/




















































































































































































































































































































Автор: Федорчук В.В.
Теги: дифференциальная геометрия алгебраические и аналитические методы в геометрии алгебра геометрия топология линейная алгебра аналитическая геометрия
ISBN: 5-93196-105-4
Год: 2003




Текст
В. В. Федорчук
— курс—
аналитической
ГЕОМЕТР' И
И ЛИНЕЙНО"
АЛГ Ы
В.В Федорчук
КУРС АНАЛИТИЧЕСКОЙ
ГЕОМЕТРИИ
И ЛИНЕЙНОЙ
АЛГЕБРЫ
2-е издание,
исправленное
Допущено
Министерством образования
Российской Федерации
в качестве учебного пособия
для студентов механико-математических
специальностей университетов
Москва
«Издательство НЦ ЭНАС»
2003
УДК 514.74+512.64
ББК 22.15
ФЗЗ
Федорчук В.В.
ФЗЗ Курс аналитической геометрии и линейной алгебры: Учеб.
пособие. - 2-е изд. испр. - М.: Изд-во НЦ ЭНАС, 2003. - 328 с.
ISBN 5-93196-105-4
В основе учебного пособия лежит курс лекций, читаемый автором на
механико-математическом факультете МГУ. Книга содержит в основном
традиционный материал по программе курсов «Аналитическая
геометрия» и «Линейная алгебра и геометрия». В отличие от известного
учебника академика П.С. Александрова в настоящем пособии векторная
алгебра строится на основе современного школьного курса геометрии с
четким выделением используемых аксиом Эвклида, подробно исследуются
плоские сечения поверхностей 2-го порядка, приведение матрицы
оператора к жордановой форме основано на геометрическом подходе, даны
элементы тензорной алгебры.
Для студентов вузов по специальностям «математика», «механика».
УДК 514.74+512.64
ББК 22.15
© Федорчук В.В., 2001
ISBN 5-93196-105-4 © ЗАО «Издательство НЦ ЭНАС», 2001
ОГЛАВЛЕНИЕ
Предисловие 6
ЧАСТЬ I. АНАЛИТИЧЕСКАЯ ГЕОМЕТРИЯ
Глава I. Векторы 7
§ 1. Предварительные теоретико-множественные понятия и факты 7
§ 2. Отрезок и полупрямая 8
§ 3. Полуплоскость и полупространство 12
§ 4. Определение вектора 14
§ 5. Сложение векторов и умножение вектора на число .... 19
§ 6. Векторы на прямой 22
§ 7. Линейная зависимость 24
§ 8. Геометрический смысл линейной зависимости 27
§ 9. Базисы и координаты 29
§ 10. Проекции и координаты 30
§ Πι. Определение скалярного произведения векторов и его свойства 36
§ 12. Скалярное произведение в координатах 38
§ 13. Системы координат 40
Глава II. Уравнения прямой линии и плоскости 47
§ 14. Уравнения прямой линии на плоскости 47
§ 15. Взаимное расположение прямых на плоскости. Полуплоскости 50
§ 16. Прямая линия на плоскости с прямоугольной системой
координат 53
§ 17. Уравнения плоскости 55
§ 18. Взаимное расположение плоскостей. Полупространства ... 58
§ 19. Прямая в пространстве 60
§ 20. Плоскость в пространстве с прямоугольной системой координат 61
Глава III. Преобразования координат. Ориентация. Векторное и
смешанное произведения 64
§ 21». Матрицы и операции над ними .... .64
§ 22. Переход от одного базиса к другому 67
§ 23. Переход от одной аффинной системы координат к другой . 69
§ 24. Ориентации прямой, плоскости, пространства ... 71
§ 25. Ориентированный объем параллелепипеда 72
§ 26. Векторное и смешанное произведения 75
§ 27. Некоторые приложения векторного и смешанного произведений
к прямым и плоскостям в пространстве 77
Глава IV. Линии второго порядка
§ 28. Алгебраические линии на плоскости. Квадратичные функции и
их матрицы 81
§ 29. Ортогональные матрицы 84
§ 30. Преобразования прямоугольных координат 86
§ 31. Ортогональные инварианты квадратичных функций .... 98
§ 32. Преобразование уравнения линии второго порядка при
повороте осей координат 89
§ 33. Приведение уравнения линии второго порядка к каноническому
виду 92
§ 34. Определение канонического уравнения линии второго порядка
по инвариантам 93
3
§ 35. Директориальное свойство эллипса, гиперболы и параболы 97
§ 36. Фокальное свойство эллипса и гиперболы 101
§ 37. Кривые второго порядка в полярных координатах .... 103
§ 38. Пересечение линии второго порядка с прямой 106
§ 39. Теоремы единственности для линий второго порядка 111
§ 40. Центры линий второго порядка 113
§ 41. Асимптоты и сопряженные диаметры линий второго порядка 117
§ 42. Главные направления и главные диаметры линий второго
порядка. Оси симметрии 122
§ 43. Расположение линий второго порядка 126
Глава V. Аффинные преобразования 132
§ 44. Преобразования 132
§ 45. Определение и свойства аффинных преобразований . 132
§ 46. Аффинная классификация линий второго порядка .... 137
§ 47. Определение и свойства изометрических преобразований 140
§ 48. Классификация движений плоскости 142
Глава VI. Поверхности второго порядка 146
§ 49. Основная теорема о поверхностях второго порядка . 146
§ 50. Эллипсоиды 148
§ 51. Гиперболоиды 151
§ 52. Конические сечения 155
§ 53. Параболоиды 159
§ 54. Цилиндры 161
§ 55. Аффинная классификация поверхностей второго порядка . 164
Глава VII. Проективная плоскость 167
§ 56. Пополненная плоскость и связка 167
§ 57. Однородные координаты на проективной плоскости. Теорема
Дезарга 169
§ 58. Проективные системы координат 175
§ 59. Проективные преобразования 179
§ 60. Линии второго порядка в однородных координатах ... 182
§ 61. Проективная и проективно-аффинная классификации линий
второго порядка 183
ЧАСТЬ II ЛИНЕЙНАЯ АЛГЕБРА И ГЕОМЕТРИЯ
Глава /. Линейные пространства 186
§ 1. Определение линейного пространства 186
§ 2. Линейная зависимость. Базисы. Размерность 190
§ 3. Подпространства линейного пространства. Операции над ними 194
§ 4. Прямая сумма подпространств· 198
§ 5. Линейные отображения и изоморфизмы 201
Глава II. Сопряженные пространства 204
§ 6. Определение и простейшие свойства сопряженных пространств 204
§ 7. Второе сопряженное пространство 205
§ 8. Аннуляторы и нулевые подпространства. Системы однородных
линейных уравнений 207
Глава III. Линейные операторы в линейном пространстве 211
§ 9. Матрица линейного оператора 211
§ 10. Алгебра линейных операторов и алгебра матриц ... 214
§ И. Инвариантные подпространства. Приводимые операторы 217
§ 12. Собственные векторы. Спектр оператора. Диагонализируемые
операторы 219
§ 13. Характеристический многочлен оператора. Алгебраическая и
геометрическая кратности его корней 221
§ 14. Нильпотентные операторы. Их характеристические многочлены 224
§ 15. Разложение вырожденного оператора в прямую сумму нильпо-
тентного и невырожденного 227
§ 16. Единственность жордановой формы нильпотентного оператора 228
§ 17. Существование жорданова базиса для нильпотентного оператора 331
§ 18. Жорданова форма произвольного оператора 254
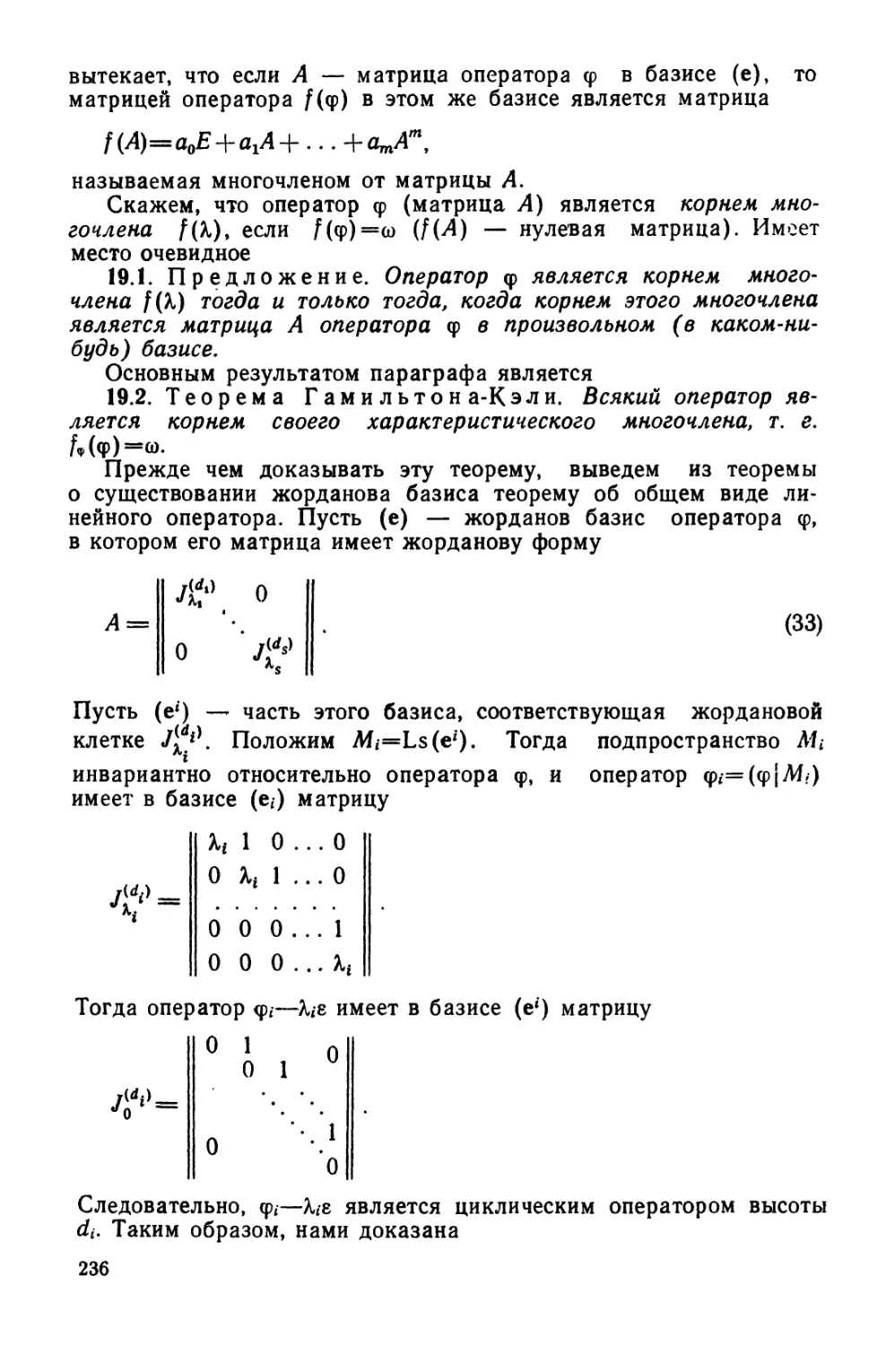
§ 19. Теорема Гамильтона—Кэли .... ... 235
4
Глава IV. Билинейные и квадратичные функции 239
§ 20. Билинейные функционалы и их матрицы 239
§ 21. Ранг билинейного функционала. Левое и правое ядра . 242
§ 22. Квадратичные функции и полярные к ним билинейные
функционалы 244
§ 23. Приведение квадратичной формы к каноническому виду
методом Лагранжа 246
§ 24. Нормальный вид квадратичной формы. Закон инерции . 250
§ 25. Теорема Якоби о приведении квадратичной формы к
каноническому виду 252
§ 26. Положительно определенные квадратичные функции. Критерий
Сильвестра. Определитель Грама. Неравенство Коши—Буняков-
ского 255
Глава V. Эвклидовы пространства 259
§ 27 Эвклидовы и нормированные пространства 259
§ 28. Длины и углы. Ортогональные системы векторов. Процесс ор-
тогонализации 262
§ 29. Ортогональное дополнение. Общий вид линейного функционала
в эвклидовом пространстве 266
§ 30. Линейные отображения эвклидовых пространств. Изоморфизмы.
Сопряженные операторы 269
§ 31. Самосопряженные операторы 271
§ 32. Изометрические операторы. Инвариантные подпространства.
Корни характеристического многочлена 273
§ 33. Канонический вид изометрического оператора 275
§ 34. Неотрицательные операторы ... 277
§ 35. Разложение произвольного оператора в композицию
неотрицательного и изометрического 279
§ 36. Квадратичные функции в эвклидовых пространствах 280
Глава VL Точечные пространства 283
§ 37. Аффинные и точечно-эвклидовы пространства 283
§ 38. Плоскости в аффинных пространствах. Различные способы их
задания 286
§ 39. Пересечение плоскостей. Их взаимное расположение 288
§ 40. Выпуклые множества в аффинных пространствах . 292
§ 41. Точки общего положения. Симплексы. Барицентрические
координаты 296
§ 42. Аффинные отображения аффинных пространств. Разложение
аффинного отображения точечно-эвклидова пространства в
композицию изометрического и неотрицательного самосопряженного 298
§ 43 Классификация движений пространства 302
§ 44. Поверхности второго порядка в трехмерном пространстве 305
Глава VII. Элементы тензорной алгебры 309
§ 45. Тензоры. Запись в координатах 309
§ 46. Операции над тензорами. Базис в пространстве тензоров 312
§ 47. Симметрическое и кососимметрические тензоры.
Альтернирование 213
§ 48. Внешнее умножение. Базис в пространстве кососимметрических
тензоров 317
Предметный указатель .
5
ПРЕДИСЛОВИЕ
Книга представляет собой учебное пособие по объединенному
курсу аналитической геометрии и линейной алгебры для
университетов. В основе ее лежит курс лекций, неоднократно
прочитанный автором на механико-математическом факультете МГУ.
Книга состоит из двух частей: «Аналитическая геометрия» и
«Линейная алгебра и геометрия», соответствующих курсам лекций
1-го и 2-го семестров. Каждая из частей состоит из семи глав.
Пособие содержит в основном традиционный, но специально
подобранный материал, соответствующий программам курсов
«Аналитическая геометрия» и «Линейная алгебра и геометрия».
Книга содержит ровно столько материала, сколько его можно с
разумной скоростью прочитать на лекциях с 1 сентября по 20
декабря и с 7 февраля по 20 мая за вычетом праздничных дней.
Поэтому, в частности, менее подробно изложена общая теория
поверхностей 2-го порядка, нет унитарных пространств и /г-мер-
ного проективного пространства.
Одна из отличительных особенностей книги — стремление
автора построить векторную алгебру на основе аксиом
планиметрии. С этой целью в § 2 ч. I яв(но выделены применяемые ниже
аксиомы порядка и откладывания, определены отрезок,
полупрямая, полуплоскость и полупространство и выведены некоторые их
свойства. Автор надеется, что тем самым построен необходимый
мост между школьным курсом 'геометрии и курсом
аналитической геометрии. Кроме того, устранены некоторые
недоговоренности школьного курса геометрии, вполне объяснимые тем, что
они касаются аксиоматического материала, излагаемого в
6-м классе.
Нумерация утверждений — сквозная в пределах каждой
части, формул — в пределах каждой главы. Из-за экономии места
автор зачастую вынужден обращаться к формальным ссылкам
типа: «Отсюда согласно (АГ, I, предложение 7.7) и получаем...»,
где АГ означает «Аналитическую геометрию», т. е. первую часть
книги. Ссылки в пределах одной части, как правило,
ограничиваются «номером утверждения или номером параграфа.
Для хорошего усвоения курса необходимо восстановить все
недостающие доказательства (их немного), решить задачи и
разобрать примеры.
Автор надеется, что небольшой размер книги привлечет к ней
читателя, хотя и не обещает читателю легкой прогулки,
полностью лишенной крутых подъемов и опасных спусков.
6
ЧАСТЬ I
Аналитическая геометрия
Глава I
ВЕКТОРЫ
§ 1. ПРЕДВАРИТЕЛЬНЫЕ ТЕОРЕТИКО-МНОЖЕСТВЕННЫЕ
ПОНЯТИЯ И ФАКТЫ
Предполагаются известными из школы понятия множества,
отображения из одного множества в другое и элементарных
теоретико-множественных операций: объединения U, пересечения О»
разности \, произведения одного множества на другое.
Отображение /: X-+Y называется инъективным, или взаимно
однозначным, если для любых различных элементов хи х2^Х их
образы f{x\), f{x2) также различны.
Отображение f:X-+Y называется сюръективным, или
отображением на, если для каждого элемента y^Y существует такой
элемент х^Х, что /(*)=#.
Если выполнены оба эти условия, то отображение /
называется взаимно однозначным отображением на, или взаимно одно-
значным соответствием, или биекцией.
Бинарное отношение Я на множестве X — это подмножество
52 множества ХхХ всех упорядоченных пар (хи х2) элементов из
X. Если (хи х2)^52, то говорят, что хх и х2 находятся в
отношении 52, и пишут ххЯх2.
Отношение эквивалентности на множестве X — это бинарное
отношение 52, удовлетворяющее аксиомам:
1) рефлексивности: х31х для любого элемента х^Х\
2) симметричности: если х\31х2, то х231х\\
3) транзитивности: если Х\Ях2 и х2ЗИхг, то Х\91хъ.
Отношение эквивалентности обычно обозначается символом
~, хотя на любом множестве Ху содержащем более одного
элемента, существует не одно отношение эквивалентности.
Пусть отношение эквивалентности на множестве X. Для
х^Х обозначив через Сх непустое множество {л/еХ -.х*—х) и
назовем его классом эквивалентности элемента х. Читатель легко
проверит, что имеют место
1.1. Предложение. Если хи х2^СХу то х\~х2.
1.2. Предложение. Если Сх[)СуФ09 то СХ=СУ.
Таким образом, множество X разбивается на непустые классы
эквивалентности, которые либо попарно не пересекаются, либо
совпадают. Множество классов эквивалентности называется
7
фактор-множеством множества X по отношению эквивалентности
~ и обозначается XI—. Согласно предложению 1.2 каждый
элемент множества X принадлежит ровно одному классу
эквивалентности. Поэтому, сопоставляя элементу χ его класс
эквивалентности СХу получаем отображение множества X на множество XI—.
Пусть на множестве X дано бинарное отношение St. Тогда оно
индуцирует бинарное отношение 3lY на произвольном
подмножестве YczX:
х%уу^>х%у и ху y&Y.
1.3. Предложение. Пусть YaX и на множестве X дано
отношение эквивалентности Я. Тогда 3tY также является
отношением эквивалентности, а классы эквивалентности Cf и C*Y
отношений St и &γ связаны друг с другом следующим образом:
Доказательство предоставляется читателю.
§ 2. ОТРЕЗОК И ПОЛУПРЯМАЯ
Отрезок. Для дальнейшего нам понадобятся некоторые
аксиомы эвклидовой геометрии. Имеются различные версии аксиом
Эвклида. Сформулируем аксиомы порядка в терминах
расстояния.
Аксиомы расстояния. Для любых двух точек Μ и N
эвклидова пространства Ε определено неотрицательное число
ρ(Λί, Ν)—расстояние между этими точками. Функция
расстояния ρ удовлетворяет следующим аксиомам.
Нь Аксиома тождества. ρ(Λί, Ν)=0 тогда и только
тогда, когда Μ=Ν.
Н2. Аксиома симметрии. ρ(Λί, Ν) = р(#, Μ).
Из. Неравенство треугольника. р(М, N)+p(Ny 0)>
>р[М90).
Определение 1. Говорим, что точка О лежит между
точками Μ и Ν, и пишем (ΜΟΝ), если ΜΦΟφΝ и
Ρ(Λ1, 0)+ρ(0, Ν)-ρ(Μ4Ν).
Определение 2. Интервалом (ΜΝ), соединяющим точки
Μ и Ν, называем множество всех точек О, лежащих между Μ и
Ν, т. е.
(ΜΝ)={0: (ΜΟΝ)}.
Добавляя к интервалу {ΜΝ) точки Μ и Ν, получаем отрезок
ΜΝ, соединяющий точки Μ и N. По другому это можно записать
так:
ΜΝ = {0:ρ(Μ, 0)+ρ(0, N)=p(My N)}.
8
При этом точки интервала (MN) называются внутренними
точками отрезка MN, а точки Μ и Μ — его концевыми точками.
Расстояние между точками Μ и N называется также длиной отрезка
ΜΝ и обозначается через |ΛίΝ|. Поэтому определение отрезка
можно записать следующим образам:
ΜΝ={0: \ΜΟ\ + \ΟΝ\ = \ΜΝ\).
Если точки Μ и Л/1 совпадают, то отрезок ΜΝ имеет нулевую
длину и состоит из одной точки.
Аксиомы порядка и откладывания.
Шь Для любых трех различных точек на прямой ровно одна
лежит между двумя другими.
Ш2. Если точка О лежит между точками Μ и Ny то точки Л4,
/V, О лежат на одной прямой.
Ш3. Для любой точки О, лежащей на прямой /, и для любого
числа d>0 существуют ровно две такие точки Мь М2е/, что
р(Л!ь 0)=р(0,М2)=1
В силу того что будет доказано в 2.1 и 2.5, аксиому Шз
можно сформулировать следующим образом:
От любой точки Ое/ на прямой I можно отложить ровно два
отрезка заданной длины d.
III4 (аксиома Паша). Пусть в плоскости даны три точки
Λί, Ν, О и прямая /, не содержащая ни одну из этих точек. Тогда
если I пересекает интервал {ΜΝ), то она пересекает ровно один
из двух других интервалов (МО) и (N0).
2.1. Предложение. В условиях аксиомы Ш3 имеем
{М{ОМ2).
Доказательство. Согласно ΙΗι одна из точек Λίι, О, М2
лежит между двумя другими. Предположим, что (ОМхМ2). Тогда
р(0, Λί,)+ρ(Λίι, Λί2)-ρ(0, М2).
Но р(0, Λί!)=ρ(0, М2). Следовательно, р(Ми Af2)=0, т. е. Λί,=
=Λί2. Противоречие. Аналогично отбрасывается случай (ОМ2М{).
2.2. Предложение. Если 0&:ΜΝ, то MOczMN.
Доказательство. Надо показать, что всякая точка Р&
еЛЮ принадлежит MN. Для этого в силу неравенства
треугольника достаточно проверить, что
р(М, Р)+р(Р9 Λ0<ρ(Λί, Ν). (1)
Согласно (MON) и (МРО) имеем
ρ(Λί, Λ/)=ρ(Λί, 0)+ρ(0, Ν)=9(Μ, Ρ)+ρ(Ρ9 0)+ρ(0, Ν)>
>ρ(Αί, Р)+р(Р9 Ν).
2.3. Предложение. Если тонки Μ, Ν, О лежат на одной
прямой, то MOczMN[)NO.
Доказательство. Считаем, что точки Λί, N9 О попарно
различны, поскольку в противном случае утверждение очевидно.
9
Возьмем точку Pe(AfO), отличную от точки N. Существует
прямая /, пересекающая прямую, на которой лежат точки Λί, Ν, О,
ровно в одной точке Р. Тогда согласно аксиоме Паша точка Ρ
принадлежит одному из интервалов (ΜΝ) или (N0).
Из предложений 2.2 и 2.3 вытекает
2.4. Следствие. Если №*=МО, то ΜΝ[)ΝΟ=ΜΟ.
2.5. Предложение. Если Ν&ΜΟ, то N является
единственной общей тонкой отрезков ΜΝ и N0.
Доказательство. Предположим, что существует точка
P&MNflNO, отличная от точки N. Тогда
р(М, Р)<р(М, N) и р(Р, 0)<9(N, О).
Поэтому ρ (Λί, 0)=р(М, Ρ)+ιρ(Ρ, 0)<ρ(Λί, Λ^) + (Л^, 0)=р(М, О).
Противоречие. Предлож»_ние 2.5 доказано.
2.6. Предложение. Если (ΜΝΟ) и (ΝΡΟ), то (ΜΝΡ).
Доказательство. По условию имеем
ρ(Λί, tf)+p(.Vf 0)=9(M, О), (2)
p(N9 Р)+р(Р, 0)=p(JV, О). (3)
Кроме того, NOczMO согласно 2.2. Следовательно, Р^МО, т. е.
ρ(Λί, Р)+р(Р, 0)=р(М, О). (4)
Из (2) и (3) вытекает
ρ(Λί, Ν)+Ρ(Ν, Ρ)+ρ(Ρ, 0)=ρ(Λί, О). (5)
Сравнивая (4) и (5), получаем ρ(Λί, Ρ)=ρ(Λί, Ν)+ρ(Ν, Ρ).
Предложение 2.6 доказано.
2.7. Предложение. Если (ΜΝΟ) и (NOP), то (MNP).
Доказательство. Предположим, что точка N не лежит
на отрезке MP. Тогда согласно 1111 возможны два случая: Me
еУУР или РеМАЛ Рассмотрим первый из них. Поскольку Og
eWP, то согласно 2.4 имеем ΜεξΝΌ[]ΟΡ. Но MNf)NO={N} в
силу 2.5. Поэтому AfeOP. Из условия предложения 2.7 и аксиомы
ΙΙΙι вытекает, что МФР. Поэтому имеем (ОМР). Но (NOP) и
(ОМР) согласно 2.6 влечет (NOM), что противоречит условию
(MNO) предложения 2.7. Аналогично разбирается случай Ре
еМЛЛ Предложение 2.7 доказано.
2.8. Предложение. Для любого неотрицательного числа
d^p(0, Λί) существует ровно одна такая тонка NeOM, что
p(0,N)=d.
Доказательство. Сначала проверим единственность.
Предположим, что существует отличная от точки N точка Ре
е(Ж, находящаяся на расстоянии d от точки О. Тогда
р(Ру М)=9(0, M)—d = p(N, M). (6)
Но согласно 2.4 точка Ρ лежит на одном из отрезков ON или
10
NM, т. е. р(0, Р)<р(0, N) либо ρ (Ρ, Λί)<ρ(#, Λί).
Противоречие.
Существование. Предполагаем, что МФО. Тогда согласно Шз
на прямой /, проходящей через точки О и Λί, существует такая
отличная от точки Λί точка Ми что
р(Ми 0)=р(0, Λί).
Покажем сначала, что если Ν&1 и p(N, 0)^p(Oy Λί), то ЛГе
еМ\М. Предположим, что это не так. Тогда согласно 1111 либо
(ΛΜί,Λί), либо (Λί,ΛίΛΟ.
Рассмотрим первый случай. Согласно 2.1 имеем (М{ОМ).
Поэтому из 2.6 вытекает {ΝΜχΟ), откуда
р(ЛГ, 0)>р(МьО).
Противоречие. Аналогично разбирается случай (ΛίιΛίΝ).
Возьмем теперь существующие согласно 1Н3 две точки Л/*ь
N2^l, такие, что
p(iV,,0)=p(0,iV2)=d.
Согласно только что доказанному NUN2^MXM. Но отрезок Л^Л4
является в силу 2.4 суммой отрезков ΛίιΟ и ΟΛί. Если ни одна из
точек Nu N2 не лежит на ΟΛί, то обе они принадлежат отрезку
МхОу что противоречит уже проверенной единственности.
Предложение 2.8 доказано.
Полупрямая. Возьмем произвольно точку О на прямой /.
Введем отношение эквивалентности >на множестве /\{0}. Скажем,
что точки Λί, Ν&1\{0} лежат по одну сторону от точки О, если
ΟξέΛίΜ Так определенное бинарное отношение на /\{0} есть
отношение эквивалентности. В самом деле, рефлексивность и
симметричность этого отношения очевидны, транзитивность
вытекает из 2.3.
2.9. Предложение. Отношение «точки лежат по одну
сторону от точки О» разбивает множество 1\{0) на два класса
эквивалентности.
Доказательство. Пусть d — какое-нибудь положительное
число. Возьмем существующие согласно Шз такие точки Ми
Л12е/, что
р(Ми 0)=rf = p(0, Λί2).
Тогда согласно 2.1 точки Λί3 и Λί2 лежат в разных классах
эквивалентности. Покажем теперь, что всякая точка JVe/\{0}
эквивалентна либо точке Ми либо точке Λί2. Пусть точка N не
эквивалентна ни Ми ни Λί2, τ. е.
MlN=*OeNM2.
Но из аксиомы Паша вытекает, что если различные точки Λίι, Λί2,
N лежат на одной прямой, то никакая точка О не может принад-
п
лежать трем интервалам (Afb М2)у (MXN) и (ЛШ2) сразу.
Противоречие. Предложение 2.9 доказано.
Эти классы эквивалентности называем полупрямыми, на
которые точка О разбивает прямую /, или полупрямыми с началом
в точке О. Полупрямая с началом в точке О однозначно
определяется любой своей точкой. Полупрямую с -началом в точке О,
проходящую через точку М, обозначаем (ОМ-+). Добавив к
полупрямой начальную точку О, получим луч ΟΛί-κ
2.10. Предложение. Любые два луча прямой I с началами
Ох и 02
1) либо не пересекаются,
2) либо пересекаются по отрезку Ох02,
3) либо один из них содержится в другом.
Доказательство. Предположим, что лучи пересекаются
и пусть Μ — их общая точка. Рассмотрим общий случай, когда
точки Οι, 02, Μ попарно различны. Предположим сначала, что
точка Μ не лежит на отрезке 0\02, и пусть, например, (МО\02).
Тогда для любой точки N луча ОхМ-+, если N^MOu то Ν^Μ02
согласно 2.2. Если же №&МОи то (NMOx), что вместе с (МО\02)
согласно 2.7 дает (ΝΜ02) и, значит, Ν&02Μ-+. Итак, если М&
&0{02t то луч ΟιΛί—>- целиком содержится в луче 02М-+ или
наоборот.
Пусть теперь (0\М02) и N — произвольная точка отрезка
Ох02. Тогда интервал (ΜΝ) согласно 2.4 и 2.2 является частью
интервала (0\02) и поэтому не содержит »ни точки Οι, ни точки
02. Следовательно, точка N лежит по ту же сторону от точек Ох
и 02, что и точка Λί. Значит, Οχ02αΟχΜ-+{\02Μ-+. С другой
стороны, если Ν^Οχ02 и, например, (NOx02)y то из (ОхМ02) и 2.6
вытекает (ΝΟχΜ), τ. е. ΝφθλΜ-+. Предложение 2.10 доказано.
Из него вытекает, что полупрямые на прямой располагаются
аналогичным образом, только в случае 2) они пересекаются по
интервалу.
2.11. Предложение. Пусть даны прямая I, точка Ое/ и
число d>0. Тогда в каждой из полупрямых, на которые точка О
разбивает прямую I, существует ровно одна точка, находящаяся
на расстоянии d от точки О.
Доказательство. Согласно аксиоме 1И3 на прямой I
существуют ровно две точки Мх и Λί2, находящиеся на расстоянии
d от точки О. В то же время согласно 2.1 точка О лежит между
Мх и М2у т. е. точки Мх и М2 лежат в разных полупрямых с
началом в точке О.
§ 3. ПОЛУПЛОСКОСТЬ И ПОЛУПРОСТРАНСТВО
Пусть даны плоскость π и лежащая на ней прямая /. Одна из
аксиом планиметрии утверждает, что множество π\/ непусто.
Введем на этом множестве отношение эквивалентности. Скажем,
что точки Λί, Ν^π\1 лежат по одну сторону от прямой / (пишем
MStN)y если MNf)l=0.
12
3.1. Предложение. Si есть отношение эквивалентности на
π\/.
Доказательство. Надо проверить только аксиому
транзитивности. Пусть MSiN и NSiO. Если точки Λί, Ν, О лежат «а
одной прямой, то MOcMN\]NO согласно 2.3 и, значит, МО[)1 = 0У
т. е. MSiO.
Пусть теперь точки Λί, Ν, О не лежат на одной прямой.
Предположим, что МО[\1Ф0. Но тогда прямая /, пересекая одну из
сторон МО треугольника ΜΝΟ, должна согласно аксиоме Паша
пересекать еще одну из его сторон. Противоречие.
Предложение 3.1 доказано.
3.2. Предложение. Существуют ровно два класса
эквивалентности отношения Si.
Доказательство. Возьмем произвольно точки Мед\/ и
Ое/. Проведем через точки Λί и О прямую т. На прямой т
согласно 2.9 существует точка Ν9 не принадлежащая лучу ΟΛί-κ
Точка О при этом является внутренней точкой отрезка MNy а
точки Μ и N неэквивалентны. Покажем теперь, что любая третья
точка Рел\/ эквивалентна либо точке Λί, либо точке N.
Предположим, что точки Ρ и Λί неэквивалентны, т. е. 1{\(МР)Ф0.
Тогда прямая /, пересекая интервалы (ΜΝ) и (ΛίΡ), согласно
аксиоме Паша не пересекает интервал (ЛЛР), т. е. PStN.
Предложение 3.2 доказано.
Классы эквивалентности отношения Si назовем
полуплоскостями, на которые прямая I разбивает плоскость π. Обозначим
эти полуплоскости символами л-, π+ или πΓ. π/+.
Непосредственно из определения полупрямых и
полуплоскостей вытекает
3.3. Предложение. Пусть прямая Iczn разбивает
плоскость π на полуплоскости π~ и π+. Пусть, кроме того, в
плоскости π дана другая прямая гп, пересекающая прямую I в точке О.
Тогда множества т[\п~~ и mf\jx+ являются полупрямыми, на
которые точка О разбивает прямую m (кратко: прямая пересекается
с полуплоскостью по полупрямой).
Пусть теперь в пространстве Ε дана плоскость π. Одна из
аксиом стереометрии утверждает, что множество £\я непусто.
Скажем, что точки Λί, Ν^Ε\π лежат по одну сторону от
плоскости π (пишем MSnN), если MNf]n=0.
3.4. Предложение. 5Я есть отношение эквивалентности на
Е\п.
Доказательство. Надо проверить только аксиому тран-
зцтивнодтж Пусть MSnN и MSnO. Существует плоскость ль про-
зити,вности. Пусть MSnN и NSnO. Существует плоскость ль
проходящая через точки Λί, Ν9 О. Если плоскости π и πι
параллельны, т. е. πΠπι==0, то πΓ|ΛίΟ = 0, поскольку ΜΟαπ{ .согласно И12.
Значит, MSnO.
Пусть теперь плоскости π и πι пересекаются по прямой /,
которая разбивает плоскость πι на полуплоскости пг и п\+. Точки
Λί и N лежат в одной из этих полуплоскостей, поскольку в про-
13
тивном случае отрезок MN, пересекаясь с прямой /, тем более
пересекался бы с плоскостью π^/. Аналогично точки N и О
лежат в одной полуплоскости. Тогда все три точки Μ, Ν, О лежат в
одной полуплоскости и, значит, МО(]1=0. Следовательно, МО[\й=
(поскольку ΛίΟ(=:πι) = (Λίθηπι)ηπ=Λίθη(πιηπ)=Λίθη/=0. Итак,
ΛίΟΠπ=0, т. е. MSnO. Предложение 3.4 доказано.
3.5. Предложение. Существует ровно два класса
эквивалентности отношения Sn.
Доказательство аналогично доказательству предложения 3.2
и предоставляется читателю.
Классы эквивалентности отношения Sn называем
полупространствами, на которые плоскость π разбивает пространство,
или полупространствами, ограниченными плоскостью π.
Два следующих утверждения непосредственно вытекают из
определений полупространства, полуплоскости, полупрямой.
3.6. Предложение. Пусть πι и п2— плоскости,
пересекающиеся по прямой I, и пусть £~, £+ — полупространства,
ограниченные полуплоскостью п\. Тогда £~Пл2, E+f\n2— полуплоскости,
ограниченные прямой I.
3.7. Предложение. Пусть плоскость π разбивает
пространство на полупространства Е-у £·+, и пусть прямая I
пересекается с плоскостью π в точке О. Тогда Е~{\1, Е+{)1 —
полупрямые, на которые точка О разбивает прямую I.
§ 4. ОПРЕДЕЛЕНИЕ ВЕКТОРА
Вектором ΛίΛ/1 с началом в точке Μ и концом в точке N
называют направленный отрезок ЛШ, в котором точка Μ объявлена
началом, а точка N — концом. Можно вектором назвать и
упорядоченную пару точек (Λί, Ν).
Длина \ΜΝ\ отрезка М№ называется также длиной \ΜΝ\
вектора ΜΝ. Векторы нулевой длины называются нулевыми.
Ненулевые векторы ΜχΝ\ и Μ2Ν2 называются одинаково
направленными, если лучи ΜχΝχ-*- .и Μ2Ν2-*· одинаково
направлены, а это в свою очередь означает, что либо
1) отрезки ΜχΝχ и Μ2Ν2 лежат на одной прямой и лучи
ΜχΝχ-* и Μ2Ν2-+ пересекаются по лучу (рис. 1), либо
1 > 1 _>
^ Νη Μ2 Ν2
Рис. 1
2) отрезки ΜχΝχ и Μ2Ν2 лежат на параллельных прямых Ιχ и
12> и лучи ΜχΝχ-*· и M2Nr-*· лежат по одну сторону от прямой
МХМ2 в плоскости, проходящей через прямые Ιχ и /2 (рис. 2).
14
4 1 3 а м е ч а н и е. Из 3.3 вытекает, что лучи М,#,^ и М2Л^
лежат' по одну сторону от прямой %}**™™J^™£№ 0°т'-
гда для какой-нибудь пары точек N/eMf^ и Щ е=М2Л^ от
резок Ni'Ni' не пересекается с прямой М\М2.
Рис. 2
Векторы MlNl и М2ЛГ2 называются равными, если выполнены
два условия:
а) |м7лГ,|^[М2лГ2|
и (в случае |Μι#,.|=^0)
б) ΛίιΛ^ι и Af2W2 одинаково направлены. ^
4.2. Предложение. Для любого вектора МЫ_илнзбойточки
М, сиществует единственная такая точка Nu что Mtf=M,JV,.
Доказательство. Рассмотрим случай когда точка М, не
лежит на прямой МЛЧдва других случая: 1) Μ, лежит на.
прямой ΜΝ 2) вектор ΜΝ нулевой — предлагается рассмотреть
читателю) Тогда точка ЛГ, должна лежать на прямой /, проходящей
^еГез точку Λί, и параллельной прямой ΜΝ. Такая прямая /
существует «У по' пятому постулату Эвклида единственна.
Рассмотрим плоскость π, проходящую через точки Μ, Ν,Μ,.]Прямая
ММ, разбивает плоскость π на две полуплоскости π и irK
Предположим что точка ΛΓ лежит в полуплоскости π+. Тогда точка JV,
такжГдолжн°а лежать в *+. Следовательно точка ^должна
принадлежать множеству /Ππ+ τ. е. согласно 3.3 полупрямой с на-
Som в рчке М,. Но согласно 2.11 на этой полупрямой
существует ровно одна точка Nu находящаяся «а расстоянии rf—|А#ЛГ|
от точки Mr Предложение 4.2 доказано.
0ТТ4°; Пое дл ожени е. Отношение одинаковой
направленности является отношением эквивалентности на множестве всех
^Доказательство. В проверке нуждается только аксиома
транзитивности. Одинаковую направленность лучей обозначаем
15
символом <-. Пусть Μ{Νγ-+~Μ2Ν2-+ и M2N2-+~MzN's-+.
Обозначим через /,· прямую, на которой лежит луч Λί,-Λ^-^.
Предположим сначала, что прямые 1и 'г, 'з не лежат в одной плоскости.
Через точки Λίι, Λί2, Мъ проведем плоскость л. Она разбивает
пространство на два полупространства Е~ и Е+. По определению
одинаковой направленности лучей прямые /ь /2, /з попарно
параллельны. Обозначим через π\2 плоскость, проходящую через
прямые 1\ и 12. В силу одинаковой направленности лучей ΜΧΝ\-+
и Μ2Ν2-+- отрезок ΝΧΝ2 не пересекается с прямой /ι2=πΠπι2.
Значит, отрезок ΝΧΝ2 не пересекается с плоскостью π. В самом деле,
ΝχΝ2[\η= {ΝχΝ2(]πΧ2) Ππ =ΝΧΝ2[) (πι2Ππ) =-ΝχΝ2()1=0. Таким
образом, отрезок NXN2 лежит в одном из полупространств, например
в £+. Аналогично N$NzczE+, так как N2^E+. Значит, NxNzaE+.
Отсюда, обозначив через πΐ3 плоскость, содержащую прямые 1Х
и /3, получаем Ν ΧΝ $αΕ+[\πΧζ. Но множество £+Пя1з согласно 3.6
является полуплоскостью Л13+, ограниченной прямой /i3,
проходящей через' точки Мх и Λί3. Таким образом, отрезок ΝΧΝ$ не
пересекается с прямой /ΐ3, откуда согласно 4.1 получаем одинаковую
направленность лучей ΜΧΝΧ-+ и MsNz-+.
Пусть теперь прямые /ь /2, h различны, но лежат в одной
плоскости π. Возьмем точку М, не принадлежащую плоскости π.
Согласно 4.2 существует такая точка /V, что ΜΝ-+~Μ2Ν2-+.
Тогда тройки лучей ΜχΝ\->9 Μ2Ν2-+> ΛίΝ-> и ΜΝ-+, Μ2Ν2-+, Μ$Ν<γ+
удовлетворяют условиям уже рассмотренного случая. Значит,
Μ{Ν{^ ~ ΜΝ-+, ΜΝ-+ ~ AMV-*. Лучи MxNx^f MN^f MzNr+
также не лежат в одной плоскости. Следовательно, ΜΧΝΧ-+ ~
Пусть теперь /2=/з. Тогда один из лучей Μ2Ν2-+, M3/V3->
содержит другой. Предположим, что Μ2Ν2-+^>ΜΖΝΖ-+. Пусть точки
Λίι, М2 принадлежат прямой /!2, которая разбивает плоскость π
на две полуплоскости пх2~ и πι2+. Точки Νχ и Ν2 лежат в одной из
этих полуплоскостей, например в пх2+. Аналогичный смысл
придадим символам /Ι3, πΐ3~ и лпз4". Предположим, что Λ/ιΘπΐ3+. На
отрезке М2Мг возьмем внутреннюю точку Μ и проведем через нее
прямую /, параллельную прямой 1Х2. Поскольку полупрямые
(ΜΧΝΧ-+) и (Μ2Ν2-+) лежат в полуплоскости πι2+, прямая I
пересекает полупрямую (MXNX-+) в некоторой точке N (рис. 3).
Прямая /, пересекая сторону М2М$ треугольника МХМ2М$У
согласно аксиоме Паша должна пересекать и другую его сторону.
Этой стороной в силу параллельности I и 1Х2 может быть только
МхМг. Итак, прямая I пересекает отрезок MXMZ. Поскольку
отрезок МХМ$ лежит между прямыми 1Х и /з, то и пересекаться он
может только той частью прямой /, которая лежит между прямыми
1Х и /з, т. е. отрезком ΜΝ. Значит, отрезок ΜΝ пересекается с
прямой /ΐ3. Поэтому точки Μ и N лежат в разных
полуплоскостях, ограниченных этой прямой. Но точка N принадлежит
полупрямой (MxNx-+)y а мы предполагали, что Л^ея^4". Значит, Ne
еяи4" и Λί^πΐ3~. Тогда из (МзММ2) вытекает, что Λί2Θπΐ3~·
Поэтому из (Λί2Λί3Λ/3) получаем Ν3^πΐ3+. Итак, точки N и Ν3 при-
16
надлежат одной полуплоскости πκϊ. Следовательно, Μ,Λ^
-* ~ Λί3#3~^.
Таким образом, мы показали, что, уменьшая одинаково
направленные лучи, снова получаем одинаково направленные лучи.
Отсюда переходя к дополнительным лучам, получаем, что
увеличение одинаково направленных лучей снова приводит к
одинаково направленным лучам. Итак, случай /2=/3 и аналогичный ему
случай /ι=/2 полностью разобраны.
Рис. 3 Рис 4
Пусть теперь /ι=/3. Предположим, что лучи MVN{-+- и M3N3-p
направлены в разные стороны. Возьмем точку ЛЛ>'е/3 так, что Мз
лежит между Nz и N*'. Тогда лучи M3NZ'-+ и M{N{-* одинаково
направлены. А это вместе с одинаковой направленностью лучей
Ai^r-* и Л*2#2-^ согласно только что разобранному случаю дает
одинаковую направленность лучей М3Ы3'-+ и M2N?-+, что
противоречит одинаковой направленности лучей M2N2-^ и jW3/V3-k
Наконец, случай, когда три луча лежат на одной прямой,
можно свести к уже разобранным случаям двух прямых так же,
как при рассмотрении случая трех различных прямых, лежащих
в одной плоскости, мы выходили в пространство. Но еще проще,
не выходя в плоскость, воспользоваться предложением 2.10.
Предложение 4.3 доказано.
Из него непосредственно вытекает
4.4. Предложение. Отношение равенства является
отношением эквивалентности на множестве всех векторов.
Класс равных векторов называется свободным вектором, или
просто вектором. В дальнейшем слово «свободный», как правило,
опускаем и понимаем под вектором ΜΝ как направленный
отрезок ΜΝ, так и свободный вектор а, определенный вектором Μ\Ν,
т. е. класс эквивалентности, состоящий из всех векторов, равных
17
MN. Поэтому наряду с точным утверждением MN^a. применяем
►
и неформальное равенство M/V=a.
Векторы нулевой длины образуют класс эквивалентности, на-
►
зываемый нулевым вектором и обозначаемый 0. Имеем 0=ЛШ
для любой точки М.
Выражения «отложить вектор а от точки ЛЬ> или «приложить
вектор а к точке Λί» означают «взять (существующий согласно
4.2) вектор Л1/У=а».
4.5. Замечание. Мы определили свободные векторы в
пространстве. Можно дать такое же определение, оставаясь в
пределах плоскости или даже прямой. При этом из предложения 4.4
непосредственно вытекают его модификации, когда «множество
всех векторов» заменяется на «множество всех векторов на
плоскости» или на «множество всех векторов на прямой». И здесь нас
не должно смущать то, что при проверке транзитивности
одинаковой направленности лучей на плоскости мы выходили в
пространство. Надо просто вспомнить предложение 1.3.
Вектор как параллельный перенос. Возьмем произвольный
вектор а. Определим отображение
U-.E-+E,
сопоставляющее точке Μ конец вектора а, отложенного от точки
Λί, т. е. f&(M)=N, где N— единственная согласно 4.2 точка,
такая, что Ai:V=a. Отображение /а назовем параллельным
переносом на вектор а. Это отображение обладает следующим
основным свойством:
MN = [л (Μ) /а (Л/) для любых точек Μ и N.
В самом деле, предположим, что точки Μ, Ν и f (M) не лежат
на одной прямой (рис. 4). Тогда в четырехугольнике MNf&(N)X
Xfa{M) противоположные стороны Λί/a (Λί) и Nfa (N) равны и
параллельны. Значит, этот четырехугольник— параллелограмм.
Тогда с учетом того, что точки N и f*{N) лежат по одну сторону
—► >
от прямой Mf&(M), получаем необходимое равенство MN=fa[M)x
X /a(N). Рассмотрение случая, когда точки Λί, Ν и f&(M) лежат
•на одной прямой, сводится к перебору различных случаев
взаимного расположения этих точек и предоставляется читателю.
Пусть теперь, наоборот, дано отображение /: Е-+Е,
обладающее свойством MN=f(M)f(N) для любых точек Μ и N. Тогда
существует единственный такой вектор а, что f=fsL. В самом деле,
единственность такого вектора вытекает из того, что
упорядоченная пара точек Λί, /(Λί) определяет единственный вектор а=
18
=Λί/(Λί). Тэперь существование. Фиксируем точки О и полагаем
■ ■ >
а=0/(0). Для выполнения равенства /=/а .надо проверить
равенство Αί/(Αί) =0/(0) для произвольной точки М. Делается
это, опираясь на .равенство OM—f(0) /(Λί), так же, как выше мы
доказывали равенство MN=f&(M) f*(N)t исходя из Ai/a(Ai)=
Итак, вектор можно отождествлять с параллельным
переносом на этот вектор.
§ 5. СЛОЖЕНИЕ ВЕКТОРОВ И УМНОЖЕНИЕ ВЕКТОРА НА ЧИСЛО
Сумму двух векторов а и b определяем следующим образом.
Приложим вектор а к какой-нибудь точке М. Пусть N — конец
►
этого вектора, т. е. sl=MN. Затем приложим вектор b к точке N.
■■ >
Пусть b=NP. Теперь положим а+b равным свободному вектору,
содержащему MP в качестве своего представителя (рис. 5), т. е.
Ίμν+Ί№==Έρ.
■/
Рис. 5
Проверим корректность этого определения, т. е. независимость
результата от выбора точки М. Пусть Λί'ΛΓ е а и N'P' e b,
покажем, что МР=М'Р'. Рассмотрим параллельный перенос
f\E-+E на вектор с=ММ'. Тогда MN^f(M)f (N). Но f(M)=M\
следовательно, f(N)=N'. Аналогично NP=f(N)f(P) и,
следовательно, f(P)=P'. Таким образом, M'?'=f (Μ) f (P)=MP, что
и требовалось доказать.
Произведение вектора а на вещественное число α определяем
так. Берем вектор AT/V=a и полагаем аа, равным свободному
вектору, содержащему такой вектор ΛίΡ, что:
19
а) MP лежит на прямой MN\
б) MP направлен так же, как MN, если а>0, и в другую
сторону, если а<0;
в) \№\ = \*\.\Έν\.
►·
Легко видеть, что этими условиями вектор MP определен
однозначно. Корректность определения операции умножения
вектора на число проверяется так же, как и для операции сложения
векторов.
5.1. Теорема. Операции сложения векторов и умножения
вектора на число обладают следующими свойствами:
1°. а+Ь=Ь+а (коммутативность сложения);
2°. (а+Ь)+с=а+ (Ь+с) (ассоциативность
сложения);
3°. существует такой вектор О (называемый нулевым
вектором), что а+0=а для любого а;
4°. для каждого вектора а существует такой вектор — а
(называемый вектором, противоположным вектору а), что а+(—а) =
=0;
5° (α-f Р)а=аа+$а для любых чисел α, β и любого вектора а;
6°. а(ра) = (оф)а для любых чисел α, β и любого вектора а;
7°. a(a-f b)=aa-f <xb для любого числа а и любых векторов
а, Ь;
8°. 1 · а=а для любого вектора а.
Доказательство. Коммутативность и ассоциативность
сложения проиллюстрирована на рис. 6 и 7.
Рис. 6 Рис. 7
Свойства 3° и 8° очевидны. Если a—MN, то в качестве векто-
►
ра —а можно взять вектор NM. Тогда по определению сложения
а + ( —а)=^ + ЛШ=ЛШ=0.
Свойства 5° и 6° проверяются перебором различных вариантов
знаков и абсолютных значений чисел α и β. Наибольший интерес
20
представляет свойство 7°. Пусть а=ЛШ, Ь=Л/ГР. Тогда а + Ь =
=МР Отложим на прямой MN вектор AfyV1=aa и проведем
через точку Νχ прямую, параллельную прямой Л/75, до пересечения
ее с прямой MP в точке Р\ (рис. 8). Треугольники MNP и MNXPX
Рис. 8
подобны, имея общий угол Μ и пару равных углов при вершинах
N я Ν\. Тогда стороны одного треугольника подобны сторонам
другого треугольника. Значит,
а_ I ΜΝχ | ^ | MP, | = | N^ |
I MN | | MP | | NP |
Отсюда получаем, что NlP1=^ab и ΛίΡχ = а(а + Ь). Следовательно,
a(a + b)=MPl=MN1 + N1P1—aai + ab. Теорема 5.1 доказана.
5.2. Замечание. Строгое доказательство теоремы о
подобных треугольниках опирается на теорему о пропорциональности
отрезков на сторонах угла, рассеченного параллельными прямы*
ми (в наших обозначениях —рис. 8 —Г7гг^=——— · В по-
v к | MN | | MP | У
следние годы в школьном курсе по "геометрии эта теорема не
доказывалась. Ее доказательство легко извлекается из имеющейся
в школьном курсе теоремы Фалеса:
Если параллельные прямые, пересекающие стороны угла,
отсекают на одной его стороне равные отрезки, то они отсекают
равные отрезки и на другой его стороне.
5.3. Замечание. Мы определили векторы и проверили
свойства 1—8°, опираясь на модифицированную аксиоматику Эвкли-
да. Молено было взять эти свойства за аксиомы пространства
векторов и строить геометрию, отправляясь от этих аксиом.
5.4. Определение. Пусть V — некоторое множество,
элементы которого называем векторами, хотя их природа может
быть произвольной, и пусть К—некоторое поле (читатель может
пока считать, что К — это множество R всех вещественных
чисел). Предположим, что для любых двух векторов a, beV
определен третий вектор, обозначаемый символом а + Ь и называемый
21
суммой векторов а и Ь. Кроме того, предположим, что для любо-
го числа аеК и любого вектора aeV определен вектор,
обозначаемый символом аа и называемый произведением вектора а на
число а. Если при этом выполнены свойства 1—8° (из теоремы
5.1), то множество V называется векторным (или линейным)
пространством. Свойства 1—8° называются аксиомами векторного
(линейного) пространства.
Теорему 5.1 можно переформулировать так:
Множество свободных векторов в эвклидовом пространстве
является векторным пространством над полем вещественных
чисел.
Другим (простейшим) примером векторного пространства
является множество Vy состоящее из одного элемента — нулевого
вектора 0. Ниже познакомимся еще с некоторыми примерами
векторных пространств.
5.5. Замечание. Мы определили векторы, операции
сложения векторов и умножения вектора на число, рассматривая
направленные отрезки в пространстве. Но мы уже отмечали выше
(замечание 4.5), что можно ограничиться рассмотрением лишь
векторов на плоскости или на прямой. Операции сложения
векторов и умножения вектора на число »не выводят за пределы
данной плоскости (или данной прямой). Ясно также, что при таком
уменьшении множества рассматриваемых векторов эти операции
продолжают обладать свойствами 1—8°.
Таким образом, множества свободных векторов на прямой, на
плоскости, в пространстве с операциями сложения векторов и
умножения вектора на число образуют векторные пространства
над полем вещественных чисел, которые обозначаем через Vect
(1), Vect (2), Vect (3) соответственно.
§ 6. ВЕКТОРЫ НА ПРЯМОЙ
Из определения одинаковой направленности лучей,
предложений 2.9 ,и 2.10 вытекает, что на прямой имеется лишь два
направления лучей. Поэтому на ней имеется лишь два направления
векторов. Следовательно, все ненулевые векторы на прямой
разбиваются на два класса эквивалентности, состоящие из одинаково
направленных векторов. Объявив векторы из одного класса
положительными (положительно направленными), задаем
положительное направление на прямой (направление движения от точки
Μ к точке N положительно, если вектор ΜΝ положительно
направлен). В таком случае мы задали на прямой ориентацию.
Прямую / с выбранным на ней ненулевым вектором е назовем
осью (I, е). На оси положительное направление определяется
вектором е.
На оси {1У е) каждый вектор а может быть однозначно
записан в виде а=ае. В самом деле, отложим вектор е от
какой-нибудь точки Ое/. Пусть e=OOi. От той же точки О отложим и
22
вектор а, пусть а=СШ. Если М=0, то а=0-е. Если же вектор а
ненулевой, то либо он направлен так же, как и вектор е, либо в
противоположную сторону. Тогда согласно определению
произведения вектора на число в первом случае
I 00, |
а во втором случае —
\00г\
Число а, для которого а=ае, назовем алгебраическим
значением вектора а на векторе е, пишем а=(азеа). Итак,
а=(азеа)е. (7)
6.1. Предложение. Алгебраическое значение обладает
следующими свойствами:
1) (aЗeλa)=λ(aЗea);
2) (азе(а + Ь))=(аЗеа) + (азеЬ).
Доказательство. Имеем (азе (Яа))е= (согласно (7)) =
=^а=(согласно (7)) =Я((азеа)е) = (согласно аксиоме 6°
векторного пространства) = (λ(азе а))е, откуда получаем равенство 1).
Аналогично (азе (а+Ь))е = а-ьЬ=(азеа)е+ (азе Ь)е = (согласно
аксиоме 7° векторного пространства) = ((азе а)+(азсЬ))е,
откуда получаем равенство 2).
Вторая часть предложения 6.1 может быть сформулирована
следующим образом.
6.2. Лемма Шаля. При любом расположении точек Λ4, .V,
Ρ на прямой имеет место равенство
(аЗеМЙ) + (аЗеЛ^Р) = (азеМ?).
6.3. Определение. Пусть даны два векторных
пространства Vy W над одним и тем же полем К. Отображение f: V-+W
называется линейным, если оно удовлетворяет следующим двум
свойствам:
1) /(а + Ь)—f (a) +f(Ь) для любых a, beV\
2) /(аа)=а/(а) для любых аеК, аеУ.
6.4. Определение. Линейное отображение f\V-+W между
векторными пространствами называется изоморфизмом этих
пространств, если оно биективно.
Читатель может легко проверить, что в этом случае обратное
отображение /_I: W-+V также линейно.
6.5. Пример. Читатель легко убедится в том, что множество R
всех вещественных чисел с имеющимися в нем операциями
сложения и умножения является векторным пространством над
самим собой.
23
6.6. Теорема. Отображение f: Vect (l)-^R, сопоставляющее
каждому вектору а на оси (I, е) его алгебраическое значение на
векторе е, является изоморфизмом векторных пространств.
Линейность этого отображения вытекает из предложения 6.1,
биективность легко выводится из определений вектора и его
произведения на число, а также из аксиомы 1П3.
Зафиксируем точку О на оси (/, е). Тогда отображение /:
:Vect(l)-^R определяет отображение /0: /->R следующим
образом:
fo{M)-f(OM).
Из предложения 4.2 вытекает, что, сопоставляя каждой точке Μ
вектор ОМ, получаем взаимно однозначное соответствие между
точками и векторами. Таким образом, отображение fo— биекция
между точками геометрической прямой / и вещественными
числами, т. е. точками числовой прямой. Отображение fo переносит
порядок, имеющийся в множестве чисел, на прямую I:
M<N^f0(M)<fo(N).
Легко видеть, что этот порядок обладает следующим свойством:
если M<N и (MPN), то M<P<N.
Итак, выбирая на прямой ненулевой вектор е и задавая тем
самым ее ориентацию, мы упорядочиваем множество ее точек.
Заметим, наконец, что если вектор е имеет единичную длину, то
отображение fo сохраняет расстояние между точками.
§ 7. ЛИНЕЙНАЯ ЗАВИСИМОСТЬ
Ассоциативность сложения векторов позволяет говорить о
сумме трех векторов
a + b + c=(a + b) +c=a+ (Ь + с).
По индукции может быть определена сумма любого числа
векторов
ai + a2+ ... + а„.
При этом в силу коммутативности можно произвольно менять
порядок слагаемых.
Отметим еще несколько следствий из аксиом векторного
пространства:
0а=0 для любого вектора а;
α 0=0 для любого числа а;
—а=(—1) -а для любого вектора а.
Итак, с векторными равенствами можно поступать так же, как
с числовыми: произвольно расставлять скобки; переставлять
слагаемые; прибавлять к обеим частям равенства одинаковые векто-
24
ры; переносить слагаемое, меняя его знак, из одной части
равенства в другую и т. д.
Выражение
aiai + <i2a2+ ... -fanan
называется линейной комбинацией векторов аь...,ал с
коэффициентами αι,...,αη. Линейная комбинация называется
тривиальной, если все ее коэффициенты равяы нулю. В противном случае
линейная комбинация называется нетривиальной.
Если вектор а равен линейной комбинации векторов ai,...,an,
то говорят, что вектор а линейно выражается через векторы ai,...
...,ап. Проиллюстрируем это определение двумя примерами.
1) Нулевой вектор 0 линейно выражается через любую
непустую систему векторов аь ...,ап:
0=0.а1+---+0-а11.
2) В начале § 6 было показано, что на прямой всякий вектор
линейно выражается через любой ненулевой вектор.
7·!. Определение. Система векторов аь...,ал называется
линейно зависимой, если существует нетривиальная линейная
комбинация этих векторов, равная нулевому вектору. В
противном случае векторы аи..., аЛ называются линейно
независимыми.
Из определения вытекает, что пустое множество векторов
линейно независимо.
7.2. Предложение. Система векторов, состоящая из одного
элемента а, линейно зависима тогда и только тогда, когда а=0.
Доказательство. Из равенства 1-0=0 вытекает линейная
зависимость системы, состоящей из нулевого вектора.
Предположим теперь, что аа=0. Если а#0, то 1 = —а и, значит, а=1 -а=
α
==[—а)-а=—(аа)= — 0=0. Предложение доказано.
V α у α α
7.3. Предложение. Всякая подсистема линейно
независимой системы векторов линейно независима.
Доказательство. Предположим, что подсистема аь...
..., а& системы аь...,аЛ линейно зависима. Возьмем
нетривиальную линейную комбинацию
ОА+ ...+«ЛаЛ=0.
Прибавим к обеим частям этого равенства нулевой вектор
0а*.н + ...+0а11=0.
Получим нетривиальную линейную комбинацию векторов ai,,
...,ап, равную нулевому вектору. Значит, система аь...,ап,
линейно зависима. Предложение 7.3 доказано.
25
Из предложений 7.2 и 7.3 вытекает
7.4. Предложение. Всякая система векторов, содержащая
нулевой вектор, линейно зависима.
7.5. Предложение. Система, содержащая не менее двух
векторов, линейно зависима тогда и только тогда, когда какой-
нибудь вектор этой системы линейно выражается через
остальные.
Доказательство. Предположим, что вектор ап линейно
выражается через векторы аь... t an~i:
an=a,a1+ ... + αη_ιβη_ι.
Тогда
α^χ-r · · · +«π-Λι- ι —аи = 0,
или, что то же самое,
<h*i+ · · · +α»-Αι^ι+(—1)аЛ=0.
Таким образом, нетривиальная линейная комбинация (an—
=—1) векторов аь...,ап равна нулевому вектору, т. е. эти
векторы линейно зависимы.
Наоборот, пусть
о^-Ь .. .+anan=0,
где, например, αι#0. Тогда
·.-(--*>+-+(--5-К
Предложение 7.5 доказано.
7.6. Предложение. Если вектор а линейно выражается
через линейно независимые векторы аь...,а„, то такое выражение
единственно.
Доказательство. Возьмем два таких выражения:
а=а1а1+ ... + aflau,
a=Piai+ . . +Mn.
Тогда, вычитая из одного равенства другое и приводя подобные
члены, получаем
О=(о1-Р1)а1+ ... + (ап-$п)ап.
Но из линейной независимости векторов ai,...van следует, что
«ι—βι = 0, .. , αη—ρη=0, т. е. α1=β1, ... , α„=βη.
' 7.7. Предложение. Если при добавлении вектора а к
линейно независимой системе аь...,а„ получаем линейно
зависимую систему, то вектор а линейно выражается через векторы
aj,..., З.П-
26
Доказательство. Существуют такие числа αι,. ..,α„,
an+it не все равные нулю, что
θι·ι+ · · · +anan+an+ia=0. (8)
Тогда обязательно Оп-н^О. В самом деле, если аЛ+!~0, то an+ia—
=0 и, следовательно, равенство (8) превращается в равенство
а1а1+...+аЛаЛ=0.
Согласно предположению среди чисел αι,...,αΛ имеется
отличное от нуля. Следовательно, система ai,...,an линейно
зависима. Это противоречие показывает, что ап+1^0. Поэтому из (8)
получаем
\ αη+ι / \ «п+1 /
Предложение 7.7 доказано.
§ 8. ГЕОМЕТРИЧЕСКИЙ СМЫСЛ ЛИНЕЙНОЙ ЗАВИСИМОСТИ
Векторы а и b называются коллинеарными, если они
параллельны одной прямой.
8.1. Предложение. Два вектора коллинеарны тогда и
только тогда, когда они линейно зависимы.
Доказательство. Пусть векторы а и b коллинеарны.
Отложим их от одной точки. Тогда они лежат на одной прямой /.
Предположим, что а=тЧ) (если оба вектора нулевые, то они
линейно зависимы согласно 7.4). Но на прямой всякий вектор
линейно выражается через любой ненулевой вектор. Итак, Ь~аа и
векторы а и b линейно зависимы согласно 7.5.
Пусть теперь векторы а и b линейно зависимы. Согласно 7.5
один из них линейно выражается через другой, например, Ь=аа.
Тогда векторы а и b коллинеарны согласно определению
умножения вектора на число. Предложение 8.1 доказано.
8.2. Предложение. На плоскости существуют два линейно
независимых вектора,
В самом деле, возьмем в плоскости три точки О, Λί, Ny не
лежащие на одной прямой. Тогда векторы ОМ и ON неколлинеар-
ны и согласно 8.1 линейно независимы.
8.3. Предложение. Любые три вектора на плоскости
линейно зависимы.
Доказательство. Пусть векторы а, Ь, с лежат в одной
плоскости. Если среди них имеется коллинеарная пара, то они
линейно зависимы согласно 8.1 и 7.3. Предположим, что векторы
а, Ь, с попарно неколлинеарны. Тогда, отложив их от одной точки
О: a=OAf, b=ON9 с=ОР, получим три различные прямые ОМ,
27
ON, OP. Проведем через точку Р прямую /ь параллельную
прямой ОМ. Прямая ON, пересекая прямую ОМ, будет пересекать и
параллельную ей прямую 1\. Пусть Νχ—точка пересечения
прямых ON и Л. Аналогично прямая k, проведенная через точку Ρ
параллельно лрямой ON, будет пересекать прямую ОМ в
некоторой точке Afj (рис.9). Четырехугольник ΟΜχΡΝχ — параллело-
■■ ■ » ■■ ■« »
грамм. Следовательно, ΟΝ{*=Μ}Ρ. Поэтому
ΟΡ^ΟΜχ + МгР=ОМ, + ONt.
Ч
Рис. 9
Рис. 10
Поскольку векторы ОМ и ON — ненулевые, существуют такие
числа α и β, что ΟΜχ=αΟΜ и ΟΝχ=$ΟΝ. Значит,
ΟΡ=αΟΜ+$ΟΝ или с=аа+0Ь.
Итак, векторы а, Ь, с линейно зависимы согласно 7.5.
Предположение 8.3 доказано.
Из предложений 8.3 и 7.3 вытекает, что система векторов в
плоскости, состоящая более чем из трех векторов, также
линейно зависима.
Векторы а, Ь, с называются компланарными, если они
параллельны одной плоскости.
8.4. Предложение. Три вектора компланарны тогда и
только тогда, когда они линейно зависимы.
Доказательство. Необходимость вытекает из 8.3.
Достаточность. Пусть векторы а, Ь, с линейно зависимы. Тогда
согласно 7.5 один из них, например с, линейно выражается через
остальные: c=aa+pb. Отложив векторы а, Ь, с от одной точки О: а=
=ΟΛί, b—ON, с=ОР, видим, что вектор ОР является суммой век-
28
торов, лежащих на прямых ОМ и ON. Значит, вектор ОР лежит
в плоскости, проходящей через эти прямые.
8.5. Предложение. В пространстве существуют три
линейно независимых вектора.
В качестве таких векторов согласно 8.4 можно взять любую
тройку векторов ОМ% ON, OP, где точки О, Λί, V, Ρ не лежат в
одной плоскости.
8.6. Предложение. Любые четыре вектора в пространстве
линейно зависимы.
Доказательство проходит по схеме доказательства
предложения 8.3. Поэтому даем лишь его набросок. Отложим векто*
ры аь а2, а3, а4 от одной точки: а»=ОЛ^. Достаточно рассмотреть
случай, когда никакие три из четырех прямых ОМи ΟΛί2, OAf3,
ΟΛί4 не лежат в одной плоскости. Существует параллелепипед,
такой, что:
1) точка О является одной из его вершин;
2) его ребра ONu ΟΝ2, ΟΝ$ лежат на прямых ОМи ΟΛί2, ОМъ
соответственно;
3) отрезок ОМА является его диагональю (рис. 10). Тогда
ΊΪΜΑ=ΟΝχ+Έ^2+^ζ=κ^
Итак, вектор а4 линейно выражается через векторы аь а2, аз.
Предложение 8.6 доказано.
Из него следует, что любая система векторов в пространстве,
содержащая более четырех векторов, также линейно зависима.
Результаты этого параграфа можно суммировать следующим
образом.
8.7. Теорема. Для л=1, 2, 3, в векторном пространстве
Vect (η) существует система из η линейно независимых векторов,
в то время как любая система, содержащая более η векторов, ли-
нейно зависима.
§ 9. БАЗИСЫ И КООРДИНАТЫ
9.1. Определение. Пусть V — векторное пространство и
е!,...,еп — некоторая система его векторов. Эта система
называется базисом пространства V, если она линейно независима и
полна. Последнее означает, что всякий вектор пространства V
линейно выражается через векторы еь... ,еЛ.
Из 8.7 и 7.7 вытекает
9.2. Предложение. Любые η линейно независимых
векторов образуют базис векторного пространства Vect (/г), я=1, 2, 3.
С другой стороны, из 8.1 и 8.4 вытекает
9.3. Предложение. Любой базис пространства Vect (n)
состоит из η векторов. я=1, 2, 3.
29
Пусть ei,...ten — базис пространства V и aeV. Тогда в силу
полноты базиса
a*a!ei+ . ..+a»en. (9)
Согласно 7.6 числа alt...tan вектором а определяются
однозначно. Эти числа называются координатами вектора а в базисе еь...
...,еп. Равенство (9) назовем разложением вектора а по
векторам базиса еь...,еп.
Если в векторном пространстве зафиксирован базис ei,...,en»
то наряду с записью a=a!ei+ ... +antn иногда .пишем
a«{al,.,.,a"}.
Из аксиом векторного пространства вытекает
9.4. Предложение. Координаты суммы векторов равны
сумме координат, а координаты произведения вектора на число
равны произведению координат на это число, т. е.
{а\ ..., а*)+{Ь\..., 6»}—{a*+61,..., ап + Ь*},
λ{α,,...,α*}={λα1,...Λα*}.
9.5. Определе-ние. Арифметическим n-мерным
(вещественным) пространством называется множество Rn всех
упорядоченных наборов из η вещественных чисел (<χι,...,αΛ) с операциями
сложения
(αϊ,.. . ,αΛ) + (|βι,.. .,βη) = (αι+ιβι,... , αΛ + βη)
и умножения на число
Я(аь ... t αη)=(λαχ, ... , λα„).
Легко проверить, что эти операции удовлетворяют аксиомам 1—
8° векторного пространства. Значит, Rn является векторным
пространством. Нулем в этом пространстве является набор (0, ..,0),
противоположным к элементу (аь · · ·, ап) является набор
(—>αι,...,—αΛ). Пространство R1 очевидно совпадает с R.
Обобщением теоремы 6.6 является
9.6. Теорема. Отображение /: Vect(rt)-*-Rn, /г=1, 2, 3,
сопоставляющее каждому вектору а набор его координат (α1,. . ,ап)
в некотором фиксированном базисе ei,...,en, является
изоморфизмом векторных пространств.
Линейность отображения / вытекает из предложения 9.4, би-
ективность очевидна.
§ 10. ПРОЕКЦИИ И КООРДИНАТЫ
Теперь от алгебраического определения координат векторов,
данного в § 9, перейдем к их геометрическому описанию. Пусть
на плоскости даны две непараллельные прямые 1\ и 1%. Через
произвольную точку Μ плоскости проводим прямую U, парал-
30
лельную прямой /2. Она пересекает прямую 1Х в точке Мх
(рис. 11). Эта точка называется проекцией точки Μ на прямую
U параллельно прямой /2.
Рис. 11
Рис. 12
Пусть теперь в плоскости дан вектор а. Отложим его от
какой-нибудь точки О: а=ОЛ1 Пусть Ох и Мх — проекции точек О
й Μ на прямую /| параллельно прямой /2 (рис. 12). Вектор ьх=*
—ОхМ\ назовем проекцией вектора а на прямую 1Х параллельно
/2 (пишем а!=пр{»а).
Надо проверить корректность этого определения, т. е.
независимость вектора at от выбора точки О. Это можно сделать чисто
геометрически, но мы привлечем алгебраические соображения.
■■ ■ >
Спроектируем вектор ОМ на прямую /2 параллельно прямой 1Х.
Получим вектор а2=02М2 (рис. 13). Ясно, что OM—01M1 + 02M2t
т. е.
а=а! + а2.
(10)
Рис. 13
Итак, для того чтобы определение вектора а^пр^а не
зависело от точки О приложения вектора а, достаточно показать, что
представление (10) вектора а в виде суммы векторов, параллель-
3!
Ных прямым 1\ и /2, единственно. Возьмем другое такое
представление:
a=b! + b2.
Тогда
(ai-bO + ia.-bd-O. (Η)
Значит, векторы ai—bi и а2—Ь2 линейно зависимы и согласно 8.1
коллинеарны. Но они лежат на прямых U и /2 соответственно.
Следовательно, один из них нулевой» но тогда в силу (11) второй
также равен нулю. Таким образом, корректность определения
вектора а1=пр}«а доказана. Заодно мы проверили равенство
а=пр{»а + пр{«а. (12)
Пусть теперь векторы еь е2 образуют базис в плоскости. Π роек-
цией вектора а на вектор ei параллельно вектору е2 называется
вектор
пр£а=пр£а, (13)
где прямые 1\ и 12 параллельны векторам ei и е2 соответственно.
Тогда равенство (12) можно переписать в виде
а=пр ^а + пр£а. (14)
Но вектор пр*а можно записать в виде αβι, где а, как мы знаем,
равно азе,(пр£а). Это число α обозначаем через (азпр^а)и
называем алгебраическим значением проекции вектора а на вектор
ei параллельно вектору е2. Итак,
np*us=(a3np*|a)ei.
Из равенства (14) получаем
а=(аз пр*;а) ег + (аз пр*а) %. (15)
Но запись
а^а^ + а^
означает, что а1, а2 — координаты вектора а в базисе еь е2. Таким
образом, координаты вектора а в базисе еь е2 — это
алгебраические значения проекций вектора а на векторы е{ и е2.
Пусть теперь в пространстве даны плоскость π и
непараллельная ей прямая /. Через произвольную точку Μ пространства
проведем прямую /', параллельную прямой /, и плоскость л;',
параллельную плоскости π. Обозначим через Mt точку пересечения
плоскости π' с прямой / и через Мя точку пересечения прямой V
с плоскостью π (рис. 14). Точка Μι называется проекцией точки
32
Μ на прямую / параллельно плоскости π, а точка Λίπ—-проекцией
точки Μ на плоскость π параллельно прямой /.
Возьмем теперь в пространстве вектор а и отложим его от
какой-нибудь точки О: а=ОЛ4. Спроектируем точки О и Μ на
>
прямую I и плоскость π (рис. 15). Обозначим вектор Ο/Λί/ через
■ »
а/, а вектор 0„Λίл — через ал. Назовем вектор а, проекцией векто-
ра а на прямую / параллельно плоскости π, а вектор ап —
проекцией вектора а на плоскость π параллельно лрямой /. Обозначим
эти векторы через пр*а и пр^а соответственно.
Рис. 14 Рис. 15
Из рассмотрения трех имеющихся на рис. 15
параллелограммов получаем
а=ОМ=Ш7> +ШС>=0№+ О^Йд =а, + ая.
Как и выше, из 8.1 вытекает единственность представления
а=а,+ая (16)
вектора а в виде суммы векторов, параллельных прямой / и
плоскости π. Таким образом, определение проекций npfa и пр^а не
зависит от точки О приложения вектора а. Равенство (16) можно
переписать в виде
а=пр* а + пр^а. (17)
Если е — ненулевой вектор, параллельный прямой /, то вектор
пР/ла называем также проекций вектора а на вектор е парал-
33
лельно плоскости π и обозначаем через пр£а. Число (аЗе(пр*а)>
обозначаем через (азпр£а). Вектор пр^а называем также
проекцией вектора а на плоскость π параллельно вектору е и
обозначаем пр£а. В этих обозначениях равенство (17) можно
переписать в виде
а=пр£а + пр*а. (18
Рис. 16
Возьмем в пространстве базис ei, e2, е3 и отложим эти
векторы от какой-нибудь точки О. Проведем через точку О плоскости
πι, Я2, яз так, что
πι параллельна векторам е2, ез;
π2 параллельна векторам Сь ез;
яз параллельна векторам ei, e2 (рис. 16).
Назовем эти плоскости базисными.
Разложим вектор а по векторам базиса еь е2, е3:
а=а3е! + а2е2 + я3е3. (19)
Вектор a^i параллелен вектору е^ а вектор а\ + адев параллелен
плоскости пг. Поэтому а1е1=пр^а. Аналогично а2е2=пр£*а и а3е3 =
= пр£а. Следовательно, равенство (19) можно переписать в виде
а=пр£а + пр£а + пр£а. (20)
Ясно также, что
а'=(азпр^а), /=1, 2, 3. (21)
i
Поэтому равенство (19) можно переписать еще в виде
а=(аз пр£»а) ех -f (аз пр*«а) е2 + (аз пр Ja) e3. (22)
Таким образом, в пространстве координаты вектора — это алгеб-
34
раические значения его проекций на базисные векторы
параллельно базисным плоскостям.
Обобщением предложения 6.1 является
10.1. Теорема. Для любых векторов а и Ь и любого числа а
имеем
(аз пр (ϊ+Б))=(аз пр а) + (аз пр Ь),
(аз пр (аа))=α (аз пр а).
Здесь речь идет о проекциях типа пр* в плоскости и пр£ в
пространстве. Утверждение теоремы вытекает из того, что
алгебраические значения проекций — это координаты, и из
предложения 9.4 о координатах суммы векторов и цроизведения вектора
на число.
10.2. Теорема. Для любых векторов а и Ь и любого числа а
имеем
пр (а+Ь) =пр а+пр Ь,
пр(аа)=<хпра.
Здесь речь идет о всевозможных типах проекций. В силу 10.1
в доказательстве нуждается только случай пр=пр.^ Согласно
(17) имеем
a+b=npf(a+b) + np/Jl(a + b).
Кроме того, уже установлено, что
ПР? (а+Ь)=пр*а + npfb.
Поэтому '
пр'я(а + Ь)=(а + Ь)—npf (a + b)=(a—npfa) +
+ (Ь—пр*Ь)=(согласно (17))=пр^ а + пр£Ь.
Аналогично проверяется и равенство np^(aa)=anpia.
Итак, мы определили различные проекции векторов. Сама
операция сопоставления вектору его проекции является
отображением, называемым проектированием. Теорему 10.2 можно
переформулировать следующим образом (см. определение 6.3):
10.3. Теорема. Проектирования
пр£: Vect (2)-*Vect (l),
npf : Vect (3)-+Vect (1),
np^: Vect (3)-+Vect (2)
являются линейными отображениями.
35
§ 11. ОПРЕДЕЛЕНИЕ СКАЛЯРНОГО ПРОИЗВЕДЕНИЯ ВЕКТОРОВ
И ЕГО СВОЙСТВА
Угол между двумя векторами. Пусть в пространстве (или на
плоскости) даны два ненулевых вектора а и Ь. Отложим их от
одной точки О: а=СШ, Ь=(Ж В плоскости, проходящей через
точки OMNt определены два угла между лучами ОМ-+ и ON-+.
Рис. 17
Эти углы принимают неотрицательные значения φ и 2π—<φ
(рис. 17), косинусы которых одинаковы. Наименьший из этих
углов назовем углом между векторами ОМ и ON и обозначим
через (ОМ, ON). Найдем его косинус. Спроектируем точку .V
ортогонально на прямую ОМ, получим точку N{. Обозначим ч ерез е а
вектор единичной длины, имеющий то же направление, что и
вектор а. Пусть 0#1=Яеа. Тогда |OJVi|-*|X|, а знак λ совпадает со
знаком cos(OAf, ON). С другой стороны, из прямоугольного
треугольника ΟΝΝχ имеем \ONi\=*\ON\- cos |(ΟΛί, 0Ν)\.
Следовательно,
λ= \0N\cos{OM?0N). (22)
Для произвольного вектора с обозначим через преас
ортогональную проекцию вектора с на вектор еа, т. е. проекцию вектора с
на вектор еа параллельно плоскости перпендикулярной вектору
еа. Тогда
—►
и равенство ON1=he& означает, что
Л=(азпреаЬ).
36
Значит, согласно (22) имеем
(азпреаЬ)= lb| cos (ОМ?Ъ$)у
откуда
—*Л—► (азпр Ь)
cos (ОМ, CW) = -—f (23)
или
^ (азпр Ь)
cos(a, b)= -f—. (24)
I ь ι
Равенство (24) можно взять за определение косинуса угла между
ненулевыми векторами а и Ь, а предыдущие рассуждения
показывают, что это определение совпадает с наглядно
геометрическим. Поскольку под углом между двумя векторами а и b
понимаем угол, принимающий значения от 0 до π, не имеет значения,
в каком порядке рассматриваем эти векторы. Поэтому
cos (a, b)=cos(b, a)
и наряду с равенством ('24) имеем
^ (азпр а)
cos(a, Ь)= —f—. (25)
|а|
Определение скалярного произведения. Скалярным
произведением двух векторов a, b называется число (а, Ь), .равное
произведению длин этих векторов на косинус угла между ними:
(а, Ь)=|а|.|Ь|-с«(аГЬ). (26)
Скалярное произведение нулевого вектора на любой вектор
полагается равным нулю.
Из (24) и (25) имеем
(а, Ь)= |а| (азпреаЬ)= |Ь| (азиреьа). (27)
Свойства скалярного произведения.
И.1гТео ρ е м а. Для любых векторов а, Ь, с и любого числа
а имеем
1) (а, а)>0, причем (а, а)=0 тогда и только тогда, когда а=
=0.
2) (а,Ь) = (Ь,а).
3) (а + Ь, с)=(а, с) + (Ь, с).
4) (оса, а)=а(а, Ь).
Доказательство. Свойства 1) и 2) очевидны. Проверим
свойство 3). Имеем (а + Ь, с)=(согласно (27)) = |с| (азпрвс(а + Ь)) =
(согласно 10.1)=|с|(азпреса)+|с| (^nipecb)=(a, c) + (b, с). Аналогично
проверяется свойство 4).
37
Из определения скалярного произведения и свойств косинуса
непосредственно вытекает
11.2. Теорема (неравенство Коши-Буня ко вско-
го). Для любых векторов a, b имеем
-|а|.|Ь|<(а, Ь)<|а|.|Ь|.
При этом, если а#0, то (а, Ь) = |а| · |Ь| тогда и только тогда,
когда Ь=аа, где а^О.
§ 12. СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ В КООРДИНАТАХ
Из свойств скалярного произведения вытекает, что линейные
комбинации векторов можно перемножать как многочлены:
(ОА+0^2 + 0333, Pib1 + p2b2)=(aia1 + c62aa + a3a3) ΡΛ) +
+ (а1а1+а2а2 + ос8а3, p2b2)==o1p1(a1, b^-fa^fo Ьг)+
+ α3βι(*3. b^ + a^iax, Ъ2) + а&2(а2, Ь2)+ОзР2(а3, Ь2).
Возьмем в пространстве векторов на плоскости базис еь е2.
Тогда для векторов
а^аЧ + а^, Ь=61е1 + 62е2 (28)
имеем
(a, ty-oVfe, е1) + аФ(е1, e^ + a2^, е^+а^е,, е,). (29)
Положим (е*, tfi^gij и назовем числа ga метрическими
коэффициентами базиса. Тогда, учитывая, что gij^gju равенство (29)
можно переписать в виде
(а, b)=aWgn + (aW + aW)gl2 + aWg22. (30)
Аналогично в пространстве, взяв базис ci, e2i е3, для векторов
а=а1е1 + а2% + а3е8, Ь=Ь1е1 + &% + Ь% (31)
получаем
(a, b)=aWgn + a*b*g22 + a*b*g93 + (aW + aW) g12 +
+ (aV + eV)iII + (A» + aW)it|f (32)
или в более компактной форме
3 3
(а> Ь>=Е Σ βν*«· <33>
Равенства
|а| =у7аГа), cos(a?b)= (а' b)
r v ; v ' |а|-|Ь|
38
позволяют по координатам векторов и метрическим
коэффициентам базиса находить длины векторов и углы между ними. Так,
для векторов (28) имеем
I а | = W)2 gn + 2aVft, + (a2)2 gsi, (34)
cos (аГь) = a41gu + (alb*+ a4%) g" + аЧ*8*>
Via1)*gu + 2aWgn+(a*)*gii У(6»)аgn+2b*b*glt+ (6*)»ft,'
(35)
Аналогичные формулы имеют место и для векторов (31) в
пространстве. Дадим их в компактном виде, применяя равенство (33)
/3 3
3 3
Σ Σ ^ω
соз(аГь)= з з -1'-1 з (37)
V Σ Σ ■"« V Σ Σ blbl*«
Базис eb...,en (на прямой, на плоскости или в пространстве)
называется ортонормированным, если
1 для i = /;
О для ιφ].
Длины векторов ортонормированного базиса равны единице:
|е,|=УвгП-1,
а равенство £<,·=() для ί#/ означает, что cosfe,·, е,)=0, т. е.
векторы ортонормированного базиса попарно перпендикулярны. Все
приведенные выше формулы имеют в ортонормированном базисе
значительно более простую запись. Так, для векторов в
пространстве
(а, b^aW + aW + aW, (38)
!a|=-K(a1)2 + (a2)2 + (a3)2, (39)
003^)^-7-== *»+*» + *» (40)
У (a1)2+ («")*+ (**)* У (&1)1+ (&*)*+ (**)*
Отбрасывая по третьему слагаемому в формулах (38) — (40),
получаем соответствующие формулы для векторов на плоскости.
Отметим еще одно утверждение Из формулы (38) вытекает
12.1. Предложение. Координатами произвольного вектора
а в ортонормированном базисе еь е2, е3 являются скалярные
произведения (а, ei), (а, е2), (а, е3).
39
§ 13. СИСТЕМЫ КООРДИНАТ
Аффинные координаты. Пусть на прямой, на плоскости или в
пространстве заданы точка О и базис €i,...,en. Тогда говорим,
что задан репер Ot{... еп.
Для любой точки Μ вектор ОМ называется
радиусом-вектором точки Μ (относительно точки О) и обозначается через гм.
Пусть
OM=&t1+...+xnen. (41)
Числа х\...,хп из .равенства (41) называются (аффинными)
координатами точки Μ в репере Ot\ . ..e„. Иногда будем говорить и
о координатах вектора в -репере Oei...en, подразумевая под этим
его координаты в базисе ei,...,e„. Таким образом, координаты
точки Μ в репере Ot\... еп — это координаты ее радиуса-вектора
в этом репере. Точку Μ с координатами х\...,хп иногда будем
записывать Μ (х\..., хп).
Рис. 18
13.1. Предложение. В данном репере для точек М(х\\...
...уХ\п) и N(x2l,...,X2n) имеем MN={x2x—xx\ ... ,х2п—ххп}.
Утверждение вытекает из равенства
MN=rs-rM, (42)
проиллюстрированного на рис. 18.
Строка (л:1,. .. ,хп) координат произвольной точки есть
элемент арифметического /г-мерного пространства Rn. Таким
образом, задание репера Oei...eTt определяет, очевидно, биективное
отображение
«точка»-*«строка ее координат». (43)
13.2. Определение. Биективное отображение (43)
называется (аффинной) системой координат, определяемой репером
Oei... еп. Ее обозначают обычно символом Ох1... хп или Охх...
...хп> Точка О называется началом системы координат. Прямая
с заданным на ней репером Ое называется осью координат Ох с
началом О.
40
Таким образом, задание системы координат Oxyz в
пространстве эквивалентно заданию трех осей координат Ox, Оу, Oz с
общим началом. Эти оси называются соответственно
Ох — ось абсцисс,
Оу — ось ордилат,
Oz — ось аппликат.
Начало О делит ось координат Ох на две полуоси:
отрицательную и положительную (рис. 19).
Рис. 19
Ось координат делит плоскость на координатные
полуплоскости, а пара осей координат — на координатные квадранты или
четверти I, II, III, IV (рис. 20).
ш
ж
Рис. 20
Плоскости, проходящие через пары осей координат,
называются координатными плоскостями Оху, Oxzt Oyz (рис. 21).
Координатная плоскость делит пространство на два
координатных полупространства, а тройка координатных плоскостей
делит пространство на восемь координатных октантов.
Возьмем в пространстве произвольную точку Λί.
Спроектируем эту точку на координатные оси Ox, Oyt Oz параллельно
координатным плоскостям Oyz, Oxz, Oxy соответственно.
Полученные проекции обозначим через Ми М2> Мг. Пусть х — координата
точки Afι на оси Ох, и пусть точки Λί2 и Λί3 имеют на осях Оу и
Oz координаты у и ζ соответственно. Тогда из сказанного в § 10
о связи между проекциями и координатами вытекает, что числа
х, у, ζ являются координатами точки Μ в системе координат
Oxyz. Таким образом, координаты точки в пространстве — это
41
координаты ее проекций на координатные оси параллельно
координатным плоскостям.
13.3. Замечание. Читатель всегда должен иметь в виду,
что одну и ту же точку можно рассматривать на прямой, на
плоскости и в пространстве. В зависимости от этого точка имеет
одну, две или три координаты. Так, точка Ми имеющая на оси Ох
одну координату х, в пространстве имеет тройку координат (*,
0,0).
/
1
г
1
/
/
1
/
/
!
1
L
1
1
!\
*,
1
Τ
/ '
/
°Х1
У
А
:г
*V
/
/
/
/
ι
/
—/
/
'
ρ
*2
1 -Р
V ι
°ху /
У
Рис. 21
Деление отрезка в данном отношении. Говорят, что точка МФ
ФМХ делит невырожденный отрезок ΑίοΛίι в отношении λ, если
МйМ=ШМ1.
(44)
Пусть Го> г,, г — радиусы-векторы точек Λί0ι Ми М. Тогда
уравнение (44) переписывается в виде
Г —Γ0 = λ(Γ1—Г),
или
ГО + λΓ!
1+λ
(45)
42
Это уравнение при всяком λΦ—l определяет радиус-вектор г
точки Μ на прямой ΑίοΛίι. При λ=*—1 получаем «бесконечно
удаленную» точку этой прямой.
Расписывая равенство (45) покоординатно, получаем
1+λ * * 1 + λ ' 1 + λ ' 1 '
При λ=1 точка М является серединой отрезка М0Мг и формулы
(46) превращаются в
*__&±£ц y=J>!L±ll-, 2=^1±J^ (4?)
Δ it &
Прямоугольные координаты. Система координат Ох1 ...хп
называется прямоугольной, если она определяется ортонормирован-
ным репером Oei...en, т. е. репером, в котором базис ei,...,en
ортонормирован.
Пусть в пространстве дана прямоугольная система координат
Oxyz. Возьмем две точки Afi(Jti, уп *\) и М2(Х2> У29 *2). Тогда
расстояние p(Afb M2) между ними равно длине соединяющего их
вектора
МгМ2={х2—хи у2—у19 г2—гг).
Поэтому согласно (39)
9(М19 M2)=V(x2-x1f + (y2-yf + (z2-z1)\ (48)
В частности, уравнение
(x-x# + (y-ytf+(z-tf=R*9 (49)
где /?>0, описывает геометрическое место всех точек М(х, у, г),
находящихся на расстоянии R от данной точки M0(x0t у^ г0), т. е.
сферу радиусом R с центром в точке М0.
На плоскости с прямоугольной системой координат Оху
расстояние между точками М\(х\, у\) и Αί2(χ2, У2) определяется
равенством
р(Л4„ М2)^У(х2-х^ + (у2-уг)\ (50)
Уравнение
(x-x0)*+(y-yo)2=R2 (51)
описывает окружность радиусом R с центром в точке Λί0(*ο, #о).
Полярные координаты. Зафиксируем на плоскости точку О и
назовем ее началом, или полюсом. Пусть / — проходящая через
точку О прямая. Зададим на прямой / ориентацию выбором
какого-нибудь ненулевого вектора^ е, параллельного этой прямой.
Луч с началом в точке О, имеющий направление вектора е,
назовем полярной осью. Прямая / разбивает плоскость на две полу-
43
плоскости, одну из которых назовем отрицательной (нижней), а
другую — положительной (верхней). Теперь для каждой точки Μ
(рис. 22) плоскости можно определить ее полярные координаты,
а именно:
1) расстояние г от точки Μ до начала О;
2) угол наклона φ радиуса-вектора ОМ точки Μ к полярной
оси.
Рис. 22
Число г называется полярным радиусом точки Λί. Полярный
радиус любой точки, отличной от точки О, положителен; для
точки О он равен нулю.
Угол φ называется полярным углом точки Λί. Полярный угол
определен для всех точек плоскости, за исключением точки О.
Полярный угол принимает значения на отрезке [0, π] для точек
положительной полуплоскости, включая прямую /. Для точек же
отрицательной полуплоскости полярный угол принимает значения
в интервале (—π, 0) (рис. 23).
Рис. 23
Итак, полярные координаты точки — это полярный радиус и
полярный угол. Описанное выше отображение, которое ставит в
соответствие точке МФО пару (г, φ) ее полярных координат,
называется полярной системой координат Οφ на плоскости,
определенной началом, полярной осью и положительной
полуплоскостью.
44
Вместо выбора положительной полуплоскости можно выбрать
положительное направление вращения в плоскости. Тогда
естественно считать, что полярный угол φ принимает значения в
полуинтервале [0, 2π) (рис. 24).
Рис. 24
Если на плоскости дана полярная система координат Ог<р, то
по ней естественно определяется и прямоугольная система
координат. Начало этой системы координат совпадает с началом
полярной системы координат, положительная полуось абсцисс
совпадает с полярной осью, а положительная полуось ординат
находится в положительной полуплоскости.
Полученную таким образом прямоугольную систему
координат Оху называем системой, определенной полярной системой
координат Огу (рис. 25).
Рис. 25
Наоборот, если дэна прямоугольная система координат Оху,
то однозначно определяем полярную систему координат 0г<р,
сохраняя начало данной прямоугольной системы координат и
требуя, чтобы полярная ось совпадала с положительной полуосью
абсцисс, а положительная полуплоскость состояла из тех точек,
ординаты которых положительны.
45
Очевидно» что такое соответствие между полярными и
прямоугольными системами координат на плоскости является
биективным.
Имеют место очевидные формулы, связывающие
прямоугольные координаты (х, у) произвольной точки А! с ее полярными
координатами (г, φ):
r=rcos<p, \
r=Y x* + t? .
cosq>=—=■
sin φ
r
,_ У
У
V^ + У1
(52)
(53)
Глава II
УРАВНЕНИЯ ПРЯМОЙ ЛИНИИ И ПЛОСКОСТИ
§ 14. УРАВНЕНИЯ ПРЯМОЙ ЛИНИИ НА ПЛОСКОСТИ
Фиксируем на плоскости аффинную систему координат Оху.
Возьмем прямую /, лежащую в плоскости. Всякий ненулевой
вектор а, параллельный прямой /, называется направляющим
вектором этой прямой.
Пусть точка М0(хо, у0) лежит на прямой /. Тогда для любой
>
точки М(х, у) этой прямой векторы ΛίοΑί и а коллинеарны.
Значит, существует такое число t, что
AMI-ia. (1)
Наоборот, всякая точка Af, для которой выполнено условие (1),
лежит на прямой / согласно определению произведения вектора
на число. Таким образом, условию (I) удовлетворяют все точки
Af прямой I и только они. Равенство (1) —это уравнение прямой
в векторной форме.
Обозначим через г0 и г радиусы-векторы точек Af0 и Λί
соответственно. Тогда
Af0Af=r—г0
и уравнение (1) принимает вид
г—г0=/а,
или
г=г0+/а. (2)
Это также векторное уравнение прямой (рис. 26).
Рис. 26 Рис. 27
47
Бели вектор а имеет координаты {α, β}, то, переходя в
формуле (2) от равенства векторов к равенству их координат, получаем
У-Л + Ф. I
Это параметрические уравнения прямой, проходящей через точку
(*о, Уо) с направляющим вектором {α, β}.
Исключая из уравнений (3) параметр t, получаем
каноническое уравнение прямой
* —*о _ У — Уо /4ι
α β
Здесь, например, если <х=0, то уравнение (4) превращается в
равенство
χ—jc0=0.
Это уравнение описывает прямую lf параллельную оси Оу и
проходящую через точку Λί0(χ0, 0) на оси Ох (рис. 27).
Приведем теперь уравнение (4) к общему знаменателю.
Получим эквивалентное ему уравнение
βχ—ay—β*0 + α#0=0,
которое, полагая Λ=β, β=—α, С=—βχ&+α#ο> запишем в виде
Ах + Ву + С=0. (5)
Это общее уравнение прямой линии на плоскости.
Поскольку вектор а~{а, β} — ненулевой, по крайней мере один
из коэффициентов А и В отличен от нуля. Поэтому левая часть
уравнения (5) представляет собой многочлен первой степени от
неизвестных хну. Следовательно, уравнение (5)—уравнение
первой степени, т. е. всякая прямая на плоскости есть линия
первого порядка.
Верно и обратное: всякая линия первого порядка на
плоскости является прямой, т. е. уравнение (5) в аффинной системе
координат Оху на плоскости описывает прямую.
В самом деле, возьмем частное решение (х0, у0) уравнения
(5). Такое решение всегда существует: если, например, АФО, то
можно положить ί/ο=0 и jc0=—С/А. Рассмотрим прямую /,
проходящую через точку M0(xQ, yQ)f с направляющим вектором а=
={—β, А}. Возьмем теперь произвольную точку М(х, у) на
прямой / и покажем, что ее координаты удовлетворяют уравнению
(5). Согласно (1) существует такое число t, что
{х—х0, у—y0) = t{ — β, Α}. (6)
Отсюда получаем
А(х—х0) + В(у—*/0)=(согласно (6))=Л(—Bt) + B At=0,
48
или
Ах + Ву—Ах0—Ву0=0. (7)
Но (хо, Уо) есть решение уравнения (5), т. е.
С=—Ахо—Ву0.
Значит, равенство (7) совпадает с равенством (5). Итак,
координаты (ху у) всякой точки Af, принадлежащей 1У удовлетворяют
уравнению (5).
Пусть теперь точка М(х, у) удовлетворяет условию (5). Тогда
из того, что точка М0(х0у у0) также удовлетворяет этому условию,
получаем
А(х—х0) + В(у—у0)=0,
или
X — Хр В_
У — Уо А
■■■ ►
Значит, векторы Λί<>Μ={χ—дс0, у—уо) и а={—В, А)
пропорциональны. Следовательно, согласно (1) точка Μ лежит на
прямой /.
Таким образом, нами доказана
14.1. Теорема. Прямые на плоскости — это β точности линии
первого порядка.
Из доказательства этой теоремы следует, что а={—В,
А}—направляющий вектор прямой, задаваемой уравнением (5).
Если ВФО, то уравнение (5) можно переписать в виде
или
y=kx + b. (8)
Это известное из школы уравнение прямой с угловым
коэффициентом k. Стоит отметить, что в аффинной системе координат
число k не имеет геометрического смысла тангенса угла наклона
прямой к оси Ох, как в прямоугольной системе координат. Так,
на рис. 28 перпендикулярная к оси Ох прямая имеет уравнение
У=х.
Вернемся теперь к уравнению (4). Пусть на прямой I кроме
точки М0(х0, у0) дана отличная от нее точка Мх(хи у{). Тогда в
качестве направляющего вектора а прямой I можно взять вектор
{λ'ι— хо, У\—Уо}· При этом уравнение (4) принимает вид
* — хо У — У о /п\
*ι —*ο Ух — У о '
Это уравнение прямой, проходящей через две точки Λί0 и М,.
49
Выделим некоторые частные случаи общего уравнения (5)
прямой /:
1) / проходит через начало координат ФФ· С—0;
2) / параллельна оси Олг4=»Л—0;
Рис. 28
3) I параллельна оси Оу<=>В=0;
4) / совпадает с осью 0х4=М=С=О;
5) / совпадает с осью Оу*=>В=С=0.
§ 15. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПРЯМЫХ НА ПЛОСКОСТИ.
ПОЛУПЛОСКОСТИ
В пределах этого параграфа на плоскости фиксирована
аффинная система координат Оху.
15.1. Предложение. Для того чтобы прямые 1и /2, зада-
ваемые соответственно уравнениями
AxX + Btf + C^O,
А2х + В2у + С2=0,
совпадали, необходимо и достаточно, чтобы
Λ _ ^ι _ Су
Лч £>2 ^2
50
№
(11)
(12)
Доказательство. Необходимость. Векторы {—Ви Л ι},
{—B2t А2) являются направляющими для прямых 1и 12. Значит,
они коллинеарны. Существует такое число а, что
{-Ви Λ)=α{-β2, Α2). (13)
Возьмем точку (х0, yoi^li—h· Тогда
4^0 + ^0 + ^=0,
Л2*о + Я^о + Са=0.
Умножим второе из этих уравнений на α и вычтем его из перво-
хо. Тогда с учетом (13) получим
С ι—аС2=0,
а это вместе с тем же равенством (13) дает нам условие (12).
Достаточность. Из условия (12) вытекает, что
AxX + Biy + C^aiAjc + Btf + CJ
для некоторого α, τι е. уравнения, задающие прямые lu k>
эквивалентны.
15.2. Предложение. Прямые lu h> задаваемые
соответственно уравнениями (10), (11), параллельны и не совпадают
тогда и только тогда, когда
А-=Л.фЛ. (14)
Аг Вг £а
Доказательство. Необходимость вытекает из
пропорциональности направляющих векторов {—Ви Ах}, {—В2, А2] прямых
/ι, 12 и предложения 15.1. Достаточность. Первая часть условия
(14) дает нам параллельность направляющих векторов прямых
ht к, а вторая часть вместе с предложением 15.1— несовпадение
прямых /ь /г.
Из предложений 15.1 и 15.2 вытекает, что условие
-£*i (15)
эквивалентно тому, что прямые lu h, задаваемые уравнениями
(10), (11), пересекаются по одной точке.
15.3. Предложение. Пусть прямые /ь /2, задаваемые
уравнениями (10), (11), пересекаются по одной точке Λίο(*ο» Уо)-
Тогда прямая /3 проходит через точку М0 в том и только в том
случае, когда она задается уравнением
а(А1х + В1у + С1)+^(А2х + В2у+ей)=09 (16)
являющимся линейной комбинацией уравнений (10) и (11).
Доказательство. Достаточность очевидна. Проверим
необходимость. Пусть прямая /з, задаваемая уравнением
A3x + Bzy + C3=0, (17)
проходит через точку Af0. Возьмем на прямой h какую-нибудь
точку Мх(хх% ух), отличную от точки Λί0. Положим
<h= — {А2х1 + В^у1 + Сг), |
^1=A1x1 + Bly1 + Cv ]
Поскольку точка Мх не может одновременно принадлежать
прямым /| и /г, по крайней мере одно из чисел αϊ и βι отлично от
нуля. Тогда уравнение
«ι (A1x + B1y + Ci) + ^1 (Α2χ + Β& + С2)=0 (18)
согласно условию (15) является уравнением первой степени
(коэффициенты при неизвестных одновременно в нуль не
обращаются). Поэтому согласно 14.1 оно определяет некоторую прямую
/. Она очевидно проходит через точку Af0. Подставляя
координаты точки М{ в левую часть уравнения (18), получаем U
α1β1 + β1(-α1)=0.
Следовательно, прямая / проходит и через точку М\. Значит, она
совпадает с прямой /з. Но тогда в силу 15.1 уравнение (17)
получается из уравнения (18) умножением на некоторое число γ.
Тогда при α=γαι, β^βι уравнения (16) и (17) совпадают.
Предложение 15.3 доказано.
Уравнение (16) называется уравнением пучка прямых,
проходящих через точку пересечения прямых (10) и (11).
15.4. Теорема. Пусть прямая I задана уравнением (5).
Тогда множества X" и Х+ всех точек М(х, у) плоскости, для
которых соответственно
Ах + Ву + С<0 и Ах + Ву+С>0,
являются полуплоскостями, ограниченными прямой L
Доказательство. Пусть точки М0(х0, у0) и М\(хи ух)
лежат в множестве Х~. Возьмем произвольную внутреннюю точку
М(х, у) отрезка МоМх. Эта точка делит отрезок М0М{ в
некотором положительном отношении λ. Тогда, как показано в § 12,
χ _ *о + λχι „_ Уо + λι/ι
1+λ ' 1+λ '
Поэтому, учитывая очевидное тождество
С =\—— С+—— С,
1 l + λ ^ 1+λ '
52
имеем
Ax + By + C=-T^(Ax0 + By0^C) + j^(Ax1 + Byl+C)<Of
так как обе точки М0 и М{ принадлежат Х~. Следовательно, Aie
еЛ"-. Итак, по определению полуплоскости (§ 3) Х~ лежит в
одной из полуплоскостей, ограниченных прямой /. То же самое
можно сказать и про множество Х+. Но плоскость исчерпывается
множествами X", /, Х+. Значит, множества Х~ и Х+ лежат в
разных полуплоскостях и исчерпывают их. Теорема 15.4 доказана.
Множество X" называется отрицательной полуплоскостью по
отношению к уравнению (5) прямой /, а множество Х+ —
положительной полуплоскостью.
§ 16. ПРЯМАЯ ЛИНИЯ НА ПЛОСКОСТИ С ПРЯМОУГОЛЬНОЙ
СИСТЕМОЙ КООРДИНАТ
Угол между прямыми. Пусть на плоскости дана
прямоугольная система координат Оху, определяемая ортонормированным
репером Oeie2. Мы знаем, что вектор а={—В, А} является
направляющим вектором прямой /, заданной общим уравнением (5).
Угол φ между прямыми 1\ и /2> задаваемыми общими
уравнениями (10) и (11), равен углу между их направляющими векторами
а!={—Ви А\) и а2={—В2, А2) (рис. 29). Следовательно,
cos<p= (ai>a2) » 4Α + *Α (19)
Рис. 29
Формула (19) дает нам значение одного из углов между
прямыми 1{ и /2. Косинус дополнительного π—<р также получается из
формулы (19), если уравнение одной из прямых умножить на —1.
Из формулы (19) вытекает условие
4Л + £А=о
перпендикулярности прямых 1Х и /2.
Расстояние от точки до прямой. Расстоянием от точки М0 до
прямой / называется длина перпендикуляра Λί0Μι, опущенного из
этой точки на прямую. Отрезок ΛίαΛίι короче любого другого от-
53
резка MqM, соединяющего точку Λί0 с произвольной точкой Μ
прямой /.
16.1. Предложение. Расстояние от точки М0 с
координатами (х0, уо) до прямой I, заданной общим уравнением (5),
выражается формулой
,,(Λίβ, /)=M*o + */o + CL, (20>
V^ + b2
Доказательство. Мы знаем, что вектор а={—5, А)
является направляющим вектором прямой /. Рассмотрим вектор п=
={Л, В). Имеем
(а, п)=— ВА+АВ=0.
Следовательно, вектор η .перпендикулярен вектору а. Проведем
через точку М0 прямую 1\ перпендикулярно прямой /. Точка Мх
пересечения этих прямых и будет основанием перпендикуляра,
опущенного из М0 на /. Параметрические уравнения (3) прямой
1[ имеют вид
x=x0 + tA, \ ^2|\
y=y0 + tB. \
Пусть точка Мх имеет координаты (хи у\). Эти координаты
получаются по формулам (21) при некотором значении U параметра
t. Поскольку Л^е/, имеем
А(хо + ^А) + В(у0 + ^В)+С=0.
Отсюда
_ Ах0 + Ву0 + С (22)
1 л2+я2 ' '
Вектор М0Мг соединяющий точку М0(х0, уь) с точкой Мг(х0 + ^А,
ί/ο + Ζχβ), имеет координаты {1гА9 ^β}. Следовательно, μ(Λί0,/)=
= |Л^Л?I = |<1|КЛ2 + В2=(согласно (22))= \Ax^^+J:\y что и
требовалось доказать.
Скажем, что общее уравнение (5) прямой нормировано, если
Л2+В2= 1. От общего уравнения (5) всегда можно перейти к
эквивалентному нормированному
А х+ , JL— у+ пУ „С рй =0. (23)
У А2 + Я2 У Л2 + В2
Таким образом, предложение 16.1 можно переформулировать
следующим образом:
Расстояние от точки до прямой равно (по абсолютной
величине) результату подстановки координат этой точки в левую часть
нормированного уравнения этой прямой.
54
§ 17. УРАВНЕНИЯ ПЛОСКОСТИ
Утверждения о плоскости в пространстве аналогичны
утверждениям о прямой на плоскости. Основное отличие — в
размере формул: на один вектор, на одно уравнение, на одну
координату, на одно слагаемое больше. Поэтому при выводе формул,
касающихся плоскости в пространстве и принципиально не
отличающихся от формул для прямой на плоскости, опускаем
некоторые детали.
Что такое плоскость в пространстве? Мы знаем (§ 8), что на
плоскости существуют два линейно независимых вектора, через
которые линейно выражается любой вектор, лежащий в этой
плоскости. Более того, любые два линейно независимых (некол-
линеарных) вектора образуют базис в пространстве векторов на
плоскости (§ 9).
17.1. Предложение. Пусть в плоскости π даны точка М0
и два неколлинеарных вектора а и Ь. Тогда точка Μ
принадлежит плоскости π в том и только в тон случае, когда существуют
такие числа и и υ, что
MoM = ua+vb. (24)
Доказательство. Точка Μ лежит в плоскости π тогда и
только тогда, когда вектор М0М параллелен плоскости. Это по
определению означает компланарность векторов а, Ь, ΛίοΜ. А
последнее в силу неколлинеарности векторов а и Ь эквивалентно
тому, что вектор М0М линейно выражается через векторы а и Ь.
Предложение 17.1 доказано.
Равенство (24) представляет собой уравнение плоскости в
векторной форме. Оно имеет описательный характер и
утверждает в основном, что плоскость однозначно определяется
лежащими в ней точкой и двумя неколлинеарными векторами.
Зафиксируем в пространстве начало О. Обозначим через г0
и г радиусы-векторы точек М0 и Μ соответственно. Тогда
уравнение (24) принимает вид
г—r0 = wa+ub,
или
г = г0+ ыа + ЫЬ. (25)
Это также векторное уравнение плоскости (рис. 30).
Возьмем теперь в пространстве аффинную систему координат
Qxyz. Пусть в этой системе координат точки и векторы имеют
соответственно координаты
М0(хо, у0, z0), M(x,y,z), & = {ах,а2, а3}, b = {6i, 62, 63}.
55
Переходя в уравнении (26) от равенства векторов к равенству их
координат, получаем
x=xQ + ua1 + vblA
y=y0 + ua2 + vb2f (26)
ζ=ζη + αα3+ιΛ3·)
Это параметрические уравнения плоскости.
vb
"орт* *"
ι a иаУ
\ /
о
Рис. 30
Система уравнений (26), или эквивалентная ей система
х—хь=^иах-\-хЛ)1ч \
y—yo=u<*2 + vbty |
ζ — z0=ua3 + vb3t]
выражает линейную зависимость столбцов матрицы
X Xq
У—Уо
2—20
<*1
02
<h
Μ
ч
b,\\
что в свою очередь эквивалентно равенству
х—х* У—Уо г—*о
аг а2 а3
h b2 b3
(27)
или (после раскрытия определителя по первой строке)
уравнению
А (х—х0) + В {у—уо) + С (ζ—ζο),
(28)
где
Л =
\а2 а3
\ь2 ь3
В—
» *-'
а3 ах
Ь3 Ьг
. с=
α, а2\
Ь\ Ь2\
(29)
56
Равенство (27) является уравнением плоскости, проходящей
через точку М0(х0,уо, 2о) и пару неколлинеарных векторов а={аь
аъаъ) и Ъ={ЬЬ Ьь 63}.
Пусть теперь в плоскости даны три точки Mi(xif yit ζχ·), ί=
= 0, 1,2, не лежащие на одной прямой. Положим a = Af0Mi и Ь =
►
= ΛίοΛί2. Тогда уравнение (27) принимает вид
* —*о У —Уо ζ — ζ0
χι— хо У ι — У о ζι 2о
%2—хо Уг Уо ζ2 ζο
= 0.
(30)
Это уравнение плоскости, проходящей через три точки с
координатами (*о, Уо, *о). {xuyi>*i)> {хьУъ**)-
Вернемся к уравнению (28). Полагая D=—Ах0—Вуо—Сг0,
запишем его в виде
Ax+By+Cz+D = 0.
(31)
Это есть общее уравнение плоскости. Из непропорциональности
векторов а и Ь вытекает что по крайней мере одно из чисел Ау
В, С, определенных равенствами (29), отлично от нуля. Значит,
общее уравнение плоскости есть уравнение первой степени, а
плоскость, таким образом, является поверхностью первого
порядка.
Верно и обратное утверждение: всякое уравнение (31)
первой степени является уравнением плоскости. В самом деле,
предположим, что АФО, возьмем точку Λί0(—О/Л,0,0), векторы а=
= {—В/А, 1,0}, Ь = {—С/Л, 0, 1} и покажем, что плоскость π*
проходящая через точку Λί0 и векторы а и Ь, совпадает с множеством
решений уравнения (31). Уравнение (27) плоскости π имеет вид
или
х + т
в
А
А
*+— +
А
У *
1 0
0 1
т'+
= 0,
А *
(32)
Таким образом, уравнение (31) и задающее плоскость π
уравнение (32) пропорциональны.
Итак, нами доказана
17.2. Теорема. Плоскости β пространстве — это в точности
поверхности первого порядка.
57
§ 18. ВЗАИМНОЕ РАСПОЛОЖЕНИЕ ПЛОСКОСТЕЙ.
ПОЛУПРОСТРАНСТВА
18.1. Предложение. Вектор а = {а, β, γ} параллелен
плоскости π, задаваемой общим уравнением (31), тогда и только
тогда, когда
Λα+ββ + Ογ=0. (33)
Доказательство. Вектор параллелен плоскости тогда и
только тогда, когда вместе с его началом плоскости
принадлежит и его конец. Отложим вектор а от точки М0(х0,уо,г0)
плоскости π. Тогда его конец Мх имеет координаты (jco+α, ί/ο+β,
Ζο+ϊ). Таким образом, параллельность вектора плоскости
равносильна равенству
A(x0+a)+B(yo+$)+C(z0+y)+D = 0,
которое с учетом условия
Ax0+Byo+Cz0+D = 0
принадлежности точки Λί0 плоскости π эквивалентно равенству
(33). Предложение 18.1 доказано.
18.2. Предложение. Плоскости щ и π2, соответственно
заданные своими общими уравнениями
Axx+Bxy+Cxz+D = Q (34)
и
А2х + В2у + C2z+D2 = 0, (35)
параллельны β широком смысле слова (не пересекаются как
множества или совпадают) тогда и только тогда, когда
jlb=JL=JiL. (36)
А% fig С 2
Доказательство. Достаточность вытекает из 18.1.
Проверим необходимость. Предположим, что АхФ0. Тогда векторы
а={-В1/Л1, 1,0} и b«{-CiM,,0, 1}
параллельны плоскости п\. Значит, они параллельны и плоскости
п2. Тогда условие (33) для данных векторов а и Ь
превращается в равенства
M~i-)+B'=0" Μ-ίτ)+<:·-0
или
А% В2 А2 Съ
Αι Вх Аг~ d '
что и требовалось доказать.
58
18.3. Предложение. Плоскости πι и π2, заданные общими
уравнениями (34) и (35), совпадают тогда и только тогда, когда
-ii-=JL=:^=J>!- (37)
А2 £*г \*2 *^2
Доказательство. В проверке нуждается только
необходимость. Согласно условию (36) существует такое а, что
{Al,Bl,Cl} = a{A2,B2,C2}. (38)
Возьмем точку (х0, у0, ζ0)&π\=π2. Тогда
ΑχΧο+Biyo+CiZo+Di^O,
А2х0+В2у0 + C2z0+D2=0.
Умножим второе из этих уравнений на α и вычтем из первого.
Получим Di—α/)2=0, что и требовалось доказать.
Из предложений 18.2 и 18.3 вытекает
18.4. Следствие. Плоскости Л\ и л2, заданные общими
уравнениями (34) и (35), параллельны в узком смысле слова (не
пересекаются как множества) тогда и только тогда, когда
Из предложения 18.2 вытекает
Л.=Л-=^фЛ^. (39)
А% 3% С% l)%
18.5. Предложение. Плоскости Л\ и п2> заданные общи-
ми уравнениями (34) и (35), пересекаются по прямой тогда и
только тогда, когда векторы
п{ = {Аи Вь Сх) и п2={Л2, В2, С2)
неколлинеарны.
18.6. Предложение. Пусть плоскости щ и π2, заданные
уравнениями (34) и (35), пересекаются по прямой I. Тогда
плоскость яз проходит через прямую I в том и только в том случае,
когда она задается уравнением
a(Axx+Bxy+Cxz+Dx) + $(A2x+B2y+C2z+D2)=0. (40)
Это уравнение называется уравнением пучка плоскостей,
проходящих через линию пересечения плоскостей (34) и (35).
Доказательство предложения 18.6 аналогично доказательству
соответствующего предложения 15.3 для прямых.
18.7. Теорема. Пусть плоскость л задана уравнением (31).
Тогда множества Х- и Х+ всех точек М(х, у, ζ) пространства, для
которых соответственно
Ax+By+Cz+D<0 и Ax+By + Cz+D>0,
являются полупространствами, ограниченными плоскостью л.
59
Множество Х- называется отрицательным полупространством
по отношению к уравнению (31) плоскости π, а множество Jf+ —
положительным полупространством. Доказательство теоремы 18.7
аналогично доказательству соответствующей теоремы 15.4 о
полуплоскостях.
§ 19. ПРЯМАЯ В ПРОСТРАНСТВЕ
Векторные уравнения прямой на плоскости и в пространстве
совпадают. Напомним, что уравнение (1)
AMf-fa,
когда параметр t пробегает всевозможные вещественные
значения, описывает переменную точку Μ прямой /, проходящей через
точку М0 и параллельной ненулевому вектору а.
Если в пространстве фиксировано начало О, то уравнение (2)
г=г0+/а
описывает радиус-вектор г переменной точки прямой / с
направляющим вектором а, проходящей через точку M0t радиус-вектор
которой равен г0.
Пусть в аффинной системе координат Oxyz точка Λί0 имеет
координаты (хо, Уо,г0), а вектор а —{α, β, γ}. Тогда векторное
равенство (2) превращается в систему координатных равенств
χ=χ0 + αί, 1
*=Л + #. (41)
z=z0+,yt. )
Это параметрические уравнения прямой. Из уравнений (41)
вытекает пропорциональность векторов {х—х0, у—Уо, ζ—ζ0\ и {α, β, γ},
которую можно записать в виде
х — *о — У — У о ζ — 2q (42)
α β Υ
Это канонические уравнения прямой. Здесь надо сделать те же
оговорки, что были сделаны относительно канонического
уравнения (4) прямой на плоскости. Если, например, а=0, то х—х0=0.
Это означает, что прямая лежит в плоскости х=хо и имеет там
каноническое уравнение
у — У о _ г -— 20
β Υ
Если же, например, α=β=0, то прямая лежит в плоскостях χ—
—лго=0 и у—1/0=0, т. е. является линией их пересечения.
Если на прямой / кроме точки М0 дана еще точка Мх(хх, уи ζχ),
то в качестве направляющего вектора а можно взять вектор
М0Мх = {х{—х0, £/ι—ί/ο, Zi—Zq}.
60
Тогда уравнения (42) принимают вид
Х — Х0
у —У о
(43)
*ι — *о Ух — Уо *ι — *о
Это уравнения прямой, проходящей через две точки Λί0 и Afb
Каждая прямая может быть представлена как линия
пересечения двух плоскостей. Очевидно, что уравнения (42)
эквивалентны системе из двух уравнений первой степени, каждое из
которых является уравнением плоскости.
19.1. Предложение. Если прямая I задана как линия
пересечения двух плоскостей тс\ и п2
A2x + B2y + C2z + D2=0,
то вектор
(44)
а=
1*1 Сг
\В2 С2
»
СуАу
С2 А2
>
АуВу\
А% В2
(45)
является направляющим вектором этой прямой.
Доказательство. Отметим прежде всего, что из 18.5
вытекает непропорциональность векторов
{АиВиСх) и {A2iB2tC2}.
Поэтому по крайней мере одна из координат вектора а отлична
от нуля. Рассмотрим теперь определитель
/=1, 2.
Он равен нулю, так как имеет одинаковые строки. Раскрывая
его по первой строке, получаем
\А%
А
к
Βι
Вг
Вг
СЛ
Сг\
с,|
А.
By Су
В2 С2
+ Bt
Су Ay
Со А*
+с,
Аг βχ
А2 В2
= 0.
Но это равенство является условием (33) параллельности
вектора а плоскости ш, /=1,2. Итак, ненулевой вектор а параллелен
каждой из плоскостей πι и n2t следовательно, он является
направляющим вектором линии их пересечения.
§ 20. ПЛОСКОСТЬ В ПРОСТРАНСТВЕ С ПРЯМОУГОЛЬНОЙ
СИСТЕМОЙ КООРДИНАТ
Пусть в пространстве дана прямоугольная система координат
Oxyz. Условие (33) параллельности вектора плоскости
показывает, что вектор п = {Л, β, С} перпендикулярен плоскости ет,
заданной уравнением (31). Его называют нормальным вектором этой
61
плоскости, а за угол между плоскостями принимают угол <р
между их нормальными векторами. Поэтому для угла φ между
плоскостями πι и Я2, заданными уравнениями (34) и (35), имеем
cos(p=-
АгА2 + ВгВг + СхСа
V А*+ В\ + C\V А\+ В\+ С\
(46)
Условием перпендикулярности плоскостей πι и яг является
равенство
'iM2 + BlB2+C,C2 = 0.
(47)
Угол между вектором а={«, β,γ} и плоскостью π есть по
определению угол ψ между этим вектором и его проекцией на
плоскость (рис. 31). Угол этот заключен в пределах от 0 до π/2.
Рис. 31
Обозначим через φ угол между вектором а и прямой /,
перпендикулярной плоскости π. Тогда
sin ψ=cos φ.
Но поскольку направляющим вектором прямой / является
вектор п, имеем
\Аа + вр + Су\
cos q> =
VA* + B* + C*Va* + fl· +y2
(48)
Здесь считаем, что плоскость π задана уравнением (31). Правая
часть в равенстве (48) взята по абсолютной величине, поскольку
угол φ не превосходит л/2. Итак, угол ψ между вектором а и
плоскостью π определяется по формуле
sin *ψ= -
ΐΛα+θβ + Cyl
У Д2 + В2 + С2 уа2 + β2 + γ2 '
(49)
В частности, по формуле (49) вычисляется угол между прямой
/ с направляющим вектором {α, β, γΐ и плоскостью π.
62
Расстояние от точки M0(x0,y0iz0) до плоскости π, заданной
уравнением (31), определяется по формуле
ρ(Λί0, π)= 1^+ ** + <* +PI. (50)
Вывод этой формулы, использующий перпендикулярность вектора
{А, В, С) плоскости π, аналогичен выводу формулы (20) для
расстояния от точки до прямой.
Глава III
ПРЕОБРАЗОВАНИЯ КООРДИНАТ. ОРИЕНТАЦИЯ.
ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ
§ 21. МАТРИЦЫ И ОПЕРАЦИИ НАД НИМИ
Для дальнейшего нам понадобятся некоторые сведения из
алгебры. Напомним, что прямоугольная таблица
ап а12 ... а1п
#21 а22 · · · &2П
(1)
чисел, состоящая из т строк и η столбцов, называется матрицей
размером тхп.
Матрицами размером \Хп являются строки
\\а{... aj
или (в более принятых обозначениях)
{ах, ..., аЛ).
Матрицами размером mxl являются столбцы
аЛ
При т=л матрица (1) называется квадратной. Квадратные
матрицы размером пХп называются матрицами порядка п. В ос*
новном мы будем иметь дело с квадратными матрицами, а также
Со строками и столбцами. Множество матриц размером шХп
обозначаем через Мт,п. Для квадратных матриц используем
более короткое обозначение: Мп,п^Мп.
В множестве МШ,Л определены операции сложения и
умножения на число. Суммой двух матриц
*11 "12
... а
т
*т\
атг · · · апп
Ι &11 &12 · · · &1н
и В=\
II
I bmi bm2
...6n
размером тхп называется матрица
I ^11+^11 «12 + ^12 ••«Ιη+^ΙΤί
I am\ + ^ml am2 + #m2 · · · amn + ^mri
л+в=
64
а произведением матрицы А на число α называется матрица
аап αα|2 ... αα1η
аЛ=
Очевидно, что эти операции удовлетворяют аксиомам 1—8°
линейного (векторного) пространства (см. § 5, гл. 1). Записывая
строки матрицы А размером тХп последовательно в одну
строку длиной т/г, получаем изоморфизм между линейным
пространством Мт,п и арифметическим /пл-мерным пространством Rmn.
Матрицы размером тХп можно умножать на матрицы
размером пхр. Произведением строки А= (аи ..., ап) (матрицы
размером 1 Х/г) на столбец
В =
*1
(матрицу размером nXl) является матрица размером 1X1, т. е.
число
В общем случае произведением матрицы
А =
Яц ·
Umi
на матрицу
В=\
ьп ..
ьп1..
• · Ь\п I
&тп 1
• Ьи> 1
• ьпр |
является матрица АВ = С размером тХр, у которой стоящий на
пересечении ί-й строки и /-го столбца элемент сц равен
произведению i-й строки матрицы А на /-й столбец матрицы В% т. е.
cU = Lt aiA;·
(2)
Λ=1
Умножение матриц ассоциативно, т. е. если А, В, С
—матрицы, имеющие соответственно размеры mxn, пхр, pXq, то
(АВ)С=А(ВС).
(3)
Это легко выводится из того, что в двойных суммах можно
менять порядок суммирования. В самом деле, матрицу в левой ча-
65
сти формулы (3) обозначим через D, а матрицу в правой части
формулы (3) — через D'. Тогда
dii=YAalh[YAbhiCU).
к I
Убирая скобки и меняя в одном из этих равенств порядок
суммирования, получаем
dij^d'ij.
Операция умножения очевидно дистрибутивна по отношению
к сложению, т. е.
А{В + С)=АВ+АС,
(Л + В)С=ЛС + ВС,
ι4)
(5)
где А, В, С — любые матрицы, для которых левые и правые
части равенства (4) (соответственно (в)) имеют смысл.
Квадратная матрица
1 0 ... 01
£ =
0 1
о
о о
1
называется единичной матрицей. Она обладает тем свойством, что
для любой квадратной матрицы А того же порядка
Л£=£Л = Л.
(6)
Для матрицы А размером гпХп определена матрица Л*
размером /гХт, называемая матрицей, транспонированной к матрице
А (или просто транспонированной матрицей А*). Она
определяется равенством
Легко проверить, что операции транспонирования и умножения
матриц связаны следующим образом:
(АВ)* = В*А*
(7)
В алгебре каждой квадратной матрице А сопоставляется
число, называемое ее определителем (или детерминантом) и
обозначаемое через 1Л1 (или deL4). Из курса высшей алгебры
известно, что
det(AB)=detA-detB.
(8)
66
Квадратная матрица, определитель которой отличен от нуля,
называется невырожденной. Известно, что матрица вырождена
тогда и только тогда, когда ее строки (или, что то же самое,
столбцы) линейно зависимы. Под линейной зависимостью строк
(или столбцов) понимается линейная зависимость их как
элементов линейного пространства Rrt.
Для каждой невырожденной матрицы А существует
единственная матрица, называемая обратной матрицей и обозначаемая
символом А"\ что
Из (8) и (9)1 получаем
deti/T1)
deM
(9)
(10)
Операция перехода к обратной матрице связана с операциями
умножения матриц и транспонирования формулами
(АВ)-1=В~1А-\ (11)
(Л*)-1» (Л-1)*· (12)
§ 22. ПЕРЕХОД ОТ ОДНОГО БАЗИСА К ДРУГОМУ
В этом параграфе исследуем зависимость между различными
базисами векторного пространства V и между координатами
векторов в различных базисах. Под векторным пространством
читатель может понимать здесь пространство Vect(n), п= 1,2,3,
хотя наши рассуждения остаются справедливыми в общем случае.
Для этого требуется только
Теорема. Любые два базиса векторного пространства V
имеют одинаковое количество векторов.
Эта теорема будет доказана во втором семестре, но в
интересующем нас случае V=Vect(n) она доказана в § 9
(предложение 9.3).
Итак, пусть в векторном пространстве V дано два базиса
е,,..., е„ и е/,..., е/.
Представив каждый вектор второго базиса е/,..., е/ в виде
линейной комбинации векторов первого базиса, получим
ej= Сце^+^гЛ » · · · "τ^Λΐ^η,
·, = (13)
ел=с1пе1 + с2?)е2-(- ... -rcnntn. )
Формулы (13) можно переписать в виде матричного равенства
сп с21 ... с]
ni
(14)
ile»i
\с\п с2п
. Сп
67
22.1. Замечание. Определение произведения матриц
можно распространить на случай, когда элементы одной из матриц
являются векторами. Произведение таких матриц является
матрицей с векторными элементами. При этом считаем, что
аа = аа
для любого вектора а и любого числа ос. Из ассоциативности
умножения вектора на число (аксиома 6° векторного пространства)
вытекает, что для любых трех матриц А, В, С, среди которых
одна является векторной, закон ассоциативности умножения (3)
остается верным. При перемножении таких матриц, очевидно,
остается в силе закон (7) транспонирования произведения.
Транспонируя равенство (14), получаем равенство
(е,\ ·.., е;)=(ех, ..., еп)
Матрица
си с12
Сп\ Сп2
Спп
(15)
С=
называется матрицей перехода от базиса еь..., е„ к базису е/,...
..., е/. Столбцами этой матрицы являются координаты векторов
нового базиса е/, ...,еЛ7 в старом базисе. Из единственности
разложения вектора по векторам базиса (предложение 7.6)
вытекает единственность матрицы С перехода от одного базиса к
другому.
Введя более короткие обозначения базисов (е) = (ej,..., еп) и
(е7) = (е/,..., еЛ7), перепишем равенство (15) в виде
(е7) = (е)С
(16)
22.2. Предложение. Если С — матрица перехода от
базиса (е) к базису (е7), a D — матрица перехода от базиса (е7) к
базису (е"), то матрица CD является матрицей перехода от
базиса (е) к базису (е").
В самом деле, из ассоциативности умножения матриц имеем
(e") = (e')D=((e)C)D=(e)(CD).
Из предложения 22.2 вытекает
22.3. Предложение. Если С — матрица перехода от
базиса (е) к базису (е'), то матрицей перехода от базиса (е7) к
базису (е) является обратная матрица О1.
22.4. Предложение. Невырожденные матрицы и только
они являются матрицами перехода от одного базиса к другому.
68
Доказательство. Невырожденность матрицы перехода
от одного базиса к другому вытекает из предложения 22.3. Пусть
теперь (βι,..., е„) — базис и
сп си ... с
Ы
Cnl Сп2 · · · ^пп
— невырожденная матрица. Тогда векторы е/,..., еп', получаемые
из векторов ci, ...,е„ по формулам (13), линейно независимы, так
как в противном случае были бы линейно зависимы столбцы
невырожденной матрицы С. Но если в пространстве есть базис,
состоящий из η векторов, то всякие η линейно независимых
векторов образуют его базис. Предложение 22.4 доказано.
Найдем теперь зависимость между координатами векторов в
двух базисах (е) и (е'). Пусть вектор χ в базисе еь..., еп имеет
координаты хи ..., хп, а в базисе е/,..., ея' — Х\%..., Хп. В
матричной форме это означает, что
=(еъ ..., еп)
=(ei, ..., е*)
(17)
Пусть С — матрица перехода от базиса (е) к базису (е'). Тогда
с учетом равенства (16) равенство (17) переписывается в виде
(*ι. ···> *п)
Хп
=(elf ..., еп)С
(18)
Переходя от равенства (18) векторов к равенству их координат,
получаем
*1
Хп
=С
(19)
Итак, если С — матрица перехода от базиса (е) к базису (е'),
то координаты вектора χ в этих базисах связаны между собой
формулой (19).
§ 23. ПЕРЕХОД ОТ ОДНОЙ АФФИННОЙ СИСТЕМЫ КООРДИНАТ
К ДРУГОЙ
Пусть в пространстве даны две аффинные системы координат
Охуг и O'x'y'z' y определяемые реперами Oeie2e3 и О'е/ег'ез'
соответственно. Пусть С — матрица перехода от базиса (е) к
базису (е'), и пусть (αϊ, α2, α3) —координаты нового начала О' в ста-
69
ром репере. Предположим, что точка Μ имеет в этих реперах
координаты (*, у, ζ) л (*', у\ г') соответственно. Тогда векторное
равенство
по определению координат точки можно переписать в виде
(*ι. е* е3)
Это равенство с учетом равенства (16) переписывается в виде
X
у\
ζ \
— (βΐ. *. *s)
Г1
|α2
\ая\
+ (ei, ег, ез)
Г
k
ζ'
(©!» β2, C3)
=(«ι. «г. es)
Γ1
α»
+ (*ι. ег. ез)с
(20)
Переходя теперь от равенства (20) векторов к равенству их
координат, получаем
(21)
11*1
\у\
\z \
=С
\х'\
\у\
к
+
ail
ΓΊ
1«з1
или в развернутой форме
х=спх' +с12у' + с13г' + а1у
У=с21х' + спу' +c2iz' +α2>
ζ=спх' + с32у' -f съъг' + α3.
Матрица
Сц С12 ^1з #1
^21 ^22 ^23 #2
^31 ^32 С33 а3
(22)
(23)
называется матрицей перехода от старой системы координат
Oxyz к новой системе координат O'x'y'z'. В компактной форме
матрицу (23) можно записать в виде (С, а), где
а=
23.1. Предложение. Если (С, а) — матрица перехода от
системы координат Oxyz к системе координат 0'х'ц'г\ a {D, Ь) —
матрица перехода от системы координат O'x'y'z' к системе
координат 0"x"y"z'\ то матрицей перехода от системы координат
70
Oxyz к системе координат О"χ"у"ζ" является матрица (CDy Cft-f
+ α).
В самом деле,
\х
\у\
\\г
=С
\х'\
\у'\
\ζ'\
+
|βι|
г2
Us
I / I
\=C\D\
1 V 1
\x"\
к
2"
+
hi
к
к I
l\ !
H
1/ 1
hi
Ы
lo.li
Kl
ki
kl
+c
hi
h
kl
H
hi
Г2
kl:
§ 24. ОРИЕНТАЦИИ ПРЯМОЙ, ПЛОСКОСТИ, ПРОСТРАНСТВА
В § 6 мы определили ориентацию прямой, выбрав один из двух
классов одинаково направленных ненулевых векторов и объявив их
направление положительным. Каждый ненулевой вектор на прямой
образует базис, и переход от одного базисного вектора к другому
осуществляется путем умножения вектора на отличное от нуля
число. При этом одинаково направленные векторы связаны
положительным множителем. Это определение ориентации
распространяется на векторные пространства большего числа измерений.
Два базиса ei,..., en и е/, ...,е/ векторного пространства V
называются одноименными, если матрица С перехода от одного
базиса к другому имеет положительный определитель.
24.1. Предложение. Отношение одноименности является
отношением эквивалентности на множестве всех базисов
пространства V.
В самом деле, рефлексивность отношения одноименности
вытекает из того, что переход от базиса к самому себе осуществляется
посредством единичной матрицы, симметричность — из
предложения 22.3 и формулы (10), транзитивность — из предложения 22.2
и формулы (8).
Поскольку определитель матрицы перехода от одного базиса к
другому либо положителен, либо отрицателен (здесь мы
рассматриваем векторное пространство над полем R вещественных чисел),
в пространстве V существует ровно два класса одноименных
базисов. Каждый из этих классов называется ориентацией
пространства V.
Интуитивно задание ориентации означает задание направления
движения на прямой (слева направо или наоборот), направления
вращения на плоскости (по часовой стрелке или против) и винта
в пространстве (правого или левого). Так, правая ориентация
пространства определяется таким базисом е^ег, ез, что вектор
в! кратчайшим способом совмещается с вектором е2 при
вращении против часовой стрелки, если смотреть на плоскость векторов
ei и е2 с конца вектора е3 (рис. 32).
71
24.2. Предложение. Пусть в пространстве даны два
базиса еье2, е^ и е,,е2, е3', различающиеся третьим вектором.
Тогда они одноименны в том и только в том случае, когда
(азпр«вз)>0,
где через π обозначается плоскость, параллельная векторам t\
и е2.
Рис. 32
Рис. 33
111 0
0 1
II о о
α!
Ί
vl
Доказательство. Пусть вектор ез' имеет в базисе ei,e2,
ез координаты {α, β, γ}. Тогда матрица
С=
является матрицей перехода от базиса ei,e2, e3 к базису е^е^ез'
и detC=v. С другой стороны, согласно формуле (22) из гл. I
7=(азпр£е3),
что и завершает доказательство.
Из того, что при перестановке пары строк определитель
матрицы меняет знак, вытекает
24.3. Предложение. Базисы, получающиеся друг из
друга перестановкой пары векторов, разноименны.
§ 25. ОРИЕНТИРОВАННЫЙ ОБЪЕМ ПАРАЛЛЕЛЕПИПЕДА
Пусть в пространстве выбрана ориентация. Базисы, задающие
эту ориентацию, назовем положительными.
Для упорядоченной тройки векторов аь а2, аз определим число
<аьа2, а3>,
72
называемое ориентированным объемом параллелепипеда,
построенного на векторах aj,a2, аз. Это число равно нулю тогда и
только тогда, когда векторы аьа2, а3 компланарны. Если же
векторы Л\% а2, аз линейно независимы, то, отложив их от одной точки
О, получим параллелепипед, тремя ребрами которого являются
векторы аь а2, а3. Число (ai, a2t a3) равно объему этого
параллелепипеда, взятому со знаком «плюс», если тройка аь а2, а3
положительна, и со знаком «минус» — в противном случае.
Обозначим через Sa,a, площадь параллелограмма, сторонами
которого являются векторы а! и а2. Тогда
|(alf a2, a3>|=Saiat./i,
где h — высота параллелепипеда. Проведем через точку О
прямую /, перпендикулярную плоскости векторов ai и а2, и
обозначим через η тот из двух единичных векторов этой прямой, для
которого тройка аьа2, η положительна (рис. 33).
Ясно, что
/г=| (азпр а3) |,
где через прп обозначена ортогональная проекция на вектор п.
В то же время из предложения 24.2 вытекает, что знак тройки
ai, a2, а3 совпадает со знаком (азпрпа3). Поэтому имеет место
формула
(alf a2, а3)=оа|а2· (азпрпа3). (24)
25.1. Теорема. Ориентированный объем параллелепипеда
обладает следующими свойствами:
1 . (alf а2, а3) = (а3, alf а2) = (а2, а3, ах) = (а2, а,, а3) =
= —(а3, а2, а!> = —(а1э а3, а2);
2 . (аг, а2, ла3^=л(а|, а2, а3);
3°. (alf a2, a^ + a^) = (all a2, a^> + <alf a2,a^).
В самом деле, свойства 2° и 3° линейности ориентированного
объема вытекают из формулы (24) и теоремы 10.1 о линейности
алгебраического значения проекций. Свойство 1° косокоммутатив-
ности вытекает из предложения 24.3.
Для подстановки (взаимно однозначного отображения) 0:{1,
2,3}->{1,2,3} через (—1)° обозначается знак этой подстановки,
т. е.
ί 1, если подстановка σ четна;
(— Π =
ν ' I—1, если подстановка σ нечетна.
В этих обозначениях свойство косокоммутативности
ориентированного объема записывается так:
Г. (alf a2, a3)=(—l)a(aa(i), аа(2), аа(3)).
25.2. Замечание. Из косокоммутативности
ориентированного объема вытекает, что свойства линейности 2° и 3° выполня-
73
ются не только для третьего аргумента, но также и для первых
двух. Таким образом, ориентированный объем параллелепипеда
является косокоммутативным трилинейным функционалом
(числовой функцией) от трех векторных аргументов.
Пусть теперь в пространстве зафиксирован базис ei,e2, е3 (не
обязательно положительный), а векторы аьа2, аз даны своими
координатами в этом базисе:
а, = {хЛ*.·2,*8}. ί= 1,2,3.
Тогда, воспользовавшись трилинейностью ориентированного
объема, получаем
3 3 Э
<аг, а2, а,) = ( J] x\eh ]£ x{ejt £ xUh} =
i=l
/=1
k=i
3 3 3
=Σ Σ Σ Х*М(Ъ, th ek).
i=\ /=1 k--=l
Из 27 слагаемых этой суммы 21 слагаемое (когда среди трех
векторов е*,е/, е* имеется пара совпадающих) заведомо равно
нулю. Отбросив эти слагаемые и воспользовавшись косокоммутатив-
ностью, получаем
<аг, а„ а3> = £^(,)^(2)^з(3)(-1)<1(е1, е2, е3>.
Но
^(_1)^(Πχσ(2)χσ(3;=(ΐ6ί
1 2 3
Х\ Х\ Х\
1 2 3
Х<1 Х2 Х2
1 2 3
*3 *3 #3
Окончательно получаем
\ai» а2» аз) —
1 2 3
Х\ Х\ Х\
1 2 3
#2 #2 #2
1 2 3
Хз Хз #3
(*ι. е2» е8>.
(25)
Если базис еье2, ез ортонормирован и положителен, то формула
(25) принимает вид
<alf a2, а3) =
1 2 3
Х\ Х\ Х\
1 2 3
Х2 Х2 %2
х\ х\ х\
(26>
При выводе формулы (25) мы не пользовались определением
ориентированного объема, а исходили только из его косокомму-
тативности и трилинейности. Поэтому для любого косокоммута-
74
тивного трилинейного функционала φ имеет место аналогичная
формула
<p(alt a2, а3)=
1 2 3 1
Х\ Х\ Х\
1 2 3 1
Х2 %2 #2
1 2 3
*з #з #з |
Φ (elf e2t e3).
(27)
Отсюда, в частности, вытекает
25.3. Теорема. Всякий косокоммутативный трилинейный
функционал φ β Vect(3) пропорционален функционалу
ориентированного объема.
В самом деле, коэффициентом пропорциональности является
число
<Ρ(«ι, е2, е3)
<ei, e2, е3)
На ориентированной плоскости аналогичным образом
определяется ориентированная площадь <ai, a2) параллелограмма со
сторонами ai, а2. Если в положительном ортонормированном
базисе ei, e2 векторы аь а2 имеют координаты
ai = {*bl/t}, а2 = {х2>#2},
то имеет место аналог формулы (26)
К Ух
<*ι. а2) =
*2 ί/2
(28)
Ориентированная площадь является косокоммутативным
билинейным функционалом, и каждый такой функционал
пропорционален функционалу ориентированной площади.
§ 26. ВЕКТОРНОЕ И СМЕШАННОЕ ПРОИЗВЕДЕНИЯ
Как и в предыдущем параграфе, считаем, что в пространстве
задана ориентация.
26.1. Определение. Векторным произведением векторов
а и Ь называется такой вектор [а, Ь], что
1) его длина равна произведению длин векторов а и Ь на
синус угла между ними;
2) он перпендикулярен каждому из векторов а и Ь;
3) он направлен так, что упорядоченная тройка a, b, [a, b]
положительна.
26.2. Определение. Смешанным произведением трех
векторов а, Ь, с называется число ([а, Ь], с), равное скалярному
произведению векторного произведения векторов а и b на вектор с.
26.3. Предложение. Смешанное произведение совладает
с ориентированным объемом
([а,Ь],с)=(а,Ь,с>. <29)
75
Доказательство. Сравним формулу (24) из § 25
<а, b,c>=Sab· (азпрпС)
и формулу (27) из § 11
([a, bj, с)=|[а, Ь]|(азпре[а Ь1с).
Для завершения доказательства остается заметить, что согласно
26.1.1
|[a,b]|=Sab,
а согласно 26.1.2 и 26.1.3
П = е[а,Ь].
Из предложения 26.3 непосредственно вытекает формула
([а,Ь],с) = (а,[Ь,с]). (30)
26.4. Теорема. Векторное произведение обладает
следующими свойствами:
Г [а,Ь]т-[М];
2°. [аДЬ]=А|а,Ь];
3°. [а,Ь+с]=[а,Ь]+[а,с].
Доказательство. Проверим свойство 3°. Остальные
можно проверить аналогично или извлечь непосредственно из
определения. Равенство 3° эквивалентно тому, что вектор
d = [a,b+c]—[а,Ь]—[а, с]
нулевой. Для этого достаточно показать, что (d, d)=0.
Имеем
(d, d) = ([а, Ь+с]-[а, Ь]-[а, с], d) - ([а, Ь+с], d)-([a, b], d)-
— ([а, с], d) = (согласно 26.3) =<а, b + c, d>—<a, b, d)—<а, с, d>«
-(согласно 25.1.3°) =(а, Ь, d> + <a, с, d>—<а, b, d>—<а, с, d) = 0.
Теорема доказана.
Векторное произведение в прямоугольных координатах.
Найдем координаты векторного произведения [ai,a2], если векторы
ai и а2 заданы своими координатами в положительном ортонор-
мированном базисе еь е2, е3:
а2 = {хьУьг2}.
Пусть
[aba2] = {X,y,Z>.
Тогда согласно предложению 12.1
*=([аьа2],е!), У= ([а,,а2],е2), Z= ([a„ а2], е3).
76
Поэтому, исходя из (29) и (26), получаем
X=<ai, aj, 0 =
|*i Ух zx
Us У г Ч
11 ο ο
=r
Ух *ι
У 2 z2
Аналогично
\zx χι
Y=\
Итак,
{ах, а2]=
Ζ=
Χι Ух
Х2 У г
\Ух *х
\У2 г3
•
гу хх
2* хг
»
Χχ Ух\
Хг Уг\
)·
или в условной записи в виде определителя
[alt a2]=
1*1 Ух ζι\
\х2 У2 *2
е1 *2 е3
(31)
(32)
§ 27. НЕКОТОРЫЕ ПРИЛОЖЕНИЯ ВЕКТОРНОГО И СМЕШАННОГО
ПРОИЗВЕДЕНИИ К ПРЯМЫМ И ПЛОСКОСТЯМ В ПРОСТРАНСТВЕ
Решим сначала задачу взаимного расположения в
пространстве двух прямых 1\ и /2, заданных векторными уравнениями
r=r1 + ia1> r=r2 + /a2. (33)
Условием их параллельности является коллинеарность векторов aj
и а2, а условием совпадения — коллинеарность тройки векторов
аь а2, г2—гь
Для того чтобы прямые 1\ и /2 лежали в одной плоскости,
т. е. пересекались или были параллельны, необходимо и
достаточно, чтобы три вектора аи а2, г2—Γι были компланарны, т. е.
(r.-rlf alt а2>=0 (34)
по определению ориентированного объема.
Отсюда вытекает, что условие
(г2—Γι, аь а,)#0 (35)
эквивалентно тому, что прямые 1\ и /2 скрещиваются.
27.1. Предложение. Расстояние от точки М0 с радиусом-
вектором г0 до прямой I
г=Г! + ^а
определяется по формуле
Р(М0, 1)= "г»-г»;а1
!а|
(36)
77
В самом деле, это расстояние равно высоте А
параллелограмма, построенного на векторах π—г0 и а (рис. 34). А формула
[(36) и дает нам эту высоту по правилу «площадь
параллелограмма, деленная на длину основания».
Рис. 34
Рис. 35
Пусть теперь в прямоугольных координатах Oxyz
г0={*о> Уо> ζ0}, Γι={*ι* ί/ι> ζχ}, a={a, β, ν}·
Тогда формула (36) в силу равенства (31) принимает вид
Р(Ч. 0=
V\
У1 — У0 ^ — г0
β Υ
+
·Ζ0 *! — Χ0 12
+
Χι — *ο ί/ι — Уо\
α β
ΐ/α2 + β2 + Υ2
(37)
27.2. Предложение. Расстояние между
скрещивающимися прямыми ly и /2 (длина общего перпендикуляра), заданными
уравнениями (33), определяется по формуле
Р&. h)-
Кг2 —rlt at, aa)|
(38)
В самом деле, это расстояние равно расстоянию между
параллельными плоскостями, в которых лежат прямые U и /2. А это
расстояние в свою очередь равно высоте h параллелепипеда,
построенного на векторах r2—rbai,a2 (рис. 35). Но формула (38)
и дает нам эту высоту — объем параллелепипеда, деленный на
площадь основания.
Если в прямоугольных координатах
Γ|={*ι. ft, **}> аг = {аь β*, γ{}, ί = 1, 2,
78
то в силу (26) и (31) формула (38) принимает вид
Ρ (Л, /2)=
Ч — Χι У
αϊ
<*2
2— Уг
βι
β*
*2 —
Υί
Υί
*1
1/1
βι Υί
β2 Ye
2
+
Υί «ι
Υ2 Οο
2
«1
da
βι
β2
г
(39)
Приведем теперь некоторые векторные уравнения плоскости
и прямой в пространстве. Векторное уравнение
г—г0=ма+иЬ
плоскости, проходящей через точку с радиусом-вектором г0 и
параллельной векторам а и Ь, означает компланарность векторов
г—г0, а, Ь. Поэтому его можно переписать в виде
<г-г0> а, Ь>=0. (40)
Воспользовавшись линейностью смешанного произведения,
уравнение (40) можно переписать в виде
(г, a, b)+D=0, (41)
где D = —(г0, a, b). Обозначим вектор [а,Ь] через п. Тогда
уравнение (41) можно переписать в виде
(г, n) + D=0. (42)
Это уравнение плоскости через ее нормальный вектор п.
Если в прямоугольной системе координат п = {Л, В, С}, а г =
= {х, У, *}. то
(г, п)=Ах + Ву + Сг,
и уравнение (42) переходит в общее уравнение плоскости.
Векторное уравнение прямой /
г—г0=*а
означает коллинеарность векторов г—г0 и а, что эквивалентно
равенству
[г-г0, а] = 0, (43)
или
[г, а] = М,
где
(44)
(45)
М=[г0, а].
27.3. Предложение. Если вектор а ненулевой, а вектор
Μ ему перпендикулярен, то уравнение (44) является уравнены-
ем некоторой прямой I с направляющим вектором а.
79
Доказательство. Надо найти вектор г0,
удовлетворяющий условию (45). Тогда уравнение (44) будет эквивалентно
уравнению (43), описывающему прямую. Положим
г — 1** Ml
Если М=0, то г0=0 и условие (45), очевидно, выполнено. Если
же М=£0, то тройка
а, М, г0
образует ортогональный и по определению векторного
произведения положительный базис.
Тогда тройка
г0, а, М
также будет ортогональным положительным базисом. Поэтому
вектор [г0, а] может отличаться от вектора Μ только
положительным множителем. Но
|[r„ a]| = !r0|4a||=Ji^=Ji^=|M|.
|а| 1*1
Итак, условие (45) выполнено. Предложение 27.3 доказано.
Глава IV
ЛИНИИ ВТОРОГО ПОРЯДКА
§ 28. АЛГЕБРАИЧЕСКИЕ ЛИНИИ НА ПЛОСКОСТИ.
КВАДРАТИЧНЫЕ ФУНКЦИИ И ИХ МАТРИЦЫ
28.1. Определение. Множество Г точек плоскости
называется алгебраической линией, если в некоторой аффинной системе
координат это множество может быть описано как множество
решений уравнения
^(^^=0, (I)
где F — многочлен. Наименьшая степень такого многочлена
называется порядком линии Г.
28.2. Замечание. Определение порядка алгебраической
линии не зависит от аффинной системы координат, в которой
рассматривается ее уравнение (1). Это вытекает из следующего
утверждения.
28.3. Предложение. Пусть Оху и О'х'у'— две аффинные
системы координат, связанные между собой формулами перехода
x=cnx' + c12y' + av J
у—с21х' + с22у' + а2. ]
Тогда степень любого многочлена F(x,y) от переменных χ и у
совпадает со степенью многочлена
G(x\ y') = F{cnx' + cl2y'+av c21x' + с2.2у' + а2) (3)
от переменных х' и у'.
Доказательство. Достаточно показать, что степень G
не больше степени F. А это вытекает из того, что для любого
одночлена ax?yq, входящего в F, многочлен
я foi*' + С\гУ' + <*х)Р (c2i*' + с22у' + a2)q
имеет степень <р+<7·
Если многочлен F(x,y) задает линию Г в системе координат
Оху, то всякий пропорциональный ему многочлен а/\ а=?^0, также
задает линию Г. Конечно, данную линию можно задать и
многочленом более высокой степени, например F2. Но хотелось бы,
чтобы многочлены данной степени р, задающие в системе координат
Оху линию Г порядка р, были пропорциональны. В таком
случае говорим, что для линии Г верна теорема единственности.
В § 15 мы уже доказали теорему единственности для линий
первого порядка (для прямых). Но уже для линий второго порядка
теорема единственности не имеет места. Так, линия второго по-
81
рядка, состоящая из одной точки, может быть задана
непропорциональными многочленами
х*+у2 = 0 и x2+2t/2=*0.
Все-таки ниже докажем теорему единственности для линии
второго порядка, содержащей более одной вещественной точки.
28.4. Определение. Отображение f: π-^R плоскости π в
множество R называется квадратичной функцией, если для
любой аффинной системы координат s — Oxy на плоскости π
существует такой многочлен Fs второй степени, что для любой точки
М(х, у)&п
f(M)=Fs(x,y). (4)
Ясно, что в данной системе координат только один многочлен
F=FS может удовлетворять условию (4). Скажем, что многочлен
F представляет функцию f в системе координат Оху. Пусть
F (х, у)=апх2 + 2а12&у)+ а22у2 + 2а13х + 2а^у + d33. (5)
Тогда матрицу
А=
"11
012
013
а12
022
023
013
023
0ЯЯ
(6)
называем матрицей квадратичной функции f в системе координат
Оху. Читатель должен обратить внимание на то, что элементы
матрицы А, стоящие вне главной диагонали, равны половинам
соответствующих коэффициентов многочлена F.
Матрицу
*п
Ί2
*12
(7)
называем матрицей квадратичной части функции f. По крайней
мере один из элементов матрицы 8ί должен быть отличен от
нуля.
Квадратичная часть
F2 (χ> У)=0ц*2 + 2а12ху + а22у2
многочлена F(x,y) может быть записана в матричной форме
следующим образом:
F2(x, y)=(x> У)*
(8)
а сам многочлен F(x,y) в матричной форме можно записать так:
χ
(9)
F(x, У)=(х, У> 1)А
82
Пусть теперь О'х'у' — другая аффинная система координат,
и переход от системы Оху к системе О'х'у' осуществляется по
формулам (2). В силу единственности многочлена,
представляющего квадратичную функцию в данной системе координат,
многочлен G(x\ y')t определяемый равенством (3), будет
представлять функцию f в системе координат О'х'у'.
Найдем матрицу А' функции f в системе координат О'х'у'.
Для этого дополним формулы перехода (2) равенством
1=0.^+0. у'+\\.
Получим
х=спх' + с12у' + ах1,
0==с21х' + с220' + а2-1,
l=0-x' + 0.y' + l.lt
или в матричной форме
(Ю)
где
IIх II 1
\\y\\=D\
Ml
1*1
и
1ι1
D=
un
u21
^12
^22
*2
0 0 1
(И)
Транспонируя равенство (10), получаем
(χ, у, 1)=(*', У', l)D'. (12)
Если точка Μ имеет координаты (х, у) и (х'.у') в системах Оху
и О'х'у', то, учитывая (9), получаем
х'
"=G(x', y')=f(M)=F(x, у)=(х, у, \)А\
<*\ У', У) А'
У'
1
Отсюда с учетом (10) и (12) имеем
х'
(*\ У' 1)Л'
=(*', у', l)D'AD
Таким образом, равенство
A'=D*AD
(13)
выражает матрицу А' квадратичной функции f в новой системе
83
координат О'х'у' через ее матрицу А в старой системе
координат Оху.
Наряду с реперами Oeie2 и О'е/ег', определяющими системы
координат Оху и О'х'у'> рассмотрим репер Ое1/е2/. Пусть он
определяет систему координат Ох"у". Тогда формулы перехода от
системы координат Оху к Охпу" отличаются от формул
перехода (2) только отсутствием столбца свободных членов, т. е.
(14)
где
х\\
у\\
=с\
IIе"
11*21
X"
\у"\
Cl2
^22 II
Обозначим через %■" матрицу квадратичной части функции f в
системе координат Ох"у". Тогда, рассуждая так же, как при
выводе формулы (13), получаем
(*", У")Т
=(*, У) 31
=(*", у")СЖ
т. е.
Щ"=С*31С.
(15)
Поскольку реперы Ot[t2 и О'е^ отличаются только началом,
соответствующие системы координат получаются одна из другой
параллельным сдвигом, т. е.
х"=х' + Ьи
у"=у'+ь2.
Но легко заметить, что при параллельном переносе системы
координат квадратичная часть квадратичной функции не меняется.
Поэтому, если мы обозначим через %' матрицу квадратичной
части функции f в системе координат О'х'у'у то %'** 91" и
согласно (15)
3l' = C* «С.
(16)
§ 29. ОРТОГОНАЛЬНЫЕ МАТРИЦЫ
29.1. Определение. Квадратная матрица С называется
ортогональной, если
СС*=Е. (17)
Равенство (17) означает, что формальные скалярные произведе-
84
ния различных строк равны нулю, а формальные скалярные
квадраты строк равны единице, т. е.
У г г _{ 1, если » = /;
2L, cihcih — \ Л . . £
Υ [ 0, если ι φ f.
(18)
матрицы С по строкам. Из равенства (17) вытекает
С* = С~К (19)
Это еще одно определение ортогональной матрицы.
Эквивалентные условия (17) и (18) выражают
ортогональность матрицы С по строкам. Из равенства (17) вытекает
С*С=Е (20)
также является определением ортогональной матрицы. Оно
выражает ортогональность матрицы С по столбцам:
скалярные произведения различных столбцов равны нулю, а
скалярные квадраты столбцов — единице.
29.2. Предложение. Произведение ортогональных матриц
ортогонально, обратная к ортогональной матрице также
ортогональна.
Доказательство. Пусть матрицы А и В ортогональны.
Надо проверить условие (17) для матрицы С=АВ. Применяя
свойства операций над матрицами из § 21, получаем
(АВ) (АВУ = ABB* А* = АЕА*=А А * =£.
Аналогично для С=А~Х имеем
{А~Х){А~Х)*=А~1(ЛТ^ЛМГ^согласно (20))=£~1=£.
Поскольку единичная матрица £, очевидно, ортогональна,
предложение 29.2 можно перефразировать следующим образом:
Ортогональные матрицы данного порядка η с операцией
умножения образуют группу, обозначаемую символом О(п).
Ортогональные матрицы второго порядка. Поскольку при
транспонировании определитель матрицы не меняется, из
определения 29.1 ортогональной матрицы вытекает, что ее
определитель равен ±1.
29.3. Предложение. В зависимости от знака
определителя ортогональные матрицы второго порядка имеют вид
cos φ —sin φ
sin φ cos φ
или
cos φ
sin φ
sin φ
— cos φ
(21)
Доказательство. Пусть ортогональна матрица
С = |
"11
^12
и22
85
Воспользуемся свойством ортогональности ее столбцов. Из
условия
С2 4-С2 =1
вытекает существование такого φ, что
cu = cosq), ί:2ι=5ίηφ.
Из ортогональности первого и второго столбцов
^1 Аг ~*~ ^21^22 ζ= ^
следует, что
c12=/sinq), с22= — icos<p.
Далее, из условия
с\2 + с\2— 1
получаем, что *=±1. Наконец, если |С| = 1, то f=—1, а если
|С|=—1, то ί=1, что и завершает доказательство предложения
29.3.
§ 30. ПРЕОБРАЗОВАНИЯ ПРЯМОУГОЛЬНЫХ КООРДИНАТ
Здесь мы будем рассматривать прямоугольные системы
координат и базисы на прямой, на плоскости и в пространстве.
30.1. Теорема. Матрица С ортогональна тогда и только
тогда, когда она является матрицей перехода от одного ортонор-
мированного базиса к другому.
Доказательство. Пусть С — матрица перехода от ор-
тонормированного базиса еь..., tn к ортонормированному базису
е/,..., tn. Тогда
Поскольку
1, если i = /;
если ίφ\.
(*;, · · · . e;)=(elf ... , en)
'П1
. cn
(22)
(23)
имеем ei=\)ckieh. Нов ортонормированном базисе еь...,еп ска-
k
ное произведение (е!, е;!) равно сумме произведений
соответствующих координат этих векторов. Поэтому равенства (22)
превращаются в
?CftiH о,
1, если i = /;
если ίφ\\
(24)
86
Но это есть условие ортогональности матрицы С по столбцам.
Наоборот, если С — ортогональная матрица и еь..., е« —
ортонормированный базис, то для базиса е/,..., ея', полученного
по формуле (23), условие (24) ортогональности матрицы
превращается в условие (22) его ортонормированности. Теорема
доказана.
Из теоремы 30.1 вытекает
30.2. Следствие. Если равенство
Ι *ι 1
1 *»
\=с\
И1'
\Хп\
\ + \
1 °1 \
1а» 1,
задает переход от прямоугольной системы координат Охх... хп к
прямоугольной системе координат 0'хх' ...хп\ то матрица С
ортогональна. Наоборот, если система координат Ох\... хп
прямоугольна и матрица С ортогональна, то система координат 0'х\ ...
... Хп также прямоугольна.
Посмотрим теперь, как преобразуются прямоугольные
координаты плоскости. Пусть Οβιβ2 и Ot\'t2 — два ортонормирован-
ных репера. Тогда согласно 30.1 и 29.3 переход от базиса еьС2
к базису е/, в2Х осуществляется с помощью одной из матриц
вида (21). В первом случае
ej = {cos(p, sin φ},
t'2={—sin φ, cos φ}
легко видеть, что репер Ое/ег' получается из репера Ot{t2
поворотом на угол φ (рис. 36).
Рис. 36
Рис. 37
87
Во втором случае
е[ = {со8ф, sin φ},
е^ —{sinq\ —coscp}
репер Ое/ег' получается из репера Ое^г поворотом на угол φ с
последующим отражением второго базисного вектора
относительно первого (рис. 37).
Таким образом, на плоскости две прямоугольные системы
координат Оху и Ох'у' с общим началом связаны между собой
либо формулами
x=x'cos(p—г/' sin φ, |
y=x'sinq)+ у' cos φ )
поворота осей координат на угол φ, либо формулами
х=х' cos φ + у' sin φ,
i/=A:'sinq)— у" cost
Φ, ϊ
(25)
(26)
поворота осей координат на угол φ с последующим отражением
второй оси координат относительно первой. При этом
положительным вращением является вращение от оси Ох к оси Оу.
§ 31. ОРТОГОНАЛЬНЫЕ ИНВАРИАНТЫ КВАДРАТИЧНЫХ ФУНКЦИЙ
Пусть квадратичная функция f в системе координат Оху
представляется многочленом
F (х, у)=апх2 + 2апху + а22у2 + 2а1дх + 2ai2y + а33.
Наряду с матрицами А и 31 поставим в соответствие функции
f их определители:
& =
δ=
ап
012
013
аи
012
012
022
023
012
022
013
023
033
31.1. Предложение. Если переход от системы координат
Оху к системе координат О'х'у' происходит с помощью матрицы
(С, а) и detC=±l, то
Δ' = Δ и δ' = δ.
Доказательство. Имеем Δ' = detА' = (согласно (13)) =
= det(DMD)=detD*.det^.detD=det^(detD)2-deM(detC)2=det^=:A.
Аналогично на основании формулы (16) проверяется равенство
δ' = δ.
88
Из предложения 31.1 и следствия 30.2 вытекает
31.2. Предложение. Для данной квадратичной функции
числа А и δ являются ортогональными инвариантами, т. е. они
не меняются при переходе от одной прямоугольной системы ко-
ординат к другой.
31.3. Предложение. Для данной квадратичной функции
ортогональным инвариантом является след
S = au + a22
матрицы Ч ее квадратичной части.
Доказательство. Из формулы (16)
*;2
*и
*12
*12
*22
UJ1
'12
L-22
непосредственно вытекает, что
ап=сп (cnan + c2ia12) + с21 (сиа12 + ^21а22)%
а22 = СХ2 (С12ап + С22а12) + С22 \С12аП + С22«22)·
Поэтому, группируя коэффициенты при а**/, получаем
S'=a\y + a22=an{c\x + c\2) + а22(с\х + <*,) +
+ 2а12(сис21 +с12с22)=ап + а22=5.
31.4. Определение. Характеристическим многочленом
квадратичной функции f называется многочлен
ап — λ
*12
«12
«22 ^
=λ2—5λ + δ.
(27)
Здесь имеется в виду, что
31 =
*11
*12
«12 «22
есть матрица квадратичной части функции f в некоторой
прямоугольной системе координат Оху. Из 31.2 и 31.3 вытекает, что
характеристический многочлен функции f не меняется при
переходе к другой прямоугольной системе координат, т. е. он
является ортогональным инвариантом. Ортогональными инвариантами
являются и корни λι и λ2 характеристического многочлена
квадратичной функции.
§ 32. ПРЕОБРАЗОВАНИЕ УРАВНЕНИЯ ЛИНИИ ВТОРОГО ПОРЯДКА
ПРИ ПОВОРОТЕ ОСЕЙ КООРДИНАТ
Пусть линия второго порядка Г в .прямоугольной системе
координат Оху задана своим общим уравнением
F(х, у)=апх2 + 2ai2xy + а22у2 + 2а^х+ 2а23у + а33=0. (28)
89
Перейдем к новой прямоугольной системе координат Ох'у\
поворачивая оси исходной системы координат на угол φ. Тогда
=С
где согласно (25)
С=
cos φ —sin φ
sin φ cos φ
Многочлен F представляет в системе координат Оху
квадратичную функцию f. Для матрицы 3t' квадратичной части этой
функции в системе координат Ох'у' согласно (16) имеем
*' =
cos φ sin φ
—sin φ coscp
«11 «12
*J2 "22
cos φ —sin φ
sin φ cos φ
Непосредственный подсчет показывает, что
а\х=ап cos2 φ + 2α12 cos φ sin φ + «22 sin2 Φ»
α22=απ sin2 Φ—2«j2 cos φ sin φ + α22 cos2 φ,
«ί2=(—«η + α22)cosq) sin φ + an(cos2φ—sin2 φ).
(29)
Итак, если а\$Ф0, то, поворачивая систему координат на угол
φ, 0<φ<π/2, такой, что
ctg2q>=
ап — а22
2fli.
(30)
получаем систему координат, в которой матрица %'
квадратичной части функции f имеет диагональный вид
0
(31)
Г =
-и
0 а
22
Уравнение линии Г в этой системе координат Ох'у' принимает
вид
«и*'2 + «22ί/'2 + 2а[ъх' + 2а2Ъу' + «33 = 0. (32)
Найдем этот угол φ по-другому. Считая «'i2=0, имеем
al',cos9 = a|'1cosq>—α,'^ίηφ.
Подставляя в правую часть этого равенства а'и и а'п из формул
(29) и приводя подобные члены, получаем
а[х cos φ=αη cos φ + α12 sin φ.
90
Отсюда
tg ф=
«13
(33)
Но в системе координат Ох'у' матрица %' квадратичной функции
/ имеет диагональный вид (31). Поэтому числа а'и и а'х2 явля-
ются корнями характеристического многочлена (27) функции f в
силу его ортогональной инвариантности. Следовательно,
равенство (33) можно переписать в виде
tg<P=
λι — <*ιι
Ям
(34)
Здесь в качестве λι берется тот из корней характеристического
многочлена, для которого tg<p>0. Из ортогональной
инвариантности 5 и 6 и из того, что а\$Ф0, легко вытекает существование
такого корня.
Определим еще одно число, связанное с матрицей (6)
квадратичной функции /. Положим
К=
«22 «23
1 «23 «33
+
«11 «13
«13 «33 1
(35)
32.1. Предложение. При повороте осей прямоугольной
системы координат число К не меняется.
Доказательство. Подставляя в многочлен F(x,y)
вместо переменных χ и у их выражения через х' и у' по формулам
(25), непосредственным подсчетом убеждаемся в том, что
«ί3 = «is cos φ + α23 sin φ,
«23= — «13 δ1Π Φ + «23 COS ф,
«33 = α33·
(36)
Поэтому, применяя формулы (36) и пользуясь инвариантностью
3, получаем
Я'=«зз(ап +«;2)—«,'з—«23 =«зз$—(«i3cos φ + a23sinq>)2—
— ( —а1351Пф+«2зС08ф)2 = а3з(«11 + «22) —«13—«23 = ^'
Легко видеть также, что число К не меняется и при
отражении одной оси координат относительно другой. Поэтому для
данной квадратичной функции оно является одинаковым во всех
прямоугольных системах координат с общим началом, К называется
ортогональным семиинвариантом.
91
i) -V
α2
r2
2) —
7 α2
ν2
4i
ά) α*
Χ*
4>1r
5)4
α2
6)^=
7)г/*-
8) у* +
9)ί/8=
■ + -*-'
6*
·+-£-■
+ 6»
_ и .
yj_.
:2рХ,
■о2=0,
а2=0,
= 0,
= 1,
= — 1
— 0
— "»
*1.
=0,
§ 33. ПРИВЕДЕНИЕ УРАВНЕНИЯ ЛИНИИ ВТОРОГО ПОРЯДКА
К КАНОНИЧЕСКОМУ ВИДУ
33.1. Теорема. Для любой линии второго порядка
существует прямоугольная система координат, в которой уравнение этой
линии имеет один из следующих видов:
эллипс;
мнимый эллипс;
пара мнимых пересекающихся прямых;
гипербола;
пара пересекающихся прямых;
парабола;
пара параллельных прямых;
пара мнимых параллельных прямых;
пара совпадающих прямых.]
Доказательство. Без ограничения общности можно
считать, что линия второго порядка Г задана в прямоугольной
системе координат общим уравнением (28). В § 31 показано, что,
поворачивая оси системы координат, можно добиться того, чтобы
коэффициент а\2 в уравнении (28) стал равным нулю. Теперь
параллельным переносом системы координат хотим добиться того,
чтобы в уравнении
апх2 + а22уг + 2а1Н к + 2а23у + а33=0 (37)
исчезли члены первой степени. Рассмотрим сначала случай
ацФ0Фа22.
Выделяя полные квадраты, перепишем уравнение (37) в виде
aalx+^Y + an(y + ±.Y + au--$L-±.-0.
Это уравнение после замены переменных
Х'=х+3*-у у>=у + ^
и введения новых обозначений можно переписать в виде
ап*2 + Я22</2 + Язз=0. (38)
Предположим теперь, что в уравнении (37) один из
коэффициентов при квадратах переменных равен нулю. Меняя в случае на-
92
добности названия переменных, можно считать, что αη=0. Тогда
после параллельного переноса системы координат вдоль оси Оу
х'=х% y>=y+^L
уравнение (37) превращается в уравнение вида
ai2y2 + 2а13х + Оз^О.^ (39)
Если а\эгФ0, то после параллельного переноса вдоль оси Ох
*'=х + -3ь, у'=у
2а13
уравнение (39) принимает вид
х22у2 + 2а13х=0. (40)
Если же αΐ3=0, то уравнение (39) имеет вид
О2202+а3з=О. (41)
Итак, после поворота и параллельного переноса прямоугольной
системы координат общее уравнение (28) линии второго порядка
приводится к одному из трех видов (38), (40), (41), где числа
й\и 022 и а\г отличны от нуля. Но уравнение вида (38)
пропорционально одному из уравнений 1)—5), уравнение (40)
пропорционально уравнению 6), а уравнение (41) пропорционально
одному из трех уравнений 7) —9). Теорема доказана.
33.2. Замечание. Переименовывая в случае надобности
названия осей координат или меняя их направления, можно
считать, что
а) а2>62 в уравнениях 1) —3);
б) р>0 в уравнении 6);
в) aV=0 в уравнениях 7) и 8).
С этими оговорками уравнения 1) —9) называются
каноническими уравнениями линий второго порядка.
ξ 34. ОПРЕДЕЛЕНИЕ КАНОНИЧЕСКОГО УРАВНЕНИЯ ЛИНИИ
ВТОРОГО ПОРЯДКА ПО ИНВАРИАНТАМ
В предыдущем параграфе мы показали, что, переходя от
одной прямоугольной системы координат к другой, можно от
общего уравнения (28) линии второго порядка перейти к одному из
трех видов (38), (40), (41). Соответственно на три группы
разбиваются квадратичные функции, представленные общим
многочленом F(x,y) из уравнения (28) в исходной прямоугольной
системе координат. Теперь мы хотим найти канонические
представления квадратичных функций
I) апх2+а22у2+ам,
Н) а22у2+2а1Ъх,
III) а22у2+аъг
93
по их ортогональным инвариантам. Матрица А этих функций в
канонической системе координат имеет соответственно вид
Оц
0
0
0
0
«13
0
0
0
0
<hz
0
0
°22
0
0
Ом
0
0
0
038
а18
0
0
0
0
<*!»
Рассмотрим случай I). Он характеризуется тем, что &Ф0. При
этом в канонической для квадратичной функции системе
координат
Ь—апа22> Δ=αηα22α38» λ1=α11> λ2=α22.
Поэтому уравнение (38) можно переписать следующим образом:
λ1χ2 + λ2^2+4-=0. (42)
Легко видеть, что следующая таблица характеризует линии
второго порядка группы I в зависимости от знаков чисел λι, Ιλα,
Δ/δ.
Эллипс
Мнимый эллипс
Мнимые пересекающиеся
прямые
Гипербола
Пересекающиеся прямые
Δ
sgn λι = sgn "КгФ sgn —
Δ
sgn λι = sgn λ* = sgn
-το
sgnXx^sgnXa, Δ = 0
sgnλ1=£sgnλ2, Δ#0
sgn λι φ sgn λ2, Δ = 0
Случай II) характеризуется тем, что
6=0, Δ^Ο
34
IZSSSSZSSSt B К1'»°»'™«>й Д" квадратичной функ.
координат
Δ= — агза\г> 5=а22
Поэтому а18=± γ -А. и уравнение щ принимает вид
у±»/ГХ,_«. (4з)
»™Γο6Κρ33ο"„"''ΚΚΟβ УРаВ"е"Ие ™"б°™ записываете, следу.
*"* k^F'· (44.
Осталось рассмотреть случай III)
δ=0, Δ=0.
34.1. Предложение. Если δ=Δ=0, το К является ото.
гональным инвариантом. является орто-
ГГрГат%^^
l?Z°r? СИСТеМЫ °ХУ На некотоР»й угол, а система OV'Y" Г
лучается параллельным переносом системы Ох"у" (рис. 38).
Рис. 38
и о^3"^ЛЬпа'Т<?В'§ 32 слЗдУет- что ПРИ переходах Оху+Ох"у"
Loo У "V * У число * не меняется. Поэтому достаточно по-
Ка~Т"Л™ * не меняется при параллельном переносе Ох"у"-*
ην",?" Ум ' рИ ЭТ0М мы в°льны в выборе системы координат
L·' ее П0ЛУЧИМ из °ХУ поворотом на такой угол когда
коэффициент а12 в общем уравнении (28) линии второго порядка
95
обращается в нуль (см. § 32). В этой системе координат матрица
% квадратичной части диагональна
81 =
ац О
О а22
Значит, δ=απα22. Поэтому одно из чисел αϊ ι и 022 равно нулю.
Считаем, что ац = 0. Тогда в системе Ох"у" матрица А имеет вид
О als
О
О
2i3 023 а
*22
*23
33
Но из Δ = 0 вытекает, что αΐ3=0. Итак, в системе координат
Ох"у" наша квадратичная функция представляется многочленом
>
G(x\ у")=а22у"г + 2а23у'' + а33.
При параллельном переносе
*"=*'"+6,
получаем
G (х\ У")=а22у'"г + 2 (а22с + а23) ут + а22с2 + 2а23с + а33.
Поэтому в системе 0'х"'у"' число К имеет вид
/(' =
^22 023 + ^2^
023 + «22^ 033 + 2023^ + 022^
Следовательно, К' = 0220зз + 202202зс + 022е2 — агз— 2022023е — a\f* —
= 02208з—а2з=^- Предложение доказано.
Уравнение (41) можно переписать в виде
S^+^=0.
(45)
Каноническое уравнение линии второго порядка группы III имеет
вид
У2+—=0.
Поэтому получаем при
/С<0 — параллельные прямые,
/ί>0—мнимые параллельные прямые,
/(=0 —совпадающие прямые.
96
(46)
§ 35. ДИРЕКТОРИАЛЬНОЕ СВОЙСТВО ЭЛЛИПСА, ГИПЕРБОЛЫ
И ПАРАБОЛЫ
Пусть на плоскости даны прямая / и не принадлежащая ей
точка F. Решим следующую задачу: найти на плоскости
геометрическое место Г точек Λί, таких, что
^^Л=е>^ (47)
Р(М, /) V
Рассмотрим отдельно три случая: е=1, е<1, е>\.
I. е=1. Обозначим расстояние между точкой F и прямой I
через р. Введем такую прямоугольную систему координат Оху на
плоскости, что ось Ох перпендикулярна прямой / и проходит
через точку F, а ось Оу делит пополам перпендикуляр, опущенный
из точки F на прямую I (рис. 39). В этой системе координат точ-
Рис. 39
ка F имеет координаты (р/2,0), а прямая I описывается
уравнением jc=— р/2. Обозначим через (х, у) координаты произвольной
точки Μ нашего множества Г. Тогда
1 =
р(М, f)
/(-f)·
+ у2
Р(М, /)
* +
2
(48)
Поскольку F9M, ни числитель, ни знаменатель в равенстве (47)
в нуль не обращаются. Поэтому уравнение (48) эквивалентно
уравнению
(*+f),-('-f),+'·
97
которое после приведения подобных членов превращается в
каноническое уравнение параболы
у2=2рх.
(49)
Итак, парабола (49) является геометрическим местом точек Μ,
равноудаленных от точки F с координатами (р/2, 0) и прямой I,
описываемой уравнением *+р/2=0. Точка F называется фокусом
параболы, а прямая / ее директрисой. Расстояние ρ между
фокусом и директрисой параболы называется фокальным
параметром, или просто параметром параболы.
II. е<\. Обозначим расстояние между точкой F и прямой /
через d. Существует такое число а>0, что
d= ае.
с
Поэтому можно ввести прямоугольную систему координат Охущ
в которой точка F имеет координаты (ае, 0), а прямая / задается
уравнением χ =0 (рис. 40). Тогда уравнение (47) перепи-
е
сывается в виде
У(х-ае)а + «/2 _
е.
(50
у\
0
\ 1
/у
F(ae,0) J
,*-4
* е
χ
Рис. 40
Приводя равенство (50) к общему знаменателю и возводя обе
части в квадрат, получаем эквивалентное уравнение
(х—ае)2 + у*=(ех—af.
После приведения подобных членов имеем
(1—е>)х* + у*=а2(1—е2). (51)
98
Разделив равенство (51) на правую часть а2(1— г2)==Ь2,
получаем каноническое уравнение эллипса
£-+-£-_ι.
а2 ^ &
(52)
Итак, нашим геометрическим местом точек является эллипс (52),
где
de
1-е2
, ь=аУ\— в2.
Точка F(ae, 0) называется фокусом эллипса, прямая х=а/е — его
директрисой, число е — эксцентриситетом.
Если эллипс задан каноническим уравнением (52) и не
является окружностью (т. е. а>Ь), то, полагая
У а2 — Ь*
9 w
(53)
получаем, что этот эллипс является геометрическим местом точек,
удовлетворяющих уравнению (47), где точка F(aef0) и прямая /
(х=а/е) такие же, как и выше.
Окружность
*2+#2=а2
получается из эллипса (52) предельным переходом при Ь-+а. При
этом е->0, фокус переходит в центр окружности, директриса
уходит в бесконечность.
III. е>\. Как и в предыдущем случае, вводим такую
прямоугольную систему координат Оху, в которой фокус F имеет
координаты (ае, 0), а директриса / задается уравнением х =0
е
(рис. 41). Это можно сделать, потому что разрешимо уравнение
d=ae-
Рис. 41
99
Повторяя выкладки предыдущего случая для нашего
геометрического места точек Г, получаем то же уравнение (51).
Но теперь 1—е2<0. Положив Ь2=(е2—\)а2 и разделив равенство
(51) на правую часть, получаем каноническое уравнение
гиперболы
-4-1·
(54)
Итак, геометрическим местом точек является гипербола (54), где
de
е*—\
Ъ=аУ&—\
Точка F(ae$ 0) называется фокусом гиперболы, прямая х=а/е —
ее директрисой, число е — эксцентриситетом.
Если гипербола задана каноническим уравнением (54), то,
полагая
,_ ТЛ*2 + ь2
(55)
получаем, что эта гипербола является геометрическим местом
точек, удовлетворяющих уравнению (47), где точка F имеет
координаты (ае, 0), а прямая / — уравнение х=*а/е.
Вернемся теперь к каноническому уравнению эллипса (52).
Поскольку вместе с точкой (х, у) эллипсу принадлежат и точки
(*>— У) и (—х,у)$ он является фигурой, симметричной
относительно осей координат. Поэтому, отражая точку F и прямую
/относительно оси Оу, получаем точку F'(—ae,Q) и прямую /'(*=
——а/е), которые также являются фокусом и директрисой
эллипса, т. е. точкой и прямой, относительно которых эллипс обладает
директориальным свойством (47). Таким образом, у эллипса (52)
X
Рис. 42
100
(a>b) есть два фокуса: левый Fx и правый F2. Они
расположены на оси Ох (рис. 42), которая называется фокальной осью
эллипса. Поскольку эксцентриситет эллипса е<1, его директрисы —
левая 1\ и правая h — расположены от начала координат
дальше, чем вершины эллипса (—α,Ο) и (а, 0), расположенные на
его фокальной оси. Поэтому директрисы лежат вне основного
прямоугольника
—a<jc<a, —b<y<b, (56)
в котором лежит эллипс.
Гипербола (54) также симметрична относительно осей
канонической системы координат. Таким образом, у гиперболы также
два фокуса F\ и F2 и две директрисы. Для гиперболы эксцентри-
Рис. 43
ситет е>1, поэтому ее директрисы 1Х и 12 удалены от начала
координат на расстояние, меньшее а, они пересекают основной
прямоугольник (56) и проходят между центром и соответствующей
вершиной гиперболы (—а, 0) или (а, 0) (рис. 43).
§ 36. ФОКАЛЬНОЕ СВОЙСТВО ЭЛЛИПСА И ГИПЕРБОЛЫ
36.1. Теорема. Эллипс (52) есть геометрическое место
точек Μ плоскости, для которых
Ρ(Λί, Fi) + P(M, F2)=2a. (57(
Здесь точки Ft и F2 имеют координаты (—ае, 0) и (ае, 0), где е=
= va ~~—<1 и соответственно Ь=аУ\—е2.
а
Доказательство. Из уравнения (51), имеем
!/2=(1-*2)(α2-*2).
101
Поэтому для произвольной точки М(х, у) эллипса имеем
Ρ (Μ, Ft) = V(x + ае)2 + tf=V# + Шх + дУ + (1 — <*)(α*—**)=,
=}/"jc2 + 2aeA: + aV + aa—jc2—г2а2 + е2г8 = l/"a2 + 2aex + e*x2 = \a +
+ ex\=a + ex, поскольку а>|х|. Таким образом,
p(MfFx)=a+ex.
Аналогично получаем
p{M$F2)=a—ex.
Итак, всякая точка эллипса удовлетворяет уравнению (57).
Наоборот, если точка М(х,у) удовлетворяет уравнению (57)
Y(x + aef+y* + V(x — aef+y2=2а,
то после переноса одного слагаемого в правую часть и
возведения в квадрат получаем
(x + ae)2 + y2=4a2—4aV(x—aef + y* + (x—aef + y*y
или после очевидных преобразований
V(x—ае)2+у2=а—ex.
Еще раз возводя в квадрат, имеем
х2—2аех + а2е2 + у2=а2—2аех + Лс2,
или
(1—е2)*2+#2=а2(1— е2).
Таким образом, всякая точка М(х,у), удовлетворяющая
уравнению (57), удовлетворяет и уравнению (51). Поскольку е<1, из
уравнения (51) получается каноническое уравнение эллипса
(52). Теорема доказана.
36.2. Теорема. Гипербола (54) есть геометрическое место
точек Μ плоскости, для которых
|(>(М, /ч)-р(Л1, F2)|=2a. (58)
Здесь точки Л и F2 имеют координаты (—ае, 0) и {ае, 0), где
g== ^° +— > 1 и соответственно b=a]fe?—1.
а
Доказательство. Так же, как и в случае эллипса,
получаем, что есЛи точка М(х, у) принадлежит гиперболе, то
ρ(Λί, FJ=\a + ex\9 ρ(Λί, F2)=\a-ex\.
102
Но теперь, в отличие от эллипса, а<|х|. Поэтому
тл с \—а—ех, если *<—а;
p(M'fH a + ex.
Ρ (Λ1, F2)=
если χ > а,
а—ех, если х^—а;
— а + ех, если χ ^ а,
откуда и вытекает равенство (58).
Наоборот, если точка М(х, у) удовлетворяет уравнению (58),
то, преобразуя его так же, как уравнение (57) при
доказательстве теоремы 36.1, получаем, что она удовлетворяет уравнению
(51). Но е>\, поэтому уравнение (51) эквивалентно
каноническому уравнению гиперболы (54). Теорема доказана.
§ 37. КРИВЫЕ ВТОРОГО ПОРЯДКА В ПОЛЯРНЫХ КООРДИНАТАХ
Парабола. Поместим полюс полярной системы координат в
SOKyc параболы, заданной в прямоугольной системе координат
ху каноническим уравнением (49), а полярную ось направим
в положительную сторону оси Ох (рис. 44).
ι
N
Ν'
i
0
у
Ι±^**"
V?
/
/ν
F Λ
f χ
Рис. 44
Рис. 45
В этой системе координат
r=FM=MN=N'F + FM'=p + r cosy.
Следовательно, в выбранной нами полярной системе координат
парабола описывается уравнением
г— Ρ
1— cos φ
(59)
Эллипс. Поместим полюс полярной системы координат в
левый фокус эллипса, заданного каноническим уравнением (52), а
103
полярную ось направим в положительную сторону оси Ох
(рис. 45). В этой системе координат
*+ea=rcos<p, или JC=rcos<p—еа.
Но при доказательстве теоремы 36.1 было показано, что
г=а + ех.
Поэтому
r=a + e(rcos(p—ea)=a(l—e2)+ercos(p1
откуда
г- а(1-е8) . (60)
1 — е cos φ
Гипербола. Поместим полюс полярной системы координат в
правый фокус гиперболы, заданной каноническим уравнением
(54), а полярную ось направим в положительную сторону оси Ох
(рис. 46). В этой системе координат
х—ea—rcos<p, или х=гсо$у+еа.
Рис. 46
Но при доказательстве теоремы 36.2 было показано, что для
точек правой ветви гиперболы
г=—а+ех.
Поэтому
г=— a + e(rcosq>+ea)=a(e^— l) + ercos<p,
откуда получаем, что правая ветвь гиперболы описывается
уравнением
г- *(**-!) (61)
1 — е cos φ
104
Фокальный параметр. Пусть Г — эллипс, гипербола или
парабола. В канонической системе координат фокусы этих кривых
второго порядка лежат на оси Ох% которая называется фокальной
осью соответствующей кривой. Проведем через какой-нибудь
фокус F кривой Г прямую, перпендикулярную к ее фокальной оси.
Эта прямая пересечет кривую Г в двух точках N и ЛГ. Длину
полученной таким образом хорды NN' обозначим через 2р.
Половина длины этой хорды называется фокальным параметром
кривой Г.
Для параболы фокальный параметр совпадает с ее
параметром. В самом деле, обозначив через / директрису параболы,
имеем (см. рис. 44)
р(/\ /)=p(iVb /) = (согласно директориальному свойству пара-
болы)=р(Мь F)
Теперь найдем фокальный параметр эллипса и гиперболы. Он
равен ординате у точки N (см. рис. 45 и 46). Из уравнения (51)
имеем
*/2=(1-е*)(а2-л:2),
откуда при х=±еа получаем
р2=(1—е2)2а2,
или
р=|1— е2\а. (62)
Учитывая, что для эллипса и гиперболы
b=aV\l-e*\t
получаем
Р--£-. (63)
а
Равенство (62) позволяет переписать уравнения (60) и (61)
единым образом:
1— е cos φ
(64)
Поскольку для параболы е=1, уравнение (64) совпадает с
уравнением (59) параболы. Таким образом, кривые второго
порядка — парабола, эллипс, гипербола (ее правая ветвь) —
описываются одним уравнением (64) в полярной системе координат.
Левую ветвь гиперболы также можно описать уравнением (64),
поместив полюс в левый фокус гиперболы и направив полярную ось
в отрицательную сторону оси Ох.
105
§ 38. ПЕРЕСЕЧЕНИЕ ЛИНИИ ВТОРОГО ПОРЯДКА С ПРЯМОЙ
Рассмотрим линию второго порядка Г, заданную в некоторой
аффинной системе координат Оху общим уравнением
F (х, у) = апх2 + 2аХ2ху + а22*/2 + 2alzx + 2а2эу + а33=О,
и прямую /, заданную параметрическими уравнениями
x=xQ + at, \
У=Уо + &. )
Найдем точки пересечения прямой / с линией Г. Для этого надо
подставить координаты точек прямой / в уравнение линии Г.
Сделав это, получаем относительно параметра t уравнение не более
чем второй степени
F2t*+2Fxt+F0=0, (65)
где
F2=F2{a, β)=αηα2 + 2α12αβ + 022β2>
F1=F1(a9 β, χ0, у0)=аиах0 + а12(ау0 + ^) + а2фу0 + а13а + а2^у
F0=F (*0, y0)=anxl + 2a12x0y0 + а22у\ + 2а13х0 + 2а23у0 + а33.
Скажем, что направляющий вектор а={а, β} прямой / имеет
асимптотическое направление по отношению к линии Г, если
αηα2 + 2α12αβ + α22β2=0. (66)
Отметим, что эго определение не зависит от аффинной системы
координат, в которой задано уравнение линии Г. В самом деле,
F2(a, β)=(α, β)* J*
где % — матрица квадратичной части квадратичной функции f,
представленной в системе координат Оху многочленом F(x,y).
Пусть теперь О'х'у' — другая аффинная система координат;
(С, а)—матрица перехода от системы Оху к системе О'х'у';
G(x\ yf)—многочлен, представляющий функцию / в системе
О'х'у'; {α\ β'} — координаты вектора а в новой системе
координат. Тогда
(α, β)=(α', β') С%
Ια ι
\=с\
\а'
|β'
и согласно § 28
%'=с*ис,
106
где St' —матрица квадратичной части функции f в системе
координат О'х'у'. Поэтому
G,(a', β')=(α\ β')*'
=(α', $')СЖ
=(α, β) SI
a
=F* (<*, β)·
Из исследования уравнения (65) для параметра / точек
пересечения прямой I с линией Г вытекает
38.1. Теорема. Если прямая I имеет неасимптотическое
направление по отношению к линии второго порядка Г, то I
пересекает линию Г в двух вещественных точках (различных или
совпадающих) или в двух мнимых точках. Если же прямая I имеет
асимптотическое направление, то она либо целиком содержится в
линии Г, либо имеет с ней не более одной общей точки.
38.2. Замечание о комплексной плоскости. В теоремах 38.1 и
33.1 мы говорим о мнимых точках, мнимых прямых, мнимом
эллипсе, подразумевая под ними подмножества комплексной
плоскости. Комплексной же плоскостью называем арифметическое
двумерное комплексное пространство С2, где С — поле
комплексных чисел. Таким образом, точками комплексной плоскости
являются упорядоченные пары (zuz2) комплексных чисел. Выбрав
на обычной плоскости π аффинную систему координат Оху и
отождествив точки Λί^π с упорядоченными парами (х, у) их
координат, можем рассматривать вещественную плоскость как
подмножество R2 комплексной плоскости С2. Точка (zu z2)
комплексной плоскости называется вещественной, если обе ее координаты
z\ и z2 — вещественные числа; в противном случае точка (zu z2)
называется мнимой.
По аналогии с вещественным случаем прямую на
комплексной плоскости естественно определить как линию первого
порядка, т. е. как множество решений уравнения первой степени
Ах+Ву + С=0.
Если среди всех пропорциональных уравнений
k(Ax+By + C)=0,
задающих прямую /, имеется уравнение, коэффициенты kA, kB,
kC которого вещественны, то прямую / называем вещественной.
Например, прямая
ix+iy=0
является вещественной, так как она может быть задана
уравнением
x+y=Q.
107
Прямая
является мнимой.
Алгебраическая линия, заданная уравнением
F(x,y)=0,
называется вещественной, если можно найти такое комплексное
число λ=/=0, что все коэффициенты многочлена XF(x, у)
вещественны. Вещественная линия может не содержать ни одной
вещественной точки. В качестве примера можно взять мнимый эллипс
а2 Ь2
Вещественная линия
α* ^ ft2
имеет единственную вещественную точку (0,0). Эта линия
распадается на пару мнимых прямых
aba b
и называется парой мнимых пересекающихся прямых.
Точно так же вещественная линия
у2+а2
при а>0 распадается на пару мнимых прямых
y+ia=0, у—ia=0
и называется парой мнимых параллельных прямых.
38.3. Предложение. Прямая Ах+Ву+С содержится β
линии второго порядка F(x,y)=Q тогда и только тогда, когда
многочлен F(x,y) делится на многочлен Ах+Ву+С без остатка.
Доказательство. Достаточность очевидна. Проверим
необходимость. Предположим, что ВФО, и рассмотрим многочлен
F[(x, у) как многочлен от у. Тогда
F(x,y)=a22y*+cl(x)y+c*(x),
где Ci(x)=2al2x+2a23, c2(x) = апх2+2а1гх+аы. Положим
D(x,y)=Ax+By+C
и поделим F(x, у) на D(x,y) как многочлены от у. Тогда
F(x, y) = G(x, y)D{x, у) +R<x).
Степень многочлена R{x) как многочлена от у меньше степени
D(x,y). Поэтому R(x) не зависит от у. Нам надо показать, что
108
/?(х)=0. Предположим, что ϋ(χο)φΟ для некоторого *0.
Поскольку ВФО, существует такое у0> что D(x0i y0) =0. Тогда точка (*<>,
#о), будучи на прямой D(x,y)=0, принадлежит линии F(x, y) =
= 0. Следовательно,
0=F(x0, Уо) = G(x0, #о)Я(*о, Уо) + #(*о) = Я(*о)^0.
Противоречие. Аналогично рассматривается случай АФО.
Предложение доказано.
Вернемся теперь к асимптотическим направлениям линий
второго порядка. Если прямая / имеет асимптотическое направление
относительно линии второго порядка Г, то всякий ее
направляющий вектор является вектором асимптотического направления.
Асимптотическим направлением линии второго порядка Г
назовем класс {α : β} всех ненулевых векторов, пропорциональных
какому-нибудь вектору а={а, β} асимптотического направления.
Такой класс однозначно определяется отношением координат α/β
или β/α входящих в него векторов.
Из условия (66), определяющего асимптотические
направления, вытекает, что всякая линия второго порядка имеет два
асимптотических направления, которые могут быть вещественными и
различными, вещественными и совпадающими или мнимыми.
В самом деле, по крайней мере один из трех коэффициентов аи,
012, 022 отличен от нуля. Если ацФО, то, разделив уравнение (66)
на β2, для определения асимптотических направлений {α : β) полу
чаем квадратное уравнение
откуда
α — <»m± Vaf2 — au<hz
__ _ .
откуда
β _ — <h*± ra2l2 — fliifli2
α α22
2αι2αβ=0,
откуда получаем
{α:β}={0:1}Η{α:β}={1:0}.
(66х)
(662)
Если а22¥=0, то для определения отношения α : β имеется
уравнение
Наконец при ац=а22=0 уравнение (66) превращается в
109
38.4. Замечание. Число
6Jfl"4=|3{|,
являясь ортогональным инвариантом квадратичной функции /,
может изменяться при переходе от одной аффинной системы
координат к другой. Но из формулы (16) вытекает, что при таких
переходах не меняется знак этого числа. Более того, при
умножении квадратичной функции f на k инвариант δ умножается на k2.
Таким образом, для данной линии второго порядка Г знак числа
δ не зависит ни от аффинной системы координат, ни от
уравнения второй степени, с помощью которого она записывается (в § 39
будет доказано, что в общем случае линия второго порядка в
данной аффинной системе координат описывается
пропорциональными уравнениями), т. е. sgno является инвариантом линии Г.
38.5. Определение. Линию второго порядка называем
линией эллиптического, гиперболического или параболического
типа, если соответственно б>0, б<0 или 6=0.
38.6.- Теорема. Линии второго порядка характеризуются
числом и видом асимптотических направлений:
1) линии эллиптического типа имеют мнимые асимптотические
направления;
2) линии гиперболического типа имеют различные
вещественные асимптотические направления;
3) линии эллиптического типа имеют совпадающие
асимптотические направления.
Эта теорема фактически была доказана при исследовании
уравнения (66), поскольку дискриминант квадратного уравнения
(66ι) или (662) есть α2ΐ2—апагг^ — б, а в случае ац = а22 имеем
два различных асимптотических направления и δ=—α2ι2<0.
38.7. Предложение. Никакие три точки эллипса,
гиперболы или параболы не лежат на одной прямой.
Доказательство. Если три точки линии второго порядка
лежат на одной прямой /, то согласно 38.1 прямая / имеет
асимптотическое направление и целиком содержится в Г. Поэтому
эллипс отпадает, поскольку у него вообще нет асимптотических
направлений. Асимптотические направления параболы у2 = 2рх
определяются из уравнения β2=0 и имеют вид {1 :0}. Прямая такого
направления параллельна оси Ох, имеет уравнение у —с и
пересекается с параболой по единственной точке (с2/2р,с).
Асимптотические направления гиперболы
j* £_ = j
α2 Ь2
определяются из уравнения
J!l—Ё!- = о
а2 б2
110
и имеют вид {α : β} = (α: ±fc}. Прямые асимптотического
направления записываются параметрическими уравнениями
*=*. У=Уо± — *.
а
Для параметра t точки пересечения прямой и гиперболы
получаем уравнение
/ b v2
α2 б2
а после приведения подобных членов
Но это уравнение относительно t имеет не более одного решения,
поскольку правая часть отлична от нуля. Предложение доказано.
§ 39. ТЕОРЕМЫ ЕДИНСТВЕННОСТИ ДЛЯ ЛИНИЙ ВТОРОГО
ПОРЯДКА
39.1. Теорема. Если на плоскости даны пять различных
точек Mit i=l,..., 5, из которых никакие четыре не лежат на
одной прямой, то существует единственная линия второго порядка,
проходящая через эти точки.
Доказательство. Покажем, что для данной аффинной
системы координат Оху существует единственный с точностью до
пропорциональности такой многочлен F(xtу) второй степени, что
координаты точек Af,·, i=l, ..., 5, удовлетворяют уравнению
F(xt f/)=0. Обозначим неизвестные коэффициенты многочлена
F следующим образом:
an:=Zit 2#ΐ2 ==г2» ^22==^3» ^al3==24> ^2S===^8» ^33==^β·
Пусть точки Mi имеют координаты (xi,yi). Тогда для нахождения
коэффициентов многочлена F получаем систему из пяти
однородных уравнений с шестью неизвестными ги ..., ζ6
z^ + z^itji + z^+z^Xi+z^i + z^^O, t = l, . ... 5.
Из курса высшей алгебры известно, что такая система имеет
ненулевое решение. Более того, решение такой системы единственно
с точностью до пропорциональности, если уравнения линейно
независимы. Итак, надо показать, что в нашем случае система
линейно независима.
Предположим, что это не так. Тогда одно из уравнений
системы, например пятое, линейно выражается через остальные. Это
означает, что всякая линия второго порядка, проходящая через
точки Λίι,..., Λί4, проходит и через точку Λί5. Здесь логически
возможны два случая:
111
1) некоторые три точки из Λίι,...,Λί4 лежат на одной прямой;
2) никакие три точки из Λί1>...,Λί4 не лежат на одной прямой.
Рассмотрим первый случай. Пусть точки Ми Λί2> Αί3 лежат на
одной прямой /. По условию теоремы точки МА и М$ не лежат
на этой прямой. Через точку Λί4 можно провести прямую т,
пересекающую прямую Ζ и не проходящую через точку Λί5 (рис. 47).
Тогда линия второго порядка, состоящая из двух
пересекающихся прямых / и /л, проходит через точки Ми ..., Λί4 и не проходит
через Λί5. Противоречие.
т
Рис. 47
Рассмотрим второй случай. Обозначим через /», прямые,
проходящие через точки Mi и Afy. Тогда пара прямых In и /з4
образует линию второго порядка Гь а пара прямых /i4 и /2з образует
линию второго порядка Гг. Из того, что никакие три точки
среди точек Л4Ь ..., Λί4 не лежат на одной прямой, легко извлекается,
что ΓιΠΓ2={Λίι, Λί2, Λί3, Λί4}. Но по предположению кривая Г,,
содержа точки Afb ..., Λί4, должна содержать и точку Мъ.
Противоречие. Теорема доказана.
39.2. Теорема. Пусть в некоторой аффинной системе
координат Оху уравнения второй степени
F(x,y)=0 и G(x,(/)=0
определяют одну линию второго порядка Г, содержащую более
одной вещественной точки. Тогда многочлены F и G
пропорциональны.
Доказательство. Легко видеть, что на эллипсе,
гиперболе, параболе, паре пересекающихся и паре параллельных
прямых существуют пять различных точек, никакие четыре из
которых не лежат на одной прямой. Поэтому для этих линий
второго порядка наша теорема единственности вытекает из теоремы
39.1.
Остаётся рассмотреть случай, когда Г является парой
совпадающих прямых, поскольку остальные линии второго порядка
содержат не более одной вещественной точки (см. § 33). Пусть
прямая /, из точек которой состоит линия Г, задается уравнением
Ах+Ву + С = 0.
ма
112
Тогда согласно предложению 38.3
F(x9 y)=(Ax + By + C)(A1x^rB1y + C1\
G(x, у)=(Ах + Ву + С)(А2х + В2у + С2).
Но, поскольку линия Г является парой совпадающих прямых,
уравнения Aix + Biy+Ci = Ot i=l,2, описывают ту же прямую /.
Следовательно, многочлен AiX+Biy + Ci пропорциональны
многочлену Ах+Ву+С (см. § 15). Теорема доказана.
§ 40. ЦЕНТРЫ ЛИНИЙ ВТОРОГО ПОРЯДКА
В этом параграфе, как и всюду в четвертой главе,
рассматриваем плоские множества.
40.1. Определение. Точки Μχ и М2 называются
симметричными относительно точки М0 (рис. 48), если
М^=—М^Л%. (67)
Рис. 48
Условие (67) эквивалентно тому, что точка М0 делит отрезок
М\М2 пополам. В самом деле, из (67) вытекает, что
Тогда
mJa2=Μ^ζ+λ^λ£= 2λμ?0,
откуда
Но это и означает, что М0 делит отрезок М{М2 пополам.
40.2. Определение. Точка М0 называется центром
симметрии множества Г, если для всякой точки М^Т точка М\
симметричная точке Μ относительно точки Λί0, также принадлежит Г.
40.3. Замечание. Если множество Г пусто, то всякая
точка является центром симметрии этого множества.
из
40.4. Теорема. Если точка М0(хо, у0) является центром
симметрии линии второго порядка Г, содержащей по крайней мере
одну точку и определяемой в некоторой аффинной системе
координат уравнением второго порядка
Р(х,у)=апх2+2а12ху + а22у2+2а1гх+2а2гУ+агг=0, (68>
то
βι Α+ <4ι0ο+ βιβ=0.1
012^0 + 02200 + 023 = 0- J (
Доказательство. ГТеренесем начало координат в точку
О'=М0(х0, ί/o), т. е. перейдем к новым координатам х\ у' по
формулам
х = х' + х0, у = у' + у0.
Тогда в новой системе координат О'х'у'
013=апх0 + а12у() + а13,
023 = 012*0 + 02200 + 023·
Таким образом, исходная задача сведена к следующей: если
О(0,0)—центр симметрии непустой линии второго порядка, то
013== 023 = 0.
Возьмем произвольно точку Μχ(χ\> ι/ι)εΓ. Тогда по
определению центра симметрии имеем М2(—х\,—ί/ι)^Γ. Следовательно,
0=F(xu y{)—F(—xu —yx) =4α13*ι + 4α230ι.
Следовательно, если а\$Ф§ или агз^О, то вся линия Г лежит
на прямой
013*+0230 = 0.
Тогда Г — либо пара совпадающих прямых, либо пара мнимых
пересекающихся прямых. В первом случае согласно теореме 39.2
F(x, 0)=fe(a13x+0230)2.
Но это противоречит тому, что линейная часть ai3*+0230
многочлена F отлична от нуля.
Во втором случае точка О(0,0) также принадлежит Г,
значит, а3з = 0. Пересечение оси Ох с линией Г описывается
уравнением F(xy 0)=0, т. е.
апх2+2а13х=0. (71)
Из условия О*ЛГ = {О(0,0)} вытекает, что уравнение (71) имеет
единственное решение х=0. Но пара мнимых пересекающихся
прямых является линией эллиптического типа. Значит, в нашем
случае б>0, в частности аиФО. Следовательно, из единственности
решения уравнения (71) вытекает, что ai3 = 0. Аналогично
показывается, что агз = 0. Теорема доказана.
114
(70)
40.5. Определение. Если координаты точки М0(х^0)
удовлетворяют системе (69), то точка MQ называется центром линии второго
порядка (68).
Покажем, что это определение не зависит от аффинной системы
координат, в которой рассматривается уравнение линии второго порядка.
То, что точка М0(х^у0) удовлетворяет системе уравнений (69), в
матричной форме можно переписать следующим образом:
■%
36
1
=
0
о
\d
щв А =
Лг °и °о
<*а % °а
°о °ъ °я
, d = %хь + α^0 + (%.
(72)
Пусть теперь О'х'у' - другая аффинная система координат и переход от
системы Оху к системе О'х'у' осуществляется по формулам (2) из § 28.
Пусть точка М0 имеет в системе О'х'у' координаты ( V» у0' \ Тогда
А'
= (согласно(13))=D*AD
= (согласно(Ю)) =
к
Я
11
= D*
0
0
d
=
к ь oil
к Яг 0
к <ч Ч
0
1°
\d\
=
0
0
1
1-1
= D|4A
Таким образом, если координаты (χ^0) точки М0 в системе Оху
удовлетворяли системе уравнений (69), то координаты ι xQ\y0 ' ] этой же точки
в системе О'х'у' удовлетворяют аналогичной системе уравнений
Отметим также, что попутно доказано равенство
4гх'о + агзУо + аъг = апхо + агзУо + агъ·
40.6. Предложение. Всякий центр линии второго порядка
является центром ее симметрии.
Доказательство. Пусть М0(х0,у^)- центр линии второго порядка Г,
описываемой уравнением (68). Тоща, осуществив параллельный перенос
начала координат в точку М0, получаем согласно (70) и (69), что а[ъ = а'2г=0.
Это означает, что для многочлена G(x\y'\ соответствующего
многочлену F(x,y) в системе О'х'у', имеем G(x\y') = G(-x't- у'), т. е. новое начало
115
координат является центром симметрии нашей линии Г.
Предложение доказано.
Из определения центра вытекает, что линия второго порядка
может:
I. иметь один центр (система (69) имеет единственное
решение);
II. иметь прямую центров (уравнения системы (69)
пропорциональны);
III. не иметь центров (система (69) несовместна).
40.7. Теорема. Вышеперечисленные варианты количества
центров линии второго порядка характеризуются следующим об-
разом:
Ι. δΦΟ;
II. δ=Δ = 0;
III. 6=0, Δ^Ο.
Доказательство. I. Согласно § 15 прямые
*ιι*+αΐ2#+α13=0 и α12χ+α22# + α23=0
пересекаются по одной точке тогда и только тогда, когда
С11 φ йП
#12 #22
а это эквивалентно тому, что 6=5^0.
II. Если уравнения системы (69) пропорциональны, то
пропорциональны первые две строки матрицы А и, следовательно,
δ = 0=Δ. Пусть теперь δ=0=Δ. Из условия δ=0 вытекает, что
по крайней мере один из коэффициентов ац и 022 отличен от
нуля. Предположим, что а\\*Ф0. Tot да в силу пропорциональности
строк матрицы Ч существует такое число ft, что
aX2 = ka\U a22=kaX2-
Раскроем определитель Δ по трет ьей строке:
(73)
0=Δ=α
13
а12 а13
а22 #23
*23
*11 * 13
012 0*>
=(согласно (73) и δ=0)=(&α1Γ. -α23)
+ α33δ=
ап α13
*12 "23
Тогда, если kaxz—α23=0, то в силу (73) уравнения системы (69)
пропорциональны.
Если же
ап ап
0J2 <*2J
= 0,
io с учетом неравенства ацФО б».-рая строчка этого определителя
получается из первой умноженьом на некоторое число, которое
согласно (73) равно k. Следовате шно, снова а2з=£я13.
116
III. Утверждение является следствием двух рассмотренных
случаев. Теорема доказана.
§ 41. АСИМПТОТЫ И СОПРЯЖЕННЫЕ ДИАМЕТРЫ ЛИНИЙ
ВТОРОГО ПОРЯДКА
Асимптоты. 41.1. Определение. Асимптотой линии второго
порядка Г называется всякая прямая асимптотического
направления, проходящая через центр линии Г.
41.2. Предложение. 1) Гипербола и пара пересекающихся
прямых имеют две асимптоты.
2) Параллельные прямые (различные, совпадающие и
мнимые) имеют одну асимптоту.
3) Остальные линии второго порядка асимптот не имеют.
Доказательство. Утверждения 1) и 3) вытекают из
классификации линии второго порядка по числу асимптотических
направлений и центров (теоремы 38.6 и 40.). Утверждение 2
вытекает из того, что, как легко видеть, линия центров параллельных
прямых у2 —с имеет асимптотическое направление.
Уравнение гиперболы в асимптотах. Рассмотрим гиперболу Г,
заданную каноническим уравнением
Л i/^= j
α2 ft2
в некоторой аффинной системе координат Оху. Асимптотические
направления {α : β} этой гиперболы находятся из уравнения
откуда получаем два решения;
{α:β> = ία:6}, {α : β} = {α : — b).
Центр гиперболы находится в начале координат. Следовательно,
асимптоты гиперболы имеют уравнения
JL—<L=o, JL + JL=o. (74)
ах a b
Перейдем к новой системе координат 0'х'у\ полагая
, jc у_ , χ . у
а Ь а Ь
Тогда уравнение гиперболы
(Τ'Τ) (i+f) - ' <">
в новых координатах записывается следующим образом:
xV-1. (76)
117
Оси новой системы координат являются асимптотами гиперболы
(рис. 49), а уравнение (76) называется уравнением гиперболы в
асимптотах.
Рис. 49
Асимптоты гиперболы на самом деле япляются ее
асимптотами в том смысле, что точка Μ гиперболы, перемещаясь по одной
из ее ветвей в бесконечность, становится сколь угодной близкой
к одной из ее асимптот. В самом деле, покажем, что, когда точка
М(х0, у0) перемещается по верхней части правой ветви гиперболы
в бесконечность, ее расстояние от асимптоты /
JL-JL^o
а Ь
стремится к нулю. Согласно § 20 имеем
Ρ(Λί, 0
__ J 6Х0 — Qf/Q 1
Уа*Ть2 '
В то же время из (75) вытекает, что
Ьх0—ау0=—--—.
Ьх0 + ау0
Поэтому, поскольку xq, Уо>Оу расстояние
а*Ь2
Ρ(Λί, /)=■
Va*+b*(bx0 + ay0)
от точки М(х0, уо) до прямой I стремится к нулю при хо, {/о^ + °°.
Сопряженные диаметры и сопряженные направления. В § 38
мы выяснили, что прямая / неасимптотического направления
пересекает линию второго порядка Г в двух точках Λίι и Λί2
(различных, совпадающих или комплексно сопряженных). Пусть Λί0
—середина отрезка (хорды) МХМ2. Решим задачу отыскания всех
сене
редин хорд, параллельных данному неасимптотическому
направлению.
Пусть линия Г задана общим уравнением F{x, y)=0 в
аффинной системе координат Оху, а прямая / неасимптотического
направления задана параметрическими уравнениями
x = xo+at, y = yo+$t. (77)
Предположим, что точка М0(х0у у0) является серединой хорды
МхМ2у высекаемой линией Г на прямой /. Пусть координаты
точек Мх и М2 получаются из уравнений (77) при значениях
параметра t=t\yt2 соответственно. Поскольку точка М0 является
серединой хорды ΜχΜ2, а ее координаты (x0t y0) соответствуют
значению параметра ί=0, имеем
ίι + /2 = 0.
Но значения tut2 находятся из уравнения (65). Поэтому по
теореме Виета
?1 = α1ΐαΛ:0 + «12 (αί/ο + β*θ) + <*22$Уо + «13α + <*23β = 0·
Перегруппировывая члены этого уравнения, получаем, что
всякая середина М(х, у) хорды неасимптотического направления
{α : β} удовлетворяет уравнению
а (апх + а12у + α13) + β {а12х + а22у + а23) = 0. (78
Это есть уравнение первой степени. В самом деле, если
ααη + βα12=0, αα12 + βα22=0, (79)
то направление {а : β} асимптотическое, поскольку равенства (79)
эквивалентны матричному равенству
(α. β)
"11 "12
а12 а22
= (0, 0).
Таким образом, нами доказано
41.3. Предложение. Все середины Μ (χ, у) хорд данного
неасимптотического уравнения {а : β) лежат на прямой (78).
Эта прямая называется диаметром линии второго порядка Г,
сопряженным данному неасимптотическому направлению {α: β).
Прямая (78) согласно условию (69) проходит через все центры
линии Г, поэтому она и называется диаметром этой линии. На
рис. 50, 51 и 52 изображены диаметры эллипса, параболы и
пары параллельных прямых.
Определение диаметра, сопряженного данному
неасимптотическому направлению линии Г, не зависит от аффинной системы
координат Оху, в которой мы рассматриваем уравнение этой
119
У
^^^ш^^^
Рис. 50
Рис. 51
ι
^шшшщшшшш^ ,
шшш^^к^т^шж^ *
Рис. 52
линии. В самом деле, уравнение (78) сопряженного диаметра в
матричной форме можно записать следующим образом:
(α, β, ОМ
=0.
(80)
Для другой аффинной системы координат 0'х'у\ связанной с
системой Оху формулами перехода (2), легко видеть, что
(α,β,0) = (α',β',0)£*,
где D — матрица (И) из § 28. Поэтому, учитывая равенства (10)
и (13) из § 28, получаем
(α, β, ОМ
=(а\ β', 0)DMD
=(<*', β', ОМ'
Итак, условие (80) влечет выполнение аналогичного условия и в
системе координат О'х'у'.
41.4. Определение. Направления ai={cti, βι} и а2=
= («2, β2) называются сопряженными относительно линии второго
порядка Г, заданной в аффинной системе координат Оху общим
уравнением F= (x, у) =0, если
ΛιΛ«ι + 012 («А + βΛ) + α^βΑ = 0.
(81)
120
Это уравнение в матричной форме можно записать
следующим образом:
(«ι. М*
<*2
β2
= 0.
Мы знаем, что при переходе к новой системе
координаты векторов изменяются по правилу
(α, β)-(α', β') С·.
(82)
координат О'х'у'
Поэтому согласно (16) условие (82) выполняется и в системе
координат О'х'у'. Таким образом, определение сопряженности
направлений а! и а2 не зависит от аффинной системы координат,
в которой мы рассматриваем уравнение линии Г.
Асимптотические направления (§ 38) — это направления,
которые сопряжены самим себе, т. е. самосопряженные
направления. Направление, сопряженное любому направлению,
называется особым направлением данной линии второго порядка.
41.5. Предложение. Особые направления — это
асимптотические направления параболических линий. Для остальных
линий каждому направлению сопряжено ровно одно направление.
Доказательство. Возьмем произвольное направление
{αϊ : βι} и найдем все сопряженные ему направления ία2: β2}
относительно данной линии второго порядка Г из уравнения (81).
Оно является однородным уравнением первой степени
относительно неизвестных <х2 и β2. Поэтому согласно записи (82) этого
уравнения оно имеет единственное с точностью до
пропорциональности решение, если
(«ι. fc)*=*(0, 0),
(83)
а в противном случае всякое направление является его
решением. Но если δ=|3ί|#0, то выполняется условие (83),
поскольку в противном случае строки матрицы % линейно зависимы с
коэффициентами αϊ и βι. Это нам доказывает вторую часть
предложения 41.5.
Что касается первой части предложения 41.5, то в силу
самосопряженности особого направления достаточно проверить, что
асимптотическое направление {αϊ : βι) параболической линии
является особым. Поскольку условие сопряженности направлений
не зависит от системы координат, достаточно рассмотреть
уравнение параболической линии
У2=Н(х)
в канонической системе координат, где Н(х)—многочлен
степени <1. Тогда
9ί =
0 0
О 1
{α1:β1} = {1:0}
121
и
(«ι. Ρι)*=(0, 0).
Предложение 41.5 доказано.
41.6. Предложение. Направление диаметра, сопряженного
направлению {а : β}, сопряжено этому направлению.
Доказательство. В качестве направляющего вектора
прямой (78) можно взять вектор
0={αα12 + βα22, — ααη—βα12}.
В то же время
(α, β)3ί = (αα11 + βα12ί αα,2 + βα22).
Поэтому согласно (82) вектор е сопряжен вектору {α, β}.
Предложение 41.6 доказано.
41.7. Предложение. Для центральной линии Г любая
прямая неасимптотического направления, проходящая через
центр, является диаметром, сопряженным некоторому
направлению.
Доказательство. Пусть а — направляющий вектор
данной прямой / неасимптотического направления. Согласно 41.5
существует единственный с точностью до пропорциональности
вектор Ь, сопряженный вектору а. Вектор Ь не может быть
асимптотического направления, поскольку в противном случае ему
были бы сопряжены по крайней мере два различных направления:
а и Ь. Рассмотрим существующий согласно 41.3 диаметр т,
сопряженный направлению Ь. Тогда в силу 41.6 вектор а является
направляющим для прямой т. Кроме того, диаметр m проходит
через центр линии Г и, следовательно, совпадает с прямой /.
Предложение 41.7 доказано.
§ 42. ГЛАВНЫЕ НАПРАВЛЕНИЯ И ГЛАВНЫЕ ДИАМЕТРЫ ЛИНИЙ
ВТОРОГО ПОРЯДКА. ОСИ СИММЕТРИИ
Главные направления. 42.1. Определение. Направление
{α : β) называется главным направлением линии второго порядка
Г, если оно перпендикулярно некоторому сопряженному ему
направлению/
Примером главного направления является особое
направление, поскольку оно сопряжено любому, в частности
перпендикулярному, направлению.
Рассмотрим на плоскости прямоугольную систему координат
и найдем все главные направления {α : β} линии Г, заданной
общим уравнением F(x, ί/)=0. Если вектор {α, β} имеет главное
направление, то он сопряжен с перпендикулярным вектором {—β, α).
Тогда условие (81) сопряженности направлений выглядит
следующим образом:
αι2α2+ (α22—απ)αβ—α12β2=0. (84)
122
Итак, все главные направления {α : β} линии Г в
прямоугольной системе координат находятся из уравнения (84).
Назовем обобщенной окружностью линию, которая имеет
каноническое уравнение
х2+у2=с. (85)
Если с>0, то это окружность радиуса Ус, если с=0 — окружность
нулевого радиуса (в нашей терминологии — пара мнимых
пересекающихся прямых), если с<0 — окружность мнимого радиуса
(мнимая окружность).
В другой прямоугольной системе координат уравнение
обобщенной окружности может отличаться от уравнения (85) только
членами первой и нулевой степени. В самом деле, мы знаем, что
матрица квадратичной части при переходе к новой системе
координат изменяется по правилу
Но в нашем случае 31 =£, а С — ортогональная матрица как
матрица перехода от одной прямоугольной системы координат к
другой. Следовательно,
%'=С*ЕС=Е.
Таким образом, в прямоугольной системе координат общее
уравнение линии второго порядка является уравнением
обобщенной окружности тогда и только тогда, когда
011 = 022» 012=0. (86)
Поэтому из (84) вытекает
42.2. Предложение. Для обобщенной окружности любое
направление является главным.
Наряду с этим имеет место
42.3. Предложение. Если линия второго порядка Г не
является обобщенной окружностью, то у нее существует ровно
два взаимно перпендикулярных главных направления.
Доказательство. Если 012=0, то уравнение (84) имеет с
точностью до пропорциональности два решения:
{α:β}41:0}, {α : β}={0 : 1}. (87)
Если же 012=^0, то, разделив уравнение (84) на β2, получаем
α аи — <*22±у (ап — α^)2 + 4α?2
β 2д15
(88)
Непосредственная проверка показывает, что скалярное
произведение векторов
{αϊ, βι} = {αιι—022 +У (0ц—022)2 + 40?2, 2а12}
123
и
{α2» Μ = {βη—«22— K(fln—α22)2 + 4α22, 2α12(
равно нулю, т. е. полученные главные направления
перпендикулярны. Предложение 42.3 доказано.
Из (87) вытекает, что для линий, заданных каноническими
уравнениями (αΐ2=0), главные направления — это направления
осей координат.
Главные диаметры и оси симметрии. 42.4. Определение.
Диаметр линии второго порядка называется главным, если он
сопряжен с перпендикулярным ему направлением.
Направление главного диаметра, очевидно, является главным.
Обратное неверно: направление, перпендикулярное особому,
является главным, но не есть направление главного диаметра.
В то же время имеет место
42.5. Предложение. Для центральной линии Г всякое
главное направление является направлением главного диаметра.
Доказательство. Согласно 41.7 достаточно убедиться в
том, что главное направление не является асимптотическим. Но
главному направлению сопряжено перпендикулярное
направление, в то время как в силу предложения 41.5 асимптотическому
направлению центральной линии сопряжено оно само.
На главном диаметре согласно предложению 41.3 лежат все
середины хорд перпендикулярного направления. Поэтому главный
диаметр является осью симметрии линии второго порядка.
Решим теперь обратную задачу: найдем все оси симметрии
линии второго порядка Г, содержащей более одной вещественной
точки. Итак, пусть прямая / является осью симметрии такой
линии Г. Предположим сначала, что перпендикулярное прямой /
направление {α : β} не является асимптотическим. По условию все
середины хорд направления {α : β} лежат на прямой /. С другой
стороны, они лежат на диаметре т, сопряженном направлению
{α : β}. Поскольку линия Г содержит более одной точки, отсюда
вытекает, что прямые I и m совпадают.
Пусть теперь перпендикулярное к прямой I направление
является асимптотическим. Линия Г не может целиком
располагаться на прямой /, поскольку в этом случае линия Г была бы парой
совпадающих прямых, а ее асимптотическое направление было бы
параллельно прямой /. Возьмем точку Μ на линии Г, не лежащую
на прямой /. Тогда симметричная ей относительно прямой / точка
ΛΓ также принадлежит Г. Прямая т, проходящая через точки Μ
и ΛΓ, целиком лежит в линии Г, поскольку она имеет
асимптотическое направление и пересекается с Г по крайней мере в двух
точках. Следовательно, линия Г распадается на две прямые m
и т' — пересекающиеся, параллельные или совпадающие. Вторая
прямая т' не может быть наклонной к прямой /, так как в этом
случае прямая I не может быть осью симметрии линии,
составленной из двух прямых т и т\ из которых одна перпендикулярна,
124
а другая наклонна к прямой L Поэтому прямая т' либо
перпендикулярна к прямой /, либо с ней совпадает. В первом случае
линия Г состоит из двух параллельных (может быть,
совпадающих) прямых (рис. 53). Тогда всякая прямая, перпендикулярная
к этим прямым, является осью симметрии линии Г. Кроме того,
осью симметрии линии Г является также единственный ее
(главный) диаметр d — средняя прямая между прямыми т и т'.
л
/77
Μ
Μ
JSQ°
Рис. 53
Рис. 54
Во втором случае линия Г представляет собой пару
перпендикулярных прямых т и т'=1 (рис. 54). Каждая из этих прямых
является осью симметрии линии Г. Кроме того, осями симметрии
являются биссектрисы d\ и d2 двух пар вертикальных прямых
углов, образованных прямыми / и т. Эти биссектрисы являются
взаимно сопряженными главными диаметрами.
Итак, нами доказана
42.6. Теорема. Пусть линия второго порядка Г содержит
более одной вещественной точки. Тогда
1) если линия Г представляет собой пару параллельных или
совпадающих прямых, то она имеет бесконечно много осей сим-
метрии, из которых одна является главным диаметром;
2) если линия Г представляет собой пару перпендикулярных
прямых, то она имеет четыре оси симметрии, из которых две
являются главными диаметрами;
3) во всех остальных случаях главные диаметры и только они
являются осями симметрии.
Ось параболы. Из теоремы 42.6 вытекает, что осью симметрии
параболы является ее главный диаметр. В канонической системе
125
координат (αΐ2β0) главными направлениями являются
направления осей координат, одно из них для параболы является
асимптотическим, следовательно, ось Ох является единственным главным
диаметром и единственной осью симметрии параболы.
Найдем теперь уравнение оси параболы в произвольной
прямоугольной системе координат, считая, что а^О. Поскольку для
параболы б—О, имеем απα22=β2ΐ2· Следовательно,
(ап—а22)2 + 4а22=(аи—а22)2 + 4апа22=(ап + а22)2.
Значит, уравнение (88) принимает вид
α __ ап — а22 ± (вц + Д22)
β 2α12
Поэтому главными направлениями параболы являются
{<хь βι}={απ, α12), ία2, β2>={α22, — α{2}.
Второе из этих направлений — асимптотическое. В самом деле,
α2 ",ι
=а31а|2+2а12(—а22а12)+а22а22=а22(а11а22—af2)=0.
(«2» β2)*ϊΐ β
Итак, остается найти диаметр, сопряженный направлению {ац,
αί2}. Уравнение (78) в нашем случае записывается так:
011 fall* + 0120 + Я1з) + «12 («12* + ОД + «2з) = О,
или
(аП + а 12) * + а12 (аИ + а22) 0 + <*ΐΑ3 + «12^23 = 0.
Заменяя α2ΐ2 на а\\а2г, получаем
a11(an+a22)x + a12{au+a22)y + analz + a12a23=0.
В параболическом случае an + a22=S^0. Таким образом,
уравнение оси параболы можно записать в виде
αηχ+α^+ ^^ =0. (89)
Что касается параллельных прямых, то для них главным
диаметром является линия центров. Поэтому уравнение (89) в
этом случае имеет более простой вид
aux+al2y+aiz=0. (90)
§ 43. РАСПОЛОЖЕНИЕ ЛИНИЙ ВТОРОГО ПОРЯДКА
Мы знаем, как по ортогональным инвариантам линии второго
порядка, заданной в прямоугольной системе координат Оху
произвольным уравнением, определить ее каноническое уравнение
(§ 34). Для того чтобы иметь полную информацию о линии вто-
126
рого порядка, надо научиться еще находить расположение осей
канонической системы координат.
I. Центральный случай (6^0). В этом случае каноническое
уравнение пропорционально уравнению
К1х^ + К2у^ + -^ = 0. (91)
о
Мы уже знаем (см. § 32), что при повороте осей координат на
угол φ, для которого
tgtp=fl"-au.,^-'n ,
квадратичная часть уравнения принимает вид
λ,*/2 + λ2ί/'2.
Далее, при переносе начала координат в центр линии,
определяемой из системы
011* + Αΐ2ί/ +013 = 0»
^12^ + a22i/ + 023=0»
в уравнении исчезают члены первой степени и оно принимает вид
(91). Направления новых осей координат можно менять на
противоположные. Поэтому остается только упорядочить корни %\ и
%2 характеристического многочлена. Уравнение (91)
пропорционально уравнению
А
+ ~г=0.
λ, λ! δ2
Поэтому в эллиптическом случае должно выполняться
неравенство
Γλι|<|λ2|, (92)
поскольку мы считаем, что фокусы лежат на оси OV. Для
гиперболы
sgnXi=sgnA. (93)
Для пересекающихся прямых выбор λι и Хг не имеет
существенного значения, хотя мы можем для определенности
предположить, что для канонического уравнения
_^ £_ = о
а2 Ъг
пересекающихся прямых выполнено условие а2>62. В этом
случае можно воспользоваться условием (92).
127
Пример. Пусть линия второго порядка Г задана в
прямоугольной системе координат Оху уравнением
6ху+8у2—
\2х—26у+11=0.
Тогда
* =
со оо
о со
' А=\
10 3—61
3 8 —13
1 —6 —13 11 |
Имеем б=|91|=—-9<0 (гиперболический случай), Д=|Л| =
=81, S=8. Характеристический многочлен
λ2—8λ—9
имеет корни 9,-1. Согласно условию (93)
λι=9, λ2=—1.
Гаким образом, каноническое уравнение гиперболы Г имеет вид
*'*
9
= 1.
Для угла φ наклона оси О'х' к оси Ох имеем
tg(p=T=3·
Центр находим из системы
Ъу- 6=0,
Зх + 8у—13=0у
откуда новое начало О' имеет координаты (—1, 2).
Мы имеем всю необходимую информацию, чтобы изобразить
гиперболу (см. рис. 55). Поскольку fr/a=3, асимптоты наклонены
к оси О'х' под углом φ, для которого tg<p=3. Следовательно, одна
из асимптот горизонтальна. Вершины гиперболы отстоят от
нового начала О' на расстояние а=1.
II. Параболический случай (6=0). Если линия Г
представляет собой параллельные прямые (Δ=0), то она имеет каноническое
уравнение
/2 ! k
=0.
Осью О'х' является прямая центров
апх + а12у + (1\г=*0.
В качестве оси О'у' можно взять любую прямую,
перпендикулярную прямой центров.
128
Рис. 55 Рис. 56
Если же линия Г является параболой (Δ#0), то она имеет
каноническое уравнение
Осью О'х' является ось симметрии параболы
ап + а22
Вершиной параболы и новым началом О' является точка
пересечения оси с параболой. Осью О'у' является прямая,
перпендикулярная оси параболы и проходящая через ее вершину.
Ориентировать ось О'у' можно в любую сторону. Теперь остается только
указать положительное направление оси О'х'. Имеются формулы,
которые выражают координаты положительного вектора на оси
О'х через коэффициенты общего уравнения F(xty)=0
параболы в прямоугольной системе координат. Но мы их приводить не
станем. Вместо этого предложим способ, позволяющий
преобразовать общее уравнение параболы в каноническое и найти
формулы перехода к канонической системе координат. Для этого
рассмотрим конкретный
Пример. Пусть линия Г задана уравнением
х2—4ху + 4у2+4х—Зу—7=0. (94)
Квадратичная часть уравнения является полным квадратом,
значит, мы имеем дело с линией параболического типа. Уравнение
(89) ее оси имеет вид
M-.f-f)
129
Ось симметрии является осью 0'х\ которая имеет уравнение
*'-0.
Предположим, что формулы
х'=сих+с12у+аи
У'=С2{Х+С22у+а2
выражают канонические координаты через исходные. Тогда
прямая
с2\х+с22у+а2~0
является осью параболы. Следовательно, существует такой
коэффициент пропорциональности к, что
c2lx+c22y+a2=k(x—2y+ 1).
Поскольку матрица
* с\\ с\2
II ^21 сгч II
ортогональна, имеем c22i Ч-с222=1, откуда £—±1/У5. Преобразуем
наше уравнение (94), выделяя полный квадрат выражения
х — 2у+\
±1/5 *
Имеем
х2—4ху + 4у2 + 4х—Зу—7=
= 5 ( *"Xyg * )2-(2x-4{/ + l) + 4x-3y-7=0t
или
Правая часть этого уравнения пропорциональна х', и
коэффициент пропорциональности положителен. Из ортогональности
матрицы С вытекает, что
„,_—2х-у + 8
Таким образом, уравнение (94) имеет вид
130
Переходим к новым прямоугольным координатам
V5 '
х —2у+ 1
В этих координатах парабола имеет уравнение
5у''=У5*', или /=-L-x'.
Параметр параболы равен 1/2У5.
Теперь о расположении параболы. В столбцах матрицы С*
или в строках матрицы С стоят координаты векторов ортонорми-
рованного репера 0't\t2'% определяющего каноническую систему
координат О'х'у'. Следовательно,
,-! yg· т/5 г v-(± yg · т ys J
Расположение параболы изображено на рис. 56. Положительное
направление оси О'у' можно выбрать произвольно.
131
Глава V
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
§ 44. ПРЕОБРАЗОВАНИЯ
44.1. Определение. Преобразованием множества X в себя
называется произвольная биекция /: Х-+Ху т. е. взаимно
однозначное отображение множества X на себя. Множество всех
преобразований множества X в себя обозначим через Тг(Х).
Преобразования конечного множества называются его
подстановками или перестановками. Множество подстановок конечного
множества, состоящего из η элементов, является группой,
называемой симметрической группой Sn.
Если f и g— преобразования множества Ху то их композиция
g°f также является преобразованием. Преобразованием также
будет и отображение f-1, обратное к преобразованию f. Поэтому
множество Ίν(Χ) образует группу, операцией умножения в
которой служит композиция преобразований, единицей является
тождественное преобразование id*.
Пусть G— подгруппа группы Ίτ(Χ). Скажем, что множества
Уь Y2czX G-эквивалентны, если существует преобразование g^G,
отображающее множество Y\ на множество Уг.
44.2. Предложение. Отношение G-эквивалентности
является отношением эквивалентности на множестве Р(Х) всех
подмножеств множества X.
Доказательство предоставляется читателю.
Таким образом, множество Р(Х) распадается на классы G-
эквивалентных между собой подмножеств. При этом, чем
больше группа G, тем больше классы G-эквивалентности, тем больше
«похожих» между собой фигур.
В геометрии рассматриваются различные группы
преобразований. Так, изучаемая в школе эвклидова геометрия исследует те
свойства фигур, которые не меняются при движениях (изометри-
ях); равными называются фигуры, которые можно перевести
одну в другую движением.
В аналитической геометрии наряду с изометрическими
преобразованиями рассматриваются также аффинные и проективные
преобразования.
§ 45. ОПРЕДЕЛЕНИЕ И СВОЙСТВА АФФИННЫХ ПРЕОБРАЗОВАНИЙ
45.1. Определение. Преобразование f:En-+Ent /1=1,2,3,
прямой, плоскости или пространства называется аффинным, если
существуют две аффинные системы координат Ох\... хп и 0'х\'...
... Хп9 такие, что координаты любой точки М^Еп в первой
системе координат совпадают с координатами е образа f(M) во
второй системе координат (см. рис. 57). В этом случае говорим, что
132
аффинное преобразование / ассоциировано с двумя системами
координат Οχχ ...Хп и Ο'χχ ... Хп или с двумя реперами Ot\... е„ и
u ei ... ел .
Рис. 57
Мы подробно исследуем аффинные преобразования плоскости
π=£2. При этом мы в основном остановимся на свойствах
аффинных преобразований, общих для прямой, плоскости и
пространства, обсуждая иногда различия между плоским и
пространственным случаями.
45.2. Преобразование векторов, порожденное аффинным
преобразованием. Пусть f — аффинное преобразование плоскости
(пространства), ассоциированное с двумя системами координат
Ох{...хп (старой) и Ο'χχ ...Хп (новой).
Рассмотрим вектор MN. Поскольку координаты вектора
получаются вычитанием координат его начальной точки из координат
его конца, координаты вектора f(M)f(ti) относительно нового
репера те же, что и координаты вектора MN относительно
старого репера.
Таким образом, получаем отображение
f: Vect (л)-> Vect (я),
определяемое равенством
f(MN)=f(M)f(N). (1)
Отображение f определяется также равенством координат
вектора а и его образа f(a) (в разных·реперах). Поэтому определение
—,—*
(1) не зависит от точки приложения вектора a=MN.
Поскольку отображение / определяется равенством координат
вектора и его образа, оно является изоморфизмом векторного
пространства Vect (л) на себя. Более точно, отображение f
является композицией двух изоморфизмов
g: Vect (n) -> Rn и h: Rn -> Vect (n).
Первый изоморфизм g ставит в соответствие вектору a==Vect(n)
набор его координат в старом репере, а второй изоморфизм h
133
переводит набор чисел (X|,...,xn)ERn в вектор с координатами
хи .., Хп в новом репере.
Изоморфизм / называется линейным отображением,
порожденным аффинным отображением f.
45.3. Предложение. Пусть f: Еп-+Еп — аффинное
преобразование и Оег... еЛ — произвольный репер в Еп. Тогда f(0)fx
Χ(*ι) ... f(««) — это единственный репер, такой, что
преобразование f ассоциировано с реперами Ое\..еп и f(0)f(t\) .../(еп).
Доказательство. Поскольку линейное отображение f,
являясь изоморфизмом, переводит линейно независимую систему
векторов в линейно независимую, f(0)f(e{) ...f(tn) — репер. Пусть
Μ — произвольная точка с координатами (хи..., хп) в репере
Ое{... еп. Это означает, что
В силу линейности отображения / имеем
f(0)f(M)=J(OM)=x1J(tl) + ... + xj(tn).
Но это равенство эквивалентно тому, что точка f(M) имеет
координаты (χι,...,*я) в репере f(0)f{tx) .../(е„).
Осталось проверить единственность репера О'е/... ел', такого,
что преобразование f ассоциировано с реперами Ot\... е„ и О'е/...
...еп'. Для точки Μ с координатами (хи..., хп) в репере Oei...ert
единственной точкой с теми же координатами в репере Се/... еп'
является точка f(M). Поэтому f(O), имея нулевые координаты,
совпадает с О'. Далее, пусть е*«ОЛ£*. Тогда f(^i)=f(0)f(Mi) =
=07(Λί*·)·Ηο /(Λίί) — единственная точка, все координаты которой
в новом репере равны нулю, кроме ι-й, которая равна 1.
Следовательно, f(Μι)—это конец взктора е/, отложенного от точки О',
т. е. /(ег)=е/. Предложение доказано.
45.4. Предложение. Множество всех аффинных
преобразований f:En-+En образует подгруппу группы Ίν(Εη),
называемую группой аффинных преобразований Еп.
Доказательство. Тождественное отображение
ассоциировано с любой парой совпадающих реперов. Если преобразование
f ассоциировано с реперами Ое\... ел и 0'е/... еЛ', то обратное
преобразование ассоциировано с реперами O'e/ ... еп' и Ot\.. ел.
Если fug — аффинные преобразования, первое из которых
ассоциировано с реперами Oei...en и О'е/ ...еп', то из 45.3 легко
следует, что композиция go/ ассоциирована с парой Oei...en и
e(0')g(e\') ...Цеп). Предложение доказано.
45.5. Предложение. При аффинном преобразовании
а) плоскость переходит в плоскость;
б) сохраняется параллельность плоскостей;
в) прямая переходит в прямую;
134
г) сохраняется параллельность прямых;
д) сохраняется деление отрезка в данном отношении.
Доказательство, а) Плоскость π есть множество всех
точек пространства, задаваемых уравнением
Ax+By+Cz+D=0 (2)
в некоторой аффинной системе координат Охуг. Пусть аффинное
преобразование f ассоциировано с парой систем координат Охуг
и О'х'у'г'. Тогда образ плоскости f(ji) описывается тем же
уравнением (2) в системе координат О'х'у'г', т. е. является
плоскостью.
б) Параллельность плоскостей π и π' равносильна тому, что
они не пересекаются. Из бисктивности преобразования f
вытекает, что плоскости /(π) и f(n') также не пересекаются.
в) В случае аффинного преобразования плоскости
рассуждение такое же, как и в пункте а). В пространстве прямая /
является линией пересечения двух различных плоскостей πι и яг.
Тогда f(l)czf(ji\)flf(jt2). Переход к обратному преобразованию f-1 с
учетом а) показывает, что f(/)z>f(jti)f|f(ji2).
г) Для прямых на плоскости рассуждение такое же, как и
в п. б). Прямые в пространстве параллельны, если они лежат в
одной плоскости и не пересекаются. Поэтому утверждение
вытекает из а), в) и биективности преобразования f.
д) Точка Ρ делит отрезок ΜΝ в отношении λ, если
В силу линейности отображения / имеем
7(MP)=Xf(PN)f
а это согласно (1) эквивалентно тому, что
f(M)f(P)=Xf(P)f(N).
Предложение доказано.
Условие д) является характеристическим для аффинных
преобразований, т. е. имеет место
45.6. Предложение. Преобразование f является аффинным
тогда и только тогда, когда оно сохраняет деление отрезка в
данном отношении.
Доказательство достаточности, отнюдь не тривиальное,
предоставляется читателю в качестве задачи.
45.7. Теорема. Существует единственное аффинное
преобразование плоскости, переводящее данную тройку не лежащих на
одной прямой точек О, Μ, Ν в другую тройку не лежащих на
одной прямой точек О', Μ', Ν' той же плоскости.
Аналогичное утверждение верно для пространства и четверки
точек, не лежащих в одной плоскости.
135
Доказательство проведем для плоскости. Для
проверки существования достаточно взять аффинное преобразование f,
ассоциированное с реперами Ot\t2 и 0'ei'e2', где
e,=OAi, e2=CW, e[=0'M\ ео=0'ЛГ.
Для доказательства единственности достаточно проверить, что
аффинное преобразование /, переводящее точки О, Μ, Ν в точки
О', Μ', Ν\ ассоциировано с описанными выше реперами Oeie2 и
О'е/ег'. Это непосредственно вытекает из предложения 45.3.
45.8. Аналитическая запись аффинного преобразования. Пусть
аффинное преобразование f плоскости ассоциировано с реперами
Oeie2 и 0'ei'e2'. Пусть
С =
с η с12
С21 С22
— матрица перехода от базиса еье2 к базису еЛег'. Пусть,
кроме того, известны координаты аи #2 нового начала О' в исходной
системе координат Оху. Тогда координаты (х,у) произвольной
точки Μ и координаты (х\у') ее образа ΛΓ=/(λί) в исходном
репере связаны соотношениями
x'=cux+c12y + av
y'=c2lx + c22y + a2
В самом деле, имеем
χ
У
:1
0'ЛГ = (еь е2)
Поэтому
=(«i. ег)С
(3)
(4)
OM'=00' + 0'M'=(tu е,) 1
II а2
+ («1. е2>С
Итак,
(βι. ej)
χ'
У'
= ОМ'=(е
ι. *j\c\\*
L \\У
+
«ι
Последнее равенство представляет собой векторную запись
уравнений (3).
Аналогичные формулы
х,=сах + с1д+сиг + а1,
У'=сах+спу + CggZ+а2,
г' =с81-«Г+сзгу+с33г4-а3
справедливы для аффинного преобразования пространства.
136
(5)
Наоборот, пусть на плоскости фиксирована система координат
Оху, порожденная репером Ое{е2. Пусть отображение f переводит
точку М(х, у) в точку /(Λί)=Λί'(χ/,ι//), где х\ у' задаются равен-
\ с с I
ствами (3), u 12 \Ф0. Тогда отображение f является аффин-
I ^21 С22 I
ным преобразованием, ассоциированным с репером Oeie2 и
0't\t2\ где точка О' имеет координаты (аи а2) и
(ei, е2)=(е1э е2)С.
В самом деле, пусть произвольная точка N плоскости имеет
координаты (ξ, η) и (ξ',η') в реперах Oext2 и О'е/ег'
соответственно. Мы знаем (см. § 23), что в этом случае
1=Сц1'+спг\' + а19 | 6
i\=c21l'+c22r\' + a2. 1
В качестве точки N возьмем точку f(Λί), которая в репере Oeie2
имеет координаты (х',у')> определяемые соотношениями (3). Ее
координаты (ξ', η') в репере О'е/е/ удовлетворяют
соотношениям (6):
xf = c11l,+cX2r\f + a1,
У'=сг11' + с22х\' + а2.
Сравнивая эти равенства с равенствами (3), получаем ξ'=*, η'=
=*/. Итак, точка Μ с координатами (х, у) в репере Oe{t2
отображением f переводится в точку f(M) с координатами (х, у) в
репере 0/е1'е2/, что и требовалось доказать.
45.9. Замечание. Если соотношения (3) дают
аналитическую запись аффинного преобразования /, то формулы
χ z=cux-\-c12y, \ .„.
у'=с21х + с22у J
представляют собой аналитическую запись (в базисе еь е2)
порожденного этим преобразованием линейного отображения f, т. е.
вектор а=хе1 + уе2 переходит в вектор f {а)=х'е\ + у'е2. В самом
деле, положив а=(Ж, имеем f (a)=0'Af'f а дальше надо
воспользоваться равенством (4).
§ 46. АФФИННАЯ КЛАССИФИКАЦИЯ ЛИНИЙ ВТОРОГО ПОРЯДКА
Из определения аффинного преобразования и предложения
45.3 вытекает
46.1. Предложение. При аффинном преобразовании f
плоскости линия второго порядка Г переходит в линию второго
порядка. Более того, для любой аффинной системы координат
Оху существует аффинная система координат О'х'у', в которой
137
уравнение линии f(T) совпадает с уравнением линии Г в системе
Оху.
46.2. Предложение. Инвариантами аффинных
преобразований являются центры, асимптотические направления и
асимптоты линий второго порядка.
Это означает, что если f: Е2-+Е2 — аффинное преобразование;
Г — линия второго порядка; точка Я, вектор а, прямая /
являются соответственно центром, асимптотическим направлением,
асимптотой линии Г, то f(P), f (a), /(/) будут соответственно
центром, асимптотическим направлением, асимптотой линии f(T).
Предложение 46.2 непосредственно вытекает из 46.1,
поскольку упомянутые элементы (центры, асимптотические направления,
асимптоты) выражаются уравнениями, однозначно задаваемыми
уравнением данной линии второго порядка.
46.3. Теорема. Произвольная линия второго порядка
посредством аффинного преобразования переводится в одну из
следующих линий, заданных в некоторой прямоугольной системе
координат уравнениями
1) jc2 + ^=i;
2) х* + у*= — 1,
3) х2 + #2=0;
4) х2— tf=\\
5) χ2 —1/ = 0\
6) у2 = х\
7) y2=U
8) y2=-U
9) ί/2 = 0.
Доказательство. Выписанные здесь уравнения
представляют собой в простейшем виде канонические уравнения 1)—9)
из теоремы 33.1. Поэтому достаточно указать аффинное
преобразование, переводящее каждую из линий 1)—9) из 33.1 в линию
с тем же номером из 46.3. Доказательство проведем для случая
эллипса (уравнение 1)). Другие случаи рассматриваются
аналогичным образом.
Итак, эллипс Г задан в некоторой прямоугольной системе
координат О'х'у' уравнением
a2 &2
Нам надо перевести его в окружность S1, заданную в другой
прямоугольной системе координат Оху уравнением х2+#2=1
(рис. 58). Искомое аффинное преобразование f мы построим как
•композицию аффинных преобразований f\ и /2. Первое из них в
системе координат О'х'у' имеет следующую аналитическую запись:
138
При этом эллипс Г перейдет в окружность S0l=fi(r),
задаваемую в системе О'х'у' уравнением х'2 + у'2=1 (рис. 59). Второе
аффинное преобразование f2 будет ассоциировано с парой
систем координат О'х'у' и Оху. Поскольку окружности So1 и S1
имеют в этих системах одинаковые уравнения, одна из них
перейдет в другую. Теорема доказана.
Рис. 58
Рис. 59
46.4. Теорема. Линии второго порядка, имеющие
различные названия, аффинно неэквивалентны.
Доказательство. Сначала различим между собой линии
второго порядка, имеющие более одной вещественной точки.
Линии, содержащие прямую, неэквивалентны эллипсу, гиперболе я
параболе, поскольку никакие три точки любой из этих кривых не
лежат на одной прямой (см. § 38). Предложение 46.2 позволяет
различить между собой эллипс, гиперболу и параболу: парабола
не имеет центра, эллипс не имеет асимптотических направлений.
Линии, распадающиеся на прямые, можно различить по центрам
симметрии. Пересекающиеся прямые имеют единственный центр
симметрии, а параллельные и совпадающие прямые — линию
центров. Любой центр симметрии совпадающих прямых лежит на
них, а для параллельных прямых это не так.
139
Единственная линия, содержащая только одну вещественную
точку (пара мнимых пересекающихся прямых) очевидно не
может быть аффинным преобразованием переведена ни в какую
другую линию. То же сауое верно и относительно линий, не
имеющих ни одной вещественной точки (мнимый эллипс и пара
мнимых параллельных прямых). Остается только различить их
между собой. С теоретико-множественной точки зрения эти линии,
представляя собой одно и то же пустое подмножество
вещественной плоскости, эквивалентны между собой относительно любой
группы преобразований. Различить их можно на комплексной
плоскости (см. 38.2). В этом случае любая вещественная прямая
пересекает мнимый эллипс либо по одной, либо по двум
комплексным точкам, в то время как прямая асимптотического
направления у=0 совсем не пересекает пару мнимых параллельных
прямых у2+ 1=0. Теорема доказана.
§ 47. ОПРЕДЕЛЕНИЕ И СВОЙСТВА ИЗОМЕТРИЧЕСКИХ
ПРЕОБРАЗОВАНИЙ
47.1. Определение. Аффинное преобразование $:Еп-+Е'\
az=1,2, 3, называется изометрическим, если оно ассоциировано с
двумя прямоугольными системами координат.
Изометрические преобразования называются также
движениями. Если реперы, с которыми ассоциировано движение, одноимен-
ны, то оно называется собственным, в противном случае —
несобственным.
Обоснованием определения изометрического преобразования
служит
47.2. Теорема. Преобразование f: Еп-+Еп, /г= 1, 2, 3, являет-
с я изометрическим тогда и только тогда, когда оно сохраняет
расстояние между точками, т. е. когда
P(Aflt М2)=р(!(Мг), f(M2)) (8
для любых точек МиМ2^Еп.
Доказательство проведем для случая плоскости. Пусть
f — изометрическое преобразование, ассоциированное с
прямоугольными системами координат Оху и О'х'у'. Пусть точки М}
и М2 имеют в исходной системе координат Оху координаты
(хьУ\) и (хьУт). В силу прямоугольности этой системы
координат (см. § 13)
ρ(Λί„ M2)=V(Xi-X2)2 + (Ui ί/2)ζ.
Точки f(Afi) и f(M2) имеют те же координаты (хиУ\) и (х2, {/г),
но уже в новой системе координат О'х'у', которая также
прямоугольна. Поэтому
ptfiMj, 1(М2))=У(Х1^х2)* + Ш2У
и равенство (8)' проверено.
140
Пусть теперь преобразование / сохраняет расстояние между
точками. Тогда оно, очевидно, сохраняет деление отрезка в
данном отношении. Поэтому согласно 45.6 преобразование f является
аффинным. Возьмем в плоскости какой-нибудь ортонормирован-
ный репер Ое{е2. Для завершения доказательства остается в силу
45.3 показать, что репер f(0)f(t{)f(e2) также ортонормирован.
Пусть концы векторов е, и е2, отложенных от точки О, находятся
в точках М{ и М2. Тогда ортонормированность репера Oeie2
эквивалентна тому, что треугольник МхОМ2 имеет стороны с длинами
1, 1, У2. Но такие же длины сторон будут и у треугольника
f{Mi)f(0)f(M2), так как отображение f сохраняет расстояние
между точками. Следовательно, репер f(0)f(ei)f(t2)
ортонормирован. Теорема доказана.
47.3. Замечание. При доказательстве теоремы 47.2 мы
применили предложение 45.6, доказательство которого было
предоставлено читателю. Но аффинность преобразования f,
сохраняющего расстояние между точками, можно доказать и не опираясь
на предложение 45.6. Для этого заметим сначала, что
отображение f переводит равные векторы в равные, В самом деле, равен-
>. *.
ство векторов M{N{ и M2N2 эквивалентно тому, что
четырехугольник M{NXN2M2 является параллелограммом. Но тогда
параллелограммом будет и четырехугольник f(M{)f(N{)f(N2)f(M2).
(Обратим внимание читателя на то, что, делая такое заключение, мы
опираемся не только на сохранение длин сторон
четырехугольника но и на сохранение длин его диагоналей.) Итак,
преобразование f порождает отображение f: Vect(2)-^Vect(2).
Отображение это линейно опять-таки в силу сохранения преобразованием
f параллелограммов и деления отрезка в данном отношении.
Поэтому для завершения проверки аффинности преобразования f
достаточно доказать
47 А. Предложение. Пусть преобразование f : Еп-+Еп
переводит равные векторы в равные, и пусть порождаемое этим
преобразованием отображение frVect(fl) Vect(n) линейно.
Тогда преобразование f аффинно.
Доказательство. Отметим прежде всего, что, поскольку
/ — преобразование, отображение f также биективно. Поэтому оно
является изоморфизмом и, в частности, базис переводит в базис.
Пусть Οβιβ2 — какой-нибудь репер на плоскости. Тогда f(0)f{e{)
f(e2) —тоже репер. Пусть произвольная точка Μ имеет в репере
Oeie2 координаты {х, у). Это означает, что
0Λ4=χβ1 + ί/«2·
Тогда из линейности отображения f получаем
/ (О) f (M)= 7 Ш)=$ (е>) + у1{чУ
Но это равенство означает, что точка f(M) имеет в репере
f(0)f(e{)f(e2) координаты (х,у). Таким образом, преобразование
141
f ассоциировано с парой реперов и, следовательно, аффинно.
Предложение доказано.
47.5. Замечание. Легко видеть, что рассуждения,
приведенные в 47.3, и предложение 47.4 практически доказывают
предложение 45.6. Надо проверить только, что если преобразование f
сохраняет деление отрезка в данном отношении, то оно
параллелограмм переводит в параллелограмм. Для этого надо заметить,
что f переводит прямую в прямую, а параллельные прямые — в
параллельные. Последнее утверждение в случае плоскости
вытекает из того, что параллельные прямые — это те, которые не
пересекаются. В случае пространства надо предварительно
показать, что преобразование f плоскость переводит в плоскость.
Из теоремы 47.2 вытекает
47.6. Предложение. Изометрические преобразования
образуют подгруппу группы всех аффинных преобразований.
47.7. Аналитическая запись изометрического преобразования.
Аффинное преобразование f, записанное в прямоугольной
системе координат Оху формулами
xf=cux + c12y + a1 J
yf=c21x+c22y + a2 J
является изометрическим тогда и только тогда, когда его
матрица
С = Сп Cl2
II С2\ С2Ч II
ортогональна.
Доказательство. Пусть система координат Оху задает*
ся ортонормированным репером Oeie2. Из 45.3 и 45.8 следует, что
матрица С является матрицей перехода от базиса еье2 к базису
f(et),f(e2). Поэтому ортогональность матрицы С равносильна ор-
тонормированности базиса f(ei),f(e2) (см. § 30). С другой
стороны, при доказательстве теоремы 47.2 мы показали, что
изометрическое преобразование переводит ортонормированный репер в ор-
тонормированный. Для завершения доказательства утверждения
47.7 остается вспомнить определение изометрического
преобразования и еще раз обратиться к предложению 45.3.
§ 48. КЛАССИФИКАЦИЯ ДВИЖЕНИЙ ПЛОСКОСТИ
48.1. Теорема. Всякое собственное движение плоскости
представляет собой либо параллельный перенос, либо поворот
вокруг некоторой точки на определенный угол и. Всякое
несобственное движение плоскости является отражением относительно
некоторой прямой вместе с возможным сдвигом вдоль этой прямой.
142
При надлежащем выборе прямоугольной системы координат
эти преобразования имеют соответственно следующую
аналитическую запись:
*■=*+<.,.,
у =у + а2, )
x' = xcosa—ysina, |
у' = л: sin a + j/ cos a, (
х'-х + а, |
у'=—у- 1
Доказательство. Зафиксируем на плоскости
положительное направление вращения, например, против часовой стрелки.
Это дает нам ориентацию плоскости. Все реперы при этом
разбиваются на положительные и отрицательные. Возьмем
прямоугольную систему координат Оху, связанную с каким-нибудь ортонор-
мированным положительным репером Ое^г. В этой системе
координат наше движение записывается формулами
x9=cux + c19y + al9 \ (3)
у' = с21х + с22у + а2, J
где матрица С ортогональна. Если С — единичная матрица, то
формулы (3) превращаются в (9). Если СФЕ, но f — собственное
движение, то С как матрица перехода между одноименными
реперами Otxt2 и f(0)f(t\)f(ег) имеет положительный
определитель. Мы знаем (см. § 29), что в этом случае
cos a —sin a
sin a cos a
Покажем, что существует точка Οι, которую преобразование
оставляет на месте. Для этого надо показать совместность
системы уравнений
х1==с11х1 -}- с12уч -f-fli,
yl = c2lxi + cX2yl+al%
или с учетом конкретного вида матрицы С
хх(\ —cosa) + y} sina=a1, )
— xls\na-\-yi(\—cosa) = a2. \
Определитель этой системы равен (1—cosa)2-f sin2a. Он отличен
от нуля, так как cosa=^l (C¥=E).
Итак, движение f имеет неподвижную точку Оь Тогда в
репере Oit{e2 оно записывается формулами (10). В самом деле, в
реперах Oe{t2 и Oieie2 аналитические записи преобразования f
имеют одну и ту же матрицу С, поскольку согласно 45.9 посредством
143
этой матрицы в базисе еье2 записывается линейное отображение
/· С другой стороны, свободные члены а{ и а2 в записи (3)
движения f в репере OiCie2 равны нулю, поскольку согласно 45.8
(аь а2) — это координаты точки f (Οι) =Οι в репере Oieie2.
Для завершения исследования собственных движений
остается отметить, что фор-мулы (10) и являются формулами поворота
плоскости на угол α относительно начала координат. Это следует
из того, что векторы еь е2 при этом движении переходят в
векторы eiCosa+e2sina, —e^ina-f e2cosa соответственно, т. е.
поворачиваются на угол α (см. § 30).
Пусть f— несобственное движение. Тогда определитель
матрицы С в записи (3) отрицателен. В этом случае (см. § 29)
г II cos a sin a ||
II sin a —cos a ||
Покажем, что найдется ненулевой вектор е, который отображение
/ оставляет на месте. Аналитическая запись (7) отображения
имеет вид
x' = xcosa + i/sina, |
y'=xsina — ί/cosa. f
Нам надо найти ненулевое решение системы
x=xcos α-(-у sin a, ]
i/=xsina—ί/cosa. J
или
x(l—cosa)—ysina=0, |
— xsina + y(l+cosa) = 0. (
Определитель этой системы равен (1—cosa) (1 + cosa)—sin2a=0.
Следовательно, ненулевое решение она имеет.
Но если f(e)=e, то для любого пропорционального вектора
е'=Хе имеем
7(е')=7(*е)=Я?(е)==Яе=е\
Следовательно, существует такой единичный вектор е/, что
f(t\)=ti'. Дополним его до ортонормированного базиса е/,е2'.
Поскольку f — несобственное движение, ортонормированные
базисы е/, *е2' и /(е/), f(e2') разноименны. Но f(ei')=ei', значит,
f(βι') =—е2'. Таким образом, матрица перехода от базиса е/,
е2' к базису f (e/),f (е2') имеет вид
II о
144
Поэтому из 45.3 и 45.8 вытекает, что в репере Oei'e2' движение
/ записывается формулами
у =—у+ь2, J
где числа Ьи b2f вообще говоря, отличны от чисел аи α>ι из
первоначальной записи (3). Возьмем теперь точку О' с координатами
(bi/2, Ь2/2) в репере Oei'e2'. Движение f переводит точку О' в
точку f(O') с координатами (bJ2 + blf —b2/2 + b2)=( — bu
— b2\, т. е. сдвигает ее на вектор 07(0')={^i» 0}=&1ei.
Поэтому в репере О'е/ег' точка f{0') имеет координаты (fci,0).
Следовательно, запись движения f в репере 0'ei'e2\ отличающаяся
от записи (12) этого движения в репере Ое/е/ только столбцом
свободных членов, имеет вид (11), где а=Ь\. Теорема доказана.
Глава VI
ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА
§ 49. ОСНОВНАЯ ТЕОРЕМА О ПОВЕРХНОСТЯХ ВТОРОГО ПОРЯДКА
49.1. Определение. Поверхностью второго порядка
называется всякое множество Φ точек пространства, которое в
некоторой аффинной системе координат Oxyz может быть задано
уравнением второй степени
011*2 + 022ί/2 + Язз*2 -г 2а12ху -f 2al3xz + 2a23yz +
+ 2aix + 2a2y-\-2a3z + a0=0. (1)
Как и в случае линий второго порядка, это определение
нуждается в некоторых пояснениях.
1) Если в какой-нибудь аффинной системе координат
множество Φ описывается уравнением второй степени (1), то в любой
другой аффцнной системе координат его также можно задать
уравнением второй степени. Для этого достаточно вместо
переменных x,y,z в уравнение (1) поставить их аыражения через
новые переменные x',y',z' (см. § 28).
2) Всякая плоскость в пространстве может быть описана как
уравнением первой степени
Ax+By+Cz+D=0,
так и уравнением второй степени
(Ax+By+Cz + D)*=0. (2)
Конечно же плоскость является поверхностью первого порядка,
но в аналитической геометрии считают, что уравнение (2)
описывает поверхность второго порядка, которая называется парой
совпадающих или слившихся плоскостей.
3) Наконец, принципиально различные уравнения могут
описывать одно и то же множество. Например, каждое из уравнений
χ2+1=0 и х2 + у2+1=0 описывает пустое множество в
(вещественном) пространстве. Но если мы перейдем от вещественного к
комплексному пространству по аналогии с тем, как в § 38 мы перешли к
комплексной плоскости, то упомянутые выше уравнения будут
иметь различные множества решений. Поэтому в аналитической
геометрии считается, что эти уравнения описывают различные
поверхности второго порядка.
49.2. Теорема. Для любой поверхности второго порядка
существует прямоугольная система координат Oxyz, в которой
уравнение этой поверхности имеет один из следующих 17 видов:
146
1) эллипсоид
χ2 , у2 , ζ2
= 1;
α2 ft2
2) мнимый эллипсоид
χ2 и2 ζ2
3) однополостный гиперболоид
^ί—I-JC ί 1;
α2 Ь2 с2
4) двуполостный гиперболоид
χ2 у2 ζ2
"α2" "b2 с2"*- ~ '
5) конус
х2 и2 ζ2
-—|—г — =0;
α2 b2 с2
6) мнимый конус
γ2 *Л уЧ
а* Ь* <*
7) эллиптический параболоид
χ2 >-у% -~2г (р, ?>0);
гический параб<
-2г (р, ?>0);
Ρ <7
8) гиперболический параболоид
jfi £
р я
9) эллиптический цилиндр
α2 Ь2
10) мнимый эллиптический цилиндр
у2 ,»2.
а2 ^Ь2
11) гиперболический цилиндр
j? !£_=1·
а2 ь2
12) параболический цилиндр
у2=2рх;
147
13) пара пересекающихся плоскостей
а2 Ъ2
14) пара мнимых пересекающихся плоскостей
JL^JL-O;
а2 ^ ft2
15) пара параллельных плоскостей
У2=а2 (а^о);
16) пара мнимых параллельных плоскостей
у*+а2=*0 (а#0);
17) пара совпадающих плоскостей
Теорема эта будет доказана в § 44 второй части книги.
Уравнения 1)—17) называются каноническими уравнениями
поверхностей второго порядка.
§ 50. ЭЛЛИПСОИДЫ
50.1. Каноническое уравнение (вещественного) эллипсоида
имеет вид
jL+jL+jL=i. О)
α2 62 с2
Положительные числа а, 6, с называются полуосями
эллипсоида. Без ограничения общности (меняя, если нужно, оси координат)
можно считать, что в каноническом уравнении (3) а>>Ь>с.
Эллипсоид, изображенный на рис. 60, лежит в прямоугольном
параллелепипеде
—а^х^а, —&<#<&, —c<z<|c.
Если а=Ь, то сечения эллипсоида плоскостями z=ft, —c<:/i<
<с, суть окружности
радиусом гл=—Ус2—й2, вырождающиеся в точки при /i=±c.
с
Поэтому такой эллипсоид называется эллипсоидом вращения. Его
Jt2 Ζ2
можно получить вращением эллипса 1—г- = 1, у=0 во-
а2 с2
круг оси 2. Аналогичным образом при 6=с имеем эллипсоид вра-
148
тения, который получается вращением эллипса —рН ,
у=0 вокруг оси х. Наконец, при а=6=с эллипсоид (3) является
сферой радиусом а.
Рис. 60
Произвольный эллипсоид (3) получается из сферы
χ2+ι/2+ζ2==α2
посредством аффинного преобразования, являющегося
композицией двух сжатий вдоль осей у и ζ. Это аффинное преобразование
записывается следующим образом:
, , b , с
х==х, у'=—у, г =—ζ.
а а
Прежде чем исследовать произвольные плоские сечения
эллипсоида, выскажем одно общее утверждение.
50.2. Предложение. Пересечением поверхности второго
порядка плоскостью является лежащая в этой плоскости линия не
более чем второго порядка.
Доказательство. Возьмем такую систему координат Oxyzy
в которой данная плоскость имеет уравнение г=0. Получим
уравнение линии пересечения в координатах χ и у на этой плоскости,
если в уравнении (1) переменную ζ заменим нулем, т. е.
апх2 + 2апху + а^уг + 2ахх + 2а2у + а0=0.
Это, как мы знаем, общее уравнение линии второго порядка. Но в
нашей ситуации возможен случай ах\ ==012=022=0. Тогда в
пересечении получается прямая (ах2+а£>Ь), или оно задается
уравнением а0=0, которое описывает либо пустое множество (а<г^0),
либо всю плоскость (α0=0). Предложение доказано.
50.3. Предложение. Любое плоское сечение эллипсоида
есть либо эллипс, либо мнимый эллипс, либо пара мнимых переев-
кающихся прямых.
149
Доказательство. Пусть эллипсоид задан каноническим
уравнением (3). Что касается плоскости π, зададим ее
параметрическими уравнениями
x=x0 + a1u-{'$iv, 1
У=Уо + а2и + №, | (4)
так, что векторы m1={ai> <*2, аз} и m2={Pi, β2, β3} образуют орто-
нормированный базис в пространстве всех векторов, лежащих в
этой плоскости. Тогда параметры и и ν будут прямоугольными
координатами переменной точки этой плоскости. При
подстановке в уравнение (3) вместо переменных х, у, ζ из выражений
через параметры и и ν из (4) получим уравнение плоского сечения
в координатах иу v. Простой подсчет показывает, что
квадратичная часть этого уравнения будет иметь вид
+
ti
β!
ьг
■)■
(5)
Рассмотрим вспомогательные векторы
"Н—. -г-· —!■ пН—. -is —)·
[а Ь с ) (а Ь с )
С их помощью многочлен (5) допускает более компактную запись
п\и2 + 2(щ, щ)ж + п*р2.
Подсчитаем инвариант δ уравнения нашего плоского сечения.
Имеем
6=
η? (Πι, п2)
П2
=n?nf-(nlf п2)2=
(Πι, П2)
=п2п2(1— cos2q>)=n2n2sin2(p,
где φ — угол между векторами пх и п2. Но векторы Πι и п2
линейно независимы, поскольку их пропорциональность влекла бы
пропорциональность перпендикулярных векторов тп\ и т2. Поэтому
sincp^O и, следовательно, δ>0. Последнее же условие и
характеризует нам три линии эллиптического типа (§ 34). Таким
образом, никаких других линий в плоском сечении эллипсоида быть не
может. В то же время сечение плоскостями 2=ή эллипсоида (3)
показывает, что все три возможности реализуются. Предложение
доказано.
50.4. Задача. Доказать, что среди плоских сечений
произвольного эллипсоида имеются окружности.
150
§ 51. ГИПЕРБОЛОИДЫ
51.1. Двуполостный гиперболоид имеет каноническое уравнение
γ2 //2 72
JL- + 1 —= — 1, (6)
а2 Ь2 с2 w
где а>Ь. Изображен двуполостный гиперболоид на рис. 61.
Если α=ί>, то сечения двуполостного гиперболоида
плоскостями z=/t, \h\>c, суть окружности. Поэтому такой гиперболоид
является гиперболоидом вращения. Его можно получить вращением
χ2 ζ2
гиперболы — р = — 1, у=0 вокруг оси ζ.
Произвольный двуполостный гиперболоид (6) получается из
гиперболоида вращения
х2 у2 ζ2
"^ о* ?~ ——
посредством аффинного преобразования, представляющего собой
сжатие оси у с коэффициентом Ь/а.
151
5t.2. В плоских сечениях двуполостного гиперболоида кроме
эллипсов и гипербол имеются и параболы. В самом деле, возьмем
плоскость
сх—az+ac=0. (7)
Эта плоскость проходит через точку Λί0(0, Ο, с) и параллельна
векторам
mi={0, 1, 0}, m2=( Дг, 0, . с ),
Параметрически эту плоскость можно задать следующим образом:
х= t^wo;
(8)
Параметры и и ν являются прямоугольными координатами на
плоскости, так как векторы т1 и т2 единичны л перпендикулярны
между собой. Заменяя в уравнении (6) переменные х9 у, ζ на их
выражения через параметры м, v из (8), получаем
2ν
-=о,
Ь2 Уа* + с*
или
и*=2 У_ v.
Уа*+с*
Это есть каноническое уравнение параболы с параметром
Р =
Уа*+с2
51.3. Определение. Прямая / называется прямолинейной
образующей какой-нибудь поверхности Ф, если 1аФ.
51.4. Предложение. Двуполостный гиперболоид не имеет
прямолинейных образующих.
Доказательство. Все прямые можно разделить на
прямые, пересекающие плоскость г=0, и прямые, параллельные этой
плоскости. Прямые, пересекающие плоскость г=0, не могут быть
прямолинейными образующими, поскольку эта плоскость не
пересекается с гиперболоидом (6). Остальные прямые лежат в
плоскостях г=й, пересечение которых с гиперболоидом (6) либо пусто
(|Л|<с), либо состоит из одной точки (\h\~c), либо является
эллипсом (\h\>c).
152
51.5. Одиополостный гиперболоид имеет каноническое
уравнение
-*-+-£--Ji--1, (9)
а2 Ь2 с2
где а>&. Изображен одиополостный гиперболоид на рис. 62.
Если а=Ь> то одиополостный гиперболоид является
гиперболоидом вращения, как и двуполостный. Произвольный одиополостный
гиперболоид, как и двуполостный, получается из гиперболоида
вращения посредством сжатия вдоль оси у.
51.6. Сечения однополостного гиперболоида плоскостями z=
=/г являются эллипсами. Эллипс
г2 и2
а2 Ь2
являющийся пересечением однополостного гиперболоида (9) с
плоскостью 2=0, называется горловым эллипсом, или эллипсом
горлового сечения данного гиперболоида.
Сечения гиперболоида (9) плоскостями x=h и ί/=Λ являются
гиперболами, кроме случаев х=±а, ι/=±&, когда эти гиперболы
превращаются в пересекающиеся прямые.
В качестве задачи читателю предоставляется доказать, что
при пересечении однополостного гиперболоида другими
плоскостями набор аффинных типов плоских сечений пополняетдя только
параболой и парой параллельных прямых.
Более конкретная часть этой задачи: доказать, что
плоскость (7) пересекает гиперболоид (9) по параболе, а после
параллельного переноса этой плоскости в начало координат — по паре
параллельных прямых.
51.7. Теорема. Через каждую точку однополостного
гиперболоида (9) проходят ровно две прямолинейные образующие.
Доказательство. Сначала решим эту задачу для
простейшего однополостного гиперболоида
х*+у>—ζ2=1 (10)
и, более того, для конкретной точки Λί0(1, 0, 0) на окружности
горлового сечения. Пусть т={а, β, у} — направляющий вектор
прямой /, проходящей через точку М0. Переменная точка Mt этой
прямой имеет координаты (1+α/, β£, yt)y где параметр /
принимает произвольные вещественные значения. Точка М(
принадлежит гиперболоиду в том и только в том случае, когда
(1 + α/)2 + β2ί2—γ2/2=1
или
(α2 + β2—ν2)*2 + 2αί=0. (11)
153
Поэтому прямая I содержится в гиперболоиде (10) тогда и только
тогда, когда левая часть уравнения (11) тождественно равна
нулю, т. е.
α2+β2—γ2=0, α=0.
Отсюда получаем с точностью до пропорциональности только два
направляющих вектора прямолинейных образующих:
"1{={0, 1, 1}, т2={0, 1,-1}.
Итак, для точки Мо(1, 0, 0) гиперболоида (10) утверждение
теоремы доказано.
Теперь покажем, что точку М0 можно перевести в любую
другую точку Μ гиперболоида (10) посредством аффинного
преобразования, которое этот гиперболоид отображает на себя. Поскольку
при аффинном преобразовании прямая переходит в прямую,
отсюда будет вытекать, что через точку Μ проходит столько же
прямолинейных образующих, сколько их проходит через точку М0.
Гиперболоид (10) является гиперболоидом вращения.
Следовательно, любая его точка может быть получена посредством
вращения вокруг оси ζ точки, лежащей на гиперболе
χ2—ζ*=\, у-0. (12)
Поэтому достаточно точку Λί0 перевести в произвольную точку
Λϊ(λγ0, Ο, г0) на этой гиперболе. Определим аффинное
преобразование / формулами
7Л 1
(13)
х'
У'
г'
=х0х
=
= Ζ0Χ
у;
+
+
ZqZ\
X0Z>
Поскольку *о2—2о2=1 согласно (12), определитель матрицы этого
преобразования равен 1. Значит, матрицей обратного;
преобразования f~* будет матрица
(И)
х0 0
0 1
г0 0
-г0
0
Х(
Непосредственная подстановка показывает, что /(Λί0)=Λί.
Покажем теперь, что отображение / переводит гиперболоид (10) в
себя. Согласно (13) имеем
х'2 + у'2—z'2=(x0x+z0zf + y2—(z0x + x0zf =
= (*1-г1)*2 + У2—(*g—4)*2=(согласно (Щ=х2+y2-z2=\.
Аналогично (с применением матрицы (14)) показывается, что
обратное отображение /_I также переводит гиперболоид (10) в себя.
154
Таким образом, преобразование / отображает гиперболоид (10)
на себя.
Для завершения доказательства теоремы остается заметить,
что аффинное преобразование, задаваемое формулами
х =—, У
а
Ь ' с
отображает гиперболоид (9) на гиперболоид (10).
§ 52. КОНИЧЕСКИЕ СЕЧЕНИЯ
52.1. Произвольный конус
х*}
=0,
а2 &*
где а>6, получается из конуса вращения или кругового конуса
(а=6) сжатием вдоль оси у. Конус вращения удобнее записывать
в виде
х2+у2—#2z2=0.
(15)
Плоскость 2=1 пересекает этот конус по окружности радиусом R.
В этом параграфе мы найдем все плоские сечения конуса (15).
Для этого достаточно рассмотреть плоскости, параллельные
оси у.
Произвольная плоскость, параллельная оси у, получается из
горизонтальной плоскости z=h поворотом ее вокруг оси у на
некоторый угол а. Такой поворот записывается следующим образом:
x'=xcosa —zsina;
у'= у;
z'=xsina +zcosa.
(16)
Это следует из того, что при преобразовании (16) вектор е2
остается на месте, а векторы еь е3 переходят в векторы eicosa-f
+ e3sina, —е! sina+e3cosa соответственно, т. е. поворачиваются
на угол α в плоскости Oxz (см. § 30). Плоскость z=h проходит
через точку Λί0(0, 0, h) и параллельна векторам βι={1, 0, 0} и
^^{О, 1, 0}. Из формул (16) следует, что после поворота этой
плоскости вокруг оси у на угол α получаем плоскость πα,
проходящую через точку Λί0'(—Л sin a, 0, Л cos α) и параллельную
векторам e/={cosa, 0, sin a} и е2. Запишем параметрические уравнения
плоскости л«:
х=—hsina + u cos a;
у= υ\
г— h cos a-f- и sin a.
(17)
155
Параметры и и ν будут прямоугольными координатами на этой
плоскости, определяемыми ортонормированным репером М0'е1'е2'.
Подставив выражения (17) в уравнение (15) и приведя подобные
члены, получаем уравнение
w2(cos2cc—R2sir\2a)+^—2uhcosas\r\a(l+R2) +
+ ft2(sin2a —/?2cos2a)=0 (18)
нашего плоского сечения в координатах и, и.
1) При cos2 a— #2sin2a=0 имеем #=ctga и, следовательно,
cos a sin a (1 + /?2)=cos asin a =ctg a=R.
sin2 a
Поэтому уравнение (18) принимает вид
v2=2hRu + h2(R2cos2a— sin2 a),
или после переноса начала системы координат α, ν
v>*=2hRu'. (19y
При ft>0 это есть каноническое уравнение параболы с
параметром p=hR (рис. 63), который при изменении h может принимать
a' U
\ !
\
Рис. 63
все положительные значения. При Л=0 получаем пару
совпадающих прямых.
Таким образом, мы доказали
52.2. Предложение. Плоским сечением конуса (15) может
быть парабола любого параметра.
156
2) Пусть теперь cos2 α—R2 sin2 α^Ο. Преобразуем уравнение
(18), выделив полный квадрат с переменной и. Получаем
(cos2a-^sin2a)L2-2^ (1 + *>«»«*'« +
L cos2 a — I?2 sin2 a
ft2 (1+К2)2 cos2 a sin2 a 1 ^=
(cos2 a — Я2 sin2 a)2 J
2 (1+*2)2 cos* a sin2 a _fe2(sin2a_^CQS2a)< (20)
cos2a-/?2sin2 a v '
Правая часть этого уравнения после очевидных преобразований
принимает вид
h2K2
cos2 a — /?2 sin2 a
После параллельного переноса системы координат м, υ
и>-=и ft О + К2) cos a sin a
cos2 a — #2 sin2 a
уравнение (20) превращается в
(cos2a—/^sin2a)a'2+t>'2= — . (21)
v ' cos2 a — /?2 sin2 a
или при ft^O
. = 1. (22)
Г /tW 1 Γ /ι2/?2 1
[ (cos2 a — #2sin2a)2 J [ cos2 a — R* sin2 a J
2э) Если cos2 a—/?2 sin2 a>0, то уравнение (22) есть
каноническое уравнение эллипса, малая ось которого параллельна оси у
(см. рис. 64).
При изменении угла α от 0 до arctg — отношение полуосей
R
а 1
Ь j/cos1»— #2 sin2 α
изменяется от 1 до +оо. Кроме того, при изменении h большая
полуось
аат щ*
cos2 α — R* sin2 α
принимает все допустимые значения. Таким образом, нами
доказано
52.3. Предложение. Плоским сечением конуса (15) может
быть эллипс любого размера.
157
Если в уравнении (21) А=0, то мы получаем пару мнимых
пересекающихся прямых.
2г) При cos2α—#2sin2a<0 уравнение (22) является
каноническим уравнением гиперболы, изображенной на рис. 65. Как и в
случае эллипса, фокальная полуось а принимает все
положительные значения, но для отношения полуосей имеется ограничение
_а_ 1 >—·
Ь >O?2sin*a-- cos2 a ^ R
ι ι .
Рис 64 Рис. 65
Следовательно, не всякая гипербола является плоским сечением
данного кругового конуса (15). Но изменяя R, можем получить
сколь угодно малые отношения полуосей. Таким образом, мы
доказали —
52.4. Предложение. Плоским сечением конуса (15)
может быть любая гипербола с отношением полуосей a/b^l/R.
Гипербола любого размера может быть плоским сечением какого-
нибудь кругового конуса.
Если в уравнении (21) Л=0, то мы получаем пару
пересекающихся прямых.
52.5. Итак, коническими сечениями являются: эллипсы,
гиперболы, параболы, пересекающиеся прямые, мнимые
пересекающиеся прямые, совпадающие прямые.
158
§ 53. ПАРАБОЛОИДЫ
53.1. Эллиптический параболоид имеет каноническое уравнение
-£- + -1_=2г, (23)
Ρ Я
где р>9>0. Плоскость ί/—0 пересекает этот параболоид по
параболе Λ:2=2ρ2, ί/=0 параметра р. Плоскости x=h пересекают его по
параболам y2=2qz—qh2/p, x=h параметра q. Поэтому
эллиптический параболоид может быть получен параллельным
перемещением одной подвижной параболы, когда ее вершина скользит по
другой неподвижной параболе. При этом параболы находятся в
перпендикулярных плоскостях, а их оси параллельны и
направлены в одну сторону (см. рис. 66).
53.2. Если p^q, то сечения параболоида (23) плоскостями
ζ=/ι>0 являются окружностями. Такой параболоид есть
параболоид вращения. Он может быть получен вращением параболы
χ2=2ρζ9 */=0 вокруг оси г. Произвольный же эллиптический
параболоид получается из параболоида вращения сжатием вдоль
какого-нибудь направления, перпендикулярного оси вращения.
53.3. Прямолинейных образующих эллиптический параболоид
не имеет. Доказательство такое же, как и для двуполостного
гиперболоида (§ 51).
53.4. Задача. Доказать, что любое вертикальное плоское се-
чение параболоида (23) является параболой параметра р\
изменяющегося в пределах от q до р.
53.5. Задача. Доказать, что любое невертикальное сечение
параболоида (23) является эллипсом, мнимым эллипсом или
парой мнимых пересекающихся прямых. При этом эллипс любого
размера является плоским сечением данного параболоида (23).
159
53.6. Гиперболический параболоид имеет каноническое
уравнение
Ρ Я
где р, <7>0. Плоскость t/=0 пересекает этот параболоид по
параболе x2=2pz, */=0 параметра р. Плоскости л:=Л пересекают его
по параболам f/2=—2qz+qh2lpy x=h параметра q. Но оси этих
парабол, в отличие от параболы, лежащей в плоскости ί/=0,
направлены в отрицательную сторону оси г. Гиперболический
параболоид, как и эллиптический, может быть получен параллельным
перемещением одной подвижной параболы, когда ее вершина
скользит по другой неподвижной параболе. При этом параболы
находятся в перпендикулярных плоскостях, их оси параллельны,
но направлены в разные стороны (см. рис. 67). Из этого
построения видно, что гиперболический параболоид имеет вид седла.
53.7. Предложен ие. Любое не вертикальное плоское сече-
ние гиперболоида (24) является гиперболой или парой
пересекающихся прямых.
Доказательство. Произвольную невертикальную
плоскость π можно записать в виде
Ах+Ву + z+C=0.
Эта плоскость проходит через точку О'(0, 0, —С) и
параллельна векторам ei'={l, 0, — А} и е2'={0, 1, —В}. Параметрические
уравнения этой плоскости
х=и, y=v, z=—С—Аи—Βυ
позволяют записать уравнение плоского сечения гиперболоида
(24) в аффинных координатах ut v на плоскости π:
— — — + 2(C + Au + Bv)=0. (25)
Ρ я
При фиксированных А и В и при изменении С (т. е. при
параллельном перемещении плоскости π) уравнение (25) представляет
собой уравнение гиперболы, которая лишь при одном значении С
превращается в пару пересекающихся прямых.
53.8. Предложение. Любое вертикальное плоское сечение
гиперболоида (24) является параболой или прямой.
Доказательство. Произвольную вертикальную плоскость
π можно записать в виде
Ах+ Ву + С=0, (26)
где можно предполагать, что А2 + В2=1 и В¥*0 (сечения
плоскостями x=h мы уже исследовали). Эта плоскость проходит через точ-
160
ку О'(О, —С/В, 0) и параллельна векторам е/={0, 0, 1} и е2'=-=
={—Ву Л, 0}. Из параметрических уравнений плоскости
х= —Βν, ι
J в
z = и
мы получаем уравнение плоского сечения гиперболоида (24) в
прямоугольных координатах м, υ:
-et-irhiL*. ,27,
Если qB2—pA2¥=0, то уравнение (27) является уравнением
параболы, ось которой, совпадая с осью и, параллельна оси ζ и
направлена вверх или вниз в зависимости от знака числа qB2—рА2.
Если же qB2—pA2t т. е.
ΐ-± Ϋΐ ■
(28)
то такая плоскость пересекает гиперболоид (24) по прямой.
Предложение доказано.
53.9. Теорема. Через любую точку гиперболического
параболоида проходит роено две прямолинейные образующие.
Доказательство. Возьмем произвольную точку
Мо(*о, ί/ο, 20) на гиперболоиде (24). Через эту точку проходят
ровно две плоскости πι и π2, задаваемые уравнением (26),
удовлетворяющим условию (28). Эти плоскости пересекают гиперболоид
(24) по прямым 1\ и /2. Обе эти прямые проходят через точку Λί0,
поскольку вертикальная прямая х=Хо, у=Уо пересекает гиперболо-
/пп . / 9х1 — РУо\ -
ид (24) в единственной точке лг0» ί/ο» · Других прямоли-
\ %РЯ I
нейных образующих, проходящих через точку М0у нет, так как
любая прямая лежит в вертикальной плоскости, а если
вертикальная плоскость (26) пересекает гиперболоид (24) по прямой, то
ее уравнение удовлетворяет условию (28). Теорема доказана.
§ 54. ЦИЛИНДРЫ
54.1. Определение. Цилиндрической поверхностью или
цилиндром называется поверхность, получающаяся в результате
движения прямой (которая называется образующей этого
цилиндра), перемещающейся параллельно себе и пересекающей данную
линию (которая называется направляющей этого цилиндра).
54.2. Теорема. Непустая поверхность Ф, заданная общим
уравнением второй степени (1), является цилиндром, образующие
161
которого параллельны оси ζ тогда и только тогда, когда
уравнение (1) имеет вид
т. е. когда азз=Я1з==Д2з=аз=0.
Доказательство. Достаточность очевидна. Для
проверки необходимости возьмем какую-нибудь точку MQ(xQy y0t z0) на
поверхности Ф. Тогда прямая
x=Xq, У=Уо, z=z0+t (29)
целиком содержится в поверхности. Подставляя координаты ее
точек (29) в уравнение (1) и учитывая, что М0еФ, получим
a33t2 + 2 (х0а13 + yQa23 + z0a33 + a3) t=0.
Это равенство должно выполняться при всяком t. Следовательно,
азз—0. Теперь уравнение (1) можно переписать в виде
F(x, y) + 2z(a13x-{'a23y + a3)=0.
Если условие а1з=Л23===^з=0 не выполняется, то можно найти такую
пару чисел (хи ί/ι), что а^\Ч-^з^+Яз^О. Тогда, положив
г F(xu У\)
2 (а13хх + аг9у1 + а3)
получим точку Мх(хи уи zx)y принадлежащую поверхности Ф, в
то время как никакая другая точка прямой
х=Х\, У=Уи z=zx + t
поверхности Φ не принадлежит. Это противоречие и завершает
доказательство.
54.3. Итак, цилиндрическая поверхность второго порядка
задается в некоторой канонической системе координат уравнением
F(x,y)=Ot (30)
где ^(л:, у) — многочлен второй степени от переменных х, у.
Линия второго порядка, определенная уравнением (30) в плоскости
2=0, является направляющей линией данной цилиндрической
поверхности. Если эта линия является эллипсом, действительным или
мнимым, гиперболой или параболой, то цилиндр над ней
называется соответственно эллиптическим цилиндром (рис. 68), мнимым
эллиптическим цилиндром, гиперболическим цилиндром (рис. 69)
или параболическим цилиндром (рис. 70).
Если направляющая линия есть пара прямых, то
цилиндрическая поверхность распадается на пару плоскостей (совпадающих,
параллельных или пересекающихся, действительных или
мнимых).
162
J *^
Рис. 68
Рис. 69
__ _-|-
Рис. 70
163
54.4. Предложение. Всякое невертикальное плоское
сечение цилиндра (30) является линией второго порядка, имеющей то
же название, что и его направляющая.
Доказательство. Мы знаем (см. 53.7), что всякая
невертикальная плоскость может быть задана параметрическими
уравнениями
лг=г/, y=v, г=—C—Au—Βυ.
Подставляя эти выражения в уравнение (30), получаем уравнение
F(u, и)-0,
выражающее плоское сечение в аффинных координатах и, v.
54.5. Предложение. Произвольная вертикальная
плоскость либо не пересекает цилиндр (30) (не имеет даже общих
мнимых точек), либо целиком в нем содержится, либо пересекает
его по паре параллельных прямых (действительных, мнимых или
совпадающих).
Это утверждение вытекает из результатов § 38 о пересечении
прямой с линией второго порядка и из следующего наблюдения.
Обозначим цилиндр (30) через Ф, вертикальную плоскость —
через π, плоскость Оху — через πΐ2, прямую πίΐπ^ — через /,
линию ΦΠπΐ2 — через Г. Тогда плоское сечение πΠΦ является
(вертикальным) цилиндром над /ПГ.
§ 55. АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО
ПОРЯДКА
55.1. Предложение. Пусть аффинное преобразование
f:Es-*~E3 переводит поверхность второго порядка Φ в поверхность
второго порядка Ф', плоскость я — в плоскость π'. Тогда линии
л;ПФ и л'ПФ' имеют одинаковые названия.
Доказательство. Возьмем в пространстве аффинную
систему координат Oxyz, для которой плоскость π является
координатной плоскостью Оху. Согласно 45.3 существует единственная
аффинная система координат O'x'y'z', такая, что преобразование
/ ассоциировано с системами координат Oxyz и O'x'y'z'.
Поскольку /(π)=π', плоскость π' будет координатной плоскостью О'х'у'.
Пусть поверхность Φ в системе координат Oxyz задается
уравнением второго порядка F(x, у, z)=0. Тогда поверхность Ф' в
системе координат O'x'y'z' может быть задана тем же уравнением
F(x', y\ г')=0. Поэтому плоские сечения πΠΦ и л'ПФ' имеют
одинаковые уравнения F(x, у, 0)=0 и F(x', у', 0)=0 в системах
координат Оху и О'х'у' соответственно. Но мы знаем, что линии
второго порядка, задаваемые одинаковыми уравнениями (в разных
аффинных системах координат) аффинно эквивалентны и,
следовательно (см. § 46), имеют одинаковые названия. Предложение
доказано.
164
55.2. Теорема. Произвольная поверхность второго порядка
посредством аффинного преобразования может быть переведена
в одну из следующих 17 поверхностей, заданных в некоторой
прямоугольной системе координат уравнениями
1)
2)
3)
4)
5)
6)
7)
8)
9)
10)
И)
12)
13)
14)
15)
16)
17)
x2+{/2+z2=l;
x2+y2+z2 1;
х2+У2—z2=l;
х2+У2—г2=— 1;
x2+y2—Z2=0;
x2+y2+z2=0;
x2+y2=z;
x2—y2°=z;
x2+y2=l;
x2 + y2 1;
x2-y2=l;
y2=x;
х2—у2=0;
X2 + y2=0;
y*-U
</2+l=0;
y2=o.
При этом поверхности, имеющие одинаковые названия (§ 49), аф-
финно эквивалентны, а поверхности разных названий аффинно
неэквивалентны.
Доказательство. Первая часть этого утверждения
доказывается так же, как соответствующая теорема 46.3 для линий
второго порядка. Поверхность 1) —17) из 49.2 переводится в
соответствующую поверхность 1) —17) из 55.2 посредством аффинного
преобразования, являющегося композицией трех сжатий или ра*
стяжений вдоль осей канонической системы координат. Так,
например, для поверхностей 1)—6) годится одно и то же
преобразование с аналитической записью
/ X t У ι 2
χ =—, у —Нг» г =—·
а Ь с
Что касается второй части теоремы, то поверхности разных
названий мы различим их плоскими сечениями, в частности
наличием или отсутствием прямолинейных образующих. При этом мы
будем опираться на предложение 55.1. Отметим с самого начала,
что поверхности, не имеющие вещественных точек (мнимый
эллипсоид, мнимый эллиптический цилиндр, пара мнимых параллельных
плоскостей), можно различить только в комплексном
пространстве. Все сечения мнимого эллипсоида (вещественными)
плоскостями будут мнимыми эллипсами, среди плоских сечений мнимого
эллиптического цилиндра имеются как мнимые эллипсы, так и
мнимые параллельные прямые, а среди плоских сечений пары
мнимых параллельных плоскостей мнимых эллипсов нет вообще.
165
Остальные поверхности различимы в вещественном
пространстве. Мнимый конус — это единственная поверхность, имеющая
одну вещественную точку. Пара мнимых пересекающихся
плоскостей — это единственная поверхность, вещественные точки
которой образуют прямую. Цилиндры различаются между собой
своими направляющими. Шесть основных поверхностей (эллипсоид,
гиперболоиды, конус, параболоиды) делятся на две равные
группы отсутствием или наличием прямолинейных образующих.
Эллипс, эллиптический параболоид и двуполостный гиперболоид
различаются тем, что двуполостный гиперболоид имеет в плоском
сечении гиперболу, а эллиптический параболоид — параболу. Во
второй группе только гиперболический параболоид не имеет в
плоском сечении эллипса, у однополостного гиперболоида есть
параллельные прямолинейные образующие, а конуса нет.
Оставшаяся часть задачи (отличить цилиндры от основных поверхностей)
предоставляется читателю.
Глава VII
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
§ 56. ПОПОЛНЕННАЯ ПЛОСКОСТЬ И СВЯЗКА
56.1. Инцидентность. Современная математика базируется на
теории множеств. При теоретико-множественном подходе основным
элементом геометрии считается точка. Что касается прямых,
плоскостей, других геометрических фигур, то они являются
множествами точек.
Но можно строить геометрию, в которой основными
элементами являются прямые или по крайней мере прямые и точки
равноправны. Для этого в первую очередь надо сделать симметричным
бинарное отношение между точками и прямыми, состоящее в том,
что точка принадлежит прямой. Этой цели можно добиться, если
использовать вполне употребимое выражение: «точка лежит на
прямой». Симметричное ему выражение: «прямая лежит на
точке» — хотя и непривычно на слух, не противоречит наглядным
представлениям. Обычно же в этом случае говорят, что прямая и
точка инцидентны.
Одна из наиболее важных аксиом планиметрии гласит:
Πι. Любые две различные точки плоскости инцидентны одной
и только одной прямой.
Симметричное к ней утверждение:
П2. Любые две различные прямые плоскости инцидентны
одной и только одной точке, — противоречит пятому постулату Эв-
клида. Поэтому, чтобы добиться равноправия между прямыми и
точками, надо заставить параллельные прямые пересекаться.
Сейчас мы сделаем это, построив пополненную плоскость.
56.2. Пополненная плоскость. Чтобы в плоскости π не стало
параллельных прямых, надо к каждой прямой добавить по крайней
мере одну точку. Для данной прямой Ιαπ обозначим через |7]
несобственный пучок прямых, параллельных прямой /. Этот пучок
[/] назовем несобственной точкой плоскости тс. Обычные ее точки
будем называть собственными.
Добавим к плоскости π все ее несобственные точки и
обозначим это новое множество через л. Прямые / плоскости π, к
каждой из которых добавлена несобственная^ точка |7], называются
(собственными) прямыми в множестве π. Эти прямые
обозначаются символами / или просто теми же буквами I. Несобственная
точка [/] называется несобственной точкой прямой I. Легко
проверить, что в новой (расширенной) плоскости π выполняется
аксиома П2. Но при этом перестала выполняться аксиома Пь
никакая прямая не проходит через две несобственные точки. Исправить
положение можно, объявив множество π\π всех несобственных
точек еще одной (несобственной) прямой.
167
Множество π с выделенными в ней собственными и
несобственной прямыми и называется пополненной плоскостью.
Несобственные точки пополненной плоскости называются также «бесконечно
удаленными», несобственная прямая — «бесконечно удаленной»
прямой.
56.3. Общее определение проективной плоскости. Пополненная
плоскость удовлетворяет аксиомам П! и П2. Кроме того, она
очевидно удовлетворяет следующим двум аксиомам.
П3. Существуют три точки, не инцидентные одной прямой.
ГЦ. Каждая прямая инцидентна по меньшей мере трем точкам.
Проективной плоскостью S называется произвольное
множество, элементы которого именуются точками, и набор его
подмножеств, именуемых прямыми, если при этом выполняются аксиомы
lb—ГЦ.
Задача. Доказать, что любая проективная плоскость
содержит по меньшей мере семь точек. Построить проективную
плоскость на семи точках.
56.4. Вещественная проективная плоскость. Две проективные
плоскости Sj и S2 называются изоморфными, если существует би-
екция f:Sx-+S2y которая переводит точки в точки, прямые в
прямые и сохраняет отношение инцидентности.
Вещественной проективной плоскостью называется проективная
плоскость, изоморфная пополненной плоскости. Обычно
вещественная проективная плоскость обозначается символом RP2.
В соответствии с этим пополненная плоскость называется
(первой) моделью вещественной проективной плоскости.
В дальнейшем вещественную проективную плоскость иногда
называем просто проективной плоскостью.
56.5. Связка. Множество всех прямых и плоскостей
трехмерного пространства, проходящих через данную точку О,
называется связкой с центром О или связкой О. Прямые связки называем
лучами.
Назовем луч и плоскость связки О инцидентными между
собой, если данный луч лежит в данной плоскости. Если назвать
теперь лучи связки «точками», а ее плоскости — «прямыми», то
легко видеть, что связка удовлетворяет аксиомам Πι—П4, т. е.
является проективной плоскостью.
56.6. Перспективное соответствие. Возьмем какую-нибудь
плоскость π, не проходящую через точку О. Тогда через каждую точку
Μ плоскости π проходит единственная прямая (луч) tn=OM
связки О. Таким образом, установлено соответствие, называемое
перспективным соответствием, между всеми точками плоскости π и
лучами связки О. При этом соответствии каждой прямой /, лежащей
в плоскости л, сопоставляется принадлежащая связке О
плоскость λ=0/, проходящая через точку О и прямую I (рис. 71).
Очевидно, что при перспективном соответствии между
плоскостью π и связкой О сохраняется отношение инцидентности: если
на плоскости π точка Μ инцидентна прямой /, то соответствующие
168
луч ОМ и плоскость 01 связки также будут инцидентны, и
наоборот.
Но перспективное соответствие между плоскостью π и связкой
О не является взаимно однозначным: лучи связки, параллельные
плоскости π, не соответствуют никакой точке плоскости π, а
плоскость связки, параллельная плоскости π, не соответствует никакой
прямой плоскости π. Назовем особым лучом связки всякий луч,
параллельный плоскости π, а особой плоскостью связки — ее
плоскость, параллельную плоскости π.
Рис. 71
Рассмотрим пучок плоскостей, проходящих через особый луч
связки. Неособые плоскости этого пучка при перспективном
соответствии переходят в несобственный пучок параллельных
прямых на плоскости π, который задает (несобственную) точку
пополненной плоскости π. Поставив в соответствие всякому
несобственному пучку параллельных прямых, лежащих в плоскости π,
параллельный этим прямым особый луч связки О, а несобственной
прямой плоскости π — особую плоскость связки О, продолжаем
перспективное соответствие до биекции между всеми точками и
прямыми пополненной плоскости π и всеми лучами и
плоскостями связки О. Эта биекция также называется перспективным
соответствием. Очевидно, что это перспективное соответствие также
сохраняет отношение инцидентности. Следовательно, оно является
изоморфизмом проективных плоскостей.
Итак, связка изоморфна пополненной плоскости и является
(второй) моделью вещественной проективной плоскости.
§ 57. ОДНОРОДНЫЕ КООРДИНАТЫ НА ПРОЕКТИВНОЙ
ПЛОСКОСТИ. ТЕОРЕМА ДЕЗАРГА
57.1. Однородные координаты в связке. Пусть дана связка О.
Возьмем в пространстве какой-нибудь репер Ое,е2е3 с началом в
точке О. Для произвольного луча m связки тройку координат хи
169
x2t хъ любого направляющего вектора этого луча назовем тройкой
однородных координат луча m (в данном репере Ое^ез).
Обозначим класс всех пропорциональных данной тройке хи х2, Хг
ненулевых троек через {х\\х2\хг)- Каждая тройка из класса (x{:x2:xz)
также будет тройкой однородных координат луча т. Весь же
класс троек (х{:х2:хг) назовем однородными координатами луча
т (в репере Ое^ез).
Пусть теперь дана принадлежащая связке О плоскость λ. В
репере Ое^ез она может быть записана уравнением
а{хх + а2х2+яз*з=0. (1)
Тройку аи 02, Яз назовем тройкой однородных координат
плоскости λ. Тройки однородных координат плоскости также определены
с точностью до пропорциональности. Класс всех
пропорциональных данной тройке аь а2, аъ ненулевых троек обозначим через
{а{:а2:аг} и назовем однородными координатами плоскости λ (в
репере Ое^ез).
Любую ненулевую тройку хи х2> хъ, удовлетворяющую
уравнению (1), можно рассматривать и как тройку координат
принадлежащей плоскости λ точки Λί, и как тройку однородных
координат инцидентного плоскости λ луча т=ОМ. Таким образом,
уравнение (1) представляет собой условие инцидентности луча с
однородными координатами (х\\х2\хг) и плоскости с однородными
координатами {ах\а2:а^.
57.2. Однородные координаты на плоскости. Предположим, что
на обычной плоскости π выбран репер oeie2. Пусть Μ —
произвольная точка плоскости, *, у — ее координаты в этом репере.
Тогда всякая ненулевая тройка чисел
*1, *2, *3,
пропорциональная тройке
*, ί/, 1,
называется тройкой однородных координат точки Μ (в репере
οβιβ2).
Ясно, что ^переход от тройки однородных координат хи х2, *з
точки Λί к ее аффинным координатам х, у осуществляется по
формулам
*=—, </= —. (2)
Такой переход возможен, поскольку для ненулевой тройки хи x2f
*г, пропорциональной тройке xt у, 1, всегда ХзФО.
Совокупность всех троек однородных координат хи х%, хъ
точки Μ обозначается через (Х\:х2:хз) и называется однородными
координатами точки Μ (в репере ое^).
170
Возьмем теперь на плоскости π некоторую прямую /, заданную
(в репере oeie2) общим уравнением
Ах+Ву+С=0. (3)
Мы знаем, что коэффициенты уравнения (3) данной прямой I
определены с точностью до пропорциональности, т. е. для любой
ненулевой тройки аи а2, а3, пропорциональной тройке Л, Ву С,
уравнение
а\Х + а2у + аг=0 (4)
описывает ту же прямую /. Совокупность всех ненулевых троек
аи а2, а3, пропорциональных тройке Л, Ву С, обозначается через
{αι:α2:α3} и называется однородными координатами прямой / (в
репере ое^г).
Найдем теперь, как прямая / описывается в однородных
координатах своих точек. Если аффинные координаты х, у точки Μ
удовлетворяют уравнению (4), то ее однородные координаты хи
х2, Хг согласно формулам (2) удовлетворяют уравнению
ο'(ν)+ο'(ΐ)+ο»=0·
или
аххх + а2х2+ аз*з=0. (5)
При этом ясно, что если хгФО, то тройка хи *2, *з,
удовлетворяющая уравнению (5), является тройкой однородных координат
точки Λί, принадлежащей прямой (4).
Но важно отметить, что уравнению (5) удовлетворяют не
только ненулевые тройки хи х%% Хз, являющиеся однородными
координатами точек прямой (4). При *3—0 уравнению (5)
удовлетворяют тройки, пропорциональные тройке а2, —аи 0. Естественно
предположить, что совокупность (а2:—а{:0). представляет собой
однородные координаты бесконечно удаленной точки \1] прямой /.
Сейчас мы убедимся, что это в самом деле так.
57.3. Связь однородных координат в связке с однородными
координатами на плоскости. Возьмем в пространстве какой-нибудь
репер Oeje2e3. Конец вектора е3, отложенного от точки О,
обозначим о. Проведем через точку о плоскость π параллельно векторам
еь е2 (рис. 72).
В репере Ot^ts плоскость π, очевидно, имеет уравнение хг=*
= 1. Поэтому всякая точка Μ плоскости π, имеющая в репере
oeie2 координаты х, у, в репере Oeie2e3 имеет координаты ху у, 1,
и наоборот.
Следовательно, всякий собственный (по отношению к
плоскости π) луч связки О, проходящий через точку М(х, у)у имеет в
связке однородные координаты (х:у:\).
171
При перспективном соответствии всякой несобственной точке
пополненной плоскости π (классу [/] параллельных прямых на
плоскости π) ставится в соответствие луч связки, параллельный
этим прямым [/]. Такой луч является несобственным и лежит в
плоскости *3=0. Следовательно, несобственные точки
пополненной плоскости соответствуют лучам связки с однородными
координатами вида (х\:х2:0).
Рис. 72
Пусть теперь прямая / в плоскости л имеет уравнение (4).
Один из направляющих векторов этой прямой в базисе еь е2 на
плоскости имеет координаты {а2, —а{}. Тогда в пространстве в
базисе еи е2, е3 этот вектор имеет координаты {а2, —аь 0}. Но это
и есть направляющий вектор луча связки, соответствующего
несобственной точке [/] прямой I. Таким образом, при перспектив-
ном^оответствии несобственная точка [/] прямой /, заданной
уравнением (4), переходит в луч связки с однородными координатами
(а2:— а{:0).
Это подтверждает высказанное нами в конце пункта 57.2
предположение об однородных координатах несобственных точек и
позволяет распространить определение однородных координат на
несобственные точки:
совокупность ненулевых троек (а2:—а1:0) является
однородными координатами несобственной точки прямой (4) (в репере
oeie2) на пополненной плоскости π.
При таком определении любое уравнение (5) первой степени
относительно переменных хи х2у хъ можно рассматривать как
уравнение прямой (на пополненной плоскости π) с однородными
координатами {αι:α2:α3}. Собственные прямые характеризуются
условием α!2+α22>0, несобственная прямая имеет уравнение
т. е. ее однородные координаты равны {0:0:1}.
Итак, мы определили однородные координаты точек и прямых
на пополненной плоскости π. При этом перспективное соответствие
определяется равенством однородных координат соответствующих
друг другу точки и луча, прямой и плоскости. Уравнение (5)
172
(как и тождественное ему уравнение (1)) представляет собой
условие инцидентности точки (х\'.Х2'Хг) прямой {аг:а2:а3}.
57.4. Арифметическая модель проективной плоскости.
Предыдущие рассмотрения подводят нас к следующему определению.
Арифметической проективной плоскостью называется множество
Ρ элементов двух родов, называемых соответственно
«арифметическими точками» и «арифметическими прямыми». И те и другие
суть классы пропорциональных между собой ненулевых троек
вещественных чисел. Точки обозначаются, например, через (Х\:Х2'>
:хг), а прямые — через {αι:α2:α3}. При этом между точками и
прямыми установлено отношение инцидентности: точка (х\:х2'.Хг)
и прямая {а{:а2:аг} называются инцидентными между собой, если
αι*ι + α2*2+β3*3=0. (5)
Замечание. Такое симметричное определение, в котором
точки и прямые полностью равноправны, не совсем согласуется с
определением 56.3 проективной плоскости, в котором прямыми
назывались множества точек. Но это рассогласование легко
ликвидировать, если арифметическую прямую {а{:а2:а^} отождествить с
множеством всех арифметических точек (х\:х2:хъ),
удовлетворяющих условию (5).
Ставя теперь в соответствие точкам (X\\x2:xz) и прямым
{α{:α2:αζ} арифметической проективной плоскости прямые и
плоскости связки О (или точки и прямые пополненной плоскости π),
имеющие в некотором фиксированном репере однородные
координаты (х\:х2'-хъ) и {а{:а2:а3} соответственно, получаем, очевидно,
изоморфизм арифметической проективной плоскости предыдущим
моделям проективной плоскости.
Таким образом, арифметическая проективная плоскость
является еще одной (арифметической) моделью проективной
плоскости.
57.5. Принцип двойственности. Пусть верно какое-нибудь
утверждение, касающееся точек и прямых на проективной плоскости
и отношения инцидентности между ними. Тогда будет верно и
двойственное утверждение, получаемое из данного утверждения
заменой слов «прямая» на «точка» и наоборот.
В самом деле, числовое равенство (5), выражающее условие
инцидентности точки (х\:х2:хг) и прямой {а{:а2:аъ}> не зависит от
того, какую из двух троек хи х2, xs и аь а2, аъ мы заключаем в
круглые, а какую — в фигурные скобки, т. е. не зависит от того,
считаем ли мы тройки хи х2, хг и аи а2, аз тройками однородных
координат точки и прямой или, наоборот, прямой и точки.
Принцип двойственности иллюстрирует равноправие точек и
прямых на проективной плоскости. С таким же правом, как мы
раньше считали первоначальным понятие точки, а прямую
определяли как множество точек, удовлетворяющих уравнению (5), мы
можем считать первоначальным понятие прямой и определять
точку как множество инцидентных ей прямых (пучок прямых), удов-
173
летворяющих тому же уравнению (1), в котором, правда,
переменными уже являются аи Й2, Яз·
57.6. Теорема Дезарга. Временно прямую, инцидентную
точкам А и 5, обозначаем через АВУ точку, инцидентную прямым
а и Ь, — через (α-b). Треугольником называем совокупность трех
точек, не инцидентных одной прямой. Сторонами треугольника
называем прямые, инцидентные парам его вершин.
Теорема. Пусть на проективной плоскости даны два
треугольника LMN и L'M'N' так, что не совпадают соответственные
вершины и стороны этих треугольников. Тогда три прямые LL'y
ММ'У NN' инцидентны одной и той же точке в том и только в том
случае, когда три точки (MN-M'N')t (NL>N'L')f (iLAf, ISM')
инцидентны одной и той же прямой (рис. 73).
Рис. 73
Доказательство. Введя обозначения для прямых MN=
=/, NL=my LM=n, M'N'=l'y N'L'=m\ L'M'=n\ читатель легко
убедится в том, что прямое и обратное утверждения этой теоремы
двойственны друг другу. Поэтому в силу принципа двойственности
достаточно проверить необходимость условий этой теоремы.
Предположим, что на проективной плоскости введены
однородные координаты. Обозначим какую-нибудь тройку однородных
координат точек Lt Λί, Ν, L\ M'9 Ν' соответственно через 1, m, n, 1',
m', η'. По условию три прямые LL\ MM\ NN' инцидентны одной
точке Ω. Пусть ω — какая-нибудь тройка однородных координат
этой точки. Поскольку три точки L, Ζ/, Ω коллинеарны, три
тройки 1, Г, ω линейно зависимы (это легко получить, например, если
в качестве модели проективной плоскости взять связку). Но
тройки 1 и Г, будучи тройками координат различных точек L и L·\ не
пропорциональны. Поэтому тройка ω есть линейная комбинация
троек 1 и Г. По тем же соображениям тройка ω является линейной
174
комбинацией троек m и πι', а также η и п'. Следовательно,
существуют такие ненулевые пары чисел (λ, λ'), (μ, μ'), (ν, ν'), что
ω=λΙ + λΤ=μπι + μ/ίτι/=νη4-ν'η', откуда получаем
ит—νη=ν'η'—μ'πι', (6)
νη— λ1=λ,1/—vV, (7)
λΐ—μίη=μ,ηι/—λ'Γ. (8)
Эти равенства являются, как легко видеть, равенствами
ненулевых троек, которые обозначим через р, q, r соответственно.
Обозначим через Р, Q, R точки, тройками однородных координат
которых служат тройки р, q, г соответственно. Равенство (6)
означает, что Ρ={ΜΝ·Μ'Ν'). Аналогично Q=(NLN'L')y R=(LM.L'M').
С другой стороны, складывая равенства (6), (7), (8), получаем
p-fq4-r=(0, 0, 0).
Следовательно, точки Ру Q, R инцидентны одной прямой. Теорема
Дезарга доказана.
§ 58. ПРОЕКТИВНЫЕ СИСТЕМЫ КООРДИНАТ
58.1. Определение. Два репера Ое^ез и Oei'e2'e3' с
общим началом О называются эквивалентными, если существует
такое число λ, что
е/=Яе/, /=1, 2, 3.
58.2. Предложение. Реперы Oeie2e3 и Ое'^г'ез'
эквивалентны тогда и только тогда, когда каждый луч связи О имеет одни
и те же однородные координаты в этих реперах.
Доказательство. Необходимость очевидна.
Предположим теперь, что однородные координаты каждого из лучей в этих
реперах одинаковы. Тогда луч, несущий вектор е/, имеет в обоих
реперах однородные координаты (λ: 0:0), откуда β/=λιβι для
некоторого λι^Ο. Аналогично e2'=^2e2, ез'=^зе3. Осталось показать,
что λι=λ2=λ3. Луч с направляющим вектором е/=е/ + е2/+е3/
имеет по предположению в обоих реперах однородные координаты
(1:1:1), откуда t'=X(e{ + е2-Ье3) при некотором ХФО. Но, с
другой стороны, е' =λι6Ι-Κλ2β2+λ3β3. Следовательно, λ=λι=λ2=λ3, что
и требовалось доказать.
58.3. Определение. Проективной системой координат в
связке О называется класс эквивалентных между собой
аффинных реперов (или, что то же самое, аффинных систем координат)
с началом О.
Из доказательства предложения 58.2 вытекает, что
проективная система координат в связке О однозначно определяется
упорядоченной четверкой некомпланарных (никакие три не лежат
в^ одной плоскости) лучей Хи Х2, ^з, £ этой связки. Лучи Хи
Х2, Хг называются координатными, а луч Ε — единичным. Коор-
175
динатные лучи являются осями координат эквивалентных
аффинных систем координат, а любая точка Ε на единичном луче Ε
является концом диагонали ОЕ параллелепипеда, построенного
на единичных векторах е1=0£1, е2=0£2, е3=0£3 аффинной
системы координат, принадлежащей данной проективной системе
координат (рис. 74).
χ,
г
%
Рис. 74
Поэтому четверку Х\9 Х2у Хъ, Ε также можно назвать
проективной системой координат, или, более точно, проективным
репером, определяющим данную проективную систему координат.
58.4. Определение. Тройки координат произвольного луча
связки О в аффинном репере Oeie2e3, или, что то же самое, в
любом аффинном репере, эквивалентном реперу Oeie2e3, называются
тройками проективных координат этого луча в проективной
системе Х\Х2ХгЕ.
58.5. Однородные координаты как проективные. Таким
образом, тройки однородных координат произвольного луча связки О
в аффинном репере Oeie2e3 (см. 57.1) — это тройки проективных
координат этого луча в проективной системе координат Х{Х2ХъЕ,
определяемой репером_Oeie2e3._
В частности, лучи Х\, Х2у Хг, Ε имеют в этой системе
следующие координаты
*,= (1:0:0), J?2=(0:1:0), Х3=(0:0:1), £=(1:1:1).
При описанных выше изоморфизмах моделей проективных
плоскостей (связка — пополненная плоскость, связка —
арифметическая проективная плоскость) проективные координаты в связке
переносятся и на пополненную плоскость и на арифметическую
проективную плоскость. Но в отличие от связки, где все
проективные системы координат равноправны, на арифметической
проективной плоскости имеется исходная привилегированная система
координат. Что касается пополненной плоскости, то там имеется
176
целое семейство привилегированных проективных систем
координат. Каждая из них определяется аффинной системой координат,
задающей однородные координаты. Всякий аффинный репер
ot\e2 на плоскости π, расположенной в пространстве, при
фиксированной точке Ο^π, однозначно задает такой аффинный репер
Oeie2e3, ts=Oo (см. рис. 72) в пространстве, что проективные
координаты лучей связки О, определенные репером Ое^ез,
совпадают с однородными координатами соответствующих им точек
пополненной плоскости π, определенными репером ое{е2.
58.6. Переход от одной проективной системы координат к
другой. Теперь основной моделью проективной плоскости считаем
связку, хотя нагляднее представлять себе проективную плоскость
в виде пополненной плоскости, а аналитические выкладки проще
проводить в однородных координатах, т. е. фактически на
арифметической проективной плоскости. Считая связку основной моделью
проективной плоскости Р, мы, как правило, называем ее лучи точ
ками, а плоскости — прямыми проективной плоскости Р, в соот
ветствии с этим лучи Хи ^2, ^з, £, определяющие проективную си*
стему координат, обозначаем Х\, Х2у ^з, Е. Точки Хх, Х2, Хз> Ε
задающие проективную систему координат ΧΧΧ2Χ$Ε, называем ее
фундаментальными точками.
Пусть на проективной плоскости Ρ даны две проективные
системы координат — исходная ХХХ2Х$Е и «новая» система
Χ\Χ2Χ$Ε'. Новая система задана какими-то тройками
проективных координат ее фундаментальных точек относительно исходной
системы:
Х;=(сп : с21 : с31),
Λ2==(£ΐ2 · С22 · £32)»
Хз=(с13: с23: с33)>
£'=(<5ι: ε2 : ε3).
Надо найти формулы преобразования координат, выражающие
координаты хи х2, х3 любой точки Μ относительно исходной
системы координат через координаты х\\ х2\ х$ топ же точки в
новой системе координат.
Предположим сначала, что тройки координат (9) точек X/,
Х2у Хг\ Е' выбраны согласованными, т. е. подчинены условию
1^11» ^21» С31/ + \С12» С22> ^32/4" {^13» ^23» ^ЗЗ/ —(εΐ> ε2» ε3/· (*^)
Тогда, возвращаясь к связке О и предполагая, что исходная
проективная система Х{Х2Х3Е порождается аффинным репером
0е,е2е3, видим, что векторы
С1=== 1^11» ^21» C3lf* е2===1С12» ^22» С321» ез='^13> ^23» C33f> (*')
(9)
177
заданные координатами в базисе еь е2, е3, линейно независимы,
поскольку лучи Χ/, Х2\ Хг не лежат в одной плоскости. Более
того, равенство (10) гарантирует нам (см. доказательство
предложения 58.2), что репер Ое/е/ез' порождает проективную систему
координат Χ\Χ2'Χ$Ε'.
Далее, каждая тройка хи х2, хъ проективных координат в
системе Х\Х2ХЪЕ произвольного луча т есть согласно 58.4 тройка
координат в репере Ое^ез некоторого направляющего вектора а
этого луча. Аналогичным образом тройка координат Х\ч х2\ Хъ
луча т в системе ΧΧ'Χ2Χ$Ε' есть тройка координат в репере
Ое/е'гвз' какого-то направляющего вектора а'=Ха того же луча
т. Поэтому из (11) и из формул преобразования аффинных
координат (§ 23) получаем
ΙΧχ
1 хз!
=
сп c12 cl3
С 21 ^22 С23
! ^31 ^32 ^33 1
1
1 х'з 1
Это и есть формула перехода от проективной системы ХгХ2Х$Е к
проективной системе Х\'Х2'Хг'Е'. Здесь λ — вещественный
множитель, принимающий все отличные от нуля значения.
Формула (12) получена в предположении (10)
согласованности координат точек Х\\ Χ/, Χζ', Ε. Но этого условия всегда
можно добиться, заменив векторы е/, е2', ез' из (11) на
пропорциональные векторы λιβ/, λ2β2', Х3ез'. Для этого числа λ/ надо
найти из системы уравнений
з
Усик;=еь /=1, 2, 3. (13)
Матрица С этой системы не вырождена, поскольку столбцы ее
состоят из координат векторов е/, е2', е3', не лежащих в одной
плоскости. Поэтому система (13) имеет единственное решение Хи
λ2, Хз. Ни одно из этих чисел не равно нулю. В самом деле, если
бы, например, λι=0, то лучи Х2\ XV, Е' лежали бы в одной
плоскости. Итак, переходя от векторов е/ к векторам λ;β/, можно
добиться условия (10) и после этого пользоваться формулой
перехода (12), в которой, разумеется, матрица С уже отлична от
исходной.
58.7. Замечание. Для данной проективной системы
координат ΧιΧ2Χ$Ε и невырожденной матрицы С существует едкчст-
венная проективная система координат ХХ'Х2ХЪ'Е\ переход к
которой от исходной системы осуществляется по формулам (12).
Это вытекает из того, что матрица С с точностью до
пропорциональности является матрицей перехода от репера Oeie2e3,
задающего систему ХХХ2ХЪЕУ к реперу Ое/е/ез', задающему систему
Х\'Х2Х% Е*'.
178
§ 59. ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ
59.1. Определение. Отображение /:Р-*-Р проективной
плоскости называется ее проективным преобразованием, если
существуют две такие проективные системы координат ХхХ2ХгЕ и
Хх'Х2ХъЕ\ что произвольная точка М^Р имеет те же
проективные координаты в системе Х\Х2Х$Е, что точка M'=f(M) в
системе ХХ'Х2'ХЪ'Е'.
59.2. Аналитическая запись проективного преобразования.
Предположим, что проективное преобразование / задано двумя
системами координат Х\Х2ХЪЕ и Χ\Χ2Χ$Ε\ связанными между
собой формулами перехода (12). Мы хотим найти, как связаны
между собой координаты хи #2, *з произвольной точки Μ в
системе ΧχΧ2Χ$Ε и координаты Х\\ х2\ хъг ее образа M'=f(M) в той же
системе. Для этого обозначим координаты точки М* в системах
ХХХ2ХЪЕ и Х/Х^Хъ'Е' через уи у2у Уъ и У\, У2, Уъ соответственно.
Тогда согласно (12) имеем
з
λ^=Σ^ί/;, ί = 1, 2, 3. (14)
Но по определению проективного преобразования yi'=Xi. Кроме
того, в наших исходных обозначениях yi=Xi'. Следовательно,
формулы (14) принимают вид
з
λ*ί=£δ^7., ί=1, 2, 3. (15)
Это и есть аналитическая запись проективного преобразования
в проективных координатах.
Наоборот, из 58.7 легко вытекает, что для невырожденной
матрицы С и проективной системы координат ХХХ2ХЪЕ существует и
единственно проективное преобразование, записываемое
формулами (15).
59.3. Группа проективных преобразований. Из матричной
записи формул (15)
И
к
1*3
=
С11 С12 СП
^21 С22 ^23
1 ^31 ^32 СЪЪ 1
ΙΧι II
Хг
1 "*3
вытекает, что если в системе координат Χ\Χ2Χ$Ε проективное
образование / задается матрицей С, а проективное
преобразование g — матрицей Д то их композиция g°f задается матрицей
DC и, следовательно, также является проективным
преобразованием. Аналогично матрица С~{ задает преобразование f~K Итак,
преобразование, обратное к проективному, также будет
проективным. Поскольку тождественное преобразование также проективно,
нами доказана
179
Теорема. Множество всех проективных преобразований
проективной плоскости является группой (изоморфной группе всех
невырожденных матриц третьего порядка),
59.4. Предложение. При проективном преобразовании f с
матрицей С прямая с координатами {ах : а2: аз} переходит в
прямую с координатами {а1:а2:аг}С-{.
Доказательство. Итак, пусть проективное
преобразование / ассоциировано с системой координат ΧλΧ2Χ$Ε и Х/Х2 Хз'Е'
и прямая / задана в первой системе уравнением
а1х1 + а2Х2+а3х3=0.
Тогда ее образ /(/) в новой системе координат задается таким же
уравнением или (с учетом нового обозначения координат точек)
(аи а2, а3)
=0.
Из равенства (12) вытекает, что в исходной системе координат
прямая /(/) задается уравнением
(йи а2, а3)С~
=0,
что и требовалось доказать.
59.5. Проективно-аффинные преобразования. Проективная
плоскость с выделенной на ней несобственной прямой называется
проективно-аффинной плоскостью. Точки несобственной прямой
называются несобственными, остальные точки — собственными.
Проективное преобразование проективно-аффинной плоскости
называется проективно-аффинным, если оно отображает
несобственную прямую на себя.
В качестве проективно-аффинной плоскости возьмем
арифметическую проективную плоскость с несобственной прямой хз=0,
или, что то же самое, пополненную плоскость с однородными
координатами хи хг, хъ, порожденными аффинными координатами
*, У-
59.6. Теорема. 1) Для того чтобы проективное
преобразование, заданное формулами (15), было проективно-аффинным,
необходимо и достаточно, чтобы
^31 ~ ^32 =5= О^СзЗ·
(16)
2) Всякое проективно-аффинное преобразование (15),
рассматриваемое на множестве собственных точек плоскости,
является аффинным преобразованием, имеющим аналитическую запись
180
x'=anx + a12y + a13, J
ί/'=α21χ + α22ί/ + α23, j
где αυ= .
сзз
3) Всякое аффинное преобразование (17) продолжается до
проективно-аффинного преобразования, имеющего аналитическую
запись
λ*ι=апхг + а12х2 + а13х3,
КХ2=== ^21*^1 « #22*^2 ι ^23*^3»
λΧ3= *3·
)
(18)
Доказательство. 1) Необходимость. Точка (1:0:0)
преобразованием (15) переводится в точку (Ксп :%с2\'- λ£3ι), которая
является несобственной, если c3i=0. Аналогично c2i=0. Из
невырожденности матрицы С получаем Сзз^О. Достаточность очевидна.
2) Если первое и второе из равенств (15) разделить на третье,
то с учетом условий (16) и равенств х = ——, #=—— получим
#з хз
равенства (17). Эти равенства определяют аффинное
преобразование, поскольку
| С11 С12 I
ап ап '
а2Х а22
_ j C21 C22 I _ №С , q
сзз
3) Преобразование (18) проективно-аффйнно, так как
выполнены условия (16). Это преобразование является продолжением
аффинного преобразования (17), поскольку равенства (17)
получаются из первого и второго равенств (18) делением их на третье
из равенств О 8).
59.7. Следствие. Множество всех проективно-аффинных
преобразований есть подгруппа группы всех проективных
преобразований проективной плоскости, изоморфная группе аффинных
преобразований аффинной плоскости.
59.8. Предложение. Любая пара /ь /2 пересекающихся
прямых может быть посредством проективного преобразования
переведена в любую другую пару пересекающихся прямых //, 12.
Доказательство. Пусть Хъ — точка пересечения прямых
1\ и /г, Х\у Х2 — точки на прямых 1и /2, не совпадающие с точкой
Яз, и пусть точка Ε не принадлежит ни одной из прямых /ь /2,
Х\Х2. Аналогично отправляясь от прямых //, /2', построим
точки Χι', Л/, ЛУ, £'. Тогда проективное преобразование, ассоиииро-
ванное с проективными реперами ХХХ2ХЪЕ и Х\Х2Х'ЕГ, очевидно,
и будет искомым.
18!
§ 60. ЛИНИИ ВТОРОГО ПОРЯДКА В ОДНОРОДНЫХ
КООРДИНАТАХ
60.1. Если на плоскости с аффинными координатами х, у
задана линия второго порядка Г общим уравнением
аих2+2а12ху+а22у2+2а13х+2а23у + а33=0, (19)
то с переходом х = -^-, у=-^- от аффинных координат к одно-
родным уровнение (19) превращается в уравнение
аих2 + 2а12х1х2 + а22х\ + 2а13хгх3 + 2а23х2х3 + а33х2=0. (20)
Это уравнение на множестве всех собственных точек плоскости
(л'з^О), очевидно, эквивалентно уравнению (19). Если же
рассматривать уравнение (20) на пополненной плоскости π, то ему кроме
всех собственных точек, удовлетворяющих уравнению (19), т. е.
точек линии Г, удовлетворяют несобственные точки, подчиненные
условию
апх2 + 2а12х1х2 + а22х\=0,
т. е. асимптотические напра^ения линии Г.
Таким образом, линия Г, заданная уравнением (20),
получается из линии Г добавлением к ней ее асимптотических
направлений (если таковые имеются).
60.2. Определение. Линией второго порядка на
проективной плоскости называется множество Г точек, проективные
координаты которых (в некоторой проективной системе координат)
удовлетворяют однородному уравнению второй степени (20).
Заметим, что в этом определении уже не предполагается
выполнение условия
*?1+«?2+β22^°· (21)
60.3. Линии второго порядка на проективной-аффинной
плоскости. Мы знаем уже, что линия второго порядка на пополненной
плоскости, удовлетворяющая условию (21), является пополнением
линии второго порядка (19) на обычной плоскости ее
асимптотическими направлениями. Какие же еще могут быть линии второго
порядка па проективно-аффинной плоскости? Предположим, что
απ=α12=6^=0. Тогда уравнение (20) превращается в уравнение
х3 (2α13.^ + 2а23х2 + а33х3)=0. (22)
Это есть уравнение двух прямых
х3=0, 2а13х{ + 2а2ъх2 + аъгхг=0.
Первая из этих прямых — несобственная, а вторая может быть
как собственной, так и несобственной.
182
Таким образом, всякая линия второго порядка на проективно-
аффинной плоскости есть
1) либо обычная линия второго порядка, пополненная
асимптотическими направлениями;
2) либо пара пересекающихся прямых, одна из которых
несобственная;
3) либо пара совпадающих несобственных прямых.
§ 61. ПРОЕКТИВНАЯ И ПРОЕКТИВНО-АФФИННАЯ
КЛАССИФИКАЦИИ ЛИНИЙ ВТОРОГО ПОРЯДКА
61.1. Предложение. Эллипс, гипербола и парабола проек-
тивно эквивалентны, т. е. переводятся друг в друга посредством
проективного преобразования.
Доказательство. Отметим прежде всего, что эллипсом,
гиперболой и параболой мы называем здесь обычные эллипс,
гиперболу и параболу, пополненные своими асимптотическими
направлениями, т. е. к гиперболе добавляется пара точек, а к
параболе — одна. Покажем, что эти три линии проективно
эквивалентны действительному овалу, т. е. линии, имеющей в некоторой
проективной системе координат уравнение
jtf+jtf—*82=0. (23)
В самом деле, эллипс в некоторой аффинной системе координат
имеет уравнение
которое, будучи записано в однородных координатах, совпадает с
уравнением (23). Гипербола может быть записана уравнением
а:2—г/2—1=0,
или в однородных координатах
Последнее уравнение эквивалентно уравнению
*! + *§—*?=0. (24)
Очевидно, что проективное преобразование
λΛ'3 = Χχ )
переводит линию (24) в действительный овал (23). Наконец,
парабола может быть записана уравнением
*2-*/=0,
183
или в однородных координатах
*ι2—*2*з=0. (25)
Проективное преобразование, обратное к которому записывается
формулами
Xxl = x[y J
λ,ν2= —Яэ + Яз» j
λ*3= x« + xL !
переводит линию (25) в линию (23). Предложение доказано.
61.2. Теорема. Существует ровно 5 классов проективной
эквивалентности линий второго порядка, а именно:
1) х{2 + х22—*32=0, действительный овал;
2) л'12 + лг22-Ьл:з2=0, мнимый овал;
3) ΛΊ2—Л'22=0, пересекающиеся прямые;
4) λ:ι2+λ:22=0, мнимые пересекающиеся прямые;
5) λί2=0, совпадающие прямые.
Доказательство. Будем рассматривать проективную
плоскость как проективно-аффинную с несобственной прямой λ:3=
=0. Тогда согласно 60.3 любая линия второго порядка (20) есть
либо одна из девяти обычных линий второго порядка, пополненных
асимптотическими направлениями; либо пара пересекающихся
прямых, одна из которых несобственная; либо пара совпадающих
несобственных прямых. Последние две линии согласно 59.8 проек-
тивно эквивалентны соответствующим линиям, состоящим из
собственных прямых. Таким образом, надо доказать, что каждая из
девяти обычных пополненных линий второго порядка проективно
эквивалентна одной из пяти перечисленных в формулировке тео«
ремы линий.
Мы уже доказали (61.1), что эллипс, гипербола и парабола
эквивалентны действительному овалу. Ясно также, что мнимый
эллипс (Λ:2+ί/24-1=0) эквивалентен мнимому овалу;
пересекающиеся прямые (х2—#2=0), мнимые пересекающиеся прямые (х2+
+ У2=0) и совпадающие прямые (л:2=0) соответственно
проективно эквивалентны линиям 3), 4), 5). Параллельные прямые (х2—1 =
=0) пересекаются в несобственной точке (0:1:0) и в однородных
координатах записываются уравнением х{2—л:32=0, проективно не
отличающимся от уравнения 3). Наконец, мнимые параллельные
прямые (л'2+1=0) пересекаются в той же вещественной
несобственной точке (0:1:0), а их уравнение в однородных координатах
*12 + л:з2=0 проективно эквивалентно уравнению 4).
Остается показать, что линии 1)—5) попарно неэквивалентны.
Мнимый овал — это единственная из пяти линий, не имеющая
вещественных точек. Мнимые пересекающиеся прямые — это
единственная линия, имеющая одну вещественную точку.
Действительный овал проективно эквивалентен эллипсу, следовательно,
никакие три его точки не лежат на одной прямой. Это отличает его от
184
линий 3) и 5). Наконец, любые три точки линии 5) лежат на
одной прямой, а для линии 3) это не верно. Теорема доказана.
61.3. Определение. Две линии второго порядка на проек-
тивно-аффинной плоскости назовем проектывно-аффинно-эквива-
лентными, если одну можно перевести в другую посредством про-
ективно-аффинного преобразования.
61.4. Теорема. Существует ровно 11 классов проективно-аф-
финной эквивалентности линий второго порядка, а именно:
1) девять обычных пополненных линий второго порядка;
2) пара пересекающихся прямых, одна из которых
несобственная;
3) пара совпадающих несобственных прямых.
Доказательство. Из теоремы 59.6 вытекает, что аффин-
но эквивалентные линии будут проективно-аффинно эквивалентны.
Далее, любые линии типа 2) согласно 59.8 проективным
преобразованием переводятся одна в другую так, что несобственная
прямая переходит в несобственную прямую, т. е. это проективное
преобразование проективно-аффинно. Таким образом, из 60.3
вытекает, что существует не более одиннадцати перечисленных выше
классов проективно-аффинной эквивалентности.
Остается показать, что линии из разных классов не
эквивалентны. При этом мы уже можем пользоваться теоремой 61.2.
Следовательно, надо различать только линии, попавшие в один из
пяти классов проективной эквивалентности. Мнимым овалом
являются эллипс, гипербола и парабола. Они проективно-аффинно
неэквивалентны между собой, поскольку пересекаются с
несобственной прямой по разному количеству точек: 0, 2, 1. Мнимому
овалу принадлежит только мнимый эллипс. В пересекающиеся
прямые попали три линии: собственные пересекающиеся прямые,
параллельные прямые и пересекающиеся прямые, одна из которых
несобственная. Эти линии также пересекаются с несобственной
прямой по разному количеству точек: 2, 1, оо. Мнимые прямые
могут пересекаться в собственной точке (мнимые пересекающиеся
прямые) и в несобственной точке (мнимые параллельные
прямые). Этим они и отличаются друг от друга. Наконец,
совпадающие прямые могут быть собственные и несобственные. Ясно, что
они проективно-аффинно различны. Теорема доказана.
ЧАСТЬ II
Линейная алгебра и геометрия
Глава I
ЛИНЕЙНЫЕ ПРОСТРАНСТВА
§ 1. ОПРЕДЕЛЕНИЕ ЛИНЕЙНОГО ПРОСТРАНСТВА
п.1. В первой части (§ 5, определение 5.4) фактически было
дано определение линейного пространства. Сейчас мы его лишь
напомним.
1.1. Определение. Линейным (или векторным)
пространством над полем К (как правило, полем R вещественных чисел и
иногда полем С комплексных чисел) называется множество V,
элементы которого называются векторами и в котором
определены операция сложения (а, Ь)-^а+Ь и операция умножения
(а, а)->-аа на числа аеК. При этом предполагается, что для
любых векторов a, b, ceV и чисел α, β^Κ выполнены аксиомы
1°. a+b=b + a;
2°. (а+Ь)+с=а+(Ь+с);
3°. Существует такой вектор OeV (называемый нулевым
вектором), что а + 0=а;
4°. Для каждого вектора aeV существует такой вектор —ае
eV (называемый вектором, противоположным вектору а или
обратным к вектору а), что а+(—а)=0;
5°. (с^)а=аа + ра;
6°. а(ра) = (сф)а;
7°. a(a + b)=aa + ab;
8°. Ьа-а.
Линейное пространство над полем R называется вещественным
линейным пространством, а над полем С — комплексным
линейным пространством.
п.2. Свойства операций. Поскольку линейное пространство
является группой:
1) правый нуль является левым нулем;
2) правый обратный — левым обратным;
3) нуль и вектор, обратный к данному, единственны;
4) если а + Ь=а хотя бы для одного вектора яеУ, то Ь=0.
Напомним некоторые свойства, которые мы отмечали в первой
части (гл. 1, § 7):
5) 0а=0 для любого вектора а;
6) a 0=0 для любого числа а;
7) —а=(—1) -а для любого вектора а;
186
8) если аа=0, то либо а=0, либо а=0.
Проверим одно из этих свойств, например 6).
Согласно аксиоме 7° имеем
α·0 + α·0=α(0 + 0)=α·0,
откуда α-0=0 в силу свойства 4).
В линейном пространстве наряду с суммой двух векторов а
л b можно говорить и об их разности, считая по определению, что
а—Ь=а+(—Ь).
При этом из аксиом 5° и 6° и свойства 7) вытекает
9) (а—Р)а=аа—ра.
Вектор можно переносить из одной части равенства в другую
с изменением знака. В самом деле, если
а=Ь+с,
то
а—с=а+ (—с) = (Ь+с)+ (—с) = (согласно 2°) =
=Ь+(с+(— с))=Ь + 0=Ь.
В первой части (гл. 1, § 7) мы отмечали, что по индукции
можно определить сумму любого конечного числа векторов. Сейчас
мы придадим этому точный смысл. Сумму трех векторов аи а2>
аз определяем следующим образом:
ai + а2+ а3= (а! + а2) + а3.
Если уже определена сумма η—1 векторов ai ..., ап-\, то
полагаем
а1 + ... + аЛ-1 + а„==(а1 + ... + аЛ_1)+аЛ.
Практически это означает, что для определения суммы
упорядоченной последовательности векторов аи ..., аЛ надо к вектору
ai прибавить вектор а2, затем к полученному вектору ai + a2
прибавить вектор а3, затем к полученной сумме (ai + a2)+a3
прибавить вектор а4 и так далее, т. е.
ах+ ...+a„_1+a7l= (... ((aj + а2) + а3) + ... +a„_i) + an. (1
(η—2) скобок)
Так определенная нами стандартная сумма η векторов
получается при стандартной последовательности суммирования
(вектор ak прибавляется к сумме предыдущих векторов alf ..., а*-!),
что соответствует стандартной расстановке скобок, указанной в
равенстве (1). Но на практике часто возникают суммы векторов,
в которых скобки расставлены по-другому.
1.2. Предложение. В любом линейном пространстве
имеет место обобщенный закон ассоциативности сложения векторов,
187
т. е. сумма векторов аь ..., ап с произвольной расстановкой
скобок равна стандартной сумме (1).
Доказательство. Индукция по я>3. При n=Z
утверждение сводится к аксиоме 2°. Сделаем переход от η—1 к п.
Складывая η векторов, при любой расстановке скобок производим
η—1 сложений, одно из которых производим последним. Это
означает, что наша сумма векторов аь ..., аЛ имеет вид
а + Ь,
где а — сумма векторов аь ..., а* при некоторой расстановке
скобок, a b — сумма векторов а*+ь ..., ал при некоторой
расстановке скобок. Рассмотрим общий случай η—&>3, предоставив
читателям рассмотреть более простые случаи η—&=1,2. По
предположению индукции вектор Ь можно представить в виде
Ь=с+аЛ,
где с — стандартная сумма векторов а*+1, ..., &п-\. Тогда по
аксиоме 2°
а+Ь=а+ (с+ал) = (а + с)+ая.
Но по предположению индукции вектор a-f-c равен стандартной
сумме векторов аь... ,an_i, что и завершает доказательство.
В линейном пространстве имеет место и обобщенный закон
коммутативности
а! + .. .4-ап=ао(1) + .. . + аа(л), (2)
где σ — произвольная подстановка множества {1, ..., я}.
Доказательство, лроводимое по индукции на основе аксиомы 1°,
предоставляем читателю.
Таким образом, мы обосновали сделанное в первой части (§ 7)
замечание о том, что с векторными равенствами можно поступать
так же, как с числовыми.
п.З. Примеры. Мы уже отмечали в первой части, что
линейными пространствами (над полем R) являются
U Пространства Vect(i), .1=1, 2, 3, векторов на прямой на
плоскости, в пространстве.
2. Арифметическое я-мерное вещественное пространство R*,
в частности R=Rl.
3. Пространство Мт>п матриц размером тхп, в частности
Мп=Мп,п.
Приведем еще несколько примеров линейных пространств.
4. Арифметическое /г-мерное пространство К" над полем К, в
частности арифметическое л-мерное комплексное пространство
Сп. Пространство Кп состоит из всех упорядоченных наборов
(аь ..., ал) из /г элементов аь ..., ап поля К с операциями
сложения
(α,, ..., α„) + (βι, ..., pn) = (ai + pb ..., α„ + β„)
188
и умножения на число
λ (αϊ, ..., ап) = (Хаь ..., λαΛ).
Нулем в этом пространстве является набор (0, ..., 0),
противоположным к элементу (αϊ, ..., ап) является набор (—сп, ..., —ап).
Из аксиом поля непосредственно вытекает, что множество Кп с
так введенными операциями удовлетворяет аксиомам 1—8°
линейного пространства.
Само поле К является линейным пространством: К=К!.
5. Пространство M(R, R) всех вещественных функций на
числовой прямой с естественными операциями сложения и
умножения на число.
Этот пример допускает далеко идущее обобщение. Линейным
пространством над полем К будет множество М(Х, К) всех
отображений
произвольного множества X в поле К. Наличие в поле К операций
сложения и умножения позволяет складывать отображения в К
и умножать их на числа. А именно для f, g^M(X, К), λ^Κ
полагаем
(f+g) (x)=f(x)+8(x), (λ/) (*)=λ (/(*)) для всех хе-Х.
Аксиомы линейного пространства проверяются непосредственно.
6. Линейным вещественным пространством является
множество C(R, R) всех непрерывных вещественных функций на R. Это
следует из того, что сумма непрерывных функций и произведение
непрерывной функции на число являются непрерывными
функциями.
7. По аналогичной причине линейным вещественным
пространством является множество D(R, R) всех дифференцируемых
вещественных функций на R.
8. Линейными вещественными пространствами являются
множество P(R) всех многочленов от одной вещественной переменной
χ с вещественными коэффициентами и его подмножество /MR),
состоящее из всех многочленов степени <п.
Ясно, что имеют место включения
Pn{R)czP(R)czD(Rf R)cC(R, R)cAf (R, R).
9. Линейным вещественным пространством является множество
R+ всех положительных вещественных чисел, в котором операции
определены следующим нестандартным образом. Для a, 6eR+ и
λeR полагаем по определению
α + 6=α·ί?, kassa\
Роль нуля в пространстве R+ играет единица, а обратным к
элементу а является число 1/а. Проверка аксиом линейного
пространства предоставляется читателю.
189
10. Простейшим линейным пространством (над любым полем)
является (называемое нулевым) пространство, состоящее из
одного нулевого вектора.
§ 2. ЛИНЕЙНАЯ ЗАВИСИМОСТЬ. БАЗИСЫ. РАЗМЕРНОСТЬ
п.1. Линейная зависимость. Линейная зависимость конечных
систем векторов и связанные с ней понятия были определены в
первой части (§ 7). Там же приведены некоторые элементарные
утверждения, касающиеся линейной зависимости конечных систем
векторов.
2.1. О π ρ е дел е н и е. Скажем, что произвольная система
'(множество) А векторов линейного пространства V линейно не-
зависима, если всякая ее конечная подсистема линейно
независима.
Согласно (АГ, 1, предложение 7.3) это определение является
обобщением определения линейной независимости конечной
системы векторов.
Пусть теперь в линейном пространстве V даны две системы
векторов А я В, Скажем, что система А линейно выражается
через систему β, если каждый вектор системы А является линейной
комбинацией некоторой (конечной) подсистемы векторов из В.
Две системы векторов назовем линейно эквивалентными, если
каждая из них линейно выражается через другую. Легко
проверить, что отношение линейной эквивалентности является
отношением эквивалентности на множестве всех подмножеств линейного
пространства.
2.2. Лемма (основная лемма о линейной
зависимости). Пусть даны две конечные системы векторов 4={аь ...
..., ат} и В={Ъ{, ..., Ъп}. Тогда если система А линейно
выражается через систему В и m>nt то система А линейно зависима.
Доказательство. Представим векторы а,- в виде
линейных комбинаций векторов b7:
/-1
(3)
Тогда в матрице
сп ... с1п
стп1 · · ' стпп
число строк больше числа столбцов. Отсюда по теореме о ранге
матрицы вытекает, что строки матрицы С линейно зависимы.
Существуют такие числа αϊ, ..., am, не все равные нулю, что
Σ α^υ·=0, /==1,
η.
(4)
i=l
190
Тогда из свойств операций в линейном пространстве получаем
т т η
V а7-огг=(согласно (3))==£ af (]£ ci}bj) =
/Ξι i==i /=i
η m η
= Σ ^Ца^)Ь;=(согласно (4))=Ц 0.^=0.
Таким образом,
т. е. системя А линейно зависима. Лемма доказана.
2.3. Следствие. Если две конечные системы векторов
линейно эквивалентны и линейно независимы, та эти системы состоят
из одинакового числа векторов,
2.4. Предложение." Если линейно зависимая упорядочен*
нал система векторов А={аи ..., ап] начинается с ненулевого
вектора, то существует такое к, 1<&</г, что система {аь ..., а*}
линейно независима, а вектор a*+i через нее линейно выражается.
Доказательство. Для Ι^ί^/г положим Лг={а1, ..., а/<}.
Имеем растущую цепочку
Α{αΑ2α.. .czAn=A.
Она начинается с линейно независимой системы А\ и кончается
линейно зависимой системой Ап. Поэтому существует такое k,
1<£<я—1, что система Ak линейно независима, а система Ak+\
линейно зависима. Отсюда согласно (АГ, 1, предложение 7.7) и
получаем, что вектор а/?+1 линейно выражается через Apt.
Предложение доказано.
2.5. Предложение. Пусть
^={ai, ..., am, am+i, ..., art}
— такая линейно зависимая система, что подсистема {аь .... ат}
линейно независима. Тогда из системы А можно выкинуть вектор
*k при некотором й>т+1 так, что полученная система Ах будет
линейно эквивалентна системе А.
Доказательство. По предложению 2.4 существует такой
вектор адг, что векторы аь ..., a.k-\ линейно независимы, а вектор
адг через них линейно выражается. В силу независимости векторов
аь ..., am обязательно й>/л+1. Непосредственно из определения
вытекает, что система Л1=Л\{аА:} линейно эквивалентна системе
А. Предложение доказано.
п.2. Базисы и размерность. Напомним (см. АГ, § 9), что
базисом линейного пространства V называется всякое сто линейно
независимое подмножество £, через которое пространство V линейно
выражается.
2.6. Теорема. Во всяком ненулевом линейном пространстве
существует базис.
191
Эту теорему доказывать не будем. Ее доказательство
существенно опирается на известный постулат теории множеств —
аксиому выбора. В этой книге мы будем иметь дело только с
пространствами, в которых существует базис и, более того, в которых
существует конечный базис.
2.7. Теорема. Любые два базиса линейного пространства
состоят из одинакового числа векторов.
2.8. Определение. Число векторов произвольного базиса
линейного пространства V называется его размерностью и
обозначается через
dim 1/.
Согласно теореме 2.7 это число не зависит от базиса и однознач
но определяется пространством V. Размерность нулевого
пространства по определению полагается равной нулю.
Пели в пространстве V существует конечный базис
(состоящий из η векторов), то оно называется конечномерным (я-мер-
ным).
2.9. Замечание. Утверждение теоремы 2.7 верно и для
бесконечных базисов. При этом говорят, что два множества X и Υ
имеют одинаковое число элементов (имеют одинаковую
мощность), если существует биекция f:X-+Y. Докажем теорему 2.7
лишь для конечного базиса, поскольку общий случай требует
обращения к арифметике кардинальных чисел, что выходит за
рамки нашей книги.
Доказательство теоремы 2.7 (конечномерный
случай). Пусть в линейном пространстве V даны два базиса Ε и Е'
и базис Ε состоит из η векторов. Если базис Е' состоит из
конечного числа векторов, то это число равно η согласно следствию 2.3.
Предположим теперь, чо множество Е' бесконечно. Тогда в нем
можно выбрать подмножество Е", состоящее из я+1 вектора.
Множество Е" линейно выражается через Ε и, следовательно,
линейно зависимо по лемме 2.2. Но это противоречит линейной
независимости базиса £'. Теорема 2.7 доказана.
2.10. Предложение. Для произвольного ненулевого линейного
пространства Vразмерности dim V'= η выполняются следующие
условия:
а) любые η линейно независимых векторов образуют базис;
б) любая полная система из η векторов является базисом.
Доказательство. Начнем с а). Пусть Ε - базис, состоящий
из η векторов, а Ег - произвольная линейно независимая система,
состоящая из η векторов. Предположив, что £" не является базисом,
найдем вектор а, который линейно не выражается через векторы
системы Е'. Тогда согласно (АГ, 1, предложение 7.7) система
Е" = Е'Ц{а} линейно независима. Но система Е" состоит из η + 1
вектора и линейно выражается через базис Е, состоящий из η
векторов. Это противоречит лемме 2.2.
192
Теперь б). Надо показать, что полная система А, состоящая из η
векторов, линейно независима. Предположим противное. Поскольку в
пространстве V имеются ненулевые векторы, система А также
содержит ненулевой вектор. Тогда А состоит не менее чем из двух
векторов, и согласно (АГ, 1, предложение 7.5) некоторый вектор а еА
линейно выражается через оставшиеся векторы системы А.
Следовательно, система А' = А \ {а} линейно эквивалентна системе А и
поэтому тоже полна. Но в пространстве V существует базис,
состоящий из η векторов. Он линейно выражается через полную систему А ',
состоящую из η - 1 вектора. Это противоречит лемме 2.2.
Предложение 2.10 доказано.
2.11. Следствие. В n-мерном пространстве
а) любая линейно независимая система содержит <п
векторов;
б) любая полная система содержит >/г векторов.
2.12. Теорема. В конечномерном ненулевом линейном
пространстве любую линейно независимую систему векторов можно
дополнить до базиса.
Доказательство. Пусть А={&и ..., а*} — линейно
независимая система. Индукцией по k докажем, что ее можно
дополнить до базиса n-мерного пространства V. Если 6=0 (т. е.
система А пуста), то в качестве искомого базиса возьмем любой базис
пространства V. Предположим, что мы уже доказали наше
утверждение для всех &<:/, и пусть &=/+1. Тогда для системы
{аь ..., а/} по предположению индукции можно найти векторы
bi, ..., Ъп-ι так, что система £'={а1, ..., a*, blt ..., bn-i) является
базисом пространства V. Прибавим к системе Ε вектор аж·
Полученная система
£'={аь ., а/, аж, Ьь ..., Ьп_/}
будет полна, как и базис Е. Но содержащая п+ 1 вектор система
Ег линейно зависима. Согласно предложению 2.5 (для ш=1+1)
из системы Е' можно выкинуть один из векторов Ь, так, что
получившаяся система Е" будет линейно эквивалентна системе £' и,
следовательно, полна. Итак, мы построили полную систему £"=>
=>Л, состоящую из η векторов. По предложению 2.10 Е" — базис.
Теорема доказана.
2.13. Замечание. Напомним, что в первой части нами
были определены координаты вектора в базисе (§ 9), матрица
перехода от одного базиса к другому и получен закон изменения
координат вектора при переходе от одного базиса к другому (§ 22).
В дальнейшем пользуемся этим без дополнительных оговорок.
п.З. Примеры. 1. Из результатов § 8 первой части следует,
что dim Vect(i)=i.
2. dimR*=tt. Стандартный базис этого пространства образуют
строки единичной матрицы Е.
3. dimP„(R)=rt+l. В качестве базиса можно взять
многочлены 1, х, ..., хп. Полнота этой системы очевидна, линейная неза-
/
193
висимость вытекает из того, что многочлен степени ρ имеет не
более ρ корней.
4. dim Мт,п=тп. В качестве базиса можно взять систему
матриц Ец, 1</</п, \<j<n% где на месте /, / матрицы Ец стоит
единица, а на остальных местах — нули.
5. Примером бесконечномерного пространства является
пространство P(R) всех многочленов. В этом пространстве имеется
счетный базис, состоящий из одночленов
1 χ х.п
1 , Л-, . . . , Л- , ... .
6. Другим примером бесконечномерного пространства
является C(R, R) всех вещественных непрерывных функций. В этом
пространстве нет счетного базиса. Более того, любой базис этого
пространства имеет ту же мощность, что и множество всех точек на
вещественной прямой, т. с. мощность континуума.
§ 3. ПОДПРОСТРАНСТВА ЛИНЕЙНОГО ПРОСТРАНСТВА.
ОПЕРАЦИИ НАД НИМИ
п.1. Определение подпространства. Непустое подмножество Μ
линейного пространства V (над полем К) называется линейным
подпространством (или просто подпространством) пространства
V, если a+beAi и ааеМ для любых а, ЬеМ и аеК.
Очевидно, что если Μ — подпространство линейного
пространства V, то любая линейная комбинация векторов из Μ
принадлежит М.
Ясно также, что подпространство Μ линейного пространства
V, наделенное имеющимися в пространстве V операциями
сложения и умножения на число, само является линейным
пространством. В частности, нулевой вектор пространства V принадлежит
любому его подпространству.
Пусть А — произвольное непустое подмножество линейного
пространства V. Обозначим через Ls(^) множество всех линейных
комбинаций векторов, принадлежащих Л, и назовем это
множество линейной оболочкой множества Л в пространстве V. Линейной
оболочкой пустого множества назовем множество, состоящее из
одного нулевого вектора. Имеет место очевидное
3.1. Предложение. Линейная оболочка любого множества
AcnV является линейным подпространством пространства V, со-
держащим А.
Пространство Ls(A) называется также линейным
пространством, натянутым на множество А (или на векторы множества Л).
3.2. Предложение. Для любого подпространства Μ
конечномерного линейного пространства V имеем
dimAi<dim V.
При этом из равенства dimAi=dimV вытекает равенство M=V.
Доказательство. Первое утверждение вытекает из
теоремы 2.12. Если же dimM=dimKt то, взяв базис Е={еи ..., tn}
194
в пространстве Λί, получаем согласно предложению 2.10, что Ε
является базисом и в пространстве V, откуда и вытекает
включение VczM. Предложение доказано.
п.2. Примеры. 1. Множество, состоящее из нулевого вектора,
является наименьшим подпространством любого линейного
пространства. Само линейное пространство V является своим
наибольшим подпространством.
2. Пространство Vect(l) векторов на прямой имеет два
подпространства: нулевое и совпадающее со всем пространством.
3. Пространство Vect(2) векторов на плоскости кроме
тривиальных подпространств (нульмерного и двумерного) имеет
одномерные подпространства, каждое из которых является
пространством всех векторов, параллельных некоторой прямой.
4. Читателю предоставляется доказать, что любое я-мерное
пространство имеет подпространства всех промежуточных
размерностей от 0 до п.
5. Пространство P«(R) многочленов степени <л является
подпространством пространства P(R) всех многочленов.
6. Подпространством пространства R" является пространство
£(Σ) всех решений системы
[апхх +...+<*! А =0,
УатЛ+ ...+атпхп = 0
однородных линейных уравнений от η неизвестных.
7. Вопрос. Является ли подпространством пространства
Prt(R) множество всех многочленов степени /г?
п.З. Пересечения и объединения подпространств. Напомним, что
пересечением
П{Х«:ае=Л}
еемейства подмножеств Ха данного фиксированного множества X
называется множество
{х^Х.х^Ха для любого аеЛ}.
Объединением
(]{Ха:а^А)
семейства подмножеств Ха данного множества X называется
множество
{х^Х: существует такое аеЛ, что х^Ха}.
Имеют место следующие законы двойственности:
Х\П {Ха : ае А}= [){Х \Ха ; αε Л}, (5)
Х\и{Ха:осеЛ}=П{Х\Ха:аеЛ}. (6)
195
Непосредственно из определение вытекает
3.3. Предложение. Пересечения любого семейства
подпространств Ма данного линейного простратт&а V является его
подпространством.
Для данного множества AaV через Li (Л) обозначим
пересечение всех линейных подпространств пространства У, содержащих
это множество А. Согласно предложению 3.3 Li (Л) является
(очевидно наименьшим) линейным подпространством пространства V,
содержащим множество А.
3.4. Предложение. Для любого подмножества А
линейного пространства V имеем
L\{A)=Ls(A).
Доказательство. Поскольку Li (Л) — наименьшее
подпространство, содержащее множество Л, оно согласно
предложению 3.1 содержится в Ls^). Покажем теперь, что Ls^) лежит в
любом подпространстве Λί, содержащем Л. Если x^Ls(A), то
вектор χ является линейной комбинацией векторов аь ..., але
&АаМ. Но подпространство Μ вместе с векторами аь ..., а*
содержит и все их линейные комбинации. Следовательно, xeAf.
Предложение доказано.
В то время как любое пересечение подпространств является
подпространством, объединение подпространств почти никогда
подпространством не является. Имеет место
3.5. Предложение. Если объединение М1[)М2
подпространств М{ и М2 линейного пространства. V является его
подпространством^ то одно из этих подпространств лежит в другом.
Доказательство. Предположив противное, возьмем вектор
&{^М{\М2 и вектор &2^М2\МХ. Тогда их сумма a^a2
принадлежит Af1(JAf2 и, следовательно, лежит в каком-нибудь из слагаемых
Μ ι и М2. Предоположим, что &\ + &2^Μ{. Поскольку М{ —
подпространство, имеем
а2=(а1 + а2)— л{^М{.
Но это противоречит тому, что &2^Μ2\ΜΧ. Предложение доказано.
п.4. Суммы подпространств. Пусть Μ я N — подпространства
линейного пространства V. Назовем их суммой множество
M + JV={a + b:ae=Ai, be=N}. (7)
Ясно, что сумма подпространств является подпространством,
содержащим и Μ и N. Более того, имеет место
3.6. Предложение. Сумма подпространств Μ+Ν является
линейной оболочкой их объединения М\ \Ν.
Доказательство. Включение
M + NczLs(M[}N)
непосредственно вытекает из определений. С другой стороны, М +
+ N является подпространством, содержащим M{jN. Но Ls(M\jN)
196
является согласно 3.4 наименьшим подпространством, содержащим
M[)Ny откуда и вытекает обратное включение. Предложение
доказано.
Пусть теперь дано некоторое семейство подпространств Λία,
аеЛ, данного линейного пространства V. Их суммой
2{Ма:ае=А}
называется линейная оболочка их объединения. Это определение
для двух слагаемых согласно предложению 3.6 эквивалентно
определению (7). Сумма конечного числа подпространств Ми ..., Λί6
обозначается также через
Λί, + ... + Af,.
Ясно, что
Мг+... +Ms={ai+ ... +а,: а, €5 М,}. (8
3.7. Теорема. Пусть Μ и N — подпространства линейного
пространства V. Тогда
a\m(M + N)=a\mM + a\mN—A\m{M{\N). (9
Доказательство. Пусть
dim7W=m, dimJV=n, a\m(M[\N)=l.
Нам надо найти базис пространств M + N, состоящий из т+п—/
векторов. Пусть {ai, ..., а/} — базис пространства Mf\N.
Согласно теореме 2.12 его можно дополнить векторами bi, ..., bm«/ до
базиса пространства Μ и векторами сь ..., с„-/ до базиса
пространства N. Покажем, что система
£={alf ..., a,, bj, ..., bm_/, q, ..., crt-/},
состоящая из т + п—/ векторов, является базисом пространства
M + N. Произвольный вектор из M + N имеет вид x-f у, где хеМ,
yeJV. Поскольку системы
£1={а1, ..., a,, blf ..., bm_/},
£*={*ι. ..., а/э clf ..., crt_z}
образуют базисы пространств М и N соответственно, поэтому
векторы χ и у могут быть представлены в виде
х=а1а1+ ... +<z/a/ + a/+ib1-f ... +ambm_/,
У=РА+ · · · +Ра +р/+1сх+ ... + Р»с,г_,.
Тогда
/ т—1 п-1
* + У=Е (af + Pi)ai+ Σ аЧ-/Ь/ + Е βι+/**·
197
Осталось проверить, что система Ε линейно независима.
Представим нулевой вектор в виде линейной комбинации векторов
из Е:
ί = 1 /=1 Λ=1
Положим
х=а1а1 + ... +а/а/ + р1Ь1+ · ·.+Pm-/bw_/. (11)
Вектор х, будучи линейной комбинацией векторов системы £ь
принадлежит М. С другой стороны, из (10) следует, что
Поэтому xeN и, следовательно, x^Mf\N. Тогда вектор χ можно
представить в виде линейной комбинации базисных векторов
аь ..., а/ пространства Μ(]Ν:
x=6iai+ ... -f-б/а/.
Это равенство можно переписать в виде
х=61а1+ ... +б,а/ + 0-Ь1+ ... Ч-О-Ьщ-/. (12)
Равенства (11) и (12) представляют собой разложения вектора
χ по векторам линейно независимой системы £ι. В силу
единственности такого разложения at=6/ и β/=0. Поэтому равенство
(10) принимает вид
ЗД+... +«Λ + ΥΛ+ ... + yn-iCn-i=0, (13)
откуда в силу линейной независимости системы Е2 получаем
at=0 и υατ=0. Таким образом, все коэффициенты линейной
комбинации (10) равны нулю. Теорема доказана.
§ 4. ПРЯМАЯ СУММА ПОДПРОСТРАНСТВ
4.1. Определение. Сумма M + N подпространств линейного
пространства V называется прямой, если их пересечение Aff|Ar
состоит из нулевого вектора. В этом случае пишем M + N=M(BN*
4.2. Предложение. Для подпространств Μ и N, дающих
в сумме линейное пространство V, эквивалентны следующие
условия:
а) V=M®N;
б) всякий вектор аеК однозначно представляется в виде
суммы Ь + с, где b&Vf, ceiV;
в) существует вектор аеУ, который однозначно
представляется в виде суммы Ь + с, где beAi, ceJV;
198
г) нулевой вектор однозначно представляется в виде суммы
векторов из Μ и Ν\
д) если Ех — базис в М, а Е2 — базис в Ν, то Ei[jE2 является
базисом в V;
е) dim V=dimM-t-dim jV.
Доказательство. а)=^б). Предположим, что некоторый
вектор а имеет два различных представления
a=bi+Ci=b2+C2.
Тогда bi—b2=c2—сь Ненулевой вектор bi—b2 принадлежит Μ и,
будучи равным вектору с2—сь принадлежит N. Таким образом,
пересечение Mf\N содержит ненулевой вектор bi—b2.
Противоречие. -~
Импликация б)=^в) тривиальна. Проверим в)=^г).
Предположим, что наряду с представлением 0=0+0 имеется
нетривиальное представление 0=bI + cI. Тогда вектор а из п. в) наряду
с представлением а=Ь + с допускает представление a=(b+bi) +
+ (c + ci). Противоречие.
Теперь импликация г)=^д). Пусть £i={ai, ..., am} — базис
в Λί, а £2={bi, ..., Ъп} — базис в N. Поскольку V=M + N,
система E=Ei\jE2 полна в пространстве V. Покажем, что она линейно
независима. Пусть
слан- ... +amam+Pibi+ ... + βΑι=0.
Положим a=aiai+...+атат и b=Pibi+...+рлЬп. Имеем а+
+ Ь=0, откуда согласно г) а=0 и Ь=0. Но из равенств
aiai + ... + amam=0, pibi + ... 4- β«^=0
в силу линейной независимости систем Ελ и £2 вытекает, что
α,·=0, i=l, ..., m, и β/=0, /=1, ..., п.
Импликация д)=^е) тривиальна. Импликация е)=^а)
вытекает из теоремы 3.7. Предложение 4.2 доказано.
Пусть Μ — подпространство линейного пространства V.
Подпространство NczV называется алгебраическим дополнением
подпространства Μ в пространстве V, если V=M®N.
4.3. Предложение. Для любого подпространства Μ
конечномерного линейного пространства V существует
алгебраическое дополнение. При этом если 0<dimM<dim V, то
алгебраическое дополнение определено неоднозначно.
Доказательство. Возьмем базис еь ..., ет в
подпространстве Μ и дополним его до базиса Е={е{у ..., ет, ет+ь · ·, е„}
всего пространства V. Тогда согласно 4.2 подпространство Лт=
=Ls(em+i, ..., е„) будет алгебраическим дополнением к М.
Теперь неоднозначность. Наряду с базисом Ε рассмотрим систему
199
0 ..
1 ..
0
.. 0 1
..0 0
• ι о
0 1
E'={eu ..., em, em+i, ..., e„_i, e„ + ei}. Матрицей перехода от
базиса Ε к системе Ef является матрица
С =
В силу невырожденности матрицы С система Е' согласно (АГ,
предложение 22.4) также будет базисом пространства V. Тогда
подпространство A^1=Ls(em+1, ..., e„_b en+ei) также будет
алгебраическим дополнением к М. Дополнения N и Νχ различны,
так как ei + en^N\\N. В самом деле, если бы e\ + en^N, то ei=
= (ei-fen)—en^Nt что противоречило бы равенству V=M(BN.
Предложение доказано.
4.4. Определение. Пусть Ми ..., Ms — подпространства
линейного пространства V. Скажем, что V является прямой сум-
мой этих подпространств, и пишем
V=Mx®...®MSy
если V=M{+ ...+MS и для всякого i=\f ..., s
ММ(М{+ ... +Mi-x + Mi+i+ ... +Λί5)-{0}.
(14)
Это определение является обобщением определения 4.1 на случай
s>3.
4.5. Предложение. Для подпространств М\, .... MSt
дающих в сумме линейное пространство V, эквивалентны следующие
условия:
а) ν=Λί1Θ...ΘΛί5;
б) всякий вектор аеУ однозначно представляется в виде
суммы векторов a,eMt·;
в) существует вектор a^V, который однозначно
представляется в виде суммы векторов a,eAft;
г) нулевой вектор однозначно представляется в виде суммы
векторов из Μ г,
д) если Ει — базис в Mif то Ex\j ... (JES — базис в V;
е) dim V=dimMi+ ... + dimAfs.
Доказательство проходит индукцией по числу слагаемых s
с применением предложения 4.2.
4.6. Примеры. 1. Квадратную матрицу Л=||а*/|| назовем
симметрической, если
и кососимметрической, если
aji=—aji.
200
Множество всех симметрических (кососимметрических) матриц
А&Мп обозначим через МпС1Ш(Мпкос). Ясно, что МпСЦ1Л и Мп"ос
являются подпространствами пространства Мп и
2. г ( К ) == /четн ~г *нечетн·
Здесь через Рчетн(Рнечетн) обозначается множество всех
многочленов, каждый из которых является суммой одночленов четной
(нечетной) степени.
3. Если {еь ..., ея} — базис в пространстве V, то
V=Ls(eO® ...®Ls(e„).
§ 5. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ И ИЗОМОРФИЗМЫ
5.1. Определение. Напомним (АГ, определение 6.3), что
отображение <р : V-**W линейных пространств над одним и тем же
полем К называется линейным, если для любых a, beV и аеК
1) <p(a + b)=<p(a)+cp(b),
2) <р(аа)=скр(а).
Линейное отображение φ : V-+W называется
а) мономорфизмом, если оно разные векторы переводит
в разные;
б) эпиморфизмом, если q>(V) = W;
в) изоморфизмом, если оно одновременно является
мономорфизмом и эпиморфизмом, т. е. биекцией.
Из определений непосредственно вытекает
5.2. Предложение. Пусть ця : V\-+V2 и q>2: V2-+Vz —
линейные отображения. Тогда их композиция φ2°φι : Vi-+Vs
является линейным отображением, композиция мономорфизмов —
мономорфизмом, композиция эпиморфизмов — эпиморфизмом,
композиция изоморфизмов — изоморфизмом.
Если φ : V-+W — изоморфизм, то определено обратное
отображение φ-1 : W-+V, которое, очевидно, является линейным и,
следовательно, изоморфизмом.
5.3. Задание линейного отображения образом базиса. Всякое
линейное отображение φ сохраняет линейные комбинации, т. е.
<p(ctiai-b ... +a*afe)=ai(p(ai)+ ... -Ьадр^).
Поэтому для задания линейного отображения φ : V-+W
достаточно определить его на векторах еь ..., еп некоторого базиса
пространства V. Зная векторы φ(βι), ..., φ(β«), для произвольного
вектора
Χ=*ΐβ!+ ... +Хг£п
полагаем
φ(χ)=χ,φ(βΙ)+ ... +*„<р(е„).
201
Из сохранения линейным отображением линейных комбинаций
вытекает
5.4. Предложение. Всякое линейное отображение
переводит линейно зависимую систему векторов в линейно зависимую.
Пусть φ : V-+W — линейное отображение. Множество
{хеУ:ф(х)=0}
называется его ядром и обозначается Кегср. Множество <p(V)
(образ отображения φ) обозначается через Im<p. Легко видеть,
что множества Кегср и Im<p являются линейными
подпространствами пространств V и W соответственно.
Размерность пространства Im φ называется рангом
отображения φ и обозначается г (φ).
5.5. Предложение. Линейное отображение φ : V-+W
является мономорфизмом тогда и только тогда, когда Кет φ={0}.
Доказательство. Из линейности отображения φ
вытекает, что оно переводит векторы аь a2EV в один и тот же
вектор b^W тогда и только тогда, когда ai—a2eKer<p, откуда
утверждение и следует.
5.6. Лемма. Пусть φ : V-+W — линейное отображение, и
£={ei, ..., еп] — такой базис пространства V, что первые его
m векторов еь ..., ет образуют базис ядра Кегф. Тогда система
векторов F={<p(em+i), ..., <р(еп)} является базисом образа 1тφ.
Доказательство. Сначала покажем, что система F полна
в Im<p. Пусть belmcp. Существует такой вектор aeV, что
q)(a)=b. Разложим вектор а по векторам базиса Е:
а) φ — эпиморфизм;
Тогда, поскольку еи ..., emeKerq), имеем
η η
Ь=<р(а) = У! а,<р(е,)= £ a^(et).
i=\ i—m+\
Теперь проверим линейную независимость системы F. Пусть
Pi<p(em+i)+ ... +β„ —тф(е71 )=0. (15)
Положим a=Piem+1+...+р„_тет. Тогда согласно (15) имеем
<р(а)=0, т. е. аеКегф. Значит, вектор а можно разложить по
векторам базиса ei, ..., tm пространства Кегср:
a=aiei-f ... + awem.
Сравнивая это равенство с определением вектора а, получаем
αιβι + ... + amew—Piem+i—... —Р«-тел=0. (16)
Поскольку Ε — базис, все коэффициенты линейной комбинации
(16) равны нулю, в частности, βι=... =Р/г-т=0. Таким образом,
линейная комбинация (15) тривиальна. Лемма доказана.
202
Из этой леммы и теоремы 2.12 вытекает
5.7. Теорема. Для всякого линейного отображения <р: V-+W
справедлива формула
dim V=a\m Ker<p + dim Ιπιφ. (17)
Теперь приведем некоторые характеристики изоморфизмов.
5.8. Предложение. Линейное отображение φ : V-+W
является изоморфизмом тогда и только тогда, когда оно любой
(какой-нибудь) базис пространства V переводит в базис
пространства W.
Доказательство предоставляется читателю.
Из теоремы 5.7 и предложения 5.5 вытекает
5.9. Предложение. Если dim V=dim W, то для линейного
отображения φ : V-+W эквивалентны следующие условия:
а) φ — эпиморфизм;
б) φ — мономорфизм;
в) φ — изоморфизм.
5.10. Теорема. Все n-мерные линейные пространства над
одним и тем же полем изоморфны между собой.
Доказательство. Пусть V и W — два /г-мерных
пространства. Возьмем базис ai, ..., ап в пространстве V и базис
Ьь ..., Ъп в пространстве W. Зададим линейное отображение
φ : V-+W способом, предложенным в п. 5.3: положим q)(a;)=b„
/=1, ..., /г, и продолжим по линейности отображение φ на все
пространство V. Так построенное линейное отображение φ : V-+-
-+W будет изоморфизмом в силу предложения 5.8. Теорема
доказана.
5.11. Примеры. 1. Простейшими примерами линейных
отображений являются тождественное отображение ε : V-*V и нулевое
отображение ω : V-^-W.
2. В (АГ, § 10) показано, что геометрические проектирования
являются линейными отображениями * векторных пространств
Vect(2) и Vect(3).
3. Для аффинного отображения /: Е-^Е ассоциированное
с ним линейное отображение f=Vect(3)->Vect(3) переводит
базис в базис (АГ, § 45) и, следовательно, является изоморфизмом.
4. Из свойств производной вытекает, что дифференцирование
d:D(R, R)-WW(R, R), ставящее в соответствие всякой
дифференцируемой функций / ее производную f'=d{f), является
линейным отображением.
Глава II
СОПРЯЖЕННЫЕ ПРОСТРАНСТВА
§ 6. ОПРЕДЕЛЕНИЕ И ПРОСТЕЙШИЕ СВОЙСТВА СОПРЯЖЕННЫХ
ПРОСТРАНСТВ
6.1. Определение. Выше мы отмечали (§ 1), что всякое
поле К является линейным пространством над самим собой.
Линейное отображение ξ: V-+K линейного пространства V над
полем К в это поле называется линейным функционалом (или
просто функционалом) на пространстве V. Функционалы
называются также ковекторами пространства V.
6.2. Примеры. 1. Простейшим функционалом является
нулевой функционал ω : V-+K.
2. Для фиксированного feR функционалом является
отображение 6*:C(R, R)-*R, ставящее в соответствие произвольной
(непрерывной) функции / ее значение /(f) в точке t.
3. Положив S(f)=\f(t)dt, получаем функционал на прост-
о
ранстве С ([0, 1], R) непрерывных функций на отрезке [0, 1].
4. Функционалом является отображение φ : R*-*R, задаваемое
формулой
<р(х\ ..., хп)=х1 + ... +хп.
6.3. Определение. Множество всех функционалов на
данном ли'-гйном пространстве V обозначается через V* и
называется пространством, сопряженным к пространству V.
Непосредственная проверка показывает, что сумма ξ+η двух функционалов
ξ и η, определяемая равенством
(ξ + η)(*)-ξ(*)+η(*),
и произведение а| функционала ξ на произвольное число а,
определяемое равенством
(αξ)(χ)=α·ξ(χ),
являются функционалами. Ясно также, что эти операции
удовлетворяют аксиомам линейного пространства. Роль нулевого
элемента в V* играет нулевой функционал ω : V-*K. Таким образом,
сопряженное пространство V* является линейным пространством.
6.4. Определение. Пусть еь ..., е« — базис в
пространстве V и geV*. Числа
*ι=ξ(βι), ..., a„=g(ert)
называются коэффициентами функционала ξ в базисе еь ..., е,,.
204
Для произвольного вектора x=x1e]+ ... +хпеп в силу
линейности функционала ξ имеем
g(x)=.r1ai+...+x"a«. (1)
Из 5.3 вытекает, что всякий функционал ξ однозначно
определяется своими коэффициентами в базисе еь ..., е,г.
Воспользуемся этим замечанием и для данного базиса еи ..., е„
пространства V определим функционалы ε1, ..., ε". Положим
в'(еу)-вД (2)
6.5. Предложение. Функционалы г\ ..., гп образуют
базис сопряженного пространства У*, который называется базисом,
сопряженным к базису еь ..., е«. Коэффициенты функционала ξ
в базисе еь ..., е„ являются его координатами в базисе ε1, ...
..., ε".
Доказательство. Покажем, что из (1) вытекает
равенство
|=а^Ч- ...+α„ε". (3)
Для произвольного вектора χ имеем (a^x+ ... +апгп)(х)=(по опре -
η п.
делению операций в У'^а^гЧх)-^ ... +апгп{х)=2^ αίε\Σ x'ej) =
η η η η η
=(согласно линейности 8*)=^, α^ x'V(e;)=J]a| J] *7δ/=Σ а.х* =
=λ:1λ:1+ ... +κηαη.
Таким образом, равенство (3) проверено. Из него, в
частности, вытекает полнота системы ε1, ..., ε". Для завершения
доказательства остается проверить ее линейную независимость, для
чего в свою очередь надо показать, что коэффициенты нулевого
функционала ω равны нулю. Итак, пусть ω=αιε!+ ... +απεη.
Тогда
η η
0=a>(ey.)=V д<е|(е/)=У afi^a,.
Предложение доказано.
6.6. Следствие. Для конечномерного пространства V
dim V*=dim V.
6.7. Следствие. Всякое конечномерное линейное
пространство изоморфно своему сопряженному пространству.
§ 7. ВТОРОЕ СОПРЯЖЕННОЕ ПРОСТРАНСТВО
7.1. Определение. Пусть V — линейное пространство,
У* — пространство, ему сопряженное, а (V*)* — пространство,
сопряженное пространству V*. Линейное пространство (1/*)* на-
205
зывается вторым сопряженным пространством (по отношению
к пространству V).
Для любого линейного пространства V существует
естественное отображение
c:V-»{V*)*9
которое определяется следующим образом. Для произвольного
вектора хеУ линейный функционал с(х) : V*-+K задается
равенством
*(χ)(ξ)=ξ(χ) (4)
для всякого ξ^Κ*.
Чтобы проверить корректность этого определения, надо
показать, что отображение с(х) линейно. Имеем с(х)(1+у\) =
= (1+11) (х) = (по определению операций в V*)=|(x)-f η(χ) =
=с(х) (1)+с(х) (η). Аналогично проверяется и второе свойство
линейности.
7.2. Предложение. Для всякого линейного пространства V
отображение с : V-+(V*)* является мономорфизмом.
Доказательство. Сначала проверим, что отображение с
линейно. Для вектора х, yeV надо проверить равенство
с(х+у)=с{х)+с{у),
т. е. показать, что два отображения c(x-fy) и с(х) + с(у)
пространства V* в поле К совпадают. Для этого надо доказать, что
Совпадают их значения на любом элементе ξ пространства V*.
Имеем
(c(x + y))(g) = (no определению (4))=£(х+у)=£(х)+£(у)-
=с(х) (I) +с(у) (ξ) = (πο определению операций в (V*)*) = (c(x) +
+ с{у))(1).
Аналогично проверяется и второе свойство линейности с(Кх)=
=кс{х).
Теперь покажем, что Кегс={0}. Пусть аеУ — ненулевой
вектор. Дополним его до базиса Ε пространства V (см. § 2).
Определим линейный функционал ξ : V->K, полагая ξ(а) = 1, ξ(β)=0
для еЕ£\{а} и продолжая его по линейности на все
пространство V (см. 5.3). Таким образом, для всякого ненулевого вектора
aeV существует ковектор l^V*f который на а принимает
ненулевое значение. Поэтому, если для некоторого вектора xgV
функционал с{х) : V*-+K является нулевым (т. е. согласно (4)
ξ(χ)=0 для всякого gel/*), то х=0. Итак, Кегс={0}.
Предложение доказано.
7.3. Замечание. Читателю следует обратить внимание на
то, что при доказательстве предложения 7.2 мы применили
теорему о дополнении линейно независимой системы до базиса,
сформулированную нами в общем случае, но доказанную только
в конечномерном.
206
Согласно следствию 6.6 для конечномерного пространства V
имеем dim V=dim(V*)*. Поэтому из предложений 7.2 и 5.9
вытекает
7.4. Предложение. Для конечномерного пространства V
отображение с : V-r(V*)* является изоморфизмом.
7.5. Замечание. Конечно сам факт изоморфности
пространств V и (V*)* является тривиальным следствием совпадения
их размерностей. Но основным содержанием предложения 7.4
является то, что указанный в нем изоморфизм с является
«естественным», определяемым без какого-то ни было произвола.
Пространства V и V* также изоморфны, но «естественного»
изоморфизма между ними не существует. Мы проиллюстрируем этот факт
в гл. VII.
Завершим этот параграф тем, что с помощью второго
сопряженного пространства докажем
7.6. Предложение. Для любого базиса (ε) = (εΙ, ..., ?г)
сопряженного пространства V* в пространстве V существует
единственный базис (е) = (еь ..., е«), которому сопряжен базис
(ε).
Доказательство. Предположим, что базис (ε) сопряжен
базису (ei, ..., еп). Положим Х/=с(е,·). Система (χ) = (χι, ..., χη)
образует базис пространства (V*)*, так как отображение с
является изоморфизмом согласно 7.4. Кроме того,
χ;(ε')=£(β;) (ε7) = (согласно (4))=ε/(βΙ·)=6ί/. Таким образом,
базис (χ) сопряжен базису (ε). Но такой базис в пространстве
{V*)* определен единственным образом. Поэтому и базис (е) =
=с~"1(х) определен однозначно. Единственность доказана. Для
проверки существования достаточно положить (е)=с~1(х), где
(χ) — базис второго сопряженного пространства, сопряженный
базису (ε). Предложение доказано.
§ 8. АННУЛЯТОРЫ И НУЛЕВЫЕ ПОДПРОСТРАНСТВА. СИСТЕМЫ
ОДНОРОДНЫХ ЛИНЕЙНЫХ УРАВНЕНИЙ
п. 1. Аннуляторы. 8.1. Определение. Пусть S —
произвольное подмножество линейного пространства V. Множество
{ξ^Ι/* : ξ(χ)=0 для всякого xeS} называется аннулятором
множества S и обозначается через Ann S или S0.
Ясно, что Ann S является линейным подпространством
пространства V*. Легко проверить также формулу
Ann(U{Sa:aG А})= П {AnnSa : ae A}, (5)
из которой, в частности, вытекает
8.2. Предложение. Если SidS2, то AnnS2czAnnS\.
8.3. Предложение. Аннулятор любого множества SczV
совпадает с аннулятором его линейной оболочки.
207
Доказательство. В силу предложения 8.2 достаточно
проверить включение
Ann Sc: Ann (Ls(S)).
Пусть ξ^Αηη S и xeLs(S). Существуют такие векторы aj, ...
..., a^eS, что x=aiai+ ... 4-а%а*. Тогда
|(x)=ai|(aI)+...+a^(afe)=0,
т. е. g^Ann(Ls(5)). Предложение 8.3 доказано.
8.4. Предложение. Если Μ — подпространство
конечномерного пространства V, то
dimM + dim(AnnM)=dim V. (6)
Доказательство. Возьмем в пространстве V базис
(ei, ..., tn), первые m векторов еь ··., ет которого образуют
базис подпространства М. Пусть (ε1, ..., ε") — сопряженный
базис. Достаточно проверить, что ковекторы ε?η+1, ..., εη образуют
базис аннулятора Ann Λί. Эти ковекторы линейно независимы и
по определению сопряженного базиса лежат в ΑηηΛί. Покажем,
что каждый ковектор ξ^ΑηηΛί линейно через них выражается.
Пусть ξ=|ιε1+ ... +1ηεη. Поскольку е/еМ для i^m, имеем
η
0=Б(е|)=ЕЬе'(е,)=Ь.
/=»
Таким образом, |=|m+iem+I+ ... +ξΛεΛ. Предложение доказано.
п. 2. Нулевые подпространства. Пусть теперь Τ —
произвольное подмножество пространства V*, сопряженного к линейному
пространству V.
8.5. Определение. Множество {xeV:g(x)=0 для всякого
ξ^Γ} называется нулевым подпространством, соответствующим
множеству Г, и обозначается символом Г0.
Очевидно, что любое нулевое подпространство является
линейным подпространством V.
Читатель легко установит, что для нулевых подпространств
справедливы такие же факты, как и для аннуляторов:
1) (и{Га:аеЛ})0=П{(7,а)о:аеЛ};
2) если 7,1с=7,2, то (Τ2)οα(Τχ)ο;
3) 7o=(Ls(r))0;
4) если Nc:V* — подпространство, то
dimW+dim(JV0)=dimV. (7)
Кроме того, имеет место
8.6. Предложение. Если MaV и NaV* —
подпространства, то
(М°)0=М и (No)°=N.
208
Доказательство. Проверим первое из этих равенств.
Согласно (6) и (7)
dimM=dim(M°)0.
Поэтому достаточно проверить включение Mcz{M°)b. Но для
любых хеМ и 1<=М° и имеем ξ(χ)=0, откуда по определению
нулевого подпространства и вытекает, что хе(М°)0.
Равенство (Ν0)°=Ν проверяется аналогично. Предложение
доказано.
8.7. Замечание. Из предложения 8.6 вытекает, в частности,
что всякое линейное подпространство Μ пространства V
является нулевым подпространством, соответствующим единственному
подпространству Nc:V*y а всякое линейное подпространство N
пространства У* является аннулятором единственного
подпространства MczV.
Связь между аннуляторами и нулевыми подпространствами
можно проиллюстрировать еще одним способом.
8.8. Предложение. Для конечномерного пространства V
если MdV и NaV* — подпространства, то
(М°)°=с{М) и №=c(N0).
Доказательство. Согласно предложению 8.6 достаточно
проверить одно из этих равенств, например первое, а для этого
в силу совпадения размерностей в свою очередь достаточно
проверить включение c(M)cz{M°)°. Пусть xeAi и ξ^Λί0. Тогда
0=ξ(χ) = (согласно (4))«*(х) (|).
Итак, функционал с(х) принимает нулевые значения на любом
ковекторе ξ^Λί0. Следовательно, с(х)е(М°)°. Предложение
доказано.
п. 3. Системы однородных линейных уравнений. Пусть Т=
=={|1» ···» £m}c:V* — конечное множество ковекторов. Нулевое
подпространство Г0, соответствующее этому множеству 7\
состоит из всех векторов х, удовлетворяющих системе уравнений:
ξ'(χ)=0, ..., ξ*(χ)-0. (8)
Зафиксируем в пространстве V базис еи ..., е„. Тогда оно
отождествляется с арифметическим /г-мерным пространством К", а
векторы χ отождествляются со строчками (jc1, ..., хп) своих
координат.
Пусть (α,-ι, · · ·, Ягп) — коэффициенты ковектора ξ2 в базисе
(«ι, ..., е«) (или, что то же самое, координаты в сопряженном
базисе ε1, ..., ε"). Тогда система (8) переписывается в виде
( апхг+ ...+α1η*"=ϋ,
amXxl+...+amnxn=0.
209
Таким образом, нулевое подпространство, соответствующее
множеству 7\ в арифметическом л-мерном пространстве является
пространством решений системы (9) линейных однородных
уравнений. Размерность этого пространства Т0 согласно (7) равна
η—dim Ls(r).
Но размерность линейной оболочки множества Τ равна
максимальному числу его линейно независимых ковекторов, т. е.
максимальному числу линейно независимых уравнений системы (9),
или, что то же самое, максимальному числу линейно
независимых строк матрицы этой системы.
Итак, мы доказали
8.9. Предложение. Множество решений системы (9)
является подпространством пространства К" размерности η—г, где
г — ранг этой системы (==ранг матрицы этой системы).
Кроме того, из 8.7 вытекает
8.10. Предложение. Всякое подпространство пространства
К", имеющее размерность η—г, является пространством решений
системы однородных линейных уравнений ранга г.
Глава III
ЛИНЕЙНЫЕ ОПЕРАТОРЫ В ЛИНЕЙНОМ
ПРОСТРАНСТВЕ
§ 9. МАТРИЦА ЛИНЕЙНОГО ОПЕРАТОРА
9.1. Определение. Линейным оператором (или просто
оператором) в линейном пространстве V называется всякое
линейное отображение φ : V-+V этого пространства в себя.
9.2. Примеры. Кроме приведенных в § 5 примеров
тождественного оператора ε : V-+V, нулевого оператора ω : V-^V и
операторов в геометрических векторных пространствах Vect(2) и Vect(3)
отметим следующие.
1. Для фиксированного числа λ^Κ линейным оператором
является отображение λε : V-*>V9 пропорциональное тождественному
и переводящее произвольный вектор хеУ в вектор λχ.
2. Пусть пространство V представлено в виде прямой суммы
своих подпространств Μ и N. Тогда любой вектор χ
пространства V однозначно представляется в виде
x=y+z, (1)
где уеМ, zeJV. Отображение φ : V-+V, переводящее вектор χ
в вектор у из равенства (1), является оператором, называемым
проектированием пространства V на подпространство Μ
параллельно пространству N. Это отображение можно рассматривать
и как линейное отображение из V в М. Этот пример обобщает
рассмотренные в (АГ, § 10) примеры проектирований в Vect(3)
и Vect(2).
3. Отображение дифференцирования d будет оператором в
пространстве P(R) всех вещественных многочленов.
4. В пространстве С([0, 1], R) непрерывных вещественных
функций линейным оператором будет интеграл / как функция
верхнего предела интегрирования:
X
I(f)(x)=lf(f)dt.
0
9.3. Определение. Пусть в линейном пространстве V
задан базис (е) = (еь ..., е„). Для оператора φ : V-+V пусть
φ(β/)=αυβι+ ... +anje„, /=1, ..., п. (2)
Матрица
4п · · · 0ΐη
А=
αηι ... ап
(3)
211
в /-м столбце которой стоят координаты φ(β,), называется
матрицей оператора φ в базисе (е). Иногда также обозначаем ее
символами
Определение матрицы А оператора φ в базисе еь<
пускает следующую матричную запись:
(φ(βι),
<p(e*)) = (ei,
tn)A.
..,еп до-
(4)
9.4. Предложение. Ранг г (φ) оператора φ совпадает
с рангом его матрицы А в произвольном базисе.
Доказательство. Векторы φ(βι), ..., <р(е„) образуют
полную систему в Im<p. Поэтому базис пространства Ιπΐφ можно
выбрать из этой системы векторов. Следовательно, r(<p)=dimlm(p
равно максимальному числу линейно независимых векторов в
системе φ(βι), ..., <р(е„). Но линейная независимость произвольной
подсистемы векторов φ(βι), ..., <р(еЛ) эквивалентна линейной
независимости соответствующих столбцов матрицы А.
Предложение доказано.
9.5. Предложение. Пусть оператор φ имеет в базисе (е) =
= (βι, ..., еп) матрицу А. Тогда вектор χ с координатами (х\, ...
..., хп) в базисе (е) отображается вектор <р(х), координаты
(х\\ ..., Хп) которого в базисе (е) находятся по формуле
х\
Хп
=Л
(5)
Доказательство. Вектор χ=ΑΓιβι+ ... +xntn переходит
при отображении φ в вектор
φ(χ)=χ1φ(β1)+ ...+x„<p(ert). (6)
В матричной форме равенство (6) записывается в виде
Φ(χ)=(φ(*ι), .·., Ф(е„))
а с учетом (4)
<P(x)=(ei, ..., еп)Л
Таким образом, столбец А
(7)
является столбцом координат
вектора φ(χ) в базисе (е), что и доказывает наше утверждение.
212
9.6. Предложение. Пусть С — матрица перехода от
базиса (е) = (еь ..., е„) пространства V к базису (е')=»(е/, ...
..., ея'). Тогда для произвольного оператора φ : V-+V его
матрицы в базисах (е) и (е') связаны соотношением
Л!Ре/)=СГ1<с)С. (8)
Доказательство. По определению матрицы перехода от
базиса к базису имеем
(е[, .... <)=■(*, ..., еп)С. (9)
Это означает, что
Следовательно,
ф(е/')=с,]ф(е1)+ ... +cnjq>(en), /=1, ..., п. (10)
Легко видеть, что система векторных равенств (10)
эквивалентна матричному равенству
(<р(е|), ..., <р(е^)=(<р(е,), ..., ф(еп))С.
Применив к правой части этого равенства определение (4)
матрицы оператора, получим
(φ (е|), ..., φ (0)=(*. ..., en) AfC. (11)
Но согласно (9) имеем
(elf ..., en)=(ei, ..., e^)C~l.
Поэтому равенство (11) превращается в
(φ(ei), .... Ф(^))=(еь .... en)(TlA^Cf
что равносильно доказываемой формуле (8).
9.7. Определение. Две квадратные матрицы А я В одного
размера называются подобными, если существует такая
невырожденная матрица С, что
В=С^АС.
Читатель легко убедится в том, что отношение подобия
является отношением эквивалентности на множестве Мп всех
квадратных матриц размером /г. Из предложения 9.6 и из того, что
линейный оператор однозначно определяется своими значениями
на векторах произвольного базиса вытекает
9.8. Теорема. Две квадратные матрицы порядка η подобны
тогда и только тогда, когда они являются матрицами одного
и того же оператора, действующего в данном n-мерном линейном
пространстве.
2ГЗ
§ 10. АЛГЕБРА ЛИНЕЙНЫХ ОПЕРАТОРОВ И АЛГЕБРА МАТРИЦ
В § 1 мы приводили в качестве примера линейного
пространства множество М(Х, К) всех отображений множества X в поле
К. Но для возможности складывать отображения и умножать их
на числа достаточно, чтобы значения этих отображений
принадлежали не полю, а линейному пространству. Поэтому линейным
пространством будет и множество M(Xt V) всех отображений из
множества X в линейное пространство с естественно
определенными операциями сложения и умножения на число:
(f+g)(x)4ix)+8(xh
(af) (*)-α ■/(*)·
В частности, линейным пространством будет и множество
M(V, V) всех отображений линейного пространства V в себя.
Линейным подпространством пространства M(Vy V) является
множество Op(V) всех линейных операторов, действующих на
линейном пространстве V.
Нулем в линейном пространстве Op(V) служит нулевой
оператор ω : V-+V.
Операторы можно не только складывать, но и умножать.
Произведением φψ операторов φ и ψ называется их композиция
φοψ, τ. е.
(φψ)(*)=φ(Ψ(*)).
Умножение операторов, как и умножение любых отображений,
ассоциативно, т. е.
(φψ)χ=φ(ψχ).
Кроме того, легко убедиться в том, что умножение операторов
двояко дистрибутивно по отношению к сложению, т. е.
φίΨ+χΗφψ+φχ,
(φ + <ψ)χ=φχ+ψχ.
Следовательно, множество Op(V) с так определенным
умножением является кольцом. Это кольцо обладает единицей, которой
является тождественное отображение ε : V-+V.
Ясно также, что для любого аеК
(αφ)ψ=φ(αψ)=α(φψ). (12)
Линейные пространства, которые являются кольцами,
удовлетворяющими соотношению (12), называются алгебрами. Итак,
множество Op(V) является алгеброй.
Из соотношения (12) и из равенства εφ=φε, верного для лю-
-бого оператора φ, вытекает, в частности, что
(αε)φ==φ(αε)
214
для любого оператора φ. Таким образом, операторы вида αε —
они называются скалярными операторами — перестановочны со
всеми операторами. Оказывается, что это свойство является
характеристическим для скалярных операторов, а именно имеет
место
10.1. Предложение. Оператор φ : V-+V перестановочен со
всяким оператором из Op(V) тогда и только тогда, когда он ска-
лярен.
Доказательство. Надо проверить только необходимость.
Предположим сначала, что для некоторого вектора χ вектор
φ(χ) ему непропорционален, следовательно, векторы χ и φ(χ)
линейно независимы. Положим βι=χ, β2=φ(χ), и дополним
систему (еь е2) до базиса (е) пространства V. Определим оператор
t : V-И7, задав его на векторах базиса следующим образом:
ψ(β/)=βι.
Тогда ty(p(ei)=i|?(e2)=ei. В то же время φψ(βι)=φ(βι)=β2. Итак,
оператор φ не перестановочен с оператором ψ. Это противоречие
показывает, что для каждого вектора хеУ существует такое
число α=αχ, что φ(χ)=αχ.
Осталось показать, что эти числа ах одинаковы для всех
ненулевых векторов xgK. Заметим сначала, что если векторы
χ и у пропорциональны, то ах =ау. В самом деле, пусть y.=jix·
Тогда φ^)=φ(βχ)=βφ(χ)=βαχχ=αχ (Рх)=аху.
Предположим теперь, что для линейно независимых векторов
χ и у числа ах и ау различны. Тогда для вектора ζ=χ—у имеем
φ(ζ)=αζ ζ, т. е.
Ф(х-у)=а2 (х-у). (13)
С другой стороны,
ф(х—У)=ф(х)— φ(γ)-αχχ—ay у. (14)
Сравнивая (13) и (14), получаем
αζ (χ_У)=ахх—ayy,
или
(az—ax )x— (az—ay )y=0.
Эта линейная комбинация линейно независимых векторов χ и у
нетривиальна, поскольку ax=^ay. Полученное противоречие и
завершает доказательство предложения 10.1.
10.2. Замечание. Из предложения 10.1 вытекает, что если
dim V>2, то алгебра Op(V) некоммутативна. Что касается
нульмерного и одномерного пространств, то в них всякий оператор
скалярен.
Легко проверить, что линейное пространство Мп квадратных
матриц порядка η над полем К с естественной операцией
умножения матриц также является алгеброй.
215
10.3. Предложение. Пусть в n-мерном линейном
пространстве V зафиксирован базис еь ..., ея. Тогда отображение,
которое ставит в соответствие оператору φ : V-+V его матрицу Αφ
в базисе еи ..., ея, является изоморфизмом алгебры Op(V) на
алгебру Мп.
Доказательство сводится к рутинной проверке. Наиболее
интересным здесь представляется равенство
(15)
Его легко проверить, применив формулу (5).
Оператор φ называется невырожденным, если его матрица А9
(в каком-нибудь базисе) имеет отличный от нуля определитель.
Из формулы (8) вытекает, что это определение не зависит от
базиса, в котором мы рассматриваем матрицу оператора.
Оператор, не являющийся невырожденным, называется вырожденным.
Оператор φ называется обратимым слева, если существует
такой оператор ψ, что ·
ψφ=ε,
и обратимым справа, если существует такой оператор χ, что
φχ=ε·
Читатель легко проверит, что имеет место
10.4. Предложение. Если оператор φ обратим слева, то
он является мономорфизмом, а если обратим справа, то —
эпиморфизмом.
10.5. Задача. Доказать, что предложение 10.4 допускает
обращение, т. е. если оператор φ — мономорфизм, то он обратим
слева, а если — эпиморфизм, то обратим справа.
Оператор φ называется обратимым, если он обратим слева и
справа. Из предложения 10.4 вытекает, что в этом случае
отображение <р : V-+V является биекцией, т. е. существует обратное
отображение φ-1 : V-+V — отображение, которое удовлетворяет
соотношениям
φ~1φ==φφ""1=ε.
Из равенства (15) вытекает
Лф-'НЛф)"1. (16)
Предложения 5.8 и 5.9, характеризующие изоморфизмы между
(вообще говоря) различными линейными пространствами,
дополняет
10.6. Предложение. Для линейного оператора <р,
действующего в конечномерном пространстве, эквивалентны следующие
условия:
а) φ обратим слева;
б) φ — мономорфизм;
в) φ обратим справа;
216
г) φ — эпиморфизм;
д) φ обратим;
е) φ невырожден.
Доказательство. Эквивалентность условий д) и е)
вытекает из формулы 16. Условие д) тривиальным образом влечет
все предыдущие. Импликации а)=^б)=^д) и в)=^г)=^д)
вытекают из предложений 10.4 и 5.9. Предложение доказано.
§ П. ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА. ПРИВОДИМЫЕ
ОПЕРАТОРЫ
11.1. Определение. Линейное подпространство Μ
пространства V называется инвариантным относительно оператора
φ : 1/->V, если φ(Λί)<ζ:Λί, или, что то же самое,
(p(x)eAf для любого χ^Λί.
11.2. Примеры. 1. Нулевое подпространство и все
пространство V инвариантны относительно любого оператора.
2. Ядро Кегф и образ Im<p всякого оператора φ инвариантны
относительно этого оператора.
3. Для оператора d:P(R)->P(R) дифференцирования в
пространстве всех вещественных многочленов инвариантным будет
подпространство Pn(R) всех многочленов степени не больше /г.
Если MczV — инвариантное подпространство относительно
оператора φ : V-+V, то, рассмотрев ограничение (φ|Λί)
отображения φ на множество Λί, получим, как легко видеть, линейный
оператор
(φ|Λί) :Af-WW,
действующий на пространстве /М.
Из предложения 10.6 вытекает
11.3. Предложение. Если MczV — инвариантное
подпространство относительно невырожденного оператора φ : V-+V в
конечномерном пространстве V, то оператор (φ|Λί) также не
вырожден.
Непосредственно из определений читатель легко выведет
11.4 Предложение. Пусть MczV — инвариантное
подпространство относительно оператора φ : V-+V, и пусть (е) = (еь ...
..., tn) — такой базис в пространстве V, первые m векторов
еь ..., ет которого образуют базис подпространства М. Тогда
матрица Лф<е) оператора φ в базисе (е) является полу
распавшейся матрицей вида
./Ιφ
В | С
0 | D
где В — квадратная матрица порядка пг. При этом матрица В
является матрицей оператора (φ|Λί) ; М-+М в базисе еь ..., ет.
217
11.5. Определение. Оператор φ : V-+V называется
приводимым, если пространство V можно представить в виде прямой
суммы двух ненулевых инвариантных подпространств Μι и Λί2.
В этом случае оператор <р однозначно восстанавливается
своими ограничениями φι = (φ|Λί1) и <ρ2=(φ|Λί2) на подпространства
М\ и Λί2. А именно:
<p(x)=<pi(xi)-r<p2(x2), (17)
где χ=χι + χ2 и х,-еМ|.
Эту ситуацию можно рассмотреть с другой стороны.
11.6. Предложение. Пусть пространство V представлено
в виде прямой суммы (ненулевых) подпространств Мх и Λί2.
Пусть заданы операторы φι и φ2, действующие на пространствах
М\ и М2 соответственно. Тогда существует такой единственный
оператор φ : V-+V, называемый прямой суммой операторов ψχ и
<Р2 (<ρ=φιθφ2), что (φ|Λί/)=φ/, ί=1, 2.
В самом деле, такой оператор обязательно должен
задаваться формулой (17), а эта формула по линейным операторам φ! и
<р2 определяет линейный оператор φ.
11.7 Замечание. Предложение 11.6, очевидно, обобщается
на случай, когда V является прямой суммой произвольного
(конечного) числа слагаемых:
V=Mi®...®M8.
В частности, имеет место
11.8. Предложение. Пусть
V=M{®...eMS9
где Ми ..., Ms — инвариантные подпространства относительно
оператора φ. Тогда
φ=(φ|Λίι)Θ...Θ(φ|Μ,).
Читатель легко убедится в том, что имеет место
11.9. Предложение. Пусть пространство V является
прямой суммой подпространств Ми ..., Ms, и пусть (е*) = (еги ..., е^.)—
базис в M-iy ί=1, ..., 5. Пусть на каждом из слагаемых Mi
действует оператор φ„ который в базисе (е1) имеет матрицу А;.
Тогда матрицей оператора φ=φι θ ... Θφ* в базисе
(e)=(el, ..., е,1ч, ..., ej, ..., e*s)
служит блочно-диагональная матрица А вида
Ах О
А =
О
Оператор <р, не являющийся приводимым, называется
неприводимым.
218
11.10. Примеры. 1. В одномерном пространстве V всякий
оператор неприводим, поскольку V нельзя представить в виде
прямой суммы двух ненулевых подпространств.
2. Проектирование на подпространство Μ параллельно
подпространству N (пример 9.2.2) является приводимым оператором.
3. Примером неприводимого оператора в двумерном
пространстве V является оператор φ, который в некотором базисе ei, e2
имеет матрицу
0 1
Αφ
о о
Единственным одномерным инвариантным подпространством
этого оператора является линейная оболочка первого базисного
вектора Ls(ei).
§ 12. СОБСТВЕННЫЕ ВЕКТОРЫ. СПЕКТР ОПЕРАТОРА.
ДИАГОНАЛИЗИРУЕМЫЕ ОПЕРАТОРЫ
12.1. Определение. Ненулевой вектор xeV называется
собственным вектором оператора φ : V-+V, если существует
такое число ХеК, что
φ(χ)=λχ.
Число λ называется собственным значением оператора φ,
соответствующим собственному вектору х.
Множество всех Собственных значений оператора ср
называется спектром этого оператора и обозначается через Sp φ.
12.2. Предложение. Пусть λι, ..., λ3 — попарно
различные собственные значения оператора φ, соответствующие
собственным векторам хь ..., xs. Тогда векторы хи ..., х* линейно
независимы.
Доказательство. Индукция по s. Для s=2 утверждение
было проверено при доказательстве предложения 10.1. Совершим
переход от s к 5+1. Рассмотрим линейную комбинацию
αιΧχ+ .. . +asxs + as+1xs+i = 0. (18)
Применив к ней оператор φ, получим
αιλΛ+ .. · +α5λ5χ5 + αδ+1λδ+ιΧδ+ι = 0. (19)
Умножим равенство (18) на Xs+i и вычтем полученное из
равенства (19). Тогда
α1(λ1—λ8+ι)χι+ .. . +as (λ5—λ5+ι)χ5=0. (20)
По предположению индукции линейная комбинация (20)
тривиальна, откуда
cti= ... =as=0,
219
поскольку λ/—λ5+ι^0. Поэтому равенство (18) принимает вид
tts+iXs+i^O.
Но по определению х5-н^0. Следовательно, as+i=0. Предложение
12.2 доказано.
Из предложения 12.2 вытекает
12.3. Следствие. Спектр оператора φ, действующего в
конечномерном пространстве V, конечен.
Для собственного значения λ оператора φ : V-+V положим
Μλ={χ^1/:φ(χ)=λχ}. (21)
Таким образом, множество Λίλ получается добавлением нулевого
вектора к множеству всех собственных векторов оператора φ,
отвечающих собственному значению λ.
12.4. Предложение. Множество Μλ является
подпространством пространства V, инвариантным относительно оператора φ.
Доказательство предоставляется читателю. Пространство Мк
называется собственным подпространством оператора φ
(отвечающим собственному значению λ).
12.5. Предложение. Пусть λ — собственное значение
оператора φ и (е) = (в!, ..., ет) — произвольный базис собственного
подпространства Мх. Тогда матрица оператора (φ|Λίλ) в этом
базисе есть диагональная матрица λΕ.
Доказательство предоставляется читателю.
12.6. Предложение. Пусть λι, ..., Xs — попарно
различные собственные значения оператора φ. Тогда сумма собственных
подпространств
Λίλι+...+Λίλδ
-является прямой.
Доказательство. Согласно предложению 4.5 надо
показать, что если
Xi+...+xs=0, Χί^Λίλ., (22s
то х,=0 для всех ί=1, ..., s. Предположив, что это не так,
оставим в сумме (22) только ненулевые слагаемые:
Получим нетривиальную линейную комбинацию собственных
векторов х/д, отвечающих различным собственным значениям. Это
противоречит предложению 12.2. Предложение 12.6 доказано.
12.7. Определение. Оператор φ : V-+V называется диаго-
нализируемым, если в некотором базисе его матрица диагональ-
на. Очевидно, что этот базис состоит из собственных векторов
оператора φ.
220
12.8. Предложение. Оператор <реОр V диагонализируем
тогда и только тогда, когда
Κ=Λ4λιφ...©Λίν
где {λι, ..., ЯзНЭрср.
Доказательство. Достаточность вытекает из
предложения 12.5 и условия д) предложения 4.5. Пусть теперь оператор φ
диагонализируем, т. е. пространство V имеет базис еь ..., е„,
состоящий из собственных векторов оператора φ. Тогда каждый
элемент этого базиса принадлежит некоторому собственному
подпространству Λίλ.. Следовательно,
V=MK-
+ Λί».
Но эта сумма является прямой согласно предложению 12.6.
Предложение 12.8 доказано.
Из предложения 12.8 и условия е) предложения 4.5 вытекает
12.9. Следствие. Оператор φ: V-+V диагонализируем тогда
и только тогда, когда
dim V=d\mMxt+ ... +dim Αίλδ,
где {λι, ..., Xs}=Sp φ.
§ 13. ХАРАКТЕРИСТИЧЕСКИЙ МНОГОЧЛЕН ОПЕРАТОРА.
АЛГЕБРАИЧЕСКАЯ И ГЕОМЕТРИЧЕСКАЯ КРАТНОСТИ ЕГО КОРНЕЙ
Попробуем решить следующую задачу. Пусть в пространстве
V действует оператор φ. Как найти все его собственные векторы
(или хотя бы один собственный вектор)?
Предположим, что χ — собственный вектор оператора φ с
собственным значением λ, т. е. φ(χ)=λχ. Тогда вектор χ
принадлежит ядру оператора φ—λε, который, таким образом, согласно
предложению 10.6 является вырожденным. Эти рассуждения
можно обратить, т. е. имеет место
13.1. Предложение, а) Число ЯеК является собственным
значением оператора φ тогда и только тогда, когда оператор
φ—λε вырожден;
б) вектор χ является собственным вектором оператора <р,
отвечающим собственному значению λ тогда и только тогда, когда
х<=Кег((р—λε).
Утверждение б) предложения 13.1 эквивалентно равенству
Мх-Кег((р—λε). (23)
Возьмем в пространстве V произвольный базис (e) = (ei, ...
..., е„). Пусть
αη ... аы
ап1 ... апп
221
— матрица оператора φ в этом базисе. Тогда согласно
предложению 10.3 матрицей оператора φ— λε в базисе (е) является
матрица
/ΐψ — КС ===
Поэтому согласно 13.1 а) имеем
13.2. Предложение. Для λ^Κ условие ЯеБрср
эквивалентно тому, что
det(4e)—λ£)=0.
Определитель det(A^—λΕ) представляет собой многочлен
степени η от переменной λ, который обозначим через f$(h) и
назовем характеристическим многочленом оператора φ (в базисе
(е)).
Характеристический многочлен оператора не зависит от
выбора базиса. В самом деле, пусть (e') = (ei', ..., ея') — другой
базис пространства V, и пусть С — матрица перехода от базиса
(е) к базису (е'). Тогда согласно (8>
j(e') )С Г~~{ А{е)Г IF Г~х 4(е)Г
/1φ AtJLt О /1ф О — i\,L* —— О /1<р \j ——
—C~lkEC=C-1 (А^-КЕ)С.
Следовательно,
/<f'> (l)=det(A{/)—KE)=aet(C-1 (A^—XE)C)=
= det (С"1) /<>е) (λ) det C=f(* (λ).
Поэтому многочлен det(Лфе)—λΕ) обозначаем символом /φ(λ).
В новых обозначениях предложение 13.2 можно
переформулировать следующим образом:
13.3. Предложение. Число λο^Κ является собственным
значением оператора φ тогда и только тогда, когда оно является
корнем его характеристического многочлена /φ(λ).
В частности, для алгебраически замкнутого поля (например,
для поля С комплексных чисел) спектр оператора совпадает
с множеством корней его характеристического многочлена.
Таким образом, практический способ нахождения собственных
векторов оператора φ основан на предложении 13.3 и состоит
в следующем. Сначала находим все корни характеристического
многочлена /φ(λ), принадлежащего К. Затем для каждого такого
корня λ/, решая систему однородных линейных уравнений с
матрицей Αφ]—XtE, находим координаты (в базисе (е)) всех
собственных векторов с собственным значением λ,·. Если при
фиксированном базисе (е) мы отождествим пространство V с арифме-
222
αη—λ ... α1η
αηι · · · «πα—λ
тическим я-мерным пространством К", то собственное
подпространство Мъ будет совпадать с пространством решений системы
однородных линейных уравнений с матрицей А^ — XtE.
13.4. Определение. Кратность собственного значения λο
оператора φ как корня ею характеристического многочлена, т. е.
такое число /η(λο), что многочлен /φ(λ) делится на (λ—X0)m(X°\ но
не делится на (λ—X0)m(Xo)+1, называется алгебраической
кратностью собственного значения λο.
Его геометрической кратностью называется размерность
(ϋπιΛ1λ0 собственного подпространства Μχ0.
13.5. Предложение. Геометрическая кратность
собственного значения λο произвольного оператора φ не больше его
алгебраической кратности.
Доказательство. Пусть dimAix0=m. Возьмем в
пространстве V базис еь ..., е„, первые m векторов которого образуют
базис подпространства М\0. Тогда согласно 11.4 в этом базисе
матрица оператора φ имеет вид
Поэтому
Ap(X)=det(i4—XE)=det(B—%E).det(D—λΕ).
Но В является матрицей оператора
(φ|Μλ0)=λ0ε.
Следовательно, Β=λοΕ и det(S—λ£) = (λο—λ)"1. Таким образом,
многочлен /φ(λ) делится на (λ—λο)"1, откуда m=dimMx0^m(X0).
Предложение доказано.
13.6. Предложение. Оператор φ диагонализируем тогда и
только тогда, когда любой корень характеристического
многочлена принадлежит полю К и его геометрическая кратность
совпадает с алгебраической.
Доказательство. Пусть Sp<p=(Xi, ..., λ<?}· Положим
n0 = d\m ЛЬ, -f f dim Μχ2
Согласно 13.5 имеем dim M)y.^m (Κι) и
/ΐο<ΐι=Ή(λι)+ ... +m(Xs).
При этом равенство αζο=Αι эквивалентно тому, что dim Αίλ.=/η(λί)
для всех i=l, ..., 5. Но если SpcpczK, то fli=dim V. Поэтому
утверждение предложения 13.6 вытекает из следствия 12.9.
Из предложения 11.9 вытекает
13.7. Предложение. Если <p=q>i©<pf> mo /φ(λ)=/<Γι(λ)·/φι(λ).
223
§ 14. НИЛЬПОТЕНТНЫЕ ОПЕРАТОРЫ. ИХ ХАРАКТЕРИСТИЧЕСКИЕ
МНОГОЧЛЕНЫ
Наделяя множество операторов Ор(У) структурой алгебры
(§ 10), мы стали называть композицию ψ°φ операторов φ и ψ
их произведением ψφ. В соответствии с этим m-кратную
композицию оператора φ называем его m-й степенью:
φο, , ,οφ = (рш.
\ )
м раз
Степени операторов перемножаются по тем же правилам, что
и степени чисел. Так, для α, β<=Κ и натуральных т\ и пг2 имеем
(αφ)'"1 (βφΓ2 = α^β'"^'»^. (24)
Для невырожденного оператора φ определен обратный оператор
φ-1 и
(φ™)-ι=(φ-ΐ)'*=ιφ-»\ (23)
Если оператор φ невырожден, то для него имеет место формула
(24) для любых гп\ и гп2 и отличных от нуля α и β. В частности,
φ°=ε.
14.1. Определение. Оператор φ называется нильпотент-
ным, если некоторая его степень <рт является нулевым
оператором. Отметим, что здесь всегда пг^О.
Наименьшее число р, такое, что φρ=ω, называется высотой
нильпотентного оператора φ. Ясно, что равенство <рт=со влечет
равенство (рт+1=чо. Поэтому высота ненулевого нильпотентного
оператора <р — это такое число р^2, что φ^-^ω, а φρ=ω.
14.2. Предложение. Пусть ρ — высота нильпотентного
оператора <р и вектор aeV таков, что ц)Р-1(&)Ф0. Тогда векторы
φ*-1 (а), сро-2(а), ..., <р(а), а
линейно независимы.
Доказательство. Рассмотрим равную нулю линейную
комбинацию
αιφ*-1 (а)+ ... + ар_кр (а) + ара=0. (26)
Предположим, что среди ее коэффициентов αϊ, ..., аР есть
отличные от нуля. Существует такое *>0, что ар-^О и ат=0
для всех m>p—k. Следовательно, равенство (26) имеет вид
акрР-|(а)+ ... +ар_^/е(а)=0.
Применим к обеим частям этого равенства оператор φρ-*-1.
Поскольку <рт=чо для всех пи^ру получим
ар-л<рр-1(а)=0.
224
Но по условию уР-х(&)Ф0. Следовательно, ар_/г=0. Это
противоречие и доказывает предложение 14.2.
Из этого предложения вытекает
14.3. Следствие. Высота нилыготентного оператора φ<=
eOp(V) не превосходит размерности пространства V.
Читателю предоставляется доказать, что имеет место
14.4. Предложение. Всякое собственное значение нильпо-
тентного оператора равно нулю.
Это утверждение можно усилить. Из того, что всякий корень
характеристического многочлена /φ(λ), принадлежащий полю К,
является собственным значением оператора φ, вытекает
14.5. Π ρ едл о же ни е. Если нильпотентный оператор φ
действует в пространстве V над алгебраически замкнутым полем К
(в частности, над полем С), то все корни его
характеристического многочлена равны нулю, т. е.
Μλ)-(-λ)*. ' (27)
14.6. Предложение. Всякий оператор φ, действующий
в ненулевом вещественном пространстве V, имеет одномерное или
двумерное инвариантное подпространство.
Это предложение непосредственно вытекает из следующего
утверждения:
14.7. Лемма. Пусть λ=α+/β — комплексный корень
характеристического многочлена оператора φ, действующего в
вещественном пространстве V. Тогда существуют такие линейно
независимые векторы a, h^V, что
ф(*)=«а-РЬ. } ,м.
cp(b)=fJa + ab. | (М)
Доказательство. Зафиксируем в пространстве V какой-
нибудь базис ei, ..., ея. Пусть А — матрица оператора φ в этом
базисе. По условию матрица А—λΕ имеет равный нулю
определитель. Поэтому система однородных линейных уравнений с
матрицей А—λΕ имеет в поле С ненулевое решение z=(zu ..., ζη).
Пусть zk=Xk + iyk, Λ~1, ..., п. Положим
К1 ||
Уп\\
Тогда
(Л-Х£)(х-Иу)«0,
или
Λ(χ + *Υ) = (α + ίβ)(χ + ίγ). (29)
х}
1 %п
г уН
225
(30)
Равенство (29) двух комплексных матриц эквивалентно
равенствам их вещественных и мнимых частей, т. е.
Лх=ах—βγ,
Лу = рх + ау.
Положим
a=A:ie1+ ... -Vxntn, b=*/iei+ ... + yntn.
В силу эквивалентности условий (30) и (28) остается проверить
линейную независимость столбцов χ и у. Поскольку x-f iy —
ненулевое решение системы с матрицей А—λΕ и β^Ο, из второго
равенства (30) вытекает, что столбец у ненулевой. Предположим
теперь, что существует вещественное число γ, для которого
x=vy.
Тогда система равенств (30) примет вид
уАу=(ау—β) у,
Λγ=(βΥ+α)γ,
откуда (αγ—β)γ=γ(βγ+α)γ. Отсюда в силу условия у¥=0
получаем αγ—β=βγ2+αγ. Но β^Ο, поэтому γ2=—1. Противоречие.
Лемма доказана.
14.8. Предложение. Для нильпотентного оператора φ,
действующего в вещественном пространстве, верна формула (27).
Доказательство. Надо проверить, что все корни
характеристического многочлена /φ(λ) равны нулю. Вещественные корни
равны нулю согласно 14.4. Предположим, что имеется
комплексный корень α+*β. Возьмем векторы а и Ь из леммы 14.7 и
положим M=Ls(a, b). Из условия (28) вытекает, что подпространство
Μ инвариантно относительно оператора φ и φ(Μ)=Λί, τ. е.
оператор (φ|Λί) невырожден. Но тогда для всякого натурального m
оператор (срт|М) невырожден, что противоречит нильпотентности
φ. Предложение доказано.
14.9. Пример. Стандартным нильпотентным оператором
является циклический оператор, т. е. такой оператор φ, для которого
в пространстве V существует базис ej, .,., е,т со свойством
φ(β!)=0, (р(е2)=еъ ... , <p(e„)=en-i.
В этом базисе, называемом циклическим, матрица оператора φ
имеет вид
0 1
0 1
226
14.10. Предложение. Нилыготентный оператор φ является
циклическим тогда и только тогда, когда его высота совпадает
с размерностью пространства.
Доказательство. Необходимость вытекает из того, что
для циклического базиса φ"-1^)—βι. Достаточность вытекает
из предложения 14.2, так как векторы
φ"-1 (а), φ*""2 (а), ... , φ (а), а
образуют циклический базис пространства.
§ 15. РАЗЛОЖЕНИЕ ВЫРОЖДЕННОГО ОПЕРАТОРА В ПРЯМУЮ
СУММУ НИЛЬПОТЕНТНОГО И НЕВЫРОЖДЕННОГО
15.1. Теорема. Всякий вырожденный (не нильпотентный)
оператор φ единственным образом может быть представлен в ей-
де прямой суммы нильпотентного и невырожденного операторов
φι и φ2.
Доказательство разобьем на ряд вспомогательных лемм.
Для натурального числа m положим
Mm=Kerq)m, JVm=Im<pm.
1. Лемма, а) Подпространство Мт инвариантно
относительно оператора φ;
б) MmcMm+l\
в) если Mm=Mm+\ то Aim+1=Mm+2.
Утверждения а) и б) вытекают из одного факта: если
(рт(х)=0, то <pm+1(x)=<p(<pm(x))=0. Что касается утверждения
в), то в силу б) достаточно проверить включение Mm+2aMm+l.
Пусть хеЛ1т+2, т. е. <рт+2(х)=0. Положим у=(р(х). Тогда
Фт+1(У)==,Фт+2(х):==0, т. е. уеМт+1=Л1ш. Значит, <pw(y)=0, а
тогда фт+1(х)=фш(у)=0, т. е. хеМт+1.
2. Лемма, а) Подпространство Nm инвариантно относительно
оператора φ;
б) Nm+laNm;
в) Nm=Nm+l равносильно тому, что Mm=Afm+1;
г) если Nm=Nm+\ то Nm+l=Nm+2.
Утверждения а) и б) вытекают из равенств φ(φΜ(χ))β
=(pm+1(x)=(pm((p(x)). Утверждение в) вытекает из утверждений
б) лемм 1 и 2 и из того, что согласно теореме 5.7 для любого
натурального ρ имеем
dim Mp +dim Np=dim V. (31)
Утверждение г), которое можно проверить и непосредственно,
вытекает из утверждений в) лемм 1 и 2.
3. Лемма. Если Mm=Mm+\ то V=Mm@Nm.
Доказательство. Согласно (31) достаточно проверить,
что Mm[\Nm={Q}. Пусть x^Mm{\Nm. Тогда (рт(х)=0 и существует
такой вектор уеК, что срт(у)=х. Следовательно, (p2m(y)=(pm(x)=*
227
=0, т. е. уеЛ12т. Но согласно лемме 2 имеем Мт=М2т. Значит,
уеЛ1т, т. е.
0=<рт(у)=х.
4. Лемма. Если Мт=Мт+1, то оператор (ф|Л1т) нильпотен-
тен, а оператор (φ|Ν'η) невырожден.
Доказательство. Оператор (<р|Мт) по определению Мт
нильпотентен для любого m^l, и его высота не превосходит т.
Чтобы проверить невырожденность оператора (q)|Afm), достаточно
показать, что его ядро нулевое. Пусть xeJVm и <р(х)=0. Тогда
x^MlczMm. Следовательно, x^Nmf]Mmy т. е. х=0 согласно
лемме 3.
Из лемм 3 и 4 вытекает, что φ является прямой суммой ниль-
потентного оператора (у\Мт) и невырожденного оператора
(<p|JVm), если Мт=Мт+К
5. Единственность представления φ=φιθφ2. Пусть V=M{(BMo,
оператор (φ|Λίι) нильпотентен, а оператор (φ|Μ2) невырожден.
Надо показать, что если Afm=Aim+1, то Mi=Mm, a Af2=A/Tm. Пусть
ρ — высота оператора (ф|Λ^ι). Тогда для любого вектора χΕΛίι
имеем <рр(х)=0, т. е. MxczMp. Но М^аМт согласно лемме 1.
Итак, М{аМт.
Пусть теперь xeAf2. Из невырожденности оператора (φ|Λί2)
вытекает невырожденность любой его конечной степени, в
частности (<p|M2)w. Поэтому существует такой вектор уеМ2, что
х=<Рт(у). Следовательно, М2аЫт.
Таким образом, dimAii<dimAfm, dim Ai2<dim Nm. Но
dimM1 + dimM2=dimy=dimMm + dim^m.
Поэтому dimM1=dimMm, dimM2=dim^m и, следовательно, Мх=^
= Мт, M2=Nm. Теорема доказана.
15.2. Предложение. Если все корни характеристического
многочлена оператора φ равны нулю, то он нильпотентен.
Доказательство. В противном случае согласно 15.1
имеем φ=φιθφ2, где оператор φ2 невырожден. Тогда /φ(λ) =
=/ν1(λ)/φ3(λ) в силу 13.7. Но ни один из корней
характеристического многочлена /φ2(λ) невырожденного оператора φ2 по
определению не равен нулю. Противоречие.
§ 16. ЕДИНСТВЕННОСТЬ ЖОРДАНОВОЙ ФОРМЫ
НИЛЬПОТЕНТНОГО ОПЕРАТОРА
16.1. Определение. Квадратная матрица вида
Ι λ 1 0 .
0 λ 1 0
О 0 λ 1
0 0. .
0 0. .
• ο
. 0 1
λ 1
λ'
228
называется жордановой клеткой и обозначается символом Д\
где d — порядок матрицы.
Квадратная матрица А имеет жорданову форму, если она —
прямая сумма жордановых клеток, т. е. является блочно-диаго-
нальной матрицей с жордановыми клетками на диагонали:
А =
W .0
о j-f
(33)
Базис βι, ..., tn пространства V называется жордановым
базисом для оператора φ, если матрица оператора φ в этом базисе
имеет жорданову форму.
Примером жорданова базиса является циклический базис
циклического нильпотентного оператора 14.5. Матрицей оператора
в этом базисе служит жорданова клетка Лп).
16.2. Предложение. Если матрица (33) является матрицей
оператора φ в некотором базисе, то спектр Sp φ оператора φ
совпадает с множеством {λι, ..., λ*}, которое в свою очередь состоит
из всех корней многочлена /φ(λ).
Доказательство. Из треугольности матрицы (33) выте-
s
кает, что fv(h)=Y\(ki—Xfif Следовательно, {λι, ..., λ<?} — это
множество всех корней характеристического многочлена
оператора φ. В то же время всякое число λ/, являясь элементом матрицы
оператора φ, принадлежит основному полю К. Для завершения
доказательства остается применить предложение 13.3.
Из предложений 16.2 и 14.4 вытекает
16.3. Следствие. Если матрица А нильпотентного оператора
φ имеет жорданову форму, то она является прямой суммой жор-
дановых клеток вида J(0di).
Основным результатом этого параграфа является
16.4. Теорема. Жорданова форма матрицы нильпотентного
оператора определена однозначно с точностью до перестановки
жордановых клеток.
Доказательство. Согласно 16.3 жордановы клетки
матрицы А нильпотентного оператора φ, имеющей жорданову форму,
отличаются друг от друга только их размером. Обозначим через
m>d число жордановых клеток матрицы Л, имеющих порядок d.
Теорема будет доказана, коль скоро мы докажем, что числа md
не зависят от выбора жорданова базиса, а однозначно
определяются оператором φ.
Пусть (е) = (еь ..., еп) — базис пространства V, в котором
оператор φ имеет матрицу А. Пусть жорданова клетка /0(й°
матрицы А стоит на пересечении строк и столбцов с номерами от
*+1 до k+d. Скажем, что вектор ek+i базиса (е), l^a<rf, стоит
229
над i-м столбцом этой жордановой клетки /o(rf). По определению
матрицы А оператора φ имеем
ф(еА+|)=0, <р(еЛ+2)=е/н-1, ..., q>(ek+d)=tk+d-[. (34)
Из соотношений (34) вытекает, что для l<i<d
φ* (tk+i) =0, φ1'-1 (e*+j:) =e*+i*=0. (35)
Здесь по определению считаем φϋ=ε.
Скажем, что вектор хеК имеет высоту i no отношению к
оператору φ, если φι'(χ)=0, а у*-{(х)Ф0. Если φ — нильпотентный
оператор высотой р, то каждый ненулевой вектор χ имеет высоту
и она не превосходит р. Более того, в любом базисе имеются
векторы высоты р, поскольку всякая линейная комбинация
векторов высоты ^i имеет высоту ^ί.
Обозначим через hi число векторов базиса (е), имеющих
высоту i по отношению к оператору φ. Из соотношений (35)
вытекает, что вектор е/ базиса (е) имеет высоту ι тогда и только
тогда, когда он стоит над i-м столбцом соответствующей
жордановой клетки, которая, таким образом, имеет порядок >ί.
Следовательно,
hi=n%i+ ... +шР9
откуда
mi=hi—hi+{. (36)
Таким образом, для завершения доказательства достаточно
показать, что числа hi однозначно определяются оператором φ.
Докажем, что
/ii = dimKercp'—dimKercp*-1. (37)
Формула (37) вытекает из того, что
Λι+ · - · +A,=dimKerq>', (38)
а для проверки формулы (38) достаточно показать, что векторы
базиса (е), имеющие высоту ^£, образуют базис в пространстве
Кег<р'. Обозначим систему этих векторов через (е1), а систему
остальных векторов базиса (е) — через (е2). Поскольку каждый
из векторов системы (е1) принадлежит Kerq>', надо проверить
только, что эта система полна в Кег<р1. Возьмем произвольный
вектор хеКегф* и разложим его по векторам базиса (е) всего
пространства V. Тогда вектор χ однозначно представляется
в виде
Х=Х! + Х2,
где X! — линейная комбинация векторов из (е1), а х2 —
линейная комбинация векторов из (е2):
x2=a1e/l+...+<Vv
230
Вектор Х2=х—Χι принадлежит Кег φ', т. е. φ'(χ2)=0.
Следовательно,
οιφ' (%) + · · · + W («/,)=°· (39)
Но каждый вектор е; из системы (е2) имеет высоту ^/+1.
Поэтому из второй части соотношений (35) вытекает
φ1" (е/) =*/-,·.
Таким образом, равенство (39) принимает вид
откуда «, = .. .=агу=0.
Формула (38), а вместе с ней и теорема 16.4 доказаны.
Из соотношений (36) и (37) вытекает формула
trii = 2 dim Кег φ' — dim Кег φ'-1 — dim Ker φ'+!. (4 0)
§ 17. СУЩЕСТВОВАНИЕ ЖОРДАНОВА БАЗИСА ДЛЯ
НИЛЬПОТЕНТНОГО ОПЕРАТОРА
В этом параграфе будет доказана теорема, сформулированная
в заголовке. Согласно 16.3 и 14.9 эта теорема может быть
сформулирована следующим образом:
17.1. Теорема. Всякий нильпотентный оператор разлагается
в прямую сумму циклических операторов.
Доказательство. Пусть ρ — высота нильпотентного
оператора φ. Как и в § 15, положим Afm=Ker<pm. Имеем растущую
последовательность подпространств
М1 cz М2 а ... с: Мр~х cz Mp=V.
Для 2</</7 положим 7(ί=φί'-1Λ1ί' и /<Ί=Λί1. Покажем, что
/Ci+icz/Ci. (41)
Пусть xe/Ci+i. Существует такой вектор yeAfi+1, что φ'ίΥ)—*·
Положим z=(p(y). Тогда φ«(ζ)=φί+ι(γ)=0, поскольку yeAfi+l.
Следовательно, z^M1 и φί~Ι(ζ)==Φί(γ)==χ» τ· е· хеЛ. Таким
образом, включение (41) проверено (включение Κ·2αΚι=*Μι
проверяется аналогично). Итак, имеем следующую растущую
последовательность подпространств:
KpczKp-icz ...c=/Cfc=/C1 = Af1.
Пусть векторы ef, ... , е£ образуют базис в подпространстве /Ср,
дополним его векторами ер~\ ... , е^""1 до базиса подпространства /Cp_i
и так далее. Получим базис
Щ: 1</<р, 1</<т,}
231
в подпространстве Κι=Μι. По определению подпространств /(,
для £2*2, 1<7<яг,·, существуют такие векторы а/еМ», что
е^ф-Чар· (42)
Рассмотрим таблицу векторов
t βΡ=φΡ-ΐ(βΡ), φ^2(3Ρ) ф(ар), af;
е^=Ф"-'(ау, 9"-2(a„pIp), ... , q>(a'p), а£р;
е?=<р(а2), а?'.
(43)
е2 =ю(а2), а2 ;
е}=а};
\ ej1=ami.
Докажем, что система (е) всех векторов из таблицы (43)
образует базис пространства V. Для этого согласно 2.10 достаточно
показать, что система, (е) линейно независима и состоит из /ζ—
=dim V векторов.
Векторы, стоящие в первом столбце таблицы (43), образуют
базис пространства К{=М{ и, следовательно, являются
векторами высотой 1. Векторы, стоящие в k-м столбце таблицы (43), при
отображении φ переходят в (k—1)-й столбец, оставаясь в тех же
строках, и, следовательно, имеют высоту k.
Возьмем равную нулю линейную комбинацию векторой
системы (е) и покажем, что она тривиальна. Запишем ее в виде
ci+ ..:+Cp=0, (44)
где через и обозначена часть этой линейной комбинации,
состоящая из всех векторов ί-го столбца. Предположим, что линейная
комбинация (44) нетривиальна, и пусть k — наибольший номер,
для которого в линейной комбинации ck имеются ненулевые
коэффициенты. Тогда равенство (44) принимает вид
ci+ ... +cfe=0.
Применим к этому равенству оператор φ*"1. Учитывая, что в
комбинации а стоят векторы высотой i, получим
φ*-4<:*)=0. (45)
Пусть
cft=aiy--*(af)+ ... +α£ρφ*-*^) + ... +a?af + ... +<а^.
Тогда с учетом (42) равенство (45) принимает вид
ofef + ·. · +сйД,+ ... +а?е? + ... + <&к£к=0
232
и представляет из себя равенство нулю линейной комбинации
части базисных векторов пространства ЛР. Поэтому все
коэффициенты а/ равны нулю, что противоречит выбору номера k.
Следовательно, система (е) линейно независима.
Из § 15 (лемма 1) мы знаем, что подпространства М1
инвариантны относительно оператора φ и, следовательно,
относительно всех его степеней <р*. Поэтому
Kf==Im((p'-4Af).
Очевидно, что Y&r(q>l-x\Ml)cz Kerip'-^Af-1. С другой стороны,
если хеЛ*1""1, то xeMf и φί~1(χ)=0, т. е. х е Kerfo'"1^1). Таким
образом,
Л1|"'1 = Кег (φ1-11 Μ1).
Поэтому, считая Л4°={0}, согласно 5.7 имеем
dim/Ci + dimM'-^dimM1. (46,)
Сложив равенства (46,), έ=1, ..., ρ, получим
dimКл + ... +dim/Cp=dimMp=d\m V=n.
Но по построению векторов e7·' и таблицы (43) видим, что число
ее векторов, стоящих в i-м столбце, равно
тр+ ... +mi=dim/(i.
Поэтому число всех векторов системы (е) равно
d\mKi+ ... +d\mКр=п.
Таким образом, (е) — базис в пространстве V.
Осталось проверить, что это — жорданов базис. Положив
LJ=Ls{(p-i(a,·), ... , φ (а}), а}},
1 </<р, 1</<т,·, видим, что
V == L\ ф . . . ф Lrtip Ш · · · ф Lj φ · . . φ Lmt.
Далее, подпространство L,J инвариантно относительно оператора
φ, а соответствующая строчка таблицы (43) дает нам
циклический базис оператора (φ|1/1). Теорема доказана.
Из теоремы 17.1 и предложения 15.2 вытекает обобщающее
предложения 14.5 и 14.8
17.2. Предложение. Оператор φ, действующий в любом
пространстве V, нильпотентен тогда и только тогда, когда для
него верна формула
ΜλΗ(-λ)".
Отметим еще одно следствие теоремы 17.1.
233
17.3. Предложение. Нильпотентный оператор φ
неприводим тогда и только тогда, когда его высота равна п.
Для его доказательства нам потребуются следующие
очевидные вспомогательные утверждения, имеющие тем не менее и
самостоятельный интерес.
17.4. Предложение. Если V=MX@M2 и подпространства
Μι инвариантны относительно операторов φ и ψ, то
φ*=(φ|Λίι)(Ψ|Λί,) θ ^|Μ2)(ψ|Μ2).
17.5. Следстзие. Если φ = φΐ4ρφ2, mo φ*=φ*Θ<Ρ2·
Доказательство предложения 17.3. Достаточность
вытекает из 14.3 и 17.5. Необходимость вытекает из теоремы 17.1
и из того, что размер любой жордановой клетки нильпотентного
оператора не превосходит его высоты, в силу неравенства
§ 18. ЖОРДАНОВА ФОРМА ПРОИЗВОЛЬНОГО ОПЕРАТОРА
18.1. Предложение. Если λο — корень
характеристического многочлена оператора φ и μ^Κ, то λο+μ — корень
характеристического многочлена оператора φ+με.
В самом деле, если в некотором базисе ЛФ=Л, то
Α<ρ+με=·-Α + μ£. Следовательно,
Λφ—Я0Я=Л—λ0Ε=Α + μΕ—(λ0 + μ)Ε=Αφ+με—(λ0 + μ)Ε,
откуда утверждение и вытекает.
Следующее утверждение очевидно.
18.2. Предложение. Всякий жорданов базис для
оператора φ будет жордановым базисом и для оператора φ + με, где
μΕΞΚ.
Из предложения 11.9 вытекает
18.3. Предложение. Пусть пространство V разлагается
в прямую сумму М\(ВМ2 подпространств, инвариантных
относительно оператора φ, и пусть <pt=(cp|jWt). Тогда если (е1*) — жор-
данов базис подпространства Mi для оператора φ/, то (e) = (el)(J
U(e2) — жорданов базис для оператора φ.
18.4. Теорема. Если все корни характеристического
многочлена оператора φ принадлежат полю К, то в пространстве V
существует жорданов базис для оператора φ. При этом жордано-
ва форма матрицы оператора φ определена однозначно с
точностью до перестановки жордановых клеток.
Доказательство. Индукция по числу s корней
многочлена Μλ). Пусть λι — единственный корень характеристического
многочлена. Тогда согласно 18.1 единственный корень многочлена
/(ρ_λιε(λ) — нуль. Согласно 15.2 оператор φ—λιε нильпотентен.
Из теорем 16.4 и 17.1 вытекает единственность и существование
жордановой формы матрицы этого оператора. Тогда согласно
234
предложению 18.2 теорема существования и единственности жор-
дановой формы будет верна и для оператора φ.
Совершим индуктивный переход от s к s+Ι. Пусть {λι, ..., λ*,
λ*+ι} — все корни многочлена /φ(λ). Тогда согласно 18.1 корнями
характеристического многочлена оператора φ—λ5+ιε будут числа
λι—λ<Η-ι, ..., λ*—Л*+1, 0 и только они. Поскольку OeSp(q)—λ<?+ιε),
оператор φ—λ*+ιε вырожден и не нильпотентен согласно 14.4. По
теореме 15.1 пространство V единственным образом
представляется в виде прямой суммы МХ@М2 инвариантных относительно
φ—λ<?+ιε подпространств так, что оператор φι=(φ—λ5+ιε|Λίι)
нильпотентен, а оператор φ2=(φ—λ5+ιε|Μ2) невырожден.
Согласно 13.7 оператор φι имеет одно собственное значение 0, а
оператор φ2 s собственных значений λ*—λ*+ι, i=l, ..., s. Тогда
существование жорданова базиса оператора φ—λ5+ιε вытекает из
предположения индукции и предложения 18.3.
Теперь единственность жордановой формы матрицы оператора
φ—λ<?+ιε. Пусть (е) — жорданов базис для этого оператора.
Обозначим через (е1) множество всех векторов базиса (е), стоящих
над жордановыми клетками матрицы Α^ΐχ^ имеющими нули
на диагонали, и пусть (е2) = (е)\(е1). Положим Ari=Ls(e1),
N2=Ls(e2). Тогда V=N\(BN2i пространства Ni инвариантны
относительно оператора φ—λ5+ιε, матрица оператора ψι=(φ—
—λ<?+ιε|Νι) в базисе (е1) имеет жорданову форму с нулями на
диагонали, а матрица оператора ψ2=(φ—λ5+ιε|Ν2) имеет
жорданову форму с числами λι— λ5+ι, ···. λ5—λ5+ι на диагонали.
Поэтому оператор ψι нильпотентен, а ψ2 невырожден. Тогда Ν\=Μ\,
Ν2=Μ2 согласно 15.1, и из предположения индукции и
предложения 18.3 вытекает единственность жордановой формы матрицы
оператора φ—λ<?+ιε. Итак, теорема 18.4 для оператора φ—λ5+ιε, а
согласно 18.2 и для оператора φ доказана.
18.5. Замечание. Из предложения 16.2 вытекает, что
принадлежность корней многочлена /φ(λ) полю К является
необходимым условием существования жорданова базиса для
оператора φ.
§ 19. ТЕОРЕМА ГАМИЛЬТОНА-КЭЛИ
Пусть
/(λ)=α0 + αιλ+ . .. +атХт-
произвольный многочлен над полем К, и пусть φ — оператор,
действующий в пространстве V над полем К. Тогда определен
оператор /!(φ)=α0ε + α1φ+ ... +am(p"\
называемый многочленом от оператора φ. Из теоремы об
изоморфизме между алгеброй операторов и алгеброй их матриц (§ 10)
235
вытекает, что если А — матрица оператора φ в базисе (е), то
матрицей оператора /(φ) в этом же базисе является матрица
/(Л)=а0£ + а1Л+...+атЛт,
называемая многочленом от матрицы Л.
Скажем, что оператор φ (матрица А) является корнем
многочлена /(λ), если /(φ)=ω (f(A) — нулевая матрица). Имеет
место очевидное
19.1. Предложение. Оператор φ является корнем много-
члена /(λ) тогда и только тогда, когда корнем этого многочлена
является матрица А оператора φ в произвольном (в
каком-нибудь) базисе.
Основным результатом параграфа является
19.2. Теорема Гам и л ьтон а-Кэли. Всякий оператор
является корнем своего характеристического многочлена, т. е.
Ы<р)=а>.
Прежде чем доказывать эту теорему, выведем из теоремы
о существовании жорданова базиса теорему об общем виде
линейного оператора. Пусть (е) — жорданов базис оператора φ,
в котором его матрица имеет жорданову форму
А =
4*} О
(33)
Пусть (е') —· часть этого базиса, соответствующая жордановой
клетке j£l). Положим Mi=Ls(el). Тогда подпространство Μ ι
инвариантно относительно оператора φ, и оператор <p»=(q>jAf;)
имеет в базисе (е,·) матрицу
У^ =
λ( 1 0 .
О %i 1 ..
о
о
0 0 0.
0 0 0.
1
λ.
Тогда оператор φ,-—λ,ε имеет в базисе (е1) матрицу
0
ф-
0 1
0 1
Следовательно, φ,—λίε является циклическим оператором высоты
di. Таким образом, нами доказана
236
19.3. Теорема. Если матрица оператора <р имеет жорданову
форму (33), то
<ρ=φιθ...Θφ*, (47)
где φι—λ/ε — циклический оператор высотой du
Доказательство теоремы Гамильтон а-К эли.
Рассмотрим сначала случай, когда основное поле К
алгебраически замкнуто. Тогда к оператору φ можно применить теорему
19.3. Пусть
V=M{®...@MS
— разложение пространства V, соответствующее представлению
(47) оператора φ. Чтобы доказать, что оператор /φ(φ) нулевой,
достаточно доказать, что нулевым является его ограничение на
каждое из инвариантных подпространств Ми ..., Ms. Поскольку
матрица оператора φ имеет жорданову форму (33),
/Φ(λ)"Π(λ|-*Λ
Следовательно,
Мф)=ГИМ-<рЛ (48)
Из формулы (48) вытекает, что оператор (φ—λ^)*' является
делителем оператора /φ(φ), τ. е. существует многочлен gi(X), для
которого
/Ф(ф)=£г(ф)(ф—КФ-
Поэтому для вектора хеМ/ имеем
Мф)«=*1 (Ф)((Ф-М^(Х)). (49)
Но согласно 19.3 оператор φ,—'λ;ε—(φ—λιε\Μί) является
циклическим высотой di. Следовательно, (φ — Я^)^'(х)=0, откуда
Μφ)(χ)=0 согласно (49). Итак, (/φ(φ) \Μι)=ω и, значит, /Φ(φ) =
^усть теперь поле К не является алгебраически замкнутым.
Возьмем какой-нибудь базис (е) пространства У, и пусть А —
матрица оператора φ в этом базисе. Согласно 19.1 достаточно
доказать, что матрица U(A) является нулевой.
Известно, что поле К можнс вложить в алгебраически
замкнутое поле Κι (читатель может считать, что K=R, a Ki=C).
Возьмем какое-нибудь линейное пространство V\ над полем
Κι, имеющее ту же размерность /г, что и пространство Vi
(например, Vri=Ki/1). В пространстве V\ возьмем какой-нибудь базис
237
(е1) и определим оператор ψ : V\-+V\ так, чтобы в базисе (е1) он
имел матрицу Л. Ясно, что
Ш-Ш- (50)
При этом равенство (50) надо понимать как равенство
соответствующих коэффициентов этих многочленов.
По уже доказанной теореме Гамильтона—Кэли для
алгебраически замкнутого поля Μψ)=ω, следовательно, f*(A) — нулевая
матрица. Применение равенства (50) завершает доказательство
теоремы Гамильтона—Кэли в общем случае.
Глава IV
БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ
§ 20. БИЛИНЕЙНЫЕ ФУНКЦИОНАЛЫ И ИХ МАТРИЦЫ
В этой главе предполагаем, что характеристика основного
поля К равна нулю. Читатель может считать, что К равно R
или С.
20.1. Определение. Пусть V — линейное пространство
над полем К. Отображение ξ : Vx V-+K называется билинейным
функционалом (или билинейной функцией) на пространстве V,
если при каждом фиксированном значении одного аргумента оно
линейно по другому аргументу, т. е.
ξ(*ι + Χ2, У)=£(*1> У) + 1(х2, У)·
ξ(αχ, γ)=αξ(χ, у),
£(х, yi+z2)=|(x, yi) + £(x, у2),
ξ (χ, αγ)=αξ(χ, у)
для любых векторов χ, χ*, у, y*eV и для любого числа аеК.
20.2. Примеры. 1. Скалярное произведение векторов (АГ, § 11)
является билинейным функционалом в Vect(n), я=1, 2, 3.
2. Билинейным функционалом в К" является отображение ξ,
задаваемое равенством
ξ(χ, у)=л:1у1+.. .+хпУп-
3. Билинейным функционалом в пространстве С([0, 1], R)
непрерывных функций на отрезке является отображение |,
задаваемое равенством
К/, g)=lf(t)g(t)dt.
о
Как и всякие отображения в поле, билинейные функционалы
ξ и η можно складывать и умножать на числа аеК:
(ξ + η)(Χ, У)=£(х> У)+Л(х, У), (1)
(αξ)(χ)=α(|(χ)). (2)
Ясно, что отображения ξ-1-η и αξ, определенные равенствами (1)
и (2), также будут билинейными функционалами.
Л4ножество всех билинейных функционалов на пространстве
V обозначим через T2(V). Легко проверить, что множество T2(V)
с операциями сложения (1) и умножения на число (2) само будет
линейным пространством над полем К. Нулем этого пространства
является нулевой функционал ω : VX V-+K.
239
20.3. Определение. Билинейный функционал ξ называется
симметрическим, если
6(х.У)=6(У.х)
для любых векторов х, уе1Л
Если же
Если же ξ(χ, у)=—|(у, х), то билинейный функционал ξ
называется кососимметрическим.
Множество симметрических билинейных функционалов на
пространстве V обозначим через Т2СИМ(У), а множество кососим-
метрических — через T2K0C(V). Ясно, что множества Т2СИМ(У) и
Т2К0С(У) являются линейными подпространствами пространства
T2(V). Болзе того, имеет место
20.4. Предложение.
T2(l/)=T2CHM(V)©V°c(V).
В самом деле, для любого билинейного функционала ξ имеем
Ь==ьсим~Г'ькос>
где симметрический функционал £СиМ определяется равенством
£сим(х, Υ)-γβ(Χ, У) + 6(У. X)], (3)
а кососимметрический функционал |КОс — равенством
1кос(х, у)=-5-[6(х, у)-6(у. χ)]· (4)
20.5. Определение. Пусть ξ — билинейный функционал
на пространстве V, и пусть (е) = (еь ..., еп) — базис этого
пространства. Положим
*//-*(*, е7). (Б)
Матрица
Ьп ... Ь1п
В =
Ьпл · · · Ьп
ynl
называется матрицей билинейного функционала ξ β базисе (е).
Эту матрицу обозначаем также символами
вг, в£\ в* 'п.
Элементы Ьц матрицы В называются коэффициентами
функционала | β базисе (е). Если
η η
Χ==Σ *ίβί· y=E m>'
1-1 /=!
240
то в силу билинейности функционала ξ имеем
ξ(χ, y)=6(£xielf ^У/е/)=£х^у/|(еь е,):
/=1 ' i = \ /=1
i=l
= £ Mrf/. т. е
ξ(χ, у)= £ ьихгх,. (6)
«./=1
Стоящее в правой части равенства (6) выражение называется
билинейной формой от переменных хи ..., хп и у и ..., Ул. Таким
образом, всякий билинейный функционал выражается в базисе
билинейной формой от координат. Наоборот, всякая билинейная
форма задает равенством (6) некоторый билинейный
функционал. Следовательно, при фиксированном базисе существует би-
екция между множеством билинейных функционалов и
множеством билинейных форм. Поскольку билинейная форма однозначно
определяется матрицей В своих коэффициентов Ьц% равенство (6)
устанавливает биекцию между билинейными функционалами и их
матрицами в фиксированном базисе. Эта биекция, очевидно,
является линейным отображением, т. е.
βΗ-η = £ξ + βη,
Βλ1=λΒι.
Итак, нами доказано
20.6. Предложение. При фиксированном базисе в прост-
ранстве V соответствие
является изоморфизмом между пространством T2(V) билинейных
функционалов и пространством Мп квадратных матриц порядка
/z=dim V.
При этом ясно также, что симметрическому функционалу
соответствует симметрическая матрица, а кососимметрическому
функционалу — кососимметрическая матрица.
Равенство (6) можно переписать в виде
ξ(χ, у)=2дг,(£Ь|,»,),
i=l X /-1
откуда получаем, что
ξ(χ, у)=(л:1, ... хп)Вг
Ух
Уа
(7)
241
20.7. Предложение. Пусть (е) = (еь ..., еп) и (е') =
= (е/, ..., tn) — два базиса в пространстве V, и пусть С —
матрица перехода от базиса (е) к базису (е'). Тогда для любой
билинейной функции ξ ее матрицы в этих базисах связаны
соотношением
BP=C*BfC. (8)
Доказательство. Пусть векторы х, у имеют в базисах (е) и
(е') координаты (*lf ... , *п), (Уи · · · > Уп) и (х[, ... , х'п), (*/[, ... , уп)
соответственно. Тогда согласно (АГ, §22)
(х1у ... хп)=(х[9 ... , х'п)С\
Поэтому, применяя (7), имеем
Ух
Уп
=с
Ух
У'п
(9)
(х'{, ... , х'п) Въ
<е')
Уп
=ξ(Χ, у) = (Х1э ... 9Хп)Щ
(е)
Ух
Уп
-(согласно (9))=(д:;, ... , х'п)С*в£]С
Ух
Уп
Сравнивая начало и конец этой цепочки равенств, мы и получаем
формулу (8).
§ 21. РАНГ БИЛИНЕЙНОГО ФУНКЦИОНАЛА. ЛЕВОЕ И ПРАВОЕ
ЯДРА
21.1. Определение. Рангом г (ξ) билинейного функционала
называется ранг г(Вг) его матрицы в каком-нибудь базисе. Из
предложения 20.7 вытекает корректность этого определения.
Для билинейного функционала ξ положим
Кег|ев={х^1/ : ξ(χ, у)=0 для всех yeV},
Кег?Р={хеЕ V : £у(, х)=0 для всех у <= V}
и назовем эти множества соответственно левым и правым ядром
функционала ξ.
Из линейности функционала ξ по каждому из аргументов
вытекает, что его левое и правое ядра являются линейными
подпространствами пространства V.
21.2. Теорема.· Для любого билинейного функционала ξ на
n-мерном пространстве V имеем
dim Кег^ев=/г—r(E)=dim Кег"Р.
(10)
242
Доказательство. Проверим правое из равенств (10).
Пусть (е) = (еь ..., еп) — какой-нибудь базис пространства V.
Легко проверить, что
Кег£Р={хе V : l(eh х)=0 для всех ί = 1, ... , η].
Тогда для вектора χ=χ&\+ ... +хпеп условие принадлежности
его Кег6пр состоит в том, что
|(et·, X&+ ... +хпеп)=0, ί = 1 я.
Пользуясь линейностью ξ по второму аргументу, получаем
]£ */£(е*, е/)=0, ί=1, ... , η,
или, учитывая (5),
ί Ь1Лхг+ . ·. +Ь1пхп=0,
(11)
I bnlx±+ ... +6ηη^=0.
Итак, вектор х принадлежит правому ядру Кег£р тогда и только
тогда, когда его координаты удовлетворяют системе (11).
Матрицей этой системы служит матрица В|с) функционала ξ в базисе
(е). Поэтому Кег|р, будучи отождествлено с пространством
решений системы (11), имеет размерность η—г(В^))=п—г(|).
Аналогично проверяется леЪое из равенств (10). Теорема доказана.
Для некоторых функционалов равенство dimKer|eD=dim Кег£р
можно усилить.
21.3. Предложение. Если билинейный функционал ξ
является симметрическим или кососимметрическим, то
KerfB=Ker?p. (12)
Доказательство. Принадлежность хеКеГ|ев
эквивалентна тому, что ξ(χ, у)=0 для любого yeV. Но в зависимости от
симметричности или кососимметричности ξ имеем ξ(χ, у) =
= ±£(у, х), что в любом случае нам дает ξ (у, х)=0, а это
означает принадлежность вектора χ правому ядру функционала ξ.
Из предложения 21.3 вытекает, в частности, что если Кет™* φ
Φ КеГ|Р, то функционал \ не является ни симметрическим, ни
кососимметрическим.
21.4. Задачи. 1. Привести пример билинейного функционала
ξ, левое ядро которого не совпадает с правым.
2. Привести пример билинейного функционала ξ, который
удовлетворяет условию (12), но не является ни симметрическим,
ни кососимметрическим.
243
§ 22. КВАДРАТИЧНЫЕ ФУНКЦИИ И ПОЛЯРНЫЕ К НИМ
БИЛИНЕЙНЫЕ ФУНКЦИОНАЛЫ
22.1. Определение. Отображение b : V-+K называется
квадратичной функцией, если существует такой билинейный
функционал |, что
6(χ)=ξ(χ, χ) для любого вектора xgV. (13)
Из этого определения непосредственно вытекает, что для
любого хеУ и любого аЕК
b(Kx)=X2b(x). (14)
22.2 Предложение. Для любой квадратичной функции Ь
существует единственный симметрический билинейный
функционал ξ, удовлетворяющий условию (13).
Доказательство. Единственность вытекает из того, что
в силу симметричности функционала ξ и условия (13)
Их + У)=£(х + У, х + у)=1(х, χ) + 2ξ(χ, y) + g(y, у),
откуда
|(х, y)=±[b(x + y)-b(x)~b(y)l (15)
Для доказательства существования надо проверить, что
задаваемый формулой (15) функционал является симметрическим,
билинейным и удовлетворяет условию (13). Симметричность
очевидна, условие (13) вытекает из условия (14) для Я=2. Наконец,
билинейность. Поскольку b является квадратичной функцией,
существует билинейный функционал ξ1, удовлетворяющий условию
(13). Следовательно,
1(х, у^уКЧх+у, х+у)-е<х, х)-Р(у, у)]=
= γ[Ρ<χ. χ)+Ρ(χ, у)+1Чу, х)+?(у, у)-Р(х, х)-
-ЕЧу. ν)]=γВ1 (χ. у)+?(у> χ)],
откуда и вытекает билинейность функционала ξ. Предложение
доказано.
22.3. Определение. Билинейный симметрический
функционал |, определяемый квадратичной функцией, b в предложении
22.2, называется функционалом, полярным к квадратичной
функции by и обозначается символом ξ*.
Предложение 22.2 позволяет дать другое определение
квадратичной функции. А именно имеет место
22.4. Предложение. Отображение b : V-+K является
квадратичной функцией тогда и только тогда, когда оно
удовлетворяем
ет условию (14), и функционал, определенный формулой (15),
билинеен и симметричен.
Доказательство этого предложения фактически содержится
в доказательстве предложения 22.2.
Итак, формулы (13) и (15) устанавливают взаимно
однозначное соответствие между квадратичными функциями и
симметрическими билинейными функционалами. Поэтому любое
утверждение о квадратичных функциях можно переформулировать как
утверждение о симметрических билинейных функционалах, и
наоборот. В этой главе будем изучать квадратичные функции,
предоставив читателю переформулировку получаемых утверждений на
язык симметрических билинейных функционалов.
Матрицей Вь квадратичной функции Ь в базисе (e) = (ei, ...
..., е„) называется матрица В\ь полярного к ней
симметрического билинейного функционала ξ&, рангом г(Ь) квадратичной
функции называется ранг билинейного функционала ξ*. Если
Bh=
bv .. bx
bnl · · · Ьпп
(16)
то для вектора χ=*ιβι+ ... +xntn имеем согласно (6)
η
b(x)=lb(x, x)= γ bijXiX/.
(17)
Выражение, стоящее в правой части формулы (17), называется
квадратичной формой от переменных хи ..., хп и обозначается
символом Ь(хи ..., Хп). Квадратичная форма является
однородным многочленом второй степени. Симметрическая матрица (16)
называется матрицей квадратичной формы Ь(хи ..., Хп). Рангом
квадратичной формы называется ранг ее матрицы.
Формула (17) означает, что квадратичная функция во всяком
базисе записывается в виде квадратичной формы, и при
фиксированном базисе мы можем отождествлять квадратичные
функции с квадратичными формами.
Учитывая симметричность матрицы квадратичной формы
(bij=bji), равенство (17) можно переписать в виде
i<f
(18)
ϊ=1
Равенство (7) для квадратичных функций принимает вид
*(x)=(*i. ... , xn)Bb
(19)
245
При переходе от одного базиса к другому матрица
квадратичной функции преобразуется по формуле, с точностью до
обозначений совпадающей с формулой (8), т. е.
Bie,)=C*B{be)C.
(20)
§ 23. ПРИВЕДЕНИЕ КВАДРАТИЧНОЙ ФОРМЫ К КАНОНИЧЕСКОМУ
ВИДУ МЕТОДОМ ЛАГРАНЖА
Базис (е) = (е!, ..., еп) пространства V называется
каноническим для квадратичной функции Ь : V-+K, если матрица функции
b в этом базисе диагональна:
вь=
λ,
о
о
Запись квадратичной функции b в каноническом базисе
6(х)=М?+ ... +ληχ\
(21)
называется канонической формой или каноническим видом
данной квадратичной функции.
Привести квадратичную форму Ь(хи ..., хп) к каноническому
виду означает найти каноническую форму соответствующей
квадратичной функции.
23.1. Теорема. Для каждой квадратичной функции
существует канонический базис.
Доказательство. Индукция по размерности η
пространства V, на котором определена квадратичная функция Ь. При
я=1 любой базис является каноническим. Предположим, что мы
уже доказали теорему для всех квадратичных функций,
определенных на пространствах размерности ^.п—1, и пусть dim V=n.
Возьмем какой-нибудь базис еь ..., еп в пространстве V. Пусть
квадратичная функция Ь записывается в этом базисе
квадратичной формой (18).
I. Предположим, что йц#0. Положим
*,=*! +
■*2+ ·■
. Ь\п
hi Ьп
Тогда равенство (18) принимает вид
(22)
b(x)=bn(x[f+ £ buXiXj,
(23)
где
°ij — °ii
(24)
246
Положим теперь л:2/=х2, ..., Хп^Хп- Учитывая (22), получаем
формулы перехода к новой системе координат
xv—χ. - х0 ...
*я\
Хл
2*
(25)
х„ =
Хп- )
Формулы (25) определяют переход от базиса (е) к новому
базису (e') = (ei', ..., enf):
1
1
(е|, ... , е'п)=(еи .. . , en) υ Ι (26)
Векторы
*ι' = «ι. e'2= — -^-tx + e2, ... , en=—JSL^ + tn
°11 ΰ11
образуют базис в пространстве Vy поскольку матрица перехода
в формуле (25) имеет отличный от нуля (равный 1)
определитель.
Из (23) и (25) вытекает, что в базисе (е') квадратичная
функция Ь записывается в виде
Ь(х)=Ьп(х{)*+ 2 Ъ[.х]хг
i,/=2
(27)
где Ьц определены равенствами (24).
Положим Vri=Ls(e2/, ..., ert'). Тогда правое слагаемое в
формуле (27) можно рассматривать как квадратичную форму,
представляющую в базисе е2', ..., еп' квадратичную функцию Ьх на
пространстве V\:
η
i,/=2
По предположению индукции в пространстве V\ существует базис
ъъ'ь ..., е„", канонический для квадратичной функции Ь\. Пусть
в этом базисе функция Ьх записывается в виде
МХ) = М*2)2+ · · · +Ьпп(ХпГ.
247
Тогда векторы βι'=βι, e2", ..., ел" образуют базис пространства
V, и квадратичная функция Ь записывается в этом базисе в виде
b(x) = bn(x[f + bl2(X2f+ · · · +Ь"пп(Хп)\
что и завершает доказательство теоремы в случае йц¥=0.
II. рассмотрим теперь случай, когда Ьц=0, но существует
такое to, что bioio^0. Этот случай сводится к уже рассмотренному,
если мы изменим нумерацию векторов базиса (е), поставив
вектор е*0 на первое место.
III. Предположим теперь, что все диагональные элементы Ьц
раны нулю. Если и остальные коэффициенты Ьц равны нулю, то
базис (е) (как и любой другой) является каноническим. Если же
имеется отличный от нуля коэффициент Ьц, то без ограничения
общности (меняя в случае надобности нумерацию векторов
базиса) можно считать, что ft^^O.
Сделаем преобразование
Xl = X. Х'у I
-*2 — *\ "ι ·*2'
*з=
ν3»
(28)
"Ίι· /
Определитель матрицы этого преобразования
1 —1 0 ... О
1
0
0
1 0 ..
0 1 ..
0 0..
. 0
. 0
.. 1
равен 2 и, следовательно, отличен от нуля (мы пользуемся тем,
что характеристика поля К отлична от двух). Следовательно,
формулы (28) задают переход к новым координатам х\л ..., хп'9
соответствующим новому базису
е1 = е1 + е2» е2=—е1 + е2» ез=е3» ·· » еп==еп·
В этом базисе квадратичная функция b записывается
следующим образом (мы исходим из записи (18) с учетом того, что
6«-0):
Ь(х)=2Ь12(х[)*-2ЬХ2(х'2)2 +
+ 2 J M*i—jg*;+2 £ b2i(x[+x'2)x:+
ί=3
t=*
248
В этой записи коэффициент bn'=2b\2 отличен от нуля, и этот
случай, таким образом, сводится к уже рассмотренному. Теорема
доказана.
23.2. Замечание. Фактически мы не только доказали
теорему о существовании канонического базиса для квадратичной
функции, но и указали алгоритм, позволяющий произвольный
базис пространства V перевести в канонический. Алгоритм этот
предложен в XVIII веке великим французским математиком Лаг-
ранжем. Поэтому описанный выше метод приведения
квадратичной функции к каноническому виду называется методом Лагран-
жа. Метод Лагранжа фактически сводится к методу выделения
полных квадратов, описанному в разделе I доказательства. Если
же процесс выделения полных квадратов останавливается на
некотором этапе (может быть, первом) ввиду отсутствия
ненулевых коэффициентов на диагонали, то применяется гспомогатель-
ное преобразование вида (28), после которого вновь можно
применить метод выделения полных квадратов.
23.3. Замечание. Теорема 23.1, называемая теоремой
Лагранжа, на языке квадратичных форм утверждает, что для любой
квадратичной формы Ь(хи ..., хп) существует невырожденное
преобразование переменных, приводящее эту форму к
каноническому виду
λι (*;)*+...+ λ п(хр.
При этом преобразование переменных
xi=cnx\ + · · · Л-Стхп>
хп—стх[ ~\~ · · · -\~сппхп
называется невырожденным, если определитель его матрицы
отличен от нуля.
В таком виде теорема Лагранжа полностью относится к
алгебре и применима к абстрактным квадратичным формам,
возникающим в любых вопросах, в том числе и не связанных с
геометрией квадратичных функций.
23.4. Замечание. Из доказательства теоремы Лагранжа
вытекает, что за исключением перестановок координат переход
к каноническому виду осуществляется посредством композиции
преобразований вида (25) и (28). Поэтому если коэффициенты
квадратичной формы принадлежат полю Кос:К, то ее можно
привести к каноническому виду посредством преобразования
переменных, коэффициенты которого также лежат в поле Ко-
В частности, если коэффициенты квадратичной формы
рациональны (вещественны), то ее можно привести к каноническому
виду посредством рационального (вещественного)
преобразования.
249
§ 24. НОРМАЛЬНЫЙ ВИД КВАДРАТИЧНОЙ ФОРМЫ.
ЗАКОН ИНЕРЦИИ
п. 1. Нормальный вид квадратичной функции. Пусть
квадратичная функция b приведена к каноническому виду
6(χ)=λ1χ|+...+λη^.
Если г — ранг этой квадратичной функции, то среди
коэффициентов λι, ..., λπ имеется ровно г отличных от нуля. Без
ограничения общности можно считать, что отличны от нуля первые г
коэффициентов. Тогда
&(χ)=λ^+...+λΛ4 (29)
I. Предположим, что функция b задана на комплексном
пространстве V. Перейдем к новым координатам посредством
преобразования с комплексными коэффициентами, полагая
у* = xit если i>r. )
Тогда квадратичная функция b представляется в виде
Ь(х)=!/*+...+& (30)
где уи ..., уГу уг+и ···, Уп — новые координаты вектора х.
Выражение (30) называется нормальным видом_ квадратичной
функции b в комплексном пространстве. Итак, нами доказано
24.1 Предложение. Всякая квадратичная функция в
комплексном пространстве может быть приведена к нормальному
виду (30).
24.2. Определение. Две квадратичные формы называются
эквивалентными, если они представляют одну и ту же
квадратичную функцию в разных базисах.
Согласно (20) в пространстве V над полем К две
квадратичные формы эквивалентны, если для их матриц В{ и В2
существует такая невырожденная матрица С с элементами из К, что
B<i=C В^С
Из предложения 24.1 вытекает
24.3. Предложение. В комплексном пространстве две
квадратичные формы эквивалентны тогда и только тогда, когда
совпадают их ранги.
II. Рассмотрим теперь случай вещественного пространства.
Среди коэффициентов λ* в записи (29 ) могут быть как
положительные, так и отрицательные. Предположим, что первые ρ κο-
250
эффициентов >0, а остальные <0. Перейдем к новым
координатам посредством вещественного преобразования
yi=Y\%i\ Хи если i^r\ )
yt= хи если i>r. j
Тогда
Ь(х)=у\ + ... +yl-yl+l- ... _# (31)
Выражение (31) называется нормальным видом квадратичной
функции Ь в вещественном пространстве. Итак, нами доказано
24.4. Предложение. Всякая квадратичная функция в
вещественном пространстве может быть приведена к нормальному
виду (31).
п. 2. Закон инерции Базис (е) = (еь ..., еп) вещественного
пространства V, в котором квадратичная функция Ь принимает
нормальный вид (31), назовем нормальным (для этой функции).
Число ρ положительных членов в формуле (31) и число q=r—ρ
называются соответственно положительным и отрицательным
индексом инерции квадратичной функции bt их разность а=р—q
называется ее сигнатурой.
24.5. Теорема. Положительный и отрицательный индексы
инерции вещественной квадратичной функции и, следовательно,
ее сигнатура не зависят от выбора нормального базиса.
Доказательство. Пусть в нормальных базисах (е) =
= (еь ..., еп) и (е,) = (е/, ..., еп') квадратичная функция Ь
принимает нормальный вид (31) и
ft(x)=a*+ ... +22-zJ+1- · . · -4 (32
соответственно. Предположим, что p¥*s и, например, p>s.
Рассмотрим подпространства М{ и М2 пространства V, натянутые
на векторы еь ..., ер и e's+i, ..., еп' соответственно. Тогда
dim М} + dim М2=р + (n—s) > п.
Следовательно, существует ненулевой вектор х^М\(]М2. Пусть
в базисах (е) и (е') вектор χ имеет координаты
(Уъ · · · ■ УР, 0, ... , 0) и (0, ... , 0, zs+b .. · , гп)
соответственно. Тогда из (31) и (32) вытекает, что
У\+ · · · +У2р-Ь(х)=-г1+1- .. .-4 (33)
Правая часть в равенстве (33) не превосходит нуля, а левая
часть положительна, так как х=^0. Это противоречие и
доказывает теорему.
Из предложения 24,4 вытекает, что всякая вещественная
квадратичная форма Ь(х\, ..., хп) приводится к нормальному виду
(31). Число ρ из формулы (31) называется положительным ин-
251
дексом инерции этой квадратичной формы. Из теоремы 24.5
вытекает корректность этого определения. Аналогично определяются
отрицательный индекс инерции и сигнатура квадратичной формы.
Из 24.4 и 24.5 вытекает
24.6. Предложение. В вещественном пространстве две
квадратичные формы эквивалентны тогда и только тогда, когда
совпадают их ранги и индексы инерции.
§ 25. ТЕОРЕМА ЯКОБИ О ПРИВЕДЕНИИ КВАДРАТИЧНОЙ ФОРМЫ
К КАНОНИЧЕСКОМУ ВИДУ
Пусть А - квадратичная матрица порядка η и 1 < к < п. Обозначим
через Ак матрицу, получающуюся вычеркиванием из матрицы А
последних η - к строк и η - к столбцов. Определитель матрицы Ак назовем
угловым минором порядка к матрицы А.
Квадратную матрицу называем треугольной, если все ее
элементы, расположенные ниже главной диагонали, равны нулю.
Невырожденность треугольной матрицы равносильна тому, что
все элементы, стоящие на главной диагонали, отличны от нуля.
25.1. Предложение. Квадратная матрица С треугольна и
невырожденна тогда и только тогда, когда она является матрицей
перехода между базисами (e) = (ei, ..., е„) и (e') = (ei', ..., ert'),
связанными соотношениями
Ls(e,, ..., efe)=Ls(e1/, ..., eft'), A-l, ..., п. (34)
Доказательство. Пусть невырожденная матрица C=?lk/y!l
треугольна и (e) = (ei, ..., еп) — базис. Определим систему
векторов (е/) = (е1/, ..., е„'), полагая
(е/, ..., е„') = (е,, ..., е«)С.
Тогда в силу невырожденности С система (е') также будет
базисом. Далее, для любого k
ek'=c{kei+ ... +Ckk^kf
следовательно, e*'eLs(ei, ..., е*). Поэтому
Lsfe/, ..., e/)c:Ls(ei, ..., еЛ),
откуда и вытекают равенства (34), так как размерности
пространств Ls(ei', ..., е/) и Ls(ei, ..., е*) совпадают.
Наоборот, пусть С является матрицей перехода между
базисами (е) и е'), связанными соотношениями· (34). Тогда е*'е
eLs(ei, .... е*), т. е. вектор е*' является линейной комбинацией
векторов еи ..., ek. Поэтому все координаты вектора е/ в базисе
(е) с номерами >6-М равны нулю, что и означает треуголь-
ность матрицы С. Предложение доказано.
25.2. Предложение. Пусть треугольная матрица С
является матрицей перехода от базиса (е) к базису (е'), и пусть
252
квадратичная функция Ь имеет в базисах (е) и (е/) матрицы В
и В' соответственно. Тогда для любого &=1, ..., η
Bk—CkBkCk
(35)
Доказательство. Согласно 25.1 базисы (е) и (е')
удовлетворяют соотношениям (34). Обозначим через bk ограничение
квадратичной функции b на подпространство K=Ls(ei, ..., е*) =
=Ls(e/, ..., е/) пространства V. Тогда ясно, что функция bk
имеет в базисах еь ..., ek и е/, ..., е/ пространства Vk матрицы
Bk и Bk соответственно. Поэтому для завершения
доказательства остается отметить тот очевидный факт, что Ck является
матрицей перехода от системы еь ..., tk к системе е/, ..., е*'.
Треугольную матрицу С назовем единично треугольной, если
все стоящие на ее главной диагонали элементы равны единице.
Преобразование переменных
ΙΧι
1 %п 1
Uc
1Уг 1
\Уп 1
назовем единично треугольным, если матрица С единично
треугольна.
25.3. Теорема Якоб и. Пусть Ь(хи ..., хп) — квадратичная
форма ранга г, и пусть Δ& — угловой минор порядка k ее
матрицы В. Тогда эту форму можно привести к каноническому виду
λιί/,2+
+ Ъуг2
единично треугольным преобразованием в том и только в том
случае, когда
Δ,^Ο,
Δγ^Ο.
При этом λ*=Δ*/Δ*-ι., где Δ0=1.
Доказательство. Необходимость. Пусть
кая единично треугольная матрица С, что
=С*ВС.
Тогда согласно (35) для всякого £<г имеем
λ,
(36)
существует та-
|1 λι.
0
'к
0
0
' 0
о
о
:CkBkCk,
253
откуда с учетом очевидного равенства det Ck = 1 получаем
Достаточность. Индукция по я. Если η = 1 и Ьп = Αι Φ О, то
квадратичная форма уже имеет канонический вид
Сделаем теперь переход от л - 1 к л. Имеем Ъп = Δχ * 0.Совершим
основное преобразование из доказательства теоремы Лагранжа.
Λ1—Λι Ι Λο ··· - ли>
•*о»
*»·
(37)
В новых координатах матрица нашей квадратичной формы
принимает вид
В1=
II Ьп о .
0 &22 ·
Ι ό ь'п2 .
..0
• · &2/J
• · Ьпп
(38)
Поскольку преобразование (37) единично треугольно, из 25.2
вытекает, что угловой минор порядка k матрицы В1 равен Δ*. й=
= 1, ..., п. Тогда из (38) вытекает, что для &=2, ..., η
ΔΑ:=&ιιδΑ;-ι=Διδ*.-ι,
где δ/ — угловой минор порядка i матрицы
^22·.· Ьоп
В' =
ЬП2 · · · Ьпп
Следовательно,
Таким образом, В" является матрицей квадратичной формы
Ь'(хъ% ..., Хп) ранга г—1, удовлетворяющей условию (36) тео-
254
ремы Якоби. По предположению индукции существует единично
треугольное преобразование
У2
Уп
=с
приводящее квадратичную форму Ь'{х2', ..., Хп) к
каноническому виду
Равенство у\=х\' дополняет преобразование (39) до единично
треугольного преобразования
1У1
1 Уп
\=с\
Ι ΧΊ II
\*'п I
Тогда композиция преобразований (37) и (40) будет, очевидно,
единично треугольным преобразованием, приводящим
квадратичную форму Ь(хи ..., Хп) к каноническому виду
Теорема доказана,
§ 26. ПОЛОЖИТЕЛЬНО ОПРЕДЕЛЕННЫЕ КВАДРАТИЧНЫЕ
ФУНКЦИИ. КРИТЕРИЙ СИЛЬВЕСТРА. ОПРЕДЕЛИТЕЛЬ ГРАМА.
НЕРАВЕНСТВО КОШИ—БУНЯКОВСКОГО
В этом параграфе основным полем будет поле R.
26.1 * Определение. Квадратичная функция b называется
положительно определенной, если Ь(х)>0 для любого вектора
х^О.
Симметрический билинейный функционал называется
положительно определенным, если он полярен к положительно
определенной квадратичной функции.
Квадратичная форма Ь (хь ..., хп) называется положительно
определенной, если она представляет в некотором базисе
положительно определенную квадратичную функцию, т. е. если Ь(хи ...
• ·., *л)>0 как только (хи ..., #rt)#(0, ..., 0).
Симметрическая матрица В называется положительно
определенной, если она является матрицей положительно определенной
квадратичной функции (формы).
26.2. Предложение. Квадратичная функция b
положительно определена тогда и только тогда, когда ее ранг и сигнатура
255
(39)
равны η, или, что то же самое, когда она имеет следующий
нормальный вид
6(х)=л:12+ ...+*„*,
т. е. в некотором базисе ее матрица единична.
Доказательство. Достаточность очевидна. Для проверки
необходимости приведем функцию Ь к нормальному виду
согласно 24.4. Предположив, что ее положительный индекс инерции
р<я, получим ft(x)<0, для х=(0, ..., 0, 1).
Из 26.2 и из закона (20) изменения матрицы квадратичной
функции при изменении базиса вытекает
26.3. Предложение. Матрица В положительно определена
тогда и только тогда, когда существует такая невырожденная
матрица С, что
В=С*С.
(41)
26.4. Следствие. Если матрица В положительно
определена, то det 5>0.
26.5. Теорема (критерий Сильвестра). Матрица В
положительно определена тогда и только тогда, когда все ее
угловые миноры положительны.
Доказательство. Считаем, что В — матрица
квадратичной функции Ь в базисе ei, ..., ея. Обозначим через bk
ограничение функции Ь на подпространство l/*=Ls(ei, ..., ek)
пространства V. Для положительно определенной функции Ь функция bk
будет положительно определенной квадратичной функцией на
пространстве Vk, a Bk будет матрицей этой функции в базисе
еи ..., е*. Тогда из 26.4 вытекает, что A*=det Bk>0 для всех
fc=l, ..., п.
Наоборот, пусть теперь все угловые миноры Δ& положительны.
Тогда по теореме Якоби квадратичная функция Ь приводится
к следующему каноническому виду:
6(х) = .
До
откуда согласно 26.2 вытекает ее положительная определенность.
Теорема доказана.
Пусть Ь — квадратичная функция, и Χι, ..., х* — конечный
набор векторов. Положим
Вь(хъ ... , хЛ)=
g(xlf Хх)...^, xft)
6(х*. Χι).·.ξ(χ*. Xfc)
где ξ — билинейный симметрический функционал, полярный
функции b (см. § 22). Матрицу В*(хь ..., х*) назовем матрицей
256
Грама системы векторов xlt ..., хк относительно квадратичной
функции 6. В частности, для базиса (e) = (ei, ..., е„) имеем
Вь(ъ. ...,en)=Bie).
Определитель матрицы ВЬ(Х[, ..., х«) называется определителем
Грама системы векторов хи ..., х* относительно b и обозначается
через G*(xi, ..., xk) (или G(xu ..., χ*)):
Gb(xu .... x*)=detBb(x\t ..., χ^).
26.6. Предложение. При перестановке векторов
определитель Грама не меняется, т. е. для любой подстановки σ:{1, ...
G(xb ..., x*)=G(Xo(1)t ..., χσ(Λ)). (42)
В самом деле, достаточно проверить это утверждение для
транспозиции σ, меняющей местами числа i и /. Но в этом
случае матрица Вь(х^\), ···» х*(*)) получается из матрицы Вь(х\, . ··
..., xk) посредством двух элементарных преобразований:
перестановки i-Pi и у-й строки и перестановки t-го и /-го столбцов, при
каждом из которых определитель меняет знак.
26.7. Теорема. Пусть b — положительно определенная
квадратичная функция. Тогда
G(x,, ..., х*)>0.
При этом
G(x,, ..., х*)=*0
тогда и только тогда, когда векторы хь ..., х* линейно
зависимы.
Доказательство. Предположим, что векторы хь ..., х*
линейно независимы. Положим Ai==Ls(xb ..., Xk) и b{=(b\M).
Тогда Вь(хи .... Xk) является матрицей положительно
определенной квадратичной функции Ьх на линейном пространстве Μ в
базисе хи ..., х*. Тогда G(хь ..., xk) >0 согласно 26.4.
Пусть теперь векторы хи ..., xk линейно зависимы. Согласно
26.6 их можно менять местами, не меняя определителя Грама.
Поэтому можно считать, что вектор xk линейно выражается
через векторы Χι, ..., xk-\:
χΛ=αιχ1+ .. . +otjfe-iX*-i.
Тогда в силу линейности полярного к функции b функционала ξ
по второму аргументу имеем
257
Bb(xlt ... ,хл)=
л-i
ξ(χ„ χ,) . . . |(x„ x*-i), J] «ιξ(Χι, Χι)
г=1
Λ-1
ξ(χΛ, χ,).. . ξ(χΛ, x*-i), J] α,ξ(χΑ, χ,)
ί«Ι
т. е. последний столбец матрицы Грама является линейной
комбинацией предыдущих столбцов с коэффициентами <ц, ..., α*«ι.
Отсюда G(xu ..., хл)=0. Теорема доказана.
Из 26.5 и 26.7 вытекает
26.8. Следствие. Матрица Грама любой линейно
независимой системы векторов относительно положительно определенной
квадратичной функции положительно определена.
26.9. Неравенство Кош и—Бу н яковского. Если ξ —
положительно определенный симметрический билинейный
функционал, то для любых векторов χ и у
-Уб(х. х)6(у. у)<6(х. y)<Vfe(*. x)6(y. у).
При этом равенство
(43)
6(х. y)=V'6<*. х)6(У. У)
(44)
имеет место тогда и только тогда, когда векторы χ и у
неотрицательно пропорциональны.
Доказательство. Согласно 26.7 имеем
е<х. у)=
ξ(χ, χ) ξ (χ, у)
6<У. х)6(У. У)
>0,
т. е. ξ(χ, х)|(у, у)5*[£(х, y)l2, что равносильно неравенствам
(43).
Если же ξ(χ, y)—Yl(x> х)£(у, у), то G(x, у)=0.
Следовательно, согласно 26.7 векторы χ и у линейно зависимы.
Предположим, что х^О и у=ах. Тогда
6(х. У)=а|(х, х),
а с другой стороны
|/|(х, х)|(у, у)=Уа?1(х, χ)ξ(χ, Χ)=|α|ξ(χ, χ).
Отсюда согласно (44) имеем α=|α|, т. е. а>0.
Наконец, из у=ах, а>0, равенство (44) вытекает
тривиальным образом.
Глава V
ЭВКЛИДОВЫ ПРОСТРАНСТВА
§ 27. ЭВКЛИДОВЫ И НОРМИРОВАННЫЕ ПРОСТРАНСТВА
27.1. Определение. Пусть V—вещественное линейное
пространство. Положительно определенный симметрический
билинейный функционал ξ : VX V-+R называется скалярным
произведением на пространстве V. Пространство V с заданным на нем
скалярным произведением называется эвклидовым пространством.
Поскольку в эвклидовом пространстве скалярное произведение
фиксировано, символ ξ скалярного произведения опускается, и
скалярное произведение векторов χ и у обозначается через
<х.У)·
Из определения скалярного произведения (х, у) вытекает, что
оно обладает следующими свойствами:
1) (χ, χ)Ξ^0, причем (х, х)=0 тогда и только тогда, когда
х=0;
2) (χ, у)-(у, χ);
3) (х+у, z) = (x, z) + (y, ζ);
4) (αχ, у)=а(х, у).
27.2. Примеры. 1. В (АГ, § 11) было введено скалярное
произведение в Vect(n) на основании метрики, имеющейся на
прямой, на плоскости и в пространстве.
2. Надо иметь в виду, что стандартное (геометрическое)
скалярное произведение не является единственным в пространствах
Vect(/i), так как, в частности, любой функционал, получающийся
умножением скалярного произведения на положительное число,
будет положительно определен.
3. Если в конечномерном пространстве V фиксирован базис
ei, ..., е„, то скалярное произведение (х, у) будет задано, коль
άκορο мы определим его на векторах базиса. При этом числа
Ор/, е;·) можно задавать произвольно под единственным условием,
чтобы матрица
В =
(tlf е^ ... (в!, е„)
(ert, ег)... (еп, ел)
была симметрической и положительно определенной.
В частности, в качестве матрицы В можно взять единичную
матрицу Е. Поэтому в R* скалярное произведение можно
определить, например, следующим образом:
(х, у)=Х\У\ + ...+хпуп. (1)
259
4. В бесконечномерном пространстве С ([О, 1], R) скалярное
произведение можно задать так:
(f,g) = V(t)g(t)dt.
о
5. Гильбертово пространство /г. Элементами этого
пространства являются бесконечные последовательности вещественных чисел
Х= \Х\, . . ., Xi, . . .),
удовлетворяющие условию
f^2<oo. (2)
Сложение и умножение на числа в этом пространстве
определяются покоординатно, т. е.
(xlf ... ,хи...) + (у19 ... .Л,...)—(*i+&.··. ,Χι+Уи .-.).
а(Хц ... Ухи · · .)==(ouc1, ... , <ххг, ...).
При этом надо проверить, что последовательность
{х\+уи ..., */ + *//, ...)
удовлетворяет условию (2). Для этого согласно
£ (*|+лр=£ *?+£у' + 2Σχμ
1=1 i-=l !«■.! 1=1
достаточно показать, что ряд
i*dti (3)
i=i
сходится абсолютно. Но скалярное произведение (1) в
пространстве R* удовлетворяет неравенству Коши—Буняковского 26.9.
Следовательно,
£ iwi=£ μ(ι · ш < ι/ς*? у £ *?.
i^l i=l *«1 1=1
Переходя в неравенстве (4) к пределу при л-*оо, получаем
(4)
Ι«·1 i=l ί=1
откуда в силу условия (2) и вытекает абсолютная сходимость
ряда (3).
260
Итак, операции в множестве 12 определены корректно. Ясно,
что эти операции превращают множество k в вещественное
линейное пространство. Скалярное произведение в /2 определяется
следующим образом. Для векторов
х=(х19 ... ,хь ...), у=(уи ... ,yit ...)
полагаем
(х. y)=*i#i+ · · · +*#i + · · · · (5)
Число (х, у) определено корректно согласно абсолютной
сходимости ряда (3). Симметричность и положительная
определенность функционала (5) очевидны, его билинейность вытекает из
свойств абсолютно сходящихся рядов.
Линейное пространство h со скалярным произведением (5)
называется (сепарабельным) гильбертовым пространством.
27.3. Определение. Нормой в линейном пространстве V
называется отображение II · II : K-HR+, ставящее в соответствие
всякому вектору xeV неотрицательное число ||х|| и
удовлетворяющее аксиомам
1) если ||х||=0, то х=0;
2) '||«||-|α|.Μ;
3) llx+ylKllx|| + llyll.
Линейное пространство V с заданной на нем нормой ||·||
называется нормированным-пространством.
27. 4. Примеры. 1. Естественная норма на R определяется
следующим образом:
Цх||-|х|.
2. Одним из обобщений предыдущего примера является еле·
дующа норма на R":
II(*ь ..., jc«)||=max{|xi|f ..., |дся|).
3. Норма из примера 2 обобщается до нормы на С([0, 1], R):
ll/ll=sup{|/(0|:^[0, 1]}.
Важный пример нормированного пространства дает
27.5. Предложение. Если V — эвклидово пространство, го
равенство
||х||-У(хГх) (6)
определяет норму на V.
Доказательство. Аксиомы 1) и 2) нормы вытекают из
свойств 1) и 4) скалярного произведения. Проверим неравенство
11х+у1К11х|| + 11у11. Имеем
261
Цх + У112=(х + У, x + y)=(x, x) + 2(x, y) + (y, y)<
(в силу неравенства Коши—Буняковского) ^ (χ, χ) +
Ψ+Ϋ(χ, х)(у, у) + (у, у>—ilx|laH-2ЦхП - ПУН-Ы1у||2=01^1И-ПУП>2.
Норма (6) называется нормой, порожденной скалярным
произведением. Если норма порождена скалярным произведением, то
ее квадрат является (положительно определенной) квадратичной
функцией. Поэтому согласно равенству (15) из § 22 формула
(х, y)=Y[||x + y||2-||x||a-||y||2] (7)
задает единственное скалярное произведение, порожденное
нормой.
Итак, всякое эвклидово пространство является
нормированным. Обратное не верио.
27.6. Предложение. Норма
11(*ь *2)ll-max{|*i|, |x2|} (8)
на пространстве R2 не порождается никаким скалярным
произведением.
Доказательство. Предположим, что норма (8)
порождается некоторым скалярным произведением. Возьмем в R2 векторы
х=(1, 0), у=(уЛ2-1, 1), х + у=(/2, 1).
Тогда согласно (7)
(х, y)=^[||x + y||2-||x||2-||y||2]=Y[2-l-l]=0,
откуда (х, — у) = (—1)(х, у)=0. Но х—у=(2—У27 1),
следовательно, ||х—у 11=1. Поэтому
(х, —у)=-^-£Цх—у|^—ЦхЦ2^—i!y||2J—-^-[1 — 1 — 1]——^-.
Полученное противоречие завершает доказательство.
§ 28. ДЛИНЫ И УГЛЫ. ОРТОГОНАЛЬНЫЕ СИСТЕМЫ ВЕКТОРОВ.
ПРОЦЕСС ОРТОГОНАЛИЗАЦИИ
В (АГ, § 11) мы определили это скалярное произведение
векторов в Vect(n), отправляясь от длины векторов и угла меж^Уч
ними. Теперь, имея аксиоматически заданное скалярное
произведение (положительно определенный симметрический билинейный
функционал), можем определить длины векторов и углы между
ними.
Итак, пусть V — эвклидово пространство и хеК. Число
(х, х) называется скалярным квадратом вектора х. Оно равно
262
нулю только для нулевого вектора. Норма ||х||=У(х, х) вектора
χ называется его длиной и обозначается через |х|.
В этих обозначениях неравенство Коши—Буняковского
принимает такой же вид·
-|х|.|у|<(х, уК|х|.|у|, (9)
какой оно имело для геометрического скалярного произведения
в Vect(fl).
Из неравенств (9) вытекает, что для ненулевых векторов χ и у
-К (х»у) <ι.
|х| · |у|
Это позволяет определить угол (х, у) между ненулевыми
векторами χ и у по формуле
/ "^ ч (*. У)
(х, у) = агссос —-———.
J; |х| -|у|
Таким образом, для ненулевых векторов χ и у определен угол
между ними, принимающий значение от 0 до π. Из 26.9
(равенство (44)) вытекает, что угол этот равен нулю тогда и только
тогда, когда векторы χ и у пропорциональны с положительным
коэффициентом пропорциональности.
Для скалярного произведения в произвольном эвклидовом
пространстве имеет место формула
(х, y)=l*i · liflcos(xTy), (Ю)
по которой оно определялось в (АГ, § 11).
Векторы χ и у называются ортогональными, если (х, у)=0.
Для ненулевых векторов их ортогональность означает, что угол
между ними прямой.
28.1. Определение. Система ненулевых векторов
называется ортогональной, если она состоит из попарно ортогональных
векторов. Ортогональная система векторов называется ортонор-
мированной, если она состоит из единичных векторов, т. е.
векторов единичной длины.
Непосредственно из определения вытекает
28.2. Предложение. Система векторов хь ..., хт
ортогональна (ортонормирована) тогда, когда матрица Грама этой
системы В(хи ..., хт) диагональна и не вырождений (единична).
Из 28.2 и 26.7 вытекает
28.3. Предложение. Всякая ортогональная система
векторов линейно независима.
Из 28.2 и 26.2 вытекает
28.4. Предложение. Во всяком конечномерном
эвклидовом пространстве существует ортонормированный базис.
263
Пусть (e) = (ei, ..., ert) — произвольный базис в эвклидовом
пространстве V. Тогда для векторов
η η
x = J,xiei, y^yyjtj
1-1 /«1
согласно формуле (6) из § 20 скалярное произведение этих
векторов в координатах записывается в виде
(х, у)-у х|Л(еь еД (11)
а длина вектора — в виде
|х|=|/ £ ХгЪ&и *,). (12)
i,/=l
Числа (е/, е,) называются метрическими коэффициентами базиса
(е) и обозначаются иногда (при фиксированном базисе) через
gif. В этих обозначениях равенства (11) и (12) распространяют
на случай произвольного я-мерного эвклидова пространства
приведенные в (АГ, § 12) соответствующие формулы для
пространств Vect(2) и Vect(3).
Для ортонормированного базиса (е) формулы (11) и (12)
принимают вид
(х, у)=ХгУг + ... + хпуп, (13)
|х|-/*;+...+*2. (14)
откуда вытекает формула
Из формулы (13) вытекает
28.5. Предложение. Координатами произвольного вектора
χ в ортонормированном базисе еь ..., ея являются скалярные
произведения (х, еО, ..., (х, ея). г. е.
х=(х, ei)ei+ ... + (х, е„)ея. (16)
Это утверждение обобщает предложение 12.1 из первой части.
Напомним, что вещественная матрица С называется
ортогональной, если /
С*С=Е.
28.6. Предложение. Матрица С порядка η ортогональна
тогда и только тогда когда она является матрицей перехода от
264
одного ортонор миро ванного базиса в n-мерном эвклидовом
пространстве к другому ортонормированному базису.
Фактически это утверждение было доказано нами в (АГ,
§ 30). Но формально там мы имели дело с не более чем
трехмерными эвклидовыми пространствами. Поэтому для строгого
доказательства надо заметить, что согласно 28.2 равенство
Е=С*ЕС
выражает закон изменения матрицы скалярного произведения
при переходе от одного ортонормированного базиса к другому.
28.7. Теорема. Пусть в эвклидовом пространстве V дана
линейно независимая система векторов (х) = (хь ..., хг). Тогда
существует единственная такая ортогональная система векторов
(e) = (ei, ..., ег)> которая получается из системы (х) посредством
преобразования с единично треугольной матрицей С, т. е.
(еи ..., er) = (xj, ..., Xr)C.
Доказательство. Индукция по г. При г= 1 утверждение
очевидно, поскольку необходимо βι=Χι. Предположим, что мы
уже преобразовали единственным образом векторы Χι, ..., χ*-ι
в ортогональную систему еи ..., β*-! посредством единично
треугольного преобразования. Нам надо показать, что существует
единственный вектор е*, перпендикулярный всем векторам
еь ..., е*-! и имеющий вид
efc=aixi+ ... +(X*-iXfc~H-Xh.
Вектор ek—Xk принадлежит линейной оболочке Ls(xi, ..., χ*-ι),
которая совпадает с Ls(ei, ..., e*_i) в силу треугольности
преобразования, переводящего векторы Χι, ..., χ*-ι в векторы еь ...
..., вй-ь Поэтому вектор е* можно искать в виде
β*=βΛ+ ... +pfc-iefc-i + xfc. (17)
Умножив равенство (17) на вектор е*, ί=1, ..., k— 1, в силу
ортогональности векторов ei, ..., е*, получим
0=Ме„ e£) + (Xfc, е,), (18>
откуда
p.= _iLfeiJi)_ (19)
(еь ef)
Таким образом, числа β/, а вместе с ними и вектор е*
определяются однозначно. В то же время уравнение (18) эквивалентно
тому, что вектор е* ортогонален вектору е/. Теорема доказана.
28.8. Замечание. Процесс построения векторов еь ..., ег,
при котором ei=Xi, вектор ek имеет вид (17), где числа β£
определяются из уравнения (19), называется процессом ортогонализа-
ции векторов хь ..., хг. Процесс ортогонализации можно приме-
265
нять и к линейно зависимым системам векторов. Только в этом
случае некоторые из векторов efe, определяемые уравнениями (17)
и (19), будут нулевыми.
Теорема 28.7 позволяет усилить предложение 28.4.
28.9. Теорема. В конечномерном эвклидовом пространстве
любую ортогональную (ортонормированную) систему векторов
можно дополнить до ортогонального (ортонормированного)
базиса.
Доказательство. Пусть Χι, ..., χ,ή — такая система.
Согласно 28.3 она линейно независима. Дополним ее до
какого-нибудь базиса (х) = (хь ..., хт, ..., х„). Подвергнув его процессу
ортогонализации, получим ортогональную систему векторов (е) =
= (еь ..., е/г), которая в силу своей линейной независимости
будет базисом. При этом е/=х,· для i^m. В самом деле, это
вытекает как из самого алгоритма ортогонализации, так и из
условия единственности в теореме 28.7.
Итак, для ортогональной системы утверждение доказано.
Если же система хь ..., хт ортонормирована, то для того, чтобы
из уже построенного ортогонального базиса (е) получить орто-
нормированный, достаточно положить
е/=е//|е,-| для i=m+l, ..., п.
28.10. Замечание. Теорему 28.9 нельзя распространить на
бесконечномерные пространства. В самом деле, в гильбертовом
пространстве h (пример 27.2.5) рассмотрим систему векторов
(е) = (е„ i=l, ..., /г, ...), где вектор е,= (0, ..., 0,1, 0, ...) имеет
единственную ненулевую координату 1 с номером /. Система (е)
ортонормирована, а всякий вектор х, ортогональный всем
векторам системы (е), равен нулю. Поэтому систему (е) нельзя
расширить ни до какой отличной от нее ортогональной системы.
В то же время система (е) не является базисом в /2, так как ее
линейная оболочка состоит из векторов, лишь конечное число
координат которых отлично от нуля, не исчерпывающих всего
пространства /2.
§ 29. ОРТОГОНАЛЬНОЕ ДОПОЛНЕНИЕ. ОБЩИЙ ВИД ЛИНЕЙНОГО
ФУНКЦИОНАЛА В ЭВКЛИДОВОМ ПРОСТРАНСТВЕ
Пусть S — произвольное подмножество эвклидова
пространства V. Положим
S±={xel/: (χ, у)=0 для всякого y&S}
и назовем множество S-1 ортогональным дополнением/ множества
5 в эвклидовом пространстве V. '
Из линейности скалярного произведения по первому
аргументу вытекает
266
29.1. Предложение. Ортогональное дополнение
Sx,произвольного множества SczV является линейным подпространством
пространства V. Кроме того,
Sa(S±)\ (20)
29.2. Предложение. Пусть в эвклидовом пространстве V
дано конечномерное пространство М. Тогда
Доказательство. Возьмем в пространстве Μ ортонорми-
рованный базис ei, ..., em и для произвольного вектора xeV
положим
у=(х, e,)ei + ...+ (x, em)em (21)
и z=x—у. Тогда zeAf-1. В самом деле, для этого достаточно
проверить, что вектор ζ перпендикулярен произвольному базисному
вектору е, пространства М. Но
(ζ, е;) = (х—у, et-) = (x, et) — (у, е,)=0,
поскольку числа (х, et) согласно (21) являются координатами
вектора у в базисе еь ..., ет, а согласно 28.5 эти координаты
равны (у, е/).
Итак, вектор χ представляется в виде суммы вектора уеМ и
вектора z&W-1-, т. е. V—M+M·*-. В то же время в силу
положительной определенности скалярного произведения пересечение
М{\М± содержит только нулевой вектор, что и завершает
доказательство.
Из этого предложения и формулы (20) вытекает
29.3. Следствие. Для конечномерного подпространства Μ
эвклидова пространства V имеем
М=(М±)\
В самом деле, достаточно проверить включение о. Пусть
\^(М±)±. Представим вектор χ в виде x=y+z, где уеЛ4»
zgM1. Вектор χ перпендикулярен любому вектору из Λί-1, в
частности вектору ζ. Тогда
0=(х, z) = (y, ζ)+ (ζ, ζ) = (ζ, ζ).
Итак, ζ=0, а х=уеЛ1.
29.4. Замечание. Для бесконечномерного подпространства
Μ ни предложение 29.2, ни эквивалентное ему следствие 29.3,
вообще говоря, места не имеют. В самом деле, возьмем
рассмотренную в 28.10 систему (е) векторов гильбертова пространства fa
и положим Af=Ls(e). Тогда ясно, что ортогональное дополнение
М*- содержит только нулевой вектор, в то время как
пространство Μ не исчерпывает всего гильбертова пространства 1%
267
Из предложения 29.2 вытекает
29.5. Предложение. Если dim V=n, то для любого
подпространства MaV
dim Mx=n—dim M.
29.6. Определение. Если пространство V представлено
в виде
V=M®M\
то согласно 9.2.2 определено проектирование пространства V на
подпространство Μ параллельно его ортогональному дополнению
Л1-Ч Это линейное отображение (оператор) назовем ортогональ
ным проектированием пространства V на подпространство Μ и
обозначим ргмх.
Пусть в эвклидовом пространстве V зафиксирован вектор а.
Определим отображение |а : V-+-R, полагая
|а(х) = (х, а). (22)
Из линейности скалярного произведения по первому аргументу
вытекает, что |а будет линейным функционалом на пространстве
V. Имеет место и обратное.
29.7. Теорема. В конечномерном эвклидовом пространстве
V для всякого линейного функционала ξ существует такой
единственный вектор а, что ξ=ξα. Более того, соответствие а-*|а
является изоморфизмом между линейным пространством V и
сопряженным к нему пространством V*.
Доказательство. Для нулевого функционала ξ=ω надо
взять а=0. Пусть теперь ξ — ненулевой функционал. Тогда
dimlm£=l и, следовательно, согласно 5.7
dim Ker £=dim V—1.
В силу 29.5 пространство (Kerg)^ одномерно. Возьмем в нем
какой-нибудь единичный вектор е.
Если £=£а, то вектор а перпендикулярен всякому вектору
x^Kerg, значит, вектор а пропорционален вектору е. Пусть
а=ае. Тогда
|(е) = (е, а) = (е, ае)=а(е, е)=а.
Следовательно, а==|(е)е. Покажем, что вектор а — искомый.
Пусть x&V — произвольный вектор. Он однозначно
представляется в виде
x=y+z, где уеКег ξ, ζ=ββ.
Тогда
(х, а)-(у, а)+ (ζ, а) = ^е,|(е)е)=де.(е),
268
а с другой стороны
6(х)-*(у) + Б(2)-6№е)-К(е).
Единственность вектора а фактически доказана при его
построении, но она вытекает и из того, что для любого другого
вектора а' имеем
(а—а', а—а')^0,
а это равносильно условию
(х, а)¥*(х, а') для х=а—а'.
Из уже доказанного вытекает, что отображение а-*£
является биекцией между V и V*. Из линейности скалярного
произведения по второму аргументу вытекает линейность этого
отображения. Теорема доказана.
§ 30. ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ ЭВКЛИДОВЫХ ПРОСТРАНСТВ.
ИЗОМОРФИЗМЫ. СОПРЯЖЕННЫЕ ОПЕРАТОРЫ
ЗОЛ. Определение. Пусть V и W — эвклидовы
пространства. Отображение φ : V-+W называется изоморфизмом
эвклидовых пространств, если оно является изоморфизмом линейных
пространств и сохраняет скалярное произведение, т. е.
(х, у)-(ф(х), ф(у)) (23)
для любых векторов х, уе1Л
30.2. Предложение. Для отображения q>:V-+W эвклидова
пространства V на эвклидово пространство W следующие
условия эквивалентны:
1) φ — изоморфизм;
2) отображение φ линейно и сохраняет длину векторов;
3) отображение φ линейно и сохраняет скалярное
произведение;
4) отображение φ сохраняет скалярное произведение.
Доказательство. Импликация 1)=^2) тривиальна,
поскольку сохранение длины векторов равносильно сохранению их
скалярных квадратов. Проверим импликацию 2)=^3). Если φ
сохраняет длину векторов, то (φ(ζ), φ(ζ)) = (ζ, ζ) для всякого
ζ^ΙΛ Следовательно,
(<Р(х+У), <р(х+У)) = (х+У> х+у).
В силу линейности отображения φ это равенство равносильно
равенству
(<р(х), ф(х)) + (ф(у),ф(у))+2(ф(х), ф(у)) =
= (х, х)+(у, у) + 2(х, у);
откуда и вытекает равенство (23), так как φ сохраняет
скалярные квадраты.
269
Импликация 3)=М) тривиальна. Остается проверить что из 4)
вытекает 1). Сначала покажем, что отображение φ линейно, т. е.
φ(αχ+βγ)=αφ(χ)+·βφ(γ). Положим
ζ=φ(αχ + βγ)— сир(х)— βφ(γ).
Надо показать, что ζ=0, для чего достаточно проверить
равенство (ζ, ζ)=0. Имеем
(ζ, ζ) = (φ(αχ+βγ),φ(αχ + βγ))+α2(φ(χ),φ(χ)) +
+ β2(<Ρ(Υ)> φ(γ))-2α(φ(αχ+ιβγ), φ(χ)) —
-2β(φ(αχ+ΐβγ), φ(γ)) + 2αβ(φ(χ), φ (у)).
В этом равенстве символ отображения φ всюду можно убрать,
поскольку оно сохраняет скалярное произведение. Затем,
воспользовавшись билинейностью скалярного произведения и приведя
подобные члены в правой части, получаем, что она равна нулю.
Осталось показать, что φ — мономорфизм, т. е. Кег<р={0}.
Пусть φ(χ)=0. Тогда 0=(φ(χ), φ(χ)) = (χ, χ), откуда х=0.
Предложение доказано.
30.3. Предложение. Конечномерные эвклидовы
пространства изоморфны тогда и только тогда, когда их размерности
совпадают.
Доказательство. Надо проверить только достаточность
условий. Пусть dim К=сНт W=n. Возьмем в пространствах V и
W ортонормированные базисы (е) = (еь ..., ел) и (е/) = (е/, ...
..., ел') и определим линейное отображение φ : V-+W> полагая
ср(е,)=е/, ί=1, ..., /г. Остается согласно 30.2 проверить, что
отображение φ сохраняет длину векторов. Вектор
Х—Х\£\ + . . . + Хп£п
посредством отображения φ переходит в вектор
ф(х)=х1е;+...+^.
Поскольку базисы (е) и (е') ортонормированы, длина каждого
из этих векторов согласно (14) равна Vx\+ .. .+х%.
Предложение доказано.
Из 28.5 вытекает
30.4. Предложение. Для матрицы А9=\\ац\\ оператора φ
в ортонормированном базисе еь ..., еп имеем
а,7=(е,, (р(е,)). (24)
30.5. Определение. Операторы φ и ψ, действующие в
эвклидовом пространстве V, называются сопряженными, если
(х, Ф(У)Н(Ф(х), У) \ (25)
для любых векторов х, yeV.
270
30.6. Предложение. Операторы φ и ψ сопряжены тогда и
только тогда, когда для любого (какого-нибудь) ортоноржирован-
ного базиса еь ..., е„
Α<ρ=(Α$) .
Доказательство. Пусть для ортонормированного базиса
Ар=Ы> Λ*=!Ιαί,ΙΙ.
Согласно 30.4 это означает, что
<*υ=(*ι> ф(е/)), а;7=(е, ψ, (е7·)).
Поэтому равенство ац=а'ц равносильно условию сопряженности
(25), выполненному для базисных векторов е, и е;. Но если
условие сопряженности выполнено для базисных векторов, то оно
выполнено и для любых векторов. Предложение доказано.
Из предложения 30.6 непосредственно вытекает
30.7. Предложение. Для любого оператора φ,
действующего в конечномерном эвклидовом пространстве, существует
единственный сопряженный к нему оператор ψ.
Этот оператор ψ обозначается через φ*. Из предложения 30.6
вытекает равенство
(<ρ*)*=φ. (26)
30.8. Предложение. Если подпространство MaV
инвариантно относительно оператора φ, то его ортогональное дополнение
М1- инвариантно относительно сопряженного оператора <р*.
Доказательство. Надо показать, что для любого вектора
уеМ-1 вектор φ* (у) перпендикулярен любому вектору хеМ. Но
(<р*(у),х)-(у, Ф(х))=0,
поскольку φ(χ)^Λί.
Завершим этот параграф двумя простыми свойствами
операции сопряжения, вытекающими из предложения 30.6 и свойств
операции транспонирования матриц.
30.9. Предложение. Для любых операторов <р, феОр(У)
(φοψ)*=<ψ*οφ*.
30.10. Предложение. Для любого невырожденного
оператора φ сопряженный оператор также невырожден и
(ф-ГНф*)-1·
§ 31. самосопряженные операторы
31.1. Определение. Оператор φ называется самосопряжен·
ным, если он сопряжен самому себе, т. е. φ=φ*, или
(х, Ф(У))-(Ф(Ж), У). (27)
271
Из предложения 30.6. непосредственно вытекает
31.2. Предложение. Оператор φ самосопряжен тогда и
только тогда, когда для любого (какого-нибудь) ортонормирован-
ного базиса (е) = (еь ..., ея)
Непосредственно из определений вытекает
31.3. Предложение. Ограничение самосопряженного опера-
тора на инвариантное подпространство является
самосопряженным оператором.
Из предложения 30.8 вытекает
31.4. Предложение. Если подпространство MczV
инвариантно относительно самосопряженного оператора φ, то его
ортогональное дополнение М2- также инвариантно относительно φ.
31.5. Предложение. Все корни характеристического
многочлена Μλ) самосопряженного оператора φ вещественны.
Доказательство. Предположим, что характеристический
многочлен /φ(λ) имеет комплексный корень α+ίβ. Тогда согласно
лемме 14.7 существуют такие линейно независимые векторы
х, yeV, что
φ(χ)=αχ—ру, | ^
<Р(у)=Рх + ау. J
Согласно (27) имеем
(х, φ(γ))=β(*> х) + а(х, у)
II
(φ(χ). у)=а(х. у)—β(γ. у).
Сравнивая правые части этих равенств, получаем
β[(χ, хН-(у, у)]=0.
откуда β=0, поскольку χ и у — ненулевые векторы. Это
противоречие и доказывает наше утверждение.
31.6. Теорема. Для любого самосопряженного оператора φ,
действующего в конечномерном пространстве V, существует ор-
тонормированный базис, в котором матрица оператора φ диаго-
нальна.
Доказательство. Индукция по размерности η
пространства V. Надо найти ортонормированный базис из собственных
векторов. При /г=1 утверждение очевидно. Предположим, что мы
его доказали для всех самосопряженных операторов,
действующих в пространствах размерности ^.п—1, и пусть dim V=n.
Возьмем какой-нибудь корень λι характеристического многочлена
/φ(λ). Согласно 31.5 число λι вещественно, следовательно, оно
является собственным значением оператора φ. Пуст^ е{ —
собственный вектор, отвечающий собственному значению λι. Разделив
272
в случае необходимости вектор е, на его длину, можно считать,
что |ei| —1.
Подпространство M=Ls(ei) является одномерным и
инвариантным относительно оператора φ. Тогда согласно 29.5, 31.3 и
31.4 ортогональное дополнение Мх будет (п—1)-мерным
подпространством, инвариантным относительно φ, а оператор
— самосопряженным. По предположению индукции в
пространстве Л1х существует ортонормированный базис е2, ..., е„ из
собственных векторов оператора ψ. Добавляя к этому базису вектор
еь получим ортонормированный базис пространства К, состоящий
из собственных векторов оператора φ. Теорема доказана.
§ 32. ИЗОМЕТРИЧЕСКИЕ ОПЕРАТОРЫ. ИНВАРИАНТНЫЕ
ПОДПРОСТРАНСТВА. КОРНИ ХАРАКТЕРИСТИЧЕСКОГО
МНОГОЧЛЕНА
32.1. Определение. Оператор φ : V-+V называется
изометрическим, если он сохраняет скалярные произведения.
32.2. Предложение. Для отображения φ : V-+V
конечномерного эвклидова пространства V эквивалентны следующие
условия:
1) φ — изоморфизм эвклидова пространства V на себя;
2) φ — оператор, сохраняющий длины векторов;
3) φ — изометрический оператор;
4) φ сохраняет скалярные произведения.
Доказательство почти дословно повторяет доказательство
предложения 30.2. При этом учитывается, что для операторов,
действующих в конечномерных пространствах, мономорфность
эквивалентна эпиморфности (см. § 10).
32.3. Предложение. Для оператора φ в конечномерном
пространстве следующие условия эквивалентны:
1) φ изометричен;
2) φ переводит любой (какой-нибудь) ортонормированный
базис в ортонормированный базис;
3) матрица оператора φ в любом (каком-нибудь) ортонорми-
рованном базисе ортогональна;
4) φ*==φ_1.
Доказательство. Импликация 1)=^2) тривиальна.
Импликация 2)=^3) вытекает из 28.6. Импликация 3)=^4) вытекает
из 30.6 и определения ортогональной матрицы. Проверим
импликацию 4)=И). Имеем (φ(·χ), φ(χ)) = (χ, ф*<р(У)) = (х, φ-'φίγ))^
= (х, у). Таким образом, оператор φ сохраняет скалярные про-
изведени. Предложение доказано.
Ограничение изометрического оператора <р на инвариантное
подпространство, очевидно, является изометрическим оператором.
32.4. Предложение. Если конечномерное подпространство
273
MczV инвариантно относительно изометрического оператора φ,
то его ортогональное дополнение М1- также инвариантно
относительно <р.
Доказательство. Пусть хеЛР. Надо показать, что
(<р(х), у)=0 для любого вектора уеМ. Но согласно 32.2
оператор (φ|Λί) эпиморфен. Следовательно, существует такой вектор
zeM, что q)(z)=y. Поэтому (φ(χ), у) = (<р(х), φ(ζ)) = (χ, ζ)=0.
Предложение доказано.
32.5. Предложение. Если λ0 — корень
характеристического многочлена изометрического оператора φ, то |λο| = 1.
Доказательство. Утверждение очевидно для
вещественного корня ιλ0. Пусть теперь λ0=α + /β. Тогда согласно 14.7
существуют ненулевые векторы χ и у, удовлетворяющие условиям
(28). Следовательно,
(χ, χ)Ηφ(χ), φ(χ))=α2(χ, χ)-2αβ(χ, γ)+β2(γ, у),
(У, У)-(φ(У), φ(Υ))=β2(Χ, χ)+2αβ(χ, у)+.а2(у, у).
Складывая эти равенства, получаем
(х, х) + (У, Υ) = (α2 + β2)[(χ, х) + (у, у)],
откуда α2+β2=1. Предложение доказано.
Для изометрических операторов лемма 14.7 допускает
следующее уточнение.
32.6. Предложение. Пусть α+ίβ, β#0, — корень
характеристического многочлена изометрического оператора <р. Тогда
существует такая пара единичных перпендикулярных векторов ej и
е2, что
φ(β1)=αβ1-ββ2,1
ф(е2)=ре1+-ае2. J
Доказательство. Возьмем существующие по лемме 14.7
векторы х и у, удовлетворяющие условиям (28). Покажем
сначала, что они перпендикулярны. Имеем
φ (αχ + βγ)=αφ (χ) + βφ (у)=(со гласно (28))=
=α(αχ—βγ) + β(βχ + αγ)=(α2 + β2)χ=(ΰθ^3ΰΗθ 32.5) =χ.
Таким образом,
φ(αχ + βγ)=χ.
Поэтому
|αχ + βγ| = |φ(αχ + βγ)| = |χ| = ίφ(χ)| = |αχ-βγ|,
274
т. е.
α2(χ, χ) + β2(γ, у) + 2оф(х, у)=сс2(х, χ) + β2(γ, У)-2оф(х, у),
откуда αβ(χ, у)=0. Если а#0, та (х, у)=0. Предположим теперь,
что а=0. Тогда условия (28) превращаются в
φ(χ)=—Ру, φΜ=βχ,
откуда
(х, у)-(ф(х), φ(γ))-(-βΥ. βχ)=-β2(Χ, У)·
Следовательно, и в этом случае (х, у)=0.
Теперь покажем, что |х| = |у|. Имеем (χ, χ)=(φ(χ), <р(х)) =
=(αχ—βy, αχ—βy)=(в силу (х, у)=0)=а2(х, χ) + β2^, у), откуда
(1-α2)(χ, χ)=β2(Υ, у) или β2(χ, χ)=β2(Υ, у). Значит, (х, х)=(у, у).
Для завершения доказательства остается положить
χ у
Cl—ΊΐΡ е2"" iyi '
§ 33. КАНОНИЧЕСКИЙ ВИД ИЗОМЕТРИЧЕСКОГО ОПЕРАТОРА
33.1. Примеры. 1. В одномерном пространстве имеется ровно
два изометрических оператора: тождественный и
противоположный ему. Это вытекает из того, что в этом случае согласно 32.6
собственное значение оператора равно ±1.
2. В двумерном пространстве пример изометрического
оператора дает оператор поворота на угол t> т. е. оператор, который
в некотором ортонормированном базисе имеет матрицу
II sin / cos t ||
Если для изометрического оператора φ в двумерном
пространстве число α+ίβ является ком'плексным корнем
характеристического многочлена, то согласно 32.6 оператор φ необходимо
является оператором поворота на угол t, для которого cosf=a,
sin/=—β.
3. В произвольном конечномерном пространстве всякий
изометрический оператор разлагается в прямую сумму операторов^
указанных в п. 1, 2 (теорема 33.2).
33.2. Теорема. Для любого изометрического оператора φ
в конечномерном пространстве V существует ортонормированный
базис, в котором матрица оператора имеет следующий
канонический вид:
275
1
1
— 1
sin /x cos t1
0
cos /s —sin is
II sin ts cos ts ||
Доказательство. Индукция по размерности п
пространства V. Для л=1 утверждение вытекает из 33.1.1. Пусть теперь
/г>2, и для всех изометрических операторов в пространствах
размерности <л—1 теорема доказана. Возьмем какой-нибудь
корень λι характеристического многочлена оператора φ.
Предположим сначала, что он комплексный: λι=α-Η'β. Для этого корня
согласно 32.6 существует ортонормированная система еь е2,
удовлетворяющая условиям (28ι). Тогда подпространство Λί=
=Ls(eb е2) инвариантно относительно оператора φ. Согласно 32.4
ортогональное дополнение М2- также инвариантно относительно
оператора <р. По предположению индукции в пространстве М2-
существует ортонормированный базис е3, ..., еп, в котором
матрица оператора ((р|ЛР) имеет канонический вид (30). Тогда
базис еь е2, ез, ..., ert (после перестановки в случае необходимости
векторов ei и е2) и будет согласно 33.1.2 каноническим для
оператора φ.
, Если же λι — вещественный корень, то берем единичный
вектор еь являющийся собственным вектором оператора φ с
собственным значением λι, полагаем Af=Ls(e!) и далее рассуждаем,
как в уже рассмотренном случае. Теорема доказана.
33.3. Замечания. 1. Итак, теорема 33.2 утверждает, что для
изометрического оператора φ пространство V разлагается в
прямую сумму попарно перпендикулярных одномерных и двумерных
инвариантных подпространств. На этих двумерных
подпространствах, изометричных обычной эвклидовой плоскости, оператор φ
является оператором поворота на угол ί, для которого cost—
—/sin/ является корнем характеристического многочлена. Стоит
отметить, что направление положительного вращения в
плоскости определяется ее ориентацией. Поэтому если в ортонормирован-
ном базисе (еь е2) оператор φ имеет матрицу (29), т. е. является
оператором поворота на угол t, то в базисе (еь —е2) оператор φ
будет осуществлять поворот на угол —t Этим объясняется,
почему при определении двумерного инвариантного подпространства
достаточно ограничиться одним из двух комплексно-сопряженных
корней характеристического многочлена.
276
2. Хотя канонический базис изометрического оператора
определен далеко неоднозначно, канонический вид (30) его матрицы
определен однозначно с точностью до перестановки двумерных
клеток и замены клеток вида
II α —β ||
|| β ос ||
на сопряженные клетки вида
II α β II
II —β α |Γ
Это вытекает из того, что каждая одномерная клетка матрицы
(30) определяет вещественный корень характеристического
многочлена, а каждая двумерная клетка — пару
комплексно-сопряженных его корней.
§ 34. НЕОТРИЦАТЕЛЬНЫЕ ОПЕРАТОРЫ
34.1. Определение. Самосопряженный оператор φ
называется неотрицательным (положительным), если
(φ(χ),χ)>0 ((φ(χ),χ)>0)
для всякого ненулевого вектора хеУ.
Мы знаем (теорема 31.6), что для самосопряженного
оператора φ существует ортонормированный базис, состоящий из
собственных векторов. В таком базисе еь ..., ея (<р(е*)—λ№) для
вектора
х=*Х\е\ + ... + ХпЪя
имеем
(φ(χ), χ)=λι*ι2+.. . + ληΧη2.
Поэтому имеет место
34.2. Предложение. Самосопряженный оператор φ
неотрицателен (положителен) тогда и только тогда, когда все корни его
характеристического многочлена неотрицательны
(положительны), или, что то же самое, когда Spq> состоит из неотрицательных
(положительных) чисел.
Отсюда же вытекает
3.43. Предложение. Положительность оператора φ
складывается из его неотрицательности и невырожденности.
34.4. Предложение. Если оператор φ положителен, то
^обратный оператор φ""1 также положителен.
Доказательство. Существование qr1 вытекает из 34.3,
его самосопряженность — из 30.10, положительность — из
следующего очевидного утверждения.
277
34.5. Предложение. Если 5ρφ={λι, ..., λδ} для
невырожденного оператора φ, то
SpqrMlAi, ..., 1/λ.>.
34.6. Предложение (единственность неотрицательного
корня). Для любого неотрицательного оператора φ существует
единственный неотрицательный оператор ψ, такой, что ψ2=φ.
Доказательство. Существование. Берем существующий
согласно 31.6 ортонормированный базис е^ ..., ея, состоящий из
собственных векторов оператора__<р с собственными значениями
Яь ..., λ/г, и полагаем ф(е*)»уХ;е(-. Единственность. Пусть ψ2=φ
и оператор ψ неотрицателен. Берем ортонормированный базис
(е) = (еь ..., ert), состоящий из собственных векторов оператора
ψ с неотрицательными собственными значениями μι, ..., μη.
Тогда φ (et) =ψ2(ег) ==μί2βί. Таким образом, базис (е) состоит из
собственных векторов φ, и если в нем оператор φ имеет матрицу
II λχ 0 ||
φ—I! * I»
II Λη Π
то оператор ψ имеет матрицу
УЪ о II
0 ' Ук II
Предложение доказано.
34.7. Предложение. Для любого (невырожденного)
оператора φ операторы
φοφ* и φ*οφ
неотрицательны (положительны).
Доказательство. Сначала проверим самосопряженность
оператора ψ=ιφοφ*. Применяя предложение 30.9 и формулу (26),
получаем
■ψ*= (φοφ*) *= (φ*) *οφ*=φοφ*=-ψ.
Теперь — неотрицательность ψ:
(ψ(χ), x)-(q> (Φ* (Χ)), Χ) = (φ*(Χ), φ*(*))>0.
Для оператора φ*οφ доказательство такое же.
34.8. Предложение. Изометрический неотрицательный
оператор φ является тождественным.
Доказательство. Имеем φ=φ*=φ_1 в силу 32.3.
Следовательно, φ2=φ-1φ=ε. Итак, квадрат неотрицательного оператора
φ равен тождественному. Отсюда φ=ε согласно 34.6.
Aty —
278
§ 35. РАЗЛОЖЕНИЕ ПРОИЗВОЛЬНОГО ОПЕРАТОРА
В КОМПОЗИЦИЮ НЕОТРИЦАТЕЛЬНОГО И ИЗОМЕТРИЧЕСКОГО
35.1. Те о ре м а. Любой оператор φ в конечномерном
эвклидовом пространстве может быть представлен в виде композиции
<Γ=χοψ (31)
неотрицательного оператора ψ и изометрического оператора %.
При этом для невырожденного оператора такое представление
единственно.
Доказательство. Рассмотрим сначала случай
невырожденного оператора φ. Докажем единственность представления
(31). Имеем
<ρ*οφ=(<ψ*οχ*)ο (χοψ)=<ψο (χ*οχ) οψ= (согласно 32.3) =
==ψο(χ-1οχ)οψ=<ψ2
Таким образом, оператор ψ согласно 34.6 определяется
однозначно, как неотрицательный квадратный корень из оператора φ*°φ.
После этого необходимо χ=φ°ψ~ι.
Теперь докажем существование представления (31) в общем
случае. Оператор φ*°φ неотрицателен согласно 34.7. Поэтому из
него можно извлечь неотрицательный корень ψ (34.6). Остается
построить изометрический оператор χ.
Для самосопряженного оператора ψ существует ортонормиро-
ванный базис е,, ..., е„ из собственных векторов (31.6). При этом
можно считать, что векторы еь ..., ет отвечают ненулевым
собственным значениям, а остальные — нулевым. Положим' Λί=
=Ls(ei, ·., em). Тогда подпространство Μ и его ортогональное
дополнение Μ2- инвариантны относительно оператора ψ, оператор
ψι = (\|)|Α1) невырожден, а оператор ψ2=(ΨΐΛί±) нулевой.
Положим φι==(φ|Λί). Отображение φι является линейным
отображением пространства Μ на пространство <р(М). Определим
линейное отображение χ!:Λί->φ(Λί), полагая χι—φ^ψΓ1. Покажем,,
что отображение χι сохраняет скалярные произведения векторов
х, уе=Л1
ОМ*). Μγ))=(φ(Ψ7ι(χ»> <p(V(y)))=
=(VW. Φ*φ(ν(ν)))=(ν(χ), *2(V(y)))=
=(VW* +(y))-(+(*r,W)· У)=(*> y>·
Таким образом, отображение χι является изоморфизмом между
эвклидовыми пространствами Μ и φ(Αί). В частности, векторы
Χι(*ι), ···» 3Ci(e"0 образуют ортонормированный базис
пространства φ(Λί). Дополним его до ортонормированного базиса всего
пространства V векторами е^+р ..., е^. Теперь определим
изометрический оператор %\V-+V так, чтобы он переводил ортонор-
279
мированный базис еь ..., еч в ортонормированный базис
ai(ei). · · · »Xi(em), e;+1, ...,<, т. с. положим
vu\—i χι(^ если *<m'
I e,·, если i^m+l.
Так определенное отображение χ на множестве М совпадает с
отображением χι.
Остается проверить равенство (31). Произвольный вектор хе
еУ представим в виде x=y+z, где yeAf, zeM1. Тогда
χψ(χ)=χψ(γ)+χ44ζ)=χΛ(γ) + χ(0)=φ1(ν^ι(γ))=φ(γ)=φ(χ),
поскольку φ (ζ) =0. В самом деле, (φ(ζ), φ(ζ)) = (ζ, φ*φ(ζ)) =
= (ζ, ψ2(Ζ)) = (Ζί 0)==0. Теорема доказана.
35.2. Замечание. Любой оператор φ можно представить и
в виде композиции
φ=ψοχ
изометрического оператора χ и неотрицательного ψ. Это вытекает
из доказанной теоремы, если мы представим сопряженный
оператор φ* в виде композиции (31).
§ 36. КВАДРАТИЧНЫЕ ФУНКЦИИ В ЭВКЛИДОВЫХ
ПРОСТРАНСТВАХ
Пусть в линейном пространстве V фиксирован базис (е) =
— (еь ..., €п). Тогда согласно § 10 отображение
ставящее в соответствие оператору <peOp(V) его матрицу А$
в базисе (е), является изоморфизмом между линейными
пространствами Op(V) и Мп.
С другой стороны (§ 20), отображение ξ->βξβ\ ставящее в
соответствие билинейному функционалу £eT2(V) его матрицу βφ}
в базисе (е), является изоморфизмом между линейными
пространствами T2(V) и Мп. Таким образом, при фиксированном базисе
(е) отображение
ставящее в соответствие оператору φ билинейный функционал
ξΦ, имеющий в базисе (е) ту же матрицу, что и оператор φ,
является изоморфизмом между пространствами Op(V) и T2(V).
Но изоморфизм этот зависит от выбора базиса (е) и не
является естественным, поскольку при переходе к другому базису
280
(е') посредством матрицы С матрицы операторов и матрицы
функционалов изменяются, подчиняясь разным законам:
А^^С^А^С, (32)
^{0)=С*В^С. (33)
Если же V — эвклидово пространство, то изоморфизм
Ор(У)-^Т2(К) можно определить, не прибегая к базисам. Такой
естественный изоморфизм определяется равенством
(Ф(х). У)-6(х, У). (34)
В самом деле, равенство (34) по оператору φ непосредственно
определяет функционал ξ=ξΦ. С другой стороны, по функционалу
ξ и вектору χ равенство (34) однозначно определяет вектор <р(х)
(например, через его координаты (φ(χ), β;) в каком-нибудь ор-
тонормированном базисе еь ..., е«).
Более того, если мы ограничимся рассмотрением лишь ортонор-
мированных базисов, то законы (32) и (33) изменения матриц
операторов и функционалов будут одинаковы. Таким образом,
имеется полная параллель между теорией операторов и теорией
билинейных функционалов в эвклидовом пространстве. Поэтому
утверждения об операторах в эвклидовом пространстве можно
переформулировать на языке билинейных функционалов,
квадратичных функций и квадратичных форм.
Поскольку соответствие (34) переводит самосопряженные
операторы в симметрические функционалы, из теоремы 31.6 о диаго-
нализируемости самосопряженного оператора вытекает
36.1. Теорема. Для каждой квадратичной функции Ъ в
эвклидовом пространстве существует ортонормированный базис, в
котором она имеет канонический вид,
36.2. Теорема. Любую вещественную квадратичную форму
η
Ь(Хц...9хп= Jj Ьц xt Xj можно ортогональным преобразованием
£./--.1
переменных привести к каноническому виду
λΐί/ΐ2+ .. , + ληΙ/η2.
При этом коэффициенты Яь ..., λη являются корнями
характеристического многочлена
dei\B— λ£|=0
и, следовательно, определены однозначно с точностью до
порядка.
В основной своей части теорема 36.2 непосредственно
вытекает из теоремы 36.1, если мы отождествим квадратичную форму
Ь(х\9 ..., *я) с квадратичной функцией Ъ на пространстве R* со
стандартным скалярным прозведением. Что касается
коэффициентов λι, ..., λη, то они образуют спектр самосопряженного опе-
281
ратора cp:Rn-*Rrt, матрицей которого в стандартном для Rrt
базисе является матрица В нашей квадратичной формы.
36.3. Теорема. Пусть даны две вещественные квадратичные
формы а(хх> ..., хп) и Ь(хи ..., хп), первая из которых
положительно определена. Тогда существует преобразование переменных,
приводящее первую форму к нормальному а вторую к
каноническому виду.
Доказательство. Пусть А и В — матрицы наших
квадратичных форм а и Ь соответственно. Согласно 26.2 форму а
можно привести к нормальному виду. Это означает существование
невырожденной матрицы С, такой, что
С*АС=Е.
Матрица С осуществляет преобразование переменных (х1у ..., хп)
и переменные (ух, ..., уп), в которых форма b записывается с
помощью матрицы
В'=С*ВС.
Далее, согласно теореме 36.2 существует ортогональная матрица
Z), преобразующая переменные (уи .*., #4 в переменные (г,, %..
..., zn)t в которых форма Ь записывается с помощью
диагональной матрицы
B"=D*B'D.
Преобразование переменных с матрицей CD и будет искомым.
В самом деле, согласно (33) в переменных (г,, ..., ζη) форма а
записывается с помощью матрицы
(CD)MCD=D*(CVIC)D=D*£D=£,
поскольку матрица D ортогональна.
Глава VI
ТОЧЕЧНЫЕ ПРОСТРАНСТВА
§ 37. АФФИННЫЕ И ТОЧЕЧНО-ЭВКЛИДОВЫ ПРОСТРАНСТВА
37.1. Определение. Аффинным {или точечно-аффинным)
пространством над векторным пространством V называется
множество S, элементы которого называются точками, вместе с
отображением v:SxS-+V, удовлетворяющим следующим аксиомам:
1) (аксиома суммы) для любых точек Ри Р2, P$&S имеем
v(Pu P*) + v(PbPz)-v(Pu P.); 0)
2) (аксиома откладывания вектора) для любой точки Ре5 и
для любого вектора хе^ существует единственная точка Q^S>
такая, что
v{P9 Q)=x. (2)
Таким образом, всякой паре точек Р, Q аффинного
пространства S ставится в соответствие вектор v(P, Q), который мы, как
>
правило, обозначаем через PQ. При этом
Что касается аксиомы откладывания вектора, то ее можно
трактовать как наличие отображения +:SxV-+S, ставящего в
соответствие точке Ρ и вектору χ точку
Последнее равенство равносильно тому, что x—PQ. При этом
аксиома суммы принимает вид
(Р+х)+У=Р+(х+у) (3)
для любой точки P^S и любых векторов х, ysV.
В любом аффинном пространстве S имеют место следующие
свойства:
PQ=0 тогда и только тогда, когда P=Q; (4)
PQ=-QP. __ _^ _^ _ (5)
В самом деле, РР=0, поскольку РР + РР=РР согласно
аксиоме суммы. С другой стороны, если PQ=0, то PQ—PP и по
аксиоме откладывания вектора P=Q. Наконец, из
Q=JPP=PQ + QP
вытекает равенство (5).
283
37.2. Примеры. 1. Прямая, плоскость и пространство являются
аффинными пространствами над векторными пространствами
Vect(l), Vect(2) и Vect(3) соответственно,
2. Всякое векторное пространство V превращается в аффинное
пространство над самим собой, если мы определим отображение
u:VxV-*V следующим образом:
*>(*, У)=У—х- (6)
Зафиксируем некоторую точку O^S и назовем ее началом.
Тогда каждой точке PeS можно поставить в соответствие вектор
ОР, называемый радиусом-вектором точки Ρ относительно начала
О. Равенство
Ао(Р)-ОР
задает нам отображение fto:S-*-V, которое естественным образом
отождествляет аффинное пространство S с аффинным (в смысле
37.2.2) пространством V. Более точно, имеет место
37.3. Предложение. Отображение ho:S-+-V является би-
екцией, сохраняющей операцию ν аффинного пространства, т. е.
ό[Ρ, Q)=v(h0(P), h0(Q)). (7)
В самом деле, биективность отображения ho непосредственно
вытекает из аксиомы откладывания вектора. Что касается
равенства (7), то согласно определению (6) оно эквивалентно
вытекающему из аксиомы суммы равенству
7q=OQ—OP. (8)
Таким образом, предложение 37.3 позволяет в основном свести
изучение аффинных пространств к изучению векторных
пространств. Единственное существенное отличие аффинных
пространств от векторных состоит в том, что в векторном
пространстве имеется единственное естественное начало — нулевой вектор,
в то время как в аффинном пространстве в качестве начала можно
взять произвольную точку.
37.4. Определение. Пусть в аффинном пространстве S
зафиксировано начало О, а в векторном пространстве V
зафиксирован базис еь ..., ся. Тогда мы говорим, что в пространстве S
задан репер Ot\.. ,ея. Всякий репер Oej.. .е„ определяет систему
координат Οχχ.,.Χη в пространстве S, т. е. отображение
сопоставляющее точке Ρ ее координаты {хи ..., х«), т. е.
координаты ее радиуса-вектора ОР в базисе ei, ..., ert.
284
Размерностью аффинного пространства 5 над векторным
пространством V называется размерность пространства V:
dimS=dim V.
37.5. Замечание. Из равенства (8) вытекает, что если
точки Ρ и Q имеют координаты {хи ..., Хп) и (у\, ..., уп)
соответственно, то
PQ={yi—Xu ..., Уп—Хп}.
37.6. Предложение. Пусть в аффинном пространстве S
даны две системы координат Ох{ ...хп и 0'х/...хп\
соответствующие двум реперам Ое{... е„ и О'е/... е/. Пусть С — матрица
перехода от базиса е,, ..., е„ к базису е/, ..., е/, а (аи ..., ап) —
координаты начала О' в системе координат Ох{... хп. Тогда
переход от координат (хи ..., хп) к координатам (х{\ ..., хп')
произвольной точки PeS осуществляется по формуле
Ι! χι
!Ι χη\
\=с\
ΙΧχ 1
Ι χ'η I
и
αι li
Ι α»Ί
Доказательство этого предложения совпадает с
доказательством соответствующего утверждения из первой части (см. § 23).
37.7. Определение. Аффинное пространство S над
эвклидовым векторным пространством V называется
точечно-эвклидовым (или просто эвклидовым) пространством.
Система координат Ох\...хп точечно-эвклидова пространства
V называется прямоугольной, если она соответствует ортонормиро-
ванному реперу Oei...en, т. е. реперу, для которого базис еь ...
..., е„ ортонормирован.
37.8. Предложение. Всякое точечно-эвклидово
пространство S превращается в метрическое пространство, если мы
определим расстояние р(Р, Q) между точками Ρ и Q по формуле
р(Р, Q) = \PQ\. (Ю)
В самом деле,.длина вектора является его нормой (см. § 28),
а из аксиом нормированного пространства (см. § 27)
непосредственно вытекают аксиомы метрического пространства:
1. (аксиома тождества) р(Р, Q)=0»P=Q;
2. (аксиома симметричности) р(Р, Q)=p(Q, Я);
3. (аксиома треугольника) р(Р, Q)+p(Q, #)>p(f\ #)·
Из формулы ((14), § 28) для длины вектора, заданного
координатами в ортонормированном базисе, вытекает, что в
прямоугольной системе координат расстояние между точками Р{х\, ...
• ·., Хп) и Q(yu · · ·, У η) определяется по формуле
р(Я, 0)=У(х1-уР+...+(хп-упГ. (11)
285
§ 38. ПЛОСКОСТИ В АФФИННЫХ ПРОСТРАНСТВАХ.
РАЗЛИЧНЫЕ СПОСОБЫ ИХ ЗАДАНИЯ
38.1. Определение. Пусть S — аффинное пространство над
векторным пространством V, Po^S — некоторая точка, V0czV —
подпространство. Множество
*(Р» V0)={Pt=S:W<=V0} (12)
назовем плоскостью в пространстве S, проходящей через точку
Р0 и параллельной подпространству VQ.
38.2. Предложение. Если Ρι^π(Ρ0, V0)t то
π (Ρι, Κο)=π(Ρ0, V0). (13)
В самом деле, Р0РгеУ0 согласно (12). Поэтому равенство
(13) вытекает из равенства
Предложение 38.2 можно переформулировать следующим
образом: плоскость, параллельная подпространству V0, однозначно
определяется любой из своих точек.
Всякая плоскость в аффинном пространстве сама является
аффинным пространством. Более точно, имеет место
38.3. Предложение. Пусть S0=n(P0, V0) — плоскость в
аффинном пространстве S. Тогда отображение u0=(v\S0xS0)
задает на этой плоскости структуру аффинного пространства над
векторным пространством V0.
Доказательство. В проверке нуждается только равенство
v(SoXS0)=V0.
Если PQeS0, то ^ ^qW0. Поэтому и(Р, Q)^Q=~P$—
-Р?е V0.
Наоборот, для вектора хеУ0 и для точки Р0 согласно аксиоме
откладывания вектора существует такая точка Q, что P0Q=x.
Тогда QeS0 согласно (12), откуда х=у(Р0, Q)^v(S0xS0).
Предложение доказано.
38.4. Определение. Если V0 — подпространство
векторного пространства V, a Xo^V — некоторый вектор, то множество
Хо+У0={*о+у:уеК0}
называется линейным многообразием пространства V, проходящим
через вектор х0 и параллельным подпространству V0.
286
Читателю предоставляется доказать
38.5. Предложение. Если векторное пространство V
рассматривать в качестве аффинного, то
Χο+νΌ=π(χ0, V0).
Таким образом, всякое утверждение о плоскостях можно
сформулировать на языке линейных многообразий, и наоборот. Этим
мы в дальнейшем воспользуемся.
38.6. О п ρ е д е л е н и е. Размерностью плоскости л(Р0у Vo)
называется размерность подпространства V0:
dim π (Ль У о) =dim V0.
38.7. Примеры. 1. Нульмерные плоскости — это одноточечные
множества.
2. Одномерные плоскости называются прямыми.
3. Плоскости размерности η—1 называются гиперплоскостями.
4. Единственной /г-мерной плоскостью в n-мерном аффинном
пространстве S является само это пространство.
38.8. Векторное уравнение плоскости (линейного
многообразия). Возьмем в подпространстве V0 базис ei°, ..., е*°. Тогда
произвольный вектор χ из линейного многообразия Xo+V0 имеет вид
χ-χ0+/ιβι° + ... + ί*β*0, teK. (14)
Это и есть векторное уравнение линейного многообразия.
>
Если е*=/у5г-, то для плоскости π(Ρ0, Vo) уравнение (14)
можно переписать в виде
Р=Р0 + ^Р0Рг+ ... +tkP,Pk. (15
Это уравнение называется векторным уравнением плоскости.
39.9. Параметрические уравнения плоскости в координатах.
Пусть Ох{...Хп — система координат в пространстве S, соответ-
►
ствующая реперу Оех...еп. Пусть векторы Р0Рг из уравнения (15)
имеют в базисе е{...еп координаты (Сц9 ..., ст), а точка Ро
имеет координаты (хД ..., хп°). Тогда координаты (хи ..., Хп)
произвольной точки Ρ плоскости π(Ρ0, ^о) согласно (15) получаются
из уравнений
Xi=x\ + t1cn+ ... +thcih9
Хп=х°\+^сп,+ ...+^спк.
(16)
Эти уравнения называются параметрическими уравнениями
плоскости в координатах.
38.10. Плоскость как пространство решений системы
неоднородных линейных уравнений. Из результатов § 8 вытекает, что
всякое подпространство V0 арифметического я-мерного пространст-
287
ва К" является пространством решений L(2) системы Σ
однородных линейных уравнений с матрицей
сп ... с1п
С =
Пусть χο—(^ι°, .... х,.°)еК'' Тогда плоскость л(х0, V0)c:Kn
является пространством решений /-(Σι) системы Σι неоднородных
ли-чйных уравнений >
^ml-^1 ι · · · "г Стп^п =="m>
где fei=^ti^i°4-. ..+ с1пхп- Размерность плоскости π(χ0, V0)
согласно § 8 равна η—г, где г — ранг матрицы С. В частности,
гиперплоскость всегда можно задать одним уравнением а\Х\+ ...
...+αηχη=α. (17)
, 38.11. Аффинная оболочка множества в аффинном
пространстве. Пусть XaS— подмножество аффинного пространства.
Положим L(X)=Ls{PQ :Pt Q^X}. Тогда для Р0еХ плоскость
я(Р0, L(X)) содержит X. При этом для разных точек Я0, Р\^Х
согласно 38.2 имеем π(Λ>, L(X))=*n(P\t L(X)). Следовательно,
плоскость π (A). L(X)) не зависит от выбора точки Р0^Х. Эта
плоскость обозначается л(Х) и называется аффинной оболочкой
множества X в аффинном пространстве 5.
§ 39. ПЕРЕСЕЧЕНИЕ ПЛОСКОСТЕЙ. ИХ ВЗАИМНОЕ
РАСПОЛОЖЕНИЕ
39.1. Предложение. Плоскость π(Λ, V\) лежит в
плоскости л(Р2у У%) тогда и только тогда, когда PyP2^V2 и VxczV2.
Доказательство. Если п(Ри Vx)c:n(P2> V2), то
n(P2t V2)=k(Pu V2) согласно 38.2, откуда РЛеУ2. Кроме
того, для любого вектора xeVi существует такая точка Qe
е=л(Л, Vi), что Я$=х. Но Qe=jt(P2, V2)=n(Pu V2),
следовательно, х= PXQ e V2.
Достаточность. Пусть Q^n(P\t V\). Это означает, что
ОД €= Vx cz V2. Тогда P2Q=^K+ Р&& V2> следовательно, Q<=
еп(Р2, V2).
39.2. Следствие. Плоскости л{Ри V\) и п(Р2, V2) тогда и
288
только тогда, когда π(Ρ|, 1/ι)=π(Ρ2, V2) V^ = V2 и РЛе^.
39.3. Предложение. Пусть плоскости πα=π(Ρ0, Va), аеЛ,
имеют общую точку Р. Тогда их пересечение также является
плоскостью. Более того,
П{я«:ае=Л}=я(Р, П{^а:аеЛ}). (18)
Доказательство. Надо проверить равенство (18).
Включение zd вытекает из 39.1. Пусть теперь Q^f\{na:a^A}. Поскольку
πα=π(/\ V*)t имеем PQ^Va для всякого аеЛ. Следовательно,
PQs=f\{Va:a<=Al откуда Qg=jt(P, (){V„:aeEA}.
39.4. Предложение. Аффинная оболочка л(Х) множества
XaS является наименьшей из плоскостей ncrS, содержащих
множество X, т. е.
n(X)=(){n:Xczn}.
Доказательство. Пусть Хатс(Р0, V0). Надо показать, что
n(X)an{P0t Vo). Согласно 38.2 можно считать, что Ро^Х Следо-
вараяию, надо проверить включение L(X)czV0y для чего достаточ-
>
но показать, что если Р, QeX, то PQ^V0. Но Р, Qejt(P0, Vo)>
следовательно, Р*Р, P0QeVo, а тогда PQ=PqQ—P*PgV0.
Предложение доказано.
В то время как непустое пересечение плоскостей всегда
является плоскостью, объединение плоскостей почти никогда плоскостью
не является.
39.5. Задача. Доказать, что если объединение Я\[}п2
плоскостей πι и π2 есть плоскость, то одна из этих плоскостей лежит в
другой.
39.6. Определение. Непересекающиеся плоскости π (Pi, V\)
и π(Ρ2, V2) называются параллельными (соответственно
скрещивающимися), если одно из подпространств V\ и V2 лежит в другом
(соответственно ViO^VHO}).
Легко заметить, что если две плоскости одновременно и
параллельны и скрещиваются, то одна из них есть точка.
39.7. Предложение. Две гиперплоскости π а иль, заданные
уравнениями
a1x1 + ... + anxrt=a0,
biX\ + .r + bnXn=b0,
соответственно параллельны тогда и только тогда, когда
289
Доказательство. Если плоскости πΛ и пъ параллельны,
то параллельные им (п—1)-мерные подпространства V* и Vb
совпадают. Но эти подпространства задаются однородными
уравнениями
αιΧι + ... + αηΧη=0,
bxX] + ... + 6«л:«=0,
эткуда вытекает, что
_£]__ _ ап
В то же время -^2-^-^Ц
ьп ь0
юскольку в противном случае уравнения, задающие гиперплос-
юсти π« и Яб, были бы пропорциональны, а сами эти плоскости
ювпадали бы. Проверка достаточности условий предоставляется
штателю.
39.8. Лемма. Аффинная оболочка π(πιΙΙπ2) объединения пло-
жостей m=n(Piy V/), ί=1, 2, параллельна подпространству
ν·-Μ*Α. νχ+ν2).
Доказательство. Произвольная точка Q/ел, имеет вид
Q. = P. + y., где у,е V.
Поэтому
0А=№+у2-У1.
Отсюда для Х=п\\)п2 имеем L(X)aVQ. Наоборот, всякий вектор
вида
Л^2 + У1 + У2» где yi€=Vh
соединяет точку В{— У\^л{ с точкой Рг+Уг^Яг. Следовательно,
VocL(X).
39.9. Предложение. Пусть β аффинном пространстве даны
две плоскости π/=π(Ρ/, V,·), 1=1,2. Пусть
dim m=miy dim (Vifl V2)β*·
Тогда
а) если П[{]я2=£0, то
dim π (niU^2) =Щ + m2—k\
б) если Л|Пя2=0, то
dimji(jiiUn2)—/и,* + т2—Λ+1.
290
С учетом леммы 39.8 и формулы dim(Vi + V2)=mx + m2—k
(см. § 3) предложение 39.9 будет доказано, коль скоро мы
докажем
39.10. Предложение. Плоскости п{Ри V\) и n(P2t V2)
пересекаются тогда и только тогда, когда Р\Р2& ^1 + ^2*
Доказательство. Пусть Qejt(A, Vt)f ί=1, 2. Тогда
Наоборот, пусть P1P2^.V1 + V2f т.е.
№=Ух + У2, где у, el/,.
Положим β, = Рх + У ρ Q2 = ρι - У2- Тогда
Й2=^-У2-(+У,) = 0·
Следовательно, Q\=Q2 будет общей точкой наших плоскостей.
Предложения 39.10 и 39.9 доказаны.
Из предложения 39.9 непосредственно вытекает
39.11. Следствие. Для любых двух прямых в аффинном
пространстве существует содержащая их плоскость π размерности
сНтл<:3.
39.12. Определение. 1. Вектор χ перпендикулярен
плоскости π (Л), У о) у если он перпендикулярен подпространству Vo, т. е.
xeVV-. 2. Вектор χ параллелен плоскости л(Р0, К0), если хеУ0.
39.13. Ппал^ожение. Для того чтобы вектор χ с
координатами *,,...,*„ был параллелен гиперплоскости π, заданной
уравнением
a{Xi + ... + anXn=at
необходимо и достаточно, чтобы
^ + ...+^4=0. (19)
В самом деле, если π=π(Ρο, 1/0), то согласно 38.10 равенство
(19) описывает подпространство V0 через координаты его
векторов.
39.14. Предложение. Для того чтобы вектор У был
перпендикулярен гиперплоскости π, заданной в прямоугольных
координатах уравнением
а{хх + ... + апхп=ау
необходимо и достаточно, чтобы вектор у был пропорционален век·*
тору е={аи ..., ап).
Доказательство. Равенство (19) в прямоугольных
координатах означает перпендикулярность вектора е любому вектору
xeV0, где π=π(Ρο, V0). Следовательно, eeV0x и, поскольку
291
dimVV-=l, вектор е образует базис в подпространстве IV",
откуда наше утверждение и вытекает.
39.15. Определение. Перпендикуляром, опущенным из
точки Ρ на плоскость π, называется вектор PQ, перпендикулярный
плоскости π и кончающийся в этой плоскости (фея).
39.16. Предложение. Из данной точки Ρ на данную
плоскость π можно опустить единственный перпендикуляр.
Доказательство. Пусть π=π(/>0, У0). Тогда вектор
РР0 однозначно представляется в виде
РРо=х+у, где xeV0\ yeVQ.
Точка Q=P+x и будет единственным концом перпендикуляра.
В самом деле, PP0=PQ+QPo, fQ=x, следовательно, QPo=y и,
значит, Qen.
39.17. Определение. Расстоянием p(f\ π) от точки Ρ до
плоскости π называется длина перпендикуляра PQy опущенного
из точки Ρ на плоскость я. Из теоремы Пифагора вытекает, что это
расстояние является наименьшим расстоянием между точкой Ρ и
какой-либо точкой Яея.
39.18. Предложение. Пусть в точечно-эвклидовом
пространстве S выбрана какая-нибудь прямоугольная система
координат. Тогда расстояние от точки Ρ(χχ°, ..., хп°) до гиперплоскости
я
αχΧχ + ...+anXn^a
определяется по формуле
М-ь-+»<-| . (20)
У «?+...+<£
Формула эта с учетом предложения 39.14 выводится так же,
как в первой части мы выводили соответствующую формулу для
прямой на плоскости и для плоскости в пространстве.
§ 40. ВЫПУКЛЫЕ МНОЖЕСТВА В АФФИННЫХ ПРОСТРАНСТВАХ
40.1. Линейные комбинации точек. При выборе начала О в
аффинном пространстве S мы можем отождествить точки P&S с их
радиусами-векторами OP&V. Поэтому наряду с линейными
комбинациями векторов можно попробовать определить и линейные
комбинации точек. Пусть Ри ..., Pk&S, λχ, ..., Яле К. Положим
λΛ+. -. +λΛ=ο+λ1αζ+. - · +λΛοΚ. (2ΐ)
292
Чтобы определение (21) не зависело от выбора начала, надо
иметь равенство
которое, очевидно, эквивалентно тому, что
0=0' + λίΟ'δ+ ... + λΛΟΌ.
Следовательно, для корректности определения линейной
комбинации точек (21) надо, чтобы
(λ1+..+λΛ)ΟΌ=570>
т. е. чтобы
λι + ... + λ*-1. (22)
Таким образом, линейная комбинация точек (21) определена
корректно, если выполнено условие (22). Такие линейные комбинации
будем называть аффинными.
С аффинными комбинациями точек мы во многом можем
поступать так же, как с линейными комбинациями векторов. Так,
очевидно, что элементы аффинной комбинации можно менять
местами. Их можно также группировать в следующем смысле:
М*1 + . · · + hmPm + Kn+\Pm+\ + · · · +λΛΡΛ =
-*■+■ · ■+λ-> (i^bcp-+· · · +х^зд;) р"+
+Xm+j/Vfi + ... +λΛΡΛ.
Более общим образом, имеет место
40.2. Предложение. Пусть
m(i)
/-I
Тогда
k к m(i)
Σ ΜΊ=Σ Σ λιμ,/Ρι/· (23)
Это равенство доказывается непосредственной проверкой на
основе определения. Аффинность правой комбинации вытекает из
того, что двойная сумма совпадает с повторной:
к т{г) к т{г)
Σ Σ λιμΜ=Σ λ* Σ Ρυ·
293
40.3. Предложение. Аффинная оболочка множества X
совпадает с множеством всех аффинных комбинаций точек из X.
Доказательство. Возьмем в качестве начала точку Ое
еХ. Аффинная комбинация точек из X имеет вид
—►
Ясно, что эта точка принадлежит π(Χ). Далее, векторы вида ОР,
где Р&Х, образуют полную в L(X) систему. Поэтому
произвольная точка Q^n{X) имеет вид
Q=0 + XxOF\+...+lkoK.
Но здесь уже числа λ/ не удовлетворяют условию (22). Положим
λο=1— λι—...— λ*. Тогда
0--=ληΟ+λ1Ρ1 + ...+λΛΡΛ>
ι. e. Q является аффинной комбинацией точек из X.
Предложение доказано.
Из того, что аффинная оболочка множества, состоящего из
двух различных точек, одномерна, вытекает
40.4. Предложение. Через две точки в аффинном
пространстве можно провести единственную прямую.
Из предложения 40.3 вытекает
40.5. Предложение. Прямая, проходящая через точки Р0
и Ρи описывается уравнением
P=tP0+(l—t)Pu teK. (24)
Теперь будем рассматривать вещественные аффинные
пространства.
40.6. Определение. Отрезком, соединяющим точки Р0 и
Р], называется множество ΡοΡι точек Ρ вида
P-tP0+(l—t)Pu 0<f<l. (25)
Точки Ρ0=1·Ρο+0·Ρι и Ρ!=0·Ρο+1·Ρι принадлежат отрезку Ρ0Ρι
и называются его концевыми точками (концами).
40.7. Определение. Аффинная комбинация точек
λ\Ρ{ +.. .+XkPk
называется выпуклой, если все ее коэффициенты Κι
неотрицательны.
Таким образом, отрезок можно определить как множество
выпуклых комбинаций его концов.
40.8. Определение. Множество XczS называется
выпуклым, если вместе с любыми своими точками Ρ и Q множество X
содержит и весь отрезок PQ.
40.9. Примеры. 1. Выпуклым множеством является отрезок
РоР'. В самом деле, пусть Р, QeP0Pi. Это означает, что точки Ρ
294
и Q являются выпуклыми комбинациями точек Р0 и Р\. Но тогда
их выпуклая комбинация tP+(l—t)Q согласно 40.2 будет
выпуклой комбинацией точек Р0 и Р\, т. е. будет принадлежать
отрезку РоРи
2. Из предложения 40.3 непосредственно вытекает, что
выпуклой является всякая плоскость, в частности точка и все
пространство S.
3. Выпуклым является всякий шар в точечно-эвклидовом
пространстве. В самом деле, пусть |ОР|<г, |OQ|<:r. Тогда \ЮР+
+ (l—t)OQ\<t\OP\ + {l—t)\OQ\<r.
Читателю предоставляется доказать
40.10. Предложение. Пересечение (]{Ха:аеА) любого
семейства выпуклых множеств выпукло.
40.11. Определение. Пересечение всех выпуклых
множеств, содержащих данное множество X, называется его
выпуклой оболочкой и обозначается через convX. Таким образом,
convX — наименьшее выпуклое множество, содержащее
множество X.
40.12. Предложение. Выпуклая оболочка множествах
совпадает с множеством С(Х) всех выпуклых комбинаций точек
из X.
Доказательство. Заметим сначала, что множество С(Х)
выпукло и содержите. В самом деле, для РеХ имеем Ρ = 1 · Ρ е С(Х). Если же
P,QeC{X\ т.е.
* —λι-Ρι + . . . + λ»ι*/η, ПЕЛ,
то
m n
/p+(i-/)Q=Z л,Р,+Е α-Ομ/Q/
1 = 1 /«1
и эта комбинация точек Pi и Q/ выпукла.
Остается показать, что если УгэХ — выпуклое множество, то
Yz^C(X). Включение
λιΡι + ... + XkPkeY
доказывается индукцией по k. При Л=1 утверждение равносильно
тому, что XaY. Индуктивный переход k—l->fc вытекает из
равенства
λΑ+ . · · +Xk-iPk-x + XhPk=
и выпуклости множества У. Предложение доказано·
295
40.13. Полупространство. Пусть в аффинном пространстве S
гиперплоскость π задана уравнением
axxi + .. , + anXn=a
в некоторой аффинной системе координат. Тогда множества
S~={P(xu ..., xn)^S:a{Xi + ...-\-anXn—α<0}
S+={P(xu ..., xn)eES:a{x{ + ... + anXn—a>0}
выпуклы. Называются множества S~ и S+ полупространствами,
ограниченными гиперплоскостью π. Выпуклость множеств S~ и
S+ доказывается так же, как в первой части доказывались
аналогичные утверждения для полуплоскости и полупространства (АГ,
§ 15 и 18).
§ 41. ТОЧКИ ОБЩЕГО ПОЛОЖЕНИЯ. СИМПЛЕКСЫ.
БАРИЦЕНТРИЧЕСКИЕ КООРДИНАТЫ
41.1. Пусть S — л-мерное аффинное пространство и пусть fc<
</г. Из векторного уравнения (15) плоскости вытекает, что для
произвольных Λ+1 точек Р0, Λ, ··, Pk^S существует
содержащая их плоскость л размерности <k. Если же наименьшая
содержащая их плоскость имеет размерность ky то будем говорить, что
точки Ро, Р\* .., Pk находятся в общем положении или
являются точками общего положения.
Более общим образом, (конечное) множество XczS
называется множеством точек общего положения, если никакие k+l
точек из X при &</г не лежат в плоскости размерности <k—1.
41.2. Примеры (в трехмерном пространстве). 1. Две точки
находятся в общем положении, если они различны.
2. Три точки находятся в общем положении, если они не
лежат на одной прямой.
3. Четыре точки находятся в общем положении, если они не
лежат в одной плоскости.
41.3. Предложение. Точки Р0, ..., Pk, лежащие в п-мерном
аффинном пространстве, &<я, находятся в общем положении
тогда и только тогда, когда векторы Р0Р^ ..., P0Pk линейно
независимы.
Доказательство. Аффинная оболочка π точек Ро, ..., Pk
описывается уравнением
Р=Ро+W\+... WV (15)
Следовательно, dimn=k тогда и только тогда, когда векторы
Р0Рь ..., P0Pk линейно независимы. Отсюда с учетом того, что
296
аффинная оболочка π является наименьшей плоскостью,
содержащей точки Л), ...» Pk (см. 39.4), наше утверждение и вытекает.
Следующее предложение вытекает как из 41.3, так и из
определения общего положения.
41.4. Предложение. Любая подсистема точек общего
положения находится в общем положении.
Еще одним критерием общего положения является
41.5. Предложение. Точки Ри ..., Р*, лежащие в п-мер-
ном аффинном пространстве, k<n—1, находятся в общем
положении тогда и только тогда, когда существует единственная
содержащая их плоскость π размерности k—1.
Доказательство. Если точки Рь ..., Pk находятся в
общем положении, то наименьшая содержащая их плоскость
(аффинная оболочка) и будет единственной содержащей их
плоскостью размерности k— 1. Наоборот, если точки Ρι, ..., Ρ* не
находятся в общем положении, то согласно 41.3 линейная оболочка
V0 векторов РЛ, ·.., Р\ имеет размерность tn^k—2. Возьмем
базис еь ..., ет в подпространстве V0 и дополним его до базиса
βι, ..., em, ern+i, ..., еп всего пространства V. Тогда
πι=π(Ρι, Ls(eu ..., e*)),
π2=π(Ρι, Ls{eu ..., еЛ_ь ея))
будут двумя различными jffc—1)-мерными плоскостями,
содержащими точки Pi,..., Pft. Предложение доказано.
41.6. Определение. Пусть в вещественном /г-мерном
пространстве S даны точки Ро, ..., Pk, k<.n, находящиеся в общем
положении. Их выпуклая оболочка conv{P0, .. ., Pk}
обозначается через σ(Ρο, ..., Pk) и называется k-мерным симплексом
пространства S с вершинами Ро, ..., Pk.
Для подмножества {/0> ..., tV}cz{0, ..., k) симплекс σ (Λ"0· ■ · ·
·.·, Pi) называется r-мерной гранью симплекса σ(Ρο, ..., Pk).
В частности, вершины симплекса — это его нульмерные грани.
41.7. Примеры. 1. Нульмерный симплекс — точка.
2. Одномерный симплекс — отрезок.
3. Двумерный симплекс — треугольник.
4. Трехмерный симплекс — тетраэдр.
41.8. Согласно 40.12 симплекс σ(Ρο, ..., Pk) является
множеством выпуклых линейных комбинаций
Ρ=λ0Ρο+...+λ*Ρ*. (26)
При этом
Но согласно 41.3 векторы P0Pi Р0Рь линейно независимы.
297
Поэтому числа λι, ..., λ* определены однозначно, а поскольку
λο— 1 —λι— ... —λ*,
все числа λ0, λι, ..., λ* в равенстве (26) однозначно определены
точкой Р. Эти числа называются барицентрическими
координатами точки Ρ в симплексе σ(Ρο, . · ·, Pk).
Физический смысл барицентрических координат состоит в
следующем. Если в точках Р0, · · ·, Pk поместить массы λο, ..., λ*, то
центр масс этой системы будет находиться в точке Ρ симплекса
σ(Ρο, ···» Ptt) с барицентрическими координатами (λο, ..., λ*).
В качестве легкого упражнения читателю предоставляется
доказать
41.9. Предложение. Произвольная r-мерная грань
σ(Ρί0, ..., Pif) симплекса σ=σ(Ρ0, Pk) состоит из всех точек
Р, барицентрические координаты λο, ..., λ* которых в симплексе
а удовлетворяют системе уравнений
λ/=0 для всех /^/о, · · ·, ir-
В частности, для вершины Pi имеем λ;= 1, а все остальные
барицентрические координаты равны нулю.
§ 42. АФФИННЫЕ ОТОБРАЖЕНИЯ АФФИННЫХ ПРОСТРАНСТВ.
РАЗЛОЖЕНИЕ АФФИННОГО ОТОБРАЖЕНИЯ ТОЧЕЧНО-ЭВКЛИДОВА
ПРОСТРАНСТВА В КОМПОЗИЦИЮ ИЗОМЕТРИЧЕСКОГО
И НЕОТРИЦАТЕЛЬНОГО САМОСОПРЯЖЕННОГО
42.1. Определение. Пусть Vu V2 — векторные
пространства над полем К, a Su S2 — аффинные пространства над
векторными пространствами Vu V2 соответственно. Отображение
f:S{-+S2 называется аффинным, если существует такое линейное
отображение
D(f):V^V2y
что
D(f)(PQ)=f(P)f(Q) (27)
для любых Р, QeVV
Отображение £>(/), однозначно определяемое равенством (27),
называется дифференциалом, или линейной частью аффинного
отображения /.
42.2. Примерами аффинных отображений являются
аффинные преобразования, изученные в (АГ, гл. V).
Большой запас аффинных отображений доставляют нам
линейные отображения векторных пространств, рассматриваемых в
качестве аффинных в смысле 37.2.2.
298
42.3. Предложение. Пусть f:S{-»S2 и g'.S^-^S^ —
аффинные отображения. Тогда их композиция g°f:S{-*£3 также
является аффинным отображением. При этом
D(gof)-D(g)oD{f).
Доказательство предоставляется читателю.
42.4. Предложение. Если для аффинного отображения
f:S{-±S2 существует обратное отображение f~l:S2-»Su то оно
также аффинно.
Доказательство. Определим сначала отображение
<p:V2-*VV Зафиксируем точку 0'&S2 и положим
Ф(У)=Г1(0')Г,(П где Р'=0' + у.
Теперь покажем, что <p°D(/)=id. Пусть 0=f~l{0'). Для
вектора xeVi возьмем такую точку P^SU что х=ОР. Тогда
φοΟ(/)(χ)=φ(Ο(/)(ΟΡ))=φ(/(0)/(Ρ))=
=φ(07(Ρ))=Γ1(0')Γ1(/(ί)=0?-=χ·
Из определения (27) отображения D(f) и из эпиморфности
отображения / вытекает, что D(f) — эпиморфизм. Поэтому из
равенства <p°Z)(/)=id следует, что отображение φ является обратным
к отображению D(f). Будучи обратным к линейному
отображению, отображение φ также линейно. Оно и является
дифференциалом отображения /-1. В самом деле, для этого надо проверить
условие (27). Пусть Р\ Q'^S2. Тогда
φ(^^)=φ(0^—ό^ο=φ(θ^)—φ(ό7Ρ')=
=г* (οι rl m-rl (О')Гl (P')=rl (Ρ')Γι (Q'i.
Предложение доказано.
42.5. Определение. Аффинное отображение f:Sx-*~S2
называется изоморфизмом аффинных пространств, или аффинным
изоморфизмом, если для него определено обратное отображение
f~K Таким образом, аффинный изоморфизм — это аффинное
отображение /, являющееся биекцией. В этом случае согласно 42.4
обратное отображение /_1 также будет изоморфизмом.
Напомним (см. § 37), что при зафиксированном начале 0&S
равенство hQ(P)=OP задает отображение h0:S-*~V.
Переформулировкой предложения 37.3 является
42.6. Предложение. Отображение h0:S-*-V является
аффинным изоморфизмом. Дифференциалом этого отображения
служит тождественное отображение idy.
29ί*
42.7. Следствие. Все n-мерные аффинные пространства,
определенные над одним и тем же полем К, аффинно изоморфны
между собой.
Пусть теперь в аффинном пространстве S задана аффинная
система координат Охх ...хп> определяемая репером Оъх... еЛ. Мы
хотим найти запись аффинного отображения f:S-*~S пространства
S в себя в этих координатах.
42.8. Предложение. Всякое аффинное отображение /:S-*
-*S записывается в координатах формулой
II х[ 1
Ι χη 1
\=а\
1*1
\Хп\
И
1αι 1
1 On I
где (хи ..., хп) — координаты произвольной точки P&S, (χ/, ...
..., Хп) — координаты ее образа /(Р), (аи ..., ап) —
координаты образа начала f{0) и А — матрица дифференциала D(f) в
базисе еь ...., ея.
Наоборот, всякое отображение, задаваемое равенством (28),
будет аффинным, а матрицей его дифференциала будет
матрица А.
Доказательство. Имеем
^-^ή+/(^/(/0-^+θ(/)(δ?),
т. е.
Oj^=D(/)(0P) + 0T(0),
а формула (28) является записью этого векторного равенства в
координатах.
Наоборот, отображение /, задаваемое равенством (?8),
переводит начало координат О в точку /(О) с координатами (βι,...,αη).
Поэтому равенство (28) эквивалентно равенству
ОНР)=ч>(ОР) + 0№, (29)
где φ — линейное отображение, матрицей которого в базисе
еь ..., еп является матрица А. Но из равенства (29) получаем
φ(ΟΡ)=0^-0/^Τ=/(0)/(Ρ))
т. е. <р=Ф(/). Предложение доказано.
Иногда равенство (28) будем записывать в более простой
форме
х'=Лх+а.
300
42.9. Предложение. Если аффинные отображения f:S-+S
и g:S-*~S записываются в координатах формулами
х'=Лх+а и х'=5х+Ь
соответственно, то их композиция g°f записывается формулой
х'=ВАх+(Ва+Ъ). (30)
В самом деле, если /(х)=х' и g(x')««x", то
х"=Ях'+Ь.
Поэтому gf(x)=*x"=Bx'+h=B(Ax+di)+b=BAx+BsL+b9
что и требовалось доказать.
42.10. О π ρ ед ел е н и е. Аффинное отображение f:S-+S
точечно-эвклидова пространства называется изометрическим, если
его дифференциал D(f) является изометрическим оператором
векторного эвклидова пространства V.
42.11. Предложение. Для аффинного отображения f:S-+
-*S точечно-эвклидова пространства следующие условия
эквивалентны:
а) / — изометрическое отображение;
б) f сохраняет расстояние между точками;
в) D(f) имеет ортогональную матрицу в любом ортонормиро-
ванном базисе.
Это утверждение вытекает из свойств изометрических
операторов и из того, что сохранение расстояний между точками
отображением / равносильно сохранению длин векторов его
дифференциалом.
42Л2. Определение. Аффинное отображение f:S-+S
точечно-эвклидова пространства называется неотрицательным
самосопряженным, если оно имеет неподвижную точку, а его
дифференциал является неотрицательным самосопряженным оператором.
При этом точка P^S называется неподвижной точкой
отображения fiS-^-S, если/(Р)=Р.
Несложно убедиться в том, что неотрицательное
самосопряженное отображение представляет собой композицию сжатий или
растяжений вдоль осей некоторой прямоугольной системы
координат с началом в неподвижной точке.
42.13. Теорема. Всякое аффинное отображение /:S-*S то-
чечно-эвклидова пространства разлагается в композицию
f=g°h
изометрического отображения h и неотрицательного
самосопряженного отображения g.
Доказательство. В пространстве S зафиксируем
некоторую прямоугольную систему координат Ох\...хп%
соответствующую ортонормированному реперу Ое{... еп. Пусть отображение f
записывается в этой системе координат формулой
/(х)=Лх+а. (31)
301
Дифференциал этого отображения согласно теореме 35.1
представляется в виде композиции изометрического и неотрицательного
самосопряженного операторов. Это согласно 42.8 соответствует
представлению матрицы А в виде произведения ВС ортогональной
матрицы С и симметричной неотрицательной матрицы В.
Отображение Л, задаваемое формулой
Л(х)=Сх+а,
будет изометрическим, поскольку матрица С его дифференциала
ортогональна.
Самосопряженное неотрицательное отображение g ищем в
виде
g(x)=fix+b.
Согласно 42.9 имеем
f(x)=gh(x)=BCx+ (fia+b).
Поэтому в силу (31)
Ь=а—Ва.
(32)
(33)
Осталось показать, что отображение g имеет неподвижную точку.
Имеем
g (а) = (согласно (32) )=fla+b= (согласно (33)) =
=Ва+(а—Ва)=а.
Теорема доказана.
§ 43. КЛАССИФИКАЦИЯ ДВИЖЕНИЙ ПРОСТРАНСТВА
Изометрические отображения называются еще движениями.
43.1. Теорема. Для произвольного движения f трехмерного
пространства существует прямоугольная система координат
0*1*2*з, β которой движение f описывается одним из следующих
способов:
1) параллельный перенос
х'=£х+
а;
2) винтовое движение
II **'
х'г
II х'г \
1
Ι ι о о II
0 cos α —sin α
I 0 sin α cos α ||
1XA
Us
II *a
+
l0il
0
1 ° 1
302
3) вращение вокруг некоторой оси с отражением относительно
плоскости, перпендикулярной к оси вращения
x'l 1
*2
Хз
\ = \
1—1 о
0 cos α
I 0 sin α
0 Ι
— sina
cos a 1
Η
ΙΧι 1
4
I X3 1
4) отражение относительно плоскости с параллельным
переносом вдоль этой плоскости
Xl
Хч
хз 1
=
— 1 0 0
0 10-
о о ι II
*1
ч
II *з
г
0
а2
I a3
Доказательство. В координатной записи
х'=Лх + а
аффинного отображения f матрица А есть матрица
дифференциала отображения /, который в нашем случае является
изометрическим оператором. Поэтому согласно теореме о каноническом
виде изометрического оператора (§ 33) существует ортонормирован-
ный базис еь е2, е3, в котором матрица А оператора D(f) имеет
один из четырех указанных в формулировке теоремы 43.1 видов.
Следовательно, остается выбором начала координат добиться
того, чтобы столбец а свободных членов имел простейший вид.
Выберем начало О произвольным образом. Пусть ортонорми-
рованному реперу Oeie2e3 соответствует прямоугольная система
координат Оу!у2уз, в которой движение / записывается в виде
у'=Лу+а.
(34)
Перенесем теперь начало в точку 0°, радиус-вектор 00° которой
равен у0. Пусть хи *2, хз — новые координаты точек. Тогда х,=
^yi—yp или yi=Xi + yi°. Поэтому равенство (34) перейдет, в
равенство
x/+y°-i4(x + y°)+a,
или
х'=Лх+(Лу°—у°+а).
Наша задача — выбрать у0 так, чтобы выражение Ау°—у°4-а
приняло простейший вид, по возможности нулевой. Последнее
достижимо, если разрешимо уравнение
(Л-£)у°=-а.
(35)
303
Разрешимость этого уравнения гарантируется обратимостью м
рицы А—Еу а это равносильно тому, что единица не является ха
рактеристическим корнем матрицы А. Этому условию удовлетво
ряет третий случай
Л =
—10 0
0 cos α —sin α
0 sin α cos α
В первом случае (А=Е) имеем Лу°—у°+а=а, т. е. столбец а
свободных членов не меняется при изменении начала координат.
Во втором и четвертом случаях система уравнений (35)
принимает соответственно вид:
Ί
4)
0=— аи
(cos a— Off"—sina-«/§=—<*г,
sin а · у\ + (cos а— 1) у\ — — %;
-2у\=-аи
0 =-аа,
1 0 =-а,,
т. е. становится, вообще говоря, несовместной. Но разрешая
систему 2) относительно неизвестных у2°, #з°, а систему 4) относительно
неизвестной у{° и перенося начало координат в точки (0, у2°, уг°)
и (у\°, 0, 0) соответственно, мы получаем требуемую нам в
случаях 2) и 4) запись отображения f. Теорема доказана.
Анализ доказательства теоремы 43.1 показывает, что в
многомерном случае имеет место
43.2. Теорема. Если единица является корнем кратности k
характеристического многочлена дифференциала D(f)
изометрического отображения f:S-+St то в некоторой прямоугольной системе
координат Охх... хп отображение f записывается следующим об-
разом:
1 х> 1
к
\=А\
\*1 1
1 *»
и
1 аЧ
0
1 0 |
304
где
Л =
— 1
— 1
coso^—sinai
sin аг cos ax
sinas cosas
>PG
§ 44. ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА В ТРЕХМЕРНОМ
ПРОСТРАНСТВЕ
В этом параграфе докажем теорему, сформулированную в А1\
§49.
44.1. Теорема. Для любой поверхности второго порядка су-
ществует прямоугольная система координат Oxyz, в которой
уравнение этой поверхности имеет один из следующих видов:
1) эллипсоид
х . У
" +4=1;
2) мнимый эллипсоид
4+-S-+4---1*'
а2 б2 с2
3) однополостный гиперболоид
b2 с2
Ί;
4) двуполостный гиперболоид
JL.-lJL· £L ι·
5) конус
а2 ft2
-2-=0;
6) мнимый конус
γ2 |у2 у2
^~ + -^~+—=0;
а2 Ь2 с2
305
7) эллиптический параболоид
—+-£-=2г (р, (7>0);
8) гиперболический параболоид
— -^-=2* (р, (7>0);
9) эллиптический цилиндр
^- + -£-=1;
а* 6а
10) мнимый эллиптический цилиндр
—+ -^- =
—Ια* + ft* If
11) гиперболический цилиндр
Jt Л ι.
а* Ь* ~1'
12) параболический цилиндр
У2=2рх;
13) пара пересекающихся плоскостей
а2 Ь2
14) пара мнимых пересекающихся плоскостей
^ + ■£--0;
а2 ^Ь2
15) /шра параллельных плоскостей
У2=а2;
16) /гара мнимых параллельных плоскостей
#2+а2=0;
17) пара совпадающих плоскостей
У2=0.
Доказательство. Без ограничения общности можно
считать, что поверхность Φ задана в некоторой прямоугольной
системе координат ΟχΧ{χ2χζ своим общим уравнением
Ь(*ь Х2, хг) + 2а{хи х2, Хз) + а0=0, (36)
306
где b(x1$ x2, *8) = /Ε buxixj—квадратичная форма от переменных х19
х*> *з> а(хи Чу *s)=ai*i + a2*2 + aJ*3—линейная форма от
переменных хи Х2, *з. Согласно теореме 36.2 существует такое
ортогональное преобразование переменных
(37)
где в новых переменных уи у2, Уг квадратичная форма Ь имеет
канонический вид
Равенство (37) осуществляет переход от прямоугольной системы
координат 0\ххх2хг к прямоугольной системе координат ОхУху^уь.
В этой системе координат уравнение поверхности (36) имеет вид
ΙΙΉ
г*
ΙΙ*·Ι
=с
ί/ll
\уА
\уЛ
КУ\ + Щ + ^1 + 2а[уг + 2а^2 + 2а^8+а0=0.
(38)
Случай I. Ранг формы Ь равен 3, т. е. λιλ^^Ο. В этом
случае после параллельного переноса осей координат в fo*o« ^*-
чало по формулам
*.=#* + ·
λ*'
ί=1, 2, 3,
получаем, что в новой прямоугольной системе координат Οζχζ2ζζ
уравнение (38) примет вид
Μ + λ^ + λ^ + α^Ο.
(Щ
Уравнение (39) пропорционально одному из канонических
уравнений 1)—6) после необходимого переименования координат.
Случай II. Ранг формы Ь равен 2. Пусть, например, λ\%2Φ
#0. В этом случае после параллельного переноса осей координат
в новое начало по формулам
*1 = Уг
λ£
* = 1, 2, 28=#з>
получаем, что в новой прямоугольной системе координат 02ZiZ2z9
уравнение (38) примет вид
V? + ^ + 2a£s + a;=0.
(40)
Теперь если а3/=0, то система 02ζχζ2ζ^ и будет после
переименования осей координат канонической, а уравнение (40) будет про-
307
порционально одному из уравнений 9)—11), 13), 14). Если же
а3/=^0, то после замены
получаем новую прямоугольную систему координат Οζγ г2 съ\ в
которой уравнение (40) после переименования координат и
возможного изменения направления одной из осей координат на
противоположное будет пропорционально одному из канонических
уравнений 7), 8).
Случай III. Ранг формы b равен 1. Пусть, например, λ2^0.
В этом случае после замены
22 = 02 + —
получаем, что в новой прямоугольной системе координат 02у\г2уъ
уравнение (38) примет вид
Х2г1 + 2а'1У1 + 2а'#в + а'0=0. (41)
Если здесь αι'=α3'=0, то уравнение (41) после переименования
координат пропорционально одному из канонических уравнений
15) —17). Если же α/2+α3/2>0, то, производя замену
ι 1 ,
а{У1 + а3у3+—а0
х= / - ,
J ί/=*2»
получаем прямоугольную 'систему координат Oxyzf в которой
уравнение (41) пропорционально каноническому уравнению (12).
Теорема доказана.
Глава VII
ЭЛЕМЕНТЫ ТЕНЗОРНОЙ АЛГЕБРЫ
§ 45. ТЕНЗОРЫ. ЗАПИСЬ В КООРДИНАТАХ
45.1. Определение. Пусть V — векторное пространство над
полем К, V* — сопряженное к нему пространство. Тензором типа
(р, q), где р, q*>0, на пространстве V называется произвольное
отображение
Г:Ух...хУхУ*х...хУ*^К
произведения ρ экземпляров пространства V и q экземпляров
пространства V*, которое полилинейно, т. е. линейно по каждому
аргументу при фиксированных значениях остальных.
45.2. Примеры. 1. Ковекторы (элементы пространства V*)
являются тензорами типа (1, 0).
2. Векторы (после отождествления их с элементами второго
сопряженного пространства) можно рассматривать как тензоры
типа (0, 1). При этом для вектора χ и ковектора % по определению
x«)-fc(x).
3. Билинейные функционалы %:VxV-+K — тензоры типа
(2,0).
4. Линейный оператор y:V-*~V можно отождествить с тензором
Гф типа (1, 1), который определяется следующим образом:
rf(x. W-fc(<p(x)). (i)
45.3. Тензорные обозначения. Векторы обозначаем латинскими
буквами, индексированными снизу, ковекторы — греческими
буквами, индексированными сверху. В то же время индексы
координат векторов пишем вверху, а индексы координат ковекторов —
внизу. Вместо записи
η
x=x1t1+ ... + xntn> или х=Jj xl*u
1=1
пишем
Аналогично ковектор ξ в сопряженном базисе записывается так:
Вообще тензорные обозначения предполагают, что если в каком-
то выражении один и тот же индекс, например ί, встречается и
вверху и внизу, то по этому индексу идет суммирование. При этом
309
пределы суммирования не указываются, их, как правило, можно
легко определить по самому виду выражения.
Далее, если наряду с базисом еи ..., tn мы рассматриваем
другой базис, то в общих рассуждениях его удобнее обозначать,
ставя штрихи не у букв, а у индексов:
ci · · · t еп .
Формулы разложения векторов е^, ..., tn> по базису еь
тензорных обозначениях имеют вид
•ч—rf,e,
i'^ir
При этом матрица С перехода от базиса еь
вг, . ··, еЛ' записывается следующим образом:
., ея
.., е„ в
(2)
базису
С =
с\>
спу
А-
45.4. Предложение. Пусть (е) = (еь ..., ел) и (e')=(eis ...
. ..,еь')— базисы пространства V, α (ε) = (ε!, ..., ε") и
(ε')=(ε1', ..., гп')— сопряженные им базисы пространства V*.
Тогда если С — матрица перехода от базиса (е) к базису (е'), то
матрицей перехода от базиса (ε) к базису (ε') будет матрица
(С-1)*.
Доказательство. Найдем сначала, как преобразуются
координаты ковеЯторов. Пусть
l-be'-b*1'.
Согласно предложению 6.5 имеем
Тогда
ξ, = £(*,) = (согласно (2)) = ξ(ο\.β) = cfc{e,) = c%r
Итак, координаты ковекторов преобразуются по тому же закону
(2), по которому преобразуются базисные векторы, т. е.
«IS .... Ь|') = <&1. .... 1п)С
Из этого равенства получаем
(3)
Но согласно (АГ, § 22) равенство (3) и означает, что матрица
(С-1)* есть матрица перехода от базиса (ε) к базису (ε7).
Предложение доказано.
giii
1 ·
II ι» Ι
-(Ο*
ь' 1
1ь.'1
310
45.5. Замечание. В§7 мы обещали проиллюстрировать
отсутствие «естественного» изоморфизма между пространствами V
и К*. У нас нет точного определения «естественного»
изоморфизма. Но одна из естественных попыток построения такого
изоморфизма состоит в том, что при фиксированном базисе еи ..., ел в
пространстве V вектору х=х£е, ставится в соответствие ковектор
6=х,в1 + .. .+хпгп. Однако из предложения 45.4 вытекает, что
такая конструкция зависит от выбора базиса и не является
«естественной».
45-6. Запись тензора в координатах. Пусть Τ — тензор типа
(р, q). Пусть векторы и ковекторы заданы в координатах:
xfc=x^e<ftf Л=1, ..., р,
V=lli^K ί=ι,..., я.
Тогда, пользуясь полилинейностью тензора Г, получаем
1 (xlf ..., Хр, ξ t ..., ς )==
=п*1Ч',....*>,. &*·,.... ι^)=
=*{' ... д£р& ... $Τ(*ι9 ..., eip, e/S ..., ε'*).
Здесь в нижней строке записана (р+9) -кратная сумма,
суммирование идет по переменным индексам ι\, //, каждый из которых
принимает значения от 1 до я.
Числа
г1;:.:'{«=г(е,,,.... eip, 8/. в'«)
называются коэффициентами тензора Г (в базисе еь ..., ert).
Таким образом,
т(хи..., Хр, ρ,..., 1')=г(;:::^·... *h/. · · · ц. (4)
Эта формула означает, что тензор выражается полилинейной
формой (однородным многочленом) от координат векторов и ковек-
торов.
45.7. Изменение коэффициентов тензора при переходе к
другому базису. Пусть переход от базиса (е) к базису (е')
осуществляется по формулам (2), а сопряженные базисы (ε) и (ε')
связаны формулами
вГ =d}V.
311
Согласно 45.4 числа ά\— элементы матрицы (О1)*. Мы хотим
найти коэффициенты Τ ». - тензора Г в базисе (е'). Из равенст-
1 Р
ва (4) вытекает, что
Т^'^.-.с^Г.^^Х (5)
§ 46. ОПЕРАЦИИ НАД ТЕНЗОРАМИ. БАЗИС В ПРОСТРАНСТВЕ
ТЕНЗОРОВ
46.1. Тензоры одного и того же типа (р, q) на векторном
пространстве V можно складывать и умножать на числа как
отображения одного множества VpX{V*)q в векторное пространство К.
Множество всех тензоров типа (р, q) на пространстве V
обозначается символом T^>(V). Множество это, будучи
подмножеством векторного пространства M(VpX(V*)*t К) (см. § 1),
является, как легко видеть, его линейным подпространством. Итак,
множество Tfe'*>(V) есть векторное пространство над полем К.
Ясно также, что при сложении тензоров их коэффициенты
складываются:
(s+T#:::i;-s;::::ij+7t:.tP. (β>
Аналогично при λ^Κ
(ят)?;.;:/«=я(71:::.^. <d
46.2. Тензоры можно также перемножать. Для тензоров S и
Τ типа (р, q) и (г, s) соответственно определен тензор S®T типа
(p+rt ?+s), называемый (тензорным) произведением тензоров S
и Т. Тензор этот определяется следующим образом:
(5®ТЖ. .... хР, хр+ь .... хр+г, 1\ .... lq9 V+1, .... £<+s) =
=S(xu ..., хр, ξ1, ..., V)-T(x^u ..., *P+r, V+l, .·., 1«П
Непосредственно из определения операций над тензорами
вытекает, что умножение ® дистрибутивно относительно сложения:
(#+S)®r=/?®74S®7\ (8)
R®(S + T)=R®S+R®T (9)
и ассоциативно
(#®S)®7W?®(S®r). (10)
312
Ассоциативность тензорного умножения позволяет по индукции
определить тензорное произведение
lT®2T®...®kT
произвольного конечного упорядоченного набора тензоров.
46.3. Теорема. Если еи ..., е« — произвольный базис
пространства V, α ε1, ..., гп — сопряженный ему базис пространства
V*, то всевозможные тензорные произведения вида
ε** <g> ...® е^фед® ...®е/·, О1)
образуют базис пространства T<^>(V). Коэффициенты Т£'.\?р
тензора Τ являются его координатами в этом базисе.
Доказательство. Из определения тензорного умножения
вытекает, что значение тензора
ε**® ...фв'рфед®...®^
на наборе
хь .... хр, \\ .... V
равно
*ί'·· ·*# ■■■%■
Отсюда согласно (4) вытекает полнота системы (11) и равенство
T=Tt:fa® ·. · ®ε*ρ® e/l ® ... ® ev (12)
Следовательно,
Т{* eip, β\ ..., E'V)=rf;.:;(«> (13)
что дает нам линейную независимость системы (11). Теорема
доказана.
46.4. Следствие.
dimT<™>(V0=/^-4
§ 47. СИММЕТРИЧЕСКИЕ И КОСОСИММЕТРИЧЕСКИЕ ТЕНЗОРЫ.
АЛЬТЕРНИРОВАНИЕ
47.1. В (АГ, § 44) мы определили симметрическую группу Sn.
Она состоит из биекций множества {1, ..., п) на себя, которые
называются подстановками (степени /г).
Подстановка σ называется четной (нечетной), если четно
(нечетно) число пар (σ(0, σ(/)), для которых t</, но σ(ί)><*(/)·
Символом (—1)σ обозначается знак подстановки σ. Это число,
равное +1, если подстановка четная, и равное —1, если
подстановка нечетная.
313
Известно, что для композиции (произведения) τσ подстановок
о и τ
(-1Г=(-1П-1Г. (14)
47.2. Для тензора Τ типа (/?, 0) и подстановки o^Sp
определим тензор аТ равенством
(ОТ) (ХЬ . . . , Χρ)=Γ(Χσ(ΐ), . . ., Χσ(ρ)).
Получаем отображение
очевидно являющееся изоморфизмом линейных пространств
(обратное отображение определяется подстановкой or1).
Ясно также, что для любых подстановок σ, xeSp и для любого
тензора Τ имеем
τ(σΓ) = (τσ)7\ (15)
47.3. Определение. Тензор Τ типа (р, 0) называется
симметрическим, если
σΓ=7\
и кососимметрическим, если
σ7=(— \)°Т.
47А. Примеры. 1. Тензоры типа (1,0) являются
одновременно и симметрическими и кососимметрическими.
2. Скалярное произведение дает нам пример симметрического
тензора типа (2, 0).
3. Смешанное произведение является кососимметрическим
тензором типа (3, 0).
4. На одномерном векторном пространстве V всякий тензор
Τ типа (р, 0) является симметрическим. В самом деле, возьмем
какой-нибудь ненулевой вектор ее V. Он образует базис
пространства V. Тогда, с одной стороны,
(аГ)(е, ...,е)=7(е, ...,е),
а, с другой стороны, для векторов х/=ше
Т(хи ..., Χρ)=αι...αρΓ(β, ..., е),
откуда и вытекает симметричность тензора Т.
47.5. Предложение. Если векторы Х\, ..., хР линейно
зависимы, а тензор Τ кососимметрический, то
Т(хи ..., х,)-0. (16)
Доказательство. Отметим сначала, что равенство (16)
имеет место, если среди векторов хь ...,хр есть одинаковые. Воб-
314
щем случае один из векторов, например χ , линейно выражается через
остальные:
χ = α,χ,+ ... + а ,х ..
р 11 р-\ р-\
Тогда
7^хр...,хр) =7^хр...,хн, α,χ,* ... +a^1xp.1) = 5al7fx1,...,xH,xl) = 0.
ι=1
Последнее равенство справедливо в силу рассмотренного выше
частного случая совпадающих векторов. Предложение доказано.
47.6. Следствие. Всякий кососимметрический тензор типа
(р, 0) на n-мерном пространстве равен нулю, если ρ > п+1.
47.7. Замечание. Начиная с этого момента предполагаем, что
основное поле К, над которым задано векторное пространство V, имеет
характеристику нуль. В этом случае возможно деление на любые целые
числа, в частности нар!
47.8. Операция альтернирования. Для тензора Г типа (р, 0)
определяем новый тензор Alt Г следующим образом:
Altr= — Σ(-1)σσΓ.
ploeSp
47.9. Предложение. Тензор Alt Τ кососимметричен.
Доказательство.Дляσ6 S имеем
( * λ
σ(ΑΙϊΤ) = σ\
PUeS,
= (в силу линейности операции σ) =
= Л Е(-1)^(тГ) = (согласно(15)) =-1 Σ(-1)τ(στ)Γ.
P-xeSp P'xeSp
Положим ρ = στ. В силу (14) имеем
ИГ = ΗΠ-ι)\
откуда
(_!)' = (-1)"(-1)р.
Далее, когда τ пробегает всю группу S , подстановка ρ = στ также
пробегает всю группу S . Поэтому
σ(ΑΚΓ) = 1 Σ(-1)τ (от)Ц ΣΗΠ-1)ρρΓ =
Ρ· reSp
Pl reSp
= И)
Предложение доказшо
Р'· ™sp
= (-l)°Altr.
315
47.10. Предложение. Тензор Τ является кососимметрическим
тогда и только тогда, когда Г= Alt Т.
Доказательство. Пусть тензор Гкососимметричен. Тогда
АкГ=— Σ(-1)σσΓ =
Pl°eS p
= -ΪΣΗσ(-ι)σΓ=ν=Γ.
Обратная импликация вытекает из Предложения 47.9.
47.11. Следствие. Для любого тензора Τ типа (р, 0)
Alt (Alt 7) = Alt Г.
47.12. Множество всех кососимметрических тензоров типа (р, 0) на
векторном пространстве V обозначим символом
тГ(П
Это множество, очевидно, является линейным подпространством
пространства Τ^·0) {V).
Из определения операции альтернирования вытекает, что она
является линейным оператором, действующим в пространстве Т^'0) (V).C
учетом же предложений 47.9 и 47.10 получаем
47.13. Предложение. Операция альтернирования
осуществляет проектирование пространства Т^'0) (V) на его подпространство
тГ'(П
Отметим еще одно свойство операции Alt.
47.14. Предложение. Для любого тензора Τ типа (р, 0) и для
любой подстановки σ степени ρ
a(Alt7) = Alt(a7).
Доказательство. Будем следовать схеме доказательства
предложения 47.9. Имеем
σ(Α11Γ) =- Σ(-1)τ(στ)Γ=^ ^(-^(сшг^Г.
P'-reSp p\XeSp '
Обозначим στ<τ_Ι через р. Когда τ пробегает S , подстановка р также
пробегает всю группу S . Кроме того,
(-1)" = нп-О'НГ" =(-ΐ)τ(-ι)σ(-ΐ)σ =(-ΐ)τ·
316
Поэтому
a(AltT)=-i- VJ(—1)τ(στοτ-ΐ)σΓ=
x£Sp
=-^- 2(_1)'Ρ(σΤ)=ΑΗ(σΓ)·
peSp
47.15. Операция частичного альтернирования. Для произвольной
подгруппы Η симметрической группы Sp и тензора Τ типа (р, 0)
полагаем
В частности,
Alts Г=АИ7\
47.16. Предложение. Если HaSp—произвольная подгруппа,
то для любого тензора Τ типа (р, 0)
Alt (Alt* T)=Alt Т.
Доказательство. Имеем
Alt(Alt//T)=AIt (—^— JJ(—1)хтГ]=(в силу линейности Ait) =
τ£Η
=— VJ(—1)тАН(тГ)=(согласно 47.14) =
=— VJ(—1)Ч(АИГ)=(согласно 47.9) =
|Я| tu
^][](-1)т(-1)т(АИГ)=^|Я!АНГ=АиГ.
§ 48. ВНЕШНЕЕ УМНОЖЕНИЕ. БАЗИС В ПРОСТРАНСТВЕ
КОСОСИММЕТРИЧЕСКИХ ТЕНЗОРОВ
48.1. Определение. Внешним произведением кососиммет-
рических тензоров S и Τ называется тензор
SA7=Alt(S®r).
В этом определении не обязательно предполагать, что
перемножаемые тензоры кососимметричны. Но именно в классе косо-
симметрических тензоров операция внешнего умножения играет
317
особо важную роль. Она заменяет операцию тензорного
умножения, которая выводит нас из класса кососимметрических тензоров.
48.2. Предложение. Внешнее умножение ассоциативно,т.е.
(RAS)AT-RA(SAT). (17)
Доказательство. Покажем, что каждая из частей
равенства (17) равна Alt(Л®S®Г). Пусть /?, S, Τ являются тензорами
типа (р, 0), (q, 0), (г, 0) соответственно. В группе Sp+q+r выделим'
подгруппу Hrs> состоящую из всех подстановок, оставляющих
числа p+q+l, ..., p+q+r на месте. Группа Hrs естественно
изоморфна группе Sp+q. Этот изоморфизм обозначим через К Для
0€=Sp+q
L/w.4 ίσ(0> если i^p-jrq;
h(a)(i)=\ . _ , , t
ww Ι ι , если i^p + q+\.
Итак, имеем
(#AS)Ar=Alt(Alt(#®S)®r).
Но ясно, что
Alt (R ® S) ® T=A\tHRS(R ® S ® Т).
В самом деле, это вытекает из того, что для a&Sp+g очевидно
σ(#®5)®7=Α(σ)(#®5®Γ).
Поэтому
(Rf\S)/\T=A\t(A\tH^$(R ® S® Г)) = (согласно 47.16) =
=Alt(tf®S®T).
Аналогично проверяется равенство
#A(SAO=Alt(#®S®r).
Предложение доказано.
Теперь можем определить внешнее произведение любого числа
кососимметрических тензоров. По индукции доказывается, что при
любой расстановке скобок
ijyv. .Л*7,=АИ(,Г®.. .®*Г). (18)
48.3. Предложение. Внешнее умножение косокоммутатив-
но, т. е.
SAT=(-l)»<TAS
для тензоров S и Τ типа (р\ 0) и (q, 0)\ соответственно.
Доказательство. Рассмотрим подстановку teSp+$,
определяемую равенством
τ(1, ...,р, р+1, ...,р + ?)-(Р+1, ...,Р+<7, 1, ...,р).
318
По определению
S®r=x(r®5).
В самом деле,
T(7<g)S)(xlf ..., Xp.H)=T®S(xx{{h ..., xxiP+Q))=
= Τ®S(Xp+i, ..., Xp+?> Xi, ..., Xp)=
= 7'(X^i, ..., Xp+q)S(x1, . .., Xp) =
= S(X!, . .., Хр)Г(Хр+ь ..., Xp+<7) = S®r(Xj, . .., Xp+47).
Ясно также, что
(-1)τ=(-1Γ·
Поэтому
S/\T=Alt(S<g>T)=Alt(x(T ® S))=t Alt(T®S)=
=(—l)TAlt(r®S)=(—l^TAS.
48.4. Предложение. Ковекторы ξ1, ..., |ρ линейно
зависимы тогда и только тогда, когда
1!Л...Л|^0. (19)
Доказательство. Заметим сначала, что если среди ковек-
торов |1, ..., |р имеются совпадающие: V=V> то равенство (19)
выполняется. В самом деле, возьмем подстановку σ, которая
меняет местами только числа i и /. Эта подстановка нечетна. Ясно
также, что
σ(11®...®^)=|1®...®^.
Поэтому
SV\ ... Л6'=АИв1® ... ® W-Alt(aftl® · · · ® Sp))=
=σΑΚ«ι® ... ® ξ")=(-1)σ АЩ11® ... ® ξρ)=-ΙχΛ · · · Л V.
В общем случае линейно зависимой системы ξ1, ..., %р один
из ковекторов линейно выражается через остальные. Без
ограничения общности можно считать, что
|Ρ=α1|1+...+α^Ι|^>.
Тогда в силу полилинейности внешнего умножения имеем
ιχλ · · · л ip=sv\ · · · л *"-· л (Σ «д'Н
=Σ«£1Λ...Λΐ*-ιΛΐί.
319
В последней сумме все слагаемые равны нулю согласно уже
рассмотренному случаю совпадающих сомножителей.
Пусть теперь ковекторы ξ1, ..., |р линейно независимы.
Дополним их ковекторами %р+\ ..., |л до базиса пространства V*. Этот
базис сопряжен некоторому базису еь ..., ел пространства V.
Для любой нетождественной подстановки aeSp имеем
σβ1®...®!")^, ..., ер)=|1(еа(1))-...-Г(еа(Р))=0.
Поэтому
. РЛ...Л6р(ед, ....е,)»-!-*1®...®^, .... ер)=-^*0.
Предложение доказано.
48.5. Следствие. Если p>/z=dim V, то всякий кососиммет-
рический тензор типа (р, 0) равен нулю.
48.6. Теорема. Пусть еи ..., еп — базис пространства V, а
ε1, ..., гп — сопряженный ему базис пространства V*. Тогда
тензоры
8^Д...Д8Ч *!<... <*р, (20)
образуют базис пространства кососимметрических тензоров
T&0>(V).
Доказательство. Согласно 46.3 всевозможные
тензорные произведения вида
е*1® ... ®ειρ
образуют базис пространства Т<^0>(1/). Но отображение
АИ:Т(Р.0)(1/)^т(р.0)(1/)
является эпиморфизмом в силу 47.13. Поэтому система (20) полна в
пространстве Тк(орс,0) (V) согласно 48.3. Проверим ее линейную
независимость. Для фиксированного набора ζ °< ... </ ° в силу замечаний,
высказанных в заключительной части доказательства предложения 48.4,
при ij< ... <iD имеем
0 , если (llt ..., ιρ)Φ(ί\, · · ·, ip),
, если (/lt ..., ip)—(iu · ··, h)-
8^Д...Ле^(ео, ..., eo) = j
ι ρ I
Ι Ρ!
Возьмем некоторую линейную комбинацию
Г-7',,...,,β'.Λ...Λβ1' (21)
тензоров из системы (20). Согласно только что сделанному
замечанию имеем
Τ (е о, ..., е о)= —- То .0.
11 1р р\ 1Г лр
320
Поэтому линейная комбинация (21) равна нулю тогда и только
тогда, когда все ее коэффициенты Tia... , равны нулю. Теорема
доказана.
48.7. Следствие. Для р<л=(Нт V
dimt£c0)(V)=Cpn.
48.8. Следствие. Внешнее произведение
является единственным с точностью до пропорциональности
ненулевым кососимметрическим тензором типа (л, 0).
Найдем значение тензора в!Л.••Лвя «я векторах хь .... х«.
Имеем
г1/\.../\вп(хи ..., хд)=
ΗτΣ!(-1)σσ(ε1®'·
^€S„
,±^(-lfBi{Xa(l)y
Xn) =
0£Sn
-iS(-ir*r...-4.-^
σ€5η
*1
xln.
4
Таким образом, определитель матрицы, составленной из
координат векторов хь ..., х«, представляет собой единственный с
точностью до пропорциональности кососимметрический тензор типа
(л, 0).
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аксиома Паша 9
аксиомы векторного пространства 22
— метрического пространства 285
— порядка н откладывания 9
— расстояния 8
алгебра 214
аннулятор 207
асимптота линии второго порядка 117
Базис векторного пространства 29
— жорданов 229
— линейного пространства 191
— ортонормированный 39
— положительный 72
базисы векторного пространства одноименные 71
биекция 7
Вектор 14
— направляющий прямой 47
— нулевой 14
— свободный 17
— собственный оператора 219
векторы коллинеарные 27
— компланарные 28
— одинаково направленные 14
— ортогональные 263
— равные 15
вид квадратичной формы канонический 246
— — — нормальный 250
высота нильпотентного оператора 224
Гипербола 92
гиперболоид вращения 151
— двуполостный 147
— однополостный 147
гиперплоскость 287
грань симплекса 297
группа проективных преобразований 179
— симметрическая 132
Движение 140
— винтовое 302
— несобственное 140
— собственное 140
диаметр линии второго порядка главный 124
— — , сопряженный неасимптотическому направлению 119
директриса гиперболы 100
— параболы 98
— эллипса 99
дифференциал аффинного отображения 298**
длина вектора 14
— отрезка 9
дополнение ортогональное 266
Значение вектора алгебраическое 23
— проекции вектора алгебраическое 32
— собственное оператора 219
322
Изоморфизм аффинных пространств 299
— векторных пространств 23
— эвклидовых пространств 269
— линейных пространств 201
инвариант ортогональный 89
индекс инерции 251
интервал 8
инцидентность луча и плоскости связки 168
— прямой и точки 167
Квадрант координатный 41
квадрат вектора скалярный 262
класс эквивалентности элемента 7
клетка жорданова 229
ковектор 204
комбинация векторов лииейн%ч 25
— точек аффинная 293
— выпуклая аффинная 294
конус 147
— мнимый 147
координаты аффинные 40
— барицентрические 298
— вектора 30
— однородные бесконечно удаленной точки прямой
луча 170
— плоскости 170
точки 170
— полярные 44
коэффициенты базиса метрические 38, 264
— тензора 311
— функционала 204
кратность собственного значения алгебраическая 223
_ геометрическая 223
критерий Сильвестра 256
Лемма Шаля 23
линия алгебраическая 81
вещественная 108
— второго порядка на проективной плоскости 182
— гиперболического типа 110
— параболического типа ПО
— эллиптического типа 110
луч связки 168
особый 169
Матрица билинейного функционала 240
— Грама 257
— единично треугольная 253
— квадратичной формы 245
функции 82, 245
— части функции 82
— квадратная треугольная 253
положительно определенная 255
— кососимметрическая 200
— линейного оператора 212
— ортогональная 84
— перехода от одного базиса Ас другому 68
от стаоой системы координат к новой 70
— симметрическая 200
метод Лагранжа ϊνό
323
многочлен характеристической квадратичной функции 89
оператора 222
— от оператора 235
многообразие линейное 282
множества (/-эквивалентные 132
множество выпуклое 294
— всех преобразований множества в себя 132
— точек общего положения 296
модель проективной плоскости арифметическая 173
мономорфизм 201
мощность множества 102
Направление асимптотическое линии второго порядка 109
— главное линии второго порядка 122
— особое линии второго порядка 121
— самосопряженное 121
напоавления, сопряженные относительно линии второго порядка 220
направляющая цилиндра 161
независимость векторов линейная
неравенство Коши-Буняковского, 38, 258
норма 261
норма, порожденная скалярным произведением 262
Оболочка аффинная множества 288
— выпуклая множества 295
— .линейная множества 194
Образ отображения 201
образующая прямолинейная поверхности 152
— цилиндра 161
объем параллелепипеда ориентированный 73
окружность обобщенная 123
октант координатный 41
оператор диагонализируемый 220
— изометрический 273
— линейный 211
— невырожденный 216
— неотрицательный 277
— неприводимый 218
— нильпотентный 224
— обратимый 216
— — слева (справа) 216
оператор приводимый 218
— самосопряженныъ 271
— скалярный 215
операторы сопряженные 270
определитель Грама 257
ориентация на прямой 22
ось 22
— координат 40
— полярная 43
— фокальная эллипса 101
— — кривой второго порядка 105
отношение бинарное на множестве 7
— эквивалентности 7
отображение аффинное 298
изометрическое 301
неотрицательное самосопряженное 301
— взаимно однозначное 7
— на 7
— инъективное 7
— линейное 23
— на 7
324
полилинейное 309
— сюръективное 7
отрезок 8, 294
Парабола 92
Параболоид гиперболический 147
— эллиптический 147
параметр (фокальный) кривой второго порядка 105
параболы 98
перенос апараллельный 302
на вектор 18
перестановка конечного множества 132
перпендикуляр 292
плоскости проективные изоморфные 168
плоскость в аффинном пространстве 286
— комплексная 107
— координатная 41
— пополненная 168
— проективная 168
арифметическая 173
вещественная 168
— проективно-аффинная 180
— связки особая 169
площадь параллелограмма ориентированная 75
поверхность второго порядка 146
— цилиндрическая 161
подобие матриц 213
подпространство инвариантное 217
— линейное 194
— нулевое 208
— собственное оператора 220
подстановка конечного множества 132
— нечетная 313
— четная 313
полуплоскость 13
— отрицательная по отношению к уравнению прямой 53
— положительная по отношению к уравнению прямой 53
полупространство 14, 296
— отрицательное по отношению к уравнению плоскости 60
— положительное по отношению к уравнению плоскости 60
полупрямая 12
полюс 43
порядок линии 81
преобразование аффинное 132
— изометрическое 140
— множества в себя 132
— невырожденное 249
— проективно-аффинное 180
— проективное проективной плоскости 179
.проектирование 35
— ортогональное на подпространство 268
проекция вектора на вектор параллельно плоскости 33
— — — прямой 32
на плоскость параллельно вектору 34
— — — прямой 33
—- прямую параллельно плоскости 33
— — — прямой 31
— точки на плоскость параллельно прямой 33
— — на прямую параллельно прямой 31
__ _ _ плоскости 33
произведение векторов векторное 75
скалярное 37, 259
325
смешанное 75
— тензорное 312
— тензорное внешнее 317
пространство арифметическое n-мерное (вещественное) 30
— аффинное 283
— векторное 22
— второе сопряженное 206
— гильбертово 261
пространство линейное 22, 186
— нормированное 261
— сопряженное 204
— точечно-эвклидово 285
— эвклидово 259
— C(R, R) 189
— D(R, R) 189
— Kw 188
— Ls(A) 194
— C(R, R)
— Kn
— 0(R, R)
— Ls(A)
— M(xt k)
— Aiw,n
~Λίη
— Op(V)
-P(R)
— Rn
— T<p>i)(V)
процесс ортогонализации 265
прямая вещественная 107
— мнимая 108
— несобственная 167
Радиус-вектор точки 40
радиус полярный точки 44
разложение вектора по векторам базиса 30
размерность аффинного пространства 285
ранг билинейного функционала 242
— линейного пространства 192
— квадратичной функции 245
— отображения 202
расстояние от точки до плоскости 292
— отображения 202
расстояние от точки до плоскости 292
— — — до прямой 53
репер 40
— ортонормированный 43
реперы эквивалентные 175
Связка 168
семиинвариант ортогональный 91
сигнатура 251
симплекс к-мерный 297
симплекс ^-мерный 297
система векторов линейно зависимая 25
— — — независимая 25
— — ортогональная 263
— координат аффинная 40
— — в связке проективная 175
326
— — полярная 44
— — прямоугольная 43
— — — определенная полярной системой координат 45
соответствие взаимно однозначное 7
— перспективное (между точками плоскости и лучами связки) 168
спектр оператора 2Ш
сумма линейных подпространств 196
— — — прямая 198
Тензор кососимметрический 314
— симметрический 314
— типа (р, q) 309
теорема Гамильтона—Кэли 236
— Дезарга 174
— Фалеса 21
— Якоби 253
точка «бесконечно удаленная» 168
— неподвижная отображения 301
— плоскости несобственная 167
точка плоскости собственная 167
— прямой несобственная 167
точки общего положения 296
тройка однородных координат луча 1*70
— — — плоскости 170
— — — прямой 171
— — — точки 170
— проективных координат луча в проективной системе 176
Угол между векторами 36
— — вектором и плоскостью 62
— — прямыми 53
— полярный 44
уравнение плоскости векторное 55
— прямой нормированное 54
— пучка прямых 52
уравнения канонические линий второго порядка $3
— плоскости параметрические 56
— прямой канонические 60
— — параметрические 48
Фактор-множество 8
фокус гиперболы 100
— параболы 98
— эллипса 99,
форма билинейная 241
— жорданова 229
— квадратичная 245
— — , положительно определенная 255
формы квадратичные эквивалентные 250
функционал билинейный 239
— — кососимметрический 240
— — симметрический 240
— линейный 204
— , полярный к квадратичной функции 244
функция квадратичная 82, 244
— — положительно определенная 255
Центр линии второго порядка 115
— симметрии множества МЗ
цилиндр 161
— гиперболический 147
327
мнимый эллиптический 147
параболический 147
эллиптический 147
Четверть координатная 41
Эксцентриситет гиперболы 100
— эллипса 99
эллипс 92
горлового сечения гиперболоида 153
горловой 153
мнимый 92
эллипсоид 147
— вращения 148
мнимый 147
эпиморфизм 201
Ядро отображения 202
— функционала левое 242
— — правое 224
Учебное издание
ISBN 5-93196-105-4
9И785931И961057
Федорчук Виталий Витальевич
КУРС АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ И ЛИНЕЙНОЙ АЛГЕБРЫ
Художественное оформление В.Е. Горин
Технический редактор Е.Ф. Леонова
Корректор В. В. Отурина
Лицензия № 071727 от 01.09.98.
Подписано в печать 31.01.03.
Формат 60x90/16. Бумага офсетная № 1. Гарнитура Тайме.
Усл. печ. л. 20,5. Уч.-изд. л. 19,95.
Тираж 5 000 экз. (2-й завод 1 501-3 500 экз.).
Изд.№122.3аказ№915.
ЗАО «Издательство НЦ ЭНАС».
115201, Москва, Каширское ш., д. 22, корп. 3.
Тел./факс (095) 113-53-90,234-71-82. E-mail: pr@enas.ru
www.enas.ru
Отпечатано с готовых диапозитивов
в ФГУП «Производственно-издательский комбинат ВИНИТИ».
140010, г. Люберцы, Московская обл., Октябрьский пр-т., 403.
Тел.554-21-86.