), то он
не воспринимает нагрузки, перпендикулярной к линии стержней,
образующих его; 2) ело ж н ы е,— образованные соединением
простых ферм. Соединение (фиг. 9) можно осуществлять при по-
мощи трех непараллельных и не пересекающихся в одной точке
стержней ad, се, bf (это 'вытекает из условий опирания ферм, так
И
как одну из соединяемых простых ферм можно рассматривать
по отношению к другой как опорную поверхность) или с помощью
одного стержня kl и общего шарнира А, что также эквивалентно
трем стержням.
Более сложные случаи образования ферм выходят за пределы
курса и поэтому в книге не рассматриваются.
Условия геометрической неизменяемости
и статической определимости простых плоских ферм *
Рассмотрим простые фермы, обладающие минимальным числом
стержней, обеспечивающих их геометрическую неизменяемость.
Элементарная свободная ферма представляет собой треуголь-
ник I, II, III (см. фиг. 8,а) и является геометрически неизменяе-
мой, Простая ферма образуется путем присоединения к элемен-
тарной ферме каждого последующего узла с помощью двух стерж-
ней и остается геометрически неизменяемой.
В элементарной ферме имеются три узла и три стержня. При-
бавим к ней (п—3) узлов. Число примененных для этого стержней
равно 2(п—3). В результате получим число узлов, равное
3+(л—3)=п и число стержней ш = 34 2(п—3). Таким образом,
условие геометрической неизменяемости свободной плоской фермы
состоит в том, что
т = 2п—3, (1)
где in— число стержней;
п— число узлов.
Это условие дает минимальное, необходимое для геометри-
чески неизменяемой фермы число стержней при данном числе
узлов. Однако это условие может оказаться недостаточным. На-
пример, сооружение, изображенное на фиг. 10, удовлетворяя усло-
вию т=2п—3, оказывается механизмом.
Простые фермы заведомо геометрически неизменяемы, что еле
дует из условия их образования.
* В учебной и справочной литературе термины «геометрическая неизменяе-
мость» и «статическая определимость» часто обозначаются г. н. и с. о. соответ-
ственно.
Рассмотрим далее условие статической определимости сво-
бодной плоской фермы. Такая ферма будет статически определи-
мой, если усилия во всех ее стержнях и опорные реакции можно
определить при помощи уравнений статики. Напомним, что стати-
чески определимое опорное устройство эквивалентно трем
стержням.
Так как для каждого узла можно написать два уравнения ста-
тики (SPX = O, SPp = 0), то для п узлов свободной фермы будем
иметь 2п уравнений статики. Три из этих уравнений должны быть
использованы для определения усилий в элементах, прикрепляю-
щих свободную ферму,— усилий в трех опорных стержнях (для
определения опорных реакций). Следовательно, число уравнений,
используемых для определения усилий в стержнях, будет 2п—3.
Таким образом, число стержней статически определимой свобод-
ной фермы должно быть равно
m = 2n—3. (la)
Как видим, условия геометрической неизменяемости и статиче-
ской определимости совпадают.
Перейдем к рассмотрению аналогичных условий для прикреп-
ленной фермы.
Геометрическая неизменяемость простой прикрепленной фермы
обеспечивается последовательным присоединением узлов к фер-
ме AIB при помощи двух стержней (см. фиг. 8,6). Так как в по-
следней ферме имеются один узел и два стержня (узел 1 и стерж-
ни Al, В1) и присоединение (п—1) узлов происходит с помощью
2(п—1) стержней, то общее число узлов прикрепленной фермы
будет 1 + (п—1) узлов, а общее число стержней m = 2 + 2(n—1) =
= 2п.
Таким образом, для прикрепленной фермы получим условие
геометрической неизменяемости в виде
т = 2п. (2)
Далее, для п узлов прикрепленной фермы (не считая опорных)
можно написать 2п уравнений равновесия, которые могут быть
использованы при определении усилий в стержнях.
Отсюда следует, что число стержней -т прикрепленной фермы
из условия статической определимости
ш = 2п, (2а)
где п—число узлов, не считая опорных. И в данном случае усло-
вия геометрической неизменяемости и статической определимости
совпадают.
Итак, условия статической определимости и геометрической не-
изменяемости простых плоских ферм имеют следующий вид:
для свободной фермы т — 2п—3,
для прикрепленной фермы т=2п.
Поясним сказанное примерами и задачами.'
13
4
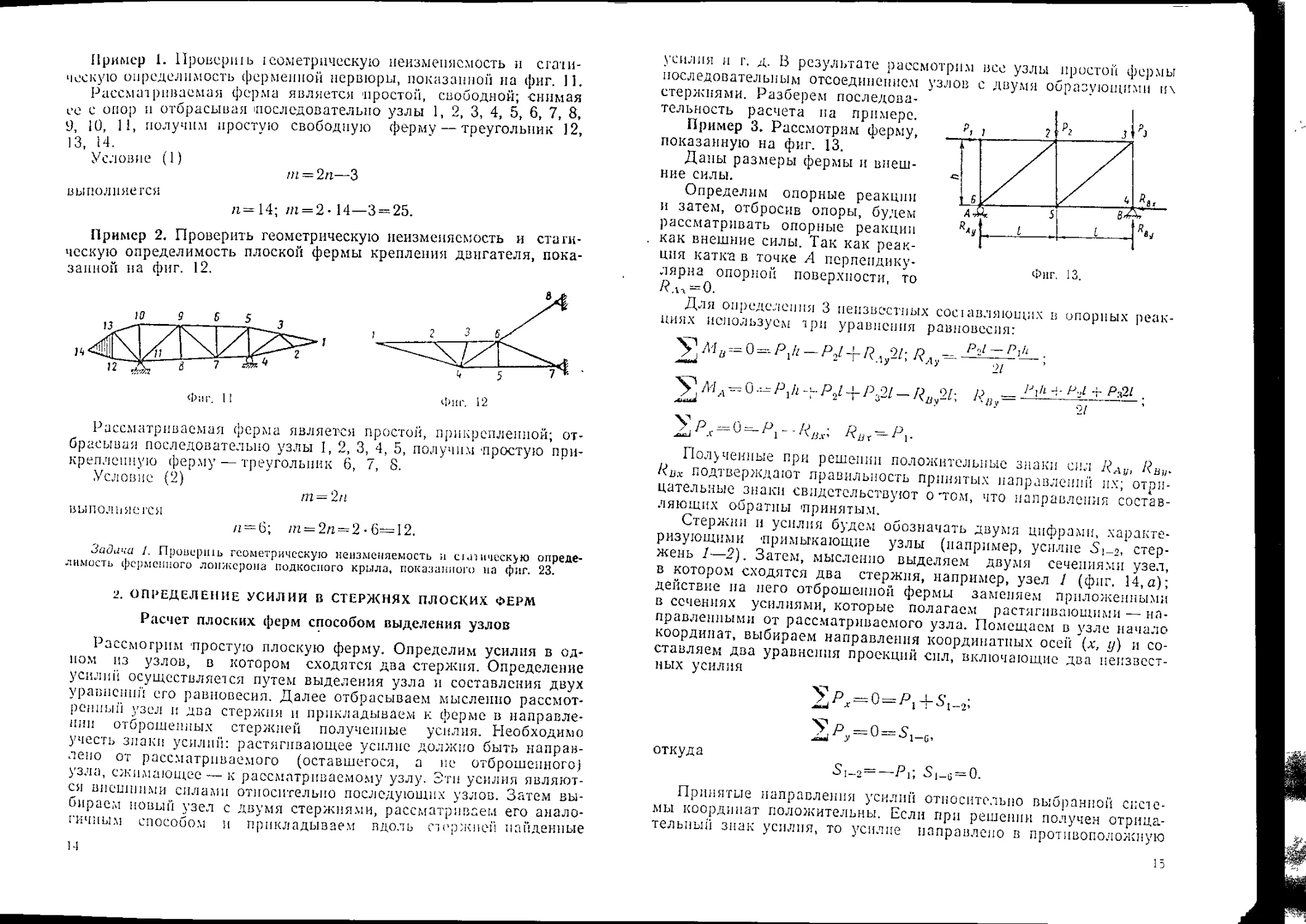
Пример 1. Провсршь юометрическую неизменяемость и сгази-
ческую определимость ферменной нервюры, показанной на фиг. 11.
Рассматриваемая ферма является простой, свободной; снимая
се с опор п отбрасывая 'последовательно узлы 1, 2, 3, 4, 5, 6, 7, 8,
9, 10, 11, получим простую свободную ферму — треугольник 12,
13, 14.
Условие (1)
т — 2п—3
выполняется
/г— 14; /п = 2-14—3 = 25.
Пример 2. Проверить геометрическую неизменяемость и стати-
ческую определимость плоской фермы крепления двигателя, пока-
занной на фиг. 12.
Фиг. 11
Chit. 12
Рассматриваемая ферма является простой, прикрепленной; от-
брасывая последовательно узлы 1, 2, 3, 4, 5, получим 'Простую при-
крепленную ферму — треугольник 6, 7, 8.
Условие {2)
т='2п
вы полняегся
/г = 6; пг — 2п=2 • 6—12.
Задача /. Пронершь геометрическую неизменяемость и сьлическую опреде-
лимость ферменного лонжерона подкосного крыла, показанного на фиг. 23.
2. ОПРЕДЕЛЕНИЕ УСИЛИИ В СТЕРЖНЯХ ПЛОСКИХ ФЕРМ
Расчет плоских ферм способом выделения узлов
Рассмотрим простую плоскую ферму. Определим усилия в од-
ном из узлов, в котором сходятся два стержня. Определение
усилий осуществляется путем выделения узла и составления двух
уравнений его равновесия. Далее отбрасываем мысленно рассмот-
ренный узел и два стержня и прикладываем к ферме в направле-
нии отброшенных стержней полученные усилия. Необходимо
учесть злаки усилий: растягивающее усилие должно быть направ-
лено от рассматриваемого (оставшегося, а не отброшенного)
узла, сжимающее — к рассматриваемому узлу. Эти усилия являют-
ся внешними силами относительно последующих узлов. Затем вы-
бираем новый узел с двумя стержнями, рассматриваем его анало-
гичным способом и прикладываем вдоль стержней найденные
14
усилия и г, д. В результате рассмотрим все узлы
простой фермы
последовательным отсоединением
стержнями. Разберем последова-
тельность расчета на примере.
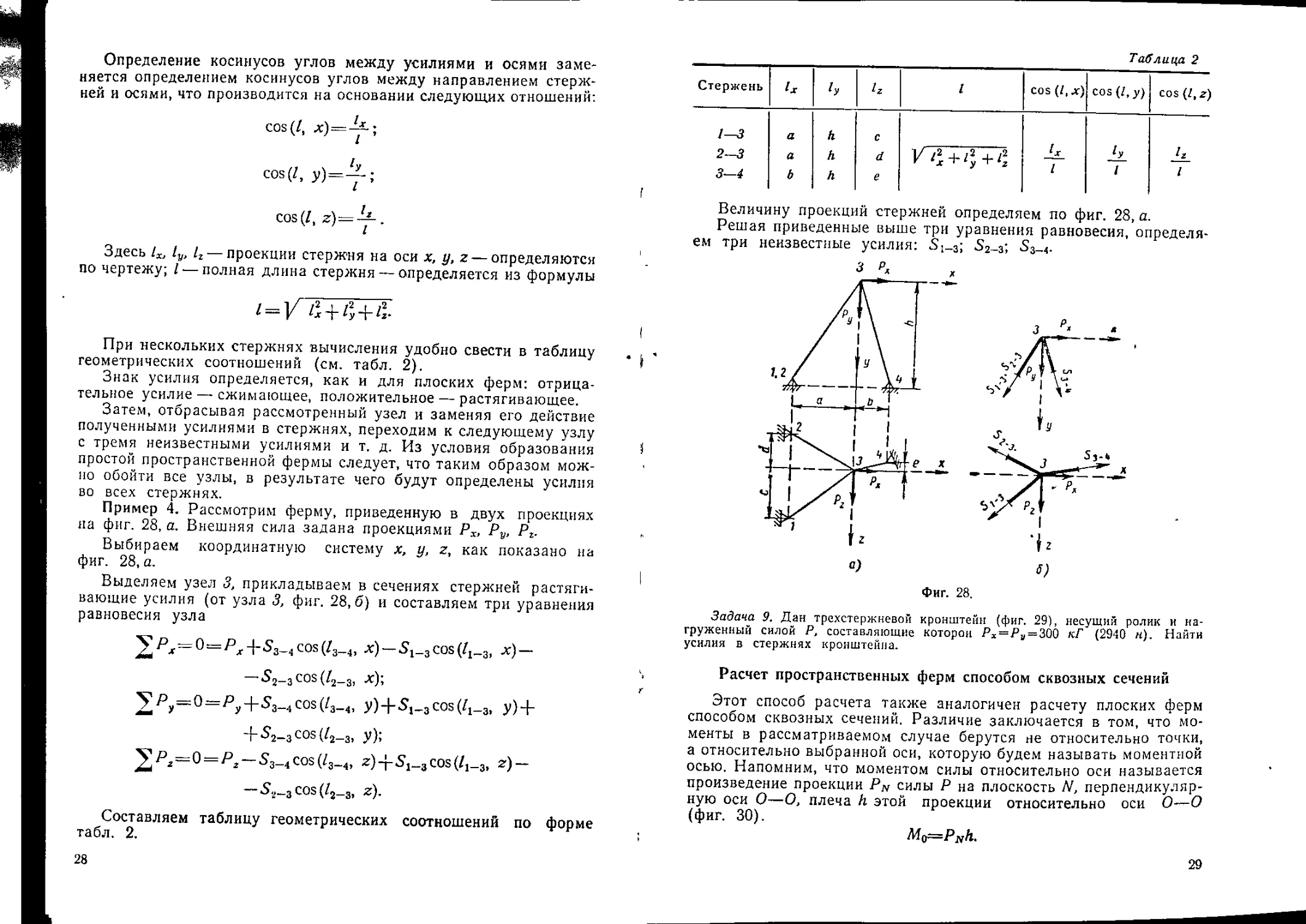
Пример 3. Рассмотрим ферму,
показанную на фиг. 13.
Даны размеры фермы и внеш-
ние силы.
Определим опорные реакции
и затем, отбросив опоры, будем
рассматривать опорные реакции
как внешние силы. Так как реак-
ция катка в точке А перпендику-
лярна опорной поверхности, то
Ялч=0.
узлов с двумя образующими их
Для определения 3 неизвестных coci являющих в опорных реак-
циях используем три уравнения равновесия:
У Л-1 а = О = Р, А - Р21 + «, у2/; /<, у
_ 4*
5j мл " о - P,h Р21 + Р321 - ;
у л,~®=_PL - - РВЛ.', P/Jt^pl-
Полученные при решении положительные знаки сил RAy, R^
Rux подтверждают правильность принятых направлений их; отри-
цательные знаки свидетельствуют о'том, что направления состав-
ляющих обратны принятым.
Стержни и усилия будем обозначать двумя цифрами, характе-
ризующими 'примыкающие узлы (например, усилие -Si—2, стер-
жень 1—2). Затем, мысленно выделяем двумя сечениями узел,
в котором сходятся два стержня, например, узел 1 (фиг. 14,а);
действие на пего отброшенной фермы заменяем приложенными
в сечениях усилиями, которые полагаем растягивающими — на-
правленными от рассматриваемого узла. Помещаем в узле начало
координат, выбираем направления координатных осей (х, у) и со-
ставляем два уравнения проекций сил, включающие два неизвест-
ных усилия
Si-2----Pf, S(_g = O.
откуда
Принятые направления усилий относительно выбранной систе-
мы координат положительны. Если при решении получен отрица-
тельный знак усилия, то усилие направлено в противоположную
15
сторону — к узлу п соответствующий стержень (в нашем приме-
ре /—2) будет сжат.
Затем отбрасываем мысленно рассмотреннын узел и стерж-
ни 1—2 и 1—6 и переходим к следующему узлу, включающему
два неизвестных усилия — к узлу 6 (фиг. 14,6). Выделяем узел
двумя сечениями, прикладываем в направлении стержня/—6 опре-
Фиг 14
деленное выше усилие (в данном случае равное нулю) и, рассмат-
ривая равновесие узла, аналогично предыдущему имеем
2^=0=5c_2cos(/^2, л)4-£6^5;
—0^S6_2cos(/6_.,, у)ЯЛу.
Здесь углы между усилиями и осями координат обозначены
как углы между направлениями стержней и осями координат.
Как и в приведенных выше рассуждениях неизвестные усилия
приняты растягивающими
Получаем
о ___
б“‘ соь(/6_2, у)’
5 _ CQS х\
G~5 COS(ZC-2, у)
Отсюда ясно, что стержень 6—2 сжат, а стержень 6—5
растянут.
Значения косинусов углов, образуемых стержнями с координат-
ными осями, получаем на основании следующего:
cos(/, cos(Z, у) = -~,
где Zx, /j,—проекции стержней на оси х, у берутся по заданным
размерам фермы, а Z^-4-Zy.
Далее, отбрасываем узел б и переходим к узлу 2 (фиг. 14,а).
От узла 2 можем перейти затем к рассмотрению узла 5
(фиг. 14,г). Наконец, из рассмотрения узла 3 (фиг. 14,6) опреде-
ляем последнее усилие S3_4. Равновесие узла 4 (фиг. 14,е), не рас-
смотренного нами, является контролем правильности решения
фермы.
Случаи нулевых стержней
Воспользовавшись способом выделения узлов, рассмотрим сле-
дующие случаи, в которых усилия в стержне равны нулю (случаи
нулевых стержней).
1) Двухстержневой узел, в котором отсутствует внешняя сила
(фиг. 15, а).
Фиг. 15.
Равновесие узла возможно только в том случае, когда усилия
в обоих стержнях равны нулю.
Взяв сумму проекций на две оси, каждая из которых перпенди-
кулярна одному из стержней (па фиг. 15, а оси показаны пункти-
ром), получим из суммы проекций на ось I—I
5г cos а = 0; S2 = 0;
из суммы ‘проекций на ось II—II
cos р = 0; 5] = 0.
2) Двухстержневой узел, нагруженный внешней силой, совпа-
дающей с направлением одного из стержней (фиг, 15,6). Тогда
усилие во втором стержне равно нулю, в чем можно убедиться,
взяв сумму проекций на ось, перпендикулярную направлению пер-
вого стержня,
S-> cos u = 0; So = 0,
2 1563
17
3) Трехстержневой узел, в котором отсутствует внешняя сила
и два из стержней которого находятся на одной прямой (фиг. 15, в).
Усилие в отдельно стоящем (третьем) стержне равно нулю,
что следует из суммы проекций на ось, перпендикулярную направ-
лению первых двух стержней (ось I—I)
S3cosa=0; S3 = 0.
Задача 2. Определить способом выделения узлов усилия в стержнях фермы,
приведенной на фиг. 16.
Л' Л=500 кГ (4900 «).
Задача 3. Определить способом выделения узлов усилия в стержнях фермы,
приведенной на фиг. 17.
p1=pa=P3=500 кГ (4900 к); Р4=—1000 (—9800 н); Р5=1000 кГ (9800 «).
Определение усилий в стержнях фермы способом выделения
узлов можно производить и графически с помощью разложения
приложенной к рассматриваемому узлу известной силы (или равно-
действующей известных сил) на направлении двух стержней, т. е
с помощью построения замкнутого силового многоугольника для
рассматриваемого узла.
Совокупность замкнутых силовых многоугольников для всех
узлов фермы, представляющая собой упорядоченный графический
расчет усилий в стержнях, называется диаграммой Максвелла-
Кремоны.
Диаграмма Максвелла-Кремоны
Рассмотрим ферму, показанную на фиг. 18, опорные реакции
для которой определены. Pj = 1000 кГ (9800 н); Р2=1500 кГ
(14 700 я); Р3=800 кГ (7840 н); а = 30°; /<Ау = 460 кГ (4500 к);
Рдх = 0; РВх = 300 кГ (2940 я); /?В1/=1090 кГ (10700 «).
Области, заключенные между двумя внешними силами, а также
области, ограниченные тремя усилиями (стержнями), обозначаем
цифрами, а усилия, силы и узлы будем обозначать цифрами, соот-
ветствующими примыкающим областям (например, сила Pi обо-
значается 1—2*, усилие в левом вертикальном стержне S1-7, верх-
ний левый узел 1—2—7). Условимся обходить ферму и узлы по ча-
совой стрелке. Строим многоугольник внешних сил 1—2—3—4—5—
* Первая цифра — начало вектора, вторая — конец.
18
6—1 (фиг. 18,6), который должен быть замкнут, так как система
находится в равновесии.
Начнем с рассмотрения равновесия узла, в котором сходятся
два стержня, например, с узла 10—4—5—6 (узел В). Строим для
него замкнутый силовой многоугольник, обходя узел по часовой
стрелке. Обход начинаем с крайней известной силы 4—5. Силы
4—5, 5—6 нанесены при построении силового многоугольника внеш-
них сил.
Из конца силы 5—6 (т. е. точки 6) на фиг. 18,6 проводим ли-
нию, параллельную стержню 6—10. Чтобы замкнуть многоугольник
0 HJffOWOOSOTdOWw
О 200 «00 ЁООбООкГ
Фиг. 18
в точке 4, необходимо из точки 4 провести линию, параллельную
стержню 10—4 до пересечения ее с'предыдущей линией. Таким об-
разом получим точку 10.
Итак, для рассматриваемого узла имеем построенный много-
угольник сил 4—5—6—10—4. Для определения знака усилия, об-
ходя только что построенный замкнутый многоугольник «по по-
току» сил, отмечаем, что усилие 6—10 направлено влево, а усилие
10—4 вниз относительно рассматриваемого узла В.
Значит усилие 6—10, направленное от рассматриваемого
узла, — растягивающее; усилие 10—4, направленное к рассматри-
ваемому узлу,— сжимающее. Знаки усилий [растягивающее плюс,
сжимающее минус] удобно проставлять на чертеже фермы рядом
со стержнем (см. фиг. 18,а).
Затем переходим к следующему узлу, содержащему не более
двух неизвестных усилий, и производим аналогичное построение.
Рассмотрим узел 9—3—4—10, в котором приложена сила Р$.
Обходим узел по часовой стрелке, начиная с крайней известной
силы 3—4 (Р3).
Из точки 10 (см. фиг. 18,6) проводим линию, параллельную
усилию 10—9, из точки 3 — линию, параллельную усилию 9—3;
пересечение линий дает точку 9 и величину усилий 10—9, 9—3.
Обходим многоугольник 3—4—10—9—3 «по потоку» сил и отме-
чаем, что усилие 10—9 направлено влево — вниз относительно рас-
2* 19
сматриваемого узла, т. е. от узла — стержень 10—9 растянут;
усилие 9—3 направлено к узлу — стержень 9—3 сжат.
Затем рассматриваем последовательно узлы 6—8—9—10;
2—3—9—8—7; 1—2—7 (усилие 7—1 равно нулю) и составляем
таблицу усилий (см. табл.. 1).
Таблица 1
Стер- жень 1—7 7-8 8—9 9—10 10—4 8—6 10—6 2—7 3—9
Усилие 0 —950 —280 +580 —1090 +820 +300 —1000 —500
к Г (н ) (—9300) (—2740) (+5680) (—10700) (+8040) (+2940) (—9800) (—4900)
Построение диаграммы показано на фиг. 18, б.
Как и при решении ферм способом выделения узлов, при по-
строении диаграммы Максвелла-Кремоны, последний, не участво-
вавший в построении узел 1—7—8—6 (узел А), является кон-
трольным.
Задача 4. Построить диаграмму Максвелла-Кремоны для фермы, показан-
ной на фиг. 16. Сверить полученные в стержнях усилия с решением по способу
выделения узлов.
Задача 5. Построить диаграмму Мак-
свелла-Кремоны для фермы, приведенном
на фиг. 17. Сверить полученные в стерж-
нях усилия с решением по способу выделе-
ния узлов.
Рассмотрим следующие особые случаи
в построении диаграммы Кремоны.
1. Если опоры прилегают к двум кон
нам одного стержня (фиг. 17), то для по-
строения диаграммы не обязательно пред-
варительное определение опорных реакций.
Действительно, ведя построение от узла,
где приложена сила Р5 справа налево доходим до опорных узлов, в которых
реакции определяются непосредственно из диаграммы.
2. Если силы приложены к внутренним узлам фермы (фиг. 19), то посту-
паем следующим образом. Сила Р, приложенная к внутреннему узлу А, выно-
сится по своему направлению на внешний контур фермы в точку В. Между
точкой В и узлом А вставляется фиктивный стержень АВ, усилие в котором, как
это следует из суммы проекций сил на ось I—I, равно Р. Очевидно также, что
'$gb=5bd.
Таким образом введение стержня АВ не влияет на распределение усилий
в элементах фермы.
Далее диаграмма строится обычным порядком.
Способ сквозных сечений (способ Риттера)
В тех случаях, когда приходится определять усилия в отдель-
ных стержнях фермы выборочным путем (не решая всей фер-
мы), удобно применять способ сквозных сечений. Для этого
необходимо провести сечение через три не пересекающиеся
в одной точке стержня (в том числе и через стержни, в которых
20
определяются усилия). Сечение разделяет ферму на две части
(сквозное сечение). Рассмотрим далее равновесие одной из отсе-
ченных частей фермы.
Пусть требуется определить усилия в стержнях, отмеченных на
фиг. 20 двумя черточками. Проводим сквозное сечение через эти
три стержня и рассматриваем равновесие любой из отсеченных
частей фермы, например, левой. Действие отброшенной части за-
меняем приложенными в сечениях стержней неизвестными уси-
лиями Ss, S3, которые полагаем растягивающими. Если в ре-
зультате решения задачи получим отрицательный знак усилия, то
это свидетельствует о том, что
стержень сжат. Под действием
сил Pi, Si, S2, S3 левая
часть фермы должна нахо-
диться в равновесии.
Три уравнения равновесия q2
можно написать или в виде
двух уравнений проекций щ
уравнения моментов, или в
виде трех уравнений момен-
тов. Напишем три уравнения
моментов относительно вы-
бранных точек — «моментных»
Фиг. 20.
точек. Очевидно, что для упрощения задачи моментными точками
должны быть точки пересечения двух стержней, усилия в которых
неизвестны. Тогда в уравнение моментов войдет только одно неиз-
вестное усилие. Так, например, в рассматриваемом случае в каче-
стве моментных точек выбираем точки: Oi (для определения Si),
О2 (для определения S2) и О3 (для определения S3). Уравнения
моментов имеют вид
— /?л (а—0;
^^02~—Рлс'\Р 1 (a-hc)—5£Лг—0;
2 (а+* + d) - Pj (b+</) - S3h3=0,
откуда
Plb — RA(a + b) k
Pl (a + с) — Рдс
4
c _ Рд (a 4- b + d) — Pj (b + d)
°з— ~ •
«3
В ряде случаев одна из моментных точек уходит в бесконеч-
ность, так как два из рассеченных стержней параллельны [фермы
21
с параллельными поясами (фиг. 21)]. В этих случаях одно из урав-
нении моментов может быть заменено уравнением проекций на
соответствующим образом выбранную ось.
Рассмотрим раскосную ферму с параллельными поясами. Рас-
косные фермы иногда встречаются в конструкциях отсеков лонже-
ронов Крыла, нервюр.
Проведем на ферме сквозное сечение через верхний и нижний
пояса и раскос (сечение I—I) и рассмотрим правую часть фермы.
Неизвестные усилия, как всегда, полагаем растягивающими. Для
определения усилий в поясах моментные точки должны быть вы-
браны на пересечении поясов с раскосом (точки Оь О2)- Усилие
в раскосе следует определять из суммы проекций сил на ось у,
так как в этом случае усилия в поясах дадут проекцию на эту
ось, равную нулю. Рассматривая равновесие отсеченной правой
части, имеем
yP,=0=P1+P2+P3+S2cos(S„ у); S2=-£1±^±Tj;
cos(S2, у)
У мт=о = - Р, + /2) - P2l3 - 5,Л; S, = - р>(‘‘ + ‘^ + рЛ .
—О ——Р1 Л + ^2 +У — Р, (^2“гАз)— Р
с _ Р\ (Л+ ^2+ h) + Р2 (^2+ ^з) + Psh
°з--------------------------•
Для определения усилия S4 в стойке проведем сечение П—II
и составим уравнение проекций на ось у.
у — 0 = Р\ -|- Р2 -{“ Р'З—^4’
S4 = P1+P2 + P3-
Отмечаем, что в рассматриваемой ферме стойки будут растя-
нуты, верхние пояса и раскосы сжаты, нижние пояса — растя-
нуты.
Очевидно, что, изменив направление раскосов, получим растя-
нутые раскосы. В конструкции целесообразно раскосы распола-
99
гать таким образом, чтобы они по возможности работали на рас-
тяжение, так как сжатые раскосы работают на продольный изгиб
и получаются тяжелее растянутых, особенно при их значительной
длине.
Задача 6 Определить усилия в отмеченных двумя черточками стержнях фер
мы, приведенной на фиг 22, пользуясь способом сквозных сечений Р=300 кГ
(2940 н), /=300 мм Необходимые размеры определять по чертежу.
Задача 7. Определить усилия в отмеченных двумя черточками стержнях фер-
мы, приведенной на фиг. 23, пользуясь способом сквозных сечений. Р = 400 кГ
(3920 н), / = 200 мм
Указание Предварительно нужно определить реакцию в подкосе. Необ-
ходимые размеры определять по чертежу
Понятие о статически неопределимых плоских фермах
Система, в которой число определяемых неизвестных усилий
равно числу уравнений статики, является статически определимой.
Система, в которой число определяемых неизвестных усилий боль-
ше числа уравнений статики, является статически неопределимой.
Разность между числом определяемых усилий и числом уравнений
статики дает степень статической неопределимости системы
и доказывает число «лишних» неизвестных.
«Лишними» эти неизвестные являются только потому, что они
не определяются уравнениями статики, а элементы, обусловливаю-
щие наличие лишних неизвестных, не являются необходимыми
для геометрической неизменяемости системы (например, «лиш-
ний» стержень ab для фермы на фиг. 24,а). Однако для работы
рассматриваемой системы эти элементы существенно важны.
Статическая неопределимость системы оказывает сильное
влияние на распределение усилий. При этом усилия (напряжения)
распределяются по элементам системы более равномерно, их мак-
симальные значения уменьшаются. Кроме того, повышается «жи-
вучесть» системы, так как при повреждении, например, одного
стержня статически неопределимой фермы ее геометрическая не-
изменяемость может не нарушиться.
Статически неопределимые системы обладают большей жест-
костью, чем статически определимые, благодаря наличию допол-
23
нительных (сверх обеспечивающих геометрическую неизменяе-
мость) связей — стержней, опор и т. д.
Лишними неизвестными могут быть опорные реакции; тогда
система статически неопределима в отношении опорных реакций
Лишними неизвестными могут быть и внутренние усилия в конст-
рукции; тогда система статически неопределима относительно
внутренних усилий. Приведенная на фиг. 24, а ферма имеет три
составляющих в опорных реакциях, относительно которых ферма,
следовательно, статически определима, и имеет число стержней
/П!=10, что на единицу больше числа необходимых стержней
(т = 2п—3=9). Эта ферма однажды статически неопределима,
и за лишнее неизвестное можно принять усилие в стержне ab.
Фиг. 24.
Если в статически определимой системе распределение сил
между элементами конструкции обусловлено только условиями
равновесия системы или ее частей, то в статически неопределимой
системе этих условий недостаточно и для определения усилий в ее
элементах требуется рассмотрение деформаций системы.
Усилия в стержнях статически неопределимой плоской фермы
с лишним стержнем ab (см. фиг. 24, а) определяются следующим
путем. Выбрасывая лишний стержень ab и приводя таким образом
ферму к статически определимой, можно найти бо— изменение
расстояния между точками а и b в направлении ab для фермы,
показанной на фиг. 24,6*.
Изменение расстояния между этими же точками от сил, рав
ных 1 кГ, действующих в направлении ab (см. фиг. 24, в), обозна-
чим б]. При действии неизвестной силы X в лишнем стержне ab
это изменение расстояния будет в X раз больше, т. е. Хбь
Тогда из условия отсутствия разрывов в ферме следует, что
суммарное изменение расстояния между точками а и b как от
внешней нагрузки (б0), так и от усилия X в стержне ab (Хб1),
должно равняться деформации стержня ab, т. е.
где I, Е,
Ьг
F — длина, модуль упругости первого рода и площадь
поперечного сечения стержня ab.
* Методы определения деформаций ферм здесь не излагаются.
24
Отсюда находим величину усилия X в лишнем стержне. Усилия
в стержнях заданной фермы получим путем суммирования усилий,
вызванных внешней нагрузкой без лишнего стержня (So), и усилий,
вызванных лишним стержнем (SiX), где St — усилия в стержнях
от сил, равных 1 кГ, приложенных в узлах а и Ь.
Таким образом
S=S0+S1X
Глава III
ОБРАЗОВАНИЕ И ЭЛЕМЕНТЫ РАСЧЕТА
ПРОСТРАНСТВЕННЫХ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ ФЕРМ
1. ОБРАЗОВАНИЕ ПРОСТРАНСТВЕННЫХ ФЕРМ
Условия закрепления. Классификация
Рассмотренное выше определение плоской фермы, понятие о ее
неизменяемости, а также допущение о шарнирности соединений ее
стержней и приложении нагрузки в узлах полностью применимо
и к пространственной ферме *.
Фиг. 25,
Опорные устройства пространственных ферм подразделяют-
ся на:
1) пространственные шарниры — опорная реакция может иметь
любое направление и содержит три неизвестных составляющих по
осям х, у, г. Такая опора эквивалентна трем пересекающимся
в одной точке стержням (фиг. 25,а);
2) плоские шарниры — опорная реакция содержит две неизвест-
ных составляющих по двум осям в плоскости, перпендикулярной оси
шарнира. Такая опора эквивалентна двум пересекающимся в одной
точке стержням (фиг. 25,6);
3) катки — опорная реакция проходит через центр катка и пер-
пендикулярна опорной поверхности. Такая опора эквивалентна
одному стержню и содержит одну неизвестную составляющую —
величину реакции (фиг. 25,в).
* В узлах пространственных ферм имеем шаровые шарниры, обеспечиваю
шие свободу вращения относительно любой оси.
25
Опорные устройства пространственной статически определимой
системы должны содержать всего шесть неизвестных — соответст-
венно числу уравнений статики пространственной системы.
Возможны следующие комбинации рассмотренных выше опор-
ных устройств; пространственный шарнир и три катка; пространст-
венный шарнир, плоский шарнир и каток; шесть катков; три пло-
ских шарнира и т. д.
При этом необходимо, чтобы: 1) все опорные реакции не пере-
секали одной прямой; 2) опорные реакции не были параллельны
между собой.
В первом случае момент внешней силы, не проходящей через
одну прямую, которую пересекают опорные реакции, не может быть
°) <>) в) г)
Фиг. 26.
уравновешен опорными реакциями, так как момент опорных реак-
ций относительно этой прямой равен нулю. Во втором случае про-
екция внешней силы, не параллельной опорным реакциям, на пер-
пендикулярное им направление не может быть уравновешена опор-
ными реакциями, проекция которых на это направление равна
нулю.
Подразделение ферм по отношению к основанию на свободные
и прикрепленные, описанное в гл. И, полностью сохраняется и для
пространственных ферм. Примером свободной пространственной
фермы является ферма, показанная на фиг. 26, а; прикрепленная
пространственная ферма показана на фиг. 26,6. При снятии при-
крепленной фермы с опор плоская система abc получает свободу
вращения относительно Ьс. Элементарные пространственные фермы
приведены на фиг. 26, в — свободная и на фиг. 26, г — прикреп-
ленная.
По способу образования пространственные фермы аналогично
плоским также подразделяются на простые и сложные. Простые
пространственные фермы образуются путем последовательного при-
соединения к элементарной ферме (см. фиг. 26, в и г) каждого
узла с помощью трех пересекающихся стержней. Последователь-
ным отсоединением узлов и трех присоединяющих каждый узел
стержней простые пространственные фермы можно разобрать и по-
лучить элементарную ферму.
26
Условия геометрической неизменяемости и статической
определимости простых пространственных ферм
. Из условий образования простой пространственной фермы сле-
дует, что она является геометрически неизменяемой. Выведем из
этих условий соотношение между числом стержней и числом узлов
сначала для свободной пространственной фермы. Элементарная
свободная пространственная ферма (см. фиг. 26, в) содержит че-
тыре узла и шесть стержней. Прибавление (п—4) новых узлов
требует прибавления 3(п—4) стержней. В результате получим чис-
ло стержней /п = 6 + 3(п—4)=3п—6.
Таким образом, условие
неизменяемости свободной
ной фермы имеет вид
т = 3п—6,
плоских ферм
где т — число стержней;
п — число узлов.
Это условие, как и для
дает минимально необходимое для геомет-
рической неизменяемости число стержней
(3)
геометрической
пространствен-
при данном числе узлов.
Элементарная прикрепленная пространственная ферма имеет
один узел* и три стержня (см. фиг. 26,а). Присоединение (п—1)
узлов требует 3(п—1) стержней. Получаем число стержней т~3 +
+3(л—1)=3п, т. е. условие геометрической неизменяемости при-
крепленной пространственной фермы имеет вид
т^Зп. (4)
Рассуждая аналогично изложенному при определении условий
статической определимости плоских ферм, получим условия ста-
тической определимости для свободной и прикрепленной простран-
ственных ферм, которые совпадают с условиями геометрической
неизменяемости их.
Задача 8 Проверить геометрическую неизменяемость и статическую опре-
делимость отсека ферменного фюзеляжа, показанного на фиг. 27.
2. ОПРЕДЕЛЕНИЕ УСИЛИЙ В СТЕРЖНЯХ ПРОСТРАНСТВЕННЫХ ФЕРМ
Расчет пространственных ферм способом выделения узлов
Этот способ расчета аналогичен расчету плоских ферм способом
выделения узлов. Начинаем рассмотрение фермы с узла, в котором
сходятся не более трех стержней (три неизвестные усилия). Выде-
ляем мысленно этот узел, прикладываем в сечениях стержней не-
известные усилия, полагая их растягивающими, и находим их путем
составления трех уравнений равновесия узла.
* Опорные узлы в расчет не вводятся.
27
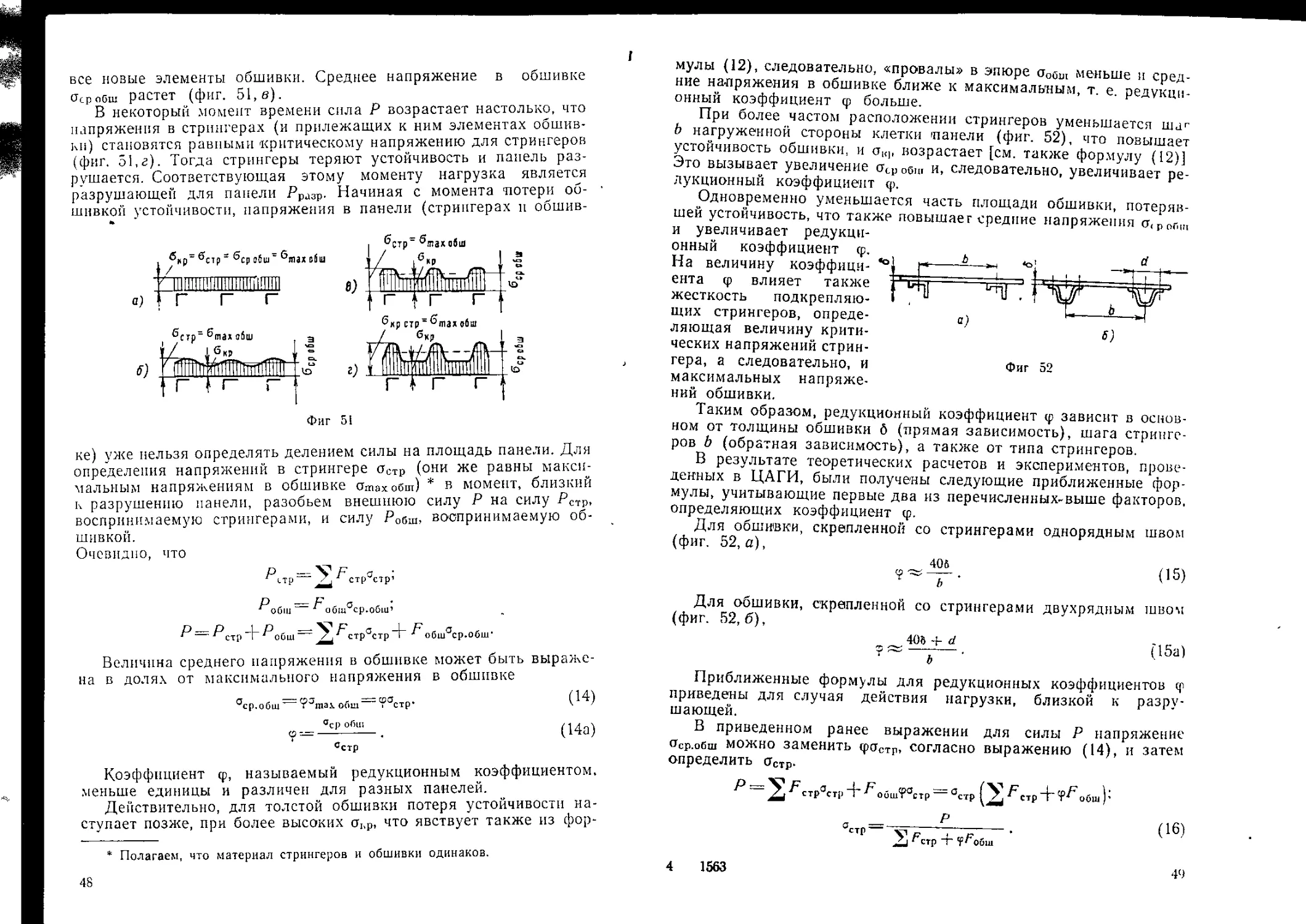
Определение косинусов углов между усилиями и осями заме-
няется определением косинусов углов между направлением стерж-
ней и осями, что производится на основании следующих отношений:
cos (/,
cos (/,
cos(/,
Здесь /Xj ly, 1г — проекции стержня на оси х, у, z— определяются
по чертежу; I — полная длина стержня — определяется из формулы
1=У zi+z’+z’.
При нескольких стержнях вычисления удобно свести в таблицу
геометрических соотношений (см. табл. 2).
Знак усилия определяется, как и для плоских ферм: отрица-
тельное усилие — сжимающее, положительное — растягивающее.
Затем, отбрасывая рассмотренный узел и заменяя его действие
полученными усилиями в стержнях, переходим к следующему узлу
с тремя неизвестными усилиями и т. д. Из условия образования
простой пространственной фермы следует, что таким образом мож-
но обойти все узлы, в результате чего будут определены усилия
во всех стержнях.
Пример 4. Рассмотрим ферму, приведенную в двух проекциях
на фиг. 28, а. Внешняя сила задана проекциями Рх> Ру, Рг.
Выбираем координатную систему х, у, z, как показано на
фиг. 28, а.
Выделяем узел 3, прикладываем в сечениях стержней растяги-
вающие усилия (от узла 3, фиг. 28,6) и составляем три уравнения
равновесия узла
°=4-S3_4 cos (Z3_.}, х) -Si-з cos (Z1„3,
*^2-3 COS (4—3i
У =0 -= Py+53-4 cos (Z3_4, у)+S'i-з cos (Zx_3>
y)+
4-S2_3cos(/2-3, y);
2^=0=^-S3-4Cos(Z3_4, z)-j-S1„3cos(/1_3, z)~
cos (Z2_3, z).
Составляем таблицу геометрических соотношений по форме
табл. 2.
28
Таблица 2
Стержень 1х Ч Ч l cos (/, x) cos(Z.y) cos (l,z)
у а h c r
2—3 3—4 а b h h d e 4 I h I 4 I
Величину проекций стержней определяем по фиг. 28, а.
Решая приведенные выше три уравнения равновесия, определя-
ем три неизвестные усилия: S2-a; S3_4.
3 РЛ
Фиг. 28.
Задача 9. Дан трехстержневой кронштейн (фиг. 29), несущий ролик и на-
груженный силой Р, составляющие которой Рх = Ри = 300 кГ (2940 н). Найти
усилия в стержнях кронштейна.
Расчет пространственных ферм способом сквозных сечений
Этот способ расчета также аналогичен расчету плоских ферм
способом сквозных сечений. Различие заключается в том, что мо-
менты в рассматриваемом случае берутся не относительно точки,
а относительно выбранной оси, которую будем называть моментной
осью. Напомним, что моментом силы относительно оси называется
произведение проекции PN силы Р на плоскость N, перпендикуляр-
ную оси О—О> плеча h этой проекции относительно оси О—О
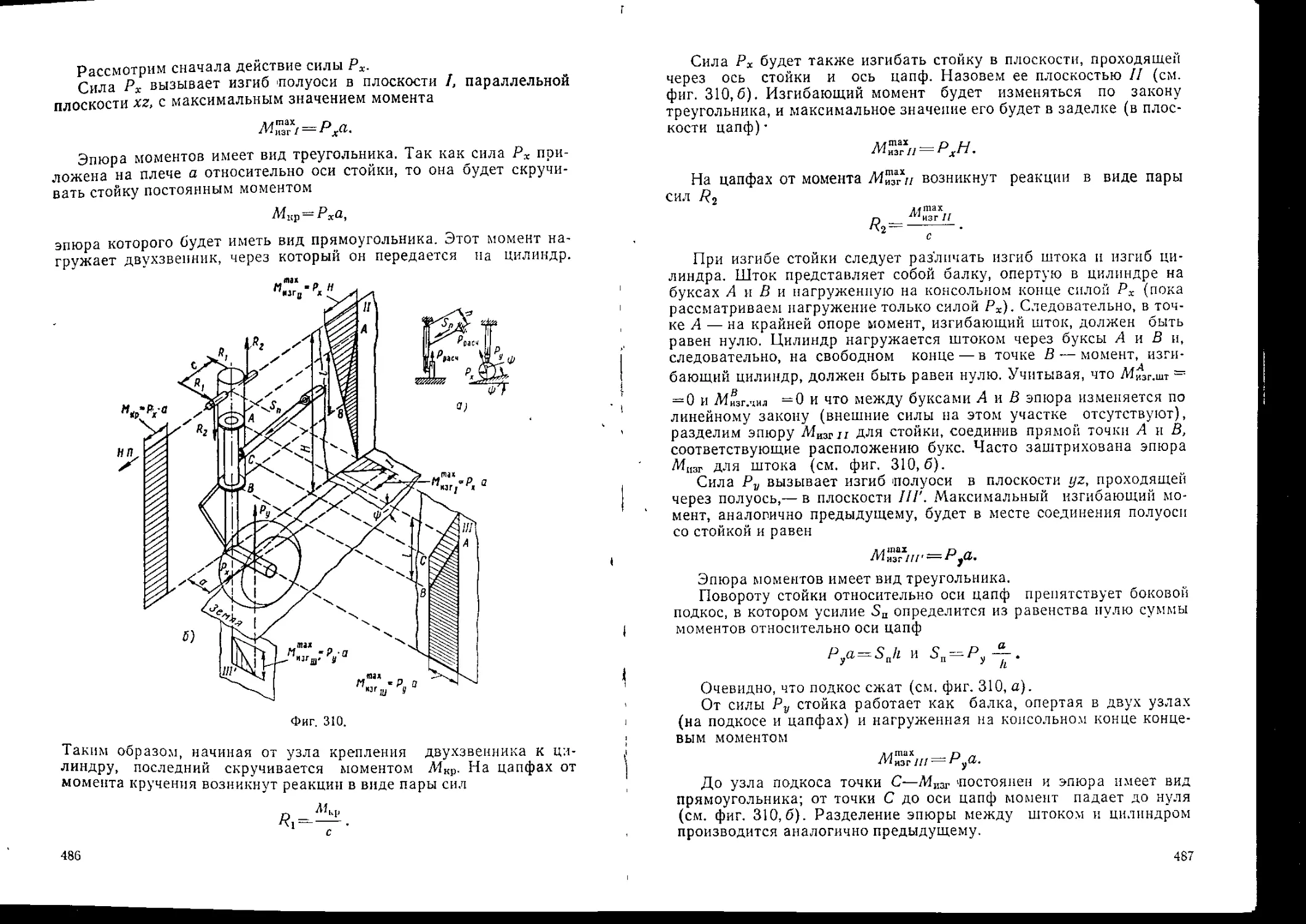
(фиг. 30).
M(f=P Nh.
29
Из этого определения следует, что:
а) если сила проходит через ось, то момент ее относительно осн
равен нулю (плечо равно нулю);
б) если сила параллельна оси, то момент ее относительно оси
равен нулю (проекция силы на плоскость, перпендикулярную оси,
равна нулю).
Рассмотрим следующий пример.
Пример 5. Определим усилия в стер-
жнях крепления турбореактивного дви-
гателя (фиг. 31, а), представляющего
собой шесть стержней, крепящихся
в узлах /, 2, 3, 4 к фюзеляжу. Дана
внешняя сила Р, составляющие которой
Рх, Ру; составляющая Рг равна нулю.
Фиг. 29
Фиг. 30.
I
к
Координатные оси нанесены на чертеже. Ввиду симметрии нагру-
жения и симметрии конструкции относительно оси у усилия в сим-
метрично расположенных стержнях будут равны, т, е.
•^6-1 — 2’ *^5-1 — *^7—2’
•$5-4—^7-3*
Таким образом, задача с шестью неизвестными сводится к зада-
че только с тремя неизвестными.
Однако и при несимметричной конструкции задача была бы вполне разре-
шима (хоти и значительно усложнена), так как при шести неизвестных имеем
шесть уравнений равновесия.
Определим усилия в стержнях 5—4, 7—3. Проводим сквозное
сечение I—II (удобнее провести сечение непосредственно у узлов
4 и 3, как это будет видно дальше) и выбираем моментную ось,
проходящую через узлы 1 и 2. В этом случае неизвестные усилия
в четырех стержнях (6—1, 6—2, 5—1, 7—2), проходя через эту ось,
дадут моменты относительно оси, равные нулю, и, следовательно,
не войдут в уравнение моментов. В сечениях стержней 5—4, 7—3
прикладываем растягивающие неизвестные усилия S5-4, каж-
30
дое из которых раскладываем на три неизвестные нам составляю-
щие по координатным осям
*5(5—4)х, * •*5(5—4) J', «5(5—4) z, *5(7—3) х, *5(7—3)j, *5(7— 3)z*
Составляя уравнение моментов относительно оси 1, 2, отмечаем,
что усилия *S(5-4)y и S(7~з)И проходят через ось 1, 2, и дают момент
относительно нее, равный нулю (чем и объясняется удобство вы-
Фнг. 31.
бора сквозного сечения у узлов 3 и 4); составляющие *5(5-4)7
и 5(7-з)г параллельны оси 1, 2 и дают момент относительно осн 1,
2, также равный нулю.
Тогда имеем
2 М ,_2=О=Pxh. - Р, (а + Ь) - 25(5_4) х2й, ”
* Это не вносит новых неизвестных, так как составляющие усилия связаны
с усилиями через косинусы углов; например,
S(8-4)z=*Sb-4 COS (/5_4, X) И Т. Д.
•* Коэффициент <2» перед S(5_4}X учитывает, что S5_4=S7_j.
31
откуда
Pxh — Py(a + b)
5(6-4).=-----------------.
Усилие <S$—4 определим из
с _ „ О
° 5—4 — 7. Г — ° 7-3-
C0S(/5-4, X)
Косинусы углов между стержнями и осями определяем также
при помощи геометрических соотношений. Например,
cos (I х\— х = — — b -
5 41 J Z5_4 К^2+Л2+(с —0,5d)2
Если усилие Ss_4 получится с отрицательным знаком, то значит
стержень 5—4 сжат.
Для определения усилий Ss-i, <Se-2 выбираем ось 5—7. Сквозное
сечение проводим через точку 6 — сечение III—II (фиг. 31,6).
Прикладываем в сечении неизвестные усилия Sa-ь £б-2 и рас-
кладываем их по осям. Моменты усилий в стержнях 5—1, 7—2,
5—4, 7—3, силы Рх, а также составляющих усилий S(6-2)»»
S(6-i)z, S(o -2)z относительно оси 5, 7 равны нулю, как проходящие
через ось или параллельные оси.
2 Л15_7^0 = — P?a+2S(6-i)xO,5rf;
с Р?а . с _ S(6-l)Jf _с
*J(6-1)X — —— > ^6-1— ,, л—°6—2*
d cos (Z6_i, х)
Усилия в стержнях 5—1, 7—2 определяются аналогичным об-
разом. Моментную ось следует принять проходящей через линию
плоскостей, в которых лежат стержни 6—/, 6—2 и 5—4, 7—3 (точ-
ка О на фиг. 31,6),
Задача 10. Определить усилия в 4 стержнях крепления двигателя и в узле
«В» (фиг. 32). Дано: Р~10 000 кГ (98 000 н), Г=5000 кГ (49 000 н), а=20 см,
6=80 см, с=50 см, а=45°.
Узел <В» представляет собой плоский шарнир, дающий составляющие усилий
Ивх, fist- Составляющая Рву—0.
Способ разложения на плоские фермы
Этот способ применяется в том случае, когда пространственная
ферма образована соединением ряда плоских ферм (что имеет
место, например, в конструкции ферменных фюзеляжей; см.
фиг. 33*).
Для перераспределения усилий между четырьмя плоскими фер-
мами ставятся диагональные раскосы, расположенные в плоско-
* Стойки и раскосы нижней и левой боковой плоских ферм на фиг. 33 не
показаны.
32
стях, перпендикулярных оси пространственной фермы (на фиг. 33
показаны лишь торцовые раскосы 1—8 и 2—7).
Это обеспечивает более 'равномерное нагружение четырех пло-
ских ферм и одновременно вносит статическую неопределимость
Фиг. 32.
в конструкцию. Число «лишних»
неизвестных (степень статиче-
ской неопределимости) равно
числу внутренних диагональных
раскосов, так как торцовые диа-
гональные раскосы (/—8, 2~7)
являются необходимыми из усло-
вий геометрической неизменяе-
мости фермы. В этом легко убе-
диться проверкой условий стати-
ческой определимости и геомет-
рической неизменяемости, пока-
занной на фиг. 33 фермы, по фор-
муле
т — 3/z—6.
Фиг, 33.
Число узлов п=16; потребное число стержней
т = 3,16—6-42.
Фактическое число стержней (полагая наличие двух внутрен-
них диагональных раскосов) равно 44. Следовательно, система
дважды статически неопределима.
Учитывая, что усилия во внутренних диагоналях невелики,
а следовательно, невелико и влияние их на усилия в плоских фер-
мах, а также для упрощения расчета, принимаем следующие допу-
щения.
Предполагаем, что указанное на фиг. 33 распределение внешних
сил по плоским фермам обеспечивается наличием диагональных
раскосов.
Каждую плоскую ферму рассматриваем работающей независи-
мо от других под нагрузкой, действующей в плоскости фермы.
Усилия в элементах, общих для смежных плоских ферм, определя-
ем алгебраическим суммированием усилий, полученных в этих эле-
ментах при рассмотрении каждой из ферм.
3 1563
33
Рассмотрим порядок определения усилий в стержнях фермы.
Силы Рь Рг. Рз/ ^4, нагружающие ферму, расположены в гори-
зонтальной и вертикальной плоскостях. Так, силы Pj нагружают
вертикальную ферму 1—2—6—5, силы Р2 — вертикальную ферму
4__3—7—8, силы Р3 и Р4 — горизонтальные фермы 1—2—3—4
и 5__в—7—8 соответственно. Усилия в стержнях ферм можно без
труда определить одним из приведенных выше способов. Пояса
фермы являются общими элементами для смежных плоских ферм.
Например, пояс 4—3 общий для ферм 1—2—3—4 и 3—7—8—4.
Следовательно, усилие 5 в рассматриваемом отсеке найдем как
алгебраическую сумму усилий S' и S" в отсеке, -полученных при
рассмотрении ферм 1—2—3—4 и 3—7—8—4 соответственно
Глава IV
СЖАТЫЕ СТЕРЖНИ
1. УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ
В конструкции самолета часто встречаются тонкостенные сжа-
тые стержни: подкосы крыла, подкосы шасси, стержни плоских
и пространственных ферменных конструкций — фюзеляжа, мото-
рамы, лонжеронов крыла и т. д. Особенность работы тонкостенного
сжатого стержня заключается в том,
ления его оси — общая потеря
устойчивости, или от выпучивания
что он разрушается от искрив-
Фиг. 35
Фиг. 34,
стенки — местная потеря устойчивости Эти деформации носят еще
название продольного изгиба. На фиг. 34 показаны: а — общая
и б —местная потери устойчивости сжатого стержня.
Рассмотрим общую потерю устойчивости стержня. Сначала
рассмотрим, что следует понимать под устойчивостью стержня.
Если сжатый стержень, искривленный малой поперечной силой,
восстанавливает свое первоначальное положение после снятия по-
34
перечной силы, то равновесие его устойчиво; говорят, что такой
стержень устойчив (фиг. 35, а). При увеличении сжимающей силы
Р наступит момент, когда снятие поперечной силы ДР не приведет
к восстановлению ‘первоначального положения стержня и прогиб
останется (фиг. 35,6). Такое равновесие называют безразличным
и соответствующая ему сжимающая сила называется критической
силой Ркр. При дальнейшем увеличении сжимающей силы (Р>Ркр)
искривление стержня от поперечной силы возрастает и становится
значительным. Таким образом,
практически критическая сила
для сжатого стержня является
предельной. Критическую силу
определяют еще как силу, удер-
живающую стержень в слегка
искривленном положении.
Формула для определения
критической силы получена
Л. Эйлером в предположении,
что напряжения в сжатом эле-
менте не превосходят предела
пропорциональности (в пределах
действия закона Гука).
Формула эта имеет вид
(5)
Концы
шарнирно
оперты
С = 1
Концы
Заделаны
С = Ь
Один конец
заделам, dpyzou
сдоМен
Фиг 36
. „ 71 £^min
где с — коэффициент, учитывающий способ закрепления концов
стержня (коэффициент заделки);
Е— модуль упругости первого рода материала стержня;
Aon—момент инерции сечения стержня относительно оси меньшей
жесткости, т. е. меньший из двух экваториальных моментов
инерции относительно центральных осей;
I — длина стержня.
На фиг. 36 показаны некоторые способы закрепления концов
стержня, положение изогнутой оси стержня, а также даны соответ-
ствующие этим способам значения коэффициента заделки.
На практике наиболее часто встречается закрепление концов
стержня среднее между шарнирным (конец свободно поворачи-
вается) и заделкой (конец не поворачивается). Для такого закреп-
ления, называемого приторцовкой, коэффициент с принимается рав-
ным двум.
Другой вид формулы Эйлера получим из уравнения (5), разде-
лив обе части уравнения на площадь сечения стержня F,
D * *,
„ __г 71 Е ^min
F кр /25
3*
35
Используем известное из сопротивления материалов выражение
Jmln .___ ,2
2 — ‘•mln,
z
где zmln — минимальный радиус инерции сечения, и ——обозначим
1 min
через Л.
Получим
а г- 2 S
л £/min _ тс Е
а —С----------------= С--------
12 А2
(6)
Величина называется гибкостью стержня и харакге-
* mln
ризует сопротивляемость стержня продольному изгибу.
t
i
(П
2. ПРОДОЛЬНЫЙ ИЗГИБ СЖАТЫХ СТЕРЖНЕЙ ЗА ПРЕДЕЛОМ
ПРОПОРЦИОНАЛЬНОСТИ
Выше было указано, что формула Эйлера получена в предполо-
жении, что напряжения в сжатом элементе о<оцц, где опц— предел
пропорциональности.
Таким образом, при (Уьр = аПц получим предельное (наименьшее)
значение Х=АЭ, при котором справедлива формула Эйлера.
Подставив в формулу (6) аПц и Лэ, получим для шарнирного
закрепления концов (с=1)
у слц
Для легированной стали, термически обработанной до предела
прочности ов=12 000 кГ/см2 (1176 Мн/м2) при аПц=8000 кГ/см2
(784 МнМ2), Е=2-106 кГ/см2 (19,6 *104 М«/л12), получим ?.э^50;
для дуралюмина при <тв = 4000 кГ/см2 (392 Мн/м2), одц=2100 кГ/см2
(206 Мн/м2) и Е=7 • 105 кГ/см2 (6,86-104 Мн/м2) имеем Лэ~60.
При А<ЛЭ (т. е. при увеличении радиуса инерции сечения или
чменьшении длины стержня) гибкость стержня столь мала, что оьр
получается большим, чем оцц Для этого случая имеются другие
эмпирические формулы, одна из которых (формула Тетмаиера)
имеет вид:
Сьр Овсл\(1 йЛ),
где Оц cjk — предел прочности сжатия; Л— гибкость стержня;
а — коэффициент, зависящий от материала и определяемый по
формуле
а=( !—baH-L,/-2Щ-.
36
Построим в координатах сгкр и X кривые по формуле Эйлера (6)
и по формуле Тетмайера. Получим гиперболу Эйлера (сплошная
линия) и прямую Тетмайера (пунктирная линия (фиг. 37).
Опытные кривые crKp по X на участке л^/.з хорошо совпадают
с гиперболой Эйлера; при Х<ХЭ опытная кривая (пунктир с точкой
на фиг. 37) расходится с кривой Эйлера и близка к прямой Тет-
майера.
3 РАСЧЕТ СЖАТЫХ СТЕРЖНЕЙ
Для расчета стержней различного сечения на продольный изгиб'
в ЦАГИ получены опытные кривые для различных закреплений
концов и разных материалов. На фиг. 38—42 показаны кривые для
трубчатых стержней и для гнутых и прессованных профилей.
На фиг. 43 приведен другой вид кривых зависимости критиче-
ской силы от длины для дуралюминовых труб различного попереч-
ного сечения. Такие графики составляются и для других ходовых
типов и размеров поперечных сечений.
Для определения критических напряжений местной устойчиво-
сти тонкостенного стержня пользуются полуэмпирическими форму-
лами и графиками. Для трубчатого стержня
(8)
где Е— модуль упругости первого рода материала стержня;
D — наружный диаметр трубы в мм;
б —толщина стенки в мм.
Для профилей
h₽ / Ь \2
(9)
Здесь Е и б имеют прежние значения;
Ь— ширина рассчитываемого элемента сечения;
k— коэффициент, зависящий от отношения ширины а (соседнего
с рассчитываемым элемента) к b (фиг. 44).
Расположение рассчитываемого и соседнего с ним элементов
характеризуется тремя схемами 1, 2, 3> приведенными на фиг. 44,
каждой из которых соответствует своя кривая.
Ясно, что из условий равнопрочности желательно иметь одина-
ковые значения окр и о^стн.
* Эта формула справедлива при о“рСТН<впц
Фиг. 37.
Критическое напряжение
инерции поперечного сечения
Фиг 38
38
бкр
Критическое напряжение Критическое напряжение
кГ
ММ2
100
80
60
kO
20
(380)
(78k)
(392)
(196)
труВ* опертых на
Для
торец, дяя труб сварных X
-или клепаных конструкций -|—
С=1
О
Кривая Ойлера
Сталь ЗОХГСА ~
бв~ 120 кГ/мм2
С=2
Для тру5. имеющих шаровые опоры
10 20 30 40 50 60 70 80 90 100 ~
Отношение длины труды к радиусу
инерции поперечного сечения
Фнг. 39
Фиг. 40
39
Отношение длины уголки открытого (гнутого)
дуралюпинового профиля к радиусу инерции
поперечного сечения
Фиг. 41.
Критическое напряжение
Отношение длины открытых прессованных
дуралюминовых профилей к радиусу инерции
поперечного сечения
Фиг. 42
40
\
Критическая сила
Фиг. 44.
41
Таким образом, для расчета сжатого стержня на прочность при
заданной сжимающей силе Р и размерах стержня необходимо
определить:
1) /т1«= 1/ и Г7“;
р г ‘mill
2) предельное (разрушающее) напряжение сжатия из условий
общей устойчивости стержня акр=/^—1— по графикам (см., напри-
мер, фиг. 38 — 42);
3) омес,и из условий местной устойчивости стержня по форму-
лам (8), (9); р
4) действующее напряжение а=—,
где Л— площадь сечения стержня.
Действующее напряжение а сравнивается с меньшим из двух
напряжений; акр или о™стн. Условие прочности стержня
° °1Ср’
о оместн
кр
При пользовании графиками Plip=f(O для расчета стержня следует опре-
делить:
1) Р1:р по графику;
2) по формулам (8), (9) о“рстн и критическую силу Р”рСТ“, обусловли-
вающую местную потерю устойчивости
рместн _ мест
^кр акр
Условие прочности стержня
или
р < р
кр
Р < Р
мести
кр
Рассмотрим следующий пример.
Пример 6. Проверить прочность трубчатого подкоса подмоторной
рамы, выполненного из стали ЗОХГСА при сгв= 12 000 кГ/см2
(1176 Л1к/л2), с поперечным сечением Dxd—60X58 мм и длиной
/=1300 мм, сжатого силой Р=15000 кГ (147 000 н). Опоры под-
коса принимаем приторцованными (с=2).
Находим: F= 1,854 см2; о = —=70,7 кГ/мм2 (693 Мн/м2;
F
7= 2,09 сж; — = 62.
I
По графику фиг, 40 для стали ЗОХГСА при пв=12 000 кГ/см2
(1176 Мн/м2) находим сгв = 84 кГ/мм2 (822 Мн/м2).
Определяем о^стн^ 100 wC/жж2 (981 Мн/м2) [формула (8)], Так
как (\р <С акрСТК, то условие прочности будет а<<зкр, что и выпол-
няется—стержень прочен.
42
Задача И. Проверить прочность сжатого стержня из дуралюмниа с торцо-
выми опорами при Р=1500 кГ (14 700 н); /=40 си; сечение стержня приведено
на фиг. 45.
Задача 12. Подобрать размеры сжатой шарнирно опертой трубы из дуралю-
мина при Р = 5000 кГ (49 000 н); / = 100 см.
В заключение настоящей главы рассмотрим кратко работу сжато-изогнутого
стержня. Пусть имеется сжатый стержень с начальной кривизной оси (mi
(фиг. 46).
Действующий в сечениях стержня начальный изги-
бающий момент МцЗГ=Р[ вызовет увеличение началь-
ного прогиба, что вызовет увеличение плеча силы Р
и увеличение МИэг. а это, в свою очередь, вызовет уве-
личение прогиба и т. д. В курсе'Сопротивления мате-
риалов излагается, что если сжимающая сила Р меньше
критической Рир, то нарастание прогибов ослабевает
Фиг. 45.
Фиг. 46.
с их увеличением и при некотором прогибе наступает равновесие стержня.
По мере приближения силы Р к РКр нарастание прогибов делается все более
интенсивным и при Р = Рцр равновесное положение стержня теоретически соот-
ветствует бесконечно большому значению ушаИсм. формулу (И)]. Разрушение
стержня, однако, происходит при Р<Ркр’под влиянием дополнительного изгиба.
Определение напряжений в сжато-изогнутом стержне производится на осно-
вании суммирования напряжений от сжатия и изгиба
^шах
а
Г
(10)
где AiOTax = Pymax—максимальный изгибающий момент;
II/ — экваториальный момент сопротивления сечения стержня.
Максимальный прогиб ушщ определяется по следующей формуле:
_ —Уш а х— ....
Утах — р - U1)
Р кр
Полученное по формуле (10) напряжение в случае прочного стержня удов-
летворяет условию
° < ов,
где оа — предел прочности материала стержня.
Глава V
ОСНОВЫ РАСЧЕТА ТОНКОСТЕННЫХ КОНСТРУКЦИЙ
1. СЖАТЫЕ ТОНКОСТЕННЫЕ ПАНЕЛИ
Критические напряжения неподкрепленных пластин
Характерной особенностью современного самолетостроения яв-
ляется применение тонкостенных конструкций с обшивкой, рабо-
тающей при изгибе и кручении конструкции.
В начале развития самолетостроения роль внешней оболочки крыла, фюзе-
ляжа, оперения играла полотняная обшивка, натянутая на деревянный каркас.
Обшивка, работая на растяжение, передавала воздушные нагрузки на каркас.
При этом каркас подвергался изгибу и кручению, сама же обшивка в работе
на изгиб и кручение не участвовала Так были выполнены крылья самолетов
Фиг 47.
пионеров нашей авиации - Я. М. Гаккеля, Д. П. Григоровича и многих более
поздних самолетов — например, истребителя И-16, разведчика Р-5 и др. Однако
уже давно конструкторы пытались сделать обшивку «несущей», т. е. включить
ее в работу на изгиб и кручение конструкции. Например, русский конструктор
И. И. Стеглау впервые применил жесткую (фанерную) обшивку крыла. В своих
самолетах АНТ-4, АНТ-6 в тридцатых годах известный конструктор самолетов
А. Н. Туполев применил жесткую металлическую гофрированную обшивку с рас-
положением волн гофра по потоку. Однако в этих конструкциях обшивка исполь-
зовалась слабо.
Создание «несущей» обшивки стало возможным, когда были освоены вы-
сокопрочные и легкие металлы — дуралюмины и когда, наряду с этим, была
разработана теория работы и расчета тонкостенных конструкций. Большая
заслуга в этом советских ученых: В 3. Власова, В. Н. Беляева, А. А. Уманского,
Ю. Г. Одинокова и других.
Рассмотрим сжатую пластину без подкреплений (фиг. 47, а),
нагруженную по двум кромкам; две остальные кромки свободны.
При напряжениях, называемых критическими, пластина потеряет
44
устойчивость и образует волну. Дальнейшее увеличение сжимаю-
щей силы практически невозможно, так как даже очень малые
приращения ее вызывают резкое увеличение деформаций. Следует
отметить, что напряжения во всех сечениях пластины, перпендику-
лярных сжимающим силам, одинаковы.
Сечения пластины различными плоскостями показаны на
фиг. 47, а. Работа такой пластины аналогична работе стержня на
продольный изгиб. Рассмотрим теперь ту же пластину при усло-
вии, что она оперта по всем четырем кромкам (фиг. 47, б). В этом
случае после потери пластиной устойчивости нагрузку на нее мож-
но еще увеличить за счет элементов пластины по сечению 2—2,
расположенных вблизи опертых кромок и остающихся почти пря-
молинейными. При этом возрастание нагрузки будет вызывать
увеличение напряжения в этих элементах, в то время как напря-
Фиг 48
жения вдали от кромок остаются равными окр. Рассмотрим, как из-
меняются эпюры распределения напряжений по сечению 3—3
(фиг. 47, б) по мере увеличения сжимающей силы. Эпюра, приве-
денная на фиг. 48, а, соответствует моменту потери устойчивости
пластины. Для этой эпюры критические напряжения являются
одновременно и средними (сгСр) и максимальными (сгШах)- С увели-
чением сжимающей силы эпюра изменяет свой вид, как показано
на фиг. 48, б, в, г. Для эпюры по фиг. 48, г имеем то же значение
<укр, но значительный рост сгср и crmax. Следует заметить, что крити-
ческие напряжения для опертой по четырем кромкам пластины (см.
фиг. 47, б) значительно выше критических напряжений пластины,
опертой по двум нагруженным кромкам (см. фиг. 47, а).
Критическое напряжение произвольно закрепленной и сжатой
по двум кромкам плоской пластины определяется по теоретической
формуле
ом.=0,9Л —— (12)
’ / £ \2
\ 5 /
и зависит от материала, характеризуемого модулем упругости Е
первого рода, толщины пластины 6, размера нагруженной кром-
ки Ь, а также от отношения размеров нагруженной и ненагружен-
ной кромок bja и от закрепления кромок (т. е. от того, оперты или
защемлены края пластины). Последние два фактора учитываются
коэффициентом k.
45
На фиг. 49 'Приведены два вида закрепления кромок пластины:
а — опертые кромки, б — заделанные.
Значения коэффициента k для пластины, все четыре стороны
которой оперты (наиболее часто встречающийся в практике слу-
чай), будут равны
при > 1, /г ^4.
(12а)
(126)
Фиг. 49.
Для пластины, две ненагруженные стороны которой свободны,
k=(-^^ и формула (12) примет вид, напоминающий формулу
\ а / ’
Эйлера,
(12в)
Для криволинейной пластины, произвольно закрепленной и сжа-
той по двум кромкам, критическое напряжение определяется по
формуле
0,9&Е । 0,3£
’’ ^^^41 и III И *4** MW
кр f b \2 ‘ _R_
\ s / а
(13)
Здесь R— радиус кривизны обшивки, остальные обозначения
прежние.
Все приведенные в настоящем параграфе соображения выведе-
ны в предположении справедливости закону Гука, т. е. в предпо-
_ ь
ложении, что сгкр^Опц. Соответствующие этому значения — не-
трудно получить из формулы (12), подставив о]ф вместо оП11. Для
дуралюмина получимJ —30. В конструкции самолета приме-
\ /кр
няются окантованные профилями панели (клетки) обшивки, имею-
щие преимущественно — >30 и, следовательно, о1{р<оПц.
46
Сжатые панели, выполненные из одного материала
Рассмотрим тонкостенную панель, состоящую из оошивки, под-
крепляющих ее продольных элементов (стрингеров) и попереч-
ных элементов (полок нервюр) и сжатую силами Р, приложенными
параллельно направлению стрингеров (фиг. 50).
Обшивка панели разбивается на ряд «клеток» (например,
1—2—3—4), каждая из которых может быть рассмотрена, как пла-
стина, опертая по всем четырем кромкам на контуре, образованном
профилями. Таким образом,
критические напряжения об-
шивки, как было показано
выше; 2) дает возможность
получить при нагружении
панели среднее напряжение
в обшивке, большее крити-
ческого, вследствие того, что
элементы обшивки у профи-
лей не теряют устойчивости
и способны работать при
более высоких напряжениях
(см. фиг. 48), и 3) вклю-
чается в работу панели на
подкрепление обшивки: 1) пов&шает
Фиг 50
сжатие, составляя сущест-
венную часть площади поперечного сечения панели. В свою очередь
стрингеры также получают подкрепление от обшивки — повы-
шается их критическое напряжение?
Поставим задачу определить 'напряжения в элементах панели.
Для этого рассмотрим работу панели при разных значениях силы
Р. Пусть сила Р столь мала, что обшивка панели не потеряла
устойчивости. Тогда по всему сечению панели устанавливаются
одинаковые напряжения и
О = Q г
стр ср.обш
+ Обш
Здесь /^стр —суммарная площадь сечений стрингеров;
Добш-площадь сечения обшивки;
астР, аср.Обш —соответственно напряжения в стрингерах и средние
напряжения в обшивке.
При увеличении силы Р напряжения стстр и щрОбш растут до ве-
личины критических напряжений в обшивке окр. В этот момент
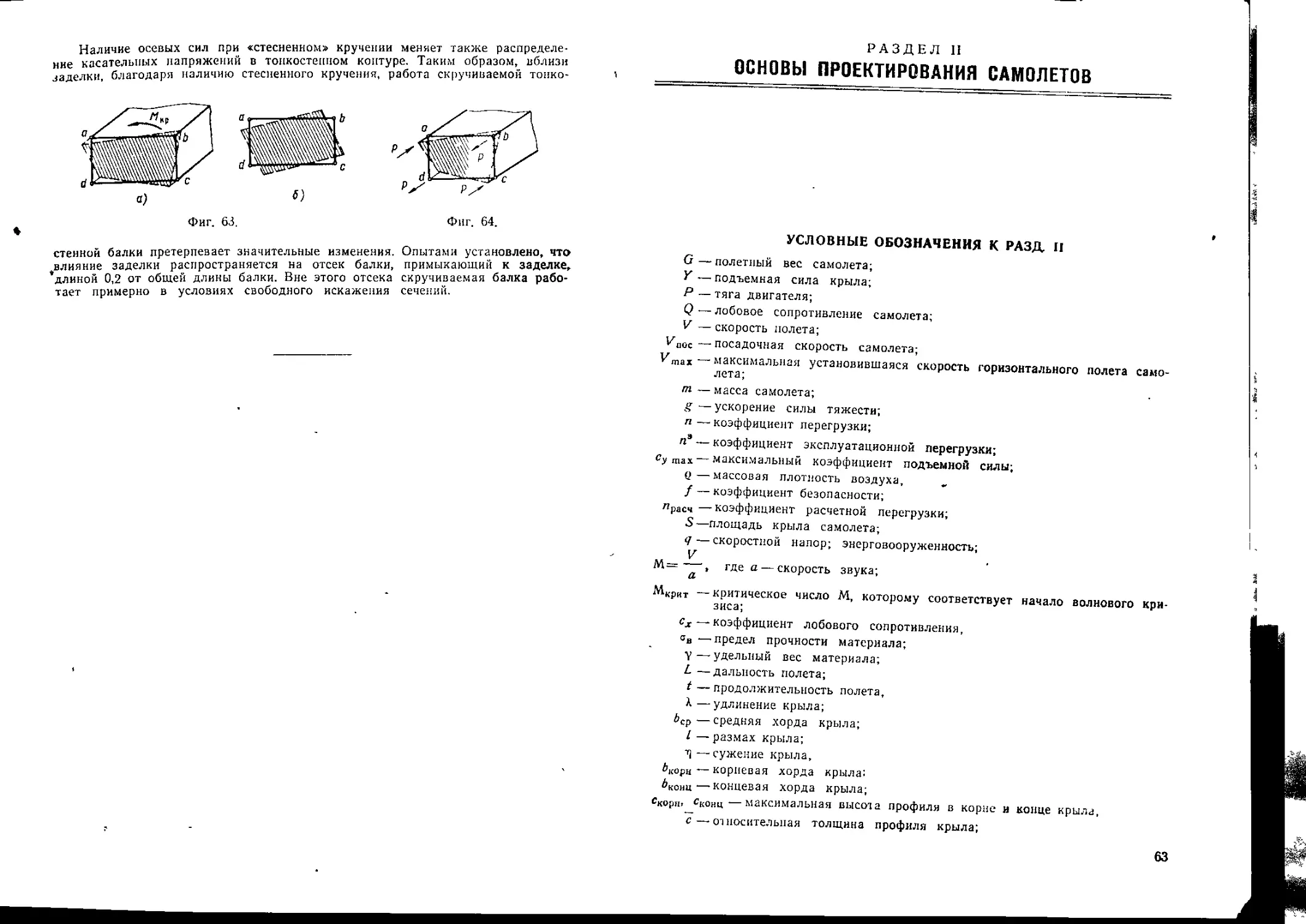
эпюра напряжений в обшивке имеет вид, показанный на фиг. 51, а.
Дальнейшее увеличение силы Р вызывает рост напряжений
в стрингерах и элементах обшивки вблизи стрингеров, еще не по-
терявших устойчивости (фиг. 51,6). В элементах, потерявших
устойчивость, напряжения остаются равными ог1!р. По мере увели-
чения внешней силы Р область потери устойчивости захватывает
47
все новые элементы обшивки. Среднее напряжение в обшивке
Осробш растет (фиг. 51, в).
В некоторый момент времени сила Р возрастает настолько, что
напряжения в стрингерах (и прилежащих к ним элементах обшив-
ки) становятся равными критическому напряжению для стрингеров
(фиг. 51,а). Тогда стрингеры теряют устойчивость и панель раз-
рушается. Соответствующая этому моменту нагрузка является
разрушающей для панели Рразр. Начиная с момента ‘потери об-
шивкой устойчивости, напряжения в панели (стрингерах и обшив-
Фиг 51
ке) уже нельзя определять делением силы на площадь панели. Для
определения напряжений в стрингере сгСтр (они же равны^макси-
мальным напряжениям в обшивке Отахобнг)
к разрушению панели, разобьем внешнюю
воспринимаемую стрингерами, и силу РОбш,
шивкой.
Очевидно, что
* в момент, близкий
силу Р на силу РСтр.
воспринимаемую об-
<-тр стр стр1
= F о
общ 1 обш Ср.общ’
*--- ^стр обш стр°стр ~Г f обш°ср»обш‘
Величина среднего напряжения в обшивке может быть
на в долях от максимального напряжения в обшивке
^ср.общ ’ ’ Т^тах общ 'Р^стр*
^ср общ
.
сстр
выраже-
(14)
(14а)
Коэффициент <р, называемый редукционным коэффициентом,
меньше единицы и различен для разных панелей.
Действительно, для толстой обшивки потеря устойчивости на-
ступает позже, при более высоких сгьр, что явствует также из фор-
* Полагаем, что материал стрингеров и обшивки одинаков.
48
мулы (12), следовательно, «провалы» в эпюре аобЦ1 меньше и сред-
ние напряжения в обшивке ближе к максимальным, т. е. редукци-
онный коэффициент ф больше.
При более частом расположении стрингеров уменьшается
b нагруженной стороны клетки 'панели (фиг. 52), что повышает
устойчивость обшивки, и ок1, возрастает [см. также формулу (12)]
Это вызывает увеличение Осробш и, следовательно, увеличивает ре-
дукционный коэффициент ф.
Одновременно уменьшается часть площади обшивки, потеряв-
шей устойчивость, что также повышает средние напряжения
и увеличивает редукци-
онный коэффициент ф, ь tf
На величину коэффици- *°| |"*~ " " --н—
ента ф влияет также Гт4|1 ' ~ь-п| 1 WjJJ*
жесткость подкрепляю- I , u ' ’
щих стрингеров, опреде- а) -
ляющая величину крити- S)
ческих напряжений стрин-
гера, а следовательно, и Фиг 52
максимальных напряже-
ний обшивки.
Таким образом, редукционный коэффициент ф зависит в основ-
ном от толщины обшивки б (прямая зависимость), шага стринге-
ров b (обратная зависимость), а также от типа стрингеров.
В результате теоретических расчетов и экспериментов, прове-
денных в ЦАГИ, были получены следующие приближенные фор-
мулы, учитывающие первые два из перечисленных-выше факторов,
определяющих коэффициент ф.
Для обшивки, скрепленной со стрингерами однорядным швом
(фиг. 52, а),
406
b
(15)
Для обшивки, скрепленной со стрингерами двухрядным швом
(фиг. 52,6),
406 +
b
(15а)
Приближенные формулы для редукционных коэффициентов ф
приведены для случая действия нагрузки, близкой к разру-
шающей.
В приведенном ранее выражении для силы Р напряжение
Пср.обш можно заменить фастр, согласно выражению (14), и затем
определить остр.
°стр
°стр
4 1563
49
Произведение (р-Робш назовем приведенной (редуцированной)
площадью обшивки Рщшв.обш; тогда выражение (16) примет вид
°стр Y / F
7}* стр г / лрив.обш
(16а)
Таким образом, для определения напряжений в сжаюн панели
необходимо определить;
1) действительные площади стрингеров и обшивки SFCtP
И F обш*>
2) значение редукционного коэффициента ср по формуле (15)
или (15а);
3) приведенную площадь обшивки Рприв.обш;
4) напряжение Остр = Отах обш- Условие Прочности (Тетр^"Окр.стр-
Фиг. 53.
При этом Пир стрингера в панели, как было упомянуто выше,
увеличивается по сравнению с оКр для изолированного стрингера,
так как стрингер в панели не может потерять устойчивости в пло-
скости, параллельной плоскости обшивки.
Учитывая это обстоятельство, характеристики сечения стрингера
следует рассматривать вместе с присоединенной обшивкой
(фиг. 53, б), длина которой принимается равной 40 толщин (6).
Пример 7. Найти максимальные напряжения и проверить проч-
ность сжатой панели, показанной на фиг. 53, а, при; 6 = 12 слг,
а—120 см; 6 = 0,15 см; Р = 20000 к.Г (196000 н). Сечение стринге-
ра вместе с присоединенной обшивкой показано на фиг. 53,6.
Произведем сначала вспомогательные вычисления.
Площадь сечения стрингера (включая присоединенную об-
шивку)
РстР= (4—2 - 0,2)0,154-2 • 2,5 • 0,24-6 - 0,15 = 2,44 см2.
Статический момент площади относительно оси х'
Sx. = 6-0Л52 2) 15 (4.Oj 152.2 35.0,2) = 3,377 см2.
2
Ордината центра тяжести сечения
3,377 , оо
уит=--------— 1 >38 см.
>ц.т 244
50
Момент инерции Jx сечения относительно центральной оси
х—х* получим, взяв момент инерции стрингера относительно
оси х" (см. фиг. 53,в), прибавив момент инерции стрингера за
счет переноса оси х" в х—х и прибавив момент инерции присоеди-
ненной обшивки.
При этом собственным моментом
инерции обшивки —=
6-0,153
12
пренебрегаем.
Таким образом
4- (2,44 - 6 • 0,15) (2,15 -1,38)2+
12 12
4-6-0,15-1,32=6,9 сх4;
/6,9 « CQ 120
-Ц—=1 68 см: 72;
2,44 1,68
405 40-0,15 _ п
77обш=4 • 12 • 0,15 = 7,2 см2.
Площадь сечения стрингера (без присоединенной обшивки)
/7ст₽=1,54 см2.
Находим напряжения в стрингере (максимальные напряжения
в обшивке)
°«р = «6ш =-у-„ --Г -----= 2050 ML (201 Мн[м2).
X Г стр । обш СМ~
Определяем критическое (предельное) напряжение в стрингере
по фиг. 42 (опоры принимаем торцовыми).
(Tj«p.ctp~2550 к.Г/см2 (250 Мн/м2) >сгстр.
Отсюда следует, что рассматриваемая панель прочна.
Задача 13. Для условий примера 7 найти средние и критические напряже
НИЯ В обшиВКС СГсробш И СЫр.обш-
Задача 14. Определить сжимающую силу, которая разрушает панель, пока-
занную на фиг. 53, а, при следующих данных: стрингер, прессованный из дуралю-
мина (сечение стрингера показано на фиг. 53,6); а = 33 с.и; 6 — 10 см- й=0,15 см.
Полагаем, чго разрушение происходит в тот момент, когда напряжения в стрин-
гере достигают критической величины.
В практике встречается применение сжатых панелей, имеющих профили,
жесткость которых весьма различна. В качестве примеоа можно привести па-
нель крыла, в которую, кроме стрингеров, входят и иояса лонжеронов (фиг. 54),
В этом случае внешняя сила Р, сжимающая панель, может быть представлена
* Момент и радиус инерции берем относительно оси х—х, так как потеря
устойчивости стрингера возможна в вертикальной плоскости, т. е. изгиб будет
происходить относительно оси х—х. В горизонтальной плоскости «выпучиванию»
стрингера препятствует обшивка.
4*
51
аналогично вышеизложенному как сумма сил, воспринимаемых поясами лонже
раков, стрингерами и обшивкой.
Р ~ Рлонж 4“ Рcip 4’ Робщ ™ РлОНЖаЛОН#К 4“ Рстр°стр 4“ Робщаср.о6ш-
Здссь Kip, /\16u1 площадь одного пояса лонжерона, одною
стрингера и обшивки соответственно,
оЛ11П1ч (ТстР1 Оср общ — соответствующие напряжения.
Так как пояс лонжерона обычно имеет большую жесткость, чем стрингер,
ю он терне। устойчивость самым последним и при более высоких напряжениях,
чем критическое напряжение стрингера. Разрушение панели наступит, очевидно,
в случае потери устойчивости пояса лонжерона *,
Выразим напряжения аср.обиь сгСтР в долях от максимального напряжения
панели Одни <кТ равного максимальному напряжению в обшивке вблизи лон
жерона
аср, общ Тобш^шах обш — ¥обшадонж>’ астр ?стралпиж>
Редукционный коэффициент
а Ср. обш
?обш~ »
алотк
(17)
астр ?сгр ~ а Л011Ж (18)
обшивки фобш определим из
^ср. обш аср* общ °стр
fOOUJ — алОнж аСТр № алоиж
Но так (14), (15) как согласно выражениям
°ср.обш 40о
астр “ b '
то получим, мнем (18), воспользовавшись выражс-
408
?обш — Тетр-
Так как панель рассмлрнвастся в момент, близкий к разрушению, когда
напряжения в профилях приближаются к критическому, го
астр
?стр—
7 Юнж
акр.стр
аК]КЛ0ИЖ
По данным ЦАГИ для стрингеров, выполненных из дуралюмнновых гнутых
профилей,
Фстр^'0,35,
для стриш еров, выполненных из прессованных профилей,
фс тр—-^ 1 *
* Здесь речь идет об изолированной панели. В крыле вертикальная стенка
препятствует потере устойчивости пояса лонжерона в вертикальной плоскости*
а обшивка — в горизонтальной.
52
Выражение для силы Р е помощью редукционных коэффициентов на осно-
вании выражений (17, 18) можно напнсагь в виде
Р — УЛлонж?лонж 'Ь У ^ст стр^лонж 4" FобшТобш^лоиж =
~ Злонж (2 ^онж 4“ У стрУстр FойшУобш)
п затем
р
алонж = V Р —iTV p гл t_ Р * (19)
*ЛОНЖ Т" • СТрТСТр т * обш ^обш
Выражение ^стрфстр обычно называется приведенной площадью стрингера,
а ^овшфобш — приведенной площадью обшивки.
В этом случае
алО|ЬК “ VI -7 , V Р 1 f? ~ ’ (19а)
* ЛОНЖ Г Л4 Г ПрИВ'СТр *Г * при в. обш
Из выражения (19а) определяем ол«иж=атак «вш.
Условие прочности панели
Оленьи^ Пир JI on Hi*
Работа панели, выполненной из разных материалов
Рассмотрим случай, когда продольный набор панели выполнен из разных
материалов, например, пояса лонжеронов — из стали, стрингеры и обшивка — из
дуралюмина.
В дальнейших рассуждениях будем исходить из того, что при деформации
сжатия или растяжения сечения панели перемещаются параллельно, оставаясь
плоскими, т. е. что все элементы панели де-
формируются на одинаковую величину
(фиг 55)
А/ а •'
AZ = const; е = — -- — = const.
’ I Е
Рассмотрим сначала растянутую панель
Необходимо указать, что при одинаковых
деформациях напряжения растяжения в об
шивке и стрингерах, выполненных из одного
материала, различны ввиду меньшей жестко-
сти обшивки. Это объясняется плохим натя Фиг. 55.
жением обшивки при клепке, в результате чего
образуется так называемый начальный прогиб обшивки (начальная кривизна),
а также ослаблением растянутой обшивки отверстиями под заклепки. Как и в слу-
чае со сжатыми панелями, учтем эти явления введением редукционного коэффи-
циента растянутой обшивки ср обш, т. е. некоторым уменьшением работающей
площади сечения обшивки.
По опытным данным, <робш принимается равным 0,8-=-1,0.
Напишем для растянутой панели выражение осевой силы
°стр
или
Р — °ЛОНЖ
4" Тобш ^обш )
°стр
^дОнж
2
/
• а*=еЕ — известное выражение закона Гука, где е— относительное удли-
нение: Е— модуль упругости первого рода*
53
Так как
9л0нж — ££сталн> ^стр — е^дур»
ТО
ссгр
° лонж
^дур
-----=
стали
(20) ’
Здесь встали, £дур—модули упругости первого рода стали и дуралюмина
Величину назовем коэффициентом редукции по модулям.
Множитель в выражении Р, заключенный в квадратные скобки, можно на-
звать приведенной к стали площадью панели. Коэффициент редукции <pAf пока’
зывает, во сколько раз нужно уменьшить площадь сечения дуралюминовых
элементов, чтобы заменить их эквивалентными стальными.
Из предыдущих выражений получаем для растянутой панели
СЛОцЖ --
Vj Глонж + (2 Л:тр "h ?обш ^обш)
прив.раст
(21)
Из выражения (20) имеем
<Устр = фмСГдоцн£*
(22)
Для сжатой панели, имеющей продольный набор из стали и дуралюмина,
«приведение» элементов из дуралюмина к стали также осуществляется с по-
мощью введения Кроме того, необходимо «привести» (редуциро-
встали
вать) площади стрингеров и площадь обшивки вследствие потери ими устойчи-
вости; это достигается введением редукционных коэффициентов (рСтР и (робш-
В результате полученная ранее формула (19), вследствие введения множи-
теля в площадь дуралюминовых элементов, преобразуется
алОнж —
прив.сж
Остр — ф •. фстрОлопж*
(23)
а с учетом формулы (18)
(24)
2 ТОНКОСТЕННЫЕ КОНСТРУКЦИИ, РАБОТАЮЩИЕ НА СДВИГ
Работа тонкой стенки до потери устойчивости от сдвига
Примерами тонкостенных конструкций самолета, работающих
на сдвиг, являются стенки лонжеронов, нервюр, панели, обшивки
крыла и т. д.
Рассмотрим работу тонкостенной неподкрепленной панели,
опертой по контуру и нагруженной поперечными силами, как это
показано на фиг. 56. Буквой q обозначена погонная (на единицу
длины) нагрузка. Очевидно, что внешние силы и моменты находят-
ся в равновесии, так как вертикальные, равно как и горизонталь-
ные нагрузки, дают пару сил и момент вертикальной пары сил qa,
равный (qa)b, равен моменту (qb)a горизонтальной пары сил.
54
Стенка работает на сдвиг, и возникающие в ней касательные на-
пряжения определяются из уравнения
где Q — поперечная сила;
F — площадь поперечного сечения стенки.
Напряжения в сечении вертикальной плоскостью получим из
Q~qa; F=ab и т = —= —.
«8 8
Такие же напряжения получим в сечении горизонтальной плос-
костью
Q^—qb', .
йб &
При некоторой величине касательных напряжений т происхо-
дит потеря устойчивости стенки и она выпучивается, образуя диа-
гональные складки —волны (см. фиг. 56). Образующие волн
наклонены примерно под углом 45°. Касательные напряжения, со-
ответствующие этому моменту, называются критическими ткр, и ве-
личина их зависит от тех же факторов, что и величина окр для
сжатой пластины.
Для определения тКр поль-
зуются формулой, аналогичной
приведенной выше формуле (12)
ДЛЯ Окр
= (25)
\ 5 /
ft=5,64-AZ8 (25а)
/ а V
7
Фиг 56
где b — меньшая сторона панели;
Е — модуль упругости первого рода.
Перейдем теперь к рассмотрению балки, нагруженной на кон-
це силой Р (фиг. 57). Балка состоит из поясов АВ, CD, стенки,
соединяющей пояса, и подкрепляющих стенку стоек. Стенка балки
работает на сдвиг. Пояса балки воспринимают изгибающий мо-
мент, вызванный внешней силой Р, и нагружаются парой сил, как
это показано на фиг. 57, б. Каждый из отсеков балки между стой-
ками можно рассматривать, как опертую по четырем сторонам тон-
костенную панель, описанную выше.
Как показали исследования, после потери стенкой устойчиво-
сти нагрузка на балку может быть значительно увеличена.
55
При этом работа балки претерпевает изменения. Для выяснения
этих изменений остановимся подробнее на рассмотрении работы
стенки.
Выделим мысленно в стенке малый квадрат abed (фиг. 57, 58, а),
который будет нагружен касательными напряжениями т. Эти на-
пряжения показывают, как отброшенная балка действует на вы-
Б-Б
Фиг. 57.
деленный квадрат. Равенство касательных напряжений, действую-
щих по горизонтальным ab, de и вертикальным ad, be граням,
обусловлено известным из сопротивления материалов законом
«парности касательных напряжений», т. е. оно вытекает из усло-
вий равновесия рассматриваемого квадрата. *
Проведем теперь в выделенном квадрате сечения a'b'c'd', на-
клоненные под углом 45° к сторонам квадрата abed.
а)
5)
Фиг 58
в)
Из рассмотрения равновесия треугольной части стенки, напри-
мер, a'bb' (фиг. 58,6) устанавливаем, «ио на наклонной площад-
ке а'Ь' действуют нормальные, сжимающие стенку напряже-
ния ас,к.
На фиг. 58,6 напряжения oCfli показаны как действие стенки
на выделенный треугольник a'bb*.
* Момент горизонтальной пары сил должен быть равен моменту вертикаль
поп пары сил.
Такие же напряжения действуют на площадке c'd'. На пло-
щадках d'a' и Ь'с' действуют нормальные растягивающие напря-
жения (Траст, что ясно, например, из равновесия части стенки
Ь'сс' (фиг. 58, в). Таким образом, элемент стенки a’b'c'd' подвер-
жен растяжению и сжатию -по диагональным взаимно перпенди-
кулярным направлениям. При малых значениях т напряжения а(Нч
и Ораст также малы.
При увеличении т под влиянием возросших напряжений осл,
'шикая стенка потеряет устойчивость. Гребни волн будут распо-
ложены вдоль растягивающих напряжений араст (см. фиг. 56).
Такие значения т, как было сказано выше, называются критиче-
скими.
Работа тонкостенной балки после потери устойчивости от сдвига
Рассмотрим теперь работу тонкостенной балки ’после потери
устойчивости от сдвига. Увеличим внешнюю силу Р, нагружаю-
щую балку (см. фиг. 57), вследствие чего касательные напряже-
ния т = —= — на сторонах квадрата abed (фиг. 58, а) возрастут.
Также возрастут и растягивающие напряжения ораст по сторонам
d'a', cfb’, действующие вдоль диагональных волн. Однако напря-
жения аСН{ по сторонам а'Ь' и t/d' возрасти не могут, так как стен-
ка в этом направлении потеряла устойчивость.
Дальнейшее увеличение силы Р воспринимается растяжением
стенки — увеличиваются растягивающие напряжения о])аст вдоль
диагональных волн.
Эти напряжения направлены -примерно под углом 45° к осп
балки и примерно равны удвоенным касательным напряжениям.
Поэтому тонкая стенка, нагруженная сдвигающей силой Р, рас-
считывается на разрыв по условию
арас > —
(26)
Потерявшая устойчивость от сдвига растянутая стенка вызы-
вает догрузку и других элементов тонкостенной балки. Как видно
из фиг. 59, растянутая стенка, стремясь сблизить между собой
пояса балки, вызывает сжатие 'противодействующих этому стоек и,
стремясь -сблизить между собой стойки, вызывает сжатие противо-
действующих этому поясов. Кроме того, растянутая стенка стре-
мится -прогнуть пояса между стойками, вызывая местный изгиб
поясов. Аналогично стенка действует и на крайние стойки, стре-
мясь прогнуть их между поясами.
Изложенные соображения позволяют определить дополнитель-
ные напряжения в элементах балки после потери стенкой устой-
чивости.
57
Однако, вследствие принятых допущений, эти напряжения по-
лучаются завышенными по сравнению с напряжениями, получен-
ными опытным путем.
Поэтому расчет элементов балки, тонкая стенка которой
потеряла устойчивость, производится по экспериментальным
графикам.
Пример 8. Тонкостенная балка нагружена силой Р, как показано
на фиг. 57, а. Данные балки: Я=200 мм; 6—150 мм; 6=1,5 леи;
Р = 5000 кГ (49 000 н). Проверить прочность дуралюминовой стен-
ки в отсеке Д. Предел прочности ав=4000/сГ/сл12 (392Мн!м2). Пре-
дел прочности 'При сдвиге тв—2400 кПсм2 (235 Мн/м2).
Пояс Пояс
Фиг 59.
Определяем критическое напряжение стенки по формулам
(25), (25а),
Ткр = 2>72-°>9^7-1°в (47,6
(Гб)
^=1660 кГ[см2 (163 /Ия/Л12)<тв.
Так как т>ткр, то стенку необходимо проверить на растя-
жение.
еГраст=2т=3320 кГ/см2 (326 Мн/м2) <ов.
Стенка прочна.
(а\з. ТОНКОСТЕННЫЕ КОНСТРУКЦИИ, РАБОТАЮЩИЕ НА КРУЧЕНИЕ
/ В работе частей самолета часто встречаются случаи нагруже-
ния тонкостенных конструкций крутящим моментом. Необходи-
мым условием работы тонкостенной конструкции на кручение
58
является наличие замкнутого тонкостенного контура. Незамкнутый
контур имеет весьма малую жесткость на кручение и практически
не может воспринимать крутящий момент. Так, введение разреза
в трубчатое сечение dXd0 = 6Qx57 мм (фиг. 60) при неизменном
крутящем моменте повышает касательные напряжения примерно
в 60 раз и увеличивает угол закручивания на единицу длины тру-
бы в 1200 раз*.
Фиг. 60. Фиг. 61.
Выведем формулу, позволяющую определить касательные на-
пряжения от кручения в тонкостенном замкнутом контуре произ-
вольной формы.
Рассмотрим тонкостенную трубу 'неправильной формы, нагру-
женную крутящим моментом 7ИКр (фиг. 61,а). Толщина стенки
б трубы различна в разных точках сечения. В сечении трубы дей-
ствуют касательные напряжения т. Предположим, что эти напря-
жения будут тем меньше, чем больше толщина стенки б, поэтому
произведение тб остается постоянным для всех точек сечения
тд=const(27)
Очевидно, что q есть касательная сила, действующая на едини-
цу длины контура сечения, т. е. погонная касательная сила
(фиг. 61,6). Полагаем, что сила q приложена по средней линии
толщины стенки. Из условия равновесия рассматриваемого сече-
ния (фиг. 61, а) следует, что момент внутренних касательных
сил q относительно точки О, расположенной внутри контура, дол-
жен быть равен внешнему моменту Л4ир. Выделим на контуре
участок, длиной dl, нагруженный силой qdl, приложенной по сред-
* См., например, С. П. Тимошенко, Сопротивление материалов, ч. I, Гос-
техтеоретиздат, 1932.
59
ней
ной
110
линии толщины стенки (фиг. 61, е). Момент этой элементар-
силы относительно точки О, находящейся на радиусе р,
dM — §qdl.
Qiii л ..
— представляет собой площадь dF0 заштрихованного на
фиг. 61 треугольника, для которого dl является основанием, а о —
высотой. Следовательно, pt// = 2t/F0 и dM—2qdF$.
Просуммировав элементарные моменты, т. е. взяв интеграл по
всему контуру* от обеих частей предыдущего равенства, и зная,
что величину q, принятую
постоянной, можно выпе-
й лзади=;Мм« сти за знак интеграла, по-
лучим
hni^22H»M (Г0(щ=7,5м«
/ а '
1 =
тел кн"
с х
^стенки~ 1.2 мп
^хр
Фи I. 62
где Го—площадь контура,
ограниченного
средней линией,
стенки и больших габаритных размерах
место в конструкции самолета, площадь
При малой толщине
контура, как это имеет
Го можно вычислить, как заключенную внутри внешнего контура
(заштрихована на фиг. 61, а). Получаемая при этом погрешность
будет невелика.
Далее, исходя из равенства момента М внутренних сил момен-
ту Л4М) внешних сил, на основании предыдущей формулы получим
MKf-----2gF0; 4 —
^lfp
250
t
И, наконец, при помощи выражения
q _ -Мкр
S 2Г(Д
(27) получим окончательно
(28)
Эта формула называется формулой Бредта.
Поясним примером пользование формулой (28).
Пример 9. Сечение крыла, показанное на фиг. 62, нагружено
крутящим моментом Л4ир = 7000 кГ • м (68 600 н.-м).
Носок и хвостик имеют в обшивке конструктивные вырезы.
Размеры межлонжеронной части контура приведены на фиг. 62.
Найти напряжения в обшивке и стенке.
4
Интеграл но контуру обозначается знаком
60
Рассматриваем работающий на кручение тонкостенный замкну-
тый контур abed. Площадь Fo, заключенную внутри контура, вы-
числяем приближенно как площадь трапеции
Лер--(АПСр + Л3а1н)0,5^(220 + 180)0,5 — 200 .и.щ
Г0^/Лср—1000-200 = 2-105 мм7;
Л1кр 7-106
Т„6ш"7. 5 - И ,7 «Г/ми» (114 Мн/м2);
О&обш 2 *2и 1IjO
Мкр 7-106
Те,еик« = —--------= - , |Т"14'6 КГ1ММ <143 ЛК/*2)-
/Г оостенки 2-2* 1U°-1 ,2
Задача 15. В сечении фюзеляжа действует крутящий момент Л11(р=8000 кГ - м
(78 400 Н‘М). Найти напряжение в обшивке фюзеляжа, если сечение фюзеляжа л
круглое, диаметром 0,8 м ври толщине обшивки — 1 мм.
Задача 16. Найти суммарные напряжения в стенке переднего лонжерона
крыла по данным примера 9, если па крыло, кроме крутящего момента, дейст-
вует снизу вверх поперечная сила Q=2500 кГ (24 500 я), распределяющаяся
между лонжеронами поровну.
Указание. Обратить внимание па направление касательных напряжений
от Л71(р и Q.
ч
Понятие о «стесненном» кручении
Сделанные выше выводы справедливы при условии, что поперечные сечения
трубы (балки) при деформации кручения поворачиваются, оставаясь плоскими.
Это условие имеет место и при рассмотрении кручения валов в курсе сопротив-
ления материалов. Однако практически оно выполняется для круглых сечений *.
При кручении, например, прямоугольных контуров происходят более сложные
явления. Рассмотрим физическую сущность их.
Пусть тонкостенная балка прямоугольного сечения, имеющая четыре про
дольных пояса и поперечные жесткие диафрагмы, подвергается действию крутя-
щего момента. Тогда, как показывает опыт, для того чтобы сечение балки после
поворота оставалось прямоугольным (что обеспечивается в балке наличием
поперечных жестких диафрагм-нервюр), отдельные точки его должны выйти
из первоначальной плоскости и сечение получится искаженным (см. пунктир на
фиг. 63, а). Если бы диафрагмы не препятствовали изменению прямых углов
между стенками контура, то после поворота сечение балки оставалось бы плос-
ким, но не прямоугольным, как показано пунктиром на фиг. 63,6.
В случае «свободного» кручения, когда ничто не препятствует искажению
сечения, в элементах контура возникают только касательные напряжения.
Если же по условиям работы конструкции сечение должно оставаться неиска-
женным, плоским (например, в месте заделки), то в нем возникают осевые силы
(перпендикулярные плоскости сечения), устраняющие искажения, т. е. приво-
дящие все точки сечения в одну плоскость. Так как эти силы являются силами
внутренними, то при отсутствии внешних сил и моментов, перпендикулярных
плоскости сечения, они должны быть самоуравновешивающимися, т. е. сумма
проекций и моментов этих сил должна быть равна нулю. Это условие выполняет-
ся при распределении осевых сил, как показано на фиг. 64.
При этом условно, для упрощения, полагаем, что обшивка на нормальные
напряжения не работает. Осевые силы Р должны быть попарно равны и про-
тивоположны. Так же равны и противоположны должны быть моменты пар
сил А
* При постоянной толщине стенки это условие выполняется также для квад-
ратных тонкостенных сечений.
61
Наличие осевых сил при «стесненном» кручении меняет также распределе-
ние касательных напряжений в тонкостенном контуре. Таким образом, вблизи
заделки, благодаря наличию стесненного кручения, работа скручиваемой тонко-
1
а)
Фиг. 63,
б)
стенной балки претерпевает значительные изменения,
влияние заделки распространяется на отсек балки,
’длиной 0,2 от обшей длины балки. Вне этого отсека
тает примерно в условиях свободного искажения
Фиг. 64.
Опытами установлено, что
примыкающий к заделке,
скручиваемая балка рабо-
сечений.
РАЗДЕЛ II
ОСНОВЫ ПРОЕКТИРОВАНИЯ САМОЛЕТОВ
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ К РАЗД II
G—полетный вес самолета;
К —подъемная сила крыла;
Р — тяга двигателя;
Q —- лобовое сопротивление самолета;
V — скорость полета;
Упос —посадочная скорость самолета;
Ушах максимальная установившаяся скорость горизонтального полета само4"
лета;
т — масса самолета;
g —ускорение силы тяжести;
л —коэффициент перегрузки;
п3 — коэффициент эксплуатационной перегрузки;
Сушах — максимальный коэффициент подъемной силы;
Q—массовая плотность воздуха,
f — коэффициент безопасности;
Ярасч — коэффициент расчетной перегрузки;
8—площадь крыла самолета;
q—скоростной напор; энерговооруженность;
И
М=—где а — скорость звука;
а
Мкрит —критическое число М, которому соответствует начало волнового кри*
зиса;
сх — коэффициент лобового сопротивления,
ав —предел прочности материала;
у — удельный вес материала;
L —дальность полета;
t —продолжительность полета,
X —удлинение крыла;
iCp—средняя хорда крыла;
I — размах крыла;
т] — сужение крыла,
^корн—корневая хорда крыла:
^конц—концевая хорда крыла;
скорн, Сконц — максимальная высота профиля в корне и конце крыла,
с—относительная толщина профиля крыла;
63
Alto удлинение горизонтальною оперения;
',г.о - сужение горизонтального оперения;
5г.о - площадь горизонтального оперения;
^СЛХ — средня*1 аэродинамическая хорда крыла;
А, 0 расстояние от центра давления горизонтального оперения до центра
тяжести самолета;
Sp.u - площадь руля высоты,
^р.н—площадь руля направления;
5Э.1 — площадь элеронов,
5в.о — площадь вертикального оперения;
— удлинение фюзеляжа;
/фюэ — длина фюзеляжа;
р — удельная нагрузка на крыло,
V — мощность двигателя; реакция земли;
II — потолок; высота полета;
t Н -время набора высоты;
г - удельная мощность;
г' — удельная тяга,
тр, — к. п. д. винта;
Q—удельный расход гоплиаа,
<эТоп ~ нес топлива;
£m:ix — максимальное аэродинамическое качество самолета;
«крит —Угол атаки, соответствующий Су maxi
«\-ст—угол установки крыла относительно линии земли при горизонтальном
положении самолета;
Хал центровка самолета.
Глава VI
ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К САМОЛЕТАМ
1 ОСНОВНЫЕ ЧАСТИ САМОЛЕТА И ИХ НАЗНАЧЕНИЕ
Самолет состоит из следующих основных частей: крыла, фюзе-
ляжа, оперения, силовой установки, шасси и системы управления
самолетом (фиг. 1, 2, 3).
Крылья являются главной частью самолета и предназначе-
ны для создания подъемной силы при поступательном движении
самолета в воздухе. Кроме создания подъемной силы, крыло обес-
печивает поперечную устойчивость и управляемость, а также ча-
сто используется для крепления двигателей, шасси, размещения
вооружения, топлива и т. п.
Самолеты с одним крылом (одной несущей плоскостью), назы-
ваются монопланами (фиг. 1, 2), с двумя крыльями—бипланами
(фиг. 3).
Крылья современных самолетов снабжаются средствами меха-
низации (закрылками, щитками, предкрылками), служащей для
улучшения взлета, посадки и маневрирования самолета во время
полета.
Закрылок
Горизонтальное оперение
[цсльпопоборотное)
Киль 1 Вертикальное
Руль направления | оперение
^Крыяо
Фюзеляж
Заборник Воздуха
Фонарь кабины
Предкрылок или
отклоняющийся
пасок
Элерон
Приёмник Возбуи/хаги
давления (ПВД)
_________Ц/ДССУ
^ГлаЗные
опоры Передняя опора
Фиг, I, Схема моноплана с турбореактивным двигателем.
Фюзеляж или корпус самолета служит для размещения эки-
пажа, пассажиров, грузов, иногда двигателей и для соединения
основных частей (крыльев, оперения и пр.) в одно целое. Иногда
фюзеляж и шасси заменяется лодкой, которая позволяет произво-
дить взлет и посадку на воду, такой самолет называют гидро-
самолетом.
1 риппер
Руль направления I Вертикальное
Киль f оперение
ДВияатсль
Фюзеляж
Элерон
Убирающееся
шасси
Руль 1 Г оризон-
Высоты У шальное
Стабилизатор J оперение
Закрылок
Уриннер
Кабина
экипажа
Фиг. 2, Схема моноплана с двумя турбовинтовыми двигателями.
Оперение представляет собой несущие поверхности, пред-
назначенные для обеспечения продольной и путевой устойчивости
и управляемости самолета. Соответственно этому самолет нор-
5 1563
65
мальной схемы имеет горизонтальное оперение, предназначенное
для обеспечения продольной устойчивости и управляемости; и вер-
тикальное оперение — для обеспечения путевой устойчивости
и управляемости.
Напомним, что устойчивость это свойство, обеспечивающее при случайном
отклонении самолета возвращение его в первоначальное положение.
Горизонтальное оперение дозвуковых самолетов со-
стоит из неподвижной или ограниченно подвижной части — ста-
билизатора и подвижной — руля высоты. На сверхзвуковых само-
летах горизонтальное оперение выполняется управляемое, без
руля высоты (целыюповоротное горизонтальное оперение).
Кабина летчика.
Фюзеляж
Руль направления
Киль
Руль высоты.
НИЖНЕЕ
крыло
Верхнее
крыле
Предкрылок
Стойка
Двигатель Неубираюшееся
шасси
Фиг. 3. Схема биплана.
Триммер
Стабилизатор
ЗаЗняя опара
^Закрылок
Злерон
Триммер
Вертикальное оперение состоит из неподвижной ча-
сти— киля и подвижной — руля направления.
Шасси есть система опор самолета, предназначенная для
стоянки, передвижения по аэродрому, посадки и взлета и снаб-
женная обычно устройствами, поглощающими энергию удара.
Самолеты, предназначенные для работы на сухопутных аэро-
дромах, имеют колесное шасси или лыжи.
Самолеты, совершающие взлет, посадку и передвижение по
водной поверхности (гидросамолеты), имеют фюзеляж в виде лод-
ки и подкрыльные поплавки.
Самолеты, совершающие взлет и посадку как с сухопутных,
так и с водных аэродромов, называются амфибиями. Такие само-
леты имеют колесные шасси и фюзеляж в виде лодки.
Силовая установка служит для создания тяги. При
поршневом двигателе (ПД) на носок вал’а двигателя устанавли-
вается воздушный винт для преобразования крутящего момента
66
двигателя в силу тяги. При реактивном двигателе (ТРД — тур-
бореактивном и ЖРД—-жидкостно-реактивном) тяга возникает
в результате отбрасывания двигателем газов назад (реакция).
При турбовинтовом двигателе — ТВД тяга создается главным об-
разом винтом и частично реакцией газов.
Управление самолетом есть система проводки и меха-
низмов, при помощи которой летчик, непосредственно или исполь-
зуя автоматические устройства, управляет движением самолета,
воздействуя на рули высоты, рули направления и элероны, а так-
же обеспечивает управление механизацией, триммерами и т. п.
Кроме перечисленных основных частей, на самолетах имеются разнообразное
оборудование, а на военных самолетах также вооружение. Не останавливаясь
на рассмотрении оборудования и вооружения, которые изучаются в специальных
курсах, отметим лишь, что, например, на современном стратегическом бомбар-
дировщике установлено свыше 2000 агрегатов оборудования, облегчающих работу
зкипажа по управлению самолетом и двигателями, обеспечивающих точную
навигацию, создающих нормальные условия в высотной кабине, а в военных са-
молетах автоматически управляющих сближением самолета с целью и моментом
выпуска снаряда. Радиолокационное оборудование позволяет также обнаружить
на значительном расстоянии самолеты противника, определить характер местно-
сти, над которой пролетает самолет и г. п.
2 . ОБЩИЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К САМОЛЕТАМ
К современному самолету предъявляются следующие основные
требования:
1. Возможно более высокие летно-технические характеристики.
2. Малый вес конструкции при. обеспечении необходимой проч-
ности и жесткости.
3. Эксплуатационные требования.
4. Обеспечение высокой технологичности конструкции.
5. Возможно более высокие экономические показатели.
Летно-технические характеристики самолета
Основными летными показателями самолета являются его ско-
рость, дальность и предельная высота (потолок) полета. Наряду
с этими показателями в зависимости от назначения самолета су-
щественное значение имеют его скороподъемность, грузоподъем-
ность, маневренность, посадочная скорость, вооружение.
Максимальная скорость, или наибольшая установившаяся скорость
горизонтального полета при полной мощности или тяге силовой установки —
основной показатель, по которому оценивают качество того или иного самолета.
Посадочная скорость из условий безопасности посадки самолета
не должна превосходить заданной "величины. В настоящее время посадочная
скорость военных самолетов должна быть не более 25СМ-300 км/час (70-т-
83 м/сек); гражданских — не более 180-S-200 км/час (50—55 м/сек). Отношение
(Утах : Vпо с) называется диапазоном скоростей. Стремятся к достижению воз-
можно большого диапазона скоростей.
Дальность полета или наибольшее расстояние, которое самолет мо-
жет пролететь без пополнения запасов топлива и масла, для многих типов само-
летов имеет весьма большое значение.
5*
67
A
Потолок самолета — это предельная высота, на которую данный са-
молет может подняться и на которой может совершать горизонтальный полет.
Высотность самолета, т. е. его способность летать на больших высотах, является
важным качеством самолета, особенно военного.
Г рузоподъемность — это способность самолета перевозить заданное
количество груза, бомб или пассажиров.
Маневренность —это способность самолета изменять за определенный
промежуток времени скорость, высоту и направление полета.
Вооружение характеризуется числом огневых точек (управляемых сна-
рядов, пушек), калибром оружия, скорострельностью (числом выстрелов в мину-
ту), эффективностью оружия, т. е. вероятностью поражения цели, и является
важнейшей характеристикой военного самолета.
Самолет должен быть устойчивым и управляемым на всех ре-
жимах полета.
На фиг. 4 приведен рост рекордных скоростей по годам, до-
стигнутых на самолетах и ракетопланах. Рекорды скорости поле-
та, начиная с 1945 г., устанавливаются на самолетах с реактив-
ными силовыми установками.
Известно, что мощность, развиваемая поршневым двигателем,
мало зависит от скорости полета, а сила тяги изменяется обратно
пропорционально скорости полета V и прямо пропорционально
к. п.д. винта т]в, что выражается формулой:
П
где P — сила тяги;
N — мощность двигателя;
т]в — к. п.д. воздушного винта;
V— скорость 'полета (в м/сек).
Для получения необходимой силы тяги при полете на больших
скоростях требуется весьма значительное увеличение мощности
двигателя. Так, например, на небольшом самолете для достиже-
ния скорости полета 2000—2200 км/час (555—610 м/сек) потре-
буется тяга в 50004-6000 кГ (49 000—58 800 н)
Если принять к. п.д. винта т|в~0,70—0,80, то мощность двига-
теля для получения указанной тяги должна быть:
75-% 7361%
Поршневой двигатель,' развивающий такую мощность, будет
иметь очень большой вес [—-'20 000 кГ (196 000 к)], большие габа-
риты и громоздкий винт. В этом и заключалась основная причина
затруднений, встретившихся при переходе к полету на больших
скоростях самолетов с поршневыми двигателями.
Тяга реактивных двигатели при М<1 мало зависит от скорости
полета, а при М>1 даже увеличивается с ростом скорости. Если
к этому добавить, что удельный вес и габариты реактивных двига-
телей значительно меньше, чем поршневых, то станет понятно,
почему силовые установки с реактивными двигателями получили
для скоростных самолетов повсеместное применение.
68
На фиг, 5 показаны мировые рекорды дальности полета на са-
молетах.
Дальность полета особенно важна для межконтинентальных
пассажирских самолетов и тяжелых ракетоносителей. Следует
Фиг, 4. Рекорды скорости полета самолетов и ракетопланов.
заметить, что дальность полета самолета может изменяться в ши-
роких пределах в зависимости от вариантов загрузки.
На фиг. 6 приведены мировые рекорды высоты по годам, до-
стигнутые на специальных или приспособленных для этой цели
самолетах и ракетопланах.
Применение жидкостных ракетных двигателей (ЖРД) на са-
молете позволит намного 'превысить существующие рекорды ско-
рости и высоты. В настоящее время проектируются и строятся
экспериментальные образцы самолетов со скоростями полета
(6ч-8) М. и высотой полета 100-^300 км.
Обеспечение высоких летно-технических характеристик самоле-
та тесно связано с совершенствованием аэродинамических форм
самолета.
Переход от биплана со стойками и расчалками к свободнонесущему моно-
плану с убирающимися в полете шасси резко уменьшил величину лобового со-
противления самолета.
Дальнейшее снижение сопротивления самолета достигалось улучшением про-
филей крыла и оперения, приданием плавных форм фюзеляжу, устранением са-
мых незначительных выступов на обтекаемой поверхности. Получила широкое
внедрение клепка впотай и соединение листов обшивки встык Входит в упо-
требление толстая обшивка, сохраняющая под действием аэродинамических
нагрузок первоначальную форму; улучшаются способы окраски и полировки
поверхности и т. д
п
120000
flOOOO
IQOODO
90000
шоо
70000
60000
50000
шоо
30000
20000
10000
WJJ f
9 ¥553 J J
1 1 9 1
monnt 1 1 1 9 1 9 |
раке $
1 HQ i 3 i t
if $ t §
На саг сило lojiernax c выни yrm портиев амвЗкпяи Ha CUi hinu саполепи wSbiMU yc ix c peaxm толовлап -2М52--Л J2S8I ивнь/ми I*, 1 7 —
J 57 11*5751 | J565i VMM । pzw a 38S14 iSMJb
1930г 1935г 1990г 1995 г 1950г 1955 г 1960г 1965г 1970г
Фиг. 6 Рекорды высоты полета самолетов и ракетопланов
Одновременно были уменьшены размеры крыла, оперения, что также ока-
зало влияние на уменьшение сопротивления самолета. Основным мероприятием,
позволявшим уменьшить площадь крыла, явилось применение элементов меха-
низации крыла для увеличения подъемной силы во время посадки и разбега.
Усовершенствование капотов двигателей, особенно поршневых двигателей
с воздушным охлаждением, улучшение аэродинамики радиаторов и использо
вание реакции выхлопа значительно уменьшили лобовое сопротивление силовых
установок.
71
Вместе с гем повысилась их гига в результате совершенствования дню ле-
лей и винтов.
Современный этап в развитии аэродинамики скоростного само-
лета характеризуется стремлением придать обтекаемым частям
самолета такие формы, которые отвечали бы требованиям, связан-
ным с влиянием сжимаемости воздуха.
Академик С. А. Чапльи ин (1869—1942 гг.) еще н 1903 г. в работе «О газовых
струях» доказал, что при скоростях полета, близких к скорости звука, необходимо
учшывать влияние па аэродинамику самолета сжимаемости воздуха
На скоростях полета свыше
сжимаемости воздуха
800—900 км/час
влияние
0.2 0.4 0,6 0,8 1.0 1.2 7,4 7/ 0 П
Фиг 7. Зависимость ст от чиста .4
при ра пличных X
имеет волновое сопротивление.
(220—250 м/сек)
на аэродинамику самолета стано-
вится уже заметным и интенсив-
но растет с увеличением чис-
ла М.
Число М, соответствующее
скорости набегающего потока,
при которой местная скорость
его в какой-либо точке поверх-
ности тела равна скорости звука
(волновой кризис), называется
критическим числом М и обозна-
чается Мкр.
При скоростях, превышаю-
щих критическую, наибольшую
долю в сопротивлении самолета
Поэтому наиболее важным шагом
на пути создания сверхзвукового самолета является уменьшение
волнового сопротивления.
На волновое сопротивление влияют удлинение крыла, стрело-
видность в плане и относительная толщина профиля.
Так, при уменьшении удлинения крыла влияние сжимаемое in
воздуха уменьшается (фиг. 7).
Стреловидная форма крыла в плане существенно влияет на ве-
личину волнового сопротивления, особенно в зоне М=1
(фиг. 8). Однако при скоростях, соответствующих числу М = 2,0,
волновое сопротивление (при равных прочих условиях) стреловид-
ного крыла становится равным сопротивлению прямого крыла.
При звуковых и сверхзвуковых скоростях полета очень сильно
влияет на величину волнового сопротивления относительная тол-
щина профиля (фиг. 9).
Уменьшение волнового сопротивления фюзеляжа и других
нвнесущих агрегатов самолета, таких, как фонарь кабины, гондо-
лы двигателей, 'подвесные топливные баки и проч, достигается,
прежде всего, устранением прямых скачков уплотнения. Чтобы из-
бежать возникновения прямого скачка на фюзеляже, носовую
часть фюзеляжа следует заострять и уменьшать радиус входных
кромок заборника.
72
К требованиям аэродинамического совершенствования можно
отнести также и герметизацию конструкции самолета.
Попадание воздуха внутрь самолета и затем вытекание его
наружу через щели вызывает значительное 'повышение лобового
сопротивления самолета.
Фиг 8. Влияние стреловидности кры-
ла на величину сх.
Фиг. 9. Влияние с на вели-
чину сх.
В целях герметизации конструкции створки, крышки, двери,
окна самолета снабжаются мягкими прокладками (резиновыми
или кожаными).
П Вес, прочность и жесткость конструкции
Конструкция всякого самолета прежде всего должна быть до-
статочно прочной, т. е. напряжения в силовых элементах и их со-
единениях, могущие возникнуть в полете, а также при посадке
и движении по земле, не должны превышать предельно допусти-
мых для данной конструкции напряжений.
Различают статическую прочность, соответствующую пос жененному
возрастанию нагрузок; динамическую п р о ч и о с т ь — при резком, вне-
запном изменении нагрузки (удар при посадке, резкий воздушный порыв)
и усталостную прочность — при повторных регулярных (например,
вибрации, вызванные работой силовой установки) и нерегулярных циклических
нагрузках. «Усталостное» разрушение происходит при сравнительно небольших
напряжениях (при «пределе усталости»), зависящих ог числа повторений на-
[ рузки, г. е. от срока службы конструкции.
Наряду е достаточной прочностью необходимо обеспечить
жесткость конструкции.
Если прочность конструкции характеризуется напряжениями
в ее элементах, то жесткость характеризуется деформациями.
При встречающихся в эксплуатации максимальных нагрузках
нельзя допускать остаточные деформации элементов конструкции
самолета, превосходящие допустимые величины, которые предпи-
сываются нормами прочности самолетов.
Весьма важно обеспечение жесткости (ограничение деформа-
ций) у агрегатов, создающих аэродинамические силы.
Удовлетворяя требованиям прочности и жесткости, конструк-
ция самолета должна быть возможно более легкой, так как каж-
дая, даже незначительная экономия веса улучшает летные харак-
73
теристики самолета и 'повышает его экономичность, позволяя уве-
личить полезную нагрузку. Можно добиться уменьшения веса
конструкции путем правильного распределения материала в сече-
ниях (т. е. добиваясь равнопрочности конструкции), а также при-
менением лучших материалов, уменьшением количества и разме-
ров несиловых деталей и пр.
Необходимо учитывать изменение физико-механических свойств
материала конструкции вследствие аэродинамического нагрева
при больших скоростях полета, который происходит из-за тормо-
жения потока поверхностью самолета. Так, например, при скорости
полета, равной 3000 км!час (835 At/сек), температура на поверх-
ности обшивки будет около 300°С (573° К), что существенно сни-
жает допустимые напряжения (см. гл. X), а также влияет на рас-
пределение действующих нагрузок между элементами.
Эксплуатационные требования
К ним относятся:
а) эффективное использование внутренних объемов, доступ-
ность всех частей и деталей, подлежащих осмотру и обслужива-
нию, легкость ремонта конструкции, возможность хранения под
открытым небом и эксплуатации в различных метеорологических
условиях;
б) удовлетворение требований надежности* в боевых и мир-
ных условиях.
Надежность самолета в боевых условиях ха-
рактеризуется надежной защитой экипажа, силовых установок,
важнейших элементов конструкции и органов управления. Эффек-
тивным средством повышения живучести является применение
брони (бронестекла в кабине, стальные плиты)защищающей
экипаж и жизненно важные агрегаты и детали самолета.
Боевой надежностью конструкции называют спо-
собность ее выдерживать нагрузки в боевом полете при наличии
частичных разрушений у самолета от попадания в пего снарядов
противника. Надежность конструкции повышается применением
конструкций с рассредоточенными силовыми элементами. В этом
случае разрушение одного из элементов конструкции не снижает
существенно ее несущую способность.
К мероприятиям по повышению надежности самолетов относят-
ся протектирование (специальная защита) топливных баков, обес-
печение возможности полета при отказе одного-двух двигателей
(для самолета с несколькими двигателями), противопожарные
устройства, дублирование важнейших агрегатов, управления, гид-
росистем и т. д.
* Под надежностью понимается свойство конструкции самолетов сохранять
работоспособность ее в течение заданного интервала времени в определенных
условиях эксплуатации самолета как на земле, так и в полете.
74
Надежность конструкции самолетов в мир-
ных условиях характеризуется, главным образом, способно-
стью конструкции не разрушаться при длительном действии по-
вторных нагрузок, т. е. обладать высокой усталостной прочностью.
Сюда же следует отнести и способность конструкции противо-
стоять разрушению ее силовых элементов под влиянием коррозии.
Усталостная прочность конструкции повышается рациональньш выбором ма-
териала (см. ниже), дублированием некоторых силовых элементов, т. е. примене-
нием нескольких путей передачи усилий, применением ограничителей распростра-
нения трещин (накладок) и т. п.
[Ь Технологичность конструкции в самолетостроении
Под технологичностью понимают такие свойства конструкции,
которые при обеспечении эксплуатационных качеств изделия поз-
воляют достигнуть в процессе его изготовления высоких производ-
ственных показателей — малой трудоемкости, простоты обработки,
коротких сроков освоения и снижения стоимости продукции.
То обстоятельство, что технологическая рационализация кон-
струкции, не требуя серьезных затрат для своего осуществления,
приносит большой производственно-экономический эффект, делает
ее основным фактором в борьбе за рост производительности труда.
Основные требования, предъявляемые технологией к конструк-
ции, сводятся к следующему.
1. Простота конструкции и широкое применение
стандартных, нормализованных
и унифицированных конструкции
элементе в, д е т а л е й и узлов
Простота конструкции преследует цель создания самолета или
его агрегата из наименьшего количества простых по конфигурации
деталей при наиболее удобном их изготовлении и легкой сборке.
На фиг. 10 приведены два конструктивных примера. Для про-
изводства узла «а» требуется более 20 инструментов и 19 произ-
водственных операций; для узла «б»-—только 8 инструментов
и 5 операций.
В СССР существуют Государственные общесоюзные и ведом-
ственные стандарты (нормали). Стандартизация и нормализация,
ограничивая выбор детали в пределах стандарта, нормали, позво-
ляют уменьшить число типов размеров деталей, сократить номен-
клатуру материалов и полуфабрикатов, что значительно сокра-
щает объем работ по проектированию и освоению в производстве
новых изделий.
Одновременно с этим производство стандартных и нормализо-
ванных элементов конструкции представляется возможным орга-
низовать в порядке кооперирования на специализированных пред-
приятиях, применяя наиболее прогрессивные методы.
75
В конструкции самолета широко применяются стандартные
и нормальные крепежные детали (болты, винты, шайбы, гайки,
заклепки и т. л.); детали системы питания топливом, системы
смазки (краны, штуцеры, переходники, пробки, горловины) и мно-
гие другие детали.
Фиг 10.
Наряду с использованием стандартов и нормалей следует стре-
миться к более широкому внедрению унификации или преемствен-
ности конструкций.
Термином «унификация конструкции» определяют степень ис-
пользования в новых конструкциях самолетов деталей и узлов,
а в отдельных случаях и целых агрегатов, других ранее спроекти-
рованных, освоенных в производстве и проверенных в эксплуата-
ции самолетов.
2. Обоснованные точность изготовления
и чистота обрабатываемой поверхности
Точность изготовления детали, узла и агрегата и чистотх
обработки 'поверхностей следует устанавливать, исходя из строго
обоснованных технических требований, так как переход на более
высокие степени точности и чистоты неизбежно влечет за собой
повышение трудоемкости и себестоимости изготовления.
3. Рациональный выбор вида заготовок
При выборе вида заготовки основным критерием экономич-
ности деталей является их стоимость изготовления при обязатель-
ном условии, что предъявляемые к ним требования прочности,
веса и аэродинамических свойств удовлетворяются полностью.
Важное значение имеет выбор материалов, обладающих наряду
с высокими физико-механическими свойствами хорошей обрабаты-
ваемостью.
Ниже показаны некоторые виды заготовок, полученные со-
временными высокопроизводительными методами (фиг. И, 12,
13, 14).
На фиг. 12 показана рама лонжерона тяжелого самолета, кото-
рая была изготовлена двумя разными способами, В первом слу-
чае (а) сборная рама имела 22 детали, 1500 крепежных нормалей
76
Фиг 12 Рамы лонжерона! изготовленные разными способами
Л
Фиг 13. Горячештампованная панель крыла (заготовка).
штатов
оооодоаоа
77
и весила 180 кГ (1760 «); во втором случае (б) —рама была на-
готовлена при помощи горячей штамповки и состоит из одной
детали весом в 118 кГ (1160 н).
4. Рациональный выбор способа обработки
заготовки детали
Независимо от вида -получения заготовок надо стремиться, где
только возможно, оставлять поверхности необработанными.
Основным видом обработки заготовок является механическая
обработка. Одним из новых процессов обработки является глубо-
кое травление или химическое фрезерование.
6-5
Фиг. 14. Деталь, изготов-
ленная при помощи литья.
Б-Б
Фиг, 15. Панель, обрабо-
танная глубоким травле-
нием
На фиг. 15 показан пример детали, обработанной при помощи
глубокого травления.
5. Рациональный выбор способа
соединения элементов конструкции
Повышение степени технологичности конструкции самолета
можно достигнуть выбором рационального способа соединения
ее элементов. В самолетостроении применяются соединения: бол-
товые, заклепочные, сварные, клеевые, клеесварные, шомполь-
ные и др.
* Процесс глубокого травления состоит в том, что заготовка, подлежащая
обработке, погружается в ванну с соответствующим раствором. Места заготовки,
не подлежащие травлению, покрываются изолирующим составом. Глубина трав-
ления определяется продолжительностью нахождения заготовки в растворе
Точность обработки достигает 0,05 леи.
78
Болтовые и винтовые соединения являются наиболее трудо-
емкими и в весовом отношении более тяжелыми.
Из всех -процессов изготовления сборных панелей обшивок
(склеивание, точечная сварка, клепка и т. д.) самым распростра-
ненным является клепка. Расчленение агрегатов на панели и узлы
должно обеспечивать возможность максимальной механизации
клепальных работ.
В самолетостроении широко применяются и сварные соедине-
ния. Преимущество сварных соединений перед заклепочными за-
ключается в том, что такие соединения обеспечивают герметич-
ность, уменьшают вес конструкции и снижают трудоемкость ее из-
готовления.
Наряду с клепкой и сваркой все шире применяются клееные
конструкции из тонких металлических листов и профилей.
Преимущества клеевых соединений, а именно: более высокое
качество обтекаемых поверхностей, лучшая герметизация, отсут-
ствие шума при сборке, меньший вес по сравнению с болтовыми
и заклепочными соединениями и проч., обусловливают эффектив-
ность их применения в конструкциях самолетов.
6. Обеспечение требования сборки.
Расчленение конструкции самолета
Технология сборки предъявляет к конструкции самолета спе-
цифические требования, к которым в первую очередь относятся:
отсутствие пригоночных работ, возможность поточной сборки и
взаимозаменяемость.
Сборочные работы самолета по трудоемкости составляют 40—
60% изготовления объекта; поэтому учет особенностей сборки при
проектировании значительно 'повышает производительность труда
и снижает себестоимость изделия.
Особенно важное значение при выполнении требований сборки
имеет выбор схемы расчленения конструкции агрегатов и само-
лета. Расчленение -позволяет изготовлять отдельно узел, панель
и секцию и монтировать на них элементы оборудования.- Разли-
чают расчленение на агрегаты, секции и панели (фиг. 16).
Готовый самолет можно легко разобрать без разрушения со-
единений на агрегаты: фюзеляж, крылья, оперение, силовую уста-
новку и шасси.
Конструкция агрегата состоит из секций, которые в свою оче-
редь собираются из деталей, узлов и панелей.
Расчленение конструкции на отдельные сборочные единицы
значительно уменьшает трудоемкость, повышает производитель-
ность труда сборщиков и монтажников, сокращает цикл сборки
и монтажа, сокращает потребные производственные площади и ко-
личество рабочих мест. При этом несколько увеличивается вес
конструкции за счет введения соединений.
79
80
Кроме того, расчленение конструкции позволяет применять бо-
лее широкую механизацию сборочных работ, ввод в работу кле-
пальных прессов-автоматов, сварочных автоматов и других средств
механизации.
Важным требованием сборки, устраняющим подгонку и обли-
чающим замену в эксплуатации, является обеспечение взаимоза-
меняемости агрегатов и узлов самолета.
Размеры, вес, качество поверхности, расположение стыковых
отверстий и т. 'п. взаимозаменяемых частей должны быть одина-
ковы (в пределах допусков).
Экономические показатели
Стоимость производства самолета в целом в значительной сте-
пени обусловливается рациональной технологией изготовления,
технологией сборки и выбора материалов.
Важнейшим экономическим ‘показателем гражданских самоле-
тов является рентабельность 'перевозок 'пассажиров и грузов, ко-
торая находится в прямой зависимости от:
а) скорости перевозок;
б) величины перевозимого за один рейс гр>за;
в) дальности одного рейса;
г) (прямых издержек за 1 час полета (стоимость топлива, смаз-
ки, ремонта, обслуживания и т. п.).
Глава 17/
КЛАССИФИКАЦИЯ САМОЛЕТОВ
1. КЛАССИФИКАЦИЯ САМОЛЕТОВ ПО НАЗНАЧЕНИЮ
Назначение самолета в значительной мере определяет его лет-
ные и весовые характеристики, размеры, особенности компоновки
и оборудования.
В соответствии с назначением самолеты подразделяются на
военные и гражданские. Классификация самолетов по нашачеппю
приведена на фиг. 17.
Военные/Самолеты
Современные военные самолеты, несмотря на большое разно-
образие боевых задач, стоящих перед ними, можно разделить на
следующие основные типы: истребители, бомбардировщики (ра-
кетоносители), военно-транолортные и многоцелевые самолеты,
используемые в зависимости от обстановки по различным назна-
чениям.
Истребители (фиг. 18). Основное назначение истребите-
лей — поиск и уничтожение в воздухе самолетов п ракет против--
6 1563 81
лика. Так как истребитель предназначен для воздушного боя, то
он должен обладать возможно большими горизонтальной и верти-
кальной скоростями, большим потолком, высокой маневренностью,
очень большой прочностью и живучестью.
Фиг. 17 Классификация самолетов по назначению
По роду боевой работы, определяющей особенности конструк-
ции и компоновки самолета, современные истребители можно раз-
делить на следующие типы: истребители ПВО или перехватчики —
для перехвата и уничтожения ракет и стратегических самолетов
противника; фронтовые—для завоевания господства в воздухе
над полем боя и на тактической глубине обороны; палубные —
для обеспечения господства в воздухе над морем; истребители-
82
бомбардировщики пли ракетоносители — для нападения с воздуха
на войска, огневые средства, укрепленные сооружения, располо-
женные в зоне передовых позиций, а также в оперативной глубине
территории противника.
Каждый из этих типов истребителей имеет специфические осо-
бенности. Так, например, для истребителя ПВО наряду с большой
горизонтальной скоростью требуется очень большая вертикальная
скорость (скороподъемность) и высота полета, для истребителя-
бомбардировщика — необходима достаточная дальность и универ-
сальность вооружения.
Фиг. 19. Стратегические бомбардировщики или ракетоносители.
Скорости и дистанции воздушного боя в современных условиях
требуют применения на истребителях реактивного оружия и спе-
циальных автоматически действующих средств управления, при-
целивания и наводки оружия на цель.
Современный истребитель представляет собой сверхзвуковой
самолет с полетным весом от 6 до 18 тонн (59 000—176 000 и),
с весьма мощной силовой установкой, имеющий один, иногда два
реактивных двигателя, броневую защиту и вооруженный современ-
ным наиболее эффективным оружием. При небольших размерах
истребитель насыщен разнообразным новейшим оборудованием.
Бомбардировщики или ракетоносители (фиг. 19)
служат для разрушения в тылу противника коммуникаций, соору-
6* 83
женин, имеющих военное и политическое значение, и для бомбар-
дировки с воздуха воинских соединений и их укреплений. Для этой
дели они могут быть попользованы как носители управляемых
снарядов.
Различают бомбардировщики (ракетоносители) тактиче-
ские и стратегические.
Тактические бомбардировщики (ракетоносители)
предназначены для действий по войскам и войсковым тылам про-
тивника. Они имеют сильное оборонительное вооружение и надеж-
ную броневую защиту. Скорость — околозвуковая или сверхзвуко-
вая; полетный вес — 154-30 т [(15-е-ЗО} I04 я], потолок — 18-^24 км,
дальность 3()0()д-4000 км.
Фш 2l) J раисиорiныи самолет
К =»[ои группе бомбардировщиков относятся также п а л \ 5-
н ы е б о м б а р д и р о в щ и к и, ’Предназначенные для действия
прогни кораблей и подводных лодок.
Стратегические бомбардировщики (ракетоноси-
тели) предназначены для нападения па важнейшие военные объ-
екты, политические и экономические центры, расположенные в глу-
боком тылу противника па расстоянии 6000—8000 кж и больше от
фронта пли границы.
Дальность полета такого бомбардировщика (свыше 10 000 км
без заправки в воздухе) не позволяет истребителям охранять его
на всем маршруте полета, и поэтому он сам должен иметь силь-
ное оборонительное вооружение и специальные (автоматические)
средства управления им.
Максимальная скорость его — околозвуковая или сверхзвуко-
вая. Полетный вес может достигать 200 т (200- 104 я) и выше, по-
толок около 24 кж.
Военно-транспортные самолеты. Основное назна-
чение таких' самолетов — перевозка воинских соединений, различ-
ного рода военного снаряжения, включая орудия, танки и управ-
ляемые снаряды, а также заправка в воздухе топливом боевых са-
84
молетов (фиг. 20). В условиях мирного времени они выполняют
функции грузовых гражданских самолетов.
Воепно-транопортные самолеты имеют скорость 600ч-
1000 км/час (165—280 м/сек); полетный вес свыше 100 т
(100-104 н) и дальность — 5000-Н10000 км и выше.
Многоцелевые самолеты, Наиболее часто используют-
ся в качестве истребителей, для самостоятельных бомбардировоч-
ных действий и разведки.
Гражданские самолеты
Основное назначение гражданских самолетов — перевозка пас-
сажиров, почты, грузов и обслуживание народного хозяйства.
Гражданские самолеты делятся на следующие основные типы
и группы: пассажирские, учебные, спортивные и специализирован-
ные самолеты, применяемые в'народном хозяйстве.
Пассажирские самолеты в зависимости от дальности полета,
величины платной нагрузки и количества пассажиров делятся на
магистральные и самолеты местных линий (фидерные).
Межконтинентальные самолеты (фиг. 21,а, б) и магистраль-
ные или дальние и средней дальности (фиг. 21, в) предназначены
для обеспечения воздушного сообщения на главных авиалиниях
и имеют основные показатели, приведенные в табл. I
Габ.ища I
Тип самилеы 1, 11ла 1 нал нагруз- ка в шинах (ньютонах) ДалБкос! ь ли* 1 Количество пассажиров
Межконтинентальные (сверхдальние) самолеты, >15 : (15-КН) > 6000 >120 чел.
Магистральные дальние самолеты 12-J-15 |(12 : 15)- 10Ц 4000—5000 100—120 чел.
Магистральные самолеш средней дальности 54-12 [(5 ч-12)-1041 1000 : 3500 40 . 100 чел.
В настоящее время конструкторы
работают
над созданием
сверхзвуковых магистральных пассажирских самолетов, которые,
вероятно, будут иметь дальность полета 4000ч~6000 км и выше
и скорость (2,04-3,0) М.
Самолеты местных авиалиний (фиг. 22, см. также
фиг. 3) 'предназначены для обеспечения воздушного сообщения на
авиалиниях протяженностью до 1000 км и имеют число пассажи-
ров до 30 человек.
Настоящая классификация пассажирских самолетов лишь
приближенно характеризует их липы и меняется с развитием тех-
ники.
85
4?
86
Развитие пассажирских самолетов основано на максимальном
удовлетворении требованиям безопасности, скорости, экономично-
сти и регулярности Одновременно с улучшением этих показателей
должны быть обеспечены достаточно хорошие удобства и обслу-
живание пассажиров
Фиг 22 Пассажирский самолет местных тннн
Учебные самолеты служат для обучения в летных шко-
лах военной и гражданской авиации Различают учебные са-
молеты первоначального обучения и учебно-
тренировочные, служащие для постепенного перехода учени-
ка-летчика с самолета первоначального обучения на самолеты,
эксплуатируемые в военной и гражданской авиации
Фиг 23 Сельскохозяйственный самолет
87
Специазизи р о в а и п ы е само л е т ы (фиг. 23) создаю) -
ся в соответствии с 'потребностью народного хозяйства.
Например, самолеыя санитарные для перевозки больных;
сельскохозяйственные, используемые для сева и борьбы с вреди-
телями полей и садов, для охраны лесов от пожаров, для под-
кормки с воздуха минеральными удобрениями различных сельско-
хозяйственных культур; для ледовой разведки; для разведки на
рыболовецких промыслах и пр.
Спортивные, рекордные и экспериментальные
самолеты служат для достижения рекордных показателей или
для различных исследований. Методы и средства, при помощи ко-
торых достигнуты рекордные показатели, используются в даль-
нейшем при конструировании новых самолетов.
Роль гражданской авиации в народном хозяйстве нашей стра-
ны все возрастает. «Авиационный транспорт превратится в массо-
вый вид перевозки пассажиров, охватит все районы страны»
(«Программа КПСС»).
2. КЛАССИФИКАЦИЯ САМОЛЕТОВ ПО КОНСТРУКТИВНЫМ ПРИЗНАКАМ
%
В зависимости от количества несущих плоскостей (крыльев)
самолеты подразделяются на монопланы, имеющие одну несу-
щую плоскость, н бипланы — с двумя несущими плоско-
стями.
Первый в мире самолет с паровым двш ателем, построениыц в России
в 1882 -1884 1 г , был монопланом (фиг. 24) Он был изобретен нашим ылаигш-
вым соотечественником А Ф Можипскнм. В 1881 г 3 ноября ехц была выданч
лриви iei ия флеш), в которой значилось, чю « на сие изобретение иреж ie
сею никому друюмх в России привилегии выдано не было»
Первый в мире самолет с бензиновым двигателем, поднявшийся в воьцх,
был биплан, пос । роенный в 1903 i в США братьями Райт (фиг. 25)
Вскоре в России русские конечрукгоры Я. М. Гаккель, Д. П Гршорович и др
разработали новую схему самолеч а-бпплана, получившую впоследовин всемир-
ное распросч ранение.
Монопланы долгое время уступали бипланам, главным обра-
зом, в весе крыла и маневренности. С дальнейшим ростом скоро-
сти полета, а также применением новых материалов и более усо-
вершенствованных конструктивно-силовых схем крыльев аэродина-
мические преимущества моноплана по сравнению с бипланом
становились все более очевидными. В настоящее время моноплан
является основной схемой для всех самолетов.
При всем MHoiообразии различных конструктивных признаков
существующие самолеты-монопланы можно свести к следующим
группам, различающимся по:
а) расположению крыла;
б) типу внешнего набора крыла;
в) типу фюзеляжа;
88
89
г) типу и расположению оперения;
д) типу шасси;
е) числу двигателей;
ж) типу двигателей;
з) расположению двигателей.
Классификация самолетов по конструктивным признакам при-
ведена на фиг. 26.
Рассмотрим несколько подробнее самолеты, различающиеся по
расположению и типу внешнего набора крыла. Другие конструк-
тивные признаки будут рассмотрены при изучении соответствую-
щих агрегатов самолета в разд. III настоящего курса.
Фиг. 25. Самолет братьев Райт.
По расположению крыла относительно фюзеляжа самолеты
подразделяются на низкопланы, средней л аны и вы-
сокопланы.
Низкоплан — самолет с нижним расположением крыла от-
носительно фюзеляжа.
С аэродинамической точки зрения благодаря наличию значи-
тельной интерференции * нижнее расположение крыла является
наименее выгодным; кроме того, оно ограничивает размеры бомб
или ракет в фюзеляже бомбардировщика при их размещении меж-
ду лонжеронами.
Однако несмотря на это многие современные самолеты различ-
ного назначения выполняются по низкопланной схеме. Это объяс-
няется тем, что данная схема имеет существенные преимущества:
1. Ввиду того, что крыло расположено близко от поверхности
земли, эффект приращения подъемной силы при посадке (влияние
земли) будет наибольшим.
2. Шасси получается невысоким и, следовательно, более лег-
ким и проще убирается.
* Взаимного влияния частей самолета
90
<
Фиг. 26 Классификация самолетов по конструктивным признакам.
91
Средней л а п —самолет, у которого крыло расположено при-
мерно на середине высоты фюзеляжа Эта схема самолета стала
типичной для современных истребителей и бомбардировщиков.
Среднеллан имеет следующие преимущества:
1. При среднем расположении крыла потери на интерферен-
цию минимальны, что особенно благоприятно сказывается при
больших скоростях полета; это является основным достоинством
среднеплана.
2. Внизу, в средней части фюзеляжа, легко размещаются от-
секи для бомб или ракет.
К числу недостатков рассматриваемой схемы следует отнести:
1. Увеличение веса шасси.
2. Затрудненное расположение пассажирских кабин в средней
части фюзеляжа.
Высокоплан — самолет, у которого крыло примыкает непо-
средственно к верхней части фюзеляжа.
При такой схеме интерференция между крылом и фюзеляжем
незначительна. Кроме того, к 'преимуществам высокоплана отно-
сится следующее:
1. Хороший обзор нижней полусферы, чем объясняется широ-
кое применение этой схемы для сельскохозяйственных само-
летов.
2. Возможность размещения внутри фюзеляжа (у бомбарди-
ровщиков) бомб (ракет) крупных размеров независимо от конст-
руктивной схемы крыла.
Основным недостатком высокопланной схемы является слож-
ность уборки главных ног шасси в крыло. При высоком его рас-
положении главные ноги получаются высокими, тяжелыми, не-
удобными для уборки в крыло. Уменьшить в таком случае высоту
главных ног шасси можно, разместив их под гондолами силовых
установок или по бокам фюзеляжа.
Наличие интерференции крыла и фюзеляжа оказывает сущест-
венное влияние на волновое сопротивление. Аэродинамические
исследования показали, что волновое сопротивление комбинации
крыло — фюзеляж можно значительно снизить, применяя так на-
зываемое «правило ^площадей». Это правило состоит в том,
что эпюра площадей (распределение площадей вдоль оси самоле-
та), нормальных к потоку поперечных сечений самолета, должна
максимально приближаться к эпюре площадей тела минимального
сопротивления.
Практическое применение правила площадей к конструкции
самолета заключается в том, что на фюзеляже делаются местные
плавные впадины, компенсирующие прирост площадей сечении
за счет крыла и надстроек, а в некоторых случаях накладываются
местные обтекатели, восполняющие резкие провалы эпюры площа-
дей (фиг. 27, пунктир на эпюре площадей соответствует пунктир-
ным очертаниям фюзеляжа).
92
Крыло каждой из рассмотренных схем может быть выполнено
с подкосами или без них. По этому признаку самолеты разделяют-
ся на свободноиесущие и подкосные (фиг. 28)
Фиг. 27
Свободнонесущее крыло можно рассматривать как консоль-
ную балку, подкосное крыло — как балку на двух опорах с кон-
солью.
На фиг. 28 показаны примерные эпюры изгибающих моментов
свободнонесущего и подкосного крыльев монопланов. Как видно,
Фиг. 28 Эпюры из1ибающи\ моментов в подкосных и в сво
бодноцесхщих крыльях монопланов.
наибольшие (расчетные) изгибающие моменты при одинаковых
размерах и нагрузках крыла в подкосном крыле в несколько раз
меньше, чем в свободнонесущем.
93
Из этого следует, что подкосное крыло можно сделать легче,
чем свободнонесущее, но при этом подкос создает добавочное
лобовое сопротивление.
Поэтому в настоящее время применяются исключительно сво-
боднонесущие крылья. Крылья с подкосами применяют в редких
случаях и только для нескоростных самолетов.
Схемы самолетов
Отнесение самолета к группам приведенной классификации
определяет схему самолета. Например, схема самолета: «свободно-
несущий моноплан со средним расположением крыла, однофюзе-
ляжный, с центральным оперением, шасси с передним колесом,
с двумя турбореактивными двигателями, расположенными на
крыле».
Из всего многообразия комбинаций конструктивных признаков
выделяют, кроме нормальной схемы, схемы «летающее крыло*
и «утка».
Фиг. 29. Схема самолета типа «летающее крыло»
На самолете типа «летающее крыло», иногда называемого
«бесхвостка», горизонтальное оперение отсутствует.
Применение этой схемы позволяет получить самолет с мини-
мальным весом и меньшим лобовым сопротивлением.
Современные самолеты типа «летающее крыло» (см. фиг. 19,
26) имеют острую и удлиненную переднюю часть фюзеляжа и, на-
оборот, укороченную заднюю часть. Вертикальное оперение уста-
навливается, преимущественно, на фюзеляже.
Крыло обычно треугольное в плане, так как по условиям ком-
поновки и вследствие большой корневой хорды такого крыла
рули высоты, размещенные на задней кромке крыла*, имеют до-
статочно большое плечо относительно центра тяжести самолета.
Тяжелые самолеты представляется возможным осуществить
без фюзеляжа и оперения — по схеме «летающее крыло», так как
большая строительная высота крыла позволяет разместить в нем
кабины, грузы и оборудование (фиг. 29).
* Часто рули высоты являются одновременно и элеронами. В этом случае
они называются элевонами,
94
Первые самолеты типа «летающее крыло» были построены в СССР в начале
20-х годов Б. И. Черановским
Существенным недостатком схемы «бесхвостка» является сле-
дующее обстоятельство.
Для уравновешивания моментов при увеличении угла атаки
необходимо рули высоты отклонять вверх (фиг. 30). Однако при
этом неблагоприятное изменение кри-
визны профиля уменьшает сч. _______
Для сохранения подъемной силы —
в этом случае требуется большая пло- —J
щадь крыла, чем у самолетов обычной
схемы, что в значительной мере снижает
указанные выше преимущества схемы
«бесхвостка». Другим недостатком этой
схемы является трудность осущсствле-
ния эффективной механизации крыла,
так как закрылки, отклоненные для уве- фиг 30-
личения су книзу, создают момент, кото-
рый уравновешивается дополнительным отклонением рулей высоты
кверху, что уменьшает су.
На самолете типа «утка» (фиг. 31) горизонтальное оперение
расположено впереди крыла.
Схема «утка» была применена еще в начале этого века на самолетах братьев
Райт и русского конструктора А. В, Шиукора (1912 г*)'
Такая схема обладает по сравнению с обычной схемой самоле-
та некоторыми преимуществами:
1. У самолета обычной схемы горизонтальное оперение боль-
шей частью имеет отрицательную подъемную силу, уменьшающую
подъемную силу самолета.
Фиг. 31. Схема самолета типа «утка».
У самолета типа «утка» аэродинамическая сила горизонталь-
ного оперения положительна — направлена вверх, подъемная сила
самолета увеличивается, при прочих равных условиях посадочная
скорость несколько уменьшается.
2. Горизонтальное оперение не затенено крылом, что повышает
его эффективность.
95
К недостаткам самолета типа «утка» следует отнести затруд-
нения в обеспечении путевой устойчивости и управляемости, свя-
занные с малым плечом вертикального оперения и увеличением
длины посоьои части фюзеляжа.
Глава УШ
ВНЕШНИЕ НАГРУЗКИ, ДЕЙСТВУЮЩИЕ НА САМОЛЕТ
1 ГОРИЗОНТАЛЬНЫМ ПОЛЕТ
4
В прямолинейном горизонтальном полете с постоянной скоро-
стью на самолет действуют следующие силы (фиг. 32):
Фиг 32, Силы, действующие не са-
молет в горизонтальном полете.
I) вес самолета G;
2) подъемная сила Уо,
3) тяга винта Ро или сила
реакции вытекающих газов из
реактивного двигателя;
4) лобовое сон роти в,пе-
ние Qo.
Для упрощения допускаем,
что все перечисленные силы
проходят через центр тяжести
самолета.
Для того чтобы самолет совершал горизонтальный полет с по-
стоянной скоростью Vo, необходимо равновесие всех сил.
Следовательно:
где
Уо — G и Pq~ Qq,
_WSV» С) _c^svt>
0“ о
2 КРИВОЛИНЕЙНЫЙ ПОЛЕТ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ
Рассмотрим самолет, находящийся в криволинейном полете
по траектории с радиусом кривизны, равным г (фиг. 33, а, б), В этом
случае на самолет действуют те же силы, что и при горизонталь-
ном полете. G, Р, Y и Q, только они не находятся в равновесии,
г. е. в сумме дают не пуль, а некоторую неуравновешенную силу,
приложенную к самолету. Положим, что по касательной к траек-
тории силы находятся в равновесии, так как неуравновешенная
тангенциальная сила сравнительно мала и не играет существен-
ной роли. Тогда, согласно второму закону Ньютона, самолет будет
двигаться с ускорением, действующим в направлении неуравно-
вешенной силы по нормали к траектории.
96
Ускорение (центростремительное ускорение) равно и на-
г
правлено, к центру кривизны траектории. Как известно из меха-
ники, действующие силы вместе с инерционными силами нахо-
дятся в равновесии (принцип Даламбера). Прикладываем к само-
лету центробежную силу инерции
У2 G V2
т ——-------
Г g Г
где т— масса самолета,
g—ускорение силы тяжести,
Центр кривизна траектории
Фиг. 33. Силы, действующие на самолет в
траектории
*
криволинейном полете.
и проектируем все силы на нормаль к траектории (см. фиг. 33, а)
Г-Осозб- — —=0.
g г
Здесь 0 — угол между силой тяжести и нормалью к траектории.
После простых преобразований получим
Y 172 У 172
----COS 0 --- И - - —----kcos6.
G gr о gr
Отношение^ показывающее, во сколько раз подъемная сила
в криволинейном полете больше веса самолета G (или, что то же
самое, больше подъемной силы в горизонтальном полете), назы-
вается коэффициентом перегрузки (или перегрузкой) и обозна-
чается буквой п. Так как интересующее нас наибольшее значение п
для данной траектории будет иметь место при cos 0 = 1, т. е. в наи-
низшей точке траектории (см. фиг. 33,6), то
Y V?
П~---—----
G gr
7 1563
97
Вероятную в эксплуатации самолета максимальную подъем-
ную силу на данном режиме будем называть эксплуатационной I
и обозначать Уэ. Соответствующий ей коэффициент перегрузки,
т. е. возможный в эксплуатации наибольший коэффициент пере-
грузки на данном режиме, будем называть коэффициентом экс-
плуатационной перегрузки (эксплуатационной перегрузкой) п3.
Фиг 34
В горизонтальном полете
всякий груз действует на огра-
ничитель (опору, узел крепле-
ния) с силой, равной своему
весу. В криволинейном полете
к весу груза прибавляется
инерционная сила, направлен-
ная в сторону, противоположную ускорению. Силу, равную сумме
веса и инерционной силы, будем называть массовой силой. Наи-
большая сила, с которой груз действует на опору в криволинейном
полете, — эксплуатационная массовая сила — в п3 раз больше его
веса. Покажем это.
Обозначим: Grp —вес груза; шгр — масса груза; гр — инерцион-
ная сила груза; РгР —эксплуатационная массовая сила, с которой
ч ГТ V2
груз действует на опору. При полете с ускорением j = — инер-
ционная сила
Массовая сила (фиг. 34) равна
p?P-P7rP+arp=orp (XL+i )=огр»’. (2)
Формула (2) в равной степени относится и к распределенным
массам. Если погонный вес (вес единицы длины) конструкции фю-
зеляжа равен то в криволинейном полете эксплуатационная
массовая погонная нагрузка будет равна д$п3.
Is
3. ПОЛЕТ В НЕСПОКОЙНОМ ВОЗДУХЕ. ПРЕДЕЛЬНЫЕ ПЕРЕГРУЗКИ
Значительные перегрузки возникают при полете самолета в не-
спокойном воздухе (в болтанку). Рассмотрим случаи, когда само-
лет попадает в вертикальный порыв воздуха (восходящий или
нисходящий поток) Пусть самолет летит горизонтально со ско-
48
ростыо Vo* * и на него снизу подействовал вертикальный порыв
воздуха со скоростью ы0 (фиг 30. Суммарная скорость потока
относительно самолета будет V=Vo+Sq**. В результате угол ата-
ки изменится на величину
да—arctg — 0
Vo Vo
и величина скорости станет
cosAa
Изменится также подъемная сила на величину
(?V2
У Q
и перегрузка будет равна
п~~
ДУ
Знак минус соответствует нисходящему потоку воздуха.
Фиг. 35 Полет в неспокойном воздухе
Положим вследствие малости угла AacosAa?^! и, следова-
тельно, V^Vq.
Из фиг. 35, б найдем
Acy=Aatg — tg<₽.
у О
ТУ 1
Но, как известно, =
da
।
* Рассматриваем движение воздуха относительна самолета
* * Векторн а я сумма.
7*
99
Подставляя Дсу и И в выражение для перегрузки, получим
dc? u0 Q^o
„ = 1 ±_ 1 , 3
G da 2р
где Р~^~ обозначена величина, называемая удельной нагрузкой на
крыло.
Отсюда видно, что перегрузка при полете в неспокойном воз-
духе увеличивается с увеличением скорости горизонтального по-
лета Vo и скорости вертикального порыва Щ), а также зависит от
d с
высоты полета, удельной нагрузки на крыло и величины —- ,
da
которая меняется, с изменением числа М (фиг, 35,в), замедляя
рост перегрузки при больших числах М.
Найдем максимально возможное значение перегрузки. Очевид-
но, что
__ ^tn»X
q
Максимально возможное значение подъемной силы найдем из
V2
_____ „ шах
шах ^утахУ
а вес самолета G из условия равенства его и подъемной силы при
посадке выразим в виде
V2
у-._ г пое
u—
где су maXe соответствует малым числам М.
Тогда
_ СУ mux / V'max V
"max а I v 1 *
max0 \ 1!ОС /
(4)
где д=-^—относительная плотность воздуха на высоте, соот-
ветствующей ^тах.
Таким образом максимально возможная перегрузка умень-
шается с высотой и растет с ростом максимальной скорости. От-
ношение Су щах~, характеризующее влияние сжимаемости на коэф-
Су тах0
фициент максимальной подъемной силы при больших скоростях
меньше 1 и несколько уменьшает значение «шах-'
Для современных скоростей теоретическое значение /гша1 может
достигать 40—50.
100
В условиях эксплуатации такую перегрузку получить практиче-
ски невозможно ввиду того, что переход с малых су на су щах на
режиме максимальной скорости происходит не мгновенно, а за
какой-то промежуток времени, в течение которого скорость по
траектории упадет, т. е. Утах будет меньше ----—Кроме
.того, рассчитывать самолет на прочность с п3 = 40<-50 нецелесооб-
разно, так как летчик физиологически не может выдержать такие
перегрузки.
*3
V
Сч
Ча
с*
«э
=3
Cj
С}
3:
«о
CS
Продолжительность деиотВия
Фиг. 36 Предельные перегрузки, пере-
носимые человеком
Результаты специальных исследований показывают, что при
нормальном положении летчика в самолете уже при перегрузке
5ч-6,5, действующей в течение 3—4 сек, наступают болезненные
явления (в лежачем положении действие перегрузки величиной
14—18 в течение большего промежутка времени летчик переносит
значительно легче). На фиг. 36 показаны предельные перегрузки
в различных направлениях, переносимые человеком в зависимости
от продолжительности их действия.
При нормальной перегрузке, когда ускорение направлено вверх,
инерционная сила направлена вниз и летчика прижимает к си-
денью. В криволинейном полете возможны обратные перегрузки,
когда ускорение направлено вниз, а инерционная сила вверх и лет-
чика отрывает от сиденья, как это имеет место, например, когда
самолет входит в пикирование (см. фиг. 33,в).
При современных скоростях полета и резком изменении их
(торможении, разгоне) возможны значительные перегрузки в на-
правлении спина — грудь, которые, однако, легче переносятся че-
ловеком (см. фиг. 36).
Для повышения способности летчика выдерживать высокие
перегрузки применяется противоперегрузочный костюм (фиг. 37),
состоящий из пояса и ножных захватов, в которые подается сжа-
тый воздух Давление в поясе и захватах, автоматически устанав-
101
ливаемос в зависимости от перегрузки, регулирует циркуляцию
крови в организме.
Измерение величины коэффициента эксплуатационной пере-
грузки производится в полете посредством акселерометра или
акселерографа.
Фиг. 37. Противопере-
грузочный костюм.
Фиг. 38. Схема акселерометра.
На фиг. 38 показан схематично-акселерометр. Грузик 1, подве-
.шенный к тарированной пружине 2, перемещается пропорциональ-
но действующей на него силе (перегрузке). Стрелка 4 указывает
по шкале величину перегрузки. Колебания грузика гасятся жид-
костным демпфером 5. Все части акселерометра заключены в кор-
пусе 3.
На фиг. 39 в качестве примера приведены значения перегрузок
в характерных точках на траекториях, получающихся при выпол-
нении некоторых фигур высшего пилотажа *.
4. криволинейный полет в горизонтальной плоскости
Криволинейный полет с изменением направления движения
в горизонтальной плоскости называется виражем. При вираже са-
молет кренится в сторону поворота (фиг. 40); при этом подъ-
емная сила крыла не только уравновешивает вес самолета G, но
и дает слагающую в виде центростремительной силы S. Чем боль-
ше крен, тем больше должна быть подъемная сила, чтобы ее вер-
тикальная составляющая уравновесила вес самолета G, а значит
тем больше будет сила S и меньше радиус виража R.
* ^Возможность выполнения петли, т. е. полета по замкнутой траектории, ле-
жащей в вертикальной плоскости, впервые в истории авиации была теоретиче-
ски доказана Н. Е. Жуковским в 1891 г. в его работе «О парении птиц». В 1913 г.
русский летчик П Н. Нестеров впервые в мире выполнил петлю.
102
г) боевой переворот
Фиг 39. Перегрузки при различных
высшего пилотажа.
103
Рассмотрим вираж без скольжения, для выполнения которого
необходимо, чтобы вертикальные составляющие действующих сил
находились в равновесии, »т. е
Y cos р—G = 0,
откуда
COS₽
Так как знаменатель (cos
всегда должен быть больше
или
Фиг. 40 Силы, действующие
на самолет при вираже
р) всегда меньше единицы, то У
G. Это значит, что на самолет при
вираже действуют перегрузки. Зна-
чение коэффициента перегрузки
получается из равенства
G
1
П = _____.
cos£
Чем круче вираж, т. е чем больше угол р, тем меньше cos р
и, следовательно, больше п
Для современных самолетов предельное значение чугла крена
установившегося виража р ~75н-80°, причем наибольшее значе-
ние коэффициента перегрузки п достигает 4<-6.
5. ПОСАДКА
Посадка самолета совершается следующим образом (фиг. 41).
Самолет, планируя, подходит к земле. На некотором расстоянии
от земли самолет выравнивается. В конце выравнивания самолет
Фиг 41 Схема посадки самолета
обладает еще большой горизонтальной скоростью, для погашения
которой он некоторое время «выдерживается» над землей, т. е.
летит горизонтально. Сохранение подъемной силы, равной весу
самолета при уменьшении скорости, достигается путем увеличения
угла атаки до положения, при котором су достигнет значения
104
Фиг. 42.
Сушах. В дальнейшем, вследствие падения скорости, подъемная
сила станет меньше силы веса G, самолет начнет «парашютиро-
вать» до приземления. Последней стадией посадки является пробег.
В момент приземления са-
молет обладает некоторой
вертикальной скоростью, ко-
торая за очень короткий
промежуток времени гасит-
ся и становится равной
нулю. Следовательно, при-
земляясь, самолет испыты-
вает воздействие значитель-
ного вертикального ускоре-
ния, направленного вверх,
которое вызвано превышением силы Рэ, действующей на шасси
над силой веса G (фиг. 42).
Так же как и в случаях полета, отношение вероятной макси-
мальной силы, действующей на посадочные органы при посадке,
к весу самолета (или, что все равно, к силе, действующей на по-
садочные органы при стоянке), будем называть коэффициентом
эксплуатационной перегрузки при посадке п?.
э р3
П3 = .
G
Глава IX
РАСЧЕТНЫЕ НАГРУЗКИ И НОРМЫ ПРОЧНОСТИ
САМОЛЕТОВ
/с
1. РАСЧЕТНЫЕ НАГРУЗКИ
Для того чтобы конструкция самолета могла надежно выдер-
живать все действующие на нее в полете нагрузки, она должна
обладать достаточной прочностью, что может быть достигнуто дву-
мя способами
1. Расчетом конструкции на прочность в соответствии с дейст-
вующими (эксплуатационными) нагрузками и подбором сечений
элементов конструкции таким образом, чтобы напряжения в них
были равны допускаемым напряжениям, которые принимаются
ниже разрушающих. Такой способ расчета принят в общем маши-
ностроении. В этом случае коэффициент Д характеризующий за-
пас прочности, определяется как отношение разрушающих напря-
жений к допускаемым
у _ °разр
71------•
105
2. Расчетом конструкции на прочность, руководствуясь увели-
ченными, по сравнению с эксплуатационными, нагрузками (будем
называть их расчетными нагрузками) и подбором сечений эле-
ментов таким образом, чтобы напряжения в них были равны раз-
рушающим. Так как эксплуатационные нагрузки ниже расчетных,
то конструкция будет иметь коэффициент запаса, величина кото-
рого определяется как отношение расчетной
/ нагрузки к эксплуатационной
f ^расч
г г> Г Г -/2 рз •
Фиг, 43
Последний способ расчета принят в са-
молетостроении благодаря двум его основ-
ным преимуществам.
1) Коэффициент fa не равен Л и ближе
к действительности, чем
Величины и fi различны потому, что при на-
грузках, близких к разрушающим, нарушается пря-
мая пропорциональность между силами и напряже-
ниями.
Рассмотрим, например, сжатую панель (фиг. 43) и покажем, что для нее
Положим, что допускаемое напряжение Одел достигнуто при силе Р и при-
аразр
пято равным 0,5 Оразр Тогда запас прочности fj = ------ =2.
°доп
Это значит, что разрушение панели произойдет при увеличении силы
в два раза, т. с при силе 2РЭ. Однако такое положение справедливо при усло-
вии, что при возрастании силы в два раза все напряжения тоже возрастут
в два раза (см. пунктир на фиг. 43). В действительности, как нам известно
из разд. I настоящего курса, часть обшивки потеряет устойчивость при
Р<Рразр, произойдет перераспределение напряжений, стрингеры догрузятся
за счет потерявшей устойчивость обшивки и напряжения в них достигнут вели-
чины Стразр при силе, меньшей 2 Рэ, например, при силе, равной 1,8 Рэ. Тогда
^расч 1,8РЭ
—-------------= 1 g
рэ Р9 '
Таким образом, действительный запас прочности панели равен /г=1,8.
Поэтому расчет по второму способу хотя и сложнее, по оказывается более
точным.
2) Во всяком расчете на прочность применяются некоторые
допущения в отношении выбора расчетной схемы при определении
нагрузок. Поэтому надежность расчета на прочность должна под-
тверждаться опытными испытаниями. При расчете по первому спо-
собу опытная проверка заключается в сравнении расчетных на-
пряжений с действительными. Замер последних под нагрузкой до-
статочно громоздок.
При расчете по второму способу для проверки результатов рас-
чета на практике достаточно провести испытания конструкции
(при постепенно увеличивающейся нагрузке) до разрушения. Пра-
106
вильно рассчитанная конструкция разрушается при силе, равной
-Ррасч-н1,1^расч- Преждевременное разрушение свидетельствует
о недостаточной прочности конструкции; разрушение при Р>
>1>1^расч свидетельствует о том, что конструкция чрезмерно
тяжела.
Такие испытания проводятся не только над опытными, но
и время от времени над серийными конструкциями и называются
статическими испытаниями (фиг. 44).
Фиг, 44. Статические испытания самолета
Число, показывающее, во сколько раз расчетная нагрузка боль-
ше эксплуатационной нагрузки, называется коэффициентом без-
опасности f
z ^расч
J рэ '
откуда расчетная нагрузка
Ррасч = /^э- (5)
Так как для крыльев
Уэ = Gn3,
то
Урасч™ G/13/:‘=Л1расч^, (6)
где Прасч — коэффициент расчетной перегрузки
Ярасч—М9’ (7)
Из условий получения конструкции малого веса желательно,
чтобы коэффициент безопасности был как можно меньше. Однако
величина (наименьшее значение) коэффициента определяется из
107
условия отсутствия остаточных деформаций при действии эксплуа-
тационных перегрузок и температур, возможного повторного дей-
ствия нагрузок, возможного отступления в технологии производ-
ства и др. Величина коэффициента безопасности для современных
конструкций самолетов находится в пределах 1,5-^2,0 и устанав-
ливается для каждого расчетного случая.
В случае работы конструкции в условиях высоких температур при наличии
ползучести материала допустимые остаточные деформации и разрушающие на-
пряжения определяются еще сроком службы самолета — временем действия
нагрузок.
Итак, расчет конструкции самолета на прочность производится
по расчетным нагрузкам
расч——И-расч^?-
Полученные напряжения сравниваются с разрушающими (для
данного элемента) напряжениями.
\ 2. НОРМИРОВАНИЕ НАГРУЗОК
На самолет независимости от условий «полета будут действо-
вать различные по направлению и величине силы при различных
углах атаки (от угла атаки, соответствующего су шах> до угла ата-
ки, соответствующего cymin— максимальному отрицательному зна-
чению су). В диапазоне летных углов атаки самолет может полу-
чить перегрузку величиной от максимального положительного до
максимального отрицательного значения.
При посадке также возможно нагружение самолета различны-
ми силами.
Чтобы при расчете на прочность конструкции самолета или его
отдельных агрегатов не производить в каждом случае специаль-
ных исследований для определения расчетных нагрузок, выбраны
характерные положения самолета, обусловливающие наиболее тя-
желые условия в работе его частей.
Положения эти называются расчетными случаями и обозна-
чаются первыми буквами латинского алфавита А, А', В, С, D, D'
и т. д. Применительно к каждому агрегату расчетный случай обо-
значается латинской буквой и индексом агрегата, например:
Вк — случай В для крыла; Ас.у — случай А для силовой установки.
Фиг. 45, а дает наглядное представление о маневрах, соответст-
вующих указанным расчетным случаям. На фиг. 45,6 показаны
соответствующие расчетным случаям точки на полярах.
Расчетные случаи рассматриваются в нормах прочности, раз-
работанных ЦАГИ на основе учета опыта отечественного и зару-
бежного самолетостроения и новейших данных авиационной
науки.
В отношении норм прочности все самолеты разбиты на три
класса: маневренные, ограниченно-маневренные и неманевренпые.
108
Для каждого случая нормы прочности задают коэффициент
эксплуатационной перегрузки n9tax, в зависимости от класса само-
лета, и коэффициент безопасности f.
Для гражданских самолетов /г9пах не превышает 3,5; для истребителей
может достигать 6-5-9 (по данным зарубежной печати).
Сличай D
Фиг. 45. Основные расчетные случаи.
Кроме того, для каждого полетного случая задается или зна-
OV2
чение cv или скоростной напор Величины су и q связаны
&
между собой уравнением подъемной силы
но
откуда
Г’=с>5?у-=‘?А'
У3 — п? G,
n3G = cyqS.
(8)
По заданному су из уравнения (8) можно найти q и наоборот
(величины G, S и л9 известны).
Рассмотрим основные расчетные случаи.
Случай А — криволинейный полет на угле атаки, которому
соответствует су тах и наибольшее значение эксплуатационной пе-
регрузки л9—(?9пах. Коэффициент безопасности f=l,5.
Этот случай имеет место при выполнении «горки», при выходе
из пикирования и планирования, при воздействии мощных восхо-
дящих потоков воздуха на самолет в горизонтальном полете и др.
109
Случай А' — криволинейный полет с такой же -перегрузкой,
как и в случае А, но при наибольшей возможной или допустимой
скорости Vmax.max самолета. Эта скорость отличается ОТ Ртах—
максимальной скорости горизонтального полета.
Для истребителей скорость в этом случае соответствует скоро-
сти -пикирования. В случае А' коэффициент су меньше, чем
Сутах, коэффициент /=1,5.
Случай А' введен потому, что
хотя суммарная нагрузка на крыло
/ / X здесь такая же, как в случае А, но
/ / / /// распределение нагрузки при малых:
~ углах атаки и из-за влияния сжи-
/7 7 I I маемости другое: во-первых, центр
< / / давления сдвинется назад, и эле-
Г / Y = 0 менты крыла, расположенные бли-
же к задней кромке, будут нагру-
f Р жаться больше, чем в случае А;
фИГ 4б во-вторых, изменится распределе-
ние нагрузки по размаху крыла.
Случай В. Криволинейный полет на малых углах атаки
с одновременным отклонением элеронов. п^=0,5н^ах; <7 = <7max maxi
/ = 2,0. Возможные траектории для случая В те же, что и для слу-
чая А'. Случай В возникает на больших скоростях, перегрузка
при нем будет меньше, чем в случае А' из-за меньших углов
атаки. Случай В введен как расчетный, вследствие больших
крутящих моментов, получающихся из-за смещения назад центра
давления.
Случай С — пикирование, т. е. вертикальный полет на угле
атаки, при котором подъемная сила самолета равна нулю (си«0).
При этом элероны отклонены <7 = <7maxmax; f — 2,0. Случай С харак-
теризуется также действием больших крутящих моментов. Распре-
деление аэродинамической нагрузки в сечении крыла таково
(фиг. 46), что образуется пара сил.
Случай D — криволинейный полет на угле атаки, соответст-
вующем максимальному отрицательному коэффициенту подъемной
силы Cymin; ——0,5л*; f — 1,5. В этом случае силы действуют
противоположно их направлениям в случаях А и В.
Случай D' также соответствует отрицательной подъемной
силе, но только при полете с большей скоростью и, следовательно,
с меньшим коэффициентом (—су), чем в случае D. Этот вид нагру-
жения характеризуется перемещением центра давления назад по
хорде /=1?5; (/= 0,8 • (/max max-
Рассмотрим один из посадочных случаев.
Случай Е — грубая посадка на три точки (см. фиг. 42).
Самолет находится в положении стоянки. К шасси приложена
сила Р| — n9G. Величина зависит от свойств амортизации.
110
3. АЭРОДИНАМИЧЕСКИЙ НАГРЕВ
Как известно, при обтекании тела 'потоком воздуха образуется
пограничный слой, скорость которого по толщине его переменна.
Разница скоростей в пограничном слое вызывает трение частиц
воздуха, которое переходит в тепло, повышая тем самым темпера-
туру пограничного слоя. От пограничного слоя тепло передается
обтекаемой поверхности, а от нее через материал обшивки на
каркас самолета, в кабины и т. д. Это явление называется аэроди-
намическим нагревом.
При малых скоростях он незначителен. Однако уже при М = 2
у земли температура обшивки будет свыше 200° С (473° К). При
числе М=5 алюминиевые сплавы плавятся, а при М=8 на высоте
15 км температура нагрева достигнет 2200° С (2473° К). Прогрев
конструкции происходит постепенно, в течение некоторого време-
ни и, следовательно, имеет место неравномерный ее нагрев. При
этом происходит рассеивание части тепла в атмосферу. Необходи-
мо учесть, что при равных значениях числа М теплопередача от
пограничного слоя к поверхности обшивки с увеличением высоты
значительно снижается благодаря уменьшению плотности воздуха.
Кроме того, на больших скоростях и больших высотах увеличи-
вается доля излучаемого тепла в окружающее пространство. По-
этому с увеличением высоты при прочих равных условиях аэро-
динамический* нагрев уменьшается.
В последние годы, в связи со значительным ростом скоростей
самолетов, возникла новая проблема — преодоление так называе-
мого «теплового барьера». Под «тепловым барьером» понимают
ограничения, которые накладываются на скорость полета в связи
с нагревом самолета.
Эти ограничения связаны с тремя моментами:
I) С ростом температуры механические качества материалов
снижаются — уменьшается предел прочности сгв и модуль упруго-
сти Е, ухудшается работа при длительном нагружении конструк-
ции в связи с усилением «ползучести» * при высоких температу-
рах. Так, например, при температуре 260° С (533° К) прочность
алюминиевых сплавов уменьшается примерно на 25%.
2) В результате аэродинамического нагрева возникают допол-
нительные напряжения элементов конструкции, которые могут
быть значительными. Присоединяясь к основным напряжениям, они
могут вызвать разрушение конструкции. Температурные напряже-
ния возникают в случае различных коэффициентов расширения,
различных модулей упругости материалов конструкции, неравно-
мерного нагрева.
Пусть, например, лонжерон, пояса и стенка которого выполнены из дюралю-
мина, подвергается неравномерному нагреву по высоте лонжерона. Верхний пояс
его нагрет до температуры б, нижний до t2, причем температура меняется по
линейному закону (фиг. 47).
* Под «ползучестью» понимают свойство материала изменять свои размеры
при длительном действии постоянно)"! небольшой нагрузки.
111
Если бы температура по высоте была постоянной, то волокна материала
по всему сечению равномерно удлинились бы (посколько изменение длины лон-
жерона не ограничено) и температурные напряжения отсутствовали бы. В рас-
сматриваемом случае напряжения обусловлены разностью температур между
верхним и нижним волокном (Л—fa). Удлинение волокна а, имеющего разность
у
температур Л(fi—/а) ~ будет равно
Д/ = ad/7 - а — /2) ~~ I.
Н
Здесь а — коэффициент линейного расширения,
/ — длина лонжерона.
Фиг. 47.
Относительное удлинение
Д/ у
е = -— = a (f L — /2) 77
/ п
и напряжение
а = г£ = а£ (Л — /2) ГГ > — —/2); а2 —О,
п
1 е. напряжения по высоте лонжерона также меняются по линейному закону
(см. фиг. 47). Нетрудно убедиться, что эпюра распределения напряжений по вы-
соте лонжерона может быть представлена как сумма двух эпюр (фиг. 47) —
эпюры напряжений растяжения (Трасти эпюры напряжений изгиба
0тах=±О,5(Г1. Следовательно, неравномерный нагрев в данном случае создал
напряжения, эквивалентные совместному действию растяжения и изгиба.
3) Для борьбы с аэродинамическим нагревом требуются специ-
альные меры (интенсивного охлаждения), чтобы создать нормаль-
ные жизненные условия для экипажа и пассажиров.
Изменение температуры в точке полного торможения потока
в зависимости от скорости полета, приближенно, может быть опре-
делено по формуле
7= 7'я(1+0.18М1 2),
где Гн — температура в градусах Кельвина окружающего воз-
духа на высоте Н,
М—(У — скорость полета самолета, а — скорость звука),
а
112
Действительное увеличение температуры обшивки меньше за
счет теплопередачи, излучения, неравномерного торможения и т. п.
На фиг. 48 приведены кривые зависимости температуры об-
шивки от высоты и числа М. На фигуре показаны предельно допу-
стимые температуры для различных материалов и до каких скоро-
стей полета на различных высотах применимы указанные мате-
10051-VV3)
Н Xrt
0~Ts 3045
6D ''
76 0
(W33)
ШР5Ш0Ш $400 Ы400*лЛас
500
370
-(77J)
(5*J)
,5ш/ / X____________ТитаиоВыесмавь!
3208 3^350 5Ш
100
Л15
15М?!2&з1о8 4500 *я/«е
i 4—pl--i 1--1--1__L J-t
0 12 3 * 5 6 7 5 J fo П
Фиг. 48, Зависимость температуры обшивки от чис-
ла М и высоты полета.
риалы. Так, например, дюралюмин можно применять на скорости
до 1500 км/час у земли и на скорости 2600 км/час на высоте 30 км.
Нагрев для различных частей поверхности не одинаков и в
значительной мере зависит от аэродинамических форм агрегатов.
Характер изменения температуры по профилю крыла показан на
фиг. 49.
Кроме нагрева, обусловленного торможением потока, нагрев отдельных ча-
стей самолета происходит вследствие выделения тепла силовой установкой, а на
больших высотах — от солнечных лучей. Этот нагрев на высотах, достигнутых
самолетами, играет, однако, второстепенную роль, так как он значительно менее
интенсивен, чем аэродинамический нагрев.
Борьба с аэродинамическим нагревом
ведется многими путями. Наиболее про-
стой путь — это уменьшение времени по-
лета на большой скорости, чтобы обшив-
ка не успела разогреться до не .опусти-
мой температуры. Это так называемая
«пассивная» защита. Кроме того, существуют методы «активной»
защиты от аэродинамического нагрева. Наиболее эффективные из
них являются покрытие наружной поверхности самолета специаль-
ными нетеплопроводными жаростойкими, теплоизоляционными ма-
териалами. А также применяется охлаждение путем циркуляции
жидкости (топлива или воды) в пространстве между наружной
и внутренней обшивкой. Топливо, отнимая тепло от обшивки, нагре-
8 / 1563 " 113
Фиг. 49,
вается и поступает в двигатель. Вода же нагревается до темпера-
туры кипения и испаряется через щели в конструкции, на что
расходуется большое количество тепла. Такое охлаждение назы-
вается испарительным.
В ряде случаев для защиты от нагрева применяются комбина-
ции этих способов: охлаждения, тепловая изоляция и жаропроч-
ные материалы.
4 ОГРАНИЧЕНИЯ СКОРОСТИ САМОЛЕТА
На современном самолете с мощными реактивными двигателя-
ми имеется возможность достигать очень больших скоростей, но
в ряде случаев дальнейшее увеличение
Фиг. 50. Ограничения
скорости самолета.
их ограничивается условиями прочности,
жесткости летательных аппаратов, на-
грева конструкции и т. п.
Рассмотрим более подробно условия
возникновения этих ограничений.
Ограничение по перегрузке иногда
имеет место при полете в неспокойном
воздухе. При заданных значениях пере-
грузки ио, скорости восходящего потока
п и удельной нагрузки р зависимость
предельной скорости Уо от высоты *
обусловливается формулой (3) и
фически изображена на фиг. 50
вая п}.
У2
Ограничение по скоростному напору -производится
£
гра-
(кри-
в це-
лях уменьшения поверхностной нагрузки на крыло, оперение, кото-
рая пропорциональна q.
Зависимость предельной скорости от высоты получится из
и изображена на фиг. 50 (кривая q).
Ограничение по температуре зависит от свойств применяемого
материала Задавшись допустимым значением предела прочности
сгв, по графику, приведенному ниже (см. фиг 52), находим допу-
стимую для данного материала температуру обшивки. Затем по
графику фиг 48 для полученной температуры находим парные
значения И и М (V), которые наносим на фиг. 50 (кривая Г).
Очевидно, что возможные скорости полета лежат левее гранич-
ных кривых, т. е. левее заштрихованной кривой. На фиг. 50 нане-
* Плотность воздуха Q есть функция высоты.
114
сена также кривая максимальных скоростей, обеспечиваемых дви-
гателем (кривая V).
Из фигуры видно, что возможные, с учетом ограничений, ско-
рости меньше максимальных в значительном диапазоне высот.
Глава X
МАТЕРИАЛЫ, ПРИМЕНЯЕМЫЕ В КОНСТРУКЦИИ САМОЛЕТА
1. ВЫБОР МАТЕРИАЛА
Для силовых частей конструкции самолета материал выбира-
ют исходя из назначения и условий работы этих частей.
В конструкциях самолетов применяются преимущественно алю-
миниевые сплавы за исключением конструкции шасси, элементов
крепления двигателей к самолету и
некоторых других частей, которые вы-
полняются из высокопрочных сталей.
В конструкциях самолетов, летаю-
щих с М>2 для деталей крыла, фюзе-
ляжа, оперения, подверженных значи-
тельному аэродинамическому нагреву, р^г^
применяются титановые сплавы, а
в ряде случаев и жаростойкие стали.
Важнейшим условием для правиль- Фиг. 51
ного выбора материала является по-
лучение возможно малого веса при надлежащей прочности. Для
оценки материала с этой точки зрения введено понятие удельной
прочности материала.
Рассмотрим, например, стержень длиной I, растягиваемый си-
лой Р* (фиг. 51). Площадь поперечного сечения стержня опреде-
ляется из
°в,раст
где (Увраст — предел 'прочности материала при растяжении.
Вес стержня GCT будет равен произведению объема F-Z на
удельный вес у
Сст=Ну.
Подставляя в последнее выражение значение площади Г, по-
лучим
Р t Pl
-----ly=------,
° в раст °в,раст
У
* Сила Р является расчетной для стержня, так как при определении ее
учтен коэффициент безопасности f.
8*
115
1
116
Таким образом, вес стержня при заданной силе и длине будет
ав.раст
тем меньше, чем больше отношение ------, которое называется
удельной прочностью материала на растяжение.
Для других деформаций получаются другие выражения удель-
ной прочности, например (даны без вывода), при срезе —, при
у ’
изгибе --——— ,при продольном изгибе —— и т. д.
Разумеется эти показатели должны быть взяты при соответ-
ствующей температуре.
Удельная прочность основных материалов при /=20° С
(Г=293°К) приведена в табл. 2.
При выборе материала необходимо учитывать сопротивляе-
мость его динамическим нагрузкам, определяемую ударную вяз-
костью и пределом усталости * *, наличие отечественного сырья, тех-
нологические, экономические и эксплуатационные факторы, а так-
же ползучесть материала (при повышенных температурах).
2. КРАТКАЯ ХАРАКТЕРИСТИКА ОСНОВНЫХ МАТЕРИАЛОВ
Некоторые данные по основным конструкционным материалам
приведены в табл. 3. Зависимость предела прочности некоторых
материалов от t приведена на фиг. 52.
Алюминиевые сплавы
Алюминиевые сплавы наиболее широко применяются пр^ изго-
товлении самолетов, летающих на скоростях до 2М.
Из них наиболее распространенным является дуралюмин.
В настоящее время имеются марки дуралюмина с пределом
прочности до ав~55—60 кГ!мм2 (54D—590 Мн)м2}. Дуралюмин
выпускается заводами в виде листов, профилей, труб, прутков
и проволоки. Для деталей и узлов, работающих при температурах
выше 120° С (393° К), следует применять жаропрочные алюминие-
вые сплавы.
Необходимо учитывать такое свойство дуралюмина, как «ста-
рение», т. е. повышение твердости по истечении некоторого вре-
мени после термообработки. Дуралюмин плохо противостоит кор-
розии, против чего применяют з-ащитные покрытия, чаще всего
анодирование (электролитический процесс покрытия детали плен-
кой окиси алюминия).
* Ударной вязкостью называется работа, затраченная на разрушение образ-
ца, отнесенная к 1 см2 ялощади .’его поперечного сечения. Пределом усталости
называется наибольшее значение периодически меняющегося напряжения, кото-
• рое может выдержать материал при неограниченно большом числе циклов (пе
ремен напряжения).
117
Краткая характеристика основных
Наименование! Марка Удельный вес у-103 кГ[см% (Мн/мэ) Модуль упругости Е кГ[сл& (Мн/м%) Предел прочности на растяже ав кГ!см~ (Мн/м?) при различ температурах
20° С (293 °К) 100° С (373° К) 200° С (473° К) 300° с (573° К)
20 7,85 (77) 2.Ы06 (20,6-104) 4000— 5000 (390— 490) ——
45 7,85 (77) 2,1-106 (20,6-104) 6400 (630) 6000 (598) —-
ЗОХГСА 7,85 (77) 2,0*106 (19,6-104) 13 000 (1270) 1 - 12 100 (1186)
тали ЗОХГСНА 7,85 (77) 1,95-106 (19,1-104) 16 000 (1570) 15 600 (1530) 15 300 (1500) 15 000 (1470)
ЭИ-643 7,80 (76,5) X 1,9-106 (18,6-104) 19 000 (1860) — 17 000 (1670)
Я1ТН в 7,90 (77,4) 1,8-106 (17,6-104) 9300 (9Ю) * 7500 (7350)
СН-2 7,70 (75,5) 1,95-106 (19,1-104) 14 000 (1370) м 12000 (1176) 11500 (ИЗО)
Д16-Т 2,85 (28) 7,5-105 (73,5-103) 4200 (4Ю) 1 •
сплав; Д19 2,85 (28) 7,5-105 (73,5-103) 4400 (430) 4200 (410) 3600 (353) 1900 (186)
иниевые Д20 2,85 (28) 7,5-105 (73,5-103) 4200 (4Ю) 3500 (343) 2600 (255) 1900 (186)
2 Д21 2,85 (28) 7,5-105 (73,5-103) 4200 (4Ю) 3800 (372) 3300 (323) —
118
Таблица 3
конструкционных материалов
ние ных Технологические свойства Область применения Приме чание
400° С (673° К)
Высокая пластичность, хорошая свариваемость Сварные и штампован- ные малонагруженные де- тали; заклепки
Хорошая обрабатывае- мость резанием. Пластич- ность удовлетворительная. Свариваемость плохая Крепежные детали
10 600 Хорошая пластичность, свариваемость, обрабаты- ваемость резанием Ответственные сварные
(1040) штампованные детали; крепежные детали
13300 (1300) То же Наиболее ответственные динамически нагруженные детали
16 000 Сваривается, обрабаты- Ответственные узлы; уз-
(1570) вается резанием. Удовле- творительная пластич- ность, высокая теплопроч- кость лы шасси; болты
7300 Удовлетворительная Обшивка Нержаве-
(715) пластичность, высокая теплопрочность ющая
11300 Удовлетворительная Обшивка, каркас, узлы Нержаве-
(1110) пластичность, высокая теплопрочность, хорошая свариваемость * ющая
Пластичность средняя, свариваемость плохая Обшивка и каркас при нормальной температуре
" То же Обшивка, заклепки, ра- ботающие при /<250° С (523° К)
Пластичность средняя, свариваемость удовлетво- рительная, теплопрочный Листовые и кованые детали, работающие при t до 350° С (623° К)
* Пластичность средняя, свариваемость плохая Кованые, штампован- ные детали, работающие при t до 250° С (523° К)
119
Наименование Марка Удельный вес у. 103 кГ 1см5 (Мн/м3) Модуль упругости £ кГ/см2 (Мн/м2) Предел прочности на растял;е <тв кГ/см2 (Мн/м2) при разлнч температурах
20° С (293° К) 100° С (373° К) 200° С (473° К) 300° с (573° К)
3 S3 В95-Т В65 АЛО 2,85 (28) 2,85 (28) 2,85 (28) 7,5 105 (73,5 103) 7,5 105 (73,5 103) 7,5 105 (73,5 103) 5500 (540) 4200 (4Ю) 2000 (196) 4800 (470) 3600 (353) 1800 (176) 2800 (274) 2700 (265) 1500 (147) 900 (88)
=; С О 0) АЛЮ 2,85 (28) 7,5-105 (73,5 103) 3000 (294) 2700 (265) 2500 (245) 1100 (108)
S3 О) S X X S АК4-1 2,85 (28) 7,5-105 (73,5-103) 4200 (410) 3900 (382) 3300 (323) 1600 (157)
2 АКЬ АМцА 2,85 (28) 2,7 (26,5) 7,5-105 (73,5 103) 7,5-105 (73,5 103) 4200 (4Ю) 1100— 2200 (108— 216) ' । “ I ,—
X <3 X ВТ1-2 4,55 (44,6) 1,04 106 (10,2 104) 5500 (540) — — 2500 (245)
новые < ВТ-6, ВТ-15 4,55 (44,6) 1,13 106 (11,1 104) 10 000 (980) 7200 (706) 6700 (657)
) Тита
*-ч -Q МЛ4 1,8 (17,6) 4,3-105 (42,1-103) 2400 (235) — —
сплав МА2 1,8 (17,6) 4,3 105 (42,1-103) 2600 (255) — ——
О 3
х о к гз МА8 1,8 (17,6) 4,3-105 (42,1-103) 2500 (245) 2000 (196) 1600 (157)
S
120
Продолжение
ние ных Технологические свойства Область применения Приме^ чание
400° С (673° К)
— Пластичность средняя, свариваемость плохая Ответственные детали каркаса самолета
Ч-—_ Пластичность высокая, свариваемость плохая Высокопрочные заклеп- ки
Льется, свариваемость хорошая Детали сложной конфи- гурации средней нагру- женности
— Льется, свариваемость хорошая То же, работающие при повышенной температуре
600 (59) Пластичность высокая, свариваемость удовлетво- рительная Кованые, штампован- ные детали средней на- груженности, работающие при повышенных темпера- турах
* То же То же при нормальной температуре
Отличная пластичность и свариваемость Детали глубокой вытяж- ки, сварные баки
1900 (186) Пластичность удовлет- ворительная, сваривается, обрабатывается резанием Теплопрочный Обшивка, профили, штам- пованные детали, работа- ющие при температурах не свыше 350° (623°К) Техниче- ский титан
6000 (590) То же Обшивка, профили, штампованные, кованые и крепежные детали, ра- ботающие при температу- рах до 450° С (723° К)
—— Льется, сваривается удовлетворительно Малонагруженные ли- тые детали, арматура
“ч-г» Свариваемость плохая. Пластичность высокая. Обрабатываемость реза- нием тоже МалЪна груженные штампованные детали, ар- матура
~ 1 Пластичность высокая, хорошо сваривается, обра- батывается резанием Детали из листов, про- филей, труб
121
Сравнительно широко 'применяются алюминиевые сплавы для
изготовления деталей при помощи литья (АЛ9). Механические
свойства этих сплавов сравнительно невысоки; из них отливают
детали средней нагруженности: тормозные барабаны, арматуру,
кронштейны, качалки и пр.
(Hjcn1) КГ/НП?!
160
(ЦШ*) 150
140
ио
I 120
I 110
6 (&В 10s) 100
S. so
5 во
e 70
S 60
| (W0s) 50
•iO
30
20
10
ТенпЕрптура
Фиг, 52, Влияние температуры на предел прочности
Алюминиево-марганцевый сплав АМцА 'применяется для изго-
товления деталей из листа посредством глубокой вытяжки, из
сплава АМцА изготовляются также сварные топливные баки.
Алюминиево-магниевый сплав АМг обладает высокой пластич-
ностью и применяется для изготовления трубопроводов топливной
и масляной систем.
Стали
В конструкции самолета применяются стали малоуглеродистые,
среднеуглеродистые и специальные (легированные).
Малоуглеродистая сталь (марок 10, 20) широко при-
меняется для изготовления деталей из листов, а также для закле-
пок; малоуглеродистая сталь пластична, хорошо штампуется и сва-
ривается.
122
С р е д н е у г л е р о д и ст а я сталь (марки 45) служит основ-
ным материалом для изготовления крепежных деталей (болтов,
винтов, гаек и пр.).
Легированная сталь (ЗОХГСА, ЗОХГСНА) широко при-
меняется для изготовления наиболее нагруженных деталей и узлов
(пояса лонжеронов, стойки шасси, стыковые узлы и т. п.)_
Из этих сталей изготовляются также наиболее прочные крепеж-
ные детали (болты, винты, гайки). Стальные заклепки изготов-
ляются из стали 15 и марганцовистой стали 20ГА.
Специальные жаропрочные стали (ЭИ643, Я1ТН, СН-2) при-
меняются для элементов конструкции (каркас, обшивка, узлы), ра-
ботающих в условиях высоких температур.
Все стальные детали должны быть защищены от коррозии по-
средством цинкования или кадмирования (покрытия электролити-
ческим способом слоем цинка или кадмия). Сталь ЗОХГСНА — ок-
сидируют.
Магниевые сплавы
Магниевые сплавы обладают высокой удельной прочностью при
невысоком значении предела прочности. Основными недостатками
магниевых сплавов являются: высокая стоимость, подверженность
коррозии и воспламеняемость. Магниевые сплавы бывают литейные
(МЛ4, МЛ5) и деформируемые (штамповкой, прессованием —
МА8, МА2). Применяются магниевые сплавы для малонагружен-
ных кронштейнов, деталей колес, управления. Детали из магние-
вых сплавов защищают от коррозйи посредством окраски или хро-
мирования.
Титановые сплавы
Титановые сплавы представляют собой высокопрочные и тепло-
прочные сплавы. Сплавы рекомендуются для изготовления дета-
лей, работающих при повышенных температурах — 4004-450° С
(673—723° К). Они обладают высокой удельной прочностью
(сгв/у = 22,6• 105) и пределом прочности [ов = до 10000 кГ/см2
(980 Мн/л12)], имеют удовлетворительные технологические свойст-
ва. Стоимость их в настоящее время значительно превышает стои-
мость сталей.
Неметаллические материалы
Наряду с материалами для силовых частей в конструкции са-
молета применяется много разнообразных материалов для тепло-
звукоизоляции, бытового оборудования, электро- и радиооборудо-
вания, отделки кабин и т. п. Применяются различного рода древе-
сина, резина, ткани, клеи, пластмассы, материалы из полимеров
и т. п.
123
С развитием химической науки и химического 'Производства
применение последних будет все возрастать.
Остановимся кратко на некоторых неметаллических мате-
риалах.
Древесина является дешевым материалом и хорошо обра-
батывается. Однако дерево неоднородно по своим механическим
характеристикам и прочность его во многом зависит от направле-
ния приложения силы относительно волокон. Механические свой-
ства древесных материалов изменяются в зависимости от влажно-
сти воздуха. Деревянные конструкции подвержены гниению, забо-
леванию «грибком».
Стеклотекстолит — слоистый материал в виде листов,
плит. Механически обрабатывается, склеивается, склепывается.
Применяется в качестве электроизоляции, термоизоляции, для
облицовки отсеков топливных баков, а также для конструкционных
и радиотехнических деталей, работающих ‘ при температуре до
200°С (473° К).
Пресспорошки различных марок применяются для изго-
товления путем прессования электроизоляционных деталей, радио-
деталей, декоративных деталей, а также (фторопласт) для термо-
стойких и стойких к агрессивным средам деталей.
Полиэтилен применяется как электроизоляционный и хи-
мически стойкий материал, из которого изготовляются трубы, плен-
ки, ленты и другие детали.
Полиэтилен механически обрабатывается, сваривается. Детали
образуются литьем под давлением, горячим прессованием, штам-
повкой.
Пенопласты применяются в качестве легкого заполнителя
для слоистых конструкций (см. гл. XIII), в качестве «радиопро-
зрачного» материала, а также для целей теплоизоляции Пенопла-
сты обладают малым удельным весом [<0,2 г/см3 (2000 н/м3)]„
механически обрабатываются, склеиваются, при нагревании фор-
муются.
Органическое стекло применяется для остекления кабин
самолетов при рабочих температурах от —60 до 4-60°С (333° К)
и выше. Органическое стекло формуется, сваривается, склеивается
и механически обрабатывается.
Силикатное стекло различных марок служит для изго-
товления прозрачной брони кабины экипажа. Для внутренней об-
лицовки кабин пассажирских самолетов применяется павинол —
негорючий материал, изготовленный путем нанесения на стекло-
ткань поливинохлоридной массы различных цветов и тиснений.
Для обивки кресел применяется текстовинит — хлопчатобу-
мажная ткань с полихлорвиниловым цветным покрытием.
Глава XI
ВЫБОР СХЕМЫ И ОСНОВНЫХ ПАРАМЕТРОВ САМОЛЕТА
- ' 1. СТАТИСТИКА
Задание. Тактико-технические требования
Эскизное проектирование самолета представляет собой первый
этап проектирования, в результате которого выявляется схема са-
молета, его основные размеры и компоновка, т. е. размещение эки-
пажа, вооружения, грузов, оборудования.
Задание спроектировать самолет содержит ряд требований:
производственных, эксплуатационных, тактико-технических и др.
В тактико-технические требования включаются только основ-
ные требования в зависимости от назначения самолета. Так, на-
пример, для истребителя задаются максимальная и посадочная
скорости Ущах и Vnoc, вооружение, время набора высоты пото-
лок Н, дальность L или продолжительность t полета и пр.
Для пассажирского самолета задаются максимальная и поса-
дочная скорости, требования безопасности, экономичности, удоб-
ства, грузоподъемность, дальность и др.
Выполнение всех этих требований сопряжено с большими труд-
ностями вследствие их противоречивости. Так, например, требова-
ние получения максимальной скорости полета противоречит требо-
ванию получения приемлемой посадочной скорости, так как
с увеличением скорости полета одновременно увеличивается и по-
садочная скорость; увеличение скорости полета противоречит
увеличению дальности, а для военного самолета и увеличению
мощности вооружения, так как при выполнении последних требо-
ваний возрастает вес самолета и т. п.
Тактико-технические требования на проектирование нового
самолета должны превышать по важнейшим для заданного типа
самолета показателям данные существующих самолетов.
Это необходимо делать из тех соображений,' что при наблю-
дающейся общей тенденции к повышению летно-технических ха-
рактеристик самолетов данные проектируемого самолета к момен-
ту его полного освоения в серийном производстве могут быть пе-
рекрыты другими новыми самолетами.
Повышения тактико-технических требований проектируе <ых
самолетов по сравнению с существующими можно достигнуть:
1) применением мощных или более экономичных, с меньшими
габаритами или более легких двигателей;
2) улучшением аэродинамики самолета, изысканием внешних
форм, обеспечивающих уменьшение влияния сжимаемости, аэро-
динамического нагрева;
3) применением более совершенной механизации крыла, управ-
ления пограничным слоем;
4) совершенствованием силовых схем агрегатов самолета, обес-
печивающих требуемую прочность и жесткость при меньшем весе;
125 *
5) улучшением технологии производства, что непосредственно
влияет на соблюдение требуемых форм и обводов самолета;
6) применением новых высокопрочных и теплопрочных мате-
риалов;
7) применением новых методов соединения отдельных деталей,
узлов (например, склейки металлов);
8) применением нового самолетного оборудования, обеспечи-
вающего упрощение и улучшение управления самолетом, точное
и своевременное выполнение боевого задания, улучшение условий
работы экипажа, безопасность экипажа при аварии;
9) применением, для военных самолетов новых, более эффек-
тивных типов вооружения, систем наведения и защиты, при их
меньшем весе.
Статистика и ее значение
Выбирая основные размеры самолета, конструктор должен
удовлетворить многие противоречивые требования. Так, например,
выбирая малую площадь крыла с целью уменьшения лобового со-
противления самолета для обеспечения максимальной скорости
конструктор должен учитывать, что он ухудшает этим взлетно-
посадочные характеристики самолета, а уменьшая, например, дли-
ну хвостовой части фюзеляжа и, следовательно, уменьшая ее вес,
он вместе с тем уменьшает и плечо оперения до центра тяжести
самолета, что, как известно, приводит к ухудшению устойчивости
и управляемости самолета.
Если еще учесть, что полетный вес самолета оказывает влияние
на его размеры, а размеры, в свою очередь, влияют на вес, та
станет понятной трудность выбора основных размеров самолета
с помощью только теоретических расчетов. -
Поэтому для определения основных размеров проектируемого-
самолета пользуются данными современных, однотипных с проек-
тируемым, самолетов. При этом пользуются не абсолютными вели-
чинами (размер, вес, мощность силовой установки существующих,
самолетов), а относительными величинами, называемыми стати-
стическими коэффициентами. Эти коэффициенты получают в ре-
зультате обработки статистики, т. е. различных данных самолетов*
прототипов.
В статистику должны входить следующие основные данные по^
нескольким лучшим самолетам-прототипам:
а) общие данные;
б) технические данные двигателей;
в) геометрические данные (размеры);
г) весовые данные;
д) данные вооружения (для военного самолета);
е) летные 'данные,
126
Статистические коэффициенты
Рассмотрим некоторые основные статистические коэффициенты.
Предварительно познакомимся с принятой весовой классификаци-
ей самолета, -приведенной на фиг. 53. В несъемное оборудование
Фиг. 53,
входит часть оборудования, не отделяемая в эксплуатации от кон-
струкции самолета (электропроводка, приборные доски, несъем-
ные элементы обогрева, вентиляции и пр.).
Весовые коэффициенты
1. Коэффициент весовой отдачи
, ^нагр
где Онагр — вес нагрузки; G — вес самолета.
Этот коэффициент характеризует весовое использование само-
лета и желательно, чтобы он был возможно большим.
2. Коэффициенты относительного веса агрегатов
k — 2^- Ъ ~и т л
"кр п » "ф _ И Т. Д.,
где GKP — вес крыла;
Оф — вес фюзеляжа.
127
Приводим средние численные значения коэффициентов относи-
тельного веса агрегатов.
Для крыла.....................................
, фюзеляжа...................................
. шасси......................................
, оперения ..................................
. управления ................................
Акр=0,104-0,13
йф=0,07 4-0,12
=0,04 4-0,06
АОп=0,024-0,025
АУпр=0,0154-0,02
3. Коэффициенты относительного веса конструкции, силовой
установки, вооружения, оборудования
. __ Монстр й , ^С.у . t GBoop (7об
Монстр ’ ^С.у" Q > ^всюр= ёГ’ ^об== G
И другие.
Геометрические коэффициенты
1. Удлинение крыла
>.=^=Л
4ср S
где /?Ср — средняя хорда крыла;
S, I — площадь и размах крыла (фиг. 54).
2. Сужение крыла
^корн
^ = 7--------------------------,
^конц
где бкорн, £ковд — корневая и концевая хорды крыла.
3. Относительная толщина профиля, выраженная в процентах
— скорн “ сконц 1ППл. ,
^корн , 100% , ^КОНЦ- , 100%,
^корн *конц
ГД6 £корш ^конц наибольшая высота профиля в корне и конце
крыла.
Такие же коэффициенты следует определить для оперения (на-
пример, Лго, 7]г.о и т. д.).
4. Коэффициент статического момента горизонтального опе-
рения
JL ___ ^Г.О^Г О
Г‘°“ S*CAX ’
где Аг.о — расстояние от центра давления* горизонтального опе-
рения до центра тяжести самолета;
5г>0— площадь горизонтального оперения;
^сах—средняя аэродинамическая хорда крыла.
* £Го часто принимается как расстояние от центра тяжести самолета до
оси вращения рулей высоты.
128
Фиг 54 Три проекции самолета
9 1563
129
Для трапецевидного крыла 6САХ есть хорда, проходящая через
центр тяжести площади полукрыла.
5. Относительная площадь о-перения, рулей, элеронов
Г.О *^В.О 5р.в *Sp Н *^Э.1
S, ’ 0 ’ с ’ с*’
О Ог о *^в.о
где 5 , S 0 —площадь горизонтального и вертикального оперения;
5 В)5Г н, —площадь руля высоты, направления и элеронов.
Приводим средние численные значения относительных пло-
щадей t
5^=0,15-4-0,25; 5ь» =0,12-4-0,25;
s s
^±1 — 0 06-^0,1; ^=0,30 = 0,45.
S ’ ’ Sr.o
^=0,30 — 0,45;
•^в.о
6, Удлинение фюзеляжа
Аф = -/ф ,
ф <1*
где /ф — длина фюзеляжа;
йф— диаметр круга, площадь которого равна миделевому се-
чению фюзеляжа.
Лети о-т ех и и ч е с к и е коэффициенты
I. Удельная нагрузка на крыло
G кГ / и \
S м? \м?)'
Этот коэффициент характеризует посадочную скорость УПос,
длину взлетной дистанции £Взл и маневренность самолета. Дей-
ствительно, чем больше вес при данной площади крыла (или чем
меньше площадь крыла при данном весе), тем больше посадочная
скорость, длина взлетной дистанции и тем больше радиус и время
виража. Увеличение радиуса и времени виража происходит пото-
му, что с увеличением веса возрастает потребная скорость как
для горизонтального полета, так и для виража, а с увеличением
скорости V возрастает радиус виража.
130
2. Энерговооруженность
q — lL л. сАкГ(л. с.\н) (для ПД и ТВД);
G
q'^-^-кГ тяги/кГ (н тягами) (для ТРД)*,
О
где W— мощность двигателя; Р— тяга двигателя.
Величина, обратная энерговооруженности, называется удельной
нагрузкой на мощность кГ1л.с.; н}л, или удельной нагруз-
кой на тягу кГ[кГ тяги; н!н тяги^.
Энерговооруженность характеризует время набора высоты
потолок Н, а также длину взлетной дистанции £взл.
Действительно, увеличение N и Р приводит к увеличению из-
бытка мощности и тяги, что, как известно, увеличивает вертикаль-
ную скорость, скороподъемность и потолок.
Такое же влияние оказывает уменьшение веса G. Одновремен-
но увеличение N и Р уменьшает длину разбега при взлете са-
молета.
Увеличение энерговооруженности только за счет увеличения
мощности (тяги) силовой установки приводит, как правило, к уве-
личению веса самолета, что тормозит рост энерговооруженности.
Поэтому важнейшими являются мероприятия, направленные на
уменьшение веса силовой установки п повышение ее экономич-
ности.
3. Удельная мощность (тяга)
гл. с. 1м2 [для ПД (поршневые двигатели) и ТВД],
5
— кГ тяги/jt2 (н тягаем?) (для ТРД).
Эта величина в основном характеризует максимальную ско-
рость Утах, так как увеличение N и Р увеличивает Vmax так же,
как и уменьшение S.
Это явствует также из следующих формул (известных из кур-
са аэромеханики):
з
max 77
150^ N tf **
сх самб^у
(9)
3
max И
1472ца N „
______max Н I
С Q„ S J
х сам1-// /
*
** *
Эту величину часто называют тяговооружеимосгью
В системе МКГСС
В системе СИ
131
«=1/ “ 0°)
* С О г г
х сам*-//
В табл. 4 приведены средние значения статистических коэф-
фициентов для современных самолетов различного назначения
2 ВЫБОР СХЕМЫ И ОСНОВНЫХ ПАРАМЕТРОВ САМОЛЕТА
При выборе схемы самолета следует исходить из учета его
назначения и всей совокупности предъявляемых к нему требо-
ваний.
В настоящее время некоторые характерные признаки, опреде-
ляющие схему современного самолета, являются относительно
стабильными. Так, 'подавляющее большинство современных само-
летов представляет собой свободнонесущие монопланы, однофюзе-
ляжные, с хвостовым оперением, имеющие шасси с передней опо-
рой (ногой).
Однако эти схемы различны по расположению крыла, форме
крыла в плане, числу, типу и расположению двигателей.
Вопрос о расположении крыла решается сопоставлением преи-
муществ и недостатков низкопланной, среднепланной и высоко-
планной схем. Формы крыльев в плане рассмотрены в разд. III,
гл. XIII.
Выбор типа двигателя определяется в зависимости от скорости
полета самолета, а также требованиями экономичности в эксплу-
атации.
В настоящее время на самолетах устанавливают преимуществен-
но турбореактивные двигатели — ТРД (а также их разновид-
ность— турбовентиляторные двигатели — ТВРД) и турбовинтовые
двигатели — ТВ Д.
До 1944—1945 гг. в самолетостроении применялись исключи-
тельно поршневые двигатели — ПД. Как указано было выше, ПД
не могут обеспечить потребную тягу для возросших скоростей
полета, так как тяга их с увеличением скорости резко падает.
Вследствие своей высокой экономичности (удельный расход топ-
лива * Се=0,2ч-0,22 кГ/л.с.ч (2-5-2,2 м/л.с.ч), а также повышенной
надежности, обусловленной многолетним опытом их эксплуатации,
в настоящее время ПД применяются на учебных, сельскохозяйст-
венных и некоторых других специализированных самолетах, ле-
тающих со скоростями до 400-=-500 км/час (ПО—140 м/сек).
Турбореактивные двигатели создают тягу, возрастающую с уве-
личением скорости**. Это наряду с малым весом, малым миделем,
простотой устройства, применением более дешевого топлива (ке-
росина) обусловливает применение их для больших дозвуковых,
начиная с 80Од-850 км/час (220—240 м/сек), и сверхзвуковых ско-
* Удельный расход топлива — расход на одну лошадиную силу [или па одни
килограмм тяги (ньютон тяги)] в час.
** В диапазоне чисел М=0,5-:-3,0.
132
ростей. Удельный расход ТРД С\.~0,74-0,8 кГ/кГ тяги ч (н/н тяги ч).
Для ТВРД С?~0,5ч-0,6 кГ/кГ тяги ч (н/н тяги ч).
Появление реактивных самолетов еще в 1903 г. предвосхитил великий рус-
ский ученый К- Э. Циолковский, разработавший основы теории реактивного дви-
жения и предложивший схему жидкостно-ракетного двигателя.
Стремление найти двигатель, который удовлетворял бы пере-
ходным от ПД к ТРД скоростям полета, т. е. скоростям 600—
900 км/час, привело к созданию турбовинтового двигателя.
Тяга турбовинтового двигателя падает с возрастанием скоро-
сти, однако значительно медленнее, чем у поршневого двигателя.
Поэтому ТВД в состоянии обеспечить потребную тягу до более
высоких скоростей, чем ПД. ТВД обладают высокой экономично-
стью, удельный расход топлива Се=0,25-:-0,30 кГ/л. с. ч. (2,5-^-
3 н/л.с.ч). Вместе с тем ТВД обладают малым весом, малым ми-
делем, простотой устройства. Это обусловило широкое применение
их в диапазоне скоростей 6004-900 км/час (170—250 м/сек).
Жидкостно-ракетные двигатели — ЖРД на современных само-
летах в качестве самостоятельной силовой установки применяются
весьма редко.
Такие двигатели устанавливаются главным образом на экспе-
риментальных самолетах.
Иногда ЖРД применяются в качестве дополнительной силовой
установки на самолетах с ТРД, служащей для кратковременного
форсирования тяги самолета в полете или на взлете.
Тяга ЖРД практически не меняется с изменением скорости,
и в отличие от ранее рассмотренных двигателей, не падает (даже
несколько возрастает) с увеличением высоты- Это позволяет по-
лучить большие скорости полета самолета на больших высотах. Так
на экспериментальном самолете Л-15 (США) с ЖРД в 1963 г.
достигнута высота свыше 100 000 м и скорость около 7000 км/час
(1950 м/сек). Весьма низкая экономичность (Се= 10-:-15 кГ/кГ
тяги ч), требующая больших запасов горючей смеси, препятству-
ют широкому применению ЖРД.
Прямоточный воздушно-реактивный двигатель (ПВРД) ис-
ключительно прост по конструкции, однако он не может работать
при нулевой скорости движения и поэтому может устанавливаться
на самолет лишь в сочетании с другим типом двигателя, обеспечи-
вающим старт и разгон самолета. Тяга ПВРД растет с увеличени-
ем скорости, достигая потребных для горизонтального полета ве-
личин при скоростях 800—1000 км/час (220—280 м/сек).
Однако экономичность ПВРД при этих скоростях весьма низ-
ка Се=8-~10 кГ/кГ тяги ч (н/н тяги ч).
С ростом числа М. экономичность ПВРД возрастает, достигая
значения 2--3 кГ/кГ тяги ч (н/н тяги ч) при М~3. В настоящее
время ПВРД устанавливают лишь на экспериментальных само-
летах *.
* Области применения различных двигателей см. б гл. XVI, разд. Ш.
135
Тип самолета ч Весовые коэффициенты
* ^КОНСТр ^с.у &воор &об
Истребитель ПВО с ТРД 0,304-0,40 0,284-0,35 0,204-0,25 0,014-0,02 0,104-0,14
Истребитель - бомбардиров- щик с ТРД 0,354-0,45 0,284-0,33 l 0,184-0,23 0,014-0,02 0,084-0,10
Стратегичес- кий бомбарди- ровщик (ра- кетоносец) с ТРД 0,454-0,50 0,264-0,30 0,094-0,13 А 0,014-0,04 0,104-0,12
Магистраль- ный пассажир- ский самолет с ТВД 0,454-0,55 0,284-0,32 0,074-0,11 'II 0,104-0,12
Военно-транс- портный само- лет с ТВД 0,454-0,55 0,284-0,32 0,074-0,10 ‘ 0,104-0,12
в знаменателе — для самолетов с треугольным крылом.
1
1
134
Таблица 4
Геометрические коэффициенты Летно-технические коэффициенты
X* ^корн % * еч q л.с.1кГ (л.с./н) q' кГ тяги!кГ (н тяги]н) Г Л.С.1мЪ г‘ кГ тяги}м2 (н тяги!м2)
24-4 2,04-3,0 3,54-6 0,554-0,6 94-15 3504-500 2004-300 /35004-5000\ \2000 4-3000/ 0,54-1,3 200—500 1504-250 /20004-50004 \1500 4-2500/
3-=-4 2,04-3,0 44-6 0,55-.-0,6 *- 94-13 3504-500 (35004-5000) 0,54 1,3 2004-500 (20004-5000)
Ф ►й- ОО < 2,04-2,5 54-12 0,64-0,8 104-13 4004-550 2004-300 /40004-55004 \20004-3000/ 0,25-:- 0,55 1004-150 (10004-1500)
74-10 2,04-2,5 12-;-1G 0,554- 0,65 74-10 3504-450 (35004-4500) 0,24-0,3 (0,024- 0,03) 704-100
74-10 2,04-2,5 124-16 0,554- 0,65 74-9 4004-550 (40004-5500) 0,024- 0,28 (0,02-:- 0,28) 804-120
135
Число двигателей обусловливается потребной мощностью
(тягой) для обеспечения требуемых летных данных. При этом,
в целях увеличения надежности самолета, целесообразно рас-
средоточить потребную мощность (тягу) на 2ч-4 дви-
гателя.
Однако на небольшом самолете типа истребителя, исходя из
условий уменьшения габаритов, рациональной компоновки его, ча-
сто ставят один мощный двигатель.
Расположение двигателей определяется особенностями аэроди-
намической компоновки самолета и, в свою очередь, оказывает су-
щественное влияние на его компоновку.
Рассмотрим, например, самолет с ТРД, расположенными на
хвостовой части фюзеляжа (см. фиг. 54). Эта схема была создана
во Франции (самолет «Каравелла»), и основным назначением ее
является увеличение критического числа М. крыла, свободного о г
гондол двигателей. Вместе с тем это позволило усилить механиза-
цию крыла, располагая закрылки по всему свободному от элеронов
размаху, а также уменьшить шум в пассажирской кабине. Распо-
ложение двигателей вне крыла позволяет наиболее просто осуще-
ствлять замену двигателя новым, более мощным двигателем, т. е.
осуществить так называемую «модификацию самолета». Далее,
близкое к плоскости симметрии самолета расположение
двигателей облегчает полет самолета при выходе из строя
одного из двигателей, так как уменьшает момент несимметричной
тяги.
Наряду с этим отсутствие двигателя на крыле увеличивает
вес крыла, так как массовая сила двигателя, расположенного на
крыле, направленная противоположно подъемной силе, создает
момент, разгружающий крыло. Кроме того, необходимость выно-
са горизонтального оперения из зоны высоких температур обуслов-
ливает высокое его расположение — на киле и тем самым* увеличи-
вает вес киля, нагружаемого дополнительно силами от горизон-
тального оперения.
Приведенный далеко не полный анализ схемы самолета с ТРД,
расположенными на хвостовой части фюзеляжа, показывает все
многообразие и противоречивость факторов, которые приходится
учитывать при выборе схемы самолета.
Некоторые соображения о схеме типа «летающее крыло»
(«бесхвостка») и «утка» приведены выше.
Совершенно очевидно, что выбор схемы самолета требует глу-
бокого анализа и сопоставления различных схем применительно
к конкретным требованиям, предъявляемым к проектируемому
самолету.
Рассмотренные схемы некоторых самолетов, безусловно, яв-
ляются временными. Наличие большого разнообразия опытных
самолетов свидетельствует о настойчивых поисках рациональных
схем, способствующих дальнейшему росту летных данных.
136
Выбор двигателя
Из числа существующих типов двигателей (ПД, ТРД или ТВД) двшагель
выбирают из условия обеспечения основных летных данных и, прежде всего, мак-
симальной скорости *,
Из формул (9) и (10)
хг л' с max//
CrcaaQjy З^щах H
1472
или
2
г< сх^ц^паН
JJr.iai//= "Г
можно найти максимальную мощность или тягу двигателя на высоте, соответ-
ствующей VmaxH. Эта высота, так же как и VmaiH, предусматривается летно-
техническими требованиями. Кроме JVmax и или Ртах я, неизвестными являются
величины т]в, сх сам и S. к. п.д. винта т)в можно принять равным 0,8. Значе-
ние сх сам нужно получить из статистики для самолетов-прототипов. Так как
в статистических данных значение сх сам обычно не приводится, то его следует
найти из формул (9) или (10), приняв значения Лшиа (или Ршах я), S,
Ишахя из статистики.
G
Величину S получаем из S- — ,где удельная нагрузка р на крыло выби-
Р
рается по статистике, а полетный вес G в первом приближении определяется
с помощью весового статистического коэффициента
, ^нагр GTon
ь --------_-------
отд г.
Найдя из статистики £огд и определив на основании летно-технических требо-
ваний вес нагрузки без веса топлива и смазки (ОЯдгр~^т оп), находим
нагр ^тои
^отд
По найденным таким образом значениям Лгтах и или PiaiI и необходимо
найти значения Wmaxo, Дшахо, соответствующие У=0, //=0.
Мощность ТВД или тяга ТРД на высоте и скорости отличных от нуля мо
жет быть выражена следующим образом: Nmu н = ^Мтахо, />ШахЛ7=«Р^’тах0г
где gtf, зависят от скорости (числа М) и высоты полета. Однако такого рода
зависимости (характеристики двигателей) индивидуальны. Воспользуемся при-
ближенными зависимостями
N
тахО ~
Л^тахН
(11)
(12)
Значения коэффициентов Zn> Ер даны на фиг. 55, 56.
Из нескольких двигателей, удовлетворяющих найденной мощности Л’шахо
или тяге Рщдхо, выбираем двигатель, который имеет наименьшие мидель, вес
* Возможен выбор двигателя из условия обеспечения заданной дальности,
потолка и т. п.
137
и удельный расход топлива и является наиболее простым и надежным в - экс-
плуатации.
Приводимое ниже определение полетного веса является вторым прибли-
жением.
Определение полетного веса самолета
Исходными данными для определения полетного веса и основ-
ных размеров самолета являются:
а) задание, включающее тактико-технические требования;
б) статистика, собранная и обработанная по нескольким со-
временным самолетам, однотипным с проектируемым;
в) статистика по самолетам однотипным с проектируемым, по
годам — для учета динамики развития.
Имея значение энерговооруженности самолета
7у
(Г'~ (Для ПД и ТВД) 1
С/
или }
?'=£ (для ТРД)
и мощность ДО или тягу Р двигателя, находим полетный вес
C = кГ (н) или G- ~кГ(н). (13) |А
Выбор площади и размеров крыла
Принимая из статистики удельную нагрузку на крыло
138
и воспользовавшись определенным выше значением G, определим
площадь крыла
№.
(14)
Величины q и q't как было указано ранее, характеризуют скороподъемность,
потолок, взлетные качества, а величина р—-посадочную i—7 -------------;
ность, взлетные качества. Величины же р и q(q') в совокупности обусловливают
величину удельной мощности г (г7)
р —• посадочную скорость, маневрен-
ЛА
л = qp= —
которая характеризует максимальную скорость самолета. Таким образом, выбор
коэффициентов q и р в качестве исходных для определения основных парамет-
ров не является случайным, так как они тесно связаны с летными характери-
стиками самолета.
Далее,1 зная из статистики удлинение крыла
Л /2
находим размах крыла
Z--=/XSjf.
Найдем из статистики сужение крыла
^РрН
7) = ---
‘'коли
(15)
„ ^корн + ^КОНЦ ,
и ПОМНЯ, ЧТО 5~-------!-------Z,
2
неизвестными величинами Ь*пп„
KVptl
к 25ч
получим из двух уравнений с двумя
и b
v КОНЦ*
h — 25
К01Щ (7)4-1)/
Зная из статистики относительную толщину профиля
корн
(16)
Г' ~ р
кор«=^100% и FKO„U=^100%,
"корн 0KGHU
найдем
— О 0It? ь
кори ivKOpHvKOp«’
КОНЦ Q,01^KOHH^KOHU*
(17)
перпен-
Угол стреловидности % между линией четвертей хорд и
дикуляром к вертикальной плоскости, проходящей через ось сим-
метрии самолета, может быть приближенно выбран по графику
фиг. 57 в зависимости от заданной летно-техническими требова-
139
ими ми максимальной скорости (числа М) и относительной толщи-
ны профиля в сечении по средней хорде.
— ^корн 4" СКОНН
с =------------.
7)4-1
График построен на основании формул
JU г_
М-М-.
Кр Л’ кр X 1 4- cos X
В последней формуле опущен член, учитывающий влияние cv, так как на режи-
ме Vm»x Су мал и влиянием его можно пренебречь.
Малая стреловидность (х~0-н2(Г) назначается из соображений
центровки, о чем будет сказано ниже.
Таким образом имеем все размеры крыла, по которым можно
построить его проекции.
Выбор профиля крыла излагается в курсе аэро'механики Y
Выбор основных размеров самолета
Размеры миделевого сечения фюзеляжа должны быть мини-
мально необходимыми для размещения двигателя, бомб, экипажа,
пассажиров, грузов и т. п. и для обеспечения обзора.
Определив из этих условий величину r/ф, т. е. диаметр круга,
равного по площади миделевому сечению, и взяв из статистики
Хф= получим
/ф—Афб/ф (18)
* См. Д. М. Прицкер и В А Турья н, Аэромеханика, Оборопгиз,
I960, стр 223—226
140
Площадь горизонтального оперения 5Г.О определяется по ко=
эффициенту статического момента горизонтального оперения
Ь — Sr,o4r О
Г0“ Sb САХ ’
взятому из статистики.
Величиной Лг.о задаемся конструктивно — обычно эта величина
равна 2,8—3,2 Ьсах — и затем определяем
„ 5Ь„.„
«г » = *г., -7^ • (19)
Аналогичным образом определяется площадь вертикальною
оперения
- ь 51
и.о * ^в-о ,
Z-li о
(19')
Размеры оперения так же, как и крыла, определяются по вели-
чинам Лго, Иго и т. и., взятым из статистики (см. гл. XIV).
Стреловидность оперения принимается равной, а иногда не-
сколько большей стреловидности крыла
Хго^Хво^Х,
(20)
так как следствием волнового кризиса на оперении, кроме увеличе-
ния сопротивления, является ухудшение устойчивости и управляе-
мости самолета.
Площади рулей (элеронов) получаем по взятым из статистики
их относительным площадям, например:
(24
где берем из статистики. Хорду руля (элерона) нужно взять
Sr о
в процентах от хорды стабилизатора, киля (крыла) из ста-
тистики
Аналогично этому, по относительным хордам —— и относит ель-
ь
ным размахам определяются размеры механизации (щит-
ков, закрылков и т. п.).
Колея шасси (см. фиг. 54) принимается равной
(0,2^0,25)/. . (22)
Определение других размеров шасси см. в гл. XVIII.
141
Последовательность выбора основных размеров может быть
представлена следующей схемой.
^мех
Принимаем из статистики
Определяем
q р X V) с
Ь
I
^мех
t
*-*р.в
Хф #Г1о _
г.о
S
I
*^эл
I
^эл
Задаемся конструктивно
Приближенное определение летных данных
После определения полетного веса и основных размеров са-
молета необходимо проверить, удовлетворяют ли они летно-техни-
ческим требованиям. Так как проведение полного аэродинамиче-
ского расчета для выявления летных данных громоздко, то для пер-
воначального анализа имеются приближенные формулы, которые
устанавливают связь между летными данными и основными стати-
стическими коэффициентами и дают возможность варьировать па-
раметры самолета для обеспечения требуемых летных данных.
Приводим некоторые приближенные формулы
Самолеты с ПД и ТВД
1. Максимальная скорость
max //--125
NH — 0,00125
КМ
час
*
(23)
0,00004 w м
ЗА' сек /
на данной высоте в л. с,\
Д— относительная плотность воздуха (по MCA)* **;
5 —площадь крыла в ж2.
Несколько более громоздко, но и
лена по формуле
max 11 34,7
где NH—мощность двигателя
более надежно Vmax может быть
опреде-
150 /ут)в
сам
сек
(24)
з
Vшах /7
1472Л njaK\
5Д
* В системе СИ.
** MCA—международная стандартная атмосфера.
142
где 1]в^0,8, а значение сх сам определяется из статистики
<\г сам
150 ЛАшах и
Сх сам ~
1472 Nшах // 7]^ у
6/y^^max Н /
(25)
В формуле (25) все данные берутся для самолета-прототипа из статистики;
1)в=0,8
2. Потолок
нп„~ 17,1 -0,139Л/>— 1/^17(4+0,094? км- (26)
™Н расч V 5 у \ Л /
В системе СИ вместо коэффициента 0,139 будет 4,3.
Здесь Р4СЧ — мощность двигателя на расчетной высоте* **;
Ар— коэффициент, учитывающий изменение мощности
ПД на расчетной высоте ^Ар——Л7-раеЧ-^.
Для ТВД Ар^к
3. Дальность полета
G-jOiiVmax Н р
~~-----------Г д;Л ,
(27)
где GTon — вес топлива в кГ («);
1/П1,х„-максимальная скорость на данной высоте з км/час;
Nff ~ мощность двигателя на той же высоте в л. с,;
СеН~~соответствующий этой высоте удельный расход топлива
в кГ/л. с. ч (н/л. с. ч);
F — коэффициент, принимаемый для самолета с одним двига-
телем, равным 1,38; для самолетов с двумя и четырьмя
двигателями 1,48.
4. Длина разбега (взлетной дистанции)
•^-разб(вал)
k —
Лг0
М.
(28)
Для разбега /г = 0,75; для взлетной дистанции k = 2.1 (в системе
СИ — 72 и 202 соответственно).
* В системе СИ.
** Расчетной высотой называется высота, до которой мощность двигателя
сохраняется или несколько возрастает.
143
5. Посадочная скорость
где Gnoc — вес самолета при посадке, равный полетному весу G
за вычетом расходуемой нагрузки.
Молено принять остаток топлива перед посадкой AGTOn~0,26гоц
для самолетов с ТРД и AGTOn~0,5GTOK для самолетов с ПД, ТВД
AGTon определяется из формул (27), (33). Вес бомб, снарядов G6
определяется в соответствии с летно-техническими требованиями.
Значения в первом приближении могут быть приняты для
прямых крыльев max—1,5, для стреловидных крыльев 1,1.
6. Длина послепосадочного пробега
лро6 0,025 VI* м.
(30)
где Vnoc подставляется в км/час.
Самолеты с ТРД
1. Максимальная скорость (число Mmai) определяется по гра-
фику фиг. 58, где по оси абсцисс отложена величина
Po/S Рр/$____________
f(H) 1,206 — 0,0385Я<ж’
а по оси ординат Мтах; Ро— тяга у земли
Аналотчно предыдущему Гт, н может быть определена по формуле
2^max Н •**
сек
где Ci сам — определяется из статистики
2. Потолок
(31)
(32)
где сХо может быть принято:
для самолетов с одним двигателем сХо—0,018;
для самолетов с двумя двигателями сХа^0,02 и
для самолетов с четырьмя и более двигателями
Ро — тяга у земли
0,022;
* В системе СИ.
144
3. Дальность полета
топ^тах И
КМ,
(33)
где V „ — максимальная скорость на данной высоте в км[чае;
Ри — тяга на данной высоте в кГ (и);
СеИ-~ соответствующий тяге удельный расход топлива.
Fi можно принять для истребителя 1,1; для бомбардировщика 1,2.
Фиг. 58.
4. Длина разбега
Ра,6~0,8-^--^
(34)
(Лраз6 «0,0814 .
\ О 1 /
Посадочная скорость самолета с ТРД определяется по форму-
ле (29), длина пробега после посадки — по формуле (30).
* В системе СИ,
10 1563
Г лава XII
ЦЕНТРОВКА И КОМПОНОВКА САМОЛЕТА
1. ПРИБЛИЖЕННЫЙ ВЕСОВОЙ РАСЧЕТ САМОЛЕТА
Знание веса отдельных агрегатов, грузов и т. п, составляющих
полетный вес самолета (см. фиг. 53), необходимо для определения
положения центра тяжести самолета и уточнения полетного веса,
определенного ранее в первом приближении.
Рассмотрим последовательно определение составляющих полет-
ного веса.
Вес нагрузки
Вес нагрузки, как было указано выше, состоит из веса топлива
и смазочного материала, веса экипажа, веса пассажиров, веса гру-
зов, багажа и веса бомб, снарядов для военного самолета.
Вес топлива определяется из формул (27), (33)
Птоп^ (для самолета с ПД, ТВД), (35)
Vmax И Р
(?топ —' LCeHPf1- (для самолета с ТРД). (36)
Значения L, Утах я берутся из летно-технических требований;
значения ceII, NH(Pn)—из данных двигателя. Вес смазочного
материала принимается равным 2—3% о? веса топлива (меньшие ,
значения — для самолетов с ТРД).
Вес экипажа определяется в зависимости от числа членов эки-
пажа, которое, в свою очередь, определяется назначением самоле-
та и летно-техническими требованиями. Вес одного члена экипажа
для военных самолетов принимается 100 кГ (980 н); для граждан-
ских— 80 кГ (780 я), вес одного пассажира — 80 кГ (780 я). Вес
багажа вычисляется в зависимости от числа пассажиров. По нор-
мам ГВФ на одного пассажира полагается до 30 кГ (294 к) багажа.
Вес грузов в грузовом самолете, боезапаса (снарядов, бомб)
в военном самолете задается летно-техническими требованиями.
Вес конструкции
Вес конструкции составляется из, веса отдельных агрегатов:
крыла, фюзеляжа, оперения, шасси и управления. Вес агрегата за-*
висит от величины и характера действующих на него нагрузок, от
материалов, из которых он изготовлен, от веса несиловых деталей
(прокладок, диафрагм, стенок и пр.), которые неизбежно входят
в конструкцию агрегата. Поэтому теоретическое определение веса
агрегатов представляет собой значительные трудности.
14(>
Приближенно вес агрегатов определяется по статистическим
данным с помощью коэффициентов относительного веса агрегатов
= = и т. д. (37)
Вес силовой установки
Двигатели, винты, радиаторы на самолетных заводах не изго-
товляются, и вес их определяется по данным заводов-изготовите-
лей. Вес моторамы, капотов, баков, трубопроводов определяется
по данным статистики.
Более грубо вес силовой установки может быть определен с по-
мощью статистических коэффициентов
(3S)
а также
° с., ~ -tN0. °C, « /V (39)
где 7V0, Ро—номинальная мощность, тяга двигателя у земли;
Л'у —удельный вес силовой установки.
Вес вооружения и оборудования
Вес вооружения и оборудования определяется по данным заво-
дов, изготовляющих предполагаемое к установке вооружение
и оборудование. Номенклатура же устанавливаемого вооружения
и оборудования зависит от назначения самолета и определяется из
летно-технических требований.
2. КОМПОНОВКА И ЦЕНТРОВКА САМОЛЕТА
♦ Компоновка самолета
Компоновка самолета, т, е. размещение в самолете экипажа,
грузов, оборудования, а также взаимное расположение агрегатов
самолета, должна удовлетворять следующим требованиям:
1. Обеспечение наибольших углов обзора экипажу. Так, напри-
мер, угол обзора вперед — вниз должен быть равен 7—9° (фиг. 59).
Этот угол измеряется между горизонтальной и касательной к фю-
зеляжу линиями, проведенными от глаза летчика
Экипаж должен быть размещен вне плоскости винтов.
2. Размещение расходуемых грузов ближе к центру тяжести
самолета, чтобы изменение их веса не оказывало значительного
влияния на положение центра тяжести самолета.
Так как положение центра тяжести еще не определено, то его
принимают ориентировочно на расстоянии 0,25 бСАХ от носка САХ
для самолетов, у которых скорость полета меньше скорости звука,
и 0,35 £сах для самолетов, летающих со сверхзвуковой скоростью
(фиг. 59). Величина и положение САХ определяются графически
по способу, изложенному на стр. 154.
10*
147
3. Для маневренных самолетов возможно меньший разнос масс
относительно всех трех осей, чтобы не увеличивать массовый мо-
мент инерции самолета и не ухудшать его маневренность.
4. Обеспечение доступа к агрегатам, требующим периодическо-
го осмотра.
5. Размещение шасси должно обеспечивать:
а) Зазор не менее 160 мм между поверхностью земли и кон-
цом лопасти винта в нижнем ее положении, а также между поверх-
ностью земли и нижней точкой фюзеляжа.
Фиг. 59. К компоновке самолета.
Отсюда величина h (см. фиг. 59) должна быть равна
h = Ламорт “Ь 160 ММ,
где Адневм — опускание самолета при полном, обжатии пневма-
тикой;
Ааморт — опускание самолета при полном обжатии амортиза-
торов.
б) Для предохранения заваливания самолета на хвост колеса
главных ног шасси необходимо располагать за центром тяжести
таким образом, чтобы при посадке самолета на главные колеса
реакция R (см. фиг. 59) прошла сзади центра тяжести, для чего
угол выноса шасси назад у, образованный между перпендикуля-
ром к линии земли при стоянке и линией, соединяющей центр тя-
жести с точкой касания главных колес, должен быть больше угла
<р, т. е. не менее 15°.
в) Расположение предохранительной хвостовой пяты должно
обеспечивать при посадке на главные .колеса и небольшом зазоре
между хвостовой пятой и землей угол атаки крыла, равный
Опое накрит—(2~3°), чтобы значение су было близко к макси-
мальному. Здесь Щерит — угол атаки, соответствующий cvniax.
Уменьшение аЬрит на 2—ЭР идет в «запас» — против возможного «провали-
вания» самолета при случайном увеличении угла атаки сверх аКрат ♦»
* Как известно, при а>акрИт величина су падает по сравнению с шах-
148
Для этой цели угол <р должен быть равен
ф — Якрит (24-3°) ((ХустЧ-Оо) >
где ауст — угол установки крыла относительно оси самолета (обыч-
но 14-2°), ао — угол между осью самолета и линией земли при
стоянке.
Угол установки крыла ауСт выбирается из условия обеспечения минималь-
ного лобового сопротивления самолета на режиме максимальной, скорости, т. е.
на таком режиме ось фюзеляжа должна быть горизонтальна.
Поэтому угол установки крыла должен быть равен углу атаки на режиме
Ушах н на рабочей высоте; ауСт=аттахя.
Последний определяется по значению
_ 20
Су max № р <Ц/2 '
шах Я
Угол ао должен обеспечить наивыгоднейшее значение угла атаки крыла при
взлете самолета. Из фиг. 59 видно, что аа3л = ао+ауст.
Фиг. 60.
г) Размещение шасси должно обеспечивать возможность уби-
рания его в полете.
Положение носового колеса обусловливается углом [3—80^90°
или размером (0,284-0,35)/ф, где /ф длина фюзеляжа.
Колея шасси /ш (см. фиг. 54) принимается равной (0,184-0,3) I.
Для велосипедной схемы шасси (фиг. 60, обозначения те же,
что на фиг. 59):
3 = 1004-120°; /ш желательно иметь возможно большим; у =
= (0,44-0,5) р.
Остальные соотношения такие же, как для шасси с носовым ко-
лесом. Подкрыльные опоры у большинства самолетов на стоянке
касаются земли.
6. Размещение горизонтального оперения по высоте должно
обеспечивать вынос его из «аэродинамической» тени крыла, т. е.
из зоны завихренного потока, сбегающего с крыла (фиг. 61).
Положение оперения по длине фюзеляжа, как уже было сказа-
но, определяется величиной
(2,54-3,5) ЬСАХ.
При A<3 Lr.o(l,24-2,0)&CAX.
149
7. При компоновке самолета в целях уменьшения волнового
сопротивления следует соблюдать «правило площадей» (см.
на стр. 92 и фиг, 27).
При сверхзвуковых скоростях нужно обеспечить плавное изменение не попе-
речных сечений, а сечений плоскостями, имеющими наклон, равный углу скачка,
взятого для данного числа М
8. Должно быть обеспечено аварийное покидание военного са-
молета экипажем с помощью катапультирования и аварийные вы-
ходы (люки) в пассажирском самолете.
Фиг 61. Размещение горизонтального оперения по высоте
Одновременно с компоновкой различных грузов производится
компоновка силовых элементов конструкции самолета — лонжеро-
нов, шпангоутов, нервюр, узлов креплений различных агрега-
тов и пр. На фиг. 62, 63 приведены компоновочные схемы пасса-
жирского самолета Ил-18 и современного истребителя.
Определение положения центра тяжести самолета
На основании весового расчета получаем вес всех агрегатов
конструкции, экипажа, топлива и смазочного материала, грузов,
боезапаса, элементов силовой установки, оборудования и воору-
жения.
В результате компоновки знаем размещение всех весов, удов-
летворяющее приведенным выше требованиям. Теперь можно пе-
рейти к определению положения центра тяжести самолета.
Предварительно необходимо наметить положение центра тяжести
отдельных составляющих веса самолета, что делается приближен-
но, так как погрешности, имеющие место при этом, не оказывают
существенного влияния на положение центра тяжести самолета.
Центр тяжести крыла принимается на расстоянии 0,38—0,42
&ср от носка средней хорды; центр тяжести фюзеляжа —- на рас-
стоянии ~0,4/ф от передней точки фюзеляжа.
Центр тяжести топливных баков принимается в центре тяже-
сти их боковой проекции; центр тяжести оперения принимается
аналогично крылу. Центр тяжести симметричных грузов и агрега-
тов находится на оси симметрии. Центр тяжести двигателя, ору-
жия и пр. определяется на основании данных заводов-постав-
щиков.
150
1
со
СО
L\
152
На боковой проекции самолета, выполненной в масштабе, на-
носятся точки, соответствующие центрам тяжести отдельных ве-
сов (фиг. 64), при этом мелкие веса оборудования, вооружения,
силовой установки группируются по месту размещения на самолете
Фиг 64. К центровке самолета,
/—радиолокационная станция, 2—снарядный ящик, 3—пушка, 4—топливопрпемлик,
5—радиооборудование, б—передняя нога шасси, 7—главная нога шасси, <5—катапуль-
тируемое сиденье и летчик, высотное оборудование, /0, 11, /2—топливные баки,
13—заборник воздуха, 14— воздушные тормоза, /5—управляемый стабилизатор, 16—ТРД,
17— фюзеляж, 18— крыло, 19—бомба, 20—отсек электрооборудования, 21—навигационное
оборудование, 22—отсек гидросистемы, 23—вертикальное оперение
и заменяются одним грузом. Выбираем произвольную, но удоб-
ную систему координатных осей х, у (см. фиг. 64) и составляем
весовую ведомость по форме табл. 5.
Таблица 5
№
по
пор.
Наименование груза
Огр
*Г(л)
К1 -М
(н-м)
Так как расположение центра тяжести самолета по его высоте
незначительно влияет на устойчивость, то в весовую ведомость
вносим лишь координаты хгр, взятые из центровочного чертежа
(фиг. 64).
Положение центра тяжести самолета определяется по формуле
(40)
153
Определение средней аэродинамической хорды (САХ)
и центровка самолета
Как известно из аэромеханики, моментные характеристики npoj
филя относятся к носку профиля и получаются из продувок пря-
моугольного крыла с постоянной хордой Ь. Чтобы использовать
эти характеристики для крыла заданного самолета, необходимо
крыло его заменить прямоугольным крылом в плане, моменты ко-
торого относительно оси z будут равны моментам заданного кры-
ла *. Хорда такого прямоуголь-
ного крыла называется средней
аэродинамической хордой и обо-
значается &САХ- Для трапеце-
видного крыла 6САХ есть хорда,
проходящая через центр тяжести
площади полукрыла. Графиче-
ское построение се приведено на
фиг. 65. Откладываем по одну
сторону ОТ Йьорп хорду &ковд, В ПО
другую сторону ОТ &КОНЦ ХОрДу
6корн. Концы отложенных хорд
соединяем прямой. Пересечение
прямой со средней линией трапе-
ции даст точку, через которую
проходит &САХ . Это построение
определяет также положение хСАХ — носка САХ относительно
носка корневой хорды.
Определив этим способом величину йСАХ и положение ее
(хСАХ )> наносим САХ на центровочный чертеж {см. фиг. 64) и за-
меряем расстояние х'и т от центра тяжести самолета до носка
САХ.
Центровкой самолета, выраженной в процентах, называется ве-
личина
ц.т
100%.
6САХ
Величины допустимых центровок для современных самолетов
находятся в пределах:
(41)
для самолетов со скоростью полета ниже
скорости звука..............................хцт=20—30%,
для самолетов со сверхзвуковой скоростью . . хцт=30ч-40%
Меньшие величины ^цт соответствуют передним центровкам,
большие — задним центровкам. Центровки определяются для раз-
* Кроме того, должны быть равны также подъемные силы и силы сопротив-
ления крыла заданного самолета и прямоугольного крыла
154
личных вариантов загрузки самолета; при полной нагрузке, при
израсходованном топливе, при сброшенных бомбах и т. п.
Разбег центровок при различных вариантах загрузки должен
быть возможно меньшим (3—5%). В отдельных случаях, при на-
личии достаточной продольной устойчивости допускаются и боль-
шие значения разбега центровки.
Значение центровки
Центровка имеет решающее значение в обеспечении продоль-
ной устойчивости и управляемости самолета. Значение центровки
было установлено еще в 90-х годах прошлого века С. С. Нежда-
новским.
Пусть самолет находится в равновесии на каком-либо режиме
(фиг. 66). При случайном увеличении угла атаки подъемная сила
У увеличится и сместится к носку -крыла г, т е. крыло создаст от-
Фиг 66.
Фиг 67.
носительно центра тяжести добавочный момент, стремящийся уве-
сти самолет от положения равновесия (дестабилизирующий мо-
мент). Этот момент -парируется возрастающим моментом от силы,
действующей на горизонтальное оперение.
Величина дестабилизирующего момента крыла будет больше
при задней центровке и меньше при передней. Значит устойчивость
при задней центровке будет уменьшаться, при передней увеличи-
ваться.
Влияние центровки на устойчивость хорошо иллюстрирует помещенная в по-
токе модель крыла (предложенная проф. В. С. Пышновым), приведенная на
фиг. 67. Модель на эскизе «а», у которой ось вращения размещена впереди
(передняя центровка), находится в состоянии устойчивого равновесия, модель
на эскизе «б» (задняя центровка)—в состоянии неустойчивого равновесия.
Изменение величины устойчивости самолета в полете крайне
нежелательно. Самолет, обладающий большой устойчивостью, при
отклонении его летчиком слишком энергично стремится возвра-
титься в начальное положение. Летчику приходится прикладывать
большие усилия для удержания самолета в отклоненном положе-
нии. И, наоборот, самолет с малой устойчивостью очень вяло воз-
вращается к исходному положению, слишком быстро реагирует на
* При увеличении а центр давления перемещаемся вперед.
155
небольшие отклонения рулей и требует от летчика постоянного
внимания.
Отсюда следует, что обеспечение нормальной центровки являет-
ся важной задачей при компоновке самолета.
Исправление центровки
При первом варианте компоновки самолета редко можно полу-
чить надлежащую центровку. Исправление центровки осуществ-
ляется тремя способами (или их комбинацией):
1. Изменением компоновки, т. е. перемещением различных гру-
зов. При этом переднюю центровку нужно исправлять перемеще-
нием грузов назад, заднюю — перемещением грузов вперед. Опе-
рация эта громоздка и по существу сводится к проведению новой
компоновки самолета.
Фиг, 68
2. Изменением положения крыла относительно фюзеляжа. Так
как одновременно с -перемещением крыла перемещается и САХ,
а положение центра тяжести самолета изменяется при этом незна-
чительно, то величина дцт меняется. Так, например, при исправ-
лении передней центровки (фиг. 68, а) крыло нужно перемещать
вперед — тогда носок САХ тоже переместится вперед (смещение
ц. т. вперед при этом будет незначительно) и расстояние от него
до центра тяжести самолета увеличится (фиг. 68; б).
Этот способ также сложен, так как перемещение крыла влечет
за собой значительные перемещения силовых элементов, связанных
с крылом (силовых шпангоутов фюзеляжа и пр.).
Первый и второй способы применяются в случае значительных
исправлений центровки.
3. Незначительным изменением стреловидности крыла с сохра-
нением положения бКОрн *• В этом случае, как и в предыдущем,
имеет место смещение САХ при незначительном смещении центра
тяжести самолета. Исправление, например, передней центровки
(фиг 69) достигается перемещением концов крыла вперед (прида-
нием так называемой обратной стреловидности крылу или умень-
* Нельзя смешивать незначительное изменение стреловидности для исправ-
ления центровки с приданием крылу стреловидности для устранения влияния
сжимаемости.
156
шением прямой стреловидности). Цифрой 2 на фиг. 69 указано
исправленное положение центра тяжести и новая величина .
Этот способ не вызывает существенных изменений компоновки,
но может применяться только при незначительных исправлениях
центровки.
Этапы проектирования и испытания самолета
В заключение главы рассмотрим этапы проектирования само-
лета. Процесс проектирования можно разбить на три основных
этапа.
1. Эскизный проект. Этот этап включает изучение и обра-
ботку статистики, изучение динамики развития самолетов, изы-
скания, выбор схемы и основных параметров самолета, весовой
расчет, разработку схемы члене-
ния и общих видов основных
агрегатов самолета, выбор основ-
ных материалов, основного са-
молетного оборудования, аэроди-
намический расчет и расчет
устойчивости, и заканчивается
составлением общего вида само-
лета в трех проекциях и компо-
новкой.
На этом этапе производят
сравнительные продувки моде-
лей различных вариантов рас-
смотренных схем.
2. Предварительный проект. Этот этап начинается
после утверждения «заказчиком» эскизного проекта и состоит из
уточнения компоновки, проведения различных экспериментов по
выбору наивыгоднейших аэродинамических форм, материалов,
конструктивных схем и т. п. Разрабатываются чертежи агрегатов,
устанавливаются размеры основных деталей на основе расчетов
Прочности, проводятся аэродинамический расчет, расчет устойчи-
вости на основе продувок моделей, расчет вибропрочности и т. п.
Уточняется перечень оборудования; разрабатываются мероприятия
по обеспечению взаимозаменяемости агрегатов самолета, техноло-
гичности изготовления и сборки конструкции. Этап заканчивается
постройкой макета самолета в натуральную величину для взаим-
ной увязки основных размеров, отдельных сопряжений, размеще-
ния грузов и т. п.
3. Исполнительный или рабочий проект и испы-
тания. На этом этапе, на основе данных предварительного проекта,
уточняются компоновочные данные, уточняются все расчеты, про-
изводится конструктивная и технологическая разработка всех узлов
и деталей самолета и проверка прочности их при помощи расчетов
(а в случае необходимости и путем испытаний).
157
Производится весовой контроль, т. е. сопоставление веса дета-
лей, ^подсчитанного по чертежам, с проектным весом, а также сопо-
ставление проектного веса с фактическим.
Параллельно производится постройка опытных экземпляров:
для статических и динамических испытаний и для летных испы-
таний.
Статические испытания проводятся как самолета в це- |
лом (см. фиг. 44), так и отдельных его частей. Воздушная нагрузка
имитируется натяжением лямок, приклеиваемых во многих местах |
к поверхности самолета. Производятся замеры напряжений и де-
формаций сначала при нагружении наибольшей эксплуатационной ;
нагрузкой, а затем и разрушающей нагрузкой.
Агрегаты, подверженные динамическим (ударным, вибрацион-
ным) нагрузкам (шасси, топливные баки, моторные рамы и т. п.),
подвергаются также динамическим испытаниям. Шасси,
например, испытывают на копрах. Испытание заключается в том,
что стойку шасси вместе с пневматикой сбрасывают с некоторой
высоты и затем измеряют полученные нагрузки и перемещения
Крепления двигателя, баки подвергают колебаниям с помощью
вибраторов для проверки числа циклов колебаний, при которых
конструкция разрушается от усталости. :
При статических и динамических испытаниях сверхзвукового '
самолета воспроизводятся реальные температурные условия. Для
этого испытываемая часть конструкции обогревается, например,
кварцевыми лампами.
Летные испытания служат для изучения в полете нагру-
зок, действующих на самолет, выявления температур и напряже- ।
ний в отдельных частях в летных условиях, изучения колебаний J
частей самолета, а также определения летно-эксплуатационных ха- • [
рактеристик самолета. ;
В случае успешного окончания испытаний вся техническая до-
кументация самолета передается для серийного производства. (
Но на этом не заканчивается работа конструкторского кол- ;
лектива над самолетом. С первых шагов запуска самолета в се-
рийное производство конструкторский коллектив держит тесную i
связь с производством, решает вопросы, непрерывно возникающие
в процессе производства. В содружестве с коллективом производ-
ственников конструкторы устраняют недостатки конструкции, вы-
явившиеся как в процессе производства, так >и в первые дни экс-
плуатации. Важное значение для повышения качеств самолета
имеет модификация самолета — частичные конструктивные изме-
нения (иногда полная замена одного или нескольких агрегатов) не
требующие коренной перестройки производства. Таким образом,
тесная связь конструктора с производством является залогом со-
вершенствования конструкции и ее обновления.
РАЗДЕЛ Ш
КОНСТРУКЦИЯ И РАСЧЕТ АГРЕГАТОВ САМОЛЕТА
НА ПРОЧНОСТЬ
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ К РАЗД. HI
с — максимальная толщина профиля крыла,
Хс — координата максимальной толщины профиля относительно носка;
b—хорда профиля крыла; шаг стрингеров;
/max — максимальная вогнутость профиля крыла;
дуэтах — коэффициент максимальной подъемной силы крыла,
сх—коэффициент лобового сопротивления крыла;
X — угол стреловидности крыла;
V — скорость полета самолета, объем воздуха в камере амортиза-
тора;
Д—скорость звука;
Мкрнт — критическое число М, которому соответствует начало волнового
кризиса;
S—площадь крыла; осевая,сила;
I—размах крыла; длина тяги проводки управления;
X——удлинение крыла;
—сужение крыла;
^корн — корневая хорда крыла;
^конц —концевая хорда крыла;
К — аэродинамическое качество самолета;
Р—Тяга двигателя; внешняя сила; усилие на ручке управления;
G — полетный вес самолета;
ci — индуктивное сопротивление крыла;
Мизг — изгибающий момент;
Л/кр—крутящий момент.
Q—поперечная сила; лобовое сопротивление самолета;
8—толщина стенки; толщина обшивки; угол отклонения рулей;
окр —критическое нормальное напряжение;
У'крнт.фд — критическая скорость флаттера;
у—удельный вес материала; угол поворота колеса;
qy — аэродинамическая погонная нагрузка;
?кр — массовая погонная нагрузка крыла;
Ргр — массовая сила груза;
р—удельная нагрузка;
Y — подъемная сила крыла;
у — коэффициент безопасности;
159
лэ — коэффициент эксплуатационной перегрузки,
<1 — погонная нагрузка;
ст—коэффициент момента крыла;
<?гр — вес груза или агрегата:
ЛраСч — коэффициент расчетной перегрузки;
J — экваториальный момент инерции сечения;
Н — высота полета самолета; высота лонжерона;
т. — погонный крутящий момент; масса самолета;
тм — касательные напряжения при кручении;
—касательные напряжения от поперечной силы;
тв — предел прочности при сдвиге;
ов — предел прочности при растяжении;
— редукционный коэффициент; угол установки лопасти вин?а;
п —- число стрингеров; количество стыковых болтов; число оборотов
винта; передаточное число управления; показатель политропы;
УПос— посадочная скорость самолета;
Sr.o — площадь горизонтального оперения.
SB.o — площадь вертикального оперения,
59Л — площадь элерона;
А!ш — шарнирный момент;
Одв — вес двигателя;
£— модуль упругости материала 1-го рода;
n — собственная частота колебаний элемента;
•Ру-v сила инерции; -
—вертикальная скорость;
U/—момент сопротивления сечения;
Т — сила трения;
^ам — коэффициент полноты диаграммы обжатия амортизатора;
хкр — координата центра тяжести сечения крыла.
Глава XIИ
КОНСТРУКЦИЯ КРЫЛЬЕВ И РАСЧЕТ ИХ НА ПРОЧНОСТЬ
I. ФОРМЫ И ПАРАМЕТРЫ КРЫЛЬЕВ
/
Назначение крыла и требования к нему
Основное назначение крыла — создание подъемной силы при
поступательном движении самолета. Кроме того, крыло служит
для создания устойчивости и управляемости самолету; к конструк-
ции крыла крепятся элероны, механизация и, часто, шасси и сило-
вые установки; внутренний объем крыла используется для раз-
мещения оборудования и топлива.
Форма и конструкция крыла должны удовлетворять требова-
ниям аэродинамики, технологии изготовления, эксплуатации и пр.
160
Требования к крылу самолета могут быть сведены в несколько
основных групп.
1. Аэродинамические требования. Наименьшее со-
противление (формы, трения, волновое, индуктивное, интерферен-
ции и пр.); возможность получения наибольшего сутах при приме-
нении механизации; наибольшая величина аэродинамического
качества су[сх\ обеспечение достаточной устойчивости, управляе-
мости и необходимой балансировки на всех режимах полета.
2. Конструктивные требования. Малый вес при до-
статочной прочности и жесткости крыла (полное удовлетворение
требованиям норм прочности); возможность удобной конструктив-
ной увязки конструкции крыла с другими агрегатами самолета.
Сохранение заданного профиля крыла при эксплуатационных
перегрузках с учетом нагрева обшивки при полетах на больших
скоростях.
3. Эксплуатационные требования. Максимальное
использование внутреннего объема, высокая живучесть (т. е. ми-
нимальная уязвимость силовых элементов, органов управления
и механизации), доступность для осмотра и обслуживания всех
ответственных частей и деталей, легкость ремонта, эксплуатация
в любое время года, удобное размещение оборудования и всех ча-
стей, которые расположены на крыле и внутри его, возможность
хранения под открытым небом, взаимозаменяемость крыла и его
частей.
4. Производственно-экономические требова-
ния. Удовлетворяя всей совокупности требований, конструкция
крыла должна допускать применение при данном объеме произ-
водства наиболее экономичной технологии изготовления.
Следует иметь в виду, что значительная часть требований,
предъявляемых к крылу, взаимно противоречива. Например, тон-
кое крыло (с:~3—4%) хорошо удовлетворяет требованиям мини-
мального лобового сопротивления, но по весу, величине сутах.
а также по использованию внутренних объемов оно оказывается
невыгодным по сравнению с толстым крылом. Наличие разъемов
и вырезов в крыле обеспечивает сборочные работы, транспорти-
ровку и обслуживание во время эксплуатации, однако при этом
увеличивается лобовое сопротивление и вес конструкции крыла
и т. д.
Конструктору приходится находить рациональное компромис-
сное решение, наилучшим образом удовлетворяющее предъявляе-
мым требованиям.
Профили крыльев
л
Поперечное сечение крыла называют его профилем (дужкой).
Аэродинамические характеристики профиля зависят от его гео-
метрических параметров.
11 1563 161
Геометрическими характеристиками профиля крыла (фиг. 1).
являются:
ляются на тонкие
Фиг 1. Геометрические характеристики
профиля
100 —относительная толщина профиля в %; С Lt
ь
с —максимальная толщина профиля;
Z> —хорда профиля;
7 .— относительное положение максимальной толщины;
с ь
х—координата максимальной толщины профиля относи-
тельно носка;
0,30 н-0,50.
Для скоростных профилей характерны большие значения.
/шах — максимальная кривизна профиля или наибольшее рас-
шах стояние от касательной к средней линии, проведенной
параллельно хорде, до хорды. Отношение этой величины
к длине хорды, т. е.
называется относительной кривизной профиля.-, f «
7 ь
ж 0 0,02.
В зависимости от относительной толщины с профили подразде-
(с<6%), средние (с — 6~- 10%) и толстые
(ё> 10%).
Изменения геомет риче-
ских параметров профилей
крыла влекут за собой су-
щественные изменения их
аэродинамических характе-
ристик.
Так, например, волновое
сопротивление крыла про-
порционально квадрату от-
носительной толщины про-
филя сХБ = /(ё2).
В зависимости от кривизны средней линии профиля имеются
следующие типы профилей (фиг. 2,а).
Двояковыпуклый несимметричный профиль в на-
стоящее время наиболее часто применяется у самолетов с поршне-
выми двигателями, так как облада’ет малым профильным сопро-
тивлением на средних и больших углах атаки и дает сравнительно
высокие значения Некоторые из профилей этого типа имеют
постоянный центр давления (на ~25% хорды), что способствует
уменьшению веса конструкции крыла.
S-образный профиль (профиль со средней линией, имею-
щий форму буквы S) имеет несколько отогнутый вверх хвостик,
что позволяет получить профиль с постоянным центром давления
Значение сушах у такого профиля меньше, чем у профиля без ото-
гнутого вверх хвостика.
162
Двояковыпуклый симметричный профиль (у кото-
рого средняя линия совпадает с линией хорды, т. е. 7=0) дает
малое сопротивление на малых углах атаки, применяется для
крыльев дозвуковых и околозвуковых самолетов и, как правило,
для хвостового оперения всех самолетов.
а)
раздай
!)
Фиг. 2 Классификация профилей
Современные профили, применяемые для околозвуковых само-
летов, имеют обычно симметричные очертания, малые радиусы за-
кругления носка, малые значения с и хс^40—50% хорды.
На фиг. 2, б приведены некоторые формы сверхзвуковых про-
филей. Острые носки их обеспечивают возникновение косых скач-
ков уплотнения.
Формы крыльев (вид спереди)
По виду спереди различают крылья с различными попереч-
ными V (фиг. 3). Поперечное V крыла измеряется углом -ф между
горизонтальной плоскостью и плоскостью хорд полукрыла. Зна-
чение его может быть положительным — крыло отогнуто кверху
(на угол до 7°, фиг. 3,6), отрицательным — крыло отогнуто книзу
(на угол до 5°, фиг. 3, в) и нулевым (фиг. 3, а). Положительное
поперечное V служит для увеличения поперечной устойчивости са-
молета; отрицательное поперечное V — для уменьшения попереч-
ной устойчивости самолета.
Крылья, изображенные на фиг. 3, г, д, получили названия
крыльев типа «чайка» и «обратная чайка». Такие крылья умень-
шают интерференцию крыла и фюзеляжа, но являются более слож-
ными в производстве.
11*
163
Формы крыльев в плане
Форма крыла в плане влияет на аэродинамические и конструк-
тивные характеристики всего самолета, в частности, на вес крыла
и его индуктивное и волновое сопротивления.
Рассмотрим основные формы крыла в плане: прямые, стре-
ловидные и треугольные (фиг. 4).
Прямые крылья характеризуются нулевым или малым углом
стреловидности % (примерно —5-н+10°), замеряемым между ли-
нией, проходящей через 0,25 хорды (линией фокусов), и перпенди-
куляром к плоскости симметрии самолета.
Фиг, 3. Формы крыльев (вид спереди).
Прямоугольные крылья (фиг. 4, а) применяются преиму-
щественно в бипланах и подкосных монопланах. Иногда они уста-
навливаются на сверхзвуковых самолетах и самолетах-снарядах,
так как лобовое сопротивление прямоугольного крыла на скоро-
стях свыше 2М становится меньше, чем у крыльев других форм.
Прямоугольные крылья удобны в производстве вследствие про-
стоты очертаний (хорда и толщина профиля не изменяются по раз-
маху), но обладают по сравнению с трапецевидными крыльями
худшими аэродинамическими и весовыми качествами. Индуктивное
сопротивление их больше, а распределение подъемной силы по раз-
маху таково, что точка приложения равнодействующей аэродина-
мических сил на полукрыле будет расположена дальше от кор-
невого сечения крыла, являющегося местом заделки (zi>з2;
фиг. 5). Значит больше будут изгибающие моменты в сечениях
крыла и больше вес крыла.
Кроме того, при одинаковых относительных толщинах профиля
С1 = С2 абсолютная толщина профиля в корне прямоугольного
164
к
I
►
Фиг 4 Формы крыльев в плане
165
крыла будет меньше благодаря меньшей корневой хорде.
Как известно, балка с меньшей высотой, работающая на изгиб,
получается более тяжелой, так как момент сопротивления ее мень-
ше (при прочих равных условиях).
Недостатком прямоугольного крыла, по сравнению с трапеце-
видным, является также ограниченность внутренних объемов, бла-
годаря малой абсолютной толщине профиля в корневом и близле-
жащих к нему сечениях.
Прямые трапецевидные крылья (см. фиг. 4,6*, в) получили г
широкое распространение в свободнонесущих монопланах. Имея J
преимущества перед прямоугольным крылом в величине индуктив- g
ного сопротивления и веса, а также в лучшем использовании внуг- {
ренних объемов, трапецевидное крыло несколько сложнее в про- у
Фиг. 5
Трапецевидное крыло малого удлинения (см
фиг. 4, в) применяется на некоторых сверхзвуковых самолетах,
так как малые удлинения способствуют уменьшению волного со-
противления при сверхзвуковых скоростях.
Стреловидные крылья (см. фиг, 4,г, д, е). Скорость воз-
душного потока около крыла, фюзеляжа, гондолы двигателя и опе-
рения выше скорости полета самолета и зависит от кривизны об-
текаемых поверхностей этих частей. Так, при скоростях полета,
равных 0,70—0,75 скорости звука, воздушный поток может местами
достигнуть скорости звука, В этих местах возникает волновой
кризис, при котором нарушаются аэродинамические характеристи-
ки самолета; появляются скачки уплотнения, вследствие чего
возрастает сопротивление, изменяется характер распределения
* Трапецевидные крылья с прямоугольным центропланом могут рассматри-
ваться как разновидность трапецевидного крыла.
подъемной силы по размаху крыла, меняется устойчивость
и управляемость самолета.
В связи с ростом скоростей полета самолетов и необходимостью
перенести начало волнового кризиса в область более высоких
скоростей, широкое применение нашли стреловидные крылья. Стре-
ловидность бывает прямой — концевое сечение крыла оснесено
назад относительно корневого (см. фиг. 4, г, е) и обратной — кон-
цевое сечение вынесено вперед (см. фиг. 4, 5).
Влияние большой стреловидности (порядка 35—60°) на умень-
шение волнового сопротивления приближенно можно пояснить так:
рассмотрим два крыла с одинаковыми профилями, движущиеся
с одинаковой скоростью V, одно из которых стреловидное (фиг. 6).
Пусть для крыла с х^=0° при скорости полета V начался волновой
кризис, т. е. местная скорость на профиле Уместп стала равна ско-
рости звука аместн. При этом число М полета, равное V/a * (где
а — скорость звука), называется критическим Мьрпт. Для стрело-
видного крыла форма профиля выдерживается в сечениях, пер-
пендикулярных линии четвертей хорд. Составляющая скорости
У| = У cos х
и будет обусловливать величину местной скорости при обтекании
профиля. Составляющая скорости V2=Vsinx в первом прибли-
жении не будет оказывать влияния на распределение скоростей
вдоль профиля.
Так как У1<У, то Умести < Умести, т. е. местные скорости при
обтекании стреловидного крыла будут меньше, что устранит воз-
никновение волнового кризиса.
V
При достижении стреловидным крылом скорости ----- составляющая
cos у
* Здесь скорость полета V и скорость звука а рассматриваются на данной
высоте полета.
167
V
скорости V1 будет равна--- cos%=V и тогда стреловидное крыло будет иметь
cos х
такое же сопротивление, как и прямое, движущееся со скоростью V.
Таким образом, влияние стреловидности заключается в увеличении скорости,
при которой наступает кризис (т. е. увеличении М1(рит)> в—-— раз (см. фиг. 8,
cos х
разд. II).
Эти выводы дают приближенные значения МКрит, так как они не учиты-
вают влияния корневой части крыла, которая обтекается потоком, параллельным
плоскости симметрии самолета, и влияния концевых срывов на крыле, обуслов-
ленных наличием поперечной скорости V2. Опыты показали, что стреловидность
2
увеличивает Мирит в --------- раз, т. е.
1 -f- cos л
2
(МКрит)х == Мкрит J , ч,
* л»
где (МКрнт)х — критическое число М стреловидного крыла.
Прямая стреловидность повышает поперечную устойчивость
самолета.
Повышенная поперечная устойчивость стреловидного крыла
требует иногда придания крылу отрицательного поперечного V для
уменьшения поперечной устойчивости и обеспечения умеренных
усилий при управлении элеронами. Кроме того, прямая стрело-
видность повышает путевую устойчивость самолета.
Обратная стреловидность применяется редко и главным обра-
зом из соображений улучшения характеристик стреловидного кры-
ла на больших углах атаки. Влияние ее на волновой кризис ана-
логично прямой стреловидности.
Но стреловидные крылья обладают и существенными недо-
статками. Так как характеристики крыла обусловлены не ско-
ростью полета V, а составляющей, перпендикулярной линии
четвертей хорд Vcosx, то подъемная сила стреловидного крыла
меньше, чем нестреловидного (при прочих равных условиях).
Коэффициент максимальной подъемной силы сутах стреловидного
крыла также снижается. Резко падает эффективность механиза-
ции. У стреловидных крыльев срыв потока с крыла начинается
с его концов на сравнительно небольших углах атаки. Этому спо-
собствует скольжение потока вдоль крыла со скоростью У> (см.
фиг. 6). Концевой срыв ухудшает поперечную устойчивость
и управляемость, а также продольную устойчивость на больших
углах атаки вследствие падения подъемной силы концов крыла.
Это явление можно частично устранить установкой на крыле греб-
ней (см. фиг. 11), уменьшающих перетекание пограничного слоя
вдоль крыла.
Существенным недостатком стреловидного крыла является его
большой вес по сравнению с прямым крылом, имеющим те же зна-
чения удлинения, сужения и относительной толщины. Увеличение
веса стреловидного крыла объясняется увеличением длины крыла
с ростом х и сложностью конструкции крыла у борта фюзеляжа
(см. конструктивные особенности стреловидных крыльев).
168
Существенное влияние стреловидности на волновое сопротив-
ление имеет место при числах М=0,84-1,8. При М>1,8 стрело-
видность не дает уменьшения волнового сопротивления. Поэтому,
учитывая изложенные выше недостатки стреловидных крыльев^
для самолетов, летающих на больших сверхзвуковых скоростях
(примерно, начиная с М= 1,84-2,0) целесообразно применять
прямое крыло малого удлинения. Естественно, что такое решение
идет в ущерб характеристикам этих самолетов на дозвуковых
и малых сверхзвуковых скоростях.
В связи с этим на некоторых самолетах применяются крылья
с «изменяемой геометрией» (фиг. 7), т. е. с изменяемым углом
стреловидности. Конструктивная сложность таких крыльев пре-
пятствует их распространению.
Треугольные крылья
(см. фиг. 4, ж, з). В настоящее
время применяются треугольные
крылья с большой стреловидностью \
и малым удлинением 1,54-2,0.
Основные преимущества тре- \д
угольного крыла, по сравнению
с прямым крылом, следующие:
1. Незначительное увеличение сх Фиг. 7. Крыло с изменяемой
при полете на околозвуковых скоро- геометрией,
стях. Это обусловлено большой
стреловидностью треугольного крыла (60° и более по передней
кромке) и малым удлинением,
2. Малое лобовое сопротивление при полетах на сверхзвуковых
скоростях, что обусловлено малым удлинением треугольного
крыла.
3. Треугольное крыло имеет большие хорды на значительной
части размаха, что при данной толщине профиля позволяет полу-
чить меньшую относительную толщину его, а это также улучшает
аэродинамические характеристики крыла.
4. При одинаковой относительной толщине профиля жесткость
треугольного крыла выше, внутренний объем больше, чем у крыла
другой формы.
5. По аналогии с фиг. 5, легко заключить, что у треугольного
крыла равнодействующая аэродинамических сил на полукрыле
будет расположена ближе к корню, чем у крыла трапецевидного
и прямоугольного. Больше будет также абсолютная толщина про-
филя в корне из-за больших хорд. Поэтому конструкция треуголь-
ного крыла имеет наименьший вес.
» Наряду с этими преимуществами треугольного крыла ему при-
сущи весьма существенные недостатки:
1. Максимальная подъемная сила на самолете с треугольным
крылом получается при таких больших углах атаки, которые ока-
зываются недостижимыми при практически приемлемых длинах
У ног шасси (фиг. 8).
169
При применяемых посадочных углах атаки апос коэффициент
подъемной силы суп0С треугольного крыла на 30^-50% меньше, чем
у прямого крыла.
2. Меньшие чем у прямого крыла значения коэффициента подъ-
емной силы cv на всех углах атаки.
Су
3 Меньшее значение качества ~ как на дозвуковых, так и на
Сх
сверхзвуковых скоростях.
4. Ограничена возможность применения и эффективного ис-
пользования механизации крыла, как из-за малого размаха тре-
Фиг. 8. Использование максимальной подъем-
ной силы при посадке. anoc—посадочный угол
атаки, применяемый на практике.
угольного крыла, так и из-за малого приращения коэффициента
подъемной силы и создания значительных пикирующих моментов
при отклонении закрылков (щитков).
Самолет с треугольным крылом можно выполнять без горизон-
тального оперения, по схеме «бесхвостка». Рули высоты размещают
в хвостовой части крыла.
Однако при этом отклонение рулей высоты вверх при посадке
уменьшает супОс крыла (см. фиг, 30, раз. II). Для компенсации
этого приходится принимать малые значения удельных нагрузок
G
т. е. .увеличивать площадь крыла при данном полетном
О
весе, что увеличивает вес конструкции.
Влияние геометрических параметров крыла на его
характеристики
Рассмотрим влияние удлинения X и сужения -ц крыла на его
аэродинамические и весовые характеристики.
С увеличением X индуктивное, а следовательно, и общее сопро-
тивление крыла на дозвуковых скоростях уменьшается, аэродина-
мическое качество крыла К= — возрастает.
Сх
170
В результате этого уменьшается потребная для горизонталь-
ного полета тяга Р = —, уменьшается часовой расход топлива,
К
зависящий от тяги, и увеличиваются продолжительность и даль-
ность полета.
Этим и объясняется применение больших X для дозвуковых
самолетов с большой дальностью.
Для сверхзвуковых самолетов с увеличением X качество крыла
падает, вследствие возрастания сХВолп, и дальность снижается.
щей аэродинамических сил
Фиг. 9. Крылья с одинаковыми площадями,
но разным сужением и удлинением.
С другой стороны, увеличение X .вызывает сдвиг точки прило-
жения равнодействующей аэродинамических сил от корня крыла,
увеличивает изгибающий момент и вес конструкции крыла
(фиг. 9).
Уменьшение X приводит к увеличению критического угла атаки
Окрит. Аналогично треугольному крылу это снижает значение су пос
(см. фиг. 8).
'Уменьшение X благоприятно влияет на характеристики крыла
при больших скоростях, уменьшая волновое сопротивление (см.
фиг. 7 разд. II). Для современных самолетов удлинение крыльев
находится в пределах 2ч-10. Большие значения X имеют дальние
тяжелые самолеты.
Сужение в плане q влияет на индуктивное сопротивление кры-
ла, максимальный коэффициент его подъемной силы и вес. Наи-
выгоднейшее значение q, при котором cXi является минимальным,
равно примерно 2. Наивыгоднейшее с точки зрения увеличения
сУтах сужение q равно 2ч-2,5.
Увеличение q, вследствие приближения равнодействующей
аэродинамических сил к корню крыла, уменьшает вес крыла (см.
фиг. 9).
Вместе с тем увеличение q способствует появлению срыва по-
тока на конце крыла, что ухудшает поперечную устойчивость са-
молета и уменьшает эффективность элеронов.
171
2, КОНСТРУКТИВНЫЕ СХЕМЫ И КОНСТРУКЦИЯ КРЫЛЬЕВ
Деформации крыла и работа его элементов
Крыло самолета с точки зрения строительной механики пред-
ставляет собой балку, которая в общем случае может быть нагру-
жена распределенными и сосредоточенными силами. Эти силы про-
изводят изгиб и кручение крыла (фиг. 10). Конструкция крыла
состоит из продольного и поперечного наборов и обшивки
(фиг. 11).
Фиг. 10. Деформации крыла.
д—нсдеформираванное крыло, б—деформированное
крыло^
Лонжероном называется мощный продольный элемент балоч-
ной или ферменной конструкции, воспринимающий значительную
часть изгибающего момента и поперечную силу. При этом пояса
лонжерона нагружаются осевыми силами, а его стенка или фер-
ма— поперечными силами. Крепление лонжеронов в корневой
части осуществляется разнесенными по высоте узлами (фиг. 11),
способными передать изгибающий момент.
Продольной стенкой называют элемент, расположенный вдоль
по размаху крыла (по всей его длине или только в некоторой его
части) и воспринимающий поперечную силу от изгиба и кручения
крыла. Крепление продольных стенок в корневой части осуществ-1
ляется шарнирным узлом (см. фиг. 11), который не может пере-
дать изгибающий момент. По конструкции и расположению про-
дольные стенки аналогичны лонжеронам крыла, но имеют весьма
слабые пояса, поэтому их часто называют также дополнительными
лонжеронами или лонжеронами-стенками. Соединяя верхнюю
и нижнюю обшивку крыла, продольные стенки совместно с об-
шивкой и стенками лонжеронов образуют в поперечном сечении
крыла замкнутые контуры, которые воспринимают крутящий мо-
мент. Обычно продольные стенки, расположенные в хвостовой
части, используют для крепления закрылов или щитков и элеронов.
172
Стрингером называется
продольный элемент, воспри-
нимающий осевые нагрузки от
изгиба и местные аэродинами-
ческие нагрузки и подкреп-
ляющий обшивку. Стрингер
представляет собой профиль
в виде уголка, швеллера
и т. п. Иногда вместо стринге-
ров для подкрепления обшивки
между лонжеронами ставят
гофр с волнами, расположен-
ными по размаху.
Нервюрами называются
элементы поперечного набора,
представляющие собой тонко-
стенные плоские' балки или
фермы. Они сохраняют задан-
ную форму профиля крыла,
передают местные нагрузки
на лонжероны и обшивку,
поддерживают стрингеры, об-
шивку и стенки, увеличивая
их критические напряжения.
Обшивка крепится к про-
дольным и поперечным эле-
ментам конструкции крыла
и образует гладкую поверх-
. ность его.
Обшивка не только вос-
принимает аэродинамическую
нагрузку, но и участвует в об-
щей работе крыла, нагру-
жаясь при этом нормальными
напряжениями от общего из-
гиба и касательными напря-
жениями от кручения крыла.
Таким образом, изгибаю-
щий момент Л4ИЗГ крыла нагру-
жает осевыми силами пояса
лонжеронов, стрингеры и об-
шивку (фиг. 12, а). Попереч-
ная сила Q при изгибе крыла
нагружает в основном стенки
или фермы лонжеронов и
продольные стенки (фиг. 12, б).
Крутящий момент Л1кр, дей-
ствующий на крыло, нагру-
Фиг. /1. Конструкция монопланного крыла.
лонжерон, 2—стрингеры, 3—нормальные нервюры, 4—передняя продольная стенка, 5—обшивка, усиленные нервюры, 7—задний
(хвостовой) стрингер, 8—задняя продольная стенка, Р—стыковые узлы.
173
жает замкнутые тонкостенные контуры, образованные стенками
лонжеронов или продольными стенками и обшивкой (фиг. 12, в).
Фиг 12 Нагружение элементов конструкции
крыла.
Конструктивные схемы крыльев. Классификация
Так как в подавляющем большинстве крыльев современных
самолетов полеречная сила воспринимается преимущественно
стенками лонжеронов или продольными стенками, а кручение вос-
принимается контуром, образованным жесткой обшивкой и стен-
ками, то крылья могут быть подразделены по характеру восприня-
тия изгибающего момента (фиг. 13) на лонжеронные (схемы I, II,
III), кессонные (схемы IV, V, VI) и моноблочные (схема VII).
Если изгибающий момент нагружает в основном пояса лонже-
ронов вследствие того, что стрингерный набор слаб (сечение и чис-
ло стрингеров невелико), а тонкая слабо подкрепленная обшивка
рано теряет устойчивость в сжатой зоне, то имеем лонжеронное
крыло.
Если нормальные усилия при изгибе воспринимаются как об-
шивкой со стрингерным набором, так и поясами лонжеронов, то
такое крыло будем называть кессонным.
Если элементами, воспринимающими нормальные усилия, возни-
кающие при изгибе, являются верхняя и нижняя обшивки со стрин-
герным набором, лонжероны отсутствуют, а 'продольные балки
выполняются в виде продольных стенок, не воспринимающих изги-
174
бающего момента, то такое крыло будем называть моноблочным.
1 Эта схема встречается весьма редко.
В настоящее время наиболее употребительными являются кес-
сонные конструктивные схемы (реже встречаются лонжеронные
схемы *).
С одним лонжероном
Фиг. 13
Классификация крыльев по конструктивным признакам
С х с п а VI]
В некоторых случаях оказывается целесообразным применять
в разных частях крыла разные конструктивные схемы. Например,
центроплан выполняют по лонжеронной схеме, отъемные части —
по кессонной.
Конструкции крыльев с полотняной обшивкой, воспринимающей только воз-
душные нагрузки, в прошлом применялись сравнительно широко. В настоящее
время такие конструкции иногда применяются лишь для нескоростных само-
летов и планеров, так как они обладают недостаточной общей и местной
жесткостью.
Конструкция прямых крыльев
Лонжеронные крылья
Важным этапом в развитии конструкций крыльев явилось применение, наря-
ду с лонжеронами, тонкой гофрированной металлической обшивки, работающей
на сдвиг при кручении крыла. В Советском Союзе такие конструкции крыльев
* Анализ конструктивных схем приведен ниже.
175
были разработаны в 1926—1928 гг. конструкторским коллективом под руковод-
ством главного конструктора А. Н. Туполева и установлены на бомбардиров
щике ТБ 1.
Для дальнейшего улучшения аэродинамики крыла вскоре вместо гофриро-
ванной обшивки начали применять гладкую тонкую (0,8-т-2 дш) дуралюминовую
обшивку, подкрепленную стрингерами и нервюрами. Необходимая толщина об-
шивки, а также подкрепляющий ее набор определялись из условий работы
обшивки на сдвиг от кручения В этом случае толщина обшивки получалась не-
большой, вследствие чего при изгибе крыла она имела в сжатой зоне низкие
критические напряжения ок₽.
Фиг. 14
Однолонжеронное крыло
с продольными стенками.
Количество лонжеронов в крыле чаще всего бывает равно одно-
му или двум, реже трем, и определяется особенностями компонов-
ки конструкции самолета.
В случае однолонжеронной схемы крыла лонжерон расположен
в месте максимальной строительной высоты профиля. Для созда-
ния контура, воспринимающего кручение, и для крепления элеро-
нов и механизации примерно на 65—70% хорды располагается
продольная стенка. Иногда ставят также переднюю продольную
стенку.
В двух лонжеронных конструкциях передний лонжерон распо-
лагается на 15—25%, задний на 60^-70% хорды. Благодаря такому
расположению максимальная строительная высота профиля в этой
схеме не используется, что является недостатком, ведущим к уве-
личению веса конструкции На кручение работает контур, образо-
ванный обшивкой и стенками лонжеронов.
На фиг. 14 приведена одна из конструкций однолонжерояных
крыльев с двумя продольными стенками.
На фиг. 15 изображено трехлонжеронное крыло.
176
Силовыми элементами конструкции этого крыла являются лонжероны I, 2,
3, стрингеры 4, нервюры 5 и обшивка 6. Хвостовой стрингер 7 соединяет хвосто-'
вики нервюр и служит для соединения верхней и нижней обшивок
Для увеличения жесткости обшивки в корневом отсеке, на участке распо-
ложения куполов шасси, обшивка подкреплена гофром 8,
Фиг 15 Трехлонжеронное крыло
/, 2, 3—лонжероны 4—стрингер, 5—нервюра, 6—обшивка 7—хвостовой стрингер,
<9—гофр
Стремление использовать ряд преимуществ конструкции лон-
жеронного типа: удобство вырезов, простоту стыковки отъемных
частей, возможность использования внутренних объемов — обусло-
вили применение этой конструкции для крыльев некоторых самоле-
тов небольших размеров
Кессонные крылья
Увеличение скоростей самолетов повысило требования и к кон-
струкции их несущих поверхностей. Тонкая гладкая обшивка не
обеспечивала крылу достаточной жесткости и прочности на всех
режимах полета, следствием чего явилась необходимость увеличить
12 1563
177
толщину обшивки и усилить ее стрингерами. Одновременно с этим,
чтобы не утяжелять конструкцию, возник вопрос о более эффек-
тивном использовании обшивки в работе крыла при изгибе.
В однолонжеронных конструкциях крыльев с задней продоль-
ной стенкой или в двухлонжеронных конструкциях обшивку между
лонжеронами усиливали стрингерным набором или гофром, чтобы
обеспечить при уменьшении сечений поясов лонжеронов воспри-
нятие изгибающего момента. Такая конструкция крыла получила
название кессонной.
Ввиду того, что элементы конструкции, воспринимающие нор-
мальные напряжения при изгибе, расположены в рассматриваемых
крыльях на значительной части контура профиля в большом уда-
лении от нейтральной оси, материал используется наиболее рацио-
нально и вес крыла получается небольшим.
Стрингеры и обшивка имеют высокие критические напряжения
и эффективно участвуют в работе крыла на изгиб, воспринимая
большую часть изгибающего момента.
Верхняя панель крыла в наиболее тяжелых случаях нагруже-
ния работает на сжатие, вследствие чего ее делают с более толстой
обшивкой, чем нижнюю. Стрингерный набор верхней панели иногда
заменяют гофром.
На фиг. 16 показано кессонное крыло самолета Ил-28, конст-
рукции С. В. Ильюшина. Лонжероны с уменьшенными сечениями
поясов располагаются как у двухлонжеронных крыльев. Верхняя
и нижняя обшивка или панели подкреплены большим числом
стрингеров.
Характерной особенностью рассматриваемой конструкции яв-
ляется разъем по хорде, делящий крыло на верхнюю и нижнюю
панели, и большое количество штампованных деталей. Возмож-
ность отдельного изготовления верхней и нижней панелей значи-
тельно облегчает производство крыла с повышенной точностью
заданного профиля с гладкой поверхностью. Для доступа к местам
соединения панелей обшивка носка, а также носовая и хвостовая
верхние панели крепятся винтами при 'помощи анкерных гаек
(см. узел /1).
На фиг. 17 изображена конструкция отъемной части кессонно-
го крыла пассажирского’ самолета Ил-18.
Конструкция крыла имеет два лонжерона, обшивку междулонжеронной ча-
сти со стрингерами, средние части нервюр я несиловые носовую и хвостовую
части крыла.
Внутренняя полость крыла используется в качестве емкости для топлива
(«бак—отсек») и покрыта герметиком. Все заклепочные швы герметизированы
с помощью уплотнительной пленки и замазки, винтовые соединения — с помощью
резиновых прокладок.
На верхней панели крыла имеется люк со съемной крышкой, через который
завершаются монтажи арматуры топливного отсека.
Кессонная конструкция крыла позволяет применить монолит-
ные панели, в которых обшивка представляет одно целое с под-
крепляющими элементами. На фиг. 18, а изображен отсек крыла,
178
Фиг. 16. Конструкция крыла кессонного типа (цифры указывают порядок сборки).
t
I
9
I
*
I
J
180
у которого верхняя и нижняя поверхности между продольными
стенками с усиленными поясами образованы из монолитных полос,
соединенных между собой при помощи двухрядных заклепочных
швов.
При наличии очень малой строительной высоты крыла, что бы-
вает при применении тонких профилей, крыльев может оказаться
Фиг 18. Конструкция крыла, образованного из монолитных
панелей.
целесообразным выполнять панели из толстой обшивки без стрин-
геров и нервюр (моноблочная конструкция) (фиг. 18,6).
Кессонная конструкция крыла дает возможность эффективно
использовать строительную высоту профиля крыла; кроме того, она
обладает высокой живучестью. Эти преимущества обусловили ши-
рокое применение таких крыльев в современном самолетостроении
Мощные, работающие при изгибе и кручении крыла, панели
между лонжеронами требуют контурного крепления при стыковке
(см. фиг. 17).
Конструкция стреловидных крыльев
Конструктивно-силовые схемы стреловидных крыльев анало-
гичны нестреловидным. Эти крылья бывают лонжеронные и кес-
сонные.
181
Конструктивные особенности стреловидных крыльев опреде-
ляются наличием в корневой части треугольника АВС (фиг. 19,6).
Можно считать, что остальная часть крыла работает на изгиб,
Диагональ,
работающая
на сжатие
Фиг. 19
сдвиг и кручение как пря-
мое крыло.
В стреловидном крыле
нервюры могут ставиться
по потоку (фиг. 19, а) или
перпендикулярно линии фо-
кусов (четвертей хорд)
крыла (фиг. 19,6). В пер-
вом случае нервюры имеют
большую длину и при креп-
лении их к лонжеронам и
продольным стенкам необ-
ходимо малковать профили,
что существенно усложняет
производство.
Кроме тою, при неблагоприятном направлении касательных напряжений от
кручения обшивка крыла быстрее теряет устойчивость, так как на сжатие рабо-
тает большая диагональ параллелограмма, работающего на сдвиг (d'>d,
фиг. 19, а)
Число нервюр при установке их по потоку получается меньшим,
благодаря меньшей длине крыла в направлении оси 2.
Лонжеронные стреловидные крылья
Рассмотрим работу стреловидного крыла с двумя лонжеронами
и нервюрами, перпендикулярными линии фокусов (фиг. 20).
В этом случае изгибающий момент Мизг, действующий на пе-
редний лонжерон, может быть заменен (фиг. 20, б) парой сил S,
лежащих в плоскости действия этого момента. При разложении сил
S на направление подфюзеляжной части лонжерона 5ЛОнмх
и бортовой нервюры SHepB момент сил 5Лошк будет изгибать под-
фюзеляжную часть лонжерона, момент сил ЗцерВ будет нагружать
бортовую нервюру ВА, так как действует в ее плоскости. Анало-
гичное влияние оказывает изгибающий момент А4ИЗГ у борта фю-
зеляжа по заднему лонжерону. В результате этого бортовая нер-
вюра ВА нагружена значительным моментом, чего не наблюдается
у прямого крыла. Стреловидность оказывает влияние также на
распределение изгибающих моментов по лонжеронам. Дело в том,
что если бы борт фюзеляжа проходил по линии ВС, то крыло
было бы нестреловидным с соответствующим ему распределением
моментов. Но так как точка В находится на борту фюзеляжа,
а точка С — на расстоянии от него, то при деформации крыла по-
ложение точки В не меняется, положение точки С меняется и де-
формации переднего лонжерона, вследствие стреловидности, воз-
растают по сравнению с деформациями заднего лонжерона. Таким
182
183
образом жесткость переднего лонжерона уменьшается. Это об-
стоятельство приводит к увеличению изгибающего момента, на-
гружающего задний лонжерон, и к разгрузке переднего лонжеро-
на. Изменение изгибающего момента у стреловидного крыла по
одному из лонжеронов в сечении ВС (см. фиг. 20, а и б) составляет
примерно 30-:-40 % от изгибающего момента лонжерона прямого
крыла.
Так же меняются и поперечные силы по лонжеронам. По мере
удаления от ко^оня крыла перераспределение изгибающего момента
и поперечной силы между лонжеронами уменьшается, составляя
примерно 10% на длине а/з полуразмаха.
Фиг. 21. С\ема нагружения однолонжеронного стреловидного крыла
с внутренним подкосом.
Крутящий момент Л11ф с обшивки крыла передается на нервюру
ВС, которая передает крутящий момент на опоры В иС (фиг. 20, в)
в виде пары сил. Сила вызовет дополнительный изгиб переднего
лонжерона, сила Ru воспримется узлом В фюзеляжа.
На фиг. 11 показано однолонжеронное стреловидное крыло
с передней и задней продольными стенками. Работа его аналогич-
на работе рассмотренной выше схемы.
В небольших самолетах из компоновочных соображений при-
ходится иногда убирать шасси в корневую часть крыла и в фю-
зеляж.
Рассмотренные на фиг. 20, 11 схемы крыла обладают тем не-
достатком, что из-за необходимости установки мощной бортовой
нервюры затруднена уборка шасси внутрь фюзеляжа. Этот недо-
статок устранен в однолонжеронной схеме крыла, показанной на
фиг. 21. Здесь лонжерон (фиг. 21,6) в точке D раздваивается:
одна часть шарнирно крепится к точке А, а вторая — жестко в точ-
ке В. От изгибающего момента Л4ИЗГ и поперечной силы Q лонже-
184
рон работает как балка, опертая в точках А и D (фиг. 21,а).
Поперечная балка (ее называют внутренним подкосом) BD изги-
бается силой А’о-
При уборке шасси в крыло и фюзеляж нарушается целостность
бортовой нервюры АВ. Так как бортовая нервюра не силовая, то
вырезы в ‘ней не нарушают силовой схемы крыла. Крутящий мо-
мент Л1кр передается через изгиб силовой нервюры DE, которая
раздает крутящий момент на узлы Е и D. Опорой узла Е в этом
случае является дополнительный лонжерон BE.
Возможна передача части крутящего момента на участке DA через контур,
образованный обшивкой носка крыла и стенкой лонжерона. Нагружение носка*
нервюры АС в этом случае показано на фиг. 21, в.
Конструкция однолонжеронного стреловидного крыла с внут-
ренним подкосом (фиг. 22) разработана конструкторским коллек-
тивом под руководством А. И. Микояна и М. И. Гуревича в конце
сороковых годов.
Кессонные стреловидные крылья
В кессонных крыльях, так же как и в двухлонжеронных, пере-
распределение нагрузок происходит путем увеличения нагрузки
на задние элементы (стрингеры, обшивку, задний лонжерон)
и уменьшения ее на передние. Это имеет место в результате раз-
личной длины задних и передних силовых элементов.
Усилия в верхней и нижней панелях от действия изгибающего
момента в плоскости излома раскладываются на составляющие,
которые направлены вдоль продольных элементов и обшивки
внутри фюзеляжа (участок D'DC'C, фиг. 23, а) и в плоскости бор-
товой нервюры CD. Последнее и обусловливает необходимость
иметь здесь усиленную бортовую нервюру,
В отличие от нагружения бортовой нервюры лонжеронного
стреловидного крыла (см. фиг. 20, в), здесь бортовая нервюра на-
гружена распределенными силами от излома стрингеров в плане
(фиг, 23,6).
Передача поперечных сил происходит по лонжеронам на борт
фюзеляжа в точки D, С как у двухлонжеронного крыла. Передача
крутящего момента также аналогична рассмотренной у двухлон-
жеронного крыла и происходит через нервюру ВС, опертую по
борту фюзеляжа в точке С и на передний лонжерон в точке F.
Часть крутящего момента может быть передана изгибом носка нервюры DE
(аналогично фиг. 21, в); часть крутящего момента может быть передана на борт
фюзеляжа также верхней и нижней панелями DFC, которые связаны по борте
фюзеляжа с панелями DCC'Df.
На фиг. 24 показана отъемная часть кессонного стреловидного
крыла с двумя лонжеронами самолета Ту-104.
Конструкция треугольных крыльев
Треугольные крылья современных самолетов имеют малые
удлинения, так как в этом случае наилучшим образом реализуются
185
E
О
О
С
X
X
X
ф
X
сз
со
е;
с
X
<
Ж
m
о
ф
О
о
х
X
о
ф
X
о
о
х
О
«
ж
X
ф
о
s
ч
о
tx
с
*
я
ф
л
2
Ji
Л
V §
*©
СО
СО
сч
сч
S
X
и
о
я
3
х
X
ci
о
CJ
*х
о
X
я
о
X
о
a
к
X Й
ф 2
к
ф
x
№
я
е;
5 a
сп Ж
а
ф
Ч
к
а
х
a 2
ф
Ф
ф
Ф
сп
X *
“° W-
5 3з
Sb Л _
I X рз
J. р
ш
га с
х
R «5
3 °
-5
ж
а
СП
о
Ji
L-
*С4
х 3
о
X
£
к
ф
СП
£
а
3
ф
К
а
о
ф
а
Q
<Л О Л
Я X
я
V >к ”»
о 2 ф
ж
>
S I -
«
X
X
ж
ф
а
я
X Е<
X V
о a
а
ж
S, Ф
ж
- Ei
со О
а с
2
я 3
ф СП
186
Фиг. 23.
весовые и аэродинамические преимущества их, о которых сказано
выше.
Конструкции треугольных крыльев малого удлинения аналогич-
ны прямым и стреловидным крыльям и могут быть лонжеронными
и кессонными.
В треугольных крыльях нервюры, как правило, ставят по по-
току. Характер работы конструктивно-силовых элементов рассмат-
риваемых крыльев не отличается от ранее рассмотренных.
Конструкции треугольных крыльев с 'Продольным набором, рас-
положенным перпендикулярно фюзеляжу, получаются более лег-
кими в весовом отношении,
чем конструкции с изломом
продольного набора в пла-
не, так как лонжероны, про-
дольные стенки и стрингеры
имеют значительно меньшие
длины, кроме того, отсутст-
вует косая стыковка у борта
фюзеляжа. Однако такие
конструкции имеют суще-
ственный недостаток, ’ со-
стоящий в том, что эле-
менты продольного набора
получаются искривленными
вследствие того, что они
располагаются не по обра-
зующим линиям крыла. При наличии излома продольного набора
в плане, как и у стреловидных крыльев, требуется мощная борто-
вая нервюра.
На фиг. 25 изображена конструкция однолонжеронного тре-
угольного крыла с продольными стенками, шарнирно опертыми на
борту .фюзеляжа. Особенностью конструкции лонжерона является
передача изгибающего момента с помощью разнесенных по гори-
зонтали отверстий стыкового узла (фиг. 25, в). Лонжерон следует
располагать из условия достижения минимального веса, т, е. вбли-
зи наибольшей строительной высоты профиля крыла. Хотя по
жесткости однолонжеронное крыло уступает многолонжеронному,
все же оно выгоднее по весу и удобно в компоновке, так как осво-
бождается большой объем в фюзеляже.
На фиг. 26 показано однолонжеронное треугольное крыло
с внутренним подкосом, аналогичное стреловидному крылу,
изображенному на фиг. 22. Особенностью его конструкции является
применение монолитных панелей, в которых стрингеры и обшивка
получаются из одного куска металла прессованием.
В случае двух- и многолонжеронной конструкции треугольного
крыла значительная часть фюзеляжа оказывается занятой цен-
тральным отсеком крыла.
187
Фиг. 24. Отъемная часть кессонного стреловидного крыла.
/—кессон, 2—носовая часть, 3— аэродинамическая перегородка, 4—верхняя панель, 5—стрингер, нер-
вюра, 7— передний лонжерон, 8—задний лонжерон, 9—стеклотекстолитовая облицовка, 10—стрингеры // —
лента, 12—такелажный узел, 13—концевой обтекатель, //—элерон, 15— закрылок. 16—хвостовой отсек.
Фиг, 25. Однолонжеронное треугольное крыло.
1—продольные стенки, 2—носовая продольная стенка, <?—нервюры, 4—лонжерон, 5—обшивка, задняя продольная стенка, 7—шарнирные
стыковые узлы, 8—стыковой узел лонжерона, 9—стыковая нервюра, 10—усиленная нервюра.
фиг 26 Однолонжеронное треугольное крыло с внутренним подкосом
190
Это усложняет использование объема фюзеляжа, однако много-
лонжеронная конструкция оказывается более жесткой.
Кессонные конструкции треугольных крыльев с переломом
осей продольных элементов панели по борту фюзеляжа (фиг 27, а)
Фиг 27 Схемы кессонных треугольных крыльев
как указано выше, менее выгодны по сравнению со схемой, в кото-
рой перелом отсутствует (фиг. 27,6).
Основной недостаток рассматриваемых конструкций треуголь-
ных крыльев состоит в том, что большая часть фюзеляжа занята
центропланом
Сравнительная оценка крыльев
различных конструктивно-силовых схем
Рассмотрим, как удовлетворяют основным требованиям раз-
личные конструктивные схемы крыльев
Весовые особенности конструктивных схем
крыльев. Наименьший вес конструкции будет иметь то крыло,
в котором материал наилучшим образом использован для работы
крыла на изгиб и кручение, т. е. в котором материал работает при
более высоких напряжениях.
В однолонжеронном крыле с лонжероном, расположенным
вблизи максимальной толщины профиля (30—45% хорды крыла),
материал лонжерона используется эффективнее, чем в двухлонже-
ронном крыле, так как располагается дальше от нейтральной оси
сечения.
При равных условиях (нагрузка, размеры, материал и т д) вес
однолонжеронного крыла будет меньше двухлонжеронного.
В кессонных крыльях «о сравнению с лонжеронными материал
распределен более равномерно по силовому контуру, что позво-
ляет значительно повысить величины критических напряжений
в обшивке и стрингерах. Это обуславливает меньший вес кессонных
крыльев сравнительно с лонжеронными.
Однако при сравнительно небольших значениях ЛГизг нагружающего крыло
(это имеет место у крыльев легких самолетов, а также при малых удлинениях)
потребные для восприятия Л1ИЭГ толщины обшивки и сечения стрингеров могут
оказаться небольшими, что обусловит небольшие значения оКр их. В этом случае
более выгодным в весовом отношении может оказаться лонжеронное крыло.
Удовлетворение требованиям аэродинамики
крыл а. Выпучивание обшивки в полете под действием аэродина-
мических нагрузок, производственные дефекты, связаны с конст-
руктивными особенностями того или иного типа крыла.
Кессонные конструкции крыльев, в которых применяется тол-
стая обшивка, можно считать более совершенными с точки зрения
аэродинамики в сравнении с лонжеронными. Значительное влияние
на гладкость обшивки оказывает жесткость каркаса. Малейшая
неправильность в форме нервюры цли положении стрингера вызы-
вает вмятину или волну на обшивке.
Конструкции, образованные из монолитных панелей с мини-
мальным числом заклепок, в наибольшей мере удовлетворяют
требованиям аэродинамики.
Удовлетворение требованиям эксплуатации.
С точки зрения эффективного использования внутренних объемов
и доступности ко всем агрегатам, узлам и деталям, подлежащим
систематическому осмотру, лучшими являются лонжеронные кон-
струкции крыльев со слабо нагруженной обшивкой. В этом случае
наличие больших вырезов в обшивке крыльев для баков, шасси
и пр. легко может быть компенсировано незначительным уси-
лением.
Живучесть конструкции, т. е. способность выдерживать на-
грузки в полете при частичных разрушениях, увеличивается при
рассредоточенных силовых элементах по сечению крыла. Напри-
мер, двухлонжеронное крыло обладает большей живучестью, чем
однолонжеронное, но в свою очередь уступает кессонному крылу.
Удовлетворение производствен н о-э кономиче*
ским требованиям. С точки зрения технологии изготовления
более целесообразными конструкциями являются кессонные. В про-
изводстве таких крыльев сравнительно легко расчленить конструк-
цию на отдельные, достаточно жесткие сборочные единицы, т. е.
панели.
Некоторые направления в развитии конструкции крыльев
Характерной особенностью современных конструкций крыльев
является широкое применение тонкостенных клепаных конструк-
ций с обшивкой, работающей при изгибе и кручении крыла. Одна-
ко ослабление стрингеров и обшивки отверстиями под заклепки
и болты, которое составляет около 10—15% рабочей площади се-
192
чения, вызвало необходимость изучения новых путей, ведущих
к улучшению конструкций.
Одним из них является применение точечной сварки при соеди-
нении обшивки с продольным и поперечным наборами (фиг. 28, а).
Фиг. 28. Соединения обшивки с профилями.
а—соединение точечной сваркой, б—соединение клеем.
Склеенные металлические конструкции
(фиг. 28, б; 29)
В настоящее время разработаны новые типы клеев,
дают возможность осуществить достаточно стойкие и
которые
прочные
Фиг. 29. Конструкция крыла с применением клеевых соединений,
/—подкладка, склеенная с обшивкой, 2—стрингеры, склеенные с обшивкой*
^соединения алюминиевых сплавов и других металлов. Склеенные
конструкции позволят получить гладкую поверхность крыла и зна-
чительное уменьшение трудоемкости производства.
13 1563
193
Монолитные конструкции
(см. фиг. 18, 26)
Цельноблочные или монолитные панели дают возможность бо-
лее эффективно использовать механические свойства металла,
а следовательно, осуществить легкую по весу конструкцию. В таких
конструкциях улучшается гладкость поверхности. Для конструк-
ций, в которых имеет значение герметичность, уменьшение коли-
чества соединений весьма важно, так как уменьшается вес герме-
тизирующих материалов и трудоемкость работ по уплотнению кон-
струкции. В связи с применением на современных скоростных са-
молетах тонких крыльев, имеющих малые строительные высоты,
клепаные конструкции панелей становятся нерациональными
вследствие уменьшенного момента инерции при изгибе, так как
полки стрингеров приближаются к нейтральной оси. В этом случае
монолитные конструкции позволяют осуществить топкие крылья
с более эффективным использованием материала.
Как известно, при полете на больших скоростях, конструкция
крыла сильно нагревается. Монолитная конструкция с толстой
обшивкой и часто расположенными ребрами будет являться в этом
случае более благоприятной, так как уменьшаются температурные
деформации и улучшается отвод тепла.
' > Конструкции с многослойной обшивкой*
(фиг. 30)
Многослойная обшивка состоит из двух металлических листов,
между которыми расположен заполнитель. В качестве заполнителя
применяют легкие материалы, имеющие сотовую (фиг. 30, а) или
пористую (фиг. 301, б) структуру или выполненные в виде гофра
(фиг. 30, в).
Создание многослойных конструкций высокой прочности из
листов стали, дуралюмина и стеклотекстолитовых, текстолитовых
сот, пенопласта или бальзы в качестве заполнителя стало возмож-
ным после разработки новых сортов клея* склеивающего разные
материалы.
Легкий внутренний слой — заполнитель [объемный вес у = 0,054-
0,10 г!см? (4904-980 н/л-t3)] имеет сравнительно низкие механиче-
ские характеристики и только поддерживает наклеенные с обоих
его сторон металлические листы, предохраняя их от местной по-
тери устойчивости.
Общая устойчивость такой конструкции в 504-100 раз превы-
шает устойчивость составляющих ее листов, так как резко возра-
стает момент ее инерции.
Увеличенная устойчивость при сжатии и сдвиге позволяет при-
менять многослойную обшивку без подкрепляющего продольного,
* Многослойная обшивка была предложена в 1928 г. советским ученым
С. О. Зоншайном.
194
набора стрингеров (фиг, 30, а) и при значительном увеличении
расстояний между нервюрами.
Способы заделки торцов панелей показаны на фиг. 31, а, б, в.
Места соединения элементов многослойной конструкции проекти-
руются обычно без заполнителя (фиг, 31, г, д, е, ж). Необходимая
прочность и жесткость таких участков достигается установкой
вкладышей, профилей и втулок.
Фиг. 30. Многослойная обшивка.
а—сотовые заполнители, б—пористые заполнители, в—гофрированный заполнитель,,
е—крыло с многослойной обшивкой.
Многослойная обшивка обладает по сравнению с одинарной
следующими преимуществами:
1) способностью воспринимать все виды нагрузок, как в пло-
скости панели, так и нормальных к ней;
2) значительным улучшением качества поверхности благодаря
отсутствию заклепочных швов;
3) хорошими термо- и звукоизоляционными свойствами.
К недостаткам многослойных обшивок следует отнести:
1) сложность контроля качества склейки;
2) трудность осуществления стыковых соединений;
3) сложность передачи местных сосредоточенных нагрузок.
За последнее время конструкции обшивок с заполнителями стали применять»
на серийных самолетах. Например, в самолете В-58 (США), летающем со сверх-
звуковыми скоростями, около 90% обшивки крыла, фюзеляжа и оперения выпол-
нены с применением сотовых заполнителей.
13* 19> ‘
На фиг. 32 показана конструкция крыла с многослойной об-
шивкой английского бомбардировщика «Виктор».
Фиг 31. Типовые соединения многослойной обшивки.
a, 6f в—способы заделки кромок и законцовок }элов* г, д—способы передачи сосре-
доточенных нагрузок* е—соединение полки лонжерона обшивкой, ж—соединение
полки лонжерона со стенкой.
Конструкции крыльев из пластиков
Некоторые пластики имеют высокие значения удельной прочности (например,
пластики на основе стекловолокна) и заслуживают внимания с точки зрения их
использования в качестве основных конструктивно-силовых элементов крыла.
Применение пластиков позволит легко создавать конструктивные элементы со
сложными формами и изменениями площадей сечений. В настоящее время в этом
направлении ведутся исследования.
3. СТЫКОВЫЕ СОЕДИНЕНИЯ КРЫЛЬЕВ .
Крылья могут быть разъемными и неразъемными по размаху.
Разъемы значительно усложняют конструкцию крыла и уве-
личивают его вес ввиду наличия соединительных узлов. Однако
требования сборки, транспортировки и эксплуатации вызывают не-
обходимость делать крылья с разъемами.
Расположение разъемов по размаху крыла бывает различным
(фиг. 33, а, б, в, г) и зависит от назначения и требований, предъ-
являемых к самолету.
Разъемы применяются в крыльях подавляющего большинства
современных самолетов. Соединение частей крыла в месте разъема
осуществляется с помощью стыковых узлов и контурных соедине-
ний. Стыковые узлы служат для крепления лонжеронов и продоль-
ных стенок отъемных частей крыла к центроплану или борту
фюзеляжа.
196
д
СтыквВомый профиль
Фиг, 32, Консоль крыла с многослойной обшивкой,
/“Панель обшивки, 2— нервюра хвостового отсека, 3—третий лонжерон,
4 четвертый лонжерон, 5—законцовка, 6—второй лонжерон, 7—заделка
отклоняющегося носка, 5 первый лонжерон, отклоняющийся носок.
197
' Стыковые узлы бывают моментные, способные передать момент
в виде пары сил S и поперечную силу Злонж = Q'+Q" (узлы 2
ла фиг 34), и шарнирные — способные передать только попереч-
Фиг 33
ную силу Qct (узел 1 на фиг 34) Моментные узлы устанавли-
ваются на лонжеронах, шарнирные — на продольных стенках
Осевое силы передаются на стыковые узлы непосредственно поясами лон
жеронов Поперечные силы по стенкам лонжеронов передаются на уз ты через
стойки, связывающие пояса лонжеронов в сечении по разъему Поперечные силы
по обшивке передаются на уз ты через нервюру, расположенную в сечении по
разъему.
Фиг 34 Стыковка одполонжеронного стреловидного крыла.
I—шарнирным узел 2—моментные узлы 3— пояс лонжерона 4—стенка лонжерона
5—нервюры
Для передачи усилий с панелей обшивки и стрингеров кессон-
ных (и моноблочных) крыльев в месте разъема применяют сты-
ковку по контуру панелей распределенными элементами — контур-
ные соединения (фиг 35).
Такая стыковка передает как осевые, так и поперечные силы
панелей
198
Лонжероны и продольные стенки кессонных крыльев соеди-
няются в месте разъема с помощью стыковых узлов, как и в лон-
жеронных крыльях.
Фиг 35 Стыковка крыльев по контору
/—угольник 2— стыковые узлы
Стыковые узлы
По конструкции стыковые узлы бывают вильчатые (с верти-
кальной или горизонтальной осью стыкового болта), фитинги, нип-
пельные и накладные Гребенчатые узлы с количеством ушков три
и более являются разновидностью вильчатых
Кроме того, возможно непосредственное соединение поясов
лонжеронов «на ус»
Вследствие больших нагрузок, передаваемых стыковыми узла-
ми, они обычно выполняются из высокопрочных сталей (легиро-
ванных) и термически обрабатываются до предела прочности
ств=140—180 кГ/мм2 (1400—1800 Мн/м2)
Вильчатые узлы (фиг. 36, 1, 2) крепятся к поясу лонжеро-
на болтами (реже — заклепками) Стыковой болт работает на срез
и смятие
Болт узла, показанного на фиг 36,1, имеет две плоскости сре-
за, болт узла, показанного на фиг 36,2 — четыре плоскости среза
В стыковых узлах типа фитингов (фиг 36,3) болты, пере-
дающие растягивающую осевую силу S, действующую в поясе лон-
жерона, работают не на срез, как в вильчатом узле, а на разрыв
Сжимающая осевая сила (на фиг 36, 3 — верхние силы S) пере-
дается непосредственно соприкосновением торцов фитингов По-
перечная же сила Q, так же как и в вильчатых узлах, вызывает
срез и смятие этих болтов.
199
' Стыковые узлы бывают моментные, способные передать момент
в виде пары сил S и поперечную силу Злонж = Q'+Q" (узлы 2
ла фиг 34), и шарнирные — способные передать только попереч-
Фиг 33
ную силу Qct (узел 1 на фиг 34) Моментные узлы устанавли-
ваются на лонжеронах, шарнирные — на продольных стенках
Осевое силы передаются на стыковые узлы непосредственно поясами лон
жеронов Поперечные силы по стенкам лонжеронов передаются на уз ты через
стойки, связывающие пояса лонжеронов в сечении по разъему Поперечные силы
по обшивке передаются на уз ты через нервюру, расположенную в сечении по
разъему.
Фиг 34 Стыковка одполонжеронного стреловидного крыла.
I—шарнирным узел 2—моментные узлы 3— пояс лонжерона 4—стенка лонжерона
5—нервюры
Для передачи усилий с панелей обшивки и стрингеров кессон-
ных (и моноблочных) крыльев в месте разъема применяют сты-
ковку по контуру панелей распределенными элементами — контур-
ные соединения (фиг 35).
Такая стыковка передает как осевые, так и поперечные силы
панелей
198
Лонжероны и продольные стенки кессонных крыльев соеди-
няются в месте разъема с помощью стыковых узлов, как и в лон-
жеронных крыльях.
Фиг 35 Стыковка крыльев по контору
/—угольник 2— стыковые узлы
Стыковые узлы
По конструкции стыковые узлы бывают вильчатые (с верти-
кальной или горизонтальной осью стыкового болта), фитинги, нип-
пельные и накладные Гребенчатые узлы с количеством ушков три
и более являются разновидностью вильчатых
Кроме того, возможно непосредственное соединение поясов
лонжеронов «на ус»
Вследствие больших нагрузок, передаваемых стыковыми узла-
ми, они обычно выполняются из высокопрочных сталей (легиро-
ванных) и термически обрабатываются до предела прочности
ств=140—180 кГ/мм2 (1400—1800 Мн/м2)
Вильчатые узлы (фиг. 36, 1, 2) крепятся к поясу лонжеро-
на болтами (реже — заклепками) Стыковой болт работает на срез
и смятие
Болт узла, показанного на фиг 36,1, имеет две плоскости сре-
за, болт узла, показанного на фиг 36,2 — четыре плоскости среза
В стыковых узлах типа фитингов (фиг 36,3) болты, пере-
дающие растягивающую осевую силу S, действующую в поясе лон-
жерона, работают не на срез, как в вильчатом узле, а на разрыв
Сжимающая осевая сила (на фиг 36, 3 — верхние силы S) пере-
дается непосредственно соприкосновением торцов фитингов По-
перечная же сила Q, так же как и в вильчатых узлах, вызывает
срез и смятие этих болтов.
199
В накладных узлах (фиг. 36,4) и при стыковке «на ус»
(фиг. 36, 5) осевое усилие передается срезом и смятием болтов,
соединяющих пояса с накладками и пояса между собой. Попереч-
ная сила передается стойкой, соединяющей стенки лонжеронов.
Фиг. 36. Типы стыковых узлов.
Узлы стыковки тонких крыльев с малой строительной высотой
целесообразно выполнять со сквозными вертикально расположен-
ными стыковыми болтами (фиг. 37).
Для очень тонких крыльев (с малой строительной высотой лон-
жерона) применяется узел с горизонтальной базой (см. фиг. 25).
В этом случае можно значительно увеличить базу I узла и тем
самым уменьшить силу, действующую на стыковые болты.
Контурные соединения
Контурные соединения могут осуществляться с помощью сты-
ковых угольников (см. фиг. 35), монолитных стыковых профилей
(так называемых стыковых гребенок), имеющих пазы или отвер-
стия под болты (см. фиг. 17,а), с помощью накладок (фиг. 17,а.
200
НИЖНЯЯ панель) И С Помощью фитийгов, соединенных со стринге-
рами и обшивкой (фиг. 38). Болты контурного стыка нагружаются
осевым усилием от изгиба * и сдвигающим усилием от кручения
крыла. Поперечная сила передается узлами лонжеронов или про-
дольных стенок.
Для равномерной передачи сжимающих сил у разъема опорные
поверхности фитингов, особенно в верхней панели, приторцовы-
ваются. Большое количество фитингов и стыковых болтов, а также
высокая точность обработки торцовых поверхностей значительно
усложняют изготовление их и эксплуатацию. На нижней панели
болты ставятся чаще или большего диаметра, так как в нормаль-
ном полете они более нагружены.
4. КОНСТРУКЦИЯ ЭЛЕМЕНТОВ КРЫЛА
Лонжероны и продольные стенки
Основным назначением лонжеронов является воспринятое изги-
бающего момента и поперечной силы, действующих на крыло при
изгибе. При этом пояса лонжеронов нагружаются осевыми силами,
а его стенки или ферма — поперечными силами от изгиба и кру-
чения крыла (фиг. 39).
Для обеспечения минимального веса лонжерона, при заданной
высоте его, расстояние между центрами тяжести поясов лонжеро-
* В растянутой зоне. В сжатой зоне усилия передаются непосредственно
\ торцами угольников (стыковых профилей).
201
5)
Фиг. 38. Фитинги.
Фиг. 39. Нагружение лон-
жерона.
Фиг 40
202
на должно быть максимальным, т. е. площади поясов необходимо
сосредоточить возможно дальше от нейтральной оси сечения.
С этой точки зрения из двух форм поперечного сечения одинако-
вых по площади поясов лонжерона, приведенных на фиг. 40, сле-
дует предпочесть пояс а, так как в этом случае строительная
высота сечения лонжерона будет больше, чем в случае б, т. е,
^а>йб-
При большей высоте h получаем меньшие осевые усилия, а это
потребует меньшее количество материала для поясов лонжерона,
в результате чего конструкция будет легче.
Палочный
ферменный
смешанный
Фиг. 41. Классификация лонжеронов,
По конструкции элементов лонжероны разделяются на балоч-
ные, ферменные и смешанной конструкции, когда одна часть лон-
жерона имеет стенку, а другая — решетку (фиг. 41).
Балочные лонжероны. Лонжероны современных самоле-
тов делают преимущественно балочной конструкции. Они состоят
из верхнего и нижнего поясов, жестко связанных одной или двумя
стенками. Для повышения устойчивости стенок ставятся стойки
или диафрагмы.
Пояса лонжеронов выполняются из прессованных и катаных
профилей из дуралюмина, легированных сталей, а иногда из маг-
ниевых и титановых сплавов. Стенки лонжеронов выполняются из
дуралюмина толщиной 0,8ч-5 мм (иногда из стали).
Стойки используются также для соединения нервюр с лонже-
роном.
Формы сечений поясов лонжеронов, имеют большое разнооб-
разие; все же представляется возможным выделить наиболее ха-
рактерные сечения (фиг, 42). Для уменьшения веса лонжеронов
пояса делают переменного по длине сечения. С этой точки зрения
рациональным является сечение 42,3, которое за счет устранения
полосы и одного из уголков постепенно может быть ослаблено
203
к концу крыла. Переменное по длине сечение профилей (4~7)
обеспечивается с помощью механической обработки. Такие про-
фили существенно упрощают конструкцию лонжерона, а при на-
личии «усиков» 5 для крепления обшивки устраняется ослабление
пояса отверстиями под заклепки. Двутавровое монолитное сече-
ние 7 применяется при наличии малой строительной высоты лон-
жерона. .
Выравнивающая накладка 6 обеспечивает форму профиля кры-
ла в данном сечении.
Фиг. 42. Сечения поясов лонжеронов.
Толщина стенки лонжерона определяется из условия отсутствия
потери устойчивости от касательных напряжений. Несмотря на то,
что при т>ТкРпт стенка может эффективно работать, возникающая
при этом догрузка поясов и стоек утяжеляют конструкцию лонже-
рона. Наиболее выгодными оказываются стенки с отношением
Л/дсг порядка 80—100, не теряющие устойчивости при эксплуата-
ционных нагрузках.
Стойки выполняются уголкового, угло-бульбового, таврового
и швеллерного сечений из прессованных и катанных дуралюмино-
вых профилей, а также из гнутых из листа профилей и склепы-
ваются как со стенкой, так и с поясами лонжерона.
На фиг. 43 показана конструкция балочного лонжерона средней
части крыла с цельными фрезерованными поясами переменного по
размаху сечения. Стыковые узлы — фитинги выполнены совместно
с поясами лонжеронов. Корневые стыковые узлы крепят лонжерон
к центроплану, концевые служат для крепления лонжерона отъем-
ной части крыла.
204
Лонжероны тонких крыльев часто выполняются монолитными,
т. е. пояса, стенка-и стыковые узлы представляют собой одно целое
(фиг. 44).
На фиг. 45 изображен отсек лонжерона с разъемом по линии
хорд.
Ферменные лонжероны. При большой высоте крыла
иногда применяют ферменные лонжероны, состоящие из поясов,
стоек и раскосов, образующих плоскую ферму.
Фиг. 43. Лонжерон крыла.
Ферменные металлические лонжероны выполняются из сталь-
ных труб, соединенных сваркой, или толстостенных прессованных
дуралюминовых профилей, соединенных между собой заклепками
или болтами. Сечения элементов фермы (поясов, стоек, раско-
сов) не отличаются от приведенных выше типовых сечений поясов,
стоек балочных лонжеронов. Для сжатых стержней необходимо
предусмотреть достаточную жесткость, предотвращающую потерю
устойчивости.
На фиг. 46 показан лонжерон, представляющий собой раскос-
ную ферму из дуралюминовых толстостенных профилей.
Продольные стенки выполняются балочной конструкции
(фиг. 47). На фиг. 47, г показана монолитная продольная стенка.
Напомним, что продольные стенки не передают изгибающего мо-
мента и стыкуются шарнирным узлом. Пояса стенок значительно
облегчены, и площадь поперечного сечения такого пояс^мало от-
личается от площади сечения стрингера.
205
Стрингеры
Стрингеры являются простейшими конструктивно-силовыми
элементами продольного набора крыла. Вес набора стрингеров
в зависимости от типа конструкции крыльев составляет 5-:-20 %
веса крыла.
А А
Фиг. 44. Монолитный лонжерон.
Фиг. 45. Лонжерон с разъе-
мом по линии хорд.
Стрингеры крыльев имеют назначение:
1) увеличивать устойчивость обшивки для повышения крити-
ческих, нормальных и касательных напряжений во время работы
при изгибе и кручении крыла;
Фиг. 46. Ферменный раскосный лонжерон.
lt пояса. 3— раскос» ^“болт*
20b
2) воспринимать совместно с обшивкой нормальные усилия
при изгибе крыла;
3) передавать поперечную нагрузку с обшивки на нервюры
(фиг. 48); при этом стрингеры работают на изгиб.
Стрингеры поддерживают обшивку при ее работе на сдвиг
и на сжатие; обшивка же в свою очередь поддерживает стрингеры
Фиг. 47. Продольные стенки крыльев.
при работе на сжатие. Конструктор должен стремиться, чтобы об-
шивка и стрингеры при совместной работе имели высокие крити-
ческие напряжения общей и местной потери устойчивости. Этим
требованием определяется рациональная форма сечения стрингера
и расстояния между ними.
В качестве стрингеров применяются профили разнообразных
форм сечений (фиг. 49). При одинаковой
ковых габаритах катаные или гнутые
из листов стрингеры профилей типов
4 2, 5> 6, 7, 8 скорее потеряют устой-
чивость, чем стрингеры профилей 3 и
4, образующих совместно с обшивкой
замкнутый контур. Подкрепленная
профилями типа 3 и 4 обшивка лучше
участвует в работе. Однако такие про-
фили неудобны при производстве, так
как требуют для приклепывания об-
шивки двойного количества заклепок.
Кроме того, при стрингерах этого типа
труднее избежать искажения поверх-
ности обшивки крыла при клепке
из-за наличия двухрядного шва.
Прессованные профили типов 9, 11,
12,. 13 и 14 допускают без потери устой-
чивости большие напряжения сжатия
[оир«26ч-28 кГ!м.^ (2604-280Мн!м2}},
толщине стенки и одина-
Фиг. 48. Нагружение стрин-
геров.
чем катаные из листов профили по-
добных же сечений. Поэтому в современных кессонных конструк-
циях крыльев предпочитают применять прессованные стрингеры.
Местная устойчивость обеспечивается применением толстых стенок
профиля и утолщениями (бульбами) на кромках его.
207
Для соединения вдоль размаха хвостовика нервюр, а также
верхней и нижней обшивок применяют продольный элемент, назы-
ваемый задним стрингером (фиг. 50).
Профили гнутые или катанные из листов
/2 3 « 5 6 1 8
Профили прессованные или катанные из болЗанок и брусков
9 Ю Я !2 /3
15
Фиг. 49.
Сечения стрингеров.
Нервюры
собой балки
или
фермы, имеющие
хорды крыла. Нер-
Нервюры представляют
форму профиля крыла и расположенные вдоль
вюры сохраняют форму профиля, воспринимают и распределяют
усилия между обшивкой и продольными элементами, служат опо-
рами для стрингеров, а также являются элементами местного
усиления конструкции крыла, воспринимающими сосредоточенные
нагрузки от шасси, силовых установок, вооружения и пр.
Нервюры с точки зрения строительной механики можно рас-
сматривать как балки или фермы, нагруженные аэродинамической
_______ нагрузкой и сосредоточенными силами от
агрегатов, присоединенных к нервюре.
Рассмотрим работу нервюры, нагружен-
ной аэродинамической нагрузкой. При этом
нервюра оперта на стенки лонжеронов (про-
дольных стенок) и обшивку, на которых воз-
никают реакции. Полагаем, что носок и хво-
стик нервюры не участвуют в ее работе. Воз-
душная нагрузка в виде распределенных сил приходит на нервюру
от стрингеров — Рстр (см, фиг. 48) и непосредственно от обшивки,
через заклепки крепления обшивки к нервюре — РОбш (фиг. 51, а).
Заменим распределенные силы равнодействующей Рц, которая
сдвигает нервюру в направлении ее действия и стремится повер-
нуть ее относительно некоторой точки О (фиг. 51,6). Перенесем
далее силу Рн в точку О и добавим крутящий момент Л4кр, равный
произведению силы Ри на плечо переноса (фиг. 51, в). Сдвигу нер-
вюры силой Рн противодействуют стенки, на которых возникнут
реакции Pt и Рг. Повороту нервюры от Л)кр противодействуют
верхняя и нижняя обшивки и стенки, в которых возникнут реакции
Фиг. 50.
208
в виде погонных касательных сил q, определяемых по формуле
Бредта (см* разд. I, стр. 60) *
Я 2F0 1
где Fo —площадь, ограниченная работающим на кручение кон-
туром.
Суммарные реакции в стенках будут обусловлены сдвигом и по-
воротом нервюры. В результате нервюра будет нагружаться изги-
бом в ее плоскости и сдвигом.
Так же как и лонжероны, нервюры имеют полки, восприни-
мающие изгиб в виде осевых сил (сжатие, растяжение), и стенку
или ферменную решетку, воспринимающую поперечную силу.
Фиг. 51. Нагружение нервюры.
Нервюры в прямых и треугольных крыльях ставятся по потоку,
а в стреловидных, преимущественно, ставятся перпендикулярно
линии четвертей хорд крыла.
Рассмотрим классификацию нервюр.
В соответствии с назначением нервюры подразделяются на
нормальные — участвующие лишь в общей работе крыла, и уси-
ленные— участвующие в общей работе крыла и, кроме того, вос-
принимающие местные сосредоточенные нагрузки.
Особо могут быть выделены панельные, или бесстеночные, нер-
вюры, представляющие собой ободки и профили, расположенные
вдоль хорды (см. фиг. 16).
По конструкции нервюры подразделяются на балочные, фер-
менные и ферменно-балочные, сочетающие элементы ферменных
и балочных нервюр (фиг. 52).
По наличию разъемов нервюры могут быть неразъемными
и разъемными. Разъемные нервюры обычно делятся на три части:
носовую, среднюю и хвостовую. Кроме того, нервюры могут иметь
разъем по хорде.
Неразъемные нервюры применяются сравнительно редко, так
как в этом случае уменьшается высота лонжеронов и, следова-
тельно, увеличивается их вес.
Расстояние между нервюрами крыльев лежит в широких преде-
лах (150—400 мм и более) и зависит от толщины обшивки, шага
и мощности стрингеров, удельной нагрузки на крыло.
14 1563 . 4$ 209
a
Приближенно шаг нервюр определяется из соотношения ~^1-=-1,5 для лон
а
жеронпого крыла и для кессонного, где а — расстояние между нераю
рами; 6 — шаг стрингеров,
В носовой части крыла ставят дополнительные носки нервюр,
так как на носок крыла действуют большие воздушные нагрузки.
Вес набора нервюр составляет в зависимости от конструкции
]Q__140/0 от веса крыла.
Полка
Раскос Стоика
Ферменные
Фиг, 52. Конструктивные схемы нервюр.
Балочные нервюры часто выполняют штампованные из
листов. Стенки нервюр при сравнительно малой толщине (0,8~
1,5 мм) имеют большой запас прочности, и поэтому для уменьше-
ния веса в нервюрах делают вырезы, которые можно использовать
для проводки управления элеронами, механизацией и пр. Для по-
вышения устойчивости стенок края отверстий отбортовывают, ста-
вят стойки, а иногда в стенках делают рифтовку. Отогнутые края
стенок образуют полки нервюр, к которым крепится обшивка,
В усиленных нервюрах полки выполняются из прессованных или
210
катаных профилей. Нервюра, изображенная на фиг. 53, состоит
из носовой, двух средних и хвостовой частей.
По контуру сделаны вырезы 1 для стрингеров. С внутренней стороны полок,
в местах крепления съемных панелей, установлены специальные гайки 4. В ме-
стах крепления к лонжеронам полки нервюр имеют подсечки 5.
На фиг. 54 прказана балочная конструкция нервюры с разъе-
мом по строительной горизонтали (по хорде).
Фиг. 53. Нормальная балочная нервюра.
/-^вырезы для стрингеров, 2—отверстия облегчения, Шрифты» 4—анкер-
ная гайка, 5—подсечка для пояса лонжерона, 6—подкрепляющий профиль.
На фиг. 55 показана усиленная нервюра крыла самолета Ан-10,
пояса которой выполнены из прессованных уголков.
Ферменные нервюры применяются редко и преимущест-
венно в крыльях с большой строительной высотой профиля.
Конструкция их аналогична конструкции ферменных лонжеро-
нов. Иногда встречаются ферменные конструкции нервюр, полу-
ченные из листового материала при помощи штамповки, при этом
для повышения жесткости раскосов и стоек их края отбортовы-
вают (фиг. 56).
Фиг. 54. Нервюра крыла с разъемами по хорде.
Соединение нервюре обшивкой и стрингерами показано
на фиг. 57, а, б. Соединение нервюр с лонжероном показано на
фиг. 57, в для нормальной нервюры и на фиг. 55 для усиленной.
На фиг. 57, г показано соединение ферменной нервюры с лонжеро-
ном и обшивкой.
Для упрощения производства нервюр в современных конструк-
циях применено соединение с помощью компенсаторов (фиг. 57,6;
см. также фиг. 17).
14*
2И
В этом случае полка нервюры соединяется с обшивкой не непо-
средственно, а через специальный элемент — компенсатор. Панель
обшивки со стрингерами и приклепанными к ним компенсаторами
Фиг. 55. Усиленная нервюра.
^—>зел крепления подкоса мотогондолы, 2—узлы крепления раскосов, Л—кницы крепления
нервюр с панелями, 4—стенка, 5—пояса.
устанавливается в сборочном приспособлении, контур которого
соответствует внешним теоретическим обводам крыла. Затем про-
изводится соединение компенсаторов с нервюрами.
Обшивка
Каркас крыла покрывают обшивкой в виде дуралюминовых ли-
стов толщиной 0,8-;-8 мм. Основное назначение обшивки — воспри-
нятие воздушных нагрузок, образование и сохранение внешней
поверхности крыла и участие в общей работе конструкции крыла.
Во всех случаях обшивка должна иметь возможно более гладкую
поверхность, так как поверхность обшивки оказывает значитель-
ное влияние на аэродинамические характеристики крыла.
В свободнонесущих крыльях обшивка обычно работает на нор-
мальные усилия — при изгибе крыла и на касательные — от дей-
ствия крутящего момента.
212
Вес обшивки в современных крыльях
составляет в зависимости от конструкции
20—60% от веса крыла.
Обшивка не должна^терять устойчи-
вость от сжатия и сдвига при эксплуатаци-
онных нагрузках.
Толщина обшивки вдоль по размаху
и по хорде меняется.
Стыковка обшивки выполняется одно- и
двухрядным заклепочным швом на эле-
ментах каркаса и бывает следующих ти-
пов: внахлестку со снятой кромкой
(фиг. 58, а), внахлестку (фиг. 58,6),
в стык (фиг. 58, в) и внахлестку с подсеч-
кой (фиг. 58,г).
Соединение внахлестку дает большее
сопротивление и применяется редко.
Шаг заклепок должен обеспечивать
устойчивость сжатой обшивки между за-
клепками, что определяется условием
/<256.
В последнее время начинают применять
соединения обшивки с каркасом при по-
мощи клея и сварки.
При скоростях полета более 2М дуралю-
мин в качестве материала обшивки стано-
вится непригоден вследствие понижения
механических свойств его от аэродинамиче-
ского нагрева.
Для таких скоростей целесообразно
применение обшивки из титановых спла-
вов, а также многослойной обшивки из
стали.
Противообледенительные устройства
Обледенение возникает при полете са-
молета через холодные слои атмосферы,
насыщенные влагой. Переохлажденные ча-
стицы воды, соприкасаясь с холодной
поверхностью частей самолета, оседают
на них в виде льда.
Наиболее интенсивно обледеневают пе-
редние кромки крыла и оперения при тем-
пературах от 0 до —8° С (273-^265° К) во
время полета в густой облачности или в по-
лосе дождя, выпадающего из верхнего бо-
лее теплого слоя воздуха в нижний более
холодный слой.
213
Отложение льда происходит быстро и распространяется по хор-
де на значительную глубину. Толщина льда на передних кромках
может достигнуть 5 8 см.
Фиг. 57. Соединения нервюр
Отложение льда на передней кромке крыла в значительной сте-
пени влияет на нормальное обтекание крыла воздухом, нарушает
устойчивость самолета и может привести к аварии.
Фиг. 58. Соединения обшивки.
Известны три способа защиты против обледенения: термине-
ский, химический и механический.
214
Термический способ наиболее широко применяется в на-
стоящее время и заключается в том, что к передней кромке крыла
или оперения подводится тепло для подогрева обшивки. Подогрев >
может быть осуществлен горячим воздухом или электрическим
током.
На фиг. 59 показана воздушно-термическая система с питанием
горячим сжатым воздухом, взятым от компрессора двигателя. На-
Фиг. 59. Полумонтажная схема противообледенителей.
/—заборник горячего воздуха от компрессора двигателя, 2—крыльевые выходные на^
садки, 3—отверстия выхода воздуха, 4—выходные насадки оперения.
ружная 'поверхность носовой части обогревается горячим воздухом,
который проходит по каналам, образованным волнами гофра
и обшивкой. Движение горячего воздуха во внутренней полости
носка крыла показано стрелками.
На фиг. 60 показан электротермический противообледенитель
для крыла и оперения, представляющий собой многослойную кон-
струкцию. Электрический ток по особым шинам подводится к слою
токопроводящей обмазки, изолированной от обшивки стекло-
тканью. При пропускании тока обмазка нагревается, что предот-
вращает обледенение.
Химический способ борьбы с обледенением заключается
в том, что подвергающуюся обледенению поверхность покрывают
слоем специальной жидкости — «антифриза», замерзающей только
при низких температурах.
215
Для того чтобы жидкость не могла быть смыта дождем и не
сдувалась потоком воздуха, на передней кромке крыла укрепляют
накладку из пористого материала (например, кожи), пропитанную
жидкостью.
Фиг. 60 Электротермический противообледенитель.
i
г'
Механический способ борьбы с обледенением состоит
в том, что образовавшийся лед откалывается и сбрасывается
с крыла. Устройство, показанное на фиг. 61, представляет собой
резиновые протекторы, смонтированные на передних кромках
Фиг. 61. Механический противообледенитель.
/^обшивка передней кромки крыла, 2—камерный протектор, 3—средняя ка-
мера, 4—боковые камеры, 5—слой льда,
ц «
крыла и оперения. Внутри протекторов имеются продольные каме-
ры, в которые поочередно поступает сжатый воздух, вздувающий
камеры и ломающий лед.
216
5. НАГРУЗКИ, ДЕЙСТВУЮЩИЕ НА КРЫЛО
' Расчетные случаи. Виды нагрузок
Крыло должно быть рассчитано на все расчетные случаи, пре-
дусмотренные нормами прочности.
Наиболее тяжелыми для крыла оказываются случаи: А*.
^к-
В полете, а также при посадке самолета на его крыло дейст-
вуют следующие нагрузки (фиг. 62): аэродинамические нагруз-
фюзеляжа
Фиг, 62. Нагрузки, действующие на крыло.
’ » ч
ки массовые нагрузки от крыла <уКр; массовые нагрузки от гру-
зов и агрегатов, размещенных в крыле и на крыле Ргр; нагрузки,
вызванные работой агрегатов, связанных с крылом (нагрузки от
шасси, крепящегося к крылу, тяга силовой установки и т. п.).
Аэродинамические нагрузки и массовые нагрузки крыла являются
распределенными. Массовые нагрузки от сосредоточенных грузов,
а также нагрузки от шасси и силовой установки являются сосредо-
точенными и приложены в узлах крепления соответствующих гру-
зов и агрегатов.
Аэродинамические нагрузки
Величина расчетной подъемной силы, действующей на крыло
в криволинейном полете, определяется из формулы
rpac4=O«7=C„pS Кг (н), (1)
где О —полетный вес самолета;
л9 —коэффициент эксплуатационной перегрузки;
сукр —коэффициент подъемной силы крыла;
~----скоростной напор;
4*
5 —площадь крыла;
/—коэффициент безопасности.
217
Возьмем полоску длиной, равной единице, вдоль размаха кры-
ла (фиг. 63) и определим действующую на крыло погонную на-
грузку qv, которая будет равна-
а —с S с^2 /
ту сеч^под 2 ‘
Здесь суСеч — коэффициент подъемной силы рассматриваемого 1
сечения крыла;
5П0Л ” площадь рассматриваемой полоски
Фиг. 63
и
Очевидно, что 5ПОЛ = b • 1 = Ь.
Тогда
Я у £усеч^ Л
iff
(2)
Погонная нагрузка исчисляется в кГ!м (н/м). В другом сечении
qv будет отличаться вследствие другого значения смсеч и Ь, так
как *—f есть величина постоянная для всех сечении. Предположим
2 -
приближенно, ЧТО Су сеч^const = Сунр. Зная из формулы (1), что
_ 20пэ
Сукр~ 5qV2
и подставив значение сукр в формулу (2), получим после сокра-
щений
Gn3
4?=^
(3)
т. е. погонная нагрузка пропорциональна хорде крыла.
Для трапециевидных крыльев с сужением i] до 3 и стреловид-
ностью х до 60° формула (3) дает значения qv, незначительно от-
личающиеся от точных.
218
В прикидочных расчетах для треугольных крыльев можно счи-
тать q'j/^const; при этом
где I — размах крыла.
Погонная нагрузка qv направлен
полета (как и подъемная сила У).
Следует помнить, что имеется еще вто-
рая составляющая полной аэродинамиче-
ской силы — сила лобового сопротивле-
ния Q.
Обозначим расчетную погонную лобо-
вую нагрузку через qx.
Найдем проекции погонных сил qx, qy
на направление п (фиг. 64), перпендику-
лярное хорде*.
Получим
qn =qv cos a+qx sin a.* **
Для малых углов, какими являются
летные углы ата.-.н, можно предположить,
что
sin a==0, COS asa 1;
югда
qn-qv.
Положение точки приложения qv
центра давления для дозвуковых скоростей, определяется, как из-
вестно, по следующей формуле:
х^-^Ь, (4)
Су
где ст — коэффициент момента крыла.
Значение су берется соответственно рассматриваемому случаю.
Коэффициент Ст определяется в зависимости от су по кривой,
полученной в результате продувок (фиг. 65). Для сверхзвуковых
скоростей Если в нескольких сечениях крыла нанести
положение' центра давления и полученные точки соединить, то по-
лучим линию, близкую к прямой, — линию центра давления.
перпендикулярно скорости
Фиг. 64 Определение
вдоль хорды, т. е. положение
Массовые нагрузки. Нагрузки при посадке
Из изложенного выше известно, что при криволинейном полете
при посадке расчетная нагрузка от агрегата или груза будет
РГр = GrpМрасчл (5)
где Grp — вес груза (например, шасси, двигателя, боезапаса и т. п.);
Ярасч — коэффициент расчетной перегрузки.
I ♦ Нагружение крыла в плоскости хорд не рассматриваем, так как нагрузки
в этой плоскости сравнительно невелики, а жесткость весьма значительна.
** Угол между нормалью к хорде п и qy равен а, так как стороны его
взаимно перпендикулярны к хорде и направлению скорости.
219
Массовая нагрузка (инерционная сила-рвес) направлена в сто-
рону, противоположную ускорению, т. е. в сторону, противополож-
ную аэродинамическим нагрузкам, и приложена в центре тяжести
груза. Погонные массовые силы конструкции крыла qKV распреде-
ляются так же, как вес крыла. Приближенно можно считать, что
вес крыла распределяется по размаху пропорционально хордам.
В таком случае погонная нагрузка массовых сил крыла qKV
будет:
(S')
bt
Фиг. 65. Определение положения центра давления.
Точка приложения погонной нагрузки дкр находится в центре
тяжести сечения крыла, т. е. на 40ч-50% хорды крыла от носка
Хкр^ (0,4-i-0,5) b.
При посадке самолета силы, действующие на шасси, пере-
даются через крепление его на конструкцию крыла. Одновременно
на крыло действуют массовые и небольшие аэродинамические на-
грузки. Массовые силы определяются, как и ранее, по формуле (5)
Ргр ~ СгрИрасч-
Здесь Прасч — коэффициент расчетной перегрузки соответствую-
щего посадочного случая. В дальнейшем рассмотрение нагрузок
и прочности крыла будет проводиться для полетного
случая.
необходимо
изгибающий
Рассмотрим полукрыло как кон-
Построение эпюр поперечных сил
Для расчета сечения на сдвиг, изгиб и кручение
знать действующие в сечении поперечную силу Q;
и крутящий Мкр моменты.
сольную балку, защемленную в фюзеляже в сечении по бортовой
нервюре*. Распределенную нагрузку на участке фюзеляжа отно-
сим к фюзеляжу.
* Это равноценно для работы полукрыла рассмотрению всего крыла как
двухопорной балки (см. фиг. 62).
220
Эпюры Q, Мизг будем строить сразу от разности
9 ~ <7кр-
Предварительно построим эпюры погонных нагрузок а а пп
оазмаху ПОЛУКПЬТ.ГТЯ пчаи Quono,,,,,-, К____4v’ “КР по
бортового, конце-
затем построим
размаху полукрыла, взяв значения хорд b для
вого и нескольких промежуточных сечений а
эпюру q (фиг. 66).
Убирающееся шасси
Фиг. 66.
Для стреловидных крыльев построение эпюры q, а также по-
следующие построения эпюр Q, Qrp, Мизг, Мгризг удобно вести для
истинной длины полукрыла-----, вдоль его оси. Для этого за-
меняем приближенно стреловидное крыло равновеликим прямым
(фиг. 67, а) и распределяем нагрузку по длине —1-—, где у0 —угол
COS Уо
стреловидности по оси крыла.
В этом случае значения погонных нагрузок определяем из:
Gr?f ,
9у=—^~Ьсоз^ (3')
о
Фсрл / ,
?кр ----— ь cos xOf (4')
о
Я~-Яу Якр-
221
Для треугольного крыла без излома продольного набора в пла-
не поступаем как для прямого крыла (фиг. 67,6, сплошные линии),
для треугольного крыла с изломом продольного набора в плане
поступаем как для стреловидного (фиг. 67,6, пунктир).
Построим эпюру поперечных сил Q от распределенных нагрузок
q для прямого крыла (фиг. 66).
Фиг 67.
В сечении 1 поперечная сила равна сумме всех сил, располо-
женных справа от сечения 1. Элементарная сила справа от сече-
ния /
dQ — qdl,
где dl — элемент длины крыла.
q —г переменная погонная нагрузка.
Сумма элементарных сил справа от сечения /
Qi = f q dl.
о
Интегрирование ведется от начала отсчета I (концевое сечение
крыла) до сечения 1.
Аналогично Q2—^qdl и т. д.
и
222
Интеграл (6) удобно вычислять графо-аналитическим спосо-
бом, как площадь эпюры, ограниченной кривой и ординатами q
в концевом сечении (/ = 0) и в рассматриваемом сечении 1 {1 — 1\)
с учетом масштаба построения эпюры. Это положение известно
из математики.
Площадь эпюры практически удобно измерять, сведя искомую площадь
к площади трапеции. Масштаб учитывается таким образом’ при вычислении пло-
щади эпюры основание трапеции берется в метрах, в соответствии с масштабом
длины эпюры q, а высота трапеции берется в кГ/.ч (н/л) в соответствии с мас-
штабом q
Определив таким образом значения Q в нескольких сечениях
крыла, откладываем их от оси абсцисс в выбранном масштабе
и, соединяя концы отрезков плавной кривой, получаем эпюру по-
перечных сил Q от распределенных нагрузок. Эпюры поперечных
сил Qrp от сосредоточенных массовых сил строятся по обычным
правилам курса сопротивления материалов, т. е. последовательно
суммируются все силы по одну сторону от сечения.
Пример построения эпюры Qrp приведен на фиг. 66. Знак
эпюры Qrp противоположен знаку эпюры Q от распределенных
нагрузок.
Построение эпюр изгибающих моментов
Из курса сопротивления материалов известна теорема Журав-
ского: производная от изгибающего момента МИЗР по длине балки
дает поперечную силу, т. е.
Q___'Иизг
4 dl
Отсюда
и
Qdl. (7)
о
Таким образом, значение изгибающего момента в сечении
крыла может быть получено интегрированием эпюры поперечных
сил Q в пределах от начала отсчета длины (от концевого сечения
крыла) до рассматриваемого сечения. Аналогично предыдущему,
интегрирование заменяется вычислением соответствующих пло-
f 1
щадей эпюры Q — интеграл j Qdl есть площадь эпюры, ограни-
0
ченная кривой и ординатами Q при 1=0, l=lt. Учет масштабов
эпюры Q производится так же, как было указано выше, т. е. при
вычислении площади эпюры основание трапеции берется в метрах,
а средняя высота трапеции в килограммах (ньютонах), в соответ-
ствии с масштабом Q. Произведя такие подсчеты для нескольких
223
сечений, получаем значение Л4ИЗг в этих сечениях, по которым
строим эпюру Л/113Г (см. фиг. 66).
Эпюра изгибающих моментов от массовых сил Л1гризг может
быть построена интегрированием эпюры Qrp от массовых сил
и будет иметь ряд прямолинейных участков с изломами в местах
приложения массовых сил. Более просто эту эпюру можно полу-
чить вычислением суммы моментов справа от сечения для несколь-
ких сечений.
Например, для бортового сечения
AlX^rpi''+Ар/'-
Эпюра Л1Гризг показана на фиг. 66. Знак ее противоположен
знаку эпюры Мизг от распределенных нагрузок. Построение эпюр
Q и Л1изг для стреловидных и треугольных крыльев ведется анало-
гичным образом (см. замечания к построению эпюры <?).
Центр жесткости. Ось жесткости
Рассмотрим изгибаемую балку прямоугольного сечения с на-
грузкой, лежащей в плоскости симметрии сечения (фиг. 68, а) и вне
ее (фиг. 68,6). Очевидно, что в случае б будет иметь место кру-
Фиг. 68
чение балки, в отличие от случая а. При этом кручение будет
происходить относительно точки О, лежащей на пересечении двух
осей симметрии сечения, и крутящий момент определится из
Л1Кр = РсЛ
где с — расстояние от линии действия силы до точки О.
224
Очевидно, что и в сечении крыла есть точка, относительно кото-
рой происходит кручение крыла; силы, приложенные в данной
точке, не вызывают кручения крыла. Такая точка называется
центром жесткости (ц.ж.) сечения*. Линия, проходящая через
центры жесткости различных сечений, называется осью жесткости,
или линией центров жесткости. На схеме в показана деформация
крыла силой, приложенной в центре жесткости, на схеме г — вне
центра жесткости.
Фиг. 69.
Положение центра жесткости зависит от жесткостей лонжеронов (продоль-
ных стенок). При равных их деформациях (прогибах, перемещениях ос сдвига)
крыло не будет закручиваться и сила будет приложена в центре жесткости.
Но для того чтобы получить равные деформации при разных жесткостях лонже-
ронов необходимо, чтобы сила была приложена ближе к более жесткому
лонжерону. Следовательно, центр жесткости смещен по направлению к более
жесткому лонжерону.
Положение центра жесткости сечения крыла приближенно определяется из
следующих уравнений: **
Для двухлонжеронного прямого крыла (фиг. 69,а), а также для двухлон-
жеронного стреловидного крыла на расстоянии > с от сечения ВС (фиг, 69,6).
J пер
Jпер "Ь Jзадн
(8)
где /Пер, /задн — моменты инерции переднего и заднего лонжеронов.
* Иногда ее называют центром изгиба.
** Даны без вывода.
15
1563
225
Для двухлонжеронного стреловидного (треугольного) крыла в сечении ВС
(фиг. 69, б).
•^задн ( 1 + ^х)
Jпер^х “1“ задн (1 х) *
ь = _ Упер.^___________с (9)
7пер J зади ( 1 + ^Х )
у _ Л cos3X 1
х с sill X tgx ’
где — угол стреловидности по линии четвертей хорд.
На участке длиной с от сечения ВС линия центра жесткости приближенно
может быть получена плавным сопряжением линии центра жесткости заштрихо-
ванного (фиг. 69, б) участка с центром жесткости в сечении ВС. Для однолон-
жеронных прямых и стреловидных крыльев центр жесткости находится на оси
лонжерона.
Для кессонных прямых и стреловидных крыльев положение центра жест- ’
кости определяется по формулам (8), (9) соответственно, в которых вместо мо-
ментов инерции J лонжеронов фигурируют площади сечения F стенок лонжеро-
нов (продольных стенок).
Если данных по моментам инерции и площади стенок лонжеронов еще нет ;
(например, в стади эскизного проектирования), то можно предположить, что j
момент инерции лонжерона пропорционален квадрату его высоты В2, а площадь ;
стенки — высоте лонжерона И. Тогда в формулы (8), (9) подставляем № j
вместо J и В вместо Д.
Построение эпюры крутящих моментов
Обозначим плечо погонной силы qy (т. е. расстояние между
центром давления и центром жесткости в данном сечении) через
Хц.ж, а плечо погонной силы q^p (т. е. расстояние между центром
тяжести и центром жесткости) через Называя крутящий мо-
мент, действующий на единицу длины крыла, погонным крутящим
моментом т кГ'.м,1м (н>м/м) *, получим схему закручивания £
крыла, показанную на фиг. 70 J
+ (10) I
i
По вычисленным таким образом значениям tn для нескольких
сечений строим эпюру погонных крутящих моментов т (фиг. 71) **. *
Крутящий момент £Шнр, вызванный в любом сечении крыла по- ’
гонным крутящим моментом, действующим на длине dl, опреде- >
лится из * ?
dMKp=mdl. ।
* Сокращение единиц длины в размерности величины т нецелесообразно,
так как при эгогл теряется физический смысл погонного крутящего момента. *
** Фиг 71 может быть построена как продолжение эпюр фиг. 66.
226
I
Тогда полный крутящий момент в сечении /, равный сумме всех
крутящих моментов по одну сторону от рассматриваемого сечения,
будет
.WKpl = j/?z У/. . (11)
О
Вычисляется этот интеграл, как и предыдущие, графо-анали-
тическим способом: как площадь эпюры т от конца крыла до рас-
Фиг. 70. Погонные крутящие моменты от аэродинамических
нагрузок.
сматриваемого сечения (пользование масштабами при этом ана-
логично предыдущему).
Вычисляем Л1Кр в нескольких сечениях и строим эпюру Л1кр.
Условимся о правиле знаков: если момент закручивает крыло
на увеличение угла атаки, то считаед! его положительным и на-
оборот.
Крутящий момент в рассматриваемом сечении, обусловленный
сосредоточенными массовыми нагрузками, получаем как сумму
моментов относительно оси жесткости всех сил, расположенных по
одну сторону от сечения.
Знаки моментов учитываем, как было указано выше. Эпюра
Мгр.ир приведена на фиг. 71.
15*
' 227
гр/^ц.Ж] Ч ' гР2"^Ц-Ж2*
Обозначая плечо силы относительно оси жесткости через Хц.ж
(см. фиг, 66), запишем выражение крутящего момента от сосредо-
точенных массовых нагрузок в корне крыла
длкорн
Построение суммарных эпюр
Получив в результате приведенных выше построений расчет-
ные эпюры Q, Мцзг, Мкр от распределенных и сосредоточенных
нагрузок, построим суммарные эпюры
Qs = QH_Qrp 1
Л/нзг и=Л/изг + Л/гр>изг ? (12)
Л1Кр “Ь-^гр.кр' J
Суммирование величин Q, Л1ИЗг. Мир производится с учетом
знаков. Суммарные эпюры показаны из фиг. 72.
а) От аэродинамических нагрузок
ГП.,1 । 111.иттп м
''гр.вк
1 гтхп
Для стреловидных и треугольных крыльев построение эпюр Af«p
не отличается от описанного.
Рассмотрим особенности построения эпюр для однолонжеронного стреловид-
ного крыла с внутренним подкосом. Ограничимся рассмотрением лишь аэроди-
намических нагрузок qy.
Эпюру qv строим вдоль оси лонжерона, которая является осью жесткости
(фнг. 73). Из равновесия лонжерона находим реакцию фюзеляжа Ri и реакцию
228
главной балки /?4. Момент аэродинамических сил qv относительно оси жесткости
уравновешивается реакцией фюзеляжа /?2 в узле 2, откуда находим
; .....
2-3
Рассматривая внутренний подкос как балку, опертую на фюзеляже и нагру-
женную силами и R2, находим реакцию /?поди=—Яг]-/?;.
Фиг. 73. Построение эпюр для стреловидного
крыла с внутренним подкосом.
Строим эпюры Q, ЛТцэг для лонжерона и для внутреннего подкоса и эпюру
МКр для крыла (фиг. 73).
6. РАСЧЕТ НА ПРОЧНОСТЬ СЕЧЕНИЯ КРЫЛА. РАСЧЕТ НЕРВЮР
Расчет сечения лонжеронного крыла
Сечение крыла нагружено поперечной силой Q, приложенной
в центре жесткости сечения, изгибающим моментом Л1ИЗг и крутя-
щим моментом Л11ф. Поперечная сила нагружает стенки лонже-
ронов, которые работают на касательные напряжения; изгибаю-
щий момент нагружает пояса лонжеронов осевыми силами, причем
\ пояса работают на нормальные напряжения; кручение вызывает
' касательные напряжения в контуре, образованном стенками лон-
жеронов и межлонжеронной обшивкой ♦. Определим перечислен-
ные напряжения.
Рассмотрим расчет двухлонжеронного крыла, прямого, стрело-
видного или треугольного, схема сечения которого приведена на
фиг. 74, а. Прежде всего распределим поперечную силу Q и изги-
Фиг. 74. Нагружение сечения двухлонжеронного крыла.
бающий момент Л4ИЗГ между передним и задним лонжеронами. Так
как сила Q перенесена в центр жесткости сечения * **, то, распреде-
лив ее по лонжеронам, получим
Оперея» = Q —; (13)
с с
где Рцередн, фзаДн — поперечные силы по переднему и заднему лон-
жеронам.
Величины а, Ь, характеризующие положение центра жесткости,
получаем из формул (8) и (9). Распределение Л4113Г и Q между
лонжеронами одинаково, т. е.
М — • М —М — (14)
2 впереди нэг 1 2К/эаДн 2Мизг ‘
С С
Осевая сила S в поясе лонжерона
__ । 44изг
Л ’
где h — расстояние между центрами тяжести поперечного сечения
поясов лонжерона (см. фиг. 39).
* Работой обшивки носка на кручение в целях упрощения задачи пренеб-
регаем.
*• С добавлением крутящего момента.
230
Обозначив через Н высоту лонжерона (или высоту профиля
в месте расположения лонжерона) и приняв /1^0,95//, будем иметь
впереди „
передн ~ 0,95//кередн ’ ЗЭДН ~ 0,95/Узадц
Нормальные напряжения получим, разделив силу S
лонжерона на площадь F сечения лонжерона
(15)
в поясе
а =
св-
(16)
Полученные напряжения в сжатом поясе (так же как в растя-
нутом) сравниваем с ав, так как сжатый пояс подкреплен в двух
плоскостях и устойчивости не теряет.
Напряжения в стенке лонжерона определяются, как отношение
силы Q к площади сечения стенки лонжерона. Например, для пе-
реднего лонжерона
Упереди
т «
передн р
гпередн
Напряжения от кручения в
формуле Бредта
(17)
0,95 Н пере дн$ передн
тонкостенном контуре находим по
Г
4
(18)
Тм— 250Ь •’
где б — толщина обшивки (стенки), для которой определяется
напряжение.
Так как стенка лонжерона нагружается касательными напря-
жениями т от Q и Мкр, то
T = Tq±Tm. (19)
Суммирование или вычитание напряжений зависит от направ-
ления крутящего момента. Как видно из схемы фиг. 74, б, на стен-
ке переднего лонжерона эти напряжения вычитаются, на стенке
заднего лонжерона — суммируются.
Касательные напряжения т в стенках лонжеронов, а также
в обшивке, не должны превышать критических напряжений.
Предельные касательные напряжения принимаются для дур-
алюминовой стенки примерно 1500 юГ/сти2 (147 Мн/л2) и для дур-
алюминовой обшивки— 1200 кГ1см2 (118 Мн/м2) с учетом работы
обшивки на нормальные напряжения.
В случае ферменного лонжерона, рассматривая лонжерон, как балку с па-
раллельными поясами *, получаем усилия в стойках (фиг. 75, а) и раскосах
(фиг. 75,6)
О ^3
С7 = 5раск —
cosa
* Ввиду малой величины угла наклона поясов это допустимо.
231
По найденным усилиям прочность стоек и раскосов проверяется на растя-
жение и продольный изгиб.
Усилия и напряжения в поясах ферменного лонжерона определяются, как
и для балочного лонжерона, по формулам (15), (16),
Пример определения нагрузок и расчета сечения
лонжеронного крыла
Приведем пример проверочного расчета сечения двухлонжеронного прямого
крыла. Расчет проведем от аэродинамических нагрузок случая Ак.
Разгрузку от массовых сил учтем приближенно, снизив расчетные значения
Мизг и Q * на 20%.
1 Исходные данные (фиг. 76, 77). Крыло трапециевидной формы в пла-
не. Лонжероны расположены, пердний на 15% хорды, задний на 65% хорды.
Высота лонжеронов одинакова и равна 0,54 м; cvmax = l,4. соответствующий
ему ст=—0,35; шаг нервюр 400 мм, обшивка дуралюмиповая толщиной
кГ / Мн\
босш ~ 1,5 лол, лонж= ^20 [ 1180 ~ I
г
Фиг. 75 К расчету ферменного лонжерона.
размах крыла 1~20 я; хорды: йборт=3,7 м, 5конЦ=1,85 я; пло-
щадь крыла 5=55 я2. Полетный вес самолета G=41000 кГ (108000 «). Коэф-
фициент эксплуатационной перегрузки случая Я] Яд=8; коэффициент безопас-
ности f=I,5
Построение эпюр. Определяем расчетную нагрузку
РРасч = ОлУ= 11 000-8-1,5 = 132000 кГ (1 290 000 я).
Берем 10 сечении крыла (на расстоянии через 1 л) и вычисляем для каж-
дого сечения погонную нагрузку q, значения хорд 6epjTcn из чертежа (фиг. 76).
Ррасч^ 132 000
q — —~— Ь = 2400 b кГ!м.
S 55
Вычисления значении q, Q и Мизг в различных сечениях по размаху крыла
сведены в табл. I.
Таблица 1
№ сечения 0 1 2 3 4 5 6 7 8 9
Ь я 3,7 3,49 3,29 3,08 2,88 2,67 2,46 2,26 2,05 1,85
q кГ!м 8 800 8 380 7 900 7 400 6 910 6410 5 916 5430 4920 4440
Q кГ 60 000 51 300 43 200 35 500 28400 21 700 15500 9880 4680 0
238 000 184000 140 000 99 000 67500 41 000 22 500 9500 2350 0
Выбрав масштаб
q, строим эпюру q для полуразмаха крыла (см. фиг. 76,6).
* Значения Л11{р не снижаем, так как массовые силы могут даже увели-
чить Мир.
232
Для построения эпюры поперечных сил Q производим графическое интегри-
рование эпюры q. Интегрируя эпюру Q, получаем значения ЛГИЭР.
Выбрав масштабы Q и Л1НЗг, строим эпюры (см. фиг. 76, в, г).
Погонный крутящий момент
ГД* Хц nt,
где хц ж — плечо нагрузки относительно центра жесткости.
Фиг. 76. К расчету сечения крыла.
Так как высота лонжеронов одинакова, то центр жесткости находится по
середине между лонжеронами, т, е. на расстоянии от носка сечения, равном
0,65^ — 0,156
= 0,46.
2
J
233
Центр давления находится на расстоянии от носка сечення, равном
с г» 0,35
^-£ = -^ = 0,25^
Су 1,4
Тогда
и
Хц ж = 0,46—0,256=0,156
т=0,1 sbq.
Вычисления по определению т и M[tp сведены в табл. 2.
Сучение крыла
Материал паясоб-Ст ЗОХГСА
Предел прочности бь~ J20 кГ/нн2
(1}8103н/См2)
Поперечное сечение пояса
лонжерона F=1f>08 мн2
Материал стенки - Д 1ST
°)
Сечение лонжерона
Фиг. 77.
Таблица 2
№ сечения 0 1 2 3 4 5 6 7 8 9
b м 3,7 3,49 3,29 3,08 4,88 2,67 2,46 2,26 2,05 1,85
q кГ{м 8 880 8 380 7 900 7 400 6 910 6410 5910 5430 4920 4440
т. кГ'М/м 4 930 4 390 3 900 3 420 2 980 2570 2180 1840 1520 1230
Afhp кГ-м 26 000 21500 17 100 13600 10 300 7470 5070 3080 1365 0
Выбрав масштаб т, строим эпюру (см. фиг. 76, д).
Для построения эпюры крутящего момента Л1ьр производим графическое
интегрирование эпюры т.
Выбрав масштаб Л1кр, строим эпюру (см. фиг. 76, е).
Расчет бортового сечения крыла на изгиб Схема сече-
ния крыла приведена на фиг. 77, а. Нагрузки берем из эпюры Л1цЗГ на фиг. 76.
231
ду лонжеронами пополам, то Л1переди=/Иэадн =
Разносим Л1изг по лонжеронам. Так как центр жесткости делит расстояние меж-
Л4цЗГ 238000
= =119 000 кГ’М
£ Лг
(1 170 000 Я-Л1).
Находим усилия S в поясах лонжерона; для
нов они равны
переднего и заднего лонжеро-
-^передн
^задн
"ерма = SaalH = °’8 0,95Я„ерем = °’8 0.95Я..Д,
119 000
= 0,8- ~ = 185000 кГ (1 815000 н).
V | * ** ) О А
Коэффициент 0,8 учитывает разгрузку массовыми силами.
Зная величину усилия, действующего в поясе лонжерона, определяем на-
пряжение в поясе лонжерона (см. фиг. 77,6).
8 185000
* = " 1Сла в 115 (ИЗО Л1«Л«2) < ав.
г 1600
Расчет бортового сечения крыла на кручение
и сдвиг. Полагаем, что крутящий момент воспринимается контуром abed
(см. фиг. 77, а).
^54-185=10 000 см2,
Мкр 2 600 000
г«».п = —------=~ - ' = 870 кГ/см? (85,2 Мн/МГ) < г=с“.
2Г(}бобщ 2-lUUUU*0,15
Так как центр давления располагается впереди центра жесткости
(см. фиг. 77, о), то напряжения при сдвиге от поперечной силы и кручения
суммируются на переднем лонжероне и вычитаются на заднем.
•Мкр
1, ГТ A FiA т IT "
2 F(впереди
0,9577 передн^передн
2 600 000 30 000
2-10 000-0,5 + ’%, 95-54-0,5
= 1200 кГ/см? (118 Л1я/.н2)<
З^кр QsaiH
2/^0^ з a in 0,95 7/3 а чн 8 з а дн
2 600 000
2-10000-0,5
Л „ 80000
-0>8Х~п. п < = 000 кГ/с*2 (66,5 .Ш/.и2)<г3ст.
V । УО • О * * и.О
Следовательно, по расчету на случай Лк стенка заднего лонжерона может
быть сделана более тонкой. Однако этот вывод требует проверки и на другие
расчетные случаи.
Расчет сечения кессонного крыла
На фиг. 78 показано нагружение прямого кессонного крыла.
Изгибающий момент ЛТизг нагружает две панели кессона осевыми
усилиями. Сдвиг же от поперечной силы и кручение кессонного
крыла принципиально не отличаются от соответствующего нагру-
жения лонжеронного крыла.
235
Поэтому расчет сечения такого крыла на сдвиг и кручение ’про-
изводится, как и расчет лонжеронного крыла, по формулам (17),
(18), (19).
Осевое усилие S, нагружающее панели, определяется из
________________________ I Мизг
где 1г — расстояние между центрами тяжести панелей кессона,
которое может быть приближенно принято равным 0,85 от макси-
мальной высоты профиля в данном сечении.
Фиг. 78. Нагружение сечения кессонного крыла.
Напряжение в растянутой панели получим, разделив усилие S
на площадь панели *. Эти напряжения должны быть меньше пре-
дела прочности Ов материала панели
^раст пан & Хр р . „/7
*раст * пл i CTp 4"
Здесь площадь сечения поясов лонжеронов или продоль-
ных стенок, входящих в растянутую панель;
?'стр — площадь сечения стрингера;
л —число стрингеров;
В — ширина панели кессона;
8 —толщина обшивки.
Для определения напряжений в сжатой панели необходимо вве-
сти редукционный коэффициент ср обшивки, учитывающий потерю
устойчивости сжатой обшивкой, т. е. степень участия обшивки
в работе крыла при изгибе **.
Полученные напряжения сравниваем с критическими напряже-
ниями стрингера.
* Элементы панели выполнены из одного материала.
** Полагаем, что б рассматриваемом крыле жесткость пояса лонжерона
и стрингера примерно равны
236
Таким образом, имеем
°сж ~ 2 ^4-nFCTp+¥BB "" °кр стр‘ В * * * * * * * * * * * * (21)
Значение редукционного коэффициента <р берется на основании
опытных данных для панелей, однотипных по конструкции с рас-
сматриваемой, или определяется приближенно по формуле
ф
й
(22)
где b — шаг стрингеров.
Фиг. 79.
В стреловидном, а также треугольном кессонных
крыльях с изломом в плане продольного набора, как сказано было
ранее, имеет место догрузка задних продольных элементов и уча-
стков обшивки и разгрузка передних. Эпюра распределения нор-
мальных напряжений ок в корневом сечении от изгиба по панели
стреловидного крыла изображена на фиг. 79, а. На этой же эпюре
показано распределение напряжений crOK = const без учета стрело-
видности. На графике фиг. 79,6 даны осредненные кривые зависи-
" Gif _ X
мости от относительного положения точки сечения •
Пользуясь этими кривыми для любого значения х, находим х, ак
и Ок = Экстон. Естественно, предварительно нужно определить на-
пряжения сгОц как для 'Прямого крыла.
Пример расчета сечения стреловидного кессонного крыла
, В качестве примера рассмотрим проверочный расчет корневого сечения стре-
'’ловидного кессонного крыла, показанного па фиг. 80.
Угол стреловидности по оси крыла Хэ—35°.
Относительная толщина профиля в корне с=15в/о.
237
Рассмотрим равновеликое прямое крыло (пунктирная линия на фиг. 80)
I 7,4
с длиной-------- nr о и хордами 6корц=4,52 cos 35О=3,7 м и 6конц=
cos 7.0 cos
=2 26Xcos 35°= 1,85 м, т. е. с размерами приведенного выше двухлонжеронного
крыла (см. фиг. 76). Исходные данные примем те же, что и для упомянутого двух-
лонжеронного крыла. Поэтому эпюры Q, Мизг, Л)кр остаются без изменения (см.
фиг. 76).
Расчет на кручение и сдвиг не отличается от изложенного выше и повто-
рять его не будем.
Проведем расчет корневого сечения на изгиб.
1Ь00
Фиг, 80.
Сперва рассчитаем сечение прямого крыла.
Л4Иэг=210 ООО кГ • м (2 060 000 н • ж) (см. эпюру фиг. 76, а)
&«орн=3,32 л (см. схему фиг. 76, а)
Л=0,85с=0,85* 0,15 -3,32=0,424 м.
о Л1ЯЗГ 0,8*210000
5=0,8—= - •---=396000 кГ (388-104 я).
Л 0,424
Коэффициент 0,8 учитывает разгрузку массовыми силами. Конструкция верх-
ней (сжатой) панели кессона: толщина обшивки 6Обш=1»5 мм; шаг стрингеров
£7=64 мм. Стрингер выполнен из дуралюминового прессованного профиля
ПР102-12 с площадью сечения fcTp=353 мм2; ав=40 кГ/мм2 (392 Мн/м2);
критическое напряжение окр=28 кГ/мм2 (274 Мн/м2).
Число стрингеров по верхней панели-—25.
Пояс лонжерона выполнен из двух дуралюминовых прессованных профилей
с площадью сечения
Лчонж =2 865=1730 мм2.
Приведенная площадь сжатой панели
Fприв с ж = 2К л он ж 4"25/''етр "ЬфКрбш.
238
Редукционный коэффициент 9 обшивки приближенно определяем как
F крив.еж — 2 -1730 + 25 • 353 + 1660 • 1,5 • 0.94 = 14 650 м-И2;
396 000
«ок.сж 14 650
= 27 кГ/мм'2 (265 Мн/At?).
Растянутая панель отличается от сжатой количеством стрингеров, умень-
шенным до 14,
Грает = 2 • 1730+14- 353 + 1660- 1,5=10 900 лш2;
396 000
а°к-₽аст~ w900
=36,3 кГ/ммЦ356 Мн/м?).
Найдем поправочные коэффициенты ок (см. фиг, 79, б) для определения
напряжений в более нагруженных задних элементах (стрингерах) стреловидного
крыла.
Для х = 0, интерполируя, имеем oJv^I ,6.
Следовательно,
ак,сж=27 • 1,6=43 кГ/мм2 J421 Л1н/л£3)>аКр.стр,
О’к.раст =36,3-’1,6=58 кГ/мм2 (568 Л1н/л<2)>Ое.
Сечение не прочно.
О температурных напряжениях в крыле
V. Представим сечение кессона крыла как симметричное (фиг, 81) и выполнен-
ное из разных материалов. Под действием температуры элементы кессона из-
менят свои длины.
Пусть все элементы крыла свободно удлинились от нагрева так, что удлине-
ния их различны и равны atl, где а — коэффициент линейного расширения эле-
мента, t—температура нагрева.
Плоскость сечения исказится (как показано на фиг. 81) ив сечении темпера-
турные напряжения не возникнут. Фактически сечение остается плоским, де-
формации всех элементов одинаковы и равны Ы=а1.
Тогда, очевидно, напряжения в элементах будут обусловлены лишь дефор-
мацией al—atl=El
и относительной деформацией
г=а— at. (23)
Соответствующие деформации е напряжения
О=е£.
Е
i Введем коэффициент редукции по модулям <р= — (см. разд. I, стр. 51),
Го
где До — модуль упругости 1-го рода материала, принятого за основной.
239
Тогда
о=ЕЕ0(р. (24)
Из равновесия кессона, свободного от внешних нагрузок» следует, что сумма
проекциии всех сил в сечении на ось крыла равна нулю
2^ = о,
(25)
где AF—площадь элемента (стригнера, участка обшивки). Сумма распростра-
няется на все сечение.
Подставляя в (25) значения а, е из (24), (23), получим
2(а-а0 £оТД5 = О
И
"=
(26)
Подставляя
окончательно:
выражение (26) в
(23) и полученный результат в (24), получим
E02)<faMF
F
F
т-
(27)
Определение нагрузок на стыковые соединения
Рассмотрим нагружение стыковых узлов двухлонжеронного
прямого крыла (фиг. 82).
Сила S, действующая на стыковой узел в направлении пояса
лонжерона,
Л1передн р ^эадн
^передн гг' ’ ‘^заДн^ТТ * (28)
"дере ин "задн
Здесь Л4переДн, Л1заДН —изгибающие моменты по переднему и
заднему лонжеронам в месте стыка, по-
лученные по формуле (14);'
впереди, Язадн — расстояние между стыковыми болтами
лонжеронов.
Так как
jW^p
Qjf передн Qm задн >
то сила, действующая на стыковой узел, например передний, будет
равна*
- Спереди х Слг передн
впереди.ст
(29)
2
* Полагаем, что эта сила распределяется поровну между верхним и нижним
узлами.
240
f \ Здесь фпередн и Qm передн поперечные силы по лонжерону от
^изгиба и кручения соответственно;
В — расстояние между лонжеронами.
Знак -f- или — в скобках зависит от направления крутящего
момента. Таким образом, имеем нагружение стыкового болта
силой
— }/" *$передн
2
передн, ст
(см. фиг. 82).
Здесь R — суммарная сила.
Фиг. 82. Нагружение стыковых узлов двухлонжеронного прямого крыла.
Рассмотрим контурный стык кессонного прямого крыла
(фиг. 83, а).
Осевые силы Здередш 5задн> действующие на узел лонжерона,
и SK, действующие на один болт контурного стыка *, найдем, пола-
гая, ' что усилие, нагружающее панель,
f
^изг
Л
(30)
распределяется между болтами стыка панели пропорционально их
площадям разрыва** (или квадратам диаметров).
* В сжатой зоне болты стыка на осевые усилия не работают; усилия эти
с одной части крыла на другую передаются непосредственно контактом стыко-
вых угольников.
** Если болты работают на срез, то берем площади среза.
16 1563
241
Тогда
перелн
(31)
задн
где f—-площадь сечения болта, а сумма
болты панели (верхней или нижней).
распространяется на все
Фиг 83 Нагружение стыкового соединения кессонного крыла.
Вертикальная поперечная сила, действующая на один, напри-
мер, передний узел лонжерона,
Qnepem Д QjW перед» 1 0»5Mhp \ (32)
^спереди.ст ' 2 \^псРеДН "— /
Эта формула аналогична формуле (29) с той только разницей,
0,5 Л4 кр
что в случае кессонного крыла QM передне Фмзад^=--------~♦ т- е*
принимаем, что вертикальные реакции в виде пары сил 'на лонже-
ронах вызываются лишь половиной крутящего момента Л11;р. Вто-
рая половина Л1)!р передается через контурный стык в виде сил Тк.
В лонжеронном же крыле весь крутящий момент создает верти-
кальные реакции на лонжеронах.
Горизонтальная сила Tv, действующая на один болт контурного
стыка, определяется из
0,5Л1Кр /к
к= Л
где /i — расстояние между центрами тяжести панелей (см, стр. 236
и фиг. 78);
/1С — площадь среза контурного болта, в котором определяется
усилие.
(33)
242
Сумма распространяется на все болты панели, работающие на
срез от Тк *.
Для стреловидных (треугольных) крыльев нагрузки на стыко-
вые соединения приближенно определяются следующим образом
Предварительно необходимо пе-
рейти от моментов Л1ИЗГ, Мкр, взя-
тых вдоль и относительно оси
крыла (см. фиг. 67), к моментам
Л4ьр 2Иизг г» Действующим в пло-
скости стыка и перпендикулярным
ей (фиг. 84).
Для этого воспользуемся изо-
бражением моментов в виде век-
торов, направленных по правилу
штопора.
Далее графическим путем на-
ходим равнодействующий момент
М и раскладываем его на Л/ИЗГ2
и Л4крг (фиг 84) Аналитически
Фиг 84
это может быть выполнено так
•^изг z ^изгС^Хо 1 (34)
^кр г ~ ^изг sin Хо~Т“А4кр COS /0. J
Найденные значения Л4изгг, Л4крг подставляем в формулы (14),
(28) 4- (33) вместо Л4ИЭГ, Л4кр.
Положение центра жесткости стреловидного (треугольного)
крыла, необходимое для распределения Л1113г по лонжеронам, опре-
деляется по формуле (9).
Дальнейшее определение нагрузок не отличается от приведен-
ного выше для прямого крыла.
Найденные по формуле (31) значения 5передн, S3a3n, SK для кес;
сонного_ стреловидного крыла необходимо домножить на коэффи-
циент сгк, взятый по графику фиг. 79, б в зависимости от относи-
тельной координаты — рассматриваемого болта (фиг. 83, а)
В
Расчет нервюр
Конструктивные размеры и сечения нормальных нервюр, нагру-
женных аэродинамической нагрузкой, как правило, обеспечивают
их прочность.
Рассмотрим определение изгибающих моментов и поперечных
сил, а также определение напряжений в сечении усиленной нер-
вюры, воспринимающей местные нагрузки.
* По схеме фиг 83 болты стыковых узлов лонжеронов в сумму нс вктю-
чаются, так как они на срез от Тк не работают
16*
243
Рассмотрим нервюру, связывающую лонжероны в месте креп-
ления стойки шасси (фиг. 85,а). Нервюра передает на крыло кру-
тящий момент P(a + iZ), где Р— сила, действующая от стойки
шасси; (a+d) — плечо силы до центра жесткости сечения крыла.
На нервюру от обшивки и стенок лонжеронов будут действовать
Фиг. 85.
Нагружение усиленной нервюры.
реактивные погонные касательные силы, определяемые по формуле
Бредта
Л1кр _ Р (« 4- d)
2Fo
(35)
Кроме кручения, сила Р вызывает также сдвиг нервюры; реак-
ции, возникающие на лонжеронах, определяются положением цен-
тра жесткости относительно лонжеронов
С с
(36)
Теперь, от опоры В к опоре А строим эпюру поперечных сил Q.
На участке ВА, т. е. по длине рассматриваемой средней части
нервюры,
Q ~ const = ср>
где ЯСР — средняя высота нервюры (высота прямоугольника, ко-
торым условно заменена нервюра).
Изгибающий момент Л1ИЗГ в точке В равен нулю, от В до А
изменяется по линейному закону, а в точке А равен
АТцзГ A Pd.
Эпюры Q и Л1ИЗГ приведены на фиг. 85, а.
Расчетные формулы для определения напряжений в сечении
нервюры не отличаются от приведенных выше формул для*лонже-
ч'\
244
рона, так как конструкция нервюры и лонжерона однотипна
(фиг. 85.6).
Мизг
0,95/7
(37)
араст р °в> °сж р °кр
" раст гсж
(38)
в>
(39)
0,95/75
где FpaCT, ^сж—площади сечения растянутой и сжатой полок нер-
вюры;
тв — для дуралюмина принимается 1500 кГ1см2 (14700
н[см?).
7. ФЛАТТЕР КРЫЛА
Определения
Флаттером называются самовозбуждающиеся колебания в по-
лете крыла или оперения с быстронарастающей амплитудой.
При некоторых условиях полета самолета крыло под действием
одноразового внешнего возмущения (например,
приходит в колебательное движение. Отклонения
начального положения в течение корот-
кого промежутка времени (1—5 сек)
нарастают столь резко, что конструкция
разрушается. При этом источником ко-
лебаний являются возмущающие силы,-
созданные самим крылом. Флаттер про-
является в виде сильной тряски про-
водки управления и всего самолета
и резких возрастающих колебаний
крыльев, или оперения. Явления эти
столь опасны, что предусмотрение мер,
устраняющих явление флаттера, является одной
задач при конструировании самолета.
Напомним некоторые определения, связанные
порыва' ветра)
крыла от его
Фиг. 86.
из важнейших
Напомним некоторые определения, связанные с .колебаниями
Выведем балку (фиг. 86) из состояния равновесия и предоставим
ее самой себе. Балка будет совершать колебания относительно по-
ложения равновесия со все уменьшающимися отклонениями — за-
тухающие колебания. Количество колебаний балки за единицу
времени (в секунду) называется частотой собственных колебаний.
Величина наибольшего отклонения от положения равновесия
называется амплитудой. Причиной уменьшения амплитуд, т. е.
затухания колебаний, являются: силы трения в заделке, трение
частиц материала * и силы сопротивления воздуха, называемые
* При деформации тел одни частицы материала смещаются относительно
других, что сопровождается трением.
245
демпфирующими силами. Если в крайних положениях балки при-
кладывать к ней силу, направленную по движению балки, то эта
сила будет стремиться увеличить амплитуду колебаний балки,
сделать колебания нарастающими. Такая сила называется возму-
щающей Условием нарастания колебаний является превышение
энергии (работы), возмущающих сил над работой демпфирующих
сил. Частота изменения возмущающей силы называется частотой
вынужденных колебаний системы.
Имеется два вида флаттера крыла: изгибно-крутильный и из-
гибно-элеронный.
Изгибно-крутильный флаттер
Пусть крыло, находящееся в потоке, получило начальное от-
клонение (прогиб) вниз и затем было предоставлено самому себе
(положение 0 на фиг. 87, а). Элерон при этом жестко закреплен.
а)
S) г)
Фиг 87
Для удобства рассмотрения полагаем самолет неподвижным, а по-
ток— набегающим со скоростью V. На фиг. 87, а показаны центр
жесткости и центр тяжести сечения, которые в обычных конструк-
циях крыльев расположены примерно на 38—40% и 42-е-45%
хорды соответственно. Пунктиром показано начальное положение
хорды крыла. Под действием сил упругости сечение крыла будет
перемещаться из нижнего положения в начальное. Скорость и
вертикального перемещения крыла будет при этом нарастать от
нуля до максимума в начальном положении.
246
Далее, благодаря накопленной кинетической энергии сечение
будет передвигаться вверх со все уменьшающейся скоростью
вплоть до остановки, после чего силы упругости заставят сечение
переместиться вниз и т. д.
Эпюра вертикальных скоростей и движения сечения крыла
приведена на фиг. 87, в. Эпюра вертикальных ускорений IF сече-
ния крыла приведена на фиг. 87, г.
В среднем положении 2 скорость максимальна, а ускорение
равно нулю.
При ускоренном движении будут иметь место инерционные си-
лы движущихся масс крыла, направленные против ускорения
и приложенные в центре тяжести сечения.
При движении сечения от положения 0 до положения 2
(фиг. 87,а) инерционная сила будет направлена вниз (ускорение
направлено вверх) и вызовет закручивание крыла относительно
центра жесткости, увеличивающее угол атаки сечения. Центр тя-
жести как бы отстает в своем движении от центра жесткости. При
движении ог положения 2 до 4 ускорение и инерционная сила ме-
няют знак, сечение «раскручивается», угол атаки уменьшается
и в положении 4 приходит к начальному. Центр тяжести как бы
стремится догнать центр жесткости.
Таким образом, изгибные колебания сопровождаются крутиль-
ными.
Связь между положением крыла и величиной угла закручива-
ния довольно сложна, так как величина упругих и инерционных
сил меняется. Но очевидно, что во всех промежуточных положе-
ниях 1, 2, 3 сечения имеем увеличение угла атаки, сравнительно
с исходным, и, следовательно, наличие дополнительной аэродина-
мической силы ДР, направленной вверх — в сторону движения
крыла. Сила ДР является возмущающей, величина ее не постоянна.
Теперь рассмотрим обратное движение сечения крыла (поло-
жения 4—8, фиг. 87,6). Рассуждая аналогично предыдущему, за-
метим, что при движении крыла вниз от положения 4 до положе-
ния 8 углы атаки меньше исходного, что равносильно добавлению
подъемной силы ДР, направленной вниз, т. е. возмущающей силы.
В итоге рассмотрения колебаний крыла приходим к заключе-
нию, что на всем протяжении колебаний на сечение крыла дейст-
вуют возмущающие силы. Последовательные стадии движения
сечения крыла в полете при изгибно-крутильном флаттере пока-
заны на фиг. 88. Там же показано и направление возмущающих
сил ДР.
При описанных выше явлениях, кроме возмущающей силы ДР,
имеют место также демпфирующие силы, к которым относятся*
силы трения в соединениях и внутренние силы трения ДР1 в мате-
риале, а также аэродинамические силы ДР2 при изгибных коле-
баниях.
При движении сечения крыла, например, вниз, к поступатель-
ной скорости V добавляется вертикальная скорость и (фиг. 89, а),
247
что вызывает увеличение угла атаки на Да и дополнительную
подъемную силу ДР2, направленную против взмаха, т. е. препят-
ствующую колебаниям.
Фиг. 88.
Если работа возмущающих сил больше работы демпфирующих
сил, то энергия системы возрастает, что вызывает «раскачивание»
системы, т. е. изгибно-крутильный флаттер. Это явление происхо- '
дит на больших скоростях.
Если работа возмущающей силы ДР меньше, чем работа демп-
фирующих сил ДР1 и ДР2 (что происходит при полете на малых
скоростях), то флаттер не имеет
Фиг. 89.
места.
Рассмотрим, от чего зависят
силы ДР, ДРЬ ДР2.
Аэродинамическая возмущаю-
щая сила ДР при данной жест-
кости крыла, как известно из
аэромеханики, зависит от квад-
рата скорости самолета
ДР = Дс,е^--=А1/2, (40)
А
где k — коэффициент пропорцио-
нальности.
Сила трения ДР1 от скорости полета не зависит.
Аэродинамическая демпфирующая сила ДР2 пропорциональна
первой степени скорости, т. е. ДР2=Л]У, где k\—коэффициент, не
зависящий от скорости. Покажем это.
Аэродинамическая демпфирующая сила
дР2=дСу25^-,
где через Дсу2 обозначено приращение су за счет вертикальной
248
скорости н. Зависимость между Дсу2 и приращением угла атаки
Да может быть выражена (см. фиг, 89, б)
откуда
Acy2 = Aa-tgY.
Но так как (см. фиг. 89, а),
то
(41)
Г
Таким образом, влияние возмущающей силы более значитель-
но на больших скоростях, чем влияние демпфирующих сил,
В такой же зависимости от ско-
рости полета находится и раоота
этих сил. Эта зависимость приве-
дена на фиг. 90, где нанесены сум-
марная работа демпфирующих сил
ДР1 и ДР2 и работа возмущающей
силы ДР.
Точка а — пересечения кривых
работы возмущающих и демпфи-
рующих сил — дает скорость, при
которой наступает изгибно-крутиль-
ный флаттер — критическая
рость
тер а.
колебания, возникшие под действием случайной силы, будут воз-
растать, не нуждаясь во внешних толчках.
CKQ-
изгибно-крутильного флат-
Начиная с этой скорости
Изгибно-элеронный флаттер
Рассмотрим изгибные колебания крыла с очень большой жест-
костью на кручение, т. е. практически не закручивающегося. Пред-
положим при этом, что, при наличии люфтов в проводке управле-
ния и нежесткости проводки, элерон можег отклоняться и что центр
тяжести сечения элерона находится за осью вращения.
Рассуждая аналогично предыдущему, отметим, что при дви-
жении сечения крыла снизу вверх до исходного положения 2
(фиг. 91, а) сила инерции элерона Рзэл, приложенная в его центре
тяжести, вызовет отклонение элерона вниз, элерон будет как бы
отставать от крыла. Появится дополнительная подъемная сила
ДРЭЛ, направленная вверх. В положениях 2—4 направление инер-
ционной силы изменится, элерон будет возвращаться к исходному
положению, сила ДР0Л будет уменьшаться. Таким образом, во всех
* положениях движения крыла вверх имеет место дополнительная
249
подъемная сила, направленная вверх и являющаяся возмущающей.
Такая же картина наблюдается при движении сечения крыла вниз
{фиг. 91,6).
Ос. вращения U Т элерона
а) - 5)
Фиг 91.
Последовательные положения сечения крыла в полете при из-
гибно-элеронном флаттере показаны на фиг. 92
Кроме рассмотренной возмущающей снлы ДРЭЛ> имеют место,
как и ранее, демпфирующие силы; трения ЛР[ и аэродинамическая
Фиг. 92
сила при изгибных колебаниях крыла ДР2 При работе возмущаю-
щей силы, превышающей работу демпфирующих сил, наблюдается
250
изгиб но-элеронный флаттер. Скорость, при которой наступает это
явление, называется критической скорое! ью изгибно-элеронного
флаттера.
Меры предотвращения флаттера
Так как флаттер возникает тогда, когда скорость полета дости-
гает критической величины
V VКрит фл^
то для предотвращения флаттера необходимо создать такую кон-
струкцию, чтобы максимально-возможная для данного самолета
скорость была меньше VpPIIT фл.
Рекомендуется соблюдать неравенство
1,1 Ртах Ркрнт фл (42)
Для устранения изгибно-крутильного флаттера проводятся сле-
дующие мероприятия.
1) Увеличение жесткости крыла на кручение путем утолщения
обшивки и стенок лонжеронов. Это уменьшает закручивание сече
ния крыла, являющееся источником возмущающих сил.
2) Перемещение вперед линии центра тяжести сечений крыла.
Обычное расположение центра тяжести и центра жесткости пока-
зано на фиг. 87. Перемещение центра тяжести сечения вперед
уменьшает момент инерционной силы Р3 вследствие уменьшения
плеча этой силы и уменьшает закручивание крыла
Перемещение центра тяжести достигается путем увеличения
толщины обшивки носка * и рационального размещения агрегатов
в крыле и на крыле. Например, установка двигателя па крыле по-
вышает Укрит фл
Иногда для увеличения УНритфл приходится загружать перед-
нюю кромку крыла. В этом случае нет надобности загружать ее
по всему размаху, а достаточно загрузить только концевую часть,
которая оказывает наибольшее влияние на флаттер (см. фиг. 22)
Важнейшим мероприятием для предотвращения изгибно-эле-
ронного флаттера является весовая компенсация элерона — совме-
щение центра тяжести элерона с осью его вращения — и переком-
пенсация — расположение центра тяжести элерона перед осью вра-
щения. В последнем случае отклонение элерона под действием
сил Р3эп происходит в направлении, обратном изображенному на
фиг. 91, и дополнительная подъемная сила ДРЭл из возмущающей
превратится в демпфирующую. Весовая компенсация (перекомпен-
сация) осуществляется путем расположения в носке элерона спе-
циальных грузов — балансиров (фиг. 93, а). Однако установка
грузов увеличивает вес конструкции крыла.
* Это мероприятие полезна и для увеличения жесткости крыла на кручение,
и для улучшения аэродинамики крыла, а также для уменьшения аэродинамиче-
ского нагрева
251
Увеличение Укрит.фл может быть достигнуто с помощью уста-
новки демпферов (фиг. 93,6), которые при отклонениях элеронов
создают дополнительные демпфирующие силы. Происходит это
следующим образом; при отклонениях элерона связанный с ним
поршень А перемещается в цилиндре В, заполненном вязкой жид-
костью (например, смесью спирта и глицерина). Поршень имеет
ВссоЗая хопленраиия
Злерома
а)
Фиг, 93.
небольшие отверстия, и перетекающая через них при отклонении
элерона жидкость создает сопротивление движению элерона. При
медленном отклонении элерона сила сопротивления жидкости
невелика, при больших же скоростях отклонения сила сопротивле-
ния жидкости резко увеличивается, так как эта сила пропорцио-
нальна квадрату скорости движения жидкости.
Уменьшение люфтов в проводке управления, допускающих сво-
бодное отклонение элерона под действием' инерционных сил, также
увеличивает У1фит.Фл-
Влияние некоторых параметров на Укрит.фл
С формой крыла в плане связано распределение массы крыла
по размаху, жесткость на кручение также зависит от формы крыла
в плайе.
Проведенные в ЦАГИ сравнительные расчеты показали, что
наименьшую критическую скорость флаттера имеет прямоугольное
крыло, а наибольшую — треугольное.
Удлинение крыла и стреловидность крыла
влияют на Укрит.фл через интенсивность нарастания су по а, кото-
рая характеризуется величиной ~ = tgy (см. фиг. 89) и обуслав-
da
ливает рост возмущающих сил.
Для крыльев малого удлинения, а также при большой стрело-
видности величина tgу сравнительно мала и Унрит.фл возрастает.
Число М полета также влияет на наклон кривой су по а
(на tgy). При дозвуковых скоростях с ростом Mtgy увеличивается
и Укрит.Фл падает; при сверхзвуковых скоростях с ростом М. tg у
уменьшается и Укрит.фл растет.
С увеличением высоты полета У1{рИт.фл растет, т. к. умень-
шение плотности воздуха р тормозит рост возмущающих сил.
252
1
!
4
8. МЕХАНИЗАЦИЯ КРЫЛА
Механизация крыла служит для увеличения его подъемной
силы, а в ряде случаев и для увеличения сопротивления. Некото-
рые типы механизации улучшают поперечную устойчивость и управ-
ляемость на больших углах атаки.
На возможность получения крыла с повышенной подъемной силой впервые
указал академик С. А. Чаплыгин еще в 1910 г. Он предложил сделать в крыле
несколько щелей, разрезающих его вдоль по размаху. На больших углах атаки
через щели проходят струи воздуха, которые сдувают пограничный слой на -
верхней поверхности крыла. Первые самолеты с механизированными крыльями ’
были построены в конце 20-х и начале 30-х годов. С 1935—1937 гг. механизиро-
ванные крылья стали устанавливать почти на всех самолетах.
Используется механизация крыла главным образом
ке и взлете самолета.
Применение механизации >при посадке позволяет
площадь крыла без увеличения посадочной скорости,
что ’величина посадочной скорости определяется формулой
т
л
при посад-
уменьшить
Известно,
(43)
I/ ==ц1/_2£—
и ПОС -Г I/ О ’
г су maxQO4^
где р — коэффициент, учитывающий влияние земли.
При ограниченной посадочной скорости Упос площадь крыла
может быть тем меньше, чем больше cvmax- Уменьшение площади
крыла позволяет уменьшить, и другие размеры самолета и таким
образом снизить общее лобовое сопротивление самолета, что при-
водит к увеличению максимальной скорости^
Кроме того, применение механизации повышает су на углах
атаки, меньших критического, соответствующих режимам разбега
и взлета. Это позволяет сократить длину разбега при взлете
и длину пробега после посадки.
Применение механизации при посадке позволяет также вслед-
ствие увеличения лобового сопротивления уменьшить пробег са-
молета после посадки.
Свойства некоторых видов механизации крыльев давать одно-
временно с ростом су и резкое увеличение сопротивления крыла,
т. е. понижение качества самолета, используются для увеличения
угла планирования.
Из аэродинамики самолета известно, что угол планирования 0 тем больше,
су 1
чем меньше качество К=—, так как tg 0 =“. Увеличение угла планирования 0
Сдг Л
• важно для расчета планирования перед посадкой, особенно при небольших раз-
мерах посадочной площадки и закрытых подходах к ней.
Кроме того, механизация может «тормозить» самолет в полете
для увеличения его маневренности (например, уменьшения ра-
диуса виража истребителей) или ограничения скорости. В этих
случаях механизация значительно увеличивает сх сам.
К механизации предъявляются следующие основные требова-
ния: возможно большее увеличение fymax, незначительное увели-
253
чение критического угла атаки (при котором су будет максималь-
ным), так как в противном случае для обеспечения посадки на ре-
жиме* су max потребуется большой посадочный угол атаки и очень
высокое шасси; малое перемещение центра давления крыла вдоль
ХОрдЫ — иначе применение механизации создаст значительные
продольные моменты, нарушающие балансировку самолета; ми-
нимальное ухудшение аэродинамики самолета при закрытой меха-
С у
низании, тФ е* в нормальном полете; максимальное значение ~
₽ сх
при частично использованной механизации для взлета.
Механизация должна отвечать также общим требованиям
упрощения самолетной конструкции, повышения надежности ее
действия и достижения малого веса.
Типы механизации. Классификация.
Имеются два основных типа механизации (фиг. 94).
1. Механизация, увеличивающая подъемную силу.
2. Механизация, увеличивающая только лобовое сопротив-
ление.
При первом типе механизации увеличение подъемной силы
обеспечивается:
а) изменением кривизны профиля;
б) управлением.пограничным "слоем (УПС);
в) комбинированными средствами: управлением пограничным
слоем с одновременным изменением кривизны профиля; изменени-
ем кривизны и увеличением площади крыла; изменением кривизны
профиля, увеличением площади крыла и УПС.
Изменение кривизны профиля достигается путем от-
клонения вниз всей хвостовой части крыла или только ее нижней
поверхности. В первом случае применяется закрылок (фиг. 94, а),
во втором — щиток (фиг. 94,6).
Вследствие увеличения кривизны возрастает подъемная сила
и сила сопротивления крыла, критический угол атаки несколько
уменьшается. На взлете закрылки и щитки отклоняются обычно
на 15-ь20°, при посадке — на 40-^50°.
Управление пограничным слоем осуществляется
сдуванием или отсасыванием его. При сдувании пограничного слоя
передняя часть крыла на участке размаха выполняется в виде от-
дельного агрегата — предкрылка, который в неотклоненном поло-
жении плотно прижат к крылу, а в отклоненном — образует с кры-
лом профилированную щель (фиг. 94, в). Поток, выходящий из
щели, при обтекании крыла на больших углах атаки обладает
большой скоростью, большой кинетической энергией и, будучи на-
правлен по касательной к верхней поверхности крыла, отодвигает
назад (сдувает) точку отрыва пограничного слоя. Это увеличивает
Сушах, а также акрит- Увеличение акРит усложняет применение пред-
крылков при посадке самолета, так как требует значительного
254
Механизация
крыла
Фиг 94 Классификация типов механизации.
255
увеличения длины ног шасси. Предкрылок иногда используют для
повышения «крит в полете (что улучшает противоштопорные харак-
теристики крыла), а также для улучшения работы элеронов на
больших углах атаки. В последнем случае предкрылок устанавли-
вается против элерона.
Различают фиксированные предкрылки, жестко связанные
с крылом, и автоматические предкрылки. Выдвижение автомати-
ческого предкрылка происходит под действием аэродинамических
сил, автоматически: на малых углах атаки крыла аэродинамиче-
ские силы прижимают предкрылок к крылу, на больших — наобо-
рот, отодвигают его впе-
ред от крыла (фиг. 95).
Отсасывание погра-
ничного слоя как само-
стоятельный тип механи-
зации применяется редко
ввиду конструктивной
сложности. Сущность
этого способа заключает-
ся в создании разрежения
Фиг 95. Силы, действующие на предкрылок
при разных углах атаки.
на верхней поверхности крыла с помощью отсасывания специаль-
ными вентиляторами пограничного слоя через щели в обшивке
(фиг. 94, а).
Комбинированные типы механизации представ-
ляют собой объединение в одном агрегате упомянутых выше типов.
Щелевой закрылок (см. фиг. 94, д) осуществляет увеличение
подъемной силы как путем увеличения кривизны профиля, так
и путем отсасывания пограничного слоя, благодаря наличию про-
филированной щели между крылом и закрылком. Выходящий из
щели с большой скоростью поток воздуха создает разрежение
в задней части профиля и, отсасывая пограничный слой, смещает
к задней кромке точку отрыва потока от крыла.
Щиток со скользящей осью вращения (см. фиг. 94, е) меняет
кривизну профиля, а также увеличивает площадь крыла.
Выдвижной закрылок* (см. фиг. 94, ж) представляет собой
профилированное крылышко, расположенное в задней нижней
части крыла. Закрылок обеспечивает изменение кривизны профиля,
увеличение площади крыла, а также «щелевой эффект», т. е. сме-
щение точки отрыва пограничного слоя к задней кромке. Выдвиж-
ные закрылки в настоящее время получили наибольшее распро-
странение. В целях дальнейшего повышения эффективности вы-
движных закрылков стали устанавливать на них дефлекторы
(предкрылки) (фиг. 94, з). Такой вид механизации получил назва-
ние двухщелевых выдвижных закрылков.
На современных сверхзвуковых самолетах с тонкими профиля-
ми крыльев и острой передней кромкой применяют отклоняющийся
* Закрылок Фаулера.
256
носок (фиг. 94, и). В неотклоненном положении острый носок при-
водил бы к срыву потока на больших углах атаки. При отклонении
вниз носок становится примерно по потоку, что затягивает срыв
потока и приводит К увеличению Сушах-
Так как отклоняющийся носок дает одновременно большое
увеличение акрит. то его целесообразно применять в комбинации
с закрылком.
Дальнейшее повышение эффективности механизации достигается примене-
нием закрылков со сдуванием пограничного слоя (фиг. 96, а) и реактивных за-
крылков (фиг. 96, б), находящихся в стадии исследования.
В этих случаях используется сжатый воздух от компрессора ТРД (ТВД)
или выхлопные газы.
Фиг. 96
Эксперименты показывают, что при сдувании пограничного слоя с отклонен-
ного вниз закрылка можно увеличить cvmax крыла в 2,5н-3,0 раза. Более рез-
кое увеличения подъемной силы крыла можно достичь с помощью «реактивного
закрылка», выпуская мощную струю газов через узкую щель, расположенную
вдоль размаха крыла у задней кромки, вниз, под углом к набегающему потоку
(фиг. 96,6). Однако для этого требуются большие расходы газа.
Сила реакции /? вытекающей струи увеличивает подъемную силу на R sin О
и тягу на R cos 0, где 0 — угол отклонения вниз реактивной струи.
Для увеличения эффективности механизации иногда на одном
самолете сочетают два типа механизации, например, предкрылок
и закрылок или отклоняющийся носок и выдвижной закрылок.
Эффективность каждого из средств механизации может быть
оценена отношением приращения Дсу вследствие механизации
К Сушахисх исходного профиля, т. е. величиной —~.
шах исх
Выразив это отношение в процентах, получим данные по эф-
фективности механизации *, приведенные в табл. 3.
Эффективность механизации зависит от доли размаха крыла,
занимаемого механизацией /ые1//> места расположения ее и относи-
тельной хорды элементов механизации Ьыех/Ь.
Механизация, расположенная в задней части крыла, занимает
60—70%' размаха крыла ** и находится между элеронами и фюзе-
ляжем.
* При размещении механизации по всему размаху крыла.
** Включая и подфюзеляжную часть крыла.
17 1563 257
Таблица 3
Средства механизации (см. фиг. 94)
Предкрылок в
Отклоняющийся носок и
Нещелевой закрылок а
Щиток б
Щелевой закрылок g
Щиток со скользящей осью вращения е
Выдвижной закрылок Фаулера ж
Двухщелевой выдвижной закрылок з
----*— 100%
max исх
55—65
50—60
65-75
75—85
85—95
85—95
110—130
130—150
Относительная хорда такой механизации составляет 204-30%
хорды крыла. Предкрылки размещаются чаще всего перед элеро-
нами. В этом случае они называются концевыми и занимают ЗО-н
45% размаха. Относительная хорда механизации, расположенной
в передней части крыла, составляет 104-15% хорды крыла.
Необходимо отметить, что с увеличением стреловидности крыла
эффективность механизации падает. Особенно это проявляется
у треугольных крыльев, для которых, в целях достижения прием-
лемой посадочной скорости, принимают малые удельные нагрузки
на крыло (см. разд. И).
Ко второй группе средств механизации, увеличивающих только
лобовое сопротивление самолета, относятся тормозные щитки (см.
фиг. 94, к). Назначением таких щитков является быстрое умень-
шение скорости самолета при горизонтальном полете и длины про-
бега после посадки.
Конструкция основных типов -механизации
Конструкция большинства типов механизации с точки зрения
строительной механики представляет собой опертую в несколь-
ких узлах крепления к крылу тонкостенную балку, нагруженную
аэродинамическими силами, вызывающими изгиб, сдвиг и кру-
чение ее.
Для воспринятия изгиба и сдвига в конструкции предусматри-
вается один-два лонжерона, на которых устанавливают узлы под-
вески и управления. Иногда узлы подвески ставят на усиленных
носках нервюр.
Для воспринятия кручения служит замкнутый контур обшивки,
или трубчатый лонжерон, или лонжерон, образующий вместе
с обшивкой замкнутый контур.
Рассмотрим конструкции некоторых типов механизации.
258
Предкрылок, изображенный на фиг. 97, состоит из лонже-
рона 1, переднего 2 и заднего 3 стрингеров, нервюр 4 и обшивки 5.
Все элементы конструкции предкрылка выполнены из тонкостен-
ных профилей и листов. На шарнирном четырехзвеннике, установ-
Фиг. 97. Предкрылок.
ленном в вертикальной плоскости, предкрылок выдвигается, не
перемещаясь вдоль крыла (по размаху).
На фиг. 98 показан отклоняющийся носок, состоящий
из стенки 1, нервюр 2, обшивки 3, узла подвески 4 и цилиндра
управления 5. Пунктиром показано отклоненное положение носка.
На фиг. 99 показана конструкция щитка.
Фиг. 98. Отклоняющийся носок.
Он состоит из лонжерона 1, разрезных нервюр 2, переднего стрингера 3
и заднего стрингера 4; с наружной стороны щиток зашит обшивкой. Лонжерон
является основным продольным элементом, к которому крепятся шарниры 6
для тяг-тапдеров отклонения щитка. Щиток подвешивается па крыло при помощи
петель 5, вклепанных в переднюю кромку.
На фиг. 100 показан выдвижной закрылок. При выпу-
ске и уборке закрылок 'Передвигается по направляющим стальным
рельсам на прикрепленных к нему каретках. Каждый из направ-
ляющих рельсов крепится к заднему лонжерону посредством двух
17*
259
подкосов. Передвижение закрылка по направляющим рельсам про-
изводится посредством подъемников-ходовых винтов с помощью
специальных гаек, связанных шарнирно с рычагами выдвижного
закрылка. При вращении ходовых винтов гайки перемещаются
и переводят закрылок в соответствующее положение. Ходовые вин-
ты приводятся в действие реверсивным электродвигателем, соеди-
ненным с ходовыми винтами трубчатым валом с коническими зуб-
чатыми колесами.
Фиг. 99. Щиток.
Конструкция закрылка подобна конструкции крыла и состоит
из двух лонжеронов, штампованных нервюр и дуралюминовой об-
шивки (см. сечения по А—А, В—В фиг. 100).
При взлете закрылок отклоняется приблизительно на 15—20°,
образуя щель с крылом; в этом случае значительно увеличивается
су при малом приращении сх.
При посадке закрылок отклоняется на 40—60° и выдвигается
назад, что дает возможность наряду с изменением кривизны про-
филя заметно увеличить несущую площадь крыла.
Двухщелевой закрылок или закрылок с дефлектором
показан на фиг. 101. Дефлектор жестко прикрепляется к носовой
260
части закрылка. Между дефлектором и закрылком имеется про-
филированная щель, улучшающая аэродинамику крыла при от-
клоненном закрылке.
В-В
Фиг. 100. Выдвижной закрылок.
На фиг. 102 показано устройство для сдувания тираничного
слоя с поверхности закрылка.
На фиг. 103 показан общий вид воздушного тормоза (тормоз-
ного щитка), установленного на крыле самолета.
261
Диафрагмы
Обшивка-
Дефлектор
Лонжерон
Нервюра
Убранное поло,-пение'
Стенки
Взлетное положение
Посадочное положение
Фиг. 101. Выдвижной двухщелевой закрылок.
Фиг. 102. Схема сдувания по-
граничного слоя с поверхности
закрылка.
/—распределительный воздухопро-
вод, 2—сборная камера, 3—насадок,
4—щель для выдувания воздуха.
262
Стремление использовать заднюю часть крыла для механиза-
ции, увеличивающей су, привело к тому, что конструкторы стали
Фиг. 103. Воздушный тормоз на крыле
устанавливать тормозные щитки в хвостовом отсеке фюзеляжа по
обеим его сторонам, а иногда на крыльях перед закрылками.
Нагрузки и расчет на прочность механизации
Величина расчетной воздушной нагрузки на щиток, закрылок
расч—«/о мех? мех>
(44)
где k — коэффициент пропорциональности, задаваемый нормами
прочности;
f — коэффициент безопасности;
5мех— площадь щитка, закрылка;
?мех — расчетный скоростной напор.
По размаху Ррасч распределяется пропорционально хордам
___ />расч h
*/расч о ^мех*
^мех
(45)
По хорде нагрузка распределяется по трапеции (для щитка)
или по треугольнику (для закрылка).
Рассмотрим, например, последовательность расчета выдвиж-
ного закрылка, опертого на двух рельсах.
Находим Ррасч по формуле (44) и ?расч по формуле (45). При
ЭТОМ МОЖНО принять Z?MCx^COnst = &*₽*"*•
Центр давления расположен в центре тяжести эпюры нагрузок
на хорде.
На закрылок действует воздушная нагрузка Ррасч> силы реак-
ции со стороны рельсов и Rs (заменяем их одной силой R),
а также сила S со стороны подъемника (фиг. 104,0, б).
263
Реакции на роликах А, В, которые считаем перпендикулярны-
ми поверхности рельса, дают равнодействующую R, проходящую
через точку От.
Реакция S направлена по подъемнику и пересекается с силой
Ррасч в точке О. Так как силы 3, РраСч и R находятся в равновесии,
то они пересекаются в одной точке — в точке О. Отсюда направле-
ние реакции пройдет через точки Oi и О. Строим замкнутый
Фиг. 104. К расчету закрылка.
треугольник сил, из которого находим величины S, R (фиг. 104, в).
Далее определяем составляющие Snf перпендикулярные хорде
закрылка, и в результате приходим к расчетной схеме, изображен-
ной на фиг. 104, а.
Там же изображены эпюры Q, МИаг
Q1 (/расчет 9расч^
м _ а а~- м __:а + ^)2
1изг Чрасч g ’ *3нзг Урасч
=R*,=?мс, («+*)+%=
264
Значение крутящего момента в середине пролета вычислим
определив положение центра жесткости как для сечения крыла,
Ррпсч ~
&
где г, е — плечи сил ^раСч и относительно центра жесткости
(см. фиг. 104, а).
Определение напряжений в сечении по найденным значениям
Q, Мизг, Л4кр принципиально не отличается от определения напря-
жений в сечении крыла.
Глава XIV
КОНСТРУКЦИЯ ОПЕРЕНИЯ
И РАСЧЕТ ЕГО НА ПРОЧНОСТЬ
1. НАЗНАЧЕНИЕ, ФОРМА И РАСПОЛОЖЕНИЕ ОПЕРЕНИЯ
Назначение оперения
К оперению самолета относятся: элероны; горизонтальное хво-
стовое оперение, состоящее из неподвижной (или ограниченно под-
вижной) поверхности — стабилизатора и подвижной — руля высо-
ты; вертикальное хвостовое оперение; состоящее из неподвижной
поверхности — киля и подвижной — руля направления.
На сверхзвуковых самолетах горизонтальное оперение обычно
выполняется цельноповоротным (без руля высоты).
Назначением оперения является обеспечение устойчивости
и управляемости самолета относительно всех трех осей.
Устойчивость есть способность самолета сохранять задан-
ный летчиком режим полета и возвращаться к нему, если самолет
выведен из него какой-либо внешней причиной.
Управляемостью самолета называется его способность,
отвечать на перемещения рулей соответствующими перемещениями
в пространстве.
Различают три вида устойчивости и управляемости: продоль-
ную— относительно оси z, путевую — относительно оси у и попе-
речную— относительно оси х (фиг. 105).
Продольная устойчивость самолета обеспечивается гори-
зонтальным оперением, а продольная управляемость — рулем вы-
соты. Так как эффективность рулей высоты на сверхзвуковых ско-
ростях полета уменьшается, то для повышения продольной управ-
ляемости самолета применяется цельнороворотное горизонтальное
оперение.
Путевая устойчивость обеспечивается вертикальным опере-
нием, а ’путевая управляемость — рулем направления.
265
Поперечная устойчивость самолета обеспечивается прида-
нием крылу поперечного V (см. гл. XIII, фиг. 3), а поперечная
управляемость — элеронами, отклоняющимися в противоположных
направлениях.
При полетах самолетов на больших высотах в условиях очень малой плот-
ности воздуха использование аэродинамических органов управления (рулей
высоты, рулей направления и элеронов) невозможно. В этих случаях для управ-
ления используют струйные рули (фиг. 106), которые устанавливаются на зна-
чительных расстояниях от центра тяжести самолета. Принцип действия струй-
ных рулей состоит в том, что из сопел выпускается струя газа с большой ско-
ростью, которая и создает необходимую реактивную силу для управления са-
молетом.
Общие требования, предъявляемые к оперению, можно сфор-
мулировать следующим образом: 1) эффективность при всех ско-
ростях и углах атаки; 2) малое лобовое сопротивление; 3) допу-
стимые усилия при управлении; 4) отсутствие вибрации; 5) доста-
точная прочность и жесткость при малом'весе; 6) при крене про-
извольные моменты рысканья * должны быть минимальными;
7) простота производства.
Выбор размеров оперения производится по статистическим коэф-
фициентам и проверяется расчетом устойчивости и управляемости
самолета.
Значения относительных площадей ^2- и ~2а также значения
относительных площадей рулей и элеронов (см. разд. II, стр. 130).
s S
Большие значения -^2- и меньшие значения -^2- принимаются
для стреловидных и треугольных крыльев.
* Относительно оси у. '
266
267
Хорда рулей составляет 0,35—0,45 хорды оперения. Размах
элеронов определяется из ~ 0,34-0,4; хорда элерона равна
примерно 0,25 хорды крыла.
Относительные толщины: сг 0 ~ сал ~ 3 8%.
Удлинения \,0~3-:-4,5 и Хв>0 «0,8-ь 1,2.
Сужения: 1г 0'^0 2,0 -3',0.
Фиг. 107. Интерцептор на крыле.
Схема действия интерцептора
В бесхвостых самолетах и в самолетах типа «летающее крыло» применяют-
ся элевоны, т, е. такие элероны, которые, кроме своей основной функции, выпол-
няют еще и функции руля высоты. ~ ,
Для поперечного управления применяются иногда интерцепторы, представ-
ляющие собой пластипки или щитки, расположенные на верхней поверхности
крыла. При выдвижении или отклонении интерцептора от поверхности (фиг. 107)
создается интенсивный срыв потока, понижение подъемной силы и поперечный
момент для управления самолетом.
Форма и расположение оперения
Горизонтальное и вертикальное оперения по своим внешним фор-
мам весьма близки к крылу (фиг. 108).
Отмеченные выше преимущества и недостатки различных форм
крыльев в равной мере относятся и к аналогичным формам опе-
рения.
Шайбы двухкилевого оперения часто делаются овальными,
эллиптическими. Профили оперения применяются тонкие симмет-
ричные, для сверхзвуковых самолетов — с заостренными носками.
Для улучшения характеристик на больших скоростях оперению
придается стреловидность, применяются треугольные оперения.
Профили рулей являются частью профиля хвостового оперения
и делаются также симметричными. Профиль элерона — несиммет-
ричный. Рекомендуемая ЦАГИ форма- профиля элерона показана
па фиг. 109.
Отклонение обоих элеронов всегда взаимно противоположно. Например, для
того чтобы накренить самолет влево, необходимо правый элерон отклонить вниз,
а левый — вверх (фиг. НО). У полукрыла с опущенным элероном увеличится
подъемная сила Уо 3, а у полукрыла с поднятым элероном она уменьшится
268
—Уи,о. Разность моментов подъемных сил создаст крепящий момент ЛЦ относи-
тельно оси ох, под действием которого самолет начнет вращаться в сторону под-
нятого элерона. '
При крене на большом*угле атаки изменяются и лобовые со-
противления. полукрыльев. Лобовое сопротивление полукрыла
с опущенным элероном Х0,э увеличится на большую величину, чем
Д/ $ У г)
Фиг. 108. Формы оперения.
а, б—прямое, в—стреловидное* г—треугольное.
лобовое сопротивление полукрыла с поднятым элероном Хпл.
Вследствие разности моментов лобовых сопротивлений полукрыль-
ев возникнет разворачивающий момент Му, который повернет
самолет в сторону полукрыла с опущенным элероном (см.
фиг. ПО), т. е. в сторону, противоположную крену. Для уменьше-
ния этого момента применяют элероны с формой профиля, пока-
занной на фиг. 109. При отклонении такого элерона вверх из обво-
да крыла выступает носок, который
увеличивает сопротивление этого полу-
крыла.
При отклонении элерона вниз щель
между элероном и крылом улучшает
обтекание элерона и несколько сни-
жает сопротивление крыла с опущен-
ным элероном. Благодаря этому раз-
ность сопротивлений полукрыльев
уменьшается, а следовательно, умень-
шается и разворачивающий момент.
Для уменьшения вредного момента
Фиг. 109. Профиль элерона.
при отклонении элеронов
применяется также дифференциальное управление элеронами, за-
ключающееся в том, что угол отклонения элерона вниз делается
меньшим (104-15°), чем угол отклонения элерона вверх (154-25°).
Это уменьшает сопротивление крыла с опущенным элероном, т. е.
уменьшает разность лобового сопротивления правого и левого
крыльев. Разность подъемных сил при этом примерно сохраняется.
269
Расположение оперения должно обеспечивать эффективность
его работы на всех возможных режимах полета. Это обеспечивает-
ся расположением горизонтального оперения по длине, по высоте
и взаимным расположением горизонтального и вертикального
оперений.
Расположение оперения по длине должно
Аго, Ав.о аэродинамических сил, действующих
тельно центра тяжести самолета.
обеспечить плечо
на оперение, относи-
Фиг. ПО.
Чтобы избежать вредного влияния спутной струи, сходящей
с крыла на больших углах атаки, горизонтальное оперение целе-
сообразно вынести из спутной струи (зоны завихренного потока)
вверх или вниз (см. фиг. 61, разд. 11)^
При расположении горизонтального оперения наверху верти-
кального уменьшается жесткость крепления горизонтального опе-
рения, т. е. увеличиваются деформации его под нагрузкой, услож-
няется конструкция узлов крепления (из-за малой базы крепления)
н увеличивается их вес. Однако при таком расположили горизон-
тального оперения существенно повышается эффективность вер-
тикального оперения.
Устранение затенения одного оперения другим (например, вер-
тикального оперения горизонтальным) достигается некоторым
смещением одного оперения относительно другого вдоль оси са-
молета. Это улучшает противоштопорные характеристики са-
молета.
В некоторых случаях применяется разнесенное (двухкилевое,
трехкилевое) вертикальное оперение (фиг. 111, 108,6).
270
Двухкилевое вертикальное оперение имеет перед однокилевым
некоторые преимущества:
1. Улучшение работы горизонтального оперения вследствие
снижения индуктивного сопротивления его;
2. Меньшая высота двухкилевого оперения сравнительно с одно-
килевым уменьшает плечо силы, действующей на вертикальное
оперение относительно оси фюзеляжа и момент, скручивающий
фюзеляж.
Фиг. 111. Разнесенное вертикальное оперение.
Наиболее существенными недостатками разнесенного верти-
кального оперения при фюзеляжной схеме самолета являются:
1) увеличение веса горизонтального оперения;
2) неблагоприятные изменения вибрационных характеристик
горизонтального оперения, сосредоточенные массы — шайбы на
концах стабилизатора уменьшают собственную частоту его ко-
лебаний.
Разнесенное вертикальное оперение устанавливается на само-
летах, выполненных по двухбалочной схеме, а иногда и на само-
летах обычной схемы с ПД.
Встречаются самолеты с горизонтальным оперением, имеющем большие углы
поперечного V (фиг. 112). В этом случае отпадает надобность в вертикальном
оперении.
Впервые V-образное оперение было построено и испытано в СССР в на-
чале 30-х годов конструктором Д. П. Григоровичем на самолете Р-5.
271
Такое оперение представляет собой две несущие поверхности, расположен-
ные наклонно по бокам хвостовой части фюзеляжа. Эти поверхности состоят из
неподвижной стабилизирующей части и подвижной—.рулей.
При отклонении рулей в одну сторону (только вверх или только вниз) они
действуют как рули высоты (фиг. 112,6). Возникающие при этом дополнительные
аэродинамические силы дают вертикальную составляющую У и горизонталь-
ную Р. Горизонтальные составляющие взаимно уравновешиваются, а верти-
кальные направлены в одну сторону и создают продольный момент самолета
относительно оси Ог.
При отклонении рулей в разные стороны они действуют, как рули направ-
ления (фиг. 112,6). В этом случае горизонтальные составляющие Р направлены
в одну сторону и создают момент относительно оси Оу. Вертикальные состав-
Фиг. 112. V-образное оперение.
ляющие У направлены в разные стороны, дают пару сил, кренящую самолет,
которая парируется элеронами. Значительные моменты, закручивающие фюзеляж,
сложность кинематики управления и конструкции узлов крепления к фюзеляжу,
обусловили ограниченное применение такого оперения.
Обеспечение требуемой эффективности горизонтального опере-
ния на сверхзвуковых скоростях достигается путем замены руля
высоты цельноповоротным горизонтальным оперением. На некото-
рых сверхзвуковых самолетах применяется также цельноповорот-
ное вертикальное оперение.
При дозвуковых скоростях отклонение руля высоты изменяет распределение
давления по всей поверхности горизонтального оперения (фиг. ИЗ, а).
Снижение эффективности руля высоты при М>1 объясняется тем, что воз-
мущения (изменения давления), вызываемые его отклонением, не выходят за
область скачка давления {тки) (фиг. 113,6) и таким образом не достигают
стабилизатора. Следствием этого является то, что'отклонение руля не оказывает
влияния на перераспределение давления по стабилизатору и увеличение его аэро-
динамической силы.
Элероны располагаются по задней концевой части крыла,
вследствие чего увеличивается их плечо до оси хх (см. фиг. 105)
самолета. Они несколько не доходят до конца крыла, что предот-
вращает срыв потока с конца крыла при отклонении элерона.
272
При длинных элеронах изгиб крыла может привести к тому,
что оси шарниров, подвески элерона не будут лежать на одной пря-
Фиг. 113.
мой, что может вызвать заклинивание элерона. Для устранения
этого явления элерон разделяют на несколько независимых, от-
дельно подвешенных, но синхронно работающих частей.
2. МЕРЫ, УМЕНЬШАЮЩИЕ ДАВЛЕНИЕ НА РУЧКУ (ПЕДАЛИ)
Аэродинамическая компенсация
При управлении самолетом летчик прикладывает к ручке
штурвалу, педалям) усилия, которые возрастают по мере откло-
нения рулей.
Эти усилия можно определить из условия равенства работ; ра-
бота летчика равна Pdx, где Р— сила, приложенная летчиком
к ручке (педали), dx— элементарное* перемещение ручки (педа-
ли) в направлении силы Р.
Работа аэродинамических сил, преодолеваемых летчиком при
повороте руля, равна
Mmdd,
где — шарнирный момент (момент аэродинамических сил от-
носительно оси шарниров); dd— элементарное угловое перемеще-
ние руля (фиг. 114)
(46)
и
Р=МЯ^-. (47)
dx
Величина называется передаточным числом управления,
dx
При росте скорости полета и при увеличении размеров само-
лета шарнирные моменты, а вместе с ними и усилия на ручке,
штурвале и педалях управления будут интенсивно возрастать,
вследствие чего управление самолетом станет невозможным.
* На конечном перемещении х величина Р не постоянна, поэтому рассматри-
ваем перемещение dx.
18 1563 273
/
Усилие Р можно уменьшить применением аэродинамиче-
ской компенсации рулей. Ее действие основано на том,
что относительно шарниров рулей создается момент обратного
знака.
Фиг. 114.
Роговой компенсатор представляет собой часть рулевой поверхности,
вынесенной перед осью вращения и расположенной у края рулей (фиг. 115).
Нагрузка, действующая на компенсатор, дает относительно оси вращения момент,
знак которого противоположен знаку момента нагрузки на основную часть руля.
Фиг. 115. Роговая и осевая компенсации.
Недостатком роговой компенсации является ее расположение у края руля,
что, из-за образующейся при отклонении руля щели, вызывает значительные за-
вихрения и увеличение лобового сопротивления. Тем не менее, ввиду простоты
конструкции, роговые компенсаторы иногда применяются на самолетах.
274
Осевая компенсация представляет собой часть рулевой
поверхности, расположенной впереди оси вращения по всей длине
руля или по ее части (фиг. 115).
Площадь осевой компенсации составляет 10-=-25% площади
руля. Дальнейшее увеличение площади компенсаторов быстро
приводит к 100%-ной компенсации (равенство моментов руля
и компенсатора) и даже к «перекомпенсации», которая недопусти-
ма, так как крайне затрудняет управление.
Ч 3 Конпенсатор 2
Ь ЭЛ
«)
Фиг. 116, Внутренний компенсатор элерона.
1—камеры, 2—щели, 3—*прорезнненная ткань, 4-~стенка лонжерона
крыла.
г
Внутренний компенсатор. Этот вид компенсации при-
меняется преимущественно для элеронов и представляет собой
осевой компенсатор большой относительной величины, помещенный
в камеру 1 с узкими щелями 2 (фиг. 116, а). Камера 1 разделена
герметической гибкой перегородкой 3, прикрепленной с одной сто-
роны к носку элерона, а с другой — к стенке 4 камеры (продоль-
ной стенке или стенке лонжерона). Носок элерона не обтекается
потоком, как при осевой компенсации, а находится под действием
разности статических давлений, которые устанавливаются на дан-
ном режиме полета в обеих полостях камер (фиг, 116,6). Для
необходимой степени компенсации площадь компенсатора прихо-
дится делать до 40% от площади элерона, что уменьшает диапа-
зон углов его отклонения. Преимуществом подобного типа компен-
сации является ничтожный прирост лобового сопротивления кры-
ла, так как при отклонении элерона носок компенсатора не выхо-
дит за очертания профиля крыла.
18*
275
Сервокомпенсатор представляет собой часть поверхно-
сти руля у задней кромки (фиг. 117), отклоняющейся в зависимо-
сти от отклонения руля при помощи тяги, соединенной с неподвиж-
ной частью оперения (килем или стабилизатором).
Сервокомпенсатор 1 имеет рычаг 2, который тягой 3 соеди-
нен с неподвижным кронштейном 4. Шарнирный четырехзвенник
abed при отклонении руля меняет свою конфигурацию, причем
Фиг. 117. Сервокомпенсаторы,
/—сервокомпенсатор, 2— рычаг сервокомпенсатора, 3—тяга, —кронштейн.
сервокомпенсатор поворачивается в сторону, противоположную по-
вороту руля. На руле образуется момент Ph, а на сервокомпенса-
торе момент Р[Н обратного знака.
Площадь сервокомпенсатора составляет 6—8% площади руля.
Сервокомпенсатор имеет недостатки:
1) уменьшение эффективности руля, так как сила, развиваю-
щаяся на компенсаторе, противоположна силе на основном руле;
2) наличие сервокомпенсатора может стать источником виб-
рации.
Из-за этих недостатков сервокомпенсаторы обычно применяют
в сочетании с осевой компенсацией.
Средства балансировки
В отличие от аэродинамической компенсации, автоматически,
без вмешательства летчика, уменьшающей усилия на ручке, имеют-
ся средства, с помощью которых летчик по своему желанию может
«снять» усилие с ручки (педалей). Такие средства называются ба-
лансировочными. Необходимость пользования ими возникает при
длительном полете на установившемся режиме. К средствам ба-
лансировки относятся изменение угла установки стабилизатора и
триммер.
276
Изменение угла установки стабилизатора служит только для
продольной балансировки самолета (относительно оси г). Одно из
креплений стабилизатора (заднее на фиг. 118) сделано шарнир-
ным, а другое соединено с механизмом, перемещающим его по вер-
тикали, что обеспечивает перестановку стабилизатора в нужном на-
правлении.
Пусть, например, необходимо снять усилие с ручки управления при откло-
ненном вверх руле высоты 2> создающем на оперении отрицательную силу
—Pro (сплошные линии на фиг 118,6). Тогда с помощью подъемника 3,
поворачивающего рычаг 4 н серьгу 5, стабилизатору 1 придается меньший
угол установки (пунктир на фиг. 118,6). При этом необходимая для
балансировки сила —Рг о создается за счет уменьшения угла атаки
стабилизатора, а руль высоты займет положение, соответствующее нулевому
усилию на ручке
Триммер (фиг. 119) отличается от описанного ранее серво-
компенсатора (см, фиг. 117) тем, что он имеет самостоятельную
систему управления и при отклонении рулей сохраняет неподвиж-
ное положение по отношению к рулям. Отклонение триммера соз-
дает шарнирный момент, обратный шарнирному моменту руля, и
таким образом удерживает руль в отклоненном положении, т. е.
как бы заменяет действие руки летчика.
Триммер устанавливается на руле высоты, руле направления
и элероне, площадь его составляет 4ч-8% площади руля или
элерона. Триммер используется также и для других целей.
Например, на самолетах с двумя и несколькими двигателями
при помощи триммера отклоняют руль направления для
гашения момента, появляющегося при остановке одного из
двигателей; с помощью триммера элерона гасят реактивный
момент винта.
Как известно, при вращении винта возникает реакция отбрасываемых вин-
том масс воздуха, отклоняющая самолет в сторону, противоположную вращению
винта. При соответствующем отклонении триммера элерона на крыле создается
увеличенная подъемная сила, которая противодействует крену.
Следует отметить, что реактивный момент винта на самолетах с одним дви-
гателем удобно гасить также с помощью соосных винтов (двух винтов, вра-
щаемых специальным редуктором в противоположных направлениях), а на са-
молетах с несколькими двигателями — применением двигателей с разным направ-
лением вращения винтов.
Функции триммера, как средства балансировки, и сервокомпен-
сатора, как средства аэродинамической компенсации, могут быть
объединены в одном агрегате — траммер-сервокомпенсаторе
(фиг. 120). Схему его получают из обычной схемы сервокомпен-
сатора (см. фиг. 117), в которой шарнир b делают передвиж-
ным вдоль хорды и управляемым. При фиксированном
положении шарнира b и отклонении руля триммер-сервокомпен-
сатор работает как сервокомпенсатор; при перемещении шар-
нира b и неподвижном руле он работает как триммер При
одновременном перемещении шарнира b и руля триммер-серво-
компенсатор может получить большое отклонение, что снижает
его эффективность.
277
оо
Фиг 118 Изменение угла установки стабилизатора.
{—стабилизатор, 2—руль высоты, Я—подъемник, 4—рычаг, 5—серьга<
ю
3. ВИБРАЦИИ 0ПЕРЕНИЯ1 РЕВЕРС ЭЛЕРОНОВ
«Бафтинг» оперения
Вибрации типа «бафтинг» представляют собой колебания опе-
рения, вызванные завихренным потоком, срывающимся с крыла,
фонаря кабины, гондол двигателей и других, расположенных впе-
реди, обтекаемых потоком частей. Это явление возникает чаще
всего на больших углах атаки, т. е. на малых скоростях полета.
Такой «бафтинг» называется нескоростным. Вихри, срывающиеся
с крыла периодически, через малые промежутки времени создают
пульсирующий поток, который, попадая на оперение, вызывает
воздушные удары (фиг. 121). Особенно опасен «бафтинг» в случае
Фиг. 121. «Бафтинг» оперения.
совпадения частоты воздушных ударов с собственной частотой
колебаний оперения. В этом случае имеет место явление резонан-
са, т. е. колебания будут совершаться со все возрастающими
амплитудами. Но и при отсутствии резонанса удары могут быть
достаточно сильными.
На больших скоростях полета при неблагоприятном располо-
жении оперения возможен скоростной «бафтинг», который вызы-
вается нарушением плавности обтекания крыла из-за возникнове-
ния скачков давления (так называемый волновой срыв потока).
В результате этого позади крыла образуется завихренный поток.
Попадая на оперение, вихри вызывают сильную тряску его.
Мерами устранения «бафтинга» являются:
I) вынос оперения из области завихренного потока позади кры-
ла. Для этого горизонтальное оперение следует или высоко под-
нять, или низко опустить;
2) устранение причин, вызывающих завихренный поток.
На срыв потока в корневой части крыла очень сильно влияет
характер сопряжения крыла с фюзеляжем. Правильно выполнен-
ные зализы имеют существенное значение для устранения «баф-
тинга».
Флаттер оперения
Флаттер представляет собой незатухающие упругие колеба-
ния горизонтального и вертикального оперения в полете, возникаю-
щие при достижении некоторой скорости, зависящей от характе-
ристик конструкции оперения.
280
Флаттер оперения возникает в основном по тем же причинам
и подчиняется тем же закономерностям, что и флаттер крыла.
Поэтому предупреждать его следует теми же мерами в отношении
аэродинамики, жесткости и распределения масс, что и флаттер
крыла.
Различают изгибно-рулевой флаттер (изгиб фюзеляжа с отклонением ру-
лей) и крутильно-рулевой флаттер (кручение фюзеляжа с отклонением рулей)
оперения.
Причина возникновения этих форм флаттера заключается в том, что
собственный вес руля, создавая момент относительно шарнира вращения при
случайно начавшемся колебании, дает инерционную силу и момент, вращающий
руль. Так как подвески руля и проводка управления не абсолютно жестки,
то руль отклоняется и создает аэродинамическую силу, действующую по ходу
уже возникших колебаний. Так возникает периодическая сила, вызывающая
флаттер.
Для предотвращения флаттера оперения аналогично сказанному
в гл. XIII применяют весовую балансировку (компенсацию) рулей
(см. фиг. 93 гл. XIII).
Реверс элеронов
Реверсом элеронов называется явление потери эффективности
элеронов или обратное действие их при достижении самолетом
критической скорости VKp реверса.
Рассмотрим прямое крыло. При отклонении элерона, например
вниз (фиг. 122, а), соответствующая половина крыла получит при-
Фиг, 122. Схема реверса элерона.
ращение подъемной силы на величину ДУЭ. Сила ДУЭ на крыле
с опущенным элероном будет приложена позади центра жесткости
сечения крыла (см. фиг. 122, а). При таком расположении сила
ДУЭ на плече d до центра жесткости даст некоторый момент, кото-
рый будет закручивать его, в данном случае уменьшать угол атаки.
Это вызовет уменьшение подъемной силы крыла.
Таким образом отклонение вниз элерона не только увеличивает
подъемную силу, но одновременно и уменьшает ее.
1
281
Приращение подъемной силы крыла вследствие отклонения эле-
рона зависит от угла отклонения элерона 6Э и квадрата скорости
полета
ДУэ = МэУ2.
Уменьшение подъемной силы крыла вследствие закручива-
ния его
ДУа=£кДаУ2,
где да _ изменение угла атаки,
Аэ. — коэффициенты пропорциональности.
Так как при данной жесткости величина Да зависит от ДУЭ, т. е. от
квадрата скорости, то ДУ« зависит от скорости в четвертой степени.
г Отсюда следует, что падение ДУа
с ростом скорости опережает
рост ДУЭ. Это иллюстрируется
графиком на фиг. 123.
В результате с ростом ско-
рости полета уменьшается об-
щий прирост подъемной силы,
создаваемый отклонением эле-
рона, т. е. эффективность эле-
рона убывает.
При достаточно большой ско-
рости полета и недостаточной
жесткости крыла на кручение, весь прирост подъемной силы, созда-
ваемый отклонением элерона, поглощается уменьшением подъем-
ной силы ввиду закручивания крыла, т. е. —ДУа=ДУ0. Эффектив-
ность элерона станет нулевой, а скорость полета достигнет вели-
чины критической скорости реверса (см. фиг. 123).
При дальнейшем росте скорости подъемная сила на крыле
с опущенным элероном будет уменьшатося, что вызовет обратный
крен самолета в сторону опущенного элерона. При отклонении
элерона вверх картина явления подобна рассмотренной (см.
фиг. 122,6).
Мерой предотвращения реверса элеронов нестреловидного кры-
ла является-увеличение жесткости конструкции крыла на кру-
чение.
Стреловидные крылья обладают меньшей критической ско-
ростью реверса, чем прямые крылья. Это объясняется тем, что
изменение углов атаки у стреловидных крыльев происходит не
только за счет закручивания крыла, но и за счет его изгиба.
Рассмотрим деформацию стреловидного крыла при изгибе
(фиг. 124). Линия центров жесткости (ось г) в деформированном
положении показана на фиг. 124 пунктиром. Спроектируем на эту
ось точки 1 и 2 хорды фактического обтекания, по которой опреде-
ляется угол атаки. Очевидно, что точки 1' и 2', изображающие
деформированное положение точек 1 и 2, переместятся от началь-
282
ного положения на различную величину. Так как у2'>у1, то следо-
вательно, хорда /—2 повернется относительно набегающего потока
на некоторый угол Аси, в сторону уменьшения угла атаки (при из-
гибе крыла вверх, фиг. 124, б). Таким образом, для стреловидных
крыльев увеличение ДУЭ вызывает уменьшение ДУ не только от кру-
чения, но и от изгиба.
Фиг. 124.
Изменение угла атаки при изгибе будет тем больше, чем больше
стреловидность и удлинение крыла и чем меньше относительная
толщина профиля (в последнем случае уменьшается момент инер-
ции сечения крыла).
Таким образом, мерой предотвращения реверса элеронов (по-
вышения У1;р реверса) стреловидного крыла является увеличение
жесткости его на кручение и на изгиб.
Необходимо отметить, что на околозвуковых и сверхзвуковых
скоростях эффективность элеронов понижается также вследствие
влияния сжимаемости (появления скачков давления). Поэтому на
ряде самолетов в дополнение к элеронам устанавливаются интер-
цепторы.
4. КОНСТРУКЦИЯ ОПЕРЕНИЯ
Оперение самолета с точки зрения строительной механики пред-
ставляет собой балки, опертые или закрепленные на фюзеляже
и нагруженные аэродинамическими силами, вызывающими изгиб,
сдвиг и кручение этих балок. Сходство внешних форм оперения
и крыла, а также сходство нагружения приводят к тому, что си-
ловые схемы и назначение элементов оперения и крыла являются
сходными. Отсюда и конструкция элементов оперения весьма по-
хожа на конструкцию элементов крыла. При классификации кон-
структивных схем оперения и его элементов можно воспользоваться
классификацией и терминологией, разработанными для крыла
283
и его элементов. Исходя из этого описание конструкции элементов
оперения изложено кратко. Более подробно рассматриваются от-
личительные особенности конструкции элементов оперения.
1 Стабилизаторы. Кили
Силовые схемы стабилизатора и киля состоят из продольного
набора (лонжероны, стрингеры), поперечного набора (нервюры
обычные и усиленные) и обшивки. Изгиб воспринимается поясами
лонжеронов, стрингерами и частично обшивкой; поперечная сила
воспринимается стенками лонжеронов; кручение воспринимается
замкнутым контуром: обшивка — стенки лонжеронов.
Конструкции стабилизаторов и килей делают двухлонжеронны-
ми и кессонными.
При малых нагрузках на оперение (у небольших самолетов, при
малых удлинениях оперения), когда толстая часто подкрепленная
обшивка может оказаться недогруженной, целесообразно приме-
нять лонжеронные схемы. У больших самолетов стабилизаторы,
кили выполняются преимущественно кессонными. Наличие заднего
лонжерона в этих схемах позволяет сравнительно просто осущест-
вить подвеску рулей. В местах установки узлов подвески рулей ста-
вятся усиленные нервюры.
Стабилизаторы небольших самолетов часто выполняются не-
разъемными по размаху. В этом случае стабилизаторы крепятся
к фюзеляжу на четырех узлах — по два узла на каждом из двух
лонжеронов. Кили иногда выполняют за одно целое с фюзеляжем,
однако чаще делают отъемными.
Конструкции неразъемных стабилизаторов и килей по сравне-
нию с разъемными получаются более простыми и имеют меньший
вес. Разъемы по размаху стабилизатора бывают в плоскости сим-
метрии и у борта фюзеляжа.
Способы стыковки стабилизаторов в месте разъема аналогичны
способам стыковки крыльев и зависят от конструктивной схемы:
лонжеронные стабилизаторы соединяются по разъему стыковыми
узлами; кессонные — по контуру.
На фиг. 125 показана конструкция стреловидного кессонного
стабилизатора самолета Ту-104 с разъемом по бортам фюзеляжа.
Отъемные части стабилизатора стыкуются с помощью угольников 3 и фи-
тингов на лонжеронах к центральной части 1, вмонтированной в фюзеляж.
В месте «излома» лонжеронов в плане ставится мощная бортовая нервюра 4.
Крепление стабилизатора к фюзеляжу осуществляется двумя передними 13
и двумя задними узлами, расположенными на отъемных частях стабилизатора
(см. фиг. 125J.
Крепление кронштейнов подвески рулей и соединение нервюр
с лонжероном показано на фиг. 126.
На самолете Ту-104, как и на некоторых других самолетах,
предусмотрено регулирование угла установки стабилизатора на
земле, что может оказаться необходимым, например, при различных
вариантах загрузки самолета: если при одном варианте самолет
284
сбалансирован на каком-либо угле атаки, то при другом варианте
может потребоваться отклонение рулей и приложение значитель-
ного усилия на ручке, чего можно избежать путем изменения у; ла
установки стабилизатора.
Угол установки стабилизатора регулируется на земле через
каждые 0,5° посредством различного сочетания отверстий в перед-
фиг. 125. Конструкция стреловидного кессонного стабилизатора.
/—центральная часть стабилизатора, 2—съемный носок, ^—стыковые уголь-
ники, 4—опорная нервюра, 5—передний лонжерон, 6—нервюра, 7—концевой
обтекатель, кронштейны подвески руля высоты, 9—хвостовая часть,
10—диафрагмы, 11—кронштейн карданного вала, 12—карданный вал,
13— кронштейн, /4—лонжерон, /5—'отверстия для стыковки стабилизатора
с фюзеляжем и изменения угла установки стабилизатора, 16—накладка,
17—профиль, 18—стыковочный угольник.
них узлах соединения стабилизатора с фюзеляжем (см. фиг. 125,6).
При этом стабилизатор поворачивается относительно точек крепле-
ния на заднем лонжероне.
Возможны лонжеронные конструкции стреловидных стабилиза-
торов с внутренним подкосом, аналогично описанным в гл. ХШ
конструкциям крыльев (см. фиг. 22), Иногда, удовлетворяя требо-
ваниям аэродинамики, горизонтальное оперение располагают на
киле (фиг. 127).
Разъем стабилизатора в этом случае осуществлен по плоскости
соприкосновения с килем.
285
Отсутствие рулей высоты упрощает конструкцию цельноповорот-
ного горизонтального оперения. Однако наряду с этим некоторое
усложнение конструкции вносит наличие оси, относительно которой
поворачивается оперение, и необходимость заделки ее. Вращение
каждой половины оперения осуществляется либо на оси, жестко
закрепленной в фюзеляже (фиг. 128, а,б), либо на оси, жестко
закрепленной в оперении (фиг. 128, в, г).
На фиг. 128, а показана конструкция однолонжеронного цельно-
поворотного горизонтального оперения.
Фиг. 126. Узел соединения нервюр с лонжероном.
/—нервюра, 2—задний лонжерон, силовая нервюра, кронштейн под-
вески руля высоты, 5—фитинг, 6— компенсатор, 7—«стойка нервюры, 5—пояса
нервюры*
Заделка оси здесь осуществлена с помощью шкворня, который
крепится в фюзеляже в точках А и В. В бортовой нервюре опере-
ния, а также в усиленной нервюре размещаются подшипники. От-
клонение оперения производится с помощью рычага, крепящегося
к бортовой нервюре. В целях уменьшения усилий для управления
ось располагается вблизи линии центров давлений, соответствую-
щих эксплуатационному режиму самолета (т. е. примерно на
^^^сахг.о^я сверхзвуковых скоростей). Схема нагружения опере-
ния представлена на фиг. 129. Изгибающий момент от вертикаль-
ных нагрузок (от подъемной силы и массовых сил) воспринимается
лонжероном и частично продольным набором с обшивкой. При
этом оперение работает как балка, опертая на ось в подшипниках
C\D. Нагрузки, передающиеся на ось, изгибают ее в вертикальной
286
плоскости как консольную балку, защемленную в узле А
(фиг. 129, а).
Изгибающий момент от лобовых нагрузок (от силы сопротивле-
ния) воспринимается лонжероном и передней стенкой. Через под-
шипники С и D эти нагрузки передаются на ось, изгибая ее в гори-
зонтальной плоскости как балку, опертую в точках А * и В
(фиг. 129,б).,При этом шкворень также изгибается. Крутящий мо-
Фиг. 127. Общий вид стреловидного оперения.
мент нагружает замкнутый контур, образованный обшивкой, лон-
жероном и стенкой, и передается на бортовую нервюру, где урав-
новешивается усилием, приложенным к рычагу. Последнее нагру-
жает изгибом в вертикальной плоскости ось на участке DA. В этом
случае узел А представляет собой заделку (фиг. 129, в).
На фиг. 130 показана кессонная конструкция стреловидного
киля самолета Ту-104, Конструкция его подобна описанной выше
конструкции стабилизатора этого самолета.
* Вертикальный шарнир в точке А не является заделкой для лобовых
нагрузок.
287
У
i
3
£
Фиг, 128. Конструкция цельноповоротного горизонтального оперения
<=
a
288
Рули. Элероны. Триммеры
Рули и элероны однотипны с точки зрения строительной меха-
ники и представляют собой балки, опертые в узлах подвески и на-
груженные аэродинамическими силами. Момент аэродинамических
сил относительно оси вращения (шарнирный момент Л1ш) уравно-
вешивается моментом, создаваемым усилием в тяге управления.
Таким образом, рули и элероны также подвержены изгибу, сдвигу
и кручению. Основными силовыми элементами их являются лон-
жерон (реже два), нервюры, обшивка и иногда стрингеры.
Фиг. 129.
Лонжерон представляет собой тонкостенную балку швеллерно-
го или двутаврового сечения, которая воспринимает изгиб и попе-
речную силу. Для восприятия кручения в конструкцию вводится
достаточно жесткая обшивка носка, образующая совместно с лон-
жероном замкнутый контур *.
Конструкция руля высоты стреловидного оперения тяжелого са-
молета показана на фиг. 131.
Лонжерон 1 двутаврового сечения в корне руля соединяется с трубой 2,
заканчивающейся карданной вилкой, с помощью которой осуществляется соеди-
нение половины руля с карданным валом. Набор штампованных нервюр состоит
из носков 3 и хвостиков 4. Подвеска каждой половины руля осуществляется
на узлах 3, приклепанных к лонжерону и нервюре. Руль высоты имеет весо-
вую балансировку, аэродинамическую осевую компенсацию и триммер.
Подвеска и управление стреловидных рулей высоты отличаются
некоторыми особенностями (фиг. 132). Часто управление рулями
высоты, оси вращения которых находятся под углом, осуществляет-
ся рычагом, отклоняющимся в плоскости симметрии самолета, что
требует применения взаимно перпендикулярных шарниров-карда-
нов 1 в месте соединения лонжеронов оулей 2 с рычагом 3
(фиг. 132, а).
* В прошлом применялись трубчатые лонжероны, воспринимающие изгиб,
кручение и поперечную силу.
19 1563 289
Узел 4
Фиг. 130, Конструкция стреловидного кессонного киля.
290
Угловое вращение рычага 3 относительно оси 4 может быть, как
известно из механики, представлено вектором G. Оно раскладывает-
ся на два вращения: относительно оси вращения половины руля
(изображаемое вектором 01) и относительно оси кардана А (изо-
бражаемое вектором 62, фиг, 132, б).
1
4
Фиг, 131 Конструкция руля высоты
/—лонжерон, 2—труба, 3—носок нервюры, 4—хвостик нервюры, 5—балочьа, б—гр>з, 7—кон-
цевой профиль, 8— узел подвески руля
Аналогичное разложение вращения имеет место и для другой
половины руля высоты, в результате чего обе половины руля пово-
рачиваются относительно пересекающихся осей.
На фиг. 133 показана конструкция узла соединения двух поло-
вин стреловидного руля высоты для случая, когда горизонтальное
оперение расположено на фюзеляже*
19*
291
Применение малых относительных толщин профилей для опере-
ния обусловило целесообразность использования при осуществле-
нии конструкции рулей специальных заполнителей.
На фиг. 134 показана однолонжеронная конструкция элерона
с заполнителем.
Конструкция одной из частей разрезного по длине элерона
с внутренней компенсацией показана на фиг, 135.
Каркас состоит из двутаврого лонжерона Л носков 2 и хвостиков 3, нервюр
и задней стенки 4. Часть носка элерона, расположенная перед осью вращения,
представляет собой внутреннюю аэродинамическую компенсацию. По передней
Фиг. 132. Схема карданной подвески стреловидного руля высоты,
/—карданы, 2—лонжероны, 3—рычаг. 4—ось.
кромке прикреплена прорезиненная ткань 5, которая крепится к задней стенке
крыла, образуя внутри хвостовой части крыла две герметически разделенные
камеры.
На передней кромке расположены балансировочные грузы б. Элерон подве-
шивается к крылу с помощью узлов 7, 8 и управляется рычагом 9, который при
отклонении не выступает за контур крыла.
В носке рулей делают вырезы для расположения кронштейнов
подвески, тем самым уменьшается в данном сечении жесткость
на кручение руля. В этих сечениях необходимо конструкцию
усилить подобно тому, как это показано на фиг. 136.
Подвеска руля или элерона осуществляется при помощи сфери-
ческих шариковых подшипников, которые устанавливаются в не-
скольких местах по длине. Количество шарниров определяется дли-
ной руля или элерона.
Для обеспечения взаимозаменяемости рулей и элеронов приме-
няют подвеску шарниров на ориентирующихся по размаху крон-
штейнах (фиг. 137). При этом для предотвращения смещения руля
или элерона вдоль оси вращения один из шарниров крепится на
неориентирующемся кронштейне. Такая подвеска упрощает монтаж
и демонтаж руля.
Конструкция триммера показана на фиг. 138.
292
Фиг. 133, Узел соединения двух половин руля высоты.
7—руль высоты, 2—триммер, 3—вилка патрубка, 4—кулиса, 5—вилка карданного
вала, б—карданные валы, 7—рычаг управления рулем высоты, 8—кронштейны
карданного вала, 5—узел стыковки стабилизатора с фюзеляжем, /0—лонжерон
i
Фиг. 134. Элерон с
заполнителем.
/—лонжерон, 2—нервюра.
<?—заполнитель, -/—об-
шивка, 5—законцовка.
293
4
Узел А
Сечение А-А
ю
Узел Б
Ю
Фиг. 135 Конструкция
8~
к>
to
СЛ
элерона.
/—лонжерон 2—носок нервюры, 3—хвостик нервюры, ^—задняя стенка. 5—ткань, 6—груз,
j , L j /й—узел подвески триммера.
К
со
я
•о
о
Q
&
я
Г)
о
о?
<D
W
о
я
S
г
о
0J
rt>
п
я
S
с*
р
и
ta
Е
о
о
н
tr
«ЛСс
О
h
о
*о
а
о
*и
Vi bS
О о>
*
Е
йа
•о
я
я
XJ 5
’ ia
<*2
© -
н
и
я
я
7,
Я—узлы
с?
о
п>
я
£
о
*ъ
tx*
Ь5
подвески эперопа, 5—рычаг управления,
о
а
п
О
со
о
г
Сз
Хс
*
1
д-д
I I
Фиг, 138. Триммер.
5. РАСЧЕТ ОПЕРЕНИЯ НА ПРОЧНОСТЬ
Внешние нагрузки. Расчетные схемы
Во время полета самолета на оперение действуют аэродинами-
ческие силы, причем их величина и характер действия зависят от
режима полета. В нормах прочности предусматриваются расчетные
(наиболее тяжелые и характерные) случаи.
В большинстве расчетных случаев эксплуатационные нагрузки
на оперение определяются по формулам, полученным в результате
теоретических и летных исследований и приведенным в нормах
прочности самолетов.
Например, в установившемся криволинейном полете нагрузка
на горизонтальное оперение (называемая уравновешивающей на-
грузкой) устанавливается из условия равенства моментов сил от-
носительно центра тяжести самолета, действующих на горизон-
тальное оперение и на самолет без горизонтального оперения
M,r.„==M2(S.r.o.
Тогда
Pr.o = nizqS , (48)
7т.о
где т’г — коэффициент момента самолета относительно его центра
тяжести, определенный для данного расчетного случая
по продувкам модели самолета без горизонтального опе-
рения при наиболее неблагоприятной в отношении на-
грузок центровке*;
^-расстояние от центра тяжести самолета до центра дав-
ления горизонтального оперения.
В тех случаях, когда летчик желает изменить режим полета, он
отклонением рулей вызывает дополнительную нагрузку на опере-
ние. Эта нагрузка, называемая маневренной, является неуравнове-
шенной и пропорциональна величине скоростного напора q и пло-
щади оперения Son (горизонтального или вертикального). Так как
то
n3G
cys ’
— й/гэ — 50п
О
(49)
, где а — коэффициент пропорциональности.
Нормы прочности предусматривают в качестве расчетных — слу-
чаи полета в неспокойном воздухе, остановки двигателей с одной
* Коэффициент т2 можно при отсутствии продувок определить теоретически
(см. аэродинамику самолета).
297
(50)
стороны от плоскости симметрии самолета (для нагружения вер-
тикального оперения) и другие случаи.
В нормах прочности даны также значения коэффициентов безо-
пасности Д Получим Ррасч=Рэ/- Распределение нагрузки между
стабилизатором и рулем высоты (килем и рулем направления) при-
ни мается пропорционально их илохцадям^ т< е*
Рруля 5рудя ^*стаб (киля) ^стаб(киля)
-----= ----—— И ----~~
Р расч *^г.о (в.о) 'расч ‘-’г.о (в.о)
Отсюда МОЖНО найти Рруля И Рстаб ИЛИ Ркиля*
Погонную нагрузку (на единицу длины размаха) для рулей,
а также для стабилизатора или киля находим из условия пропор-
циональности ее хорде q=kb.
Коэффициент пропорциональности k равен отношению расчет-
ной нагрузки на данную поверхность к ее площади, т. е.
. Тогда
<?С
(51)
_______ 1 РУЛЯ ,
(7руля ' е 0руЛЯ’
^руля
Р
_________ 'стаб(киля)
ыб (киля)—"“"Т Рстаб (киля)*
*\таб (киля)
Вычислив значения q для нескольких сечений, можно построить
эпюры q по размаху руля и стабилизатора (киля), как показано на
фиг. 139.
Расчетной схемой для рулей (высоты и направления) является
балка, опертая на стабилизатор или киль в узлах подвески и на-
груженная аэродинамическими силами. Расчетной схемой для
стабилизатора является балка, опертая в узлах крепления стаби-
лизатора к фюзеляжу, нагруженная аэродинамическими силами,
а также силами, действующими на руль высоты. Последние пере-
даются на стабилизатор через узлы подвески руля к стабилизатору,
равны опорным реакциям руля, но направлены противоположно.
Киль однокилевого оперения представляет собой балку, закреплен-
ную в фюзеляже, нагруженную аэродинамическими силами, а так-
же силами от руля направления, равными, но противоположными
опорным реакциям.
Элерон может быть нагружен аэродинамическими силами в не-
отклоненном положении, как часть крыла. Однако чаще расчетны-
ми для элерона являются нагрузки при отклонении его на макси-
мальной скорости.
Принимают, что интенсивность аэродинамической нагрузки постоянна по
размаху элерона (см. фиг. 140) и равна на передней кромке
^эл=0,64?тах кГ/м2 (н/л2),
оУ2
111ах
где 9inax = — скоростной напор.
298
б ертикальное оперение
299
Распределение нагрузки по хорде принимают по трапеции.
Погонные нагрузки по размаху элерона определяются по формуле
*эл = — Ал кГ!м (н/м)
и расчетная погонная нагрузка (па единицу длины элерона)
? — „ ЭЛ^Эл/>
(52)
где f — коэффициент безопасности.
Определив значение q для нескольких сечений, може.м построить эпюру q по
размаху элерона.
Расчетная схема элерона не отличается от расчетной схемы
рулей.
Построение эпюр поперечных сил и изгибающих моментов
Рули или элероны большей частью подвешиваются на трех и
более узлах, т. е. представляют собой, с точки зрения строительной
механики балки, статически неопределимые. Для рассмотрения
их (определения опорных реакций) воспользуемся следующим
приближенным методом, который поясним на примере трехопорного
руля иди элерона. Разделим отсек между опорами поровну
(фиг. 141, а). Предположим, что каждая из опор воспринимает на-
грузку двух смежных с ней полуотсеков балки. Так как нагрузка
на участке длины балки выражается как J qdl и равна площади
эпюры q на этом участке, то опорные реакции (равные и противо-
положные нагрузке на опоры) будут равны
/?1 = пл. abf,
*
/?2 = пл. beef,
^з —пл. cde.
При этом, конечно, нужно учесть масштабы эпюры q. Теперь
построим эпюры поперечных сил Qq и QR раздельно от погонной
нагрузки q и от реакций R (см. фиг. 141,6), учитывая разность их
знаков, но откладывая их от одной оси. Алгебраическая сумма
эпюр дает суммарную эпюру поперечных сил Qs. Однако вместо
вычитания отрезков удобнее построить «зеркальное отображение»
эпюры Qg, т. е. отложить ее с обратным знаком. Значение Qs по-
казано частой штриховкой на фиг. 141, в.
Эпюра Qs, отложенная от оси абсцисс, показана на фиг. 141, г.
Аналогично предыдущему, строя эпюру изгибающих моментов
А4иагq от аэродинамических сил (интегрируя эпюру Qq, фиг. 141,6)
и откладывая от той же оси зеркальное отображение эпюры Л1цзгн
300
¥
Фиг. 141. Построение эпюр для тре.хопорного руля
(элерона).
301
от опорных реакций, получим суммарную эпюру изгибающих мо-
ментов уИцзгв- Отложенная от оси абсцисс (в большем масштабе)
эта эпюра будет иметь вид, приведенный на фиг. 141, е. Необходимо
следить за тем, чтобы в сечениях, где Qs =0, эпюра ЛГизга имела
максимум или минимум *.
Так как определение опорных реакций было не строгим, то ве-
роятно, что Л4изгз в точке а (левый конец балки) окажется не рав-
ным нулю. При этом величина ,(Л4изгя )а получается небольшой
и этой неувязкой можно пренебречь. Но ее можно и устранить, при-
ложив, например, к опорам 1 и 2 пару сил ДО (фиг. 141, а), величи-
на которых определяется из
(-41 из г s)a -jf- N/j—jj=0;
ДГ_ __ (41ИЗг з)а
Л-2
При этом необходимо внести соответствующие исправления
в эпюру Qu и Л4ИЗГ1!. Исправления показаны пунктиром на
фиг. 141, в, г, д.
Построение эпюр поперечных сил Q и изгибающих моментов
Л1паг для стабилизатора или киля, согласно расчетной схеме,
приведенной на фиг. 139, сводится к суммированию эпюр от
погонных нагрузок q и эпюр от усилий, обратных реакциям руля.
Построение таких эпюр производится, как было описано в гл. ХШ.
Эпюры приведены на фиг. 142.
Остановимся кратко на построении эпюры Q и Л1113Г от верти-
кальных нагрузок для цельноповоротного оперения, схема нагру-
жения которого изображена на фиг. 129, о. Имея эпюру расчетных
погонных нагрузок q и рассматривая оперение как балку, опертую
в точках С и D на оси (фиг. 143), находим реакции опор Rc
и из:
р ~~р . р ....р а
l'C J расч 2расч
и получаем эпюры Q, Л4ИЗГ наложением соответствующих эпюр от
воздушной нагрузки и от опорных реакций (фиг. 143, а). Ось рас-
сматриваем как балку, защемленную в узле А и нагруженную
силами, равными и противоположными реакциям /?с, Rd (фиг.
Построение эпюры крутящих моментов
Выше было рассмотрено построение эпюры погонных нагрузок
для руля или элерона. Точка приложения погонной нагрузки q
* Это следует из теоремы Журавского Q=------При производной, рав-
нои нулю, функция имеет максимум или минимум.
302
вдоль хорды, т. е. центр давления, определяется по нормам прочно-
сти, где даны эпюры распределения нагрузки вдоль хорды, различ-
ные для разных случаев (см.
например фиг. 140, фиг. 144).
Центр давления элерона или
руля, стабилизатора или киля
находится в центре тяжести
площади эпюры нагрузок
вдоль хорды, который легко
определяется.
Приближенно погонные
крутящие моменты (моменты
погонных сил) относительно
оси вращения руля или эле-
рона вычисляют по формуле
кГ/н<м\
m~qr------(----), (53)
м \ м /
где г — расстояние между
осью вращения и ли-
нией центра давления
в данном сечении.
Эпюры т и Мкр для руля
или элерона и схема приложе-
ния сил приведены на фиг. 145.
Сумма погонных крутящих
моментов, равная площади
эпюры т (с учетом масшта-
бов), есть шарнирный мо-
мент Мш.
Так как момент аэродина-
мических сил относительно оси
вращения уравновешивается
моментом Sh усилия 5 в тяге
управления, то
Мш—S/i.
Фиг. 142. Эпюры q, Q, ЛГИзг для ста
билизатора.
Интегрируя эпюру т, напри-
мер, справа налево и учиты-
вая шарнирный момент Мш
в месте приложения усилия S, получим эпюру крутящих моментов
Мкр для руля или элерона.
Определение крутящих моментов от аэродинамической нагрузки
для стабилизатора или киля, так же как определение центров жест-
кости сечений, не отличается от изложенного в гл. XIII для крыла.
К эпюре Мьр от аэродинамической нагрузки нужно прибавить
эпюру Л1Кр от сил, равных и противоположных реакциям руля. По-
I
J
a)
Фиг. 143.
Фиг, 144, Эпюра нагрузок по
хорде оперения для случая манев-
ренной нагрузки.
304
лученная таким образом суммарная эпюра Л4крВ и эпюры Л1кр
Миря для стабилизатора показаны на фиг. 146.
Построение эпюры Л1кр для цельноповоротного оперения (фиг. 129) не от-
личается какими-либо особенностями. Ось оперения на кручение не работает.
Фиг. 145. Кручение руля или элерона
Расчет сечений на прочность
По найденным значениям Л1113Г, Q, Мкр проводим расчет сечений
на прочность. Чтобы избежать повторений сказанного в гл. XIII,
ограничимся краткими указаниями и приведем основные расчетные
формулы.
Проверку сечений элементов конструкции рулей и элеронов
при их изгибе и кручении приближенно можно произвести по сле-
дующим формулам:
для трубчатого лонжерона (фиг. 147, a)t воспринимающего изгиб, поперечную
силу и кручение
а =
____Л4из г
0,1 (£)3_^з)
=2—9_____
Q П
--(£2—^2)
А/кр
0,2(£>з_ t/3)
Q 1 Л{ н
(54)
(55)
(56)
(57)
20 1563
305
Фиг 146 Эпюры Л1кр для стабилизатора
Фиг. 147 Напряжения в сечениях руля или элерона.
306
Для лонжерона открытого профиля, воспринимающего изгиб и
работающего на кручение совместно с обшивкой носка (фиг. 147, б)
-Мцзг
0,9/7
а
(58)
$
/^ПЛ 4" ^прив&обш
оа —для растянутой зоны
(59)
а,... —для”сжатой зоны.
—
Здесь Гп>л—площадь пояса лонжерона*;
бприв — ширина обшивки носка, присоединенной к лонжерону
и принимающей участие в работе егочна изгиб;
^прив
Для лонжерона, штампованного из листа,
3,6Е
□ =^3 —:--
кр / b \2’
\ 5 /
(60)
где b — ширина пояса лонжерона.
Для лонжерона с поясами из прессованных, катаных профилей
окр определяется так же, как для поясов лонжерона крыла.
Напряжения в стенке
у 0№ст ’
__ 47Кр
2Л05ст’
(61)
(62)
(63)
та=т<?+Ъ1 <гв-
Здесь Го — площадь, ограниченная контуром, работающим на кру-
чение.
Расчет на прочность сечений прямого, стреловидного и треуголь-
ного стабилизатора (киля) по известным значениям Q, Мизг, Мкр
не отличается от расчета на прочность сечений крыла соответст-
вующей формы в плане.
* К стенке [-образного лонжерона можно отнести часть лонжерона высотой
0,9 Н по обе стороны от его середины, а остальную часть — отнести к поясам.
20*
: Глава XV
ФЮЗЕЛЯЖИ САМОЛЕТОВ И РАСЧЕТ ИХ НА ПРОЧНОСТЬ
1. ТИПЫ КОРПУСОВ САМОЛЕТОВ. ВНЕШНИЕ ФОРМЫ ФЮЗЕЛЯЖЕЙ
Назначение, требования, типы корпусов
Корпус самолета служит для размещения экипажа, пассажиров,
грузов, оборудования. К корпусу крепятся крылья, оперение, часто
силовая установка и другие агрегаты самолета.
Общие требования, предъявляемые к самолету и его агрегатам,
изложены в разд. II. Отметим лишь некоторые специфические тре-
бования, относящиеся к корпусу самолета.
1) Для ослабления интерференции и уменьшения лобового со-
противления самолета необходимо плавно сопрягать корпус с при-
мыкающими к нему частями самолета.
2) Так как прогибы и закручивание корпуса влияют на углы
атаки оперения, то жесткость конструкции корпуса на изгиб и кру-
чение должна обеспечить достаточную эффективность горизонталь-
ного и вертикального оперений на всех режимах,
3) Удобство размещения экипажа, пассажиров, оборудования
и грузов. Удобство загрузки и выгрузки самолета.
4) Звукоизоляция. Создание нормальных условий для экипажа
и пассажиров на больших высотах, при низких температурах окру-
жающего воздуха.
5) Обеспечение удобного входа и возможности быстрого поки-
дания самолета экипажем, особенно при авариях.
6) Минимальное затенение обзора летчику, особенно при по
садке самолета.
7) Максимальное использование внутренних объемов.
Корпусы самолетов подразделяются на фюзеляжи, лодки и гон-
долы. Под фюзеляжем понимают корпус сухопутного самолета, на
котором расположены вертикальное и горизонтальное оперения
(фиг. 148, а).
Корпусом гидросамолета является лодка, которая, кроме ука-
занного выше назначения, служит также для обеспечения взлета
с воды и посадки на воду. Лодка, как и фюзеляж, несет на себе
оперение (фиг. 148,6), но отличается от фюзеляжа внешними фор-
мами (обводами нижней части), обеспечивающими ее «мореходные»
качества.
Гондола является корпусом без оперения (фиг. 148, с).. На са-
молетах, имеющих гондолу, оперение поддерживается двумя балка-
ми, крепящимися к крылу. Такие самолеты называют двухбалоч-
ными.
В книге рассматриваются сухопутные самолеты, поэтому дан-
ная глава посвящена описанию конструкций фюзеляжей.
308
» «ГМ
»€й^1ал*-!
I
309
Внешние формы фюзеляжей
Внешние формы фюзеляжа характеризуются видом поперечного
сечения и видом сбоку (фиг, 149).
При выборе формы и размеров поперечного сечения следует
прежде всего исходить из требований аэродинамики (обтекаемость
формы и площадь поперечного сечения), эксплуатации (удобство
размещения экипажа, пассажиров и грузов) и строительной меха-
ники (рациональное расположение силовых элементов конструкции).
J Прямоугольное с Верхний ободом «о ^'/7
2 Обильное с плоски ми боковинами у 1
3 Овальное, сужива- ющееся кверху 1 1 « /Я ,-х_
k Овальное симмет- ричное {эллипс) % _ V 1
5 Круглое г -- — 1
6 Сечение образован ное двумя кругами
Фиг. 149, Формы фюзеляжей.
Сечения 1, 2 применяются в настоящее время на военнотранс-
портных (грузовых) самолетах, так как при такой форме сечений
увеличивается площадь грузового пола и лучше используется
объем грузового помещения. В кабине, имеющей сечение 3, удобно
разместить летчика при сохранении минимального миделя.
Для размещения экипажа, пассажиров и грузов круглые сече-
ния не выгодны, так как при этом неэффективно используется
площадь с боков и снизу, что ведет к увеличению миделя и поверх-
ности фюзеляжа. Однако для фюзеляжей с герметическими отсека-
ми, подверженных разности внутреннего и внешнего давлений, наи-
более рационально круглое сечение*, а для больших самолетов —
* Под действием внутреннего давления в тонкостенной конструкции круг-
лого сечения возникают лишь растягивающие напряжения.
310
сечение, образованное из двух окружностей разного диаметра. Та-
кая форма сечения позволяет уменьшить мидель по сравнению
с круглым и предпочтительней по весу сравнительно с овальной.
Формы фюзеляжей в виде сбоку зависят от назначения самоле-
та, от расположения двигателей и воздухозаборников и от характе-
ра обводов остекленной части кабины.
Формы фюзеляжей а, г, д (см. фиг. 149) характерны для боль-
ших самолетов с несколькими двигателями, размещенными на
крыльях. Форма б свойственна истребителям с носовым воздухоза-
борником. Форма в применяется для сверхзвуковых самолетов.
В этом случае в носовой части фюзеляжа возникает косой скачок
давления, что снижает волновое сопротивление сравнительно с пря-
мым скачком. Форма е применяется для грузовых самолетов, так
как она обеспечивает удобное устройство заднего загрузочного
люка.
В настоящее время в целях уменьшения лобового сопротивления
на некоторых больших самолетах фонарь кабины летчика вписьг
вается в контур фюзеляжа (см. фиг. 149, е, д).
Относительные размеры фюзеляжа характеризуются его удли-
нением
j-
ЛФ — ’
«ф
где /ф — полная длина фюзеляжа, равная 0,8—1,2 размаха крыла
для самолетов с прямыми и стреловидными крыльями
при Л^4~5; при Х = 2ч-3 /ф= (1,54-2,0)/;
с/ф— диаметр круга, равновеликого миделевому сечению.
Для истребителей d$= 1,2ч-1,5 м, для дальних бомбардировщи-
ков— 2,34-2,8 м, для дальних пассажирских самолетов — 34-3,8 м.
Влияние удлинения фюзеляжа на сопротивление его различно
на различных скоростях. При М<£1 увеличение Лф до некоторого
предела уменьшает сопротивление формы, но увеличивает сопротив-
ление трения. Для таких самолетов употребительные значения
Хф = 74-10. При околозвуковых скоростях преобладающую роль
в сопротивлении играет волновое сопротивление, которое с увеличе-
нием Хф (до Хф= 184-20) уменьшается. Такие самолеты имеют
Хф = 94-12. Сверхзвуковые самолеты по тем же причинам имеют
1ф=9~-15.
Необходимо оговориться, что соображения компоновки могут
привести к некоторым отклонениям от принятых значений Хф.
2. КОНСТРУКТИВНЫЕ СХЕМЫ И КОНСТРУКЦИЯ ФЮЗЕЛЯЖЕЙ
Силы, действующие на фюзеляж
Силы, действующие на фюзеляж во время полета или при посад-
ке, можно разделить на следующие группы:
1) массовые силы конструкции фюзеляжа;
3U
Передняя Средняя Задняя
часть часть часть
го
!лрасч?дв
лди &
2) массовые силы агрегатов, грузов и оборудования, располо-
женных в фюзеляже;
3) силы, приходящие к фюзеляжу от прикрепленных к нему
других частей самолета;
4) аэродинамические силы, действующие непосредственно на
фюзеляж;
5) для герметических фюзеляжей — силы внутреннего давле-
ния. Силы, указанные в п. 4, сравнительно невелики и при расчете
их не учитываются.
Силы, приложенные к фюзеляжу, рассматриваются в двух
плоскостях: параллельной плоскости симметрии самолета и перпен-
дикулярной плоскости сим-
метрии самолета. Примером
нагружения фюзеляжа си-
лами, параллельными плос-
кости симметрии самолета,
может служить выход са-
молета из пикирования,
или посадка самолета. При-
мером нагружения фюзеля-
жа силами, перпендикуляр-
ными плоскости симметрии
’ самолета, может служить
Реакции крыла полет самолета с отклонен-
ными рулями направления.
фиг- 150 Под действием нагрузок
конструкция фюзеляжа испытывает деформации. От сил, дейст-
вующих параллельно плоскости симметрии самолета, фюзеляж
изгибается в вертикальной плоскости. Под действием сил, прило-
женных к фюзеляжу в горизонтальной плоскости (перпендикуляр-
ной плоскости симметрии), фюзеляж изгибается в горизонтальной
плоскости. Кроме того, при нагрузке на вертикальное оперение
фюзеляж скручивается. Таким образом, конструкция фюзеляжа
в общем случае работает на вертикальный изгиб и сдвиг, горизон-
тальный изгиб и сдвиг и кручение.
Для построения эпюр поперечных сил Q, изгибающих моментов
Л1Изг и крутящих моментов Л41ф необходимо установить, по какой
силовой схеме работает фюзеляж при данной нагрузке, В полетных
случаях фюзеляж представляет собой балку, опирающуюся на лон-
жероны (стенки) крыла. Тогда при вертикальном изгибе фюзеляж
рассматривают как двухопорную балку с двумя консолями
(фиг. 150). Если силы действуют только на переднюю или заднюю
часть, то при расчете этой части фюзеляжа ее рассматривают как
консоль, заделанную у лонжеронов крыла.
При расчете фюзеляжа на прочность его обычно условно рас-
членяют на три части: переднюю, среднюю и заднюю (см.
фиг. 150),
312
Приходящиеся на фюзеляж нагрузки; от оперения, шасси и др,
агрегатов для данного расчетного случая вычисляют в соответствии
-с нормами прочности. Вообще фюзеляж должен быть рассчитан
на все случаи, установленные для крыльев, оперения, силовой
установки и шасси, т. е. для частей, прикрепленных к фюзеляжу
и передающих ему нагрузки. Кроме того, нормами предусматри-
вается ряд расчетных случаев, специфических для фюзеляжа.
Конструктивные схемы фюзеляжей
Конструкция фюзеляжа состоит из силовой системы (каркас,
оболочка), воспринимающей внешние нагрузки, и элементов вспо-
могательного назначения. Силовая схема современных фюзеляжей
(в целом или по частям) представляет собой тонкостенную балку
Такие фюзеляжи называются балочными.
4
Фиг. 151. Ферменный фюзеляж.
/—лсн^жерон пояс, 2—расчалки, 3—раскос.
4—распорка, 5—стойка
Ранее фюзеляжи легких самолетов выполняли в виде пространственной фер-
мы. Эта конструктивная схема в настоящее время не применяется ввиду боль-
шого веса и технологической сложности, но сохранилась в некоторых самолетах
(например ПО-2, Як-18).
В ферменных фюзеляжах (фиг. 151) обтекаемая форма достигается при
пойощи дополнительных надстроек к силовой части, что увеличивает вес кон-
струкции. В качестве обшивки применяется полотно, фанера или тонкие листы
дюралюмина. Такая конструкция не удовлетворяет требованиям, предъявляемым
аэродинамикой при больших скоростях.
Иногда фюзеляжи по длине выполняются по различным конструктивным
схемам. Например, переднюю часть делают ферменной, заднюю — балочной; та-
кие фюзеляжи относят к смешанной конструктивно-силовой схеме.
В балочном фюзеляже (фиг. 152) основными элементами
являются:
313
а) продольный набор — лонжероны и стрингеры;
б) поперечный набор — шпангоуты;
в) обшивка.
К элементам вспомогательного назначения относятся детали
для местного усиления основной конструкции; детали для установ-
ки различных грузов, предметов вооружения и оборудования;
детали, выполняющие специальное назначение и в то же время
являющиеся частью конструкции фюзеляжа (например, пол в ка-
бинах, противопожарные перегородки и т. д.).
05шийоч#ый
Фиг. 152. Балочные фюзеляжи.
/—лонжероны, 2—стрингеры* 5—шпангоуты. -/—обшивка
В балочном фюзеляже изгибающие моменты воспринимаются
лонжеронами, стрингерами и обшивкой; поперечные силы и кру-
тящий момент воспринимаются обшивкой. Характер и степень
нагружения элементов конструкции зависят от разновидностей
конструктивно-силовой схемы фюзеляжа.
ф применяются три разновидности балочных фюзеляжей (см.
1. Конструкция, состоящая из мощных лонжеронов и слабого
набора стрингеров и шпангоутов, с обшивкой, работающей на
сдвиг от поперечных сил и крутящего момента. Такой фюзеляж
называется лонжеронным,
2. Конструкция, состоящая из обшивки, работающей при изги-
бе и кручении фюзеляжа, и часто расположенных стрингеров
и шпангоутов. Такой фюзеляж называется стрингерным (полу-
314
3. Конструкция, представляющая собой сравнительно толстую
или многослойную обшивку, подкрепленную только шпангоутами.
В этой конструкции все нагрузки воспринимает обшивка. Такой
фюзеляж называется обшивочным (монокок).
Отметим сходства и различия в работе конструктивных эле-
ментов фюзеляжа и крыла. Назначение и работа стрингеров и об-
шивки фюзеляжа и крыла аналогичны. Можно лишь отметить, что
обшивка фюзеляжа имеет большую кривизну, чем обшивка крыла
и более устойчива при работе на сжатие и сдвиг. Кроме того, об-
шивка фюзеляжа весьма слабо нагружена поверхностной воздуш-
ной нагрузкой. Лонжероны фюзеляжа работают аналогично
поясам лонжеронов крыла *. Шпангоуты фюзеляжа по назначе-
нию аналогичны нервюрам крыла, за исключением того, что они
не передают воздушную нагрузку. Отмеченные сходства обуслов-
ливают сходность форм, сечений силовых элементов фюзеляжа и
крыла.
Конструкция фюзеляжей
В современных балочных фюзеляжах каркас выполняется, как
правило, из дуралюминовых профилей, обшивка — из листового
дуралюмина.
Расстояние между шпангоутами меняется в пределах от 350
до 800 мм в зависимости от размеров шпангоутов и толщины об-
шивки. Шаг стрингеров, в зависимости от типа балочного фюзеля-
жа, равен примерно 100—250 мм. В хвостовом отсеке фюзеляжа
часть стрингеров обрезают, так каю иначе они будут расположены
слишком часто. Места обрыва стрингеров располагают на разных
шпангоутах во избежание резкого ослабления сечения. Толщина
обшивки 0,8—8 мм.
Лонжеронные конструкции фюзеляжей были разработаны при-
менительно к самолетам с одним поршневым двигателем, распо-
ложенным впереди фюзеляжа. Применение их целесообразно для
самолетов с ТРД, расположенным в фюзеляже (например в хво-
стовой его части). В этом случае наличие лонжеронов в верхнем
и нижнем сводах дает возможность рационально осуществить
крепление силовой установки. Узлы крепления двигателя разме-
щаются на силовом шпангоуте и усилия с них передаются на лон-
жероны передней части фюзеляжа.
На фиг. 153, а изображена лонжеронная хвостовая часть фю-
зеляжа.
Каркас ее состоит из восьми лонжеронов, к которым крепятся стыковые
узлы 1, 2, 3\ слабых стрингеров; обычных 4 и усиленных 5 шпангоутов.
В месте крепления лонжерона киля поставлен характерный для многих кон-
струкций наклонный усиленный шпангоут 6. лежащий в плоскости лонжерона
киля. Это позволяет передать усилия с поясов лоюкерона непосредственно на
наклонный шпангоут, а с него на обшивку. Отсутствие такого шпангоута привело
* Роль стенки лонжеронов крыла выполняет обшивка фюзеляжа.
315
* Фиг 153. Хвостовая часть фюзеляжа
, Z 5—стыковые узлы на. лонжеронах, 4—шпангоуты, 5—силовые шпангоуты, б—наклонный шпангоут, 7-нкожух выхлопной трубы,
Я—'хвостовой обтекатель.
316
бы к необходимости иметь вертикальный шпангоут АВ и мощную горизонталь-
ную балку АС (фиг. 153,6 пунктир), воспринимающие составляющие S*
усилия 5.
На фиг. 154 показана хвостовая часть фюзеляжа самолета,
у которого два турбореактивных двигателя размещены в фюзе-
ляже. Лонжероны заканчиваются стыковыми узлами (фитингами)
и на значительном удалении от места стыка переходят в стрин-
геры.
Стрингерные конструкции фюзеляжей (полумонокок) являют-
ся характерными для современных самолетов.
На фиг. 155 изображен фюзеляж стрингерной конструкции со-
временного пассажирского самолета Конструкция фюзеляжа гер-
метизирована за исключением хвостовой части.
Нормальные шпангоуты штампованы из листового материала и имеют
|__ -образное сечение Усиленные шпангоуты предназначены для крепления кры-
ла, оперения и передней ноги шасси Каждый шпангоут имеет поперечную гори-
зонтальную балку, которая служит опорой для пола кабины. Центроплан крепит-
ся своими лонжеронами к усиленным шпангоутам (см. фиг. 155, соединение цен-
троплана с фюзеляжем).
Конструкция фюзеляжа разработана с учетом панельной сбор-
ки и широкого применения прессовой клепки.
Панели образованы из обшивки, частого набора стрингеров
и поперечных элементов и соединяются между собой при помощи
технологических разъемов.
. В местах технологических разъемов панелей ставятся усилен-
ные стрингеры (фиг. 156), для чего используются прессованные
профили таврового сечения.
Конструкция фюзеляжа вызывает необходимость делать боль-
шие вырезы (например для бомболюков), а это требует постанов-
ки мощных продольных балок (бимсов) (фиг. 157).
Обшивочные конструкции фюзеляжей (монокок), состоящие из
толстой обшивки и шпангоутов, еще не получили широкого при-
менения.
В рассматриваемой конструкции обшивка воспринимает все
виды нагрузок, действующие на фюзеляж. В целях повышения
устойчивости обшивки при работе на сжатие и сдвиг приходится
увеличивать толщину ее, что ведет к увеличению веса конструкции
Применение обшивки с заполнителем (фиг. 158) резко повышает
ее устойчивость (критические напряжения). В этом случае вес об-
шивочного фюзеляжа будет наименьшим.
Конструкция элементов фюзеляжей
Основными элементами конструкции балочных фюзеляжей
являются: лонжероны*, бимсы, стрингеры, шпангоуты, обшивка
и узлы.
* При большом числе продольных элементов различного сечения лонжеро-
нами считают лишь те элементы, которые служат для восприятия основной
части нагрузки при изгибе. Продольные элементы, не отвечающие этому усло-
вию, называют усиленными стрингерами.
317
Лонжероны и стрингеры делаются из прессованных
(реже гнутых) стальных и дуралюминовых профилей. Сечения
лонжеронов и стрингеров могут быть одинаковой формы и отли-
чаются только размерами — площадь сечения лонжеронов значи-
тельно больше. 1
Лонжероны и стрингеры часто применяют для местного усиле-
ния и ставят на участках, где имеются вырезы для кабин экипа-
жа, для размещения крыла и шасси.
Этой же цели служат бимсы (см. фиг. 157), которые в районе
вырезов воспринимают осевые силы при изгибе.
Шпангоуты подразделяются на нормальные, служащие для
придания формы фюзеляжу и подкрепления обшивки, и усилен-
ные, воспринимающие, кроме того, местные нагрузки.
На фиг. 159 показаны нормальные шпангоуты пассажирских
самолетов. Нормальные шпангоуты выполняются из прессованных
или гнутых дуралюминовых профилей, согнутых по форме сече-
ния фюзеляжа, и состоят из нескольких частей.
Усиленные шпангоуты, как об этом говорилось выше, предна-
значены для передачи сосредоточенных сил и моментов, действую-
щих в плоскости шпангоутов, на обшивку. Такие шпангоуты уста-
навливаются в местах разъемов фюзеляжа, в местах крепления
< к фюзеляжу крыльев, оперения и других агрегатов.
Шпангоуты обычно охватывают весь периметр сечения фюзе-
ляжа. В местах вырезов шпангоуты охватывают только часть пе-
риметра.
; На фиг. 160, а показаны силовой шпангоут фюзеляжа с вмон-
тированной в него балкой, представляющей собой продолжение
лонжерона крыла. На этом же шпангоуте находятся узлы крепле-
ния двигателя и узлы стыка с хвостовой частью фюзеляжа.
На фиг. 160, б показан монолитный наклонный шпангоут фюзеля-
жа, расположенный в месте стыковки с килем. На переднем пла-
не виден шпангоут, аналогичный изображенному на фиг. 160, а.
\ В балочных фюзеляжах местные нагрузки от различных гру-
зов и агрегатов передаются через соответствующие узлы на кар-
кас. С каркаса эти нагрузки должны быть распределены на об-
; шивку фюзеляжа. При этом стрингеры, лонжероны должны пере-
давать на обшивку силы, действующие вдоль фюзеляжа (в этом
случае исключается поперечный изгиб их), а шпангоуты — силы,
1 действующие поперек фюзеляжа (фиг. 161).
'' Рассмотрим нагружение усиленного шпангоута, передающего
I1 на обшивку силу Р (фиг. 162,а). Реакции обшивки изображены
1 в виде погонных касательных сил q. Однако при такой передаче
[ усилий шпангоут будет изгибаться, что в весовом отношении не-
* выгодно, так как возникают значительные изгибающие моменты;
' кроме того, при изгибе материал средней части сечения мало на-
гружен и нерационально используется. На фиг. 162, б, в показаны
два способа разгрузки шпангоута от изгиба. В первом из них вме-
сто изгиба шпангоута будет иметь место сжатие подкосов силой Sn
319
и растяжение распорки силой Sp (вертикальная составляющая SB
уравновешивается силами на обшивке). Во втором случае сила Р
через заклепочное соединение стойки со стенкой шпангоута нагру-
жает стенку сдвигом. Далее со стенки, через заклепки соединения
с поясами, нагрузка передается на пояса шпангоута и далее на об-
шивку.
Обшивка балочных фюзеляжей представляет собой дур-
алюминовые листы, отштампованные по форме поверхности фюзе-
ляжа, и является силовым элементом конструкции. Поэтому в ме-
стах вырезов (люки, окна, двери, фонари кабины экипажа) де-
лают местные подкрепления.
В лонжеронных и стрингерных фюзеляжах небольшие вырезы
мало ослабляют сечение и для усиления их достаточно круговой
окантовки отверстия (фиг. 163, а). При значительных вырезах, ка-
кие требуются, например, для фонаря (фиг, 163,6) для грузового
люка или входной двери, сечения значительно ослабляются и для
усиления выреза приходится ставить усиленные стрингеры, корот-
кие лонжероны, бимсы и усиленные шпангоуты.
Крепление обшивки к продольному и поперечному наборам за-
висит от расположения стрингеров (лонжеронов) относительно
шпангоутов и бывает следующих видов:
1. Стрингеры проходят снаружи шпангоутов и обшивка кре-
пится только к стрингерам (фиг. 164, а).
21 1563
321
V
322
Такое соединение часто осуществляется в месте расположения
нормальных шпангоутов. При этом уменьшается количество
заклепок, а обшивка достаточно хорошо подкрепляется стрингера-
ми. Эта конструкция может также оказаться рациональной при
наличии нагрева вследствие больших скоростей полета.
2. Стрингеры проходят внутри шпангоутов и обшивка крепит-
ся только к шпангоутам (фиг. 164,6). Это крепление встречается
редко, так как оно ухудшает подкрепление обшивки.
Фиг. 158. Отсек фюзеляжа с многослойной обшивкой.
3. Стрингеры врезаны в шпангоуты заподлицо и обшивка кре-
пится и к шпангоутам, и к стрингерам (фиг. 164, в, г). Это крепле-
ние является наиболее распространенным.
Если обшивка крепится к каркасу, то необходимо в местах"
пересечения стрингеров и шпангоутов из технологических сообра-
жений иметь связь между ними (фиг. 164, в, уголок 5). В случае
конструкции, состоящей из панелей, такой связи не нужно
(фиг. 164, а). Это обстоятельство также упрощает технологию из-
готовления панельной конструкции.
Аналогично креплению нервюр к обшивке крыла в креплении
шпангоутов к обшивке часто применяют компенсаторы (фиг.
164,а, поз. 4). Такое крепление дает существенные ’технологиче-
ские преимущества (см. гл. ХШ) —снижает требования к точно-
сти изготовления шпангоутов.
Стыковка фюзеляжей
У небольших самолетов с турбореактивными двигателями, рас-
положенными в задней части фюзеляжа, последний расчленяют на
две-три части (фиг. 165,а). Такое разъемное соединение необходи-
мо в эксплуатации для установки и снятия двигателя. У больших
самолетов фюзеляж расчленяют на несколько частей, которые
стыкуются при помощи разъемных соединений (фиг, 165,6).
Стыковка частей фюзеляжа обусловливается его конструктив-
ной схемой. В лонжеронных фюзеляжах соединение осуществляет-
ся стыковыми узлами, установленными на лонжеронах (фиг. 166).
В стрингерных фюзеляжах соединение производится по контуру
посредством стыковых угольников или фитингов (см. фиг. 155,
узел 5).
21*
323
co
to
Фиг. 159. Типовые нормальные шпангоуты.
я) /“Нижняя часть шпангоута, 2— порог двери, 3—секция шпангоута, 4 соединяющая накладка, б)
J—опорная балка настила пола,<^—стойка, 5—балка пола багажника.
/—обод, 2—стыковая накладка,
Фиг, 160, Усиленные шпангоуты.
а—усиленный шпангоут и месте стыковки с крылом, /—профиль, 2-узел крепления двигателя
узел фюзеляжа, 5—стыковой узел крыла, б—усиленные шпангоуты в месте стыковки с килем
гоут в месте расположения бимса.
3—крыльевая балка. 4—стыковой
и двигателем, e—усилениый шпан-
Такие способы стыковки соответствуют характеру работы рас-
смотренных схем фюзеляжей: сосредоточенные силы, действую-
щие вдоль лонжеронов, передаются с одной части на другую при
помощи стыковых узлов; распределенные силы, действующие
вдоль стрингеров и по обшивке, — при по-
мощи контурной стыковки.
Соединение крыла с фюзеляжем осуще-
ствляется по трем схемам, приведенным на
фиг. 167. В схемах а и б крыло в месте сты-
ка не имеет разъема и лонжероны крыла
пропускают или рядом с силовым шпангоу-
том, или между верхней и нижней его
частью. В низкопланной схеме лонжероны
крыла проходят под силовыми шпангоута-
ми, в высокопланной — над силовыми шпан-
гоутами. Крепятся лонжероны к шпангоутам
заклепками или болтами с помощью угольни-
ков или специальных
узлов. В случаях соединения по схемам а и б
достигается уравновешивание изгибающих моментов двух половин
крыла на его центральной части; узлы стыка нагружены только
поперечной силой, которую они передают с лонжеронов на шпан-
гоуты фюзеляжа. В третьей схеме в крыло имеет разъем в месте
-стыка, центральная часть лонжеронов крыла входит в конструкцию
силовых шпангоутов, а отъемные, части стыкуются с ней узлами,
Фиг. 162.
расположенными на этих шпангоутах. Здесь изгибающий момент
передается через узлы стыковки на шпангоут и уравновешивается
на поясах 1 лонжерона центроплана.
Соответствующие схемам а, б, в конструкции соединения кры-
ла с фюзеляжем показаны на фиг. 168, а, б, 160, а.
Сравнительная оценка различных схем фюзеляжей
На основе анализа конструкций балочных фюзеляжей различ-
ных типов представляется возможным дать их сравнительную
326
оценку с точки зрения аэродинамики, прочности и жесткости, жи-
вучести и использования внутренних объемов.
Аэродинамика обшивочного балочного фюзеляжа в наи-
большей степени удовлетворяет современным требованиям. Тол-
у
Фиг. 163. Усиление вырезов.
/—вырез для кабины летчика, 2— усиленный ' шпангоут, 3—продольный элемент (лон-
жерон) усиления выреза.
стая обшивка и меньшее число заклепок обеспечивает такому фю-
зеляжу гладкую и неизменяющуюся в полете поверхность.
Однако необходимость обеспечения устойчивости слабо под-
крепленной обшивки приводит к увеличению ее толщины и веса
конструкции.
327
Удовлетворительные прочность и жесткость обши-
вочных фюзеляжей при малом весе обеспечиваются лишь при при-
менении обшивки с заполнителем. В противном случае более лег-
кой оказывается стрингерная конструкция.
Живучесть конструкции наиболее высокая у обши-
вочного и затем у стрингерного фюзеляжа, так как силовые эле-
менты фюзеляжей этих типов рассредоточены по всему контуру
сечения
Фиг 164 Крепление обшивки к стрингерам и шпангоутам
й—обшивка крепится только к стрингеру, 6—обшивка крепится только
h шпангоуту, в. г—обшивка крепится к стрингеру и шпангоуту. /—стрингер,
2—шпангоут, 3—обшивка, 4—компенсатор, 5—уголок
Использование объемов наиболее эффективно у лон-
жеронных схем фюзеляжа, наличие больших вырезов в обшивке
которых менее существенно снижает прочность конструкции.
Кроме того, на лонжеронном фюзеляже проще осуществляется
установка стыковых узлов оперения, шасси и т. п.
В настоящее время часто применяются балочные фюзеляжи
комбинированных схем, например, лонжеронный в отсеках, имею-
щие большие вырезы в обшивке и стрингерный в остальной части
328
I
передняя часть фюзеляжа, 2—первая средняя часть фюзеляжа, <3— вторая средняя часть фюзеляжа, 4—хвостовая часть
фюзеляжа, 5—кормовая часть фюзеляжа
329
Фиг 166 Стыковые узлы балочного лонжеронного
фюзеляжа
1~вильчатый узел, 2—лонжерон, 3—усиленным шпангоут,
накидной болт, 5~прорезь узла.
Фиг. 167.
330
Фиг. 168. Стыковка фюзеляжа и крыла
1—‘лонжерон центроплана, 2—узел, 5—усиленный шпанго\т, 4~накладка. J—стыковой болт
331
3. КАБИНЫ
Назначение. Требования, предъявляемые к кабинам
Кабины самолетов предназначены для размещения экипажа,
пассажиров, грузов. В соответствии с назначением кабины подраз-
деляются на кабины экипажа (летчика, штурмана, радиста и др.),
пассажирские и грузовые.
Кабины могут быть невысотными и высотными (герметиче-
скими) .
Кабины экипажа должны удовлетворять основным требова-
ниям, перечисленным в начале главы (стр. 308).
К пассажирским кабинам, кроме того, предъявляются следую-
щие специфические требования:
1) достаточный объем (не менее 1,0 .я3 на пассажира), удоб-
ные сиденья, достаточное освещение, хорошая внутренняя отделка,
индивидуальная вентиляция;
2) звукоизоляция кабин от шума двигателей и вибрирующих
частей самолета;
3) достаточное количество входных дверей, а также наличие
аварийных выходов и аварийных средств;
4) наличие хорошо оборудованных подсобных помещений
(туалетные, буфеты-кухни, гардеробы и пр.).
Требования к грузовым кабинам зависят от характера пере-
возимого груза. Общими требованиями'' для грузовых кабин
являются:
1) надлежащие размеры и размещение грузовых помещений
и люков, обеспечение удобства погрузки и разгрузки;
2) наличие специальных приспособлений для крепления
грузов.
Герметические кабины
Метеорологические условия полета на высотах свыше 10 000—
12 000 Л1 более благоприятны; незначительная облачность, постоян-
ство направления и силы ветра, меньшая возможность обледене-
ния повышают безопасность и регулярность полетов на этих вы-
сотах.
Кроме того, на большой высоте полет более экономичен и даль-
ность полета возрастает.
Известно, что дальность полета зависит от продолжительности и скорости
полета, т. е.
L~tV,
где t — время полета;
V — скорость полета.
На больших высотах мощность поршневого или турбовинтового двигателя
(ТВД), а также тяга турбореактивного двигателя (ТРД) падают, имея на вы-
соте 11 000—12 000 м значения, равные примерно 254-30"/о мощности (тяги)
у земли.
332
В связи с этим значительно уменьшается количество топлива, расходуемое
двигателем, вследствие чего при имеющемся запасе топлива увеличивается про-
должительность полета. Скорость на больших высотах уменьшается по сравне-
нию со скоростью у земли не столь резко, в результате чего дальность на вы-
соте существенно возрастает.
Так, для самолетов с реактивным двигателем дальность на
высоте 11 000 jn -превышает дальность у земли более чем в 1,5 раза.
Уже начиная с 4500—5000 м понижение давления атмосферы,
а следовательно, уменьшение весового содержания кислорода
в единице объема воздуха, влечет за собой ухудшение самочувст-
вия.
Вместе с понижением давления атмосферы падает и давление
содержащегося в ней кислорода — так называемое парциальное
давление кислорода. Это также ухудшает жизнедеятельность орга-
низма.
Вследствие недостатка кислорода и уменьшения его давления,
а также общего уменьшения давления окружающей среды на
больших высотах появляются признаки «высотной болезни» —
боли в суставах, ослабление зрения и пр.
Распространенным способом поддержания жизнеспособности
человека на больших высотах является использование кислород-
ной аппаратуры, автоматически добавляющей к воздуху кислород
в нужном на данной высоте количестве. Однако при этом сохра-
няется низкое атмосферное давление. Современные кислородные
приборы не могут обеспечить требующихся условий кислородного
питания на высоте свыше 12 000 м.
Наилучшим средством обеспечения безопасности и удобства
при высотных полетах является герметическая кабина, в которой
сохраняется заданное барометрическое давление находящегося
в ней воздуха, химический состав воздуха и обеспечивается пар-
циальное давление кислорода.
Если к тому же в кабине поддерживается определенная темпе-
ратура и влажность воздуха, то такая система называется систе-
мой кондиционирования воздуха.
Имеется два основных типа герметических кабин: вентиляцион-
ные и регенерационные.
Герметической* кабиной вентиляционного
типа является кабина, в которой необходимое давление и обмен
воздуха поддерживаются путем наддува атмосферного воздуха.
Наддув создается нагнетателем (компрессором) двигателя или
специальной установкой.
Регулирование современных кабин устроено таким образом,
что нормальное давление поддерживается до определенной высоты
(5000-4-7000 м), начиная с которой обеспечивается уже только из-
быток давления (0,4—0,5 ат) над давлением окружающей среды
(фиг. 169). Поэтому на высотах более 11 000 м необходимы кисло-
родные приборы.
Герметической кабиной регенерационного ти-
п а является кабина, в котором необходимое давление и обмен воз-
333
духа поддерживаются регенерационными устройствами (не связан-
ными с окружающей атмосферой). Кислород подается в кабину
из баллонов со сжатым кислородом или приборов, содержащих
жидкий кислород. Для удаления продуктов выдыхания воздух
кабины пропускается через регенерационную установку, поглощаю-
щую углекислый газ (СОг)
и водяные пары. При этом паде-
ние давления компенсируется по-
дачей кислорода.
Преимуществом регенераци-
онной герметической кабины яв-
ляется независимость от давле-
ния окружающей среды, более
высокое процентное содержание
кислорода и возможность, вслед-
ствие этого, повышения высотно-
сти кабины. Недостатком такой
кабины является повышенная по;
жарная опасность (вследствие
высокого содержания кислорода),
ограниченный запас кислорода
в баллонах и несколько более
сложное устройство.
Наряду с двумя основными типами’герметических кабин иногда применяют
герметическую кабину смешанного типа, т. е. кабину, в которой .давление и об-
мен воздуха поддерживаются методом вентиляции и регенерации.
Для самолетов, летающих на высотах до 25 000—30 000 м,
наибольшее распространение -получили герметические кабины
вентиляционного типа. На высотах свыше 30 000 л;, а также
для полетов в космосе, кабины будут только регенерационного
типа.
Е
ГГладило самолета
1.0
| OS
Е
а
<5
10 Krt
Высота полета
Фиг.
нения
169, Примерный график изме-
давления в кабине самолета.
На фиг. 170 приведена принципиальная схема герметической
кабины вентиляционного типа. Воздух из компрессоров реактив-
ных двигателей 1 в сжатом и нагретом состоянии поступает в кон-
трольный клапан 2, автоматически регулирующий температуру по-
ступающего в кабину экипажа 3 воздуха. При температуре 20° С
(293° К) воздух непосредственно по трубопроводу 4 поступает
в кабину. При более высокой температуре контрольный клапан
направляет поток в воздушный радиатор 5, откуда охлажденный .
воздух по трубопроводу 6 подается в кабину. Радиатор охлаждает-
ся воздухом, забираемым из атмосферы, который поступает в ра-
диатор через заборник 7 и отводится через- трубу 8. Необходимое
давление в кабине обеспечивается регулятором 9.
На фиг. 171 показана схема герметической кабины регенераци-
онного типа.
Для того чтобы обеспечить очистку отработанного воздуха,
применяется инжектор 7, имеющий форму трубки Вентури. Соз-
дающееся в узком сечении трубки разрежение подсасывает воздух,
334
насыщенный углекислотой, который затем поступает для очистки
в регенеративный патрон 8 и в кабину.
На фиг. 172 дана так называемая полумонтажная * схема си-
стемы кондиционирования воздуха на пассажирском самолете.
Фиг. 170. Схема герметической кабины вентиляционного типа,
/—двигатель, 2—контрольный клапан, 3— кабина экипажа, 4, if—трубопроводы,
5—радиатор, 7—заборник воздуха, 6—труба, 9—регулятор давления.
Герметическая кабина вентиляционного типа. Система наддува ка-
бины является комплексной и обеспечивает наддув, отопление,
вентиляцию и необходимую влажность воздуха.
Фиг. 171. Схема герметической кабины регенерационного
типа,
/—баллон с кислородом, 2—кислородный прибор, 3—кислородная
маска, 4—баллон С воздухом, 5—запорный кран, 6—резервуар,
7—инжектор, 8—регенеративный патрон, S—клапан избыточного
давления, /(/—обратный клапан, //—ручной клапан.
Горячий воздух на выходе из компрессоров двигателей поступает в систе-
му кондиционирования по нескольким каналам, образуя «горячую» линию: по
* Отражающая действительное взаимное расположение агрегатов системы
на самолете.
335
/(afaw экипажа
Фиг. 172. Полумонтажная схема системы кондиционирования воздуха на пассажирском самолете,
трубопроводам 1—к воздухо-воздушному радиатору; по трубопроводу 2_к си-
стеме отопления самолета; по трубопроводу 3 — к системе обдува фонарей (для
защиты стекол от запотевания) и обогреву санузлов; по трубопроводу 4 —
к системе индивидуальной вентиляции.
В линии трубопроводов от двигателя установлены обратные клапаны (для
предотвращения утечки воздуха при остановке какого-либо двигателя), заслонки,
регулирующие подачу воздуха, и ограничители давления воздуха.
Охлажденный в радиаторе воздух образует «холодную» линию и подается
в систему индивидуальной вентиляции, проходя через турбохолодильник (для
дополнительного охлаждения) или минуя его, в зависимости от температуры
воздуха. Регулирование температуры путем перекрытия заслонок на трубопро-
водах, подводящих горячий и холодный воздух, производится автоматически:
чувствительный датчик выдает сигнал на электромеханизм, переставляющий
заслонки, управляющие подачей воздуха. Так как работа турбохолодильника
сопровождается сильным шумом, то на выходе воздуха из него установлен глу-
шитель шума.
Из магистрали за турбохолодильником холодный воздух подается в короба
индивидуальной вентиляции и через насадки — в кабины. Холодный воздух по-
дается также в систему отопления, где смешивается с горячим воздухом, посту-
пающим по трубопроводу 2. В последнем случае поступление холодного и горя-
чего воздуха регулируется в зависимости от температуры в системе отопления
с помощью заслонок.
По пути в кабину воздух системы отопления проходит глушитель шума,
форсуночный увлажнитель, поддерживающий заданную влажность воздуха
в кабине и поступает в отопительные короба, а оттуда в кабину,
«Отработанный» воздух поступает в подпольное пространство (см.
фиг. 177,6) и далее к регуляторам давления в передней и задней части фюзеля-
жа, которые регулируют сбрасывание воздуха в атмосферу.
Для охлаждения воздуха, подаваемого в кабину сверхзвукового
самолета, также используются воздушные радиаторы (см.
фиг. 170), однако температура охлаждающего воздуха, проходя-
щего через радиатор, благодаря торможению-его при сверхзвуко-
вых скоростях будет высока. В этом случае * необходимо после-
дующее охлаждение воздуха, поступающего в кабину, которое осу-
ществляется в воздушной турбине (турбохолодильная установка,
фиг. 173). Воздух расширяется на лопатках турбины и давление
и температура его понижаются.
Иногда воздух, предварительно охлажденный в воздушном ра-
диаторе, дополнительно охлаждается в испарительном теплооб-
меннике, где свое тепло воздух отдает испаряющейся жидкости.
Герметическая кабина может представлять собой совершенно
самостоятельный агрегат, имеющий вид герметического сосуда,
расположенного внутри фюзеляжа. Такие герметические кабины
обычно называют вставными, они воспринимают нагрузки только
от внутреннего или внешнего избыточного давления воздуха.
В настоящее время герметические кабины выполняются в виде
герметизированных отсеков фюзеляжа. В этом случае достигается
уменьшение веса, так как конструкция кабины воспринимает, кроме
избыточных давлений, все нагрузки, действующие на данный отсек
фюзеляжа.
• А также при необходимости дополнительного охлаждения воздуха на до-
звуковом самолете.
22 1563 337
Наиболее целесообразной, с точки зрения прочности, формой
для кабины, подверженной внутреннему давлению, является сфера
или цилиндр со сферическими днищами (см. фиг. 155).
Для обеспечения воздухонепроницаемости в местах крепления
и соединения обшивки под заклепочные швы подкладываются уплот-
нительные’ленты (тиоколовые), а головки заклепок покрываются
тиоколовой замазкой или другими герметиками.
Фиг. 173. Схема турбохолодильной установки.
Окна, двери и люки герметизируются при помощи резиновых
прокладок и резиновых трубок (об этом подробней ниже).
Крышки люков и двери открываются внутрь, вследствие чего
избыточное внутреннее давление прижимает крышку люка или
дверь к раме и способствует герметизации. Выводы тяг и тросов
управления из кабины также герметизируются.
Для тяг с поступательным движением успешно применяется вы-
вод с гофрированным шлангом (фиг. 174,а), для тросов — вывод
с резиновым уплотнением (фиг. 174,6).
Для валов с вращательным движением применяют уплотнения
типа сальниковых.
Герметизация вывода ручки управления может быть выполне-
на при помощи конуса из хлопчатобумажной ткани, оклеенной ре-
зиной (фиг. 175).
Степень герметичности кабины характеризуется величиной
утечки воздуха, которая задается в зависимости от назначения
самолета и проверяется при испытании. На случай быстрой потери
кабиной избыточного давления предусматривается второй агрегат
для дополнительного наддува и аварийное кислородное питание.
На военных самолетах наиболее эффективным средством спасе-
ния экипажа при повреждении герметических кабин на больших
338
Тяга
А-а
Л
*
о)
Тяга
ТиоколоЗая
лента
чомут
Тиоколовый
мгут
РезиноЗый
щланг
Детали услоЗно
поЗернуты
Фланец
Фиг. 174. Герметизация выводов тяг (а) в тросов (6).
/—текстолитовый корпус, 2—накладка, 3—резиновый сердечник, <—шайба,
5—болт 6—трос.
Фиг. 175
Фиг. 176, Скафандр.
/—-оболочка, 2—шлем. 3—шарнир, 4—
щиток, 5( 7—шланг, кислородная
маска, 8—замок, 9—клапан, 30—пара-
шютный кислородный прибор, Н—про-
вод радиосвязи.
22*
339
высотах является использование специальных спасательных авиа-
ционных скафандров.
Авиационный скафандр — это воздухопроницаемый ко-
стюм (фиг. 176), снабженный специальной аппаратурой, которая
может до значительной высоты поддерживать необходимое для
жизни давление воздуха и содержание в нем кислорода.
Кабины экипажа
Кабины экипажа самолета предназначены для размещения лет-
чиков, штурманов, радистов и других членов экипажа, а также
приборов, агрегатов и устройств, обеспечивающих управление са-
молетом и постоянный контроль за полетом. На больших самолетах
Фиг. 177. Формы фонарей.
с экипажем в несколько человек каждый из членов экипажа имеет
свое рабочее место, снабженное всеми необходимыми приборами
и оборудованием.
Фонарь кабины (остекленный верх) для обеспечения необ-
ходимого обзора выполняется в виде надстройки, возвышающейся
над основным контуром фюзеляжа (фиг. 177). Такой фонарь зна-
чительно увеличивает лобовое сопротивление самолета.
Фиг. 178. Схема отклонения передней части фюзеляжа.
На некоторых самолетах для увеличения обзора при посадке передняя часть
фюзеляжа отклоняется вниз (фиг. 178). .
Остекление фонаря кабины выполняется из органического
стекла, но при больших скоростях (М1,5) такое стекло теряет фи-
зико-механические свойства вследствие нагрева. В этом случае его
заменяют силикатным стеклом.
340
Передние,(а иногда и задние) стекла фонарей истребителей
являются броневой защитой и делаются из бронестекла толщиной
50—70 мм.
Применение герметических кабин значительно усложнило кон-
струкцию фонарей кабин экипажа. Каркас фонаря обычно состоит
• из отдельных секций, выполненных при помощи штамповки или
литья. Фонарь остеклен двойными стеклами, в этом случае при
разрушении любого внутреннего или наружного стекла оставшееся
стекло выдерживает полное избыточное давление.
На фиг. 179 показан фонарь истребителя с характерными сече-
ниями. В данном случае особую сложность представляет креп-
ление стекла, а также обеспечение воздухонепроницаемости сдвиж-
ной или откидной части фонаря. Герметизация остекления обес-
печивается при помощи прокладок, жгутов, замазки и резины.
Сдвижная часть фонаря герметизируется при помощи резино-
вых шлангов, показанных в сечениях III—III и IV—IV. Располо-
женные между сдвижной и неподвижной частями фонаря эти
шланги, когда в них подается сжатый воздух, плотно прилегают
к обеим частям, обеспечивая герметизацию.
Для того чтобы обеспечить покидание самолета при аварии,
фонари военных самолетов делаются сбрасывающимися.
Фонарь, изображенный на фиг. 179, может откатываться по рельсам на пе-
редних и задней каретках. На фиг. 180 показана поворотная часть 3 заднего
рельса в закрытом (а) и открытом (б) положении. При повороте ее, осущест-
вляемом крюком 4, фонарь приподнимается над фюзеляжем (фиг. 180,6)
и сдувается потоком воздуха.
На современном самолете в кабиле летчика необходимо раз-
местить устройства для управления самолетом и двигателем, пило-
тажно-навигационные приборы и приборы контроля за работой
систем и различных агрегатов самолета и двигателя, а также необ-
ходимое радиотехническое оборудование.
На фиг. 181 показано размещение приборов и оборудования на
доске кабины истребителя при виде по полету, на фиг. 182 — по-
ложение летчика в кабине истребителя и размещение устройств
управления.
Для удобства наблюдения за показаниями приборов они груп-
пируются по назначению и устанавливаются на приборных досках
в определенном порядке. Обычно в центре приборной доски рас-
полагаются пилотажно-навигационные приборы. Приборы контроля
за работой двигателя располагаются в правой части приборной
доски.
Механизмы управления различными агрегатами в кабине раз-
мещаются по группам в соответствии с их назначением.
Так как правая рука летчика занята управлением самолета, то
на правом борту кабины располагаются управления такими агрега-
тами и устройствами, которые редко применяются в полете.
Чаще всего справа размещают управление запуском двигате-
ля, радиотехническими устройствами, аварийными системами и пр.
341
ш-ш
Фиг 179 Фонарь кабины летчика на истребителе
передний замок 2—ручка фонаря, 5-ролики, -/-сдвижная часть фонаря 5-ручка снятия стопора 6-п вреднее стек то
7—рамка, 8—унчотняющая пленка, 9—боковое стекло SO—прокладка
342
С левой стороны летчика, наоборот, размещаются управления
такими агрегатами и устройствами, которыми часто приходится
пользоваться в полете, например, органы управления двигате-
лем и пр.
Все механизмы управления агрегатами располагаются так.
чтобы летчик мог ими пользоваться без особых затруднений. Обыч-
но они снабжаются пояснительными надписями, а некоторые
рычаги окрашиваются в определенные цвета
а) Закрытое положение б) Открытое положение
Фиг. 180 Задний замок фонаря
/—сдвигающаяся часть фонаря, 2—каретка поворотная часть
рельса, 4—крючок, 5—тяга, 5—рельс
Большое количество приборов- и устройств, расположенных
в кабине, за которыми летчику приходится наблюдать, затрудняет
его работу и быстро утомляет. Поэтому конструкторы самолетов
стремятся функции контроля за различными системами переложить
на приборы-автоматы.
Кабина летчиков (экипажа) в больших самолетах значительно
отличается от описанной выше. В ней гораздо больше приборов,
а рукоятки управления двигателями и другими агрегатами распо-
ложены так, что ими пользуются оба рядом сидящие летчика. Не-
которые приборы и рукоятки дублируются
На фиг 183 показана кабина экипажа, в которой размещаются
два летчика, штурман, радист и бортмеханик.
Кабины экипажа оборудуются удобными при работе и отдыхе
креслами.
Кресло летчика должно обеспечивать ему возможность хо-
рошего обзора. Для выполнения этого требования кресло делают
регулирующимся по росту летчика.
Кресло штурмана и радиста обычно делаются вра-
щающимися относительно вертикальной оси, а в некоторых случа-
ях складывающимися.
С увеличением скорости полета оставление экипажем кабины
самолета в аварийных случаях делается все более затруднительным,
343
ю
fl
о
12
14
(5
П
25
часы
Компас
ко тор
ЯН
К
15
Бензи-
номер
ВЫСОЛЮ
ад
метр
Указа-
7ах
мет
тор кур-
са
Указа
на
Указа
ОТ6/7Й
юрости
ермо-
метр
боди
метр
Линия перегиба
приборной диски
Индика
тель
оборот
Варио-
/1
19
20
22
21- 24
£
4J
<=.
ъ
580_о
230.
' Услоднь/а центр
вращения ручки
Фиг, 18L Размещение приборов и оборудования на приборной
доске кабины истребителя.
1—доска приборов, 2—прицел, 3—педали, 4—пол кабины, 5— ручка управле-
ния самолетом, 6—сиденье, 7—ручка бомбосбрасывателя, 5—‘доска прибо-
ров— левая часть, 9—доска приборов—правая часть, /0—кислородный
прибор, //—указатель положения шасси, /2—выключатель фары, 13—конт-
рольная кнопка, /4—выключатель сигнализации шасси, 15—ручка управле-
ния шасси, 16— манометр сети сжатого воздуха, /7—пусковая кнопка, /Д—пе-
реключатель, /0—предохранитель управления шасси, 20, 22—ручка переза-
рядки, 2/—настройка радиополукомпаса, анометр, 24—щиток радио-
полукомпаса, 25—переключатель бензиномера.
Примечание. Нижняя часть доски приборов условно развер-
нута в вертикальное положение.
так как человек физически не в состоянии преодолеть сопротивле-
ние воздуха при выходе из кабины.
В качестве средств спасения членов экипажа при аварии са-
молета в полете на современных военных самолетах применяются
катапультируемые * кресла, а на очень больших скоростях и вы-
сотах полета — отделяемые кабины.
лад педалей условный центр вращения ручки
Фиг. 182. Положение летчика и размещение органов управления
в кабине истребителя.
/—доска приборов, 2— прицел, 3—педали, V—пол кабины, 5—ручка управления
самолетом, 6—сиденье, 7—бронеспинка, 8—стекло фонаря, 9—ручка управления
тормозами, 10—бронестекло заднее, 11—зеркало, 12—бронестекло фонаря.
При покидании самолета необходимо обеспечить членам эки-
пажа защиту их от воздушного потока, ограниченные перегрузки,
а также надлежащую траекторию полета, чтобы не допустить за-
девания за оперение самолета. На фиг. 184 показаны траектории
катапультирования при различных скоростях Ус самолета и на-
чальной скорости Vo сидения.
Из фигуры видно, что с увеличением скорости полета траекто-
рия движения сидения становится все более пологой из-за влияния
увеличивающегося лобового сопротивления.
Чтобы поднять траекторию, необходимо увеличить начальную
скорость Vo сидения и уменьшить его лобовое сопротивление.
Так как путь разгона.сиденья ограничивается высотой кабины,
* Принудительное выталкивание кресла при помощи специального стреляю-
щего механизма.
345
5
ч
о
о
03
та
a «
с 2
£ Ч та ч
Ч та О Ф
£• С- =£ t
с >» *
та та
та
Е
,ь©
та
та
S
О
ч
a S
а Ч
л >
Ч С
та
• а х
“ о Ч
§оЧ
о -
X
a
<у
О о н
<« ЬЮ К 3
»• м л ш з
о О
й я
Е
О
та
х
та
3
3
Iw и , “*
s I Э
k-Z V4I *• ’ 1А "
я
«
та _
Л 0.0
1г-
U
Ф
О
О
та
ф
Ч
L «5
3
m
и
х
ф
=J
н°
к
К
та
X
О
Ф
S
та I
V . I
ф Ю
&та« л
1 i I S
oS
ч
и
о
о
X
аГ*=
х 3 ,
К ХЧз
&
ф
о
та
та
о
та
м
х
х
та
*
о
X
и
Ф
сх
X
а
о)
о
S1
Ф 5*
л о .
Й'ОС,
к
U
с
U
ф
3
2
та
д
3 'С
о
та
§
346
то для выбрасывания экипажа вверх приходится применять боль-
шие кратковременные перегрузки в направлении голова—таз
(равные примерно 15—20).
Поэтому увеличение начальной скорости Уо допустимо, если
оно не приводит к чрезмерным перегрузкам. Уменьшение лобово-
го сопротивления сиденья благоприятно сказывается также на
уменьшении перегрузок в направлении спина — грудь.
Значительное снижение перегрузки в направлении голова —
таз может быть достигнуто при катапультировании экипажа вниз
= 720км/час (200 м/сек)
Уа-22 м/сек
1У’ 1200км/час(333м/сек)
15 х[м]
Фиг 184. Траектория катапультирования при различных скоростях полета.
Уо = О
Vc= 720км/час (200м/сек)
Vf ООО км/час (250м/сек)
Vc~ 1000км/час (278 м/сек)
через специальные люки. В этом случае требуется меньшая на-
чальная скорость сиденья при отделении от самолета, что позво-
ляет снизить перегрузку.
Катапультируемое кресло (сиденье), изображенное на фиг. 185,
состоит из каркаса с чашкой 1> бронеспинки 7, заголовника 2 и при-
вязных ремней 5. Спинка и заголовник имеют мягкие подушки.
К чашке кресла прикреплены подножки 4, на которые член эки-
пажа при катапультировании ставит ноги.
Для защиты лица от воздействия воздушного потока имеется
шторка, в случае более высоких скоростей применяется контей-
нер, защищающий все тело.
Кресло устанавливается на направляющие рельсы, по которым
оно может перемещаться на роликах, имеющихся на спинке кресла
Сзади, к верхней части кресла, крепится стреляющий механизм.
Катапультируемое сиденье сблокировано со сбрасываемым фо-
нарем: пиропатрон сиденья снимается с предохранителя при по-
мощи ручки сбрасывания фонаря.
Для того чтобы кресло при выходе из кабины, попадая в поток
воздуха, не вращалось беспорядочно, оно имеет стабилизирующие
щитки 3, удерживающие кресло в вертикальном положении.
347
Наиболее перспективным способом оставления кабины на
больших высотах и скоростях полета является отделяемая от са-
молета кабина с последующим катапультированием членов эки-
пажа.
' а) 8ид спереди . 5) Вид сзади
Фиг. 185. Катапультируемое кресло.
/—каркас сиденья с чашкой, 2—заголовник, 2—стабилизирующие щитки, подножка,
5—ремни, d—захваты, /^бронеспинка, S—рукоятки управления стреляющим механиз-
мом, Р—скоба шторки.
В отделяемой кабине сравнительно просто решаются вопросы,
связанные с обеспечением жизненных условий экипажа при поки-
дании самолета на больших высотах (фиг. 186,6).
На фиг. 186, а показаны последовательные положения летчика
перед отделением кабины (Л 2> 3).
Пассажирские кабины
Пассажирские кабины самолетов предназначены для размеще-
ния пассажиров. В самолетах, обслуживающих местные воздушные
линии, пассажирские кабины рассчитаны на 3—9 пассажиров и
348
обычно являются непосредственным продолжением кабины лет-
чика (фиг. 187).
На больших самолетах пассажирские кабины представляют
собой отдельные помещения (фиг. 62, разд. II), а размеры их опре-
деляются объемом, приходящимся на одного пассажира. В совре-
менных самолетах такой удельный объем колеблется в пределах
от 1,2 до 2,0 лс3.
а)
Фиг. 186, Катапультирование летчика из сверхзвукового
самолета.
В настоящее время пассажирские кабины межконтинентальных
и магистральных самолетов подразделяют на классы в зависимо-
сти от удельного объема и комфорта кабины.
Размещение кресел в пассажирской кабине, ориентировочные
размеры ее, а также размещение подсобных помещений в пасса-
жирском самолете показано на фиг. 188 для двух классов кабин.
По техническим требованиям на всех транспортных самолетах
полагается, кроме пассажиров, перевозить определенное количест-
во груза, который нужно удобно разместить без затраты лишнего
времени на загрузку и выгрузку. Для этого предусматриваются
багажные отделения объемом от 1 до 20 м3 и более в зависимости
от размеров самолета.
Каркас пола пассажирских кабин показан на фиг. 155,
разд. III. Он состоит из поперечных (опорных) балок, установлен-
ных в нижней части шпангоутов и продольных балок. Роль по-
следних выполняют также рельсы, которые имеют фасонное сече-
349
ние. На рельсы устанавливаются кресла; кроме того, они являют-
ся опорой для панелей пола, которые обычно имеют слоистую
конструкцию.
Внешние слои часто выполняются из фанеры, а в качестве за-
полнителя используются пенопласт, бальза и соты.
Одним из важных требований, предъявляемых к пассажирским
кабинам, является требование комфорта. В него входит внутреннее
оформление кабины, наличие удобных кресел, система кондицио-
нирования воздуха, индивидуальной вентиляции, индивидуального
подсвета. К требованиям комфорта относится и теплозвукоизоля-
ция кабины.
Фиг. 187.
Шум на самолете вызывает преждевременное утомление эки-
пажа и пассажиров, временную глухоту и затрудняет работу эки-
пажа и особенно радиста.
Уровень силы звука измеряется в децибеллах (дцб). Один децибелл—та-
кое изменение силы звука, которое улавливает человеческий слух.
Разговор шопотом дает громкость примерно 30 дцб, шум при перелистыва-
нии книги — 45 дцб, нормальный разговор — 65 дцб, громкий разговор 70—
80 дцб.
Громкость шума в пассажирской кабине современного самолета дальнего
следования не должна превышать 90—100 дцб. На самолетах, предназначенных
для более коротких рейсов, может быть допущен шум до 110 дцб.
Основные источники шума на самолете — двигатели, винты
и вибрирующие части самолета и его оборудования. В кабину шум
передается через элементы конструкции и проникает через щели
в фонарях, окнах и дверях, а также через вентиляционные каналы.
Для уменьшения шума внутри кабин необходимо эластичное
крепление двигателей и такое расположение винтов, чтобы концы
их лопастей были удалены от обшивки фюзеляжа на 400—500 мм.
Стекла и двери во избежание образования щелей и дребезжания
ставят на резиновых прокладках.
350
ОШ
000Z ООН
Фиг. 188 Компоновка.кабин
На современном самолете борьба с шумом ведется также с по-
мощью звукоизоляции, которая должна одновременно быть
и теплоизоляцией.
Тепло-звукоизоляционный материал должен отличаться высо-
кой звукопоглощаемостыо, малой теплопроводностью, а также ма-
лым весом, огнестойкостью и малой влагопоглощаемостью. Кроме
того, он должен легко монтироваться на самолете.
40+80
Фиг. 189. Схема теплозвукоизоляции
Декоративная
обшивка--------
Стеклянная вата
(АТИМСС)-------
Уплотненная
стеклянная Вата
(АТИМС)-------
НеОлоновая вата
(ВТ-4)
кабины пассажирского самолета.
В качестве звукоизолирующих материалов применяются капро-
новая вата с удельным весом у = 50 кГ/ж3 (490 н/л?), материал из
стекловолокна, называемый АТИМС с удельным весом у—25 кГ/м?
(245 н/м3).
Тепло-звукоизоляция на современных самолетах.осуществляет-
ся по схеме, изображенной на фиг. 189.
Входные двери следует располагать по левому борту из
расчета одна входная дверь размером 1700X800 мм на 30—40 пас-
сажиров. На пассажирских самолетах с герметическими кабинами
дверь должна открываться, как правило, внутрь (см. стр. 338).
На фиг. 190 показана дверь самолета Ил-18. Дверь отходит
внутрь кабины (для этого нужно повернуть шарнирную панель 7)
и затем перемещается вперед или назад по направляющим рель-
сам. Дверь имеет две зоны герметизации — внутреннюю и наруж-
ную (фиг. 190, сечение А—А) и герметизируется двумя резиновыми
профилями трубчатого сечения, к которым двери прижимаются
внутренним избыточным давлением.
Запасные аварийные люки предусматриваются в сов-
ременных пассажирских самолетах для выхода пассажиров из ка-
352
бин в аварийных случаях. Размещаются аварийные люки преиму-
щественно по бортам в среднем отсеке фюзеляжа, а иногда вверху.
Форма вырезов для аварийных люков овальная с размером по
осям 450X750 мм.
Фиг. 190. Входная дверь.
/—чашка, 2— каркас двери, 3—балки каркаса, 4—замок, 5— направляющая трубка,
лента. 7—шарнирная панель, 8— каретка. 9—направляющий рельс. 10—усиленный
шпангоут. 11—окантовка выреза, /2—резиновый профиль-
Окна пассажирских кабин имеют разнообразные фор-
мы, чаще всего круглые или прямоугольные с закруглениями.
Вырезы для окон в обшивке фюзеляжа делают между шпангоу-
тами (фиг. 191), используя последние в качестве дополнительной
жесткости к окантовке отверстия.
23 1563
353
Окна обычно состоят из внутреннего и наружного стекол, из-
готовленных из ориентированного органического стекла (фиг. 191,
сечение А—Л). Одно из стекол, как правило, делается более тол-
стым. Такое стекло работает при небольших напряжениях и,
следовательно, обладает высокой усталостной прочностью.
Резинобый профиль
КольаеВой прижим
Внутреннее стекло
Наружное стекло
ПолуколъиеВые
прижимы
ОкантоВка
Уплотнительная замазка
Фиг. 191. Конструкция окна.
Штампобанная
наша
Воздушная прослойка между стеклами соединена трубкой
с патроном влагопоглотителя (силикагеля), что предотвращает за-
потевание стекол.
Герметизация стекол по краям обеспечивается резиновыми про-
кладками и соответствующими прижимами.
Грузовые кабины и багажно-грузовые помещения
На пассажирских самолетах для перевозки багажа и коммер-
ческих грузов предусматриваются специальные помещения. На
межконтинентальных и магистральных самолетах дальнего следо-
вания грузы располагаются под полом пассажирских кабин и в от-
секах фюзеляжа (фиг. 192), а на самолетах местных линий —
354
Фиг. 192. Багажно-грузов^ые помещения.
23*
355
в отсеках фюзеляжа. Каждое багажно-грузовое помещение должно
иметь загрузочные люки, расположенные в доступных местах,
и устройства для крепления грузов. На фиг. 192 показано разме-
щение грузовых помещений самолета Ил-18. В нижних помещениях
грузы перемещаются на специальной телеЖке, для чего в полу
проложены направляющие рельсы.
Фиг. 193.
В транспортных самолетах большой грузоподъемности грузо-
вые кабины представляют собой отдельный отсек фюзеляжа (см.
фиг. 20, разд. II). В таких самолетах очень важное значение имеет
обеспечение удобных подходов для погрузки и выгрузки, которые
осуществляются через большие люки (фиг. 193).
Пол грузовой кабины должен располагаться на уровне кузова
грузовой автомашины.
В конструкциях грузовых отсеков характерным является уси-
ление пола путем установки мощного продольного и поперечного
наборов и наличие различного рода швартовочных узлов, трапов
и подъемно-транспортных устройств, облегчающих погрузку и вы-
грузку.
4. РАСЧЕТ ФЮЗЕЛЯЖА НА ПРОЧНОСТЬ
Нагрузки, действующие на фюзеляж. Расчетные случаи
Как сказано выше, в полете и при посадке фюзеляж нагру-
жается силами от присоединенных к нему агрегатов, массовыми
силами грузов, расположенных в фюзеляже, и массовыми силами
самой конструкции фюзеляжа (последние невелики, и ими можно
пренебречь).
356
Расчетными случаями для фюзеляжа являются, таким образом,
случаи нагружения всех агрегатов, передающих нагрузки на фюзе-
ляж. Например, случай нагружения фюзеляжа при посадке на три
точки обозначается Е#; нагружение фюзеляжа в криволинейном
полете обозначается АфЕф и т. д.
Предусматриваются несимметричные случаи нагружения фюзе-
ляжа: Яф — нагружение задней части фюзеляжа боковой силой,
действующей на вертикальное оперение; EJ — боковое нагружение
инерционными силами передней части фюзеляжа (при маневре).
Предусматриваются также аварийные случаи (посадка с невыпу-
щенным шасси и пр.). Коэффициент эксплуатационной перегрузки
ft9 соответствует расчетным случаям (Е, А и т. д.), предусмотрен-
ным в нормах прочности; коэффициент безопасности f для фюзе-
ляжа равен 1,8.
Величины массовых нагрузок определяются из
~ “ ^гр^расч * >
где СГр — вес груза.
Сила Ргр приложена в центре тяжести груза.
Зная внешние нагрузки, можно построить эпюры поперечных
сил Q и изгибающих моментов Л1изг (фиг. 194).
Кручение фюзеляжа будет иметь место в том случае, koi да
силы не проходят через ось жесткости фюзеляжа, которая, как
и в крыле, определяется как линия, проходящая через центр жест-
кости сечений. Центром же жесткости будем по-прежнему назы-
вать в сечении точку, в которой приложение силы не вызывает
кручения. Будем приближенно считать, что центр жесткости лежит
на оси симметрии сечения посередине его высоты.
Зная точки приложения внешних сил и расстояние их до оси
жесткости, можно построить эпюру крутящих моментов AfItp. Поль-
зуясь эпюрами Q, АГизг, AfKp, произведем определение напряжений
в сечениях. Некоторые случаи являются расчетными для какой-
либо одной части фюзеляжа (например, случай EJ только для
передней части фюзеляжа). Очевидно, что в этих случаях нет
нужды строить эпюры для всего фюзеляжа, а переднюю и заднюю
части фюзеляжа можно рассматривать как консольные балки,
закрепленные у лонжеронов крыла.
Предполагая, например, что в хвостовой части отсутствуют
грузы, и принимая за ось жесткости ось фюзеляжа, получим эпю-
ры поперечных сил Q, изгибающих ЛГизг и крутящих Л4Кр моментов
хвостовой части фюзеляжа для нагружения силами Рг.о и Рв 0, при-
веденные на фиг. 195.
Построение этих эпюр в пояснениях не нуждается.
* Если пренебречь подъемной силой крыла в посадочных случаях.
357
Расчет балочного фюзеляжа на изгиб
Так как принципиально расчет сечений любой из частей, на
которые фюзеляж делится по длине, по найденным значениям Q,
Мизг, -Мкр одинаков, то дальнейшее изложение ведется примени-
тельно к расчету хвостовой части фюзеляжа.
Фиг. 194. Нагрузки, действующие на фюзеляж.
Рассмотрим расчет ее на изгиб от вертикальных нагрузок (на-
пример, от нагрузок на горизонтальное оперение — Рг.о) и гори-
зонтальных нагрузок (на вертикальное оперение — Рв.о).
Работа элементов сечения фюзеляжа подобна работе элементов
сечения крыла. Следовательно, и расчет на прочность сечения фю-
зеляжа принципиально не отличается от расчета сечения крыла.
Можно принять, что в лонжеронном фюзеляже изгибающие
моменты воспринимаются только лонжеронами, которые нагру-
жаются осевыми силами 5Л.
358
Фиг. 195. Нагрузки, действующие на конструктивные элементы балочно-лонжеронной части фюзеляжа
359
Величины осевых сил, действующих на лонжероны, при изгибе
в вертикальной плоскости будут равны
л 2НЯ ;
аналогично при изгибе в горизонтальной плоскости
(64')
Напряжения находим из формул
= • (65)
^раст * сж
Здесь Лшст и Fem — площади сечений растянутого и сжатого
лонжеронов.
Сцппариая сипа ра стяжения
Фиг. 196 Нагрузки, действующие на конструктивные элементы
б алочио-стрингерной части фюзеляжа.
Полученное напряжение сравниваем с пределом прочности ма-
териала лонжерона, сжимающее напряжение — с критическим на-
пряжением сжатого лонжерона.
Критическое напряжение лонжерона определяется по кривым
gKn = f(X)> Гибкость, X=//Z определяется по длине I, равной шагу
шпангоутов;’ i— радиус инерции сечения лонжерона.
Таким образом получаем условия прочности
°раст °сж °кр.л*
В стрингерном фюзеляже изгибающий момент воспри-
нимается стрингерами и обшивкой, вызывая в них растяжение
и сжатие (фиг. 196). Рассмотрим, например, действие вертикаль-
ного изгибающего момента.
360
Стрингеры и обшивка, расположенные вблизи нейтральной оси,
работают при малых напряжениях. Пренебрегая ими, можно при-
нять для приближенного расчета, что пара сил S с плечом —Н
3
нагружает верхний и нижний своды, состоящие из стрингеров
и обшивок (см. фиг. 196, своды обведены штрихпунктирной ли-
2
нией). Здесь—Н — расстояние между центрами тяжести сводов.
3
Высоту свода для эллиптических и круглых сечений можно принять
равной 0,257/.
S=3X!2£ ,66
2Н ' ’
Тогда для растянутого свода напряжение определяется так:
S S .
°раст р р , р °в- 1
Г св ПГ стр + Г общ
Здесь Л-в — площадь сечения свода;
^стр, — площадь сечения одного стрингера, обшивки;
п — число стрингеров свода.
Для сжатого свода
°стр %хобш~ р р . р ^>акр.стр*
г ПриВеСВ iU стр 1 т7 обш
Здесь ОсТр, Отахобш — напряжение в стрингере, равное максималь-
ному напряжению в рбшивке;
Лхрив.св — приведенная (редуцированная) площадь се-
чения свода;
<р—редукционный коэффициент обшивки, при-
, , „408
4 ближенно равный — и учитывающий по-
терю устойчивости обшивки;
Робш — площадь сечения обшивки;
6 — толщина обшивки;
Окр.стр — критическое напряжение стрингера.
Расчет стрингерного фюзеляжа на горизонтальный изгиб про-
водится так же, как и на вертикальный изгиб. Размер Н — высота
фюзеляжа, заменяется размером В — шириной. Вместо высоты
свода 0,257/ имеем 0,25В.
В обшивочных фюзеляжах также рассматриваем нагружение двух
сводов высотой 0,25ff или 0,25В, Нормальные напряжения, возникающие в об-
шивке,
S /
°раст р °в
г раст.св
S
°сж J7 °кр-обш
” СЖ.СВ
где Пкр.абщ — критическое напряжение обшивки*
(69)
(70)
361
Расчет балочного фюзеляжа на сдвиг и кручение
Во всех разновидностях балочных фюзеляжей (лонжеронном,
стрингерном, обшивочном) сдвиг и кручение воспринимает обшив-
каР подкрепленная лонжеронами, стрингерами и шпангоутами.
' Рассматривая нагружение фюзеляжа, соответствующее
фиг 195, а 196, и считая приближенно, что высота боковых пане-
лей,” воспринимающих, сдвиг, равна для лонжеронных фюзеля-
жей Нл, для стрингерных и обшивочных — Н, получим касатель-
* 3
ные напряжения Tqb-
----для
2НЛЪ
лонжеронных фюзеляжей;
— для стрингерных и обши-
вочных фюзеляжей.
(71)
Полученные напряжения сравниваются с разрушающим каса-
тельным напряжением тв, равным для дуралюмина 154-18 кГ[мм*
(14,74-17,7 ntH/ji2).
Tq
При горизонтальном сдвиге (фиг. 195,6) напряжения в верхней
и нижней панелях обшивки вычисляются так же, только И и Нл
заменяются соответственно В и Вл, как и при расчете на изгиб.
Однако полученное касательное напряжение Tqi>= не является
^пан
окончательным. Кручение, сопутствующее горизонтальному сдвигу
(вызванное моментом силы Рво), также создает касательные на-
пряжения в обшивке.
Л'Кр
(72)
Здесь Fq — площадь, ограниченная средней (или наружной) лини-
ей контура сечения. В итоге в одной из панелей тКруч суммируется
с Tqr. а в другой — вычитается (фиг. 195,6).
Для более напряженной панели (верхней на фиг. 195,6)
T2==TQr + 'Tltpy4<TB. (73)
Об усталостной прочности фюзеляжей
Конструкция фюзеляжей с герметическими кабинами работает
в условиях переменных во времени нагрузок. Это обусловлено
в основном изменяющимися нагрузками, действующими на фюзе-
ляж от оперения, крыла (маневренные нагрузки), турбулентностью
атмосферы, приводящей к изменению избыточного давления в ка-
362
бине по сравнению с окружающей средой, а также пульсирующими
давлениями, вызванными реактивной струей. Переменные нагруз-
ки приводят к явлениям усталости конструкции.
Вопросы усталостной прочности конструкций современных пас-
сажирских самолетов имеют особо важное значение, так как у них
почти весь фюзеляж занят герметической кабиной В настоящее
время наряду со статическими испытаниями конструкции проводят
испытания на усталостную прочность.
Особенно тщательно подвергаются испытаниям на усталостную
прочность конструкции герметических фюзеляжей с учетом нагру-
зок от внутренних давлений.
Выявлены некоторые факторы, влияющие на усталостную проч-
ность конструкций.
1. Важнейшим средством повышения усталостной прочности
является снижение расчетных напряжений в силовых элементах
тонкостенных конструкций.
2 В конструкциях герметических фюзеляжей весьма важно
обеспечить равномерную нагрузку элементов конструкции (осо-
бенно обшивку) сосредоточенными нагрузками в местах крепле-
ния к фюзеляжу крыла, двигателей, шасси и пр.
3. В местах вырезов для окон, дверей и люков необходимо кон-
струкции выполнять так, чтобы не было концентраций напряжений,
достигающей опасной величины.
4. Исследования показывают, что усталостная прочность резко
повышается в конструкциях, в которых применяются клеевые или
клеесварные соединения.
Повышенная живучесть может быть обеспечена дублированием
некоторых конструктивных элементов и уменьшением интенсивно-
сти распространения усталостных трещин.
Последнее достигается рациональным выбором материала кон-
струкции и применением ограничителей трещин — накладок, свер-
лений в местах возможного появления трещин.
Глава XVI
СИЛОВЫЕ УСТАНОВКИ
1. НАЗНАЧЕНИЕ СИЛОВЫХ УСТАНОВОК И ТРЕБОВАНИЯ К НИМ.
РАСПОЛОЖЕНИЕ ИХ НА САМОЛЕТЕ
С
Ндзначение силовых установок, требования к ним
Силовая установка на самолете представляет собой совокуп-
ность двигателя с его агрегатами, систем и устройств, обеспечи-
вающих надежную работу двигателя в различных условиях полета.
В силовую установку входят:
363
I) двигатель (поршневой, турбовинтовой, турбовентиляторный,
турбореактивный, прямоточный воздушно-реактивный, ракетный
и др.) с агрегатами и системами запуска и управления;
2) воздушный винт (для силовых установок с поршневыми
и турбовинтовыми двигателями);
3) моторная рама или другой вид подвески и крепления дви-
гателя к конструкции самолета;
4) капоты, обтекатели, гондола двигателя;
О W00 2000 3000 4000 Укп/час
(276) (556) (634) (1112) ч/сек
Истинная скорость полета
Фиг. 197. Области применения самолетов с различ-
ными типами двигателей.
5) системы питания двигателя топливом и смазочным с баками;
6) системы охлаждения двигателя и его агрегатов;
7) устройства для всасывания воздуха (кроме силовых устано-
вок с ракетными двигателями) и выхлопа отработанных газов;
8) системы управления и контроля за работой различных агре-
гатов;
9) противопожарные устройства;
10) противообледенительные устройства.
В настоящее время на самолетах устанавливаются силовые
установки с различными типами двигателей (см. разд. II, гл. XI).
Примерные области применения двигателей различных типов
на самолетах в зависимости от скорости и высоты полета показаны
на фиг. 197.
К силовым установкам, независимо от их типа и места располо-
жения на самолете, предъявляются следующие основные требо-
вания:
364
1. Выгодное с аэродинамической точки зрения расположение
силовой установки на самолете и рациональное конструктивное
оформление ее.
2. Минимальные потери в системах всасывания и выхлопа.
3. Поглощение вибраций двигателя и винта креплениями си-
ловой установки к самолету так, чтобы вибрации не передавались
на конструкцию самолета.
4. Компенсация узлами крепления температурных перемеще-
ний корпуса двигателя, т. е. обеспечение свободного перемещения
отдельных точек двигателя, вызванного его нагревом.
5. Быстрое снятие и установка двигателя и его агрегатов на
самолет.
6. Легкий доступ ко всем частям двигателя и его оборудова-
ния, требующих периодического осмотра и регулирования.
7. Обеспечение для военных самолетов живучести (малой по-
ражаемости в боевых условиях) всей силовой установки, т. е. пра-
вильное расположение защитных устройств для наиболее уязви-
мых агрегатов.
8. Локализация пожара при его возникновении в пределах от-
сека двигателя. Пожарные перегородки должны вполне надежно
защищать каркас самолета от распространения пожара.
Кроме .того, двигатель должен иметь возможно большую мощ-
ность или тягу и высотность при возможно меньшем весе, надежно
работать в пределах установленного срока, легко запускаться
в любую погоду и на различных высотах, обладать возможно мень-
шими габаритами, иметь малый удельный расход топлива и хоро-
шую приемистость, т. е. способность быстро изменять число обо-
ротов.
Расположение силовых установок на самолете
Силовые установки располагаются в фюзеляже, на крыльях
и в гондолах, установленных под крыльями или на хвостовой ча-
сти фюзеляжа.
Типы двигателей, их количество и расположение на самолете
определяются на основании летно-технических требований: ско-
рости, высотности, грузоподъемности, дальности и пр.
Силовые установки с поршневыми (ПД) и тур-
бовинтовыми двигателями (ТВД).
Силовые установки с одним поршневым или турбовинтовым
двигателем и тянущими винтами обычно располагаются в носовом
отсеке фюзеляжа (см. фиг. 198, схемы I, II). При таком размеще-
нии двигателя сравнительно просто решается компоновка всей
силовой установки и крепление ее к фюзеляжу. Однако в этом
случае затруднена установка убирающегося шасси с передним ко-
лесом.
Силовые установки с двумя, четырьмя поршневыми (см.
, фиг. 199, схемы I и II} или турбовинтовыми двигателями (схе-
365
Фиг. 198. Расположение поршневых и турбовинтовых
двигателей в фюзеляже.
Фиг. 199. Расположение поршневых и турбовинтовых двигателей на крыльях.
366
мы III и IV) располагаются обычно в носовой части крыла. Такое
расположение двигателей разгружает конструкцию крыла, так как
массовые силы двигателей действуют в сторону, противоположную
аэродинамическим нагрузкам, и уменьшают вызванные ими изги-
бающие моменты.
Силовые установки с турбореактивными и ра-
кетными двигателями.
На самолетах небольших размеров ТРД обычно устанавли-
ваются в хвостовой части фюзеляжа (фиг. 200, схема Л II).
1РД
фиг. 200. Расположение турбореактивных и ракетных двигателей в хвостовой
части фюзеляжа.
2—турбореактивный двигатель, расположенный в хвостовом отсеке фюзеляжа, //—два
турбореактивных двигателя, расположенных в хвостовом отсеке фюзеляжа, Ш—само
лет с ускорителями (ЖРД)* установленными в хвостовом отсеке фюзеляжа, /И-ракето-
план с ракетным двигателем (ЖРД)*
При таком расположении двигателей представляется возмож-
ным разместить экипаж в переднем отсеке фюзеляжа. Кроме того,
ось выхлопного сопла двигателя, как правило, совпадает с осью
хвостового отсека фюзеляжа и проходит через центр тяжести са-
молета; поэтому балансировка самолета при изменении режима
работы двигателя почти не нарушается.
Существенным недостатком расположения турбореактивных
двигателей в хвостовом отсеке фюзеляжа является конструктивная
сложность создания входных устройств для воздуха, поступающего
в двигатели. В этом случае входные каналы приходится делать
длинными, в результате чего заметно увеличиваются потери.
Иногда для кратковременного увеличения максимальной скоро-
сти полета устанавливают в хвостовом отсеке фюзеляжа ускори-
тели (фиг. 200, III). В качестве ускорителей в настоящее время ис-
пользуются маломощные ракетные двигатели, преимущественно
ЖРД-
Самолеты, предназначенные для полетов на больших скоростях
и высотах (ракетопланы), снабжаются мощными ракетными дви-
367
гателями, которые обычно располагаются в хвостовом отсеке фю-
зеляжа (фиг. 200, IV).
На самолетах, имеющих два, четыре и более реактивных дви-
гателя, двигатели обычно располагают на крыльях. Компоновка
силовых установок на крыле может быть различной. Так, в целях
уменьшения сопротивления лучше двигатели располагать в наибо-
лее толстой части крыла (центроплане) (фиг. 201,/). Кроме того,
при таком расположении двигателей проще осуществить полет
с неработающим двигателем (меньше заворачивающий момент от
несимметричной тяги), упрощается топливная система за счет бо-
лее коротких трубопроводов.
Фиг. 201. Расположение турбореактивных двигателей на крыльях.
Возможна установка ТРД на крыльях на некотором расстоя-
нии от корня крыла (фиг. 201,//). В этом случае гондолы двигате-
лей могут быть использованы для убирания шасси. Однако такое
расположение двигателей увеличивает сопротивление крыла и сни-
жает эффект стреловидности (критическое число М). На современ-
ных самолетах двигатели часто располагают под крыльями на пи-
лонах (фиг. 201, III, IV). Такая схема выгодна с точки зрения аэро-
динамики, так как значительно снижается интерференция между
гондолой двигателя и крылом. Однако конструкция гондол, пило-
нов и элементов крепления получается довольно сложной и тяже-
лой. Большим недостатком является также близкое расположение
воздухозаборников к земле, что приводит к быстрому износу дета-
лей и агрегатов двигателя вследствие попадания во всасывающую
систему пыли и песка.
Желание конструкторов найти наиболее выгодное расположе-
ние двигателей привело к размещению их на концах крыльев
368
(фиг. 201,7V, V). В этом случае крыло сохраняет хорошую аэроди-
намику и уменьшается вес конструкции крыла вследствие раз-
грузки его. Наряду с этим следует отметить, что полет с нерабо-
тающим двигателем при такой схеме затруднен из-за большого
разворачивающего момента.
Расположение двух или четырех двигателей в специальных
гондолах на хвостовой части фюзеляжа (фиг. 202) имеет свои осо-
бенности. Прежде всего при такой компоновке двигателей резко
возрастает пожарная безопасность и уменьшается шум в кабинах
пассажиров и экипажа.
• А
Фиг. 202. Расположение ТРД на хвостовой части фюзеляжа.
Кроме того, улучшается аэродинамика крыла, представляется
возможным расположить механизацию крыла по всему размаху.
По высоте фюзеляжа двигатели можно расположить так, чтобы
тяга их проходила вблизи центра тяжести самолета, что уменьшает
влияние работы двигателей на продольную балансировку самолета.
Недостатком такой схемы является увеличение веса крыла (на
2-ь4%), так как отсутствует разгрузка крыла массовыми силами
двигателей. Несмотря на это указанная схема находит в последнее
время широкое применение (отечественный самолет Ил-62, зару-
бежные— Виккерс VC-10, «Каравелла» и др.).
2. ВОЗДУХОЗАБОРНИКИ. ВЫХЛОПНЫЕ УСТРОЙСТВА
Воздухозаборники
Расположение и устройство воздухозаборников силовых уста-
новок имеет весьма важное значение. Степень использования ско-
ростного напора сильно влияет на величину тяги (мощности). Так,
например, в турбореактивных двигателях около 30% повышения
24 1563 369
давления воздуха приходится на долю скоростного напора,
а остальные 70% осуществляются компрессором.
В прямоточных воздушно-реактивных двигателях сжатие возду-
ха осуществляется только скоростным напором. Поэтому всасы-
вающим устройствам при проектировании самолетов с реактивны-
ми двигателями следует уделять большое внимание.
Воздухозаборники для самолетов с турбовин-
товыми (а также
но выполняются в виде
а)
поршневыми) двигателями обыч-
кольца (фиг. 203, а) и внизу (фиг. 203,6)
или вверху гондолы. Коль-
цевой воздухозаборник в
наибольшей мере удовлетво-
ряет изложенным выше тре-
бованиям.
В этом случае благодаря
вращению обтекателя винта устра-
няется торможение пограничного
слоя, что создает благоприятные
условия для более эффективного
использования скоростного на-
пора.
Фиг. 203.
Формы внутреннего канала должны обеспечивать малые гид-
равлические потери, для чего переходы и повороты каналов следу-
ет делать плавными, а внутренняя обшивка должна клепаться по-
тайными заклепками.
Воздухозаборники для самолетов с турборе-
активными двигателями бывают лобовые, боковые,
крыльевые, а иногда их располагают внизу или вверху фюзеляжа.
Лобовые воздухозаборники располагаются в носо-
вой части фюзеляжа (фиг. 200, //; 204, а, б) или в передней части
гондол двигателей (см. фиг. 201, 202).
Воздухозаборники, расположенные в передней части фюзеляжа,
являются достаточно эффективными. Однако при этом неизбежны
большие потери на трение, так как приходится делать длинные
каналы.
Один канал с воздухозаборником в носке (фиг. 204, а) значи-
тельно усложняет конструкцию фюзеляжа, размещение топливных
баков и увеличивает площадь поперечного сечения (мидель) фю-
зеляжа.
Раздвоенные каналы, проходящие по бортам фюзеляжа
(фиг. 204,6), позволяют более компактно разместить в фюзеляже
топливо и различное оборудование.
Лобовые воздухозаборники на дозвуковых или сверхзвуковых
самолетах с числом М<1,5 имеют постоянное входное сечение
(фиг. 205, а). На сверхзвуковых самолетах такой заборник вызывает
прямой скачок давления на входе в него, что, как известно из аэро-
динамики, приводит к значительным потерям энергии. Эти потери
уменьшаются при проходе воздуха через косой скачок. Однако
370
существенная разница в потерях при прямом и косом скачке имеет
место при М>1,5. Поэтому на сверхзвуковых самолетах, летающих
на числах М>1,5, применяют профилированное (иногда кониче-
ское) остроносое «центральное тело», которое обеспечивает возник-
новение системы косых скачков на нем (фиг. 205,6). При этом
значительно снижается потеря энергии на входе в воздухозабор-
ник. Наивыгоднейшее расположение «центрального тела» относи-
Фиг. 204. Лобовые воздухозаборники в фюзеляже.
тельно воздухозаборника и наивыгоднейшая величина проходного
сечения для воздуха (между телом и заборником) меняется при
изменении числа М. На современных сверхзвуковых самолетах
«центральное тело» может автоматически, в зависимости от числа
М, перемещаться вдоль оси двигателя, занимая оптимальное по-
ложение. Такие заборники называются заборниками с регулируе-
мой геометрией.
На фиг. 206 показано изменение тяги (в процентах от взлет-
ной тяги) по числу М для трех типов лобовых воздухозаборников.
Боковые воздухозаборники размещаются сбоку фю-
зеляжа (фиг. 200, /, III, фиг. 207). Они применяются обычно для
забора воздуха к двигателям, установленным в хвостовом отсеке
фюзеляжа. Эти воздухозаборники позволяют уменьшить длину ка-
24*
371
нала, а следовательно, и гидравлические потери. Однако на входе
в боковой воздухозаборник скоростной напор меньше, чем на входе
в лобовой, так как теряется часть скоростного напора вследствие
трения воздуха о поверхность фюзеляжа. Для уменьшения потерь
S) для И ъд
Сопло
с регулируемой
геометрией
Воздухозаборник
с регулируемой Центральное
геометрией тело
воздухозаборник
с нерегулируемой
геометрией
Сопло с нерегулируемой
геометрией
а) для M^ot85
Фиг. 205. Установки ТРД, предназначенные для дозву-
ковых и сверхзвуковых самолетов.
при входе необходимо применять отсос приторможенного стенкой
фюзеляжа слоя воздуха-пограничного слоя.
Отсасывание (см. фиг, 207, а) осуществляется через отдельную
полость, начинающуюся на входе в воздухозаборник. Эта полость
представляет собой один или несколько каналов, по которым
«
1 2
М
Фиг. 206.
Выдвижной
конус
Неподвижный
конус
Без конуса <
воздух отводится от воздухозаборника. Расположение воздухоза-
борников в нескольких сантиметрах от боковой поверхности фюзе- t
ляжа (фиг. 207, б) дает тот же эффект.
Крыльевые воздухозаборники располагают обычно
в носовой части крыла вблизи бортов фюзеляжа (см. фиг. 201,7).
372
При расположении двигателей в хвостовом отсеке фюзеляжа ка-
налы крыльевых воздухозаборников имеют значительную кривизну,
а следовательно, и существенные потери скоростного напора.
входное отверстие
для Воздуха
Фиг. 207, Боковые воздухозаборники.
Устройство дли
отсасывания погранично- Щ//
го слоя со стенах фюзеляжа
В конструкцию воздухозаборников входят элементы конструк-
ции фюзеляжа или крыла. Во избежание падения давления в кана-
лах соединения частей их должно быть герметичным.
На фиг. 208 показана конструкция входной части воздухозабор-
ника а и каналов его б.
Выхлопные устройства
Отвод реактивной струи турбореактивного и турбо-
винтового двигателей осуществляется с помощью выхлопной тру-
бы (см. фиг. 204) и не должен вызывать уменьшение тяги и мест-
ный перегрев конструкции самолета.
Для уменьшения веса выхлопной трубы, упрощения охлаждения
и креплений выхлопную трубу желательно делать более короткой,
однако в большинстве случаев длина трубы определяется общей
компоновкой самолета. Местный перегрев предотвращается уста-
новкой вблизи выхлопных газов обшивки из листовой жароупор-
ной стали и теплоизоляцией горячих частей двигателя. Выхлоп-
ную трубу покрывают кожухом, через который продувается воздух,
или защищают теплоизоляционным покрытием.
Выхлопная труба делается из листовой жароупорной стали.
Крепление выхлопной трубы (фиг. 209) по переднему фланцу осу-
ществляется к двигателю. Для воспринятия монтажных перекосов
и осевых перемещений вследствие расширения от нагрева это со-
единение делают телескопическим с шаровым шарниром (на
фиг. 209 роль шарнира выполняет кольцо с буртиком). Задний ко-
нец трубы подвешивается на шарнирной подвеске, не препятствую-
щей температурным перемещениям трубы или опирается с по-
мощью роликов на рельсы, проложенные в гондоле (фюзеляже).
373
Фиг. 208. Устройство воздухозаборника,
1—каналы, 2—передний кок. <3—панели наружной обшивки, 4. б—’внутрен-
няя обшивка. 5—шпангоуты, 7—передняя стенка крыла, 8—обтекатель.
374
Передний узел креплений к гондоле
фланец, 2—конус-проставка, 3—ролик для вкатывания трубы, -/—выхлопная труба, 5—болт, 6—отражатель, 7— кольцо с буртиком,
стыковочный хомут, Р—втулки стыковочных болтов, 10—кронштейн, 11— рельс гондолы, 12—ролик.
375
3. КОНСТРУКЦИЯ КРЕПЛЕНИЯ ДВИГАТЕЛЯ К САМОЛЕТУ
Для установки двигателя и крепления его к конструкции фю-
зеляжа или крыла применяются моторные рамы (или другие виды
крепления). Независимо от типа и конструкции креплений двига-
теля к самолету они должны удовлетворять общим требованиям,
изложенным выше в пп. 3, 4, 5, 6, основных требований к силовым
установкам. Кроме того, они должны иметь минимальный вес при
достаточной прочности и жесткости.
Нагрузки, действующие на крепление двигателя
В общем случае на крепление двигателя действуют следующие
нагрузки:
1. Массовая сила
фициента расчетной
Драсч, определяемая как произведение коэф-
перегрузки пРасч на вес силовой установки
Фиг. 210.
Gc.y, состоящий из веса двига-
теля и агрегатов (винт, обтека-
тель винта, моторная рама
и т. п.).
расч — ^расчСГс.у-
Сила Ррасч может быть на-
правлена вниз, вверх, вбок (см.
фиг. 210) -и приложена в центре
тяжести силовой установки.
2. Тяга Р, создаваемая воз-
душным винтом или реактивным
двигателем.
3. Реактивный момент винта Л4С.У (для самолетов с воздушным
винтом).
4. Аэродинамические нагрузки, действующие на гондолу или
на капот силовой установки в том случае, когда гондола или ка-
пот крепится к моторной раме. Аэродинамические нагрузки
сравнительно с другими невелики. ' ‘
Конструкция моторной рамы поршневого двигателя
Моторная рама звездообразного поршневого двигателя* состо-
ит из трубчатого кольца, к которому крепится картер двигателя,
и приваренных к нему стержней. Кольцо с помощью стержней
соединяется с конструкцией самолета (крылом, фюзеляжем). Та-
кая моторама представляет собой пространственную ферму и число
стержней в ней должно быть не менее шести (обычно бывает
8 стержней и более).
Узлы крепления моторных рам к фюзеляжу или крылу пред-
ставляют собой вваренные в стержни проушины, или фитинги.
* Рядные поршневые двигатели в настоящее время в авиации встречаются
редко.
376
В ушковых соединениях болты работают на срез, в соединениях
с помощью фитингов — главным образом на разрыв. Встречаются
также соединения со сферическими шарнирами.
На фиг. 211 показана ферменная восьмистержневая моторная
рама под звездообразный двигатель. Все элементы рамы выпол-
нены из стали ЗОХГСА.
Картер двигателя крепится шпильками к кольцу, к которому приварены
втулки 3 (см. сечение Б—Б). Во втулки вставляется резиновый амортизатор.
Стержни пространственной фермы приварены к кольцу при помощи косынок
(см. сечение В—В), Задние концы стержней попарно соединены и сварены
со стаканом узла крепления рамы к крылу. В стаканах монтируются амортиза-
торы. К кольцу моторной рамы приварены также ушки, служащие для крепле-
ния капота двигателя.
Конструкция моторных рам турбовинтовых двигателей
Турбовинтовые двигатели крепят к конструкции са-
молета при помощи пространственной стержневой системы, соеди-
ненной с узлами двигателя. Крепление может быть ферменным,
в этом случае стержни работают на осевые усилия, и ферменно-
балочным, некоторые элементы крепления представляют собой
балки, работающие на изгиб.
На фиг. 212 показана конструкция рамы, при помощи которой
турбовинтовой двигатель крепится к крылу самолета. Система
крепления состоит из пространственной двухъярусной фермы
и демпферов крепления двигателя к раме. Верхние и нижние под-
косы передней фермы имеют на одном конце вилки с резьбовыми
наконечниками, служащие для регулировки^ положения оси дви-
гателя.
На фиг. 213 показано крепление турбовинтового двигателя при
помощи системы стержней и балки, представляющее собой фер-
менно-балочную конструкцию. Балка 5, опертая в двух узлах —
на шпангоуте гондолы и внутреннем подкосе 6, может работать
на изгиб от боковых сил. Остальные элементы представляют собой
стержни, работающие лишь на осевые нагрузки.
Двигатель крепится на четырех цапфах. Передние цапфы 1
вставлены в передние демпферы 2 двух балок 5. С помощью балок
и верхних подкосов 4 цапфы 1 передают нагрузки на узлы, распо-
ложенные на силовом шпангоуте гондолы двигателя. Нагрузка
от задних цапф передается на узлы силового шпангоута через
подкосы-демпферы 9.
Конструкция моторных рам турбореактивных двигателей
На корпусе ТРД имеется несколько площадок, на которых мо-
гут быть установлены цапфы или вильчатые (ушковые) узлы.
Наличие нескольких возможных точек крепления позволяет
применять разные варианты крепления двигателя в зависимости
от особенностей конструкции агрегата самолета, на котором уста-
навливается двигатель. Обычно около центра тяжести двигателя
377
Фиг 211 Конструкция моторной рамы звездообразного двигателя
/—верхние узты с амортизаторами 2—нижние узлы с амортизаторами, 3—втулка крепления двигателя
к моторной раме, 4—фаспорные чашки, 5—шайба с привулканизированными резиновыми шайбами, б—рас-
порная втулка, 7—тулка, 8—затяжная гайка, 5—вильчатый болт, 10—шпилька крепления двигателя,
И—распорная втулка, 12—резиновая втулка.
378
имеются два специальных прилива, на которых монтируются глав-
ные опорные цапфы.
Для удобства монтажа в обеих опорных цапфах предусматри-
ваются шаровые вкладыши. Крепление двигателя с помощью цапф
воспринимает тягу, массовые силы и все моменты, за исключением
момента относительно оси цапф, который вызывается несовпаде-
нием центра тяжести двигателя с осью цапф. Для предотвращения
поворота двигателя относительно этой оси в систему подвески
вводится крепление, располагающееся в задней или передней
части двигателя.
Крепление турбореактивного двигателя выполняется чаще все-
го в виде шести-восьми стержневой пространственной фермы Для
обеспечения монтажа двигателя, расположенного в хвостовой ча-
сти фюзеляжа, последнюю делают отъемной (см. фиг. 165).
Демпферы в конструкции крепления ТРД, как правило, отсут-
ствуют, так как вибрации, вызываемые работой ТРД, незначи-
тельны.
На фиг. 214 показана рама подвески турбореактивного двигате-
ля на самолете.
Двигатель крепится в четырех точках за две цапфы (крепление 1) и за два
верхних ушка—при помощи вильчатых наконечников 5.
Рама подвески представляет собой восьмистержневую ферму, закрепленную
на шпангоуте фюзеляжа в пяти узлах. Рама сварной конструкции, с трубчатыми
стержнями, выполненными из легированной стали
Цапфа двигателя вставляется в эксцентриковую шаровую втулку 4, которая
закрепляется на раме двигателя крышкой 2. Регулирование положения оси дви-
379
Фиг 213, Крепление турбовинтового двигателя к гондоле
^передняя цапфа, 2—передний демпфер, 3—серьга, 4—верхний подкос 5—балка,
внутренний подкос, 7—кронштейн, 8—перемычка металлизации, 9—оадний подкос-
о х , демпфер
о? задний подкос-демпфер /—вилка, 2—стопорный винт, 5—корпус, гайка, 5 и 5_
втулки, 7 дисковый демпфер, 8—кольцо, 9—втулка, /0—центральный стержень,
//—переходная втулка, /2—ухо.
380
гателя обеспечивается поворотом втулки. Для этой же цели служат вильчатые
наконечники 5, которые ввертываются на резьбе в стержни рамы.
На фиг. 215 показано ферменное шестистержневое крепление
ТРД, расположенного в корневой части крыла. Ферма крепится
к двигателю и к силовым шпангоутам фюзеляжа.
Узел Л
12
Установка эксцентрика,
при регулировании двигателя
Установочная
иска
Узел О
Узел S
крепления рама
к фюзеляжу
Фиг. 214. Рама подвески турбореактивного двигателя
/—основное крепление 2—крышка узла 3—основной узел, 4~ эксцентриковая
втулка 5—вильчатый наконечник, 5—раскос рамы 7—стержень с резьбой для ре-
гулирования, контргайка 9—стержень крепления коробки приводов /0—вилка
крепления коробки приводов, 11—стержни рамы, J2—верхний раскос
//
Узел А
еаюбнаго
10
Ю
При размещении турбореактивного двигателя под крылом на
пилоне двигатель можно подвешивать к пилону при помощи виль-
чатых узлов, расположенных сверху на корпусе двигателя
(фиг. 216).
Амортизаторы моторных рам
Поршневой двигатель с винтом является источником колеба-
ний, вызванных неравномерностью крутящего момента двигателя,
а также некоторой статической несбалансированностью винта (не-
совпадением его центра тяжести с осью вращения) и динамической
несбалансированностью его (центры тяжести отдельных лопастей
винта не находятся в одной плоскости, перпендикулярной оси вра-
щения винта). Несбалансированность винта является также источ-
ником колебаний установок с турбовинтовыми двигателями Эти
колебания являются возмущающими. Если частота таких колеба-
381
1
Фиг. 216.
382
ний совпадает с собственной частотой колебаний частей самолета,
то возникает «раскачивание» системы — резонанс.
Для снижения частоты передаваемых самолету колебаний,
а также уменьшения частоты собственных колебаний силовой уста-
новки в креплении двигателей применяют упругие элементы —-
амортизаторы.
Амортизаторы крепления силовой установки применяются и в
тех случаях, когда опасность резонанса отсутствует. В этом слу-
чае амортизация необходима для снижения усталостных напряже-
ний, возникающих в моторных рамах и конструкции самолета,
а также для устранения неприятных ощущений у пассажиров
и экипажа, вызываемых вибрацией самолета.
Амортизаторы силовой установки обычно ставят в узлах креп-
ления двигателя к моторной раме и в узлах крепления рамы к кон-
струкции самолета.
На фиг. 211 показаны амортизаторы моторной рамы
звездообразного поршневого двигателя.
Двигатель крепится к кольцу рамы шпильками 10, проходящими через
стальные втулки 11 с привулканизированными к ним резиновыми амортизацион-
ными втулками 12. В каждую из втулок 3, приваренных к кольцу моторной
рамы, вставлены по две амортизационные втулки 12.
В данном случае усилия со шпилек 10 на кольцо моторной рамы передаются
резиной, работающей на сжатие.
В дополнение к амортизаторам на кольце рамы предусмотрены амортиза-
торы в узлах 1 и 2 крепления рамы к гондолам двигателей.
На фиг. 213,6 показан подкос-демпфер крепления ТВД.
При установке амортизаторов следует иметь в виду, что на применяемую
в амортизаторах резину вредно действует бензин и масло. Поэтому амортиза-
торы должны быть закрыты защитными корпусами или крышками. Следует учи-
тывать также, что прочность и особенно упругие свойства амортизаторов при
низких температурах [ниже — 3(7'С (303° К)] резко ухудшаются.
4. РАСЧЕТ КРЕПЛЕНИЯ ДВИГАТЕЛЯ НА ПРОЧНОСТЬ
Расчетные случаи
Выше было указано, что крепление двигателей несет нагрузку
от массовых сил, реактивного момента и тяги.
Комбинация этих нагрузок и их величина регламентируются
нормами прочности самолетов.
В нормах прочности предусмотрены следующие расчетные случаи:
1. Случай Дм.у для поршневых двигателей и случай Лр.д для реактивных
двигателей соответствуют случаю А для крыла.
Крепление нагружается массовой силой.
Расчетная сила определяется по формуле *
Ррасч == б?м.у 1 (б)/ (^)
ИЛИ
Р расч = ^р.Дпл/ > (75)
где <7M.y, GpJl — вес силовой установки;
Лд — эксплуатационная перегрузка случая А;
f—коэффициент безопасности, равный 1,5.
383
Расчетная сила направлена противоположно подъемной силе крыла (вниз,
перпендикулярно оси двигателя) и приложена в центре тяжести силовой
установки
2. Случай £>м.у для поршневых двигателей и случай Dp д для реактивных
двигателей соответствуют случаю D для крыла. Крепление нагружается массовой
силой, определяемой аналогично (74), (75).
Так как расчетная сила в этом случае противоположна силе случая А, то
она вызовет в стержнях фермы усилия противоположного знака. Этот случай
может быть расчетным для длинных стержней, растянутых в случае 4м.у и, сле-
довательно, сжатых в случае Dm.у.
3. Случай Нм.у для поршневых двигателей и случай Яр.д для реактивных
двигателей соответствует боковому нагружению массовой силой.
4. Случай Л4м.у для поршневых двигателей и случай ГРД для реактивных
двигателей соответствует нагружению при работе двигателя на стоянке. Крепле-
ние двигателя нагружено максимальной тягой и реактивным моментом винта
М = 716,2—f.
п J
Кроме указанных случаев, нормы прочности предусматривают нагружение
крепления двигателя массовыми силами при посадке самолета, а также случаи
совместного действия нагрузок Дм.у+Л1м.у; -4р,д+7'р.д; DM,y+AfM.y; Dp д~г
+ Л>.к и Др-
Расчет крепления двигателя
В разд. I (см. фиг. 31 пример 5) было рассмотрено определе-
ние усилий в стержнях моторной рамы турбореактивного дви-
гателя.
Фиг, 217.
Рассмотрим определение усилий в элементах ферменно-балоч-
ной моторамы ТВД, изображенной на фиг. 213. Схема ее показана
на фиг. 217, а. Рассмотрим симметричное нагружение силами Рх
и Ру (тяга и массовая сила). Для такого нагружения балка 1—5—
3 может рассматриваться как стержень, совпадающий с направле-
384
нием 1—5. Усилие в ней обозначим Так как стержень
не связан непосредственно с двигателем, то двигатель крепится
шестью стержнями — система статически определима. Симметрия
нагружения и конструкции обусловливает равные усилия в сим-
метричных элементах. Таким образом имеем три неизвестных
усилия.
Проведем сечение 1—1, отсекающее раму от самолета и напи-
шем уравнение моментов относительно оси 1—1 цапф.
2 ЛГ1-!- 2S2_4Z>=0.
Определяемые усилия считаем положительными (направленны-
ми от узла)
' с ___РУа
Стержень 2—4 растянут.
Составляем сумму проекций всех сил на ось у.
2y=251_2cos(/l_2, y)H-2S2_4—Ру=0;
51_2——2^2~4 , где cos(Zl_2, у)— _
1 2 2 COS (/1—2, у) \ 1 2- // /62_|_С2
Стержень 1—2 растянут.
Из суммы проекций всех сил на ось х получим
—2S1_2cos(Z1_x) 2S1—5 Рх—О
С рл+251_2 cos (/t—2, х) COS 17 jd___ ь —
Ox-s- j—. we COS((1_2,
Знак усилия S1-5 зависит от величин Рх, Ру.
Полученное усилие в балке Si-s в точке 5 раскладывается на
2 направления — по стержню 5—6 и части 5—3 балки. Разложение
удобно произвести графически (фиг. 217, б).
При действии боковой нагрузки балка 1—5—3 нагружена по
схеме, изображенной на фиг. 217, в, и работает на изгиб.
Растянутые стержни пространственных ферм рассчитываются
на разрыв, сжатые стержни — на продольный изгиб, как изложено
в разд, I. За длину сжатого стержня принимается расстояние меж-
ду узлами крепления. Коэффициент заделки с принимается равным
единице.
Нагрузки на узлы соединения стержней моторной рамы с фюзе-
ляжем, крылом, двигателем определяются как усилия (или равно-
25 1563 385
действующие усилий, если к узлу присоединено несколько
стержней) в стержнях, соединенных с рассматриваемыми узлами.
Например, нагрузка на узел, показанный на фиг. 218, есть
усилие 5. Разложив усилие S на составляющие Sy, Зг, можно
произвести расчет узла и его крепления.
Фиг 218
5 ГОНДОЛЫ И КАПОТЫ ДВИГАТЕЛЕЙ
На современных самолетах для уменьшения лобового сопро*
тивления двигатели заключаются в гондолы. Они дают возмож-
ность осуществлять плавный переход от силовой установки к фю-
зеляжу или крылу и предохраняют двигатель и его агрегаты от
загрязнения. Одновременно с этим гондолы используются для
правильного распределения и направления потока воздуха, необхо-
димого для работы двигателя и для его охлаждения.
Гондола двигателя включает в себя капот, который представ-
ляет собой обычно несиловую часть гондолы и состоит из системы
легкосъемных или откидных крышек.
Гондолы двигателей представляют собой тонкостенные конст-
рукции, аналогичные конструкциям фюзеляжа.
В современных силовых установках применяются каркасные
и панельные конструктивно-силовые схемы гондол и капотов.
Каркасная конструкция гондолы состоит из мощного каркаса
и легких крышек, которые крепятся к каркасу, или тонкой обшивки,
прикрепленной к продольному и поперечному наборам. В этом
случае гондола воспринимает нагрузки от двигателя и передает
их на крыло
Панельная конструкция гондолы или капота состоит из боль-
ших и достаточно жестких панелей. Панели, связанные быстро-
действующими стягивающими замками, образуют замкнутую до-
статочно жесткую оболочку. Такая конструкция воспринимает
воздушные нагрузки.
Нагрузки от двигателя в этом случае через мотораму передают-
ся непосредственно на крыло или фюзеляж.
386
Гондола турбовинтового двигателя (фиг 219)
состоит из обтекателя втулки винта, переднего и заднего капотов,
хвостовой части гондолы и стекателя для отвода выхлопных газов
w Обтекатель втулки винта служит для уменьшения лобового
сопротивления двигателя, для профилирования входного канала
двигателя и для защиты втулки винта от загрязнения.
йВтекател
редуктора
Верхние крышки
переднего колота
Силовая
ферма
Верхняя крышка
jfffaeao капота
Шяахмут
заднего халата
Cu/wteu и/яашум
Боксш
&1JMQ
Нижняя крышка
wfaeea капота
ХйоствВал чаапь
гондолы
Рама
мшорадиатрра
1
Обтекатель Нижние крышки
Втулки Винта ререйке г$ капота
Фиг 219 Основные части гондолы ТВД
fioxofajt крышка
л» far г s колота
Передний капот состоит из воздухозаборника, обтекателя ре-
дуктора, верхней и двух боковых балок и четырех крышек.
Передний шпангоут вместе с носком обшивки образует кольце-
вую камеру противообледенительного устройства воздухозаборни-
ка, в которую теплый воздух подается через патрубок из противо-
обледенительной системы самолета
В задний капот двигателя входят силовые шпангоуты, крышки
и рама маслорадиатора. Гондола заканчивается хвостовой частью
На фиг 220 показана компоновка гондолы ТВД.
Гондолы турбореактивных двигателей, располо-
женных в крыле, полностью или частично размещаются внутри
крыла (фиг 221).
В этих случаях лонжероны крыла в отсеке размещения двига-
телей имеют кольцеобразную форму и одновременно являются
усиленными шпангоутами гондолы.
Гондолы, расположенные под крылом (см фиг 216) по конст-
рукции аналогичны описанным выше.
25*
387
CJ
Co
co
Фиг. 220. Компоновка гондолы ТВД.
/—винт, 2—воздухозаборник двигателя, воздухозаборник масляного радиатора, 4—масляный радиатор, 5—дви-
гатель, 6—шпангоуты гондолы и противопожарные перегородки, 7—гибкая выхлопная труба, 5—крыло, Р—перед-
ний капот, /0—задний капот, 11—шасси в убранном положении
Воздушный канал
Передний лонжерон центроплана
Стека тель
Средняя часть Масляньт Дренаж
^масладана
Воздухозаборник
Продольные еило/ые
балки
Л 00000
топлива
Задний лонж ер
центра пла на
Калат двигателя
Дбигатель
СлиВная-
трубка
__Mgg/7^jVg^
л опта fftk/га теля
Фиг. 221. Гондола турбореактивного двигателя.
Ц/унтоВьгй клапан
S
со
Гондолы и капоты обычно изготовляют из дуралюминовых ли-
стов и профилей, иногда для узлов применяются магниевые
сплавы. На участках, подвергающихся высоким температурам,
применяют нержавеющую сталь
6. БАКИ И ТОПЛИВНЫЕ ОТСЕКИ. РАДИАТОРЫ
Расположение баков и топливных отсеков и требования к ним
Топливо, потребное при полете самолета, размещается в спе-
циальных отсеках и баках.
Для размещения топлива используются внутренние объемы
в фюзеляже и крыле (фиг. 222, а, см. фиг. 62 разд. И). Однако,
ввиду крайней ограниченности внутренних объемов в указанных
°)
Фиг 222 Расположение топливных баков на самолете
агрегатах самолета, иногда применяются специальные удобообте-
каемые подвесные топливные баки, расположенные на крыльях
(фиг. 222,6), Такие баки в полете после использования топлива
обычно сбрасываются.
В целях лучшего использования внутреннего объема в некото-
рых современных конструкциях самолетов топливо заливается
непосредственно (без специальных оболочек) в отсеки крыла,
надлежащим образом герметизированные. Целесообразность та-
кого размещения топлива обусловлена также тем, что массовые
силы топлива разгружают крыло в полете.
390
При конструировании и расположении топливных отсеков и ба-
ков на самолете должны быть удовлетворены следующие основные
требования:
1. При размещении отсеков и баков необходимо предусматри-
вать, чтобы по мере расходования топлива положение центра тя-
жести самолета заметно не изменялось.
2. Достаточная прочность и герметичность топливных отсеков
и баков при минимальном весе конструкции.
3. Удобное расположение отсеков и баков на самолете, облег-
чающее их эксплуатацию и ремонт
4. Простота конструкции бака и его креплений.
5. Быстрота заполнения отсеков и баков топливом, а также
быстрый слив топлива в воздухе в аварийных случаях.
6. Наличие дренажной системы — соединение свободного объ-
ема бака с атмосферой или источником давления, чтобы предотвра-
тить образование разрежения над топливом (маслом) по мере его
расходования.
7. Обеспечение питания двигателя на всех режимах полета
8 Расположение топлива и конструктивная компоновка отсеков
и баков должна обеспечивать безопасность в пожарном отношении.
Конструкция топливных баков и отсеков
На самолетах применяются жесткие баки — неизменяемой
формы и мягкие баки — с гибкой оболочкой. Мягкие баки облада-
ют значительными преимуществами: их можно помещать в самолет
через небольшие люки; они не подвергаются влиянию вибраций;
при простреле получают минимальные отверстия. Поэтому мягкие
баки имеют преимущественное распространение.
Жесткие баки (фиг. 223) состоят из обечайки (боковой наруж-
ной поверхности), двух днищ и внутренних перегородок. Перего-
родки имеют отверстия с отбортовкой и придают баку жесткость,
предупреждают резкое переливание топлива при фигурных поле-
тах, а также смягчают гидравлические удары при кратковременных
ускорениях.
Для изготовления жестких баков применяют магниевые сплавы,
алюминиевомарганцевый сплав и другие материалы. Толщина
листов, применяемых для изготовления баков, 0,6—2 мм.
Детали баков соединяются при помощи клепки и сварки. Не-
проницаемость и плотность заклепочного шва достигаются уста-
новкой эластичных прокладок.
Жесткие баки иногда покрывают мягкой защитной оболочкой — протекто-
ром, который представляет собой многослойную конструкцию, аналогичную обо-
лочке мягкого бака
Для обеспечения питания двигателя во время фигурных поле-
тов при отрицательных перегрузках, когда топливо отрывается от
днища бака, в баках (жестких и мягких) предусмотрены специаль-
ные приспособления, схема одного из которых показана на фиг. 224
391
(a — прямой полет, б — полет при отрицательных перегрузках).
При прямом полете трубка открывает достуй топлива к-камере,
откуда топливо поступает в питающую магистраль. При отрица-
Фиг. 223. Конструкция жесткого топливного бака.
тельных перегрузках груз посредством рычага опускает трубку
и питание производится через верхнюю часть ее.
Жесткие масляные баки имеют те же конструктивные элемен-
ты, что и топливные. Кроме того, в конструкцию масляных баков
Трубка
Втулка
Топливо
Груз
Топливо
а) Нормальное положение клапана
б) Положение клапана при отрицательных,
перегрузках
Дренажные отверстия
Колпак
Груз
Стенка
бака
Фиг. 224, Клапан отрицательных перегрузок.
введен фильтр для очистки поступающего в двигатель масла от
механических примесей и пеногаситель для гашения попадающей
в бак пены — отделения воздуха и газов, растворившихся в масле
392
(фиг. 225). При образовании пены объем масла значительно уве-
личивается, что приводит к выбросу масла из бака и ухудшает
fiffr 6 перевернутом
i положении
Фиг. 225. Масляный бак.
работу насоса. Пеногасители выполняются в виде лотков, по ко-
торым разливается масло, или в виде сепараторов, представляю-
щих собой спиральные трубы с большим числом отверстий.
Керосиностойкая резина
agg'J
mmuullUiaiit& резина
^капроновое
полотно
Фиг. 226 Мягкий бак
Мягкие баки выполняются из гибкой оболочки, состоящей из
нескольких слоев резины и ткани (фиг. 226). Слой набухающей
резины является протектором, затягивающим пробоины.
На фиг. 226, а показан мягкий топливный бак, расположенный
в крыле.
393
Отсек крыла, где установлен топливный бак, облицовывают
листами стеклотекстолита (фиг. 227), а иногда ставят специальную
жесткую дуралюминовую оболочку — контейнер.
Внутрь бака, после установки его на место, вводят распорные
шпангоуты, состоящие из двух половин (см. фиг. 226,6). В баке
обе половины шпангоута соединяют болтами и прикрепляют
к стенкам бака, как показано на фиг. 226, в Отверстия в баке за-
крываются жесткими дуралюминовыми панелями, на которых мон-
тируется арматура бака
/—нижняя съемная панель 2—стеклотек-
столитовая облицовка» 3— нижняя несъем-
ная панель.
Фиг, 227, Сечение крыла в месте
расположения топливного бака
Поверхность бака при наполнении его топливом плотно приле-
гает к стенкам отсека или контейнера.
Топливные отсеки Герметизированный топливный отсек
крыла показан на фиг. 17. гл. XIII.
Аналогично герметическим кабинам, герметизация соединений Ч
отсека осуществляется путем уплотнения заклепочных швов и пу-
тем изоляции швов от герметизируемого объема — внутренняя по-
верхность отсека покрыта самовулканизирующимся герметиком. 1
В конструкции отсека предусмотрено минимальное количество
отверстий, стыков (
Радиаторы ?
Радиаторы на самолете служат для охлаждения масла и воз- ]
духа (например, при подаче воздуха в герметическую кабину).
В соответствии с этим, радиаторы подразделяются на масляные
и воздушные ,
394
I
I
Наиболее часто применяются сотовые радиаторы, которые со-
стоят из большого количества прямых медных трубок Концы тру-
бок с двух сторон развальцовываются на шестигранники и соеди-
няются между собой и с кожухом (обечайкой) радиатора при
Фиг 228, Радиатор
помощи пайки (фиг. 228). Внутри трубок проходит охлаждающий
воздух, между трубками — охлаждаемая жидкость или охлаждае-
мый воздух Для использования скоростного напора радиатор рас-
полагают торцами трубок навстречу потоку воздуха.
Для уменьшения аэродинамического сопротивления радиаторы
помещают <в специальных тоннелях
7 ТОПЛИВНЫЕ СИСТЕМЫ. МАСЛОСИСТЕМЫ
Топливные системы самолетов
Назначение топливной системы — обеспечить подачу топлива
к двигателям на всех высотах и режимах полета в нужном коли-
честве и с необходимым давлением
В топливную систему входят баки, трубопроводы, фильтры, кла
паны, краны и пр.
К топливной системе предъявляются следующие основные тре-
бования (см. также требования, предъявляемые к бакам)
1. Возможность нормальной работы при выходе из строя одно-
го из баков или участка трубопровода.
2. Обеспечение пожарной безопасности
3. Возможно малое изменение положения центра тяжести са
молета при выгорании топлива.
4. Обеспечение полной выработки топлива из баков (допускает-
ся остаток топлива не более 1,5% емкости бака)
Первое требование обеспечивается кольцеванием топливопро-
водящих путей, т. е. введением дополнительных топливопроводов,
соединяющих напорные (находящиеся под давлением) магистрали
питания различных двигателей. Простейшая схема кольцевания,
обеспечивающая питание двух двигателей при вышедшем из строя
одном баке и одном топливопроводе, показана на фиг 229
395
Пожарная безопасность достигается путем установки противо-
пожарных перегородок, системой огнетушения, путем заполнения
свободного объема баков над топливом нейтральным газом
(НГ) — углекислотой или азотом, находящимся в баллонах под
высоким давлением. Нейтральный газ, как известно, не горит и го-
рения не поддерживает.
В качестве меры пожарной безопасности применяется также
установка пожарных кранов, отключающих систему от двигателя.
Пожарный кран должен быть расположен перед насосом двигателя
(считая от бака), что повышает надежность его действия, так как
уменьшается давление на входе в кран.
Усподные обозначения
К двигателю
К двигателю
j Края | Кран
ф открыт %) закрыт
Выход баков
из строя
Выход трубопро-
водов из строя
Фиг. 229.
Малое перемещение центра тяжести самолета при выгорании
топлива достигается размещением баков около центра тяжести
или симметрично относительно ц. т., а также определенной после-
довательностью выработки топлива из отдельных баков.
Полная выработка топлива обеспечивается размещением забор-
ных штуцеров в нижней части бака.
Топливные системы самолетов с ПД, ТВД и ТРД не имеют
принципиальных различий.
В современных топливных системах питание двигателей осу-
ществляется обычно из расходного бака. Топливо из остальных
баков, являющихся резервуарами топлива, подается в расходный
бак электрическими насосами подкачки.
Для установления очередности выработки баков устанавливает-
ся очередность включения насосов подкачки.
Для устранения возможности перетекания топлива в обратном
направлении устанавливаются обратные клапаны.
На фиг. 230 показана принципиальная схема топливной систе-
мы самолета с турбореактивным двигателем. Топливо из баков-
резервуаров 1 подается в расходный бак 2 под давлением, созда-
ваемым отбором воздуха от компрессора двигателя.
Редукционный клапан 4 обеспечивает постоянство давления
в баках /, стравливая избыток его. Расходный бак 2 соединен
с окружающей атмосферой дренажной трубкой. Из бака 2 топливо
396
насосом подкачки 5, имеющим электрический привод, подается
к двигателю через обратный клапан 6 и пожарный кран 7. Фильт-
ры, а также насосы низкого и высокого давления монтируются
в двигателе. Избыточное давление в топливной магистрали за на-
сосом подкачки стравливается через перепускной клапан 8 в бак 2.
Фиг. 230. Схема топливной системы самолета с турбо-
реактивным двигателем,
/—баки-резервуары» 2—расходный топливный бак, 5—трубки,
соединяющие топливные баки, 4—редукционный клапан, 5—на-
сос подкачки, ^—обратный клапан, 7—пожарный кран, 8—пере*
пускнай клапан, 3—сливной кран, 10—заливные горловины,
Я—расходные штуцеры, 12—штуцеры дренажа.
На фиг. 231 показана полумонтажная схема питания на самоле-
те с одним ТРД, расположенным в хвостовой части фюзеляжа.
На самолете имеется четыре топливных бака — передний мягкий, задний
и два подвесных — жесткие. Расходным баком является передний. В нем уста-
новлен клапан отрицательных перегрузок. Топливо из подвесных баков подается
в расходный под давлением воздуха, подводимого к подвесным бакам от ком-
прессора двигателя. Топливо из'заднего бака перекачивается насосом. Дренаж
осуществляется атмосферным воздухом.
На фиг. 232 показана принципиальная схема топливной системы
на самолете с четырьмя ТВД. Левая пара двигателей питается от
397
баков левой половины крыла, правая — от баков правой. В кры-
ле имеются мягкие баки и два бака отсека (№ 8).
Расходный бак — № 1 — снабжен двумя подкачивающими на-
сосами 7, создающими давление на выходе топлива из бака. Пере-
качивающие насосы 5 подают топливо из других баков в расход-
ный. Обратные клапаны 6 препятствуют отливу топлива. Порядок
выработки горючего из баков устанавливается автоматически;
датчиками являются топливомеры. При необходимости возможно
осуществить питание всех двигателей от баков одной половины
крыла. Для этого открывают кран кольцевания 9.
to fwanxud}
Передние w
toff's^!
Трубопровод тШмвош
Змивная горловина-
л •
Дрень онныруцтуцер-^
херосиномер
трудно
'го&ювию
ТПрувкП
Сливная пробка
Перекаливаний
'Фильтр па двигателе
Спив из переднего
I Пожарный крон
шхичивающии насос
Сливная пробно
Хлопан отрицательны*
Топливный трубопровод
воздушный трубопровод
Фиг. 231, Топливная система на самолете с одним ТРД.
Дренаж топливной системы осуществляется забором воздуха
из атмосферы. Обратные клапаны 1 дренажа препятствуют выпле-
скиванию топлива.
Заправка баков топливом может производиться сверху через
заливные горловины и снизу под давлением через две горловины
международного стандарта (централизованная заправка). В по-
следнем случае время полной заправки самолета (24 000 л) состав-
ляет 15-^20 лшн.
Слив топлива осуществляется через сливные краны 8.
Для увеличения дальности полета в ряде современных самолетов пред-
усмотрено устройство для заправки топливом в воздухе. Заправка осуществляет-
ся специально оборудованными самолетами-заправщиками.
398
399
С самолета-заправщика выпускается гибкий шланг с конусом на конце
(фиг.233). У заправляемого самолета имеется телескопический приемник, который
Фиг. 233, Схема заправки самолета в полете.
при сближении заправляемого самолета с заправщиком входит в зацепление
с конусом. Перекачка топлива производится насосами большой производитель-
ности.
Маслосистемы
Система 'питания маслом должна обеспечивать в любых усло-
виях работы двигателя подачу и отвод масла, очистку его от меха-
нических примесей, охлаждение и отделение от масла воздуха
и растворенных в нем газов (гашение
Фиг. 234. Схема системы
маслопитания,
/—маслобак» 2—сливной кран,
3—фильтр, 4—радиатор, 5— пено-
гаситель, шунтовой клапан,
7—трубка, 8—горловина масло-
бака.
пены). Количество масла на самолете
сравнительно невелико — примерно
2~5% от количества топлива.
Рассмотрим схему маслосистемы
на самолете (фиг. 234). Из маслобака
1 через запорный и сливной кран 2
масло попадает в двигатель. Отрабо-
танное масло из двигателя насосом,
находящимся в двигателе, откачивает-
ся в фильтр 5, радиатор 4 и возвра-
щается по трубопроводу в пеногаси-
тель 5 бака. Отделенное от пены мас-
ло вновь попадает через кран 2 в дви-
гатель и т. д.
В начале работы двигателя, когда
масло еще холодное и имеет большую
вязкость, давление его при прокачке
возрастает и может повредить соты
радиатора. В этом случае открывается
шунтовой клапан б, включенный па-
раллельно радиатору, и масло прохо-
дит через клапан в бак, минуя радиа-
тор. Когда масло подогрелось и вяз-
кость его уменьшилась, давление при
прокачке масла падает, шунтовой кла-
пан закрывается и масло проходит
через радиатор.
Иногда для уменьшения вязкости масло три запуске двигателя
разбавляют топливом.
400
Дренаж бака осуществляется посредством трубки 7. Масло за-
ливается в бак .через горловину 8 с сеткой.
На фиг, 221 ^показана монтажная схема маслосистемы.
Масло из бака поступает в нагнетающую помпу двигателя. Из
откачивающей помпы масло подается к топливно-масляному ра-
диатору, где происходит охлаждение масла и подогрев топлива.
Выходящее из радиатора масло подается в маслобак. Шунтовый
клапан вмонтирован в радиатор.
Глава XVII
УПРАВЛЕНИЕ САМОЛЕТОМ
1 КЛАССИФИКАЦИЯ. ТРЕБОВАНИЯ К УПРАВЛЕНИЮ
Классификация управления
На самолете имеется много установок, агрегатов, механизмов
и устройств, которыми управляют члены экипажа или различные
автоматы. Однако, обычно, «управление самолетом» называют
воздействие на органы самолета летчиком.
В комплекс управления рулем высоты, горизонтальным опере-
нием, рулем направления, элеронами или другими устройствами
управления входят: командный рычаг, или иное устройство в ка-
бине летчика, и система проводки от командного рычага к органам
управления.
Управление самолетом подразделяется на две независимые
системы: ручное управление и ножное управление.
Ручное управление включает управление рулем высо-
ты или цельноповоротным горизонтальным оперением и управле-
ние элеронами, осуществляемое летчиком при помощи ручки или
штурвальной колонки, расположенных в кабине летчика.
Ножное управление предназначено для воздействия
на руль направления и осуществляется при помощи педалей, на
кЪторые летчик нажимает ногами.
Движения рук и ног при управлении самолетом соответствуют
естественным рефлексам человека (фиг. 235), что значительно
облегчает обучение пилотированию. При движении руки вперед
«от себя» (фиг. 235, а) рули высоты (горизонтальное оперение^
отклоняются вниз (при нормальной схеме) и самолет опускает
нос — появляется пикирующий момент относительно оси д.
При движении руки назад «на себя» (фиг. 235,6) рули высоты
отклоняются вверх и самолет поднимает нос — появляется каб-
рирующий момент. Движение руки налево (фиг. 235, в) вызывает
отклонение правого элерона вниз, левого элерона — вверх и крен
на левое крыло (вокруг оси х); движение руки направо вызывает
правый крен.
26 1563
401
ножном управлении: движение левой ноги
вызывает отклонение руля направления и са-
Аналогично в
(фиг. 235, г) вперед
Фиг. 235.
ПО
молета палево, а движение вперед правой ноги вызывает отклоне-
ние руля и самолета направо.
По типу проводки управление подразделяется на жесткое, гиб-
кое и смешанное (фиг. 236).
402
Гибкая проводка управления осуществляется при помо-
щи тросов. Применение троса позволяет посредством роликов
изменять направление проводки управления с резкими поворотами
и прокладывать проводку в наиболее удобных и безопасных ме-
стах (например, под полом, по борту и т. д.). Гибкая проводка
имеет малый вес.
Недостатком гибкой проводки является наличие большого тре-
ния в местах перегиба тросов и вытяжка тросов, возникающая
несмотря на предварительное растяжение их перед установкой.
Кроме того, при большой длине проводки трос «пружинит» вслед-
ствие упругой деформации, в результате чего у летчика создается
впечатление, что управление «люфтует» (возникает движение ры-
чага управления без поворота элерона, руля), что снижает чув-
ствительность управления.
Гибкая проводка в настоящее время применяется редко.
Жесткая проводка управления выполняется из тонко-
стенных дуралюминовых труб — тяг.
Жесткое управление не вытягивается, имеет меньшее трение
в сочленениях и является более живучим (по сравнению с тросо-
вым). Однако жесткое управление тяжелее гибкого.
Жесткое управление широко применяется на современных са-
молетах.
Смешанная проводка управления представляет собой
сочетание жесткой и гибкой проводок.
Все вращающиеся части—качалки, втулки, шарниры и пр.
как при гибкой, так и при жесткой системах управления ставятся
на шарикоподшипниках, что позволяет снизить трение и облегчить
управление, уменьшить износ и возможность появления люфтов.
Управление самолетом удобно классифицировать также по
типу командного рычага управления, на который непосредственно 1
воздействует летчик.
403
Для систем ручного управления различают управление ручкой
и управление штурвалом, а для систем ножного управления: ры-
чажное — с вращением рычага около вертикальной оси и с ка-
чающимися педалями (относительно горизонтальной оси).
По роду затрачиваемой энергии управление самолетом вы-
полняется механическим (используется мускульная энергия лет-
чика), а на скоростных и тяжелых самолетах для уменьшения
усилий на ручке и педалях используется гидравлическая, электри-
ческая и пневматическая энергия.
Требования к управлению
Наряду с общими для всех частей самолета требованиями -
достаточная прочность и жесткость, малый вес и малое сопротив-
ление (отсутствие выступающих в поток деталей), простота про-
изводства и ремонта, удобство эксплуатации и достаточная живу-
честь. К управлению следует предъявить еще ряд специфических
требований.
1. При отклонении органов управления (рулей, элеронов,
цельноповоротного горизонтального оперения) усилия на ручке,
штурвале и педалях должны возрастать плавно. Величины усилий
не должны превышать пределов, предусмотренных нормами.
Например, максимальные величины давления на ручку при
управлении рулями высоты: при пикировании — для истребителей
4—9 кГ (39—88 н), для бомбардировщиков 6—14 кГ (59—137 к),
при посадке — для истребителей 2 кГ (^20 «), для бомбардиров-
щиков 4 кГ (39 н).
2. Обеспечение необходимых углов отклонения рулей и элеро-
нов. Эти углы составляют 154-30“ причем углы отклонения рулей
высоты и элеронов вверх часто делают большими, чем углы откло-
нения их вниз. Такое управление называется дифференци-
а л ь н ы м. Конструктивно оно обеспечивается присоединением
одной из тяг управления к рычагу угловой качалки в нейтральном
положении не под прямым углом (фиг. 237).
Как видно из фиг. 237, при равных углах р отклонения рычага
в обе стороны линейные перемещения а и b узла А, связанного
с рулем или элероном, не равны, поэтому не равны и отклонения
руля или элерона в обе стороны.
3, Должна быть предусмотрена независимость действия рулей
высоты или целыюповоротного горизонтального оперения и эле-
ронов: отклонение ручки или колонки управления в продольном
направлении не должно вызывать отклонения элеронов и на-
оборот.
4. При деформациях крыла, фюзеляжа и оперения должна быть
' исключена возможность заклинивания проводки и механизмов
управления.
404
5. Вся система проводки управления должна иметь минималь-
ное трение в сочленениях, минимальный износ трущихся частей
и не допускать люфтов (под люфтом здесь подразумевается воз-
можность движения ручки, штурвала, колонки и педалей без
отклонения рулей или элеронов вследствие слабины в проводке).
Фиг. 238.
6. При гибкой проводке па участках, поддерживаемых роли-
ками, ведущие рычаги во избежание натяжения троса (фиг. 238, а)
необходимо делать в виде секторов (фиг. 238,6). При этом дол-
жен быть обеспечен угол охвата сектора тросом, для чего ветвь /
присоединяют к сектору в точке 2, а ветвь 3 — в точке 4.
7. Педали ножного управления должны регулироваться по ро-
сту летчика, для чего подножка делается переставной.
2. СИСТЕМЫ УПРАВЛЕНИЯ
Типы командных рычагов
Ручка управления представляет собой рычаг, который
при отклонении вперед—-назад вращается относительно оси О,
Фиг, 239, Схемы
приводов ручного управления.
/—труба, 2, рычаги, 4— тяга»
(фиг. 239, а), при отклонении вбок — вращается вместе с тру-
бой / и расположенным на ней рычагом 2 относительно оси а—Ь.
405
т
3 проводки
Нижний конец ручки соединен тягой 4 с рычагом
г пулю высоты (горизонтальному оперению). Рычаг 2 соединен
с тягами управления элеронами. При продольном управлении
(пучка на себя — от себя) рычаг 2 неподвижен. При управлении
же элеронами (ручка вбок) неподвижность руля высоты (горизон-
тального оперения), т. е. неподвижность точки Ь, может бьиь до-
стигнута в том случае, если точка b
будет лежать на оси вращения тру* *
бы / — оси а-b. На фиг. 239, а при
отклонении ручки в стороны точка b
будет вершиной конической поверхно-
сти, описываемой тягой 4. В обеих
схемах (фиг. 239, а, б) узел b кон-
структивно должен представлять со-
бой универсальный шарнир.
Штурвальное
н и е (фиг. 240) состоит
управлении
у п р а в л е-
колонки 1
из
8
10
13
8
7
12
6
Фиг 241 Схемы приводов
ножного управления
4—рычаги, 2—педали, 5—осн,
5—тнга к рулю, 7—качалки, 3—'гру-
ба, 9—сектор, Летяги, вал,
12—рычаг, 13—ось педали
Фиг. 240 Схема приводов штурваль-
ною управления
и штурвала 2, устроенного таким обра-
зом, чго колонка может отклоняться
только вперед—назад для управле-
ния рулями высоты. Элероны управляются вращением штурвала,
соединенного с зубчатым колесом 3. На зубчатое колесо надета
цепь 4, концы которой соединены с тросом 5, Тросы через ролики 6
подводятся к элеронам. Колонки обычно крепятся снизу к горизон-
тально расположенной трубе 7, несущей рычаги 8 управления ру-
лями высоты.
Независимость управления рулем высоты и элеронами в дан-
ном случае достигается путем совпадения оси вращения всей колон-
ки с осью тросов 5, вследствие чего при управлении рулем высо-
ты тросы 5 не будут натягиваться или ослабляться.
Ручка и штурвал с вертикальной колонкой имеют широкое,
применение. Управление элеронами с помощью штурвала позво-
ляет уменьшить усилия путем увеличения угла поворота штурва-
-106
ла, что увеличивает время отклонения элеронов. Поэтому ручку
ставят на истребителях и небольших самолетах, управление кото-
рыми не требует затраты больших усилий, но в то же время
должно обладать высокой чувствительностью. Штурвал ставят на
более тяжелых самолетах.
Рычажное ножное управление (фиг. 241, а) состоит
из рычага 1 с педалями 2, установленного на вертикальной оси 3.
Для обеспечения перемещения педалей параллельно оси самолета
предусмотрен дополнительный рычаг 4, сидящий на оси 5. Рыча-
ги 1 и 4 вместе с педалями образуют шарнирный параллелограмм.
От рычага 1 отходит тяга 6 к рулю направления.
Горизонтальное расположение рычага требует для получения
достаточного плеча довольно широкой расстановки ног, что необ-
ходимо одновременно и для того, чтобы ноги не мешали ручке
управления отклоняться в стороны. Сочетание рычажного ножшио
управления с ручкой ручного управления имеет широкое приме-
нение.
Ножное управление с качающимися педалями
(фиг. 241, б) состоит из педалей 2, подвешенных на качалках 7, ко-
торые могут вращаться относительно трубы 8. На качалках педалей
расположены секторы 9, связанные с тягами 10, которые сообщают
вращение валу 11. Последний через рычаг 12 и тягу 6 приводит
в действие руль направления.
Вертикальное расположение рычагов позволяет ставить педали
близко друг к другу, что экономит место в кабине и хорошо соче-
тается со штурвальным управлением, не занимающим много места
по ширине кабины.
На установке педалей обычно монтируют ножное управление
тормозами. Торможение производится качанием педали, связан-
ной с цилиндрами управления тормозами, относительно горизон-
тальной оси 13 или нажатием специальных рычагов.
Управление с помощью гидроусилителей
(бустеров)
Управление рулями (элеронами, горизонтальным оперением)
как любой механизм, служащий для передачи механической энер-
гии, характеризуется передаточным числом.
Если обозначим через Р усилие на ручку (или педали), а через
Q — усилие, развивающееся на рычаге руля, то передаточное чис-
ло п — — .У современных самолетов передаточное число для руч-
ного управления берется в пределах 1/3—1/6, а для ножного управ-
ления 1/1,5ч-1/3.
С ростом скоростей полета самолетов при сохранении обычной
кинематической связи между командными рычагами управления
и рулями (элеронами) интенсивно увеличиваются усилия, дейст-
вующие на ручку, штурвал и педали.
407
При переходе к сверхзвуковым скоростям полета потребные
углы отклонения рулей для балансировки самолета увеличиваются
вследствие возрастания устойчивости самолета и уменьшения эф-
фективности рулей.
Усилия на ручке (штурвале) и педалях при управлении сверх-
звуковым самолетом изменяются в столь широких пределах, чго
никакими средствами современной аэродинамической компенсации
(см. гл. XIV) их не представляется возможным сохранить прием-
лем ими.
Кроме того, при воздействии больших усилий на ручки, штур-
валы и педали летчик не может обеспечить необходимую скорость
отклонения рулей или элеронов, что снижает маневренность само-
лета.
Снижение усилия Р, прикладываемого летчиком к органам
управления, можно было бы обеспечить соответствующим переда-
точным числом в системе управления, т. е. соответствующим под-
бором плеч рычагов, однако, это привело бы к увеличению пере-
мещения конца ручки или педалей. Это следует из условия равен-
ства работ, совершаемых усилием Р летчика и шарнирным момен-
том руля Afm.
Рх = Л1шд.* (76)
Здесь х и б — линейное перемещение ручки и угловое переме-
щение руля соответственно (см. фиг. 114, стр. 274).
Для снижения усилия, прикладываемого летчиком к ручке или
педалям, применяют гидравлические (или электрические) приво-
ды-усилители.
Преимуществом управления с помощью гидроусилителей яв-
ляется также наличие дополнительного демпфирования гидроси-
стемы при колебаниях руля пли элерона вследствие флаттера опе-
рения или крыла
Существуют две схемы включения гидроусилителя в проводку
управления и в зависимости от $того шарнирный момент руля мо-
жет восприниматься гидроусилителем полностью или частично.
Если большая часть шарнирного момента руля воспринимается
гидроусилителем и некоторая его доля воспринимается летчиком,
то такая система управления называется обратимой, В этом слу-
чае усилия, передающиеся на ручку (штурвал) и педали, увеличи-
ваются с увеличением отклонения рулен.
Летчик таким образом «чувствует» самолет, что является пе-
применным условием, обеспечивающим нормальное управление
самолетом.
На фиг. 242, а, б показана одна из схем обратимой системы
управления рулем высоты с помощью гидроусилителя. Аналогич-
ные схемы применяются и для рулей направления и элеронов.
При отклонении ручки рычаг 3, приводимый в движение тягой 7,
* Трением в передаче пренебрегаем.
408
повернется относительно шарнира 2 на рычаге 5 управления рулем
высоты. При этом с помощью тяги 9 переместится золотник 4 рас-
пределительного устройства. Через одно из отверстий цилиндр 10
сообщит с цилиндром 11 напорную магистраль гидроусилителя,
через другое — сливную магистраль. Гидросмесь, подведенная к зо-
Фиг. 242 Схема управления рулем высоты с помощью обратимою
(а, б) и необратимого (а) гидроусилителя.
I, 5^ТЯГ1( 2—шарнир, рычаг, 4—золотник распределптелыюго устройства,
5—рычаг управления рулем высоты, 6—кронштейн, 7—трубки, ^“-напорная
трубка, 10. Я—цилиндры,
лотнику по напорной трубе 8, проходит по одной из трубок 7
к цилиндру гидроусилителя и перемещает поршень его в направле-
нии перемещения тяги 1.
Перемещение поршня гидроусилителя и тяги 1 в одном направ-
лении обусловливают перемещение шарнира 2 в этом же направ-
лении, а следовательно, поворот рычага 5 и отклонение руля
высоты.
'Одновременно перемещается цилиндр 10 распределительного
устройства, жестко связанный с рычагом 5 кронштейном 6. На-
409
правление движения цилиндра 10 совпадает с направлением дви-
жения тяги 1 — цилиндр движется вслед за золотником, уменьшая
проходное сечение отверстий. Когда цилиндр 10 займет относи-
тельно золотника положение, показанное на схеме (см. фиг. 242,6),
поступление гидросмеси в цилиндр прекратится и система будет
находиться в равновесии.
Такое устройство обусловливает «слежение» рычага 5 руля вы-
соты за ручкой — каждому положению ручки соответствует опре-
деленное положение руля, несмотря на отсутствие между ними
жесткой связи.
В равновесном положении системы на поршне гидроусилителя
развивается усилие S, определяемое из равновесия рычага 3 (на
фиг. 242, б усилия показаны для случая перемещения тяги 1
влево)
Sa^Pb', S=P~.
а
На рычаг в шарнире 2 действует усилие
А
т-1 Ра
Передаточное число п =-~ определяет степень чув-
ствительности управления.
Уравнение работ для такой системы будет иметь вид
Px4-Sln = Mmb,
где Рх — работа, совершаемая летчиком;
S, /п — сила, действующая на поршень силового цилиндра,
и перемещение поршня.
Таким образом, работа, совершаемая гидроусилителем, рав-
на Sla.
При повреждении или отказе гидроусилителя система управле-
ния превращается в обычную механическую систему; рычаг 3, по-
ворачиваясь относительно шарнира на штоке гидроусилителя, пе-
редает движение рычагу 5. Это требует установки шарнирной
подвески цилиндра гидроусилителя.
В целях удобства перехода с бустерного управления на ручное
в современных обратимых системах передаточное число прини-
мается равным 1/3-4-1/5.
Так как усилия в проводке управления от командного рычага
до гидроусилителя значительно меньше, чем после него, то гидро-
усилитель выгоднее помещать в непосредственной близости от
управляемых поверхностей.
На фиг. 243 показана установка гидроусилителя, смонтирован-
ная на кронштейне 12.
Работа гидроусилителя происходит следующим образом.
При перемещении тяги 1 (от летчика) перемещается шток золотника 2,- на-
ходящегося внутри исполнительного штока 3 гидроусилителя. Гидросмесь долж-
410
на поступать в цилипдр 4 таким образом, чтобы шток гидроусилителя переме-
щался вслед за штоком золотника. С наконечника 5 штока гидроусилителя
через щеки 6 часть усилия передается на обратимую тягу 10, а оттуда— на
тягу 1, обеспечивая летчику чувство управления; большая же часть усилия пере-
дается через серьгу 7 и рычаг 8 на тягу 9, идущую к рулю или элеронам
Возможность применения обратимых систем ограничивается
резким увеличением воздушных нагрузок и значительным переме-
щением центра давления на поверхностях управления при около-
звуковых и малых сверх-
звуковых скоростях.
При этом резко изме-
няются шарнирные мо-
менты рулей и усилия на
ручку, штурвал и педали.
Применение обратимой
системы управления са-
молетом не устраняет
указанного явления, так
как на ручке (педалях)
с некоторым уменьше-
нием воспроизводятся
резкие изменения усилий.
Поэтому в настоящее
время для самолетов
с большим диапазоном
скоростей применяют н е-
обратимую систему
управления (фиг, 242, в),
В этом случае шарнир-
ный момент полностью
воспринимается бустером.
Летчик приводит в дви-
жение лишь золотник,
Фиг. 243. Установка гидроусилителя.
/—тяга, идущая от летчика, 2—шток золотника.
3—исполнительный шток, 4—рабочий цилиндр,
5— регулируемый наконечник, 5—щена, 7—серьга,
8—рычаг, 9—тяга, идущая к рулю или элеронам,
/0—обратимая тяга, //—трубки подвода и отвода
гидросмеси, /2—кронштейн.
а усилия на ручке (штур-
вале) и педалях имитируются искусственно при помощи специаль-
ных загрузочных устройств, меняющих определенным образом уси-
лия при изменении режима полета.
Для имитации усилий, возрастающих по мере увеличения угла
отклонения руля, и ощущения их летчиком при управлении в си-
стему включается пружинный нагрузочный механизм. Таким обра-
зом, летчик преодолевает усилие не от шарнирного момента руля,
а от сжатия или растяжения пружины нагрузочного механизма
(см. фиг. 244).
К нагрузочному устройству присоединяется механизм так назы-
ваемого «триммерного эффекта». При включении этого механизма
снимается по желанию летчика при длительном полете усилие
с ручки. Получается эффект, равноценный действию триммера.
Этот эффект достигается перемещением упора А пружины на-
грузочного механизма с помощью электромоторчика, вследствие
411
чего снимается деформация пружины, вызванная перемещением
ручки.
Для имитации изменения усилий на ручке при изменении ско-
рости и высоты полета в систему включают добавочный загрузоч-
ный автомат, к которому подводится скоростной напор воздуха
Изменение последнего вызывает перемещение мембраны, связан-
ной с дросселирующим масло золотником. Масло подается в испол-
нительный цилиндр, поршень которого связан с командным рыча-
гом. В результате меняется усилие на командном рычаге.
ОВД Г руз
аВтонато усилий
Силовой привод
автопилота
Ц ельноло воротное
горизонтальное
оперение
Г и дроусилитель
Фиг 244. Схема необратимой системы управления цсльноповоротным
горизонтальным оперением.
Имитация усилий в зависимости от перегрузки создается гру-
зом, устанавливаемым на ручке управления или на тяге системы
управления (см. фиг. 244).
На фиг. 244 показана схема необратимой системы управления
цел ьн олово ротным горизонтальным оперением.
Для увеличения надежности применяются часто самостоятель-
ные дублирующие друг друга системы. Кроме того, на некоторых
самолетах каждая часть элерона и каждая из половин руля имеют
индивидуальные гидроусилители. Это позволяет (хотя и с огра-
ничениями) пилотировать самолет при отказе одного гидроусили-
теля. Обычно в систему проводки управления гидроусилителем
включается и силовой привод автопилота.
Не следует думать, что переход к гидроусилительным системам
управления снимает вопрос о необходимости использования на со-
временном самолете средств аэродинамической компенсации шар-
нирного момента рулей. Напротив, в связи со все более расширяю-
щимся диапазоном скоростей полета самолета и резким возра-
станием шарнирных моментов рулей этот вопрос не теряет своей
остроты и при использовании гидроусилителей. Аэродинамические
средства компенсации шарнирного момента необходимы как для
снижения потребных мощностей, устанавливаемых на самолете
гидроусилителей, так и для повышения безопасности аварийного
перехода на ручное управление при выходе гидроусилителя из
строя.
412
Проводка управления
Рассмотрим некоторые примеры проводок различных типов.
На фиг. 245 изображена схема жесткой проводки управления
дозвуковым самолетом. На небольшом участке от штурвальной ко-
лонки до сектора применена тросовая проводка. Рулевые машинки
автопилота включены в проводку управления параллельно (ана-
логично схеме на фиг. 244).
На фиг. 246 показана схема жесткой проводки управления
сверхзвуковым самолетом.
Управление необратимое, снабжено механизмами триммерного
эффекта и нагрузочными устройствами для имитации усилий при
управлении. В проводке управления элеронами нагрузку создает
упругий стержень 2, закручивающийся при отклонении ручки.
В проводке управления стабилизатором (цельноповоротным гори-
зонтальным оперением) и рулем паправлення нагрузочный меха-
низм пружинный. Отклонения элеронов и руля направления произ-
водится гидроусилителями, а стабилизатора — гидромоторами
через червячную пару. В проводку управления включены рулевые
машинки автопилота. Поворот стабилизатора производится с по-
мощью кулисы 21, скользящей в пазу, расположенном в фюзе-
ляже.
На самолетах с большой дальностью полета, а также на учеб-
ных устанавливается двойное управление, при котором имеются
два командных поста управления.
На учебных самолетах командные рычаги двойного управления
располагают обычно один за другим. Иногда на таких самолетах
ручки и педали управления ставят рядом.
На фиг. 247 показано двойное управление учебным самолетом.
Ручное управление жесткое, ножное— гибкое.
Задняя ручка 1 и задняя установка педалей 2 включены последовательно
в цепь проводки управления. Соединительная тяга 3 управления рулем высоты
проходит внутри продольной трубы 4, на которой размещен рычаг управления
элеронами 5. Установка педалей рычажного типа.
На фиг. 248 показано управление рулями направления при раз-
несенном вертикальном оперении.
На фиг. 249 показана конструктивная схема ручки управления при наличии
на самолете элевонов, г. е. элеронов, выполняющих также назначение рулей
высоты. Элевоны являются органами продольного и поперечного управления
бесхвостых самолетов и могут отклоняться оба одновременно в одну сторону,
а также в противоположные стороны. При отклонении вперед — назад ручка /
вместе с жестко присоединенной к ней траверсой 2, а также вместе с сережками
3, качалками 4 и кронштейном 5 отклоняется относительно оси О—О. Все пере-
численные звенья отклоняются как одно целое, концы качалок 4 перемещаются
в одну сторону и сообщают отклонение элевонам в одну сторону (вверх или
вниз). При отклонении ручки в стороны вращение ее и траверсы 2 происходи^!
относительно оси О'—О', расположенной в остающемся неподвижном кронштей-
не 5. Одна из сережек 3 движется вверх, другая — вниз, вызывая несимметричное
отклонение качалок 4, концы которых движутся в противоположных направле-
ниях. Элевоны отклоняются в разные стороны: один — вверх, другой — вниз.
413
SO
Управление элеронами.
/—тяга, 2—закручивающийся стержень 5—механизм триммсрного эффекта. 4—уплотнение в задней cieirKC кабины, 5- качалки, ^1жи,
7—качалки, 8— гидроусилитель, 9—рулевая машинка
Управление стабилизатором
10— качалка, //—тяга, 12—нагрузочный автомат, Л?—механизм триммсриого эффекта, //—тяга. 15— гмдромоторы, /£—червячная парз
/7—рулевая машинка, /5—ось стабилизатора, /9—корте подшипника, 20— треуготьная рама привода стабилизатора, 2/—кулиса
Управление р\лсм направления
?2—j сдали 23—к.14а чиа, 24—ии i, 25—загрузочный автомат, 26— механизм триммсрного эффекта, 27— ролевая машинка, 23—тяга,
29—гидроусилитель, 30—р>ль направления.
Управление всеми рулями должно быть снабжено стопорами
предельных положений, препятствующими дальнейшему движению
элементов управления.
На фиг. 250, а, б, показано управление интерцепторами на са-
молете Ту-124. Интерцепторы, как известно из предыдущего,
в сочетании с элеронами улучшают поперечную управляемость
самолета, а также могут быть
a
n
Фиг. 248. Схема управления при
разнесенном вертикальном оперении
Фиг 249. Схема привода управления
элевонами.
/—ручка, -2—траверса, 3—сережки, -/—ка-
чалки, 5—кронштейн.
♦
На некоторых самолетах в целях улучшения характеристики управляемости
в проводку управления рулями включаются пружинные тяги.
Так, например, в проводку управления рулем направления самолета Ан-10
(фиг. 251) включена пружинная тяга 1. При повороте трубчатого вала 2 и дву-
плечей качалки 5 поворачивается руль направления 3. При малых нагрузках на
руль (и следовательно, на проводку управления) тяга 1 работает как жесткая
и сервокомпенсатор * 4 отклоняется как одно целое с рулем. С увеличением на-
грузки на тягу 1 она изменяет свою длину (в зависимости от направления по-
ворота), вал 2 с рычагами поворачивается относительно руля и при помощи
тяги 6 отклоняет сервокомпенсатор в сторону, противоположную отклонению
руля, В результате уменьшается усилие на педалях.
Особенности управления самолетом на больших высотах
Полет современного самолета на больших высотах имеет свои
особенности. С увеличением высоты при сохранении скорости поле-
та ухудшается ответная реакция самолета на отклонение рулей,
самолет становится более вялым в управлении.
* См гл. XIV «Оперение самолета».
1563
416
417
Фиг. 250. Управление интерцепторами.
Фиг, 251. Управление с пружинным сервокомпенсатором руля
направления.
-118
Одновременно с этим естественное демпфирование колебаний
самолета, т. е. сопротивление вращению его относительно оси.
проходящей через центр тяжести самолета, с увеличением высоты
полета заметно ослабевает, вследствие чего эффект от действия
различных возмущений (воздушных порывов, случайных движений
Фиг. 252. Принципиальная схема продольного управ-
ления самолета с автоматом стабилизации и демп-
фирования,
f—‘загрузочный механизм, 2— ПВД, 3—датчик автомата
демпфирования и стабилизации, '/-читок управления,
5—бустер, 6—силовой шток, 7—раздвижная тяга.
рычагов управления) сохраняется в течение более продолжитель-
ного времени. Поэтому необходимо предусматривать специальные
меры по искусственному демпфированию движения самолета на
больших высотах.
В настоящее время для этой цели применяют автоматы демпфи-
рования. У автомата демпфирования чувствительный элемент реа-
гирует на изменение во времени угловой скорости вращения само-
лета относительно его центра тяжести.
При этом рули самолета автоматически, без участия летчика,
отклоняются так, что создается момент аэродинамических сил, на-
правленный против вращения самолета. Для того чтобы управле-
ние от автомата демпфирования не
оказывало воздействия на команд-
ные рычаги, в систему управления у5
включается специальное звено — на- ~Т
пример, раздвижная тяга, длина кото-
рой меняется в зависимости от величп- —-
ны и знака сигнала, приходящего от
чувствительного элемента.
Принципиальная схема подобного
комбинированного управления рулями Фиг. 253.
самолета представлена на фиг. 252.
При полетах самолетов на больших высотах (более 50 км) в условиях очень
малой плотности воздуха использование аэродинамических органов управления
(рулей и элеронов) невозможно. В этих условиях для управления самолетом
(ракетопланом) могут использоваться газовые рули, представляющие собой не-
большие поверхности, расположенные в потоке газов, выходящих из сопла ра-
кетного двигателя (фиг. 253).
На современных ракетопланах чаще устанавливают струйные рули (сопла),
которые располагают на значительном расстоянии от центра тяжести (см,
фиг. 106, гл. XIV). В качестве струйных рулей могут быть установлены малень-
кие ракетные двигатели (ЖРД), включаемые летчиком или автопилотом по мере
необходимости.
27*
419
3. КОНСТРУКЦИЯ ЭЛЕМЕНТОВ УПРАВЛЕНИЯ
Ручки
Ручка в кабине летчика устанавливается на продольной
(реже — поперечной) трубе или в кронштейне.
На фиг. 254 показан центральный узел управления самолетом.
В качестве командных рычагов используются ручка 1 и педали 2,
Фиг. 254. Центральный узел управления.
J—ручка. 2—педали, 3—вилка, 4—рычаг управления элеронами, 5, 11,
/5—тяги, 6—направляющая педали, 7—кронштейн педали, 8—кольцо,
5—основной рычаг, 10— крон штейн, 12—передний рычаг параллелограмма.
420
смонтированные на литом кронштейне 10. Ручка закреплена на
вращающейся в подшипниках оси, закапчивающейся вилкой 3.
На этой же оси посажен рычаг управления элеронами 4, передаю-
щий движение тяге 11. При управлении элеронами тяга 5 управ-
ления рулем высоты описывает коническую поверхность с верши-
ной, лежащей на продолжении оси вращения ручки, чем обеспечи-
вается независимость управления элеронами и рулем высоты.
Ручки представляют собой неравноплечие рычаги, выполнен-
ные обычно из дуралюминовых труб. В нижней части эти трубы
входят в башмаки, при помощи которых ручки устанавливаются на
горизонтальной трубе-валу или на кронштейны (см. фиг. 254).
В верхней части ручка заканчивается удобной рукояткой. На ру-
коятке обычно устанавливают гашетки и кнопки для управления
вооружением, тормозами колес, а иногда и триммерами.
Штурвальные колонки
Штурвальная колонка ручного управления самолетом
(фиг. 255, а) состоит из колонок, штурвальных головок со штурва-
лами и основания. Поворотом штурвала обеспечивается управле-
ние элеронами; наклоном «на себя» или «от себя» всей колонки —
управление рулем высоты. Колонка выполняется из трубы из алю-
миниевого или магниевого сплава. Верхнюю часть, на которой
устанавливается головка со штурвалом, и нижнюю часть — основа-
ние часто делают литой из легких сплавов. Система передачи от
штурвала обычно применяется механическая и может быть осу-
ществлена с помощью цепи Галля (фиг. 255,6) или конических
зубчатых колес. Вывод тросов из колонки осуществляется с по-
мощью роликов (фиг. 255, в). К основанию колонки крепится
рычаг, сообщающий движение тягам управления рулем высоты.
Независимость управления рулем высоты и элеронами достигает-
ся расположением тросов па оси вращения колонки.
При сдвоенном управлении колонки могут устанавливаться раз-
дельно, в этом случае связь между ними осуществляется через про-
водку управления, и на общем основании (сдвоенные колонки).
На верхней части колонки могут располагаться различные кнопки
вспомогательного управления (триммерами, автопилотом, радио-
оборудованием), а также штурвал управления поворотом передней
ноги шасси (см. фиг. 255).
Педали
Ножное управление в кабине' летчика состоит из горизонталь-
ного или вертикального рычага и подножек. Расстояние между си-
деньем летчика и подножками должно быть отрегулировано по
росту летчика, поэтому или вся педаль, или только подножки де-
лаются переставными.
Рычаги с вертикальной осью вращения обычно выполняются
в виде параллелограмма (см. фиг. 254). Подножки педалей 2
421
Д
V'i Штурвалы управления
W Колонка. элеронами х /?
| \V ДА Шпурёал управления
1'1 ЛАай* передней ногой
Wm (к'<Дч11 шасси
W /
Фиг 255 Сдвоенная штурвальная колонка
>
4?2
укреплены в кронштейнах 7 и могут регулироваться но росту лет-
чика, что осуществляется выключением защелки с помощью коль-
ца 8 и смещением подножки по направляющей 6.
На фиг 254 показан узел соединения С основного рычага
и центрального кронштейна 10
Для тяжелых самолетов широко применяются командные посты
с педалями, качающимися относительно горизонтальных осей, рас-
положенных вверху (фиг. 256) или внизу.
Летчик может регулировать педали по своему росту, установив
палец, смонтированный в штангах, в соответствующее отверстие
в секторе
На установке педалей смонтировано управление тормозами
колес Связь между левым и правым постами ножного \правления
осуществляется посредством тяг и вала (фиг 256,6)
Детали проводки управления
К деталям проводки управления относятся тяш, тросы, рычаги,
секторы, качалки, направляющие, ролики, подшипники и г. д.
Тяги обычно выполняются из дуралюминовых труб; иногда для
тяг используют стальные трубы. Во избежание вибраций тяги не
должны быть длинными. Практически длина тяг, а также расстоя-
ние между опорами тяг более 2 щ не применяются. На концах тяг
имеются заделки для шарнирного присоединения других тяг.
Заделки концов тяг могут быть жесткие или регулирующиеся,
представляющие собой стакан, в котором имеется осевое отверстие
с нарезкой для ввинчивания ушкового или вильчатого болта. Та-
ким образом создается возможность изменять в известных преде-
лах расстояние между центрами шарнирных концов тяги, что зна-
чительно упрощает pei улирование проводки.
Так как тяги могут в некоторых случаях перемещаться не толь-
ко поступательно, но также отклоняться в стороны и вращаться, то
шарнирные концы тяг делаются трех типов
1) простой шарнир — с одной осью вращения,
2) двойной шарнир — с двумя осями вращения (вращение
в плоскости тяги и вокруг оси тяги),
3) универсальный шарнир — с тремя осями вращения, выпол-
няемый обычно в виде шарового шарнира. При небольших углах
отклонения роль такого шарнира может выполнять ориентирую
щийся двухрядный шарикоподшипник.
На фиг. 257 показаны различные заделки концов тяг и типы
шарниров (на эскизах а, б, в, г, д, е — простой; ж — двойной, з —
универсальный). В универсальном шарнире обойма 1 вставляется
в ушко и закрепляется в нем развальцовкой усиков 3. Шаровой
вкладыш 2 вставляется в обойму через прорезь 4 в теле обоймы,
диаметр и ширина которой равны диаметру и ширине вкладыша,
затем вкладыш поворачивается в обойме.
42 i
вал Пеааль Палец
а)
Фиг 256 Командный пост ножного управления
/—рычаг дтя подсоединения тяги управления рулем направления 2—тяги 3—рыч ir секюра правой педали 4—рычаг
сскгора левой гедатщ 5—рычаг рег\ллровочного устройства
Для повышения надежности проводки управления иногда тяги
выполняют из двух труб: основной и дублирующей. В случае раз-
рушения одной из труб система управления остается полностью ра-
ботоспособной.
На фиг. 258 показана конструкция регулируемого соединения
концов тяг, образованных из двух труб.
Фиг 258 Регулируемое соединение концов тяг управления
/—наружная тр>ба тяги, 2— внугрепляя труба тя1и, 5— перемычка мс
галлгзацшц ^—шлицевое соединение, 5—шарнирный болг
Концы дублируемых труб соединены между собой шлицевым соединением
При поломке шарнирного болта, соединяющего концы основных труб, зазор
в шлицевом соединении выбирается и в работу включаются дублирующие трубы
Все соединения тяг должны иметь металлические гибкие пере-
мычки-металлизацию (см. фиг. 258).
Для гибкой проводки применяют тросы. В качестве соедини-
тельных элементов применяются коуши, соединяемые с тросами
при помощи наконечника. Регулировочными элементами являются
тандеры. Все эти детали стандартизированы.
На фиг. 259, а показана за-
Фиг. 259
делка троса в коуше с помощью
наконечника. На фиг. 259, б по-
казан тандер, состоящий из гай-
ки и двух ушковых наконечников,
имеющих: один — правую, дру-
гой— левую резьбы. Поворотом
гайки расстояние между цент-
рами ушков можно изменять.
В системе проводки управле-
ния, начиная от командного по-
ста и кончая рулями, применяют-
ся рычаги и различные качалки.
Рычаги обычно ставятся непосредственно на элеронах и рулях,
а также на командных постах ручного и ножного управления (см.,
например, фиг. 255, 256).
Качалки управления бывают двух типов. К первому относятся
поддерживающие качалки, служащие лишь для подвески тяг про-
водки управления (фиг. 260, а), а ко второму - - качалки, служа-
426
Cobluhchus В
К штурвальной
Фиг, 260, Установки качалок управления,
/—кронштейн, 2—втулки, 3—качалки с шарикоподшипниками, /—болты,
5—ушковый болт тяги, £—наконечник.
427
щие для изменения усилия и направления движения тяг проводки
управления (фиг. 260,6, в).
Плечи качалок могут располагаться в одной плоскости
(фиг 260,6 — качалка D), в двух и более плоскостях (фиг. 260, в;
б — качалка С).
Поддерживающая качалка (фиг. 260, а) не меняет усилия
в тяге, а только уменьшает свободную длину тяги.
Особенность конструкции показанного на фиг. 261, а узла со-
стоит в том, что при большой длине рычага 2 движущиеся части
не выходят за очертания профиля тонкого крыла. Кинематика узла
Фиг 261 Узел управления элероном
/—рычаг }правления. 2—рычаг элерона.
построена на принципе вращения прямоугольного треугольника
АВС относительно его гипотенузы АС, для чего необходимо, чтобы
ось вращения рычага управления 1, ось рычага 2 элерона и ось
вращения элерона пересекались в одной точке С (см. фиг. 261,6).
В смешанной проводке управления при переходе с тросовой
на жесткую обычно применяют секторы, которые представляют со-
бой часть ролика с канавками на ободе для троса (фиг. 262).
При повороте сектора трос всегда сбегает по касательной к окруж-
ности канавки.
В качестве направляющих устройств для жесткой проводки
управления применяются ролики.
На фиг. 263 показаны роликовые направляющие, состоящие из
обоймы с тремя роликами, которые поддерживают тягу. Направ-
ляющие также уменьшают свободную длину тяги. Это улучшает
работу тяги на продольный изгиб и уменьшает склонность ее
к вибрациям
Для тросовой проводки в качестве направляющих применяют
ролики и втулки. Установка роликов (фиг. 264) может быть не
подвижной а и ориентирующейся 6. Диаметр роликов выбирается
по стандарту в зависимости от диаметра троса и угла охвата
ролика. Для того чтобы трос при случайном ослаблении не сошел
с ролика, ставят предохранитель 5.
428
Фиг 262 Сектор.
*
Фиг 263 Роликовые направляющие.
429
Фиг 264 Ролики и направляющие тросовой проводки правления
1—кронштейн, 2- втулка ротик 4—ботт 5— предохранитель троса
Сомнение А
130
В те\ случаях, когда перегиб троса невелик или необходимо
только поддерживать трос на длинном прямолинейном участке
проводки, вместо ролика ставят направляющие втулки На фиг
264,а показана втулка для тросовой проводки
К рулю направления
К рулю высоты
А-А
Качалка S герметической кабине
Вал
днище
Качалка Sue герметической
кабины
г”рметич°скои найины
Фш 2G5 Герметический вывод качалок управления
Фетросое
кольцо
Кароли
Уплотнитель-
ное нСЛьЦО
На фиг 265 показан вывод проводки управления из гермети-
ческой кабины с применением качалок Гермовывод представляет
собой коробку, внутри которой установлены валы. Эти валы, при
прохождении через боковые стенки гермокоробки, загерметизиро
ваны уплотнениями из резины круглого сечения и фетровыми
кольцами
4. РАСЧЕТ СИСТЕЛШ УПРАВЛЕНИЯ САМОЛЕТОМ НА ПРОЧНОСТЬ
Нагрузки на агрегаты управления
Силы, приложенные к ручке или педалям, определяются вели-
чиной шарнирных моментов и величиной отклонений рулей или эзе-
ронов, а также перемещениями органов управления.
Из выражения (76) стр 408 имеем
х
(77)
где 6 — угол отклонения руля;
х — перемещение ручки или педали
Величина — мо/кет быть определена при заданных размерах
проводки управления Расчетный шарнирный момент Мш опреде
431
ляется, как было указано в гл. XIV, в соответствии с нормами проч-
ности самолетов. Величину Р можно также определить, найдя
усилие в тяге, соединенной с рулем,
(фиг. 266, а)
и последовательно определяя затем по правилам статики усилия
во всех элементах проводки.
Так как соотношения плеч рычагов в проводке управления
различны при разных положениях командных рычагов, то расчет
усилий нужно вести для нескольких положений рычагов. Прибли-
женно усилия можно определять для неотклоненных командных
рычагов.
Фиг. 266.
Расчетная величина Р ограничена нормами прочности в сле-
дующих пределах:
для ручки при управлении рулем высоты 1304-240 кГ (1270—2350н)
„ „ „ „ элеронами 654-130 кГ (640—1270н)
„ педалей 1804-250кГ (1760—2450н).
Если величина силы Р, полученная расчетом, не находится
в этих пределах, то расчет следует вести на ближайшую к ней пре-
дельную величину.
Например, если для педалей получено Р = 200 кГ (1960 н), то расчет произ-
водят на эту силу; если же получено Р=300 кГ (2940 н), то расчет ведут
на силу в 250 кГ (2450 н).
Усилия 5 во всех элементах проводки определяются на основа-
нии общих положений статики — из рассмотрения равновесия эле-
ментов проводки. Рассмотрим, например, определение усилий при
управлении рулем высоты в элементах проводки, приведенной на
фиг. 266, а.
Из условия равновесия ручки имеем
Pa=Sxb и .
Реакция в шарнире А
— Р-^.
432
Из условия равновесия следующего рычага
5^=52^ и 52=5! —,
Здесь растягивающее усилие в первой тяге Si направлено уже
влево — от рассматриваемого узла соединения тяги с рычагом. Ре-
акция в шарнире В
Rb—32-^Si,
Переходя к следующему рычагу и прикладывая усилие S2 про-
тивоположно направлению, определенному для рычага В, получим
S2^=Sj/ и S3=S2 -у-.
Реакция в шарнире С
Rc = S3—S2.
Поддерживающая качалка D не изменяет ни величины, ни на-
правления силы S3.
По полученным усилиям в тягах проверяем последние на рас-
тяжение, приняв аразр~0,8 ов вследствие ослабления тяг отверстия-
ми под болты, трубчатые заклепки:
тяги ___ тяги
тяги П
ТЯГИ — (£>2— ^2)
(78)
Кроме того, проверяем тяги на продольный изгиб, принимая
для определения гибкости за длину расстояние между направляю-
щими. При этом учитываем, что тяги, растянутые при отклонении
ручки «на себя», окажутся сжатыми при отклонении — «от себя».
Усилия S в тросах при гибкой проводке определяются аналогич-
ным путем. Например, усилие в тросе управления элеронами
(фиг. 267, а)
дтр-н е .
Ролик не изменяет величины усилия STp в тросе, а меняет толь-
ко направление усилия. Сила R> нагружающая кронштейн ролика,
определится как равнодействующая усилия в ветвях троса SiP
(фиг. 267, а).
По найденному в тросе усилию STp трос подбирается по стан-
дартам, где приведены разрушающие усилия для различных типов
и размеров троса.
Найдя таким образом усилия S во всех элементах проводки,
можно произвести расчет этих элементов на прочность.
28 1563 433
Так например, для ручки эпюра изгибающих моментов будет
иметь вид, приведенный на фиг. 266,6. По значению Л1113Г в «опас-
ном» сечении (для которого можно предполагать большие напря-
жения) определяем на-
пряжения
МцЭГ
w7
(79)
$тр
г)
Фиг. 267.
где (тв — предел прочно-
сти материала;
W— момент сопро-
тивления сече-
ния ручки.
По усилию Ra рассчи-
тываем болт и вильчатое
соединение в узле А. По
усилию Si рассчитываем
болт и вильчатое соедине-
ние в узле соединения
ручки и первой тяги.
Рассмотрим расчет
штурвальной колонки,по-
казанной на фиг. 267.
Переносим силы Р и
и 5тр, действующие на
штурвал и звездочку, на
ось трубы. Получаем силу
(P-bSTp). Моменты от пе-
реноса этих сил уравно-
вешиваются, скручивая
вал головки штурвала
(но не нагружая трубу
изгибом).
Переносим также силы STp, действующие в вертикальной и го-
ризонтальной ветвях троса, огибающих ролик, на ось ролика. Мо-
менты от переноса этих сил взаимно уравновешиваются.
Схема нагружения основания колонки показана на фиг. 267, б.
Опорные реакции определяем, приравняв нулю сумму моментов
всех сил относительно опор 1 и 2.
+5W) 4 - STP (6 - г+е) - Sipr] =
A О
^=777 «р + 5тр) «-5tp(a + r-e)+Sipr] = ——у-.
434
Эпюра изгибающих моментов показана на фиг. 267, в. Значе-
ния изгибающих моментов:
ЛГ3
/И4 = Л?2(Ь —г ф-е) (большее значение);
M±=R2(b~гф-е)-—STpr (меньшее значение).
На фиг, 267,а показана эпюра осевых сил, действующих на
трубу.
Горизонтальная сила 5тр уравновешивается двумя реакциями
0,5 STp на опорах.
По найденным значениям сил и моментов рассчитываем сече-
ние трубы на сжатие (продольный изгиб), основание колонки на из-
гиб, ось ролика на силу 7? и опорные узлы на силы R\t R2 соответ-
ственно.
Вибрации проводки управления
Тяга управления, как и всякая система, имеет частоту собствен-
ных колебаний, т. е. частоту, с которой она будет совершать ко-
лебания после того, как причина, вызвавшая их, исчезнет.
Силовая установка вызывает в проводке управления вынужден-
ные — изгибные колебания (фиг. 268). Частота их может быть
Фиг. 268.
равна частоте «возмущающих» импульсов силовой установки. При
совпадении частот вынужденных и собственных колебаний насту-
пит резонанс. В этом случае в результате работы на усталость тяга
может разрушиться. Следует иметь в виду, что разрушение тяги
от вибрации происходит обычно не сразу, а после некоторого,
иногда довольно длительного времени.
Во избежание явлений резонанса, особенно на режиме эксплуа-
тационных оборотов двигателя, необходимо, чтобы частота собст-
венных колебаний v каждой тяги в минуту отличалась от числа
оборотов двигателя и удвоенного числа оборотов двигателя на
эксплуатационном режиме на 300—400 колебаний в минуту.
Расчет частот собственных изгибных колебаний тяг проводки
управления, шарнирно соединенных на качалках, сводится к олре-
28-
435
делению частот собственных колебаний
ленной на концах, по формуле
балки, шарнирно закреп-
EJ кол
/п мин
где EJ — жесткость тяги на изгиб в кГ-см2 (н-л:2);
т — погонная масса тяги в кГ * се к2/см2 (н- сек.2/м2)\
I — длина тяги в см.
Значение 1 / — для труб различных диаметров и сечений обыч-
у т
но приводятся в справочниках.
Увеличение диаметра трубы ведет к повышению частоты собст-
венных колебаний тяги. Увеличение длины тяги приводит к умень-
шению частоты собственных колебаний.
Наиболее эффективным способом изменения частоты собствен-
ных колебаний тяги является изменение ее длины, т. е. установка
промежуточных качалок или направляющих опор.
Глава XVIII
ШАССИ САМОЛЕТА
1
1. ОБЩИЕ СВЕДЕНИЯ. КЛАССИФИКАЦИЯ
Назначение шасси. Требования, предъявляемые к шасси
Шасси служит для передвижения самолета по земле при раз-
беге перед взлетом, пробеге после посадки и при передвижении
по аэродрому. Оно воспринимает также нагрузки, действующие на
самолет во время посадки и передвижения по земле. В соответст-
вии с этим шасси должно иметь устройства, смягчающие удары,
возникающие при посадке вследствие наличия вертикальной ско-
рости снижения (см. разд. II) и при пробеге или разбеге по неров-
ной поверхности.
При ударе самолета о землю вертикальная скорость снижения
его уменьшается до нуля за короткий промежуток времени, что
сопровождается появлением значительных ускорений и инерцион-
ных сил. Шасси самолета снабжено пневматиками колес и амор-
тизаторами, увеличивающими время гашения вертикальной ско-
рости и, следовательно, уменьшающими ускорения и силы, дейст-
вующие на шасси.
Наряду с общими требованиями ко всем частям самолета
к шасси предъявляются следующие специфические требования:
1. Обеспечить свободное передвижение и достаточные устойчи-
вость и управляемость самолета на земле.
2. Иметь минимальное лобовое сопротивление в полете.
436
к
>
3. При обжатии амортизаторов обеспечить минимальное пере-
мещение колес в направлении продольной оси самолета и сохране-
ние неизменной ширины колеи шасси во избежание срыва, по-
крышек.
4. Компоновка шасси на самолете должна также обеспечивать
противокапотажные свойства самолета, не допускать заваливания
на хвост, иметь достаточное расстояние от концов лопастей винтов
и от самой нижней точки хвостовой части самолета до поверхности
земли, а также посадочный угол атаки (см. разд. II).
5. Должна быть достаточная проходимость * шасси у самоле-
тов, предназначенных для эксплуатации на грунтовых аэродромах.
6. Обеспечить поглощение амортизацией шасси, предписанной
нормами прочности, работы. При этом большая часть работы
должна превращаться в тепловую энергию (подробней об этом
см. «Амортизаторы шасси»).
7. Иметь достаточную эффективность колесных тормозов для
сокращения длины пробега после посадки.
К убирающемуся в полете шасси, кроме перечисленных, предъ-
являются также дополнительные требования:
а) уборка или выпуск шасси у небольших самолетов не долж-
ны занимать более 6—12 сек, а у больших 12—15 сек.;
б) иметь механизм аварийного выпуска шасси;
в) должна быть надежная фиксация шасси в выпущенном
и убранном положениях с помощью замков. Иметь сигнализацию
убранного и выпущенного положений шасси.
Типы шасси
Под типом или схемой шасси подразумевается количество опор
и их особенности расположения на самолете.
На самолетах применяются следующие три основных типа
шасси:
1. Трехопорное шасси с задней (хвостовой) опорой (фиг.
(269, а); основная нагрузка при этом -приходится на две главные
опоры, расположенные впереди центра тяжести самолета;
2. Трехопорпое («трехколесное») шасси с передней (носовой)
опорой (фиг. 269,6); основная нагрузка при этом приходится на
две главные опоры, расположенные позади центра тяжести само-
лета;
3. Двухопорное или велосипедное шасси** (фиг. 269, а) с дву-
мя подкрыльными вспомогательными опорами; при таком шасси
вся нагрузка приходится на две опоры, расположенные под фюзеля-
жем сзади и спереди центра тяжести самолета. Подкрыльные опоры
* Под проходимостью самолета следует понимать его способность само-
стоятельно (с помощью собственного двигателя) передвигаться по грунтовому
аэродрому, а также производить взлет и посадку.
** В середине 30-х годов советскими конструкторами было впервые приме-
нено велосипедное шасси.
437
служат для поддержки крыла при кренах самолета во время стоящ
ки и движения по аэродрому.
В настоящее время этот тип шасси иногда применяют для само-
летов с тонкими крыльями (чтобы избежать затруднений с убор-
кой шасси в крыло с малой строительной высотой), а также для
самолетов с высоким расположением крыла (так как шасси, рас-
положенное на крыле, получилось бы высоким и тяжелым).
Гпарная ГлаВная
опора ° опора
Ось санолста
Фиг, 269 Основные типы шасси.
Шасси может быть убирающимся в полете и неубирающимся;
в последнем случае шасси заключают в обтекатели.
На современных военных, транспортных и пассажирских само-
летах шасси делают убирающимися, так как увеличение скорости
от снижения лобового сопротивления гораздо более существенно,
чем вынужденное утяжеление самолета, вызванное установкой ме-
ханизмов уборки и выпуска шасси.
На самолетах, имеющих малые скорости полета, бывает целе-
сообразным применять неубирающееся шасси.
438
Тилы взлетно-посадочных опор
В качестве взлетно-посадочных опор самолетов применяются
преимущественно колеса, реже — лыжи, а иногда гусеницы.
Шасси с колесными опорами (см. фиг. 269) имеет
небольшое сопротивление движению при взлете и большое сопро-
тивление при посадке с применением торможения; наличие пневма-
тиков колес улучшает амортизацию при ударах и др.
Фиг. 270. Шасси с лыжными опорами.
Недостатком колесных опор является конструктивная слож-
ность их, большой вес и большие габариты колес, ухудшается про-
ходимость колес при увеличении взлетно-посадочных скоростей.
Шасси с лыжными опорами (фиг. 270) применяется у самоле-
тов, предназначенных для эксплуатации со снежных аэродромов
в полярных условиях.
Лыжное шасси может быть выполнено с удельной нагрузкой
0,3—0,5 кГ.1см2 (30—50 кн/.м2) на поверхность аэродрома, тогда как
у колесных шасси удельная нагрузка составляет 2—3 кГ/сз!2 (200—
300 кн/м2) и более. Это повышает проходимость лыжного шасси.
Преимущества и недостатки шасси с передним колесом
В настоящее время наиболее распространенным типом шасси,
особенно для скоростных самолетов, является шасси с передним
колесом. Расположение такого шасси на самолете см. в разд. II.
Шасси с передним колесом имеет следующие преимущества по
сравнению с шасси с хвостовым колесом.
1. Возможность осуществления посадки с большей скоростью
(при малом угле атаки крыла, фиг. 271,а). Посадка на такой ско-
439
рости (при таком же угле атаки) самолета, имеющего шасси с xboj
стовым колесом (фиг. 271,6) сопряжена с опасностью «капота»
самолета (заваливания на нос) в случае переднего удара и, кроме
того, вызывает «взмывание» самолета вверх после удара о землю —
так называемое «козление». Последнее явление объясняется тем
обстоятельством, что массовая сила Gn3 и реакция земли N созда-
ют пару сил, увеличивающую угол атаки самолета. При увеличении
же угла атаки возрастает подъемная сила и самолет взмывает
вверх. Возможность увеличения посадочной скорости при наличии
Фиг. 271.
шасси с передним колесом приводит к уменьшению площади кры-
ла, что в свою очередь позволяет увеличить максимальную скорость
самолета.
2. Возможность осуществления также нескоростной посадки
при углах атаки, соответствующих су щах. В этом случае посадка
совершается на главные колеса (фиг. 271,в). При правильном рас-
положении шасси относительно центра тяжести самолета обеспе-
чивается перевал самолета на переднее колесо. На случай завали-
вания на хвост при неудачной посадке на чрезмерно большом угле
атаки ставится предохранительная хвостовая опора.
Таким образом, на самолете, имеющим шасси с передним коле-
сом, возможны два вида посадок — скоростная и нескоростная, что
упрощает технику выполнения посадки. На самолете, имеющим
шасси с хвостовым колесом, единственно правильной является не-
скоростная посадка — на три точки (фиг. 271,а).
3. Некоторое сокращение длины разбега при взлете по сравне-
нию с шасси с хвостовым колесом. Меньший угол атаки в положе-
нии разбега у самолета, имеющего шасси с передним колесом,
уменьшает лобовое сопротивление, и следовательно, уменьшает
длину разбега. Хотя одновременно уменьшение подъемной силы
увеличивает длину разбега, но влияние этого фактора слабее и дли-*
на разбега все же сокращается.
4. Некоторое сокращение длины пробега после посадки, благо-
даря возможности более интенсивного торможения колес без опас-
ности «капота» самолета.
440
Фиг, 272.
5, Близкое к горизонтальному положение продольной оси само-
лета на стоянке и при передвижении по земле создает значитель-
ные удобства для пассажиров и улучшает обзор для летчика.
Наряду с существенными преимуществами, шасси с передним
колесом имеет также следующие недостатки.
1. Большая нагрузка на переднее колесо при посадке и, как
следствие этого, значительно больший вес и «зарывание» (худ-
шая проходимость) переднего колеса. Увеличение нагрузок на пе-
реднее колесо объясняется тем, что: а) при торможении инерцион-
ная сила массы самолета создает
момент, догружающий переднее ко-
лесо. На фиг. 272: Р7р—сила трения;
— сила инерции; N—сила, догру-
жающая переднее колесо; б) «пере-
вал» на переднее колесо при посадке
на главные колеса сопровождается
также дополнительными нагрузками
на переднее колесо вследствие углово-
го ускорения вращения самолета.
2. Возможность появления самовозбуждающихся колебаний
(«шимми») свободно ориентирующегося переднего колеса.
Для обеспечения рулежки переднее колесо делается ориентирующимся, т е.
свободно поворачивающимся относительно оси стойки.
Рассмотрим колебания переднего колеса, условившись, что «проскальзывание»
колеса (поворот относительно оси стойки без поступательного движения и дви-
жение в направлении, перпендикулярном плоскости колеса) невозможно
Благодаря упругости стойки колесо может отходить в сторону от линии
движения на величину у (фиг. 273, о). Тогда плоскость колеса по отношению
к земле наклонится, отойдя на угол 0 от вертикальной плоскости, и ось колеса
наклонится на угол 0 к горизонту. Ось колеса пересечется с землей в точке а
и колесо при движении будет вращаться относительно наклонной оси а^а',
двигаясь по криволинейной траектории. При этом изменяются угол у поворота
колеса *, боковое перемещение у и угол 0 наклона колеса.
Рассмотрим движение колеса, получившего начальный поворот ушах (по-
ложение / на фиг. 273,6).
Колесо, двигаясь в первый момент под углом уюах к направлению движения
х—х, перемещается в сторону на величину у и одновременно отклоняется на
угол 0 от вертикальной плоскости. Последнее явление вызывает криволинейное
движение колеса с .увеличением бокового перемещения у и угла наклона 0
и уменьшением угла поворота у (положение //). В некоторый момент времени
колесо займет положение III, при котором перемещение и угол наклона колеса
в вертикальной плоскости (наклон оси колеса к горизонту) будут максимальны-
ми (ушах, 0 шах), а угол у поворота колеса будет равен нулю. Из этого поло-
жения, из-за наличия угла 0 , колесо будет двигаться на уменьшение переме-
щения у, а следовательно, и на уменьшение угла наклона 0, а угол поворота у
будет увеличиваться в направлении, обратном предыдущему (положение IV).
В положении V величины у и 0 равны нулю, а угол поворота у колеса до-
стигает максимального значения ушах. Далее колесо проходит положения VI,
* Угол у отсчитывается от оси х—х до касательной к траектории движения
колеса.
441
- // VIII аналогичные положениям //, Щ, IV, и возвращается в исходное по-
ложение IX, повторяющее положение /. Затем вся картина повторяется сначала.
Фиг. 273. Схема колебаний («шимми») переднего колеса.
Таким образом, имеются незатухающие (гармонические) колебания колеса,
не нуждающиеся в посторонних толчках, — самоколебания. Если учесть возни-
кающие при таком движении ускорения, инерционные силы, упругость пневма-
тика и т. п.. то окажется, что при больших скоростях движения самолета колеба-
ния могут быть нарастающими и увеличение перемещения у колеса может вы-
звать срыв пневматика и поломку стоики.
Для того чтобы колебания переднего колеса была затухающи-
ми, применяются гасители колебаний — демпферы
Устойчивость движения по земле. Флюгерная устойчивость
Важным преимуществом шасси с передним колесом является
устойчивость движения по земле и, так называемая, флюгерная
устойчивость.
Рассмотрим устойчивость движения по земле.
Дадим самолету малое отклонение от направления движения
и проследим, как он будет вести себя под действием сил, возникаю-
щих вследствие этого отклонения. Если эти силы стремятся воз-
вратить самолет в начальное положение
то в этом случае самолет устойчив
при движении по земле, и наоборот.
Рассмотрим шасси с передним коле-
сом (фиг, 274, а).
Пусть случайная причина (напри-
мер, несимметричное сопротивление
качению колес) отклонила самолет на
угол р, искривив его траекторию. Тот-
час же возникают центробежные силы
инерции приложенные в центре
тяжести самолета, и реакции F боко-
вого трения главных колес. Переднее
колесо ориентирующееся и на нем
боковая сила не возникает. Пара сил
Р; и F дает момент относительно
центра тяжести самолета, уменьшаю-
щий угол р (стабилизирующий мо-
мент) .
Таким образом самолет устойчив
при движении по земле.
При повороте на угол р самолета,
имеющего шасси с хвостовым колесом,
силы Pj и F создают момент, увели-
чивающий угол р (дестабилизирую-
щий момент, см. фиг. 274,6). Ориен-
тирующееся (для обеспечения управ-
ляемости) хвостовое колесо не испы-
тывает воздействия боковых сил и не
препятствует увеличению угла р. Сле-
довательно, самолет будет неустойчив
при движении по земле. Для повыше-
ния устойчивости при разбеге само-
лета перед взлетом хвостовое колесо
(стабилизирующие силы),
Фиг. 274
делают стопорящимся; летчик может
фиксировать его в продольной плоскости самолета. Тогда боковая
сила Ехв (см. фиг. 274, в) возникает также на хвостовом колесе,
момент ее относительно центра тяжести самолета является стаби-
лизирующим (уменьшает угол р).
Рассмотрим флюгерную устойчивость.
Пусть самолет подходит на посадку с боковым ветром — посад-
ка осуществляется со сносом. В момент соприкосновения с землей
возникают боковые силы трения F на главных колесах и инерцион-
ная сила Ру в центре тяжести самолета (см. фиг. 274, а, б. Ско-
'eEOxdeH
at'<ZT7’;-I -ojomw юхиеонехз вохихзеии-зоГТ'
яхэомиэонас!аиэн и I -dXdnx вдЛичдшги ~ . I
442
443
рость ветра V показана пунктиром). При переднем положении ц. т.
(шасси с передним колесом) момент пары сил развернет самолет
по ветру в направлении Л4стаб (как флюгер) — самолет имеет флю-
герную устойчивость. При заднем положении ц. т. (шасси с хвосто-
вым колесом) самолет развернет против ветра в направлении
Фиг. 275.
Мдестаб — флюгерная устойчивость отсутствует. В последнем случае
(см. фиг. 274, б) возникает тенденция к опрокидыванию самолета
на внешнее (относительно центра разворота) крыло, вызванная
двумя причинами: увеличением подъемной силы на внутреннем
(относительно центра разворота) крыле, так как внешнее крыло
затенено фюзеляжем и моментом силы Р; на плече Н от центра
тяжести самолета до земли (фиг. 275).
Нагрузки, действующие на шасси
При стоянке самолета на шасси действуют стояночные усилия,
обусловленные весом самолета и являющиеся реакциями земли.'
Эти усилия определяются разнесением из центра тяжести самолета
веса G на колеса шасси (см. фиг. 42 разд. И). Сумма этих реакций
по условию равновесия равна весу самолета
2Р СТ~Ь-^СТ ~ G,
где Рст — стояночное усилие на главное колесо;
Л^ст — стояночное усилие на переднее или хвостовое колесо.
Величины усилий РСт и jVCT зависят от расстояния между рас-
сматриваемой опорной точкой и центром тяжести самолета и равны
(фиг. 276).
2Р„=-^-О; ЛГ„=—£—G. (80)
с + d с + d
Для шасси с хвостовым колесом РСт ~0,45G, для шасси с носо-
вым колесом Рст~0,4G.
В момент посадки на самолет действует вертикальное ускоре-
ние j, направленное вверх (на гашение вертикальной скорости Vy),
которое буд уг тем больше, чем меньше обжатие амортизации (чем
выше ее жесжость), т. е. чем меньше путь, на протяжении которого
гасится верт шальная скорость. Наличие ускорения / вызвано реак-
циями земли при посадке, следовательно, нагрузки при посадке
зависят от жесткости амортизации.
Фиг, 276,
Обозначая силу, действующую на шасси при посадке в случае
£, через Рэш — 2Рэ-\-№3 (фиг. 276, а), а отношение ее к весу G
самолета через п3Е (коэффициент эксплуатационной перегрузки
случая £), получим
р3
(81)
Так как распределение силы Р3Ш между главными колесами и
хвостовым или передним колесом такое же, как и распределение
веса G (стояночной нагрузки на шасси), то можно записать
_ Р3 N3
п3 =----=----;
£ Per Л^ст
P3=Pcr^ N^-Ncxri^ (82)
где Р3, Рст —эксплуатационное и стояночное усилия на одну
главную стойку;
NCT —эксплуатационное и стояночное усилия на переднюю
или хвостовую стойку.
В современных самолетах п3Е может доходить до 3,5.
Кроме вертикальных нагрузок, на шасси могут действовать
и другие нагрузки.
При пробеге по аэродрому и ударе о кочку может произойти
передний удар (фиг. 276,6). Такое нагружение соответствует слу-
445
чаю G норм прочности. При торможении главных к хпес на них
действует горизонтальная сила трения Тэ (фиг. 276,с, случай Т).
При посадке со сносом на шасси действуют боковые силы
(фиг. 276, а). Отношение силы Т7??, к полетному весу самолета есть
коэффициент эксплуатационной перегрузки случая
При развороте самолета на земле на стойку шасси может воз-
действовать крутящий момент Л1*р.
Перечисленные нагрузки вызывают осевые усилия в стойке, из-«
гиб ее в двух плоскостях и скручивание.
Классификация ног и стоек шасси
Каждая опора шасси представляет собой совокупность различ-
ных элементов, получивших наименование ноги шасси, которые
классифицируются по следующим признакам:
Фиг. 277.
1) По характеру воспринятия нагрузок различаются следую-
щие конструктивные схемы шасси (см. фиг. 277): а — ферменная;
б — балочная консольная, в — балочная подкосная и г —ферменно-
балочная.
2) По расположению амортизатора относительно стойки * раз-
личают телескопические стойки (фиг, 278,а, б, в), выполненные как
одно целое с амортизатором и изменяющие свою длину, и жесткие
стойки с вынесенным амортизатором (фиг. 278,г).
Телескопические стойки более компактны и имеют несколько
меньший вес, благодаря чему имеют большее распространение, осо-
бенно для главных ног шасси тяжелых самолетов. Недостатком их
является наличие на нижнем конце штока амортизатора состав-
ляющей Р2 (фиг. 278), перпендикулярной оси штока. Это вызывает
изгиб штока в цилиндре, как балки, опертой на буксах А и В,
вызывает увеличение трения в буксах при движении штока, требует
* Стойкой называют основной силовой стержень ноги.
446
повышенной жесткости штока и ухудшает работу уплотнений амор-
тизатора.
Особенно этот недостаток присущ схеме «а», так как упомяну-
тые поперечные силы для схем «б» и «в» могут быть невелики при
надлежащим образом выбранных геометрических соотношениях.
В схеме «г» амортизатор, будучи шарнирно прикреплен к жесткой
стойке и рычагу, испытывает лишь осевые нагрузки и лишен упо-
мянутого недостатка. Внутренняя полость стойки в этой схеме часто*
используется как баллон для сжатого воздуха.
Фиг. 278.
/—колесо, 2—амортизатор, 3— рычаг, 4— сгонка.
Усилия в амортизаторе то схеме «а» Раы—Pi. Для схем «б»,,
«в», «а» Рам определяется из равновесия рычага, т. е. суммы момен-
тов относительно точки D должны быть равны 0, Например для
схемы «б»
Введение шарниров Е в схемах «б», «в» обеспечивает отсутст-
вие заклинивания штока амортизатора в цилиндре.
3) По типу крепления колес к стойке различаем непосредствен-
ное крепление оси колеса к штоку амортизатора (фиг. 278, а),
крепление с помощью рычага — рычажную подвеску (фиг. 278, б, г),
полурычажную подвеску (фиг. 278, в) и крепление с помощью
тележки (фиг. 279). Преимуществом рычажной подвески, как ска-
зано было выше, является то, что величина поперечных сил в штоке
амортизатора уменьшается; при вынесенном амортизаторе они
совсем отсутствуют. Кроме того, если в стойках шасси, к штоку
которых непосредственно крепится ось колеса, горизонтальная
составляющая нагрузки Р? не воспринимается амортизатором (не
вызывает его обжатия), то рычажная подвеска колес обеспечивает
амортизацию также и сил Р%, вызывающих усилие в амортизаторе.
Недостатком рычажной подвески является конструктивная
447
трудность обеспечения большого хода амортизатора и несколько
больший вес. Поэтому в главных стойках тяжелых самолетов ры-
чажная подвеска встречается редко. Полурычажная подвеска
обеспечивает несколько больший ход амортизатора, чем рычажная,
но вместе с тем увеличивает поперечные силы в штоке амортиза-
тора. В настоящее время на тяжелых самолетах для уменьшения
давления колес на поверхность аэродрома устанавливают много-
колесные ноги шасси, к телескопическим стойкам которых крепят-
ся так называемые «тележки».
Фиг. 279.
На фиг. 279 (см. также фиг. 283) показана схема многоколес-
ной ноги шасси. Тележка имеет, четыре колеса, расположенные по-
парно на двух осях 2 и 3. Оси свободно посажены в вилки свар-
ной рамы 2—3, шарнирно прикрепленной к амортизационной стой-
ке 6. Каждая ось соединена с рычагом. Рычаги обеих осей соеди-
нены тягой 4—5. Передний рычаг шарнирно соединен со
стабилизирующим амортизатором и подкосом 7—8, который вто-
рым концом присоединен к стойке. Свободная посадка осей в раме
2—3 обеспечивает передачу моментов AfT при торможении колес
через рычаги и тягу 4—5 на подкос 7—8 и далее на стойку.
При этом поворот тележки относительно оси 1 в направлении
действия моментов сил Т и перераспределение усилий между
колесами не происходят, если тележка находится в равновесии под
действием сил торможения Т (фиг. 279), усилия Sn в подкосе и ре-
акции в шарнире Л которая должна пройти через ось 2 передних
колес *. Как известно, три силы, находящиеся в равновесии, долж-
ны пересекаться в одной точке, в данном случае в точке Оь- отсюда
и определяется необходимое направление подкоса 7—8.
* Последнее следует из равновесия оси 2. 7
448
Аналитические зависимости могут быть установлены из следую-
щих соображений. Напишем условие равновесия тележки в виде
равенства нулю суммы моментов всех сил относительно оси / креп-
ления тележки к стойке.
V Ж1 - 2РГ’ I - 2Р* АН/ - 4ТН + Snb = 0.
(83)
При отсутствии перераспределения усилий между колесами
yjiK'p_рзадн
Тогда
Sub—4TH = 0. (84)
Из равновесия передней оси следует, что
. VAl2-Sria-477z-0.
Тогда из уравнений (84) и (85)
а Л
(85)
получим
(86) фип 280.
Последнее соотношение обусловливает направление подко-
са 7—8,
4) По расположению колес относительно стоек последние под-
разделяются на вильчатые, полувильчатые, с консольной осью и со
спаренными колесами (фиг. 280). Установка спаренных колес вме-
сто одного позволяет значительно уменьшить их диаметр и облег-
чить уборку шасси.
Выбор расположения колес определяется прежде всего из усло-
вий и кинематики уборки, допускаемых габаритов (длине и шири-
не) ноги шасси и компоновки ее на самолете.
2. КОНСТРУКТИВНЫЕ СХЕМЫ ШАССИ.
КОНСТРУКЦИЯ ГЛАВНЫХ НОГ ШАССИ
*
Ферменное шасси
В ферменной конструктивной схеме шасси нагрузки, преимуще-
ственно в виде растяжения и сжатия, воспринимаются стержнями
пространственной фермы, несущей колесо. В настоящее время
ферменное шасси применяется весьма редко (главным образом на
самолетах с малой скоростью полета), так как оно громоздко, что
очень затрудняет уборку его в полете. В весовом отношении такое
шасси выгодно, так как элементы, работающие на осевые усилия,
получаются легче, чем элементы, работающие на изгиб.
Балочное шасси
Балочное консольное шасси представляет собой кон-
сольную балку-стойку, заделанную в крыле.
29 1563 449
Ввиду отсутствия у этого шасси подкоса оно конструктивно
просто и удобно для уборки. На фиг. 281 показаны расчетные схе-
мы и эпюры изгибающих моментов для: а — балочного консолыю-
г0 и g—балочного подкосного шасси при одинаковых размерах
стоек и нагружении одинаковой силой Т. Неблагоприятное распре-
деление ТИизг для балочного консольного шасси увеличивает его
вес, что обусловило редкое применение этой схемы.
Одностоечное балочное шасси с подкосом является
наиболее распространенной схемой современного убирающегося
шасси. Особенность этой схемы состоит в том, что верхний конец-
3 аделк a Шарниры
а) б)
Фиг. 281.
стойки заделан в одной плоскости к конструкции самолета (пре-
имущественно к крылу). В перпендикулярной же плоскости стойка
крепится к конструкции самолета шарнирно и подпирается под-
косом.
По расположению подкосы могут быть боковыми (шасси уби-
рается вдоль по размаху) и задними или передними (шасси уби-
рается назад или вперед). Усилия в боковом подкосе обусловлены
боковой силой. Силы же, действующие в плоскости колеса, не вы-
зывают нагружения бокового подкоса и воспринимаются стойкой,
как консольной балкой. Задний подкос не воспринимает боковых
сил.
Для увеличения жесткости крепления стойки и уменьшения ре-
акций на цапфах (траверсах), последние «разносят» в направле-
нии ИХ оси.
Рассмотрим примеры конструкции балочных подкосных ног
шасси. На фиг. 282 показана балочная конструкция главной ноги
шасси с боковым подкосом-подъемником уборки и выпуска ноги.
Для предотвращения самопроизвольного складывания шасси
под действием боковых сил в конструкции подъемника предусмот-
рено запирающее устройство, обеспечивающее жесткое соединение
450
29“
451
штока с цилиндром подъемника при выпущенном шасси и возмож-
ность перемещения штока в цилиндре при уборке.
Конструкция шасси при этом упрощается, также как и уборка
его. Однако весьма большие нагрузки, действующие на запираю-
щее устройство подкоса-подъемника, препятствуют применению
такого решения на тяжелых самолетах.
Передний подкос
Амортизационная стоика
Двухзвенник
Цилиндры подъема
и Выпуска стайки
Рама подвески
амортизационной
стойки
Передний тормозной
рычаг тележки
Фиг. 283. Балочная подкосная
конструкция главной ноги шасси.
Кронштейн с роликом
управления механизмом
створок
Тяга компенсационного
механизма
Рычаг механизма па*
Ворота тележки на
раме
Тяга механизма побо-
рота тележки
Двухплечии рычаг механизма
поворота тележки
Стабилизирующий амортизатор
Подкос компенсационного
механизма
Ось подвески
тележки
Шлицевая втулка
Датчик автомата тор*
можения
Задний
тормозной
рычаг
колеса
Ось
Рома тележки
452
Стойка 7 представляет собой трубу из легированной стали. Внутренняя
полость стойки используется в качестве баллона сжатого воздуха. В верхнем
узле 14 размещена ось 1 крепления ноги в крыле. Нижняя часть стойки имеет
проушины для крепления сварного рычага 6. К нижней части рычага приварена
ось колеса 13.
На фиг. 283 показана балочная конструкция главной ноги шас-
си с передним подкосом. Телескопическая стойка шасси крепится
к крылу с помощью подвески.
Шток амортизационной
стойки соединяется с ци-
линдром амортизационной
стойки при помощи двух-
звенника.
Двухзвенник состоит из
двух рычагов, прикреплен-
ных к цилиндру и штоку
амортизационной стойки и
шарнирно соединенных
между собой. Двухзвенник
устраняет возможность по-
ворота поршня в цилиндре,
но вследствие «складыва-
ния» рычагов обеспечивает
поступательное движение
Фиг. 284.
штока в цилиндре.
К переднему тормозному рычагу тележки присоединен стабили-
зирующий амортизатор. Он обеспечивает выравнивание нагрузок
на передние и задние колеса тележки при посадке и пробеге, устра-
няет ее продольные колебания, устанавливает тележку в нужное
положение в воздухе перед посадкой. При уборке стойки стабили-
зирующий амортизатор, связанный кинематически с механизмом
уборки, поворачивает тележку относительно оси подвески ее
к стойке.
Ферменно-балочное шасси
Ферменно-балочные конструкции ног шасси представляют собой
стойки, подкрепленные системой стержней-подкосов. Применение
подкосов дает возможность значительно уменьшить величину изги-
бающих моментов, действующих на стойку, и увеличить жесткость
конструкции ноги шасси. Подкосы шарнирно соединены со стойкой
и работают на растяжение и сжатие.
Рассмотрим работу стойки, схематично изображенной на
фиг. 284, от боковой силы F. При отсутствии подкосов эпюра изги-
бающих стойку моментов имеет вид, изображенный на фиг. 2S4
FH
пунктиром, и При наличии подкосов реакции R =
в узлах крепления траверсы В вызывают в подкосах усилия 5ц==
=cosa’ п^,ичем °ДИН подкос растянут, другой сжат. Складывая эти
453
Траверса
Подкосы
Амортизатор
Серьга крепления ноги
в убранном положении
Замок вылущенного
положения шасси_
Серьга
Штанга
Подъемник
_____Задний подкос
Двухзденник
Демфер тележки
Тележка
Ось колес
Фиг, 285. Ферменно-балочная конструкция главной ноги шасси.
Детали крепления
колеса на оси
/яга компенсационного
механизма
Подкосы компенсационного
механизма
Колесо
454
усилия в точке А на оси стойки получаем, что вертикальные со*
ставляющие взаимно уравновешиваются, горизонтальные же
составляющие S = Sn sin a~R tg а суммируются и дают в корневом
сечении момент
М = —2S/z = —2fltga-ft.
Но igct-- — и тогда М — — 2R ~ Л = — Ra
2Л 2Л
Полный изгибающий момент в корневом сечении будет равен
Ra = O.
Эпюра моментов показана сплошными линиями. Выигрыш
в весе в последнем случае очевиден, несмотря на наличие под-
косов.
На фиг. 285 показана одностоечная ферменно-балочная конст-
рукция ноги шасси с тележкой, на которой установлены четыре
колеса.
На фиг. 286 (показаны главные ноги шасси с многоколесными
тележками.
133
3. УБОРКА ГЛАВНЫХ НОГ ШАССИ
Схемы уборки главных ног шасси
С увеличением скорости полета самолета интенсивно растет со-
противление неубирающегося шасси.
На современном скоростном самолете уборка шасси значитель-
но повышает максимальную скорость самолета. Повышается также
дальность полета и другие летные данные.
Эти обстоятельства заставили перейти к применению убирающе-
гося шасси, несмотря на его значительный вес, трудоемкость и вы-
сокую стоимость изготовления.
Впервые в СССР убирающееся шасси было спроектировано в 1931 г. и уста-
новлено на самолете РД или ЦАГИ-25, а затем в 1932—1933 гг. на пассажир-
ском самолете ХАИ-1 и истребителях И-14 и И-16.
Уборка шасси обычно осуществляется или в направлении по
размаху крыла, причем большей частью колесами к фюзеляжу —
в более толстую часть крыла, или в направлении по хорде с убор-
кой колес назад или вперед. Амортизационная стоика снабжена
щитком, который при уборке шасси плотно закрывает углубление
в крыле. При уборке шасси в гондолы двигателей или фюзеляж
отверстия закрываются специальными створками, управление ко-
торыми связано с движением шасси.
Уборка шасси осуществляется передачей: а) гидравлической,
б) пневматической, в) электрической.
На случай отказа основной системы должна быть предусмотре-
на система аварийного выпуска шасси.
Уборка ног шасси по размаху крыла
Наиболее широко в небольших самолетах применяется схема
уборки шасси с движением колес по размаху к фюзеляжу. В тех
случаях когда толщина крыла не позволяет расположить колеса во
внутренней полости крыла, их располагают в фюзеляже.
В ряде конструкций шасси роль бокового подкоса выполняет
силовой подъемник. Кинематика уборки шасси при это*м значи-
тельно упрощается.
На фиг. 287, а, б (см. также фиг. 282) показана убирающаяся
главная нога шасси самолета. Поворот стойки при уборке происхо-
дит относительно оси, размещенной в верхнем узле 4 стойки. Сило-
вой подъемник 5 шарнирно крепится к стойке и конструкции
крыла.
Подъемник (фиг. 287, в) состоит из цилиндра 6, имеющего
кольцевую канавку 7 под шарики, внутри которого перемещается
поршень 8 с уплотнениями 11. Поршень соединен со штоком 9, в ко-
торый ввернут ушковый болт 10 для присоединения подъемника
к стойке. В поршне просверлены отверстия для шарикбв 12. Плун-
жер 13 с уплотнениями может свободно перемещаться вдоль
штока.
456
Фиг. 287. Схема уборки логи шасси и конструкция силового подъемника,
стойка, 2—рычаг, 3—'амортизатор, 4—узел, 5—подъемник, S—цилиндр, 7— канавка, Л—поршень, 5—штог,
/я—ушковый болт, //—уплотнения, /2—шарики, /<?— плунжер, /-/—пружина, 17—^распределительная коробка.
457
При уборке ноги шасси гидросмесь под давлением поступает
в подъемник со стороны штока (фиг. 287,г).
Давлением гидросмеси плунжер перемещается вправо и, сжи-
мая пружину 14, освобождает шарики. В убранном положении
стойка фиксируется замком, расположенным на крыле. При выпус-
ке ноги шасси гидросмесь через распределительную коробку /5
подается в левую часть цилиндра, перемещая поршень вправо.
Когда поршень достигает крайнего правого положения (фиг. 287, д),
Цилиндр-подъемник
Створка
Замок убранного положения
Фиг. 288.
Распорная тяга
Складывающийся подкос
Серьга подвески стойки
б убранном положении
Амортизационная стойка
Уборка главной ноги шасси
по размаху.
шарики отжимаются конусным выступом плунжера и заскакивают
в канавку, где удерживаются действием пружины плунжера. Пор-
шень перемещаться не может.
Распределительная коробка обеспечивает выход жидкости из
цилиндра со стороны, противоположной поступлению жидкости,
и является гидрозамком, прекращающим выход жидкости из ци-
линдра при посадке с неполностью выпущенной ногой шасси
(когда шариковый замок не заперт).
Аварийный выпуск шасси осуществляется при помощи сжато-
го воздуха, поступающего в подъемник.
Уборка главной ноги шасси по размаху в фюзеляж показана
на фиг. 288. Уборка ноги производится при помощи цилиндра-
подъемника. Предварительно, с помощью специального цилиндра
458
управления замком, открывается замок подкоса, размещенный
в узле складывания его, и освобождается распорная тяга, соеди-
ненная с замком. В выпущенном положении ноги распорная тяга
совместно с замком препятствует складыванию подкоса под дей-
ствием боковых сил.
Шток цилиндра-подъемника под давлением жидкости втяги-
вается в цилиндр и стойка вместе с тележкой поворачивается
к плоскости симметрии самолета. Подкос при этом складывается.
Когда серьга подвески стойки доходит до упора, запирается замок
убранного положения и закрываются створки, кинематически свя-
занные со стойкой. Выпуск ноги производится в обратном порядке.
Уборка ног шасси по хорде крыла
Уборка ног шасси в направлении по хорде крыла имеет широ-
кое применение на самолетах с двумя и несколькими двигателями.
В этих случаях ноги шасси обычно убираются в гондолы двига-
телей с движением колес вперед или назад.
О58од гондола
двигателя
Фиг. 289. Кинематическая схе-
ма уборки ноги шасси по хорде
крыла.
На самолетах с двигателями, расположенными по бортам фю-
зеляжа или на хвостовой части фюзеляжа, для уборки ног шасси
делают специальные гондолы.
На фиг. 289 показана кинематическая схема убирающегося
шасси с движением колес назад.
459
Под действием подъемника 1 складывающийся подкос 2 своим
нижним звеном увлекает за собой стойку 3 шасси, которая вра-
щается относительно оси О подвески. При уборке ноги шарнир В
переместится по дуге ВВ' радиуса ОВ и займет положение В’;
ось колеса А переместится в положение Л7 по дуге АА' радиу-
са ОА; шарнир С переместится по дуге СС' радиуса DC.
Фиг. 290. Уборка ноги шасси по хорде крыла.
Новое положение подкоса определяется положением точки С,
так как точка В' определяется расположением убранной стойки.
Положение точки С7 может быть определено на основании того,
что она лежит на дуге радиуса DC и на дуге радиуса ВС, прове-
денной из точки В', т. е. на пересечении этих дуг.
На фиг. 290 показана схема уборки главной ноги шасси с дру-
гой кинематикой. Нога убирается в специальную гондолу на
крыле, назад по хорде. Штоки цилиндров-подъемников (см. также
фиг. 283), снабженные шариковыми замками, перемещаясь влево,
поворачивают раму подвески относительно оси «О». Вследствие
неизменности длины подкоса стойка поворачивается относительно
оси О] крепления стойки к раме назад. Одновременно система тяг
поворачивает двуплечий рычаг и через стабилизирующий аморти-
затор поворачивает тележку относительно оси О2 подвески тележ-
ки. В убранном положении нога фиксируется замком.
460
Нога шасси, изображенная на фиг. 285, убирается в мотогондолу по хорде
вперед.
Верхний конец заднего подкоса крепится к штанге, которая ведет его при
уборке и выпуске ноги шасси по заданной траектории. Шарнир соединения зад-
него подкоса с направляющей штангой имеет серьгу, которая запирается замком
выпущенного положения.
Уборка и выпуск шасси производится с помощью подъемника, шток кото-
рого крепится к стойке, а цилиндр к кон-
струкции самолета. Для фиксации ноги
в убранном положении на стойке уста-
новлена серьга.
Поворот тележки относительно
стойки, при убирании обеспечивается
демпфером тележки — увеличением ею
длины.
При уборке шасси по хорде в топ-
кое крыло или в гондолу двигателя
иногда бывает необходимо повернуть
колесо на 90°.
На фиг. 291, а и б показана схема
уборки такого шасси. Поворот стойки
относительно своей оси обеспечивается
поводком 4, соединенным с рычагом 3.
Поводок 4 при движении стойки
совершает сложное пространственное
движение, поэтому на концах его ста-
вят шаровые шарниры А и В,
При движении стойки назад шар-
нир А, расположенный выше осн цапф,
стремится уйти вперед. Благодаря связи
Фис. 291. Уборка ноги шасси с по
воротом колеса.
1—стоика» 2—стакан, 3— рычаг, *7—поводок
5—цапфы, 6—подкос» 7—хомут подкоса
с поводком 4, длина которого неизменна, рычаг поворачивает стойку относи-
тельно своей осн в подшипниках, смонтированных в стакане 2 и хомуте 7.
Уборка главных ног шасси вдоль оси фюзеляжа, применяемая
в шасси велосипедной схемы, не отличается от описанной выше
уборки шасси по хорде.
4. КОНСТРУКЦИЯ И УБОРКА ПЕРЕДНИХ НОГ ШАССИ
ЗАДНЯЯ НОГА ШАССИ. ДОПОЛНИТЕЛЬНЫЕ ОПОРЫ
Передние ноги шасси
Передняя нога шасси располагается в плоскости симметрии
самолета и крепится к конструкции передней части фюзеляжа.
Отличительной особенностью передней ноги шасси является
то, что переднее колесо выполняется ориентирующимся, т. е. мо-
жет поворачиваться относительно оси стойки, что способствует
улучшению устойчивости и управляемости самолета при движении
его на земле. В связи с возможностью поворота колеса относи-
тельно оси стойки необходимо обеспечить устойчивое положение
носового колеса относительно оси стойки, что достигается нали-
чием плеча устойчивости t, показанного на фиг. 292. Угол накло-
на си передней стойки равен 0ч-10°. Устойчивость колеса сохра-
няется вследствие того, что при случайном повороте колеса на
461
угол V И При направлении движения, указанном стрелкой, возни-
кающая боковая сила F стремится повернуть колесо относительно
оси О стойки в сторону уменьшения угла у.
Передняя нога шасси имеет 14-2 колеса, крепящиеся непосред-
ственно к штоку амортизатора рли с помощью рычага (рычажная
подвеска). В последнем случае, благодаря меньшим диаметрам
передних колес сравнительно с главными колесами и меньшему
потребному ходу амортизатора, удается разместить амортизатор
внутри стойки, что увеличивает ком-
пактность стойки (см. фиг. 278).
Для улучшения управляемости
при рулении самолета передние ноги
шасси часто делают управляемыми.
Для того чтобы при уборке перед-
ней ноги колесо находилось в среднем,,
не повернутом относительно оси стой-
ки положении, применяется центри-
рующее устройство.
Конструкция, а также схемы убор-
ки передней ноги шасси принципи-
ально не отличаются от конструкции
и схем уборки главных ног по хорде
крыла. Передняя нога шасси убирает-
ся в фюзеляж назад или вперед. Для
крепления передней ноги в передней
части фюзеляжа часто располагают
две мощных продольных балки, обра-
зующих одновременно «колодец» для
уборки шасси
Рассмотрим некоторые конструкции передних ног шасси.
На фиг. 293 показана балочная консольная нога шасси с рычаж-
ной подвеской колеса. Амортизатор расположен внутри стойки
и соединяется с рычагом с помощью серьги. Нижняя часть ноги
совместно с рычагом центрирующего устройства и верхним хому-
том свободно поворачивается (ориентируется) на некоторый угол
в стойке. Последняя с помощью траверсы крепится к конструкции
фюзеляжа. Поворот нижней части ноги через хомут и связанный
с ним поводок сообщает поступательное движение цилиндру
управления поворотом передней ноги, который является одновре-
менно и демпфером «шимми». При этом вязкая жидкость вытес-
няется из одной полости цилиндра в другую через малые отвер-
стия. При малых угловых скоростях поворота нижней части ноги—
при рулежке — поступательная скорость цилиндра мала и гидрав-
лическое сопротивление перетеканию жидкости невелико.
При больших угловых скоростях поворота нижней части ноги —
при колебаниях типа «шимми» — резко возрастает сопротив-
ление жидкости (оно пропорционально квадрату скорости проте-
кания жидкости через отверстия), колебания демпфируются
462
Шпангоут
* Z г * * л * % \ ’ X \ * * ' Г>й'Хщ1*М \. few%. i] Победах Стойка^ .,/ /’ол и к jssJ. \ Ш'Н(|?ИЯ Рычаг X центрирующего,7и||?ТЯЯЖ^^^^' устройства Zra&jiffl । /в^ j/s ШЯЬ \ * О^£л$^^гпш ШГ7$ ?Х£^ <$? И та/jF > ^£s3j>^ vFx V /F >6£М гл®Ф 1 wsra&z Скоба » llflfi НхГ'Л'Х JKct 1 ?ж /к P"’° Uxlvtw^/ xSm Ко лес o^--"^' Wi x. Цилиндр управления педоранан x?^x / передней ноги шасси Z z * // htiS Гi дроцилиндр \/ * < / /Ж - ' ySopKu и дылуска /\ * Il ilS передней наги шасси АЗ Л1 Шг х Г™5ст1 ^аз ъе/нный ч VaTxlj подшипник Траверса Ц^^~гГФх Рта^х3^ Лрофиларобанн^и кулаиок * *»*“ *<5к жь ЧЯЫПЬ * стоики ^еРьг<1 ^^^^^^^*^^*****^4 ч\ „г^ 'Jt*«n. fc 2ХХ. ?^МТШ cZ/'^^яЛ W '/1й vA vt У / < fj^W^
Фиг 293 Балочная консольная передняя нога шасси
При управлении передней ногой шасси поворотом штурвала летчик воздей-
ствует на золотнил распределительного устройства гидросистемы, который подает
под давлением жидкость в цилиндр-демпфер. Движение цилиндра поворачивает
нижнюю часть ноги с колесами и одновременно сообщается золотнику таким
образом, что золотник возвращается в исходное относительно штурвала положе-
ние и подача жидкости в цилиндр прекращается. Это обеспечивает поворот
колес вслед за движением штурвала — слежение.
Фиг. 294. Конструкция передней ноги шасси.
/—колеса, 2—амортизационная стоика, демпферы с механизмом поворота передней
нонк «/—складывающийся подкос, 5—механизм распора, гидравлический цилиндр
подъема передней ноги, 7—замок подвески передней ноги, 8~траверса, 9—раскос
Уборка ноги производится вперед с помощью гидроцилиндра,
поворачивающего ногу относительно оси крепления ее к фюзеля-
жу. В выпущенном и убранном положении нога запирается
замком.
Конструкция фермеиио-балочной передней ноги шасси самоле-
та с непосредственным креплением оси колес к штоку амортиза-
тора показана на фиг. 294, а, б.
Уборка и выпуск ноги осуществляется с помощью подъемни-
ка 6, цилиндр которого прикреплен к верхнему рычагу 7 склады-
вающегося подкоса 4, а шток к рычагу траверсы 8 стойки. При
464
уборке ноги механизм распора 5 складывается и поднимает под-
кос за его средний шарнир, создавая тем самым начальный
«надлом» подкоса. Нога убирается на-
зад по полету.
Управление поворотом колес осу-
ществляется посредством демпферов 3.
Конструкция демпфера показана
на фиг, 295,
Центрирующее устройство изобра-
жено на фиг, 296. На штоке амортиза-
тора установлен кулачок, который
входит в зацепление с кулачком, уста-
новленным в цилиндре, и тем самым
Уплотни-
паяет
Сальник
Нижняя
букса
улачак
штока
Кулачок
цшшнйра
Фиг.
296, Центрирующее
устройство.
Фиг 295, Демпфер передней ноги.
1—цилиндр, 2—поршень со штоком, З^уплотнсние,
4—ушко со втулками, 5—щтуцерьц
обеспечивает установку колес в нейтральное положение, когда
колесо отрывается от земли. При передвижении же по земле
амортизатор обжат, кулачки разъединены и шток с колесами мо-
жет поворачиваться.
Задняя нога шасси — установка хвостового колеса
Конструкция установки хвостового колеса для обеспечения маневренности
при рулежке должна допускать ориентировку колеса при разворотах самолета
на земле, а для повышения устойчивости самолета при взлете и посадке (во
избежание «рыскания») ориентирующееся хвостовое колесо должно фиксиро-
ваться в нейтральном положении. Для этого применяются стопорные устройства,
исключающие возможность поворота хвостового колеса при стопорении
Хвостовые колеса, как правило, убираются назад в хвостовую часть фю-
зеляжа. На фиг. 297 изображена конструкция задней ноги шасси с рычажной
подвеской колеса и вынесенным амортизатором. Стопорение колеса осуществлено
замком, расположенным в узле 3.
30 1563
465
Дополнительные опоры
К ним мы отнесем подкрыльные ноги шасси у самолетов,
имеющих велосипедную схему шасси, и предохранительные
хвостовые опоры у самолетов, имеющих шасси с передним
колесом х
Подкрыльные ноги убираются в гондолу или в крыло, обычно
имеют телескопическую стойку с непосредственным креплением
Фиг. 297. Конструкция задней ноги шасси
/—верхний узел, 2—стойка, 3—средний узел, 4—нижняя траверса, 5—вилка
6—колесо 7—амортизатор
колеса к штоку и балочную консольную конструктивную схему.
Элементы конструкции подкрыльной ноги принципиально не отли-
чаются от описанных выше.
При посадке, а иногда и взлете самолет с носовым колесом мо-
жет коснуться хвостом земли. Для предохранения хвостовой части
фюзеляжа устанавливают специальные хвостовые опоры.
466
На фиг. 298 показана убирающаяся хвостовая опора тяжелого
самолета, снабженная спаренными колесами и амортизатором.
Фиг 298. Убирающаяся хвосювая опора.
5. АМОРТИЗАТОРЫ ШАССИ
Назначение амортизации и требования, предъявляемые к ней
Амортизация шасси предназначена для поглощения ударов
при посадке самолета и при встрече с неровностями почвы во вре-
мя движения по земле.
Работа, которую должна поглотить амортизация шасси, за-
дается по нормам прочности формулой
V2
А- т ,
9 ’
(1
где т- — — масса самолета,
с
V — „приведенная11 вертикальная скорость самолета в
момент соприкосновения с землей, учитывающая из-
менение кинетической! и потенциальной энергии его.
На основании экспериментальных и теоретических исследова-
ний грубой посадки самолета в нормах прочности самолетов дана
30*
467
формула для определения вертикальной скорости Уу. Работа, ко-
торую должна воспринять амортизационная система (амортиза-
торы и пневматики), называется нормируемой — Анорм и вычис-
ляется отдельно для главных ног шасси и для передней (задней)
ноги.
Амортизатор шасси должен отвечать следующим основным
требованиям.
1. Воспринимать при прямом ходе (обжатии) энергию (рабо-
ту) удара, что обеспечивается соответствующим ходом и усилием
амортизатора.
2. Воспринимать работу так, чтобы усилия в амортизаторе
нарастали непрерывно и плавно, достигая наибольшей величины
в конце прямого хода (обжатия).
3. Быстро возвращаться в исходное положение после удара,
чтобы иметь возможность воспринять следующий удар; пря-
мой и обратный ходы должны совершаться менее чем
за 0,8 сек.
4. Для смягчения обратных ударов большая часть восприня-
той стойкой работы должна превращаться в тепло и рассеи-
ваться.
Если поглощенная амортизатором работа будет аккумулиро-
ваться в амортизаторе (в виде энергии давления), то по окончании
обжатия амортизатора эта энергия возвратится, разжимая амор-
тизатор с большой силой, что приведет к сильному обратному
удару ноги о землю и «козлению» (прыжкам) самолета.
Превращенная в тепло работа, т. е. разность между восприня-
той и возвращенной амортизатором работой, называется работой
гистерезиса, которая, следовательно, должна быть возможно
большей.
5. Амортизирующие свойства амортизатора не должны менять-
ся с изменением температуры.
6. Обеспечивать герметичность уплотнений, простоту подготов-
ки к полету и обслуживания.
Амортизатор представляет собой конструкцию, которая под
действием внешних сил упруго сокращается, поглощая при этом
энергию удара.
Сокращение длины ноги шасси достигается применением Де-
формируемых материалов или устройств. В качестве амортизирую-
щих материалов и устройств используется резина в виде шнуров
или пластин (резиновые амортизаторы) и вязкая жидкость в соче-
тании с воздухом или азотом. Последние амортизаторы называют-
ся жидкостно-газовыми.
Применение азота (или другого инертного газа) обеспечивает
невоспламеняемость жидкости и сохраняет от коррозии стенки
амортизатора.
Резина при работе на растяжение и сжатие является хорошим амортизи-
рующим материалом. Резиновая амортизация применяется иногда на легких
самолетах и бывает двух видов: шнуровая и пластинчатая.
468
Общим недостатком такой амортизации является малая величина работы
гистерезиса, а также изменение амортизирующих свойств резины при низких
температурах.
Работа жидкостно-газовых амортизаторов
Наибольшее распространение в настоящее время получила
жидкостно-газовая амортизация, в которой используется сопротив-
ление, возникающее
при протекании жидко-
сти через малые (ра-
счетные) отверстия в
газовую камеру.
Рассмотрим схему и
работу жидкостно-га-
зового амортизатора
(фиг. 299,/).
Амортизатор со-
стоит из цилиндра / и
штока 2. Цилиндр при-
креплен к узлу само-
лета, а на штоке
укреплено колесо.
Шток имеет в цилинд-
ре две опоры: верхнюю
буксу 6 и нижнюю
опору 8. В цилиндре
жестко закреплен плун-
жер 5, который может
быть профилирован по
наружному контуру
или иметь постоянное
сечение. В донышке
плунжера имеется ма-
лое отверстие 7. На
шток насажен кольце-
вой клапан 4, назы-
ваемый клапаном тор-
можения обратного хо-
да-
Полость А цилинд-
ра заполнена воздухом
или азотом под дав-
лением 30~н60 ат, по-
лости В и С заполнены
жидкостью — спирто-
глицериновой смесью
(примерно 70% глице-
Ваздцх или газ
э
б
1
4
Плавный
проток
И
> Сильное
> торможение
Фиг. 299. Схема жидкостно-газового амортизатора.
1—цилиндр, 2—шток, 3—плунжер, 4—клапан торможения
обратного хода, 5—уплотнение, 6—верхняя букса, 7—от-
верстие в донышке плунжера, 8—'ннжняя опора.
жидкость
мар
469
рина и 30% спирта), обладающей большой вязкостью и морозо-
стойкостью.
Между штоком 2 и плунжером 3 образуется кольцевая щель
для протока жидкости. Для устранения утечки жидкости из ци-
линдра ставят уплотнения 5.
При ударе колеса о землю шток 2 движется вверх. Газ в ци-
линдре сжимается, на что затрачивается работа, которая аккуму-
лируется газом. Это обеспечивает возвращение штока в начальное
положение.
Жидкость является практически несжимаемой * и при ударе
вытесняется из полости В через расчетные отверстия — кольцевую
щель между плунжером 3 и штоком 2 и отверстие 7 — в цилиндр,
откуда свободно проходит через ряд больших отверстий в верхней
буксе 6, отжимает давлением газа клапан 4 торможения обратного
хода вниз до упора и, минуя клапан, заполняет кольцевую по-
лость С (пространство за поршнем). На вытеснение жидкости из
полости В в цилиндр затрачивается механическая работа, кото-
рая не накапливается в стойке, а переходит в тепловую энергию
и полностью рассеивается.
При обратном ходе шток под давлением газа движется вниз,
а жидкость из кольцевой полости С начинает перетекать в газовую
полость А. При этом давлением жидкости в полости С клапан 4
прижимается к верхней буксе 6 и перекрывает все отверстия пря-
мого хода (большие отверстия), оставляя для протока только
малые отверстия, имеющиеся в самом клапане (фиг. 299,//).
Протекание жидкости через эти отверстия происходит с большим
торможением; в результате этого стойка разжимается медленнее,
что уменьшает обратный удар. Из полости А в полость В под дав-
лением сжатого газа жидкость перетекает через отверстия про-
тока прямого хода (кольцевую щель и отверстие 7).
Таким образом, газ обеспечивает упругость стойки, а жид-
кость — рассеивание энергии (гистерезис).
Диаграмма работы жидкостно-газовых амортизаторов.
Типы их
Рассмотрим зависимость усилий Рам, действующих на шток
амортизатора, от хода штока дам при прямом ходе и изобразим
эту зависимость графически в координатах Раы и 6ам. Рассмотрим
пока амортизатор без клапана торможения обратного хода
(фиг. 300, а). Пренебрегая силами инерции движущегося штока,
будем считать, что в каждый момент времени внешняя сила
и усилия, направленные против перемещения штока, равны. По-
следние усилия вызваны двумя факторами: сжатием газа Рг и со-
противлением жидкости Рн> при выдавливании ее через расчетные
* При давлении до 500-=-600 ат
470
отверстия. Суммарная сила, действующая на шток амортиза-
тора,
Рам = Л-+Лк. (87)
Усилие Рг, обусловленное сжатием газа, по ходу штока изме-
няется по политропическому закону
Рг1/Л = сопз1, (88)
где
п — показатель политропы, равный примерно 1,3;
V — переменный объем газа.
Фиг. зоо.
В координатах Рам и дам этот закон имеет вид кривой ADB
(см. фиг. 300,в).
Начальная ордината кривой обусловлена наличием начального
давления р0 сжатого газа в стойке.
Усилия, обусловленные сопротивлением жидкости, пропорцио-
нальны квадрату скорости Уж протекания ее через расчетные от-
верстия
(89)
где k — коэффициент пропорциональности, зависящий от удель-
ного веса жидкости, вязкости и пр.;
Уи; — скорость протекания жидкости.
В начальном и конечном положениях штока скорость его
(а следовательно, и скорость протекания жидкости) равна нулю
и Рж в этих положениях равно нулю. Усилия Рж по ходу штока
откладываем не от оси абсцисс, а от кривой ADB, чтобы получить
сразу суммарные усилия Рам. На фиг. 300, в усилия Рж, отложен-
ные от политропы сжатия газа, изображены кривой АСВ Ордина-
471
ты этой же кривой, отсчитанные от оси абсцисс, дают значе-
ния Рам.
На элементарной длине хода штока работа усилия Рам равна
Рампам и выражается площадью заштрихованного элементарного
прямоугольника. Очевидно, что общая работа, поглощенная амор-
{ам лих
тизатором при Прямом ходе И равная Г Раисам, выразится
о
площадью ACBFGA. Эта работа должна быть равна нормируемой
работе для стойки за вычетом работы пневматика
•/4ам=-^норм АЦ11=площади ACBFGA.
По окончании прямого хода под действием сжатого газа стойка разжимает-
ся. При этом жидкость из полости А через калиброванные отверстия проталки-
вается в полость В (фиг. 300,6). Усилия, обусловленные сопротивлением обрат-
ному проталкиванию жидкости,
где —скорость обратного протекания жидкости через расчетные отверстия.
Усилие Рж направлено против движения штока—• вверх и поэтому будет
вычитаться из усилия Рт (см. фиг. 300,6). Таким образом, на шток будет дей-
ствовать при обратном ходе усилие
Лм = Л~Рж- (90)
Кривая изменения усилия Рж по ходу штока, отложенная от кривой Рг,
нанесена на фиг. 300, а — кривая ВЕЛ (пунктир). Ординаты ее, отсчитанные от
оси абсцисс, дадут значение Рам при обратном ходе.
Работа, возвращенная амортизатором на обратном ходе,
о
Л>бр = J Рам У&ам = площади BEAGFB.
ам шах
Рассеянная, превращенная в тепло, работа гистерезиса равна ЛГИСт=Лам—
—ЛобР — площади АСВЕА.
Обозначив максимальное усилие в амортизаторе Рам max и мак-
симальный ход байтах, введем характеристику «полноты» диа-
граммы работы. Назовем коэффициентом полноты диаграммы амор-
тизатора величину Г)ам
^-7,—------------• <91>
*ам max Оам max
Применяемая в амортизаторах «начальная затяжка», т. е. соз-
дание начального усилия в амортизаторе, с которого он начнет
обжиматься (Р°м на фиг. 300, в), повышает коэффициент полноты
диаграммы цам, чем уменьшается ход амортизатора, необходимый
для поглощения работы Лам. Усилие начальной затяжки делается
обычно несколько меньше стояночного усилия Лш.ст амортизато-
ра, чтобы на стоянке амортизатор был обжат на небольшую вели-
чину дам.ст-
472
На характер кривой обжатия АСВ весьма сильное влияние
оказывает величина площади проходных отверстий. В современ-
ных амортизаторах она составляет 2н-5% площади штока амор-
тизатора.
На фиг. 301 исходные кривые прямого и обратного ходов показаны сплош-
ными линиями. Если уменьшить площадь отверстий для прохода жидкости, тс
вследствие увеличения скорости протекания ее силы сопротивления Р-м и Рк
жидкости возрастут и кривые прямого и обратного ходов будут иметь вид, по-
казанный на фиг. 301 пунктиром с точкой (АС" В, BD"A). Поглощенная амор-
тизатором работа, а также работа гистерезиса возрастет, что является положи-
Однако амортизатор в этом случае по-
лучается более жестким, нарастание уси-
лий по ходу штока будет более интенсив-
ным. При грубой посадке увеличение ско-
рости штока в начале его хода вызовет
увеличение Рж и появление пиков нагрузки
(см. пунктир с двумя точками). Время
прямого и обратного ходов амортизатора
возрастет. Если увеличить отверстия для
прохода жидкости, то значения Р!К и Рж
уменьшатся, кривые прямого и обратного
хода сблизятся (AC'B, BD'A), Амортизатор
получится более мягким, с плавным нара-
станием усилий по ходу штока, однако по- .
глощенная им работа и работа гистере-
Фиг 301.
зиса уменьшится.
Для получения достаточно эластичного амортизатора и обес-
печения необходимого гистерезиса в большинстве современных
амортизаторов 'применяют клапаны торможения обратного
хода (клапан 4 на фиг. 299). Амортизаторы с таким клапаном
называют амортизаторами с торможением на обратном
ходе.
Кривой обжатия амортизатора в этом случае будет кривая
АСВ на фиг. 301, так как на прямом ходе отверстия для прохода
жидкости достаточно велики. Кривой разжатия будет кривая
BD"A> так как при обратном ходе значительная часть отверстий
перекрывается клапаном, а оставшиеся для прохода жидкости
отверстия малы. Этим обеспечивается плавное нарастание усилий
на прямом ходе без уменьшения работы гистерезиса. Так как кри-
вая обжатия амортизатора в этом случае более полога (вследст-
вие меньшего сопротивления жидкости), то для сохранения рабо-
ты Дам требуется увеличение хода амортизатора.
Жидкостно-газовые амортизаторы подразделяются на аморти-
заторы с постоянным по ходу поршня сечением для прохода жид-
кости — с постоянным отверстием и с переменным по ходу поршня
сечением для прохода жидкости — с переменным отверстием.
Здесь имеется в виду изменение отверстия вдоль хода штока (а не
при переходе от прямого хода к обратному).
При постоянном по ходу отверстии для протока жидкости на
прямом ходе кривая обжатия амортизатора имеет вполне опреде-
473
ленный для стойки вид, обусловленный скоростью протекания
жидкости.
В большинстве случаев выгодно задаться определенным харак-
тером протекания кривой обжатия амортизатора, обеспечивая,
например, более пологую кривую обжатия (меньшую жесткость)
при малых нагрузках, что достигается изменением сечения для
протока жидкости по ходу поршня.
Конструкция амортизаторов
На фиг. 302 .показана конструкция и схема работы жидкостно-
газового амортизатора с профилированной иглой.
Фиг. 302. Амортизатор главной ноги шасси.
1 цилиндр, 2—шток, 3—двухзвенник, 4—игла, 5—букса, 6—клапан торможения,
' плунжер, 6’—поршневое кольцо, 9, 10, 11—тайки, /2—пакет уплотнения,
диафрагма, 14—опорное кольцо
474
Амортизатор делится на две полости:
Нижняя полость заполнена специальной
верхнюю и нижнюю,
жидкостью (АМГ-10),
а верхняя полость в основном азотом
и частично жидкостью.
При сжатии амортизатора (пря-
мой ход) жидкость проталкивается из
нижней полости в верхнюю через
кольцевой зазор, образованный плун-
жером 7 и иглой 4. Амортизатор имеет
переменное по ходу отверстие — вели-
чина кольцевого зазора меняется за
счет профилированной иглы, соеди-
ненной с дном поршня.
Клапан торможения на обратном
ходе расположен в пространстве
между штоком и цилиндром.
При обратном ходе давлением
жидкости снизу подвижный кольцевой
клапан торможения 6 приподнимается
и плотно прижимается к буксе 5, за-
крывая большие отверстия в ней. При
этом жидкость проходит только через
малые отверстия в кольцевом кла-
пане.
На фиг. 303 показан амортизатор
главной ноги шасси с рычажной под-
веской колеса. Амортизатор располо-
жен вне стойки, имеет клапан тормо-
жения на обратном ходе. Изменение
сечения отверстий обеспечивается при
помощи гильзы 3, имеющей вырезы
переменной ширины по ходу поршня.
В нижней части плунжера и в неподвижно
закрепленном донышке плунжера имеются
расчетные отверстия. Нижнее уплотнение пред-
ставляет собой фетровый сальник, верхнее —
кожаные манжеты и распорные дуралюмино-
вые кольца. Все детали, кроме букс и уплот-
нений, сделаны из легированной стали; буксы
бронзовые. При обжатия амортизатора жид-
кость перетекает в полость над донышком
плунжера через вырезы в гильзе, ширина ко-
торых переменна, а также через отверстия
в донышке (клапан 6 при этом приподнят)
Фиг. 303. Амортизатор глав-
ной ноги шасси
d4
7—цилиндр, 2—шток» 3—гильза,
4—плунжер, 5—донышко плун-
жера, 6—клапан торможения
обратного хода. 7—зарядный
штуцер S—уплотнения» 9—на-
правляющие буксы, /(7—головка
цилиндра, Н—\шкн штока.
и через центральное отверстие в плунжере. При обратном ходе площадь прохода
смеси уменьшается вследствие перекрытия отверстий в донышке плунжера кла-
паном 6, Заливка смеси производится через отверстие под зарядный штуцер 7.
Зарядка сжатым воздухом производится через тот же зарядный штуцер после
заливки смеси.
В последние годы начали применяться жидкостные амортиза-
торы. В таких амортизаторах упругим телом является жидкость,
475
работающая под достаточно большими давлениями [(2000ч-
3000 кГ(см2) (200—300 Мн/м2) и выше]. В этом случае жидкость
изменяет свой первоначальный объем па 15—20%.
На фиг. 304 показан жидкостный амортизатор. Герметически
закрытый цилиндр / с толстыми стенками наполнен силиконовой
жидкостью. В цилиндр входит поршень 2, имеющий две серии
небольших отверстий 7 и 8. К поршню прикреплен шток 4, кото-
рый у основания цилиндра проходит через сальник 5 высокого
давления. Под действием нагрузки шток поршня входит в цилиндр
и сжимает жидкость.
» 2 7 3 5 б 4
8
Фиг. 304. Жидкостный амортизатор.
/—цилиндр, 2—поршень, 3—уплотнительное кольцо. 4—шток, 5—’сальник, 6—гайка сальника,
7, if—отверстия.
Энергия удара при прямом ходе поршня поглощается сжатием
жидкости и сопротивлением при перетекании ее из одной камеры
в другую через отверстия 7 и 8 при открытом шариковом клапа-
не в отверстии 8.
Обратный ход поршня происходит под действием расширения
жидкости. При обратном ходе поршня отверстия с шариковыми
клапанами закрываются и жидкость перетекает из полости под
поршнем в полость над поршнем только через серию отверстий 7,
чем достигается торможение на обратном ходе.
Конструкция жидкостного амортизатора проста и имеет ма-
лые габариты. Однако ввиду сложности уплотнения эти аморти-
заторы пока имеют малое распространение.
Определение основных размеров жидкостно-газового амортизатора
При расчете амортизации определяем следующие основные размеры: диа-
метр штока, ход штока и начальный объем (начальную длину) газовой камеры.
Исходными данными являются: значение стояночного усилия РСт на колесо,
полученное из центровки самолета, и схема ноги шасси.
Нормы прочности предписывают необходимость поглощения амортизацион-
ной системой эксплуатационной работы 4эпри максимально допустимом уси-
лии Рм д на пневматике и максимальной работы Лщах = 1,849 при предельном
усилии /’пред на пневматике.
Рассмотрим определение размеров амортизатора для поглощения работы Лэ,
которую обозначим ЛДорм.
476
По стояночному усилию РСт подбираем колесо. В каталогах авиационных
колес, выпускаемых заводом-изготовителем, приведены размеры и другие дан-
ные колес, применяемых при различных значениях Рст (см. приложения 1—4).
Там же берем значение Ры.п и соответствующую ему работу Лип, поглощае-
мую пневматиком.
Для использования полного обжатия пневматика колеса и поглощения им
работы Аав следует обеспечить, чтобы эксплуатационная сила, действующая
на колесо Рэ=п^Р0Т| была равна определенному из каталога Рм д.
Тогда
^м.д = Р9 = «1 Рст
И
4 = ^. (92)
откуда определяем коэффициент эксплуатационной перегрузки пЕ.
Полученное значение п3Е должно находиться в пределах
4^00
2'5<^<2'6+^Пда- (93)
Диаметр штока выбирается с таким расчетом, чтобы начальное давление
на поршень р0 находилось в пределах 30—90 ат.
Задаемся усилием «предварительной затяжки», т. е. начальным усилием
в необжатом амортизаторе (см. фиг. 300, е),
Рцлл^^ ,8Р* ам.ст-
(94)
Стояночное усилие в амортизаторе определяется через стояночное усилие
на колесе из рассмотрения геометрических соотношений стойки шасси
(см. фиг. 278).
Имея значение Рам и приняв начальное давление р0, определяем пло-
щадь штока F по наружному диаметру Z)sap (см. фиг. 299)
F = (95)
РО
и
£)нар =1,13 /Л (96)
Работа, которую должна воспринять одна амортизационная стойка Лам»
определится из условия, что нормируемая работа Л110рм для одной ноги шасси
должна быть воспринята амортизатором и пневматиками. Тогда
^4ам ^норм^'24дя- (97)
Определив по формуле (97) значение и пользуясь формулой (91), на-
ходим ход штока
амортизатора
-Дам
— р
* ам шахтам
Здесь Раи шах определяется по Рэ из геометрических соотношений стойки.
На основании анализа существующих амортизаторов принимаем значения
t| а к ^0,65-т-О,75.
Начальный объем газовой камеры определяется из решения уравнения поли*
тропы сжатия газа
ам шах
ам
п
(99)
477
И уравнения, связывающего объемы с ходом штока,
Vk = Vq—Р бам шах-
(100)
о, у и v0_- конечный и начальный объемы газа соответственно;
зде * /—определяется по формуле (95).
Решение уравнений (99) и (100) с использованием уравнения (94) дает
(101)
Показатель политропы п может быть принят равным 1,3. Длина газовой ка-'
меры разжатого амортизатора
£о = ^. (102)
Рц.
где Рл — площадь сечения цилиндра по внутреннему диаметру.
6. АВИАЦИОННЫЕ КОЛЕСА
Авиационное колесо является частью шасси самолета.
В настоящее время применяются нетормозные (хвостовые
и передние) колеса и тормозные (главные) колеса.
Нетормозные колеса представляют собой упрощенную конст-
рукцию главных колес (без тормозов и тормозных рубашек).
Тормозные колеса
Главные колеса, как правило, тормозные; это позволяет при-
мерно наполовину сократить длину пробега самолета после при-
земления, а также улучшить его маневренность на земле.
К тормозам предъявляются следующие основные требования:
1. Одновременное и одинаковое по силе воздействие тормозов
на оба колеса (иначе самолет будет заворачивать при торможении).
2. Плавность действия тормозов, т. е. постепенное возрастание
силы трения.
3. Обеспечение быстрого включения и выключения тормозов
(полное торможение должно наступать примерно через 2 сек,
а полное растормаживание — через 1,5 сек).
4. Обеспечение возможности торможения каждого главного
колеса в отдельности.
5. Чистота поверхностей тормозов.
6 Минимальный нагрев и износ трущихся поверхностей.
7. Автоматическое регулирование силы торможения, чтоб
исключить проскальзывание пневматика («юз») по поверхности
аэродрома.
Тормоза самолетных колес делаются колодочные, камерные и
дисковые.
Основной частью колодочного тормоза служат две (или несколько) коло-
док / (фиг. 305, а, б). Колодки, имеющие обычно тавровое сечепие, отливают
из легкого сплава. Внешние поверхности колодок, соприкасающиеся с тормозной
478
колесо.
\ бращйлил
\ R
растормаживания (устране-
Фиг. 305. Схема колодочного тормоза
/—колодки, 2—анкерный болт, 3—кронштейн, 4—фла-
нец, 5—чашка, А—шарнир, 7—пружины.
рубашкой, которая вращается вместе с колесом, облицовывают материалом,
имеющим высокий коэффициент трения (ретинакс, феродо, металлокера-
мика).
Одну из колодок (правую на фиг. 305, а) крепят анкерным болтом (шарни-
ром) 2 к кронштейну 3 (или чашке 5), который через фланец 4, называемый
тормозным, скреплен с осью колеса. Ось колеса неподвижно соединена со стой-
кой. Прицепная (левая) колодка шарниром 6 крепится к правой колодке.
Действием различного рода передач на свободном конце прицепной левой ко-
лодки создается при торможении сила R, называемая распором. Под давлением
распора колодка прижимается к вращающейся с колесом тормозной рубашке,
вызывая силы трения Т, тормо
ния распора) колодка оттяги-
вается от колеса пружиной 7.
На фиг. 305, а показаны
силы трения Т, действующие
на колодки. На основную ко-
лодку действует сила воз-
никающая вследствие трения
прицепной колодки о тормоз-
ную рубашку и значительно
превышающая силу R
Колодочные тормоза
создают большой тормоз-
ной момент, но отличают-
ся неравномерным изно-
сом и применяются ред-
ко.
Схема колеса с дву-
сторонним камерным тор-
мозом приведена на
фиг. 306.
Обод колеса 1 со сту-
пицей вращается на ро-
ликовых подшипниках 9 j
руется на ободе при помощи съемной реборды 4, В обод впрессо-
ваны стальные тормозные рубашки 5. Тормозные колодки 6 раз-
мещены на тормозном диске 2; между ними и диском проложена
резиновая камера 7 (см. фиг. 306,6). Диск 2 соединен болтами
с тормозным фланцем 10, неподвижно скрепленным с осью. На
фиг. 306, а диск с колодками условно вынесен из колеса, в дейст-
вительности же они размещаются так, что колодки 6 концентрнчны
рубашке 5. Колодки представляют собой пластины, связанные
между собой пружинками (см. фиг. 306, б) и соединенные при по-
мощи зубьев с диском таким образом, что они не могут провора-
чиваться относительно него. При подаче давления в камеру
колодки 6 перемещаются в радиальном направлении и прижи-
маются к рубашке 5, тормозя вращение колеса. Пружинки обес-
печивают растормаживание колеса, т. е. отвод колодок от
рубашки 5.
Камерные тормоза отличаются простотой изготовления и экс-
плуатации, малым весом и плавной работой, без заклинивания.
оси
3. Пневматпк монти-
479
К недостаткам камерных тормозов относятся: замедленность
действия, большой расход воздуха и потеря камерой упругих
свойств при низких температурах.
Дисковые тормоза (фиг. 307, а) действуют по принципу фрик-
ционной пластинчатой муфты сцепления. На барабане 2 колеса
и корпусе тормоза посредством шлиц укреплены тормозные диски:
вращающиеся 3 вместе с колесом и неподвижные 4. Диски могут
перемещаться по шлицам в направлении оси колеса. Жидкость
4
I 1
Фиг. 306. Схема колеса с двухсторонним камерным тормозом.
J—обод колеса, 2—тормозной диск, 3—ось, 4—съемная реборда, 5—тормоз-
ная рубашка, 6—тормозные колодки, 7—резиновая камера, 8—вентиль»
3—роликовый подшипник, 10—тормозной фланец.
через канал 5 поступает к поршням и через нажимной диск прижи-
мает вращающиеся диски к неподвижным. По устранении давления
поршни 8 возвращаются в исходное положение пружинами.
Дисковые тормоза компактны, создают большой тормозной мо-
мент, работают плавно, без заклинивания, и не требуют точной кон- ,
центричности колеса и барабана. ь
Недостатком дисковых тормозов является плохой отвод тепла, :
вследствие чего при непрерывном торможении возможен пере-
грев их.
На современных тормозных колесах, чтобы избежать при тормо-
жении проскальзывания колеса относительно поверхности аэродро-
ма сверх допустимой величины, применяется автоматическое регу-
лирование тормозного момента. Если такое проскальзывание
(«юз») имеет место, то происходит резкое замедление вращения
колеса, связанной с ним шестерни и шестерни инерционного дат-
чика (см. фиг. 307,6). В результате этого сигнал, поступающий от
датчика на электромагнитный агрегат, сбросит давление и колесо
растормозится, т. е. начнет свободно вращаться.
480
Пневматики авиаколес
Авиационные пневматики состоят из камеры и покрышки. Каме-
ры изготовляются из высококачественной резины, а покрышки —
из нескольких слоев резины и крепкой ткани. На современных само-
летах применяются пневматики (фиг. 308): а — высокого давления
(84-15 ат), б — среднего давления (54-8 ат) — полубаллоны ив —
низкого давления (34-5 ат), называемые баллонами. Колеса с пнев-
матиками высокого давления имеют относительно небольшую
ширину и поэтому стойку с таким колесом проще убрать в крыло.
Они дают малое обжатие при ударе, обладают меньшей способ-
ностью поглощать работу по сравнению с другими типами ппевма-
тиков и ввиду малой (площади соприкосновения с грунтом и боль-
шого удельного давления имеют плохую проходимость на мягких
грунтах. Поэтому колеса с пневматиками высокого давления приме-
няются для самолетов, требующих по конструктивным соображе-
ниям применения узкого колеса и осуществляющих взлет и посадку
с благоустроенных аэродромов с твердым покрытием взлетно-поса-
дочной площадки.
Широкое применение находят пневматики-полубаллоны, имею-
щие значительно большую ширину, чем пневматики высокого дав-
ления. Они дают значительное обжатие при ударе о землю, имеют
небольшое удельное давление на грунт и обладают большей спо-
собностью поглощать работу. Применяются они для пассажирских
и учебных самолетов.
Баллонные пневматики имеют еще большую ширину и спосооны
поглощать значительную часть работы удара при посадке.
Малое удельное давление па грунт исключает возможность
вдавливания баллонов в землю. К недостаткам баллонных колес
следует отнести трудность уборки колес в крыло из-за их большой
ширины.
Каждый из рассмотренных типов пневматиков характеризуется
отношением ~(см. фиг. 308), где D наружный диаметр колеса;
d — диаметр, или максимальная ширина пневматика.
Колеса выбирают по каталогам в зависимости от стояночного
усилия на колесо*. В каталогах приведены также диаграммы
Р по дЛ11 работы, поглощаемой пневматиком, максимально допусти-
мые нагрузки на пневматик, давление в пневматике п прочие
данные.
Для передвижения самолетов по снежным аэродромам иногда в целях по-
вышения проходимости колеса заменяют лыжами. Опорные площадки лыж опре-
деляются из условий допустимых удельных нагрузок на поверхность [около
1200 кГ/м2 (11 800 н/м3)].
* См. приложения 1—4.
31 1563
481
•1
Фш 307 Конструкция колеса с дисковым тормозом
/—корпус колеса 2—корпус тормоза, 3—вращающиеся диски, 4— непо-
движные диски, 5—канал для жидкости, кольцевая полость, 7—рези-
новое кольцо, 8—кольцевой поршень, S—кольцевой диск, /0—кольцевая
регулировочная шайба.
482
Полуреборда
Барабан
Канол
Инериион
мыи дат
ник
Поршень Вентиль
Покрышка
Капера
Корпус
порпозц
исстернп
колеса
Биметалли-
ческий
диск
Нажипнеи
Suck
Металла
керамический
6(1
4 Рояихолед-
шипчек
[U ссшеркя
батника
31*
483
На фиг. 309 показана конструкция лыжи главной ноги шасси самолета Ан-12.
Крепление лыжи к стойке ноги шасси производится при помощи кабана, при
Фиг. 308. Типы пневматикой.
этом регулировка положения лыжи осуществляется стабилизирующим аморти-
затором. Лыжа снабжена системой обогрева, предотвращающей ее примерзание.
7. РАСЧЕТ ШАССИ НА ПРОЧНОСТЬ
В начале настоящей главы (см. «Нагрузки, действующие на
шасси») были описаны внешние нагрузки, действующие на стойку
шасси. Им соответствуют определенные расчетные случаи, изложен-
ные в нормах прочности самолетов.
Расчетная сила
Ррасч “ Р3 * f/
где f — коэффициент безопасности, определяемый нормами проч-
ности.
Рассмотрим нагружение и расчет некоторых конструктивных
схем ног шасси.
Построение эпюр для балочной подкосной ноги шасси
Для балочной подкосной ноги шасси с боковым подкосом рас-
четная схема нагружения в плоскости, параллельной плоскости
симметрии самолета (ху), представляет собой консольную балку,
защемленную в плоскости цапф. В плоскости, перпендикулярной
плоскости симметрии самолета (уг), расчетная схема ноги пред-
ставляет собой балку, шарнирно опертую на цапфах и в узле креп-
ления подкоса,’нагруженную силой Ррас11 на оси колеса (фиг. 310,а).
Ограничимся рассмотрением нагружения шасси силами, лежа-
щими в (плоскости колеса. Это соответствует случаям нагружения
£ш, Сш и др. Для удобства расчета расчетную силу Ррасч раскла-
дывают на два направления по осям, связанным со стойкой (см.
фиг. 310, а). Составляющая Ру = Ррасчcosф параллельна оси стой-
ки, Рл. = Ррасч sin ф — перпендикулярна ей. Затем, рассматривая от-
дельно действие Ру и Рх, находим изгибающие и крутящие
моменты, нагружающие элементы шасси, и строим эпюры этих мо-
ментов.
484
J
I
ОЬте*.атель
4
Рассмотрим сначала действие силы Рх.
Сила Рх вызывает изгиб полуоси в плоскости I, параллельной
плоскости xz> с максимальным значением момента
Эпюра моментов имеет вид треугольника. Так как сила Рх при-
ложена на плече а относительно оси стойки, то она будет скручи-
вать стойку постоянным моментом
Мм’р — Рха^
эпюра которого будет иметь вид прямоугольника. Этот момент на-
гружает двухзвенник, через который он передается на цилиндр.
Фиг. 310.
Таким образом, начиная от узла крепления двухзвенника к ци-
линдру, последний скручивается моментом Л1К₽- На цапфах от
момента кручения возникнут реакции в виде пары сил
486
Сила Рх будет также изгибать стойку в плоскости, проходящей
через ось стойки и ось цапф. Назовем ее плоскостью // (см.
фиг. 310,6). Изгибающий момент будет изменяться по закону
треугольника, и максимальное значение его будет в заделке (в плос-
кости цапф)*
М™П = РХН.
На цапфах от момента возникнут реакции в виде пары
сил Р2
с
При изгибе стойки следует различать изгиб штока и изгиб ци-
линдра. Шток представляет собой балку, опертую в цилиндре на
буксах А и В и нагруженную на консольном конце силой Рх (пока
рассматриваем нагружение только силой Рх). Следовательно, в точ-
ке А — на крайней опоре момент, изгибающий шток, должен быть
равен нулю. Цилиндр нагружается штоком через буксы А и В и,
следовательно, на свободном конце — в точке В — момент, изги-
бающий цилиндр, должен быть равен нулю. Учитывая, что Л1^3г.шт =
= 0 и ЛТизглил =0 и что между буксами А и В эпюра изменяется по
линейному закону (внешние силы на этом участке отсутствуют),
разделим эпюру Л1нзг;; для стойки, соединив прямой точки А и В,
соответствующие расположению букс. Часто заштрихована эпюра
Мцзг для штока (см. фиг. 310,6).
Сила Ру вызывает изгиб долуоси в плоскости yz, проходящей
через полуось,— в плоскости ИГ. Максимальный изгибающий мо-
мент, аналогично предыдущему, будет в месте соединения полуоси
со стойкой и равен
Эпюра моментов имеет вид треугольника.
Повороту стойки относительно оси цапф препятствует боковой
подкос, в котором усилие определится из равенства нулю суммы
моментов относительно оси цапф
Pya = Sah и Sn~Py-~~.
I
Очевидно, что подкос сжат (см. фиг. 310, а).
От силы Ру стойка работает как балка, опертая в двух узлах
(на подкосе и цапфах) и нагруженная на консольном конце конце-
вым моментом
М™*п! = Р,а.
До узла подкоса точки С—Л4ИЗГ 'постоянен и эпюра имеет вид
прямоугольника; от точки С до оси цапф момент падает до нуля
(см. фиг. 310,6). Разделение эпюры между штоком и цилиндром
производится аналогично предыдущему.
487
Построение эпюр для балочной консольной ноги шасси
с рычажной подвеской колеса
Построение эпюр для балочной ноги шасси с рычажной подвеской колеса,
несколько отличное от описанного выше, показано на фиг. 311,6 и в.
Прежде всего найдем усилие S в амортизаторе и реакцию R шарнира .4
рычага.
Это удобно произвести графически, пользуясь теоремой о трех силах
fpacH, 5 я R находятся в равновесии и, следовательно, пересекаются в точке О
пересечения Ррасч и S. Из силового треугольника находим величину и направ-
ление R и S (фиг. 311, а). Рассмотрим нагружение цилиндра стойки. Приклады-
ваем к цилиндру в узлах А и В силы, равные R и S, представляющие собой
7 действие рычага и амортизатора на цилиндр (они противоположны по направ-
лению определенным ранее R и S), и раскладываем их на составляющие вдоль
оси цилиндра и перпендикулярно ей. Получаем соответственно силы Rn, Rt, Sn,
St (фиг. 311,6).
Рассматривая цилиндр как балку, защемленную на цапфах, строим эпюру
изгибающих моментов в плоскости 7/ Максимальное значение момента
= К" + h).
В месте приложения величины S„ имей моею «скачок» в эпюре па вели
чину момента Snd. Реакция на цапфах oi момента М™*// представляет собои
пару сил Rz‘.
с
Силон Рч на плече а сгонка будет изгибаться в плоскости 111, причем изги-
бающий момент будет постоянен
М ц'1Г//1~ Р уй.
Реакция замка Rs, препятствующая повороту стойки относительно оси цапф,
определили из условия
а
R,b = Рха в /?3 = Ру ~ .
Сила Рх на плече а будет скручивать стойку постоянным крутящим мо-
ментом
Мкр = Рх • а. (см. фиг. 311,6).
Реактивная пара сил Ri на цапфах определится из
Afhp а
R^c - Мкр и Ri
с с
Нагружение полуоси анало1ично описанному выше (см. фиг. 310).
Разложим силы Ррасч, S и R, действующие на рычаг, на составляющие Ps>
Ss, Rs вдоль оси рычага и перпендикулярно оси Pq, Sq, Rq (фиг. 311, в).
Разложение удобно производить графически В результате получим изгиб
рычага в плоскости 1 (проходящей через ось рычага и колеса) постоянным
моментом
AlUJr i~Psd,
изгиб в плоскости /7' (проходящей через ось рычага и перпендикулярной плос-
кости 1) с максимальным значением изгибающего момента
н кручение рычага постоянным моментом
Л1Ьр = Р(?а.
488
Фиг. 311.
489
Соответствующие эпюры показаны на фиг. 311, в. Таким образом, цилиндр
стойки и рычаг изгибаются в двух плоскостях и скручиваются, а полуось изги-
бается в двух плоскостях; амортизатор же нагружен только осевым усилием.
Построение эпюр для тележки шасси
Рассмотрим нагружение тележки шасси несимметричной нагруз-
кой: согласно указаниям норм прочности в этом случае нагрузка
оаспоеделяется между левыми и правыми колесами в отношении
F F 0,7:0,3 (или 0,3: 0,7).
Фиг 312
Представим себе такую на-
грузку как сумму симметричной и,
так называемой, обратно-симмет-
ричной нагрузки.
На фиг. 312 показано распреде-
ление силы 2РК, действующей на
одну пару колес. Аналогично рас-
пределяется и сила 2Т.
Нагружение тележки симмет-
ричной нагрузкой и соответствую-
щая эпюра изгибающих моментов
на фиг. 313, а. Здесь
из равновесия задней
в вертикальной плоскости показаны
усилие в компенсационной тяге получаем
оси (см. фиг. 279):
2Th
где с — плечо силы Sb относительно оси 3, Sn определяется из (84)
или (85)
*B = 4PK; 7?r=4r-FSncos?;
M^2PKl- &M = Rrd.
Фиг. 313.
490
Обратно-симметричная нагрузка тележки и соответствующие
эпюры изгибающих моментов в горизонтальной плоскости и крутя-
щих моментов показаны на фиг. 313, б. Здесь
2-0,. о- _ 2-0,47> .
----~ 7 Г ---- ---- t
<P=0,4PKg; AlM.r=0,4Tg.
О расчете элементов шасси на прочность
Полуось рассчитывается на изгиб в двух взаимно перпендику-
лярных плоскостях / и IIP (см. фиг. 310, 311). Суммарный изги-
бающий момент полуоси Л4ЦЗГП определится из
м„зг.п = / (Л1и3аЛ)2 + (Л!• )2
Значения Л1ИЗГ/ и Миг//г берутся из соответствующих эпюр.
Напряжение
___^иэг.п
С —------а
W в
где W — экваториальный момент инерции кольцевого сечения
полуоси с наружным диаметром D и внутренним d\
U7 = —
32 D
(EF — d*).
сгв— предел прочности материала полуоси.
Шток амортизатора (см. фиг. 310) рассчитывается также на
изгиб в двух плоскостях II и III аналогичным путем. Осевым сжи-
мающим усилием Ру в штоке можно пренебречь, так как оно обыч-
но дает небольшие напряжения.
Цилиндр работает, как уже указывалось, на изгиб в двух плос-
костях II и III и на кручение. Осевой силой в цилиндре (напри-
мер, от подкоса, см. фиг. 310) пренебрегаем.
Тогда
Л^изг цил= V ^изг7/ -|-Л1изг III г
где Л4ИЗГ//, Л1ИЗ[. {П — значения изгибающих моментов, взятые для
„опасного* сечения цилиндра из соответст-
вующих эпюр.
Опасное сечение будет в том месте, где сечение цилиндра ослаб-
лено, а значение ЛГизг.цпл велико. Для выявления опасного сечения
491
рассматриваем нагружение нескольких сечений. Находим нормаль-
ные и касательные напряжения в сечении
_ _ ‘^ИЗГ.ЦИЛ ,т Л^Р
s ' - ——---- и Т - - -—— ,
где IFp —полярный момент сопротивления кольцевого сечения.
Wo = 2Г=— (D* - Л
р 16D 7
Затем по 3-й теории прочности, известной из курса сопротивле-
ния материалов, находим приведенные напряжения оПр, которые
сравниваем с ов.
Фиг. 314.
Рычаг (фиг. 311, в) также работает на совместный изгиб в двух плоскостях
и кручение*, однако расчет его отличается от изложенного расчета для ци-
линдра, так как он имеет не круглое сечение. В этом случае суммировать гео-
метрически изгибающие моменты в двух плоскостях не следует (см. фиг. 314,
а также фиг. 311, s). Нужно определить максимальные нормальные напряжения
от -Мизг/, Л1ИЗГц, и касательные напряжения от AfKp.
^изг/ -^изг П' ^КР
И = Гу ’ С2== Гх ’ Т ~ 250В ’
JF W
где Гу, ГЛ-— экваториальные моменты сопротивления относительно соот-
ветствующих осей;
Fq — площадь сечения, ограниченная средней линией контура
(см. фиг. 314, б);
В — толщина стенки сечения.
* Влиянием осевых сил пренебрегаем.
492
Как видно из фиг. 314, а, нормальные напряжения Oi и п2 суммируются
в точках А, В сечения
я = <4 + аз-
Так как в этих же точках действуют и касательные напряжения т, то поль-
зуясь 3-й теорией прочности, находим приведенные напряжения, которые срав-
ниваем С Ов
я„р = К°2 + 4т2 < оа.
Нагрузки на болты и проушины в соединениях элементов конструкция шасси
определяются, как силы, действующие в элементах конструкции, соединяемых
болтами. Так, например, на болт и проушины узла С (фиг. 310,6) действует
усилие в подкосе 5П; на болт и проушины узла В (см. фиг. 311,6) действует
усилие S в амортизаторе.
Глава XIX
ПРОЧИЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ ТЯЖЕЛЕЕ ВОЗДУХА
Кроме обычных самолетов, в настоящее время существуют еще
другие летательные аппараты тяжелее воздуха. Рассмотрим основ-
ные схемы летательных аппаратов, представляющих наибольший
интерес.
1. САМОЛЕТЫ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ*
Самолеты вертикального взлета и посадки появились в послед-
ние годы. Известно, что для обеспечения разбега и пробега совре-
менных скоростных самолетов необходимы дорогостоящие бетони-
рованные дорожки значительной длины (до четырех километров).
Для самолетов вертикального взлета и посадки не требуются
аэродромы и их довольно сложное оборудование.
В современных условиях в результате бурного развития авиа-
ционных двигателей и, следовательно, резкого увеличения энерго-
вооруженности появилась реальная возможность создать самолеты
с вертикальным взлетом. Вертикально взлетающий самолет спо-
собен совершать вертикальный взлет и посадку и висеть неподвиж-
но в воздухе.
Для этого необходимо, чтобы его силовая установка развивала
силу тяги, превышающую взлетный вес самолета. Таким образом,
тяговооруженность вертикально взлетающего самолета должна
быть больше единицы. В настоящее время принимают q'~- —Х>1,3.
Вертикальный взлет и посадка самолета могут производиться
двумя способами. При первом способе самолет совершает взлет
и посадку при вертикальном положении фюзеляжа, а при перехо-
де от вертикального взлета к горизонтальному полету и обратно
к вертикальной посадке весь самолет поворачивается относительно
своей поперечной оси (фиг. 315, а),
* Сокращенно их называют СВВП — самолеты вертикального взлета и по-
садки.
493
При втором способе взлета и посадки (фиг. 315,6) самолет со-
храняет на всех режимах полета горизонтальное положение фюзе-
ляжа. Необходимая для вертикального взлета и посадки тяга по-
лучается поворотом винтов или двигателей, отклонением вниз
потока газов реактивных двигателей или потока воздуха закрыл-
ками. Возможна также установка двух отдельных групп двигате-
лей__одних двигателей, используемых только для вертикального
взлета и посадки, а других только для горизонтального полета.
Фиг 315 Различные способы вертикального
взлета.
а— при вертикальном положении фюзеляжа, б—при горн
зонтальном положении фюзеляжа.
Разнообразие построенных экспериментальных и опытных
СВВП дают возможность классифицировать их * по способу взлета
и посадки и принципу создания тяги при взлете и посадке
(фиг. 316). Особенностью полета вертикально взлетающих самоле-
тов является режим вертикального взлета и посадки и режим пере-
хода к горизонтальному полету и обратно. На этих режимах тре-
буются специальные системы управления, обеспечивающие устойчи-
вость и управляемость самолета, так как аэродинамические органы
устойчивости и управляемости неэффективны из-за малой поступа-
тельной скорости.
Эти вопросы в настоящее время не могут считаться полностью
решенными и поэтому такие самолеты не вышли из стадии экспери-
ментирования.
Вертикально взлетающие самолеты с винтами стали возможны
лишь с появлением турбовинтовых двигателей, обладающих малым
удельным весом** [0,18—0,20 кГ/л. с. (1,8—2,0 н/л. с.)], малыми га-
баритами и большой мощностью.
На фиг, 317 (см. также фиг. 315, 316) показан эксперименталь-
ный вертикально взлетающий самолет с соосными винтами.
См Е И Ружицкий, «Безаэродромная авиация», Оборот из, 1959 г
Удельным весом двигателя называется отношение его веса к мощности.
494
Вертикально взлетающие са мелеть
самолетов
495
I
Для использования самолетов в народном хозяйстве целесооб-
разно иметь горизонтальное положение фюзеляжа на всех ре-
Фиг 317 Самолет с вер-
тикальным взлетом
фиг 316,ж), создавая
жимах.
Вертикальная сила тяги взлета и посад-
ки у таких самолетов может создаваться
либо поворотом винтов вместе с крылом
(см. фиг. 315, 316, г) или только поворотом
винтов, находящихся в кольцевых тонне-
лях (см. фиг. 316, 6), либо отклонением
вниз потока от винтов (фиг. 318 и фиг
316, е).
Вертикально взлетающие самолеты с
реактивными двигателями в последние
юды встречаются все чаще.
Сохранение горизонтального положения
фюзеляжа возможно с применением пово-
рачивающихся турбореактивных двига ге-
лей, которые при взлете и посадке устанав-
ливаются в вертикальном положении (см
вертикальную тягу, а при горизонтальном
полете устанавливаются в горизонтальном положении.
Вертикальную тягу можно получить также отклонением вниз
потока газов турбореактивного двигателя при помощи специальных
устройств в виде поворачи-
вающихся лопаток, установ-
ленных в реактивном сопле
двигателя (см. фиг 316, з)
Фн[ 318 Схема деиывия сил на самолет
при взлете с устройством для отклонения
потока от винтов
—подъемная сила крыла, QKp—сопротивление
крыла, /?Кр — равнодействующая сила крыта Р—тяга
алитов, Я—равнодействующая всех сил, действующих
на крыпо при его обд\вке, 0—угол наклона равно
действующей
Фиг 319 Схема самолета сани
гателями для вертикального
взлета и горизонтального по-
лета,
/—двигатель для горизоЕ^тального
полета, 2—двигатели для вертикаль-
ного взлета, 3—струнные рули
Возможно создание самолетов с силовыми установками, состоя-
щими из двух групп: одной для вертикального взлета и другой для
горизонтального полета (фиг. 319 и фиг. 316,и).
Управление при вертикальном взлете и посадке может осущест-
вляться газовыми рулями, отклоняющими реактивную струю
(фиг 320, а) и струйными рулями (фиг. 320,6, в). Струйные рули
496
представляют собой реактивные сопла, к которым подается сжатый
воздух, отбираемый от компрессора двигателя. Момент реактивной
силы, возникающий вследствие вытекания из сопла воздуха, вызы-
вает отклонение самолета относительно соответствующей оси.
Фиг. 320 Способы управления при вертикальном взлете
а—при помощи газовых рулей, б—при помощи струйных рулей,
в—схема действия струйного руля.
Управление в горизонтальном полете осуществляется отклоне-
нием обычных рулей высоты, рулей направления и элеронов.
2. ВЕРТОЛЕТЫ
Вертолеты представляют собой летательные аппараты, способ-
ные совершать вертикальные и горизонтальные полеты. Вертолет
способен взлетать с места вертикально и садиться без пробега,
он может висеть в воздухе на одном месте. В иностранной литера-
туре такой аппарат называют геликоптером (gelicos — винт и pte-
ron — крыло).
Идея вертолета зародилась очень давно. Так еще известный художник и ме-
ханик Леонардо да Винчи в 1473 г. создал летательный аппарат с воздушным
винтом на вертикальной оси. Великий русский ученый М. В. Ломоносов в 1739 г.
создал действующую модель вертолета.
Большое значение для развития вертолета имели работы академика
Б. Н. Юрьева. Схема одновинтового вертолета с хвостовым винтом, разработан-
ная Б. Н. Юрьевым в 1910 г., сейчас является самой распространенной.
В СССР созданы различные вертолеты от легкого одноместного
«летающего мотоцикла» до гигантского турбовинтового вертолета,
который может перевозить до 80 пассажиров.
32 1563
497
В настоящее время выявилось несколько схем, но которым
оятся современные вертолеты. На фиг. 321 показан «летающий
вагон» конструкции А. С. Яковлева, который представляет собой
двухвинтовой вертолет так называемой продольной схемы.
Д Рассмотрим одну из распространенных схем — одновинтовой
вертолет с рулевым хвостовым винтом.
Такой вертолет (фиг. 322) состоит из фюзеляжа, внутри которо-
го размещаются двигатели, экипаж, пассажиры и грузы; над фю-
зеляжем в горизонтальной плоскости устанавливается несущий
винт ДЛЯ создания подъемной силы. При вращении его возникает
Фиг. 321.
реактивный момент, стремящийся повернуть вертолет'против вра-
щения винта. Для уравновешивания этого момента в хвостовой
части фюзеляжа ставится хвостовой винт.
Поршневой или реактивный двигатель посредством трансмиссии
вращает несущий винт.
Лопасти несущего винта в поперечном сечении имеют вид .про-
филя крыла самолета. При вращательном движении на лопастях
вертолета, установленных под некоторым углом к плоскости вра-
щения винта, возникает тяга, под действием которой вертолет
поднимается в воздух. Лопасти во втулке несущего винта могут
поворачиваться и устанавливаться под различными углами к плос-
кости вращения винта, а также вращаться относительно располо-
женных на втулке горизонтальных шарниров, совершая так назы-
ваемое маховое движение.
Одновременным изменением углов установки всех лопастей до-
стигается изменение общего шага несущего винта, увеличиваются
углы атаки всех лопастей и, таким образом, изменяется величина
силы тяги несущего винта. Помимо этого, летчик может придать
каждой лопасти различные углы установки и получить на них не-
одинаковые силы тяги.
Пусть на лопастях 1 и 2 (фиг. 323) углы установки, которые
ранее были равны, изменились так, что ф1^><р2-
На лопасть, угол установки (а значит и угол атаки) который
увеличился, действует большая подъемная сила. Благодаря нали-
чию горизонтального шарнира, эта лопасть устанавливается в на-
О
о
m
ГС
X
I S £3
С1
о
с
ГС
о
и J. *£
td 9°° 2
J3
О
га
\р
о
О
га
С
о
ч
О о
ГС
с о ГС
о
ГС
S
5 S s
§г&
С
к
и
си
ГС
cd
cd
гс
я
га
cs
д
cj
га
о
а
с
Л
Л
3
л
р:
cd
cd
М Н
О
о
СП
ГС
о
J3
о
и
CD м3
ГС
о
Q
гс
и
Q
ГС
о
S
ф
W
су
ГС
, - ГС
X о
р
ГС
О
О
>4
а
НЗ О
гч
си
а
GO
\gbs
о
CD
о
о
ГС
ГС
U
Q
£
с
ГС
Q
О
£9
ГС
О
S3
о
ГС
А
ГС
О
q
о
О
О
а
о
ГС
о
о
со
о о
Я 1Q
CJ
5S
гс
ГС
к
s
а>
ГС
К
Я
гс
а
я
£
Q
ГС
ГС
ГС
и
У
га
й
и
га
a
о гс
Ю к?
о
О
л
V
0^
X
3
Он я
О I
3 §
С2
О 5S
О
О
Я
О
го
О
Н
X
О
о
Ь£
о 7?
о>
«5
ГС
д
1 И о
’ О £3
О
ГС
S
ГС
ГС
CJ
О
CiJ
Я
О
ГС
CJ
Б
о
3
сз
О
СУ
О
о
о
ГС
ГС
О .,
ш з
g£
5 L
га
ас
О
CQ
О
X
о
2
л
cj
О
Мостовой винт
сч
сч
со
сз
ГС
су
£3
^\3
2 I
с
о
сч х
ГС
qj С
£
с
к
ГС
о
га
а
а
ГС
и
ГС
V
О
ГС
а
ГС а
w о
ГС
ГС
2
2
ГС
3
2
ГС
а
сз
г
Ci
ГС
ь
с _
X о
я
ГС
5
Си
£
сз
ru
га
499
правлении равнодействующей силы тяги лопасти Рл, веса ее 6Л и
центробежной силы инерции /л (фиг. 323,а), т. е. под большим
углом У1 в продольной плоскости (фиг. 323,6).
Одновременно на другой лопасти угол установки ср2 уменьшился
и она устанавливается под углом у2 в продольной плоскости
(фиг. 323,6). Благодаря наличию специального устройства, назы-
ваемого автоматом-перекосом, такое изменение углов установки
Ф ЦТ
Фиг. 323.
лопастей производится циклически, т. е. при прохождении лопастью
определенного сектора окружности она будет иметь определенный
угол установки *, при прохождении другого сектора окружности
лопасть будет иметь другой угол установки. При этом конус, обра-
зованный вращающимися лопастями, наклонится, и полная сила
тяги Р отклонится от вертикали. Момент ее относительно центра
тяжести вертолета вызовет наклон его, а составляющая Р' сооб-
щит ему поступательное движение.
Наклонение силы тяги вправо или влево позволяет вертолету
лететь в боковом направлении.
♦ При данном положении автомата-перекоса.
500
Если у несущего винта тяга больше веса вертолета, то он без
разбега взлетает вертикально. Если тяга несущего винта уменьшит-
ся и станет меньше веса вертолета, то он будет вертикально сни-
жаться.
За последние годы вертолеты получили широкое применение
в народном хозяйстве. Например, они с успехом используются как
транспортное средство, особенно в местах бездорожья и отсутст-
вия аэродромов. В сельском хозяйстве с вертолетов ведется полив-
ка и подкормка посевов, распыление ядов для уничтожения вре-
дителей. Вертолеты эффективно используются в промышленной
и научной разведке
Фиг. 324 Схема тяжелого комбинированного вертолета с реак-
тивным компрессорным приводом несущего винта
1—кабина экипажа, 2—воздушные винты, 5—втулка несущего винта,
4—руль высоты, 5—стабилизатор* 6—грузовой люк, 7—руль направления,
Я—килевая шайба, 9— реактивная горелка, 10—элероны, //—воздухо-
заборник вспомогательного компрессора, 12—вспомогательный компрес-
сор, 13—турбовинтовой двигатель, 14—канал для подвода сжатого
воздуха, 15—пассажирская кабина.
По сравнению с самолетом у вертолета значительно меньше ско-
рость, дальность и высота полета. Дальнейшим шагом по пути уве-
личения скорости и дальности полета является создание комбиниро-
ванных вертолетов, т. е. вертолетов с крылом, несущим винтом
и тянущим (как у самолета) винтом.
На фиг. 324 показана компоновочная схема английского пасса-
жирского комбинированного вертолета с реактивным компрессор-
ным приводом несущего винта. Вертолет имеет высокорасположен-
ное крыло с установленными на нем турбовинтовыми двигателями.
Последние вращают тянущие винты и через гидравлические муфты
сцепления приводят в действие компрессоры.
Сжатый воздух подводится к реактивным горелкам, расположен-
ным на концах лопастей; туда же впрыскивается топливо. Тяга,
развиваемая горелками, создает крутящий момент, вращающий не-
сущий винт.
501
3 ГИДРОСАМОЛЕТЫ
Самолет, конструкция которого позволяет производить взлет
с воды и посадку на воду, называется гидросамолетом.
Иногда сухопутные самолеты превращают в гидросамолеты,
устанавливая на них вместо колес поплавки. Самолеты же, совер-
шающие взлет с земли и воды и посадку как на сухопутных, так
Днище Редан
Фиг, 325 Гидросамолет или летающая лодка с реактивными двигателями.
и на водных аэродромах, называются амфибиями; такие самолеты
имеют и лодку, и колесное шасси.
Наибольшее распространение получили лодочные гидросамоле-
ты, часто называемые летающими лодками (фиг. 325). В этом слу-
чае фюзеляж и шасси заменяет лодка, служащая одновременно
устройством для взлета, посадки и передвижения по воде, а также
корпусом для размещения экипажа, пассажиров и грузов.
В 1906 г. французский конструктор Л. Блерио построил первый
гидросамолет. Развивая эту идею, русский конструктор Д. П. Гри-
горович построил в 1914 г. летающую лодку М-5, которая была при-
нята на вооружении русской армии.
502
Если при создании сухопутных самолетов главное внимание со-
средоточивается на придании самолетам хороших аэродинамиче-
ских форм, то при создании гидросамолетов необходимо обеспечить
также их мореходные свойства.
Гидросамолеты не имеют амортизирующих устройств, аналогич-
ных амортизаторам шасси сухопутных самолетов. Для смягчения
удара о воду при посадке лодке гидросамолета придается форма
днища. Часто встречающиеся в настоящее время лодки гидро-
самолетов с формами обводами днищ показаны на фиг. 326.
Фиг 326. Различные формы днищ, лодок
гидросамолетов
Днища лодок современных гидросамолетов, кроме того, имеют
по длине уступы высотой 150—200 мм, называемые реданами (см.
фиг. 325).
Реданы служат для ускорения отрыва лодки от воды. Без реда-
нов длина разбега гидросамолета была бы очень большой вследст-
вие значительных сил сцепления между днищем лодки и водой.
Лодка несет всю нагрузку гидросамолета при его стоянке и дви-
жении по воде и обеспечивает ему продольную остойчивость *. Для
создания поперечной остойчивости на гидросамолете устанавливают
небольшие подкрыльные поплавки.
4. АППАРАТЫ НА ВОЗДУШНОЙ ПОДУШКЕ
В последние годы появился и сейчас усиленно развивается но-
вый тип летательных аппаратов — аппараты на воздушной подуш-
ке. Такие аппараты движутся со скоростью до 150 км/час (40 м/сек)
на высоте от 0,3 до 1 м над земной или водной поверхностью, везде-
ходны и могут быть использованы в труднодоступных болотистых
местностях, над мелководными реками, ледовыми полями и пр.
Принцип действия такого аппарата заключается в следующем.
Воздух поступает в двигатели через большие воздухозаборники,
сжимается в компрессорах двигателей и подается под основание
аппарата. При этом под аппаратом на большой площади создается
область повышенного давления, поддерживающая аппарат над
* Под остойчивостью гидросамолета понимается способность его возвра-
щаться в положение равновесия на воде по прекращении действия силы, вызвав-
шей отклонение его от этого положения.
503
поверхностью. Тяга, необходимая для поступательного движения,
создается винтами изменяемого шага. Для повышения устойчиво-
сти и управляемости аппарат часто снабжают стабилизирующими
поверхностями и рулями.
Фиг. 327. Аппарат на воздушной подушке.
/—вентиляторы, 2—воздушные винты, 5—кольцевые каналы воздушных вин-
тов, -/—аэродинамические рули направления, 5—кабина экипажа.
На фиг. 327 изображен аппарат на воздушной подушке.
В настоящее время имеются проекты создания крупных аппара-
тов такого типа для гражданских и военных целей.
5. БЕСПИЛОТНЫЕ ЛЕТАТЕЛЬНЫЕ АППАРАТЫ
Общие сведения
Во второй мировой войне, как известно, получили большое раз-
витие бомбардировочная, истребительная и транспортная авиация.
Рост летнотехнических данных бомбардировочной авиации с одной
стороны и повышающаяся эффективность средств ПВО с другой
вызвало появление в конце второй мировой войны беспилотного
управляемого в полете снаряда. Кроме высокой эффективности, во
много раз превышающей эффективность обычных видов вооруже-
ния, он позволяет решать совершенно новые задачи противовоз-
душной обороны'
Советские конструкторы и ученые, развивая и воплощая в жизнь
идеи, высказанные еще К. Э. Циолковским, создали самую мощную
в мире ракетную технику, самые совершенные ракеты.
В настоящее время Советская Армия имеет на своем вооруже-
нии все типы мощных беспилотных управляемых снарядов. Кро-
ме того, созданы метеорологические и геофизические беспилотные
504
управляемые в полете ракеты, при помощи которых проводятся
исследования верхних слоев атмосферы и космического простран-
ства.
Подлинным триумфом советской науки явился запуск 4 октября
1957 г. первого искусственного спутника Земли (фиг. 328). После-
дующие запуски более
тяжелых спутников, со- —
здание межпланетных ав- ’
тематических станций,
получение фотографии об-
ратной стороны Луны, [ V ----------„ ..
полеты советских космо- t J
навтов, запуск автомата-
ческих станций в направ-
лении Венеры, Марса и ^Х.
Луны еще выше под- ^Х.
няли знамя советской
науки. Х^^^
Управляемый снаряд ^Х^
можно определить как ^Х.
устройство, движущееся
В Пространстве без эки- Фиг 328. Первый искусственный спутник
пажа и обладающее сред- Земли.
ствами управления соб-
ственной траекторией. Несмотря на все многообразие существую-
щих типов управляемых снарядов для всех них является характер-
ным наличие некоторых общих конструктивных элементов: двига-
тельной установки, системы наведения и стабилизации, отсека для
размещения полезной нагрузки, силового корпуса, комплекса стар-
тового оборудования.
Двигательная установка обеспечивает создание тяги по реак! яв-
ному принципу.
Системой наведения называется совокупность средств, устройств
и приборов, которые, определяя относительное положение
цели и управляемого снаряда и воздействуя на систему управ-
ления снаряда, вводят необходимые изменения в траекторию сна-
ряда, обеспечивая поражение цели. Часть элементов системы
наведения находится на борту самого снаряда. Некоторые элемен-
ты могут находиться вне снаряда: на месте старта, на пути к цели,
у самой цели. На каждом летательном аппарате имеется отсек для
размещения полезного груза, который необходимо донести до цели.
Если ракета имеет военное назначение, то это боевой заряд. Если
ракета исследовательская, то полезный груз — исследовательская
и радиопередающая аппаратура. Все части управляемого снаряда
связываются силовым корпусом, предназначенным для размещения
грузов, оборудования и воспринятия нагрузок, действующих на сна-
ряд в полете.
505
Г
к „яисимости от величины заданного полезного груза и задан-
Лености назначается запас топлива управляемого снаряда.
"°" Л^Дением дальности снаряда необходимо иметь и больший
запас'топлива, а следовательно, возрастает вес конструкции сна-
пяпа Здесь проявляется недостаток несоставного (одноступенча-
того! снаряда: заданная скорость сообщается не только полезному
того) cHdi «а грузу, но и целиком всей
Приборы
Л1
конструкции снаряда. От
указанного недостатка
частично свободны со-
ставные (многоступенча-
тые) снаряды, которые,
как показывает название,
состоят из нескольких
частей-ступеней.
Основная идея со-
ставного снаряда заклю-
чается в том, что по мере
выгорания горючего от
него отделяются ставшие
ненужными части и тяга
двигателей расходуется
не на увеличение скоро-
сти этих бесполезных ча-
Полезный
груз
и
III
Полезный
груз
Приборы
стей, а только на увели-
чение скорости частей,
которые используются
или будут использоваться
в дальнейшей работе сна-
Фиг. 329. Схемы многоступенчатых сна-
рядов.
а—последовательное соединение, б—параллельное
соединение, I. II, III—ступени снаряда.
ряда. Таким образом до заданной скорости разгоняется только
масса последней ступени с полезным грузом, а масса остальных
ступеней получает меньшие скорости. При помощи составных сна-
рядов можно получить космические скорости, тогда как при помо-
щи одноступенчатых снарядов на обычном химическом топливе
достичь таких скоростей нельзя. Ступени снаряда могут присоеди-
няться последовательно (тандемное соединение) и параллельно
(пакетное соединение) (фиг. 329).
Стартовое оборудование включает в себя пусковые устройства,
системы контроля и наблюдения за снарядом в полете. Более по-
дробное рассмотрение этих конструктивных элементов управляе-
мых снарядов будет приведено ниже.
Классификация управляемых снарядов
Форма управляемого снаряда, его размеры и устройство опреде-
ляется, в конечном счете, его назначением. Поэтому классификацию
управляемых снарядов целесообразно проводить по принципу на-
значения снаряда.
506
В зависимости от назначения, которое определяется местом стар-
та и местом цели, все управляемые снаряды подразделяются
на следующие основные классы: «воздух—воздух», «поверхность—
поверхность», «поверхность—воздух», «воздух—поверхность»
(фиг. 330).
Класс «поверхность — поверхность» включает в себя
любой управляемый снаряд, стартующий с поверхности земли
Фиг. 330. Классификация управляемых снарядов (классы, обведенные пунктир-
ными линиями, еще не получили развития).
(воды) и 1предназначенный для поражения цели, тоже находящейся
на поверхности земли (воды). Этот класс снарядов весьма обширен
и включает в себя разнообразные снаряды, предназначенные для
поражения целей на расстояниях от нескольких километров до
10 000 км и более.
Снаряды класса «поверхность—поверхность» могут быть под-
разделены на следующие три типа:
1. Снаряды тактического назначения (дальностью до 100 юн);
2. Снаряды оперативно-тактического назначения (дальностью
100-^1000 кж).
3. Снаряды стратегического назначения (дальностью свыше
1000 км), предназначенные для поражения стратегических целей.
Тактические и стратегические снаряды можно в свою очередь
подразделить на снаряды, летящие основную часть времени в тро-
посфере или стратосфере, испытывающие на протяжении всего
времени полета действие аэродинамических сил и представляющие,
507
по сути дела, беспилотные самолеты (фиг. 331), и на снаряды,
большая часть траектории которых проходит в области больших
высот (ЮОн-ЮОО /см),— баллистические снаряды. Движение сна-
ряда последнего типа на большей части траектории является дви-
жением свободно брошенного тела в поле сил земного тяготения.
Фиг. 331.
Рассмотрим траекторию баллистического снаряда (фиг. 332).
Она имеет следующие элементы:
Активный участок траектории — участок полета сна-
ряда с работающим двигателем. В конце активного участка двига-
тель выключается. Дальность снаряда будет определяться величи-
ной и направлением вектора скорости снаряда в конце активного
участка. Точность выдерживания заданного для определенной даль-
ности значения скорости и угла наклона траектории в конце актив-
ного участка и определяет, в основном, точность попадания в цель.
Фиг. 332. Схема полета снаряда с отделяющейся головной
частью.
Участок свободного полета. Снаряд летит как свобод-
но брошенное тело. Расчеты показывают, что траектория снаряда
в этом случае представляет эллиптическую кривую. Для дальних
снарядов участок свободного полета составляет основную часть
траектории.
508
слои атмосферы,
происходит интен-
снаряда. Для того
Горючее
Горючее
Жидкий -
кислород
Жидкий
кислород
Cj
зе
U
Е
Сз
с.
о
Е
са
Компоновочная схема
МБС.
Участок входа снаряда в плотные
На этом участке за счет сопротивления воздуха
сивное торможение и разогревание конструкции
чтобы снаряд не сгорел и достиг цели,
необходимо обеспечить его тепловую
защиту. В снарядах дальнего действия
целесообразно применить отделяю-
щуюся головную часть, содержащую
боевой заряд. Тепловая защита этой
сравнительно небольшой головной ча-
сти осуществляется применением теп-
лопоглощающих покрытий и экранов,
а также соответствующим аэродина-
мическим профилированием. В настоя-
щее время большие баллистические
снаряды представляют собой слож-
ные и дорогие сооружения. Межконти-
нентальные баллистические снаряды
(МБС) имеют вес 50-^-100 т и более
((0,54-1,0 Мн) и дальность свыше
10 000 kjh.
Схема компоновки МБС показана
на фиг. 333.
Баллистические снаряды средней
дальности (БССД) имеют стартовый
' вес 15-—40 т (0,15—0,4 Мн) и даль-
ность в несколько тысяч километров.
Перспективным видом управляемого
снаряда класса «поверхность—’Поверх-
ность» является ракетоплан. После
активного участка и свободного по-
лета по баллистической траектории
последняя ступень (или последние
ступени) ракетоплана, снабженная
аэродинамическими поверхностями, с
огромной скоростью (порядка
20000 км!час или 5550 м!сек) входит
в верхние слои атмосферы- Благодаря
наличию аэродинамических поверхно-
стей и большому запасу кинетической
энергии, ракетоплан может совершать
планирующий или рикошетирующий
полет (фиг. 334), что позволяет ему получить дальность приблизи-
тельно в четыре раза большую, чем у баллистического снаряда при
прочих равных условиях. Уже при существующих двигателях
имеется возможность создания ракетоплана с кругосветной даль-
ностью, который, облетев земной шар, приземлился бы на месте
старта.
Фиг, 333,
509
невелика (около 10 км). Снаряд
Тактические снаряды могут быть управляемыми и не управляе-
ма фиг 335 изображен противотанковый управляемый сна-
пял относящийся к снарядам ближнего действия. Такой снаряд
имеет небольшой вес [в пределах 50 кг (500 я)] и может переносить-
запускаться одним человеком. Снаряд запускается с простей-
шего стартового устройства (на фиг. 335 стартовым устройством
служит контейнер для переноски снаряда). Дальность снаряда
у --ч г'--- управляется по проводам или по
радио и имеет боевую головку,,
способную пробивать броню тол-
щиной до 400 мм.
Снаряды класса «по-
верхность— воздух» (зе-
нитные)- Этот класс включает
в себя любой снаряд, стартую-
I
I
f
г
I
К
Фиг. 335. Противотанковый
управляемый снаряд.
Фиг. 334, Траектория полета сна-
рядов.
1—ракетоплан, II—дальний баллистический
снаряд, ///—спутник.
щий с поверхности земли, назначением которого является пораже-
ние цели, летящей в воздухе. Воздушными целями могут быть дру-
гие управляемые снаряды, а также самолеты. Поскольку скорость
цели может быть очень велика, дальность зенитных снарядов и их
скорость должны быть также большими. Зенитные снаряды имеют
обычно двухступенчатую конструкцию (фиг. 336). В качестве пер-
вой ступени применяются пороховые ракетные двигатели. На вто-
рую ступень устанавливают ракетный двигатель, если дальность
снаряда невелика (до 100 км) и прямоточный воздушно-реактив-
ный двигатель (ПВРД) —для больших дальностей (несколь-
ко сотен километров). Зенитные снаряды могут нести как заряд
обычного взрывчатого вещества, так и небольшие атомные
заряды.
Среди зенитных снарядов особое место занимают снаряды-пере-
хватчики баллистических снарядов (так называемые антиснаряды).
1 ак как баллистический снаряд движется с огромной скоростью,
то при его перехвате возникает ряд трудноразрешимых проблем,
и и311ТННЬ1Х С в03М0Я<Н0 более ранним обнаружением снаряда
ь елением его среди ложных целей и помех, с ограниченным
510
Фиг. 336. Управляе-
мый снаряд класса
«поверхность — воз-
дух».
временем для приведения в готовность систем ашгисиаряда, с точ-
ностью работы системы наведения и т. п.
Снаряды класса «воздух — поверхность» вклю-
чают в себя любой снаряд, стартующий с самолета или вертолета
и предназначенный для поражения любой
цели на поверхности земли.
Небольшие снаряды этого типа [весом
до 600 кг (6000 н)] являются дальнейшим
развитием авиабомб и предназначены для
более точного, по сравнению с последними,
поражения цели. Сюда относятся управляе-
мые бомбы, не имеющие силовой установки,
и управляемые снаряды, имеющие силовые
установки, которые позволяют самолету-
носителю точно поразить цель, оставаясь
на относительно безопасном расстоянии от
нее. Большие снаряды этого класса (весом
в несколько тонн) переносятся тяжелыми
самолетами и предназначены для пораже-
ния сильно защищенных крупных объек-
тов. Такой снаряд несет ядерную головку
и запускается за несколько сотен километ-
ров от цели.
Обладая сверхзвуковой скоростью, в не-
сколько раз большей, чем скорость само-
лета-носителя, большим потолком и срав-
нительно небольшими размерами, такой
снаряд может легче, чем бомбардировщик,
преодолеть ПВО противника и поразить
цель.
К классу снарядов «воздух—поверх-
ность» также относятся снаряды, предна-
значенные для борьбы с подводными лод-
ками. Последние в современных условиях
имеют большое значение как носители мощ-
ного ракетного оружия. Такие снаряды пра-
вильнее называть «воздух—поверхность—
вода». Последняя ступень такого снаряда
представляет собой самонаводящуюся тор-
педу, которая отделяется от него и наво-
дится на подводную лодку.
Снаряды класса «воздух—воздух» предназначены
для поражения воздушных целей и запускаются с самолета. Снаря-
ды этого класса обычно одноступенчатые и имеют, как правило,
небольшую дальность (от нескольких километров до нескольких
десятков километров) и вес (до нескольких сотен килограмм), т. е.
являются относительно небольшими снарядами. Применение на
511
современных истребителях снарядов класса «воздух- -воздух» зна-
чительно повышает их эффективность.
В настоящее время на некоторых снарядах «воздух—воздух»
вместо заряда обычного взрывчатого вещества устанавливают не-
большие ядерные заряды, что делает их особенно эффективными
против групповых целей. Снаряд класса «воздух—воздух» показан
на фиг. 337.
Управление снарядами
Управляемый снаряд мы определили как беспилотный летатель-
ный аппарат (Л. А.), обладающий средствами изменения направ-
ления своего движения.
Система управления летательным аппаратом выполняет сле-
дующие задачи:
1. Управляет движением Л. А. в соответствии с управляющими
сигналами.
2. Сохраняет требуемое положение Л. А. при воздействии на
него различных возмущений.
Все траектории полета беспилотных летательных аппаратов
можно разделить на две группы:
1. Программные траектории.
2. Траектории наведения.
При неподвижных целях и неподвижных стартовых устройствах
(или при подвижных стартовых устройствах: подводная лодка, са-
молет, положение которых точно можно определить в определенный
момент времени) данные, необходимые для расчета траектории,
можно получить из известного относительного положения места
старта и цели.
Следовательно, имеется возможность рассчитать траекторию
снаряда заранее, а сам снаряд снабдить устройствами, обеспечи-
вающими его движение по этой траектории. Движение по расчетной
траектории обеспечивается воздействием на органы управления
снаряда в определенные моменты времени по определенному
закону — Программе, которая «закладывается» в программирую-
щее устройство системы наведения. Такие траектории и системы на-
ведения называются программными. Программное наведение
512
используется для снарядов «поверхность—поверхность», «воздух—
поверхность», а также для выведения на орбиту спутников.
В случае подвижной цели, а также неподвижной цели, но по-
движной стартовой установки, координаты которой не определены,
относительное положение места старта и цели все время меняется.
Для поражения цели в этом случае система наведения должна
иметь устройство, «чувствующее» все время цель, следящее за ней
и непрерывно определяющее относительное положение снаряда
и цели. К таким системам наведения относятся системы телеуправ-
ления, самонаведения и их комбинации. Они применяются на сна-
рядах классов «воздух—воздух», «поверхность—воздух» и на неко-
торых снарядах «воздух—поверхность».
Схема ^бес хвястка *
Подвижные управляющие
крылья
Отклоняемое хвоставое
оперение
Фиг 338 Схемы снарядов с различным расположением
управляющих поверхностей.
Для того чтобы обеспечить управляемому снаряду определен-
ный характер движения (определенное положение в пространстве
и определенные направление и величину вектора скорости полета),
необходимо управлять величиной и направлением равнодействую-
щей всех сил, действующих на него. Применяемые органы управ-
ления зависят от типа летательного аппарата. Управление при
помощи аэродинамических поверхностей применяется для лета-
тельных аппаратов, летающих в плотных слоях атмосферы при
достаточных скоростных напорах. Схемы аэродинамического
управления приведены на фиг. 338. Для летательных аппаратов,
летающих в разреженных слоях атмосферы или в космическом
пространстве, аэродинамические управляющие поверхности мало
эффективны или вообще бесполезны. Управление такими аппарата-
ми производится либо путем изменения направления вектора тяги
основного двигателя, либо установкой специальных управляющих
двигателей. Управление ведется по схемам, показанным на фиг. 339.
Программные системы наведения
Рассмотрим кратко следующие программные системы наве-
дения.
33 1563
513
Радионавигационные системы. Данные о своем мес-
тонахождении снаряд получает при помощи радиоаппаратуры,
помешенной на земле и на самом снаряде. Если местонахождение
гнапяда не соответствует заданному по программе, то система
управления подает на рули сигнал, приводящий снаряд к программ-
ному положению. Недостаток этой системы заключается в том, что
n J она подвержена действию
помех.
Астронавига ц и-
о н и ы е системы. Дей-
ствительные координаты
снаряда определяются
бортовой аппаратурой по
небесным светилам и
сравниваются с программ-
ными координатами ме-
стонахождения, соответ-
ствующими заранее рас-
считанной траектории.
В случае несоответствия
этих координат система
управления подает сигнал
на органы управления,
устраняющий это несоот-
ветствие.
Иперциал ь и а я
система наведе-
ния- Ускорение снаряда
очень точно определяется
в каждый момент време-
ни. Затем оно интегри-
скорости. После второго
'Р
«)
Фиг. 339
г)' Ю
Методы создания управляющих
воздействий.
двигателя на кардановом подвесе.
а) поворотом
б) применением газовых рулей, в) отклонением реак-
тивной струн дефлектором или поворотным соплом,
г) применением дополнительных (верньерных) двига-
телей, д) впрыском газа в закритическую часть сопла.
руется, что, как известно, дает значение
интегрирования получаем пройденный путь или координаты сна-
ряда при выбранном начале отсчета пути.
Эти данные сравниваются с программными и в случае их несо-
ответствия на органы управления подаются сигналы, исправляющие
это несоответствие. Система автономна, так как управление снаря-
дом осуществляется только за счет измерений, проводимых на са-
мом снаряде. Система не излучает и не принимает никакой энергии,
следовательно, создать помехи ей невозможно *. Для получения
достаточной точности системы очевидно необходимо добиться очень
высокой точности акселерометров, интеграторов и других элемен-
тов системы.
Например при дальности 8000 км скорость в момент выключе-
ния двигателя должна быть 23800 км/час. Ошибка в скорости на
0,1 % приводит к промаху ЗО-МО км.
Имеется в виду чисто инерциальная система.
514
Инерциальные системы широко применяются на снарядах клас-
са «поверхность—поверхность» (баллистических) и «воздух—
поверхность». Перечисленные выше системы могут применяться
не только в «чистом» виде. Возможна их комбинация, например,
астроинерциалвная, радиоиперциальнаяи т. д.
Системы телеуправления и самонаведения
Выше мы рассмотрели программные системы наведения. В этих
системах во время полета снаряда измеряется не отклонение его
от цели, а отклонение координат снаряда, его скорости и т. д. от
программных. Таким образом, эти снаряды не имеют непосредствен-
ной связи с целью и стрелять такими снарядами по подвижный
целям нельзя.
Снаряды, предназначенные для поражения подвижных целей,
должны все время «чувствовать» цель, получать информацию о ее
Фиг 340 Схема наведения снаряда на цель по кривой
совмещения.
положении. Такой информацией может стать отраженное или не-
посредственное радио, инфракрасное или оптическое излучение
цели. Назовем углом упреждения угол между направлением век-
тора скорости снаряда и линией «снаряд—цель».
Тогда методы наведения естественно подразделить на:
а) наведение с нулевым углом упреждения (метод погони);
б) наведение с постоянным углом упреждения = const;
в) наведение с переменным углом упреждения -q =5^ const.
Наведение снаряда с некоторым углом упреждения позволяет
ему двигаться на пересекающихся курсах с целью (в отличие от
метода «погони»), что при правильном выборе угла упреждения
приводит к траектории, близкой к прямолинейной (незначитель-
ные нормальные перегрузки).
Наиболее благоприятным с этой точки зрения является метод
наведения с переменным углом упреждения.
Широко применяется для наведения метод совмещения, при
котором снаряд в каждый момент времени находится на прямой,
соединяющей точку наблюдения с целью (фиг. 340).
В зависимости от того, где вырабатываются сигналы управле-
ния — на борту снаряда или они поступают на снаряд из внешнего
33
315
источника (пункта управления), системы наведения можно под-
разделить на системы самонаведения и системы телеуправления.
Система телеуправления. Сущность этой системы на-
ведения заключается в том, что траектория движения снаряда
определяется командами, получаемыми им извне, в зависимости
от движения цели. В связи с этим система наведения предусмат-
ривает одновременное слежение (радиолокационное или оптиче-
ское) за снарядом и за целью. Команды на снаряд передаются либо
по проводам, либо чаще по радиоканалу.
Фиг. 341. Схема наведения с двумя следящими лока-
торами.
/—цель, 2—снаряд, 3—связь с локатором раннего оповеще-
ния, 4—локатор слежения за целью, 5—локатор слежения
за снарядом, 6—вычислительная машина, 7—передатчик
управляющего сигнала на снаряд, 8—точка разрыва снаряда.
Сближение снаряда с целью может происходить по кривой со-
вмещения (см. фиг. 340), или же снаряд направляется 'в упрежден-
ную точку встречи, рассчитанную счетно-решающим устройством
(фиг. 341). Так как во время полета снаряда цель может маневри-
ровать, то вычисления производятся непрерывно и положение
упрежденной точки меняется. Одной из разновидностей системы
телеуправления является наведение по лучу. Снаряд во время по-
лета автоматически удерживается по оси луча радиолокатора,
направленного на цель и все время за ней следящего. Следователь-
но, сближение снаряда и цели происходит по кривой совмещения
(фиг, 342).
Рассмотренные системы, особенно радиокомандная, имеют су-
щественный недостаток, заключающийся в том, что имеется воз-
можность создания им помех.
Системы самонаведения, В этих системах использует-
ся какой-либо вид лучистой энергии, излучаемый (или отражае-
516
мый) целью, благодаря чему она выделяется на фоне окружаю-
щей среды.
Системы самонаведения подразделяются на:
а) пассивные, использующие собственное излучение цели
(фиг. 343);
J
У
(
Фиг. 342. Схема наведения по лучу.
/—цель, 2—снаряд, 3—связь с локатором раннего
оповещения, 4—локатор слежения за целью, 5—син-
хронная связь, 6—локатор наведения снаряда.
б) активные, использующие энергию, отраженную от цели,
причем излучатель и приемник этой энергии находятся на борту
снаряда (фиг. 344);
Фиг. 343, Схема пассивного самона-
ведения.
Фиг. 344. Схема активного само-
наведения.
в) полуактивные, использующие энергию, отраженную от цели,
причем на снаряде располагается только приемник энергии, а из-
лучатель расположен вне снаряда (фиг. 345)—на земле, кораб-
ле и т. п.
517
Одной из наиболее распространенных систем пассивного само-
наведения является система наведения по инфракрасному (тепло-
вому) излучению цели (И. К—система). Все предметы с темпе-
ратурой выше абсолютного нуля являются источниками инфра-
красного излучения, зависящего от температуры и характеристик
поверхности излучающего тела.
На снаряде устанавливается ряд устройств, в конечной цели
служащих для определения смещения источника И. К. излучения
(цели) от оси И. К. устройства снаряда (головки наведения сна-
ряда) и для слежения за
Фиг 345 Схема полуактивного само-
наведения.
целью, т. е. ликвидация этого
смещения. Инфракрасные си-
стемы наведения легче, меньше
по размерам и дешевле радио-
локационных систем.
Так, например, И. К. си-
стема снаряда «Сайдуиндер»
состоит из такого же количе-
ства деталей, что и обыкновен-
ный широковещательный ра-
диоприемник. Чувствительный
элемент ее может обнаружить
тепло, излучаемое плиткой
мощностью в 2 кет на расстоя-
нии 16 км.
Существенным недостатком
системы является сниже-
ние дальности действия систе-
мы при наличии облачности, осадков, дыма или тумана, а также
невозможность атаки цели в направлении солнца в пределах сек-
тора 20-^30°.
Принцип действия активной и полуактивной системы одинаков.
Цель все время «освещается» локатором и является, следователь-
но, источником постоянного отраженного излучения, по которому
и ориентируется снаряд. Приемная антенна, установленная на
борту снаряда, имеет свободу углового перемещения и осущест-
вляет поиск (фиг. 346, а) и захват цели (фиг. 346,6). В даль-
нейшем антенна все время автоматически направляется на
цель.
Задача системы наведения в этом случае состоит в том, чтобы
поворачивать снаряд так, чтобы он двигался по направлению
к цели с заданным углом упреждения.
Снаряд с активной системой самонаведения сам облучает цель
при помощи бортового следящего радиолокатора, а затем ориен-
тируется по отраженным сигналам без какой-либо помощи извне,
лагодаря наличию на борту сложной и большой аппаратуры, сна-
ряд получается дорогим и тяжелым.
518
Полуактивная система, очевидно, свободна частично от этих не-
достатков, так как па борту снаряда имеется только приемная
антенна и приемник.
Цель найдено
При миске цели
Фиг. 34G.
Очень часто применяют комбинацию нескольких систем наведе-
ния. Например при увеличении дальности промах снаряда, управ-
ляемого командной системой наведения, растет. Поэтому на конеч-
ном участке полета такого снаряда целесообразно применить само-
наведение.
Двигательные установки
Для создания тяги в двигателях прямой реакции отбрасывае-
мой массе рабочего тола (газа) необходимо сообщить как можно
большую скорость. Эта скорость возникает в результате преобра-
зования химической энергии топлива в кинетическую энергию ра-
бочего тела.
В качестве рабочего тела может быть использована смесь газов
(продуктов сгорания) и атмосферного воздуха. Можно также
использовать газы высокого давления и высокой температуры, ко-
торые образуются в камере сгорания двигателя при химической
реакции, происходящей без участия атмосферного воздуха.
Двигатели первого типа — воздушно-реактивные двигатели.
К ним относятся:
а) прямоточные (ПВРД),
б) пульсирующие (ПуВРД),
в) турбореактивные (ТРД).
Двигатели второго типа образуют класс ракетных двигателей,
которые подразделяются на двигатели, работающие на твердом
топливе (РДТТ), и жидкостные ракетные двигатели (ЖРД).
В первых двигателях топливо до начала химической реакции
находится в твердом состоянии.
ТРД применяется в качестве силовой установки на некоторых
управляемых снарядах, летающих на больших дозвуковых и сверх-
звуковых скоростях.
519
ПуВРД, хотя и применялся на первых управляемых снарядах,
но не является перспективным и в настоящее вре^я не приме-
няется.
Прямоточные двигатели применяются для беспилотных лета-
тельных аппаратов, летающих на больших сверхзвуковых скоростях
(ЗМ и выше). Прямоточный двигатель не может работать при ну-
левой скорости полета и поэтому разгон снаряда, снабженного
ПВРД, должен осуществляться ускорителем.
Ракетные двигатели — практически единственные в настоящее
время из существующих двигателей, для работы которых наличие
атмосферного воздуха не является обязательным условием.
Имеется ряд проектов использования для полетов в космиче-
ском пространстве ионных и плазменных силовых установок, но
пока они еще очень дороги и громоздки. К тому же ЖРД и РДТТ
не исчерпали еще полностью своих возможностей. Поэтому в бли-
жайшее время РДТТ и ЖРД останутся, вероятно, единственными
двигателями для полетов в космическом пространстве.
Рассмотрим устройство ЖРД-
ЖРД состоит из следующих основных частей:
а) одной или нескольких ракетных камер, в которых жидкое
топливо участвует в химической реакции, приводящей к образо-
ванию газов высокого давления и температуры. В дальнейшем
газы в этой же камере разгоняются до большой сверхзвуковой
скорости, что обеспечивает создание реактивной тяги;
б) устройства для принудительной подачи топлива в ракетную
камеру;
в) системы управления двигателем.
В большей части в ЖРД используется в качестве топлива два
жидких компонента: жидкий окислитель (кислород, азотная кисло-
та и т. п.) и жидкое горючее (спирт, керосин и т. п.). Топливо по-
дается в ракетную камеру принудительно под давлением, которое
должно быть, естественно, больше давления газов в камере. Это
давление может обеспечиваться наличием на борту снаряда запаса
сжатого газа, который, поступая в баки с топливом, вытесняет его
в камеру сгорания; тогда подача топлива производится по схеме
(фиг. 347, а) и называется вытеснительной.
В случае вытеснительной подачи топлива топливные баки
должны выдерживать большое давление вытесняющего газа, по-
этому они получаются тяжелыми. Кроме того, довольно значи-
тельным получается вес баллона с сжатым газом. Для мощных
двигателей с большим временем работы выгоднее подавать топ-
ливо в камеру сгорания насосами, приводимыми от специальной
газовой турбины.
Такая подача производится по схеме фиг. 347,6 и называется
турбонасосной. Турбонасосная схема применяется на всех больших
снарядах с ЖРД.
520
РДТТ (фиг. 348) имеют некоторые преимущества перед ЖРД
в отношении простоты конструкции и надежности (отсутствие си-
Двойные стенки камеры для прохода
охлаждающего топлива
Насос окислителя Клапаны
5) Схема жидкостного ракетного двигателя
с турбонасосной подачей
5
а) Схема баллонной вытеснительной подачи
Фиг. 347.
/—баллон со сжатым газом, 2—редуктор дам си ня газа, 3—топливные баки,
4—камера двигателя, 5—заборники*
стемы подачи топлива и т. д.). Сейчас, когда достигнуты большие
успехи в отношении надежного зажигания и точного выключения
РДТТ в нужный момент времени, РДТТ находят все более широ-
Сечение заркда
Фиг. 348. Схема РДТТ.
кое применение. Имеются РДТТ с тягой, превышающей 250 т
(2,5 Мн), которые применяются в качестве силовых установок
дальних -баллистических снарядов.
521
Система боевого снаряжения снарядов
В боевое снаряжение снаряда входит взрыватель, обеспечиваю-
щий подрыв боевой части в нужный момент времени, и боевая го-
ловка содержащая боевую часть. При очень точном наведении
боевой заряд может быть небольшим. Вообще же потребная для
поражения цели мощность боевого заряда зависит от точности си-
стемы наведения. Увеличивая боевой заряд, можно снизить требо-
вания к точности системы наведения, что в ряде случаев приводит
к более рациональной конструкции всего снаряда.
На большинстве управляемых снарядов, предназначенных для
действия против подвижных целей, применяются неконтактные
взрыватели, обеспечивающие подрыв боевого заряда и поражение
цели даже при отсутствии прямого попадания в нее.
Стартовые устройства
Ни один современный управляемый снаряд не может стать эф-
фективным оружием, если его наземное и стартовое оборудование
не обеспечит надежного хранения и быстрого и безопасного за-
пуска
Железобетонные дВери такт
Шахта
для
отВодо
газоб
Командный пункт
Укрытие для антенн
Фиг 349. Скрепленная стартовая база дальних баллистических снарядов.
Полный комплекс наземного и стартового оборудования управ-
ляемых снарядов включает в себя транспортные средства, средст-
прк.ХРаНеНИЯ’ сРедства заправки топливом, приборы предпускового
ютра и проверки снарядов, пусковые приспособления, а также
аппаратуру системы наведения.
/ЛигТая4а\ВЫе ^азы баллистических снарядов дальнего действия
connv-лгпы? п₽^став^ют собой большие и сложные инженерные
ваяиыг Я‘ ^наРяДы хранятся в глубоких подземных бетониро-
ахтах в вертикальном положении. Для запуска снаряд
522
поднимается специальными подъемниками на поверхность земли
или запускается непосредственно из шахты.
Там же под землей находится командный пункт, запасы топли-
ва и запасные части, электростанции, мастерские и т. д.
Подготовка и проверка готовности к действию всех многочис-
ленных систем управляемого снаряда является важной и сложной
операцией. Для этой цели применяется различное автоматическое
и полуавтоматическое оборудование, которое обеспечивает провер-
ку работы системы клапанов, установку и. настройку приборов
и всей аппаратуры системы наведения. Пусковые приспособления
включают стартовые пусковые установки и различное дополни-
тельное оборудование. Устройство пусковых установок зависит от
типа снаряда (см. фиг. 337, 349). Поэтому они могут быть самыми
разнообразными, но выполняют общие задачи; обеспечивают опо-
ру снаряда на старте -и начальное направление полета. Иногда
стартовой установкой может служить контейнер для перевозки
и хранения снаряда (см. фиг, 335).
Глава XX
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ КОНСТРУКЦИИ САМОЛЕТА
И ИХ РАСЧЕТ
1. ОБЩИЕ ЗАМЕЧАНИЯ
Разделение конструкции на части и, следовательно, наличие
в конструкции соединений влечет за собой увеличение веса са-
молета. Более легкой, при прочих равных условиях, будет конст-
рукция, состоящая из меньшего числа частей и меньшего
количества соединений. Наличие соединений (особенно разъемов;
усложняет конструкцию, а следовательно, повышает ее стоимость,
увеличивает трудоемкость производства. Тенденция уменьшения
числа соединений достаточно ясно выявилась в современном само-
летостроении— например, в создании монолитных панелей, цельно
штампованных узлов и т. п.
Вместе с тем разумное разделение является мощным фактором
повышения технологичности конструкций (см. гл. VI).
В ряде случаев увеличение числа деталей упрощает производ-
ство, улучшает технологичность изделия. Например, из двух срав-
ниваемых конструкций штока амортизатора, изображенных на
фиг. 350, проще и дешевле шток со вставным дном, так как он из-
готовляется из тонкостенной трубы, в то время как шток с цель-
ным дном изготовляется из прутка.
Вопрос о целесообразности укрупнения или членения конструк-
ции решается анализом конкретной конструкции для конкретного
типа производства.
523
Такие элементы соединения как болты, винты, гайки, шайбы,
заклепки и т. п в большинстве своем стандартизированы и норма-
лизированы. Производственный и экономический эффект стан-
дартизации и нормализации этих элементов чрезвычайно велик
Уменьшается число типо-
Фиг 350
размеров деталей, сокра-
щается номенклатура ма-
териалов и полуфабри-
катов, отпадает необходи-
мость в конструировании
элементов соединений для
вновь проектируемых из-
делий, так как можно воспользоваться имеющимися стандартами
и нормалями. Обеспечивается взаимозаменяемость узлов и агре-
гатов. Изготовление стандартных и нормальных элементов соеди-
нений ведется специализированными заводами в процессе массо-
вого производства.
Можно отметить, что авиационные элементы крепления отли-
чаются от принятых в общем машиностроении повышенной проч-
ностью материала, более высокой точностью изготовления, чисто-
той обработки поверхности, что обусловило введение специальных
авиационных нормалей.
2 ТИПЫ СОЕДИНЕНИЙ
Соединения элементов конструкции подразделяются на разь-
емные и неразъемные.
Разъемными соединениями называются соединения, при помо-
щи которых можно разбирать агрегат без разрушения как соеди-
няемых, так и соединяющих элементов и деталей. Такие соедине-
ния осуществляются при помощи болтов, винтов, шурупов, шпилек,
замков и валиков.
Неразъемными соединениями называются соединения, которые
не позволяют разбирать конструкцию без разрушения соединяе-
мых элементов (клеевые, сварочные соединения) или соединяющих
их деталей (заклепки, пистоны). Неразъемные соединения подраз-
деляются на прочные и прочно-плотные (герметичные).
В зависимости от степени подвижности соединяемых деталей
различают неподвижные, малоподвижные и подвижные разъем-
ные соединения.
Неподвижные разъемные соединения исключают взаимное сме-
щение соединяемых деталей (например, соединение стыкового узла
с лонжероном крыла, кронштейна подвески руля с лонжероном
стабилизатора и т. д.).
Малоподвижные соединения обладают редко повторяющимся
относительным перемещением, которое происходит при кратковре-
менной нагрузке, значительно меньшей расчетной (шарниры под-
косов шасси, соединения элементов управления закрылком и т.д).
524
Подвижные соединения характеризуются часто повторяющимся
относительным смещением их элементов, происходящим при ра-
счетной нагрузке (шарниры проводки управления рулями, элеро-
нами, шарниры подвески рулей и т. д.).
Кроме этого, разъемные соединения по способу передачи ими
усилий можно подразделить на узловые и контурные.
При узловых соединениях усилия с одной соединяемой конст-
рукции на другую передаются в нескольких (двух — четырех)
узлах. При контурных соединениях усилия с одной соединяемой
конструкции на другую передаются большим числом болтов, соеди-
няющих угольники или фитинги, расположенные по контуру соеди-
няемых конструкций.
3. СОЕДИНЕНИЯ с ПОМОЩЬЮ ПРОУШИН
Проушины весьма распространены как в неподвижных, так и
в подвижных разъемных соединениях элементов конструкции.
На фиг. 351 показано соединение, которое состоит из двойной про-
ушины (вилки) и одинарной проушины (ушка). На фиг. 36,1,2
гл. ХШ показано соединение, которое состоит из тройной проуши-
ны (гребенки) и двойной проушины. Проушины соединены между
собой болтом.
Сяебаяелие уда балка
Фиг. 35L Соединение «ухо—вилка».
Применение двойных и тройных проушин обусловлено необхо-
димостью увеличить площадь среза болта и смятия проушины
(болта). Так, для соединения, изображенного на фиг. 351, имеем
две плоскости среза болта и площадь смятия, соответствующую
ширине одинарной проушины или суммарной ширине двойной
проушины. Для соединения, изображенного на фиг. 36 (2) гл. ХШ,
имеем четыре плоскости среза и площадь смятия, соответствую-
щую ширине двойной или тройной (проушины.
525
Фиг. 352
526
Расчет 'проушин, нагруженных силой Р, на разрыв производит-
ся по формуле
. (ЮЗ)
Здесь F—n(b—d')b— площадь поперечного сечения проушин по
центру отверстия, п — число проушин, k\— поправочный коэффи-
циент, учитывающий неравномерность распределения напряжения
по сечению проушины и определяемый по графикам (фиг. 352,353).
Коэффициент ki зависит от эксцентриситета е= ~ и отношения
ширины проушины b к диаметру отверстия d.
В целях обеспечения равнопрочности вильчатого соединения
суммарная ширина проушин двух сопряженных деталей должна
быть примерно одинакова. Проушины проверяются также на смя-
тие по формуле:
гсм“-~ < аа.см> U°4)
Г см
где FCM = ndb — площадь смятия проушин, п — число проушин,
Ств.см — предел прочности смятия. Последний принимается для по-
движных соединений равным 0,2ов, для малоподвижных соедине-
ний— 0,65ов. для неподвижных разъемных соединений — ав, для
неподвижных неразъемных соединений— 1,3сгв.
4. СОЕДИНЕНИЯ с ПОМОЩЬЮ ФИТИНГОВ и стыковых УГОЛЬНИКОВ
Фитингами называются узлы, соединяющие две части тонко-
стенных конструкций с помощью болтов, работающих на растяже-
Фиг. 354.
ние (фиг. 354, а). Аналогично нагружаются болты в соединениях
с помощью стыковых угольников (фиг. 354,6).
В отличие от соединения с помощью проушин, в которых болт,
работающий на срез и смятие, требует посадки высокого класса
527
точности, болт в соединении с помощью фитингов и стыковых
угольников может иметь посадку более низкого класса. Это упро-
щает обработку стыков и снижает стоимость производства.
Для восприцятия поперечной силы в местах соединений должны
быть предусмотрены специальные узлы с точными посадками
болтов, работающих на срез. Таким образом, имеет место разгра-
ничение функций отдельных болтов стыка — одни воспринимают
растягивающие усилия, обусловленные наличием изгибающего мо-
мента, другие — поперечную силу.
5. ЗАКЛЕПОЧНЫЕ СОЕДИНЕНИЯ
Размеры и размещение заклепок
Основные типы заклепок, применяемые в самолетостроении,
приведены в приложении 5.
Применяемые в самолетостроении заклепки имеют следующие
стандартные диаметры (в мм): 1; 1,4; 1,6; 2; 2,6; 3; 3,5; 4; 5; 6;
7; 8; 10.
6)
Фиг, 355,
Свыше 10 Л1м заклепки в самолетостроении не применяются
из-за невозможности вести холодную клепку.
Для определения диаметра отверстия под заклепку имеется
следующее соотношение:
^отв Дзакл4"^Д -ЛЬИ. _
Для подсчета
(фиг. 355, а):
длины заклепки пользуются соотношением
L=d + — s,
1 42 *
а для потайной заклепки, устанавливаемой в штампованном гнез-
де (фиг. 355,6),
L,—s И- Л-|-1,3dt
где s — толщина склепываемого пакета,
528
do — наибольший допустимый диаметр отверстия,
d — диаметр заклепки,
h — высота потайной головки в мм.
Размер L округляется в пределах ±0,5 мм в соответствии со
стандартными длинами.
Для определения основных размеров, характеризующих относи-
тельное расположение заклепок, пользуются следующими эмпири-
ческими соотношениями (см. фиг. 355, в).
Шаг заклепок для односрезного шва
Для двухсрезного шва
^5d.
Расстояние оси заклепки от края листа
a^2d+2 мм.
Диаметр заклепки и потребная из условий прочности толщина
лист^ получаются расчетом на прочность заклепочного соединения.
Расчет заклепочных соединений
Заклепки в соединениях конструкции самолета работают на
срез, смятие и в ряде случаев (крепление обшивки к каркасу) на
отрыв головки.
Рассмотрим расчет заклепок, работающих на срез и смятие.
Наиболее часто встречающиеся заклепочные швы бывают
односрезными (фиг. 356, а) и двухсрезными (фиг. 356,6).
По длине шва распределение си-
лы Р между заклепками принимают
пропорциональным площади
(смятия) заклепки, т. е.
где Р3 i — усилие на одну заклепку,
Pi — площадь среза (смятия) за-
среза
(Ю5)
р
Фиг. 356.
клепки.
При равных площадях среза (смятия) заклепок (/^const)
(Ю5')
4
где п — число .заклепок в шве.
34 1563
529
расчет заклепок может производиться по формулам, известным
из курса «детали машин»:
на срез: т==--
711 “Г"
на смятие: бси=4г^1»^в.
и О
где Р3 i — усилие, действующее на заклепку,
d — диаметр заклепки,
П} — число плоскостей среза,
а—толщина листа (пакета), в котором сминается за-
клепка.
Например, для соединения, изображенного на фиг. 356,6, нуж-
но брать меньшую из толщин: 61 или 26а; j
Oii— предел ’прочности на растяжение материала заклепки (при
проверке на смятие листа под заклепкой — предел прочности мате- ;
риала листа); - /
тв — предел прочности материала на сдвиг.
Для проверки заклепок удобно пользоваться готовыми табли- |
цами, в которых даны разрушающие нагрузки для заклепок: на ;
срез Рср для одной плоскости среза и на смятие Рсм- Эти нагрузки |
зависят от материала заклепки, диаметра ее, материала листа
и толщины его (приложения 6, 7).
Нагрузки, взятые из таблиц, сравниваются с действующи-
ми — Р3 i.
Условие прочности:
Пример. Найти Рср и Рсм для двухсрезной заклепки из Д18,
б/=3,5 мм; материал листа — Д16, 6=1,5 мм.
В приложении 6 находим Рср для односрезной заклепки, рав-
ную 185 кГ (1810 я). ' '
Для двухсрезной заклепки 1
Рср —2 • 185 = 370 кГ (3620 я). 1
В приложении 7’находим РСм = 365 кГ (3580 я). Прочность со- 1
единения определяется смятием листа. I
Для заклепки, работающей на отрыв головки, приближенно
можно принять разрушающую нагрузку
Р отр^ОДР ср,
t
где Рср — разрушающая нагрузка на срез односрезной заклепки.
Рассмотрим нагружение заклепочного соединения изображен-
ного на фиг. 357. В этом случае примем следующие допущения:
при деформации (срезе, смятии) заклепок смещение узла будет
530
1
состоять из поступательного смещения в направлении, параллель-
ном силе Р, и поворота узла относительно точки, называемой
центром жесткости (ц. ж.) заклепочного соединения. Таким
образом, центр жесткости соединения есть точка, приложение силы
в которой вызывает лишь поступательное (без поворота) смеще-
ние узла.
Принятое допущение позволяет рассматривать нагружение
представленного на фиг. 357 соединения раздельно силой Р, прило-
женной в ц. ж., и моментом относительно ц. ж. М = Р1, а затем
суммировать полученные силы, действующие на заклепку.
Фиг. 357,
Рассмотрим действие силы Р.
При 'поступательном смещении узла деформации всех заклепок
равны, следовательно, равны и напряжения в них, а силы, возни-
кающие в заклепках пропорциональны площадям среза их*.
Значит точка приложения равнодействующей Р' сил Р'3 L нахо-
дится в ц. т. площадей среза заклепок (на фиг. 357 показаны ре-
акции заклепок). Равновесие внешней Р и внутренних Р' сил
возможно только в том случае, когда они проходят через одну
точку. Следовательно, ц. ж. совпадает с ц. т. площадей среза за-
клепок. Отсюда координаты ц. ж. в прямоугольной системе коор-
динат определяются из:
ц.т
у“т
Де х„ у/ —координаты центров заклепок,
Af —площади среза заклепок,
/ — порядковый номер заклепки.
Силу P'3i определим по формуле (105), (105').
(106)
* Полагаем, что расчетной деформацией является срез заклепки.
1563
34*
531
Рассмотрим действие момента М (фиг. 357,6).
При повороте узла возникнет деформация заклепки, а значит
и напряжение в ней, пропорциональное радиусу rit соединяющему
и. ж. с центром заклепки.
Поэтому сила, возникающая в заклепке пропорциональна
радиусу и площади среза заклепки и направлена перпендику-
лярно радиусу g.
Рз i == kF [Г I,
где k — постоянный коэффициент пропорциональности.
Из условия равновесия узла и^еем, что момент внутренних уси-
лий в заклепках относительно ц. ж.
должен равняться внешнему моменту Л4. Используя вышеприве-
денное выражение для Р' м имеем:
Подставляя значение k в выражение для Р31, получим:
В случае заклепок одинакового диаметра формулы (106),
упрощаются:
.V =2^. у
ц.т п 1 Уил п
(Ю7)
(Ю7)
(106')
(107')
Рз1 И
Здесь п — число заклепок в соединении.
Сумма (2) распространяется на все заклепки.
Имея определенные по формулам (105), (107) значения
p'3i, складываем их графически и получаем силу, нагружающую
заклепку (фиг. 357, в),
(108)
Прочность заклепки, нагруженной силой Р3$, проверяется, как
изложено выше.
532
6 БОЛТОВЫЕ СОЕДИНЕНИЯ
Основные типы болтов, винтов, гаек и шайб, применяемые
в самолетостроении, приведены в приложениях 8-5-11.
В местах конструкции, где нет удобных подходов для заверты-
вания гаек, крепление элементов осуществляется с помощью вин-
Фиг. 358,
тов и анкерных гаек.
Основные типы анкерных
гаек приведены в прило-
жении 12. Пример креп-
ления носка крыла с по-
мощью анкерных гаек по-
казан на фиг. 358. Гайка
является самоконтрящей-
ся, так как имеющиеся в
ее головке прорези после
обжатия уменьшаются,
что обусловливает пружи-
нящие свойства гаек.
Для уменьшения требуемой точности [постановки анкерных
гаек (что значительно упрощает постановку их) в настоящее вре-
мя широко применяют «плавающие» анкерные гайки (фиг. 359,а),
размещенные в ленте (профиле) и перемещающиеся в ней в пре-
делах, обусловленных выпуклыми точками, т. е. в пределах
1,5—2 мм. Выпуклые точки выштампованы на ленте. Лента при-
клепывается к каркасу и при креплении обшивки к каркасу
Фиг, 359. Плавающие анкерные гайки,
а—крепление в ленте, б—‘крепление пластиной.
несовпадение осей отверстий в обшивке и в гайке компенсируется
возможным перемещением гаек. Возможна групповая (с помощью
длинной ленты) и одиночная постановка плавающих анкерных гаек
(фиг. 359,6). Винты применяют в случае, когда нет возможности
завернуть гайку на болте и когда соединения не работают на
срез.
533
Шайбы укрывают нерабочую часть резьбы и увеличивают пло-
щадь смятия под гайкой или головкой болта. Контровочные шай-
бы служат для контровки соединения.
Длина болта определяется по формуле (см. фиг. 360);
Фиг 360.
L=s+b+'h+&h,
где L —длина болта,
s — толщина соединяемого па-
кета,
6 — толщина шайбы,
h — высота гайки,
Дй — запас нарезной части бол-
та шага резьбы).
Полученная длина болта округляется до ближайшей большей
стандартной длины.
Расчет болтовых соединений
Болты в соединениях работают на срез, смятие и разрыв.
На срез болт рассчитывается по формуле:
(Ю9)
где Рб ср —сила, срезающая болт,
и — число плоскостей среза болта,
тв —предел прочности на сдвиг материала болта*.
Напряжения смятия болта равны напряжениям смятия проуши-
ны под болтом и поэтому болт на смятие должен проверяться
лишь в том случае, если материал его слабее материала проуши-
ны (что бывает редко).
На растяжение болт проверяется в сечении нарезной части по
формуле
^б.раст
< 0,65ов,
(110)
4
где ^«.раст—сила, растягивающая болт,
внутренний диаметр резьбы.
Коэффпаиснт 0,65 учитывает концентрацию напряжений в на-»
резной части болта.
При отсутствии других данных та принимается примерно равным 0,6 Q*.
534
Если болт одновременно подвергается растяжению силой
Рб.раст и срезу силой Р6 ср, то расчет болта производится на срез:
т=_^<4, (1П)
ИГ
где F--площадь сечения болта,
& —коэффициент, определяемый по фиг. 361, в зависимости
а Р& рост
от отношения —, где а=---------.
Т F
Для подбора диаметров болтов из ’материалов Д1Т, стали 45,
ЗОХГСА, работающих лишь на разрыв или срез, удобно пользо-
ваться таблицей (см. приложение 13).
• Фиг 361
Группы болтов, так же ’как и заклепок, могут быть нагружены
силой, приложенной *в центре жесткости (ц. ж.) этой группы и
вне его.
Термин «центр жесткости» болтового соединения аналогичен
таковому для заклепочного соединения. Координаты его опреде-
ляются по формуле (106).
Если сила приложена в центре жесткости болтового соедине-
ния, то нагрузка на 1 болт определяется из:
Р^Р^~Г> (Н2)
2.1
где Рг—площадь среза (или смятия, или разрыва) болта.
Если сила приложена вне центра жесткости, то момент внеш-
ней силы относительно ц. ж. соединения может при этом действо-
вать в плоскости, перпендикулярной осям болтов (см. фиг. 357) —
тогда болты работают лишь на срез (смятие), «и в плоскости, па-
раллельной осям болтов — тогда болты работают на срез (смятие)
от внешней силы и на разрыв от момента (фиг. 362). В первом
случае определение усилий, действующих на болт, производится
по формулам (105), (107), (108).
535
Во втором случае кронштейн нижним * ребром упрется в стен-
ку Л и болты будут работать на разрыв. Полагая, что реакция 7?
стенки проходит по оси нижнего болта и что разрывающее болт
усилие Рб грает ПрОПОрЦИОНЭЛЬНО КООрДИНЗТе Уг болта, отсчитан-*
ной от нижнего (неработающего) болта, получим формулу для
определения Рб грает, аналогичную формуле (107):
Р — АЛ
б I раст 22
(ИЗ)
Вывод этой формулы опускаем.
При F=const формула упрощается:
(113')
Кроме силы Рбграст, в случае, изображенном на фиг. 362, на
f? i
болт действует срезающая сила Рбгср=Р<Н-, и болт должен быть
проверен также на срез с учетом растяжения по формуле (111).
/ Особенности герметических заклепочных и болтовых
соединений
В современных герметических кабинах соединение их элемен-
тов также выполняется герметически.
Отличительной особенностью таких соединений является умень-
шение шага заклепок, болтов, увеличение числа рядов их и при-
менение специальных уплотнительных элементов. К числу ’послед-
них относятся полотняные ленты, (покрытые герметиком, замазки,
пасты, жгуты.
Герметизация соединений осуществляется как нанесением
уплотнительных материалов на поверхность собранного соедине-
ния (поверхностная герметизация), так и введением уплотнителя
между соединяемыми деталями или между деталями и заклепками
или болтами (внутришовная герметизация). Наиболее употреби-
* При данном направлении силы.
536
тельные герметики — самовулканизирующиеся пасты У-ЗОМ,
УТ-31, жидкий раствор ВТУР, замазка и пропитанная замазкой
тканевая лента ТГ-18 и др.
EZZZZZZZZ
Г ернелтзирующая
ЛДГЛЛJ
Фиг 363.
На фиг. 363, 364 показаны типовые конструкции заклепочных
и болтовых герметических соединений.
Тцоколобые
Тиоколодая
замазка
жгуты Шайбы из тио-
колодой ленты
ТиохалоВав лента
Тиоколовая замазка
fMSSlX\
Тиокалобая
лента
ШаиВы из
тиохолаВои
ленты
7иаколо8ые жгуты
ТиохолоВая заназха
Тиокалобая лента
Фибровое
уплотнение
ТиоколоВые жгуты
Фиг. 364. Внутришовная герметизация соединений.
а—герметизация болтов с выступающими головками, б—герметизация бол-
тов с потайными головками, в—герметизация анкерныч гаек.
Расчет на прочность герметических соединений не отличается
от изложенного выше для обычных соединений.
7. СВАРНЫЕ СОЕДИНЕНИЯ
Сварные соединения широко применяются в современном са-
молетостроении. Сварка обеспечивает получение деталей сложной
конфигурации путем соединения простых по конфигурации дета-
лей. Применение сварных конструкций вместо клепаных умень-
шает вес конструкции, снижает трудоемкость. Современные методы
сварки позволяют получить при этом достаточную прочность и на-
537
нежность сварного шва. Особенно широко сварка применяется
в конструкциях: шасси, управления, двигателей. Для качествен-
ной сварки рекомендуется соотношение толщин свариваемых дета-
лей от 1 : 1 до 1 :2. Типы сварных швов показаны на фиг. 365.
Сварные швы в соединениях рекомендуется располагать так,
чтобы они работали на срез. С этой точки зрения соединения ли-
стов и труб, изображенные на фиг. 365, б, в, д, ж, предпочтительнее
соединении, изоораженных на фиг. 365, a, с.
Фиг. 365,
Сварные швы рассчитываются на срез
мулам:
р
t —— <?тв
гср
Р
3 — “Д <Р°в»
* разр
или разрыв
по фор-
(114)
(По)
где тв~0,6зв; оа — предел прочности растяжения материала листа
(трубы);
Ф коэффициент, учитывающий ослабление материала
сваркой (неоднородность шва, наличие структурных
изменении, остаточных напряжений), который может
оыть принят равным 0,8;
ср, разр площадь сварных швов, определяемая как произведе-
ние числа швов на периметр одного шва L н на мень-
шую из толщин свариваемых материалов дгащ
538
J
Так, например, для фиг. 365,6 при 61<Й2*
F=2Ldrt
ДЛЯ .фиг, 365,6 'При 61<б2
Fs^jidbi.
Сварные швы трубчатых стержней рассчитываются по экспе-
риментальным формулам (см. оправочную книгу 'по расчету само-
лета на прочность — Астахов М. Ф. и др., Оборонгиз, 1954,
стр. 158—161).
8. КЛЕЕВЫЕ СОЕДИНЕНИЯ МЕТАЛЛОВ
Соединение элементов конструкции с помощью склеивания
стало все чаще применяться в конструкции самолетов. По сравне-
нию с клепкой, склеивание повышает усталостную прочность кон-
струкций, повышает качество 'поверхности, улучшает герметизацию
конструкции, снижает стоимость проектирования и изготовления
Соединения
со стыковым
элементом
(плиткой* бтулкои и т. л)
Плоскостные
соединения
Нахлестка
Врезные
(шпунтовые)
соединения
Тадрадые
соединения
«
Цилиндрические
(трудчатые)
соединения
Фиг. 366. Рекомендуемые конструктивные формы клее*
вых соединений.
конструкций. В конструкциях применяют также комбинированное
соединение — клей с заклепками или сварными точками (см.
фиг. 29, гл. XIII).
В настоящее время применяются клеи на смоляной основе, ра-
ботающие при температуре 200° С (473° К) и выше.
При обычных температурах предел прочности клеевого соеди-
нения равен 150—200 кПсм2 (15—20 А!н/л12).
Конструктивные формы клеевых соединений изображены на
фиг. 366.
539
Клеевые соединения хорошо работают на сдвиг и плохо на «от*
дирание», т. е. на растягивающую силу, приложенную к краю листа
перпендикулярно плоскости склеивания.
Рекомендуется концы таких швов закреплять заклепками или
контактной сваркой.
Недостатком клеевых соединений является изменение механи-
ческих свойств его в зависимости от температуры.
Широко применяется склеивание при изготовлении двухслой-
ных дуралюминовых и стальных обшивок с металлическим сото-
вым заполнителем,
Марки применяемых клеев и их характеристики при различ-
ных температурах приведены в приложении 14.
Прочность клеевого соединения, работающего на сдвиг, прове-
ряется по формуле:
(ив)
где Ь, / — соответственно ширина и длина клеевого шва,
/г —число работающих швов.
9. СОЕДИНЕНИЯ С ПОМОЩЬЮ КОМПЕНСАТОРОВ
Компенсатором называется специальный элемент в конструк-
ции соединения, поглощающий в процессе сборки отклонения от-
дельных деталей от номинальных размеров. Таким образом, ком-
пенсатор позволяет осуществлять изготовление отдельных деталей
с большими отклонениями размеров от номинала, которые затем
компенсируются при соединении этих деталей. Снижение требова-
ний к точности изготовления деталей при одновременном сохране-
нии точности собранного узла, панели, агрегата снижает трудо-
емкость изделия и стоимость его.
При сборке крыла с разъемом в плоскости хорд методом сбор-
ки от обшивки (см. фиг. 16, гл. ХШ) точность внешних обводов
крыла определяется точностью ложементов, в которые уклады-
вается обшивка. Неточность изготовления по высоте верхней
и нижней частей лонжеронов компенсируется прокладкой, подби-
раемой при сборке.
Применение уголкового компенсатора для соединения стрин-
гера с нервюрой, шпангоутом (фиг. 57, д, гл. XIII) обеспечивает
изготовление шпангоутов, нервюр с значительными допусками.
Регулируемый компенсатор (см, фиг. 247 гл. XVII) имеет виль-
чатый наконечник с резьбой, ввернутый в тягу проводки управле-
ния (или в подкос крепления двигателя, в шток цилиндра шасси
и т. п.), Таким образом неточность расстояния между двумя шар-
нирами компенсируется ввертыванием пли вывертыванием вильча-
то го н а кон еч н и к а.
Применяется также компенсация неточностей в изготовлении
собираемых изделий оставлением специальных припусков по сты-
540
ковочным поверхностям этих изделий. Эти припуски снимаются
только после окончательной сборки изделий при соединении их
друг с другом.
Компенсатором является также увеличение диаметра отверстий
относительно диаметра болта, работающего на растяжение, при-
менение плавающих анкерных гаек и т. >п.
Рассмотренные примеры не охватывают всех видов компенса-
торов. Они лишь поясняют основное назначение их как элементов,
которые наиболее простыми путями компенсируют при сборке не-»
точности производства.
542
П риложение 1
ТОРМОЗНЫЕ АВИАКОЛЕСА ПОД ШИНЫ ВЫСОКОГО ДАВЛЕНИЯ
Обозначе- ние ШИНЫ и колеса Индекс колеса Стояночная нагрузка при взлетном ве- се самолета Стояночная нагрузка при посадочном лесс са молста Рабочее дав- ление в шипе Максимально допустимая нагрузка V‘*V iidix пиши вя1Гсох Работа, пог- лощаемая шиной при 8мл Предельная радиальная нагрузка Боковая раз- рушающая нагрузка Взлетная скорость Посадочная скорость Вес колеса без шипы Вес шипы
Рст* вал РСТ. ПОС Ло Ат.д S м. 1 Аы Рпр Р раз V взл ^ПОС GK Gin
кГ кГ к Г 1см- кГ мм кГ-м кГ кГ км/час км 1 час кГ кГ
570Х1-10В Кт51 1 200 950 7 5 250 85 190 7 800 3000 240 240 32,2 8,9
600X155В Кт44 2 100 1 940 6,8 5 800 91 245 15000 5 770 280 210 40 2 пп » 10,6 1 Г*
660X160В Кт28 2900 2 175 9 8 300 89 315 17 000 6 530 275 205 38 15
660X160В Ki 63 2900 2 200 9 8 300 89 315 20 700 7 250 . 320 225 61 15
660X200В Кт37 3 600 2 710 9 9 300 107 430 19500 7 540 315 240 50 14,9
800X200В Кт 50 4250 3 350 9 13 000 132 720 25 100 11 400 300 240 80 20
800 x225 В Кт39 4 200 2 980 9 14 200 132 800 20 800 10500 300 220 58 21,7
800 x225В Кт52 4 200 3 000 9 14 200 132 800 25 400 11 500 300 215 77 21,/
880x230В Кт69 5 100 3900 10,5 15 500 130 900 28 000 12 750 360 270 103 2d
950 x250В Кт59 4 600 3 800 9 14 000 130 820 25 300 11 500 34U 250 99 25
1000 X 280В Кт72 5 265 4 600 8 17 500 155 1 200 29 000 13 150 300 220 120 37
1050 x300В Кт77 5 800 5 400 5,5 16 000 188 1 370 31500 14 500 185 154 102 36
1100 x330В К т 16/2 9 500 6 800 9 32 000 197 2 680 52 300 23 700 300 250 160 67
1150x355В Кт36/3 12 000 И 000 8,5 36 000 212 3 220 60 000 30 000 260 200 166 j (
1160 4390В Кт76 10 000 7 000 12,5 31 800 160 2150 55 000 25 000 360 280 190 57
1260 x 390В Кт 42 12 000 9500 8 37 700 233 3 880 61 000 34 400 340 280 275 93
1500x50013 Кт25 20 000 13 000 9,2 68 000 305 8 900 81 000 45 000 300 210 260 181,3
1500 x500В 1<т43 26 000 15 000 И 81 500 312 10900 78 000 48 750 320 230 295 181,3
1500 x500В Кт58 25 000 13 000 11 81 500 312 10 900 78 000 48 750 320 230 158,5 1 /6,0
1700Х550В Кт31 23 000 14 000 9,5 28 000 313 10000 93 000 51 700 300 230 330 225
Приложенне 2
ТОРМОЗНЫЕ АВИАКОЛЕСА ПОД
ШИНЫ ПОЛУБАЛЛОННОГО ТИПА
Обозначе- ние шины и колеса Индекс колеса Стояночная на- грузка при взлет- ном весе само- лета Стояночная на- грузка при поса- дочном весе са- молета Рабочее давле- ние в шине Максимально допустимая на- : грузка 1'‘кс/ nd и 1‘ИШШ ВЛД 1?ЭД 1 Работа, погло- щаемая шиной при 5М.Д Предельная ра- диальная на- грузка Взлетная ско- рость Посадочная скорость Вес колеса без шины Вес шины
РСТ. В31 РС т пос Ро РМ,Д &М.Д 4д Р пр ^В31 VIlOc Gm
кГ кГ к Г 1см* кГ мм кГ-м кГ км)час км {час кг кг
500X150 K14I-T 141 480 480 2,5 1 800 88 60 5 000 120 105 8,2 6,9
595X185 К134-Т 334 630 630 2,5 2 550 106 140 4 200 105 а 84 10,5 9,8
600X180 К142-Т 342 1300 1300 4,5 4 500 101 200 8 400 155 140 13,4 10,3
800X260 К163-Т 163 2800 2800 4,5 8 900 165 670 14 200 160 150 31 24,5
900X300 К145-Т 545 3830 3830 4,7 12 300 187 1055 21 300 160 140 48 36,5
1200X450 7755-774 6000 6000 3,8 20 800 271 2600 33 500 125 110 51 81
Приложение 3
НЕТОРМОЗНЫЕ АВИАКОЛЕСА ПОД ШИНЫ ВЫСОКОГО ДАВЛЕНИЯ
Обозначе- ние шины п колеса Индекс колеса Максимальная стояночная на- грузка на колесо Динамическая нагрузка Усадка шипы при РД)1И и Рабочее давле- нпс в шине Максимально- допустимая на- грузка Усадка шины при Рм.д Работа, погло- щаемая шиной при бмл Предельная ра- диальная на- грузка Взлетная ско- рость Посадочная скорость Вес колеса без шины Вес шипы
Рст* макс ^лин °1Ш1 /’О Р М.Д °м,л Дил Увзл Иное GK
кГ кГ М М к Г/см2 кГ ММ кГ-м кГ км/час км/час кг кг
570ХМ08 К 283 800 2000 42 7 5250 85 190 11 200 250 190 8,9 8,9
600X1558 К 252 1490 2100 46 6 5150 90 220 10700 275 200 10 10,6
К 257 2250 2750 47 7,5 6100 87 227 14600 270 200 14 15
660х160В 1300* — 60 7,5 6100 87 227 14 600 270 210*
900 X 275В К270/2 3150 5 200 79 5,5 13 000 159 880 17 400 300 240 27 37,5
900X275В К 286 3150 5 200 79 5,5 13 000 159 880 17 400 300 240 21 37,5
поохззов К 278 9500 12 000 98 9 31 000 197 2 680 47000 300 210 52 67
1700X550В К 282 21 000 31 000 156 9,5 78 000 313 10 000 85 000 300 230 170 226 '
* Нагрузка п скорость даны при разворотах для
колеса, используемого
в качестве подкрыльного.
Й
Приложение 4
НЕТОРМОЗНЫЕ ЛВИАКОЛЕСА ПОД ШИНЫ ПОЛУБАЛЛОННОГО ТИПА
Си " ™ 8 Обозначе- ние шины и колеса Индекс колеса Максимальная стояночная на- грузка на колесо Динамическая нагрузка Усадка шины ПРИ Рдин Рабочее давле- ние в шине Максимально допустимая па грузка Усадка шины । при Рм.д Работа, погло- щаемая шиной при ам.д Предельная радиальная нагрузка Взлетная ско- рость Посадочная скорость Вес колеса без шины Вес шины
Рст, макс Р лип ® дин Ра РМ.Д Аьд Р пр ^взл ^ПОС GK
кГ кГ кГ]см~ кГ ММ кГ-м кГ км/час км/час кг кг
200 X 80 41-3 165 165 16 3,5 465 32 6 790 160 90 0,8 1,3
300X125 К 350 370 500 32 3,5 1340 65 36 2190 200 150 1,9 3,6
400X150 44-1 925 1050 49 4 3000 99 130 6170 205 205 3,3 5,2
470X 210 К 353 1150 1600 57 3,5 4500 115 200 7500 185 175 4,7 9,0
500X125 К 250 575 670 32 3,5 1800 64 50 2920 165 150 9,0 5,9
600X180 К 277 810 1700 52 4,5 4500 104 200 7150 255 234 6,7 10,3
600 X 250 45-1 1300 1750 79 2,5 4470 159 315 7650 125 ПО 6,7 15,7
700X150 39-7 925 1300 47 3,5 3300 94 135 6750 165 150 8,0 И,1
Си
Фь СП
ОСНОВНЫЕ ТИПЫ ЗАКЛЕПОК,
Тип заклепок Обычные
Форм ы
j о г 1 1
та Xs та о 5 °*. о ~ 2 с £? з - , 1 ^>44 а = /25’ ,
О «м о та £Х tj О £ <Г\., + I '4/ s-rz
О СХг О до
та 22 О О 3. та н CJ и > + ±: £ Он та су —< з* *- rtj d L-l—l Ljj лшя ик°^9' 0^30° Потаи- лпоско- Потаи* ная вьтум-
« *=; “ та О. Й 'Ч ° *= * 2 лия
EL -"*. £0 Н Сц i=t 1 1
В95 25 2^-10 3501А 3515А 3531А 3547А 3558А
АМг5 16 24-10 3502А 3516 А 3532А 3548А 3559А
Алю- Д18П 19 2и2,6 3503А 3517А 3533А 3549А 3560А
МИНИ- №
евые
спла- Д19П 28 2,6—8 3504А 3518А 3534А 3550А 3561А
вы
А1Мц 7 24-6 3505А 3520А 3536А — 3562А
Д16П 25 — м —-*«
15,10 34 2-:-10 3506А 3521А 3537А 3551А 3563А
20ГА 50—63 3,5—iu 3507А 3522А 3538А — —
Стали 1Х18Н9Т 44 24-6 3508А 3523А 3539А 3552А 356421
ЗОХГСА 72 54-12
546
Приложение 5
ПРИМЕНЯЕМЫЕ В САМОЛЕТОСТРОЕНИИ
С высоким сопро- тивлением срезу Для односторонней клепки
Взрывные двух- камерные С сердечником Г айкн-пистоны
13
11
головки
1! h Потаи пая L й у 4= » гт Ц- лес Г0Я 1 1] 1$тай- нал л л ь р 1 йу- руг- вал а V/U J- I + 1 а /кт ная 1и а = ПО ’
а fljlGCffQ- Ёыпук- лая /Jj к ОЯ h L
Кольцо 2035А55 II , 1 2040А56 || 1 1 204IA56 Пистоны 1649С49 Сердеч- ники 1650С49 1C4SC49 I651C52 1653С52 Винт 1654С51 \
2032А55 2036А55 2037А55 ь 2034А55 2038А55 2039А55 1 1 1 1 1 1 i 1 1 а J а ^Ч-b-w* 1 1 1 1 1
35*
547
РАСЧЕТНЫЕ ДАННЫЕ ДЛЯ ПОДБОРА ДИАМЕТРОВ ЗАКЛЕПОК
Диаметр непоставленной заклепки (мм) Разрушающее усилие на срез заклепки по одной плоскости (кГ)
АМг5 Д18 В-65 15 А 20ГА
2,6 90 100 135 180 265
3 120 135 175 . 240 350
3,5 165 185 240 325 480
4 215 240 315 425 630
5 335 375 490 665 980
6 480 535 705 960 1410
7 655 730 960 1310 1920
8 855 955 1255 1710 2510
10 1335 1490 1965 2670 3930
12 1925 2150 2825 3850 5650
36 1563
Приложение 7
РАСЧЕТНЫЕ ДАННЫЕ ДЛЯ ПОДБОРА ДИАМЕТРОВ ЗАКЛЕПОК
Разрушающее усилие на смятие листа в зависимости от его толщины (кГ)
Лш1мет1 непоста ленной закдепк (деле) ПЮ1С- риал листа 0,3 0,4 0,5 0,6 0,8 1 1,2 1,5 1,8 2 2,5 3 3,5 4 5 6 8 10
2,5 Д16А-1 20 45 55 60 70 75 90 95 110 125 145 155 180 215
3 Д16А-Т . 20 55 65 70 85 90 105 ПО 125 145 170 180 210 250 315 380
3,5 Д16А-Т 20 65 75 85 100 105 120 125 145 170 195 210 245 295 365 440 490 610 735
4 Д16А-Т 20 95 ПО 120 140 145 170 190 225 240 280 335 420 505 560 700 840 980 1120 1400 1680
5 Д16А-Т 20 180 210 240 280 300 350 420 525 630 700 875 1050 1225 1400 1750 2100 2800 3500
6 Д16А-Т 20 360 420 505 630 755 840 1050 1260 1470 1680 2100 2520 3360 4200
7 Д1ЬА-Т 20 735 880 980 1225 1470 1715 1960 2450 2940[3920 4900
8 Д16А-Т 20 1010 1120 14С( 1680 1960^2240 2800 3360 4480 5600
10 Д16А-Т 20 1750 2100 2450 2800 3500 42001б600 7000
12 Д16А-Т 20 29403360 4200 5040*6720 1 8400
g Примечание. В пределах жирных линий—рекомендуемые толщины листов.
/7риложение 8
БОЛТЫ
Наименование
нормали
Эскиз
По- Марка стали Рекомендуе- Шифр Основное назначение
садка или сплава мые диаметры
Болты с шестигран-
ной головкой
с5 45
38ХА
ЗОХГСА
Х17Н2
Д1-Т и Д1-П
Л62ПТ и
ЛС59-1
От 2,6 до 18 3001А
От 4 до 18 3002А
От 5 до 24 3003А
От 5 до 18 3004А
От 5 до 12 3005А
От 4 до 12 3006А
Основной тип болтов
при работе на разрыв
Болты с шестигран-
ной головкой с умень-
шенным размером под
ключ и короткой частью
Болты с шестигран-
ной головкой третьего
класса точности (А3)
ЗОХГСА От 5 до 24
45 От 5 до 18
ЗОХГСА От 5 до 12
Д1-Т я Д1-П
3016 А
3017А
3018А
3021А
Основной тип болтов
при работе на разрыв
Основной тип болтов
при работе на срез в
ответственных соеди-
нениях
Болты с уменьшен-
ной шестигранной го-
ловкой третьего класса
точности (С3) и корот-
кой нарезной частью
ЗОХГСА
От 5 до 24 | ^3024 А
Основной тип болтов
при работе на срез в
ответственных соеди-
нениях
Болты с шестигран-
ной головкой для шар-
нирных соединений,
второго класса точ-
ности (А)
Болты с шестигран-
ной головкой ступен-
чатые
Болты конические
ЗОХГСА От 4 до 22 3027 А L 1 Оси шарниров
3 1 ЗОХГСНА От 6 до 24 3030А i Оси шарниров
ЗОХГСА Х17Н2 От 3 до 20 От 5 до 18 ЗОЗЗА 3034А Для особо ответст- венных соединений,ра- ботающих на срез
Болты с полукруглой
головкой
45 От 1,7 до 10
ЗОХГСА От 5 до 10
Х17Н2 От 1,7 до 10
Д1-Т и Д1-Т От 3 до 10
Л62ПТ и ЛС59 От 1,7 до 6
1-Л62ПТ и От 1,7 до 6
ЛС59-1 анти-
магнитн.
3050А
3051А
3052А
3053А
3054А
3054А
ант.
Для неответственных
соединений при работе
на разрыв и срез
Болты с потайной го-
ловкой угол 90°
45
ЗОХГСА
Х17Н2
Д1-Т и Д1-П
Л62ПТ и
ЛС59-1
Л62ПТ и
ЛС59-1
антимагннтн.
От 1 до 10
От 5 до 10
От 1 до 10
От 3 до 10
От 1 До 6
От 1 до 6
3063А
3064А
3065А
3066А
3067А
Для соединений, ра-
ботающих на срез при
невозможности поста-
вить болт с высокой
головкой
3067А
ант.
Продолжение
Наименование
нормали
Эскиз
Болты с потайной го-
ловкой угол 90° треть-
его класса точности (A'j)
По- садка Марка стали или сплава Рекомендуе- мые диаметры Шифр Основное назначение
Аз ЗОХГСА От 5 до 20 1 3079А Для ответственных соединений, работаю- щих на срез
Приложение 9
ВИНТЫ
Наименование
нормали
Эскиз
Марка стали
нлп сплава
Рекомендуе-
мые диаметры
Шифр
нормали
Особое назначение
Винты с шестигран-
ной головкой
45
От 2,6 до 10
3151А
Для соединений, в ко-
торых гайкой является
одна из деталей
Винты с цилиндриче-
ской головкой
10 От 1 до 10 От 1 до 10 3157 А 3158 А 3159А Для соединений, в ко- торых ганкой является одна из деталей
Х17Н2 П62ПТ и ЛС59-1
От 1 до 6
Л 62 ПТ и ЛС59-1
антимагнитная От 1 до 6 3159 -
ант.
Винты с полукруглой
головкой
Винты с потайной го-
ловкой, угол 90°
10 Х17Н2 Д1-Т и Д1-П Л62ПТ и ЛС59-1 Л62ПТ и ЛС59-1 антимагнитная От 1,7 до 10 От 1,7 до 10 От 3 до 10 От 1,7 до 6 От 1,7 до 6 3166 А 3167 А 3168 А 3169 А 3169 А ант. Для соединений, в ко- торых гайкой является одна из деталей
10 Х17Н2 Д1-Т и Д1-П Л62ПТ и ЛС59-1 Л62ПТ и ЛС59-1 антимагнитная От 1 до 10 От 1 до 10 От 3 до 10 От 1 до 6 От 1 до 6 1 3177 А 3178 А 3179А 3180 А 3180А авт. Для соединений, в ко- торых гайкой является одна из деталей
П раложенис 10
ГАЙКИ
Наименование
нормали
Марка стали или
сплава
Рекомендуемые Шифр
диаметры нормали
Основное назначение
Гайки шестигранные,
высокие
А12 От 4 до 18 3301А Для болтов, работа-
ЗОХГСА От 5 до 24 3302А ющих на разрыв
Х17Н2 От 2 до 18 3303А
Э11481 От 5 до 18 3304А
ДНТ От 4 до 12 3305А
ЛС59-1 От 4 до 12 3306А
ЛС59-1 антимагнитная От 4 до 12 3306А ант,
Продолжение
Наименование нормали Эскиз Марка стали или сплава Рекомендуемые дна метры Шифр нормали Основное назначение
* Гайки шестигранные низкие А12 Х17Н2 ЭИ481 Д1-Т ЛС59-1 ЛС59-1 антимагнитная От 5 до 24 От 5 до 18 От 5 до 18 От 5 до 12 От 5 до 12 От 5 до 12 3310А 3311А 3312А 331 ЗА 3314А 3314А ант. Для болтов, работаю- щих на срез
р 1 1 1
Гайки шестигранные для нерасчетных креп- лений и контровки * А12 и 20 Д1-Т и Д16А-Т ЛС59-1 ЛС59-1 антимагнитная От 2 до 42 От 2 до 12 От 2 до 12 От 2 до 12 3320А.3321А 3322А 3323А 3323А ант. Для нерасчетных креплений, контровки
Гайки шестигранные, корончатые, усиленные А12 ЗОХГСА Х17Н2 ЭИ481 Д1-т От 4 до 18 От 5 до 24 От 5 до 18 От 5 до 18 От 5 до 12 3326А 3327А 3328А 3329А ЗЗЗОА Для болтов, работаю- щих на разрыв
Гайки шестигранные, прорезные, низкие Ьъ 1 ч * * 1 А12 Х17Н2 Э14481 дьт ЛС59-1 ЛС59-1 антимагнитная От 4 до 24 От 4 до 18 От 4 до 18 От 5 до 12 От 4 до 12 От 4 до 6 3341А 3342А 3343А 3344А 3345А 3345А ант. - Для болтов, работаю.- ших на срез ч
№ Гайки самоконтря- щиеся шестигранные, высокие ЗОХГСА От 3 до 24 3350А Для болтов, работаю- щих на разрыв
Гайки самоконтря- щиеся, шестигранные, низкие ЗОХГСА От 5 до 24 3355А Для болтов, работаю- щих на срез
-•
П риложение 11
ШАЙБЫ
-именование нормали Эскиз Марка стали или сплава Шифр нормали
Пайбы Д16А-Т 3401А
10; 20 и 10Г2А 3402А
АМцА*\\ 3403А
ЗОХГСА 3404А, 3405А
1X18 НЭТ 3406А
мзм 3407А
Л62Т и ЛС59-1 3408А
Л62Т и ЛС59-1
антимагнитная 3408А ант.
Пайбы обжимные 20 Л62М 3420А 3421А
Наибы контровочные с шутреипими зубцами X 65Г БрОФб,5-0,15 3431А 3432А
Пайбы контровочные л ухсюронпие с упо- 1 м в гнездо V 20 1Х18Н9Т 3451А 3452А
Наибы контровочные
I' посторонние с упо-
р ч в гнездо
20
1Х18Н9Т
3463А
3464А
П риложение 12
АНКЕРНЫЕ ГАЙКИ
* Наименование Эскиз Шифр Обозначение на чертеже, резьба диамет- ром d
1954А56
Шифр—d
Гайки самокон-
трящиеся пла-
вающие
Гайки самокон-
трящиеся двух-
у шковые
Гайки самокон-
трящиеся одно-
ушковые
Гайки самокон-
трящиеся угло-
вые
1956А56 Шифр—d
1958А56 * Шифр—d
1960А56 Шифр—d «
•»
557
Приложение 13
расчетные данные для подбора диаметров болтов
Диаметр болта Шаг резьбы Разрушающее усилие на срез по одной плоскости (кГ) Разрушающее усилие на растяжение (кГ)
Д1-Т Сталь 45 Сталь ЗОХГСА Д1-Т Сталь 45 Сталь ЗОХГСА
Посадка G Посад! <а Х3
3 0,5 176 283 484 160 285 520
1 0,7 313 504 860 320 503 920
5 0,8 498 787 1 344 510 805 1 480
6 1 723 1 140 1 946 725 1 150 2110
8 1,25 1 290 2 030 3 465 1 315 2070 3 800
10 1,5 2 036 3 181 5 432 2 060 3 270 6 000
12 1,5 2 931 4 563 7 791 3 080 4 850 8 940
14 1,5 4013 6 232 10640 4 300 6 829 12540
16 1.5 5 264 а 8151 13 926 5 700 9 297 17 048
18 1.5 6 685 10 373 17 710 7350 12 133 22 247
20 1,5 8 242 12 792 21 840 9 160 15 345 28 136
)'} 1,5 1 000 15 457 26 390 11 250 18 934 34 716
24 1,5 11 925 18 409 31 430 13 680 22 900 41 983
27 1,5 -" 23 315 39 807 . 29 550 54 180
40 1,5 28 805 49 180 — 37 050 67 930
Примечание. Приняты разрушающие напряжения: На срез болтов На растяжение болтов для Д1-Т—27 кГ1мм'1 для ДМ— 38 кГ1мм1 . стали 45 — 41 кГ[мл& . стали 45 —60 кГ/лм<2 . стали ЗОХГСА—70 2 . стали ЗОХГСА—ПО
558
П риложение 14
СТАТИЧЕСКАЯ ПРОЧНОСТЬ КЛЕЕВЫХ СОЕДИНЕНИЙ
Марка клея Температура в °C Склеиваемые материалы
—60 20 60 100 150 200 300
Преде н Л про1 ений д [ПОСТИ уралю при с, мина I 1,виге со j icrjcM^ едн-
БФ-2 70 200 95 40 13 —- Алюминий и его спла- вы, медь и его сплавы, стали различных ма- рок, пластмассы, ор- ганическое стекло, де- рево, фибра, кожа, фар- фор, керамика
ПУ-2 135 190 140 80 14 ——' Дуралюмин с пено- пластом типа ПС-1 и стеклотекстолитом типа КАСТ
ВС-10-Т 120 130 — 100 — 40 Алюминий и его спла- вы, стали, стеклотек- столит, пенопласты
В К-32-200 180 170 160 — ' — 70 35 Алюминий и его спла- вы, стали
В К-32-ЭМ 110 150 170 20 _ — — То же
МПФ-1 150 75 — —-
СООТНОШЕНИЕ МЕЖДУ МЕХАНИЧЕСКИМИ ЕДИНИЦАМИ
СИСТЕМ МКГСС и СИ
Наименование величины
Система Л1КГСС Система СИ
Масса
Сила
Удельный вес
Плотность
Давление (напряжение)
Работа
Мощность
1 т. е. л.
1 кГ
1 кГ!м^
т. е. м.
1---------
л/3
кГ л
1------
сек
л. с.)
9,81 кг
9,81 н
9,81 н/м*
н Мн
9,81--(9,81-10-2—)
-М2
9,81 дж
9,81 вт (736 вт)
ЛИТЕРАТУРА
1. Архангельский Г. И., Проектирование элементов конструкции само-
ютов, Оборонгиз, 1955.
2. Астахов М Ф. и др., Справочная книга по расчету самолета на проч
юсть, Оборонгиз, 1954
3 Бойцов В. В. и др., Сборочные и монтажные работы, Оборонгиз, 1959
4. Бельский В. Л. и др., под редакцией Кана С. Н., Конструкция лета-
ельных аппаратов, Оборонгиз, 1963.
5. Григорьев В. П., Технология самолетостроения, Оборонгиз, 1960.
6. Ж о в и н с к и й Н. Е., Тепловой барьер при сверхзвуковых скоростях по
[Ста, Воениздат, 1959.
7. К а н С. Н., Прочность самолета, Оборонгиз, 1955.
8. Каи С. Н., Свердлов И. А., Расчет самолета па прочность, Оборон-
ИЗ, 1958.
9. Келдыш М. В., Г р о с с м а н Е. Н., М а р и в Н. И., Вибрации на само*
1ете, БНГ, 1942.
10. Комитет технической терминологии АН СССР, «Терминология конст-
рукции и прочности самолетов», АН СССР, 1954.
11. М а к а р е в с к и й А. И., Француз Г. А., Силы, действующие па са-
молет в полете и при посадке, БНТ, 1943.
12. О с т о с л а в с к и й И. В., Аэродинамика самолета, Оборонгиз, 1957.
13. П о л и к о в с к и й В. И., Самолетные силовые установки, Оборонгиз,
1952.
14. Прицкер Д. М., Ту рьян В. А., Аэромеханика, Оборонгиз, 1960.
15. ПротопоповА. Б., Жулев В. И., Конструкция и работа частей са-
молета, Воениздаг, 1958.
16. Ростовцев Г. Г., П а н о в к о Я. Г., Строительная механика самолета,
1 I—III, ЛКВВИА, 1950—1953.
17. Федоров В. И., Конструкция реактивных самолетов, Воениздат, 1960.
18. Ф е о д о с ье в В. И , Синярев Г. Б., Введение в ракетную технику,
Оборонгиз, 1960.
19. Фомин Н. А , Проектирование самолетов, Оборонгиз, 1961,
20. Шульженко М. Н., Мостовой А. С., Курс конструкций самоле-
ов, Оборонгиз, 1956.
21. Периодическая советская и зарубежная печать.
22. Технические описания самолетов Ил-18, Ту-104, Ан-10А, Ан-24.
ОГЛАВЛЕНИЕ
Стр
Предисловие......................................................... 3
Раздел I
ОСНОВЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ САМОЛЕТА
Глава I. Основные понятия строительной механики....................... 6
1. Предмет строительной механики. Элементы сооружений............ 6
2. Понятие о расчетной схеме. Основной метод строительной
механики ....................................................... 6
Глава II. Образование и расчет плоских статически определимых ферм 9
I. Образование плоских ферм...................................... 9
2. Определение усилий в стержнях плоских ферм................... 14
Глава III. Образование и элементы расчета пространственных стати-
чески определимых ферм........................................... 25
1. Образование пространственных ферм............................ 25
2. Определение усилий в стержнях пространственных ферм .... 27
Глава IV. Сжатые стержни............................................. 34
1. Устойчивость сжатых стержней................................ 34
2. Продольный изгиб сжатых стержней за пределом пропорциональ-
ности .......................................................... 36
3. Расчет сжатых стержней . .................................... 37
Глава V. Основы расчета тонкостенных конструкций..................... 44
1. Сжатые тонкостенные панели.................................. 44
2. Тонкостенные конструкции, работающие на сдвиг................ 54
3. Тонкостенные конструкции, работающие на кручение............. 58
Раздел II
ОСНОВЫ ПРОЕКТИРОВАНИЯ САМОЛЕТОВ
Глава VI. Требования, предъявляемые к самолетам.................... 64
1 Основные части самолета и их назначение...................... 64
2 . Общие требования, предъявляемые к самолетам................ 67
Глава VII. Классификация самолетов................................. 81
1 Классификация самолетов по назначению........................ 81
2 Классификация самолетов по конструктивным признакам .... 88
Глава VIII Внешние нагрузки, действующие на самолет............. 96
1. Горизонтальный полет........................................ 96
2. Криволинейный полет в вертикальной плоскости................ 96
3. Полет в неспокойном воздухе. Предельные перегрузки.......... 98
561
4. Криволинейный полет в горизонтальной плоскости..........» .
5. Посадка....................................................
Глава IX. Расчетные нагрузки и нормы прочности самолетов
1. Расчетные нагрузки . . . .
2. Нормирование нагрузок . . .
3. Аэродинамический нагрев . .
4. Ограничения скорости самолета
Глава X. Материалы, применяемые в конструкции самолета
1, Выбор материала..............................................
2. Краткая характеристика основных материалов...................
Глава XI. Выбор схемы и основных параметров самолета.................
1. Статистика...................................................
2. Выбор схемы и основных параметров самолета . . . ............
Глава XII. Центровка и компоновка самолета......................
1. Приближенный весовой расчет самолета....................
2. Компоновка и центровка самолета.........................
Стр.
102
104
105
105
108
111
114
115
115
117
125
125
132
146
146
147
Раздел III
КОНСТРУКЦИЯ И РАСЧЕТ АГРЕГАТОВ САМОЛЕТА НА ПРОЧНОСТЬ
Глава XIII. Конструкция крыльев и расчет их на прочность ..... 160
1. Формы и параметры крыльев.................................... 160
2. Конструктивные схемы и конструкция крыльев . . . 172
3. Стыковые соединения крыльев.................................. 196
4. Конструкция элементов крыла.................................. 201
5. Нагрузки, действующие на крыло............................... 217
6, Расчет на прочность сечения крыла. Расчет нервюр............. 229
Флаттер крыла............................................... 245
о? Механизация крыла............................................ 253
Г лава XIV. Конструкция оперения и расчет его на прочность........... 265
1. Назначение, форма и расположение оперения............. . . 265
2. Меры, уменьшающие давление на ручку (педали)................. 273
3. Вибрации оперения. Реверс элеронов .............. 280
4. Конструкция оперения......................................... 283
5. Расчет оперения на прочность ................................ 297
Г лава XV- Фюзеляжи самолетов и расчет их на прочность.............. 308
I. Типы корпусов самолетов. Внешние формы фюзеляжей........... 308
2, Конструктивные схемы и конструкция фюзеляжей................. 311
3. Кабины...................................................... 332
4. Расчет фюзеляжа на прочность.................................356
I лава XVI. Силовые установки 363
1. Назначение силовых установок и требования к ним. Расположение
их на самолете............................................... 303
2. Воздухозаборники. Выхлопные устройства 369
3. Конструкция крепления двигателя к самолету . . . ' . \ . 376
4. Расчет крепления двигателя на прочность .................... 383
о. 1 ондолы и капоты двигателей 386
6. Баки и топливные отсеки. Радиаторы............." , * * * 390
7. 1опливные системы, Маслосистемы . ..................' 395
I лава XVII, Управление самолетом . . 401
1. Классификация. Требования к управлении)..................... 401
562
Стр.
2. Системы управления........................................... 405
3. Конструкция элементов управления ............................ 420
4. Расчет системы управления самолетом на прочность............. 431
Г лава XVIII. Шасси самолета........................................ 436
1. Общие сведения. Классификация........................... ... 436
2. Конструктивные схемы шасси. Конструкция главных ног шасси 449
3. Уборка главных ног шасси..................................... 456
4. Конструкция н уборка передних ног шасси. Задняя нога шасси.
Дополнительные опоры. . ....................................... 46]
5. Амортизаторы шасси........................................... 467
6. Авиационные колеса........................................... 478
7. Расчет шасси на прочность.................................... 484
Глава XIX. Прочие летательные аппараты тяжелее воздуха .... . 493
1. Самолеты вертикального взлета и посадки...................... 493
2. Вертолеты.................................................... 497
3. Гидросамолеты................................................ 502
4. Аппараты на воздушной подушке................................ 503
5. Беспилотные летательные аппараты............................ 504
Глава XX. Соединения элементов конструкции самолета и их расчет 523
1. Общие замечания.............................................. 523
2. Типы соединений.............................................. 524
3. Соединения с помощью проушин................................. 525
4. Соединения с помощью фитингов и стыковых угольников .... 527
5. Заклепочные соединения....................................... 528
6. Болтовые соединения.......................................... 533
7. Сварные соединения.......................................... 537
8. Клеевые соединения металлов.................................. 539
9. Соединения с помощью компенсаторов.......................... 540
Приложения:
1. Тормозные авиаколеса под шины высокого давления.............. 542
2. Тормозные авиаколеса под шины полубаллонного типа............ 543
3. Нетормозные авиаколеса под шины высокого давления .... . 544
4. Нетормозные авиаколеса под шины полубаллонного типа .... 545
5. Основные типы заклепок, применяемые в самолетостроении . . . 546
6. Расчетные данные для подбора диаметров заклепок.............. 548
7. Расчетные данные для подбора диаметров заклепок.............. 549
8. Болты........................................................ 550
9. Винты........................................................ 552
10. Гайки....................................................... 553
11. Шайбы....................................................... 556
12. Анкерные гайки.............................................. 557
13. Расчетные данные для подбора диаметров болтов............... 558
14. Статическая прочность клеевых соединений.................... 559
Литература.................................................... 560