/






























































































































































































































































Автор: Бороздин В.Н.
Теги: автодорожный транспорт системы управления гироскопические приборы
ISBN: 5-217-00359-6
Год: 1990




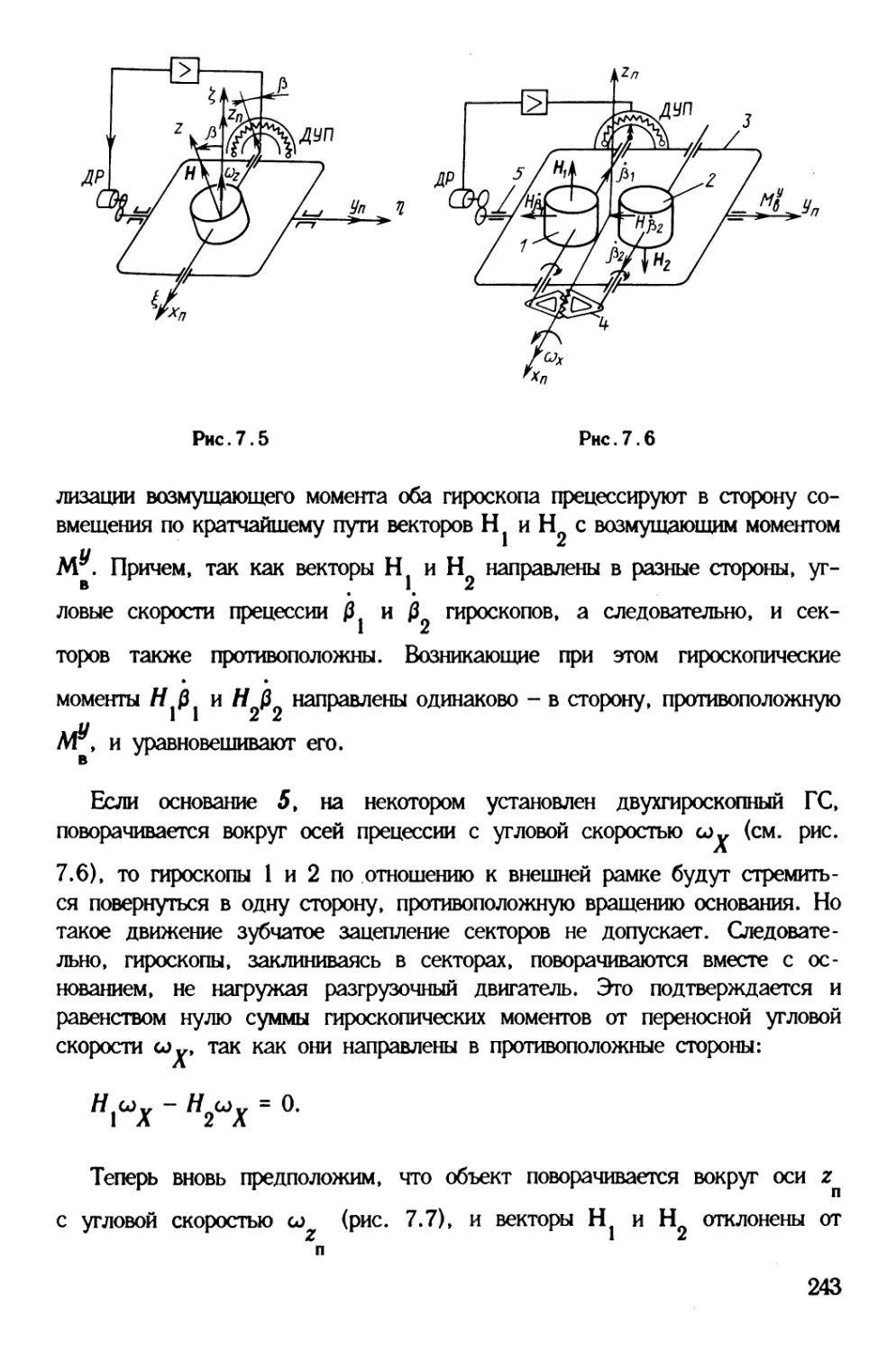
Текст
D
D
ДЛЯ ВУЗОВ
ВЛ.Бороздин
ГИРОСКОПИЧЕСКИЕ
ПРИБОРЫ
И УСТРОЙСТВА
СИСТЕМ
УПРАВЛЕНИЯ
МАШИНОСТРОЕНИЕ
ДЛЯ ВУЗОВ
В.Н.Бороздин
ГИРОСКОПИЧЕСКИЕ
ПРИБОРЫ
И УСТРОЙСТВА
СИСТЕМ
УПРАВЛЕНИЯ
Допущено Государственным комитетом СССР
по народному образованию
в качестве учебного пособия для студентов
высших технических учебных заведений
Москва
'Машиностроение-
1990
ББК 39.37-5-01я73
Б83
УДК [681.586.2.004Л4:629.7+623.4.084.3](075.8)
Рецензенты: кафедра приборов и систем ориентации и навигации
Киевского политехнического института и кафедра
автономной навигации управления и механики
Ленинградского электротехнического института
Бороздин В. Н.
Б83 Гироскопические приборы и устройства систем
управления: Учеб. пособие для вузов. - М.:
Машиностроение, 1990. 272 с.: ил.
ISBN 5-217-00359-6.
Изложена прикладная теория гироскопа. Рассмотрены
физическая сущность, принцип Действия и характеристики
гироприборов, применяемых в системах управления,
ориентации и. навигации; свободные гироскопы, датчики и
указатели углов крена, тангажа, курса, угловых ускорении и
скоростей; интегрирующие гироскопы, одно-, двух- и
трехосные гиростабилизаторы. Приведены точностные и
эксплуатационные характеристики гироприборов при
различных режимах работы в реальных условиях.
Б ^^М^У5 252-S9 ББК 39.37-5-01я73
ISBN 5-217-00359-6 © В. Н. Бороздин, 1990
ПРЕДИСЛОВИЕ
Гироскопические приборы и устройства изучаются студентами
приборостроительных факультетов авиационных и некоторых политехнических
вузов как самостоятельная дисциплина или как разделы смежных
дисциплин. Традиционно эта дисциплина считается трудной, особенно при
самостоятельном изучении.
Учебная и монографическая литература, посвященная гироскопам,
многочисленна и разнообразна. По этой тематике опубликован ряд
серьезных книг отечественных и зарубежных авторов. Однако большинство
изданных книг ориентированы на инженеров-разработчиков
гироскопических устройств и систем, они значительны по объему и не всегда
охватывают основные группы гироустройств (ГУ). Студенты и инженеры
"негироскописты" при работе с такой литературой испытывают
значительные затруднения. Настоящая книга соответствует учебной
программе одноименной дисциплины для студентов втузов, обучающихся по
специальности "Системы управления летательных аппаратов". Она будет
полезна в качестве учебного пособия и студентам приборостроительных и
других смежных специальностей.
Автор ставил перед собой задачу в книге относительно малого объема
изложить в сжатой форме элементы прикладной теории гироскопа и гиро-
приборов, применяемых в качестве измерительных устройств и датчиков
первичной информации систем управления, ориентации и навигации
современных Л А различных классов. Практически всем основным результатам,
полученным аналитически, дается физическая или геометрическая
интерпретация.
На практике определилась тенденция объединения отдельных
измерительных устройств в измерительные комплексы, что позволяет получить
качественно новую измерительную информацию, существенно превосходящую
по точности и надежности ту, которую можно получить с конкретного
измерителя (датчика). Автор преднамеренно не рассматривает вопросы
такого комплексирования, полагая, что эта задача других дисциплин.
Все ГУ рассматриваются с целью выявления их точностных и
эксплуатационных характеристик в близких к реальным условиях на борту
ЛА. Такой подход поможет будущему инженеру по системам управления
грамотно сформулировать требования для разработчика ГУ или выбрать
нужное ГУ из имеющихся.
Поскольку параметры измерительной информации с большинства ГУ
получают в виде угловых величин, а потребители нуждаются в физических
величинах, например, в виде напряжения или тока, на выходных осях
приборов устанавливаются различные датчики-преобразователи. В то же
время, учитывая, что особенности работы датчиков-преобразователей
3
освещены в соответствующей литературе, в пособии обращено внимание на
точностные характеристики собственно ГУ. Поэтому при анализе их
работы не делается существенного различия, в каком виде получается
конечная измерительная информация. Заметим, что на практике влияние
датчиков-преобразователей на выходной сигнал ГУ весьма существенно и
нередко определяет пределы достижимой точности.
В тексте пособия используются наиболее распространенные термины и
обозначения.
ВВЕДЕНИЕ
Практически не существует ЛА, управление и ориентация которых
осуществлялись бы без применения гироскопических устройств. Это
объясняется тем, что при пилотировании и управлении на борту ЛА необходимо с
высокой точностью моделировать какие-либо опорные (базовые)
направления, принимаемые за начало отсчета, относительно которых определяется
его положение. Такими направлениями могут быть, например, направление
вертикали места, плоскости меридиана, главной ортодромии и др.
Реализация базовых направлений на неподвижном относительно земли
основании не представляет особых трудностей. Например, за направление
вертикали, в первом приближении, можно принять направление отвеса
(маятника), по которому он устанавливается, при условии, что на него
действует только сила тяжести; за направление магнитного меридиана -
установившееся положение магнитной стрелки. Относительно этих
направлений можно было бы определять угловую ориентацию ЛА'
(например, ф - угол курса, у - угол крена и # - угол тангажа). Однако
такие, как их называют, простейшие указатели направлений мало
пригодны для применения на подвижных объектах. Гироскопические
приборы, в Силу своих свойств, в большинстве случаев меньше
подвержены внешним возмущениям и получают более достоверную информацию о
параметрах движения ЛА. В настоящее время они широко распространены.
Гироприборы применяются в авиации, ракетной технике, морском флоте, в
горном деле при прокладке шахт, при глубинном бурении, в
вычислительных устройствах и т.д. Запуски баллистических ракет и
спутников Земли без гироприборов было бы осуществить невозможно.
Первые упоминания о гироскопе относятся к началу ХУШ столетия. В
1852 г. французским ученым Фуко был продемонстрирован лабораторный
образец гироскопа с тремя степенями свободы. Собственно Фуко и ввел
термин "гироскоп" (от греческих слов "гирос" - вращение, "скопео" -
наблюдаю), теоретически показав, что с помощью этого прибора можно
наблюдать факт суточного вращения Земли.
4
Фундаментальный вклад в развитие теоретических исследований
гироскопа внесли Эйлер, Лагранж, Пуансо, Ковалевская и др. Велика заслуга
советских ученых, положивших начало развитию прикладной теории
гироскопов и гиросистем. Среди них прежде всего следует назвать
А. Н. Крылова, Б. В. Булгакова, Я. Н. Ройтенберга, А. Ю. Ишлинского,
С. С. Тихменева, Пельпора Д. С, и др.
В настоящее время гироскопическая техника достигла очень высокого
уровня развития, и тем не менее продолжаются интенсивные исследования
и разработка новых нетрадиционных типов ГУ. Современная гиросистема
представляет собой сложнейший комплекс, в состав которого кроме
собственно гироскопов могут входить различные усилительно-
преобразовательные устройства, следящие системы, микропроцессоры
и т.п.
Часто ГУ удовлетворительно работают в соответствующей комбинации с
другими измерительными устройствами, применение которых без
гироскопов практически невозможно или ограничено. Примером этого могут
служить гировертикали с системой коррекции от физического маятника,
моделирующие направление вертикали места.
ГЛАВА 1. ЭЛЕМЕНТЫ ПРИКЛАДНОЙ
ТЕОРИИ ГИРОСКОПА
1.1. УСКОРЕНИЯ И СИЛЫ ИНЕРЦИИ КОРИОЛИСА
Из курса теоретической механики известно, что абсолютное ускорение
W точки, совершающей сложное движение, равно геометрической сумме
а
относительного W и переносного W ускорений, при условии, что
переносное движение поступательное.
Если же переносное движение вращательное, то абсолютное ускорение
складывается из трех ускорений: относительного W , переносного W и
Кориолиса (или поворотного) W , т.е.
W = W + W + W . (1.1)
а г е к
Поскольку ускорение Кориолиса лежит в основе гироскопических
явлений и его физическая природа не вполне очевидна, рассмотрим
следующий пример сложного движения точки А при котором это ускорение
возникает. Предположим (рис. 1.1), что штанга / вращается в плоскости
чертежа равномерно с угловой скоростью со вокруг неподвижной точки 0.
По штанге / со скоростью V движется муфта 2. В данном случае
движение штанги является переносным, а движение муфты относительно
5
У1У1
\90°
We A Wr Vr x,
Рис.1.1,
Рис. 1.2
штанги - относительным. Будем считать, что вся масса муфты
сосредоточена в точке А. Траекторией движения точки будет некоторая
спиральная линия. Итак, точка А участвует в сложном движении:
относительном со скоростью V и переносном со скоростью V . Величину
линейной скорости переносного движения находим как линейную скорость
при вращательном движении: V = о>г, где г - расстояние точки А от оси
вращения 0.
Абсолютная скорость точки А в любой момент времени равна
геометрической сумме V = V + V и определяется как диагональ
параллелограмма скоростей.
Обозначим через ф = о>/ угол между осями х и х , тогда проекции
абсолютной скорости V на неподвижные оси х и у будут соответственно
а
равны:
V = V cos ф - V sin ф = V cos ф - corsin ф\
х г Y e Y r Y
V = V sin ф * V cos ф = V sin ф + corcos ф.
у г * е * г * *
(1.2)
Для нахождения проекций абсолютного ускорения на эти же оси
продифференцируем выражение (1.2):
dV
х dt
dV
dt
cos ф - V
dip
r dt
sin ф -
dr
""IT
d\p
sin ф - cor —-n— cos ф;
dV dV d
W = Ar = ,/ sin \p + V f4 cos \p +
у dt dt Y r dt *
+ o> —r>— cos ip - cjt -^r— sin «£,
———— ГЛС i/i — /.*Г '
но так как _.
J*- = u JL- = v *— = W
<« u* ^ V <tt V
2
то W = W cos у - uV sin <p - cSV sin у - cj rcos ^; (1.3)
2
W = W sin у + o>V cos *р * cjV cos ^ - o> rcos<p.
у r * r Y r Y ^
Заменяя о> г = W (в данном случае это центростремительное
ускорение) и приводя подобные члены, получим
W = W cos ^ - 2cjV sin ^ - W cos </>;
W = W sin <р + 2uV cos <p - W sin ^. (1.4)
Так как неподвижные оси х, у мы можем выбрать как угодно, то,
предположив (рис. 1.2), что в момент отсчета оси х и х совпадают
(<р = 0), получим
W =W -W ; W =2ojV . (1.5)
х г е у г
Записав в соответствии с рис. 1.2 скалярные равенства в векторной
форме, видим, что абсолютное ускорение действительно равно
геометрической сумме W = W + W + W,. Причем величина добавочного
ускорения, или ускорения Кориолиса равна удвоенному произведению
угловой скорости переносного вращения на относительную скорость:
W = 2uV . (1.6)
к Г
Для определения направления ускорения Кориолиса необходимо (см.
рис. 1.2) вектор относительной скорости V повернуть на угол 90 в
сторону переносного вращения а> (в случае, если векторы о> и V
перпендикулярны).
Физически ускорение Кориолиса W можно представить как эффект,
происходящий вследствие вращательного переносного движения. Причем
одна составляющая cSV ускорения Кориолиса есть следствие того, что
вектор V относительной скорости поворачивается в пространстве со
скоростью cj переносного вращения. Вторая составляющая cjV ускорения
Кориолиса есть результат изменения вектора V скорости переносного
движения тонки, вызванного ее относительным движением со
скоростью V .
г
Сказанное можно пояснить следующим образом (рис. 1.3). За
бесконечно малый промежуток времени At вектор относительной скорости
V повернется в пространстве на угол А<р из-за имеющейся угловой
скорости о> переносного вращения. Это означает, что вектор V получит
приращение AV.
Ввиду малости угла А<р можно записать
AV = AipV . (1.7)
Поделив правую и левую части равенства (1.7) на А/ и переходя к
пределам, получим
lim
А/-> О
AV
At
lim
At-
А<р
At
V., или 4f
ill-* = <* •
dt r r
Таким образом, при вращении вектора относительной скорости V с
(1.8)
угловой скоростью о> точка А движется с ускорением
W = cjV .
к Г
Аналогично за тот же бесконечно малый промежуток времени (рис.
1.4) вектор V переносной скорости получит приращение
AV = со(г - г) = соДг. (1.9)
Поделив правую и левую части уравнения (1.9). на At и переходя к
пределам, получим
У<
и /_\>
i
\s
<^*i
V
X
Рис. 1.3
Рис. 1.4
Рис. 1.5
В общем случае векторы относительной скорости V и переносной
угловой скорости со могут быть направлены под углом а, отличным от 90
(рис. 1.5).
Тогда для определения ускорения Кориолиса вектор скорости
относительного движения V надо разложить на две составляющее V , V ,
г z у
одна из которых параллельна вектору со, а вторая перпендикулярна.
Ускорение Кориолиса вызывается только составляющей V ,
перпендикулярной вектору со, и равно
W = 2coVsin а. (1.10)
к Г
Направление ускорения W получим, повернув составляющую V на 90
в сторону переносного вращения. Действительно, параллельная
составляющая V cos а не получает приращения вследствие поворота с
угловой скоростью со (перемещается параллельно самой себе) и не дает
приращения линейной переносной скорости V (не изменяет радиуса г). В
итоге, учитывая направление и величину полученного ускорения, можно
записать, что в общем случае сложного движения точки (тела) ускорение
Кориолиса равно удвоенному векторному произведению векторов угловой
скорости переносного вращения со и относительной скорости V , т.е.
W = 2coxV . (1.11)
к Г
Выражение (1.11) однозначно определяет ускорение Кориолиса и по
модулю, и по направлению. Важно отметить, что условием появления
ускорения Кориолиса в случае сложного движения тела является
вращательное переносное движение. При этом относительное движение
может быть как поступательным, так и вращательным.
В случае сложного движения тела, когда переносное движение
вращательное, возникающее ускорение Кориолиса (поворотное ускорение)
создает инерционные силы Кориолиса, которые необходимо учитывать
наряду с силами инерции относительного и переносного движений.
Инерционная сила Кориолиса равна
F = mW , (1.12)
к к
где /л - масса движущейся материальной точки (тела).
С проявлениями сил инерции Кориолиса часто приходится встречаться
в природе и технике. В рассмотренном выше случае со штангой муфта
будет оказывать давление на штангу, пытаясь ее изогнуть в
направлении, противоположном переносной скорости со. Некоторые изобретатели
по незнанию законов механики предлагали построить летательный
9
аппарат, основанный на действии
центробежной силы в качестве подъемной.
Предполагаемый аппарат был похож на обычный
лопаточный эксцентриковый насос
(рис. 1.6), у которого, , действительно,
верхняя лопатка / дает большую
центробежную силу F , чем нижняя 3 - F ; но зато
лопатки 2 и 4, смещаясь вдоль пазов влево,
помимо сил F, F , испытывают давление сил
2 4
направленных вниз,
инерции Кориолиса F ,
поэтому все эти силы уравновешиваются и
никакой подъемной силы не создают. Если же насос имеет всего две
лопатки, то эти силы, чередуясь, вызывают сотрясения насоса и его
фундамента, и поэтому для обеспечения динамической балансировки насосы с
числом лопаток меньше четырех не делают.
Вследствие вращения Земли силы инерции Кориолиса в Северном
полушарии вызывают такие явления, как размыв правых берегов рек,
дополнительное давление движущегося поезда на правый рельс,
отклонение ветров и морских течений вправо, отклонение падаюших тел к
востоку и т.п. (в Южном полушарии наоборот).
1.2. ГИРОСКОПИЧЕСКИЙ МОМЕНТ. ЗАКОН ПРЕЦЕССИИ
В качестве примера проявления сил инерции Кориолиса рассмотрим
сложное движение диска вокруг неподвижной точки 0, совпадающей с его
центром масс (рис. 1.7). Диск выполнен из однородного по плотности
материала (радиус R и толщина Л). Предположим, что диск каким-либо
способом приведен в быстрое вращение вокруг полярной оси z с
постоянной по модулю относительной угловой скоростью 12 и одновременно
вращается еще вокруг экваториальной оси у с постоянной переносной
угловой скоростью о>. При этом 12 > cj (такое сложное движение диска
является простейшим примером движения гироскопа). Отметим, что
система координат xyz выбрана так, что она участвует вместе с диском
в переносном вращении с угловой скоростью w и не участвует в
относительном вращении с угловой скоростью 12. Выясним, при каких
условиях возможно такое сложное движение. Для этого определим силы и
моменты, приложенные к диску, т.е. решим обратную задачу механики.
Такой подход позволяет относительно просто (по сравнению с прямой
задачей - по заданным силам и моментам определить закон движения)
получить однозначный ответ на поставленную задачу.
10
Рис. 1.7
Так как оси ху и z являются осями симметрии диска, то центробежные
силы взаимно уравновешиваются. Совмещение центра масс диска с точкой
опоры исключает влияние на характер его движения силы тяжести и
реакций опоры. В рассматриваемом случае элементарные частицу диска
будут двигаться с ускорениями Кориолиса, а следовательно, к ним
будут приложены силы инерции Кориолиса. Определим действие сил
инерции Кориолиса.
Для этого возьмем на диске элементарную частицу, имеющую массу /п.,
отстоящую от оси вращения z на расстоянии г. и движущуюся с
относительной линейной скоростью
V. = Пхг..
(1.13)
Ускорение Кориолиса рассматриваемой частицу
W . = 2coVsin a = 2cjQrsin a
к* i i
(1.14)
направлено параллельно оси г. Сила инерции Кориолиса направлена в
противоположную сторону W . и
(1.15)
F . = - m.W ..
к* I к*
Выразим массу частицу диска через ее элементарный объем и
плотность р материала (см. рис. 1.7):
/л. = phrArAa. (1.16)
Подставляя в равенство (1.15) значения т. из выражения (1.16) и
W . из формулы (1.14), найдем величину элементарной силы инерции
Кориолиса:
F . = - 2pQju)hr .Arsin aAa.
(1.17)
11
Из рис. 1.7 видно, что эта сила создает элементарные моменты
относительно осей х и г/. Величина этих моментов
М . = F и. = F /sin a;
XI кГ1 к1 I
М . = F х. = F /.cos а. (1.18)
yi Kl I Kl I
Подставляя в выражения (1.18) F . из (1.17), получим
3 2
М . = - 2р12соЛг .Arsin a'Aa;
з
М . = - 2рПсоЛг.Arsinacos a*Aa. (1.19)
{/* *
Суммарные значения моментов инерционных сил всех точек диска
относительно выбранных осей х и у будут выражаться интегралами
R 2тг
М = - 2р£2соЛ r.dr sin cufa;
О О
(1.20)
R 2тг
М = - 2р12соЛ r.drl sinacosada.
0 0
Вычисляя интегралы в равенствах (1.20), получим
R4
М = - 2р£2соЛ -— тг; М = 0, или М = - / Оси, (1.21)
л; ^ 4 у х z
4
где / = рЛл7? /2 — момент инерции диска относительно оф Z.
Таким образом, при рассматриваемом сложном движении диска
относительно его оси х возникает момент от инерционных сил Кориолиса:
М = -/ £2cj. Момент, создаваемый силами инерции Кориолиса, называют
гироскопическим моментом (иногда гироскопической реакцией).
Поскольку гироскопический момент М в рассматриваемом случае
г
является единственным инерционным моментом, возникшим в результате
движения быстро вращающегося диска еще и с переносной угловой
скоростью со, то согласно принципу Даламбера он должен уравновешивать
противоположно направленный ему внешний момент М (см. рис. 1.7),
х
т.е. можно записать М + М =0, или
г в
/ Пш = МХ. (1.22)
Z в
12
Итак, для существования заданного движения к диску должен быть
приложен внешний момент который и обеспечивает его переносное
вращение с угловой скоростью со. В результате этого материальные точки
диска движутся с ускорениями Кориолиса, а следовательно, к ним
приложены силы инерции Кориолиса. Благодаря симметрии диска,
равнодействующие элементарных сил Кориолиса дают пару сил, которая и
обусловливает появление момента сил инерции Кориолиса -
гироскопического момента. Гироскопический момент уравновешивает (является
реакцией) приложенный внешний момент.
Выражение для гироскопического момента чаще записывают в следующем
виде:
М = - //со,
г
(1.23)
где Н = J £1 — собственный кинетический момент, или собственный момент
Z
количества движения гироскопа (в элементарной теории гироскопов
обычно считают, что векторы полного и собственного моментов
количества движения практически совпадают, так как для гироскопов £2 > СО).
Из формулы (1.22) с учетом (1.23) можно получить величину угловой
скорости со =
В
Рассмотренное движение быстро вращающегося диска (гироскопа) под
действием внешнего момента с переносной угловой скоростью со в
прикладной теории гироскопа называют прецессионным движением или
прецессией.
Для определения направления вектора гироскопического момента М
можно воспользовап^я следующим правилом: гироскопический момент
направлен таким образом, что он как бы стремится совместить вектор
кинетического момента Н (или $2) с вектором переносной угловой
скорости вращения со (прецессии) по кратчайшему пути (рис. 1.8).
Рис. 1.8
Рис. 1.9
13
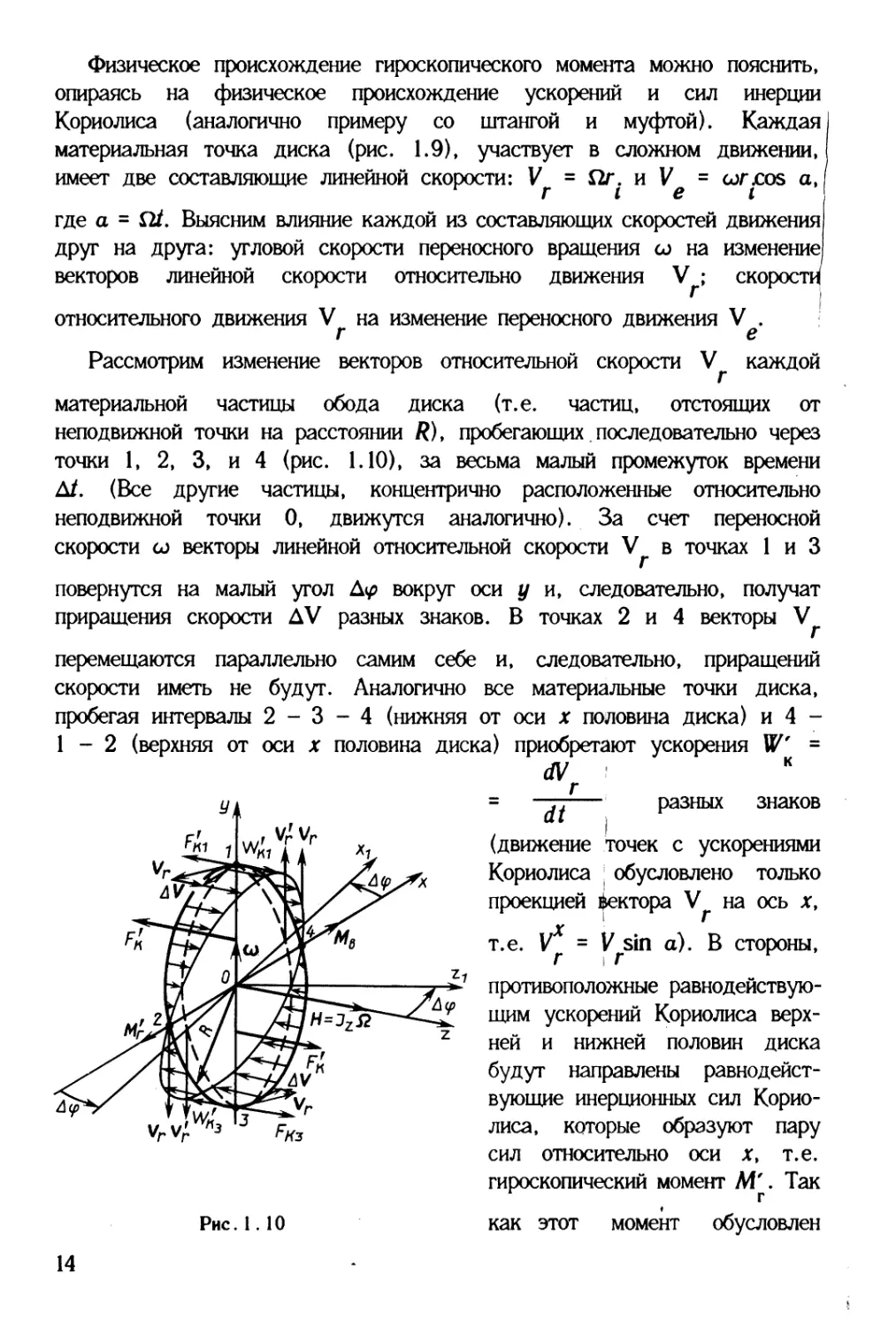
Физическое происхождение гироскопического момента можно пояснить,
опираясь на физическое происхождение ускорений и сил инерции
Кориолиса (аналогично примеру со штангой и муфтой). Каждая!
материальная точка диска (рис. 1.9), участвует в сложном движении,)
имеет две составляющие линейной скорости: V = £2г. и V = а>гхх>5 а,
где а = Qi. Выясним влияние каждой из составляющих скоростей движения
друг на друга: угловой скорости переносного вращения о> на изменение!
векторов линейной скорости относительно движения
скорое
:ти
относительного движения V на изменение переносного движения V .
Рассмотрим изменение векторов относительной скорости V каждой
материальной частицу обода диска (т.е. частиц, отстоящих от
неподвижной точки на расстоянии /?), пробегающих. последовательно через
точки 1, 2, 3, и 4 (рис. 1.10), за весьма малый промежуток времени
А/. (Все другие частицу, концентрично расположенные относительно
неподвижной точки 0, движутся аналогично). За счет переносной
скорости о> векторы линейной относительной скорости V в точках 1 и 3
повернутся на малый угол Д<р вокруг оси у и, следовательно, получат
приращения скорости AV разных знаков. В точках 2 и 4 векторы V
перемещаются параллельно самим себе и, следовательно, приращений
скорости иметь не будут. Аналогично все материальные точки диска,
пробегая интервалы 2-3-4 (нижняя от оси х половина диска) и 4 -
1 - 2 (верхняя от оси х половина диска) приобретают ускорения W =
dV
dt
разных знаков
(движение точек с ускорениями
Кориолиса ! обусловлено только
проекцией ректора V на ось *,
т.е. V
V sin а). В стороны,
Рис.1.10
противоположные
равнодействующим ускорений Кориолиса
верхней и нижней половин диска
будут направлены
равнодействующие инерционных сил
Кориолиса, которые образуют пару
сил относительно оси х> т.е.
гироскопический момент М'. Так
как этот момент обусловлен
14
только одной половиной ускорения Кориолиса (W), то он будет равен
половине от его общей величины М' = - //о>/2.
г
Теперь рассмотрим (как и ранее по ободу диска) изменение векторов
линейной переносной скорости V из-за движения материальных точек
диска с относительной скоростью V (рис. 1.11, а). На рисунке видно,
что скорость V в точках 1 и 3 равна нулю (как и в любой точке,
принадлежащей оси у), а в точках 2, 4 V = а>/?, т.е. имеет
максимальные значения по модулю, ^но разные знаки. На рис. 1.11, а
показана эпюра скорости V по ободу диска [V = {(а)]. По эпюре
скорости (см. рис. 1.11, б) построена эпюра ускорений Кориолиса
материальных точек по ободу диска. Аналогично предыдущему случаю все
материальные точки диска выше оси х движутся с ускорениями Кориолиса
положительного знака, ниже оси х - отрицательного знака. В точках
приложения равнодействующих ускорений Кориолиса положительного и
отрицательного знаков в противоположные им стороны будут приложены
равнодействующие сил инерции Кориолиса, образующие пару сил
относительно оси х, а следовательно, вторую составляющую
гироскопического момента М" = - Яо>/2. Результирующий гироскопический момент
относительно оси х\ будет равен сумме составляющих: М = М' +
♦ М" = Ни. \
г !
Таким образом, гироскопический момент, по физической природе
является моментом Коршлисовых сил и возникает в результате переносного
вращения (прецессии) диска, которое обеспечивается приложенным
УН
Ни) sin of
Рис. 1.11
Рис.
12
15
внешним моментом. На рис. 1.10 и 1.11 легко увидеть» почему
результирующий гироскопический момент относительно оси у равен нулю.
Полученные ранее соотношения для гироскопического момента и
угловой скорости прецессии справедливы для частного случая, когда векторы
Н и со взаимно перпендикулярны. В общем случае, когда эти векторы
направлены под углом а (рис. 1.12), как следует из предыдущих
рассуждений, ускорения Кориолиса возникают лишь от составляющей со = cosina.
Следовательно, величина гироскопического момента М = //со = //cosina, j
где a - угол между векторами Н и со. Направление вектора
гироскопического момента М определится, как и ранее, совмещением вектора Н с;
вектором со по кратчайшему пути, т.е. М перпендикулярен Ни со. Таким
образом, в общем случае, величина и направление гироскопического
момента определяются однозначно векторным произведением
М = Нхсо. (1.24)
г
Поскольку гироскопический момент М уравновешивает внешний момент М ,
то можно записать М = М = Hcosin H со, откуда
М в г
со = s —. (1.25)
Н sin H ы
Соотношение (1.25) является основным в элементарной теории
гироскопов. Его иногда называют законом прецессии. Не отражая всех
подробностей рассматриваемого явления, этот закон! позволяет сделать,
в первом приближении, ряд важных выводов о сложной движении диска. В
частности, например, если М = 0, то из выражения] (1.25) следует, что
угловая скорость прецессии со = 0. Это означает, ( что диск не имеет
переносного вращения и, следовательно, вектор кинетического момента Н
сохраняет неизменным свое направление в пространстве.
Для определения направления угловой скорост^ прецессии можно
пользоваться следующим правилом (см. рис. 1.7, 11.8): прецессионное
движение направлено на совмещение вектора кинетического момента Н
(собственной скорости вращения £1) с вектором внешнего момента М по
в
кратчайшему пути.
Аналогичные выводы могут быть получены и на основании известной из
du
п ШЛ
теоретической механики теоремы о кинетическом моменте: —-г.— = М ,
где Н - полный кинетический момент.
п
16
Рис. 1.13 Рис. 1.14
Эта теорема, применительно к гироскопу (когда принимают Н ~ Н),
п
формулируется следующим образом: (рис. 1.13) линейная скорость и кон-
ца вектора кинетического момента Н геометрически равна вектору
главного момента внешних сил М (теорема Резаля), т.е.
в
и = М* (1.26)
в х dH
Если, например, принять, что М = 0, то и = -т:— = 0, откуда Н =
= const, т.е. вектор Н остается постоянным как по величине, так и по
направлению. Теорема Резаля позволяет однозначно определять и
направление прецессии (см. рис. 1.13).
С гироскопическими явлениями мы часто встречаемся в обыденной
жизни. Не говоря уже о детском волчке, катании обручей и т.п., почти
на всех видах транспорта (велосипеды, мотоциклы, автомобили,
железнодорожные поезда и др.) приходится считаться с этими явлениями.
Пренебрежение ими в некоторых случаях может привести к авариям.
На совремренным турбореактивных и турбовинтовых самолетах
вращающиеся турбины имеют большой кинетический момент. При маневрах
самолета могут возникать гироскопические моменты значительной величины,
которые необходимо учитывать при пилотировании и при расчете вала
турбины (винта) на прочность. Действительно (рис. 1.14), если принять
условно, что турбина вращается по часовой стрелке (глядя от летчика),
то при левом вираже гироскопический момент М = Но> будет
"заставлять" нос самолета подниматься вверх, что придется компенсировать
рулем высоты. При правом вираже векторы о> и, следовательно, М изменят
в г
направления на обратные.
1.3. ГИРОСКОП С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
И ЕГО ОСНОВНЫЕ СВОЙСТВА
В современной научно-технической и учебной литературе нет строгого
определения термина "гироскоп". Если ранее к гироскопам относили ме-
17
ханические измерительные устройства, принцип работы которых основан
на использовании сил инерции Кориолиса, то в последние годы термин
"гироскоп" все чаще трактуют в буквальном смысле: гироскоп -
указатель вращения. При таком расширенном толковании под гироскопом
подразумевают любое устройство, позволяющее автономно, т.е. без связи с
внешней средой, измерять вращение основания относительно инерциальной
системы координат [9].
В настоящее время наибольшее распространение имеют гироскопические
устройства с быстро вращающимся ротором (маховиком), имеющим две или
три степени свободы. В дальнейшем именно таким ГУ и будет уделено
основное внимание.
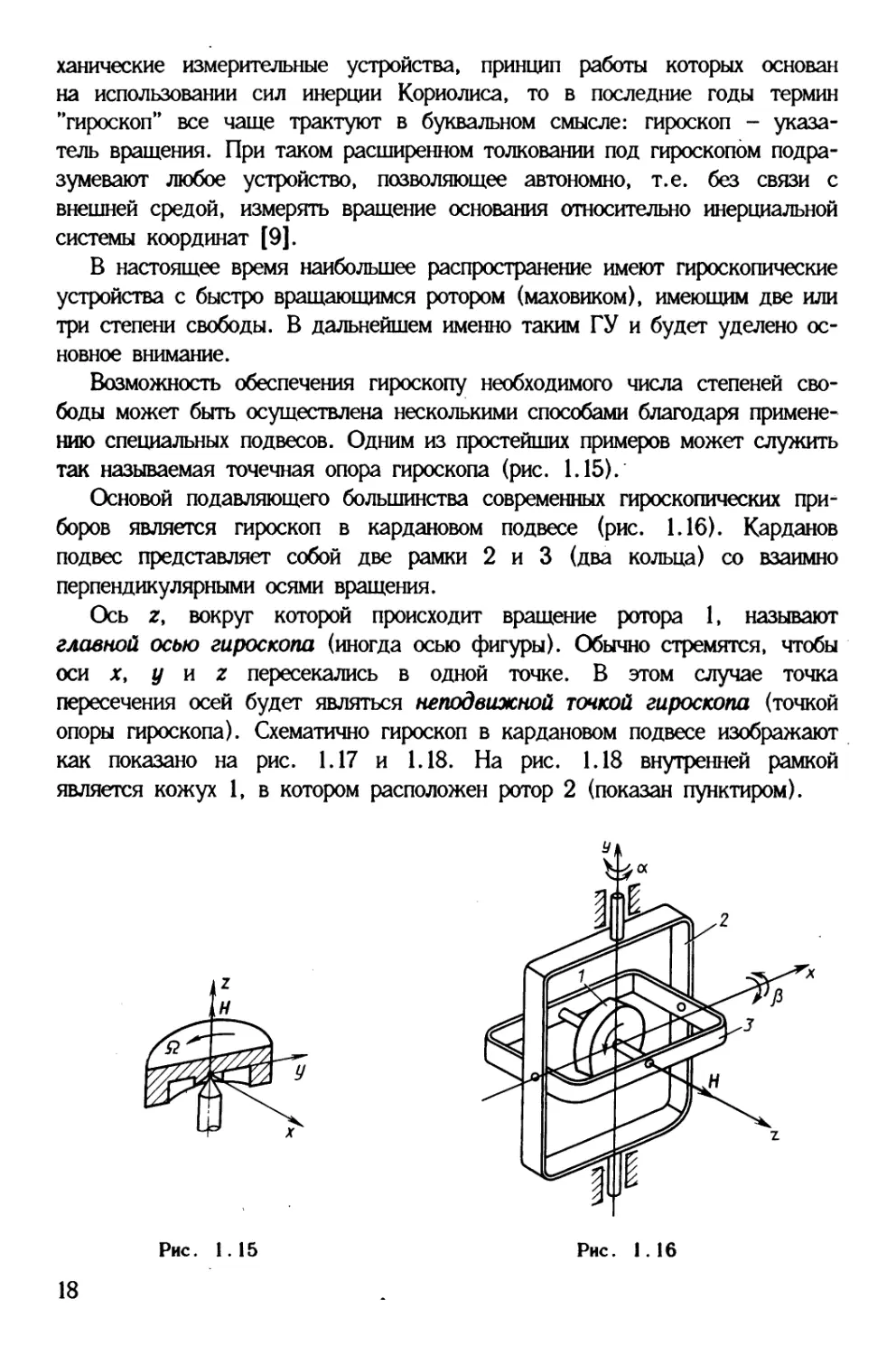
Возможность обеспечения гироскопу необходимого числа степеней
свободы может быть осуществлена несколькими способами благодаря
применению специальных подвесов. Одним из простейших примеров может служить
так называемая точечная опора гироскопа (рис. 1.15).
Основой подавляющего большинства современных гироскопических
приборов является гироскоп в кардановом подвесе (рис. 1.16). Карданов
подвес представляет собой две рамки 2 и 3 (два кольца) со взаимно
перпендикулярными осями вращения.
Ось z, вокруг которой происходит вращение ротора 1, называют
главной осью гироскопа (иногда осью фигуры). Обычно стремятся, чтобы
оси х, у и z пересекались в одной точке. В этом случае точка
пересечения осей будет являться неподвижной точкой гироскопа (точкой
опоры гироскопа). Схематично гироскоп в кардановом подвесе изображают
как показано на рис. 1.17 и 1.18. На рис. 1.18 внутренней рамкой
является кожух 1, в котором расположен ротор 2 (показан пунктиром).
Рис. 1.15 Рис. 1.16
18
Рис. 1.17 Рис. 1.18
Гироскоп, центр тяжести которого совпадает с неподвижной точкой,
называют астатическим, а центр тяжести которого не совпадает с
неподвижной точкой-гиромаятником или тяжелым гироскопом. Астатический
гироскоп, вокруг осей подвеса которого отсутствуют внешние моменты,
называют свободным гироскопом. Теоретически главная ось гироскопа в
кардановом подвесе может занимать любое направление в пространстве,
однако при практической реализации ее повороты обычно ограничены.
Условимся в дальнейшем углы поворота главной оси гироскопа
(вектора Н) вокруг оси внешней рамки обозначать а, а углы поворота
вокруг оси внутренней рамки - /3. Схема расположения осей гироскопа по
отношению к объекту может быть различной в зависимости от выполняемой
задачи. Рассмотрим поведение гироскопа в кардановом подвесе,
основываясь на уравнении (1.25), выражающем закон прецессии. Если в
осях подвеса гироскопа (см. рис. 1.17) отсутствуют внешние моменты,'
то его главная ось будет сохранять неизменным свое первоначально
заданное направление при любых поворотах основания. При действии
момента М внешних сил вокруг оси х подвеса внутренней рамки,
согласно закону прецессии, главная ось гироскопа начнет
поворачиваться (прецессировать) с постоянной угловой скоростью а =
= М /Н вокруг оси у внешней рамки в сторону совмещения вектора Н с
клх
вектором М по кратчайшему пути.
в
Если же момент М будет приложен вокруг оси подвеса внешней рамки,
то аналогичное движение будет совершать внутренняя рамка с угловой
19
скоростью j3 = (полагаем Н х со). Это несколько противоречит нашим
обычным представлениям. Во-первых, потому что движение происходит не
вокруг оси приложения момента, а вокруг оси, ей перпендикулярной.
Во-вторых, мы привыкли, что под действием постоянного момента тело
начинает поворачиваться ускоренно с угловым ускорением со = М //, где
в
/ - момент инерции тела относительно оси вращения.
В данном же случае гироскоп поворачивается с постоянной угловой
скоростью со = М /Я, пропорциональной приложенному моменту М и
обратно пропорциональной кинетическому моменту Я. Но из этого
следует, что несмотря на постоянно действующий момент, энергия
гироскопа остается неизменной. Иначе говоря, приложенный момент,
обеспечивая прецессионное движение, не совершает работы, т.е. прецессия
есть движение, совершаемое без затраты энергии.
Угловая скорость со прецессии, соответствующая данным значениям
приложенного момента М и кинетического момента Я, возникает
"мгновенно", скачком, при приложении момента и "мгновенно" исчезает
при снятии момента. Таким образом, при изменении момента
соответственное изменение угловой скорости прецессии происходит без
запаздывания. Иначе говоря, прецессия представляется "без-
инерщюнной". Но этот вывод противоречит тому, что энергия системы
при приложении момента не может измениться мгновенно. Следовательно,
уравнение, выражающее закон прецессии, на основании которого мы
проводим рассуждения, не отражает полного движения гироскопа в
рассматриваемом случае. Кроме прецессионного движения должно
существовать какое-то другое, в процессе которого момент совершает
работу, обеспечивающую увеличение энергии системы на величину энергии
прецессии. Это дополнительное движение, называемое нутацией, будет
выявлено ниже при более строгом анализе на основе технических
уравнений гироскопа.
Если по одной из рамок гироскопа нанести удар, его главная ось
практически не изменит своего направления (при достаточно большом Я).
Это объясняется тем, что удар можно рассматривать как кратковременное
приложение момента. Угол поворота главной оси гироскопа при этом
Мв
определится выражением -т»— t. Практически при малом времени t этот
угол будет малым даже при значительном М .
20
1.4. УРАВНЕНИЯ ДВИЖЕНИЯ ГИРОСКОПА И ИХ АНАЛИЗ
1.4.1. Составление уравнений движения гироскопа
Существует несколько методов составления полных (точных) уравнений
движения гироскопа. Каждый из них в конечном итоге приводит к
одинаковым результатам. Выбор соответствующего метода может зависеть
от условий поставленной задачи, личного опыта и т.д. Читатель,
интересующийся этим вопросом, может найти ответ в соответствующей
литературе [1, 2, 4, 8, 9]. В большинстве случаев технических
приложений гироскопа достаточно приемлемые результаты могут быть получены
при сравнительно упрощенном математическом описании его движений.
Наиболее часто способы упрощения уравнений состоят в пренебрежении
слагаемыми, начиная со второго порядка малости, и линеаризации
оставшихся членов. Воспользуемся наиболее простым и наглядным методом
составления технических уравнений движения гироскопа, базирующимся на
принципе Даламбера. Этот метод замечателен тем, что он позволяет
сразу получить линеаризованные уравнения. В принципе с помощью этого
метода можно получить и точные уравнения.
Вначале получим уравнения движения гироскопа в кардановом подвесе
без учета угловых движений опорной системы координат. Для этого
выберем инерциальную систему координат %г£ с началом в точке
пересечения осей гироскопа (рис. 1.19). (Инерциальной системой
координат называют правую прямоугольную систему координат, начало
которой помещено в некоторой точке пространства, либо перемещается с
постоянной скоростью, а направление осей относительно звезд
неизменно). Систему прямоугольных координат xyz свяжем с гироскопом
Рис. 1.19 рис. 1.20
21
таким образом, что ось х будет направлена по оси внутренней рамки
карданова подвеса, ось у - по оси внешней рамки, а ось z - по главной
оси. Причем оси координат могут участвовать во всех угловых движениях
гироскопа, кроме собственного вращения ротора. Такую систему
координат в прикладной теории гироскопов называют "полуподвижной" или
осями Резаля.
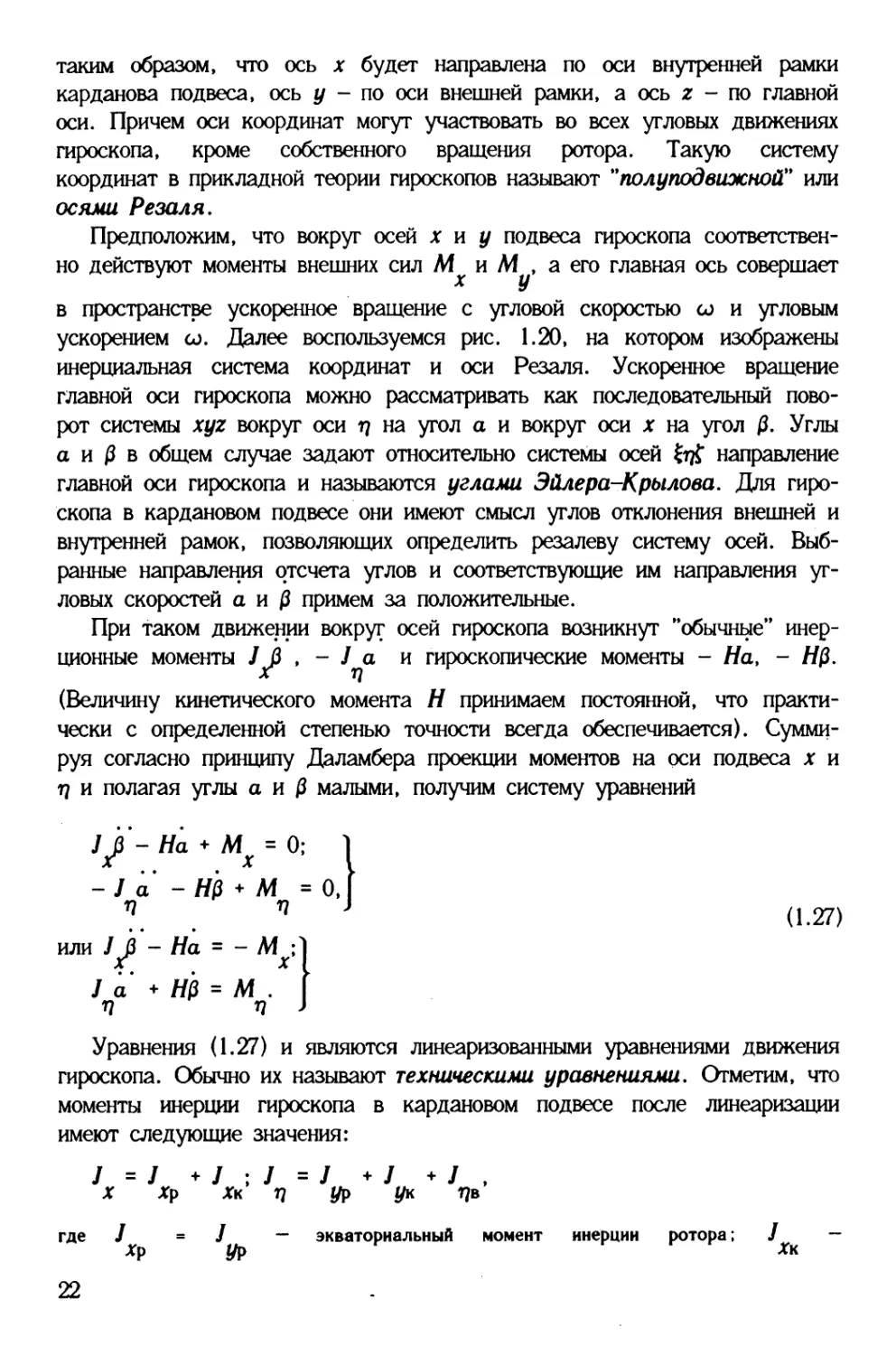
Предположим, что вокруг осей х и у подвеса гироскопа
соответственно действуют моменты внешних сил М и М , а его главная ось совершает
в пространстве ускоренное вращение с угловой скоростью о> и угловым
ускорением о>. Далее воспользуемся рис. 1.20, на котором изображены
инерциальная система координат и оси Резаля. Ускоренное вращение
главной оси гироскопа можно рассматривать как последовательный
поворот системы xyz вокруг оси г} на угол а и вокруг оси х на угол 0. Углы
а и 0 в общем случае задают относительно системы осей £т£ направление
главной оси гироскопа и называются углами Эйлера-Крылова. Для
гироскопа в кардановом подвесе они имеют смысл углов отклонения внешней и
внутренней рамок, позволяющих определить резалеву систему осей.
Выбранные направления отсчета углов и соответствующие им направления
угловых скоростей а и 0 примем за положительные.
При таком движении вокруг осей гироскопа возникнут "обычные"
инерционные моменты Jв , - / а и гироскопические моменты -На, - //0.
(Величину кинетического момента Н принимаем постоянной, что
практически с определенной степенью точности всегда обеспечивается).
Суммируя согласно принципу Даламбера проекции моментов на оси подвеса х и
17 и полагая углы а и 0 малыми, получим систему уравнений
]£'- На + Мх = 0; 1
-J а -НР + М = 0,|
Т?. ч J (1.27)
или / й - На = - М ;
/ а' + Щ = М .
17 Т7
Уравнения (1.27) и являются линеаризованными уравнениями движения
гироскопа. Обычно их называют техническими уравнениями. Отметим, что
моменты инерции гироскопа в кардановом подвесе после линеаризации
имеют следующие значения:
/=/ W;/=/ * J W,
X Хр Хк Г) ур ук Т7в
где / = 1 — экваториальный момент инерции ротора; / —
22
экваториальный момент инерции кожуха (внутренней рамки); / — момент
тув
инерции внешней рамки относительно своей оси.
Из уравнений видно, что любые внешние моменты, приложенные вокруг
осей подвеса гироскопа, уравновешиваются суммой инерционных
моментов - "обычными" инерционными моментами и гироскопическими. Причем
для технически применяемых гироскопов роль гироскопических моментов,
как правило, весьма существенна, так как величина кинетического
момента Н всегда выбирается большой. Этим и объясняется повышенная
инерционность (неподатливость) гироскопа [2].
Нетрудно видеть, что уравнения (1.27) при Н = О, т.е. при невраша-
ющемся роторе, становятся независимыми и описывают раздельно движения
вокруг осей внешней и внутренней рамок как систем с одной степенью
свободы.
Как показывает опыт, для решения ряда прикладных задач могут быть
упрощены и уравнения (1.27) путем отбрасывания членов //3 и /а и
учета, что М * М . Тогда
На = М ;
х
(1.28)
Щ = М
Эти уравнения называют укороченными, усеченными или прецессионными
уравнениями. Они являются выражением рассмотренного ранее закона
прецессии для случая малых углов а и 0, что легко видеть из
рис. 1.21. Действительно, приложенный к гироскопу внешний момент М
вызывает прецессию его главной оси (вектора Н) с угловой скоростью
о> = М ///. Проекциями вектора угловой скорости прецессии со на оси х и
в
у соответственно будут 0 = М /Н и а = М ///, откуда получим уравнения
(1.28).
Если при линеаризации уравнений
движения гироскопа в них при
гироскопических членах удержать cos /3, то
прецессионные уравнения примут вид:
//acos/З = М
Hficosp = М .
(1.29)
Эти уравнения справедливы для любых зна-
7Г у Л у 7Г
2
чений угла 0 в области
<0<
Рис.1.21
23
Правомерность отбрасывания "обычных" инерционных членов в уравнениях
(1.27) будет обоснована ниже.
1.4.2. Понятие картинной плоскости
При анализе поведения гироскопа в различных режимах работы из
уравнений (1.27) определяются переменные, характеризующие движение
его главной оси (вектора Н). Этими переменными являются углы, угловые
скорости и угловые ускорения. Поскольку пространственное
представление движения главной оси гироскопа является затруднительным, то
вводят специальное понятие, так называемой "картинной" плоскости.
Картинной плоскостью (Р) называют плоскость, перпендикулярную
вектору Н (главной оси) в его неотклоненном положении, расположенную
на расстоянии одной линейной единицы ("1") длины от неподвижной точки
гироскопа (рис. 1.22). Точку Е пересечения главной оси гироскопа с
картинной плоскостью называют полюсом, апексом или вершиной
гироскопа.
При условии малости углов а и 0 отклонения главной оси от
исходного направления можно рассматривать как линейные отклонения
вершины £ гироскопа в прямоугольной системе координат сф на картинной
плоскости (рис. 1.23). Так как картинная плоскость находится на
расстоянии "1" длины от неподвижной точки, то угловые скорости а , 0
Р
н
Ру Ру\
Рл
<Ху
(Ху
о(л а л
Рис. 1.22
Рис. 1.23
24
и угловые ускорения а , 0 соответственно численно равны линейным
скоростям а , /3 и линейным ускорениям а , 0 , которые также могут
л л л л
быть изображены графически как векторы скорости (ускорения) вершины
гироскопа £ на картинной плоскости. При этом выбранным положительным
направлениям отсчета углов а и 0 и их производных соответствуют
положительные углы и производные на картинной плоскости. В дальнейшем
индекс "л" при а и 0 опустим, помня, что на картинной плоскости для
вершины гироскопа £ будем изображать векторы линейной скорости,
которые численно равны угловым скоростям.
Таким образом, введенное понятие позволяет непосредственно
использовать результаты аналитического решения уравнений движения для
графических построений и толкований движения вершины гироскопа на
картинной плоскости, которые значительно нагляднее, чем
пространственные построения.
При дальнейшем изложении материала будем пользоваться по мере
необходимости как построениями на картинной плоскости, так и в
пространстве, что будет способствовать лучшему пониманию физического
смысла явлений.
1.4.3, Краткий анализ уравнений движения гироскопа
Было установлено, что свободный гироскоп сохраняет неизменным
направление своей главной оси в инерциальном пространстве. Однако
в реальных условиях работы гироскоп никогда не бывает свободен от
действия различных внешних моментов. Такими моментами могут быть
моменты сил трения в осях подвеса, моменты от неуравновешенности и
др. Как увидим дальше, во многих гироприборах имеются специальные
моментные устройства, предназначенные для приведения главной оси к
заданному положению.
Характер действия моментов может быть самым разнообразным. Поэтому
при анализе поведения гироскопа в каждом конкретном случае необходимо
это учитывать. Однако из всего разнообразия внешних возмущений
гироскопа можно выделить некоторые наиболее характерные (типовые), какими
являются, например, воздействие постоянного внешнего момента;
кратковременное воздействие внешнего момента, типа удара; знакопеременное
периодическое воздействие момента, которое можно приближенно
рассматривать как гармоническое.
25
Рис. 1.24 Рис. 1.25
Анализируя поведение гироскопа при типовых возмущениях и делая
соответствующие выводы, можно распространить их и на более обшие
случаи.
Рассмотрим реакцию гироскопа на два первых типовых возмущения.
Поведение гироскопа при воздействии постоянного момента.
Предположим, что вокруг одной из осей гироскопа (рис. 1.24),
например, оси внешней рамки, приложен постоянный внешний момент М *
~ М . Будем считать при этом, что моменты по другим осям
отсутствуют, а моменты инерции / = / = / . Принятые допущения
X Т) Э
соответствуют пренебрежению массой рамок карданова подвеса, т.е.
будем рассматривать не гироскоп в подвесе кардана, а так называемый
симметричный гироскоп, у которого момент инерции относительно любой
экваториальной оси равен / . Однако, как показывает опыт, неучет
массы рамок практически не оказывает влияние на основное
(прецессионное) движение гироскопа. Поэтому принятые допущения не
нарушат существенно общности основных выводов, но упростят
математическую процедуру.
С учетом принятых ограничений уравнения движения гироскопа (1.27)
запишем в виде:
/ & -На = 0;
э
/а' ♦ Щ = М . (1.30)
э У
Для их решения применим обычный прием снижения порядка уравнений,
для чего введем обозначения 0 = р, а = q, H/J = д. Тогда уравнения
э
(1.30) примут вид:
26
ai (1.31)
-ft— * up = pMJH
Продифференцировав второе уравнение системы (1.31) и подставив в
dp
него значение —т.— = pq из первого уравнения, получим
-^- + Л = 0. (1.32)
Общее решение такого уравнения, как известно, можно записать так:
q = Mnpi + Bco&pt, (1.33)
где А и В — постоянные интегрирования.
Из второго уравнения системы (1.31) найдем значение
Продифференцировав выражение (1.33) и подставив его в (1.34),
получим решение для второй переменной:
р = М/Н - Acostf + Bsin/Л. (1.35)
Постоянные А и В определим для нулевых начальных условий, т.е. при
t - о, Pq - % - о.
Тогда из выражений (1.33) и (1.35) получим А = М/Н; В = 0, и
решения уравнений (1.31), соответствующие принятым начальным
условиям, будут иметь вид:
М
q = НУ sin id;
М (1.36)
Р = НУ (1 - cos д/).
Решения (1.36) выражают закон изменения скоростей (/ = аир = 0во
времени. На рис. 1.25 даны их графики.
Если бы решение поставленной задачи проводилось на основании
прецессионных уравнений (1.28), то получили бы
а = (/ = 0;/3 = р = М/Н. (1.37)
27
Сравнивая решения (1.36) и (1.37), полученные на основании решения
технических и прецессионных уравнений, заметим, что первые
отлила
чаются гармоническими составляющими скоростей —jr-— sin \d и
М
- —тт^— cos pit а вторые являются постоянной составляющей первых.
п
Для того, чтобы получить закон изменения углов отклонения главной
оси гироскопа, проинтегрируем равенства (1.36):
-]«*.-
м
e = \pdt = -ff^- ш - sin pi) ♦ с2.
(1.38)
Постоянные интегрирования С и С определим для нулевых начальных
условий, т.е. при t = О, а = /3 = 0.
Тогда из равенств (1.38) найдем С = М/(Нц), С = 0 и,
окончательно, решения запишем в виде:
М М
а = -77й— (1 - cos д/); 0 = -тт2— (м* - sin vt). (1.39)
Ям
Ям
Рис. 1.26
28
Рис.1.28
Рис.1.29
Равенства (1.39) выражают закон изменения углов а и |3 во времени. На
рис. 1.26 даны их графики.
Таким образом, как видно из решения уравнений (1.39), если к
гироскопу приложить внешний момент М , его главная ось будет
совершать сложное движение, состоящее из прецессионного движения
М
вокруг оси х, характеризуемого членом
Я
•t и наложенных на него
дополнительных колебаний вокруг осей х и г/, характеризуемых
М М
соответственно членами -
Яд
sin д/ и
Яд
(1 - cos д/). Это
дополнительное движение главной оси гироскопа называют нутационными
колебаниями или просто нутацией. Параметрами нутационных колебаний
являются их частота д и амплитуды а и 0 . Для рассмотренного случая
д = H/J ; а = 0 = М /(Яд) = М / /Я'.
э и и у у э
Нетрудно увидеть, что уравнения (1.39) являются параметрическими
уравнениями циклоиды. Следовательно, в координатах а0, т.е. на
картинной плоскости (при условии малости углов а и |3), вершина
гироскопа будет описывать траекторию, являющуюся циклоидой (рис.
1.27). Такое сложное движение оси гироскопа называют псевдорегулярной
(ложно регулярной) прецессией. Так как для подавляющего большинства
реальных гироустройств основным движением является прецессионное, а
амплитуда и период нутации очень малы, то практически нутационными
колебаниями часто пренебрегают. К этому следует добавить, что
нутационные колебания быстро затухают благодаря всегда имеющимся в
реальных устройствах моментам сил сухого и вязкого трений, которыми
29
при анализе мы пренебрегали. В общем случае траектория движения
вершины гироскопа зависит от начальных условий и может иметь,
например, один из видов, показанных на рис. 1.28.
Если бы в качестве исходной была взята система уравнений (1.28),
т.е. мы учли бы массу рамок карданова подвеса и приняли М * 0, то
качественная картина полученных результатов изменилась бы
незначительно. Главная ось гироскопа так же совершила бы
псевдорегулярную прецессию в направлении совмещения с вектором
момента М = М + М (рис. 1.29) с частотой нутации д = H/V J J
2
Амплитуды нутации определялись бы соотношениями а = М J /H и
0 = М J /H . В общем случае амплитуды нутации зависят и от начальных
угловых скоростей а , /? .
Если взять начальные условия такими, что в момент времени,
соответствующий приложению к гироскопу внешнего момента М , его
главная ось поворачивается (прецессирует) в пространстве вокруг оси х
с постоянной угловой скоростью в = р = М/Ну а вокруг оси у
движение отсутствует, т.е. при t = 0, q = 0, р = М/Н> тогда из
выражений (1.33) и (1.35) получим А = В - 0 и, следовательно, 0 = р =
= М/Н; q = а = 0.
Это означает, что ось гироскопа сохранит свое начальное состояние,
т.е. будет продолжать двигаться (прецессировать) вокруг' оси х
внутренней рамки со скоростью, соответствующей начальным условиям.
Нутационные колебания в данном случае не возникают. Такое движение
гироскопа без нутационных колебаний под действием внешнего момента
называют регулярной прецессией (точнее его называют вынужденной
регулярной прецессией, однако поскольку для свободного движения мы
ввели термин нутация, в дальнейшем будем пользоваться термином
регулярная прецессия). Как видим, регулярная прецессия полностью
совпадает как по начальным условиям, так и по установившемуся режиму
с движением гироскопа, которое было установлено при рассмотрении
сложного движения диска, и соответствует закону прецессии
(прецессионным уравнениям).
Таким, образом, возникновение нутационных колебаний оси гироскопа
обусловлено определенными начальными условиями. Практически они
30
существуют только в переходном процессе, а затем движение вырождается
в регулярную прецессию. Это и понятно, так как нутация есть не что
иное, как свободные колебания системы, а регулярная прецессия -
вынужденное движение. Сравнивая технические (1.27) и прецессионные
(1.28) уравнения движения гироскопа и их решения, можно сделать
вывод, что вторые не учитывают нутационных колебаний гироскопа.
Следовательно, причиной возникновения нутации являются "обычные"
инерционные члены J в и / а , обусловленные движением гироскопа под
* ч ....
действием внешнего момента с угловыми ускорениями а и 0. *
Проведенный анализ по существу является решением прямой задачи. В
отличие от обратной задачи (см. разд. 1.2), ее решение, как видим, не
однозначно, а зависит от начальных условий. Результат, полученный при
решении обратной задачи, совпадает с решением прямой задачи для
начальных условий,, соответствующих случаю регулярной прецессии, т.е.
при / = 0, а = 0, |3 = р = М/Н. Действительно, при решении обратной
задачи эти условия выполнялись - мы предполагали наличие переносной
угловой скорости со, которая и была получена равной со = М/Н.
Дадим физическое пояснение движению оси гироскопа под действием
приложенного момента при нулевых начальных условиях (рис. 1.30).
Причиной, вызвавшей появление внешнего момента М будем считать силу
Р, которая может быть обусловлена, например смещением центра тяжести
по оси х на величину / . В начальный момент времени ось z (вектор Н)
расположена вертикально и обе рамки карданова подвеса не имеют
движения. Постоянный момент М = Р1 вызовет ускоренное вращение
внешней рамки со скоростью а. Эта переносная скорость а создает
гироскопический момент Лг = - На вокруг оси х внутренней рамки,
который, в свою очередь, вызовет ускоренное вращение внутренней рамки
с угловой скоростью /3. (Напомним, что за положительное направление
угла |3 и его производных принята отрицательная часть оси х). Это
второе ускоряющееся переносное вращение вызовет второй возрастающий
гироскопический момент Лг = - Н0 вокруг оси внешней рамки j/,
направленный против внешнего момента М .
Пока М > Лг величина а будет возрастать, а вместе с ней будут
расти гироскопический момент ЛГ = - На и угловая скорость /J. Когда
гироскопический момент Лг = - Н0 сравняется по величине с М , а затем
31
начнет превышать его, а начнет убывать, сохраняя свое направление,
а гироскопический момент т = - На, также уменьшаясь, будет
действовать все в том же направлении, а следовательно, будет
увеличивать угловую скорость 0 внутренней рамки.
Так как при этом Лг = -Н0 > М , то угловая скорость а убывает, и
когда она станет равной нулю, угловая скорость 0 внутренней рамки
будет максимальной. Гироскопический момент ЛГ в это мгновение будет
г
равен нулю, а гироскопический момент Лг будет максимальным. Затем
г
угловая скорость а изменит свое направление, и вектор Н под действием
разности Лг - М = - HP + Р1 начнет ускоренно поворачиваться в
сторону уменьшения угла а. При этом гироскопический момент т также
изменит свое направление (знак) и будет теперь замедлять движение
внутренней рамки, т.е. скорость 0 начнет уменьшаться, а
следовательно, будет уменьшаться и Лг. Пока Лг = - Щ > М , скорость
- а возрастает , и поэтому возрастает гироскопический момент ЛГ = На,
тормозящий движение внутренней рамки, и угловая скорость /3
уменьшается. Когда уменьшающийся гироскопический момент Лг = - Н$
станет опять меньше М , то движение внутренней и внешней рамок начнет
замедляться до тех пор, пока обе скорости - а и & не обратятся в
нуль.
Рис.1.30
Рис.1.31
32
С этого момента все явления начнут повторяться в той же
последовательности. В результате вершина гироскопа (точка £) будет
описывать траекторию, являющуюся правильной циклоидой. Ранее было
рассмотрено движение полюса Е гироскопа от начала координат картинной
плоскости до точки 1 (см. рис. 1.30).
Поведение гироскопа при ударе. Удар можно рассматривать как
кратковременное приложение момента вокруг какой-либо из осей
гироскопа, например оси у (рис. 1.31), в результате чего, вектор
кинетического момента приобретает начальную угловую скорость а = q
в направлении приложенного момента. В дальнейшем внешний момент свое
действие прекращает.
Таким образом, это будет соответствовать начальным условиям, когда
t = 0, q = q , p = 0, и М = М = 0. Из уравнений (1.33) и (1.35)
находим А = 0 и В = q .
Решения (1.33) и (1.35) для данного случая
q = qQ cos д/; р = qQ sin д/. (1.40)
Для того чтобы получить значения углов а и 0, проинтегрируем
уравнения (1.40):
Г qo
а = я cos jxtdt = sin jxt + С:
Г Я0
0 = \q sin \ddt = cos \d * С .
JO Д 4
Для нулевых начальных условий а = в = 0, постоянные С = 0, С =
= q /д и тогда
*° • ,
а = sin д/;
\ ^ , (1-41)
Р = cos д/,
или, перенося слагаемое q /д во втором уравнении в левую часть,
возведя оба уравнения в квадрат и сложив, получим
a2 + (fi - (?0/д)2 = (^/д2. (1.42)
Нетрудно убедиться, что уравнение (1.42) есть уравнение окружности с
радиусом г = q /д в координатах а0 (см. рис. 11.31).
33
Таким образом, главная ось гироскопа после удара совершает в
пространстве незатухающие колебания, описывая конус, основанием которого
будет окружность. Радиус этой окружности прямо пропорционален
начальной скорости q
О
а и моменту инерции /
кинетическому моменту //, т.е.
г - %ПН.
и обратно пропорционален
(1.43)
Как показывает анализ, в случае, если моменты инерции / * / , то
* у
основанием конуса будет эллипс, вытянутый вдоль оси гироскопа с
большим моментом инерции (рис. 1.32). Отношение большой и малой осей
эллипса равно отношению моментов инерции гироскопа в степени 1/2,
т.е. Ь/а = (/ // )1/2.
У *
Сравнивая решения (1.39), полученные для случая, когда к гироскопу
приложен постоянный момент М , с решениями (1.41), видим, что в
последних отсутствует член, пропорциональный времени,
характеризующий прецессионное движение, являющееся вынужденным движением.
Следовательно, при ударе ось гироскопа совершает только свободные
колебания, которые мы назвали нутацией. Причем эта нутация вызвана
начальным импульсом, сообщившим главной оси гироскопа скорость q.
Практически, из-за наличия моментов сил сухого и вязкого трений
(М ), не учтенных в исходных уравнениях, указанное движение будет
затухать. Полюс гироскопа, описывая спираль на картинной плоскости,
будет приближаться к положению равновесия, которым является центр
окружности или эллипса (см. рис. 1.32).
Постоянное смещение полюса гироскопа на величину q/д можно
Рис.1.32
34
Рис. 1.33
рассматривать как частицу пути, пройденного им при псевдорегулярной
прецессии. Действительно (рис. 1.33), если импульсы момента одного
знака будут действовать через определенные интервалы времени, то в
среднем полюс гироскопа Е будет перемещаться вдоль оси 0 по прямой,
состоящей из суммы перемещения q /д. При частоте импульсов, равной
бесконечности, приходим к случаю, соответствующему приложению
постоянного момента, т.е. главная ось гироскопа будет совершать
псевдорегулярную прецессию.
Дадим физическое пояснение движению главной оси гироскопа при
ударе для случая, когда моменты инерции / = / = / (рис. 1.34, а).
Как мы уже оговорили, из-за приложения импульса момента главная ось
гироскопа получила начальную угловую скорость q . В результате
движения вектора Н с переносной угловой скоростью q возникает
гироскопический момент Hq , направленный по оси х внутренней рамки.
Он явится причиной возникновения углового ускорения р = 0 = Hq /J ,
О э
причем векторы линейной скорости q и линейного ускорения р на
картинной плоскости перпендикулярны друг другу.
Величины q и / постоянны по условию, следовательно,
гироскопический момент Hq и ускорение р будут постоянными. Таким
образом, полюс гироскопа £ на картинной плоскости движется с
постоянной линейной скоростью q . Перпендикулярно этому вектору
v s«r=q°/JJ
t
Рис. 1.34
35
направлено постоянное ускорение р. Очевидно, что такому случаю
соответствует движение полюса Е по окружности, когда q есть линейная
скорость точки £, а р - центростремительное ускорение (см.
рис. 1.34, б).
Радиус этой окружности найдем на основе следующих рассуждений. С
одной стороны ускорение р = Hq 11 , с другой стороны, кинематическая
О э
связь при движении точки с постоянной скоростью по окружности может
быть выражена р = q /г. Из этих двух соотношений находим г = q J /H =
= <l/a» т.е. значение радиуса окружности, по которой будет двигаться
полюс гироскопа £, полученное на основании физических рассуждений,
соответствует значению радиуса, полученному аналитически из уравнения
(1.42).
Отметим, что при точном решении полных (нелинеаризованных)
уравнений для случая, когда вектор Н не перпендикулярен оси внешней
рамки и М = 0, при нутационных колебаниях будет наблюдаться
систематический уход гироскопа вокруг оси внешней рамки. Величина
этого ухода практически очень мала [4, 8].
1.5. ГИРОСКОП С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
И ЕГО СВОЙСТВА
Если гироскоп в кардановом подвесе лишить одной степени свободы,
например жестко закрепить внешнюю рамку, то получим гироскоп с двумя
степенями свободы (рис. 1.35). Такой гироскоп обладает уже иными
свойствами по сравнению с гироскопом с тремя степенями свободы.
Рассмотрим его реакцию на приложение внешнего момента.
Постоянный внешний момент М , приложенный вокруг оси х внутренней
рамки гироскопа с тремя степенями свободы вызывал его прецессию с
угловой скоростью а = М /Н вокруг оси у внешней рамки. Возникающий
при этом гироскопический момент На уравновешивал внешний момент М и
внутренняя рамка практически не поворачивалась. Приложение такого же
внешнего момента М к гироскопу с двумя степенями свободы, вследствие
отсутствия третьей степени свободы, его прецессии вызвать не может,
а следовательно, не будет и противодействующего гироскопического
36
момента. Поэтому гироскоп начнет с ускорением 0 = М //
поворачиваться в направлении приложенного момента точно так же, как если бы
ротор не имел собственной скорости вращения 12 (т.е. Н = 0). Отличие
состоит в том, что ускоренное переносное вращение гироскопа вокруг
оси х обусловит возникновение возрастающего гироскопического момента
Лг = Нр, который проявит себя давлением на опоры подвеса и будет
г
уравновешиваться моментом М~ сил их реакций /?.
Если предположить, что гироскоп подвешен в "идеальных" опорах
Ш = 0), а основание, на котором он установлен, вращается с
постоянной угловой скоростью ау, то это приведет к появлению сил
инерции Кориолиса (рис. 1.36), а следовательно, и гироскопического
момента М = tfcjySin по)у = HcjyCOS 0 вокруг оси х гироскопа. Этот
гироскопический момент вызовет ускоренное вращение гироскопа в
направлении совмещения вектора кинетического момента Н с вектором
переносной угловой скорости ау по кратчайшему пути, т.е. |3 =
= HcjyCosfi/J . Тогда угловая скорость и угол поворота гироскопа опре-
хх t t
деляются соотношениями 0 = H/J oy;os (Mi; /3 = H/J oy:os №t .
0 0
Таким образом, вынужденное вращение гироскопа с двумя степенями
свободы вокруг оси перпендикулярной оси х рамки и вектору Н приводит
к его ускоренному вращению вокруг оси х. При этом угол /3 поворота
рамки пропорционален двойному интегралу от переносной угловой
37
скорости о>у или интегралу от угла ф поворота основания за время /. В
соответствии с записанным соотношением для угла 0 гироскоп с двумя
степенями свободы называют иногда дважды интегрирующим гироскопом.
Аналогичные выводы можно получить и на основании технических
уравнений гироскопа (1.27). Действительно, приложение внешнего
момента М к внутренней рамке гироскопа при закрепленной внешней
рамке соответствует тому, что в уравнениях а = а = 0. Тогда
Щ = М .
У
Откуда 0 = -М//;/3 = /3/и//0 = М, т.е. приложение момента М
приводит к ускоренному вращению гироскопа вокруг оси х, а это, в свою
очередь, обусловливает гироскопический момент, который
уравновешивается моментом Мр реакции опор /?.
Если основание, на котором установлен гироскоп вращается с
постоянной переносной угловой скоростью ау, а его опоры идеальные
(М =0), тогда в первом уравнении а выполняет роль переносной
в
угловой скорости cjv основания, и система уравнений принимает вид:
Jв = На = Hcjy,
Щ = М ,
У
откуда & = Hcjy/J , что соответствует значению для 0 , полученному
ранее (при cos & = 1). Уравнение Щ = М означает, что вращение гирос-
копа с угловой скоростью 0 обусловливает приложение гироскопического
момента к основанию, который уравновешивается моментом реакции R опор.
Свойство гироскопа с двумя степенями свободы реагировать на
переносную угловую скорость основания широко используется в ряде
гироскопических устройств.
1.6. ЭНЕРГЕТИЧЕСКИЕ СООТНОШЕНИЯ
ПРИ ДВИЖЕНИИ ГИРОСКОПА
При предварительном рассмотрении движения гироскопа под действием
постоянного момента на основании уравнения, выражающего закон
прецессии, были отмечены некоторые несоответствия с точки зрения баланса
38
энергии. Поэтому рассмотрим, в самых обших чертах, энергетические
соотношения при движении гироскопа.
Известно, что кинетическая энергия тела, вращающегося относительно
1 2
оси, определяется формулой Т = --— /о> , где cj - мгновенная угловая
скорость; / - момент инерции тела относительно оси вращения. Для
рассматриваемого нами случая движения гироскопа его кинетическая
1 2
энергия Т складывается из кинетической энергии Т = —— / 12 ,
г р 2 z
приобретенной вследствие собственного вращения ротора, и кинетической
энергии Т псевдорегулярной прецессии, явившейся следствием
п.п
приложения внешнего момента М , т.е. Т = Т + Г . Поскольку мы
приняли, что Н = / £2 = const, то кинетическая энергия ротора (Г )
z р
остается неизменной.
При псевдорегулярной прецессии, соответствующей приложению момента
М (при нулевых начальных условиях), главная ось гироскопа (вектор Н)
поворачивается относительно оси внешней рамки [см. уравнения (1.39)]
М /
на угол а = —^~— (1 - cos jxt).
Н2
Следовательно, приложенный внешний момент М совершает при этом
работу
Л = М а = —Uj— (1 - cos tf). (1.44)
У Н
Эта работа в каждый момент времени должна быть равна кинетической
энергии псевдорегулярной прецессии Т
Поскольку при псевдорегулярной прецессии гироскоп совершает
сложное движение юкруг оси внешней рамки [см. решения (1.36)] со
М
скоростью а = —гг-— sin id и вокруг оси внутренней рамки со скоростью
М
/3 = -тр— (1 - cos jit), то кинетическая энергия при этом будет
1 О 9 M*J
Т = -±- J (а + П = V— <! - cos /*>. <L45)
п.п 2 э jj2
что в точности соответствует выражению (1.44), т.е. А = Т
39
Таким образом, энергия гироскопа как механической системы
увеличивается ровно на величину работы, совершаемой приложенным моментом.
С течением времени в результате действия моментов сил сухого и
вязкого трений энергия нутации рассеивается, колебания затухают, и
гироскоп совершает только регулярную прецессию с угловой скоростью
0 = р = М /Н. Кинетическая энергия регулярной прецессии при этом
V
J М2
т* п= I-'/ = 4~ -JL7i~ • (L46)
р.П I Э I gjZ
что соответствует половине полной работы, совершаемой внешним
моментом М . Вторая половина этой работы, как было уже сказано,
рассеивается при затухании нутационных колебаний, в чем легко
убедиться, записав значение энергии нутации. Действительно, скорость
нутационных колебаний относительно осей внешней и внутренней рамок
М
гироскопа характеризуется соответственно членами -тр— sin д/ и
М
- —ц — cos ju/. Следовательно, энергия нутации
/ м2 м2 / м2
Т = -J- ( —{- sin2 л/ ♦ —jf- cos2 л/) = \У . (1.47)
н.к J ^ ^ 2Н2
Из проведенных рассуждений следует, что при псевдорегулярной
прецессии имеет место энергетический баланс. В случае регулярной
прецессии начальные условия уже предусматривают движение гироскопа
со скоростью р = М /Ну которая в точности сохраняется и в дальнейшем
при приложении внешнего момента М . Следовательно, энергия системы в
данном случае не изменяется. Она остается такой же, как и до
приложения внешнего момента. Внешний момент при этом работы не
производит, так как он не поворачивает главной оси гироскопа в
направлении своего приложения, хотя и обеспечивает сохранение
начальной угловой скорости вокруг оси внутренней рамки.
Аналогично и при ударе: начальные условия предусматривают
сообщение системе начальной угловой скорости q , соответствующей
внесению энергии, равной Т = J q /2, которая, если не учитывать
моментов сопротивления, в точности сохраняется и в дальнейшем, т.е.
40
т э ,2 2V э ,2 2 .
Гуд =-J- (go ♦ р ) =-J- (go cos jtf*
j 2
+ qQ sin /if) = —-— . (1.48)
При действии моментов сопротивления энергия нутации затрачивается на
их преодоление, и ось гироскопа останавливается.
Рассмотрим пример, который позволит дать некоторые количественные
оценки параметров движения оси гироскопа под действием приложенного
момента. Возьмем гироскоп с техническими параметрами, близкими к
2 -1
реальным конструкциям современных приборов: Н = 0,4 кг'м'с /(~ 4х
3 -3 2 2
х Ю г'см'с); J ~ / 0,2*10 кг'м /(- 2 г'см'с ). Предположим,
х У _3
что вокруг оси внешней рамки приложен момент М =0,4*10 Н' м.
Случай 1. Ротор гироскопа не вращается, т.е. £2 = Н = 0. Внутренняя
рамка остается неподвижной, а внешняя начинает равноускоренно
. . 2
вращаться по закону а - a t 12 с угловым ускорением а - М /J
0,4'icf -2 -2 .2
_ _— = 2 с (* 114,6 град • с ). Тогда угол а = 1 * Г .
0,2-10"
Через одну секунду а = 1 рад (~ 57,3 град).
Через одну минуту а = 3600 рад (~ 573 оборота).
и 2-1
Случай 2. Ротор вращается, П = 0,4 кг'м 'с Главная ось
гироскопа совершает псевдорегулярную прецессию вокруг оси внутренней
; АЛ lL1 0.4-ю"3 t -з -1
рамки с угловой скоростью р = /VI /п = ~~~ = 1*10 рад*с
(~ 0,057 град* с ). Угол поврота внутренней рамки изменяется по
закону
&• к.
-3
Через одну секунду /3 = 1*10 рад (= 0,057 град).
-3
Через одну минуту /3 = 60*10 рад (~ 3,42 град).
Определим параметры нутации.
Амплитуда а = /3 М J/H2 = 0,4' 10~3'0,2' 10"3/(0.4)2 =
-6 " "Н У
= 0.5-10 рад (~ 0.1 ).
41
Частота Д = Н/ VJ J = ' ;— = 2*10 рад'с" .
X U -3
* 0,2-10
Приведенный пример убедительно иллюстрирует отличительные
особенности гироскопа и его способность "сопротивляться" внешним
возмущениям. Действительно, в первом случае, когда Н = 0, механическая
система под действием приложенного момента за 1 мин совершает 573
оборота в направлении приложения момента. Причем скорость вращения со
временем нарастает. Во втором случае, когда механическая система
является гироскопом, ее поведение будет существенно отличаться:
поворачивается внутренняя рамка, а не внешняя, к которой приложен
момент. Точнее говоря, при учете нутационных колебаний поворачивается
и внешняя рамка, но максимальный угол ее поворота будет, как мы уже
подсчитали, равен всего лишь 0,1". К тому же этот угол изменяется
периодически во времени от нуля до максимального значения с большой
частотой, так что практически эти отклонения не воспринимаются
зрительно и не могут быть зарегистрированы большинством применяемых
датчиков углов. Внутренняя рамка поворачивается за 1 мин на угол
около 3,5 , что в значительной степени меньше, чем поворот внешней
рамки в первом случае.
Этот же пример подтверждает и правомерность неучета в большинстве
случаев нутационных колебаний гироскопа, как не имеющих практического
значения. В дальнейшем при анализе поведения различных трехстепенных
гироприборов мы будем пользоваться только прецессионными (усеченными)
уравнениями (1.28) и (1.29), в которых кроме угловых скоростей а и 0
в общем случае будем учитывать и переносные угловые скорости опорной
системы отсчета.
1.7. УРАВНЕНИЯ ДВИЖЕНИЯ ГИРОСКОПА
С УЧЕТОМ ПЕРЕНОСНЫХ И УГЛОВЫХ СКОРОСТЕЙ СИСТЕМЫ ОТСЧЕТА
Прецессионные уравнения (1.28) не учитывают угловых скоростей
самой системы отсчета {itf. Практически же трехстепенные гироскопические
приборы в большинстве случаев предназначаются для моделирования
каких-либо определенных направлений, меняющих свою ориентацию в
пространстве, например относительно Земли. В этом случае выбранная система
отсчета может поворачиваться в пространстве с угловой скоростью по
соответствующему закону U(t).
Рассмотрим следующий пример. Предположим, что гироскоп должен
обозначать направление географического меридиана или вертикали места,
42 •
относительно которых требуется измерять угловые отклонения
какого-либо объекта. Для этого выберем (рис. 1.37) в качестве опорной
прямоугольную систему координат Z.V.S. с началом в точке О ,
ориентированную таким образом, что ось £ направлена на восток по касательной к
параллели, ось т? - на север по касательной к меридиану, а ось f -
перпендикулярно двум первым. Очевидно, что ось £ будет
перпендикуляром к горизонтальной плоскости Р, в которой лежат две другие оси,
т.е. она будет направлена по вертикали места. Систему координат,
ориентированную таким образом относительно Земли, принято называть
географической.
Вследствие суточного вращения Земли с угловой скоростью о> система
координат Z.V.S. будет вращаться с той же угловой скоростью. Через
определенный промежуток времени ее начало координат О переместится в
пространстве вместе с Землей в точку О . При этом перемещении
горизонтальная плоскость Р, с которой система координат {.ткГ как бы
жестко связана, будет поворачиваться с угловой скоростью U вокруг
оси 17 и с угловой скоростью 1Л. вокруг оси f . Величина этих угловых
скоростей может быть легко определена. Из рис. 1.38 видно, что U =
1?
о> cos <р и J/. = о> sin а, где у - широта места.
Таким образом, для решения поставленных задач необходимо, чтобы
главная ось гироскопа, будучи совмещена с одним из заданных
Рис. 1.37
Рис. 1.38
43
направлений (меридиана или вертикали), в дальнейшем поворачивалась в
пространстве с угловой скоростью заданного направления.
В общем случае система координат £т£ может поворачиваться в
пространстве еще и в результате перемещений объекта относительно
Земли. При составлении уравнений движения (1.28) были учтены только
относительные угловые скорости а и 0 главной оси гироскопа вокруг
осей £тт$\ В уравнениях движения гироскопа в общем случае должны быть
учтены гироскопические моменты и от переносных угловых скоростей
опорной системы отсчета. Тогда прецессионные уравнения движения надо
записать в виде
Hq = М ;
-Нр = М ,
У
(1.49)
где р и CJ — суммы проекций относительных (а, /3) и переносной (U)
угловых скоростей соответственно на оси Хну гироскопа.
Знак "минус" перед Нр означает, что ранее за положительное
направление 0 принято отрицательное направление оси х и,
следовательно, у слагаемых, входящих в р, при подстановке в уравнение
необходимо изменить знаки на обратные.
При нахождении сумм проекций угловых скоростей на оси гироскопа
обычно пользуются таблицей направляющих косинусов углов между осями
Ы и xyz или, что то же, таблицей проекций единичных векторов одной
системы на оси другой (табл. 1). Эта таблица получается из рис. 1.39,
который аналогичен рис. 1.20 с той лишь разницей, что в данном случае
принятая система отсчета £т£ сама вращается в пространстве с угловой
скоростью U. имеющей составляющие на те же оси U» U и (Л.. Проекции
угловых скоростей на оси гироскопа, ориентированного относительно
осей £т£ (см. рис. 1.20):
р = - 0 + (У cos (£Уж) + U cos (т7,дг) + Ujcos (f ,ж);
q = acos (т/V) + ^fccos (£y) + V cos (ruy) + t/.cos (tCj/). (1.50)
Входящие в эти выражения косинусы углов приведены в табл. 1.
Поскольку гироскоп предназначается для обозначения указанных ранее
направлений, несовпадения его осей с осями системы отсчета являются
погрешностями, которые не должны превышать определенных величин.
Поэтому углы а и 0 можно принять малыми.
Тогда табл. 1 может быть преобразована в другую (табл. 2).
На основании табл. 2 выражения (1.50) могут быть преобразованы:
44
p =
я =
-/»
а *
Подставляя
для р
лучим
и q
полученные
в уравнения
(1.51)
значения
(1.49), по-
j
аУ
?
/z
fcn
rx !
■лИА /Л1
CJl2L,Jxi..-
^-
H(a + U - UJ) = Мд
Я(0 - U^ + Uha) = M
(1.52)
U-
Рис.1.39
Эти уравнения и есть уравнения
движения гироскопа для принятой
ориентации его осей xyz относительно системы координат %t$.
Конкретные значения угловых скоростей Uy U и (Л зависят от выбора опорной
системы отсчета.
Таблица 1
COS a
- sin a
sin asin 0
cos 0
- cos asin 0
Таблица 2
- a
-и
1.8. ПОДВИЖНЫЕ СИСТЕМЫ КООРДИНАТ.
ПРИМЕНЯЕМЫЕ ПРИ АНАЛИЗЕ ГИРОСКОПИЧЕСКИХ ПРИБОРОВ
Выбор соответствующей опорной системы координат, относительно
которой должны производиться измерения каких-либо величин
(перемещений, скоростей, ускорений и т.п.), дело произвольное. Однако от
этого в значительной степени зависит сложность решений той или иной
поставленной задачи. Не останавливаясь на этом вопросе подробно,
45
отметим лишь, что в ряде случаев движение объекта удобно
рассматривать относительно прямоугольной системы координат, которая
сама движется. В прикладной теории гироскопов при исследовании
приборов - указателей направлений - в качестве опорной обычно
используют одну из трех систем координат: географическую, ортодромическую и
систему координат, связанную с траекторией движения объекта. Первые
две системы обычно применяются при исследованиях курсовых гиро-
приборов, третья - при исследованиях гировертикалей (авиагоризонтов).
1.8.1. Географическая система координат
Данная система координат ориентируется относительно Земли
следующим образом (рис. 1.40). Ось rj направлена на север, ось £ - на
восток, ось f направлена перпендикулярно двум первым, т.е. в зенит.
Начало координат 0 совмещается с неподвижной точкой гироскопа.
Предположим, что гироскоп установлен на объект, который движется в
горизонтальной плоскости Ь\ со скоростью V, направленной по отношению
к меридиану (оси rj) под углом курса ф. Вследствие вращения Земли и
собственного перемещения объекта относительно Земли система координат
&7t поворачивается в пространстве. Найдем проекции угловой скорости
этого вращения на оси £, rj и f. Широту места нахождения объекта
обозначим через у и радиус Земли - через R . Перенесем вектор угловой
скорости вращения земли £ в начало координат 0 и спроектируем его
на оси £т7$\ Получим составляющие: на ось f - to = со sin <p и на ось
в 3
rj - о> = о> cos у (которые обычно называют вертикальной и
горизонтальной составляющими вращения Земли). Далее вектор линейной
скорости объекта V разложим на составляющие Уд, = Vcos ф по оси г} и
VF = Vsin ф по оси £.
На рис. 1.40 видно, что из-за движения объекта со скоростью V*,
система координат £т£ поворачивается вокруг оси £ с угловой скоростью
Uу = - V„/R. Вокруг оси 17 система координат будет поворачиваться с
угловой скоростью, горизонтальной составляющей вращения Земли о> =
г
= со cos \f> плюс угловая скорость от восточной составляющей линейной
скорости Vp, равная Vp/R . Вокруг оси t система координат
поворачивается с угловой скоростью, равной сумме вертикальной составляющей
вращения Земли со = со sin <p и угловой скорости от восточной составляющей
В 3
46
V-. линейной скорости объекта относительно
Земли. Движению объекта по параллели с
радиусом R cos \p и со скоростью VF
соответствует угловая скорость Vp/(R cos <^),
вектор которой совпадает с направлением
вектора со . Следовательно, проекция этой
угловой скорости на ось f равна
V^sin^Z? cos ^)-
Таким образом, окончательно, значения
проекций угловых скоростей на оси £т£
можно записать в виде:
Рис.1.40
U,
*
- Vcos ф/Rj
I/ = со cos \p * Vsin ф/Я ;
17 3 3
(1.53)
Uу = со sin \р * Vcos ф sin \p/(R cos ^).
1.8.2. Система координат,
связанная с траекторией движения объекта
Предположим, что в данный момент времени объект совершает движение
по криволинейной траектории (рис. 1.41), лежащей в горизонтальной
плоскости, со скоростью V и углом курса ф. Ось ц направим по вектору
скорости V полета (по касательной к траектории). Ось £ направим по
нормали к траектории (по радиусу р). Тогда ось f будет направлена по
вертикали места в зенит. Как и в предыдущем случае, при нахождении
интересующих нас проекций угловых скоростей Ut> U и U. необходимо
к *П s
учитывать как скорость вращения Земли, так и переносные угловые
скорости, обусловленные движением объекта относительно Земли.
Из рис. 1.41 видно, что вектор угловой скорости вращения Земли со
лежит в плоскости меридиана, а следовательно, составляющая со =
= со cos у направлена на север. Поэтому горизонтальная составляющая
даст проекцию на ось £, равную - со cos <p sin ф. Кроме этого
47
Рис.1.41
(вследствие облета объектом Земли) по оси %, направлена угловая
скорость, равная - V/R . На ось rj спроектируется только
горизонтальная составляющая угловой скорости со , проекция которой
г
равна со cos \p cos ф.
Вокруг оси % система отсчета £т£ поворачивается с суммарной
угловой скоростью, включающей вертикальную составляющую вращения
Земли со sin \p и угловую скорость разворота (виража) в горизонтальной
плоскости объекта со = V/p (где р - радиус виража).
в
Итак, значения проекций переносных угловых скоростей для системы
координат, связанной с траекторией движения объекта, в окончательном
виде запишутся в следующем виде:
Uy = - со cos у sin ф - V/R ;
U = со cos ^ cos ф; (1.54)
rj 3
Uu = со sin \p + V/p.
В последующих главах книги на основе изложенной прикладной теории
48 • '
гироскопа рассмотрены основные типы ГУ и их поведение при наиболее
характерных (типовых) режимах работы: на неподвижном основании; при
прямолинейном движении с постоянной скоростью и ускорением; при
вираже и периодических колебаниях основания. При этом принято, что
ротор гироскопа имеет номинальную частоту вращения, т.е. Н = const.
(На практике это условие обычно выполняется.)
Более подробный анализ поведения ГУ, установленных на подвижных
объектах, с учетом всех возможных возмущающих факторов в общем случае
достаточно сложен; он освещен в специальной литературе,
предназначенной для разработчиков ГУ.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Поясните на примерах условия возникновения ускорений Кориолиса.
2. Как проявляют себя ускорения Кориолиса при движении основания
по поверхности Земли в районах Северного и Южного полюсов, экватора?
3. Поясните физическую природу возникновения гироскопического
момента.
4. Нарисуйте схему гироскопа в кардановом подвесе и определите
величины и направления прецессионного движения. варьируя величины и
направления Ни М .
в
5. Дайте качественную сравнительную характеристику прецессионных и
технических уравнений движения гироскопа.
6. Дайте физическое пояснение псевдорегулярной прецессии для
случая воздействия момента внешних сил относительно оси внутренней
рамки; охарактеризуйте составляющие движения.
7. Поясните, что имеют в виду, когда говорят:
а) движение гироскопа 'безынерционно',
б) гироскоп обладает 'высокой инерционностью'.
8. Дайте физическое пояснение свойству гироскопа с двумя степенями
свободы совмещать свою главную ось с вектором переносной угловой
скорости.
9. Поясните качественно соблюдение баланса энергии гироскопа при
его движении в результате приложения внешнего момента.
, 10. Поясните необходимость учета переносных угловых скоростей
базовой (опорной) системы координат в" уравнениях движения гироскопа.
49
ГЛАВА 2. СВОБОДНЫЕ ГИРОСКОПЫ
2.1. ОБЩИЕ СВЕДЕНИЯ
Свободным гироскопом (СГ) называют астатический гироскоп,
относительно осей подвеса которого не действуют внешние моменты. Как
известно, такой гироскоп обладает свойством сохранять неизменным
направление своей главной оси в инерциальном пространстве. Благодаря
этому свойству и ряду других, о которых уже говорилось, СГ получил
широкое распространение как самостоятельный прибор и как основной
элемент ряда ГУ. Вполне понятно, что любой реальный гироскоп не может
быть полностью свободен от действия вредных моментов. Это прежде
всего потому, что невозможно обеспечить идеальный подвес, который не
накладывал бы моменты на гироскоп. Практически невозможно абсолютно
точно уравновесить гироскоп, т.е. сделать его астатическим. Кроме
этого, устройства подвода питания к гироскопу, съема сигналов
измерительной информации и др. также будут создавать различные
вредные моменты М относительно осей подвеса. Поэтому под СГ (в
техническом смысле) подразумевается такой гироскоп, в котором вредные
моменты в осях подвеса сведены к целесообразному минимуму.
По-видимому, такие реальные гироскопы было бы целесообразно называть
некорректируемыми. Однако в технике термин "свободный гироскоп"
получил весьма широкое распространение.
Практически в конструкции СГ (рис. 2.1) могут быть предусмотрены
специальные датчики момента ДМ и ДМ , назначение которых заключается
** У
в том, чтобы устанавливать его главную ось в требуемое исходное
положение. Они могут предназначаться также для того, чтобы
обеспечивать программное значение измерительной информации (например,
Рис.2. 1
50
для управления объектом). Сигналы измерительной информации снимаются
с датчиков углов ДУ и ДУ .
Свободные гироскопы в большинстве случаев используются как
измерители (датчики) углов поворота объектов, время управляемого движения
которых не превышает нескольких минут. При этом движение объекта
может быть неравномерным. К таким объектам относятся управляемые ракеты
классов "воздух-воздух", "земля-воздух", "воздух-земля" и т.п.
Предположим, что гироскоп в момент пуска расположен относительно
объекта как на рис. 2.1 и является датчиком углов крена и тангажа для
системы автоматической стабилизации и управления. В силу
рассмотренных свойств гироскоп будет с точностью до вредных уходов сохранять
неизменным ("запоминать") направление своей главной оси в абсолютном
(инерциальном) пространстве. Если объект под действием каких-либо
причин изменит, например угол тангажа по сравнению с заданным, датчик
угла ДУ зафиксирует это изменение, так как щетка потенциометра
жестко связана с осью внутренней рамки гироскопа и, следовательно,
останется неподвижной. База потенциометра, который закреплен на внешней
рамке, повернется вместе с объектом относительно щетки на угол,
равный изменению угла тангажа. Сигнал с датчика угла ДУ поступит в
систему управления, и органы управления вернут объект в исходное
положение. Если же, например оператору, обеспечивающему наведение объекта
на цель, необходимо повернуть его на некоторый угол тангажа (по
сравнению с исходным), он с помощью специальных средств телеуправления
может подать необходимый сигнал на датчик момента ДМ . Этот датчик
момента приложит к внешней рамке момент, который заставит прецессиро-
вать гироскоп вокруг оси внутренней рамки. Следовательно, щетка
потенциометра также начнет поворачиваться. С датчика угла ДУ в систему
управления поступит сигнал, заставляющий органы управления
отклоняться так, что объект начнет поворачиваться в необходимую сторону до тех
пор, пока с датчика угла ДУ не перестанет поступать сигнал. Таким
образом, по желанию оператора объект может быть выведен на
необходимый угол тангажа. Аналогичное управление возможно обеспечить по
любому каналу.
Как видно из рис. 2.1, для получения информации по каналу курса
(рыскания) на объект необходимо установить второй гироскоп, ось
внешней рамки которого должна быть параллельна оси Y. Более
предпочтительно, с точки зрения повышения точности и надежности
работы, по каждому каналу ставить один СГ со съемом сигнала по оси
внешней рамки (рис. 2.2).
51
Рис.2.2
Кроме решения перечисленных задач, СГ могут применяться как
датчики в системах головок самонаведения, стабилизации антенн, для целей
телеметрии и т.п.
2.2. ПОГРЕШНОСТИ СВОБОДНЫХ ГИРОСКОПОВ
Погрешности в измерении углов с помощью СГ зависят от их принципа
действия, качества изготовления и условий работы. Представляется
целесообразным раздельное выявление влияния различных факторов на
точностные характеристики СГ. Иногда бывает удобно делить погрешности
на инструментальные и методические.
Инструментальные - это погрешности, возникающие из-за
недостаточной точности, качества изготовления, сборки отдельных элементов и
узлов прибора, несовершенства материалов и т.п.
Методические - это погрешности, обусловленные несовершенством
метода, принципа работы, положенного в основу измерительного
устройства.
Наиболее достоверные результаты о точностных характеристиках любых
измерительных устройств могут быть получены в результате анализа их
математических моделей, учитывающих соответствующие условия работы. В
качестве упрощенной математической модели для СГ примем прецессионные
уравнения (1.49), что является приемлемым для решения многих
технических задач.
52
2.2.1. Погрешности СГ на неподвижном основании
Для случая неподвижного основания Uy = U = U = 0. Следовательно,
р = - 0, q = а. Предположим, что в осях подвеса гироскопа имеются
вредные моменты М и М . Тогда прецессионные уравнения для СГ
На = МХ;
в
яр = му.
в
Откуда
а = МХ/Н;
с в
0 = МУ/Н.
с в
Таким образом, свободный гироскоп (в техническом смысле) не
сохраняет ориентации своей главной оси, а прецессирует относительно
инерциального пространства с угловыми скоростями а и /3 . Эти угловые
с с
скорости обусловлены действием вредных моментов в осях подвеса
гироскопа. Они характеризуют техническое качество СГ. Поэтому
прецессию гироскопа под действием вредных моментов в осях его подвеса
в дальнейшем условимся называть собственной прецессией [4, 11].
Иногда ее называют дрейфом, собственным уходом. В общем случае
угловая скорость его собственной прецессии
2Mb /0 п
со = —п , (2.1)
С П
где 2/Vf — сумма всех вредных моментов, действующих относительно
в
неподвижной точки гироскопа.
Очевидно, что погрешности в измерении углов пропорциональны
времени. Именно поэтому применение СГ ограничено по времени.
Погрешности, обусловленные действием вредных моментов, относятся к
инструментальным.
При достаточно строгом подходе к решению вопроса о собственной
прецессии приходится сталкиваться со значительными трудностями. Дело
в том, что, как видно из уравнения (2.1), величина собственной
скорости прецессии зависит от суммы вредных моментов, действующих на
гироскоп, которые в общем случае являются случайными функциями
времени и точному учету не поддаются. Величина кинетического момента
Я, хотя и принимается в большинстве практических случаев как
53
постоянная, фактически также будет зависеть от различных, в общем
случае, случайных факторов. Поэтому при дальнейшем рассмотрении дадим
лишь краткую качественную характеристику влияния наиболее характерных
вредных моментов на собственную прецессию (дрейф) СГ.
Сумму всех вредных моментов разобьем условно на наиболее
характерные слагаемые:
т - \м\ ♦ т\ ♦ \м\ ♦ \м |
где
нб1
М — моменты сил сухого трения
т
в осях подвеса;
(2.2)
М — моменты от
нб
неуравновешенности (несбалансированности);
устройств, обеспечивающих подвод питания к
м
тп
гироскопу
м" -
и съем сигналов
прочие неучтенные
(в частности моменты от токоподводов);
моменты.
Моменты сил сухого трения, создаваемые опорами подвеса
гироскопа, - один из наиболее существенных факторов, вызывающих
собственные уходы гироскопов. Предполагается, что моменты сил сухого
трения не зависят от времени, угловой скорости относительного
перемещения, а зависят от нагрузки на опору и меняют знак при
изменении направления скорости относительного перемещения. Однако это
приближение весьма грубое. В действительности эти зависимости
значительно сложнее. Даже при сделанных допущениях характеристика
момента трения, как правило, не бывает симметричной, т.е. при
изменении знака скорости относительного перемещения абсолютное значение
момента сил трения не остается постоянным. Поэтому если даже
полагать, что гироскоп установлен на объект, совершающий
гармонические колебания, будет наблюдаться его односторонний уход
(рис. 2.3).
Моменты от неуравновешенности (несбалансированности) возникают в
результате несовпадения центра тяжести гироскопа с его неподвижной
точкой. Эти моменты могут носить случайный характер. Так, например,
из-за зазоров в реальных конструкциях центр тяжести не будет иметь
строго определенных координат. Следует заметить, что статическую
балансировку принципиально возможно произвести лишь с точностью до
моментов сил трения в опорах, на которых она производится. Это
определяется равенством М = М . Это указывает на зависимость
моментов неуравновешенности (несбалансированности) от моментов сил
трения.
Моменты от устройств, обеспечивающих подвод питания к гиромотору и
съем сигналов, зависят от конструкции этих устройств, которые, в свою
54
очередь, зависят от вида подводимой энер- р i мт
гии. В приборах с электрическим питанием
они могут иметь характер упругих моментов
или моментов сил сухого трения.
К числу неучтенных моментов могут быть
отнесены реактивные при разгоне и
торможении ротора, моменты, возникающие от
инерционных сил при вибрациях в неравно-
жестких конструкциях и др. Все они могут
оказывать существенное влияние на
величину собственных уходов гироскопа.
Кроме перечисленных факторов,
вызывающих собственные уходы гироскопа,
необходимо упомянуть об уходах, возникающих из-
за нутационных колебаний главной оси
гироскопа, если она отклонена от перпенди- Рис.2. 3
куляра к плоскости наружной рамки на угол /3. Причем скорость этого
ухода тем больше, чем больше угол отклонения 0. Однако как показывает
анализ, скорость этого ухода имеет порядок сотых долей градуса в час
и учитывается только в весьма точных (прецизионных) приборах [8, 9].
2.2.2. Погрешности СГ на подвижном основании
Предположим, что СГ предназначен для измерения углов крена и
тангажа ЛА (см. рис. 2.1). Как уже отмечалось, при полете ЛА базовая
система координат £w, относительно которой должны измеряться углы
крена 7 и тангажа #, вращается с угловой скоростью U. Следовательно,
движение СГ будет описываться уравнениями (1.52). Проекции угловой
скорости U на оси %гцр определяются равенствами (1.54). После
подстановки равенств (1.54) в уравнения (1.52) получим уравнения СГ
на подвижном основании:
Н[а * о> cos \p cos ф
(со sin у *
V/p)fi] = AT
H\fi * со cos \p sin ф + V/й + (to sin \p + V/p)a] = Ar.
3 3 3 в
(2.3)
Приняв для простоты полет ЛА за прямолинейный (V/p = 0),
последними слагаемыми в левых частях уравнений можно пренебречь ввиду
их малости, и тогда из уравнений (2.3) можно найти
а.= М /Н - со cos кр cos ф;
в 3
л^/я
(V/R + со cos ip sin ф).
«3 «з
(2.4)
55
Из равенств (2.4) следует, что главная ось гироскопа прецессирует
относительно базовой системы координат £т£ с угловыми скоростями а и
/3, а следовательно, углы крена и тангажа будут измеряться с
погрешностями:
t t
а = Лг /Hdt - со cos у cos фсИ;
О О
t t (2.5)
/3=f Mp/Hdt - J(V//?3 + co3cos у sin 0)Я.
Из выражений (2.4) и (2.5) легко увидеть, что первые слагаемые
обусловлены собственной прецессией гироскопа, причины появления
которой уже выяснены. Вторые слагаемые зависят от угловых скоростей
вращения Земли и перемещения ЛА относительно Земли. Физический смысл
этих слагаемых легко понять, если вспомнить, что свободный гироскоп
сохраняет неизменным направление своей главной оси в инерциальном
пространстве. Следовательно, его ориентация относительно любой
вращающейся системы отсчета изменяется. В подтверждение рассмотрим
следующий пример.
Предположим, что свободный гироскоп (2М = 0) установлен на
экваторе Земли в точке О (рис. 2.4). Его главная ось в начальный
момент времени совмещена с направлением вертикали (осью £ ).
Вследствие суточного вращения Земли с угловой скоростью со через
определенный промежуток времени точка О переместится в новое
положение О . Направление вертикали места f повернется в
пространстве на угол /3. Главная ось гироскопа (вектор Н), сохраняя
направление неизменным в инерциальном пространстве, уже будет
составлять с направлением вертикали места в точке О угол /3. Для
наблюдателя, находящегося на Земле, будет казаться, что гироскоп
повернулся относительно вертикали места на угол /3. Поэтому описанное
относительное угловое перемещение главной оси гироскопа и системы
координат (в данном случае оси t), связанной с Землей, называют
кажущейся прецессией (в отличие от собственной прецессии) гироскопа.
В общем случае кажущаяся прецессия гироскопа будет определяться
56
суммой проекций всех переносных угловых скоростей
выбранной системы координат на оси х и {/, как это было ^
указано в разд. 1.7. Кажущаяся прецессия СГ, как
правило, учитывается только в случае применения СГ в
автономных системах управления объектов большой
дальности. В объектах, например класса "воздух-воздух",
где с помощью свободных гироскопов решается задача
стабилизации объекта относительно центра масс, и
расстояние до цели невелико, влияние этих факторов не
учитывается. Однако отметим, что как правило, Рис. 2.4
ориентация опорной системы координат для СГ в рабочем режиме
совпадает с ориентацией системы координат, связанной с
объектом-носителем в момент старта. Эта ориентация зависит от
решаемой задачи. Поэтому в случае необходимости учета кажущихся
уходов СГ нужна информация об ориентации носителя в момент старта
относительно земных осей.
Погрешности, обусловленные кажущейся прецессией, относятся к
методическим. К методическим погрешностям СГ относят также карданные
погрешности [7, 9]. Карданные погрешности гироскопа появляются при
несовпадении осей поворотов объекта с осями карданова подвеса. Таким
образом, они обусловлены кинематическими свойствами карданного
подвеса и являются чисто геометрическими погрешностями в отсчете
показаний. При их возникновении главная ось гироскопа не меняет
своего направления в пространстве, поэтому при выравнивании объекта
погрешности исчезают. Ввиду ограниченности маневров ЛА, на которых
устанавливаются СГ, углы поворота рамок гироскопа относительно
корпуса обычно невелики. Благодаря этому в ряде случаев карданные
погрешности могут быть снижены выбором соответствующей ориентации СГ
относительно ЛА. При необходимости могут быть получены формулы для
вычисления карданных погрешностей в зависимости от расположения осей
подвеса СГ [17, 9] относительно ЛА.
Если известен закон движения объекта, методические погрешности
могут быть учтены с помошью бортовых ЭВМ.
2.3. КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ СВОБОДНЫХ ГИРОСКОПОВ
Особенности конструктивного оформления свободных гироскопов
определяются спецификой условий их работы и требованиями,
предъявляемыми к ним. Существует множество вариантов конструкций,
которые практически не представляется возможным описать. Однако можно
указать некоторые рекомендации по самым обшим вопросам проектирования
свободных гироскопов.
57
Эти обшие рекомендации в известной степени могут быть
распространены и на другие гироскопические приборы, в основе конструкции
которых лежит астатический гироскоп. Первые такие рекомендации можно
сформулировать на основании рассмотрения технических уравнений
движения гироскопа (1.27). При решении большинства практических задач
достаточно пользоваться прецессионными уравнениями, которые
получаются в результате отбрасывания обычных инерционных членов в полных
уравнениях. Очевидно неучет этих членов будет тем правомернее, чем
меньшую величину они составляют. Следовательно, • всегда желательно
иметь минимальными значения моментов инерции / и / гироскопа. Это
возможно обеспечить путем выбора рациональных форм рамок и их
материала.
Например, у большинства авиационных гироскопов рамки выполняются
из легких сплавов на алюминиевой основе. Для свободных гироскопов это
не всегда приемлемо из-за необходимости обеспечения повышенной
жесткости конструкции. Дело в том, что свободные гироскопы в
большинстве случаев устанавливаются на объекты, движущиеся с большими
ускорениями, что обусловливает перегрузки, достигающие иногда сотен
g. При этом конструкция прибора должна быть не просто жесткой, а
равножесткой, т.е. имеющей равную жесткость по всем направлениям. В
противном случае при действии инерционных сил вокруг осей могут
возникать моменты, вызывающие собственные уходы.
Ранее было выяснено, что собственная скорость прецессии гироскопа
определяется соотношением со = —тг— • Он° эквивалентно
с п
прецессионным уравнениям. Из него видно, что уменьшение собственной
прецессии (или дрейфа) возможно путем уменьшения вредных моментов и
увеличения кинетического момента гироскопа. Краткая характеристика
основных вредных моментов была дана в предыдущем разделе. Здесь лишь
укажем на необходимость их снижения прежде всего применением опор с
малыми моментами трения, безмоментных устройств подвода питания и
съема сигналов и т.п. Это во многом зависит от правильности
конструктивного решения, выбора материалов, совершенства технологии
изготовления и сборки прибора и его элементов. Увеличение
кинетического момента наиболее целесообразно осуществлять за счет
радиуса инерции ротора и скорости его вращения. При этом следует
учитывать, что увеличение радиуса, а в гиромоторах с электрическим
питанием и частоты вращения ротора, связано с увеличением габаритных
размеров прибора в целом. Увеличение кинетического момента путем
применения материалов с повышенной плотностью к желаемым результатам
не приводит, так как пропорционально увеличиваются и моменты трения в
58
опорах подвеса. Увеличение Н путем применения материалов с повышенной
плотностью может быть оправдано только в малогабаритных и поплавковых
приборах.
Учитывая, что свободные гироскопы, как правило, предназначены для
кратковременной работы, все их элементы могут работать в
форсированном режиме, что дает конструктору большие возможности при
их проектировании.
Питание свободных гироскопов может быть самым разнообразным, что
зависит от вида энергии имеющегося на борту объекта, времени его
работы и т.д. Наиболее удобным является электрическое питание. Вместе
с тем применяется и пневматическое питание. В тех случаях, когда
время работы объекта исчисляется секундами и необходимо осуществить
"мгновенный" (в доли секунды) запуск гиромотора, применяются
гироскопы с пороховым приводом. Иногда применяется комбинированное
питание, например запуск - пороховой, а последующая работа гиромотора
обеспечиваеться электрической или какой-либо другой энергией.
В качестве устройств съема сигналов могут применяться самые
разнообразные датчики угловых и линейных перемещений. Например,
потенциометрические, индуктивные, индукционные, струйные реле и др.
Наиболее часто применяются потенциометрические датчики, так как они
просты в изготовлении, достаточно надежны (учитывая кратковременность
работы), позволяют снимать сигналы большей мощности. Вместе с тем
следует учитывать, что они могут создавать значительные моменты
трения, увеличивая дрейф гироскопа.
Как уже указывалось, в свободных гироскопах предпочтительнее
снимать сигнал только по внешней рамке. Это дает выигрыш в габаритах,
упрощается конструкция, а также позволяет существенно снизить
собственные уходы. Уменьшение вредных уходов объясняется тем, что в
гироскопе' уходы внешней рамки зависят от вредных моментов,
действующих в осях внутренней рамки. В осях внутренней рамки меньше
моменты трения (так как меньше ее масса). Ее легче уравновесить.
Возможные аксиальные люфты в осях внутренней рамки вызывают моменты
только по оси внешней рамки. Следовательно, погрешности в съеме
сигнала с оси внешней рамки могут оказаться существенно меньше.
Поскольку свободный гироскоп не обладает избирательной
способностью по отношению к какому-либо определенному направлению в
пространстве, то перед пуском его главная ось должна быть
соответствующим образом ориентирована относительно объекта или
пространства. Это может быть осуществлено с помощью датчиков моментов
по осям или с помощью специальных устройств, называемых арретирами.
Аррешр - это конструктивное устройство, обеспечивающее жесткую
фиксацию всей подвижной системы гироскопа в нерабочем состоянии по
59
отношению к корпусу прибора или объекта. Арретиры бывают механи-
ские, электромеханические и др. К ним предъявляются требования точной
фиксации в нужном положении главной оси гироскопа и быстроты
срабатывания при освобождении (разарретировании) гироскопа.
Рассмотрим пример возможного применения свободных гироскопов в
системе управления баллистической ракетой.
Как известно. траектория движения баллистической ракеты состоит из
двух участков (рис. 2.5): активного полета (АД), на котором работают
двигатели и система управления, и свободного баллистического полета
(ДЕ), на котором ракета движется в результате полученного запаса
кинетической энергии. Понятно. что точность попадания такой ракеты в
намеченную цель будет определяться параметрами ее движения в момент
выключения двигателя и системы управления, а именно вектором скорости
V. Вектор скорости в свою очередь определяется углом наклона
траектории в, углом отклонения ф (угол рыскания) вектора от
вертикальной плоскости. которую называют плоскостью стрельбы, и
абсолютной величиной — модулем. Например, для того, чтобы ракета
попала в цель, расположенную на расстоянии 10000 км с отклонением не
более 100 км, только погрешность выставки плоскости стрельбы
2 4
(прицеливания) не должна превышать угла Аф ~ arctg b/L * 10/10 *
о
* 0.6 . Ракету же необходимо удерживать в плоскости стрельбы на всем
активном участке траектории полета.
Перед пуском ракета устанавливается строго вертикально. При этом
ее оси X и Y должны находиться в плоскости стрельбы. После старта
ракета несколько секунд движется вертикально (см. рис. 2.5) до точки В,
после этого она начинает разворачиваться вокруг оси Z и наклоняться в
плоскости стрельбы в сторону цели, постепенно уменьшая угол в до
о
величины, близкой к 45 . В дальнейшем этот угол сохраняется
постоянным до тех пор, пока модуль скорости V не достигает расчетного
значения, затем двигатели и система управления отключаются, и дальше
ракета движется по инерции.
В некоторых типах ракет (например, V-2) все перечисленные
параметры поддерживаются в заданных пределах с помощью трех
гироскопических приборов. Два из них являются свободными гироскопами
и измеряют угловые координаты ракеты. Третий, называемый гироин-
тегратором линейных ускорений, измеряет модуль вектора скорости,
после достижения расчетной величины которого подается сигнал
(команда) на отключение двигателей и системы управления. Один из свободных
гироскопов, называемый ~гировертикантом~ (рис. 2.6. а), измеряет
угловые отклонения ракеты вокруг осей Y (угол рыскания) и X (угол
60
крена, вращения). Система управления парирует эти отклонения, в
результате чего ракета удерживается в вертикальной плоскости, т.е. в
плоскости стрельбы (отсюда и название жгировертикантж). Второй
свободный гироскоп, называемый 'гирогоризонтом' (рис. 2.6, б),
обеспечивает требуемое программное изменение угла тангажа.
Оба эти прибора однотипны по конструкции и выполнены на базе
одного гиромотора. Гировертикант (см. рис. 2.6, а) устанавливается на
ракете так. что плоскость его внешней рамки совпадает с плоскостью
стрельбы, а ось у внешней рамки параллельна оси Y ракеты. Углы
поворота ракеты вокруг продольной оси X снимаются с потенциометра 1,
закрепленного на внешней рамке, вокруг оси Y — с потенциометра 2.
закрепленного на корпусе прибора. Щетки потенциометров 1 и 2 жестко
связаны с осями внутренней и внешней рамок соответственно.
Первоначальная выставка гироскопа осуществляется датчиками моментов
61
5 и 6, на которые через усилители 3 поступают сигналы,
соответственно, с маятника 4, закрепленного на кожухе гиромотора, и с
потенциометра 1. В момент старта все цепи коррекции разрываются. и в дальней -
шем на всем участке управляемого полета гироскоп остается свободным.
Гирогоризонт (см. рис. 2.6, б) устанавливается на ракете так,
чтобы его ось (/ внешней рамки совпадала с осью Z ракеты, т.е. была
перпендикулярна плоскости стрельбы, а главная ось горизонтальна
(параллельна оси Y ракеты).
Первоначальная выставка гирогоризонта осуществляется аналогично
выставке гировертиканта — по сигналам с маятника 7 через усилитель 6
датчиком момента 8 и по сигналам с датчика 5 (типа жда-нетж) через
усилитель 6 датчиком момента 9. В процессе работы гироскоп остается
свободным. Командный сигнал в систему управления на отработку
необходимой траектории полета поступает с потенциометра 3, который
может свободно поворачиваться вместе с диском 4 на оси внешней рамки
гироскопа, с которой скреплена щетка потенциометра. Поворот диска с
потенциометром относительно неподвижной щетки обеспечивается
специальным программным устройством (кулачком) 2 с приводом от
шагового двигателя 1.
При программном повороте диска нулевая точка потенциометра уходит
от неподвижной щетки, в систему управления поступает сигнал на
разворот объекта. По достижении заданного угла в диск
останавливается, нулевая точка потенциометра совмещается со щеткой, и ракета
дальше продолжает полет с постоянным углом в. Влияние вращения земли
учитывается при расчете траектории. Собственные скорости прецессии
гировертиканта и гирогоризонта составляют около семи угловых минут в
минуту.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Дайте обоснование возможности применения СГ для измерения
углов ориентации ЛА и укажите основные ограничения.
2. Нарисуйте шесть возможных вариантов расположения СГ в
кардановом подвесе относительно ЛА для измерения его углов ориентации
и охарактеризуйте особенности каждого варианта с учетом характера
движения ЛА.
3. Перечислите основные источники погрешностей СГ.
4. Воспользовавшись рис. 2.3, дайте физическое пояснение изменения
угла (Ш) при вращении Л А с угловой скоростью, изменяющейся по
периодическому закону.
5. Чем обусловлена кажущаяся прецессия (уход) СГ? Укажите ее
влияние на выходной сигнал измерительной информации.
62
ГЛАВА 3. ГИРОСКОПИЧЕСКИЕ ДАТЧИКИ
И УКАЗАТЕЛИ УГЛОВ КРЕНА И ТАНГАЖА
3.1. ОБЩИЕ СВЕДЕНИЯ
Гировертикалями или авиагоризонтами называют гироскопические
устройства, обладающие избирательной способностью по отношению к
направлению вертикали места и предназначенные для измерения углов
крена и тангажи (дифферента).
Различают гировертикали, являющиеся чувствительными элементами
систем автоматического управления, и гировертикали, с помощью которых
получают визуальные показания углов (в авиации их называют
авиагоризонтами). В дальнейшем будем пользоваться общим термином
гировертикаль. Принцип действия гировертикалей основан на совместном
использовании свойств астатического гироскопа и обычного физического
маятника.
Как известно, ни физический маятник, ни астатический гироскоп в
отдельности не могут служить удовлетворительными указателями
вертикали на подвижном объекте. Придание астатическому гироскопу
избирательной способности по отношению к вертикальному направлению
возможно двумя принципиально отличными способами.
Первый способ основан на создании необходимого позиционного
момента (момента, возращающего гироскоп к направлению вертикали) в
результате смещения центра тяжести всей механической системы вниз по
главной оси. Гировертикали (ГВ) такого типа называют гиромаятниковыми
вертикалями, или гиромаятниками.
Второй наиболее распространенный способ создания позиционных
моментов основан на том, что сам гироскоп остается астатическим, но
он дополняется системой коррекции, чувствительным элементом которой
обычно служит физический маятник. Такие гировертикали называют
гировертикалями с системой коррекции.
Техническая и физическая сущности комбинации астатического
гироскопа с физическим маятником по второму способу заключается в
следующем (рис. 3.1). На кожухе гиромотора 1 астатического гироскопа
размещены малоинерционные маятники 2 и 3. Причем оси качания
маятников расположены так, что маятник 3 может отклоняться в
плоскости перпендикулярной оси внешней рамки j/, а маятник 2 - в
плоскости перпендикулярной оси внутренней рамки х (конструктивное
выполнение и расположение маятников может быть различным - важно,
чтобы они раздельно реагировали на отклонения главной оси гироскопа
вокруг осей внешней и внутренней рамок).
63
Рис.3. 1 Рис.3.2
При отклонении маятников (или гироскопа относительно маятников)
поступают сигналы на моментные моторы Al и Лт .
Эти моментные моторы (их обычно называют коррекционными, иногда
датчиками моментов), прикладывая моменты по соответствующим осям,
заставляют прецессировать главную ось гироскопа до тех пор, пока она
не займет направление, при котором с маятников не будет поступать
сигналов. На неподвижном основании это будет направление вертикали
места (направление вектора силы тяжести).
Таким образом, гироскоп приобретает избирательную способность по
отношению к направлению вертикали. В чем же преимущества такой
комбинации? Ведь избирательную способность гироскоп приоб|эел
благодаря свойствам маятника, недостатки которого как указателя
вертикали известны. Оказывается, в результате комбинации
астатического гироскопа с физическим маятником получается механическая
система, обладающая совершенно иными динамическими свойствами, чем
каждое устройство в отдельности. С одной стороны, из-за свойств
маятника гироскоп приобрел избирательную способность, с другой
стороны, из-за свойств гироскопа вся система стала значительно
инерционнее, чем маятник, т.е. она приобрела способность больше
"сопротивляться" внешним возмущениям.
Для пояснения сказанного в качестве примера рассмотрим поведение
гировертикали с системой коррекции (см. рис. 3.1) по одному из
каналов. Предположим, что главная ось гироскопа совпадает с
направлением вертикали, а маятник 2 под влиянием возмущений совершает
колебания по закону, определяемому функцией 5 = 5(/), где 5 - угол
отлонения маятника от направления вертикали. Тогда к гироскопу по оси
внешней рамки коррекционный мотор будет прикладывать возмущающий
64
момент, пропорциональный углу отклонения маятника, т.е. Лг = k&(t),
где k - коэффициент пропорциональности.
Согласно закону прецессии гироскоп начнет прецессировать вокруг
оси внутренней рамки с угловой скоростью в = мР/Н = (Ш))/Н. Угол в
отклонения главной оси гироскопа от направления вертикали определится
интегрированием угловой скорости прецессии, т.е.
Н J
s(t)dt.
о
На рис. 3.2 показан график изменения во времени угла отклонения
маятника 5 = 5(/). Тогда, в соответствии с предыдущим выражением
график для угла 0 определится усредненной площадью, ограниченной
кривой 5(f), умноженной на коэффициент k/H, который практически можно
сделать достаточно малым. Иначе говоря, в результате выбора малой
скорости прецессии при периодических колебаниях чувствительного
элемента коррекции (маятника) ось гироскопа не успевает отклоняться
на значительные углы. Получается своего рода следящая система с
большой постоянной времени, являющаяся фильтром нижних частот.
Исходя из сказанного, нетрудно убедиться, что движение главной оси
гироскопа к положению равновесия будет определяться зависимостью
момента коррекции от угла рассогласования осей гироскопа и маятника:
М =/(5). (3.1)
к
Эту зависимость называют характеристикой коррекции.
Все существующие в настоящее время гировертикали независимо от их
конструкции и принципа действия можно разделить по типу коррекции на
следующие основные группы: типа гиромаятник; с пропорциональной
коррекцией; с постоянной коррекцией; со смешанной коррекцией.
Наиболее широкое распространение получили гировертикали со
смешанной коррекцией. Изучению поведения перечисленных типов гировертикалей
при различных режимах работы и будет посвящено содержание последующих
разделов данной главы.
3.2. ГИРОМАЯТНИКОВАЯ ВЕРТИКАЛЬ
Гиромаятниковая вертикаль. или гиромаятник. представляет собой
трехстепенный гироскоп, центр тяжести которого смещен относительно
неподвижной точки по главной оси (по оси фигуры) на величину / вниз.
3 - 369 65
Рис.3.3 Рис.3.4
Благодаря смещению центра тяжести гиромаятник приобретает
избирательную способность к направлению вертикали места. Принципиальная
кинематическая схема гиромаятника представлена на рис. 3.3.
Составим уравнение движения и рассмотрим поведение гиромаятника на
неподвижном основании. Для этого применим уже известный прием
поворота осей гироскопа относительно неподвижной системы координат
%Г$. Как видно из рис. 3.4, положение главной оси гироскопа
определяется углами а и /3 (ось f направлена по вертикали).
Чтобы получить уравнения движения гиромаятника, воспользуемся
прецессионными уравнениями гироскопа (1.49), в которые следует
подставить значения угловых скоростей р и Ц и значения моментов М и
М для нашего случая.
Поскольку основание принято неподвижным,
переносные .угловые скорости Uy ■ V = V\ ■ 0. Следовательно, (J - а;
р = — /3. Значения моментов М и М получим на основании рассмотрения
рис. 3.4. В результате отклонения главной оси от направления
вертикали (оси {*) на угол а вокруг оси внешней рамки будет
действовать момент
р
— mot sin a,
где Ш
масса; g — ускорение
свободного падения. Кроме этого, вследствие наличия моментов сил
сухого трения в реальных конструкциях движению гиромаятника с угловой
скоростью а будет препятствовать момент трения в осях подвеса
внешней рамки, зависящий от знака угловой скорости, т.е.
М = - М sign a.
вш вш
Аналогично по оси внутренней рамки будут действовать моменты от
66
X
силы тяжести М = /nrf sin /3 и трения М = М sign /3. Суммируя
р Z вн вн
раздельно внешние моменты, действующие по осям внутренней и внешней
рамок, получим: М = /Пб£ sin 0 * М sign /3; Л1 = - mgl sin a -
v X Z вн у Z
- М sign а. Подставив найденные значения проекций угловых скоростей
и моментов в прецессионные уравнения и, полагая углы а и /3 малыми,
получим уравнения движения гиромаятника на неподвижном основании:
На = md a + M sign /3;
Z вн
Я/3 = - mglj - М J\gn a, (3.2)
где /Hg£j3 и /Hg/ а — позиционные моменты, возникающие соответственно
по осям внутренней и внешней рамок при отклонении главной оси от
вертикали на углы /3 и а; М , М — моменты сил сухого трения в осях
вн вш
внутренней и внешней рамок соответственно.
Для того, чтобы установить закон движения главной оси
гиромаятника , необходимо проинтегрировать уравнения (3.2). Ограничимся
интегрированием уравнений без учета моментов трения, т.е. положим
М = М - 0. Тогда, поделив почленно оба уравнения (3.2) на Н,
вн вш
получим
а = Х/3;
/J - - Ха.
(3.3)
где а = mgf /H.
Чтобы исключить время, поделим первое уравнение системы (3.3) на
второе, тогда
а/0 = - |3/а или аа = - ДЗ. (3.4)
Интегрируя левую и правую части уравнения (3.4), найдем закон
изменения координат вершины (полюса) гиромаятника на картинной
плоскости:
2 2 2
а ♦ /Г = 0 . (3.5)
где в — постоянная интегрирования.
Легко увидеть, что уравнение (3.5) есть уравнение окружности с
Центром в начале координат и радиусом в, который может быть найден из
начальных условий. Предположим, что в начальный момент времени / = 0
67
вершина гиромаятника находилась на картинной плоскости (рис. 3.5) в
/2 2
точке А с координатами а и в, тогда в = га + в
Таким образом, вершина гиромаятника, установленного на неподвижном
основании. будучи отклоненной от начала координат, совершает
движение, траекторией которого на картинной плоскости является окружность.
Радиус в этой окружности равен начальному отклонению вершины от
начала координат. Если же вершина гиромаятника в начальный момент
времени находилась в начале координат, то она там и будет оставаться.
Направление движения полюса гироскопа на картинной плоскости может
быть установлено из рассмотрения уравнений (3.3). Например, из
первого уравнения следует, что всем положительным значениям /3
соответствуют положительные значения а. а отрицательным значениям /3 —
отрицательные значения а, т.е. при всех /3 У 0 а увеличивается, при
всех /3 < 0 а уменьшается. Это означает, что вершина гиромаятника (см.
рис. 3.5) перемещается по найденной нами траектории (окружности) по
часовой стрелке.
Полученный для нашего случая закон движения вершины гиромаятника
можно трактовать как прецессию вокруг вертикали места. Скорость этой
прецессии X = ПХ$ /Ни ее вектор направлен вниз от неподвижной точки.
На рис. 3.6 изображен гиромаятник, условно закрепленный в
неподвижной точке 0 (для упрощения рисунка карданный подвес не
изображен). вектор Н которого отклонен от направления вертикали на
углы а и /3 , что соответствует рассмотренному случаю. Главная ось
гиромаятника будет описывать в пространстве вокруг вертикали места
I
fi
\А
Vl\
^J I «
Рис.3.5
Рис. 3.6
68
v
конус, вершина которого находится в неподвижной точке 0. Основанием
этого конуса является окружность, лежащая на картинной плоскости.
Физическое происхождение указанного движения оси гиромаятника
можно пояснить на основании рассмотрения рис. 3.7. Предположим, что
главная ось гиромаятника отклонена от направления вертикали (оси £)
о
на угол, равный 90 . Тогда вокруг оси К, перпендикулярной плоскости
рисунка, возникнет позиционный момент М = mgl , направленный на
читателя. Этот момент М стремится повернуть гиромаятник по
направлению к вертикали вокруг оси своего приложения. Однако согласно
правилу прецессии, движение начнется в плоскости перпендикулярной
плоскости приложения этого позиционного момента. Гиромаятник начнет
прецессировать вокруг оси f с угловой скоростью X в направлении
совмещения вектора кинетического момента Н с вектором момента М по
кратчайшему пути. Но одновременно с поворотом вектора Н будет
поворачиваться и вектор позиционного момента М . так как гиромаятник
представляет собой жесткую конструкцию. и точка С приложения силы
тяжести всегда лежит на оси Z. Таким образом, гиромаятник будет
прецессировать вокруг вертикали места с угловой скоростью прецессии
X = fflgf ///, а вершина его вектора Н будет описывать окружность.
Итак. гиромаятник, вокруг осей подвеса которого действуют только
позиционные моменты. еще не приобретает избирательной способности.
Если его главная ось отклонена от положения равновесия, то
возникающий при этом позиционный момент не устраняет этого
отклонения, а стремиться перевести его в другую плоскость [см.
уравнения (3.3) и рис. 3.7]. Такой гиромаятник называют иногда
недемпфированным гиромаятником.
Для выяснения поведения гиромаятника при наличии моментов сил
трения вместо уравнений (3.3) необходимо рассматривать уравнения
(3.2), приведя их к виду:
а - Х/3 * m sign /3;
(3.6)
0 = - Ха - тп sign а,
вш
где m = М /Н — скорость прецессии внешней рамки от момента сил
вн вн
трения в оси подвеса внутренней рамки; ТП М /Н — скорость
вш вш
прецессии внутренней рамки от момента сил трения в оси внешней рамки.
Уравнения (3.6) являются нелинейными. Не будем останавливаться на
их решении. Укажем лишь, что их можно решить. например методом
69
Рис.3.7
Рис.3.8
'припассовывания' (сшивания) решений по участкам, где а и /3 имеют
постоянные знаки [2]. Как следует из анализа уравнений, траекторией
движения вершины такого гиромаятника на картинной плоскости будет
спираль, сходящася к началу координат (рис. 3.8). Однако из-за
моментов трения она не дойдет до начала координат, а остановится на
какой-либо из сторон НвТЫрехугОЛЬНика застоя. Как видно из рис. 3.8,
траектория в виде спирали получается от соответствующей скорости
прецессии ГП, обусловленной моментами трения в осях подвеса.
Действительно, если бы моменты сил трения отсутствовали, траекторией
движения вершины была бы окружность, изображенная на рисунке
пунктиром. Вектор линейной скорости в этом случае обозначен X. Он
равен геометрической сумме векторов скоростей а и /3. Это означает,
что гиромаятник поворачивается вокруг осей внешней и внутренней рамок
с мгновенными угловыми скоростями а и /3. Моменты сил трения М и М
вш вн
будут направлены в противоположные стороны угловым скоростям а и /3.
М * М заставит
вн
Результирующий момент сил трения М
т вш
прецессировать гиромаятник с дополнительной угловой скоростью m
= m + m Вектор m направлен к началу координат. Следовательно,
вершина гироскопа будет двигаться со скоростью X = X + ГП, т.е.
ТП
вектор повернется на угол, равный arctg — , и траекторией движения
будет уже не окружность, а спираль.
К аналогичным результатам приводит и наличие в осях подвеса момен-
70
тов, пропорциональных угловым скоростям а и 0, т.е. демпфирующих
моментов. (Поведение гиромаятника с центром тяжести, смещенным вверх.
предлагаем читателю проанализировать самостоятельно). Таким образом,
если в осях подвеса гиромаятника, центр тяжести которого смещен вниз
от неподвижной точки, имеются моменты сил сухого трения или
демпфирующие моменты, он приобретает избирательную способность к направлению
вертикали места. С помощью такого гиромаятника можно измерять углы
крена и тангажа объекта. Понятно, что моменты сухого трения являются
нежелательными, т.к. вершина гиромаятника не будет доходить до
истинной вертикали на углы, определяемые четырехугольником застоя. Кроме
этого, угловые колебания объекта через моменты сил трения в осях
будут вызывать возмущения гиромаятника, заставляя его главную ось
уходить от направления вертикали. Поэтому моменты трения в осях подвеса
гиромаятников также стремятся сводить к минимуму. Затухание колебаний
обычно обеспечивают путем введения специальных демпфирующих
устройств .
Анализ поведения гиромаятника. установленного на подвижном
основании, показывает, что ему присущи так называемые СКОрОСГНЫв ПОгрвШ-
HOCTU, возникающие из-за вращения Земли и собственного перемещения
основания (объекта) относительно Земли. Эти погрешности могут
достигать нескольких градусов. Кроме этого, вследствие того, что центр
тяжести гиромаятника смещен относительно неподвижной точки. он будет
подвержен влиянию ускорений. Принципиально можно создать гиромаятник
невозмущаемый ускорениями. Для этого необходимо обеспечить ему период
собственных колебаний, равный 84,4 мин (период Шулера). Однако это
связано с большими техническими трудностями [2, 4].
Из-за перечисленных недостатков, а также вследствие значительных
габаритных размеров и массы. гиромаятниковые вертикали на летательных
аппаратах распространения не нашли. Исторически они явились первыми
гировертикалями и ограниченно применяются на некоторых объектах.
3.3. ГИРОВЕРТИКАЛИ С ПРОПОРЦИОНАЛЬНОЙ КОРРЕКЦИЕЙ
В гировертикалях с пропорциональной коррекцией момент коррекции
пропорционален углу рассогласования между направлениями главной оси
гироскопа и маятника. Техническая реализация системы коррекции,
обеспечивающей пропорциональную зависимость корректирующего момента
от угла рассогласования, может быть весьма разнообразной. Однако для
подавляющего большинства гировертикалей в основе системы коррекции
лежит физический маятник и какое-либо моментное устройство.
Принципиальная схема гировертикали с пропорциональной коррекцией
71
ы
arctgh
-(Р)
Рис.3.9
изображена на рис. 3.9. Если предположить, что момент, развиваемый
коррекционным мотором, пропорционален напряжению (току), снимаемому с
потенциометра, щетка которого жестко связана с маятником, а база
жестко связана с кожухом гиромотора, то момент коррекции будет
пропорционален углу рассогласования между направлениями главной оси
гироскопа и маятника (см. рис. 3.9, а). Здесь и далее при анализе
будем пользоваться только идеальными характеристиками зависимости М
от углов рассогласования, т.е. без учета зон нечувствительности,
гистерезиса и т.п.:
Af = - kt (a - v)\ M& = - kAfi - 5), (3.7)
к 2 ^
Г
где
м"
момент коррекции по углу а;
*#-
момент коррекции по углу /3;
к к
V и 5 — углы отклонения маятников от направления вертикали
соответственно в поперечной и продольной плоскостях (положительные
направления отсчета для них те же,
что и для а и /3); k и k —
коэффициенты пропорциональности.
Отметим, что схема чувствительного элемента коррекции,
представляющая собой маятник, скользящий по потенциометру (см.
рис. 3.9, б), является принципиальной. Она наглядна. Давать описа-
72
*
ние каких-либо конкретных конструктивных устройств не представляется
возможным из-за ограниченности объема данного пособия.
Измерение углов крена и тангажа (см. рис. 3.9) осуществляется
датчиками углов соответственно ДУ и ДУ , которые могут быть
потенщюметрическими, индуктивными, индукционными и др. Следует
помнить, что если система коррекции не возмущена, то она не принимает
никакого участия в измерениях углов крена или тангажа. Измерения в
этом случае осуществляются точно так же, как и в свободных
гироскопах, т.е. при изменении угловых положений объекта изменяют
относительное расположение элементы датчиков углов, например щетки,
жестко связанные с гироскопом, и базы потенциометров.
Рассмотрим поведение гировертикали с пропорциональной коррекцией
при различных режимах движения объекта.
3.3.1. Поведение и погрешности гировертикали
с пропорциональной коррекцией
на неподвижном основании
Уравнения движения гировертикали с пропорциональной коррекцией для
случая неподвижного основания получим из рассмотрения рис. 3.10 и
общих прецессионных уравнений движения гироскопа (1.49). Для
неподвижного основания, как и ранее q - а; р = - /3.
Так как ось гироскопа отклонена от вертикали на углы а и 0, вокруг
осей внутренней и внешней рамок система коррекции создаст коррек-
ционные моменты т = - t а и м = - k В. Поскольку основание
К 1 К L
неподвижно, углы v = 0 и 5 = 0. Суммируя проекции моментов по осям
получим:
М = - k а * М sign /3;
М = - kB - М sign a.
у 2 вш ь
(3.8)
Подставив значения q, р и М и М в уравнения (1.49), получим
х у
уравнения движения гировертикали на неподвижном основании с учетом
моментов трения в осях подвеса:
На = - k a + M sign 0;
1 вн . (3.9)
Нр = - kj - М sign a.
2 вш
Церепишем уравнения (3.9) в следующем виде:
73
a = - eta * m sign 0;
1 ви
0 = - €J " M see11 a>
2 вш
(3.10)
0 и a = 0 = 1, тогда a = - e и 0 = - e ,
где e = fc ///; e = fc /// - эффективности коррекций соответственно по
осям внешней и внутренней рамок.
Физический смысл е и е становится ясным, если в уравнениях
(3.10) положить m = m
вн вш
т.е. е и е есть скорости прецессий под действием коррекщюнных
моментов при отклонениях главной оси на углы а и 0, равные одному
радиану (иначе гоюря, это удельные скорости). Выясним вначале
характер движения главной оси гировертикали без учета моментов сил
трения. Для этого в уравнениях (3.10) положим тп = m =0, тогда
вн вш
a = - е^а;
(3.11)
Поделив друг на друга соответственно левые и правые части первого
и второго уравнений, получим
а/0 = ла/0. (3.12)
где Л = €J€t>'
Разделим переменные в уравнениях (3.12):
а/а = Л0/0.
(3.13)
После интегрирования левой и правой частей уравнения (3.13),
получим
гЛау
ш. m.ji
Г /z
■4/
/ \
\/м" \
<м>
'вн
Рис.3. 10
Рис.3.11
74
In a = nln 0 + In C,
(3.14)
где С — постоянная интегрирования, определяемая из начальных условий.
Пусть при t = 0 a = а и j3 = j3 , тогда из (3.14) найдем In С =
= In a - nln 0 . Подставив найденное значение постоянной в уравнение
(3.14) и преобразуя его, получим
In a - In aQ = /i(ln 0 - In /3Q) или a/aQ = (/3/^)". (3.15)
Выражение (3.15) и является уравнением траекторий движения вершины
гировертикали на картинной плоскости, которые будут параболами
(рис.3.11, а). Если эффективности коррекции по осям взять равными,
т.е. е = е , что на практике встречается часто, то л = 1 и уравнение
(3.15) примет вид:
0 = —— а. (3.16)
ао
Нетрудно видеть, что это есть уравнение прямой, проходящей через
заданную точку с координатами a , в и начало координат.
Следовательно, при равных эффективностях коррекции траекториями
движения вершины гироскопа будут прямые, сходящиеся к началу
координат (рис. 3.11, б). Движение будет направлено к началу координат, а
не в обратном направлении ч Это следует из уравнений (3.11).
Действительно, при всех a > 0 a < 0, а при 0 > 0 & < 0.
При а = Ои/3 = Оа = Ои0 = О, т.е. вершина гировертикали
остановится в начале координат. Гировертикали, у которых главная ось
из отклоненного положения возвращается к вертикали места по
кратчайшему пути (что соответствует траекториям на картинной
плоскости в виде прямых, сходящихся к началу координат), иногда называют
гировертикалями с радиальной коррекцией.
Выясним теперь влияние моментов сил трения на характер движения
гировертикали. Для этого воспользуемся уравнениями (3.10),
преобразовав их к следующему виду:
т
а = -€ (а - — sign 0);
1
т
^ = -€9^+ -7е—sign a).
Введя новые переменные
(3.17)
75
m
a = (a- —j— sign 0);
1 (3.18)
m
/л ВШ . 'v
pfl= ^ * "1— Slgn a*
и подставив их в выражения (3.17), получим
a = - еа ;
П { П (3.19)
гл 2 л
Нетрудно видеть, что уравнения (3.19) аналогичны по структуре
уравнениям (3.11). Следовательно, если рассматривать движение вершины
гироскопа в координатах а и /3 при условии постоянства знаков а и 0,
траектории движения будут такими же, как и при отсутствии моментов
трения. Координаты установившегося положения вершины гировертикали в
системе координат а0 можем найти из выражений (3.18), положив в них
a = & =0. Тогда
л л
т
а = вн sign j3; (3.20)
61
т
* ВШ
0 = - sign a.
На основании рис. 3.12, а и системы уравнений (3.20) запишем:
для I квадранта a < 0; sign a = - 1; 0 < 0; sign /J = - 1.
Тогда a = - ш /e, и й = /п /б (точка 1), т.е. из любой точки I
I вн 1 I вш 2
квадранта (исключая область, ограниченную осью а и пунктирной линией)
вершина гироскопа будет двигаться к точке 1 с координатами а ив
(см. рис. 3.12, а),
для II - IV квадрантов a = - т /е. и 0 ■ = - т /ел (точка 2);
II вн 1 II вш 2
ain = w /е и 01П = - /л /е (точка 3); a = /л /е и 0 =
III вн 1 III вш 2 IV вн 1 IV
= т /ел (точка 4).
вш 2
76
Если коррекция радиальная, т.е. е = е , то траекториями будет
семейство прямых, сходящихся к вершинам четырехугольника застоя. В
случае е * е траекториями будет семейство парабол, сходящихся к тем
же вершинам четырехугольника застоя [рис. 3.12, б (е > е )].
Поскольку
т = М /Н; т = М /Н и е = к/Н; еп = кЖ
вн вн вш вш 112 2
то погрешности от моментов сил трения в осях подвеса
Отсюда видно, что величина угла застоя \а | внешней рамки прямо
пропорциональна моменту сил трения в осях подвеса внутренней рамки
М и обратно пропорциональна крутизне k характеристики коррекци-
онного момента ЛП\ Аналогично угол застоя |0 | внутренней рамки
пропорционален моменту сил трения в осях внешней рамки М и обратно
вш
пропорционален крутизне к .
Следовательно, для снижения погрешностей от трения необходимо
уменьшать моменты сил трения и увеличивать крутизну моментных
характеристик. Однако как увидим дальше, увеличение крутизны
моментной характеристики приводит к увеличению погрешностей от
ускорений. Поэтому выбор значений к должен производиться с учетом
влияния всех факторов.
Влияние моментов сил трения в осях подвеса на характер движения
вершины гировертикали с радиальной коррекцией можно пояснить
следующим образом.^ Предположим, что вершина гировертикали на
картинной плоскости (рис. 3.13) отклонена в точку с координатами
а -0 Тогда по осям возникнут коррекиионные моменты ЫГ и АГ, которые
заставляют вершину гироскопа прецессировать с угловыми скоростями а
и ^ по направлению к началу координат* (к вертикали). В
противоположную сторону угловым скоростям а и & в осях подвеса направлены
моменты сил трения М и М , которые вызовут дополнительную
прецессию вершины гировертикали со скоростью m = m + m .
Суммарный вектор линейной скорости (т + а + 0 ) направлен к точке 1
77
Рис.3. 12
Рис.3.13
равновесного положения. Когда вершина гировертикали пересечет ось 0,
корректирующий момент (т) будет равен нулю, а следовательно, будет
равна нулю и скорость а от момента коррекции. Далее до точки 1
движение будет происходить за счет момента коррекции (ЛГ) и момента
сил трения (М ). В точке 1 \Мр\ = \М |; |АГ| = \М |, т.е. все
моменты уравновесятся и вершина гировертикали остановится. Из условия
равенства коррекционных моментов и моментов сил трения найдем а =
= - М /k ; ft = M Ik , что соответствует выражениям (3.21). Точно
такое же пояснение движения вершины можно дать и в других квадрантах
картинной плоскости.
Время возвращения к положению равновесия, или, как иногда его
называют, время установления (Г ) главной оси гировертикали можно
определить на основании следующих рассуждений. Предположим, что
вершина гировертикали (рис. 3.14, а) отклонена в точку (а ; 0 ).
Тогда в результате приложения соответствующих коррекционных моментов
она начнет возвращаться (прецессировать) к началу координат (к
вертикали) со скоростью и = Va + 0
(3.11) и полагая е = е = е, получим
или, учитывая уравнения
/2~
гКа„ +
" = еКао * ^о = eV (322)
Г - Va + /3 — модуль радиуса вектора точки (а , /3 ).
С другой стороны, скорость прецессии и можно рассматривать как
78
производную от радиуса-вектора
точки Оа , 0 ) с обратным знаком,
\ U и
т.е. и = - г. Тогда, учитывая
тождество (3.22), можно записать
Г + €Г\= О
(3.23)
Интегрируя полученное уравнение
при начальных условиях t = О, г =
Рис.3. 14
г , наид<
закон изменения вектора г по времени:
(3.24)
г = roei;
Отсюда в^дно, что отклонение вершины гироскопа от положения
равновесия убывает по экспоненциальному закону (рис. 3.14, б) с
постоянной времени г = 1/е. Аналогичный результат можно было бы
получить и раздельным интегрированием уравнений (3.11). Теоретически,
как следует и^ выражения (3.24), вершина гировертикали вернется к
установившемуся^ положению через время / -» оо. Однако практически
считают, что врекя установления
Т = (3...4)r i (3...4)/e. (3.25)
У \
Величина погрешности при этом составляет около 5...1 % от
начального отклонения. Выражение (3.25) применимо для приближенного
определения Т и при наличии моментов трения в осях подвеса. Время
установления Г . можно получить и по точной формуле, если заданы
начальное отклонение гировертикали R = Va" + /Г и допустимая
погрешность г = Va + & , где а и & - допустимые погрешности по
осям внешней и внутренней рамок. Логарифмируя выражения (3.24) найдем
Т = (In R - In r*)/e. (3.26)
у О
Кроме моментов сил трения на характер движения гировертикали,
установленной на неподвижном основании, будут оказывать влияние и
моменты от неуравновешенности гироскопа, поскольку, как уже
указывалось, создать астатический гироскоп практически невозможно.
При этом могут возникнуть два принципиально различных случая.
1. Центр тяжести смещен в боковом направлении (в плоскости внешней
рамки) по осям х и у (рис. 3.15). В этом случае к гироскопу будут
79
Рис.3. 15
приложены моменты от неуравновешенности
(несбалансированности) М и
нб
М , знаки которых будут зависеть от знаков координа^ центра тяжести
хс и ус.
Для выяснения влияния моментов Лг и Лг на поведение
нб нб
гировертикали подставим их значения (см. рис. 3.15) в правые части
уравнений (3.9).
Тогда получим
На = - кла + М sign 0 - М sign y„\
вн нб С
W
k а - М sign а + Лг sign ж^>,
вш
нб
или
а = - еа ♦ т sign 0 - т sign yn\
1 вн нб С
0 = - ев ♦ т sign
а + пг
(3.27)
(3.28)
2^ вш ° нб ° С
sign х,
где /Л = М* /Н; И? М /Н — скорости прецессий внешней и
нб нб нб нб
внутренней рамок от момента неуравновешенности.
Сравнивая уравнения (3.28) и (3.17), увидим, что они аналогичны по
форме. Следовательно, характер движения вершины гировертикали не
изменился. Если е * е , траекториями будет семейство парабол, если
80
e = %* траекториями будет
семействб прямых. Отличие в
том, что\ координаты
установившегося положения другие.
Действительно, \для случая смещения
центра треста, изображенного
на рис. Ь.15, ах полагая в
уравнениях \(3.28) а = 0 = 0 и
т = т = Q, найдем
вн вш \
а = - т\/вх = - М /к.;
нб нб 1 нб 1
р* = „У)/* = му /к.
нб нбС 2 нб 2
Таким образом, для данного случая вершина гировертикали из любого
отклоненного положения будет возвращаться в точку с координатами
* *
а ; & (см. рис. 3.15, б). Легко показать, что эта точка будет
нб нб
центром четырехугольника застоя, к вершинам которого будут сходиться
все траектории.
Отметим, что при отклонении гировертикали вокруг какой-либо из
осей в одну или другую сторону, время ее возвращения к
установившемуся положению будет различным. Это объясняется тем, что в
одном случае моменты коррекции и неуравновешенности складываются, в
другом - вычитаются. На практике это свойство часто используют для
проверки качества балансировки.
2. Центр тяжести смещен вверх или вниз по главной оси г. Характер
движения гировертикали в этом случае может быть выявлен на основании
совместного рассмотрения поведения гиромаятника и гировертикали с
системой коррекции.' Ранее уже было установлено, что гироскоп со
смещенным вверх или вниз центром тяжести, будучи отклоненным от
вертикали, , совершает коническую прецессию вокруг направления
вертикали места. При этом траекторией движения на картинной плоскости
будет окружность (или спираль) с центром в начале координат.
Траекториями движения вершины гировертикали с радиальной
коррекцией, как известно, являются прямые линии. Следовательно, в
итоге вершина гировертикали будет двигаться со скоростью, равной в
сумме скоростей от коррекционных моментов и от моментов
несбалансированности [(рис. 3.16, а), если центр тяжести смещен вниз,
и (рис. 3.16, б), если центр тяжести смещен вверх].
Рис.3. 16
(3.29)
81
В гировертикалях с системой коррекции стремятся к тому/ чтобы
центр тяжести совпадал с неподвижной точкой гироскопа. %Однако ранее в
некоторых конструкциях гировертикалей центр тяжести намеренно
смещали вниз на небольшую величину. Это делалось для то^о, чтобы
ускорить восстановление гироскопа к вертикали при запуске.
3.3.2. Поведение и погрешности гировертикали
при прямолинейном движении объекта
с постоянной скоростью /
/
В разделе 1.6 было показано, что вертикаль места в йбщем случае
поворачивается в пространстве вследствие суточного вращения Земли и
перемещения объекта относительно Земли. Для того ^тобы
гировертикаль выполняла возложенные на нее функции, ее главная ось должна
следить за направлением вертикали места. Понятно, ч/го это
обеспечивается системой коррекции.
При анализе поведения гировертикали на подвижном основании все
выводы, полученные для случая неподвижного основания, остаются
справедливыми, но они дополняются вследствие влияния факторов,
обусловленных движением основания. Поэтому в дальнейшем для простоты
анализа не будем учитывать моменты трения и неуравновешенности. При
выяснении влияния вращения земли и перемещений объекта относительно
Земли на поведение гировертикали необходимо составить уравнения,
учитывающие указанные движения. Для исследований гировертикалей на
подвижном основании наиболее удобна система отсчета, связанная с
траекторией движения объекта [см. равенство (1.54)].
При составлении уравнений за исходные примем прецессионные
уравнения движения гироскопа (1.49). Поскольку ориентация осей xyz
гировертикали относительно принятой системы отсчета &т£ та же, что и
на рис. 1.39 и в разд. (1.7), то значения проекций угловых скоростей
р и q будут соответствовать выражениям (1.51). Значения моментов по
аналогии с уравнениями (3.8) при условии М = М = О будут
вн вш
следующими: М = - k а; М = - kв. Подставив значения р-.q и М ; М
в прецессионные уравнения (1.49), получим
Н(к + U - UJ) = - kf,
Н(0 - \JX * Vf) = - k20.
Значения проекций переносных угловых скоростей t/.., U и 1Л. для
82
(3.30)
системы\ координат, связанной с траекторией движения объекта,
определяются равенствами (1.54). Прежде чем сделать подстановку значений
U U и 1Л. в выражения (3.30), примем следующие допущения. Поскольку
движение объекта предполагается прямолинейным, то р = оо,
Следовательно, V/p = 0, тогда 1Л. = to sin ^. Так как углы а и 0 малые,
s з
то произведения Ujol и I/JJ будут величинами второго порядка малости по
сравнению с другими членами, стоящими в скобках. Неучет этих членов
не окажет заметного влияния на конечный результат. Поэтому примем их
равными нулю. Уравнения (3.30) после подстановки в них значений и
выражений (1.54) с учетом принятых допущений, деления правых и левых
частей на Н примут вид
а + е а = - со cos у cos ф;
Р * е Р = - (V//?3 ♦ со cos ip sin ф). (3.31)
Полагая ф> <р постоянными величинами, уравнения (3.31) легко
интегрируются. При t = 0, а = а и 0 = в их решения запишутся в
виде
а = к - 0е + <у
U v -*t V (3.32)
где CU, = - (СО COS <p COS ф)/€ ; (3.33)
положения
определяются из выражений (3.31) как частные решения при а ■ /3 = 0.
Из уравнений (3.31) и их решений (3.32) следует, что они
аналогичны по структуре уравнениям и их решениям для случаев
неподвижного основания. Таким образом, характер движения гировертикали
останется тем же. Вершина гировертикали на картинной плоскости из
любого отклоненного положения будет стремиться к точке с координатами
а-., 0 Их принято называть скоростными погрешностями или
девиациями, (Девиациями гироприборов вообще называют
установившиеся отклонения главной оси от требуемого направления при движении
основания). Как видно из уравнений (3.33), скоростные погрешности
обратно пропорциональны эффективности коррекции.
83
" <™з
вершины
+ со COS \p Sin Ф)/€ — координаты установившегося
3 2
гировертикали на картинной плоскости. а., и /3.,
Физический смысл скоростной погрешности становится ясным /i3
рассмотрения следующего частного случая движения гировертикали
(рис. 3.17). Предположим, что гировертикаль установлена на самолет,
который движется с постоянной линейной скоростью ]/„ вдоль / экватора
Земли (у = 0) в направлении с Запада на Восток (ф = 90 )./ Тогда из
выражений (3.33) найдем си, = 0, АЛУ/Й + со )/е .
Поясним этот результат. Пусть в начальный момент времени главная
ось гироскопа совпадает с направлением вертикали f. Далее вертикаль
места вместе с самолетом будет поворачиваться с угловой скоростью
(V/R + со ). Высотой полета самолета, как и ранее, пренебрегаем. Ги-
роскоп в силу своих свойств будет стремиться сохранить свое
первоначальное направление. Но маятник, установленный на корпусе гиромотора,
будет поворачиваться под действием силы тяжести вместе* с направлением
вертикали. В результате между направлениями главной оси гироскопа и
оси маятника появится нарастающее рассогласование угла 0.
Пропорционально этому углу 0 к оси внешней рамки гироскопа будет приложет
коррекционный момент М
кв. Ось гироскопа начнет прецессировать
вслед за направлением вертикали со скоростью к в/Н. Когда скорость
прецессии гироскопа достигнет
значения к в„/Н =
ш3 ♦
+ ыз)
нарастание угла
прекратится. Главная ось гироскопа и
направление вертикали будут
поворачиваться в пространстве с
одинаковыми скоростями. При
этом угол между их направле-
ш3 ♦
Рис.3. 17
ниями будет &у =
+со )/е , что соответствует зна-
чению Д., найденному ранее. С
увеличением скорости полета
угол 0 начнет увеличиваться до
тех пор, пока вновь не наступит
равенство скоростей прецессии
гироскопа и поворота вертикали
места.
84
*
Практически для гировертикалей, применяемых на самолетах, летающих
со скоростями не превышающими 1000 км/ч, величина скоростной
погрешности обычно меньше углов застоя от моментов сил трения. Поэтому она
учитывается только в высокоточных (прецизионных) приборах.
3.3.3. Поведение и погрешности гировертикали
при движении объекта с ускорением
Поскольку чувствительными элементами системы коррекции
гировертикали являются малоинерционные маятники, то при ускоренном движении
объекта они будут отклоняться от направления вертикали места. Эти
отклонения маятников, в свою очередь, через коррекционные моторы будут
вызывать соответствующие отклонения главной оси гировертикали.
При выяснении влияния линейных ускорений на поведение
гировертикали не будем учитывать влияния переносных угловых скоростей, моментов
сил трения и других факторов, так как их учет в данном случае не дает
ничего нового.
Рассмотрим движения объекта с постоянным ускорением Wy>
направление которого параллельно продольной оси объекта (оси внешней рамки
гироскопа). Значение ускорения в поперечном направлении примем равным
нулю. При таком движении объекта за счет действия инерционной силы
F = mWy маятник будет отклоняться от направления вертикали места на
и Л \у
угол 5 = arctg (рис. 3.18). Ввиду малой инерционности маятника
переходным процессом при его отклонении пренебрегаем. К внешней рамке
Рис.3. 18
85
-^
II
II
4
Pi
"4
tH
v_
, ь 11
wx>o
Рис.3.20
Рис.3. 19
будет приложен коррекционный момент Лт = k 5. Главная ось гироскопа
начнет прецессировать к направлению кажущейся вертикали (KB). На
основании уже имеющегося у нас опыта по составлению уравнений движения
гировертикали и рис. 3.18, с учетом сделанных допущений, запишем
а
~€1а;
е2(5 - 0).
(3.34)
Если для простоты анализа предположить, что угол 5 отклонения
маятника от направления вертикали мал, то 5 = arctg Wy/g ~ Wy/g .
Тогда уравнения (3.34) можно представить в виде
а + е а = 0;
(3.35)
0*е2МеЛ/£.
Сравнивая уравнения (3.35) с уравнениями (3.10), нетрудно
заметить, что их структура аналогична. Следовательно, характер движения
гировертикали останется прежним. Траектории движения вершины на
картинной плоскости останутся теми же. Отличие будет состоять лишь в
координатах установившегося положения вершины, которые найдем
интегрированием уравнений (3.35). При начальных условиях / = 0, а
v *-
V*
(3.36)
= /3 решение будет таким:
a = aQe ; & = (0Q - ву$)е +
Отсюда видно, что при t -» оо
<ty = 0; /£ = Wx/g. (3.37)
Таким образом, в пределе главная ось гировертикали установится по
направлению кажущейся вертикали, т.е. по тому же направлению, что и
маятник. Из любой точки картинной плоскости вершина гировертикали
86 . •
будет двигаться по экспоненциальному закону к точке с координатами
* *
о^, L. Время установления определится соотношениями (3.25) или
(3.26). Очевидно, что при исчезновении ускорения вершина возвратится
к вертикали места, причем за то же время Т . Для гировертикали с
радиальной коррекцией траектории движения вершины для рассмотренного
выше случая изображены на рис. 3.19, а.
На рис. 3.20 показан график изменения угла 0 во времени при
нулевых начальных условиях, т.е. когда в момент возникновения
ускорения Wу ось гироскопа совпадает с направлением вертикали места.
Аналитически это может быть получено из уравнений (3.36) при t = а =
= 0о = 0, т.е.
WX "V
0 = -f— (1-е 2 ). (3.38)
Практически объекты, на которых применяются гировертикали с
системой коррекции, очень редко движутся ускоренно длительное время.
Поэтому вершина гироскопа не успевает дойти до кажущейся вертикали, и
следовательно, погрешности от ускорений составляют лишь часть от
углов 5 и v отклонения маятников.
Например (см. рис. 3.20), если самолет увеличивает скорость от
значения V до значения V с ускорением W „ в течение времени t , то
вершина гироскопа уйдет за это время от направления вертикали на угол
0,. Далее, начиная с момента времени / , самолет летит с постоянной
l н
скоростью V , т.е. W„ = 0. Вершина гироскопа начнет прецессировать к
направлению вертикали места (на рис. 3.20 пунктирная линия). При этом
время ус1ранения погрешности / (угла 0,) будет в несколько раз
больше, чем время ее нарастания t . Действительно, скорость ухода
гироскопа от вертикали убывает от значения е 5 до е (5 - 0), а
скорость возвращения (при W „ = 0) убывает от значения - еJ3 до нуля.
Рассмотренный факт является существенным недостатком гировертикалей с
пропорциональной коррекцией.
В случае, когда объект'движется с ускорением еще и по поперечной
оси, решения уравнений имеют вид:
87
a= (%- WJg)e ' + WJg;
0 ^t (3-39)
&=%- Wx/g)e 2 + Wx/g.
Точка положения равновесия определяется координатами cl^ * W-/g;
^ ~ ^х'& ^а Рис* ^'^» ^ изображены траектории движения вершины
гировертикали с радиальной коррекцией для этого случая, но с учетом
моментов трения в осях подвеса.
Как показывает подробный анализ, при изменении объектом скорости
на заданную величину AV погрешности от ускорений прямо
пропорциональны ускорению W и обратно пропорциональны эффективности коррекции.
Поэтому гировертикали с пропорциональной коррекцией целесообразно
применять на объектах, имеющих малый диапазон изменения скоростей и
летающих с малыми ускорениями [4]. Погрешности гировертикалей,
возникающие от ускорений, иногда называют баллистическими девиациями.
Для их снижения, как видно из уравнений (3.39), целесообразно
уменьшать эффективность коррекции. Однако при этом необходимо учитывать,
что с уменьшением эффективности е коррекции возрастают погрешности от
моментов сил трения, неуравновешенности и скоростные погрешности.
В некоторых модифицикациях гировертикалей имеются специальные
устройства, выключающие продольную коррекцию при движении объекта с
ускорениями, совпадающими по направлению с продольной осью объекта.
3.3.4. Поведение и погрешности гировертикали
при вираже объекта
Виражом называют поворот объекта в горизонтальной плоскости. Термин
вираж обычно употребляют применительно к самолетам. Это один из
наиболее часто выполняемых маневров. При вираже самолет, а следовательно, и
все приборы и устройства, установленные на нем, сравнительно
длительное время подвергаются действию центробежных сил одного знака.
Понятно, что такой режим работы весьма неблагоприятен для гировертикалей,
так как чувствительными элементами их системы коррекции являются
физические маятники. Маятник (рис. 3.21) будет отклоняться от направления
вертикали в поперечной плоскости на угол
v = arctg to V/g,
в
где со = V/p — угловая скорость виража,
в
Система коррекции заставляет гироскоп прецессировать к кажущейся
вертикали.
88
*
Рис.3.22
Чтобы выяснить действительное движение гировертикали, необходимо
составить ее уравнения движения для данного случая и проанализировать
их (рис. 3.22). При составлении прецессионных уравнений примем
следующие допущения. Будем считать, что вираж правильный. Правильным
называют вираж в горизонтальной плоскости с постоянными угловой со и
линейной V скоростями без изменения высоты полета. Для правильного
виража справедливо соотношение v = у = arctg со V/g, т.е. угол крена у
в
равен углу отклонения поперечного маятника v. Поскольку обычно
угловая скорость со значительно больше угловых скоростей вращения и
в
облета Земли, то можно пренебречь переносными угловыми скоростями:
иу а и ~ 0, а иу = V/p = со = const.
i П S в
Тогда проекции угловых скоростей на оси х и у будут
/> = -/?-соа; (7 = а-со0.
в в
Значение проекций моментов (рис. 3.22)
М = - k la + 7) + М sign 0;
X \ вн
Л* = - кв - М sign a.
г/ 2 вш ь
Подставив значения р, с/, Л1 и М в прецессионные уравнения
(1.49), получим уравнения движения гировертикали при вираже объекта:
(3.42)
(3.40)
(3.41)
Н(а - со 0) = k la + 7) + М sign 0;
в 1 вн
Я(/3 + со а)
в
fe 0 - М sign a.
2 вш
89
После деления правых и левых частей уравнения (3.42) на Я и
преобразований, получим
а * е а - со & = - е у + т sign /3;
1 в ! вн (3.43)
0 + eJ3 + coa = -/n sign а.
2 в вш
Данные уравнения являются исходными для анализа поведения
гировертикали при вираже самолета.
Решения системы (3.43) при е = €Л = е; у * со Wg и т - т = О
12 в вн вш
имеет вид
а = Ад sin (со / + А) + а ;
^ в I (3-44)
/3 = Аеcos (cj / ♦ Д) + U ,
в в
где А и А — постоянные интегрирования.
со V Jv
* = - !LT-I : 0* = ^^Г^ • <3-45>
в /■ 2. 2V в ,, 2, 2V
(1 ♦ со /е )£ е(1 ♦ со /е )g
в в
* *
Из уравнений (3.44) видно, что при / -> оо а -> а и0->0.
в в
* *
Следовательно, точка с координатами а , 0 будет точкой
установившегося положения равновесия вершины гировертикали на картинной
плоскости. Практически время установления, т.е. время прихода вершины
гировертикали в точку с координатами а , /3 из любого отклонен-
в в
ного положения, будет Т = (3...4)/е.
У
Выражения (3.45) справедливы как для левого, так и для правого
виражей. При этом в случае правого виража а будет положительным, так
* в
как изменится знак у со ; 0 - положительно в том и в другом случае.
в в
2 2
Если вираж происходит с большой угловой скоростью, т.е. со > е ,
♦ * в
то для определения а и 0 можно пользоваться приближенными формулами
в в
а* * ±eV(« gh f * eV/g (3.46)
В В В
(а > 0 при со < 0; а < 0 при со > 0).
В В В В
* *
Как видно из уравнений (3.45), а и 0 при постоянных значениях эф-
В В
фективности коррекции и линейной скорости полета самолета, зависят от
90
kP
мг=о ^_
V-д^"
-1
Ч
1
i ! и
T^ft +
^УА
\
1
ч\
аmax
V
У/г
<Хтах
"* *"
ч
1
'
сх
Рис.3.23
угловой скорости о> виража. Для этого случая можно найти
геометрическое место точек установившегося положения вершины гировертикали при
различных значениях угловой скорости о> .
Возведя в квадрат равенства (3.45), сложив их и делая необходимые
преобразования, получим
(3.47)
а * 02 - 0 eV/g = 0.
в в в
Найденное уравнение является уравнением окружности с центром,
расположенным на оси 0 на расстоянии eV/(2g) от начала координат
(рис. 3.23, а). Следовательно, каждому значению угловой скорости
виража, при прочих равных условиях, вершине гировертикали на
картинной\ плоскости соответствует определенная точка положения
равновесия, Лежащая на окружности радиуса eV/(2g) (причем для левого
виража ■- на левой части полуокружности, считая от оси 0, для
правого - на правой). Чтобы найти траектории, по которым будет
двигаться вершина до точек положения равновесия, в уравнениях (3.44)
перенесем а и /3 в левые части, возведем полученные равенства в
в в
квадрат и сложим их по частям:
(а - -а ) + (0 - 0 ) = А е
в в
(3.48)
Это есть уравнение логарифмической спирали в координатах а0 с
полюсом в точке (а , 0 ). Таким образом, если в момент входа самолета в
в в
вираж вершина гировертикали совпадала с вертикалью места, в процессе
виража она будет уходить от вертикали к точке с координатами (а ,
0 ). При этом траекторией движения вершины на картинной плоскости
будет скручивающаяся логарифмическая спираль (см. рис. 3.23, а). Для
правого и левого виражей с одинаковой по модулю угловой скоростью
|со | траектории симметричны относительно оси 0. Как видно из рисунка,
91
вершина гировертикали при движении по логарифмической спирали к точке
равновесия отклоняется от направления вертикали на углы большие а и
в
*
0 . Возможные максимальные отклонения могут быть определены по
следующим приближенным формулам [4]:
\а I * (1 - 0,57б/со )eV/g;
1 max1 в
|0 |« 2(1 - 1,57е/со )eV/g. (3.49)
1 max1 в
Как показывает подробный анализ уравнений (3.43), с учетом моментов
сил трения в осях подвеса, траектории движения вершины гировертикали
будут такими, как изображены на рис. 3.23, б. При этом максимальные
погрешности на левом вираже будут несколько меньше, а на правом
вираже - больше и могут быть подсчитаны по следующим приближенным
формулам [4]:
для левого виража
\ат I = \а I - |2ш/со I; (3.50)
1 max1 ■ max1 ' в1
|/Зт | = |/J | - |4m/co |;
max» ■ max1
для правого виража
la I = |x I * I2™/" h <3-51>
1 max1 ■ max1 ■ в1
|0T | = |/3 I + |4m/w I.
1 max1 ■ max1 ' в1
где ТП = M /H — скорость прецессии от моментов сил трения (для М
т т
/
М2 * М2 ).
вн вш
* *
На левом вираже точка положения равновесия с координатами а ; в
в В
будет центром четырехугольника застоя, на одной из сторон которого и
остановится вершина гировертикали. На правом вираже вершина
гировертикали не имеет устойчивого положения, а будет описывать траекторию,
* *
близкую к окружности вокруг точки (а ; в). Формулы (3.50), (3.51)
в В
справедливы при Н > 0 (см.рис.3.23),т.е. для случая, когда
кинетический момент направлен вверх. Летчики, видимо в силу физиологических
особенностей человека, считают более удобным выполнение левого виража,
так же как и подавляющее большинство людей предпочитают левый поворот
правому, например при езде на велосипеде, на коньках и т.д. Как было
выяснено выше, погрешности гировертикалей при Н > 0 меныйе в случае
92
левого виража. Именно по этой причине в отечественных гировертикалях
направление вращения ротора ранее выбиралось так, чтобы вектор
кинетического момента Н был направлен вверх.
Выясним физический смысл влияния виража на поведение
гировертикали. Для этого вначале рассмотрим движение свободного гироскопа
относительно картинной плоскости при вираже самолета. Если ось
гироскопа, установленного на самолете, совпадает с направлением
вертикали места, по которой направлен и вектор угловой скорости
виража, то вполне очевидно, что никакого относительного перемещения
между вершиной гироскопа и картинной плоскостью происходить не будет.
Если же ось ротора в начальный момент наклонена, например в
продольном по отношению к самолету направлении (рис. 3.24, а), то при
вираже, по мере поворота самолета, продольный наклон гироскопа будет
"переходить" в поперечный (рис. 3.24, б), так как ось гироскопа будет
сохранять неизменным свое направление в пространстве. Картинная
плоскость будет поворачиваться вместе с самолетом. При повороте
самолета на 360 ось ротора относительно самолета опишет конус, а
вершина гироскопа относительно картинной плоскости - окружность
(рис. 3.24, в).
Таким образом, при вираже самолета вершина свободного гироскопа,
если она отклонена от начала координат, движется относительно
картинной плоскости с линейной скоростью о> г, где г - радиус-вектор
в
вершины гироскопа относительно начала координат.
Теперь рассмотрим движение оси гировертикали без учета моментов
сил трения для случая левого виража самолета (НП - направление
полета). Под действием центробежных сил маятник поперечной коррекции
(рис. 3.25) будет отбрасываться во внешнюю сторону виража на угол v =
= у = arctg cj V/g. Ось гировертикали, а на картинной плоскости ее
в
вершина, под действием коррекционного момента начнут прецессировать к
кажущейся вертикали (к точке KB) со скоростью - k(y - а)/Н = - е(у -
-а). Как только вершина гировертикали отойдет от начала координат,
появится составляющая относительной скорости о> г, которая вызовет ее
в
отклонение в положительном направлении отсчета углов 0. Это
отклонение, в свою очередь, вызовет появление коррекционного момента
k&, а следовательно, и скорости прецессии е/3. В результате сложения
всех этих скоростей вершина гировертикали будет двигаться по
логарифмической спирали к точке с координатами а ; в. В точке
в В
равновесия геометрическая сумма всех скоростей равна нулю, т.е. е(у -
93
j
co0r*
W
% V*
(y-oOj^/cOen\
в
Y' )J—
__l
x^<\
<^^A
a
».
i/>
Ve
i
i
Hfl
a
Рис. 3.24
Рис. 3.25
- a) + e/J = a; r. Если вираж продолжается, то ось гировертикали будет
описывать в пространстве вокруг вертикали места вместе с самолетом
конус. Прибор будет иметь установившиеся значения погрешностей в
измерении углов крена а и углов тангажа 0 . Пояснение движения оси
в в
гировертикали в случае правого виража аналогично.
При учете моментов сил трения в осях подвеса к рассматриваемым
скоростям добавится скорость т от моментов сил трения. На левом
вираже она направлена во внутреннюю сторону спирали, а на правом - во
внешнюю. Этим объясняется уменьшение в первом случае и увеличение во
втором погрешностей а и 0
max max
Виражные погрешности, так же как и погрешности от линейных
ускорений иногда называют баллистическими. Их величина может
достигать 10 и более. Как уже отмечалось, вираж является одним из'
наиболее часто применяемых маневров. Поэтому для снижения виражных
погрешностей применяются специальные способы, например: отключение
поперечной коррекции при вираже; наклон главной оси гироскопа вперед
по полету на определенный угол.
Смысл первого способа вполне понятен, так'как первопричиной увода
оси гироскопа от направления вертикали места является именно
поперечная коррекция, которая при вираже заставляет ее прецессировать
к кажущейся вертикали. Поэтому, отключив поперечную коррекцию, ось
гироскопа по поперечной оси на время виража оставляем свободной. При
этом, если она находилась в зоне углов застоя, то так там и будет
оставаться. (Обычно время виража редко превышает 3-5 мин.) Если ось
гироскопа до виража не совпадала с вертикалью места, то, как
показывает анализ, под действием продольной коррекции и моментов сил
94
трения в осях подвеса при левом вираже она будет возвращаться к
четырехугольнику застоя, при правом - к окружности радиуса г =
- 8т/Ш (рис. 3.26) [4]. Отключение поперечной коррекции считается
наиболее эффективным способом. Иногда при вираже выключают как
продольную, так и поперечную коррекции. В этом случае при правом вираже
гировертикалью можно пользоваться кратковременно, так как ось
гироскопа будет уходить под действием моментов сил трения от направления
вертикали.
Сущность второго способа заключается в следующем. Предположим, что
чувствительный элемент коррекции (маятник) так установлен на
гироскопе (рис. 3.27. а), что при несовпадении его главной оси с
направлением вертикали места в продольном направлении на угол fiQ сигнала на
коррекшонный мотор Л^ не поступает. На датчике съема сигнала или
указывающем устройстве по углу тангажа это смещение на угол 0Q должно
быть учтено.
Рис. 3.26
Рис. 3.27
95
Рассмотрим поведение вершины гировертикали в этом случае на
картинной плоскости, например при левом вираже (рис. 3.27, б). В начале
виража вершина гироскопа под действием поперечной коррекции начнет
двигаться в направлении к кажущейся вертикали со скоростью ео> V/g.
в
Однако из-за переносного вращения самолета с угловой скоростью виража
о> вершина гироскопа, в свою очередь, будет двигаться относительно
в
картинной плоскости с линейной скоростью о> в, направленной в
в О
противоположную сторону скорости от коррекции. Если величину угла в
подобрать такой, чтобы при некоторой постоянной скорости полета V
имело место равенство 0 о> = бсо V/g, то вершина гироскопа будет
О в в
неподвижна относительно картинной плоскости и, следовательно,
погрешности гировертикали будут равны нулю.
Условие полной компенсации виражной погрешности при постоянном
значении линейной скорости V запишется в виде
/30 = eVQ/g. (3.52)
Как показывает анализ, при скоростях полета, отличных от V ,
виражные погрешности имеют место, и при некоторых значениях V < V /2
они могут достигать величин, превышающих погрешности гировертикалей,
у которых ось гироскопа не наклонена. Поэтому этот способ снижения
виражных погрешностей целесообразно применять на самолетах, диапазон
изменения скоростей которых сравнительно невелик. Понятно, что он
справедлив как для правого, так и для левого виражей [4, 5]. Кроме
перечисленного, для снижения виражных погрешностей может быть
рекомендовано уменьшение эффективности коррекции. Но это, как уже
отмечалось, ведет к увеличению ряда других погрешностей.
3.3.5. Поведение гировертикали
при гармоническом возмущении системы коррекции
Как известно, летательный аппарат движется по сложной траектории.
Даже при так называемом "прямолинейном полете" его действительная
траектория не является прямой линией. Обычно она представляет собой
периодическую кривую. При этом, кроме колебаний центра масс по
траектории, ЛА совершает еще колебания относительно центра масс. Диапазон
частот колебаний зависит от типа ЛА, его системы стабилизации и др.
Для самолетов этот диапазон ориентировочно лежит в пределах от 0,01
96
до 2 Гц. В результате угловых колебаний ЛА чувствительные элементы
(маятники) системы коррекции гировертикали совершают вынужденные
колебания относительно некоторого среднего положения, которое в общем
случае не будет направлением вертикали места.
Для того чтобы выяснить влияние колебании маятников на поведение
гировертикали, рассмотрим такой идеализированный случай. Предположим,
что колебания совершает только маятник поперечной коррекции, а сам
гироскоп как бы находится на неподвижном основании (т.е. Uy = U =
= Uу = 0). при этом колебания маятника происходят относительно
направления вертикали места по гармоническому закону v = v sin д/,
где v - амплитуда отклонения маятника от вертикали; д - частота
вынужденных колебаний маятника. Переходными процессами при
установлении маятника, как и ранее, пренебрегаем. Правомерность того,
что колебания принимаются гармоническими, может быть обоснована
возможностью разложения любой периодической функции в ряд гармоник.
Поэтому, проводя исследования влияния одной из главных компонент и
учитывая тот факт, что гировертикали с пропорциональной коррекцией
относятся к классу линейных систем, для которых справедлив принцип
суперпозиции, можно получить достаточно обшие выводы.
Уравнения движения гировертикали для данного случая могут быть
получены так же, как и уравнения (3.10), заменой в первом уравнении
угла рассогласования а на (а - v sin д/):
а: = - е (а - v sin д/) + т sign 0;
1 т вн
0 = - е JJ - /л sign а, (3.53)
2 вш
илиф
а + е а = ev sin/x/ ♦ т sign j3;
1 \ т ън
0 + ев = - т sign а. (3.54)
2 вш
Решениями полученных уравнений при / = 0; т = т = 0 и а = а ;
0 = /3Q будут
а = а е - а sin Д-е + а sin(/x/ + A);
0 , т т (3.55)
где Д = arctg ( - -^ ); а^ = V e./V^i * €
€ т т \ 1
,/2 2
4- 369
97
Рис.3.28
Из второго равенства (3.55) следует, что характер движения
гировертикали вокруг оси внутренней рамки не изменился, т.е. остался
таким же, как и в случае неподвижного основания. Внешняя же рамка,
система коррекции которой возмущена, совершает более сложное движение.
Как видно из первого равенства (3.55), это движение описывается двумя
экспонентами с одинаковым затуханием и гармонической составляющей. С
течением времени первые две составляющие затухают, и внешняя рамка
будет совершать установившиеся колебания с отставанием по фазе на
угол А и амплитудой а , прямо пропорциональной эффективности
коррекции, амплитуде вынужденных колебаний маятника и обратно
пропорциональной частоте возмущающих колебаний (рис. 3.28). Этот вывод не
является неожиданным, так как гировертикаль с пропорциональной
коррекцией при сделанных допущениях может рассматриваться как линейная
система.
В действительности характер движения будет значительно сложнее.
Кроме рассмотренных факторов на движение гировертикали будут
оказывать влияние моменты сил трения в осях подвеса, которые вызовут
дополнительные колебания. Точный анализ поведения гировертикали с
учетом влияния всех факторов затруднителен. Однако уже на основании
полученных приближенных выводов, имея соответствующие данные о
параметрах движения объекта, на котором предполагается использование
гировертикали, можно выбрать значение эффективности коррекции таким,
чтобы величина амплитуды колебаний главной оси а лежала в допустимых
пределах.
3.4. ГИРОВЕРТИКАЛИ С ПОСТОЯННОЙ (РЕЛЕЙНОЙ) КОРРЕКЦИЕЙ
Принципиальная кинематическая схема гировертикали с постоянной
коррекцией изображена на рис. 3.29. Принцип ее работы аналогичен
принципу работы гировертикали с пропорциональной коррекцией.
Основной отличительной особенностью гировертикали такого типа
является постоянная характеристика коррекции (рис. 3.30, а). Это
98
Рис.3.29
Рис. 3.30
означает, что при любом значении угла отклонения главной оси
гироскопа от направления вертикали (на неподвижном основании) к
соответствующей рамке прикладывается коррекиионный момент М ,
постоянный по абсолютной величине. Направление приложения коррекционного
момента определяется знаком угла отклонения. Схема возможной
реализации постоянной коррекции изображена на рис. 3.30, б. Анализ
поведения гировертикали будем проводить по принятой ранее схеме, т.е.
будем выяснять влияние на характер движения ее главной оси каждого
фактора в отдельности.
Уравнения движения гировертикали с постоянной коррекцией для
каждого частного случая могут быть составлены точно так же, как это
сделано для гировертикалей с пропорциональной коррекцией, например
(3.9), (3.30) и др. Другими в них будут лишь члены, характеризующие
коррекиионные моменты. Если для гировертикалей с пропорциональной
коррекцией значения коррекщюнных моментов определялись соотношениями
(3.7), то для постоянной коррекции они будут
АГ = - ATsign (а - v)\
к 0
М? = - Assign (0 - 5),
где
d-
0
абсолютное значение момента коррекции по углу /3;
(3.56)
ЛГ* — то же
0
по углу а (обычно ЛГ* = Лт* = ^п^*
Однако в данном случае мы поступим несколько иначе. Вначале
составим уравнения движения гировертикали для общего случая, а уже
потом будем преобразовывать их применительно к отдельным частным
99
случаям. Для этого, как и обычно, воспользуемся общими прецессионными
уравнениями движения гироскопа (1.49). Значения р и q соответствуют
равенствам (1.51):
р = - /J ♦ l/j - l/ja;
q = a ♦ U -UJ.
В правых частях уравнений кроме коррекщюнных моментов (3.56)
учтем по аналогии с выражениями (3.8), (3.27) моменты сил трения и
моменты от неуравновешенности:
Л4 = - Assign (a -p) * М sign 0 - Л1* sign уг\
X О вн нб С /0 ~~к
а и (3*57)
М = - ЛГ sign (0 - 5) - М sign a ♦ Лг sign х„.
у 0 вш нб С
Подставив значения р, (/ и М , М в исходные уравнения, получим
х у
Ща ♦ Uv - Vf) - -Assign (a - ,) ♦ Assign fi - Assign j,^ ^
1/(0 - Uk * Uya) = -Assign (0 - S) - M sign a + Al*' sign *,,,
% S 0 bui нб С
или
(a ♦ (/^ ♦ Up = ^sign («-„)♦ m^sign * - /n^sign ^ ^
(/3 - 1Л, ♦ l/va) = -co sign (0 - 5) - m sign a ♦ or sign x^,
< f к вш нб С
где СО 1 = МЦ/Я: с/ = MJ/W — скорости прецессии от моментов коррекции.
Полученные уравнения (3.58) или (3.59) и будут уравнениями движения
гировертикали с постоянной коррекцией.
3.4.1. Поведение гировертикали
на неподвижном основании
Для случая неподвижного основания Uy = U = 1Л. = v = 5 = 0. Кроме
того, будем считать, что моменты трения и неуравновешенности
отсутствуют, т.е. М = М = ЛГ = Mr = 0. Тогда уравнения (3.59) примут
вн вш но но
ВИД
a .
a = - со sign a;
к
100
0 = - Jsign 0. (3.60)
Полученные уравнения нелинейные, но они могут быть
проинтегрированы при условии движения вершины гировертикали в одном квадранте, где
а и 0 имеют постоянные знаки. Так, полагая, что в начальный момент
времени вершина находится в I квадранте в точке с координатами а и
0 (рис. 3.31, а), решения уравнений (3.60) можно записать так:
а,
а = - со t + а ;
J (3.61)
0 = -сЛ + 0
к 0
Исключив в (3.61) время путем деления первого равенства на второе,
преобразуем полученное выражение и найдем уравнение траекторий
вершины на картинной плоскости:
J
(0 - 0О> = —J— (а - о0). (3.62)
СО
к
Это есть уравнение прямой, проходящей через точку с координатами а •
со
0 , с углом наклона к оси а, равным arctg — .
со
к
Уравнение (3.62) справедливо до пересечения с одной из осей
координат. Далее, для случая движения из точки а ; в (см. рис. 3.31,
а), первое уравнение (3.60) обращается в нуль, и вершина будет
двигаться по оси 0 до начала координат. Как уже было отмечено, угол
наклона траектории определяется отношением скоростей продольной и
поперечной коррекций. При со = со он равен 45 . Характер движения
вершины в других квадрантах картинной плоскости аналогичен. Время
успокоения или установления гировертикали будет определяться временем
полной ликвидации отклонений оси как по углу а, так и по углу |3.
Следовательно, полагая в уравнении (3.61) а = |3 = 0, получим
За время установления принимается большее значение Т .
При учете моментов сил трения в осях подвеса уравнения движения
гировертикали будут следующими:
101
a = - cj sign a + m sign 0;
K BH (3.64)
ji = - a/sign 0 - /n sign a.
к вш
Решая их при тех же начальных условиях, что и уравнения (3.60),
получим
в
(- со ♦ т )
(0 - /J ) = * EHL— (a - aQ). (3.65)
(- О) ♦ /Л )
к вн
Сравнивая полученное уравнение с (3.62), видим, что они отличаются
лишь значениями угловых коэффициентов; т.е. траекторией движения
вершины будет прямая, повернутая относительно траектории движения без
учета моментов сил трения на некоторый угол Ьр (рис. 3.31, б).
Точкой равновесного положения вершины работоспособной
гировертикали будет начало координат. Это видно из уравнений (3.64).
Действительно, прецессия гироскопа под действием моментов коррекции
возможна лишь при |a>a| > \т | и Jcj | > \т | , а это означает, что
моменты коррекции должны быть больше моментов трения. В противном
случае система коррекции будет неработоспособна. Следовательно,
гировертикали с постоянной -коррекцией не имеют установившихся
погрешностей от моментов сил трения в осях подвеса, что справедливо
лишь для случая идеальной характеристики коррекщюнного устройства. В
реальных схемах чувствительных элементов системы коррекции всегда
имеются зоны нечувствительности или гистерезиса. Поэтому главная ось
гироскопа устанавливается по направлению вертикали места с точностью
до зоны нечувствительности или гистерезиса системы коррекции.
102
Практически величина этой зоны обычно лежит в пределах угловых минут
и для непрецизионных приборов не учитывается.
Время установления гировертикали с допустимой точностью может быть
подсчитано по формулам (3.63) (точный анализ показывает, что за счет
моментов сил трения время установления гировертикали в общем случае
несколько больше) [4].
Таким образом, влияние моментов сил трения в осях подвеса на
поведение гировертикали с постоянной коррекцией на неподвижном
основании незначительно. Однако это вовсе не означает, что требования
к качеству подшипников подвеса могут быть снижены. Дело в том, что
коррекщюнный момент для обеспечения надежной работоспособности
гировертикали выбирается в несколько раз больше моментов сил трения в
осях подвеса. Но увеличение момента коррекции приводит к увеличению
баллистических погрешностей гировертикали, что естественно,
нежелательно.
Физический смысл рассмотренных движений гировертикали может быть
пояснен следующим образом (см. рис. 3.31, а). Предположим, что
главная ось гировертикали (а на картинной плоскости соответственно
вершина) отклонена от направления вертикали в точку с координатами
а , в. При этом юкруг осей внутренней и внешней рамок возникнут
соответственно постоянные коррекционные моменты -М~ и -ЛГ. В
а
результате вершина начнет прецессировать с постоянной скоростью со +
+ со в направлении устранения отклонения. Вектор суммарной скорости,
а следовательно, и траектория движения вершины будут наклонены по
J
отношению к оси а на угол у - arctg . После того как вершина
со
к
дойдет до оси /3, поперечная коррекция выключится, внешняя рамка
остановится, а внутренняя рамка (вектор Н) будет продолжать движение
вдоль оси /3 к началу координат до полного устранения отклонения по
углу 0.
При наличии моментов сил трения в осях подвеса (см. рис. 3.31, б)
движению вершины под действием моментов коррекции будут
препятствовать моменты трения М и М , которые вызовут дополнительную
скорость прецессии (т ♦ т ). В результате суммарный вектор
скорости, а следовательно, и траектория движения вершины будут
повернуты на угол Аф по отношению к вектору скорости и траектории движения
103
вершины в случае, когда моменты сил трения в осях подвеса не
учитываются.
В дополнение к рассмотренному отметим, что в реальных конструкциях
гировертикалей, характеристика коррекции которых имеет зону
гистерезиса, главная ось гироскопа совершает автоколебания около
направления вертикали места, что создает неблагоприятные условия для работы
прибора в целом.
Не будем подробно останавливаться на выяснении влияния остаточной
неуравновешенности на поведение гировертикали, так как методика
анализа и результаты во многом аналогичны уже рассмотренному вопросу
о влиянии моментов сил трения. Отметим лишь, что если величина
коррекционного момента выбрана при условии выполнения соотношения
(3.67), то для случая неподвижного основания влияние
неуравновешенности невелико и его можно не учитывать.
3.4.2. Поведение гировертикали
при прямолинейном движении объекта
с постоянной скоростью
При выяснении влияния переносных угловых скоростей в результате
перемещения объекта относительно Земли и суточного вращения Земли на
поведение гировертикали с постоянной коррекцией положим, как в случае
гировертикалей с пропорциональной коррекцией, М = М = 0; Vjol =
= L/J3 = 0; v - 5 = 0. Тогда, подставляя значения Uy и V из равенств
(1.54) в уравнения (3.59), получим
. а .
а + а> cos \p cos ф = - а> sign а;
в (3.66)
0 + а> cos \p sin ф + V/R = - а> sign 0.
Чтобы ось гироскопа следила за вертикалью места, необходимо
выполнение следующих неравенств: |о> cos ^ cos ф\ < |о> |; \V/R \ +
в к 3
+ |о> cos у sin ф\ < |о> |, т.е. необходимо, чтобы скорость прецессии
от коррекции была больше переносных угловых скоростей. Очевидно, что
равенство этих скоростей технически неприемлемо, так как в случае
начального несовпадения оси гироскопа с вертикалью места погрешность
не может быть ликвидирована системой коррекции.
Практически величина коррекционного момента для гировертикалей
с постоянной коррекцией выбирается из услов^ш
104
M0 = (2...3)[Я(«з * IV^/^P * |Мт|]. (3.67)
где V — максимальная скорость полета для типа объекта, на котором
max
предполагается использование гировертикали.
Таким образом, если величина коррекционного момента выбрана при
условии выполнения соотношения (3.67), у гировертикали с постоянной
коррекцией практически отсутствуют погрешности от трения,
неуравновешенности, собственной скорости объекта и вращения Земли
(точнее они будут лежать в пределах зоны нечувствительности или зоны
гистерезиса системы коррекции). Физический смысл отсутствия
скоростных погрешностей понятен, так как при вращении вертикали места
в результате перемещений объекта и вращения Земли возникающее
рассогласование между направлениями маятника (вертикали места) и
главной оси гироскопа, превышающее зону нечуствительности или
гистерезиса, вызывает приложение к гироскопу коррекционного
момента. Этот момент заставляет прецессировать его главную ось за
вертикалью со скоростью, превышающей в несколько раз скорость
вращения вертикали места, так как величина коррекционного момента
выбрана из условия (3.67). В результате ось гироскопа непрерывно
следит за направлением вертикали с точностью до зоны
нечувствительности или гистерезиса системы коррекции.
3.4.3. Поведение и погрешности гировертикали
при прямолинейном движении объекта с ускорением
При прямолинейном ускоренном движении объекта чувствительные
элементы системы коррекции будут устанавливаться по направлению
кажущейся вертикали. Вследствие этого система коррекции вызовет
прецессию главной оси гироскопа к кажущейся вертикали. Уравнения
движения гировертикали для этого случая могут быть' получены из
уравнений (3.59). Полагая в них для простоты анализа Ut = U = Uh =
= 0; М = М = 0, получим
т нб
а = - о> sign (а - р);
к
/J = - cAign {& - 5),
(3.68)
z _ X
где v = arctg , о = arctg — углы отклонения от вертикали
о о
места маятника поперечной и продольной коррекций соответственно.
105
Уравнения (3.68) аналогичны по структуре уравнениям (3.60).
Следовательно, характер движения вершины гировертикали будет таким
же, как и в случае неподвижного основания. Отличие лишь в координатах
точки положения равновесия. Если в случае неподвижного основания это
начало координат на картинной плоскости (т.е. направление вертикали
места), то в случае ускоренного движения объекта точка положения
равновесия, как это видно из уравнений (3.68), имеет координаты а™, =
= v ~ W/g; L = 8 = W Jg, т.е. это будет направление кажущейся
вертикали (рис. 3.32). Однако как указывалось выше, время ускоренного
движения объектов, на которые устанавливаются гировертикали с
системой коррекции, не бывает длительным. Поэтому ось гироскопа не
успевает уходить от направления вертикали места на значительные углы.
Так, например, если объект изменяет скорость от значения V до
значения V , двигаясь с постоянным ускорением Wy> величина
баллистической погрешности может быть определена следующим образом
(полагаем, что в начальный момент времени главная ось гировертикали
совпадала с направлением вертикали места). Из второго уравнения
(3.68) найдем /3 = о> /. Время / полета с ускорением, а следовательно,
время прецессии гироскопа к кажущейся вертикали, определим из
соотношения / = (V - У )ЛР~ = AV/W„, тогда
Pw = <Jw/Wx. (3.69)
Отсюда видно, что величина баллистической погрешности для
гировертикалей с постоянной коррекцией обратно пропорциональна
ускорению, с которым объект набирает заданное приращение скорости AV.
Это говорит о том, что гировертикали с постоянной коррекцией наиболее
целесообразно применять на объектах, движущихся со значительными
ускорениями (в противоположность гировертикалям с пропорциональной
коррекцией).
Максимальное значение баллистической погрешности при
равноускоренном или равнозамедленном движении объекта определяются
уравнением
? .&
е ■ Vo>'AV/g . О.70)
max
Для случая переменного ускорения
У = WbJw/g . (3.71)
0
max к
106
вмЧ
А
*"Ь
i
i
х
с ь
\
-« »-
t
Рис.3.32
Рис.3.33
Формулы (3.70) и (3.71) справедливы, если в начальный момент
времени отклонение гировертикали в поперечной плоскости отсутствует,
т.е. а = 0.
Преимуществом гировертикалей с постоянной коррекцией по сравнению
с гировертикалями с пропорциональной коррекцией является и то, что у
них время нарастания t погрешности от ускорения равно времени
устранения / (рис. 3.33).
Пути уменьшения баллистических погрешностей те же, что и для
гировертикалей с пропорциональной коррекцией - уменьшение (в
допустимых пределах) скорости прецессии со от моментов коррекции и
применение устройств, отключающих систему коррекции при ускорениях.
3.4.4. Поведение и погрешности гировертикали
при вираже объекта
Причины, вызывающие возмущения системы коррекции гировертикали при
вираже объекта были указаны. Для составления уравнений гировертикали
с постоянной коррекцией при вираже можно воспользоваться той же
методикой, которая была применена при составлении уравнений
гировертикали с пропорциональной коррекцией (3.42). Они могут быть
получены и непосредственно из уравнений (3.59) при тех же допущениях,
что и при составлении уравнений (3.42):
Н(а - со 0)
ЯС0 + со а)
в
- Assign (а - у) + At sign/3;
и вн
- ATsign 0 - М sign a,
0 вш
(3.72)
или
107
a - cj /3 = - cj sign (a - 7) ♦ m sign 0;
щ * B" (3.73)
/3 ♦ cj a = - cj sign 0 - m sign a.
в к вш
Уравнения (3.72) и (3.73) отличаются от уравнений (3.42) и (3.43)
для гировертикали с пропорциональной коррекцией только членами,
характеризующими коррекционные моменты. Уравнения (3.73) нелинейные,
однако при условии постоянства знаков при нелинейных членах они могут
быть проинтегрированы как линейные. Найдем их решения при отсутствии
моментов сил трения в осях подвеса, т.е. при т = т = 0.
вн вш
Продифференцировав первое уравнение (3.73) и подставив в него
значения 0 из второго, получим
2 в
а * cj а = - cj cj sign (I. (3.74)
в в к
Решение этого уравнения запишем в виде
a = A sin (cj / ♦ А) ♦ a , (3.75)
в в
J
где a - - sign /J; (3.76)
в CJ ^
в
А и А — постоянные интегрирования.
Подставив в первое уравнение системы (3.73), значение а из
выражения (3.75), найдем
/3 = A cos (cj / ♦ А) ♦ /Л (3.77)
в в
a
где 0 = —-— Sign (a - 7). (3.78)
В CJ
в
Таким образом, как видно из решений (3.75) и (3.77), а и &
являются периодическими функциями времени и, следовательно, в общем
случае ось гироскопа в процессе виража не имеет устоичиюго положения
равновесия.
Для определения траектории движения вершины гироскопа на картинной
плоскости перенесем в уравнениях (3.75) и (3.77) соответственно а и
0 в левые части, возведем уравнения в квадрат и сложим их по частям,
в
тогда получим
108
(a - aV+<0 - 0*)2= А2. (3.79)
В В
Полученное выражение есть
уравнение окружности с координатами
центра а и 0 .
в в
На рис. 3.34 изображены
траектории движения вершины на
картинной плоскости при правом и левом
виражах объекта для случая, когда Рис.3.34
в начальный момент времени ось гироскопа совпадала с направлением
вертикали места и при со = со = со (что обычно практически
обеспечивается). Погрешности в измерении углов крена и тангажа будут
периодически изменяться от нуля до 2 | со /со |. Максимальные погрешности для
правого и левого виражей будут определяться по формулам
max
± 2со /|со I; 0 = 2со /|со I
к ■ в1 max к ■ в1
(3.80)
(знак минус в первой формуле соответствует левому виражу). Из
равенств (3.80) видно, что максимальные погрешности (а также и
координаты а и 0 ) прямо пропорциональны скорости коррекции и
обратно пропорциональны угловой скорости виража. Это опять
подтверждает, что гировертикали с постоянной коррекцией наиболее
целесообразно применять на легких маневренных объектах. Однако следует
заметить, что максимальные погрешности с уменьшением со не могут быть
больше величины со V/g.
При
1 <А>
к
со
в
<
со V
в
g
<
со
О к
Z
со
в
а
max
=
0
max
со V
В
g
(3.81)
При
СО
со
со V
В
S
со V
В
8
и 0 = 0.(3.82)
max
109
Если вершина гировертикали к моменту начала виража не совпадала с
истинной вертикалью, а находилась в какой-либо точке вне окружности с
радиусом со /со (назовем ее предельной)» например в точке а» то она
постепенно придет к этой окружности (см. рис. 3.34). Если же вершина
находится внутри предельной окружности, например в точке 6» то она
будет двигаться по окружности, концентричной предельной (на рис. 3.34
изображены пунктиром траектории для этих случаев при левом вираже).
Если же вершина к началу виража находилась в точке с координатами а
* в
и /3 , то она так там и будет оставаться на все время виража» так как
в
эта точка является точкой устойчивого равновесия.
* #
Физически это означает» что в точке а » |3 геометрическая сумма
в в
скоростей от коррекции и переносной скорости равна нулю» т.е. главная
ось гировертикали (ее вершина) будет оставаться неподвижной
относительно картинной плоскости.
Движение вершины гировертикали, например при левом вираже из
начала координат (при со = со = со ), можно объяснить следующим
образом (рис. 3.35). Под действием поперечной коррекции вершина
гировертикали из начала координат (от вертикали) начнет двигаться со
скоростью со по направлению к кажущейся вертикали (точка KB) вдоль
оси а до точки а = со /со , так как при а < со /со переносная скорость
меньше скорости продольной коррекции со , и вершина гировертикали не
может сойти с оси а. Далее, начиная от точки а = со /со переносная
к в
скорость со а будет больше скорости со продольной коррекции, вершина
сойдет с оси а и будет двигаться по окружности с радиусом, равным
со /со , вокруг точки а , 0 .
KB В В
При выяснении поведения гировертикали с учетом моментов сил трения
в осях подвеса необходимо рассматривать уравнения (3.73). Как
показывает анализ этих уравнений, моменты сил трения снижают
максимальные погрешности (рис. 3.36) при левом вираже и увеличивают при
правом (при Н > 0) [4].
Величина максимальных погрешностей может быть подсчитана по
следующим формулам [4]: ,
110
CJSK
5^Q. j CJH
KB
f i in
Mil
JW1
mcjJ
wWmr
U)K(<x)
—9-
1/5
\w*
**>
4
^CJ„
i>0
\P cje<0
МтФО
Рис.3.35
Рис.3.37
max
Л
max
со
CJ
CJ
CJ
m
CJ
m
CO
(3.83)
Знак минус соответствует левому виражу, знак плюс - правому. Для
уменьшения погрешностей гировертикали при вираже можно рекомендовать
те же способы, что и для гировертикали с пропорциональной коррекцией.
Однако наиболее эффективным является отключение поперечной коррекции.
При этом (рис. 3.37) устойчивым положением оси будут заштрихованные
области и соединяющий их отрезок оси а. Из любого отклоненного
положения вершина гироскопа при вираже будет возвращаться в одну из
точек устойчивого равновесия. Чтобы это выполнялось для правого
виража необходимо еще дополнительное условие со /со > 2,45 [4].
Уменьшение погрешностей путем наклона главной оси вперед по полету
для гировертикалей с постоянной коррекцией нецелесообразно, так как
111
условием полной компенсации погрешности является соотношение /3 =
= о> /о> . Это означает, что оно справедливо только для одного
к в
определенного значения угловой скорости виража о> , что практически
в
трудно выполнимо.
3.4.5. Поведение гировертикали
при гармонических возмущениях системы коррекции
Рассмотрим поведение гировертикали в данном случае с теми
допущениями, которые были сделаны в разд. 3.3 для гировертикали с
пропорциональной коррекцией. При этом ограничимся анализом лишь
уравнения, описывающего движение одной рамки, например по углу а. Это
уравнение, по аналогии с (3.53), для постоянной характеристики
коррекции без учета моментов сил трения можно записать в виде
а = - cj sign (а - р sin id). (3.84)
к т
Решение этого уравнения зависит от сомножителя sign (a -
- v sin id). При а > v оно будет
т т
о = о. - ы (/ - П, (3.85)
О к О
т.е. если в начальный момент времени / = 0 ось гировертикали была
отклонена от вертикали на угол а больший, чем амплитуда v колебаний
чувствительного элемента коррекции (маятника), то движение гироскопа
остается таким же как и в случае, когда колебания маятника
отсутствуют (рис. 3.38).
При \а\ < v sin id в решении (3.85) перед слагаемым cj (t - t )
будет меняться знак в соответствии со следующими условиями:
sign (а - v sin id) =
♦ 1 при а > v sin id\
т (3.86)
- 1 при а < v sin id.
Характер движения оси гировертикали в этом случае легче понять,
если процесс изобразить графически . На рис. 3.39 показан закон
изменения во времени амплитуды v(t) колебаний маятника.
В.П. Данилин. Гироскопические приборы. М,. : Высшая школа, 1969.
112
Рис.3.39
Пусть в некоторый момент времени t отклонение а вершины
гировертикали равно отклонению v sin \d . Тогда для t < t < t
a. + cj (t - t ). В
l к l
изменение а будет определяться уравнением а
момент времени t произойдет переключение чувствительного элемента
коррекции, и уравнением движения вершины станет а = а - о> (/ - / ),
которое справедливо для интервала времени t < / < t . Из рис. 3.39
видно, что А/ = /
'1<'з
t = А/ , тогда Аа
а^ - а, < а -
2 1 2
- а = Аа и, следовательно, а < а . Продолжая рассуждения, получим
о £ о 1
А/ < А/ • А/, < А//, Д/ < Д/ ...
12 3 4 5 6
При этом соответственно
Аа. < Аа : АаЛ < Да ; Аа^ < Аал
12 3 4 5 6
(3.87)
(3.88)
а К а : а К а : а <а.
3 Г 5 3* 7 5
(3.89)
Заметим, что степень неравенства в выражениях (3.87), (3.88),
(3.89) с возрастанием индекса уменьшается, следовательно, средняя
скорость
ср
а
п
t
п
■*■
а
п
2 "
♦ 2
- t
п
(п = 1, 2, 3 ...)
(3.90)
с течением времени также уменьшается.
Таким образом, в интервале отклонений \а\ < \р | ось гироскопа
движется к вертикали с уменьшающейся средней скоростью, т.е.
коррекция как бы преобразуется из постоянной в пропорциональную. В
установившемся движении (рис. 3.40) получим \а \ = \а \ = ... =
= \а I = ... Причем, очевидно, что t ш - t = Г/2, где Г = 2тг/д -
1 П1 Л+1 Л
период колебаний маятника.
ИЗ
■ Максимальные отклонения гироскопа
от вертикали в этом случае будут
\а I = со Г/4 = со тг/(2д). (3.91)
1 /Л1 к к
Из выражения (3.91) следует, что
в установившемся движении макси-
Рис.3.40 мальные ошибки гировертикали будут
определяться периодом колебании маятника. Формула (3.91) справедлива
лишь в случае, когда а = о> Г/4 < v . Если же v < о> Г/4, то макси-
т к т /п к
мальные отклонения оси гировертикали в установившемся движении
будут равны отклонениям маятника, т.е. а = v . В этом случае ось
гироскопа будет повторять движения маятника. Однако, это наблюдается
только при малых амплитудах и малых частотах возмущающих колебаний.
3.5. ГИРОВЕРТИКАЛИ СО СМЕШАННОЙ КОРРЕКЦИЕЙ
Ранее были рассмотрены гировертикали с пропорциональной и
постоянной коррекциями. При этом было установлено, что погрешность
гировертикалей с пропорциональной коррекцией зависят от величины
эффективности е = k/H коррекции (при Н = const). К тому же
зависимость эта не однозначна. Для уменьшения скоростных
погрешностей, погрешностей от моментов сил трения, неуравновешенности
эффективность коррекции желательно увеличивать. В то же время для
уменьшения погрешностей от ускорений эффективность коррекции следует
выбирать малой. В результате получается противоречие, которое в
случае пропорциональной коррекции устранить невозможно.
Гировертикали с постоянной коррекцией, обладая рядом преимуществ
перед гировертикалями с пропорциональной коррекцией, имеют тот
недостаток, что практически не имеют положения равновесия, поскольку
главная ось гироскопа совершает незатухающие колебания. Это
обусловлено наличием зоны гистерезиса у чувствительного элемента
коррекции, а также его высокочастотными колебаниями за счет вибраций
и других причин. Погрешности гировертикали в этом случае могут и не
учитываться вследствие их малости, но знакопеременное приложение
коррекционного момента М создает неблагоприятные условия для работы
прибора. Устранить указанный недостаток удается применением так
называемой смешанной коррекции, характеристика которой изображена на
рис. 3.41. Смешанную коррекцию можно рассматривать как объединение
пропорциональной и постоянной, откуда и происходит ее название.
114
Рис.3.42
В зоне углов ±Ф зависимость моментов коррекции от угла
рассогласования пропорциональна, при углах рассогласования больших |ф| момент
коррекции постоянен и равен \М |. Зона пропорциональности Ф
выбирается обычно в пределах 0,3 ... 1,5 . Величина момента М выбирается из
условия (3.67). Благодаря этому эффективность коррекции в зоне
пропорциональности получается большой (при постоянном значении
кинетического момента //), что позволяет значительно снизить погрешности от
моментов сил трения, неуравновешенности и др. Кроме этого,
практически погашаются колебания гироскопа, свойственные постоянной коррекции.
Ограничение величины момента коррекции значением М при отклонениях
больше |Ф| позволяет снизить погрешности при значительных ускорениях.
По названным причинам гировертикали со смешанной коррекцией получили
наиболее широкое распространение.
Анализ поведения гировертикали со смешанной коррекцией может быть
выполнен по той же методике, что и для пропорциональной и постоянной
коррекций. При этом следует лишь учитывать, в области какой
коррекции находится главная ось гироскопа, и соответствующие ей
значения моментов коррекции должны быть записаны в правые части
уравнений движения.
На рис. 3.42 изображена картинная плоскость, которая разбита на
ряд областей (зон), характеризуемых типом коррекции. Пунктирные линии
обозначают границы зоны пропорциональной коррекции по углу а
(отклонение внецшей рамки) и по углу 0 (отклонения внутренней рамки).
Области I соответствуют пропорциональной коррекции по обеим осям. В
115
кМк
IP)
\\
Рис.3.41
областях П коррекция по углу а пропорциональная, а по углу 0 -
постоянная. В областях Ш коррекция по углу а постоянная, а по углу
0 - пропорциональная. В областях IV коррекция постоянная по углам а и
0. Соответственно этому выражения моментов коррекции по областям для
случая неподвижного основания могут быть записаны в следующем виде:
область I \а\ < |^> |; |Л1 = ♦ k a;
i^i < 1ф21= К= ? v
область П \а\ < |Ф |; [Н? = + ka; (3.92)
1*1 > l*,h И " ' <
область Ш \а\ > |Ф |; fAf^ = + MJJ;
И<1*21=к = _+¥:
область IV |а| > |Ф |;
1*1 > l*,h
к О
. к О
На рис. 3.42 показаны траектории движения вершины гировертикали
для случая неподвижного основания при k = k ; ЛГ = Af* и М * 0.
Следует отметить, что анализ поведения гировертикалей со смешанной
коррекцией с учетом положения главной оси гироскопа в указанных
областях целесообразен лишь при зонах пропорциональности, достигающих
нескольких градусов. Зоны пропорциональной коррекции в современных
гировертикалях обычно находятся в пределах 15'...30'. Поэтому они с
достаточной для практики степенью точности могут быть отнесены к
гировертикалям с постоянной коррекцией.
В качестве примера чувствительного элемента, реализующего
смешанную характеристику коррекции, может быть приведен так называемый
жидкостный маятниковый переключатель (рис. 3.43). Он представляет собой
медный баллончик, заполненный специальной токопроводящей жидкостью 1.
К корпусу 2 баллона подводится переменное напряжение 36 или 40 В
частотой 400 или 500 Гц. В крышке баллона имеются четыре изолированных
друг от друга контакта 3. Баллон заполняют жидкостью так, чтобы
оставался пузырек воздуха (инертного газа), который при горизонтальном
116
wz
о—
1
J
Щ^\
v^C
2
У
^Ш|\
%J^47
X
6
Рис. 3.43
расположении чувствительного элемента перекрывает поровну все четыре
контакта (см. рис. 3.43, а). При этом сопротивления между корпусом
баллона и всеми контактами будут равны. При наклонах чувствительного
элемента (см. рис. 3.43, б) площади контактов, перекрытые жидкостью
(воздухом), будут изменяться, соответственно будут изменяться и
сопротивления между корпусом и накрестлежашими контактами, а
следовательно, будут меняться и токи, протекающее через контакты.
Зоны пропорциональности определяются углами наклона вокруг осей х и у
от исходного горизонтального положения, при котором контакты
перекрыты поровну до полного перекрытия жидкостью одного и
соответственно воздухом другого. При дальнейшем увеличении угла
наклона сопротивление между корпусом и каждой из этой пары контактов
остаются неизменными.
В качестве исполнительных
элементов системы коррекции -
датчиков момента - в схеме с
жидкостным маятниковым
переключателем применяются обычно
двухфазные асинхронные двигатели,
работающие в заторможенном
режиме.
Упрощенная электрическая
схема гировертикали с жидкостным
маятниковым переключателем
показана на рис. 3.44. К гиромотору
(ГМ), представляющему собой
трехфазный асинхронный двига-
117
Рис. 3.44
тель, подводится переменное напряжение. Последовательно с обмотками
гиромотора включены обмотки возбуждения (ОВ) коррекционных моторов
(М ). Управляющие обмотки (ОУ) коррекционных моторов, включенных
встречно, соединены с соответствующими контактами жидкостного
маятникового переключателя. При горизонтальном расположении чувствительного
элемента (ЧЭ), что должно соответствовать совпадению главной оси
гироскопа с вертикалью места, токи, протекающие через управляющие
обмотки коррекционных моторов, будут создавать равные, но
противоположно направленные моменты. Гироскоп остается в покое. При наклонах
чувствительного элемента равенство токов через соответствующие обмотки
нарушается, а следовательно, нарушается и равенство моментов.
Результирующий момент вызывает прецессию главной оси гироскопа таким
образом, чтобы ликвидировать наклон чувствительного элемента, т.е. будет
возвращать гироскоп к вертикали.
3.6. НЕВЫБИВАЕМЫЕ ГИРОВЕРТИКАЛИ
При выяснении поведения гировертикалей на различных режимах работы
за исходное положение гироскопа нами принималось такое, при котором
вектор кинетического момента Н был перпендикулярен плоскости внешней
рамки, что соответствует горизонтальному полету. Однако в реальных
условиях ЛА может выполнять сложные фигуры высшего пилотажа, при
которых ось внешней рамки гироскопа может совмещаться с главной осью
(вектором Н). В этом случае гироскоп теряет одну степень свободы, а
вместе с ней теряет и свойство сохранять неизменным направление своей
главной оси, или, как иногда говорят, теряет "устойчивость". Кроме
этого, еще до полного совмещения осей наличие угла отклонения вектора
Н от перпендикуляра к плоскости рамки снижает "сопротивляемость"
гироскопа внешним моментам.
Это легко показать на следующем примере. Предположим
(рис. 3.45, а), что к внутренней рамке гироскопа приложен внешний
момент т . При этом полагаем, что в начальный момент главная ось пер-
в
пендикулярна плоскости внешней рамки (угол 0 = 0). Тогда согласно
закону прецессии гироскоп начинает прецессировать вокруг оси внешней
рамки с угловой скоростью а = т/Н. Теперь рассмотрим движение того
же гироскопа (см. рис. 3.45, б), но будем считать, что в начальный
момент его главная ось отклонена от перпендикуляра к плоскости
внешней рамки на угол 0. Тогда гироскоп будет прецессировать уже с
угловой скоростью а = М /(//cos 0).
х
Следовательно, при действии одного и того же момента М во втором
118
Рис.3.45
случае гироскоп прецессирует в 1/cos /3 раз быстрее, т.е. его
погрешности при прочих равных условиях увеличиваются. В
гировертикалях это приводит, в частности, к увеличению виражных
погрешностей, так как как бы увеличивается эффективность коррекции.
Для устранения возможности совмещения осей гироскопа применяют
различные устройства. Наиболее удачным решением следует считать
применение дополнительной следящей рамки. Принципиальная схема
гировертикали со следящей рамкой изображена на рис. 3.46. Внешняя рамка 1
обычного трехстепенного гироскопа закрепляется не в корпусе прибора,
а в дополнительной рамке 2. При поворотах объекта вокруг оси у, что
соответствует на схеме изменениям угла тангажа, перпенди- кулярность
между главной осью гироскопа и плоскостью внешней рамки 1 не
меняется. В случае изменения угла крена, т.е. при поворотах объекта вокруг
оси х. следящая рамка 2, а вместе с ней и внешняя рамка 1 также
начнут поворачиваться. Щетка 4, жестко закрепленная на ось внутренней
рамки гироскопа, замкнет один из контактов 3, расположенных на
внешней рамке. Электрический сигнал поступит на двигатель 5, который
через редуктор 6 начнет вращать следящую
рамку 2 в сторону, противоположную
повороту объекта. В результате угол между
главной осью г гироскопа и плоскостью
внешней рамки будет автоматически
поддерживаться близким к 90 .
У гировертикали, выполненной по
такой схеме, не только исключается
возможность совмещения рамок, т.е. она
становится не выбивав мой, но и
поддерживается постоянной, в указанном смысле
"устойчивость" гироскопа.
Рис. 3.46
119
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Если у СГ (в техническом смысле) центр тяжести смещен вдоль
главной оси, то он является гиромаятником. Рассмотрите его поведение
при ускорениях основания.
2. Поясните принципиальные различия гиромаятника и ГВ с системой
коррекции.
3. Формулы погрешности ГВ от моментов сил трения имеют вид: а
т
*
■ ИХ /€ : в - ТП /б . Можно ли при постоянном моменте сил трения, не
вн 1 т вш 2
* *
изменяя абсолютного значения 6, снизить а и /3 ?
т т
4. Как по виду траекторий полюса ГВ на картинной плоскости
установить факт наличия маятниковое™?
5. Дайте физическое пояснение скоростной погрешности ГВ с
пропорциональной коррекцией.
6. Как изменятся баллистические погрешности ГВ с пропорциональной
коррекцией, если ее центр тяжести смещен вдоль главной оси?
7. Как влияют моменты сил трения в осях подвеса ГВ при отключенной
коррекции (продольной и поперечной) в случае виража ЛА?
8. Дайте сравнительную характеристику погрешностей ГВ с пропорцио1
нальной и постоянной коррекциями.
9. Нарисуйте схему ГВ и представьте, что она установлена на ЛА,
который накренился, например вправо. Поясните, как при этом
формируется сигнал измерительной информации пропорциональный крену.
10. Поясните необходимость и как технически обеспечивается невыби-
ваемость ГВ при эволюциях ЛА.
ГЛАВА 4. ДАТЧИКИ И УКАЗАТЕЛИ УГЛА КУРСА
4.1. ОБЩИЕ СВЕДЕНИЯ
Для решения задач пилотирования и навигации необходимо на борту ЛА
иметь информащно об его угловой ориентации по отношению к какому-либо
заведомо известному (базовому) направлению, лежащему в горизонтальной
плоскости. В качестве таких базовых направлений используют
географический и магнитный меридианы, направление главной ортодромии и др.
Угол между выбранным базовым направлением и проекцией продольной оси
ЛА на горизонтальную плоскость называют углом курса (ф), или курсом
ЛА (рис. 4.1). В зависимости от базового направления угол курса
(курс) называют соответственно географическим, или истинным (ф ),
магнитным (ф ), ортордроминеским (ф ) и т.п. Углы курса, отсчитывае-
120
Рис.4. 1 Рис.4.2
мые вправо (по часовой стрелке) от базового направления, принимают за
положительные.
Выбор базового направления (начала отсчета) в общем случае не
является произвольным. Он обусловлен характером решаемой задачи,
типом ЛА, условиями, в которых должен происходить полет, наличием
соответствующих средств измерения и др. Так, при горизонтальном
полете ЛА с постоянным истинным курсом ф его траекторией будет
сферическая логарифмическая спираль, фокус которой совпадает с
географическими полюсами Земли (рис. 4.2). Такую линию называют
локсодромией. (Здесь и далее будем считать, что Земля имеет форму
шара.) Очевидно, что локсодромия не является кратчайшим расстоянием
между двумя точками, заданными на поверхности Земли. В то же время
известно, что кратчайшим расстоянием между двумя любыми точками на
поверхности Земли является дуга большого круга, которую принято
называть ортодромией. Таким образом, полет из пункта А в пункт В (см.
рис. 4.2) по ортодромии будет экономичнее, так как потребует меньших
затрат времени, горючего и др. (особенно при полетах на большие
расстояния).
Приборы и устройства, с помощью которых можно измерять текущее
значение угла курса, называют компасом или курсовыми приборами
(системами). В качестве измерителей угла курса подвижных объектов (ЛА,
надводных и подводных кораблей и др.) широкое распространение
получили приборы и системы, в основу которых положен гироскоп с тремя
степенями свободы. Курсовые гироскопические приборы (системы) можно
подразделить на гирокомпасы (ГК), гирополукомпасы (ГПК) и гиромагнитные
компасы (ГМК).
ГК позволяет определять истинный (географический) курс движущегося
объекта, так как его главная ось автоматически устанавливается в
плоскость географического меридиана. Он применяется главным образом
на кораблях морского флота как навигационный прибор. В авиациях ГК
л >■* 121
Рис.4.3 Рис.4.4
применяется ограниченно прежде всего из-за некоторых недостатков
принципиального характера.
ГПК дает возможность выдерживать (временно) любое выбранное
направление полета ЛА и совершать развороты в горизонтальной
плоскости на заданные углы.
ГМК позволяет определять магнитный курс подвижного объекта,
поскольку его чуствительным элементом является магнитная система. Роль
же гироскопа в основном сводится к повышению динамических качеств
прибора. В книге ГМК не рассматриваются, так как они изучаются в
дисциплине "пилотажно-навигационные устройства".
4.2. ГИРОКОМПАСЫ
4.2.1. Принцип работы и уравнения движения
Принципиальная возможность использования гироскопа в качестве
указателя географического меридиана была установлена еще Леоном Фуко
в 1852 г. Однако ввиду значительных технических трудностей
практическая реализация идей Фуко была осуществлена лишь спустя
полвека. В 1908-1910 гг. вначале американская фирма "Сперри", а затем
немецкая фирма "Аншютц" запатентовали первые работоспособные
конструкции гирокомпасов. Правда, следует отметить, что Фуко указывал на
возможность использования для этой цели гироскопа с двумя степенями
свободы, в то время как оба запатентованных ГК были разработаны на
базе гироскопа с тремя степенями свободы.
Упрощенная схема ГК представляет собой гироскоп в кардановом
подвесе (рис.4.3), главная ось которого z (вектор Н) расположена
горизонтально, ось внешней рамки у вертикально, а центр тяжести С
смещен в экваториальной плоскости относительно неподвижной точки 0
122
вниз на величину / . Оказывается, что такой гироскоп при условии
сведения к определенному пределу вредных моментов в осях подвеса,
будучи установленным на неподвижном относительно Земли основании,
приобретает избирательную способность по отношению к плоскости
географического меридиана. При любом отклонении его главная ось
возвращается к этой плоскости.
В подтверждение указанного факта и для выявления некоторых других
особенностей поведения ГК получим его уравнения движения и
проанализируем их. В качестве опорной системы координат примем
географическую систему координат (рис. 4.4), начало которой совпадает
с неподвижной точкой 0 гироскопа и движется горизонтально
относительно земной поверхности с постоянной скоростью.
Ориентацию полуподвижных осей xyzt связанных с гиромотором
(внутренней рамкой гироскопа), будем определять углами а и 0
соответственно вокруг осей f и jr.
Далее воспользуемся прецессионными уравнениями трехстепенного
гироскопа:
Hq = М ;
-Нр = М. (4.1)
У
Теперь для получения уравнений движения ГК надо найти значения
проекций угловых скоростей р и q и проекций моментов М и М на оси
гироскопа.
Из рис. 4.4 при условии малости углов а и 0 находим
/> = -P-Ut-U a; q = а + Uy - U 0. (4.2)
К 17 S 17
Аналогично найдем моменты
М = тЫ sin 0 ± М*; М = ± М*, (4.3)
■ х- *у и . х у у
* *
где М и М — некоторые возмущающие моменты в осях подвеса (например
моменты трения и др. ); mg = Р — сила тяжести ротора и внутренней
рамки ГК.
Подставив значения (4.2) и (4.3) в (4.1), получим
Н{а ♦ 1Л. -I/ 0) = т&в ± М*;
f v У* (4.4)
H(fi*Uk + U a) = ± M*.
Для географической системы отсчета проекции угловой скорости на
°си {; г? и f определяются соотношениями (1.53). После деления правых
123
и левых частей уравнений (4.4) на Я, подстановки в них значении
(1.53) и несложных преобразований получим:
а - (со cos \р * Vp/R + Х)0 = - (со sin \p +
+ V*3tg *] * М*///; (4'5)
k ♦ (co3Cos * ♦ VJRJa = ^/«3 ± А^/Я,
где X - fflgf /Я — скорость прецессии ГК от маятникового момента.
Уравнения (4.5) являются уравнениями движения гирокомпаса,
установленного на подвижном относительно Земли основании.
Рассмотрим несколько частных случаев работы (поведения)
гирокомпаса.
4.2.2. Поведение гирокомпаса
на неподвижном относительно Земли основании
В этом случае в уравнениях (4.5) надо положить Vp = V„ = 0. Примем
также, что в осях подвеса ГК отсутствуют возмущающие моменты, т.е.
* *
М = М = 0, тогда уравнения запишутся в виде
-* у
1а - (со cos \р + Х)0 = - со sin \p\
3 (4.6)
0 + со cos tf-a = 0.
3
Из них, приняв a = j3 = 0, можно найти координаты равновесного
положения а и 0 главной оси ГК:
a = 0;
Ясо sin ip
& = -п ; . (4.7)
//a> cos ip t mgl
3 Y * у
Таким образом, из системы (4.7) следует, что в равновесном
состоянии при принятых ранее допущениях главная ось ГК располагается
в плоскости географического меридиана (а = 0) под углом 0 к
плоскости горизонта (приподнята над горизонтом в северном полушарии и
опущена - в южном). Отметим, что выражение для |3 с достаточной
степенью точности можно записать так: t
124
//со sin if
? - -ik— • (48)
5 У
поскольку в реальных конструкциях ГК величину маятникового момента
3
/ngf выбирают в (1 2) • 10 раз больше множителя //со . На основании
^ *
этого можно также заключить, что угол 0 мал. Практически он равен
нескольким угловым минутам.
Теперь выясним, как ведет себя ГК в случае, когда его главная ось
выведена из положения равновесия, т.е. будет отклонена от плоскости
меридиана. Для этого решим систему уравнений (4.6), предварительно
отбросив в первом уравнении слагаемое со cos у ввиду его малости по
сравнению с X. Из второго уравнения системы (4.6) после его
дифференцирования (полагая <р = const) найдем значение
а = 2 . (4.9)
со cos \р
Подставив его в первое уравнение, получим
2
0 ♦ Хсо cos $•(} = со sin ip cos у. (4.10)
Решение уравнения (4.10) может быть записано в виде:
/3 = A cos (aq/ ♦ А) + 0*. (4.11)
где д = Vmgl CO COS ф/Н — круговая частота собственных незатухающих
гармонических колебаний; А и А — произвольные постоянные,
определяемые начальными условиями.
Из второго уравнения системы (4.6), подставив в него
продифференцированное выражение (4.11), найдем
а = sin Ш * Д). (4.12)
со cos \р 0
Таким образом, из выражений (4.11) и (4.12) следует, что если
главную ось ГК произвольно отклонить от направления меридиана на
малые углы а и 0, она будет совершать незатухающие гармонические
колебания как по координате а, так и по координате 0 с круговой
частотой м и амплитудами, зависящими от начального отклонения.
Если воспользоваться понятием картинной плоскости, то полученные
125
результаты можно истолковать следующим образом. Выражения (4.11) и
(4.12) являются параметрическими уравнениями эллипса, и,
следовательно, главная ось ГК (ее вершина, аппекс) при своем движении описывает
на картинной плоскости траекторию, являющуюся эллипсом (рис. 4.5).
Вращение происходит по часовой стрелке, если смотреть на картинную
плоскость с севера. Центром эллипса (точкой пересечения осей) будет
//to sin ф
точка с координатами а = 0; /3 = /3 = -. . Отношение большой
Щ У
(а) и малой (Ь) осей эллипса может быть найдено из (4.11) и (4.12)
как отношение амплитуд гармонических колебаний
а мо / mglu
-f- = * У -п й . (4.13)
о о> cos у по> cos <р
В гирокомпасах, применяемых на подвижных объектах, величина X
обычно выбирается во много раз больше со . Поэтому из выражения (4.13)
следует, что эллипс сильно вытянут по горизонтальной оси, а это
соответствует отклонениям главной оси ГК от направления меридиана.
Итак, мы установили, что главная ось трехстепенного гироскопа с
выбранной ориентацией его осей подвеса и смещенным вниз от
неподвижной точки центром тяжести находится в устойчивом равновесии в
плоскости географического меридиана. Однако при отклонении от
положения устойчивого равновесия она совершает незатухающее коническое
движение (основанием конуса является эллипс) вокруг оси, лежащей в
плоскости меридиана. Это обстоятельство существенно затрудняло бы
использование данного прибора как компаса. Поэтому в реальных
конструкциях ГК предусматриваются специальные демпфирующие устройства
для успокоения колебаний [2, 4]. Тогда траекторией движения вершины
гироскопа будет спираль, сходящаяся к точке равновесного положения с
координатами а = 0, 0 = 0 (рис. 4.6). (Координаты точки равновесия
могут зависеть от способа реализации демпфирующего момента [4]).
Такой прибор, при указанных выше ограничениях, уже отвечает основным
требованиям, предъявляемым к компасам - в устойчивом состоянии его
главная ось ориентирована в направлении географического меридиана, а
при ее отклонении от этого направления вновь возвращается к нему,
или, как принято говорить, обладает избирательной способностью по
отношению к направлению географического меридиана (точнее по
отношению к плоскости географического меридиана).
126
Избирательной способности ГК по
отношению к плоскости географического
меридиана можно дать следующее физическое
пояснение. Предположим, что гирокомпас
установлен на неподвижном относительно г
Земли основании на экваторе (^ = 0), и
его главая ось, находясь в плоскости х4^
горизонта, отклонена, например на восток Г
(рис. 4.7, а). Вначале сила тяжести mg = I.
= Р не вызовет момента, так как линия ее И''\
действия проходит через точку подвеса О
(неподвижную точку). Далее вследствие
суточного вращения Земли ось внешней
рамки ГК, оставаясь направленной вертикально, начнет поворачиваться в
пространстве вместе с Землей с угловой скоростью со . Главная ось ГК
благодаря свойствам гироскопа сохранит свою первоначальную ориентацию
в инерцдальном пространстве. При этом из-за горизонтальной
составляющей вращения Земли со ссвд произойдет ее относительный подъем
над плоскостью горизонта на угол 0 (рис. 4.7, б). На этот же угол по
вернется и линия, соединяющая неподвижную точку 0 и центр тяжести С
(ось (/). Поэтому вокруг оси х внутренней рамки возникнет маятниковый
момент Лг = /Hgf sin 0 (на рис. 4.7, б направлен перпендикулярно
х у
плоскости листа, от читателя), который вызовет прецессию главной оси
ГК с угловой скоростью а = /ngf sin fi/H к плоскости географического
if
меридиана. Прецессия главной оси будет одновременно сопровождаться ее
дальнейшим подъемом над плоскостью горизонта из-за вращения Земли.
Когда главная ось придет в плоскость меридиана, угол ее подъема
над горизонтом 0 достигнет максимальной величины (рис. 4.7, в).
Маятниковый момент также достигнет максимума. Далее из-за
маятникового момента главная ось продолжит прецессию, удаляясь от
плоскости меридиана на запад. Угол ее подъема над горизонтом начнет
уменьшаться, в соответствии с этим уменьшаются маятниковый момент и
скорость прецессии. Когда угол подъема 0 станет равным нулю (рис.
4.7, г), прецессия прекратится (маятниковый момент равен нулю).
Главная ось в это время направлена на запад. Однако вследствие
вращения Земли главная ось продолжит изменение ориентации по
отношению к плоскости горизонта, но уже начнет опускаться вниз. При
этом, появляющийся маятниковый момент по отношению к ориентации ГК
изменит знак на обратный (на рис. 4.7, д он направлен перпендикулярно
Рис.4 .5
127
Рис. 4 .6
плоскости листа, от читателя), и главная
ось начнет прецессировать обратно к
плоскости меридиана, продолжая опускаться вниз
и т.д. В итоге главная ось будет совершать
незатухающее коническое движение вокруг ге-
а ографического меридиана.
Если в начальный момент времени главную
ось ГК ориентировать точно по направлению
меридиана, она будет сохранять свою
первоначальную ориентацию (при условии М = М = 0), так как эта ори-
ентаиия соответствует устойчивому равновесию: а = 0, 0 =
Но) sin 0
= ^— = 0, а следовательно, и М = 0.
mgl х
Предусмотренные в конструкции ГК демпфирующие устройства,
рассеивая энергию свободных колебаний, обеспечивают его успокоение и
приведение главной оси в положение устойчивого равновесия, т.е. к
направлению на географический север.
Рассмотренный пример является частным случаем. В реальных условиях
ГК работает в значительном диапазоне изменения широты места (<р =
= ± 75 ). Однако данное физическое пояснение принципа работы
гирокомпаса остается справедливым для любого значения широты места.
#
Его необходимо лишь дополнить обоснованием наличия угла $ * 0. Это
становится ясным, если обратить внимание на то, что вертикальная
составляющая угловой скорости вращения Земли о> sin \p на экваторе
В
Рис. 4.7
128
Рис.4.8 Рис.4.9
равна нулю и, следовательно, плоскость меридиана не имеет вращения
вокруг вертикальной оси f. Поэтому главная ось ГК, придя к положению
равновесия с координатами а = 0, 0 = 0, в дальнейшем остается
свободной от воздействия маятникового момента, и будет сохранять свою
ориентацию в инерциальном пространстве, совпадая с направлением линии
юг-север при повороте Земли на любой угол (рис. 4.8).
Если же ГК расположить в районе Земли, где угол у * О, его
установление в плоскость меридиана, как уже было отмечено, будет
аналогично процессу, происходящему при <р = 0. Однако после успокоения
главная ось, находясь в плоскости меридиана, будет приподнята над
% //co3sin у #
горизонтом на угол 0 = —z '—. Наличие угла 0 обусловлено
Щу
тем, что на широте у плоскость меридиана поворачивается вокруг
вертикальносй оси f с угловой скоростью о> sin у. Для того, чтобы
главная ось гирокомпаса располагалась в ней, необходимо, чтобы она
прецессировала с той же скоростью. Эта прецессия и обеспечивается
маятниковым моментом при отклонении главной оси от плоскости
горизонта вверх на угол /3 , соответствующий данной широте <р (рис.
2
4.9). Из условия равенства абсолютной скорости прецессии главной
2
Абсолютная скорость прецессии — скорость относительно инерциаль-
ной системы координат; а и /3 в данном случае — скорости относительно
географической системы координат.
5 - 369 129
оси за счет маятникового момента и вертикальной составляющей со
вращения Земли на широте у> можно найти значение угла 0 , т.е.
mg/ sin &
SL
со sin ip, (4.14)
H з
откуда
//CO sin Ф
g* » 3 , .
что соответствует выражению (4.8), полученному при решении уравнений
(4.6).
Итак, мы выяснили принцип работы простого маятникового ГК, но при
этом полагали, что в осях его подвеса полностью отсутствуют какие-
либо "вредные" моменты. Однако при технической реализации подвеса
добиться этого не удается. Поэтому рассмотрим, как влияет на поведение
ГК наличие вредных моментов в осях подвеса внешней и внутренней
рамок. Не вдаваясь в природу этих моментов (это могут быть моменты от
сил сухого трения, несовершенства подвода энергии к гиромотору и
т.п.), обозначим их через М и соответственно по осям внутренней
(х) и внешней (у) рамок ГК. С учетом вредных моментов уравнения (4.6)
запишутся в виде:
а - (со cos ф + Х)0 = - о> sin ф * М /Н, /л 1СЧ
s 3 * вр (4.15)
/3 * со cos Ф'а = Лг /Н .
3 вр
Координаты положения равновесия найдем из условия а = 0 = 0:
(4.16)
*
0 =
*
а -
//со sin ф - М
3 вр
//со cos ф * mgl
3 * у
вр
//со cos ф
Сравнивая выражения (4.16) и (4.7), видим, что координаты
положения равновесия изменились. Угол |3 уменьшился (при ЛГ > 0) на
некоторую величину, обусловленную т в оси внутренней рамки, в то же
время внешняя рамка отклонилась на угол а . Если изменение угла р
*
практически не скажется на показаниях * ГК, то угол а является,
130
Рис.4. 10
Рис.4. 11
непосредственной погрешностью, так как этот угол характеризует
несовпадение главной оси с плоскостью меридиана (рис. 4.10).
Полученные результаты являются несколько неожиданными, поскольку
для гироскопа характерны перекрестные связи - моменты, приложенные к
одной рамке, вызывают прецессию, а следовательно, и отклонение другой
рамки. Однако такому влиянию вредных моментов на ГК можно дать
физическое толкование. Предположим, что первоначально главная ось ГК
находилась в положении равновесия с координатами а = а = 0, 0 =
//со sin \p
3
= М
тК
и вредные моменты по осям отсутствовали.
Появление момента действующего вокруг оси внутренней рамки
(например в положительном направлении, как это показано на рис.
4.11), вызовет прецессию главной оси гироскопа со скоростью а =
х вр
= М ///, совпадающей по направлению с вертикальной составляющей
вр
угловой скорости вращения Земли со sin ^. Главная ось начнет
"обгонять" плоскость меридиана, т.е. появится некоторое отклонение по
углу а. Однако в результате поворота главной оси на угол а она
одновременно начнет опускаться относительно плоскости горизонта вниз
из-за проекции на ось внутренней рамки горизонтальной составляющей
вращения Земли со cos ^*a. Угол 0 начнет уменьшаться, а следовательно,
будут уменьшаться маятниковый момент /ngf В и скорость прецессии от
131
него. Под действием переменного маятникового момента и момента ЛГ
вр
главная ось, совершая колебания, придет в новое положение равновесия
с координатами а = а = 0, 0 = 0 , где выполняется условие
компенсации вертикальной составляющей вращения Земли
(mgie* + М* )/// = со sin у. (4.17)
В выражении (4.17) член //со cos <р-0 опущен из-за малости по
сравнению с mgf 3 . Компенсация со sin^ обеспечивается суммой
маятникового и вредного моментов, а следовательно, угол |0 | < |0 |.
Аналогичными рассуждениями легко показать, что при Л** < 0, \в \ >
± вр ' I1
> IM-
При появлении вредного момента Лг , действующего вокруг оси
вр
внешней рамки (рис. 4.12), возникнет прецессия главной оси со
скоростью 0 = М /Н в направлении ее подъема над плоскостью
горизонта, что приведет к увеличению угла 0, а следовательно, и
маятникового момента. При этом условие равновесия по углу а также
нарушится, и главная ось начнет прецессировать в направлении к
западу. Поворот главной оси на угол а обусловит появление на оси
внутренней рамки проекции горизонтальной составляющей вращения Земли
равной со cos v?*a. Из-за этой проекции угол 0 относительного подъема
главной оси над плоскостью горизонта начнет уменьшаться, что приведет
затем к уменьшению маятникового момента. Под действием переменного
маятникового момента и вредного момента М главная ось придет в
вр
новое положение равновесия с координатами а и 0 . При этом угол 0
останется прежним, поскольку условие компенсации со sin \p останется
* 3
прежним. Появление же угла а обусловлено необходимостью компенсации
скорости прецессии главной оси 0 = Лг /Н от вредного момента
* вр вр
(обеспечения 0 = 0 ) за счет проекции на ось внутренней рамки
горизонтальной составляющей вращения Земли со cos у а . Чем больше
тем на больший угол а будет отклоняться от плоскости меридиана глав-
132
пая ось, так как для компенсации его
влияния требуется большая проекция
со cos у а.
3
В конечном итоге движение главной
оси ГК под действием постоянных вредных
моментов, действующих в осях его
подвеса, следует рассматривать как переход к
новому положению равновесия (4.16).
Приведенное физическое пояснение движе-
ния главной оси ГК справедливо при пос- ^з^5^.«*||ГгО
х и
тоянных значениях моментов М и М . В
вр вр
реальных условиях их составляющими яв- Рис.4.12
ляются и моменты сил сухого трения, которые образуют зону "застоя" в
окрестности положения равновесия и могут существенно исказить
характер движения ГК. Теоретический анализ и физические пояснения сущности
маятникового момента, приводящего главную ось ГК в плоскость
меридиана, показывают, что первопричиной его появления является проекция на
ось внутренней рамки горизонтальной составляющей угловой скорости
вращения Земли со cos у а (иными словами, кажущаяся прецессия главной
оси относительно плоскости горизонта с угловой скоростью в общем
случае равной о> cos (^sin а). В частности, это следует и из второго
равенства (4.16), которое запишем в виде
//со cos кр'а
М»
вр
(4.18)
Левая часть этого равенства является гироскопическим моментом,
который уравновешивает приложенный к ГК вредный момент М (см.
рис. 4.12). При увеличении вредного момента будет пропорционально
увеличиваться и угол а. При М = О а = 0 и 0 = 0 , главная ось на-
вр
ходится в плоскости меридиана (в положении равновесия) и тенденций к
ее уходу из этой плоскости не будет.
Величину
//со cos <psin a = М
3 н
(4.19)
принято называть направляющим моментом ГК. Поскольку множитель
//со cos у, выполняющий роль "жесткости" (по гналогии с пружиной), сам
по себе весьма мал, направляющий момент также мал. Поэтому при разра-
133
ботке ГК весьма сложной технической проблемой является обеспечение
его подвеса с малыми возмущающими моментами.
Пример. Вычислить величину направляющего момента ГК с
кинетическим моментом Н - 2.45 Н'м, установленного на экваторе (<р
0) и обеспечивающего показания с погрешностью 5^1; О)
-5-1
- 7,29*10 рад'с
Решение. По формуле (4. 19)
М = 2,45*7,29-Ю"5' }* -1 = 0,3'Ю"5 Н'м.
н 180
Как видим, даже при сравнительно большом кинетическом моменте
направляющий момент весьма мал. К этому добавим, что М умень-
о
шается с увеличением широты места <р. Так, на широте у - 60 М
-5
- 0,15*10 Н'м. Это является одной из причин, ограничивающих
применение ГК в районах высоких широт.
4.2.3. Поведение гирокомпаса
на подвижном основании
Подвижным относительно Земли основанием будем считать, например
корабль, подводную лодку и т.п.
В начале рассмотрим случай прямолинейного движения основания с
постоянной скоростью V. Для анализа воспользуемся уравнениями (4.5),
в которых примем М = М = 0:
а - (o>3cos у * У//Я3 + Х^ = ~ (и *in у + V//R3tg Ч>)\
0 * (cj3cos у ♦ V^RJa = VN/R3.
(4.20)
Эти уравнения по своей структуре аналогичны уравнениям (4.6) и
отличаются лишь коэффициентами и постоянными членами. Следовательно,
характер движения главной оси останется прежним, т.е. в общем случае
главная ось будет совершать незатухающие колебания. При этом
траекторией движения полюса гироскопа на картинной плоскости будет эллипс.
Координаты равновесного положения главной оси, к которому она
будет приходить при наличии демпфирования, найдем из системы (4.20),
приняв а = 0 = 0: /
134
v
* N
<V= (/?3co3cos^ + VE) :
/d i/ v (4.21)
(/?3CJ3sm <p ♦ V£tg<p)
(fl^cos^ + V£ + /?3X)
Сравнивая полученные выражения с выражениями (4.7), видим, что они
качественно отличаются. Главное отличие заключается в появлении
отклонения по углу а. Для получения количественной оценки необходимо
прежде всего знать величину и направление (угол курса) линейной
скорости движения объекта. Если эту оценку проводить применительно к
кораблям морского флота, то, учитывая их малую линейную скорость по
сравнению с линейной скоростью от вращения Земли в средних широтах, в
выражениях (4.21) членами, зависящими от восточной составляющей V„,
можно пренебречь. Тогда координатами положения равновесия будут:
vv ;
(4.22)
*
•V-
*
0 =
VN
R3<*>3 cos<^
со sin \p
3
со cos<p + X
*
Отсюда видим, что угол & при наличии скорости V не изменился, а
*
угол Оу, являющийся погрешностью в показаниях, может достигать
значительной величины. Таким образом, при движении ГК с некоторой
о о
постоянной скоростью V и углом курса ф отличным от 90 и 270 , его
главная ось устанавливается в вертикальной плоскости, повернутой от
плоскости географического меридиана на угол си,. Причем это угол
возрастает с увеличением широты места. Погрешности в показаниях ГК,
обусловленные движением основания (объекта), принято называть
скоростными девиациями. Поскольку Уд, = Vcos ф, то скоростные
о о
девиации при углах курса 90 и 270 равны нулю.
Пример, v Определить скоростную девиацию ГК. установленного на
корабле, движущемся курсом ф = 0 со скоростью V - 72 км/ч на широте
V? = 60° (R = 6371 км).
Решение. По формуле (4.22) находим
135
72 • 1 о
Оу - 1 1 = °.°86 * 5 •
3.6-10 -637Г7.2910 -0.5
Как видим, скоростная девиация ГК достигает значительной величины
даже при небольшой по сравнению со скоростью ЛА скорости движения.
При скоростях движения порядка сотен километров в час скоростная
девиация достигает десятков градусов.
Показания современных гирокомпасов, применяемых на кораблях,
автоматически корректируются на величину скоростной девиации путем ее
вычисления по измеренному (например лагом) значению линейной скорости
и текущей широте места. Подобная коррекция ГК на самолетах затруднена
ввиду того, что для вычисления скоростной девиации необходима
достаточно точная информация о путевой скорости, а на борту самолета,
как правило, известна воздушная скорость.
Физический смысл скоростной девиации ГК становится ясным
непосредственно из его принципа работы. Направляющий момент ГК
обусловлен горизонтальной составляющей угловой скорости вращения
Земли. При движении ГК по поверхности Земли (рис. 4.13) возникает
дополнительная угловая скорость V/R . Вектор этой угловой скорости
направлен перпендикулярно вертикальной плоскости, в которой лежит
вектор линейной скорости V. В итоге горизонтальная плоскость будет
поворачиваться с угловой скоростью, равной сумме векторов:
Zoj = со cos у * V/Я = со cos у + Vg/Я ♦ уд/*3- (4-23)
Поскольку ГК не в состоянии различить эти угловые скорости, его
главная ось в соответствии с принципом работы будет устанавливаться
по направлению их равнодействующей (точнее в вертикальной плоскости,
в которой лежит эта равнодействующая). Положительное направление
равнодействующей иногда называют динамическим севером [12]. В общем
случае главная ось ГК указывает на динамический север. Однако чаще
направление, по которому устанавливается главная ось ГК, называют
гироскопическим или компасным меридианом, а курс, отсчитываемый от
этого меридиана - гироскопическим или компасным.
Как уже отмечалось, при больших скоростях перемещения основания
*
скоростная девиация Оу достигает нескольких десятков градусов.
Понятно, что в этом случае для ее вычисления уже нельзя пользоваться
первой формулой (4.22), так как она получена при условии малости
углов а и 0. Новая расчетная формула может быть получена из
136
рассмотрения рис. 4.13, где угол Оу
заключен между направлениями ON и ON
н г
и определяется из треугольника угловых
скоростей:
(4.24)
te<V
V3cos^ + v£
По этой формуле угол Оу считается
положительным при отклонении главной
оси (вектора Н) от плоскости
географического меридиана на запад.
Из равенства (4.24) следует, что при больших линейных скоростях и
различных углах курса знаменатель формулы может быть положительным,
отрицательным или нулем. Например, при движении вдоль экватора с
востока на запад (\р = 0, ф = - я/2) со скоростью, равной линейной
скорости вращения Земли (V = 1670 км/ч), ГК вообще потеряет избирательную
способность, так как результирующая угловая скорость будет равна нулю
(ГК будет неподвижен относительно инерциальной системы координат;
годовым вращением Земли пренебрегаем).
На средних широтах это происходит при скоростях, примерно вдвое
меньших (cos 60 =0,5). Средние скорости полета современных
транспортных самолетов лежат в пределах 700 ... 900 км/ч, т.е. соизмеримы
с линейной скоростью вращения Земли. Это является дополнительным
подтверждением трудностей применения ГК в авиации. В заключение отметим,
что скоростная девиация не зависит от конструктивных параметров ГК.
Она зависит только от скорости основания и широты места. Таким
образом, это методическая погрешность прибора.
Источником погрешностей ГК на движущемся основании являются не
только линейные скорости. Принципиальная схема ГК независимо от
конструктивного решения содержит физический маятник. При ускоренном
движении основания к ГК будут прикладываться дополнительные маятниковые
моменты, обусловленные инерционными силами. Эти моменты вызовут
дополнительные отклонения главной оси от плоскости меридиана к новому
положению равновесия. Отклонения главной оси ГК, вызванные
ускорениями основания, называют баллистическими девиациями. Баллистические
девиации могут достигать значительных величин. С целью их устранения
или, по крайней мере, сведения к допустимому минимуму конструктивные
параметры ГК выбирают такими, чтобы обеспечить период собственных
незатухающих колебаний главной оси, равным периоду Шулера (это иногда
называют условием невозмущаемости):
137
г =
_2тг_
2тг
/
Н
tngl со cos<p
= 84,4 мин.
(4.25)
При строгом выполнении условия (4.25) главная ось ГК при появлении
ускорений (а следовательно, изменении значений скорости V) переходит
из одного положения равновесия к другому, определяемому новым
*
значением скоростной девиации Оу , без колебаний. Условие (4.25) и
1
физический смысл движения главной оси ГК в этом случае становятся
понятными из рассмотрения рис. 4.14 и приближенной формулы для
определения скоростной девиации из (4.22).
Движение основания, например с ускорением W„ вызовет инерционный
момент mW J , который будет приложен к оси внутренней рамки. Этот
момент согласно закону прецессии заставит главную ось прецессировать с
угловой скоростью а~у = mWjJ/H. Угол а при этом начнет увеличиваться.
Но одновременно будет увеличиваться и составляющая линейной скорости
V\,. Большему значению линейной скорости соответствует и большая
величина скоростной девиации. Следовательно, угол а должен нарастать и по
этой причине (см. объяснение к рис. 4.12). Условие отсутствия
баллистической девиации будет обеспечиваться в том случае, если в любой
момент времени скорость нарастания угла а от инерционного момента будет
равна скорости его увеличения от. изменения линейной скорости, т.е.
ПРИ Cfy
откуда
V
или
mWxly
~Н~
N
^з00^
mgl ucosip
н
= -2-
(4.26)
(В данном случае а = Оу
рассматривается как переменная величина, а ^ =
= const). Левая часть равенства
(4.26) является квадратом круговой
частоты и собственных незатухающих
колебаний главной оси ГК [см. формулу
(4.11)]. Поэтому можно записать ^
Т = 2тг
/
Н
Рис.4. 14
s У 3 Y
138
= /-£- 2тг. (4.27)
8
Таким образом, при реализации ГК с соблюдением условия (4.27) его
главная ось будет без ошибок отслеживать направление на динамический
север при любом изменении линейной скорости. Например (см. рис. 4.14).
при изменении скорости на некоторую величину AV главная ось в общем
случае пришла бы в точку с координатами си, и ^ по спирали (пунктир-
1
ная линия). Если же условие невозмущаемости соблюдено - по сплошной
линии.
Практически все современные ГК, применяемые на движущихся
объектах, выполняются с соблюдением условия невозмущаемости Шулера.
Однако при этом существенно возрастает время готовности прибора к
использованию при запуске. Дело в том, что в связи с необходимостью
введения демпфирования период затухающих колебаний ГК возрастает до
115... 130 мин. Поэтому время успокоения при запуске может достигать
3...7 ч. На практике это время снижается до 0,5...1 ч путем
приложения определенным способом сформированных внешних моментов [4].
Важно отметить, что период 84,4 мин сохраняется лишь при
отсутствии демпфирования. А это, как известно, приводит к
незатухающим колебаниям главной оси при любом ее случайном
отклонении. Кроме того, как видно из формулы (4.27), период колебаний
зависит от широты места. В реальных конструкциях ГК при движениях
основания с ускорением демпфирующие устройства автоматически
выключаются, а кинетический момент Н изменяют пропорционально широте
места, например путем изменения угловой скорости собственного
вращения ротора.
На показания ГК существенное влияние оказывают колебания основания
относительно осей, лежащих в горизонтальной плоскости. Причиной таких
колебаний может быть, например, качка корабля вследствие волнения
моря/ При качке к центру тяжести ГК будут прикладываться
знакопеременные инерционные силы. Эти силы в случае неблагоприятной
ориентации оси, вокруг которой происходят колебания, по отношению к
горизонтальным осям ГК могут создавать инерционные моменты,
значительно превышающие направляющий момент, и уводить главную ось из
плоскости меридиана. Отклонения главной оси, обусловленные качкой
корабля, называют интеркардинальной (четвертной) девиацией.
Если ось колебаний корабля совпадает с одним из главных
(кардинальных) направлений юг-север или восток-запад, интеркардинальная
девиация отсутствует. При колебаниях, совпадающих с промежуточными
(четвертными или интеркардинальными) направлениями юг-запад или
139
север-запад, интеркардинальная девиация достигает максимума (10... 15
и более).
Итак, на примере простого маятникового ГК нами рассмотрены
наиболее важные вопросы, характеризующие его как измеритель истинного
курса движущегося объекта. Современные ГК являются весьма сложными и
совершенными как в схемном, так и в конструктивном исполнении
устройствами. В их. состав помимо собственно гироскопов входят
вычислители, корректоры, следящие системы, дистанционные передачи и другие
элементы. Некоторые модификации ГК позволяют одновременно получить
информацию об углах курса, крена и дифферента. Наиболее широкое
применение ГК нашли на кораблях морского флота. Однако этим их
применение не ограничивается. ГК достаточно широко применяются для
точного определения соответствующих направлений при прокладке
тоннелей, в горном деле (маркшейдерский ГК), при начальной выставке
других курсовых приборов и инерциальных систем, например на
аэродромах, стартовых площадках и т.п. Следует отметить, что в
условиях неподвижного относительно Земли основания ГК позволяет
определять направление географического меридиана с весьма высокой
точностью (погрешность исчисляется долями угловой минуты). Причем для
этой цели могут быть использованы и ГК на базе гироскопа с двумя
степенями свободы. Прибор, по принципу работы являющийся аналогом ГК
и называемый гироорбитантом, применяется на космических летательных
аппаратах.
Более подробные сведения о ГК можно найти в работах [2, 4, 7,
9, 13].
4.3. ГИРОПОЛУКОМПАСЫ
4.3.1. Назначение н принцип действия
Гирополукомпас представляет собой астатический гироскоп, главная
ось которого с помощью каких-либо средств поддерживается вблизи
горизонтальной плоскости, а ось внешней рамки располагается
вертикально (обычно параллельно нормальной оси самолета).
Первоначально ГПК получили распространение как пилотажные приборы,
облегчающие пилотирование самолета (развороты на заданные углы и
выдерживание направления полета), так как они меньше, чем другие
курсовые приборы, подвержены влиянию внешних возмущений. В связи с
существенным повышением точностных характеристик гироскопов вообще
ГПК широко применяются и для целей навигации как самостоятельные
приборы, так и в составе курсовых систем, информация от которых
поступает в СУ. *
140
Рис.4. 15
Рис.4.16
Принцип действия ГПК основан на использовании свойств свободного
гироскопа сохранять первоначальную (заданную) ориентацию своей
главной оси в инерциальном пространстве.
Как следует из принципа действия ГПК не имеет избирательной
способности к какому-либо определенному направлению в горизонтальной
плоскости (не имеет направляющего момента), а лишь временно
поддерживает ("запоминает") некоторое заданное, т.е. не обладает
всеми свойствами компаса. Предварительная ориентация главной оси ГПК
осуществляется по магнитному или какому-либо другому компасу. По этой
причине он и получил название полукомпаса. В научно-технической и
учебной литературе некоторые авторы называют этот прибор гироскопом
направления (ГН), гироазимутом (в морской практике), курсовым
гироскопом. Поскольку в авиации за ним прочно укрепилось название
ГПК, при дальнейшем изложении будем пользоваться этим термином.
Упрощенная схема ГПК изображена на рис. 4.15. Гиромотор 1 (ротор с
кожухом), являющийся одновременно внутренней рамкой, размещен во
внешней рамке 2. На гиромоторе закреплен маятниковый жидкостный
переключатель 3, который реагирует на отклонения главной оси от
плоскости горизонта. При отклонении главной оси от горизонтального
направления сигнал с маятникового переключателя подается на
коррекиионный мотор 4, который, создавая момент соответствующего
направления, возвращает главную ось в горизонтальную плоскость. На
оси внешней рамки жестко закреплена шкала (либо ротор датчика угла)
5, а на корпусе самолета - стрелка (база датчика) 6. Возможна и
обратная комбинация. При разворотах самолета, а следовательно, и
стрелки 6 вокруг нормальной оси Y шкала 5 в силу свойств гироскопа
будет оставаться ориентированной неизменно. По взаимному расположению
141
стрелки и шкалы можно судить о величине угла разворота самолета. Если
в данный момент времени главная ось ГПК ориентирована по направлению
географического меридиана, то измеренный угол будет являться истинным
курсом самолета. Преимущества ГПК, например по сравнению с магнитным
компасом, в данном случае очевидны, поскольку его показания
практически безынерционны, в то время как показания магнитного компаса в
момент разворота неопределенны из-за значительных колебаний стрелки
(картушки). А именно при выполнении разворота и необходима точная
информация о текущем значении угла курса.
Когда для стабилизации главной оси в плоскости горизонта в
качестве чувствительного элемента используются свойства физического
маятника, как это показано на рис. 4.15, коррекцию называют
маятниковой горизонтальной.
В некоторых ГПК практически аналогичного результата добиваются,
поддерживая главную ось в близком перпендикулярному направлению к
плоскости внешней рамки (рис. 4.16). В этом случае коррекцию называют
горизонтальная межрамочная.
ГПК применяются как курсовые приборы для визуального отсчета
показаний и в качестве датчиков автопилотов и навигационных систем.
Поскольку ГПК не обладает избирательной способностью относительно оси
внешней рамки, которая является измерительной осью, выясним, какой
курс им целесообразно измерять.
4.3.2. Гирополукомпас
как измеритель географического курса
Оценим возможности ГПК как измерителя географического (истинного)
курса самолета. Воспользуемся системой уравнений (4.4), которая будет
описывать движение главной оси ГПК, если в первом уравнении отбросить
маятниковый момейт. Тогда после подстановки в уравнения (4.4)
значений (1.53), учета момента горизонтальной коррекции, сил трения и
неуравновешенности в осях подвеса, получим:
Н(а ♦ w sin* + V^Rtgv) - //(c^cos* + Vg/Я )/J = M + л£ ♦ M*t
Ж/3 - VJR) * Hiucas* + VJRja = M? + M * МУ * M*,(4.28)
/V 3 3 с 3 к вш нб (/
где М , М — моменты сил сухого трения соответственно в осях
вн вш
внутренней н внешней рамок; — моменты от смещения центра
^ нб нб
тяжести в осях Ху; Ml = — fc/3 — момент коррекции по углу /3 (принято,
что коррекция пропорциональная); k — коэффициент пропорциональности.
142
Уравнения (4.28) описывают движение главной оси ГПК относительно
географической системы координат с учетом прямолинейного движения
основания (например самолета) с постоянной скоростью V. Чтобы
ответить на поставленный выше вопрос, несколько упростим уравнения
(4.28). Для этого предположим, что моменты сил трения и
неуравновешенности в осях подвеса отсутствуют, система горизонтальной
коррекции поддерживает угол 0 близким к нулю, а угол а отклонения
главной оси от меридиана малый. Тогда уравнения (4.28) после деления
их на Н примут вид:
а + cjsiity + Ур/Яо*8^ = °;
& - VN/R3 ♦ (c^cos* ♦ Vyya = - €0. (4.29)
Отсюда следует, что угол а может быть определен непосредственно из
первого уравнения.
Установившееся значение угла 0 легко получить из второго
уравнения, полагая /3 = 0:
/3 = —^—2 £-2 . (4.30)
€
Как видим, путем выбора крутизны характеристики коррекции (при Н =
= const) угол 0 можно сделать сколь угодно малым.
В случае отклонения главной оси ГПК от положения равновесия,
#
например на угол Щ > |/3 |, ее обратное движение будет происходить
по экспоненциальному закону (аналогично гировертикали с
пропорциональной характеристикой коррекции).
Вернемся к первому уравнению системы (4.29). Из него следует:
a = - (a>3sin <p ♦ Vg/RJg *), (4.31)
а это означает, что главная ось ГПК имеет кажущийся уход
относительно географического меридиана, обусловленный вертикальной
составляющей угловой скорости вращения Земли и угловой скоростью cj
от перемещения самолета в восточном направлении относительно Земли.
Действительно, главная ось ГПК сохраняет неизменным свое направление
в инерциальном пространстве, а плоскость меридиана вращается вокруг
вертикальной оси (рис. 4.17) с угловыми скоростями cj = cj sin \p и
В «J
о> = V-/R tg <р. В результате главная ось (вектор Н) как бы отстает от
143
плоскости меридиана, накапливая угол а = Аф = - (cj s&ty +
О
+ Vp/R tg \p)dt. Этот угол между главной осью и меридианом называют
скоростной погрешностью ГПК. Иногда ее разделяют на погрешность от
вращения Земли и погрешность от перемещения самолета относительно
Земли.
Таким образом, в данном случае ГПК как измеритель (указатель)
истинного курса мало пригоден, поскольку его погрешность только из-за
вращения Земли, например для широты Москвы (у = 56 ), будет нарастать
со скоростью около 12 град/ч. Однако этот недостаток можно устранить,
если заставить главную ось ГПК принудительно поворачиваться (пре-
цессировать) со скоростью, равной скорости вращения плоскости
местного меридиана. Обычно в ГПК именно так и поступают. Для этого в
конструкции прибора на оси внутренней рамки предусматривается
коррекиионныи мотор который обеспечивает приложение к гироскопу
момента пропорционального угловой скорости вращения местного
меридиана (рис. 4.18). Поэтому, если первоначально главную ось
выставить по направлению меридиана, она будет следовать за ним без
отставания.
Коррекцию, обеспечивающую прецессию главной оси вокруг оси внешней
рамки, называют азимутальной коррекцией ГПК. Отметим, что на практике
обычно компенсируют лишь составляющую cj sin <p, учет которой не
вызывает особых затруднений, так как эта скорость невелика (не
превышает 15 град/ч). С компенсацией составляющей cj от перемещения
с
самолета дело обстоит сложнее. Это объясняется тем, что ее величина
о
резко возрастает с увеличением широты места (при у -> 90 tg у -* оо),
а следовательно, при полетах в высоких широтах ее практически нельзя
компенсировать. При полетах в средних широтах со скоростью около
1000 км/ч эта составляющая имеет величину того же порядка, что и
угловая скорость от вращения Земли, но для ее учета необходима
информация о путевой скорости самолета. По указанным причинам ГПК как
измерители истинного курса самолета, как правило, не применяются.
В некоторых ГПК (рис. 4.19) компенсация вращения Земли вместо
прецессии гироскопа осуществляется соответствующим вращением шкалы
(или датчика угла) 1 специальным двигателем 2, установленным на
внешней рамке гироскопа 3. По своим конечным результатам оба способа
компенсации практически идентичны. В ранйих конструкциях пилотажных
144
Рис.4. 17
ГПК азимутальный корректирующий момент обеспечивался путем смещения
центра тяжести гиромотора (внутренней рамки) вдоль главной оси в
положительном направлении. При этом величина смещения / определялась
из условия cj siity = mgl/Ht откуда / = //со sin *p/(mg).
Главными недостатками этого способа являются зависимость
точностных характеристик ГПК от ускорений, малая стабильность
компенсационного момента, сложность перенастройки (изменение величины / ) при
изменении районов полета (широты <р).
Так как ГПК не обладает избирательной способностью, то для
начальной выставки главной оси в ряде случаев предусматривают специальные
механические или электромеханические устройства, позволяющие
поворачивать гироскоп относительно корпуса прибора и устанавливать главную
ось в нужном направлении. В некоторых приборах для достижения этой
цели разворачивается не гироскоп, а шкала (см. рис. 4.19).
4.3.3. Гирополукомпас
как измеритель ортодромического курса
В практике самолетовождения удобнее совершать полеты по
траекториям, являющимся ортодромиями. В частности, например, как уже
отмечалось, кратчайшим расстоянием между пунктами вылета и назначения
является дуга большого круга, заключенная между ними, т.е. участок
ортодромии. Поэтому целесообразно, чтобы траектория полета
практически совпадала с этой ортодромией. Но ортодромия пересекает
географические меридианы под разными углами (см. рис. 4.2), т.е. в
Рис.4. 18
Рис.4. 19
145
каждой точке траектории свой угол курса ф (географический или
магнитный). Следовательно, для того, чтобы самолет двигался по
заданной ортодромии, нельзя лететь с постоянным курсом, например по
магнитному компасу. (Магнитный компас, как и гирокомпас, является
указателем локсодромии). Полет по заданной ортодромии с
использованием магнитного компаса или любого другого указателя
локсодромии можно обеспечить лишь в том случае, если в систему
управления (автопилот) будет непрерывно вводиться информация о
значении угла курса в соответствующей точке траектории. Это может
выполнять специальное вычислительное устройство или ЭВМ. Если
необходимо, чтобы полет происходил по ортодромии, а в качестве
курсового прибора используется какой-либо указатель локсодромии, при
предварительной прокладке маршрута штурман или пилот намечают на пути
следования пункты, где должны вводиться поправки в значение угла
курса. При этом фактическая траектория, состоящая из частей
локсодромии, будет тем ближе к ортодромии, чем чаще вносятся
поправки. Как видим, получается довольно-таки сложная и трудоемкая
для экипажа процедура. Поэтому представляется целесообразным иметь
курсовой прибор, непосредственно указывающий направление ортодромии.
Прежде чем перейти к рассмотрению такого прибора, вспомним два уже
знакомых нам указателя географического меридиана. Это гирокомпас и
гирополукомпас (хотя мы и отметили ряд недостатков ГПК как указателя
географического курса, принципиально он таковым быть может). Обратим
внимание, что каждый из этих приборов, по существу, является
материализованной моделью географической системы координат
(географического трехгранника). В самом деле, в нормальном режиме работы их
оси однозначно отслеживают ориентацию осей географического
трехгранника: оси внешней и внутренней рамок параллельны соответственно
осям Г, £, главная ось параллельна оси г\.
Посмотрим под этим углом зрения на ГПК. Не сможет ли он выполнять
роль модели какой-либо системы координат, однозначно определяющей
ориентацию ортодромии относительно Земли, и служить
удовлетворительным указателем направления заданной ортодромии?
Предположим, что относительно Земли (рис. 4.20) по заданной
ортодромии летит самолет (его центр масс 0) со скоростью V и углом
курса ф. С точкой 0 свяжем географическую систему координат %г$. В
этой же точке поместим центр новой системы координат £ftf?ftfft» оси
которой относительно Земли проведены так: ось f совпадает с осью f
(направлена в зенит), ось я - по касательной к ортодромии в
направлении полета, ось { - перпендикулярна к осям r\ ,f так, чтобы
146
трехгранник £fti?ft£ft был правый. Так. ори- ^
ентированный трехгранник (систему
отсчета) называют ортодромический. Из
рис. 4.20 понятно, что ортодромический
трехгранник &J7ntn участвует в сложном
движении - поворачивается в абсолютном
пространстве с угловыми скоростями
суточного вращения Земли со и
относительного перемещения самолета (относительно
Земли) V/R . Найдем проекции этих
угловых скоростей на оси £ т? Jft- Поскольку
вектор линейной скорости V направлен
Рис.4.20
вдоль оси « . вектор угловой скорости V/R параллелен оси { и
направлен в отрицательную сторону. Кроме этого на ось £ в отрицательном
направлении проектируется горизонтальная составляющая со
со cos у.
Ее проекция равна - со cos^sin^. На ось я в положительном направлении
проектируется горизонтальная составляющая вращения Земли со = со cos^.
г 3
Ее проекция равна со cos^ cos^. По оси f направлена только
вертикальная составляющая со
со SHty.
Итак, проекции угловых скоростей на оси 5ftr? t будут равны:
U> = - со co&psintf/ - V/R ;
*0 3
U = со co&pcosi//;
."о 3
(4.32)
(Л. - со siity.
Для того, чтобы дать оценку ГПК как указателю ортодромии, получим
его уравнения движения относительно ортодромического трехгранника
Wo-
Так как ортодромический курс принято отсчитывать от направления
заданной ортодромии, то будем полагать, что главная ось ГПК
ориентирована вдоль оси т? , а его центр тяжести совпадает с точкой 0.
Тогда уравнения ГПК для этого случая получим из уравнений (4.4) при
147
тех же условиях, как были получены уравнения (4.28), дополнительно
О
заменив в них значения Uy, U и (Л. соответственно значениями Uy
U , (Л. из (4.32):
% Г0
Н(а + cj silty - со со&рсоа/г/З) = М + ЛГ + М ; (4.33)
3 3 вн нб X
Л!13 + M * MP * M*.
3 3 3 к вш но у
Во втором уравнении членом cj co&pcosi/ra при малом a можно пренебречь.
Положим также, что вредные моменты в осях подвеса отсутствуют, а угол
& системой горизонтальной коррекции поддерживается близким к нулю.
Тогда система (4.33) примет простой вид:
a + cj siity = 0;
/3 - cj соьцятф - V/R = - €0. (4.34)
Как и ранее, первое уравнение системы (4.34) является независимым
и его можно рассматривать отдельно. Из него следует:
a = - cj siiv. (4.35)
Выражение (4.35) позволяет сделать важный вывод: главная ось ГПК с
горизонтальной коррекцией в ортодромической системе координат £n*?nfn
имеет кажущийся уход только от вертикальной составляющей вращения
Земли.
Действительно, обращаясь к рис. 4.20, видим, что угловая скорость
V/R , обусловленная перемещением самолета, направлена по оси £ ,
«э и
Поэтому трехгранник £я { поворачивается вокруг вертикальной оси t
0 0 0 0
только со скоростью cj = cj siity, следовательно, с этой скоростью
вращаются вместе с Землей и ортодромия, и касательная к ней ось т? .
Для того чтобы ГПК сделать указателем ортодромии (указателем
ортодромического курса), достаточно скорректировать кажущийся уход
его главной оси, вызываемый составляющей cj siity. Как это реализуется
на практике пояснено ранее.
Достоинством ГПК как указателя ортодромического курса, с помощью
которого можно достаточно точно обеспечить полет по ортодромии,
является так же возможность его применений" в районах высоких широт и
148
даже непосредственно на полюсе, где ГК и магнитные компасы
неработоспособны. Это объясняется опять же его независимостью от угловой
скорости, обусловленной перемещением самолета, что подтверждается срав-
пением выражений (4.31) и (4.35). В (4.31) слагаемое -= *2 V ПРИ
кз
у -> 7г/2 стремится к бесконечности, и прибор становится
неработоспособным.
ГПК, скорректированные только на угловую скорость вращения Земли,
получили широкое применение в авиации. Они применяются не только на
самолетах дальнего действия, совершающих полеты главным образом по
ортодромии, но и на легких маневренных самолетах, которые летают
преимущественно по произвольным траекториям. За базовое направление в
этом случае принимают направление меридиана в пункте взлета.
Погрешности в показаниях ГПК при этом незначительны из-за сравнительно
небольшой дальности полетов (сотни километров) таких самолетов.
4.3.4. Погрешности ГПК
и способы их снижения
Рассмотрим основные погрешности ГПК, которые могут возникать в
реальных условиях его эксплуатации, разделив их на методические и
инструментальные.
Методические погрешности. Погрешности от угловых скоростей
суточного вращения Земли и перемещения самолета, как мы уже выяснили,
проявляются в виде кажущегося ухода главной оси относительно базовой
системы координат (см. рис. 4.17). Если ГПК используется как
указатель истинного курса, скорость его ухода (нарастания погрешности) при
условии идеальной стабилизации главной оси в плоскости горизонта
(0 = 0) определяется выражением Аф = а - (cj sirty? + Vp/R tg<p). Этот
уход может быть скомпенсирован азимутальной коррекцией, выполненной
по бдной из ранее рассмотренных схем (см. рис. 4.18 и 4.19). Однако,
как уже отмечалось, в реальных конструкциях ГПК компенсируется только
составляющая cj siity. Следовательно, прибор будет иметь ошибку.
абсолютная величина которой может быть вычислена по формуле
1А*1 = 11/й3 I VEigipdt\- (4-36)
'о
Эта погрешность особенно велика при полетах в высоких широтах.
Например, при полете вдоль параллели на восток со скоростью 1000 км/ч
149
в районе Крыма (<р = 45 ) она будет нарастать со скоростью около
9 град/ч, а в полярных районах (у = 75 ) - уже со скоростью более
30 град/ч, в то время как даже в грубых пилотажных ГПК по техническим
условиям допускается нарастание ошибки не более 3 за 15 мин. Данный
пример еще раз подтверждает недостатки ГПК как указателя истинного
курса самолета. Если ГПК используется как указатель ортодромического
курса и в его схеме предусмотрена компенсация уходов от вертикальной
составляющей cj sirty, погрешность в показаниях может возникать из-за
несвоевременного ввода поправки на изменение широты места у. Дело в
том, что в современных навигационных ГПК эта поправка вводится
вручную установкой на пульте управления рукояткой соответствующего
значения широты. Следовательно, если на азимутальный датчик момента
(коррекщюнный мотор) поступает напряжение, соответствующее широте
<р , для которой обеспечивается полная компенсация, то при полетах на
другой широте главная ось будет уходить со скоростью
а = Аф = cj (sin if - sin \p). (4.37)
Например, если в ГПК введена корректирующая поправка на широту
(р = 60 (Ленинград), то при полете на широте ip - 45 (Крым) скорость
нарастания погрешности будет: Аф = cj (sin 60 - sin 45 ) = 15(0,865 -
- 0,707) - 2,4 град/ч. Погрешность от изменения широты места иногда
называют широтной погрешностью.
При полетах самолета северными курсами (наиболее быстрое изменение
широты) со скоростями около 1000 км/ч для того, чтобы величина ошибки
в показаниях ортодромического курса не превышала 0,5 , введение
поправки на широту ip следует производить через интервалы, равные
7... 10°.
Формулы (4.32), а следовательно, и (4.35) получены в
предположении, что самолет летит точно по заданной ортодромии. Если же
полет будет происходить с отклонениями от нее, то в формуле (4.35)
появится дополнительное слагаемое
v м
тг*-тг- (438)
3 3
где V — проекция путевой скорости на плоскость ортодромии (на ось
"о
77 ); Д£ — боковое отклонение от заданной ортодромии.
Происхождение этого слагаемого аналогично второму слагаемому в
выражении (4.31). Оно означает, чта при наличии бокового отклонения
150
заданная ортодромия вращается относительно ГПК еще и с угловой
скоростью, обусловленной перемещением самолета относительно Земли.
Следовательно, в измерениях ортодромического курса будет погрешность
\w\-\t~\ vv ^ir^i- (4-39)
О
Эта формула при сравнительно малых отклонениях от заданной
ортодромии (сотни километров) и последующем полете тем же курсом позволяет
достаточно точно оценить величину погрешности в измерениях угла курса.
Так, например при боковом отклонении до 600 км и дальности полета
1000 км погрешность не превышает 1 . Следует отметить, что при
возвращении на заданную ортодромию эта ошибка в показаниях ГПК
сохраняется. Поэтому дальнейший полет по заданной ортодромии с тем же курсом
невозможен.
Выше мы рассмотрели погрешности ГПК, обусловленные кажущимися
уходами главной оси при условии ее идеальной стабилизации в плоскости
горизонта, т.е. 0 = 0. Как уже отмечалось, это обеспечивается
горизонтальной коррекцией. Поскольку в общем случае кажущиеся уходы
наблюдаются не только вокруг оси внешней рамки, но и вокруг оси
внутренней рамки, условие работоспособности горизонтальной коррекции
можно найти из второго уравнения системы (4.28):
Ki > iW(w3+ ^-лм+ Kb (440)
где V — максимальная скорость самолета, на котором установлен ГПК;
Формула (4.40) получена из выражений (4.28) для экстремального
значения момента коррекции, когда скорости кажущегося и собственного
уходов максимальны. Эту же формулу можно получить и из уравнений
(4.33).. Из формулы (4.40) следует, что условие 0 = 0 может быть
обеспечено постоянной коррекцией . д
Если в схеме ГПК предусмотрена пропорциональная коррекция (М =
= - fc/З), то главная ось может иметь максимальное отклонение от
плоскости горизонта
3
Возможные осложнения, вызванные автоколебательными режимами
Др. , не учитываются.
151
max
Ы V
п , max ч
—ч * —>
hV
(4.41)
В этом случае в зависимости от требуемой точности измерения угла
курса может возникнуть необходимость учета кажущихся уходов от
проекций угловых скоростей со cos ip и Vr/Й на ось у [см. формулу
(4.28)] для ГПК-указателя локсодромии или проекции со co&pcostf/ на ту
же ось для ГПК-указателя ортодромии [см. формулу (4.33)]. Кроме того,
в ГПК с компенсацией вертикальной составляющей со siity с помощью
мотора азимутальной коррекции появится дополнительная погрешность,
так как условие компенсации рассчитывается, исходя из равенства
со siity = т/Н (в предположении 0 = 0). При наличии же угла 0*0
К
главная ось будет прецессировать со скоростью -"Б 7Г > <о siity.
(л с osp) 3
Карданная или креповая погрешность ГПК возникает при отклонениях
оси внешней рамки от направления вертикали при поперечных и
продольных кренах самолета. Она обусловлена кинематикой карданного
подвеса и никак не связана ни с какими гироскопическими явлениями.
Это - геометрическая ошибка в отсчете показаний. Главная ось ГПК при
этом своей ориентации в инеридальном пространстве не меняет.
Физический (геометрический) смысл карданной погрешности заключается в
том, что при наклонах оси внешней рамки измерение (отсчет) угла курса
будет происходить в наклонной плоскости, в то время как
действительное изменение угла курса (разворот самолета) происходит в
горизонтальной плоскости (рис. 4.21). На рисунке оси XYZ связаны с
самолетом, который летит с углом курса ф, отсчитываемым, например от
географического меридиана (SN). Главная ось ГПК (вектор Н) совпадает
с направлением меридиана. Когда самолет летит без крена, то угол
курса отсчитывается по дуге АВ - ф (угол между плоскостями ОКА и
ОУВ), принадлежащей горизонтальной плоскости. При крене самолета на
угол у его оси соответственно займут новое положение Y'Z'. При этом
ось внешней рамки гироскопа так же наклонится на угол крена у, как и
нормальная ось самолета У, а вместе с ней наклонится и шкала прибора,
поскольку она закреплена на внешней рамке. Следовательно, показания
угла курса по прибору будут отсчитываться по дуге ВС = ф (угол между
плоскостями ОУ'С и (Ж'В). В сферическом треугольнике ABC известны
углы В = у; С = 7г/2 и сторона (дуга) АВ = ф. В соответствии с
формулами сферической тригонометрии можно найти сторону (дугу) ВС =
152
Рис.4.21 Рис.4.22
= Ф : tgtf/ = tgф cos?. Тогда величина погрешности в измерении курса
может быть найдена как разность действительного (истинного) курса и
курса, отсчитываемого по прибору:
Аф = ф - ф - ф - arctg (\%ф cos 7)- (4.42)
г
Эта формула справедлива при условии, что главная ось гироскопа
находится в горизонтальной плоскости (/3 = 0). По формуле (4.42) могут
быть построены графики зависимости Аф = ((ф) для различных значений
угла крена у (рис. 4.22).
Как видим, карданная погрешность является периодической функцией
угла ф с периодом, равным 7г. При углах курса равных 0; 7г/2; 7г; 3/27Г,
т.е. на главных румбах, она равна нулю. Это объясняется тем, что на
главных румбах крен самолета по отношению к гироскопу происходит
вокруг оси внутренней рамки (л/2; 3/2тт) или вокруг главной оси (0; 7г).
Геометрически это означает, что в треугольнике ABC (см. рис. 4.21) в
первом случае углы А и С будут равны 7г/2, а следовательно, и дуга
ф = ф ; во втором случае треугольник ABC стягивается в точку, поэтому
погрешность отсутствует. Величина карданной погрешности существенно
зависит от угла крена и при глубоких кренах достигает десятков
градусов. Отметим, что она не зависит от знака угла крена. При
уменьшении угла крена карданная ошибка уменьшается и при крене,
равном нулю, обращается в нуль. Графики (см. рис. 4.22) построены
для случая, когда главная ось ГПК совпадает с началом отсчета (с
направлением ортодромии или меридиана). Так как в современных
В ГПК с межрамочной коррекцией при длительном времени наклона
внешней рамки после ее выравнивания ошибка останется. Это объясняется
уходом главной оси из плоскости горизонта.
153
навигационных ГПК нет арретирующего устройства, то главная ось в
рабочем режиме имеет произвольную ориентацию в азимуте (нужный курс
устанавливается поворотом шкалы или датчика угла). Поэтому графики
карданных погрешностей сдвигаются по оси абсиисс (ф) на величину угла
отклонения главной оси от направления начала отсчета.
При практическом применении ГПК карданная погрешность может быть
учтена экипажем по графикам (см. рис. 4.22). Однако это усложняет
пилотирование самолета. Дело в том, что именно при разворотах требуется
правильный отсчет показаний с прибора, а разворот, как правило,
сопровождается креном, что приводит к искажениям фактического угла
курса. И чем больше угол крена, тем больше это несоответствие. Поэтому
летчики обычно поступают так. Начинают разворот с большим углом
крена, по ГПК качественно оценивают величину угла разворота. При
приближении к его заданному значению постепенно уменьшают крен до нуля, что
позволяет более точно контролировать угол курса по прибору. Однако
это не позволяет в полной мере использовать маневренные возможности
самолета, а в ряде случаев приводит к необходимости последующего
уточнения курса дополнительными доворотами самолета. Карданная
погрешность возникает и при изменении угла тангажа самолета. Для
устранения карданных погрешностей необходимо ГПК устанавливать на
стабилизированное в горизонтальной плоскости основание. На практике,
например в курсовых системах (рис. 4.23), ГПК помещают в дополнительные
рамки 1 и 2 карданова подвеса, которые посредством быстродействующих
следящих систем по сигналам с гировертикали двигателями Д и Д
стабилизируют его в горизонтальной плоскости.
Виражная погрешность ГПК обусловлена действием горизонтальной
коррекции при вираже самолета с креном. Теоретическое исследование
виражной погрешности является довольно сложной задачей. Поэтому
рассмотрим лишь ее физический смысл и дадим качественную оценку
возможным отклонениям главной оси ГПК при вираже самолета. В отличие
от карданной погрешности виражная погрешность является действительным
уходом главной оси от первоначальной ориентации под действием
коррекиионного мотора горизонтальной коррекции. Поэтому виражная
погрешность после выравнивания самолета остается. Выясним причины ее
возникновения и характер проявления.
Предположим, что самолет, на котором установлен ГПК, делает
плоский (без крена) левый вираж с некоторой угловой скоростью cj
(рис. 4.24). В этом случае, если в ГПК применена горизонтальная
межрамочная коррекция, прецессии главной оси не будет, так как она в
процессе полного разворота самолета (на 360 ) будет оставаться
перпендикулярной к плоскости внешней рамки. Если же в ГПК применена
154
Рис.4.24
горизонтальная маятниковая коррекция, чувствительный элемент
(маятник) системы коррекции под действием инерционных (центробежных)
сил установится по направлению кажущейся вертикали. По сигналу с
маятника коррекиионный мотор приложит к оси внешней рамки
корректирующий момент, который вызовет ее прецессию к направлению
перпендикуляра к кажущейся вертикали (к маятнику).
Поскольку ось внешней рамки расположена вертикально, прецессия
главной оси будет происходить в вертикальной плоскости Р, т.е. в
плоскости меридиана. Поэтому погрешности в показаниях ГПК не будет.
Рассмотрим опять левый вираж, но уже с углом крена у (рис. 4.25).
В этом случае ось внешней рамки у отклонится от направления вертикали
вместе с нормальной осью самолета на угол у и при развороте на 360
опишет в пространстве конус, ось которого совпадает с вектором
угловой скорости виража со . При этом независимо от типа
горизонтальной коррекции главная ось начнет прецессировать, стремясь
сохранить перпендикулярность либо к плоскости внешней рамки
(межрамочная коррекция), либо к направлению маятника (маятниковая
коррекция). Эта прецессия будет происходить в наклоненной плоскости Q
со скоростью 0. Как видим из рисунка, скорость 0 имеет составляющую
/3 в горизонтальной плоскости. А это означает, что главная ось с этой
скоростью /3 уходит от плоскости меридиана. Если проследить за
поведением составляющей /3 за полный цикл виража, то оказывается, что
г
она, несколько изменяясь по величине, направлена постоянно в сторону
виража [4]. Уход главной оси ГПК, обусловленный горизонтальной
составляющей скорости прецессии, от действия горизонтальной коррекции
при вираже с креном и составляет виражную погрешность.
155
Рис.4.23
Рис.4.25 Рис.4.26
Виражная погрешность практически не зависит от типа горизонтальной
коррекции (межрамочной или маятниковой). Она определяется лишь
характеристикой коррекции (пропорциональная, постоянная, смешанная).
Эта погрешность не исчезает после выравнивания самолета, поскольку
она является следствием изменения ориентации главной оси. При
циклически повторяющихся виражах она суммируется. Характер изменения
виражной погрешности для ГПК с сильной коррекцией показан на рис. 4.26.
Она прямо пропорциональна углу крена, скорости прецессии гироскопа от
момента коррекции и обратно пропорциональна угловой скорости виража.
Особенно большой величины виражная погрешность бывает у ГПК с
"сильной" коррекцией (в одноосных гиростабилизаторах). Например, при
угле крена 60 за один полный оборот виража погрешность достигает
180 . В навигационных ГПК она может составлять 1...2° за один оборот
виража. Для снижения виражной погрешности ГПК можно рекомендовать
уменьшение скорости прецессии гироскопа от коррекционного мотора
горизонтальной коррекции Однако эта величина ограничена снизу
неравенством (4.40).
Второй путь снижения виражной погрешности - это выключение
коррекции на вираже. Наконец, самое эффективное мероприятие - установка
ГПК на стабилизированном в горизонтальной плоскости основании или в
дополнительные рамы карданова подвеса (см. рис. 4.23). При этом
одновременно будут устранены и виражная, и карданная погрешности.
Карданная и виражная погрешности ГПК, обусловленные кренами
самолета, являются наиболее существенными. Однако помимо них в ГПК
при отклонениях оси внешней рамки от направления вертикали имеют
место и другие погрешности. Например, при длительном наборе высоты
156
или снижении самолета главная ось может отклонится на угол 0, равный
углу тангажа # (величина угла /3 в этом случае зависит от взаимной
ориентации главной оси и самолета). При последующем горизонтальном
полете наличие угла /3 приведет к ошибкам в определении угла курса. В
этом случае целесообразнее маятниковая коррекция, так как она при
отсутствии ускорений обеспечивает угол /3 = 0. При наличии колебании
самолета относительно связанных осей, что практически всегда имеет
место, вокруг оси внешней рамки ГПК в общем случае появляются
постоянные составляющие моментов коррекции, которые приводят к
систематическому накоплению ошибок по курсу [4]. Отметим также, что
погрешности в определении курса, обусловленные наличием угла /3. могут
появиться в показаниях ГПК с маятниковой горизонтальной коррекцией
при длительных полетах самолета с линейным ускорением одного знака.
Инструментальные погрешности. Наиболее заметное, влияние на работу
гироскопических приборов вообще и ГПК в частности оказывают моменты
сил сухого (кулонова) трения, приведенные к осям подвеса, моменты от
неуравновешенности гироскопа и моменты от устройств, обеспечивающих
подвод питания и съем сигналов.
Проявление влияния моментов сил трения в ГПК и в свободном
гироскопе во многом аналогично. Некоторая специфика поведения
обусловлена лишь наличием в ГПК горизонтальной коррекции. Для
приближенного анализа поведения ГПК воспользуемся системой уравнений
(4.34). переписав ее как систему уравнений моментов с учетом и
моментов трения:
Н(а + cj siity) = M sign/3;
3 вн
#(/3 - gj со&р sintf/ - V/R) = - *0 - М signa, (4.43)
3 3 вш
где
[+ 1 при a > 0;
sign/3 = 1
♦ 1 при /3 > 0;
signa = ]
- 1 при /3 < 0,
(4.44)
1 при a < 0.
Вначале выясним поведение ГПК на неподвижном основании (cj = V -
0). Тогда систему (4.43) можно переписать в виде:
(4.45)
(а = m sign/3;
вн
& = - е/3 - m signa.
вш
157
где т = М /Н - скорость прецессии внешней рамки от момента сил
трения в оси внутренней рамки; т = М /Н - скорость прецессии
внутренней рамки от момента сил трения в оси внешней рамки.
В уравнениях системы (4.45) присутствуют нелинейные члены. Однако
при условии рассмотрения в области постоянных знаков а и /3 они
становятся линейными. Из второго уравнения, полагая /3
вынужденное решение
О, найдем
/3 = - m /e signa.
вш
На картинной плоскости (рис. 4.27) линии 0
(4.46)
+ m /e являются
границами заштрихованной области, где невозможно движение гироскопа
под действием момента горизонтальной коррекции. Физически это
означает, что в интервале значений угла /3 = ±m /€ = ±M Ik момент
вш вш
коррекции равен моменту сил трения в оси внешней рамки или меньше его
и, следовательно, не может его преодолеть, т.е. в этой области
коррекция неработоспособна. Далее, исходя из принципа работы
горизонтальной коррекции для областей, где она работоспособна, заключаем:
при 0 > 0 угловая скорость /3 < 0;
при (I < 0 угловая скорость /3 > 0. J
(4.47)
Тогда из уравнений системы (4.45) с учетом (4.47) для любых a
следует:
при /3 > 0; /3 < 0; a < 0; ~
при 0 < 0; 0 > 0; a > 0.
(4.48)
Задавшись начальными условиями при / =
= 0; a = a ; /3 = /3 (точка Л), получим
уравнения движения для области 0 ■>
(4.49)
/3 = - €/3 + тп
Рнс.4.27
и их решение
158
a = ал - m t;
0 BH (4.50)
/3 = (/Зл - /п /б)е + m /e
0 bui вш
Из выражений (4.50) видим, что угол /3 непрерывно убывает,
асимптотически приближаясь к /3 = /п /б. При этом угол а неограниченно
нарастает со скоростью, пропорциональной моменту сил трения в оси
внутренней рамки.
Аналогично может быть получено и решение для области, лежащей ниже
/3 - - т /е. В этом случае угол /3 будет так же убывать, а угол a
нарастать по закону a = a + т /, т.е. главная ось будет
неограниченно уходить в азимуте в противоположную сторону.
Практически главная ось через конечное время остановится на границе
|/3 | = \т /б|, когда моменты коррекции и сил трения уравновесятся.
Полученным результатам можно дать простое физическое толкование.
Предположим, что главная ось ГПК отклонена от исходного направления,
как показано на рисунке 4.27, в некоторую точку на картинной
плоскости с координатами a , /3 . Тогда горизонтальная коррекция заставит
ее прецессировать со скоростью - €/3 в сторону уменьшения угла /3. При
этом в оси внутренней рамки возникает момент сил трения - М ,
который будет направлен в противоположную сторону угловой скорости /3.
Этот момент вызовет прецессию внешней рамки со скоростью - т .
Движению внешней рамки с угловой скоростью - т будет препятствовать
момент сил трения в ее оси М , который направлен в противоположную
сторону моменту коррекции М = - k$ и будет уменьшать скорость
прецессии от коррекции на величину т . В результате вершина гироскопа
(точка А) будет двигаться по картинной плоскости со скоростью б/З +
♦ m + m . Поскольку скорость прецессии от коррекции (в случае
пропорциональной характеристики) зависит от .угла /3, то по мере
приближения к оси а она будет уменьшаться. Скорости прецессии от
моментов сил трения нами приняты постоянными. Поэтому траектория
движения будет искривляться. В некоторой точке на границе линии /3 =
159
= m /e моменты от коррекции и сил трения в оси внешней рамки
уравновесятся (М + fc/З = 0), и главная ось остановится.
При анализе мы взяли произвольные начальные значения углов а, что
соответствует реальным условиям функционирования ГПК. Однако для
большей убедительности обратим внимание на траектории / и 2 на
рис. 4.27. Здесь, если предположить, что при а = 0, /3 = ± /3 главная
ось совпадает с направлением ортодромии (меридианом), наглядно виден
ее уход от заданной ориентации в азимуте.
Таким образом, можно сделать вывод, что моменты сил трения в осях
подвеса гироскопа приводят к собственной прецессии главной оси ГПК.
Особенно нежелательно наличие момента сил трения в оси внутренней
рамки, так как он вызывает собственную прецессию главной оси в
азимуте, т.е. непосредственно приводит к погрешности в измерении угла
курса. Момент сил трения в оси внешней рамки, хотя и не приводит
непосредственно к погрешностям, может являться причиной прецессии
внутренней рамки, а это, как мы уже выяснили, приведет к погрешностям
прибора. Следовательно, необходимо сводить момент сил трения в осях
подвеса ГПК к минимально возможным значениям.
Рассмотрим теперь влияние на ГПК моментов сил трения в осях
подвеса при учете вращения Земли. Для этого случая система уравнений
(4.43) может быть записана так:
а + а; siity = /п sign/3;
3 вн
/3 - со cos<p sin^ = - €0 - т signa.
3 вш
(4.51)
Из уравнений (4.51), полагая a = /3 = 0, найдем условия, при которых
главная ось ГПК будет вращаться вместе с базовой системой отсчета,
т.е. не будет кажущегося ухода ГПК:
со siity = m sign/3;
ф3 BlV (4.52)
/3 = (со со&р sintf/ - т signa)/€.
3 вш
Если для внутренней рамки (угол /3) это находится в согласии с
принципом работы ГПК - главная ось должна поворачиваться вместе с
базовой системой под действием горизонтальной коррекции, чтобы
оставаться в плоскости горизонта, - то для внешней рамки (угол а) это
означает потерю гироскопом основного свойства сохранять ориентацию
главной оси в инерциальном пространстве. Иногда это явление называют
потерей полукомпасного эффекта.
160
Рнс.4.28 Рнс.4.29
Первое равенство (4.52) можно записать в виде неравенства:
К*»\<\т\*\М/Н\.
(4.53)
3 " ■ ■ вн1
Оно устанавливает предельное значение угловой скорости основания,
ниже которого ГПК теряет полукомпасный эффект.
Предположим, что со siity > \т |, а угол /3 положителен и по
своему абсолютному значению больше /3 , определяемого вторым
равенством (4.52). Тогда в согласии сф назначением горизонтальной
коррекции угол /3 начнет уменьшаться, т.е. /3 < 0.
Последнее неравенство позволяет однозначно определить знаки в
уравнениях (4.51):
а = - cj sin^ - т ;
3 вн
/3 = - 6/3 + сл cos<£ sin^ + m .
3 вш
(4.54)
Из первого уравнения видим, что помимо кажущегося ухода главной оси
со скоростью - со sirty будет еще и уход со скоростью - т ,
обусловленный моментом сил трения в оси внутренней рамки. Приняв начальное
значение угла /3 < 0, легко выяснить, что помимо кажущегося ухода
главной оси опять же будет уход от момента сил трения М ,
совпадающий по направлению с со siity.
Физическую сущность поведения ГПК при наличии моментов сил трения
в осях подвеса и при учете вращения Земли поясним на следующих
примерах. Вначале рассмотрим поведение ГПК без горизонтальной коррекции
(т.е. свободного гироскопа). Это позволит лучше понять физический
6-369
161
смысл происходящих явлений. Влияние горизонтальной коррекции учтем
позже при рассмотрении движения ГПК относительно Земли.
Предположим, что гироскоп (рис. 4.28) установлен на неподвижном
относительно Земли основании на широте <р, и его главная ось
ориентирована по направлению меридиана NS. В осях подвеса имеют место
моменты сил трения М и М . Причем М /Н < cj sirty = со , т.е. скорость
вн вш вн 3 В
прецессии от момента сил трения в оси внутренней рамки меньше
вертикальной составляющей угловой скорости вращения Земли. Тогда
вследствие вращения Земли к оси внешней рамки будет приложен момент сил
трения М , направление которого совпадает с направлением
вертикальной составляющей со siity, так как подшипники основания при вращении
пытаются увлечь за собой гироскоп. Этот момент заставит главную ось
(внутреннюю рамку) прецессировать с угловой скоростью т = М /Н в
сторону совмещения вектора Н с вектором момента М . Прецессии
внутренней рамки будет препятствовать момент сил трения в ее оси М .
Момент сил трения М в свою очередь вызовет прецессию внешней рамки со
скоростью т = М /Н в направлении, совпадающим с со . В итоге (если
вн вн В
пренебречь отклонением главной оси от плоскости горизонта на
некоторый угол /3) гироскоп будет прецессировать за направлением меридиана,
отставая от него, так как со = gj siity > М /Н = т . Иначе говоря,
в 3 г~ вн вн
будет наблюдаться и кажущийся уход (угол между Н и N S ), и
собственный уход относительно инерилального пространства (угол между Н и MS),
обусловленный моментом сил трения М .
Возьмем теперь те же, что и в рассмотренном примере, условия. Но
предположим, что в гироскопе применены подшипники худшего качества,
так что момент сил трения в оси внутренней рамки больше, чем
гироскопический момент от вертикальной составляющей вращения Земли, т.е.
М /Н > со sirup = со . Тогда (рис. 4.29) вследствие вращения основания
вн 3 В
с угловой скоростью со к оси внешней рамки будет приложен момент сил
В
трения М . Однако этот момент не сможет вызвать прецессию внутренней
рамки, так как в ее оси момент сил трения М > //со . Внутренняя рамка
как бы заклинивается, и гироскоп теряет одну степень свободы. Поэтому
внешняя рамка, будучи захваченной моментом сил трения М , начнет
поворачиваться вместе с основанием (на рисунке угол между Н и NS за
162
время наблюдения /). Так будет продолжаться до тех пор, пока
гироскопический момент //со siity, обусловленный переносной скоростью, не
сможет преодолеть момент сил трения в оси внутренней рамки, т.е. пока
//со siity < M .
3 вн
Поведение ГПК с учетом моментов сил трения при движении
относительно Земли самолета целесообразно рассмотреть для случая выполнения
им разворота в горизонтальной плоскости (виража). Влиянием угловой
скорости вращения Земли при анализе можно пренебречь ввиду ее малости
по сравнению с угловой скоростью виража со . Тогда уравнения движения
могут быть получены из системы (4.51) заменой в первом уравнении
вертикальной составляющей на угловую скорость виража со (направление
левого виража принято положительным):
(4.55)
а + со = m sign/3;
в вн
/3 = - €/3 - т signa.
вш
Легко видеть, что уравнения систем (4.51) и (4.55) по своей
структуре одинаковы. Поэтому их формальный анализ практически не
отличается от уже выполненного выше при учете вращения Земли. В самом деле,
из системы (4.55) следует, что для конкретного прибора существует
критическое (пороговое) значение угловой скорости виража, ниже
которой он перестает фиксировать углы разворота. Иными словами, главная
ось будет поворачиваться вместе с самолетом, а следовательно,
"теряется" начало отсчета. При развороте самолета на 360 с угловой
скоростью со < со . главная ось ГПК развернется вместе с ним так же на
о
360 . Таким образом, ГПК в этом случае не выполняет своих функций
указателя угла разворота.
Соотношение, определяющее критическую скорость, находится из
системы (4.55) при a = /3 = 0:
со = ± т = ± М ///. (4.56)
в вн вн
Угловую скорость виража, соответствующую значению М ///, обычно
обозначают со . и называют порогом чувствительности прибора:
1-1.1= К/Ч- «57>
Отметим, что реальные значения угловой скорости виража (со ) на 2-3
порядка больше порога чувствительности ГПК (со . ). Но и при этих
163
скоростях момент сил трения в оси внутренней рамки, вызывая
собственную прецессию гироскопа, будет приводить к погрешностям в измерении
угла разворота. Подтвердим последнее анализом уравнений (4.55). Из
второго уравнения системы (4.55), положив 0 = О, найдем /3 = ± т /в,
тем самым определим границу области, где возможно движение главной
оси под действием системы коррекции.
Предположим, что в начальный момент времени / = О угол /3 = /3 по-
ф
ложителен и по абсолютному значению больше /3 = т /е. Эти условия
(как и ранее) позволяют однозначно определить знаки в уравнениях
системы (4.55) и записать ее в виде:
а = - со, - т ;
о вн
/3 = - €/? + т .
вш
(4.58)
Из первого уравнения следует, что главная ось движется
относительно самолета с угловой скоростью, превышающей угловую скорость виража
на величину скорости собственной прецессии т от момента сил трения.
Поясним физический смысл полученного результата. Предположим
(рис. 4.30), что ГПК был установлен на самолет, который летел курсом
ф = 0 (вдоль меридиана SN) и
начал делать левый вираж с
угловой скоростью со > \т |.
При этом главная ось в момент
начала виража совпадала с
плоскостью меридиана, но по
каким-либо причинам была
отклонена от плоскости горизонта
вверх на некоторый угол /3 >
\т /в|. В этом случае к оси
внешней рамки будут приложены
два момента . Момент
горизонтальной коррекции, равный fc/3,
А „Л и момент сил трения М . По-
Рис. 4.30 ^ вш
Моменты и угловые скорости изображены на рисунке векторами,
поэтому знаки по тексту не оговариваются.
164
скольку по условию момент коррекции больше момента сил трения, то
внутренняя рамка под действием разности моментов начнет прецессиро-
вать к плоскости горизонта с угловой скоростью €/3 - т . Прецессии
внутренней рамки будет противодействовать момент сил трения в ее
подшипниках М . Этот момент сил трения М вызовет прецессию внешней
вн вн
рамки с угловой скоростью т = М /Н в сторону, противоположную
виражу. Таким образом, самолет (на рисунке изображена его продольная
ось X') за время наблюдения / развернется на угол ф = cj tt ^a ГПК
зафиксирует разворот на угол ф = ф + Аф, так к^к главная ось за это
время повернется в противоположную сторону на угол Аф = т /,
обусловленный влиянием трения М .
вн
Рассуждая аналогично, можно дать физическое пояснение результатам
решения уравнений (4.55) и при других начальных условиях. Отметим,
что поведение ГПК с горизонтальной коррекцией в предельном случае,
когда со < т , ничем не отличается от поведения свободного гиро-
в вн
скопа.
Не останавливаясь подробно на моментах сил трения в главных опорах
(в осях ротора) ГПК, скажем о них несколько слов. Как и в любом
гироскопе, эти моменты непосредственного влияния на точностные
характеристики не оказывают. От них зависят мощность, потребляемая гиромото-
ром, а следовательно, его тепловой режим и габаритные размеры, что
косвенно может приводить к увеличению собственных уходов. /Кроме того,
повышенные моменты сил трения в опорах главной оси существенно влияют
на рабочий ресурс гиромотора.
При анализе поведения ГПК с учетом влияния моментов сил трения в
осях подвеса мы идеализировали механизм и условия протекания
процессов. В реальных условиях под действием различных неучтенных
факторов его поведение может быть существенно иным. Такими факторами
могут быть, например колебания самолета вокруг связанных осей,
приводящие к произвольному изменению знаков относительных угловых
скоростей а и /3, а следовательно, и изменению направления (а в общем
случае и величины) моментов сил трения; несимметричность
характеристик моментов сил трения и коррекции и многие другие. Все это будет
приводить к дополнительным собственным уходам главной оси ГПК в
азимуте. Поэтому при разработке, проектировании и изготовлении ГПК и его
отдельных узлов предусматривают принципиальные, схемные, конструктив-
165
ные и технологические решения, обеспечивающие минимальные значения
моментов сил трения в осях подвеса.
Погрешности от смещения центра тяжести (от неуравновешенности)
гироскопа проявляются в виде собственной прецессии главной оси в
инерциальном пространстве. Она обусловлена приложением к гироскопу
момента от силы тяжести в случае неподвижного основания, а также еще
и моментов инерционных сил при его движении. Понятно, что в процессе
изготовления гироскопа по конструктивным и технологическим причинам
невозможно добиться абсолютно точного совмещения центра тяжести с
неподвижной точкой. Помимо этого при эксплуатации величина, а в общем
случае и направление смещения центра тяжести являются случайными
функциями времени, вероятностные характеристики которых указать весьма
сложно. Поэтому строгий анализ поведения ГПК с учетом моментов от
неуравновешенности - задача трудно разрешимая. Если же исходить из
условий, что координаты центра тяжести известны и не изменяются во
времени, основные особенности поведения ГПК могут быть установлены на
основании простых физических рассуждений с применением прецессионных
уравнении. Однако и такой упрощенный подход позволяет в первом
приближении сформулировать ряд требований к точности уравновешивания
(балансировки) относительно каждой из осей подвеса гироскопа.
Предположим, что центр тяжести ГПК расположен в точке С
(рис. 4.31), определяемой координатами / ; / ; / . Отметим, что
смещение центра тяжести С относительно неподвижной точки 0 может быть
обусловлено как неуравновешенностью всего карданного узла, т.е.
механической системы "внешняя рамка - внутренняя рамка - ротор", так и
неуравновешенностью только гиромотора, т.е. механической системы
"внутренняя рамка (кожух гиромотора) - ротор". В дальнейшем будем
полагать, что смещение центра тяжести обусловлено лишь последним
обстоятельством. Из рисунка можно увидеть, что при вертикальной ориентации
оси внешней рамки и угле /3 = 0 смещение центра тяжести в точку С
приводит к возникновению момента только вокруг оси внутренней рамки.
Этот момент ЛГ = /ng( пропорционален координате / и не зависит от
нб Z Z
координат / и / . В соответствии с законом прецессии гироскоп будет
X у
прецессировать вокруг оси внешней рамки с угловой скоростью mg( ///,
/ *
накапливая ошибку в измерении угла курса Аф = ! m$JHdt.
о *
Таким образом, можно сделать вывод, что смещение центра тяжести
вдоль главной оси (z) является наиболее нежелательным, поскольку оно
приводит к появлению нарастающей по времени погрешности даже при
166
нормальном рабочем положении прибора. Однако это не означает, что
требования к смещению центра тяжести вдоль осей х и у могут быть
снижены. Дело в том, что при наклонах прибора (например при кренах
самолета или при отклонениях главной оси гироскопа от плоскости
горизонта) смещение центра тяжести вдоль осей х и у приведет к
появлению моментов соответственно вокруг осей внешней и внутренней
рамок, а это в свою очередь вызовет прецессию главной оси. Прецессия
вокруг оси внутренней рамки будет компенсироваться системой
горизонтальной коррекции. Прессия же внешней рамки явится
непосредственной причиной погрешности в измерении угла курса.
Рассмотрим этот вопрос несколько подробнее. Предположим, что центр
тяжести гиромотора расположен в точке С(1 , / , / ), а главная ось
гироскопа отклонена от плоскости горизонта на угол /3 (рис. 4.32). Из
рисунка следует, что указанное смещение центра тяжести обусловит
появление вокруг оси внутренней рамки момента
М* = Р I - Р I = mri cos0 - md sin0.
нб yz zy z у
Этот момент при конечном значении угла 0 заставит гироскоп
прецессировать вокруг оси внешней рамки с угловой скоростью
анб = mg/H(lz " ly tg/})' (4'59)
Таким образом, при наличии угла /3 погрешность ГПК зависит и от
смещения центра тяжести вдоль оси (/. При этом важно отметить, что
составляющая скорости дрейфа (а ), обусловленная смещением центра
нб
тяжести вдоль главной оси (координата / ), не зависит от угла /3, в то
время как составляющая, обусловленная координатой / , пропорциональна
tg/З. Варьируя значениями координат / , / и угла 0, можно получить
167
все частные случаи движения главной оси ГПК в азимутальной плоскости
от момента неуравновешенности.
На практике при балансировке прибора первоначально добиваются
устранения дрейфа вокруг оси внешней рамки при /3 = 0, т.е. добиваются
минимального значения координаты / . После этого, отклонив главную
ось гироскопа на некоторый угол /3, устраняют смещение центра тяжести
вдоль оси (/. Эту операцию обычно называют устранением маятниковости.
Выше мы кратко рассмотрели некоторые частные случаи поведения ГПК
при наличии момента ЛГ . обусловленного смещением центра тяжести
вдоль осей у и г. В реальных условиях, как это уже отмечалось, в осях
гироскопа подвеса имеют место еще и моменты сил трения, которые
усложняют его работу. Поэтому более достоверные результаты могут быть
получены при одновременном учете моментов несбалансированности, сил
трения и горизонтальной коррекции.
Для случая, изображенного на рис. 4.32, уравнения движения ГПК с
учетом моментов ; М 9 М и Ат = - kQ запишутся так:
иб вн вш к
На cos/З = mg(l cos/3 - / sin/3) + М
(4.60)
Щ cos/? = - fe/3 - М
вш
Поделив оба уравнения на Н cos/З, получим
М
Н * М (4.61)
В = - —
* Н cos/З -
Из системы (4.60) и (4.61) видим, что при
\mg(lz cos/3 - /^ sin/3)| < |MJ;
WKJ
(4.62)
дрейфа гироскопа вокруг осей внешней и внутренней рамок наблюдаться
не будет. Физически это означает, что моменты неуравновешенности
(несбалансированности) и горизонтальной коррекции не могут преодолеть
моменты сил трения в соответствующих осях, а следовательно, не могут
вызвать прецессию гироскопа.
168
Наличие моментов сил трения в осях подвеса не позволяет получить
моменты от неуравновешенности меньше, чем эти моменты сил трения,
т.е. затрудняет процесс уравновешивания. Остаточная
неуравновешенность гироскопа при движении основания с ускорением будет вызывать
прецессию, так как инерционные моменты могут существенно превышать
моменты сил сухого трения. Поведение ГПК при движении основания с
ускорением можно выяснить из приведенных ранее рассуждений.
В заключение отметим, что уравновешивание гироскопа - весьма
ответственный и трудоемкий этап производства, поскольку от качества
его выполнения существенно зависят точностные характеристики приборов
и, в частности ГПК.
В настоящей главе рассмотрены наиболее характерные случаи
поведения ГПК для выяснения влияния на его точностные и эксплуатационные
характеристики принципиальных схемных решений, конструктивных
параметров и режимов движения основания. Некоторым из них дана лишь
качественная оценка, что обусловлено ограниченностью объема пособия и
его ориентацией на соответствующего читателя.
Более подробное изложение теории и практики применения ГПК можно
найти в работах [4, 7, 9, 13].
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Поясните принцип действия маятникового ГК. Будет ли он
работоспособен, если вместо смещения центра тяжести гироскопа применить
систему коррекции с чувствительным элементом в виде жидкостного
маятникового переключателя?
2. В маятниковом ГК возмущющне моменты в оси внешней рамки
приводят к его отклонениям вокруг этой же оси. Поясните, почему это
происходит, ведь для гироскопа характерны перекрестные связи?
3. Поясните причины и сущность скоростной погрешности ГК.
4. Поясните физический смысл и условия невозмущаемости ГК ускоре -
ниями основания.
5. Чем объяснить, что ГПК широко применяются на ЛА, хотя они не
обладают избирательной способностью по отношению к направлению
меридиана?
6. Чем обусловлена необходимость горизонтальной коррекции в ГПК, н
сколь высоки требования по поддержанию угла /3, близким нулю?
7. В чем принципиальная разница между ГПК указателями локсодромии
и ортодромии?
8. Почему для ГПК требования к подшипникам подвеса внутренней
рамки существенно выше, чем к внешней?
169
Глава 5. ДАТЧИКИ УГЛОВЫХ СКОРОСТЕЙ И
УСКОРЕНИИ.
ИНТЕГРИРУЮЩИЕ ГИРОСКОПЫ
5.1. ОБЩИЕ СВЕДЕНИЯ
Законы управления, реализуемые в системах управления (СУ), в общем
случае сод<ержат совокупность координат управляемых параметров, их
производных и интегралов. При этом роль производных в законе
управления достаточно велика. Для получения сигналов измерительной
информации, пропорциональных производным от углов ориентации подвижных
объектов, в частности ЛА, широкое распространение получили ГУ.
Поскольку первая и вторая производные от угла являются соответственно
угловой скоростью и угловым ускорением, условимся в дальнейшем ГУ,
предназначенные для их измерения, называть датчиками угловых
скоростей или угловых ускорений. Такое название этих ГУ вполне
оправдано, так как оно отражает их функциональное назначение в СУ.
На практике чаще применяют датчики угловых скоростей (ДУС) на
основе гироскопа с двумя степенями свободы. В научно-технической и
учебной литературе ДУС иногда называют гиротахометрами (ГТ),
скоростными гироскопами, дифференцирующими гироскопами и т.п. В
некоторых сравнительно редких случаях угловую скорость можно измерять
гироскопами с тремя степенями свободы. Тогда их называют ДУС или ГТ с
тремя степенями свободы. Гироскопы с двумя и тремя степенями свободы,
выполненные соответствующим образом, позволяют измерять одновременно
угловые скорости и ускорения, т.е. первую и вторую производные от
угла поворота объекта. В этом случае их называют датчиками угловых
скоростей и ускорений, или гиротахоакселерометрами.
Интегрирующие гироскопы (ИГ) выполняются главным образом на основе
гироскопа с двумя степенями свободы и применяются для измерения углов
ориентации различных объектов. Поэтому их иногда называют
двухстепенными гироскопическими датчиками углов. Следует отметить, что все
гироскопические устройства предназначены, как правило, для измерения
параметров углового движения объектов. Исключением является лишь
гироскопические интеграторы линейных ускорений (ГИЛУ), выполненные на
основе гироскопа с тремя степенями свободы. Их применяют для
измерения приращения линейной скорости основания путем интегрирования
проекции на ось чувствительности линейного ускорения. Поэтому ГИЛУ
называют иногда гироскопическими интегрирующими акселерометрами.
В настоящей главе рассматриваются гироскопические измерительные
устройства (измерительные преобразователи), выходные сигналы
измерительной информации которых пропорциональны угловым скоростям,
угловым ускорениям или интегралу от измеряемой величины.
170
5.2. ДАТЧИКИ УГЛОВЫХ СКОРОСТЕЙ, УСКОРЕНИЙ
И ИНТЕГРАТОРЫ НА ОСНОВЕ ГИРОСКОПА
С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ
5.2.1. Датчики угловых скоростей
на основе гироскопа с тремя степенями свободы
ДУС с тремя степенями свободы могут иметь различные варианты
конструктивных решений. Однако их основу составляет гироскоп с тремя
степенями свободы, движения относительно двух из которых ограничены
упругими связями. Причем эти связи могут быть как перекрестными так и
прямыми. Рассмотрим работу датчика, выполненного по наиболее
распространенной схеме с перекрестными связями. Его кинематическая
схема представлена на рис. 5.1 и состоит из астатического гироскопа,
на осях подвеса которого размещены датчики углов ДУ , ДУ и датчики
СО у СОу
моментов ДМ , ДМ . Датчики углов и моментов электрически связаны как
показано на рисунке и предствляют собой электрические "пружины". Эта
связь может быть как через усилители, так и без них, что определяется
выбором технических параметров элементов датчика.
Принцип работы датчика заключается в следующем. Предположим, что
он установлен на объект, который поворачивается с угловой скоростью
со,, (угловую скорость coy для простоты примем равной нулю). Гироскоп в
силу своих свойств будет стремиться сохранить неизменной ориентацию
главной оси z. Поскольку база датчика угла ДУ (в данном случае база
СОу.
Рис.5. 1 Рис.5.2
171
потенциометра) закреплена на объекте, она будет поворачиваться вместе
с ним. Щетка же потенциометра в первый момент будет оставаться
неподвижно, так как она жестко закреплена на оси внешней рамки гироскопа.
Следовательно, между нулевой точкой потенциометра и щеткой появится
нарастающий угол а. Пропорционально этому углу на датчик момента ДМ
через усилитель поступит напряжение. Датчик момента ДМ приложит к
оси внутренней рамки гироскопа момент ЛГ = ka, который вызовет
прецессию гироскопа с угловой скоростью а в направлении поворота
объекта. Если угловая скорость ojy = const, то нарастание угла а
прекратиться, когда скорость прецессии а станет равной o>v, т.е. k а/Н = cjyt
Н Г \ Y
откуда а = т— ау: установившееся значение угла а пропорционально
угловой скорости ay. Так как ток *, протекающий через сопротивление R ,
пропорционален углу а, то и напряжение U , снимаемое с сопротивле-
вых
ния R , пропорционально угловой скорости ау. При малых углах а и /3
измерение угловой скорости о>„ аналогично рассмотренному.
Составим уравнения движения датчика. Для этого начало системы
координат XYZ, жестко связанной с объектом, совместим с неподвижной
точкой гироскопа (рис. 5.2). Система координат xyz, полусвязанная с
ротором гироскопа (жестко связанная с внутренней рамкой), в исходном
положении совпадает с осями объекта XYZ. В общем случае положение
системы xyz относительно системы XYZ, как и ранее, определяется
углами а и /3.
Воспользуемся далее общими прецессионными уравнениями (1.49).
Найдем суммы проекций переносных угловых скоростей и суммы проекций
моментов на оси х и у гироскопа в предположении, что углы а и /3 малые:
q = а + ау;
р = - /3 + а>х;
М = - ka + М sign/3 ± МХ ;
X 1 вн нб
М = - kj - М signa ± МУ.
У 2 вш & нб
(5.1)
(5.2)
где fc и k — крутизна характеристик (общие коэффициенты передачи)
датчиков моментов ДМ и ДМ соответственно по углам а и /3.
172
В системе (5.1) не учтены проекции переносных угловых скоростей от
вращения Земли и линейной скорости объекта, так как обычно
эффективность коррекции выбирают по крайней мере на порядок больше их
значений. Подставив равенства (5.1) и (5.2) в общие прецессионные
уравнения, получим уравнение движения трехстепенного ДУС:
Н(а ♦ cjv) = - ka ♦ М sign/3 ± М* ; ,. Q.
I 1 вн нб W.6)
Н(Р - со J = - kj - М signa ± МУ .
Л 2 вш нб
Перейдем от уравнений моментов к уравнениям угловых скоростей
путем деления правых и левых частей (5.3) на Н и запишем их в виде:
a ♦ е{а = - ь>у + *_ sign* * «£; (5 4)
/3 + ев = cov - т signa ± яг .
2 Л вш нб
Предположим, что моменты сил трения и неуравновешенности в осях
подвеса гироскопа отсутствуют, тогда
a + € а = - ojy-t
& + S& = WJf' (5,5)
Дифференциальные уравнения системы (5.5) аналогичны по структуре
уже рассмотренным ранее уравнениям (3.10).
Запишем их решения для нулевых начальных условий в предположении,
что со„ и coy постоянны:
иу - et
a = - р- (1 - е ); (5.6)
M-^d-e 2).
2
Из (5.6) при / —► оо найдем статические значения (частные решения)
углов
/ Н
У • ' *1 Y (5.7)
2
Таким образом, в установившемся режиме углы отклонения гироскопа
а и /3 пропорциональны соответственно угловым скоростям ay и cj„.
Причем оси внешней и внутренней рамок гироскопа одновременно являются
173
входными (осями чувствительности) и выходными для одноименных угловых
скоростей. Это обусловлено перекрестной связью датчиков углов и
датчиков моментов. Знак минус в первом выражении означает, что
действительный угол отклонения а при заданном направлении cjy будет
иметь другой знак, нежели указано на рис. 5.2, т.е. ось х гироскопа
отстает от оси X объекта так же, как на рисунке ось у отстает от оси
У. По этой причине датчики угловых скоростей такого типа в литературе
иногда называют "отстающими" гироскопами. Если за выходные величины
взять углы поворота объекта у и ф соответственно вокруг осей X и У,
тогда угловые скорости с*)„и cjy можно рассматривать как их производные
и (5.7) записать так:
Н _//_#_
'ст - Г" "X - JTdt
2 2
(5.8)
Соотношения (5.8) при формальном подходе поясняют, почему такой
гироскоп иногда называют дифференцирующим. Если же говорить строго,
то никакого дифференцирования в приборе не происходит. Действительно,
на входе прибора - угловая скорость, а на выходе - величина,
пропорциональная угловой скорости. Отношение H/k называют
чувствительностью, или крутизной выходной характеристики ДУС. Как следует из
соотношений (5.6) увеличение чувствительности датчика приводит к
ухудшению его динамических свойств. Поэтому трехстепенные датчики
угловых скоростей целесообразно применять для измерения медленно
меняющихся угловых скоростей. Тогда точностные качества датчика будут
определяться главным образом статическими погрешностями (от моментов
сил трения, неуравновешенности, реактивных моментов датчиков угла и
др.). Действительно, полагая в системе (5.4) а = /3 = 0, найдем
статические значения углов:
„ М
п вн
И М
q _ П + ВШ +
ст &Л X &Л
2 2
<
нб
*2 '
(5.9)
Основные рекомендации по снижению статических погрешностей датчика
остаются такими же, что и практически для всех гироскопических
устройств. Это - снижение вредных моментов в осях подвеса гироскопа.
174
В данном случае дни могут быть снижены еще и путем увеличения
коэффииинтов передачи k и k при сохранении требуемой
чувствительности.
Преимуществом трехстепенного ДУС можно считать возможность
одновременного измерения угловых скоростей относительно двух осей, т.е. он
является двухкомпонентным измерителем. В принципе возможно его
последовательное использование в двух режимах: в качестве ДУС и в качестве
СГ на одном и том же объекте. Для этого необходимо предусмотреть в
электрической схеме отключение датчика момента ДМ . Тогда сигнал
измерительной информации с датчика угла ДУ будет пропорционален углу
"к
рыскания (как в свободном гироскопе). Упругая связь внутренней рамки
по углу /3 будет выполнять в этом случае роль межрамочной коррекции
(как в ГПК).
Трехстепенные ДУС на практике применяются для измерения малых
угловых скоростей в системах управления и наведения, например при
испытаниях ЛА, а также в авиационных прицелах для вычисления угла
упреждения цели [9].
5.2.2. Датчики угловых скоростей и ускорений
на основе гироскопа с тремя степенями свободы
С помощью астатических гироскопов с упругим ограничением движений
рамок можно измерять не только угловые скорости, но и угловые
ускорения. Информация об изменении этих параметров используется в системах
управления ЛА для улучшения их динамических свойств, например для
более интенсивного успокоения колебаний, т.е. демпфирования. Поэтому
датчики угловых скоростей и ускорений называют иногда демпфирующими
гироскопами. Одна из простейших схем такого датчика изображена на
рис. (5.3). Принципиально она аналогична схеме на рис. 5.1. Отличие
заключается лишь в том, что движения гироскопа относительно осей
подвеса ограничены упругими связями большой жесткости (пружины 1 и 2).
Конструктивно эти связи могут быть реализоаны в виде механических
пружин 1 и 2 (см. рис. 5.3) или электрических "пружин". Демпфер 3
предназначен для гашения собственных колебаний гироскопа.
Принцип действия такого датчика можно объяснить следующим образом.
Предположим, что объект, на котором установлен датчик, поворачивается
относительно связанной оси У с постоянной угловой скоростью cjy. Тогда
внешняя рамка гироскопа под действием момента от упругой силы жесткой
175
пружины 1 в установившемся режиме
начнет поворачиваться вместе с объектом
с той же угловой скоростью ojy. При
этом относительно оси внутренней
рамки х возникнет гироскопический момент
М = //cjv, который заставит ее повора-
Г I
чиваться. В установившемся режиме ги-
т
роскопическии момент
уравновесится
Z моментом упругой силы пружины
м*.
т.е. Ниу = k J3, откуда
„ Н
су
2
(5.10)
Рис.5.3
Следовательно, угол поворота
внутренней рамки гироскопа пропорционален угловой скорости объекта cj„
вокруг оси У, т.е. датчик является ее измерителем.
Если объект поворачиваться равноускоренно, т.е. с постоянным
ускорением ay, то угол /3 будет увеличиваться со скоростью
]3 = ?-соу. (5.11)
Вращение гироскопа с угловой скоростью /3 приведет к появлению
гироскопического момента МI = - ///3, направленного по оси у внешней
г
рамки. Вследствие ускоренного поворота объекта с ускорением cjy к
внешней рамке будет приложен еще и инерционный момент М = - / cj„.
Эти два момента + М ) деформируют пружину 1 и в установившемся
г и
режиме уравновесятся моментом ее противодействия, т.е.
У У 1
Отсюда
Hfi ♦ / cjv
У Y
(5.12)
(5.13)
После подстановки /3 из выражения (5.11) в (5.12) и преобразований
получим
176
H/k ♦ J
a= 1 JL^V, (5.14)
т.е. угол а поворота внешней рамки гироскопа пропорционален угловому
ускорению cjy объекта вокруг оси Y. Данный вывод не является
неожиданным, особенно, если рассмотреть датчик как некоторое механическое
устройство, лишенное гироскопических свойств (положить Н = 0). Тогда
из уравнения (5.12) получим / ay = k а, что соответствует обычному
инерционному датчику угловых ускорений. В гироскопическом датчике
наличие Н увеличивает его инерционность вокруг оси j/, а
следовательно, и чувствительность к угловому ускорению оу. Если при тех же
допущениях рассмотреть поведение датчика при ускоренном вращении объекта
только относительно оси X с угловой скоростью со„и угловым ускорением
cjy, то получим, что угол а отклонения внешней рамки пропорционален
угловой скорости cjy, а угол /3 отклонения внутренней рамки
пропорционален угловому ускорению cj„. При одновременном вращении объекта
относительно осей X и Y перекрестные связи сохраняются, и сигнал
измерительной информации с датчика угла ДУ • будет зависеть от cjv и cjv, ас
датчика угла ДУ - от cj„ и ау, т.е. сигналы будут смешанными. Это
Л
является существенным недостатком, ограничивающим применение
трехстепенных датчиков не только как двухкомпанентных, но и как однокомпане-
нтных измерителей.
Их использование в системах управления допустимо лишь при условии,
что одна из осей рамок гироскопа (неизмерительная) может быть
ориентирована параллельно той оси объекта, угловые движения
относительно которой существенно ограничены. В литературе [9]
рассмотрены и другие схемы таких датчиков и способы, позволяющие
частично ограничить или даже исключить взаимное влияние измеряемых
параметров. Однако распространения они не нашли главным образом из-за
усложнения конструкции.
' Выше были рассмотрены характерные особенности датчиков угловых
скоростей и ускорений на основе простых физических рассуждений.
Очевидно, что помимо отмеченного, сигналы измерительной информации
таких датчиков имеют еще инструментальные и динамические погрешности.
Качественная и количественная оценка их влияния на выходные сигналы
177
может быть получена на основе анализа уравнений движения гироскопа,
учитывающих его динамику и возмущающие моменты.
Поскольку, как уже отмечалось выше, датчики такого типа широкого
распространения не имеют, подробного анализа проводить не будем.
Более полные сведения о них можно получить, например в книге [9].
5.2.3. Гироскопические интеграторы линейных ускорений
Гироскопические интеграторы линейных ускорений (ГИЛУ) применяются
для измерения приращения линейной скорости центра масс подвижных
объектов путем интегрирования линейного ускорения вдоль оси
измерения. На рис. 5.4 изображена одна из возможных схем ГИЛУ,
расположенного на ЛА, движущемся с углом наклона траектории в и
ускорением W„. ГИЛУ представляет собой трехстепенный гироскоп, ось
внутренней рамки (гиромотора) 1 которого, смещена относительно оси 2
внешней рамки 3 на некоторую величину / . Так что оси х и у
перекрещиваются, а не пересекаются, как это требовалось ранее. Центр масс
гиромотора располагается в точке С пересечения главной оси z и оси
внешней рамки у (когда эти оси взаимно перпендикулярны). Центр масс
внешней рамки у находится на ее оси. На оси внешней рамки размещены
датчик момента ДМ и датчик угла ДУ. Датчик угла ДУ связан с осью
внешней рамки гироскопа через редуктор 4.
Нарушение перпендикулярности осей z и у в рабочем режиме, например
вследствие возможной прецессии внутренней рамки, вызванной
возмущающими моментами в оси внешней
рамки, регистрируется
контактным датчиком 5. Подвижный
контакт датчика 5 жестко
закреплен на оси (или кожухе)
внутренней рамки, а токопод-
водящие ламели - на внешней
рамке. В случае нарушения
перпендикулярности рамок
(появлении угла /3) управляющий
сигнал с контактного датчика
5 поступает через усилитель
на датчик момента ДМ. Датчик
момента прикладывает к оси
внешней рамки момент так,
Рис.5.4 чтобы внутренняя рамка пре-
178
цессировала в сторону устранения угла /3. Таким образом,
обеспечивается межрамочная коррекция гироскопа аналогично ГПК. В нерабочем режиме
нулевые значения углов а и /3, а следовательно, и перпендикулярность
рамок обеспечиваются электромагнитным арретиром (на рисунке не
показан). Осью чувствительности (входной осью) прибора является ось
внешней рамки. Она же и выходная ось. Принцип действия ГИЛУ поясним на
примере применения его в СУ баллистической ракеты. Одной из задач
такого управления является точное измерение модуля вектора абсолютной
линейной скорости центра масс ракеты, направленного по касательной к
траектории полета и сопоставление его с расчетным (программным)
значением.
Предположим, что ГИЛУ установлен на ракете как это показано на
рис. 5.4. Ракета движется с некоторым углом наклона траектории в и
ускорением, вектор которого W„ параллелен продольной оси ракеты X.
Ось внешней рамки ГИЛУ (ось чувствительности) так же параллельна оси
X ракеты. Будем считать, что система межрамочной коррекции (МРК)
обеспечивает перпендикулярность вектора Н к оси внешней рамки j/, a
вредные моменты в осях подвеса отсутствуют. На рисунке показана схема
сил и моментов, действующих при таком движении ракеты на гироскоп. К
центру масс гиромотора (системы ротор - кожух) приложены инерционная
сила F = т(- WY) и сила тяжести Р = mg. Так как центр масс гиро-
и л
мотора смещен относительно оси подвеса внутренней рамки х на величину
/ , силы F и Р создадут моменты соответственно AT = mWJ и Мр =
= /ngf sin 0. Результирующий вектор этих моментов совпадает с
положительным направлением оси х. Под действием этих моментов
гироскоп начнет прецессировать вокруг оси внешней рамки с угловой
скоростью
а = (mW^ * m$z sinfl)///. (5.15)
Угол поворота внешней рамки за время с момента старта ракеты (/ =
= 0), когда ее линейная скорость равнялась нулю (V = 0), до момента
времени (/ ) достижения центром масс заданной точки траектории может
быть определен интегрированием выражения (5.15):
t
а = / (mW^ * m$z sihO)/Hdt. (5.16)
Поскольку величины ml и Н являются конструктивными параметрами
179
прибора, которые можно принять постоянными, выражение (5.16) можно
записать так:
а = ml/H HWY + g sinO) dt, (5.17)
* о л
или
t
а = mlJH (Vx * / g sinftfl). (5.18)
0
где V у = J W ydt — абсолютная линейная скорость ракеты в момент
времени t\ fill /H — передаточный коэффициент, чувствительность.
Таким образом, выходная величина ГИЛУ (угол а) пропорциональна
интегралу от линейного ускорения или приращению линейной скорости цент-
ра масс ракеты в направлении оси чувствительности с точностью до / х
О
х g sinddt. Поэтому такой гироскоп называют интегрирующим.
/
Выражение / g sinddt является методической погрешностью, обуслов-
0
ленной интегрированием проекции на ось чувствительности вектора
ускорения силы тяжести. Поскольку программная траектория баллистической
ракеты и величина ускорения силы тяжести в районе старта известны,
эта погрешность может быть учтена.
Подынтегральное выражение в уравнении (5.17)
(Wx ♦ gsiad) = W^ (5.19)
принято называть "кажущимся ускорением**. Тогда множитель в уравнении
(5.18)
t
(VY + i g sinddt) = V (5.20)
Л о
называют "кажущейся скоростью". В соответствии с такой терминологией
можно сказать, что выходной сигнал ГИЛУ пропорционален интегралу от
кажущегося ускорения W или приращению кажущейся скорости (V ).
В процессе работы (измерения) гироскоп может поворачиваться вокруг
оси внешней рамки на несколько оборотов. Поэтому датчик угла ДУ
кинематически связан с ней через редуктор с передаточным числом i < 1
180
так, чтобы выходной угол датчика а = ал < 2п. Через редуктор может
д
быть выполнена и связь датчика момента с гироскопом, но уже с
передаточным числом / > 1. Так делают в тех случаях, когда возмущающие
моменты относительно оси внешней рамки достигают значительных величин.
Датчик угла системы межрамочной коррекции (МРК) может иметь линейную
или релейную характеристику. О выборе типа характеристики сказано
далее.
Ранее мы выяснили принцип работы ГИЛУ без учета влияния каких-либо
факторов, кроме ускорения силы тяжести. В реальных условиях его
выходной сигнал содержит погрешности, обусловленные целым рядом помех
как методического, так и инструментального характера. Рассмотрим
наиболее существенные из них. Для этого составим прецессионные
уравнения ГИЛУ, установленного на ЛА, движущимся с произвольно
направленными векторами кажущегося ускорения W и абсолютной угловой
скорости со. При дальнейшем изложении индекс ~к" при W опустим,
понимая под ускорением - кажущееся ускорение. Методика составления
уравнений остается прежней.
В качестве системы отсчета, относительно которой будем
рассматривать движение гироскопа, выберем систему осей XYZ, жестко связанную с
ЛА (рис. 5.5). Ориентацию системы осей xyz> жестко связанных с
гиромотором, относительно системы XYZ определим углами а и /3.
Сведение на рис. 5.5 в одну точку 0 начал систем координат XYZ и xyz
при рассмотрении кинематических параметров для вращательного движения
является допустимым. Воспользовавшись рис. 5.5 и направляющими
косинусами табл. 1, найдем суммы мгновенных значений проекций угловых
скоростей р, q и ускорений Wу, Wy и W- на оси х и у (следует иметь
ввиду, что в таблице оси £; т\ и t надо заменить соответственно осями
X, У, Z, так как именно они в данном случае приняты базовыми):
р = - /3 + со_ cosa - со., sina;
q = (a + со у) cos/3 - (a>7 sina + cjy cosa) sin/3; (5.21)
(5.22)
W = W cosa - Wv sina
x z Y
W = Wx cos/3 - (Wy cosa + Wz sina) sin/3.
Теперь найдем суммы проекций внешних моментов на оси х и у в
предположении, что балансировка прибора выполнена идеально, т.е.
центр масс внешней рамки лежит на ее оси у> а центр масс гиромотора
181
расположен в точке пересечения главной оси z с осью внешней рамки у,
когда они перпендикулярны (угол /3 = 0). На рис. 5.6 показана схема
действия на гироскоп инерционных сил и моментов. Вследствие движения
гироскопа с ускорением W к центру масс гиромотора С будет приложена
инерционная сила F = /п(- W). Ее составляющие F = /п(- W ); F =
= /п(- W ) создадут относительно осей подвеса инерционные моменты
М* = F I = mlW :
и yz z у
Np = FM = -ni(l- cos/3)№ .
и X Z X
(5.23)
(Инерционная сила F момента не создает, так как она проходит
через точку 0 подвеса внутренней рамки (кожуха).) Плечо Ы момента
силы F относительно внешней рамки обусловлено отклонением главной
оси гироскша от перпендикуляра к плоскости ху на угол 0. Из рис. 5.7
видно, что Д/ = (/
/ cos0) = 1(1
Z Z
cos/З). Предположим, что в
осях подвеса имеются вредные моменты
= М sign/3 ± M ;
в
М signa ± M
вш
(5.24)
Рис.5.5
Рис.5.6
182
где М и
вн вш
м
моменты сил
сухого трения, приведенные к осям
соответственно внутренней и
внешней рамок; М н М — прочиеi—1
неучтенные вредные моменты,
приведенные к соответствующим
осям подвеса.
Моментная характеристика ДМ
по углу /3 имеет линейную
зависимость - fc/З. Суммируя
проекции найденных моментов на
оси х и у, получим
Рис.5.7
М
М*;
(5.25)
mlW ±
х z у
М = - W - ml (1 - cosfrW ± Myt
У г х в
где k — передаточный коэффициент датчика момента.
Прецессионные уравнения ГИЛУ получим подстановкой в общие
уравнения (1.49) значений (5.21) и (5.25) с учетом (5.22) и (5.24):
Н[(а + со J cos/3 - ((л)7 sina + cjy cosa) sin/J =
= ml [Wx cos/3 - (W- sina + Wy cosa) sin/3] +
+ M sign/3 ± M ;
H(P - со- cosa + ojy sina) cos/3 = - fc/3 - ml x
(5.26)
x (1 - cosfi)(Wj cosa - Wy sina)
M signa ± M
He решая уравнений (5.26), перепишем их в форме, удобной для
качественного анализа:
ml
ml
Н
W
X " "Н {WZ Sina + WY C0Sa) tg/? +
+ (co~ sina + cov cosa) tg/3 - cov ♦ (M sign/3 ± M ) тт ;
L l Abh X n
H • mlz
/3 = - г- (/3 - со- cosa + cjy sina) cos/3 - „ (1 - cos/3) x
x (W- cosa - Wv sina) - т- (M signa ± M ).
Z / к вш (/
(5.27)
183
Рис. 5.8
Из первого уравнения системы (5.27) следует, что выходной сигнал
ГИЛУ а зависит не только от проекции ускорения Wу, но и от других
составляющих. Первые три из них представляют собой методические
погрешности, последние - инструментальные. Дадим пояснение их физической
сущности.
Второе слагаемое правой части уравнения является моментом
инерционных сил, обусловленных поперечными ускорениями Wy и W-. На рис. 5.8
видно, что когда угол а = О, главная ось гироскопа z расположена в
плоскости XY и инерционная сила mWy на плече / = / sin/} создает
вокруг оси внутренней рамки х момент - mWyl . При этом составляющая
mW7 sina = 0. Далее, в результате прецессии внешней рамки с угловой
скоростью а угол а возрастает, составляющая инерционной силы mWy cosa
уменьшается, а составляющая mW- sina - увеличивается и т.д.
Периодическое изменение инерционных сил приведет к периодическому
приложению вокруг оси внутренней рамки момента, изменяющегося с
частотой прецессии гироскопа. В итоге на полезный выходной сигнал a =
ml
—т»— Wy будет накладываться периодически изменяющийся сигнал помехи
от поперечных ускорений.
Третье и четвертое слагаемые обусловлены движением ЛА с угловой
скоростью cj. Формально их можно объяснить как гироскопические мо-
184
менты. Однако влияние проекций со,,, со- и со„ на гироскоп неравнозначно.
Проявление составляющих со,, и со- поясним на примере гипотетического
случая. Предположим, что W = со^ = со- = 0, т.е. ЛА вращается только с
угловой скоростью ojy (рис. 5.9). Тогда, если угол /3*0, гироскоп
будет вращаться вокруг оси внешней рамки с угловой скоростью а = со^х
xcosatg/З. При повороте ЛА вокруг оси Y на угол ф = = л/2 главная ось
гироскопа повернется на угол a = /3. Аналогично будет вести себя
гироскоп и при наличии составляющей со-, если углы a * 0 и /3 * 0.
Поскольку в общем случае гироскоп прецессирует с угловой скоростью а,
то сигнал этой помехи будет иметь колебательный характер. Если еще
учесть, что ЛА имеет систему стабилизации углов, то угловые скорости
cjy и со- будут невелики и будут изменяться периодически. Лишь угловая
скорость со- имеет небольшую постоянную составляющую, что обусловлено
видом траектории на активном участке. С учетом сказанного можно
полагать, что суммарный сигнал помехи будет так же незначительным.
Предположим, что угол /3 = 0. Тогда первое уравнение (5.27) примет вид:
ml
а =
W,
соу + тг Ш sign/3
An вн
М*).
х
(5.28)
Н WX
Из выражения (5.28) следует важный вывод: если МРК обеспечивает
перпендикулярность рамок (0 - 0), на гироскоп не оказывают влияние
поперечные ускорения Wy* W- и угловые скорости cjy и со^. Однако из
рассмотрения (при тех же условиях) второго уравнения системы (5.27)
следует, что МРК с линейной характеристикой угол (I = 0 в общем случае
обеспечить не может. Причинами этого являются, прежде всего,
остаточные вредные моменты в оси внешней рамки, а также гироскопические
моменты от перекрестных угловых ско- Ук
ростей, для компенсации которых в
системе МРК с линейной
характеристикой принципиально необходимо
отклонение главной оси гироскопа Haj
угол /3.
Практически влияние указанных
факторов можно не учитывать, если
значение угла /3 не превышает долей
градуса. В МРК с линейной
характеристикой этого можно добиться
увеличением передаточного коэффициента
185
и у sin p
k. Но тогда потребуется включение в схему усилителя. При этом следует
иметь в виду, что существенное увеличение k может привести к
нарушению устойчивости системы МРК - к появлению автоколебаний. Правда,
работа МРК в режиме автоколебаний для ГИЛУ оказывается благоприятной,
так как приводит к осреднению результирующего момента сил трения в
оси внутренней рамки, а следовательно, к снижению собственной
прецессии. В итоге повышается точность ГИЛУ. Однако на практике по
конструктивно-технологическим соображениям эта задача чаще решается
применением МРК с релейной характеристикой. Подбором параметров системы
формируют автоколебательный режим с заданными значениями амплитуды и
частоты. Обычно стремятся, чтобы амплитуда была малой, а частота
высокой. Очевидно, что уменьшение амплитуды автоколебаний соответствует
уменьшению среднего значения угла /3, а следовательно, приводит к
снижению методических погрешностей. Заметим, что для решения задачи
синтеза автоколебаний в уравнениях гироскопа необходимо учитывать
инерционные члены [4, 9].
Выясним теперь влияние на выходной сигнал ГИЛУ переносной^ угловой
скорости cov. Для этого в равенстве (5.28) положим М = М = 0 и
Л вн X
проинтегрируем его:
ml t t
а = -^- / Wtftt - / coy//. (5.29)
О О
Из рассмотрения равенства (5.29) следует, что выходной угол можно
представить как разность (сумму) двух углов а = а - а , где (при
/л 1 W со i
t ml t
z z
% ~ ^ °W ~ H ^ ^yfi = H ^X ~~ полезный сигнаИ» a = / wv<tt =
о w о
= у - угол поворота ЛА вокруг продольной оси (угол вращения).
Таким образом, выходной сигнал помимо полезной информации о
приращении кажущейся скорости содержит информацию о приращении угла
вращения у (угла крена) ЛА, что является погрешностью измерения.
Физический смысл этого результата поясним, рассмотрев несколько
частных случаев.
Предположим, что угловая скорость со„ = 0. Тогда выходной угол a =
= а™, который обусловлен только прецессией гироскопа - угловым
перемещением щетки относительно базы потенциометра (см. рис. 5.4).
Если ускорение W„ = 0, а угловая скорость со„ * 0, то выходной
сигнал а = а , т.е. гироскоп измерит только приращение угла вращения
со
186
у. При этом гироскоп не прецессирует и щетка потенциометра останется
на месте, а его база вместе с ЛА повернется на угол вращения (крена).
В данном случае ГИЛУ работает аналогично свободному гироскопу, т,е.
измеряет угол вращения у. Теперь предположим, что ЛА движется с
ускорением Wу и угловой скоростью cj„ так, что приращения от ускорения
и угловой скорости равны, т.е. а^ = а . Тогда при W\, > 0 и cj„ > О
гироскоп и ЛА повернутся на один и тот же угол. Относительного
перемещения щетки и базы потенциометра не произойдет, и угол а - 0.
В общем случае выходной сигнал всегда определяется как
относительное угловое перемещение гироскопа и ЛА. Погрешность ГИЛУ,
установленного непосредственно на ЛА, обусловленная составляющей угловой
скорости о>„, более существенная, чем рассмотренные выше, так как она равна
интегралу от ее абсолютного значения, т.е. равна углу вращения. В
некоторых менее ответственных системах управления, она может быть
снижена за счет повышения точности стабилизации ЛА по углу вращения.
Наиболее успешно эта задача решается установкой ГИЛУ на одноосный гиро-
стабилизатор, ось стабилизации которого совпадает с его осью
чувствительности.
В результате анализа уравнений (5.27) мы выяснили зависимости
выходного сигнала ГИЛУ от угловой скорости и перекрестных ускорений.
Используя равенства (5.27), возможно получить количественную оценку
методических погрешностей для каждого конкретного случая. Однако
практически вычисления сделать невозможно, так как очень сложно
установить законы изменения угловых скоростей, поперечных ускорений и
угла /3. Польза анализа заключается в том, что он позволяет лучше
понять влияние на прибор различных факторов в реальных условиях
работы, что необходимо разработчикам и гироустройств, и СУ. Напомним,
что исходные уравнения (5.26) приближенные. Помимо инерционных членов
гироскопа в них не учтены центростремительные ускорения ЛА при его
движении по криволинейной траектории вокруг центра масс. Влияние этих
факторов, вообще говоря, невелико, но при строгом анализе следует
учитывать и их [9].
Рассмотрим инструментальные погрешности ГИЛУ. В первом уравнении
(5.27) положим /3 = со„ = 0. Тогда
ml
а = -дг- WY- jr (Af sign/3 ± M ). (5.30)
n л п вн X
Из этого равенства следует, что полезный сигнал содержит
составляющую скорости прецессии от остаточных вредных моментов, приведенных к
оси подвеса внутренней рамки гироскопа. Это ни что иное как
собственная прецессия (дрейф) гироскопа. К числу вредных моментов следует от-
187
нести, прежде всего, момент сил сухого трения, который складывается
из моментов сил трения в подшипниках и датчике угла МРК. "Неучтенные"
моменты могут быть обусловлены, например упругими моментами токопод-
водов к гиромотору, датчику угла МРК и др. Моменты сил трения
определяют такую важную характеристику прибора, как порог чувствительности.
Если в оси внутренней рамки вредный момент определяется только
моментом сил трения М , то соотношение для порога чувствительности может
бьпъ получено на основании следующих рассуждений. До тех пор, пока
абсолютное значение момента от измеряемого ускорения jml^^i | меньше
момента сил трения \М |, прецессии гироскопа быть не может. Она
начнется лишь после того, как полезный момент сравняется с моментом
\М |, а затем превысит его. Тогда из равенства (5.30) при М = 0
получаем ml Wv > M , откуда W . = М /(ml ) - порог чувствительности
Z Л вн ' min вн Z
ГИЛУ по ускорению.
Таким образом, при изменении измеряемого ускорения в пределах
±W . прибор не будет на него реагировать. Поскольку в конечном итоге
выходной сигнал прибора пропорционален интегралу от ускорения, то
наличие момента сил трения М приводит к нарастающей по времени
поет/
z
грешности по скорости. Действительно, а = „ Wv ± M ///, где
л Л вн
М /Н - погрешность выходного сигнала по угловой скорости прецессии.
Тогда М /(ml ) = W . есть погрешность выходного сигнала по уско-
вн Z mm
рению. , , и
r ml t . t
у 1
Угол поворота гироскопа а = —jz— J W^dt ± jr i M dt. При М
0 0
Мвн Мвн ♦
= const цН / - погрешность по углу а, тогда —.— t = AV -
z
погрешность ГИЛУ от моментов сил трения в оси внутренней рамки по
скорости.
Все прочие вредные моменты в оси внутренней рамки будут также
приводить к погрешностям в измерении приращения скорости. Для снижения
инструментальных погрешностей, как это следует из последних
соотношений, необходимо прежде всего уменьшать вредные моменты. Увеличение
188
смещения центра тяжести / также приводит к уменьшению погрешностей.
Но при этом следует иметь в виду, что будут увеличиваться амплитуда и
снижаться частота автоколебаний, на влияние которых указывалось
ранее.
К инструментальным погрешностям ГИЛУ относят также погрешности от
нестабильности передаточного коэффициента или чувствительности wiJH.
Понятно, что в условиях эксплуатации по различным причинам могут
изменяться линейные размеры гироскопа, скорость вращения ротора и т.п.
Это в свою очередь приведет к изменению передаточного коэффициента, а
следовательно, к погрешностям в измерении скорости.
При проектировании и разработке ГИЛУ предусматриваются различные
конструктивно-технологические решения, обеспечивающие минимальное
значение инструментальных погрешностей. Однако полностью их устранить
невозможно. Следует еще добавить, что инструментальные погрешности
непостоянны во времени. Поэтому на практике непосредственно перед
пуском ракет проводят контрольную тарировку ГИЛУ. Суть тарировки
заключается в экспериментальном определении передаточного
коэффициента прибора на момент старта. Для этого на вертикально стоящей ракете
разарретируется гироскоп. Под действием силы земного тяготения он
начнет прецессировать вокруг оси внешней рамки. Теоретически для
идеального прибора однозначное соответствие между измеряемой скоростью и
углом поворота гироскопа устанавливается его статической
характеристикой:
ml t ml
а = -^- / Wdt = -^ V. (5.31)
Тогда для рассматриваемого эксперимента можно записать:
т' Г Т т' Г
ат = -^А / gdt = -^А g7\ (5.32)
о
Замерив тарировочное время прецессии гироскопа Т на заданный угол
а (обычно на один или целое число оборотов), из формулы (5.32)
находят тарировочный передаточный коэффициент:
/п' /' а
k = -ттА = -£- . (5.33)
Передаточный коэффициент, полученный экспериментально, в общем
случае отличается от коэффициента k = ml/H, указанного в паспорте на
прибор, так как он учитывает возможные изменения параметров прибора к
189
моменту эксперимента. В соответствии с полученным передаточным
коэффициентом k корректируются исходные данные для системы управ-
т
ления.
Помимо рассмотренной схемы ГИЛУ, известны и ее модификации, в
частности двухроторные, двухгироскопные и др., которые позволяют
обеспечить компенсацию некоторых возмущающих факторов. Однако эти схемы
сложнее в изготовлении. Применяются ГИЛУ главным образом в системах
управления ракетами для измерения текущего значения скорости или
выдачи команды на выключение двигателя при достижении ракетой скорости
заданной программной величины. В зависимости от этого выбирается и
тип датчика угла ГИЛУ. Возможно применение ГИЛУ и как интегрирующих
акселерометров для решения различных навигационных задач.
5.3. ДАТЧИКИ УГЛОВЫХ СКОРОСТЕЙ
И ИНТЕГРИРУЮЩИЕ ГИРОСКОПЫ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
Датчики угловых скоростей (ДУС) и интегрирующие гироскопы (ИГ) с
двумя степенями свободы нашли очень широкое распространение и
применяются для измерения абсолютной угловой скорости и углов различных
объектов. В основу их принципа действия положено свойство гироскопа с
двумя степенями свободы совмещать свою главную ось по кратчайшему
пути с вектором угловой скорости вынужденного переносного вращения.
Конструктивная реализация этих устройств весьма разнообразна.
Однако принципиально они различаются лишь характером связей
относительно выходной оси. Ниже рассмотрим основные особенности и технические
характеристики ДУС и ИГ при наиболее характерных режимах работы. Как
и ранее при получении аналитических соотношений, как правило, не
будем учитывать влияние на выходной сигнал измерительной информации
помех датчиков углов.
5.3.1. Датчики угловых скоростей
Датчик угловой скорости представляет собой гироскоп с двумя
степенями свободы, движение которого вокруг оси ^подвеса рамки
ограничено упругой связью. На рис. 5.10 изображена его кинематическая
схема. Система координат xyz жестко связана с рамкой гироскопа.
Опорная система координат XYZ жестко связана с ЛА. Направление полета
ЛА показано на рисунке стрелкой НП. Ротор гироскопа 1 размещен в
рамке 2 и может свободно вращаться вокруг оси z. Рамка 2 имеет
190
возможность поворачиваться вокруг оси х, но этот поворот ограничен
пружиной 3 и демпфером 4. Угол поворота гироскопа /3 вокруг оси х
измеряется датчиком угла 5.
Прибор работает следующим образом. При вращении основания,
например ЛА, на котором установлен ДУС, с угловой скоростью ау
возникает гироскопический момент AT = Hcjy sin (H ay), направленный в
сторону совмещения вектора кинетического момента Н с вектором угловой
скорости cjy по кратчайшему пути. В результате рамка начнет ускоренно
поворачиваться. Повороту рамки противодействует момент сил упругости
пружины М - - k /3. (Предполагаем, что другие противодействующие
моменты отсутствуют.) Когда момент пружины и гироскопический момент
сравняются, рамка остановится. Возможные колебания рамки затухнут
вследствие рассеяния энергии в демпфере. Для установившегося
равновесия моментов можно записать k /3 = //со., sin (90 - /3) = Hcjw cos/3.
n / Y
Откуда
/3 = jp- ay cos/3, (5.34)
П
где k — коэффициент угловой жесткости пружины; W/k — статическая
п п
чувствительность или передаточный коэффициент.
Обычно подбором чувствительности угол /3 делают не более 5 , тогда
cos/З * 1, и выражение (5.34) можно переписать так:
0 = $г--су (5.35)
п
т.е. угол поворота /3 рамки гироскопа пропорционален измеряемой
угловой скорости cjy. Равенство (5.35) устанавливает однозначную связь
между входным и выходным сигналами идеального ДУС в статическом
режиме, т.е. является его статической характеристикой. Далее угол /3 в
зависимости от типа датчика угла может быть преобразован в какую-либо
другую удобную для потребителя физическую величину, например
напряжение. Ось Y корпуса прибора называют измерительной или входной
осью, ось у осью чувствительности, а ось х - выходной. В общем случае
Л А может двигаться с угловой скоростью cj, вектор которой направлен
произвольно относительно его связанных осей XYZ (рис. 5.11).
Уравнение движения ДУС получим суммированием и приравниванием нулю
(в соответствии с принципом Даламбера) наиболее существенных
моментов, действующих на внутреннюю рамку вокруг ее оси подвеса х.
191
Для этого воспользуемся рис. 5.11, на котором изображены оси XYZ,
связанные с ЛА, и оси xyz> связанные с рамкой гироскопа. Угол /3
определяет ориентацию гироскопа относительно ЛА. Рис. 5.11
соответствует рис 5.10, но на нем не показан гироскоп.
Найдем моменты, действующие на рамку гироскопа. При движении ЛА с
угловой скоростью со, проекции которой на его оси обозначены на
рис. 5.11 соответственно со„, иу и со_, вокруг оси рамки возникает
гироскопический момент М = //со , где со - проекция угловой скорости со
на ось у гироскопа. В соответствии с рис. 5.11 со = cOyCOS0 + co~sin0.
Тогда
М* = Я(со„ cos/3 + coT sin/3). (5.36)
г / Z
Под действием гироскопического момента ЛГ рамка гироскопа начнет
г
ускоренно поворачиваться с угловым ускорением /3 и угловой скоростью
/3. При этом, если еще предположить, что ЛА вращается вокруг оси X с
ускорением со„, вокруг оси рамки возникает инерционный момент
(5.37)
М* = - Jlfi + со„),
и X л
где
момент инерции рамки и всех вращающихся с ней деталей,
приведенный к оси X.
Движение рамки с угловой скоростью /3 обусловливает появление
демпфирующего момента сил вязкого трения в демпфере. Полагая
Рис.5.10
Рис.5. 11
192
зависимость сил вязкого трения и скорости /3 линейной, можно записать
МХ = -kj}, (5.38)
д д
где k — коэффициент демпфирования,
д
Отклонение рамки на угол /3 приводит к деформации пружины и
вызывает появление противодействующего момента
'м* = - k /3, (5.39)
п п
где k — коэффициент жесткости пружины,
п
Поскольку к оси рамки практически всегда приложены вредные моменты
сил сухого трения, неуравновешенности, упругих токоподводов и др.,
при суммировании моментов в общем случае необходимо учитывать и их. В
данном случае ограничимся лишь моментами сил трения и
неуравновешенности на рисунке не показан):
М* = -М* sign/З ± М* . (5.40)
ВТ Нб
где М и Ai — соответственно моменты сил трения и неуравновешенное -
т нб
ти, приведенные к оси X.
Приравнивая сумму найденных моментов (5.36) - (5.40) к нулю,
получим уравнение движения рамки ДУС: //(ay cos/3 + cj- sinj3) - /(/3 + со J -
-kQ-kfl-м sin/3 ± ЛГ = 0. Перепишем это уравнение в более
д п т нб
удобном виде
]Ь * k /3 + k /3 = Hcjy cos/3 + Hcjz sin/3 -
- / cjv - M* sin/3 ± M* (5.41)
X X т нб
и формально разрешим его относительно переменной /3:
Н 1
/3 = т— cj-, cos/3 + т— (Hcj- sin/3 - / cov -
k Y к L X л
п п
- J J- k /3 - M* sin/3 ± M* ). (5.42)
x д т нб
Полученное равенство позволяет дать предварительную качественную
оценку ДУС как измерителя угловой скорости. Действительно, из
1 - 369 193
Рис.5.12
сравнения выражений (5.42) и (5.35) следует, что выходной сигнал
реального ДУС помимо полезного сигнала содержит гамму помех,
обусловленную моментами различной физической природы. (Все они для
наглядности заключены в скобки.) Первое слагаемое в скобках
представляет собой гироскопический момент от поперечной угловой
скорости о>7 основания (ЛА). Второе слагаемое - инерционный момент от
переносного углового ускорения о>„. Третье и четвертое слагаемые -
соответственно инерционный момент от относительного ускорения 0 и
демпфирующий момент. Они характеризуют собственное движение рамки
гироскопа. Перечисленные моменты являются причиной методических
погрешностей в измерении угловой скорости. Природа двух последних
моментов ясна. Они инструментального происхождения.
Инструментальные погрешности. Положив в равенстве (5.42) со_ = а>„ =
= /3 = 0 = 0 и cos/} ~ 1, получим
& = f- "y " it- {Mrsin^ ± Кв)т (5,43)
П П
Из этого выражения можно увидеть, что в установившемся режиме в
границах принятых допущей гироскопический момент уравновешивается
моментом от пружины и остаточными вредными моментами в оси подвеса
рамки. Равенство (5.43) является аналитической формой записи реальной
статической характеристики ДУС. Вначале выясним влияние на
статическую характеристику момента сил сухого трения, положив в
(5.41) М* = 0. Тогда
нб
194
/3 = -jf- coy ± -p Af. (5.44)
Предположим теперь, что угол /3 = 0, т.е. рамка гироскопа находится
в исходном "нулевом" положении. Тогда из равенства (5.44) можно
получить Ни.. = ± М*. Физически это означает, что пока гироскопический
I Т
момент равен или меньше момента сил трения, движения рамки произойти
не* может, и угол /3 будет оставаться равным нулю. Таким образом,
момент сил трения определяет порог чувствительности ДУС, т.е.
минимальное значение измеряемой угловой скорости со . , при котором
nun
рамка гироскопа начинает движение: |//со| > \м |, откуда найдем
предельные значения:
со . = ± rflH. (5.45)
min т
На рис. 5.12,а изображена "реальная" статическая характеристика
ДУС. Кавычки указывают, что при получении и этой характеристики так
же допущена определенная идеализация. (Например, момент сил трения
принят постоянным по модулю.) На рис. 5.12,а, б видим, что при
увеличении угловой скорости от нуля до значений ± со . угол /3
mm
остается равным нулю. И только после этого порога рамка начинает
отклоняться.
Теперь предположим, что угловая скорость со,, = 0. Тогда из
равенства (5.44) получим k /3 = ± ЛГ, т.е. момент сил трения
п т
уравновешивается моментом пружины. Отсюда предельные значения
в = ± M*/k . (5.46)
3 т п
Физически это означает, что даже при отсутствии измеряемой угловой
скорости рамка гироскопа может оставаться отклоненной на любой угол в
пределах ± /3 , так как момент пружины k в = ЛГ не в состоянии вер-
з п 3 т
нуть гироскоп в нулевое положение. Угол /3 обычно называют углом за-
стоя. Он является причиной "нулевого" сигнала. Таким образом,
реальная, в принятом смысле, статическая характеристика ДУС представляет
собой параллелограмм. На рис. 5.12,а показано, что его предельные
границу определяются при плавном увеличении скорости от нуля до
+а> и затем при плавном ее уменьшении через нуль до -со и обратно
195
до нуля. Такой вид статической характеристики говорит о
неоднозначности зависимости между выходным и входным сигналами.
Действительно, из формулы (5.44) и рис. 5.12 видно, что любому
конкретному значению измеряемой угловой скорости (например со ) может
соответствовать любое значение угла поворота рамки гироскопа в
пределах /3 = /3 ± /3 . И наоборот, углу отклонения /3 может соответствовать
любое значение угловой скорости со = со ± со . . Отрезок на статической
характеристике, ограниченный точками ± со . , называют зоной
нечувствительности, а отрезок, ограниченный точками ± /3 , - зоной застоя.
Зоны нечувствительности и застоя являются важными точностными
характеристиками ДУС. Для их снижения, как это следует из формулы (5.44),
необходимо уменьшать момент сил трения в оси подвеса х гироскопа и
увеличивать кинетический момент Н и коэффициент жесткости пружины k ,
п
сохраняя заданную чувствительность.
Для выяснения влияния момента неуравновешенности на статическую
точность ДУС положим в формуле (5.43) Лг = 0. Тогда
' " ЗГ "Y * Ь ^
нб
(5.47)
По структуре записи статическая характеристика (5.47) аналогична
записи статической характеристики с учетом момента сил трения (5.44).
Однако влияние момента неуравновешенности на выходной сигнал ДУС
существенно различно. Дело в том, что при составлении уравнения
движения для ДУС мы ограничились формальной
записью момента неуравновешенности как
некоторой постоянной по модулю величины,
не зависящей от движения рамки гироскопа.
Фактически же момент неуравновешенности
зависит от координат положения центра
масс гироузла относительно неподвижной
точки, его ориентации относительно ЛА и
плоскости горизонта.
На рис. 5.13 показана схема действия
на гироскоп сил и моментов от
неуравновешенности. Сила тяжести Р = mg разложена
на две составляющие Р = mg sin/3 и Р =
■
y\j^-
Ыру0к
.*
'(Оу \
\с\ ^\
упд=Р\
-<£\У"п
Рис.5.13
mg cos/3. Суммируя в установившемся ре-
196
жиме моменты гироскопический ЛГ = - Hcjv cos/3, пружины М = k /3,
Г / П П
составляющих силы тяжести М = - тп$ sin/З и Мр = m$ cos/З, дейст-
PZ У У Z
вуюших вокруг оси х, получим WcjyCos/3 + k /3 - mgl sin/3 + /ng< x cos/3 =
= 0. Полагая угол /3 малым, и следовательно, sin/3 - /3, cos/3 ~ 1,
получим
•/3 = (//о;у - m#z)/(kn - mgly). (5.48)
Как видим, момент неуравновешенности гироскопа приводит к
дополнительной деформации статической характеристики. Смещение центра масс
гироскопа вдоль главной оси z перемещает характеристику вверх или
вниз (см. рис. 5.12,6) в зависимости от знака / на величину ± /3 .
Z нб
Смещение центра масс вдоль оси у приводит к изменению
чувствительности ДУС. При / > 0 чувствительность увеличивается, а при / < 0 -
уменьшается. Полученные результаты указывают на необходимость
тщательного уравновешивания подвижной системы прибора. Отметим, что на
неуравновешенный гироскоп будут оказывать влияние и инерционные силы
от линейных и центростремительных ускорений.
К инструментальным погрешностям приводит и нестабильность
конструктивных параметров прибора - это прежде всего кинетического момента Н
и коэффициента жесткости пружины, определяющих чувствительность ДУС.
О мерах, обеспечивающих стабильность //, говорилось выше. Стабильность
коэффициента жесткости, если пружина механическая, обеспечивается
подбором материалов и комфортностью условий работы. В настоящее время
наибольшее распространение получили ДУС с электрической пружиной.
Методические погрешности ДУС. Они могут составлять значительную
долю от общего уровня его погрешностей и зависят не только от
конструктивных параметров самого прибора, но и от параметров движения
основания. Именно поэтому даже ДУС, имеющий практически идеальную
статическую характеристику, не может быть успешно применен без
предварительного анализа и оценки возможных методических погрешностей.
В общем выражении для выходного сигнала (5.42) методические
погрешности обусловлены первыми четырьмя членами (моментами),
заключенными в скобки. Для того чтобы пояснить проявление каждого из них, в
равенстве (5.42) будем последовательно оставлять кроме полезного
момента лишь интересующий нас, полагая его постоянным.
Погрешность от угловой скорости со-, направленной по перекрестной
оси, обусловлена действием на гироскоп дополнительного
гироскопического момента от этой угловой скорости:
197
и и
/3 = г— ь>у cos/3 + т— cjz sinj3. (5.49)
П П
Формула (5.49) получена из (5.42) с учетом оговоренных условий. Но
она может быть получена по данным из рис. 5.14, где М - HtOy cos/3 и
М = //со sin/З. При рассмотрении рис. 5.14 легко выясняется и
Г2
физический смысл данной погрешности.
Если в формуле (5.49) принять sinj3 ~ /3 и cos/З - 1, то получим
'= гтшг «v (5-50)
п Z
Поделив числитель и знаменатель правой части равенства (5.50) на k ,
п
получим
> - ггк^- "у - **г <5-51)
где S = H/k — статическая чувствительность; S = S/(l + S CJ-) —
0 п 0 0 L,
чувствительность с учетом перекрестной угловой скорости U)-.
Таким образом, влияние перекрестной угловой скорости проявляется
через изменение чувствительности (крутизны выходного сигнала). (При
принятом направлении вектора кинетического момента Н знак "-" в
знаменателе соответствует со7 > 0, знак "+" - & < 0). В частности в
предельном случае при некотором отрицательном значении со7 знаменатель
формул (5.50), (5.51) обращается в нуль, и прибор вообще теряет
устойчивость. Поэтому при выборе ДУС необходимо учитывать соотношение
измеряемой и перекрестной угловой скорости. Обычно параметры Н и k
выбирают так, чтобы изменение статической чувствительности 5 = H/k
при максимальном значении и>7 не превышало 1%. Практически это
реализуется уменьшением до допустимого значения максимального угла
отклонения гироскопа /3 путем увеличения жесткости пружины k . Для грубых
п
о о
ДУС угол /3 обычно не превышает 5 , для высокоточных /3 < 1 . Од-
max max
нако следует иметь в виду, что при уменьшении угла /3 повышаются
требования к разрешающей способности (порогу чувствительности)
датчика угла.
198
Рис.5. 14
Рис.5. 15
Ранее мы предполагали, что поперечная угловая скорость cj- постоян
на. В реальных условиях она, как правило, периодически изменяется.
Анализ показывает, что даже при гармоническом представлении этих
колебаний в выходном сигнале будет постоянная составляющая погрешности
[9]. Уменьшение угла /3 приводит так же и к ее снижению. В тех
случаях, когда абсолютное значение поперечной угловой скорости
существенно превышает измеряемую угловую скорость, а точность измерения
должна быть высокой, могут применяться специальные схемы ДУС,
например двухгироскопные.
На рис. 5.15 представлена принципиальная схема такого ДУС. Два
идентичных гироскопа 1 и 2 с равными, по противоположно
направленными кинетическими моментами Н и Н , кинематически связаны между
собой, например зубчатыми секторами 3 с передаточным числом i = - 1.
Пружина 4, демпфер 5 и датчик угла ДУ могут быть соединены должным
образом с любым из гироскопов. При вращении основания с угловыми
скоростями о>у и cj7 к гироскопу / будут приложены гироскопические моменты
Н cjy cos/3 + Н и- sin/З, а ко второму гироскопу - Н <*>у cos/3 + H gj- x
х sin/З. Приводя все моменты к оси первого гироскопа х и суммируя их,
получим
Н ь>у cos/3 + Н cjz sin/3 + (- Н cjy cos/3 + Н cj- sin/3)/ - * /3 = О,
199
или
(// ♦ Н )cov cos/3 ♦ (// - H)cjt sin/3 = k /3.
12/ 1 2 Z n
Так как |Я | = \H2\ = |//|, то
0 = jp- coy cos/3. (5.52)
П
Таким образом, видим, что выходной сигнал двухгироскопного ДУС не
зависит от перекрестной угловой скорости со7, а его чувствительность
вдвое выше. Физический смысл компенсации влияния поперечной угловой
скорости обусловлен тем, что кинематическая связь гироскопов
допускает их вращение вокруг осей х и х лишь в противоположные стороны.
Гироскопические же моменты Нх<*>7 sin/З и Н' ь>- sin/З имеют одинаковые
направления и, складываясь, уравновешиваются в секторах. К
недостаткам этой схемы следует отнести усложнение конструкции, увеличение
габаритных размеров, массы, потребляемой мощности, моментов сил
сухого трения в зубчатой паре, а также ухудшение динамических свойств
вследствие увеличения приведенного момента инерции U = J * J =
Х\ Х2
= 2/ ) относительно оси х.
X
Инерционный момент J cjy от переносного углового ускорения проявля-
X Л.
ет себя следующим образом. При ускоренном повороте ЛА вокруг оси,
совпадающей с выходной осью ДУС, он через пружину начнет увлекать за
собой гироузел. Однако вследствие инерционности гироузел будет
отставать от основания. В случае поворота с постоянным ускорением cj„ после
успокоения переходного процесса установится равновесие момента от
пружины и инерционного момента, т.е. k /3 = - / cj^. Из этого равенства
;
X
и найдем величину погрешности /3 = - т— cj„. Очевидно, что в общем
случае угловое ускорение со„ может изменяться произвольно. Тогда при
оценке его влияния на выходной сигнал необходимо учитывать частотные
характеристики ДУС. Особенно существенным это влияние может оказаться
при высокой частоте колебаний ЛА относительно выходной оси ДУС, так
как угловое ускорение прямо пропорционально квадрату частоты. Фор-
200
мально зависимость выходного сигнала от инерционного момента J cjy мо-
X А
жет быть получена из равенства (5.40) при равенстве нулю прочих
помех:
13 = *" "V " Г" 'х"*- (5-53)
п п
Отсюда следует, что для уменьшения погрешности целесообразно
увеличивать коэффициент жесткости пружины и уменьшать момент инерции гироуз-
ла относительно выходной оси. В случае применения двухгироскопного
ДУС эта погрешность практически исключается при соблюдении равенства
моментов инерции гироскопов / и / . Объясняется это тем, что инер-
.*■ *2
ционные моменты / cjy и / cjf будут иметь одинаковое направление (см.
X, А Хл А
1 # 2
рис. 5.15, например при а>„ > 0, / ы„<0и/ cjv < 0) и уравновеши-
А X. А ДС\ А
1 2
вают друг друга в секторах.
Динамические погрешности ДУС. Как и любой динамической системы они
обусловлены инерционностью его подвижной системы и наличием
демпфирования. Именно поэтому выходной сигнал /3(/) не может мгновенно
следовать за изменяющейся во времени измеряемой угловой скоростью
cj(/). Разность выходного сигнала и измеряемой величины в каждый
момент времени при условии равенства нулю всех помех и составляет
динамическую погрешность. В общем случае измеряемая угловая скорость
cj(0 может изменяться по произвольному закону. Поскольку выходной
сигнал /3(/) является функцией измеряемой угловой скорости cj(/), то
очевидно, что динамические погрешности зависят не только от
конструктивных параметров ДУС, но и от закона ее изменения. Поэтому
при проектировании и разработке ДУС возникает задача рационального
выбора его параметров, обеспечивающих минимизацию динамических
погрешностей в возможно более широком диапазоне спектра законов
изменения угловой скорости.
Практически эта задача решается в результате анализа реакции
выходного сигнала /3(/) на ступенчатое и гармоническое входное
воздействие. При ступенчатом изменении измеряемой угловой скорости cj
подбором конструктивных параметров прибора добиваются желаемого
качества переходного процесса; при гармоническом изменении -
минимального несовпадения в каждый момент времени входного и
выходного сигналов по амплитуде и фазе. И в первом, и во втором
случаях для анализа в качестве исходного принимается дифференциальное
уравнение (5.41) в предположении полного отсутствия помех и cos/З = 1:
201
J J '♦ k& + k& = Huv. (5.54)
Л Д П J
Это уравнение обычно приводят к виду
0 + 25/3 + Mq/3 * j- су (5.55)
х
где Д = Vk /J — круговая частота собственных незатухающих
О п X
(недемпфированных) колебаний подвижной системы; 5 = k /(2J ) —
д х
коэффициент затухания собственных колебаний.
Рассмотрим реакцию ДУС на ступенчатое изменение измеряемой угловой
скорости ау. Аналитическое выражение ступенчатой функции может быть
записано так:
Ш) =
со., = 0 при t < 0;
со., = const при / > 0.
Решение уравнения (5.55) в этом случае представляется в виде суммы
общего решения однородного уравнения (без правой части) и частного
решения неоднородного уравнения:
/3 = А~ U smint ♦ А) ♦ -У-у оу (5.56)
X 0
/2 2
где j! = Уа — 6 - частота собственных затухающих (демпфированных)
колебаний: Л и А — постоянные интегрирования.
Решение (5.56) описывает собственные затухающие колебания рамки
гироскопа относительно положения равновесия, определяемого частным
решением или статическим отклонением
'ст= ТТ "у= if- "г (557)
Vo
С течением времени свободные колебания затухают, и рамка остано-
2 2
вится, повернувшись на угол /3 . При 5 > и собственное движение
ст 0
рамки будет апериодическим, что на практике является нежелательным,
так как оно характеризуется худшими динамическими характеристиками.
На рис. 5.16 даны графики переходных процессов ДУС, отличающихся
2
только коэффициентами затухания 5. Кривая / соответствует 5 > д .
202
Кривые 2 и 3 соответствуют б < б < б . А
Разность ординат /}(/) - /3 = А/3 в каждый ^1
момент времени и составляет абсолютную
погрешность измерения угловой скорости в
переходном процессе. На практике требования
к качеству переходного процесса обычно
задаются величиной декремента затухания D
или временем успокоения колебаний t
Рис.5. 16
(временем переходного процесса). Декремент
затухания определяется как отношение двух последовательных амплитуд,
т.е. амплитуд, отстоящих друг от друга на полупериод Г/2 = л/д.
Следовательно,
D
№
Ш ♦ Г/2)
б7г//1
= е = е
*b/vJ~-
(5.58)
Таким образом, декремент затухания характеризует изменение смеж-
тгб/кд2 - б2
ных амплитуд в е раз, а величина 5 характеризует скорость
затухания колебаний. Общее решение уравнения (5.55) при нулевых
начальных условиях (/3 = /3 = 0) после нахождения постоянных
интегрирования можно записать в виде
п
J б2 - 5/
- VI + —- е
sin(ju/ + 0)
М
(5.59)
где в = arcctg —
Отсюда, как и из выражения (5.56) следует, что угол /3 = /3 при
ст
/ -> оо. Однако если задана величина абсолютной погрешности /3 , то за
время переходного процесса можно принять t , при котором огибающая
п.%
колебаний будет отличаться от /3 на величину /3 , т.е.
-б/
0
,/с2, 2 п.п
= И + б /м е
Откуда после логарифмирования получим
203
t si,hl<^y',, (5.60)
п.п б f
Таким образом, вариацией параметров прибора можно обеспечить
желаемое качество переходного процесса.
При изменении входной угловой скорости по гармоническому закону
cov = со sin/x /, где со ид соответственно ее амплитуда и частота,
/ /Л и /Л и
дифференциальное уравнение (5.55) принимает вид
fi + 25/3 + М^ = у- со sinn U (5.61)
0 У /Л и
X
а его общим решением, как и ранее, будет сумма общего решения
однородного уравнения и частного решения
- St
Р = Ае sm(id * А) + & sinGx / + ^), (5.62)
/Л и
где
Ни
в = т-5- ' (5.63)
/Л У
^д^ - Д2)2 ♦ (2бд )2
0 и и
амплитуда вынужденных колебаний;
25М
Ч> = arctg - 2 " 2 (5.64)
0 и
— отставание по фазе колебаний рамки ДУС от колебаний ЛА.
Первое слагаемое решения (5.62) описывает свободные колебания
рамки гироскопа аналогично тому, как это было при ступенчатом
изменении угловой скорости. Второе слагаемое описывает вынужденные
колебания. Здесь важно отметить, что вынужденные колебания рамки
происходят с частотой д изменения угловой скорости со , а их
амплитуда (I и фаза у зависят не только от параметров прибора, но и
от частоты ii . На практике свободные колебания сравнительно быстро
затухают, и выходной сигнал ДУС будет содержать лишь составляющую,
определяемую вынужденными колебаниями. Если в выражениях (5.63) и
(5.64) для амплитуды и фазы вынужденных колебаний формально положить
М = 0, получим
204
м
ficm
1
0
0
Ж
г
-тт
d=0,70T\
V d=0
\Ч 0,2
о Ци/Ио
0,5у\\
d=0,70T^
d=0
^0,1
н \\
Рис.5. 17
а - Н - Н
т r 2 т k m
JC О
Рис.5.18
(5.65)
что соответствует статическому отклонению рамки гироскопа при со =
= const. Наиболее наглядно зависимости амплитуды и фазы вынужденных
колебании от частоты могут быть представлены графиками безразмерных
функций:
Vcr = X = WV d) И * = WV dK <5'«>
где X - коэффициент динамической восприимчивости; d = б/д -
относительный коэффициент затухания.
Тогда из зависимостей (5.66) с учетом данных (5.63) - (5.65)
получим
U
т
1
1^1 ~ (М /MJ2]2 ♦ 4Лд /и )2
и 0 и О
(5.67)
V> = arctg (
2d(u /д )
и О
1 - <д /дп)5
н О
(5.68)
205
В теории автоматического регулирования формулы (5.67) и (5.68)
называют соответственно относительными амплитудно- частотной и фазо-
частотной характеристиками. Коэффициент X можно также трактовать как
коэффициент изменения статической чувствительности. Действительно, из
формул (5.67) с учетом равенства (5.65) имеем
/3 =Х/3 =XtJ-co. (5.69)
/л ст к т
п
т.е. выходной сигнал при гармоническом изменении входного отличается
от статического в X раз.
На рис. 5.17 изображены семейства амплитудно-частотных и
фазо-частотных кривых для различных значений коэффициента d. *Из
графиков следует, что амплитудные и фазовые искажения выходного
сигнала незначительны на начальном участке кривых, где отношение
частот д /и близко к нулю, т.е. и > д . Точка д /и = 1 оси абсцисс
и О J Он и О
(см. рис. 5.17,а) соответствует резонансному пику. С увеличением
относительного коэффициента затухания d резонансный бросок
сглаживается, но увеличивается сдвиг по фазе (см. рис. 5.17,6). Из
формулы (5.68) и рис. 5.17,6 видно, что сдвиг по фазе равен нулю лишь
при d = 0. Поэтому для каждого конкретного случая возникает задача
поиска компромиссного решения, т.е. выбора такого соотношения
параметров прибора, при котором погрешности по амплитуде и фазе
находились бы в допустимых пределах.
На практике значение относительного коэффициента затухания обычно
выбирают в пределах d = 0,4 ... 0,8. С точки зрения минимума
амплитудных искажений относительный коэффициент затухания d
рекомендуется выбирать близким к 0,7. В этом случае одновременно
обеспечивается и минимальное время переходного процесса при
ступенчатом изменении угловой скорости. При d = 0,8 обеспечивается
линейность начального (дорезонансного) участка фазо-частотной
характеристики, что способствует минимальному искажению формы
выходного сигнала, когда закон изменения измеряемой угловой скорости
более сложный (представляет сумму гармоник) [9].
В некоторых случаях, когда предъявляются жесткие требования по
ограничению временного запаздывания, коэффициент d выбирают равным
0,4 ... 0,5, заведомо допуская увеличение амплитудных искажений. Дело
в том, что при d = 0,4 ... 0,5 несколько меньше отставание выходного
сигнала по фазе, а фазовое отставание, как известно, однозначно
связано с временным соотношением у = д/. Следовательно, уменьшение
отставания по фазе одновременно приводит к уменьшению временного
запаздывания / = ^?/д. Наиболее общей практической рекомендацией по
3
206
обеспечению минимального значения динамических погрешностей является
выполнение неравенства и > (8 - 10)/i и d - 0,7. Увеличение соб-
0 и
ственной частоты прибора д = Vk /J целесообразно, прежде всего,
насколько это возможно, за счет уменьшения момента инерции / и потом
уже за счет увеличения жесткости пружины k . При этом, как уже
отмечалось, следует помнить, что увеличение k ведет к уменьшению
чувствительности, а следовательно, к ужесточению требований к
разрешающей способности датчика угла.
Ограничение собственной частоты по верхнему пределу обусловлено
возможной реакцией ДУС на упругие колебания корпуса ЛА. В реальных
условиях собственная частота может отличаться в сторону снижения от
подсчитанной по формуле д = Vk /J вследствие нежесткости
0 п' X
конструкции прибора. Для обеспечения упругой связи в ДУС применяются
механические пружины различных конструкций (цилиндрические, плоские,
торсионы) или магнитоэлектрические датчики моментов (электрические
пружины).
ДУС с механическими пружинами обладают рядом недостатков, наиболее
существенными из которых являются нестабильность жесткости пружин,
дополнительное трение в местах заделки пружины, механический
гистерезис упругих элементов. Все это в итоге приводит к снижению точностных
характеристик. Демпфирование собственных колебаний в таких приборах
обычно обеспечивается применением пневматических демпферов. В
некоторых случаях требуемого демпфирования добиваются заполнением корпуса
прибора специальной жидкостью. Однако в обоих случаях для обеспечения
постоянства коэффициента демпфирования необходимо предусматривать
специальные меры (герметизация, термостатирование и др.).
В качестве датчиков угла в ДУС с механическими пружинами
применяются потенциомегрические и индукционные. Здесь важно отметить, что
поскольку ДУС с механической пружиной является измерителем
разомкнутого типа, то ему в большой степени присущи погрешности,
обусловленные нестабильностью параметров датчика угла. Например, колебания
напряжения, питающего потенциометр, приводят к аналогичным колебаниям
выходного сигнала. Применение потенциометрических датчиков угла
приводит к дополнительным моментам сил трения, обусловленным силами
трения между токосъемными щетками и базой потенциометра, а
следовательно, к увеличению порога чувствительности и угла застоя (нулевого
сигнала).
207
ДУС с электрической пружиной. Как правило, они обладают лучшими
точностными характеристиками. Поэтому в настоящее время они находят
более широкое применение. На рис. 5.18 изображена принципиальная
схема такого ДУС. На выходной оси х гироскопа 1 размещены датчики
угла 3 и момента 2, которые электрически связаны между собой (т.е.
ДУС охвачен обратной связью). Наличие в цепи обратной связи усилителя
4 обусловлено типом датчика угла (мощностью снимаемого сигнала). В
случае потенщюметрического датчика угла усилитель обычно не
применяется.
Таким образом, ДУС с электрической пружиной является измерительным
устройством замкнутого типа. Прибор работает следующим образом. При
вращении ЛА с угловой скоростью cjy возникает гироскопический момент
Hcjy (принимаем cos/З = 1), в результате чего рамка гироскопа
повернется на угол /3 в направлении совмещения вектора кинетического момента
Н с вектором угловой скорости ау по кратчайшему пути. Пропорционально
углу /3 с потенциометра на вход усилителя поступит напряжение, и через
обмотку датчика момента, а следовательно, и через сопротивление R
потечет ток L В результате взаимодействия тока / с полем постоянного
магнита датчика возникнет момент, противодействующий
гироскопическому. В установившемся режиме момент электрической пружины уравновесит
гироскопический момент, т.е. k I = Hcjy* откуда найдем
* = т— cjy, (5.70)
м
где k — коэффициент пропорциональности (крутизна характеристики
датчика момента).
Тогда выходное напряжение, снимаемое с сопротивления R ,
HR
U = iR = —S- ыу. (5.71)
ВЫХ И К I
м
Из равенства (5.71) следует, что выходное напряжение V
пропорционально измеряемой угловой скорости cjv и не зависит от параметров
датчиков угла и колебаний напряжения U (питающего напряжения), при-
п
ложенного к потенциометру. Физический смысл последнего результата
заключается в следующем (см. рис. 5.18). Предположим, что при
неизменном значении угловой скорости cov напряжение питания U упало. Тогда
I П
208
через обмотку датчика момента потечет меньший ток I < /. Момент
электрической пружины k i уменьшится, и разностный момент (Hojy -
- k i ) начнет поворачивать рамку гироскопа в направлении увеличения
угла /3. При этом снимаемое с потенциометра напряжение также начнет
увеличиваться, а следовательно, будет увеличиваться и ток,
протекающий через обмотку моментного датчика, до тех пор, пока он не примет
то же значение /, при котором обеспечивается равенство моментов k i =
Таким образом, при колебаниях напряжения на потенциометре (датчике
угла) в схеме ДУС автоматически изменяется угол отклонения рамки /3,
поддерживая неизменным значение тока i и равенство моментов k i =
= Wcjv, а следовательно, и выходное напряжение U = iR . Независи-
/ вых н
мость выходного сигнала от колебаний напряжения источника питания
является важным достоинством ДУС с электрической пружиной.
Демпфирование собственных колебаний в ДУС с электрической пружиной может быть
обеспечено с помощью того же датчика момента путем введения
корректирующих звеньев с опережением по фазе в цепи сигнала, снимаемого с
датчика угла. Обеспечивая малые остаточные моменты в осях подвеса
рамки гироскопа, применяя бесконтактные датчики угла с высокой
разрешающей способностью, электронные усилители в цепи обратной связи с
большим коэффициентом усиления и корректирующие звенья, можно
получить ДУС с весьма малыми статическими и динамическими погрешностями.
Существуют датчики угловых скоростей, способные измерять угловые ско-
—4 —5—1
рости порядка 10 ... 10 с [9].
5.3.2. Интегрирующие гироскопы
с двумя степенями свободы
Кинематическая схема интегрирующего гироскопа (ИГ) с двумя
степенями свободы аналогична схеме ДУС. Отличие заключается в характере
связи на гироскоп. Если в ДУС это позиционная связь (пружина), то в
ИГ - диссипативная (демпфер). Позиционная связь в ИГ практически
отсутствует. На рис. 5.19 изображен гироскоп с двумя степенями свободы
1, движение рамки 2 которого вокруг оси х ограничено демпферами 3.
Использование двух демпферов вместо одного улучшает симметричность
характеристики демпфирующего момента при изменении направления враще-
8- 369
209
ния подвижной части прибора. Хотя практически значительно чаще
демпфирование обеспечивается трением о жидкость, которой заполняют корпус
прибора или за счет электромагнитных сил.
Принцип работы ИГ заключается в следующем. При вращении основания
с угловой скоростью cjw возникает гироскопический момент, который
принуждает гироскоп ускоренно поворачиваться вокруг оси рамки х в
направлении совмещения по кратчайшему пути вектора кинетического
момента Н с вектором переносной скорости соу. Вращению гироскопа
препятствует момент сил вязкого трения демпфера. В установившемся
режиме (при cjy = const) гироскопический момент и момент демпфера
уравновешиваются, т.е. k /3 = //cjv cos/3, откуда при cos/3 = 1
д У
^= F~ "r (5J2)
д
Угол поворота гироскопа определится как интеграл от /3 в пределах
времени измерения:
Н
*=k
д J
oytf. (5.73)
С датчика угла ДУ можно снять напряжение, пропорциональное углу /3, а
н *
угол /3 поворота ИГ пропорционален интегралу от cjw, т.е. т— / ojydt,
д О
что соответствует приращению угла поворота основания вокруг оси Y.
Соотношение (5.72) объясняет происхождение названия прибора. Датчик
момента ДМ используется для начальной выставки подвижной системы на
ноль и для приложения управляющих моментов в случае применения ИГ в
сочетании со следящей системой (в индикаторных ГС). Так же как и в
ДУС угол /3 в ИГ ограничивают величинами не более единиц градусов с
целью уменьшения влияния составляющей перекрестной угловой скорости
со- sin/3.
Уравнение движения ИГ может быть получено из уравнения (5.41)
движения ДУС, если отбросить слагаемое, обусловленное позиционной
связью, - момент пружины:
210
JS
+ k 0 = //gv cos/3 +
д /
+ Ho)- sin/3 — / Cjjy +
♦ M* signj3 ± M* . (5.74) J.
т нб
откуда
/3 = j- coy cos0 ♦ Г
a a
x (//u_ sin0 — / u„ -
M* sin/3
Af4
нб
V
(5.75)
Рис.5. 19
Из уравнения (5.73) при общепринятых допущениях можно получить
амплитудно-частотную и фазо-частотные характеристики ИГ (рис. 5.20, а и
б). Погрешности ИГ можно рассчитать на основе сопоставления уравнения
движения реального прибора (5.74) с уравнением движения идеального
прибора (5.72), как это сделано при анализе ДУС. Главное отличие
будет состоять в том, что погрешности ИГ интегрируются, т.е. нарастают
во времени. В результате этого знакопеременные возмущения подвижной
системы ИГ на выходе прибора осредняются (сглаживаются), а
знакопостоянные дают накапливающуюся погрешность.
Интегрирующие гироскопы, как правило, применяются в качестве
чувствительных элементов гиростабилизаторов, где они работают в
замкнутом контуре системы стабилизации. В этом случае обеспечивается
малый рабочий диапазон углов (I. Как самостоятельные измерители углов
подвижных объектов ИГ применяются крайне редко.
Для снижения возмущающих моментов и, прежде всего, момента сил
трения ИГ выполняют с поплавковым подвесом чувствительного элемента.
Сущность поплавкового (гидростатического) подвеса, принцип его работы
можно пояснить по схеме, изображенной на рис. 5.21. Гиромотор 1
заключен в цилиндрический кожух (поплавок) 2, который с помощью опор
3 подвешен в корпус 5. На корпусе и осях поплавка установлены статоры
б и роторы 4 датчиков угла и момента. Внутренняя полость корпуса
прибора заполнена жидкостью с большой плотностью (в 2 ... 2,5 раза
больше плотности воды) и большим коэффициентом динамической вязкости
(1 ... 5 Па-с) [9].
В соответствии с законом Архимеда на поплавок действует
выталкивающая сила, которая при соответствующем подборе объема и формы поплав-
211
A(uh
W
Рис.5.20
Рис.5.21
ка и плотности жидкости практически компенсирует силу тяжести
подвижной части (поплавка) прибора. В результате подшипники (опоры)
чувствительного элемента оказываются разгруженными от действия силы
тяжести, а следовательно, и моментов сил трения. Кроме гидростатической
разгрузки опор жидкость предохраняет их от ударной нагрузки,
вибраций, а также обеспечивает демпфирование колебаний поплавка за счет
сил трения в зазоре между жидкостью и внешней поверхностью поплавка и
внутренней поверхностью корпуса. Вязкость жидкости и величина зазора
между этими поверхностями выбираются такими, чтобы при всех
практически возможных в процессе работы прибора скоростях вращения поплавка
относительно корпуса прибора течение жидкости было ламинарным, а
демпфирующий момент был бы строго пропорционален скорости вращения
поплавка. Для поддержания плотности и вязкости жидкости постоянными в
приборе может быть предусмотрено термостатирование, обеспечиваемое
самостоятельной системой стабилизации температуры (обмотка обогрева
7), или прибор помещается в термостатированный отсек. Двухстепенные
поплавковые интегрирующие гироскопы обладают очень высокими
точностными и эксплуатационными характеристиками. Их изготовление трудоемко
и требует очень высокой культуры производства.
При помощи гироскопа с двумя степенями свободы можно одновременно
получать сигнал измерительной информации, пропорциональный
производной и интегралу от угловой скорости (как смешанные, так и
раздельные). В частности, этого можно достичь последовательным соединением с
корпусом прибора пружины и демпфера. Такие гироскопы иногда называк/г
интегродифференцируюищми или форсирующими.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Поясните причины ограниченного применения датчиков угловых
скоростей и ускорений, выполненных на основе гироскопа с тремя степенями
свободы.
212
2. Чем объясняется необходимость межрамочной коррекции в ГИЛУ, н
сколь точно она должна обеспечивать угол /3 близким к нулю?
3. Как сказывается на точности работы ГЛУ смещение центра масс гн-
ромотора относительно оси его подвеса?
4. Поясните на примере преимущества ГИЛУ со спаренными
гироскопами.
5. С какой целью проводится предстартовая тарировка масштабного
коэффициента ГИЛУ?
6. Поясните принцип работы ДУС с двумя степенями свободы.
7. Проанализируйте инструментальные погрешности ДУС по его
статической характеристике, полученной экспериментально.
8. Зависят ли погрешности ДУС от ориентации его выходной оси
относительно Л А при сохранении ориентации входной (измерительной) оси?
9. Укажите пути снижения динамических погрешностей ДУС.
10. Дайте сравнительную характеристику ДУС с механической и
электрической пружинами.
11. Поясните принцип работы интегрирующего гироскопа и
охарактеризуйте основные его погрешности.
Глава 6. НЕТРАДИЦИОННЫЕ ТИПЫ ГИРОСКОПОВ
6.1. ОБЩИЕ СВЕДЕНИЯ
Со времен Леона Фуко в течение десятков лет введенный им термин
гироскоп означал устройство, состоящее из симметричного тяжелого бы-
стровращающегося ротора, подвешенного без трения таким образом, чтобы
центр его масс совпадал с центром подвеса. Однако в буквальном
переводе слово "гироскоп" означает "указатель вращения". Поэтому в
последние десятилетия все чаще под гироскопом начинают понимать и другие
устройства, основанные на иных принципах действия, но предназначенные
для обнаружения (и измерения) вращения в инерцдальном пространстве.
Это обусловлено, прежде всего, непрерывным поиском путей
совершенствования гироскопических измерительных устройств и привлечения
принципиально новых средств и методов для решения тех же задач, которые
решаются с помощью традиционных гироскопов.
Науке известно более 100 различных физических явлений и принципов,
которые могут быть использованы для обнаружения и измерения вращения,
т.е. для целей гироскопии [9]. Некоторые из этих явлений, в основе
которых лежит использование быстровращающегося симметричного ротора,
открывают новые пути уменьшения вредных сил и моментов,
воздействующих на ротор и приводящих к его уводу. Другие же явления,
213
имеющие принципиально новую физическую природу, позволяют
использовать в качестве носителя кинетического момента движущиеся ионы,
атомы и элементарные частицы или даже электромагнитные поля. Оценить
перспективность применения различных физических явлений для целей
гироскопии даже на ближайшие десятилетия - задача непростая. Развитие
отдельных направлений науки и техники взаимосвязано, нередко носит
скачкообразный, а иногда и лавинообразный характер. Поэтому открытие
новых эффектов, явлений, совершенствование материалов и технологии
могут привести к неожиданным результатам. Например, в конце 50-х
годов в некоторых литературных источниках указывалось на
неперспективность роторных вибрационных гироскопов из-за их нетехнологичности.
В настоящее время они весьма успешно применяются и даже считаются
перспективными.
Во многих научно-исследовательских центрах и лабораториях стран
мира интенсивно и небезуспешно ведутся работы по прецезионной
гироскопии. Только в США^ разработкой гироскопических элементов и
гиросистем в 70-е годы было занято около 50 фирм. В настоящей главе
на основании работ [9, 10, 12] кратко (в основном на уровне описания)
рассмотрены нетрадиционные типы гироскопов, которые считаются
перспективными (некоторые из них используются в различных системах,
другие находятся в стадии опытных разработок). К таким гироскопам
относятся вибрационные гироскопы роторного и камертонного типов,
гироскопы с газовым и электростатическим подвесами, гироскопы со
сверхпроводящим ротором (криогенные гироскопы) и лазерные гироскопы.
Более подробные сведения о нетрадиционных гироскопах можно найти в
специальной литературе.
6.2. ВИБРАЦИОННЫЕ ГИРОСКОПЫ
Вибрационным гироскопом (ВГ) называется измерительное устройство,
в котором возникающий гироскопический момент вызывает колебания
(отклонения) носителя кинетического момента относительно его опоры
(основания), причем эти колебания используются как полезный сигнал,
являющийся мерой угловой скорости переносного вращения основания, на
котором установлен ВГ.
Существующие ВГ подразделяют на роторные вибрационные гироскопы
(РВГ) и осцилляторные вибрационные гироскопы (ОВГ). В основу такой
классификации положен признак, определяемый характером основного
движения носителя кинетического момента (чувствительного элемента). В
РВГ таким основным движением является собственное вращение ротора
(чувствительного элемента), в ОВГ - колебательное движение
чувствительного элемента (массы).
214
6.2.1. Роторные вибрационные гироскопы
Роторные вибрационные гироскопы в настоящее время получили
достаточно широкое применение. Они могут отличаться приводом, способами
реализации и конструкцией подвеса ротора, его формой, съемом
полезного сигнала и т.д. Наиболее широко распространены два типа роторных
вибрационных гироскопов - с двумя и тремя степенями свободы.
Рассмотрим принцип работы и устройство РВГ с двумя степенями
свободы на примере простейшей кинематической схемы (рис. 6.1). Ротор
гироскопа 1 представляет собой симметричное кольцо, которое при помощи
упругих торсионов 2 соединено с валом 3. Привод ротора осуществляется
двигателем 4 через вал, с которым кинематически связан генератор
опорного напряжения (на рисунке не показан). Двигатель жестко
скреплен с основанием 5. Степень свободы ротора вокруг оси х (совпадающей
с осью торсионов) ограничена упругостью торсионов. В рабочем режиме
углы поворота (колебаний) ротора вокруг оси торсионов измеряются
датчиком угла 6.
На рис. 6.1 введены следующие системы координат: ж, у , z -
система координат, связанная с основанием (ось z направлена по оси
вала); х , у , z - система координат, связанная с валом и вращающаяся
вместе с ним (ось х совпадает с осью торсионов); xyz - система
координат, связанная с ротором и повернутая относительно вала вокруг оси
х на угол 0.
Рис.6. 1
215
В случае неподвижного основания ротор вращается с постоянной
угловой скоростью 12 вокруг своей полярной оси z, совпадающей с осью z
основания (вала двигателя). При этом элементы датчика угла 6 (статор
и ротор) находятся в согласованном положении, и его выходной сигнал
равен нулю. Если основание вращается в инерциальном пространстве с
некоторой переносной угловой скоростью, вектор которой со лежит в
плоскости х у, перпендикулярной к оси вала, возникает
гироскопический момент М = //со, где Н = / 12 - собственный кинетический момент ро-
т Z
тора, / - момент инерции ротора относительно его полярной оси z. Его
проекция ЛГ на ось торсионов поворачивает ротор вокруг этой оси на
угол 0 с угловой скоростью /3. (Составляющая гироскопического момента
Лг колебаний ротора практически не вызывает, так как жесткость
торсионов вокруг оси у значительно больше, чем вокруг оси х.) Поскольку
ротор вращается с собственной угловой скоростью 12 = const, проекция
х
М изменяется по гармоническому закону с частотой 12, и ротор
колеблется вокруг оси торсионов так же с частотой 12. Амплитуда колебаний
ротора зависит от измеряемой угловой скорости со, а фаза зависит от
соотношения со и со - проекций со на оси основания х , у . С датчика
угла поворота б полезный сигнал поступает на вход устройства 7, в
котором, используя сигнал опорного генератора, можно с помощью двух фа-
зочувствительных выпрямителей разделить сигнал, пропорциональный /3,
на две составляющие, одна из которых пропорциональна со , а вторая -
Х0
со . Таким образом, двухстепенной РВГ является двухкомпонентным изме-
У0
ригелем угловой скорости (двухкомпонентным ДУС).
Уравнения движения РВГ во вращающейся вместе с ротором системе
координат xyz можно получить суммированием проекций моментов на ось х
торсионов.
Введем следующие упрощающие допущения: экваториальные моменты
инерции ротора / =/ =/;12>со ,со ,со ;/Зс1; центр масс ро-
х у хо уо zo
тора и начала выбранных систем координат совпадают с неподвижной
точкой 0. Тогда линеаризованные уравнения РВГ запишутся в виде [12]
216 ■ .
j'p* k 0 + [k ■* (J - /)£22]0 = H(o> sinn/ - w cosM). (6.1)
a т г *o yo
2
Коэффициент позиционного момента k + (J - /)fi = с в уравнении
(6.1) представляет собой сумму двух составляющих, одна из которых
k - жесткость торсионов, вторая - (/ - J)Sl - динамическая
жесткость, обусловленная моментом центробежных сил инерции.
Перепишем уравнение (6.1) в виде
0 + Ш# ♦ М> = М» sinn/ - « оовПГ). (6.2)
О *0
где д* = С//. 2du = * //, Л = H/J.
О Од
Частное решение уравнения (6.2) при постоянных со и со можно
\ h
записать так
0 = — [со sin(£2/ - *) -
i/~2 ^2V2 2 2^2 *0
К(м0 -П ) ♦ 4(ГдоП
- со cosM - *p)]; (6.3)
где у = arctg — — . (6.4)
<м0 - п )
Из (6.3) следует, что выходной сигнал гироскопа во вращающейся
системе координат xyz зависит от со , со и представляет собой
Х0 У0
амплитудно-модулированные колебания на частоте собственного вращения
ротора. Из (6.4) также следует, что при выполнении условия д = ft,
т.е. в режиме резонанса, амплитуда колебаний имеет максимальное
значение:
J1 2
гсо +
0 = ЛА г> ГСО + СО
max 2au ft дг ул
Поскольку А = HIJ = / П/У, 2du J = * , то
2 0 д
/3 = -73 Усо+со =т— Усо + со . (6.5)
max 2/au Jt tL k X Un
^0 0 *0 д 0*0
Таким образом, как видно из выражения (6.5), при работе в
217
резонансном режиме коэффициент передачи прибора, связывающий ампли-
/2 2
туду входной величины Ко + о> с амплитудой выходной величины
Х0 У0
/3 , определяется только отношением 1 Ik . Следовательно, при малом
max Z д
трении (малом k ) коэффициент передачи может быть значительным, что
д
предопределяет высокую чувствительность прибора к измеряемой угловой
скорости. Отметим, что коэффициент передачи РВГ в резонансном режиме
не зависит от скорости 12 собственного вращения ротора, следовательно,
резонансный режим можно обеспечить при малых скоростях 12, что
способствует повышению срока службы и надежности прибора. Вместе с тем
выбор значения скорости 12 обусловлен выполнением резонансного режима
12 = д. Тогда с учетом значения и = с/J
р О О
(6.6)
12 = /-77-1
21-1
Z
Выражение (6.6) называют условием динамической настройки РВГ.
Поскольку 2/ = (У + /)>/, то это условие практически может быть
реализовано. Наличие в суммарной жесткости динамической составляющей
(/ - /)12 имеет большое практическое значение для динамически
настраиваемых в резонанс гироскопов. Дело в том, что из-за
зависимости динамической составляющей жесткости от собственной
скорости ротора 12 собственная частота д является также функцией 12.
Это приводит к тому, что резонансный пик амплитудной частотной
характеристики (при дЛ = 12 ) получается не очень узким при большой
О р
его резонансной ординате, соответствующей малому значению
относительного коэффициента затухания d. В результате коэффициент передачи
прибора и величина фазового сдвига становятся менее критичными к
изменениям д или 12 [9].
Эффект "растянутого" резонанса проявляется тем сильнее, чем больше
2
отношение динамической жесткости (/ - 7)12 к статической k .
z т
В наибольшей степени такой эффект проявляется при нулевом значении
статической жесткости, т.е. при k = 0. В этом случае теоретически
возможно такое необычное явление, как выполнение условия резонанса
при любой скорости вращения ротора гироскопа. Действительно, условие
218
резонанса (6.6) при k = 0 и 2/ = / выполняется при любой
скорости 12. Амплитудная частотная характеристика в этом случае прямая,
параллельная оси частот. Практическое выполнение условия 2/ = /
невозможно, однако вполне реальным является обеспечение условия
1,987 = / . Это достигается применением ротора в виде тонкого диска
[9. 12].
Основными достоинствами РВГ являются, во-первых, малый порог
чувствительности благодаря упругому подвесу ротора, свободному от
моментов сил трения, и, во-вторых, высокая чувствительность, обусловленная
резонансным режимом работы. К числу наиболее существенных
методических погрешностей РВГ относится погрешность, обусловленная угловой
вибрацией основания с частотой 212 вокруг осей х и у . Возникающий
при этом гироскопический момент вокруг оси торсионов оказывает на
ротор воздействие, аналогичное воздействию гироскопического момента от
медленно меняющейся измеряемой угловой скорости. Методические
погрешности РВГ появляются также и в том случае, когда вектор абсолютной
угловой скорости основания имеет проекции cj на ось вращения вала
приводного двигателя. Физический смысл этой погрешности заключается в
том, что в этом случае возникает дополнительный гироскопический
момент, приложенный к ротору вокруг оси торсионов. Из анализа следует,
что при выполнении условия k > 2(/ - / )cj эта погрешность мала
[9, 12].
Инструментальные погрешности РВГ возникают, главным образом, из-за
наличия у ротора статической неуравновешенности, определяемой
смещением центра масс ротора в системе координат xyz. Влияние динамической
неуравновешенности ротора на погрешность прибора мало. Съем полезного
сигнала в РВГ принципиально может быть осуществлен и в невращающейся,
связанной с корпусом системе координат. Следует иметь в виду, что
съем полезного сигнала во вращающейся системе координат с точки
зрения простоты и точности измерения является предпочтительным.
На рис. 6.2 изображена кинематическая схема РВГ с тремя степенями
свободы. На основании 1 установлен двигатель 2, на валу 3 которого с
помощью торсионов 7 закреплено внутреннее кольцо 4. Ротор 5 связан с
кольцом 4 при помощи торсионов 6, перпендикулярных торсионам 7. Ротор
имеет три степени свободы относительно основания - он вращается
вместе с валом двигателя и внутренним кольцом с угловой скоростью 12,
может поворачиваться вместе с внутренним кольцом относительно вала
вокруг оси торсионов 7 с угловой скоростью /3 и относительно внутреннего
219
кольца вокруг оси# торсионов б с
угловой скоростью а. Углы поворота
(колебаний) ротора вокруг осей
торсионов (осей подвижной системы
координат) или осей, связанных с
HuJ ^ корпусом, содержат информацию о
7 компонентах со , со угловой
скорости со. Обработка измерительной
информации осуществляется
аналогично тому, как это делается в РВГ
с двумя степенями свободы. В этом
^Ч^Г—^\//%^1 приборе также реализуются условия
у Jr^<- резонансной динамической
настройки, обеспечивающей высокую чув-
Рнс.6.2 ствительность к измеряемым угловым
скоростям. Погрешности РВГ с тремя степенями свободы в значительной
мере аналогичны погрешностям РВГ с двумя степенями свободы. Такие
гироскопы в иностранной литературе называют иногда гирофлексами.
Роторные вибрационные гироскопы с двумя и тремя степенями свободы
благодаря их высокой чувствительности, сравнительно небольшим габаритным
размерам и малому дрейфу применяются в качестве основных
чувствительных элементов гироскопических стабилизаторов.
6.2.2. Осцилляторные вибрационные гироскопы
Главным отличительным признаком осцилляторных вибрационных
гироскопов (ОВГ) является колебательное движение чувствительного
элемента - носителя кинетического момента. Относительное движение
чувствительного элемента ОВГ может быть не только угловым, но и возвратно-
поступательным, например в виде поперечных колебании струны или
стержня, упруго подвешенной массы и т.п. В качестве примера рассмотрим
вибрационный гироскоп камертонного типа фирмы "Сперри", называемый
иногда гирогроном, который является одним из первых промышленных
образцов (рис. 6.3).
С основанием 1 при помощи упругого торсиона 2 скреплен камертон,
стержни 7 которого приводятся в автоколебательный режим контуром
положительной обратной связи, состоящим из датчиков перемещений (или
скорости) 5, усилителя (в устройстве 8) и тяговых электромагнитов 6.
При вращении основания с переносной угловой скоростью со к центрам
Z0
220
iF^2moZ0V M kW^Zuzo
\V=V0sin/i0t
%=2mvzol/
Рис.6.3
масс с и с стержней прикладываются силы инерции Кориолиса.
Поскольку колебания стержней происходят по гармоническому закону в
противофазе, силы Кориолиса, приложенные к стержням камертона,
изменяются по тому же закону. Пара сил, образованная силами
Кориолиса, создает вокруг оси торсиона (оси z ) знакопеременный
момент. Этот момент, закручивая торсион, вызывает крутильные
колебания жестко скрепленного с ним якоря 4. Амплитуда (угла или
угловой скорости) колебаний якоря пропорциональна измеряемой угловой
скорости, а фаза зависит от направления скорости со . Параметры
Z0
колебаний якоря воспринимаются датчиком 3 и передаются в устройство
8, где усиливаются и преобразуются в напряжение выходного сигнала U ,
в
пропорциональное амплитуде угловой скорости. Измерительной осью
гиротрона является ось z.
Получим простейшие аналитические соотношения, характеризующие
работу прибора. На рис. 6.4 изображен вид на торцу стержней камертона
в момент, когда стержни 1 и 2 отклоняются в разные стороны от оси z
с линейной скоростью V = V sinat. При вращении основания с угловой
скоростью со точки с и с , в которых будем считать сосредоточены
221
массы т стержней, будут двигаться с ускорениями Кориолиса W = 2cj V.
к Z0
Так как стержни колеблются в противофазе, ускорения Кориолиса точек
сие направлены в разные стороны. Соответственно к центрам масс
стержней будут приложены противоположно направленные силы инерции
Кориолиса F = 2то) V. Пара сил, образованная силами F на плече 2R ,
Z0
создает момент инерционных сил Кориолиса - гироскопический момент -
вокруг оси z ; М = F 2R = 4mco VR , где R - расстояние от оси z
Z0
крутильных колебаний до центров масс стержней камертона.
Гироскопический момент М поворачивает камертон, закручивая
торсион. Если жесткость и угол закручивания торсиона обозначить
соответственно через k и а, то в рабочем режиме в каждый момент
времени справедливо равенство М - 4mo> VR = k а, откуда
4шсо V7? . D I/ 4
\ ° 4тУ0 "-V
a = ~k = 1 ых-
т т О
Таким образом, амплитуда крутильных колебаний камертона (якоря)
пропорциональна измеряемой угловой скорости, а фаза зависит от
направления скорости со .
Параметры приборы выбирают такими, чтобы амплитуда отклонений
стержней камертона была малой, т.е. чтобы выполнялось условие
R > АЛ, а собственная частота д колебаний стержней совпадала с
собственной частотой д крутильных колебаний. Работа прибора в режиме
резонанса может быть обеспечена подбором жесткости торсиона при
выполнении условия
./-
k
2mRQ
В этом случае прибор имеет максимальную чувствительность к измеряемой
угловой скорости. Однако в гиротроне, как и во всех известных типах
осцилляторных гироскопов, в отличие от роторных вибрационных
гироскопов невозможно обеспечить динамическую настройку. Поэтому его
амплитудно-частотная характеристика имеет очень острый резонансный
222
Рис.6.5
пик, что затрудняет практическое использование резонансного режима.
Другим существенным недостатком таких приборов является
нестабильность их характеристик, обусловленная старением материалов,
усталостью упругих элементов, температурным режимом и т.п. Указанные
недостатки перекрывают такие положительные качества ОВГ, как
отсутствие вращающихся деталей, обеспечивающее долговечность работы,
малые габаритные размеры, масса и др. Поэтому осцилляторные гироскопы
широкого применения не нашли.
6.3. Гироскопы с неконтактными подвесами
К эффективным направлениям, позволяющим существенно снизить
возмущающие факторы, воздействующие на гироскоп, относятся поиск и
разработка методов и средств бескарданных неконтактных подвесов. В числе
первых таких подвесов был разработан газовый, затем Появились
магнитные, электростатические и другие типы подвесов. По своей физической
сущности гироскопы с такими подвесами остаются традиционными - в
основу их работы положен быстроврашающийся твердотельный ротор. Однако
специфические особенности собственно подвесов в существенной мере
меняют их техническую реализацию и характер работы приборов в целом,
что привело к необходимости выделения таких гироскопов в
самостоятельный класс.
Основным преимуществом гироскопов с неконтактными подвесами
является практически полное отсутствие трения, которое оказывает
преобладающее влияние на их точностные характеристики. Другим важным досто-
223
инством таких гироскопов является отсутствие у них дрейфов,
обусловленных в случае использования карданова подвеса кинематическими
связями между ротором и рамками и проявляющихся как при нутационных
колебаниях гироскопа, так и при колебаниях основания.
На рис. 6.5 представлена схема гироскопа с неконтактным газовым
подвесом [12, 13]. Собственно газовый подвес может быть выполнен
статическим и динамическим. В газостатическом подвесе ротор 2
удерживается во взвешенном состоянии силами избыточного давления газа,
принудительно подаваемого в рабочий зазор между ротором и сферической
поверхностью опоры 6, жестко связанной с корпусом 1. В газодинамическом
подвесе первоначально невращающийся ротор 2 опирается своей
внутренней сферической поверхностью на опору 6. После приведения ротора во
вращение гиромотором 5 газ, заполняющий подвес, увлекается ротором и
вгоняется в клиновидный зазор между ротором и опорой, в результате
чего в зазоре переменного профиля создается переменное давление,
имеющее наибольшее значение в области минимального зазора. При
достижении определенной скорости вращения ротор отделяется от механической
опоры и далее удерживается во взвешенном состоянии силами избыточного
давления газа.
К числу наиболее существнных возмущающих моментов, вызывающих
дрейф гироскопа с газодинамическим подвесом, следует отнести моменты,
обусловленные неуравновешенностью, неидеальностью сферической
поверхности ротора, силами трения газовой среды. При искажении сферической
поверхности ротора нормальные силы давления газа на его поверхность
создают момент относительно центра масс; силы трения газовой среды
создают возмущающий момент даже в том случае, когда поверхность
ротора имеет идеальную сферическую форму.
Необходимые управляющие моменты для изменения ориентации ротора
гироскопа с газовым подвесом могут быть сформированы с помощью
электромагнитных датчиков моментов 3. Съем информации об угловом положении
ротора относительно корпуса осуществляется с помощью двухкоординатных
индукционных или емкостных датчиков угла 4, как это показано на рис.
6.5. Поскольку к ротору в процессе работы приложены силы трения, то
для восполнения потерь на трение в приборе предусмотрен привод-
гиромотор 5. Гиромотор существенно ограничивает углы взаимной
ориентации ротора и корпуса прибора, поэтому гироскопы с газостатическими
подвесами применяются только в платформенных системах ориентации (в
индикаторных ГС), где осуществляется двухкоординатное отслеживание
корпуса, установленного на платформу за осью ротора. Основными
преимуществами гироскопов с газовыми подвесами помимо достаточно высокой
точности являются высокая перегрузочная способность и большой ресурс
работы.
224
Достигнуты значительные успехи в решении проблемы создания
гироскопов с электромагнитным неконтактным подвесом. Подвесы этого типа
используются для центрирования поплавковых гироскопов и в
конструкциях шаровых гироскопов. Конструктивная схема шарового гироскопа с
магнитным подвесом представлена на рис. 6.6 [12]. Шаровой ротор 3.
выполненный из феррита, взвешивается в магнитном поле статоров 5
подвеса. Каждый из статоров представляет собой многополюсную (например
восьмиполюсную) конструкцию.
Для обеспечения устойчивости подвеса необходимо управлять током в
катушках, установленных на полюсах статора, в зависимости от
перемещений ротора. Это управление может быть реализовано как на основе
активных, так и пассивных (магниторезонансных) схем. В активных схемах
управление током в катушках осуществляется по сигналам датчиков
линейных перемещений ротора относительно корпуса. В пассивных схемах
управление током осуществляется путем использования резонансных
свойств электрических контуров, в которые включаются катушки статора.
На рис. 6.7 представлена характерная резонансная зависимость тока / в
катушке от ее индуктивности L. При выборе рабочей точки в зарезонанс-
ной области (/ . L ) подвес устойчив. Действительно, при увеличении
Р Р
рабочего зазора между полюсом и ротором индуктивность L катушки
уменьшается, ток в ней возрастает, возрастает магнитный поток в
рабочем зазоре и сила притяжения ротора к полюсу статора увеличивается.
При уменьшении рабочего зазора сила притяжения ротора к полюсу
уменьшается.
Разгон ротора (см. рис. 6.6) осуществляется с помощью
электропривода, статор 1 которого установлен на корпусе 2. Поскольку из-за
явления вращательного гистерезиса ротор испытывает воздействие
тормозящих моментов, необходимо, чтобы электропривод работал постоянно и
осуществлялось двухкоординатное отслеживание корпуса прибора за
ротором. Датчики момента 4 электромагнитного типа и индукционные
(индуктивные) датчики угла 6 могут иметь идентичную конструкцию.
К числу основных возмущающих моментов, вызывающих дрейф гироскопа
с электромагнитным подвесом, следует отнести моменты, обусловленные
неидеальностью сферической поверхности ротора, неуравновешенностью,
магнитной анизотропией и гистерезисом материала ротора, вихревыми
токами при несовпадении оси симметрии магнитного поля подвеса и оси
вращения ротора. Следует, однако, отметить, что гироскоп с
электромагнитным подвесом обладает существенно более низким уровнем
возмущающих моментов, чем гироскоп с газовым подвесом.
Считают, что одним из перспективных типов является гироскоп с
электростатическим подвесом ротора. Принцип работы электростатическо-
225
го подвеса основан на использовании сил притяжения между электрически
нейтральным металлическим (обычно алюминиевым или бериллиевым)
ротором и электродами, возникающими при наличии на электродах
потенциалов. В соответствии с известными теоремами Ирншоу и Браунбека при
постоянных по времени потенциалах электродов электростатический подвес
неустойчив, поэтому для обеспечения его работоспособности необходимо
осуществлять управление потенциалами в зависимости от линейных
перемещений ротора. Пространственный подвес сферического ротора может
быть осуществлен, например, тремя системами электродов с управляемыми
потенциалами.
Принципиальная схема гироскопа с электростатическим подвесом
ротора представлена на рис. 6.8. Ротор 2 взвешивается в электрическом
поле электродов 3. Рабочий зазор между сферическим ротором и
поверхностью электродов может быть от десятков до сотен микрометров. Для
обеспечения большой жесткости подвеса необходимо создавать достаточно
высокую напряженность электрического поля в рабочем зазоре.
Предельное значение напряженности ограничено напряженностью пробоя. Согласно
данным, приведенным в работах [12, 13], при вакууме 1,33* (10
10 ) Па допустимая напряженность электрического поля в зависимости
от материала электродов составляет (37 ... 120)-10 В/м.
Ротор приводится во вращение с помощью двигателя 4, который после
набора номинальной частоты вращения отключается. Далее гироскоп
работает на выбеге. Наличие высокого вакуума обеспечивает достаточно
большую постоянную времени выбега ротора. Ротор выполняется в виде
полой сферической оболочки и имеет динамическую ось симметрии
вследствие утолщения стенок в экваториальной части; вращение ротора
вокруг этой оси устойчиво. Система съема информации об угловом
Рис.6.7 Рис.6.8 Рис.6.9
226
положении ротора относительно корпуса прибора обычно строится на
основе оптических считывающих устройств 1.
По принципу управления потенциалами электродов различают активные
и пассивные электростатические подвесы. В активных подвесах, которые
могут быть выполнены на постоянном или переменном токе, управление
потенциалами осуществляется по сигналам от датчиков линейных
перемещений ротора с помощью высоковольтных усилителей.
В пассивных электростатических подвесах, которые называются также
резонансными, используется резонансный характер зависимости
напряжения на емкости электрод-ротор от величины этой емкости. Резонансная
зависимость осуществляется включением емкости электрод-ротор в
резонансный контур. На рис. 6.9 представлена характерная зависимость
потенциала U на электроде от емкости С между электродом и ротором в
резонансом электростатическом подвесе. При рациональном выборе
рабочей точки подвеса V , С уменьшение емкости С (при увеличении
Р Р
зазора между электродом и ротором) приведет к увеличению потенциала
на электроде (электрический потенциал ротора предполагается нулевым).
Это в свою очередь приведет к увеличению напряженности электрического
поля в рабочем зазоре и соответственно к увеличению силы притяжения
ротора к электроду.
Основными факторами, определяющими дрейф электростатического
гироскопа, являются отклонение поверхности ротора от идеальной сферы,
несбалансированность, наличие паразитных магнитных полей. Так,
паразитные магнитные поля взаимодействуют с вихревыми токами, наводимыми во
вращающемся роторе, в результате чего возникают моменты относительно
центра масс ротора, приводящие как к дрейфу гироскопа, так и к
замедлению его угловой скорости. Электростатический гироскоп относится к
числу наиболее прецизионных гироскопов, может длительное время
работать на выбеге, использоваться как в платформенных, так и
бесплатформенных системах ориентации.
Перспективным типом гироскопов считают также криогенный гироскоп
со сверхпроводящим подвесом ротора. Принцип работы сверхпроводящего
подвеса криогенного гироскопа основан на использовании эффекта Мейс-
нера - способности сверхпроводников выталкивать из себя магнитное
поле.
В этом смысле сверхпроводник, охлажденный до температуры перехода
в сверхпроводящее состояние, можно рассматривать как идеальный
диамагнетик, у которого проницаемость равна нулю. При этом индукция
магнитного поля на поверхности сверхпроводника не должна превышать
критического значения. В отличие от электростатического сверхпро-
227
водящий подвес является при
соответствующей конфигурации
магнитного поля собственно
устойчивым.
Источниками магнитного поля в
сверхпроводящем подвесе часто
являются короткозамкнутые
сверхпроводящие катушки, в которых
циркулирует незатухающий ток.
в Возможно и непосредственное
подключение сверхпроводящих катушек
к источнику тока.
На рис. 6.10 представлена уп-
w рощенная конструктивная схема
криогенного гироскопа фирмы
"Дженерал Электрик". Этот
гироскоп предназначен для работы на
стабилизированной платформе.
Сверхпроводящий (ниобиевый) ро-
Рис.6.10 тор б взвешивается в магнитном
поле катушек подвеса 2, причем характер распределения магнитного
поля, которое на поверхности ротора имеет только касательную к этой
поверхности составляющую, во многом определяется формирующими
сверхпроводящими экранами 1. Раскрутка ротора осуществляется вокруг
вертикальной оси с помощью двигателя разгона 10, расположенного внутри
ротора и создающего магнитное поле, которое оказывает силовое
воздействие на стенки окон 9. Коррекция углового положения ротора
обеспечивается моментным датчиком 8, магнитное поле которого оказывает
силовое воздействие на внутреннюю поверхность цилиндрического стакана
ротора. Съем сигнала рассогласования между ротором б и кожухом 7
осуществляется с помощью оптического датчика, зеркало 5 которого
выполнено на роторе (стрелками 4 указаны лучи света от оптического
датчика). Демпфирование линейных колебаний ротора производится с помощью
катушек демпфирования 3, в которых при колебаниях ротора возникают
вихревые токи, и энергия механических колебаний рассеивается в виде
тепла.
Основными факторами, определяющими дрейф криогенного гироскопа,
являются отклонение поверхности ротора от идеальной сферы,
несбалансированность, магнитный момент Лондона, замороженный магнитный поток.
Магнитный мбмент Лондона возникает вследствие вращения
сверхпроводника и направлен строго по оси вращения. В случае несовпадения
магнитного момента Лондона с осью симметрии магнитного поля, создаваемого
228
катушками подвеса, возникает механический момент, приложенный к
ротору и стремящийся совместить ось его вращения с осью симметрии поля.
Замороженный магнитный поток является следствием захвата
магнитного потока материалом ротора при переходе его в сверхпроводящие
состояние. Этому явлению способствуют в сверхпроводнике микроскопические
пустоты, микротрешины, несверхпроводяшие примеси. На сверхпроводящий
ротор с замороженным магнитным потоком в магнитном поле подвеса
действует возмущающий момент. Для его уменьшения необходимо тщательное
магнитное экранирование полости гироскопа при охлаждении до рабочей
температуры.
Несомненными преимуществами криогенного гироскопа являются его
высокая стабильность, а также эффективность использования на борту в
комплексе криогенного оборудования (криогенные вычислительные
устройства, криогенное электрооборудование, криогенная электроника и т.д.).
6.4. ЛАЗЕРНЫЕ ГИРОСКОПЫ
В отличие от рассмотренных ранее гироскопов в основу работы
лазерного гироскопа (ЛГ) положены качественно новые физические явления и
принципы. В них носителем информации о вращательном движении являются
электромагнитные колебания (волны).
Идея о принципиальной возможности измерения абсолютной угловой
скорости с помощью оптических средств впервые была высказана еще в
начале XX столетия Майкельсоном и затем практически подтверждена в
1913 г. Саньяком. Эффект, лежащий в основе работы рассматриваемых
гироскопов, состоит в том, что на вращающемся теле время прохождения
луча света по замкнутому контуру отличается от времени его
прохождения по тому же контуру на покоящемся теле.
Центральным функциональным узлом (собственно источником
информации) ЛГ является оптическое устройство - кольцевой оптический
квантовый генератор (КОКГ), содержащий оптический замкнутый контур,
образованный тремя или более зеркалами, в котором циркулируют два встречных
световых луча, представляющих собой индуцированное излучение,
порождаемое в резонаторе активной газовой (например гелий-неоновой)
смесью. Эти лучи выводятся из резонатора и интерферируют. При вращении
основания, на котором установлен контур, каждый из лучей проходит
пути разной длины, что приводит к смещению интерференционной картины,
частота которого содержит информацию о величине угловой скорости
вращения основания.
Выбор в качестве излучателя оптического квантового генератора
(лазера) обусловлен тем, что его излучение обладает высокой моно-
229
хроматичностью, когерентностью.
направленностью и большой плотностью
мощности (понятие "когерентность"
означает связь или согласованность между
фазами колебаний в различных точках
пространства в один и тот же момент
времени или между фазами колебаний в
одной и той же точке в различные
моменты времени). Когерентность
электромагнитных колебаний позволяет получить
высоконаправленный световой пучок с
чрезвычайно малыми поперечными
сечениями и обеспечить практическую реализа-
Рис. 6.11 цию интерференционной картины.
Подробнее принцип работы поясним на примере простейшей схемы
лазерного ДУС. оптический контур которого - треугольный. На рис. 6.11
показаны КОКГ. содержащий трубку 1 с активным веществом газовой
рабочей смесью, которая возбуждается от генератора накачки 2
высокочастотным (частотой несколько десятков мегагерц) или постоянным
(напряжением тысячи вольт) током, и собственно кольцевой резонатор,
включающий два непрозрачных зеркала 3 и одно полупрозрачное зеркало 4.
Активная смесь порождает в резонаторе индуцированное излучение
вследствие перехода атомов неона (Ne) с высоких (возбужденных генератором
накачки) на низкие энергетические уровни. Это становится возможным,
если коэффициент усиления в активной среде превышает коэффициент
потерь, а длина волны когерентного излучения целое число раз
укладывается по периметру резонатора. Возникающие при этом электромагнитные
колебания (обычно с длиной волны, примерно равной 0,63 мкм) выходят
из торцев трубки 1 и распространяются в противоположных направлениях
к непрозрачным зеркалам 3. Отраженные лучи с помощью полупрозрачного
зеркала 4 выводятся за пределы контура, и с помощью дополнительного
непрозрачного зеркала 5 направления их распространения совмещаются.
Лучи попадают на фотокатод фотоэлектронного умножителя, где
интерферируют друг с другом, создавая интерференционные полосы.
Вращение корпуса лазерного гироскопа с угловой скоростью cj, вектор
которой перпендикулярен к плоскости контура, приводит к тому, что
интерференционные полосы начинают перемещаться относительно фотокатода
со скоростью вращения корпуса. Это обстоятельство связано с тем, что
при вращении вследствие появления разности времен хода лучей,
распространяющихся по оптическому замкнутому контуру в противоположных
направлениях, появляется и разность их хода, т.е. как бы разность длин
периметра резонатора, по которому они распространяются. При генерации
230
в КОКГ длины волн должны уложиться в теперь уже разных периметрах
одинаковое целое число раз, поэтому эти длины, а следовательно, и
частоты электромагнитных колебаний при наличии cj становятся разными;
появляется разность частот to (частота биений), что приводит к
смещению интерференционных полос. Перемещение на один шаг между
интерференционными полосами соответствует изменению фазы биений на 2тт
радиан. На выходе фотоэлектронного умножителя б появляется
электрический сигнал с разностной частотой to. После усиления этот сигнал
поступает на частотомер 7 и регистрируется устройством 8.
Возможна иная физическая интерпретация принципа работы лазерного
ДУС. В КОКГ при наложении бегущих волн, направленных встречно,
образуются стоячие волны. Местоположение их узлов и пучностей
относительно резонатора является неопределенным и не зависит от его углового
положения. При вращении резонатора относительно инерииального
пространства стоячие волны остаются неподвижными, что следует из постулата
постоянства скорости света и принципа относительности. Смещение
интерференционных полос по фотокатоду с частотой to можно
интерпретировать как результат поворота резонатора относительно неподвижной
картины стоячих волн.
Аналитическая зависимость между измеряемой угловой скоростью и
разностью частот to излучений, распространяющихся встречно по
контуру, для заданных конструктивных параметров устройства (частоты
излучений v при cj ~ 0, периметра контура L и ограниченной им площади S)
может быть получена из анализа принципа работы идеализированного
лазерного ДУС с круговым контуром. Поскольку по длине периметра L
резонатора должно укладываться целое число длин волн А, то общее число
стоячих волн, образующихся в контуре, л = L А. Таким образом,
повороту контура на угол 2тт радиан соответствует число стоячих волн л =
= L А. Тогда повороту контура на элементарный угол cjA/ будет
соответствовать число стоячих волн Ал = L а>А//(27гХ).
к
Заметим, что величина
А/ = Ал/А/ = L со/(2тгХ) (6.7)
к
представляет собой, по существу, частоту следования стоячих волн
относительно некоторой фиксированной точки замкнутого контура и
связана с разностью частот to встречных лучей соотношением
А/ = to/2. (6.8)
Используя зависимости (6.7) и (6.8) и учитывая, что для кругового
контура п/п = 4S/L , после преобразований получим
231
to = J|- cj. (6.9)
К
Формула (6.9) справедлива не только для кругового контура, но и
для плоского замкнутого контура любой конфигурации.
Если вектор угловой скорости cj направлен под некоторым углом /3 к
перпендикуляру, опущенному на плоскость контура, то формула (6.9)
принимает вид
Ар = jj— cos/3-co. (6.10)
к
Следовательно, измерительной осью прибора является ось, нормальная
к плоскости контура. Комбинация трех плоских лазерных ДУС в один блок
с ортогональной ориентацией измерительных осей позволяет получить
трехкомпонентный измеритель угловой скорости. Целесообразно отметить,
что ЛГ можно использовать и в интегрирующем режиме, т.е. в режиме
измерителя углов поворота основания. Перепишем формулу (6.9) в виде
J dtp _ 45 da
2тг dt = XL dt %
к
где <р — фаза биений; а — угол поворота прибора вокруг измерительной
оси.
Очевидно, что
* ~ *0 AS
(а - а).
2я XL ^ V
К
Таким образом, о приращении угла поворота можно судить по числу
периодов (полупериодов) биений (периодов колебаний электрического
сигнала с разностной частотой Д*>).
Лазерные гироскопы обладают рядом существенных преимуществ по
сравнению с традиционными. Это, прежде всего: отсутствие каких-либо
механических вращающихся элементов, а следовательно, они свободны от
погрешностей, обусловленных моментами сил трения, неуравновешенности;
высокая надежность и способность устойчиво работать в условиях
значительных перефузок; относительно малая потребляемая мощность
(единицы ватт); их практически мгновенная (доли секунды) готовность к
работе. Весьма важным преимуществом ЛГ является дискретность
выходного сигнала измерительной информации, что позволяет
использовать этот сигнал без дополнительных преобразовании в ЭВМ. Кроме
того, ЛГ могут работать в широком динамическом диапазоне, что делает
возможным их применение в бесплатформенных навигационных системах.
Наряду с преимуществами ЛГ необходимо указать ряд их недостатков и
232
специфических проблем, с которыми пришлось столкнуться при
разработке. Одна из наиболее сложных проблем связана с так называемым
эффектом "захвата" или синхронизации частот колебаний,
распространяющихся в рабочем контуре в противоположных направлениях.
"Захват" частот при малой их расстройке обусловлен взаимным
рассеиванием каждой волны в направлении распространения встречной при
отражении от зеркал и других оптических элементов. В результате этого
явления при малых измеряемых скоростях вращения частоты обоих лучей
оказываются одинаковыми, и разностная частота Д*> равна нулю, что
предопределяет наличие порога чувствительности прибора.
В основе другой проблемы - нестабильность масштабного коэффициента
4S/(XL) ЛГ, допустимое значение которого составляет 10 . Причиной
нестабильности масштабного коэффициента является изменение периметра
резонатора, например из-за температурных колебаний, но главным
образом эта нестабильность порождается нестабильностью коэффициента
преломления оптической среды. Активная среда уменьшает расстройку частот
Ду по сравнению с той, которая была бы в "пустом" резонаторе (эффект
затягивания частот). Учет влияния аномальной дисперсии активной среды
показывает, что ее относительное влияние наиболее существенно при
малой частоте биений Ар. Решение указанных проблем обеспечивается
различными путями. Так, например уменьшения зоны "захвата" добиваются
доведением до минимума рассеяния на зеркалах, глубоким вакуумировани-
ем тракта, по которому распространяются лучи. Кроме того, зона
"захвата" уменьшается при увеличении периметра, охватываемого лучами, а
также при уменьшении длины волны X используемого излучения. Сужение
зоны "захвата" путем увеличения периметра резонатора ограничивается
конструктивными требованиями массогабаритных характеристик. Выбор
длины X рабочей волны ограничивается значениями, при которых возможна
генерация.
Постоянство оптического пути резонатора обеспечивается
использованием монолитной конструкции из материалов с малым температурным
коэффициентом линейного расширения, таких как ситал, Ger - vit и др.
Принципиальным решением проблемы "захвата", одновременно
способствующим уменьшению влияния эффекта затягивания частот, является
смещение рабочей точки ЛГ из зоны захвата, например введением
дополнительного вращения (равномерного или реверсивного) резонатора вокруг
измерительной оси, либо другими методами, в которых реализуется
невзаимность показателя преломления для противоположно направленных
лучей (на основе магнитооптических эффектов Фарадея, Керра и др.).
Повышение стабильности масштабного коэффициента достигается
главным образом регулированием длины оптического пути (периметра резона-
233
тора) обычно на основе схем экстремального регулирования таким
образом, чтобы обеспечивалось получение максимальной мощности излучения.
Лазерный гироскоп, как уже отмечалось, обладает относительно
широким диапазоном измерения. Теоретическое значение верхнего предела
этого диапазона определяется шириной полосы пропускания кольцевого
резонатора, а нижнего - нестабильностью частоты генерируемых
колебаний. Смещение и дрейф нулевого сигнала обусловлены различием
коэффициентов преломления среды для встречных лучей вследствие движения
среды внутри резонатора (эффект Френеля - Физо), движения атомов в
активной среде (эффект Лэнгмюра), эффекта Фарадея и др. Кроме того,
смещение нуля может быть вызвано анизотропным рассеянием, невзаимными
эффектами насыщения в активной среде, рассеянием на неоднородностях
резонатора и др.
Случайный дрейф ЛГ составляет 10 ... 10 /ч.
В настоящее время работы по совершенствованию ЛГ продолжаются.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Поясните принцип действия РВГ с тремя степенями свободы.
2. Поясните физическую сущность динамической настройки.
3. В чем причина более высокой чувствительности РВГ по сравнению
с камертонным гироскопом?
4. Дайте сравнительную характеристику гироскопам с неконтактными
подвесами.
5. Поясните принцип действия лазерного гироскопа.
Глава 7. ГИРОСТАБИЛИЗАТОРЫ
7.1. ОБЩИЕ СВЕДЕНИЯ
Обычно под термином стабилизатор понимают комплекс методов и
средств, предназначенный для поддержания на заданном уровне каких-
либо контролируемых параметров объекта (объектов, процессов). Если
следовать этому определению, то в принципе подобные функции по
обеспечению с определенной степенью точности собственной угловой
ориентации или ориентации размещенных на нем объектов (элементов) может
выполнять свободный гироскоп (СГ). Действительно, как мы уже знаем, СГ
обладает свойством сохранять заданную ориентацию главной оси в инер-
ииальном пространстве с точностью до вредных уходов. Следовательно,
если на кожухе (внутренней рамке) гироскопа разместить какой-либо
234
объект А> то он будет ориентирован с той же о
точностью в инерииальном пространстве отно- h
сительно двух осей, совпадающих с осями
внешней и внутренней рамок при эволювдях
основания (рис. 7.1).
Очевидно, что для того, чтобы продлить
время нормального функционирования такого
стабилизатора, необходимо уменьшать его
собственную прецессию а = ЛГ/Ш cos/3) и /3 =
cos/}). Это возможно путем уменьшения
вредных моментов и увеличения кинетического Рис. 7.1
момента. Но исходя из самого назначения гироскопа в данном случае как
стабилизатора, вредные моменты существенно уменьшить нельзя, так как
дополнительная нагрузка на него от стабилизируемого объекта приводит
к их увеличению. Увеличение кинетического момента также не всегда
возможно и желательно, так как это связано, например с увеличением
массогабаритных характеристик, потребляемой мощности питания и т.п.
Поэтому СГ в качестве стабилизаторов каких-либо элементов
относительно двух осей применяют редко. Вместе с тем благодаря перекрестной
реакции гироскопа на возмущающие моменты представляется возможным
расширить применение СГ как стабилизатора относительно одной оси. Именно
эта особенность имеется в виду, когда дается рекомендация применения
СГ в качестве датчика угла со съемом сигнала только по оси внешней
рамки. В этом случае СГ выступает как одноосный гироскопический
стабилизатор (ГС) с непосредственной гироскопической стабилизацией
относительно измерительной оси.
Действительно, поскольку съем сигнала в СГ осуществляется только с
одной оси, к нему предъявляются требования по обеспечению неизменной
ориентации только относительно измерительной оси (оси внешней рамки).
Изменение ориентации главной оси вокруг оси внутренней рамки на
выходном сигнале с внешней рамки практически не сказывается. Таким
образом, при наличии возмущающих моментов, действующих по оси внешней
рамки (оси стабилизации), например от сил трения в потениио-
метрическом датчике угла, прецессирует внутренняя рамка. В результате
этой прецессии возникает гироскопический момент, который
уравновешивает возмущающий момент, и внешняя рамка (с точностью до угла
нутации) не отклоняется. В данном случае прецессию вокруг оси
внутренней рамки называют стабилизирующей прецессией, а саму ось -
осью прецессии. Так осуществляется одноосная непосредственная
гироскопическая стабилизация. При таком способе измерения угла
ориентации по оси внешней рамки СГ может быть допущено ощутимое
235
увеличение возмушзющего момента без заметного влияния на его
точность. Это позволяет в частности увеличить мощность снимаемого
сигнала измерительной информации.
В то же время вредные моменты в оси подвеса внутренней рамки (в
оси прецессии) будут оказывать непосредственное влияние на выходной
сигнал в виде собственной прецессии внешней рамки СГ с угловой
скоростью а = т/(Н cos/З). Здесь отметим, что принципиального различия
между СГ и одноосными непосредственными гиростабилизаторами (НГС)
практически нет. Их обычно различают по функциональным признакам.
СГ - это, как правило, измерительные устройства. Одноосные НГС - это
стабилизаторы каких-либо объектов (элементов), например оптических
устройств, головок самонаведения и т.п. Одновременно ось стабилизации
НГС может быть и измерительной.
Применение НГС целесообразно лишь в случае, когда возмущающие
моменты по оси стабилизации и время его функционирования невелики. Дело
в том, что помимо дрейфа ГС в результате действия возмущающих
моментов стабилизирующая прецессия внутренней рамки ограничена углом /3 =
= ± 7г/2, и тогда главная ось совмещается с осью стабилизации, и
гироскоп теряет стабилизирующие свойства. При одностороннем действии по
оси стабилизации постоянного возмущающего момента предельное время
стабилизации определится соотношением t = ттН cos/3/(2Ar). Таким об-
тах в
разом, время функционирования одноосного непосредственного ГС
ограничено не только собственными уходами относительно оси стабилизации,
но и возможным совмещением внутренней и внешней рамок. Поэтому
одноосные НГС имеют ограниченное применение.
Далее рассмотрены принцип действия и характерные особенности
работы силовых, индикаторных и индикаторно-силовых ГС на основе
прецессионной теории. При этом предполагается, что ГС как динамические
системы устойчивы. Как показывают исследования и практический опыт, такой
подход оправдан при предварительном изучении основных (медленных)
движений ГС. Однако важно отметить, что окончательные выводы о
характере движения ГС на основе такого рассмотрения сделать нельзя. Дело в
том, что, как правило, ГС имеют значительные массы и моменты инерции
относительно осей стабилизации. Следовательно, в динамическом режиме
работы они подвержены более существенным возмущениям, чем
рассмотренные ранее гироскопы. Поэтому анализ работы силовых ГС на основе
прецессионной теории является грубым приближением.
Для получения достоверных результатов необходимо привлечение
полных уравнений динамики твердых тел, входящих в состав ГС, а также
уравнений переходных процессов в его электрических цепях. Анализ
236
полных уравнений с учетом условий работы позволяет ответить на
вопросы об устойчивости и динамических погрешностях ГС, что,
безусловно, является определяющим при оценке его работоспособности.
Не будем останавливаться на получении и анализе уравнении ГС. Укажем
лишь, что задачи обеспечения устойчивости и заданных динамических
характеристик ГС решаются выбором его параметров с применением
известных методов анализа и синтеза автоматического управления и
регулирования с учетом специфики гироскопических явлений [11, 12].
7.2. ОДНООСНЫЕ СИЛОВЫЕ ГС
Идея силовой гироскопической стабилизации была предложена в
1924 г. советским инженером С.А. Ноздровским. Принципиальная
кинематическая схема одноосного силового ГС изображена на рис. 7.2. Гиро-
стабилизаторы применяются как для реализации определенных
направлений, относительно которых измеряется угловая ориентация подвижных
объектов, так и для ориентации относительно этих направлений
соответствующих элементов и устройств (например акселерометров, авиационных
прицелов, антенн и т.п.). На рисунке показана платформа 1, на которой
размещен элемент стабилизации А На платформе же размещен гироскоп 2
с двумя степенями свободы. Легко увидеть, что платформа вместе с
размещенным на ней гироскопом представляет собой гироскоп с тремя
степенями свободы.
На оси гироскопа с двумя степенями свободы, являющейся осью
внутренней рамки, установлен датчик угла поворота относительно платформы.
Обычно его называют датчиком угла прецессии (ДУЛ). ДУЛ через
усилитель 3 соединен с двигателем, который называют двигателем разгрузки
(ДР), или стабилизирующим двигателем. На оси внешней рамки может
быть также размещен и датчик угла (ДУ) для измерения угловой
ориентации основания 4. Так же, как и ранее, ось т? платформы (внешней рамки)
является осью стабилизации, а ось
х гироскопа - осью прецессии. ГС,
выполненной по такой схеме,
предназначен для угловой стабилизации
платформы 1 (внешней рамки) вокруг
оси стабилизации т?, а следователь- ДР
но, он обеспечивает угловую
стабилизацию относительно оси т?
размещенного на платформе элемента
(например акселерометра А) и
позволяет измерять углы отклонения
основания относительно той же оси.
^ у
237
Рассмотрим принцип работы силового ГС в рамках прецессионной
теории (см. рис. 7.2). Предположим, что вокруг оси стабилизации приложен
постоянный возмущающий момент М , который может быть результатом
остаточной неуравновешенности платформы, сил трения, упругих сил токо-
подводов и других, приведенных к оси стабилизации. Тогда гироскоп
начнет прецессирповать с угловой скоростью /3 =М /(Н cos/З) в направлении
в
совмещения по кратчайшему пути вектора кинетического момента Н с
вектором возмущающего момента М . При этом возникает гироскопический мо-
в
мент Лг = - Я/3 cos/З, который уравновесит возмущающий момент М .
Поэтому ориентация платформы вокруг оси стабилизации не нарушится. Из-
за того, что гироскоп, прецессируя, повернется относительно платформы
на угол /3, с датчика угла прецессии через усилитель 3 на двигатель
разгрузки поступит напряжение, пропорциональное углу прецессии.
Двигатель разгрузки включается так, чтобы момент, создаваемый им по
сигналу с ДУП, был направлен в сторону уменьшения угла /3, т.е. в
противоположную сторону возмущающему моменту М . Обычно зависимость
момента ДР от угла /3 выбирают линейной. Тогда возмущающий момент будет
уравновешиваться суммой моментов - гироскопическим и от двигателя
разгрузки: Я/3 cos/З + fc/3 = Лг, где k - общий коэффициент передачи.
Так как разность между возмущающим моментом и моментом от
разгрузочного двигателя уменьшается, будет уменьшаться и скорость прецессии
0 = (МУ - ШШ cos/3).
в
Когда момент разгрузочного двигателя достигнет величины
возмущающего момента, прецессия гироскопа прекратится, гироскопический момент
станет равным нулю, и возмущающий момент будет уравновешиваться
только моментом двигателя разгрузки: fc/З = Лг. В итоге ГС будет как бы
в
разгружен от действия возмущающего момента. Именно поэтому ДР и
называют разгрузочным двигателем.
Работу силового ГС условно можно рассмотреть по этапам. На первом
этапе, когда к платформе приложен возмущающий момент, его парирует
гироскопический момент, т.е. Лг = Я/3. На втором этапе (в переходном
в
режиме) гироскоп через ДУП включает ДР, и возмущающий момент уже
парируется суммой моментов Лг = Я/3 cos/З + fc/З. На третьем этапе (в уста-
Р
238
новившемся режиме) момент двигателя разгрузки fc/З сравняется с
моментом Лг, скорость прецессии /3 = 0, и возмущающий момент парируется
только двигателем разгрузки Лг = kf$ .
При этом платформа относительно оси стабилизации сохранит
первоначально заданную ориентацию, а гироскоп по отношению к платформе
повернется на постоянный угол /3 = М Ik, обеспечивая приложение постоян-
в
ного разгрузочного момента Лг = - fe/З , уравновешивающего М . Если
Р в
и г
возмущающий момент Лг убрать, то уравновешивающий его момент ДР вызо-
в
вет прецессию гироскопа в обратную сторону. Возникнет гироскопический
момент М = ///3 cos/З, равный и противоположно направленный моменту
двигателя разгрузки Лг = - fc/З , а следовательно,
уравновешивающий его.
Далее вследствие обратной прецессии гироскопа угол прецессии
уменьшается, уменьшаются и момент разгрузки, и скорость прецессии, и
гироскопический момент до тех пор, пока гироскоп не вернется в
исходное положение. При этом платформа относительно оси стабилизации опять
сохранит заданную ориентацию. Таким образом, в силовом ГС введением
обратной связи по углу прецессии устранена возможность совмещения
рамок. Следует отметить, что это справедливо при условии, что
возмущающие моменты не превышают возможностей ДР. В противном случае гироскоп
может лечь на упоры, ограничивающие максимальный угол прецессии
(обычно не более 10 ), и платформа под действием возмущающего момента
начнет ускоренно вращаться вокруг оси стабилизации, как если бы
гироскопа и не было.
Из рассмотрения принципа работы ГС следует, что гироскоп в силовом
ГС играет двоякую роль. В начальный момент приложения возмущений он
является как бы силовым элементом, т.е. парирует возмущающий момент,
а в переходном режиме кроме силовой функции выполняет функции
управления разгрузочным двигателем.
Схема силового ГС обеспчивает разгрузку оси стабилизации, но не
устраняет погрешностей по углу стабилизации за счет вредных моментов
в оси прецессии гироскопа. К числу этих моментов можно отнести
моменты сил трения, неуравновешенности, ДУП и др. Так, например (см.
рис. 7.2) в переходном процессе работы системы разгрузки, прецессии
гироскопа с угловой скоростью /3 препятствует момент сил трения т в
239
оси прецессии. Этот момент вызовет прецессию платформы относительно
оси стабилизации с угловой скоростью а = т/(Н cos/З), что,
естественно, приведет к погрешности по углу стабилизации. Как видим,
силовой ГС не свободен от погрешностей из-за собственной прецессии
(дрейфа). Однако в силовом ГС, как уже отмечалось, технически легче
довести собственную прецессию до минимальных значений.
Рассмотренная схема ГС работает в режиме свободного гироскопа,
т.е. она позволяет обеспечивать с точностью до собственных уходов
одноосную стабилизацию относительно любого направления в инерцдальном
пространстве. При необходимости в некоторых случаях собственные уходы
по оси стабилизации могут быть устранены системой коррекции. Это
делается, если требуется длительное время стабилизации.
Предположим, что ГС в течение длительного времени должен
обеспечивать (стабилизировать) ориентацию платформы 1 относительно
вертикальной плоскости т£, проходящей через ось стабилизации tj (рис- 7.3).
Легко себе представить, что ГС, избраженный на рис. 7.2, выполнить
такую задачу не сможет, так как, даже будучи первоначально
принудительно ориентирован заданным образом, с течением времени он эту
ориентацию начнет изменять из-за ухода (дрейфа) платформы от вредных
моментов в оси прецессии гироскопа с угловой скоростью а = т/Ш cos/3).
Для устранения дрейфа в схему ГС необходимо дополнительно ввести
элементы системы коррекции. На платформе 1 устанавливается физический
маятник 4 (как указано на рис. 7.3), являющийся чувствительным
элементом системы коррекции, а на оси прецессии гироскопа 2 - кор-
рекционный мотор (датчик момента) Маятник и коррекиионныи мотор
электрически связаны между собой. В результате ГС приобретает
избирательную способность по отношению к вертикальной плоскости. Система
коррекции обеспечивает с определенной точностью начальную ориентацию
(выставку) платформы и устраняет ее систематический уход от вредных
моментов. При этом работа системы коррекции ГС аналогична работе
системы коррекции гировертикали.
Однако имеются некоторые отличия. Например, если платформа
отклонится от вертикальной плоскости т? вокруг оси стабилизации на
некоторый угол а (угол между осью z платформы и осью f), с маятника на
п п
коррекиионныи мотор поступит управляющий сигнал. Коррекиионныи
мотор приложит к оси прецессии момент ka t и платформа начнет прецес-
1 п
сировать в направлении совмещения оси z с осью f.
240
В реальных конструкциях
вредные моменты в оси
стабилизации могут достигать величин
на один-два порядка больше, чем
в обычных гировертикалях.
Поэтому может оказаться, что кор-
рекщюнный мотор в начальный AP^frfj ^ j
момент не в состоянии преодо- /А\М
леть, например, момент сил
трения в оси стабилизации.
т
Платформа как бы заклинивается
и не прецессирует под действием
ЛЛ Поскольку нет прецессии
платформы, нет и гироскопического момента, уравновешивающего коррек-
иионный момент. Тогда гироскоп, потеряв степень свободы по оси
стабилизации, становится как бы двухстепенным и под действием коррекщюн-
ного момента начнет ускоренно поворачиваться сам относительно оси
прецессии О х. При этом с ДУП через усилетель 3 на ДР поступит
напряжение, пропорциональное углу /3, и разгрузочный двигатель приложит к
платхЬорме момент М = - kj, направленный на устранение угла /3, сле-
довательно, в противоположную сторону моменту сил трения ЛГ.
Таким образом, разгрузочный двигатель как бы разгрузит ось
стабилизации от момента сил трения, и платформа под действием
коррекиионного момента А^ = k а будет прецессировать со средней
Рис.7.3
К *>
K]F[_
6)
Мр
ЪНихР
9 -369
Рис.7.4
241
скоростью, близкой к k а/Н в направлении устранения угла а.
Статическая погрешность по углу стабилизации в этом случае
определится так же, как и в гировертикалях с пропорциональной
коррекцией, из условия равенства момента коррекции и момента сил
трения в оси прецессии:
< - К/4
Ранее речь шла о поведении ГС на неподвижном основании. Рассмотрим
особенности его работы при угловых движениях основания относительно
осей, перпендикулярных оси стабилизации. Предположим, что одноосный
ГС установлен на объект, который поворачивается с угловой скоростью
со„ вокруг оси, совпадающей с осью прецессии ГС (рис. 7.4, а). Тогда
разгрузочный двигатель будет прикладывать к оси стабилизации момент,
обеспечивающий вращение (прецессию) гироскопа с той же угловой
скоростью, с какой вращается объект. Величина этого момента равна
Ны„. Понятно, что на точностных характеристиках этот факт практически
не отразится, но разгрузочные возможности стабилизатора будут снижены
(рис. 7.4, б). Особенно это существенно при больших угловых скоростях
поворота объекта.
Теперь предположим, что основание поворачивается вокруг оси,
перпендикулярной плоскости платформы (внешней рамки), с угловой
скоростью со- (рис. 7.5). Если во время поворота вектор Н гироскопа
совпадает с осью платформы (угол /3 = 0), то ничего нежелательного не
произойдет. Это движение не вызовет ни моментов, ни каких-либо
движений платформы. Однако в общем случае вектор Н гироскопа отклонен
от нулевого положения на угол 0. Тогда аналогичный разворот приведет
к повороту платформы вокруг оси стабилизации. Это явление аналогично
тому, которое имеет место в гировертикалях, когда продольное
отклонение вектора Н при вираже переходит в поперечное и т.д.
Указанные недостатки устранены в двухгироскопных ГС. На рис. 7.6
изображена принципиальная схема такого ГС. Два идентичных по
параметрам гиромотора 1 и 2 размещены в общей внешней раме 3. Векторы
кинетического момента Н и Н равны и направлены в противоположные
стороны.
Между собой гиромоторы кинематически связаны, например, секторами
4 с передаточным числом / = - 1. Остальные элементы схемы совпадают
со схемой одногироскопного ГС. Система разгрузки оси стабилизации в
двухгироскопном ГС (иногда его называют ГС со спаренными гироскопами)
работает аналогично одногироскопному. При действии по оси стаби-
242
uu*
Рис.7.5
Рис.7.6
лизании возмущающего момента оба гироскопа прецессируют в сторону
совмещения по кратчайшему пути векторов Н и Н с возмущающим моментом
М . Причем, так как векторы Н и Н направлены в разные стороны,
угловые скорости прецессии 0 и 3 гироскопов, а следовательно, и
секторов также противоположны. Возникающие при этом гироскопические
моменты И в и Нв направлены одинаково - в сторону, противоположную
Лг, и уравновешивают его.
Если основание 5. на некотором установлен двухгироскопный ГС.
поворачивается вокруг осей прецессии с угловой скоростью со у (см. рис.
7.6). то гироскопы 1 и 2 по отношению к внешней рамке будут
стремиться повернуться в одну сторону, противоположную вращению основания. Но
такое движение зубчатое зацепление секторов не допускает.
Следовательно, гироскопы, заклиниваясь в секторах, поворачиваются вместе с
основанием, не нагружая разгрузочный двигатель. Это подтверждается и
равенством нулю суммы гироскопических моментов от переносной угловой
скорости со„, так как они направлены в противоположные стороны:
Hl"X
HuY = 0.
2 X
Теперь вновь предположим, что объект поворачивается вокруг оси z
с угловой скоростью со (рис. 7.7). и векторы Н и Н отклонены от
Z \ л$
243
№
^i^ZnSin/i
uZnsinjb
оси г на угол /3. Тогда гироскопи-
п
ческие моменты //cj sin/3 и // со х
1 z ^ 2 z
п п
xsin/З от переносной угловой
скорости со будут направлены в одну
п
сторону и уравновесятся на
секторах, так как движение в одном
направлении они не допускают.
Таким образом, двухгироскопные
Рис. 7.7 ГС имеют существенные преимущества
перед одногироскопными особенно в тех случаях, когда имеют место
большие угловые скорости объектов, на которых они применяются.
7.3. ДВУХОСНЫЕ СИЛОВЫЕ ГС
При решении задач управления и навигации подвижных объектов, а
также стабилизации отдельных элементов различных систем сравнительно
часто возникает необходимость в двухосной или трехосной стабилизации.
Основная идея силовой гироскопической стабилизации изложена при
рассмотрении одноосных ГС. Кратко она может быть сформулирована так. Для
того чтобы обеспечить гироскопическую (силовую или непосредственную)
стабилизацию относительно одной или нескольких осей, в схеме на
каждую ось стабилизации должен быть предусмотрен по крайней мере один
двухстепенный гироскоп, который в совокупности с ней являлся бы
трехстепенным. На рис. 7.8 изображена принципиальная кинематическая схема
двухосного гиростабилизатора. (Иногда двух- и трехосные ГС называют
двух- или трехосными гиростабилизированными платформами - ГСП.)
Два гироскопа с двумя степенями свободы 1 и 2 (как правило
одинаковые) размещены на платформе 3, которая имеет степень свободы
относительно рамки 4. Рамка 4, в свою очередь, имеет возможность
поворачиваться вокруг оси у относительно корпуса 5. Углы поворота
гироскопов 1 и 2 относительно платформы измеряются соответственно датчиками
углов прецессии ДУП и ДУП , которые непосредственно или через
усилители связаны с двигателями разгрузки ДР и ДР . Двигатель ДР закреп-
ух у
лен на корпусе, а ДР - на внешней рамке 4. Углы поворота корпуса
(основания) относительно осей х и у измеряются датчиками углов ДУ
п п X
244
и ДУ . На осях прецессии гироскопов размещены датчики моментов ДМ
и ДМ2.
Двухосный силовой ГС может выполнять как измерительные функции,
например измерение углов ориентации основания относительно
определенным образом ориентированной платформы, так и функции стабилизации
элементов (Л), размещенных на платформе 3.
Из рис. 7.8 видно, что двухосный ГС состоит из двух как бы
объединенных в единое целое одноосных ГС. Действительно, при упрощенном
рассмотрении системы разгрузки по каждой оси стабилизации работают
независимо друг от друга. Например, при появлении возмущающего
момента вокруг оси стабилизации внешней рамки гироскоп 1 начнет прецес-
сировать с угловой скоростью в. В результате возникает
гироскопический момент #/3 , который первоначально скомпенсирует момент Лг. Далее
с датчика ДУП на разгрузочный двигатель ДР поступит напряжение, про-
порииональное углу прецессии /3. Двигатель ДР начнет развивать момент
к в , направленный в противоположную сторону моменту Лг, разность
между моментами k 3 и Лг начнет уменьшается, а следовательно, начнут
уменьшаться скорость прецессии в и гироскопический момент Нв.
Когда момент двигателя разгрузки сравняется с возмущающим моментом
Лг, прецессия гироскопа прекратится. Вектор Н окажется отклоненным
от перпендикуляра к плоскости платформы на угол в
Ориентация платформы вокруг оси внешней рамки останется неизменной.
Работа системы разгрузки по оси платформы аналогична. Только в этом
случае прецессирует гироскоп 2, который управляет двигателем ДР .
Также, как и в одноосных, в двухосных ГС статическая точность
стабилизации определяется собственной прецессией платформы от вредных
моментов в осях подвеса двухстепенных гироскопов. Датчики моментов
ДМ и ДМ на осях прецессии гироскопов предназначены для управления
ориентацией платформы, т.е. для ее разворотов в необходимых случаях
вокруг осей стабилизации.
На рис. 7.9 показано иное расположение гироскопов относительно
платформы нежели на рис. 7.8. С точки зрения принципа работы это
изменение существенной роли не играет. Например, при действии по оси
245
Рис.7.8 Рис.7.9
стабилизации платформы возмущающего момента разгрузка
осуществляется гироскопом 2 и двигателем ДР . Аналогична работа системы
разгрузки и по оси стабилизации рамки. Однако при выборе той или иной
схемы следует иметь ввиду, что разгрузочные двигатели ГС, показанного
на рис. 7.9, при вращении основания вокруг оси z с угловой скоростью
со будут иметь нежелательную нагрузку от гироскопических моментов
п
//со и Я со (это было показано на примере одноосного ГС),
п п
Кроме уже отмеченного, в схеме двухосного ГС, изображенного на
рис. 7.9, реакция каждого из гироскопов на возмущающие моменты только
по "своей" оси стабилизации обеспечивается лишь при условии, что
векторы их кинетических моментов Н и Н перпендикулярны осям
стабилизации (углы в = /3 = 0). Как только векторы Н и Н (или один
из них) отклонятся от исходного направления, они начинают
реагировать на возмущающие моменты по обеим осям стабилизации (за
счет проекций Н sin/З). Хотя это и не приводит к существенным
изменениям в работе ГС в целом, однако такая перекрестная связь между
каналами стабилизации нежелательна. Также, как и в одноосных ГС, эти
недостатки устраняются, если на платформе установить по каждой оси
прецессии по два кинематически связанных гироскопа. Кинетические
моменты каждой пары гироскопов должны быть равны и противоположно
направлены. (Обычно все четыре гироскопа имеют одинаковые по
абсолютной величине кинетические моменты //.)
246
Рис.7.10 Рис.7.11
На рис. 7.10 показана схема двухосного четырехгироскопного ГС. В
основном эта схема состоит из уже известных элементов (1, 2), не
требующих дополнительных пояснении. Отличие заключается лишь в
элементах кинематической связи гироскопов. Здесь она обеспечивается
не секторами с зубчатым зацеплением, а шарнирным четырехзвенником 3 и
4, называемым антипараллелограммом. Антипараллелограмм при малых
углах отклонения выполняет ту же роль, что и секторы, но
технологичнее в изготовлении и может быть изготовлен с минимальным трением в
соединениях. Последнее обстоятельство очень важно, поскольку моменты
сил трения в осях прецессии гироскопов являются основными источниками
погрешностей стабилизации. Принцип работы такого ГС по каждой оси
стабилизации аналогичен одноосному двухгироскопному ГС.
В четырехгироскопных ГС схема расположения осей прецессии
гироскопов по отношению к платформе принципиального значения не имеет. В
авиации и ракетной технике ГС со спаренными гироскопами имеют
ограниченное применение прежде всего из-за значительных массогабаритных
характеристик. Поэтому, как уже отмечалось, при выборе ГС необходимо
учитывать расположение гироскопов относительно платформы и ЛА.
Двухосные силовые ГС успешно используются в авиации в качестве
гировертикалей. На рис. 7.11 показана одна из возможных схем ГВ на
базе двухосного ГС. На платформе помимо гироскопов 1 и 2 размещен
жидкостный маятниковый переключатель МП, который выполняет роль
чувствительного элемента, реагирующего на ее отклонения от плоскости
горизонта. На осях прецессии гироскопов установлены коррегадионные
ап ^п
моторы (датчики моментов) М п и М п. На измерительных осях (осях
247
стабилизации) предусмотрены датчики углов крена у и тангажа
самолета. (На рис. 7.11 направление полета указано стрелкой НП).
Работа системы разгрузки такой ГВ не отличается от работы уже
рассмотренных ГС, а работа системы коррекции аналогична обычным
одногироскопным гировертикалям и зависит лишь от типа коррекции
(пропорциональная, постоянная или смешанная).
Например, если платформа под действием каких-либо причин
повернется вокруг измерительной оси у относительно плоскости горизонта на
некоторый угол а , в жидкостном маятниковом переключателе произойдет
п
а
перераспределение токов, и на коррекционный мотор М гироскопа 1
поступит напряжение, пропорциональное углу а . Коррекционный мотор
приложит вокруг оси прецессии момент fca . Под действием этого коррекии-
1 п
онного момента гироскоп 1 (вместе с платформой) начнет прецессировать
вокруг измерительной оси у в сторону устранения угла a . Аналогичным
образом осуществляется и коррекция платформы вокруг оси х, только в
этом случае с МП напряжение поступает на М гироскопа 2.
Гировертикали, выполненные на базе двухосных силовых ГС, обладают
относительно высокой точностью и позволяют снимать с датчиков углов
сигналы значительной мощности. Это объясняется тем, что повышение
нагрузки на оси стабилизации практически не сказывается на точностных
характеристиках ГС. Последние обстоятельства дают возможность
получать на борту ЛА с силовой ГВ измерительную информацию одновременно
несколькими потребителями. А это, в свою очередь, оправдывает
повышенные массогабаритные характеристики силовых ГВ. Таким гировертикали
иногда называют центральными гировертикалями (ЦГВ). Погрешность
выдерживания вертикали места современными ЦГВ лежит в пределах единиц
угловых минут.
7.4. ТРЕХОСНЫЕ СИЛОВЫЕ ГС
Трехосные гиростабилизаторы, как следует из их названия,
обеспечивают стабилизацию платформы относительно трех взаимно
перпендикулярных осей и, следовательно, могут моделировать с достаточно высокой
точностью любую произвольно ориентированную в пространстве систему
координат. Поэтому они находят широкое применение в системах
управления, навигации и ориентации различных подвижных объектов (самолетов,
ракет, космических ЛА, кораблей морского флота).
248
Трехосные гиростабилизаторы чаще называют гиростабилизированными
платформами (ГСП), иногда пространственными ГС. Следуя принципу
силовой гироскопической стабилизации, легко предположить, что трехосная
ГСП должна иметь три оси стабилизации и соответственно три гироскопа.
На практике ГСП могут отличаться схемами подвесов платформы,
ориентацией двухстепенных гироскопов относительно платформы и др. Выбор
расположения и ориентации осей гироскопов на платформе связан с
обеспечением их устойчивости и точности и зависит от режима работы, а также
характерных особенностей движения основания (объекта).
На рис. 7.12 показана схема простейшей ГСП. имеющей три канала
стабилизации (три одноосных ГС). Платформа 1 подвешена в кардановом
подвесе, состоящем из рамок 5 (внутренняя) и б (внешняя). На
платформе размещены три гироскопа 2. 3 и 4, обеспечивающие
соответственно стабилизацию вокруг осей у, х, z и управление
двигателями разгрузки ДР , ДР и ДР . В данной схеме ГСП ось
стабилизации платформы (ось z ) расположена вертикально, векторы
кинетических моментов гироскопов перпендикулярны оси платформы; оси
прецессий гироскопов 2, 3 перпендикулярны платформе, а гироскопа 4 -
параллельна ей. На первый взгляд принцип стабилизации такой ГСП ничем
не отличается от принципа стабилизации, например одногироскопных
двухосных ГС. Вообще говоря, так оно и есть, если рассматривать
работу ГСП раздельно по каналам при условии ориентации ее элементов.
как это изображено на рисунке. При действии возмущающего момента
по оси внешней рамки начинает прецессировать гироскоп 2. с датчика
угла прецессии на ДР поступит управляющий сигнал на включение.
Пропорционально углу прецессии гироскопа 2 разгрузочный двигатель ДР
приложит момент, противодействующий возмущающему. По окончании
переходного процесса эти моменты уравновесятся. Ориентация внешней рамки
останется неизменной. Так же осуществляется стабилизация относительно
оси х внутренней рамки и оси z платформы. Однако введение третьей
п
оси стабилизации приводит к дополнительным взаимосвязям каналов. Это
обусловлено тем. что при повороте основания ГСП вокруг оси z
меняется взаимная ориентация измерительных осей гироскопов и осей подвеса
платформы. При действии возмущающих моментов по осям стабилизации х и
у гироскопы 2 и 3 будут прецессировать не только от "своего", но и от
"чужого" возмущающего момента. В случае прямой связи ДУП с ДР и
ДУП с ДР (как показано на рис. 7.12) в цепях разгрузки появятся ис-
249
каженные управляющие сигналы, а
это приведет к дополнительным
нежелательным нагрузкам на
стабилизирующие двигатели,
усложнит функционирование систем
стабилизации, что в конечном
итоге снизит точность
стабилизации, и в некоторых случаях
приведет к потере устойчивости.
Покажем это на примере
максимального несоответствия
взаимного расположения осей
стабилизации и измерительных осей
гироскопов.
В исходном положении (см.
рис. 7.12) на действие
возмущающего момента Лг, как мы уже
Рис.7.12 выяснили, реагирует гироскоп 2
и ДР обеспечивает его компенсацию. Если основание ГСП развернется
относительно исходного положения платформы 1 на 90° (рис. 7.13), то
на тот же возмущающий момент МУ будет реагировать уже гироскоп 3,
который, прецессируя, гироскопическим моментом Н /3 обеспечит компенса-
иию момента М и одновременно включит ДР . ДР , прикладывая момент
вокруг оси х\ вызовет прецессию гироскопа 2, а следовательно, и
гироскопический момент Н & парирующий его действие. В результате
прецессии гироскопа 2 на ДР поступит управляющий сигнал,
пропорциональный углу 02, и ДР в итоге скомпенсирует возмущающий момент МУ.
Таким образом, и в этом случае стабилизация платформы может
обеспечиваться, но она происходит по длинной цепочке промежуточных
воздействий, что безусловно отразится на качестве стабилизации. (В
зависимости от характера возмущзющих воздействий может произойти и потеря
устойчивости ГСП.) Для того, чтобы устранить взаимосвязь каналов
стабилизации по осям внешней и внутренней рамок, в системе стабилизации
ГСП предусматривается специальное распределительное устройство -
преобразователь координат (ПК). В преобразователе координат сигналы,
получаемые с гироскопов 2 и 3, складываются таким образом, что резуль-
250
тирующий управляющий сигнал
поступает /иль на тот двигатель
разгрузки, по оси которого приложен
возмущающий момент.
В качестве преобразователей
координат в ГСП обычно применяют си- MJ
нусно-^осинусные вращающиеся
трансформаторы (СКТ). Ротор СКТ
механически связан с осью платформы и
имеет' две обмотки (рис. 7.14), на
одну из которых после
предварительного усиления поступает переменное
напряжение с ДУП гироскопа 2, а на
другую - переменное напряжение с ДУП,
кУп
*п
\ДРу
Рис.7. 13
гироскопа 3. Статор СКТ
механически связан с внутренней рамкой и также имеет две обмотки. С одной
из них (также после усиления) напряжение поступает на управляющую
обмотку ДР , с другой - на ДР . В согласованном (исходном) положении,
* У
как это показано на рис. 7.14 и 7.15, а, возмущающий момент, например
по оси у внешней рамки ГСП, вызовет прецессию гироскопа 2. С датчика
угла прецессии (ДУП ) через вращающийся трансформатор напряжение
передается на ДР , т.е. именно на тот разгрузочный двигатель, по оси
которого приложен Лг. При развороте в горизонтальной плоскости осно-
вания ГСП, а следовательно, и осей карданова подвеса (х; у) на 90 ,
возмущающий момент Лг будет уже вызывать прецессию гироскопа 3. Но
так как статор СКТ повернется вместе с основанием относительно
ротора, механически связанного с неизменно ориентированной платформой,
так же на 90 , то напряжение с ДУП будет подаваться опять же на ДР
и возмущающий момент Лг скомпенсируется моментом, развиваемым ДР .
В случае когда относительная ориентация платформы и оси внешней
рамки занимают промежуточное положение по сравнению с положениями,
изображенными на рис. 7.15, момент Лг вызывает прецессию гироскопов 2
и 3. Скорость прецессии каждого гироскопа будет пропорциональна
синусу угла между их главными осями и осью внешней рамки. Пропорционально
скоростям прецессии изменятся углы прецессии гироскопов, а
следовательно, и напряжения с ДУП и ДУП . Магнитные потоки, создаваемые об-
251
Рис. 7.14
мотками ротора СКТ. будут
пропорциональны управляющие
сигналам с ДУП. Результир][таций
магнитный поток, равный |их
геометрической сумме,
поворачивается относительно плат|формы
на тот же угол, на которой
повернется основание (внешняя
рамка) ГСП относительно
платформы. Вследствие этого ре-
I AU Мрх зультирующий магнитный i поток
JCbff » наводит напряжение лишь в об-
"7" * мотке статора СКТ,
электрически связанной с управляющей
обмоткой ДР . Таким офазом.
когда к внешней рамке ГСП
приложен М . СКТ (преобразователь
в
координат) приводит в действие
только ДР . Аналогично
приводится в действие и ДР .
Поскольку ГСП обеспечивает стабилизацию относительно трех осей, ее
удобно использовать для измерения углов пространственной ориентации
различных подвижных объектов. Например, на самолетах с помощью ГСП
измеряют углы крена, тангажа и курса. При использовании трехосных ГСП
Рис.7. 15
252
на крневренных ЛА возникает
необходимость в
дополнительной у следящей рамке. Эта
рамк4 со специальным
следящим |приводом предотвращает
совмещение оси платформы с
осью внешней рамки при
угловых отклонениях (близких к
±90 ) ЛА относительно оси,
совпадающей с осью
внутренней рамки. В итоге платформа
становится невыбиваемой при
любых эволюциях ЛА.
На рис. 7.16 показана
кинематическая схема подвеса
ГСП
со следящей рамкой.
Рис.7.16
Платформа с кардановым подвесом (внутренняя рамка 2 и внешняя рамка
3) размещена в следящей рамке 4. Отклонение оси z платформы 1 от
| п
перпендикуляра к плоскости внешней рамки 3 фиксируется датчиком угла
(ДУ) который через усилитель управляет следящим двигателем СД. СД
поворачивает следящую рамку 4 таким образом, чтобы ось z платформы
оставалась перпендикулярной к оси у внешней рамки. На рисунке
показаны тЖкже преобразователь координат ПК и его связи с датчиками углов
прецессии гироскопов. С целью упрощения рисунка по осям стабилизации
на рисунке не изображены ДР.
Инерционные возмущающие моменты в трехосных ГСП в связи с
пространственной стабилизацией платформы имеют относительно меньшие
величины, чем в двухосных и одноосных ГС, поэтому в трехосных ГСП
обычно № применяют спаренные гироскопы. В общем случае трехосных ГС
выбор {расположения и ориентации осей гироскопов на платформе зависит от
режима их работы, а также характерных особенностей движения
основания. .Отметим, что пространственная (трехосная) стабилизация платформы
обеспечивает более комфортные условия для нормального
функционирования размещенных на ней чувствительных элементов, ограничивая
инерционны^ возмущения, обусловленные колебаниями и вибрациями основания.
Соответственно трехосные силовые ГСП имеют относительно меньшие
погрешности, чем двух- или одноосные ГС.
Ошовые ГС широко используют в случаях, когда необходимо
стабилизировать приборы и устройства, имеющие относительно большую массу
(прицелы, головки самонаведения, телескопы и т.д.), или как первич-
! 253
ные датчики ориентации в непрецизионных системах информации (в
пилотажных центральных курсовых приборах, гировертикалях, гирокурсо-вер-
тикалях и т.д.). /
7.5. ИНДИКАТОРНЫЕ И ИНДИКАТОРНО-СИЛОВЫЕ ГС
Индикаторные и индикаторно-силовые ГС бывают одноосные, двух(|сные
и трехосные. К индикаторным ГС относят такие, в которых возмущающие
моменты, действующие по осям стабилизации, компенсируются только
стабилизирующим двигателем. Гироскопические моменты гироскопов, проуиво-
что
эле-
действуюшие возмущающим, либо отсутствуют, либо настолько малы]
ими можно пренебречь. В качестве гироскопических чувствительных
ментов в индикаторных ГС применяются астатические гироскопы, ДУС
интегрирующие и дважды интегрирующие гироскопы с двумя степенями
свободы (в том числе и нетрадиционных схем). Сигналы с гироскопов через
усилители поступают на стабилизирующие двигатели. В соответствии с
типом чувствительного элемента управление стабилизирующими
двигателями осуществляется по углу стабилизации, по угловой скорости изменения
угла стабилизации и по интегралу изменения угла стабилизации.
Рассмотрим кратко работу индикаторного ГС на астатических
гироскопах. На рис. 7.17 показана кинематическая схема индикаторного
ГС на астатических гироскопах (расположение гироскопов на платформе
может быть и иным). На платформе 3. подвешенной во внутренней и
внешней рамках 4 и 5, размещены два астатических гироскопа 1 и 2L На
оси внешней рамки астатического гироскопа 1 установлен датчик угла
ДУ, а на осях внешней и внутренней рамок гироскопа 2 установлены
соответственно датчики углов ДУ и ДУ . j
При отклонениях платформы от ориентации, задаваемой астатическими
гироскопами, с датчиков углов через усилители на стабилизирующие
двигатели поступают управляющие сигналы, пропорциональные углам
отклонения вокруг соответствующих осей стабилизации. С ДУ сщгнал
через усилитель поступает непосредственно на СД , который развивает
стабилизирующий момент и разворачивает платформу вокруг оси
стабилизации z к согласованной с астатическим гироскопом 1 ориентации. С ДУ
и ДУ управляющие сигналы вначале поступают на преобразователь
координат (ПК), а затем на СД или СД , или на оба вместе, в зависимости
** У
от того, как отклонилась платформа - вокруг оси х или оси (/, или,
вокруг обеих осей одновременно.
Далее стабилизирующие двигатели, вращая платформу каждый вркруг
254
ей оси» приводят ее в согласо-
ное с астатическими гироскопа-
гловое положение. Так обеспе-
ся стабилизация платформы
<Ьггельно заданной ориентации,
лучае необходимости управление
ориентацией индикаторной ГСП
можно обеспечить, если на осях
подвеса гироскопов предусмотреть
датчики моментов (коррекиионные
двигатели), которые, заставляя
прец^ссировать тот или другой ги-
росксю, через соответствующие ДУ
и Сд развернут платформу по за-
дангому закону.
Ткк, индикаторная ГСП,
изображенная на рис. 7.17, может выпол-
Рис.7.17
нять]функции гирокурсовертикали (ГКВ), если на платформе 3 установить
жидкостный маятниковый переключатель (обычно для достижения этой цели
на платформу устанавливают два акселерометра), соединив его
надлежащим образом с установленными на осях внешней и внутренней рамок
гироскопе 2 датчиками моментов. На оси внутренней рамки гироскопа 1 также
требуется установить датчик момента, управляющие сигналы на который
могут поступать от внешних источников информации (какого-либо
компаса). (Маятниковый переключатель и датчики моментов на рис. 7.17 не
показаны.)
Таким образом, как видим, платформа индикаторного ГС отслеживает
ориентацию астатических гироскопов. Причем и в режиме стабилизации, и
в рфкиме управления силовыми элементами, обеспечивающими развороты
платформы, являются стабилизирующие двигатели. Трехстепенные
гироскопе в каналах стабилизации играют роль измерительных элементов -
инджаторов. В общем случае в индикаторных ГС любой из ранее
перечисленных чувствительных элементов (гироскопов)
измерительным элементом - индикатором. Именно поэтому
1ют индикаторными.
«мер, если в качестве чувствительных элементов ГС применены
ковые интегрирующие гироскопы с малыми кинетическими моментами,
воздействии возмущающих моментов по осям стабилизации они, по
iy, измеряют соответствующие углы поворота платформы и управля-
•абилизируюшими двигателями, практически не участвуя в непосред-
юй стабилизации. Каналы стабилизации индикаторных ГС на
практике часто работают по углу отклонения, т.е. чувствительными
255
является
такие ГС
м,
^нагр
\\мг
Платформа
Мраз\
1
Внутренняя
обратная
сбязь
Внешняя
обратная
сбязь 1
^. |
||AW
J Блок
1 гироскопоб
ММШ
■^ 1
1
Рис.7. 18
элементами являются трехстепенные астатические или двухстепенны*
интегрирующие гироскопы. При этом для обеспечения работы системы
стабилизации принципиально необходим угол отклонения платформы, который
является погрешностью стабилизации. Снижения этой погрешности обычно
добиваются выбором значительного по величине общего коэффициента
передачи канала стабилизации (в индикаторных ГС общий коэффициент
передачи примерно на порядок больше, чем в силовых ГС).
Однако это вступает в противоречие с обеспечением устойчивой
работы ГС. Поэтому для обеспечения устойчивости ГС при значительных
коэффициентах общей передачи в каналы стабилизации вводят разлжные
корректирующие звенья. В индикаторных ГС предъявляются выажие
требования к быстродействию канала стабилизации. Статическая точность
индикаторных ГС, также как и силовых ГС, определяется дрейфом
(собственной прецессией) гироскопов, обусловленных остаточными
вредными моментами. Однако вследствие более легких условий работы
гироскопических чувствительных элементов, размещенных на платформе,
дрейф индикаторных ГС может быть значительно меньшим. Именно поэтому
они широко применяются в инерииальных навигационных системах. I
Для того чтобы обосновать выделение индикаторно-силовых ГС е|
самостоятельный тип гиростабилизаторов, рассмотрим общую функциональную
схему, изображенную на рис. 7.18 [12], и на ее основе поясним
принятый принцип классификации. На рисунке показаны: платформа; блок
Гироскопических чувствительных элементов; внешняя стабилизирующая
обратная связь - цепь (канал) разгрузки (М ); внутренняя стабилизирующая
обратная связь - момент гироскопической реакции блока гироскопов
(М ); возмущающий момент в осях прецессии блока гироскопов {1
);
256
момент управления (М ) и момент нагрузки Ш ) (возмущающий
моменте вокруг осей стабилизации. Внешняя обратная связь работает по
управляющим сигналам с блока гироскопов. Ей свойственно динамическое
запаздывание, обуслов- ленное постоянными времени элементов цепи
разгрузки. Гироскопические элементы в данном случае играют роль
индикаторов нагрузки, реагирую щих на изменение ориентации платформы.
Внутренняя обратная связь обеспечивается непосредственно
гироскопами; она безынерционна и тем эффективнее, чем больше собственные
кинетические моменты гироскопов. Гироскопы в данном случае играют роль
непосредственных стабилизирующих элементов. В соответствии с
рассмотренной общей схемой, в зависимости от принципа построения и роли
гироскопических элементов в процессе стабилизации ГС разделены на
рассматриваемые нами типы.
К непосредственным отнесены ГС, не имеющие внешней обратной связи.
Стабилизации в них обеспечиваются только за счет гироскопического
момента.
Индикаторные ГС не имеют внутренней обратной связи. Процесс
стабилизации обеспечивается за счет моментов, развиваемых стабилизирующими
двигателями. Гироскопические элементы выполняют роль индикаторов
отклонения платформы.
Силовые ГС имеют внутреннюю и внешнюю стабилизирующие связи. При
этом обе обратные связи достаточно равноправны. Для повышения
эффективности внутренней обратной связи обычно кинетические моменты
гироскопов стараются сделать по возможности большими.
Индикаторно-силовые ГС имеют внутреннюю и внешнюю обратные
стабилизирующие связи, но благодаря конструктивным связям, прикладываемым
относительно осей прецессии двухстепенных гироскопов, ГС ведет себя
либо как индикаторный, либо как силовой ГС в зависимости от характера
изменения внешнего возмущающего момента, приложенного к платформе.
Вернемся к рассмотрению индикаторно-силовых ГС. Как уже
отмечалось, принципиальная схема индикаторно-силовых ГС не отличается от
схемы силовых ГС. В индикаторно-силовых ГС, в качестве гироскопических
чувствительных элементов применяются интегрирующие гироскопы и ДУС.
Следовательно, в случае применения интегрирующего гироскопа
преобладающим будет момент диссипативной связи (демпфера), а в случае ДУС -
момент позиционной связи (пружины). Поэтому, если принцип работы
силового и индикаторно-силового ГС одинаков, то процессы стабилизации
различаются и зависят от типа гироскопических чувствительных
элементов и характера возмущений. В индикаторно-силовых ГС наложение на
гироскопы диссипативной и позиционной связей изменяет их скорости
прецессии, а следовательно, и величину гироскопического момента. Поэтому
257
роль гироскопов как непосредственных силовых элементов снижена.
Выявление всех особенностей поведения индикатор-носиловых ГС возмбжно
лишь на основе анализа их математических моделей, учитывающих тип
гироскопического элемента и характер возмущающих воздействий.
Как показывает такой анализ [12], в индикаторно-силовых ГС} при
низких частотах колебаний платформы, т.е. при д < k/H (k/H - уде!пьная
скорость прецессии платформы под действием момента разгрузки) момент
нагрузки (возмущающий момент) воспринимает на себя целиком
разгрузочный двигатель, а гироскопический момент мал и играет роль
демпфирующего момента. Таким образом, на низких частотах индикаторно-сикювой
ГС ведет себя как индикаторный. На средних частотах индикаторно-
силовой ГС функционирует также в режиме индикаторного, но имеет при
равных условиях лучшие динамические характеристики, чем индикаторные.
По мере возрастания частоты колебаний платформы в районе частоты
среза более существенно сказывается временное запаздывание в цепи
разгрузки, и в данном случае приобретают большее значение моменты
демпфирования, обеспечивающие устойчивость системы и лучшие
характеристики стабилизации в переходных и установившихся режимах. В этом
смысле все большую роль при переходе от низких частот к средним
приобретает гироскопический момент, выполняющий роль демпфирующего
момента. На средних и высоких частотах, наряду с гироскопическим
моментом, на процесс стабилизации начинают оказывать влияние и инерционные
моменты платформы. При высоких частотах индикаторно- силовой ГС имеет
характеристики силового.
Таким образом, варьируя виды и эффективность накладываемых на
гироскопические чувствительные элементы связей, добиваются желаемых
динамических свойств ГС с учетом условий их работы.
7.6. ПРИНЦИП ПОСТРОЕНИЯ ГИРОВЕРТИКАЛЕЙ
С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ
Известно [7, 8], что физический маятник принципиально может не
иметь погрешностей от ускорений, если период его собственных
колебаний равен 84,4 мин (период Шулера), а основание маятника перемешается
по поверхности сферы (например Земли). Однако техническая реализация
маятника с периодом Шулера невозможна. Вместе с тем оказалось
возможным создание гироскопических устройств, моделирующих поведение
маятника, с периодом Шулера. Физической основой создания таких устройств
является использование принципа интегральной коррекции гировертикали,
предложенный в 1932 г. Е.Б. Левенталем и Л.М. Кофманом [7, 8].
Рассмотрим принцип построения невозмущаемой гировертикали с интег-
258
Рис.7. 19
ральной коррекцией на примере упрощенной схемы инерииальной курсовер-
тикали навигационной системы. На рис. 7.19 изображена трехосная ГСП,
на которой установлены два интегрирующих гироскопа 1 и 2,
обеспечивающих управление стабилизирующими двигателями, расположенными на
горизонтальных осях подвеса платформы (элементы цепей стабилизации по
осям и курсовой гироскоп на рисунке не показаны, так как принцип
стабилизации платформы остается прежним). На осях прецессии гироскопов 1
и 2 установлены датчики моментов соответственно ДМ и ДМ которые
корректируют ориентацию платформы в горизонтальной плоскости по
сигналам, поступающим с акселерометров А„ и Ар через усилители и
интеграторы.
Для пояснения принципа работы невозмущающей гировертикали с
интегральной коррекцией примем следующие допущения: каналы
стабилизации ГСП априорно устойчивы; угловые движения платформы
описываются прецессионными уравнениями; на платформу и гироскопы не
действуют возмущающие моменты; платформа идеально ориентирована в
259
азимуте (ось у расположена в плоскости
п
географического меридиана); суточное вра-
*2 щение Земли отсутствует. Таким образом, в
Р идеале платформа должна моделировать
систему отсчета &£, ориентированную геогра-
\тд ^ п фически. Предположим, что основание, на
котором установлена ГСП, движется по по-
Рис.7.20 верхности Земли с ускорением W = W.. + Wp,
а платформа (по аналогии с обычными ГВ) отклонена вокруг оси у
внутренней рамки на угол а и вокруг своей оси на угол /3 (индекс "п" при
а и /3 далее опущен). Тогда в соответствии с рис. 7.20 сигнал,
поступающий с акселерометра Лд,, будет равен W - W^ cps/3 ~ g sin/3. Сигнал
с акселерометра Ар будет равен W = Wp cosa - g sina.
Прецессионные уравнения платформы вокруг ее горизонтальных осей
подвеса получим, воспользовавшись, как и ранее, общими прецессионными
уравнениями
Hq
МХ'
Нр = М
Проекции угловых скоростей на горизонтальные оси подвеса платформы
для данного случая: q = a + Vr/fl : р
0 - VN/R3, где VE и VN
соответственно восточная и северная составляющая линейной скорости
основания.
Поскольку сигналы с акселерометров поступают на датчики моментов
ДМ и ДМ после предварительного интегрирования, то моменты коррекции
по осям прецессии гироскопов при условии малости углов а и 0:
М = М* = *
(WE - ga)dt:
М = Л!** = k
(wN - аш.
260
После подстановки значений проекций угловых скоростей р и q и
моментов Mr, Mr в общие прецессионные уравнения, получим:
а +
'N
Я,
н
н
(WE - ga.)dt;
О
(wN - am.
Поскольку а> = 0, то можно принять Wp = V- и WN - V\,, тогда после
дифференцирования уравнений и несложных преобразований получим:
а +
Н
k.
ga = (
Н
k.
^/Г^ = (/Г
R3 )WE'
- k; )Wn-
Если конструктивно обеспечить равенство коэффициентов
пропорциональности каналов коррекции k
fc = k, кинетических моментов // =
2 1
= //=// и k/H = \/R , что технически при современном уровне
технологии и элементной базы вполне реализуемо, то
0.
а + ~— а
«3
0; & + §- /3
Кз
Полученные уравнения движения платформы совпадают с уравнением
движения физического маятника, имеющего период собственных колебаний,
равный 84.4 мин. Действительно, из уравнений следует, что собственная
частота незатухающих колебаний платформы вокруг горизонтальных осей
МЛ
А
g/R„ и, следовательно, период колебаний платформы Т
2я V 84.4 мин.
8
Таким образом, если выполнено условие k/H
l/R , правая часть
261
уравнений равна нулю независимо от наличия ускорений. Это означает,
что у платформы отсутствует вынужденное движение - она невозмушаема
ускорениями. Поскольку в системе отсутствует демпфирование из
последних уравнений следует, что при ненулевых начальных условиях по
углам а, 0 и их производным платформа будет совершать незатухающие
гармонические колебания с амплитудой, равной начальным отклонениям, и
периодом Шулера. Эти колебания не могут быть задемпфированы без
нарушения условия невозмушаемости при использовании внутренней
информации. Эта задача решается с помощью внешней информации,
например о линейной скорости движения основания. Отметим, что с
рассматриваемой ГСП можно получать информацию не только об ориентации
основания, но и другие параметры его движения.
Так, например, сигналы на выходе интеграторов пропорциональны
составляющим Уд, и Vp абсолютной линейной скорости. Повторное
интегрирование этих сигналов дает информацию о дальности и боковом
отклонении основания, скажем, от точки старта. Установка третьего
акселерометра, измерительная ось которого вертикальна, позволяет
получить информацию о вертикальной скорости и высоте. Именно так (при
простейшем рассмотрении) работающие устройства и называют
инерциальными навигационными системами (ИНС). Так как сигналы в ИНС
неоднократно интегрируются, то интегрируются и погрешности [8].
Поэтому ко всем элементам ИНС предъявляются чрезвычайно высокие
требования по точности.
Помимо ИНС, работающих на основе ГСП, в настоящее время интенсивно
разрабатываются и совершенствуются так называемые бесплатформенные
ИНС. В бесплатформенных ИНС чувствительные элементы (акселерометры и
гироскопы) устанавливаются непосредственно на объекте. По их
информации и информации, получаемой от внешних источников, с помощью
вычислительных средств определяются параметры ориентации объекта. В
бесплатформенных ИНС базовые системы координат моделируются
аналитически, в отличие от платформенных, где эта задача решается
платформой, т.е. физическим моделированием. Естественно, что все
элементы бесплатформенных ИНС работают в более жестких условиях.
Поэтому к ним предъявляются еще более высокие требования по точности,
быстродействию, надежности и т.д.
Разрабатываемые в настоящее время ИНС ориентированы на применение
нетрадиционных чувствительных элементов (гироскопов, акселерометров)
и вычислительных средств новых поколений. Точностные характеристики
как платформенных, так и бесплатформенных ИНС в большой степени
зависят от их первоначальной ориентации (начальной выставки)
относительно заданной системы отсчета. Особенно это важно для ИНС,
262
рассчитанных на продолжительную работу. Например, начальная ошибка
о
выставки ГСП в азимуте, равная 1 , при скорости полета ЛА 1300 км/ч
за 1 ч полета приводит к погрешности (в боковом отклонении) в
определении координат более 20 км. Поэтому задача начальной выставки
ИНС являются важной самостоятельной проблемой [7, 12].
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Поясните принцип действия одноосного силового ГС.
2. В чем состоят принципиальные отличия в требованиях к контурам
(каналам) стабилизации (разгрузки) и коррекции ГС?
3. Работоспособен ли ГС, изображенный на рис. 7.2, при какой-либо
другой ориентации оси прецессии гироскопа относительно платформы?
Если да, то в чем будет отлнчие?
4. Какими особенностями обладают одноосные ГС со спаренными
гироскопами?
5. В чем заключается основной принцип двух- н трехосной силовой
стабилизации?
6. От чего зависит выбор расположения гироскопов на двухосной
платформе?
7. Нарисуйте схему двухосной снловой гировертикали; поясните ее
принцип действия. Почему она может обеспечить более высокую точность
измерения углов крена и тангажа, чем обычные одногироскопные ГВ?
8. Поясните принцип действия трехосной (пространственной) ГСП.
9. Почему в схеме трехосной ГСП (см. рис. 7.14) необходим
преобразователь координат и как он функционирует?
10. Чем отличаются силовые ГС от индикаторных?
11. В чем особенности функционирования инднкаторно-силовых ГС.
12. Поясните, в чем заключается принцип построения ГВ с
интегральной коррекцией?
СПИСОК ЛИТЕРАТУРЫ
1. АРНОЛЬД Р.И., Мондер Л. Гиродинамнка и ее техническое
применение. М. : Машиностроение, 1974. 468 с.
2. Булгаков Б.В. Прикладная теория гироскопа. М. : Изд-во МГУ,
1976. 400 с.
3. Гироскопические системы/ Под ред. Д.С. Пельпора. - М. : Высшая
школа, 1971. Ч I. 488 с.
4. Гироскопические системы./ Под ред. Д.С. Пельпора. - М. : Высшая
школа, 1972. Ч. П. 472 с.
263
5. Гироскопические системы/ Под ред. Д.С. Пельпора. - М. : Высшая
школа. 19S0. Ч. Ш. 128 с.
6. Индикаторные гироскопические платформы/ Под ред. А.Д.
Александрова. М. : Машиностроение. 1979. 239 с.
7. ИШЛИНСКИЙ А.Ю. Ориентация, гироскопы и ннерциальная навигация.
М.: Наука. 1976. 670 с.
8. ИШЛИНСКИЙ А.Ю., БОРЗОВ В.И., СтепаненКО Н.П. Лекции по теории
гироскопов. М. . Изд-во МГУ. 19S3. 248 с.
9. ОДИНЦОВ А.А. Теория и расчет гироскопических приборов. Киев:
Вища школа. 19S5. 392 с.
10. Пельпор Д.С., ОСОКИН Ю.А., Рахтенко Е.Р. Гироскопические
приборы систем ориентации и стабилизации. М. : Машиностроение. 1977.
208 с.
11. Пельпор Д.С. Гироскопические системы. М. : Высшая школа. 1986.
424 с.
12. Репников А.В., Сачков Г.П., Черноморский А.И. Гироскопические
системы. М. : Машиностроение. 1983. 320 с.
13. РИГЛИ У., ХолЛИСТер У., Денхард У. Теория, проектирование и
испытание гироскопов. М. : Мир. 1972. 416с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Авиагоризонт 62
Гирогоризонт 61
Акселерометр интегрирующий 188,
256
Апекс (вершина) гироскопа 24
Арретир 58, 59
Базовые (опорные) направления 4,
45
Бесплатформенные инерциальные
системы 259
Вертикаль кажущаяся 84 , 85, 87,
104
— места 63
Вертикальная составляющая угловой
скорости вращения Земли 45
Вираж правильный 87, 88
Виражная погрешность
гировертикали 87
— гирополукомпаса 153
Время установления гировертикали
77, 78
Входная ось 172, 190
Выходная ось 172, 190
Гироазимут 140
Гировертикаль 62
-гиромаятниковая 62, 64
— невозмущаемая 255
— невыбиваемая 117
— с интергральной коррекцией
255
-со смешанной коррекцией 113. . .
117
— с постоянной коррекцией 97. . .
113
— с пропорциональной коррекцией
70...97
— с радиальной коррекцией 74
— с системой коррекции 62
— центральная (ЦГВ) 245
Гировертикант 59. . .61
Гнроннтегратор линейных ускорений
(ГИЛУ) 169, 177
Гирокомпас 120... 139
Гиромагнитный компас 120
Гиромаятник 19, 62
-недемпфированный 68
Гиромотор 61, 140
Гироорбитант 139
Гирополукомпас 120, 139... 169
Гироприборы 59
Гироскоп астетический 19
— вибрационный 212
— в кардановом подвесе 18
— дважды интегрирующий 37
— демпфирующий 174
— дифференцирующий 173
— интегрирующий 169
— интегродифференцирующий 210
— камертонный 218
— курсовой 140
— лазерный 226
— направления 140
— осциляторный вибрационный 217
— отстающий 172
— поплавковый 209
— роторный вибрационный
212...216
— свободный 19, 49
— с двумя степенями свободы
36...38, 189
— скоростной 168
— с криогенным подвесом 225
— с тремя степенями свободы 18
— с электромагнитный подвесом
222
— с электростатическим подвесом
223
тяжелый 19
265
— форсирующий 210
— шаровой с газодинамическим
подвесом 221
Гироприборы 59
Гиростабилизатор 231. . . 233, 253,
254
— двухгироскопный 239
— двухосный 241
— индикаторносиловой 233, 251
— индикаторный 233, 251, 252
— непосредственный 231, 233
— одноосный 233, 234
— пространственный 245
— силовой 233
— трехосный 245
Гиростабилизированная платформа
(ГСП) 241
Гиротахоакселерометр 169
Гиротахометр 168
гиротрон 2IS
Гирофлекс 217
Горизонтальная составляющая
угловой скорости вращения Земли 45
Датчик момента 49, 63, 169
— угла 49, 72, 188
прецессии 234
— углового ускорения 176
— угловой скорости 168, 188
Двигатель разгрузки 234, 235
Девиация 82
— баллистическая 87
гировертикалей 87, 93
гирокомпаса 136. . . 138
— ннтеркардинальная 138
— скоростная гировертикалей 82
— — гирокомпаса 134
гирополу компаса 142
Демпфер 174, 189
Демпфирование 125
Динамическая настройка РВГ 215
Динамический курс 135
Дрейф гироскопа 52
Жесткость динамическая 214
— пружины 214
Застоя зона 69
— угол 193
— четырехугольник 69
Карданная погрешность 151. . . 153
Когерентность 227
Кожух гиромотора 18, 62, 71
Компас 12, 144
Кориолиса момент 12, 13
— сила 16... 19
— ускорение 5... 9, 11, 14
Коррекция азимутальная 143
— горизонтальная 140, 141
— интегральная 225
— маятниковая 140, 141
— межрамочная 141
— постоянная 64
— пропорциональная 64
— смешанная 64
Коэффициент передачи 171, 253
Крен (угол крена) 4, 62, 87
Курс (угол курса) 119
— географический 119
— гироскопический 135
— истинный 119
— компасный 115
— магнитный 119
— ортодромический 119
Курсовые системы 120, 153
Локсодромия 120
Маятниковость 166
Маятниковый жидкостный
переключатель 115, 116
Меридиан 121
- географический 119
— магнитный 119, 120
— ортодромический 119, 120
Метод кинетостатики 21
Момент возмущающий (внешний) 12,
25. 69, 122
— гироскопический 12. . . 17
266
— демпфирующий 174, 179
— инерции полярный 12, 213
экваториальный 22
— инерционный 22, 23
— кинетический 13
— количества движения 13
— неуравновешенности
(небаланса) 53
— позиционный 62, 66
— сил инерции 22
— трення 53
— упругих сил 175
Мотор коррекцнонный 63
Навигационная система инерциаль-
ная 259
Направляющие косинусы 43, 44
Направляющий момент гирокомпаса
132
Нутация 20, 28. . .30
Опоры главный 163
Ортодромия 120, 144
Оси измерительные 141
— подвеса гироскопа IS
— Резаля 22
Ось гироскопа главная 18
— прецессия 233, 235
— стабилизации 233, 235
— фигуры 18
— чувствительности 190
Период незатухающих колебаний
гирокомпаса 124, 137
Плоскость горизонта 45
— картинная 24, 25
— стрельбы 59
Погрешности динамические датчиков
угловых скоростей 199. . . 205
— инструментальные 51
гировертикалей 74, 80
гирокомпаса 129, 133
гирополукомпаса 155. . . 167
датчиков угловых скоростей
192, 195
— — интегрирующих гироскопов
182, 186, 187, 208
свободных гироскопов 52. . .
54
— методические 51
— - гировертикалей 81, 95,
104...111
гирокомпаса 133. . . 138
гирополукомпаса 148. . . 155
датчиков угловых скоростей
195, 196, 198, 199
— — интегрирующих гироскопов
162...185, 208
— — свободных гироскопов 54. . .
56
Подвес гироскопа 18
— — газодинамический 221
газостатический 221
гидростатический 209
криогенный 225
электромагнитный 222
электростатический 223
Полукомпасный эффект 159
Полюс гироскопа 24
Порог чувствительности 162
гирополукомпаса 162
датчика угловой скорости
193
Потеря устойчивости 248
Преобразователь координат 248,
249
Прецессии закона 16
— правила 13, 16, 17
Прецессионное движение
(прецессия) 13, 28
Прецессия регулярная 30
— кажущаяся 55, 56
— псевдорегулярная 29
— собственная 52
— стабилизирующая 233
Пружина механическая 174, 205
— электрическая 169
Радиус Земли 45, 46, 134
Ракета баллистическая 59. . .61
Рамка внешняя IS
— внутренняя 18
— вледящая 118, 250
Ротор 18
Свойства гироскопа 18...20
Система координат подвижная 42,
45
— коррекция 62
географическая 42, 45
инерциальная 21
ортодромическая 145
поол у подвижная 21, 22
связанная с объектом 46,
151. 180
с траекторией объекта 46
Скорость кажущаяся 179
— коррекции удельная 73
Собственный момент количества
движения 13
— уход гироскопа 52
Теорема о кинетическом моменте 17
— Резаля 17
Точка опоры (неподвижная)
гироскопа 18
Углы ориентации 4, 22
— Эйлера-Крылова 22
Упругая связь 169
Ускорение абсолютное 5... 7
— кажущееся 179
— осестремительное
(центростремительное ) 7
— относительное 5... 7
— переносное 5... 7
Условие динамической настройки
215
— невозмущаемости гировертикали
с интегральной коррекцией 258,
259
— — гирокомпаса 136. . . 138
--Шулера 136... 138, 258. 259
Уравнения движения гировертикали
72...73. 99
гироинтегратора (ГИЛУ) 182
гирокомпаса 122, 123
гироскопа технические (ли-
неализованные) 21, 22
датчика угловых скоростей
(ДУС) 191
— — интегрирующего гироскопа
(ИГ) 208
— — прецессионные 23
— — роторного вибрационного
гироскопа (РВГ) 212
Уходы гироскопа 52
Характеристика коррекции 64, 71,
98
— статическая ДУС 190, 192...
194
Чувствительность ДУС 173, 196
Шулера период 136, 255, 258
Эффективность коррекции 72
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 4
Глава 1. Элементы прикладной теории гироскопа 5
1.1. Ускорения и силы инерции Кориолиса 5
1.2. Гироскопический момент. Закон прецессии 10
1.3. Гироскоп с тремя степенями свободы и его основные
свойства 17
1.4. Уравнения движения гироскопа и их анализ 21
1.4. 1. Составление уравнений движения гироскопа 21
1.4.2. Понятие картинной плоскости 24
1.4.3. Краткий анализ уравнений движения гироскопа ... 25
1.5. Гироскоп с двумя степенями свободы и его свойства 36
1.6. Энергетические соотношения при движении гироскопа 3S
1.7. Уравнения движения гироскопа с учетом переносных
и угловых скоростей системы отсчета 42
1.8. Подвижные системы координат, применяемые при
анализе гироскопических приборов 45
1.8.1. Географическая система координат 46
1.8.2. Система координат, связанная с траекторией
движения объекта 47
Вопросы для самопроверки 49
Глава 2. Свободные гироскопы 50
2.1. Общие сведения 50
2.2. Погрешности свободных гироскопов 52
2.2. 1. Погрешности СГ на неподвижном основании 53
2.2.2. Погрешности СГ на подвижном основании 55
2.3. Конструктивные особенности свободных гироскопов . 57
Вопросы для самопроверки 62
Глава 3. Гироскопические датчики и указатели углов крена и
269
тангажа 63
3.1. Общие сведения 63
3.2. Гиромаятниковая вертикаль 65
3.3. Гировертикали с пропорциональной коррекцией 71
3.3.1. Поведение и погрешности гировертикали с пропор -
циональной коррекцией на неподвижном основании 73
3.3.2. Поведение и погрешности гировертикали при
прямолинейном движении объекта с постоянной скоростью 82
3.3.3. Поведение и погрешности гировертикали при
движении объекта с ускорением 85
3.3.4. Поведение и погрешности гировертикали при
вираже объекта 88
3.3.5. Поведение гировертикали при гармоническом
возмещении системы коррекции 96
3.4. Гировертикали с постоянной (релейной) коррекцией 98
3.4. 1. Поведение гировертикали на неподвижном основа -
нии 100
3.4.2. Поведение гировертиткали при прямолинейном дви -
женин объекта с постоянной скоростью 104
3.4.3. Поведение и погрешности гировертикали при пря -
молинейном движении объекта с ускорением 105
3.4.4. Поведение и погрешности гировертикали при
вираже объекта 107
3.4.5. Поведение гировертикали при гармонических воз -
мущениях системы коррекции 112
3.5. Гировертикали со смешанной коррекцией 114
3.6. Невыбиваемые гировертикали 118
Вопросы для самопроверки 120
Глава 4. Датчики и указатели угла курса 120
4.1. Общие сведения 120
4.2. Гирокомпасы 122
4.2.1. Принцип работы и уравнения движения 122
4.2.2. Поведение гирокомпаса на неподвижном относи -
тельно Земли основании 124
4.2.3. Поведение гирокомпаса на подвижном основании 134
4.3. Гнрополукомпасы 140
4.3. 1. Назначение и принцип действия 140
4.3.2. Гирополукомпас как измеритель географического
курса 142
4.3.3. Гирополукомпас как измеритель ортодромического
курса 145
4.3.4. Погрешности ГПК и способы их снижения 149
Вопросы для самопроверки 169
Глава 5. Датчики угловых скоростей и ускорений.
Интегрирующие гироскопы 170
5.1. Общие сведения 170
5.2. Датчики угловых скоростей, ускорений и
интеграторы на основе гироскопа с тремя степенями свободы ... 171
5.2. 1. Датчики угловых скоростей на основе гироскопа с
тремя степенями свободы 171
5.2.2. Датчики угловых скоростей и ускорений на основе
гироскопа с тремя степенями свободы 175
5.2.3. Гироскопические интеграторы линейных ускорений. 178
5.3. Датчики угловых скоростей и интегрирующие
гироскопы с двумя степенями свободы 190
5.3. 1. Датчики угловых скоростей 190
5.3.2. Интегрирующие гироскопы с двумя степенями
свободы 209
Вопросы для самопроверки 212
Глава 6. Нетрадиционные типы гироскопов 213
6.1. Общие сведения 213
6.2. Вибрационные гироскопы 214
6.2. 1. Роторные вибрационный гироскопы 215
6.2.2. Осцилляторные вибрационные гироскопы 220
6.3. Гироскопы с неконтактными подвесами 223
6.4. Лазерные гироскопы 229
Вопросы для самопроверки 234
Глава 7. Гиростабилизаторы 234
7.1. Общие сведения 234
7.2. Одноосные силовые ГС 237
7.3. Двухосные силовые ГС 244
7.4. Трехосные силовые ГС 248
7.5. Индикаторные и индикаторно - силовые ГС 254
7.6. Принцип построения гировертикалей с интегральной
коррекцией 258
Вопросы для самопроверки 263
Список литературы 263
Предметный указатель 265
Учебное пособие
БорОЗДИН Вячеслав Николаевич
ГИРОСКОПИЧЕСКИЕ ПРИБОРЫ
И УСТРОЙСТВА СИСТЕМ УПРАВЛЕНИЯ
Редактор Г.Д. Журавлева
Художественный редактор В.В. Лебедев
Технический редактор Е.Е. Бородкнна
Корректор Г.А. Сафонова
ИБ № 5780
Сдано в набор 27.04.89. Подписано в печать 17.04.90. ТО 1772.
Формат 60x88/16 Бумага офсетная № 2. Печать офсетная.
Усл.печ.л. 16,66. Усл.кр.-отт. 16,66. Уч.-изд.л. 15,94.
Тираж 3900 экз. Заказ№369. Цена 85 к.
Ордена Трудового Красного Знамени издательство "Машиностроение",
107076, Москва, Стромынский пер. , 4
Отпечатано в Московской типографии № 8
Государственного комитета СССР по печати с
оригинал-макета, изготовленного в издательстве
"Машиностроение" на персональных ЭВМ по программе "Астра-Н",
разработанной НИИЦЭВТ.
101898, Москва, Центр, Хохловский пер., 7»