/


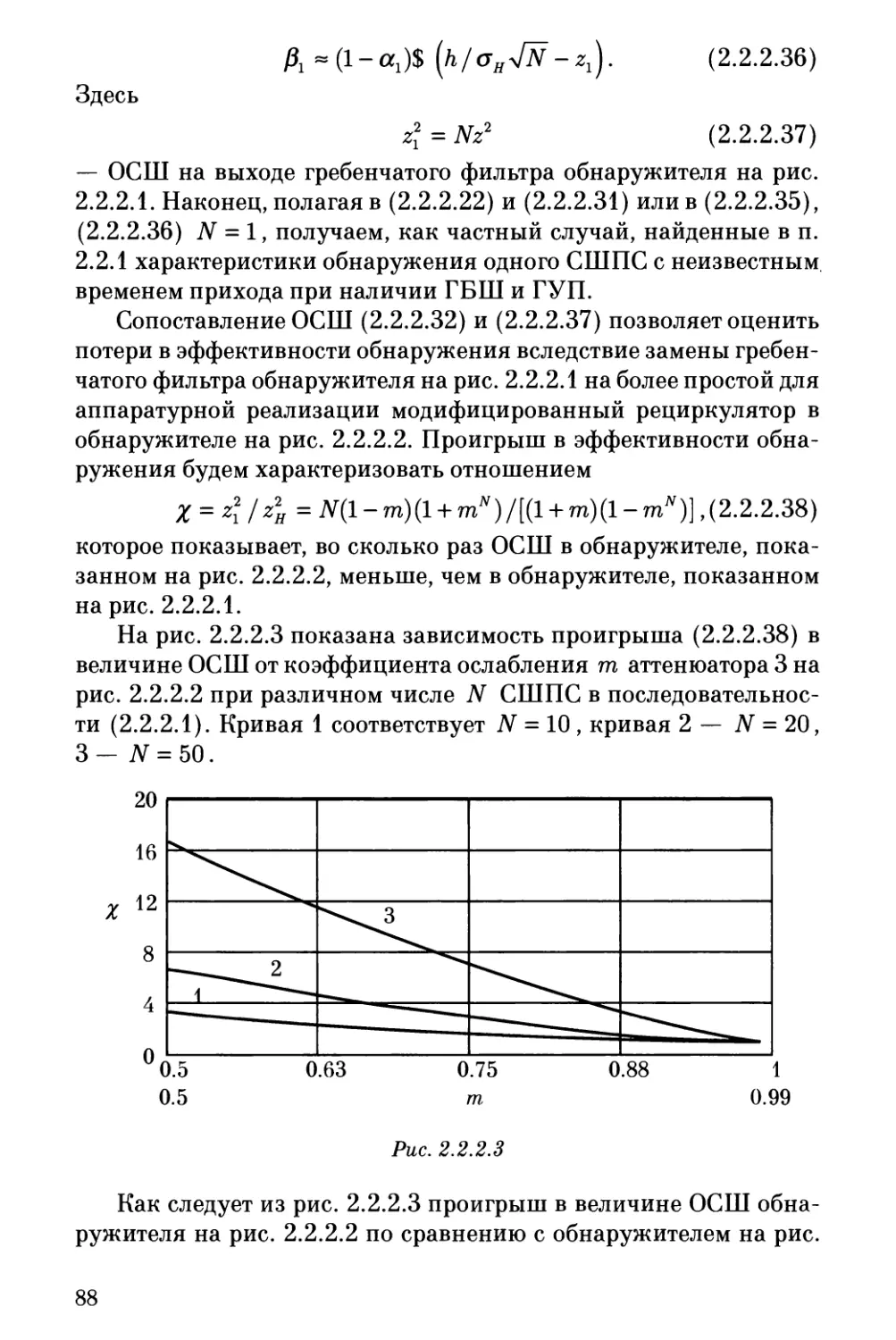








Автор: Радзиевский В.Г. Трифонов П.А.
Теги: электротехника охотничье хозяйство рыбное хозяйство электроника радиотехника обработка сигналов
ISBN: 978-5-88070-231-2
Год: 2009



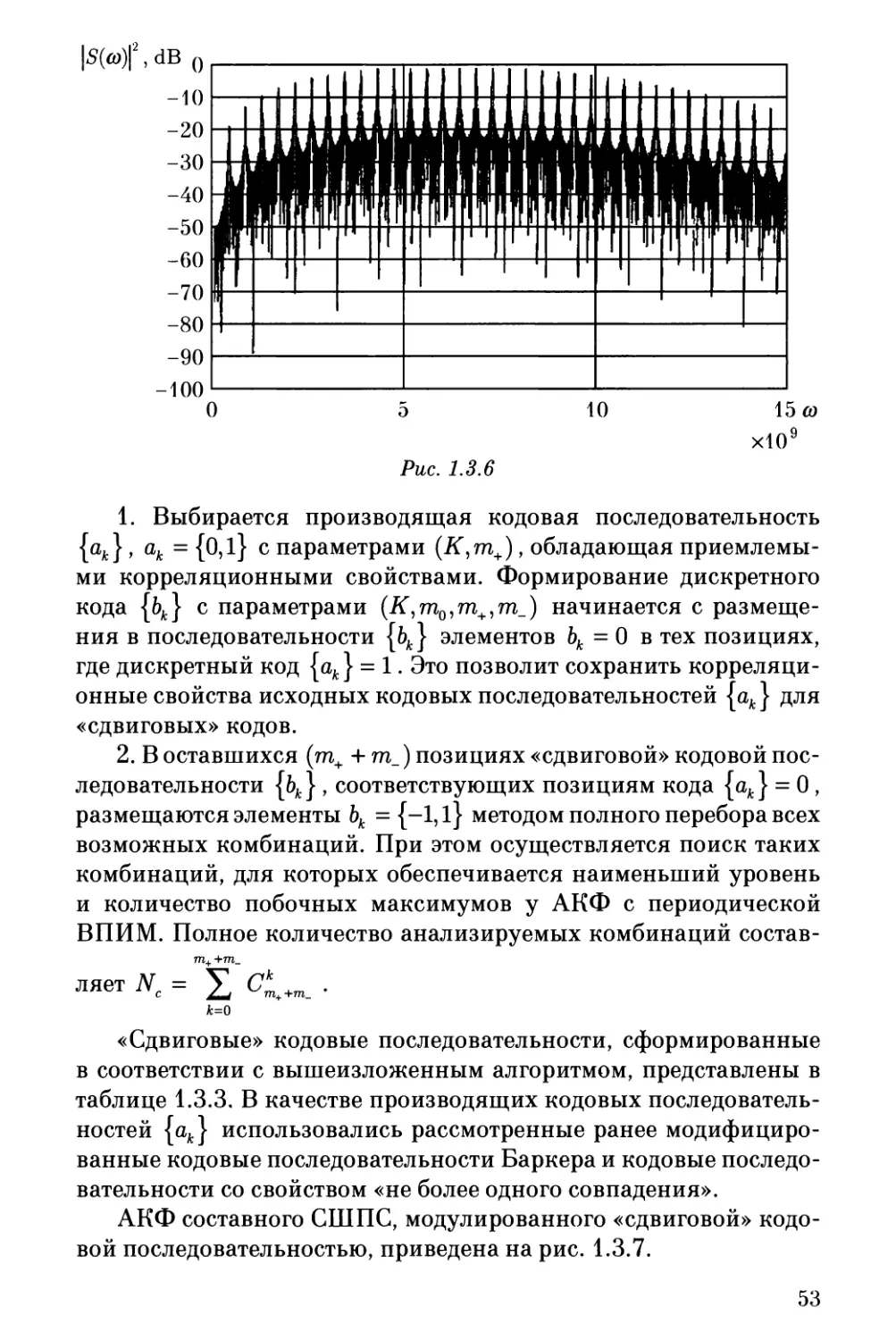
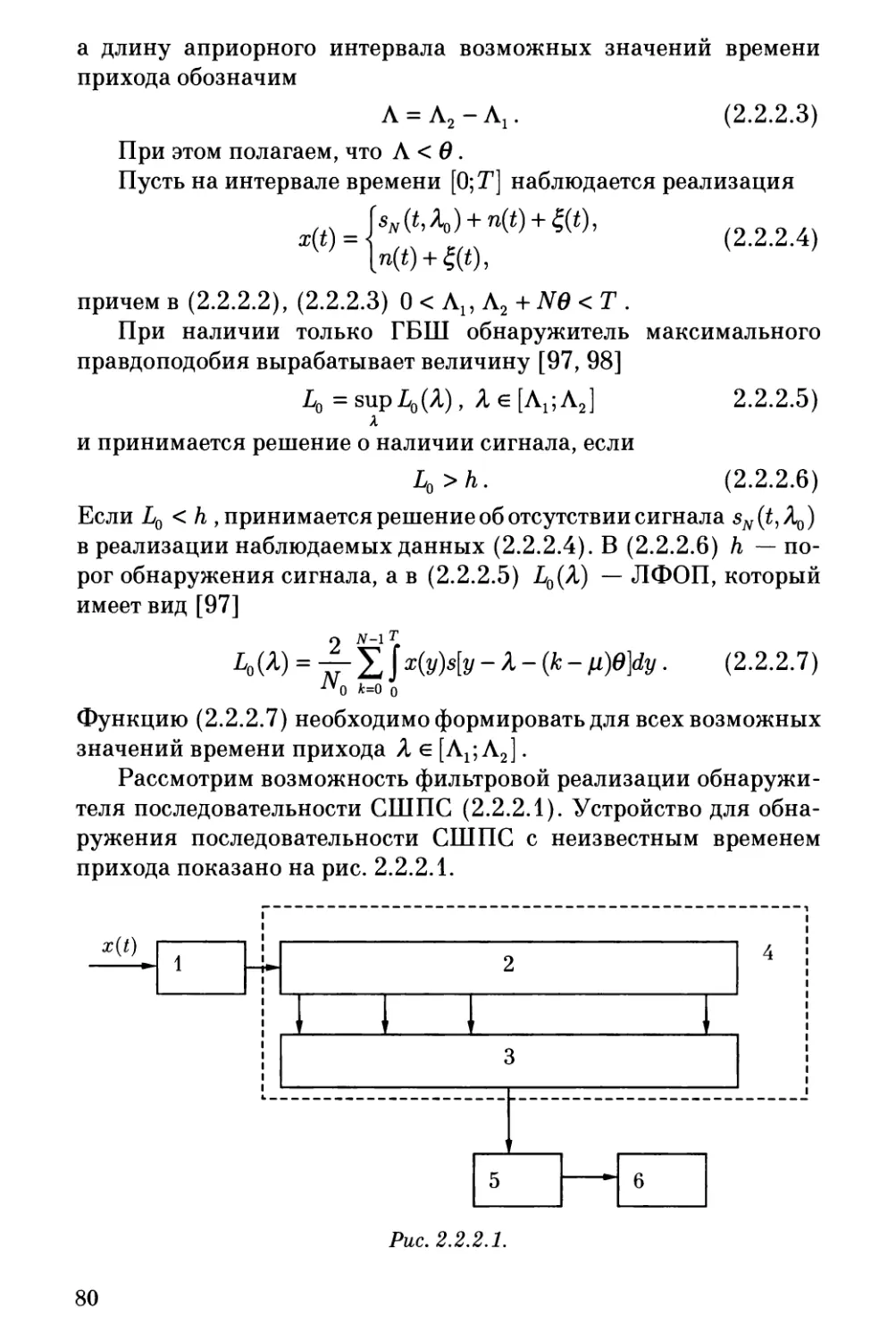
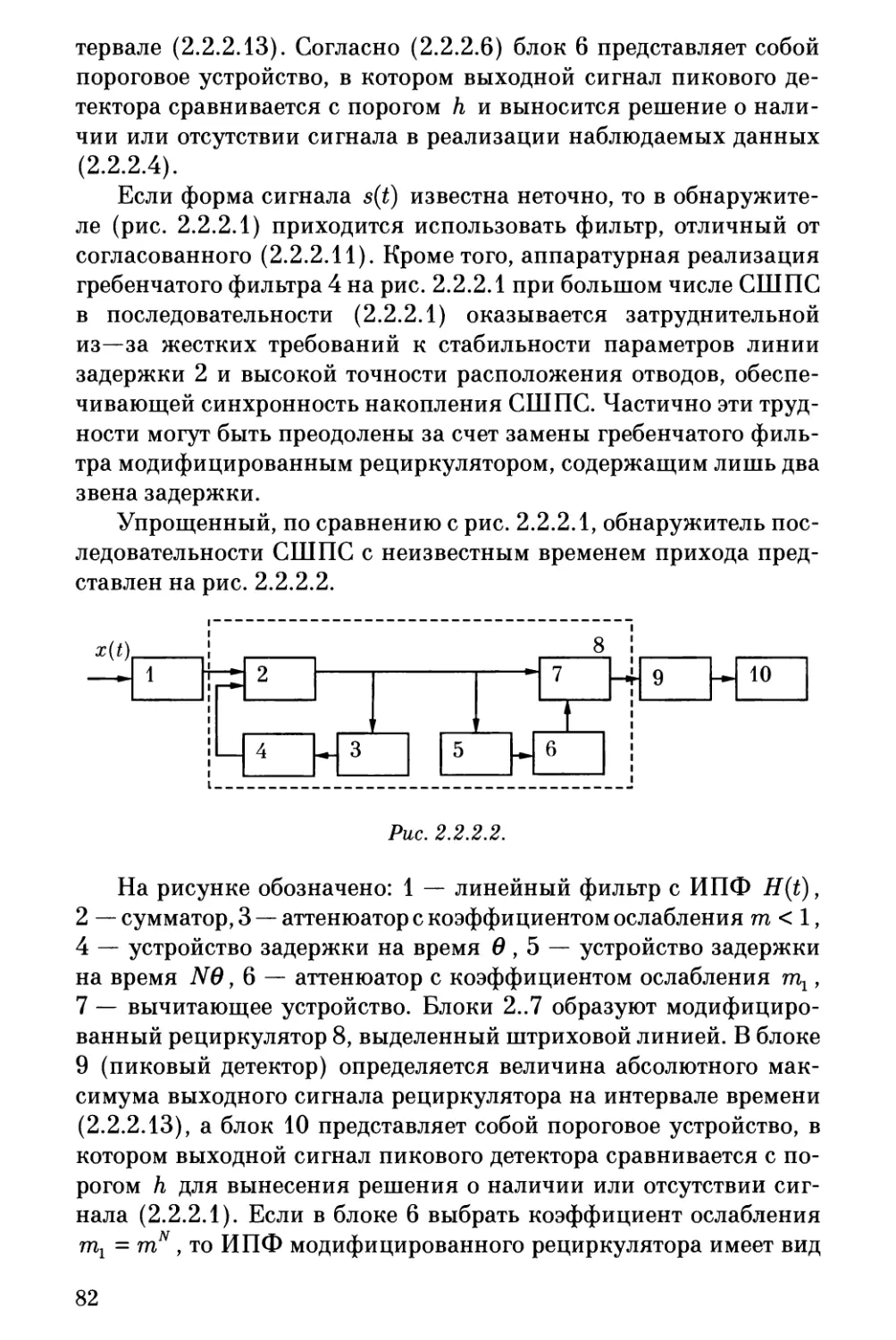
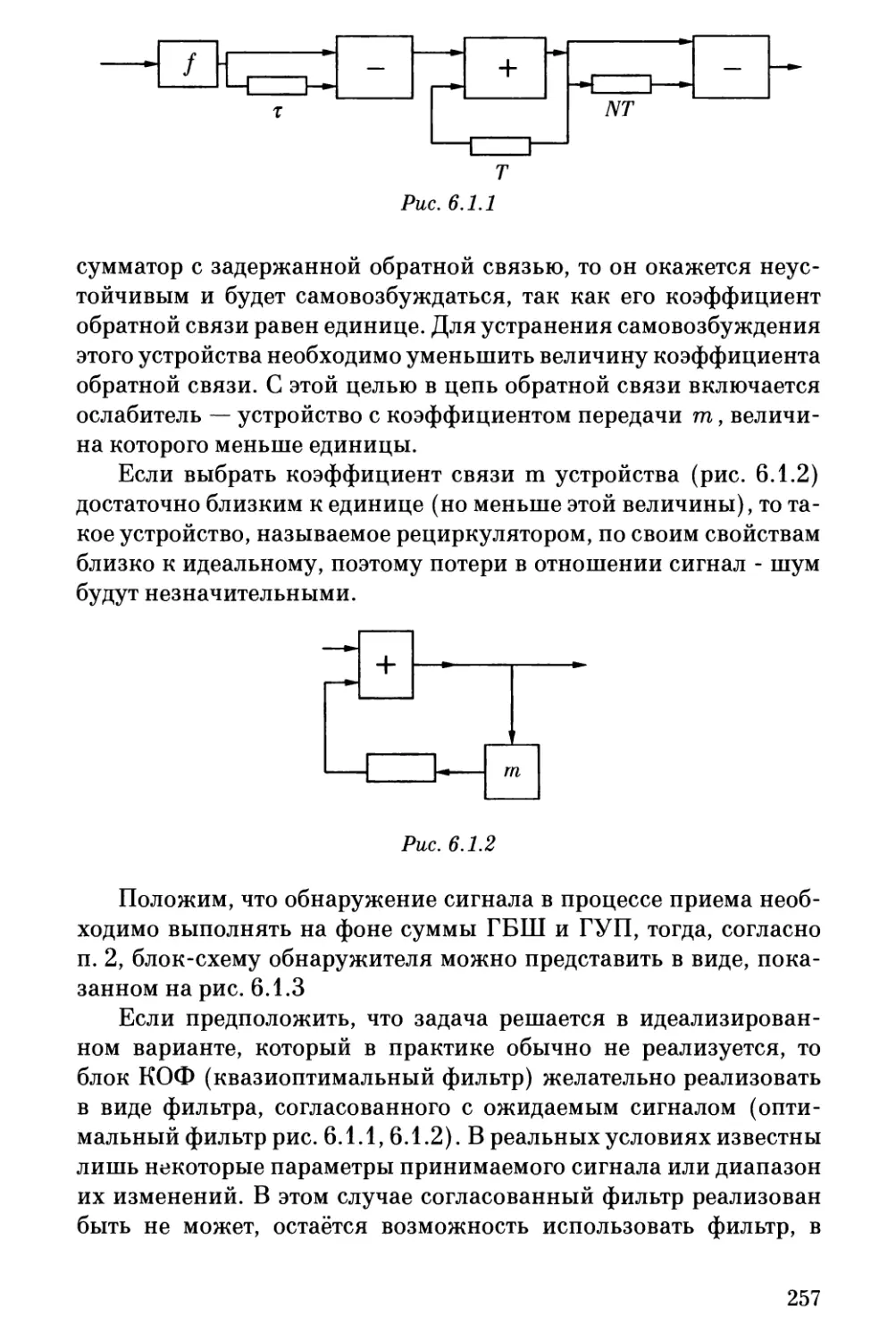
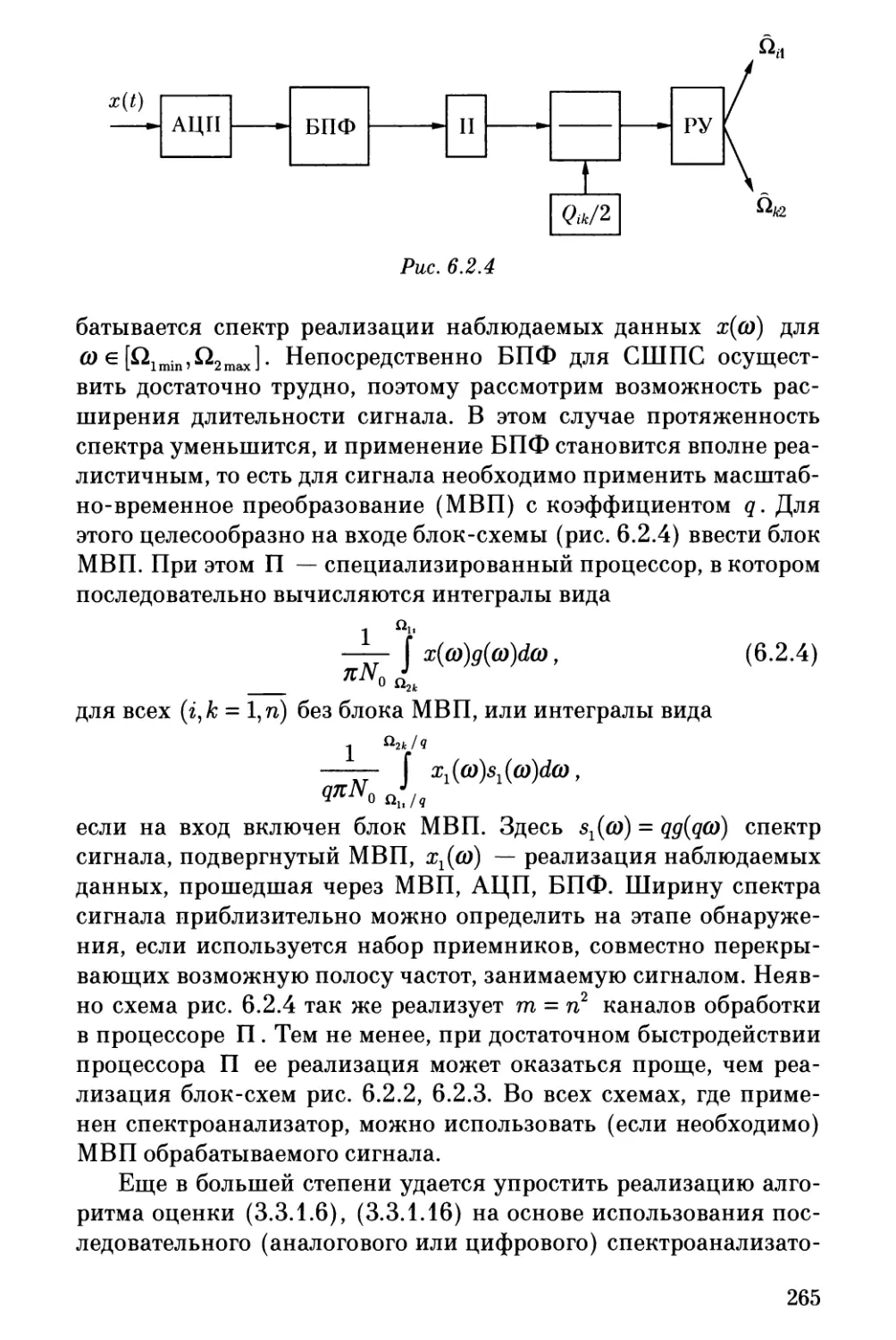
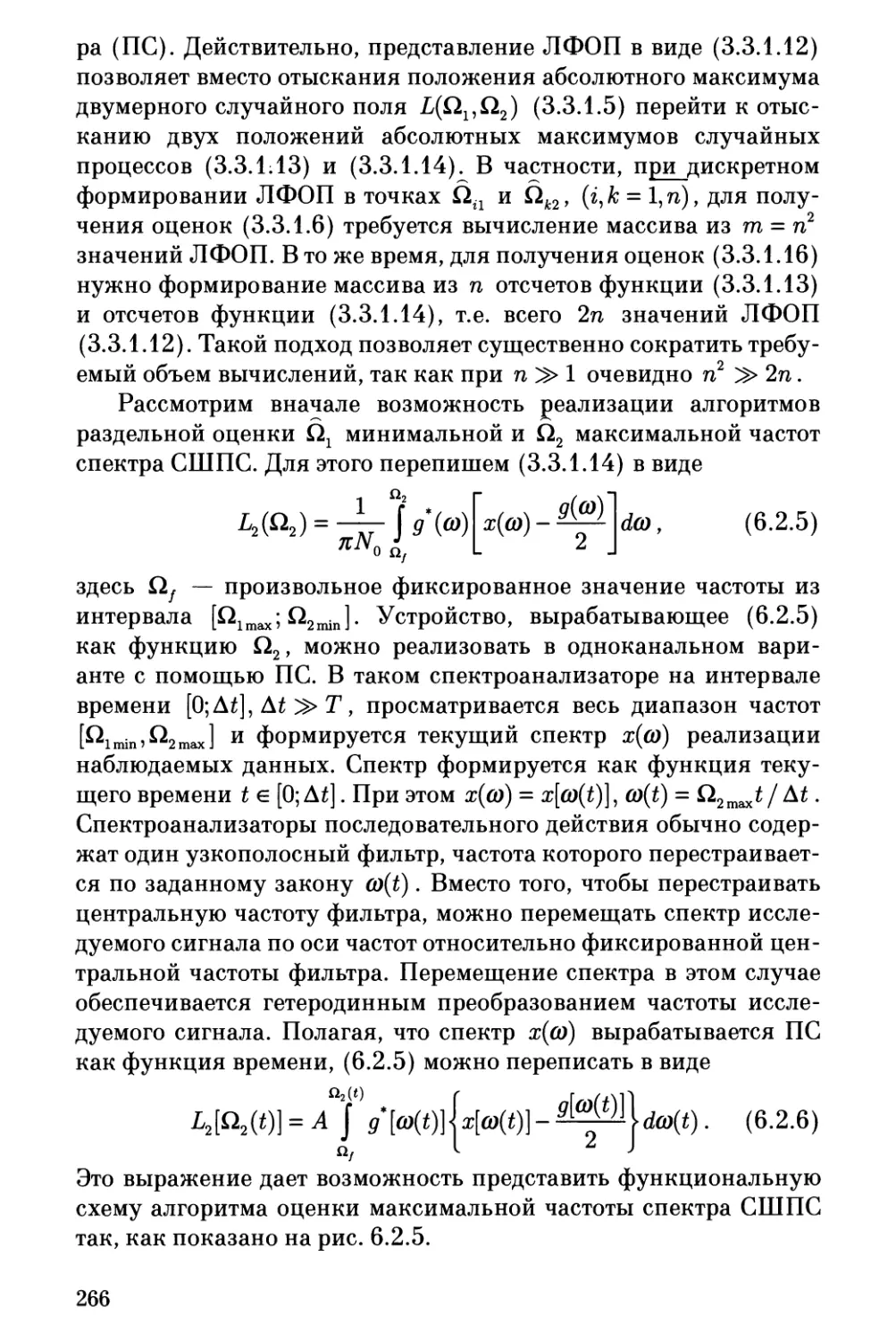
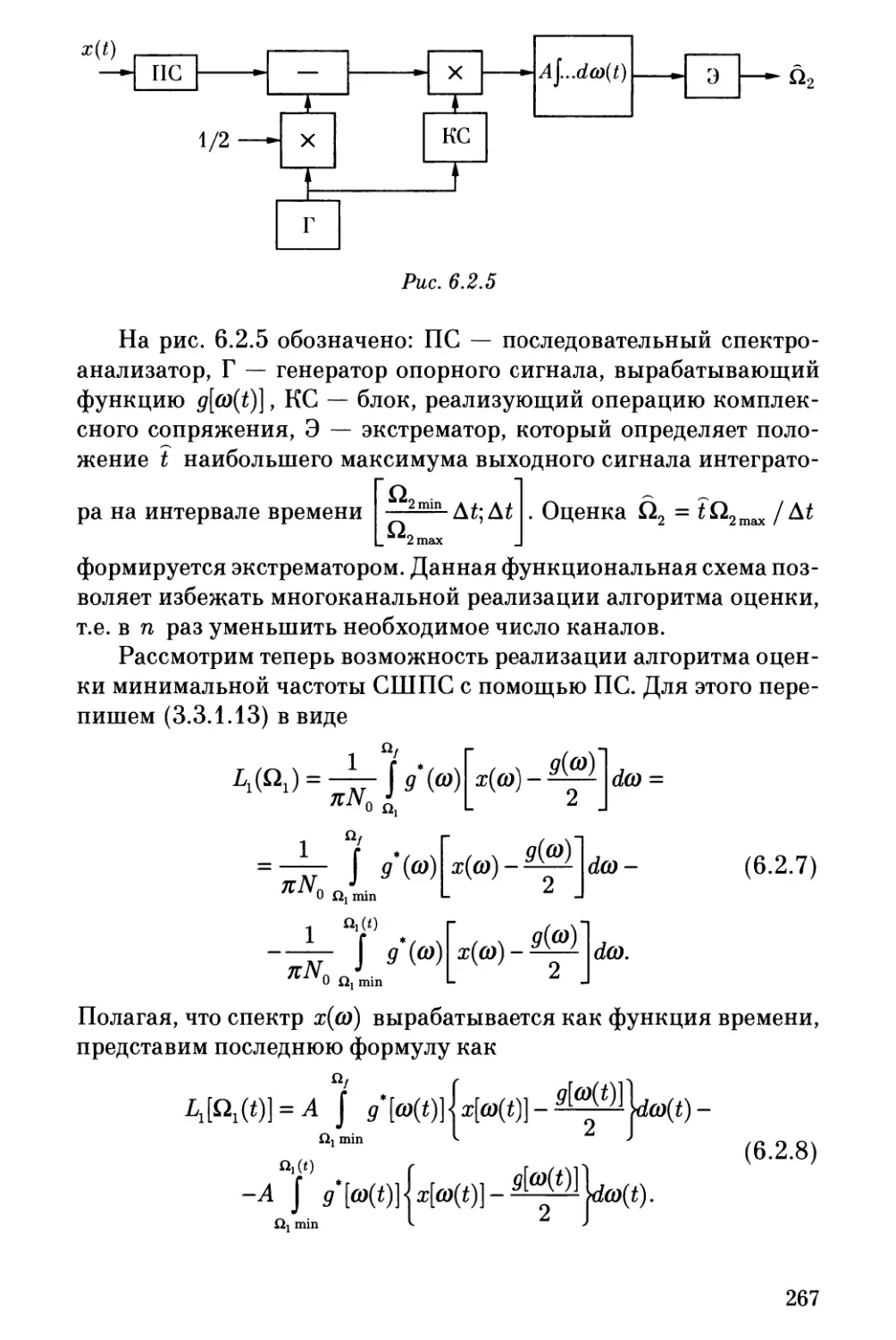
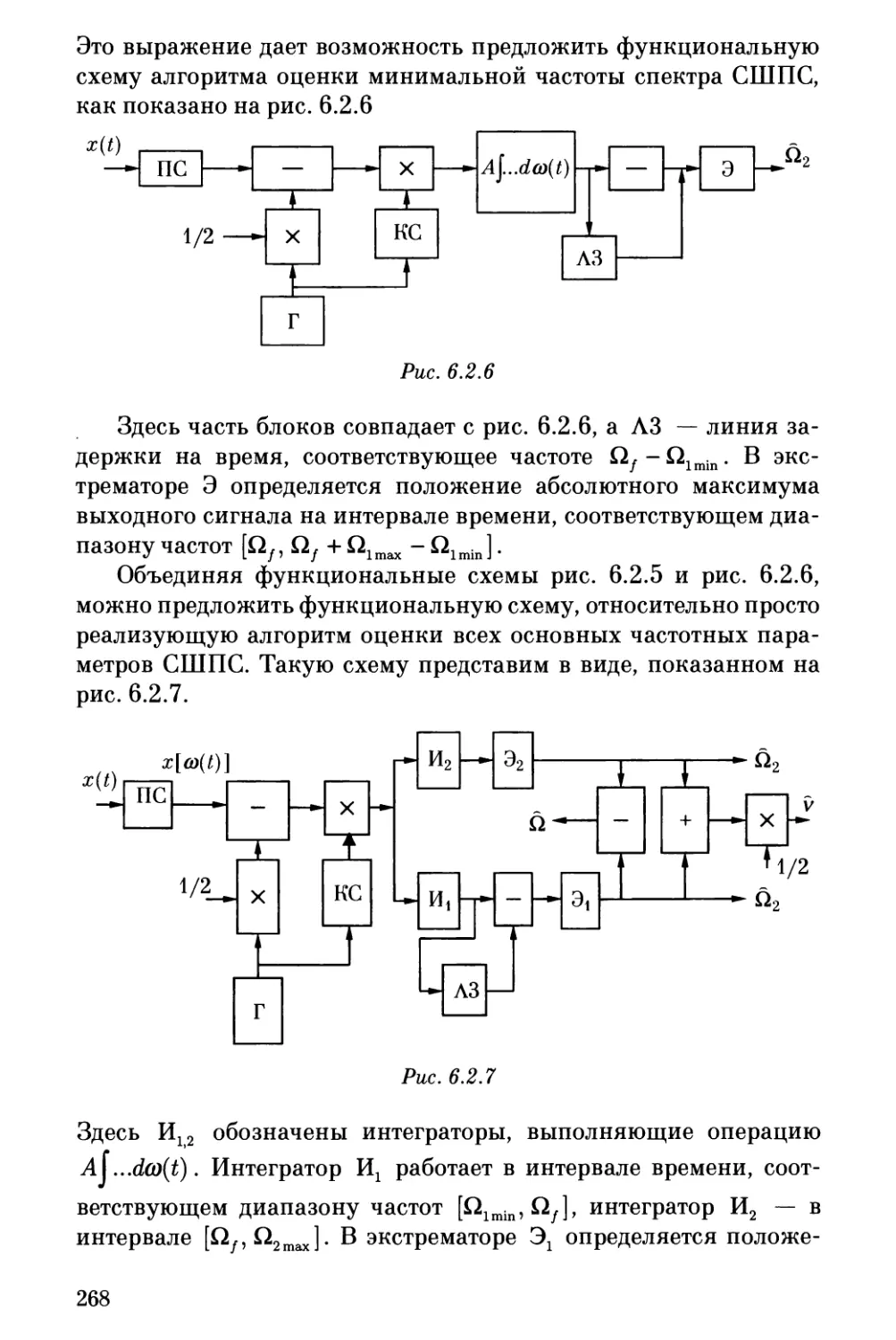
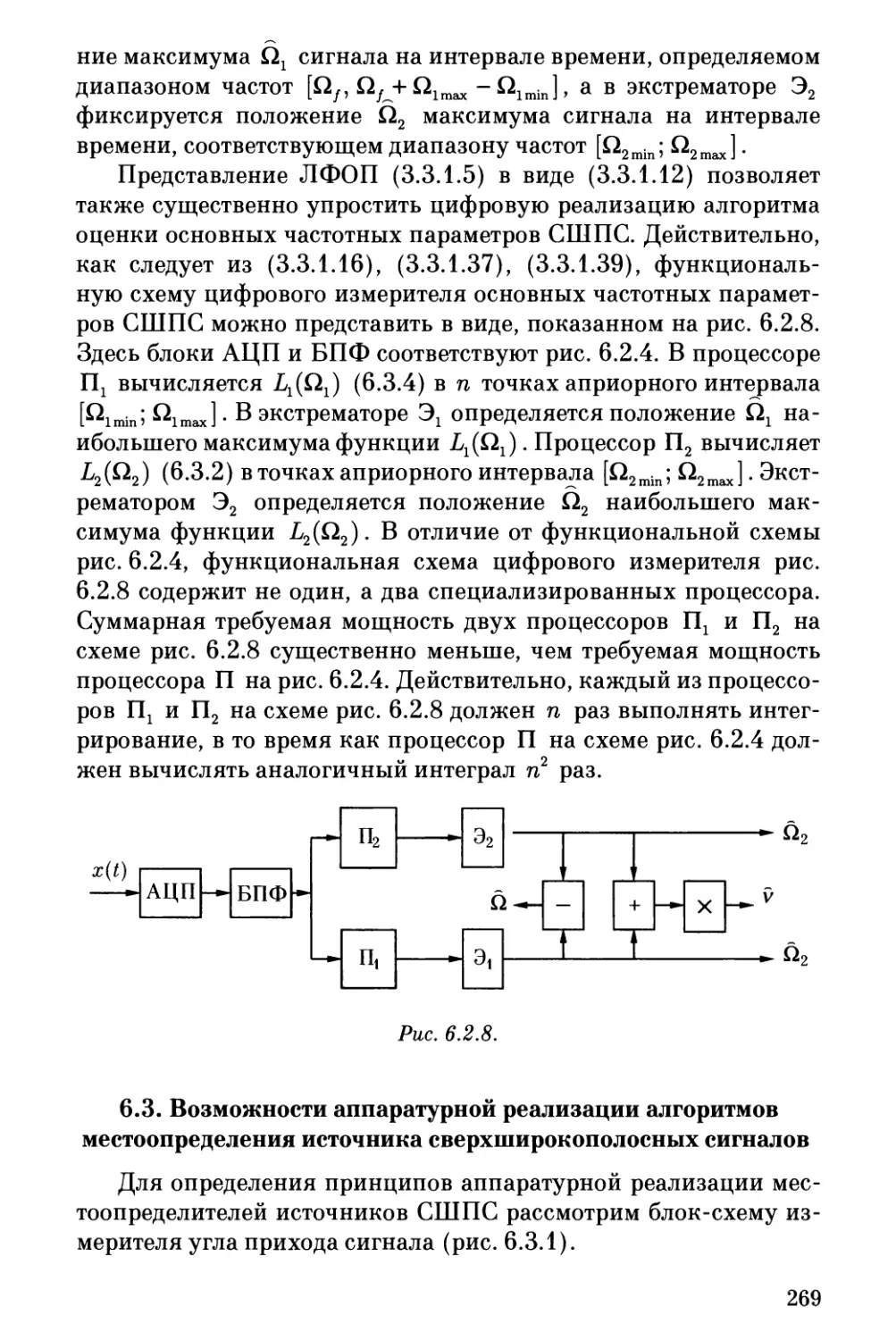
Текст
I
В. Г. Радзиевский, П. А. Трифонов
и
Издательство «Радиотехника»
Москва 2009
УДК 621.391.82
Ρ 15
ББК 47.05.03
Рецензенты:
доктор технических наук, профессор В.В. Сазонов
засл. деят. науки РФ,
доктор технических наук, профессор СВ. Игольников
Радзиевскнй В.Г., Трифонов П.А.
Ρ 15 Обработка сверхширокополосиых сигналов и помех. - М.:
«Радиотехника», 2009. - 288 с: ил.
ISBN 978-5-88070-231-2
Излагаются вопросы, включающие описание моделей
сверхширокополосных сигналов, синтеза и анализа алгоритмов обнаружения
и измерения информационных параметров в условиях помех и
априорной неопределенности, принципов радиоэлектронной разведки,
включая высокоточное местоопределение источников излучения, и
радиоэлектронного подавления сверхширокополосных и
узкополосных радиосистем, а также способов аппаратурной и программной
реализации соответствующих радиоэлектронных устройств.
Для студентов и аспирантов радиотехнических
специальностей, инженеров и научных работников, связанных с
проектированием и эксплуатацией радиоэлектронных средств.
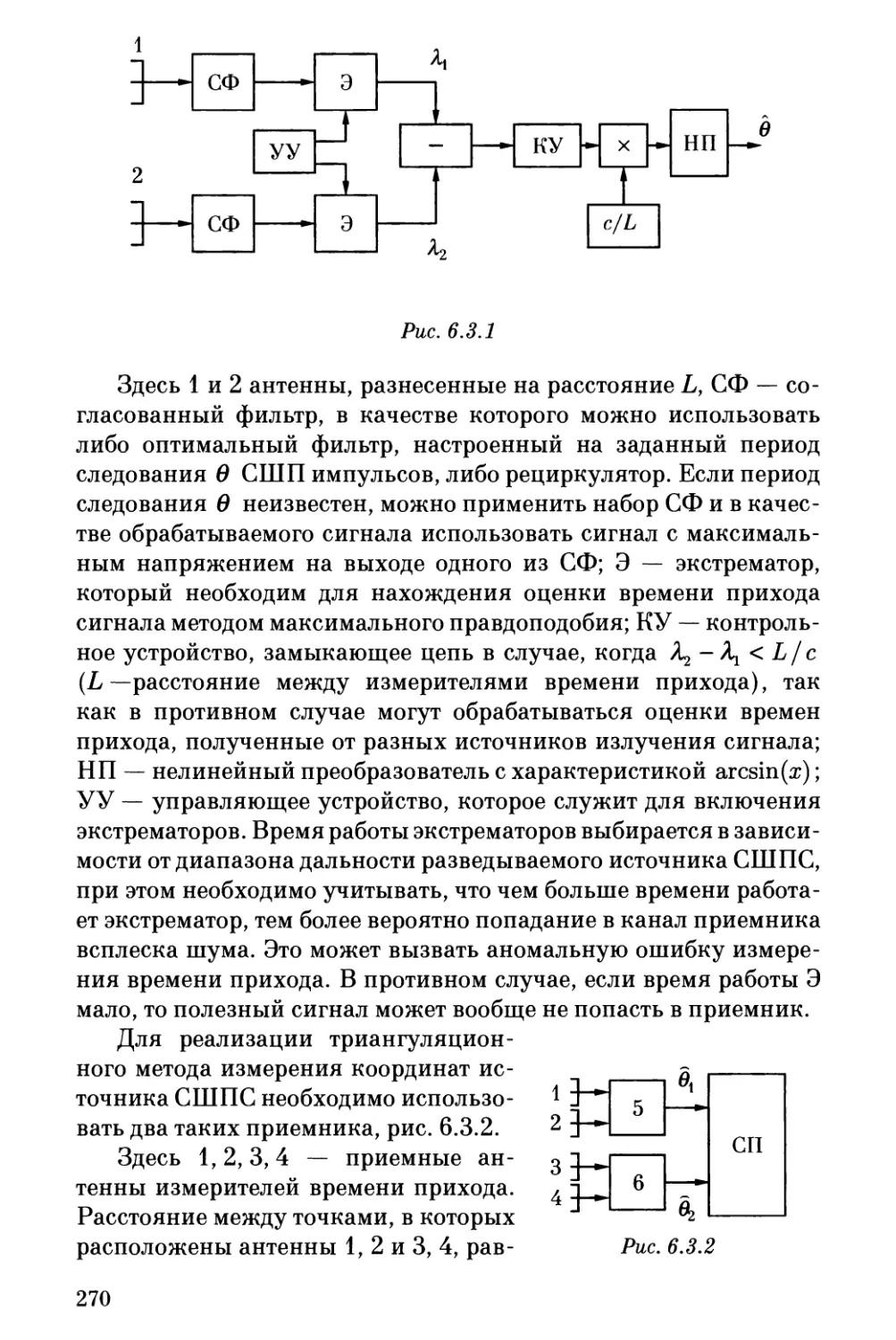
ISBN 978-5-88070-231-2
УДК 621.391.82
ББК 47.05.03
© Радзиевскнй В.Г., Трифонов П.А.
© Издательство «Радиотехника», 2009
50-летию Федерального
государственного научно-исследовательского
испытательного центра радиоэлектронной борьбы
и оценки эффективности снижения замет-
ности, нашим коллегам, выполнившим свой
долг, посвящается.
ВВЕДЕНИЕ
В условиях информационного конфликта эффективность
различных систем управления в значительной степени зависит от
качества функционирования радиоэлектронных средств (РЭС).
Поэтому как при разработке, так и их применении самое
серьезное внимание уделяется повышению информативности и защите
от преднамеренных и непреднамеренных помех, неизбежно
сопровождающих процесс приема радиосигналов.
В настоящее время довольно отчетливо прослеживаются два
пути развития радиоэлектронной техники. Первый связан с
дальнейшим улучшением технических характеристик узкополосных
РЭС и основан на развитии уже традиционных принципов и
подходов, второй — с внедрением новых способов излучения и приема
сверхширокополосных сигналов (СШПС) и соответствующих им
технических решений с учетом последних достижений во многих
областях фундаментальной и прикладной науки. Ожидается, что
с помощью РЭС с СШПС могут более успешно, чем с
узкополосными, решаться задачи обнаружения и распознавания, включая
замаскированные и подповерхностные объекты, в радиолокации
[9, 10, 15, 33—37, 57, 58 и др.]; повышения объема и скрытности
передачи данных в радиосвязи [141, 142, 165 и др.]; увеличения
точности местоопределения в навигации [135 и др.]. При этом у
всех перечисленных типов РЭС повышается конфликтная
устойчивость в условиях применения активных и пассивных помех,
улучшаются условия электромагнитной совместимости,
затрудняется их радиоэлектронная разведка, а, значит, и
информационное обеспечение действий по радиоэлектронной борьбе.
С момента опубликования первых работ по СШПС [6, 26, 124,
125, 130 и др.] многочисленными исследователями получен ряд
3
важных результатов, относящихся как к теоретическим основам
нестационарной электродинамики, так и к принципам
построения РЭС [1-4, 27, 29, 39, 42, 91, 95, 129 и др.]. Разнообразие
практических приложений и достаточно высокий уровень
технологической проработки отдельных элементов и устройств
свидетельствует о необходимости более тщательного и глубокого
подхода к вопросам приема СШПС в условиях помех, в частности,
к синтезу и анализу алгоритмов обработки таких сигналов при
обнаружении и измерении информационных параметров.
Относительно немногочисленные известные работы в этом
направлении [7, 88, 103—108] лишь подтверждают целесообразность
дальнейших исследований, которые позволят выбрать и
реализовать нужные способы обработки СШПС исходя из требований к
эффективности и степени сложности аппаратурной и
программной реализации основных функциональных операций в ходе
приема. Одновременно с этим до сих пор недостаточное внимание
уделяется вопросам радиоэлектронной разведки и подавления
перспективных сверхширокополосных радиосистем,
являющихся важнейшими составляющими радиоэлектронной борьбы, а
также анализу эффективности функционирования современных
узкополосных систем различного назначения при воздействии на
них сверхширокополосных излучений.
Итак, создание и практическое использование
сверхширокополосных систем представляет собой качественный скачок в
развитии радиоэлектроники. Можно ожидать, что использование
СШПС, ширина спектра которых Δ/ соизмерима с их средней
частотой /0, т.е. Δ///0 ~ 1, позволит на более высоком
информационном уровне решать совокупность задач, возникающих
в радиолокации, радиосвязи и радионавигации. При этом
важную роль играет не только большая абсолютная ширина спектра
сигнала, достигающая единиц гигагерц, но и его значительная
относительная широкополосность Δ///0 . Отказ от
традиционного постулата узкополосности уже привел к необходимости
пересмотра многих основополагающих концепций, начиная с
принципов изучения, приема и обработки радиосигналов, рассеяния
электромагнитного поля объектами и кончая математическими
методами синтеза и анализа РЭС. В настоящее время эта работа
активно продолжается.
Предлагаемая монография в основном базируется на
оригинальных результатах исследований авторов и имеет цель
восполнить существующие пробелы в основах приема и статистической
4
обработки СШПС [63—85, 109—117]. Книга содержит введение
и шесть глав.
В первой главе проводится анализ принципов
функционирования РЭС с СШПС, а также перспектив их развития.
Приводятся некоторые данные экспериментальных исследований и
технические характеристики таких РЭС. Предложено
систематизированное описание СШПС и их классификация. Наряду с
детерминированными рассматриваются стохастические видео-
и радиосигналы. Выполнен анализ нескольких основных типов
последовательностей СШПС.
Вторая глава посвящена статистическому синтезу и анализу
оптимальных и квазиоптимальных обнаружителей квазидетер-
минированных и стохастических СШПС при наличии
узкополосных помех и белого шума. Рассмотрение проводится как для
одиночных, так и для последовательностей сигналов при
различном уровне характерной для приема параметрической априорной
неопределенности. Отдельно рассмотрен вопрос обнаружения
сигналов СШП РЛС с неизвестными параметрами движения.
В третьей главе проведен статистический синтез и анализ
оптимальных и квазиоптимальных измерителей временных и
частотных параметров сигналов. Исследуется влияние узкополосных
помех на пороговые характеристики оценок основных частотно-
временных параметров СШПС.
В четвертой главе применительно к задачам
радиоэлектронной разведки СШПС выполнен анализ эффективности
квазиправдоподобного и энергетического обнаружения и измерения
частотных параметров, когда отсутствует или лишь частично
известна информация о форме принимаемого сигнала.
Определены основные факторы, влияющие на снижение эффективности
приема в условиях повышенной априорной неопределенности.
Развиты способы определения местоположения источников
излучений, принимаемых на фоне узкополосных помех и шума,
синтезированы алгоритмы определения направления прихода
СШПС, найдены оценки местоположения источника сигнала с
помощью триангуляционной и разностно-дальномерной систем.
В пятой главе рассмотрены особенности радиоэлектронного
подавления СШП РЛС активными шумовыми помехами.
Выполнен анализ эффективности обнаружения и измерения
параметров узкополосных сигналов при преднамеренном воздействии
сверхширокополосных помех и шума. В качестве модели помехи
используется экспоненциально-синусный радиоимпульс.
5
На основе изложенных результатов в шестой главе
представлены принципы создания обнаружителей и измерителей
информационных параметров СШПС, включая возможные блок-схемы
их аппаратурной и программной реализации.
Небольшая часть представленных материалов носит
обзорный характер, что позволяет читателю, не знакомому с данной
областью, получить начальные сведения. Основные разделы
книги предполагают определенную подготовку и знание основ
современной теории оптимального приема и обработки сигналов.
Предложенная библиография позволяет при необходимости
восполнить существующие пробелы.
Авторы считают своим приятным долгом выразить глубокую
признательность доктору технических наук, профессору В. В.
Сазонову и заслуженному деятелю науки РФ, доктору технических
наук, профессору С. В. Ягольникову, взявшим на себя труд по
рецензированию рукописи. Авторы благодарны
заслуженному деятелю науки РФ, доктору технических наук, профессору
А. П. Трифонову за конкретную помощь и критические
замечания, способствовавшие улучшению книги, а также всем коллегам
по работе, оказавшим поддержку при подготовке и оформлении
материалов настоящего издания.
6
1. ПРИНЦИПЫ И ПЕРСПЕКТИВЫ
ПРИМЕНЕНИЯ РАДИОЭЛЕКТРОННЫХ СИСТЕМ
СО СВЕРХШИРОКОПОЛОСНЫМИ СИГНАЛАМИ.
МОДЕЛИ СВЕРХШИРОКОПОЛОСНЫХ
СИГНАЛОВ
1.1. Анализ современного состояния разработок
радиоэлектронных средств со сверхширокополосными сигналами
В последние годы в экономически развитых странах началась
разработка и практическое использование радиоэлектронных
средств (РЭС) со сверхширокополосными сигналами (СШПС).
Об этом сообщается в различных источниках, причем
библиография только по радиолокационным СШПС и их применениям
насчитывает сегодня более пяти тысяч наименований. Ссылаясь на
мнение американских экспертов в области стратегических
вооружений [149, 151], приведем следующее высказывание: «Страна,
первая вышедшая на широкое использование технологии
сверхширокополосной импульсной электродинамики, получит
качественное преимущество перед другими, особенно заметное в
военной области. В мировой радиоэлектронике в течение последних
15—20 лет лавинообразно нарастает интерес к новому
направлению создания радиоэлектронных вооружений на основе
сверхширокополосной радиоэлектроники, которая должна обеспечить
революционный скачок в возможностях средств электронного и
радиоэлектронного вооружения».
В США в настоящее время действительно предпринимаются
серьезные усилия по совершенствованию технологий СШП
радиоэлектроники. Основные государственные лаборатории и
большинство радиоэлектронных компаний ведут НИОКР по СШПС,
есть данные о проведении испытаний опытных образцов связи,
радиолокации и электронного поражения [57, 58,135—180 и др.].
В Российской Федерации согласно [27, 54, 57, 58, 132 и др.]
также ведутся разработки экспериментальных образцов
отечественных радиоэлектронных систем ближнего и дальнего радиуса
действия, имеются сведения об их успешных испытаниях.
7
Физическая основа целесообразности использования СШПС
достаточно очевидна — количество информации, передаваемой
в единицу времени, прямо пропорционально полосе
используемых частот. Альтернативой этому могло бы являться увеличение
времени передачи информации, но, в частности, в радиолокации
время контакта с целью всегда ограничено, поэтому проблема
повышения информативности при использовании традиционных
подходов остается.
Применительно к разрабатываемым на основе СШПС
системам связи [141, 142,165,172] предполагается, что использование
этих сигналов позволит организовать работу нескольких
независимых каналов связи в одной и той же полосе частот. Для этого в
каждом канале связи узкополосный сигнал, несущий
информацию, смешивается с СШП псевдослучайным сигналом и
излучается в эфир. С помощью набора из N независимых
(ортогональных) СШП псевдослучайных сигналов можно получить N таких
каналов, существующих в полосе частот СШПС без взаимных
помех. На приемной стороне информационный сигнал
отделяется от псевдослучайного сигнала и передается потребителю
информации. В [165] отмечается, что СШПС позволяют устранить
недостатки связных систем, связанные с многолучевым
распространением радиоволн.
Аппаратуру, излучающую СШПС, можно использовать и для
определения местоположения по методу, аналогичному тому, что
применяется в глобальной навигационной системе GPS [135,
168]. Однако, если приемники системы GPS позволяют измерять
время с точностью единицы — несколько десятков не, то точность
измерения при использовании СШПС может быть на
несколько порядков выше, что при измерении расстояния обеспечивает
субсантиметровую разрешающую способность. С помощью сети
опорных СШП радиостанций пользователи могут точно
определять свое местоположение в пределах зданий и других участков с
мешающими отражениями, где приемники GPS не будут
эффективно работать из-за многолучевого распространения
радиосигналов [135].
С точки зрения информационных возможностей применение
СШПС в радиолокационных системах позволяет повысить
разрешающую способность по дальности и скорости: отраженный
от цели сигнал несет не только интегральную информацию, но
и данные об отдельных элементах объекта; устраняются
интерференционные провалы в диаграмме направленности антенны
8
(ДНА) при наблюдении за целью под низким углом места,
поскольку полезный и переотраженный сигналы разделяются во
времени; растет помехозащищенность в условиях наблюдения в
пассивных помехах, так как ЭПР цели в малом импульсном
объеме обычно превышает ЭПР такой помехи [33—36, 96].
Перспективность методов СШП радиоэлектроники была
известна давно и достаточно широко обсуждалась, начиная с
середины 1970—χ годов [36, 130]. Однако их практическая
реализация стала возможной только после достижения соответствующего
уровня развития следующих технологий, базовых для СШП
радиоэлектроники (что произошло в середине 1990-х годов):
технологии генерации мощных сверхкоротких
(длительностью 1 не и короче) импульсов с практически неограниченным
ресурсом ( много больше 1010 импульсов) с высокой стабильностью
и большой частотой повторения;
технологии излучения таких импульсов непосредственно в
пространство (СШП антенная техника);
технологии формирования СШПС с произвольной
поляризационной структурой;
технологии скоростной цифровой обработки больших
массивов информации (вычислительная техника).
Учитывая изложенное выше, а также известные данные о
разработках СШП устройств [135—180], есть все основания
считать, что уже в ближайшей перспективе может получить широкое
применение новый тип радиоэлектронных объектов, а именно —
СШП РЭС.
В плане элементной базы радиоэлектроники, используемой в
настоящее время, можно отметить, что большинство элементов и
узлов традиционной и проектируемой аппаратуры для излучения,
преобразования и приема относительно узкополосных сигналов
оказываются непригодными. В первую очередь это относится к
резонансным устройствам: волноводным мостам, циркуляторам,
усилителям, большинству согласующих устройств и т.д. Как
правило, невозможным оказывается преобразование частоты при
формировании и приеме СШПС. При приеме импульсных
сигналов нано- и субнаносекундной длительности не осуществляется
их детектирование.
В теоретическом плане отказ от традиционного допущения об
узкополосности Δ/ / /0 « 1, Δ/ — ширина полосы частот, /0 —
центральная частота сигнала, приводит к необходимости
описания таких сигналов как функции времени без выделения огиба-
9
ющей и фазы и, соответственно, без использования комплексных
моделей сигналов. Применение методов спектрального анализа
не исключается, однако необходимо учитывать возникающие
особенности. При обработке СШПС поле таких сигналов в точке
наблюдения не разделяется на произведение двух сомножителей,
один из которых зависит от времени и описывает форму сигнала,
а другой — от пространственных координат и связан с
диаграммой направленности антенны (ДНА), так как форма сигнала
зависит от направления излучения. Это необходимо учитывать при
обосновании принципов измерения пространственного
положения источников радиоизлучения (ИРИ), ибо традиционные
методы амплитудной, фазовой и амплитудно-фазовой пеленгации
оказываются неприменимы.
Определенная специфика появляется и в трактовке ЭПР
цели. Особенность заключается в том, что излучение очень
коротких (сверхкоротких) импульсов приводит к эффекту
сверхразрешения по дальности, то есть к возможности наблюдения объекта
не как точечной цели, характеризуемой интегральной ЭПР, а как
пространственно-протяженной, описываемой
дифференциальным распределением ЭПР по дальности. Поэтому необходимо
определенное переосмысление и уточнение способов изучения
отражательных характеристик исследуемых объектов.
В настоящее время наиболее заметные результаты по
практическому использованию СШПС связаны с техникой
радиолокации, поэтому ниже имеющиеся в данной области достижения
обсудим более подробно.
Основное отличие сверхширокополосной радиолокации
связано с использованием очень короткого импульса
(наносекунды и менее) при излучении, при этом применяются как
радиоимпульсы с заполнением, так и видеоимпульсы. Такой импульс
имеет малую протяженность в пространстве, которая измеряется
единицами метров или даже меньше. Поэтому при отражении от
отдельных элементов конструкции цели удается создать ее
детальный радиолокационный портрет и далее решать задачу
распознавания образа хорошо апробированными способами. Недостатки
метода связаны с его очевидными достоинствами, ибо короткий
импульс требует широкой полосы пропускания, являющейся
более доступной для воздействия помех.
Судя по известным направлениям исследований и разработок
[151, 168] одним из основных является обнаружение
малозаметных целей, при этом ожидается заметное преимущество по ряду
10
тактико-технических характеристик по сравнению с обычными
узкополосными РЛС.
В 1989 г. в России проводилось испытание
высокопотенциальной экспериментальной СШП РЛС [57]. При испытаниях
самолет с эффективной площадью рассеяния порядка 1 м2 был
отчетливо виден на фоне острова на расстояниях порядка 100 км,
разрешение по дальности составляло около 1 м. В качестве
передатчика зондирующих сигналов использовался генератор
радиоимпульсов с несущей частотой 10 ГГц, длительностью 5 не
(длина электромагнитного импульса в пространстве примерно 1,5 м)
и эффективной мощностью 0,5 ГВт, причем частота повторения
импульсов достигала 100 Гц.
Другой важной областью практического применения СШП
радаров является обнаружение и наблюдение объектов на
коротких дистанциях, составляющих от единиц и десятков метров до
нескольких километров. Это радары, обнаруживающие объекты
в плотных средах (почва, лед), и радары, обнаруживающие
объекты в воздухе. Практическая потребность в классе таких РЛС
оказалась высокой, поэтому уже создано большое количество
действующих образцов военных и промышленных радаров,
решающих самые разнообразные задачи. Радары, работающие на
малых дистанциях [17, 18, 25, 60, 139, 163—180], являются
относительно простыми по конструкции и имеют небольшой объем
аппаратуры.
Третья область применения СШП РЛС — это получение
радиоизображения за счет существенного увеличения количества
и повышения качества информации, в частности при
исследовании радиолокационных характеристики объектов [6, 41]. При
получении радиоизображений объектов также используются
установленные на воздушных носителях РЛС с синтезированной
апертурой [38, 166, 170], они предназначаются, как правило, для
картографирования местности и для поиска на местности
различных объектов, скрытых растительностью или замаскированных
иным образом.
Известна также область применения СШП радаров для
контроля акваторий, аэропортов, лесных массивов, территорий
различного назначения. Такие радары занимают промежуточное
положение между РЛС малой и большой дальности [136, 170,
171]. Они обеспечивают не только высокое разрешение целей, но
и большую устойчивость при работе в пассивных и активных
помехах [33, 34].
И
В соответствие с определением сверхширокополосных
сигналов, введенным экспертами DARPA министерства обороны США
и уточненным FCC (Федеральной комиссией по связи) [141,142],
сверхширокополосная РЛС — это радиолокатор, у которого
ширина спектра сигнала значительно больше 25 % от центральной
частоты. Излучение в таком радиолокаторе происходит в виде
одиночных импульсов или нескольких периодов колебания на
центральной частоте. В типовых случаях длительность импульса
находится в пределах от 100 пс до 1,5 не, центральная частота — в
диапазоне от 650 МГц до 5 ГГц, а ширина спектра может
составлять несколько гигагерц [9, 121].
Перечисленные ниже потенциальные информационные
преимущества СШП РЛС перед радиолокаторами, использующими
узкополосные сигналы, основаны именно на работе со
сверхкороткими импульсами и, соответственно, в сверхширокой полосе:
— широкая полоса СШП РЛС обеспечивает им более высокую
разрешающую способность по дальности и точность измерения
расстояния до цели. При высоком пространственном разрешении
появляется реальная возможность выделения цели из фоновых
помех. Так, при использовании СШП РЛС с синтезированием
апертуры было получено изображение отражателей, скрытых под
покровом леса [166]. Для традиционной радиолокации такое
обнаружение представляет серьезную проблему, особенно в
отношении целей с малой эффективной площадью рассеяния (ЭПР)
на малой высоте или целей на поверхности суши или моря;
— СШП РЛС способны распознавать тип и форму цели,
поскольку принятый эхо-сигнал несет информацию не только об
объекте в целом, но и об его элементах. Протяженность пикосе-
кундного импульса в пространстве ст (где с — скорость света, τ —
длительность импульса) намного меньше длины цели, и в этом
случае цель является уже не точечным отражателем, как для
традиционного радиолокатора, а матрицей отражающих элементов
(микроцелей). Зондирующий сигнал СШП РЛС, поочередно
отражаясь от отдельных элементов, образует импульсную
последовательность, параметры которой зависят от геометрии объекта и
импульсных характеристик цели. Эта последовательность,
называемая «портретом цели», представляет собой распределение
отраженной мощности во времени. В результате ЭПР также
становится зависимой от времени и эта зависимость (форма портрета)
изменяется при смене ракурса наблюдения за целью. Амплитуда
импульсов, составляющих портрет, зависит от ЭПР соответству-
12
ющих отражающих элементов, а их полярность — от магнитной
проницаемости материала элементов;
— обеспечивается электромагнитная совместимость СШП
РЛС с обычными узкополосными РЛС. При совместной работе
этих радаров в полосу частот узкополосного попадает лишь
небольшая часть энергии сигнала СШП РЛС. Поскольку их полосы
частот могут отличаться примерно на три порядка, за время
действия СШП РЛС помеха, возникающая от неё в приемнике
узкополосной РЛС, не успевает достичь заметной величины. Кроме
того, при равной средней мощности излучения обоих радаров
удельная мощность на единицу частоты у СШП РЛС примерно
на три порядка ниже, т.е. в приемник узкополосной РЛС
попадет лишь тысячная доля энергии сверхширокополосного
сигнала. Влияние излучения узкополосной РЛС эффективно
снижает частотная режекция, вырезающая из спектра сигнала СШП
РЛС полосу частот, занимаемую сигналом узкополосной РЛС.
При совместной работе двух или нескольких СШП РЛС
возможно временное разделение сигналов. Из-за малой длительности
сверхширокополосного сигнала и большой скважности помеха от
соседнего локатора будет занимать очень малый участок;
— существенное уменьшение ЭПР пассивных помех в
элементе разрешения — дождя, тумана, аэрозолей и т.п.,
облегчающее наблюдение цели на их фоне;
— реализация СШП РЛС осуществляется достаточно
простыми и дешевыми аппаратными средствами. В частности, приемная
аппаратура обычно строится по схеме прямого преобразования
(без канала ПЧ, вернее, с использованием так называемой го-
модинной архитектуры). К тому же различные РЛС используют
одни и те же базовые схемы передатчика и приемника [127, 132].
Преимущества СШП РЛС особенно важны при их
применении в военных системах для распознавания и получения
изображений целей и их селекции, обеспечения скрытности от
систем разведки и радиоэлектронной борьбы, низкой вероятности
перехвата сигналов, предотвращения поражения со стороны
противорадиолокационных управляемых ракет. Кроме того, они
успешно используются для определения местоположения,
предупреждения о возможности столкновения, точного измерения
расстояния, обнаружения несанкционированного
проникновения, обнаружения объектов в почве (зарытых мин, в том числе
пластиковых), в стенах, за лиственным покровом и пр.,
медицинского диагностирования. Одобренные Федеральной комиссией
13
США по связи радиолокационные устройства уже обнаруживают
дыхание или другого типа движение даже сквозь стены зданий в
процессе проведения контртеррористических операций.
Используемые в настоящее время на практике СШП РЛС
можно условно разделить на две группы. К первой группе
относятся относительно маломощные и соответственно небольшой
дальности действия (десятки метров — километры) СШП РЛС,
ко второй группе — СШП РЛС большой мощности с дальностью
действия сотни километров.
В качестве базовых прототипов СШП РЛС ближнего действия
рассмотрим компактные радиолокационные системы различного
применения —MIR-радиолокаторы (micro impulse radar) [163].
В общем случае MIR-радиолокатор — это СШП РЛС с селекцией
целей по дальности.
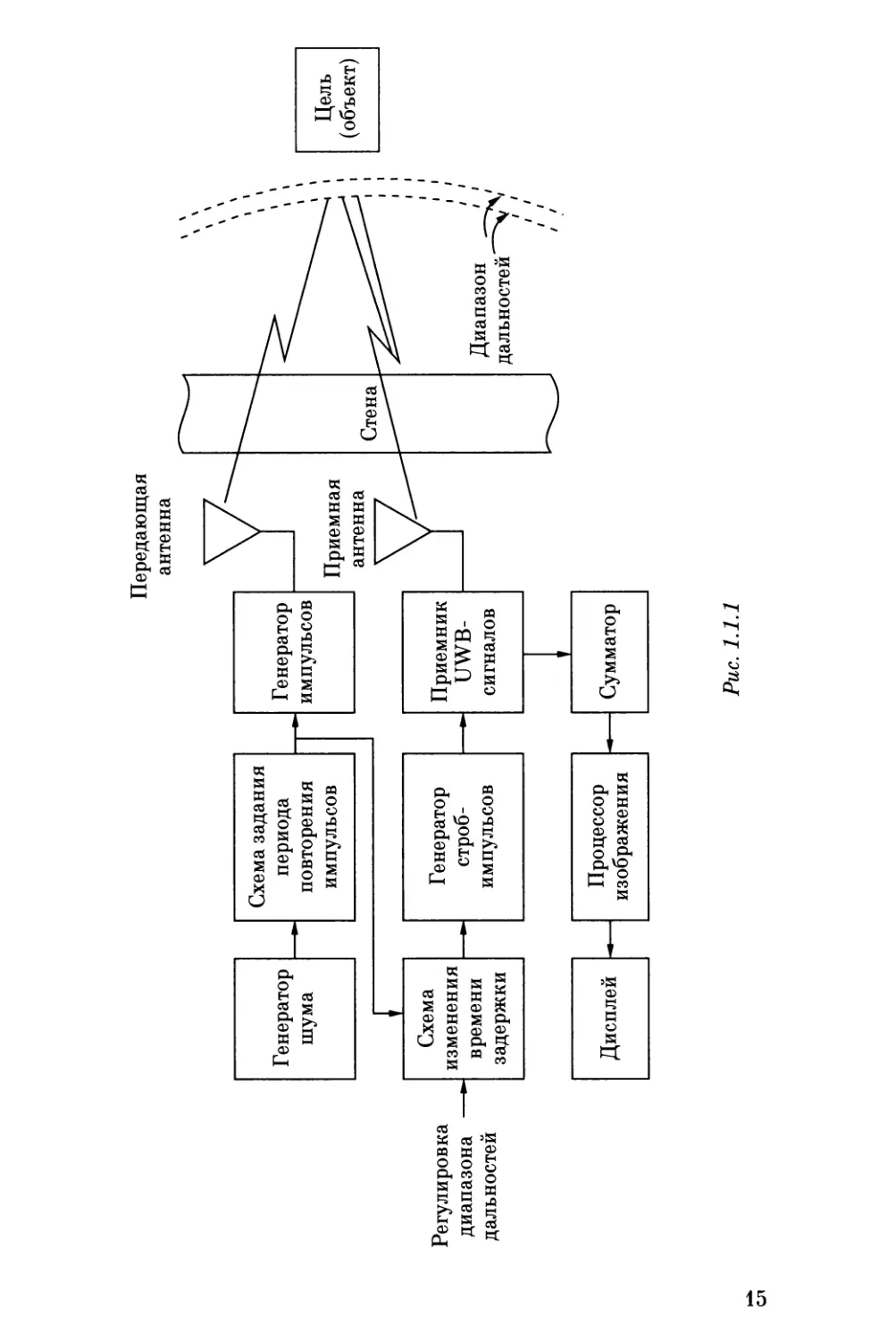
Типовая схема такой РЛС содержит передатчик с генератором
импульсов и приемник с генератором строб-импульсов, работа
которого синхронизируется сигналом с передатчика (рис. 1.1.1)
[139]. Ниже приведены основные характеристики MIR-радиоло-
катора:
дальность действия в воздухе — около 50 м;
разрешающая способность по дальности — 1 см;
длительность импульсов — 200 пс;
время нарастания импульсов — 50 пс;
частота повторения импульсов — 2 МГц;
полоса спектра сигнала — 1—4 ГГц;
передающая антенна — несимметричный вибратор из
одного провода длиной около 4 см, (антенна больших размеров может
увеличить дальность и направленность действия, а также
повысить возможность проникновения СШПС в различные вещества,
такие, как вода, снег, почва).
Принцип действия MIR-радиолокатора следующий.
Приемник принимает эхо-сигналы только от объектов,
находящихся в пределах задаваемого передатчиком диапазона
расстояний — от нескольких сантиметров до десятков метров. Период
повторения зондирующих импульсов преднамеренно рандоми-
зируется относительно номинального значения с помощью
генератора шума. Это обеспечивает эффективное снижение помех от
функционирования другой передающей аппаратуры (связных
станций, телевизионных передатчиков и пр.), работу без
взаимных помех нескольких радиолокаторов, находящихся на
небольшом расстоянии друг от друга, и, кроме того, «сглаживание»
14
л
ч
CD
Я
_, ч
Η
К
CD
с*
vo
О
s—"
л «
о 9
н 9
л л
Он Ч
CD >>
К И
„® S
^ Я
1
es
а задани
зриода
торения
^ и Я
φ м О
и в
о
1
1
Он
о
н л
к я
CD
£н
CD
g
с
ьсов
ч
>>
Я
2
Я
анте
И ι О
риемн
UWB
игнал
С °
,
ι
ft «
о 9
н ' о
ft 2 ч
5Г ft >>
r© ° S
1
1
^ s s §
2 в « 2
S CD CD ft
g К £ ft
И CD φ CD
О S ft 3
» pa <»
Η n
ft
О
уммат
и
'
1
В5
ft Я
О д
О φ
CD ft
Я" g
о ft
ftVO
Я
1
'
Ή
CD
Ч
Я
о
Я
«
ί
τ
5 K 8
ft CO Q
5 5 л
^5
® « S
15
спектра излучения, вследствие чего сигнал ΜIR—радиолокатора
напоминает фоновый шум, который трудно обнаружить другими
датчиками.
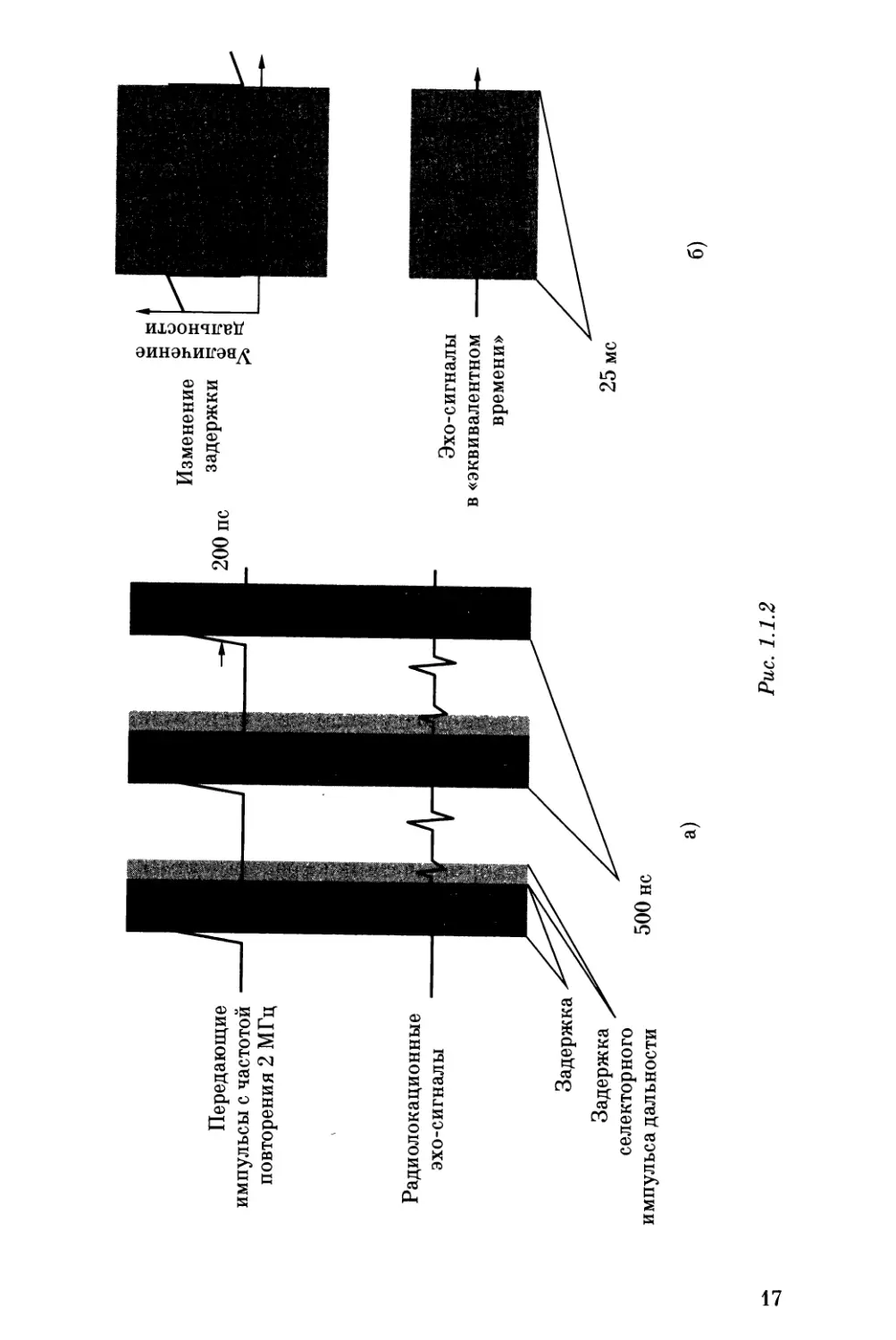
Селекция по дальности в MIR-радиолокаторе происходит
следующим образом. В момент излучения зондирующего импульса
по сигналу от передатчика срабатывает схема задержки
селекторного импульса дальности, по окончании которой строб-импульс
отпирает приемник для приема лишь тех эхо-сигналов, которые
соответствуют узкому временному «окну» (рис. 1.1.2а). Этим
предотвращается прием нежелательных сигналов. Изменение
времени задержки относительно зондирующего импульса происходит
по пилообразному закону. В результате появляется возможность
регистрировать все эхо-сигналы в «эквивалентном масштабе
времени», который коррелируется с расстоянием до объекта (рис.
1.1.26). Структура импульсов в «эквивалентном масштабе
времени» точно соответствует исходной структуре в реальном времени
и при этом ее легко индицировать на экране осциллографа или
передавать в компьютер. Такой стробоскопический метод
используется в высотомерах, устройствах измерения уровня жидкости в
резервуарах, а также во всех MIR-приложениях с
формированием изображений. Усреднение по тысячам импульсов повышает
отношение сигнал-шум, а пороговая схема с выбираемым
уровнем порога позволяет обнаруживать любое перемещение объекта
и включать тревожную сигнализацию.
MIR—технология имеет ряд достоинств при изготовлении
различных датчиков:
как и для всех СШП РЛС, эхо-сигналы датчиков несут
гораздо больше информации, чем узкополосные сигналы, а
сверхширокая полоса спектра обеспечивает высокую разрешающую
способность и точность определения дальности. Аппаратура менее
восприимчива к помехам, возникающим от работы других
радиолокаторов;
чрезвычайно низкие требования к электропитанию —
средний потребляемый ток составляет всего лишь несколько
микроампер;
средняя СВЧ-мощность, составляющая несколько десятков
микроватт, не представляет опасности для здоровья оператора
(мощность излучения — меньше одной тысячной мощности
излучения мобильного телефона);
малая стоимость аппаратных средств благодаря
использованию устаревших компонентов;
16
июончшвА
эинэьшгэя^
К
Рн
CD
tt
03
3 S
., о К
еЗ К Μ
в н φ
£ к s
Ы CD CD
о ς Рн
ι Л pa
о ра
X К
СЪ pa
17
малые размеры (печатная плата — около 4 см2);
высокое проникновение зондирующего сигнала в
большинство материалов низкой проводимости, что обеспечивает «видение
сквозь стены», бетон и другие препятствия, включая
человеческую ткань;
точная установка дальности действия, что снижает
вероятность ложных тревог;
скрытность работы MIR-датчика вследствие рандомизации
периода повторения импульсов.
Достоинства MIR-технологии открывают возможности для
создания многочисленных дешевых систем для обнаружения
перемещения, измерения расстояния, получения изображений.
Во многих случаях они имеют преимущества перед обычными
пассивными и активными ИК-датчиками, УЗ-,
сейсмическими и СВЧ-доплеровскими устройствами. Так, на работу многих
«обычных» датчиков неблагоприятное воздействие оказывают
условия окружающей среды, повышая уровень ложных тревог.
Пассивные ИК-датчики могут срабатывать при наличии
источника света или тепла. СВЧ-доплеровские датчики создают
взаимные помехи, используют дорогостоящие компоненты, их сигналы
имеют ограниченное проникновение вглубь материала.
Существуют автомобильные MIR-датчики (для помощи при
парковке, обнаружения возможности столкновения,
круиз-контроля, приведения в действие воздушных подушек безопасности,
электронного указателя уровня различных жидкостей), датчики
систем безопасности (для обнаружения несанкционированного
проникновения и перемещения, контроля доступа,
мониторинга за перемещением детей, периметровой охраны,
автосигнализации при краже транспорта), датчики средств промышленной
автоматики и т.п.
Важное применение MIR-технологии — в «электронных
измерителях уровня» жидкости, не имеющих движущихся деталей.
В таком измерителе зондирующий сигнал распространяется не по
воздуху, а по металлическому проводу, и измеряется время
прохождения электромагнитных импульсов, отраженных от
поверхности жидкости. Разрешающая способность прибора — меньше
1 мм, точность измерений — в пределах 0,1 %.
Известно применение СШП РЛС типа MIR-радиолокаторов
для обнаружения мин.
Решение актуальной проблемы поиска зарытых в землю мин
особенно затруднено в отношении противопехотных мин, кото-
18
рые в значительной степени изготовлены из пластмасс и покрыты
неотражающей резиновой оболочкой. Такие мины практически
невозможно обнаружить с помощью металлоискателя.
На основе MIR-модулей и высококачественной системы
формирования изображения была разработана радиолокационная
система подповерхностного зондирования для обнаружения мин
[176]. Эта система построена на передающих и приемных
модулях, которые размещаются независимо друг от друга и снабжены
отдельными антеннами. Рабочая ширина спектра зондирующего
импульса составляет 1—5 ГГц, частота повторения импульсов 10
МГц, пиковая мощность 1 Вт, частота сканирования 40 Гц.
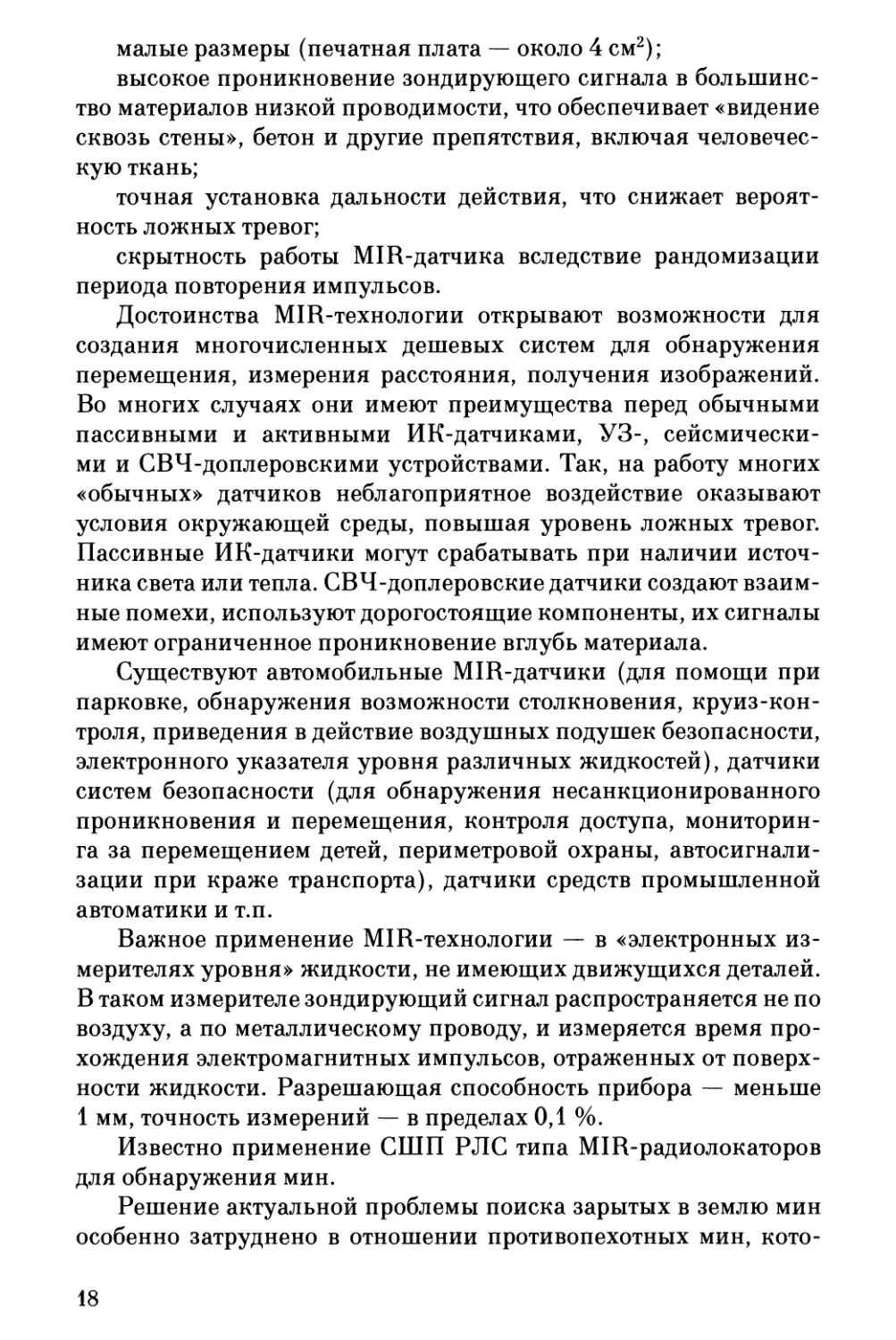
Устройство для поиска мин содержит несколько СШП-модулей,
которые могут монтироваться в ручном устройстве (рис. 1.1.3), либо
на небольшой роботизированной
тележке. В любом варианте матрица СШП-
модулей проходит над землей на высоте
10 см. Принимаемые радиолокационные
сигналы обрабатываются бортовым
компьютером для измерения изменений в
диэлектрических и проводящих
характеристиках подповерхностных слоев.
В течение нескольких секунд с
помощью алгоритмов реконструкции
необработанные радиолокационные данные
преобразуются в двух- и трехмерное
томографическое изображение высокого
разрешения подповерхностных слоев. В
ручном устройстве изображение
индицируется на шлемном экране оператора.
Результаты полевых испытаний опытного образца показали, что
система легко отличает пластиковые противопехотные мины от
окружающей почвы [176].
Существует другой вариант радиолокатора
подповерхностного зондирования для обнаружения неметаллических мин [178].
Это портативный импульсный радиолокатор с длительностью
импульса 0,3 не, частотой повторения импульсов 250 кГц, пиковой
мощностью 18 Вт и шириной спектра 0,3—3 ГГц. Такая широкая
полоса означает, что по эхо-сигналу может быть выделена
информация об ЭПР цели, которая зависит от формы цели, материала
и структуры поверхности. Алгоритмы обнаружения и
классификации зарытых в земле объектов позволяют использовать абсо-
19
лютное значение ЭПР, чтобы отличить мину от булыжника или
металлического фрагмента корпуса взорвавшейся бомбы.
Такой радиолокатор состоит из приемопередающей
аппаратуры, процессора сигналов, батареи питания, размещаемых
в заплечном ранце, и штанги с антенной и ручкой управления.
Антенна содержит две скрещенные пары симметричных
вибраторов. Данная конфигурация сводит к минимуму помеховые
отражения от наземной поверхности. Первые испытания этого
радиолокатора проводились в лаборатории над заполненным песком
ящиком [178].
В США создана СШП РЛС для беспилотного вертолета
корпуса морской пехоты. Радар предназначен для обнаружения
подвешенных проводов и других небольших объектов в городских
условиях и представляет собой усовершенствованный вариант с
повышенной чувствительностью ранее разработанного СШП
радиовысотомера высокой точности.
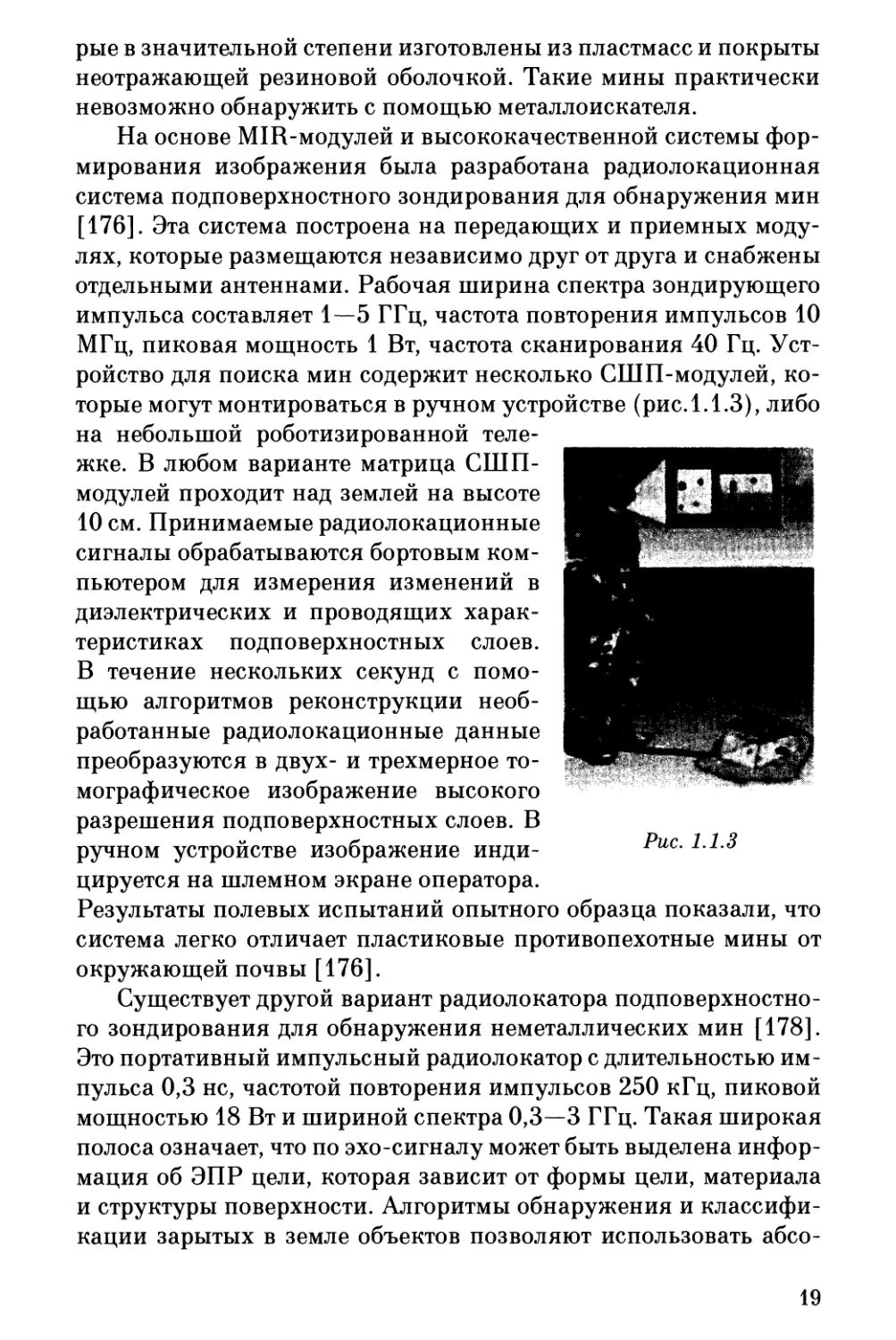
Блок-схема радиолокатора приведена на рис. 1.1.4.
Приемник содержит антенну, полосовой фильтр для ограничения
спектра помех, малошумящий усилитель с высоким коэффициентом
передачи, детектор на туннельном диоде и цифровой процессор
сигналов. В передатчике зондирующие импульсы проходят через
полосовой фильтр на отдельную передающую антенну.
Полосовой
фильтр
Малошу-
\*-\ мящий
усилитель
Полосовой
фильтр
Широкополосные
антенны
Полосовой
фильтр
Генератор Μ Пусковая
импульсов \
Детектор
hH на туннель- НН процессор
ном диоде
Цифровой
сигналов
Схема
автоматического
изменения
смещения
Ввод/
вывод
Рис. 1.1.4
Детектирование наносекундных и субнаносекундных
сигналов осуществляется с помощью прямосмещенного туннельного
диода, работающего на краю области отрицательного
сопротивления, благодаря чему он ведет себя как чувствительный к заряду
прибор. Когда накопленный заряд превышает регулируемый по-
20
рог, туннельный диод «срабатывает» и формирует на своем
выходе измеряемое напряжение. Для поддержания чувствительности
приемника на постоянном уровне при наличии флуктуации
температуры прибора и мощности питания, а также внутренних и
внешних шумов и помех, используется схема автоматической
регулировки смещения туннельного диода. Длительность
излучаемого СШП РЛС импульса составляла 2,5 не, ширина спектра —
400 МГц, коэффициент заполнения импульсов 0,0025 %, средняя
мощность — 25 мкВт. Поскольку детектор на туннельном диоде
открывается лишь на короткий интервал времени,
соответствующий конкретной дальности, и существует автоматическая
регулировка его смещения, такой радиолокатор характеризуется
относительно высокой помехоустойчивостью. На испытаниях он
продемонстрировал достаточно высокий уровень сигнал-помеха
при работе в его полосе частот станций помех непрерывного
излучения и станций заградительных шумовых помех.
Масса такой СШП РЛС не превышает 2,3 кг, минимальная
дальность обнаружения — 75 м, время реакции — не менее 5 с
при скорости полета вертолета 15 м/с, минимальная длина
обнаруживаемого объекта в горизонтальной или вертикальной
плоскости — 0,3 м. РЛС должна также работать в режиме
предотвращения столкновений с препятствиями спереди, сзади и по бокам
беспилотного вертолета.
Во время испытаний СШП РЛС продемонстрировала равную
30—90 м дальность обнаружения различных объектов, включая
автомобили, небольшие деревянные здания, металлические
вышки, деревья [166].
Известно [165] применение СШП РЛС для обнаружения и
визуализации объектов «сквозь стену». В качестве зондирующих
импульсов в этом случае используются «гауссовы» моноциклы с
точно регулируемым интервалом между импульсами. При
длительности моноцикла от 0,2 до 1,5 не интервал составляет от 25
до 1000 не. Ширина спектра такого сигнала превышает 2 ГГц, в
результате чего при длительности импульса 500 пс разрешение
достигается менее 9 см. Использованием позиционно-импуль-
сной модуляции сигнала «псевдослучайным кодом» его
частотный спектр рандомизируется, что делает зондирующий сигнал
в частотной области практически неотличимым от белого шума,
т. е. его сложно обнаружить и осуществить радиоперехват даже
на небольшом расстоянии от передатчика, если не используется
корреляционный приемник. В корреляторе приемника прини-
21
маемый сигнал умножается на «эталонное» колебание с
последующим интегрированием результата, и выходное напряжение
коррелятора служит мерой относительных временных позиций
принятого моноцикла и эталона. Весь процесс происходит в
течение длительности импульса, т. е. за время меньше 1 не.
Известны отечественные разработки СШП РЛС малой
мощности [34, 45, 50,127]. Рассмотрим структурную схему,
характеристики, особенности построения и результаты испытаний макета СШП
РЛС, разработанной в Московском авиационном институте на
кафедре «Аналоговые и цифровые радиосистемы» коллективом
Russian UWB Group. РЛС рассчитана на обнаружение движущихся
целей на расстоянии нескольких километров. Разработка РЛС
выполнялась в два этапа. При испытаниях в лабораторных условиях
макет обеспечил обнаружение движущихся целей на расстоянии
до ста метров. Тем самым подтверждена правильность технических
решений, выбранных при построении РЛС и ее систем.
РЛС предназначена для контроля воздушного пространства
в узких горных образованиях (долины, ущелья, каньоны),
недоступных для традиционных радиолокационных средств. РЛС
осуществляет постоянное наблюдение в плоскости,
пересекающей ущелье, имеет неподвижную антенну с широкой
диаграммой направленности и способна обнаруживать движущиеся
цели в пределах прямой радиолокационной видимости на фоне
подстилающей поверхности. РЛС обеспечивает разрешение
целей, разнесенных по дальности или скорости, а также определяет
дальность до цели, направление движения цели и радиальную
составляющую скорости цели. Согласно [34] РЛС имеет
следующие характеристики:
тип сигнала генератора: однополярный моноимпульс;
пиковая мощность сигнала передатчика: с генератором малой
мощности 50 Вт, с генератором большой мощности 205 кВт;
средняя мощность сигнала передатчика: с генератором малой
мощности 25 мВт, с генератором большой мощности 24 Вт;
диапазон частот сигнала зондирования: от 300 до 800 МГц;
длительность сигнала зондирования: от 2 до 10 не;
разрешающая способность по дальности: от 0.4 до 1.5 м;
потенциальная дальность обнаружения цели с ЭПР не менее
0.5 м2: с генератором малой мощности до 150 метров, с
генератором большой мощности до 1000 метров;
минимальная дальность обнаружения: с генератором малой
мощности 1 м, с генератором большой мощности 10 м;
22
диапазон скоростей обнаруживаемых целей: от 7 до 60 км/ч;
количество дальностных каналов приемника: 1;
ширина диаграммы направленности антенн: в вертикальной
плоскости 60°, в горизонтальной плоскости 40°;
шаг установки строба дальности: 30 см;
длительность стробирования сигнала: от 2 до 64 не;
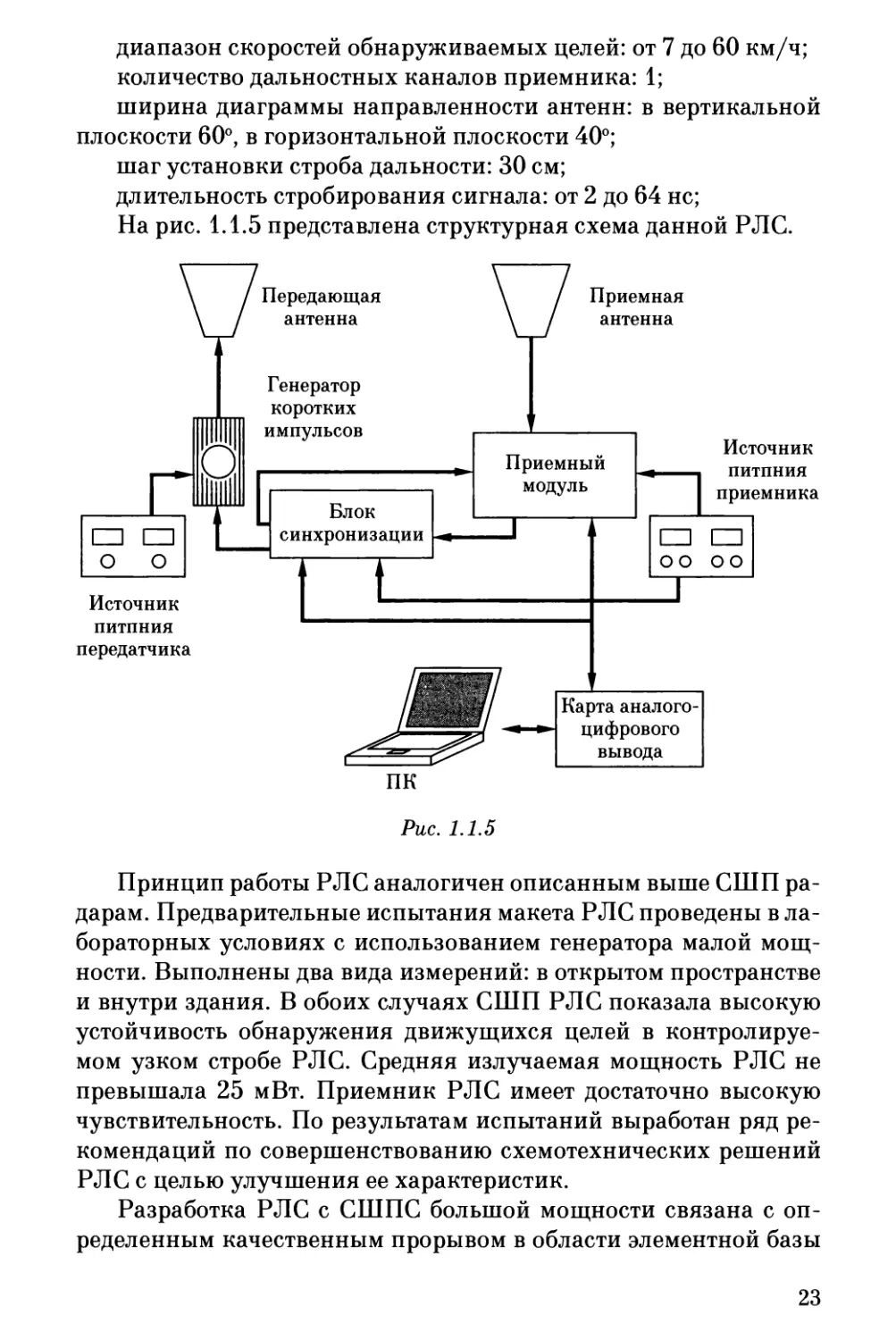
На рис. 1.1.5 представлена структурная схема данной РЛС.
π
О
о
Источник
питпния
передатчика
Передающая
антенна
Приемная
антенна
Генератор
коротких
импульсов
Блок
синхронизации
Приемный
модуль
Источник
питпния
приемника
оо оо
Карта аналого-
цифрового
вывода
Принцип работы РЛС аналогичен описанным выше СШП
радарам. Предварительные испытания макета РЛС проведены в
лабораторных условиях с использованием генератора малой
мощности. Выполнены два вида измерений: в открытом пространстве
и внутри здания. В обоих случаях СШП РЛС показала высокую
устойчивость обнаружения движущихся целей в
контролируемом узком стробе РЛС. Средняя излучаемая мощность РЛС не
превышала 25 мВт. Приемник РЛС имеет достаточно высокую
чувствительность. По результатам испытаний выработан ряд
рекомендаций по совершенствованию схемотехнических решений
РЛС с целью улучшения ее характеристик.
Разработка РЛС с СШПС большой мощности связана с
определенным качественным прорывом в области элементной базы
23
радиоэлектроники, т.е. с тщательно охраняемыми
технологическими достижениями в области высоковольтных генераторов и
релятивистских СВЧ-приборов, позволяющих получать пико-
и наносекундные видео и радиоимпульсы гигаваттного уровня
мощности. Кроме того, импульсы малой длительности научились
получать способом временной компрессии, заключающемся в
накоплении электромагнитной энергии поля в резонаторах,
возбуждаемых от генераторов, работающих в режиме относительно
длинных импульсов, и быстром выводе из них запасенной
энергии за время, намного меньшее времени накопления. Для
повышения эффективности работы такой системы резонаторы делают
из сверхпроводников. При получении СШП импульсов также
используют разряд энергии электростатического накопителя в виде
параллельных пластин на полосковую линию, при этом в
качестве ключа, замыкающего контур разряда, применяется
фотопроводник на базе кремния или арсенида галлия, активизируемый
лазерным излучением.
Приемное устройство РЛС с импульсными СШПС по
структуре представляют собой линейный широкополосный усилитель,
а для сложных сигналов используется соответствующий
согласованный фильтр. Необходимая ширина полосы пропускания
усилителя должна соответствовать ширине спектра зондирующего
сигнала и в сантиметровом диапазоне достигает нескольких
гигагерц. Обсуждая состояние сверхширокополосной радиолокации,
отдельно отметим серию работ [105—108], посвященных синтезу
и анализу алгоритмов обнаружения целей и измерения их
дальности и скорости.
В настоящее время экспериментально получены
сверхмощные микроволновые импульсы наносекундной длительности двух
видов — видеоимпульс, не имеющий четко выраженной несущей
частоты, и радиоимпульс с несущей частотой, на один — два
порядка превышающей ширину спектра импульса.
В Институте прикладной физики и Институте сильноточной
электроники (г. Томск) на основе релятивистской лампы
обратной волны создана установка, позволяющая получать мощные
наносекундные радиоимпульсы Х-диапазона с несущей частотой
10 ГГц, длительностью 5 не (длина электромагнитного
импульса в пространстве порядка 1,5 м) и эффективной мощностью
порядка 0,5 ГВт, причем частота повторения импульсов достигала
100 Гц. Генератор был испытан в составе разработанного
радиолокатора [57]. В его поле зрения попадали водная поверхность,
24
острова, леса, населенные пункты, отдельные местные предметы.
Радиолокатор располагался в двух кабинах; приемо-передаю-
щей с антенной системой и аппаратной кабиной, в которой
находилась аппаратура обработки сигналов. Передатчик состоял
из электродинамической системы на релятивистском генераторе
пучка электронов с замедляющей системой, помещенной в
сильное магнитное поле, создаваемое криомагнитом, и специальной
канализационной системы, позволяющей передать пиковую
мощность порядка гигаватта в передающую антенну. Ради
простоты конструкции были использованы две антенны
(передающая и приёмная), развязанные экраном. В приемном тракте было
установлено специальное защитно-усилительное устройство на
базе электростатического усилителя. В приемнике обработка
отраженного сигнала проводилась в цифровом виде. Ширина
передающей и приемной диаграмм направленности 3—5°, ширина
сквозной полосы приемника около 210 МГц, стабильность
амплитуды импульса 10"2, стабильность несущей частоты 10"3.
При натурных испытаниях разработанные алгоритмы
позволили продемонстрировать следующие специфические свойства
наносекундной радиолокации: высокую вероятность
обнаружения малоразмерных летательных аппаратов и речных катеров
на фоне лесистой местности и водной поверхности; возможности
получения дальностного портрета самолета (сигнал от самолета
наблюдался в виде цуга отраженных импульсов от отдельных
блестящих точек); получение изображения берегов; увеличение
контраста движущихся целей на фоне отражений от местных
предметов; подтверждено явление высокого контраста металло-
подобных объектов на фоне водной поверхности и на фоне
плотных грозовых облаков.
Совершенствование технических характеристик
релятивистской лампы обратной волны позволяет надеяться на увеличение
мощности излучения до 1 ГВт. В то же время длительность
импульса может быть снижена до 1 не, что будет соответствовать
разрешению по дальности порядка 30 см.
Генераторы сверхмощных электромагнитных импульсов
СВЧ-диапазона могут строиться не только по цепочке
преобразования энергии, включающей импульсный генератор — ТЕМ
волну — вакуумный диод — пучок — излучение. Так, например,
волна напряжения высоковольтного генератора может быть
эффективно преобразована в электромагнитную волну при прямом
излучении специальной антенной. Характеристики такого им-
25
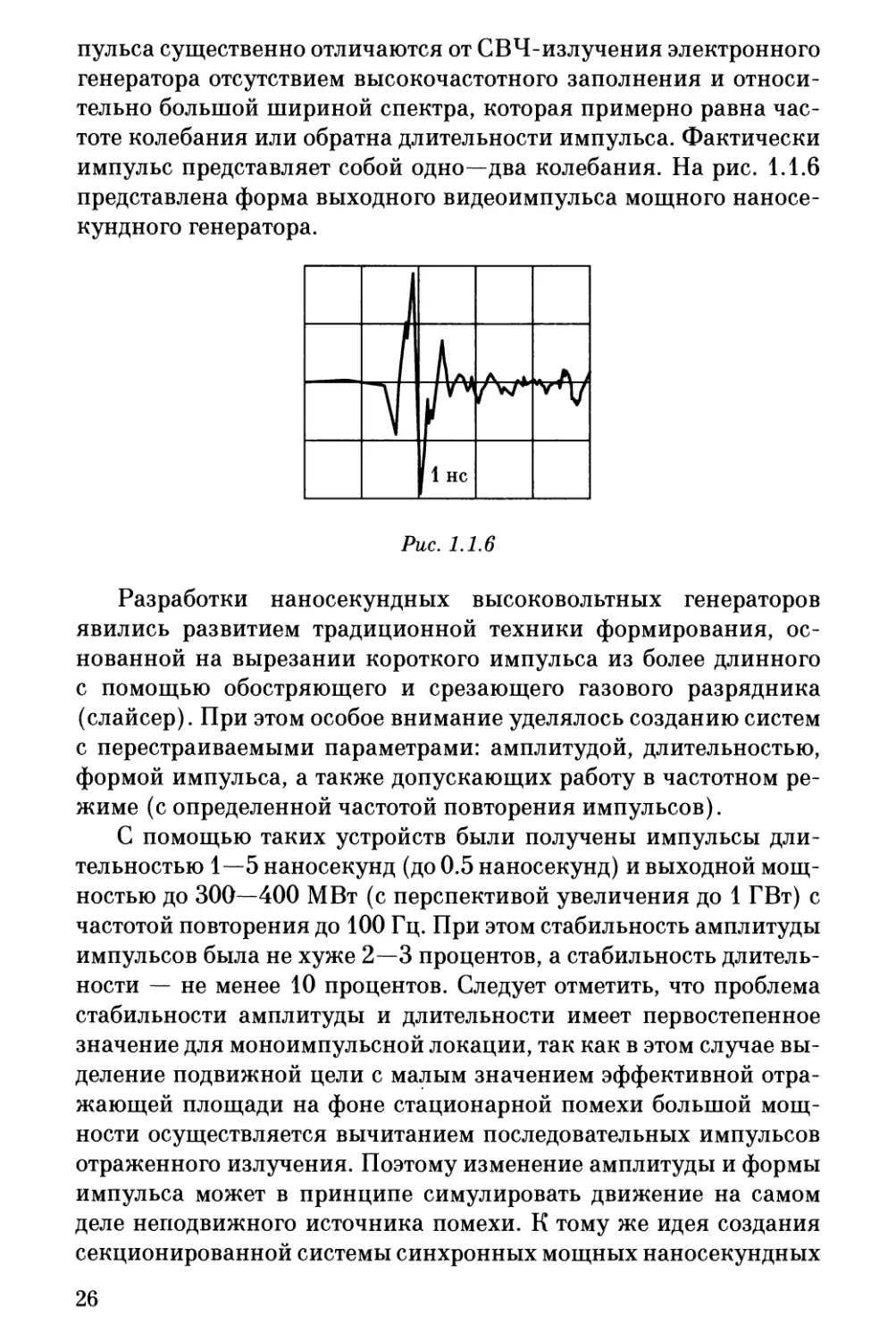
пульса существенно отличаются от СВЧ-излучения электронного
генератора отсутствием высокочастотного заполнения и
относительно большой шириной спектра, которая примерно равна
частоте колебания или обратна длительности импульса. Фактически
импульс представляет собой одно—два колебания. На рис. 1.1.6
представлена форма выходного видеоимпульса мощного наносе-
кундного генератора.
1
J
Ύ
L
|И
1 нс
Λ *L
/wnv^ iy
Рис. 1.1.6
Разработки наносекундных высоковольтных генераторов
явились развитием традиционной техники формирования,
основанной на вырезании короткого импульса из более длинного
с помощью обостряющего и срезающего газового разрядника
(слайсер). При этом особое внимание уделялось созданию систем
с перестраиваемыми параметрами: амплитудой, длительностью,
формой импульса, а также допускающих работу в частотном
режиме (с определенной частотой повторения импульсов).
С помощью таких устройств были получены импульсы
длительностью 1—5 наносекунд (до 0.5 наносекунд) и выходной
мощностью до 300—400 МВт (с перспективой увеличения до 1 ГВт) с
частотой повторения до 100 Гц. При этом стабильность амплитуды
импульсов была не хуже 2—3 процентов, а стабильность
длительности — не менее 10 процентов. Следует отметить, что проблема
стабильности амплитуды и длительности имеет первостепенное
значение для моноимпульсной локации, так как в этом случае
выделение подвижной цели с малым значением эффективной
отражающей площади на фоне стационарной помехи большой
мощности осуществляется вычитанием последовательных импульсов
отраженного излучения. Поэтому изменение амплитуды и формы
импульса может в принципе симулировать движение на самом
деле неподвижного источника помехи. К тому же идея создания
секционированной системы синхронных мощных наносекундных
26
излучателей (на основе сверхмощных единичных элементов) для
увеличения выходной мощности установки не представляется в
настоящее время нереальной; для этого также требуется высокая
стабильность параметров импульсов от отдельных элементов [4].
Методы формирования высоковольтных импульсов допускают
параллельное секционирование наносекундных драйверов,
являющихся основой наносекундных формирователей. Кроме того,
исследования показывают, что точность управляемого запуска
мощных модуляторов может составлять доли наносекунды. При
этом стабильность параметров наносекундного генератора с
пассивным излучателем (в частности, повторяемость спектральных
характеристик от импульса к импульсу) полностью определяется
характеристиками импульсов модулятора.
Для излучения наносекундных мощных видеоимпульсов
могут быть использованы, например, ТЕМ-рупоры, выполненные
в виде неоднородных полосковых линий. При этом выходная
апертура может достигать величины (40 - 50)А2, где Я — средняя
длина волны наносекундного видеоимпульса, что обеспечивает
ширину главного лепестка диаграммы направленности порядка
10 градусов по уровню — 6 дб [5].
Увеличение мощности и плотности мощности излучения, а
также управление пространственно—временными
характеристиками СШП-импульсов связано с использованием
многоэлементных антенных систем [3, 94]. Антенные решетки могут состоять
как из одинаковых элементов, возбуждаемых одними и теми же
импульсами, так и из различных антенн, возбуждаемых разными
по форме, длительности, амплитуде импульсами. В качестве
элементов антенных решеток могут быть использованы вибраторы
(биконические, сфероидально конические), дискоконусные или
штыревые антенны.
Применение относительно мощных СШП РЛС возможно и
на различных мобильных носителях, например, на космических
аппаратах (спутниках) или самолетах. Такого типа РЛС могут
эффективно выполнять задачи контроля наземной обстановки
на значительных площадях (сотни—тысячи кв. км), постоянно
или периодически отслеживать и предварительно определять
координаты различных целей (воздушных, наземных, надводных,
подводных). Ведение разведки осуществляется из зон,
расположенных вне досягаемости огневых средств противовоздушной
обороны противника. Следует отметить, что уже существующие
РЛС подобного назначения имеют в своем составе систему обра-
27
ботки, позволяющую работать с СШПС. Например, в РЛС
воздушно-космического базирования «Лакросс» применяются
зондирующие импульсы длительностью 10—20 мкс, но после сжатия
в 50—4000 раз (для повышения энергетики принятых сигналов)
на вход системы обработки подаются импульсы наносекундной
длительности, которые попадают под определение СШПС [6].
Основные работы по развитию мощных СШП РЛС в
ближайшей перспективе связаны с повышением дальности обнаружения
и точности распознавания целей.
1.2. Модели и энергетические спектры
сверхширокополосных сигналов
Любые физические процессы, используемые для передачи
(связь) или получения (локация) информации, называют
сигналами. Математическая модель сигнала s(t) устанавливает
соответствие между любым моментом времени t е Τ и значением
сигнала s e S. Здесь Τ — интервал времени, на котором
наблюдается сигнал (область определения сигнала), a S — множество
возможных значений сигнала. Сигнал s(t) называют аналоговым,
если множество Τ континуально, то есть представляет собой
множество точек некоторого отрезка.
Во многих реальных случаях для решения задач получения
или передачи информации представляют интерес не отдельные
сигналы, а целые их классы, определенные в соответствующем
пространстве. Пространство сигналов — это совокупность
сигналов, удовлетворяющая некоторым априори (заранее) заданным
условиям.
Рассмотрим ситуацию, когда возможно неоднократное
наблюдение (измерение) сигнала из заданного пространства.
Предполагается, что наблюдения выполняются при неизменном комплексе
условий. Сигнал является детерминированным, если априори (до
наблюдения) известно, что результат наблюдения при его
неоднократном повторении в неизменных условиях будет один и тот
же. Если же априори известно лишь множество возможных
исходов многократных наблюдений при неизменных условиях, то
сигнал называют стохастическим. Для стохастического сигнала
результат конкретного наблюдения предсказать достоверно
невозможно. Однако при анализе длинных серий результатов
многократных наблюдений в неизменных условиях для многих
реальных сигналов проявляется статистическая закономерность. Суть
её в том, что при возможном существенном различии результатов
28
отдельных наблюдений их средние значения в достаточно
больших сериях оказываются устойчивыми. Возникающая ситуация
неопределенности результата отдельного наблюдения обычно
допускает вероятностное описание.
Сначала рассмотрим детерминированные
сверхширокополосные сигналы. В настоящее время классификация таких типов
сигналов практически отсутствует. Эти сигналы могут быть как
радио-, так и видеоимпульсами, осуществлять перенос
информации по радиоканалу, по проводникам, выполняя
вспомогательные функции внутри системы.
Имеется несколько определений СШПС. В [6,142,143] сверх-
широкополосность определяют по величине относительной
полосы частот 7]0
^0=^ = 2^^, (1-2.1)
/о J в + J н
где Δ/ = fB - fH — полоса частот, fB, fH — верхняя и нижняя
частота спектра, /0 = (fB + /я)/2 — центральная частота спектра.
Радиолокационные сигналы, для которых η0 ~ 1, считают
сверхширокополосными.
Известно несколько иное определение относительной полосы
частот [33]
^=γ^-, (1-2.2)
J в + J н
при этом сигналы, у которых г\х < 0,01, относят к узкополосным,
0,01 < ηχ < 0,25 — к широкополосным, 0,25 < г\х < 1 — к
сверхширокополосным.
Федеральной Комиссией связи (США) в 2002 году было
предложено определение, касающееся только СШП системы
(передатчика), а не СШПС как такового [142, 143]. Считается, что
сверхширокополосным является излучатель, имеющий относительную
полосу частот излучения больше 0,25 или абсолютную полосу
частот, измеряемую по уровню — 10 дБ относительно максимума
излучения, более 500 МГц независимо от относительной полосы
частот. Данное определение опирается не только на частотные
свойства сигнала, но и подразумевает наличие определенной
разрешающей способности по дальности. Однако его общность из-за
сложности отделения узкополосных сигналов по относительному
значению полосы все-таки снижается.
Отметим некоторую ограниченность определений (1.2.1),
(1.2.2) в отношении СШП систем [35]. Так, системы, излучаю-
29
щие короткие радиоимпульсы (например, с шириной спектра 1
ГГц), с частотой заполнения, в несколько раз превышающей
ширину спектра (например, 3 ГГц), будут относиться к
узкополосным. В то же время очевидно, что они обладают рядом свойств
СШП систем. Чтобы подчеркнуть данное обстоятельство,
системы и сигналы такого типа называют короткоимпульсными или
сверхкороткими [32, 45].
Однако возникает естественный вопрос, какой импульс
можно считать коротким и с чем его сравнивать? Известно, что
расширение полосы частот повышает информативность системы в
случае, когда пространственная длительность сигнала ст
меньше размера излучающей (приемной) структуры или
отражающего объекта L. Поэтому более точное и физически
обоснованное разграничение сигналов и систем по ширине полосы дает
следующее определение [1, 2]: при L/ct<^1 система и сигнал
являются узкополосными, при L/βτ ~ 1 — широкополосными и
при L/βτ > 1 — сверхширокополосными. Согласно последнему,
сверхкороткие импульсы могут как относиться, так и не
относиться к СШПС. Здесь опять подразумевается величина
разрешения по дальности, сравниваемая с антенной или объектом. То
есть один и тот же сигнал может быть сверхширокополосным для
одного объекта и не быть таковым для другого.
Обсудив особенности и ограничения каждого из
применяемых подходов, будем далее для определенности использовать
подход, характеризуемый (1.2.1), и рассмотрим два возможных
пути представления и преобразования СШП радиосигналов.
Первый состоит в применении хорошо разработанных методов
исследования на базе комплексных моделей узкополосных
радиосигналов с получением количественных оценок эффектов,
возникающих из-за ослабления неравенства Δ///0 <^ 1. Согласно [12,
22,46] комплексную модель сигнала принципиально можно
построить при любом значении показателя"широкополосное™ вплоть
до 7j0 = 2. Однако по мере увеличения η0 появляется
необходимость в вычислении преобразования Гильберта от неузкополосно-
го сигнала, что связано с громоздкостью аналитических выкладок.
С другой стороны, современные быстродействующие элементы
радиоэлектронной аппаратуры обладают временной дискретностью,
составляющей малые доли периода колебаний в СВЧ диапазоне,
поэтому операция детектирования, традиционно выполняемая с
целью определения составляющих комплексной модели —
функций огибающей A(t) и фазы (p(t), может быть вовсе исключена.
30
Второй путь к построению описания СШПС основан на
отказе от комплексной модели сигналов и устранении ограничений
на относительную широкополосность их спектра Af/f0. Любой
сигнал, как функция времени, допускает описание с помощью
вещественной функции s(t). Процесс измерения такого
радиосигнала, по-существу, состоит в осциллографировании величин,
пропорциональных напряженности электромагнитного поля
в некоторой точке пространства, и осуществляется, как уже
отмечалось, бездетекторным устройством. Использование данной
модели сигнала в совокупности с изменением принципов
построения аппаратуры вызывает ряд следствий в теории СШПС.
Остановимся на наиболее общих из них, свойственных вещественной
модели радиосигнала s(t).
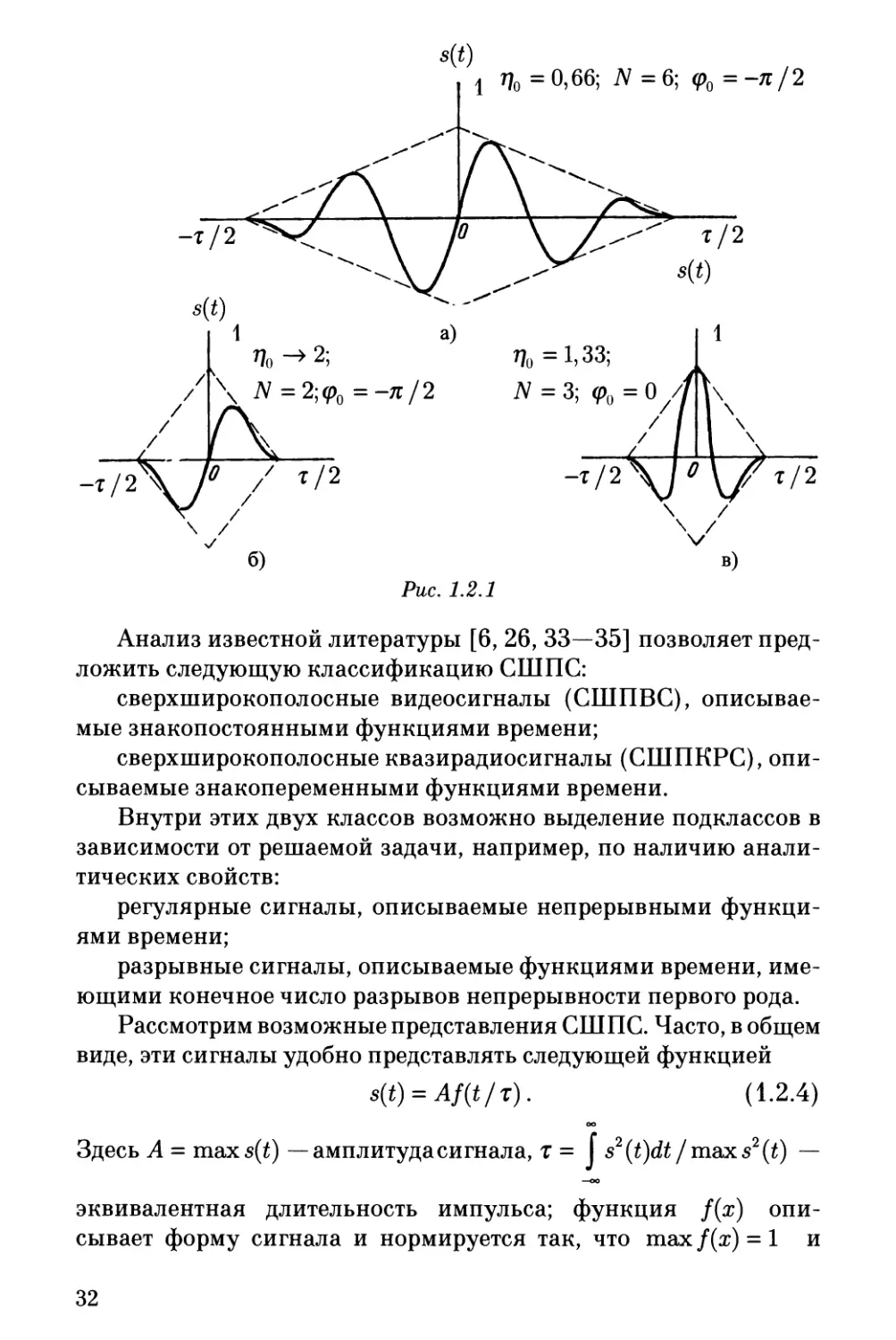
Рассмотрим импульсные СШПС, представляющие собой
финитные радиоимпульсы длительностью τ и включающие N
квазиполупериодов (иначе — временных лепестков)
высокочастотного заполнения при средней частоте /0 (рис.1.2.1). Ширину
спектра таких импульсов в области положительных частот
оценим как Δ/ = fB - fH = 2/τ , тогда показатель широкополосности
% = Af/f0~4/N. (1.2.3)
Для радиоимпульса, изображенного на рис. 1.2.1а,
наглядность комплексного представления с использованием огибающей
A(t), например треугольной формы, и начальной фазы φ0 =-π /2,
возможно, будет оставаться удовлетворительной. При
уменьшении числа временных лепестков комплексная огибающая уже
не отражает форму сигнала (рис. 1.2.16, в), поэтому применение
комплексной модели СШПС становится нецелесообразным.
Описание СШПС может быть проведено с помощью
следующих характеристик.
1. s(t) — функция времени, описывающая форму сигнала.
2. S(j(o) = \ s(t)exp(-j(Ot)dt — спектр сигнала.
3. Gs (ω) = ^(jco)! — спектр мощности (спектральная плотность),
которая характеризует распределение энергии СШПС по частоте,
либо нормированная функция Gs(ω) = \S(j(o)\ /max\S(j(o)\ .
4. Ε8(λ) = \ s(t)s(t - λ)άί — автокорреляционная функция,
либо нормированная функция Дв(Я) = J s(t)s(t - X)dt / \ s2(t)dt.
31
s(t)
ί ί?0=0,66; N=6; φ0=-π/2
\ Ν=2;φ0=-π/2
\ /
V
ΐ±
η0 =1,33;
Ν = 3; φ0 = Ο
τ/2
6)
-τ/2
Агс. 7.2.7
Анализ известной литературы [6, 26, 33—35] позволяет
предложить следующую классификацию СШПС:
сверхширокополосные видеосигналы (СШПВС),
описываемые знакопостоянными функциями времени;
сверхширокополосные квазирадиосигналы (СШПКРС),
описываемые знакопеременными функциями времени.
Внутри этих двух классов возможно выделение подклассов в
зависимости от решаемой задачи, например, по наличию
аналитических свойств:
регулярные сигналы, описываемые непрерывными
функциями времени;
разрывные сигналы, описываемые функциями времени,
имеющими конечное число разрывов непрерывности первого рода.
Рассмотрим возможные представления СШПС. Часто, в общем
виде, эти сигналы удобно представлять следующей функцией
s(t) = Af(t/T). (1.2.4)
Здесь А = maxs(£) —амплитудасигнала, τ = \ s2(t)dt/maxs2(t) —
эквивалентная длительность импульса; функция f(x)
описывает форму сигнала и нормируется так, что тах/(х) = 1 и
32
\f2(x)dx = l. В соответствии с (1.2.4) другие
характеристики СШПС можно выразить через характеристики функции
f(x). Например, спектр запишется как: S(jo)) = AtF(jcot) , где
F(jy)= J f(x)exP(-Jxy)dx , при этом спектр мощности
соответственно будет: ό,(ω) = A2x2G (ωτ), Gf(y) = \F(jy)\2.
Автокорреляционная функция принимает вид: R(X) = A2tRf — , здесь
Rf(y)= ]f(x)f(x-y)dx,n Д.(Л) = Д,(А/т).
Сверхширокополосные сигналы могут иметь различную
временную зависимость — известны видеоимпульсы положительной
и отрицательной полярности, а также биполярные
видеоимпульсы, радиочастотные импульсы [6, 33, 142, 143].
В [9] рассмотрен прямоугольный однополярный импульс
длительностью τ (на рис. 1.2.2 изображен пунктиром),
который можно получить, положив в (1.2.4) f(x) = 1(х), где
fl,|rr|<l/2
1{х) = < — индикатор единичной длительности. Таким
образом, однополярный импульс можно представить как
IX 1*1 < -г/2,
s(t) = A\ ' (1.2.5)
U [О, И > τ/2.
Нормированная спектральная плотность этого сигнала равна:
. 2
sin τζχ
@s(f) = —ГТ-' х = /ти показана на рис. 1.2.2 пунктиром.
7Г X
В качестве модели СШПС также используются
видеоимпульсы колокольной формы [88, 99], а именно
s(t) = exp(-nt2/2T2), (1.2.6)
имеющие нормированную спектральную плотность Gs(f) =
= ехр (-4π2χ2), x-fx.
Обобщением описания однополярного прямоугольного
видеоимпульса и видеоимпульса колокольной формы является
выражение [134]
33
/(*) =
exp
π
2δ~2
α
χ
2)
χ> α/2,
1, \χ\ < α/2, α = 1-<5,
(1.2.7)
exp
π Ι α
2<52
χ <-α/2.
Здесь параметр <5 < 1 определяет относительную долю полной
энергии импульса, сосредоточенную в его фронтах. В частности,
при δ = 1 квазипрямоугольный импульс (1.2.7) принимает
колокольную форму (рис. 1.2.3) и совпадает с (1.2.6), а при δ —> 0
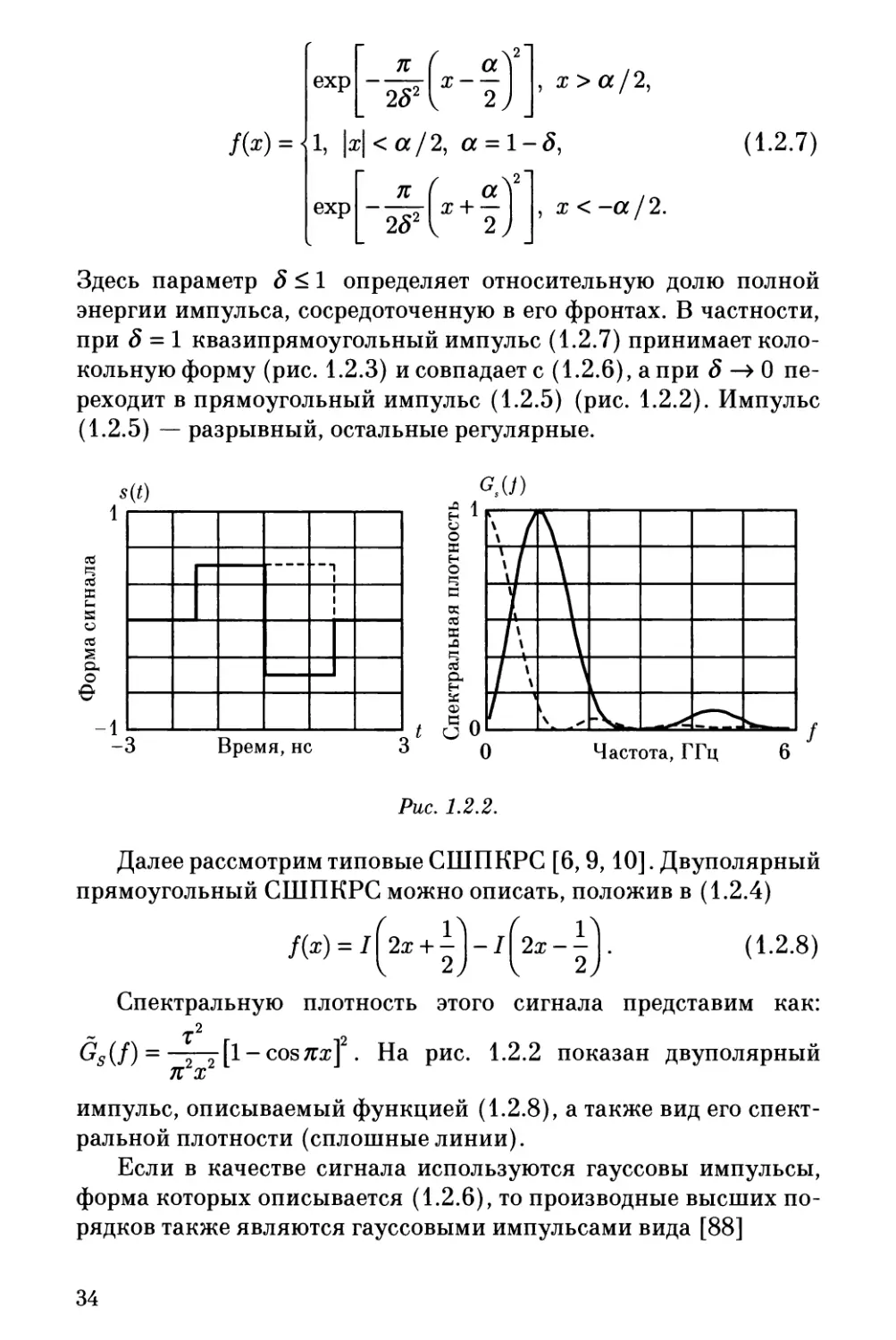
переходит в прямоугольный импульс (1.2.5) (рис. 1.2.2). Импульс
(1.2.5) — разрывный, остальные регулярные.
s(t)
о
се
S
о
е
Ί
1г
-3
Время, не
t до
F 7
\ /
1 \ 1
* 1
\ Ι
\1
1\
1 \
1х
Ι χ
1 *
/ *
i
^
Частота, ГГц
Рис. 1.2.2.
Далее рассмотрим типовые СШПКРС [6, 9,10]. Двуполярный
прямоугольный СШПКРС можно описать, положив в (1.2.4)
/(x) = /^2x + iJ-/^-iJ. (1.2.8)
Спектральную плотность этого сигнала представим как:
т2
&s(/) = 2 2 [■*· ~cos πχ\ - ^а Рис* 1-2-2 показан двуполярный
π χ
импульс, описываемый функцией (1.2.8), а также вид его
спектральной плотности (сплошные линии).
Если в качестве сигнала используются гауссовы импульсы,
форма которых описывается (1.2.6), то производные высших
порядков также являются гауссовыми импульсами вида [88]
34
sGn(t) = B-Gn(t)e*\ (1.2.9)
— ήη -—
где Gn(t) = (-ΐ)η -е2 —-е 2 — полином гауссовой функции,
dtn
η = О, 1, 2..., В — нормировочный коэффициент, включающий
в себя все постоянные величины. Для функций с η = 0,1,2,3
G0(t) = 1; Gx(t) = t; G2(t) = t2-1; G3(t) = t3-3t.
В данном случае порядок производной определяет форму
импульса. Чтобы получить гауссов импульс нужной формы,
необходимо продифференцировать соответствующее число раз
функцию (1.2.6) или воспользоваться (1.2.9), включающей полином
гауссовой функции. Импульс, описываемый (1.2.6), называют
также моноимпульсом (monopulse), а характеризуемый первой
производной гауссовой функции sG1(t) и высшими
производными — моноциклом (monocycle) [88]. Очевидно, моноциклы
являются СШПКРС.
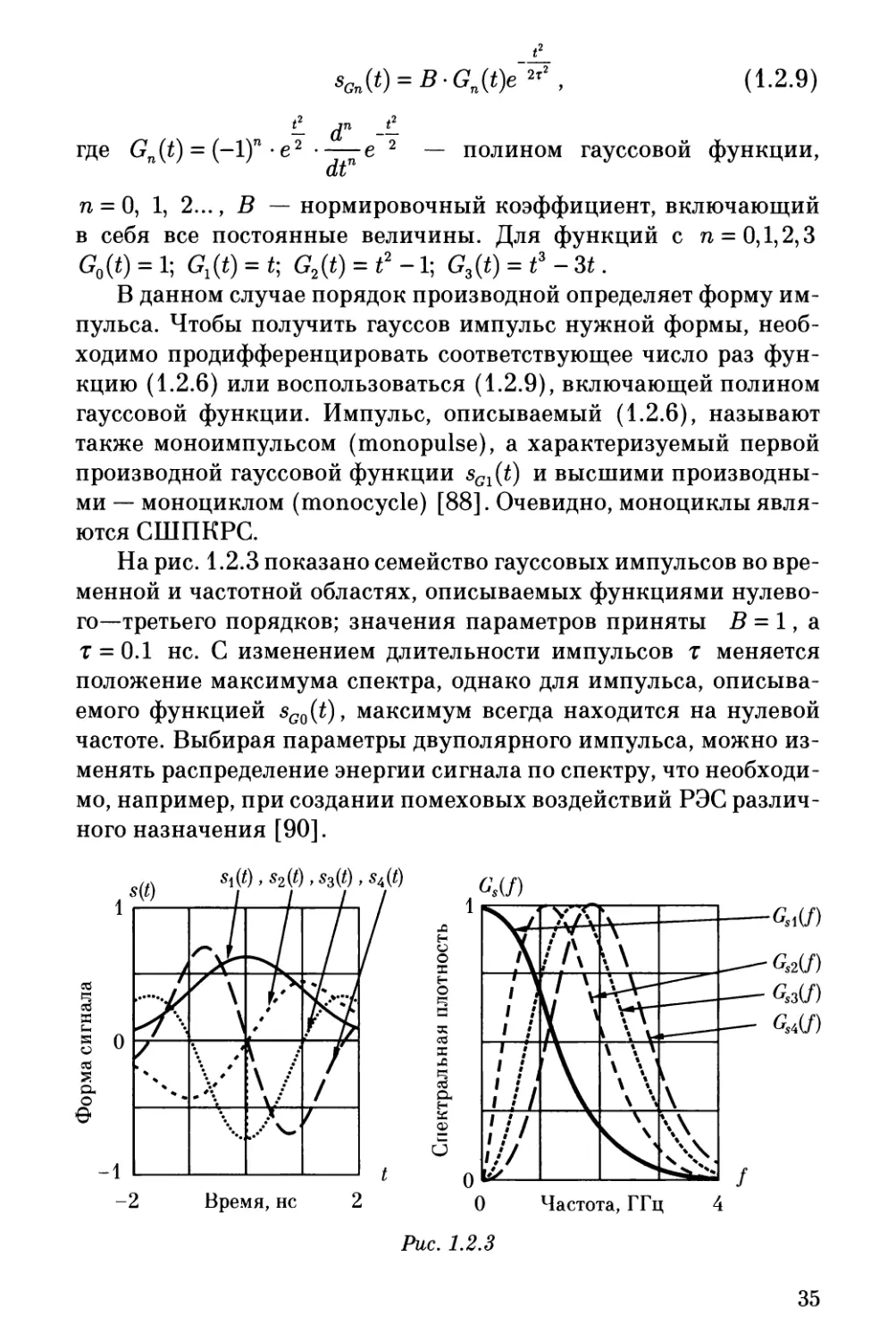
На рис. 1.2.3 показано семейство гауссовых импульсов во
временной и частотной областях, описываемых функциями
нулевого—третьего порядков; значения параметров приняты В = 1, а
τ = 0.1 не. С изменением длительности импульсов τ меняется
положение максимума спектра, однако для импульса,
описываемого функцией sGQ(t), максимум всегда находится на нулевой
частоте. Выбирая параметры двуполярного импульса, можно
изменять распределение энергии сигнала по спектру, что
необходимо, например, при создании помеховых воздействий РЭС
различного назначения [90].
-2 Время, не 2 0 Частота, ГГц 4
Рис. 1.2.3
35
В [143—146] в качестве СШПС предлагается использовать
импульсы Эрмита, а также их модифицированные аналоги.
Однако гауссовы импульсы по характеру огибающей во временной
области совпадают с импульсами Эрмита [121], поэтому данный
вид сигнала ниже более детально не рассматривается.
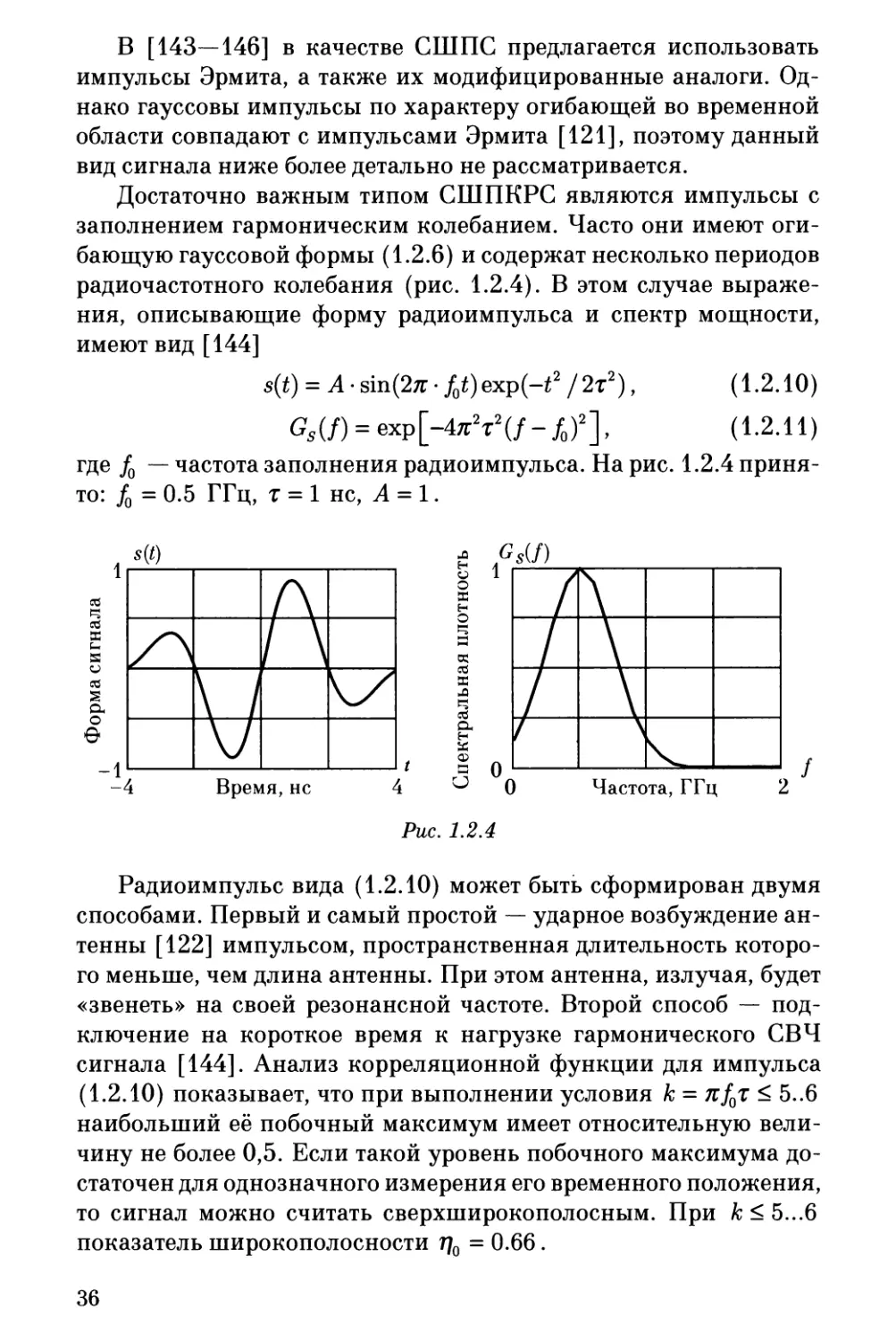
Достаточно важным типом СШПКРС являются импульсы с
заполнением гармоническим колебанием. Часто они имеют
огибающую гауссовой формы (1.2.6) и содержат несколько периодов
радиочастотного колебания (рис. 1.2.4). В этом случае
выражения, описывающие форму радиоимпульса и спектр мощности,
имеют вид [144]
s(t) = А · sin(2/r · f0t)exp(-t2 /2τ2), (1.2.10)
G5(/) = exp[-4^V(/-/0)2], (1.2.11)
где /0 — частота заполнения радиоимпульса. На рис. 1.2.4
принято: /0 = 0.5 ГГц, τ = 1 не, А = 1.
s(t)
Он
о
е
-1
/Л
,
\/
V/
Л
/\
\У
psU)
-4
Время, не
03
Он
О
7
/
/
/
\
\
N
Частота, ГГц
Рис. 1.2.4
Радиоимпульс вида (1.2.10) может быть сформирован двумя
способами. Первый и самый простой — ударное возбуждение
антенны [122] импульсом, пространственная длительность
которого меньше, чем длина антенны. При этом антенна, излучая, будет
«звенеть» на своей резонансной частоте. Второй способ —
подключение на короткое время к нагрузке гармонического СВЧ
сигнала [144]. Анализ корреляционной функции для импульса
(1.2.10) показывает, что при выполнении условия к = /г/0т < 5..6
наибольший её побочный максимум имеет относительную
величину не более 0,5. Если такой уровень побочного максимума
достаточен для однозначного измерения его временного положения,
то сигнал можно считать сверхширокополосным. При к < 5...6
показатель широкополосности η0 = 0.66.
36
В [58] предложена следующая модель СШПКРС. Считается,
что при возбуждении широкополосной антенны весьма коротким
импульсом в пространство излучается колебание вида
s(t) = A{exp(-at) - ехр(-[а + fi\tj\J8Ш Ιω0ί, t > 0, (1.2.12)
или
s(t) = Αβχρ(-αί)[ΐ-βχρ(-βί)]\8ΐη Ιω0ί, ί > 0. (1.2.13)
Такое представление учитывает характеристики огибающей и
наиболее полно соответствует экспериментальному опыту. Здесь
а и β — постоянные затухания и нарастания огибающей, ω0 —
центральная частота полосы пропускания антенной системы. В
таблице 1.2.1 приведены основные параметры СШПКРС (1.2.12)
в общем случае и при а = β = а.
Значение величины β можно определить при анализе
прохождения прямоугольного импульса длительностью τ через
полосовую цепь с равномерной частотной характеристикой в пределах
±ωτη и линейной фазо-частотной характеристикой. Длительность
фронта выходного сигнала равна постоянной нарастания СШПС
β = 1/ίψρ = (От /2π, которая прямо пропорциональна верхней
частоте в спектре СШПКРС. В зависимости от ширины спектра
возбуждающего импульса и характеристик полосы пропускания
антенны s(t) может принимать вид радиоимпульса с одним или
несколькими периодами частоты со сложной огибающей. Такое
колебание может быть также сформировано путем суммирования
двух разнополярных импульсов, смещенных на значение Δτ.
Приведем для полноты анализа другие известные модели
СШПКРС. Так, в [88] рассмотрен импульс, форма которого
описывается соотношением
s(t) = Лехр(-(а*)2 ±0i)cos(2tf/oi) (1.2.14)
при α, β > /0. Параметром β регулируется асимметрия
импульса, параметр а обеспечивает затухание и, соответственно,
неколебательный характер импульса.
В [7] предложена модель СШПС, которую можно получить
при следующем представлении функции f(x)
/(*) =
fc-1
exp
ί 2 Λ л ί 2
' Χ 1 1 ί Χ
--exp -
2cr J к I 2кга
L2„2
(1.2.15)
Здесь параметр к определяет форму сигнала. Выбирая
37
Таблица 1.2.1
Параметры СШПС
Параметр
1. Максимум
огибающей:
max '
и
max
2. Энергия, Ε
3. Эффективная
длительность,
Т2
4. Спектр, S(j<o)
5.
Корреляционная функция
огибающей,
нормированная по энергии,
ад
α*β
-(1/β)\η(α/(α + β)
[(Αβ)/(α + β)][<*/(<* + №'
(Αβ)2/[2α(α + β)(2α + β)}
(2α + β)3[(α + β)3 + α3} - 16α3 (α + β)3
2α2β2(2α + β)2(α + β)2
1 1
α + j(o a + β + j(o
^у^ехр(-аЯ) - ^ехр[-(а + j3)A]
a = β = a
= 0,7α
Α/4α
Л2/12а
= 6,25/а2
1 1
а + ;ω 2а + j(0
2ехр(-ат) - ехр(-2ат)
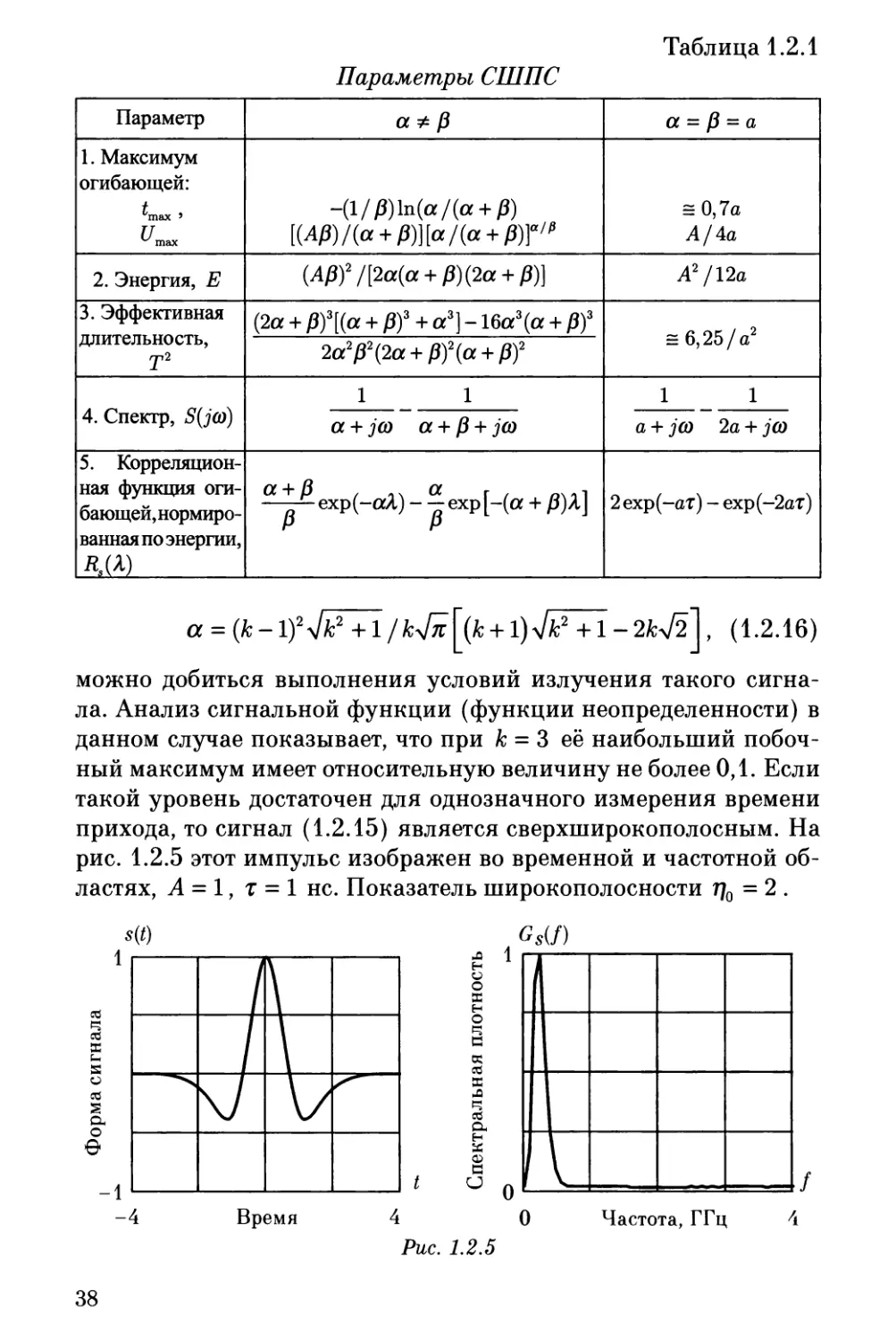
а = (к -1)2Vfc2 +1 / kjiz Uк +1) Vfc2 +1 - 2 W21, (1.2.16)
можно добиться выполнения условий излучения такого
сигнала. Анализ сигнальной функции (функции неопределенности) в
данном случае показывает, что при к = 3 её наибольший
побочный максимум имеет относительную величину не более 0,1. Если
такой уровень достаточен для однозначного измерения времени
прихода, то сигнал (1.2.15) является сверхширокополосным. На
рис. 1.2.5 этот импульс изображен во временной и частотной
областях, А = 1, τ = 1 не. Показатель широкополосности 7j0 = 2 .
s(t)
1 г-
03
03
ο ι ^sj 7 Г
"* 14 / \
S \ / \
Он ^
О
e
-ι I 1 1—
-4 Время
Gs(f)
Η
О
С
Он
Η
г
ι
Частота, ГГц
Рис. 1.2.5
38
В [9] в качестве модели СШПКРС использовался
экспоненциально-синусный импульс вида
s(t) = iaexv(-at)sin(0ti t>0> (12 17)
Один из возможных способов его формирования — ударное
возбуждение пассивной излучающей структуры очень коротким
импульсом или ступенчатым сигналом с очень коротким фронтом
[6]. Частотную характеристику многих пассивных излучающих
структур можно аппроксимировать характеристикой
резонансного контура с малой величиной добротности, равной 5...6. При
q = u)/a<10 импульс считается сверхширокополосным, при
q > 15..20 условие сверхширокополосности уже не выполняется.
Внутри класса СШПКРС необходимо дополнительно
выделить подкласс сверхширокополосных радиосигналов (СШПРС),
для которых выполняется условие излучения. Математически оно
связано с требованием нулевого значения спектральной функции
любого радиосигнала s(t) на нулевой частоте, то есть
S(ja>) = J s(t)exp(-j(ut)dt\ = J s(t)dt = 0. (1.2.18)
Физически это условие соответствует требованию
знакопеременное™ любого электромагнитного поля в свободном пространстве
или невозможности излучения поля постоянного тока излучателем
конечных размеров. Разумеется, к этому подклассу принадлежат
и модели узкополосных сигналов при Δ/ / /0 <С 1. Поскольку их
структура содержит большое число временных лепестков (N ^> 1),
(1.2.18) обычно выполняется с достаточной точностью. Так, для
сигнала, представленного на рис. 1.2.1а (N = 6) 8^ω)\ω=0= 0 при
φ0 = -π / 2 точно, а при других значениях φ0 приближенно; для
сигнала с N = 2...3 (рис. 1.2.16,1.2.1в) условие (1.2.18) может
грубо нарушаться в зависимости от параметра модели — фазы φ0.
Поскольку при выполнении (1.2.18) нижняя граничная
частота спектра радиосигнала /я > 0, значение максимальной ши-
рокополосности ограничено, то есть η0 < 2 . Это отличает СШПРС
от видеоимпульсов, для которых может быть /я = 0 (постоянный
ток) и 7j0 = 2 [123, 125]. Однако радиосигналы, благодаря
нулевому значению спектральной функции на нулевой частоте,
допускают излучение, передачу по волноводам и др.
Отметим, что условие излучения (1.2.18) достаточно
хорошо выполняется для некоторых типов сигналов, рассмотренных
выше. В частности, к СШПРС можно отнести двуполярный ви-
39
деоимпульс (1.2.8), гауссов импульс (1.2.9) при η > 0, а также
импульс с заполнением гармоническим колебанием (1.2.10) и
сигнал вида (1.2.15).
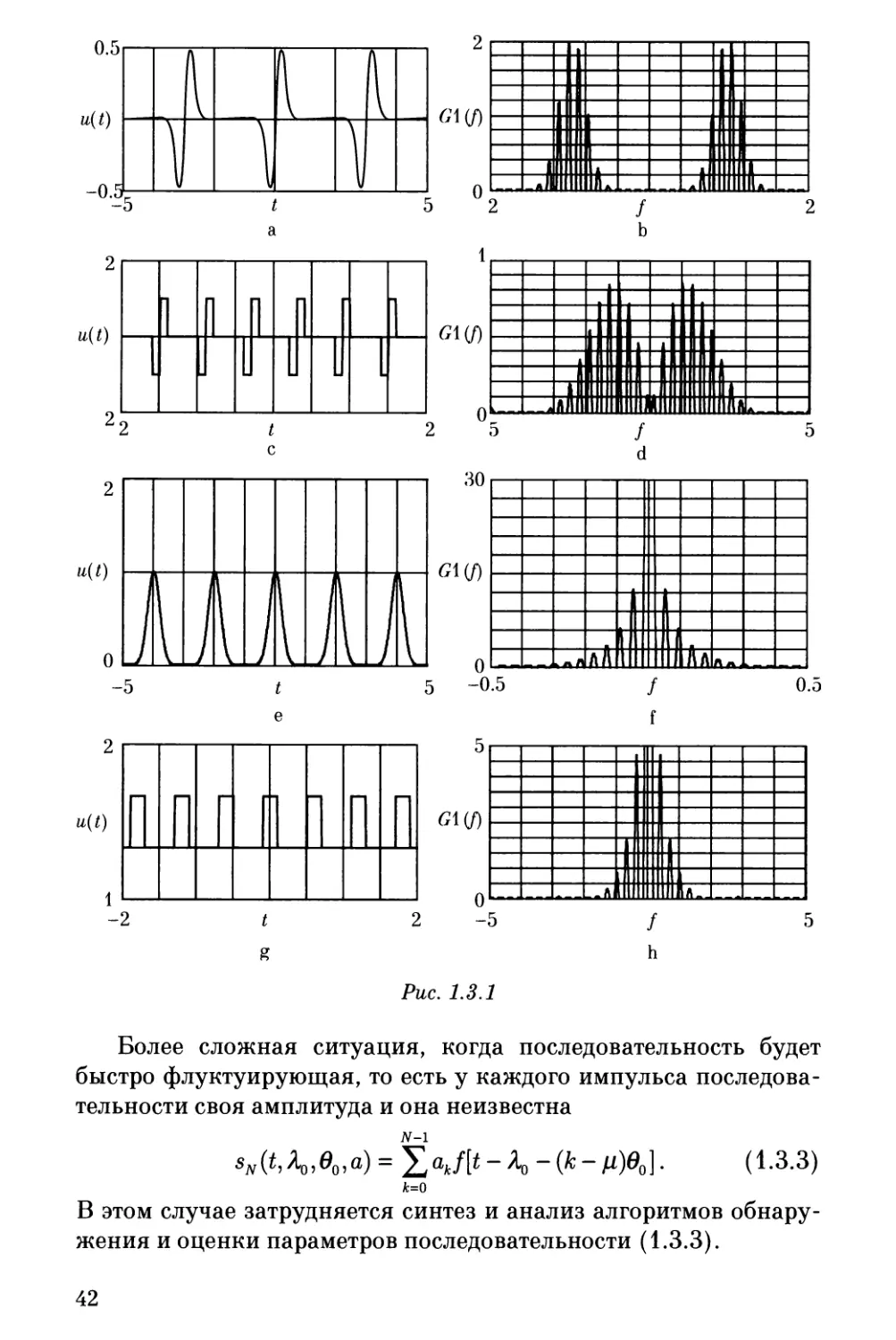
1.3. Последовательности сверхширокополосных сигналов и их
основные параметры
В п. 1.2 были рассмотрены модели одиночных СШПС. Как
правило у одиночных импульсов пиковая мощность ограничена,
поэтому в процессе радиолокационного наблюдения или
радиоэлектронной разведки энергетика сигнала оказывается недостаточной.
В результате в радиоэлектронных системах используются
последовательности СШПС. Под последовательностью СШПС
понимается совокупность СШПС, расположенных на некотором
конечном интервале времени и рассматриваемая как составной сигнал.
Рассмотрим возможные классы последовательностей СШПС.
Простейшую последовательность СШПС можно записать в
виде
8Ν&λτ>Λ) = Σ8[ί-λ0-$-μ)θ0], (1.3.1)
Jfc=0
где Я0 — время прихода последовательности, 0О — период
повторения, параметр μ определяет точку последовательности, с
которой связано её время прихода Я0. Так, при μ = 0 величина
Я0 представляет собой время прихода первого импульса
последовательности, при μ = (JV — 1) / 2 — время прихода середины
последовательности, а при μ = N -1 — время прихода последнего
импульса последовательности. Функция s(t) описывает форму
одного СШПС последовательности. Различные варианты
представления s(i) были рассмотрены в п. 1.2. Эквивалентная
длительность одного импульса определяется как τ = \ s2(t)dt / а2 , где
а = maxs(£) — амплитуда одного СШПС.
Спектр последовательности СШПС (1.3.1) при μ = Я0 = 0
можно представить в виде
Ν-1 еЗ(Ов _ β-3(θθ{Ν-ΐ)
SN{j(u) = S(ja)£exp(-jfcfl>e) = 5(?ω) ^— .
jt=o e — ι
Здесь S(jo)) — спектр одиночного СШПС (модели спектров
одиночных СШПС подробно рассмотрены в п. 1.2). В случае, когда
количество импульсов в последовательности стремится к
бесконечности, спектр последовательности СШПС является набором
40
спектральных составляющих, отстоящих на расстояние друг от
друга, равное Ω = 2π/θ, то есть на величину, представляющую
собой частоту повторения импульсов в последовательности.
Спектр одиночного СШПС ведет себя как огибающая спектра
последовательности СШПС.
Для иллюстрации последовательностей СШПС на рис. 1.3.1 а—
1.3.lh представлены формы некоторых последовательностей
СШПС, состоящие из одиночных СШПС, рассмотренных в п. 1.2,
и соответственно показаны спектры последовательностей.
Количество импульсов в последовательностях примерно 20—30.
На рис. 1.3.1а представлена последовательность синусно—
экспоненциальных импульсов (одиночный определяется как
(1.2.17)), на рис. 1.3.1Ь соответственно спектр этой
последовательности; на рис. 1.3.1с — последовательность биполярных
прямоугольных импульсов (одиночный определяется как (1.2.8)) и
соответственно спектр последовательности на рис. 1.3.Id; на рис.
1.3.1е представлена последовательность гауссовских импульсов
(одиночный определяется как (1.2.6)), соответственно спектр
последовательности на рис. 1.3.If; на рис. 1.3.lg —
последовательность однополярных прямоугольных импульсов (одиночный
определяется как (1.2.5)), соответственно спектр
последовательности на рис. 1.3.lh.
Обычно идеализированная последовательность (1.3.1) в
реальных случаях встречается достаточно редко. Более
реалистичная последовательность, кроме описанных выше параметров,
может содержать и другие неизвестные параметры. Например
последовательность СШПС с неизвестной, но одинаковой для
всех импульсов амплитудой
зм(Ь,ЪМ = а!,№-Ьо-(Ь-№о}· (1-3-2)
Jfc=0
В выражении (1.3.2) функция /(·) описывает форму одного
импульса и нормирована так, что max/(я) = 1, \ f2(t)dt = 1, и для
случая квазирадиосигнала удовлетворяет условию излучения
J f(t)dt = 0 . Последовательность (1.3.2) будем называть
медленно флуктуирующей, так как неизвестная амплитуда может
изменяться от одной последовательности к другой, оставаясь
одинаковой для всех импульсов последовательности.
41
0.5
u(t)
-0.5
\|
/ΓΊ
L
1 ι/
U
R
л
π
1 V
2
Gltf)
0
1
LJ
=R
11
II
Mil
Шл—
ШИП
llllllli
UillLJ
Ш
1ЛШ
и н
1
lUILJ
u(t)
5 2
1
G\if)
0
2 5
L»
__4
.1
11111
.llllhl
Jl ШШ
ШЖ
МММ
&__
f
d
u(t)
30
ci(/)
0
ьлЛ
αΛ
ι
(1II
1
ши
Л
л.
ML·
fl-A-,
-5
и(0
5 -0.5
5
CA{f)
1 Afll4llllllllftA»J
ί
g
2 -5
Агс. 7.3.7
/
h
-2
Более сложная ситуация, когда последовательность будет
быстро флуктуирующая, то есть у каждого импульса
последовательности своя амплитуда и она неизвестна
8Ν(ί,λ0,θ0,α) = Σ^ί[ϊ-λο-ψ-μ)θ0}. (1.3.3)
В этом случае затрудняется синтез и анализ алгоритмов
обнаружения и оценки параметров последовательности (1.3.3).
42
Существуют последовательности СШПС хотя и медленно
флуктуирующие, но каждый импульс которых зависит от вектора
неизвестных параметров. Рассмотрим такой случай.
Полагаем, что на фоне аддитивного гауссовского белого шума
с односторонней спектральной плотностью N0 наблюдается
последовательность из N СШПС, каждый из которых описывается
функцией s(£,l). Здесь 1= ^.../р — вектор неизвестных
параметров. Если неизвестные параметры имеют одинаковые
значения для всех импульсов последовательности, такая
последовательность будет аналогично (1.3.2) медленно флуктуирующей
(«когерентной»). Эта последовательность может быть записана
в виде
8Ν(ί,λ0,θ0Λο) = Σ4ϊ-ψ-μ)θ0-λ0,10]. (1.3.4)
Медленно флуктуирующая последовательность содержит ρ
неизвестных параметров. Индексом «нуль» в (1.3.4) отмечены
истинные значения параметров принимаемой последовательности.
Если неизвестные параметры 1 имеют различные значения
в различных импульсах последовательности, но в пределах
импульса постоянные, то аналогично (1.3.3) получим быстро
флуктуирующую («некогерентную») последовательность
8^Αο,ΘΜ = Σ4ί-ψ-μ)θ0-λΜ, (1.3.5)
к=0
где L = |10»1ι···1λμ| ~~ блочный (составной) вектор неизвестных
параметров, объединяющий все неизвестные параметры
последовательности. Быстро флуктуирующая последовательность
содержит Νρ неизвестных параметров. Индексом «нуль» в (1.3.4),
(1.3.5) отмечены истинные значения параметров принимаемой
последовательности.
Общим для последовательностей (1.3.1) — (1.3.5) является
то, что у них одинаковое расстояние между импульсами.
Очевидно, это расстояние определяется величиной θ — периодом
повторения. Возможны более сложные последовательности, не
являющиеся периодическими и расстояние между
импульсами у которых может быть различно. В качестве примера можно
рассмотреть сигнал, излучаемый источником, находящимся на
расстоянии R, движущимся со скоростью V и ускорением А.
Рассмотрим модель последовательности СШПС для этой
ситуации.
43
Излучаемый сигнал запишем в виде
sN(t) = Xs[t -(к-μ)θ- λ] =Χsk{t-X), (1.3.6)
Α:=0 Λ:=0
где функция sk(·) описывает форму одного импульса, причем
3,(ί) = 8[ί-ψ-μ)θ}.
Обозначим κ = к-μ, тогда (1.3.6) перепишется как
sN(t) = NZs(t-Ke-X)=^sK(t-X)f (1.3.7)
κ=-μ κ=-μ
где sk(t) = s(t - kff). Длительность импульса в (1.3.6), (1.3.7) и
параметры движения источника радиоизлучения (ИРИ) полагаем
такими, что в течение длительности одного импульса ИРИ
можно считать неподвижным. Однако, в течение длительности всей
последовательности он может смещаться на значительное
расстояние. Тогда излученный сигнал имеет вид
-SM^^sAt-RJ^^sAt-Ke-RJc). (1.3.8)
κ=-μ κ=-μ
Здесь RK =R(tlc) — дальность до ИРИ в момент времени tK
излучения импульса последовательности (1.3.7) с номером κ .
Предположим, что ИРИ движется по прямолинейной
траектории — удаляется или приближается, причем движется
равноускоренно или равнозамедленно. Тогда зависимость расстояния
до ИРИ от времени описывается функцией R(t), где R(t) —
парабола в течение всей последовательности (1.3.6), (1.3.7), то есть
R(t) = Rq + V0(t -1') + Д,(* - О2 /2 · (1.3.9)
Здесь t — момент излучения сигнала ИРИ, a R^ , VQ, Д, —
дальность, радиальная скорость и радиальное ускорение ИРИ в
момент времени t'. Очевидно, импульс с номером κ = 0
излучается ИРИ в момент времени ^=0 =0, если в (1.3.9) положить
t' = tK=0 = 0. Соответственно, импульс с номером κ = г
излучается ИРИ в момент времени tK=i = ίθ = θ. Подставляя t' = R^ / с и
tK = κθ в (1.3.9), находим дальность до ИРИ в момент излучения
импульса с номером κ
RK=R{tK) = Rb + VaKe + \K2e2/2. (1.3.10)
Подставляя (1.3.10) в (1.3.8), имеем для принятого сигнала
Ν-1-μ
**(*)= Σ s[t- R^ / β-κθ(1 + ν0 / с)- А»к2в2 /2с]. (1.3.11)
κ=-μ
44
Возвращаясь к индексу суммирования к в (1.3.1), получаем
sN{t) = %s[t-Bb / с-(к- μ)θ{\ + ν0/ с)-А,(к- μ)2θ2 /2с]. {\ЗЛ2)
Здесь, при параболической аппроксимации закона изменения
дальности, Rq , V0, A^ — дальность, радиальная скорость и
радиальное ускорение ИРИ в момент излучения импульса номера μ
последовательности (1.3.6), то есть импульса, от которого отсчи-
тывается временное положение последовательности. В
рассмотренной последовательности СШПС расстояние между
импульсами неодинаковое, а изменяется в зависимости от ускорения.
Таким образом, параметры последовательности СШПС
(1.3.12) изменяются от импульса к импульсу сложным образом, а
период повторения определяется как
вк=в
п V { Α(1<-μ)θ-
ί-^-κβ(ΐ + ^
с 2с
где θλ — расстояние между нулевым и первым импульсом, если
к = 1. При к = 2, 02 — соответственно расстояние между первым
и вторым импульсом и так далее.
Если ИРИ движется равномерно, то R(t) — линейная
функция в течение всей последовательности (1.3.6), (1.3.7),
соответственно, формулы (1.3.9) — (1.3.12) перепишутся как: R(t) = R^ +
N-l-μ
+ V0(t -1') ,RK=R(tK) = R,+ νοκθ , sN(t) = X s
κ=-μ
N-l
sN(t) = ^ls[t-RO /c-(k-μ)θ(1 + νο /с)]. Период повторения оп-
к=0
ределяется следующим образом: 0П = 0[l + F/c], то есть
изменяется относительно излученной последовательности, но постоянен
в течение всей последовательности.
В случае, когда ИРИ неподвижен, формулы (1.3.9) —
(1.3.12) примут следующий вид: R(t) = i^ , RK = R(tK) = R^,
Ν-1-μ N-l
sN(t) = Σ s[t-Ro/c], sN(t) = £ 5[*-iWc-(*;-μ)]. Период noB-
κ=-μ k=0
торения не изменяется.
Рассмотрим примеры наиболее типовых последовательностей
СШПС - составных СШПС [172].
45
Последовательности СШПС с амплитудной кодовой
модуляцией (АКМ).
Составные СШПС — последовательности сверхкоротких
импульсов без несущей, модулированные некоторой кодовой
последовательностью. Для описания процесса кодовой модуляции
введем следующие определения. Периодической (циклической)
модуляцией производящей последовательности, состоящей из
(v + 1) импульса, дискретным кодом с числом позиций К назовем
разбиение данной последовательности на Lk = (v + 1)/К блоков,
в каждом из которых осуществляется модуляция импульсов по
амплитуде или временному положению в соответствии со
значениями элементов кода. При апериодической модуляции Lk = 1.
Амплитудная кодовая модуляция — это метод периодической
модуляции составного сигнала двоичной кодовой
последовательностью {ak}, ak ={0,l}, к = 0,(ϋΓ — 1), с числом ненулевых
элементов т+ < К . АКМ достигается за счет исключения из каждого
блока (К -т+) импульсов в позициях, соответствующих
значению ак = 0 в модулирующем коде. Число импульсов в
полученной последовательности составляет m+Lk < (ν +1).
Пусть передатчиком излучается составной СШПС в виде
последовательности импульсов с амплитудной кодовой модуляцией
u{t) = ^aks{t-ke-X)y (1.3.13)
где θ — период излученного сигнала, N -1 — число периодов
последовательности, s0(t) — форма элементарного импульса, Я —
временное положение импульса внутри фрейма (всей последова-
тельности). Полная длительность сигнала Θ5 = (Ν -1)0, {α^} = О
или 1, к = О, К -1 — кодовая последовательность, модулирующая
исходную последовательность импульсов. Если модуляция носит
периодический (циклический) характер, то ак = akmodK. Полагая
приемник, в общем случае, подвижным, можно записать
выражение для принятого сигнала в виде
s1(t) = ylYsMt-tD)] = iiakyIY4y(t-kT-r-tD)].{i3AA)
к=0
Здесь 7 = 1- Vr /с — коэффициент трансформации временного
масштаба в движущейся системе координат, Vr — радиальная
скорость приемника по отношению к передатчику, t = D(t) / с —
временная задержка сигнала в канале распространения.
Излученный сигнал sN(t) содержит три временных
масштаба: длительность элементарного импульса ти, период повторения
46
θ = Qth и положение Я0 внутри фрейма, а также длину
составной последовательности (N -1)0 = (N - 1)Qth . Здесь Q = θ / ти —
скважность последовательности. У принятой
последовательности эти параметры изменяются в / раз. Если положить Q^>1,
N ^> 1, то получаем, что наиболее заметной деформации
подвергается период повторения θ , длина последовательности Θ5 и
положение сигнала внутри фрейма Я. Поскольку элементарные
импульсы в импульсной последовательности являются
сверхкороткими, то можно пренебречь изменением их амплитуд и
длительности вследствие трансформации временного масштаба. То
есть v/50(/i) ~ s0(t). Учитывая это в (1.3.14), получаем
*Ν(ϊ) = ΣαΑϊ-Μο-λο)> (1.3.15)
что совпадаете (1.3.1) при μ = 0 .
Здесь 0О = γθ , Я0 = γ(λ - tD). Несмотря на то, что
Vr <^С с, временную деформацию последовательности
необходимо учитывать, если параметр Q(N -1) > 1. При значениях
Q(N -1) » 1, характерных для составных СШПС, указанная
деформация ythQ(N -1) :$> ти. Без учета этого фактора возникает
несовпадение принятого и опорного сигнала в приемнике.
В выражении (1.3.13) s(t) определяет форму элементарных
импульсов, составляющих импульсную последовательность
(ИП). Рассмотрим составные СШПС, состоящие из импульсов
следующей формы:
1. Колокольный импульс (1.2.6)
s(t) = A, expl -^ 1; а = -41п(Л), (1.3.16)
где h — уровень, на котором вычисляется длительность импульса
τ5 . Подобной формой удобно аппроксимировать сигнал на
выходе генератора сверхкоротких импульсов.
2. Моноцикл Гаусса
*(0 = Λ(-)βχΡί-4ΐ (1.3.17)
где τ5 — временная константа, характеризующая затухание.
Длительность импульса ти = 2πτ5. Форма данного импульса с
точностью до константы соответствует первой производной по
времени от сигнала с колокольной (гауссовой) огибающей
(1.3.16) при а = 1. Модели сигналов такого вида используются в
47
сверхширокополосных радарах, импульсном радио. Широкое
применение этих моделей обусловлено тем, что напряженность
излучаемого поля практически у всех видов антенн изменяется
пропорционально производной тока в антенне. Следовательно,
при возбуждении антенны импульсом тока колокольной формы
(1.3.16) сигнал, излучаемый этой антенной, будет иметь вид
(1.3.17).
3. Моноцикл второго порядка (вторая производная импульса
(1.3.16))
, Г"] , *^
1-4ж|
s(t) = Л
ехр -2π
tz
(1.3.18)
"Sj
где типичное значение Ts = 0,29 не.
4. Квазиколебательная модель (QRS — комплекс)
s(t) = \ exp(-(ai)2 ±pt)cos(2nf0t). (1.3.19)
Параметр а определяет скорость затухания импульса, β
регулирует асимметрию данного импульса. Спектр сигнала (1.3.19)
задается выражением
S(<o) =
2α
ехр
(β-1(ω-ω0))2
а2
\ (
+ ехР
) V
(β-1(ω + ω0))'
а2
2 Л
На рис. 1.3.2 приведена форма элементарного импульса
(1.3.19); кривая 1 соответствует симметричной модели при β = 0 ;
кривая 2 — асимметричной модели при β = 25 .
s(t) 2.5
2.0
1.5
1.0
0.5
-1.0
-1.5
*v
/(
1$
II
1$
IS
h
V»
\
V
I
t
/ //
\^ 1
1
1
4
A = 2
α = 40
U = iv
-0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 г
Рис. 1.3.2
48
Рассмотрим варианты амплитудно-кодовой модуляции.
1. Модифицированные кодовые последовательности Баркера.
Коды Баркера zk = {+1,-1} , к = 0..К -1 являются
единственным представителем бинарных последовательностей,
дискретная АКФ которых в районе побочных максимумов не превышает
уровня 1 / К . Модифицированная последовательность Баркера
строится по закону: ак = 1, если zk = +1,ак = 0, если zk = -1.
Набор модифицированных кодовых последовательностей Баркера
представлен в таблице 1.3.1.
Таблица 1.3.1
Модифицированные кодовые последовательности Баркера
№
1
2
3
4
5
6
Число позиций кода
К
3
4
5
7
И
13
Число ненулевых
элементов т+
2
3
4
4
5
9
Позиции ненулевых
элементов кодовой
по следовательно сти
0, 1
0,1,3
0,1,2,4
0,1,2,5
0,1,2,6,9
0, 1,2,3,4,7,8, 10, 12
На рис. 1.3.3 приведены АКФ исходного и
модифицированного кода Баркера. На рис. 1.3.5 представлен спектр
циклического составного СШПС, модулированного модифицированной
кодовой последовательностью Баркера с числом позиций кода
Κ(τ) 1.0
0.8
0.6
Τ
Τ
1 - стандартная кодовая
последовательность
% = fU},i,=0.1
Τ
Τ
Τ
2 - модифицированная
кодовая
последовательность ak ={0,1},тц =0.2
8 τ
49
К = 7. Из рисунка видно, что спектр такого сигнала сглажен, а
величины гармоник значительно меньше по сравнению с
регулярным случаем (рис. 1.3.6).
2. Кодовые последовательности со свойством «не более одного
совпадения»
Большой интерес представляет собой класс кодовых
последовательностей {ак}, ак = {0,1} , к = 0,(ϋΓ -1), удовлетворяющих
следующему условию: при любом сдвиге во времени такой ИП на
интервал τ > ти должно происходить не более, чем одно
совпадение импульсов исходной и сдвинутой ИП [172]. К —
позиционные коды, удовлетворяющие данному условию, называются
кодами со свойством «не более одного совпадения». АКФ кодовых
последовательностей со свойством «не более одного совпадения»
должна удовлетворять условию
1 κ~μ~ι ίΐ и = 0·
т+ ^ [1/га+8;8 μ Φ 0,
где т+ —число ненулевых элементов в кодовой
последовательности. Если (7ί,7η+) » 1, то соотношение между ними т+ —> у/2К .
Обозначим как X = \х0)х1)...)хт+_Л множество позиций
ненулевых элементов кодовой последовательности, причем х0 = 0. Для
выполнения (1.3.20) необходимо и достаточно, чтобы т+(т+ -1)
всевозможных разностей элементов xi - яДпкх! К), г Φ j(mod К),
г, j = 0,(m+ -1) были конгруэнтны числам 1,2....,т+ -1 (то есть,
принимали бы каждое из значений указанного ряда чисел один
и только один раз). При этом обеспечивается минимальная длина
кода
^-i,om=mm{zmW}. (1-3.21)
Условие (1.3.21) отражает стремление к максимизации
количества ненулевых элементов т+ при заданном числе позиций кода
К. Множество X = Х(#,т+,1), удовлетворяющее указанным
требованиям, называется совершенным разностным
множеством. Кодовая последовательность, позиции ненулевых элементов
которой образуют совершенное разностное множество,
называется оптимальной кодовой последовательностью со свойством «не
более одного совпадения».
Синтез кодовых последовательностей со свойством «не более
одного совпадения» проводят в два этапа.
1. Ищется код со свойством «не более одного совпадения»
путем размещения т+ ненулевых элементов кодовой последо-
50
вательности {ак}, ак ={0,l}, fc = 0,(if-l) в позициях хк е X и
нулей на остальных (К -т+) позициях. Математически данная
задача соответствует построению совершенного разностного
множества X = Х{К,т+,1) в расширенном поле Галуа (7F[(pn)3] .
2. Оптимизируется полученная кодовая последовательность
по критерию минимума длины кода путем перестановки
элементов кода, найденного на первом этапе, при которой позиция
последнего элемента преобразованного кода удовлетворяла бы
условию (1.3.21).
Алгоритм синтеза оптимальных кодовых
последовательностей со свойством «не более одного совпадения» приведен в [88].
Набор кодовых последовательностей со свойством «не более
одного совпадения» представлен в таблице 1.3.2.
Таблица 1.3.2
Кодовые последовательности со свойством «не более одного
совпадения», порождаемые полем Галуа GFUpnf
№
1
2
3
4
5
6
Число позиций кода К
4
7
12
18
26
36
Число ненулевых
элементов т+
3
4
5
6
7
8
Позиции ненулевых
элементов кодовой
последовательности
0,1,3
0,1,4,6
0,3,4,9,11
0,1,4,10,12,17
0,1,4,10,18,23,25
0,7,10,16,18,30,31,35
На рис. 1.3.4 приведена АКФ кодовой последовательности «не
более одного совпадения»; на рис. 1.3.5 спектральная плотность
мощности СШПС, состоящего из 12 моноциклов Гаусса,
периодически модулированного кодовой последовательностью Барке-
ра длиной К = 7; на рис. 1.3.6. показана спектральная плотность
мощности немодулированной ИП, состоящей из 12 моноциклов
Гаусса.
Рассмотрим сигнал с внутриблочной позиционно-импуль-
сной модуляцией (ВПИМ) [88].
ВПИМ — это метод периодической модуляции сигнала
троичным дискретным кодом {bk} , bk = {-1.0,1} , k = 0,(if -1),
содержащим (т0,т+,т_) элементов со значениями 0,+1,-1
соответственно. Внутри каждого блока производящей последовательности
производится смещение импульсов относительно исходных
положений на некоторую долю периода их следования Δ . Позиции
51
*(*) 1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
ι 1
Г1-
_J
дискретный
ти = 0.3
Ι,
1\
и
код (7, 4),
llllll
1 1
|2 - дискретный код (12, 5),
i т-=0·1
I 1 1 i
1
lllllii
1ШШ1|йшу1
ill
ш
L
2
и
Рис. 1.3.5
смещаемых импульсов выбираются согласно положениям
элементов модулирующего кода Ьк Φ 0. Модель составного СШПС с
ВПИМ кодовой последовательностью {bk} , к = 0,(К -1) задается
выражением
s(t) = «(*АД) = Σ*0(*-(* + ^Δ)βο " Л>)> (1-3-22)
Jfc=0
bk = bkmodK , если модуляция носит периодический характер.
Модифицируем метод внутриблочной позиционно-импульсной
модуляции, описанный в [88]. Алгоритм построения «сдвиговых»
дискретных кодов состоит из двух этапов:
52
|£M|2,dB
о
-10
-20
-30
-40
-50
-60
-70
-80
-90
100
ίΐτττπ
""ПНИН
,ι \ ι ι ι τ-'ττ
JH
Иг
fflll
Ί|
frrfl If 'INI
ι Ι Ι"
ίΠ Ι^ΊΠ Η ΓΙΚΡΙ ΓΜΙΡΙ'Π MVinjnnmnvimHM
Ι ι ' ' π '[
Ι ' ' 'Ι
ΊΓ
ΉΤ
' II
ТЛ
Ύ\\
ο
10
15 ω
χΙΟ9
Рис. 1.3.6
1. Выбирается производящая кодовая последовательность
{ак} , ак = {0,1} с параметрами (К,т+), обладающая
приемлемыми корреляционными свойствами. Формирование дискретного
кода {bk} с параметрами (К,т0,т+,т_) начинается с
размещения в последовательности {bk} элементов bk = 0 в тех позициях,
где дискретный код {ак} = 1. Это позволит сохранить
корреляционные свойства исходных кодовых последовательностей {ак} для
«сдвиговых» кодов.
2. В оставшихся (т+ + т_) позициях «сдвиговой» кодовой
последовательности {bk} , соответствующих позициям кода {αΛ} = 0,
размещаются элементы Ьк ={-1,1} методом полного перебора всех
возможных комбинаций. При этом осуществляется поиск таких
комбинаций, для которых обеспечивается наименьший уровень
и количество побочных максимумов у АКФ с периодической
ВПИМ. Полное количество анализируемых комбинаций состав-
ТП++ТП_
ляет ΛΓ = У С* .
С ^^ 7П+ +ТП_
к=0
«Сдвиговые» кодовые последовательности, сформированные
в соответствии с вышеизложенным алгоритмом, представлены в
таблице 1.3.3. В качестве производящих кодовых
последовательностей {ак} использовались рассмотренные ранее
модифицированные кодовые последовательности Баркера и кодовые
последовательности со свойством «не более одного совпадения».
АКФ составного СШПС, модулированного «сдвиговой»
кодовой последовательностью, приведена на рис. 1.3.7.
53
Таблица 1.3.3
«Сдвиговые» кодовые последовательности
№
Число позиций
коц&К
Число ненулевых
элементов (га+ + т_)
Позиции ненулевых элементов
кодовой последовательности
На основе модифицированных кодовых последовательностей Баркера
1
2
7
И
3
6
(3;-1),(4;1),(6;1)
(3;1),(4;1),(5;1),(7;-1),(8;1),
(10;1)
На основе оптимальных кодовых последовательностей
со свойством «не более одного совпадения»
3
4
7
12
3
7
(2;1),(3;1),(5;-1)
(1;1),(2;1),(5;-1),(6;1),(7;-1),
(8;-1),(10;1)
1 - модуляция модифи- _|_ 2 - ВПИМ «сдвиговой»
цированнои кодовой
последовательностью
Баркера сК = 7,ти =
последовательностью при
~|~ Δ = 0.3, построенной
0.1 -|- на основе кода Баркера
с К = 7, τ =0.2
*(*) 1.0
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Спектр сигнала, модулированного «сдвиговой»
последовательностью, которая построена на основе модифицированного
кода Баркера с длиной К = 7, изображен на рис. 1.3.8.
Сравнивая спектры немодулированного сигнала (рис. 1.3.6) и
модулированного «сдвиговой последовательностью» (рис. 1.3.8)
при помощи АКМ, видно, что спектр ВПИМ более всего
соответствует спектру белого шума. Исследования показывают, что шу-
моподобный характер спектра составного СШПС со «сдвиговой»
модуляцией наиболее отчетливо проявляется с увеличением
числа периодов V. Таким образом, составные СШПС с
периодической ВПИМ меньше всего будут создавать взаимные помехи для
радиотехнических устройств, функционирующих в одном
частотном диапазоне.
54
θ 5 19 \Ъ <0>
xlO9
Рис. 1.3.8
1.4. Модели и энергетические спектры
стохастических сверхширокополосных сигналов
Рассмотрим теперь стохастические СШПС. Наиболее
реалистичным стохастическим сигналом может служить случайный
процесс ξ(ί) [106]
5(ί) = ξ(ί)>ί€=Τ.
Такой стохастический сигнал является широко используемой в
прикладных задачах математической моделью как
информационных (полезных) сигналов, так и мешающих сигналов — помех
и шумов.
Для определенности будем рассматривать в качестве
стохастического сигнала гауссовский случайный процесс (ГСП).
Такая модель случайного сигнала нашла наибольшее применение в
технических приложениях. В радиофизике, локации, связи ГСП
является достаточно адекватной математической моделью
активных и пассивных помех, атмосферных и космических шумов,
каналов с замираниями, с многолучевым распространением и т.д.
Флуктуационные шумы устройств обработки информации,
обусловленные дробовым эффектом и тепловым движением
электронов, также подчиняются гауссовскому распределению.
Адекватность модели ГСП многим реальным помехам и стохастическим
сигналам объясняется во многих случаях действием центральной
предельной теоремы. Действительно, большинство
встречающихся в реальных условиях радиофизических случайных процессов
представляет собой результирующий эффект (сумму) большого
55
числа сравнительно слабых элементарных импульсов,
возникающих в случайные моменты времени. Оказывается, что
распределение суммы приближается к гауссовскому с увеличением числа
слагаемых практически независимо от того, какие распределения
вероятности имеют отдельные слагаемые. При этом важно лишь,
чтобы влияние отдельных слагаемых с негауссовским
распределением на сумму было равномерно малым (приблизительно
одинаковым).
Для упрощения будем рассматривать стационарные гауссовс-
кие стохастические сигналы. Гауссовский стохастический сигнал
называют стационарным, если его математическое ожидание
постоянно, а корреляционная функция зависит только от разности
своих аргументов так, что
a(t) = α, Я&Л) = Bfa-tz) = B{t2-tx) (1.4.1)
при всех Μι Λ € Τ. При выполнении условия (1.4.1) все
вероятностные характеристики стационарного гауссовского сигнала
не зависят от начала отсчета времени, то есть инвариантны
относительно сдвига интервала Τ . Поэтому для стационарного
гауссовского сигнала, без потери общности, начало интервала
наблюдения Τ можно совместить с началом отсчета времени, полагая
интервал наблюдения
t € Τ = [0; Τ].
Важной характеристикой стационарного гауссовского
сигнала является спектральная плотность. Обозначим ξ(ί) = ξ(ί) - а
— центрированный сигнал и
τ
ZT = \exp(-j(ut)l;{t)dt
о
— спектр усеченного на интервале [0; Т] этого стохастического
сигнала. Тогда спектральная плотность определяется
выражением
GH = lim|(|ZrH2). (1.4.2)
Введенная таким образом спектральная плотность связана с
корреляционной функцией преобразованием Фурье
G(o)) = J exp(-ju)A)B(A)dA .
В свою очередь корреляционная функция может быть
выражена через спектральную плотность
56
B(t2 - ij = J exph'oft -ί2)Υ}(ω)άω/2π. (1.4.3)
Простейшим примером стационарного гауссовского процесса
может служить процесс с постоянной на всех частотах
спектральной плотностью
G(a>) = NJ2, - со < ω < со. (1.4.4)
Такой случайный процесс, как известно [99], называют белым
шумом. Подставляя (1.4.4) в (1.4.3), получаем корреляционную
функцию белого шума
B(t2 - О = "Г ί θχΡ[-ΜΊ - ^)]άω = -fd(t2 - О ,
где δ(·) — дельта—функция.
Обозначим
γ = sup G(a>)
— величина спектральной плотности и
Ω = jG2(a)<to[supG(cu)]-2
— эквивалентная полоса частот стохастического сигнала.
Спектральная плотность G((o) (1.4.2) имеет: Ωχ —мини-
Ω, + Ω9
мальную частоту, Ω2 — максимальную частоту, Ωξ = — —
центральную частоту, Ω = Ω2 - Ωχ —ширину полосы. Если
Ω/Ωξ > 0,2...0,5 — получаем стохастический
сверхширокополосный сигнал [6, 33].
Будем называть сигнал стохастическим
сверхширокополосным видеосигналом, если основная масса его спектральной
плотности (1.4.2) сосредоточена в окрестности начала оси частот, то
есть в окрестности точки ω = 0 , так что
£(ω)</, |ω|>Ω,
либо G((o) отлична от нуля в полосе частот
[Ωχ; Ω2 ], Ωχ = -Ω / 2, Ω2 = Ω / 2 и, соответственно, центральная
частота Ω.ξ = 0. Спектральную плотность стохастического
видеосигнала удобно представить в виде
ΰ(ω) = γ9(ω/Ω).
Здесь функция #(*) описывает форму спектральной
плотности и обладает свойствами
57
g[x) > 0, g[x) = g(-x), supg(x) = 1,
j g2(x)dx = 1.
Таким образом, полное описание сверхширокополосного га-
уссовского стационарного видеосигнала задано, если известны
[106]:
1. Функция д(*), определяющая форму спектра;
2. Параметр γ , определяющий величину спектральной
плотности;
3. Параметр Ω , определяющий ширину спектральной
плотности;
4. Математическое ожидание стохастического сигнала а .
Частным случаем стохастического видеосигнала является
полосовой сигнал, для которого
ίΐ,Η<1/2,
Такого вида аппроксимацию формы спектральной плотности
целесообразно использовать, если реальная спектральная
плотность быстро убывает за пределами полосы частот Ω .
Определим теперь класс стохастических
сверхширокополосных радиосигналов. У таких сигналов основная масса
спектральной плотности сосредоточена в некоторой полосе в окрестности
центральной частоты, сравнимой с полосой частот сигнала.
Полагая, что G((o) — спектральная плотность СШПСРС, обозначим
γ = 2supGr(fi)),
Q = JG2(o))dQ)[supG(Q))}-2
о
и Ωξ—центральная частота сигнала. В соответствии с
определением основная масса спектральной плотности G((u)
сосредоточена в окрестности частот ±Ω.ξ, причем
Ω/Ωξ «0,2..0,5,
<7(ω)</, |ω±Ωξ|>Ω..
В частности,
(9(0) = 0.
Поэтому без потери общности можно ограничиться
рассмотрением гауссовских стационарных сверхширокополосных сто-
58
хаотических радиосигналов с нулевым математическим
ожиданием
а = 0.
Действительно, спектр математического ожидания
стационарного сигнала (1.4.2) сосредоточен на нулевой частоте, где
спектральная плотность сверхширокополосного радиосигнала
практически равна нулю.
Таким образом, полное описание сверхширокополосного га-
уссовского стационарного радиосигнала задано, если известны
[106]:
1. Функция #(*), определяющая форму спектра;
2. Параметр γ , определяющий величину спектральной
плотности;
3. Параметр Ω , определяющий ширину спектральной
плотности;
4. Центральная частота Ω,ξ, определяющая положение
спектральной плотности на оси частот.
Рассмотрим еще один класс случайных
сверхширокополосных сигналов — импульсные гауссовские сигналы.
Полагая ξ(ί) стационарным гауссовским случайным
процессом, определим гауссовский импульсный стохастический сигнал
как случайную функцию вида
3(ί) = ξ(ήΙ[(ί-λ)/τ], (1.4.5)
где /(*) — индикатор единичной длительности, τ —
длительность сигнала, а Я определяет временное положение импульса.
Найдем математическое ожидание гауссовского импульса
as=(s(t)) = aI[(t-X)/T) (1.4.6)
и корреляционную функцию
в&А) = (Μ)-«.(ΟΙΚΟ-«.(«*)]) = п 7)
= I{(t1-X)/T]I{(t2-X)/T]B4(t2-t1).
Согласно (1.4.6), (1.4.7) импульсный гауссовский сигнал
является нестационарным процессом. В случае, когда Я = 0 ,
соответственно s(t) = ξ(ί)Ι[ί/ τ]. Считаем, что τ » τξ, где τξ — время
корреляции гауссовского случайного процесса ξ(ί), и поэтому
Ι[(ί1-λ)/τ]1[(ί2-λ)/τ] = 0, где С — константа.
Корреляционная функция при нулевом математическом ожидании примет
вид
Β3(ί1,ί2) = Ο·Βξ(ί2-ί1),(λ = 0). (1.4.8)
59
То есть, в этом случае спектральные свойства гауссовского
импульса примерно такие же, как у гауссовского стационарного
случайного процесса. Если принять, что l/τ —
приблизительно полоса частот, занимаемая сигналом, а 1/ίξ - полоса частот
ГСП, а также, что 1/τ ^>1/τξ, то гауссовский импульс имеет
спектральные свойства такие же, как ГСП [106].
Если ξ(ί) — стохастический видеосигнал, то соответственно
(1.4.5) — гауссовский видеоимпульс, если ξ(ί) —стохастический
радиосигнал, получаем гауссовский радиоимпульс.
Рассмотрим еще один важный тип стохастических СШПС —
стохастические СШПС со сложной модулирующей функцией.
Такие сигналы отличаются от описанных выше тем, что
предыдущие гауссовские стохастические СШПС получены в
предположении прямоугольной формы функции (1.4.5). Однако такая
разрывная функция не всегда адекватно описывает реальные
регулярные модулирующие функции, которые достаточно часто
являются непрерывными и дифференцируемыми. В ряде
приложений часто встречаются стохастические СШПС со сложной
модулирующей функцией, содержащей неизвестные параметры.
Такой импульс можно представить в виде
s(t,l,\) = f(t,mt). (1.4.9)
Здесь /(£,1) ~ модулирующая детерминированная функция,
которая в общем случае содержит ρ неизвестных параметров
1 = Ц^.../J, ξ(ί) — стационарный гауссовский центрированный
сверхширокополосный случайный процесс, известная
корреляционная функция которого К (Α, λ) = (ξ(ί)ξ(ί + Δ)) может
содержать т неизвестных параметров λ = ||Я1...Я7П||, то есть такая
корреляционная функция зависит от большего числа параметров,
чем рассмотренная выше корреляционная функция случайного
СШПС, модулированного прямоугольной функцией (1.2.7).
Полагая далее, что модулирующая функция в (1.4.9) нормирована
так, что max /(£,1) = 1 > а случайный импульс принимается на фоне
гауссовского белого шума n(t) с односторонней спектральной
плотностью N0, реализацию наблюдаемых на интервале [0;Т]
данных можно записать как x(t) = s(£,l0,X0) + n(t), где 10,λ0 —
истинные значения неизвестных параметров модулирующей
функции и спектра мощности (?(ω,λ0) процесса ξ(ί), соответственно.
60
1.5. Последовательности стохастических
сверхширокополосных сигналов и их основные параметры
Кроме рассмотренных выше одиночных стохастических
СШПС на практике могут встречаться последовательности
стохастических СШПС. Рассмотрим несколько возможных
представлений последовательностей стохастических сверхширокополосных
сигналов. Запишем последовательность случайных сигналов как
результат модуляции прямоугольного импульса стохастическим
СШПС
^βο) = Σα*[1 + ^*(*)Κ[(*-*β)/τ]. (1.5.1)
Jfc=0
Здесь θ — период повторения, ак и τ — амплитуда и
длительность А;-го импульса, ζοί,(ί) — сверхширокополосный
случайный процесс, причем (§,*(*)) = О, (&*(*)§,*(* +А)) = Κ0Ιί(λ),
Кок(0) = 1, кк — коэффициент модуляции. Перепишем (1.5.1)
более компактно
*(<,*) = Х&(*)Ж«-**)/*Ь (1-5.2)
где ξΗ(ί) — стохастический СШПС, 1(х) — модулирующая функ-
IX И < 1/2,
ция прямоугольной формы, определяемая как 1(х) = <
[0,|ж|>1/2.
То есть, получаем последовательность стохастических СШПС как
последовательность прямоугольных импульсов, модулированных
случайным процессом.
Предположим, что в последовательности (1.5.2)
модуляция осуществляется видео стохастическими СШПС. Тогда ξ^ί)
имеют следующие свойства: (4(0) = ак > (4 (04(^ + Щ ~al =
= Кк{Х) = а1к2кК0к(Х). Найдем среднее значение и
корреляционную функцию последовательности (1.5.1)
as(tl,e) = (s(t,e)) = ^akI[(t-ke)/T},
к=0
Ks (i, ,t2,6) = ([sit, ,θ)-α. (ί,, θ)] [s(t2 ,θ)-α. (t2 ,θ)}) =
= Σ*1& - Щ/ШЪ - M)/x]Kk(t2 -1,).
k=0
Рассмотрим ситуацию, когда модуляция осуществляется
радио стохастическими СШПС. Тогда ξ)ΐ(ί) имеют следующие
свойства: (4(2)) = 0, (ξΗ(ί)ξΗ(ί + λ)) = Кк(Х). Среднее значение
61
и корреляционная функция последовательности (1.5.2)
выразятся как: as(t1,e)(s(t,e)} = 0; Ks(t1,t2,e) = (s(t1,e)s(t2,e)) =
= Σ/[(ίι -^)/τ]ί[(ί2 -Ю)/т]Кк(Ь -i1).
Л:=0
Существуют более сложные последовательности СШПС с
регулярной модулирующей функцией
s(WA) = X/(*-Atf,i)4(*)· (1-5.3)
Здесь θ —период следования случайных импульсов, /(£-fc0,l) —
модулирующая функция, параметры которой определяются как в
(1.5.2).
Пусть в последовательности (1.5.3) модуляция
осуществляется видео стохастическими СШПС. Тогда ξ^ί) имеют свойства
такие же, как в последовательности (1.5.2) при модуляции
видеоимпульсами, а среднее значение и корреляционная функция
последовательности (1.5.3) определятся как
as (t,, 0, 1, ν) = (s(i, 0, 1, Α)) = Χ akf(t - *β, 1),
k=0
Ks{tl,t2,d,\,\) =
= ([s^, θ, 1, λ) - as (t,, θ, 1, λ)] [s(t2, θ, 1, λ) - as (t2, 6>, 1, λ)]) =
= ΣΜ - ke,i)f(t2 - ke,i)Kk(t2 - tt).
k=0
В случае, когда модуляция осуществляется радио
стохастическими СШПС, ξ^ί) имеют свойства такие же, как в
последовательности (1.5.2) при модуляции радиоимпульсами. Среднее
значение и корреляционная функция последовательности (1.5.3)
запишется как
а,&Д1,Х) = 0,
Ка & ,^Α 1, Я) = (s^, 0, 1, k)s(t2, 0, 1, λ,)) =
= Σ/(*ι-*β,ιι/(ί2-*β,ΐ)^(ί2-ίι).
Λ:=0
Корреляционная функция Kk(t2 -tx) также может содержать
один или несколько неизвестных параметров.
62
2. ОБНАРУЖЕНИЕ
СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ
ПРИ НАЛИЧИИ ПОМЕХ
2.1. Обнаружение последовательности
сверхширокополосных сигналов с известными параметрами
при наличии узкополосных помех и шума
Рассмотрим задачу обнаружения последовательности СШПС,
принимаемых на фоне помех от внешних источников и белого
шума. Природа помех в процессе приема является различной:
преднамеренные помехи, взаимные помехи от своих РЭС и др. Их
воздействие на аппаратуру может значительно снизить
эффективность приема и требует специального рассмотрения.
Конкретизируем общие положения теории обнаружения
применительно к сверхширокополосным сигналам. В соответствии с
п. 1.3 представим последовательность СШПС в виде
«„(*) = ΣΨ-(*-μ)β-Я]; *б[0,г]. (2.1.1)
Рассмотрим модель внешней помехи. В качестве таковой
используем, как наиболее универсальную, узкополосный
стационарный гауссовский процесс ξ(ί) с нулевым средним и
корреляционной функцией Βξ(ί2 - ^), или сумму таких процессов
ξ(*) = Σ£(*) (2·1·2)
со спектральной плотностью
_νΆ
Οξ(ω) = Σ
i-i 2
ί, Μτ-+ί.
Щг + «>λ
здесь функция д{(х) описывает форму спектральной плотности
помех и удовлетворяет условию
9 г (Х) ^ 0> 9г (Х) = 9г (~Х) J maX 9г 0*0 = 1, J ff? (x)dx = 1 ,
63
со0г — центральная частота, Ω4 = J G^{(u)d(0/maxG^tu) — эк-
0
Бивалентная полоса частот. В частном случае, представляющим
практический интерес, когда
Г1, | ж |< 1 / 2
(2.1.3) примет вид
д,(х) = 1(х) =
Уг
0,1 χ |> 1/2'
Ω
Λ ί
+ 1
'ι J
Ω.
(2.1.4)
Найдем структуру оптимального обнаружителя
последовательности СШПС на фоне суммы белого шума и узкополосной
помехи. Потенциальные характеристики обнаружения СШПС
при наличии гауссовских узкополосных помех (ГУП) можно
получить, если априори известны корреляционные функции
B{(i2 - ^), i=l,К , стационарных гауссовских случайных
процессов ξΧί). В этом случае оптимальный обнаружитель формирует
величину
N-lT
L = Σ J *( W -&-μ)θ-λ)Ά, (2.1.5)
fc=0 о
где функция V(t) определяется из решения интегрального
уравнения
τ
N0V(t)/2 + JB^t-T)V(T)dT = s(t). (2.1.6)
о
Здесь Βξ(τ) — корреляционная функция, обладающая
спектральной плотностью (2.1.3), aJV0- односторонняя спектральная
плотность гауссовского белого шума n(t) (ГБШ).
Пусть время наблюдения Τ много больше времени
корреляции узкополосной помехи, так что 7ΏΖ /2/г » 1. Тогда решение
интегрального уравнения (2.1.6) можно найти с помощью
преобразования Фурье. Функция V(t) выразится следующим образом:
1
™-£/
2/г
S(ja>)exp(j(Qt)
'^ο/2 + Σ^(ω)
dco.
(2.1.7)
Конкретизируем структуру оптимального обнаружителя для
узкополосной помехи с прямоугольной формой спектральной
плотности (2.1.4). В этом случае функция V(ja>) будет
64
V(ja>) =
^ο/2 + Σ^
t=l Δ
Ω,
Ω,
(2.1.8)
В случае, когда ω< ω0ι - Ω; /2 или co0i + Ω, /2 < ω, (2.1.8) равно
NJ2'
Если ω0, -Ω, /2<ω< ω0ι +Ω, /2, το
V{ja>) =
<ωΟΙ +
П*») ='
(2.1.9)
(Ν0 + γ)/2
Конкретизируем структуру алгоритма обнаружения одного
СШПС для случая, когда присутствует только узкополосная
помеха одного источника, то есть К = 1. Тогда, при ω > 0 из (2.1.8)
получаем
ад
η/ω)=■
0/ 2 Ω,
(2.1.10)
Рассмотрим структуру оптимального обнаружителя
применительно к последовательности СШПС (2.1.1) на фоне суммы ГБШ
иГУП.
Положим, что проверке подлежит гипотеза Н0 (сигнал
отсутствует) против альтернативы Н1 (сигнал присутствует). При
гипотезе Я0 наблюдаемая на интервале времени [О, Г]
реализация имеет вид
*(<) = η(ί)+ ££(*), (2.1.11)
t=l
здесь n(i) — реализация ГБШ с односторонней спектральной
плотностью N0, а £г(£), i=l,K — реализация независимых
узкополосных стационарных гауссовских случайных процессов,
обладающих корреляционными функциями вида Д(^2-^) и,
соответственно, спектральными плотностями G^(fi)). При
наличии сигнала, когда верна гипотеза Н1, наблюдается
реализация
ζ(*) = β*(ί) + η(<) + Σ6(ί). (2-1.12)
t=l
Положим вначале, что для проверки альтернативы Нх против
гипотезы Я0 используется алгоритм, оптимальный при наличии
65
только белого шума. В этом случае обнаружитель должен
вырабатывать величину [97, 98]
L1=^\x(t)sN(t)dt = ^^\x(t)s[t-(k-μ)θ-λ]dt.(2ΛΛЗ)
М0 0 iv0 к=0 0
Если частотные параметры ω0ί и Ω^ узкополосных помех ξχ£)
(2.1.3) априори известны или могут быть измерены с достаточной
точностью, повысить эффективность обнаружения СШПС
можно, включив на входе обнаружителя (2.1.13) режекторный фильтр
(РФ). Для помех с прямоугольными спектральными плотностями
(2.1.4) передаточная функция РФ имеет вид
#0'ω) = 1-Σ
Ω..
\/ω0ζ+ωΛ
Ω..
(2.1.14)
После включения РФ на вход обнаружителя (2.1.13) им будет
вырабатываться величина
4 = — ^\x(t)s[t-{k-μ)θ-X\dt, (2.1.15)
где x(t) — отклик РФ на реализацию наблюдаемых данных.
Потери в эффективности обнаружения при использовании
РФ обусловлены двумя причинами. Во — первых, при
прохождении через РФ СШПС теряет часть энергии. Во — вторых, форма
СШПС после прохождения РФ отличается от формы исходного
СШПС, для которого обнаружитель (2.1.13) является
оптимальным при наличии только белого шума. Поэтому рассмотрим
обнаружитель, оптимальный для приема профильтрованной
последовательности СШПС на фоне белого шума. Такой обнаружитель
должен формировать величину
13=^]^8Ν№ = ^Σ]χ(ί№-ψ-μ)θ-λ}Μ.(2ΑΛ&)
^0 0 ^0 *=0 0
Здесь sN(t) и s(t) — отклики РФ на последовательность и
одиночный СШПС, соответственно.
Вернемся к анализу алгоритма обнаружения, оптимального для
приема последовательности на фоне только белого шума. Решение
в пользу гипотезы Нх (сигнал присутствует) принимается, если
Lx >h, (2.1.17)
где h — порог, определяемый в зависимости от выбранного
критерия оптимальности обнаружения. Поскольку Lx (2.1.13)
является гауссовской случайной величиной, для вероятностей ошиб-
66
ки 1-го рода (ложной тревоги) ах и ошибки 2-го рода (пропуска
сигнала) βι можно записать [97, 98]
a1 = P(Ll >Л|Я0) = 1-Ф
βι=Ρ{ΙΛ<1ι\Ηι) = Φ
h — m0
Λ-mj
(2.1.18)
(2.1.19)
1 х t2
Здесь Ф(х) = -т= J ехр( )dt — интеграл вероятности, а
го, = {Ц\Н<), σ? =((L1-mtf\Hi), (2.1.20)
— математическое ожидание и дисперсия случайной величины
(2.1.13), когда верна гипотеза Нг (г = 0,1). Воспользовавшись
для определенности критерием Неймана—Пирсона, найдем из
(2.1.18) значение порога
h = m0 +а0ахсФ(1-а1), (2.1.21)
который обеспечивает уровень ложных тревог а. Здесь
агсФ(х) — функция, обратная интегралу вероятности Ф(х).
Подставляя (2.1.21) в (2.1.19), получаем для вероятности пропуска
сигнала выражение
А=ф
где
— 31сФ(1-а1)-г1
(щ-™0)2
(2.1.22)
(2.1.23)
— отношение сигнал—шум (ОСШ) по мощности на выходе
обнаружителя (2.1.13).
Для того, чтобы найти характеристики обнаружения (2.1.18)
и (2.1.19) достаточно определить моменты (2.1.20) случайной
величины (2.1.13). Рассмотрим вначале случай, когда
узкополосная помеха отсутствует. Тогда реализация наблюдаемых данных
при гипотезе Н0 имеет вид
x(t) = n(t). (2.1.24)
При гипотезе Нх
x(t) = sN(t) + n(t). (2.1.25)
Подставляя (2.1.24) в (2.1.13), получаем в отсутствие сигнала
N-lT
2N'
т0 =0,σ02 = l\^jn(t)s [t-(k-M)0-A]dt \ = ^js2{t)dt (2.1.26)
\[iV0 Ho J / ^0 О
67
ОСШ при приеме последовательности (2.1.11) на фоне белого
шума [98]. Полагая далее, что верна гипотеза Нх и используя
(2.1.25) в (2.1.13), при наличии сигнала находим
т1=а02, σ\=σ\. (2.1.27)
Подставляя затем (2.1.26) и (2.1.27) в (2.1.23), получаем для
выходного отношения сигнал—шум известное выражение [97, 98]
*?=**=—Js2(i)di. (2.1.28)
^о о
При наличии на входе приемника узкополосных помех
моменты (2.1.20) случайной величины (2.1.13) будут следующими
т° = °' σ» =(||-Σ}κί) + ί^(# [ΗΗ-μΡ-λφ]
= ^/Л«)* + ХХХХ4Я<6(*.)«,(«|)Х*.-(*-/*)в-А]х (2.1.29)
■*'0 0 *=0 т=0 г=1 υ=1 0 0 0
Х5 [t2 - (га - μ)θ - ХЩа^.
Учитывая предполагаемую статистическую независимость
узкополосных стационарных гауссовских случайных процессов
£(£), а также тот факт, что СШПС последовательности (2.1.1) не
перекрываются, из (2.1.23) находим
σ20=ζ2+σ2ξ, (2.1.30)
где ζ — ОСШ при приеме последовательности (2.1.1) на фоне
только белого шума, а
<ή=η^Σί ί %&-№>&)*№ (2.1.31)
составляющая дисперсии случайной величины (2.1.13),
обусловленная действием узкополосных помех. Подставляя (2.1.29)
и (2.1.27) в (2.1.23), находим ОСШ на выходе обнаружителя
(2.1.13) при воздействии узкополосных помех
ζΙ=ζ*/(ζ2+σ2ξ) = ζ2/χι. (2.1.32)
Согласно (2.1.19) при σ0 = σλ эффективность обнаружения
полностью определяется величиной отношения сигнал—шум
(2.1.23). Поэтому параметр
Χι=ζ2 /ζ2=1 + σ2ξ/ζ2, (2.1.33)
показывает снижение эффективности обнаружения
последовательности СШПС (2.1.13) вследствие воздействия узкополосных
68
помех. Используя (2.1.27) и (2.1.31), формулу (2.1.33) можно
переписать как
Х1=1 + ^-*^= = · (2.1.34)
js2(t)dt
Иногда более удобно рассчитывать потери в эффективности
обнаружения, используя спектральное представление. Для этого
воспользуемся теоремой Парсеваля и, в соответствии с теоремой
Винера—Хинчина, выразим в (2.1.34) корреляционные
функции узкополосных помех через их спектральные плотности
ЗД -О = -^ J Οίξ(ω)βχρϋω(ί2 -ί^άω. (2.1.35)
Подставляя (2.1.35) в (2.1.34), выполняя интегрирование и
выражая энергию СШПС s(t) через его спектр S(ja>), имеем
*1=1 + ^±LJ4 · (2-1.36)
"° Dswffa
о
Конкретизируем проигрыш в эффективности обнаружения
(2.1.36) для случая, когда спектральные плотности узкополосных
помех имеют прямоугольную форму (2.1.3). Подставим (2.1.3) в
(2.1.36) и получим
t=l
Параметры qt, ε{ определяются выражениями
Qi=Yt/N0, (2.1.38)
здесь ух — величина спектральной плотности узкополосной
помехи,
ω0, +Ω, / 2
J \S{3<4do>
£i=^zML· f (2.1.39)
J|s(ifl>)|2AB
О
и имеют простой физический смысл. Действительно, qx — это
отношение помеха—шум для /-ой помехи £(£), а гх — относи-
69
тельная доля энергии СШПС в полосе частот, пораженной 1-ой
помехой.
Как уже говорилось, повысить эффективность обнаружения
СШПС можно, включив на входе обнаружителя (2.1.13) РФ. Для
помех, обладающих спектральными плотностями (2.1.4),
передаточная функция РФ имеет вид (2.1.14). После его включения
на вход обнаружителя (2.1.13) будет формироваться величина
(2.1.15). Очевидно, при отсутствии сигнала реализация
наблюдаемых данных на выходе РФ запишется как
x(t) = n(t). (2.1.40)
Соответственно, при наличии сигнала на выходе РФ имеем
x(t) = sN(t) + n(t), (2.1.41)
где sN(t) — отклик РФ на последовательность СШПС (2.1.1).
Подставляя (2.1.40) в (2.1.15), а (2.1.15) в (2.1.20), для моментов
гауссовской случайной величины (2.1.15) при отсутствии
сигнала получаем
πι0=0,σ20=ζ2, (2.1.42)
где ζ2 определяется из (2.1.28). Соответственно, используя
(2.1.41) и (2.1.15), а также (2.1.15) и (2.1.23), при наличии
сигнала можно записать
2Ν
т1 = — J s(t)s(t)dt, a\ - ζ2.
Ν(
(2.1.43)
Здесь s(t) — отклик РФ на одиночный СШПС s(t). Подставляя
(2.1.42) и (2.1.43) в (2.1.23), для отношения сигнал—шум на
выходе обнаружителя (2.1.15) находим выражение
П2
Zo =
Параметр
W_
j s(t)s(t)dt
ζ~2=ζ2/χ2.
X2 = z2/4 =
js2(t)dt/js(t)s(t)dt
(2.1.44)
(2.1.45)
показывает снижение эффективности обнаружения
последовательности СШПС (2.1.1) вследствие применения РФ. Используя
спектральное представление, (2.1.45) можно переписать как
П2
Х2 =
j\S(jw)f dfl>/J|S(ia>)|2 H(ja))dco
(2.1.46)
Подставляя в (2.1.46) передаточную функцию РФ (2.1.14), имеем
70
*2=(1-ίΧΓ2· С2·1·47)
г=1
Сопоставление (2.1.37) и (2.1.47) позволяет определить условия,
при которых целесообразно применение РФ. Очевидно,
применение фильтра повышает эффективность обнаружения СШПС при
наличии узкополосных помех, если χλ > χ2 или отношение
Ζΐ2=Ζι/*2>1· (2-1-48)
Уменьшить проигрыш (2.1.47) можно, если использовать
обнаружитель, оптимальный при приеме профильтрованной
последовательности СШПС sN(t) на фоне белого шума. Такой обнаружитель
должен формировать, согласно [98], величину (2.1.16).
Аналогично, так же как и в предыдущем случае, получим для моментов гаус-
совской случайной величины (2.1.16) (сигнал отсутствует)
m0=0,a2= — js2(t)dt. (2.1.49)
При наличии сигнала можем записать
πι0=σΙ σΙ=σΙ. (2.1.50)
Для отношения сигнал—шум на выходе обнаружителя (2.1.16)
находим выражение
4=^]?№ = г*/Хз. (2.1.51)
Параметр
χ3 = z2/z23 = ] s2(t)dt/]~s2(t)dt (2.1.52)
показывает минимальное снижение эффективности
обнаружения последовательности СШПС (2.1.13) вследствие потери части
энергии СШПС при прохождении через РФ. Используя
спектральное представление, (2.1.52) перепишем как
Хз = ]\S{j<4 «to/ JlSOMf |#0ω)|2 «to. (2.1.53)
о о
Подставляя в (2.1.53) передаточную функцию РФ (2.1.14), имеем
Z, = (l-fei)"1· (2·1·54)
t=l
Сопоставляя (2.1.47) и (2.1.54), видно, что всегда χ2 > #3,причем
потери в эффективности обнаружителя (2.1.15) по сравнению с
обнаружителем (2.1.16) характеризуются отношением
71
^=Ζ2/^3=(1-Σε.Γ1» (2.1.55)
г=1
при этом χ23 > 1. Очевидно, чем большая часть спектра СШПС
перекрыта узкополосными помехами, тем более выгодно
применение обнаружителя (2.1.16) вместо обнаружителя (2.1.15).
Сопоставляя в свою очередь (2.1.37) и (2.1.54), можно определить
условия, при которых целесообразно применение обнаружителя
(2.1.16) вместо обнаружителя (2.1.13). Действительно,
применение обнаружителя (2.1.16) повышает эффективность
обнаружения, если χλ > χ3, или отношение
*13=Ζΐ/*8>1· (2-1.56)
Величина (2.1.56) показывает увеличение отношения сигнал-
шум на выходе обнаружителя (2.1.16) по сравнению с
обнаружителем (2.1.13).
И, наконец, рассмотрим алгоритм обнаружения,
оптимальный для смеси сигнала, узкополосных помех и ГБШ. Также, как
и в предыдущих случаях, для моментов гауссовской случайной
величины (2.1.5) при отсутствии сигнала получаем
τ
mQ = о, σ02 = NJs(t)v(t)dt. (2.1.57)
о
Соответственно при наличии сигнала можно записать
щ =σ1 σ2=σ02. (2.1.58)
В результате для отношения сигнал—шум на выходе
оптимального обнаружителя (2.1.5) находим выражение
τ
z\ = NJs{t)v{t)dt = ζ2/χ4. (2.1.59)
Параметр
1 1
X4=z2/z24=2\s2(t)dt/N0\s(t)v(t)dt (2.1.60)
показывает минимально возможное снижение эффективности
обнаружения СШПС вследствие наличия узкополосных помех.
Используя (2.1.8), (2.1.60) можно переписать как
χ4 = ]\S(ja>f άω/] j^i άω. (2.1.61)
°1 + 2£(?,0·ω)/^ο
72
Если спектральная плотность помехи имеет прямоугольную
форму (2.1.4), то, подставляя (2.1.4) в (2.1.61), имеем
*4=il-tr^l · (2·1·62)
Из сравнения (2.1.55) и (2.1.62) следует, что если спектральная
плотность узкополосных помех существенно превосходит
спектральную плотность белого шума, то есть qx » 1, i=l,K, то
Χ3~Χ<·_ (2.1.63)
Из (2.1.63) видно, что при qt » 1, i=l,K, обнаружитель (2.1.16)
позволяет реализовать потенциально достижимую
эффективность обнаружения без априорного знания величин у{
спектральных плотностей помех (2.1.4).
Из анализа результатов, полученных при исследовании
влияния ГУП на эффективность обнаружения СШПС, следует, что
только в случае, когда используется приемник, оптимальный для
ГБШ, проигрыш зависит от значения j ив ещё более сильной
степени зависит от величины гг. Также можно заметить, что при
<7г<40 проигрыш для всех обнаружителей примерно одинаков,
то есть можно применять самый простой алгоритм обнаружения
(2.1.5), не требующий ни каких априорных знаний о параметрах
помехи (при этом надо учитывать, что параметр гг должен быть
меньше 0.005). В остальных случаях проигрыш зависит только от
ег и практически одинаков для различных обнаружителей,
входящих в состав аппаратуры приема СШПС.
2.2. Обнаружение сверхширокополосных сигналов
с неизвестными параметрами
при наличии узкополосных помех и шума
В большинстве практических случаев, включая и задачи
обработки радиолокационных СШПС, параметры сигнала
неизвестны или известны не полностью. Поэтому ниже остановимся на
задачах обнаружения СШПС с неизвестными временными
параметрами.
2.2.1. Обнаружение одиночного сверхширокополосного сигнала
с неизвестным временем прихода
Рассмотрим задачу обнаружения СШПС с неизвестным
временем прихода, принимаемого на фоне узкополосных помех от
внешних источников и непреднамеренных помех в виде ГБШ.
73
Пусть на интервале времени t e [0;Г] наблюдается
реализация
к*-я^ + п(*)+ £(*); (2.2.1.1)
|η(ί) + ξ(ί)· (2.2.1.2)
Здесь s(t) — полезный сигнал, Я0 —время прихода, которое
априори неизвестно и принимает значения из интервала λ^ е [A^AJ,
О < Л1?Л 2< Τ, п(£) — ГБШ с односторонней спектральной
плотностью Ν0, ξ(ί) — центрированная ГУП, которая имеет
корреляционную функцию Βξ(τ) = (ξ(ί)ξ(ί + τ)) и спектральную
плотность
βξ(ω) = J Βξ(τ)βχρ(-ίαη)άτ . (2.2.1.3)
Процессы n(t) и ξ(ί), как и ранее, полагаем статистически
независимыми.
При наличии только ГБШ обнаружитель максимального
правдоподобия вырабатывает величину [98, 99]
1ь=вир1ь(Я),Яе[А1;А2], (2.2.1.4)
где
4 (Я) = — \x(t)s(t - X)dt (2.2.1.5)
^0 0
— логарифм функционала отношения правдоподобия (ЛФОП).
Принимается решение о наличии сигнала, если L0 > h и об
отсутствии, если LQ < h . Здесь h — порог обнаружения сигнала.
Функцию (2.2.1.5) необходимо формировать для всех
возможных Я € [AX;A2] . Если использовать коррелятор, то он
должен быть многоканальным и формировать (2.2.1.5) для
множества дискретных значений Я € [AjjAj . Поскольку рассматривается
обнаружение сверхкоротких наносекундных импульсов, то
количество корреляторов будет очень велико, что существенно
затрудняет аппаратурную реализацию обнаружителя.
Поэтому рассмотрим возможность фильтровой реализации
обнаружителя, использующего фильтр с импульсной переходной
функцией H(t). С выхода этого фильтра сигнал поступает на
пиковый детектор, в котором определяется сравниваемый с порогом
наибольший максимум выходного сигнала на интервале времени
[λι;λ2].
Если в таком обнаружителе использовать фильтр,
согласованный с сигналом s(i), то на выходе фильтра имеем (2.2.1.5)
74
как функцию текущего времени, а на выходе пикового детектора
получаем (2.2.1.4). Но обычно форма сигнала известна неточно.
Поэтому в предложенном обнаружителе может использоваться
фильтр, отличный от согласованного. Для такого фильтра
выходной сигнал [98, 99]
ЦХ) = — j x(t)H(t - X)dt, (2.2.1.6)
а сигнал на выходе пикового детектора — L = supL(A),
Ае[Л1;Л2].
Найдем характеристики обнаружителя: а — вероятность
ложной тревоги и β — вероятность пропуска сигнала. При
отсутствии на входе полезного сигнала s(t) отклик на выходе
фильтра (2.2.1.6) получаем в виде
ЦХ) = Ν(λ) = ] [n(t) + ξ(ί)]#(ί - А)Л, (2.2.1.7)
здесь Ν (λ) — центрированный гауссовский случайный процесс,
который обладает корреляционной функцией
ВАКХ) = №№■)) = γ ] яй - К)Щ, - K)dt +
+J J в& - QH^ - Ш(Ч - K)dtl(it2.
Согласно определению [98] вероятность ложной тревоги можно
записать как
а = P[sup7V(A) > h] = l-FN(h). (2.2.1.8)
Яе[Л1;Л2]
Здесь
FN(h) = P[sup7V(A) < h] (2.2.1.9)
Я е[Л1;Л2]
— распределение абсолютного (наибольшего) максимума
реализаций случайного процесса Ν(λ) (2.2.1.7). Точное
выражение для функции распределения (2.2.1.9) получить не удается
[100]. Однако в [97] для случайного стационарного гауссовского
процесса найдена аппроксимация функции распределения
абсолютного максимума, точность которой возрастает с увеличением
порога h и длины Л = Л2 - Лх априорного интервала возможных
значений времени прихода сигнала. Используя результаты [97],
можно аппроксимировать функцию распределения абсолютного
максимума случайного процесса (2.2.1.7) выражением вида
75
FN(h) =
exp
-^exp"^
U2 \
N J
h>0
(2.2.1.10)
[0, h<0.
Здесь σ2Ν=ΒΝ(λ,λ) — дисперсия шумовой составляющей
(2.2.1.7) на выходе линейной части квазиоптимального
обнаружил! , Ло) I
— приведенная длина априор-
жителя, а ξ = ■
ного интервала возможных значений неизвестного времени
прихода. Величина ξ определяет количество некоррелированных
отсчетов процесса Ν(λ) (2.2.1.7) на интервале времени [A^AJ .
Подставляя далее (2.2.1.10) в (2.2.1.8), для вероятности ложной
тревоги получаем приближенное выражение
а = <
1-ехр
ξ
-^ΘΧΡ"2σ2
h
2 Λ
Ν J
h>0
(2.2.1.11)
[1, Λ < 0.
Точность этого выражения возрастает с увеличением h (то есть
с уменьшением а ) и с увеличением ξ [97]. Согласно (2.2.1.11)
вероятность ложной тревоги зависит от дисперсии выходного шума
(2.2.1.7) и числа некоррелированных отсчетов ξ этого шума.
Для расчета параметров, определяющих величину
вероятности ложной тревоги, используем спектральное
описание фильтра и ГУП. Действительно, обозначая
передаточную функцию фильтра квазиоптимального обнаружителя
— H(j(o) = [ #(г)ехр(-,7<у t)dt, можно записать
σΙ =
1_
2π
~ j \H(ja,f άω + J Οξ(ω)\Ηϋω)\2 άω
(2.2.1.12)
где Сгг(ю) — спектральная плотность ГУП (2.2.1.3), а
2 J ω2 |#0ω)|2 άω + J (o2G4(a))\H(ja>)f άω
ξ = Α
Νη
~- ] \H(jcof άω + J Οξ(ω)\Ηϋω)\2 άω
.(2.2.1.13)
Для исследования влияния ГУП на величину вероятности
ложной тревоги введем в рассмотрение величину дисперсии
шумовой составляющей (2.2.1.7) при воздействии на вход
обнаружителя только ГБШ n(t)
76
N(
al=^j\H(ja>)\2da>
2π
(2.2.1.14)
и приведенной длины априорного интервала возможных
значений неизвестного времени прихода
(л 1/2
]<o2\H(j<ofd<o/]\H(j<ofd<o\ (2.2.1.15)
Очевидно, что ξη (2.2.1.15) определяет количество
некоррелированных отсчетов шумовой составляющей (2.2.1.7) при
воздействии на вход обнаружителя только ГБШ, то есть в отсутствие
ГУП.
Используя обозначения (2.2.1.14) и (2.2.1.15), можно
переписать (2.2.1.12) и (2.2.1.13) как
σΙ=<χ,ξ = ξη4ψϊχ, (2.2.1.16)
здесь
χ = 1 + -У ]θξ(ω)\Ηϋω)\2 da>/]\H(je>f da>
Nt
о Vo
,(2.2.1.17)
ψ = 1 +
Nn
λ
Ιω2Οξ(ω)\Η^ω)\2άω/\ω2\Η^ω)\2άω (2.2.1.18)
Vo о У
—коэффициенты, описывающие влияние ГУП на величину
вероятности ложной тревоги.
Полагая в (2.2.1.17) и (2.2.1.18) βξ(ω) = 0, имеем, χ = ψ = 1.
Тогда при отсутствии ГУП для вероятности ложной тревоги из
(2.2.1.16) и (2.2.1.11) получаем выражение
а„ =<
1-ехр
ξ
2/г
2σΙ
, Л>0,
(2.2.1.19)
[1, Л < 0.
Из сравнения (2.2.1.19) и (2.2.1.11) видно, как влияет наличие
ГУП на величину вероятности ложной тревоги.
Сопоставление полученных значений вероятности ложной
тревоги для различных условий обнаружения несколько
упрощается, если вероятность ложной тревоги достаточно мала, например,
а < 0,1. При выполнении этого условия при наличии ГУП и ГБШ
получаем из (2.2.1.11) для квазиоптимального обнаружения
ξ h2
α = —exp г-
2π [ ΊσΙ
(2.2.1.20)
77
Найдем теперь вероятность пропуска сигнала.
Предполагая наличие сигнала, подставим (2.2.1.1) в (2.2.1.6) и
представим сигнал на выходе линейной части обнаружителя в виде:
Z,(A) = S(A, A0) + Ν(λ), здесь S(A, AJ = J s(t - λ0)Η(ί - X)dt —
сигнальная функция, а шумовая функция определяется из
(2.2.1.7).
Обозначим Sm = тах^АДо). Тогда приближенное
выражение для вероятности пропуска β можно записать как [97]
fi = (l-ayi>[(h-Sm)/aN], (2.2.1.21)
1 х
здесь Ф(х) = ,— [ ехр(-£2 /2)dt — интеграл вероятности.
v2/r i
При малой вероятности ложной тревоги (2.2.1.21) несколько
упрощается
/5 = Ф[(Л-5т)/^]· (2.2.1.22)
Воспользуемся для определенности критерием Неймана-
Пирсона. Для этого, фиксируя а в (2.2.1.20), найдем значение
порога ha = σΝ ^-21η(2πα / ξ) . Тогда
β = φ[^-2\η(2πα/ξ) - ζ~\, (2.2.1.23)
здесь
z2=S2m/a2N (2.2.1.24)
— ОСШ на выходе линейной части квазиоптимального
обнаружителя при воздействии суммы ГБШ и ГУП. Если
обозначить я* =S£/<Tn ~ ОСШ при отсутствии ГУП и воздействии
ГБШ, то
ζ2=ζ2η/χ, (2.2.1.25)
где χ определяется из (2.2.1.17).
При воздействии только ГБШ величину вероятности пропуска
сигналаможнополучить,полагаяв (2.2.1.23) а = ап, ξ = ξη, ζ = ζη .
Для квазиоптимального обнаружителя при наличии ГБШ имеем
βπ=φ[,Ι-21η(2παη/ξη)-ζη]. (2.2.1.26)
Рассмотрим, как влияет априорное незнание времени
прихода на эффективность его обнаружения. Согласно [97], при
известном времени прихода СШПС вероятности ложной тревоги и
пропуска сигнала определяются выражениями
78
<*N
«о=1-Ф|-Ьо=ФГ"^
(2.2.1.27)
Из сопоставления (2.2.1.22) и (2.2.1.27) следует, что при
больших отношениях сигнал—шум вероятность пропуска СШПС
с неизвестным временем прихода совпадает с вероятностью
пропуска сигнала, время прихода которого априори известно.
Сравним теперь вероятности ложной тревоги. Учитывая, что (2.2.1.20)
справедливо при h » σΝ и используя асимптотическое
выражение для Ф(я),при χ —> ©о из (2.2.1.20) и (2.2.1.27) имеем
а/а0 = ξίι/σΝ^2π (2.2.1.28)
при β « β0 и h » σΝ . Определяя из (2.2.1.27) порог h при
заданном значении а0: h0 = σΝ агсФ(1-а0) и подставляя в (2.2.1.28),
получаем
а/а0=£агсФ(1-а0)/72я\ (2.2.1.29)
Здесь агсФ(х) — функция, обратная Ф(х). Точность формулы
(2.2.1.29) улучшается с уменьшением требуемого уровня
ложных тревог. Согласно (2.2.1.28), (2.2.1.29) относительные потери
в эффективности обнаружения возрастают с увеличением
приведенной длины априорного интервала ξ (2.2.1.13) возможных
значений неизвестного времени прихода СШПС и с
уменьшением требуемого уровня ложных тревог. Эти потери могут быть
значительными, так как для СШПС параметр ξ достигает значений
106...108.
2.2.2. Обнаружение последовательности сверхширокополосных
сигналов с неизвестным временем прихода
В п. 2.2.1 рассмотрено обнаружение одиночных СШПС с
неизвестным временем прихода при наличии помех различной
физической природы. Однако часто возникает необходимость в
обнаружении последовательности СШПС с неизвестным временем
прихода. Последовательность СШПС можно представить в виде
^(ίΛ) = ΣΨ-λο-(^-μ)θ], (2.2.2.1)
параметры Я, μ, θ совпадают с (1.3.1).
Полагаем, что скважность последовательности (2.2.2.1)
достаточно велика, так, что отдельные СШПС не перекрываются.
Будем считать, что
Αο€[Λι;Λ2], (2.2.2.2)
79
а длину априорного интервала возможных значений времени
прихода обозначим
Л = Л2-Л1. (2.2.2.3)
При этом полагаем, что Л < θ.
Пусть на интервале времени [0;Г] наблюдается реализация
Ы<А) + "(<>+«<<),
U \η(ί) + ξ(ί), V
причем в (2.2.2.2), (2.2.2.3) 0 < Л1? Л2 + Νθ < Τ .
При наличии только ГБШ обнаружитель максимального
правдоподобия вырабатывает величину [97, 98]
L0 = supZ,0(A), Я € [Λι;Λ2] 2.2.2.5)
я
и принимается решение о наличии сигнала, если
L0>h. (2.2.2.6)
Если L0 < h , принимается решение об отсутствии сигнала $^(£,А0)
в реализации наблюдаемых данных (2.2.2.4). В (2.2.2.6) h —
порог обнаружения сигнала, а в (2.2.2.5) L0(X) — ЛФОП, который
имеет вид [97]
^ = £Σ)χ(.ν)<ίν-λ-(!<-μ)θνν- (2-2.2.7)
Функцию (2.2.2.7) необходимо формировать для всех возможных
значений времени прихода Я € [ΛΧ;Λ2].
Рассмотрим возможность фильтровой реализации
обнаружителя последовательности СШПС (2.2.2.1). Устройство для
обнаружения последовательности СШПС с неизвестным временем
прихода показано на рис. 2.2.2.1.
x{t)
ι L
*-
2
t
г \
'
I
3
'
1
5
т
6
4 J
Рис. 2.2.2.1.
80
Здесь обозначено: 1 — линейный фильтр с импульсной
переходной функцией (ИПФ) H(t), 2 — устройство задержки с N-2
отводами через время 0,3 — сумматор. Устройство задержки 2 и
сумматор 3 образуют гребенчатый фильтр 4 с ИПФ [97]
Λι(ί) = Σ5(ί-*β)' (2.2.2.8)
к=0
где <5(·) — дельта-функция. На основе (2.2.2.8) можно записать
ИПФ устройства, содержащего последовательно включенные
фильтры 1 и 4 (рис. 2.2.2.1)
h(t)=]H(y)hl(t-y)dy = ^H(t-ke). (2.2.2.9)
Полагаем, что длительность ИПФ H(t) мала по сравнению с
периодом повторения θ , так что отдельные слагаемые в (2.2.2.9)
не перекрываются. Вычисляя свертку реализации наблюдаемых
данных x(t) (2.2.2А) и ИПФ (2.2.2.9), для выходного сигнала
гребенчатого фильтра, изображенного на рис. 2.2.2.1, получаем
выражение
y(t) = ] x(y)h(t-y)dy = X J x(t)H(t-у-кв)ау.(2.2.2.10)
Если блок 1 представляет собой фильтр, согласованный с
сигналом s(t), то следует положить [98]
H(t) = 2s(t0-t)/N0, (2.2.2.11)
где t0 — задержка сигнала, величина которой обычно выбирается
большей, чем его длительность. Подставляя (2.2.2.11) в (2.2.2.10),
имеем
о N-1 °°
Выбирая здесь
ί = ί0+(Ν-1-μ)θ + λ, (2.2.2.12)
приходим к выражению для ЛФОП (2.2.2.7). Согласно (2.2.2.5) в
блоке 5 на рис. 2.2.2.1 определяется величина абсолютного
максимума L0 выходного сигнала фильтра 4 на интервале
Р1;Т2], (2.2.2.13)
где Тх = t0 + (Ν -1 - μ)θ + Λχ, Τ2 = t0 + (Ν -1 - μ)θ + Λ2.
Следовательно, блок 5 может быть реализован как пиковый детектор, в
котором определяется наибольший максимум сигнала y(t) на ин-
81
тервале (2.2.2.13). Согласно (2.2.2.6) блок 6 представляет собой
пороговое устройство, в котором выходной сигнал пикового
детектора сравнивается с порогом h и выносится решение о
наличии или отсутствии сигнала в реализации наблюдаемых данных
(2.2.2.4).
Если форма сигнала s(t) известна неточно, то в
обнаружителе (рис. 2.2.2.1) приходится использовать фильтр, отличный от
согласованного (2.2.2.11). Кроме того, аппаратурная реализация
гребенчатого фильтра 4 на рис. 2.2.2.1 при большом числе СШПС
в последовательности (2.2.2.1) оказывается затруднительной
из—за жестких требований к стабильности параметров линии
задержки 2 и высокой точности расположения отводов,
обеспечивающей синхронность накопления СШПС. Частично эти
трудности могут быть преодолены за счет замены гребенчатого
фильтра модифицированным рециркулятором, содержащим лишь два
звена задержки.
Упрощенный, по сравнению с рис. 2.2.2.1, обнаружитель
последовательности СШПС с неизвестным временем прихода
представлен на рис. 2.2.2.2.
1 [
»
2
4
1
'
3
'
'
5
8
17
1
ι
6 I
Рис. 2.2.2.2.
На рисунке обозначено: 1 — линейный фильтр с ИПФ H(t),
2 — сумматор, 3 — аттенюатор с коэффициентом ослабления т < 1,
4 — устройство задержки на время 0,5 — устройство задержки
на время ΝΘ, 6 — аттенюатор с коэффициентом ослабления т1,
7 — вычитающее устройство. Блоки 2..7 образуют
модифицированный рециркулятор 8, выделенный штриховой линией. В блоке
9 (пиковый детектор) определяется величина абсолютного
максимума выходного сигнала рециркулятора на интервале времени
(2.2.2.13), а блок 10 представляет собой пороговое устройство, в
котором выходной сигнал пикового детектора сравнивается с
порогом h для вынесения решения о наличии или отсутствии
сигнала (2.2.2.1). Если в блоке 6 выбрать коэффициент ослабления
ml = mN , то ИПФ модифицированного рециркулятора имеет вид
82
N-l
[53, 92] 1\(t) = ^mk5(t-ke). Соответственно, ИПФ устройства,
k=0
содержащего последовательно включенные фильтр 1 и
модифицированный рециркулятор 8, (рис. 2.2.2.2) запишется как
h(t)= JH(y)hl(t-y)dy = ^mkH(t-ke). (2.2.2.14)
Вычисляя свертку реализации наблюдаемых данных (2.2.2.4)
и ИПФ (2.2.2.14), для выходного сигнала модифицированного
рециркулятора получаем выражение
№ = ] x(y)h(t-y)dy = %тк ] x(y)H(t-у-кв)ау. (2.2.2.15)
Сопоставляя (2.2.2.15) и (2.2.2.10), видно, что при значениях
т, близких к единице, сигнал на выходе модифицированного
рециркулятора на рис. 2.2.2.2 можно рассматривать как
аппроксимацию выходного сигнала гребенчатого фильтра на рис. 2.2.2.1.
Следовательно, по крайней мере при т, стремящихся к
единице, упрощенный обнаружитель на рис. 2.2.2.2 должен обладать
характеристиками, близкими к характеристикам более сложного
обнаружителя рис. 2.2.2.1.
Выбирая далее в (2.2.2.15) значения t согласно (2.2.2.12),
находим, что в устройстве, изображенном на рис. 2.2.2.2,
вырабатывается функция
L{k) = X mN-l-k J χ(ν)Η[λ + (к - μ)θ + t0- y]dy (2.2.2.16)
k=0 ^o
для всех значений Я из интервала (2.2.2.2), как функция
текущего времени. Аналогично (2.2.2.6), решение о наличии сигнала
принимается, если
L>h, (2.2.2.17)
где L = supL(A), Я € [AX;A2].
я
Эффективность обнаружителя (2.2.2.16), (2.2.2.17),
показанного на рис. 2.2.2.2, будем характеризовать величинами
вероятности ложной тревоги а и вероятности пропуска сигнала β . При
отсутствии на входе обнаружителя полезного сигнала (2.2.2.1)
для выходного сигнала модифицированного рециркулятора
(2.2.2.16) получаем выражение
L{X) = Ν{λ) = ^m""1-* J [n(t) + ξ(ί)]Η[λ + (Jfc - μ)θ +10 - y}dy. (2.2.2.18)
83
Здесь N (λ) — центрированный гауссовский случайный процесс,
который обладает корреляционной функцией
Β(λί,λ2) = (Ν(λί)Ν(λ2)) =
N-l N-1
к=0 п=0
Ν,
= ΣΣт^'1]'П'к\^-\н[\Нк-μ)θ +10 -j,]ff [λ, + (к-μ)θ + ί0 -yfo +
со оо
■ J ί β«(»ι - У2Ш*1 + (* - ДО + Ό - йЖ + (к - μ)θ + t,- y2}dyidy2 =
где
1-m21
1-m2
Nn
-bn(KK)i
+ J J ^(2/i - W2№i - ^№2 - Я,ЖФ2 = Я„& - A,),
так что процесс (2.2.2.18) является стационарным.
Согласно определению [97] вероятность ложной тревоги
можно записать как
(2.2.2.19)
где
а = P[sup7V(A) > Л] = 1 - ^(Л) ,
Яе[Л1;Л2]
FN(h) = P[ supN(X)<h]
Яе[Л1;Л2]
(2.2.2.20)
— функция распределения абсолютного (наибольшего)
максимума реализации случайного процесса Ν(λ) (2.2.2.18). Так же,
как и в пункте 2.2.1 используя результаты [97], можно
аппроксимировать функцию распределения (2.2.2.20) выражением вида
FN(h) =
ξ
h2(l-m2)
eXPj-^eXPL 2(l-m-KJ
0,
>, Λ>0
h<0
.(2.2.2.21)
Здесь σ2Ν =ΒΝ(λ,λ), a ξ = ·
32ΒΝ(λι,λ2)
σΝ \_ Э^ЭЯ^ J
!/2
приведенная
Л=Я2
длина априорного интервала возможных значении
неизвестного времени прихода. Величина ξ определяет количество некор-
84
релированных отсчетов процесса Ν(λ) (2.2.2.18) на интервале
(2.2.2.2). Подставляя далее (2.2.2.21) в (2.2.2.19), для
вероятности ложной тревоги получаем приближенное выражение
а «
о,
/i2(l-m2)
2(1-m2" К
►, h>0
h<0
.(2.2.2.22)
Точность этого выражения возрастает с увеличением h (то есть с
уменьшением а) и с увеличением ξ [97].
Для расчета параметров, определяющих величину
вероятности ложной тревоги, используем спектральное описание фильтров
1 на рис. 2.2.2.1 и рис. 2.2.2.2, а также спектральное описание
ГУП. Действительно, обозначая передаточную функцию фильтра
обнаружителя рис. 2.2.2.2 H(j(o) = Г H(t)exjp(-j(Ot)dt, можно
записать
°ι =
2π
^ J \H(ja>fda) + ] βξ(ω)\Η(1ω)\2<1ω
, (2.2.2.23)
ξ = Α
Νη
] ω2 \H(ja>tfda> + j (o2G4(a))\H(jcofd<o
2
f- J \H(ja>fda> + J Οξ{ώ)\Η{]ώ$άω
1/2
. (2.2.2.24)
При отсутствии ГУП, когда помехой является только ГБШ,
выражения (2.2.2.23) и (2.2.2.24) принимают вид
o2N=a2n=^j\H(j(o)\2da>, (2.2.2.25)
I 1/2
ξ Ξ £, = Λ j J ω2 \H(ja)fda>/ J \H(ja)tfda>\ . (2.2.2.26)
Очевидно, что ξη (2.2.2.26) определяет количество
некоррелированных отсчетов шумовой составляющей (2.2.2.18) при
воздействии на вход обнаружителя (рис. 2.2.2.2) только ГБШ, то есть в
отсутствие ГУП.
Используя (2.2.2.25), (2.2.2.26), можно переписать (2.2.2.23)
и (2.2.2.24) как
σ2Ν=σ2ηχ,ξ = ξη4ψ7χ, (2.2.2.27)
85
где
Z = l +
Nn
\]θξ\Η(ίω)\2άω/]\Η(ίω)\2άω
\o о
(2.2.2.28)
ψ = 1 + — /ω2(?ξ |Я(^)|2йсо/ J ω2 |Я(^)|2йсо . (2.2.2.29)
^oVo о )
Подставляя (2.2.2.27) в (2.2.2.22), видно, что коэффициенты
(2.2.2.28), (2.2.2.29) описывают влияние ГУП на величину
вероятности ложной тревоги. Действительно, дисперсия шумовой
функции (2.2.2.18) вследствие воздействия ГУП возрастает
пропорционально χ (2.2.2.28), а приведенная длина априорного
интервала возможных значений неизвестного времени прихода
возрастает пропорционально φμ (2.2.2.29) и убывает обратно
пропорционально φχ .
Если ГУП отсутствует, то есть G^((0) ξ 0, то χ -ψ = 1.
Соответственно, выражение для вероятности ложной тревоги (2.2.2.22)
принимает вид
а„ ~<
J ξη Γ fe2(l-m2)
о,
А>0
h<0
(2.2.2.30)
Сопоставление (2.2.2.32) и (2.2.2.30) позволяет определить
влияние наличия ГУП на вероятность ложной тревоги при
использовании обнаружителя, показанного на рис. 2.2.2.2.
Найдем теперь вероятность пропуска сигнала. Предполагая
наличие последовательности (2.2.2.1) на входе обнаружителя
рис. 2.2.2.2, подставим (2.2.2.4) в (2.2.2.16). Представим
сигнал на выходе модифицированного рециркулятора 2.2.2.8 (рис.
2.2.2.2) в виде: L(X) = 3(λ,λ0) + Ν(λ). Здесь шумовая функция
определяется из (2.2.2.18), а сигнальная функция
5(А,А0) =
]8{ν-λα-{Η-μ)θ]Η[λ + {Η-μ)θ + ία-ν]άν =
l-mN
1-га
С учетом очевидной компенсации постоянной
задержки tQ в фильтре 1 (рис. 2.2.2.1, 2.2.2.2) можно записать
5Я(ЛЯ) = J 3(ν)Η(Αλ - y)dy ,Αλ = λ-λ0.
= ΣΣ
πι
86
Обозначим Sm = тах£я(ЛА), тогда приближенное
выражение для вероятности пропуска β представим как [97]
0«(1-а)Ф(А/ая-*я), (2.2.2.31)
где а\ - (Ν2(λη = (1 - τη2Ν)σ2Ν /(1 - m2) — дисперсия шумовой
функции (2.2.2.18), а Ф(х) = J ехр(-*2 /2)dt/л/2к — интеграл
вероятности [99],
z2H=z2(l + m)(l-mN)/[(l-m)(l + mN)] (2.2.2.32)
— ОСШ на выходе модифицированного рециркулятора —
обнаружителя на рис. 2.2.2.2, z2 = S^ /σ2Ν — ОСШ при обнаружении
одного СШПС. Отметим, что точность приближенной формулы
(2.2.2.31) улучшается с ростом ОСШ (2.2.2.32) [97]. Если ГУП
отсутствует, то выражение для вероятности пропуска сигнала
(2.2.2.31) принимает вид
β = (1-αη)${Η/σηΙί-ζπΙ1). (2.2.2.33)
Здесь вероятность ложной тревоги определяется из (2.2.2.30), а
а1н = (1 ~ т2М)а2м /(1 ~ т2) = °я IX у ПРИ этом величина σ2
определяется из (2.2.2.25), а величина χ — из (2.2.2.28). Параметр
z2nH = zl(l + m)(l-mN)/[(l-m)(l + m»)} = ζ2Η /χ (2.2.2.34)
представляет собой ОСШ при отсутствии ГУП. Сопоставляя
(2.2.2.32) и (2.2.2.34), видно, что коэффициент (2.2.2.28)
показывает, во сколько раз уменьшается ОСШ вследствие воздействия ГУП.
В целом, оценить влияние ГУП на эффективность
обнаружения последовательности СШПС (2.2.2.1) с неизвестным временем
прихода с помощью обнаружителя на рис. 2.2.2.2 можно,
сопоставляя (2.2.2.22) и (2.2.2.30), а также (2.2.2.31) и (2.2.2.33).
Полученные выражения для вероятности ложной
тревоги (2.2.2.22) и вероятности пропуска сигнала (2.2.2.31) при
использовании обнаружителя, изображенного на рис. 2.2.2.2,
имеют довольно общий характер. Из них, как частный случай,
можно получить характеристики более сложного с точки
зрения аппаратурной реализации обнаружителя, представленного
на рис. 2.2.2.1. Действительно, полагая формально в (2.2.2.22) и
(2.2.2.31) т->1, имеем
1-ехр U^exp
h2
>,/ι>0
2Νσ;
0, Λ<0
(2.2.2.35)
87
^-(l-aJS (hlaH>[N-z^. (2.2.2.36)
Здесь
z2=Nz2 (2.2.2.37)
— ОСШ на выходе гребенчатого фильтра обнаружителя на рис.
2.2.2.1. Наконец, полагая в (2.2.2.22) и (2.2.2.31) или в (2.2.2.35),
(2.2.2.36) N = 1, получаем, как частный случай, найденные в п.
2.2.1 характеристики обнаружения одного СШПС с неизвестным
временем прихода при наличии ГБШ и ГУП.
Сопоставление ОСШ (2.2.2.32) и (2.2.2.37) позволяет оценить
потери в эффективности обнаружения вследствие замены
гребенчатого фильтра обнаружителя на рис. 2.2.2.1 на более простой для
аппаратурной реализации модифицированный рециркулятор в
обнаружителе на рис. 2.2.2.2. Проигрыш в эффективности
обнаружения будем характеризовать отношением
χ = z2 / zl = N(l-m)(l + mN)/[(l + m)(l-mN)],(2.2.2.38)
которое показывает, во сколько раз ОСШ в обнаружителе,
показанном на рис. 2.2.2.2, меньше, чем в обнаружителе, показанном
на рис. 2.2.2.1.
На рис. 2.2.2.3 показана зависимость проигрыша (2.2.2.38) в
величине ОСШ от коэффициента ослабления т аттенюатора 3 на
рис. 2.2.2.2 при различном числе N СШПС в
последовательности (2.2.2.1). Кривая 1 соответствует N = 10 , кривая 2 — N = 20,
0.5 0.63 0.75 0.88 1
0.5 т 0.99
Рис. 2.2.2.3
Как следует из рис. 2.2.2.3 проигрыш в величине ОСШ
обнаружителя на рис. 2.2.2.2 по сравнению с обнаружителем на рис.
88
2.2.2.1 убывает по мере приближения коэффициента
ослабления т к единице и возрастает с увеличением числа N СШПС
последовательности (2.2.2.1). Отметим, что для предотвращения
самовозбуждения рециркулятора должно выполняться условие
т < 1. Обычно выбирают т = 0,8..0,95 [53, 92].
2.2.3. Обнаружение последовательности
сверхширокополосных сигналов
с неизвестным периодом повторения
В ряде задач необходимо обнаруживать последовательность
СШПС с неизвестным периодом повторения, например, в случае
его вобуляции, случайного для наблюдателя расположения
отражающих центров объекта по дальности и др. В реальных условиях
кроме ГБШ часто действуют внешние помехи, которые, как и выше,
интерпретируются как гауссовский узкополосный случайный
процесс. В связи с этим рассмотрим обнаружение последовательности
СШПС с неизвестным периодом повторения при наличии как ГБШ,
так и ГУП. Последовательность СШПС можно записать в виде
Jfc=0
где 0О — неизвестный период повторения, который принимает
значения из интервала 0О € [0min;0max]. Частотные параметры
последовательности (2.2.3.1) и её сверхширокополосность
определяются как в (1.3.1).
Пусть на интервале времени [0;Г] в случае наличия сигнала
наблюдается реализация
χ(ί) = 8Ν(ί,θ0) + η(ί) + ξ(ί), (2.1.3.2)
а в случае отсутствия сигнала
χ(ί) = η(ί) + ξ(ί). (2.1.3.3)
Здесь спектральные плотности и параметры процессов n(t) и ξ(ί)
определяются как в (2.2.1.2).
Полагаем, что отдельные импульсы последовательности
(2.2.3.1) не перекрываются. Кроме того, считаем, что время
наблюдения [0;Г] больше длительности всей последовательности,
то есть Τ > N6max . Тогда, при отсутствии ГУП, ЛФОП можно
записать в виде [98]
2 N~lTr
ΗΘ) = — Σ J *('М'" ke)dt' (2.2.3.4)
89
Эту функцию необходимо формировать для всех возможных
значений периода повторения θ е [0min;0max].
Поскольку значение периода повторения θ неизвестно, для
того, чтобы исключить его влияние на эффективность
обнаружения, необходимо заменить неизвестное истинное значение на его
оценку максимального правдоподобия. Таким образом, при
наличии только ГБШ, получаемый обнаружитель максимального
правдоподобия вырабатывает величину [97]
i = Supi(0),ee[emin;emax]. (2.2.3.5)
Я
Решение о наличии сигнала принимается при
L>h. (2.2.3.6)
Если L < h, принимается решение о том, что сигнал отсутствует,
где h — порог обнаружения.
Согласно формулам (2.2.3.4) —(2.2.3.6) максимально
правдоподобный обнаружитель СШПС включает в себя набор
корреляторов, которые вырабатывают (2.2.3.4) для всех возможных
значений периода повторения θ е [0min;0max]. Затем экстрема-
тором в обнаружителе определяется значение L абсолютного
максимума (2.2.3.4) и сравнивается с порогом h. Поскольку
рассматривается обнаружение последовательности субнаносе-
кундных импульсов, то необходимое число корреляторов будет
весьма велико.
Найдем вероятность ложной тревоги, используя алгоритм
(2.2.3.6) при наличии ГУП. Реализация наблюдаемых данных
при отсутствии сигнала имеет вид (2.2.3.3). Подставив (2.2.3.3)
в (2.2.3.4), получим
Ь{в) = Ν(θ) = —Σ f №) + №)№-ЩМ · (2.2.3.7)
А'о fc=o о
Здесь Ν(θ) — шумовая функция на выходе приемника
максимального правдоподобия. Шумовая функция (2.2.3.7)
представляет собой линейное преобразование гауссовского случайного
процесса, следовательно, также является гауссовским случайным
процессом. Среднее значение этого процесса < Ν(θ) >= 0, а
корреляционная функция запишется как
Β(θ„θ2) = (ЭДЛГ(в2)) = Σΐ4(Щ -ηθ2), (2.2.3.8)
jfc=0 n=0
здесь
90
ВЛЪ -θ2) = η^] <* ~ ΘΜ* - β2)Λ +
л °°
+ — J \Βξ& -t2)s& -β>(<2 -в2)<М*г
(2.2.3.9)
Рассмотрим свойства функции (2.2.3.9). Пусть τ5 —
длительность СШПС 5(0, так что s(±Ts) « 0. Тогда, ΒΝ(θλ-θ2) « 0 при
Ι^ι ~^| > Т5- Считаем, что минимальная скважность
последовательности (2.2.3.1) велика, то есть
*s«0min, (2.2.3.10)
и к тому же
θ -θ <0 . (2.2.3.11)
Тогда BN(kd1 -ηθ2) «ОприЬпи £*(Α#ι -ηθ2) = ^[ОД -θ2)]
при fc = η. В результате (2.2.3.8) принимает вид
ВФМ = 1,вАЩ-е2)]. (2.2.3.12)
Jfc=0
Так как корреляционная функция (2.2.3.12) шумовой
функции (2.2.3.7) зависит от разности своих аргументов, то процесс
(2.2.3.7) при выполнении условий (2.2.3.10), (2.2.3.11) является
стационарным.
В соответствие с [97] выражение для вероятности ложной
тревоги запишется как
а = P[suPN(e) > h] = 1 - FN(h), θ е [0min;0mJ, (2.2.3.13)
где FN(h) = P[supN(e) < h] для всех θ e [0min;0max]. Аналогично,
как и в случае неизвестного времени прихода, используя
результаты [97], функцию распределения абсолютного максимума
случайного процесса (2.2.3.7) можно аппроксимировать
выражением вида
FAQ"
ехр|--ехр
0,
Л.
Л>0
Л<0
где
σΙ=Β(θ,θ) = ΝΒΝ(0) = Νσ2Ν
— дисперсия шумовой функции (2.2.3.7),
σ2Ν=ΒΝ(θ,θ) = ΒΝ(0),
(2.2.3.14)
(2.2.3.15)
(2.2.3.16)
91
θ —θ
ε max min
ϊ>2Β{θνθ2)
1/2
(2.2.3.17)
— приведенная длина априорного интервала возможных
значений неизвестного периода повторения. Величина ξ определяет
количество некоррелированных отсчетов процесса Ν(θ) (2.2.3.7)
на интервале [0min;0max]. Подставляя корреляционную функцию
(2.2.3.12) в (2.2.3.17) и выполняя дифференцирование, получаем
ξ = \iYlk2 = Vyl(2N-l)(N-l)/6 , (2.2.3.18)
где
0 -0
χ. max min
1/2
(2.2.3.19)
Подставляя (2.2.3.19) в (2.2.3.14), для вероятности ложной
тревоги находим выражение
h2
а «<
ехр
2тг
О,
2ΝσΙ
►, h>0
. (2.2.3.20)
Л<0
Такимобразом,величинавероятностиложнойтревоги (2.2.3.20)
определяется параметрами ν (2.2.3.19) и σ2Ν (2.2.3.16), а также
зависит от числа импульсов N в последовательности (2.2.3.1).
Для расчета параметров, определяющих величину
вероятности ложной тревоги, используем спектральное представление.
Спектр СШПС обозначим: S{j(u) = \ s(t)exp(-j(Ot)dt, тогда
параметр (2.2.3.16) перепишется как
σ2Ν =
J_
2π
— j |£(^)|2й(0 + _ J G{(a>)|S(ja>)|2<to
/*0 -oo ^0 -^>o
2 jG4(<»)|5(ifl))fd|,
(2.2.3.21)
= z:+-
πΝί
где z2n = 2E / N0 — ОСШ для одного СШПС при наличии только
ГБШ, а Е= js2(t)dt = — J|S(ja>)f Λ» - энергия СШПС. Ис-
LiJL
92
пользуя спектральное представление, выражение для ν (2.2.3.19)
получаем в виде
ν = (θ -θ )
V max mm/
J ω2 \S(jo)fdw + -£- J ω20ξ (w)\S(jw)fdw
0 -~
]\8ϋω)\2άω + ^]θξ(ω)\8(1ω)\2άω
1/2
. (2.2.3.22)
При отсутствии ГУП (ϋξ(ω) = 0 ) параметр σ2Ν (2.2.3.20)
определяется как
<=^]\s^d(0=z-
а выражение (2.2.3.22) можно переписать следующим образом:
vn=(0max-0min) \]o>2\S(j(o)\2d(o/l\S(ja>)\2d(o
Υ/2
Для анализа влияния ГУП на вероятность ложной
тревоги представим параметры (2.2.3.21) и (2.2.3.22) в виде:
<4 = о*«Х = ζ2ηΧ,ν = ν^ψ/χ . Здесь
* = ι +
Ν.
]θξ(ω)\8(1ω)\2(Ιω/]\8ϋω)\2άω
ο Vo
, (2.2.3.23)
ψ = 1 + — ]G)2Gs(o))\S{jo))\2d(o/J ω2 \S(jo))\2do) . (2.2.3.24)
Nt
о Vo
Коэффициенты (2.2.3.23), (2.2.3.24) описывают влияние ГУП
на величину вероятности ложной тревоги. Действительно,
дисперсия шумовой функции с\ - ο\ηχ , где а\п - Νσ2Ν = Νζ2η
— дисперсия шумовой функции (2.2.3.7) при отсутствии ГУП.
Вследствие воздействия ГУП дисперсия шумовой функции
(2.2.3.15) возрастает пропорционально χ. Параметр (2.2.3.22),
определяющий согласно (2.2.3.18) приведенную длину [97]
априорного интервала возможных значений периода следования
последовательности (2.2.3.1), вследствие воздействия ГУП
возрастает пропорционально φμ и убывает обратно
пропорционально yJX .
В отсутствие ГУП в (2.2.3.23), (2.2.3.24) нужно положить
G^((u) ξ 0 и, следовательно, параметры χ = ψ = 1. Тогда
вероятность ложной тревоги (2.2.3.20) перепишется в виде
93
a„ ~<
l-exp|-^(2JV-l)(iV-l)/6exp
2тг
o,
2Nzl
>,/i>0
. (2.2.3.25)
/i<0
Анализ полученных выражений для вероятности ложной
тревоги при различных условиях обнаружения несколько
упрощается, если вероятность ложной тревоги достаточно мала, например,
а,ап < 0,1. Тогда (2.2.3.20) и (2.2.3.25) можно представить как
ν Г Л2
а = — V(2JV-l)(JV-l)/6exp
2тг
2ΝσΙ
an~^,J(2N-l)(N-l)/6exp
in
Сопоставляя эти выражения, находим
2Nzl
к„ =
а
2πα
.yl(2N-l){N-l)/6
z-i
(2.2.3.26)
(2.2.3.27)
. (2.2.3.28)
Параметр ка показывает, во сколько раз возрастает вероятность
ложной тревоги ап (2.2.3.27) при наличии только ГБШ вследс-
твии воздействия ГУП.
Найдем теперь вероятность пропуска сигнала β .
Предположим, что сигнал присутствует на входе приемника. Тогда, в
соответствии с определением [97]: β = P[s\ipL(6) < h], 0 e [θΏύη]θταΒΧ].
Подставим реализацию наблюдаемых данных в случае наличия
сигнала (2.2.3.2) в выражение для функционала отношения
правдоподобия (2.2.3.4). Запишем (2.2.3.4) в виде суммы сигнальной
и шумовой функции L{6) = 5(0,0О) + Ν(θ). Здесь
s(e, во) = -|- Σ Σ J <* - *W - n(*)dt
-tV0 fc=o n=o _oo
— сигнальная функция, а шумовая функция Ν (θ) определяется из
(2.2.3.7). При выполнении условий (2.2.3.10), (2.2.3.11) спра-
9 JV—ι °°
ведливо выражение 5(0,0О) = — V Г s(t - kd0)s(t - k6)dt,
Следовала т^. J
о fc=o.
тельно, max5(0,0o) = 5(0О,0О) = Nz2n. Обозначим ζ2 = 52(0ο,0ο)/σ* =
= Νζ*/σ2Ν = Νζ2η Ι χ — выходное ОСШ при наличии ГУП. Тогда,
если выходное ОСШ ζ2 не слишком мало, то приближенное
выражение для вероятности пропуска сигнала β, при наличии
ГУП, можно записать как [97]
94
fi~(l-a)$(h/aL-z). (2.2.3.29)
χ
Здесь Ф(х) = J exp(-t2 /2)dt/^2n — интеграл вероятности. В
соответствии с [97] формула (2.2.3.29) является асимптотически
точной с ростом ζ . Аналогично, выражение для вероятности
пропуска сигнала при отсутствии ГУП можно записать как
βη-(1-αη)Φ(ΐι/ζΝ-ζΝ),
где ζ2Ν = Νζ2η — ОСШ при наличии только ГБШ [98], то есть в
отсутствие ГУП. Очевидно ζ2Ν = ζ2χ , или ζ2 = ζ2Ν /χ .
Таким образом, влияние ГУП на эффективность
обнаружения СШПС описывается величинами χ (2.2.3.23) и ка (2.2.3.28).
Величина χ (2.2.3.23) показывает, во сколько раз уменьшилось
ОСШ вследствие воздействия ГУП, а ка (2.2.3.28) — во сколько
раз увеличилась вероятность ложной тревоги.
Рассмотрим влияние незнания периода повторения θ
последовательности СШПС (2.2.3.1) на эффективность обнаружения
СШПС. Запишем вероятность ложной тревоги и вероятность
пропуска сигнала при априори известном периоде повторения [98]
а0=1-Ф
h
\
°LJ
h
λ
, Α = Φ — -ζ . (2.2.3.30)
\CL )
При условиях ζ ^> 1, а ^> 1 видно, что вероятности пропуска
сигнала при известном и неизвестном периоде повторения
практически совпадают, то есть β « β0. Рассмотрим поведение
вероятности ложной тревоги (2.2.3.26) при неизвестном периоде
повторения и вероятность ложной тревоги (2.2.3.30) при известном
периоде повторения в случае, когда h^> aL. Для этого
воспользуемся асимптотическим представлением интеграла вероятности
Ф(х) при х —> ©о. Согласно [24] 1-Ф(ж) - (l/ху[2ж)ехр(-х2 /2),
при х » 1. Используя это выражение, запишем отношение
вероятности ложной тревоги при неизвестном периоде повторения к
вероятности ложной тревоги при известном периоде повторения
а/а0 -ξ/ι/σ^ν^τ. (2.2.3.31)
Выберем порог h в соответствии с критерием Неймана—Пирсона
по заданной величине вероятности ложной тревоги. Тогда порог,
обеспечивающий заданное значение а0, при априори известном
периоде повторения имеет вид
/i = aLarcO(l-a0). (2.2.3.32)
95
Подставим (2.2.3.32) в (2.2.3.31) и получим: ос/а0 «
« ξ/ι arc Φ (ΐ-α0)/ %/2π. Далее, подставляя значение ξ (2.2.3.17),
получаем а/а0 « УахсФ(1-а0)^(2ЛГ-1)(ЛГ-1)/3;г/2.
Анализируя полученные выражения, можно сделать вывод,
что потери в эффективности обнаружения последовательности
СШПС возрастают с увеличением ξ (2.2.3.17) (длины
априорного интервала возможных значений неизвестного периода
повторения), с увеличением числа импульсов N в последовательности
(2.2.3.1) и с уменьшением требуемого уровня ложных тревог а0.
Соответственно, влияние ГУП описывается коэффициентами χ
(2.2.3.23) и ψ (2.2.3.24).
Найдем коэффициенты χ (2.2.3.23) и ψ (2.2.3.24) для
частного случая ГУП с прямоугольной формой спектральной
плотности
Οξ{ω) =
L
2
/
+ 1
(2.2.3.33)
Здесь γ — спектральная плотность ГУП, ωξ — центральная
частота ГУП, Ωξ — ширина полосы частот ГУП,
ν ' |0,| я |> 1/2
Считаем, что ωξ » Ωξ, то есть помеха узкополосная. Используя
(2.2.3.23) и (2.2.3.24), находим
χ = 1 + ςε, (2.2.3.34)
а ψ = 1 + qS. Здесь
ωξ+Ωξ/2
ε= j \S(j<o)\2d(o/l\S(j(D)\2d(o (2.2.3.35)
ωξ-Ωξ/2 Ο
— относительная доля энергии сигнала в полосе частот, поражен-
ωξ+Ωξ/2
ной ГУП, δ= \ Q)2\S(jQ))\2d(o/ \a>2\S(j(o)\2d(0 — ОТНОСИТеЛ
feci^-Ωξ/2 0
ная доля энергии первой производной сигнала в полосе частот,
пораженной ГУП, a q = γ / Ν0 — отношение спектральных
плотностей ГУП и ГБШ.
Если частотные параметры ωξ и Ωξ узкополосной помехи
(2.2.3.33) априори известны или могут быть измерены с
достаточной точностью, повысить эффективность обнаружения СШПС
96
можно, включив на входе обнаружителя (2.2.3.4) РФ с
амплитудно-частотной характеристикой вида
(ωξ-ωλ (ωΡ+ω^
Ωξ
υξ
Ωξ
(2.2.3.36)
\H(jo>)\ = 1-1
Тогда приемник будет вырабатывать функцию
1У/0 к=0 о
где x(t) — отклик РФ на реализацию наблюдаемых данных
(2.2.3.2) или (2.2.3.3). В отсутствие сигнала x(t) = n(t),
поскольку в рассматриваемом случае РФ полностью подавляет ГУП.
Поэтому вероятность ложной тревоги при воздействии ГУП со
спектром (2.2.3.33) и использовании РФ с амплитудно-частотной
характеристикой (2.2.3.36) определяется выражением (2.2.3.27).
Найдем вероятность пропуска сигнала при использовании РФ
(2.2.3.36). Реализация наблюдаемых данных в случае наличия
сигнала на выходе РФ будет иметь вид: x(t) = sN(t,eo) + n(t), где
sN(t,eo) — отклик РФ на принимаемый сигнал sN(t,d0) (2.2.3.1).
Соответственно, выходной сигнал приемника можно записать
как
Ll(e) = S(e,e0) + NM- (2.2.3.37)
Здесь Νη(θ) — шумовая функция при наличии только ГБШ,
которая определяется из (2.2.3.7) при ξ(ί) = 0 . Сигнальная функция в
(2.2.3.37) описывается как 5(0,0О) = — Σ Σ j *(* ~ fc6o)5(*" ηθ)άί>
Nq k=0 71=0 _oo
где s(t) отклик РФ на один СШПС s(t). При выполнении
условий (2.2.3.10), (2.2.3.11) максимум сигнальной функции будет
иметь вид: max5(0,0О) = 5(0О,0О) = Νζ2, где
ζ2 = — J s(t)s(t)dt.
Обозначим ζ2Ν = Νζ4 / ζ2η или z2N =z2N j χλ — ОСШ на выходе
приемника при использовании РФ. Полагая ОСШ ζ2Ν не слишком
малым, выражение для вероятности пропуска сигнала можно
записать как [97]: βλ ~ (1-ап)Ф(к/ζΝ -ζΝ). Параметр χλ
показывает, во сколько раз уменьшилось ОСШ вследствие применения
РФ. Представим χλ как
X, = *ll? = ]s2(t)dt/]s(t)s(t)dt=(l-ey2, (2.2.3.38)
97
где ε определяется из (2.2.3.35).
Применение РФ при априори известных ωξ и Ωξ позволяет
обеспечить такое же значение ложной тревоги, как и при
отсутствии ГУП. Однако ОСШ на выходе приемника уменьшается в χλ
(2.2.3.38) раз. Для ГУП со спектральной плотностью (2.2.3.33)
коэффициент (2.2.3.23) имеет вид (2.2.3.34). Очевидно, что при
априори известных ωξ и Ωξ применение РФ оправдано, когда
χ > χλ, то есть q > (2 - ε)(1 - ε)~2. Для СШПС обычно
выполняется условие ε<1, поэтому условием целесообразности РФ
является q > 2, то есть спектральная плотность ГУП более чем вдвое
превосходит спектральную плотность ГБШ.
2.2.4. Обнаружение последовательности
сверхширокополосных сигналов
с неизвестными временем прихода и периодом повторения
Рассмотрим обнаружение последовательности СШПС с
неизвестными временем прихода и периодом повторения при наличии
как ГБШ, так и ГУП. Последовательность СШПС и её параметры
определяются как в (2.2.2.1) и могут быть записаны
3Ν(ί,λ0,θ0) = Σ^-Κ-ψ-μ)θ0}. (2.2.4.1)
Jfc=0
Полагаем, что скважность последовательности (2.2.4.1)
достаточно велика, так, что отдельные СШПС не перекрываются. Будем
считать, что λ, е [Amin; AmJ , 0О e [0min;0mJ , а длины априорных
интервалов возможных значений времени прихода и периода
следования обозначим Л = Атах - Amin, Θ = 0тах - 0min. Считаем,
что Л < 0 . и 0 < А . < Amav + N0mav < Τ .
min min max max
При воздействии только ГБШ ЛФОП можно записать в виде
ДА, 0) = — £ jx(t)s[t -λ-(к- μ)θ]άί. (2.2.4.2)
Эту функцию необходимо формировать для всех возможных
значений времени прихода А € [Amin;Amax] и периода следования
0е[0 ;0 1.
v Lvmin ' vmax J
Поскольку значения времени прихода А и периода
повторения 0 неизвестны, для того, чтобы исключить их влияние на
процесс обнаружения, необходимо заменить неизвестные истинные
значения на их оценки максимального правдоподобия. Таким
образом, при наличии только ГБШ получаемый обнаружитель
максимального правдоподобия вырабатывает величину [97, 98]
98
L = Supi(A,0), 0e[emin;emJ, Я € [Я^; AmJ. (2.2.4.3)
Решение о наличии сигнала принимается при
L>h. (2.2.4.4)
Если L < h , принимается решение о том, что сигнал отсутствует,
где h — порог обнаружения.
Найдем вероятность ложной тревоги, используя алгоритм
(2.2.4.4) при наличии ГУП. При отсутствии сигнала (2.2.4.2)
запишется как
9 N-lT,
1(λ,θ) = Ν(λ,θ) = —ΣίΗϊ) + ξ(ί)№-ψ-μ)θ-λ]<1ί.(2.2Λ.5)
^0 Jfc=0 о
Здесь Ν(λ,θ) — шумовая функция на выходе приемника
максимального правдоподобия. Шумовая функция (2.2.4.5)
представляет собой линейное преобразование гауссовского случайного
процесса, следовательно является гауссовским случайным полем.
Среднее значение этого поля < 7V(A, 0) >= 0, а корреляционная
функция запишется как
Β(λι,θνλ2Α) = {Ν(λιΑΜλ2,θ2)) =
= ΣΣΊ|-}ψ-№-ΜΜ-Α1Μί-^-Μ)β2-λ2μί +
fc=0 π=0 (/*0 0
4 V. л (2-2.4.6)
+Ί^J J βίβ "№ ~(k~Μ"^ -(*- μΆ -KWQ =
^0 о о
= ΣΣΒΝ[λ1^-μ)θ1,λ2,(η-μ)θ2}.
Jfc=0 π=0
Здесь
τ
BN(^AAA) = J-jk* - *ι - W - θ2 - ъул +
(2.2.4.7)
+4г Яад - *!>(<! - ^ - ях^ -θ2- я.эа-
^0 0 О
Рассмотрим свойства функции (2.2.4.7). Обозначим Ts —
длительность СШПС з(£),такчто s(±Ts) « 0,тогда ^(Α^Θ^Α^^) « 0
при |Яз - Ai + 02 - 0Х| > Ts. Пусть минимальная скважность
последовательности (2.2.4.1) достаточно велика, то есть
*.«*«*,, (2-2.4.8)
а также
99
A<0min,0«0min. (2.2.4.9)
Тогда ΒΝ[λι,(1ζ-μ)θ1,λ2,(η-μ)θ2]~0 при кФпи BN[^(k-μ)θ1,
λ2,(η-μ)θ2] = ΒΝ[λι^-μ)θ1ίλ2^-μ)θ2] при к = η. Таким
образом (2.2.4.6) принимает вид
ВДДЛ^ХВД, -Я, +(*-|ΐ)(β2-β1)], (2.2.4.10)
где
9 г А Т Т
ВИ(Л) = тг|*(Φ(ί -Ч)Л + Т7гЯ^(*2 "«ι "ЧМ^Ж^ · (2.2.4.11)
^0 0 ^0 0 0
Согласно (2.2.4.10), (2.2.4.11) при выполнении (2.2.4.8), (2.2.4.9)
случайное поле (2.2.4.5) является однородным.
В соответствии с [97] выражение для вероятности ложной
тревоги запишется как
а = P[sup7V(A,0) > h] = 1 - FN(h),
^ G [Лшп^тахЬ Я G [^min^max]·
(2.2.4.12)
Здесь FN(h) = P[suP7V(A,0) < h], А € [Amin; AmJ, θ € [0min;0mJ .Оче-
видно, FN(h) представляет собой функцию распределения
величины абсолютного максимума шумовой функции Ν(λ,θ) (2.2.4.5).
Точное выражение для функции FN(h) получить не удается.
Используя результаты [97], можно аппроксимировать функцию
распределения абсолютного максимума случайного поля (2.2.4.5)
выражением вида
ί ξΗ \ h2
1ΘΧΡ1^^_43/2_ ΘΧΡ
FN(h) =
(2/г)
3/2,
2σί
0,
,h > а г
}ι<αΊ
Здесь
σΙ=Β(λ,θ,λ,θ) = Νσ2Ν
— дисперсия шумовой функции (2.2.4.5),
σ^=β„(Α,0,Α,6>),
^ = A©VdetB
— приведенная площадь области возможных значений времени
прихода и периода следования. Величина ξ (2.2.4.15) определяет
количество некоррелированных отсчетов поля Ν(λ,θ) (2.2.4.5) в
области [Amin; Amax] x [0min;0mJ . В (2.2.4.15) матрица
(2.2.4.13)
(2.2.4.14)
(2.2.4.15)
100
в =
э'^АЛЛ) Щ\А,КА)
όληολ2 Э^Эбз
э^э^
дв,дв2
(2.2.4.16)
θι-θ2
где
Κλι,θ1>*τΛ) = Β(*>ιΑ>*τΛ)/°1
(2.2.4.17)
— коэффициент корреляции шумовой функции (2.2.4.5).
Подставляя функцию (2.2.4.10) в (2.2.4.17) и выполняя
дифференцирование в (2.2.4.16), получаем, что det В = (N2 - l)d4 /12, где
ά^σ-ψΒ^λ,Α,λ,Α)/^^]^^. (2.2.4.18)
Здесь ΒΝ(λι,θ1,λ2,θ2) определяется из (2.2.4.7). Обозначим
ν = ΛΘ<ί\ (2.2.4.19)
тогда (2.2.4.15) перепишется в виде
ξ = Vy](N2-l)/3/2 . (2.2.4.20)
Соответственно вероятность ложной тревоги (2.1.4.12) можно
записать как
а «
1-ехр<-
vh \N2-l
4πσΝ
6πΝ
exp
h2
2ΝσΙ
>,h>oNjN
(2.2.4.21)
[1, h<oNy[N.
Для расчета параметров, определяющих величину
вероятности ложной тревоги, используем спектральное представление.
Спектр одного СШПС в последовательности (2.2.4.1) обозначим
S(j(o) = \ s(t)exp(-j(ot)dt, тогда параметр (2.2.4.14) перепишется
в виде
< =
2π
J- J \S(ja))\2da> + 4^ ί Ч<°Ш<4*»
Νη
Ν,
.(2.2.4.22)
Здесь ΰξ{ω) — спектральная плотность ГУП (2.2.2.3),
ζ2η = 2ЕIN0 — ОСШ для одного СШПС при наличии только ГБШ,
а Е = f s2{t)dt = — J |5(je))|2 do — энергия СШПС. Используя
спектральное представление, представим параметр (2.2.4.18)
101
J ω2 \S(j(Bf<ko + -£- J ω2Οξ(ω)\8ϋω)\2άω
d2 =
N,
J |5(ifl))|2da) + ^- J (?4(ω)|50'ω)ΓΛ»
(2.2.4.23)
Соответственно в (2.2.4.19) параметр ν выразится как
J ω2 |S(ja>)|2<to + -£- J ω2<?4(ω)|5ϋω)Γίίβ)
ν = ΛΘ-
iVn
} |S(jfl>)f«to + A J G4(e»)|5(jfi))|2cto
.(2.2.4.24)
При отсутствии ГУП (Οξ(ω) = 0) параметр (2.2.4.22) будет
иметь вид: σ2Ν = (l/2nN0)j\S(j(o)\2d(O = z2n,z (2.2.4.23) и (2.2.4.24)
определяются следующим образом: d2n = ί ω2 |5(ja))| ίίω/ j |5(ja))| dco
и vn = ΛΘ ί ω2 |S(jfl))|2dfl)/ J |S(jfl))|2(to . Таким образом
вероятность ложной тревоги (2.2.4.21) при отсутствии ГУП можно
записать как
a„ «i
νηΛ ЛГ2-1
1 - ехр { — Л ехр
hl
2Nz2
-,h>znjN
(2.2.4.25)
[1, h<zn4N.
Обозначим отношение дисперсий шумовой функции (2.2.4.13)
при наличии и отсутствии ГУП
^ = σ2/σ2π=σ2/ζ2 =
00 °° ^9 9 Δ. 9fi\
= l + 2jG4(a»)|5(ia»)r<to/JV0J|5(ja))r<to,'
или σ2Ν = ζ2ηχ и σ2 = Νζ2η / χ, то есть χ показывает, во сколько
раз увеличивается дисперсия шумовой функции (2.2.4.5)
вследствие воздействия ГУП. Обозначим
ψ = 1 + 2 J ω2βξ(ω)\8(ίω)\2άω/N0 J ω2 |S(jfl>)|2<to, (2.2.4.27)
соответственно параметр (2.2.4.18) можно переписать d2 = ά^ψ / χ .
При отсутствии ГУП величина (2.2.4.20) запишется как
102
ξη = vnyl(N2 — 1)/3 /2, где νη = ΑΘ(ζ — приведенная площадь
области возможных значений времени прихода и периода
повторения в отсутствие ГУП. Очевидно, ξ = ξηψ / χ , то есть
коэффициенты ψ и χ определяют влияние ГУП на вероятность ложной
тревоги. Вследствие воздействия ГУП дисперсия шумовой
функции (2.2.4.14) возрастает пропорционально χ. Параметр
(2.2.4.24), определяющий согласно (2.2.4.19) приведенную
площадь априорной области возможных значений времени прихода
и периода следования последовательности (2.2.4.1), вследствие
воздействия ГУП возрастает пропорционально θ е [0min; 0max ] и
убывает обратно пропорционально χ .
Анализ полученных значений вероятности ложной тревоги
для различных условий обнаружения несколько упрощается,
если вероятность ложной тревоги достаточно мала, например,
α,αη < 0,1. В этом случае (2.2.4.21) и (2.2.4.25) можно
представить в виде
vh /iV2-l
4πσΝ V 6/гЛГ
— вероятность ложной тревоги при воздействии ГУП и ГБШ,
vh /JV2-1
ап « —— J ехр
п 4πζη V 6/гЛГ
— вероятность ложной тревоги при воздействии только ГБШ.
Параметр, определяющий увеличение вероятности
ложной тревоги вследствии воздействия ГУП, согласно (2.2.4.28),
(2.2.4.29) запишется как
ка =а/ап = ψβχρ[ΐι2(χ-1)/2Νζ2ηχ]/χ3/2. (2.2.4.30)
Найдем теперь вероятность пропуска сигнала β . Положим, что
сигнал присутствует на входе приемника. Тогда, в соответствии с опре-
делением [97]: β = P[supL(A,e) < Λ], А € [А^А^], θ е [θ^-,θ^].
Запишем в случае наличия сигнала (2.2.4.2) в виде суммы
сигнальной и шумовой функции L(A,0) = *?(Я,Яо,0,0о) + Ν(λ,θ). Здесь
5(А, А0, θ,θ0) = -£- £ X J s[t -(k- μ)θ0 - Α0]ψ - (η - μ)θ - X]dt
— сигнальная функция, а шумовая функция Ν(λ,θ)
определяется из (2.2.4.5). При выполнении условий (2.2.4.8), (2.2.4.9)
функция S(A, Α0,βΑ) = 4" Σ J Φ " (fc " A*)0O - Я0]ф - (k - μ)θ - X]dt
■"θ n=0 _^o
2Νσ2Ν
(2.2.4.28)
INzl
(2.2.4.29)
103
обладает лишь одним существенным максимумом в априорной
области возможных значений Я и θ , то есть т&х8(λ,λ0,θ,θ0) =
= s(A0,A0AA) = ^n·
Обозначим ζ2 =S2(A0AAA)/<^ = ^/σ^ = ЛГ*2/* -
ОСШ при наличии ГУП. Тогда, при не слишком малом ОСШ,
приближенное выражение для вероятности пропуска сигнала
можно записать как [97]
0«(1-α)Φ(Α/σ,-ζ),
χ
где Ф(х) = \ exp(-t2 / 2)dt / у/2ж — интеграл вероятности.
Соответственно, выражение для вероятности пропуска сигнала при
отсутствии ГУП имеет вид
βη~(1-αη)Φ{ΐι/ζΝ-ζΝ),
где ζ2Ν = Νζ2η — ОСШ для всей последовательности (2.2.4.1) при
отсутствии ГУП. Очевидно ζ2Ν = ζ2χ , или ζ2 = ζ2Ν /χ . Таким
образом, влияние ГУП на эффективность обнаружения
описывается величинами χ и θ. Параметр χ (2.2.4.26) показывает, во
сколько раз уменьшилось ОСШ вследствие наличия ГУП, а
параметр ка (2.2.4.30) — во сколько раз увеличилась вероятность
ложной тревоги вследствие наличия ГУП.
Оценим влияние априорного незнания времени прихода Я и
периода следования θ на эффективность обнаружения СШПС. В
случае, когда эти параметры априори известны, вероятность
ложной тревоги и вероятность пропуска сигнала будут [98]
α0=1-Φ(Λ/σ,),/ϊ0=Φ(Λ/σ£-ίί). (2.2.4.31)
При условии ζ » 1, а « 1 видно, что вероятности пропуска
сигнала при известных и неизвестных значениях времени прихода и
периода повторения практически совпадают, то есть β « β0.
Рассмотрим поведение вероятности ложной тревоги (2.2.4.28)
при неизвестных значениях времени прихода и периода
повторения и поведение вероятности ложной тревоги (2.2.4.29) при
априори известных значениях времени прихода и периода
повторения в случае, когда h^> aL. Для этого воспользуемся
асимптотическим представлением интеграла вероятности Ф(х) при
я-»°о. Согласно [24] 1-Ф(х)«\1/хл/2п)ехр(-х2 /2), при
х ^> 1. Используя это выражение, находим асимптотическое
значение вероятности ложной тревоги (2.2.4.31) при априори
известных времени прихода и периоде повторения
104
a0 ~oLexp(-h2 /2o2L)/hyf27C. (2.2.4.32)
Сопоставляя (2.2.4.28) и (2.2.4.32), получаем
a/a0~ vh2yl(N2-l)/2/4na2L. (2.2.4.33)
Выберем порог h в соответствии с критерием
Неймана—Пирсона по заданной величине вероятности ложной тревоги а0. Тогда
порог при априори известных времени прихода и периоде
повторения имеет вид
h = aL агсФ(1 - а0). (2.2.4.34)
Подставляя (2.2.4.34) в_ (2.2.4.33), получаем
а/а0~ v[arcФ(1 -a0)fyJ(N2 -l)/2/4/г.
Анализируя полученное выражение, можно сделать вывод,
что относительные потери в эффективности обнаружения
последовательности СШПС вследствие априорного незнания
времени прихода и периода следования возрастают с увеличением ν
(площади априорной области возможных значений неизвестного
периода повторения и времени прихода), с увеличением числа
импульсов в последовательности и с уменьшением требуемого
уровня ложных тревог а0. Эти потери могут быть
значительными, так как для СШПС параметр (2.2.4.19) достигает значений
ν = 104—106.
Найдем коэффициенты χ (2.2.4.25) и ψ (2.2.4.26) для
частного случая ГУП с прямоугольной формой спектральной
плотности
ШЛЫ -J Lή -ί . (2.2.4.35)
ξ 2 Ω Ω
Считаем, что ωξ » Ωξ, то есть помеха узкополосная.
Используя (2.2.4.26) и (2.2.4.27), находим
% = l + qe, (2.2.4.36)
а ψ = 1 + ςδ. Здесь, как и ранее,
ωξ+Ωξ/2
ε= J \S№ffa/f\S(j(o)\2da> (2.2.4.37)
ωξ-Ωξ/2 О
— относительная доля энергии сигнала в полосе частот, поражен-
ωξ+Ωξ/2
ной ГУП, δ= J Q)2\S(j(o)\2d(o/ \a>2\S(j(o)\2d(0 — относитель-
ωξ-Ωξ/2 О
ная доля энергии первой производной сигнала в полосе частот,
105
пораженной ГУП, a q = γ / Ν0 — отношение спектральных
плотностей ГУП и ГБШ.
Если частотные параметры ωξ и Ωξ узкополосной помехи
(2.2.4.35) априори известны или могут быть измерены с
достаточной точностью, повысить эффективность обнаружения СШПС
можно, включив на входе обнаружителя (2.2.4.2) РФ с
амплитудно-частотной характеристикой вида
\Ηϋω)\ = 1-Ι[(ωξ-ω)/αξ]-Ι[(ωξ+ω)/αξ]. (2.2.4.38)
Тогда приемник будет вырабатывать функцию
2 N-lTr
Ζ(Α,β) = — X )x(y)s[t -(k- μ)θ - λ]α , (2.2.4.39)
где x(t) — отклик РФ на реализацию наблюдаемых данных. В
отсутствие сигнала x(t) = n(t), поскольку в рассматриваемом
случае РФ полностью подавляет ГУП. Поэтому вероятность
ложной тревоги при воздействии ГУП со спектральной плотностью
(2.2.4.35) при использовании РФ с амплитудно-частотной
характеристикой (2.2.4.38) определяется выражением (2.2.4.25) или
(2.2.4.29).
Найдем вероятность пропуска сигнала при использовании РФ
(2.2.4.38). Реализация наблюдаемых данных в случае наличия
сигнала на выходе РФ будет иметь вид x(t) = $Ν(ί,λ0,θ0) + n(t), где
sN(t,Ab,eo) — отклик фильтра на принимаемый сигнал sN(t, Xq^Oq)
(2.2.4.1). Тогда (2.2.4.39) можно переписать как
Ζ(Α,β) = 5(ΑΛ,βΑ) + ^(λ,β), (2.2.4.40)
здесь Νη(λ,θ) — шумовая функция при наличии
только ГБШ, определяемая из (2.2.4.5) при ξ(ί) = 0.
Сигнальная функция в (2.2.4.40) имеет вид: Ξίλ,λ^θ,θ^ =
о Ν-1Ν-1 °°
= —]Г ]Г $ s[t-(k- μ)θ0- X0]s[t-(n- μ)θ- X\dt. Здесь s(t) от-
-tV0 k=0 n=0 _oo
клик РФ на один СШПС s(t). При выполнении условий (2.2.4.8),
(2.2.4.9) максимум сигнальной функции будет иметь вид:
2NT
тах5(ЯЛ,в,6>0) = S^AAA) = Sm= —js(t)s(t)dt =Nz2, где
^о о
ζ2 = — Г s(t)s(t)dt — ОСШдляодногоСШПСприиспользованииРФ
и наличии только ГБШ. Соответственно, выражение для
вероятности пропуска сигнала можно записать как: β « (1 - осп)Ф(h / zN - zN).
106
Здесь z2N = S^ j Νσ2Ν — ОСШ на выходе приемника (2.2.4.2) с
использованием РФ, ζ2Ν = Nz4 j z2n, то есть ζ2Ν -ζ2Ν / χλ, где ζ2Ν —
ОСШ на выходе приемника максимального правдоподобия, не
использующего РФ, при наличии только ГБШ. Параметр χΧ
показывает, во сколько раз уменьшилось ОСШ вследствие
применения РФ. Величина^ имеет вид
Χι={1-έ)-\ (2.2.4.41)
где ε определяется из (2.2.4.37).
Следовательно, применение РФ при априори известных ωξ
и Ωξ позволяет обеспечить такое же значение вероятности
ложной тревоги, как и при отсутствии ГУП. Однако ОСШ на
выходе приемника максимального правдоподобия уменьшается в χλ
(2.2.4.41) раз. Для ГУП с прямоугольной формой спектральной
плотности (2.2.4.35) коэффициент (2.2.4.26) имеет вид (2.2.4.36).
Очевидно, что при априори известных ωξ и Ω.ξ применение РФ
целесообразно, когда χ > χλ, то есть q > (2 - ε) (1 - ε)~2. Для СШПС
обычно выполняется условие ε «1, поэтому применение РФ
оправдано, если q > 2, то есть спектральная плотность ГУП более
чем вдвое превосходит спектральную плотность ГБШ.
Так как полученные формулы для ложной тревоги и пропуска
сигнала асимптотически точные, а не абсолютно точные, то убрав
незнание периода повторения определить параметры
обнаружения при только неизвестном времени прихода не удается. Если
бы можно было получить точные формулы для ложной тревоги и
пропуска сигнала, то в них вошла бы величина интервала
возможных значений времени прихода и периода повторения. Устремив
этот интервал возможных значений времени прихода, например,
к нулю, можно было бы получить формулы для параметров
обнаружения при неизвестном периоде повторения, но известном
времени прихода.
Поскольку точное решение, как уже сказано, найти не
удается, необходимо для каждой задачи искать свое асимптотическое
решение при больших априорных интервалах неизвестного
параметра.
В [97] рассматривается задача обнаружения
прямоугольного импульса с неизвестной длительностью. В этой работе удалось
получить точные выражения для ложной тревоги и пропуска
сигнала. При устремлении границ интервала возможных значений
длительности импульса друг к другу формулы совпадают с
известными для обнаружения сигнала с известной длительностью.
107
2.3. Обнаружение стохастических сверхширокополосных
сигналов при наличии узкополосных помех и шума
В известных работах [16, 93, 106] были рассмотрены
задачи обнаружения и оценки параметров ССШПС на фоне только
ГБШ. Однако в реальных условиях, например при
радиолокационном наблюдении за объектом или в ходе радиоэлектронной
разведки, на входе приемника могут присутствовать внешние
помехи, в частности, контрпомехи, взаимные помехи от своих РЭС и
др. Поэтому ниже рассматривается задача обнаружения ССШПС
на фоне ГУП и ГБШ.
В качестве модели ССШПС (п. 1.4) будем использовать
стационарный гауссовский случайный процесс s(t). Предположим,
что рассматриваемый ССШПС имеет следующие
статистические характеристики: нулевое среднее значение (s(t)) = 0,
корреляционную функцию Bs(t2 -ίλ) = (5(^)5(^2)). Спектр мощности
ССШПС обозначим как: 6τ,(ω) = J Bs(A)exp(-ja>A)dA . Пусть Ωχ
и Ω2 — минимальная и максимальная частоты спектра мощности
Gs{(o), (Os = (Ω2 +Ω1)/2 — средняя частота, Ω5 = Ω2 -Ωχ —
полоса частот ССШПС. В случае, когда η > 0,2..0,5, где η = Ω3 / ω3,
рассматриваемый стохастический сигнал s(t) будет
сверхширокополосным [6].
Предположим, что на входе приемника на интервале времени
[0;Г] наблюдается реализация
x(t) = Y0s(t) + n(t) + j^Ut)- (2.3.1)
i=l
Здесь /0={0,1} — параметр, определяющий наличие или
отсутствие полезного сигнала в реализации (2.3.1). В выражении
(2.3.1) n(t) и ξχί) определяются как в (2.2.1.2).
Вначале рассмотрим задачу обнаружения ССШПС, используя
алгоритм обнаружения, оптимальный при наличии только ГБШ.
Предположим, что выполняется условие
μ. »1, (2.3.2)
где μ3 =Ω8Τ/2π — среднее число степеней свободы ССШПС.
Тогда алгоритм обнаружения, оптимальный при наличии ГБШ,
будет иметь вид [16, 93, 106]
Уо=1
Уо=0
108
где
τ
k=^)y\{t)dt, (2.3.3)
^o о
ЛФОП, а
yi(t)= ]χ(ν)Ηλ(ί-ν)(ΐν (2.3.4)
— отклик фильтра с передаточной функцией Ηλ(ω) =
= \ H^eyL^-jcotydt на реализацию наблюдаемых данных
(2.3.1). Согласно [106] квадрат модуля передаточной функции
Η^ω) должен удовлетворять условию
WM= 2°λω}ΙΝ» ■ (2.3.5)
Введем функцию
p.(a>) = G.(a>)/max(?.(«>), (2.3.6)
которая представляет собой нормированный спектр мощности
ССШПС, а также безразмерную величину
g,=2maxG.(a>)/Ar0 (2.3.7)
— отношение максимума спектра мощности сигнала к
спектральной плотности ГБШ. С учетом (2.3.6), (2.3.7) квадрат модуля
передаточной функции Η^ω) (2.3.5) можно представить в виде
|^(ω)|2=1Λ(ω)/[ΐ + ί,ρ,(ω)]. (2.3.8)
При выполнении условия (2.3.2) распределение случайной
величины LY (2.3.3) можно приближенно считать гауссовским [16,
93]. Поэтому для вероятности ложной тревоги αλ и
вероятности пропуска сигнала βλ в случае обнаружения ССШПС на фоне
ГУП и ГБШ получаем
α1=Ρ[ΐ1>Λ|/0 = 0] = 1-φί^^1, (2.3.9)
А = р[А<А1Го = 1] = ф[^р-]. (2-3.10)
1 х
где Ф(х) =—г= \ exp(-t2 / 2)dt — интеграл вероятности,
V2л: i
туо = (Lj | у0), <гуо = 1(1^ -туо)2 | у0) — соответственно, матема-
109
тическое ожидание и дисперсия случайной величины LY (2.3.3).
Воспользуемся критерием Неймана—Пирсона и
определим порог как: h = m0+ σ0Ψα, где Ψα = агсФ(1 - аг), функция
агсФ(х) является обратной Ф(х). Тогда, для вероятности
пропуска сигнала (2.3.10) получим
Α=Φ(ν1Ψβ-ζ1), (2.3.11)
где
v\=c\lc\. (2.3.12)
Величину ζλ в (2.3.11) можно интерпретировать как ОСШ и
представить в виде
*? = К-пъ)7<*?· (2-3.13)
Согласно [106] математическое ожидание и дисперсия
случайной величины LY (2.3.3) определяются выражениями
r° 2πΝ,
σγ0 ~ πΝί
■J|^(a))|2Gx(a),y0)<to,
где
-ώ ,;-ι
(2.3.14)
(2.3.15)
(2.3.16)
— спектр мощности наблюдаемых данных (2.3.1). Используя
функцию (2.3.6) и величину (2.3.7), выражение (2.3.16)
перепишем как
|1 + Го?.р.И+Х9*р*и1 (2·3·17)
σ.(«,7ο) = ^
где ρξί (ω) = βξί (ω) / тах<^г (ω), ςξί = 2 max G^ (ω) / Ν0.
Подставляя (2.3.17), (2.3.8) в (2.3.15) и далее в (2.3.12), для
параметра, определяющего эффективность обнаружения при
наличии ГУП, имеем
ν Л2
J
Ρ»
Ρ»
1 + Σ^Ρ4ί(ω)
^ωχ
[ΐ + 9,ρ,(ω)]
[1 + 4Р.И1
α:
1 + 1Ρ.(ω) + Σ«*Ρ*(ω)
(2.3.18)
cto
110
Очевидно, ν* < 1, а при qs « 1, νχ « 1. Подставляя (2.3.8) и
(2.3.17) в (2.3.14), (2.3.15) и далее в (2.3.13), получим
выражение для ОСШ
4/г
ίΐ7
Ρ»
QsPs(a>)
■άω
ίίτΐ
Ρ»
[ΐ + ϊ.Ρ.(ω)]
1 + ϊ.Ρ.(β>) + Σί*Ρ«.(ω)
,-ι· (2.3.19)
ώο
В случае отсутствия ГУП, то есть когда ςξι = О, для (2.3.12),
(2.3.13) из (2.3.18), (2.3.19) получаем
V2 _ Г P»
.[ΐ + ί.Ρ.(ω)]
Γίίω
Jp»d
ω
(2.3.20)
4/г
Jr^
Ρ»
-άω
]ρ](ω)άω
(2.3.21)
QsPsH
Выражения (2.3.20), (2.3.21) представляют собой параметры,
определяющие эффективность обнаружения ССШПС на фоне
только ГБШ.
Рассмотрим влияние ГУП на эффективность обнаружения
ССШПС. Введем для этого в рассмотрение величину χλ = ζ2 j z\,
которая показывает, во сколько раз уменьшится ОСШ вследствие
воздействия ГУП. Используя (2.3.19) и (2.3.21), имеем
Cl=Iii7
Р»
[1+4Р.И] L
1 + 4Ρ.(ω) + Σ%Ρ*(ω)
άω
\ρΙ(ώ)άω
.(2.3.22)
Конкретизируем полученные выражения для модели спектра
мощности сигнала прямоугольной формы, который можно
представить как
Γΐ, Ω, <| ω |< Ω2
, ' , , (2.3.23)
[0, |ω|<Ω1?|ω|>Ω2,
и модели спектра мощности помехи также прямоугольной формы
(„ .Л („ . .Л
+ Л
аИ =
ρξΜ = ι
Ι Ω,: Ι
ν Ω, ι
(2.3.24)
Ш<1/2,
Здесь I(x) = < . . , О)0г — центральная частота, Ω£. — поло-
[0,|ж|>1/2,
111
сачастотной ГУП £(t). Подставляя (2.3.23), (2.3.24) в (2.3.22),
получаем
Ζι =1 + Σε<ί»[2(1 + 0 + ί»]/(1 + ί,)2· (2-3-25)
i=l
Здесь ε{ - Ω^ /Ωβ — отношение полосы частот i-ой ГУП к
полосе частот ССШПС. Положим, что интенсивности всех ГУП в
наблюдаемой реализации (2.3.1) одинаковы, то есть ςξί = ςξ. Тогда
(2.3.25) можно переписать как
Xl = 1 + eq4 [2(1 + q,) + 9{]/(1 + q.)2, (2.3.26)
К
где ε = Σεΐ ~~ отношение суммарной полосы частот всех ГУП к
г=1
полосе частот ССШПС в реализации наблюдаемых данных.
Если центральные частоты ω0· и полосы частот Ω.ξί ГУП
априори известны или могут быть измерены с достаточной
точностью, то повысить эффективность обнаружения ССШПС можно за
счет РФ с передаточной функцией Ηκ(ώ), квадрат модуля
которой представим в виде
|я»|2 = 1-Х^И = 1-Х
■/
+ 1
Ω*
. (2.3.27)
При использовании РФ обнаружитель будет формировать
величину
1 Т оо
L2=—jy22(t)dt,y2(t)=jx(V)H1(t-V)dt\ (2.3.28)
где x(t) — отклик РФ на реализацию наблюдаемых данных
(2.3.1). Анализируя (2.3.28), видно, что величина y2(t)
формируется в результате пропускания наблюдаемой реализации
(2.3.1) через два последовательно соединенных фильтра: с
передаточной функцией вида Яд(ω) (2.3.27) и Ηλ(ω) (2.3.8). Эти два
фильтра можно рассматривать как один фильтр с передаточной
функцией
Η2(ω) = HR{m)HM . (2.3.29)
Тогда (2.3.28) перепишется как
y2(t)= \x(V)H2{t-V)dV.
(2.3.30)
112
Теперь найдем моменты случайной величины L2. Для этого в
(2.3.14), (2.3.15) вместо Ηλ(ω) (2.3.8) подставим Η2(ω) (2.3.29)
и Gx(u),y0) (2.3.17). В результате параметры, характеризующие
эффективность обнаружения ССШПС со спектром мощности
(2.3.23) при наличии ГУП со спектром мощности (2.3.24),
запишутся как
vl =(l + qsT2, ζ22=μ,(1-ε)ς2,/(1 + ς3γ. (2.3.31)
Для определения влияния ГУП на эффективность
обнаружения ССШПС в случае использования РФ введем в рассмотрение
величину χ2 = ζ2 /' ζ\, которая показывает, во сколько раз
уменьшится ОСШ вследствие воздействия ГУП и использования РФ
(2.3.24). Используя (2.3.21) и (2.3.31), получаем
χ2=1/(1-ε). (2.3.32)
Потенциальные характеристики обнаружения ССШПС при
наличии ГУП можно реализовать, если априори известны
корреляционные функции £^(£2~0> i = hK> узкополосных
помех. В этом случае обнаружитель будет вырабатывать величину
[106]
L3=±-]yl(t)dt, (2.3.33)
Ν,
о о
где y3(t)= \ x(t])H3(t-V)dV. Здесь H3(t) импульсная
переходная функция фильтра. Квадрат модуля передаточной функции,
соответствующий H3(t), имеет вид
9.Ρ.(ω)
|#зИ =г
1+Σ«*ρ*(ω)
1 + 9.Ρ.(ω) + Σ«*Ρ*(ω)
т. (2.3.34)
Найдем параметры, характеризующие эффективность
обнаружения ССШПС в случае, когда известны корреляционные
функции узкополосных помех. Для этого в (2.3.14), (2.3.15)
заменим Ηλ(ω) на Η3(ω) и подставим спектральную плотность
наблюдаемых данных (2.2.17). Тогда, для параметров (2.3.12),
(2.3.13) получим
p]{(Q)d(Q /} p]{(Q)d(Q
-j
1+&аИ + £м^И
-,, (2.3.35)
1 + Σ^ΡξΜ
ИЗ
ζ* = ■
4/γ
j
1+Σ«*ρ*(ω)
p]{Q>)d(Q
κ
1 + ^АИ + Х^Р«,И
xs
J V κ
ρ]{ώ)άω
Λ~ι
(2.3.36)
ι+Σ^ρ^(ω)
Как и ранее введем в рассмотрение величину χ3 = ζ2 /' ζ\,
которая показывает, во сколько раз уменьшится ОСШ вследствие
воздействия ГУП при оптимальном приеме ССШПС. Используя
выражения (2.3.21) и (2.3.36) для %ъ, имеем
ρ2(ω)άω
Хз =
ι
1+Σ«*ρ*(ω)
j
ρ;(ω)άω
Ι + Σ^ΡξίΗ
ί
xs
ι+ί,ρ.Η+Σ«»Ρί*(ω)
ρ]{ω)άω
> χ
(2.3.37)
1+Σ^Ρίί(ω)
j ρ82(ω)(ίω
Конкретизируем это выражение для моделей спектров
мощности ССШПС (2.3.23) и ГУП (2.3.24). В этом случае (2.3.37)
можно представить как
Х3 =
к
Ι-ε + Σ
е.(1 + 0
£? (1+ ?*)(! +9.+Ϊ*)
К
Ι-ε + Σ
ΐΤ(ι + ^)2
(2.3.38)
Когда все ГУП в реализации наблюдаемых данных (2.3.1)
имеют одинаковые интенсивности, то есть ςξί = ςξ, выражение
(2.3.38) можно существенно упростить и переписать в виде
Хз= а+^Лж!-*)^)] 2 (23.39)
[(1-е)(1 + ?.+?{)(1 + в5) + е(1 + д,)]
114
Положим ςξ »1, тогда χ3 = 1/(1 - ε). То есть, в этом случае
влияние ГУП на эффективность обнаружения ССШПС такое же,
как и при использовании РФ (2.3.32). Другими словами,
обнаружитель с РФ в случае, когда ςξ —> °° (неограниченно растет
интенсивность ГУП), становится оптимальным. Когда уровень
спектральной плотности ССШПС мал, то есть qs « 1, выражения
(2.3.26), (2.3.32), (2.3.39) несколько упрощаются
(л , л1(л , (1 + g,)2 [l + (l-£)g,(2+ <?,)]
^=1 + 645(1 + 35), χ2=1 (1-ε), χ3= f-i= / η2 ·
[(1-ε)(1 + ^)2+ε]
При этом из (2.3.18), (2.3.31), (2.3.35) следует, что νχ « ν2 « ν3 « 1
и эффективность обнаружения определяется только величиной
ОСШ (2.3.13).
На рис. 2.3.1, 2.3.2 представлены зависимости величин χΧ
(кривая 1), χ2 (кривая 2), %ъ (кривая 3) от ςξ при qs «1. Рис.
2.3.1 соответствует ε = 0.2, рис. 2.3.2 — ε = 0.5.
Анализируя графики, видно, что с уменьшением доли полосы
частот ГУП в полосе частот ССШПС эффективность
обнаружения повышается, а алгоритм с РФ по эффективности
приближается к оптимальному при больших ςξ. В то же время при малых
значениях интенсивности ГУП применение РФ снижает
эффективность обнаружения. Так, при ε = 0.5 и ςξ < 0.75 обнаружи-
ε=0.2, ?s=0
2.0
Χ(<1ξ)
1.5
1.0
/ \
2
3
<1ξ
Рис. 2.3.1
115
ε=0.2, qs=0
/l
2
3
Рис. 2.3.2
тель (2.3.3), синтезированный без учета ГУП, более эффективен,
чем обнаружитель (2.3.28), использующий РФ.
2.4. Обнаружение сигналов сверхширокополосной РЛС
с неизвестными параметрами движения
Радиолокационные станции относятся к классу
сверхширокополосных, когда протяженность импульса в пространстве
(произведение длительности импульса и скорости света) становится
сравнимой или меньше пространственной протяженности
наблюдаемого объекта. Это условие, как правило, выполняется при
уменьшении длительности сигнала до 1 не и менее [33].
Обнаружение неподвижных источников СШПС рассматривалось в [63],
однако в настоящее время существует возможность размещения
СШП РЛС на мобильных носителях — самолетах, вертолетах и
др. [170]. Как правило, параметры движения носителя РЛС для
стороннего наблюдателя неизвестны, поэтому представляет
интерес изучение влияния данного вида априорного незнания на
эффективность обнаружения сигнала.
Ниже будем полагать, что обнаружитель строится на основе
алгоритма отношения правдоподобия. Это предположение
позволит получить количественные оценки влияния неизвестных
параметров движения на качество обнаружения; по-видимому,
можно считать, что при других реализационных основах блока
116
обнаружения эти оценки будут оставаться справедливыми, по
крайне мере, в качестве некоторых предельных значений,
полученных с учетом неизвестных параметров движения носителя
объекта разведки.
Пусть РЛС излучает последовательность СШПС
к=0 к=0
параметры последовательности соответствуют (2.2.2.1).
Сигнал, принимаемый аппаратурой обнаружения, будет
иметь вид
Ν-1
к=0
s(t,Ib) = s(t,Rv,V0,AQ) =
с У с J 2с
(2.4.2)
Здесь Xq e[Tmin;Tmajc] — неизвестный момент излучения
сигнала РЛС, [Т^п^шах] ~~ интервал времени, на котором
происходит излучение сигнала; R^ — неизвестная дальность до РЛС,
которая принимает значение из интервала йе[Дт1п;Дтах];
V0 — неизвестная радиальная скорость из возможного
интервала V € [-Vmin j 2; Vmax / 2]; Д — неизвестное радиальное ускорение
РЛС из возможного интервала Ае[-Апап/2;Атах/2]; с —
скорость света. Так как слагаемое X^+R^/c в выражении (2.4.2)
одинаково для всех импульсов последовательности, обозначим
v0 = Xq+ Rq j с . Соответственно, выражение (2.4.2) можно
переписать как
Ν-1
*&ο = Σα*/
^-^yutg*
.(2.4.3)
Функции sk(-) и f(x) = sk(xT)/ak описывают форму одного
импульса, ak = max sk(t) — амплитуда, а τ= \ sl(t)dt/m&xsl(t) —
эквивалентная длительность одного импульса, которая, как в [6,
9, 125], не превышает единиц или долей наносекунды. Функция
/(·) удовлетворяет условию излучения J f(x)dx = О [6] и
нормирована так, что
max/(ж) = J f(x)dx = 1. (2.4.4)
117
Вектор ί={£ρί2Λ} Β (2.4.3) объединяет неизвестные
параметры движения РЛС: ^ = ν , l2 =V, 13 = А, причем
V0 G [Tmin + #min /ClTm*x + ^ma* / C] · ПоЛаШвМ, ЧТО, КаК ЭТО обыЧНО
имеет место в земных условиях, Vmax « с, ΝΘΑτηβχ « с, а сигнал
(2.4.3) наблюдается на фоне ГБШ n(t) с односторонней
спектральной плотностью 7V0, при этом интервал наблюдения [0;Г]
больше длительности всей последовательности (2.4.3), то есть
Τ > ΝΘ. Тогда обработке доступна реализация наблюдаемых
данных
x(t) = y0s(tX) + n(t), (2.4.5)
где /0 ={0,1} — параметр, определяющий наличие или
отсутствие полезного сигнала в реализации (2.4.5). Скважность
последовательности (2.4.3) полагаем не слишком малой (θ/τ > 2..3 ),
так что отдельные импульсы не перекрываются. В этом случае
ЛФОП с точностью до несущественной постоянной определяется
формулой [97]
Щ) =
V\ Ajk-μγθ2
2 "-1
N0 k=o
Σφ№·
ί-ν-(Ιϊ-μ)θ\ΐ +
с) 2с
τ
* (2А6>
Для того, чтобы исключить влияние неизвестных параметров
движения РЛС, заменим в (2.4.6) их значения на оценки
максимального правдоподобия [97]. Для этого максимизируем (2.4.6)
по неизвестным параметрам ν, V и А
Lm=supL(l)JeW, (2.4.7)
W = {[v^v^U-V^ /2;KmM /2},[-Amj2;Amm /2]} . (2.4.8)
Решение о наличии сигнала СШП РЛС принимается, если Lm > h ,
и решение об отсутствии сигнала, если Lm < h . Порог h
выбирается в зависимости от используемого критерия оптимальности.
Согласно (2.4.6), (2.4.7) обнаружитель должен вырабатывать
логарифм величины L(l) для всех возможных значений / е W ,
а затем определять его наибольшее значение Lm . При
использовании фильтра, согласованного с последовательностью (2.4.3),
можно сформировать логарифм величины (2.4.6) как
непрерывную функцию времени прихода ν при некоторых фиксирован-
ных значениях скорости V{ и ускорения Ак, i = l,nv, k = l,nA
[97]. Здесь V, е [-V^ /2;Vmax /2}, Ак е [-Ды„ /2;А™ /2], причем
118
значения V{, Ак обычно располагаются равномерно на
соответствующих априорных интервалах. Таким образом, обнаружитель
РЛС с неизвестными параметрами движения должен содержать
η - ПуПА фильтров, согласованных с последовательностью (2.4.3)
при соответствующих значениях скорости Vt и ускорения Ак. На
выходе каждого согласованного фильтра определяется
величина Lmik = sup(v,F.,4), ν € [vmin;vmJ . Затем, согласно (2.4.7),
наибольшая из величин Lmik, г = 1, Пу , к = 1, пА сравнивается с
порогом h. При большом числе элементов разрешения по скорости
и ускорению, укладывающихся в соответствующих априорных
интервалах возможных значений скорости и ускорения, общее
число η = ηνηΑ согласованных фильтров (каналов
обнаружителя) может быть весьма велико. Последнее обстоятельство
очевидно сказывается при определении аппаратурной или
программной реализации обнаружителя максимального правдоподобия
(2.4.6), (2.4.7).
Для расчета характеристик обнаружения подставим
реализацию наблюдаемых данных (2.4.5) в (2.4.6) и преобразуем
логарифм функционала отношения правдоподобия к виду [14]
Здесь
L(l) = Yoz2S(U) + zN(l).
z2=2T^al/N0
(2.4.10)
(2.4.11)
ОСШ для всей последовательности (2.4.3),
Ν(ϊ) =
9 νν_1 r>
= -7ΓΣψ(<)/ί
ζΝ,
ο fc=o
-ни«н:)-«
нормированная шумовая функция, а
N-1
dt
(2.4.12)
ЖЛ) = Хр№{[(^-^)+(^-дЖ^-72) +
Jfc=0
+
(Α1-Α2^-μ)2θ2/2]/βτ]
—нормированная сигнальная функция.
Величины
Р{к) = аЦ^
Jfc=0
(2.4.13)
(2.4.14)
119
характеризуют распределение суммарной мощности
последовательности (2.4.3) по отдельным импульсам, а
Sf(y)=]f(x)f(x-y)dx (2.4.15)
— нормированная сигнальная функция при оценке
положения функции /(·) [97]. В процессе вывода сигнальной функции
(2.4.13) предполагалось, что априорный интервал возможных
значений времени прихода не превосходит интервала его
однозначного определения [7], так что vmax - vmin < θ. Шумовая
функция (2.4.12) представляет собой реализацию гауссовского
центрированного случайного поля, обладающего корреляционной
функцией (N(l)N(l)) = S(IX) [14]. Согласно (2.4.13) поле Ν(ϊ)
является однородным.
Вероятность ошибки 1-го рода (ложной тревоги)
определяется как [97]
a{R,V,A) = P[Lm > h I γ0 = 0] = P[supN(l) > и] = l-FN(u). (2.4.16)
IeW
Здесь u = h/ζ —нормированныйпорог,a FN(H) = P[supN(l) < H]
IeW
—функцияраспределенияабсолютного (наибольшего) максимума
реализаций поля N(1) в области W (2.4.8). Так как длительность
каждого СШПС последовательности (2.4.3) ограничена, то, как
следует из (2.4.4) и (2.4.15), корреляционная функция (2.4.13)
поля (2.4.10) ^(/ρζ)—>0 при К-ζ —» °° . Поэтому можно
считать, что с увеличением Η распределение числа выбросов за
уровень Η реализаций поля N(1) (2.4.12) в области W (2.4.8)
сходится к закону Пуассона. Следовательно, для больших, но
конечных Я можно записать [97]
^(Я)«вхр[-П(Я)], (2.4.17)
где П(#) — среднее число выбросов реализаций поля (2.4.10) за
уровень Η в области W (2.4.8). Используя результаты [97] для
среднего числа выбросов поля (2.4.13), получаем выражение
n{H)-JJ^t^[-BL). ,2.4.,8,
Здесь
&y,V,A) = (va.x-vaaa)Vma[Aa,xJa (2.4.19)
120
— приведенный объем априорной области возможных значений
неизвестных параметров движения РЛС, а Ω — определитель с
элементами
, i,j = 1,2,3.
(2.4.20)
1 -чм*
Так как функция распределения (2.4.17) по определению
является неубывающей функцией Η , то, аналогично [97], вместо
(2.4.17) будем использовать аппроксимацию
FN{H)~\
ехр
о,
ξ(ν,ν,Α)Η2
Απ2
ехр -
Я
2 Υ
(2.4.21)
Из (2.4.16) и (2.4.21) для вероятности ложной тревоги
получаем приближенное выражение
~ξ(ν,ν,Α)η2
a(R,V,A)~
1-ехр
о,
4тГ
-ехр
( 2
U
, u>S
(2.4.22)
и<
Я
точность которого улучшается с ростом ξ(ν, F, А) и и [97]. Если
и не слишком мало, так что a(v,V,A) < 0.1, то выражение (2.4.22)
можно несколько упростить и переписать как
α(ν, V, А) « ^ν \ '
4/Г
2 ( и2
-ехр —
(2.4.23)
Подставляя далее (2.4.13), (2.4.15) в (2.4.20), находим для
элементов определителя Ω в (2.4.19) выражения
Ωη =d2 /τ2, Ω12 = Ω21 = θά2Μλ(μ)/τ2€ ,
Ω22=θ2ά2Μ2(μ)/β2τ2, Ω23 = Ω32 =θ3ά2Μ3(μ)/2cV,(2.4.24)
Ω13 = Ω31 = θ2ά2Μ2(μ)/2τ2β, Ω33 = θ4ά2Μ4(μ)/4β2τ2.
Здесь d2 = \ [df(x) / dx] dx , a
Μη(μ) = Σρ(^-μ)η.
(2.4.25)
Jfc=0
Величину (2.4.25) можно интерпретировать как момент η -го
порядка дискретной случайной величины к e[0]N -1] относи-
121
тельно точки μ [40]. При этом предполагается, что вероятность
значения к равна величине Р(к) (2.4.14), удовлетворяющей ус-
Ν-1
ловиям: 0<P(fc)<l, ^P(fc) = l. Вычисляя определитель Ω с
Jfc=0
элементами (2.4.24) и подставляя его значение в (2.4.19), имеем
ξ(ν,ν,Α) = (vmax -ν^ν^Α^άΨ^Ι/2cV, (2.4.26)
где
b = Μ2{μ)Μ,{μ)~Μΐ{μ)Μ,{μ)-Μ2»- (2 4 2?)
Перейдем от моментов (2.4.25) относительно точки μ к
начальным моментам
η»η = ΣΛ*)*η (2-4.28)
Jfc=0
дискретной случайной величины А; с распределением P(fc)
(2.4.14). Выражая в (2.4.27) величины Μη(μ) (2.4.25) через тп
(2.4.28), получаем
b = D(k)D(k2)-52. (2.4.29)
Здесь
D(k) = m2-m2 (2.4.30)
— дисперсия дискретной случайной величины к с
распределением Р(к) (2.4.14),
D(k2) = m4-m22 (2.4.31)
— дисперсия квадрата дискретной случайной величины к, а
δ = га3 - m^ . (2.4.32)
Согласно (2.4.22), (2.4.26), (2.4.29) вероятность ложной тревоги
и приведенный объем априорной области возможных значений
неизвестных параметров движения РЛС не зависят от выбора
параметра μ в (2.4.3), то есть от положения точки
последовательности СШПС, с которой связано временное положение
последовательности.
Конкретизируем (2.4.26) для прямоугольной
последовательности СШПС, обладающих одинаковыми амплитудами, так что
в (2.4.3)
% =<h =··· = α*-ι (2.4.33)
а в (2.4.24) и (2.4.28)
122
P{k) = l/N. (2.4.34)
Подставляя (2.4.34) в (2.4.28), затем (2.4.28) в (2.4.30), (2.4.31),
(2.4.32), а эти величины в (2.4.29) и, наконец, (2.4.29) в (2.4.26),
для приведенного объема находим ξ(ν,ν,Α) = (vmax - vmin)x
х ν^\^3θ3(Ν2 -1) ^N^l/iSc2 τ3 Vl5 .
Это выражение несколько упрощается при N » 1 и
принимает вид
ξ(ν,ν,Α) = (vmax - vmin)VmaxAmaxd3e3N3 /48cV>/i5 .(2.4.35)
Согласно (2.4.23) и (2.4.35) при выполнении (2.4.33) вероятность
ложной тревоги с увеличением числа СШПС в
последовательности (2.4.3) возрастает пропорционально третьей степени числа
импульсов.
Рассмотрим далее влияние разрешающей способности
последовательности СШПС (2.4.3) по неизвестным параметрам
движения РЛС на вероятность ложной тревоги. Для этого найдем
разрешающую способность последовательности СШПС (2.4.3) по
времени прихода, скорости и ускорению, которую можно
приближенно определить как полуширину параболической
аппроксимации сечения сигнальной функции (2.4.13) по соответствующему
параметру, отсчитываемую на половинном уровне от максимума
[97]. Тогда разрешение по ускорению АА может быть найдено из
уравнения S(vQ,V0,AQ,v0,V0,AQ+АА) = 1/2 . Для приближенного
расчета АА аппроксимируем сечение сигнальной функции
параболой, при этом уравнение принимает вид
"У£(у0,У0Л,УоЛ,Л)"
дА2
Отсюда находим
= Г Э25(у0,К0,А,Уо,П,Л)
"L **
Подставляя в исходную формулу (2.4.13) и выполняя
дифференцирование, для приближенного значения разрешающей
способности по ускорению получаем выражение
АА = 2βτ/θ2ά^Μ4(μ) . (2.4.36)
Аналогично, для приближенных значений разрешения по
скорости Δ V и времени прихода Δν имеем
AV = схΙθά^Μ2(μ), Αν = τ/ά. (2.4.37)
АА2 = 1.
123
Используя найденные величины разрешающей способности
по времени прихода, скорости (2.4.37) и ускорению (2.4.36),
приведенный объем априорной области возможных значений
неизвестных параметров движения РЛС (2.4.26) можно переписать в
виде
ξ(ν,ν,Α) = πινπινπιΑ^/Μ2(μ)Μ4(μ)/8 . (2.4.38)
Здесь mv=(vmax-vmin)/Av, rnv = Vmax / AV, mA = Amax / AA -
число элементов разрешения по времени прихода, скорости и
ускорению, укладывающихся в априорных интервалах возможных
значений соответствующих неизвестных параметров движения
РЛС.
Из (2.4.23) и (2.4.38) следует, что по мере улучшения
разрешающей способности последовательности (2.4.3) по неизвестным
параметрам движения РЛС вероятность ложной тревоги
возрастает и, соответственно, снижается эффективность обнаружения.
Найдем далее вероятность ошибки 2—го рода — вероятность
пропуска сигнала РЛС с неизвестными параметрами движения.
Согласно определению [97], вероятность пропуска сигнала РЛС
β(ν,ν,Α) = Ρ[Επί<Η\γΰ=1}, (2.4.39)
где Lm определяется из выражения (2.4.7). Обозначим
Hs = supL(l), Ζ € Ws и ΗΝ = supL(l), Ζ € WN при γ0 = 1. Здесь
Ws={[v0-Av,v0 + AvUV0-AV,V0 + AVUA,-AAA,+AA}}, -
подобласть априорной области (2.4.8) возможных значений
времени прихода, скорости и ускорения, в которой центральный пик
сигнальной функции (2.4.13) существенно отличен от нуля.
Соответственно, WN —дополнение Ws до W, так что Ws_kjWn = W .
Очевидно, можно считать, что сигнальная функция S(l, ζ) = 0 при
Ζ eWN. Положим далее, что априорная область (2.4.8)
возможных значений неизвестных параметров движения РЛС
достаточно велика, так что выполняется хотя бы одно из неравенств
mv » \mv » 1,гал » 1. (2.4.40)
Тогда случайные величины Hs и HN приближенно
статистически независимы и (2.4.39) можно переписать как
β(ν,ν,Α) - P(HN < h)P(Hs < h). (2.4.41)
Если выполняется (2.3.40), то Ρ(ΗΝ < Η) « FN(H) и
определяется формулой (2.4.21). Для случая не слишком малых значений
ОСШ ζ (2.3.11) в [97] найдена аппроксимация распределения
абсолютного максимума логарифма функционала отношения
правдоподобия (2.4.9) при Ζ € Ws и /0 = 1
124
3/2 Н1г /2 _ 2\
P(HS <H)~j= j expl —j— \D_3/2 (2z-x)dx , (2.4.42)
где Dn(·) — функция параболического цилиндра. Подставляя
(2.4.21) и (2.4.42) в (2.4.41), получаем приближенное выражение
для вероятности пропуска сигнала РЛС с неизвестными
параметрами движения
уЗ/2
/J(v,F,4)~-=exp
V2/r
iraiexp
4тГ
( и2
V
:Jexp
(2z2-:
2 \
(2.4.43)
D_3/2 (2z- x)dx,
при и > точность формулы (2.4.43) улучшается с ростом и , ζ
Если все параметры сигнала РЛС известны, то вместо
величины (2.4.7) с порогом h сравнивается величина LQ = L(^).
Решение о наличии сигнала СШП РЛС принимается, если L0 > h и
решение об отсутствии сигнала, если L0 < h . В этом случае
вероятности ошибок обнаружения имеют вид [97]. Вероятность
ложной тревоги запишется как
а0 = 1-Ф(г/), (2.4.44)
и вероятность пропуска сигнала
β0=Φ(η-ζ), (2.4.45)
где и = h / ζ — нормированный порог, а ζ — ОСШ определяется
из (2.4.11).
Найдем потери в эффективности обнаружения сигнала СШП
РЛС вследствие априорного незнания параметров её движения.
Для этого перепишем (2.4.35) в виде
ξ = ΨνΨνΨΑ^θ'Ν3 /48V15 . (2.4.46)
Здесь Q = θ /τ — скважность последовательности (2.4.3),
^=(vmM-vmin)/e, (2.4.47)
причем ψν < 1,
¥v=V1im/c
— максимальная относительная скорость движения РЛС,
¥л = Утахв/с (2.4.48)
— максимальное относительное изменение скорости РЛС за
период повторения последовательности (2.4.3).
125
Для оценки эффективности обнаружения сигнала РЛС
воспользуемся критерием Неймана—Пирсона. Тогда при априори
известных значениях параметров сигнала СШП РЛС вероятность
пропуска сигнала запишется как
β0(ζ) = Φ [агсФ(1 - а0) - ζ], (2.4.49)
где а0 — требуемое значение вероятности ложной тревоги, а
агсФ(х) — функция, обратная Ф(х). Отметим, что вероятность
пропуска сигнала (2.4.49) зависит лишь от ОСШ ζ , и, в
частности, не зависит от числа импульсов в последовательности (2.4.3),
если при изменении числа импульсов ОСШ ζ остается
постоянным.
При обнаружении сигнала СШП РЛС с неизвестными
параметрами движения вероятность пропуска сигнала будет иметь
вид
βξ(ζ) = β(ν,ν,Α)\^. (2.4.50)
Здесь β(ν,ν,Α) определяется из (2.4.43), а порог ηξ — из
уравнения
<x(v,V,A)l=4=a0, (2.4.51)
где a(v,V,A) определяется из (2.3.22), куда следует подставить
значение ξ из (2.4.46).
На рис. 2.4.1 приведены зависимости β0(ζ) (2.4.49)
(кривая 1) и βξ(ζ) (2.4.50) (кривые 2—4) для заданного уровня
ложной тревоги а0 = 10"3 и ψν = 1. Предполагалось, что СШП РЛС
установлена на самолете, который может развивать скорость до
600 м/с (примерно 2200 км/ч), а при резких маневрах его
скорость за период повторения импульсов может изменяться на 1 %,
0 1 2 3 4 5 6 7 8 9 10 11
ζ
Рис. 2.4.1
126
так что ψν = 2 · ΙΟ"6, ψΑ = ψν · 10 2. Скважность
последовательности (2.4.3) предполагалась равной Q = 103, а форма одиночного
импульса — близкой к гауссовой, так что d = ψζ/2 . Кроме того,
считалось, что с увеличением числа импульсов в
последовательности (2.4.2) ее суммарная энергия остается неизменной. Кривая
2 рассчитана для последовательности, содержащей N = 103
импульсов, кривая 3 для последовательности из N = 2 · 103
импульсов и кривая 4 для N = 4 · 103.
Анализируя графики, можно сделать вывод, что при
увеличении числа импульсов в последовательности СШПС
эффективность обнаружения сигнала СШП РЛС ухудшается. В этом
случае предполагается, что суммарная энергия последовательности с
меньшим количеством импульсов такая же, как и энергия
последовательности с большим количеством импульсов.
Действительно, согласно (2.4.36), (2.4.37), по мере увеличения числа
импульсов последовательности (2.4.2) ее разрешающая способность по
скорости и ускорению улучшается, что, как следует из (2.4.23),
(2.4.35), приводит к росту вероятности ложной тревоги.
127
3. ИЗМЕРЕНИЕ ПАРАМЕТРОВ
СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ
ПРИ НАЛИЧИИ ПОМЕХ
3.1. Исследование потенциальной точности оценки параметров
сверхширокополосных сигналов
Найдем потенциальную точность оценки параметров
последовательности СШПС. Полагаем, что на фоне аддитивного ГБШ
с односторонней спектральной плотностью N0 наблюдается
последовательность из N СШПС, каждый из которых описывается
функцией s(£,l). Здесь 1 = |^.../р|, вектор неизвестных
параметров. Наблюдаемую последовательность запишем в виде
8Ν&λ0ΛΜ = Σ*[ί-(Ι*-μ)θ0-λ0,10}, (3.1.1)
параметры Я, θ , μ определяются как и в (2.1.1).
Согласно [48, 119, 120], для расчета потенциальной точности
совместных оценок неизвестных параметров последовательности
(3.1.1) необходимо найти сигнальную функцию (функцию
неопределенности)
2 т
s(Xi^AA^2) = ^jsN(t,xiAA)sAt^A,k)dt. (3.1.2)
^о о
Считаем, что интервал наблюдения [0,Т] больше
длительности всей последовательности (3.1.1); величина скважности
последовательности не менее двух, так, что отдельные СШПС не
перекрываются; аргументы функции (3.1.2) удовлетворяют условию
|Ai -Jl, +(θλ -02)(Α;-μ)| < тшп(в^в2) для всех к = 0, N -1. Тогда,
подставляя (3.1.1) в (3.1.2), получим
Ν-1
»?(Α1,Α2,Θ1,Θ2,11,12) = 2^ S^^, λ2,θ1,θ2,11,12), (3.1.3)
к=0
128
^(^ί^Α^ΛΛ) -
9
= —^[ί-(1:-μ)θ1-λι,Ιι№-(1<-μ)θ2-λ2,12}<Ιί.
^0 Ο
(3.1.4)
Поскольку рассматривается регулярный случай [104], отдельные
СШПС последовательности (3.1.1) предполагаются непрерывно
дифференцируемыми по t и по всем 1(,г = 1,р. Поэтому
потенциальная точность оценки всех неизвестных параметров
последовательности (3.1.1) характеризуется корреляционной матрицей
совместно-эффективных оценок [48, 119, 120]
К = Г\ (3.1.5)
здесь I — информационная матрица Фишера, которую
представим в виде блочной (клеточной) матрицы,
1 =
А = К1 =
Βχ =
А ВЦ
|,ВГ
d2S
>в =
в,
в,
d2S
d2S d2S
,D =
d2S
dk.dk
(3.1.6)
(3.1.7)
σλ^σθ2 σθισθ2
d2S „ _
д λβ 12г
d2S
д θλ9 l2i ||
векторы-строки, к,п = 1,2; i,j = Ι,ρ; (Τ) — операция
транспонирования. Все производные от сигнальной функции (3.1.3) в
формулах (3.1.7) вычисляются при λ^ = λ^ = λ0;θ1 = θ2 = θ^ = 12 = 10.
Подставляя (3.1.4) в (3.1.3), а (3.1.3) в (3.1.7) и выполняя
дифференцирование, находим
А =
-Σ
к=0
Ν-1
1 k-μ
fc-μ (к-μ)
||Ai A:
B1=-|B<IX(*-/i),D = -j\r|^|,
2||,В = -ЛГ||^||,
А:=0
2 Г
iV0 0
<?s(Mo)
dt
9
Л,Я = — ί
JV0 0
о о
ds(t, l)ds{t,l)
dl dl
ds(t,\0)ds(t,i)
dt dl.
dt, (3.1.8)
dt.
X
129
Положим вначале, что параметры / неинформативные,
поэтому нет необходимости определять все элементы
корреляционной матрицы (3.1.5). Для расчета потенциальной точности
оценок времени прихода и периода следования последовательности
(3.1.1) достаточно найти элементы, расположенные на
пересечении первых двух строк и столбцов этой матрицы. Эти элементы
описывают потенциальную точность совместных оценок
временного положения и периода следования импульсов
последовательности (3.1.1). Матрицу размером 2x2, образованную из
элементов матрицы (3.1.5), расположенных на пересечении её первых
двух строк и столбцов, обозначим
σία) oKM&mi
\\<уКМ(1о)Щ) <?l(k)
Здесь σ2λ(10) — дисперсия совместно-эффективной оценки
временного положения медленно флуктуирующей
последовательности (3.1.1), σ2θ(10) — дисперсия аналогичной оценки периода
следования, a R(l0) их коэффициент корреляции при наличии
ρ неинформативных параметров /. Матрицу F в (3.1.9) можно
найти с помощью формулы Фробениуса [20]
F = A-BD1BT. (3.1.10)
Подставляя (3.1.8) в (3.1.10), получаем элементы этой матрицы
^=ΛΤα(1-ρ,)Σ(*-μ), (3.1.11)
К(/0) = | 2 λΓ °^™^4 = ri. (3.1.9)
F22=a \Σ(^-μ)2-ΡΡ
к=0
/Ν]
1(*-д)
i=l j=l
AtJ — элементы матрицы, обратной матрице с элементами D{J
(3.1.8), т.е. ||Aj = ||Aj^U = l^.
Обращая в (3.1.9) матрицу F с элементами (3.1.11), для
характеристик совместно-эффективных оценок временного
положения и периода следования импульсов последовательности
(3.1.1) можно записать следующие выражения
9N2 -1 + 12(1-ρΌ)[μ-(Ν-1)/2?
130
σΙ(10) = 12σ2/Ν(Ν2-ΐ),
[μ-(Ν-ΐ)/2]^1-ρρ
Щ) = "{(Ν2 -1)/12 + [μ-(Ν-1)/2]2(1-ρρ)Υ'2
Здесь
' 2 ггГЭ^Л)
э*
(3.1.14)
[iV0 oL
— дисперсия эффективной оценки временного положения одного
импульса последовательности при априори известных значениях
всех параметров, т.е. при отсутствии неинформативных
параметров.
Рассмотрим влияние наличия неинформативных
параметров на точность оценки параметров λ и θ последовательности
(3.1.1). С этой целью найдем корреляционную матрицу [47]
К0=|| σΚ °^А = ^ (3.1.15)
совместно-эффективных оценок λ и θ при отсутствии
неинформативных параметров. Обращая матрицу А (3.1.8), для
характеристик (3.1.15) совместно-эффективных оценок λ и θ при
отсутствии неинформативных параметров получаем выражения
Ν2-1 + 12[μ-(Ν-ϊ)/12}2
Л ' Ν(Ν2-ΐ)
σ2β=12σ2/Ν(Ν2-1), (3.1.16)
μ-(Ν-ϊ)/2
{(Ν2-ΐ)/12 + [μ-(Ν-ΐ)/2}2γ
Из сопоставления (3.1.13) и (3.1.16) следует, что наличие в
медленно флуктуирующей последовательности (3.1.1) конечного
числа ρ произвольных неинформативных параметров не
приводит к увеличению дисперсии эффективной оценки периода
следования. Поэтому эффективная оценка периода следования
последовательности импульсов (3.1.1) инвариантна к
неинформативным параметрам последовательности. Однако наличие
неинформативных параметров в общем случае приводит к
увеличению дисперсии эффективной оценки временного положения
последовательности (3.1.1). Убедимся в этом, полагая для
определенности
R = г V" 41* Π 1 17Ϊ
"ч* -л\ ΙΛΟ±\η -(Ν-л\ ιολ*\ιΐ* ' W·1·1';
131
μ = (Ν-ϊ)/2. (3.1.18)
Тогда формулы (3.1.13) и (3.1.16) упрощаются и принимают вид
σΙ(10) = σ2 /N(l- рр), σ2β(10) = Υλσ] /Ν(Ν2 -1), Щ) = 0, (3.1.19)
σ\ = σ2 /Ν, σ\ = 12σ? /Ν(Ν2 -1), R = 0. (3.1.20)
Сравнивая (3.1.19) и (3.1.20), находим проигрыш в точности
эффективной оценки временного положения последовательности
вследствие наличия неинформативных параметров
ΧΡ=ο2Μ/ο\={1-ρρ)-\ (3.1.21)
Следовательно, проигрыш в точности оценки временного
положения последовательности зависит от величины (3.1.12),
которую перепишем как
Рр = рЛ) = ΣΣ«ΛΜ ■ (з·1·22)
г=1 j=l
Здесь
RK=Rti(l0) = -Bi/y№ (3.1.23)
— коэффициент корреляции между совместно-эффективными
оценками временного положения и параметра /· одного
импульса, когда значения остальных р-1 параметров ^,...,/._15/г+1,...,/р
этого импульса априори известны;
д,над) = А,/7^Л (з·1·24)
— коэффициент корреляции совместно-эффективных оценок
параметров 1{ и I- при совместной оценке всех ρ неинформативных
параметров одного импульса;
k2=k2(l0) = a2(Q/^=AJDit (3.1.25)
— отношение дисперсии of (/0) совместно-эффективной оценки
параметра 1г при совместной оценке всех ρ неинформативных
параметров одного импульса к дисперсии эффективной
оценки а\ параметра 1{ одного импульса, когда значения
остальных р-1 параметров априори известны. В сущности, величина
(3.1.25) определяет проигрыш в точности
совместно-эффективной оценки параметра 1{ вследствие незнания р-1 параметров
*1>·")'ϊ-ΐ)'ί+1)··4'ρ ·
Когда значения остальных ρ параметров априори
известны, (3.1.23) — коэффициент корреляции между
совместно-эффективными оценками времени прихода и параметра 1г одного
СШПС, когда известны значения остальных р-1 параметров,
132
(3.1.24) — коэффициент корреляции между
совместно-эффективными оценками параметров 1{ и /. одного СШПС. Если
значения остальных ρ - 2 параметров априори известны, получаем
выражение (3.1.17) — коэффициент корреляции
совместно-эффективных оценок времени прихода и периода следования
последовательности (3.1.1), когда все параметры 1 каждого СШПС
априори известны [99].
Используя информационную матрицу Фишера (3.1.5), можно
также найти характеристики раздельных оценок времени
прихода и периода следования СШПС. Дисперсия эффективной оценки
времени прихода при отсутствии неинформативных параметров
и априори известном периоде следования имеет вид [48]
-1-1
= <ή/Ν. (3.1.26)
<U =
d2S
Соответственно, выражение для дисперсии эффективной оценки
периода следования при отсутствии неинформативных
параметров и априори известном времени прихода будет [48]
d2S
^.2
Ι οθ^οθ^
^ . (3.1.27)
Ν{(Ν2-ΐ)/12 + [(Ν-ϊ)/2-μ}2}
Положим теперь, что необходимо найти оценку параметров 1,
а время прихода Я и период следования θ являются
неинформативными параметрами.
Вначале будем считать, что время прихода Я и период
следования θ последовательности (3.1.1) априори известны. Тогда,
для определения корреляционной матрицы
совместно-эффективных оценок параметров 1 нужно вычеркнуть в информационной
матрице Фишера (3.1.6) первые две строки и первые два столбца.
Обращая полученную матрицу согласно (3.1.5), получаем
K0(l) = D-1=iV-1K1(l), (3.1.28)
где
К1(1) = КГ (3.1.29)
— корреляционная матрица совместно-эффективных оценок
параметров 1 при приеме одного СШПС последовательности
(3.1.1).
Пусть теперь необходимо найти точность оценок параметров
1 при априори неизвестном значении периода следования θ
последовательности (3.1.1). Вычеркивая в информационной
матрице Фишера (3.1.6) первую строку и первый столбец, получаем
133
информационную матрицу размером (р +1) χ (ρ +1) для ρ
параметров 1 и периода θ . Поскольку период следования является
неинформативным параметром, нет необходимости определять
все элементы матрицы, обратной получаемой матрице Фишера, а
достаточно найти элементы, лежащие на пересечении последних
ρ строк и ρ столбцов. Снова воспользовавшись формулой Фро-
бениуса [20] для корреляционной матрицы
совместно-эффективных оценок параметров 1 при априори неизвестном значении
периода следования, можно записать
K„(l) = [D-B2rB2/42]-1. (3.1.30)
Подставляя (3.1.8) в (3.1.29), имеем
Ke(l) = iV-1H-1) (3.1.31)
где
Яв = \σ?σ?[%(-ΐΤ' - R2RtjRuf · (3-1.32)
Сопоставляя (3.1.28) и (3.1.31), можно найти потери в точности
совместно-эффективных оценок параметров 1 каждого СШПС
вследствие незнания периода следования последовательности
(3.1.1). В частности, если
Rtl =0,i = l^, (3.1.33)
т.е. все оценки параметров 1 каждого СШПС некоррелированы
с оценкой времени прихода СШПС, то К0(1) = Κθ(1) и потери в
точности оценок вследствие незнания периода следования
отсутствуют. Тот же результат получаем, если R = 0 , при этом
совместно-эффективные оценки времени прихода и периода
следования последовательности (3.1.1) некоррелированы. Это условие
выполняется, когда параметр μ = (Ν -1)/2 , т.е. априори
известное время прихода последовательности (3.1.1) отсчитывается от
ее середины.
Положим далее, что время прихода Я
последовательности (3.1.1) априори неизвестно, но период следования известен.
Для определения потенциальной точности оценок параметров 1
в этом случае надо вычеркнуть в информационной матрице
Фишера (3.1.6) вторую строку и второй столбец. Вновь применяя к
полученной матрице формулу Фробениуса, находим
корреляционную матрицу совместно-эффективных оценок параметров 1
при априори неизвестном времени прихода последовательности
(3.1.1)
K,(l) = [D-BfB1/A1]-1. (3.1.34)
134
Подставляя (3.1.8) в (3.1.34), получаем
Κλ(1) = ΛΓΉΐ\ (3.1.35)
где
НЛ = Ισ-ν^-ΐΓ - ЗД1Г ■ (З·1·36)
Сопоставляя (3.1.28) и (3.1.35), можно найти потери в точности
совместно-эффективных оценок параметров 1 каждого СШПС
вследствие незнания времени прихода последовательности
(3.1.1). В частности, если выполняется (3.1.33), то К0(1) = Кя(1) и
потери в точности оценок параметров 1 СШПС вследствие
незнания времени прихода отсутствуют. Поскольку, согласно (3.1.17),
всегда \R\ < 1, то из сопоставления (3.1.30) и (3.1.34) следует, что
незнание времени прихода приводит к более значительным
потерям в точности совместно-эффективных оценок параметров 1
СШПС, чем незнание периода следования.
Наконец, найдем потенциальную точность оценок
параметров 1 СШПС последовательности (3.1.1), когда как период
следования θ , как и время прихода Я последовательности априори
неизвестны. Несложно убедиться, что корреляционная матрица
совместно-эффективных оценок имеет вид
Κλθ(1) = Ν-ίΗ-λ1θ. (3.1.37)
В (3.1.37) обозначено: Ηλθ = ||ϋ - ВгА_1В||. Подставляя (3.1.8) в
(3.1.37), находим, что Н^ =НЯ. Следовательно, если априори
неизвестны период следования и время прихода
последовательности (3.1.1), то потери в точности оценок параметров 1 СШПС
будут такими же, как и в случае, когда неизвестно только время
прихода.
Конкретизируем полученные общие выражения для
часто встречающихся в приложениях значений ρ = 1,2. Согласно
(3.1.25), (3.1.26) при оценке одного параметра СШПС
последовательности (3.1.1) с априори известными значениями времени
прихода и периода следования дисперсия эффективной оценки
имеет вид
σ2=σ2 /Ν . (3.1.38)
Здесь σ2 — дисперсия эффективной оценки при приеме одного
СШПС. Если априори неизвестен период следования, то для
дисперсии эффективной оценки из (3.1.31) имеем
σβ2=σ07(1-£Χ). (3.1.39)
135
Учитывая (3.1.38), (3.1.39), видно, что незнание периода
следования последовательности приводит к проигрышу в точности
эффективной оценки, который можно охарактеризовать
отношением
σΙ/σΙ=χθ =!/{!-R2Wn). (3.1.40)
Если же неизвестно время прихода последовательности или время
прихода и период следования, то, как следует из (3.1.35), (3.1.37),
дисперсия эффективной оценки параметра СШПС запишется в
виде
σΙ=σΙΒ=σΙΙ{1-ϋΙ). (3.1.41)
Сопоставляя (3.1.40) и (3.1.41), получаем, что проигрыш χ в
точности эффективной оценки параметра СШПС вследствие
незнания времени прихода или периода следования и времени
прихода последовательности (3.1.1) можно определить из (3.1.40),
положив в этой формуле R = 1, так что
* = 1/(1-Л£). (3.1.42)
Если оценивается два параметра СШПС, т.е. 1 = |^, /2||, то для
априори известных значений периода следования и времени
прихода последовательности (3.1.1) из (3.1.28) имеем
К0(1) =
σ, σλσ^
2 II
ι и ~2 ~ ~ (3.1.43)
1-^2 ||σ01σ02R^2 а\2 \ \dld2Rl2 a\ \
Здесь а\ — дисперсия эффективной оценки параметра \ одного
СШПС при априори известном значении параметра /2, с\ —
дисперсия эффективной оценки параметра /2 одного СШПС при
априори известном значении параметра \, а\{ — то же самое для
всей последовательности (3.1.1), of,г = 1,2 — дисперсия
совместно-эффективных оценок параметров \ и /2 для всей
последовательности (3.1.1), a Rn их коэффициент корреляции (3.1.24).
Если у последовательности (3.1.1) априори неизвестен период
следования, то для элементов корреляционной матрицы
совместно-эффективных оценок параметров ^ и /2 из (3.1.31) находим
выражения
σ2 _ σοι0-~ R Rti) ^ (3.1.44)
1 - R (Rtl + i^2 + 2R12RtlRt2) - R^2
136
σ2 σ02(1 R Rn) ^ (3.1.45)
1 - R (Rn + Rt2 + 2Rl2RnRt2) - R12
= ^R'RgR^ (3.1.46)
i(i-^)(i-i?X)
Согласно (3.1.44)...(3.1.46) незнание периода следования
приводит к увеличению дисперсии эффективных оценок параметров
СШПС и изменяет их коэффициент корреляции. Проигрыш в
точности эффективной оценки параметра ^, вследствие
незнания параметра /2 и периода следования, можно охарактеризовать
отношением
гг2 1 — /?2/?2
Xw=riL = 1 л пя . (3.1.47)
σ01 1 - -R (Ды + Rt2 + 2#i2Rti Rt2 ) ~ ^12
Соответственно, проигрыш в точности эффективной оценки
параметра /2 вследствие незнания параметра ^ и периода
следования характеризуется следующим образом:
гг2 1 — /?2 /?2
= ^2в_ = L п пп (3.1.48)
σ01 1 - Д (Αι + Д2 + 2Д12Д1Д2) ~ ^12
Для того, чтобы определить проигрыш в точности
совместно-эффективных оценок параметров ^ и ^ вследствие незнания
периода следования, выразим в (3.1.44), (3.1.45) а2ы через of,
согласно (3.1.43), г = 1,2. Получаем, что незнание периода следования
приводит к проигрышу в точности
QJs= (1-^22)(1-^22)
σλ l-R (Rtl + Rt2 + 2R12RtlRt2)-R^2
— для параметра ^ , и
у _ σ216 _ 0--R12)0--R Rtl) /3 γ 5Q4
c^ 1 - R (Rtl + i?i2 + 2R12RtlRt2) - R^2
— для параметра /2.
Положим теперь, что у последовательности (3.1.1), кроме
параметров ^ и /2, неизвестны также время прихода, или период
следования и время прихода. Сопоставляя (3.1.35), (3.1.36) и
(3.1.43), видно, что проигрыш в точности оценки параметра ^
вследствие незнания параметра /2 и времени прихода
последовательности (3.1.1) при R = 1 равен
,_2 2 ^ _ р2
У _ °1Я _ °ш 1 π<2 (3 151)
σ01 σ01 1 ~ Rt\ - Д2 ~ ^12 ~ 2^12Д1Д2
137
Λ1Θ — ~2 ~~ 1 o2/r>2 , r>2 , on о о \ r>2 > ^Ο.Ι.^ί?;
Соответственно, проигрыш χ2 в точности оценки параметра /2
вследствие незнания параметра ^ и времени прихода
последовательности (3.1.1) или вследствие незнания параметра /2, периода
следования и времени прихода последовательности (3.1.1) при
R = 1 будет
—2 2 ι _ р2
у _ °2λ _ °2λθ _ 1 ПП (3 152)
σοι σοι 1 ~ ^ι ~ Дг ~ Дг ~ 2Д2^аДг
Для иллюстрации полученных соотношений рассмотрим
оценку параметров последовательности импульсов вида
[Ьexp(-at) sin 0)t, t > 0, b = const,
5(ί,α,ω) = |θί2ο ; (3.1.53)
Такие импульсы и их последовательности часто
используются в качестве моделей СШПС. Действительно, один из способов
формирования СШПС заключается в ударном возбуждении
пассивной излучающей структуры очень коротким импульсом или
ступенчатым сигналом с очень коротким фронтом [27].
Частотную характеристику многих пассивных излучающих структур
можно аппроксимировать характеристикой резонансного
контура с малой добротностью. При этом излучаемый СШПС может
быть описан выражением (3.1.53). Анализ сигнальной функции
(3.1.4) для импульса (3.1.53) показывает, что при
ς = ω/α<10, (3.1.54)
наибольший ее побочный максимум имеет относительное
значение не более 0.5. Будем считать, что такой уровень побочного
максимума достаточен для однозначного измерения времени прихода
импульса (3.1.53). Условие (3.1.54) требует, чтобы добротность
контура, эквивалентного пассивной излучающей структуре, была
не более 5..6. В частности, согласно [6], когда q > 15..20 , импульс
(3.1.53) уже нельзя считать сверхширокополосным.
Подставляя (3.1.53) в (3.1.8), а результат в (3.1.28), находим
дисперсию эффективной оценки параметра а при априори
известных остальных параметрах последовательности (3.1.1)
4iV0tt3(W)3
σ°°"Μν(6 + 392+94)' {ОЛ-Щ
и дисперсию эффективной оценки параметра ω при априори
известных прочих параметрах
4N0a\l + qy
138
Потери в точности эффективных оценок вследствие наличия
неизвестных параметров зависят от коэффициентов корреляции
(3.1.22), (3.1.23), которые для параметров а и ω СШПС (3.1.53)
запишутся как
Rti ~ Rta - -^
|2(6 + 3?2+?4)'
о , 1 + gr
,2
R = R = -q\\ х * - (3.1.57)
12 "* У \2(2 + 3g4 +g6) V '
R -R - S~q2
J(6 + 3q2+q4)(2 + 3q4+q6)'
Используя (3.1.55)...(3.1.57), можно найти потери в
точности оценок параметров а и ω импульса (3.1.53) в зависимости
от степени параметрической априорной неопределенности при
приеме последовательности (3.1.1), а также в зависимости от
параметра q (3.1.54), определяющего степень относительной
широкополосное™ импульса (3.1.53).
Найденные выражения (3.1.31), (3.1.35), (3.1.37) для
характеристик совместно-эффективных оценок могут быть
использованы для расчета характеристик асимптотически эффективных
оценок параметров СШПС в условиях высокой апостериорной
точности оценок. Например, их можно использовать для
расчета характеристик совместных оценок максимального
правдоподобия [48], если ОСШ для всей последовательности импульсов
(3.1.1) достаточно велико.
На рис. 3.1.1 приведены зависимости проигрыша χ в
точности оценки параметров импульса (3.1.53) от величины q (3.1.54)
для различных наборов неизвестных параметров
последовательности (3.1.1).
Кривая 1 иллюстрирует проигрыш в точности оценки
параметра а сигнала (3.1.53) вследствие незнания периода
следования и времени прихода последовательности (3.1.1); кривая 2
показывает проигрыш в точности оценки параметра ω сигнала
(3.1.53) при тех же условиях; кривая 3 характеризует проигрыш в
точности эффективной оценки параметра а вследствие незнания
параметров ω, Я и θ последовательности (3.1.1), а кривая 4 —
проигрыш в точности эффективной оценки параметра ω
вследствие незнания параметров а , Я и θ . Согласно кривым данного
рисунка незнание параметров последовательности СШПС (3.1.1)
139
0,1 1 10 ω/α
Рис. 3.1.1
может привести к увеличению дисперсии эффективных оценок
(3.1.55) и (3.1.56) параметров сигнала (3.1.53) в 3..6 раз.
Итак, потери в точности совместно-эффективных оценок
параметров сверхширокополосных сигналов определяются
коэффициентом корреляции оценок периода следования и времени
прихода последовательности, а также коэффициентами
корреляции оценок каждого из неизвестных параметров сигнала и его
времени прихода.
3.2. Измерение временных параметров сверхширокополосных
сигналов при наличии узкополосных помех и шума
Рассмотрим задачу оценки временных параметров
последовательности СШПС, принимаемой на фоне ГУП и ГБШ.
Если для оценки параметров сигнала (2.1.1) используется
измеритель, оптимальный при наличии только белого шума, то он
должен вырабатывать выходной сигнал вида
2 Ν-ιΤ?
4(Α,β) =—^\x(t)s[t-(k-μ)θ-X]dt. (3.2.1)
Положим далее, что ГУП ξ(ί) обладает спектром мощности
прямоугольной формы (2.1.3). Тогда точность определения
параметров последовательности СШПС можно повысить, включив на
вход измерителя (3.2.1) РФ с передаточной функцией (2.1.14).
После этого измеритель будет вырабатывать сигнал
140
^0 *=0 о
где x(t) — отклик РФ на реализацию наблюдаемых данных
(2.1.12). Как и при обнаружении сигнала, потери в точности
оценки параметров при использовании РФ обусловлены
двумя причинами. Во-первых, при прохождении РФ СШПС теряет
часть энергии. Во-вторых, форма СШПС после прохождения РФ
отличается от формы исходного СШПС, для которого измеритель
(3.2.1) является оптимальным при наличии только белого шума.
Поэтому рассмотрим структуру измерителя, оптимального для
приема профильтрованной последовательности СШПС на фоне
белого шума. Такой измеритель должен формировать функцию
4(А,0) = -£- X ]x(t)s[t ~(к- μ)θ - λ}ώ . (3.2.3)
Здесь s(t) — отклик РФ на одиночный СШПС s(t).
Потенциальную точность оценки параметров
последовательности СШПС можно получить, если априори известны все
параметры узкополосной помехи. Оптимальный измеритель будет
вырабатывать сигнал
^{λ,θ) = ^%)χ{ί)υ[ί-{1ζ-μ)θίί-λ0\<}1, (3.2.4)
^0 к=0 о
здесь v(t) определяется из интегрального уравнения (2.1.6).
Будем полагать, что для получения оценок основных
параметров последовательности СШПС (2.1.1), то есть времени
прихода Я и периода следования θ , используется алгоритм (3.2.1)
максимального правдоподобия, синтезированный в
предположении, что сигнал принимается на фоне только ГБШ. Реализацию
наблюдаемых данных при наличии ГУП и ГБШ можно
представить в виде (2.1.12). Таким образом, оцениваемыми параметрами
являются Я и θ .
Если на входе приемника присутствует только ГБШ, то
оценки максимального правдоподобия (ОМП) могут быть найдены
как положение абсолютного максимума ЛФОП (3.2.1). Тогда, в
соответствие с определением ОМП, оценки Я и θ определяются
выражением
(^0) = argsupL1(^0). (3.2.5)
При наличии ГУП (3.2.5) описывает квазиправдоподобные
оценки (КПО), так как они совпадают с ОМП в отсутствие ГУП.
141
Для того, чтобы найти характеристики оценок (3.2.5) и, тем
самым, определить, какое влияние оказывает ГУП на точность
определения Я и 0 , представим ЛФОП (3.2.1) в виде суммы
сигнальной и шумовой функций
Li(X,e) = S1(X,e) + N1(X,e), (3.2.6)
где сигнальную функцию .^(Α,θ) запишем в виде
51(Я,0)=<А(Я,0)>, (3.2.7)
а шумовую представим как
Nl(W) = Ll(X,e)-S1(X,e). (3.2.8)
Для того, чтобы в явном виде записать сигнальную
функцию (3.2.7), перепишем (2.1.12) следующим образом:
x(t) = sn(£, AO,0O) + n(i) + ξ(ί); t € [0,Τ], где обозначено
Β^,Κ,^^Σε^-ψ-μ^-λν] (3.2.9)
Α:=0
— принимаемая последовательность СШПС.
По определению [48] сигнальную функцию можно
представить в виде
S1(X,e) = jsn(t,X,e) sn(t,^A)dt. (3.2.10)
о
Теперь подставим (3.2.9) в (3.2.10) и полагая, что импульсы
последовательности не перекрываются и для аргументов этих функций
выполняется условие: тах^ - Я + (0О - в)(к - μ)\ < min(0o,0),
получим
S(A,0) = —^ j s[t-(k-μ)θ0 -X0]s[t-(k-μ)θ-λ}άί. (3.2Л1)
Нетрудно убедиться, что сигнальная функция (3.2.11)
достигает наибольшего максимума при Я = ^,0 = 0О.
Представим шумовую функцию (3.2.8) следующим образом:
Ν(λ,θ) = Νη(λ,θ) + Νξ(λ,θ), (3.2.12)
где Νη(λ,θ) — шумовая функция вследствие воздействия ГБШ,
Νξ(λ,θ) — шумовая функция вследствие воздействия ГУП.
Запишем эти шумовые функции
Νη(λ,θ) = -?-Σ]η(ί>\ί-ψ-μ)θ-λ}<1ί, (3.2.13)
Νξ(λ,θ) = ^Σ]ξ№ί-ψ-μ)θ-λ}ά. (3.2.14)
142
Формулы (3.2.13) и (3.2.14) получены при условии, что
импульсы последовательности СШПС не перекрываются и время
наблюдения больше длительности всей последовательности ( Τ > ΝΘ ).
Найдем корреляционные функции шумовых функций
Β{?ιγ,?ί2,θι,θ2) = Βη(λ1,λ2,θ1,θ2) + Βξ(λ1,λ2,θ1,θ2) =
= (Ν(λίΛ)Ν(λ2,θ2))= (3.2.15)
Здесь БП(Я1,Я2,01,02) — корреляционная функция шумовой
функции (3.2.13), а Βξ(λ1,λ2,θ1,θ2) — корреляционная
функция шумовой функции (3.2.14). Подставляя (3.2.13) и (3.2.14)
N
в (3.2.15) и учитывая, что (ηψ^η^)) = — Sfa -12), получаем
2
N-l
Βη{ΚΑ,γ2Α) = (ττΣ ί ηνΜ^-ψ-μ)^-^ χ
ι#
0 Α:=0 .
2 "-1
χ — Χ J n{t2)s[t2 -{к-μ)θ2 -λ^ ) =
= Те Я Σ,1Шп&))*& -(к- μ)θ1 -\\dtAt, ~{m- μ)θ2 - X^dt,.
Τ N-l N-l
* 0 0 k=Q m=Q
Используя фильтрующее свойство δ -функции и условие
max^ - Я, + (θ, - в2)(к - μ)\ < тш^Д), (3.2.16)
получаем окончательно
2 V·1 f г, /ι .лЛ ι ι г. /ι .лЛ ι ι^ -(3·2·17)
= ^Σί*[ϊ-(!<-μΆ-λ1}8[ί-(1ϊ-μ)θ2-λ2}<Ιί.
' О *=0 .
Аналогично получаем корреляционную функцию шумовой
функции ГУП. Так же, как и в случае (3.2.17), учитываем, что
(ξ(^)ξ(ί2)) = Κξ(ί2-ί1),
Βξ(λι,θ1,λ2,θ2) =
4 ЛГ-1
ΣΜ^-^-ψ-μ^-λ^χ (3.2.18)
»0 к=0
Χ8[ί2-{Η-μ)θ2-λ2](ϋ2(α2.
При выполнении (3.2.16) формулы (3.2.17) и (3.2.18) описывают
центральные пики соответствующих функций.
143
Поскольку сигнальная функция (3.2.11) достигает
максимума в точках А = Ао,0 = 0о,то ОСШ можно записать как [48]
SUA) _
z2=-
£(Л>ЛАА)
'2JV~ V
J s2(t)dt
(3.2.19)
2N
4JV
— J s\t)dt + — J J ЗД - у^МУ^А
Положим ОСШ достаточно большим, так что оценки можно
считать надежными. Тогда учитывая, что оценки определяются
как (3.2.5), их можно найти из решения системы уравнений [48]
^[5(Я,0) + ЛГ(Я,0)]М =0, ^[8(λ,θ) + Ν(λ,θ)]ίέ = 0. (3.2.20)
В отсутствие ГУП (3.2.20) — уравнения правдоподобия.
Положим, что отсутствует ГУП и ГБШ, тогда оценки будут
совпадать с истинным значением Χ0,θ0. Положим Ν(λ,θ) = 0, тогда
dS(X,6)
ЭХ
= s\t)dt\^ - j
2
ds{t)
ds(t)
jv 4-! J и+ w L dt
dt
s(t)dt = 0,
dS(X,6)
дв
Л)>^0
dt
Следовательно, в отсутствие помех Я = λ^,θ = θ0. Будем
решать систему уравнений (3.2.20) методом малого параметра. В
качестве малого параметра используем величину, обратную ОСШ
и ограничимся первым приближением. Тогда из решения
уравнения (3.2.20) находим [48]
ад = ((А - Л,)2) = (ЗД - zs,seBM+slB^s.s, - s»r\
D2q{6) = {(θ-θ0)2) = {S\Be -2SXSMB» + S2M(SKSe - S„T2.
Здесь введены обозначения:
(3.2.21)
_ d2S(X,6) _ d2S(X,6) _d2S(X,d)
м двдх ' " дегдв2 ' λ dxjx, '
B =32Β(λ,θ)Β =32Β(λ,θ)Β = <92Д(Я,0)
σθσλ σθΛσθ0 σλ^σΧ^
(3.2.22)
Все производные берутся в точках λ^ = λ^ = Α = ΑΌ,02 = θλ =θ = θ0.
144
Подставив (3.2.22) в (3.2.21) и учитывая (3.2.11), (3.2.16)-
(3.2.20), получим выражения для дисперсий оценок
= B0N0N 1 = Дф_ 6
4 7 7 s(t) s(t )
ны следующие обозначения: Β1ξ - —2 J I iQ(i2 - t^-^-^-dt^ ,
Д" = Ж
^i[S-f) άί,Β0^Β1ξ+Β1η, Ν1 = ^-μ),Ν2 = ^-μ)2.
В случае отсутствия ГУП дисперсии оценок максимального
правдоподобия будут [48]
„2 _ JW 1 „2_ ЛЬ 6
^ - OD АГАТ АТ2 '^ ~
2ДП Щ.-ЛГГ ' β1ηΛΓ(ΛΓ2-1)
Запишем проигрыш в точности оценок параметров,
возникающий из-за наличия ГУП на входе приемника, оптимального для
белого шума
σ2 σΙ Д.
*1=-^ = -^ = ! + -£. (3.2.23)
Видно, что проигрыш в точности оценки параметров СШПС
зависит от отношения Β1ξ / В1п.
Используя теорему Винера—Хинчина [99], перейдем к
1 °°
спектральному представлению сигнала s(t) = — J S((u)ej(0td(u,
^ = ф) => *,(*) = -L ] ja>S(a>y<to, Κξ& -12) = -L J βξ(ω)ε>~<1ω.
Тогда βι4 = ± J J Kfa - t/j^^dt^ =±j- J С,И|ЗД|2 Л,
Б1п = — J — eft = \ ω2 |*ί>(ω)|2 cto. Проигрыш в точное-
0 —оо V ^"^ У 0 ^** _оо
ти оценки за счет наличия ГУП при использовании приемника,
оптимального для ГБШ, определяется выражением (3.2.23). В
спектральном представлении проигрыш в точности оценки будет
следующим
145
t ^ -OO
X\ - 1 + — ^ ·
*° |ω2|5(ω)|2<ίω
0
Предположим, что ГУП обладает спектральной плотнос-
ωοξ+Ωξ
J a)2\S((u)\2da>
тью вида (2.1.3) при К = 1. Тогда, X1=l + q
<°ь«-«,
ja>2\S(<ufda)
У
χλ =l + qK , q = —— , здесь γ0 — спектральная плотность
узколобо
лосной помехи,
ωοξ+Ωξ
\ (o2\S(o))\2do)
к = fSL^s . (3.2.24)
]a)2\S(a))\2d(o
о
Физический смысл параметра q — это отношение
спектральной плотности ГУП к спектральной плотности ГБШ, а величина
к представляет собой относительную долю энергии производной
СШПС в той части спектра, которая перекрыта ГУП. Эти
параметры определяют, насколько большим будет проигрыш в
точности оценки времени прихода и периода следования
последовательности СШПС при воздействии ГУП с прямоугольной формой
спектра мощности. Очевидно, параметр χλ является функцией
ωοξ, Ω,ξ и зависит от формы спектра СШПС. Следовательно, если
необходимо подобрать помеху, которая оказывает максимальное
воздействие на точность определения основных параметров
последовательности СШПС, надо центральную частоту помехи вы-
бирать следующим образом ωοξπι = argsup \ ω2 \S((o)\ άω .
ωοξ-Ωξ
Рассмотрим оценку времени прихода и периода следования
последовательности СШП импульсов с режекцией узкополосных
помех. Допустим, что реализация наблюдаемых данных
совпадает с (2.1.12). Пусть спектр ГУП имеет вид (2.1.4) при К = 1. Ис-
146
пользуем РФ с амплитудно-частотной характеристикой (2.1.14).
При К = 1 на вход приемника, оптимального для смеси сигнала и
ГБШ, после РФ будет поступать сигнал вида χ(t) = sN(t) + n(t).
Решающая статистика (3.2.4), которая совпадает с ЛФОП для
сигнала s(t), принимаемого на фоне белого шума, имеет вид (3.2.2).
Так же, как и в случае (3.2.7), найдем сигнальную функцию
S2(A,0) = -H-£j5[i_ (к -μ)θ0-λ0]8[ί-^-μ)θ-λ]Α. (3.2.25)
Максимум сигнальная функция (3.2.25) достигает в точке Я0,0О,
то есть выполняется равенство
]^~s(t)dt = 0. (3.2.26)
Найдем корреляционную функцию шумовой и сигнальной
функции на выходе измерителя, использующего РФ
ОДЛАА) = ДА А А А) = {Nn{KA)Nn{KA)) (3.2.27)
2 N~l °r сз 2 28)
^0 Λ:=0 ^
и подставим в (3.2.21).
Запишем дисперсии оценок времени прихода и периода
следования СШПС после применения РФ [48]
D2q{X) = ^aa, (3.2.29)
D2g(e) = ^ab. (3.2.30)
Здесьобозначено^^о^-^^-у2^2]2), Ь = -^-,
2Ν{Ν2-Ϊ) Ν{Ν2-Ϊ)
Д = fs2(t)dt =—]ω2\S(wfda>, α = f|5(ω)|2ωάω, Fl = ]da®d3®dt =
i 2τ i i ^ dt dt
1 ~ 1 - 1 <^ί+Ωί
= — J ω25(ω)50*(α>)ώο = - f ω2 |5(ω)|2 dm - - ί ω2 |5(ω)|2 άω =
1 °°
= F0(1-k) , где F0 = — l(o2\S((o)\ cto , а значение κ определяется
из (3.2.24).
147
Используя эти обозначения, дисперсии оценок будут иметь
вид: D2q{X) = αα , D2q(0) = ^ 2 . Проигрыш в точности
оценок из-за наличия РФ будет
σ\ а] (I-к)
Х2=Ш = Щ=^, (3.2.31)
<7>7f-T^· (3.2.33)
где о\,с\— дисперсии оценки максимального правдоподобия
при отсутствии ГУ П. Эти величины определяются как [48]
Выясним, в каких случаях необходимо использование РФ
при наличии узкополосной помехи. Для этого рассмотрим
отношение
χι/χ2=(1 + ςκ)(1-κ)-\ (3.2.32)
Видно, что при χλ / χ2 = (1 + qic) (1 - к:)"2 > 1 фильтр
необходим, так как проигрыш в точности оценки параметров при его
отсутствии увеличивается. Последнее условие эквивалентно
неравенству
2-к
(1-Kf
При наличии на входе узкополосной помехи в случае q < 2
использование фильтра не целесообразно, так как при этом
ухудшается точность оценки параметров.
Рассмотрим теперь оценку максимального правдоподобия
времени прихода и периода следования СШПС на выходе РФ.
Уменьшить проигрыш (3.2.31) можно, используя ОМП
параметров профильтрованной последовательности СШПС. Для
реализации наблюдаемых данных (2.1.12) ЛФОП имеет вид (3.2.3), то
есть в качестве опорного сигнала используется
профильтрованный СШПС. Тогда сигнальная функция имеет вид
S3(A,0) = -МгJ~s[t-(k-μ)θ0 -λ0}ϊ[ϊ-ψ-μ)θ-λ}άί. (3.2.34)
Используя (3.2.34), получаем дисперсии ОМП времени прихода
и периода следования профильтрованной последовательности
СШПС. Для этого достаточно в (3.2.29), (3.2.30) положить
at. (3.2.35)
148
ds(t)
dt
Переходя к спектральному представлению, получаем
P0 = 1L]a>2\s(a>)\2da> =
2π
(3.2.36)
= -L J ω2 \Η(ω)\2 \S(o>fdo> = F0(l - к).
Соответственно, для дисперсии оценок имеем выражение
о*= «» oj=°* (3.2.37)
Проигрыш в точности оценки максимального правдоподобия при
наличии РФ будет
Хз={\-кГ. (3.2.38)
Проигрыш (3.2.38) обусловлен потерей энергии сигнала при
прохождении через РФ и всегда будет меньше, чем для алгоритма
(3.2.1).
Таким образом, при q » 1 алгоритм, оптимальный для
профильтрованной последовательности СШПС (3.2.3), обеспечивает
точность измерения временных параметров, такую же как и
измеритель, оптимальный для смеси сигнала, ГУП и ГБШ (3.2.4).
Полученные результаты позволяют сделать обоснованный
выбор между рассмотренными различными алгоритмами оценки
в зависимости от имеющейся априорной информации о
параметрах узкополосной помехи, а также в зависимости от требований,
предъявляемых к точности оценки.
3.3. Измерение частотных параметров
сверхширокополосных сигналов при наличии помех
3.3.1. Измерение частотных параметров
сверхширокополосных сигналов при наличии белого шума
Рассмотрим задачу оценки частотных параметров СШПС на
фоне только ГБШ.
Пусть СШПС описывается функцией s(t), обозначим
a = maxs(£), а — амплитуда сигнала, т= Г s2(t)dt/ma,xs2(t) —
эквивалентная длительность импульса. Тогда СШПС можно
описать выражением s(t) = af(t/τ), где f(t) — описывает
форму сигнала и нормирована так, что max/(я) = 1; J f2(x)dx = 1 и
149
удовлетворяет условию излучения \ f(x)dx = 0 . Обозначим как и
ранее S(j(o) = \ s(t)eyLv(-j(ut)dt — спектр СШПС. Ширину
спектра СШПС будем характеризовать эквивалентной полосой частот:
max\S(j(u)\ . После несложных преобразований
получаем
П = 2п/тд\ (3.3.1.1)
где д = max
$ f(x)exp(-jyx)dx\
Используя (3.3.1.1), находим,
что эквивалентную длительность СШПС можно выразить через
его эквивалентную полосу частот соотношением: τ = 2/τ/Ω<72
Согласно [48], дисперсию эффективной оценки
эквивалентной полосы частот находим, используя сигнальную функцию:
™-Ш¥№)
dt. Тогда, если сигнальная
функциядваждыдифференцируемавточке Ωλ = Ω2, то есть спектр
сигнала плавно спадает, дисперсию оценки полосы частот
можно записать следующим образом: σ2α = Ω2 / z2d2, где ζ = 2α2τ / Ν0
<*/(*)ΐ\,
•—— ' dx — параметр,
ОСШ для принятого сигнала, a d2 = Г
х-
dx
определяющий зависимость дисперсии эффективной оценки
ширины спектра от формы СШПС.
Используя (3.3.1.1), получаем зависимость дисперсии
эффективной оценки ширины спектра от длительности СШПС:
4/г2
σ2 =
Ω „2_2 4 72 *
ζ т д а
Наряду с шириной спектра часто возникает необходимость в
измерении других частотных параметры СШПС, к которым
следует отнести: Ωλ — минимальная частота спектра, Ω2 —
максимальная частота спектра, ν = (Ω2+Ω1)/2 — центральная
частота спектра СШПС. Поэтому рассмотрим ОМП перечисленных
частотных параметров СШПС в предположении, что сигнальная
функция не дифференцируема, то есть спектр сигнала резко
обрывается на крайних частотах, и найдем потенциальные харак-
150
теристики оценки. Такая модель спектра используется потому,
что при плавном спадании спектра сигнала определение крайних
частот затруднено. В то же время знание этих частот для СШПС
достаточно важно, ибо ширина полосы и центральная частота
сравнимы по величине, и, следовательно, не всегда являются
достаточно информативными параметрами.
Итак, положим, что спектр принимаемого СШПС можно
представить в виде
[α(ω), ΩΊ <ω<Ω0,
5(ω,Ω1,Ω2) = Γν ;' * 2' (3.3.1.2)
где
Qie[Qinln;QiniS],i = l,2. (3.3.1.3)
В (3.3.1.2) функция д((о) (в общем случае комплексная)
описывает форму спектра СШПС в полосе частот ω е [Ωχ; Ω2]. Согласно
(3.3.1.2) сам СШПС описывается выражением
5(ί,Ω1?Ω2) = — f g((o)exp(j(Ot)do) . (3.3.1.4)
2πίχ
Полагаем, что СШПС (3.3.1.4) наблюдается на фоне ГБШ
n(i) с односторонней спектральной плотностью N0. Тогда ЛФОП
для сигнала (3.3.1.4) запишется как [48]
τ τ
L(nl,n2) = ^]x(t)s(t,al,a2)dt-^-]s2(t,n1,ci2)dt. (3.3.1.5)
Здесь x(t) = 5(£,Ω01,Ω02) + η(£) — реализация наблюдаемых
данных на интервале времени [0;Г]. В соответствии с
определением [48] ОМП Ωχ минимальной и ΟΜΠ Ω2 максимальной частот
спектра СШПС (3.3.1.4) определяются выражением
(Ω1? Ω2) = argsupi^, Ω2), (3.3.1.6)
где Ω£ принадлежат интервалам (3.3.1.3).
Выразим ЛФОП (3.3.1.5) через спектр СШПС (3.3.1.2).
Второе слагаемое в (3.3.1.5) с помощью теоремы Парсеваля
представим как
]s2(t^Q2)dt = i- \\9(ω)\2άω . (3.3.1.7)
Последнее соотношение получено в предположении, что время
наблюдения Τ много больше длительности СШПС (3.3.1.4), так
что пределы интегрирования в левой части (3.3.1.7) можно
заменить на бесконечные.
151
Подставляя (3.3.1.4) в первое слагаемое правой части (3.3.1.5),
имеем
Τ Τ Ω2
f xtysfaQ^yit = —jdtj g((o)x(t)exp(j(Ot)d(0 . (3.3.1.8)
о 27Г 0 Ωι
Обозначая
χ(ω) = $ x(t)exp(-jo)t)dt (3.3.1.9)
— текущий (выборочный) спектр наблюдаемых данных,
перепишем (3.3.1.8) как
f η^Χί,Ω^Ω^ί = — f 9(ω)χ\ω)άω . (3.3.1.10)
ο 2π i
Подставляя (3.3.1.7) и (3.3.1.10) в (3.3.1.5), для ЛФОП получаем
выражение
WM = ~jr)9(ω)χ\ω)άω--^- ί\9(ω)\2άω. (3.3.1.11)
^0 П, 27tN0 Ω,
Для расчета характеристик оценок (3.3.1.6) представим (3.3.1.11)
в виде
L(Q1)Q2) = L1(Q1) + L2(Q2)) (3.3.1.12)
где
1 Ω/
Α(Ω,) = —- J [29(ω)χ(ω)άω-\9(ω)\2]άω, (3.3.1.13)
4(Ω2) = -1- Γ [2(Κω)χ (ω)άω -\9(ω)\2}άω, (3.3.1.14)
27riVo a,
где Ω^ — произвольное фиксированное значение частоты из
интервала [Ω1ΙΜΧ; Ω2ηώ1]. В частности, можно выбрать
n,=[nimax+a2mJ/2. (3.3.1.15)
Как известно [104], гауссовские спектральные меры на
неперекрывающихся частотных интервалах ортогональны. Поэтому
слагаемые в (3.3.1.12), т.е. случайные процессы ^(Ωλ) (3.3.1.13)
и L2(Q2) (3.3.1.14) будут статистически независимыми. В
результате ОМП (3.3.1.6) минимальной и максимальной частот спектра
СШПС можно переписать как
i^argsupL,^,), Ω,είΩ^,,Ω^]. (3.3.1.16)
Введем в рассмотрение максимальное ОСШ
152
Γ\ Τ -I ^2 max
^=^is2(t,^lmin^2mJdt = -- J \g(a>fdG> (3.3.1.17)
0 ο πι*ο αΙΠύη
для принимаемого СШПС. Будем полагать ОСШ настолько
большим, что ОМП (3.3.1.16) обладают высокой апостериорной
точностью [48].
Чтобы найти в этих условиях характеристики оценки Ω2
максимальной частоты спектра СШПС, представим (3.3.1.14) в виде
суммы сигнальной и шумовой функций
4(Ω2) = 52(Ω2) Ω02) + ΛΓ2(Ω2). (3.3.1.18)
Здесь
52(Ω2,Ω02) = (4(Ω2))( (3.3.1.19)
]\Γ2(Ω2) = 4(Ω2)-<4(Ω2)>· (3.3.1.20)
Подставляя в (3.3.1.19) реализацию наблюдаемых данных x(t) и
выполняя усреднение, находим для сигнальной функции
выражение
ΐΏΪη(Ω2,Ω02) Ω2
52(Ω1?Ω2) = —- J \9(ω)\2άω--— \\g(a>fde>. (3.3.1.21)
πΝ0 Ω, 27ζΝ0 Ω,
Найдем далее выражение для корреляционной функции
шумовой функции (3.3.1.20). Учитывая, что (ΛΓ2(Ω2)) = 0, можно
записать
β2(Ω12)Ω22) = (Ν(Ω12)Ν(Ω22)). (3.3.1.22)
Подставляя в (3.3.1.20) реализацию наблюдаемых данных x(t), a
затем полученное в (3.3.1.22) и выполняя усреднение, находим
πιίη(Ω12,Ω22)
β2(Ω12,Ω22) = —- j \9(ω)\2άω. (3.3.1.23)
П1*0 Ω;
При достаточно больших значениях ОСШ (3.3.1.17),
обеспечивающих высокую апостериорную точность ОМП, её
характеристики определяются поведением ФОП (3.3.1.18) в малой
окрестности истинного значения параметра Ω02. Поэтому для расчета
потенциальной точности оценки максимальной частоты спектра
СШПС достаточно исследовать поведение сигнальной функции
(3.3.1.21) и корреляционной функции (3.3.1.23) в малой
окрестности точки Ω02. С этой целью обозначим
Δ = Ω2 - Ω02, Δ, = Ω12 - Ω02, Δ2 = Ω22 - Ω02. (3.3.1.24)
Используя эти обозначения, перепишем (3.3.1.21) и (3.3.1.23) в
виде
153
1 Ω0+πιΐη(0,Δ) 1 Δ+Ω0
52(Ω2,Ω0) = —- J \g(a>fda>-—- J |j,(fi>)|2dfl>, (3.3.1.25)
πΝη
Ω0+πιΐη(Δ1,Δ2)
β2(Ω12,Ω22) = —- J \9(ω)\2άω. (3.3.1.26)
πΙ*ο af
В условиях высокой апостериорной точности оценки
|Δ| « Ω02, \А,\ « Ω02, |Δ2| « Ω02. (3.3.1.27)
Поэтому разложим (3.3.1.25), (3.3.1.26) в ряд по степеням малых
параметров Δ, ιηίη(Ο,Δ), тт(Л15Л2) и ограничимся
использованием членов, содержащих лишь первые степени малых
параметров. В результате получаем приближенные выражения
52(Ω2,Ω02) = —-l\g(o>fd<o +
πΝ,
о а,
πΝη
ιηίη(0,Ω2-Ω02)-Ω2 Ω°2
β2(Ω12,Ω22) = —-Ι\9(ω)\2άω +
П1У/0 Ω;
1
■G\ ιηΐη(Ω12 -Ω02,Ω22 -Ω02).
(3.3.1.28)
(3.3.1.29)
πΚ
Здесь
G2=|ff(iU-
(3.3.1.30)
Как следует из (3.3.1.29) в малой окрестности точки Ω02 ЛФОП
(3.3.1.18) является гауссовским марковским случайным
процессом диффузионного типа [48].
Используя (3.3.1.28) и (3.3.1.29), аналогично [101] находим
коэффициенты сноса и диффузии локально — марковского
случайного процесса (3.3.1.18)
А01 — U,
21 2πΝη 2 | -1, Ω2 > Ω02,
К00 —
πΝη
■Gl
(3.3.1.31)
(3.3.1.32)
Решая уравнение Фоккера—Планка—Колмогорова с
коэффициентами (3.3.1.31), (3.3.1.32) при соответствующих
начальных и граничных условиях, находим, применяя метод локально-
154
марковской аппроксимации, асимптотическое выражение для
дисперсии ОМП Ω2 максимальной частоты Ω02 спектра СШПС
т,)-1-^
(3.3.1.33)
Найдем аналогичным образом дисперсию ОМП Ωχ
минимальной частоты Ω01 спектра СШПС
(3.3.1.34)
где (?! = |^(Ω01)|. Таким образом, дисперсии ОМП (3.3.1.6),
(3.3.1.16) максимальной и минимальной частот спектра СШПС
асимптотически при больших ОСШ (3.3.1.17) описываются
выражениями (3.3.1.33) и (3.3.1.34), соответственно.
Согласно [103], распределения оценок (3.3.1.16) даже
асимптотически не являются гауссовскими. Поэтому
найденными выражениями (3.3.1.33), (3.3.1.34) для дисперсий оценок
надо пользоваться с определенной осторожностью.
Действительно, если обозначить
μ = (Ωί-Ω0ί)/^2Ό(Ωί)/13, (3.3.1.35)
нормированная ошибка оценок, то распределение случайной
величины (3.3.1.35) имеет вид
W [1-Τ(μ),0<μ<οο.
(3.3.1.36)
( 5
Здесь Τ(μ) = \\μ\ + -
И
1-Ф
_
1М
V 2
ν У J
-fexp(2H)
1-Ф
3J^
2
-— . Свойства Т-распределения, которое можно
π
использовать при расчете доверительных вероятностей,
изучены в [62].
Используя ОМП Ωχ и Ω2 минимальной и максимальной
частот спектра СШПС, получаемые из (3.3.1.6) или (3.3.1.16), можно
найти как оценки Ω и ν ширины полосы частот и центральной
частоты спектра СШПС, так и их характеристики.
Действительно, в соответствии с определением оценку ширины спектра
можно выразить через оценки минимальной и максимальной частот
Ω = Ω2 - Ω,. (3.3.1.37)
155
В силу статистической независимости случайных процессов
(3.3.1.13) и (3.3.1.14), ОМП Ω и Ω2 также статистически
независимы. Это позволяет выразить дисперсию оценки ширины
спектра (3.3.1.37) через дисперсии оценок минимальной и
максимальной частот спектра СШПС
D(Q) = DiQ,) + D(Q2). (3.3.1.38)
Подставляя (3.3.1.33) и (3.3.1.34) в (3.3.1.38), получаем
выражение для дисперсии оценки (3.3.1.37) СШПС ширины спектра
СШПС
D(Q) = 104n2N20(Gi+Gt)/GiGt. (3.3.1.39)
Для оценки ν центральной частоты СШПС можно использовать
формулу
ν = (Ω2+Ω1)/2, (3.3.1.40)
что соответствует определению центральной частоты. В силу
статистической независимости оценок минимальной и
максимальной частот спектра СШПС для дисперсии оценки (3.3.1.40)
центральной частоты спектра СШПС можно записать
ΰ(ν) = Ρ(Ω1) + ΰ(Ω2)]/4. (3.3.1.41)
Тогда окончательно имеем
D(v) = 26k2N2(G4+G4)/G4G4. (3.3.1.42)
Таким образом, получив дисперсии оценок минимальной и
максимальной частот спектра СШПС (3.3.1.6) и (3.3.1.16), удается
на их основе получить оценки ширины спектра (3.3.1.39) и
центральной частоты (3.3.1.42) СШПС.
Спектр СШПС во многих случаях имеет форму,
изображенную на рис. 3.3.1.1, что соответствует концентрации энергии
сигнала в области низких частот [121, 132]. Поэтому ниже детали-
А
Gi
Go
|g2
»
Ωοι Ωο2 со
Рис. 3.3.LI
156
зируем характеристики оценок основных частотных параметров
СШПС в случае линейно изменяющегося амплитудного спектра.
Очевидно, G0 = (GY + G2)/2 . Обозначим
κ = ΰ2/ΰλ (3.3.1.43)
— параметр, характеризующий наклон вершины амплитудно-
частотного спектра (АЧС) СШПС. При к < 1 спектр выглядит,
как на рис. 3.3.1.1.
Тогда выражение для дисперсии оценки минимальной
частоты (3.3.1.34) принимает вид
Да.)=13"У. (З.зл.44)
Соответственно, для дисперсии оценки максимальной частоты
(3.3.1.33) можно записать
ДЙ^'^'Г'·. (3.3.1.45,
Наконец, для дисперсий оценок ширины спектра (3.3.1.39) и
центральной частоты (3.3.1.42) СШПС имеем
^)=13π42^!4(1"λ (3-3.1.46)
В случае спектра СШПС прямоугольной формы дисперсии
оценок получаем, полагая в (3.3.1.44)...(3.3.1.47) к: = 1, то есть
Dr(QJ = Dr(Q2) = 104π2Ν2/Ο40, (3.3.1.48)
Д(0) = 4Dr(v) = 52n2N2/G40 . (3.3.1.49)
Здесь Dr — дисперсия оценки при прямоугольной форме АЧС
СШПС.
Рассмотрим влияние отклонения формы АЧС от
прямоугольной на точность оценок основных частотных параметров СШПС.
Для этого введем в рассмотрение отношения
М Д(Ц) 16 У '
Л2 Dr(Q2) 16k:4 '
157
= Ρ(Ω) = D(v) = (l + r)4(l + r4)
Лз Dr(U) Dr(v) 32k4
(3.3.1.52)
На рис. 3.3.1.2 приведены зависимости χ^κ), г = 1,2,3,
рассчитанные по формулам (3.3.1.50)...(3.3.1.52). Эти зависимости
иллюстрируют проигрыш в оценке частотных параметров СШПС в
зависимости от наклона его спектра.
Рис. 3.3.1.2
3.3.2. Измерение частотных параметров сверхширокополосных
сигналов при наличии узкополосных помех и белого шума
Рассмотрим точность оценки ширины спектра СШПС,
принимаемого на фоне суммы ГБШ и ГУП.
Положим, что СШПС s(t) наблюдается на фоне ГБШ n(t) с
односторонней спектральной плотностью NQ и стационарной
узкополосной центрированной гауссовской помехи ξ(ί) с
корреляционной функцией Βξ(ί2 -^). Спектр СШПС, как и раньше,
запишем в виде
S(j(o) = \ s{t)exp{-j(Ot)dt
(3.3.2.1)
и обозначим
158
q = max\S(j(0)\. (3.3.2.2)
Ширину спектра СШПС (3.3.2.1) будем характеризовать
эквивалентной полосой частот
ω
σ0
Χθ 2
dS(jo>)
άω
άω
ω'
aS{joi)
άω
1 +
2βξ(ω)
(3.3.2.3)
άω
Для того, чтобы получить форму записи СШПС, содержащую в
явном виде эквивалентную полосу частот (3.3.2.3), используем
функцию
h(x) = S(jxQ)/q, (3.3.2.4)
где S(jxQ) - спектр СШПС (3.3.2.1). Функция (3.3.2.4)
нормирована таким образом, что
тах|Л(х)| = 1, \ \h(x)\ άχ = 1
00 f \
s(t) = β(ί,Ω) = — f h — βχρΟ'ωί)Λο. (3.3.2.6)
2/r j^ ν Ω /
и описывает форму спектра СШПС с единичной эквивалентной
полосой частот. Используя функцию (3.3.2.4), представим спектр
СШПС (3.3.2.1) как
S{j<o) = qh{a>ia). (3.3.2.5)
Отсюда получаем выражение для СШПС, в которое в явном виде
входит эквивалентная полоса частот (3.3.2.3)
2/г i \aj
Считаем, что в течение интервала времени [0;Г] наблюдается
реализация
x(t) = 5(ί, Ω0) + n(t) + ξ(ί), (3.3.2.7)
где Ω0 — истинное значение ширины полосы частот, а п(£), ξ(ί)
статистически независимы. Если корреляционная функция
Βξ{4~4) или соответствующая спектральная плотность θξ(ω)
узкополосной помехи ξ(ί) априори неизвестны, то для оценки
эквивалентной полосы частот Ω0 сигнала (3.3.2.1), (3.3.2.6) можно
использовать алгоритм максимального правдоподобия [99],
синтезированный без учета узкополосной помехи. При воздействии
только ГБШ логарифм функционала отношения правдоподобия
запишется в виде [48]
159
τ τ
ЦО) = —]x(tXt,Q)dt - — ]s2(t,Q)dt, (3.3.2.8)
^0 0 ^0 0
где φ,Ω) определяется из (3.3.2.6).
Реализация наблюдаемых данных x(t) (3.3.2.7), кроме белого
шума, содержит узкополосную помеху ξ(ί). Поэтому оценка
Q = argsupZ,(Q) (3.3.2.9)
не является оценкой максимального правдоподобия
эквивалентной полосы частот СШПС. Эту оценку можно также считать
квазиправдоподобной, поскольку она совпадает с оценкой
максимального правдоподобия при ξ(ί) = 0 . Для определения
характеристик квазиправдоподобной оценки (3.3.2.9) представим
(3.3.2.8) в виде суммы сигнальной составляющей и шумовых
функций
ЦО) = S(Q) + Ν(Ω) + Νξ(Ω). (3.3.2.10)
Здесь
τ τ
S(Q) = ^]s(t,Q)s(t,a0)dt-±]s2(t,a)dt = 5(Ω0,Ω)-5(Ω,Ω)/2
^0 0 ^0 0
— сигнальная составляющая,
5(Ω1(Ω2) = J-Js(i,^>(i^2)di (3.3.2.11)
^о о
— сигнальная функция (функция неопределенности),
Ν(Ω) = — }η(ί)β(ί,Ω)ώ (3.3.2.12)
^0 О
— шумовая функция, обусловленная воздействием ГБШ,
г
#4(Ω) = -Μξ(ί)«(ί,Ω)Λ (3.3.2.13)
^0 0
— шумовая функция, обусловленная действием узкополосной
помехи. Шумовые функции (3.3.2.12), (3.3.2.13) являются
реализациями статистически независимых гауссовских процессов и
обладают двумя первыми моментами
(ΛΓ(Ω)) = (^(Ω)> = 0, (ΛΓίΩ^Ω)) = 0, (ΛΓ(Ω1)ΛΓ(Ω2)) = 5(Ωι;Ω2),
(Νξ(Ωι)Νξ(Ω2)) = Β(Ωι,Ω2) =
4 Ttt ■ (3.3.2.14)
J J Βξ(ί2 - «Χ^,Ω^,Ω,)^
Ν2
Jvo о
160
Согласно (3.3.2.9) квазиправдоподобная оценка Ω
эквивалентной полосы частот СШПС Ω0 может быть найдена из
решения уравнения
~dL(Q)'
da
= 0.
(3.3.2.15)
Решая уравнение (3.3.2.15) методом малого параметра [48] и
ограничиваясь первым приближением, для ошибки измерения
эквивалентной полосы частот СШПС получаем выражение
άΝξ(Ω)~
ΔΩ = Ω - Ωη =
άΝ(Ω)
άΩ
άΩ
Здесь
«ο
σί =
^(Ω,,Ω,)
(3.3.2.16)
(3.3.2.17)
iQo
3Ω13Ω2
— дисперсия эффективной оценки эквивалентной полосы частот,
которая в условиях высокой апостериорной точности совпадает
с дисперсией оценки максимального правдоподобия [48]. Далее
полагаем, что время наблюдения Τ много больше
длительности импульса СШПС; в этом случае пределы интегрирования в
(3.3.2.11) и (3.3.2.14) можно заменить на бесконечные. Переходя
в (3.3.2.11) к спектральному представлению СШПС (3.3.2.5), для
сигнальной функции получаем выражение
2
wa)-£H£>'
'αΛ
νΩο/
άω. (3.3.2.18)
Подставляя (3.3.2.18) в (3.3.2.17) и выполняя
дифференцирование, находим дисперсию оценки максимального правдоподобия
эквивалентной полосы частот СШПС
σ2α=πΝ0Ω?0/]ω2
dS(ja>)
άω
άω = Ω20/ζ2ψ2. (3.3.2.19)
Здесь
Νη
f s\t)dt = — f |S(ju))|2 άω , (3.3.2.20)
» 7Γ A/ »
πΝ(
f0 -«, ΛΙΌ
-отношение сигнал—шум для принятого сигнала, а
Ψ2 = ί·
\dh(x)\
dx
dx
(3.3.2.21)
161
— параметр, определяющий зависимость эффективной оценки
эквивалентной полосы частот от формы спектра СШПС (3.3.2.1).
Выражение (3.3.2.19) позволяет выяснить зависимость
дисперсии оценки от параметров СШПС и ОСШ. Однако расчет
дисперсии оценки по формуле (3.3.2.19) не всегда удобен, так как
предполагает предварительное определение величин (3.3.2.2),
(3.3.2.3), (3.3.2.20), (3.3.2.21) и функции (3.3.2.4), что может
привести к вычислительным трудностям. Поэтому приведем ещё
одну форму записи дисперсии эффективной оценки
эквивалентной полосы частот СШПС, которая в ряде задач позволяет
упростить расчеты. Для этого в (3.3.2.18), (3.3.2.19) подставим
функцию h(x) из (3.3.2.4). После замены переменной интегрирования
имеем
πΝ0
σ2 =
j|S(jfi>)f<to
ω2
dSjjcof
άω
<to[max|S(,7Ci[))|]
(3.3.2.22)
Полученные аналитические выражения (3.3.2.19), (3.3.2.22) для
потенциальной точности оценки ширины спектра СШПС
используют спектральное представление СШПС (3.3.2.1). Однако,
во многих задачах обработки СШПС целесообразным является
представление СШПС в виде функции времени s(t). Обозначим
а = maxs(£) (3.3.2.23)
—амплитуда СШПС, а
τ = J s2(t)dt/mnxs2(t) (3.3.2.24)
—его эквивалентная длительность. Для того, чтобы получить
форму записи СШПС, содержащую в явном виде эквивалентную
длительность (3.3.2.24), используем функцию
f(x) = s(xr)/a. (3.3.2.25)
Эта функция нормирована таким образом, что
max/(s) = l; jf(x)dx = l (3.3.2.26)
и описывает форму СШПС с единичными амплитудой (3.3.2.23)
и эквивалентной длительностью (3.3.2.24). Используя функцию
(3.3.2.25), представим СШПС в виде
162
β(ί) = α/(ί/τ). (3.3.2.27)
Подставляя (3.2.2.27) в (3.2.2.1), для спектра СШПС получаем
выражение
ί^ω) = aTff(x)exp(-j(oxz)dx. (3.3.2.28)
Затем, подставляя (3.3.2.28) в (3.3.2.3),преобразуем числитель
полученного выражения, используя теорему Парсеваля
)s2{t)dt = ±)\S{ja>fd(o.
Далее, учитывая условие нормировки (3.3.2.26), имеем
J s\t)dt = α2τ . В (3.3.2.3) Ω = 2/г /тд\ где
д = max | [ f(x)exp(-jyx)dx |. (3.3.2.29)
У J
Таким образом, эквивалентную длительность СШПС (3.3.2.24)
можно выразить через эквивалентную полосу частот (3.3.2.3) с
помощью соотношения
τ = 2/τ/Ω#2. (3.3.2.30)
Подставляя (3.3.2.30) в (3.3.2.27), получаем представление
СШПС, в которое явно входит эквивалентная полоса частот
(3.3.2.3)
s(t) = β(ί,Ω) = af(tQg2 /2π). (3.3.2.31)
Затем, подставляя (3.3.2.31) в (3.3.2.18) и заменяя пределы
интегрирования на бесконечные, можем записать сигнальную
функцию в виде
^--Ш^ШУ- <з·3·2'32»
Подставляя далее (3.3.2.32) в (3.3.2.17) и выполняя
дифференцирование, находим дисперсию эффективной оценки
эквивалентной полосы частот СШПС
σΐ = Q2Jz2d2. (3.3.2.33)
Здесь ОСШ ζ2 определяется из (3.3.2.20), а
dx
*·ι
dx (3.3.2.34)
163
— параметр, определяющий зависимость дисперсии эффективной
оценки эквивалентной полосы частот от формы СШПС.
Используя (3.3.2.30), получаем зависимость дисперсии эквивалентной
полосы частот от эквивалентной длительности (3.3.2.24) СШПС
< =
4л:2
. (3.3.2.35)
ζ τ д а
Выражения (3.3.2.33), (3.3.2.35) позволяют исследовать
зависимость дисперсии оценки от параметров СШПС и
отношения сигнал—шум. Однако аналогично (3.3.2.19) расчет
дисперсии оценки по формулам (3.3.2.33) и (3.3.2.35) не всегда удобен,
так как предполагает предварительное определение величин
(3.3.2.23), (3.3.2.24), (3.3.2.29) и функции (3.3.2.25). Поэтому
приведем еще одну форму записи дисперсии эффективной
оценки эквивалентной полосы частот СШПС, которая в ряде задач
упрощает вычисления. Для этого в (3.3.2.32)...(3.3.2.34) подставим
функцию f(x) из (3.3.2.25). После замены переменной
интегрирования имеем
σί =
2π2Ν0α2
js2(t)dtj
,ds(t)
dt
(3.3.2.36)
dt
Учитывая, что в (3.3.2.2) q = ад , где д определяется из (3.3.2.29),
можно (3.3.2.36) переписать в виде (3.3.2.22). В этой формуле
дисперсия эффективной оценки непосредственно выражается
через спектр СШПС (3.3.2.1).
Определим далее смещение и дисперсию
квазиправдоподобной оценки (3.3.2.9) эквивалентной полосы частот СШПС.
Усредняя (3.3.2.16), находим, что квазиправдоподобная оценка
несмещенная: (ΔΩ) = 0. Соответственно, для дисперсии
квазиправдоподобной оценки можем аналогично [48] записать
Ν'<
σ2 = (ΔΩ 2) = |^5(ЦА) +
Ώ0 L
d2S(Q1Q2)
3Ω13Ω2
(3.3.2.37)
-ΙΩ0
Используя (3.3.2.17) и (3.3.2.19), преобразуем (3.3.2.37) к виду
σ2 = σΐχ , (3.3.2.38)
где
164
_ σ
Λ — 2
= 1 +
4σ^
J/ад-О
'&(^,Ω)&(^,Ω)'
^ώ2 (3.3.2.39)
Μ
άΩ άΩ
и характеризует проигрыш в точности квазиправдоподобной
оценки эквивалентной полосы частот по сравнению с
точностью оценки максимального правдоподобия вследствие наличия
узкополосной стационарной гауссовской помехи. Избежать
вычисления двойного интеграла в (3.3.2.39) можно, если перейти
к спектральному представлению. Действительно, в этом случае
получаем
* = ι + -Μω2^(ω)
Ν,
dS(jw)
άω
άω/ ]
ω'
dSjjai)
άω
άω. (3.3.2.40)
Найдем величину проигрыша в точности оценки
эквивалентной полосы СШП.С (3.3.2.41) для частного случая узкополосной
помехи с прямоугольной спектральной плотностью
G4H = t
/
ω0 -ω
Ω,
+ 1
ω0 +ω |
(3.3.2.41)
Подставляя (3.3.2.41) в (3.3.2.40), находим проигрыш в точности
оценки эквивалентной полосы частот СШПС
χ = 1 + ακ. (3.3.2.42)
Здесь а = у / Ν0 — отношение спектральных плотностей
узкополосной помехи и белого шума, а
ω0+Ωξ/2
'- J
ω
-Ωξ/2
dS(ja>)
άω
άω/ j
ω
dS{j<o)
άω
άω. (3.3.2.43)
Как следует из (3.3.2.43), проигрыш в точности
квазиправдоподобной оценки эквивалентной полосы частот СШПС будет
минимальным, если помехой поражен участок [ω0 -Ωξ /2;ω0 +Ωξ /2]
спектра СШПС с малой скоростью изменения, то есть участок с
малым значением модуля производной спектра \άΞ^ω) / άω\.
Наибольшую точность оценки эквивалентной полосы частот
СШПС при наличии узкополосной помехи можно обеспечить,
если априори известна корреляционная функция Βξ(ί2 - ίλ)
узкополосной помехи. В этом случае ЛФОП можно записать как [48]
τ 1 τ
4(Ω) = jx{t)V(t,a)dt--js(t,a)V(tia)dt9 (3.3.2.44)
о о
где функция ν(ί,Ω) определяется из решения интегрального
уравнения
165
1
N0V(t,Q)/2 + \ Βξ(ί-τ)ν(τ,Ω)άτ = S(t,Q). (3.3.2.45)
0
Соответственно, ОМП, учитывающая наличие узкополосной
помехи, имеет вид
Ω0 = argsupL0(Q). (3.3.2.46)
Для расчета характеристик ОМП (3.3.2.46) достаточно найти
сигнальную функцию [48]
т
^(Ω,,Ω,) = js(t,^)V(t,il2)dt. (3.3.2.47)
О
Опять положим, что время наблюдения Τ много больше
длительности СШПС. Заменяя тогда в (3.3.2.45) и (3.3.2.47) пределы
интегрирования на бесконечные, видим, что (3.3.2.45) переходит в
уравнение типа свертки [21]
N0V(t,a)/2+ JB^t-T)V(T,Q)dT = S(t,Q)f (3.3.2.48)
а сигнальная функция (3.3.2.47) принимает вид
5(Ω1?Ω2) = J «(ί,Ω^νχί,Ω^Λ. (3.3.2.49)
Интегральное уравнение (3.3.2.48) можно решить с помощью
преобразования Фурье [22]
к J πΝJ 1+
q f /ι(ω/Ω)βχρ(^'ωί)
_ G.(a>)/N0
άω. (3.3.2.50)
Подставляя (3.3.2.41) и (3.3.2.50) в (3.3.2.49), для сигнальной
функции имеем выражение
^о(^,Й2) =
q f Λ(ω/Ωι)Λν/£^)
Οξ(ω)/Ν0
πΝη
J 1 +
άω. (3.3.2.51)
Для определения дисперсии оценки максимального
правдоподобия эквивалентной полосы частот СШПС (3.3.2.46) достаточно
подставить (3.3.2.51) в (3.3.2.17). Выполняя
дифференцирование, в результате получаем
σ20=πΝ0Ωΐ/]ω2
dS{j(o)
άω
1 +
2ΰξ(ω)
άω. (3.3.2.52)
Однако расчет дисперсии оценки по формуле (3.3.2.52) не всегда
удобен, так как предполагает предварительное определение
величин (3.3.2.2) и (3.3.2.3). Поэтому, как и выше, приведем еще одну
166
форму записи дисперсии оценки максимального правдоподобия
эквивалентной полосы частот СШПС. Для этого в (3.3.2.52)
подставим величины (3.3.2.2) и (3.3.2.3). Получаем
πΝη
σΙ=-
]\S{j<4dm
ωΔ
dS{j<»)
άω
1 +
2βξ{ω)
d(o[max\S(j(o)[\
Сопоставляя (3.3.2.19) и (3.3.2.52), находим проигрыш в
точности оценки максимального правдоподобия вследствие воздействия
узкополосной помехи
|2
ω
Хо ~ 2 ~
dS(ja>)
άω
άω
ω
dS(jd)
άω
1 +
2βξ(ω)
(3.3.2.53)
άω
Соответственно, сопоставляя (3.3.2.37) и (3.3.2.52), определяем
проигрыш в точности квазиправдоподобной оценки (3.3.2.9) по
сравнению с точностью оценки максимального правдоподобия
(3.3.2.46), учитывающей воздействие узкополосной помехи
2 °°
σ χ г
uo /Со -«,
■■\
χ ω
dS(jw)
άω
1 +
ω2
dS{j<u)
άω
2βξ(ω)~
Ν
0
2 Γ
-1
άω\
1 +
ω'
2G,(a>)'
Ν,
0 J
dS(ja>)
άω
άωχ
άω
(3.3.2.54)
Для частного случая узкополосной помехи с
прямоугольной формой спектральной плотности, подставляя (3.3.2.41) в
(3.3.2.53), (3.3.2.54), получаем
*0=(1 + α)/[1 + α(1-ιτ)], (3.3.2.55)
χλ =1 + α2κ(1-κ)/(1 + α). (3.3.2.56)
Отметим, что проигрыш в точности квазиправдоподобной
оценки (3.3.2.9) эквивалентной полосы частот СШПС по
сравнению с точностью оценки максимального правдоподобия при
отсутствии узкополосной помехи и проигрыш (3.3.2.56) в
точности квазиправдоподобной оценки по сравнению с точностью
оценки максимального правдоподобия (3.3.2.46), учитывающей
воздействие узкополосной помехи, возрастает с увеличением ин-
167
тенсивности помех, то есть с увеличением параметра а . В то же
время проигрыш (3.3.2.55) в точности оценки максимального
правдоподобия эквивалентной полосы частот СШПС вследствие
воздействия узкополосной помехи при больших значениях
параметра а не зависит от интенсивности узкополосной помехи.
Действительно, при а » 1 из (3.3.2.55) имеем
Ζο-α-*)"1· (3.3.2.57)
Как следует из (3.3.2.57) и (3.3.2.43), если интенсивность
узкополосной помехи существенно превосходит спектральную плотность
белого шума, то проигрыш в точности оценки максимального
правдоподобия определяется только частотными параметрами помехи с
прямоугольной формой спектральной плотности (3.3.2.41).
3.4. Влияние узкополосных помех
на пороговые характеристики оценок временных параметров
сверхширокополосных сигналов
Рассмотрим влияние ГУП на вероятность появления
аномальных ошибок при оценке временных параметров СШПС. Для этого
найдем вероятность надежной квазиправдоподобной оценки,
вероятность аномальных ошибок при наличии и отсутствии ГУП, а
также коэффициент, который показывает, во сколько раз
возрастает вероятность аномальной ошибки вследствие воздействия ГУП.
Как и раньше будем рассматривать реализацию
χ(ί) = 8Ν(ί,λ(Ρθ0) + η(ί) + ξ(ί), (3.4.1)
где
3Ν&λ,θ) = Σ*[ί-λ-(1<-μ)θ}, (3.4.2)
Jfc=0
— последовательность СШПС.
В(3.4.1)оцениваемымипараметрамиявляются Я0 € [Amin; AmaJ ,
0о G [^minJ^max] - Длины априорных интервалов возможных
значений времени прихода и периода следования обозначим
соответственно Α = λπαχ-λαάα, Θ = 0max - 0min. Априорную область
возможных значений неизвестных параметров запишем как
HM[Amin;AmJ,[0min;emj}. (3-4-3)
В п. 3.1 рассмотрен алгоритм ОМП [48] параметров СШПС,
синтезированный без учета воздействия ГУП. Поэтому при
использовании этого алгоритма для оценки времени прихода Я0 и
периода повторения 0О знание параметров ГУП ξ(ί), в частности
корреляционной функции Βξ(τ), не требуется. Так как во многих
168
практических случаях параметры ГУП априори неизвестны,
далее будем использовать алгоритм оценки максимального
правдоподобия [48], синтезированный без учета воздействия ГУП.
Полагаем, что скважность последовательности (3.4.2)
достаточно велика, так что отдельные СШПС не перекрываются и
О < Л™ < Лпах + N^max < Τ. Тогда при воздействии только ГБШ
логарифм ФОП с точностью до несущественного слагаемого
запишется в виде [48]
L(A, θ) = — Jj\x(t)s[t -λ-(к- μ)θ]άί. (3.4.4)
Реализация наблюдаемых данных x(t) кроме ГБШ содержит
ГУП. Поэтому оценки
(Я,в) = argsup£(Я,0), (Я,в) € W (3.4.5)
не являются ОМП. Эти оценки можно назвать
квазиправдоподобными (КПО) [48], поскольку они совпадают с ОМП лишь при
Для определения характеристик КПО (3.4.5) представим
(3.4.4) в виде суммы сигнальной и шумовой функции [48]
1(Я,в) = 5(ЯЛ,в,в0) + ЛГ(Я,в), (3.4.6)
5(ААДв0) =
= ^ΣΣ]^-(1<-μ)θ0-λ0№-(1ΐ-μ)θ-λ}<Κ. (3Α7)
^0 £=0 п=0 _оо
Шумовая функция Ν(λ,θ) в (3.4.6) является реализацией гаус-
совского случайного поля, причем его первые два момента равны
(Ν(λ,θ)) = 0,
ΒΑ ада) = (щ^ащъа)) =
= ХХадл,(*-т>(»-А0*2], (ЗА8)
где
2 т
BN{Xl,6l,l2,e2) = —\S[t-Xi-ei}s[t-K-^2]dt +
No 0
4 тт
+Ί^ίίΒξ& ~ **М* - К - ΘΜΡ - А, - e2}dtl(it2.
(3.4.9)
Ν
•"о о о
Пусть та — длительность СШПС s(t), так что s(± τ$) ~ 0.
Полагаем, что выполняются условия Ts < θ^η, Л < вЫп, Θ -С 0min. Тогда
(3.4.7) и (3.4.8) можно переписать в виде
169
£(А,Л„,0,0о) -
2 ^_1"? (3 4 10)
= 7ΓΣΐΦ-(^-μ)θο-λ0]ψ-^-μ)θ-Α]ώ, ν"'
^ο fc=o —о
5&ΑΛΑ) = Σ**&-*ι+(*-/*)№-*i)L (3.4.11)
Jfc=0
5я(^) = j «(*>(* - λ)^ +
°~ (3.4.12)
Согласно (3.4.11), (3.4.12) случайное гауссовское поле Ν(λ,θ)
является однородным.
Обозначим λ8 и θ8 —длительность (протяженность)
сигнальной функции (3.4.10) по соответствующим аргументам. Тогда
SA ± я. А А А) - о > <?А А А ± *. А) - о.
Выделим в области (3.4.3) возможных значений времени
прихода и периода повторения сигнальную подобласть
^={[Λ.-^Λ + λ.],[βο-β.;0ο+0.]}, (3.4.13)
в которой сигнальная функция (3.4.10) отлична от нуля. Если
(W)eWs, (3.4.14)
то КПО (3.4.5) является надежной. Согласно [48] надежные КПО
являются условно несмещенными и обладают дисперсиями
Ό{λ) = σΙχ,Ό{θ) = σΙχ. (3.4.15)
Здесь σ2 = ^ ^-1 + 12[(Ν-1)/2-μ}2 = Ν0 6 _
я 2F0 2ЛГ(ЛГ2 -1) ' θ 2F0 Ν (Ν2 -1)
дисперсии ОМП времени прихода и периода повторения
[48] в отсутствие ГУП, F0 = \[ds(t)dtfdt определяет
зависимость дисперсий оценок от формы СШПС, а £ = 1 +
+ \ \ B^fa-ti)———— сЙ^ — коэффициент, который
показывает, во сколько раз возрастают дисперсии надежных КПО
времени прихода и периода повторения СШПС вследствие
воздействия ГУП.
Когда условие (3.4.14) не выполняется, появляются
аномальные ошибки, что приводит к резкому (пороговому) ухудшению
170
точности КПО (3.4.5). Поэтому пороговые свойства КПО можно
характеризовать вероятностью надежной оценки [48]
P0=m,§)eW.]. (3.4.16)
Пусть WN —дополнение области Ws (3.4.13) до области W (3.4.3),
так что W = WsuWN . Обозначим Hs = sup£(A,0), (Я, Θ) € WS и
HN = supL(A,θ), (Я,θ) € WN . Поскольку КПО (3.4.5)
определяется по положению абсолютного (наибольшего) максимума поля
(3.4.6), выражение (3.4.16) можно переписать как
P0 = P[HN<HS]. (3.4.17)
Если априорная область (3.4.3) возможных значений
неизвестных времени прихода и периода повторения последовательности
СШПС (3.4.2) не слишком мала, так что
Я5<Л, 0S<0, (3.4.18)
то случайные величины Hs и HN приближенно статистически
независимы [48, 104]. Это позволяет записать (3.4.17) в виде
P0 = JFN(x)dFs(x). (3.4.19)
Здесь FN(x) и Fs(x) — функции распределения случайных
величин HN и Н8, соответственно. Очевидно, FN(x) представляет
собой функцию распределения величины абсолютного максимума
случайного поля Ν(λ,θ). Точное выражение для FN(x) получить
не удается. В [97] для случайного однородного гауссовского поля,
как уже отмечалось выше, найдена аппроксимация функции
распределения его абсолютных максимумов, справедливая при
выполнении (3.4.18) и не слишком малых χ
РЛ*)~
ехр
2σ
► , x>oL
χ <στ
(3.4.20)
Здесь
α\ = 5(Я,0,Я,0) = Νσ2Ν (3.4.21)
—дисперсия шумовой функции Ν(λ,θ), σ2Ν = ΒΝ(λ,θ,λ,θ),
ξ = A©VdetB (3.4.22)
— приведенная площадь априорной области W (3.4.3).
Величина ξ (3.4.22) определяет количество некоррелированных
отсчетов поля Ν(λ,θ) в области W. В (3.4.22) матрица
171
в =
Э^ДЛЛ) ЩКА,КА)
όληολ2 Э^Эбз
Эв^
σθ1σθ2
(3.4.23)
θι-θ2
где
ь&ДЛД) = в{КА>КА)1<Л (3-4.24)
— коэффициент корреляции случайного поля Ν(λ,θ)
(3.4.6). Подставляя (3.4.11) в (3.4.24) и выполняя
дифференцирование в (3.4.23), получаем detB = (Ν2 - l)d4 /12, где
94(^ι^ιΛ^2)
dz=a:
э^эя,
Aj —Я2,0j — Β<ι
= M. здесь Д^ДЛЛ)
определяется из (3.2.1.9), d 2п= F0 /Ε , Ε1 = js2(£)cft — энергия
одногоСШПС,а у = 1 + 2J J β^ - t^t^s^dt/N0E
—коэффициент, который показывает, во сколько раз возрастает дисперсия
шумовой функции Ν(λ,θ) (3.4.6) вследствие воздействия ГУП.
Обозначим ν = KQd2n и ζ2 = 2Е / Ν0 — ОСШ для одного СШПС
последовательности (3.4.2) в отсутствие ГУП. Тогда (3.4.21) и
(3.4.22) принимают вид: σ\=Νζ2ψ , ξ = ν^χ(Ν2 -1)/3ψ /2, а
(3.4.20) перепишется как
ад-
4;rzvM бтгЛГ
2JV*V
►, х> ζ^ΙψΝ,
(3.4.25)
[0, х < ζ^ΙψΝ.
Введем в рассмотрение ОСШ на выходе квазиправдоподобного
приемника (3.4.4), (3.4.6)
^^(UWVff^^/y· (3-4.26)
Если ОСШ zL не слишком мало, то согласно [97] справедлива
аппроксимация
F,~4x/aL-zL) = 4x/zyfJty-zylNjY), (3.4.27)
х
где Ф(х) = J exp(-£2 /2)dt/y/2n — интеграл вероятности.
172
Подставляя (3.4.25) и (3.4.27) в (3.4.19), находим вероятность
надежной КПО
^о-
1 Г ух
~ /o^JeXPl άπ
νχ \χ(Ν2-ΐ)
yf2n[
Απ \ 6πψ
exp
χ
"27V
(x-ZyJN/ψ)2] (3.4.28)
Пусть неизвестные время прихода λ^ и период повторения 0О
распределены равномерно в априорной области W (3.4.3) их
возможных значений. Тогда, аналогично [104], для безусловных
рассеяний КПО (3.4.5) с учетом пороговых эффектов получаем
выражения
Щ) = ((Я-Я0)2) = ДЯ)Р0+(1-Р0)Л2/6,
ν(θ) = ((θ-θ0Υ) = Ό(θ)Ρ0+(1-Ρ0)Θ2/6.
(3.4.29)
Усреднение здесь выполняется по всевозможным значениям
ЯЛ и 0,0О. Полагая в (3.4.15), (3.4.28) и (3.4.29) χ = ψ = ΐ,
имеем рассеяния ОМП времени прихода и периода повторения в
отсутствие ГУП.
Формула (3.4.28) для вероятности надежной оценки
довольна громоздка и расчет по ней возможен только численными
методами. Поэтому, аналогично [104], найдем достаточно простое
аналитическое выражение для вероятности аномальных ошибок
Ра = 1 - Р0, справедливое при достаточно больших ОСШ (3.4.26)
Р.!«■
VZ
χΝ(Ν2-ΐ) ( ζ2Ν
— exp
(3.4.30)
24πψ4 3/г { ^Ψ
Эта формула обладает удовлетворительной точностью при
Рв< 0,05-0,1.
Полагая в (3.4.30) χ = ψ = 1, получаем вероятность
аномальной ошибки
Р. «■
νζ \Ν(Ν2 -1)
24πψ
для ОМП в отсутствие ГУП.
Сопоставляя (3.4.30)
ζ2Ν(ψ-ϊ)
3π
exp
z2N
(3.4.31)
4x
к = —^ = ^^ exp
Pan Ψ
4ψ
и (3.4.31), находим:
коэффициент, который
показывает, во сколько раз возрастает вероятность аномальной ошибки
вследствие воздействия ГУП.
173
4. РАДИОЭЛЕКТРОННАЯ РАЗВЕДКА
РАДИОСИСТЕМ
СО СВЕРХШИРОКОПОЛОСНЫМИ СИГНАЛАМИ
В процессе радиоэлектронной разведки (РЭР) [63] форма
принимаемого сигнала обычно неизвестна или известна неточно.
Поэтому ниже рассмотрим алгоритмы квазиоптимального
(квазиправдоподобного) и энергетического обнаружения последовательности
СШПС с неизвестной формой при неизвестных времени прихода
и периоде повторения, а также алгоритмы квазиправдоподобной
оценки центральной частоты и полосы частот. Знание этих
параметров необходимо, в частности, для создания активных помех РЭС.
Важной составляющей РЭР также является высокоточное
местоопределение источника радиоизлучения (ИРИ).
Применительно к излучению СШПС синтезированы алгоритмы местооп-
ределения, которые сохраняют свою работоспособность в
условиях контррадиопротиводействия системам РЭР.
4.1. Эффективность квазиправдоподобного обнаружения
последовательности сверхширокополосных сигналов
Рассмотрим обнаружение последовательности СШПС с
неизвестными формой, временем прихода и периодом повторения
при наличии как ГБШ, так и ГУП. Последовательность СШПС
описывается (2.2.4.1).
Пусть на интервале времени [0;Г] в случае наличия сигнала
наблюдается реализация
χ(ί) = 8Ν(ί,λ0,θ0) + η(ί) + ξ(ί). (4.1.1)
При воздействии только ГБШ ЛФОП можно записать в виде
(2.2.4.2). В этой формуле s(·) — опорный сигнал, форма
которого при оптимальном приеме совпадает с формой принимаемого
сигнала. Так как в процессе РЭР форма принимаемого сигнал
известна неточно, будем использовать квазиправдоподобный
приемник, который синтезируется для некоторого ожидаемого
174
сигнала s^-), причем в общем случае s^t) Φ s(t). Этот приемник
вырабатывает сигнал, описываемый функцией вида
4(А,0) =—^\x{t)Sl[t-Х-{к-μ)θ]άί. (4.1.2)
Учитывая неизвестные временные параметры сигнала,
обнаружитель формирует величину [97]
A =suPL1(X,e), ве[вт1п;втах], Ae[Amin;AmaJ, (4.1.3)
при этом решение о наличии сигнала принимается путем
сравнения с порогом h.
Анализ синтезированного алгоритма обнаружения СШПС с
неизвестной формой (4.1.2) отличается от ранее выполненного
(п. 2.2.4) заменой опорного сигнала s(t), совпадающего по форме
с принимаемым, на сигнал s^t), который, как уже сказано, в
общем случае не совпадает с ожидаемым. Поэтому, опуская
промежуточные выкладки, для параметров, характеризующих
эффективность обнаружения, получаем
а «
vh
N2-l
4πσΝ V 6πΝ
exp
h2
2ΝσΙ
(4.1.5)
вероятность ложной тревоги при воздействии ГУП и ГБШ, а
] ω2 IStieofdto + J- j ω2Οξ(ώ)\8^ω)\2άω
у, = Ав-
JVn
j \S^f(ko + J- J G^Stitofdxo
τ·2 —
СТтлг =
2/r
j- ] ^{jcofdco + -±- J G^S^jcofdcD
Ni
Вероятность ложной тревоги при воздействии только ГБШ
можно записать как
а„ «■
νΛ
Αττσί,
Ν2-Ι
6πΝ
exp
h2
2Νσ21ΝΒ
(4.1.6)
» ее • \ οο
Здесьу1п =ΛΘ|ω2|51(;ω)|2^ω/{^(^ώΰ,σ^ =\-πΝΛ\\8ώω)[<1ω,
Si(jo)) = j s^expi-jatydt
Λ=Я -Я ,Θ = 0 -θ
спектр ожидаемого СШПС,
длины априорных интервалов
175
возможных значении времени прихода и периода следования.
Предполагается, что вероятность ложной тревоги достаточно
мала, например, α,αη < 0,1.
Параметр, определяющий увеличение вероятности ложной
тревоги вследствие воздействия ГУП, согласно (4.1.5), (4.1.6),
запишется как
к*, =«i/«i, =¥1exp[h2(Xl-l)/2Na21NBx1]/X31/2 , (4.1.7)
где ψχ =l + 2J(O2Gi(<D)\S1(jO)fdo)/N0](O2\S1(j<Dtfdo), a
Xl =l + 2]Gs(a>)\Sl(ja>fda>/N0]\Sl(ja>fda>. (4.1.8)
Найдем вероятность пропуска сигнала βλ. Положим, что
полезный сигнал присутствует на входе приемника. Тогда,
в соответствии с определением [97]: βλ = P[supZi(A,0) < ft],
λ е^;^], ee^jfl^]. Подставим реализацию
наблюдаемых данных в случае наличия сигнала в выражение для функции
(4.1.2), которую представим в виде суммы сигнальной и шумовой
функции
А(Я,в) = 51(Я,Л1),в,в0) + ЛГ1(Я,в),
iv0 к=0 п=0 _ββ
2 N~lTc
сигнальная функция, Ν^λ,θ) = — X [[40 + £(*)Ы* ~ (^ ~ /*)0 ~ Ψ*
^0 fc=0 о
— шумовая функция. Положим, что функция S^A, Αο,θ,θο)
обладает лишь одним существенным максимумом в априорной
области возможных значений А и θ, то есть maxS^A,λ^,θ,θο) -
= адЛАА) = JV2f, где ζ2 = — J «(ί^φΛ - ОСШ при не-
оптимальном приеме без ГУП. Обозначим z2 = 5,2(λΌ,λΌ,0ο,0ο)/σ;; =
= Ν ζ* /σ2Ν = NzlR2 J χλ — ОСШ при неоптимальном приеме при
9
наличии ГУП, где ζ2η - — \ s2(t)dt — ОСШ при оптимальном
приеме СШПС s(t) на фоне ГБШ, а
176
j stys^dt
Rs= ι ~ (4.1.9)
j] s\t)dt] si(t)dt
— коэффициент корреляции между опорным сигналом и
принимаемым, который учитывает неоптимальность приема. Видно,
что если Rs = 1, то z\ — ОСШ при наличии ГУП для
оптимального приемника (2.2.4.2).
При не слишком малом ОСШ приближенное выражение для
вероятности пропуска сигнала можно записать как [97]
β«(1-α)Φ(Λ/σ1£-*ι),
χ
где Ф(х) = \ exp(-t2 / 2)dt / у/2п — интеграл вероятности.
Соответственно, выражение для вероятности пропуска сигнала при
отсутствии ГУП можно представить в виде
/^«(Ι-αΟΦίΛΜ-^),
где z\ = Nz2nR?s — ОСШ для всей последовательности (2.2.4.1).
Очевидно: z\ = ζ\χλ j R2S или z\ = ζ\Βζ / χλ. Таким образом,
влияние ГУП на эффективность обнаружения описывается
величинами χλ и к1а. Параметр χλ (4.1.8) показывает, во сколько раз
уменьшилось ОСШ вследствие наличия ГУП, а параметр к1а
(4.1.7) — во сколько раз увеличилась вероятность ложной
тревоги.
Воспользуемся как и ранее критерием Неймана—Пирсона.
Положим, что вероятность ложной тревоги αλ <С 1, тогда
вероятность пропуска сигнала будет определяться ОСШ ζ\, которое
зависит от коэффициента корреляции Rs.
Если использовать фильтровую реализацию, то фильтр на
рис. 2.2.2.1. должен иметь характеристику вида: H^i) = cs^ -1).
Введем новую переменную t' = t0-t, тогда t = t0 -1'.
Подставляя в свою очередь s^t) в (4.1.9), получим
max j s(t)H(t0 - t)dt
Rs = jl ~ (411°)
\] s\t)dt] H\t)dt
Здесь t0 выбирается таким, чтобы числитель достигал максимума.
177
Запишем выражение для Rs (4.1.10) в спектральном
представлении. Для этого выразим сигнал и характеристику фильтра (рис.
2.2.2.1.) s(t) = — f S(j(uy°"d(D , H{t0 -1) = — ] НЦсоУ^Чсо и
In j^ 2π j^
подставим эти формулы в (4.1.10). Имеем
max J S(j(o)H{j(o)emd(0
Rs = ,* ~ (4.1.11)
Л|50'а>)Г*»}|^0'®)Г*»
Определим спектр сигнала ί^'ω) и ИПФ фильтра H{j(o)
через амплитудно-частотную и фазо-частотную характеристики:
ЯЭ) = |5Ό"ω)|βχρ[ίφβ(ω)], tf(jfl>) = |#0У»)|ехр[^я (ω)]. Тогда
числитель (4.1.11) можно записать в виде: \ S(ju))H(j(o)eJ(0tod(0 =
J |S(ja)||tf (ja)| βχρ(Λφ. (ω) + φ*(ω) + ω*0])<ίω = J |S(j©)||ff(j©)| x
χ cos[<jos (ω) + <ря (ω) + ωί0 ]άω. Так как cos [φ3 (ω) + φΗ (ω) + ωί] < 1,
то максимальное значение числителя (4.1.11) будет достигаться
при φ8(ω) + φΗ(ω) + ωί0 = 0 и, соответственно, проигрыш при
применении вместо согласованного фильтра с
амплитудно-частотной характеристикой |#(,7*ω)| будет минимальным. Тогда (4.1.11)
перепишется как
]\S(ja>)\\H(j(0)\d(0
Rs = , ~ (4-1.12)
\]\S{ja>)f da>]\H{ja>f da>
Рассмотрим влияние незнания формы принимаемого
сигнала на эффективность обнаружения для одной из типовых
моделей СШПС — первой производной гауссова импульса
s(t) = -ехр(-/г£2 /2τ2), где τ —длительность импульса. Спектр
2τ
такого СШПС будет иметь вид: S(jco) = jTCOav2 exp . В
У 2π )
качестве фильтра используем полосовой фильтр, пропускающий
178
сигнал в диапазоне частот [Ω^Ω^. Подставляя спектр сигнала и
характеристику полосового фильтра в (4.1.12), получаем
J|S(fi>)|<fc>
Rs = _ Ω' ·. (4.1.13)
h]\s(afdm-[Q2-a1]
В случае, когда величина Rs приближается к 1, используемый
фильтр по своим характеристикам соответствует оптимальному.
Выполняя интегрирование в (4.1.13), имеем
R _ 0 exp(-Q2T2 /2π) - exp(-Q2T2 / 2π)
7t[q2-qJ
Введем следующие обозначения: φ = —- — нормированная на
2/г
полосу частот сигнала минимальная частота пропускания
фильтр-Ωχ)
тра, μ = —■— нормированная полоса пропускания филь-
2к
тра. Тогда (4.1.14) можно переписать как
R = 2 ехр(-2 πφ2) - βχρ(-2π(μ + φ)2)
Из этого выражения видно, что при обнаружении СШПС
величина Rs зависит от минимальной частоты пропускания фильтра
Ωχ, тогда как при приеме узкополосного сигнала, согласно [98],
такой зависимости нет.
На рис. 4.1.1 показаны зависимости Rs от μ для различных
φ. Анализируя зависимости, представленные на рис. 4.1.1, можно
сделать вывод, что при уменьшении полосы пропускания
фильтра обнаружителя по сравнению с полосой СШПС ОСШ ζ\ будет
уменьшаться, соответственно вероятность пропуска сигнала
возрастает. Вероятность пропуска сигнала будет расти и при
несовпадении или не полном совпадении полос фильтра и СШПС.
При увеличении полосы пропускания фильтра обнаружителя
ОСШ возрастает вплоть до совпадения полос фильтр и сигнала.
Дальнейшее увеличение полосы фильтра обнаружителя приведет
к уменьшению ОСШ, так как фильтр кроме сигнала будет
воспринимать больше шума. Максимальное значение ОСШ достигается,
когда полоса фильтра отстоит на 0,1 полосы сигнала от нижней
179
0.01 0.1 1 10 100
0.01 μ 100
Рис. 4.1.1
частоты полосы СШПС (φ = 0,1). Это объясняется тем, что спектр
сигнала колокольной формы в области нижней и верхней частот
имеет малую интенсивность.
Так как ζ\ - Nz2nR2s — ОСШ в отсутствие ГУП при
квазиоптимальном, a z2n — ОСШ при оптимальном приеме, соответственно,
снижение ОСШ вследствие несовпадения параметров сигнала и
фильтра определяется как R~2 = z\j z\. Таким образом, при
квазиоптимальном приеме ОСШ уменьшится в R~2 раз.
При квазиоптимальном приеме влияние ГУП на
эффективность обнаружения определяется параметром χλ (4.1.8),
а при оптимальном приеме — параметром χ (2.2.4.26). Так
как полоса ГУП много уже полезного сигнала, то можно
считать, что в пределах полосы помехи спектр сигнала постоянен,
то есть в этом случае можно записать для (2.2.4.26) и (4.1.8)
Χι ~Z = 1 + 2J Ωξ{ω)άω / Ν0. То есть, влияние ГУП на
эффективность квазиправдоподобного обнаружения такое же, как и при
оптимальном приеме.
Для нахождения вероятности ложной тревоги выберем полосу
фильтра так, чтобы ОСШ z\ было максимальным и,
соответственно, вероятность пропуска сигнала — минимальной. В этом случае
вероятность ложной тревоги (4.1.5) будет определяться парамет-
180
ром νλ (аналог (2.2.4.24)) и соответственно с его ростом
возрастает, то есть увеличивается при расширении полосы пропускания
фильтра обнаружителя.
4.2. Эффективность энергетического обнаружения
последовательности сверхширокополосных сигналов
Так как в процессе радиотехнической разведки форма
принимаемого сигнал неизвестна или известна неточно, для
обнаружения сигналов на практике часто используется энергетический
приемник (ЭП). В связи с этим найдем характеристики
обнаружения ЭП произвольного сигнала. Как известно [8], такой приемник
состоит из Ф-фильтра с АЧХ, близкой к прямоугольной,
квадратора, интегратора и РУ — решающего устройства (рис. 4.2.1)
x(t)
»>
φ
y(t)
Квадратор
y2(t)
Интегратор
Υ
РУ
Рис. 4.2.1
На вход фильтра с импульсной передаточной функцией h(t)
с АЧХ вида
H(jO>) =
ίΐ,|ω-ω0| < Δω/2,|ω + ω0| < Δω/2;
(4.2.1)
[θ,|ω-ω0| >Δω/2,|ω + ω0| >Δω/2,
где Δω — полоса пропускания фильтра, ω0 — центральная
частоты, подается реализация наблюдаемых данных x(t) = Y0f(t) + n(t),
f(t) — обнаруживаемый сигнал, n(t) — ГБШ, γ0 =0,1 —
параметр, определяющий наличие или отсутствие сигнала. Прошед-
t
шая через фильтр смесь y(t) = \x(x)h(t - τ)άτ подается на квадра-
0
тор, на выходе которого наблюдается сигнал, пропорциональный
y2(t). На выходе интегратора получаем величину
П2
Y = ]\jx(T)h(t-T)dT
dt,
(4.2.2)
Τ — время интегрирования. В решающем устройстве (РУ)
величина Υ сравнивается с порогом h и выносится решение о
наличии или отсутствии сигнала.
Найдем математическое ожидание случайной величины Υ
(4.2.2). Учитывая, что (f(t)n(t)) = 0 , можно записать
181
)dt =
)dt =
mru={Y) = j(\jx(T)h(t-x)dT\
о \Lo
= J( \j{Yo№ + n(t)}h(t-z)dT\
о \Lo J
(τ Γ t Ί2 \ τ
j \jn(t)h(t-T)dT\ ) + Y0jy2At)dt =
о Lo J / о
τ t t τ
= \\\{ФМ^))Щ - Τχ)Λ(ί - T2)dTl(lT2dt + r0Jt/s2(^,
0 0 0
ί
iVn
где ?/s(£) = j f(r)h(t - τ)άτ. Так как (^(τ^η^)) = —-flfo -τ2), то
используя фильтрующее свойство дельта функции, получаем
тп =τί Sh2№dt + Yo)y2s(t)dt,
^00 О
В случае отсутствия сигнала (/0 = 0 ) находим
2
τ t
m10={Y) = ^-jjh\T)dzdt.
(4.2.3)
(4.2.4)
Запись величины Υ в виде (4.2.2) учитывает переходные
процессы в фильтре Φ (рис. 4.2.1). Найдем условия, при которых
переходными процессами можно пренебречь. Для этого запишем
импульсную передаточную функцию h(t), соответствующую АЧХ
(4.2.1), в виде
= вш(Ад»г/2)
πτ
Подставляя (4.2.5) в (4.2.4), получаем
о J J ~2~2
mu
■dxdt.
о о
π τ
(4.2.5)
(4.2.6)
Обозначим χ = Aon/2, тогда (4.2.6) перепишется как
N^At
4 π
rau
. Τ Α Τ Δωί /2 .ο
= ^Δω, , !Ξ_£^. (4.2.7)
Α 7ΓΖ J J Τ
о о
Введем обозначения ?/ = Δωί/2/г, 5D = ΓΔ/ — база фильтра Φ,
Δ/ = Δω/2/г. При этом (4.2.7) примет вид
182
mw=^i]^dxdy. (4.2.8)
Положим ΤΑω ^> 1, тогда пределы интегрирования во втором
интеграле (4.2.8) можно заменить на бесконечные. Однако в этом
случае переходные процессы в фильтре не учитываются. Так как
оо . 2
—-ζ—dx = π, (4.2.8) перепишем как
i x
<=^-Вф. (4.2.9)
При записи математического ожидания в виде (4.2.8)
учитываются переходные процессы во входном фильтре, а при записи в
виде (4.2.9) — не учитываются. Сравнивая (4.2.8) и (4.2.9),
найдем, при каких условиях переходными процессами во входном
фильтре можно пренебречь. Для этого введем параметр,
определяющий погрешность в вычислении математического ожидания
вследствие наличия переходных процессов
δ = т°10 "omi° . (4.2.10)
Подставляя (4.2.8), (4.2.9) в (4.2.10), получаем
Вп
У ~:~2
1~υ у . 2
г rsin χ
Δη о о х
В результате численных расчетов можно убедиться, что δ
становится равным 0,1 при BD > 30 и убывает с ростом Вф. То есть,
при BD > 30 пренебрежение переходными процессами во
входном фильтре ЭП вызывает погрешность в вычислении
математического ожидания (4.2.8) не более 10 %.
Полагая в дальнейшем, что Вф достаточно велико,
переходными процессами во входном фильтре будем пренебрегать. Тогда
выходной сигнал ЭП (4.2.2) можно переписать как
тГ„ П2
Y = j\ jx(T)h(t-T)dT
dt, (4.2.12)
при этом выражение (4.2.8) принимает вид
т10=^-Вф. (4.2.13)
При наличии сигнала математическое ожидание случайной
величины Υ (4.2.4) выразится в виде
183
Δω/2
Щ1=-^-Вф+— j |ВДв>)|2Л», (4.2.14)
-Δω/2
где
Г/2
ft(J°>)= \ f(t)exp(-j(Ot)dt.
(4.2.15)
-Г/2
Дисперсию случайной величины (4.2.4) при отсутствии сигнала
можно вычислить, применяя те же методы, что и при вычислении
математического ожидания
°1={(υ-(υ))2) =
/
= М J x(r)h(t - τ)άτ
J J h{t)dt
Nn
2 (4.2.16)
4>
а при наличии сигнала,
°1=((У-(У))2) = [^(В» + 4), (4.2.17)
где
2 _ 2£Δ
(4.2.18)
— отношение удвоенной энергии той части сигнала f(t), которая
размещается в полосе пропускания фильтра Δω и в интервале
времени Τ, к спектральной плотности белого шума. Энергия этой
Δω/2
части определяется формулой Е*= — [ |Fr(jio)| άω.
On J
2π
-Δω/2
При ΒΌ ^> 1 распределение случайной величина (4.2.12)
приближенно можно считать гауссовским, тогда вероятность ложной
тревоги и вероятность пропуска сигнала запишутся как [97]
а = 1-Ф| —
Р = Ф\к-т"
(4.2.19)
(4.2.20)
Воспользовавшись критерием Неймана—Пирсона, то есть
зафиксировав вероятность ложной тревоги а , выразим из (4.2.19)
порог обнаружения
h = haaQ+m10, (4.2.21)
184
где ha = агсФ(1-а). Далее, подставляя (4.2.21) в (4.2.20),
находим вероятность пропуска сигнала
β = φ
(4.2.22)
В выражении для вероятности пропуска сигнала эффективность
обнаружения определяют два параметра — ζ\ и £?ф, поэтому ζ\
нельзя интерпретировать как ОСШ на выходе ЭП. Обозначив
Q2=z2JJb;, (4.2.23)
выражение (4.2.22) перепишем как
β = φ
ϊ2
J
(4.2.24)
Анализируя (4.2.24), можно сделать вывод, что при
фиксированном значении ложной тревоги вероятность пропуска сигнала
полностью определяется параметром Q2, поэтому Q2 можно
назвать параметром обнаружения. Из выражения (4.2.24) следует,
что с ростом Q2 вероятность пропуска сигнала убывает.
Полученные формулы позволяют рассчитать характеристики
обнаружения ЭП произвольного сигнала, при этом
эффективность обнаружения определяется параметром обнаружения Q2.
Конкретизируем приведенные результаты для двух случаев —
обнаружения узкополосного сигнала (УПС) и СШПС. Будем
считать, что используется ЭП с полосой фильтра, согласованной
с полосой УПС.
Сначала рассмотрим обнаружение УПС. Для упрощения
расчетов будем полагать, что спектр УПС постоянен в полосе частот
сигнала и, следовательно, имеет вид
F(jfl>) = Λ,ω€[ω0-Δω/2,ω0+Δω/2]. (4.2.25)
Положим, что время интегрирования Τ много больше
длительности сигнала. Тогда пределы интегрирования в (4.2.15)
можно заменить на бесконечные. Поэтому в случае обнаружения
УПС со спектром (4.2.25) параметр обнаружения (4.2.23) можно
представить как Q2nc =zlync/yJB^f а параметр (4.2.18)
перепишется в виде
ωο+Δω/2 - ^
<-=^Г 1 \Щсо)и«> = -^> (4-2.26)
185
где Ег = —Α*Αω — энергия У ПС, Д — уровень спектра
сигнала. 2π
ПриобнаруженииСШПСполосачастотсигнала ΔΩ = Ω2 -Ωχ,
Ωχ, Ω2 — соответственно верхняя и нижняя частоты спектра,
много больше полосы пропускания фильтра ЭП ( ΔΩ » Δω). Как и в
случае обнаружения УПС, предположим, что спектр СШПС
постоянен в полосе частот сигнала
S(j(o) = Α,,ω € [Ω1?Ω2]. (4.2.27)
Параметр обнаружения (4.2.23) при обнаружении СШПС
со спектром (4.2.27) примет вид Q2cuinc = z\cmnJ^, а параметр
(4.2.18) можно переписать как
ωο+Δω/2 ^
*L™=-ir J lWf*» = ^r· (4·2·28)
"iV0 ω0-Δω/2 iV0
Здесь £?2 =—^ΔΩ — энергия СШПС, А> — уровень спектра
сигнала.
Сравним характеристики обнаружения при приеме УПС и
СШПС. Изменение эффективности обнаружения будем
характеризовать величиной
О2 ζ2
О2 ~ ζ2
п?сшпс Лсшпс
^=^=i. = -^=L·. (4.2.29)
Видно, что чем больше величина (4.2.29), тем выше
эффективность обнаружения УПС по сравнению с СШПС.
Положим, что энергии УПС и СШПС равны (Ελ = Е2). Тогда,
выполняя несложные преобразования, выражение (4.2.29)
перепишем как
Δω
Так как ΔΩ » Δω, то анализируя (4.2.30), видно, что
эффективность обнаружения сигнала энергетическим приемником,
полоса входного фильтра которого много меньше полосы
принимаемого СШПС, резко падает.
Определенный интерес вызывает представление (4.2.30)
через пиковые мощности сигналов. Положим, что полосы частот
сигналов обратно пропорциональны длительностям, то есть для
УПС Дю = 1/тсшпс, а для СШПС ΔΩ = 1/τΗΠ0, где типс,тсшпс -
длительности УПС и СШПС. Тогда, выразив энергии сигналов
186
через импульсные мощности — Рх = ϋ^ΔΩ для УПС, Р2 = Ε2Αω
ρ
для СШПС, и полагая, как и ранее Ελ= Е2, получаем χλ = —.
То есть, при одинаковой энергии сигналов параметр Q2ync при
обнаружении СШПС уменьшается в у, = = — раз. Известно,
Δω Ρλ
что пиковая мощность СШПС во много раз превосходит пиковую
мощность УПС, поэтому обнаружение СШПС энергетическим
приемником, предназначенным для разведки УПС, практически
невозможно.
Выше были рассмотрены потери вследствие различия полос
частот входного фильтра и обнаруживаемого сигнала, которые
определяются формулой (4.2.30). Однако в отличие от
оптимального приемника ЭП содержит квадратор, поэтому возможны потери
и в эффективности обнаружения вследствие различия структур
оптимального и энергетического обнаружителя.
Рассмотрим случай обнаружения ЭП СШПС и положим, что
ω0-Δω/2 = Ω1, ω0 + Δω/2 = Ω2, Δω = ΔΩ , то есть полосы
частот входного фильтра и принимаемого СШПС со спектром (4.2.25)
совпадают. Введем в рассмотрение параметр
Яэш=^Ч (4-2.31)
— энергия сигнала при энергетическом обнаружении, при которой
обеспечиваются заданные значения α,/J (4.2.19), (4.2.20).
Подставляя α = β = С в(4.2.22),находимζΔ ,далееиспользуявеличину
*Δ в (4.2.31), получаем Еэш = ^^[2 + агсФ(1-(7)]агсФ(1-<7),
где параметр Еэш можно назвать пороговой энергией для ЭП.
Для сравнения рассмотрим характеристики оптимального
обнаружителя. Как известно, оптимальный приемник представляет
собой коррелятор, на выходе которого сигнал сравнивается с
порогом. Характеристики обнаружения для оптимального
приемника СШПС имеют вид [97]
а0=1-Ф - , Д=Ф
fh λ
ζ,
(4.2.32)
J
Здесь z\ - 2E / NQ — ОСШ. При фиксированном уровне ложной
тревоги (критерий Неймана—Пирсона) вероятность пропуска
сигнала (4.2.32) запишется как
187
Д,=ф[агсФ(1-а)-20]. (4.2.33)
Как и выше, введем параметр
Яопт(=^Ч- (4-2.34)
Здесь Eomt — энергия, при которой обеспечивается заданное
значение вероятностей ложной тревоги и пропуска сигнала α0, β0
(4.2.31). Подставляя а0 = β0 = С в (4.2.33), находим zQ, далее
N
используя z0 в (4.2.34), находим Eomt =—-2arcФ(1 - С), то есть
величину пороговой энергии при оптимальном обнаружении.
Для того, чтобы оценить потери в эффективности
обнаружения, возникающие вследствие отличия структуры ЭП от
оптимального приемника, рассмотрим отношение величин
_ Emt _УМ2 + агсФ(1-С)]агсФ(1-С)
^οπτί 4[arcO(l-C)J
Величина (4.2.35) показывает, на сколько нужно увеличить
энергию сигнала, чтобы эффективность обнаружения ЭП была такой
же, как у оптимального приемника, то есть (4.2.35) характеризует
потери энергии, возникающие вследствие отсутствия априорных
данных о форме сигнала.
Анализируя (4.2.35), видно, что потери в эффективности
обнаружения слабо зависят от величины С . Перепишем (4.2.35) в
г— \2 + arc Ф(1 - С)] arc Ф(1 - С)
виде χ2 = xJBD , где χ3 = ± - 2 . В резуль-
4[arcO(l-(7)J
тате численных расчетов находим, что χ3 ~ 0.41. Следовательно,
для инженерных расчетов можно использовать упрощенную
формулу £2=0.4Ц/Д^.
4.3. Измерение частотных параметров
сверхширокополосных сигналов с неизвестной формой спектра
Во многих случаях в ходе РЭР, например, при создании
прицельных шумовых помех, возникает необходимость
измерения таких частотных параметров СШПС как: Ωχ —
минимальная частота спектра, Ω2 — максимальная частота спектра,
ν = (Ωχ +Ω2)/2 — центральная частота спектра, Ω = Ω2 -Ωχ —
ширина спектра СШПС.
В процессе РЭР форма принимаемого сигнал обычно
неизвестна или известна неточно, поэтому синтезируем алгоритм квази-
188
правдоподобной оценки частотных параметров СШПС для
данной постановки.
Спектр СШПС по аналогии с (3.3.1.2) представим в виде
5(ω,Ω1?Ω2) = ГУ h l 2' (4.3.1)
v ' " 2) [0, ω<Ωι5 ω>Ω2. ν ;
Используя такие параметры СШПС как центральная частота ν
и полоса частот Ω, спектр (4.3.1) можно переписать следующим
образом:
β(ω, ν, Ω) = ς(ω)Ι [(ω - ν) / Ω], (4.3.2)
τ( λ ίΐ,Ν<1/2
где Ι (χ) = < , , , а центральная частота и полоса частот мо-
' 10,М>1/2'
гут принимать значения из соответствующих интервалов
ν е [ν^,ν^], Ω е [Qmin,QmJ. (4.3.3)
Тогда для принимаемого сигнала имеем
1 ν+Ω/2
s(t, ν,Ω) = — J q((o)exp(j(ot)d(0 . (4.3.4)
27ζ v-Q/2
Полагаем, что СШПС (4.3.4) наблюдается на фоне ГБШ n(t)
с односторонней спектральной плотностью NQ. В этом случае на
интервале времени [0;Г] обработке доступна реализация
наблюдаемых данных x(t) = s(£,v0,Q0) + n(£), где ν0,Ω0 — истинные
значения неизвестных центральной частоты и ширины полосы
частот СШПС.
ЛФОП для сигнала (4.3.4) запишется как [48, 104]
τ τ
M(v,Q.) = — \x(t)s(t,v,Q.)dt-—\s2(t,v,£l)dt. (4.3.5)
1Уо о о о
Здесь s(·) — опорный сигнал, форма которого при оптимальном
приеме совпадает с принимаемым сигналом (4.3.4). Если форма
принимаемого сигнала неизвестна, для оценки частотных
параметров СШПС используем квазиправдоподобный приемник,
который синтезируется для некоторого ожидаемого сигнала 5Х(·),
причем в общем случае s^t, ν, Ω) Φ s(t, ν, Ω). То есть, будем
использовать приемник, который синтезируется как приемник
максимального правдоподобия для некоторого ожидаемого сигнала
^(ί, ν,Ω). Выходной сигнал такого приемника будет иметь вид
τ τ
Ml(v,a) = ^]x(t)Sl(t,v,a)dt-±]s21(t,v,a)dt. (4.3.6)
189
Полагаем, что у ожидаемого сигнала ^(ί,ν,Ω) спектр подобен
спектру СШПС (4.3.2) и может быть записан как
βι(ω,ν,Ω) = ίι(ω)/[(ω-ν)/Ω]. (4.3.7)
Переходя к спектральному представлению в (4.3.6) и подставляя
в (4.3.6) спектр сигнала (4.3.7), получим
1 ν+Ω/2 1 ν+Ω/2
Μ1(ν,Ω) = —- J 9ι(ω)χ(ω)(ίω- J |?1(ω)|2Λ»,(4.3.8)
К1У0 ν-Ω/2 Z/TiV0 ν_Ω/2
Τ
где χ(ω) = j:r(£)exp(-jcu£)<ft —текущий (выборочный) спектр реа-
0
лизации наблюдаемых данных.
Рассмотрим в качестве опорного сигнала наиболее простой
сигнал со спектром прямоугольной формы. В этом случае в (4.3.7)
необходимо положить
q1(o>) = <h, (4.3.9)
где а^ — интенсивность спектра. При использовании в качестве
опорного сигнала со спектром вида (4.3.9) выражение (4.3.8)
перепишется как
M1(v,Q) = -J- J [χ(ω)-α1/2]άω.
Такую функцию необходимо формировать для всех νη и Ωηι из
интервалов (4.3.3). Перебирая все возможные значения νη и Ωηι,
(η € 1. JVV и πι € 1..Μω ), находим такие значения ν* и Ω^, при
которых функция Μ^ν',Ω^) достигает максимума.
Соответствующие значения ν* и Ω*πι будут являться оценками центральной
частоты и полосы частот СШПС. Таким образом, для
нахождения оценок ν и Ω необходимо вычислять Νν · ΜΩ значений
Μ1(νη,Ωηι). Сократить необходимое число значений функции
Μ^ν,Ω) до 2ΜΩ можно, если использовать подход, развитый
ниже.
Квазиправдоподобные оценки центральной частоты ν* и
полосы частот Ω^ спектра принимаемого сигнала можно
выразить через КПО минимальной Ω* и максимальной Ω2 частот
спектра СШПС: ν* = (Ω* +Ω^)/2 и Ω* = Ω^ -Ω^. Поэтому КПО
центральной частоты и полосы частот сигнала можно найти,
определив оценки минимальной и максимальной частот спектра. В
соответствии с [104] КПО граничных частот равны
(Q;,£i) = argsupM1(Q1,Q2),
190
где Ω1?Ω2 — значения граничных частот сигнала из интервала
Ω, € [Ω. . ; Ω. 1. г = 1,2 , Ω. . ; Ω. Λν — минимально и макси-
г L г min' г max J' ' 7 г min' г max
мально возможные значения граничных частот.
Для спектра опорного сигнала вида (4.3.9) выражение (4.3.8)
можно переписать как
Μ^,Ω,) = ^Γ \[χ(ω)-α1/2]άω. (4.3.10)
Представим (4.3.10) в виде
Μ1(Ω1,Ω2) = Μ11(Ω1) + Μ12(Ω2), (4.3.11)
Мп(^) = -£- J [*И" «! /ψω , (4.3.12)
Μ12(Ω2) = ^-\[χ(ω)-αι/2]άω, (4.3.13)
где Ω/ — произвольное фиксированное значение частоты из
интервала [Ω1π1ΕΧ; Ω2πι1η], Ω1π1ΕΧ — максимально возможное значение
нижней частоты спектра СШПС, Ω2πύη — минимально
возможное значение верхней частоты спектра СШПС.
Как известно [119], гауссовские спектральные меры на
неперекрывающихся частотных интервалах ортогональны. Поэтому
слагаемые в (4.3.11), т.е. случайные процессы Μ11(Ω1) (4.3.12) и
Μ12(Ω2) (4.3.13) будут статистически независимыми. В
результате оценку минимальной и максимальной частот спектра СШПС
можно переписать как
Q, =argsupMu(Ql)f Ц € [Цтш; Цтах], г = 1,2.
Рассмотрим статистические характеристики процессов
Μ11(Ω1) и Μ12(Ω1), которые, согласно (4.3.12), (4.3.13),
представляют собой линейные преобразования случайного процесса
χ(ω), и, следовательно, являются гауссовскими. Для их полного
статистического описания, как известно, достаточно найти
математические ожидания и корреляционные функции. Выполняя
усреднение, получаем
511(Ω1) = (Μ11(Ω1)) = ^- J 9(ω)άω-ζ2(Ω-Ω1)/2Ω0, (4.3.14)
^0 max^.Qo!)
2 πΗη(Ω2,Ω02)
512(Ω2) = (Μ12(Ω2)) = ^- J 9(ω)άω-ζ2(Ω2-Ω)/2Ω0, (4.3.15)
ll0 Ω
191
Αΐ(Ω12>Ω22) =
= ([Μη(Ωη) - (Μη(Ω ^)][Μη(Ω21) - (Μη(Ω21))]> = (4.3.16)
= z2[Q-ma^(Qn,Q21)]/Q0,
£12(Ω12,Ω22) =
= ([Μ12(Ω12)-(Μ12(Ω12))][Μ12(Ω22)-(Μ12(Ω22))]> = (4.3.17)
= ζ2[ιηίη(Ω12,Ω22)-Ω]/Ω0,
где g(a>) = q(a>)/ai,si
ζ2 =2α^Ω0/Ν0π (4.3.18)
—ОСШ на выходе квазиправдоподобного приемника при
совпадении спектра принятого СШПС со спектром ожидаемого
сигнала.
Рассмотрим математические ожидания (4.3.14) и (4.3.15)
процессов (4.3.12), (4.3.13). Их первые производные по Ωχ и Ω2,
соответственно, имеют вид
dSu(Ql) = ζ2 fl, Ц<^1?
dO, 2Ω0 11-2^^), 01>От,
^12(Ω2) = _ζ^_|2</(Ω2) -1 Ω2 < Ω02,
<ίΩ2 2Ω0{-1, Ω2>Ω02.
Согласно (4.3.19) математическое ожидание (4.3.14) достигает
максимума в точке Ωχ = Ω01, если 2д{^) > 1 или 2^(ΩΧ) > а^.
Аналогично математическое ожидание (4.3.15) достигает максимума
в точке Ω2 = Ω02, если 2^(Ω2)>α1. Таким образом, положения
максимумов математических ожиданий(4.3.14) и (4.3.15)
совпадают с истинными значениями минимальной и максимальной
частот сигнала (4.3.4) при выполнении условия
a1<2q(aj,i = l,2. (4.3.20)
Тогда КПО граничных частот спектра СШПС будут
состоятельными.
Далее будем полагать, что справедливо условие (4.3.20), а
ОСШ (4.3.18) достаточно велико. В этом случае положения
максимумов случайных процессов Μ11(Ω1) и Μ12(Ω1)
располагаются в малых окрестностях истинных значений нижней и верхней
частот спектра СШПС Ω0ζ, г = 1,2. Следовательно, при
достаточно больших ОСШ необходимо исследовать поведение случайных
процессов (4.3.12) и (4.3.13) в окрестностях точек Ω01 и Ω02. Πο-
192
лагая Δ = max ||Ωί - Ω0ί |, Ιω^ - Ω^ | i —> О, г, j = 1,2 ,
аппроксимируем средние значения (4.3.14) и (4.3.15) отрезками разложений
Тейлора
Sb(QJ = si+ z2g(ClOi)min[0,(-iy (Ω< - Ω0,)]/Ω0 - g g
-(-l)V(^-^)/2^+o(A),
где s, = (-1)'
ζ2Ω°-'
^-\9(ω)άω-ζ2{Ω(Η-Ω)/2Ωΰ
"on
, г = 1,2, а
корреляционные функции (4.3.16) и (4.3.17) перепишем в виде
β11(Ω11,Ω21) = (-1)ζ2(Ω01-Ω)/2Ω0 +
+z2min[(-l)(Q11-Q01);(-l)(Q21-Q01)]/Q0,
βΗ(Ω12,Ω22) = ζ2 (Ω02 - Ω)/2Ω0 + 22
+*2ιιώι[(Ω12 -Ω02);(Ω22 -Ω02)]/Ω0.
Поскольку положения максимумов процессов (4.3.12),
(4.3.13) располагаются в малой окрестности точек Ω01, Ω02, будем
аппроксимировать математические ожидания (4.3.14), (4.3.15)
главными членами асимптотических разложений (4.3.21).
Используя выражения (4.3.21) и (4.3.22), можно показать,
что в малой окрестности точки Ω02 процесс Μ12(Ω2) является
марковским с коэффициентами сноса и диффузии [101]
*. =— ί^2'"2 "Ω°2' h = z*
2Ω0 [-1,Ω2>Ω02, 2Ω0
где q2 = 2#(Ω02)-1.
Найдем совместную плотность вероятности распределений
положений абсолютных максимумов реализаций случайных
процессов Мп(^) (4.3.12) и Μ12(Ω2) (4.3.13)
Ψ(Ω1,Ω2) = Ψ1Ω(Ω1)Ψ2Ω(Ω2), (4.3.23)
где 1^1Ω(Ω1) и W2a(Sl2) — плотности вероятностей положений
абсолютных максимумов реализаций случайных процессов Μ11(Ω1)
(4.3.9) и Μ12(Ω2) (4.3.10).
Используя марковские свойства [101] процесса (4.3.13),
можно записать аналогично [104, 105] асимптотическую плотность
вероятности положения максимума процесса Μ12(Ω2) как
193
W2a(Cl2) =
2Ωη
<722Ψ
^(Ωο2-Ω2),^(Ωο2-Ω2ηι>η),
ζ q2
2Ωη
(^^2 max ^02 j»
?2
Ω9 . <Ω9 <Ωη9,
I min ζ Uz"
2 2
[Ll2 — Ll02 ) , V»'2max — Ω02 ) >
Ψ
2Ωη
2Ωη
2Ω,
(Ω02-Ω2ιη1η),92
(4.3.24)
Ω02<Ω2<Ω2ιηΜ,
где
<J|exp
2^y3'2
(ξ+у)
4y
Φ
Ух~ У
2
"Л
■ехр\ -
У1~У
Φ
( Л
χν2+ξ
2 J
yl*{yi-y) ' ^ 4
( Л
-ехр(-:г|)Ф
/22/:
►#,
2 У
X
а Ф(я) = J exp(-£2 /2)dt I %12к — интеграл вероятности.
В результате замены переменной χ = -Ωχ в выражении
(4.3.12) статистические характеристики случайного процесса
Μη(χ) при достаточно больших ОСШ принимают вид (4.3.24),
(4.3.25) при г = 2, где необходимо заменить sx на s2.
Следовательно, можно записать асимптотическое распределение
положения максимума процесса Μ11(Ω1)
Wm(Q1) =
2Ωη
Ψ
2Ωη
(^-ΩΟ,-^-^+Ω^),
2Ω,
2Ω,
"(Ωι^,+Ωοι)
Qlmi%-2Ql-Qo1' 22 -, (4.3.25)
^(Ωχ-ΩοΟ,-^ίΩ^+Ω,),]
<7iV
~2Λ2
£_£ι_
2Ω0
Ω^Ω^-Ω^,
(Ωοΐ+Ωΐπϋ.)
194
где q1 = 2#(Ω01)-1.
Точность выражений (4.3.24), (4.3.25) возрастает с
увеличением ОСШ (4.3.18). Если спектр принимаемого сигнала
совпадает со спектром опорного, так что q(a>) = αλ, то выражения (4.3.24),
(4.3.25) полностью совпадают с аналогичными выражениями,
найденными в п. 3.3.1.
Пусть
μ, = ζ\(Ω[-Ω01)/2, μ2 = ζ%(Ω'2 -Ω02)/2 (4.3.26)
—нормированные ошибки КПО нижней и верхней частот сигнала
(4.3.4). Тогда при ζ » 1 получаем асимптотические выражения
для плотностей вероятностей нормированных ошибок (4.3.25) в
виде
\W0(Vi/Qi)/Qi, Mi < О,
ЫШЛ), Aix>0, (4 3 27)
f^ota). μ2 <ο,
где
W0(x) = 3exp(2|x|;
1-Ф
ψ
v^2,
+ Ф
W
-1 (4.3.28)
— предельная плотность вероятности нормированной ошибки
ОМП одного параметра сигнала при условии, что второй
параметр известен. Свойства плотности вероятности (4.3.28) изучены
в [62], при этом выявлено, что плотность вероятности (4.3.28)
существенно отличается от гауссовской.
Согласно (4.3.23) и (4.3.27), совместная плотность
вероятности нормированных ошибок КПО (4.3.24) равна
Ψ2{μι,μ2) = Ψι{μι)Ψ2{μ2). (4.3.29)
Введем в рассмотрение нормированные ошибки КПО
центральной частоты и полосы частот сигнала (4.3.4):
4i = (v -ν0)ζ2/Ω0, 772 = (Ω*-Ω0>2/2Ω0. (4.3.30)
Переходя в выражении (4.3.29) к новым переменным (4.3.30),
находим предельную двумерную плотность вероятности
нормированных ошибок совместных оценок [103,104]
W2{r]l,r]2) = ^[qi^)w2[q2^\ (4.3.31)
195
Совместная плотность вероятности (4.3.31) позволяет
рассчитать асимптотические значения смещений и рассеяний КПО
ν и Ω
b(v Ι ν0)Ω0) = (ν* - ν0) = Зад2 -q;2)/4z2,
6(Ω*|ν0,Ω0) = (Ω*-Ω0) = 3Ω0(2-9Γ2-?2-2)/2ζ2, (4.3.32)
V1(v\v0,il0) = {(v-v0f) =
Κ(Ω*|ν0)Ω0) = ((Ω*-Ω0)2) =
13Ω
(ft+ft1) (flfe+fc1)
4ζ4
13Ω2
ύ
(gi+gi"1) (Q2+Q21)
Ь
(4.3.33)
Как функции qt, рассеяния и смещения (4.3.32), (4.3.33)
достигают минимума при ςλ = q2 = 1, что равносильно равенству
<Ζ(Ω01) = <7(Ω02) = α,. (4.3.34)
Тогда для характеристик КПО (4.3.32), (4.3.33) имеем
6(ν*|ν0,Ω0) = 0,6(Ω*|ν0,Ω0) = 0,
13Ω;
V(v \vM = —^,V(ii \vM =
52Ω*
(4.3.35)
ζ ζ
что полностью совпадает с аналогичными характеристиками ОМП
центральной частоты и полосы частот, найденными в п. 3.3.1
Таким образом, для обеспечения минимально возможных
рассеяний КПО необходимо обеспечить выполнения условия
(4.3.34), то есть, значения спектра сигнала на крайних частотах
Ω01 и Ω02 должны совпадать между собой.
В качестве примера детализируем полученные выражения
для типового СШПС с прямоугольной формой спектра со
скошенной вершиной
ς(ω) = а
1 + 2ω-ν0Π-*
Ωη
1 + fc
(4.3.36)
где параметр к = q(v0 - Ω0 / 2) / q(v0 + Ω0 / 2) характеризует наклон
вершины спектра. Величины q1 и q2 в этом случае запишутся как
qx =[fc(4a-l)-l]/(l + fc) и q2 = (4α - fc-l)/(l+ fc), где а = а/а1
— отношение интенсивностей принимаемого и опорного
сигналов.
Нетрудно показать, что неравенство (4.3.20) применительно к
сигналу (4.3.36) можно представить в виде
196
fa>(l + fc)/4fc, fc<l
[a>(l + fc)/4, *>1.
Тогда для смещений и рассеяний КПО (4.3.32), (4.3.33) можно
записать
6(ν>0)Ω0) = ^
4ζ
4α ——iV-i4a— 1
1 + k
1 + к
6(Ω>0,Ω0) = |^
2-1 4a— 1] -i4a — 1
1 + k
1 + k
(4.3.37)
„.(/кад-иеа^йх
4z4
fc2(c2 + l) + 2fc(l-c) + 2 2fc2 + 2k(l - c) + c2 +1
(ck-lf + (c-kf
„.„,. Λ4 13Ω2(1 + Α;)
Κ(Ω |ν0)Ω0) = °-\ ^χ
(4.3.38)
fc2(c2+l) + 2fc(l-c) + 2 2fc2 + 2k(l - с) + с2 +1
(ck-lf + (c-kf
где с = 4a -1, а ζ определено в (4.3.18). Нормированные на
соответствующую среднеквадратическую ошибку (4.3.38)
смещения КПО центральной частоты и полосы частот СШПС (4.3.37)
со спектром (4.3.36) представим как
/k = Kv>oA,)/>M(v>oA) =
4a
-L-ιΐ
1 + fc )
4a —-1
1 + k
(4.3.39)
2 13(1 + *)
fc2(c2+l) + 2fc(l-c) + 2 2fc2+2fc(l-c) + c2+l
(ck-lf + (c-kf
/}ffl=(Q>0,Q0)/VK(Q*|v0)Q0) =
2-
4a-
1 + k
-1 -
4a-
1 + fc
-1
(4.3.40)
fc2(c2+l) + 2fc(l-c) + 2 2fc2+2fc(l-c) + c2+l
(ck-lf + (c-kf
2 13(1 +A;)
Здесь νλ(ν* Ι ν0,Ω0) и ^(Ω* | ν0,Ω0) определяются из (4.3.38).
197
На рис. 4.3.1 приведены зависимости нормированного
смещения (4.3.39) КПО центральной частоты спектра СШПС (4.3.4) от
параметра, характеризующего наклон вершины его спектра к, а
на рис. 4.3.2 — зависимости нормированного смещения (4.3.40)
КПО полосы частот спектра СШПС от к. На рисунках 1, 2,
кривая 1 соответствует а = 1, кривая 2 — а = 1.5 , кривая 3 — а = 2.
Анализируя графики, можно сделать вывод, что по мере
отклонения формы спектра принимаемого сигнала от формы
спектра опорного смещение КПО центральной частоты (рис. 4.3.1)
становится отличным от нуля и возрастает (по модулю) тем быстрее,
чем больше а.
Смещение КПО полосы частот (рис. 4.3.2) уже при а = 1.5
отлично от нуля при совпадении форм опорного и принимаемого
сигналов. Это объясняется тем, что ширина полосы частот
спектра СШПС — энергетический параметр и соответственно для того,
чтобы смещение КПО было равно нулю, необходимо совпадение
не только форм опорного и принимаемого сигнала, но и их ин-
тенсивностей, в отличие от нормированного смещения КПО
центральной частоты СШПС.
Проигрыш в точности КПО по сравнению с точностью ОМП
будем характеризовать отношением их рассеяний, которое
можно записать как
у=у =у =К(У>о,Оо) =
* *" ^ V(v\v0,QQ)
= K(tf |v0,Qo)= 8<*4 χ
7(Ω*|ν0,Ω0) (l + fc^Xl + fc)3
к2 (с2 +1) + 2fc(l - с) + 2 2fc2 + 2fc(l - с) + с2 +1
(4.3.41)
(cfc-1)3 (с-к)3
Здесь νί(ν*|ν0,Ω0) и ν^Ω* \ν0,Ω0) рассеяния КПО (4.3.35),
V(v* | ν0,Ω0) и ν(Ω* Ι ν0,Ω0) — характеристики ОМП
центральной частоты и полосы частот найдены в п. 3.3.1 и могут быть
представлены в виде (4.3.35), где
ζ = 8α2Ω0 V2 / πΝ0 (1 + fc)2 л/l + к4 .
На рис. 4.3.3 приведены зависимости параметра χ (4.3.41)
от параметра к, характеризующего наклон вершины спектра
СШПС (4.3.36) для различных значений отношений интенсив-
ностей принимаемого и опорного сигналов а . Кривая 1
соответствует а = 1, кривая 2 — а = 1.5 , кривая 3 — а = 2.
198
βνο
-1
\
4
4
4
ч
Ν
*4
1
*4 ^
_>»
ifc
S
Ν
0,3
1
к
Рис. 4.3.1
/*Ω0
/
/
/
1/
2
\
3
\
Ν
0,3
1
к
Рис. 4.3.2
199
0,3 1 3
к
Рис. 4.3.3
Анализируя рис. 4.3.3, видно, что рассеяния КПО
возрастают по сравнению с рассеяниями ОМП по мере отклонения
параметров опорного от параметров принимаемого сигналов. Так, при
а = 1.5 (кривая 2) рассеяние КПО примерно в 1,6 раза больше
рассеяния ОМП. По мере отклонения формы спектра опорного
от формы спектра принимаемого сигнала рассеяние КПО
становится в 1,2 раза больше рассеяния ОМП, затем рассеяние КПО
снова возрастает (кривая 2). Когда интенсивность спектра
принимаемого сигнала в два раза превышает интенсивность спектра
опорного (а = 2, кривая 3), рассеяние КПО примерно в 3 раза
больше рассеяния ОМП при совпадении форм сигналов ( к = 1), а
при отклонении форм спектров опорного и принимаемого
сигналов рассеяние КПО убывает.
4.4. Определение местоположения источника
сверхширокополосных сигналов при наличии помех
Традиционные методы [43, 92, 133] определения
местоположения ИРИ существенным образом используют свойства узко-
полосности разведываемых сигналов. Значительную роль при
этом играет предположение о квазигармоническом характере
излучения РЭС. В результате, точность оценки местоположения
200
обычных РЭС определяется соотношением размеров апертуры
приемной системы и длины волны, на которой работает РЭС. В
случае РЭР сверхширокополосных РЭС такое понятие, как длина
волны не является адекватной характеристикой СШПС, и
традиционные методы оценки местоположения непосредственно не
применимы. В связи с этим возникает необходимость в
обобщении известных методов оценки местоположения для СШП РЭС.
4.4.1. Определение направления на источник
сверхширокополосных сигналов при наличии белого шума
Рассмотрим алгоритм определения угла прихода СШПС
на фоне только ГБШ. Для этого, аналогично [43], используем
двухпозиционную антенную приемную систему, показанную на
рис. 4.4.1.1.
В точке Μ с полярными координатами (/ζ,,0ο) расположен
источник СШПС, а в точках с координатами (-L/2,0) и (L/2,0)
расположены первый и второй измерители времени прихода
сигнала. При Rq ^> L разность хода Лг = rY-r2 = с(^ - Я02) = Lcos0o,
где ^^2 моменты прихода СШПС на приемники, с — скорость
света. Заменяя истинные значения моментов λ^ прихода
сигнала на их оценки λι (i=l,2), для углового положения источника
СШПС получаем
θ = arccos(Af IL). (4.4.1.1)
Здесь, Δγ = с(^ - AJ — оценка разности хода. Обозначим о\г —
дисперсия оценки разности хода.
У ♦
L/2 L/2 х
Рис. 4.4.1.1
201
Полагая, что оценка разности хода обладает высокой
апостериорной точностью, так что σΔΓ « L/2, для дисперсии оценки
(4.4.1.1) угла прихода 0О, аналогично [43], можем записать
^2 = 7Γ^ν· (4Α1·2)
L sin θ0
Пусть на вход измерителя времени прихода (рис. 4.4.1.1)
поступает аддитивная смесь гауссовского белого шума с
односторонней спектральной плотностью Ν0 и СШПС s(t). Если для оценки
времени прихода используются два приемника максимального
правдоподобия [119], то дисперсия оценки времени прихода
определяется выражением
-1
2
<*-£/
^о
ds(t)
dt
П2
dt\ . (4.4.1.3)
Соответственно, для дисперсии оценки разности хода можно
записать
σΐ = 2cWt .
Подставляя это выражение в (4.4.1.2), для дисперсии угла
прихода сигнала s(t) получаем
σ2θ=2β2σ2/Ι?8Ϊη2θ0.
Поскольку сигнал s(t) является сверхширокополосным, он
может быть представлен в виде
s(t) = af(t/T), (АЛЛА)
где функция f(x) описывает форму одного импульса СШПС
и нормирована так, что max/(я) = 1, J f2(x)dx = 1. Тогда
а = max s(t) — амплитуда сигнала, τ= j s2 (t)dt / max s2 (t) —
эквивалентная длительность импульса. Подставляя (4.4.1.4) в
формулу для дисперсии оценки времени прихода (4.4.1.3), получаем
σ2=τ2/ζ2Α27 (4.4.1.5)
здесь ζ2 = 2а2τ INQ =2E / NQ — отношение сигнал—шум для
одного СШПС, Ε = \ s2(t)dt —энергиясигнала, Δ2 = j [df(x)/dx] dx —
безразмерный параметр, который зависит от формы сигнала.
Подставляя далее (4.4.1.5) в выражение а\г1 =2с2а2, находим, что
202
при приеме одного СШПС вида (4.4.1.4) дисперсия оценки
разности хода определяется выражением
alTl=2R*/z2A\ (4.4.1.6)
а дисперсия оценки угла прихода имеет вид
< = 2[т\ и»1· »я· (4Α1·7)
V L ) ζ Δ sin θ0
В (4.4.1.6) и (4.4.1.7) обозначено Rs = сх — пространственная
длина одного СШПС.
Известно [43, 92], что при оценке направления прихода
узкополосного радиосигнала точность оценки угла определяется
отношением длины волны к базе измерителя: чем это отношение
меньше, тем выше точность оценки угла прихода радиосигнала.
Как следует из (4.4.1.7) при оценке угла прихода СШПС вместо
длины волны в формулу входит пространственная длина сигнала
Rs, при этом, чем меньше отношение пространственной длины
СШПС к базе измерителя, тем выше точность оценки угла
прихода такого типа сигнала.
Как правило, СШПС обладают большой пиковой мощностью
[6, 9], однако их длительность обычно очень мала, так что
отношение сигнал—шум при обработке одиночного импульса часто
оказывается недостаточным для обеспечения высокой точности
оценки времени прихода. Поэтому в большинстве практических
приложений используются последовательности СШПС вида
^0 = Σ*(*-^-Α), (4.4.1.8)
где период повторения θ обычно во много раз превосходит
длительность импульса τ.
При обработке последовательности (4.4.1.8) из N сигналов
с известным периодом повторения θ дисперсия оценки
максимального правдоподобия времени прихода уменьшается в N
раз по сравнению с дисперсией оценки времени прихода одного
СШПС (3.1.38). Следовательно, при приеме последовательности
таких сигналов дисперсии оценок разности хода и угла прихода
также уменьшаются в N раз.
Кроме времени прихода у сигналов вида (4.4.1.4) и их
последовательности (4.4.1.8) могут быть неизвестны некоторые другие
параметры, в оценке которых нет необходимости при определении
угла прихода СШПС. Влияние неинформативных параметров на
203
точность оценки времени прихода таких сигналов рассмотрено в
п. 3.1. Проанализируем, как влияет незнание одного из основных
параметров последовательности СШПС — периода повторения θ
на точность оценки угла прихода. В соответствии с методом
максимального правдоподобия для получения оценки времени
прихода последовательности (4.4.1.8) при неизвестном значении
периода повторения θ нужно это значение заменить на его
оценку максимального правдоподобия. Последнее равносильно
совместному оцениванию времени прихода и периода повторения с
последующим использованием только оценки времени прихода.
Следовательно, незнание периода повторения может вызвать
определенные трудности при аппаратурной реализации алгоритма
оценки времени прихода.
Согласно [48], при обработке последовательности СШПС
(4.4.1.8) с неизвестным периодом повторения θ дисперсия
оценки максимального правдоподобия времени прихода имеет вид
где σ2 — дисперсия оценки времени прихода одного СШПС
последовательности (4.4.1.8).
Подставляя а2 в выражение для дисперсии оценки
максимального правдоподобия времени прихода сигнала при
обработке последовательности N СШПС а\, а полученное в формулу
для дисперсии оценки разности хода и угла прихода, находим,
соответственно
2 о 2 2 2Ат?Л ηΝ-ΐΛ 2R2 (л ηΝ-ΐΛ
а2=2с2а] =-—4 1 + 3—- =—Μι + з '
Ά.2 --я N liT^ + 1l ^Δ^Γ-TV + l
,(4.4.1.9)
\2f АГ-l
l + 3^^]/M\Vsin20o. (4.4.1.10)
Сопоставляя выражение для дисперсии оценки угла прихода
последовательности из N СШПС с известным периодом
повторения и (4.4.1.10), получаем проигрыш в точности оценки угла
прихода последовательности вида (4.4.1.8) вследствие незнания
ее периода повторения
N-1
* = 1 + 3^—^. (4.4.1.11)
Согласно (4.4.1.11), проигрыш в точности оценки угла прихода
вследствие незнания периода повторения изменяется от значе-
204
ния χ - 2, Ν = 2 , до значения χ « 4, AT ^> 1. Таким образом, для
последовательности СШПС, содержащей более 10—15 сигналов,
незнание периода повторения приводит к увеличению дисперсии
оценки угла прихода примерно в 4 раза.
4.4.2. Определение направления
на источник сверхширокополосных сигналов
при наличии узкополосных помех и белого шума
Рассмотрим задачу определения угла прихода СШПС на фоне
как ГБШ, так и ГУП. Для этого дисперсию оценки разности хода
в (4.4.1.2) представим как
<й=Лт2я, (4.4.2.1)
где
<=<\{К-\)-{К-К)Ч > (4-4.2.2)
— дисперсия оценки разности моментов прихода СШПС на
измерители. Обозначим: Αλ{ = λ{ - λ^ — ошибка оценки времени
прихода СШПС на i-Ά измеритель (г = 1,2). Тогда
σ2Αλ=(Αλΐ) + (Αλϊ)-2(Αλ1Αλ2). (4.4.2.3)
Положим, что кроме источника СШПС s(t) в точке Μξ
(рис. 4.4.1.1) с полярными координатами (ί^,θ^) расположен
источник узкополосного гауссовского случайного процесса ξ(ί),
причем (ζ(ϊ)) = 0 и (ξ(^)ξ(ί2)) = Βξ(ί2 - ίλ). Считаем, что в течение
времени наблюдения [0; Т] на i—й измеритель времени прихода
поступает реализация
*,(<) = s(i - AJ + пМ + ξ(ί - λξι), (4.4.2.4)
где nt(t) — независимые гауссовские белые шумы с
односторонней спектральной плотностью N0, а λξι = τξί / с — моменты
прихода узкополосной помехи на i—й измеритель (г = 1,2).
Предполагаем, что щ{£) и ξ(ί) статистически независимы.
Если корреляционная функция Βξ(τ) или соответствующая
спектральная плотность (7ξ(ω) узкополосной помехи ξ(ί)
априори неизвестны, то для получения оценок времени прихода Яг
СШПС можно использовать алгоритм максимального
правдоподобия [48], синтезированный без учета наличия узкополосной
помехи. При воздействии гауссовского белого шума ЛФОП с
точностью до несущественного слагаемого запишется в виде
т
Ll{X) = — \xi{t)s{t-X)dt, г = 1,2. (4.4.2.5)
^0 0
205
Реализация наблюдаемых данных (4.4.2.4), кроме белого шума,
содержит узкополосную помеху ξ(ί). Поэтому оценки
Я, =argsupii(A) (4.4.2.6)
не являются оценками максимального правдоподобия. Эти
оценки, как и выше, будем назвать квазиправдоподобными (КПО),
поскольку они совпадают с оценками максимального
правдоподобия при ξ(ί) = 0. Пусть интервал наблюдения [0; Т]
существенно больше длительности СШПС s(t) и времени корреляции
узкополосной помехи ξ(ί). Тогда для определения характеристик
КПО (4.4.2.6) можно представить (4.4.2.5) в виде суммы
сигнальной и шумовых функций [48]
Ц{Х) = 5(λ-\) + ΛΓ4(λ) + ΛΓ{ ДА), г = 1,2.
Здесь
5(Я) = — ί s(t)s(t - X)dt
Not>
—сигнальная функция (функция неопределенности),
τ
^о о
—шумовая функция, обусловленная воздействием гауссовского
белого шума,
τ
Νξί{λ) = ^-)ξί{ί-λξΜ-λ)άί
—шумовая функция, обусловленная воздействием узкополосной
помехи. Согласно (4.4.2.6) КПО λ{ моментов прихода СШПС \{
могут быть найдены из решения уравнений
"ЛЬДА)"
άλ
= 0.
(4.4.2.7)
-J A,
Решая уравнения (4.4.2.7) методом малого параметра [48] и
ограничиваясь первым приближением, для ошибок измерения
моментов прихода СШПС получаем выражение
N
ΔΑ = А, - Д.. = U2-
г г "иг сутр
άΝ^λ) άΝξι{λ)
άλ
άλ
,г = 1,2.(4.4.2.8)
Здесь
А,
ч-J
'ds(t)~
dt
dt.
206
Подставляя (4.4.2.8) в (4.4.2.3) и выполняя усреднение, находим
дисперсию КПО разности моментов прихода СШПС на
измерители
σ1Α=2σ(2[1 + (Ζι-1)(1-Λί)]. (4.4.2.9)
Величина а\ = N0 / 2F0 описывает дисперсию оценки
максимального правдоподобия времени прихода СШПС в отсутствие
узкополосной помехи, величина
Xl = l + ^j]^B4(t2-t1)ds^)ds^dt1dt2/F0 (4.4.2.10)
—проигрыш в точности КПО времени прихода СШПС вследствие
воздействия узкополосной помехи, а величина
Щ = f ]4fe -1, + At) ^ ^ dt.dt, x
1 2 (4.4.2.11)
\]B{t2.ti^^Mdtdt'~
J J ξΚ2 l) dt, dt2 ' 2
—характеризует корреляцию оценок моментов времени
прихода, вырабатываемых первым и вторым измерителями вследствие
воздействия узкополосной помехи. В (4.4.2.11) обозначено
At = Z,(cos0o -cos0^)/c (4.4.2.12)
—величина, обусловленная различием угловых положений
источников СШПС и узкополосной помехи. Используя (4.4.2.9),
из (4.4.2.2) получаем дисперсию КПО угла прихода СШПС при
наличии узкополосной помехи
σ^ =2C42[l + (z1-l)(l-^)]/L2sin2e0. (4.4.2.13)
При отсутствии узкополосной помехи дисперсия оценки
максимального правдоподобия угла прихода СШПС определяется
выражением
с\ = 2β2σ2 /L2 sin2 <90. (4.4.2.14)
Сопоставляя (4.4.2.14) и (4.4.2.13), для проигрыша в точности
оценки угла прихода СШПС вследствие воздействия
узкополосной помехи находим
Хо=<у*1<у1=Х1-Щ{Х1-*)· (4.4.2.15)
Поскольку всегда χλ>\, из (4.4.2.15) следует, что при Щ > 0
проигрыш в точности оценки угла прихода СШПС будет меньше,
чем проигрыш в точности оценки времени прихода. Если Щ < 0,
207
то проигрыш в точности оценки угла прихода будет больше
проигрыша в точности оценки времени прихода СШПС, а при Щ = О
эти проигрыши совпадают. Наконец, при Щ = 1 проигрыш в
точности оценки угла прихода СШПС вследствие воздействия
узкополосной помехи отсутствует. Последнее объясняется взаимной
компенсацией ошибок измерения моментов прихода СШПС,
обусловленных узкополосной помехой, при формировании
оценки разности моментов прихода λ^-λ^. Согласно (4.4.2.11)
значение Щ = 1 достигается при At = 0 (4.4.2.12). В частности, At = О
при 0О = θξ. Следовательно, если угловые положения источников
СШПС и узкополосной помехи совпадают, то проигрыш в
точности КПО угла прихода СШПС вследствие воздействия
узкополосной помехи отсутствует.
При определении величин χλ (4.4.2.10) и Щ (4.4.2.11)
удается избежать вычисления двойных интегралов при переходе к
спектральному представлению. Действительно, обозначая через
5(ω) = J s(i)exp(-jflrt)di (4.4.2.16)
- спектр СШПС и подставляя (4.4.2.16) в (4.4.2.10) и (4.4.2.11),
находим
j G)2Gt(G))\S((0f d(0
*ι=1 + ^-^ > (4.4.2.17)
" j(D2\S((D)\2d(D
Ό
J ω2(?ξ(ω)|5(ω)|2 exp(jo)At)du)
Щ№ = = . (4.4.2.18)
j Q)2Gs(Q))\S(Q)f dQ)
Найдем величину проигрыша в точности оценки угла
прихода СШПС (4.4.2.15) для частного случая узкополосной помехи с
прямоугольной спектральной плотностью
<W = f
Л ω°"ω1ι V ω°+ω
Ω \ Ω
(4.4.2.19)
где γ — величина спектральной плотности узкополосной
помехи; Ω — ширина полосы частот, а ω0 — центральная частота;
1{х) = 1 при |х| < 1/2 и 1(х) = 0 при |х| > 1/2 . Используя
спектральные представления (4.4.2.16)...(4.4.2.18), для помехи, об-
208
ладающей спектром мощности (4.4.2.19), из (4.4.2.15) находим
проигрыш в точности оценки угла прихода СШПС
Хн=1 + Як[1-Щ(М)\. (4.4.2.20)
Здесь q = γ / NQ — отношение спектральных плотностей
узкополосной помехи и белого шума,
ύ)ο+Ω/2 оо
К= J Q)2\S(Q)fdQ)/JQ)2\S(Q)fdQ)
ωο-Ω/2 Ο
относительная доля энергии первой производной СШПС на
участке спектра, пораженном узкополосной помехой,
ύ)ο+Ω/2 ύ)ο+Ω/2
Щ(М)= J o)2\S(o)fexp(JQ)At)d(o/ j ω2 |5(ω)|2 άω .(4.4.2.21)
ωο-Ω/2 ω0-Ω/2
В силу предполагаемой узкополосности помехи ω0 » Ω. Если к
тому же полоса частот помехи настолько мала, что можно
положить |5(ω)| = const при ω е [ω0 -Ω/2;ω0 + Ω/2], то выражение
(4.4.2.21) упрощается и принимает вид
R,(At) ξ пп^22) coSa>0At. (4.4.2.22)
Анализ выражений (4.4.2.20) и (4.4.2.22) показывает, что при
достаточной близости угловых положений источников СШПС и
узкополосной помехи, когда справедливо соотношение
\θ0-θξ\ < Ιξ /2nLsme0J2qK , (4.4.2.23)
вторым слагаемым в (4.4.2.20) можно пренебречь и считать
Χοξ « 1. В (4.4.2.23) обозначено: Ιξ = 2/гс/ ω0 — длина волны
узкополосной помехи. Таким образом, если выполняется (4.4.2.23),
то потери в точности оценки угла прихода СШПС вследствие
воздействия узкополосной помехи отсутствуют.
Если же источники СШПС и узкополосной помехи разнесены
на значительный угол, так что
Z,|cos0o - cos0^| > Ц , (4.4.2.24)
то Κξ(Αί) = 0 и Х%=Хх. В (4.4.2.24) обозначено: Σξ=2πβ/Ω
— пространственная длина интервала корреляции узкополосной
помехи. Следовательно, если выполняется (4.4.2.24), то
проигрыши в точности оценок угла прихода и времени прихода СШПС
вследствие воздействия узкополосной помехи совпадают.
209
4.4.3. Способы местоопределения источника
сверхширокополосных сигналов
Рассмотренная в п. 4.4.1, 4.4.2 двухпозиционная система
измерения угла прихода СШПС может быть использована в
качестве основного функционального узла при построении
триангуляционной системы (рис. 4.4.3.1) с базой d для определения
местоположения источника радиоизлучения. В этом случае по
краям системы, в точках 1—4, должны располагаться двухпози-
ционные измерители углов (рис. 4.4.3.1).
d
Рис. 4.4.3.1
Если выполняется условие d2 <C i^, то, согласно [43], сред-
неквадратическую ошибку а„г местоопределения источника
СШПС можно выразить через дисперсию а\ оценки угла
прихода двухпозиционной системой, то есть
σ = аХЛ = 2RX
d |sin θ01 Az sin2 6QLd
Согласно этому выражению среднеквадратическая ошибка
местоопределения убывает с уменьшением пространственной
длины Rs СШПС и с увеличением базы d триангуляционной
системы и базы L каждой из двухпозиционных систем измерения
угла прихода сигнала.
При наличии преднамеренных помех в виде ГУП среднеквад-
ратическую ошибку σΤτ.ξ местоопределения источника СШПС
можно выразить через дисперсию σ^ (4.4.2.13) оценки угла
прихода СШПС
210
^ d|sin0o| ·
Потери в точности местоопределения ИРИ вследствие
воздействия ГУП определяются (4.4.2.15).
Если обрабатывается последовательность СШПС вида
8Ν(ί) = Σ*(ί-Μ-λ) (4.4.3.1)
к=0
с известным периодом повторения θ , то среднеквадратическая
ошибка местоопределения будет: σΤτ1 = σΤτ.ξ1 / y/N . Наконец, при
обработке последовательности СШПС (4.4.3.1) с неизвестным
периодом повторения θ получаем
Сопоставляя аТг1 и аТт2, видно, что незнание периода
повторения θ последовательности СШПС (4.4.3.1) приводит к
увеличению среднеквадратической ошибки местоопределения в
y/l + 3(N-l)/(N + l) раз.
Одним из преимуществ рассмотренной триангуляционной
системы определения местоположения источника СШПС
являются сравнительно низкие требования к синхронизации
обработки сигналов в близко расположенных точках нахождения двух-
позиционных измерителей угла прихода. Однако, для реализации
триангуляционной системы с помощью двухпозиционных систем
определения угла прихода необходимо использовать четыре
измерителя времени прихода СШПС.
Ограничиться применением трех измерителей времени
прихода с соответствующей синхронизацией можно, если для
определения местоположения источника радиоизлучения
использовать разностно-дальномерную (гиперболическую) систему.
Геометрию системы, в которой две одинаковые базы d
расположены под произвольным углом Г , можно пояснить с помощью
рис. 4.4.3.2. Два пункта приема 1 и 2 расположены в точках 1 и
2 с координатами (х1,у1) и (х2,У2) соответственно. Третий пункт
приема расположен в точке 0.
Положение источника СШПС, расположенного в точке М,
определено полярными координатами (i^,0o) или их декартовыми
аналогами (х0,г/0). Углы Ψχ и Ψ2 показаны на рис. 4.4.3.2, а
кривые равных задержек заданы уравнениями [43]
211
M(xq, y0)
Цх\,
2(х2, Уг)
Рис. 4.4.3.2
δι = A*ic - Κχι - хоУ + (Vi ~ УоУ}1/2 = const >
δ2 = Ат2с - [(х2 - х0)2 + (у2 - y0ff/2 = const.
Здесь Ατλ и Δτ2 — разности времени распространения СШПС из
точки М.
Согласно [43], среднеквадратическую ошибку aGr
местоположения источника сигнала можно выразить через дисперсию
σ\χ (4.4.2.9) оценки разности хода
°оп = ^cosec(r) Jcosec2 ί -^
+ cosec
2 | χ2 «
(4.4.3.3)
Если обрабатывается последовательность из N СШПС (4.4.3.1),
то среднеквадратическая ошибка aGr2 будет в y/N раз меньше,
чем aGrl (4.4.3.3). При обработке последовательности с
неизвестным периодом повторения θ эта ошибка увеличивается в
д/1 + 3(ЛГ - 1)/(ЛГ +1) раз.
212
5. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
РАДИОСИСТЕМ СО СВЕРХШИРОКОПОЛОСНЫМИ
И УЗКОПОЛОСНЫМИ СИГНАЛАМИ
5.1. Эффективность радиоподавления
сверхширокополосных РЛС
маскирующими шумовыми помехами
Для оценки эффективности маскирующих помех
узкополосным РЭС обычно используется традиционный подход,
основанный на формуле противорадиолокации [13, 90],
устанавливающей зависимость вероятности правильного обнаружения сигнала
от его мощности, а также от мощности собственных шумов
приемника, обычно аппроксимируемых гауссовским белым шумом,
и преднамеренных помех при заданном значении уровня ложных
тревог — а. При этом полагается, что амплитуда сигнала РЛС
распределена по закону Релея, а фаза — равномерно на интервале
[0;2/г]. Применение формулы противорадиолокации для СШПС
в ее традиционной форме затруднено вследствие изменения
закона распределения амплитуды, а также отсутствия однозначного
определения фазы и длины волны.
В п. 2, 4 исследовано влияние помех на характеристики
обнаружения СШПС. В частности, найдены вероятности правильного
обнаружения Робн сигнала с известными параметрами, а также с
неизвестным временем прихода при фиксированной вероятности
ложной тревоги а.
С использованием энергетического уравнения радиолокации,
характеризующего излучение-прием негармонических
радиоволн в канале с рассеянием на лоцируемом объекте [2],
выполним необходимое обобщение формулы противорадиолокации
для СШПС и рассчитаем характеристики их обнаружения при
априори известных информационных параметрах и неизвестном
времени прихода на фоне преднамеренных и непреднамеренных
помех.
213
Вероятность правильного обнаружения отраженного лоциру-
емым объектом СШПС с известными параметрами определяется
(2.2.1.27)
^обн*=1-Ф[агсФ(1-а)-С?], (5.1.1)
а вероятность правильного обнаружения сигнала с неизвестным
временем прихода — выражением (2.2.1.26)
^„( = ι-φ
-2 In
2 π
Pm\-Q
где
Q2 =
(5.1.2)
(5.1.3)
1 + σΙ/ζ2
-отношение сигнал—(помеха+шум) на выходе обнаружителя,
2Яе Рс
с_ с
Νη " Ρ
ζ2=-
(5.1.4)
2 (R - R . )
— отношение сигнал-шум, ξ = — max ^^ — приведенная
с τ
длина априорного интервала возможных значений неизвестного
времени прихода, τ — длительность сигнала, Rmin и i?max —
минимальная и максимальная дальности до цели, с — скорость света,
°? = ^iG«HsH1<to
— дисперсия шумовой функции (2.2.4.22), Ф(а) =
(5.1.5)
1
/ χ
V 2/г
х J exp \dx — интеграл вероятности, Ес = — \ \S(ω)| <ίω
и 5 (ω) — энергия и спектр СШПС, Рс = Ес /τ — мощность
сигнала,
Pm=^-Afnp = kKmT0Afnp
(5.1.6)
— мощность собственных шумов в полосе пропускания линейной
части приемника, Ν0 — односторонняя спектральная плотность
ГБШ, ϋξ (со) — спектральная плотность мощности
преднамеренных помех, ω — циклическая частота, Кт, Δ/^ иГ0-
коэффициент шума, полоса пропускания и абсолютная температура
приемника, к — постоянная Больцмана.
214
Полагая, что сигнал и помеха имеют спектры прямоугольной
формы (для упрощения аналитических выкладок), из (5.1.4) и
(5.1.5) получаем
2jG»|S(o>)2<to
ζ2 __Ч,.. .,2 . P.. Nn
(5.1.7)
N0j\S((oYda>
p [co^ αω
где
Ρη=±-\0ξ{ω)άω (5.1.8)
2* α
— мощность помехи, JVn = ΡΠΔΤ — энергия помехи, Ω; и Ω,
нижняя и верхняя частоты сигнала РЛС.
Подставляя (5.1.4) и (5.1.7) в (5.1.3), имеем
Я 2Д
Q2= с-— = =*—, (5.1.9)
Рш+Р„ iV0+JVn'
Учитывая зависимость величины Ес от наклонной дальности
«РЛС — цель» Rcu, a Nn — от расстояния между РЛС и станцией
помех i?cn [86, 87], для расчета величины Q2 введем
сферическую систему координат (г,0,<р). Будем полагать, что РЛС
расположена в начале системы, при этом координату цели и станции
прмех характеризуются радиус-векторами Rcu = (/2СЦ, β0 ? % ) и
R™ =(ЯспА><Рп); Углы (θο><Ρο) и (θπ><ίΟ определяют
направления максимумов излучения РЛС и станции помех.
Энергетическое уравнение излучения-приема
негармонических радиоволн в канале с рассеянием на объекте имеет вид [1,2]
Ε0Ο(θφ)δσΰ(θ,φ,θ0,φΰ) ^_
где
0(θ,φ) = ηΌ(θ,φ) (5.1.11)
— энергетический коэффициент усиления (КУ) антенны РЛС
[2, 30, 39], η — коэффициент полезного действия антенны РЛС,
Е0 — энергия зондирующего сигнала, подводимая к антенной
системе, Кус — коэффициент некогерентного накопления, Кус —
коэффициент поляризационных потерь сигнала, Кс —
коэффициент потерь мощности в тракте обработки,
215
j χω(θ,φ,ω)· Αω(θ,φ,ω)άω
Α(θ,φ) = * - , (5.1.12)
\χω{θ,φ,ω)άω
ο
— энергетическая эффективная поверхность антенны,
Ζπ\χω(θ,φ,ω)άω 8π| χω(θ,φ,ω)άω
0(θ,φ) = —* = ^"7^ ч (5-1-13)
— энергетический коэффициент направленного действия (КНД),
\χω{θ,φ,ω)δσω(θ,φ,θ0,φ0,ω)(1ω
δσ0{θ,φ,θ0,φ0) = ϊ = (5.1.14)
О
— обобщенная эффективная поверхность рассеяния (ЭПР)
отражающего элемента цели, определяемая пространственной
протяженностью СШПС, при этом Ν δσ0 « σ, где σ — ЭПР цели,
N « L j ст, L — размер цели,
КС
Αω(θ,φ,ω) = —Οω(θ,φ,ω) (5.1.15)
ω
— парциальная эффективная поверхность антенны на
циклической частоте ω,
1\χα(θ,φ,ω)ιάηθάθάφ
о о
— парциальный КНД антенны РЛС,
Хт (θ,φ,ω) = ^limfr2 \Ε{^θ,φ,ωίλ (5.1.17)
ZQ r->~|_ ' ' J
— частотно-угловая плотность энергии излученного поля,
>2π π
1 <*» ί,η η
ΕΣ =-jffxm(e,(p,(o)smeded(pdG> (5.1.18)
0 0 0
энергия изотропного излучения,
216
δσω(θ,φ,θ0,φ0,ω) = ]ΐΏΐ
\Ё° (гЛ<Р,о>)\2
\Ε(τ = 0,θ0,φ0,ω)\2
(5.1.19)
— парциальная ЭПР [32], Ζ 0= 120 π — волновое
сопротивление свободного пространства, Ε(τ,θ,φ,ω) и Е$ (г, 0, φ, ω)
—пространственно-частотное распределение поля, излученного
антенной РЛС и рассеянного лоцируемым объектом.
По аналогии с уравнением радиолокации [86, 87] для
узкополосных сигналов величина Ес в (5.1.10) пропорциональна
плотности потока энергии облучающей волны в месте расположения
Εβ{θ,φ)
цели *-;—- и отношению плотностей потока энергии отра-
δσ0(θ,φ,θ0,φ0)
женнои и падающей волн ; ν цели.
4πϋΙ
Коэффициент полезного действия η антенной системы
представляет собой отношение излученной энергии ΕΣ к энергии Е0,
поступающей с выхода передатчика [94]. Таким образом, в
соответствии с (5.1.11) получаем
Εβ(θ,φ) = ΕΣϋ(θ,φ). (5.1.20)
В результате подстановки (5.1.12) —(5.1.14), (5.1.18) в (5.1.10)
обобщенное уравнение радиолокации преобразуется к виду
χΑω(θ,φ,ω)άω.
При использовании узкополосных (квазимонохроматических)
зондирующих сигналов, спектр которых локализован в
окрестности несущей циклической частоты ω = ω0, плотность потока
энергии поля (5.1.17), излученного в направлении (0о,<ро) с
учетом усиления в антенне, определяется выражением
Ζ.{θ0,φ0,ω) = №-·δ{ω-ω0), (5.1.22)
где ω0 — мощность зондирующего сигнала, G = (7(0о,<ро) = гф —
КУ антенны РЛС на циклической частоте ω0,
D = D(e0,q>0)= \ύω(θ0,φ0,ω)'δ(ω-ω0)άω (5.1.23)
217
ееКНД, δ(ω-ω0) —дельта-функция, Οω(θ,φ,ω)
—аналитическое представление распределения (5.1.16).
Подставляя (5.1.15) и (5.1.22) в (5.1.21), можно получить
известное уравнение радиолокации [86, 87] для узкополосных
сигналов
Ρ = P°G ^o G^ K™ (5 1 24)
с 4/< 4/< 4/г KycKc '
где
<т0 = σ0(θ,φ) = ί σ0(θ,φ,ω)δ(ω-ω0)άω (5.1.25)
— ЭПР цели, <το(0,<ρ,ω) — аналитическое представление
функции σω (0, φ, θ0, φ0) ~ Νδσω (0, φ, 0Ο, φ0) при моностатической
. 2/гс
локации, Я = — длина излучаемой (принимаемой) волны,
ω0
с — скорость света.
Для антенн недисперсионного типа (логопериодических,
спиральных), антенн бегущей волны (щелевых, однопроводных),
решеток элементарных электрических и магнитных диполей,
биконических вибраторов, а также антенных систем с
широкополосными симметрирующе-согласующими устройствами [118]
имеет место слабая зависимость парциальных характеристик
излучения-приема от частоты сигнала. В частности, как показано в
[23], отклонение КНД логопериодической антенны с полосковым
согласующим устройством от среднего значения в диапазоне час-
Ω2-Ωχ ηοκ
тот с относительной шириной μ = — L « 0,25 не превышает
0,5 дБ. Согласно приведенным в [1] экспериментальным данным,
КУ щелевой антенны бегущей волны с экспоненциально
расширяющейся щелью при использовании согласующего полоскового
трансформатора в полосе частот с показателем μ = 0,33
изменяется в пределах 3 дБ.
Применительно к малоразмерным целям и объектам с ма-
лоотражающими формами, являющихся типовыми для
наблюдения СШП РЛС [50], парциальные ЭПР в полосе
пропускания приемника, как правило, также изменяются
незначительно. В частности, согласно [86], ЭПР сферы радиуса
4 кс
а0 > практически не зависит от частоты, а ЭПР уголковых
отражателей с треугольными и квадратными гранями в полосе
218
Ω9 -Ω,
сигнала шириной Δ/ = — L = 500 МГц, что соответствует оп-
2/г
ределению сверхширокополосности [6], с центральной частотой
Ω9 + ΩΊ
/0 = — = 5...10 ГГц изменяется не более, чем на 0,5...0,9 дБ.
4/г
В этих случаях при прогнозируемой погрешности оценки
энергии Ес на уровне 2,5...3,9 дБ распределения δσω (0,<ρ,0ο,φο,ω),
Όω (0, φ, ω) и Αω (0, φ, ω) могут быть приближенно заменены
усредненными значениями δσω (0, φ, 0О, φ0, ω) = δσω (0, φ, 0Ο, φ0, ω),
АЛ^о^^и
Αω(θ,φ,ω) = Αω=^(οτ)\ (5.1.26)
4/Γ
В результате замены парциальных ЭПР и эффективной площади
антенны РЛС усредненными значениями с учетом (5.1.26)
энергетическое уравнение (5.1.21) для СШПС преобразуется к
приближенному виду
iiS4A'Mi· (5.1.27)
с 4/г< 4/гДс2ц 4/г КусКс
τηβ6 = Ο(θ0,φ0) = ηΟω.
Энергия помехи на входе приемника РЛС определяется как
произведение эффективной площади приемной антенны на
плотность потока энергии в месте ее расположения и отношения
полосы пропускания приемника Δ/^ к ширине спектра помехи AF
[13]. В предположении прямоугольной аппроксимации спектра
помехи ее энергия в пределах полосы пропускания линейной
части приемника РЛС определяется следующим образом [13]:
Ν Νη0Οη(θ φη)4> ,А( уЧ^ (5128)
где NnQ — энергия, поступающая от передатчика помех,
Gn (0, φ) — энергетический КУ антенны станции помех, Ψ —
коэффициент, учитывающий несовпадение рабочих поляризаций
РЛС и станции помех.
По аналогии с (5.1.21) из (5.1.28) получаем энергетическое
уравнение передачи-приема помехи
ΝΠ=ψ-^]χωπ(θ,φ,ω)-Αω(θ,φ,ω)άω, (5.1.29)
219
где χωη(θ,φ,ω) — частотно-угловая плотность энергии помехи,
которая может быть вычислена с использованием (5.1.17) при
замене Ε (г, 0, φ, ω) частотно-угловым распределение мешающего
излучения.
Для квазимонохроматических помех, которые могут быть
аппроксимированы гармоническими колебаниями с несущей
частотой ω0
χωπ(θη,φα,ω)^^^;-δ(ω-ω0), (5.1.30)
где Οη=βη(θη,φη)=ηηΟη(θη,φη) — КУ антенны станции
помех, ^п0— мощность помехи, подводимая к передатчику, 7j? и
Αι (^π?<?>π)ξ Αι — коэффициент полезного действия и КНД
антенны. Величина Dn может быть вычислена аналогично (5.1.13)
и (5.1.23) при замене χω{θ,φ,ω) на χωη(θ,φ,ω).
Подставляя (5.1.30) в (5.1.29) и учитывая, что энергия
гармонических колебаний равна их мощности за период Р?, получаем
р =РЛК9и)Ч ОтахК(Ав,Аср)х(сг)2 Δ4
4/гДс2п 4/г AF Л ' ' }
где (7тах = max G (θ, φ, θη, φη), Κ(ΑΘ,Αφ) — показатель
относительного ослабления КУ антенны РЛС в направлении на
станцию помех, ΑΘ = θ - 0?, Αφ = φ - φη.
Для узкополосных помех, в полосе которых распределение
Αω(θ,φ,ω) можно считать равномерным, уравнение (5.1.29)
представимо в известном виде [13, 90]
= ΝηβηΨ Ο^Κ(ΑΘ,Αφ)χλ> Д^
п 4/гДс2п 4/г AF ' К ' ' }
где Gn = Gn — КУ антенны станции помех.
Конкретизируем полученные выражения для оценки
эффективности создания маскирующих помех типовым СШП РЛС.
Для этого сначала рассмотрим ОСШ (5.1.9) при отсутствии
активных помех. Используя (5.1.10) и полагая для простоты, что
потери в тракте обработки и поляризационные потери
отсутствуют (КСА = КА = 1), для (5.1.9) имеем
^|,М-^И^, (5Л.ЗЗ)
где ν = кКшТ0, Кяс = JKf^ = sJTm / τ , Tm — время последетектор-
ного накопления.
220
При п импульсах выражение (5.1.33) можно переписать в виде
2Είη) ,. ^2Р0пт02{ст)26аКж
Q2 =
Nn
= (4*Г
Ri.v
(5.1.34)
или через среднюю мощность
g» = 2^L = {4ку 2Р*пТ«°2(ст)26аКис _
Nn
= (4πΥ
Д>
2PcpATG2(cx)25aKH,
(5.1.35)
где AT = пТп, Тп — период повторения импульсов.
Если помеха действует в течение всего времени наблюдения
AT, то её энергию ΝΊ можно представить как
Pn0GnGAT(cTj
m2K
ι(
AF
Тогда результирующее выражение для ОСШ имеет вид
2РсрАТС2(сти)26аКис
02=(4π)"
RI
υ +
P«GnG(cT„f
Δ4
AF
AT
(5.1.36)
(5.1.37)
Положим, что энергия преднамеренной помехи значительно
превосходит энергию ГБШ, то есть величиной ν можно пренебречь.
В случае пространственного совмещения передатчика помех и
цели (случай самоприкрытия), (5.1.37) перепишется как
Ρ^ΟδσΚ^ίΑ^'
В случае постановки помех из зоны, когда Rcu Φ Rcn, получаем
'Δ/πρ
Q2 = (2π)-
(5.1.38)
Q2 = {2π)Λ " . c\ нс
v ' Ρ Π Ε?4
AF
(5.1.39)
Рассмотрим в качестве примера возможность
радиоподавления СШП РЛС большой мощности. Для этого, используя
формулы (5.1.1), (5.1.2), (5.1.38), (5.1.39), определим требуемое значение
энергопотенциала передатчика помех Pn0Gn, при котором
обеспечивается а = 10"4 и Робн = 0,2. Предположим, что создание
активных помех может осуществляться как в режиме самоприкрытия,
так и в режиме создания помех из вынесенных точек пространства.
Положим, что длительность импульса РЛС τ = 1 нс, Рср = 5 · 103 Вт,
221
G - ΙΟ3, AF = 2 ГГц, Кж = 3 . Подавление осуществляется по
главному лепестку диаграммы направленности антенны СШП РЛС.
Будем считать, что ЭПР прикрываемых целей (7 = 1,10, 50 м2.
На рис. 5.1.1 представлены зависимости энергопотенциала
передатчика помех (Pn0Gn) от дальности до цели при известном
времени прихода сигнала. Кривая 1 соответствует цели с ЭПР
σ = 1 м2, кривая 2 — σ = 10 м2, кривая 3 — σ = 50 м2.
На рис. 5.1.2 представлены аналогичные зависимости при
неизвестном времени прихода сигнала.
Анализируя рис. 5.1.1,5.2.2, видно, что энергетический
потенциал станции помех для выбранных объектов находится в
пределах 100—5000 Вт при радиоподавлении по главному лепестку
МО'
МО3
100
10
=£=
Щр
—з-
\θ 50 60 70 80
рл& Вт
90 100 110 120 130 140 150
R , км
Рис. 5.1.1
М(Г
МО3
100
10
^«t—4^^l I 3
40 50 60 70 80 90 100 110 120 130 140 150
R , км
Рис. 5.1.2
222
диаграммы направленности антенны РЛС. Несложно убедиться,
что примерно такие же значения энергопотенциала будут иметь
место и при радиоподавлении узкополосных РЛС со средней
мощностью излучения около 5 кВт.
Рассмотрим режим создания помех из зон. Предположим, что
характеристики РЛС остаются такими же, а расстояние до
постановщика помех составляет 200 км.
На рис. 5.1.3 и 5.1.4 представлены зависимости
энергопотенциала передатчика помех от дальности до цели при известном и
неизвестном времени прихода сигнала.
Как и следовало ожидать, требуемое значение
энергетического потенциала несколько возрастает, что связано с увеличением
расстояния между РЛС и станцией помех.
40 50 60 70 80 90 100 НО 120 130 140 150
R , км
Сц'
Рис. 5.1.3
р,А>Вт
НО5 , ·>!. =,
10
*40 50 60 70 80 90 100 110 120 130 140 150
R , км
Рис. 5.1.4
223
В таблице 5.1.1 представлены требуемые значения
энергопотенциалов передатчика помех для целей с различными ЭПР,
обеспечивающих Робн < 0.2 на дальности более 50 км.
Таблица 5.1.1
Требуемые энергопотенциалы передатчика помех
для СШПРЛС большой мощности
ЭПР цели σ , м2
1
10
50
Энергопотенциал передатчика помех ( Pn0Gn, Вт)
Режим самоприкрытия
при
известном времени
прихода
сигнала
2-Ю2
2-Ю3
МО4
принеизвест-
ном времени
прихода
сигнала
80
5-Ю2
3-Ю3
Режим создания помех
из зон
при
известном времени
прихода
сигнала
4-103
4Ί04
2-105
принеизвест-
ном времени
прихода
сигнала
1,2·103
1,2·104
7·104
Рассмотрим далее возможности радиоподавления СШП РЛС
малой мощности. Предположим, что создание активных помех
осуществляется в режиме самоприкрытия (Rcn = Rcn), a P^G = 24
Вт, τ = 2 не, К=А = 3 , AF = 4 ГГц. Подавление осуществляется
по главному лепестку диаграммы направленности антенны СШП
РЛС, то есть Κ(ΑΘ,Αφ) = 1.
Несложно убедиться, что при известном времени прихода
сигнала требуемая вероятность обнаружения сигнала РЛС Робп < 0.2
обеспечивается на расстоянии РЛС—цель более 1 км при
использовании передатчика помех с энергопотенциалом примерно 10
Вт для цели с ЭПР σ = 1 м2; для цели с ЭПР σ = 5 м2 необходим
энергопотенциал передатчика помех примерно 50 Вт. При
неизвестном времени прихода сигнала на расстоянии РЛС—цель
более 1 км энергопотенциал передатчика помех должен быть
примерно 6 Вт для цели с ЭПР σ = 1 м2, а для цели с ЭПР σ = 5 м2
необходим энергопотенциал примерно 30 Вт.
Таким образом, при радиоподавлении СШП РЛС
преднамеренными шумовыми помехами, согласованными по ширине
спектра с зондирующим сигналом (аналог прицельной по
частоте помехи для РЛС с узкополосными сигналами), не следует
ожидать серьезного увеличения требований к мощности станций
помех. При уменьшении длительности зондирующего сигнала в
сотни—десятки тысяч раз для сохранения на выходе
приемника требуемого отношения сигнал—помеха в РЛС должна быть
224
пропорциональна увеличена мощность излучения. Но даже при
весьма значительном увеличении пиковой мощности энергия
излучения остается примерно такой же, как для соответствующих
по назначению РЛС с узкополосными сигналами. Поэтому
известные закономерности, присущие радиоподавлению
традиционных образцов РЛС [13, 90], остаются в силе. Основные трудности
организации эффективного радиоподавления, по-видимому,
могут быть связаны с осуществлением радиотехнической разведки
СШПС, которые имеют малую длительность и, как следствие,
повышенную скрытность.
Действительно, согласно [90], отношение сигнал-шум на
входе разведприёмника прямо пропорционально средней мощности
зондирующего сигнала и обратно пропорционально полосе частот,
в которой ведется разведка. При сопоставимой с узкополосными
РЛС средней мощности полоса частот возрастает на несколько
порядков, что может привести к ухудшению качества разведки,
особенно при измерении информационных параметров сигналов
в процессе их первичной обработки.
Создание имитирующих помех СШП РЛС при условии
примерного равенства мощности помехи и отраженного от цели
сигнала связано с воспроизведением тонкой структуры,
учитывающей соотношение размера объекта и длительности сигнала. Если
традиционно цель рассматривалась как точечная и
характеризовалась интегральным значением ЭПР, то применительно к СШПС
возникает необходимость моделирования дифференциальных
распределений ЭПР. Следует отметить, что в направлении
исследования радиолокационных характеристик различных классов
целей объем выполненных работ пока вряд ли можно признать
достаточным, хотя отдельные теоретические и
экспериментальные результаты заслуживают внимания [например, 1, 2, 87, 90
и др.]. По-видимому, имеется необходимость создания
специализированных измерительных радиополигонов для определения
отражающих хаактеристик объектов в типовых задачах одно— и
многопозиционной СШП радиолокации. В противном случае
решение задач имитации тонкой структуры отраженных сигналов
может оказаться достаточно проблематичным.
225
5.2. Эффективность радиоподавления радиосистем с
узкополосными сигналами сверхкороткими импульсами
5.2.1. Радиоподавление узкополосных радиосистем
в режиме обнаружения
В [15, 41] отмечается возможность применения при
радиопротиводействии сверхширокополосных помех (СШПП) в виде
кратковременных импульсных излучений, которые по эффекту
воздействия сравнимы с заградительными по частоте помехами.
Энергетические характеристики таких помех, создаваемых для
заметного ухудшения качества приема узкополосных сигналов,
рассчитываются по известным методикам [90]. Поэтому, опуская этот
вопрос, отметим главное отличие СШПП по сравнению с
используемыми в настоящее время активными помехами — их малую
или даже сверхмалую длительность. То есть, не обсуждая
выходящие за рамки данного рассмотрения эффекты воздействия помех
большой пиковой мощности с относительно малых расстояний,
приводящие к полному или частичному поражению элементов
радиоэлектронной аппаратуры, ниже обсудим влияние частотно-
временной синхронизации сверхширокополосных излучений на
их эффективность при радиоподавлении узкополосных
радиосистем различного назначения, функционирующих в режимах
обнаружения и измерения информационных параметров сигналов.
Представим обнаруживаемый сигнал в виде
s(t,a0,q>0) = a0F(t)cos[o)0t + y/(t) + (p0], (5.2.1.1)
где α0 — амплитуда сигнала, F(t) — функция, описывающая
форму огибающей (модулирующая функция), ω0 — частота
несущей, y/(t) — закон изменения фазы, φ0 — начальная фаза. При
приеме этого сигнала на фоне только ГБШ алгоритм
обнаружения имеет следующий вид [98]
L%h. (5.2.1.2)
Но
Здесь h — порог, определяемый в зависимости от выбранного
критерия оптимальности обнаружения,
L = y/X2+Y2 (5.2.1.3)
— функционал отношения правдоподобия, величины Χ, Υ
определяются формулами [97]
γ] = Υ J*(^{™W + Ψ(№, (5.2.1.4)
226
x(t) — реализация, наблюдаемая на входе системы на
интервале времени [0;Г], которая имеет вид x(t) = 70s(£,a0,<jP0) + n(£),
параметр γ0 = (0,1) показывает отсутствие, либо наличие сигнала,
n(t) — ГБШ с нулевым средним значением и односторонней
спектральной плотностью NQ.
Алгоритм обнаружения (5.2.1.2) является оптимальным при
воздействии только ГБШ. Предположим, что кроме ГБШ на вход
такой системы может поступать и СШПП вида
b(t-^), (5.2.1.5)
где Я0 е[0;Г] — время прихода сигнала. Обозначим Ωχ —
минимальная частота, а Ω2 — максимальная частота спектра
СШПП, (Оь = (Ω2 -QJ/2 — средняя (центральная) частота.
Показатель широкополосности запишется как [6] 77 = Ωί>/ωί>, где
Ω6 = Ω2 -Ωχ — полоса частот сигнала (5.2.1.5). При η > 0,2..0,5
сигнал (5.2.1.5) является сверхширокополосным [6, 33].
Соответственно, если присутствует СШПП, наблюдаемая реализация
будет иметь вид
x(t) = Y0s(tJa0,9o) + n(t) + b(t-^). (5.2.1.6)
Найдем эффективность обнаружения УПС с помощью
алгоритма (5.2.1.2), когда на его вход кроме ГБШ поступает СШПП
(5.2.1.5). Для этого необходимо определить характеристики
обнаружителя — вероятность ложной тревоги а и вероятность
пропуска сигнала β . Определим плотность распределения
вероятностей величины L (5.2.1.3), где слагаемые Χ, Υ
представляют собой гауссовские случайные величины. Совместную
плотность распределения их вероятностей можно представить в
виде [98]
W(X,Y\Yo) = -^exp
2πσζ
ν
2σ2
(5.2.1.7)
Здесь σ2 — дисперсия, а mr ,(y0) среднее значение гауссовс-
W
ких случайных величин Χ, Υ (5.2.1.4),. Подставляя (5.2.1.6) в
(5.2.1.4) и выполняя усреднение, находим математическое
ожидание величин Χ, Υ
■*Hffl)-*¥Cb-v (5·2'1'8)
227
1 τ
здесь E = -\F2(t)dt —энергия УПС (5.2.1.1) с единичной амп-
cos
литудой, а
B,*=Y)Kt-Wt)\™[[<a0t + y,(№ (5.2.1.9)
— составляющие математического ожидания (5.2.1.8),
обусловленные воздействием СШПП (5.2.1.5). Дисперсия гауссовских
случайных величин Χ, Υ выразится как [97]
\([X-rnx(Y0)f)}
σ2 = σ* = <
щ
(5.2.1.10)
Подставляя (5.2.1.4) в (5.2.1.3), а (5.2.1.3) и (5.2.1.6) в (5.2.1.8),
находим величину дисперсии σ =
2Е_
Используя известные правила преобразования плотностей
вероятностей [44], перейдем от совместной плотности
вероятности случайных величин Χ, Υ (5.2.1.7) к плотности вероятности
случайной величины L (5.2.1.3) [97]
W(L | г.) - ^(-^Jgibl),,^), (5.2.1.11)
где τη(γ0) = ^rn2x(yQ) + τηΙ(γ0). В отсутствие СШПП плотность
вероятности (5.2.1.11) при 70 = 0 имеет вид распределения Релея, а
при /0 = 1 — распределения Раиса; в случае воздействия СШПП
при /0 = 0 и при 70 = 1 плотность вероятности (5.2.1.11) имеет
вид распределения Раиса.
В соответствии с определением вероятности ложной тревоги и
пропуска сигнала запишем [97]
оо h
а = JW(L | γ0 = 0)dL, β = JW(L \ γ0 = \)dL. (5.2.1.12)
h 0
Подставляя (5.2.1.11) в (5.2.1.12), найдем вероятность
ложной тревоги а и вероятность пропуска сигнала β
применительно к рассматриваемому случаю
а = \ χехр
h/σ
h/σ
β= J i/exp| -
о
χ2 + ζ?
у2+^
° iTo(z0x)dx
(5.2.1.13)
(5.2.1.14)
J
228
здесь I0(x)
рядка, а
функция Бесселя мнимого аргумента нулевого по-
<=■
(5.2.1.15)
Подставив (5.2.1.8) в (5.2.1.15), получаем
0 ~~ *Л
z2 =
Ν,
^Ecoscp0+Bc) J^Esincp0+Bs
Nn
(5.2.1.16)
Преобразуя последнее выражение, имеем z\ - ζ0 + ζ +
+ 2α0 (Бс cos <p0 +5esin^0), где ζ2 =
2α\Ε
OCIII в отсутствие
СШПП.
В частном случае, при отсутствии СШПП, то есть когда в
(5.2.1.6) b(t - Aq) = 0 , соответственно величины Вт, ξ 0 и
формулы (5.2.1.13), (5.2.1.14) принимают вид W
h2
«о=ехр|- —
hi° ( y2+z2^
βο= J 2/exP —\h{zy)dV-
(5.2.1.17)
(5.2.1.18)
Сопоставляя с результатами [98], видно, что (5.2.1.17), (5.2.1.18)
совпадают с найденными там характеристиками обнаружителя
УПС на фоне только ГБШ. Таким образом, сравнивая величины
вероятности ложной тревоги и вероятности пропуска сигнала при
наличии СШПП (5.2.1.13), (5.2.1.14) с их аналогичными
значениями в отсутствие СШПП (5.2.1.17), (5.2.1.18), можно
определить влияние СШПП на эффективность обнаружения УПС.
Конкретизируем общие выражения для вероятностей
ложной тревоги и пропуска сигнала для следующих моделей УПС и
СШПП.
В качестве модели УПС используем радиоимпульс с
колокольной огибающей
t
s(t) = α0 exp —ч α>β(ω0ί - φ0).
(5.2.1.19)
229
Здесь τ — длительность импульса. В качестве СШПП
используем экспоненциально-синусный радиоимпульс
b(t) = ^(ί)8ίηω6ί. (5.2.1.20)
Здесь Fb(t) = exp\ —-
^ \
модулирующая функция СШПП, хь
*ъ J
длительность импульса. В соответствии с определением сверхши-
рокополосности, приведенным в п. 1, импульс вида (5.2.1.20)
является сверхширокополосным при соьть < 2/г .
Подставляя (5.2.1.17), (5.2.1.18) в (5.2.1.9), находим
составляющие Вгс], входящие в выражение для математического ожи-
й
дания X и Υ (5.2.1.8)
в = Λ Щу1я
х<ехр
±ехр
й Noj
4(τ2+τ2)
4Λ02+τ2τ2(ω6+ω0)2'
τ2+τ2
sin
COS
ν2(ω6-ω0)
^■2 , _2
-<Μυ
4(τ2+τ2)
sin
COS
ν2(ω6+ω0)
λ-2 , -2
τ +τλ
-<»Α
Для удобства анализа эффективности обнаружения введем
следующие обозначения: zb =
2 _ ^"0
2ЬП2Я,
АГП
отношение помеха-шум
1 г
(ОПШ), £?ь = - \Fb2(t)dt — энергия модулирующей функции
СШПП, ν = ·
отношение длительностей СШПП и УПС.
В соответствии с этими обозначениями перепишем (5.2.1.15),
(5.2.1.16) как
2zlv
zl =
ζΛ =
zbj2v „
1 + V
|2
(в2л + в1х),
VT77
ζ sin φ0 +
в*
(5.2.1.21)
.(5.2.1.22)
Здесь
230
Vexp
±exp
4ρ2+φ-ξ)2
4(1 +ν2)
4p2+gt(l + <g)2'
4(1 +ν2)
sin
COS
sin
COS
Pft(l-fl
v(l + v2)
РЗьА + Ф Pfl>
v(l + v2) ν
V
(5.2.1.23)
В выражении (5.2.1.23) введены следующие обозначения:
ρ = —- — параметр, определяющий положение во времени
τ
СШПП относительно УПС, qb = ть(Оь — параметр, определяющий
степень сверхширокополосности сигнала (5.2.1.20) (чем больше
qb, тем сигнал более узкополосный, соответственно чем
меньше qb, тем сигнал более широкополосный). Согласно
определению СШПП, приведенному в п. 1, считаем qb « 2/г. Отношение
центральных частот УПС и СШПП в (5.2.1.23) обозначено как
ξ = ω0/ω,.
Анализ выражений (5.2.1.13), (5.2.1.14), (5.2.1.21)...(5.2.1.23)
показывает, что максимальная эффективность действия
сверхширокополосной помехи достигается при следующих значениях
параметров, входящих в (5.2.1.23): ξ = 1 — центральные
частоты одинаковы, так, что максимумы спектров УПС и СШПП
совпадают на оси частот, ρ = 0 — импульсы совпадают на оси
времени. При этом выражения (5.2.1.21), (5.2.1.22) примут вид:
2z2bv
1 + v2
<г2 - ν2 _ι_ J-
ΖΛ —Ζ + Ζη ·
Рассмотрим, как влияет наличие СШПП на вероятность
ложной тревоги при обнаружении УПС в случае ее максимальной
эффективности. Для этого введем в рассмотрение величину
χ = α/α0 (5.2.1.24)
— отношение вероятности ложной тревоги при воздействии к
вероятности ложной тревоги в отсутствие СШПП. Эта величина
показывает, во сколько раз увеличивается значение вероятности ложной
тревоги вследствие воздействия СШПП. Рассмотрим зависимость
χ от ОПШ zb для различных значений параметра v. Отношение
h/σ в формуле (5.2.1.13) будем выбирать исходя из выражения
(5.2.1.17) (случай обнаружения УПС на фоне только белого шума),
где, в соответствии с критерием Неймана—Пирсона [98],
зафиксируем значение а0, тогда h/σ = yj-2Ina0 . Выберем а0 = 10"3.
На рис. 5.2.1.1 показана зависимость величины χ (5.2.1.24)
от ОПШ zb. Кривая 1 соответствует параметру v = 10~2, кри-
231
к
χ
^
ι
I
ч
2
/
/
\L
Г7 1
/
/
/
f
Ъ/
ь^*~
20
40
60
80
100
120
Рис. 5.2.1.1
вая 2 — ν = 10"3, кривая 3 — ν = Ю-4, кривая 4 — ν = ДО"5. Из
сопоставления кривых видно, что с ростом ν влияние СШПП на
величину вероятности ложной тревоги быстро возрастает.
Это можно объяснить следующим образом. Корреляторы,
формирующие величины Χ, Υ (5.2.1.4), можно
интерпретировать и как фильтры, полоса пропускания которых определяется
длительностью огибающей У ПС. С увеличением ν, при
фиксированной энергии, ширина спектра СШПП уменьшается, и поэтому
доля ее энергии, попадающая в полосу пропускания
обнаружителя, возрастает.
Далее рассмотрим влияние сверхширокополосной помехи на
вероятность пропуска сигнала. Это влияние описывается
зависимостью β (5.2.1.14) от ОСШ ζ при различных значениях ОПШ
zb. Снова воспользуемся критерием Неймана—Пирсона.
Выберем а = 10~3 и, используя формулу (5.2.1.13) для
каждого возможного значения zb и ν, найдем величину
нормированного порога h J a. Подставляя h/σ в выражение для вероятности
пропуска сигнала (5.2.1.12), рассчитаем зависимость
вероятности пропуска сигнала от ζ при различных значениях zb. На
рис. 5.2.1.2, 5.2.1.3 показаны зависимости вероятности пропуска
сигнала от ОСШ ζ для различных значений ОПШ. Рис. 5.2.1.2
соответствует случаю zb = 20 ,рис. 5.2.1.3 — zb=10, при этом
кривая 1 соответствует параметру ν = 10~2, кривая 2 — ν = 10~3,
кривая 3 — ν = Ю-4, кривая 4 — ν = 10"5. Видно, что увеличение
ν с 10"5 до 10"4 фактически не влияет на величину пропуска
сигнала.
232
0.1
0.01
ю-3
Ι ΙΟ"4
ΙΟ"5
ΙΟ6
10 7
ΙΟ8
ΙΟ"9
«■■^"■■^^SCj-
-•«■^Г--
^
Ν. ^^
ГЧ\ ^
Чч
V
·*
\ ι
\ \
\\ 2
3,4\\
V
6
ζ
Рис. 5.2.1.2
10
12
0.1
0.01
ΙΟ"3
Ι ΙΟ"4
10 5
ΙΟ"6
ΙΟ"7
ΙΟ"8
ΙΟ"9
"^^
^
^ν
Ν>
Ν
. >_
\\
\\ι
л \\
*'*,\'
\ Ι
10
12
Рис. 5.2.1.3
Анализ графиков рис. 5.2.1.2, 5.2.1.3 показывает, что с
уменьшением величины ν влияние СШПП снижается,
соответственно, это влияние убывает и с уменьшением параметра zb.
Приведенные кривые позволяют количественно оценить воздействие
сверхширокополосной помехи на вероятность пропуска сигнала
при различных значениях ν и zb.
Рассмотрим ситуации, когда импульсы во времени не полно-
L
стью совпадают. Для этого выберем значение параметра ρ = —- ,
τ
соответствующее нахождению максимума модулирующей
функции СШПП в точке, где огибающая УПС уменьшилась в два раза,
то есть выберем значение ρ согласно выражению ехр(—р2) = 1 / 2,
а именно ν = Vb2 (рис.5.2.1.4).Также рассмотрим случаи, когда
значение ρ выбирается из условия ехр(—р2) = 0.1, то есть СШПП
расположен в точке, где огибающая УПС уменьшается в 10 раз
(рис. 5.2.1.5). Случай ρ = 0 соответствует совпадению максиму-
233
10
I
/
/
/
/
/
l/
/
'//
2 /
/
/
/
/
/
3^
4
20
40
60
Агс. 5.2.7.4
80
100
120
10
l/
2^
3,4
20
40
60
/>uc. 5.2.7.5
80
100
120
mob модулирующей функции СШПП и огибающей УПС и
показан на рис. 5.2.1.1.
Видно, что при заданных выше отклонениях максимумов
модулирующей функции СШПП и огибающей УПС влияние СШПП
уменьшается. В частности, эффективность обнаружения УПС в
случае нахождения максимума спектра СШПП в точке, где
огибающая УПС уменьшилась в 10 раз (рис. 5.2.1.5), практически
такая же, как и в отсутствие СШПП. Аналогичным образом
изменяется влияние данного типа помехи на эффективность
обнаружения УПС с изменением величины ξ = ω0 j (йь. В частности, по
234
мере отклонения ξ от единицы влияние сверхширокополосной
помехи на эффективность обнаружения УПС уменьшается.
Таким образом, большую роль при обнаружении УПС в условиях
применения СШПП играет синхронизация, то есть такое
расположение помехи во времени, при котором максимумы ее
модулирующей функции и огибающей УПС совпадают. Существенным
оказывается частотное согласование, которое обеспечивается при
совпадение центральных частот УПС и СШПП. По мере
отклонения точки расположения СШПП на плоскости время, частота
от точки расположения УПС на этой плоскости эффективность
воздействия СШП помехи падает.
Рассматривая влияние величины ρ (рассогласование во
времени УПС и СШПП) на вероятность пропуска сигнала (5.2.1.14),
видно, что при ρ > 1 оно практически отсутствует.
Следовательно, изменение параметров zb и ν не влияет на вероятность
пропуска сигнала. Анализ формул (5.2.1.14), (5.2.1.21)...(5.2.1.23)
также показывает, что с ростом ρ вероятность пропуска
сигнала убывает медленнее с ростом ζ для различных zb и ν, то есть
улучшается эффективность обнаружения УПС. Это объясняется
неполным перекрытием во времени СШПП и УПС.
5.2.2. Радиоподавление узкополосных радиосистем
в режиме измерения временных параметров
Рассмотрим влияние СШПП на характеристики оценки
времени прихода УПС.
Предположим, что имеется система измерения времени
прихода узкополосного сигнала
s(*,a0 А) = aoF(t - ^o)cos(v0* - φ0). (5.2.2.1)
Параметры сигнала определяются как в (5.2.1.1), а λ^ е [0;Г] —
время прихода сигнала. При приеме этого сигнала на фоне только
ГБШ с нулевым средним значением и односторонней
спектральной плотностью NQ алгоритм оценки максимального
правдоподобия имеет вид [48]
A = argsupZ,(A), (5.2.2.2)
где
Щ) = ^Χ\λ) + Υ2(λ) (5.2.2.3)
— логарифм функционала отношения правдоподобия с
точностью до постоянного слагаемого. Функции Χ(λ),Υ(λ)
определяются в соответствие с формулами [48]
235
$Ri<w,-*>fc}w)*· <5'2·2·4>
Если узкополосный сигнал (5.2.2.1) принимается на фоне ГБШ,
то реализация наблюдаемых данных имеет вид x(t) = s(t, Я0) + n(t),
где η(£) — ГБШ. Предположим, что кроме ГБШ на вход такой
системы может поступать СШПП (5.2.1.5), в этом случае
наблюдаемая реализация будет иметь вид (5.2.1.6).
Найдем смещение и дисперсию оценки (5.2.2.2) времени
прихода Я0 УПС (5.2.2.1) при воздействии СШПП. Для этого
подставим (5.2.1.6) в (5.2.2.4)
m)j=^4^:K](r,+Btiw' <5·2·2·5)
где
5(ЯЛ) = ^МF(t - X)F(t - \,)dt = αΑ(ΑΑ), (5.2.2.6)
^0 0
2 Tr fcos]
14 ^ο ο lsinJ
ΒΕ)(λ) = ϋ6(ί"η)η'"Λ)0(ν·')Λ'
(5.2.2.7)
Подставляя затем (5.2.2.5) в (5.2.2.3), получим
(5.2.2.9)
(5.2.2.10)
L{X) = ^(λ,λΧ)) + 2Ν(λ,λ0) + Ν1(λ). (5.2.2.8)
Здесь
5(ЯД) = S\X,\) + ВЦХ) + Д2(Я) +
+28(λ,λ0)[Β€(λ)οο8φ0+Β,(λ)άαφ0],'
ЛГ(ЯД) = Ν3(λ)Β3(λ) + Ν0(λ)Β0(λ) +
ЛГ1(Я) = ^(Я) + ^(Я). (5.2.2.11)
Рассмотрим свойства функций (5.2.2.9) —(5.2.2.11).
Обозначим Я = arg sup S^^) — значение времени прихода, при котором
А
функция (5.2.2.9) достигаетмаксимума max £(Я,Я0) = S^Xq) = Sm .
В отсутствие СШПП Я = λ^ максимальное значение функции
S(^^)\l=^=S0max=a20A2, где Л = 51(Я,Я). Шумовая функция
(5.2.2.10) при фиксированном значении φ0 является гауссовским
236
случайным процессом, имеет нулевое математическое ожидание
и корреляционную функцию вида
ΒΝ(λ1,λ2) = (Ν(λι,λ,)Ν(λ2,λΰ)). (5.2.2.12)
Если в (5.2.2.12) положить λ^ = λ^ = Xq, получаем дисперсию
шумовой функции (5.2.2.10) ΒΝ(λ0,λ0) = σ2Ν, причем в отсутствие
СШПП σ2Ν = а2т = а20А3.
Функция (5.2.2.11) представляет собой сумму квадратов двух
гауссовских случайных процессов, следовательно, является нега-
уссовским процессом. Её математическое ожидание (Ν^λ)) = 2А ,
а дисперсия σ2Ν1 = 4А2.
Введем вместо функций (5.2.2.9)...(5.2.2.11)
соответствующие нормированные функции
5(ЯЛ) = 5(ЯЛ)/5т,
ЛГ(ЯЛ) = ЛГ(ЯЛ)/^2(ЯЛ)), (5.2.2.13)
Ν1(λ) = Ν1(λ)/^(λ)).
Учитывая (5.2.2.13), перепишем (5.2.2.8) следующим образом:
ОД = V^[£(AA) + 2гАГ(ЯД0) + ε,Ν^λ,λ,)]'2 ·(5.2.2.14)
Здесь e2=(N2(X^))/S2m, ε\ = ШЩIS2m , a max5(ЯЛ) =
= [Ν2{λχ)) = (Ν2(λ)) = 1. В отсутствие СШПП ε2 = Ι/ζ2,
ε2 = 8/г4, где г2 = α20Α - ОСШ.
Разложим (5.2.2.14) в степенной ряд по малым (при ζ » 1)
параметрам ε2, εχ2 и ограничимся первым приближением.
Согласно [48], в этом приближении учитываются члены, которые в
отсутствие СШПП имеют порядок малости не менее, чем ζ~ι.
Следовательно (5.2.2.14) имеет вид
L(X) = Л/5(ЯЛ)+^(Я,Я0)/Л/5(ЯЛ) · (5.2.2.15)
Обозначим
5,(ЯЛ) = 71(ЯЛ),^(ЯЛ) = ΛΓ(λΑ)/>β(ΑΑ). (5.2.2.16)
и используя (5.2.2.16), перепишем (5.2.2.15) как
ДЯ) = 51(ЯА) + ^(ЯА)· (5.2.2.17)
В (5.2.2.17) ^(Α,Αο) —сигнальная функция, а 7VL(A,A0) —
шумовая функция с гауссовским распределением и нулевым
математическим ожиданием, которая имеет корреляционную
функцию
237
SN(X1,l2) = (NL(X1,l0)NL(l2,\)). (5.2.2.18)
Используя (5.2.2.12), для (5.2.2.18) получаем
S (А Ло)= ^(^i^)
Будем считать, что ОСШ при наличии СШПП
~z2=Sl/a2N (5.2.2.19)
достаточно велико, тогда смещение и дисперсия оценки (5.2.2.2)
времени прихода УПС запишутся в соответствии с [48]
следующим образом:
β(λ\λ0)=(Χ-λΧ))=λ-λ0,
ДА|А0) = ((А-А)2) =
oAjOA^
ά2λ
(5.2.2.20)
(5.2.2.21)
Здесь А = argsupS^A, Ао) = argsup5(A, Aq) .
Α λ
В случае отсутствия СШПП ОСШ (5.2.2.19) равно:
ζ2=ζ2=α%Α.
Преобразуем числитель выражения (5.2.2.21). Учитывая,
что функция ^(Α,Αο) достигает максимума в точке А, так что
dffL(A,A0)
άλ
- 0,получим
32gjV(A1,A2)
οληολ2
5-'(Ц). (5.2.2.22)
Раскрывая знаменатель (5.2.2.20), имеем
(^(Α,Αρ)
d2X
= _±5"3/2(АЛ)
Л5(АЛ)
<tt
-U
-н^-^^АЛ)
Й25(АЛ)
<U2
(5.2.2.23)
-U
Так как в этом выражении
принимает вид
dg(A,Ap)
άλ
= 0, формула (5.2.2.23)
-U
238
ά2λ
JA
= \s-l'\x,x0)
άλ2
(5.2.2.24)
Подставляя (5.2.2.22) и (5.2.2.24) в (5.2.2.21), для дисперсии
оценки находим
ДЯ|Д0) = 4
oAjOA^
d S(X^)
ά2λ
(5.2.2.25)
JA
(5.2.2.27)
Учитывая, что (N,fo)NM) = 0 и (NC^)NC(X,)) = (tf.(W(A,)> =
= 51(Л1,Я2) [48], можно записать выражение для ^(Я,,^)
(5.2.2.14), то есть
ВДЛ) = адЛ)тЛ). (5.2.2.26)
где
Ψ(λ1,λ2) = Β,(λ1)Β3(λ2) + Β0(λ1)Β0(λ2) +
+5(Я1,Я0ЖЯ2Л) + 5с(Я1)5(Д2Л)со8<р0 +
+Вс(Д2)5(А1Л)сов?>0 +JBs(A1)5(X2,AD)sin<Po +
+Bs(A2)5(A1,AD)sin<Po·
Подставляя (5.2.2.27) в (5.2.2.26), найдем производную функции
αλιαλ2
+4А [В'с2 + В'2 + Si2 + 2B'cS'0cos<p0 + 2Β'β'0 sin φ],
где
= d2 [В2 + В2 + S2 + 2BcSacos<pa + 2£?SS0 sin <p0] +
JA
d%{x)
άλ
=BwB®{X)=Bw
άλ
- S'qiS^X^) - S0,
JA
ЗДЛ)к-Д,= 4
<f =
άλ^άλ^
dF(tj
dt
dt. (5.2.2.28)
Вычисляя далее знаменатель (5.2.2.25), имеем
239
d2~s{x,K)
d2x
= 2[В'С2 + В',2 + S0'2 + 2В&С0Щ +
JA
+2B:slBmq>] + 2S0S?+2BeB:+2B.B:+BeS?coB<i>0 + (5.2.2.29)
+B'S0 cos <р0 + BaS"sin φ + B'aS0 sin <p.
d2B,AX)
Здесь
dX2
= в:\ и
d2S{XX)
dX2
= sf·
Таким образом, используя (5.2.2.28) и (5.2.2.29), перепишем
формулу для дисперсии оценки (5.2.2.25) как ·
D(Xm | \) = i{d2 [В2 + В2 + S2 + 2BcS0cos<p0 + 2B,S0 sin%] +
+А[В? +В:2 +50'2 + 2#50'α*φ0 + 2Bc'S0'sin«>]}x
х{2[5с'2 + Bf +50'2 +2B^cos<p0 +2B'aS^sm<p]+ (5.2.2.30)
+25050"+ 2ДДЧ 2ВД"+ ΒβΖ<χ*φα + 5C'S0 cos% +
+BA"sin<p + B;50sinp}"2.
Рассмотрим выражение для дисперсии оценки времени прихода
УПС при отсутствии СШПП, то есть при Β,ΛΧ) = 0. В этом слу-
14
чае Х = Xq, смещение β(Χ \λΰ) = 0 и формула (5.2.2.30)
принимает вид
D(X\^) = 4/^\Afl2=l/ald\
(2S;2+2SX)
(5.2.2.31)
так как £0' \~ = 0, a S"\~x - -a0d2. Как и можно было ожидать,
формула для дисперсии оценки времени прихода узкополосного
радиосигнала в отсутствие СШПП (5.2.2.31) совпадает с
известной [48].
Конкретизируем общие выражения для характеристик
оценки времени прихода (5.2.2.20), (5.2.2.30) при использовании
следующих моделей сигнала и СШПП.
В качестве УПС используем радиоимпульс с колокольной
огибающей
s(<A) = aoexP
cos[v0t-(p0], (5.2.2.32)
240
где τ — длительность импульса, а в качестве СШПП —
экспоненциально-синусный радиоимпульс (п. 1)
Щ - г0) = b0Fb(t - r0)sinu)6(i - у0). (5.2.2.33)
С-Го)2'
Здесь Fb(t-Y0) = exp
— модулирующая функция
СШПП, ть — длительность импульса. В соответствии с
определением сверхширокополосности, импульс вида (5.2.2.33) является
сверхширокополосным при (йьть < 2π.
Найдем для рассматриваемого случая функцию 5(А,Ад)
(5.2.2.6)
5(АА) = ^Иехр
Νη
{t-Kf
exp
{t-Xf
dt =
= θρ£ ίπ_
Nj2
exp
(я-Яр):
2τ2
2 Λ
JV0\2 V
(5.2.2.34)
Ю-
Далее детализируем выражение для Β,Λλ) (5.2.2.7). Имеем
2Ьп
B«m-tb*
с-у,)'
хехр
(ί-Α)2
cos
sin[ui6(i-y0)]x
(v0t)dt =
_ О
L ττΜ
4 χ/τ'+τ,2
exp
sin
Λ,2_2 , Q 2_
/7-2/7-2
χ 4 exp
τ4τ>6-ν0)2-4(Ατ2+7οτ2)2
±exp
Γ(Ατ2 +
τ4τ4(ω6
4τ2τ2(τ2+τ2)
70τ2)(ω6-ν0)
-Τ-2 J_^2
τ +τ6
+ ν0)2-4(Ατ2 +
■47ο
УоТ2)2"
sin
COS
χ (5.2.2.35)
4τ2τ2(τ2+τ2)
sin
COS
(Ατ2+70τ2)(ω6+ν0)
-Τ-2 _L *-2
-47ο
.-iJb£s(A).
Μ
w
τ'* ή
С учетом обозначений, введенных в (5.2.2.34) и (5.2.2.35), из
(5.2.2.9) при Tj<t получаем
241
5(ЯЛ) = z2A{S{X, Λ) + 2χ2[Βε(λ) + Β,(λ)] +
+2χ^2§(λ,λΰ)[Β€(λ)οο5φ0+Βί(λ)ήηφ0}} = (5.2.2.36)
= z2ASH{X,X0).
Здесь
х-Ъ-&
Учитывая условие ть «τ, из (5.2.2.26) и
(5.2.2.37)
(5.2.2.27) находим
Я^Л) = ζ2Α§(λ1,λ2){§(λ1,λ0)§(λ2,λϋ) +
+χ^2([§(λ1,λ0)Βε(λ2) + §(λ2,λ0)Β€(λ1)]οο8φ0 +
+[§(λ1,λ0)Βχλ2) + §(λ2,λΧ))Β,(λ1)]ύηφ0 +
+2χ2[Β€(λ1)Β€(λ2) + Βχλ1)Β,(λ2)]} = ζ2Α2ΒΗ(λι,λ2).
Подставляя (5.2.2.36), (5.2.2.37) в (5.2.2.25), имеем выражение
для дисперсии оценки времени прихода УПС
ДЯ|^) = -
d2SH{X,Xb)
ά2λ
(5.2.2.38)
Анализируя (5.2.2.38), видно, что с ростом ОСШ дисперсия
оценки времени прихода УПС убывает как 1 / ζ2. Следовательно,
при достаточно больших ОСШ (малом уровне ГБШ) основной
вклад в погрешность оценки времени прихода вносит
систематическая ошибка, которая определяется смещением оценки β(λ | Я0)
(5.2.2.20). Флуктуационная ошибка описывается дисперсией,
убывающей с ростом ОСШ. Смещение не зависит от ОСШ и в
рассматриваемом приближении определяется параметром χ, который равен
отношению количества электричества, переносимого импульсом в
виде модулирующей функции СШПП, к количеству электричества,
переносимого импульсом в виде модулирующей функции УПС.
Положим, что ω6 = ν0, то есть центральные частоты спектров
СШПП и УПС совпадают, при этом помеха оказывается наиболее
эффективной. Если к тому же π < а>ьть < 2/г, функцию Sh(X,Xq) в
выражении (5.2.2.36) можно переписать как
5я(ЯЛ) = ехР[-(Л-Л0)2] +
+ 2*72ехр[-(Л-Л0)72-(Л-Г0)2]х (5.2.2.39)
хsin(<p0 - τω6Γ0) + 2χ2 ехр[-2(Л - Г0)2].
242
Здесь введены аргументы, нормированные на длительность УПС
(5.2.2.32): Л = Α/τ, Л0 = Aq/t, Г0 = /0/τ . Наконец, полагая в
(5.2.2.39) Л0 = 0, φ0 = τω6Γ0, получаем
SH(A) = ехр(-Л2) + 2χ2 ехр[-2(Л - Г0)2]. (5.2.2.40)
Соответственно, выражение для нормированного
смещения в_ рассматриваемом частном случае принимает вид:
β = β(χ Ι 0)/τ = argsup^(A).
На рис. 5.2.2.1 приведена зависимость нормированного
смещения (систематической ошибки) β оценки (5.2.2.2) времени
прихода УПС от нормированного отклонения Г0 времени
прихода СШПП (5.2.2.33). Кривые 1—6 на рис. 5.2.2.1 рассчитаны
при значениях параметров χ = 0.2; 0.3; 0.4; 0.5; 0.6; 1. Как
следует из рис. 5.2.2.1, если Г0 = 0 (времена прихода УПС и СШПП
совпадают), то смещение оценки равно нулю при любом
относительном уровне СШПП χ . Более того, при Г0 = 0, как следует из
(5.2.2.40), с ростом χ дисперсия оценки времени прихода УПС
убывает.
Таким образом, воздействие СШПП, совпадающей во
времени с УПС, приводит к повышению точности оценки времени
прихода УПС. При всех значениях χ < %т, где %т — некоторое
О 0.4 0.8 1.2 1.6 2
Г0
Рис. 5.2.2.1
243
пороговое значение параметра χ, систематическая ошибка с
ростом Г0 сначала возрастает, а затем убывает до нуля.
При χ < %т и больших Г0 систематическая ошибка
отсутствует, так как при этом функции (5.2.2.6) и (5.2.2.7) в (5.2.2.5)
практически не перекрываются и максимум (5.2.2.7)
оказывается меньше, чем максимум (5.2.2.6). Для рассматриваемого
частного случая (5.2.2.40) пороговое значение %т - V2 /2 « 0.7 . Если
X > Хт > то систематическая ошибка с ростом Г0 возрастает
практически линейно (кривая 6 на рис. 5.2.2.1). При значительных
величинах систематической ошибки алгоритм оценки (5.2.2.2)
фактически не работоспособен, так как оценка уже не является
состоятельной.
На рис. 5.2.2.2 приведена зависимость нормированного
смещения β оценки (5.2.2.2) от относительного уровня СШПП
χ при различных значениях нормированного значения
времени прихода принимаемого сигнала Г0. Кривая 1
рассчитана при Г0 = 0.5, а кривые 2—4 — при Г0 = 1; 1.5; 2. Кривые на
рис. 5.2.2.2 подтверждают явно пороговый характер зависимости
систематической ошибки от относительного уровня χ СШПП.
Действительно, при больших величинах χ систематическая
ошибка оценки (5.2.2.2) равна Г0. Это означает, что при больших
величинах χ алгоритм (5.2.2.2) вырабатывает не оценку
времени прихода УПС, а оценку времени прихода СШПП.
2.0
1.5
β 1.0
0.5
4/
1 3
2
1
0.5
1.0
X
Рис. 5.2.2.1
1.5
2.0
244
5.2.3. Радиоподавление узкополосных радиосистем
в режиме измерения частотных параметров
Рассмотрим влияния СШПП на характеристики оценки
несущей частоты УПС.
Предположим, что имеется система измерения несущей
частоты УПС
s(t,v0) = a0F(t)cos(v0t-q>0). (5.2.3.1)
Параметры сигнала определяются как и ранее. При приеме
этого сигнала на фоне только ГБШ с нулевым средним значением
и односторонней спектральной плотностью NQ алгоритм оценки
максимального правдоподобия имеет вид [48]
ν = argsupi(v), (5.2.3.2)
где
Цу) = Jx2(v) + Y2(v) (5.2.3.3)
— логарифм функционала отношения правдоподобия. Функции
Χ(ν), Υ (ν) определяются в соответствии с формулами [48]
Χ(ν)} 2 гг ^^Jcos]
Если узкополосный сигнал (5.2.3.1) принимается на фоне ГБШ,
то реализация наблюдаемыхданных имеет вид: x(t) = s(t,v0) + n(t),
где n(i) — ГБШ. Предположим, что кроме ГБШ на вход такой
системы может поступать СШПП (5.2.1.5), при этом
наблюдаемая реализация будет иметь вид (5.2.1.6).
Найдем смещение и дисперсию оценки (5.2.3.2) несущей
частоты v0 УПС (5.2.3.1) при воздействии СШПП Для этого
подставим (5.2.1.6) в (5.2.3.4)
X(v) = S,c(v,v0)cos%+5e(v,v0)sin%+^c(v) + ^c(v), (5.2.3.7)
Y(v) = Sc(v,v0)sm(p0-Ss(v,v0)cosq)0+Ns(v) + Bs(v),
}-£!*««>£}<">*■ <5·2·μ>
где
^j(v,v0) = ^JF2w|2S|[(v-v0№i^}(v)v0))(5.2.3.8)
2 Tr icos]
v)e^i^W){4(w)*·
^j(v) = J- ]b(t - Yo)F(t)l™^(vt)dt. (5.2.3.9)
245
Подставляя затем (5.2.3.7) в (5.2.3.3), получим
Ζ(ν) = λ/5(ν,ν0) + 2ΛΓ(ν,ν0) + ΛΓ1(ν). (5.2.3.10)
Здесь
5(v,v0) = S2c(v, v0) + S2(v,v0) + B2c(v) +
+S2(v) + 2Sc(v,v0)[5c(v)cos<p0 + 5s(v)sin<p0] + (5.2.3.11)
+2-5, (v, v0) [Bc (v) sin <p0 - £, (v) cos <p0 ],
ΛΓ(ν,ν0) = JVc(v)[Sc(v,v0)cos<p0 +
+S.(v,v0)Sinfl) + B<!(v)] + (5.2.3.12)
+^.(v)[5e(v,v0)sin% -5s(v,v0)cos«jd0 + 5,(v)],
^(v) = ATc2(v) + iVs2(v). (5.2.3.13)
Рассмотрим свойства функций (5.2.3.11)...(5.2.3.13).
Обозначим: ν = argsup5(v,v0) — значение несущей частоты, при ко-
тором функция (5.2.3.11) достигает максимума max5(v,v0) =
= 5(v, v0) = Sm. В отсутствие СШПП ν = ν0, максимальное
значение функции ff (ν, ν0) [v=Vn= S0max = а20А2 ,где Л = S^v,v) ,a S^v,v0) =
= y[s2(v,v0) + S2(v,v0) /a0. Шумовая функция (5.2.3.12) при
фиксированном значении φ0 является гауссовским случайным
процессом, имеет нулевое математическое ожидание и
корреляционную функцию
ВЛу^у*) = (ЩУ!,У0)й(У2,У0)) ■ (5.2.3.14)
Если в (5.2.3.14) положить νλ = ν2 = ν0, получаем дисперсию
шумовой функции (5.2.3.12) ΒΝ(ν0,ν0) = σ2Ν , причем в отсутствие
СШПП σ2Ν = σ2Ν0 = а20А3.
Функция (5.2.3.13) представляет собой сумму квадратов двух
гауссовских случайных процессов, следовательно является нега-
уссовским процессом. Её математическое ожидание \Νι(ν)) = 2А ,
а дисперсия σ2Ν1 = 4А2.
Введем вместо функций (5.2.3.11)...(5.2.3.13)
соответствующие нормированные функции
5(ν,ν0) = 5(v,v0)/5m, N(v,v0) = Ν(ν,ν0)/J(N2(v,v0)},
^1(v) = iV1(v)/^(iV12(v)>. (5.2.3.15)
Учитывая (5.2.3.15), перепишем (5.2.3.10) следующим образом:
Цу) = V^p(v,vJ + 2£Ar(v,vJ + £liV>,v0)]1/2. (5.2.3.16)
246
Здесь e2=(N2(v,v0))/S2m, ε\ = (N2(v))/S2mf a max£(v,v0) =
= (Ν2(ν,ν0)) = (N2(v)) = 1. В отсутствие СШПП ε2 =1/ζ2,
ε2 =8/ζ4, где ζ2 = α20Α — ОСШ при приеме УПС на фоне ГБШ.
Разложим (5.2.3.16) в степенной ряд по малым (при ζ » 1)
параметрам ε2, ε\ и ограничимся первым приближением.
Согласно [48] в этом приближении учитываются члены, которые в
отсутствие СШПП имеют порядок малости не менее, чем ζ'1.
Следовательно (5.2.3.16) принимает вид
Цу) = JS(v,v0) + N(v,v0)/yjS(v,v0). (5.2.3.17)
Обозначим
S£(v,v0) = JS(v,v0),NL(v,v0) = JV(v,v0)/^(v,v0), (5.2.3.18)
и используя (5.2.3.18) перепишем (5.2.3.17) как
L(V) = SL(v,v0) + NL(v,v0). (5.2.3.19)
В (5.2.3.19) SL(v,vQ) — сигнальная функция, a NL(v,v0)
—шумовая функция с гауссовским распределением и нулевым
математическим ожиданием, которая имеет корреляционную функцию
^(ν1,ν2) = (^(ν1,ν0)ΛΓ£(ν2,ν0)). (5.2.3.20)
Используя (5.2.3.14), для (5.2.3.20) получаем
Будем считать, что ОСШ при наличии СШПП
f=S2m/al (5.2.3.21)
достаточно велико, тогда смещение и дисперсия оценки (5.2.3.2)
несущей частоты УПС запишутся в соответствии с [48]
следующим образом:
/J(v|v0) = (v-v0) = v-v0, (5.2.3.22)
D(v\v0) = ((v-vf) =
Здесь ν = argsupS'L(v,v0) и совпадает со значением
v = argsup5(v,v0).
V
В случае отсутствия СШПП ОСШ (5.2.3.21) равно:
z2=z2 = a20A.
Э2^(у1;у2)
θνχθν2
d2SL(v,v0)
dv2
. (5.2.3.23)
247
Преобразуем первый множитель выражения (5.2.3.23).
Учитывая, что функция SL(v,vQ) достигает максимума в точке ν, так
^dSL(v,voy
что
dv
= 0, получим
a2^(vi,v2)j =ГэЧ(у1?у2)
3V13V2 i L 3V13V2
Раскрывая знаменатель (5.2.3.23), имеем
§-\у,у0). (5.2.3.24)
d2SL(v,v0)
d2v
= -\s-^(v,v0)
dS(v,v0)
dv
+^2(v,v0)
d2S(v,v0)
dv2
(5.2.3.25)
Так как в этом выражении
принимает вид
dS(v,v0)
dv
d2SL(v,v0)
d2v
= 1.5-1/2
= ^-1/2(v,V0)
= 0, то формула (5.2.3.25)
^(У,Ур)"
dv2
(5.2.3.26)
Подставляя (5.2.3.24) и (5.2.3.26) в (5.2.3.23), для дисперсии
оценки находим
~d2BN(Vl,v2)~
D(v\v0) = 4±-
3ν$ν2
dv2
(5.2.3.27)
Рассмотрим выражение для дисперсии оценки несущей
частоты У ПС при отсутствии СШПП, то есть при В,, (ν) = 0. В этом
W
случае ν = ν0, смещение β(ν | ν0) = 0.
Учитывая, что (Ns{Vl)Nc{v2)) = -(Nc{Vl)Ns{v2)) = Sls(v1(v2) и
(^c(Vi)iVc(v2)) = (iV3(v1)iVs(v2)) = lSlc(v1,v2) [48], можно записать
выражение (5.2.3.14) для BN(vlfv2) в случае отсутствия СШПП
Я* 0Ί,ν2) = {α02 [S'lc(v1,v2)[51J(v1,v0)Si.(v2,v0) +
+Sle(v1,v0)Su(v2,v0)]-Su(vl,v2)[Su(vl,v0)Sle(y2,v0)-
-SiciVi.Vo^iVj.Vo)]}.
248
Теперь найдем
dVloV2 [ dVloV2
+ q и, у ^Sis(VnVo) dSls(v2,v0) ^dSls(vvv0) dSls(v2,v0)
dvx
dv0
dvx
dv0
-5lc(v2,v0)
dSls(vvv0) dSls(v2,v0)
dvx
dv0
Учитывая, что
^Jv1,v0)SrJv2,v0)|^^=52e(v0,v0),
5ls(v1?v0)5ls(v2,v0)|Vi=v2=vo = S2 (у0,у0),
dS, ,(v,vn) л
а также, что при ν = νχ = ν2 = ν0 величины ———— = 0 ,
dv
d2Sls(v,v0) =0 dSlc(vvv0) = dSlc(v2,v0) д rfgl5(v1?v0) _ ώ?ΐ5(ν2,ν0)
dv2
[48], получим
эЧ(У1.у2)
dvx
dy9
dvx
dv9
Эу^Уз
= θοΧ(ν0)ν0)
Э2^с(УпУ2)
3yx3y2
dvx
51с(у0?у0)
d25(y,y0)
Запишем выражения для \ при vx = v2=vQ в случае от-
dy
сутствия СШПП. Положим B,Av) = Q в (5.2.3.11) и учитывая,
что при Vi=v2= У0 величины
d25ls(v,v0) _ θ25ΐ3(νπν2)
dv2
dvldv2
= 0 и
dv2
^(v.Vo)
, находим
dv2
dv1dv2
= -2a025lc(v0,v0)
Vi=V2=V0
92^(ν1;ν2)
3Vj3v2
^u(Vi.Vo)
^ic(v0,V0)
Соответственно выражение (5.2.3.27) перепишем как
249
Д V I vo) = αο
Э251с(у1;у2)
dv1dv2
^i>i.Vq)
5ic(v0,V0)
(5.2.3.28)
Так как SJv,, У2)Ц = j- ) F\t)dt, ^|M = j- ] t>F\t)dt
iV0 ^» σκ1σκ2 L-Vo iV0 ^»
^i.(Vi,V2)
dv.
вим в виде
ι °°
= — J tF2(t)dt, выражение (5.2.3.28) предста-
Ду|у0) =
2 2Я
где ζ = —
,E = ±~JF2(t)dt,<id2v =
z2d2v '
J i2F2(i)di
jF2(i)di
(5.2.3.29)
JiF2(i)di
J F\t)dt
Как и следовало ожидать, формула (5.2.3.29) для дисперсии
оценки несущей частоты узкополосного радиосигнала в
отсутствие СШПП совпадает с известной [48].
Конкретизируем общие выражения для характеристик
оценки несущей частоты (5.2.3.22), (5.2.3.23) при использовании
следующих моделей сигнала и СШПП.
В качестве УПС, как и выше, используем радиоимпульс с
колокольной огибающей
s(t,v0) = α0 exp —- cos(v0* -φ0), (5.2.3.30)
где τ — длительность импульса, а в качестве СШПП —
экспоненциально-синусный радиоимпульс (5.2.2.33).
Так как время наблюдения Τ » τ , пределы интегрирования
в (5.2.3.8), (5.2.3.9) можно заменить на бесконечные
г*
ехР|--Г
«*.'.)-^ϊ[«ρ(4]
_ α0τ ίπ
(
exp
τ2(ν0-ν)'
cos[(v0 -v)t]dt =
2, (5.2.3.31)
8
250
5s(v,v0) = 0. (5.2.3.32)
Далее детализируем выражение для B,Jv) (5.2.3.9). Имеем
й К ί
ехр
е-Уо)2
8Ϊη[ω6(ί-70)]βχρ| —
л.1 \
_ \ ХХь4к
N0^?b
ехр
У\
х^ехр
Α2Κ-ν)2
4(τ2+τ2)
/Т-2 /7-2//Т-2 I /7"2\
.2
COS
sin
(vt)dt =
sin
COS
/Τ-2 . /Τ-2
τ + τ6
±exp
sin
τ2τ2(ω^+ν)2
4(τ2+τ2) J[cosJ[ τ2 +
Уо^Ч ~ Уо^у
_ ио
2 . _2
TV,
V
о л/Г + ТГ
А»·
При 70 = 0 функции <Brci(ν) перепишутся как: Bc(v) = 0,
14
цМ-А "·Λ
"•JfT?,
-ехр
ехр
τ42Κ-ν)2
4(τ2+τ2) J
τ2τ2(ω,+ν)2]1
4(τ2+τ2) JJ-
(5.2.3.33)
Положим, что выполняется условие (Оьть > π , и вторым
слагаемым в (5.2.3.33) можно пренебречь. Соответственно, для S,c-i(v,v0)
W
и Бг л (ν) получаем
W
^ 2 / \2 Λ
τ2(ν0-ν)
-^Ч-т)-^·™·
(5.2.3.34)
Ss(v,v0) = 0.
Перепишем (5.2.3.9) в виде Bc(v) = 0,
вд =
_ Н"о
А.>/*
ΛΓ„
-ехр
<Κ-ν)2
_ Vo
ехр
N,
' g2(Ft-F)2>|=TA^
(5.2.3.35)
JV-
-ВД-
251
Здесь Fb = τ(ω6 - ν0) — отклонение частоты СШПП от частоты
несущей У ПС, нормированное на полосу У ПС, F = τ (у - ν0) —
нормированное отклонение несущей частоты УПС от истинного
значения, ть / τ = ξ . С учетом введенных обозначений из (5.2.3.11)
находим
S(v, v0) = S2(v,v0) + B2(v) + 2Sc(v, v0)S»sin<p0 =
?(Fb-F)2'
αΐτ2 π
Ρ2λ τ2Χπ
+ Ч^ехр|--
N
+ (5.2.3.36)
+2 каА™ъ
2f(F6-F)2+F2
exp| —ъ |sin<p0.
NlS 4 8
Для рассматриваемого примера ζ2
чае отсутствия СШПП, А =
Ν,
■ё
Nj2
ОСИ! в слу-
ОСШ в случае отсутствия
СШПП для УПС с единичной амплитудой. Обозначим χ = —
перепишем сигнальную функцию (5.2.3.36) как
S(v,v0) =
= z2A[s2(v, v0) + 2χ2Β2(ν) + X2^2Sc(v,v0)Bs(v)Sin9u] =
= ζ2Α
+ 2^exp -
?(Fb-F)
2 Λ
(5.2.3.37)
к*2л/2
exp
2f(F6-F)2+F2
8
sm<Po
= z2ASH(v,v0).
Соответственно, выражение для BN(v1,v2) (5.2.3.14) принимает
вид
^(vuv2) = z2ASc(vl,v2){§c(v1,v0)Sc(v2,v0) +
+2X2Bs(v1)Bs(v2) + X2j2Sin9o[Sc(v2,v0)Bs(v1)- (5.2.3.38)
-Sc(v1,v0)Bs(v2j]} = z2A2BH(v1,v2).
Подставляя (5.2.3.37), (5.2.3.38) в (5.2.3.27), имеем формулу для
дисперсии оценки несущей частоты УПС
252
4
ζ2
'd2BH(vlfv2)
dvJiVz
\d2S„(v,v0)]
L d2y J
\x
2
Я
Анализируя (5.2.3.39), видно, что с ростом ОСШ дисперсия
оценки несущей частоты У ПС убывает как 1/ ζ2. Следовательно, при
достаточно больших ОСШ (малом уровне ГБШ) основной вклад
в погрешность оценки несущей частоты вносит
систематическая ошибка, которая определяется смещением оценки β(ν\ν0)
(5.2.3.22). Флуктуационная ошибка описывается дисперсией,
убывающей с ростом ОСШ. Смещение не зависит от ОСШ и в
рассматриваемом приближении определяется параметром χ ,
который равен отношению количества электричества, переносимого
импульсом в виде модулирующей функции СШПП, к количеству
электричества, переносимого импульсом в виде модулирующей
функции УПС.
Выражение для нормированного смещения в
рассматриваемом случае принимает вид: β = β(ν | ν0) · τ = argsup5(v, v0) · τ .
Рассмотрим смещение оценки несущей частоты УПС в случае,
когда в (5.2.3.37) φ0 =0. На рис. 5.2.3.1 приведены зависимости
нормированного смещения (систематической ошибки) β оценки
(5.2.3.2) несущей частоты УПС от нормированного отклонения
частоты СШПП Fb для различных значений χ при ξ = 0.003.
Кривая 1 соответствует χ - 2, кривая 2 — χ - 1.5, кривая 3 —
χ - 1, кривая 4 — χ = 0.8. Из анализа зависимостей видно, что
при Fb = 0 смещение оценки равно нулю при любом
относительном уровне СШПП χ. Более того, при Fb = 0, как следует из
(5.2.3.39), с ростом χ дисперсия оценки несущей частоты УПС
убывает. Таким образом, воздействие СШПП, совпадающей по
частоте с УПС, приводит к повышению точности оценки
частоты УПС при всех значениях χ . Если же СШПП не совпадает по
частоте с УПС, то систематическая ошибка зависит от значения
параметра χ . Положим вначале, что χ < %т , где %т — некоторое
пороговое значение параметра χ . В этом случае систематическая
ошибка с ростом Fb сначала незначительно (до 0.04—0.08)
возрастает, а затем убывает до нуля, то есть СШПП практически не
влияет на точность оценки. При χ < %т и больших Fb
систематическая ошибка отсутствует, так как при этом функции (5.2.3.8)
и (5.2.3.9) в (5.2.3.7) практически не перекрываются и макси-
253
600
525
450
375
β 300
225
150
75
1
2
3
4
60
120 180 240 300 360 420 480 540 600
Рис. 5.2.3.1
мум (5.2.3.9) оказывается меньше, чем максимум (5.2.3.8). Для
рассматриваемого частного случая ( φ0 = 0) пороговое значение
Хт = V2 / 2 « 0.7 . Если £ > £т , то систематическая ошибка с
ростом Fb возрастает (до 0.1), а затем резко увеличивает свое
значение и далее возрастает практически линейно. На рис. 5.2.3.1
значение смещения менее 0.1 принимается равным нулю. При
значительных величинах систематической ошибки алгоритм
оценки (5.2.3.2) фактически не работоспособен, так как оценка
уже не является состоятельной. Анализируя (5.2.3.37), видно,
что при уменьшении ξ, то есть когда длительность СШПП
значительно уменьшается по сравнению с длительностью УПС,
необходимо повышать энергию СШПП для того, чтобы обеспечить
достаточно большую величину смещения.
На рис^ 5.2.3.2 приведена зависимость нормированного
смещения β оценки от относительного уровня СШПП χ при
Fb = 20 . Кривая 1 соответствует ξ = 0.005 , кривая 2 — ξ = 0.003,
кривая 3 — ξ = 0.002, кривая 4 — ξ = 0.001. Кривые на рисунке 3
254
50
1
2
3
4
0 10 20 30 40 50 60 70 80 90 100
Χ
Рис. 5.2.3.2
подтверждают явно пороговый характер зависимости
систематической ошибки от относительного уровня χ СШПП.
Действительно, при больших величинах χ систематическая
ошибка оценки (5.2.3.2) равна Fb. Это означает, что при больших
величинах χ алгоритм (5.2.3.2) вырабатывает не оценку
несущей частоты УПС, а оценку центральной частоты СШПП.
Отметим, что выявленные закономерности оценки несущей
частоты УПС оказываются аналогичны соответствующим
закономерностям при оценке времени прихода сигнала.
Таким образом, при соответствующем выборе энергетических
характеристик сверхширокополосных помех их воздействие на
узкополосные системы может приводить к различным эффектам,
включая маскирование полезного сигнала при обнаружении и
дезинформацию об истинных значениях частотно-временных
параметров при их измерении.
255
6. ОСНОВНЫЕ ПРИНЦИПЫ РЕАЛИЗАЦИИ
ОБНАРУЖИТЕЛЕЙ И ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ
СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ
6.1. Принципы аппаратурной реализации обнаружителей
Для того, чтобы обосновать принципы аппаратурной
реализации обнаружителей СШПС, рассмотрим возможности построения
оптимальных фильтров (ОФ) для последовательности таких
сигналов. Эти устройства близки по своим свойствам к ОФ для
последовательностей импульсных сигналов; их использование
позволяет значительно повысить помехоустойчивость приема [53].
Пусть принимаемый СШПС представляет собой
прямоугольную последовательность N прямоугольных импульсных
сигналов. Задача состоит в подборе такого линейного устройства,
импульсная характеристика которого воспроизводит в
некотором масштабе форму этого сигнала. Одиночный прямоугольный
видеоимпульс, как известно, образуется в результате действия
единичного импульса на фильтр, оптимальный этому
видеоимпульсу и состоящий из интегрирующего, задерживающего на
длительность импульса τ и вычитающего устройств. Одиночный
импульс преобразуется в бесконечную серию таких импульсов с
периодом повторения Τ с помощью суммирующего устройства
(сумматора), выход которого соединен с входом через устройство
задержки на время Τ. Чтобы из бесконечной (но существующей
только при t > 0) последовательности видеоимпульсов получить
последовательность N видеоимпульсов, достаточно бесконечную
последовательность подать на совокупность устройства задержки
на время NT и вычитающего устройства (рис. 6.1.1).
Таким образом, ОФ для последовательности импульсов
состоит из ОФ для одиночного импульса, сумматора с задержанной
обратной связью, задерживающего и вычитающего устройств.
Все эти элементы, за исключением сумматора с задержанной
обратной связью, могут быть осуществлены. Если же выполнит],
256
»
/
■ I 1 m
1 1 *
^
~~
+
NT
Τ
Рис. 6.1.1
сумматор с задержанной обратной связью, то он окажется
неустойчивым и будет самовозбуждаться, так как его коэффициент
обратной связи равен единице. Для устранения самовозбуждения
этого устройства необходимо уменьшить величину коэффициента
обратной связи. С этой целью в цепь обратной связи включается
ослабитель — устройство с коэффициентом передачи т,
величина которого меньше единицы.
Если выбрать коэффициент связи m устройства (рис. 6.1.2)
достаточно близким к единице (но меньше этой величины), то
такое устройство, называемое рециркулятором, по своим свойствам
близко к идеальному, поэтому потери в отношении сигнал - шум
будут незначительными.
—]
ι *1
+
1
'
т
Рис. 6.1.2
Положим, что обнаружение сигнала в процессе приема
необходимо выполнять на фоне суммы ГБШ и ГУП, тогда, согласно
п. 2, блок-схему обнаружителя можно представить в виде,
показанном на рис. 6.1.3
Если предположить, что задача решается в
идеализированном варианте, который в практике обычно не реализуется, то
блок КОФ (квазиоптимальный фильтр) желательно реализовать
в виде фильтра, согласованного с ожидаемым сигналом
(оптимальный фильтр рис. 6.1.1, 6.1.2). В реальных условиях известны
лишь некоторые параметры принимаемого сигнала или диапазон
их изменений. В этом случае согласованный фильтр реализован
быть не может, остаётся возможность использовать фильтр, в
257
гЧ Φι
x(t)
КОФ W
φ2
Ju
2/fe+^Vo)
4 ny
Рис. 6.1.3
каком-то смысле приближающийся к оптимальному или
согласованному. Если известны частотные параметры принимаемого
сигнала (полоса частот, минимальная и максимальная частоты),
то в качестве КОФ может использоваться фильтр, согласованный
по полосе. Под фильтрами, согласованными по полосе, будем
подразумевать фильтры, полоса которых выбирается из
условия максимума ОСШ на их выходе [51]. Если и эта априорная
информация отсутствует, то чаще всего используются фильтры,
вырезающие соответствующую полосу частот. Например, фильтр
с прямоугольной АЧХ, причем положение этой АЧХ на оси
частот выбирается таким, чтобы вероятность попадания полезного
сигнала в этот интервал была максимальной. Так как
принимаемый сигнал предполагается сверхширокополосным, то форма его
спектра чаще всего наклонная. Наклон направлен в сторону
высоких частот, так как энергия сигнала в основном сосредоточена
в области нижних частотах. Исходя из этого и можно определить
приблизительно параметры КОФ.
Возможны и другие варианты фильтров, приближающихся к
фильтрам, согласованным по полосе и аппроксимирующие
ожидаемые АЧХ.
На рис. 6.1.3 предполагается использование согласованного
фильтра (КОФ) с передаточной функцией H(jco) = S*(jfi))exp(-jfi)£0)
. Фильтр Ф1 обладает передаточной функцией
ίΐ, ω<ωΩ-Ω/2;ω>ωΩ+Ω/2,
Η1(ίω) = \ ' , , (6.1.1)
lV } [0, ω0-Ω/2<ω<ω0+Ω/2, ν ;
а фильтр Ф2 имеет передаточную функцию
ίΐ, ωΩ-Ω/2<ω<ωΩ+Ω/2,
2U ; [0, ω<ω0-Ω/2;ω>ω0+Ω/2. ν '
258
Отметим, что фильтр Ф1 фактически является РФ, который
пропускает все частоты, кроме частот, занятых узкополосной
помехой. Если спектральная плотность этой помехи мала, так, что
у <^ Ν0, то в перемножителях на выходах фильтров Ф1 и Ф2
выходные сигналы умножаются практически на одинаковые
величины
2 2
— = —=—. (6.1.3)
Если же спектральная плотность помехи существенно
превосходит спектральную плотность ГБШ, то есть
то, очевидно, — ^>
К Ν0+γ0
и в перемножителе на выходе
фильтра Ф2 входной сигнал умножается на величину, близкую к нулю.
Следовательно, сигнал на выходе фильтра Ф2 и соответствующего
перемножителя много меньше, чем на выходе фильтра Ф1 и
перемножителя.
Пренебрегая сигналом на выходе фильтра Ф2 и
соответствующего перемножителя, при выполнении (6.1.4) получаем для
этого случая блок-схему обнаружителя в виде, показанном на
рис. 6.1.4
КОФ
Φι \—
ПУ
Рис. 6.1.4
Поскольку квазиоптимальный фильтр и фильтр Ф1 являются
линейными, с теоретической точки зрения безразлично, какой из
них включен первым — КОФ как на рис. 6.1.4, или РФ, как на
рис. 6.1.5
Φι
КОФ \—
ПУ
Рис. 6.1.5
Однако с технической точки зрения схема рис. 6.1.5 является
более предпочтительной. Действительно, узкополосная помеха в
виде преднамеренной помехи, контрпомехи процессу разведки,
взаимной помехи от своих РЭС и т.д., предполагается достаточ-
259
но мощной, поэтому при использовании обнаружителя рис. 6.1.5
требования к величине динамического диапазона КОФ могут
быть существенно снижены по сравнению с рис. 6.1.4. РФ
технически обычно реализовать гораздо проще, чем КОФ, поэтому
для него легче обеспечить линейность в большом динамическом
диапазоне.
Рассмотрим, как изменится структура обычного
корреляционного обнаружителя [48] при наличии мощной узкополосной
помехи с прямоугольной спектральной плотностью, когда
выполняется условие (6.1.4). В этом случае опорный сигнал можно
приближенно записать как
2 , ίΐ, (0< ωη -Ω/2;ω>ωη + Ω/2,
V(ja>) = — S(jo))x\ ' ' (6.1.5)
w ) Nq ν > [θ, ω0-Ω/2<ω<ω0+Ω/2. ν ;
Согласно (6.1.5) блок-схему корреляционного обнаружителя
можно представить в виде, показанном на рис. 6.1.6
x(t)
Ί х Г
Φι
1
s(t)
τ
jdt
0
Ό
Рис. 6.1.6
ПУ
Техническая реализация перемножителя, линейного в
большом динамическом диапазоне и в широкой полосе частот,
наталкивается на существенные трудности. Для снижения
требований к динамическому диапазону перемножителя целесообразно
включить перед ним РФ, т. е. вместо блок-схемы рис. 6.1.6 можно
использовать блок-схему корреляционного обнаружителя,
показанную на рис. 6.1.7.
Нетрудно убедиться, что на пороговые устройств рис. 6.1.6 и
рис. 6.1.7 поступают одинаковые сигналы, однако требования к
величине динамического диапазона перемножителя на рис. 6.1.7
оказываются как и в случае фильтровой реализации существенно
более низкими.
Применение оптимального обнаружителя при наличии
узкополосной помехи в полосе СШПС возможно только в случае,
260
я(0—J Ot
\dt
ПУ
ot
s(t)
Рис. 6.1.7
когда все ее параметры априори известны. Применительно к
помехе с прямоугольной спектральной плотностью это означает, что
априори известны все величины, входящие в (6.1.3), т. е. γού)0ι
и Ω.. Если все или часть этих параметров, как это обычно бывает,
неизвестны, то приходится использовать квазиоптимальные
обнаружители.
Блок-схему такого обнаружителя можно представить в виде,
показанном на рис. 6.1.8
x(t).
РФ
s(t)
jdt
ПУ
Рис. 6.1.8
Рассмотрим обнаружитель, оптимальный для приема
профильтрованной последовательности СШПС на фоне белого шума.
Такой обнаружитель должен формировать величину (2.1.16).
Поэтому блок-схему обнаружителя можно представить в виде,
показанном рис. 6.1.8, однако в этом случае нужно использовать
фильтр Ф1 с передаточной функцией (2.1.14), а сигнал s(t)
заменить на sN(t) (2.1.1).
Потенциальные характеристики обнаружения СШПС, как
уже отмечалось, можно получить, если априори известны все
параметры узкополосных помех.
261
6.2. Принципы аппаратурной и программной реализации
измерителей временных и частотных параметров
сверхширокополосных сигналов
Рассмотрим возможность аппаратурной реализации
измерителей основных параметров СШПС — времени прихода и
периода следования. В качестве помехи рассмотрим сумму белого и
коррелированного шумов с функцией корреляции
B{t1-t2) = Na5{tl-t2)/2 + K{tl-t2). (6.2.1)
В этом случае при приеме сигнала амплитудно-частотная
характеристика оптимального фильтра будет иметь вид [48]
\Ща»\= ^ .
1 V )l Κ(ω) + Ν0/2
Опорный сигнал v(t,l) при функции корреляции вида (6.2.1)
можно представить двумя способами
v(t,l) = JLs(i)/)_ J_J_ J ^ω,Ο^ΗΛω, (6.2.2)
v(t,l) = — ] 5(ω,/)#2(ω)Λω, (6.2.3)
In J
где
Η1(ω) = 2Κ(ω)/[Ν0+2Κ(ω)];
Η2(ω) = 2/[Ν0+2Κ(ω)}
Если основной вклад в помеху вносится белым шумом, то
удобнее пользоваться представлением v(t,l) в виде (6.2.2); при
коррелированном шуме, значительно превышающем в полосе
частот спектра сигнала уровень белого шума, опорный сигнал
удобнее представить в виде (6.2.3). Таким образом,
структурную схему оптимального приемника известного сигнала можно
изобразить в двух вариантах, зависящих от способа получения
функции v(t,l). На рис. 6.2.1 приведена структурная схема для
получения выходного сигнала оптимального приемника с
использованием опорного сигнала v(t,l) в виде (6.2.2). В данном
случае приемник состоит из двух каналов, причем один из
каналов полностью согласован для приема сигнала на фоне белого
шума. Здесь Η^ω) — линейный фильтр, формирующий вторую
составляющую опорного сигнала.
Для алгоритмов измерения временных параметров,
рассмотренных в п. 3, блок-схемы аналогичны рис. 6.1.6—6.1.8, только
262
χ(ί)
χ
Ι
, s(t,l)
f
χ
Ηχ{ω)
'
+
ι
ι
jdt
L(l)
Рис. 6.2.1
необходимо использовать несколько таких приемников, имеющих
различные параметры РФ и опорных сигналов. В совокупности они
должны перекрывать всю область возможных значений
измеряемых параметров. Когда на выходе одного из приемников
наблюдается максимум выходного напряжения, то, следовательно,
параметры этого приемника наиболее близки к параметрам принимаемого
сигнала и узкополосной помехи, если таковая присутствует.
Рассмотрим возможность аппаратурной и программной
реализации алгоритмов оценки (3.3.1.6), (3.3.1.16), (3.3.1.37),
(3.3.1.40) для определения характеристик оценок частотных
параметров СШПС. Эти алгоритмы могут быть реализованы с
помощью многоканального корреляционного приемника,
показанного на рис. 6.2.2.
x(t)
X
τ
\...dt
0
*
Qik/2
РУ
»
Ω,,
Ωί,ο
Рис. 6.2.2
Корреляционный измеритель в данном случае содержит т
каналов, каждый из которых включает перемножитель, интегратор
и вычитающее устройство. На перемножитель подается опорный
2 2
сигнал —stk(i) = —«(ί,Ω^,Ω^), на вычитающее устройство —
Νη
Νη
263
сигнал Qik = — J s(t, Ωζ1, ilk2 )dt. Значения Ωa e [Ω,
min ' 1 max J »
iV0 0
Ц2 G [^2min?^2max]> причем обычно эти точки располагаются
равномерно на соответствующих априорных интервалах. Если в каж-
дом таком интервале выбрано η точек Ωα или Qk2 (цк = 1,п), то
общее число каналов на рис. 6.2.2 т = п2 весьма велико. В
решающем устройстве (РУ) перебираются и сравниваются выходные
сигналы всех т = п2 каналов. Номера канала с наибольшим
выходным сигналом определяют оценки Ωй или ΩΛ2.
Реализация алгоритмов (3.3.1.6), (3.3.1.16) возможна также
на основе фильтровой схемы, в которой корреляторы заменены
на согласованные фильтры. Такой измеритель можно
представить в виде, показанном на рис. 6.2.3
x(t)
Hik
^
ключ
*
Quc/2
РУ
—»·
—»·
Оя
Цй
Рис. 6.2.3
Здесь Hik обозначен фильтр с передаточной функцией
я.(-)-2-|'<">""0«<#<4-.
ΛΓ0[0, ω<Ω,„0)>Ωι,
затем включен ключ, который замыкается в момент окончания
интервала t = Т . Остальные блоки соответствуют рис. 6.2.1. При
обоих способах обработки предполагается использование тп = п2
каналов, каждый из которых достаточно сложен с точки зрения
аппаратурной или программной реализации.
Существенное упрощение реализации алгоритмов оценки
(3.3.1.6), (3.3.1.16) возможно на основе спектральной обработки.
Если возможна оцифровка реализации наблюдаемых данных, то
блок-схема цифрового измерителя минимальной и
максимальной частоты спектра СШПС имеет вид, показанный на рис. 6.2.4
Здесь АЦП — аналогово-цифровой преобразователь,
БПФ — блок быстрого преобразования Фурье, в котором выра-
264
x(t)
АЦП
БПФ
II
ι
.
Qik/2
РУ
2
Ω,
Рис. 6.2.4
батывается спектр реализации наблюдаемых данных χ(ω) для
ω е [^imm»^2max]· Непосредственно БПФ для СШПС
осуществить достаточно трудно, поэтому рассмотрим возможность
расширения длительности сигнала. В этом случае протяженность
спектра уменьшится, и применение БПФ становится вполне
реалистичным, то есть для сигнала необходимо применить
масштабно-временное преобразование (МВП) с коэффициентом q. Для
этого целесообразно на входе блок-схемы (рис. 6.2.4) ввести блок
МВП. При этом Π — специализированный процессор, в котором
последовательно вычисляются интегралы вида
— j χ(ω)9(ω)άω, (6.2.4)
πΝ(
0 Ω2«
для всех (z,fc = l,n) без блока МВП, или интегралы вида
—— \ χι{ώ)8ι{ώ)άω у
если на вход включен блок МВП. Здесь s^O)) = qg(qo)) спектр
сигнала, подвергнутый МВП, χλ((ύ) — реализация наблюдаемых
данных, прошедшая через МВП, АЦП, БПФ. Ширину спектра
сигнала приблизительно можно определить на этапе
обнаружения, если используется набор приемников, совместно
перекрывающих возможную полосу частот, занимаемую сигналом.
Неявно схема рис. 6.2.4 так же реализует т = п2 каналов обработки
в процессоре Π . Тем не менее, при достаточном быстродействии
процессора Π ее реализация может оказаться проще, чем
реализация блок-схем рис. 6.2.2, 6.2.3. Во всех схемах, где
применен спектроанализатор, можно использовать (если необходимо)
МВП обрабатываемого сигнала.
Еще в большей степени удается упростить реализацию
алгоритма оценки (3.3.1.6), (3.3.1.16) на основе использования
последовательного (аналогового или цифрового) спектроанализато-
265
pa (ПС). Действительно, представление ЛФОП в виде (3.3.1.12)
позволяет вместо отыскания положения абсолютного максимума
двумерного случайного поля L(Q1,Q2) (3.3.1.5) перейти к
отысканию двух положений абсолютных максимумов случайных
процессов (3.3.1.13) и (3.3.1.14). В частности, при дискретном
формировании ЛФОП в точках Ωα и Qfc2, (z,fc = Ι,η), для
получения оценок (3.3.1.6) требуется вычисление массива из т = п2
значений ЛФОП. В то же время, для получения оценок (3.3.1.16)
нужно формирование массива из η отсчетов функции (3.3.1.13)
и отсчетов функции (3.3.1.14), т.е. всего 2п значений ЛФОП
(3.3.1.12). Такой подход позволяет существенно сократить
требуемый объем вычислений, так как при η ^> 1 очевидно п2 ^>2п.
Рассмотрим вначале возможность реализации алгоритмов
раздельной оценки Ωχ минимальной и Ω2 максимальной частот
спектра СШПС. Для этого перепишем (3.3.1.14) в виде
здесь Ω7 — произвольное фиксированное значение частоты из
интервала [Ω1ιη8Χ; Ω2πύη]. Устройство, вырабатывающее (6.2.5)
как функцию Ω2, можно реализовать в одноканальном
варианте с помощью ПС. В таком спектроанализаторе на интервале
времени [0;Δ£],Δ£»Τ, просматривается весь диапазон частот
[Ω1πιίη,Ω2πΐΕΧ] и формируется текущий спектр χ(ω) реализации
наблюдаемых данных. Спектр формируется как функция
текущего времени t е [0;Δ£]. При этом χ(ω) = χ[ω(ί)], (o(t) = Q2maxt/ At.
Спектроанализаторы последовательного действия обычно
содержат один узкополосный фильтр, частота которого
перестраивается по заданному закону ω(ί). Вместо того, чтобы перестраивать
центральную частоту фильтра, можно перемещать спектр
исследуемого сигнала по оси частот относительно фиксированной
центральной частоты фильтра. Перемещение спектра в этом случае
обеспечивается гетеродинным преобразованием частоты
исследуемого сигнала. Полагая, что спектр χ(ω) вырабатывается ПС
как функция времени, (6.2.5) можно переписать в виде
4[Ω2(ί)] = Λ J Л«Ю]{фК*)]-*^}*»(*)· (6-2.6)
Это выражение дает возможность представить функциональную
схему алгоритма оценки максимальной частоты спектра СШПС
так, как показано на рис. 6.2.5.
χ(ω)-
9((0)
άω,
(6.2.5)
266
x(t)
ПС
1/2 —
—
*
\ X
I
г
Χ
*
КС
~т~
A\...d(o(t)
Э
Рис. 6.2.5
Ωο
На рис. 6.2.5 обозначено: ПС — последовательный спектро-
анализатор, Г — генератор опорного сигнала, вырабатывающий
функцию #[ω(£)] у КС — блок, реализующий операцию
комплексного сопряжения, Э — экстрематор, который определяет
положение t наибольшего максимума выходного сигнала интеграто-
pa на интервале времени
Ω,
.Оценка Ω2 = Ш2тах/Л*
формируется экстрематором. Данная функциональная схема
позволяет избежать многоканальной реализации алгоритма оценки,
т.е. в η раз уменьшить необходимое число каналов.
Рассмотрим теперь возможность реализации алгоритма
оценки минимальной частоты СШПС с помощью ПС. Для этого
перепишем (3.3.1.13) в виде
Ω,
4(0.) = ^/*»
/UV0 Ω!
= J_ g*{0))
KNnAJK }
χ(ω)-
9{(0)
άω =
Ο Ω! min
Ω, (Ο
1 "ivb;
-— g\co)
πΝαο'.κ '
υ Ωι min
χ(ω)-
χ(ω)-
9(ω)~
2
άω-
άω.
(6.2.7)
Полагая, что спектр χ(ω) вырабатывается как функция времени,
представим последнюю формулу как
ω,
LA
№М = А J 9>{1)]\χ[ω{1)]-9^^
Ωλ min ^ '
-Aj g-Wt)}L[m{t)}-^\dO>(t).
Ωι min ^ '
(6.2.8)
267
Это выражение дает возможность предложить функциональную
схему алгоритма оценки минимальной частоты спектра СШПС,
как показано на рис. 6.2.6
x(t) , , , , , , , , , , , , , β
ПС
»|
1/2—*
—
1
1 х
I
1—
Г
»■
X
*
КС
t
^"
A\...d(o(t)\
~"Г*1
{
ЛЗ
—
t
г*·
1
э
Рис. 6.2.6
Здесь часть блоков совпадает с рис. 6.2.6, а ЛЗ — линия
задержки на время, соответствующее частоте Ω/-Ω1πι1η. В экс-
трематоре Э определяется положение абсолютного максимума
выходного сигнала на интервале времени, соответствующем
диапазону частот [Ω,, Ω, + Ω1πιαχ - QlnJ.
Объединяя функциональные схемы рис. 6.2.5 и рис. 6.2.6,
можно предложить функциональную схему, относительно просто
реализующую алгоритм оценки всех основных частотных
параметров СШПС. Такую схему представим в виде, показанном на
рис. 6.2.7.
χ[ω{ί)}
χ\ί)
ПС
-
*
—^
X
1L
1 Х
1
1
г
КС
J
1
г-4И,
Ω
И
J
—г*
\3
1
I
— Ω,
, ν
Ί/2
Ω9
Рис. 6.2.7
Здесь И12 обозначены интеграторы, выполняющие операцию
A\...do)(t). Интегратор Их работает в интервале времени,
соответствующем диапазону частот [Ω1ιη1η,Ω/], интегратор И2 — в
интервале [Ω/,Ω2πιαχ]. В экстрематоре Эх определяется положе-
268
ние максимума Ωχ сигнала на интервале времени, определяемом
диапазоном частот [Ω/? Ω7+Ω1π13Χ-Ω1πι1η], а в экстрематоре Э2
фиксируется положение Ω2 максимума сигнала на интервале
времени, соответствующем диапазону частот [Ω2πι1η; Ω2πιαχ].
Представление ЛФОП (3.3.1.5) в виде (3.3.1.12) позволяет
также существенно упростить цифровую реализацию алгоритма
оценки основных частотных параметров СШПС. Действительно,
как следует из (3.3.1.16), (3.3.1.37), (3.3.1.39),
функциональную схему цифрового измерителя основных частотных
параметров СШПС можно представить в виде, показанном на рис. 6.2.8.
Здесь блоки АЦП и БПФ соответствуют рис. 6.2.4. В процессоре
Пх вычисляется -^(QJ (6.3.4) в η точках априорного интервала
[^imin5 ^imax] · В экстрематоре Эх определяется положение Ωχ
наибольшего максимума функции ^(Ωλ) . Процессор П2 вычисляет
£2(Ω2) (6.3.2) в точках априорного интервала [Ω2πύη; Ω2πΐΕΧ]. Экст-
рематором Э2 определяется положение Ω2 наибольшего
максимума функции £2(Ω2). В отличие от функциональной схемы
рис. 6.2.4, функциональная схема цифрового измерителя рис.
6.2.8 содержит не один, а два специализированных процессора.
Суммарная требуемая мощность двух процессоров Пх и П2 на
схеме рис. 6.2.8 существенно меньше, чем требуемая мощность
процессора Π на рис. 6.2.4. Действительно, каждый из
процессоров Пх и П2 на схеме рис. 6.2.8 должен η раз выполнять
интегрирование, в то время как процессор Π на схеме рис. 6.2.4
должен вычислять аналогичный интеграл п2 раз.
x(t)
АЦП
БПФН
п2
п,
э2
Ω
Э(
ει^-4
ω.
ИЛ
-^Ω2
Рис. 6.2.8.
6.3. Возможности аппаратурной реализации алгоритмов
местоопределения источника сверхширокополосных сигналов
Для определения принципов аппаратурной реализации мес-
тоопределителей источников СШПС рассмотрим блок-схему
измерителя угла прихода сигнала (рис. 6.3.1).
269
СФ
УУ
СФ
At
λ,
ку Η χ Η ΗΠ к
Θ
c/L
Рис. 6.3.1
Здесь 1 и 2 антенны, разнесенные на расстояние L, СФ —
согласованный фильтр, в качестве которого можно использовать
либо оптимальный фильтр, настроенный на заданный период
следования θ СШП импульсов, либо рециркулятор. Если период
следования θ неизвестен, можно применить набор СФ и в
качестве обрабатываемого сигнала использовать сигнал с
максимальным напряжением на выходе одного из СФ; Э — экстрематор,
который необходим для нахождения оценки времени прихода
сигнала методом максимального правдоподобия; КУ —
контрольное устройство, замыкающее цепь в случае, когда Я^ - λ^ < L / с
(L —расстояние между измерителями времени прихода), так
как в противном случае могут обрабатываться оценки времен
прихода, полученные от разных источников излучения сигнала;
НП — нелинейный преобразователь с характеристикой arcsin(x);
УУ — управляющее устройство, которое служит для включения
экстрематоров. Время работы экстрематоров выбирается в
зависимости от диапазона дальности разведываемого источника СШПС,
при этом необходимо учитывать, что чем больше времени
работает экстрематор, тем более вероятно попадание в канал приемника
всплеска шума. Это может вызвать аномальную ошибку
измерения времени прихода. В противном случае, если время работы Э
мало, то полезный сигнал может вообще не попасть в приемник.
Для реализации
триангуляционного метода измерения координат
источника СШПС необходимо
использовать два таких приемника, рис. 6.3.2.
Здесь 1, 2, 3, 4 — приемные
антенны измерителей времени прихода.
Расстояние между точками, в которых
расположены антенны 1, 2 и 3, 4, рав- Рис. 6.3.2
5 Ь
%
СП
270
но d — базе триангуляционной системы. СП —
специализированный процессор для определения координат источника СШПС.
Управляющие устройства в приемниках 5, 6 согласовываются
исходя из условий, описанных выше.
Рассмотрим реализацию разностно-дальномерного метода
измерения координат (рис. 6.3.3).
:ЦСФ
ЗчСФ
:3~~ЧСФ
УУ
А,
Рис. 6.3.3.
КУ
СП
Здесь 1,2,3 приемные антенны, расстояния между
которыми — базы разностно-дальномерной системы. Управляющее
устройство работает аналогично схеме рис. 6.3.1, контрольное
устройство — замыкает цепи в случае, когда выполняются
неравенства X2-Xl<L J с и Я3 - λ} < LIс , так как в этом случае
регистрируется сигнал, приходящий только от одного источника.
СП — специализированный процессор для вычисления
координат источника излучения.
Таким образом рассмотренные блок-схемы позволяют
определить структуру обнаружителей и измерителей параметров
СШПС. Выбор схемы выполняется с учетом ограничений,
имеющих место для каждого конкретного варианта применения.
271
ЛИТЕРАТУРА
1. Авдеев В. Б. Угло-временные, угло-частотные и угло-энергети-
ческие характеристики излучения и приема негармонических
сигналов. // Антенны, 2005. - № 3 (94). - С. 40-50.
2. Авдеев В. Б. Энергетические характеристики направленности
антенн и антенных систем при излучении и приеме
сверхширокополосных сигналов и сверхкоротких импульсов. // Антенны, 2002. —
№7 (62).-С. 5-26.
3. Активные фазированные решетки. / Под ред. Д. И.
Воскресенского и А. И. Канащенкова. — М.: Радиотехника, 2004. — 488 с.
4. Антенны и устройства СВЧ. Проектирование фазированных
антенных решеток. — 3 изд. перераб. и доп. / Под. ред. Д. И.
Воскресенского — М.: Радиотехника, 2003. — 487 с.
5. Анцев Г. В., Сарычев В. Α., Копылов Е. Л., Французов А. Д.
Математическое моделирование рупорной линейной' антенны для
сверхкоротких импульсов. // Информационно-измерительные и
управляющие системы, 2005. — Т. 3. — № 3. — С. 56—58.
б.АстанинЛ. Ю., Косгпылев А. А. Основы сверхширокополосных
радиолокационных измерений. — М.: Радио и связь, 1989. —192 с.
7. Беспалова М. Б., Кузнецов А. В. Оптимизация параметров
импульса при сверхширокополосной совместной оценке дальности и
скорости. // Сб. трудов XI Международной научно-технической
конференции «Радиолокация, навигация, связь». — Воронеж,
2005. -Т.1. - С. 74-84.
8. Борисов В. И., Зинчук В. М. Помехозащищенность систем
радиосвязи. Вероятностно-временной подход. — М.: Радио и связь,
1999 г. - 252 с.
9. Бункин Б. В., Кашин В. А. Особенности, проблемы и
перспективы субнаносекундных видеоимпульсных РЛС. // Радиотехника,
1995. - № 4-5. - С. 128-133.
10. Бункин Б. В., Гапонов-ГреховА. В., Месяц Г. А. и др.
Радиолокатор на основе СВЧ-генератора с релятивистским пучком. //
Письма в ЖТФ, 1992. - Т. 2. - № 9. - С. 61-65.
272
11. Быков В.В. Цифровое моделирование в статистической
радиотехнике. — М.: Сов. радио, 1971. — 326 с.
12. Вайнштейн Л.А., ВакманД.Е. Разделение частот в теории
колебаний. — М.: Наука, 1983. — 288 с.
13. Вакин С.А.У Шустов Л.Н. Основы радиопротиводействия и
радиотехнической разведки. — М.: Сов. радио, 1968. — 448 с.
14. Ban ТрисГ. Теория обнаружения, оценок и модуляции в 3-х т.
/ Пер. с англ. — М.: Сов. радио, 1972. — Т. 1. — 744 с.
15. Вопросы перспективной радиолокации. / Под ред. А. В.
Соколова — М.: Радиотехника, 2003. — 508 с.
16. Вопросы статистической теории радиолокации в 2-х т. / Под
ред. Г.П. Тартаковского. — М.: Сов. радио, 1963. —Т.1. — 426 с.
17. Воронин Е.И., ГавринА.В., Мальцев Д.Б. Повышение
эффективности подповерхностного зондирования. // Радиотехника,
1996. - № 2. - С. 18-23.
18. ГавринА.В., Мальцев Д. Б. Подповерхностное
сверхширокополосное зондирование. // Радиотехника, 1995. — № 6. — С. 74—
77.
19. Газизов Т.Р. Преднамеренные электромагнитные помехи и
авионика. // Успехи современной радиоэлектроники, 2004. —
№2.-С. 37-51.
20. Гантпмахер Ф.Р. Теория матриц. — М.: Наука, 1986. — 575 с.
21. Гахов Ф.Д.у Черский Ю.И. Уравнения типа свертки. — М.:
Наука, 1978. - 296 с.
22. Гоноровский И.С. Радиотехнические цепи и сигналы. /
4-е изд., переработ. — М.: Радио и связь, 1986. — 1257 с.
23. Горемыкин Е.В., Костромин Г.И. Логопериодические
антенны с полосковым питанием. // В кн.: Рассеяние электромагнитных
волн. — Таганрог, Таганр. радиотехн. ун-т, 1999. — Вып. 11. —
С. 82-88.
24. ГрадштейнИ.С, Рыжик И.М. Таблицы интегралов, сумм,
рядов и произведений. — М.: Наука, 1971. — 1108 с.
25. Дворецкий П.И., Попов СБ., Ярмахов И.Г! Исследование
распространения электромагнитных импульсов в
слоисто-неоднородных средах с потерями // Радиотехника и электроника, 1996. — Т. 41.
-№12.-С. 1448-1461.
26. ДейвисДж.Р., БейкерД.Дж.у ШелтонДж.П.,АментВ.С.
Физические ограничения, препятствующие использованию колебаний
без несущей в системах передачи радиоволн. // Труды института
инженеров электроники и радиотехники, 1979. — Т. 67. — № 6. —
С. 5-13.
27. Диденко А.И., Юшков Ю.Г. Мощные СВЧ-импульсы наносе-
кундной длительности. — М.: Энергоиздат, 1984. — 14 с.
273
28. Дружинин В.В.у КонторовД.С, Конторов М.Д. Введение в
теорию конфликта. — М.: Радио и связь, 1989. — 287 с.
29. Залогин Н.Н., Кислое В.В. Широкополосные хаотические
сигналы в радиотехнических и информационных системах. — М.:
Радиотехника, 2006. — 205 с.
30. Зернов Н.В. Коэффициент направленного действия и
эффективная площадь апертурной антенны при излучении и приеме
негармонических сигналов. // Радиотехника, 1995. — № 3. — С. 51—52.
31. Зернов Н.В.у Меркулов Г.В. Антенны в режиме излучения
(приема) СШП сигналов // Зарубежная радиоэлектроника, 1991.
-№1. - С. 84-91.
32. Злобин С.Л., Осипов М.Л., Скосырев В.Н. Оценка
эффективной поверхности рассеяния шара и эллипсоида вращения при сверх-
короткоимпульсной радиолокации. // Радиотехника, 1999. —
№ 12. - С. 3-9.
33. Иммореев И.Я. Сверхширокополосная локация: основные
особенности и отличия от традиционной радиолокации. //
Электромагнитные волны и электронные системы, 1997. — Т.2. — № 1. —
С. 81-88.
34. Иммореев И.Я. Сверхширокополосные радары: новые
возможности, необычные проблемы, системные особенности. //
Вестник МГТУ, 1998. - № 4. - С. 128-133.
35. Иммореев И.Я., СинявинА.Н. Излучение
сверхширокополосных сигналов. // Антенны, 2001. - № 1 (47). - С. 40-50.
36. Исследование объектов с помощью пикосекундных
импульсов. / Под ред. В. Г. Глебовича. — М.: Радио и связь, 1984. — 256 с.
37. Калинин В.И., Кузнецов Е.В., Чапурский В.В.
Сверхширокополосная шумовая радиолокация с подавлением пассивных помех.
// Сб. трудов XI Международной научно-технической конференции
«Радиолокация, навигация, связь». — Воронеж, 2005. — Т. 3. —
С. 1694-1709.
38. Караваев В.В., Сазонов В.В. Основы теории синтезированных
антенн. — М.: Сов. радио, 1974. — 168 с.
39. Кашин В.А. Исследование коэффициента направленного
действия плоских антенн с видеоимпульсным излучением // ЭМС и
ЭС, 1998. - № 5. - С. 128-133.
40. КендаллМ., Стюарт А. Теория распределений. — М.: Наука,
1965. - 587 с.
41. Козлов А.И., Логвинов А.И., Сарычев В.А. Поляризация
радиоволн. — М.: Радиотехника, 2005. — 703 с.
42. Кольцов Ю.В. Методы и средства анализа и формирования
сверхширокополосных сигналов. — М.: Радиотехника, 2004 г. —
128 с.
274
43. Кондратьев B.C., Котов Л.В., Марков Л.Η.
Многопозиционные радиотехнические системы. / Под ред. В.В. Цветнова. — М.:
Радио и связь, 1986. — 264 с.
44. Крамер Г. Математические методы статистики. — М.: Мир,
1975.-648 с.
45. Кузнецов А.С, Строков Б.А. Построение радиолокационных
изображений проводящих объектов при короткоимпульсном
зондировании. // Радиотехника, 1988. — № 4. — С. 3—6.
46. Кук Ч.у Бернфелъд М. Радиолокационные сигналы. / Пер. с
англ. — М.: Сов. радио, 1971. — 568 с.
47. Куликов Е.И. Вопросы оценок параметров сигналов при
наличии помех. — М.: Сов. радио, 1966. — 244 с.
48. Куликов Е.И.у Трифонов А.П. Оценка параметров сигналов на
фоне помех. — М.: Сов. радио, 1978. — 296 с.
49. Купченко Ю.П. Нелинейная оценка параметров негауссовских
радиофизических сигналов. — Киев: Вища школа, 1987. — 191 с.
50. Лаговский Б.А. Обнаружение малозаметных
радиолокационных целей. // Антенны, 2007. — № 1(116). — С. 55—60.
51. Левин Б.Р. Теоретические основы статистической
радиотехники в 3-х кн. — М.: Сов. радио, 1976 - кн. 3. — 285 с.
52. Левин Б.Р. Теоретические основы статистической
радиотехники в 3-х кн. — М.: Сов. радио, 1975 - кн.2. — 391 с.
53. Лезин Ю.С. Оптимальные фильтры и накопители импульсных
сигналов. — М.: Сов. радио, 1969. — 446 с.
54. Мельник Ю.А., Степаненко В.Д., Шаладаев СЕ.
Возможности использования сверхширокополосных сигналов для
радиолокационного наблюдения метеорологических объектов. //
Радиотехника, 1999. - № 2. - С. 53-57.
55. Мельников Ю.П. Методы оценки эффективности воздушной
радиотехнической разведки. — М.: МО РФ, 1996. — 345 с.
56. МидлтонД. Введение в статистическую теорию связи в 2-х т.
/ Пер. с англ. - М.: Сов. радио, 1962 - Т.2. - 832 с.
57. Осипов М.Л. Сверхширокополосная радиолокация. //
Радиотехника, 1995. - № 3. - С. 3-6.
58. Панько СП. Сверхширокополосная радиолокация. //
Зарубежная радиоэлектроника, 1991. — № 1. — С. 104—106.
59. Парфенов В.И., Галун СА. Помехоустойчивость приема
импульсных сигналов с неизвестной длительностью при воздействии
мультипликативных помех. // Техника средств связи. Сер. Техника
радиосвязи, 1985. — Вып. 4. — С. 18—24.
60. Пилягин В.В. Радиоскоп для определения местоположения
скрытых в неметаллических средах объектов. // Радиотехника,
1996.-№ 5.-С. 128-133.
275
61. Питербарг В.И. Асимптотические методы в теории гауссовс-
ких случайных процессов и полей. — М.: МГУ, 1988. — 176 с.
62. Прикладная теория случайных процессов. / Под ред. К. К.
Васильева и В. А. Омельченко. — Ульяновск, 1998. — 256 с.
63. Радзиевский В.Г., Сирота АЛ. Теоретические основы
радиоэлектронной разведки. — М.: Радиотехника, 2004. — 431 с.
64. Радзиевский В.Г., Караваев МЛ. О получении
радиолокационных изображений объектов на основе томографической обработки
сверхширокополосных сигналов. // Радиотехника, 1998. — № 6. —
С. 32-36.
65. Радзиевский В.Г., Трифонов ПЛ. Потенциальная точность
оценки параметров последовательности сверхширокополосных
импульсов. // Радиотехника, 1999. — № 6. — С. 69—72.
66. Радзиевский В.Г., Трифонов ПЛ. Влияние узкополосных помех
на эффективность обнаружения сверхширокополосных сигналов. // Сб.
трудов VI Международной научно-технической конференции
«Радиолокация, навигация, связь». — Воронеж, 2000. — Т.1. — С. 321—329.
67. Радзиевский В.Г., Трифонов ПЛ. Эффективность определения
местоположения источника сверхширокополосных сигналов. //
Радиотехника, 2000. - № 6. - С. 39-42.
68. Радзиевский В.Г., Трифонов ПЛ. Влияние узкополосной
помехи на точность оценки угла прихода сверхширокополосного
сигнала. // Межвузовский сборник статей «Синтез, передача и прием
сигналов управления и связи». — Воронеж, госуд. техн. ун-т, 2002 г.
-С. 122-127.
69. Радзиевский В.Г., Трифонов ПЛ. Характеристики оценок
частотных параметров сверхширокополосного сигнала. //
Радиотехника, 2002. - № 10. - С. 3-7.
70. Радзиевский В. Г., Трифонов Π Л. Оценка частотных
параметров сверхширокополосного сигнала на фоне гауссовского белого
шума и предложения по аппаратурной и программной реализации
алгоритмов оценки. // Физика волновых процессов и
радиотехнические системы, 2003. — № 2. — С. 80—83.
71. Радзиевский В.Г., Трифонов ПЛ. Влияние узкополосной
помехи на точность оценки ширины спектра сверхширокополосного
сигнала. // Сб. трудов IX Международной научно-технической
конференции «Радиолокация, навигация, связь». — Воронеж, 2003. —
Т. 1.-С. 132-138.
72. Радзиевский В.Г., Трифонов ПЛ. Эффективность
обнаружения и измерения параметров сверхширокополосных сигналов. // Сб.
трудов I Международной научно-технической конференции
«Сверхширокополосные сигналы и сверхкороткие импульсы в
радиолокации, связи и акустике». — Суздаль, 2005 г. — С. 132—134.
276
73. Радзиевский В.Г., Трифонов П.А. Модели
сверхширокополосных сигналов. // Радиотехника, 2006. — № 6. — С. 3—9.
74. Радзиевский В.Г., Трифонов П.А. Эффективность
обнаружения узкополосного сигнала при наличии сверхширокополосной
помехи. // Радиотехника, 2007. - № 1. - С. 81-83.
75. Радзиевский В.Г., Трифонов П.А. Характеристики оценки
времени прихода узкополосного сигнала на фоне сверхширокополосной
помехи и гауссовского белого шума. // Радиотехника, 2007. —
№ 7. - С. 27-32.
76. Радзиевский В.Г, Разиньков С.Н., Трифонов П.А. Парциальные
коэффициенты направленного действия решеток вибраторов при
излучении сверхширокополосных сигналов. // Радиотехника, 2007. —
№ 7. - С. 55-59.
77. Радзиевский В.Г., Трифонов П.А. Влияние узкополосных
помех на эффективность обнаружения сверхширокополосного
стохастического сигнала. // Физика волновых процессов и
радиотехнические системы, 2007. — № 4. — С. 115—119.
78. Радзиевский В.Г., Трифонов П.А. Особенности
радиоэлектронного подавления радиоэлектронных средств с узкополосными
сигналами сверхширокополосными помехами. // Сб. трудов XIII
Международной научно-технической конференции «Радиолокация,
навигация и связь». — Воронеж, 2007. — Т. 3. — С. 2008—2015.
79. Радзиевский В.Г., Трифонов П.А. Анализ эффективности
воздействия сверхширокополосных помех на характеристики оценки
информационных параметров узкополосного сигнала. // Сб. трудов
XVII Международной научно-технической конференция «СВЧ-тех-
ника и телекоммуникационные технологии». — Севастополь,
2007.-Т.1.-С. 174-184.
80. Радзиевский В.Г., Трифонов П.А. Характеристики оценки
несущей частоты узкополосного сигнала на фоне
сверхширокополосной помехи и гауссовского белого шума. // Электромагнитные волны
и электронные системы, 2008. — № 1. — С. 61—67.
81. Радзиевский В.Г., Трифонов П.А. Оценка частотных
параметров сверхширокополосного сигнала с неизвестной формой спектра
// Радиотехника, 2008. - № 6. - С. 67-73.
82. Радзиевский В.Г., Разиньков С.Н., Трифонов П.А.
Эффективность радиоподавления сверхширокополосных радиолокационных
станций активными помехами. // Сб. трудов XIV Международной
научно-технической конференции «Радиолокация, навигация и
связь». - Воронеж, 2008. - Т. 3. - С. 2122-2135.
83. Радзиевский В.Г., Трифонов П.А. Эффективность
квазиправдоподобного обнаружения последовательности
сверхширокополосных сигналов. // Сб. трудов XIV Международной научно-техничес-
277
кой конференции «Радиолокация, навигация и связь». — Воронеж,
2008. - Т. 3. - С. 2159-2171.
84. РадзиевскийВ.Г., Трифонов ПА. Принципы аппаратурной
реализации алгоритмов первичной обработки сверхширокополосных
сигналов при их радиоэлектронной разведке. // Сб. трудов XIV
Международной научно-технической конференции «Радиолокация,
навигация и связь». — Воронеж, 2008. — Т. 3. — С. 2151—2159.
85. Радзиевский В.Г., Трифонов ПА. Эффективность
радиоэлектронной разведки сверхширокополосных сигналов. // Успехи
современной радиоэлектроники, 2009. — № 1—2. — С. 107—113.
86. Радиолокационные устройства (теория и принципы
построения). / Под ред. В.В. Григорина-Рябова — М.: Сов. радио, 1970. —
680 с.
87. Радиоэлектронные системы: Основы построения и теория. /
Под ред. Я. Д. Ширмана. — М.: Радиотехника, 2007. — 512 с.
88. Радченко Ю.С., Сохнышев СВ. Обобщенная функция
неопределенности составных сверхширокополосных сигналов. // Изв.
вузов. Радиоэлектроника, 2001. — т. 44. — № 6. — С. 33—43.
89. Сарычев В.А., Попов М.Н. Анализ поляризационного
состояния сверхширокополосных сигналов. // Изв. вузов.
Радиоэлектроника, 1991. - Т. 34. - № 5. - С. 91-94.
90. Современная радиоэлектронная борьба. Вопросы
методологии. / Под ред. В. Г. Радзиевского. — М.: Радиотехника, 2006. —
421с.
91. СодинЛ.Г. Импульсное излучение антенны
(электромагнитный снаряд). // Радиотехника и электроника, 1991. — Т. 36. —
№5.-С. 1014-1022.
92. Сосулин Ю.Г. Теоретические основы радиолокации и
радионавигации. — М.: Радио и связь, 1992. — 304 с.
93. Сосулин Ю.Г. Теория обнаружения и оценивания
стохастических сигналов. — М.: Сов. радио, 1978. — 320 с.
94. Справочник по антенной технике. / Под ред. Л. Д. Бахраха,
Е. Г. Зелкина. - М.: ИПРЖР, 1997. - Т. 1. - 248 с.
95. СтадникА.М., Ермаков Г.В. Искажение
сверхширокополосных электромагнитных импульсов в атмосфере Земли. //
Радиотехника и электроника, 1995. — Т. 40. — № 7. — С. 1009—1016.
96. Строков Б.А., Лукьянчиков А.В., Маринцев АА. Короткоим-
пульсные локационные системы. // Зарубежная радиоэлектроника,
1989. - № 8. - С. 42-59.
97. Теория обнаружения сигналов. / Под ред. П. А. Бакута. — М.:
Радио и связь, 1984. — 440 с.
98. Тихонов В.И. Оптимальный прием сигналов. — М.: Радио и
связь, 1985.-320 с.
278
99. Тихонов В.И. Статистическая радиотехника. — М.: Сов.
радио, 1966. - 678 с.
100. Тихонов В.И., Хименко В.И. Выбросы траекторий
случайных процессов. — М.: Наука, 1987. — 304 с.
101. Тихонов В.И., Миронов М.А. Марковские процессы. — М.:
Радио и связь, 1977. — 488 с.
102. Тихонов В.И., Кульман Н.К. Нелинейная фильтрация и
квазикогерентный прием сигналов. — М.: Сов. радио, 1975. — 704 с.
103. Трифонов А.П. Разрывные модели сигналов и оценка их
параметров // Прикладная теория случайных процессов и полей.
Ульяновск, Ульян, госуд. техн. ун-т, 1995. — С. 164—214.
104. Трифонов А.П., Шинаков Ю.С. Совместное различение
сигналов и оценка их параметров на фоне помех. — М.: Радио и связь,
1986. - 246 с.
105. Трифонов А.П., Корчагин Ю.Э. Оценка времени прихода и
длительности сигнала. // Электромагнитные волны и электронные
системы, 2000. - Т. 5. - № 6. - С. 33-42.
106. Трифонов А.П., Нечаев Е.П., Парфенов В.И. Обнаружение
стохастических сигналов с неизвестными параметрами. — Воронеж,
Воронеж, госуд. ун-т, 1991. — 246 с.
107. Трифонов А.П., Беспалова М.Б., Трифонов П.А.
Сверхширокополосная совместная оценка дальности и скорости флуктуирующей
цели. // Изв. вузов. Радиоэлектроника, 2005. — № 10. — С. 10—20.
108. Трифонов А.П., Парфенов В.И. Оценка длительности
случайного гауссовского сигнала с неизвестной мощностью. // Изв. вузов.
Приборостроение, 1986. - Т. 29. - № 7. - С. 7-10.
109. Трифонов А.П., Трифонов П.А. Эффективность оценки
ширины спектра сверхширокополосных сигналов. // Изв. вузов.
Радиоэлектроника, 2003. — № 4 — С. 37—42.
110. Трифонов П.А., Захаренко Г.А. Влияние узкополосных
помех на эффективность оценки параметров сверхширокополосных
сигналов. // Радиотехника, 2000. — № 9. — С. 46—49.
111. Трифонов П.А. Эффективность обнаружения
сверхширокополосного сигнала с неизвестным временем прихода при наличии
узкополосных помех. // Радиотехника, 2006. — № 6. — С. 10—13.
112. Трифонов П.А. Обнаружение последовательности
сверхширокополосных сигналов с неизвестным временем прихода при
наличии узкополосных помех. // Физика волновых процессов и
радиотехнические системы, 2007. — № 1. — С. 27—32.
113. Трифонов П.А. Влияние узкополосных помех на
эффективность обнаружения последовательности сверхширокополосных
сигналов с неизвестным периодом повторения. // Изв. вузов.
Радиоэлектроника, 2007. — № 3. — С. 30—40.
279
114. Трифонов П.А. Влияние узкополосных помех на
эффективность обнаружения последовательности сверхширокополосных
сигналов с неизвестными временем прихода и периодом повторения. //
Изв. вузов. Радиоэлектроника, 2007. — № 12. — С. 30—40.
115. Трифонов П.А. Влияние узкополосных помех на пороговые
характеристики оценки параметров сверхширокополосных
сигналов. // Радиотехника, 2007. — № 7. — С. 33—36.
116. Трифонов ПА. Характеристики обнаружения сигнала
сверхширокополосной РЛС с неизвестными параметрами движения. //
Изв. вузов. Радиоэлектроника, 2008. — № 6. — Т. 51. — С. 10—22.
117. Трифонов П.А. Оценка параметра сверхширокополосного
стохастического сигнала при наличии узкополосных помех. //
Радиотехника, 2008. - № 6. - С. 74-77.
118. Улановский А.В. Юрьев О.А., Малевич И.Ю., Тебекин В.В.,
Тимошенко В.И. Приемная синфазная антенная решетка
дециметрового и метрового диапазонов волн. // Электромагнитные волны и
электронные системы, 2000. — Т. 5. — № 5. — С. 48—55.
119. Фалькович СЕ. Оценка параметров сигнала. — М.: Сов.
радио, 1970. - 336 с.
120. Фалькович С.Е., Хомяков Э.Н. Статистическая теория
измерительных систем. — М.: Радио и связь, 1981. — 288 с.
121. Федотов Д.В., Судаков А.А. Сигналы, используемые в СШП
радиосистемах // Наукоемкие технологии, 2005. — № 7. — С. 15—21.
122. Финкельштейн М.И., Карпухин В.И., Кутев В.А., Метел-
кинВ.Н. Подповерхностная радиолокация. — М.: Радио и связь,
1994.-216 с.
123. Финкельштейн М.И., Мендельсон В.Л., Кутев В.Л.
Радиолокация слоистых земных покровов. — М.: Сов. радио, 1977. —
174 с.
124. ХармутХ.Ф. Замечания к статье «Физические ограничения,
препятствующие использованию колебаний без несущей в системах
передачи радиоволн» // Труды института инженеров электроники и
радиотехники, 1979. - Т. 67. - № 6. - С. 13-14.
125. Хармут Х.Ф. Несинусоидальные волны в радиолокации и
радиосвязи. — М.: Радио и связь, 1985. — 376 с.
126. Цифровая обработка сигналов и изображений. / Под ред.
B. Ф. Кравченко — М.: Радиотехника, 2007. — 544 с.
127. ЧайковичК.П., СлоникЛ.М., Троицкий А.В. Вертолетные
радиометрические измерения тонкого озерного льда и нефтяной
пленки на озерах. // Изв. вузов. Радиофизика, 1996. — Т. 39. — № 11. —
C. 1105-1117.
128. Чернышев С.Л. Временной анализ сверхширокополосных
фильтров. // Радиотехника, 1996. - № И. - С. 128-133.
280
129. Шварцбург А. Б. Импульсная электродинамика
негармонических сигналов. // УФН, 1994. - Т. 64. - № 3. - 133 с.
130. Ширман Я. Д. О первых отечественных исследованиях по
СШП радиолокации. // Радиотехника и электроника, 1991. —
Т.36.-№1.- С. 96-100.
131. ШляхинскийА.В., Середа Ю.С Статистические модели в
задачах зондирования. // Изв. вузов. Радиофизика, 1989. — Т.32. —
№12. -С. 1502-1506.
132. Юшков Ю.Г., Бадулин Н.Н., БацулаА.П., Мельников А.И.,
Новиков С.Α., Разин СВ., Шошин Е.Л. Наносекундный
радиолокатор с временной компрессией СВЧ-импульсов передатчика. //
Электромагнитные волны и электронные системы, 1997. — Т. 2. — № 6. —
С. 71-76.
133. Ягольников СВ. Разностный метод определения координат
летательных аппаратов по сигналам их радиовысотометров одним
бортовым средством // Конфликтно-устойчивые радиоэлектронные
системы, 1997. - № 2. - С. 15-19.
134. Ярлыков М.С Применение марковской теории нелинейной
фильтрации в радиотехнике. — М.: Радио и связь, 1980. — 360 с.
135. Assessment of Compatibility between UltraWideband (UWB)
Systems and Global Positioning System (GPS) Receivers. — NTIA
Special Publication-01-45, 2001, February.
136. Black David L. An overview of impulse radar phenomenon //
IEEE Aerosp. and Electron. Syst. Mag. - 1992-7, № 12, P. 6-11.
137. CNET News.com, 2002, February 14.
138. Daniels D.J. Surface penetrating radar for industrial and
security applications // Microwave Jornal, 1994, № 12.
139. EDN Magazine, 2000, December 21, P. 85-92.
140. Evans S. Radio techniques for the measurement of ice thickness
// Polar record, 1963, Vol. 11, P. 406-410.
141. Federal Communications (USA), Radio frequency devices. —
47 CFR, Part 15, October 01, 2003.
142. Federal Communications (USA), Revision of Part 15 of the
Commissions Rules Regarding Ultra-Wideband Transmission Systems.
First Report and Order. — FCC 02-48, April 22, 2002.
143. Flower CA. The UWB (impulse) radar caper or 'Punishment of
the Innocent' // IEEE Aerosp. and Electron. Syst. Mag. — 1992, Vol. 7,
№ 12, P. 3-5.
144. FontanaR.J. Recent System Applications of Short-Pulse Ultra-
Wideband (UWB) Technology // IEEE Transactions on microwave
theory and techniques. — 2004. — V. 52, № 9.
145. Ghvami M.y Michael L.B. // Generation of Hermite Based
Pulses for UWB Communications.
281
146. Ghvami Μ., Michael L.B., Koho R. // Hermite function based
orthogonal pulses for ultra wideband communication. — WMPC 2001.
147. Ghvami M., Michael L.B., Koho R. Multiple Pulse Generator
for Ultra-Wideband Communication using Hermite Polynomial Based
Orthogonal Pulses // UWBST 2002.
148. Harmuth H. Radar equation for nonsinusoidal waves // IEEE
Trans. EMC-31, 1989, Vol. 31, № 2, P. 138-147.
149. Hussain M. Ultra-wideband impulse radar an overview of the
principles // Aerosp. and Electron. Syst. Mag. — 1998, Vol. 13, № 9,
P. 9-14.
150. Iverson D.E. Coherent processing of ultra-wideband radar
signals // IEEE Proc. Radar, Sonar and Navig. - 1994-141, № 6,
P. 840-846.
151. James D. Taylor Introduction to Ultra-wideband Radar
Systems. CRC press Boca Raton, Ann Arbor, London, Tokyo, New-
York, 1995.
152. Jian Li, Renbio Wu An efficient algorithm for time delay
estimation // IEEE Trans. Signal Procesing, 1998, Vol. 46, № 8,
P. 2231-2235.
153. Malek G., Hussain M. Principles of High-resolution Radar
Based on Non-sinusoidal Waves // IEEE Trans. EMC-31,1989, Vol. 31,
№ 4, P. 359-375.
154. Malek G., Hussain M. Principles of high-resolution radar based
on non - sinusoidal waves. Part - 1: Signal Representation and Pulse
Compressin // IEEE Tr. EMC-31, 1989, Vol. 31, № 4, P. 359-368.
155. Malek G., Hussain M. Principles of high-resolution radar based
on non-sinusoidal waves. Part - 2: Generalized Ambiguity Function //
IEEE Tr. EMC-31, 1989, Vol. 31, № 4, P. 369-375.
156. Mohamed N.J. Carrier-free radar signal design with MTI
Doppler processor // IEEE Proc. Radar, Sonar and Navigation —
1994-141, №1, P. 59-64.
157. Mohamed N.J. Target signature using nonsinusoidal radar
signals // IEEE Trans. EMC-35, 1993-35, № 4, P. 457-466.
158. Morgan M.A. Research in ultra - wide impulse radar target
identification // Nav. Res. Rev. - 1992-44, № 1, P. 28-34.
159. MorganMA. Ultra- Wideband impulse scattering measurements
// IEEE Trans. Antennas and Propag. - 1994 - 42, № 6, p. 840-846.
160. Narayanan R.M., Yi-Xu, Hoffmeyer P.D., Curts J.O. Design,
perfomans, and applications of a coherent ultra-wideband random noise
radar // Optical - Engeneering, 1998, vol.37, № 6, p. 1855-1869.
161. Nasser J.M. Resolution function of nonsinusoidal radar
signals 1: Range-velocity resolution with rectangular pulses // IEEE
Trans. EMC-32, 1990, Vol. 32, № 2, P. 153-160.
282
162. Nasser J.Μ. Resolution function of nonsinusoidal radar
signals 1: Range-velocity resolution with Gaussian time variation // IEEE
Trans. EMC-33, 1991, Vol. 32, № 1, P. 42-50.
163. Nigel С Davidson et al. Initial Testing of Advanced Ground-
Penetrating Radar Technology for the Inspection of Bridge Decks. —
The HERMES and PERES Bridge Inspectors. - Federal Highway
Administration.
164. Nigel С Davidson et al. Radar Tomography of Bridgedecks. —
Federal Highway Administration.
165. PulsON Technology. Time Modulated Ultra-Wideband For
Wireless Application, 2000 (www.timedomain.com)
166. Fontana R.J. et al. An Ultra Wideband Synthetic Vision Sensor
for Airborne Wire Detection. — Naval Surface Warfare Center.
167. Science & Technology Review, UCRL-5200-96-1/2, 1996,
January/February, 16—29.
168. Terrence W. Barrett. History of Ultra-WideBand (UWB)
Radar & Communications: Pioneers and Innovators. Progress in
Electromagnetics Symposium (PIERS 2000). — Cambridge, Massachusetts,
2000, July.
169. Wehner D.R. High resolution radar Artech House, Norwood,
MA USA, 1987.
170. Wide-band airborne radar operating considerations for low-
altitude surveillance in the presence of specular multipath. / Teti
Joseph G. (Jr). I/ IEEE Trans. Antennas and Propag. 2000. 48, № 2.
171. Win. M.Z. Time-hopping SSMA techniques for impulse with
an analog modulated data subcarrier /M.Z. Win, R. A. Sholtz, L. W. Ful-
lerton // Proceeding of the IEEE Fourth International Symposium on
Spread Spectrum Techniques and Applications (ISSSTA '96), Germany,
Mainz, September 22-25, 1996.
172. Win. M.Z. Ultra-Wide bandwidth time-hopping spread
spectrum impulse radio for wireless multiple-access communications /
M. Z. Win, R. A. Sholtz // IEEE Transaction on communications. —
April 2000. - Vol. 48, № 4.
173. www.ece.ucsb.edu/gpr2002/
174. www.hermes.llnl.gov
175. www.lasers.llnl.gov/(John Warhuset al. Imaging Radar for
Bridge Deck Inspection)
176. www.llnl.gov/str/Azevedo.html
177.www.multispectral.com/FCC%20Action.html
178. www.s2.chalmers.se/research/signal/
179. www.uwbst2002.com/papers.htm
180. Young J., Caldecott R. 'Underground pipedetectors', US Patent
№396728,1976.
283
Оглавление
ВВЕДЕНИЕ 3
1. ПРИНЦИПЫ И ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ СО
СВЕРХШИРОКОПОЛОСНЫМИ СИГНАЛАМИ. МОДЕЛИ
СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ 7
1.1. Анализ современного состояния разработок
радиоэлектронных средств со сверхширокополосными
сигналами 7
1.2. Модели и энергетические спектры сверхширокополосных
сигналов 28
1.3. Последовательности сверхширокополосных сигналов
и их основные параметры 40
1.4. Модели и энергетические спектры стохастических
сверхширокополосных сигналов 55
1.5. Последовательности стохастических
сверхширокополосных сигналов и их основные параметры 61
2. ОБНАРУЖЕНИЕ СВЕРХШИРОКОПОЛОСНЫХ
СИГНАЛОВ ПРИ НАЛИЧИИ ПОМЕХ 63
2.1. Обнаружение последовательности сверхширокополосных
сигналов с известными параметрами при наличии
узкополосных помех и шума 63
2.2. Обнаружение сверхширокополосных сигналов с
неизвестными параметрами при наличии узкополосных помех и шума ...73
2.2.1. Обнаружение одиночного сверхширокополосного
сигнала с неизвестным временем прихода 73
2.2.2. Обнаружение последовательности
сверхширокополосных сигналов с неизвестным временем прихода 79
2.2.3. Обнаружение последовательности
сверхширокополосных сигналов с неизвестным периодом повторения 89
2.2.4. Обнаружение последовательности
сверхширокополосных сигналов с неизвестными временем прихода
и периодом повторения 98
2.3. Обнаружение стохастических сверхширокополосных
сигналов при наличии узкополосных помех и шума 108
2.4. Обнаружение сигналов сверхширокополосной РЛС
с неизвестными параметрами движения 116
3. ИЗМЕРЕНИЕ ПАРАМЕТРОВ
СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ ПРИ НАЛИЧИИ ПОМЕХ 128
3.1. Исследование потенциальной точности оценки
параметров сверхширокополосных сигналов 128
284
3.2. Измерение временных параметров
сверхширокополосных сигналов при наличии узкополосных помех и шума 140
3.3. Измерение частотных параметров
сверхширокополосных сигналов при наличии помех 149
3.3.1. Измерение частотных параметров
сверхширокополосных сигналов при наличии белого шума 149
3.3.2. Измерение частотных параметров
сверхширокополосных сигналов при наличии узкополосных помех и
белого шума 158
3.4. Влияние узкополосных помех на пороговые
характеристики оценок временных параметров
сверхширокополосных сигналов 168
4. РАДИОЭЛЕКТРОННАЯ РАЗВЕДКА РАДИОСИСТЕМ
СО СВЕРХШИРОКОПОЛОСНЫМИ СИГНАЛАМИ 174
4.1. Эффективность квазиправдоподобного обнаружения
последовательности сверхширокополосных сигналов 174
4.2. Эффективность энергетического обнаружения
последовательности сверхширокополосных сигналов 181
4.3. Измерение частотных параметров сверхширокополосных
сигналов с неизвестной формой спектра 188
4.4. Определение местоположения источника
сверхширокополосных сигналов при наличии помех 200
4.4.1. Определение направления на источник
сверхширокополосных сигналов при наличии белого шума 201
4.4.2. Определение направления на источник
сверхширокополосных сигналов при наличии узкополосных помех
и белого шума 205
4.4.3. Способы местоопределения источника
сверхширокополосных сигналов 210
5. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ РАДИОСИСТЕМ
СО СВЕРХШИРОКОПОЛОСНЫМИ И
УЗКОПОЛОСНЫМИ СИГНАЛАМИ 213
5.1. Эффективность радиоподавления
сверхширокополосных РЛС маскирующими шумовыми помехами 213
5.2. Эффективность радиоподавления радиосистем с
узкополосными сигналами сверхкороткими импульсами 226
5.2.1. Радиоподавление узкополосных радиосистем
в режиме обнаружения 226
5.2.2. Радиоподавление узкополосных радиосистем
в режиме измерения временных параметров 235
5.2.3. Радиоподавление узкополосных радиосистем
в режиме измерения частотных параметров 245
285
6. ОСНОВНЫЕ ПРИНЦИПЫ РЕАЛИЗАЦИИ
ОБНАРУЖИТЕЛЕЙ И ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ
СВЕРХШИРОКОПОЛОСНЫХ СИГНАЛОВ 256
6.1. Принципы аппаратурной реализации обнаружителей.... 256
6.2. Принципы аппаратурной и программной реализации
измерителей временных и частотных параметров
сверхширокополосных сигналов 262
6.3. Возможности аппаратурной реализации алгоритмов
местоопределения источника сверхширокополосных
сигналов 269
ЛИТЕРАТУРА 272
286
Научное издание
ОБРАБОТКА СВЕРХШИРОКОПОЛОСНЫХ
СИГНАЛОВ И ПОМЕХ
Авторы:
Заслуженный деятель науки РФ,
доктор технических наук, профессор
Вячеслав Григорьевич Радзиевский
Доктор технических наук, доцент
Павел Андреевич Трифонов
Изд. № 9. Подписано в печать 19.05.2009.
Формат 60x90 1/16. Бумага офсетная.
Гарнитура Book Old Style.
Печать офсетная. Печ. л. 18.
Тираж 500 экз. Зак. № 5398.
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: (495)621-48-37; 625-78-72, 625-92-41.
e-mail: info^radiotec.ru
www, radiotec.ru
Отпечатано в ООО ПФ «Полиграфист»,
160001, г. Вологда, ул. Челюскинцев, 3.
Издательство «Радиотехника»
предлагает Вашему вниманию
следующие книги серии
«РАДИОЭЛЕКТРОННАЯ БОРЬБА И РАЗВЕДКА»
Радиотехническая разведка. Методы одеики эффективности
местоопределеиия источников излучения.
Авторы - Ю. Я. Мельников, С. В. Попов
Рассмотрены методы местоопределеиия источников радиоизлучения
(пеленгационные, временные, доплеровские, доплеровско-временные,
многопозиционные и др.), а также методы определения вектора
скорости подвижных объектов как из неподвижного, так и подвижного
пунктов наблюдения; приведены аналитические соотношения для
оценки координат объектов и для погрешностей этих определений
(каждый из методов графически иллюстрируется); освещены отдельные
вопросы построения станции РТР.
Для радиоинженеров, разработчиков аппаратуры, аспирантов и
студентов вузов радиотехнических специальностей.
Воздушная радиотехническая разведка. Методы одеики
эффективности
Автор - ДО. П. Мельников
Систематизированы задачи воздушной радиотехнической разведки, а
также характеристики основного ее объекта - радиолокационного поля.
Выводятся соотношения, связывающие технические характеристики
аппаратуры и типового объекта разведки с показателями
эффективности - вероятностью обнаружения, распознавания типов РАС и типов
сложных объектов, а также точностью определения их координат.
Повсеместно учитывается специфика РТР с борта летательного аппарата,
состоящая в высокой плотности потока входных сигналов,
кратковременности наблюдения и, как правило, в отсутствии специального
оператора. Полученные соотношения иллюстрируются графиками и
подтверждаются результатами математического моделирования.
Для радиоинженеров-разработчиков аппаратуры, специалистов,
планирующих ее применение, а также для студентов вузов
радиотехнической специальности.
По вопросам заказа и приобретения книги
обращаться в ООО «PC-ПРБСС» по адресу:
107031, г.Москва, К-31, Кузнецкий мост, д. 20/6,
тел./факс: (495) 625-78-72, 621-48-37, 625-92-41
Полный перечень книг, выпускаемых
Издательством «Радиотехника»,
размещен на сайте http://www. radiotec.ni
e-mail: info@radiotec.ni
алгари
параг
неопр
разве,/
источь
CBepxL
моделей
анализа
юных и ys
Н^м»
ISBN 978-5-88070-231-2
9"785880»702312